/
















































































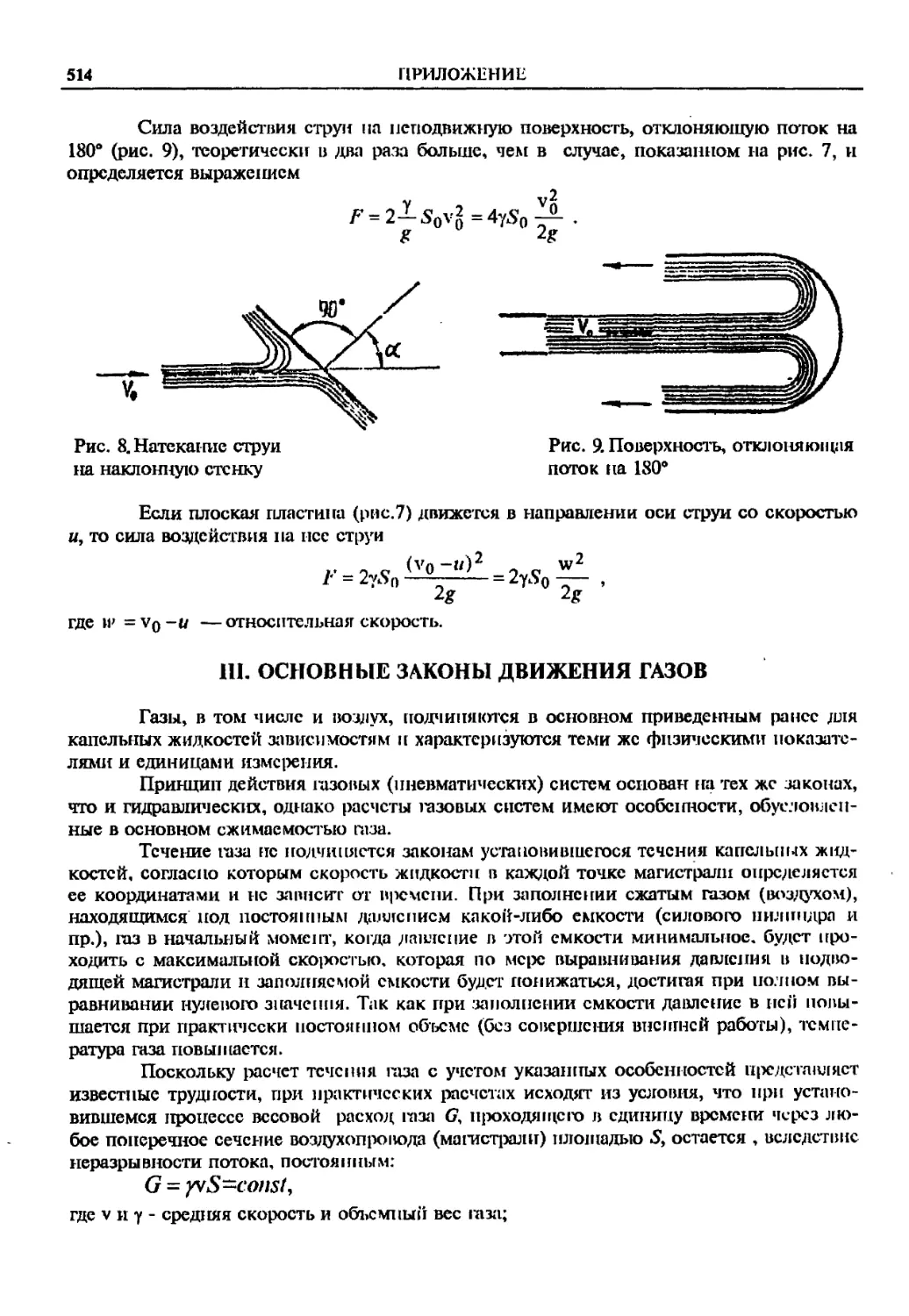



Автор: Бакуменко В.И.
Теги: общее машиностроение технология машиностроения машиноведение справочник оборудование справочник конструктора
ISBN: 5-217-01742-2
Год: 1997




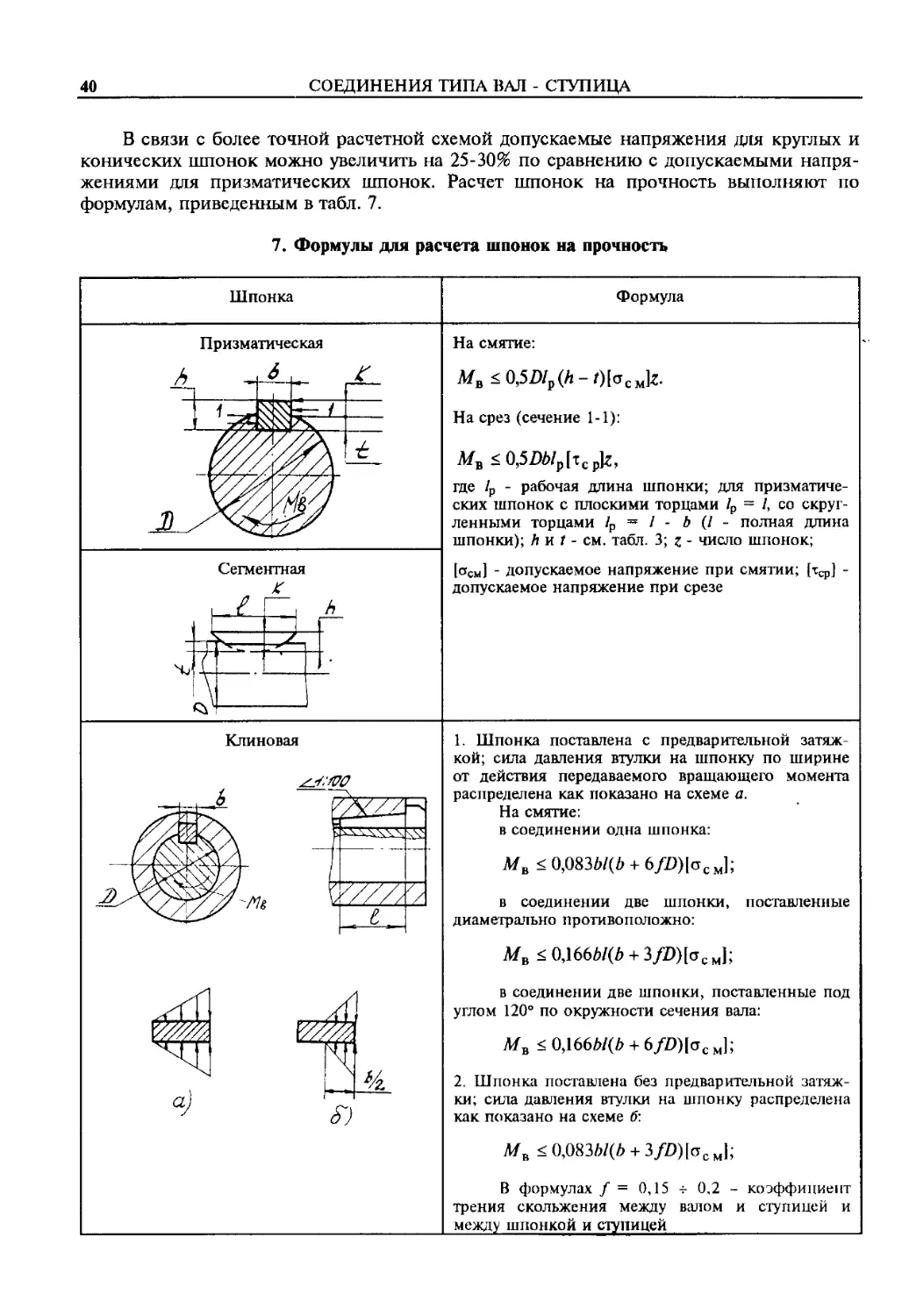
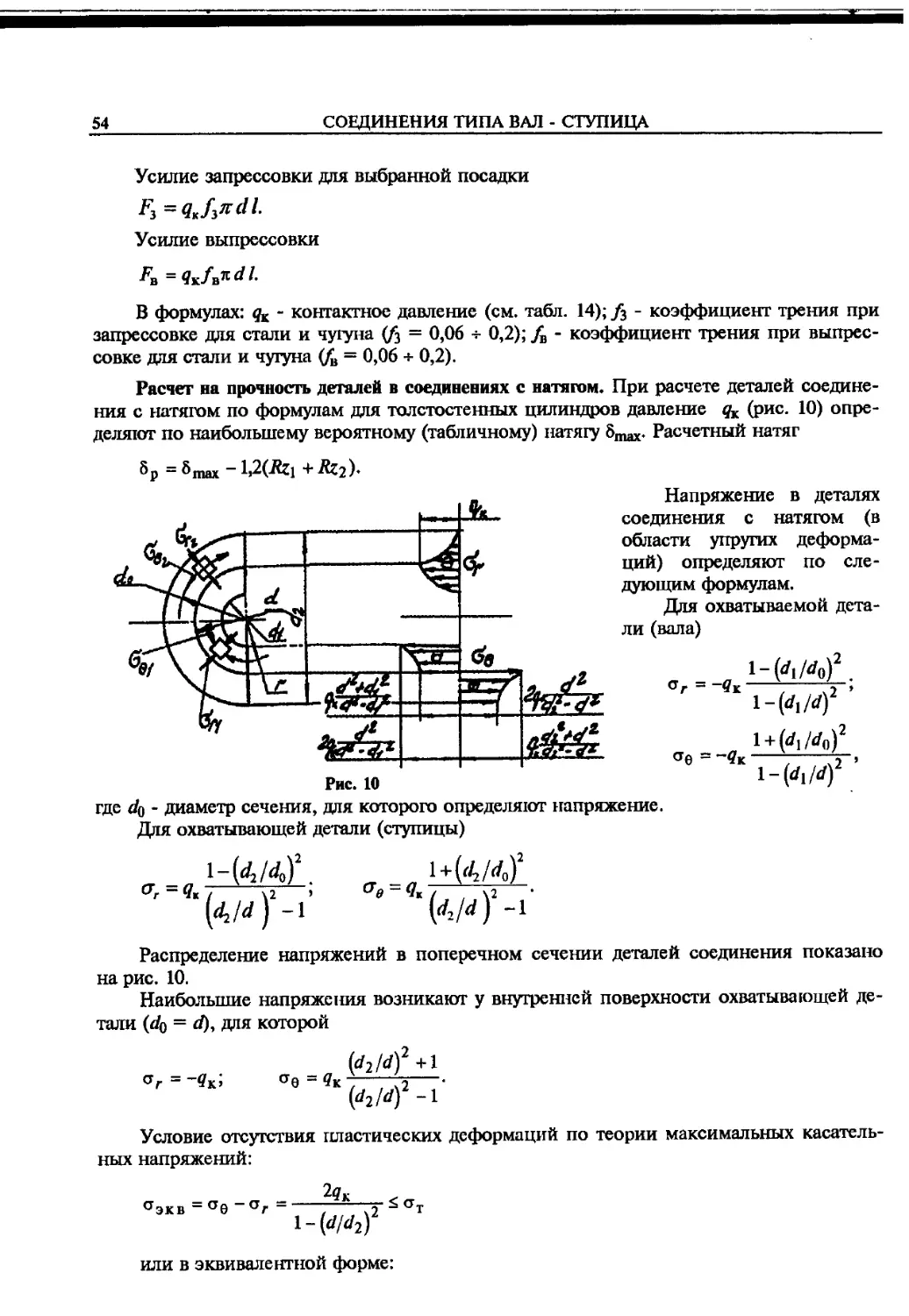
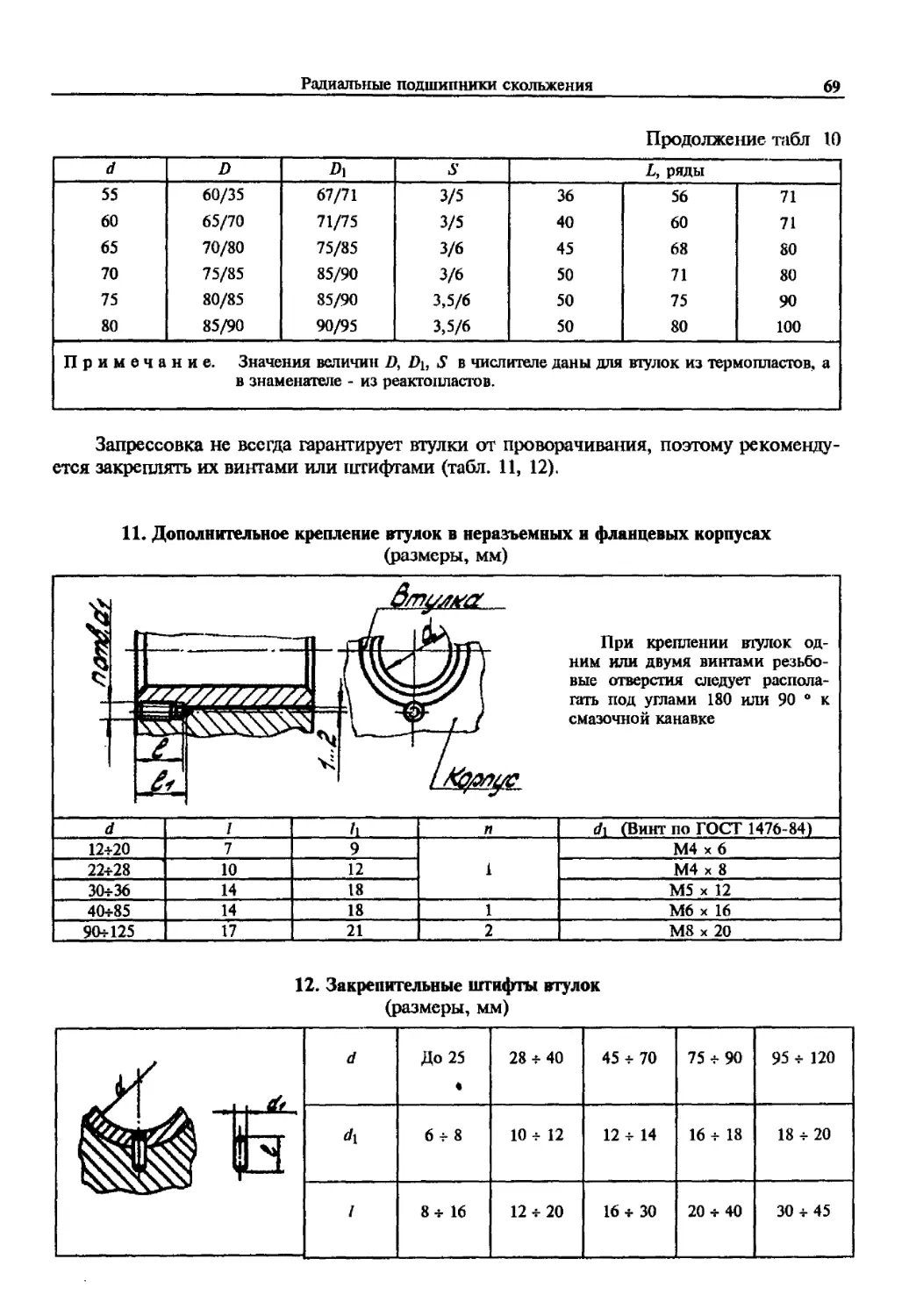
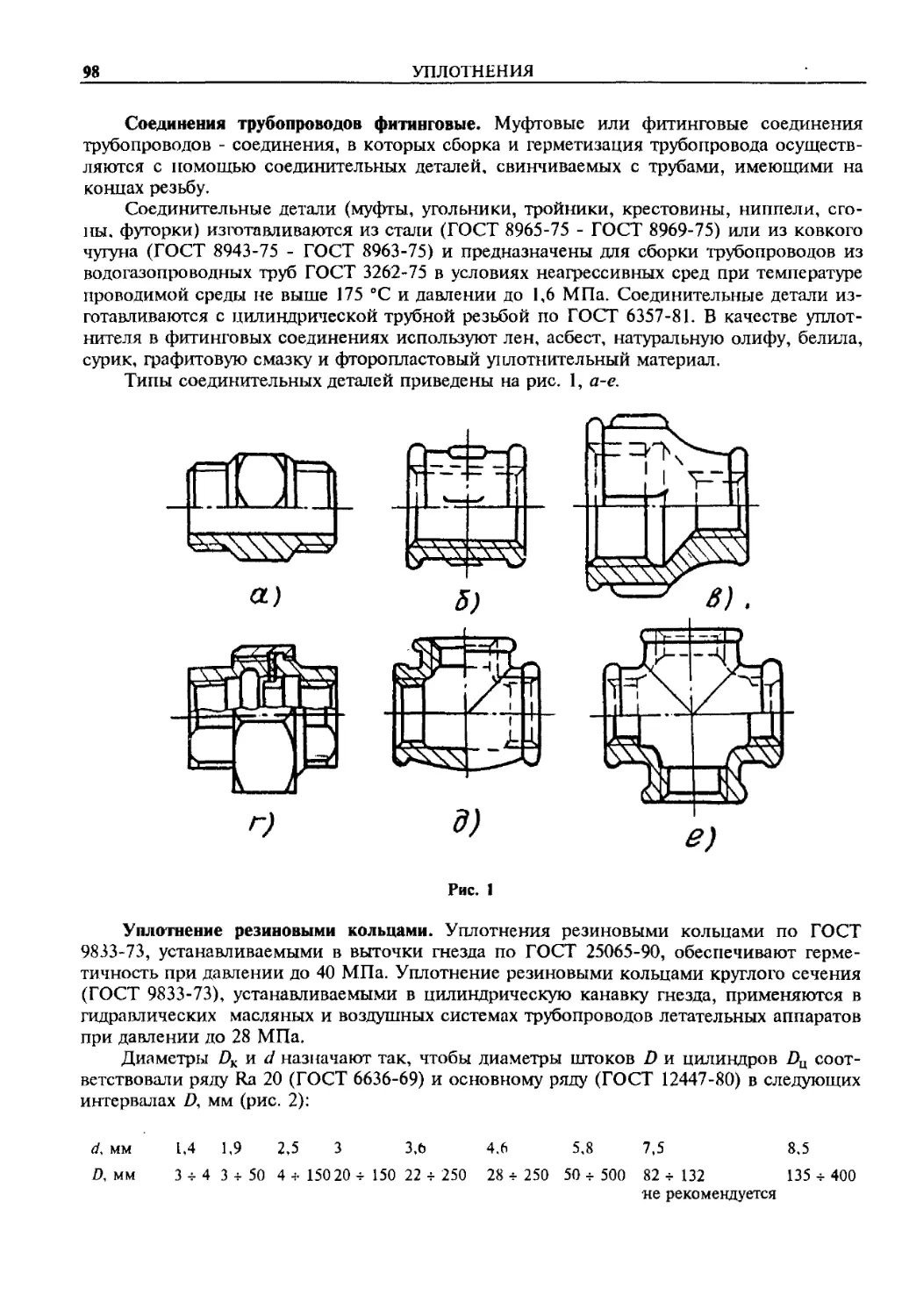
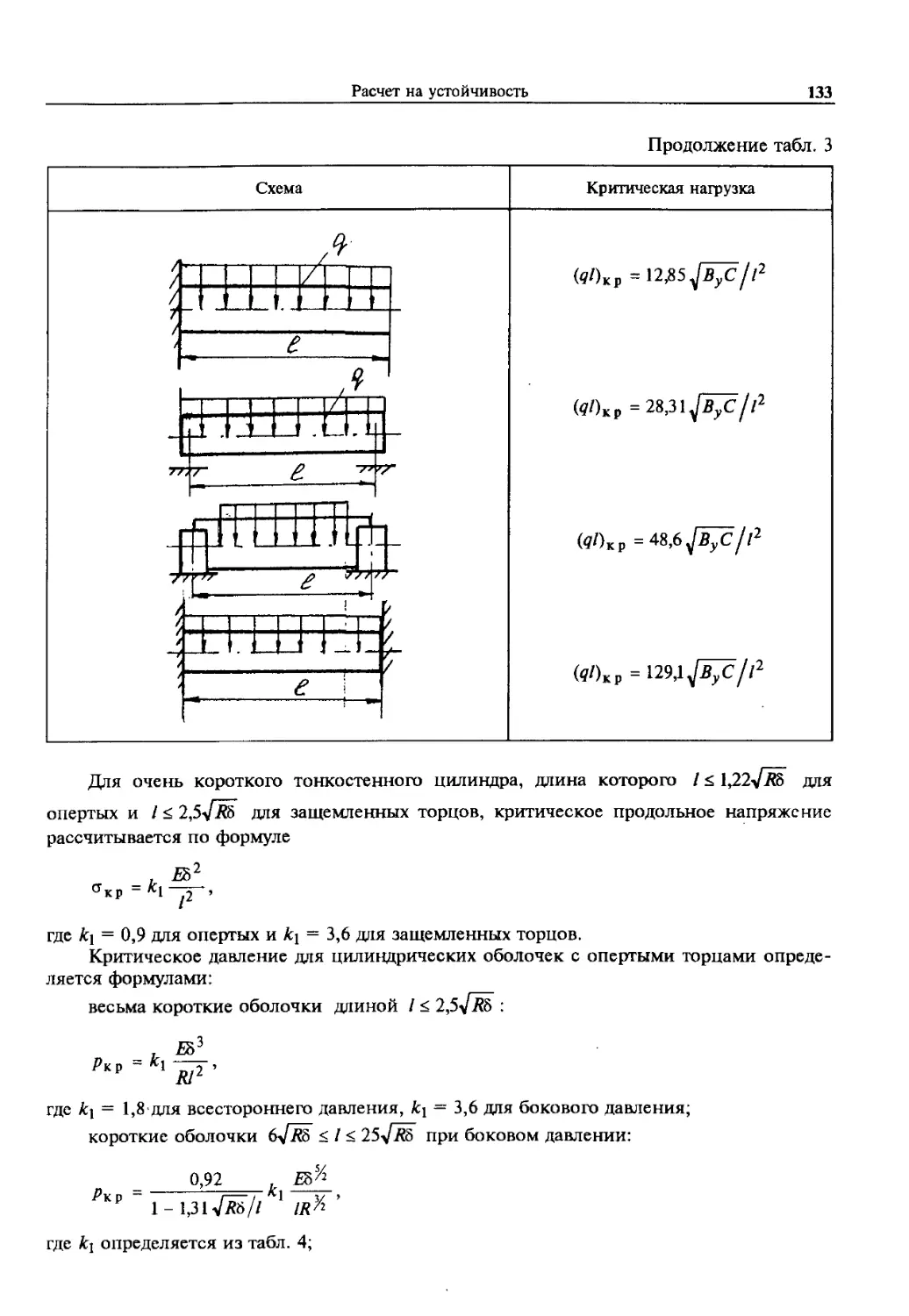
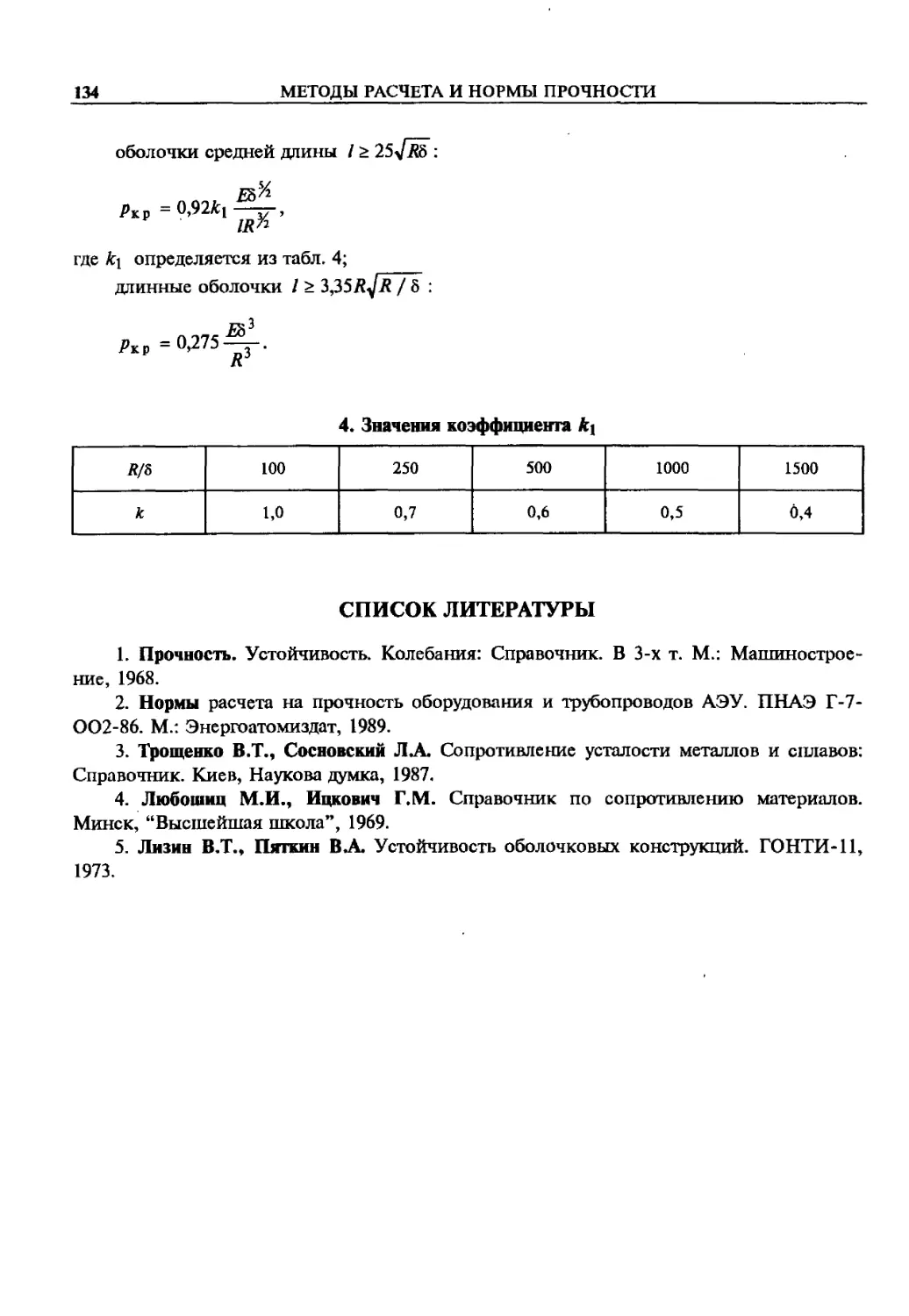
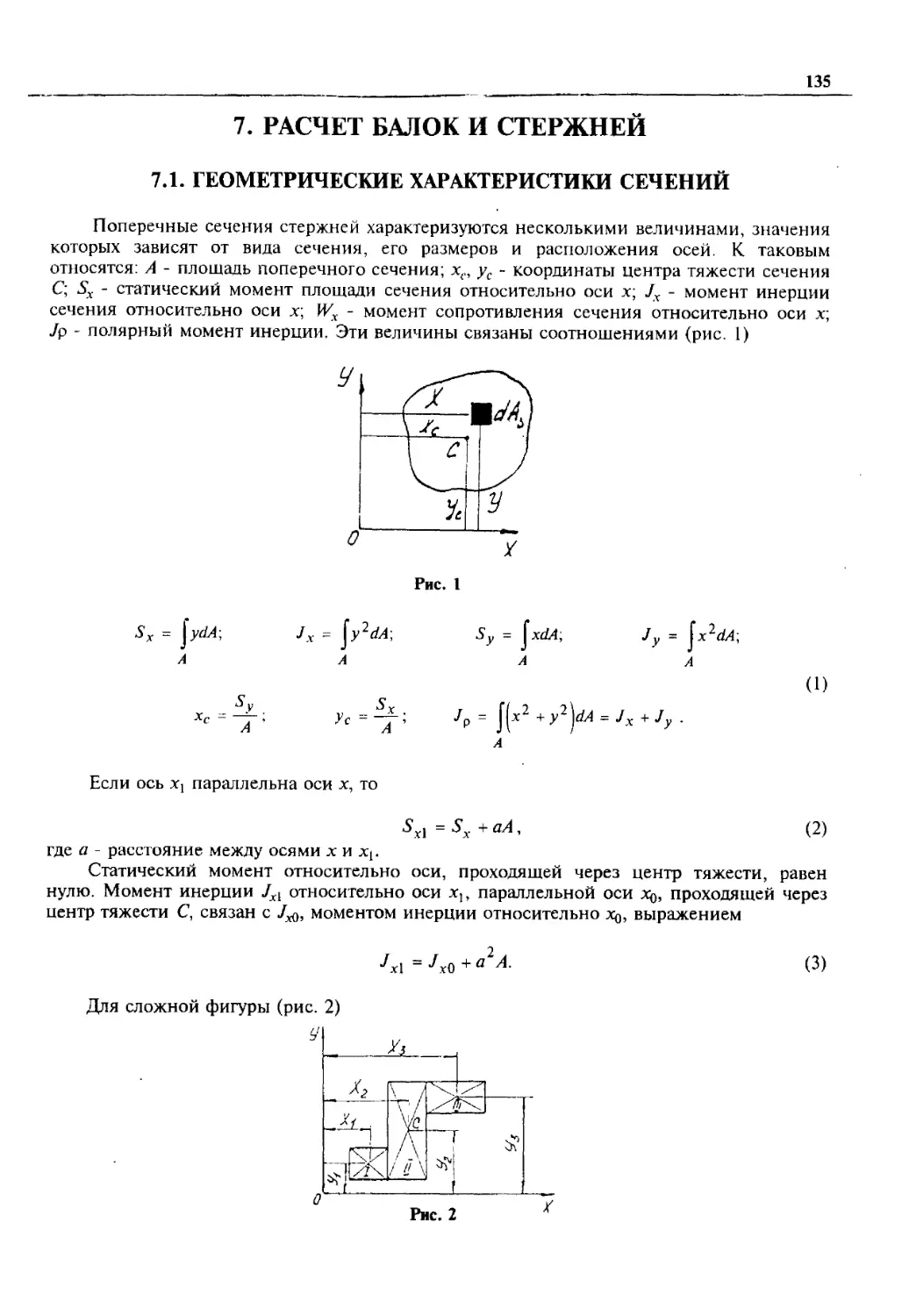
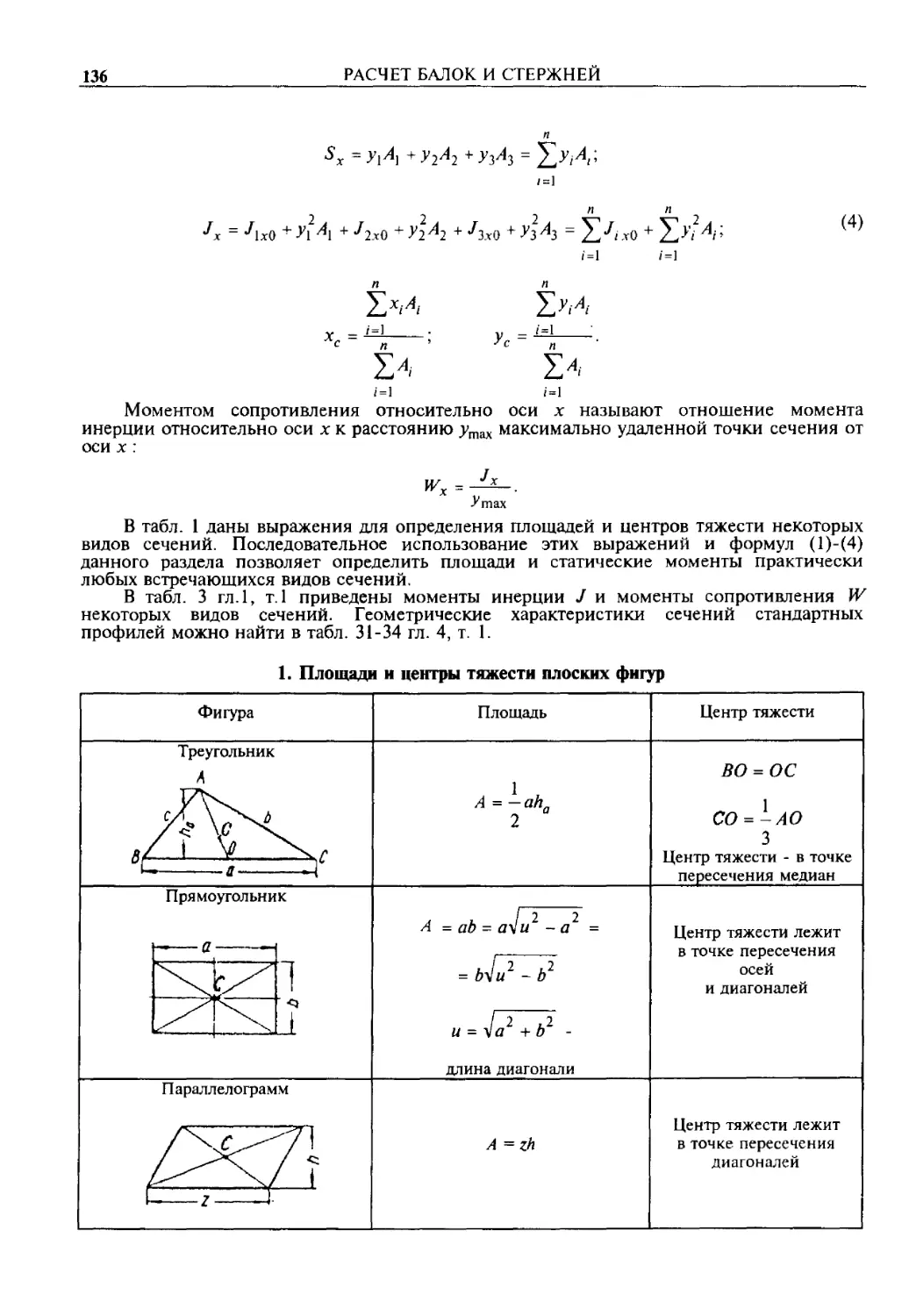
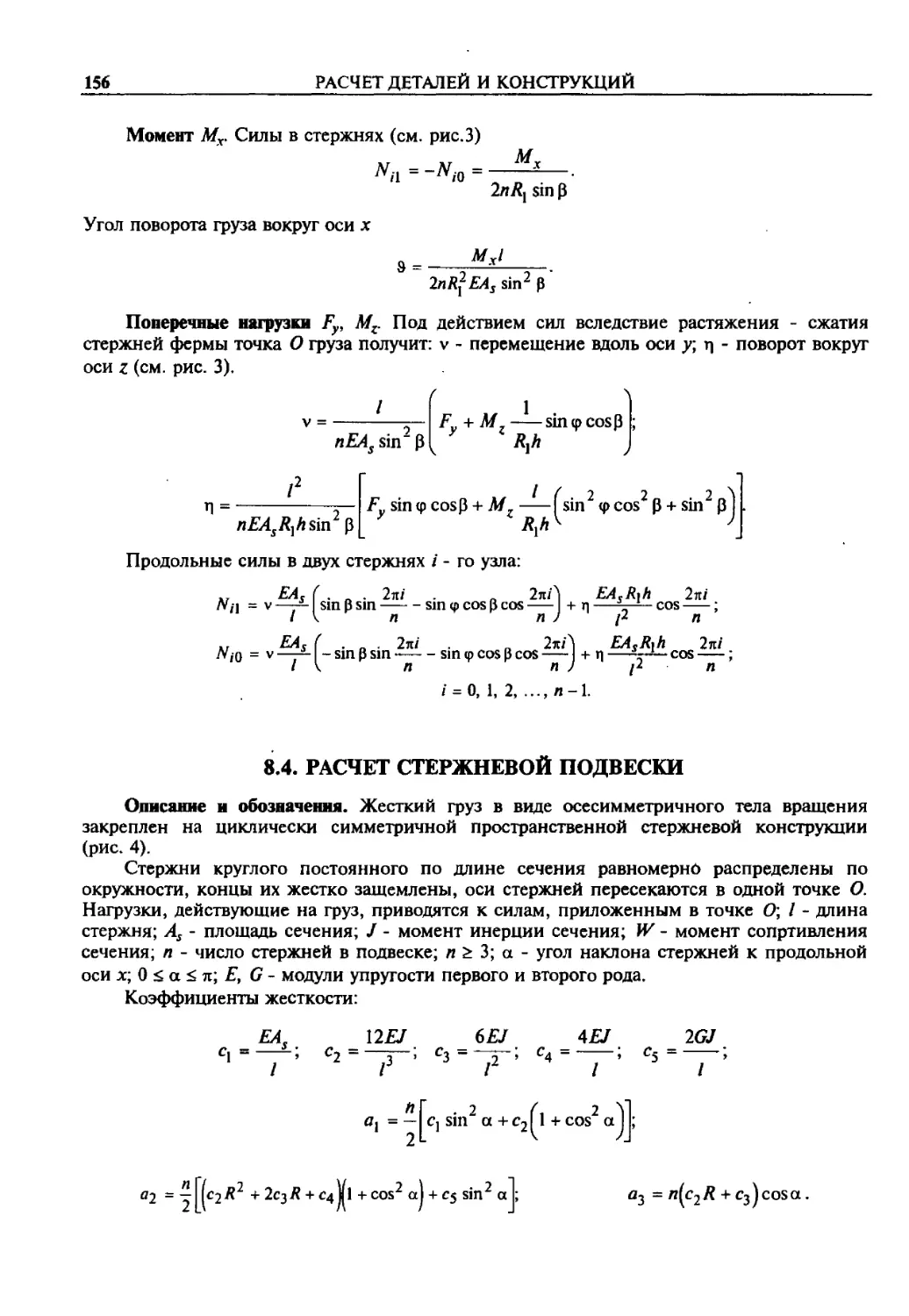
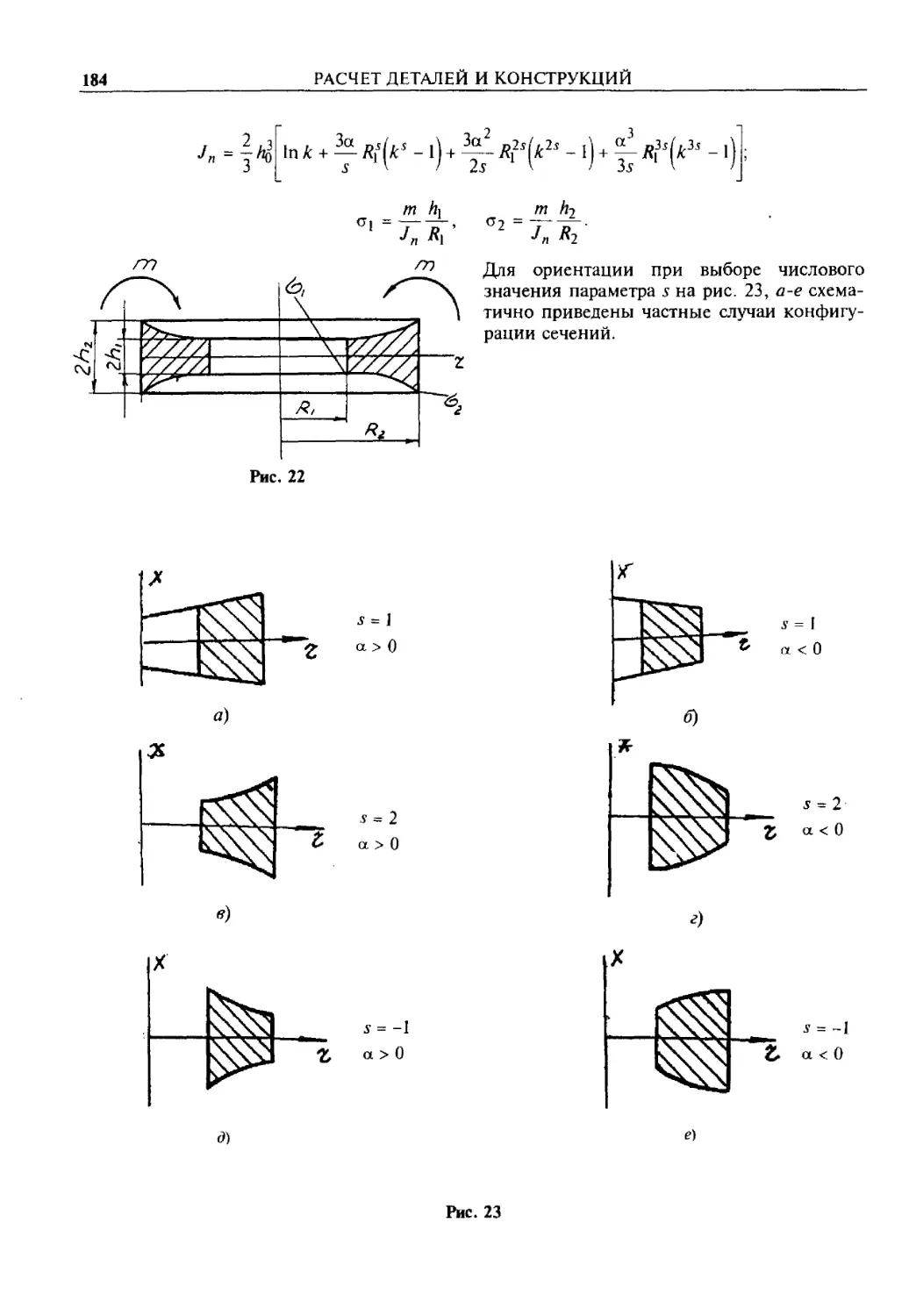
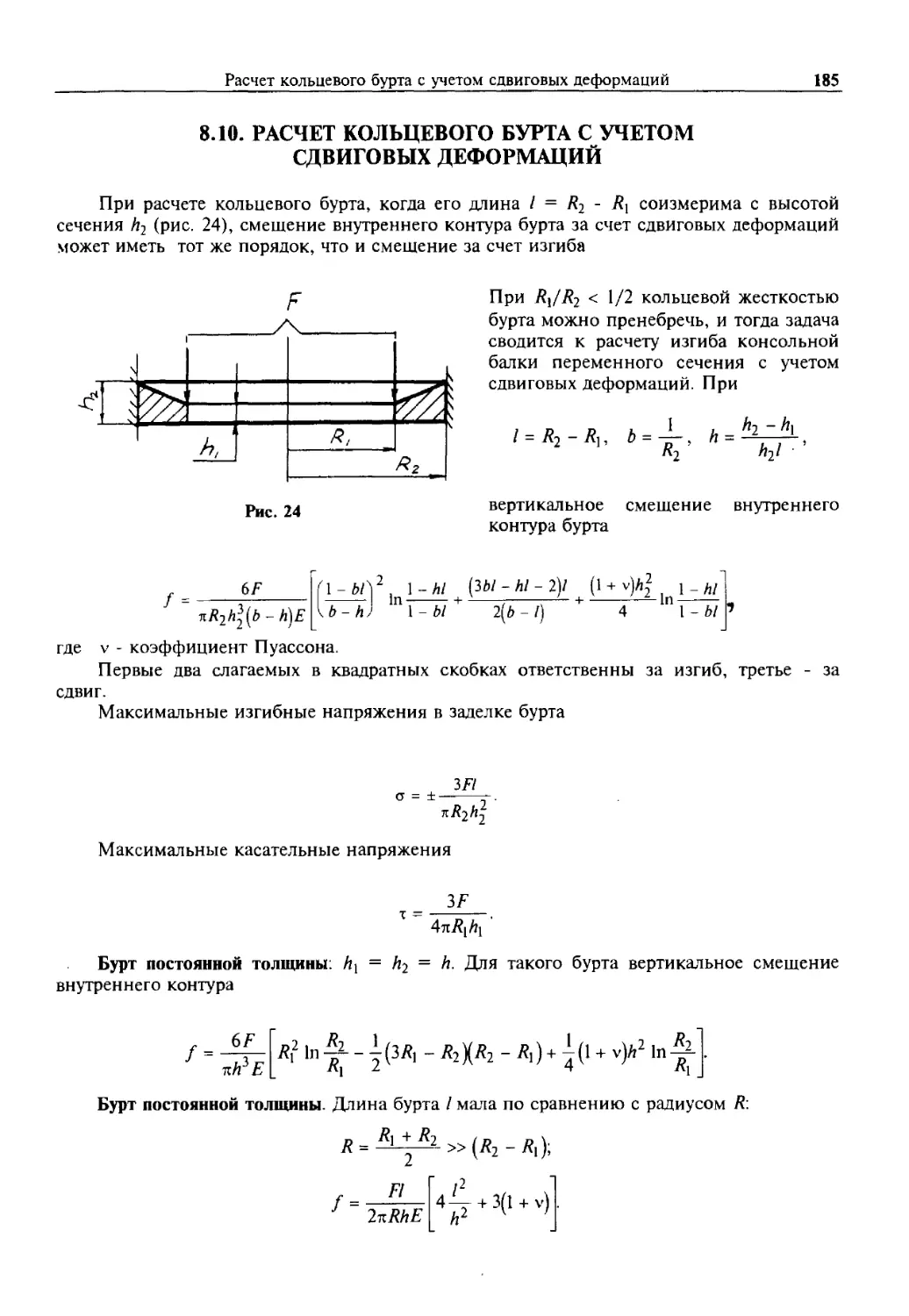
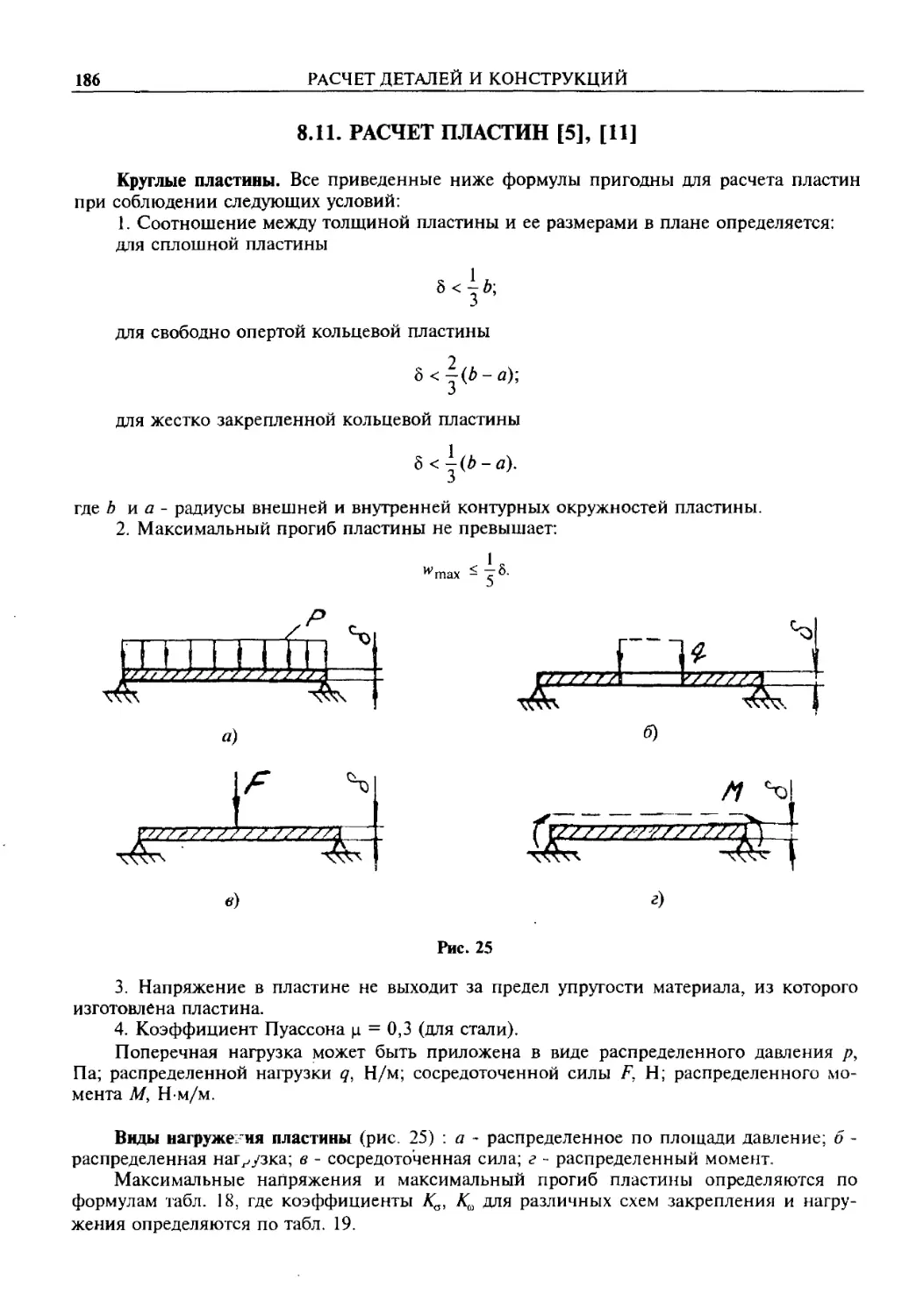
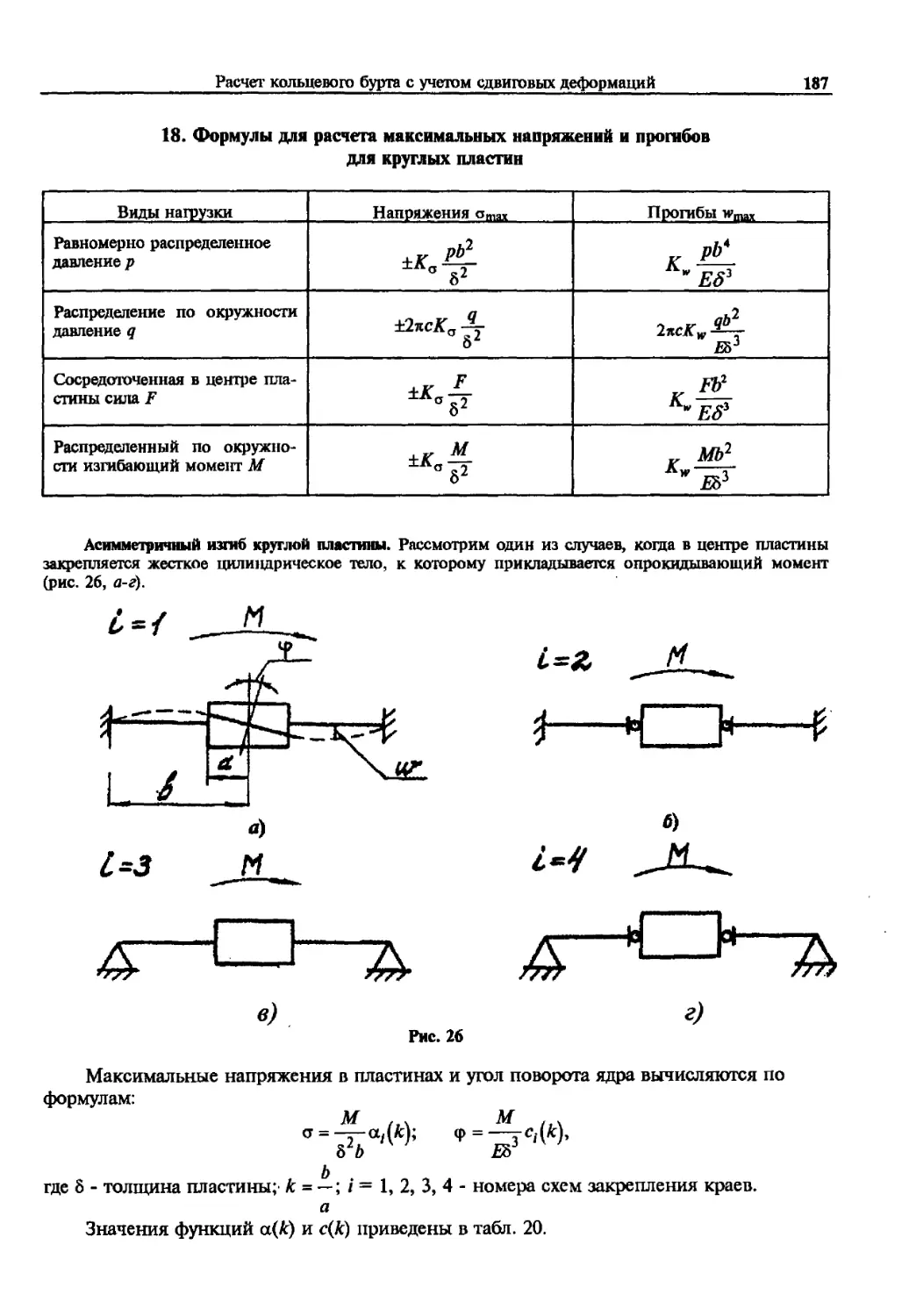
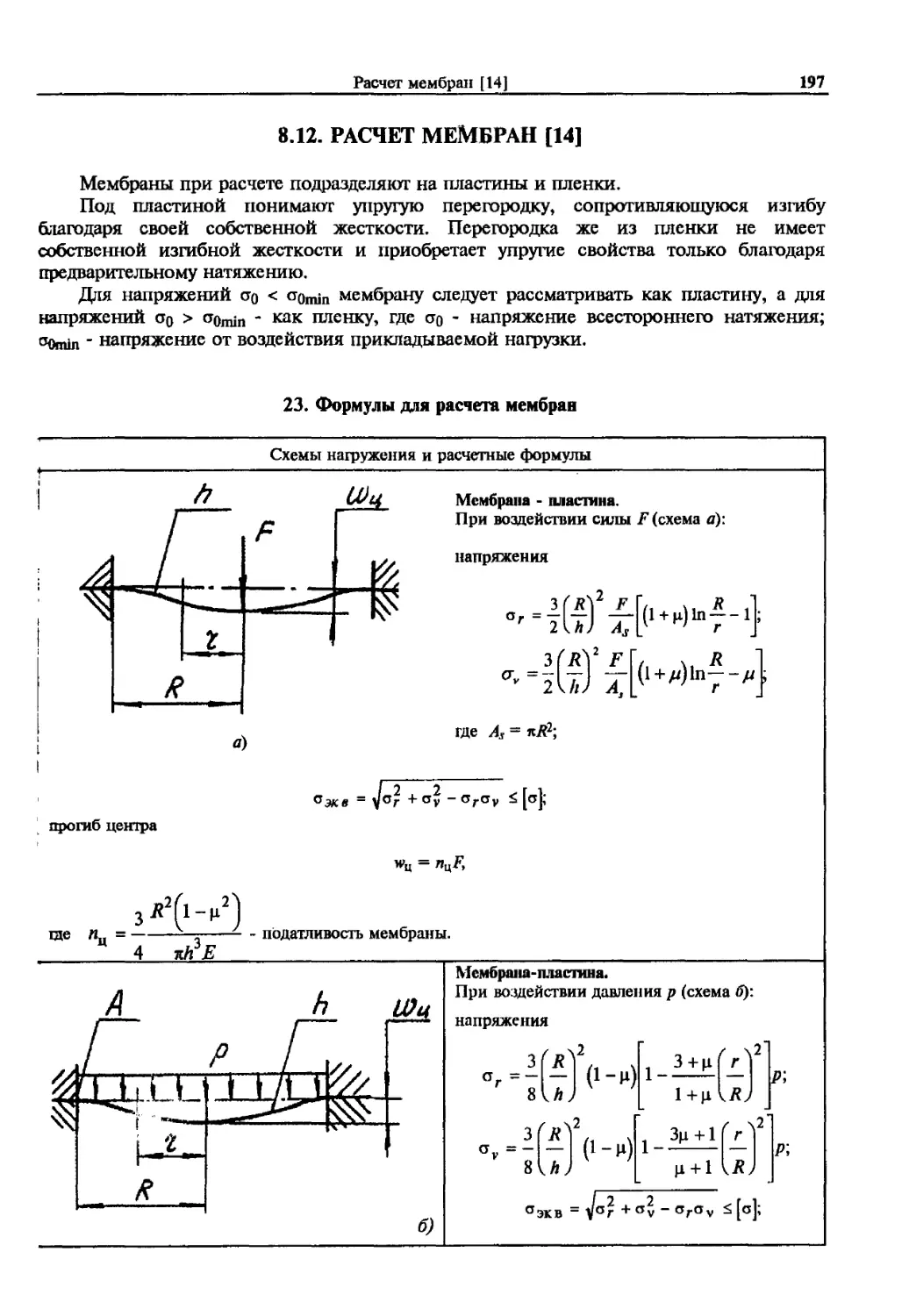
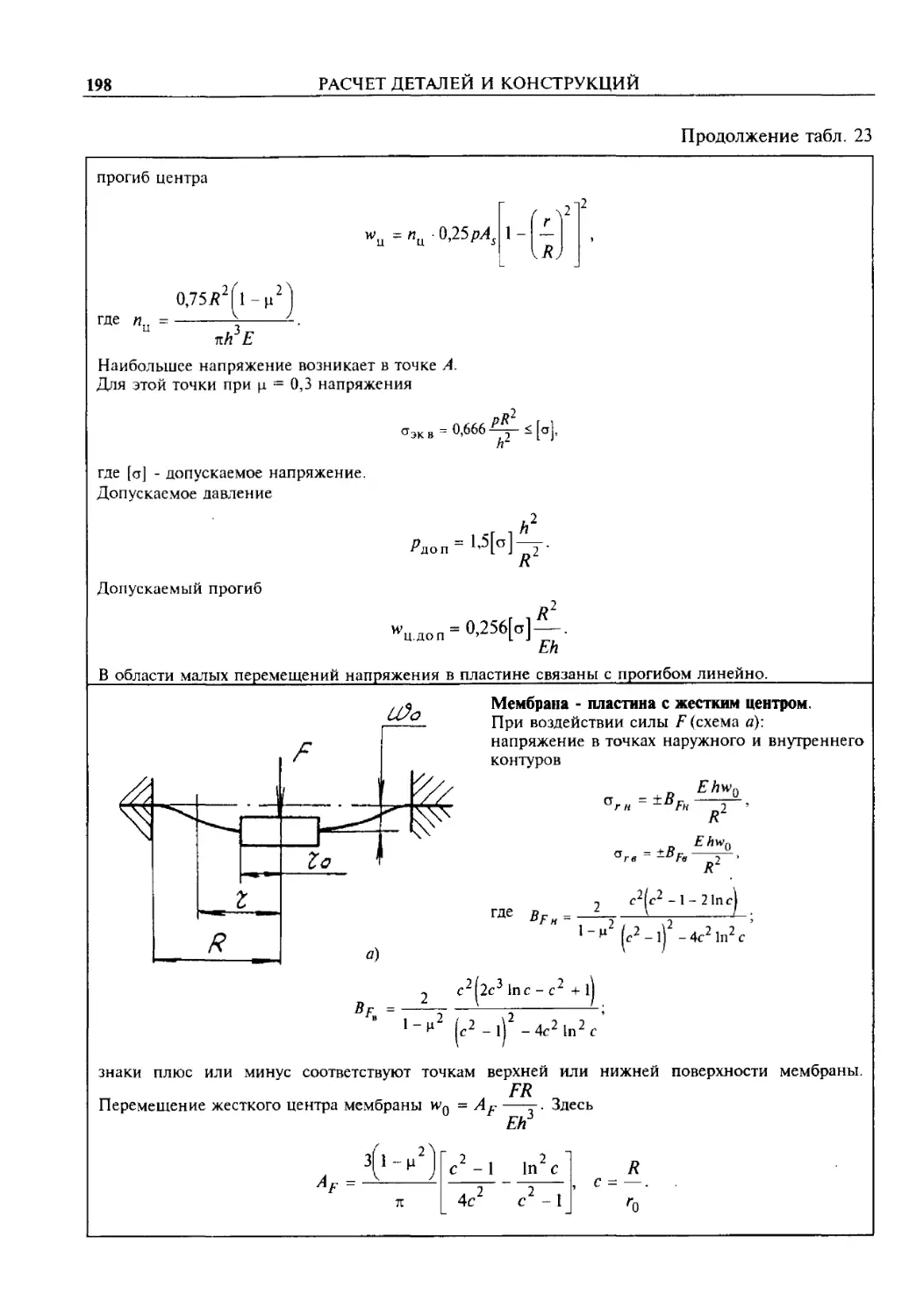
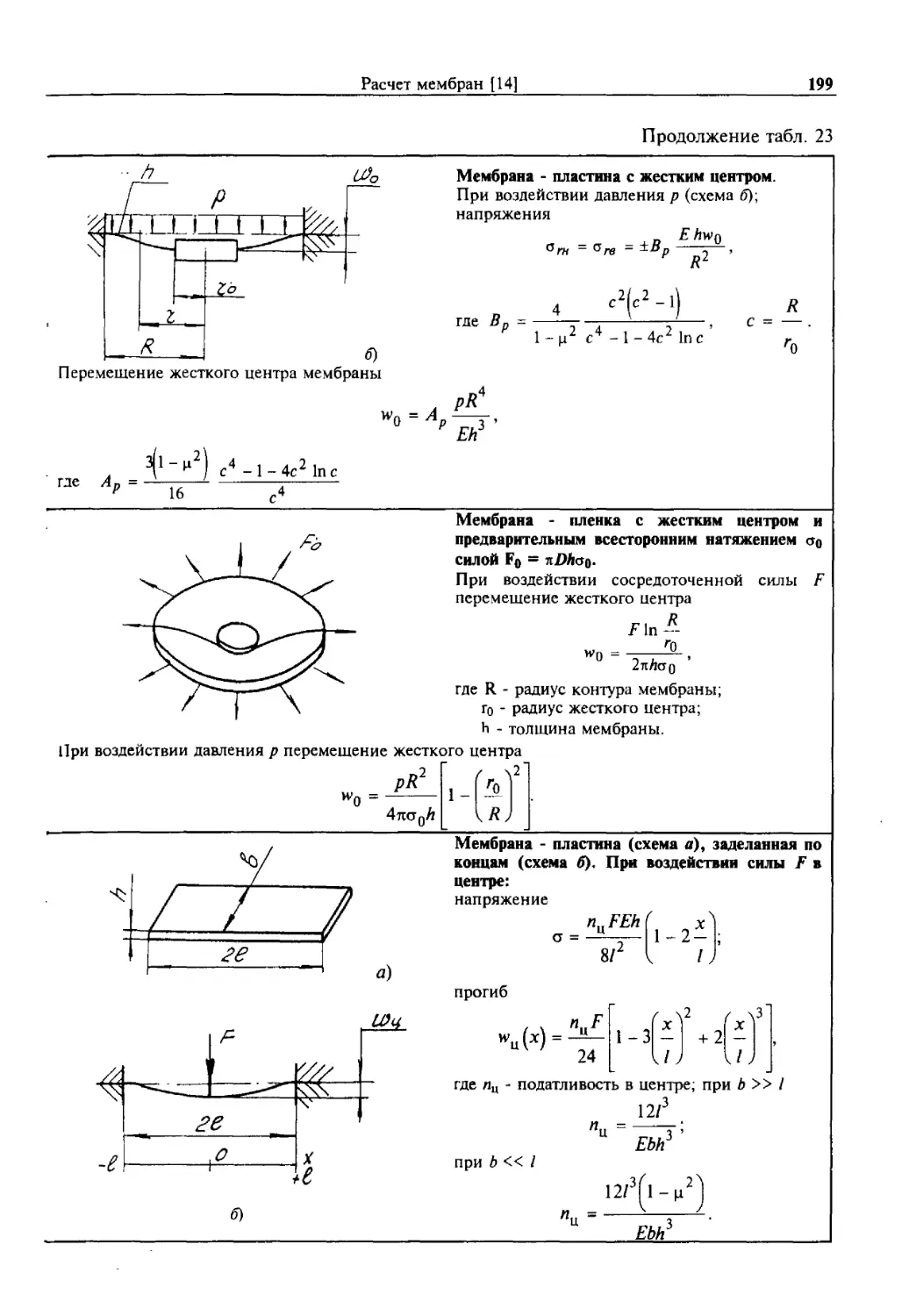
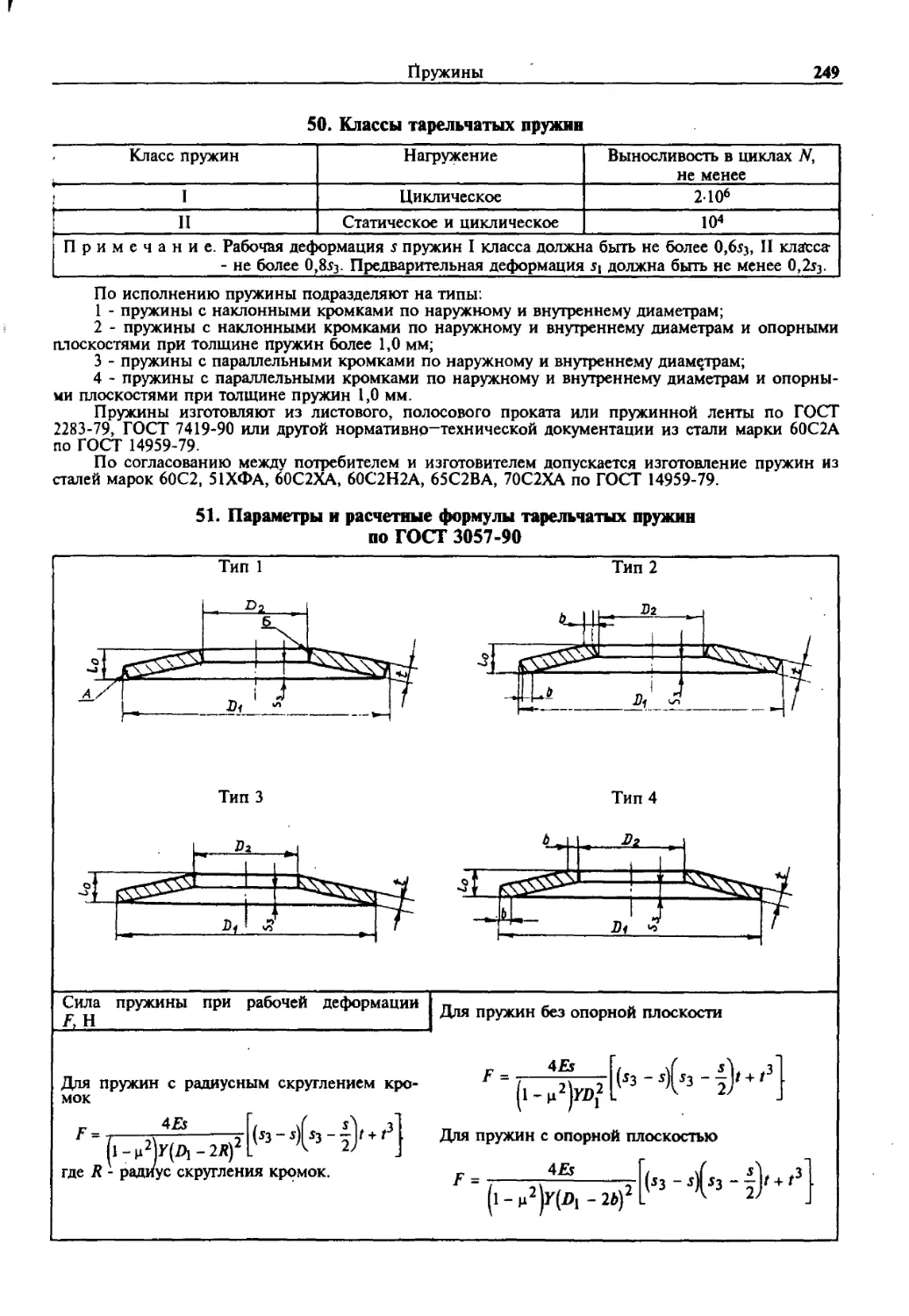
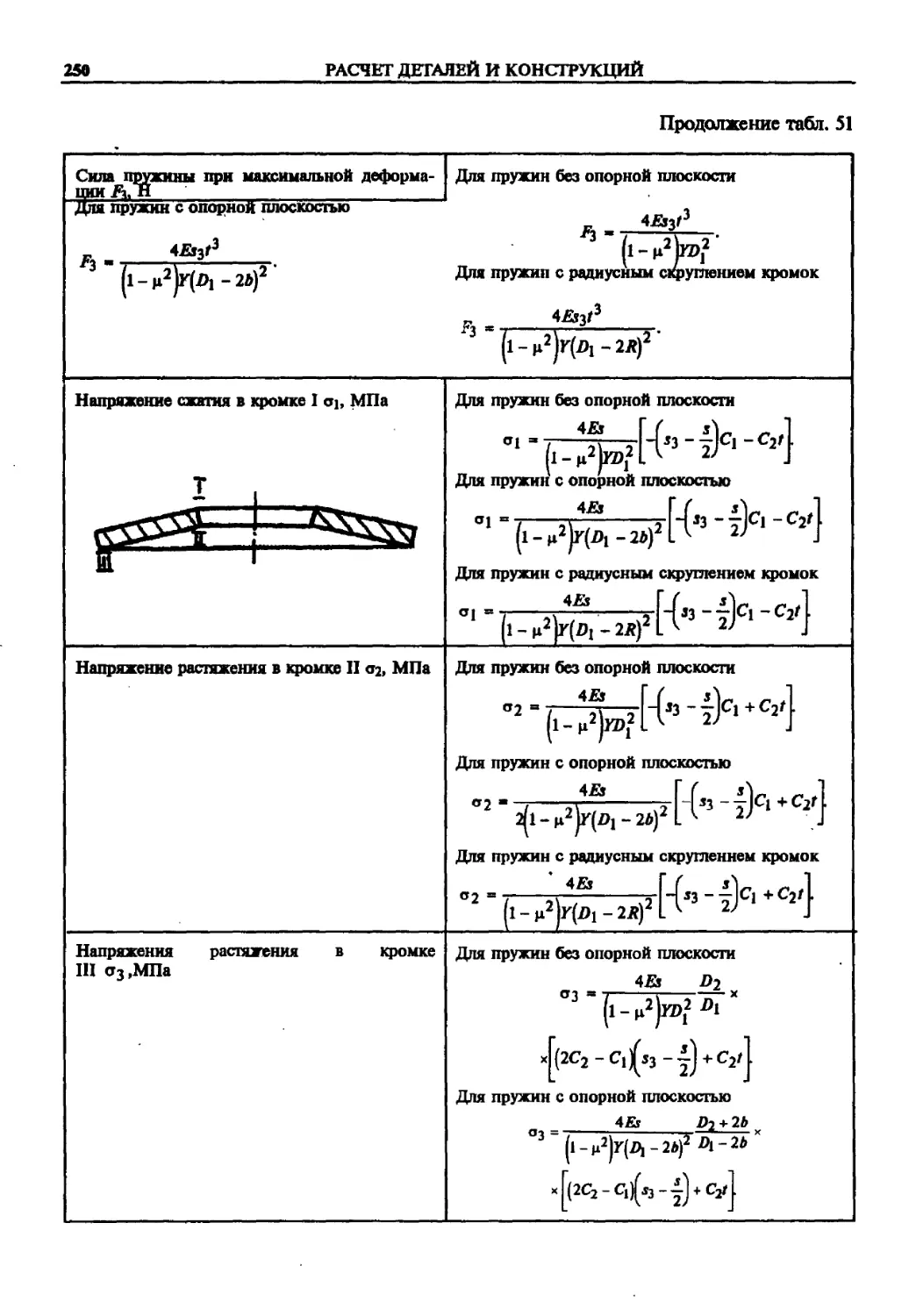
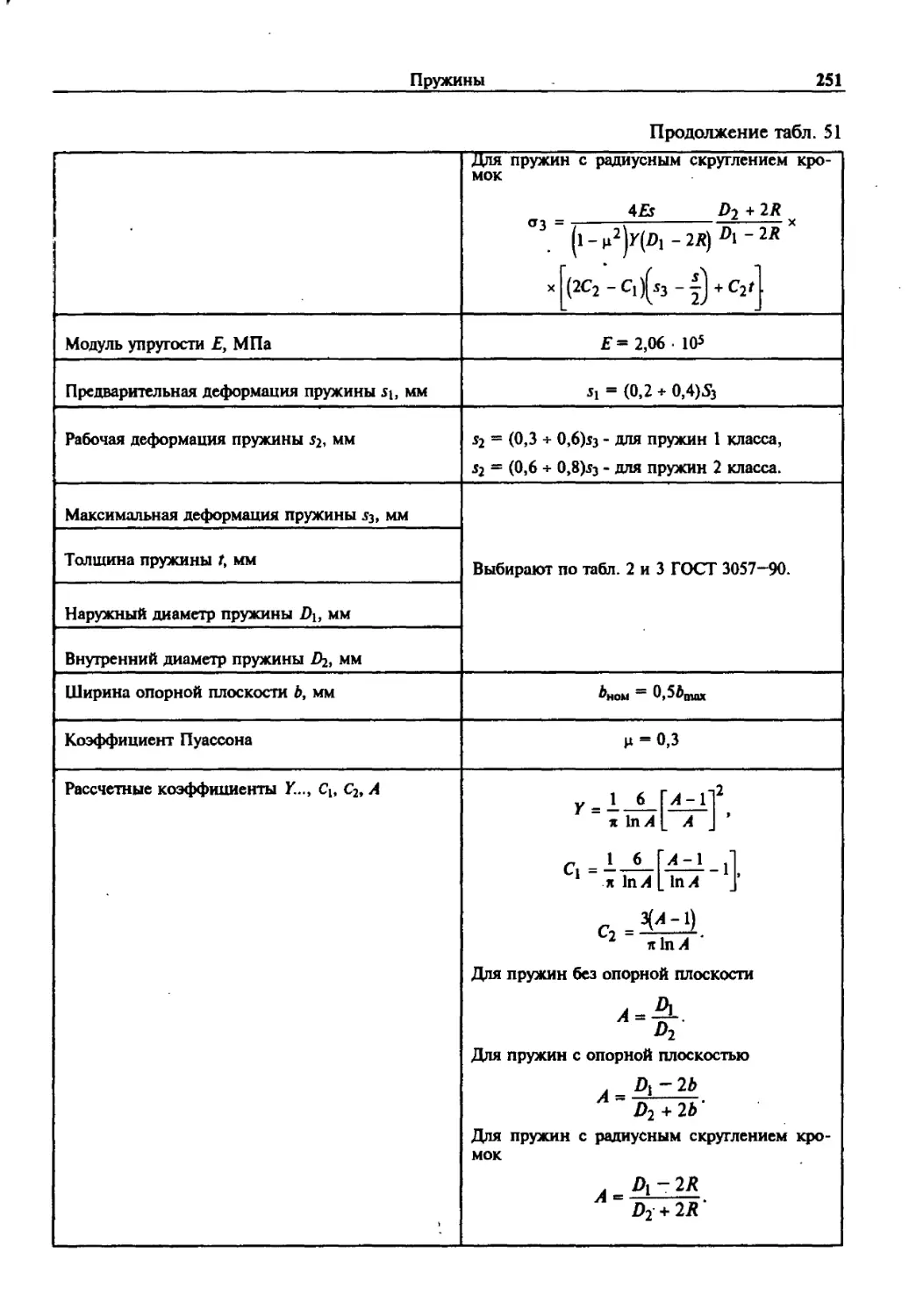
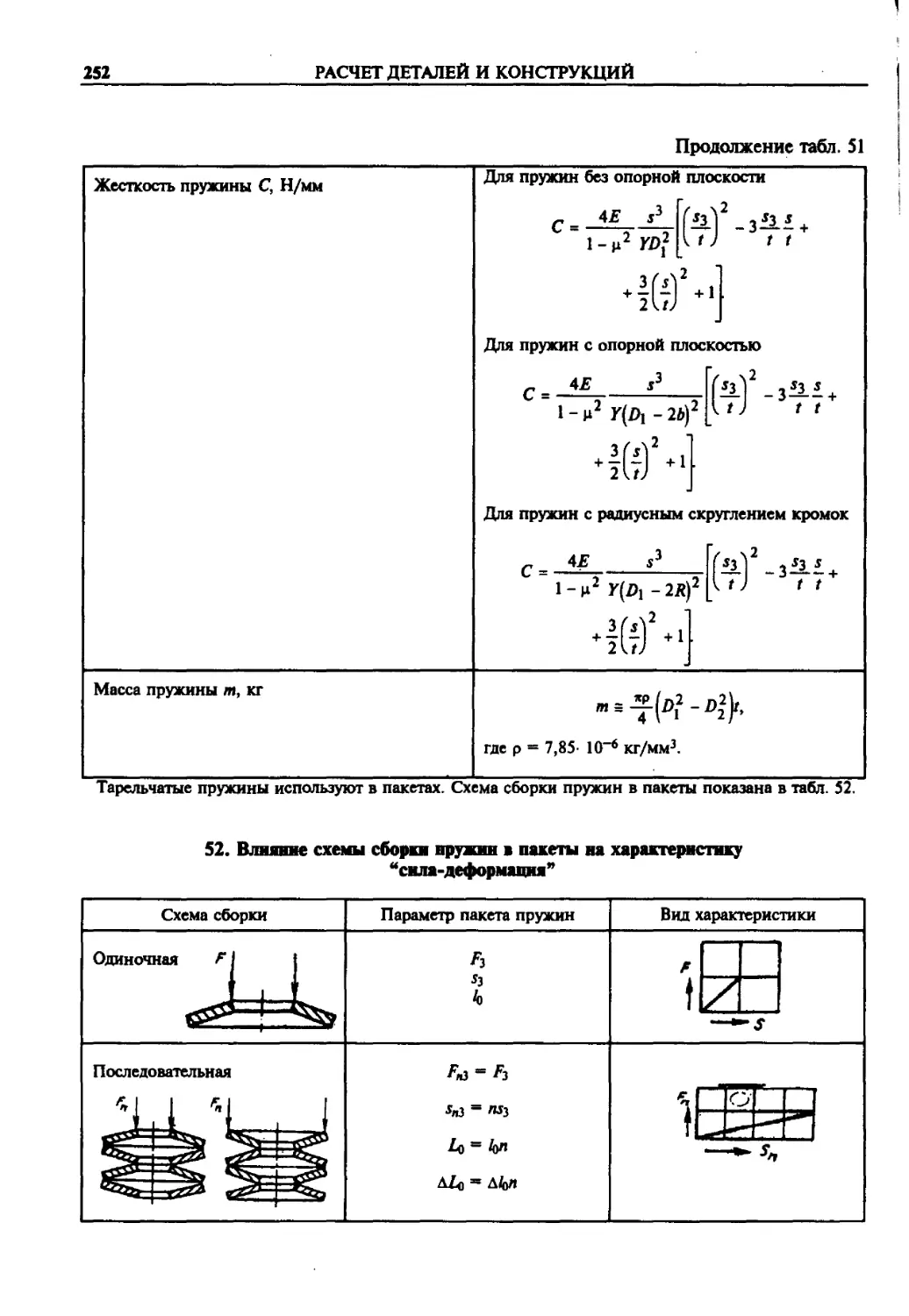
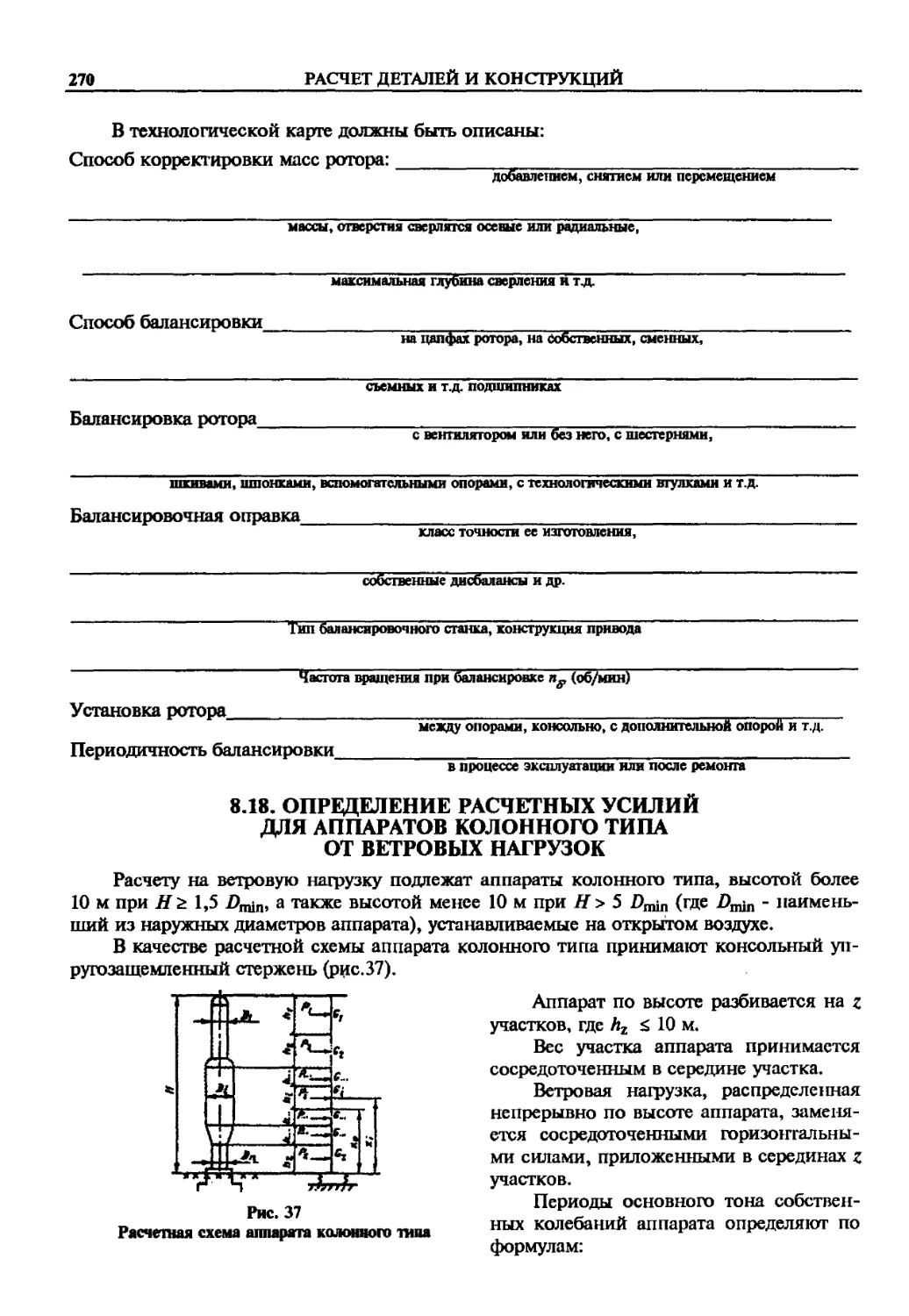
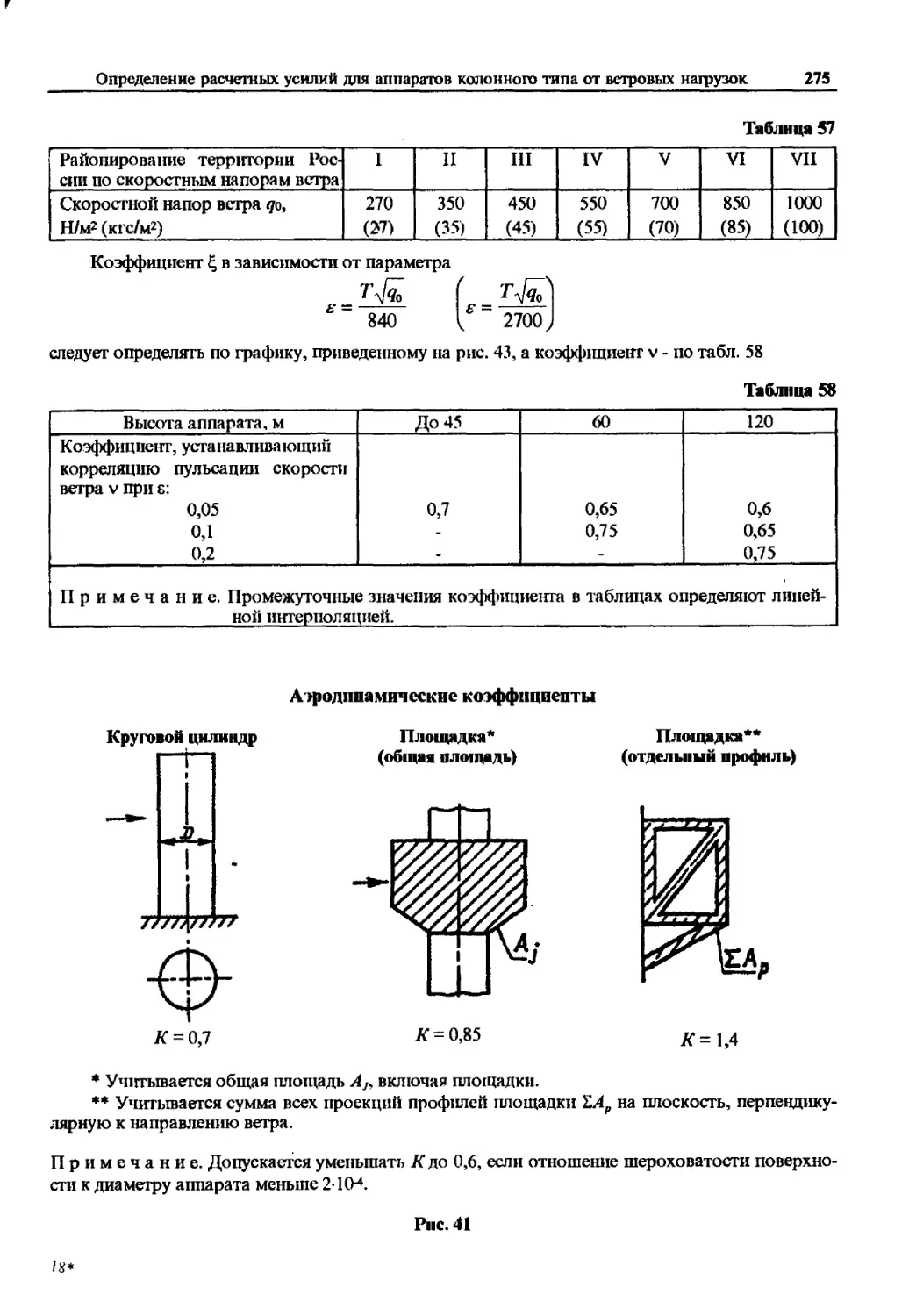
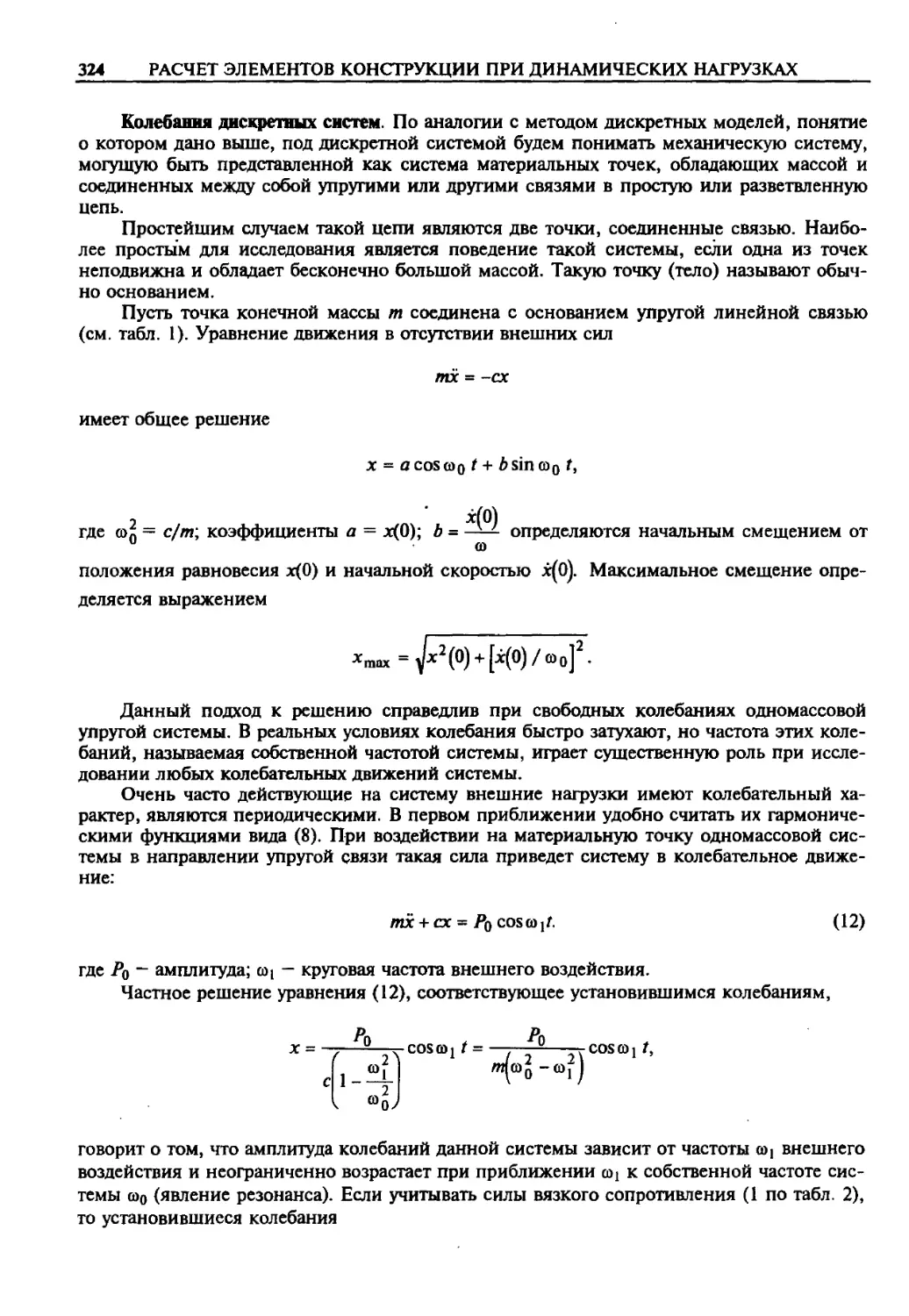
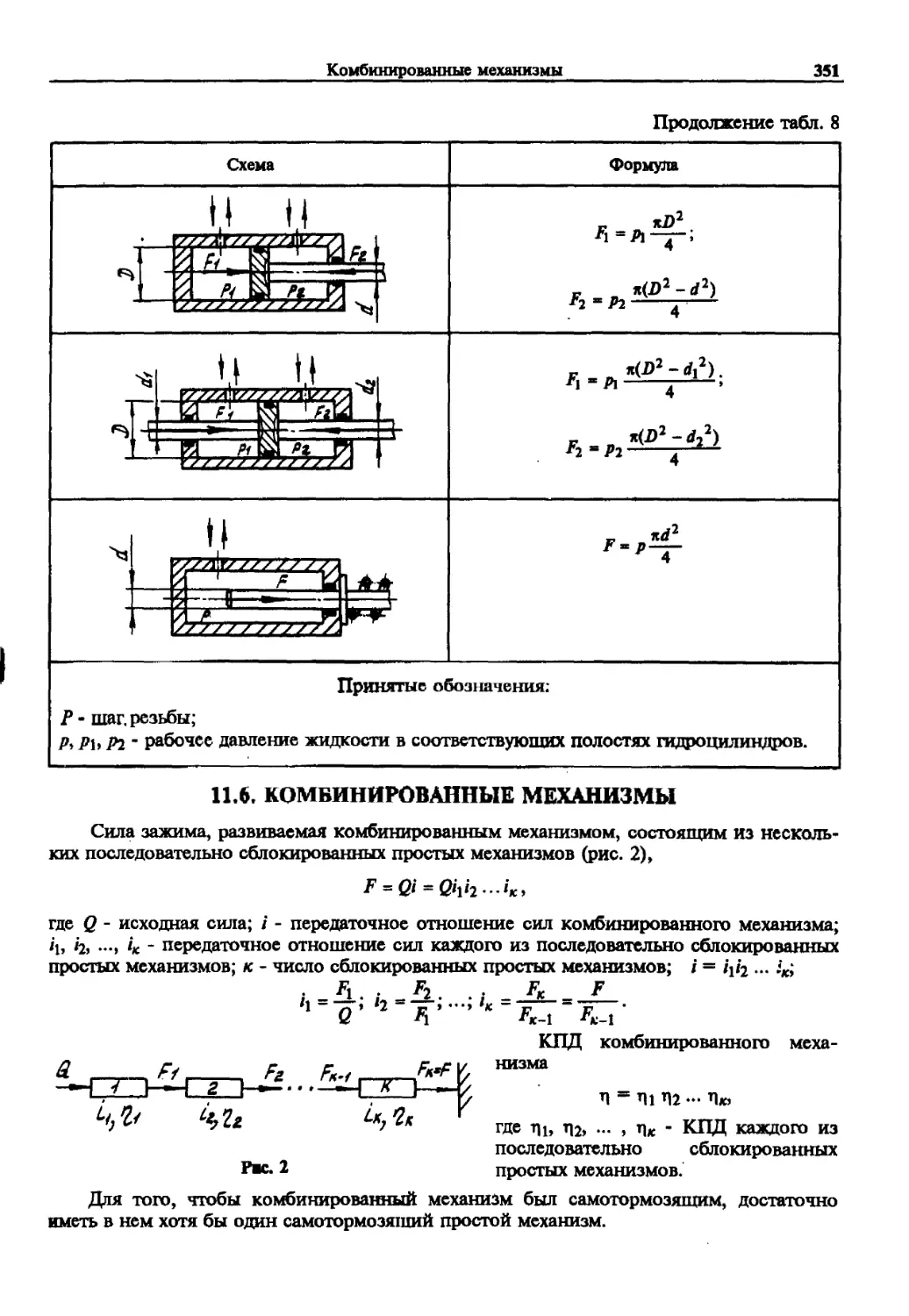
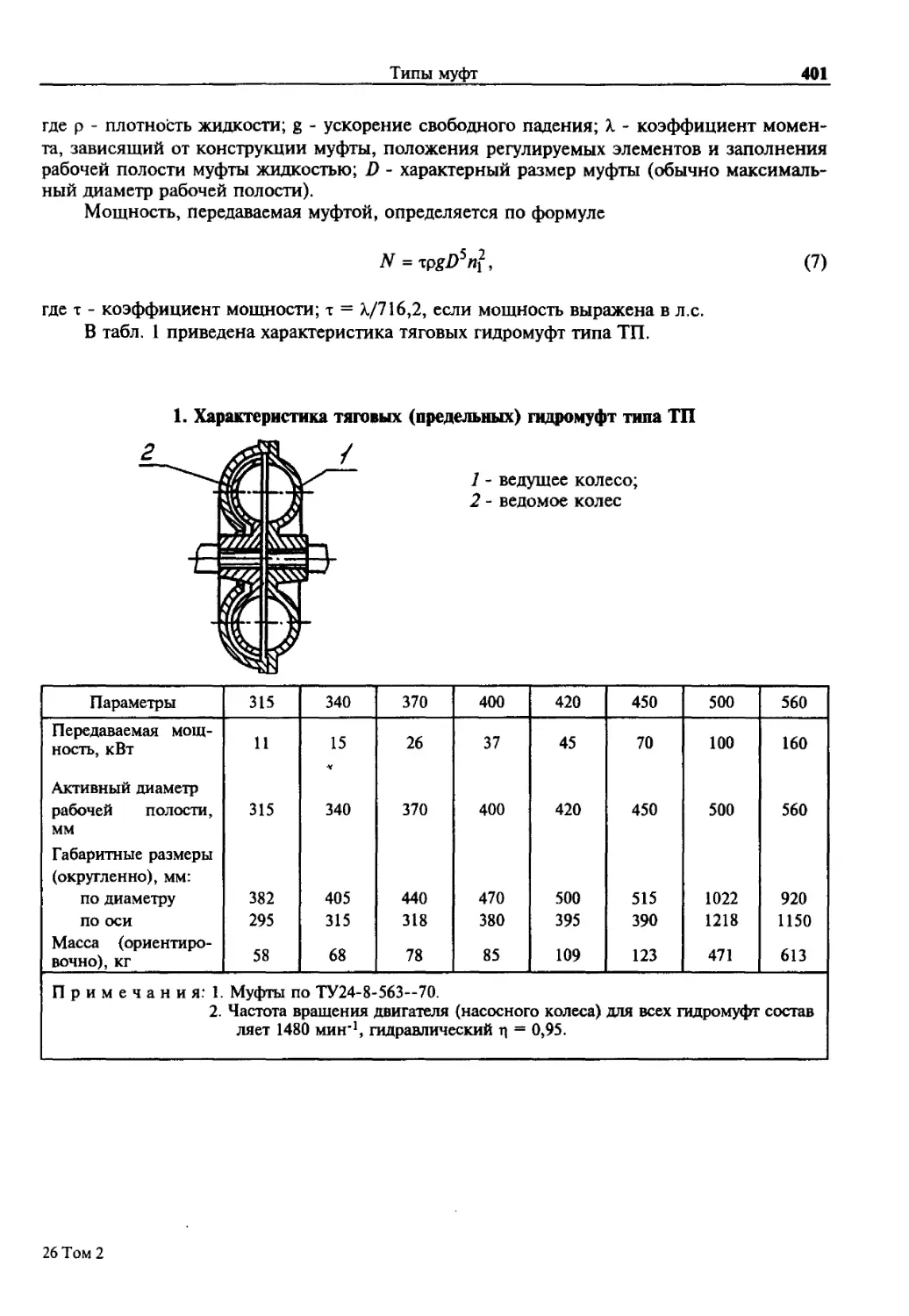
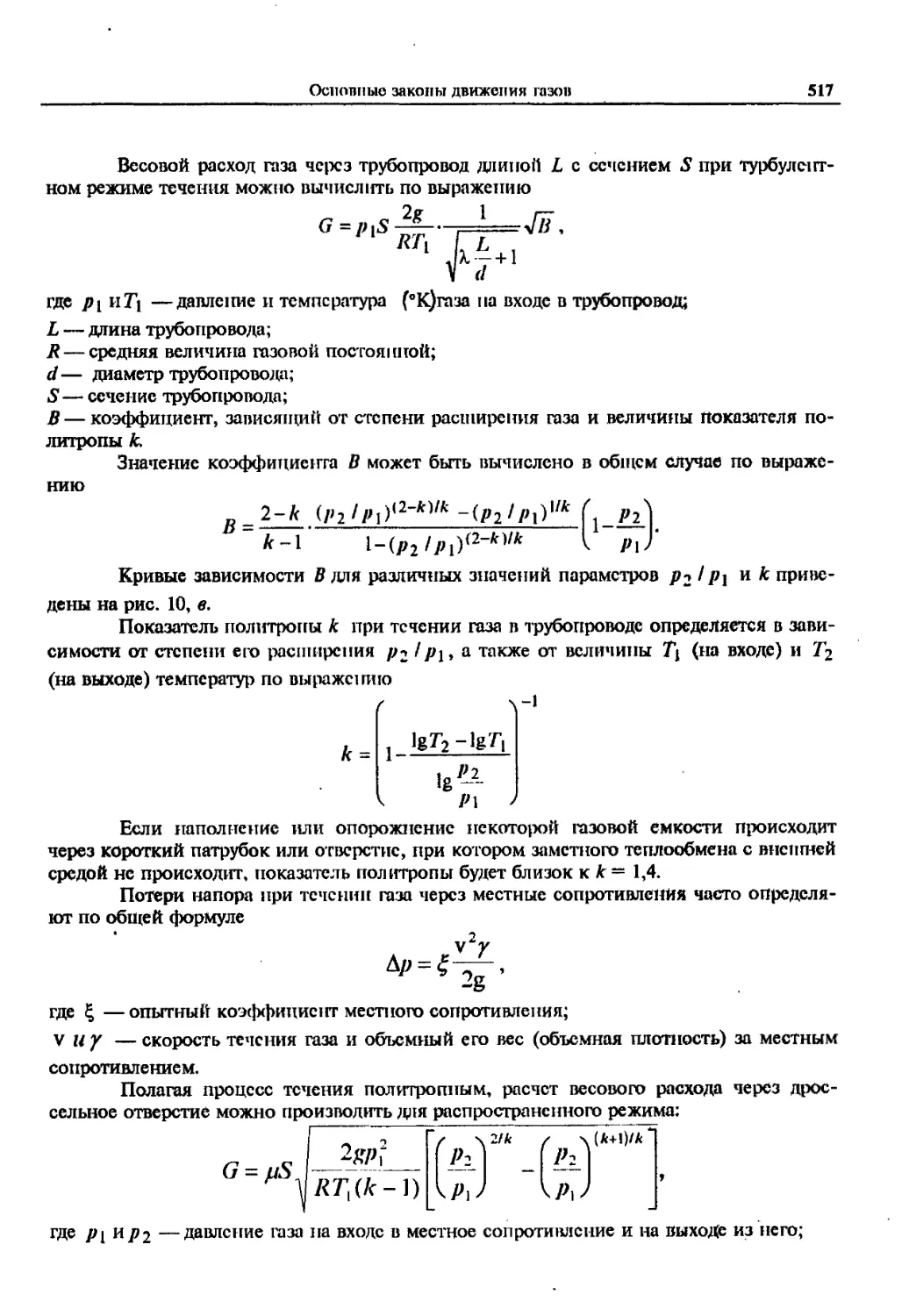
Текст
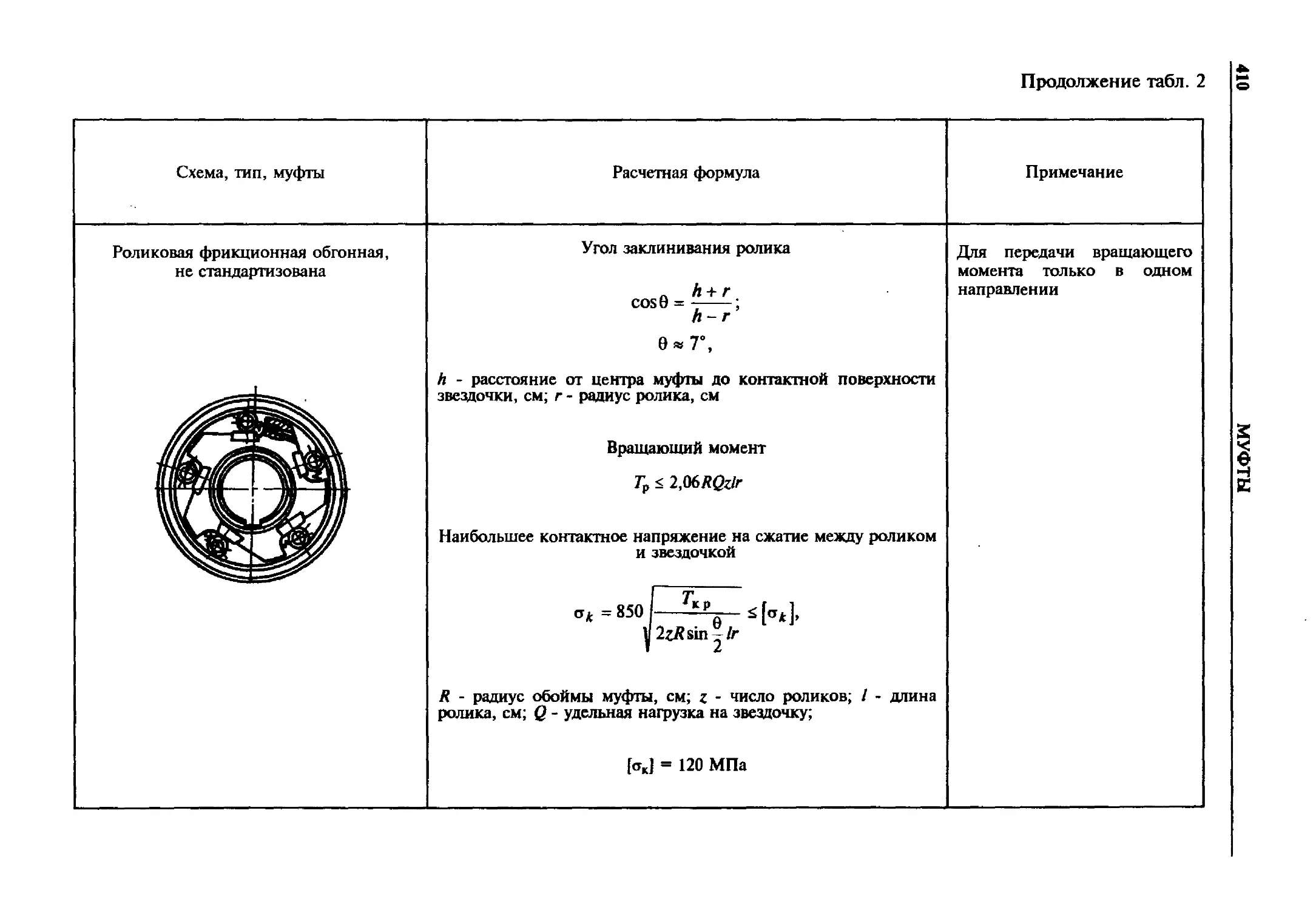
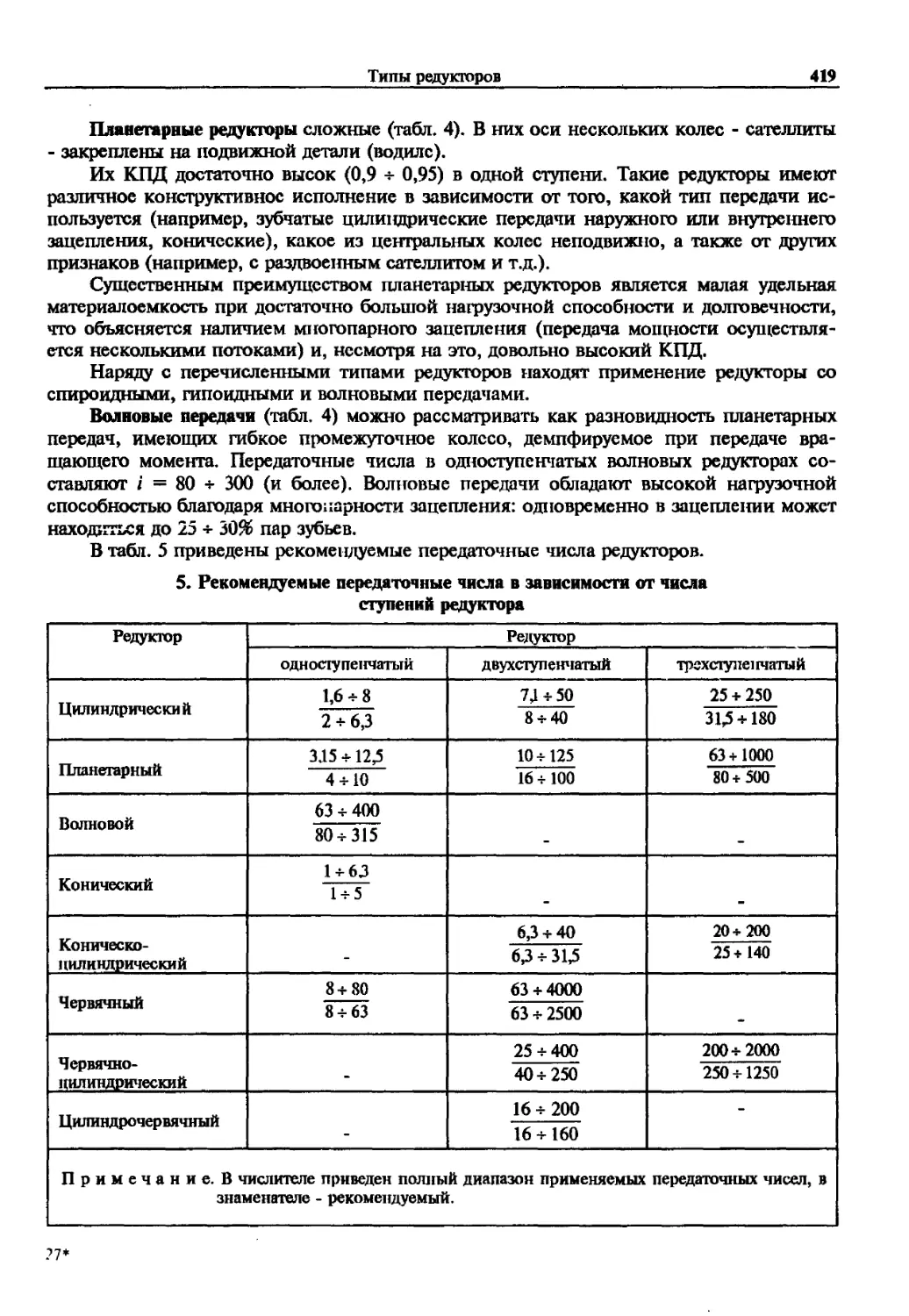
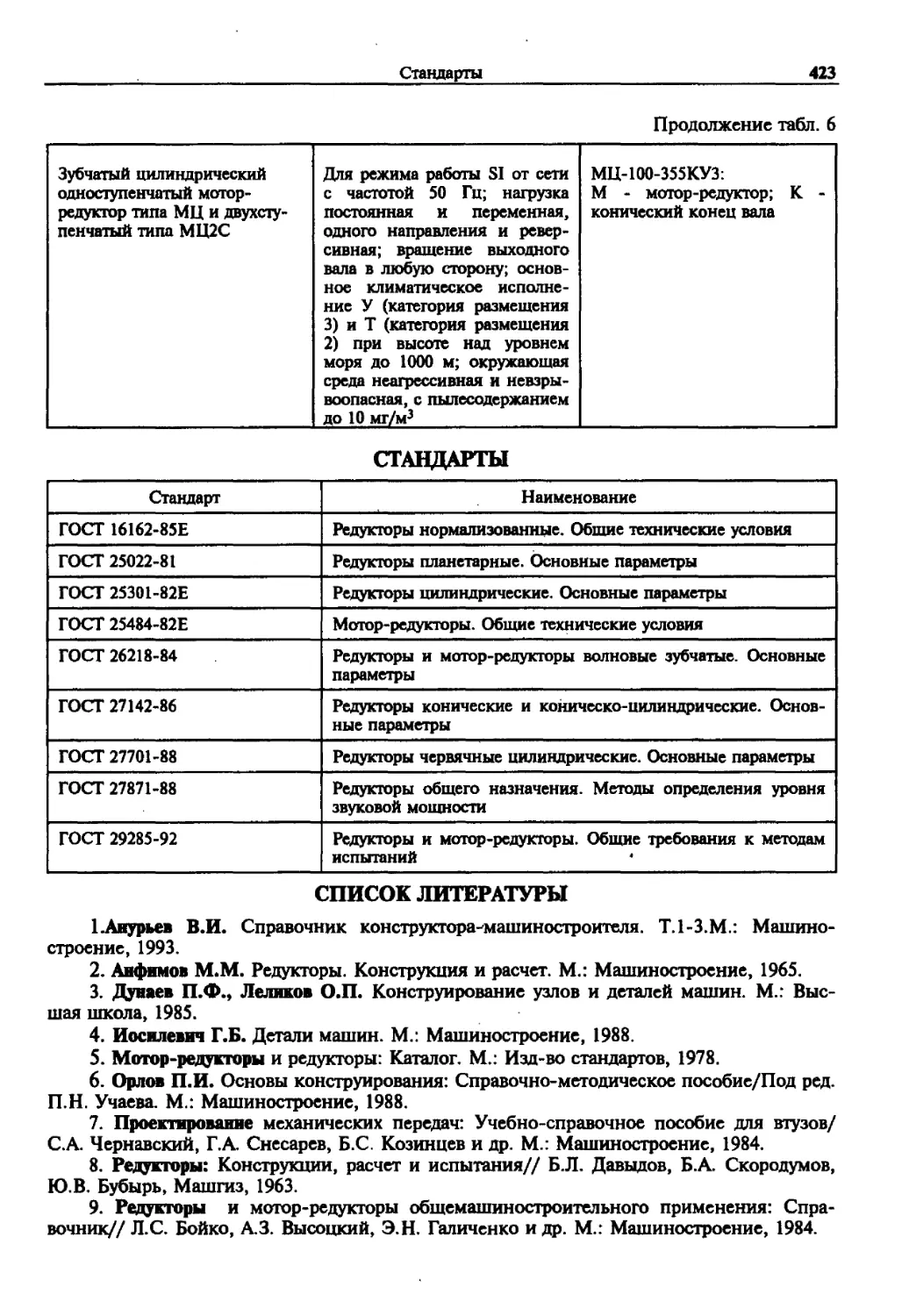
КРАПИН
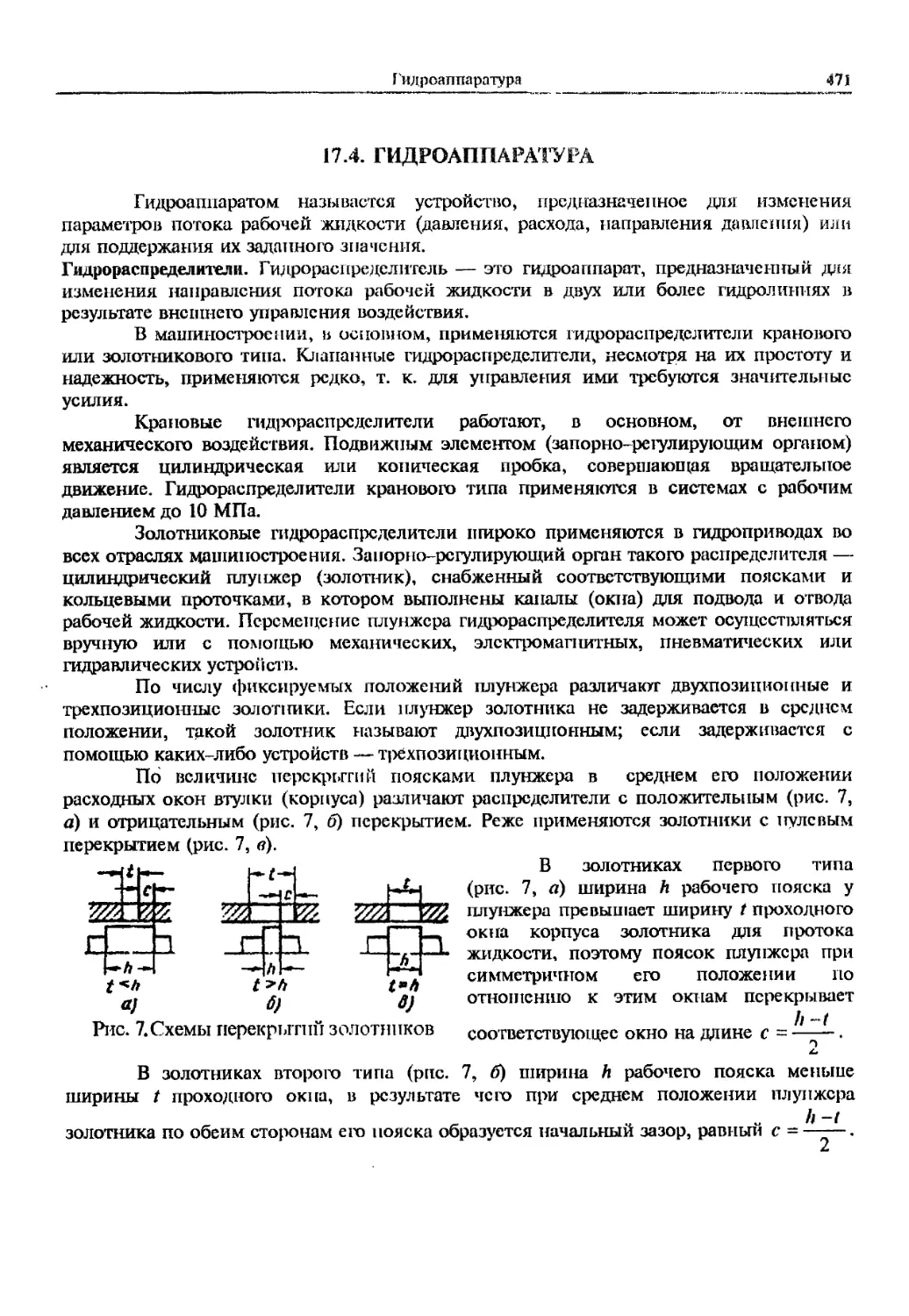
СПРАШНИК_
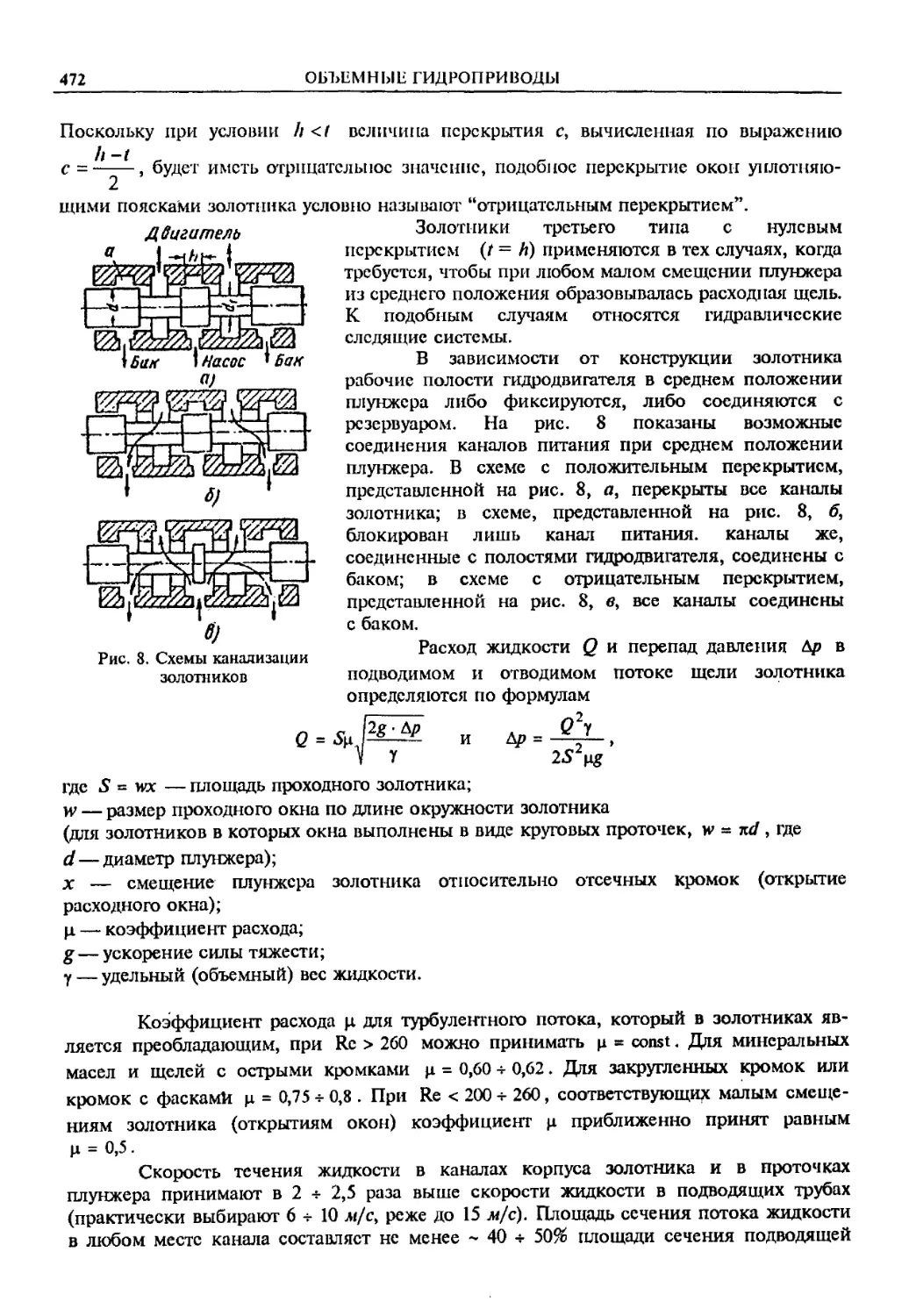
КОНСТРУКТОРА
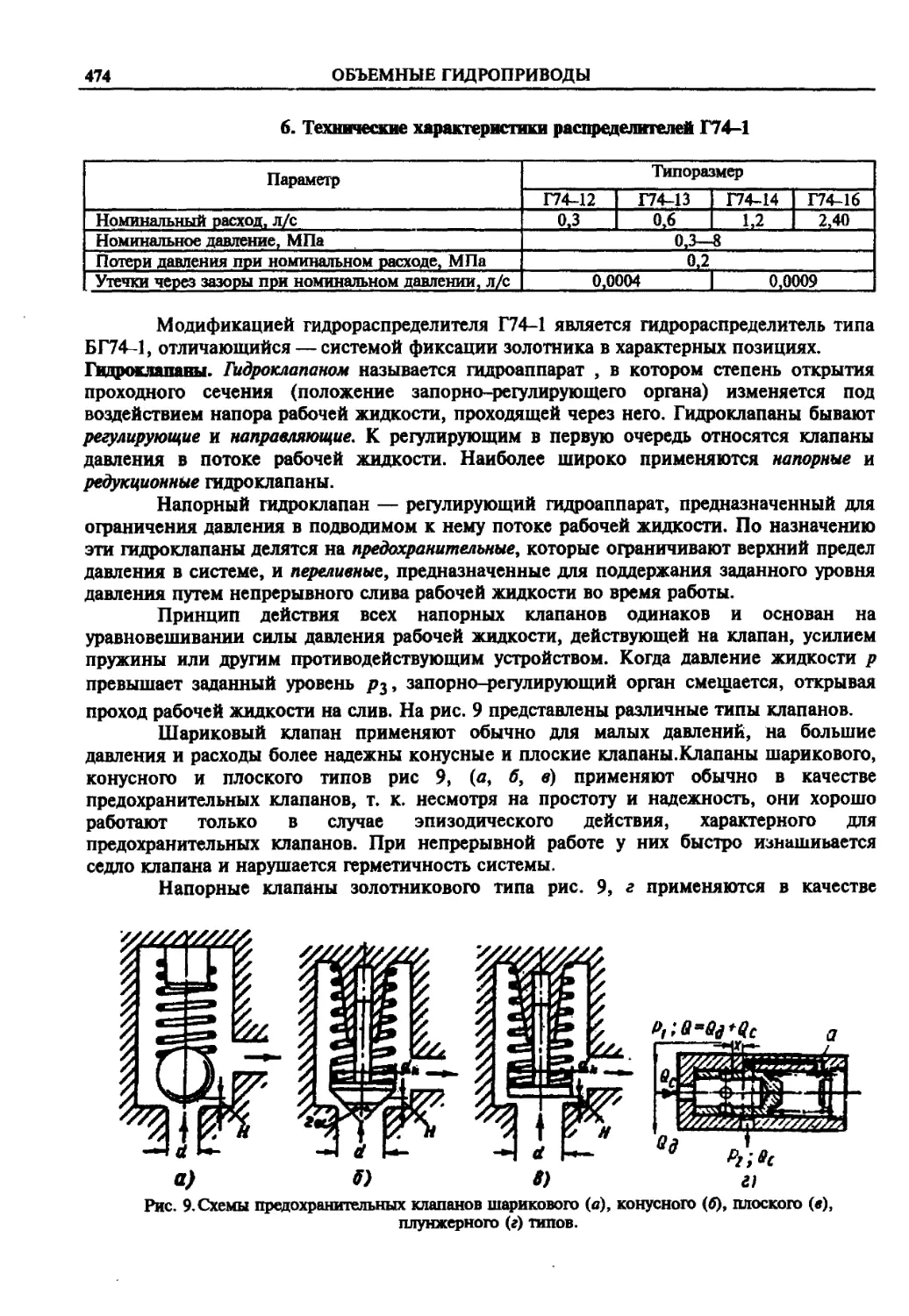
нешвдарого_
В ДВУХ ТОМАХ
Под редакцией В.И.Бакуменко
том
МОСКВА
"МАШИНОСТРОЕНИЕ"
1997
ББК34.42я2
К78
УДК 621.001.66C5)
Авторы: В.И.Бакумснко, В.А.Бшимфенко, СН.Косоруков, С.А.Атмннис, Ю.В.Бсрсепсв,
Ю.П.Воронцов, В.Ц.Комаров, А. В. Кудрявцев, Л. П Лаврова, О.Р.Мнхалева, СЛ.Нсцвстаев,
В.И.Пявсльев, Г.Ф.Свплов, В.Б.Свсчников, О.И.Тииников, В.Н.Фтшшш1.
Краткий справочник конструктора нестандартного оборудования. В 2-х томах. Т. 2/
К 78 В.И.Бакумснко. В.А.Бондарснко, С.Н.Косоруков и др.; Под общ. ред. В.И.Баку мен ко. -
М: Машиностроение. 1997 ... с ил.
ISBN 5-217-01742-2
Во втором томе приведены покрытия, основы конструирования литых деталей, типы
соединений "вал-стулиЦа", выбор и расчет подшипников качения и скольжения, виды
уплотнений подвижных и неподвижных соединений.
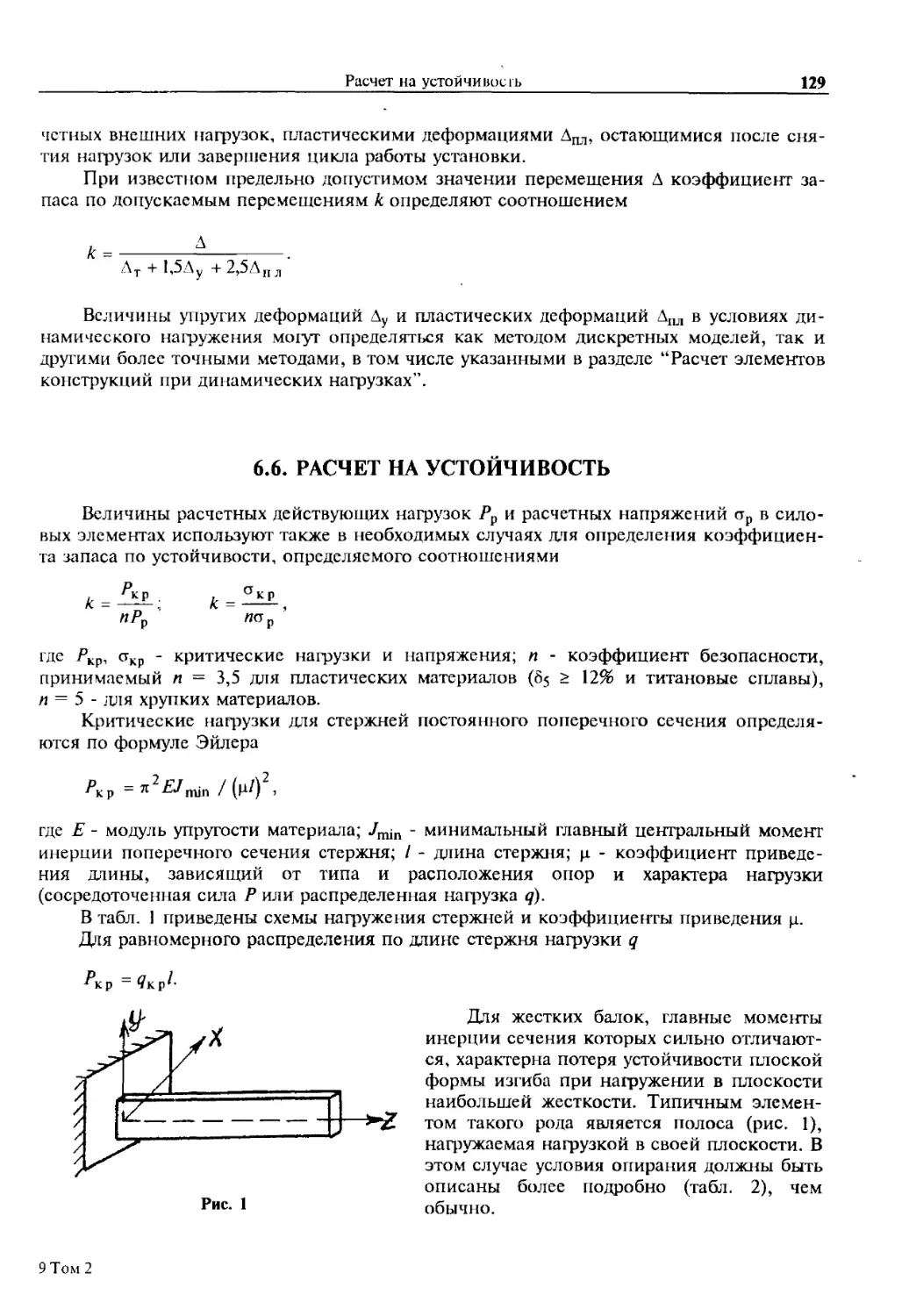
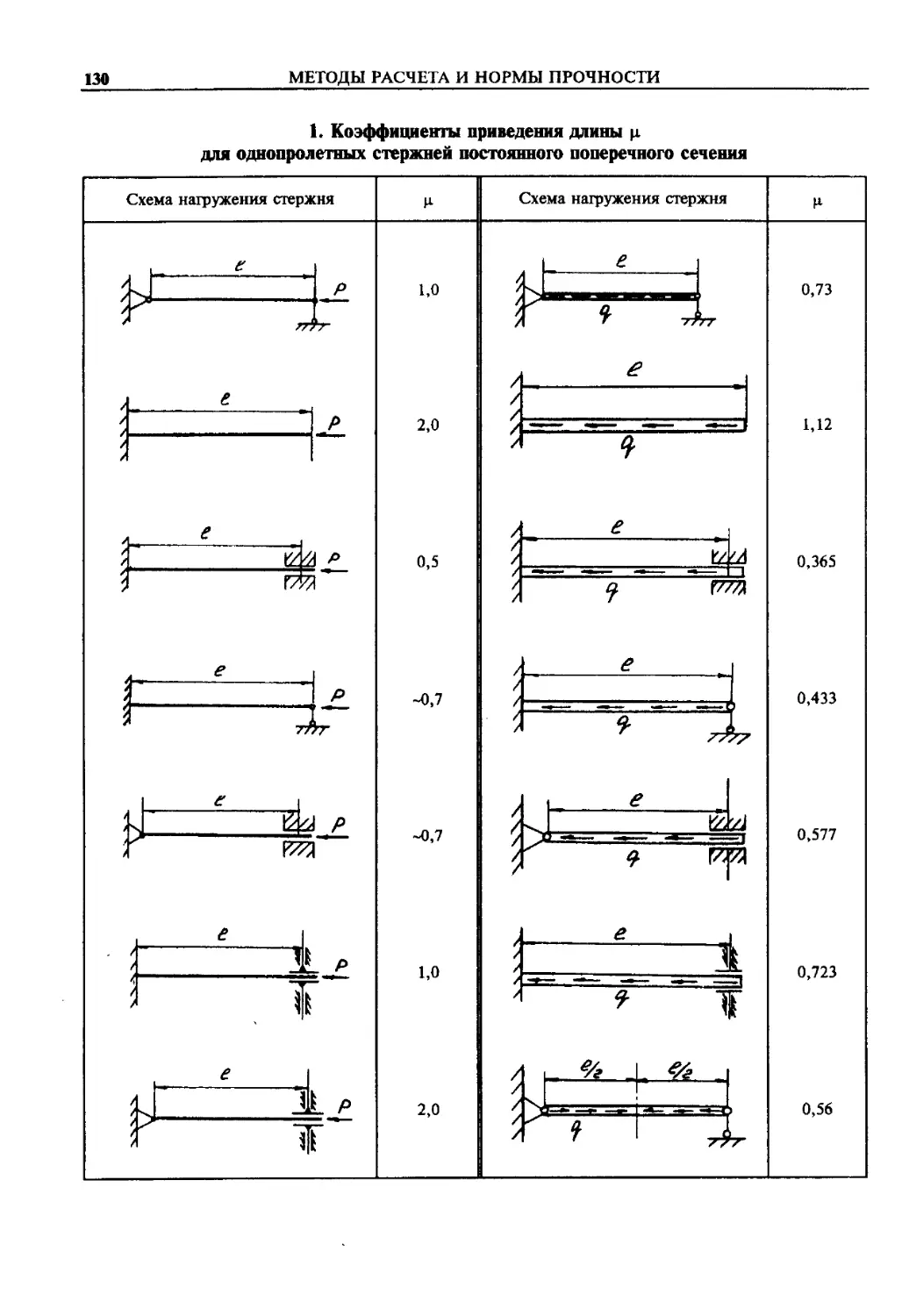
Изложены нормы прочности, принципы конструирования и расчеты стержней и
балок, различных видов дет.игей и элементов конструкций, простейших механизмов,
механических передач, муфт, редукторов и приводов, а также упрощенные методы
расчетов при действии динамических и предельных нагрузок.
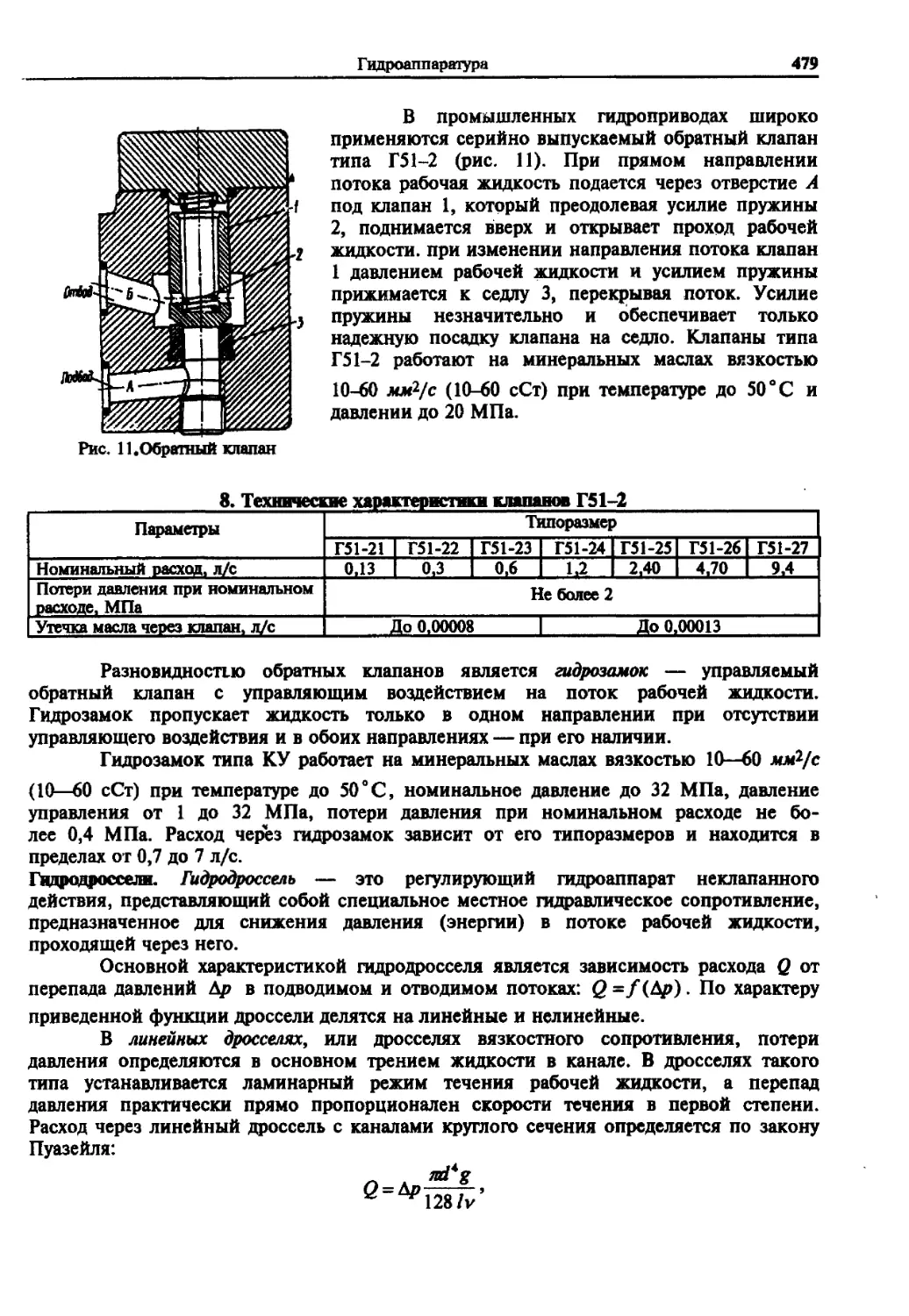
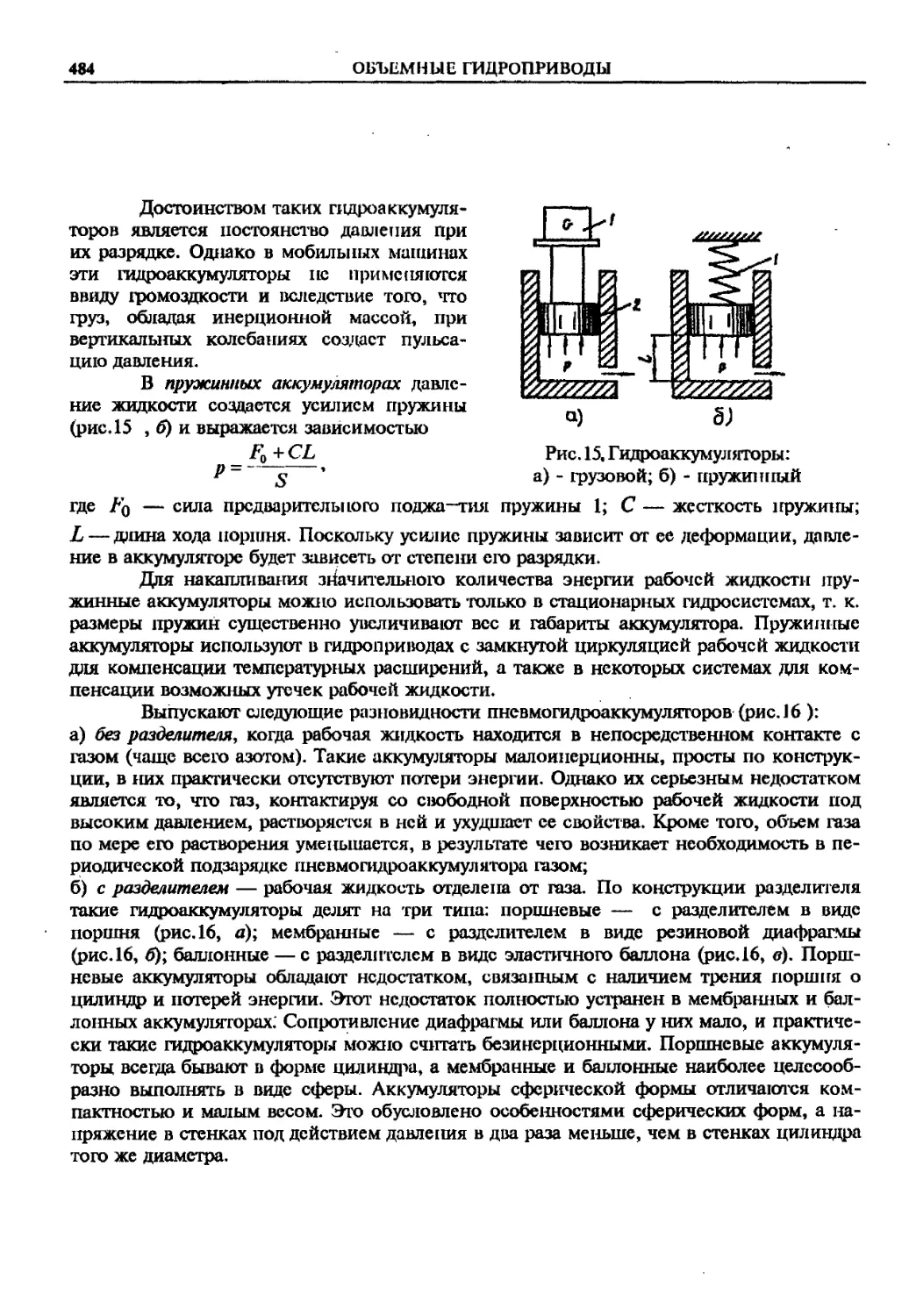
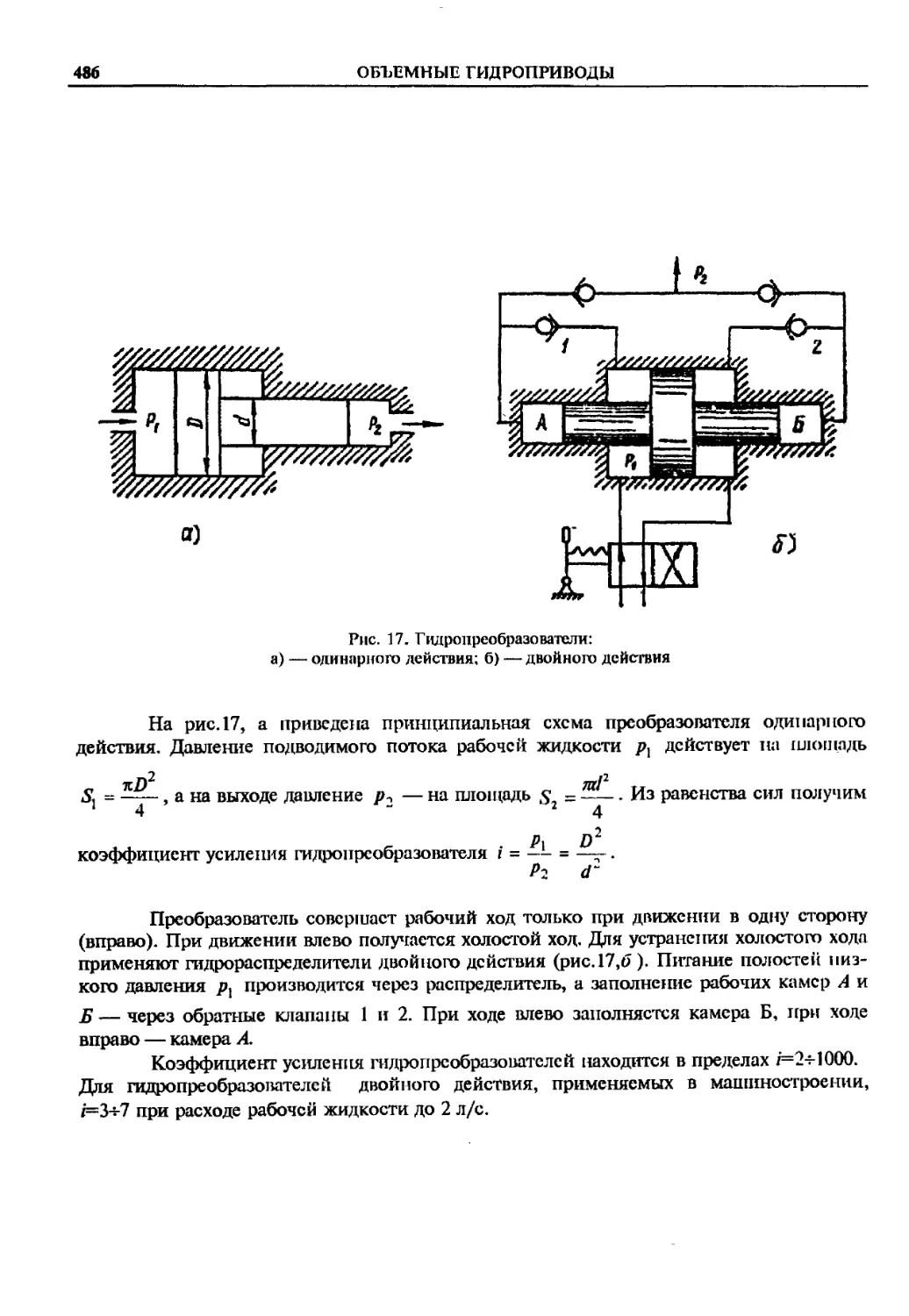
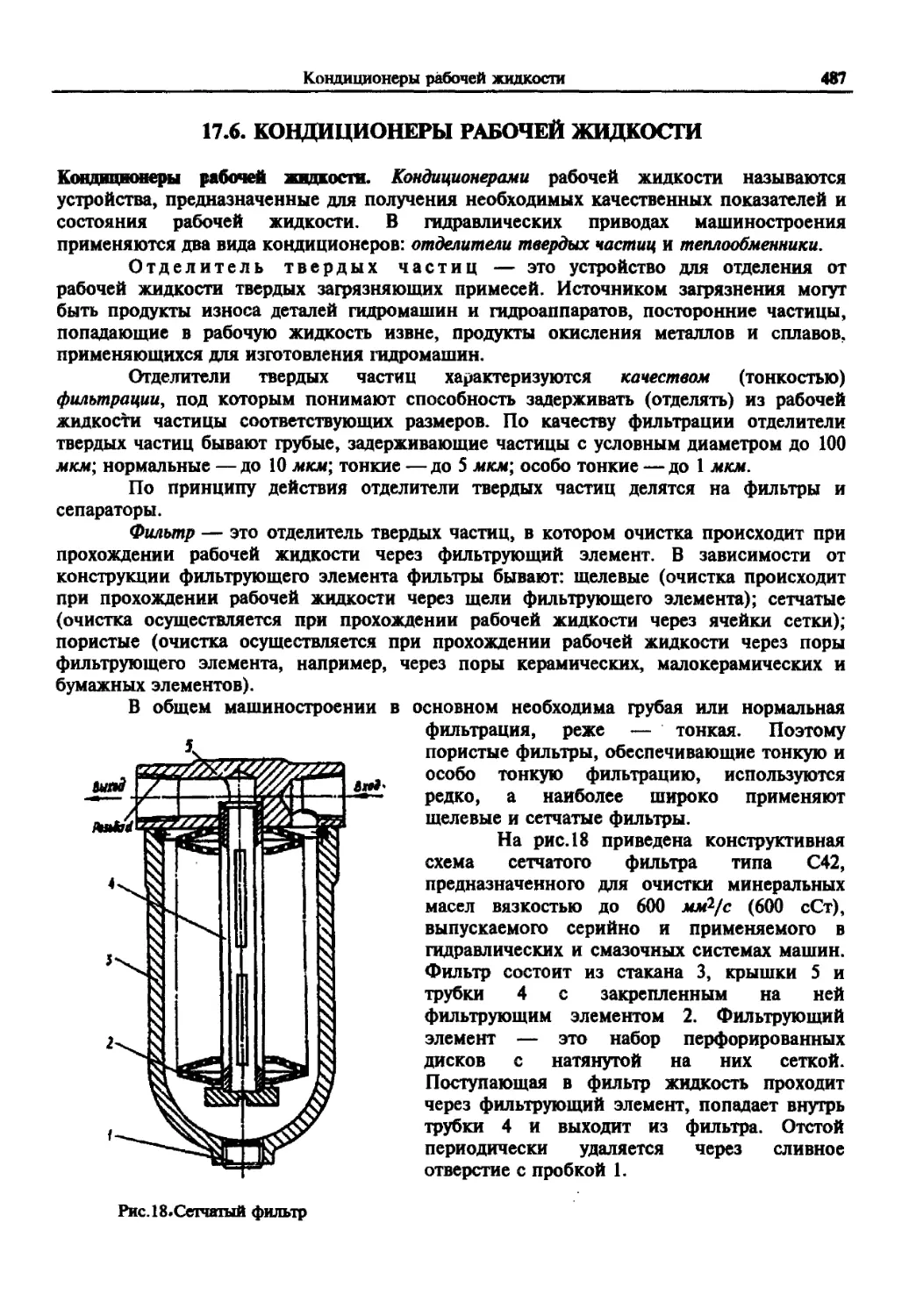
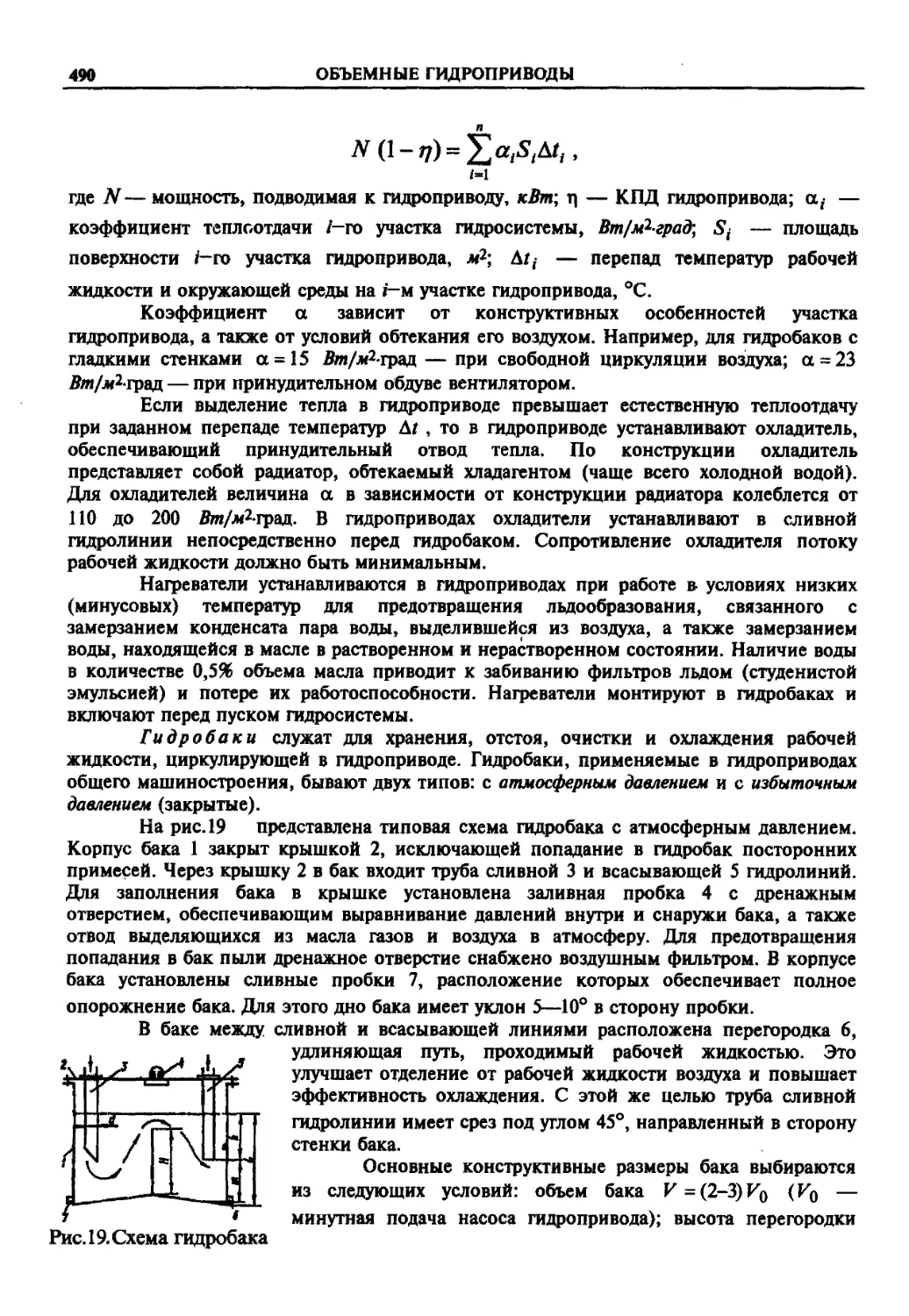
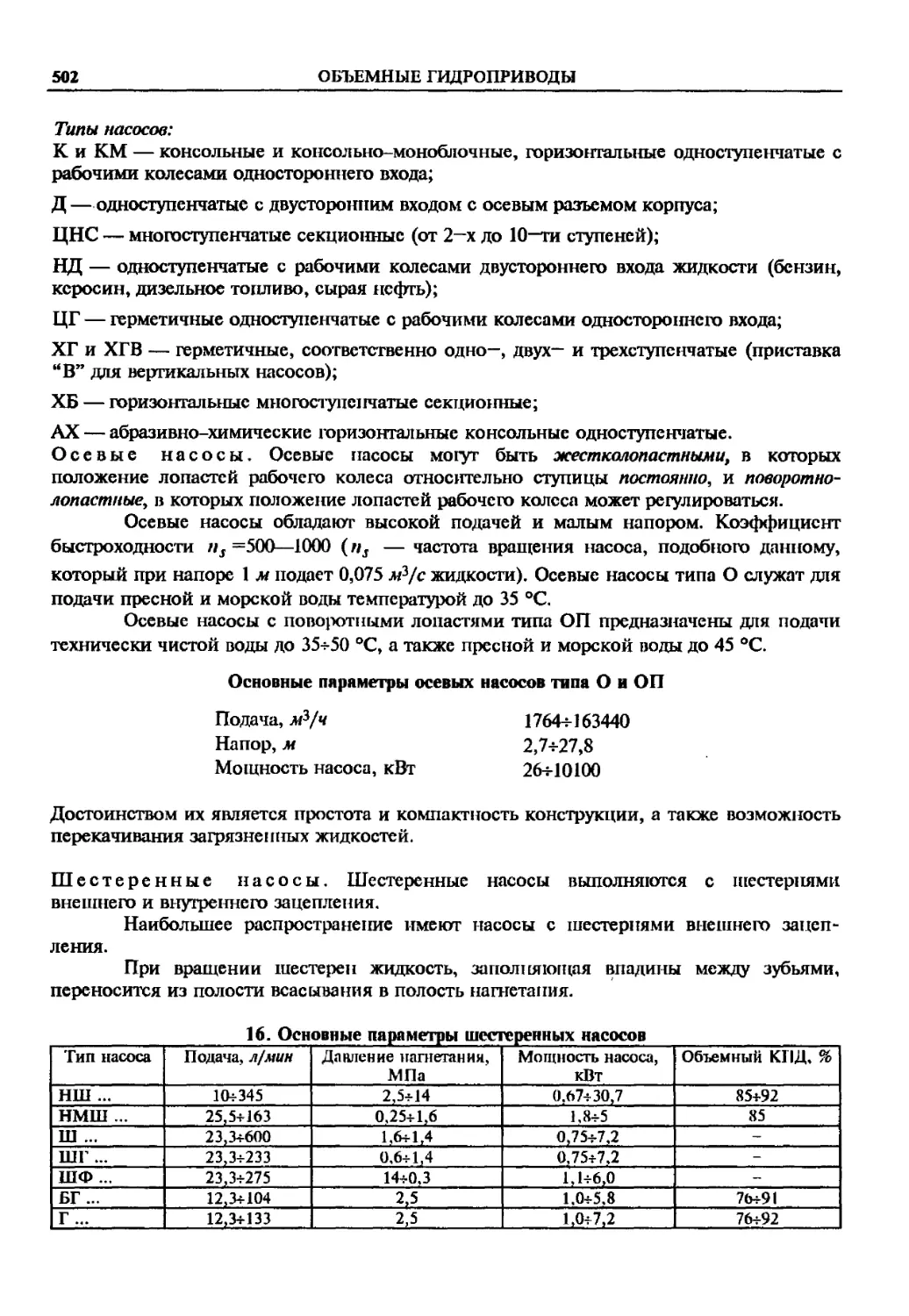
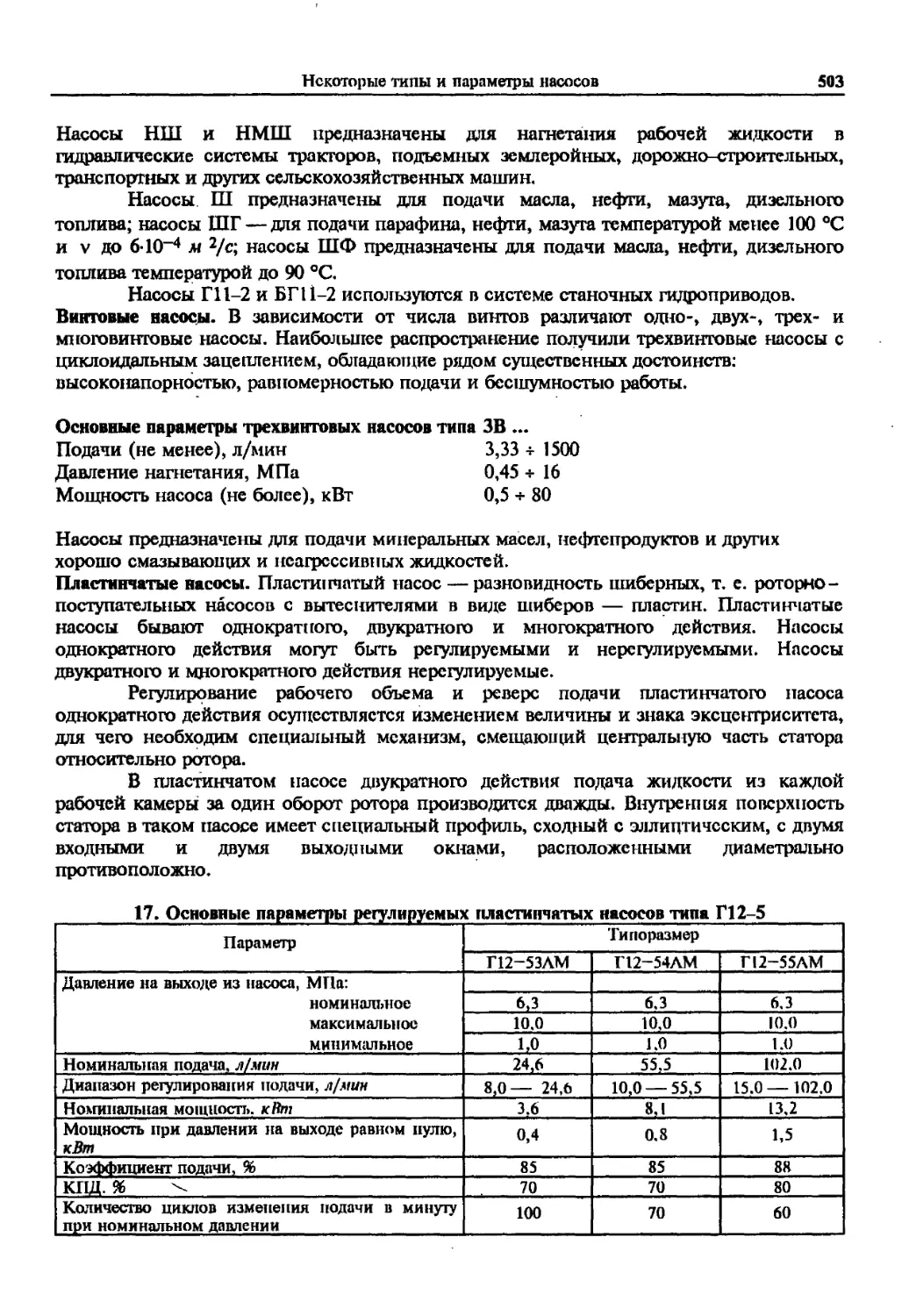
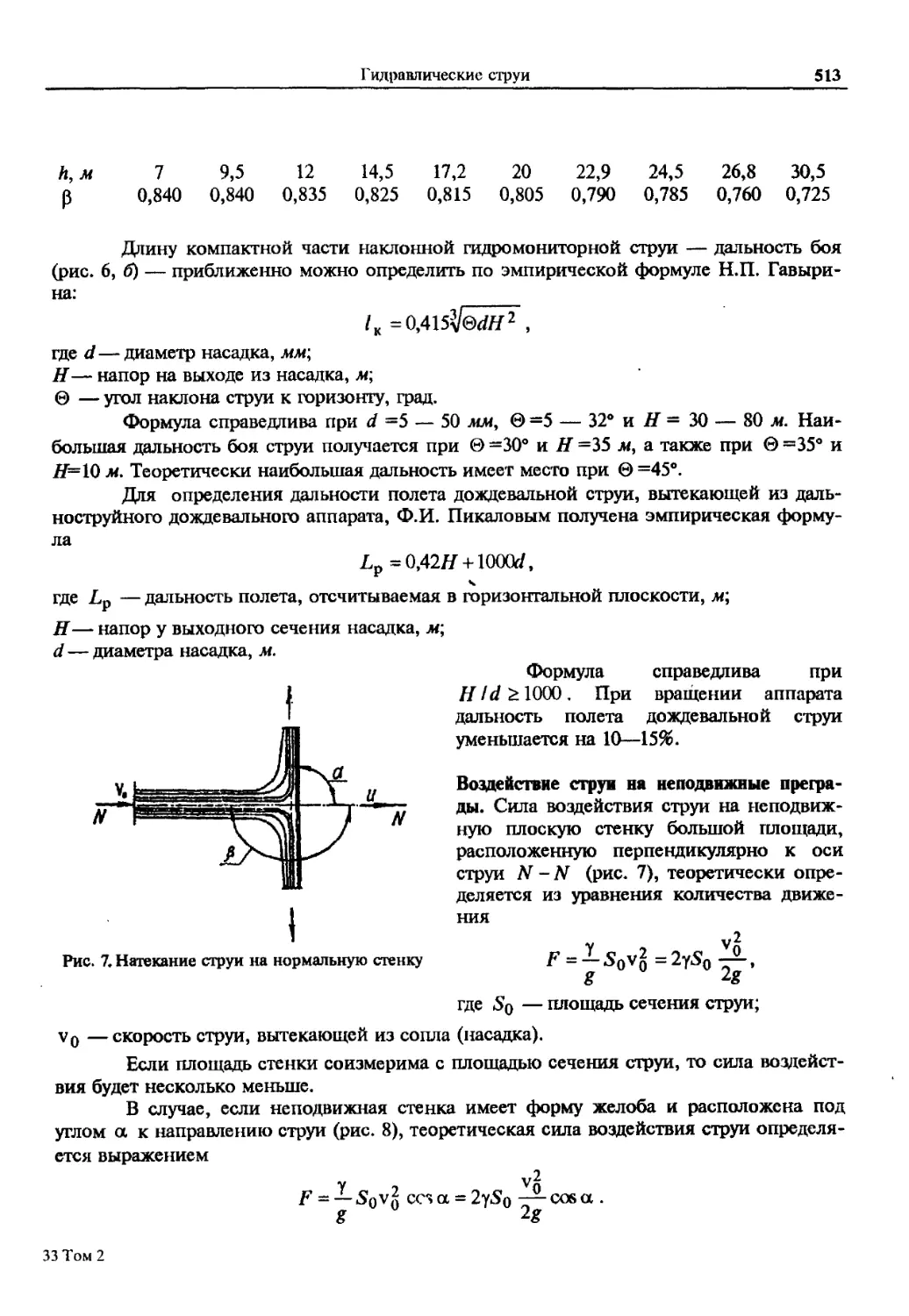
Даны расчеты шдрошший и пневмопроводов, тины и выбор гидроприводов,
гидроаппаратуры, гидроаккумуляторов и часто применяемые масла и смазки.
Формулы представлены а виде, удобном для практического пользования.
Предназначен для инженерно-технических работников, занимающихся
проектированием, изготовлением и ремонтом оборудования различных отраслей; полезен
преподавателям и студентам учебных заведений.
2702000000 Безобьявл. ББК 34.42я2
038 @1)-96
ISBN 5-217-01742-2
В.И.Бакуменко, В.А.Бондаренко,
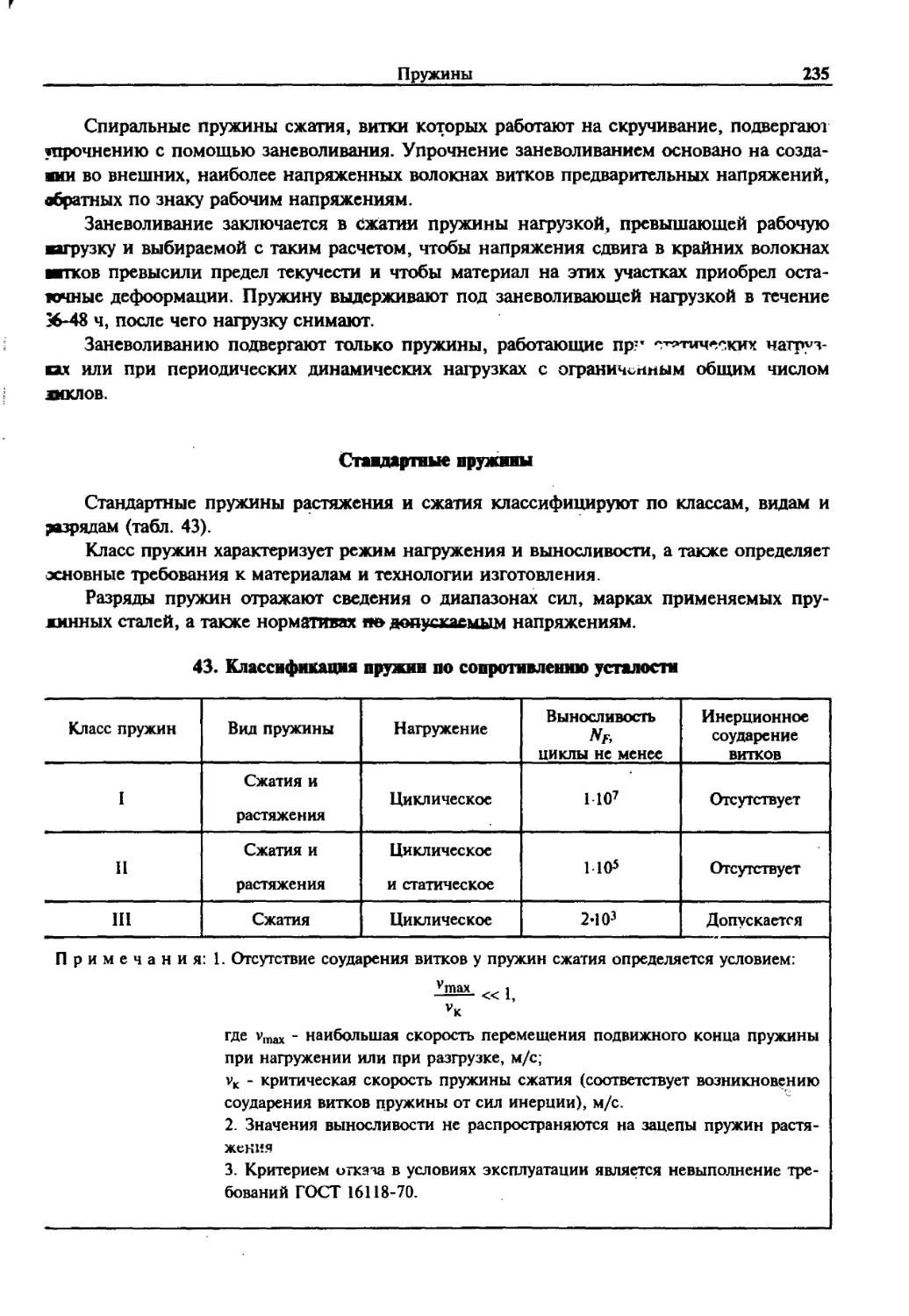
С.Н.Косоруков и др., 1997
Издательство "Машиностроения", 1997
1. ПОКРЫТИЯ
Покрытия наносят на изделия из различных материалов для защиты от коррозии,
придания изделиям декоративного вида, создания специальных поверхностных свойств
(электро- и теплопроводности, электроизоляционных, магнитных и немагнитных
свойств, светоотражающей или светопоглощающей способности и т.д.).
При выборе покрытий необходимо учитывать их назначение, условия эксплуата-
эксплуатации, материал детали, свойства и характеристику покрытий, способ нанесения покры-
покрытий, допустимость и недопустимость контактов сопрягаемых материалов.
Покрытия могут быть металлическими, неметаллическими неорганическими
(оксидными, фосфатными, фторидными и др.), пластмассовыми, резиновыми, лакокра-
лакокрасочными, пиролитичеекими (пирографит), керамическими (оксид циркония ZrC>2, кар-
карбид кремния SiC, дисилицид молибдена M0S12).
Условия эксплуатации металлических и неметаллических неорганических покры-
покрытий делят на группы: легкие условия Л - группа 1; средние С - группы 2-4; жесткие Ж -
группы 5, 6; очень жесткие ОЖ - группы 7, 8. Характеристики условий эксплуатации
приведены в ГОСТ 15150-69.
1.1. КОРРОЗИЯ МЕТАЛЛОВ
Атмосферная коррозия - наиболее распространенный вид коррозионного разруше-
разрушения металлов в результате химического или электрохимического воздействия внешней
среды. Все твердые тела адсорбируют на своей поверхности влагу из воздуха; поверхно-
поверхности этих тел покрыты тонкой пленкой влаги. В воде растворяются в большей или
меньшей степени практически все неорганические и органические соединения, а также
газы.
Оценку возможности протекания коррозии ведут по величине стандартного элек-
электродного потенциала (по водородной шкале). Элементы, расположенные в электрохи-
электрохимическом ряду потенциалов слева от водорода, подвергаются процессу окисления,
справа - процессу восстановления:
Уменьшение химической активности нейтральных атомов
>
К, Na, Ca, Mg, Al, Mn, Zn, Fe, Ni, Sfl, Pb, H2, Cu, Hg, Ag
Уменьшение способности ионов к присоединению электронов
4
Ионы металлов, стоящих в ряду слева от водорода, разряжаются труднее, чем ионы
водорода, в зависимости от места положения. Коррозия металлов, стоящих в ряду по-
потенциалов слева от водорода, сводится к вытеснению ионов водорода из раствора и пе-
переходу ионов металла в раствор.
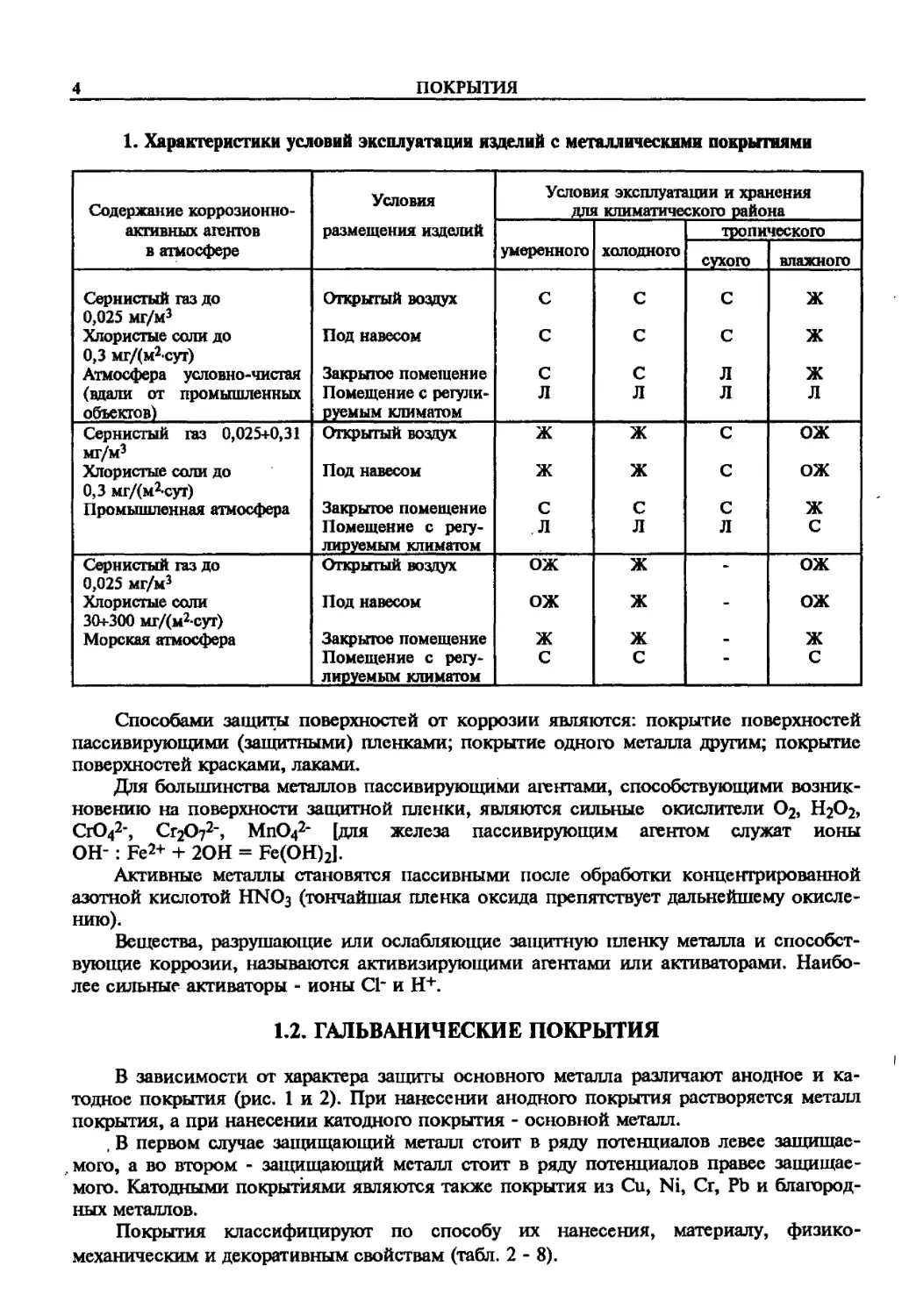
Характеристика атмосфер, агрессивных, по отношению к металлическим покрыти-
покрытиям, и условия эксплуатации изделий приведены в табл. 1.
ПОКРЫТИЯ
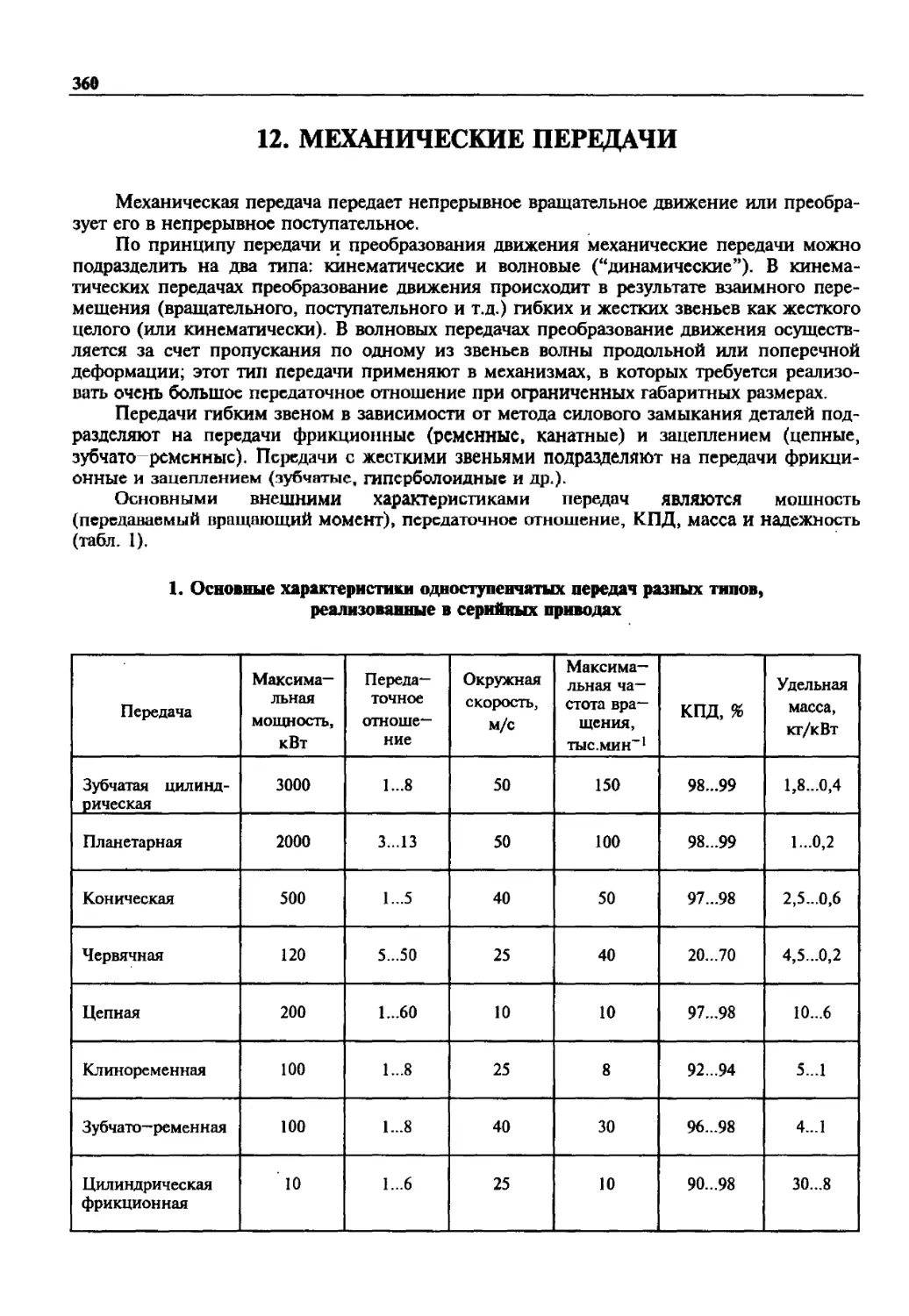
1. Характеристики условий эксплуатации изделий с металлическими покрытиями
Содержание коррозионно-
акгивных агентов
в атмосфере
Сернистый газ до
0,025 мг/м3
Хлористые соли до
0,3 мг/(м2сут)
Атмосфера условно-чистая
(вдали от промышленных
объектов)
Сернистый газ 0,025+0,31
мг/м3
Хлористые соли до
0,3 мг/(м2-сут)
Промышленная атмосфера
Сернистый газ до
0,025 мг/м3
Хлористые соли
30+300 мг/(м2-сут)
Морская атмосфера
Vp пппно
размещения изделий
Открытый воздух
Под навесом
Закрытое помещение
Помещение с регули-
регулируемым климатом
Открытый воздух
Под навесом
Закрытое помещение
Помещение с регу-
регулируемым климатом
Открытый воздух
Под навесом
Закрытое помещение
Помещение с регу-
регулируемым климатом
Условия эксплуатации и хранения
для климатического района
умеренного
С
С
С
Л
Ж
Ж
С
..л
ож
ож
ж
с
холодного
С
С
С
Л
Ж
Ж
С
Л
Ж
Ж
Ж
с
тропического
сухого
С
С
Л
Л
с
с
с
л
-
-
-
-
влажного
Ж
Ж
Ж
Л
ОЖ
ОЖ
Ж
С
ОЖ
ОЖ
Ж
С
Способами защиты поверхностей от коррозии являются: покрытие поверхностей
пассивирующими (защитными) пленками; покрытие одного металла другим; покрытие
поверхностей красками, лаками.
Для большинства металлов пассивирующими агентами, способствующими возник-
возникновению на поверхности защитной пленки, являются сильные окислители О2, Н2О2,
СгС>42', СГ2О72", МпО,}2" [для железа пассивирующим агентом служат ионы
ОН-: Fe2+ + 2OH = Fe(OHJ].
Активные металлы становятся пассивными после обработки концентрированной
азотной кислотой HNO3 (тончайшая пленка оксида препятствует дальнейшему окисле-
окислению).
Вещества, разрушающие или ослабляющие защитную пленку металла и способст-
способствующие коррозии, называются активизирующими агентами или активаторами. Наибо-
Наиболее сильные активаторы - ионы С1" и Н+.
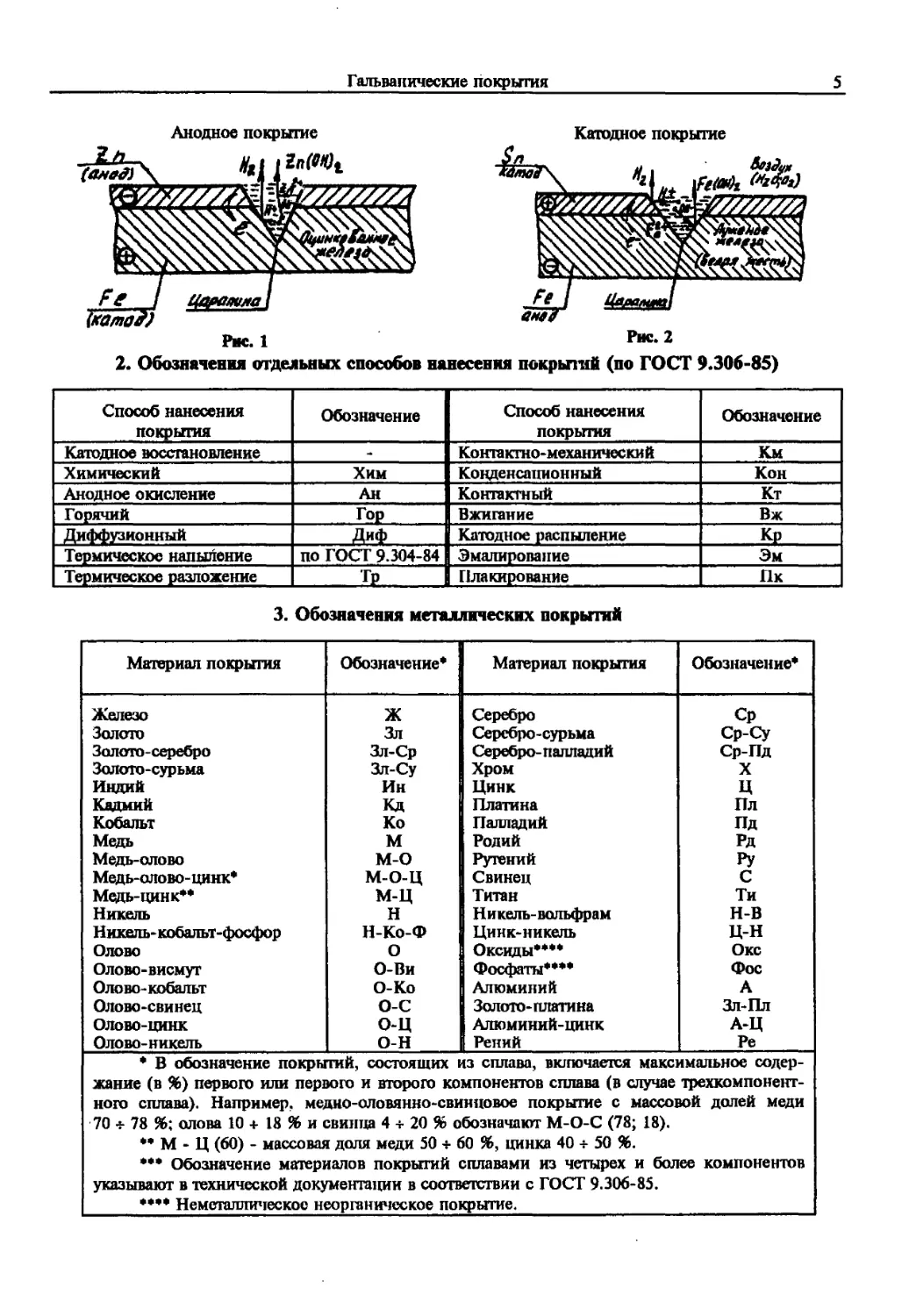
1.2. ГАЛЬВАНИЧЕСКИЕ ПОКРЫТИЯ
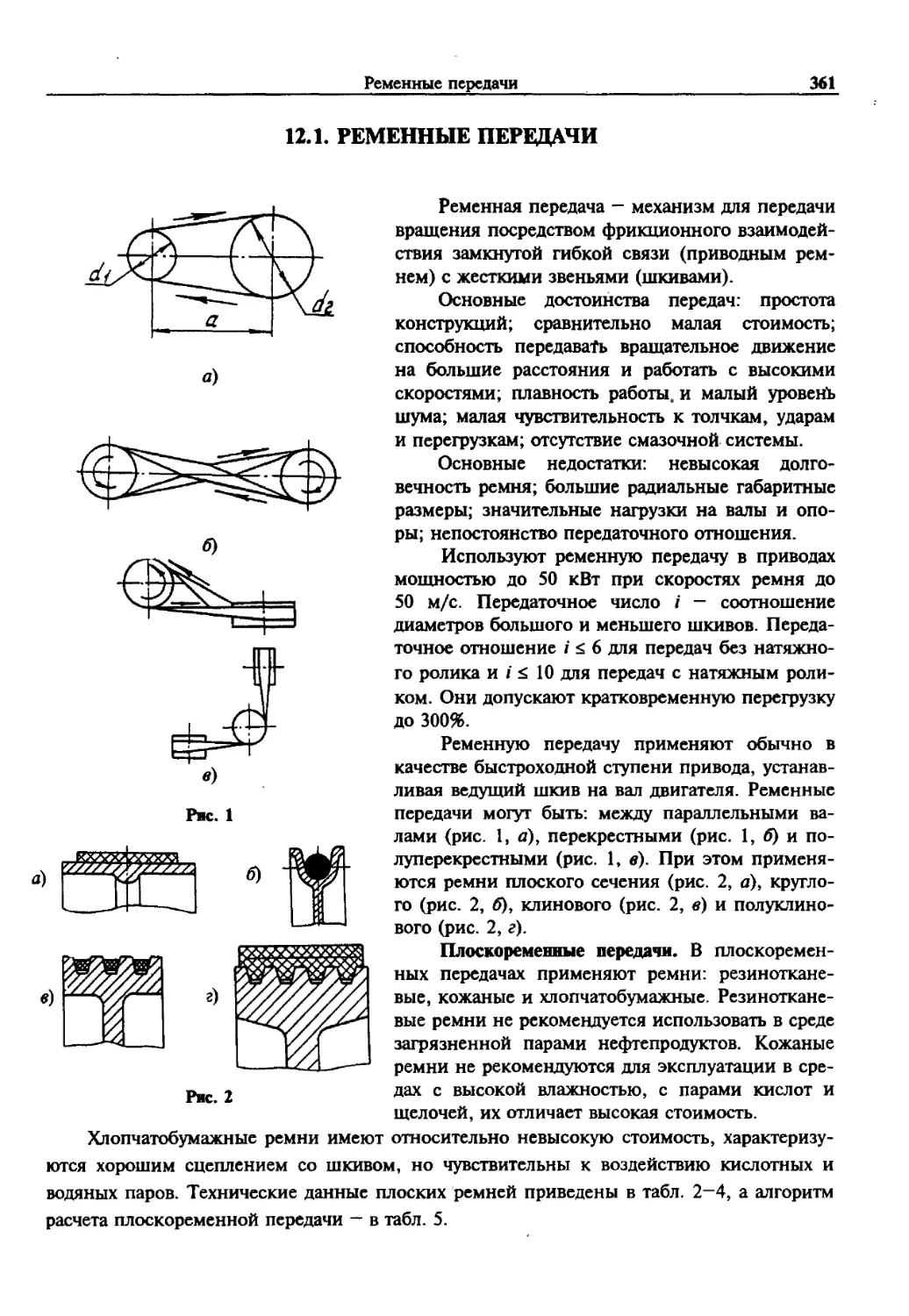
В зависимости от характера защиты основного металла различают анодное и ка-
катодное покрытия (рис. 1 и 2). При нанесении анодного покрытия растворяется металл
покрытия, а при нанесении катодного покрытия - основной металл.
, В первом случае защищающий металл стоит в ряду потенциалов левее защищае-
защищаемого, а во втором - защищающий металл стоит в ряду потенциалов правее защищае-
защищаемого. Катодными покрытиями являются также покрытия из Си, Ni, Сг, РЬ и благород-
благородных металлов.
Покрытия классифицируют по способу их нанесения, материалу, физико-
механическим и декоративным свойствам (табл. 2-8).
Гальванические покрытия
~(Ли«М \
Анодное покрытие
Катодное покрытие
Рис. 1
Рис. 2
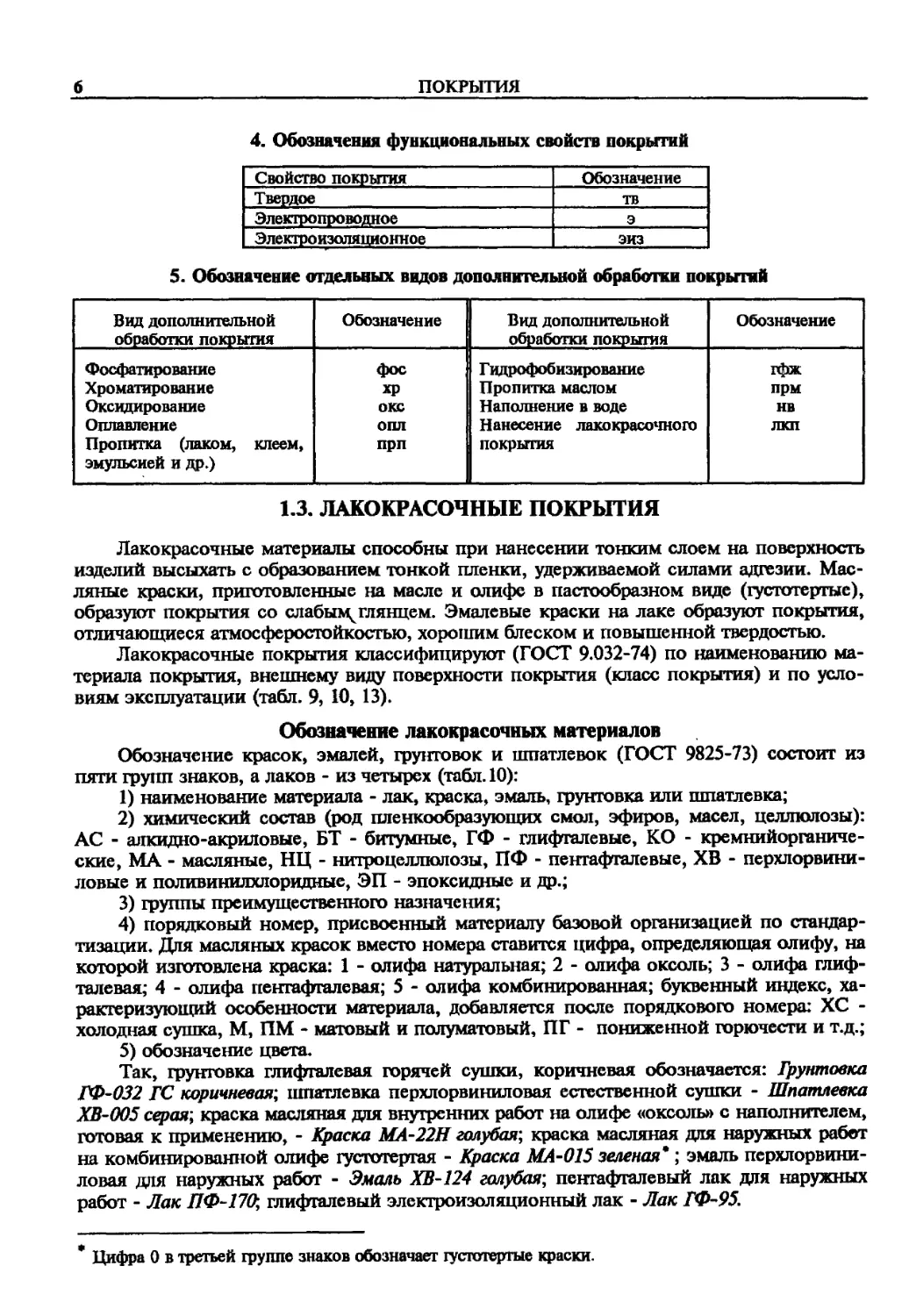
2. Обознаяення отдельных способов нанесения покрытий (по ГОСТ 9.306-85)
Способ нанесения
покрытия
Катодное восстановление
Химический
Анодное окисление
Горячий
Диффузионный
Термическое напыление
Термическое разложение
Обозначение
-
Хим
Ait
Гор
Диф
по ГОСТ 9.304-84
Тр
Способ нанесения
покрытия
Контактно-механический
Конденсационный
Контактный
Вжигаиие
Катодное распыление
Эмалирование
Плакирование
Обозначение
Км
Кон
Кт
Вж
Кр
Эм
Пк
3. Обозначения металлических покрытий
Материал покрытия
Железо
Золото
Золото-серебро
Золото-сурьма
Индий
Кадмий
Кобальт
Медь
Медь-олово
Медь-олово-цинк*
Медь-цинк**
Никель
Никель-кобальт-фосфор
Олово
Олово-висмут
Олово-кобальт
Олово-свинец
Олово-цинк
Олово-никель
Обозначение*
* В обозначение покрытий,
жание (в %) первого или первого
Ж
Зл
Зл-Ср
Зл-Су
Ин
Кд
Ко
М
МО
М-О-Ц
М-Ц
н
Н-Ко-Ф
О
О-Ви
О-Ко
О-С
о-ц
он
Материал покрытия
Серебро
Серебро-сурьма
Серебро-палладий
Хром
Цинк
Платина
Палладий
Родий
Рутений
Свинец
Титан
Никель-вольфрам
Цинк-никель
Оксиды****
Фосфаты****
Алюминий
Золото-платина
Алюминий-цинк
Рений
Обозначение*
Ср
Ср-Су
Ср-Пд
X
Ц
Пл
Пд
Рд
Ру
с
Ти
Н-В
Ц-Н
Оке
Фос
А
Зл-Пл
А-Ц
Ре
состоящих из сплава, вюпочается максимальное содер-
и второго компонентов сплава (в случае трехкомпонент-
ного сплава). Например, медно-оловянно-свинцовое покрытие с массовой
70 * 78 %; олова 10 + 18 % и свинца 4 + 20 % обозначают М-О-С G8; 18).
•• М - Ц F0) - массовая доля меди 50 * 60 %, цинка 40 -5- 50 %.
••* Обозначение материалов покрытий <
;плавами из четырех и более
указывают в технической документации в соответствии с ГОСТ 9.306-85.
¦*** Неметаллическое неорганическое покрытие.
долей меди
компонентов
ПОКРЫТИЯ
4. Обозначения функциональных свойств покрытий
Свойство покрытия
Твердое
Электропроводное
Электроизоляционное
Обозначение
ТВ
э
эиз
5. Обозначение отдельных видов дополнительной обработки покрытий
Вид дополнительной
обработки покрытия
Фосфатирование
Хроматирование
Оксидирование
Оплавление
Пропитка (лаком, клеем,
эмульсией и др.)
Обозначение
фос
хр
оке
опл
прп
Вид дополнительной
обработки покрытия
Гидрофобизирование
Пропитка маслом
Наполнение в воде
Нанесение лакокрасочного
покрытия
Обозначение
гфж
прм
ив
лют
1.3. ЛАКОКРАСОЧНЫЕ ПОКРЫТИЯ
Лакокрасочные материалы способны при нанесении тонким слоем на поверхность
изделий высыхать с образованием тонкой пленки, удерживаемой силами адгезии. Мас-
Масляные краски, приготовленные на масле и олифе в пастообразном виде (густотертые),
образуют покрытия со слабым^ глянцем. Эмалевые краски на лаке образуют покрытия,
отличающиеся атмосферостойкостью, хорошим блеском и повышенной твердостью.
Лакокрасочные покрытия классифицируют (ГОСТ 9.032-74) по наименованию ма-
материала покрытия, внешнему виду поверхности покрытия (класс покрытия) и по усло-
условиям эксплуатации (табл. 9, 10, 13).
Обозначение лакокрасочных материалов
Обозначение красок, эмалей, грунтовок и шпатлевок (ГОСТ 9825-73) состоит из
пяти групп знаков, а лаков - из четырех (табл. 10):
1) наименование материала - лак, краска, эмаль, грунтовка или шпатлевка;
2) химический состав (род пленкообразующих смол, эфиров, масел, целлюлозы):
АС - алкидно-акриловые, БТ - битумные, ГФ - глифталевые, КО - кремнийорганиче-
ские, МА - масляные, НЦ - нитроцеллюлозы, ПФ - пентафталевые, ХВ - перхлорвини-
ловые и поливинилхлоридные, ЭП - эпоксидные и др.;
3) группы преимущественного назначения;
4) порядковый номер, присвоенный материалу базовой организацией по стандар-
стандартизации. Для масляных красок вместо номера ставится цифра, определяющая олифу, на
которой изготовлена краска: 1 - олифа натуральная; 2 - олифа оксоль; 3 - олифа глиф-
талевая; 4 - олифа пентафталевая; 5 - олифа комбинированная; буквенный индекс, ха-
характеризующий особенности материала, добавляется после порядкового номера: ХС -
холодная сушка, М, ПМ - матовый и полуматовый, ПГ - пониженной горючести и т.д.;
5) обозначение цвета.
Так, грунтовка глифгалевая горячей сушки, коричневая обозначается: Грунтовка
ГФ-032 ГС коричневая; шпатлевка перхлорвиниловая естественной сушки - Шпатлевка
ХВ-005 серая; краска масляная для внутренних работ на олифе «оксоль» с наполнителем,
готовая к применению, - Краска МА-22Н голубая; краска масляная для наружных работ
на комбинированной олифе густотертая - Краска МА-015 зеленая*; эмаль перхлорвини-
перхлорвиниловая для наружных работ - Эмаль ХВ-124 голубая; пентафталевый лак для наружных
работ - Лак ПФ-170; глифталевый электроизоляционный лак - Лак ГФ-95.
Цифра 0 в третьей группе знаков обозначает густотертые краски.
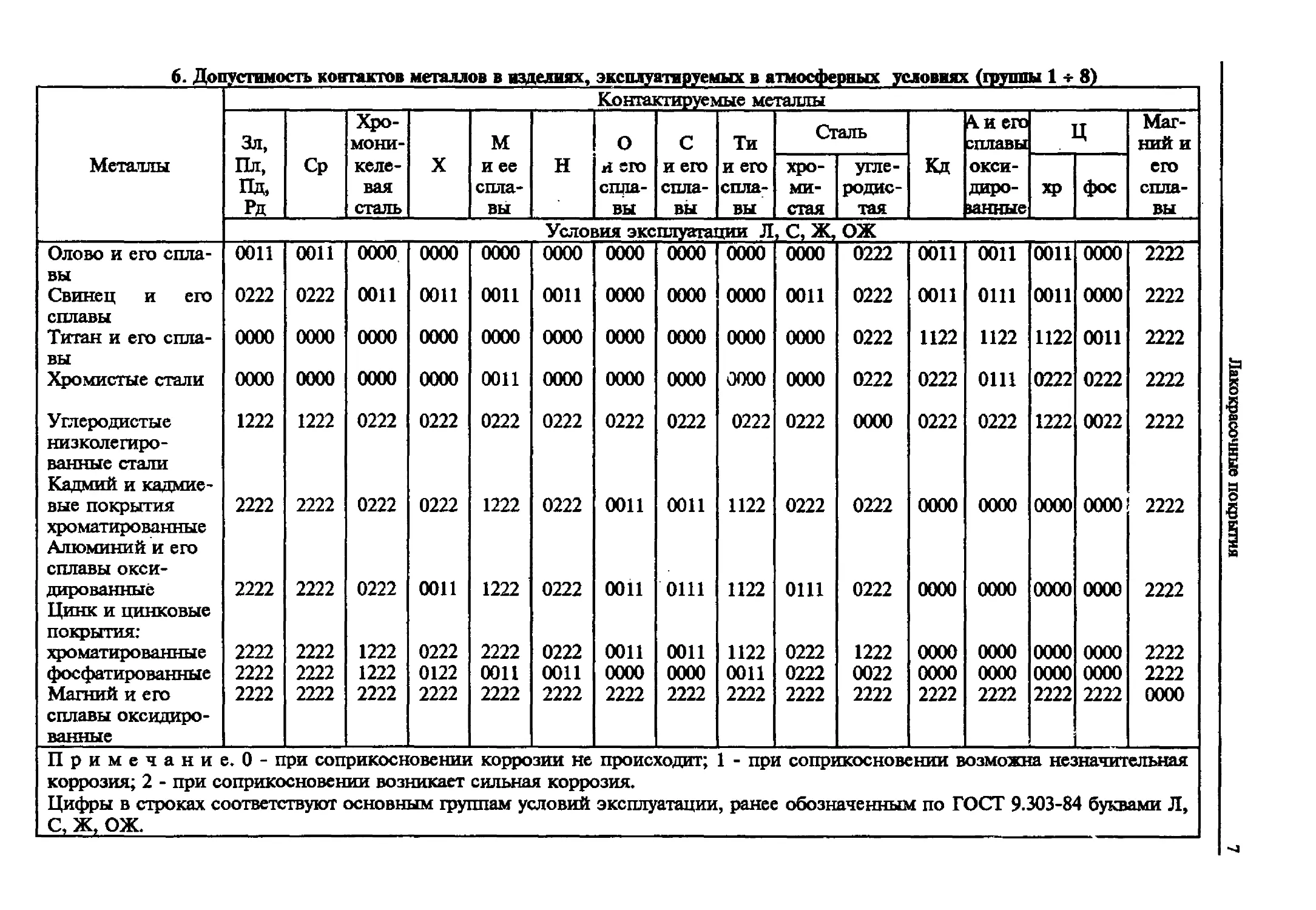
б. Допустимость контактов
Металлы
Олово и его спла-
сплавы
Свинец и его
сплавы
Титан и его спла-
сплавы
Хромистые стали
Углеродистые
низколегиро-
низколегированные стали
Кадмий и кадмие-
кадмиевые покрытия
хроматированные
Алюминий и его
сплавы окси-
оксидированные
Цинк и цинковые
покрытия:
хроматированные
фосфатированные
Магний и его
сплавы оксидиро-
оксидированные
Примечани<
металлов в изделиях,
эксплуатируемых в атмосферных условиям
: (группы 1 -г
8)
Контактируемые металлы
Зл,
Пл,
Пд,
Рд
Ср
ООП
0222
0000
0000
1222
2222
2222
2222
2222
2222
ООП
0222
0000
0000
1222
2222
2222
2222
2222
2222
Хро-
мони-
келе-
вая
сталь
0000
ООП
0000
0000
0222
0222
0222
1222
1222
2222
X
0000
ООП
0000
0000
0222
0222
ООП
0222
0122
2222
;. 0 - при соприкосновении
М
и ее
спла-
сплавы
0000
ООП
0000
ООП
0222
1222
1222
2222
ООП
2222
Н
О
и его
спла-
сплавы
С
и его
спла-
сплавы
Ти
и его
спла-
сплавы
Условия эксплуатации Л
0000
ООН
0000
0000
0222
0222
0222
0222
ООП
2222
[ коррозии не
0000
0000
0000
0000
0222
ООП
ООП
ООП
0000
2222
0000
0000
0000
0000
0222
ООП
0111
ООП
0000
2222
происходит;
коррозия; 2 - при соприкосновении возникает сильная коррозия.
Цифры в строках соответствуют основным группам условий
С, Ж, ОЖ.
эксплуатации
0000
0000
0000
0000
0222
1122
1122
1122
ООП
2222
От
хро-
ми-
мистая
С, Ж,
0000
ООП
0000
0000
0222
0222
0111
0222
0222
2222
41TTTL
ajLD
угле-
родис-
родистая
ОЖ
0222
0222
0222
0222
0000
0222
0222
1222
0022
2222
Кд
ООП
ООП
1122
0222
0222
0000
0000
0000
0000
2222
\иего
сплавы
окси-
диро-
шнные
ООН
0111
1122
0111
0222
0000
0000
0000
0000
2222
1
хр
ООП
ООП
1122
0222
1222
0000
0000
0000
0000
2222
гт
Ц
фос
0000
0000
ООН
0222
0022
0000
0000
0000
0000
2222
Маг-
Магний и
его
спла-
сплавы
2222
2222
2222
2222
2222
2222
2222
2222
2222
0000
1 - при соприкосновении возможна незначительная
, ранее
: обозначенным по ГОСТ 9.303-84 буквами Л,
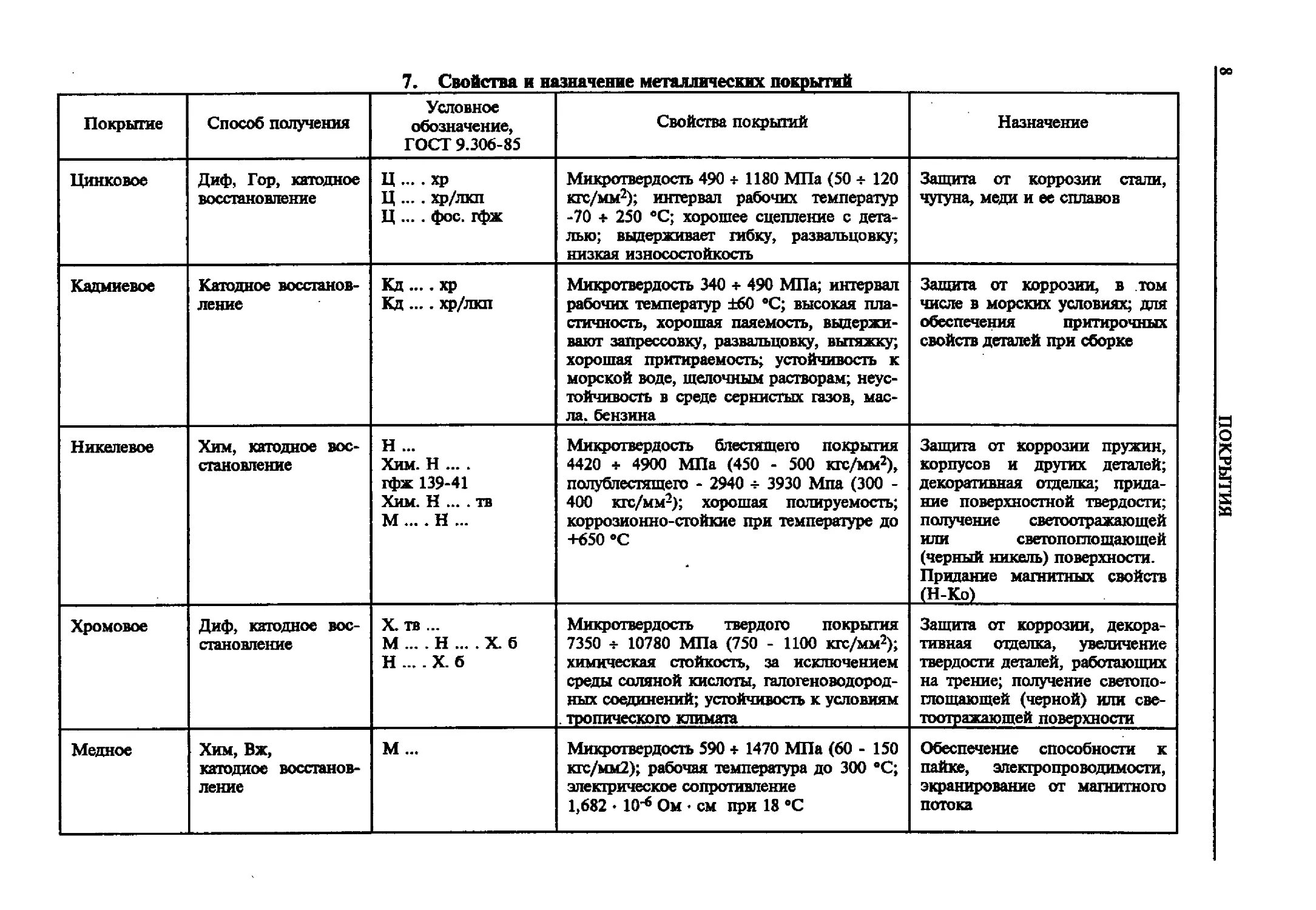
7. Свойства ¦ назначение металлических покрытий
Покрытие
Цинковое
Кадмиевое
Никелевое
Хромовое
Медное
Способ получения
Диф, Гор, катодное
восстановление
Катодное восстанов-
восстановление
Хим, катодное вос-
восстановление
Диф, катодное вос-
восстановление
Хим, Вж,
катодное восстанов-
восстановление
Условное
обозначение,
ГОСТ 9.306-85
Ц ... . хр
Ц .... хр/лка
Ц ... . фос. гфж
Кд.... хр
Кд.... хр/лка
Н ...
Хим. Н ... .
гфж 139-41
Хим. Н .... тв
М ... . Н ...
Х.тв...
М ... . Н ... . X. б
Н ... . X. б
М...
Свойства покрытий
Микротвердость 490 + 1180 МПа E0 -е- 120
кгс/мм2); интервал рабочих температур
-70 * 250 °С; хорошее сцепление с дета-
деталью; выдерживает гибку, развальцовку;
низкая износостойкость
Микротвердость 340 + 490 МПа; интервал
рабочих температур ±60 °С; высокая пла-
пластичность, хорошая паяемость, выдержи-
выдерживают запрессовку, развальцовку, вытяжку;
хорошая притираемость; устойчивость к
морской воде, щелочным растворам; неус-
неустойчивость в среде сернистых газов, мас-
масла, бензина
Микротвердость блестящего покрытия
4420 * 4900 МПа D50 - 500 кгс/мм2),
полублестящего - 2940 * 3930 Мпа C00 -
400 кгс/мм-); хорошая полируемость;
коррозионно-стойкие при температуре до
+650 °С
Микротвердость твердого покрытия
7350 -з- 10780 МПа G50 - 1100 кгс/мм2);
химическая стойкость, за исключением
среды соляной кислоты, галогеноводород-
кых соединений; устойчивость к условиям
. тропического климата
Микротвердость 590 + 1470 МПа F0 - 150
кгс/мм2); рабочая температура до 300 °С;
электрическое сопротивление
1,682 • Ю-6 Ом • см при 18 °С
Назначение
Защита от коррозии стали,
чугуна, меди и ее сплавов
Защита от коррозии, в том
числе в морских условиях; для
обеспечения притирочных
свойств деталей при сборке
Защита от коррозии пружин,
корпусов и других деталей;
декоративная отделка; прида-
придание поверхностной твердости;
получение светоотражающей
или светопоглощающей
(черный никель) поверхности.
Придание магнитных свойств
(Н-Ко)
Защита от коррозии, декора-
декоративная отделка, увеличение
твердости деталей, работающих
на трение; получение светопо-
светопоглощающей (черной) или све-
светоотражающей поверхности
Обеспечение способности к
пайке, электропроводимости,
экранирование от магнитного
потока
Я
о
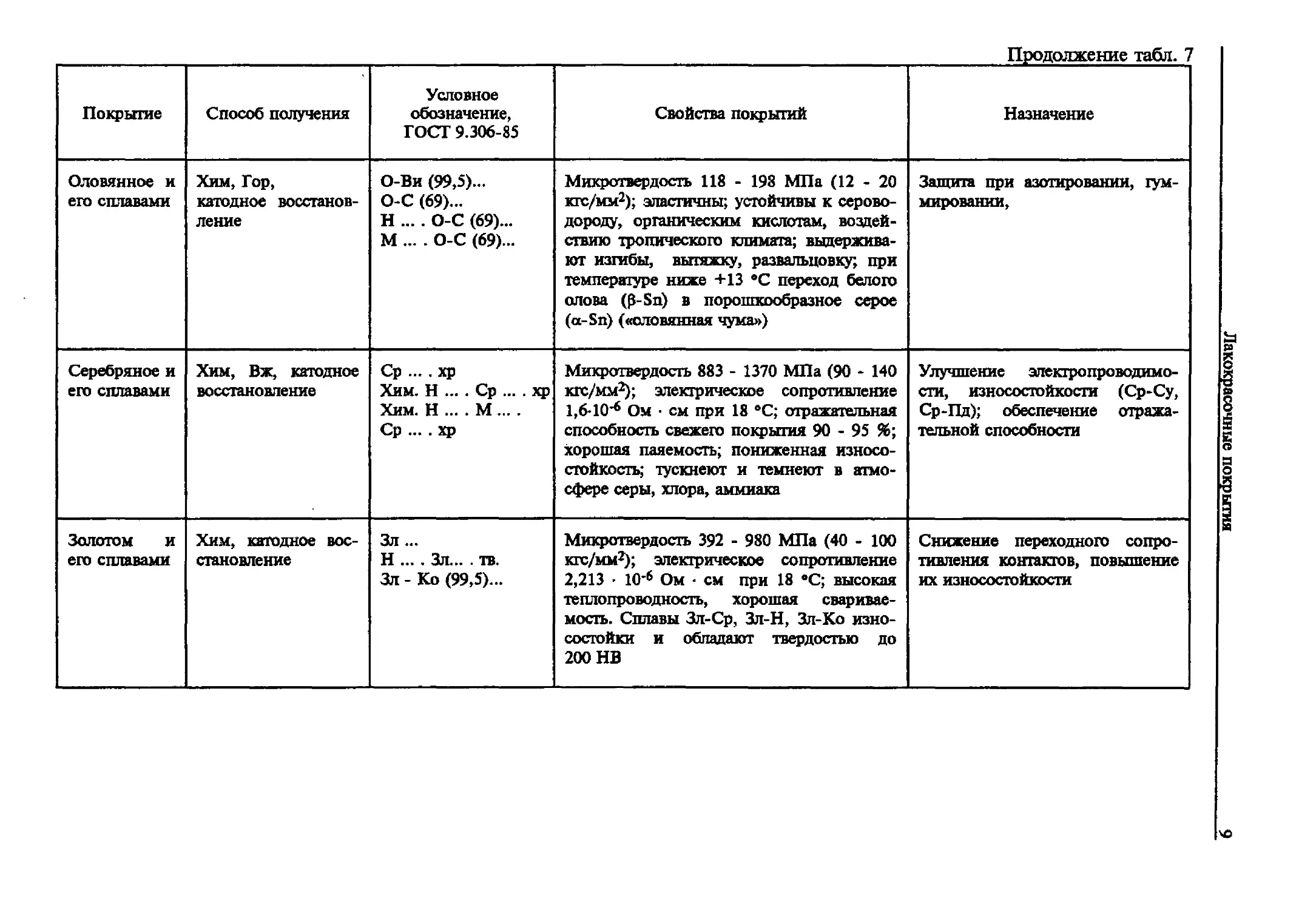
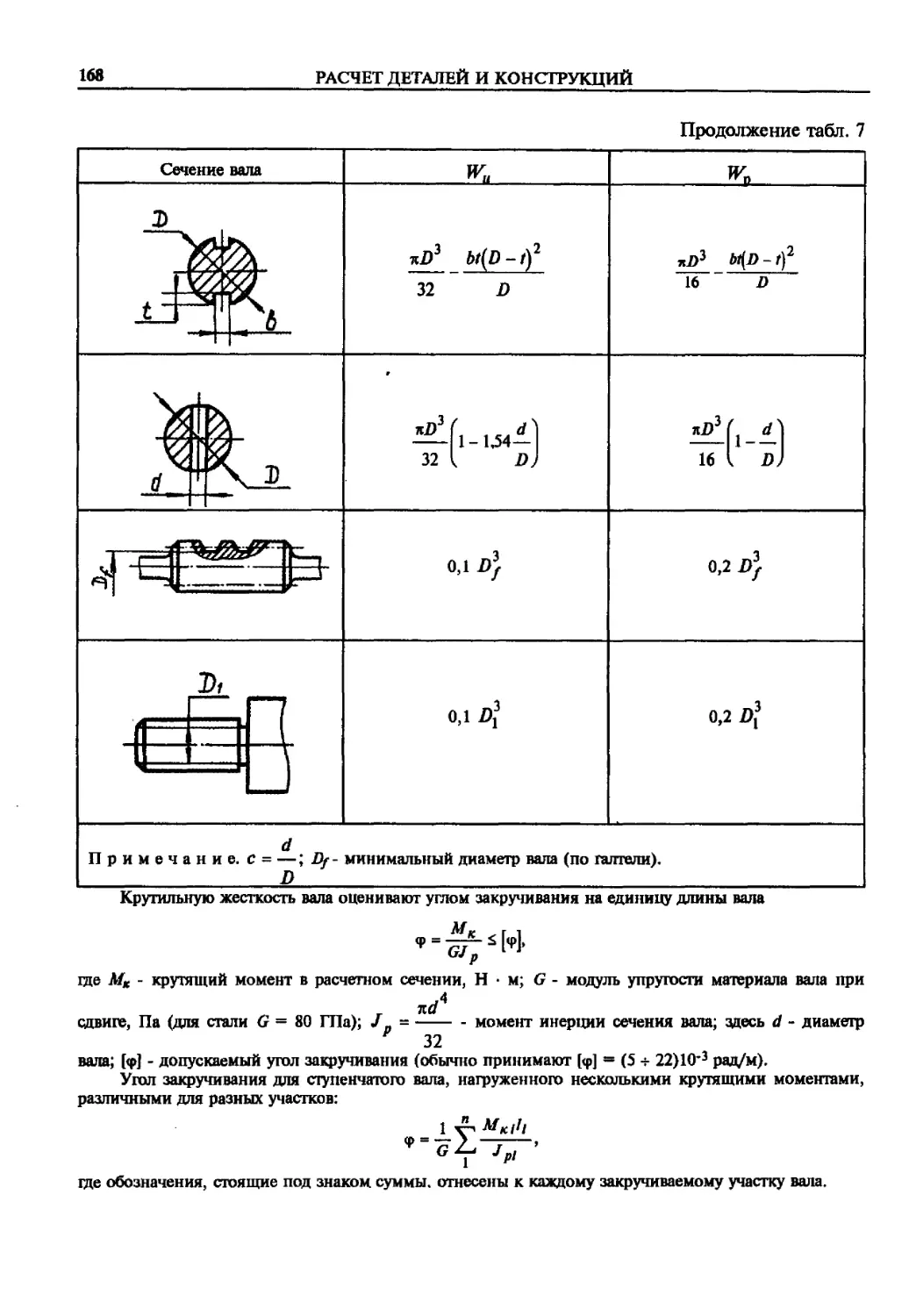
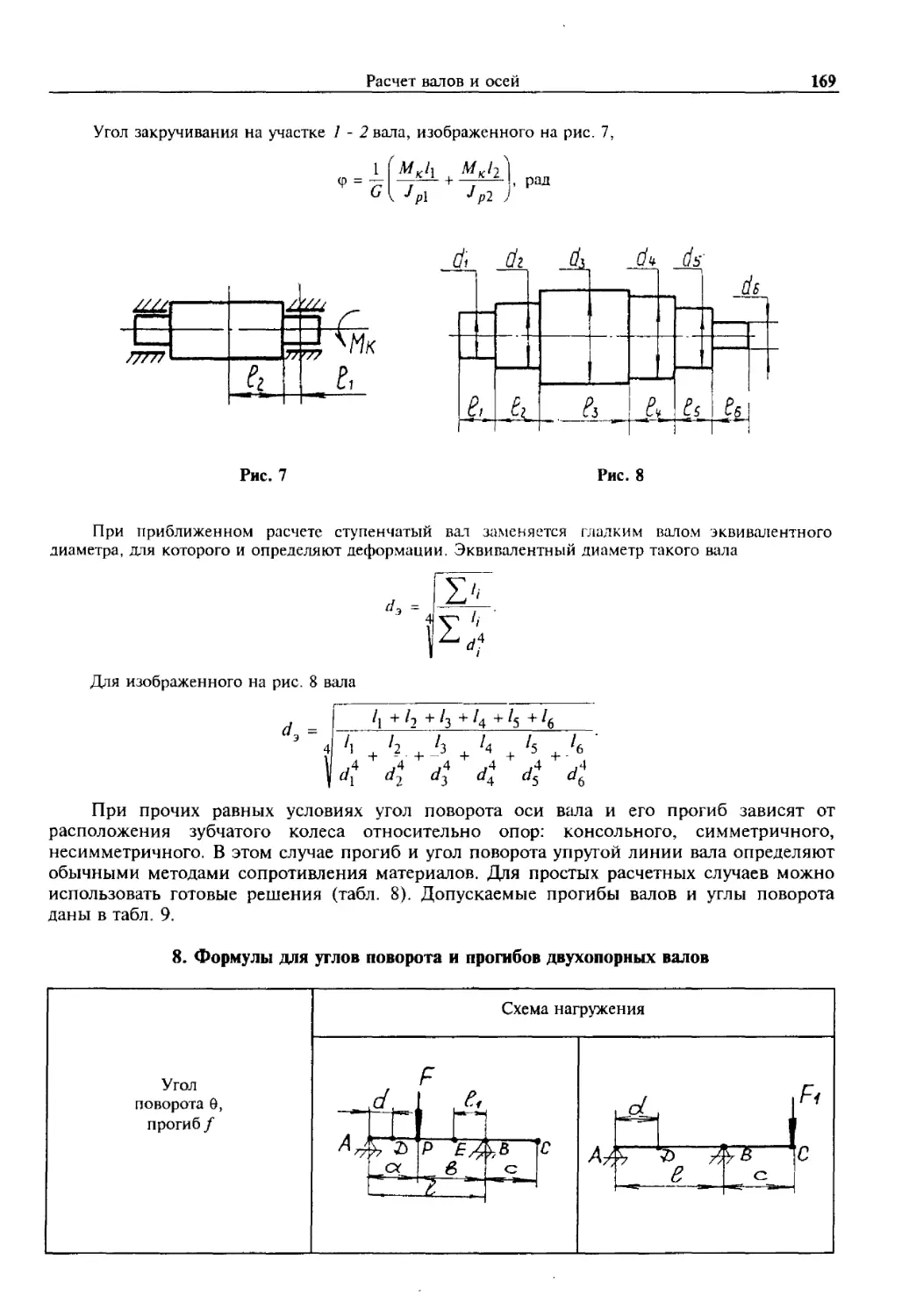
Продолжение табл. 7
Покрытие
Оловянное и
его сплавами
Серебряное и
его сплавами
Золотом и
его сплавами
Способ получения
Хим, Гор,
катодное восстанов-
восстановление
Хим, Вж, катодное
восстановление
Хим, катодное вос-
восстановление
Условное
обозначение,
ГОСТ 9.306-85
О-Ви (99,5)...
О-С F9)...
Н ... . О-С F9)...
М ... . О-С F9)..
Ср ... . хр
Хим. Н ... . Ср ... . хр
Хим. Н ... . М ... .
Ср ... . хр
Зл...
Н ... . Зл... . та.
Зл - Ко (99,5)...
Свойства покрытий
Микротвердость 118 - 198 МПа A2 - 20
кгс/мм2); эластичны; устойчивы к серово-
сероводороду, органическим кислотам, воздей-
воздействию тропического климата; выдержива-
выдерживают изгибы, вытяжку, развальцовку; при
температуре ниже +13 *С переход белого
олова O-Sn) в порошкообразное серое
(a-Sn) («оловянная чума»)
Микротвердость 883 - 1370 МПа (90 - 140
кгс/мм2); электрическое сопротивление
1,6-10"* Ом ¦ см при 18 °С; отражательная
способность свежего покрытия 90 - 95 %;
хорошая паяемость; пониженная износо-
износостойкость; тускнеют и темнеют в атмо-
атмосфере серы, хлора, аммиака
Микротвердость 392 - 980 МПа D0 - 100
кгс/мм2); электрическое сопротивление
2,213 • 10*6 Ом ¦ см при 18 °С; высокая
теплопроводность, хорошая сваривае-
свариваемость. Сплавы Зл-Ср, Зл-Н, Зл-Ко изно-
износостойки и обладают твердостью до
200 НВ
Назначение
Зашита при азотировании, гум-
гуммировании,
Улучшение электропроводимо-
электропроводимости, износостойкости (Ср-Су,
Ср-Пд); обеспечение отража-
отражательной способности
Снижение переходного сопро-
сопротивления контактов, повышение
их износостойкости
I
I
а
Покрытие
Оксидное
Оксидно-
фторидное;
оксидно-
фосфатное
Хроматно-
фторидное
Фосфатное
Пассивное
Анодно-
окисное
8. Свойства и назначение
Материал деталей
Сталь, медь и ее
сплавы, магниевые
сплавы
Алюминий и его
сплавы
Стали
Стали, медь и ее
сплавы
Алюминий и его
сплавы; медь и ее
сплавы; титан и его
сплавы
Условное
обозначение,
ГОСТ 9.306-85
Хим. Оке. прм
Хим. Оке. фтор
Хим. Оке. фтор/лкп
Хим. Фос/лкп
Хим. Фос. хр
Хим. Пас
Хим. Пас. гфж 139-41
Ан. Оке. красный
Ан. Оке. хром
Ан. Оке. хром/лкп
Аноцвет. зеленый
прм
Ан. Оке. нхр
Ан. Оке. тв. прп
Ан. Оке. эиз. гфж
139-41
неметаллических неорганических покрытий
Свойства
Невысокие защитные свойства, повы-
повышающиеся при обработке покрытий мас-
маслами, лаками, гидрофобизирующими
жидкостями
Хорошие эластичность, адгезия с метал-
металлом; плохая электропроводность оксидно-
фосфатного покрытия
Токопроводное; стабильное переходное
сопротивление; являются хорошим грун-
грунтом под окраску; механическая непроч-
непрочность
Высокое электрическое сопротивление;
термостойкость до +300 °С; не подверга-
подвергаются пайке и сварке; защитные свойства
появляются после дополнительной обра-
обработки маслами, лаками
Коррозионно-стойки после пропитки
маслами, лаками
Микротвердость дуралюминов (Д1, Д16) и
ковочных сплавов (АКб, АК8) - 1960 +
2450 МПа B00 - 250 кгс/мм2); не упроч-
упрочняемых термообработкой (АМц, АМг) -
2940 + 4900 МПа C00 - 500 кгс/мм2);
пробивное напряжение электроизоляци-
электроизоляционного покрытия до 600 В,злекгричесхая
прочность возрастает при пропитке по-
покрытия лаками; эматалевые пленки на
алюминии и оксидные на титане износо-
износостойки
Назначение
Межоперационное хранение;
декоративная отделка и защита
от коррозии (медь, магний и их
сплавы)
Декоративная отделка и зашита
от коррозии, грунт под окраску
Обеспечение стабильного пере-
переходного сопротивления
Защита от коррозии, создание
непроводящего поверхностного
слоя
Защита от коррозии
Защита от коррозии, придание
электроизоляционных свойств;
получение светопоглощающей
поверхности (медь), защита от
задиров при трении (титан),
грунты под окраску
а
8
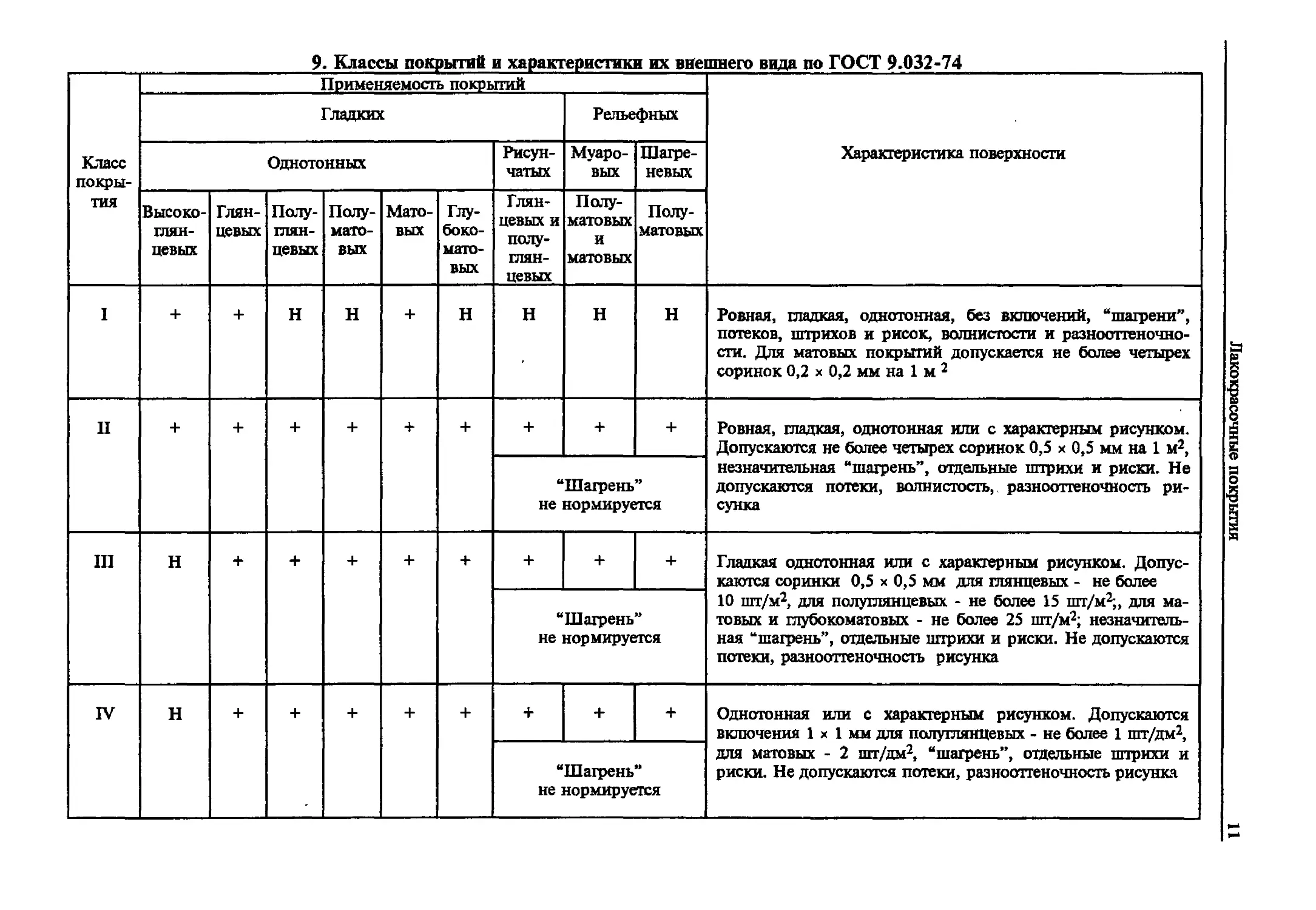
9. Классы покрытий и характеристики их внешнего вида по ГОСТ 9.032-74
Класс
покры-
покрытия
I
II
III
IV
Применяемость покрытий
Гладких
Однотонных
Высоко-
глян-
глянцевых
+
+
Н
Н
Глян-
Глянцевых
+
+
+
+
Полу-
глян-
глянцевых
Н
+
+
+
Полу-
мато-
матовых
Н
+
+
+
Мато-
Матовых
+
+
+
+
Глу-
боко-
мато-
вых
Н
+
+
+
Рисун-
Рисунчатых
Глян-
Глянцевых и
полу-
глян-
глянцевых
Н
+
Рельефных
Муаро-
Муаровых
Полу-
Полуматовых
и
матовых
Н
+
Шагре-
Шагреневых
Полу-
Полуматовых
Н
+
"Шагрень"
не нормируется
+
+
+
"Шагрень"
не нормируется
+
+
+
"Шагрень"
не нормируется
Характеристика поверхности
Ровная, гладкая, однотонная, без включений, "шагрени",
потеков, штрихов и рисок, волнистости и разнооттеночно-
сти. Для матовых покрытий допускается не более четырех
соринок 0,2 х 0,2 мм на 1 м 2
Ровная, гладкая, однотонная или с характерным рисунком.
Допускаются не более четырех соринок 0,5 х 0,5 мм на 1 м2,
незначительная "шагрень", отдельные штрихи и риски. Не
допускаются потеки, волнистость, разноотгеночность ри-
рисунка
Гладкая однотонная или с характерным рисунком. Допус-
Допускаются соринки 0,5 х 0,5 мм для глянцевых - не более
10 шт/м2, для полутянцевых - не более 15 шт/м2;, для ма-
матовых и глубокоматовых - не более 25 шт/м2; незначитель-
незначительная "шагрень", отдельные штрихи и риски. Не допускаются
потеки, разноотгеночность рисунка
Однотонная или с характерным рисунком. Допускаются
включения 1 х 1 мм для полуглянцевых - не более 1 шт/дм2,
для матовых - 2 шт/дм2, "шагрень", отдельные штрихи и
риски. Не допускаются потеки, разнооттеночность рисунка
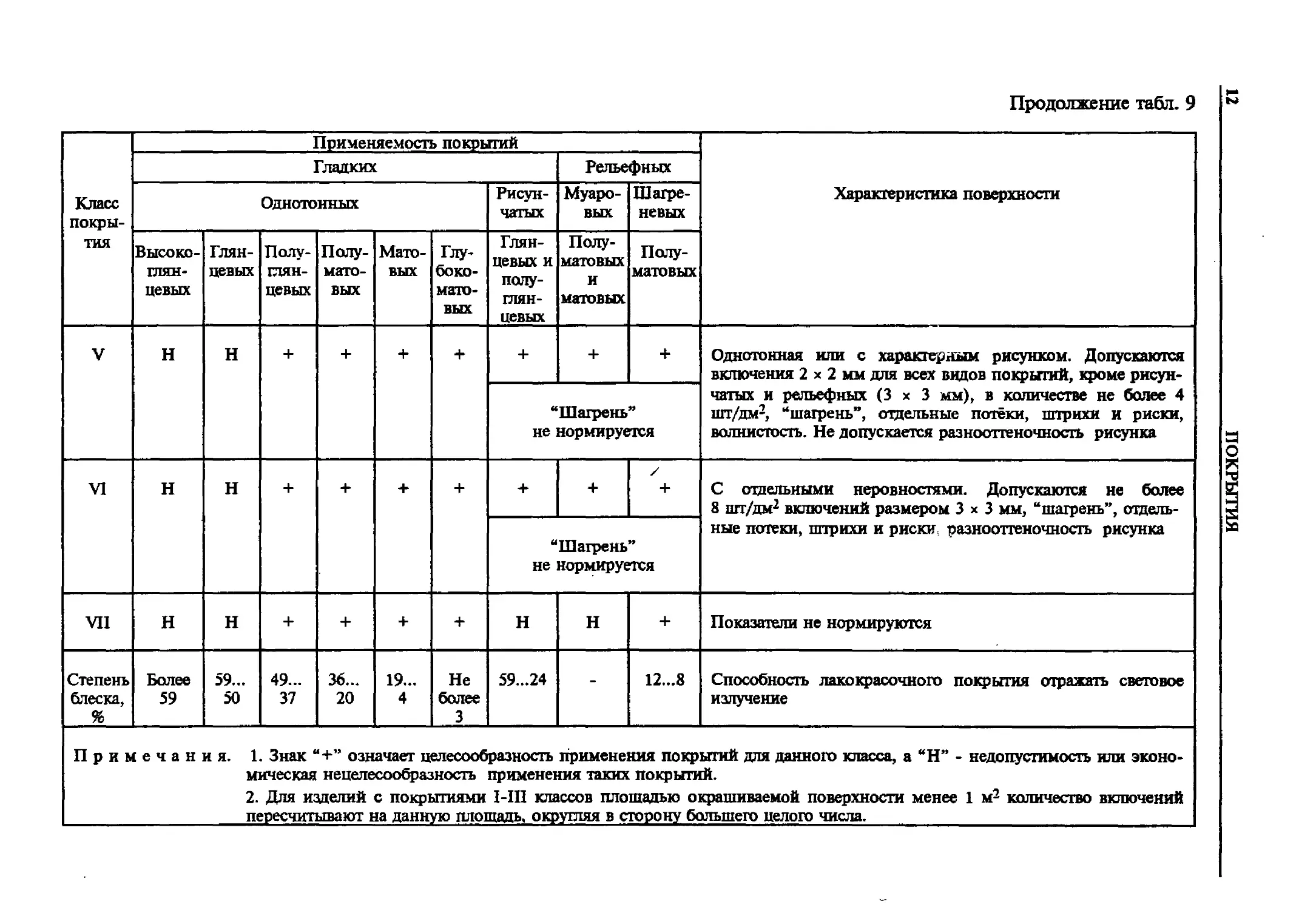
Продолжение табл. 9
Класс
покры-
покрытия
V
VI
VII
Степень
блеска,
%
Применяемость покрытий
Гладких
Однотонных
Высоко-
глян-
глянцевых
Н
Н
н
Более
59
Глян-
Глянцевых
Н
Н
Н
59...
50
Полу-
глян-
глянцевых
+
+
+
49...
37
Полу-
мато-
матовых
+
+
+
36...
20
Мато-
Матовых
+
+
+
19...
4
Глу-
боко-
мато-
вых
+
+
+
Не
более
3
Рисун-
Рисунчатых
Глян-
Глянцевых и
полу-
глян-
цевых
+
Рельефных
Муаро-
Муаровых
Полу-
Полуматовых
и
матовых
+
Шагре-
Шагреневых
Полу-
Полуматовых
+
"Шагрень"
не нормируется
+
+
/
+
"Шагрень"
не нормируется
Н
S9...24
Н
-
+
12...8
Характеристика поверхности
Однотонная или с характерным рисунком. Допускаются
включения 2 х 2 мм для всех видов покрытий, кроме рисун-
рисунчатых и рельефных Cx3 мм), в количестве не более 4
шт/дм2, "шагрень", отдельные потёки, штрихи и риски,
волнистость. Не допускается разноотгеночносгь рисунка
С отдельными неровностями. Допускаются не более
8 шт/дм2 включений размером 3x3 мм, "шагрень", отдель-
отдельные потеки, штрихи и риски, разноотгеночносгь рисунка
Показатели не нормируются
Способность лакокрасочного покрытия отражать световое
излучение
Примечания. 1. Знак "+" означает целесообразность применения покрытий для данного класса, а "Н" - недопустимость или эконо-
экономическая нецелесообразность применения таких покрытий.
2. Для изделий с покрытиями 1-Ш классов площадью окрашиваемой поверхности менее 1 м2 количество включений
пересчитывают на данную площадь, округляя в сторону большего целого числа.
о
Лакокрасочные покрытия
13
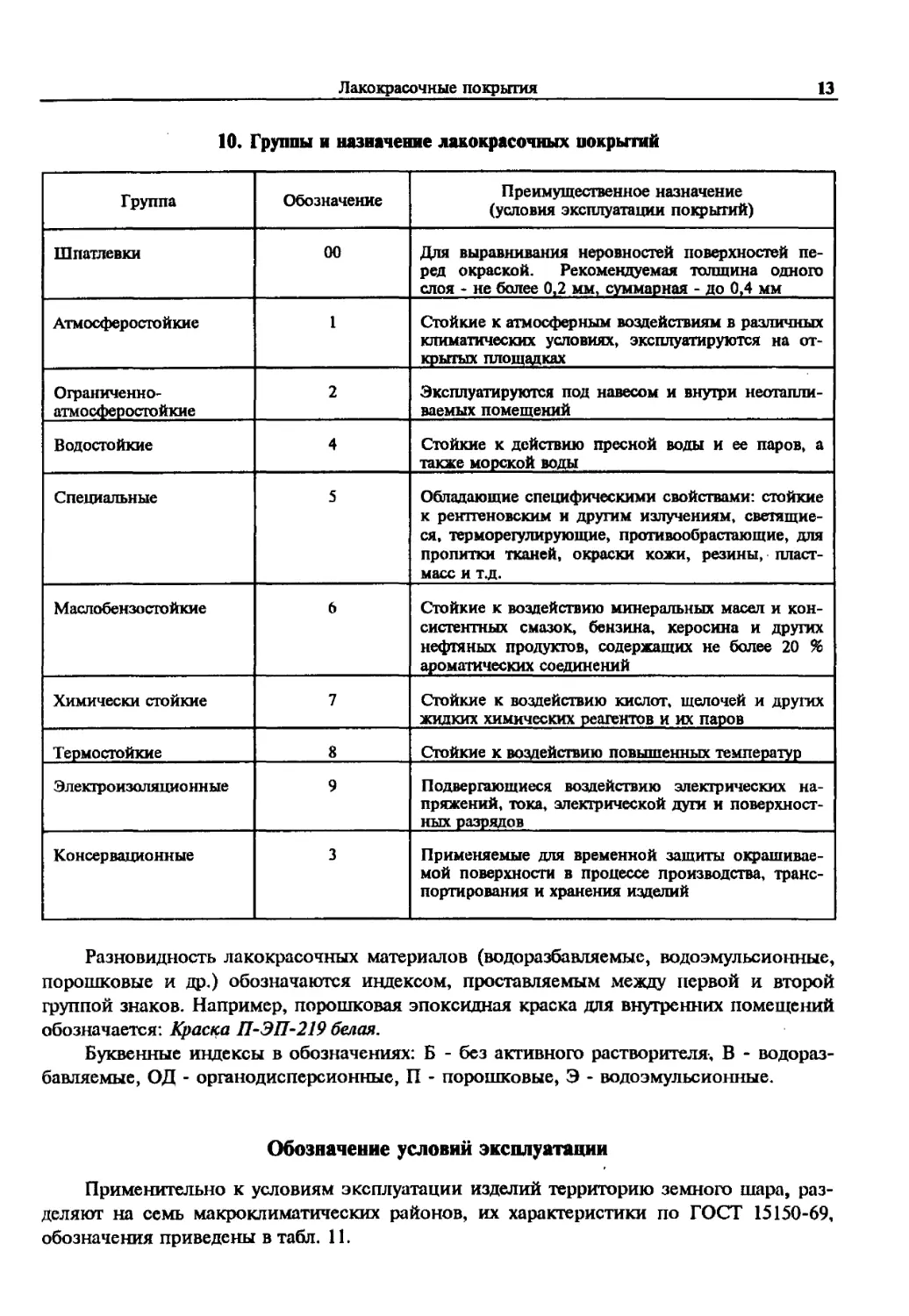
10. Группы и назначение лакокрасочных покрытий
Группа
Шпатлевки
Атмосферостойкие
Ограниченно-
атмосферостойкие
Водостойкие
Специальные
Маслобензостойкие
Химически стойкие
Термостойкие
Электроизоляционные
Консервационные
Обозначение
00
1
2
4
5
6
7
8
9
3
Преимущественное назначение
(условия эксплуатации покрытий)
Для выравнивания неровностей поверхностей пе-
перед окраской. Рекомендуемая толщина одного
слоя - не более 0,2 мм, суммарная - до 0,4 мм
Стойкие к атмосферным воздействиям в различных
климатических условиях, эксплуатируются на от-
открытых площадках
Эксплуатируются под навесом и внутри неотапли-
неотапливаемых помещений
Стойкие к действию пресной воды и ее паров, а
также морской воды
Обладающие специфическими свойствами: стойкие
к рентгеновским и другим излучениям, светящие-
светящиеся, терморегулирующие, противообрастающие, для
пропитки тканей, окраски кожи, резины, пласт-
пластмасс и т.д.
Стойкие к воздействию минеральных масел и кон-
консистентных смазок, бензина, керосина и других
нефтяных продуктов, содержащих не более 20 %
ароматических соединений
Стойкие к воздействию кислот, щелочей и других
жидких химических реагентов и их паров
Стойкие к воздействию повышенных температур
Подвергающиеся воздействию электрических на-
напряжений, тока, электрической дуги и поверхност-
поверхностных разрядов
Применяемые для временной защиты окрашивае-
окрашиваемой поверхности в процессе производства, транс-
транспортирования и хранения изделий
Разновидность лакокрасочных материалов (водоразбавляемые, водоэмульсионные,
порошковые и др.) обозначаются индексом, проставляемым между первой и второй
группой знаков. Например, порошковая эпоксидная краска для внутренних помещений
обозначается: Краска П-ЭП-219 белая.
Буквенные индексы в обозначениях: Б - без активного растворителя, В - водораз-
водоразбавляемые, ОД - органодисперсионные, П - порошковые, Э - водоэмульсионные.
Обозначение условий эксплуатации
Применительно к условиям эксплуатации изделий территорию земного шара, раз-
разделяют на семь макроклиматических районов, их характеристики по ГОСТ 15150-69,
обозначения приведены в табл. 11.
14
ПОКРЫТИЯ
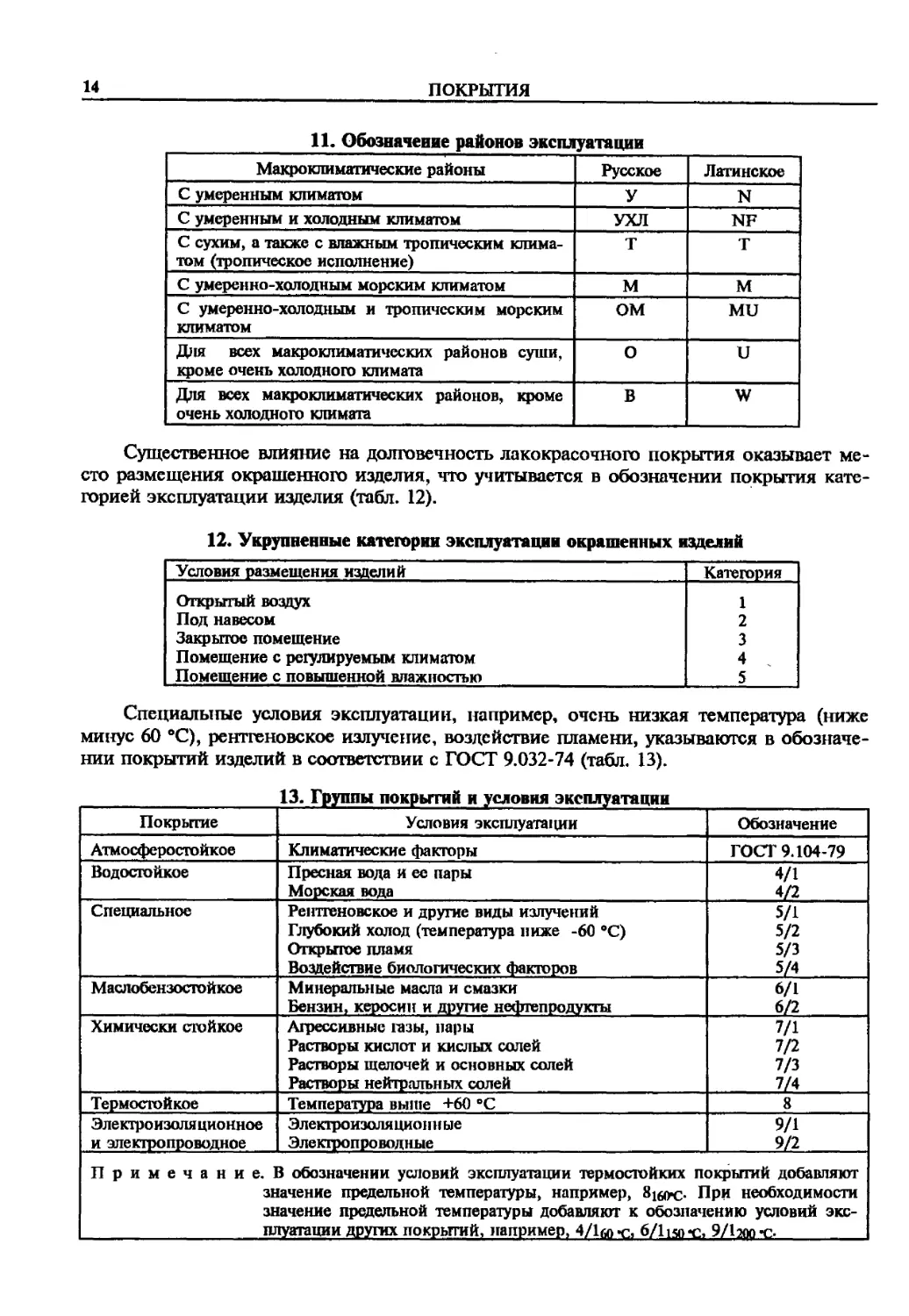
11. Обозначение районов эксплуатации
Макроклиматические районы
С умеренным климатом
С умеренным и холодным климатом
С сухим, а также с влажным тропическим клима-
климатом (тропическое исполнение)
С умеренно-холодным морским климатом
С умеренно-холодным и тропическим морским
климатом
Для всех макроклиматических районов суши,
кроме очень холодного климата
Для всех макроклиматических районов, кроме
очень холодного климата
Русское
У
УХЛ
Т
М
ОМ
О
В
Латинское
N
NF
Т
М
ми
и
W
Существенное влияние на долговечность лакокрасочного покрытия оказывает ме-
место размещения окрашенного изделия, что учитывается в обозначении покрытия кате-
категорией эксплуатации изделия (табл. 12).
12. Укрупненные категории эксплуатации окрашенных изделий
Условия размещения изделий
Открытый воздух
Под навесом
Закрытое помещение
Помещение с регулируемым климатом
Помещение с повышенной влажностью
Категория
Специальные условия эксплуатации, например, очень низкая температура (ниже
минус 60 °С), рентгеновское излучение, воздействие пламени, указываются в обозначе-
обозначении покрытий изделий в соответствии с ГОСТ 9.032-74 (табл. 13).
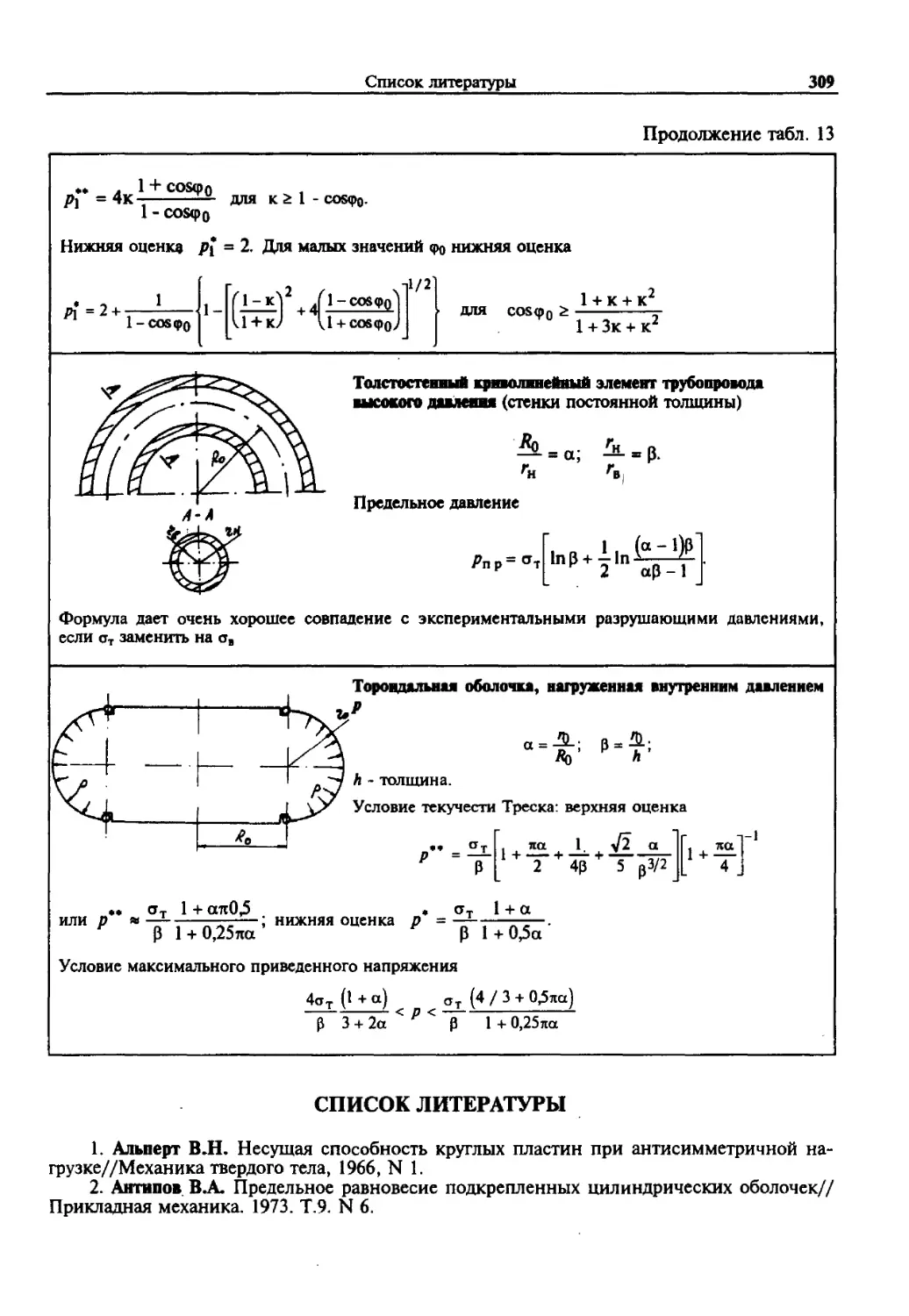
13. Группы покрытий и условия эксплуатации
Покрытие
Атмосферостойкое
Водостойкое
Специальное
Маслобензостойкое
Химически стойкое
Термостойкое
Электроизоляционное
и электропроводное
Условия эксплуатации
Климатические факторы
Пресная вода и ее пары
Морская вода
Рентгеновское и другие виды излучений
Глубокий холод (температура ниже -60 °С)
Открытое пламя
Воздействие биологических факторов
Минеральные масла и смазки
Бензин, керосин и другие нефтепродукты
Агрессивные газы, пары
Растворы кислот и кислых солей
Растворы щелочей и основных солей
Растворы нейтральных солей
Температура выше +60 °С
Электроизоляционные
Электропроводные
Обозначение
ГОСТ 9.104-79
4/1
4/2
5/1
5/2
5/3
5/4
6/1
6/2
7/1
7/2
7/3
7/4
8
9/1
9/2
Примечание. В обозначении условий эксплуатации термостойких покрытий добавляют
значение предельной температуры, например, Swrc- При необходимости
значение предельной температуры добавляют к обозначению условий экс-
эксплуатации других покрытий, например, 4/1гл^., б/Ьет-с, 9/1 ш-с.
Лакокрасочные покрытия
15
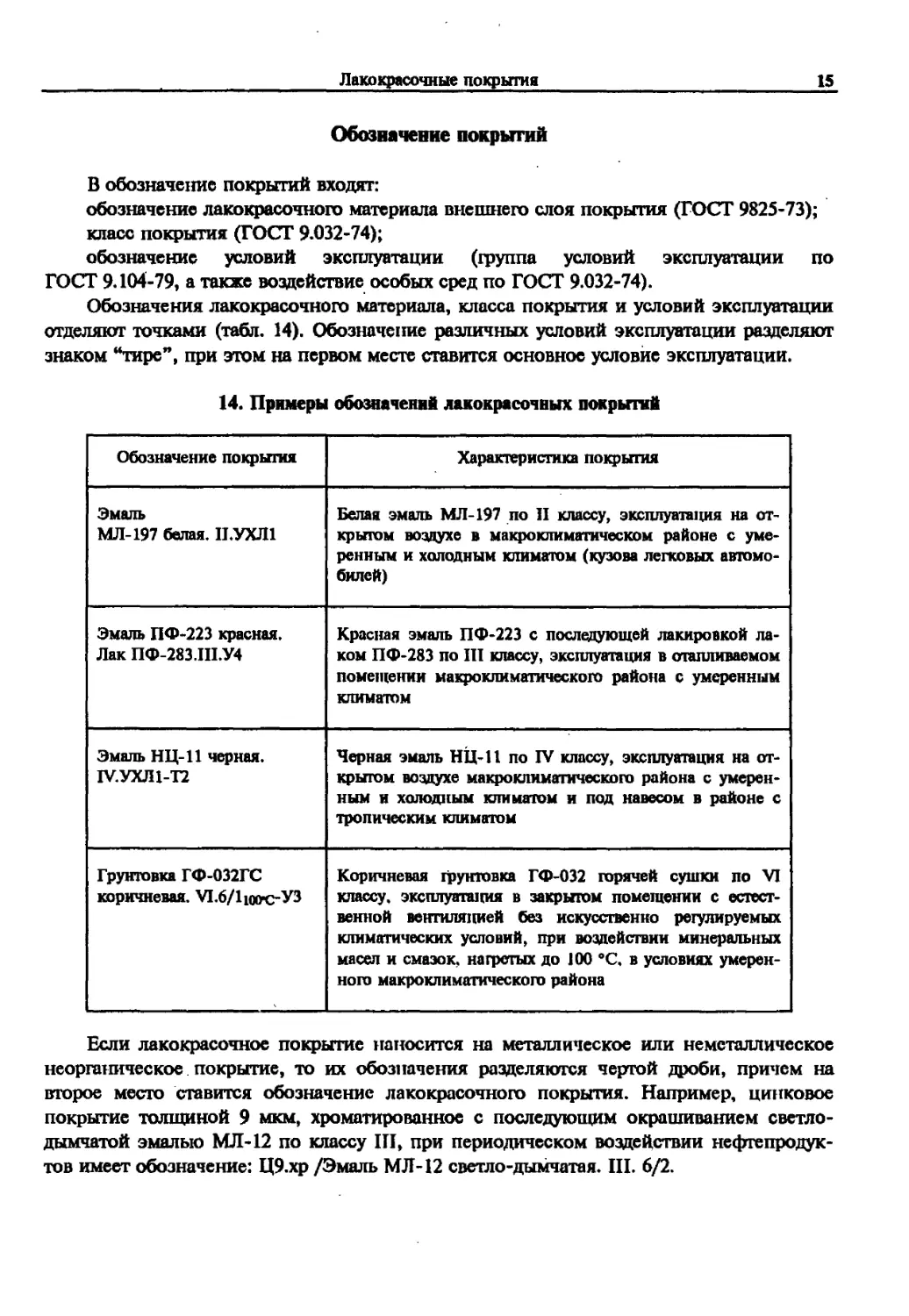
Обозначение покрытий
В обозначение покрытий входят:
обозначение лакокрасочного материала внешнего слоя покрытия (ГОСТ 9825-73);
класс покрытия (ГОСТ 9.032-74);
обозначение условий эксплуатации (группа условий эксплуатации по
ГОСТ 9.104-79, а также воздействие особых сред по ГОСТ 9.032-74).
Обозначения лакокрасочного материала, класса покрытия и условий эксплуатации
отделяют точками (табл. 14). Обозначение различных условий эксплуатации разделяют
знаком "тире", при этом на первом месте ставится основное условие эксплуатации.
14. Примеры обозначений лакокрасочных покрытий
Обозначение покрытия
Эмаль
МЛ-197 белая. И.УХЛ1
Эмаль ПФ-223 красная.
Лак ПФ-283.Ш.У4
Эмаль НЦ-11 черная.
1У.УХЛ1-Т2
Грунтовка ГФ-032ГС
коричневая. М.6/1юо-с-УЗ
Характеристика покрытия
Белая эмаль МЛ-197 по II классу, эксплуатация на от-
открытом воздухе в макроклиматическом районе с уме-
умеренным и холодным климатом (кузова легковых автомо-
автомобилей)
Красная эмаль ПФ-223 с последующей лакировкой ла-
лаком ПФ-283 по III классу, эксплуатация в отапливаемом
помещении макроклиматического района с умеренным
климатом
Черная эмаль НЦ-11 по IV классу, эксплуатация на от-
открытом воздухе макроклиматического района с умерен-
умеренным и холодным климатом и под навесом в районе с
тропическим климатом
Коричневая грунтовка ГФ-032 горячей сушки по VI
классу, эксплуатация в закрытом помещении с естест-
естественной вентиляцией без искусственно регулируемых
климатических условий, при воздействии минеральных
масел и смазок, нагретых до 100 СС, в условиях умерен-
умеренного макроклиматического района
Бели лакокрасочное покрытие наносится на металлическое или неметаллическое
неорганическое покрытие, то их обозначения разделяются чертой дроби» причем на
второе место ставится обозначение лакокрасочного покрытия. Например, цинковое
покрытие толщиной 9 мкм, хроматированное с последующим окрашиванием светло-
дымчатой эмалью МЛ-12 по классу III, при периодическом воздействии нефтепродук-
нефтепродуктов имеет обозначение: Ц9.хр /Эмаль МЛ-12 светло-дымчатая. III. 6/2.
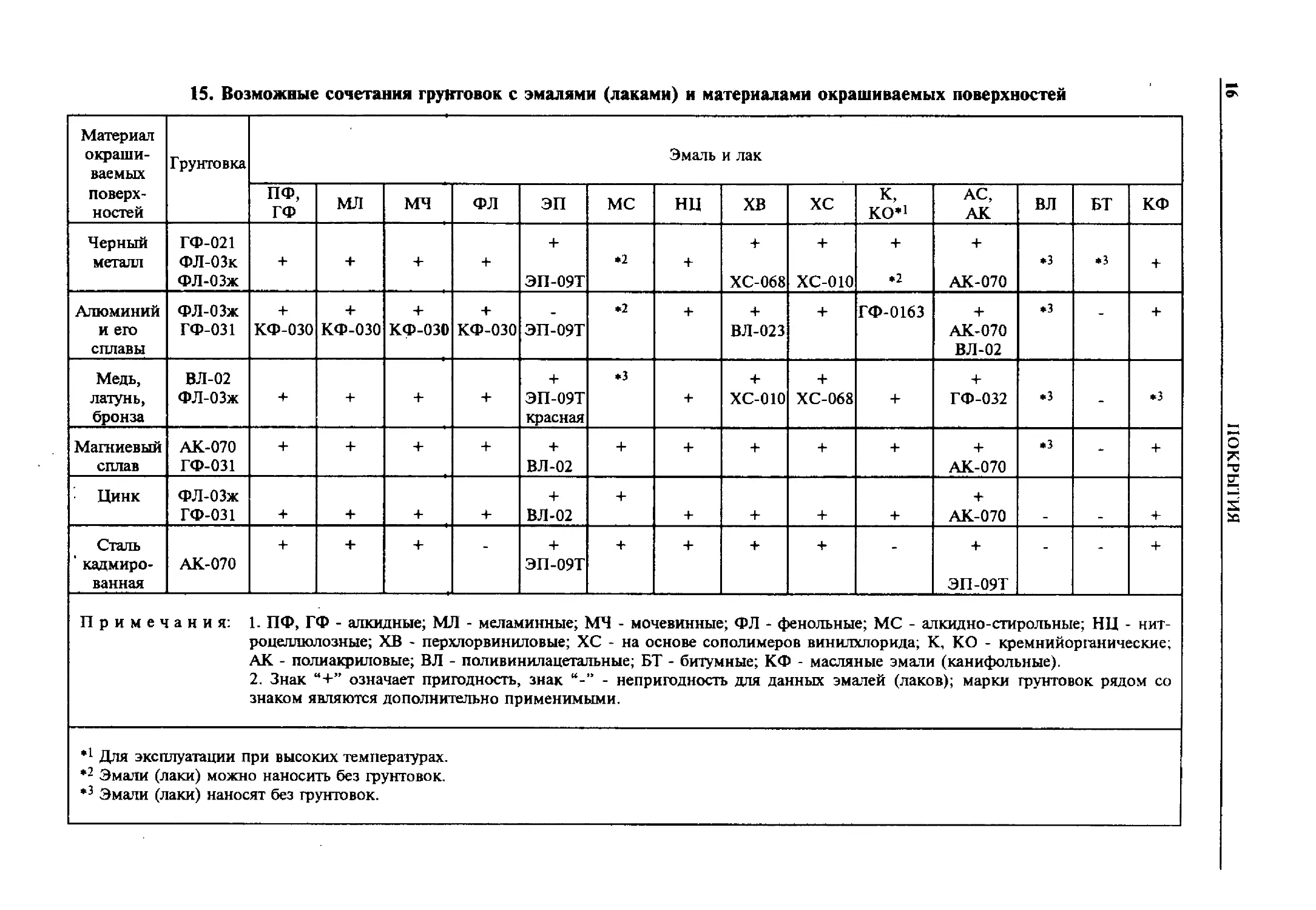
15. Возможные сочетания грунтовок с эмалями (лаками) и материалами окрашиваемых поверхностей
Материал
окраши-
окрашиваемых
поверх-
поверхностей
Черный
металл
Алюминий
и его
сплавы
Медь,
латунь,
бронза
Магниевый
сплав
Цинк
Сталь
' кадмиро-
ванная
Грунтовка
ГФ-021
ФЛ-ОЗк
ФЛ-ОЗж
ФЛ-ОЗж
ГФ-031
ВЛ-02
ФЛ-ОЗж
АК-070
ГФ-031
ФЛ-ОЗж
ГФ-031
АК-070
Эмаль и лак
ПФ,
ГФ
+
+
КФ-030
+
+
+
+
мл
+
+
КФ-030
+
+
+
+
мч
+
+
КФ-030
+
+
+
+
ФЛ
+
+
КФ-030
+
+
+
-
ЭП
+
ЭП-09Т
ЭП-09Т
+
ЭП-09Т
красная
+
ВЛ-02
+
ВЛ-02
+
ЭП-09Т
МС
•2
•2
•3
+
+
+
нц
+
+
+
+
+
+
ХВ
+
ХС-068
+
ВЛ-023
+
ХС-010
+
+
+
ХС
+
ХС-010
+
+
ХС-068
+
+
+
к,
ко*1
+
*2
ГФ-0163
+
+
+
-
АС,
АК
+
АК-070
+
АК-070
ВЛ-02
+
ГФ-032
+
АК-070
+
АК-070
+
ЭП-09Т
ВЛ
•3
*з
¦ 3
*з
-
БТ
*з
-
-
-
- ¦
КФ
+
+
*з
+
+
+
Примечания: 1. ПФ, ГФ - алкидные; МЛ - меламинные; МЧ - мочевинные; ФЛ - фенольные; МС - алкидно-стирольные; НЦ - нит-
роцеллюлозные; ХВ - перхлорвиниловые; ХС - на основе сополимеров винилхлорида; К, КО - кремнийорганические;
АК - полиакриловые; ВЛ - поливинилацетальные; БТ - битумные; КФ - масляные эмали (канифольные).
2. Знак "+" означает пригодность, знак "-" - непригодность для данных эмалей (лаков); марки грунтовок рядом со
знаком являются дополнительно применимыми.
*! Для эксплуатации при высоких температурах.
*2 Эмали (лаки) можно наносить без грунтовок.
*3 Эмали (лаки) наносят без грунтовок.
Способы литья 17
СПИСОК ЛИТЕРАТУРЫ
1. Ваысовская К.М. Гальванические покрытия. Л.: Машиностроение, 1984.
2. Гальванотехника: Справочник / Под ред. А.М.Гинберга, А.Ф.Иванова, ЛЛ.Крав-
ченко, М.: Металлургия, 1987.
3. Гальванические покрытия в машиностроении: Справочник / Под ред.
М.А.Шлугера, Л.Д.Тока. М.: Машиностроение, 1985.
4. Грилихес С.Я. Оксидные и фосфатные покрытия металлов. Л.; Машинострое-
Машиностроение, 1978.
5. Груев И .Д., Матвеев Н.И., Сергеева Н.Г. Электрохимические покрытия изделий
радиоэлектронной аппаратуры: Справочник, М.: Радио и связь, 1988.
6. Денкер И.И. Технология окраски изделий в машиностроении. М.: Высшая шко-
школа, 1984.
7. Ильин В.А. Цинкование, кадмирование, оловянирование и свинцевание. Л.:
Машиностроение, 1983.
8. Инженерная гальванотехника в приборостроении / Под ред. А.М.Гинберга. М.:
Машиностроение, 1977.
9. Лакокрасочные материалы: технические требования и контроль качества: Спра-
Справочное пособие/М.И.Карякина, Н.В.Майорова, М.И.Викторова, М.: Химия, 1984.
10. Лобанов СЛ. Практические советы гальванику. Л.: Машиностроение, 1983.
11. Общетехнический справочник / Под ред. Б.А.Скороходова. М.: Машинострое-
Машиностроение, 1989.
12. Розенфельд ИЛ., Рубинштейн Ф.И., Жигалова КЛ. Зашита металлов от корро-
коррозии лакокрасочными покрытиями. М.: Химия, 1987.
2. КОНСТРУИРОВАНИЕ ЛИТЫХ ДЕТАЛЕЙ
Литье широко применяют для изготовления фасонных деталей как мелких, так и
самых крупных типа базовых и корпусных. Литейный процесс производителен и недо-
недорог. Однако, для литых деталей характерны пониженная прочность, разброс механиче-
механических показателей в разных частях отливки, склонность к образованию внутренних де-
дефектов и напряжений. Качество отливки зависит от технологии литья и конструкции
детали. Поэтому конструктор должен знать основы литейной технологии.
2.1. СПОСОБЫ ЛИТЬЯ
Литье в песчаные формы - наиболее распространенный и универсальный способ ли-
литья. Практически единственный способ изготовления крупногабаритных отливок. Фор-
Формовку проводят по деревянным или металлическим моделям в опоках, набиваемых пес-
чано-глинистыми смесями. Внутренние полости образуют стержнями.
Литье в оболочковые формы - крупносерийное и массовое производство мелких и
средних по массе отливок из различных сплавов. Формы готовят по металлическим
моделям в виде оболочек толщиной 6-15 мм из песчаных смесей с термореактивной
смолой.
Литье в постоянные металлические формы (кокили) - серийное и массовое произ-
производство отливок из цветных сидадрв, и отднвдк> из чугуна и стали.
2 Том 2
_L8 КОНСТРУИРОВАНИЕ ЛИТЫХ ДЕТАЛЕЙ
Центробежное литье применяют для изготовления полых отливок типа тел вращения.
Металл заливают во вращающиеся чугунные или стальные барабаны, где он уплотняется
действием центробежных сил. Мелкие детали отливают этим способом в постоя!шыс метал-
металлические формы.
Литье по выплавляемым моделям - модели изготовляют из легкоплавких материалов
(парафина, стеарина, воска, канифоли) посредством литья иод давлением а металлические
пресс-формы. Модели соединяют в блоки, покрывают тонким слоем огнеупорного состава и
заформовывшот в неразъемные песчаные формы, которые прокалиплктг, п результате чего
модели без остатка удаляются. Способ применяют для отливки мелких и средних деталей
произвольной конфигурации.
Литье под давлением - металл заливают в постоянные металлические формы (пресс-
формы) под давлением. Этот вид литья применяют для массового рштотоиления небольших
и средних деталей.
2.2 КОНСТРУКТИВНЫЕ ЭЛЕМЕНТЫ ДЕТАЛЕЙ,
ПОЛУЧАЕМЫХ ЛИТЬЕМ В ПЕСЧАНЫЕ ФОРМЫ
Рассмотрим наиболее распространетплй способ литья - литье в песчаные формы. Для
обеспечения технологичности литых деталей должны быть решены следующие вопросы:
выбор плоскости разъема модели и определение расположения пе^юрмугощихся высту-
выступов и бобышек, а также протяженность горизонтальных поверхностей относительно плоско-
плоскости разъема;
установление базовых поверхностей отливки и их соответствие базам для обработки ре-
резанием;
определение необходимого числа стержней, их контуров и размеров, а также последо-
последовательность их сборки в форме;
выбор толщин и сопряжений стенок и узлов скопления металла как в готовой детали,
так и в отливке; питание и охлаждение узлов;
влияние формовочных уклонов на искажение геометрии детали и необходимость кон-
конструктивных уклонов;
допуски и черновые размеры.
Эти вопросы следует решать совместно с тсхнологом-.ситейшиком.
Форма литой детали. Основой конструкции литой детали должно быть какое-либо про-
простейшее геометрическое тело, ограниченное плоскостями и поверхностями нращешш, со-
сочлененными плавными криволинейными переходами. Дополнительные элемсгпы детали в
виде приливов, бобышек, буртов, фланцев и ребер должны примыкать к этому простейшему
телу, составляющему основу отливки.
Как правило, детали отливают опзетственными поверхностями пит, так как металл в
нижних частях отливки получается более плотным и качествешгым, чем в верхних. Конст-
Конструктору необходимо установить расположение плоскости разъем» и положение детали в
форме при заливке. Затем последовательно просмотреть все элементы конструкции и уст-
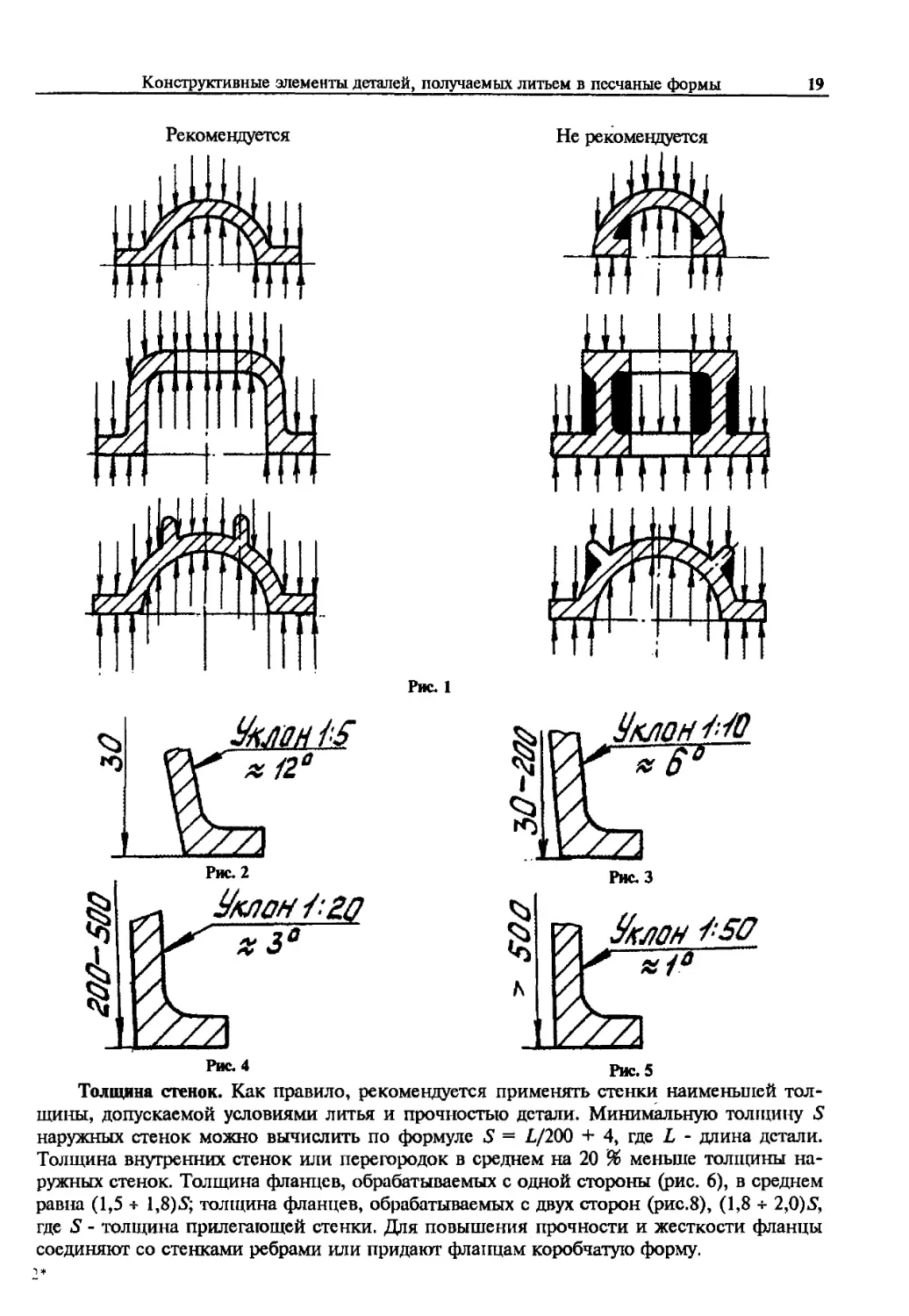
устранить подрезки посредством правила теней (рис.1).
Уклоны. Для облепения выемки модели из формы поверхностям, перпендикулярным к
плоскости разъема, придают формовочные (литейные) уклоны (рис. 2-5). Стандартные ук-
уклоны следует учитывать при конструировании деталей, имеющих большую высоту в направ-
направлении, перпендикулярном к плоскости разъема формы. В крупногабаритных отливках целе-
целесообразно предусматривать формовочные уклотты или конструктивные, превышающие фор-
формовочные. Придерживаться стандартных конструктивных уклонов необязательно.
Конструктивные элементы деталей, получаемых литьем в песчаные формы
19
Рекомендуется
Не рекомендуется
111 I Ш
РисЛ
Уклон НО
%
Й
/
Рис.2
Уклон/.ZQ
Рис.3
1
Рис4 Рис.5
Толщина стенок. Как правило, рекомендуется применять стенки наименьшей тол-
толщины, допускаемой условиями литья и прочностью детали. Минимальную толщину S
наружных стенок можно вычислить по формуле S — ?/200 + 4, где L - длина детали.
Толщина внутренних стенок или перегородок в среднем на 20 % меньше толщины на-
наружных стенок. Толщина фланцев, обрабатываемых с одной стороны (рис. 6), в среднем
равна A,5 + 1,8M; толщина фланцев, обрабатываемых с двух сторон (рис.8), A,8 + 2,0M",
где S - толщина прилегающей стенки. Для повышения прочности и жесткости фланцы
соединяют со стенками ребрами или придают фланцам коробчатую форму.
20
КОНСТРУИРОВАНИЕ ЛИТЫХ ДЕТАЛЕЙ
/777Л
s
Рис.6
Рис.8
Рис.9
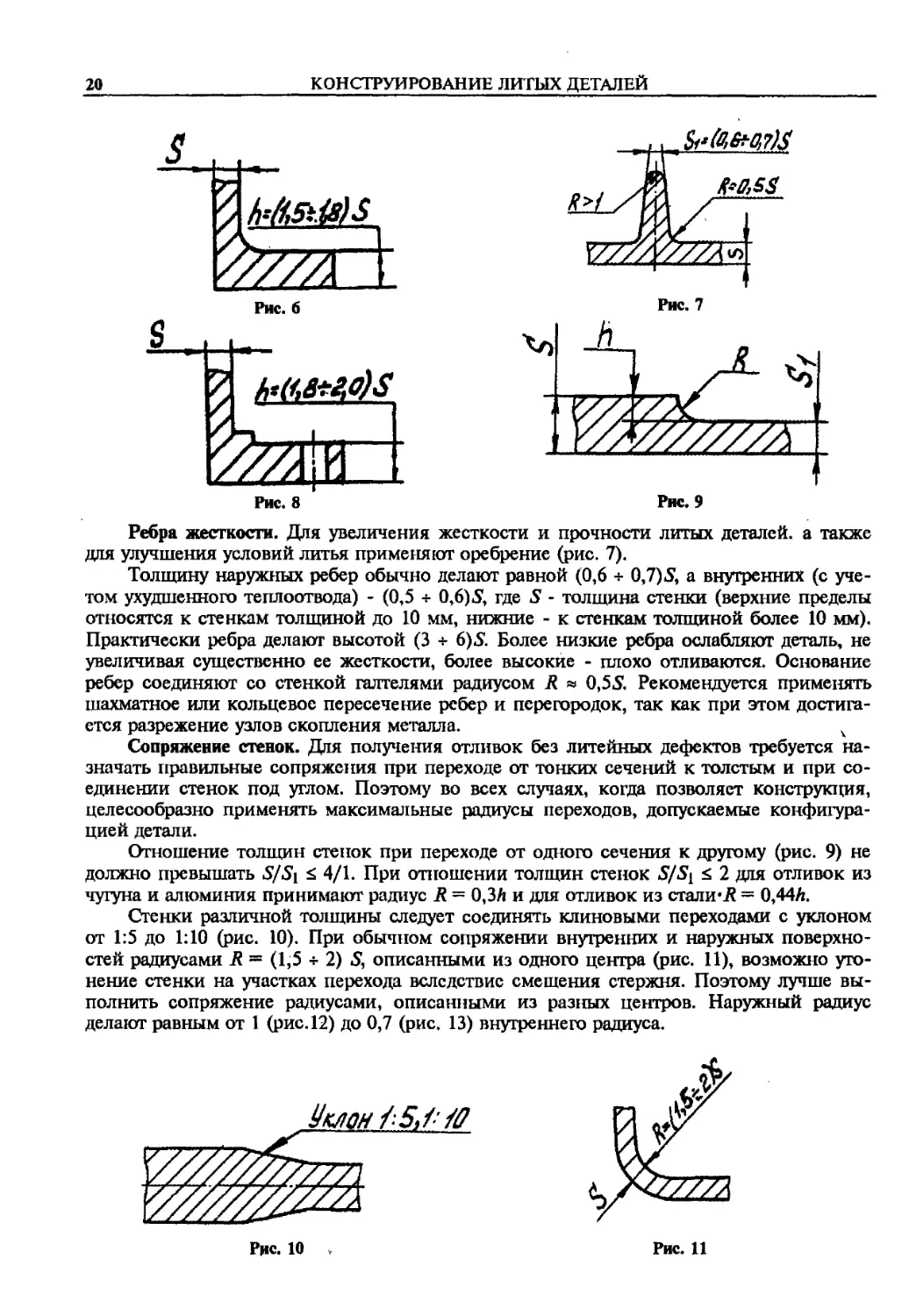
Ребра жесткости. Для увеличения жесткости и прочности литых деталей, а также
для улучшения условий литья применяют оребрение (рис. 7).
Толщину наружных ребер обычно делают равной @,6 + 0,7M, а внутренних (с уче-
учетом ухудшенного теплоотвода) - @,5 ¦*¦ 0,6M, где 5 - толщина стенки (верхние пределы
относятся к стенкам толщиной до 10 мм, нижние - к стенкам толщиной более 10 мм).
Практически ребра делают высотой C + 6M. Более низкие ребра ослабляют деталь, не
увеличивая существенно ее жесткости, более высокие - плохо отливаются. Основание
ребер соединяют со стенкой галтелями радиусом R » 0,55. Рекомендуется применять
шахматное или кольцевое пересечение ребер и перегородок, так как при этом достига-
достигается разрежение узлов скопления металла. v
Сопряжение стенок. Для получения отливок без литейных дефектов требуется на-
назначать правильные сопряжения при переходе от тонких сечений к толстым и при со-
соединении стенок под углом. Поэтому во всех случаях, когда позволяет конструкция,
целесообразно применять максимальные радиусы переходов, допускаемые конфигура-
конфигурацией детали.
Отношение толщин стенок при переходе от одного сечения к другому (рис. 9) не
должно превышать 5/5i <, 4/1. При отношении толщин стенок S/S[ <, 2 для отливок из
чугуна и алюминия принимают радиус R = О,3й и для отливок из стали -R = 0,44Л.
Стенки различной толщины следует соединять клиновыми переходами с уклоном
от 1:5 до 1:10 (рис. 10). При обычном сопряжении внутренних и наружных поверхно-
поверхностей радиусами R = A,5 + 2) 5, описанными из одного центра (рис. 11), возможно уто-
утонение стенки на участках перехода вследствие смещения стержня. Поэтому лучше вы-
выполнить сопряжение радиусами, описанными из разных центров. Наружный радиус
делают равным от 1 (рис.12) до 0,7 (рис. 13) внутреннего радиуса.
Рис.10
Рис. 11
Конструктивные элементы деталей, получаемых литьем в песчаные формы
21
Рис.12
УЛ
Рис. 14
Рис. 17
7777/
Рис.19
Рис 20
Рис.21
22 КОНСТРУИРОВАНИЕ ЛИТЫХ ДЕТАЛЕЙ
При сопряжении стенок различной толщины можно пользоваться приведенными
выше соотношениями, заменив S средним арифметическим Sq = 0,5E"+ S[) толщин со-
сопрягаемых стенок (рис. 14 и 15). Стенки с большой разницей сечений целесообразно
соединять клиновым переходным участком длиной / ? 5E - Si) (рис. 16). Следует избе-
избегать соединения стенок под острым углом (рис. 17). Если этого избежать нельзя, то ра-
радиус сопряжения принимают не менее @,5 * \)Sq. На рис. 18 и 19 показаны рекомен-
рекомендуемые соотношения для Г-образных сопряжений, на рис. 20 и 21 - для стенок, сопря-
сопряженных с фланцами. Найденные из приведенных ориентировочных соотношений ра-
радиусы округляют до ближайших стандартных размеров (/? = 1; 2; 3; 5; 8; 10; 15; 25; 30; 40
мм).
Пример записи технических требований на чертеже отливки из алюминиевого ли-
литейного сплава:
1. Термообработка Т5. Группа контроля механических свойств II. Остальные тех-
технические требования по .... Пористость не контролировать. Плотность рентгенографи-
рованием не определять.
2. Неуказанные литейные радиусы 15-30 мм.
3. Смещение ребер от номинального расположения не более 5 мм.
4. Шероховатость поверхностей, не обрабатываемых резанием, - «гм^~.
Вместо многоточия в п. 1 указывают наименование ограничительного документа,
действующего на предприятии-изготовителе.
2.3. НАНЕСЕНИЕ РАЗМЕРОВ НА ЧЕРТЕЖАХ ЛИТЫХ ДЕТАЛЕЙ
Нанесение размеров на чертежах литых деталей необходимо выполнять в соответ-
соответствии с расположением литейных баз и баз обработки резанием, а также с учетом от-
отклонения размеров.
Основные правила нанесения размеров литых деталей следующие:
размеры необрабатываемых поверхностей следует привязывать к литейной черно-
черновой базе непосредственно или через другие размеры;
исходную базу обработки резанием необходимо привязать к черновой литейной ба-
базе; все остальные размеры механически обрабатываемых поверхностей - к базе обработ-
обработки резанием непосредственно или через другие размеры.
Привязывать литейные размеры к размерам поверхностей, обрабатываемых резани-
резанием, и наоборот, недопустимо, за исключением случая, когда литейная база и база обра-
обработки резанием совпадают.
Приведенные правила необходимо соблюдать для всех трех координатных осей от-
отливки.
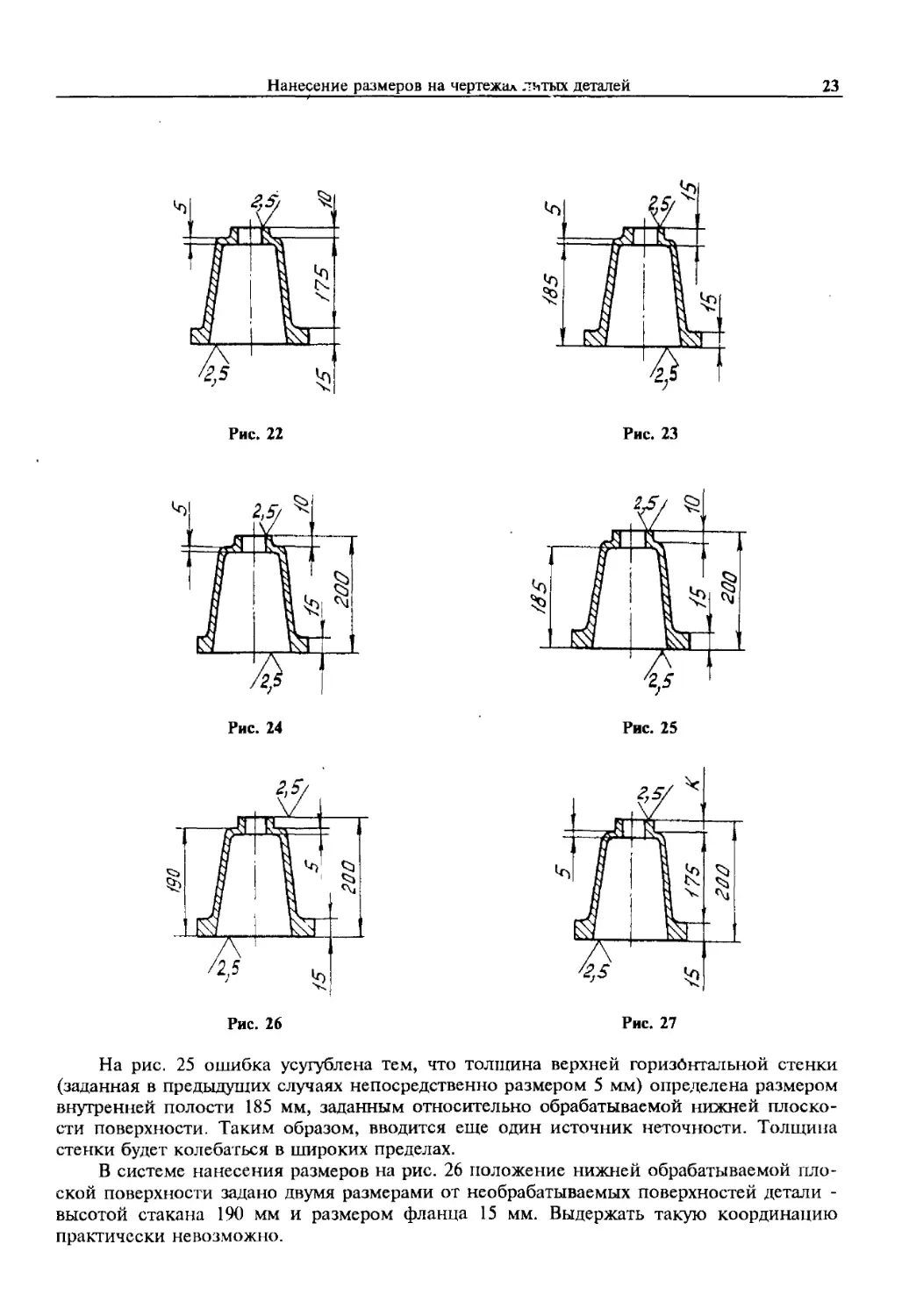
На рис. 22 - 27 приведены варианты нанесения размеров литой детали. Нанесение
размеров на рис. 22 выполнено неверно. Расстояние между обрабатываемыми плоско-
плоскостями, привязанными к необрабатываемым поверхностям через размеры 15; 175 и 10
мм, в данном случае колеблется в широких пределах вместе с колебаниями размеров
необрабатываемых поверхностей.
Такая же ошибка допущена на рис. 23, где расстояние между обрабатываемыми по-
поверхностями задано суммой размеров 185 и 15 мм.
При нанесении размеров на рис. 24 расстояние между обрабатываемыми плоско-
плоскостями B00 мм) выдерживается в необходимых узких пределах (в пределах допуска на
обработку резанием). Ошибка заключается в том, что черные поверхности привязаны к
смежным обрабатываемым плоским поверхностям (размеры 15 и 10 мм). Выдержать
такую координацию практически невозможно; положение черных поверхностей зависит
от точности отливки, эта же точность определяет и колебания расстояния до обрабаты-
обрабатываемых плоскостей.
Нанесение размеров на чертежах л^тых деталей
23
«л
Рис. 22
Рис. 23
Рис. 24
Рис. 25
Рис. 26
J
1
4>
if v
-fis '
V
Рис. 27
На рис. 25 ошибка усугублена тем, что толщина верхней горизонтальной стенки
(заданная в предыдущих случаях непосредственно размером 5 мм) определена размером
внутренней полости 185 мм, заданным относительно обрабатываемой нижней плоско-
плоскости поверхности. Таким образом, вводится еще один источник неточности. Толщина
стенки будет колебаться в широких пределах.
В системе нанесения размеров на рис. 26 положение нижней обрабатываемой пло-
плоской поверхности задано двумя размерами от необрабатываемых поверхностей детали -
высотой стакана 190 мм и размером фланца 15 мм. Выдержать такую координацию
практически невозможно.
24 КОНСТРУИРОВАНИЕ ЛИТЫХ ДЕТАЛЕЙ
На рис. 27 размеры нанесены правильно. В качестве черновой базы выбрана верх-
верхняя необрабатываемая поверхность фланца. К ней размером 15 мм привязана база об-
обработки резанием - нижняя поверхность фланца, к которой, в свою очередь, привязана
обрабатываемая верхняя плоская поверхность (размер 200 мм). Верхняя необрабатывае-
необрабатываемая поверхность координируется от литейной базы (размер 175 мм) и от нее - толщина
верхней стенки (размер 5 мм). Расстояние К между верхней, обрабатываемой поверхно-
поверхностью и верхней необрабатываемой стенкой становится замыкающим звеном размерной
цепи и служит компенсатором отклонений расположения поверхностей, получаемых
литьем. Поскольку размер К на чертеже не оговорен, то его не принимают в расчет при
контроле детали. Разумеется, номинальное значение К должно быть больше максималь-
максимально возможного смещения верхней стенки в результате неточности литья.
2.4. ДОПУСКИ РАЗМЕРОВ, ФОРМЫ,
РАСПОЛОЖЕНИЯ И НЕРОВНОСТЕЙ ПОВЕРХНОСТЕЙ ОТЛИВОК
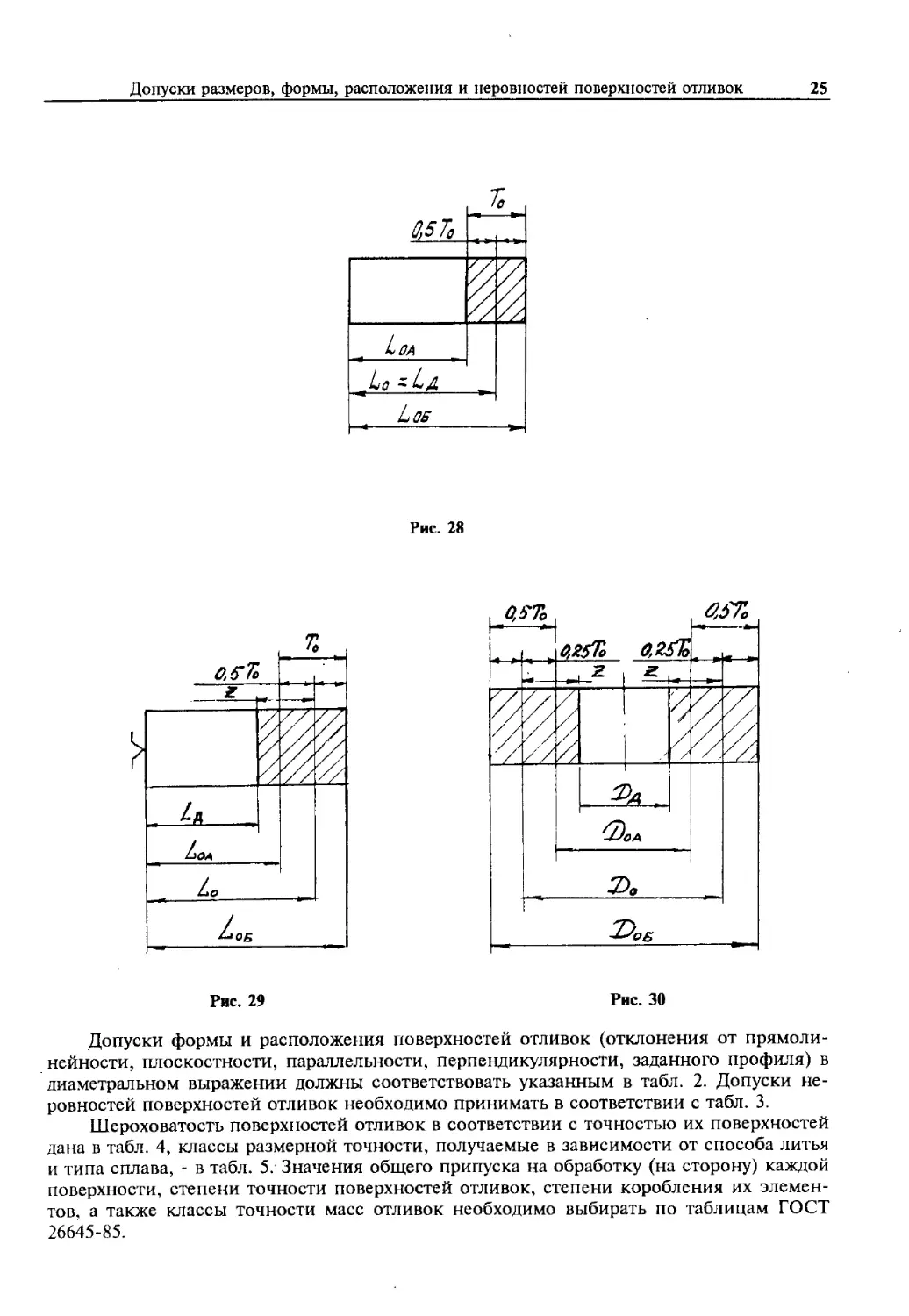
Взаимосвязь между номинальным размером до необрабатываемой поверхности де-
детали, номинальным и предельным размерами отливки и допуском на эти размеры от-
отливки должна соответствовать рис. 28.
Взаимосвязь между номинальным размером до обрабатываемой поверхности дета-
детали, номинальным и предельными размерами отливки, припуском на обработку резани-
резанием на сторону и допуском на отливку должна соответствовать рис. 29 при обработке
каждой поверхности отливки от всей базы и рис. 30 при обработке отливок типа тел
вращения или противоположных поверхностей симметричных отливок от общей базы.
Обозначения размеров на рис. 28-30: La, /)д - номинальный размер детали; Lq, Dq -
номинальный размер отливки; ?оа> Аэа " наименьший размер отливки; Lqb, А)Б ~ наи-
наибольший размер отливки; Го - допуск отливки; z - припуск на обработку металлов ре-
резанием (средний).
Под номинальным размером при установлении припусков на механическую обработ-
обработку следует понимать, номинальное расстояние между обработанной поверхностью и ба-
базой ее обработки резанием, а при обработке поверхностей вращения - их номинальный
диаметр.
У наклонных, конических и фасонных поверхностей, заданных координатами от
одной базы (кроме поверхностей, уклон которых вызван формовочными уклонами), за
номинальный размер при назначении допусков и припусков следует принимать наи-
наибольший из размеров.
Нормы точности отливки (ГОСТ 26645-85) устанавливают в зависимости от назна-
назначения и конструктивно-технологических особенностей отливки, условий ее эксплуата-
эксплуатации и изготовления.
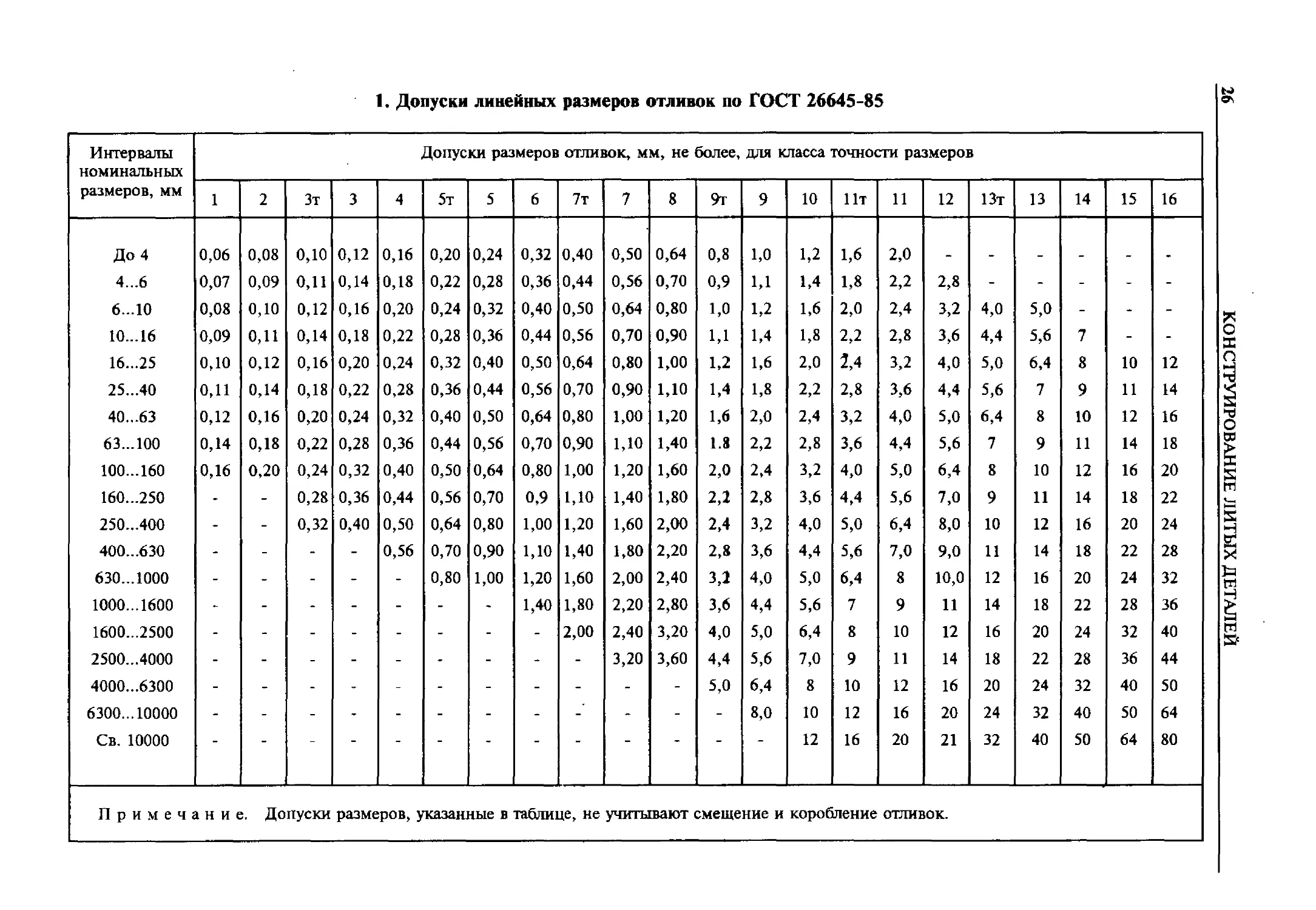
Допуски линейных размеров отливок, изменяемых и неизменяемых обработкой,
должны соответствовать указанным в табл. 1. Классы их точности и обозначения на
чертежах устанавливают по отраслевым нормативно-техническим документам. Для об-
обрабатываемых поверхностей отливок установлено симметричное расположение полей
допусков, для необрабатываемых поверхностей допускается симметричное и несиммет-
несимметричное (частично или полностью) расположение полей допусков размеров, формы и
расположения.
Допуски крутости, соосности, симметричности, пересечения осей, позиционные
допуски в диаметральном выражении не должшл превышать допуски на размеры, при-
приведенные в табл. I. Допуски угловых размеров в пересчете на линейные не должны пре-
превышать значений допусков из табл. 1 для линейных размеров соответствующих классов
точности.
Допуски размеров, формы, расположения и неровностей поверхностей отливок 25
Q,STo
LOA
Lo^La
%
Los
1
Рис. 28
OSTc
L
Рис. 29
Рис. 30
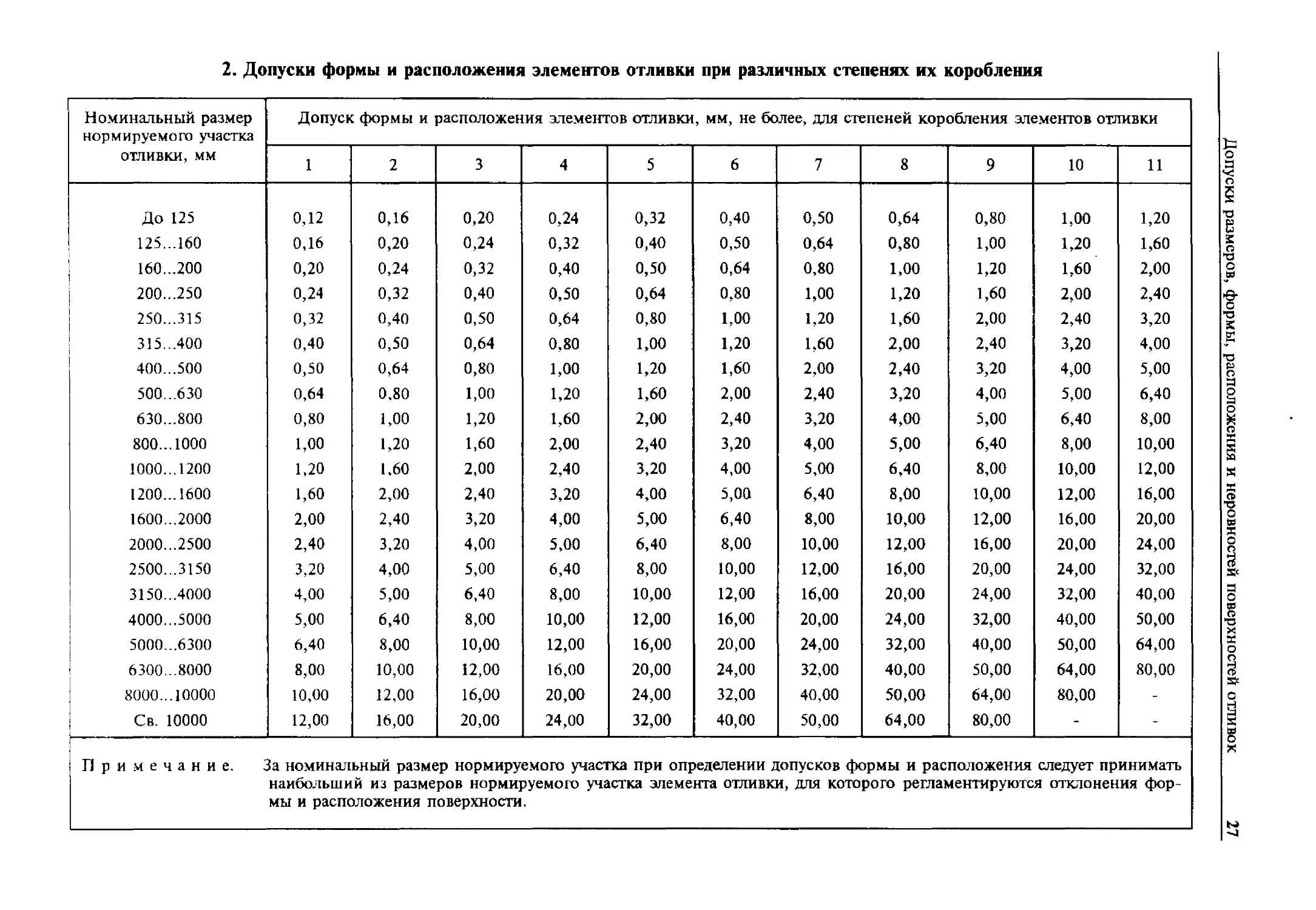
Допуски формы и расположения поверхностей отливок (отклонения от прямоли-
прямолинейности, плоскостности, параллельности, перпендикулярности, заданного профиля) в
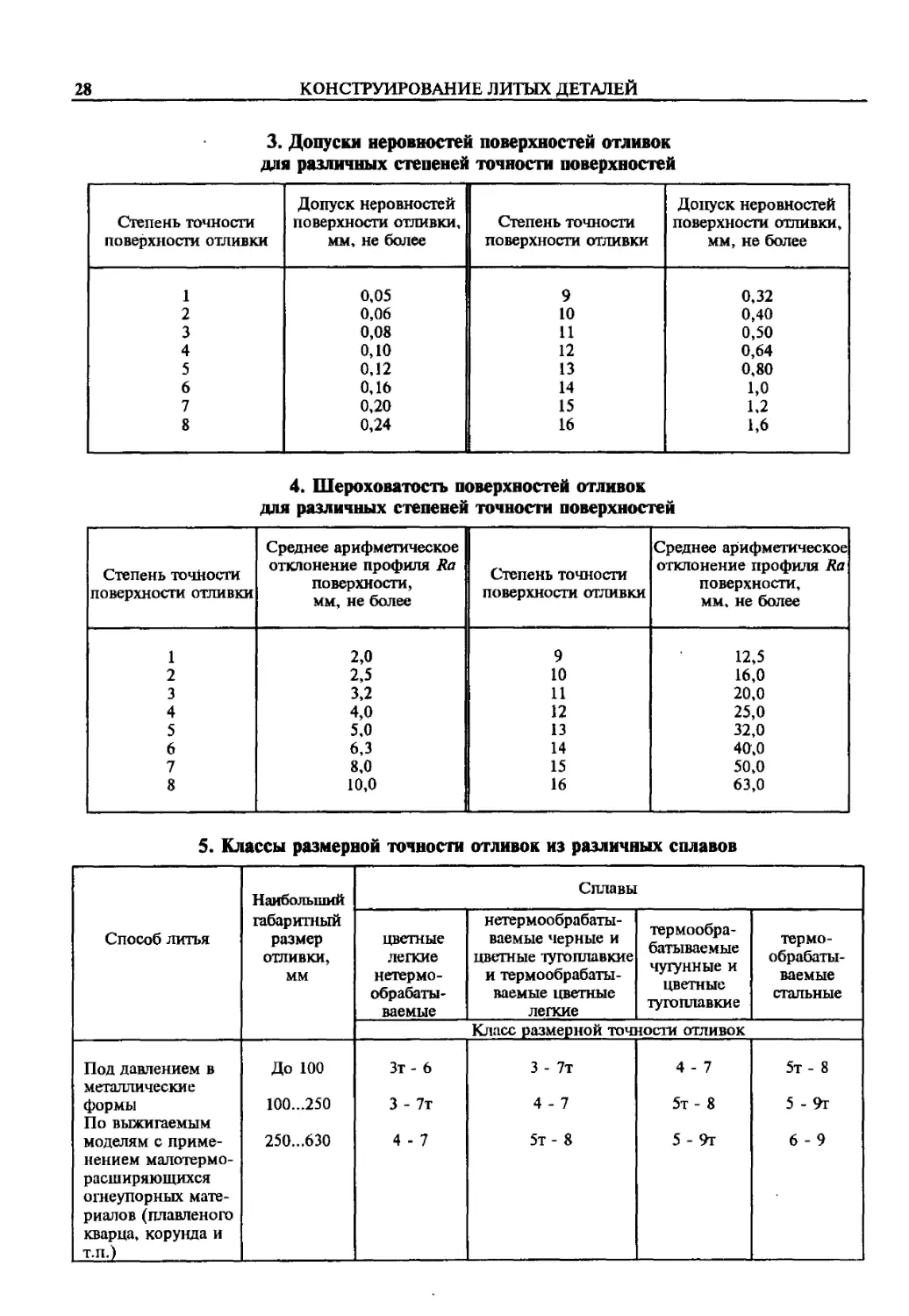
диаметральном выражении должны соответствовать указанным в табл. 2. Допуски не-
неровностей поверхностей отливок необходимо принимать в соответствии с табл. 3.
Шероховатость поверхностей отливок в соответствии с точностью их поверхностей
дана в табл. 4, классы размерной точности, получаемые в зависимости от способа литья
и типа сплава, - в табл. 5. Значения общего припуска на обработку (на сторону) каждой
поверхности, степени точности поверхностей отливок, степени коробления их элемен-
элементов, а также классы точности масс отливок необходимо выбирать по таблицам ГОСТ
26645-85.
1. Допуски линейных размеров отливок по ГОСТ 26645-85
Интервалы
номинальных
размеров, мм
До 4
4...6
6...10
10...16
16...25
25...40
40...63
63...100
100...160
160...250
250...400
400...630
630...1000
1000... 1600
1600...2500
2500...4000
4000...6300
6300... 10000
Св. 10000
Допуски размеров отливок, мм, не более, для класса точности размеров
1
0,06
0,07
0,08
0,09
0,10
0Д1
0,12
0,14
0,16
2
0,08
0,09
0,10
0,11
0,12
0,14
0,16
0,18
0?0
Зт
0,10
0,11
0,12
0,14
0,16
0,18
0,20
0,22
0,24
0,28
0,32
3
0,12
0,14
0,16
0,18
0,20
0,22
0?4
0,28
0 V
0,36
0,40
4
0,16
0,18
0,20
0,22
0,24
0 78
0 W
0,36
0 40
0,44
0,50
0,56
5т
0,20
0,22
0,24
0,28
0,32
0 36
0,40
0,44
0 50
0,56
0,64
0,70
0,80
5.
0,24
0,28
0,32
0,36
0,40
0 44
0,50
0,56
0,64
0,70
0,80
0,90
1,00
6
0,32
0,36
0,40
0,44
0,50
0 56
0,64
0,70
0,80
0,9
1,00
1,10
1,20
1,40
7т
0,40
0,44
0,50
0,56
0,64
0 70
0,80
0,90
1,00
1,10
1,20
1,40
1,60
1,80
2,00
7
0,50
0,56
0,64
0,70
0,80
0,90
1 00
1,10
1,20
1,40
1,60
1,80
2,00
2,20
2,40
3,20
8
0,64
0,70
0,80
0,90
1,00
1,10
1,20
1,40
1,60
1,80
2,00
2,20
2,40
2,80
3,20
3,60
9т
0,8
09
1,0
1,1
1,2
1,4
1,6
1.8
70
2,2
2,4
2,8
3,2
3,6
4,0
4,4
5,0
9
1,0
1,1
1,2
1,4
1,6
1,8
2,0
2,2
74
?8
3,2
3,6
4,0
4,4
5,0
5,6
6,4
8,0
10
1,2
1,4
1,6
1,8
2,0
2,2
2,4
2,8
3,2
36
4,0
4,4
5,0
5,6
6,4
7,0
8
10
12
11т
1,6
1 8
2,0
2,2
2,4
2,8
3,2
3,6
40
44
5,0
5,6
6,4
7
8
9
10
12
16
11
2,0
??
2,4
2,8
3,2
3,6
4,0
4,4
50
56
6,4
7,0
8
9
10
11
12
16
20
12
2,8
3,2
3,6
4,0
4,4
5,0
5,6
64
70
8,0
9,0
10,0
11
12
14
16
20
21
13т
4,0
4,4
5,0
5,6
6,4
7
8
9
10
11
12
14
16
18
20
24
32
13
5,0
5,6
6,4
7
8
9
10
11
12
14
16
18
20
22
24
32
40
14
7
8
9
10
11
12
14
16
18
20
22
24
28
32
40
50
15
10
11
12
14
16
18
20
22
24
28
32
36
40
50
64
16
12
14
16
18
20
22
24
28
32
36
40
44
50
64
80
Примечание. Допуски размеров, указанные в таблице, не учитывают смещение и коробление отливок.
2. Допуски формы и расположения элементов отливки при различных степенях их коробления
Номинальный размер
нормируемого участка
отливки, мм
До 125
125...160
160...200
200. ..250
250...315
315...400
400...500
500...630
630...800
800... 1000
1000...1200
1200...1600
1600...2000
2000...2500
2500...3150
3150...4000
4000...5000
5000...6300
6 300... 8000
8000... 10000
Св. 10000
Допуск формы и
1
0,12
0,16
0,20
0,24
0,32
0,40
0,50
0,64
0,80
1,00
1,20
1,60
2,00
2,40
3,20
4,00
5,00
6,40
8,00
10,00
12,00
2
0,16
0,20
0,24
0,32
0,40
0,50
0,64
0,80
1,00
1,20
1,60
2,00
2,40
3,20
4,00
5,00
6,40
8,00
10,00
12,00
16,00
расположения элементов отливки
3
0,20
0,24
0,32
0,40
0,50
0,64
0,80
1,00
1,20
1,60
2,00
2,40
3,20
4,00
5,00
6,40
8,00
10,00
12,00
16,00
20,00
4
0,24
0,32
0,40
0,50
0,64
0,80
1,00
1,20
1,60
2,00
2,40
3,20
4,00
5,00
6,40
8,00
10,00
12,00
16,00
20,00
24,00
5
0,32
0,40
0,50
0,64
0,80
1,00
1,20
1,60
2,00
2,40
3,20
4,00
5,00
6,40
8,00
10,00
12,00
16,00
20,00
24,00
32,00
, мм, не более, для степеней коробления элементов отливки
6
0,40
0,50
0,64
0,80
1,00
1,20
1,60
2,00
2,40
3,20
4,00
5,00
6,40
8,00
10,00
12,00
16,00
20,00
24,00
32,00
40,00
7
0,50
0,64
0,80
1,00
1,20
1,60
2,00
2,40
3,20
4,00
5,00
6,40
8,00
10,00
12,00
16,00
20,00
24,00
32,00
40,00
50,00
8
0,64
0,80
1,00
1,20
1,60
2,00
2,40
3,20
4,00
5,00
6,40
8,00
10,00
12,00
16,00
20,00
24,00
32,00
40,00
50,00
64,00
9
0,80
1,00
1,20
1,60
2,00
2,40
3,20
4,00
5,00
6,40
8,00
10,00
12,00
16,00
20,00
24,00
32,00
40,00
50,00
64,00
80,00
10
1,00
1,20
1,60
2,00
2,40
3,20
4,00
5,00
6,40
8,00
10,00
12,00
16,00
20,00
24,00
32,00
40,00
50,00
64,00
80,00
-
11
1,20
1,60
2,00
2,40
3,20
4,00
5,00
6,40
8,00
10,00
12,00
16,00
20,00
24,00
32,00
40,00
50,00
64,00
80,00
-
Примечание. За номинальный размер нормируемого участка при определении допусков формы и расположения следует принимать
наибольший из размеров нормируемого участка элемента отливки, для которого регламентируются отклонения фор-
формы и расположения поверхности.
28
КОНСТРУИРОВАНИЕ ЛИТЫХ ДЕТАЛЕЙ
3. Допуски неровностей поверхностей отливок
для различных степеней точности поверхностей
Степень точности
поверхности отливки
1
2
3
4
5
6
7
8
Допуск неровностей
поверхности отливки.
мм, не более
0,05
0,06
0,08
0,10
0,12
0,16
0,20
0,24
Степень точности
поверхности отливки
9
10
11
12
13
14
15
16
Допуск неровностей
поверхности отливки,
мм, не более
0,32
0,40
0,50
0,64
0,80
1,0
1,2
1,6
4. Шероховатость поверхностей отливок
для различных степеней точности поверхностей
Степень точности
поверхности отливки
1
2
3
4
5
6
7
8
Среднее арифметическое
отклонение профиля Ra
поверхности,
мм, не более
2,0
2,5
3,2
4,0
5,0
6,3
8,0
10,0
Степень точности
поверхности отливки
9
10
11
12
13
14
15
16
Среднее арифметическое
отклонение профиля Ra
поверхности,
мм, не более
12,5
16,0
20,0
25,0
32,0
40,0
50,0
63,0
5. Классы размерной точности
Способ литья
Под давлением в
металлические
формы
По выжигаемым
моделям с приме-
применением малотермо-
расширяющихся
огнеупорных мате-
материалов (плавленого
кварца, корунда и
т.п.)
Наибольший
габаритный
размер
отливки,
мм
До 100
100...250
250...630
цветные
легкие
нетермо-
обрабаты-
ваемые
отливок из различных сплавов
Сплавы
нетермообрабаты-
ваемые черные и
цветные тугоплавкие
и термообрабаты-
ваемые цветные
легкие
термообра-
itim/uuLin u
чугунные и
ЦНС1НЫС-
тугоплавкие
термо-
обрабаты-
ваемые
стальные
Класс размерной точности отливок
Зт- 6
3 - 7т
4- 7
3- 7т
4 - 7
5т- 8
4 - 7
5т-8
5-9т
5т- 8
5 -9т
6 -9
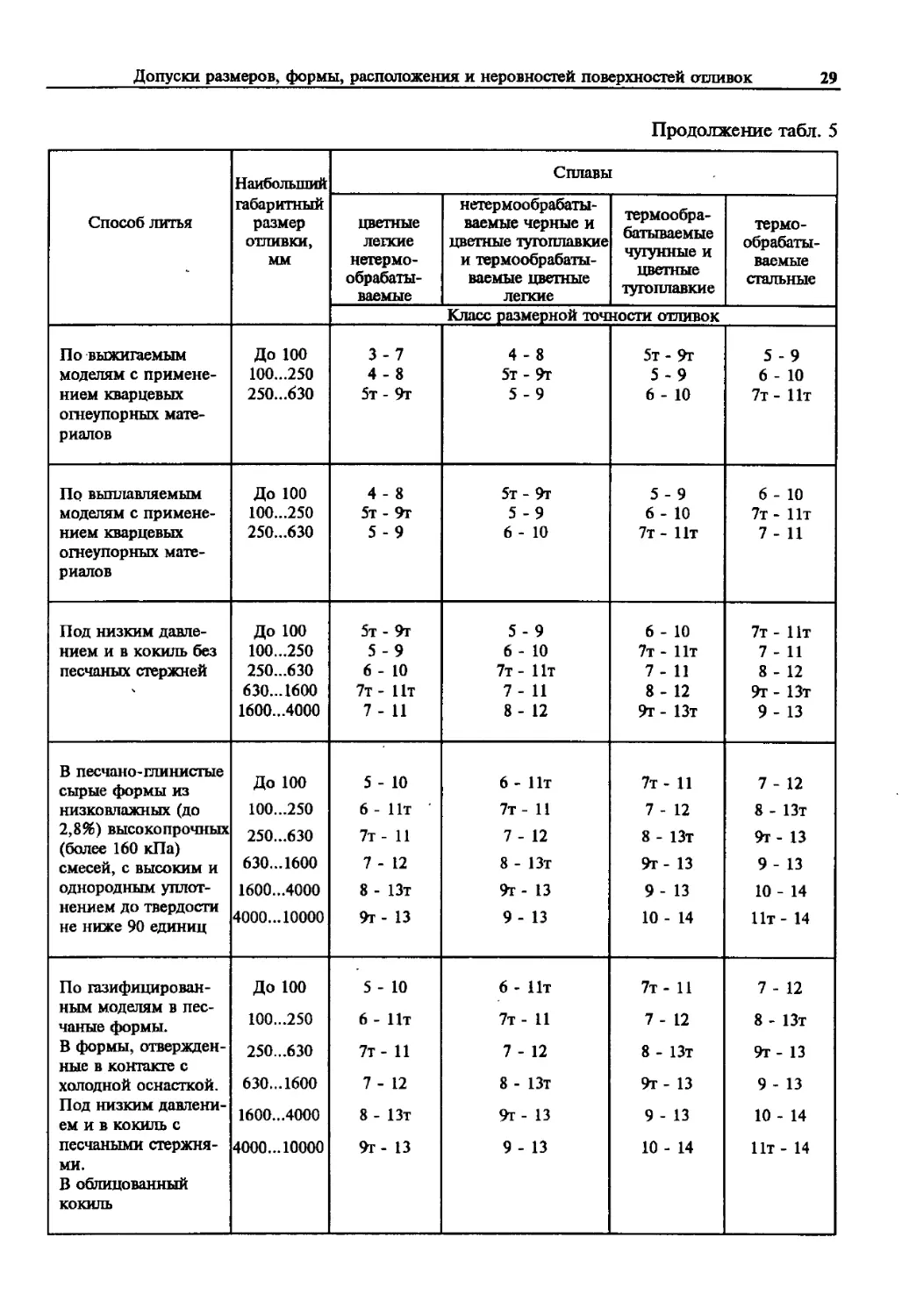
Допуски размеров, формы, расположения и неровностей поверхностей охтшвок
29
Продолжение табл. 5
Способ литья
По выжигаемым
моделям с примене-
применением кварцевых
огнеупорных мате-
материалов
По выплавляемым
моделям с примене-
применением кварцевых
огнеупорных мате-
материалов
Под низким давле-
давлением и в кокиль без
песчаных стержней
-
В песчано-глинистые
сырые формы из
низковлажных (до
2,8%) высокопрочных
(более 160 кПа)
смесей, с высоким и
однородным уплот-
уплотнением до твердости
не ниже 90 единиц
По газифицирован-
газифицированным моделям в пес-
песчаные формы.
В формы, отвержден-
ные в контакте с
холодной оснасткой.
Под низким давлени-
давлением и в кокиль с
песчаными стержня-
стержнями.
В облицованный
кокиль
Наибольший
габаритный
размер
отливки,
мм
До 100
100...250
250...630
До 100
100...250
250...630
До 100
100...250
250...630
630... 1600
1600...4000
До 100
100...250
250...630
630... 1600
1600...4000
4000... 10000
До 100
100...250
250...630
630... 1600
1600...4000
4000... 10000
цветные
легкие
нетермо-
обрабаты-
ваемые
Сплавы
нетермообрабаты-
ваемые черные и
цветные тугоплавкие
и термообрабаты-
ваемые цветные
легкие
термообра-
ftitTMTtn PUMft
WUA lUJWvJnDiV
чугунные и
1ПМПТПТА
цветные
тугоплавкие
термо-
обрабаты-
ваемые
стальные
Класс размерной точности отливок
3-7
4- 8
5т -9т
4 - 8
5т - 9т
5-9
5т- 9т
5-9
6 - 10
7т- 11т
7- 11
5-10
6- 11т
7т- 11
7- 12
8- 13т
9т- 13
5- 10
6- 11т
7т- 11
7- 12
8 - 13т
9т- 13
4-8
5т -9т
5-9
5т-9т
5-9
6- 10
5-9
6- 10
7т - 11т
7- 11
8- 12
6 - 11т
7т- 11
7- 12
8- 13т
9т- 13
9- 13
6- Пт
7т- 11
7- 12
8- 13т
9т- 13
9- 13
5т- 9т
5-9
6- 10
5-9
6- 10
7т- 11т
6- 10
7т - Пт
7- 11
8- 12
9т- 13т
7т- 11
7- 12
8- 13т
9т- 13
9- 13
10- 14
7т- 11
7- 12
8- 13т
9т- 13
9 - 13
10- 14
5-9
6 - 10
7т- Пт
6 - 10
7т - Пт
7- 11
7т - 11т
7 - 11
8 - 12
9т- 13т
9- 13
7 - 12
8 - 13т
9т- 13
9- 13
10- 14
11т- 14
7- 12
8- 13т
9т- 13
9 - 13
10 - 14
Пт- 14
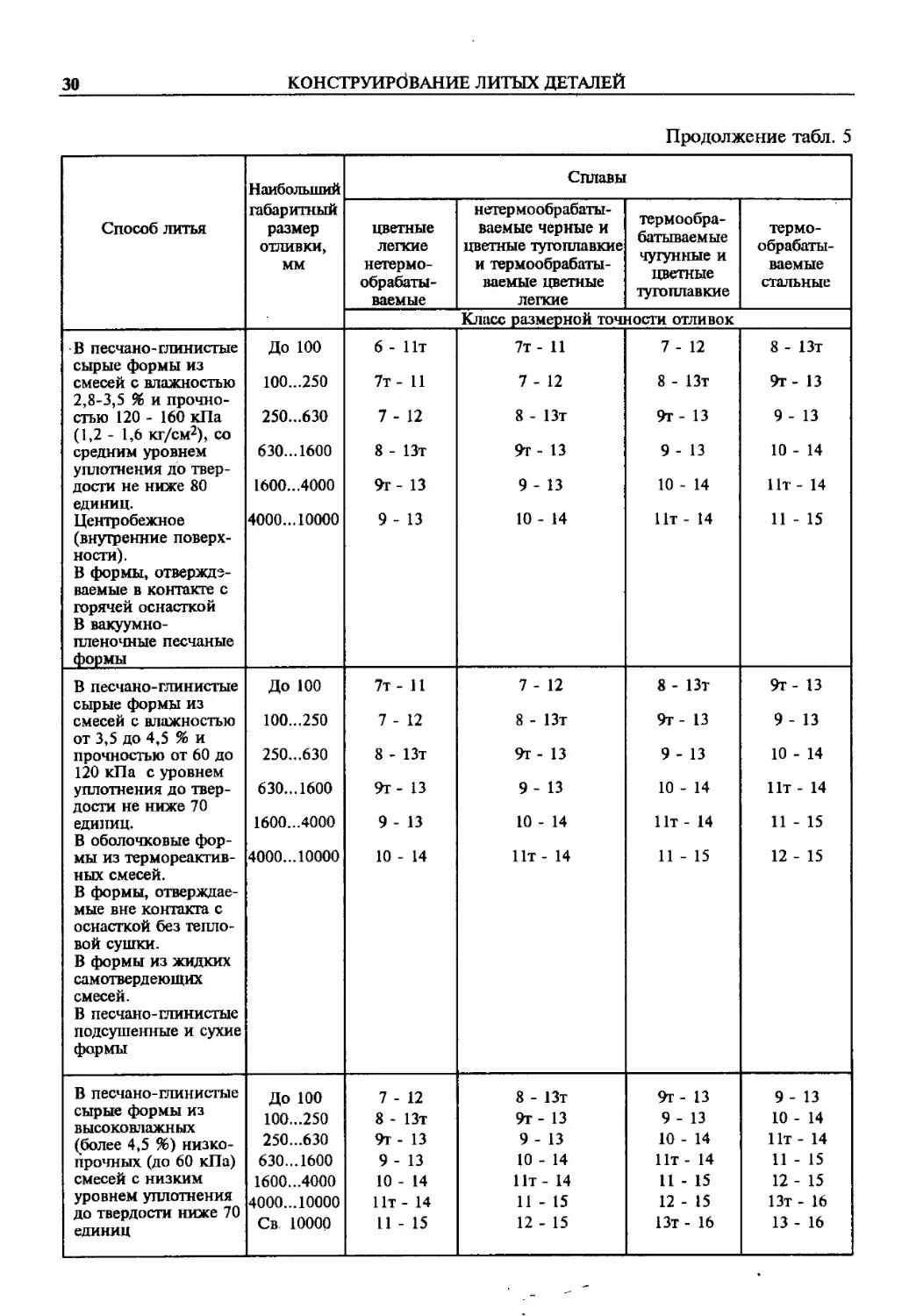
30
КОНСТРУИРОВАНИЕ ЛИТЫХ ДЕТАЛЕЙ
Продолжение табл. 5
Способ литья
В песчано- глинистые
сырые формы из
смесей с влажностью
2,8-3,5 % и прочно-
прочностью 120 - 160 кПа
A,2 - 1,6 кг/см2), со
средним уровнем
уплотнения до твер-
твердости не ниже 80
единиц.
Центробежное
(внутренние поверх-
поверхности).
В формы, отверждз-
ваемые в контакте с
горячей оснасткой
В вакуумно-
пленочные песчаные
формы
В песчано-глинистые
сырые формы из
смесей с влажностью
от 3,5 до 4,5 % и
прочностью от 60 до
120 кПа с уровнем
уплотнения до твер-
твердости не ниже 70
единиц.
В оболочковые фор-
формы из термореактив-
термореактивных смесей.
В формы, отверждае-
мые вне контакта с
оснасткой без тепло-
тепловой сушки.
В формы из жидких
самотвердеющих
смесей.
В песчано-глинистые
подсушенные и сухие
формы
В песчано-глинистые
сырые формы из
высоковлажных
(более 4,5 %) низко-
низкопрочных (до 60 кПа)
смесей с низким
уровнем уплотнения
до твердости ниже 70
единиц
Наибольший
габаритный
размер
отливки,
мм
До 100
100...250
250...630
630... 1600
1600...4000
4000... 10000
До 100
100...250
250...630
630...1600
1600...4000
4000...10000
До 100
100...250
250...630
630...1600
1600...4000
4000... 10000
Св, 10000
цветные
легкие
нетермо-
обрабаты-
ваемые
Сплавы
нетермообрабаты-
ваемые черные и
цветные тугоплавкие
и термообрабаты-
ваемые цветные
легкие
термообра-
\МЛ I ALDUwin. DJ.U
чугунные и
цветные
тугоплавкие
термо-
обрабаты-
ваемые
стальные
Класс размерной точности отливок
6 - 11т
7т- 11
7- 12
8 - 13т
9т- 13
9 - 13
7т- 11
7-12
8 - 13т
9т- 13
9- 13
10 - 14
7 - 12
8 - 13т
9т- 13
9- 13
10 - 14
11т- 14
11 - 15
7т- 11
7- 12
8 - 13т
9т- 13
9- 13
10 - 14
7- 12
8- 13т
9т- 13
9- 13
10 - 14
11т- 14
8- 13т
9т- 13
9 - 13
10 - 14
11т- 14
11 - 15
12 - 15
7 - 12
8 - 13т
9т- 13
9 - 13
10 - 14
Цт- 14
8- 13т
9т- 13
9 - 13
10 - 14
11т- 14
11 - 15
9т- 13
9 - 13
10 - 14
11т- 14
11 - 15
12 - 15
13т - 16
8- 13т
9т- 13
9 - 13
10 - 14
Пт - 14
11 - 15
9т- 13
9- 13
10 - 14
11т - 14
11 - 15
12 - 15
9- 13
10 - 14
11т- 14
11 - 15
12- 15
13т - 16
13 - 16
Стандарты на отливки из различных металлов, используемые при проектировании
31
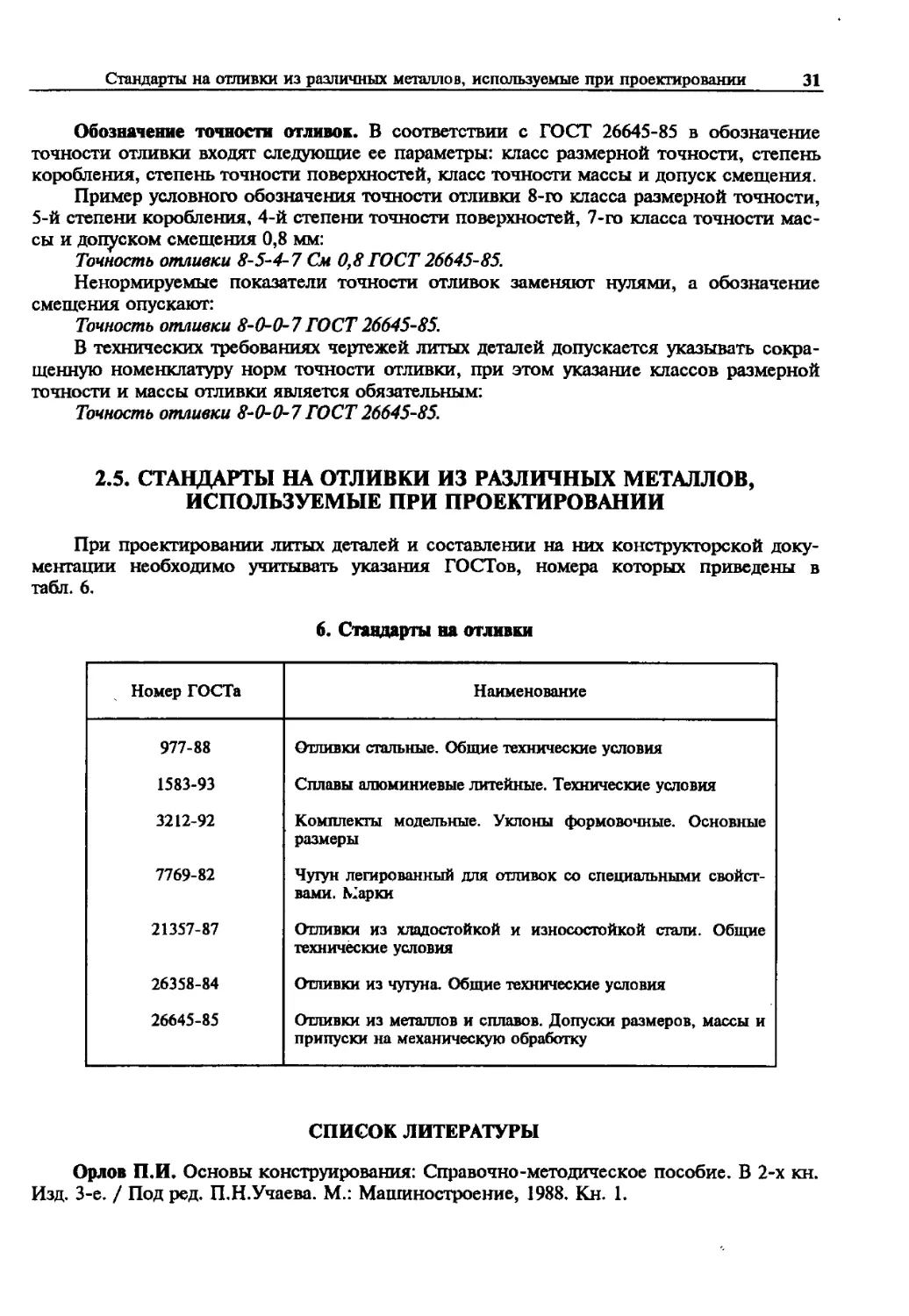
Обозначение точности отливок. В соответствии с ГОСТ 26645-85 в обозначение
точности отливки входят следующие ее параметры: класс размерной точности, степень
коробления, степень точности поверхностей, класс точности массы и допуск смещения.
Пример условного обозначения точности отливки 8-го класса размерной точности,
5-й степени коробления, 4-й степени точности поверхностей, 7-го класса точности мас-
массы и допуском смещения 0,8 мм:
Точность отливки 8-5-4-7 См 0,8ГОСТ26645-85.
Ненормируемые показатели точности отливок заменяют нулями, а обозначение
смещения опускают:
Точность отливки 8-0-0-7ГОСТ26645-85.
В технических требованиях чертежей литых деталей допускается указывать сокра-
сокращенную номенклатуру норм точности отливки, при этом указание классов размерной
точности и массы отливки является обязательным:
Точность отливки 8-0-0-7ГОСТ 26645-85.
2.5. СТАНДАРТЫ НА ОТЛИВКИ ИЗ РАЗЛИЧНЫХ МЕТАЛЛОВ,
ИСПОЛЬЗУЕМЫЕ ПРИ ПРОЕКТИРОВАНИИ
При проектировании литых деталей и составлении на них конструкторской доку-
документации необходимо учитывать указания ГОСТов, номера которых приведены в
табл. 6.
6. Стандарты на отливки
Номер ГОСТа
977-88
1583-93
3212-92
7769-82
21357-87
26358-84
26645-85
Наименование
Отливки стальные. Общие технические условия
Сплавы алюминиевые литейные. Технические условия
Комплекты модельные. Уклоны формовочные. Основные
размеры
Чугун легированный для отливок со специальными свойст-
свойствами. Марки
Отливки из хладостойкой и износостойкой стали. Общие
технические условия
Отливки из чугуна. Общие технические условия
Отливки из металлов и сплавов. Допуски размеров, массы и
припуски на механическую обработку
СПИСОК ЛИТЕРАТУРЫ
Орлов П.И. Основы конструирования: Справочно-методическое пособие. В 2-х кн.
Изд. 3-е. / Под ред. П.Н.Учаева. М.: Машиностроение, 1988. Кн. 1.
32
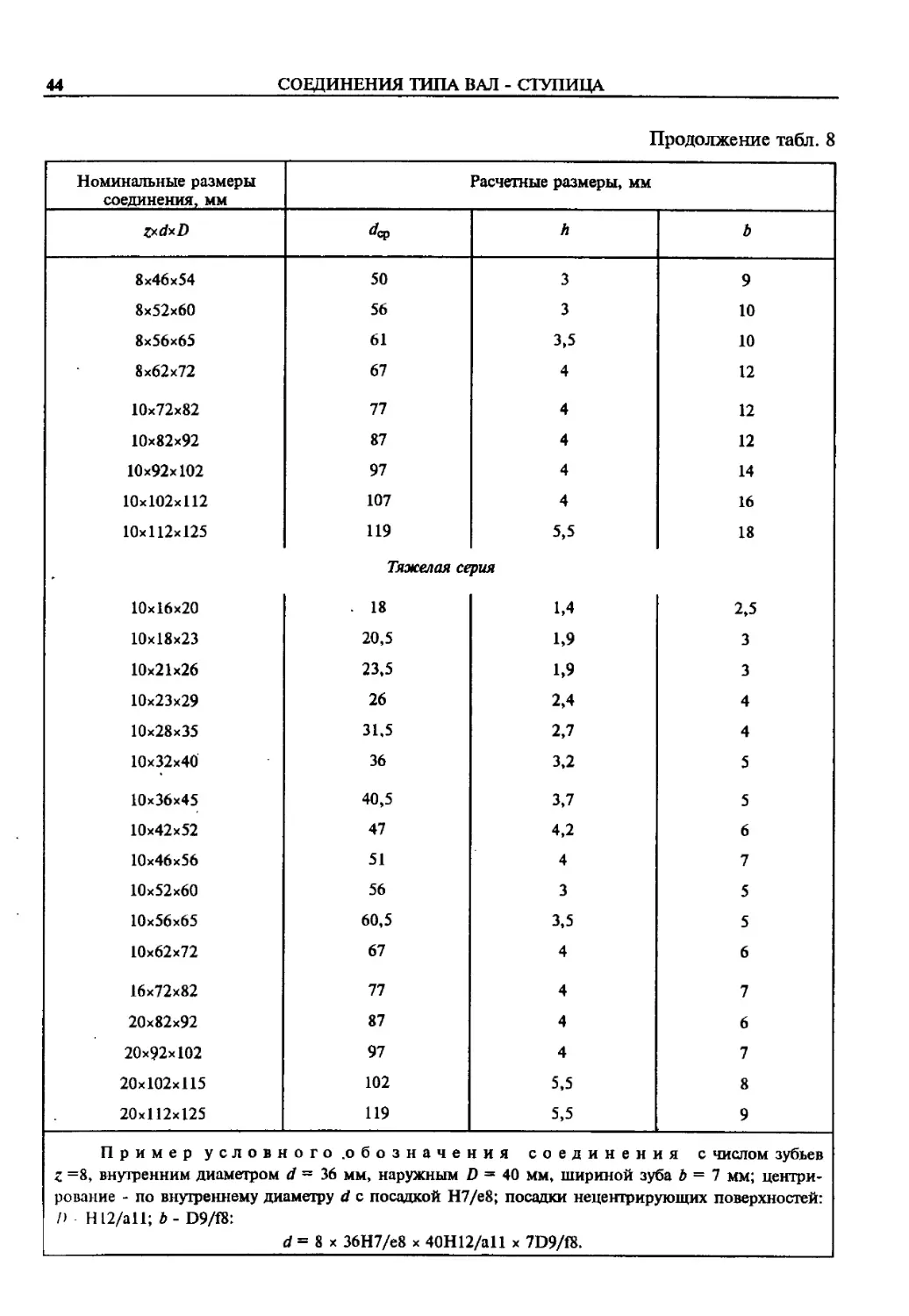
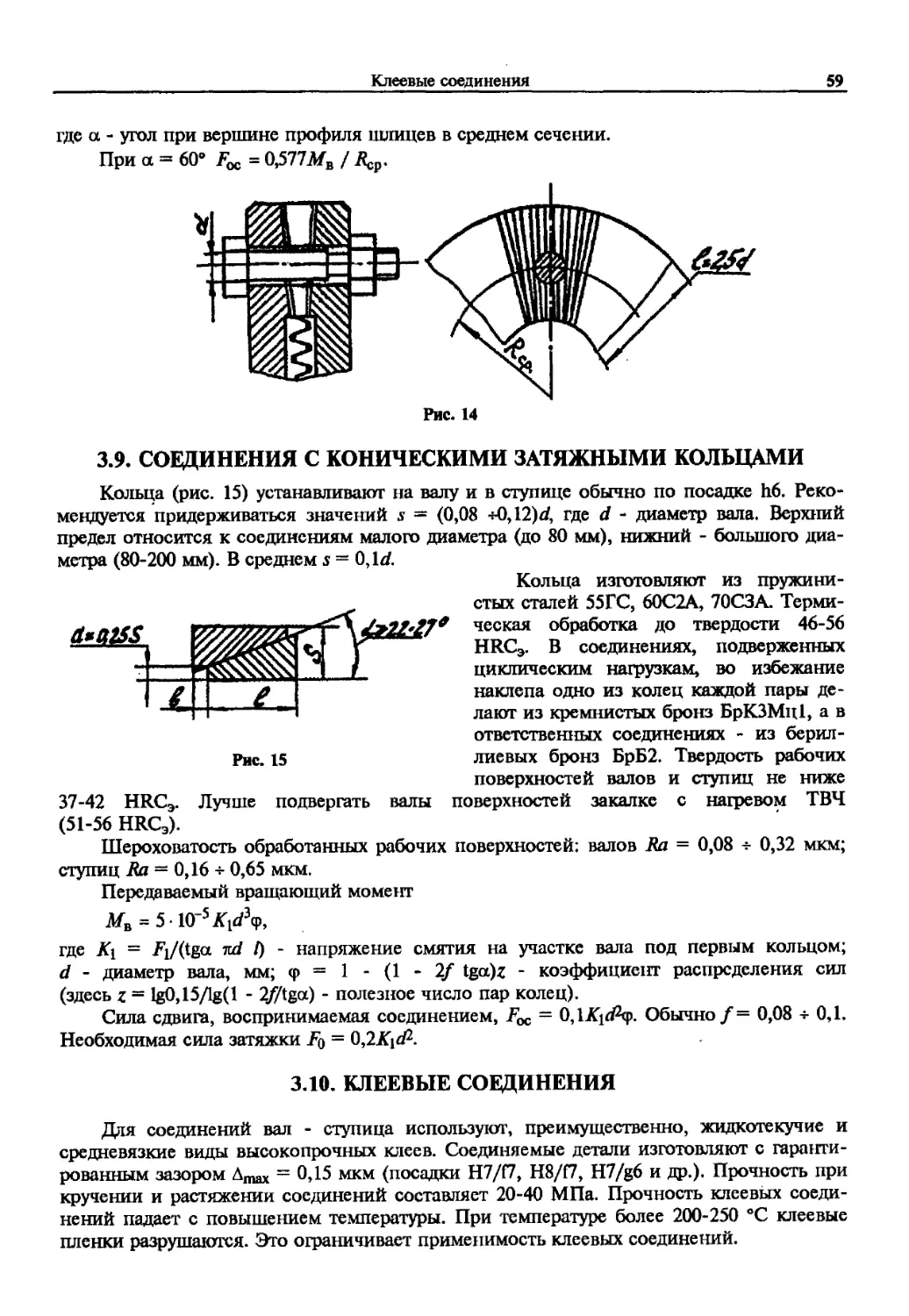
3. СОЕДИНЕНИЯ ТИПА ВАЛ - СТУПИЦА
Для передачи вращения от вала к ступице зубчатого колеса, шкива, звездочки и
других соосных деталей широко используют различные соединения - жесткие и фрик-
фрикционные. Главные виды жестких соединений - штифтовые, шпоночные, шлицевые,
призматические, фланцевые, элементы которых работают на срез, изгиб и смятие; глав-
главные виды фрикционных соединений - соединения с натягом, конусные, клеммовые, с
пружинными затяжками, передающие вращающий момент силами трения.
3.1. ШТИФТОВЫЕ СОЕДИНЕНИЯ
Штифты (типы, интервалы размеров и материалы стандартизованных штифтов
приведены в табл. 1) применяют для точного взаимного фиксирования деталей, а также
для соединения деталей, передающих небольшие нагрузки. Штифты подразделяют по
форме - на цилиндрические и конические, по типу рабочей поверхности - на гладкие и
насечные, по назначению - на установочные и крепежные.
Цилиндрические штифты устанавливают в отверстиях с натягом; иногда штифты
расклепывают (см. табл. 1).
Конические штифты выполняют с конусностью 1:50, обеспечивающей самотормо-
самоторможение и центрирование деталей.
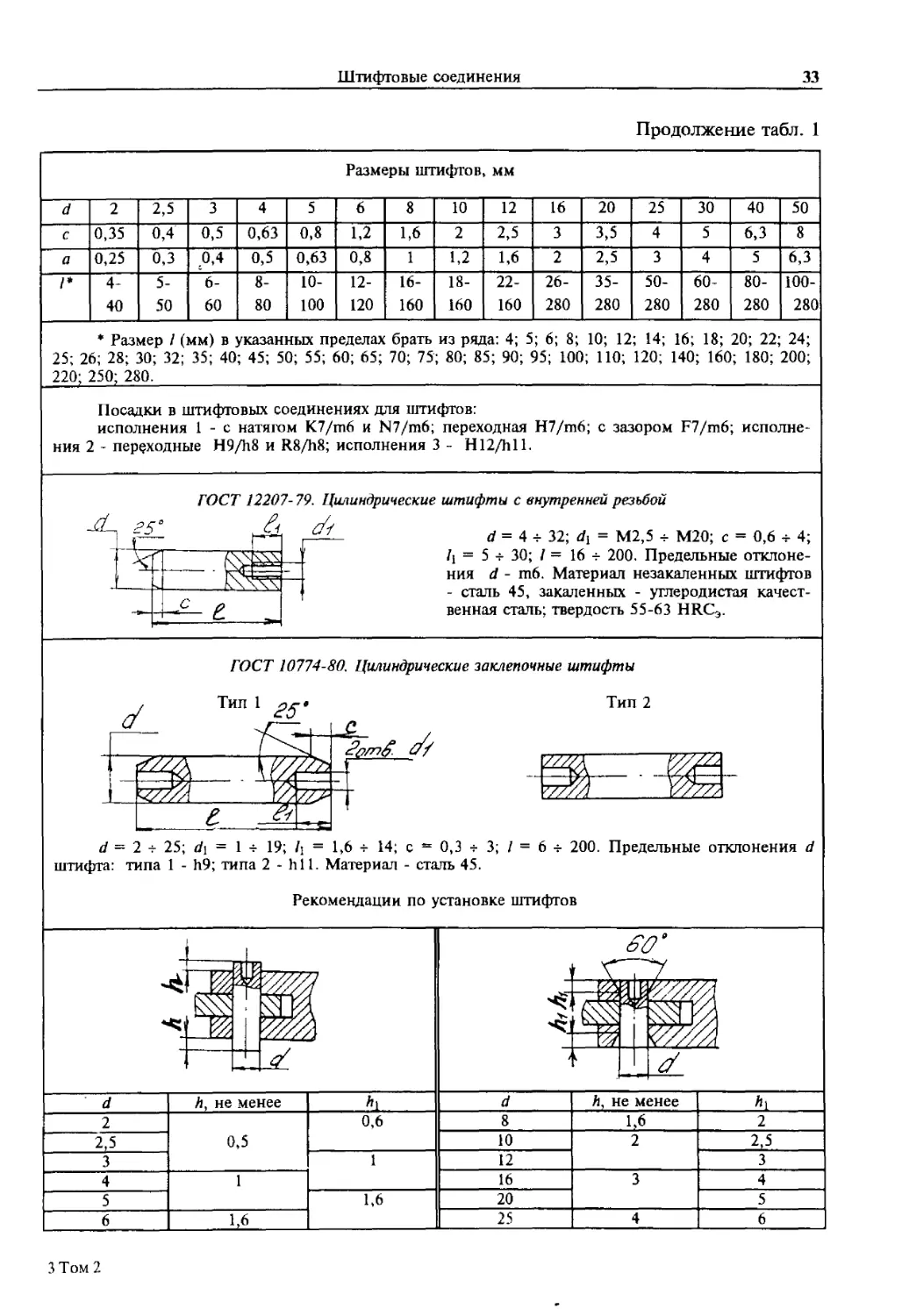
Под насеченные цилиндрические штифты с коническими (рис. 1) или цилиндриче-
цилиндрическими (рис. 2) насечками не нужно развертывать отверстие - насечки обеспечивают
надежное соединение и предохраняют штифт от выпадения в процессе работы.
Установочные штифты (рис. 3) обычно устанавливают в глухое отверстие по по-
посадке с натягом в одной из соединяемых деталей; выступающий конец штифта входит в
отверстие другой детали по посадке H7/js6 или H7/h6.
?
С
Рис.2
1. Стандартизованные штифты
гост
Исполнение 1
if
Материал
f
/О
. с
штифтов - стат
3128-70. Цилиндрические незакаленные штифты
Исполнение 2 Исполнение 3
¦ L
,45
?
Штифтовые соединения
33
Продолжение табл. 1
Размеры штифтов, мм
2,5
10
12
16
20
25
30
40
50
0,35
0,4
0,5
0,63
0,8
1,2
1,6
2,5
3,5
6,3
0,25
0,3
0,4
0,5
0,63
0,8
1,2
1,6
2,5
6,3
4-
40
5-
50
6-
60
80
10-
100
12-
120
16-
160
18-
160
22-
160
26-
280
35-
280
50-
280
60-
280
80-
280
100-
280
* Размер / (мм) в указанных пределах брать из ряда: 4; 5; 6; 8; 10; 12; 14; 16; 18; 20; 22; 24;
25; 26; 28; 30; 32; 35; 40; 45; 50; 55; 60; 65; 70; 75; 80; 85; 90; 95; 100; ПО; 120; 140; 160; 180; 200;
220; 250; 280.
Посадки в штифтовых соединениях для штифтов:
исполнения 1-е натягом К7/т6 и N7/m6; переходная Н7/т6; с зазором F7/m6; исполне-
исполнения 2 - переходные H9/h8 и R8/h8; исполнения 3 - Hl2/hll.
ГОСТ 12207- 79. Цилиндрические штифты с внутренней резьбой
t
d = 4 4- 32; dx = М2,5 * М20; с = 0,6 + 4;
/i = 5 -г 30; / = 16 -г 200. Предельные отклоне-
отклонения d - тб. Материал незакаленных штифтов
- сталь 45, закаленных - углеродистая качест-
качественная сталь; твердость 55-63 HRC3.
ГОСТ 10774-80. Цилиндрические заклепочные штифты
Тип 1 «•! Тип 2
d = 2 + 25; d\ = 1 ч- 19; /; = 1,6 -г 14; с = 0,3 -г 3; / = 6 * 200. Предельные отклонения d
штифта: типа 1 - h9; типа 2 - hi 1. Материал - сталь 45.
Рекомендации по установке штифтов
2,5
h, не менее
0,5
1,6
hi
0,6
1,6
Л, не менее
1,6
10
12
16
20
25
2.5
ЗТом2
34
СОЕДИНЕНИЯ ТИПА ВАЛ - СТУПИЦА
Продолжение табл. 1
ГОСТ 14229-78, Пружинные штифты
d = 1 -г 25; с = 0,2 + 3; 5 = 0,2 + 5;
/ = 4 -г 180; ft = 0,5 -г 3,6; а = 25 и 15°. Пре-
дельные отклонения d:
+0,5
. Матери-
ал - сталь 65Г или 60С2. Твердость 41,5 - 51,5
HRG,. Предельные отклонения d отверстия -
НИ.
ГОСТ 3129-70. Конические незакаленные штифты
d = 0,6 т 50; / = 4 т 280. Предельные от-
ююнения d - hlO; hll. Материал - сталь 45.
V ГОСТ 9464- 79. Конические незакаленные штифты с внутренней резьбой
fed
d = 6 + 50; d\ - M4 -г М24; Л = 6 + 36;
/ = 16 + 280. Предельные отклонения d - hlO;
hll. Материал - сталь 45.
ГОСТ 19119-80. Конические незакаленные разводные штифты
d = 5 ч- 16; /j = 12 * 40; * = 1 + 2;
/ = 40 ч- 250. Предельные отклонения d - hlO;
hll. Материал - сталь 45.
Л-
ГОСТ 9465- 79. Конические незакаленные штифты с резьбовой цапфой
d - 5 -=- 50; d{ = М5 + М36; h = 15,6 + 78;
/ = 40 -г 400. Предельные отклонения d - hlO;
hll. Материал - сталь 45.
€i
Глубина / запрессовки штифта зависит от материала соединяемых деталей и
диаметра d штифта (см. ниже).
Сталь, высокопрочный и ковкий чугуны, бронза 2d
Серый чугун B +.2,5)rf
Алюминиевые, магниевые и цинковые сплавы B,5 ч- 3)d
Пластмасса (без футеровки) C,3 + 3t5)d
Штифтовые соединения
35
Рабочая высота h выступающей части штифта должна
быть не менее A,5 -г 2,5)d (большие цифры интервала -
для изделий из мягких материалов). Формулы для расчета
штифтов на прочность приведены в табл. 2.
При получении отверстия под штифт соединяемые
детали сверлят и развертывают совместно.
Рис. 3
2. Формулы для расчета штифтов на прочность
Схема нагружения
Формула
'4//
i
Ш
На срез:
где F - срезающая сила; F = 2М*
На срез:
4F r i
где F = 2M*/di - срезающая сила; i - число поверх-
поверхностей среза; /Ц = nd^/A или nd^ /4 - площадь
сечения штифта, работающего на срез.
На смятие:
F
[асм]>
где у4сМ = d(D - d]) - площадь поверхности смятия
Штифт установлен в качестве предохранительного
звена, работающего на срез;
где хв «= 0,7ав - предел прочности на срез; z - число
штифтов
* Вращающий момент.
Максимально допустимый момент.
Примечание. Допускаемое напряжение на срез [xq,] = 70 -г 80 МПа; допускаемое напряже-
напряжение при смятии [осм] = 200 -г 300 МПа.
36
СОЕДИНЕНИЯ ТИПА ВАЛ - СТУПИЦА
3.2. ШПОНОЧНЫЕ СОЕДИНЕНИЯ
Типы шпонок, размеры шпонок и шпоночных узлов, посадки колес на вал. Шпонки
используют в малонагруженных соединениях, которые могут быть неподвижными или
подвижными вдоль оси вала, напряженными (клиновые и тангенциальные шпонки)
или ненапряженными (призматические и сегментные шпонки).
Призматические шпонки (табл. 3) изготовляют следующих трех типов:
обыкновенные (ГОСТ 23360-78) и высокие (ГОСТ 10748-79); их используют для
неподвижных соединений ступиц с валами;
направляющие с креплением на валу (ГОСТ 8790-79), применяемые в том случае,
когда ступицы должны иметь возможность перемещения вдоль валов (рис. 4, а);
скользящие сборные (ГОСТ 12208-66), соединяющиеся со ступицей выступом
(пальцем) цилиндрической формы и перемещающиеся вдоль вала вместе со ступицей
(рис. 4, б).
Клиновые шпонки (рис. 4, в и г) представляют собой самотормозящий клин с укло-
уклоном 1:100; их выполняют по ГОСТ 24068-80. Клиновые шпонки разделяют на заклад-
закладные и забивные. Забивные изготовляют с головками для забивки и извлечения шпонок
из пазов.
3. Размеры призматических шпонок и сечений пазов по ГОСТ 23360-78
Исполнение 1
Исполнение 2
Исполнение 3
t
-€
ч>
А-А
е/ли г-
В-Б
Шпоночные соединения
37
Диаметр
вала
В
От 6 до 8
Св
Св.
Св.
Св.
Св.
Св.
Св.
Св.
Св.
Св.
Св.
Св.
Св.
Св.
Св.
Св.
Св.
Св.
Св.
Пр
. 8 до 10
10 до 12
12 до 17
17 до 22
22 до 30
30 до 38
38 до 44
44 до 50
50 до 58
58 до 65
65 до 75
75 до 85
85 до 95
95 до ПО
ПОдо 130
130 до 150
150 до 170
170 до 200
200 до 230
и м е ч а н
Размеры
шпонки
Ъ х И
2 х 2
3 х 3
4x4
5 х 5
6 х 6
8 х 7
10 х 8
12 х 8
14 х 9
16 х 10
18 х 11
20 х 12
22 х 14
25 х 14
28 х 16
32 х 18
36 х20
40 х22
45 х 25
50 х 28
и я: 1.
2.
Глубина паза
на валу
1,2
1,8
2,5
3,0
3,5
4,0
5,0
5,0
5,5
6,0
7,0
7,5
9,0
9,0
10,0
11,0
12,0
13,0
15,0
17,0
во втулке
1,0
1,4
1,8
2,3
2,8
3,3
3,3
3,3
3,8
4,3
4,4
4,9
5,4
5,4
6,4
7,4
8,4
9,4
10,4
11,4
Длина
шпонки
6 -
6 -
8 -
10
14
18
22 -
28 -
36 -
45 -
50 -
56 -
63-
70 -
80 -
90-
100
100
ПО
125
20
36
45
- 56
- 70
- 90
ПО
140
160
180
200
220
250
280
320
360
- 400
- 400
- 450
- 500
Продолжение
Радиус
закругления г
min
0,08
0,16
0,25
0,40
0,7
max
0,16
0,25
0,40
0,60
1,0
Фаска
min
0,16
0,25
0,40
0,60
1,0
табл. 3
с
max
0,25
0,40
0,60
0,80
1,2
В ГОСТе приведены размеры сечений шпонок и пазов для валов диамет-
диаметром до 500 мм, размеры сечений шпонок b x Л до 100 х 50 мм.
Длины шпонок (мм) необходимо выбирать из ряда: 6; 8; 10; 12; 14; 16;
18; 20; 22; 25: 28: 32: 36: 40: 45: 50: 56: 63: 70: 80: 90: 100: ПО: 125: 140:
160; 180; 200
; 220; 250;
280;
320; 360
400; 450; 500.
Рис. 4
38
СОЕДИНЕНИЯ ТИПА ВАЛ- СТУПИЦА
Сегментные шпонки (ГОСТ 24071-80) применяют на валах небольших диаметров (до
38 мм) и при короткой ступице; соединения просты в изготовлении и сборке, однако
вал ослабляется глубоким пазом под шпонку (см. табл. 7).
Тангенциальные шпонки отличаются от клиновых тем, что натяг между валом и сту-
ступицей создается ими не в радиальном, а в касательном (тангенциальном) направлении.
Эти шпонки применяют, преимущественно, для тяжелонагруженных валов при переда-
передаче реверсивных движений; их выполняют по ГОСТ 24069-80 (нормальные) и ГОСТ
24070-80 (усиленные) (см. табл. 7).
Круглые цилиндрические или конические шпонки не стандартизованы. Их используют
в том случае, если втулку необходимо установить на конец вала. При диаметре вала D
диаметр шпонки d= @,16 + 0,17)Д длина / = C + 4)d. Отверстия под эти шпонки полу-
получают при сборке с обеспечением в сопряжении посадки с натягом Н7/г6. Центр отвер-
отверстия должен быть смещен в сторону центра вала (оси) на расстояние
Наиболее распространены призматические шпонки, которые, по сравнению с кли-
клиновыми, обеспечивают более удобный монтаж и демонтаж деталей, а также их лучшее
центрирование. В случае использования двух призматических шпонок их устанавливают
под углом 180°.
Применение для шпоночных соединений посадок колеса на вал с зазором недопус-
недопустимо, а переходных посадок - крайне нежелательно. Рекомендуется принимать следую-
следующие посадки:
Для колес:
цилиндрических прямозубых Н7/р6 (Н7/гб)
цилиндрических косозубых и червячных H7/rt> (H7/s6)
конических H7/s6 (H7/t6)
В коробках передач Н7/кб (Н7/т6)
Посадки с большим натягом (приведены в скобках) используют для колес ревер-
реверсивных передач.
Посадки шпонок, допуски расположения пазов. В табл. 4 и 5 приведены посадки
шпонок, поля допусков и предельные отклонения размеров шпонок и шпоночных па-
пазов в соответствии с ГОСТ 23360-78. Отклонения глубины паза на валу и во втулке да-
даны в табл. 6.
Допуск расположения паза во втулке или на валу:
параллельности: 7J « 0,5Z»umf где &иШ - допуск ширины шпоночного паза;
симметричности: при одной шпонке Г+ « 2 йцд,, при двух шпонках Т+ « 0,5 Ь1Ш.
4. Посадки призматических, сегментных и направляющих шпонок
Посадки
Плотные
Переходные
С зазором
Поле допуска
шпонки
h9
паза
вала
Р9
N9
N9; Н9*
D10
ступицы
Р9;JS9*
JS9; D10*
D10
N9; Н9Ф
Назначение
Для неподвижных соединений при
ударном нагружении
Для неподвижных соединений при
спокойном нагружении
Для направляющих шпонок
Для скользящих шпонок
• Рекомендуется для соединений с длинными шпонками (/ > Id)
Примечание. Цифровые значения предельных отклонений см. в табл. 5.
Шпоночные соединения
39
5. Предельные отклонения ширины призматических шпонок
и пазов под них на валу и во втулке
Ширина
шпонки
Ь, мм
2-3
4-6
7 - 10
12- 18
20- 28
32 - 50
56-80
90 - 100
Предельные отклонения • (мкм) ширины
шпонки
(п9)
0/-20
0/-25
0/-30
0/-35
0/-45
0/-50
0/-60
0/-70
* В числителе дроби -
вала и втулки
(Р9)
-6/-31
-12/-42
-15/-51
-18/-61
-22/-74
-2б/-88
-32/-106
-37/-124
шпоночного пазг
вала
(N9)
-4/-29
0/-30
0/-36
0/-43
0/-52
0/-62
0/-74
0/-87
втулки
(JS9)
+12,5/-12,5
+15/-15
+18/-18
+21,5/-21,5
+26/-26
+31/-31
+37/-37
+43,5/-43,5
вала
(Н9)
+25/0
+30/0
+36/0
+43/0
+52/0
+62/0
+74/0
+87/0
втулки
(D10)
+60/+20
+78/+ЗО
+98/+40
+120/+50
+149/+65
+180/+80
+220/+100
+260/+120
верхнее отклонение шпоночного паза, в знаменателе - нижнее.
б. Предельные отклонения глубины пазов
на валу и во втулке по ГОСТ 23360-78, мм
Высота шпонки
От 2 до 6
Св. 6 до 18
Св. 18 до 50
Предельные отклонения размеров
D-t
0
-0,1
0
-0,2
0
-0,3
D + t\
+0,1
0
+0,2
0
+0,3
0
Допускаемые напряжения. Стандартизованные шпонки изготовляют из ере дне угле-
углеродистых чистотя1гутых сталей специального сортамента по ГОСТ 8787-68 и
ГОСТ 8786-68. К этим сталям относятся стали марок: Ст5, Стб, 45, 50, 55 и 60. Допуска-
Допускается применять другие стали с временным сопротивлением разрыву ов = 590 МПа. В
нагруженных соединениях применяют шпонки из легированных сталей (например, из
стали 40Х с термической обработкой до 37-47 HRC,). Термически обработанные шпон-
шпонки шлифуют по рабочим граням.
Допускаемые напряжения смятия в неподвижных шпоночных соединениях находят
по формуле
[стсм1 - стт/л»
где ат - предел текучести наиболее слабого материала деталей - вала, шпонки или сту-
ступицы; при точном учете нагрузок л = 1,25; в остальных случаях п = 1,5 * 2.
Допускаемое напряжение на срез определяют из соотношения:
= @,1-г0,2)о>
40
СОЕДИНЕНИЯ ТИПА ВАЛ - СТУПИЦА
В связи с более точной расчетной схемой допускаемые напряжения для круглых и
конических шпонок можно увеличить на 25-30% по сравнению с допускаемыми напря-
напряжениями для призматических шпонок. Расчет шпонок на прочность выполняют по
формулам, приведенным в табл. 7.
7. Формулы для расчета шпонок на прочность
Шпонка
Формула
Призматическая
h
Сегментная
На смятие:
MB<Q,5Dlp(h-t)[oCM]z.
На срез (сечение 1-1):
Мв<0,5Шр[тср]г,
где /р - рабочая длина шпонки; для призматиче-
призматических шпонок с плоскими торцами /р = /, со скруг-
скругленными торцами /р = / - b A - полная длина
шпонки); hut- см. табл. 3; z - число шпонок;
[сгсм] - допускаемое напряжение при смятии; [т^,] -
допускаемое напряжение при срезе
Клиновая
[
t
W/.Z
/////
t
1. Шпонка поставлена с предварительной затяж-
затяжкой; сила давления втулки на шпонку по ширине
от действия передаваемого вращающего момента
распределена как показано на схеме а.
На смятие:
в соединении одна шпонка:
в соединении две шпонки, поставленные
диаметрально противоположно:
в соединении две шпонки, поставленные под
углом 120° по окружности сечения вала:
Мв < 0,166Ы(Ь
2. Шпонка поставлена без предварительной затяж-
затяжки; сила давления втулки на шпонку распределена
как показано на схеме б:
В формулах / = 0,15 -=- 0,2 - коэффициент
трения скольжения между валом и ступицей и
между шпонкой и ступицей
Шпоночные соединения
41
Продолжение табл. 7
А-А
Устанавливают две шпонки, каждая из которых
состоит из двух односкосных клиньев. .Расчет со-
соединения ведется с учетом только одной шпонки;
сила трения между валом и ступицей зависит от
силы затяжки обеих шпонок.
Без учета трения, вызванного затяжкой шпо-
шпонок,
с учетом трения
Мъ = А/ос „х + NfD I 2,
где х = 0,5A) - Л); осм - напряжения смятия на
узкой грани шпонки от передаваемого момента;
N - давление ступицы на вал от затяжки шпонок,
зависящее от степени затяжки и относительного
расположения шпонок по окружности вала ступи-
ступицы;
Л^ « \,4hh'CM - шпонки расположены под углом
90°;
N ъ l,7hb'CM - шпонки расположены под углом
120°;
N и 2hh'CM - шпонки расположены под углом
180°.
В формулах а'си - напряжения смятия на уз-
узкой грани от затяжки шпонки.
Условие прочности:
Торцовая
На смятие:
MB<0,25hID(\-l/DJ[ccu].
На срез:
MB<0,25bl(D-l)[zcp]
Круглая
На смятие:
Л/в<0,2ВДасм].
На срез:
В формулах / - длина шпонки
42
СОЕДИНЕНИЯ ТИПА ВАЛ - СТУПИЦА
3.3. ШЛИЦЕВЫЕ СОЕДИНЕНИЯ
Шлицевые соединения (рис. 5) обеспечивают хорошее центрирование деталей на
валу, а также передают большие моменты по сравнению со шпоночными соединения-
соединениями. Соединения выполняют подвижными и неподвижными. По форме поперечного
сечения различают три типа шлицевых соединений: прямобочные (ГОСТ 1139-80),
эвольвентные (ГОСТ 6033-80) и треугольные (изготовляются по отраслевым стандар-
стандартам).
Прямобочные шлицевые соединения (табл. 8 и 9; см. также рис. 5, а-в). В этих со-
соединениях применяют три способа центрирования отверстия ступиц на шлицевом валу
- по внешнему диаметру шлицев D, по внутреннему диаметру d, по боковым сторонам
шлицев Ь.
Центрирование по D применяют наиболее часто, когда твердость ступицы допуска-
допускает обработку отверстий протяжкой, при этом вал обрабатывают круглым шлифованием.
Центрирование по d обычно используют в подвижных соединениях при высокой
твердости ступицы или длинных валах.
Центрирование по Ь эффективно при больших знакопеременных и ударных на-
нагрузках (например, в карданных валах автомобилей). Этот способ не обеспечивает вы-
высокой точности центрирования и применяется редко.
в)
а)
г)
д)
е)
Рис. 5
Эвольвентные шлицевые соединения. В эвольвентных соединениях (см. рис. 5 г, д, е),
ступицу центрируют на валу по наружному диаметру либо по эвольвентным профилям
зубьев (рис. 5, г - плоская форма для впадины, рис. 5, е - закругленная форма для впа-
Шлицевые соединения
43
дины). Основные параметры шлицевых эвольвентных соединений по ГОСТ 6033-80
даны в табл. 10. Основные зависимости для определения размеров соединения (т - мо-
модуль, мм; z - число зубьев; х - коэффициент смещения):
угол профиля зуба а = 30°;
диаметр делительной окружности d$ = тц
номинальный исходный диаметр соединения D = mz+ 2хт + 1,1 т;
диаметр окружности вершин зубьев втулки da = D - 2т;
диаметр окружности вершин зубьев вала:
при центрировании по боковым поверхностям зубьев D^= D - 0,2т;
при центрировании по наружному диаметру Г^ = D;
смещение исходного контура хт = (D - mz- l,lm)/2.
Соединения с эвольвентными шлицами (табл. 11) более технологичны, чем соеди-
соединения с прямобочными шлицами. Для обработки валов с эвольвентными шлицами не-
необходим меньший комплект более простого инструмента. В этом случае используют
также совершенную технологию зубообработки.
8. Геометрические характеристики шлицевых прямобочных соединений
(см. рис. 5, а-в) по ГОСТ 1139-80
Номинальные размеры
соединения, мм
ZxrfxZ)
6x23x26
6x26x30
6x28x32
8x32x36
8x36x40
8x42x46
8x46x50
8x52x58
8x56x62
8x62x68
10x72x78
10x82x88
10x92x98
10x102x108
10x112x120
6x11x14
6x13x16
6x16x20
6x18x22
6x21x25
6x23x28
6x26x32
6x28x34
8x32x38
8x32x42
8x42x48
Расчетные размеры, мм
Л
Легкая серия
24,5
28
30
34
38
44
48
55
59
65
75
85
95
105
116
0,9
1,4
1,4
1,2
1,2
1,2
1,2
2
2
2
2
2
2
2
2
Средняя серия
12,5
14,5
18
20
23
25,5
29
31
35
39
45
0,9
0,9
1,4
1,4
1,4
1,9
2,2
2,2
2,2
2,2
2,2
Ъ
6
6
7
6
7
8
9
10
10
12
12
12
14
16
18
3
3,5
4
5
5
6
6
7
6
7
8
44
СОЕДИНЕНИЯ ГИЛА ВАЛ - СТУПИЦА
Продолжение табл. 8
Номинальные размеры
соединения, мм
ZxrfxZ)
8x46x54
8x52x60
8x56x65
8x62x72
10x72x82
10x82x92
10x92x102
10x102x112
10x112x125
10x16x20
10x18x23
10x21x26
10x23x29
10x28x35
10x32x40
10x36x45
10x42x52
10x46x56
10x52x60
10x56x65
10x62x72
16x72x82
20x82x92
20x92x102
20x102x115
20x112x125
Пример условного
Z =8, внутренним диаметром й = 36
рование - по внутреннему диаметру
/) Н12/а11; Ъ- D9/f8:
d=8 x
Расчетные размеры, мм
50
56
61
67
77
87
97
107
119
Тяжелая серия
. 18
20,5
23,5
26
31,5
36
40,5
47
51
56
60,5
67
77
87
97
102
119
h
3
3
3,5
4
4
4
4
4
5,5
1,4
1,9
1,9
2,4
2,7
3,2
3,7
4,2
4
3
3,5
4
4
4
4
5,5
5,5
.обозначения соединения с
мм, наружным D = 40 мм, шириной зуба Ъ =
d с посадкой Н7/е8; посадки нецентрирующих
36Н7/е8 х 40H12/all x 7D9/f8.
Ъ
9
10
10
12
12
12
14
16
18
2,5
3
3
4
4
5
5
6
7
5
5
6
7
6
7
8
9
числом зубьев
7 мм; центри-
поверхностей:
Шлицевые соединения
45
9. Допуски шлицевых прямобочных соединений
Поверхность
центрирования
Посадки *
по d
no b
no D
Назначение
Для подвижных соединений, работающих при больших ударных нагрузках и редкой разборке
b
-
F8/js7
-
-
Для подвижных соединений, работающих при умеренных нагрузках и частой разборке
d
Ь
D
H7/g6
-
-
D9/js7
Б9Д7
F10/js7
FIO/E
F8/js7
F8/js7
-
H7/js6
При средних скоростях
При малых скоростях
При значительных скоростях
Для подвижных соединений, перемещающихся под нагрузкой
d
H7/f7
H7/g6
D9/h9
D9/js7
F10/19
-
Поверхности термообрабатывать
Доя подвижных соединений, перемещающихся без нагрузки или при малой нагрузке *2
d
D
H7/f7
H7/g6
-
D9/h9
F10/f9
F8/f7
F8/f8
-
H7/I7
При малых и средних скоростях
(термообработка до невысокой
твердости)
При значительных скоростях
* Приведены только предпочтительные посадки по ГОСТ 1139-80.
*2 Предпочтительно центрирование по наружному диаметру D.
10. Предпочтительный размерный ряд
эвольвентных шлицевых соединений по ГОСТ 6033-80
Номиналь-
Номинальный
диаметр
D
6
8
10
12
15
17
20
25
30
35
40
45
50
55
60
Число зубьев z при модуле т
0,5
10
14
18
22
28
-
-
-
-
-
-
-
-
-
-
0,8
6
8
11
13
17
20
23
30
36
-
. -
-
-
-
-
1,25
-
-
-
-
-
12
14
18
22
26
30
34
38
-
-
2
-
-
-
-
-
-
-
-
-
16
18
21
24
26
28
3
-
-
-
-
-
-
-
-
-
-
-
-
-
17
18
Номиналь-
Номинальный
диаметр
D
85
90
95
100
110
120
140
160
180
200
220
240
260
300
340
Число зубьев z
при модуле т
3
27
28
30
32
35
38
45
52
58
-
-
-
-
-
-
5
15
16
18
18
20
22
26
30
34
38
42
46
50
58
-
8
-
-
-
-
-
-
-
18
21
24
26
28
31
36
41
46
СОЕДИНЕНИЯ ТИПА ВАЛ - СТУПИЦА
Номиналь-
Номинальный
диаметр
D
65
70
75
80
Число зубьев г при модуле т
0,5
-
-
-
-
0,8
-
-
-
-
1,25
-
-
-
-
2
31
34
36
38
3
20
22
24
25
Номиналь-
Номинальный
диаметр
D
380
400
440
480
500
Продолжение
табл. 10
Число зубьев z
при модуле т
3
-
-
-
-
-
5
-
-
-
-
-
8
46
48
54
58
61
11. Допуски шлицевых эвольвентных соединений
Поверхность
центрирования
s
S
D
d
d
d
D
Посадки *
по s
по D
по d
Примечание
Для неподвижных соединений,
работающих при больших ударных нагрузках и редкой разборке
7Н/9г,
7Н/8р;
7Н/7п
Hll/hll
-
-
Для неподвижных соединений,
работающих при умеренных нагрузках и частой разборке
7Н/8к;
7H/7h;
9H/g*2
9H/9h*2
9H/9h;
9H/9g;
9H/9d
9H/9h;
9H/9g;
9H/9d
Н11/Ы2
Н7/п6
H7/JS6
Н11/Ы2
H7/n6;
H7/h6;
H7/g6
При малых скоростях
При значительных скоростях
Для подвижных соединений, перемещающихся под нагрузкой
9H/9h;
9H/9g;
9H/9d
Н11/Ы2
H7/h6;
H7/g6
Поверхности
термообрабатывать
Для подвижных соединений, перемещающихся без нагрузки
9H/9h;
9H/9g;
9H/9d
9H/9h;
9H/9g;
9H/9d
Н11/Ы2
H7/h6;
H7/g6;
H7/f7
H7A6;
H7/g6
При малых и средних скоро-
скоростях (термообработка до не-
невысокой твердости)
При значительных скоростях
* Приведены только предпочтительные посадки по ГОСТ 6033-80.
*2 Предпочтительные посадки с зазором
Примечание
s - номинальная толщина зуба вала по делительной окружности.
Шлицевые соединения
47
Шлицевые соединения с треугольным профилем (см. рис. 5, ё) применяют в не-
неподвижных соединениях тонкостенных втулок или пустотелых валов (вместо соедине-
соединений с натягом), передающих небольшие вращающие моменты. Способ центрирования -
по боковым граням. По отраслевым стандартам соединения изготовляют со следующи-
следующими параметрами:
угол профиля 2а = 90; 72; 60°;
наружный диаметр D = 5 + 75 мм;
модуль m =0,2 +1,5 мм;
число зубьев z — 20 * 70.
Длину шлицевого соединения рекомендуется делать не менее @,5 + 0,8) D, лучше
A -г- 1,2) D (где D - диаметр вала). Увеличивать длину соединения свыше A,5 -е- 2) D не
рекомендуется, так как при этом снижается точность изготовления и фактическая пло-
площадь соприкосновения шлицев уменьшается.
Допускаемые напряжения. Допускаемые напряжения для неподвижных затянутых
шлицевых соединений со стальным валом и ступицей приведены в табл. 12.
12. Допускаемые напряжения смятия
для неподвижных затянутых шлицевых соединений
Термическая обработка
шлицев
Улучшение
C2-37 HRG,)*
Закалка ТВЧ;
цементация
E6-61 HRQ)
Азотирование
(900-1000HV)
Допускаемые напряжения [оси] (МПа) при нагрузке
спокойной
30-40
40-60
60-80
циклической
20-30
30-40
40-60
ударной
10-20
20-30
30-40
* В скобках - твердость термообработанной поверхности.
Дня подвижных соединений и соединений с зазором по боковым граням шлицев
эти значения [аш] уменьшают в 2-3 раза.
Если насаживаемая деталь выполнена из мягкого материала (серые чугуны, легкие
сплавы), расчет ведут по напряжениям смятия, допустимым для данного материала.
Расчет шлицевых соединений на прочность. Расчет основан на определении напря-
напряжений смятия, которые испытывают боковые поверхности зубьев. В сечениях у основа-
оснований возникают напряжения среза и изгиба, пропорциональные напряжениям смятия.
Эти напряжения можно принять за критерии подобия.
Расчет ведут по формуле
где flfcp - средний диаметр соединения; z - число зубьев; Ли/- соответственно высота и
длина поверхности контакта зубьев; у - коэффициент, учитывающий неравномерность
48
СОЕДИНЕНИЯ ТИПА ВАЛ - СТУПИЦА
распределения давления в соединениях (у = 0,7 -г- 0,8); [аш] - допускаемые напряжения
на смятие на боковых поверхностях зубьев (см. табл. 12).
Для прямобочных зубьев (см. рис. 5, а - в)
h = (D-d)/2-2f; dcp=(D + d)/2.
Для эвольвентных зубьев (см. рис. 5, г и д)
h = 0m; dcp = mz,
где 0 = 1 - при центрировании по боковым поверхностям и 0 = 0,9 при центрировании
по наружному диаметру; т - модуль шлицев; d - диаметр делительной окружности.
Для треугольных зубьев (см. рис. 5, ё)
h = (D-d)/2; dcp=d = mZ.
Предельный вращающий момент, передаваемый соединением,
3.4. ПРИЗМАТИЧЕСКИЕ СОЕДИНЕНИЯ
Призматические соединения применяют для посадки маховиков, рукояток и т.п.
Квадраты для крепления инструмента стандартизированы (ГОСТ 9523-84). Недос-
Недостатки соединений с квадратным валом - трудность изготовления отверстия во втулке,
наличие углов, создающих высокую концентрацию напряжений, и плохое центрирова-
центрирование втулки на валу; достоинства - простота изготовления вала и возможность захвата
конца вала обычным гаечным ключом.
На цилиндрическом валу с одной лыской втулка лучше центрируется, чем на квад-
квадратном валу. При изготовлении отверстия протяжкой обеспечивается лучшее сопряже-
сопряжение посадочных поверхностей.
В призматических соединениях вращающий момент передается напряжениями
смятия на плоских поверхностях вала - лысках и гранях (табл. 13; см. также табл. 12).
13. Расчет призматических соединений на прочность
Вид призматического соединения
Формула для расчета
Конструктивно принимают b —
0,75A и / -> A + 2L. Посадки
выбирают в зависимости от усло-
условий работы - Н9/19; Н9//8;
Hll/dll илиН12/Ы2.
Напряжения смятия на гранях
ЪМЪК
|°с м]»
ще К - 1,3-5- 2- коэффициент,
учитывающий неравномерность
нагружения граней; меньшее зна-
значение напряжения для 7 ? b и вы-
высокой точности сопряжения
Клеммовые соединения
49
Продолжение табл. 13
Вид призматического соединения
Формула для расчета
Для круглого вала с лыской
конструктивно принимают
b = t = G,8d.
Напряжение смятия на лыске
4М„
где/= 0,12 -г 0,18 - коэффициент
трения
3.5. КЛЕММОВЫЕ СОЕДИНЕНИЯ
Клеммовые соединения (рис. 6) удобны для посадки на валы и штоки различных
деталей (установочных колец, рычагов, щек и т.п.), нагружаемых как осевой силой, так
и моментом. Эти соединения допускают установку охватывающей детали в произволь-
произвольном угловом и осевом положениях по длине гладкого участка вала.
Рис. 6
Несущая способность фрикционных клеммных соединений зависит от силы зя-
тяжки, посадки в сопряжении клеммы с валом, соответственно от закона распределе-
распределения давлений по контактной поверхности и коэффициента трения на посадочных по-
поверхностях.
Изготавливают детали клеммового соединения, чаще всего, стальными, но можно
использовать и цветные металлы, а также некоторые из пластмасс.
Условия нормальной работы клеммового соединения при нагружении осевой
сдвигающей силой Q или моментом Мъ (см. рис. 6, а) следующие:
FTp>kQ; Мтр>кМв,
где/с= 1,2-5- 1,3- коэффициент надежности работы соединения.
В случае совместного действия Q и Мъ расчет проводят по равнодействующей R
осевой и окружной сил
Frp >kp =
Нормальная сила
4 Том2
50
СОЕДИНЕНИЯ ТИПА ВАЛ - СТУПИЦА
Imf '
N>
kR
2m/'
где /и - коэффициент, учитывающий закон распределения давлений р по поверхности
контакта; т — Зтг/8 в случае клеммы с зазором (посадки H7/h6; H7/g6); m = я/2 - с на-
натягом (посадки Н7/р6; Н7Д6);/- коэффициент трения; значения коэффициента в зави-
зависимости от материала трущихся поверхностей: 0,07 + 0,10 при трении стали по стали и
чугуну; 0,05 -*¦ 0,70 - стали по латуни; 0,03 * 0,50 - стали по алюминию; 0,015 ¦*¦ 0,25 -
стали по пластмассе.
Усилие затяжки каждого из болтов соединения
¦о=-=?
Na2
где z - число болтов на одну сторону разъемной клеммы (рис. 6, б) или полное число
болтов неразъемной клеммы (рис. 6, а).
Условие несминаемости контактных поверхностей клеммы:
mN
dl
I- CMJ
Прочность опасного сечения клеммы на изгиб (под действием изгибающего мо-
момента Ми от силы N) приближенно можно проверить по условию:
ст=
где W - момент сопротивления сечения.
3.6. СОЕДИНЕНИЯ С НАТЯГОМ
Общие сведения. Соединение деталей машин с натягом (рис. 7) осуществляют в ре-
результате их предварительной деформации. Этот вид соединения неразъемный, так как
после разборки (выпрессовки деталей) первоначальные размеры деталей меняются.
Посадки с натягом могут быть разделены на три
группы. Тяжелые и особо тяжелые посадки (Н/u, Н/х,
H/z) имеют большой натяг с большим разбросом зна-
чений. Эти посадки рекомендуется "проверять опыт-
ным путем, а не расчетом. Средние посадки (Н/г,
H/s, H/t) применяют для запрессовки втулок в шкивы
и зубчатые колеса, для закрепления зубчатых колес на
валах, для установки бронзовых венцов червячных
колес и т.п. Легкие посадки Н/р применяют в соеди-
соединениях тонкостенных деталей при передаче неболь-
небольших нагрузок.
Детали соединяют преимущественно механиче-
механическим или тепловым способом. При сборке механиче-
механическим способом охватывающую деталь с помощью
пресса (или молотка) устанавливают в охватываемую
деталь или наоборот. Этот способ используют при
небольших натягах.
Тепловой способ соединения применяют при
больших натягах и осуществляют, нагревая охваты-
Рис. 7
Соединения с натягом
51
вающую деталь до температуры 300 °С в масляной ванне или охлаждая охватываемую
деталь обычно до температуры - 150 °С в жидком азоте. Тепловая сборка, в среднем, в
1,2 - 1,5 раза увеличивает несущую способность соединения с натягом.
В конструкциях с посадкой в глухие отверстия необходимо обеспечить вывод воз-
воздуха в процессе запрессовки. Не рекомендуется запрессовывать детали в глухие отвер-
отверстия, так как эти отверстия трудно обработать точно и в них сложно проводить рас-
прессовку.
Для определения минимальной длины посадочных поясов в соединениях общего
назначения можно пользоваться формулой
где /„ид - длина пояса (за вычетом фасок), мм; а - коэффициент, учитывающий матери-
материал соединяемых деталей; для охватывающих деталей из стали а = 4, из чугунов - 5, из
легких сплавов - 6; d - диаметр соединения, мм.
Если соединение подвержено действию больших изгибающих моментов и попе-
поперечных сил, особенно знакопеременных, то длину / запрессованного элемента прини-
принимают равной A,5 -г- 2) d. Упорный бурт применяют для точной фиксации на валу наса-
насаживаемых червячных и конических колес, а также для исключения перекоса коротких
ступиц (l/d < 0,7).
Форма кромок охватываемой и охватываю-
охватывающей деталей (рис. 8) влияет на усилие запрессов-
запрессовки и на состояние поверхности. Более рацио-
рационально на охватываемой детали делать фаску с
углом а и 15 -г- 20° и шириной /j » 0,0Ы + 2 мм.
Фаска охватывающей детали имеет лишь вспомо-
вспомогательное значение и необходима для центриро-
центрирования при запрессовке.
Несущая способность соединения с натягом.
рис g Для обеспечения неподвижности соединений
среднее контактное давление qK (табл. 14, см.
также рис. 7) должно быть таким, чтобы силы трения превышали внешние сдвигающие
силы.
При нагружении соединения осевой силой /"либо вращающимся моментом Мв, а
также при совместном действии F и Мъ несущую способность соединения рассчитыва-
рассчитывают соответственно по формулам:
Як =
FK
Як =
2МЪК
Як =
fnd2l
A)
fndl'
где К - коэффициент запаса сцепления; для соединений, подверженных изгибу
(например, соединений валов и зубчатых колес редукторов), принимают К = 3 -г 4,5; в
остальных случаях К = 1,5 + 2; /- коэффициент трения (сцепления) (табл. 15); d и / -
диаметр и длина посадочной поверхности.
Соотношение между давлением на поверхности контакта и натягом:
^2^р 1
Як = Z 71 \ г Гтт ~~. ~~. ' v^)
где 5Р - расчетный натяг, мм; d - диаметр соединения, мм; Е\ и Ег ~ модули продольной
упругости материала вала и втулки, МПа; индексы 1 и 2 соответствуют валу и втулке; щ
и Ц2 - коэффициенты Пуассона материала вала и втулки; с\ и с^ - коэффициенты;
^'l-fa/dJ' 2 l-(d/d2J'
4*
52
СОЕДИНЕНИЯ ТИПА ВАЛ - СТУПИЦА
14. Ориентировочные контактные давления qK на поверхности валов,
вызванные насаженными с натягом деталями
Посадки
деталей
на вал
Н6Д5; Н7Д6
H7/n6; H7/m6
Н7/р6; Н7/п6;
Н8/и7
H8/u8; H7/JS6
Диаметр вала, мм
40
50
60 | 70
80 | 90 | 100
120
Контактные давления дь МПа
24
32
42
21
27
36,5
19
24
32
17
22
29
16
21
27
14
19
24
12
17
22
12
17
21
Для всех диаметров дк > 30 МПа
15. Коэффициенты трения/(сцепления)
при посадках с натягом (охватываемая деталь из стали)
Способ сборки
соединений
Механический
Тепловой
Материал охватывающей детали
Сталь
0,06-0,13*
0,14-ОДб
Чугун
0,07-0,12
0,07-0,09
Алюминиевые и
магниевые сплавы
0,02-0,06
0,05-0,06
Латунь
0,05-0,10
0,05-0,14
Пластмассы
0,4-0,5
* Поверхности сопрягаемых деталей предварительно смазывают машинным маслом.
Примечание. Для соединений, работающих при переменной внешней нагрузке с частотой
свыше 10 Гц, значения / следует снижать на 30-40%.
Расчетный и требуемый натяги. При проектировании соединений по заданной
внешней нагрузке определяют расчетный натяг 5Р, по которому следует назначать по-
посадку.
Так как диаметры измеряют по вершинам микронеровностей, которые при сборке
частично обминаются (срезаются), необходимый (требуемый) натяг для подбора посад-
посадки принимают несколько большим расчетного:
где Rz\ и Rz-i - средние высоты микронеровностей поверхности каждой из сопрягаемых
поверхностей; обычно Rz назначают в пределах 1,6 - 10 мкм.
Если измеряют диаметры вала и отверстия для определения давления по формуле
A) и несущей способности соединения по формуле B), то расчетный натяг
Ор =оизм — \yZyJ\Z\ + л^2 /»
где &изм = В - А - измеренный натяг (рис. 9).
Поправка на смятие микронеровностей существенна для соединений малого диа-
диаметра; для диаметров d > 50 мм при обработке до шероховатости Ra = 63 мкм и менее
Соединения с натягом
53
поправкой можно пренебречь, особенно если сборку проводить с нагревом или охлаж-
охлаждением деталей.
Если фактические диаметры вала и отверстия неизвестны, то при расчете соедине-
соединения в формуле C) принимают
5р =5Лшп
где 5ftnin - минимальный вероятный натяг.
При использовании вероятностного расчета выбор посадки более обоснован. По
закону нормального распределения размеров
- средние в пределах поля допуска сопря-
сопря- среднее квадратичное отклоне-
отклоне+ s\
где 5ср = Вср - АсР - средний натяг; Вср и
гаемые диаметры (вала и отверстия); ^б
ние табличного натяга; Sg = (es - ei)/6, S^ = (ES - EI)/6 (здесь es[ES] и ei [El] - верхнее
и нижнее отклонения диаметров вала и отверстия); tK - квантиль нормального распре-
распределения, соответствующий заданной вероятности нахождения искомого параметра.
Ниже приведены некоторые значения квантиля /к для заданной вероятности Р.
.0,5
...о
0,90
1,28
0,95
1,64
0,97
1,88
0,99
2,33
0,995
2,580
0,997
2,750
0,999
3,100
у которой минималь-
минимальа максимальный таб-
таб3
Назначим посадку с натягом,
ный (табличный) натяг 5^ > &j „^п
личный натяг 5тах < &]- тах.
Если соединение при работе подвергается нагреву, то
в формулу C) следует ввести температурный натяг (с его
знаком):
= J\a2[t2 - 20°С) - сф - 20° С)],
Рис. 9
где oci и t\ - соответственно коэффициент линейного рас-
расширения и рабочая температура охватываемой детали; ot2
и tj - то же, но охватывающей детали.
В соединениях быстровращающихся деталей также происходит "потеря" натяга,
которую надо учитывать,
- Р
w = ТбЕ
где р - плотность материала втулки; со - угловая скорость; d - диаметр вала; d\ и d2 -
диаметры соответственно внутренний и наружный втулки; v - коэффициент Пуассона
материала втулки; Е - модуль упругости материала втулки.
При угловой скорости
натяг в соединении исчезает (qK — 0).
54
СОЕДИНЕНИЯ ТИПА ВАЛ - СТУПИЦА
Усилие запрессовки для выбранной посадки
Усилие выпрессовки
В формулах: q* - контактное давление (см. табл. 14); f% - коэффициент трения при
запрессовке для стали и чугуна (/$ = 0,06 * 0,2); /ъ - коэффициент трения при выпрес-
совке для стали и чугуна (fB = 0,06 + 0,2).
Расчет на прочность деталей в соединениях с натягом. При расчете деталей соедине-
соединения с натягом по формулам для толстостенных цилиндров давление q* (рис. 10) опре-
определяют по наибольшему вероятному (табличному) натягу Ьщщ. Расчетный натяг
Напряжение в деталях
соединения с натягом (в
области упругих деформа-
деформаций) определяют по сле-
следующим формулам.
Для охватываемой дета-
детали (вала)
Рис. 10
где */о - диаметр сечения, для которого определяют напряжение.
Для охватывающей детали (ступицы)
Распределение напряжений в поперечном сечении деталей соединения показано
на рис. 10.
Наибольшие напряжения возникают у внутренней поверхности охватывающей де-
детали (d0 = d), для которой
(d2/dJ-l
Условие отсутствия пластических деформаций по теории максимальных касатель-
касательных напряжений:
i-(d/d2y
или в эквивалентной форме:
Конусные соединения
55
где сгт - предел текучести материала ступицы.
Условие отсутствия пластических деформаций для вала:
Наибольший расчетный натяг в соединении (по условию возникновения пластиче-
пластических деформаций)
Определение температурного перепада для случая сборки с нагревом (охлаждением).
Температура, до которой должна быть нагрета охватывающая деталь,
(ST
=
max
¦ 10-
'2 =
+ /. Температура, до которой должна быть охлаждена охватывае-
мая деталь,
ad
В формулах &г тах - наибольший натяг посадки, мкм; 6q - минимально необходи-
необходимый зазор при сборке в зависимости от массы и размеров деталей и используемых при-
приспособлений, мкм; а - коэффициент расширения (сжатия) деталей при нагреве
(охлаждении); d - диаметр соединения, мм; t - - температура сборочного помещения.
Во время запрессовки температура нагретой ступицы быстро падает в результате
соприкосновения с холодным валом. Поэтому расчетные температуры нагрева надо по-
повысить на величину, зависящую от времени переноса детали и быстроты операций за-
запрессовки (в среднем на 30-50 °С).
3.7. КОНУСНЫЕ СОЕДИНЕНИЯ
В конусных соединениях вращающий момент передается трением, возникающим
на посадочных поверхностях при затяжке ступицы на валу. Конусные соединения с на-
натягом (рис. 11, а) применяют в глухих и редко разбираемых соединениях, а затяжные
(рис. 11, б) - в разборных.
Для соединений с натягом рекомендуются конусности К — A:50) * A:30), для за-
затяжных соединений - обычно К = A:20) и- A:10), иногда до 1:5. По ГОСТ 21081-75 ко-
конусность К= (d - d\)/L = 2tgtx = 0,1, что соответствует а « 2°52r (d и d\ - максимальный
и минимальный диаметры вала в соединениях).
Ж.
Рис. М
56 СОЕДИНЕНИЯ ТИПА ВАЛ - СТУПИЦА
При большей конусности на несущую способность соединений существенное
влияние оказывают погрешности углов конуса вале и ступицы.
Конические поверхности вала и ступицы обрабатывают соответственно по 6 и 7-му
квалитетам; параметр шероховатости Ra = 0,32 + 1,25 мкм. В ответственных разборных
соединениях конусы притирают по краске до получения контакта на площади не менее
80% поверхности конуса.
Натяг в конусных соединениях регулируют одним из следующих способов: запрес-
запрессовкой регламентированной силой; запрессовкой вала нормированным ударом; запрес-
запрессовкой на расчетное осевое перемещение h (осевой натяг); тепловой сборкой (с нагре-
нагревом охватывающей детали или охлаждением охватываемой).
При тепловой сборке необходимо обеспечить температуры:
нагрева
охлаждения
где 8 - требуемый диаметральный натяг, мкм; сц и а2 - коэффициенты линейного рас-
расширения материалов соответственно ступицы и вала; d - наибольший диаметр конуса;
/о - температура в помещении.
В соединениях с натягом осевой нагрузке F\ (см. рис. 11, а) препятствует сила тре-
трения на посадочной поверхности и осевые составляющие реакций упругого сжатия охва-
охватываемой детали и растяжения - охватывающей.
Сила трения
где q - давление на посадочную поверхность, МПа; dcp и / - соответственно средний
диаметр и длина посадочной поверхности, мм; dcp = <fll-(//d)tga], обычно dcp » d; f -
коэффициент трения.
Осевая сила реакции
i^ = qKdcpl tga,
где a - половина угла при вершине коггуса.
Для схемы нагружения, приведенной на рис. 11, a, F\ = Frp + F^ — q к dcp l(f +
tga). При сдвиге в обратном направлении Fi = F^- Foc = qn dcp /(/"- tga).
Нагружаемость затяжных соединений (см. рис. 11, б) силами, направленными к
вершине конуса, значительно больше и определяется сопротивлением резьбы затяжной
гайки срезу.
Вращающий момент (рис. 12), передаваемый конусным соединением,
Л/в=10-Зтс dcp>Iqf/2. D)
Отсюда
Соединения рассчитывают с запасом п = 2 + 2,5, увеличивая заданный вращающий
момент Мв. Максимальный вращающий момент, передаваемый соединением, определя-
Конусные соединения
57
ется допустимым напряжением смятия [асм] (тогда q < [стсм]) на посадочных поверхно-
поверхностях, а также напряжениями, возникающими в вале и ступице.
Осевая сила, необходимая для создания давления q, Foc = q к dcp I tga. Подставляем
в это выражение значение q из уравнения E):
Так как tga = 0,5 А, то
Fnc = 103-^4.
Сила затяжки
Сопротивление сдвигу в направлении к
вершине конуса (для соединений с натягом)
Необходимый диаметральный натяг (мкм)
5=
Рис. 12
где q - по формуле E); 9 - коэффициент:
модули нормальной упругости и коэффициенты Пуассона материалов соответственно
вала и ступицы); q и с2 - коэффициенты:
1 + а} 1 + а}
где а\ и «2 " факторы тонкостенности {а\ = dcp/do; при массивном или сплошном вале
ах = 0;а2= D/dcp).
При одинаковом материале вала и ступицы 0 = (q + с2)/Е; максимальное напря-
2q
жение сжатия в вале о\ -
\-а{
максимальные напряжения разрыва в ступице
,2 '
Осевой натяг h, необходимый для получения расчетной величины 8:
А = 1051/А',
где 5Х = 5 + 2(p(Rzi + RZ2),
здесь Rz\ и Rt2 - высоты микронеровностей поверхностей вала и отверстия, мкм; ф -
коэффициент смятия микронеровностей, обычно принимают (р = 0,5, тогда
8! = 8 + RZ\ + RZ2-
58
СОЕДИНЕНИЯ ТИПА ВАЛ - СТУПИЦА
3.8. ФЛАНЦЕВЫЕ СОЕДИНЕНИЯ
Фланцевые соединения применяют, преимущественно, для соединения валов, а
также для крепления на валах деталей дискового и барабанного типов.
Вращающий момент передается призонными болтами (рис. 13) и специальными
элементами, выполненными по посадке, работающими на срез и смятие, а отчасти си-
силами трения, возникающими на стыковых поверхностях при затяжке стяжных болтов.
Вращающий момент, передаваемый фланцевым соединением,
= М
ср
л/тр =
где D - диаметр окружности расположения центров болтов; z\ и d\ - соответственно
число и диаметр призонных болтов; Zi и di - соответственно число и диаметр стяжных
болтов; [тср] и [ср] - соответственно допустимые напряжения болтов; / - коэффициент
трения на стыке соединений; /=0,1 + 0,15. Обычно силу трения не учитывают.
Если все болты призонные, то
2,55МЪ
10J
где Мъ - вращающий момент, Нм; z и d - число и диаметр (мм) болтов.
Призонные болты изготовляют из углеродистых сталей 45, 50 или легированных
40Х и термически обрабатывают C0-45 HRC3). Отверстия под призонные болты полу-
получают двумя способами - либо при совместной обработке соединяемых деталей, либо в
каждой из деталей отдельно, по кондуктору с последующим совместным развертывани-
развертыванием отверстия в деталях под посадку Н7/т6 или Н7Д6.
Обычно на участке расположения толщина
фланца b = A ¦*• l,2)d; толщины фланцев на участ-
участках перехода составляют: при переходе в силовой
пояс - Ь\ = 0,8Ь, в вал - t>2 = @,15 + 0,2)Д.
Болты рассчитывают на срез (окружной си-
силой) и растяжение (силой предварительной затяж-
затяжки):
Рис. 13
«I3KB=VCTP+'*tcp>
где ср и тср - напряжения соответственно растя-
растяжения и среза.
Для передачи больших вращающихся момен-
моментов применяют торцовые шлицы треугольного
профиля (рис. 14). Несущая способность их при-
примерно в 10 раз больше, чем фланцев с призонны-
призонными болтами.
Размеры шлицевых участков определяют из условия:
где As и ЛсР - соответственно суммарная площадь шлицевых участков и средний радиус
их расположения; [тср] - допустимое напряжение среза в шлицах.
Стяжные болты кроме силы предварительной затяжки, нагружены также осевой
силой, возникающей при передаче вращающего момента вследствие наклона рабочих
граней шлицев:
k-fc-,
Клеевые соединения
59
где а - угол при вершине профиля шлицев в среднем сечении.
При а = 60° Foe = 0?77Мв
Рис.14
3.9. СОЕДИНЕНИЯ С КОНИЧЕСКИМИ ЗАТЯЖНЫМИ КОЛЬЦАМИ
Кольца (рис. 15) устанавливают на валу и в ступице обычно по посадке h6. Реко-
Рекомендуется придерживаться значений s = @,08 -*-0,12)г/, где d - диаметр вала. Верхний
предел относится к соединениям малого диаметра (до 80 мм), нижний - большого диа-
диаметра (80-200 мм). В среднем s — 0,1*/.
Кольца изготовляют из пружини-
пружинистых сталей 55ГС, 60С2А, 70СЗА. Терми-
Термическая обработка до твердости 46-56
HRC3. В соединениях, подверженных
циклическим нагрузкам, во избежание
наклепа одно из колец каждой пары де-
делают из кремнистых бронз БрКЗМц1, а в
ответственных соединениях - из берил-
лиевых бронз БрБ2. Твердость рабочих
поверхностей валов и ступиц не ниже
поверхностей закалке с нагревом ТВЧ
d*aiSS
Рис. 15
37-42 HRC3. Лучше подвергать валы
E1-56 HRC3).
Шероховатость обработанных рабочих поверхностей: валов JRa = 0,08 + 0,32 мкм;
ступиц Ra — 0,16 -г- 0,65 мкм.
Передаваемый вращающий момент
где К\ = F\/(tgoL wd I) - напряжение смятия на участке вала под первым кольцом;
d - диаметр вала, мм; <р=1-A-2/ tga)z - коэффициент распределения сил
(здесь z = lgO,15/lg(l - 2f/tga) - полезное число пар колец).
Сила сдвига, воспринимаемая соединением, F^ = ОД^^Ар. Обычно/= 0,08 -5-0,1.
Необходимая сила затяжки Fq = Q^Kid2.
3.10. КЛЕЕВЫЕ СОЕДИНЕНИЯ
Для соединений вал - ступица используют, преимущественно, жидкотекучие и
средневязкие виды высокопрочных клеев. Соединяемые детали изготовляют с гаранти-
гарантированным зазором Дщах = 0,15 мкм (посадки H7/f7, H8/f7, H7/g6 и др.). Прочность при
кручении и растяжении соединений составляет 20-40 МПа. Прочность клеевых соеди-
соединений падает с повышением температуры. При температуре более 200-250 °С клеевые
пленки разрушаются. Это ограничивает применимость клеевых соединений.
60
СОЕДИНЕНИЯ ТИПА ВАЛ - СТУПИЦА
В конструкциях используют также клеевые соединения с натягом (переходные по-
посадки Н7/п6, Н7Д6 и др.). Их сборку осуществляют нагревом охватывающей детали до
температуры 150 °С. Такой метод обеспечивает оптимальное заполнение клеем зазора
(до остывания детали) и высокую прочность.
Для клеевого соединения определяют длину сопряжения:
при действии вращающего момента
,_
при действии силы
где [тср1 = 20 + 40 МПа - допустимое напряжение при срезе; d - диаметр вала.
3.11. РИФЛЕНЫЕ СОЕДИНЕНИЯ
Для глухого крепления деталей небольшого диаметра вместо соединений с натягом
применяют рифленые соединения (рис. 16).
На валы наносят рифли в виде продольных бороздок
треугольного профиля с наружным диаметром на 0,05-0,2
мм больше диаметра отверстия. При посадке острые грани
рифлей врезаются в материал охватывающей детали, что
обеспечивает прочную связь между валом и охватывающей
деталью.
Рифли чаще всего получают методом холодного нака-
накатывания. Твердость поверхности вала должна быть 31,5 -
36 HRC3, а отверстия - на 10-15 единиц меньше. Отвер-
Отверстия под рифленые детали небольшого размера нередко
выполняют сверлением. Нецелесообразно применять риф-
рифли в циклически нагруженных соединениях. Повторная
установка рифленных деталей не рекомендуется.
Рис. 16
СПИСОК ЛИТЕРАТУРЫ
1. Анурьев В.И. Справочник конструктора-машиностроителя. В 3-х т. Изд. 7-е.
Т.2.М.: Машиностроение, 1992.
2. Детали машин: Справочник / Под ред. Н.А. Ачеркана. Т.1.М.: Машиностроение,
1968.
3. Дунаев П.Ф., Леликов О.П. Конструирование узлов и деталей машин. Изд.4-е.
М.: Высшая школа, 1985.
4. Иосилевич Г.Б. Детали машин. М.: Машиностроение, 1988.
5. Гжиров Р.И. Краткий справочник конструктора. М.: Машиностроение, Ленин-
Ленинградское отд., 1983.
6. Кузьмин А.В., Чернин И.М., Козинцов Б.С. Расчеты деталей машин: Справочное
пособие. Изд.З-е. Минск: Вышэйшая школа, 1986.
7. Общетехнический справочник / Под ред. Е.А.Скороходова. М.: Машинострое-
Машиностроение, 1982.
8. Орлов Л.И. Основы конструирования: Справочно-методичсское пособие. В 2-х
кн. Кн. 2. Изд.З-е. М.: Машиностроение, 1988.
9. Романов М.Я., Константинов В.А., Покровский Н.А. Сборник задач по деталям
машин. М.: Машиностроение, 1984.
Радиальные подшипники скольжения
61
4. ПОДШИПНИКИ
4.1. РАДИАЛЬНЫЕ ПОДШИПНИКИ СКОЛЬЖЕНИЯ
Опора или направляющая, трение вала в которой происходит при скольжении и
которая определяет положение вала по отношению к другой части механизма, является
подшипником скольжения.
Критерии расчетов подшипников скольжения определяются характером трения в
подшипнике в зависимости от наличия смазочного материала. Сухое трение наблюдает-
наблюдается при относительном скольжении элементов опоры без смазки. Граничное трение имеет
место при наличии в отдельных зонах контакта тонких смазочных пленок (примерно
0,1 мкм), благодаря которым, коэффициент трения снижается. Жидкостное или полу-
жидкостное трение наблюдается соответственно при полном или неполном разделении
трущихся поверхностей смазочным материалом.
Сопротивление относительному движе-
движению, возникающее при сухом трении, является
результатом механического зацепления мель-
чайших неровностей соприкасающихся по-
поверхностей и их молекулярного взаимодейст-
взаимодействия. При жидкостном трении тончайшие слои
смазочного материала прилипают к поверхно-
поверхностям звеньев и относительное скольжение их
сопровождается только внутренним трением
жидкости, которое во много раз меньше трения
без смазочного материала. Наиболее благопри-
благоприятным является жидкостное трение. На рис. 1
показано изменение коэффициента трения /
подшипника в зависимости от угловой скоро-
скорости (о вала при различных режимах трения:
1 - 2 - сухое и граничное трение; 2 - 3 - полу-
полужидкостное трение; 3 - 4 - жидкостное трение,
при котором коэффициент трения
/= 0,001 + 0,01.
Упрощенный расчет
Для подшипников скольжения, работающих при граничном или полужидкостном
трении, проводят упрощенные расчеты по двум критериям (рис. 2): среднему давлению
р и его произведению на скорость скольжения - pv.
Расчет основан на удовлетворении двух условий:
где v = ж d лДб-104); п - частота вращения вала, мин; р = Fr/(d /).
Первое условие отражает требования к износостойкости подшипника. Второе ус-
условие может служить критерием расчета на ограничение нагрева трущихся поверхно-
поверхностей. Величины р и pv лишь приближенно характеризуют напряженность работы под-
подшипника, поскольку они не отражают влияния ряда важнейших факторов на работо-
работоспособность узла: первоначальных значений зазора и параметров шероховатости по-
поверхностей, вязкости смазочного материала, степени изношенности подшипника и др.
62
ПОДШИПНИКИ
В табл. 1-6 приведены значения [р], \pv] и [v] для под-
подшипников, изготовленных из различных материалов. Момент
сил трения в подшипнике
Тепловыделение в подшипнике
Рис.2
Значения/и v в эту формулу следует подставлять с уче-
учетом режима работы подшипника (см. рис. 1). Так, для гра-
граничного трения в точке 2 коэффициент f—fi выбирается из
табл. 7.
1. Антифрикционный чугун для подшипников скольжения
по ГОСТ 585-85 и серый чугун по ГОСТ 1412-85 [5]
Марка
АЧС-1
АЧС-1
АЧС-2
АЧС-3
АЧС-4
АЧС-5
АЧС-6
АЧВ-1
АЧВ-2
АЧК-1
АЧК-2
СЧ15
СЧ21; СЧ24
П р и м е ч а
Твердость
НВ
180*229
180*229
190+229
160+190
180+229
140+180
100+120
210+260
167+197
197+217
167+197
163+229
170+241
[р\,
МПа
0,05
х 9
0,1
6
15
20
9
0,5
12
0,5
12
12
\р] = 4 при v < 0,5 м/с и
продолжительных интервалах
работе; [р] = 2 при v й 1 м/с;
\р\ = 0,1 при 1 < v<,2 м/с
в
М,
м/с
2
0,2
3
0,75
5
1
4
5
1
5
1
1
\ру\,
МПа • м/с
0,1
1.8
0,3
4,5
40
20
9
2,5
12
2,5
12
12
н и е. Подшипники, изготовленные из чугуна марок АЧС-1, АЧС-2, АЧВ-1,
АЧК-1, предназначены для работы с закаленным или нормализованным
валом, из АЧС-3, АЧВ-2, АЧК-2 - с незакаленным.
2. Бронза и латунь для
Марка
БрОФЮ-1 литейная
БрОФ6,5 - 0,15, обработка дав-
давлением
БрОЦС5-5-5 литейная
БрОЦСб-6-3, то же
БрОЦС4-4-17, то же
\р],
МПа
15
15
8
5
10
подшипников скольжения [5]
[V],
м/с
10
10
3
3
4
\ру],
МПа • м/с
15
15
12
10
10
Применение
Паровые турбины, генерато-
генераторы и электродвигатели,
центробежные насосы и
компрессоры
Радиальные подшипники скольжения
63
Продолжение табл.2
Марка
БрАЖ9-4, прутки, поковки
БрАЖ9-4Л литейная
БрАЖМцЮ-3-1,5, отливки,
прутки, поковки
БрАЖС7-1,5-1,5 литейная
БрСЗО, отливки в металлическую
форму
Латуни по ГОСТ 17711-80:
ЛЦ40Мц1,5
ЛЦ23А6ЖЗМц2
ЛЦ16К4
ЛЦ40МцЗЖ
[р],
МПа
15
15
20
25
25
10
10
12
4
[V],
м/с
4
4
5
8
12
1
1
2
2
И],
МПа • м/с
12
12
12
20
30
10
10
10
6
Применение
Центробежные насосы и
компрессоры, электродвига-
электродвигатели, металлорежущие
станки, редукторы, прокат-
прокатные станы
Поршневые двигатели,
компрессоры и насосы
Конвейеры, краны, редук-
редукторы, вибраторы, экскавато-
экскаваторы, дробилки
3. Баббиты и их заменители для подшипников скольжения [5]
Марка
Б88, Б83
Б16
Б6
БН
БК, БК2
Заменители
(сплавы цинка,
алюминия, меди):
ЦАМ 10-5;
ЦАМ 9-1,5
\Р\,
МПа
20
15
5
20
15
12
[V],
м/с
60
12
6
15
15
10
\pv]t
МПа • м/с
15
10
5
15
6
12
Применение
Паровые турбины, турбогенераторы, элек-
электродвигатели мощностью свыше 750 кВт,
двигатели внутреннего сгорания
Электродвигатели, тракторы, центробежные
насосы и компрессоры, прокатные станы и
другие машины, работающие без резких
изменений нагрузки
Редукторы, насосы, вентиляторы, лебедки,
шаровые мельницы, небольшие прокатные
станы и другие машины, работающие с
умеренной нагрузкой без резких ударов
Паровые турбины и электродвигатели сред-
средней мощности, автотракторные двигатели,
поршневые компрессоры и другие машины,
работающие с переменной и ударной на-
нагрузкой
Тихоходные двигатели внутреннего сгора-
сгорания, прокатные станы, металлорежущие
станки, буксы вагонов
Машины, работающие с умеренной нагруз-
нагрузкой без резких ударов
64
ПОДШИПНИКИ
4. Порошковые материалы для подшипников скольжения [5]
Материал
Бронзо графит
(9*10% Sn, 1*4%
графита, остальное Си)
Железографит A-3%
графита, остальное Fe)
Пористость,
%
15*20
20*25
25*30
15*20
20*25
25*30
\р], МПа, при скорости скольжения v=@, U4)m/c
0,1
18
15
12
25
20
15
0,2
7
6
5
8,5
7
5
1
6
5
4
8
6,5
5
2
5
4
3
6,5
5,5
4
3
3,5
3
2,5
4,5
3,5
2,5
4
1,2
1
0,8
1
0,8
0,6
5. Синтетические материалы для подшипников скольжения [5] ,[6]
Материал
Графит
Графит, пропи-
пропитанный свинцом
или баббитом, при
смазывании мине-
минеральным маслом
Текстолит при
смазывании:
водой
маслом
Капрон АК-7 и 68
при смазывании
маслом
Полиамиды 54 и
548
Поликарбонат
Политетрафтор-
Политетрафторэтилен
(фторопласт)
Материал на дре-
древесной основе:
пластифицирован-
пластифицированная древесина
лигнофоль
Древеснослоистые
пластики
Твердая вулкани-
вулканизированная резина
\р],
МПа
1,5
10
30
10
15
7,5
7,5
-
10
6
35
6
[V],
м/с
1
1
1
6
4
7
4
-
1
8
20
МПа • м/с
-
25
20
15-г 20
7,5 * 10
7,5 - 10
0,35
-
35
Применение, свойства
Втулки (работа в агрессивных средах и
при температуре 100*600 °С)
Втулки легконагруженных опор,
/и 0,05 * 0,08
Плиты для наборных вкладышей, крошка
для прессованных вкладышей (низкая
теплопроводность и высокий коэффици-
коэффициент трения, / ю 0,2 * 0,3 при работе без
смазочного материала)
Тонкий слой на рабочей поверхности
вкладыша или тонкостенный вкладыш
/я 0,08* 0,1
Низкий коэффициент теплопроводности,
нестабильность размеров
Антифрикционные свойства близки к
АК-7, устойчив в масле, бензине, слабых
кислотах, водопоглощение меньше, чем у
полиамида
Покрытие поверхностей скольжения и
пропитка пористых вкладышей (низкие
механические свойства)
Наборные вкладыши подшипников, не-
несущие умеренную нагрузку и смазывае-
смазываемые водой
Прессованные вкладыши, смазываемые
водой
Наборные вкладыши, смазываемые водой,
в гидротурбинах, насосах, прокатных ста-
станах, /«0,1 * 0,15
Цельные вкладыши или облицовка круп-
крупных подшипников, смазываемых водой,
/» 0,05-г ОД
Радиальные подшипники скольжения
65
6. Допускаемые режимы работы подшипников,
работающих без смазочного материала [4]
Материал
подшипника
Графит
Графит, пропи-
пропитанный металлом
Углепластик
АМС-1, АФ-ЗТ
Полиамид на ос-
основе смол АК-7,
П-610
Капрон
Капрон с напол-
наполнителем АТМ-2
Текстолит
Фторопласт-4
Фторопласт-4
с наполнителем
Металлофторо-
пластовая лента
Порошковый ма-
материал, пропитан-
пропитанный маслом
Порошковый
твердый сплав
Минералокерамика
\р],
МПа
0,3*0,5
0,3-1
0,5
2-г-З
1,5-5-2,5
2ч-2,5
5
0,5ч-0,7
1*2,5
10*30
18*25
30
0,5
м/с
1,5
3
1,5*2
0,5
0,2
2,5*3
1
0,5
1
5
4*6
15
2
МПа • м/с
1
1,5
1,5
0,1*0,15
0,07*0,1
3,5
1
0,04*0,06
0,2*0,4
0,4
0,7*1
1*1,5
1
°С
400
200*300
200
75
80*90
140
80
120
120
-200*
+280
70*80
300
500
Применение
Опоры центробежных и газодувных
машин, механизмов, работающих в
среде агрессивных газов и жидко-
жидкостей при повышенной температуре
Опоры ленточных конвейеров, ре-
редукторов, сельскохозяйственных,
текстильных и бытовых машин
Опоры механизмов аппаратов, рабо-
работающих с агрессивными жидкостями
и газами, механизмов криогенной,
медицинской, пищевой техники и
др.
Подвески и шарниры в механизмах
управления самолетов, вертолетов,
автомобилей, сельскохозяйственных
машин и бытовых приборов
7. Коэффициент трения/при граничном трении стального вала
в подшипниках из различных материалов [5]
Материал подшипника
Серый чугун
Антифрикционный чугун
Бронза
Баббитовая заливка
Алюминиевый сплав АСМ
Текстолит
Полиамиды (капрон и др.)
Дерево
Пластифицированная древесина и древеснослоистые пластики
Бронзо графит
Железо графит
Сталь со слоем M0S2
Металлический вкладыш со слоем фторопласта
/
0Д5 * 0,20
0Д2 * 0,15
0,10*0,15
0,07*0,12
0,10*0,15
0,15 * 0,25
0,15 * 0,20
0,20 * 0,30
0,15 * 0,25
0,08 * 0,12
0,10*0,15
0,08 * 0,15
0,04 * 0,08
5 Том 2
подшипники
8. Гладкие металлические втулки
(размеры, мм)
-4-
-А
r-r
Н7
D
Допуск
гб
hl3
Л]
10
12
14
16
18
20
16
8-16
18
8+20
20
84-20
1.6
0.6
22
84-25
24
8+25
26
104-32
22
25
28
30
32
36
28
104-32
32
124-40
36
124-40
1,5
38
164-50
40
16+50
45
164-50
40
45
50
50
204-63
55
204-63
10
60
254-80
56
60
67
67
65
254-80
70
324-100
10
78
324-100
82
32-100
2,5
2,5
71
75
80
85
90
95
100
85
32-100
90
404-125
95
404-125
100
40-125
15
15
2,5
t.5
1,6
105
404-125
НО
504-160
115
504-160
2,5
2,5
~TJ
2,5
2,5
Т5~
105
ПО
120
125
120
504-160
125
50-г 160
15
15
2,5
1,5
1,6
135
634-200
140
634-200
* Ряд; 8; 10; 12; 16; 20; 25; 32; 40; 50;'63; 80; 100; 125; 160; 200.
Радиальные подшипники скольжения
67
Конструкция подшипника
В табл. 8-10 приведены размеры втулок подшипников скольжения, изготовлен-
изготовленных из металлических и полимерных материалов.
Металлические втулки в корпус устанавливают с натягом по посадкам: Н7/р6;
Н7/гб; H7/s6; Н7Д7; H7/u7. При посадках с большим натягом внутренний диаметр втул-
втулки, особенно тонкостенной, уменьшается. В этом случае втулку после запрессовки, как
правило, подвергают развертыванию. Посадки с большим натягом применяют, если ко-
коэффициент линейного расширения материала втулки меньше, чем материала корпуса, и
если корпус при работе нагревается.
Если коэффициент линейного расширения материала втулки больше, чем материа-
материала корпуса, и корпус холодный, то применяют умеренные натяги.
9. Металлические втулки с буртиком
(размеры, мм)
Н7
10
12
16
18
20
22
25
30
32
36
40
45
50
56
60
D
16
16
18
22
24
26
28
32
38
40
45
50
55
60
67
75
Допуск
oil
20
22
28
30
32
34
38
44
46
52
58
63
68
75
83
h!3
8*16
8*20
8*25
8*25
10*32
10*32
10*40
16*50
16*50
16*50
20*63
20*63
25*80
25*80
32*100
1,6
0,6
1,5
10
68
ПОДШИПНИКИ
Продолжение табя. 9
й
D
А
L*
Допуск
Н7
67
71
75
80
85
90
100
105
ПО
120
125
гб
82
90
95
100
105
ПО
120
125
130
140
145
dll
90
100
105
ПО
115
120
130
135
140
150
155
1U3
32-гЮО
32- 100
40-125
404-125
40+125
40-125
50-160
50-160
50-160
63-200
63-200
6
6
8
Ь
8
10
10
10
10
10
h
12
15
15
/
8
8
10
г
4
4
6
12
12
20
h
2,5
2,5
3
*1
2,5
2,5
3
С
1,6
1,6
1,6
S
2,5
2,5
3
¦ Ряд 8; 10; 12; 16; 20; 25; 32; 40; 50; 63; 80; 100; 125; 160; 200.
10. Втулки полимерные
(размеры, мм)
D
А
Z, ряды
12
14
16
18
20
22
25
28
32
36
40
45
50
16/18
18/20
20/22
22/25
25/28
26/30
30/32
32/36
36/40
40/42
45/48
50/55
55/60
22/25
22/25
25/28
28/32
30/36
32/36
36/40
38/42
42/48
45/48
50/52
55/58
60/65
2/3
2/3
2/3
2,5/3,6
2,5/4
2,5/4
2,5/4
2,5/4
2,5/4
2,5/4
2,5/4
3/4
3/5
10
12
14
14
16
16
16
16
20
22
25
28
32
12
14
16
18
20
22
25
28
32
36
40
45
50
16
18
20
22
25
28
32
36
40
45
50
56
63
Радиальные подшипники скольжения
69
Продолжение табл 10
d
55
60
65
70
75
80
Примечай
D
60/35
65/70
70/80
75/85
80/85
85/90
и в. Значения
67/71
71/75
75/85
85/90
85/90
90/95
величин D, D\,
S
3/5
3/5
3/6
3/6
3,5/6
3,5/6
L, ряды
36
40
45
50
50
50
S в числителе даны для
в знаменателе - из реактонластов.
56
60
68
71
75
80
71
71
80
80
90
100
втулок из термопластов, а
Запрессовка не всегда гарантирует втулки от проворачивания, поэтому рекоменду-
рекомендуется закреплять их винтами или штифтами (табл. 11, 12).
11. Дополнительное крепление втулок в неразъемных и фланцевых корпусах
(размеры, мм)
5
ft
JLLUS///////A
S
1
d
12*20
22+28
30*36
40*85
90*125
/
7
10
14
14
17
H
h
9
12
18
18
21
ix
n
1
1
2
При креплении втулок од-
одним или двумя винтами резьбо-
резьбовые отверстия следует распола-
располагать под углами 180 или 90 ° к
смазочной канавке
d\ (Винт по ГОСТ 1476-84)
М4 х 6
М4 х 8
М5 х 12
Мб X 16
М8 х 20
12. Закрепительные штифты втулок
(размеры, мм)
Л
d
/
До 25
*
6*8
8* 16
28
10
12
*40
* 12
*20
45*
12*
16*
70
14
30
75*
16*
20*
90
18
40
95*
18*
30*
120
20
45
70
ПОДШИПНИКИ
У
t
ч
1
J
1
—
Рис.3
Валы устанавливают в подшипниках с зазором по посадкам: H7/f7; H7/e7; Н7/е8;
H7/d8; H7/c8.
Примерные размеры бронзового или чугунного вкладыша (рис. 3)[1] следующие:
#« A,1 - 1,3) ^i + 5mm; А « 0,5 Я;
Si « 5 мм при d = 35 + 60 мм;
Si » 7,5 мм при d = 65 -г- 110 мм;
$! w 10 мм при J = 120 + 200 мм.
Целесообразно брать l/d ? 1 (I/d = 0,5 -г- 1,5). С
увеличением d отношение l/d уменьшается: чем
длиннее цапфа, тем вероятнее неравномерность
распределения нагрузки по длине и больше мест-
местный износ вкладыша. Подшипники с l/d > 1
можно применять для увеличения жесткости ва-
валов, а также в опорах подшипников вертикальных
валов, где обычно кромочные давления, вызывае-
вызываемые изгибом вала, менее опасны.
В подъемных механизмах l/d » 1,2 + 2; в металлорежущих станках l/d да 1,1 +2;в
редукторах l/d « 0,8 + 1,2; в электродвигателях l/d « 0,8 + 1,2; в двигателях внутреннего
сгорания l/d да 0,8 + 1,5.
Относительный зазор у
, где dn - диаметр отверстия втулки:
в металлорежущих станках у « 0,0005 + 0,001;
в редукторах, компрессорах \|/ » 0,001 + 0,002;
в электродвигателях, генераторах ц/ « 0,0015 + 0,0025;
в двигателях внутреннего сгорания \|/ « 0,003 -5- 0,004.
Пластмассовые втулки в корпус монтируют с натягом Д = @,01 -г- 0,03)</. [2] Зазор в
подшипнике рассчитывают по формуле 8 = @,0025 -г- 0,005)*/ + Д.
Параметр шероховатости трущихся поверхностей стальных осей и валов, сопрягае-
сопрягаемых с пластмассовыми вкладышами, должен быть Ra <, 0,63 мкм.
Параметр шероховатости трущихся поверхностей втулок должен быть Ra 5 1,25мкм
для условий жидкостного трения и Ra й 20 мкм в случае полужидкостного или гранич-
граничного трения.
Толщину стенок пластмассовых вкладышей и втулок выбирают в зависимости от
диаметра цапфы вала: @,09 + 0,1) d для диаметров 30 + 200 мм; @,05 + 0,07) d для диа-
диаметров 250 + 600 мм. Не следует выбирать толщину вкладыша больше 25 мм.
Длину втулок и вкладышей из пластмассы выбирают по формуле / да @,6 + 1,2)*/.
4.2. ПОДШИПНИКИ КАЧЕНИЯ
При выборе типа и размеров шарико- и роликоподшипников учитывают следую-
следующие факторы:
значение и направление нагрузки (радиальная, осевая, комбинированная);
характер нагрузки (постоянная, переменная, ударная);
частоту вращения кольца подшипника;
требуемую долговечность (срок службы, выраженный в часах или миллионах обо-
оборотов);
окружающую среду (температуру, влажность, кислотность и т.п.);
особые требования, обусловленные конструкцией узла машины или механизма
(необходимость самоустанавливаемости подшипника в опоре с целью компенсации пе-
перекосов вала или корпуса, обеспечение перемещения вала в осевом направлении и
т.п.).
Подшипники качения
71
Рис. 4
Подшипники качения классифицируют по следующим признакам (рис. 4):
по форме тел качения - шариковые и роликовые (ролики цилиндрические корот-
короткие или длинные, игольчатые, конические, бочкообразные, витые);
по направлению воспринимаемой нагрузки - радиальные, в основном для радиаль-
радиальных нагрузок; радиально-упорные для совместных радиальных и осевых нагрузок; упор-
упорные для осевых нагрузок; упорно-радиальные для осевой и радиальной нагрузок;
по числу рядов качения - однорядные, двухрядные и четырехрядные;
по способу компенсации перекосов вала - несамоустанавливающиеся и само уста-
устанавливающиеся.
Подшипники с отверстием одного диаметра подразделяют на размерные серии:
сверхлегкую, легкую, среднюю, тяжелую. В зависимости от ширины различают узкие,
нормальные и широкие подшипники.
По точности вращения, точности размеров и взаимного расположения поверхно-
поверхностей установлены классы точности подшипников качения: 0, 6, 5, 4, 2.
В общем машиностроении чаще всего применяют подшипники классов 0, 6 и 5.
Коэффициенты трения и допустимые окружные скорости для стандартных под-
подшипников приведены в табл. 13.
Коэффициент трения подшипников качения определяют как отношение окружной
силы трения Ттр на диаметре d вала к действующей на подшипник нагрузке F:
1 ~ F Fd '
где Мтр - момент трения, Нм; d - диаметр вала, мм.
72
ПОДШИПНИКИ
13. Коэффициенты трения и допустимые окружные скорости [6]
Типы подшипников
Шариковые:
радиальные
сферические
радиально-упорные
Роликовые:
сферические
конические
игольчатые
Упорные:
шариковые
с коническими роликами
с цилиндрическими роликами
Коэффициент трения/при нагрузке
радиальной
0,001 * 0,002
0,002 * 0,004
0,002 4- 0,003
0,002 -г 0,003
0,003 -ь 0,005
0,004 ¦«- 0,008
0,005 * 0,01
-
осевой
0,002 4- 0,003
0,0025 4- 0,004
0,01 * 0,02
0,004 * 0,006
0,01 -г- 0,02
0,02 4- 0,03
Допустимая
окружная
скорость vo, м/с
10-5-30
10-г 20
10-г 20
10-г 20
10 4-20
5 4-15
5-1-10
5 4-10
5 4-10
2+5
Допустимую частоту вращения оценивают величиной условной окружной скорости
v0 по центровой линии тел качения или по среднему диаметру подшипника
dcp = 0,5 (D + d)\
vo = 0,5 • 10-3ш</ср = 0,5 • Ю-3 2L dcp,
где <ю - угловая скорость, рад/с; я - частота вращения, мин*1.
Расчет статической грузоподъемности подшипников качения
Подшипники качения, кольца которых имеют угловую скорость ю <, 0,105 рад/с
или частоту вращения п <, X мин, рассчитывают, а затем подбирают по статической
грузоподъемности Со в соответствии с эквивалентной нагрузкой на подшипник Pq ^ Cq:
Pq = XqF,. + YoFay где Fr и Fa - радиальная и осевая нагрузки подшипника; Xq и Yq - ко-
коэффициенты радиальной и осевой нагрузок (табл. 14).
Статическую грузоподъемность неподвижного подшипника назначают из условия,
что остаточная деформация тел качения и колец под этой нагрузкой не превышает до-
допускаемую 5 = 10~4Z) (где D - диаметр тела качения).
Допускаемая статическая грузоподъемность указывается в каталогах на подшипни-
подшипники.
14. Значения коэффициентов А© и >о [7]
Подшипник
Шариковый радиальный
Шариковый радиально-упорный
при угле контакта оц *
12
18
25
26
30
35
36
40
Роликовый радиалыю-упорный
Однорядный
0,6
0,5
0,5
Го
0,5
0,47
0,43
0,38
0,37
0,33
0,29
0,28
0,26
0,22ctga
Двухрядный
Ао
0,6
1
1
Го
0,5
0,94
0,86
0,76
0,74
0,66
0,58
0,56
0,52
0,44ctga
Подшипники качения 73
Расчет динамической грузоподъемности и долговечности подшипников качения
Расчетную долговечность подшипника ?/, определяют по его динамической грузо-
грузоподъемности С, имеющейся в каталоге на подшипники, и эквивалентной динамической
нагрузке Рэ.
Динамическая грузоподъемность это постоянная нагрузка, которую подшипник
может выдержать в течение базовой долговечности A06 оборотов).
Эквивалентная динамическая нагрузка для радиальных шарикоподшипников и ра-
диально -упорных шариковых и роликовых подшипников
A)
где Хи Y - коэффициенты соответственно радиальной и осевой нагрузок; V - коэффи-
коэффициент вращения (V = 1 при вращении внутреннего кольца относительно направления
нагрузки, V — 1,2 при вращении наружного кольца); Fr и Fa - соответственно радиаль-
радиальная и осевая нагрузки, воспринимаемые подшипником в конструкции; К$ - коэффици-
коэффициент безопасности, учитывающий влияние на долговечность подшипников характера
внешних нагрузок; Kj - температурный коэффициент.
Эквивалентная нагрузка для подшипников:
с короткими цилиндрическими роликами
Рэ = FrKb Kt',
упорных
P^FuKqKt; B)
упорно-радиальных
C)
Для шариковых однорядных подшипников значения X,Уи коэффициенты осевого
нагружения е приведены в табл. 15.
Коэффициенты Хи Yданы в зависимости от отношения FJ{VF^), характеризую-
характеризующего распределение нагрузки между телами качения. При малых значениях осевой силы
(до некоторого значения FJ{V Fr) ^ е) вследствие радиального зазора в подшипнике
повышается неравномерность распределения нагрузки между телами качения. С увели-
увеличением осевой нагрузки (при Fa/(VFr) > ё) зазор выбирается, рабочая зона в подшип-
подшипнике возрастает, улучшается распределение нагрузки. В связи с этим при FJ(VFr) <, е
осевую силу не учитывают (принимают Х= 1, Y=0) и в расчете принимают лишь ради-
радиальную нагрузку. Значения коэффициента е даны в зависимости от отношения FJCq.
Для роликовых радиально-упорньгх однорядных подшипников коэффициент осе-
осевого нагружения е = 1,5 tga, коэффициенты X =1 и Y= 0 при FJ(Viy) ^еД=0,4и
У« 0,4ctga при FJ(VFr) > e.
Значения температурного коэффициента К? приведены ниже.
Рабочая температура
подшипника, °С. . . До 100 125 150 175 200 225 250 300
Кт 1,00 1,05 1,10 1,17 1,25 1,33 1,40 1,60
Значения коэффициента безопасности Kq в зависимости от характера нагрузки на
подшипники приведены в табл. 16.
74
ПОДШИПНИКИ
15. Значения коэффициентов Хя У радиальной и осевой нагрузок
для шариковых однорядных подшипников при Fa/iVJF,) > e* [7]
Подшипник
Радиальный шариковый
Радиально-упорный
шариковый
а°
0
12
18;19;20
24; 26
35; 36
Fa/Co
0,014
0,028
0,056
0,084
0,110
0,170
0,280
0,420
0.560
0,014
0,029
0,057
0,086
0,110
0,170
0,290
0,430
0,570
-
-
-
е
0,19
0,22
0,26
0,28
0,30
0,34
0,38
0,42
0,44
0,30
0,34
0,37
0,41
0,45
0,48
0,52
0,54
0,54
0,57
0,68
0,95
FJ(VFr) > e
X
0,56
0,45
0,43
0,41
0,37
Y
2,30
1,99
1,71
1,55
1,45
1,31
1,15
1,04
1,00
1,81
1,62
1,46
1,34
1,22
1,13
1,04
1,01
1,00
1,00
0,87
0,66
* При Fa/(VF^ ? е коэффициенты Х = 1, Y— 0 для подшипников любых параметров.
16. Коэффициент безопасности К$ [5]
Вид нагружения
Спокойная нагрузка без
толчков
Легкие толчки; кратковре-
кратковременные перегрузки до 125%
номинальной (расчетной) на-
нагрузки
Умеренные толчки; вибра-
вибрационная нагрузка; кратковре-
кратковременные перегрузки до 150%
номинальной (расчетной) на-
нагрузки
Кб
1
1*1,2
1,3+1,5
Область применения
Маломощные кинематические редукторы и приво-
приводы, ролики ленточных конвейеров, механизмы ручных
кранов и блоков, тали, кошки, ручные лебедки, при-
приводы управления
Прецизионные зубчатые передачи, металлорежу-
металлорежущие станки (кроме строгальных, долбежных и шлифо-
шлифовальных), гироскопы, механизмы подъема кранов,
алектротали и монорельсовые тележки, лебедки с ме-
механическим приводом, электродвигатели малой и
средней мощности, легкие вентиляторы и воздуходув-
воздуходувки
Зубчатые передачи, редукторы всех типов, буксы
рельсового подвижного состава, механизмы передви-
передвижения крановых тележек, механизмы поворота кранов,
механизмы изменения вылета стрелы кранов, шпинде-
шпиндели шлифовальных станков, электрошпиндели
Подшипники качения
75
Продолжение табл. 16
Вид нагружения
То же, в условиях повы-
повышенной влажности
Нагрузки со значительны-
значительными толчками и вибрациями;
кратковременные перегрузки
до 200% номинальной (расчет-
(расчетной) нагрузки
Нагрузки с сильными уда-
ударами и кратковременные пе-
перегрузки до 300% номиналь-
номинальной (расчетной) нагрузки
1,5+1,8
1,8+2,5
2,5+3
Область применения
Центрифуги и сепараторы, буксы и тяговые двига-
двигатели электровозов, механизмы передвижения кранов,
ходовые колеса тележек и опоры механизмов попорота
кранов и экскаваторов, мощные электрические маши-
машины, энергетическое оборудование, ходовые колеса
механизмов передвижения кранов и дорожных машин
Зубчатые колеса, дробилки и копры, кривошипно-
шатунные механизмы, валки прокатных станов, мощ-
мощные вентиляторы
Тяжелые ковочные машины, лесопильные рамы,
холодильное оборудование, рабочие роликовые кон-
конвейеры крупносортных станов, блюмингов и слябингов
Особенности расчета радиально-упорных подшипников
В радиально-упорных подшипниках при действии на них радиальных нагрузок
возникают осевые составляющие реакции, которые определяют для радиально-упорных
шариковых и роликовых подшипников по формулам соответственно
S=eFr и S = Q,83eFr. (A)
Для шариковых радиально-упорных подшипников значения коэффициента осевого
напряжения е приведе}гы в табл. 15.
Для роликовых радиально-упорных подшипников коэффициент определяют по
формуле e=l,5tgctiuiH берут из каталога [8].
Суммарная осевая нагрузка подшипника зависит от расположения его на валу, на-
направления внешней осевой силы Fai (осевая сила в косозубом или червячном зацепле-
зацеплении) и отношения составляющих реакций подшипников S\ и ф. Для определения осе-
осевой нагрузки Fai находят алгебраическую сумму всех внешних осевых сил Fa и осевых
составляющих S радиальных нагрузок. При этом осевые силы, нагружающие данный
подшипник, считают положительными, а разгружающие - отрицательными. Если полу-
полученная сумма окажется положительной, то силу Fa. для этого подшипника определяют
как алгебраическую сумму внешних сил Fa и реакции S парного подшипника. Если
сумма окажется отрицательной, то за силу Fa принимают силу S данного подшипника.
На рис. 5 показан вал на двух радиально-упорных подшипниках с действующими
силами Fn Fa, S\, S2.
Осевые нагрузки для радиально-упорных подшипников определяют по следующим
формулам в зависимости от условий нагружения:
при Si ? S2 и Fa > 0, а также при Si < S2 и Fa ? S2 - S\ силы Fa\ = S\ и Fai = S[ + Fa;
при Si < S2 и Fa <, S2 - Si силы Fal = S2- Fau Fa2 = S2.
76
ПОДШИПНИКИ
а
21
i
a
•*«—я»
i
Рис.6
Рис.5
При определении радиальных реакций
радиально-упорных подшипников следует
иметь в виду, что точка приложения реак-
реакций находится в месте пересечения оси вала
с нормалью к середине поверхности контак-
контакта тела качения с наружным кольцом, т.е. на
расстоянии а от широкого торца наружного
кольца подшипника (рис. 6).
Расстояние а находят по формулам:
для однорядных радиально-упорных
шарикоподшипников
В (D + d)tga
для однорядных радиально-упорных роликоподшипников
+ d)e T (D + cl)tga
= •—^ + ——
6 2 4'
Т
a = —
2
где dy D, В, Т, а, е - табличные параметры подшипников[8].
Расчетная долговечность подшипника Z/, связана с эквивалентной нагрузкой Рэ со-
соотношением (табл. 17)
E)
h ~60/;U
где С - динамическая грузоподъемность; р = 3 - для шарикоподшипников; р = 3,33 - для
-1
роликоподшипников; п - частота вращения, мин
Приведенная методика подбора подшипников соответствует ГОСТ 18854-82[9],
ГОСТ 18855-82[10].
Подшипники качения
77
17. Рекомендуемая расчетная долговечность
для различных типов машин и оборудования [5]
Машины и оборудование
Приборы и аппараты, используемые периодически (демонстрацион-
(демонстрационная аппаратура, механизмы для закрывания дверей, бытовые приборы)
Механизмы, используемые в течение коротких периодов времени, ме-
механизмы с ручным приводом, сельскохозяйственные машины (подъемные
краны в сборочных цехах, легкие конвейеры)
Ответственные механизмы, работающие с перерывами (вспомогатель-
(вспомогательные механизмы на силовых станциях, конвейеры для поточного произ-
производства, лифты, не часто используемые металлообрабатывающие станки)
Машины для односменной работы с неполной нагрузкой (стационар-
(стационарные электродвигатели, редукторы общего назначения)
Машины, работающие с полной загрузкой в одну смену (машины об-
общего машиностроения, подъемные краны, вентиляторы, распредели-
распределительные валы)
Машины для круглосуточного использования (компрессоры, насосы,
шахтные подъемники, стационарные электромашины, судовые приводы)
Непрерывно работающие машины с высокой нагрузкой (оборудо-
(оборудование бумагодательных фабрик, энергетические установки, шахтные насо-
насосы, оборудование торговых морских судов)
Lh,4
500
Свыше
4000
Свыше
8000
Свыше
12000
Свыше
20000
Свыше
40000
Около
100000
Выбор подшипников качения
Исходные данные для выбора подшипников следующие: расчетная схема вала с
нагрузками, известными по величине и направлению; частота вращения вала; диаметры
ступеней вала для установки подшипников; эксплуатационные режимы работы под-
подшипниковых узлов.
Последовательность выбора такая. Выбор типа подшипника по каталогу и выписы-
выписывание следующий данных: Си Q- для шариковых радиальных и радиально-упорных
подшипников с углом контакта а = 12°; С - для радиальных роликоподшипников; С, X,
Y, е - для роликовых радиально-упорных и шариковых радиально-упорных с углом кон-
контакта а > 18°.
Определение реакций опор подшипников по расчетной схеме вала с учетом фор-
формул стр.76.
Нахождение осевых составляющих реакций от радиальных нагрузок для радиально-
упорных подшипников (по формуле D)].
Определение результирующих осевых нагрузок.
Расчет отношения осевой нагрузки к радиальной FJ{VFi)\ нахождение по табл. 15
или каталогу коэффициента осевого нагружения е и коэффициентов X и Y радиальной
и осевой нагрузок. Для шариковых радиальных и радиально-упорных подшипников с
углом контакта а = 12° предварительное нахождение отношения осевой нагрузки к ста-
статической грузоподъемности FJCq.
Определение эквивалентной нагрузки рассчитываемого подшипника.
Расчет долговечности подшипника по формуле E) .
При несогласовании долговечности подшипника с требуемой, переход к более тя-
тяжелой серии или другому типу подшипника без изменения диаметра вала.
Для окончательно выбранного подшипника выписывание из каталога его размеров
и определение расстояния между опорами.
78
ПОДШИПНИКИ
Рис.7
Примеры расчета подшипников
Пример 1. Подобрать подшипник качения к ва-
валу цилиндрического косозубого зубчатого колеса
(рис. 7). Радиальные нагрузки на подшипники в
опорах: Fr] = 1,4 кН, F,2 = 1,8 кН, осевая нагрузка
Fa = 0,5 кН, диаметр вала в месте посадки
подшипников d — 35 мм, частота вращения вала
п = 1000 мин'1, срок службы редуктора 15000 ч; ра-
работа с умеренными толчками и вибрацией, рабочая
температура подшипникового узла 80 °С.
1. Для принятого радиального шарикового подшипника типа 307 по каталогу: С ~
25,7 кН, Q> — 17,6 кН, предельная частота вращения 16-Ю3 мин*1.
2. Для нахождения коэффициентов радиальной и осевой нагрузок Xyl У вычисляем
отношение осевой нагрузки подшипника к статической грузоподъемности
FJGs = 500/17600 = 0,028, а также отношение осевой нагрузки к радиальной FJ(VFr) =
= 500/A-1800) = 0,28 при коэффициенте вращения V—1 (вращается внутреннее коль-
кольцо). По табл. 15 е = 0,22 и, так как FJ{VF^ > e, коэффициенты Х= 0,56, Y= 1,99.
Эквивалентная нагрузка наиболее нагруженного подшипника по формуле A)
Рэ = @,56 ¦ 1 • 1800 + 1,99 • 500) 1,3 ¦ 1 = 2,6 кН при Kq = 1,3 и Кт= 1.
3. По формуле E) долговечность подшипника типа 307
10б ['25700'|3 _ fM,
h= 60-10001 2600 J = Ч<
Выбранный подшипник удовлетворяет условиям работы, и его долговечность обес-
обеспечена.
Пример 2. Определить расчет-
расчетные осевые и эквивалентные на-
нагрузки на конические ролико-
роликоподшипники (рис. 8). Угол а = 14°,
Fa = 2 кН, Fri = 3 кН, Fh -= 2,5 кН.
Рабочая температура подшип-
подшипниковых узлов 90 °С, коэффициент
безопасности Ag = 1.
1. Коэффициент осевого нагру-
жения
е= l,5tga= 1,5 tg 14° - 0,374.
fin
Рис.8
2. Осевые составляющие от радиальных нагрузок по формуле D)
$1 = 0,83 • 0,374 • 3 • 103 = о,931 кН; S2 = 0,83 • 0,374 • 2,5 • 103 = 0,776 кН.
3. Поскольку Fa + S{ - 5г > 0, то fe] = St = 0,931 кН; FU2 = 0,931 + 2 = 2,931 кН.
4. Эквивалентная нагрузка для каждого подшипника по формуле A), кН:
2,931Г.
РЭ2 =(Х1 -2,5 + У- 2,931)
В опорах обычно устанавливают подшипники одного размера, поэтому выбор
подшипника и его проверку на долговечность следует проводить по максимальной эк-
эквивалентной нагрузке (в данном случае по P3j).
Подшипники качения
79
Рис.9
Пример 3. Определить возможность уста-
установки роликового конического подшипника
7309 в опорах вала червяка редуктора (рис.9).
Частота вращения вала я = 1440 мин*1. Ради-
Радиальные нагрузки на подшипники /^ = 1,78 кН,
Ffl = 0,52 кН, осевая сила червяка Fa = 4,11 кН;
требуемая долговечность подшипников
12 • 103 ч; рабочая температура подшипнико-
подшипникового узла 95 °С; коэффициент безопасности К$> = 1,3.
1. Параметры, необходимые для определения долговечности данного подшипника,
по каталогу: С = 76,1 кН; с = 0,29; У= 2,09; Х = 0,4 (при FJFr > e).
2. Осевые составляющие от радиальных нагрузок по формуле D):
Si = 0,83 • 1,78 • 0,29 = 0,43 кН; ^ = 0,83 • 0,52 • 0,29 = 0,13 кН.
3. Суммарные осевые нагрузки подшипников
^, =SX+Fa= 0,43 + 4,11 = 4,54 кН; F4 =S2 = 0,13 кН.
Таким образом, больше нагружен левый подшипник, воспринимающий большие
радиальную и осевую нагрузки. Поскольку
\ I (WV,) = 4,54 / ^78 = 2,6 > е = 0,29,
то принимаем Х= 0,4; Y = 2,09.
4. Эквивалентная нагрузка подшипника по формуле A)
,0 • 1,78 + 2,09 ¦ 4,54) • 1,3 • 1,0 = 13,3 кН.
5. Расчетная долговечность принятого подшипника по формуле E)
3,33
= 3,59-10; ч:
* 60-1440 U3,3y
Ресурс подшипника 7309 значительно меньше требуемой долговечности
C,59 • 103 ч < 12 ¦ 103 ч). Не изменяя диаметр вала для посадки подшипника, выберем
другой подшипник - роликовый конический средней широкой серии 7609, для которого
динамическая грузоподъемность С = 104 кН и точки приложения реакций не изме-
изменились.
Эквивалентная нагрузка при Y= 2,06 по формуле A)
Р^ = @,4 • 1 • 1,78 + 2,06 • 4,538) ¦ 1,3 • 1,0 = 13,078 кН.
Теоретическая долговечность подигапника 7609 по формуле E)
W6 ( 1
La 60^440 ^
Долговечность подшипника близка к требуемой.
Пример 4.
Рис. 10
Подобрать шарикоподшип-
шарикоподшипники для цапфы диаметром d = 55 мм ко-
колонны поворотного крана, на которую дейст-
действует вертикальная нагрузка Fa — 60 кН. Час-
Частота вращения колонны п = 2 мин-1; режим
работы с незначительными толчками и крат-
кратковременными перегрузками; требуемая
долговечность подшипника X/, = 104 ч (рис.
10).
1. Поскольку радиальная нагрузка отсут-
отсутствует, то выбираем упорный шарикопод-
80
ПОДШИПНИКИ
шипник, для которого динамическую эквивалентную нагрузку определяем по формуле
B). По условиям работы Ао = 1,2; Кт= 1. Тогда Рэ = 60 • 1,2 • 1 = 72 кН.
2. Требуемую динамическую грузоподъемность подшипника находим из уравнения
E)
С = РЭF- 1<Г6«1АI/3 = 72F0- КГ6 • 2 • 104I/3 = 76,32 кН.
3. По каталогу при d = 55 мм и С — 76,32 кН принимаем шарикоподшипник упор-
упорный 8311 средней серии, для которого d = 55 мм, С = 90,3 кН.
Долговечность выбранного подшипника по формуле E)
Lh =
106
60-2
= 16416 ч, что больше требуемой долговечности.
4.3. ПОДШИПНИКОВЫЕ УЗЛЫ
Конструкция подшипниковых узлов должна обеспечивать следующее: возможность
теплового расширения (удлинения) вала без нарушения нормальной работы подшипни-
подшипников, т.е. без нагружения их дополнительными осевыми нагрузками; фиксацию положе-
положения вала в осевом направлении, за исключением передач с шевронными колесами; не-
необходимые условия для работы подшипника, т.е. смазку и предохранение от пыли и
грязи; удобство монтажа и демонтажа подшипников. Кроме того, все детали узла долж-
должны обладать достаточной прочностью и жесткостью.
Наибольшее распространение получили два способа установки подшипников в
корпусах.
1
Рис. 11
Первый способ заключается в том, что осевое фиксирование вала выполняют в
одной опоре, а другую опору делают плавающей (рис. 11, а, б). Фиксирующая опора
ограничивает осевое перемещение вала в одном или обоих направлениях и восприни-
воспринимает радиальную и осевую нагрузки. Плавающая опора не ограничивает осевых пере-
перемещений вала и воспринимает только радиальную нагрузку. Такой способ установки
подшипников применяют в конструкциях при сравнительно длинных валах (/« \Qd), a
также при установке валов в подшипники, размещенные в разных корпусах. Жесткость
вала может быть повышена установкой в фиксирующей опоре двух подшипников, за
счет регулировки которых сводят к минимуму радиальное и осевое смещения вала (рис.
И, б).
Второй способ заключается в том, что осевое фиксирование вала выполняют в
двух опорах, в каждой опоре лишь в одном направлении (рис. 11, в, г). Наиболее проста
конструктивно схема установки подшипников враспор (рис. 11, <?), ее широко приме-
Подшипниковые узлы
81
няют при сравнительно коротких валах. Дня исключения защемления вала в опорах
вследствие нагрева при работе предусматривают зазор а = 0,2 - 0,5 мм (в узлах с ради-
ально-упорными подшипниками). При установке враспор внешняя осевая нагрузка бу-
будет восприниматься либо одной, либо другой крышкой.
При установке подшипников врастяжку опасность защемления вала в опорах
вследствие нагрева снижается, так как в связи с температурным удлинением осевой за-
зазор в подшипниках увеличивается (рис. 11, г).
Способы фиксирования внутренних колец подшипников на валах (рис. 12) и на-
наружных колец в корпусах (рис. 13) разнообразны.
Регулирование осевых зазоров в узлах с привертными крышками (рис. 13, в) про-
производится набором прокладок между торцами крышки и корпуса.
4.4. ПОСАДКИ ПОДШИПНИКОВ
Подшипники качения устанавливают на валу по системе отверстия, а в корпусе -
по системе вала. При назначении посадок необходимо учитывать: тип подшипника;
частоту вращения; характер и вид нагрузки; жесткость вала и корпуса; характер темпе-
температурных деформаций системы (увеличение или уменьшение плотности посадки при
рабочих температурах); способ крепления подшипника (с затяжкой или без затяжки);
удобство монтажа и демонтажа.
Посадки для вращающихся колец подшипников должны исключать возможность
обкатки и проскальзывания кольца по посадочной поверхности в процессе работы под
нагрузкой. Как правило, посадки должны быть тем плотнее, чем тяжелее условия рабо-
работы. Для тяжелонагруженных колец целесообразно применять осевую затяжку, которая
исключает перенапряжение подшипников и облегчает их установку.
В корпусах из мягких сплавов подшипники следует устанавливать в термически
обработанных стальных стаканах.
Валы следует термически обрабатывать до твердости > 35 + 40 HRC3.
При назначении посадок и допусков формы и расположения поверхностей, а так-
также шероховатости поверхностей валов и отверстий корпусов можно руководствоваться
данными табл. 18,19,20.
6 Том 2
82
ПОДШИПНИКИ
18. Виды нагружения колец шариковых и роликовых подшипников
в зависимости от условий работы [3]
Условия работы
Радиальная нагрузка, воспри-
воспринимаемая шарико- и ролико-
роликоподшипниками
Постоянная по направлению
Постоянная по направлению и
вращающаяся - меньшая по
величине
Постоянная по направлению и
вращающаяся - большая по
величине
Постоянная по направлению.
Вращающаяся с внутренним
кольцом.
Вращающаяся с наружным
кольцом
Вращающееся
кольцо
Внутреннее
Наружное
Внутреннее
Наружное
Внутреннее
Наружное
Внутреннее и
наружное
в одном или
противоположных
направлениях
Виды нагружения кольца
внутреннего
Циркуляционное
Местное
Циркуляционное
Колебательное
Местное
Циркуляционное
Циркуляционное
Местное
Циркуляционное
наружного
Местное
Циркуляционное
Колебательное
Циркуляционное
Циркуляционное
Местное
Циркуляционное
Циркуляционное
Местное
19. Рекомендуемые поля допусков для посадки подшипников [6]
Условия работы
Поля допусков для посадки
подшипников класса точности
Оиб
5и4
Применение
I. Вращается (относительно нагрузки) вал
Посадки внутренних колец подшипников на вал (нагружение циркуляционное)
Особо тяжелые и тяжелые
нагрузки (ударные нагрузки)
Тяжелые нагрузки; работа с
толчками и ударами
Средние нагрузки, тяжелые
нагрузки в условиях необхо-
необходимости частого перемонтажа
Легкие нагрузки и высокие
частоты вращения, требова-
требования легкого перемонтажа и
регулировки
пб
тб
кб
JS6
п5
т5
к5
js5
В тяжелом машиностроении
В основном для ролико-
роликоподшипников и крупных
шарикоподшипников
Для подшипников всех
типов; основная посадка в
машиностроении
Для подшипников всех
типов
Посадки наружных колец подшипников в корпус (нагружение колец местное)
Тяжелые нагрузки
Тяжелые и нормальные на-
нагрузки. Большие частоты
вращения
Нормальные и легкие нагруз-
нагрузки, в частности при необхо-
необходимости осевых перемеще-
перемещений для регулирования ради-
ально-упорных подшипников
к7
JS7
Н7
Кб
JS6
Н6
Для роликоподшипников
Для роликоподшипников
Основная посадка в маши-
машиностроении
Посадки подшипников
83
Продолжение табл. 19
Условия работы
Нормальные и легкие нагруз-
нагрузки. Малые частоты'вращения
(до 200 мин'1)
Поля допусков для посадки
подшипников класса точности
Оиб
Н9
5 и4
Н8
Применение
В основном для разъемных
корпусов
II. Вращается (относительно нагрузки) корпус
Посадки внутренних колец подшипников на вал (нагружение колец местное)
Тяжелые нагрузки
Тяжелые и нормальные на-
нагрузки, в частности при не-
необходимости регулирования
зазоров осевым перемещени-
перемещением внутреннего кольца
Нормальные и легкие нагруз-
нагрузки
Легкие нагрузки
JS6
пб
g6
ft
js5
h5
g5
f5
В основном для ролико-
роликоподшипников в тяжелом
машиностроении
Основная посадка в маши-
машиностроении
Для подшипников всех
типов при невысоких тре-
требованиях к точности
Для подшипников всех
типов
Посадки наружных колец подшипников в корпус (нагружение колец циркуляционное)
Тяжелые и нормальные на-
нагрузки. Работа с толчками и
уцарами
Тяжелые нагрузки в условиях
необходимости облегченного
перемонтажа
Нормальные и легкие нагруз-
нагрузки, необходимость облегчен-
облегченного перемонтажа
Большие частоты вращения.
Необходимо дополнительное
крепление от проворота
Р7
N7
М7
К7
P6
N6
Мб
Кб
В основном для ролико-
роликоподшипников в тяжелом
машиностроении
В основном для ролико-
роликоподшипников
Для подшипников всех
типов при повышенных
требованиях к точности
Для подшипников всех
типов
20.
Номинальные
диаметры
посадочных мест
валов и отверстий, мм
До 50
50-5-80
80 -г 120
120 -f 150
150 -г 180
180 ¦=- 250
250 * 315
315 -г 400
400 + 500
Торцевое биение
заплечиков, мкм
(не более) [6]
Класс точности подшипников
0
6
5
4
Валы
20
25
25
30
30
30
35
40
40
10
12
12
15
15
15
17
20
25
7
8
8
10
10
10
12
13
15
4
6
6
8
8
8
9
10
12
0
6
Отверстия коргг
40
40
45
50
60
70
80
90
100
20
20
22
25
30
35
40
45
50
5
4
vcob (стаканов)
13
13
15
18
20
22
25
30
35
8
8
9
10
12
15
17
20
25
6*
84
ПОДШИПНИКИ
21. Допуски формы поверхностей валов и отверстий корпусов (не более) [61
Класс точности
подшипников
0; 6
5; 4
Допуск крутости
Половина допуска на диаметр в
любом сечении посадочной по-
поверхности
Четперть допуска на диаметр в лю-
любом сечении посадочной поверхно-
поверхности
Допуск цилиндричности
Половина допуска на диаметр
посадочной поверхности на длине
этой поверхности
Четверть допуска на диаметр в
любом сечении посадочной по-
поверхности
22. Шероховятость поверхностей посадки подшипников /fc, мкм [6]
Посадочные
поверхности
Валов
Отверстия корпусов (стаканов)
Торнов заплечиков полон и
корпусов (стаканов)
Класс точности
0; 6
5; 4
0; 6
5; 4
Диаметр, мм
Менее «SO
1.25
1,25
2,5
0,63
0,63
1.25
80 + 500
2,5
2,5
2,5
1,25
1,25
1,25
СПИСОК ЛИТЕРАТУРЫ
1. Анурьев В.И. Справочник конструктора-машиностроителя. Т.2. М.: Машино-
Машиностроение, 1992.
2. Бокин М.Н., Цыплаков О.Г. Расчет и конструирование деталей из пластмасс. М.-
Л.: Машиностроение, 1966.
3. Гжиров Р.И. Краткий справочник конструктора. М.-Л.: Машиностроение, 1983.
4. Иосилевич Г.Б. Детали машин. М.: Машиностроение, 1988.
5. Кузьмин А.В., Чернин И.М., Ко?ннцов Б.С. Расчеты деталей машин: Справочное
пособие. Минск: Вьппэйпшя школа, 1986.
6. Орлов П.И. Основы конструирования: Спрапочно-методическое пособие. Кн.2.
М.: Машиностроение, 1988.
7. Романов М.Я., Константинов В.А., Покровский Н.А. Сборник задач по деталям
машин. М.: Машиностроение. 1984.
8. Нарышкин В.М., КоросталневскнЙ Р.В. Справочник-каталог. Подшипники ка-
качения. М.:Машиностросние, 1984.
9. ГОСТ 18854-82. Подшипники качения. Расчет статической грузоподъемности и
эквивалентной статической нагрузки.
10. ГОСТ 18855-82. Подшипники качетшя. Расчет динамической грузоподъемно-
грузоподъемности, эквивалентной динамической нагрузки и долговечности.
85
5. УПЛОТНЕНИЯ
Уплотнительное устройство или уплотнение предназначено для разделения сред,
предотвращения или уменьшения до допускаемых пределов утечки сред через подвиж-
подвижные или различные неподвижные соединения. Общими элементами уплотнений раз-
различных видов являются уплотняемые поверхности стыка соединения и обеспечиваю-
обеспечивающий герметичность уплотнитель.
Основными факторами, влияющими на работоспособность уплотнения, являются:
свойство рабочей и окружающей сред, режимы работы, свойства материалов герметизи-
герметизируемого соединения и уплотнителя, допускаемые пределы утечки, ресурс, общий срок
эксплуатации, токсичность и химическая агрессивность сред. Часто для повышения
работоспособности создают комбинированные уплотнения, включающие уплотнители
нескольких видов.
По характеру уплотняемых соединений уплотнения подразделяют на две группы:
для неподвижных соединений;
для подвижных соединений с возвратно-поступательным, вращательным и слож-
сложным движением.
По принципу действия уплотнения подразделяются на три класса:
1) контактные, осуществляющие герметизацию за счет плотного прилегания уп-
уплотняющих деталей к соответствующим сопряженным поверхностям соединения;
2) бесконтактные, работающие при наличии щелей (зазоров) в соединениях;
3) разделительные, осуществляющие герметизацию с помощью упругой диафрагмы
между средами.
Существуют комбинированные уплотнения, в которых сочетаются элементы раз-
разных классов, а также уплотнения, механизм герметизации которых зависит от режима
работы. Например, торцовые гидростатические уплотнения при остановке и малой час-
частоте вращения являются контактными, а в основном режиме - бесконтактными.
Герметизацию неподвижных соединений осуществляют преимущественно кон-
контактными, реже диафрагменными уплотнениями и уплотнениями с герметиками, а так-
также точно соприкасающимися (притертыми) поверхностями.
По специфике механизма герметизации контактные уплотнения подразделяются
на эластомерные кольца и прокладки, металлические прокладки, газонаполненные
кольца и комбинированные уплотнения.
Герметизация точно соприкасающихся поверхностей обеспечивается за счет их
шлифования или шабрения. Такие соединения применяются при давлении до 5 МПа и
то сравнительно редко.
Обычно на первом этапе конструирования невозможно выбрать конкретный вид
уплотнения, можно лишь наметить систему уплотнения агрегата и выявить функцио-
функциональное назначение каждого уплотнения.
Для выбора конкретных уплотнений необходим анализ характеристик уплотнений
различных типов.
1. У плотните л ьные материалы
Материал
Полиэтилен,
ГОСТ 16337-77 Е
Полипропилен,
ГОСТ 26996-86 Е
Поликарбонат
Капролон
Темпе-
Температура,
°С
-70 +
+60
-90 +
+100
-30 +
+ 140
-235 +
+ 135
-40+ +100
Рабочая среда
Серная и соляная кислоты,
щелочи, спирты, масла, ки-
кислород, пищевые продукты
Разбавленные минеральные и
органические кислоты, щело-
щелочи, растворы перекисей и
спиртов, моющих веществ
Разбавленные минеральные
кислоты, алифатические уг-
углеводороды и спирты, масла,
жиры, кислород, вакуум,
фотохимикаты
Применение
Пластмасса
Оболочки подводных и других кабелей
(как защитный материал от химически
агрессивных жидкостей), труб, погло-
поглощающих шумы, вызываемые потоками
жидкости. Пропускная способность поли-
полиэтиленовых труб выше, чем металличе-
металлических. ПЭВД выпускают в виде рулонов до
400 м, полотна шириной до 1400 мм и
толщиной 30 + 200 мм, из-предварительно
вальцованного полиэтилена - листы тол-
толщиной 1 + 20 мм (прокладки и другие
технические детали). Прессованием полу-
получают блоки (полиэтиленовые) размером
500x400x200 мм и 200x200x100 мм
Для фильтров, спецодежды, морских ка-
каналов, в пищевом машиностроении
(прокладки, клапаны, манжеты)
Для изделий конструкционного и изоля-
изоляционного назначения; в криогенной тех-
технике для уплотнения затворов
Для крышек, колец, прокладок
Дополнительные сведения
ПЭВД (высокого давления):
р = 0,92 + 0,93 г/см3; '
aD - 12 + 16 МПа;
стизг =12+17 МПа;
а^ = 12,5 МПа;
стот = 14 + 17 МПа
ПЭВД (низкого давления):
р = 0,94 + 0,96 г/см3;
а„ = 22 + 45 МПа;
стизг = 20 + 38 МПа;
<*сж = 20 + 36 МПа;
стт = 20 + 36 МПа
Менее склонен к образова-
образованию трещин, чем полиэти-
полиэтилен;
р = 0,9 + 0,92 г/см3;
oD = 31 + 32 МПа;
о™ = 108+ ПО МПа
Дифлон:
р = 1,2 г/см3;
cD = 50 + 75 МПа;
ас = 80 + 120 МПа;
<w =100+120 МПа
to
о
н
X
w
я
S
so
х
и
X
К
Продолжение табл. 1
Полиамид,
ГОСТ 10589-87
Текстолит ПТК,
ГОСТ 5-78 Е
Фторопласт-3
Фторопласт-4 и
композиции на
его основе
Фторопласт-40 и
композиции на
его основе
Асбест
Картон прокла-
прокладочный,
ГОСТ 9347-74
Фибра,
ГОСТ 14613-83 Е
-60 -г
+70
-40-г
+80
-195-
+70
-269-
+260
-100 -г
+200
-
До 130
До 60
Керосин, бензин, бензол,
минеральные и органические
масла, спирты, растворы
моющих веществ, солнечная
радиация
Минеральные масла, слабые
растворы кислот и щелочей
Концентрированные кислоты
и щелочи, окислители и рас-
растворители
Практически все жидкие и
газообразные среды, вакуум, •
ограниченная доза радиации
То же, при большей стойко-
стойкости к радиации
Слабые растворы минераль-
минеральных кислот и щелочей
Керосин, бензин, спирт, аце-
ацетон, кислород, вода, масло
Для гидросистем (изготовленные из него
прокладки, манжеты более долговечны,
чем кожаные и резиновые)
Компрессоростроение (клапаны, поршне-
поршневые кольца, шайбы, прокладки)
Холодильная и криогенная техника
(прокладки и клапаны)
Все отрасли машиностроения (прокладки,
защитные кольца, грязесъемники, порш-
поршневые кольца компрессоров, клапаны,
манжеты, сальниковые набивки, сильфо-
ны)
Атомная энергетика (прокладки, клапаны)
Асбестовый картон, сальниковые набивки,
набивки кольцевые
Прокладки для топливных и масляных
систем авиационных двигателей, обеспе-
обеспечивающие плотное соединение даже непа-
непараллельных сопрягаемых плоскостей
В машиностроении как прокладочный
материал в паровых турбинах, гидравличе-
гидравлических прессах, насосах, в карбюраторах,
клапанах, бензо- и маслоприводах, трубо-
трубопроводах высокого давления жидкостей и
газов и пр.; в автомобилестроении (для
распределителей, трубок, проводов зажи-
зажигания, различных прокладок); в авиа-
авиастроении (бензо- и маслобаки, сидения
для пилотов, детали контрольно-измери-
контрольно-измерительной аппаратуры и т.д.)
р= 1,09^- 1,11 г/см3;
Ор = 50 -г 60 МПа
р = 1,3 -г 1,4 г/см3;
Ор = 100 МПа;
оизг = 160 МПа
р = 2,12 г/см3;
ор = 38 МПа;
давление среды 3,2 МПа
Антифрикционные свойства;
р = 2,18 г/см3;
ор = 20 МПа
р = 1,7 г/см3;
ор = 44 МПа;
давление среды 3,2 МПа
р = 0,8 г/см3;
ор = 10 * 20 МПа
Толщина листов 0,1 -f 76 мм;
Р = 1,1 г/см3;
ор = 30 * 60 МПа;
Осж = 150 -г 300 МПа;
оизг = 80 -г 160 МПа
Продолжение табл. 1
Материал
ПОН (общего
назначения)
ПМБ (масг.о-
бензостойкий)
ПА (армирован-
(армированный сеткой)
ПЭ (злектроли-
зерный)
ИРП1265;
ИРГИ 266
ИРП1285
В-14
Темпе-
Температура,
°С
-182 *
+450
-50 +
+300
До 450
До 180
-70 +
+250
-60 -г
+300
-45^
+ 100
Рабочая среда
Применение
Паронит, ГОСТ 481-80
Вода пресная, растворы со-
солей, спирты, нефтепродукты,
аммиак, сухие нейтральные и
инертные газы
Вода морская, нефтепродук-
нефтепродукты, аммиак, воздух
Вода пресная, нефтепродук-
нефтепродукты, водяной пар, воздух,
нейтральные газы
Щелочи с концентрацией до
400 г/л, азотная кислота до
10%
Воздух с повышенным со-
содержанием озона
Воздух, масло
Для затворов фланцевых соединений тру-
трубопроводов, трубопроводов
(Рекомендуется выполнять 2-3 мелкие
канавки треугольного сечения)
Резина
Для уплотнений, алектроизоляции, рабо-
работающих при деформации до 20% в непод-
неподвижных соединениях
То же, при деформации до 10%
Для резиновых и резинометаллических
изделий, работающих при статических
деформациях в неподвижных соединениях
Дополнительные сведения
Листовой материал размером
300x400; 1200x1700 мм, толщи-
толщиной 0,4 -г 6 мм;
Р = 1,5 -г 2 г/см3;
стр = 32 МПа в продольном на-
направлении; стр = 12 МПа в по-
поперечном направлении; давление
среды до 0,64 Мпа
Давление среды до 1 МПа
То же
Даштение среды до 0,25 МПа
Тепломорозостойкая (белые ре-
резины);
ор = 3 МПа;
удлинение 250%;
твердость на приборе ТИР 34-36
Теплостойкая (розовая резина);
ор = 5 МПа;
удлинение 100%;
твердость на приборе ТИР 72-84
Маслобензостойкая;
ар= 11 МПа;
удлинение 160%;
твердость по прибору ТИР 72-79
Продолжение табл. 1
98-1
НО-68-1
3825
922
2671
56
2959
1847
3311
Губка ВРП-1
-53 -г
+ 100
-55 +
+ 100
-30-г
+ 100
-40-г
+80
-50 +
+80
-50-
+80
-55 +
+80
-65 +
+300
АМГ-10
Воздух, слабые растворы ки-
кислот, щелочей, масла Т-1,
ТС-1, бензин
Воздух, вода, бензин, масла
Т-1, ТС-1, МК-18, НК-20
Воздух, вода
Воздух, слабые растворы ки-
кислот и щелочей
Воздух, вода
Воздух
Воздух, вода
В подвижных и неподвижных соединени-
соединениях
Для формовых резиновых и резинометал-
лических изделий, работающих при стати-
статических деформациях
Для изделий, работающих при статических
деформациях
При многократных деформациях
При многократных статических деформа-
деформациях
То же
Для изделий виброизоляции, прокладки в
изделиях, работающих в различных кли-
климатических условиях
Маслобензостойкая;
ср = 6 МПа;
удлинение 180%;
твердость по прибору ТИР 52-62
Маслобензостойкая;
стр « 9 МПа;
удлинение 250%;
твердость по прибору ТИР 55-67
ср = 11 МПа;
удлинение 140%;
твердость по прибору ТИР 80-92
Черная;
ор = 4,5 МПа;
удлинение 300%;
твердость по прибору ТИР 55-65
ар = 4,5 МПа;
удлинение 200%;
твердость по прибору ТИР 50-65
стр = 10 МПа;
удлинение 450%;
твердость по прибору ТИР 45-60
ор = 16 МПа;
удлинение 500%;
твердость по прибору ТИР 45-60
Стр = 16 МПа;
удлинение 600%;
твердость по прибору ТИР 35-50
стр = 15 МПа;
удлинение 700%;
твердость по прибору ТИР 30-45
(цвет серый)
Термостойкая
Продолжение табл. 1
Материал
Темпе-
Температура,
°С
Рабочая среда
Применение
Дополнительные сведения
Металл
Ст2, СтЗ,
ГОСТ 380-88
Стали 05 и 08
ГОСТ 380-88
Сталь 20
ГОСТ 1050-88
Стали
12Х18Н10Т и
08Х18Н10Т
ГОСТ 5632-72
Латунь,
ГОСТ 15527-70
Медь
Ml, М2, МЗ
ГОСТ 859-78
Алюминий АО,
ГОСТ 11069-74
Алюминий АД1,
АД0
ГОСТ 4784-74
Свинец С2,
ГОСТ 9559-89
Никель НП1,
НВК,
ГОСТ 6235-91
До 45
-40*
+550
До 200
-253 +
+600
До 250
-253*
+250
-
-200-5-
+ 100
-271 +
+650
Нефтепродукты, масла, на-
насыщенный пар
Нефтепродукты, безводные
щелочи, кислоты, содержа-
содержащие серу, водяной пар
Питательная вода
Нефтепродукты, среда водя-
водяного пара, вода дистиллиро-
дистиллированная, воздух, масло
Вода, масло, воздух, конден-
конденсат, пар
Нейтральная среда
Нефаепродукты, азотная ки-
кислота, фосфорная кислота,
сернистый газ
Серная кислота, соли
(й 100 °С)
Морская вода, водяной пар,
хлор, растворы щелочей,
нейтральных солей, аммиак
Стальные прокладки (близость темпера-
температурных коэффициентов линейного рас-
расширения прокладки, болтов, фланцев;
недостаток - необходимость больших кон-
контактных давлений)
-
Перед установкой в соединения проклад-
прокладки подвергают отжигу при 7^=873 + 923 °К
Прокладки в резьбовых соединениях
-
-
Давлений среды до 0,6 МПа
Давление среды до 10 МПа
-
-
-
-
Герметик
Тиоколовые
герметики
У-ЗОМ,
ГОСТ 13489-79
-60*
+ 130
Нефтепродукты и слабые
кислоты
Дтя беспрокладочных неразборных соеди-
соединений (полимерные композиции - замаз-
замазки, пасты, краски, которые в сжатом со-
состоянии превращаются в тонкую уплотни-
тельную прокладку)
р = 1450 кг/м3;
ср = 2.5 -г 4 МПа;
е = 150 * 300%;
давление среды до 0,5 МПа
Продолжение табл. 1
51 УТ-37,
ТУ38-105507-76
Фторкаучуковые
герметики
У-20А, У-22,
51-Г-9
Анаэробные
герметики 125Р,
125Ц, 6 В, 25 В,
ТУ6-01-2-370-74
Замазка
уплотнительная
У-20А.ТТ-18
-40 +
-klOO
-50-
+70
-40-
+ 100
-60-
+250;
-50 -
+70;
-
Воздух, кислота, щелочи
Вода, масло, бензин
Тиоколовые составы, нанесенные на
стальные и алюминиевые сплавы, в маши-
машиностроении, авиации, судостроении; гер-
метик У-ЗОМ, нанесенный на хлорнайри-
товый грунт, выполняет антикоррозион-
антикоррозионные защитно-герметизирующие функции.
Разгерметизация наступает при деформа-
деформации 0,05 -г 0,1 мм и давлении 0,05 -н 0,15
МПа
Для разъемных соединений (фланцевых,
резьбовых и т.п.)
В трубопроводах, подбирают по вязкости
в зависимости от зазора в соединении:
маловязкие 125Р и 1251Д при зазоре до
0,15 мм; 6В - до 0,2 мм, 25В - до 0,25 мм.
Адгезионная прочность герметиков при
сдвиге зависит от зазора: для герметика
125Р при зазоре 0,02; 0,2; 0,4 мм соответ-
соответственно сг = 5; 1,3; 0,9 МПа; для гермети-
герметика 25В при зазоре 0,02; 0,2: 0,4; 0,6; 1 мм
соответственно с = 5,4; 4,4; 3,3; 2,3;
0,4 МПа
Как высоковязкие пластические материа-
материалы (простота герметизации и отсутствие
технологических выдержек, но неустойчи-
неустойчивость герметичности соединений в про-
процессе эксплуатации и ограниченная тепло-
теплостойкость, что в значительной степени
устраняется применением высыхающих
или вулканизующихся замазок)
р = 1450 - 1550 кг/м3;
ор = 2 - 4 МПа;
е = 150 - 350%
р = 1900 кг/м3;
пр = 2 т 6 МПа;
е = 200 - 350%
<*сд.р = 8-10 МПа;
<*сд.ц = 5-10 МПа
-
92
УПЛОТНЕНИЯ
5.2. НЕПОДВИЖНЫЕ СОЕДИНЕНИЯ
Соединения гибких трубопроводов. Гибкий трубопровод представляет собой эла-
эластичный резиновый рукав, на концах которого вмонтированы детали присоединитель-
присоединительной арматуры. Закрепление и герметизация арматуры осуществляется за счет упругой
или упругопластической деформации материала рукава при контакте с деталями при-
присоединительной арматуры в процессе сборки. В комплект соединения входят, как пра-
правило, корпусная деталь (ниппель) и муфта. Рукава с обжимными муфтами являются
неразборными. В ряде конструкций вместо обжимных муфт используются хомуты, что
делает конструкцию разборной (табл. 2, 3). Концы ниппелей имеют конструкцию, ана-
аналогичную концам корпусных деталей, применяемых в резьбовых соединениях трубо-
трубопроводов.
В качестве гибких трубопроводов используются резиновые, резинотканевые рукава
с металлической оплеткой или без нее, применение которых в зависимости от транс-
транспортируемой среды, давления и температуры регламентируется стандартами. Рукава ре-
резиновые общего назначения (ГОСТ 10362-76, ГОСТ 25452-90, ГОСТ 25174-S2, ГОСТ
6286-73, ГОСТ 9356-75, ГОСТ 5398-76, ГОСТ 18698-79) обеспечивают герметичность
при давлении до 50 МПа и температуре -60 ¦*¦ +100 °С.
Рукава специального назначения определены ГОСТ 2593-82, ГОСТ 1335-84 Е. Ру-
Рукава гибкие металлические работают при давлении до 1,8 МПа и температуре до 300 °С.
Трубки резиновые различного назначения определены ГОСТ 235-78, ГОСТ 5496-78,
ГОСТ 3399-76. Рукава всех типов имеют не менее, чем трехкратный запас прочности.
Для крепления трубопроводов используются скобы, серьги и хомуты (ГОСТ 24132-80 -
ГОСТ 24140-80, ГОСТ 17678-80 - ГОСТ 17680-80).
2. Соединения ниппельно-хомутовые
(Ру<. 1 МПа, ОСТ 26-10-1501-77; размеры, мм)
4.
1 - ниппель; 2 - хомут; 3 - ушко;
4 - гайка; 5 - шплинт
Asa-
D
12,5
23
10
М22 х 1,5
60
16
27-г 28
14
МЗО х2
70
25
36-г 40
23
М42 х 2
85
31,5
43-г 47
30
М52 х2
88
Миппель
Неподвижные соединения
93
Продолжение табл. 2
Рукав
4м
12,5
16
25
31,5
10
14
23
30
*
11
15
24
31
*
15
20
29
36
*
16
22
34
42
D
20
27
39
49
R
7,5
10,5
16,5
20,5
L
60
70
85
88
/
18
22
30
33
/1
13
16
20
22
h
7
9,5
12,5
14,5
h
5
7
10
12
k
35
40
45
h
7
8
9
Лента
А.
12,5
23
145
16
27ч-28
170 -r 180
25
36 + 40
228 4- 250
31,5
43ч-47
272 + 300
¦/О
Ушко
Г
—
12,5
16
25
31,5
D
M22xl,5
M30x2
M42x2
M52x2
A
27
36
55
65
Ih
31,5
41,6
63,5
75
Ih
22,7
31
43
53
rfi(Hll)
16
22
34
42
Я
22
26
32
34
A
18
21
26
28
С
1,6
2
2
R
1,6
2
2
27
36
55
65
6
8
8
94
УПЛОТНЕНИЯ
3. Соединения ниппельные
(ру 4 0,5 МПа, ОСТ 2 А72-2-79; размеры, мм)
Соединения
D
65ч-75
120 -s- 135
56 + 66
370
80 + 200
79 * 206
69 + 195
170 +190
рукава
6
8
10
12
16
20
25
32
40
50
G 1/4"
G 3/8"
G 1/2"
G 3/4"
Gl"
G 1 1/4"
G 1 1/2"
G2"
8
10
12,5
14,5
18
24
28
36
45
55
4
6
8
10
14
18
23
30
38
48
di
5
7
9
11
15
19
24
31
39
49
4>
7,5
9,5
12
14
18
23
28
36
44
55
D
19,6
25,4
27,7
31,2
36,9
41,6
53,1
63,5
75
L
48
56
65
75
85
95
105
115
h
28
32
36
40
44
48
52
60
h
12
15
18
21
24
27
30
33
P
6
7
8
9
10
11
12
14
S
17
22
24
27
32
36
46
55
65
Неподвижные соединения
95
Продолжение табл. 3
Рукаб
М12х1,5 *
М38х2
3-г23
4 + 25
20ч-28
5-ьЮ
6,3 * 12
50*62
M14xl,5
М3бх2
5 + 22,5
6-J-25
73,5-f
119
M14xl,5*
M27x2
5 ч- 17
8-5-20
71 * 102
К 1/4" +
КЗ/4"
4-5-17
88-
120
Соединения трубопроводов дюритовые. Дюритовые (гибкие) соединения трубопрово-
трубопроводов - это соединения, в которых сборка и герметизация трубопровода осуществляются с
помощью цилиндрических прорезиненных муфт (дюритов), надеваемых на гладкие или
с кольцевыми выступами (зигами) концы труб.
Закрепление гибких прорезиненных (дюритовых) муфт на трубах осуществляется с
помощью металлических хомутиков. Дюритовое соединение трубопроводов обеспечива-
обеспечивает герметичность при давлении до 1,25 МПа (табл. 4).
96
УПЛОТНЕНИЯ
4. Дюритовые соединения (размеры, мм)
Стяжные хомутики
Концы труб под дюритовые соедннеяия
А
Dy
6
10
15
20
25
32
40
50
65
80
d
10
14
22
25
32
38
45
55
76
90
d\
13
17
25
28
35
42
49
58
80
95
R
3
4
5
a
8
9
10
L
35
40
45
муфты
10
14
22
25
32
38
44
54
76
90
dH рукава
16 ¦¦- 18
19 ч- 20
21-г 22
25-г 26
27-г 28
29* 30
31ч- 32
36 ч- 38
42ч-44
54 ч- 55
58 ч- 60
D
18
20
22
26
28
30
32
37
43
55
60
d
М5
Мб
Мб
/
25
35
40
Неподвижные соединения
97
Для npi
А,
трубы
8
10
12
14
16
17
18
20
22
25
28
30
32
34
38
40
42
45
48
51
54
57
60
Ис
1варки
по \ ^S
/7
Г
dBH для
исполнения
1
_
_
_
_
25
28
30
32
34
38
40
42
45
48
51
54.
57
60
2
13
14
18
20
22
25
27
30
33
38
40
45
51
54
57
-
полненн
к тонкое
А
2
Vrrr
е 1
ггенным труб
405"°
•? , \
i
d
6
8
10
13
15
20
25
32
40
46
48
50
—-—_
/
ъ
d\
_
_
_
_
_
_
25
28
30
32
34
38
40
42
45
48
51
54
57
60
ам
di
_
_
_
30
33
35
37
39
43
45
47
50
53
56
59
62
65
«
8
10
13
15
17
18
19
21
23
26
29
31
33
35
39
41
43
46
49
52
55
58
-
Исп
Для приварки к
\
*
13
14
18
20
22
25
27
30
33
38
40
45
51
54
57
63
-
*
16
17
21
23
25
30
32
35
38
43
45
50
56
59
62
68
—-,
-
/
At
/
7.
^—.
/
/
Продолжение
олненш
толстое
/^
г!
TCHHI
—*¦ -
V//UA
Al
/щ
L
R
7,5
5
3
0,5
1
1
1,5
габл. 4
лм трубам
7
9
12
13
14
16
17
19
-
L
30
45
60
70
h
5
6
7 Том 2
98
УПЛОТНЕНИЯ
Соединения трубопроводов фитинговые. Муфтовые или фитинговые соединения
трубопроводов - соединения, в которых сборка и герметизация трубопровода осуществ-
осуществляются с помощью соединительных деталей, свинчиваемых с трубами, имеющими на
концах резьбу.
Соединительные детали (муфты, угольники, тройники, крестовины, ниппели, сго-
ны. футорки) изготавливаются из стали (ГОСТ 8965-75 - ГОСТ 8969-75) или из ковкого
чугуна (ГОСТ 8943-75 - ГОСТ 8963-75) и предназначены для сборки трубопроводов из
водогазопроводных труб ГОСТ 3262-75 в условиях неагрессивных сред при температуре
проводимой среды не выше 175 °С и давлении до 1,6 МПа. Соединительные детали из-
изготавливаются с цилиндрической трубной резьбой по ГОСТ 6357-81. В качестве уплот-
уплотнителя в фитинговых соединениях используют лен, асбест, натуральную олифу, белила,
сурик, графитовую смазку и фторопластовый уплотнительный материал.
Типы соединительных деталей приведены на рис. 1, а-е.
а)
г)
Рис. 1
Уплотнение резиновыми кольцами. Уплотнения резиновыми кольцами по ГОСТ
9833-73, устанавливаемыми в выточки гнезда по ГОСТ 25065-90, обеспечивают герме-
герметичность при давлении до 40 МПа. Уплотнение резиновыми кольцами круглого сечения
(ГОСТ 9833-73), устанавливаемыми в цилиндрическую канавку гнезда, применяются в
гидравлических масляных и воздушных системах трубопроводов летательных аппаратов
при давлении до 28 МПа.
Диаметры DK и d назначают так, чтобы диаметры штоков D и цилиндров Dn соот-
соответствовали ряду Ra 20 (ГОСТ 6636-69) и основному ряду (ГОСТ 12447-80) в следующих
интервалах D, мм (рис. 2):
d, мм 1,4 1,9 2,5 3 3,6
Дмм 3 * 4 3 + 50 4 + 150 20 + 150 22 + 250
4,6 5,8 7,5 8,5
28 4 250 50 -г 500 82 + 132 135 * 400
не рекомендуется
Неподвижные соединения
99
Размеры при установке колец круглого сечения
приведены в табл. 5.
Рис. 2
5. Рекомендуемые размеры, мм, мест установки под кольца круглого сечения
Эск. 2
Эск. 3
Эск. 4
Поверхности канавки для радиальных уплотнений неподвижных соединений со-
согласно ГОСТ 9833-73 рекомендуется обрабатывать с шероховатостью, соответствующей
Ra = 2,5 мкм, параметр шероховатости контртела Ra < 1,25 мкм. При Z> < 80 мм и р <
10 МПа поле допуска на диаметры D - Р9, на Dn - НЮ. При /> > 80 мм целесообразно
назначать глубину канавки Л-1. При постоянном давлении р > 20 МПа или пульси-
пульсирующем давлении р > 10 МПа рекомендуется применять защитные шайбы либо обеспе-
обеспечивать сочетание размеров, при котором радиальный зазор не превышает 0,02 мм. Ши-
Ширина канавок b для уплотнений с защитной шайбой увеличивается на толщину шайбы.
Ширина канавки b определят се объем и существенно влияет на габариты соединения.
Диаметр
сечения
d
1,4
1,9
2,5
3
3,6
4,6
5,8
8,5
Радиальные соединения
Ширина
й(НП)
Эск. 1, 2
1,8
2,6
3,6
4
4,7
5,6
7
10,3
Диаметр
d№)
Эск.1
А,- 2
Dn - 2,8
Dn - 3,7
Яц - 4,7
Яц - 5,6
А* - 7,4
/>ц - 9,2
/>ц - 13,6
Диаметр
rf4(H 10)
Зек. 2
D + 2
D + 2,8
Я + 3,7
D + 4,7
/) + 5,h
D + 7,4
Z) + 9,2
D+ 13,6
Торцовые соединения
Глубина
й(+0,1)
(Н12)
Эск. 3
1
1,4
1,85
2,2
2,6
3,3
4,2
6,5
2
2,5
3,5
4,5
5
6
7,5
10,5
Конусная
фаска
Л/(Н12)
Эск. 4
2
2,5
3,3
4,2
5
7,2
7,8
П.5
100
УПЛОТНЕНИЯ
Кольцо должно быть расположено в канавке свободно: объем канавки на 5 + 10%
больше объема кольца с учетом неблагоприятного сочетания допусков.
Соединения трубопроводов с врезающимся кольцом. Соединение с врезающимся
кольцом - соединение, в котором герметизация и закрепление трубы осуществляются в
результате деформации врезающегося кольца и врезания его в трубу при взаимодейст-
взаимодействии с внутренней конической поверхностью корпусной детали под действием осевого
усилия, создаваемого накидной гайкой при затяжке.
Соединение в сборе (рис. 3, а) содержит: трубу 1,
корпусную деталь 4 (штуцер, угольник, тройник, кре-
крестовина), врезающееся кольцо 2 и накидную гайку 3.
В зависимости от материала и диаметра труб соеди-
соединения с врезающимся кольцом обеспечивают герме-
герметизацию и закрепление трубы при давлении до 63
МПа и температуре -40 + +560 °С.
Конструкция и размеры корпусных деталей рег-
регламентированы ГОСТ 21856-78 - ГОСТ 21873-78,
ГОСТ 22525-77, ГОСТ 22526-77. Технические условия
на соединения с врезающимся кольцом устанавливает
ГОСТ 15763-91. Размеры врезающегося кольца вы-
выполняют по ГОСТ 23354-78. В соединениях исполь-
используют стальные (сталь 20) холоднотянутые трубы по-
повышенной точности по ГОСТ 9567-75.
Существуют различные типы соединений трубо-
трубопроводов с врезающимся кольцом: проходные (ГОСТ
24072-80), переходные (ГОСТ 24073-80), ввертные
(ГОСТ 24074-80), угловые проходные (ГОСТ 24075-80,
ГОСТ 24078-80), тройниковые переходные (ГОСТ
24079-80, ГОСТ 24086-80), крестовые проходные (ГОСТ 24087-80), переборочные (ГОСТ
24090-80), с заглушкой (ГОСТ 24091-80). В некоторых соединениях кроме врезающегося
кольца применяют прокладки (ГОСТ 23358-87).
Если при монтаже соединений трубопроводов перемещение трубы ограничено,
применяют штуцер для радиального монтажа по ГОСТ 22525-77 (рис. 3, б) с нажимным
кольцом 6 по ГОСТ 23356-78 и прокладкой 5 по ГОСТ 23357-78.
Соединения трубопроводов с шаровым ниппелем. Соединение трубопроводов с ша-
шаровым ниппелем - соединение, в котором герметизация осуществляется в результате
взаимодействия сферической или тороидальной поверхности ниппеля с внутренней
конической поверхностью корпусной детали под действием осевого усилия, создавае-
создаваемого накидной гайкой при затяжке. Соединение в сборе (рис. 4) содержит: трубу / с
приваренным (припаянным) ниппелем 2, корпусную деталь 4 (штуцер, угольник, трой-
тройник, крестовина) и накидную гайку 3.
Существует большое количество конструкций
соединений этого типа с внутренним углом конуса
корпусной детали 24 + 90°. Наиболее предпочтитель-
предпочтительными являются соединения с углом конуса корпус-
корпусной детали 24°, так как они требуют меньших момен-
моментов затяжки, что снижает контактные напряжения.
Соединения трубопроводов с шаровым ниппелем и
углом внутреннего конуса корпусной детали, равным
2<Г, регламентированы ГОСТ 15763-91. ГОСТ 21856-
78 - ГОСТ 21873-78, ГОСТ 23353-78 - ГОСТ 23359-78,
ГОСТ 24485-80 - ГОСТ 24504-80 и обеспечивают герметизацию при давлении до 40
МПа и температуре -40 4- +120 °С. Применяются конструкции с углом конуса корпус-
Рис. 3
Рис. 4
Неподвижные соединения
101
ной детали 37°, однако, широкого распространения эти соединения не получили. В ле-
летательных аппаратах нашли применение соединения трубопроводов с углом внутренне-
внутреннего конуса корпусной детали 60° (ГОСТ 16038-70 - ГОСТ 16078-70), обеспечивающие
герметизацию при давлении до 65 МПа и температуре -60 -г +500 °С.
Соединения трубопроводов с конусной муфтой. Соединение трубопроводов с конус-
конусной муфтой - это соединение, в котором герметизация осуществляется за счет плотного
прилегания контактирующих поверхностей муфты, штуцера и трубы, а закрепление
трубы в соединении - обжатием муфты на трубе под действием усилия, создаваемого
накидной гайкой при затяжке.
Соединение в сборе (рис. 5, а,б) содержит:
корпусную деталь / (штуцер, угольник, трой-
тройник), конусную муфту 2, накидную гайку 3 и
трубу. Существенным недостатком соединения
трубопроводов с конусными муфтами является
невысокое рабочее давление (не более 10 МПа),
так как закрепление трубы в соединении осу-
осуществляется, в основном, только за счет сил
трения.
Соединительные детали: штуцера, угольни-
угольники, тройники, гайки - изготавливают из стали
35 или А12 и латуни ЛС-59-1, конусные муфты ?ис- 5
- из латуни ЛС-59-1 и Л-63, трубы - из стали 20, меди М2 и МЗ, алюминиевых сплавов
АД1М, AMrlM.
Соединения трубопроводов с развальцовкой трубы. Соединение трубопроводов с
развальцовкой трубы - это соединение, в котором герметизация и закрепление трубы
осуществляются за счет плотного прилегания контактирующих поверхностей разваль-
развальцованного конца трубы к конусным поверхностям корпусной детали и ниппеля (или
накидной гайки) под действием осевой силы,
создаваемой накидной гайкой при затяжке.
Соединение в сборе (рис. 6) содержит: тру-
трубу с развальцованным концом 1, корпусную
деталь (штуцер, угольник, тройник, крестови-
крестовину), ниппель 3 (в большинстве конструкций) и
накидную гайку 2. Внутренний угол развальцо-
ьанной части трубы и угол наружной конусной
поверхности корпусной детали стандартизован
и равен 74°. При меньших углах возможно вы-
вытягивание трубы из соединения, при больших -
увеличиваются размеры соединения.
Соединения трубопроводов с развальцов-
развальцовкой трубы (по наружному конусу) регламетрированы ГОСТ 13954-74 - ГОСТ 13974-74,
ГОСТ 13976-74, ГОСТ 13977-74, ГОСТ 20188-74 - ГОСТ 20200-74 и обеспечивают герме-
герметизацию соединения при давлении до 20 МПа.
Соединения трубопроводов штуцерно-торцовые. Соединение трубопроводов штуцер-
но-торцовое - это соединение, в котором герметизация обеспечивается за счет упругой
или упругопластической деформации прокладки, сжимаемой между плоскими поверх-
поверхностями штуцера и ниппеля, под действием усилия затяжки, передаваемого накидной
или нажимной гайкой.
В зависимости от транспортируемой среды, ее давления и температуры в качестве
материала для прокладок используются резина, паронит, фибра, фторопласт, алюми-
алюминий, медь.
Рис. 6
102
УПЛОТНЕНИЯ
В комплект соединения входят (рис. 7): корпусная деталь (штуцер) 2, ниппель 1,
нажимная гайка 3, прокладка 4 и в ряде случаев - нажимное кольцо. Конструкции и
размеры штуцерных концов с выступом, применяемых в судостроении, регламентиро-
ванны ГОСТ 2822-78, ГОСТ 5890-78. Закрепление трубы в этих соединениях осуществ-
осуществляется с помощью ниппеля, который припаивается или приваривается к трубе.
Рис. 7
В штуцерно-торцовых соединениях вакуумных аппаратов герметизация различных
вводов и их закрепление осуществляются посредством резиновой прокладки, которая,
деформируясь под действием усилия, создаваемого торцом нажимной гайки, обжимает
и удерживает ввод, одновременно уплотняя соединение. Штуцер в этом случае вварива-
вваривается в крышку или корпус аппарата, а ниппель отсутствует. Штуцерно-торцовые соеди-
соединения обеспечивают герметизацию соединения при давлении 1 • 10 Па ¦*¦ 20 МПа.
Примеры штуцерно-торцовых соединений, регламентированных ГОСТ 19749-84 - ГОСТ
19755-84, которые распространяются на закрытые затворы разъемных неподвижных со-
соединений с плоской и конической металлическими прокладками, обеспечивающими
герметичность до 12 МПа, приведены на рис. 7, а-в. На рис. 7, г показано соединение
трубопроводов (d = 2 мм), обеспечивающее надежную герметизацию при давлении до
300 МПа.
Размеры элементов соединяемых деталей приведены в табл. 6 для d = 2 мм.
6. Штуцерно-торцовые соединения
(размеры, мм)
Материал сталь 30X13 (ГОСТ 5632-72)
у Ниппель
Неподвижные соединения
103
Продолжение табл. 6
Штуцер
Материал медь Ml (ГОСТ 859-78)
Прокладка
D
M16xl
M18xl
M18xl
ном.
6
8,5
6
откл.
+0,08
+0,1
+0,08
di
ном.
9
11,5
9
откл.
+0,2
+0,24
+0,2
ном.
7,6
10
7,6
откл.
±0,2
ном.
4
1
откл.
+0,6
h
ном.
11
12
11
откл.
+0,24
h
ном.
14
15
откл
+0,24
d
ном.
6
8,5
откл.
-0,04
-0,12
-0,05
-0,15
ном.
9
11,5
откл.
-0,1
-0,3
-0,12
-0,36
ном.
14
16
откл.
-0,24
ном.
7,5
10
откл.
±0,1
ном.
6
\
откл.
±0,08
/i
ном.
10
И
откл.
+0,2
+0,24
Л
ном.
4
откл.
-0,3
С
0,3
0,5
D
ном.
9
11,5
откл.
-0,015
-0,055
-0,02
-0,07
d
ном.
6
8,5
откл.
+0,08
+0,1
S
ном.
1,5
откл.
-0,04
104
УПЛОТНЕНИЯ
Продолжение табл. 6
Гайка
Быстроразъемные соединения. Быстроразъемные соединения трубопроводов при-
применяют при частых переборках гидро- и пневмосистем, при этом широко используют
бугельные и безрезьбовые ниппельные соединения.
Герметизацию во фланцевых быстроразъемных соединениях осуществляют за счет
упругой или упругопластической деформации прокладки, устанавливаемой между
фланцами. Усилия затяжки создают профильным охватывающим хомутом, воздейст-
воздействующим на конические поверхности фланцев. Бугельные фланцевые соединения часто
используют в воздушных и вакуумных системах. Герметизацию в быстроразъемных
ниппельных соединениях осуществляют за счет упругой деформации резинового коль-
кольца. Закрепление ниппеля в гнезде штуцера осуществляется с помощью скобы, встав-
вставляемой в специальные прорези. Достоинство этого вида соединения, помимо простоты
монтажа, - возможность относительного поворота во время работы. Этот вид соедине-
соединений часто используют в гидросистемах горных машин. Примеры быстроразъемных со-
соединений приведены в табл. 7-9.
7. Фланцевое соединение из алюминиевых сплавов
(размеры, мм)
1, 2 - фланцевая концовка трубопровода,
3 - хомут; 4 - кольцо
D
M16xl
M18xl
ном.
13
14
1
откл.
+0,24
L
ном.
17
18
откл.
-0,43
Неподвижные соединения
1р5
D
40
45
50
56
63
70
80
90
100
120
140
160
180
200
A
41
46
51
57
64
71
81
91
101
121
141
161
181
201
A>
54
59
64
70
77
84
94
104
114
134
154
174
194
214
57
62
67
73
80
87
97
107
117
137
157
177
197
217
42
47
52
58
65
72
82
92
102
122
142
162
182
202
d
У1
42
47
53
60
67
77
87
97
117
137
157
177
197
Продолжение табл. 7
4(H8)
42
47
52
58
65
72
82
92
102
122
142
162
182
202
<fe(H8)
51,6
56,6
61,6
67,6
74,6
81,6
91,6
101,6
111,6
131,6
161,6
171,6
191,6
211,6
Хомут (ОСТ 1. 10056-71)
d
40
45
50
56
63
70
D
64
69
74
80
87
94
106
УПЛОТНЕНИЯ
8. Соединение фланцевое струбцинное
{ру < 2,5 МПа, ОСТ 1.76798-83; размеры, мм)
1 - струбцина; 2, 4 - фланец;
3 - уплотнение
Фланец (ОСТ 1.76799-83)
Струбцина (ОСТ 1.76794-83)
Dy
320
400
500
630
800
900
1000
1250
Я
80
ПО
125
L
31,5
44,5
54,5
А
26
18
36
35
39
45
51
/
12,5
17,5
22,5
d
М12
М16
М20
320
400
500
630
800
900
1000
1250
S
3
4
5
6
8
D
365
452
552
685
857
962
1062
1334
Di
360
445
545
678
850
955
1055
1327
Th
350
430
530
660
834
934
1042
1298
D3
330
410
510
640
810
910
1015
1270
Da
336
420
520
653
825
927
1027
1286
Ds
329
411
511
643
813
915
1015
1270
H
16
18
22
24
27
30
h
4,2
4,2
5
7
2
3
Неподвижные соединения
107
Dy
320
400
500
630
800
900
1000
1250
D
12
16
20
M12
M16
M20
L
80
110
125
Lx
30
42
35
Li
45
64
60
Li
20
26
42
и
3
4
и
17
22
25
И
26,5
37
44
Прижим
Продолжение табл. 8
Прижим болтовой
Dy
320
400
500
630
800
900
1000
1250
Hi
19
27
32
7,5
10
12
#3
10,5
15
18
Щ
3,5
4,5
4,5
В
18
24
35
С
1,6
2
2,5
1,5
2
R
10
12
15
7,5
10
12
г
3
4
5
108
УПЛОТНЕНИЯ
Продолжение табл. 8
9. Соединение безрезьбовое
(pv z 32 МПа, ОСТ 12.44.016-76; размеры, мм)
/ - гнездо; 2 - ниппель; 3 - скоба; 4 - защитное кольцо; 5 - кольцо (ГОСТ 9833-73)
Dy
8
12
16
20
25
32
D
14
18
21
24
31
38
А
20
24
26
29
39
46
d
32
36
38
42
55
60
d\
6
8,5
/
8
11
h
15
20
h
27
33
h
18
22
24
27
36
43
к
16
18
20
25
28
h
34
38
42
52
65
Dy
320
400
500
630
800
900
1000
1250
D
12,5
16,5
20,5
L
55
75
100
15
22
25
3
4
1
2
и
15
22
25
I*
3
5
6
H
33
-
32,5
43,5
54,5
я2
20
26
32
#3
8,5
13
16
#4
26
36,5
44,5
#5
9,5
14
17
#6
5,5
6,5
Dy
320
400
500
630
800
900
1000
1250
#7
19
28
34
#8
1.5
3
4
В
27
38
48
24
35
44
Bi
19,5
29
35
Bi
2
3
4
8
10,5
12,5
11
14,5
18,5
12,5
17,5
22,5
1
1,5
2
Л*
120
-
-
г
3
4
5
1,5
2
3
Г*
1
1
2
С
5
8
10
Неподвижные соединения
109
Продолжение табл. 9
Скоба
Фланцевые соединения. Фланцевое соединение трубопроводов - соединение, в ко-
котором герметизация трубопровода обеспечивается за счет упругой или пластической
деформации прокладки под действием силы затяжки, передаваемой болтами через
фланцы. В комплект фланцевого соединения входят два фланца, прокладка, болты или
шпильки с гайками. По способу закрепления на трубе все фланцы делятся на две груп-
группы: свободные и жесткие. Свободные фланцы удерживаются на трубе при помощи от-
бортовки, приварного кольца или бурта, резьбы. Все виды приварных фланцев относят-
относятся к жестким.
Фланцевые соединения различаются конструкцией уплотнительных поверхностей,
из которых наиболее широкое распространение имеют следующие: с соединительным
выступом (с плоской уплотнительной поверхностью), типов "выступ - впадина" и "шип
Dy
8
12
16
20
25
32
D
14
18
21
24
31
38
A
20
24
26
29
39
46
d
7
10
13
16
22
28
d\
13,5
17,5
19,5
22,5
29,5
36,5
d2
11
14
17
20
27
34
/
5
6
h
5,1
7Д
h
29
35
3,4
4,1
С
0,4
0,6
1
1,6
Dy
8
12
16
20
25
32
H
26
30
32
35
46
53
L
42
48
49
55
67
85
d
5
7
r
6
8
9
11
14
17
по
УПЛОТНЕНИЯ
- паз", под линзовое уплотнение, под прокладку овального сечения. Фланцы с соедини-
соединительным выступом применяют, как правило, с плоскими прокладками из резины, паро-
нита, металла. При необходимости использования металлических прокладок целесооб-
целесообразно применять зубчатые, позволяющие снизить в 1,5 - 2 раза моменты затяжки по
сравнению с плоскими. Применяют данный вид уплотнения при давлении до 10 МПа.
Уплотнения типов "выступ-впадина" и "шип-паз" обеспечивают точную фикса-
фиксацию прокладки и защищают ее от выдавливания. Применяют эти виды уплотнений при
давлении до 20 МПа. Линзовые уплотнения более целесообразно использовать при вы-
высоких давлениях B0 * 250 МПа). Под действием давления, распирающего линзовую
прокладку, проявляется эффект самоуплотнения, который возрастает с повышением
давления. Уплотнение овальными прокладками осуществляют при давлении
0,63 -5- 20 МПа. Они, как и линзовые, более надежны при температурных деформациях
трубопроводов, но моменты затяжки их в 2,5 раза ниже.
Применяют фланцы различных конструкций: плоские приварные, приварные
встык, а также на приварном кольце и резьбовые. Например, для условных проходов 10
ч- 1600 мм при давлении до 2,5 МПа и температуре до 450 °С чаще используют плоские
приварные фланцы, а при давлении до 20 МПа и температуре до 600 °С - приварные
встык. Для условных проходов до 500 мм при давлении до 2,5 МПа и температуре
300 °С применяют фланцы на приварном кольце, а при высоком давлении до 250 МПа
и температуре до 500 °С для условных проходов 6 + 200 мм, как правило, используют
резьбовые фланцы.
10. Присоединительные размеры по ГОСТ 1536-76. Тип фланца по ГОСТ 4433-76
(pv < 1 МПа; размеры, мм)
Dy
600
700
800
900
D
760
865
980
1085
A
706
810
920
1023
Dl
670
775
882
985
b
28
30
32
33
Dm
644
750
850
955
r
8
d
29
32
d\
52
58
Болты
Число
22
24
26
Резьба
M27
M30
11. Присоединительные размеры и размеры уплотнительных поверхностей по ГОСТ 12815-80
(ру < 20 МПа; размеры, мм)
„ _ ._ Тип фланца по ГОСТ 4433-76
ш. эскизы к табл. 10 ^
Dy
15
20
25
32
40
50
65
80
100
125
150
A75)
200
B25)
250
D
120
130
150
160
170
210
260
290
360
385
440
475
535
580
670
D\
82
90
102
115
124
160
203
230
292
318
360
394
440
483
572
Dl
47
58
68
78
88
102
122
133
158
184
212
242
285
315
345
29
36
43
51
61
73
95
106
129
155
183
213
239
266
292
Da
39
50
57
65
75
87
109
120
149
175
203
233
259
286
312
*>%
28
35
42
50
60
72
94
105
128
154
182
212
238
265
291
40
51
58
66
76
88
110
121
150
176
204
234
260
287
313
28
32
37
43
55
63
90
97
115
145
175
218
225
-
-
40
45
50
65
75
95
130
160
190
205
240
275
305
-
-
d
22
26
30
33
39
45
52
56
n
4
8
12
16
h
2
3
4
4,5
hi
• з
3,5
6,5
8
10
11
-
b
9
12
14
17
-
r
2,8
4
4,2
5,8
-
Диаметр
шпилек
(ном.)
M20
M24
M27
мзо
М36
М42
М48
М52
Фланец с зубом
Продолжение табл. 11
Dy
10
16
20
25
32
40
50
63
80
100
125
160
200
250
320
400
500
630
D
58
65
78
85
92
110
120
130
175
200
225
280
320
410
495
580
680
830
A
40
45
55
62
70
80
90
100
128
148
175
215
255
332
403
488
588
728
Jh
14
20
25
30
36
45
56
70
L 86
108
133
168
208
258
327
408
508
640
Db
52
60
72
80
86
105
115
125
165
190
215
270
308
400
485
570
670
820
Da
20
25
30
35
45
50
60
73
110
130
155
195
235
310
380
465
565
702
15 ±0,12
20 ± 0.14
25 ± 0.14
30 ± 0,14
40 ±0,17
45 ±0.17
50 ± 0.2
68 ± 0,2
105 ±0,12
125 ±0,13
150 ±0,13
190 ±0,15
230 ± 0,15
300 ±0,15
370 ±0.19
455 ±0.19
555 ± 0.22
692 ± 0,25
40
45
58
65
72
90
100
110
155
180
205
250
290
-
-
-
-
-
H
21
22
16
18
19
21
23
25
Щ
26
27
18
20
21
-
-
-
-
-
b
6
7
8
9
d
9
11
13
14
16
18
20
n
4
8
12
16
20
28
32
40
48
52
Dy
10
16
20
25
32
40
50
63
80
100
125
160
200
250
320
400
500
630
D
58
65
78
85
92 -
110
120
130
175
200
225
280 •
320
410
495
580
680
830
A
40
45
55
62
70
80
90
100
128
148
175
215
255
332
403
488
588
728
A>
14
20
25
30
36
45
56
70
86
108
133
168
208
258
327
408
508
640
A
52
60
72
80
86
105
115
125
164
188
214
268
306
398
482
568
668
818
DA
20
25
30
35
45
50
60
73
110
130
155
195
235
310
380
465
565
702
D%
15 ±0,12
20 ±0,14
25 ±0,14
30 ±0,14
40 ±0,17
45 + 0,17
55 ± 0,2
68 + 0,2
105 ±0,12
125 + 0,13
150 ±0,13
190 ±0,15
230 ±0,15
300 ±0,17
370 ± 0,19
455 ±0,19
555 ± 0,22
692 ± 0,25
H
10
12
14
15
16
18
19
21
23
25
#1
15
17
19
20
18
20
21
-
-
-
-
b
5
6
7
8
h
3
4
5
6
d
9
11
13
14
16
18
20
n
4
4
8
12
16
20
28
32
40
48
52
S
0,4
0,5
Фланец с канавкой
Медное уплотнение
Продолжение табл. 11
114
УПЛОТНЕНИЯ
Типы фланцев регламентированы ГОСТ 12815-80 - ГОСТ 12822-80, ГОСТ 4433-76,
ГОСТ 25660-83, ГОСТ 22512-77, ГОСТ 24935-81, ГОСТ 9399-81 (табл. 10). Соединитель-
Соединительные части по ГОСТ 9400-81, ГОСТ 10493-81, ГОСТ 22790-83 - ГОСТ 22817-83 (табл. 11).
Разделительные диафрагмовые уплотнения. Диафрагмовые уплотнения предназна-
предназначены для разделения сред. Области применения их многообразны: мембранные насосы,
газогидравлические аккумуляторы, приборы, вентили, гидробаки и т.д. Основные вари-
варианты закрепления резинотканевых и резиновых мембран 2 в корпусе с помощью вин-
винтов 1 показаны на рис. 8, а-в. Закрепление резинотканевых мембран рекомендуется
производить с пропуском винтов через мембрану (табл. 12). Для герметичности и на-
надежности закрепления винты следует располагать на расстоянии не менее двух диамет-
диаметров винта от внутренней окружности заделки и размещать их по окружности не реже,
чем через 40 - 50 мм.
а)
г
12. Закрепление резиновых мембран
(размеры, мм)
Толщина
мембраны,
t
3
4
5
6
8
10
К
9
12
14
16
20
25
3,5
5
5,5
6,5
8
10
0,4
0,5
0,6
0,7
0,8
1
5
6
7
8
10
12
S
1,4
1,8
2
2,4
3,2
4
С
0,4
0,5
0,6
0,7
0,8
1
п
0,4
0,5
0,6
0,7
0,8
1
3
4
5
6
8
10
Клапанные уплотнения
115
5.3. КЛАПАННЫЕ УПЛОТНЕНИЯ
Клапанные уплотнения или затворы являются уплотнительными устройствами пе-
периодического действия, предназначены для перекрытия потока рабочей среды.
Клапанные уплотнения классифицируют по материалу контактирующих элемен-
элементов: металл - металл (рис. 9, а-г); металл - неметалл (рис. 9, д); неметалл - неметалл.
Для запорной трубопроводной арматуры общепромышленного назначения с
Dy = 3 * 2000 мм допускаемые утечки регламентированы ГОСТ 9544-75. Клапанные уп-
уплотнения с плоским контактом (рис. 9, а) обычно применяют при Dy < 300 мм,
р < 50 МПа, температуре не более 600 °С. Клапанные уплотнения с контактом по кони-
конической поверхности (рис. 9, б, в) применяют при Dy < 200 мм, р < 250 МПа и температу-
температуре до 600 °С.
а)
г)
д)
Рис. 9
Конструкция, размеры и тип клапанных уплотнений запорной трубопроводной ар-
арматуры с уплотнением типа металл - металл (рис. 9, г), работающим при
р = 1,36 +• 1,5 108 Па и температуре -253 + +600 °С, определены ОСТ 26-07-2042-81. В
работе [13] приведены уплотнения типа металл - металл, предназначенные для гермети-
герметизации разъемных соединений в узлах аппаратуры сверхвысокого газового давления (до
1,5 ГПа). Герметизация осуществляется с помощью двух металлических элементов оп-
определенной геометрии, контактные напряжения между которыми создаются осевыми
сжимающими усилиями.
Упомянутые уплотнения имеют такую геометрию герметизирующих поверхностей,
что материалы в области контакта их элементов при нагружении разъема работают в
условиях, близких к условиям двуосного напряженного состояния. Поэтому контактные
напряжения, а следовательно, и удерживаемые давления рабочего газа не могут превос-
превосходить предела текучести использованных материалов.
Результат (р = 1,5 ГПа) был получен на запорном вентиле, уплотняемые детали ко-
которого выполнены из стали 30ХГСА, с диаметром герметизируемого канала, равным 5
мм. Однако условия всестороннего сжатия материалов сохраняются с увеличением диа-
диаметра герметизируемого канала, поэтому увеличение диаметра не является препятстви-
препятствием для использования уплотнения.
Допуски формы и взаимного расположения уплотнительных поверхностей, выпол-
выполненных по ОСТ 26-07-2042-81, устанавливают по ГОСТ 24643-81. Зависимость ресурса
клапанного уплотнителя трубопроводной арматуры, работающей при температуре до
8*
116
УПЛОТНЕНИЯ
600 °С и давлении до 150 МПа, от контактного давления на уплотнительной поверхно-
поверхности регламентирована ОСТ 26-07-2044-82. Для трубопроводной арматуры, работающей
при давлении 2,66 т4- 104 Па и температуре -200 + +255 °С, типы, конструкции и раз-
размеры клапанных уплотнителей с уплотнителем из фторопласта-4 регламентированы
ОСТ 26-07-1375-82.
Крепление уплотнительных колец и контроль качества крепления выполняют со-
согласно ОСТ 26-07-2047-82. Для трубопроводной арматуры с уплотнителями из поли-
поликарбонатной смолы "дифлон" по ТУ6-05-2П-916-74, работающей в газообразных и
жидких средах при р < 20 МПа и температуре -260 -*¦ +100 "С, типы, конструкции и ос-
основные размеры клапанных уплотнителей установлены ОСТ 26-07-2056-83.
5.4. ПОДВИЖНЫЕ СОЕДИНЕНИЯ
Кольца резиновые уплотнительные круглого сечения. Конструкция и размеры рези-
резиновых уплотнительных колец круглого сечения (рис. 10) регламентированы
ГОСТ 9833-73. Технические требования на кольца приведены в ГОСТ 18829-80. Реко-
Рекомендуемые размеры посадочных мест цилиндрической формы для установки колец да-
даны в приложении к ГОСТ 9833-73.
Рис. 10
Рис. 11
В гидро- и пневмосистемах летательных аппаратов применяют уплотнения с коль-
кольцами круглого сечения по ГОСТ 9833-73, ограниченному ГОСТ 23823-79. Диаметры
колец назначены так, чтобы диаметры штоков и цилиндров соответствовали ряду Ra 20
по ГОСТ 6636-69 и основному ряду ГОСТ 12447-80. Установлены две группы точности
колец (по отклонению диаметра сечения кольца): повышенной - для подвижных соеди-
соединений и нормальной - для неподвижных и подвижных соединений. Резиновые кольца
по ГОСТ 9833-73 применяются до давлений: 50 МПа в неподвижных соединениях;
32 МПа в подвижных соединениях. Скорость перемещения - до 0,5 м/с. Рабочая темпе-
температура -60 * +200 °С. Гарантийный срок эксплуатации колец для неподвижных соеди-
соединений из резины группы 4 при давлении до 32 МПа и температуре 25 °С составляет
7 лет, из резины группы 2-6 лет.
При постоянном давлении р < 20 МПа или пульсирующем давлении р < \0 МПа
рекомендуется применять защитные кольца, либо обеспечивать сочетание размеров,
при котором радиальный зазор не превышает 0,02 мм. Существенным недостатком ре-
резиновых колец по ГОСТ 9833-73 является склонность к скручиванию под действием
сил трения. Указанный недостаток устранен в кольцах Х-образного и овального сече-
сечений.
Для уплотнений внутренних соединений, к которым не предъявляют жестких тре-
требований к герметичности, целесообразно применять кольца уменьшенного сечения. Это
существенно снижает габариты и массу узлов с большим числом уплотнений. Утечки
через кольца круглого сечения интенсивно возрастают с увеличением давления и ско-
скорости движения. Кольца отличаются высокими начальными силами трения в момент
страгивания с места.
Кольца круглого сечения могут применяться при давлении 100 МПа, а в отдель-
отдельных случаях, если устранить выдавливание кольца в зазор при 800 + 1000 МПа, однако
при этом резко сокращается ресурс колец.
Подвижные соединения
117
Уплотнительные кольца овального сечения. Кольца предназначены для уплотнения
подвижных соединений с уплотняемыми диаметрами D^ = 50 + 500 мм (рис. 11). Реко-
Рекомендуемые размеры колец овального сечения и посадочных мест под них приведены в
табл. 13.
13. Размеры колец овального сечения и посадочных мест под них, мм
В отличие от колец круглого сечения кольца с овальным сечением не скручивают-
скручиваются и поэтому более надежны в работе. При давлении больше 15 МПа их рекомендуется
применять с защитными кольцами. Недостатки колец овального сечения - повышенная
сила трения, большая ширина кольца.
Кольца Х-образного сечения. Кольца Х-образного сечения (рис. 12) устойчивы к
скручиванию, по сравнению с кольцами круглого сечения более герметичны в динами-
динамике и создают меньшие силы трения.
Малые габариты и свойство двустороннего уплотнения колец Х-образного сечения
обусловливают их преимущественное применение в качестве уплотнений подвижных
соединений поршней гидроцилиндров систем автоматики. Кольца устанавливают в ка-
канавки с деформацией 10 + 20 %. При больших деформациях сила трения резко возрас-
возрастает, так как в контакт вступает средняя часть сечения кольца.
Тип I
Тип 2
Рис. 12
Рис. 13
Манжеты уплотнительные резиновые для гидравлических устройств. Манжеты по
ГОСТ 14896-84 (рис. 13) предназначены для герметизации штоков и цилиндров диамет-
диаметром 4 ч- 950 мм, работающих при скорости до 0,5 м/с, при давлении 0,1 + 10 МПа или с
защитными кольцами при давлении до 50 МПа, температуре -60 ¦*- +200 °С, ходе до 10
м, частоте срабатывания до 0,5 Гц.
Манжеты симметричного профиля, пригодны для герметизации штоков и цилинд-
цилиндров. Согласно ГОСТ 14896-84 изготавливают манжеты трех типов в зависимости от дав-
давления среды.
Ac
50 ч- 190
200 -г 500
Л
4,5
6,5
b
6
8,5
D
50 + 190
200 + 500
Ax
60 -r 200
210 + 510
H
3,5
5
В
7,2
10
5i
10,2
13
Вг
13,2
16
118
УПЛОТНЕНИЯ
Манжеты типа 1 предназначены для давления 0,1 + 50 МПа. Манжеты типа 2 - для
давления 0,25 -5- 32 МПа только для ремонтных работ. Вместо манжет типа 2 допускает-
допускается применять манжеты типа 3, которые предназначены для давления 1 + 50 МПа.
Нормы манжет.на герметичность следующие: утечка в статике не допускается, в
динамике объем утечки до 0,5 см3/м2 (для манжет типов 1 и 2) и до 0,2 см3/м2 (для
манжет типа 3). Размеры манжет и мест установки под них в штоках и цилиндрах при-
приведены в ГОСТ 14896-84. Конструкция и размеры защитных колец приведены в прило-
приложении к ГОСТ 14896-84; там же даны рекомендации по применению и монтажу ман-
манжет.
Манжеты, по сравнению с кольцами круглого сечения, обеспечивают пониженные
силы трения при давлении менее 1 МПа и значительно больший ресурс. Гибкие губки
манжет допускают повышенные радиальные смещения контртела, допускают примене-
применение более высоких давлений, имеют меньшую утечку. Однако они имеют и ряд недос-
недостатков: способность только к одностороннему уплотнению, увеличенные габариты,
сложность конструкции, высокие силы трения при больших давлениях, необходимость
дублирования манжет другими уплотнителями для исключения подсоса воздуха при
разряжении в рабочих полостях.
Манжеты гидросистем станков (РТМ 2 Г97-1-76). Данные манжеты отличаются от
манжет по ГОСТ 14896-84 геометрией кромки, благодаря чему улучшена герметичность
в динамике и увеличен ресурс в цеховых условиях при давлении до 10 МПа. Размеры
манжет соответствуют типу 1 по ГОСТ 14896-84.
Манжеты с пружинным силовым элементом. Манжеты (рис. 14) предназначены для
уплотнения штоков.
Применение браслетных пружин позволяет стабилизировать контактное давление
во времени во всем диапазоне рабочих температур, что улучшает эксплуатационные
показатели. Размеры этих манжет близки к размерам манжет типа 1 по ГОСТ 14896-84.
Благодаря высокой эффективности такие манжеты практически вытеснили ранее при-
применявшиеся в клапанах резиновые кольца и манжеты без пружин.
а)
6)
Рис. 14
Рис. 15
Манжеты резиновые уплотнительные для пневматических устройств (ГОСТ 6678-72).
Манжеты с пружинным силовым элементом (рис. 15) предназначены для герметизации
штоков и цилиндров с диаметрами 12 ¦*• 320 мм, работающих при давлении 0,005 н-
1 МПа со скоростью возвратно-поступательного движения до 1 м/с и при температуре
-65 -н 150 °С. С целью снижения сил трения и габаритов уплотнительного узла преду-
предусмотрены два типа манжет: 1 - для цилиндров (рис. 15, а); 2 - для штоков (рис. 15, б).
Основная область применения - пневмоцилиндры станочного оборудования, про-
промышленных роботов и тормозных систем наземного транспорта.
Герметичность уплотнения нормируется по падению давления воздуха в уплотняе-
уплотняемой полости, которое не должно превышать 3 кПа за 3 мин, 95% ресурс не менее
100 км. Для нормальной работы манжет необходимо смазывание (подача распыленного
масла в сжатом воздухе) или (при ходе более 15 мм) установка рядом с манжетами сма-
смазочных колец.
Подвижные соединения 119
Резинотканевые шевронные манжеты для гидравлических устройств (ГОСТ 22704-
77). Манжеты (рис. 16) предназначены для герметизации штоков и цилиндров диамет-
диаметром 8 т- 2000 мм, работающих при скорости возвратно-поступательного движения до
3 м/с, давлении до 63 МПа и температуре -50 * +100 °С в среде минеральных масел,
нефти, пресной и морской воды, водных эмульсий.
Предусмотрено несколько размерных ря-
рядов с разными соотношениями высот и диа-
диаметров. Ширина уплотнения определяется
числом манжет в комплекте. Материал ман-
манжет - ткань доместик, ГОСТ 1104-69, прома-
промазанная с двух сторон резиновой смесью с до-
добавками графита в качестве смазочного мате-
материала.
р -6 Осевое поджатие уплотнения в пределах
2 -5 % его ширины рекомендуется осуществ-
осуществлять подтяжкой нажимной буксы. По мере
изнашивания уплотнения предусматривается периодическая подтяжка нажимной буксы
вплоть до уменьшения ширины уплотнения на 20 + 30 % начальной. Гарантийный ре-
ресурс в зависимости от давления и скорости достигает 2000 ч- 14000 км.
Полиамидные манжеты (МН5652-78). Манжеты предназначены для герметизации
штоков и цилиндров диаметром 12 -ь 750 мм при скорости до 2 м/с, давлении до
100 МПа и температуре 0 * 90 °С, в среде воды или эмульсии. Основная область при-
применения - гидропрессовое оборудование.
Фторопластовые манжеты. Манжеты из фторопласта-4 предназначены для гермети-
герметизации штоков диаметром 8 -ь 16 мм при давлении до 6,4 Мпа, скорости до 0,015 м/с и
температуре -50 + +225 °С. Число колец в пакете более четырех, рекомендуется приме-
применять осевую пружину, создающую на опорном кольце давление 2 -г- 2,5 МПа. Герметич-
Герметичность проверяют по отсутствию пузырьков воздуха или азота при давлении 6,4 МПа.
Гарантийный ресурс 50 н- 200 км в зависимости от диаметра.
Фторопластовые уплотнительные устройства с гофрированными пружинами. Устрой-
Устройства состоят из двух разрезных колец с развернутыми в диаметрально-противоположные
стороны замками и стальной ленточной гофрированной пружины, отжимающей кольца
от дна посадочной канавки. Они предназначены для герметизации цилиндров диамет-
диаметром 18 -г- 100 мм при давлении до 21 МПа, скорости до 0,5 м/с и температуре -60 +
+ 125 °С. Характеризуются двухсторонним действием и допускают монтаж в неразъем-
неразъемные канавки.
Допускаемые утечки при работе на масле АМГ-10 не более 50 см3/мин. Невысокая
герметичность уплотнения вызвана наличием разрезов на кольцах и отсутствием на-
начального прижима колец по торцам.
Поршневые металлические (чугунные) кольца (ГОСТ 9515-81). Предназначены для
уплотнения цилиндров диаметром 20 ¦*¦ 1250 мм, для компрессоров (с давлением до
40 МПа), холодильных компрессоров и вакуумных насосов. Ресурс достигает 104 ч. В
сортамент колец входят также маслосъемные кольца.
Поршневые кольца для двигателей внутреннего сгорания (ГОСТ 621-87). Материал
колец - чугун, замок прямой или косой. Кольца предназначены для эксплуатации при
циклическом изменении температуры до 300 °С и давлении до 10 МПа и переменной
скорости до 15 м/с. В комплект уплотнительного узла обычно входят компрессионные
и маслосъемные кольца. Износостойкие покрытия на поверхности трения обеспечива-
обеспечивают ресурс до 104 ч и пути 300000 км в течение 10 лет.
Поршневые кольца для гидроцилиндров (ОСТ 2А54-1-72). Кольца применяют в гид-
гидросистемах станкостроения в среде вязких масел при давлении до 15 МПа, скорости до
7,5 м/с и температуре до 100 °С. В комплект уплотнительного узла входят 2-9 колец с
последовательно развернутыми в противоположные стороны разрезами. Кольца изго-
изготавливают из чугуна СЧ20 с косым разрезом для уплотняемых диаметров 32 *¦ 1000 мм.
120
УПЛОТНЕНИЯ
Резиновые грязесъемники для штоков (ГОСТ 24811-81). Грязесъемники выпускают
четырех типов (рис. 17): типы 1, 2 и 4 для очистки штоков диаметром от 4 до 500, 900 и
2000 мм от пыли и дорожной грязи; тип 3 для очистки штоков диаметром 200 н- 360 мм
от частиц угля, щебня и других абразивных частиц. Манжеты типов 1, 2 и 4 конструк-
конструктивно различаются только способом крепления в месте установки. Манжеты типа 3 со
скребком из твердого и износостойкого фторопласта-4 работоспособны в наиболее тя-
тяжелых условиях.
Рис. 17
Уплотнения валов. Особенности работы уплотнений для соединений с вращатель-
вращательным движением деталей являются плохие условия отвода тепла, выделяемого на тру-
трущихся поверхностях, и сравнительно быстрый износ уплотнительных элементов, а так-
также соответствующего участка вала, особенно при наличии давления запираемой среды.
Условия эксплуатации этих уплотнений характеризуются относительно низким давле-
давлением (менее 1 МПа), высокой скоростью скольжения (до 20 м/с), температурным диа-
диапазоном -50 -ь +150 °С, высокими требованиями к герметичности, которые предопреде-
предопределяют применение только контактных уплотнений.
Возможности манжетных уплотнений ограничиваются свойствами резины. Прежде
всего имеют значение ускоренное ее старение при высокой температуре и потеря эла-
эластичности при низкой, а также механическое стеклование при больших частотах вра-
вращения.
Важной причиной утечек через манжетные уплотнения является наличие статиче-
статического и динамического эксцентриситетов вала. Еще одной из причин негерметичности
манжет является отклонение от перпендикулярности уплотняющей кромки к оси вала".
Большое влияние на герметичность оказывают загрязнение рабочей жидкости и со-
состояние поверхности вала.
Резиновые армированные манжеты для валов изготовляют двух типов: тип I - од-
нокромочные (рис. 18, а); тип II - однокромочные с пыльником (рис. 18, б). Выпускают
также манжеты с двумя браслетными пружинами (рис. 18, в) для среды минеральных
масел при температуре -50 -ь +100 °С.
Манжеты эксплуатируются при давлении менее 0,05 МПа в минеральных маслах,
воде, дизельном топливе до скорости 20 м/с и температуре -60 + +170 °С в зависимости
от группы резины. Гарантийный срок службы и хранения для манжет из резины состав-
составляет 10 лет с наработкой 1000 ч; для манжет из резины групп 4-6 - 2500 ч.
Список литературы
121
Пружины для манжет изготовляют по ОСТ 23.1-77-71 из стальной углеродистой
проволоки. Каркасы для манжет выпускают по ОСТ 3805 146-78.
в)
Рис. 18
Для уплотнения вращательных соединений применяются также резиновые кольца
круглого сечения. Однако при установке этих колец по обычной схеме (под прямым
углом к оси вращения вала) они могут применяться лишь при небольших окружных
скоростях (до 0,5 м/с) и небольшом радиальном сжатии кольца, которое не должно
превышать 5-6% его поперечного сечения.
При более высоких значениях этих параметров на контактной поверхности разви-
развиваются высокие температуры, вызывающие старение резины и быстрый выход уплотне-
уплотнения из строя. Снизить трение и облегчить условия работы можно установкой колец под
некоторым углом к плоскости, перпендикулярной к оси вала, в результате чего значи-
значительно улучшаются смазка скользящих поверхностей и условия отвода от них тепла.
Рассматриваемые кольца рекомендуется применять при окружных скоростях вала
до 2,5 м/с и давлении жидкости до 0,5 МПа. При окружной скорости 0,5 м/с давление
может быть повышено до 5 МПа.
СПИСОК ЛИТЕРАТУРЫ
1. Аврущенко В.Х. Резиновые уплотнители. Л.: Химия, 1978.
2. Анурьев В.И. Справочник конструктора-машиностроителя. Т.2.М.: Машино-
Машиностроение, 1978.
3. Бабкин В.Т., Зайченко А.А., Александров В.В. Герметичность неподвижных со-
соединений гидравлических систем. М.: Машиностроение, 1977.
4. Башта Т.М. Машиностроительная гидравлика. М.: Машиностроение, 1971.
5. Бугов А.У. Фланцевые соединения. Л.: Машиностроение, 1974.
6. Васильцов Э.А. Бесконтактные уплотнения. Л.: Машиностроение, 1974.
7. Голубев А.И., Кондаков Л.А. Уплотнения и уплотнительная техника: Справоч-
Справочник. М.: Машиностроение, 1986.
8. Кокичев В.М. Уплотняющие устройства в машиностроении. Л.: Судпромгиз.
1962.
9. Кондаков Л.А. Рабочие жидкости и уплотнения гидравлических систем. М.: Ма-
Машиностроение, 1982.
10. Лащинский А.А. Конструирование сварных химических аппаратов: Справочник.
Л.: Машиностроение, 1981.
11. Макаров Г.В. Ушютнительные устройства. Л.: Машиностроение. 1973.
12. Протопопов В.Б. Уплотнения судовых фланцевых соединений. Л.: Судострое-
Судостроение. 1966.
13. Соединения трубопроводов: Справочник. Т. 1,2, М.: Издательство стандартов,
1988.
122
6. МЕТОДЫ РАСЧЕТА И НОРМЫ ПРОЧНОСТИ
6.1. ОБЩИЕ СВЕДЕНИЯ
Целью прочностного расчета является определение поведения элементов, деталей,
узлов конструкции при механических воздействиях. К таковым можно отнести внешние
сосредоточенные и распределенные по поверхности усилия, объемные силы, абсолют-
абсолютные или относительные перемещения элементов конструкций, массовые или тепловые
потоки, градиенты температур, температурные поля, излучения и пр. Условимся в даль-
дальнейшем независимо от физической природы этих воздействий называть их нагрузками,
имея в виду, что их действие приводит к изменению напряженно-деформированного
состояния конструкций.
Прочностью обычно называют способность конструкции сохранять работоспособ-
работоспособность под действием механических нагрузок в заданных условиях эксплуатации в тече-
течение заранее оговоренного срока (частным случаем является неограниченный срок год-
годности рассматриваемых элементов). Основным понятием при оценке прочности конст-
конструкции является понятие "предельное состояние*.
Наиболее часто используют одно из следующих определений предельного состоя-
состояния конструкций: 1) достижение величинами напряжений (или их комбинаций) макси-
максимально допустимых значений; 2) достижение нагрузками (или комбинациями) предель-
предельных значений, связанных с исчерпанием несущей способности силовых элементов; 3)
достижение упругими и упругопластическими перемещениями предельных значений,
определяемых конструктивными особенностями узлов и элементов машины или свой-
свойствами материала; 4) разрушение конструкций от действия циклических напряжений
(явления усталости); 5) потеря устойчивости деформированного состояния конструк-
конструкций.
Каждому предельному состоянию в расчетной практике соответствуют либо спе-
специфические методы расчета, либо особым образом определяемые характеристики мате-
материала. Однако можно указать некоторые общие правила, которыми необходимо руково-
руководствоваться при расчете на прочность. Существенными величинами в этом случае яв-
являются размеры силовых элементов и их сечений, прочностные характеристики мате-
материалов, расчетные значения нагрузок. Основным требованием при выборе этих величин
является следующее: все отклонения от номинальных значений должны быть в сторону
увеличения расчетных напряжений или уменьшения расчетных предельных нагрузок.
Например, расчетные размеры сечений берутся не номинальными и не средними для
возможных реализаций, а минимальными (или максимальными) с учетом допусков на
изготовление.
Основные прочностные характеристики материала - временное сопротивление <т?
при расчетной температуре Т, предел текучести &1 юш условный предел текучести
а 5,2 при расчетной температуре - выбирают из нижних возможных значений этих ха-
характеристик, приводимых в технических условиях на материалы или в справочниках.
Упругие постоянные - модуль упругости Е и коэффициент Пуассона ц - выбирают из
условия максимальных перемещений при заданных нагрузках. Из множества действую-
действующих на конструкцию нагрузок в качестве расчетных следует принимать нагрузки, мак-
максимизирующие напряжения или перемещения в конструкции. Аналогичные требования
- делать все допущения идущими в запас прочности - следует выполнять как при выбо-
выборе физических характеристик материала, так и при учете физических и химических ус-
условий работы конструкции (наличие излучений, химически активной среды, повышен-
повышенных или пониженных температур и др.) Наиболее предпочтительным в случае расчета
уже изготовленных силовых элементов является использование точных значений проч-
прочностных характеристик, определенных на образцах, изготовленных из той же заготовки,
что и деталь. Иногда для наиболее ответственных конструкций проводят специальные
Общие сведения 123
исследования прочности, включая экспериментальные нагружения силовых элементов в
условиях, приближенных к реальным условиям эксплуатации. Однако в большинстве
случаев оказывается достаточным при оценке результатов прочностного расчета ис-
использование стандартных прочностных характеристик: стт, <тв, остаточного удлинения
при растяжении 5ост, относительного сужения vj/, предела выносливости <t_i и др.
Однако не всегда удается определить нагрузки и свойства материалов (расчетные
значения) абсолютно точно. В действительности они всегда носят вероятностный ха-
характер и являются верхними (или нижними) границами возможных значений с какой-
то вероятностью.
Поэтому не всегда следует предпочитать точные и сложные методики расчета, если
погрешность в задании нагрузок и свойств материала велика. Например, очень точные
и сложные методы линейной теории упругости обычно мало применимы, так как ре-
реальные материалы обычно нелинейны даже и в области упругих деформаций, так что
реальные распределения и величины напряжений и деформаций далеки от расчетных
при практически значимых величинах нагрузок. Более общим недостатком всех мето-
методов, связанных с определением локального напряженно-деформированного состояния,
является во-первых, весьма приближенный характер используемых нелинейных зави-
зависимостей между тензорами напряжений и деформаций при сложном напряженном со-
состоянии и, во-вторых, трудности определения предельного состояния материала в этих
условиях, не говоря о предельном состоянии конструкции.
Далее, почти всегда реальная конструкция при расчете заменяется некоторой схе-
схемой, лишь приближенно отражающей действительную геометрию силовых элементов,
условия их соединения и нагружения. Если степень приближения мала или просто не-
недостаточна, то использовать сложные и дорогостоящие методы расчета выбранной схе-
схемы не имеет смысла, так как достигнутое уточнение результата перекроется заведомо
большей погрешностью расчетной схемы, т.е. уровень сложности расчетной методики
должен соответствовать как уровню знаний о свойствах материала, так и близости рас-
расчетной модели к реальной конструкции.
В большинстве случаев выбор расчетной схемы и ожидаемого предельного состоя-
состояния оказывается более существенной задачей для окончательного суждения о прочно-
прочности конструкции, чем поиск дальнейшего решения в рамках сделанного выбора.
Обычно подлежащую прочностному расчету деталь мысленно разбивают на эле-
элементы (стержни, пластины, оболочки и т.п.). Конфигурация детали в виде взаимного
расположения составляющих ее элементов, их размеров и способов соединения, а так-
также набор способов и мест приложения нагрузок составляют расчетную схему детали.
Причем в общем случае не следует делать различия между действующими внешними по
отношению к конструкции усилиями и так называемыми "реакциями", так как в рам-
рамках прочностного расчета деталей они неразличимы. Для того, чтобы сформулировать
некоторые дополнительные правила, введем определения, позволяющие описать доста-
достаточно общий подход к расчетам на перечисленные выше виды предельных состояний.
В качестве расчетных нагрузок Рр будем' принимать максимальные эксплуатацион-
эксплуатационные или испытательные нагрузки. В результате расчета обычно получают значения Рпр
нагрузок, соответствующие достижению какого-то предельного состояния. Допускае-
Допускаемую нагрузку Pq будем считать равной предельной нагрузке Рпр, деленной на коэффи-
коэффициент безопасности л, значение которого определяется видом предельного состояния.
Условие прочности имеет вид
где к - коэффициент запаса.
В случае применения к одному и тому же силовому элементу (сечению, локально-
локальному объему материала) разных критериев предельного состояния при одновременном
приложении расчетных нагрузок разных видов (например, Р и q) условие прочности
можно выразить в виде
124 МЕТОДЫ РАСЧЕТА И НОРМЫ ПРОЧНОСТИ
где /*о, «ft - допускаемые значения нагрузок в случаях, когда они действуют по отдельно-
отдельности.
Иногда отдельные детали должны сохранять прочность в аварийной ситуации, ко-
которая может рассматриваться как обычная расчетная схема. Значение коэффициента
запаса к в случае аварийной ситуации можно принимать к ? 2/3.
Если расчет ведется по допускаемым напряжениям (критерий 1), величина их при
расчете на аварийную ситуацию может быть увеличена з 1,5 раза.
Ниже рассматриваются некоторые особенности методов расчета и приводятся ре-
рекомендуемые значения коэффициентов безопасности для каждого из указанных выше
предельных состояний. Желательное значение коэффициента запаса во всех случаях
к = 1. Изложение рассчитано на знание и использование конструктором наиболее про-
проверенных способов расчета конкретных силовых элементов, которые описаны во мно-
многих пособиях и справочниках.
Для некоторых конструкций методы расчета и нормы прочности регламентируются
государственными стандартами или отраслевыми нормативными документами
(например, ГОСТ 14249-89 "Сосуды и аппараты. Нормы и методы расчета на проч-
прочность" и др.).
6.2. РАСЧЕТ КОНСТРУКЦИЙ
ПО ДОПУСКАЕМЫМ НАПРЯЖЕНИЯМ
Необходимым условием прогнозирования прочности по первому предельному со-
состоянию является возможность определения напряженного состояния конструкции в
каждой ее точке или хотя бы в точках, напряжения в которых заведомо наиболее опас-
опасны. Однако было бы неверно полагать, что прочность конструкции однозначно опреде-
определяется локальным напряженным состоянием вне зависимости от распределения напря-
напряжений по всему объему материала. Например, однородное по сечению растяжение
стержня из пластического материала более опасно, чем его изгиб, при одинаковых мак-
максимальных напряжениях. Также опасность нарушения прочности конструкции не уве-
увеличивается в той степени, в какой увеличиваются напряжения при появлении отвер-
отверстий, выточек или других концентраторов напряжений. Излагаемая ниже версия расче-
расчета в какой-то степени учитывает такую неоднозначность связи напряжений с прочно-
прочностью.
Обычно составляющие элементы расчетной схемы детали представляются стерж-
стержнями, кольцами, пластинами или оболочками. Действие этих элементов друг на друга в
местах их сопряжения заменяется действием некоторых усилий, являющихся по обще-
общепринятой терминологии граничными или краевыми для этих элементов и внутренними
для конструкции в целом. Таким образом, каждый элемент оказывается нагруженным
внешними по отношению к конструкции воздействиями и подлежащими определению
краевыми усилиями. Величина последних определяется обычно из кинематических или
силовых условий сопряжения элементов или деталей между собой. После этого каждый
элемент может рассматриваться отдельно и определение поля напряжений в нем обыч-
обычно не представляет затруднений, при этом найденные ранее внутренние усилия счита-
считаются для рассматриваемого элемента внешними нагрузками.
Введем определения и условные обозначения видов напряжений:
ат - общие мембранные напряжения, вызываемые действием внешних нагрузок
(соответствуют безмоментному напряженному состоянию пластин и оболочек от дейст-
действия давления и осевого усилия, средним напряжениям по сечению стержней и прирав-
приравниваемых к ним элементов);
<т„ - общие изгибные напряжения, вызываемые действием внешних механических
моментов и их уравновешивающие (соответствуют изгибанию стержней, цилиндриче-
Расчет конструкций по допускаемым напряжениям 125
ских, конических и др. оболочек в целом, изгибу пластин поперечными нагрузками,
поворотной деформации сечения колец и фланцев);
ст«м " местные мембранные напряжения, возникающие в зонах действия краевых
сил и моментов для оболочек, при локальном приложении нагрузок;
стим - местные изгибные напряжения, вызываемые в оболочках действием краевых
сил и моментов, самоуравновешенных по всему сечению, действием локальных нагру-
нагрузок;
°мк " местные напряжения в зонах концентрации, вызываемые наличием резкого
изменения геометрических очертаний конструкции (отверстия, галтели, резьбы, выточ-
выточки и т.д.);
ав - предел прочности;
ат - предел текучести;
ао,2 - условный предел текучести;
огн - номинальное допускаемое напряжение;
Лв = 2,6; «,. = «о,2 = 1,5 - номинальные коэффициенты безопасности;
к - коэффициент запаса по допускаемым напряжениям.
Будем считать нагрузки статическими, или меняющимися настолько медленно, что
силами инерции можно пренебречь. Прочностной расчет позволяет выявить точки с
наиболее опасными комбинациями напряжений (имеются в виду составляющие тензора
напряжений). Для каждого вида напряжений (<тж, сти и т.д.) можно определить направ-
направления и величины главных напряжений а\ ? aj > oj, обозначаемые далее aim сг^ и т.д.,
где / - номер главной площадки.
После этого вычисляются значения напряжений четырех групп, определяемых в
виде:
Для сравнения расчетного напряженного состояния со стандартными характери-
характеристиками материала стт, ст0 2, <тв по значениям главных напряжений для каждой группы
вычисляются эквивалентные напряжения. Соотношение между эквивалентным напря-
напряжением и составляющими тензора напряжений определяется выбором так называемой
"теории прочности", и сейчас в качестве критерия эквивалентности почти всегда ис-
используется для пластичных материалов F5 ? 12% и титан) постоянство энергии формо-
формоизменения, приводящее к выражению
где j - номер группы расчетных напряжений.
Последнее выражение следует использовать для 1, 2 и 3 групп напряжений, при
этом в качестве коэффициента запаса к принимается наименьшее из значений:
где ан = Cj/rij или стн = ао,2/ЛО.2 ДЛЯ величин к\, ki и стн = cr,j//JB для величины кз<
При статическом нагружении конструкций из хрупких материалов F5 ^ 5% и ли-
литье) максимальное из напряжений а# сравнивается с номинальным допускаемым на-
напряжением стн = ад/ял и коэффициент запаса по допускаемым напряжениям принима-
принимается равным
126 МЕТОДЫ РАСЧЕТА И НОРМЫ ПРОЧНОСТИ
При этом, если в оцениваемом напряженно-деформированном состоянии явно
преобладает сжатие, то для определения номинального допускаемого напряжения он
следует использовать предел прочности при сжатии aw, если преобладает растяжение -
предел прочности при растяжении сгвр, если преобладает чистый изгиб - предел прочно-
прочности при изгибе о-щ,. Во всех сомнительных случаях следует использовать наименьший по
модулю из пределов прочности авр, aw, сш.
При действии высоких температур принимаемые значения пределов ат, сто,2> о"в
должны соответствовать максимальной достигаемой материалом силового элемента
средней по сечению температуре за время действия расчетной нагрузки.
При расчете элементов, предназначенных для работы при низких температурах,
следует учитывать возможность понижения пластических свойств материала
(проявление хладноломкости).
Во всех случаях условием прочности является выполнение неравенства к 2. 1.
Пальцы, болты, штифты, шпонки и другие крепежные детали, работающие на срез,
следует рассчитывать, исходя из допускаемого напряжения на срез
и проверять на смятие по формуле
[<усм]<@,3-ь0,4)стт.
Во всех остальных случаях допускаемое напряжение на смятие следует принимать
согласно формуле
Для современных численных методов расчета (например, метода конечных элемен-
элементов), дающих сразу распределение напряжений по объему материала, использование
предлагаемых критериев затруднено, так как помимо определения максимальных на-
напряжений в отдельных точках необходимо определять средние по сечению напряжения,
напряжения в отсутствии концентраторов и др.
6.3. ПРОЧНОСТЬ ПРИ ЦИКЛИЧЕСКИХ НАПРЯЖЕНИЯХ
При расчетах напряжений от воздействия колебательных нагрузок предпочтитель-
предпочтительными являются методы определения перемещений с последующим определением де-
деформаций. Так как циклические напряжения обычно не превышают упругих, от дефор-
деформаций можно перейти к напряжениям по обычным линейным соотношениям связи
тензора напряжений и тензора деформаций. Обязательным в этом случае является учет
концентрации напряжений на отверстиях, галтелях и т.д., т.е. в обозначениях предыду-
предыдущего подраздела следует использовать главные напряжения четвертой группы ст#. Для
опасных точек вычисляются амплитуда изменения напряжений аа и среднее напряже-
напряжение стт, выбираемые как наиболее опасные комбинации ааи и omkL из следующих пар:
Прочность при циклических напряжениях
127
Здесь для перехода от сложного напряженного состояния (cti > ст2 > ст3) к простому
использован критерий наибольшего касательного напряжения, а максимальные и ми-
минимальные значения разностей главных напряжений выбираются в течение одного
цикла изменения напряжений. Сам цикл и моменты времени в нем для определения
напряжений выбираются таким образом, чтобы сочетание аа, от давало минимальный
коэффициент запаса. Это сочетание назовем расчетными напряжениями аа и ат.
Методик расчета коэффициента запаса по циклической прочности (или по устало-
усталости) довольно много. Предлагаемая ниже использует только одну характеристику мате-
материала, а именно предел прочности огв при обычном статическом нагружении. Она осно-
основана на зависимостях, полученных Хейвудом Р.Б. для наиболее распространенных кон-
конструкционных материалов - стали и алюминия:
afl/aB = A - ат/ав)[А0 +y(l-Ao)], A)
где для сталей
для алюминиевых сплавов
и = lgJV; N - число циклов до разрушения при данных сто и ат. Размерность напря-
напряжений - Па.
Если известны расчетные напряжения аа, <тт и число циклов за время эксплуата-
эксплуатации ЛГЭ, коэффициент запаса можно вычислить тремя способами. Во-первых, подстав-
подставляя в выражение A) значения аа и ст, можно найти разрушающее число циклов Np и
определить коэффициент запаса по числу циклов
kN =
B)
Подставив в A) известные значения ат и ЛГЭ, можно найти разрушающее значение
амплитуды напряжений стор и найти коэффициент запаса по амплитуде
C)
Принимая в качестве известных значения аа и N3, определяем разрушающее значе-
значение среднего напряжения атр и коэффициент запаса по среднему напряжению
D)
128 МЕТОДЫ РАСЧЕТА И НОРМЫ ПРОЧНОСТИ
Окончательное значение коэффициента запаса принимают наименьшим из полу-
полученных значений B)-D).
Для большинства материалов определены экспериментально характеристики уста-
усталостной прочности, наиболее известные из которых предел выносливости при симмет-
симметричном (ат = 0) цикле напряжений о.\ и предел выносливости при отнулевом ат = аа
цикле напряжений cq. Они определяются при фиксированном, так называемом базовом
числе циклов Nq, равном обычно Nq = 107. Наиболее употребляемыми при ат < аа вы-
выражениями, связывающими прочностные характеристики материала с предельными
значениями действующих напряжений Стдр и атр, являются следующие:
<*ар = <*-l[l " сттр/^в] E)
и
ар
F)
где уст = Bст_! - сто)/<то - коэффициент чувствительности к асимметрии напряжений.
Коэффициент запаса может быть определен так, как показано выше при использо-
использовании выражения A) и фиксированном Nt т.е. полагают, что N3 = Nq, либо полагают
отношение сг^р : атр равным отношению расчетных напряжений ай : аж и при этом ус-
условии находят из соотношений E) или F) величину ат. Отношение к = —— можно
2ста
считать коэффициентом запаса. Следует помнить, что справочными значениями а.\ и
сто можно пользоваться, когда эксплуатационное число циклов N3 близко к базовому
N& При значительном расхождении надо определять ct_i и ctq при Nq& N3.
6.4. ПРЕДЕЛЬНЫЕ НАГРУЗКИ
Определение коэффициента запаса по предельным нагрузкам может проводиться
только для конструкций, изготовленных из материалов с хорошей пластичностью (для
металлов и сплавов с остаточным относительным удлинением 65 ? 12% и титановых
сплавов). Во всех остальных случаях его можно использовать только для приблизи-
приблизительной оценки разрушающих нагрузок. Основы теории предельного равновесия и дос-
достаточно большое количество решений задач по определению предельных нагрузок при-
приведены в данном справочнике в разделе "Методы определения предельных нагрузок".
Коэффициент запаса прочности по допускаемым нагрузкам (по предельным нагрузкам
или по несущей способности) определяют по формуле
где п - коэффициент безопасности, принимаемый для ответственных деталей п = 2,5,
для менее ответственных п "= 2,0.
6.5. КОЭФФИЦИЕНТ ЗАПАСА
ПО ДОПУСКАЕМЫМ ПЕРЕМЕЩЕНИЯМ
Допускаемые перемещения Д обычно определяют для податливых элементов или
цепочки элементов. Их значение задают исходя из конструктивных особенностей, со-
соображений безопасности, условий сохранения работоспособности в деформированном
состоянии и других условий.
Перемещения конкретных точек конструкции могут быть обусловлены темпера-
температурными перепадами или условиями Д,., упругими деформациями Ду под действием рас-
Расчет на устойчивоегь
129
четных внешних нагрузок, пластическими деформациями Л^, остающимися после сня-
снятия нагрузок или завершения цикла работы установки.
При известном предельно допустимом значении перемещения Д коэффициент за-
запаса по допускаемым перемещениям к определяют соотношением
Величины упругих деформаций Лу и пластических деформаций Дпл в условиях ди-
динамического нагружения могут определяться как методом дискретных моделей, так и
другими более точными методами, в том числе указанными в разделе "Расчет элементов
конструкций при динамических нагрузках".
6.6. РАСЧЕТ НА УСТОЙЧИВОСТЬ
Величины расчетных действующих нагрузок Рр и расчетных напряжений стр в сило-
силовых элементах используют также в необходимых случаях для определения коэффициен-
коэффициента запаса по устойчивости, определяемого соотношениями
где Ркр, акр - критические нагрузки и напряжения; п - коэффициент безопасности,
принимаемый п — 3,5 для пластических материалов F5 ? 12% и титановые сплавы),
/1 = 5- для хрупких материалов.
Критические нагрузки для стержней постоянного поперечного сечения определя-
определяются по формуле Эйлера
где Е - модуль упругости материала; /пцП - минимальный главный центральный момент
инерции поперечного сечения стержня; / - длина стержня; ц - коэффициент приведе-
приведения длины, зависящий от типа и расположения опор и характера нагрузки
(сосредоточенная сила Р или распределенная нагрузка q).
В табл. 1 приведены схемы нагружения стержней и коэффициенты приведения \i.
Для равномерного распределения по длине стержня нагрузки q
Для жестких балок, главные моменты
инерции сечения которых сильно отличают-
отличаются, характерна потеря устойчивости плоской
формы изгиба при нагружении в плоскости
наибольшей жесткости. Типичным элемен-
элементом такого рода является полоса (рис. 1),
нагружаемая нагрузкой в своей плоскости. В
этом случае условия опирания должны быть
описаны более подробно (табл. 2), чем
обычно.
Рис. 1
9 Том 2
130
МЕТОДЫ РАСЧЕТА И НОРМЫ ПРОЧНОСТИ
1. Коэффициенты приведения длины ц
для однопролетных стержней постоянного поперечного сечения
Схема нагружения стержня
Схема нагружения стержня
1,0
2,0
0,5
-0,7
-0,7
1,0
2,0
0,73
1,12
0,365
0,433
0,577
0,723
0,56
Расчет на устойчивость
131
2. Типы опорных устройств
Схема
Характеристика
опорного устройства
У
Полная заделка
I
Заделка в плоскости ху, шарнир в
плоскости yz
Шарнир в плоскости xz, заделка в
плоскости yz
Шарнир в плоскости
ляющие в плоскости yz
направ-
Шарниры в плоскости xz и yz
В табл. 3 приведены величины критических нагрузок для некоторых случаев на-
гружения полос. Здесь Ву = EJ - жесткость при изгибе в плоскости xz (наименьшая
жесткость); С = GJK - жесткость свободного кручения: G - модуль сдвига; /к - геометри-
геометрическая жесткость при кручении; / - длина полосы.
При продольном нагружении цилиндрических и конических оболочек критические
напряжения определяются выражением
сг„ « =
где Е - модуль упругости; 8 - толщина оболочки; R - радиус кривизны оболочки.
Для верхних оценок критических напряжений используется значение коэффици-
енга кх = 0,605, для нижних (наиболее вероятных) принимают
132
МЕТОДЫ РАСЧЕТА И НОРМЫ ПРОЧНОСТИ
3. Криппескне нагрузки для некоторых случаев нагружения полос
Схема
Критическая нагрузка
м.
а.
rt
и
и
iP
77Г
= я
a: I 0,1 0,2 0,3 0,4
56,01 29,11 21,01 17,82 16,94
0,5
а: I
0,1
608
0,2
155
0,3
80,9
0,4
58,6
0,5
53,0
Расчет на устойчивость
133
Продолжение табл. 3
Схема
Критическая нагрузка
(<7/)кр =
(<7/)кр =2S,
(ql)Kp= 48,6
= 129,1
Для очень короткого тонкостенного цилиндра, длина которого / < 1,22-//й5 для
опертых и / < 2,5-/Л5 для защемленных торцов, критическое продольное напряжение
рассчитывается по формуле
л
сткр = М л '
где к\ = 0,9 для опертых и к\ = 3,6 для защемленных торцов.
Критическое давление для цилиндрических оболочек с опертыми торцами опреде-
определяется формулами:
весьма короткие оболочки длиной / < 2,i
RI2 '
где к\ = 1,8 для всестороннего давления, к\ = 3,6 для бокового давления;
короткие оболочки (у^ВЬ < I < 25>/^5 при боковом давлении:
0,92
кг
где к\ определяется из табл. 4;
134
МЕТОДЫ РАСЧЕТА И НОРМЫ ПРОЧНОСТИ
оболочки средней длины / > 25у[вЕ:
где к\ определяется из табл. 4;
длинные оболочки / >
= 0,275
R/8
к
100
1,0
4. Значения коэффициента к\
250
0,7
500
0,6
1000
0,5
1500
0,4
СПИСОК ЛИТЕРАТУРЫ
1. Прочность. Устойчивость. Колебания: Справочник. В 3-х т. М.: Машинострое-
Машиностроение, 1968.
2. Нормы расчета на прочность оборудования и трубопроводов АЭУ. ПНАЭ Г-7-
OO2-86. М.: Энергоатомиздат, 1989.
3. Трощенко В.Т., Сосновский ЛА. Сопротивление усталости металлов и сплавов:
Справочник. Киев, Наукова думка, 1987,
4. Любошиц М.И., Ицкович Г.М. Справочник по сопротивлению материалов.
Минск, "Высшейшая школа", 1969.
5. Лизин В.Т., Пяткин В А. Устойчивость оболочковых конструкций. ГОНТИ-11,
1973.
135_
7. РАСЧЕТ БАЛОК И СТЕРЖНЕЙ
7.1. ГЕОМЕТРИЧЕСКИЕ ХАРАКТЕРИСТИКИ СЕЧЕНИЙ
Поперечные сечения стержней характеризуются несколькими величинами, значения
которых зависят от вида сечения, его размеров и расположения осей. К. таковым
относятся: А - площадь поперечного сечения; хс, ус - координаты центра тяжести сечения
С; Sx - статический момент площади сечения относительно оси х; Jx - момент инерции
сечения относительно оси х; Wx - момент сопротивления сечения относительно оси х;
Ур - полярный момент инерции. Эти величины связаны соотношениями (рис. 1)
Рис. 1
= [ydA; Jx = \y2dA;
Sy = \xdA, Jy = \x2dA;
=^ Jp=
A)
Если ось Xj параллельна оси х, то
Sxl=Sx+aA, B)
где а - расстояние между осями х и х^.
Статический момент относительно оси, проходящей через центр тяжести, равен
нулю. Момент инерции Jxl относительно оси хь параллельной оси Xq, проходящей через
центр тяжести С, связан с У^, моментом инерции относительно хо, выражением
Jx\ =Jx0+a А-
C)
Для сложной фигуры (рис. 2)
136
РАСЧЕТ БАЛОК И СТЕРЖНЕЙ
i=\
Jx =
2x0
/=i
D)
v =
-'С
Моментом сопротивления относительно оси х называют отношение момента
инерции относительно оси х к расстоянию утах максимально удаленной точки сечения от
оси jc :
Утах
В табл. 1 даны выражения для определения площадей и центров тяжести некоторых
видов сечений. Последовательное использование этих выражений и формул A)-D)
данного раздела позволяет определить площади и статические моменты практически
любых встречающихся видов сечений.
В табл. 3 гл.1, т.1 приведены моменты инерции J и моменты сопротивления W
некоторых видов сечений. Геометрические характеристики сечений стандартных
профилей можно найти в табл. 31-34 гл. 4, т. 1.
1. Площади и центры тяжести плоских фигур
Фигура
Площадь
Центр тяжести
Треугольник
А
A = -ah
во = ос
СО = -АО
3
Центр тяжести - в точке
пересечения медиан
Прямоугольник
длина диагонали
Центр тяжести лежит
в точке пересечения
осей
и диагоналей
П араллел ограмм
A =zh
Центр тяжести лежит
в точке пересечения
диагоналей
Геометрические характеристики сечений
137
Продолжение табл. 1
Трапеция
h
3 ZI+Z2
Полукруг
f
А = = -nd
2 8
Круговой сектор
Ф - центральный угол
а - длина хорды
sr =
sin-
sins'' ф з"Т
2
Круговой сегмент
Ф - центральный угол
А =
r(s -a)
И = г V4r -a
2
СО =
ПА
з • з ф
2 rJ sinJ -
I A
Сектор кругового кольца
При а = л:
(D2 2
к\ R -Г
А =
ОС =
При а = л :
Л3 -г3)
Ъп\Я2 -г2
138
РАСЧЕТ БАЛОК И СТЕРЖНЕЙ
Продолжение табл. 1
Фигура
Эллипс
[ °
2а
i
L. <i
т
Эллиптический сегмент
Площадь
А — nab
Площадь эллиптического
сегмента определяется
а
произведением отношения —
на площадь соответствующего
кругового сегмента г = Ь
^элл ~ т -^к р
Центр тяжести
Центр тяжести лежит в
середине эллипса, т.е. в точке
пересечения его осей
Центр тяжести
эллиптического сегмента
совпадает с центром тяжести
кругового сегмента при
г-Ъ
7.2. РАСЧЕТ СТЕРЖНЕЙ ПОСТОЯННОГО СЕЧЕНИЯ
НА РАСТЯЖЕНИЕ, СЖАТИЕ И ИЗГИБ
Напряжения при растяжении-сжатии продольным усилием F, приложенным по
центральной оси стержня, должны удовлетворять условию
где [ст] равно наименьшему из значений —L, ——.
1,5 2,6
Следует иметь в виду, что для некоторых материалов значения ав при растяжении и
сжатии отличаются.
При внецентренном сжатии стержень считается нагруженным продольным усилием
F и изгибающим моментом М = Fb, где b расстояние между линией действия усилия F и
центральной осью.
Стержень, нагруженный изгибающими моментами и поперечными усилиями,
обычно называют балкой. Максимальные нормальные напряжения, возникающие в
опасных сечениях находящихся под нагрузкой балок, определяются формулой
^max ~~ '"max/ "»
где Мтях - изгибающий момент, действующий в опасном сечении балки; W - момент
сопротивления сечения.
Максимальные напряжения не должны превышать допускаемого напряжения, т.е.
должно выполняться условие прочности
<W ^ И-
Координаты опасного сечения, максимальные изгибающие моменты, опорные
реакции и максимальные прогибы для разных схем нагружения балок приведены в
табл. 2.
Расчет стержней постоянного сечения на растяжение, сжатие и изгиб
139
2. Расчетные данные для разных схем нагружения балок
Схема
нагружения
балки
Опорные реакции R
и максимальный
изгибающий момент
Miiax
Координата
опасного сечения
Максимальный
прогиб /
=RB = F/2;
тах = Я/4
го ~
48?У
RA = Fb/i;
RB = Fa/1;
Mnax = Fab/l
f = [Fl2aJl /B7f/)]
при
Z=j\l2-a2\/3
2
X
Ra= Rb
Mnax =
<:<,Za< 1+ с
f =
FCV
при z = с + 1/2
z
=RB = F,
max = Fa
a < zo ^ 1 - a
Fa
24EJ
при z = 1/2
Л/mox =
f -~
3EJ
F
a
С 1-
z
С
Ft
С, \ <
RB = F + Fi + F2;
Mnax =
f =
C/-/,)-
a. fc
RA=(F/2)(a2/P)C-a/t);
Rf*(F/l)(b/l)(
при zo = b
Zo= b
(при а = 0,586/)
при
M
_ Fab
max " 2/2
/ = 0,0098—
EJ
140
РАСЧЕТ БЛЛОК И СТЕРЖНЕЙ
Продолжение табл.2
Схема
нагружения
балки
А
<
4
t
а\
4
i
i
- г н
II
1ИШ|
А
f?
ri
JL
h
i
.*.
¦J..*,t,JL
1НН1Ш
,ггГЛТГ
^ j
^rrrrrfl
'ft
\
<r
t
t
*
t
f
л
r
Л
t
\U
Опорные реакции R
и максимальный
изгибающий момент Mnwx
М -Л/8
RA ~ F&Qa+byi2;
Rb = Л12(ЗА+л)//3;
AW « /Ь^//2;
Rj~Ra= ql/L;
RA = 3/8<//;
Лд = ^//3;
¦™ max = . rr
Л/шах = гЬзг
i?j = ^//2;
A/max =- qfi/6
Координата
опасного
сечения zo
Zo - 0; //2; /
i-i
-I
...
Zq = 0.5/
• -/
Максимальный
прогиб/
л3
"^ 192?Л
при t-Щ
f = IFat&fYSEJx
X CG+6J]
при о > Ь
f = IFdL&IXbEI*
x Ce+ftJ]
при а < 6
4
^ 384ЕГ
при z= 1Д
при j=0
ql
при? =0,421/
/ = 0,00652-^r
при 5-0,5193/
10,9^/4
f mEJ
при г = 0,5/
^ 30?У
при ? = 0
Расчет стержней постоянного сечения на растяжение, сжатие и изгиб
141
Продолжение табл.2
Схема
нагружения
балки
Опорные реакции R
и максимальный
изгибающий момент Mmin
Координата
опасного
сечения Zg
Максимальный
прогиб /
Ив = Ql/2;
Мпах =
S \20EJ
при z — О
RB = qa/2;
2 V 3
qalJ
J ~ ЗОЕ/ Х
xE - 5fl / / + a3 / /3
при г = О
2
RB = qa/2;
\20EJ
при z = О
RB = 9//2;
Mmax = qfi/A
/ =
У
12О?У
при z =О
^=A1/64)?/;
Лд = B1/64)?/
f =
при z = 0,5/
Л.4 = A/10)?/;
RB = B/5)ql-
f =
4\9 EJ
I t I
'¦>о
=A1/40)?/;
= (9/40)?/;
f =
327,8?7
при г = 0,402/
ft?
imx = E/96)?/2
3840?/
при г = //2
142
РАСЧЕТ БАЛОК И СТЕРЖНЕЙ
Продолжение табл.2
Схема
нагружения
балки
Опорные реакции R
и максимальный
изгибающий момент А/тах
Координата
опасного
сечения zq
Максимальный
прогиб /
RA = C/20)?/;
RB »
/ =
764?У
при z = 0,525/
Мгаах =
Afm,x = ql/46,6
Zo = 0,548/
RB=0;
Mnax =
<^0< /
J 1EJ
при z =О
а + Ь<
+M2)l2 -Mia2 -
Мпах = М] + М2
при г — о
Mnax =
при г = о
Напряжение среза в сечении, нагружаемом перерезывающим усилием Q,
определяется выражением
где S - статический момент части сечения, лежащей выше рассматриваемой точки
сечения относительно центральной оси, перпендикулярной направлению усилия Q; J -
момент инерции сечения относительно той же оси; b - ширина сечения в месте
определения напряжений.
Расчеты стержней на кручение рассмотрены в гл. 8. Предельные нагрузки стержней
и балок приведены в гл. 9.
7.3. РАСЧЕТ ПРЯМЫХ СТЕРЖНЕЙ ПОСТОЯННОГО
СЕЧЕНИЯ НА УСТОЙЧИВОСТЬ
Нагрузка, превышение которой вызывает потерю устойчивости первоначальной
формы тела, называется критической нагрузкой (Ркр).
Формула для определения критической силы для разных случаев закрепления
концов стержня в общем случае имеет вид
р _ л ^min (c\
и носит название формулы Эйлера.
Здесь Е - модуль упругости материала стержня; /min - наименьший момент инерции
сечения стержня; ц/ = /п р - приведенная длина стержня, где ц - коэффициент
приведения длины, зависящий от схемы закрепления и нагружения стержня; / -
фактическая длина стержня.
В главе 6 приведены в табл.1 значения ц для разных случаев закрепления концов
стержня.
Расчет прямых стержней постоянной сечения на устойчивость 143
Пределы применимости формулы Эйлера
Формула Sitnepa применима лишь в случае, если справедлив закон Гука, т.е. пока
критическое напряжение, возникшее в сжатом стержне при критической нагрузке Рхр,
не превышает предела пропорциональности
сткр = *кр / Лг ^ °пц.
Критическое напряжение акр представим в виде
где X = \xl / im-m ~ безразмерная величина, называемая гибкостью стержня;
/min= ^min / As - наименьший главный радиус инерции площади сечения стержня.
Формула F) справедлива, начиная с определенного значения гибкости, которое
может быть найдено из условия
Определим предельную гибкость A,,ipw ниже которой формулой F) пользоваться
нельзя:
Сжатые стержни по методике их расчета делятся на три группы:
стержни большой гибкости (X S А^д), для которых критическое напряжение
определяют по формуле Эйлера;
стержни средней гибкости (Хо ^ X <, А^ред), для них критическое напряжение
определяют по эмпирической формуле Тстмайера-Ясииского
акр=а-Ь\, G)
где Xq - такое значение гибкости, при котором величина окр, вычисленная по формуле
G), становится равной предельному напряжению при сжатии, т.е. для пластичных
материалов акр = <тт; для хрупких материалов сткр = ав;
стержни малой гибкости (А. < Xq), для которых критическое напряжение принимают
постоянным (равным предельному). Такие стерж*ги рассчитывают только на прочность.
Значения постоянных коэффициентов а и Ь приведены в табл.3.
144
РАСЧЕТ БАЛОК И СТЕРЖНЕЙ
3. Значения постоянных коэффициентов
Материал
Ст2
СтЗ
20, Ст4
25, Ст5, 35Л
35, 45Л
45
50, 55Л
14Г2, 14ХГС,
15ХСНД
ЗОХМА, ЗОХГСА,
40ХНМА
Дюралюминий Д16Т
Сосна, ель
<*т(<*0,2)
стпи
а
b
МПа
220
240
260
280
320
360
380
350
850
320
-
190
200
220
240
270
305
320
300
700
255
-
264
310
328
350
398
449
473
429
1000
406
29,3
0,7
1,14
1,11
1,15
1,43
1,67
1,87
1,52
5,57
2,83
0,194
^-пред
105
100
96
92
90
85
82
83
55
53
70
62
61
60
57
55
52
50
50
28
30
-
Для сжатых стержней большой гибкости применение стали с высокими
механическими характеристиками не оправдано, так как величина модуля продольной
упругости (Е) примерно одинакова для стали разных марок и, следовательно,
применение стали более высокого качества не приводит к повышению акр. Для стержней
средней и малой гибкости с повышением механических характеристик стали возрастает и
акр-
Пример расчета. Проверить на устойчивость при [яу] - 3 трубчатую стойку (рис. 3)
из стали ЗОХГСА (стпц = 3,5 ¦ 108 Па, Е = 2,1 • 10й Па).
¦1О*Н
Рис. 3
Решение. Предельная гибкость для материала стойки
Т = 77.
Расчет прямых стержней постоянной сечения на устойчивость 145
Геометрические характеристики поперечного сечения
I ,/Т IX I
= 45,3 см4;
64 l
13,1 см2;
/mln=/' = V/nun/^ =136 см.
Гибкость стойки (при v = 0,7)
* = v///min = 86,7.
Следовательно, X > Хщ^д и формула Эйлера применима.
Критическая сила
^^ 4
Лц> крЛ Т^
АЛ
Коэффициент запаса устойчивости
Использование коэффициентов уменьшения
основного допускаемого напряжения
Центрально сжатые стержни с малой гибкостью (X < Xq) сохраняют несущую
способность при условии, если напряжения не превышают опасного напряжения, т.е.
а < сто (ДДЯ хрупких материалов gq = ав; для пластичных материалов oq = ст).
В случае стержней с большой гибкостью опасным состоянием следует считать
момент возникновения в сжатом стержне напряжений, равных акр. Поэтому для
обеспечения работоспособности стержня необходимо выполнение следующего условия
устойчивости:
ст^[а1у, (8)
где [ст]у - допускаемое напряжение на устойчивость, определяемое по формуле
[а]у = аКр/лу.
Здесь Лу - коэффициент запаса устойчивости, который из-за возможной
эксцентричности приложения нагрузки, искривления стержня и неоднородности
материала принимается всегда несколько большим основного коэффициента запаса
прочности. Для стали яу =1,8 + 3,0; для чугуна Лу =5,0 + 5,5; для дерева яу=2,8+3,2.
Чем больше гибкость, тем меньшим принимается nv.
На практике при расчете на устойчивость принято пользоваться не допускаемым
напряжением на устойчивость [а]у, а допускаемым напряжением на сжатие [а] с
соответствующим поправочным коэффициентом <р
Му = <р[ст], (9)
где ф = (окр/ао)(«о/йу) - коэффициент продольного изгиба или коэффициент
уменьшения допускаемого напряжения на сжатие, который зависит от материала и
гибкости стержня (табл. 4).
10 Том 2
146
РАСЧЕТ БАЛОК И СТЕРЖНЕЙ
4. Значения коэффициента ф продольного изгиба для различных материалов
Гибкость
X
0
10
20
30
40
50
60
70
80
90
100
ПО
120
130
140
150
160
170
180
190
200
210
220
СтЗ, Ст4
1,00
0,99
0,97
0,95
0,92
0,89
0,86
0,81
0,75
0,69
0,60
0,52
0,45
0,40
0,36
0,32
0,29
0,26
0,23
0,21
0,19
0,17
0.16
14Г2, 15ГС, 10Г2С,
10Г2СД, 15ХСНД
1,00
0,98
0,95
0,92
0,89
0,84
0,78
0,71
0,63
0,54
0,46
0,39
0,33
0,29
0,25
0,23
0,21
0,19
0,17
0,15
0,13
0,12
0,11
Дюралюминий
Д16Т
1,00
0,999
0,998
0,835
0,700
0,568
0,455
0,353
0,269
0,212
0,172
0,142
0,119
0,101
0,087
0,076
-
-
-
-
_
-
-
Таким образом, учитывая (9) формулу проверки на устойчивость (8) теперь можно
представить в виде
а = F/A, * Ф[а1.
По коэффициентам продольного изгиба рассчитывают в основном элементы строительных
конструкций и мостов. Для элементов машиностроительных конструкций в большинстве случаев
приняты более высокие коэффициенты запаса (см. гл. 16) и, кроме того, нет строгой
регламентации значений допускаемых напряжений, поэтому не рекомендуется выполнять их расчет
по коэффициентам ср. Исключением являются элементы металлических конструкций подъемно-
транспортных сооружений, для которых широко распространен расчет по коэффициентам <р.
Выбор рациональной формы поперечных сечений сжатых стержней
Рациональной будет такая форма сжатого стержня, при которой при определенной
площади величина наименьшего радиуса инерции /min является наибольшей.
Введем безразмерную характеристику
которую назовем удельным радиусом инерции. О рациональности того или иного
сечения можно судить на основании данных, приведенных в табл. S.
Анализ приведенных данных показывает, что наиболее рациональными являются
трубчатые и коробчатые тонкостенные сечения, а наименее рациональными сплошные
прямоугольные сечения.
Расчет прямых стержней постоянной сечения на устойчивость 147
При расчете тонкостенных трубчатых стержней (труба с отношением диаметра к
толщине D/Ъ = 10 ¦*- 60) следует учитывать опасность местного выпучивания стенок.
Расчет надо вести по пониженной величине критического напряжения, получаемой
путем умножения акр на коэффициент v < 1.
При проектировании стержней, несущая способность которых определяется
сопротивлением потере устойчивости, следует стремиться к тому, чтобы стержень был
равноустойчивым во всех направлениях, т.е. чтобы главные моменты инерции были по
возможности одинаковыми.
5. Значения удельного радиуса инерции для различных сечений
Сечение
Трубчатое (а = 4в/^нар= 0,95+0,8)
Трубчатое (а = 0,7+0,8)
Уголковое
Двутавровое
Швеллерное
Квадратное
Круглое
Прямоугольное (Л = 2Ь)
2,25-1,64
1,2-1,0
0,5-0,3
0,41-0,27
0,41-0,29
0,289
0,283
0,204
СПИСОК ЛИТЕРАТУРЫ
1. Болотин В.В. Статистические методы в строительной механике. М.: Стройиздат,
1965. 278 с.
2. Вольмнр А.С. Устойчивость деформируемых систем. М.: Наука, 1967. 150 с.
3. Коганов Л.М. Основы теории пластичности. М.: Наука, 1969. 314 с.
4. Нейбер Г. Концентрация напряжений. М.: Гостехиздат, 1947. 98 с.
5. Пановко Я.Г. Основы прикладной теории упругих колебаний. М.:
Машиностроение, 1967. 244 с.
6. Писаренко Г.Г., Лебедев А.А- Сопротивление материалов деформированию и
разрушению при сложном напряженном состоянии. Киев: Наукова Думка. 1969. 198 с.
7. Прочность, усточивость, колебания: Справочник. В 3-х т. / Под обш.ред. И.А.
Биргера и Я.Г. Пановко. М.: Машиностроение. 1968. 421 с.
8. Расчет на прочность деталей машин: Справочник. /И.А.Биргер, Б.Ф. Шорр, Г.Б.
Иосилевич.М.: Машиностроение, 1979. 372 с.
9. Расчеты на прочность в машиностроении/Под ред. С.Д. Пономарева, В.Л.
Бидермана, К.К. Лихарева и др. М.: Машгиз. 1956. 262 с.
10. Серенсен СВ., Когаев В.П., Козлов Л.А., Шнейдерович P.M. Несущая
способность и расчеты деталей машин на прочность. М.: Машгиз, 1954. 238 с.
11. Стрелецкий Н.С. Основы статистического учета коэффициента запаса прочности
сооружений. М.: Госстройиздат. 1947. 140 с.
10*
148
8. РАСЧЕТ ДЕТАЛЕЙ И ЭЛЕМЕНТОВ КОНСТРУКЦИЙ
8.1. РАСЧЕТ ГИБКИХ НИТЕЙ
Два основных свойства гибких нитей:
нить работает только на растяжение;
сила N, растягивающая нить, всегда направлена по касательной к нити (рис. 1).
Упругостью нити можно пренебречь, если отношение длины нити к расстоянию
между опорами существенно больше возможной деформации нити (обычно, если
L
— > 1,03, где L - длина нити; / - расстояние между опорами). Собственным весом нити
/
обычно пренебрегают, если он составляет не больше 10% от внешних нагрузок.
и
Рис. 1
1. Формулы для расчета гибких нитей
Нить под
У
Ял
д
Н 7тЬ
Натяжени
действием п
1
А \
е нити
Схемы нагружения i
юперечной с
р
л расчетные формулы
осредоточенной силы
Первый вариант
Распор нити Н известен.
0 i нЛ 1)
"л i
RA
н
' и\ fV
1 if 'я2/2'
в
нТ
HI '
Hi
Fa
I '
4;
Расчет гибких нитей
149
Продолжение табл. 1
Второй вариант
Известна длина нити L, величина Н подлежит определению.
L =
откуда
Н =
L4 „I? [2a1 2a
/4 /2 I /2
+ 1 +
4а
+ 1
При а = —
прогиб нити
Н =
-1
Я _ I (V, .
Нить под действием двух сосредоточенных поперечных сил
Первый вариант
Распор нити Я известен.
H
RA =
i
RB =
Fxa
I
I I
H '
H
H
A)
B)
C)
ISO
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Продолжение табл. 1
Прогиб нити:
Натяжение нити по участкам:
Н
+c
l.
HI
HI
[C
HI
HI
H
N23 =
H
if
cosa0
\
—ч
\
cos a
cosa-
Второй вариант
Известна длина нити L; величина Н подлежит
определению.
И
L =
{а2 - а{
D)
С учетом A) - C) L = ДН). Аналитическое решение задачи громоздко, поэтому применяют
приближенный метод. Задаваясь различными величинами Н(Н\, #2-.), определяют из условия
D) длину нити L], L2 и, строя кривую L =ЛН), находят величину Н.
Нить под действием равномерно распределенной нагрузки
Задаются натяжением Н, определяя прогиб и
У
длину нити, или, задаваясь тах , находят
_н
UZU
Н
натяжение нити Н.
Пргиб нити
Наибольший прогиб
Длина нити
ql
Расчет гибких нитей
151
Продолжение табл. 1
Можно воспользоваться приближенным равенством
24Я
2 '
E)
откуда
Н =
2J6I — - I I '
Формулу E) можно записать в следующем виде
/ 31 /
Нить под действием сосредоточенной силы, приложенной в середине пролета
Расчет нити с учетом упругости материала
у2 Упругая деформация нити
и
и
14
N Н I F
? = = ,1 +
EAS EAS
2 '
где N - полное, натяжение нити, Н;
? - модуль упругости материала, МПа;
А3 - плошадь поперечного сечения, м2.
tga0 = ;
2#
Длина нити
Если первоначальная длина нити Lq, to длина нити под нагрузкой
L = IqA + г); F = 2Н
Рассмотрим частный случай, когда — = 1.
-1.
1-
JL к.
EAS Г
152
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Продолжение табл. 1
Схемы нагружения и расчетные формулы
Тогда
F = 2Я —
-1
271
1-
Н
ЕЛ.
если считать величину
И
ЕЛ.
«1.
Прогиб точки приложения силы
8.2. СТЕРЖНЕВЫЕ СИСТЕМЫ (ФЕРМЫ)
Рассмотрим стержневые системы (фермы) с прямолинейными стержнями.
Работа стержней на растяжение или сжатие в стержневых системах возможна только
в том случае, когда стержни соединены в узлы с помощью шарниров, а внешние силы
приложены в узловых точках. В реальных конструкциях стержни соединяют в узлы
обычно сваркой и, следовательно, расчет в предположении шарнирных узлов является
приближенным, не учитывающим дополнительные напряжения изгиба.
В табл. 2 приведены расчетные формулы для определения сил в стержнях
ферменных конструкций.
2. Формулы для определения сил в стержнях ферменных конструкций
Схемы нагружения и расчетные формулы
схема (а)
N =
2 cos a
схема (б)
N, = -F
COSI
Н = ИЪ =-F
вертикальном стержне.
йп(щ + ос2)
sinfaj +a2)
cos(aj -9)
сила в
Стержневые системы (фермы)
153
Продолжение табл. 2
+ ^i-sine [
а2 J
Rb-
— cos9+ — - 1 sin9
а \а2 )
Н = Fcos9.
*)
г Ь
ft
схема (в)
-..-. f.
1 + 2 —^- cos a
1_
2 cosa + —
/?2 = ^2 cosa = F
H = N2 sin a = —
As2 cos2 a
1
As2 cos a
/sin a
2 cos a + —
cos2 a
где v4j[ и AS2 - площади сечения стержней.
схема (г)
F
Реакции опор равны —.
2
Из условия равновесия узла А
N{ sin a + — F = 0; Ny cosa + N5 - 0;
откуда
A, 1 г ЛГ
JVi = - —-; F; N5 =
2 sin a
Из условия равновесия узла Б
cosa
—-;
2 sin a
= 2Nl cosa.
1
2 sin a
F;
sin a
154
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Продолжение табл. 2
Схемы нагружения и расчетные формулы
Получаем
1
Nj
cos а
sin а
2 sin a
F\
F;
N6 = N7 =
cos а
2 sin а
1
2 sin а
6 3 Г к А 5 ?
схема (о)
Реакции в опорах равны —. Расчет следует
2
начать с узла Б. Так как внешние силы к узлу
не приложены, то N\ = 0; N2 = 0. Далее
переходим к узлу А и находим
хт 1 г ы COSa г
2 sin a 2 sin а
Условие равновесия узла К:
cosa „
#12=0;
2 sin a
Условие равновесия узла В.
2 sin a
smot
To же для узла Г: N\4 = 0.
Так как ферма симетрична, то для сил в его
правой половине имеем ^4 = ./Уз; N$ = N1... и
т.д.
8.3. РАСЧЕТ ЗВЕЗДООБРАЗНОЙ ФЕРМЫ
Описание и обозначение. Циклически симметричная стержневая конструкция в виде
звездообразной фермы несет жесткий груз. Стержни постоянного по длине сечения
работают только на растяжение - сжатие. Нагрузки, действующие на груз, приводятся к
силам, приложенным в точке О, расположенной на оси симметрии конструкции и в
плоскости, проходящей через концы закрепления стержней на грузе (рис. 2).
Геометрия фермы полностью описывается четырьмя параметрами: h - высота
фермы; /fj - радиус окружности, на которой расположены концы стержней на грузе; R2 -
радиус окружности закрепления других концов стержней; 2л - число стержней в ферме; п
- любое целое число больше двух.
Узлы фермь!, находящиеся на грузе, нумеруются от нуля до п - 1 по часовой
стрелке, если смотреть на плоскость yoz с вершины оси х, причем нулевой узел
Расчет звездообразной фермы
155
Л
\х
Рис.2
расположен на оси у согласно рис. 3; углы ц/,-, а, р, у, ср и длина / стержня выражаются
через основные параметры фермы:
X
Jit
Vi =—, i = 0, 1, 2,..., и-1,
п
7t
а = - ;
п
R-) cos a - R\
= -± 1- ;
И
;
COS ф
Л . п R2 .
cos у = — ; sin p = —— sin a.
Рис.3
Осевая нагрузка Fx. Все стержни находятся в одинаковом напряженном состоянии.
Сила в стержне
Inh
Смещение груза
FJ'
2nEAch
2 '
где ? - модуль упругости материала; As - площадь сечения стержня.
^56 РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Момент Мх. Силы в стержнях (см. рис.3)
2nRx sin 3
Угол поворота груза вокруг оси х
_ МХ1
2nR\EAs sin2 p
Поперечные нагрузки Fy, Mv Под действием сил вследствие растяжения - сжатия
стержней фермы точка О груза получит: v - перемещение вдоль оси у; п - поворот вокруг
оси z (см. рис. 3).
(¦
F + М sin tp cosp
RAh
/2
/i?>l5/f1Asin2p
/ / 2 2 2
sin ф cosB + M. sin <p cos p + sin В
Продольные силы в двух стержнях / - го узла:
.. EAS ( . о . 2л/ . _ 2я/Л EAs
^л = v —-*- sin p sin sin (p cos (J cos + r| —*
I \ П П ) /
AT EAS( . o . 2ni . _ 2я|Л Б45Л
"/0 = v —, - Sin р Sin — - Sin ф COS P COS + II i~
I \ П П J /*
/ = 0, 1, 2, ..., л-1.
8.4. РАСЧЕТ СТЕРЖНЕВОЙ ПОДВЕСКИ
Описание и обозначения. Жесткий груз в виде осесимметричного тела вращения
закреплен на циклически симметричной пространственной стержневой конструкции
(рис. 4).
Стержни круглого постоянного по длине сечения равномерно распределены по
окружности, концы их жестко защемлены, оси стержней пересекаются в одной точке О.
Нагрузки, действующие на груз, приводятся к силам, приложенным в точке О; I - длина
стержня; As - площадь сечения; / - момент инерции сечения; W - момент сопртивления
сечения; л - число стержней в подвеске; п ? 3; а - угол наклона стержней к продольной
оси х; 0 <, а <, я; Е, G - модули упругости первого и второго рода.
Коэффициенты жесткости:
ЕА. \2EJ 6EJ 4EJ 2GJ
С2"; СЗ=1Г' С4 =
д, = — с, sin oc+c2 1+cos см;
а2 - т (С2^2 -*- 2сзЛ + C4/(J +cos2 а| + С5 sin2 а ; а
+ C3)cosa.
Растет стержневой подвески
157
Н
Продольное усилие в i - м стержне
Осевое нагружение. Перемещение точки О вдоль
оси*
и =
Cjcos a + с, sin
in а]
Продольное усилие в стержне
N = ис^ cos а.
Изгибающие моменты на концах стержней:
МА - -Мв =
Максимальные напряжения возникают в плоско-
плоскости, проходящей через ось х и ось стержня:
N М
А .
As W
As W
Поперечное иагружепие. Смещение v точки О
вдоль осп у и угол поворота р груза относительно
оси z при действии усилий Fy и Мг вычисляются
по формулам:
а{а2 -
2x1
Nt = -vqsmacos ; / = 0,1,2, ..., и-L
я
1Ьгибающие моменты на концах / - го стержня в плоскости, проходящей через ось л- и i - й
стержень,
Изгабающие моменты на концах i - го стержня в плоскости, перпендикулярной плоскости,
проходящей через ось х и / - й стержень,
Ма - [~VC3 +p(/i + C)cos]sin
Afg = fv^C2/-C3)
Крутящий момент в / - м стержне
sin——
2я/
Му = Re < shi a sin ——.
158 РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Действие момента Мх. Угол поворота груза вокруг осп х
А (С2Л2 + 2с$Я + С4 Jsin2 a + c$ cos2 a
Изгибающие моменты на концах стержней:
МА = -y(c3R +c4)sina;'
Мв = у[с2Л/ - с3(Я - /) - с4 jsina.
Крутящий момент в стержнях
Мк = ус5 cos а.
Частота собственных колебаний груза. Л/ - масса груза; Jx - массовый момент инерции от-
относительно оси х; Jy - массовый момент инерции отноаггельно оси у.
Груз имеет четыре частоты собственных колебаний:
в направлении оси х
вокруг оси .х
1 I » ( 2 ¦ 2 \
-— I— с, cos a+c2sm a ;
v2 = — Jy~\[c2r1 + 2*3* + C4Jsin2 a + с5 COS2 aj;
шошая и высшая частоты в любой плоскости, проходящей через ось х,
\Ма-1 +Jva\ -
V-1A =
3,4 =Т-
-JvaA
In \ 2Wy
Приближенная формула для частого случая. Когда к грузу в точке О приложены только
силы Fx и Fr то продольную силу в наиболее нагруженном стержне можно оцешпъ по формуле
COS a sin a
Расчет деталей на кручение
159
8.5. РАСЧЕТ ДЕТАЛЕЙ НА КРУЧЕНИЕ
3. Формулы для расчета деталей на кручение
Схемы нагружения и расчетные формулы
Расчет вала сплошного сечения
Максимальное касательное напряжение
где Мк - крутящий момент;
/_ = - полярный момент инерции.
32
D
Угол сдвига при радиусе —
2
у =
2/
/ ч MJ тт„ 2/
где ф(/) = ¦—— = . ¦ ¦- ; Ф - угол поворота концевого сечения; G - модуль сдвига.
GJp G D
Угол поворота на единицу длины вала 0 =
г
1
L.
ч
f
It?max
г
<
-\
_ ч
Расчет стержня прямоугольного сечения
Максимальные касательные напряжения
действуют на середине большей стороны
(а > в):
'max 2 '
Lab
где L =
Угол поворота на единицу длины стержня
0,216
;
Для сечения в виде вытянутого прямоугольника к^ = к2 = —.
Расчет полого вала
160
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Продолжение табл. 3
Схемы нагружения и расчетные формулы
Если толщина стенки 5 = — (D - d) мала по сравнению со средним радиусом гс =—(?> + d),
то касательные напряжения постоянны но толщине:
Расчет трубчатых тонкостенных стержней (схемы в, б, в);
гае Л3 - площадь, ограниченная средней линией сечения трубы;
й)
б)
ще Гя ——? геометрическая жесткость сечения стержня при кручении.
Для трубы (схемы а, б)
где L - длина контура.
Для трубы (схема в)
Расчет стержней открытого профиля
•;
Брусья большой кривизны
161
Продолжение табл. 3
3MJ
3 '
Угол поворота
где / - длина стержня; G - модуль сдвига. Угол
поворота на единицу длины 9 = ——.
Вилка кардана нагружена крутящим моментом
Мк. Нормальные максимальные напряжения в
заделке A-1)
1-0,212-
где
Здесь
Q =
при ц = 0,3.
*,
У -
0.514/2/3
Ь2Щ1-0,2Щ'
Q и Мк - сила и крутящий момент,
воспринимаемые одной проушиной вилки.
Угол поворота
Gbr
где g - модуль сдвига.
Примечание. Значение допускаемого относительтгого угла поворота [6] для разных
конструкции колеблется в довольно широких пределах:
[01 - @,15 + 2) Ум или [01 = @,26 -г 3,5IQ-4 рад/см. ___
8.6. БРУСЬЯ БОЛЬШОЙ КРИВИЗНЫ
К кривым брусьям относятся грузоподъемные крюки, проушины, звенья цепей,
ободы шкивов и т.п.
Распределение нормальных напряжений в поперечных сечениях кривых брусьев
иное, чем в брусьях с прямой осью. Это различие тем больше, чем больше кривизна
бруса, характеризуемая отношением высоты поперечного сечения h (рис. 5) кривого
стержня к радиусу кривизны R его оси. Условно принято различать брусья малой
кривизны, у которых h/R < 1/5, и брусья большой кривизны, у которых h/R ? 1/5.
*
в?
i
¦
Рис.5
11 Том 2
162
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Для стержня большой кривизны условие прочности:
My t N
Asl(rH-y) As l°]i
где As - площадь поперечного сечения; М - изгибающий момент в сечении; N - продо-
продольное усилие в сечении; у - расстояние от нейтральной оси до рассматриваемой точки
сечения; Ль hi - расстояние от нейтральной линии до конечных волокон балки; гн -
радиус кривизны нейтрального слоя; I = R- rH; R- радиус слоя, в котором расположены
центры тяжести сечений бруса.
В зависимости от того, в каких точках сечения суммарные напряжения от изгиба и
растяжения будут наибольшими, соответственно следует подставлять у\ = h\ или У2 = -hi
и гн - ух = Rx или гн - у2 = R2.
4. Радиус кривизны нейтрального слоя ги для сечений различной формы
Форма сечения и радиус кривизны нейтрального слоя
Брусья большой кривизны
163
Продолжение табл. 4
5. Наиболыиие изгибающие моменты и перемещения в кривых брусьях
Изгибающий момент
Перемещение
MA=FrH
Вертикальное перемещение сечения А
/ = 0,785—^-.
EJ
Горизонтальное перемещение сечения В:
Горизонтальное перемещение сечения В:
/ = 0,356^-
11*
164
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Продолжение табл. 5
MA=2Frt
Вертикальное перемещение сечения В:
/ = 0,471^-
EJ
Горизонтальное перемещение сечения R.
f = 1,571
1±
EJ
Сближение концевых сечений:
,3
EJ
я ,2
т7
Обозначения: гн- радиус кривизны нейтрального слоя; / - момент инерции сечения;
Е - модуль упругости.
8.7. РАСЧЕТ ВАЛОВ И ОСЕЙ
Общие сведения. Валы предназначены для передачи вращающего момента от одной
вращающейся детали машины к другой. Валы несут на себе детали механизма и
поэтому в зависимости от конструкции работают или на совместное действие изгиба и
кручения или только на кручение. Различают валы прямые, коленчатые и гибкие. Оси,
в отличие от валов, не передают вращающего момента, но также являются элементами,
несущими на себе те или иные детали. Оси работают только на изгиб.
Для посадки подшипников валы снабжены заплечиками или упорными буртиками
(рис. 6, а, б), высота которых должна соответствовать радиусам закруглений на кольцах
подшипников и условиям демонтажа подшипников. Переходные участки валов между
соседними ступенями разных диаметров выполняют с полукруглой канавкой для выхода
шлифовального круга (рис. 6, а, в) шил галтелью постоянного радиуса (рис. 6, г).
Расчет валов и осей
165
а)
1 п
г
0
"а
а
Рис. б
В ряде конструкций применяют полые валы для уменьшения массы, размещения
соосного вала, деталей управления подачи масла и др.
При назначении посадок основных деталей передач на валы следует пользоваться
рекомендациями ГОСТов (см. табл. 1 и 2 раздела "Допуски и посадки". При
неодинаковых допусках отверстия и вала больший допуск должен быть у отверстия;
допуски отверстия и вала могут отличаться не более чем на два квалитета.
Для посадок с зазором рекомендуют применять валы с отклонениями d, ef, f, fg, g,
h; для переходных - js, jt k, m, n; для посадок с натягом - р, г, s, t, u.
Концы входных и выходных валов редукторов, коробок передач имеют
цилиндрические или конические консольные участки для установки полумуфт, шки-
шкивов, звездочек, зубчатых колес, размеры которых выполняют по ГОСТ 12080-66 и
ГОСТ 12081-72 соответственно.
Материалы валов и осей. Валы и оси в основном изготавливают из углеродистых
сталей 20, 30, 40, 45, 50 и легированных сталей 20Х, 40ХН, 30ХГСА, 40ХН2МА,
18Х2Н4МА и др. (табл. 6). Выбор материала определяется конструкцией вала,
требованиями к нему предъявляемыми условиями эксплуатации, необходимым сроком
гарантии безотказной работы. Для улучшения механичеких характеристик применяют
различные виды термообработки, в том числе поверхностное упрочнение для
повышения износостойкости.
166
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
6. Механические характеристики некоторых материалов,
используемых для изготовления валов
Материал
45
40Х
40ХН
20
20Х
12ХНЗА
12Х2Н4А
18ХГТ
ЗОХГТ
20ХГБ
18ХНВА
40ХНМА
Диаметр
заготовки,
мм
Не ограничен
Не ограничен
120
80
Не ограничен
200
150
Не ограничен
200
60
120
120
120
60
Не ограничен
120
60
200
150
50
Твер-
Твердость
НВ
190
200
240
270
200
240
270
240
270
145
197
260
300
330
370
320
415
300
340
300
Ов
сг-1
МПа
520
560
800
900
730
800
900
820
920
400
650
950
1100
1150
950
1150
1500
1000
1150
1000
280
280
550
650
500
650
750
650
750
240
400
700
850
950
750
950
1200
800
850
850
220
250
350
380
320
360
410
360
420
170
300
420
500
520
450
520
650
450
540
450
130
150
210
230
200
210
240
210
250
100
160
210
250
280
260
310
330
270
300
270
0
0
од
0,1
од
0,1
0
0,05
0,1
0,15
0,15
од
0,15
0,2
0,1
0,2
0,15
0
0
ОД
0,05
0,05
0,05
0
0
0,05
од
0.1
0,05
од
од
0,05
од
ОД
Расчет валов, осей на прочность, жесткость и сопротивление усталости. Расчет валов
(осей) на статическую прочность ведется по наибольшей кратковременной нагрузке, в
которой учтены наиболее тяжелые условия работы машины. Расчет валов на
выносливость ведется по наибольшей длительно действующей нагрузке, повторяемость
которой за время службы детали не менее 103 циклов.
Режим нагрузки задается статистической кривой плотности распределения или
графиком изменения нагрузки во времени.
Относительные размеры валов (отношение длины к диаметру) позволяют во многих
случаях рассчитывать вал как стержень, подверженный изгибу и кручению и, кроме того,
вал может быть подвержен действию продольных сил, вызывающих растяжение-сжатие.
При действии поперечных сил и моментов, вызывающих изгиб, вал рассматривается
как стержень, лежащий в подшипниках как на опорах и нагруженный сосредоточенными
силами и моментами.
В приближенных оценках подшипники качения могут в расчете приниматься как
шарнирные жесткие опоры. При уточненных расчетах опоры качения рассматриваются
как шарнирные упругие опоры.
Если нагрузки, действующие на вал и приведенные к оси вала, расположены в
различных плоскостях, то их следует разложить на составляющие, лежащие в двух
взаимно перпендикулярных плоскостях и в каждой из этих плоскостей определить
опорные реакции и внутренние силы.
Составляющие опорных реакций и внутренних сил суммируются геометрически.
При расчете вала на прочность существенным оказывается цикл напряжений. Если
постоянная по величине внешняя нагрузка, вызывающая изгиб, неподвижна в
пространстве, а вал вращается, то напряжения меняются по симметричному циклу. Если
постоянная внешняя нагрузка вращается вместе с валом, то напряжения постоянны. При
совместном действии и вращающихся, и невращающихся относительно вала нагрузок
изгибающий момент от вращающихся нагрузок дает амплитуду напряжений, а от
невращающихся - среднее напряжение.
Расчет валов и осей
167
Расчет вала на статическую прочность сводится к определению напряжений и
вычислению запаса прочности по выбранному критерию несущей способности.
Критериями могут являться: недопустимость пластических деформаций или
недопустимых определенных перемещений.
При расчете на жесткость, как правило, требуемый диаметр сечения вала
получается больше, чем при расчете на прочность, и фактическое напряженное
состояние становится малоопасным. Это позволяет в ряде случаев проводить
упрощенный расчет на прочность, который используется на стадии проектирования.
При этом допускается пренебречь динамичностью нагрузки, концентрацией
напряжений, характеристикой цикла и т.п.
Напряжения в наиболее опасном сечении вала
а =
t +QJ5MI
W
Мк -
крутящий момент; W - момент
где Ми - максимальный изгибающий момент;
сопротивления.
Из условия а < [а], где [а] - допускаемое напряжение изгиба, получают орие-
ориентировочное значение требуемого диаметра вала в сечении. Значения моментов
сопротивления различных видов сечений приведены в табл. 7.
На стадии проектирования, как правило, геометрия вала определена недостаточно.
В первом приближении диаметр вала
-€>
где N - передаваемая мощность, кВт; п - частота вращения вала, мин; А -
коэффициент, зависящий от вида нагружений: А = 10 при постоянной не слишком
большой нагрузке; А — 11 при переменной нагрузке среднего уровня; А = 12 при
переменной значительной нагрузке.
7. Формулы для определения осевого Wt и полярного Wf
моментов сопртивленяя сечения
Сечение вала
Крутое сплошное
d /^
Ь j | t
vJiL
ViJK
у/\Л>С/л
- 1
0,1 ^
0,1 />3A - с4)
flln3 M^-'J
OJii' i ?—
ID
0,2/Р
0,2 Z^Cl - С4)
^3 Ц2)-/J
2i)
168
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Продолжение табл. 7
Сечение вала
bt(D-ty
32 В
яд3 bt[D-t)
16 D
32
D
16
0,2 D}
1
1
1
0,1 в;
0,2
Примечание, с- —; Df- минимальный диаметр вала (по галтели).
D
Крутильную жесткость вала оценивают углом закручивания на единицу длины вала
ще Мк - крутящий момент в расчетном сечении, Н • м; G - модуль упругости материала вала при
сдвиге, Па (для стали G = 80 Ша); /_ =
9
32
момент инерции сечения вала; здесь d - диаметр
вала; [<р] - допускаемый угол закручивания (обычно принимают [<р] в E + 22) 10*3 рад/м).
Угол закручивания для ступенчатого вала, нагруженного несколькими крутящими моментами,
различными для разных участков:
1 у Мк,1,
где обозначения, стоящие под знаком суммы, отнесены к каждому закручиваемому участку вала.
Расчет валов и осей
169
Угол закручивания на участке 1 - 2 вала, изображенного на рис. 7,
1 (МК1\ MKh\
ф = -^ -7iLi + -pL . рад
О [ J л1 J пУ 1
77*77
Мк
ft
Рис.7
Рис. 8
При приближенном расчете ступенчатый вал заменяется гладким валом эквивалентного
диаметра, для которого и определяют деформации. Эквивалентный диаметр такого вала
Для изображенного на рис. 8 вала
4i h h h U ^5 'б
При прочих равных условиях угол поворота оси вала и его прогиб зависят от
расположения зубчатого колеса относительно опор: консольного, симметричного,
несимметричного. В этом случае прогиб и угол поворота упругой линии вала определяют
обычными методами сопротивления материалов. Для простых расчетных случаев можно
использовать готовые решения (табл. 8). Допускаемые прогибы валов и углы поворота
даны в табл. 9.
8. Формулы для углов поворота и прогибов двухопорных валов
Угол
поворота 9,
прогиб /
Схема нагружения
d
Of
[
Р ?4
в
¦*5—"—i
С
с/
yj _z
/Л 7"
ъ
е
с
С
170
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Продолжение табл. 8
9в
ес
Qp
/D
/е
fp
/с
Fab(l + b)
6FJJ
Fab(l+a)
6EJ1
Fb{l2-b2-Zd2)
6ЕЛ
Fa(l2-a2-3lf)
bEJl
Fab(b - a)
ЪЕЛ
Fbd[t2~b2-d2)
6EJI
Fol^-S-,?)
bEJl
Fa2b2
ЪЕЛ
eB-c
F{cl
6EJ
Fvcl
ЪШ
/icB/ + 3c)
6EJ
6ЕЛ
-
FlCd[l2-d2)
bEJl
-
-
Fxc2(l + c)
3EJ
9. Допускаемые прогибы валов [fj и углы поворота [0]
Конструкция
Максимальный прогиб, мм:
валов общего назначения дпиной /
в месте установки зубчатых колес
валов червяков
Угол поворота 0. рад:
радиальный подшипник
подшипник скольжения
сферический подшипник
Параметр
[Л = @.0002 + 0,0003)/
[Л = @,01 + 0,003)/и
[Л = @,01 * 0.005)/и
[9] = 0,01
[9] - 0,001
[9] = 0,05
Расчет валов и осей
171
Запас прочности по статическому разрушению обычно принимается в пределах: при
изготовлении вала (оси) из поковки п = 2 + 2,5; при литом вале (оси) п = 2,5 + 3,5.
Расчет при циклически изменяющихся напряжениях проводится с учетом напряженного
состояния, характера переменности напряжений и других факторов, влияющих на сопротивление
усталости.
Запас прочности при совместном действии изгибающих и крутящих нагрузок
п =
п„п.
где nv - запас прочности при действии только изгибающих нагрузок; лт - запас прочности при
действии только крутящего момента; [п] - нормированное значение запаса прочности.
Запас прочности при действии только изгибающих нагрузок
Запас прочности при действии только крутящего момента
В этих формулах применены обозначения:
ст.], t_i - пределы выносливости при изгибе и при кручении соответственно с симметричным
циклом изменения напряжений;
«о. о»» - амплитуда и среднее напряжение цикла;
Ао, 1с, - эффективные коэффициенты концентрации напряжений при изгибе и кручении соответ
ственно;
Е<„ е^ - коэффициенты, учитывающие масштабный фактор;
\\1„, щ - коэффициенты, учитывающие влияние асимметрии цикла на прочность при изгибе и
кручении соответственно.
В табл. 10 и 11 приведены эффективные коэффициенты концентрации напряжений ка и Л,
для валов и осей с галтелями. Геометрические характеристики вала (оси) в зоне галтели
представлены на рис. 6, б и г.
10. Эффективные коэффициенты концентрации напряжений ко
для валов и осей с галтелями
D/d
Не более
1Д
rid
0
0,02
0,04
0,06
0,08
0,1
0,15
0,2
500
2,32
1,84
1,6
1,51
1,4
1,34
1,25
1,19
Временное сопротивление ав> МПа
600
2,50
1,96
1,66
1,51
1,4
1,34
1,25
1Д9
700
2,71
2,08
1,69
1,54
1,42
1,37
1,27
1,22
800
_
2,2
1,75
1,54
1,42
1,37
1,27
1,22
900
_
2,35
1,81
1,6
1,46
1,39
1,3
U4
1000
_
2,5
1,87
1,6
1,46
1,39
1,3
1,24
172
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Продолжение табл. 10
D/d
1,1-1,2
1,2-2
r/d
0
0,02
0,04
0,06
0,08
0,1
0,15
0,2
0
0,02
0,04
0,06
0,08
0,1
0,15
0,2
Временное сопротивление о„, МПа
500
2,85
2,18
1,84
1,71
1,56
1,48
1,35
1,27
3,2
2,4
2
1,85
1,66
1,57
1,41
1,32
600
3,1
2,34
1,92
1,71
1,56
1,48
1,35
1,27
3,5
2,6
2,1
1,85
1,66
1,57
1,41
1,32
700
3,39
2,51
1,97
1,76
1,59
1,51
1,38
1,3
3,85
2,8
2,15
1,9
1,7
1,61
1,45
1,36
800
_
2,68
2,05
1,76
1,59
1,51
1,38
1,3
_
3
2,25
1,9
1,7
1,61
1,45
1,36
900
_
2,89
2,13
1,84
1,64
1,55
1,41
1,34
_
3,25
2,35
2
1,76
1,64
1,49
1,4
1000
_
3,1
2,2
1,84
1,64
1,55
1,41
1,34
_
3,5
2,45
2
1,76
1,64
1,49
1,4
D/d
Не более
1 1
i,x
1,1-1,2
1,2-2
11. Коэффициенты концентрации при
r/d
0
0,02
0,04
0,06
0,08
од
0,15
0,2
0
0,02
0,04
0,06
0,08
0,1
0,15
0,2
0
0,02
0,04
7
0,06
п. ло
0,08
0,1
0,15
0,2
кручении Ат
Временное сопротивление ав, МПа
700
1,52
1,36
1,24
1,18
1,14
1,11
1,07
1,05
1,85
1,59
1,39
1,3
1,22
1,19
1,11
1,08
2,15
1,8
1,53
1,4
1,3
1,25
1,15
1,1
800
1,63
1,41
1,27
1,2
1,16
1,13
1,08
1,06
2,04
1,67
1,45
1,33
1,26
1,21
1,14
1,11
2,4
1,9
1,6
1,45
1,35
1,28
1,18
1,14
900
1,72
1,45
1,29
1,23
1,18
1,15
1,09
1,07
2,18
1,74
1,48
1,37
1,3
1,24
1,15
1,12
2,6
2
1,65
1,5
1,4
1,32
1,2
1,16
1000
1,83
1,5
1,32
1,24
1,19
1,16
1,11
1,09
2,37
1,81
1,52
1,39
1,31
1,26
1,18
1,15
2,85
2,1
1,7
1,53
1,42
1,35
1,24
1,2
В табл. 12 и 13 приведены эффективные коэффициенты концентрации ка и кх
соответственно для валов и осей с выточками, размеры которых показаны на рис. 6, в.
Расчет валов и осей
173
12. Эффективные коэффициенты концентрации ка для валов и
осей с выточками
t/r
0,4-0,6
0,6-1
1
1-1,5
1,5-2
r/d
0
0,02
0,04
0,06
0,08
0,1
0,15
0
0,02
0,04
0,06
0,08
0,1
0,15
0
0,02
0,04
0,06
0,08
0,1
0,15
0
0,02
0,04
0,06
0,08
0,1
0,15
Временное сопротивление ств, МПа
650
•1,96
1,82
1,77
1,72
1,68
1,63
1,53
2
1,85
1,8
1,75
1,7
1,65
1,55
2,05
1,89
1,84
1,78
1,73
1,68
1,58
2,09
1,93
1,87
1,82
1,76
1,71
176
700
2,11
1,92
1,82
1,77
1,72
1,68
1,55
2,15
1,95
1,85
1,8
1,75
1,7
1,57
2,2
1,99
1,89
1,84
1,78
1,73
1,6
2,25
2,04
1,93
1,87
1,82
1,76
1,62
800
2,26
2,06
1,96
1,87
1,77
1,72
1,58
2,3
2,1
2
1,9
1,8
1,75
1,6
2,36
2,15
2,05
1,94
1,84
1,78
1,63
2,42
2,2
2,09
1,98
1,87
1,82
1,66
900
2,4
2,21
2,06
1,92
1,87
1,77
1,63
2,45
2,25
2Д
1,95
1,9
1,8
1,65
2,52
2,31
2,15
1,99
1,94
1,84
1.68
2,58
2,36
2,2
2,04
1,98
1,87
1,71
1000
2,5
2,3
2,16
1,96
1,92
1,82
1,68
2,55
2,35
2,2
2
1,95
1,85
1,7
2,62
2,41
2,26
2,05
1,99
1,89
1,73
2,69
2,47
2,31
2,09
2,04
1,93
1,76
13. Эффективные коэффициенты концентрации
: ?г
1,02-1,1
t i i i
1,1-1,/
1 1 1 Л
1,2-1,4
r/d
0,02
0,04
0,06
0,08
0,1
0,15
0,02
0,04
0,06
0,08
0,1
0,15
0,02
0,04
0,06
0,08
0,1
0,15
650
1,29
1,27
1,25
1,21
1,18
1,14
1,37
1,35
1,32
1,27
1,23
1,18
1,4
1,38
1,35
1,3
1,25
1,2
кт для валов
и осей с выточками
Временное сопротивление ад, МПа
700
1,32
1,3
1,29
1,25
1,21
1,18
1,41
1,38
1,37
1,32
1,27
1,23
1,45
1,42
1,4
1,35
1,3
1,25
800
1,39
1,37
1,36
1,32
1,29
1,21
1,5
1,47
1,46
1,41
1,37
1,27
1,55
1,52
1,5
1,45
1,4
1,3
900
1,46
1,43
1,41
1,39
1,32
1,25
1,59
1,55
1,52
1,5
1,41
1,32
1,65
1,6
1,57
1,55
1,45
1,35
1000
1,5
1,48
1,46
1,43
1,37
1,29
1,64
1,62
1,59
1,55
1,47
1.37
1,7
1,68
1,65
1,6
1,52
1,4
174
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
14. Эффективные коэффициенты концентрации к<,ш к* для сечения вала
с поперечным отверстием диаметром d
Характер на-
гружения,
коэффициент
Изгиб, kg
Кручение, кг
d/D
0,05-0,15
0,15-0,25
0,05-0,25
Временное сопротивление ав, МПа
700
2
1,8
1,75
800
2,02
1,82
1,83
900
2,12
1,9
1.9
1000
2,35
2,1
2
15. Коэффициенты h, и к* для сечения вала со шпоночной канавкой
Характер
нагружения,
коэффициент
Изгиб, ка
Кручение, кх
Временное сопротивление ав, МПа
500
1,5
1,4
600
1,63
1,5
700
1,75
1,6
800
1,84
1,7
900
1,92
1,9
1000
2
2,1
16. Рекомендуемые величины масштабных факторов ?<, и с, для
различных диаметров вала
Вид
деформации,
масштабный
фактор
Изгиб, е<,
Изгиб, е<»
Кручение, ех
Материал
Углероди-
Углеродистая сталь
Легирован-
Легированная сталь
Сталь
Диаметр вала, мм
15
0,93
0,86
20
0,92
0,83
30
0,88
0,77
40
0,85
0,73
50
0.81
0,7
70
0,76
0.65
100
0,7
0,59
200
0,61
0,52
Коэффициенты асимметрии цикла
2a_i -а0 2t_j - т0
сто х0
где cq и то - нормальное и касательное напряжение пульсирующего цикла.
Коэффициент i|/t в среднем составляет « ОД. Величина v|/a в зависимости от мате-
материала и его характеристик принимается равной: 0,15 для углеродистой стали с времен-
временным сопротивлением ств = 350 * 550 МПа; 0,2 для углеродистой стали <тв = 650 * 750
МПа; 0,25 - 0,3 для легированной стали.
Допускаемый запас прочности при расчете на выносливость может быть представ-
представлен в виде произведения трех составляющих
[п] = [и,] \п2] \п2],
где [пу] - учитывает степень ответствешгости детали; [«21 - то же, точность расчетных
нагрузок; [лз] - то же, надежность выбранного материала.
Частные случаи расчета колец, шпангоутов
175
Величина [п{] выбирается из диапазона 1,3 - 1,5, причем большие значения соответ-
соответствуют большей ответственности детали с точки зрения последствий, вызванных полом-
поломкой детали.
Величина [п2] принимается в пределах 1,1 - 1,5 и может быть меньшей или большей
в зависимости от точности расчета нагрузок.
Коэффициент [л3] принимается равным 1,3 для деталей из проката или поковки и
1,5 для термообработанных деталей.
8.8. ЧАСТНЫЕ СЛУЧАИ РАСЧЕТА КОЛЕЦ, ШПАНГОУТОВ
Обозначения: R - радиус кольца; As - площадь сечения; / - момент инерции сечения;
W - момент сопротивления сечения; п - число равномерно расположенных по окружно-
окружности сил; F - радиальная сила.
Кольцо с жесткими включениями под сосредоточенными силами. Максимальный из-
изгибающий момент в сечении кольца возникает около жесткого включения (рис. 9)
М =
FR
2 sin a
sin(a - 0)
- cos(a - 0)
а = тс/л; 0 < 0 < а.
Продольная сила в этом же месте
N = F cos(a - 0).
2 sin a v '
Максимальная напряжения
N M
S/^ Pu
jV
M
Рис. 9
Рис. 10
Радиальное смещение под действием силы F жесткого включения
5 =
FR3
EJ
FR
1
2 sin2 a
a - 0 sin 2(a - 0) sin2(a - 0)
2 4 a-0
l
2sin2 a
a _ 0 sin 2(a - 6)
176
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Кольцо под действием сил, распределенных по площадкам. Угол 6 характеризует раз-
размер площадки, по которой распределена сила F (рис. 10).
Максимальный изгибающий момент возникает в середине площадки приложения
силы:
., FR(\ 0 , 1-cosG^
М = -—\ ¦—--ctga г—— .
2 va sinG smG )
Продольная сила в этом же месте
., F ( . 1 - cos 6^
N = •— ctga + —: .
2\ sine )
Максимальные напряжения
N М
Прогиб кольца в этой точке
ЕЧпЗ PD
EJ
EAt
2l2sin2a
1 cos a
¦ + + ¦
1 ( в\ 9cosfa-e)l
Л- 1 - - - CtgB + ctga - ^ " ; ;
шв^ а) 2 sraasinel
cos(a - 9)
- ctg9 -
sine sine 2sin2a — sinasin9e
Шпангоут под сосредоточенной силой. Для подкрепления оболочек вращения в мес-
местах приложения сосредоточенных нагрузок применяют шпангоуты - кольцевые ребра
жесткости. Характерный случай нагружения приведене на рис. 11
Рис.11
Для расчета такого кольца мысленно отделяют его от оболочки; при этом в рабочее
сечение кольца включают и часть оболочки, руководствуясь соотношением s = E-И0)Л.
Сосредоточенную силу F уравновешивают касательными силами т, действующими на
F
кольцо со стороны оболочки, х = —sin p.
FR. ( 1 ^
Изгибающий момент в кольце М = — -l + -cosp + psinp.
2я V 2 /
Продольная сила N = — I — cos p[-p sin р]1.
Радиальный прогиб шпангоута за счет изгиба
5 =
FR*
EJ
При р = к
М = Мтах = -0,239 FR; N = -0,239 F
5 = 0,0430-
Ы
Частные случаи расчета колец, шпангоутов
177
Шпангоут, нагруженный радиальной силон, распределенной по площадке. 26 - угол,
f
характеризующий размер площадки; т = —-skip - распределенное по окружности каса-
тельное усилие. Изгибающие моменты и продольные силы по участкам шпангоута
(рис. 12):
О < р < (я - G);
FR Г 1 1
Мл = -G + -Csin9 - 29cos9)cosp + (JsinGsinp ;
1 2*sine[ 2х ' и]
F f29cos9 +
= —
4л[ sine
cosB - 2Ssinfl ;
j
(it - 9) <
Рис. 12.
Частный случай G = — (рис. 13). Такая схема реализуется, например, при нагруже-
нии шпангоута гибкой лентой.
Эпюра изгибающего момента обратносимметрична относительно горизонтальной
оси. Максимальный изгибающий момент возникает при р = 67° (рис. 14):
мтах = 0,0146/тг.
Продольная сила в этом же месте
N=O,139F.
Используя принцип суперпозиции, можно рассчитать на прочность шпангоут
(кольцо), нагруженный произвольной системой сосредоточенных и распределенных ра-
радиальных сил.
Рис. 13
Рис. 14
Изгиб кольца с жестким диском внутри сосредоточенной силой. Зазор 5 между коль-
кольцом и диском считается малым: 5/Л <<1. Диск закреплен от смещения.
12 Том 2
178
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
FKD =
Пока сила F лежит в диапазоне О < F < FKp,
, контакт кольца с диском осущест-
R3
вляется в одной точке. Кольцо рассчитывается
по формулам, относящимся к нагружению
кольца по схеме рис. 10; в них следует положить
п = 2, 0 -> 0. '
При F > FKp кольцо будет охватывать диск,
контактируя с ним по углу (п - 0); 0 - значение
угла ф, с которого начинается контакт.
Угол 0 определяется из соотношения
™3
BEJ TV "
2я(е-sine cos e^
(е + sin e){i - cosе) - э2 sin e
Максимальный изгибающий момент в кольце возникает в точке приложения силы F
и равен М' = FR /я@);
/ч 2- 2cos0 -0sin0 7i(l - cos0)-(sin0-0cos0)
m^ ' 2(sin0-0cos0)
Продольная сила в этом же сечении кольца
N = Fn(Q),
n(Q\ = П _
V ' v(y@)(sin 0 - 0 cos 0) 2(sin 0 - 0 cos в) '
Прогиб кольца под силой F
v =8v@);
v@) = [(rc-0)sin0-l-cos0]+iH0)[m@)(cos0+0sin0-l)+
+/j@)(cos0+0sin0-l--sin20)-~[sine--sinecose--Oj .
l-cose-0cos6
0°
180
170
160
150
140
130
120
НО
100
90
80
70
60
50
40
Примечание.
17. Числовые значения
п -е°
0
10
20
30
40
50
60
70
80
90
100
ПО
120
130
140
4/@)
3,14
4,19
5,73
8,02
11,4
16,6
24,7
37,6
58,9
95,5
162
289
558
1200
3020
i функций у@),
«(в)
0,318
0,316
0,309
0,298
0,285
0,268
0,251
0,232
0,212
0,192
0,172
0,151
0,129
0,108
0,0868
, й(в), v@)
«@)
0,0000
0,0048
0,0188
0,0409
0,0703
0,106
0,148
0,197
0,253
0,318
0,396
0,490
0,611
0,772
1,004
я - 6 - половина угла контакта между кольцом и диском
vF)
0,467
0,605
0,764
0,947
1,16
1,40
1,69
2,03
2,45
2,95
3,58
4,39
5,46
6,97
9,22
Частные случаи расчета колец, шпангоутов
179
Совместный изгиб двух шпангоутов при поперечном нагружении. Радиусы шпангоутов
R полагаются одинаковыми; радиальный зазор между ними б - малая величина (рис.
Рис. 15,в
Силовое взаимодействие шпангоутов с оболочками представляется в виде касатель-
касательных распределенных усилий
Р . Р .
Х\ = 81Пф, Т2 = вШф.
Я-rt 71Л
Пока поперечная сила Р лежит в диапазоне 0 < Р < Ркр, где
кр
1
ад
- сила, при которой кривизны шпангоутов в точке касания становятся равными, шпанго-
шпангоуты работают по схеме рис. П.
При силе Р, большей Ркр, контакт между шпангоутами будет осуществляться по
площадке. Угол 0, с которого начинается контакт, определяется из соотношения
- /@)'
№-
4я2(е-sine cose)
(б - 2е2 - sin2 ejesine - з(е2 + sin2 ejcose'
к =
?,/,
Изгибающие моменты и продольные силы в шпангоутах в одних и тех же сечениях с
координатой ф равны по величине, но противоположны по знаку.
На прочность проверяются сечения шпангоутов при ф = 0 и ф = к, где изгибающие
моменты имеют наибольшие значения.
Изгибающий момент в шпангоуте 2 при ф = 0 равен:
Л/2@) = PRm(Q),
180
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
, v (I - cosg)(g + sine) - е2 sine n(\ - cose) + ecose - sine
™ ' 27i(sine-ecose) /(e)(sine-ecos8)
Продольное усилие в этом же сечении
Щ0) =
/ \ _ е2 sin0 - 3 sin9 + 36 cosG п
{ ' 2^(sine-0cosG) +/(eXsin0-ecose)'
Изгибающий момент в шпангоуте 2 при <р = п
/С R
Продольное усилие в этом же сечении
«я(е) = w0(e)cose + -(cose +1 + -esine).
7lV
Числовые значения функций Д0), /и@), nQ(Q), лпF) представлены в табл. \7,а, где
7t - 0 - половина угла контакта, между шпангоутами.
17,а. Числовые значения функций/(9), тF), ло(9),
е
180
170
160
150
140
130
120
ПО
100
90
80
70
60
50
40
18о-е
0
10
20
30
40
50
60
70
80
90
100
ПО
120
130
140
ДО)
4,19
6Д6
9,43
15,0
24,7
42,4
75,9
143
284
605
1400
3640
10800
39300
189000
«(в)
0,0796
0,0773
0,0713
0,0629
0,0532
0,0434
0,0341
. 0,0258
0,0187
0,0129
0,00844
0,00515 .
0,00288
0,00143
0,000601
Яо(в)
-0,239
-0,234
-0,222
-0,205
-0,184
-0,162
-0,140
-0,118
-0,0981
-0,0796
-0,0628
-0,0486
-0,0352
-0,0244
-0,0156
«я(в)
0,238
0,317
0,380
0,428
0,465
0,495
0,518
0,537
0,554
0,568
0,582
0,594
0,604
0,613
0,622
Поворотная деформация кольца
181
8.9. ПОВОРОТНАЯ ДЕФОРМАЦИЯ КОЛЬЦА
Основные положения и обозначения. Считается, что внешние силы, приложенные к коль-
кольцу, сводятся к равномерно распределенному по окружности моменту т (рис. 16).
Рис. 16
Рис. 17
В случае нагружения кольца по схеме рис. 17 интенсивность момента на единицу угла, об-
образованного вращением оси г вокруг продольной оси х и выраженного в радианах, будет рав-
равна
т =
FI
2*"f
где F - осевая сила, равномерно распределенная по окружности; / - расстояние по радиусу меж-
между окружностью, по которой приложена сила F, и окружностью, на которой расположена опо-
опора.
Выражение для т справедливо при выполнении соотношения
1 < R2IR\ <, 2.
Опора скользящая, может смещаться в радиальном направлении. Предполагается, что се-
сечение кольца не изменяет своей формы, все сечения поворачиваются на один и тот же угол \|/;
угол \|/ - малая величина.
Положение нейтральной оси г, проходящей через центр поворота сечения кольца, опреде-
определяется из равенства
где At - площадь сечения кольца.
Бели сечение кольца симметрично, то ось г является осью симметрии.
Угол поворота
т
где Е - модуль упругости материала кольца; Jn - геометрическая характеристика сечения:
Г*2
As
182
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Напряжения в любой точке сечения кольца с коор-
координатами х, г
г, X MX
ст = ?v|> - = -—-.
Максимальные напряжения возникают в точке каса-
ния прямой, проведенной из начала координат, с конту-
контуром сечения кольца (рис. 18).
Ниже для различных сечений колец приводятся фор-
формулы
для вычисления Jn и максимальных напряжений.
/„ =
Кольцо прямоугольного сечения.
Л3 In к 6/
Рис. 18
12
hlRx\nk
; k=R2/Rx.
В случае нагружения кольца по схеме рис. 19 вертикальное смещение внутреннего
контура кольца
/я2 в(к-
rrrr
F
Eh1
Напряжение
n]nk
_2 L При к, близком к единице,
ттъут
Рис. 19
Формулу для смещения / можно уточнить,
принимая во внимание сдвиговые деформации
(форма сечения при этом не сохраняется):
/=6FR?(k-lf
In к
1 1
1 + -
1+v { h
4(*-lJU
здесь v - коэффициент Пуассона.
Первое слагаемое в квадратных скобках означает перемещение от поворотной де-
деформации кольца, второе - изменение формы сечения от сдвиговых деформаций.
Сечение кольца - параллелограмм (рис 20). Ось г проходит на расстоянии xq от сере-
середины внутренней стороны кольца;
Поворотная деформация кольца
183
1 k + l 1 ( h'lnk
2k-l lnk + 17Л2
m 2_
Jn
+х0
Рис. 20
т 2
—
Толщина кольца h = Uiw (рис. 21). /„ = — hHk3 -1), h0 = -^-.
/77
Рис. 21
Напряжения на сторонах «fr и сd одтшко-
вы во всех точках, но противоположны
? по знаку
г
бг
2h(
Толщина кольца Л = 2АоA + оч*1) (рис. 22). Связь между характерными размерами сечения
кольца 2/п, 2/i2, /ti, /?2 и параметрами Ло, а и s устанапл1гоается соотношениями:
а_
184
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
л, - \
т Aj
<
У//А
777//.
727
т Л2
/„ R2
Для ориентации при выборе числового
значения параметра s на рис. 23, а-е схема-
схематично приведены частные случаи конфигу-
конфигурации сечений.
Рис.22
s = \
z а>0
а)
*)
t a> О
>г
I
а < О
= 2'
< О
Z «> О
а < О
Рис. 23
Расчет кольцевого бурта с учетом сдвиговых деформаций
185
8.10. РАСЧЕТ КОЛЬЦЕВОГО БУРТА С УЧЕТОМ
СДВИГОВЫХ ДЕФОРМАЦИЙ
При расчете кольцевого бурта, когда его длина I = R2 - Я\ соизмерима с высотой
сечения h2 (рис. 24), смешение внутреннего контура бурта за счет сдвиговых деформаций
может иметь тот же порядок, что и смещение за счет изгиба
F
\
I1 \
ч
\
////
i
Рис.24
При R\/R2 < 1/2 кольцевой жесткостью
бурта можно пренебречь, и тогда задача
сводится к расчету изгиба консольной
балки переменного сечения с учетом
сдвиговых деформаций. При
= R2- /?j, b = —,
к2
,
вертикальное смещение внутреннего
контура бурта
6F
1-Ы]2ы\-И1
b-h
\-Ы
-hi- 2I | A + v)/»22 ^ 1 _ hi
2D-/)
\-Ы
где v - коэффициент Пуассона.
Первые два слагаемых в квадратных скобках ответственны за изгиб, третье - за
сдвиг.
Максимальные изгибные напряжения в заделке бурта
а = ±-
Максимальные касательные напряжения
3F
Бурт постоянной толщины: hx = h2 = h. Для такого бурта вертикальное смещение
внутреннего контура
6F
Л, 1
1
Бурт постоянной толщины. Длина бурта / мала по сравнению с радиусом R.
п R] + ^2 ^ / D О \.
Л = » (т\л — Л| ),
FI
186
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
8.11. РАСЧЕТ ПЛАСТИН [5], [11]
Круглые пластины. Все приведенные ниже формулы пригодны для расчета пластин
при соблюдении следующих условий:
1. Соотношение между толщиной пластины и ее размерами в плане определяется:
для сплошной пластины
для свободно опертой кольцевой пластины
для жестко закрепленной кольцевой пластины
где Ъ и а - радиусы внешней и внутренней контурных окружностей пластины.
2. Максимальный прогиб пластины не превышает:
а)
V\vV
/sfA k
tvv^s.
б)
4\VA
в)
/7
г)
Рис.25
3. Напряжение в пластине не выходит за предел упругости материала, из которого
изготовлена пластина.
4. Коэффициент Пуассона \х = 0,3 (для стали).
Поперечная нагрузка может быть приложена в виде распределенного давления р,
Па; распределенной нагрузки д, Н/м; сосредоточенной силы F, Н; распределенного мо-
момента М, Н-м/м.
Виды нагруже:гия пластины (рис. 25) : а - распределенное по площади давление; б -
распределенная нагрузка; в - сосредоточенная сила; г ~ распределенный момент.
Максимальные напряжения и максимальный прогиб пластины определяются по
формулам табл. 18, где коэффициенты А^,, Ка для различных схем закрепления и нагру-
жения определяются по табл. 19.
Расчет кольцевого бурта с учетом сдвиговых деформаций
187
18. Формулы для расчета максимальных напряжений и прогибов
для круглых пластин
Виды нагрузки
Равномерно распределенное
давление р
Распределение по окружности
давление q
Сосредоточенная в центре пла-
пластины сила F
Распределенный по окружно-
окружности изгибающий момент М
Напряжения атах
q
F
±к м
Прогибы Wmax
к рЬ'
w з'
к ш2
Асимметричный изгиб круглой пластины. Рассмотрим один из случаев, когда в центре пластины
закрепляется жесткое цилиндрическое тело, к которому прикладывается опрокидывающий момент
(рис. 26, а-г).
М
Я
б)
Т777
Рис.26
г)
Максимальные напряжения в пластинах и угол поворота ядра вычисляются по
формулам:
М (ь\ М 1ъ\
Ъ b E&
b
где б - толщина пластины;' к = —; / = 1, 2, 3, 4 - номера схем закрепления краев.
Значения функций а(к) и с(к) приведены в табл. 20.
19. Коэффициенты прогибов и напряжений для круглых пластин
Схема закрепления и нагружения
пластины
или
LXU
Г/УУЛ/
Положение точки максимального прогиба,
значение Kw
В центре пластины, Kw = 0,552
В центре пластины, Kw = 0,695
Значение К, в точках
на нижней поверхности пластины
В центре пластины, К, -» да
Г Kg =0;
П**Г = Ь (jTOe : -0,334
В центре пластины, К, — -1,24
f Kc =0;
ПригггЛ {^в:-о^25
В центре пластины
Р
Kw
0,2
0,066
0,4
0,234
0,6
0,444
0,8
0,622
Р
В центре
пластины,
К,
При г = Ъ,
к„г = о
0,2
-0,185
-0,041
0,4
-0,52
-0,155
0,6
-0,87
-0,31
0,8
-1,13
-0,46
Продолжение табл. 19
В центре пластины Kw = - 4
Р
,2
В иентре гошстины
0,2
0,502
0,4
0,40
0,6
0,274
0,8
0,137
К, — 6 во всех точках
Р
В центре
пластины.
К,
При г — Ь.
0,2
-1,16
-0,321
0,4
-0,71
-0,281
0,6
-0,424
-0,214
0,8
-0,2
-0,12
В центре пластины, Kw = 0,217
В центре пластины, Kw = 0,171
В центре пластины, Kg -» м
„ \Ка =-0,48;
ПРИГ-* К-0Д43.
В центре пластины К, = - 0,49
„ \Ка -0,75;
П-И'-» {<'-0,225.
Продолжение табл. 19
р
В центре пластины
0,2
0,025
0,4
0,08
0,6
0,134
0,8
0,165
Р
В центре
пластины, А^
При г = Ь
0,2
-0,126
0,059
При г - Ъ
0,4
-0,3
0,22
0,6
-0,42
0,443
0,8
-0,48
0,653
Р
Ку/
В центре пластины
0,2
0,181
0,4
0,119
0,6
0,059
0,8
0,0163
Р
В центре
пластины, А^
При г = Ъ
К„
0,2
-0,70
0,46
При г ~ Ь
0,4
-0,31
0,4
0,6
-0,119
0,31
0,8
-0,027
0,172
а
0
0,55
При г = а
0,2
0,7
0,4
0,72
0,6
0,59
0,8
0,34
а
При
г = а
При
г = Ь
0
- 00
-0,334
0,2
- 2,43
-0,42
0,4
-1,69
-0,55
0,6
-1,33
-0,69
0,8
-1,11
-0,83
1
-0,96
-0,96
Kar(a)=KGr(b) = 0
И
6
г
а
\w\ni |
l
>
•д
а
TJP
S
л.
/°
а
\
77&Га
г* ^
777/.
а
а
а
а
а
0
0,7
0
0
0
1,04
0
4,2
При г =
0,2
0,814
0,4
0,79
При г =
0,2
1,21
0,4
3,39
При г =
0,2
1,31
0,4
1,12
При г =
0,2
5,25
0,4
6,92
2
0,6
0,53
а
0,6
5,99
Ь
0,6
0,66
Ь
0,6
8,69
0,8
0,183
0,8
8,88
0,8
0,203
0,8
10,4
1
0
1
12
1
0
1
12
а
г — а
'С
а
г = а
г — b
а
г = а
г-Ь
а
г = а
г-Ь
0
-2,48
-0,53
0
-6
0
0
00
0,53
0
12
6
0,2
-2.24
-0,57
0,2
-6,5
-0,5
0,2
5,09
0,69
0,2
12,5
6,5
II
0,4
-1,72
-0,64
= **,('
0,4
-8,3
-2,3
0 /
0,4
2,75
0,81
= *„,('
0,4
14,2
8,3
0; KOf
|MI III |*
0,6
-1,18
-0,63
>) = 0
0,6
-12,7
-6,8
'аг(*) =
0,6
1,5
0,75
0,6
18,8
12,7
(Illlr 1,11
0,8
-0,6
-0,45
0,8
-27,3
-21
0
0,8
0,65
0,49
0,8
33,3
27,3
I 1 \Ч
1
0
0
I
-СО
-GO
1
0
0
1
00
со
Продолжение табл. 19
с = b
1 Of
. а
— -
a
с = a
У
/
: \ i
; ч
a
6
!
/
/
/
' /
' /
/
"—"t
—-1
Я,
a = ~b
"г \
ъ/
/
/
/
/
a
/
i
4
-
/
/
/
/
/
^ -
л-
/
/
/
" ^; а- fl
а
Kw
а
Kw
а
Kw
а
0
0,55
0
0,22
0
0,51
0
0,217
При г =
0,2
0,7
0,4
0,72
При г =
0,2
0,24
/
0,4
0,134
при г —
0,2
0,54
0,4
0,25
При г =
0,2
0,092
0,4
0,03
b
0,6
0,59
а
0,6
0,042
а
0,6
0,06
а
0,6
0,01
0,8
0,34
0,8
0,005
1
0
0,8
0,004
1
0
0,8
0,006
I
0
а
г = а
г = Ь
а
г — о
г - Ь
а
г — а
г — b
а
г = а
r = b
0
00
0,334
0
-00
0,48
0
-оо
0,75
0
-оо
0,48
0,2
2,43
0,42
0,2
-1,31
0,53
(*) = *
0,2
-3,27
0,88
0,2
-1,12
0,41
= о,з/г0г
0,4
1,69
0,55
0,4
-1,48
0,51
*а„(*) =
0,4
-0,97
0,75
0,4
-0,57
0,31
0,6
1,33
0,69
>) = 0
0,6
-0,14
0,38
= О,ЗАГаД
0,6
-0,21
0,41-
^0,3/ГоД
0,6
-0,30
0,20
(Ь) = 0,3j
0,8
1,11
0,83
1
0,96
0,96
0,8
-0,025
0,2
1
0
0
0,8
-0,02
0,12
1
0
0
0,8
-0,12
0,1
I
0
0
кОг(ь)
Н'ИИГ Ilili'i Р*
1
j
б
i
~1~Г
-^|
а
6
Cps
/
/
/
. —-——
^—"
а
6
тттт
_-——
а
6
П р и м е ч а
с
--- -
-. /
г
^^
1
а
а= ь
F
-¦-(-
¦—-~
г
V\\N
1
_/
а
а = —
b
—-J
—'
г
н и е.
)
u
I
a
b
О
a
При г = 0
a
Kw
a
0
0,55
0
1,04
0,2
0,35
P
0,2
0,564
При г = b
0,4
0,153
0,6
0,044
F
,(b7-a2)
При г — b
0,4
0,193
0,6
0,038
0,8
0,005
1
0
0,8
0,0024
1
0
При г = b
а
Kw
a
0
4,2
0
0,512
0,2
3,42
P
0,2
0,234
наибольшее напряжение
0,4
2,11
0,6
0,96
F
При г — a
0,4
0,071
0,6
0,013
растяжения о,
0,8
0,23
1
0
0,8
0,0009
1
0
f Г (
= ^o ~ —т~ (' "*" ^) '
Ъ [_ ^
r = a
r = b
a
r — a
r = b
a
r = a
r = b
a
r = a
),4851n-
6
0
0,33
0,2
1,75
0,27
ка(ь) = о-
0
00
0,53
0,2
3,68
0,38
ATa (A) = 0;
0
9,23
6
0,2
9,04
5,74
Ao 1 o\ = o,
0
-oo
0,75
0,2
-2,81
0,58
*oAH = °'3/4(
+ 0,52j + 0,481 .
0,4
1,01
0,17
0,4
1,61
0,19
0,4
8,5
5,05
0,4
-1,12
0,35
0,6
0,55
0,08
0,6
0,62
0,06
0,6
7,73
4,05
: 0,3*O, (
0,6
-0,42
0,16
(A) = 0,3 j
0,8
0,23
0,02
0,8
0,135
0,008
0,8
6,68
2,92
-0,09
0,04
Kor(b)
i
0
0
1
0
0
1
6
1,8
1
0
0
194
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
20. Значения функций а(к) и с(к)
к
1,2
1,3
1,4
1,6
1,8
2
2,2
2,4
2,6
2,8
3
в
а1
0
0,168
0,303
0,422
0,506
0,576
0,627
0,666
0,705
0,735
0,76
н
а2
0
0,322
0,506
0,600
0,622
0,600
0,565
0,522
0,472
0,428
0,396
в
а2
0
0,0465
0,136
0,264
0,485
0,332
0,636
0,73
0,806
0,872
0,93
аЗ
0
0,278
0.418
0,606
0,692
0,743
0,772
0,798
0,828
0,844
0,856
в
а4
0,745
0,832
0,904
0,964
1,02
1,05
1,08
1,1
1,12
1,14
1,15
0
0,004
0,014
0,029
0,051
0,081
0,113
0,149
0,185
0,223
0,262
0
0,017
0,059
0,139
0,264
0,407
0,55
0,68
0,805
0,92
1,02
0
0,0085
0,031
0,067
0,116
0,18
0,225
0,275
0,322
0,368
0,407
0
0,275
0,49
0,68
0,84
0,98
1,11
1,2
1,31
1,39
1,46
Примечания: 1. Обозначения: а' - значение функции для внутреннего края пластины;
а" - значение функции для наружного края пластины.
2. Если соединение пластины по внутреннему или внешнему контуру
осуществляется на резьбе, то при расчете его считать шарниром.
21. Формулы для расчета прямоугольных пластин
Схемы нагружения
а/Ъ
с
0
Лл
1
0,1265
ч
1,1
0,1381
1-
]
1,2
0,1478
Расчетные формулы
Прямоугольная пластина шарнирно оперта по
нагрузка F сосредоточена в центре.
Максимальные напряжения
Прогиб в центре
М
0,1621
1,6
0,1714
F (
--г о,б:
бЧ
1,8
0,1769
м 0,64*
In -1
5
Fb2
?S3'
2
0,1803
-1Дб|
3
0,1846
контуру;
00
0,1849
Расчет пластин
195
Продолжение табл. 21
Схемы нагружения
0
ч
Ь/а
Kw
В центре
*..
В центре
t
А
А
а
а < ft
1
0,044
0,287
0,287
/ / / / . ¦ V
а. _
Ь/а
В точке А
В точке Б
ь
1,2
0,062
0,376
0,301
Расчетные формулы
Прямоугольная пластина шарнирно оперта по
всему контуру; нагрузка р распределена по всей
площади.
CTmax ±Ka j '
1,5
0,084
0,487
0,299
1
0,0138
0,308
0,137
1,2
0,0188
0,383
0,18
2
0,111
0,61
0',278
Прямоугольная пласта»
контуру; нагрузка р рав!
всей площади.
сттах
4
к ра
5
0,142
0,748
0,225
оо
0,142
0,75
0,225
ia защемлена по всему
иомерно распределена по
л
wmax - л w з '
1,5
0,024
0,46
0,216
2
0,0277
0,497
0,244
5
:
-
22. Формулы для расчета сферических пластин
Схемы нагружения и расчетные формулы
196
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Продолжение табл. 22
Сферическая панель. Равномерное внешнее давление
3/2
При ц = 0,3:
при свободной опоре, допускающей смещение в плоскости опорного кольца:
К\ = 1,41;
Къ = 1,08;
Кг = 0,002;
Кл, = 0,25;
при опоре, не дающей защемление и препятствующей смещению в плоскости опорного
кольца:
К\ - 1,52; Кг » 0,00576;
Къ = 0,407; JT4 = 2,07;
контур защемлен, но распор отсутствует:
Ъ = 4,56; К2 = 0,00505;
if3 = 5,92; Я4 = 0,0835;
контур защемлен и не имеет никаких перемещений:
= 5,45;
= 3,29;
Кг = 0,015;
К* = 0,394.
Пологая сферическая пластина. Равномерное
внешнее давление. Контур упруго заделан.
Материалы оболочки и кольца одинаковы.
2ЕК0
При углах а порядка 15е
Kq - 0,45[sma + (l - sina)^],
где К =
As+ah
- коэффициент жесткости опорного контура (кольца). Здесь As - площадь
поперечного сечения кольца; а - радиус кольца; h - высота кольца.
Расчет мембран [14]
197
8.12. РАСЧЕТ МЕМБРАН [14]
Мембраны при расчете подразделяют на пластины и пленки.
Под пластиной понимают упругую перегородку, сопротивляющуюся изгибу
благодаря своей собственной жесткости. Перегородка же из пленки не имеет
собственной изгибной жесткости и приобретает упругие свойства только благодаря
предварительному натяжению.
Для напряжений сто < CTOmin мембрану следует рассматривать как пластину, а для
напряжений cfq > cromin ~ как пленку, где со - напряжение всестороннего натяжения;
" напряжение от воздействия прикладываемой нагрузки.
23. Формулы для расчета мембран
Схемы нагружения и расчетные формулы
Мембрана - пластана.
При воздействии силы F (схема а):
напряжения
где As =
[ прогиб центра
гае
4 тй?Е
- податливость мембраны.
Мембрана-пластина.
При воздействии давления р (схема б):
напряжения
ст., = — —
198
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Продолжение табл. 23
прогиб центра
0J5R2
тгА
г
1-
3Е
wn = пп ¦ 0,25pAs
1-
( г"
ii
\2"
1
Наибольшее напряжение возникает в точке А.
Для этой точки при ц = 0,3 напряжения
где [а] - допускаемое напряжение.
Допускаемое давление
Допускаемый прогиб
Ц.ДОП
= 0,256[al —.
Eh
В области малых перемещений напряжения в пластине связаны с прогибом линейно.
Мембрана - пластина с жестким центром.
При воздействии силы F (схема о):
напряжение в точках наружного и внутреннего
контуров
_ _^о Ehwo
= ±Я»
где
BfH =
2 сЧс1 -l-21ncj
¦^p-lf- Ac2 In2 с'
с2\2съ\пс-с2
с2 -\\ -4с2 In2 с
знаки плюс или минус соответствуют точкам верхней или нижней поверхности мембраны.
FR
Перемещение жесткого центра мембраны wQ = Ас г-. Здесь
Eh3
AF =
3 1-ц'
2 1 1 2
с - 1 In с
л
4с
2 ,
с - I
R
с =
Расчет мембран [14]
199
Продолжение табл. 23
Мембрана - пластина с жестким центром.
При воздействии давления р (схема б);
напряжения
с2(с2-\
где Вр -
R
1-ц2 с4 -1-4с2 lnc
С =
Перемещение жесткого центра мембраны
= А.
о ~ р —Г'
Eh3
где Ар =
lnc
16
Мембрана - пленка с жестким центром и
предварительным всесторонним натяжением од
силой Fo = nDhaQ.
При воздействии сосредоточенной силы F
перемещение жесткого центра
где R - радиус контура мембраны;
го - радиус жесткого центра;
h - толщина мембраны.
При воздействии давления р перемещение жесткого центра
1-
Мембрана - пластина (схема а), заделанная по
концам (схема б). При воздействии силы F в
центре:
напряжение
прогиб
'¦«¦?
где лц - податливость в центре; при b » I
12/3
-е
при b « I
Ebh
3 '
п„ =
12/ II — М- I
ЕЬК
200
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Продолжение табл. 23
innini
-е
При воздействии давления р (схема в):
напряжение
пцрЬИ
12/
1-31*
прогиб
24
F
Мембрана - пленка с предварительным
натяжением вдоль размера 2/ силой /о = о^Ьк
При воздействии силы F по центру пленки:
прогиб
IF
2<jQbh
При воздействии давления р прогиб
'«W-
Приближенный расчет собственной частоты
мембраны
где /иэкв = 0,32т. Здесь m = рК - масса
мембраны, где р - плотность; V - объем;
«экв = ли - податливость центра.
8.13. ПРОЧНОСТЬ И ЖЕСТКОСТЬ СФЕРИЧЕСКИХ ОБОЛОЧЕК
ПОД СОСРЕДОТОЧЕННЫМИ НАГРУЗКАМИ
Расчетная методика основана на использовании теории пологих сферических
оболочек. Предполагается, что условия закрепления наружного края не влияют на
напряженно-деформированное состояние оболочки в области приложения нагрузки.
Обозначается (рис. 27); R - радиус срединной поверхности оболочки; И - толщина
оболочки; Е - модуль упругости; v - коэффициент Пуассона; г - радиус отверстия или
Прочность и жесткость сферических оболочек под сосредоточенными нагрузками
,3
201
жесткого цилиндрического ядра в вершине оболочки; D -
Eh'
- цилиндрическая
хесткость; г0 -
12^1 -v2)
при v = 0,3; а = — - безразмерная величина, про-
г0
порциональная радиусу отверстия или ядра.
Рис. 27
Все нижеследующие величины относятся
к контуру отверстия или к месту сопря-
сопряжения оболочки с жестким ядром.
W - прогиб оболочки; 0 - угол поворота
ядра; М\ - меридиональный изгибающий
момент; N\ - меридиональное нормаль-
нормальное усилие; Mi - кольцевой изгибающий
момент; N2 - кольцевое нормальное уси-
усилие; &\ - меридиональное напряжение; ci
- кольцевое напряжение.
Границы применения
1 h 1 г \ , с г—
-> — > ; — < —; s > 1,5V ЯЛ .
5 R 300 R 2
Сферическая оболочка с отверстием под действием осевой силы (рис. 28).
F 2
N
Рис. 28
6M2
max
202
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Таблица 24
а
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1
1,5
2
2,5
0,132
0,138
0,140
0,141
0,139
0,136
0,132
0,127
0,123
0.П9
0,0982
0,0824
0,0705
0,50
0,357
0,275
0,220
0,180
0,150
0,127
0,108
0,0932
0,0811
0,0448
0,0281
0,0191
ХМ
0,436
0,455
0,464
0,464
0,458
0,448
0,435
0,421
0,407
0,392
0,324
0,272
0,233
Ш
3,43
2,59
2,12
1,78
1,54
1,35
1,19
1,07
0,966
0,878
0,593
0,441
0,348
Таблица 25
а
3,0
3,5
4
5
6
7
8
9
10
0,0615
0,0543
0,0487
0,0402
0,0342
0,0297
0,0263
0,0236
0,0213
0,0138
0,0104
0,00814
0,00535
0,00377
0,00280
0,00216
0,00172
0,00140
0,203
0,180
0,161
0,133
0,113
0,0982
0,0869
0,0778
0,0705
0,286
0,242
0,209
0,165
0,135
0,115
0,0998
0,0881
0,0789
Сферическая оболочка с жестким ядром под действием осевой силы (рис. 29)
1
F
в"/
Рис. 29
Прочность и жесткость сферических оболочек под сосредоточенными нагрузками
203
a); M2=vMi;
_I,
Таблица 26
0,1
од
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1
1,5
2
2,5
3
3,5
4
5
6
7
8
9
10
Л<«)
0,118
0,107
0,097
0,0874
0,0788
0,0712
0,0644
0,0585
0,0533
0,0487
0,0323
0,0228
0,0169
0,0130
0,01030
0,00837
0,00582
0,00427
0,00327
0,00258
0,00209
0,00173
0,386
0,279
0,219
0,179
0,150
0,127
ОЛЮ
0,096
0,0845
0.0749
0,0449
0,0298
0.0212
0,0158
0.0122
0.00933
0,00659
0,00475
0,00359
0,0028
0,00225
0,00185
Ш
0299
0,273
0,246
0,222
0,200
0,181
0,164
0,149
0,135
0,124
0,0822
0,0581
0,0431
0,0331
0,0287
0,0213
0,0148
0,0109
0,00832
0,00657
0,00532
0?00439
Ш
2,62
1,95
1,56
1,30
1,10
0,946
0,824
0,725
0,642
0,573
0,351
0,237
0Л70
0,128
0,0996
0,0797
0,0543
0,0394
0,0298
0,0234
0,0188
0,0155
Сферическая оболочка с жестко гакреилепным ядром под действием момента
(рис. 30)
6 = т?/вМ; л/i =
м_
rQh
N
м
= Oi ±СТ, =
'о
•fM
204
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
/nctr
Рис. 30
Таблица 27
а
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1
№
0,193
0.137
0,105
0,829- Ю-1
0,660-Ю-1
0,531-Ю-1
0,431-Ю-1
0,354-Ю1
0,294-Ю-1
0,247-Ю-1
1,58
0,779
0,503
0,359
0,271
0,211
0.169
ОД 37
0,114
0.961-10-1
fda)
0,154
0,220
0,253
0,265
0,264
0,255
0,241
0,226
0,211
0,197
Мо)
9.66
4,89
3,27
2.42
1,89
1,52
1,25
1.05
0,894
0,774
Таблица 28
а
1,5
2
2,5
3
3,5
4
5
6
7
8
9
10
Ш)
0,125-Ю-1
0,844-Ю-2
0,65910-2
0,465-Ю-2
0,25510-2
0.127-10-2
0,417-Ю-3
0,218- Ю-3
0,145-Ю
0,901-Ю-4
0,51910-4
0,33110-*
0,519-Ю-1
0,381-10
0,325-Ю
0,251-Ю-1
0,149-Ю1
0.803-10-2
0,30410-2
0,180-10-2
0,134-Ю-2
0,920-Ю-3
0,581-Ю
0,404-Ю-3
Ma)
0,150
0,135
0,131
0,111
0,713-Ю
0,406-Ю-1
0,167-Ю-1
0,105-Ю-1
0,808-10
0,575-10-2
0,373-10-2
0,26410-2
Л(о)
0,462
0,363
0.327
0,262
0,161
0,888-Ю-1
0.349-10-1
0.213-10-1
0,161-Ю1
ОЛПЮ1
0,722-10
0,506-Ш-2
Прочность и жесткость сферических оболочек под сосредоточенными нагрузками
205
Сферическая оболочка с шарнирно закрепленным ядром под действием момента (рис.31)
Э = — /в(в); Mi =0; М2 = — fM(a);
D r0
Nl=Q; Nl=±L
Л
h h.
м
Рис.31
/псеу
Таблица 29
а
ОД
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
Л*)
0,306
0,249
0,214
0,188
0,166
0,148
0,132
0,117
0,104
2,06
1,02
0,655
0,485
0,374
0,298
0,243
0.201
0,168
fN(a)
0,101
0,164
0,212
0,248
0,275
0,293
0,304
0,309
0,310
Ма)
12,5
6,27
4.20
3.16
2,52
2.08
1,76
1,52
1,32
Таблица 30
о
1
1,5
2
2,5
3
3,5
4
5
б
7
8
9
10
Ш)
0,0927
0,0519
0,0301
0,0184
0,0119
0,00801
0,00563
0,00306
0,00184
0,00118
О,8О71О-3
0,574-10
0,422- Ю-3
Ма)
0.141
0,065310-1
0,0336-Ю-1
0,0189-Ю
0,0115-Ю-1
0,0074-10-2
0,00502-Ю-2
0.25810-2
0.149-Ю
0,934-Ю
0,622-Ю-3
0,43410-3
0,315-10-3
Ма)
0,306
0,257
0,199
0,152
0,112
0,0926
0,0744
0,0506
0,0365
0,0274
0,0213
0,0171
0,0139
Л(л)
1,15
0.649
0.401
0,265
0,186
0.137
0,104
0,0661
0,0454
0,0330
0,0251
0,0197
0,0158
206
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Контакт сферической оболочки с жестким шаром
1. Описание и обозначения
Сферическая оболочка радиуса R, толщиной h нагружается через жесткий шар
осевой силой Р (рис. 31,а)
Радиальный зазор б между шаром и
оболочкой малая величина, — « 1.
R
Считается, что краевой эффект,
обусловленный характером закрепления
края оболочки, не влияет на ее
напряженное состояние в районе
контакта, а отношение радиуса
площадки контакта г к радиусу R
г 1
удовлетворяет неравенству — < —.
R 2
2. Последовательность расчета
Вычисляются величины
,3
D =
ЕК
R2h2
12 1-v'
Га =
12fl - v2
1,82
PR1
(при v = 0,3).
По найденному J{a) из табл. ЗОд определяется величина "а". Затем вычисляется
радиус площадки контакта между шаром и оболочкой г = гоа.
По формуле
определяется смещение шара в осевом направлении; значение /ш{а) берется из табл. 30а.
Изгибающие моменты в оболочке в зоне контакта
Давление между оболочкой и шаром в полюсе
Р „, v
где fq(a) - берется из таблицы.
Нормальные усилия в вершине
'о
2
Напряжения на крайних волокнах оболочки
_ yv, ем
h ~ И'
а, _а2 ~~^-±—~.
а
0,10
i 0,20
: 0,30
0,40
0,50
0,60
0,70
0,80
0,90
1,0
1,5
2,0
2,5
3,0
3,5
4,0
5,0
6,0
7,0
8,0
9,0
10
Расчет различных деталей и соединений
Аа)
5,18
7,22
9,28
11,5
14,0
16,8
20,0
23,5
27,6
32,1
63,7
115
194
309
471
689
1340
2390
3950
6190
9260
13300
Ш
0,641
0,871
1,08
1,29
1,51
1,73
1,95
2,18
2,42
2,67
4,05
5,66
7,52
9,62
П,9
14,5
20,5
27,4
35,3
44,2
54,1
65,1
207
Таблица 30а
fq(a)
0,123
0,121
0,116
0,112
0,107
0,102'
0,0976
0,0927
0,0879
0,0833
0,0636
0,0491
0,0386
0,0310
0,0254
0,0211
0,0152
0,0114
0,00892
0,00714
0,00584
0,00487
8.14. РАСЧЕТ РАЗЛИЧНЫХ ДЕТАЛЕЙ И СОЕДИНЕНИЙ
31. Проектировочный расчет кронштейнов [11]
Схема нагружения
Расчетные формулы
1. Выбирают материал, определяют допускаемые
напряжения [а]
2. Принимают расчетную схему в виде
консольной балки
3. Определяют основные габаритные размеры
кронштейна (схема а)
М.
208
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Продолжение табл. 31
Контактирующий фланец
Схема нагружения
Расчетные формулы
Толщина уха в сечении А-А
где В - ширина; принимается из
конструктивных соображений и выполняется
постоянной или расширяющейся в сторону
основания кронштейна.
Высота сечения Б-Б
Н
6/7 a h
-г-, где р = ~;
^Ц1-р3 Н
обычно принимают р = 0,8 -=- 0,9.
Толщина полки
С целью облегчения детали в вертикальной
стенке выполняют отверстие, максимальный
размер которого не должен превышать 0,5 Я
4. Сечения кронштейна проверяют на
прочность:
о - К <; Ы
W
где Л/ - изгибающий момент; W - момент
сопротивления сечения.
Тонкостенные полки при В > 85 необходимо
проверить на местную устойчивость
5. Рассчитывают крепление кронштейнов. Для
приваренных кронштейнов оценивают
прочность сварных швов. Для резьбового
стыка определяют силу в максимально
нагруженном болте (шпильке) и назначают
диаметр болта (шпильки)
6. Рассчитывают фланец кронштейна на изгиб
под болтом
Напряжения изгиба в сечении 1-1 (схемы ж и
з) для контактирующего фланца (схема д)
W
L J
Расчет различных деталей и соединений
209
Продолжение табл. 31
Неконтактирующий фланец
для неконтактирующего фланца (схема ё)
w
1ДС fY — ——— ,
6
б - толщина полки фланца.
Эффективная ширина полки фланца на изгиб
по схеме ж
Ь= s + 3,5/2;
Эффективная ширина полки фланца на изгиб
по схеме з
32. Расчет соединений ушкового типа [11]
Схема нагружен ия
Расчетные формулы
F
Напряжения в сечении 1-1 (схема а)
F
2bhK
для двойной проушины (схема б)
F
AbhK
где AT - коэффициент концентрации;
К = 0,45 + 0,45- - 0,075—.
Ь d
Здесь принимается К<. 1.
Том 2
210
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Продолжение табл. 32
Схема нагружения
Расчетные формулы
/7
б)
Напряжения в сечении 2-2 (схема а)
F
2ahK
где при B/d < 3
Кх = 1,15 - 0,3—
b
или напряжения в сечении 2-2 (схема а)
определяют по формуле Ламе
г2-2
f(ar2 +d2
dhDR2 -d2)
Напряжения в сечении 3-3 (схема а)
F
J3-3 -
2(а + 0,2d)h
А
/г
Напряжение в сечении 1-1
Ш 6/7
где
Kh2(B-d) Kh2(B-d)
К =0,45 + 0,45 --0,075 —
Ь d
Условные напряжения разрыва в сечении 1-1
при нагружении (схемы а и б)
ЪМ
ch2 ch2
(схема в)
Расчет различных деталей и соединений
211
33. Максимальные напряжения смятия в соединениях
с цилиндрическими поверхностями [11]
Схема нагружения
Расчетные формулы
Напряжения в точках А:
для схемы а
7,6А/К .
2 '
для схемы б
С _.
IL
dt
7,6Fc
dt2
/sss//s/Ss/
ms//
/с-
Напряжения в точке А
///////A
Напряжения для детали 1:
п точке А
в точке Б
°СМ= "ТГ
Осм =
Напряжения для детали 2 в точке В
v 2/
F
и
при — ?0,5 H/>rf A"=l
Для детали 1 в точке ^i
в точке
212
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Продолжение табл. 33
Схема нагружения
Расчетные формулы
Для детали 2 в точке Б
JT-,
где
~d'
при — < 1 И / > cf K= \
а
При t * @,9 * \,\)d, с > 0,2? напряжения в
точке А деталей 7 и 2
-2M.fi. 1L
" Л b + 12
под буртом на поверхности Б
4F (, t
стсм - Y Ч
ncd2 < 2
При f » 1,\d или с * 0
Сила растяжения в болте 3
2/7
d + c
Напряжения на цилиндрической поверхности
под буртом
_ 1,21 F
Болт поставлен в отверстие с малым или
нулевым зазором
= 1,27
dh
Расчет различных деталей и соединений
213
Продолжение табл. 33
При весьма свободной посадке сопрягаемых
деталей из разнородных материалов при
<О,5+о,25;
D V EhDa
максимальные контактные напряжения
где а =
ас м = 0,835
1
F{D-d)
h Dd
Е, Е\ - модули упругости детали и болта
соответственно;
h - толщина детали
Примечание. Предел прочности при смятии неподвижных соединений рекомендуется
принимать асм = 1,3ст„, хотя можно брать стсм = A,5 -s- l,7)cre
34. Расчет клиновых соединений
Схема нагружения
Расчетные формулы
Соединения клином - разъемные и могут
быть:
нагруженными - при действии нагрузок,
постоянных по направлению (схема а);
ненапряженными, находящимися под
действием нагрузок знакопеременных (схемы
б, в).
При цилиндрическом отверстии передача
осевой силы сопряженной детали происходит
по торцу самого стержня (схема а) или
заплечика (схема в); при коническом
отверстии (схема б)- по боковой поверхности
конуса. Обычно принимают конусность
отверстия К = 1:15 или 1:10. Посадка стержня
в цилиндрическое отверстие - h6 или рб.
Клинья односкосный (схема г) и двухскосный
(схема д) по своему действию равноценны.
Односкосный клин проще в изготовлении.
Уклон клина i = tga =
а
214
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Продолжение табл. 34
Схема нагружения
Расчетные формулы
е)
г)
Самотормозящиеся клинья обычно с уклоном
.111 .11
/ \—',— , реже с / — —J—, а
100 40 30 24 20
. 1 1 1
установочные клинья - с уклоном / = —;—;—
10 6 4
и др.
Толщина клина (схема г) Ь = — -е- — У, где d
U з
- диаметр стержня.
Высота клина (схема г) обычно А ? 2,56;
определяется из условия прочности клина на
изгиб.
Сила, потребная для забивания двухскосиого
клина при действии нагрузки,
а для выколачивания
где /], /г - коэффициенты трения на опорных
поверхностях;
pi = arclgfi; p2 = arctg/г - ушы трения
соответствующих коэффициентов трения f\ и
/2-
При практических расчетах можно принимать
А =/г ~ /и тогда
При хорошей обработке поверхностей клина
/ = 0,1.
Для смазанных маслом стальных поверхностей
Для стальных сухих поверхностей
/ = 0,2ч-0,32.
Условие самоторможения клина:
для двухскосного
(оц + а2) <, 2р;
для односкосного
Расчет различных деталей и соединений
215
Продолжение табл. 34
Расчет на прочность клинового соединения
(схемы а, б, в, е, ж, з)
Напряжение изгиба клина (чеки)
3 „21 - d г ¦¦
аи г Т^ ь I и Р
4 bit
, D+d
ще / = при цилиндрическом
2
посадочном конце стержня.
Напряжение смятия:
для клина и стержня (схема ё)
для клина и втулки (схема в)
для клина и втулки (схема е)
опорного торца заплечика (схема в)
боковой опорной поверхности конического
конца штока (схема 6)
Напряжение растяжения стержня по пазу
(схемы е, з)
где в] - ширина паза стержня
Размер / (схема з) определяется из условия
прочности на срез:
216
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Продолжение табл. 34
Схема нагружения
Расчетные формулы
Напряжения смятия (схема з):
для чеки и стержня
F г ,
стс м = — Час м ];
bd
для чеки и опорной детали
F , ,
°см * Км!"
lab
35. Расчет некоторых деталей
Схема нагружения и расчетные формулы
Усилие, возникающее в одной ветви стропа,
где Q - вес поднимаемого груза;
т - количество ветвей строп;
при т = 4 и более Ки = 0,75 - коэффициент
неравномерности нагрузки на ветви стропа;
при т < 4 Кн = 1;
Кс - коэффициент, зависящий от угла
наклона а ветви стропа к вертикали.
Допускаемые натяжения строп
где R - разрывное усилие стропа; к - коэффициент запаса прочности.
Для пеньковых канатов:
R по ГОСТ 483-75; к = 8.
Для стальных канатов:
R по ГОСТ 2688-80; ГОСТ 3062-80-ГОСТ 3097-80; ГОСТ 7665-80-ГОСТ 7686-88;
к = 6 при строповке груза с захватом груза массой более 50 т;
к — 8 - при строповке грузов обвязкой до 50 т.
При отсутствии паспортных данных разрывающее усилие каната определяют по формуле
где / - число проволок в канате; и пиаметр проволоки; ав - предел прочности материала
проволоки.
Для сварных цепей:
R по ТУ; к = 6 - при строповке обвязкой; к - 5 - при строповке с захватом.
а0
Кс
0
1
15
1,03
30
1,15
45
1,42
60
2
Расчет различных деталей и соединений
217
Продолжение табл. 35
Схема нагружения и расчетные формулы
Траверса, работающая на сжатое
Усилие в канатах
F.-Я-.
2 cos a
Сжимающее усилие в балке траверсы:
для однобалочных траверс
Проверяют балку траверсы на устойчивость
где Л - площадь сечения балки траверсы; ф - коэффициент продольного изгиба, определяемый по
табл. 14 гл. 6 в зависимости от гибкости траверсы: X = ,
rain
/ - минимальный радиус инерции, подбираемый по табл. 14 гл. 6 для выбранного сечения балки;
Ы - допускаемое напряжение п траверсе.
Траверса, работающая на изгиб
Максимальный изгибающий момент
где [а] - допускаемое напряжение при изгибе.
Затем устанавливают форму и размеры поперечного сечения траверсы.
В сечении А-А напряжения вычисляют по
формуле
для трехлучевь . траверс
гае б- масса поднимаемого груза; а - длина
плеча траверсы.
Момент сопротивления
где As = ab - пощадь сечения;
W = момент сопротивления.
6
218
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Продолжение табл. 35
Схема нагружения и расчетные формулы
Бесконечно длинная полоса, защемленная по
одному краю, нагружена силой F в точке
свободного края.
Максимальные напряжения
Прогиб
где Е - модуль упругости материала.
При *//# > 0,5 наибольшее напряжение а,11а
на контуре отверстия
где а
При d/H ^ 0,5 концентрацию напряжения
можно не учитывать.
Тогда
Расчет оси
В сечении I-I
изгибающий момент
напряжения изгиба
где [сти] - допускаемое напряжение изгиба.
Цилиндрическая оболочка с фланцем под
действием осевой силы
Максимальные напряжения
Прочность и жесткость сферических оболочек
219
Продолжение табл. 35
Расчет пальца
Изгибающий момент
Напряжения от изгиба
Расчет крепления оси ходового колеса
Расчетный момент по валу этих колес
л/тр = ^-,
где ц - коэффициент трения; F - нагрузка на
колесо.
Принимаем, что напряжения смятия на
торцах планок распределяются по линейному
закону от минимума в точке В до максимума в
точке А
Напряжения смятия на торце планки
Планка крепится двумя болтами.
Наибольшее усилие, приходящееся на правый болт,
Напряжения среза
где d\ - внутренний диаметр резьбы.
Расчет монтажного полотна, изготовляемого из
листовой стали
Минимальная площадь сечения
где [о] - допускаемое напряжение на
растяжение.
Затем, задавшись толщиной листа 5, находят
ширину
220
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Продолжение тя 6. 35
Схема нагружения и расчетные формулы
Вал, работающий на изгиб и на кручение
Приведенный момент по третьей теории прочно-
прочности
где Мх - изгибающий момент; М„ - крутящий мо-
момент.
Диаметр вала
где \а] - допускаемое напряжение.
Расчет плоских круглых крышек |15|
Толщина крышки
+ с,
где к — 1 - для крышки без отверстия;
Допускаемое давление
- для крышки с отверсти-
ем;
[а] - допускаемое напряжение;
с - прибавка к расчетной толщине стенки;
с = 0,4 + 0t56i й 1 мм - прибавка на коррозию.
Расчет плоских круглых крышек с дополнительным
краевым моментом
Толщина крышки
где к - 1 - для крышки без отверстия;
- для крышки с отверсти-
отверстием;
[о] - допускаемое напряжение;
с - прибавка к расчетной толщине стенки,
Прочность и жесткость сферических оболочек
221
Продолжение табл. 35
где
к2 »0,8,-=2_-1; Ф=тах-
A)
индекс р указывает на то, что величина относится к рабочему состоянию или испытаниям, а ин-
индекс м - состояние монтажа
бз - определяют по формуле A), при этом вместо /)с.п. следует принять Di,
Допускаемое давление
Расчет толстостенных цилиндров
Цилиндр нагружен внутренним давлением
У внутренней поверхности:
напряжения радиальные
о> = -р\
тангенциальные
\-к
2 '
радиальные перемещения
¦ + Ц \,
Е [\-к2
к = —-; |Х - коэффициент Пуассона; Е - модуль упругости.
У наружной поверхности:
напряжения
перемещения
ar =0; ет0 = р-
\-к
2 '
2k
1-к
Наиболее опасной является точка у внутренней поверхности, где
(t . ,2 \
1-к'
+ V
где v
•т.р. .
; здесь От.р. - предел текучести при растяжении; от.сас - предел текучести при сжа-
сжатии.
Если цилиндр дополнительно растягивается продольной силой F, возникающей вследствие давле-
ния р на его днище, F = ркЯ{.
F к2
Тогда gf = — = р =-'
где As - площадь сечения цилиндра.
222
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Продолжение табл. 35
Схема нагружения и расчетные формулы
I
^—'
Цилиндр нагружен внешним давлением
У внутренней поверхности:
напряжения
т
<тг =0; ое - -
1-А
радиальные перемещения
2 '
и = -
рЯ
Е \-к'
У наружной поверхности
аг = -р;
сге = -
1 — Аг
2
2~'
pR2
\-к
Наиболее опасной является точка у внутренней поверхности, где
= р
2v
здесь v -
'т.р
°Т?Ж
Расчет кольца, нагруженного сжимающей
силой
Изгибающий момент
Л/ = /Я@,3183 - 0,5sina);
Силы N = - 0,5/sina;
Q = -0,5/cosa
Максимальные моменты в точках Аи В:
МА = 0,3183/К при a = 0;
Мв = -0,1817/7? при a = -
2
Изменение диаметра:
вертикального
,3
= -0Д49
/УГ
А/
горизонтального
Л =0,137
EJ
Напряжения
М
W
где J - момент инерции кольца;
Е - модуль упругости.
где W - момент сопротивления.
Прочность и жесткость сферических оболочек
223
Продолжение табл. 35
Расчет кольца, нагруженного растягивающей
силой
Изгибающий момент
М = kFa,
где к - коэффициент, зависящий от
м
отношения —.
Ь
Напряжения
М
где W - момент сопротивления
поперечного сечения кольца.
а/Ъ
а/Ъ
а/Ъ
1
1,1
1,2
1,3
1,4
1,5
0,318
0,295
0,274
0,255
0,24
0,227
1,6
1,7
1,8
1,9
2
2,1
0,216
0,205
0,195
0,185
0,175
0,167
2,2
2,3
2,4
2,5
0,161
0,155
0,15
0,145
36. Проектировочный расчет оребренной крышки
Схемы нагружения и расчетные формулы
Задано: давление р, механические свойства материала ав, стт.
1. Принимаем X = й/$дн = 3,5 + 5. Большее значение соответствует конструкции, у которой
сравнительно малая толщина основания и сравнительно высокие ребра.
2. Принимаем <р = 2-n.bJa = 0,3 -*- 0,5, где а - шаг ребер в рассматриваемом сечении;
а = 2пВ/п. Меньшее значение соответствует более редкому расположению ребер.
3. Установив допускаемые напряжения [о], вычислим
4. Определим толщину основания крышки 5ДН = 0,75р/а и число ребер п = 5,4C/8ДН.
Оценив полученное л, по конструктивным соображениям принимаем окончательно число ребер,
но не менее л > 6 -ь 8.
5. Вычислим высоту и толщину ребер: h = 5ДНЛ,; 6[ ~ <р/?/л.
6. Определим расчетные напряжения
ft2
где i5, - толщина плоской пластины, эквивалентной по прочности оребреннои крышке
224
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
37. Критические силы и напряжения для оболочек [11]
Схемы нагружения и расчетные формулы
Критические напряжения и осевая сила при
R/B = 100 -5- 1500
кр ; xp
R
где к - коэффициент устойчивости
- для качественно изготовленной оболочки.
Для цилиндров / <, 1,22-Jr& опертых и / ^ 2,5yjR6 защемленных краев
сткр =
2
где к = 0,9 для опертых и к = 3,6 для защемленных краев.
Критические напряжения и осевая сила при а
< 60° и Я/& = 100 * 1500
?5
акр = к—cosot; Fgp= 2nfc?52cos2a,
Д
l JfioasV
Если оболочки изготовлены недостаточно
качественно с несовершенствами формы,
превышающими толщину, расчетные зна-
значения /г необходимо снижать вдвое.
где R = i?i/cosa.
Оболочки с параметрами 0 < a/R < 0,5, 200 S R/6 5 1000.
В зависимости от параметра отверстия
Р = в/
'1
1\
до р = 0,45 заметного влияния отверстия не
обнаруживается;
при р = 0,45 т 2 отмечается резкое снижение
критической нагрузки;
область р > 2 характеризуется менее заметным
снижением нагрузки.
Критическая сила
2пЕк&с,
с =
+ ОД6 - при р к 0,45.
Максимальные напряжения сжатия в точках Б (сеч. А-А)
— + — [b + Rco&OL\
где А& /, Ъ - соответственно площадь, собственный момент инерции и координата центра тяжести
сечения.
Прочность и жесткость сферических оболочек
225
Продолжение табл. 37
Критический крутящий момент
Л/кр =
/кр
Формулы для расчета критических касательных напряжений
Края оперты
-т~
Края защемлены
ткп = 2,
Кр
'кр
= ЗД6А: —
<6R
—4
= 0,81*^4^
3/2
250
500
1000
1500
0,8
0,7
0,6
0,5
Поперечная сила Q приложена к абсолютно
жесткому кольцу на торце цилиндра.
Напряженное состояние определяется
нормальными и касательными напряжениями:
ay = cos a;
= 0;
Если оболочка очень длинная, то разрушение
происходит в зоне А
У коротких оболочек (/ < 2R) в зоне Б действуют касательные напряжения
При / * 2R потеря устойчивости может произойти одновременно в зонах А и Б. При расчете
используются решения для кручения. Тогда критическая поперечная сила
кр
где *кр - вычисляют по вышеприведенным формулам данной таблицы.
15 Том 2
226
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
38. Основные внутренние силы* напряжения, перемещения
размеры подкрепляющих накладок
Схема нагружения
Расчетные формулы
Радиальная сила распределена на малой
круговой площадке
В точках окружности радиуса г
F R
<т, *<т2 «±l»43-f-lg —.
о т
При о]>[ст] размеры подкрепляющей накладки
(толщина и радиус)
где 6 - толщина оболочки;
ii
rH=/M0-«; a =0,7^-.
Максимальные прогибы под силой Fz для
некоторых схем нагружения:
оболочка с защемленными или опертыми
торцами:
при 1&R& $ l и ^ * 100
F.
и =
оболочка, нагруженная двумя диаметрально-
противоположными радиальными силами:
0,75-
Продольная сила распределена на малой
круговой площадке
В точках xss±rtyss0
Перемещения по оси х
При щ>[о] размеры подкрепляющей накладки
(толщина и радиус)
Fx
№
Прочность и жесткость сферических оболочек
Продолжение табл. 38
Продольная сила равномерно распределена на
узкой площадке {b > а)
/
/а
^K.Q
В точках х = 0, у = ± —;
При т > [х] размеры подкрепляющей накладки
(толщина и ширина):
ан =2R 10"",
где а = 7,8
Окружная сила распределена на малой
круговой площадке
В точках х = 0; у ¦— ± г
Перемещения по оси у
Fy Jx2
При Ст2>[а] размеры подкрепляющей накладки
(толщина и радиус)
Fy
[а]г;
Fy
W
Окружной момент распределен на малой
круговой площадке
В точках х — 0, у =¦ х г
а] * о 2 » ±0,62—f-
62
15*
228
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Продолжение табл. 38
Схема нагружения
Расчетные формулы
Окружной момент равномерно распределен на
узкой площадке (Ь « а), вытянутой в продоль-
продольном направлении
В точках х = ± —, у = О
,. 0,
Продольный момент распределен на круговой
площадке
В точках х = ±г, у = 0
«а2*Т0,62-Ч
Продольный момент равномерно распределен
вдоль узкой площадки (а « Ь)
В точках х = 0, у - ± —
2
2Л
а
Примечания: 1. Коэффициент Пуассона принят v = 0,3.
2. Площадка нагружения называется малой, если один из ее размеров (для
круга — радиус г, для прямоугольника — половина ширины) соизмерим с
толщиной оболочки. Для больших площадок эти формулы приводят к
существенно завышенным результатам и могут быть использованы при
выборе ориентировочных размеров подкрепляющих накладок
39. Расчет круговых фланцевых соединений [11]
Фланцевые соединения подразделяют на три
основных конструктивных вида: неконтакти-
рующие, контактирующие и свободные. В
данном разделе приведен упрощенный прове-
проверочный расчет круговых фланцев на усилия,
действующие в болтах от внешних нагрузок
(давления р в емкости, опрокидывающего
момента Мо, осевой силы 7), и на усилия
затяжки болтов.
Расчет различных деталей и соединений
229
Продолжение табл. 39
Эквивалентная суммарная осевая сила, действующая на болты,
'пр
4 " "l Dnp '
где Dnp - средний диаметр прокладки;
к\ = 2,67 + 4 - большее значение принимают для нежестких фланцев, полагая, что раскрытие
происходит относительно оси, проходящей через точку ?, меньшее — ,щм жестких
- раскрытие относительно точки Е\,
к\ - 1,25 + 3 - коэффициент затяжки, меньшее значение которого соответствук! неметал-
неметаллическим (мягким) прокладкам, большее - металлическим.
Q г 1
Условие прочности фланцевых болтов а = ^ а I, где п - число болтов; As - площадь сечения
nAs l J
болта по внутреннему диаметру.
Расстояние между осями болтов (шаг болтов) обычно принимают E + l)d при малых дав-
давлениях р < 1 МПа и B,5 -5- \)d при больших давлениях р > 3 МПа.
Некоитактирующий фланец
JW
6
На фланец действует сила Q.
В сечении A-R
где л - коэффициент, учитывающий упругость
фланца и трубы:
Л =
или при DH< 1,2Z)
cp
D
Л =
1 +
где Ь - ширина сечения фланцевого кольца;
5ср=— E| +б) - средняя толщина трубы на коническом участке.
Окружное напряжение
или при Д, < 1,2/)
aOKD=0,83
'окр
D
230
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Продолжение табл. 39
Наиболее опасной будет точка В, где в двух взаимно перпендикулярных площадках действуют
сжимающие напряжения <т„ и растягивающие окружные напряжения <токр.
Эквивалентные напряжения
Г
При большом уклоне конической части (h < 281) и для труб больших диаметров может оказаться
опасным сечение А\-В\.
Тогда напряжение изгиба
а» =
С COS|J/2,
где р = 1,28 / ^Лтрбср ;
окружное напряжение от номинального давления р
+а
окр
Контактирующий фланец
Эквивалентная суммарная осевая сила, дейст-
действующая на фланец,
nD
тр
Ме
Принимают, что фланец заделан в сечении
Г-Г й упруго связан с трубой. Тогда напряже-
напряжения изгиба в сечении Г-Г
(nD& - nc)h2 '
где Гц - коэффициент, учитывающий влияние
упругости трубы @,5 ? тц ? 1).
Если труба очень жесткая, то iii = 0.5; для
тонкой трубы тц ™ 1.
Значение тц определяют по формуле
1 + Х
п = ,
2 J
где Л. =
(пР^-пс)
1 . ,
; §с = — 15j + о\ - средняя толщина трубы на
2
коническом участке.
В приближенных расчетах можно принимать тц = 0,8 -s- 1.
Расчет различных деталей и соединений
231
Продолжение табл. 39
Напряжения изгиба от момента М\\
ш сечении А-В
напряжения изгиба от момента М^.
1 сечении к\-Ъ\
6АГ.
8f
При сравнительно малой толщине фланца Л и
фланца под болтом по сечению А-Б.
редком шаге болтов возможен местный изгиб
Свободные фланцы
На фланцы действует сила Q.
Окружные напряжения:
во фланце прямоугольного сечения (схема а)
D
при DH < 1,2/)
окр
во фланце произвольного сечения (схема б)
где Jx - момент инерции сечения относитель-
относительно оси х; утвх - координата наиболее удален-
удаленной от нейтральной линии точки сечения.
232
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
8.15. ПРУЖИНЫ
Пружины делят по конструкции на следующие группы: спиральные (витые); та-
тарельчатые; кольцевые; пластинчатые.
По назначению спиральные пружины подразделяют на пружины сжатия, растяже-
растяжения и кручения.
Применяют пружины как правой, так и левой навивки. Для пружин сжатия - растя-
растяжения направление навивки безразлично. Тарельчатые и кольцевые пружины применяют
только в качестве пружин сжатия.
По характеру нагружения различают три основных случая: статическая нагрузка; ди-
динамическая нагрузка ограниченной продолжительности; динамическая нагрузка неогра-
неограниченной продолжительности.
Материал. Изготовление. Пружины изготовляют из углеродистых и легированных
сталей. Из углеродистых сталей изготовляют пружины с диаметром проволоки до 100 мм,
из легированных сталей - пружины, работающие при высоких напряжениях или повы-
повышенных температурах, а также пружины с большими сечениями проволоки (диаметром
20-30 мм) для обеспечения закалки на полное сечение.
В табл. 40 приведены основные материалы, применяемые для изготовления пружин,
и их механические свойства.
40. Режимы термической обработки и механические свойства материалов
Марка материала
65
70
75
85
Рояльная проволока
65Г
55С2; 55С2А
60С2
70СЗА
60С2Г
50ХГ; 50ХГА
55ХГР
6ОС2А
50ХФА
50ХГФА
55С2ГФ
60С2ХА
60С2ХФА
65С2ВА
60С2Н2А
БрО4ЦЗ, БрКЗМц1
БрБ2, БрБ2,5
4аю С
830
830
820
820
830
870
870
850
870
850
850
870
850
850
870
870
870
850
870
800
Механические свойства, не менее
ат, МПа
785
835
885
980
785
1175
1175
1470
1325
1175
1175
1375
1080
1325
1375
1325
1470
1665
1325
<т„ МПа
.980
1030
1080
ИЗО
2000-3000
980
1270
1270
1670
1470
1270
1270
1570
1270
1420
1570
1470
1670
1860
1470
800-900
800-1000
65, %
10
9
9
8
2-3
8
6
6
6
6
7
7
6
8
6
6
6
6
5
8
1-2
3-5
V, %
35
30
30
30
30
30
25
25
25
35
35
20
35
35
25
25
25
20
30
Примечания: 1. Стали 55С2, 55С2А можно закаливать в масло или воду, остальные стали -
только в масло. 2. Сталь 65С2ВА подвергают отпуску при 420 °С, все осталь-
остальные стали - при 470 °С. 3. Рояльную проволоку изготовляют из качественной
высокоуглеродистой стали A%С) и подвергают изотермической закалке
(нагрев до 870-950 °С) с последующей выдержкой в расплавленном свинце до
500 °С. После термообработки проволоку подвергают калибровочному во-
волочению. 4. Бронзы БрО4ЦЗ и БрКЗМц1 после навивки в состоянии поставки
подвергают нагреву до 100-150 °С для снятия напряжений. 5. Бериллиевые
бронзы БрБ2 и БрБ2,5 закаливают в воде, после чего подвергают отпуску при
250-350 °С.
Пружины
233
41. Механические свойства стальной углеродистой холоднотянутой
пружинной проволоки по ГОСТ 9389-75
Интервал
диаметров
проволоки й, мм
0,14-3,0
, 3,0-6,0
t
6,0-8,0
1
Временное сопротивление о„, МПа
Класс 1
2740-3090+
1720-1960
1720-1960+
1420-1670
-
Класс 2, 2А
2300-2740*
1620-1860
1620-1860+
1320-1570
1320-1570+
1230-1420
Класс 3
1810-2300+
1270-1620
1270-1620+
1080-1320
1080-1320+
1030-1230
Примечания: 1. Проволока изготовляется:
а) по механическим свойствам: марок А, Б, В; классов 1, 2, 2А, 3;
б) по точности изготовления: нормальной точности; повышенной
точности П.
2. Проволока классов 1, 2, 3 изготовляется нормальной и повышенной
точности, класса 2А - повышенной точности.
3. Проволока поставляется в термообработанном состоянии
Проволока класса 1 по ГОСТ 9389-75. Высокая разрывная прочность; наличие
больших остаточных напряжений первого рода (от волочения и навивки) обусловливает
появление остаточных деформаций пружин при напряжениях т3 > 0,32ав (где т3 - макси-
максимальное касательное напряжение при кручении).
При vmax > vK (см. табл. 43) остаточные деформации высоки независимо от примене-
применения операции заневоливания.
Проволока классов 2 и 2А по ГОСТ 9389-75. Отличается от проволоки класса 1
уменьшенной прочностью при разрыве и повышенной пластичностью. Применяется для
изделий, работающих при низких температурах, а также для пружин растяжения со
сложными конструкциями зацепов. Проволока класса 2А отличается от проволоки класса
2 повышенной точностью размеров, уменьшением вредных примесей в металле и более
высокой пластичностью. Применяется в авиационной промышленности.
Сталь марки 65Г. Повышенная склонность к образованию закалочных трещин.
Применяется с целью удешевления продукции для изделий массового производства в
случаях, когда поломки пружин не вызывают нарушения функционирования деталей ме-
онизмов и не связаны с трудоемкими заменами.
Сталь марки 51ХФА. Повышенная теплоустойчивость. Закаливается на твердость не
более 53,5 HRC3. В результате высоких упругих и вязких свойств служит лучшим мате-
материалом для стандартных пружин 1 класса.
Сталь марок 60С2А, 60С2. Высокие упругие и вязкие свойства. Повышенная склон-
склонность к графитизации и недостаточная прокаливаемостъ при сечениях d > 20 мм. Широ-
Широкая применимость для стандартных пружин 1 и 2 классов. Для пружин 3 класса на-
жачается при vmax < 6 м/с.
Сталь 60С2ХФА. Высокая прокаливаемостъ, малая склонность к росту зерна и
обезуглероживанию при нагреве (по сравнению со сталью 60С2А), повышенные вяз-
вязкость, жаропрочность и хладостойкость, хорошая циклическая прочность и релаксацион-
релаксационная стойкость в широком диапазоне циклических изменений температур. Пред-
Предпочтительно применение в сечениях проволоки ох 30 мм и выше.
234
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Сталь марки 65С2ВА. Высокие упругие свойства и вязкость. Повышенная прокали-
ваемость. Служит лучшим материалом для пружин 3 класса. Применяется при vmax > 6
м/с.
Сталь марки 70СЗА. Повышенная прокаливаемость. Обладает склонностью к графи-
тизации. Преимущественное применение при диаметрах проволоки d ? 20 мм. Замените-
Заменителем служит сталь 60С2Н2А.
Модуль упругости пружинных сталей Е = B,1 + 2,2I05 МПа, модуль сдвига
G = G,6 -s- 8,2I04 МПа. Предел выносливости при отнулевом циклическом нагружении
составляет в среднем 400-600 МПа. Повышения сопротивления усталости можно добить-
добиться нагартовкой поверхностного слоя (волочением, дробеструйной обработкой). Модуль
упругости сплавов на медной основе (табл. 40) ? = A,2 -г- 1,3I05 МПа, модуль сдвига G -
D,5 + 5I04 МПа.
Бериллиевые бронзы отличаются высоким постоянством упругих свойств и почта
полным отсутствием гистерезиса.
Спиральные пружины из проволоки малого диаметра (до 10 мм) с отношением
D
— > 4 (D - средний диаметр пружины; d - диаметр проволоки) изготовляют навивкой ¦
d
D
холодном состоянии. Пружины с отношением — < 4, а также пружины из проволоки
d
больших сечений навивают в горячем состоянии.
При холодной навивке возможны два варианта:
1) проволоку навивают в тсрмообработанном состоянии или после навивки подвер-
подвергают невысокому отпуску B00-300 °С) для снятия напряжений, возникающих при навив-
навивке;
2) проволоку навивают в отожженном состоянии и после навивки подвергают закал-
закалке и отпуску.
По первому способу изготовляют пружины из углеродистых сталей, например из ро-
рояльной проволоки и холоднотянутой проволоки (ГОСТ 9389-75) диаметром 0,2-8 мм, а
также из легированных сталей 65С2ВА, 50ХФА, 50ХГФА, 60С2ХФ2.
Легированные стали (за исключением вышеприведенных) подвергают после навивки
термообработке: закалке в масле и последующему отпуску.
Диаметр оправки для холодной навивки пружины
D -
где Dm - внутренний диаметр пружины.
МПа
г
981-
1471
1,05
1471-
1716
1,1
42
1716-
1962
1,12
. Значения
1962-
2207
1,14
г
2207-
2452
1,16
2452-
2697
1,18
2697-
2943
1,2
2943 и
более
1,22
Значение Donp уточняют опытной навивкой пружины.
Пружины, навиваемые в горячем состоянии, подвергают после навивки обязатель-
обязательной термообработке. Навивку производят при 800-1000 °С.
Пружины
235
Спиральные пружины сжатия, витки которых работают на скручивание, подвергаю!
упрочнению с помощью заневоливания. Упрочнение заневоливанием основано на созда-
создании во внешних, наиболее напряженных волокнах витков предварительных напряжений,
обратных по знаку рабочим напряжениям.
Заневоливание заключается в сжатии пружины нагрузкой, превышающей рабочую
¦агрузку и выбираемой с таким расчетом, чтобы напряжения сдвига в крайних волокнах
ивтков превысили предел текучести и чтобы материал на этих участках приобрел оста-
остаточные дефоормации. Пружину выдерживают под заневоливающей нагрузкой в течение
36-48 ч, после чего нагрузку снимают.
Заневоливанию подвергают только пружины, работающие пр?* гыпячъгхих чагруч-
ох или при периодических динамических нагрузках с ограниченным общим числом
послов.
Стандартные пружины
Стандартные пружины растяжения и сжатия классифицируют по классам, видам и
разрядам (табл. 43).
Класс пружин характеризует режим нагружения и выносливости, а также определяет
основные требования к материалам и технологии изготовления.
Разряды пружин отражают сведения о диапазонах сил, марках применяемых пру-
пружинных сталей, а также нормативах я» допускаемым напряжениям.
43. Классификация пружин по сопротивлению усталости
Класс пружин
I
II
III
Вид пружины
Сжатия и
растяжения
Сжатия и
растяжения
Сжатия
Нагружение
Циклическое
Циклическое
и статическое
Циклическое
Выносливость
NF,
циклы не менее
МО7
1 105
2-Ю3
Инерционное
соударение
витков
Отсутствует
Отсутствует
Допускается
Примечания: 1. Отсутствие соударения витков у пружин сжатия определяется условием:
Vmax « 1,
VK
гДе vmax - наибольшая скорость перемещения подвижного конца пружины
при нагружении или при разгрузке, м/с;
vK - критическая скорость пружины сжатия (соответствует возникновению
соударения витков пружины от сил инерции), м/с.
2. Значения выносливости не распространяются на зацепы пружин растя-
растяжения
3. Критерием отката в условиях эксплуатации является невыполнение тре-
требований ГОСТ 16118-70.
44. Разряды пружин
Класс
пружин
I
Разряд
пружин
1
2
3
4
Вид
пружин
Одножильные
сжатия и растяже-
растяжения
Сила
пружины
при максимадь>
ной деформации
Л. Я
1-850
1-800
22,4-800
140-6000
2800-180000
Диаметр
проволоки
d,MM
0,2-5,0
1,2-5,0
3,0-12,0
14-70
Маржа
стали
ПоГОСТ
1050-88 и
ГОСТ
1435-90
51ХФА-Ш
по ГОСТ
14959-79
60С2А;
65С2ВА;
70СЗА
по ГОСТ
14959-79
51ХФА
по ГОСТ
14959-79
60С2А;
65С2ВА;
70СЗА;
60С2;
60С2ХА;
60С2ХФА;
51ХФА
по ГОСТ
14959-79
Стандарт
на
заготовку
Проволожа
класса
1 по ГОСТ
9389-75
Проволока
классов
2и2Апо
ГОСТ
9389-75
Проволока
по ГОСТ
1071-81
Проволока
по ГОСТ
14963-78
Проволока
по ГОСТ
14963-78
Сталь
горяче-
горячекатаная
круглая
по ГОСТ
2590-88
НЯСз
-
47,5-53,5
45,5-51,5
44-51,5
МПа
0,3оъ
0,32о,
560
560
480
Стандартна
основные парамет-
параметры
витков
пружины
ГОСТ
13766-86
ГОСТ
13767-86
ГОСТ
13768-86
ГОСТ
13768-86
ГОСТ
13769-86
2
I
44
11
1
2
3
4
Одножильные
сжатия
и растяжения
1,5 - 1400
1,25-1250
37,5-1250
236-10000
4500-
280000
0,2-5,0
0,2-5,0
1,2-5,0
3,0-12,0
14-70
По ГОСТ
1050-88 и
ГОСТ
1435-90
По ГОСТ
1050-88
и ГОСТ
1435-90
51ХФА-Ш
по ГОСТ
14959-79
60С2А;
65С2ВА
по ГОСТ
14959-79
65Гпо
ГОСТ
14959-79
51ХФА
по ГОСТ
14959-79
60С2А;
60С2;
65С2ВА;
70СЗА;
51ХФА;
65Г;
65С2ХФА;
6ОС2ХА
по ГОСТ
14959-79
Проволока
класса 1
по ГОСТ
9389-75
Проволока
классов 2
и 2А по
ГОСТ
9389-75
Проволока
по ГОСТ
1071-81
Проволока
по ГОСТ
14963-78
Проволока
по ГОСТ
2771-81
Проволока
по ГОСТ
14963-78
Сталь го-
ряче-
катанная
круглая
по ГОСТ
2590-88
-
47,5-
53,5
45,5-
51,5
44-51,5
0,5ав
0,5ав
0,52ав
960
800
ГОСТ
13770-86
ГОСТ
13771-86
ГОСТ
13771-86
ГОСТ
13772-86
ГОСТ
13773-86
3
¦о
Продолжение табл. 44
К)
Класс
пружин
Ш
Разряд
пружин
1
2
3
Вид
пружин
Трехжилыше
сжатия
Одножильные
сжатия
Сила
пружины
при максималь-
максимальной деформации
Я, Я
12,5-1000
315-14000
6000-
20000
Диаметр
проволоки
d, мм
0,3-2,8
3,0-12,0
14-25
Марка
стали
По ГОСТ
1050-88
и
ГОСТ
1435-90
60С2А;
65С2ВА;
70СЗА
по ГОСТ
14959-79
60С2А;
65С2ВА;
70СЗА
по ГОСТ
14959-79
Стандарт
на
заготовку
Проволока
класса 1
ПО
ГОСТ
9389-75
Проволока
по ГОСТ
14963-78
Сталь го-
ряче-
катанная
круглая
по ГОСТ
2590-88
ЯЛС,
54,5...58,0
51,5...5б.О
МПа
0,6а»
1350
1050
Стандартна
основные пара-
параметры
витков
пружины
ГОСТ
13774-86
ГОСТ
13775-86
ГОСТ
13776-86
Примечания: 1. Максимальное касательное напряжение при кручении хз приведено с учетом кривизны витков.
2. Допускается использование основных параметров витков по ГОСТ 13766-86, ГОСТ 13767-86, ГОСТ 13770-86 для пру-
пружин растяжения с предварительным напряжением.
3. Временное сопротивление при растяжении о, - по ГОСТ 9389-75 или по табл. 40, 41.
2
о
X
Пружины
239
45. Основные параметры пружин по ГОСТ 13165-67,
ГОСТ 18793-80, ГОСТ 18794-80
Сжатия
i = 0,8-5-2,*5 мм
D) = 8+28 мм
щ = 28+192 мм
Fi - 20,8*151 Н
Fy = 25,8+184 Н
(ГОСТ 13165-67)
Растяжения (ГОСТ 18794-80)
i = 0,6+6 мм
Dx = 6+36 мм
4 = 6,6+156 мм
F1 = 13,2+2000 Н
f3 = 14+2120 Н
Примечания
Сжатия (ГОСТ 18793-80)
d = 0,36+40 мм
Z), * 3+210 мм
k = 5,8+976 мм
F2 = 5+71000 Н
F3 = 6,3+90000 Н
Кручения
d - 0,2+12 мм
А = 2,5+100 мм
k = 0,3+453,9 мм
Afj = 0,001+130 Нм
rf3 = 5+375°
1. Обозначения — см. табл. 47.
2. Пружина сжатия по ГОСТ 13165-67 предназначена для станочных при-
приспособлений. Материал — проволока по ГОСТ 9389—75.
3. Пружину кручения изготовляют из проволоки классов 1, 2, 2А по ГОСТ
9389-75 диаметром 0,2-2,5 мм включительно и проволоки по ГОСТ 14963—
78 диаметром 3—12 мм.
46. Значения рабочих температур пружин из различных марок сталн
Марка стали
51ХФА
60С2А, 65С2ВА,
70СЗА, 65Г
60С2ХФА
Стандарт на заготовку
Проволока класса 1
по ГОСТ 9389-75
Проволока класса 1
по ГОСТ 9389-75
Сталь горячекатаная круглая
по ГОСТ 2590-88
Интервал рабочих температур, °С
(-180) + (+250)
(-60) + (+120)
(-100) + (+250)
240
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
РАСЧЕТ ПРУЖИН
Допустимые напряжения устанавливают с учетом следующих факторов:
прочности материала на кручение (в случае пружин растяжения — сжатия) или из-
изгиб (в случае пружин кручения);
масштабного фактора (диаметра проволоки);
состояния поверхности витков;
условий работы пружины (рабочей температуры, наличия коррозионных сред и т.д.);
степени ответственности пружины;
условий приложения нагрузки (степени внецентренности нагрузки);
характера нагружения пружины.
При статической нагрузке пружины следует рассчитывать по пределу текучести при
кручении (для пружин растяжения - сжатия) или изгибе (для пружин кручения) с введе-
введением коэффициента запаса не менее 2.
При динамической нагрузке с ограниченной продолжительностью пружины следует
рассчитывать также по пределу текучести, но с увеличением коэффициента запаса в
1,3-1,5 раза.
При динамической нагрузке неограниченной продолжительности пружины следует
рассчитывать по пределу выносливости с введением коэффициента 1,3-1,5.
Приведенные выше рекомендации по запасам прочности являются ориентиро-
ориентировочными.
47. Формулы для расчета пружин сжатия и растяжения
(по ГОСТ 13765-86)
Пружина сжатия
Пружина растяжения
Наименование и обозначение
параметра
Расчетные формулы и значения
Сила пружины при предварительной деформа-
деформации F\, H
Сила пружины при рабочей деформации Fi, H
Рабочий ход И, мм
Принимают по условиям работы механизма
Наибольшая скорость перемещения подвижно-
подвижного конца пружины при нагружении или раз-
разгрузке vmax, м/с
Выносливость пружины — число циклов до
разрушения Nf
Пружины
241
Продолжение табл. 47
Наружный диаметр пружины D\, мм
Относительный инерционный зазор пружины
сжатия. Для пружины растяжения служит огра-
ограничением максимальной деформации 6.
Сила пружины при максимальной деформации
F3, H
Сила предварительного напряжения (при на-
навивке из холоднотянутой и термообрабогганной
проволоки) /о, Н
Диаметр проволоки d, мм
Жесткость одного витка пружины с\, Н/мм
Максимальная деформация одного витка пру-
пружины, мм:
5$ (при Fo = 0)
s§ (при Fo > 0)
Максимальное касательное напряжение пружи-
пружины тз, МПа
Критическая скорость пружины сжатия vK, м/с
Назначают предварительно с учетом конст-
конструкции узла.
Уточняют по таблицам ГОСТ 13766-86 -
ГОСТ 13776-86
,.,-А
Для пружин сжатия I и II классов
6 - 0,05 * 0,25.
Для пружин растяжения
6 = 0,05 * 0,1.
Для одножильных пружин III класса
6 = ОД + 0,4
3 1-S
Уточняют по таблицам ГОСТ 13764-86 -
ГОСТ 13776-86
@,1*0,25)/-3
Выбирают по таблицам ГОСТ 13764-86 -
ГОСТ 13776-86
Выбирают по таблицам ГОСТ 13764-86 -
ГОСТ 13776-86
h
Назначают по табл. 2 ГОСТ 13764-86
При проверке
. 4/-1 0,615 . D
где к- +~^т— \i--r•
4/ - 4 / d
К V^-io-3'
Максимальная скорость подвижного звена
механизма vniax должна быть равна или мень-
меньше, т.е. vK ? vmax
16 Том 2
242
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Продолжение табл. 47
Наименование и обозначение
параметра
Модуль сдвига б, МПа
Динамическая (гравитационная) плотность мате-
материала р, кг/м3
Жесткость пружины с\, Н/мм
Число рабочих витков п
Полное число витков пружины щ
Средний диаметр пружины D, мм
Индекс пружины /
Предварительная деформация з\, мм
Рабочая деформация щ, мм
Максимальная деформация $з, мм
Длина пружины при максимальной деформации
/3, мм
Длина пружины в свободном состоянии /о, мм
Длина пружины при предварительной деформа-
деформации А, мм
Расчетные формулы и значения
Для пружинной стали
G-7,85104
Для пружинной стали р = 8103
F — F F F ГтИ4
Для пружин с предварительным напряжением
_ С1
с
где щ - число опорных витков.
Рекомендуется назначать от 4 до 12
_F2
h ¦ (»i + 1 - лз)</,
где ffj - число обработанных витков.
Для пружин растяжения с зацепами
h = h + *з.
А) — h + ^
Для пружин растяжения
Пружины
243
Продолжение табл. 47
* Длина пружины при рабочей деформации (г, мм
Шаг пружины t, мм
Напряжение в пружине при предварительной
«формации ть МПа
Напряжение в пружине при предварительной
_ деформации т2, МПа
i
Длина развернутой пружины (для пружин рас-
растяжения без зацепов) /, мм
| Масса Ттружины (для пружин растяжения без
| зацепов) т, кг
Временное сопротивление проволоки при рас-
растяжении ств, МПа
Максимальная энергия, накапливаемая пружи-
пружиной, или работа деформации, U , МДж
h = h - ъ
Для пружин растяжения
h = k +*2-
/ = S3 + d
Для пружин растяжения
t=d.
т, =у-т3
^3
Для пружин из закаливаемых марок сталей
максимальное касательное напряжение тз
находят по табл. 2 ГОСТ 13764-86; для пру-
пружин из холоднотянутой и термообработанной
т3 вычисляют с учетом значений временного
сопротивления ав. Для холоднотянутой про-
проволоки ав определяют по ГОСТ 9389-75, для
термообработанной - по ГОСТ 1071-81.
Для пружин сжатия и растяжения без пред-
предварительного напряжения
V = **'*.
Для пружин растяжения с предварительным
напряжением
2
244
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
48. Формулы для расчета пружин кручения
Наименование и обозначение
параметра
Расчетные формулы и значения
Наибольший рабочий крутящий момент Mi, Нм
Исходные данные
Наибольший угол закручивания а 2
Наибольший рабочий крутящий момент Mi, Нм
32D/>! - 5rf)lO9
где D\ - наружный диаметр пружины, мм;
d - диаметр проволоки, мм;
[сгиз] - допускаемые напряжения на изгиб.
МПа;
[стИз] ~ 1,25тз, где тз - максимальное каса-
касательное напряжение, МПа, (см.табл.44)
Наименьший (установочный) крутящий момент
Ми Н м
Определяется условиями механизма: '
Mi = (Q,UO>5)M2. '.
Если установочная нагрузка не предусматри- I
вается, то М\ = 0. \
Предельно допустимый крутящий момент
3
«2
Мз_= 1,25 АЛ.
Индекс пружины с
D
где D - средний диаметр пружины, мм.
Рекомендуется принимать с » 5; в ис-
исключительных случаях допустимо с = 4
0,2-0,4
16-8
0,45-1
12-6
1,1-2,5
10-5
2,8-6
10-4
7-14
8-4
Пружины
245
Продолжение табл. 48
Коэффициент формы сечения и кривизны витка
*
: Диаметр проволоки d, мм
Нормальные напряжения при изгибе ст2, МПа
, Предельный угол закручивания при Л/з, аз,°
Наибольший рабочий угол закручивания при
Наибольший рабочий угол закручивания при
Рабочий угол закручивания от М\ до М^ 0°
j
Число рабочих витков п
Наименьшее число витков л^п
Длина пружины в свободном состоянии /о, мм
Зазор между витками 8, мм
Шаг пружины t, мм
Длина развернутой пружины 1, мм
Масса пружины т, кг
к 4С~1
4с-4
If Я1стиз]
32М2к ¦109
должно быть <*2 5 [а„з]
аз ~ 1,25а2
аг = 0,8аз
01 ^
в = аг ~aj
Обычно 6 определяют из условия работы
механизма
981a2DA-5d>M06
Л ЦаюКА-^Х4А-«)
Лт1П U23,lJ •
ДОЛЖНО бЫТЬ П » Лдпп
k = n{d + 6)
6 = 0,1 + 0,5
t=d+&
L = 3,20/1 + /,
где D - (Pj - d);
/ - длина проволоки прицепов, мм;
обычно / = 2Д
тогда Z, = 3,2(Z>i - d)n + 2B), - d).
m-qL
103
где q - масса одного погонного метра прово-
проволоки, кг/м
246
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
РАСЧЕТ ПЛОСКИХ И ТОРСИОННЫХ ПРУЖИН
Метод расчета плоских пружин зависит от перемещений, которые получает пружина
при работе.
Например, плоская пружина малого поперечного сечения при изгибе может по-
получать перемещения, соизмеримые с длиной пружины. При таких больших перемещени-
перемещениях деформации пружины могут оставаться малыми и упругими, если толщина b пружины
достаточно мала.
Для расчета таких пружин используется нелинейная теория, наиболее полно разра-
разработанная Е.П. Поповым.
Если перемещения малы по сравнению с размерами пружины, то ее рассчитывают
по линейной теории стержней.
В табл. 49 приведены формулы для расчета плоских и торсионных пружин.
49. Формулы для расчета плоских и торсионных пружин
Вид пружины
Скручивающий момент
или наибольшая допустимая
нагрузка
Прогиб силы или угол
поворота торцевого сечения
F =
= 4
L3F
ЪкЕ
А Е
3JL '
где b - ширина
/ =
\2hE
Пружины
247
Продолжение табл. 48
6Z, '
где b - ширина
2Г[ом
ЪНЕ
ф =
32MKL _ 2?[тк]
Ы
(л - число пружин)
= Л2 = ¦ ¦ = К = -
п
Ък\Еп
а
F =
321
f 64l?F
f = 1— или
r _
3dE
248
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Продолжение табл. 49
Mv =
2R
Ф =
2MKL
%G\
При h « b
лялБ
где К„ и Къ зависят от отноше-
отношения h/b, как показано в таб-
таблице
h/b
о
1
1
0,1
1,067
0,3
1,233
1,009
2,37
1,481
Плоская спиральная пружина
с числом витков w, толщиной
и шириной витка соответст-
соответственно A, b с жестко заделан-
заделанным наружным концом
с шарнирной заделкой наруж-
наружного конца
MKL
= —-—
EJ
где / =
12
Длина спиральной пружины
L = я(гн + rBH)w
1,25 MK
EJ
Обозначения:^- крутящий момент; [сти1 - допустимое напряжение на изгиб;
[тк] - допустимое напряжение на кручение; Е - модуль упругости материа-
материала; G - модуль сдвига; J - момент инерции поперечного сечения.
ПРУЖИНЫ ТАРЕЛЬЧАТЫЕ
Пружины изготовляют из рессорно-пружинной стали; работают они при температу-
температуре от минус 60 °С до плюс 120 °С.
По виду нагружения стандартом (ГОСТ 3057—90) установлены классы тарельчатьи
пружин, приведенные в табл. 50.
Пружины
249
50. Классы тарельчатых пружин
Класс пружин
Нагружение
Выносливость в циклах jV,
не менее
Циклическое
2106
II
Статическое и циклическое
104
11 ^хшичсскис и циклические iv
Примечание. Рабочая деформация 5 пружин I класса должна быть не более 0,6$з, II класса-
- не более 0,8дз- Предварительная деформация s\ должна быть не менее 0,253-
По исполнению пружины подразделяют на типы:
1 - пружины с наклонными кромками по наружному и внутреннему диаметрам;
2 - пружины с наклонными кромками по наружному и внутреннему диаметрам и опорными
плоскостями при толщине пружин более 1,0 мм;
3 - пружины с параллельными кромками по наружному и внутреннему диаметрам;
4 - пружины с параллельными кромками по наружному и внутреннему диаметрам и опорны-
опорными плоскостями при толщине пружин 1,0 мм.
Пружины изготовляют из листового, полосового проката или пружинной ленты по ГОСТ
2283-79, ГОСТ 7419-90 или другой нормативно—технической документации из стали марки 6ОС2А
по ГОСТ 14959-79.
По согласованию между потребителем и изготовителем допускается изготовление пружин из
сталей марок 60С2, 51ХФА, 60С2ХА, 60С2Н2А, 65С2ВА, 70С2ХА по ГОСТ 14959-79.
51. Параметры и расчетные формулы тарельчатых пружин
по ГОСТ 3057-90
Сила пружины при рабочей деформации
Для пружин с радиусным скруглением кро-
кромок
4Es
1-ц%(А-2Л)
где R - радиус скругления кромок.
-*(*з-§) + '3]
Для пружин без опорной плоскости
4Ё5
Для пружин с опорной плоскостью
250
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Продолжение табл. 51
Сила пружины при максимальной деформа-
ини.К. Я
пружин с опорной плоскостью
Для пружин без опорной плоскости
Для пружин с радиусным округлением кромок
Напряжение сжатия в кромке I аь МПа
Для пружин без опорной плоскости
Для пружин с опорной плоскостью
4?s
Для пружин с радиусным скрутением кромок
- 2R)
Напряжение растяжения в кромке II 02, МПа
Для пружин без опорной плоскости
Для пружин с опорной плоскостью
Для пружин с радиусным скрутением кромок
4Ез
о2 =
- 2Rf
Напряжения растяжения
III о3,МПа
в кромке
Для пружин без опорной плоскости
4J& D2
аз « 1 ~ х
Для пружин с опорной плоскостью
4Es
-2*
Пружины
251
Продолжение табл. 51
Модуль упругости Е, МПа
Предварительная деформация пружины s\, мм
Рабочая деформация пружины s2, мм
Максимальная деформация пружины s3, мм
Толщина пружины t, мм
Наружный диаметр пружины D\, мм
Внутренний диаметр пружины Di, мм
Ширина опорной плоскости Ь, мм
Коэффициент Пуассона
Рассчетные коэффициенты У..., Clt C2, A
Для пружин с радиусным скруглением кро-
кромок
4Es D2 + 2R
аз (i-^2)y(d1-2R)di-2rX
"[BC2-C!)[53-f)+C2rJ
?=2,06. 105
Ji = @,2 + 0,4Mз
s2 - @,3 + 0,6M3 - ДЛЯ пружин 1 класса,
s2 - @,6 + 0,8)j3 - для пружин 2 класса.
Выбирают по табл. 2 и 3 ГОСТ 3057-90.
ц - 0,3
у_1 6 \A-if
с,-1 6 Г^1 —m —11
1 к\пА[1пА ]'
2 itlny*
Для пружин без опорной плоскости
Для пружин с опорной плоскостью
D2 + 2b
Для пружин с радиусным скруглением кро-
кромок
А-2Л
252
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Продолжение табл. 51
Жесткость пружины С, Н/мм
Масса пружины т, кг
Для пружин без опорной плоскости
¦КЗ1-]
Для пружин с опорной плоскостью
с 4Е *3 (S3J 3535i
1-й2 У(Л, - 2*J ^ ' J ' '
Для пружин с радиусным скруглением кромок
1 - Ц2 Y(Dl - 2RJ l^'J ' '
¦1Й1-}
где р = 7,85- 10~6 кг/мм3.
Тарельчатые пружины используют в пакетах. Схема сборки пружин в пакеты показана в табл. 52.
52. Влияние схемы сборки пружин в пакеты на характеристику
"снла-деформация*
Схема сборки
Параметр пакета пружин
Вид характеристики
Одиночная F,
S3
k
Последовательная
Пружины
253
Продолжение табл. 52
Параллельная:
двухпараллельная
1)
2)
трехпараллельная
Параллельно—последовательная
Пружины различной толщины
Обозначения: л- число пружин при последовательной сборке; п\ - число пружин при
параллельной сборке; К - коэффициент, учитывающий трение при парал-
параллельной сборке (К = 1,06 при двухпараллельной сборке; К = 1,09 при
трехпараллельной сборке; К= 1,12 при четырехпараллельной сборке); Fnj
- сила при максимальной деформации пакета; sny - максимальная дефор-
деформация пакета пружин; Lq - высота пакета в свободном состоянии; ALq -
допустимое отклонение на свободную высоту пакета.
При циклическом нагружении следует отдавать предпочтение последовательной
сборке, так как влияние контактной и фрикционной коррозии при параллельной сборке
снижают циклическую стойкость пружин.
При использовании в пакете пружин различной толщины необходимо учитывать
возможность перенапряжения пружин, первыми вступающими в работу. Для предотвра-
предотвращения перенапряжения отдельных пружин применяют промежуточные упоры, огра-
ограничивающие их деформацию.
254
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Количество пружин в пакете для обеспечения их равномерной деформации рекомендуется
подбирать таким образом, чтобы высота пакета в свободном состоянии не превышала 3,0/>ь
8.16. РЕЗИНОВЫЕ УПРУГИЕ ЭЛЕМЕНТЫ
Резиновые упругие элементы применяют в конструкциях упругих муфт, вибро- и шумои-
золирующих опорах и других устройствах для получения больших перемещений.
Преимущества резиновых упругих элементов: электроизолирующая способность, высокая
демпфирующая способность (рассеяние энергии в резине достигает 30-80 %); способность ак-
аккумулировать большее количество энергии на единицу массы, чем пружинная сталь (до 10 раз).
53. Формулы для приближенного расчета резиновых упругих элементов
Расчетная схема элемента
Напряжения
Перемещения
Допускаемые
напряжения, МПа
стати-
статические
динами-
динамические
1,5
0,4
1,5
0,4
0,7
Система классов точности балансировки и методические указания
255
Продолжение табл. 53
Расчетная схема элемента
Напряжения
Перемещения
Допускаемые
напряжения, МПа
стати-
статические
динами-
динамические
Примечания: 1. Материал элементов — техническая резина с пределом прочности
<тв > 8 МПа; модуль сдвига G = 500 + 900 МПа.
2. Допускаемые напряжения для резиновых элементов упругих муфт
[а] = 2 МПа.
3. Значения коэффициента к принимают в зависимости от отношения
f/(D - d) следующим образом:
8.17. СИСТЕМА КЛАССОВ ТОЧНОСТИ БАЛАНСИРОВКИ
И МЕТОДИЧЕСКИЕ УКАЗАНИЯ
В данном разделе приведены классы точности балансировки для жестких роторов
изделий, а также требования балансировки и методы расчета дисбалансов.
54. Классы точности балансировки
Класс точности
балансировки
@)*
1
Значения произведения удельного дисбаланса (ест)
на максимальную эксплуатационную угловую скорость
вращения (юэмакс) е„а>эмакс, ммрад/с
наименьшее.
@,064)
0,16
наибольшее
@,16)
0,40
f/(D - d)
к
0
1
0,1
0,93
0,2
0,89
0,3
0,84
0,4
0,81
0,5
0,8
256
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Продолжение табл. 54
Класс точности
балансировки
2
3
4
5
66
7
8
9
10
И
A2)*
Значения произведения удельного дисбаланса (е„)
на максимальную эксплуатационную угловую скорость
вращения (щ макс) бст-оь мало мм рад/с
наименьшее
0,40
1,00
2,50
6,30
16,00
40,00
100,00
250,00
630,00
1600,00
D000,00)
наибольшее
1,00
2,50
6,30
16,00
40,00
100,00
250,00
630,00
1600,00
4000,00
A0000,00)
* Применять факультативно
Примечание. Наибольшие и наименьшие значения произведений е^оь макс, опреде-
определяющие границы классов, образуют геометрическую npoipeccmo со знаме-
знаменателем 2,5.
Расположение полей классов точности балансировки показано на рис. 32.
Роторы в изделиях с горизонтальной осью вращения, попадающие в область ниже
линии НН, где ^ст-(о2э макс < & создают в опорах динамические нагрузки от дисбалансов
меньшие, чем статические нагрузки от веса ротора.
Роторы в изделиях с горизонтальной осью вращения, попадающие в область выше ли-
линии НН, где встю2эмакс > & создают в опорах динамические нагрузки, большие, чем ста-
статические нагрузки от веса ротора (в этом случае, если нет других, кроме веса статиче-
статических нагрузок, при выборе класса точности баЛансировкп следует учитывать радиальные
зазоры в подшипниках).
Система классов точности балансировки и методические указания
257
Система классов точности балансировки
Рис.32
Том 2
258
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Примечания:
1. Границы классов показаны сплошными линиями. По оси ординат отложены
значения удельного дисбаланса в гмм/кг, ест в мкм. По оси абсцисс отложены значения
максимальной эксплуатационной частоты вращения ротора лэ макс в мин (об/мин)
или /э макс в с» т*с* в герцах (Гц).
2. Максимальная эксплуатационная угловая скорость вращения ротора связана
с максимальной эксплуатационной частотой вращения соотношениями:
A)
где лэ щах в об/мин;
*шэ макс 2 ltf3 макс B)
если /э мши- в герцах.
3. Линия ЯН"соответствует произведению ест-аJэ MaKC = g = 9810 мм-с2, т.е. ускоре-
ускорению силы тяжести.
55. Классы точности балансировки для различных
групп жестких роторов
Классы точности
балансировки
11
10
9
8
7
6
вет-го э макс
ммрад/с,
не более 1;2
4000
1600
630
250
100
40
Типы роторов
(основные размеры)
Узел коленчатого вала3 жестко установленного низ-
кообороткого судового дизеля с нечетным числом ци-
цилиндров4
Узел коленчатого вала3 жестко установленного двух-
двухтактного двигателя большой мощности
Узел коленчатого вала3 жестко установленного четы-
четырехтактного двигателя большой мощности. Узел колен-
коленчатого вала3 судового дизеля, установленного на виброи-
виброизоляторах
Узел коленчатого вала3 жестко установленного высо-
высокооборотного четырех1гилиндрового дизеля5
Узел коленчатого вала3 высокооборотного дизеля с
шестью и более цилиндрами5
Двигатели в сборе (бензиновые или дизельные) для
легковых и грузовых автомобилей и локомотивов4
Колеса легковых автомобилей, ободы колес, банда-
бандажи, приводные валы, тормозные барабаны автомобиля,
колесные пары.
Узел коленчатого вала3, установленного на виброи-
виброизоляторах высокооборотного четырехтактного двигателя
(бензинового или дизельного) с шестью и более цилин-
цилиндрами5.
Узел коленчатого вала двигателя для легкового и
грузового автомобилей и локомотива
Система классов точности балансиропки и методические указания
259
Продолжение табл.55
Классы точности
балансировки
5
i
4
3
2
1
t , ._.„
€ет-<и э макс
мм-рад/с,
не более 1;2
16
6,3
2,5
1,0
0,4
Типы роторов
(основные размеры)
Приводные валы (валы судовых винтов, карданные ва-
валы) со специальными требованиями
Части дробилок.
Части сельскохозяйственных машин.
Отдельные части двигателей (бензиновых или дизель-
дизельных) легковых автомобилей, грузовиков и локомотивов.
Узел коленчатого вала3 двигателя с шестью и более ци-
цилиндрами со специальными требованиями
Части технологического оборудования.
Главные редукторы турбин торговых судов.
Барабаны центрифуг.
Вентиляторы.
Роторы авиационных газотурбинных двигателей в сборе
Маховики.
Крыльчатки центробежных насосов.
Части станков и машин общего назначения.
Роторы обычных электродвигателей.
Отдельные детали двигателей со специальными требова-
требованиями
Газовые и паровые турбины, включая главные турбины
торговых судов.
Турбогенераторы с жесткими роторами.
Турбокомпрессоры.
Приводы металлообрабатывающих станков.
Роторы средних и крупных электродвигателей со специ-
специальными требованиями.
Роторы небольших электродвигателей.
Турбонасосы.
Приводы магнитофонов и проигрывателей.
Приводы шлифовальных станков.
Роторы небольших электродвигателей специального
назначения
Шпиндели, шлифовальные круги и роторы электродви-
электродвигателей прецизионных шлифовальных станков.
Гироскопы
: 1 ш = -J?L в — , где л в мин1 (об/мин); <о в рад/с.
2 Когда речь идет о жестких роторах с двумя симметричными относительно центра масс плоско-
плоскостями опор, к каждой плоскости следует относить половину рекомендуемого значения главного
вектора допустимых дисбалансов. При дискообразном роторе это значение относится к одной
плоскости, проходящей через центр масс ротора.
3 Узел коленчатого вала включает коленчатый вал, маховик, муфту сцепления, шкив, гаситель
крутильных колебаний, части масс шатунов, статически приведенные к осям шатунных шеек
коленчатого вала и т.д.
4 В двигателе в сборе масса ротора включает сумму всех масс, относящихся к узлам коленчатого
вала и перечисленных выше.
5 Низкооборотным считается двигатель со скоростью поршня менее 9 м/с; высокооборотным -
двигатель со скоростью поршня более 9 м/с.
260 . РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Расчет значений допустимых дисбалансов
Установить верхнее значение главного вектора допустимых дисбалансов по форму-
формулам:
для ротора, балансируемого в изделии в сборе
Ая- доп верх = трт ет табл " Аяг э» C)
для ротора, балансируемого в виде отдельной детали
Ал- доп верх = '"рот ест табл ~ Ат т" Аяг э> D)
где /Ярот - масса ротора, состоящая из всех деталей, которые вращаются в собранном
изделии как одно целое (например, собственно ротор, насаженные на него маховики,
колеса вентиляторов, шкивы, шестерни, вращающиеся вместе с ротором кольца под-
подшипников качения и т.д.)» (г);
ест табл - табличное значение удельного дисбаланса, определяемое для данного собран-
собранного изделия по верхней границе установленного класса точности балансировки и мак-
максимальной эксплуатационной частоте вращения его ротора, (мкм);
Ал- т - значение главного вектора технологических дисбалансов изделия, ротор кото-
которого балансировался не в сборе, (г-мм; ...°);
Ал- э - значение главного вектора эксплуатационных дисбалансов изделия, (г-мм;...").
Примечания:
1. Технологические дисбалансы возникают при сборе ротора, если он балансиро-
балансировался не в изделии в сборе, из-за монтажа на него деталей (шкивов, полумуфт, под-
подшипников, вентиляторов и т.д.), которые имеют собственные дисбалансы, вследствие
отклонения формы и расположения поверхностей и посадочных мест, радиальных зазо-
зазоров и т.д.
2. Эксплуатационные дисбалансы возникают из-за неравномерности износа, релак-
релаксации, выжигания, кавитации деталей ротора (например, рабочих колес насосов, венти-
вентиляторов, турбин), деформации деталей ротора под влиянием рабочей температуры рото-
ротора, неравномерности распределения материала на рабочей поверхности центрифуги,
действия шатунных и поступательно движущихся масс в поршневых машинах, за задан-
заданный технический ресурс или до ремонта, предусматривающего балансировку.
Установить нижнее значение главного вектора допустимых дисбалансов, прило-
приложенного к центру масс ротора, по формулам:
для ротора, балансируемого в изделии в сборе
Авг доп нижн = трот€сг табл < 2,5 - х>ст э E)
для ротора, балансируемого в виде отдельной детали или сборочной единицы
Аг доп нижн "«рогаст табл/2,5-Дд. т-^стэ F)
Для двухопорных роторов (рис. 33-35) верхние и нижние значения допустимых
дисбалансов в каждой из двух плоскостей коррекции 1 а 2 следует определять по фор-
формулам:
G)
(8)
Система классов точности балансировки и методические указания
261
(9)
A0)
Рис.33
Рис.34
Рис.35
Примечания: 1. Верхние и нижние значения допустимых дисбалансов в плоскости
опор, измерения или приведения определяют по этим же форму-
формулам и рис. 33-35, подставляя вместо /, и /2 расстояния от опоры А
до соответствующих плоскостей.
2. При расчете необходимо учитывать, что наибольшие значения
дисбалансов D\mn всрхн и Z>2aon верхн являются предельными, неза-
независимо от направления их действия, определяемого видами не-
уравновешенностей ротора (статической, мом.ентной или дина-
динамической).
Конструктивные и технологические требования
При проектировании изделия класс точности для него выбирается предварительно.
Для этого может быть использована таблица, а также отраслевые стандарты, содержащие
разделы о точности балансировки. После экспериментальных исследований опытных или
262 РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
уникальных образцов устанавливают окончательно класс точности балансировки, при
котором не нарушается работоспособность изделия. Экспериментальное определение
класса точности балансировки для вновь разрабатываемых изделий следует проводить
на опытных или уникальных изделиях. Роторы изделий, отнесенных к 1-му классу точ-
точности балансировки, следует балансировать в своих подшипниках в собственном корпу-
корпусе при соблюдении всех условий эксплуатации с использованием собственного приво-
привода. Роторы изделий, отнесенных ко 2-му классу точности балансировки, следует балан-
балансировать в собственных подшипниках или в собственном корпусе, со специальным
приводом, если нет собственного привода. Роторы изделий, отнесенных к 3-11-му клас-
классу точности балансировки, разрешается балансировать в виде деталей или сборочных
единиц.
Роторы изделий должны проходить динамическую балансировку. В том случае,
когда у N роторов из партии однотипных изделий значения начальных дисбалансов
Доич в плоскостях опор не превышают половины большего из верхних значений допус-
допустимых дисбалансов в плоскостях опор А или В, всю партию допускается балансировать
статически с доверительной вероятностью W. Если у N однотипных роторов, произ-
произвольно выбранных из партии, начальные дисбалансы D^ д шч j , где j ~ 1, 2, ..., N
меньше верхних значений допустимых дисбалансов, то остальные роторы этой партии с
соответствующей доверительной вероятностью W допускается не балансировать.
Допускается не проводить балансировку роторов изделий, которые в эксплуатаци-
эксплуатационных условиях работают с дисбалансами, например, роторы вибромашин, вибростолов
и т.п. На ряде изделий, когда не применяется автоматическая балансировка, разрешает-
разрешается проводить балансировку периодически по мере износа (например, шлифовальные
круги). Допустимые дисбалансы и периодичность балансировки должны быть указаны в
нормативно-технической документации. Местоположение плоскостей измерения и
плоскостей коррекции следует устанавливать при конструировании ротора. Одновре-
Одновременно следует установить, как будет проводиться корректировка масс ротора, обеспе-
обеспечить конструктивную возможность ее выполнения, назначить технологический процесс
и предусмотреть возможность балансировки ротора после запланированных ремонтов.
После балансировки остаточные дисбалансы в плоскостях коррекции и (или) измере-
измерения не должны выходить за пределы верхних значений допустимых дисбалансов. Дан-
Данные, определяемые по формулам G) - A0) следует указывать в рабочих чертежах и в
балансировочной карте, если она предусмотрена техническим заданием на разработку
изделия.
Технологические дисбалансы в плоскостях опор
Технологические дисбалансы в плоскостях опор ротора обусловлены рядом факто-
факторов, например: а) точностью изготовления поверхностей деталей, монтируемых на ро-
ротор после балансировки; б) монтажом подшипников после балансировки (если балан-
балансировка ротора проводилась на цапфах его вала без подшипников или, если после ба-
балансировки на своих подшипниках, последние были демонтированы и снова установ-
установлены при сборке машины); в) отклонением от соосности ротора и вала присоединяемой
машины.
При обработке деталей всегда допускаются производственные погрешности. По-
Поверхности валов и отверстий имеют отклонения формы по ГОСТ 24643-81:
в поперечном сечении - отклонение от круглости, т.е. овальность, огранку и т.п.;
в продольном сечении - конусообразность, бочкообразность, седлообразность, от-
отклонение от прямолинейности оси.
Поверхности цилиндрической втулки и отверстия в ней имеют отклонение от со-
соосности осей, радиальные и торцовые биения, волнистость, шероховатость и др.
Волнистость и шероховатость поверхностей деталей на неуравновешенность влияют
мало. Лишь у деталей высокого класса точности балансировки состояние поверхности
может играть некоторую роль, однако у таких деталей и класс шероховатости поверхно-
поверхности обычно очень высок, а следовательно, неровности весьма малы.
Система классов точности балансировки и методические указания 263
В тех случаях, когда нет "особых требований, вытекающих из условий работы, изго-
изготовления или измерения деталей","Ътклонения формы и расположения поверхностей ог-
ограничиваются полем допуска размера или регламентируются в нормативных материалах
на допуски, не проставляемые у размеров" (ГОСТ 24643-81).
Эти случаи наиболее распространены, поэтому при проектировании можно ориен-
ориентироваться на них и лишь при проверочном расчете ужесточать предельные отклонения,
если это окажется необходимым.
Все размеры обрабатываемого изделия защищены допусками - либо теми, которые
стоят на чертеже, либо теми, которые соответствуют принятому на данном производстве
классу точности обработки свободных размеров. Неоговоренное на чертеже радиальное
биение, равное удвоенному эксцентриситету, не с одной установки обрабатываемых ци-
цилиндрических поверхностей относительно базирующих поверхностей цапф или оси, оп-
определяются точностью металлообрабатывающего станка; на современных станках оно
примерно 10-30 мкм, а торцовое биение - менее 10 мкм на наибольшем радиусе. В каж-
каждом конкретном случае расчета эти цифры должны уточняться по имеющемуся оборудо-
оборудованию.
Пусть цилиндрическая изотропная втулка сопрягается с валом сбалансированного
ротора. Предположим, что как втулка, так и вал обрабатывались каждый не с одной уста-
установки. Пусть внешний и внутренний диаметры втулки и диаметр вала под посадку долж-
должна измеряться калибрами, микрометрами или штангенциркулями, что позволяет опреде-
определить только отклонения формы трех поверхностей. В этом случае следует отдельно учесть
несоосность двух цилиндрических поверхностей. (При измерении, например, индикато-
индикатором детали, установленной в центрах, отклонения формы и соосности измеряются со-
совместно).
Перечисленные отклонения приводят к смещению центра масс втулки и возникно-
возникновению удельного дисбаланса втулки, которое в своем максимально возможном значении
может достичь арифметической полусуммы перечисленных пяти наибольших радиальных
биений (три от отклонений формы и две от несоосности)
где 5Л, - поле допуска диаметра / -й цилиндрической поверхности или поле допуска ра-
радиального биения относительно базирующих осей или поверхностей вала и втулки.
Если цилиндрические поверхности втулки обрабатывались за одну установку, то не-
несоосность можно не учитывать
В том случае, когда заданы радиальные биения поверхностей вала и втулки, откло-
отклонения в пределах полей допусков размеров войдут в заданные биения и
Максимально возможное смещение центра масс втулки в результате торцовых бие-
биений
264
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
где e^omj - смещение центра масс втулки в результате биения 5торЦ7 j - го торца на диа-
диаметре D.
где р - плотность материала втулки; D и d - наружный и внутренний диаметры втулки.
Очевидно, что наибольшее возможное значение главного вектора технологических
дисбалансов детали от радиальных и торцовых биений будет
Очень часто в пределах допустимых отклонений формы и несоосности поверхностей
цилиндра лежат и перекосы, вызывающие моментную неуравновешенность. Однако, де-
детали в этом случае обычно будут вызывать значительно меньшие технологические дисба-
дисбалансы в опорах, нежели наибольшие возможные технологические дисбалансы от ста-
статической неуравновешенности. Поэтому при рассмотрении максимально возможных тех-
технологических дисбалансов в плоскостях опор часто достаточно учитывать только наи-
наибольшую возможную статическую неуравновешенность детали.
Полученный результат позволяет конструктору увидеть, какой размер при на-
намеченной точности изготовления вызовет разбалансировку наибольшей величины после
посадки детали на вал. Меняя класс точности изготовления отдельных размеров, можно
изменять значение технологического удельного дисбаланса детали и подобрать такой
класс точности, который обеспечит приемлемые значения технологических дисбалансов в
плоскостях опор. Эти требования должны увязываться с экономикой производства и с
его технологическими возможностями.
Пример. Стальной полый однородный цилиндр, поверхности которого обрабатыва-
обрабатывались не с одной установки, насаживается по напряженной посадке на вал сбалансиро-
сбалансированного ротора (рис. 36), цапфы которого и место посадки цилиндра обрабатывались
также не с одной установки. Значение главного векто-
\у ра остаточных дисбалансов вала DCT ост вал=0,6 г-мм.
Материал - сталь 40 по ГОСТ 1050-74.
Так как особых требований к предельным отклоне-
отклонениям формы нет, то по ГОСТ 24643-81 все эти отк-
отклонения ограничиваются полем допуска размера,
кроме взаимного расположения поверхностей 080 и
030 Н7, которые ограничены наибольшим взаимным
радиальным биением.
Определим слагаемые формулы:
1. Поле допуска 030 кб вала ротора:5[ = 0,015 мм.
2. Поле допуска 030 Н7 отверстия цилиндра: 52 =
Рис. 36 0,023 мм.
3. Поле допуска 080 цилиндра по hi2: 53max = 0,4
мм.
4. Наибольшее радиальное биение поверхности 080 относительно поверхности
030 Н7: 54 = 0,03 мм.
Система классов точности балансировки и методические указания 265
5. Наибольшее радиальное биение поверхности 030 кб ротора относительно по-
поверхности его цапф Ssmax = 0,03 мм.
6. Наибольшее торцовое биение цилиндра &горд1 = &гоРц2 = ^ ^1 мм на наибольшем
радиусе.
Наибольшее возможное значение главного вектора дисбалансов цилиндра вследст-
вследствие радиальных биений и посадки на сбалансированный вал ротора
Из этого выражения видно» что 53 = 0,4 мм создает на порядок больший техноло-
технологический дисбаланс, нежели остальные отклонения. Очевидно, для уменьшения техно-
технологических дисбалансов в плоскостях опор при сборке такого ротора следует в первую
очередь увеличить точность изготовления 080.
Наибольшее возможное значение главного вектора дисбалансов цилиндров вслед-
вследствие торцовых биений
где
Примечание.
При измерении калибром или штангенциркулем 5^,, примерно равно половине
разности наибольших значений расстояний между торцами, измеренных по концам од-
одного и того же диаметра; при измерении индикатором &гОрц равно измеренному значе-
значению торцового биения.
Главный вектор дисбалансов цилиндра вследствие технологических погрешностей
его изготовления и посадки на сбалансированный вал ротора может достичь значения
Как видно из примера торцовое биение мало сказывается на неуравновешенности
детали. Наибольшие технологические дисбалансы вносит радиальное биение.
Ш РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Условие допустимости только статической балансировки
При статической балансировке устанавливается такая корректирующая масса тк
на радиусе гк в плоскости коррекции, чтобы
Бели используется только одна плоскость коррекции и она проходит через центр
масс ротора, то статическая балансировка завершается успешно, не затрагивая действие
главного момента М& Аналогичное следствие будет иметь место, если ткгх разносится
(по правилам статики) в две плоскости коррекции, расположенные по обе стороны от
центра масс ротора.
Если же используется одна плоскость коррекции, расположенная на расстоянии /к
от центра масс ротора (например, один из торцов детали), то после такой статической
балансировки возникнет момент дисбалансов от корректирующих масс
Если при статической балансировке /)ст полностью скомпенсирован, то реакции
опор будут
где Шрот = Швал + /Пдет? ?>А,в ' расстояние от середины опор А и В до центра масс
ротора (мм).
Для этой же детали главный момент дисбалансов
где (л/ддет) и (Млде1} - измеренные на балансировочном станке главные моменты
дисбалансов детали при двух ее положениях на балансировочной оправке, повернутых
на 180° вокруг оси, перпендикулярной оси вращения оправки (при сохранении одной и
той же общей образующей посадочных поверхностей).
Если насаживаемая на вал деталь является однородным цилиндром длиной 11ЩЛ с
радиусом R и радиусом посадочного отверстия г, то прибигижеино условие допустимости
статической балансировки можно представить так
Следовательно, условием допустимости статической балансировки будет
здесь у определяется:
Система классов точности балансировки и методические указания 267
где
y «tev - 8двал
г вал чагвал 21 „ет " наибольшее возможное угловое смещение оси посадочной
поверхности вала относительно оси, соединяющей центры
поверхностей качения его цапф;
&Квал ~ поле допуска посадочного (под деталь) размера вала;
Yotbw *SYotb= ~j - наибольшее возможное угловое смещение посадочной
де т поверхности отверстия детали из-за отклонений его формы;
8лдет - поле допуска посадочного отверстия детали.
Следует иметь в виду, что статическая балансировка в динамическом режиме дает
на порядок большую точность, нежели статическая балансировка при помощи силы
тяжести (на "ножках").
Пример расчета допустимых дисбалансов
Ротор изделия имеет массу /Иро,- = 500 кг E1O5 г), максимальную эксплуатацион-
эксплуатационную частоту вращения лэ щ^ = 3000 мин и устанавливается на подшипниках качения
>fe 32222 ГОСТ 8328-75 в опоре А и № 222 ГОСТ 8338-75 в опоре В. Оба подшипника 0
по ГОСТ 520-71 устанавливаются на цапфы ротора по посадке JS6.
Эксплуатационные дисбалансы на заданный технический ресурс в 10000 ч могут
достигать 20% от табличного допустимого удельного дисбаланса.
Расстояние от опоры А до центра масс 1^ = 300 мм, до плоскостей коррекции / и 2
1\ = 100 мм, li = 700 мм, до плоскостей измерения 1\ = 50 мм и 1ц = 800 мм. Класс
точности балансировки 4-й.
1. По рис. 32 при яэ ш = 3000 мюг1 по верхней границе для 4-го класса точности
балансировки находим табличный допустимый удельный дисбаланс ротора
^сг доп табл = 20 МКМ = 0,02 ММ.
2. Балансировку ротора желательно проводить на балансировочном станке на цап-
цапфах ротора без собственных подшипников.
Для этого случая применима формула D)
Мя1 доп верхи ~ "*рот ^ст доп табл " Мгг т ~ -Чет э-
Определим слагаемые правой части:
/"рот ест доп табл = 5-105 .0,02 = 104 гмм;
Ястт = тротепод - тРот0,5(б1 + 62) = 51O5 -0,5@,02 + 0,025) = 11250 гмм,
где епод - наибольшее возможное смещение центра масс ротора от посадки подшипни-
подшипников, когда оба подшипника работают по первому режиму, т.е. с местным нагружением;
бх = 20 мкм = 0,02 мм - поле допуска 0110 отверстий подшипников по ГОСТ 520-71,
оно одинаково для монтируемых на ротор подшипников;
82 = 25 мкм = 0,025 мм - радиальное биение беговой дорожки внутренних колец под-
подшипников.
А* э = трот сст доп табл 0,2 = 5105 0,020,2 = 2000 гмм.
268
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Следовательно,
Очевидно, что выполнить балансировку ротора только на собственных цапфах нель-
нельзя.
3. При балансировке ротора на собственных подшипниках следует пользоваться
формулой C)
^ст доп верхи ~ "*рст Зет доп табл ~ -^ст э-
Если пренебречь массой внутренних колец подшипников, которые прибавятся к
массе ротора, и воспользоваться значениями, полученными в п. 2, то
По формуле E) вычисляем
4. По формулам G-10) находим верхнее и нижнее значения допустимых дисбалансов
в плоскостях коррекции 1 и 2.
5. Верхние значения допустимых дисбалансов в плоскостях измерения будут:
Система классов точности балансировки и методические указания
269
БАЛАНСИРОВОЧНАЯ КАРТА
Название предприятия
К сборочному чертежу №
Схема ротора
Параметры
Конструк-
Конструктивные
параметры
Балансиро-
Балансировочные
параметры
Данные
Масса ротора
Наибольший диаметр ротора
Длина "бочки" ротора
Длина ротора
Диаметры цапф ротора
Номера подшипников качения и их посадки
на вал и в корпус
Максимальная эксплуатационная частота
врашения
Резонансная частота вращения системы
"ротор-опоры"
Расстояние между серединами опор А и В
(плоскостями опор)
Расстояние от середины опоры А до плоско-
плоскостей коррекции 7 и 2
Расстояние от середины опоры А до центра
масс ротора
Класс точности балансировки работающего
изделия
Наибольшие значения эксплуатационных
дисбалансов в плоскостях опор А и В за тех-
технический ресурс
Наибольшие значения технологических дис-
дисбалансов работающего изделия в плоскостях
опор А и В
Значения допустимых дисбалансов в плоско-
плоскостях коррекции 1 и 2.
верхнее
нижнее
Значение корректирующих масс верхнее
Радиусы расположения корректирующих
масс в плоскостях коррекции 1 и 2
Условные
обозна-
обозначения
Юрот
"рот наиб
•рот
*1>от
<4> dB
-
пз max
Лрез.1
L
h,h
LA
D3A
П г.
1>эВ
D7b
L*\ доп верхн
Дг доп верхн
*м доп нижн
*h. доп нижн
тк\ верхн
тк2 верхн
Г\
П
Единица
кг
мм
мм
мм
мм
МИН'1
(об/мин)
МИН
(об/мин)
мм
мм
мм
г мм
гмм
г-мм
гмм
гмм
гмм
гмм
гмм
гмм
гмм
мм
мм
Значение
270
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
В технологической карте должны быть описаны:
Способ корректировки масс ротора:
добавлением, снятием или перемещением
массы, отверстия сверлятся осевые или радиальные,
максимальная глубина сверления и т.д.
Способ балансировки.
на цапфах ротора, на собственных, сменных,
съемных и т.д. подшипниках
Балансировка ротора
с вентилятором или без него, с шестернями,
шкивами, шпонками, вспомогательными опорами, с технологическими втулками и т.д.
Балансировочная оправка
класс точности ее изготовления,
собственные дисбалансы и др.
Тип балансировочного станка, конструкция привода
Частота вращения при балансировке п^ (об/мин)
Установка ротора.
между опорами, консолыю, с дополнительной опорой и т.д.
Периодичность балансировки.
в процессе эксплуатации или после ремонта
8.18. ОПРЕДЕЛЕНИЕ РАСЧЕТНЫХ УСИЛИЙ
ДЛЯ АППАРАТОВ КОЛОННОГО ТИПА
ОТ ВЕТРОВЫХ НАГРУЗОК
Расчету на ветровую нагрузку подлежат аппараты колонного типа, высотой более
10 м при Яг 1,5 Апш, а также высотой менее 10 м при Н> 5 Дщп (где ^„щ, - наимень-
наименьший из наружных диаметров аппарата), устанавливаемые на открытом воздухе.
В качестве расчетной схемы аппарата колонного типа принимают консольный уп-
ругозащемленный стержень (рис.37).
Аппарат по высоте разбивается на z
участков, где А2 <, 10 м.
Вес участка аппарата принимается
сосредоточенным в середине участка.
Ветровая нагрузка, распределенная
непрерывно по высоте аппарата, заменя-
заменяется сосредоточенными горизонтальны-
горизонтальными силами, приложенными в серединах z
участков.
Периоды основного тона собствен-
собственных колебаний аппарата определяют по
формулам:
Рис.37
Расчетная схема аппарата колонного типа
Определение расчетных усилий для аппаратов колонного типа от ветровых нагрузок 271
джя постоянного сечения Т = Tnjl +
HCPJF9
\g h
где Го = liSifJ —, или по графику, приведенному на рис. 38.
\ g EJ
При отсутствии данных о фундаменте в первом приближении допускается прини-
принимать Г» 7о
для переменного сечения
•«г
( н 1 V
{2EJl't+CFJF)
\2Щ
где CF - определяется по данным инженерной геологии; при отсутствии таких данных
CF выбирается в зависимости от плотности грунтов по табл. 56;
а/ - относительное перемещение центров тяжести участков рассчитывается по
формуле
Я . х,
ще Р/ - коэффициент, определяемый по рис. 39; у - коэффициент, определяемый по
формуле
Y - j
Здесь
Т - период собственных колебаний, с;
Е - модуль продольной упругости материала колонны при расчетной темпе-
температуре, Н/и2 (тс/м2);
Н - высота колонны, м;
Ср - коэффициент неравномерности сжатия грунта, #/м3 (тс/м2);
JF - минимальный момент инерции подошвы фундамента, м4;
G - общий вес колонны, И (тс);
g - ускорение силы тяжести, м/с2;
/ - момент инерции верхнего основного металлического сечения аппарата
относительно центральной оси, м4;
Gi - вес /-го участка колонны, Н(тс);
Щ - общая высота каждого отдельного участка аппарата, м;
А, X, ц - безразмерные параметры.
272
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Для аппаратов с двумя переменными жесткостями J\ и Jj в формуле * следует при-
принимать #3 ~ 0, то же по рис. 40; Д, X, ц - определяют по рис. 40.
Таблица 56
Грунт
Слабые грунты (материал и шлам в пластичном
состоянии, пылевой песок в состоянии средней
плотности)
Грунты средней плотности (материалы и шлам
на границе течения, песок средней плотности)
Плотные грунты (твердый глинистый шлам,
гравий и гравийный песок, плотный лесс)
Скальные грунты
Коэффициент неравномерности сжатия
грунта, Н/м3 (тс/м3)
6-Ю7 F 103)
6-ЮМ О8 F1О3+1О4)
108+210« (Ю4+2-104)
2 • 108B 104)
Примечание. Данные, приведенные в табл. 56, относятся к опорной площади более 10м2.
При меньшей площади значения, указанные в табл. 56, необходимо умно-
3 2
жить на J— , где Ар - площадь бетонного фундамента, м2.
Период колебаний То
Коэффициенты
Го, с
10
3
3
а
7
ь
5
'I
7
г
LS
1
0,9
6jS
0,6
ots
03
0,1
0,15
—
I
У
>У
iQ
к
У
р
\
f
/
у
~~7*
^-
у
у
у
У
У
—
10 15 20 10 W 50 WO 150 200 101 WO 500 '000
D - внутренний диаметр аппарата,
5 - толщина стенки аппарата
а; А
*>
0,5
8,3
о,
У
у
г о,г й
/
1
J Bfi 6
1
5 С
I
S 0
А
1
1
7 0,3 0
1
1
9 ;о
Рис. 38
Рис. 39
Определение расчетных усилий для аппаратов колонного типа от ветровых нагрузок 273
S
4
3
2
1
«3J
0
й
mmet
/
1
1 1
— II —
1—1—I
/
¦——
/I
/
s
——-
/
т
Г"ЦУ
ft?
4,4
3i
Коэффицоггы Л, А,, ц
3 J2 Я,
A1F
я,
И
0,2 US
А^л
05
ft*
\ Г Г~ I I i т I 1 | ТТТ' ' т-—г" '» '"I"—>
a?
: S Tom 2
Рис. 40
1.0
274 РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Изгибающий момент в расчетном сечении на высоте хо определяют по формуле
Pi= Pitl ¦+ Р^ - ветровая нагрузка на /-м участке;
Pljt = gijl-Dt-ht - статическая составляющая ветровой нагрузки на /-м участке;
Pidytt = vG, .^Л< " Динамическая составляющая ветровой нагрузки на /-м
участке;
MVj = l,4qdQj[xj - jco)x - изгибающий момент от действия ветра на обслуживающую
х( 1 +O,75fyK/tij)?Ap площадку j на высоте хо, Им (кгс-м)
При отсутствии точных данных о форме площадки изгибающий момент Mtj определяют
по формуле
Mtj = 0?85 qofyxj- д:о)A + 0,75 4 *j
где Dj - наружный диаметр /-го участка колошп>1, м;
xt - расстояшю от серед1шы /-го участка до поверхности земли, м;
дго - высота расчетного сечения аппарата до поверхности земли, м;
ды * нормативное значение статической составляющей, НМ2 (кгс/м2);
ht - высота /-го участка колонны, м;
v - коэффициент, устанавливающий корреляцию пульсации скорости ветра;
? - коэффициент динамичности при ветровой нагрузке;
т], - приведенное относ1ггелыюе ускорение центра тяжести /-го участка;
#о - нормативный скоростной напор ветра па высоте Юм над поверхностью
земли, НАл2 (кгс/м2);
G, - коэффициент, учитывающий изменение скоростного напора по высоте
аппарата, определяют по рис. 42;
Xj • высота обслуживающей площадки от поверхности земли, м;
iKj - коэффициент, определяют по рис. 45;
ittj - коэффициент пульсации скоростного напора для середины J-ii
площадки на высоте х^ определяют по рис. 44;
Aj - общая площадь, м2;
ZAp, Aj - приведены на рис. 41.
Нормативное значение статической составляющей ветровой нагрузки на середине /-го
участка аппарата
где qo - определяют по табл. 57;
0 - определяют по рис. 42;
К - принимают по рис. 41
Определение расчетных усилий для аппаратов колонного типа от ветровых нагрузок 275
Районирование территории Рос-
России по скоростным напорам ветра
Скоростной напор ветра q%
Н/м2 (кгс/м2)
1
270
B7)
II
350
C5)
III
450
D5)
IV
550
E5)
V
700
G0)
Таблица 57
VI
850
(85)
VII
1000
A00)
Коэффициент 4 в зависимости от параметра
Б —
Б~
840 I 2700,
следует определять по графику, приведенному на рис. 43, а коэффициент v - по табл. 58
Таблица 58
Высота аппарата, м
Коэффициент, устанавливающий
корреляцию пульсации скорости
ветра v при е:
0,05
0,1
0,2
До 45
0,7
60
0,65
0,75
120
0,6
0,65
0,75
Примечание. Промежуточные значения коэффициента в таблицах определяют линей-
линейной интерполяцией.
Круговой цилиндр
Аэродинамические коэффициенты
Площадка*
(общая площадь)
Площадка**
(отдельный профиль)
К = 0,7
К = 0,85
К = 1,4
* Учитывается общая площадь Л7, включая площадки.
** Учитывается сумма всех проекций профилей площадки ZAp на плоскость, перпендику-
перпендикулярную к направлению ветра.
Примечание. Допускается уменьшать К до 0,6, если отношение шероховатости поверхно-
поверхности к диаметру аппарата меньше 21 СИ.
Рис. 41
/8*
276
РАСЧЕТ ДЕТАЛЕЙ И КОНСТРУКЦИЙ
Коэффициент 0j,
it
/
У
Я * 41 SI
w m
Рис. 42
Коэффициент ^
——
1
Рис.43
Коэффициенты m*, mi
Коэффициент
V v I* v
у
A
IZj
i
A
/
i
-
• !
1
V 9Г
Рис.45
Приведенное относительное ускорение центра тяжести / - го участка
где а/, а^ - относительное перемещение центров тяжести /'-го и к-то участка при основ-
основном колебании; m*, mj определяют по рис. 44.
Список литературы 277
СПИСОК ЛИТЕРАТУРЫ
1. Анурьев В.И. Справочник конструктора—машиностроителя. Т.2,3, Изд. 7-е. М:
Машиностроение, 1992.
2. Астахов М.Ф. и др.: Справочная книга по расчету самолета на прочность. М.:
Оборонгиз, 1954.
3. Бнргер ИЛ., Шорр Б.Ф., Шнейдоровнч P.M. Расчет на прочность деталей машин:
Справочное пособие. Изд. 2-е М., Машиностроение, 1966.
4. Бобров И.М., Михайлов В. Г. В помощь конструктору-расчетчику. Механические
расчеты. М.: НИИНАВТОПРОМ, 1969.
5. Вайнберг Д.В., Вайнберг Е.Д. Расчет пластин. Изд. 2-е, Киев: Будивельник, 1970.
6. Детали машин: Справочник. Т.1. Изд. 3-е/ Под ред. Н.С.Ачеркана, М.: Машино-
Машиностроение, 1968.
7. Дунаев П.Ф., Леликов О.П. Конструирование узлов и деталей машин. Изд. 4-е,
М.: Высшая школа, 1985.
8. Иосилевич Г.Б. Детали машин, М., Машиностроение, 1988.
9. Кузьмин А.В., Чернин И.М., Козин Б.С. Расчеты деталей машин: Справочное по-
пособие. Изд. 3-е, Минск: Вышэйшая школа, 1986.
10. Левшина Е.С., Новицкий П.В. Электрические измерения физических величин.
Измерительные преобразователи, Л.: Энергоатомиздат, Ленинградское отделение, 1983.
11. Лизин В.Г., Пяткин В А. Проектирование тонкостенных конструкций. М.: Ма-
Машиностроение, 1985.
12. Общетехнический справочник/ Под ред. Е.А. Скороходова. М.: Машиностроение,
1989.
13. Орлов П.И. Основы конструирования. Справочно-методическое пособие. Книга
2. Изд. 3-е. М.: Машиностроение, 1988.
278 РАСЧЕТ ЭЛЕМЕНТОВ КОНСТРУКЦИЙ НА ПРЕДЕЛЬНЫЕ НАГРУЗКИ
14. Пономарев С.Д., Андреева Л.Е. Расчет упругих элементов машин и приборов.
М.: Машиностроение, 1980.
15. ГОСТ 14249-89 Сосуды и аппараты. Нормы и методы расчета на прочность.
16. ГОСТ 24755-89 Сосуды и аппараты. Нормы и методы расчета на прочность ук-
укрепления отверстий.
17. ГОСТ 24756-81 Сосуды и аппараты. Нормы и методы расчета на прочность. Оп-
Определение расчетных усилий для аппаратов колонного типа от ветровых нагрузок и сейс-
сейсмических воздействий.
18. ГОСТ 22061 -76 Машины и технологическое оборудование. Система классов
точности балансировки. Основные положения.
19. Методические указания по балансировке жестких роторов (к ГОСТ 22061-76).
9. РАСЧЕТ ЭЛЕМЕНТОВ КОНСТРУКЦИЙ
НА ПРЕДЕЛЬНЫЕ НАГРУЗКИ
Традиционно используемые методы расчета на прочность основаны на теории упру-
упругости и в качестве предельной прнимается такая комбинация нагрузок, при которой в
одной из точек конструкции напряжение (или комбинация составляющих тензора на-
напряжений) достигает некоторого допускаемого напряжения. Однако большая часть кон-
конструктивных элементов остается работоспособной при нагрузках, порой, в несколько раз
больших, чем нагрузки, соответствующие предельному состоянию по допускаемым на-
напряжениям. Это объясняется, по большей части, пластическими свойствами материалов,
перераспределением напряжений в элементах конструкций (по сравнению с упругим со-
состоянием). Очевидно, что непригодные в этом случае методы теории упругости должны
быть заменены другими, в большей степени учитывающими реальные свойства материа-
материалов. Одним из них является метод расчета по предельным нагрузкам (расчет на несущую
способность). В большинстве случаев этот метод предполагает в качестве рабочего тела
идеальную жесткопластическую среду. В развитие этого метода иногда используется тер-
термин "теория идеальной пластичности" или "теория предельного равновесия".
Ниже изложены основы теории предельного равновесия для пластических материа-
материалов, позволяющие самостоятельно находить предельные нагрузки несложных конструк-
конструкций, приведены известные решения для конкретных конструктивных элементов при раз-
разных схемах нагружения. Большая часть результатов сведена в таблицы, пользоваться ко-
которыми можно без предварительного ознакомления с первыми разделами.
Условия текучести
279
9.1. УСЛОВИЯ ТЕКУЧЕСТИ
Условия текучести в напряжениях. Пластичностью называется способность твердых
тел приобретать остаточные деформации без нарушения сплошности. Типичная диа-
диаграмма а - е при растяжении-сжатии большинства конструктивных материалов (рис. I, а)
имеет: упругий участок - значительное возрастание нагрузки, не приводящее к оста-
остаточным деформациям;- небольшой переходный участок, где напряжения близки -к ве-
величине о-т, называемой пределом текучести; область пластических деформаций, характе-
характеризующаяся постоянством напряжений или их относительно небольшим возрастанием
(явление упрочнения). Разгрузка в пластической области происходит по прямой, парал-
параллельной упругому участку. По величине пластические деформации в десятки, а иногда в
сотни раз превосходят упругие. Одной
из идеализацией реальной диаграммы с
- е может служить диаграмма идеально-
. го жесткопластического тела (рис. 1,6),
где материал остается жестким до на-
напряжений а = ат и может иметь произ-
— вольную деформацию при а — стт. На-
Ф пряжения больше предела текучести
считаются невозможными. Для растя-
растяжения - сжатия выполняется условие
Рис. 1
о - ат < 0.
A)
Равенство в этом соотношении называется условием текучести при одноосном на-
напряженном состоянии. Для сложного напряженного состояния условие текучести обычно
записывают в виде
где / - функция от составляющих тензора напряжений <т,у. Обычно / выбирается таким
образом, что /0) < 0. При / < 0 материал считается жестким, при / = 0 пластические де-
деформации возможны, состояние/> 0 считается невозможным.
Условия текучести материала в напряжениях обычно определяются эксперименталь-
экспериментально и для удобства записываются в виде некоторого аналитического выражения, доста-
достаточно хорошо описывающего экспериментальные данные. Наиболее употребительны
следующие:
условие максимального касательного напряжения (условие текучести Треска-Сен-
Веннана) 2ттах - стТ = 0, которое в главных напряжениях записывается в виде
I oi - о31 - от = 0 (qx>u2> с3);
условие максимального приведенного напряжения
C)
а\, \а2 - <т|, |<т3 -
3 т
где
+ст2 +а3);
условие пластичности по октаэдрическому напряжению или энергии формоизмене-
формоизменения (условие текучести Мизеса)
- aT = 0.
E)
280
РАСЧЕТ ЭЛЕМЕНТОВ КОНСТРУКЦИЙ НА ПРЕДЕЛЬНЫЕ НАГРУЗКИ
В координатах аь а2, аз выражения C) - E) представляют некоторые поверхности
текучести. Если одно из главных напряжений постоянно или отсутствует, в координатах
двух других могут быть построены кривые текучести.
Допустимые значения напряжений сь 02@3 = 0) при условии текучести C) удовле-
удовлетворяют условию
ст2|
F)
и в координатах сть о2 заполняют шестиугольник Треска (рис. 2). Аналогичные значения
при условии текучести Мизеса
2 + 2 - < 2 G)
заполняют эллипс Мизеса (рис. 2).
Так же как пластические деформации могут в десятки
^ и сотни раз превышать упругие деформации, перемещения,
обусловленные пластическими деформациями, для доста-
достаточно жестких элементов обычно во много раз превышают
Jr "¦* упругие перемещения. Способность конструкции выдержи-
j^ I а/ вать внешние нагрузки без больших (по сравнению с упру-
f I &2 гими) относительных перемещений ее элементов характе-
характеризует несущую способность конструкции. Процесс разви-
развития больших пластических деформаций приводит к потере
несущей способности. Этому предшествует состояние пре-
предельного равновесия - такое состояние нагруженной конст-
конструкции, при котором незначительное увеличение опреде-
определенных внешних нагрузок ведет к большим относительным
перемещениям элементов или разрушению конструкции.
Рис.2
Комбинацию внешних нагрузок, приводящих к состоянию предельного равновесия,
называют предельными нагрузками. Для конструкций из жестко-идеально-пластичного
материала действие предельных нагрузок имеет следствием перемещения произвольной
величины, если эти перемещения не приводят к заметным изменениям геометрии. Для
конкретных конструкций предельную нагрузку можно связать с характерными особенно-
особенностями диаграммы нагрузка-перемещение Р - А. Часто зависимость Р - А аналогична зави-
зависимости а - е (ем. рис. 1,а) или имеет вид, изображенный на рис. 3. Если конструкция
теряет устойчивость при пластическом течении, диаграмма (рис. Ъ,а) имеет спадающий
участок: в этом случае экспериментальным значением предельной нагрузки естественно
считать максимальное значение Р. В
других случаях обычно удается выде-
лить на диаграмме Р - А участок рез- "т
кого изменения наклона линии на-
гружения, а при достаточно развитых
пластических деформациях угол на-
наклона участка упрочнения на диа-
диаграмме изменяется мало. Это позво-
позволяет использовать метод двух каса- о '~д~ о д
тельных (штриховые линии): одна а) б)
проводится к линии упругого нагру-
жения (рис. 3,6), вторая - к линии Рис. 3
пластического течения. Точка их пе-
пересечения определяет предельную нагрузку Рт. Такая методика нахождения эксперимен-
экспериментальной несущей способности не связана с количественной характеристикой перемеще-
перемещения, а носит качественный характер, близкий к определению пластического состояния
материала, также не связанному с количественной оценкой деформации.
Условия текучести
281
Обработка этим методом диаграмм ст - е (рис. 1,а) реального материала дает
значения предельного напряжения, близкие к введенным ат (или ао>2)- Остается отме-
отметить, что в большинстве случаев определенные таким образом экспериментальные пре-
предельные нагрузки хорошо совпадают с расчетными. Возможные погрешности обработки
как в области упругих перемещений, так и пластических обычно не приводят к заметным
изменениям значений предельной нагрузки.
Условия текучести в координатах обобщенных напряжений. 6 большинстве случаев
известные методы расчета конструкций используют уравнения равновесия, записанные
не для напряжений, а для некоторых интегральных величин типа изгибающих моментов,
продольных и поперечных усилий, дейст-
действующих в сечениях элементов конструк-
конструкций разного вида. Условимся называть их
обобщенными напряжениями Qv Напри-
Например, напряженное состояние сечения
стержня можно характеризовать продоль-
продольной силой N w. изгибающим моментом М
(если пренебречь сдвиговыми напряже-
напряжениями в сечении). Принимая, что дефор-
деформация сечения возможна, если в каждой
точке сечения напряжение равно пре-
предельному стт (рис. 4,а), можно получить
Рис.4
EL
"о2
соотношение между Ми Nb прямоуголь-
прямоугольном сечении b x h:
(8)
м
N
<1;
М
bh
где NQ '= cTbh, Mq = стт—¦— - предельные значения продольной силы и момента, соот-
соответствующие действию только одного из них.
В координатах п = N/Nq, т = М/Мо кривая текучести (рис. 4,6) представляет собой
фигуру, состоящую из двух парабол. Использование (8) позволяет по заданному
значению одного из параметров определить допустимое значение второго.
Очевидно, что для пластин и оболочек, все сечения которых нагружены только мем-
мембранными силами Nb N2 либо только изгибающими моментами М\, М2, величины этих
обобщенных напряжений должны удовлетворять условиям, аналогичным F) или G), в
зависимости от того, какое из них более применимо для рассматриваемого материала;
при условии F)
{|»i|, \n2\, \щ -п2\}<\; (9)
при условии G),
m2|,
«2 -
+ т
(Ш)
(И)
A2)
где щ = —-; /и, = —j-; No = атЛ; Мо = —
No Мо 4
- предельная мембранная сила и изги-
бающий момент на единицу длины сечения срединной поверхности пластины или обо-
оболочки при действии только одного из них.
282
РАСЧЕТ ЭЛЕМЕНТОВ КОНСТРУКЦИЙ НА ПРЕДЕЛЬНЫЕ НАГРУЗКИ
Для пластин при чистом изгибе под действием изгибающих моментов Мх, М2 и кру-
крутящего момента Я может использоваться условие текучести [1J, основанное на условии
текучести Треска:
ПРИ
при
> 0;
0;
A3)
(m2 -
+
= 1 при
< 0,
где тп — H/Mq.
Из условия текучести Мизеса для этого случая условие получается в виде
Для элемента цилиндрической оболочки, находящейся под действием меридиональ-
меридионального изгибающего момента Мх(тх) и окружной мембранной силы N^n^) имеет место ус-
условие текучести (рис. 5), построенное на условии текучести Треска [2]:
= 1
±тх = 4лф - 4л
±тх = 4л
ф
(о < |лф| < 0,5);
@,5 < лф <; l);
(-04 > лф > -1).
A5)
Хотя эта поверхность построена на основе ку-
кусочно-линейного условия в напряжениях, она нели-
нелинейна.
Если к изгибающему моменту Мх и окружной
силе N9 добавляется продольная сила Nx, можно ис-
использовать частично линеаризованную поверхность
текучести [3], грани которой (рис. 6) определяются
уравнениями, представленными в табл. 1.
Рис.5
1. Грани поверхности текучести
Грань
АВК
AKF
AFH
АВН
DCI
DEI
DEG
DCG
BKFEIC
BHFEGC
Уравнение грани
2лф + тх = 2
2л„, -2пх + тх = 2
2nv - 2пх - тх = 2
2лф - тх = 2
2пх - 2/!ф + тх =2
тх - 2л,,, = 2
- 2л,, - тх = 2
2л* - 2л,р - тх = 2
тх+п2х =1
пх ~ тх = 1
Рис.6
Условия текучести
283
Точное условие текучести, полученное А.А. Ильюшиным [6] для элемента оболочки
или пластины при произвольном нагружении мембранными силами N\, N2, Nu
(сдвиговое усилие) и моментами Mi, M2, H, представляется некоторой поверхностью в
координатах Qm> 0„, Qnm.
Qn =rf +
Qm = m2
Qmn ~
- 0,5л!/я2 -
где и12 = Nl2/N0.
В параметрическом виде эта. поверхность выражается
где
2 ( 2Д 2 . 2 2
__, = —— ц Дш + Дф + ц фш + фх
ЛЯГ Ч\ г^тт т
д.v
А, = VI -
A6)
х =
А. > \а; 0 ^ ц < 1.
Знак "+" в выражениях для Дь ц/, х соответствует доминирующему изгибу, знак "-"
- доминирующему растяжению сжатию срединной поверхности оболочки.
Приближенное условие текучести, полученное А.А. Ильюшиным [6],
Qn + Qm =
A7)
достаточно близко к точному условию A6), а в некоторых случаях является точным.
Нелинейные условия текучести типа A6), A7) могут быть линеаризованы путем за-
замены криволинейных поверхностей плоскостями. Условие A7), например, в случае от-
отсутствия сдвиговых деформаций можно ввиду положительной определенности квадра-
квадратичных форм Qn и Qm представить в виде:
Ь„ =
+П2 -
) + /Я2 -
A9)
Окружность A8) можно заменить, например, обычным правильным шестиугольни-
шестиугольником, эллипсы A9), подобные эллипсу Мизеса (см. рис. 2), заменить шестиугольниками,
подобными шестиугольнику Треска. Шестиугольники можно считать, например, вписан-
вписанными:
284 РАСЧЕТ ЭЛЕМЕНТОВ КОНСТРУКЦИЙ НА ПРЕДЕЛЬНЫЕ НАГРУЗКИ
5„=±~ при |Бя|*0,5;
5„ - ±ЛFИ ± 1) при 1 * |5И| * 0,5; B0)
»hi»
. \щ
Если материал имеет разные пределы текучести при растяжении и сжатии, то это
можно учесть при переходе к условиям текучести в обобщенных напряжениях. Напри-
Например, для стержня прямоугольного сечения b х h под действием изгибающего момента М,
действующего в плоскости симметрии сечения, и продольной силы N условие текучести
где у = k/s; Л/ор = 0,25Шг2; Л^ = kbh; к, s - пределы текучести соответственно при растя-
М N
жении и сжатии; т = ——; п =
Более сложные условия текучести в обобщенных напряжениях для таких материалов
'рассмотрены, например, в [18].
Большая часть известных решений задач определения предельных нагрузок исполь-
использует линейные или линеаризованные условия текучести, так как их применение
значительно упрощает математический аппарат. С использованием нелинейных условий
текучести решено лишь небольшое количество задач: различие между результатами таких
решений и использования линеаризованных соотношений для тех же задач невелика. Это
позволяет рекомендовать линеаризацию исходных нелинейных соотношений как удоб-
удобный и надежный метод упрощения решений.
%
19.2. ОПРЕДЕЛЕНИЕ ПРЕДЕЛЬНЫХ НАГРУЗОК
Методы определения предельных нагрузок. Переход от условий текучести в обычных
напряжениях к условиям текучести в обобщенных напряжениях является первой задачей
теории предельного равновесия. Вторая задача - построение поверхности текучести в ко-
координатах параметров внешних нагрузок. Внешнее воздействие на конструкцию может
характеризоваться несколькими величинами, в том числе и разной природы. Например,
чтобы описать воздействие даже одной сосредоточенной силы на пространственную кон-
конструкцию, надо задать три координаты точки приложения силы, три направляющих ко-
косинуса вектора силы и ее значение.
Если считать значения некоторых параметров фиксированными, то сложность за-
задачи, конечно, уменьшается. Для сосредоточенной силы, например, чаще, всего считают,
что точка приложения ее и направление фиксированы, так что задача сводится к опреде-
определению предельного значения нагрузки, т.е. возможная поверхность текучести вырождает-
вырождается в точку Р = Ро на оси значений нагрузки Р. Величина Ро (или /*т) обладает теми же
свойствами, что и предел текучести при растяжении-сжатии: деформация невозможна
при Р < PQ> деформации могут неограниченно расти при Р = РОг значение Р > Ро невоз-
невозможно. В некоторых практических задачах приходится иногда учитывать несколько па-
параметров, например, значение силы Р и угол а между направлением действия силы и
Определение предельных нагрузок
285
заданной прямой, или значение Р и расстояние / от точки приложения силы до заданной
точки и т.д. В этих случаях при полном решении задачи можно получить кривую те-
текучести в координатах Р - а или Р - /. Аналитически это может быть зависимость пре-
предельной нагрузки от угла а или расстояния /.
Более полной аналогией с поверхностями текучести в обычных и обобщенных на-
напряжениях является случай, когда на конструкцию действуют одновременно несколько
сил Pj с фиксированными точками приложения и направлениями. Предельные значения
сил, т.е. при которых конструкция теряет несущую спрсобность, определяются соотно-
соотношением значений приложенных сил. В пространстве, в котором в качестве координат
выбраны значения внешних сил, может быть построена некоторая поверхность Ф(Р) = О,
охватывающая начало координат, такая, что при достижении внешними силами
значений, соответствующих этой поверхности, наступает предельное состояние, конст-
конструкция получает возможность деформироваться. Эту поверхность можно назвать поверх-
поверхностью текучести конструкции.
Поясним это понятие на примере простейшей стержневой жестко - пластической
конструкции. Положительные направления сил показаны на рис. 1,а, противоположные
соответствуют отрицательным значениям сил. Не учитывая влияние продольной силы в
стержнях, будем считать, что сечения 1, 2, 3 теряют несущую способность, если внешний
момент равен предельному изгибающему моменту Л/о (пусть PQ = Мо/1). Если знаки Р\ и
Р2 одинаковы, то деформация возможна, если любая из величин Рх, Р2 будет равна PG,
при этом происходит поворот в сечениях 1, 2. Если Р\, Р2 противоположны по знаку, то
деформация возможна за счет поворота в сечении 3, если разность Р\ - Pj по модулю
равна Pq. Построенная в координатах Ру, Р2 кривая текучести (рис. 7,6) подобна шести-
шестиугольнику Треска.
в
а)
А
У
б)
Рис.7
При решении задач предельного равновесия используют понятия статически допус-
допустимого поля напряжений и кинематически допустимого поля скоростей (или перемеще-
перемещений). Статически допустимым полем напряжений называется такое распределение на-
напряжений (или обобщенных напряжений), которое удовлетворяет уравнениям равнове-
равновесия, граничным условиям и условию текучести в виде ficy) < 0 или Д0,-) < 0. Можно
показать, что нагрузки /*, уравновешивающие статически допустимое поле напряжений
(или обобщенных напряжений), не больше истинных предельных нагрузок, т.е. ста-
статически допустимые нагрузки Р* являются нижними оценками действительных предель-
предельных нагрузок Pq. Pq> P*.
286 РАСЧЕТ ЭЛЕМЕНТОВ КОНСТРУКЦИЙ НА ПРЕДЕЛЬНЫЕ НАГРУЗКИ
Кинематически допустимые поля перемещений и деформаций должны удовлетво-
удовлетворять кинематическим граничным условиям и условию положительности работы внешних
нагрузок. Для непосредственного определения верхней оценки предельной нагрузки слу-
служит правило: нагрузка ¦!**, производящая на возможных перемещениях ту же работу, что
и внутренние напряжения на соответствующих возможных деформациях, не меньше ис-
истинной предельной нагрузки: PQ < F*.
Поиск статически допустимых нагрузок ? обычно связан с решением дифференци-
дифференциальных уравнений равновесия с учетом условия текучести в напряжениях или обобщен-
обобщенных напряжениях, при этом часто подлежат определению размеры частей конструкции, в
которых условие текучести является равенством, называемых еще "зонами пла-
пластичности-". Из всех возможных статически допустимых распределений напряжений сле-
следует выбирать то, которое дает наибольшую нагрузку /**, как наиближайшую к истинной
предельной нагрузке.
Кинематически допустимую нагрузку определяют, используя равенства
где 5а**,6<7** - кинематически допустимые перемещения и обобщенные деформации; V
- объем деформируемого материала; Q** - обобщенные напряжения, определяемые из
условия текучести F[Q,) = 0 и ассоциированного закона течения
!? B2)
о У/
где X - неопределенный параметр.
Фактически процедура нахождения допустимой нагрузки сводится чаще всего к ин-
интегрированию по объему деформируемой части конструкции. Понятно, что наименьшая
кинематически допустимая нагрузка дает наилучшее приближение к истинной предель-
предельной.
В качестве примера рассмотрим методику определения приближенной верхней
оценки предельной нагрузки для оболочек общего вида [22]. Если на поверхности обо-
оболочки постоянной толщины А определена система ортогональных координат аь а2, то
должно выполняться неравенство
*ttJJ
A,<
где A{ - работа внешних сил на кинематически допустимых перемещениях; хт - предел
текучести при сдвиге (тт = 0,5стт по условию текучести Треска; тт = 0,577огт - по условию
текучести Мизеса); А{, А2 - коэффициенты Ламе, соответствующие координатам оц, а2
согласно выражению для элемента длины dS на срединной поверхности оболочки,
dS2 = A2da2 + A\dv\\ a^ajia^al - координатные линии, ограничивающие рассмат-
рассматриваемый участок оболочки.
Квадратичная форма
2 2 °> I n I 2 2
Определение предельных нагрузок 287
деформаций срединной поверхности е,-, ае,-, а>, т вычисляется по известным формулам
теории оболочек [22].
При постановке задачи, выборе расчетной схемы и анализе результатов часто быва-
бывают полезны некоторые свойства предельных нагрузок, формулируемые в теории предель-
предельного равновесия:
если совпадают нижние и верхние оценки несущей способности, значит найдена ис-
истинная предельная нагрузка;
если к части поверхности, свободной от внешних усилий, добавить материал, то
предельная нагрузка не может понизиться;
если от части поверхности, свободной от внешних усилий, удалить часть материала,
то предельная нагрузка не может увеличиться;
увеличение предела текучести в некоторых частях конструкции не может понизить
предельную нагрузку;
уменьшение предела текучести в некоторых частях конструкции не может увеличить
предельную нагрузку;
предельная нагрузка для охватывающей поверхности текучести не меньше предель-
предельной нагрузки для охватываемой поверхности текучести;
введение дополнительных кинематических ограничений не может понизить пре-
предельную нагрузку;
снятие кинематических ограничений не может повысить предельную нагрузку.
В некоторых задачах приходится делить конструкцию на деформируемую и неде-
формируемую области. Если получено решение для деформируемой области (т.е. по-
построены для нее статически допустимое поле напряжений и кинематически допустимое
поле деформаций), то решение еще не является полным. Необходимое условие полноты
решения - возможность продолжения (расширения) статически допустимого поля на всю
недеформируемую область. В противном случае полученное значение предельной нагруз-
нагрузки является только верхней оценкой реальной предельной нагрузки.
Следует отметить также, что в задачах предельного равновесия кинематически до-
допустимое поле перемещений и деформаций, соответствующее истинной предельной на-
нагрузке, определяется не единственным образом. Причем, в данном случае речь идет не о
значении параметра к в B2), т.е. не о количественных значениях перемещений и дефор-
деформаций, обладающих подобным распределением в пространстве и отличающихся масшта-
масштабом. Возможны существенно разные распределения деформаций, например: для участка
первоначально прямолинейного стержня, нагруженного постоянным изгибающим мо-
моментом, равным предельному Л/о, изменение кривизны может быть равномерно распре-
распределено по длине стержня, т.е. ось стержня становится окружностью, либо локализоваться
в одном сечении, образуя так называемый "пластический шарнир", причем место этого
шарнира на стержне не определено.
Существенное значение имеет вопрос о пределах применимости теории предельного
равновесия. Поскольку модель жестко-идеально-пластического тела предполагает пре-
пренебрежение упругими деформациями, реальный конструкционный материал должен об-
обладать достаточно ярко выраженными пластическими свойствами. Основываясь на мно-
многочисленных результатах экспериментов [5,16,20], можно отметить, что при остаточном
относительном удлинении образца при испытаниях на растяжение 6 > 8 - 10 % методы
расчета по предельному равновесию хорошо согласуются с экспериментальными резуль-
результатами для большинства конструкционных металлов (стали, алюминиевые сплавы, титан
и т.д.). Далее, поскольку конструкция считается жесткой вплоть до потери несущей спо-
способности, уравнения равновесия записываются необходимым образом для недеформи-
руемой конструкции, как упругие, так и пластические перемещения не должны влиять на
вид уравнений равновесия, т.е. должны быть достаточно малы. Ясно, что гибкие конст-
конструкции не могут расчитываться по предельному равновесию. Однако в большинстве
случаев рассмотрение конкретных конструкций может дать обоснованное заключение о
применимости методов предельного равновесия.
288 РАСЧЕТ ЭЛЕМЕНТОВ КОНСТРУКЦИЙ НА ПРЕДЕЛЬНЫЕ НАГРУЗКИ
Предельные нагрузки элементов конструкций
Силовые элементы машиностроительных конструкций могут быть весьма разнооб-
разнообразными по исполнению, однако в большинстве случаев каждый из них можно отнести к
одному из типов, которые отличаются соотношением характерных размеров, принимае-
принимаемыми допущениями о характере работы материала, видами прикладываемых нагрузок.
Иногда в качестве отличительного признака используется способ получения решения
задачи о прочности. Ниже приводятся сведения о предельных нагрузках для основных
типов конструктивных элементов: стержней, балок, пластин, оболочек и массивных тел.
Несущая способность стержней н балок. Представление элементов машинострои-
машиностроительных конструкций стержнями или балками во многих случаях оказывается оправдан-
оправданным, так как приводит к значительным упрощениям в методах расчета. Согласно теории
предельного равновесия характерным в поведении стержней и балок является локализа-
локализация пластической деформации в одном или нескольких сечениях. Это связано с тем, что
чаще всего внутренние силовые факторы являются переменными по длине стержня или
балки, а напряжения, удовлетворяющие условиям пластичности, являются экстремаль-
экстремальными по своей природе, так что точное выполнение условий типа (8) может достигаться
только в некоторых точках оси стержня.
Часто точки экстремумов внутренних сил совпадают с некоторыми характерными
точками стержня или балки (их концами, опорами или точками приложения внешних
сосредоточенных нагрузок). Если напряженное состояние стержня характеризуется рас-
растяжением - сжатием и одновременно изгибом, точки, в которых выполняется условие
текучести (8) называют иногда "пластическими шарнирами". Это связано с тем, что все
волокна сечения должны находиться в предельном состоянии (по определению предель-
предельного состояния сечений), деформации при котором могут быть произвольными по ве-
величине, допуская таким образом достаточно произвольное распределение деформаций по
сечению. Например, при всех растягивающихся волокнах сечения один край может быть
растянут больше, другой меньше, что соответствует возможности поворота одной части
стержня относительно другой за счет деформаций в одном сечении, которое в этом
случае является "пластическим шарниром". Это же следует из условия текучести (8) и
ассоциированного закона течения B2).
Нетрудно заметить (см.рис. 4,6), что при любом соотношении момента и продоль-
продольной силы в предельном состоянии всегда возможен поворот в сечении (обобщенная де-
деформация, соответствующая изгибающему моменту) даже при М = 0.
Таким образом, в предельном состоянии стержень или балка состоит из жестких
участков, соединенных пластическими шарнирами, а перемещения определяются в ос-
основном относительными поворотами этих участков. Такая картина перемещений харак-
характерна как для прямолинейных, так и для криволинейных стержней. Одной из наиболее
часто используемых методик определения несущей способности стержней и стержневых
систем является превращение жесткой исходной конфигурации в механизм путем введе-
введения пластических шарниров. Приравнивая работу внешних усилий на возможных пере-
перемещениях работе внутренних изгибающих моментов М на возможных относительных
поворотах жестких частей, находят верхнюю оценку внешних предельных нагрузок.
Варьированием мест расстановки пластических шарниров можно найти минимальную
оценку, которая в большинстве случаев на практике не отличается от точных значений
предельной нагрузки.
Точное решение пространственных стержневых систем требует знания условий те-
текучести в обобщенных напряжениях типа (8) для продольных сил, изгибающего и кру-
крутящего момента. Получение таких условий для сечений произвольного вида весьма за-
затруднено, поэтому чаще всего в приближенных решениях используются приближенные
условия текучести. Во всех случаях необходимы предельные величины для каждого от-
отдельно взятого внутреннего силового фактора. В случае действия только продольной си-
силы N ее предельное значение No определяется только площадью сечения стержня:
Определение предельных нагрузок
289
Nn =
B3)
Если в сечении действует только изгибающий момент, его предельное значение Л/о
определяется величиной 5г - суммой статических моментов двух половин сечения отно-
относительно оси z, перпендикулярной плоскости изгиба, и делящей сечение на две равнове-
равновеликие части
Л/о - oTSz.
B4)
Величину Sz называют еще иногда пластическим моментом сопротивления. В табл. 2
приведены предельные изгибающие моменты для некоторых видов поперечных сечений.
Иногда стержень может терять несущую способность за счет напряжений сдвига,
возникающих при кручении. Понятно, что для того, чтобы сечение получило возмож-
возможность деформации, надо, чтобы в любой его точке выполнялось условие текучести х —
тт. В табл. 3 приведены предельные крутящие моменты Мк, определенные для наиболее
часто встречающихся сечений.
В табл. 4 приведены схемы нагружения прямолинейных и криволинейных стержней,
нагружаемых силами, приводящими к преимущественно изгибным деформациям. Поми-
Помимо указанных, выше характерных для сечений величин Л/о, No использованы обоз-
ччения: ?, / - длина стержня, балки или их частей; Р, q - сосредоточенная и распреде-
распределенная нагрузка; Q - суммарная нагрузка на балку; R - радиус криволинейного стержня.
В табл. 5 даны примеры расчета предельных нагрузок плоских рам.
Некоторые решения задач для круговых арок и колец приведены в табл. 6. В допол-
дополнение к ранее введенным обозначениям используются т(ср) -распределенная по длине
кольца касательная нагрузка. Она может имитировать касательные силы со стороны при-
присоединяемой к кольцу оболочки.
2. Предельные изгибающие моменты сечений
Вид сечения и предельный момент
Вид сечения и предельный момент
Mn = Z*
Мо =^
19 Том 2
290
РАСЧЕТ ЭЛЕМЕНТОВ КОНСТРУКЦИЙ НА ПРЕДЕЛЬНЫЕ НАГРУЗКИ
Продолжение табл. 2
Вид сечения и предельный момент
Вид сечения и предельный момент
M0=hbh2-H2Bb-d)\aT
Мо - 4о2бстт, -
а
где 5г - удвоенный статический момент полу-
полусечения относительно оси симметрии
где
S- - сумма статических моментов двух
половин сечения относительно оси z,
делящей сечение на две равновеликие части
Определение предельных нагрузок
291
3. Предельные крутящие моменты сечений
Вид сечения и предельный крутящий момент
где тт - предел текучести при сдвиге;
' K~WT зп '
где F - площадь сечения;
II - периметр сечения
1
(h>b)
Незамкнутые тонкостенные профили.
При одинаковой толщине 5 стенок профиля
где S - длина срединной линии сечения.
При разной толщине стенок профиля
где 5, и 5/ - соответственно толщина стенки и
длина средней линии каждого прямоугольни-
ка, входящего в состав сечения
/
/
/
у
4. Предельные нагрузки
•* п р =
I Л
III
1 1
2Л/0
Вид нагружения
р
1
п
(
стержней и
и предельная
балок при
нагрузка
А*-
L
изгибе
-Ш
ip
\
М) R
/
1 А/о
1р Л
4,828-
1.
R
19*
292 РАСЧЕТ ЭЛЕМЕНТОВ КОНСТРУКЦИЙ НА ПРЕДЕЛЬНЫЕ НАГРУЗКИ
Продолжение табл. 4
Вид сечения и предельный момент
Вид сечения и предельный момент
tft
Р
-Mi
л
t П I
mO
P =
пр
Л/n
Шп
R
Я I 1 М ( К
P -
мп
пр"
Me
M.
Определение предельных нагрузок
293
5. Предельные нагрузки рам
Вид нагружения рамы и предельная нагрузка
Шарнирно-опертая рама, нагруженная одной сосредото-
сосредоточенной силой. Разрушающая нагрузка с учетом осевых сил
Р - 1 АС1 С2
6. Предельные нагрузки колец
Схема нагружения и предельная нагрузка
Круговая арка
Относительная разрушающая нагрузка Ро = PnpR/Mo-
_ sin(<Pn ~ x)
Точное решение PQ = i—-—--?. j где х находится из
t . 2A-cosx)
уравнения СоЦф0 - х) = 1 * —- и
должно
-sin(<po-x)
удовлетворять неравенству cosx < 1 - it, pQ - А ¦ где х находится из уравнения
= 1
-(l-cosx)
3/-cosx'
и удовлетворяет неравенству 1 - 3/ < cosx
¦ 3 . , v
-81п(фО-х) 2A-cosx)
0 - ^ , где х находится из уравнения cos(<p0 - х) = 1— — и удовлетворяет
1 + 3/ - cos х 1-3/
A + 3* Г Л/о
неравенству cosy > ^ — где t = ^~
1 + 9/ 2RN0.
Криволинейный консольный брус
Дуга окружности определяется углом а и радиусом R;
сечение бруса прямоугольное.
Если пренебречь осевыми силами, то PnvR(\-
cosa)=A/o-
С учетом влияния осевой силы разрушающая нагрузка
294
РАСЧЕТ ЭЛЕМЕНТОВ КОНСТРУКЦИЙ НА ПРЕДЕЛЬНЫЕ НАГРУЗКИ
Продолжение табл. 6
Круговое кольцо
Верхняя граница:
без учета продольной
4М0.
силы р -
R
с учетом продольной
силы
р =
л + \
ctg& / 4
*С»
l = 7Rsin<?;
= 6,906^-
R
Тонкое круговое кольцо под действием скручивающего момента М и
распора Q. Предельное соотношение между внешними нагрузками
fnp
т)
'пр
QR _ s_
khb' У "" к '
к - предел текучести материала на растяжение; 5 - предел текучести
материала на сжатие; R - средний радиус кольца; М, Q - момент и
распор на единицу длины средней линии кольца
Опора
Зависимость предельной нагрузки Рт от угла опоры р дается графи-
графически ^ Wr
Предельные нагрузки массивных тел. Некоторые классические плоские и трехмерные
задачи теории пластичности могут рассматриваться как задачи по определению несущей
способности массивных тел. Известные задачи нагружения кольцевого диска и полой
сферы внутренним давлением, вращения, диска постоянной толщины, вдавливания
штампов в полуплоскость и полупространство (табл. 7), решенные для жесткопластиче-
ского материала, представляют собой фактически типичные задачи предельного равнове-
равновесия, так как, построенные методами теории пластичности поля напряжений и скоростей
перемещений, обычно удовлетворяют условиям, накладываемым теорией предельного
равновесия на статически и кинематически допустимые поля. В разных работах, посвя-
посвященных теории пластичности, можно найти множество задач, решения которых также
могут использоваться для определения предельных нагрузок.
Определение предельных нагрузок
295
7. Предельные нагрузки массивных тел
Схема нагружения и предельная нагрузка
Тонкий диск
Тонкий диск, нагруженный внутренним давлением. Пре-
2
дельное давление, рпр- —^ат cos v[,
где у] находится из уравнения
.2 т л/зГ
г 2
При — > 2,963, \\i\ =7i, pn p = -т=огт ; внутренняя часть
г\ л/3
г < 2,963г] пластически деформируется.
Толстостенный сферический сосуд
Толстостенный сферический сосуд, нагруженный внут-
внутренним давлением. Предельное давление рпр= 2ат In —
Толстостенная труба, нагруженная внутренним давлени-
давлением; предельное давление
пр
Круговой диск
Круговой диск постоянной толщины вращается с посто-
постоянной угловой скоростью со; предельная угловая скорость
равна со = \ ' .т-, где р - плотность материала диска
Вдавливание штампа
Вдавливание в полуплоскость плоского штампа шириной
2fl (плоская деформация); предельное давление
Рпр = (я + 2)тт, где хт - предел текучести при сдвиге
Вдавливание в полуплоскость выпуклого штампа
(плоская деформация); предельное давление
.YM\\
\\
Вдавливание в полупространство цилиндрического штам-
штампа; предельное давление /?пр = 5,68тт
296
РАСЧЕТ ЭЛЕМЕНТОВ КОНСТРУКЦИЙ НА ПРЕДЕЛЬНЫЕ НАГРУЗКИ
Продолжение табл. 7
Схема нагружения и предельная нагрузка
Сжатие плитами
Сжатие полосы между двумя шероховатыми плитами; рас-
распределение предельного давления для половины
п - 5*т Г^ + —\ где 2Ь - толщина полосы
Л\2 ЬУ ¦
/7
'/Л//
Осадка цилиндрической заготовки плоскопараллельными
плитами
Опенки отношения предельного давления к пределу те-
текучести при сдвиге тт следующие
Га/h
12
16
Верхняя
1,766
2,081
2.752
3,416
4,080
5,414
6,747
Нижняя
1,732
1,782
2,485
3,221
3,922
5,293
6,641
Р
Плоская задача
Клин, нагруженный давлением по боковой поверхности
Коническая труба, нагруженная наружным pj и внутрен-
внутренним р\ давлениями;
= 2tT In
т
Sin So
Предельные нагрузки пластин. Пластины являются одним из наиболее часто
встречающихся элементов конструкций. Весьма разнообразны как формы используемых
пласти, так и условия их нагружения, поэтому в практике расчетной и исследователь-
исследовательской работы задачи по определению несущей способности пластин занимают
значительное место. Наиболее разработанными и широко используемыми являются ре-
решения для круглых и кольцевых пластин при осессиметричном нагружении попе-
поперечными силами (табл. 8). Основной локальной характеристикой прочности пластин яв-
является предельный изгибающий момент на единицу длины контура Мо = aTh2/4. От-
Отличительной чертой приведенных в табл. 8 решений является то, что суммарная предель-
предельная поперечная нагрузка на пластину (сила) не зависит от абсолютных размеров пласти-
пластины в плане, она определяется локальной прочностью Мо, относительными параметрами,
характеризующими геометрию пластины (например, относительный радиус отверстия
или приложения сосредоточенной нагрузки) и условиями закрепления. Это же относится
к решениям для неоребренных пластин постоянной толщины (табл. 10 и 11).
Определение предельных нагрузок
297
8. Предельные поперечные нагрузки круглых пластин
Схема нагружения и предельная нагрузка
Ъ-а
Qn р = 4лЛ/0
вьм0
a2Cb-2a)
а
п
J±
Q - нагрузка, распределенная по окружности
радиуса а
= 2пМ0Ь
" р Ь - а
6 Л/г
1пь)
находится из уравнения ?._ А
b 2
;
?>пр = 2лЛ/0
1 _ _J_
In Л'
^ ft У
находится из уравнения — = lh
b b , . «I
298
РАСЧЕТ ЭЛЕМЕНТОВ КОНСТРУКЦИЙ НА ПРЕДЕЛЬНЫЕ НАГРУЗКИ
В табл. 9 приведены предельные моменты А/и, действующие через жесткое ядро на
кольцевую пластину при разных условиях опирания пластины по наружному краю и со-
соединения с ядром; даны решения некоторых задач по совместному действию поперечных
нагрузок и нагрузок в плоскости пластины, причем рассматривается материал, имеющий
разные пределы текучести при растяжении и сжатии, соответственно к и s. Здесь же
можно найти предельную нагрузку для пластины, вложенной без зазора в жесткую мат-
матрицу, ограничивающую перемещение боковой поверхности пластины, и нагружаемой
через жесткое ядро, вложенное в отверстие пластины также без зазора.
В табл. 10 представлены оребренные круглые пластины, нагруженные сосредоточен-
сосредоточенными и распределенными нагрузками, схемы нагружения круглых кольцевых пластин
при разных способах закрепления наружного и внутреннего краев и нагружения. Пре-
Предельные нагрузки как функции относительного радиуса отверстия р0 или относительного
радиуса приложения нагрузки р^ приведены на рис. 8 -14. Некоторые результаты, полу-
полученные для пластин, отличных по форме от круглых и кольцевых, можно найти в табл.
11. Решения даны, в основном, в виде формул, за исключением защемленной треуголь-
треугольной пластины, для которой приводится график зависимости безразмерной предельной
нагрузки от угла при вершине.
9. Предельные нагрузки круглых пластин
Схемы нагружения и предельная нагрузка
Нижняя оценка /пнн, верхняя оценка тив
т„ =
т = -^-|l,08- 2,231гД
или т1Ш = ——~B,23- 1,15г]); п находится из уравнения
1-П
л-;
При t < 0,19, т„ = 6,08с,
^— 1,08 -2,23 In - =—-=тB,23 -1,15т\)
- U п> 1 п
1 -
При ? < 0,077, mm = 4,14Е,
При % > 0,42
1 -ц
A,08-2,231.^)
4 46п
——
При 0,42 > t > 0,0525 шин = ——-, где п находится из
1 + П
уравнения -1,46A1 - 4) = A,08 - 2,23 Щ + 2,23 1пп)A +
При с, < 0,0525, /ии = 6,084
Определение, предельных нагрузок
299
Продолжение табл. 9
При 5 * 0,278
При 4 < 0,278
Пластина под действием радиальных сил рг
(на единицу длины края пластины)
При поперечном давлении q предельная нагрузка
где к, s - пределы текучести при растяжении и сжатии со-
соответственно
При поперечной силе Р
предельная нагрузка
( 1
Рпр- k(s + fli Д2 |, где А определяется из выражения
Рг =
— (k-s); к, s - пределы текучести при рас-
растяжении и сжатии соответственно;
Пластина в жесткой матрице
п Нижняя оценка предельной нагрузки
(Ь - apsb + k(b + а)]'
где к, s - пределы текучести при растяжении и сжатии со-
соответственно.
- Пуансон 1 и матрица 2 абсолютно жесткие
10. Предельные нагрузки подкрепленных пластин
Схема нагружения и предельная нагрузка
Пластина с односторонним оребрением (Ь - ширина ребра;
к - число ребер)
Если
300 РАСЧЕТ ЭЛЕМЕНТОВ КОНСТРУКЦИЙ НА ПРЕДЕЛЬНЫЕ НАГРУЗКИ
Продолжение табл. 10
Схема нагружения и предельная нагрузка
если х„ < 0, то
Если хп =¦— 1 - и,л — | | > 0, то
2 v h
если хп < 0, то
Если хп —l-i/JT
11_ V п J
верхняя оценка
> 0, то
если х„ < 0, то
Определение нижней оценки [18]
Определение предельных нагрузок
301
Продолжение табл. 10
Оребреннаа пластина с жестким ядром
п - число ребер, /„ = i— -.
и пЬ
Если L < Н, то пн = orb (H2 + й);
Предельное давление для такой же Пластины
где pj = -j- - относительный радиус границы зон с разными
л
режимами течения.
Зависимость q и pi от ро показана на рис. 8
Зависимость величины р от рр для разных значений ро при-
приведены на рис. 9-10
Зависимость ^* от ро показана из рис. 11
где р| - радиус границы между зонами с разными режимами
течения.
Зависимости р| и q от ро приведены на рис. 12
если
302
РАСЧЕТ ЭЛЕМЕНТОВ КОНСТРУКЦИЙ НА ПРЕДЕЛЬНЫЕ НАГРУЗКИ
Продолжение табл. 10
Схема нагружения и предельная нагрузка
Пластины, опертые по внутреннему и наружному краям;
Зависимости q от относительного радиуса отверстия
приведены на рис. 13
Приближенные кривые текучести в координатах
Р qR2 .. , .
представлены на рис. 14 (о - и) для
значений ро.- 0,05; 0,1; 0,2; 0,3; 0,4; 0,5; 0,6; 0,7; 0,8.
Показанные кривые текучести отличаются от истинных
только в области максимальных значений Р и q (например,
АВ, ВС, AiB,, В,СЬ рис. 14Д
Крайние угловые точки В, В\ также принадлежат точной
кривой текучести
Рис. 8
Рте. 9
Рис. 11
Рис. 13
Рте. 12
Рис. 10
Определение предельных нагрузок
303
J)
ж)
6)
* «)
Рис. 14
11. Предельные нагрузки некруглых пластин
Схема нагружения и предельная нагрузка
Эллиптическая пластина, опертая по контуру
Квадратная пластина, равномерно нагруженная давлением q
Прямоугольная пластина
Полигональная пластина
(л - число сторон):
з)
304
РАСЧЕТ ЭЛЕМЕНТОВ КОНСТРУКЦИЙ НА ПРЕДЕЛЬНЫЕ НАГРУЗКИ
Продолжение табл. 11
Схема нагружения и предельная нагрузка
Прямоугольная пластина, защемленная do трем сторонам
(четвертая сторона свободная) и нагруженная распределен-
распределенной нагрузкой
Предельная нагрузка
Предельная нагрузка прямоугольной, защемленной со всех сторон пластины
г - определяется из уравнения
где
Треугольная защемленная пластина, нагруженная
распределенной нагрузкой
Предельная нагрузка qnp определяется приведенным гра-
графиком:
Несущая способность оболочек. Оболочечные конструкции представляют наиболь-
наибольшую трудность для исследования, поэтому аналитических решений для них получено
относительно немного, причем исследования проводились почти исключительно для осе-
симметричных оболочек под действием осесимметричной нагрузки. Наибольшее ко-
количество решений получено для цилиндрических оболочек (табл. 12). Основные обоз-
обозначения: R - средний радиус оболочки; А - толщина оболочки; Мо = aTh2/4 - предельный
изгибающий момент на единицу длины.
В табл. 13 представлены предельные нагрузки для некоторых случаев нагружения
конических, сферических и тороидальных оболочек.
Использование рассмотренных некоторых свойств предельных нагрузок может слу-
служить для оценки несущей способности оболочек. Например, безмоментные распределе-
распределения внутренних мембранных сил в оболочках, удовлетворяющие условиям текучести,
являются статически допустимыми. Отсюда следует, что безмоментные решения являют-
являются нижними оценками предельных нагрузок. Вместе с тем, решения для пластин под
действием поперечных нагрузок являются нижними оценками несушей способности по-
пологих оболочек при действии таких же нагрузок, если конфигурация в плане оболочки
Определение предельных нагрузок
305
совпадает с очертаниями пластины (при одинаковой толщине, конечно), так как распре-
распределение моментов в пластине будет удовлетворять и моментным уравнениям равновесия
пологой оболочки. Предельная нагрузка для оболочки с шарнирно-подвижным краем
является нижней оценкой несущей способности оболочки с шарнирно-неподвижным
краем, предельная нагрузка которой, в свою очередь, является нижней оценкой предель-
предельной Нагрузки оболочки с защемленным краем.
12. Предельные нагрузки цилиндрических оболочек
Схема нагружения и предельная нагрузка
4 м V '
U:
' *
! ¦
Т
Цилиндрическая оболочка
Защемленная на краях, нафуженная внутренним давлени-
давлением р, осевая сила отсутствует:
Л 2 + с2 /
/»пра
т* с2 '
t t ¦ Г
С днищами под действием внутреннего давления р:
А 2+с2 /
Бесконечно длинная труба
Нагружена в плоскости направленными наружу радиаль-
радиальными силами интенсивности р на единицу длины окруж-
окружности трубы.
Верхняя граница Рп = 2<s^iJ—;
V л
нижняя границе pnp= j2o
согласно [9] ри = 1,91атлД
V я
ъ
Цилиндрическая оболочка
нагружена по краю перерезывающей силой
utrrrrrrr^a
Под действием внутреннего равномерного давления /г, осе-
осевой силы Q и крутящего момента Л/:
Q
pQ
PoQo
где Q = 2%Югат; р0 = от -^;
V3
20 Том 2
306
РАСЧЕТ ЭЛЕМЕНТОВ КОНСТРУКЦИЙ НА ПРЕДЕЛЬНЫЕ НАГРУЗКИ
Продолжение табл. 12
.м
Под действием равномерного внутреннего давления р и
распределенного по краю изгибающего момента М
Kir] = 1; Ро = °тЛ / Л; А/ = 0,25<ттЛ
М
JL
н
Подкрепленная кольцом (внешняя нагрузка-момент М и
растягивающая сила Nx):''
ТПШШШг*
^u*f
2м;
где к = B - е) + — J-гИ - е21 - -j-^K - е21; i^> - радиус центральной окружности кольца; Л, А
- радиус срединной поверхности и толщина оболочки.
S - статический момент левой или правой части поперечного сечения кольца относительно цен-
центральной оси z\-
Мт - предельное значение момента М при заданном Nx
Нагруженная локальной нормальной силой
(ро - внутреннее давление; ах - осевые напряжения, Q
суммарная нормальная сила на площадке а х Ь);
Q PR ax
а = -—=¦—: Пп = ——: п = —=-:
Ро
атЛ '
Подкрепленная; внешняя нагрузка - момент Мпр, растяги-
вающая сила Л'- , сжимающая сила Nr .
Предельный момент, приложенный к кольцу,
^пр =
\м
где
Xi =
- радиус центральной окружности кольца; пх. = -; Nq. = атЛ,
^0 '
Определение предельных нафузок
307
13. Предельные нагрузки оболочек
Схема нагружения и предельная нафузка
Замкнутая коническая оболочка, находящаяся под внутрен-
внутренним давлением р
Верхняя оценка р**< 2стт——к+
где
I
2
Р cos a
" sin а
Нижняя оценка р* > 2от — fc_, где к = —/sin ос + а —
v^ 2 V V h
cosa .
Опертая по контуру пологая оболочка вращения, осесим-
метрично нафуженная давлением. Усилие Р задано. Пре-
Предельное давление
3 aTh2
где z - средняя высота оболочки;
d
Z* - —
Р - внешняя меридиональная сила на единицу длины, от-
отнесенная к величине сттЛ; h - толщина оболочки
Пологая , нафуженная нормальным давлением р. Переме-
Перемещение края оболочки и = 0. Предельное давление
где z = —
о
Сферическая оболочка
Пологая с шарнирно неподвижным краем, нагруженная
равномерно распределенным давлением д.
Предельная нафузка
6oTh2(, п4) , .
'пр"П*Г1+зо при "-*¦
20*
308
РАСЧЕТ ЭЛЕМЕНТОВ КОНСТРУКЦИЙ НА ПРЕДЕЛЬНЫЕ НАГРУЗКИ
Продолжение табл. 13
7и2 и2 2f! 2 I „2.2
120 +ТР I1" 3Р" 2Р +TP
при и2 ? 4,
где 2А - толщина оболочки; п - -¦¦--; р = /1 т- .
Rh
Пологая с шарнирно-подвижным краем. Предельная нагруз-
нагрузка
П11И
2
где 2Л - толщина оболочки; л = 2 ; р находится из уравнения 1 - Зр2 + 2р3 = —*-
ля л*
if
Опертая по контуру и нагруженная давлением.
,2'
Нижняя оценка ?1 =
Ро
1 +
4ЛУ(а]
где
suia
— + — -1;
2 4^
Верхняя оценка
(шш-апф)
Pq = 2от — - безмоментное решение,
R
А - толщина оболочки.
2 f/2
—=—=—11 —- sin 2ф | апфйр
1Пгыпг(л\ 4 )\
Hsina - sinф)sin <prftp
Верхняя оценка отличается от нижней не более? чем на 15%
Сферический купол, нагруженный равномерным внешним давле-
давлением р:
для к й 1 - cos фо Pi* =2
1 + coscpo к f coS9Q
1 + К— h
1-
1 - К VI - COS9q
Список литературы
309
Продолжение табл. 13
•• , l + cosq><) ,
Л = 4К — ДЛЯ К ? 1 - СОБфо-
1 - cos<po
Нижняя оценка р\ = 2. Для малых значений <ро нижняя оценка
l-cosq»o
,.
1 + к + к2
для cos<po ^ 7
1 + Зк + уг
Толстое
¦икр]
Лаый элемент трубопровода
высокого давленш (стенки постоянной толщины)
Предельное давление
Формула дает очень хорошее совпадение с экспериментальными разрушающими давлениями,
если <7Т заменить на ов
Торовдальная оболочка, нагруженная внутренним давлением
Р
a = _3L; р = Л1;
Л - толщина.
Условие текучести Треска: верхняя оценка
•• от 1 + аяО,5 * ат 1 + а
или р я—! ¦--; нижняя оценка р =—• —
Р 1 + 0,25жх Р 1 + Орс
Условие максимального приведенного напряжения
4aT(l+a) ст
—-L-r—~- < Р < —
0,5iia)
2а
1 + 0,25то
СПИСОК ЛИТЕРАТУРЫ
1. Альперт В.Н. Несущая способность круглых пластин при антисимметричной на-
грузке//Механика твердого тела, 1966, N 1.
2. Антипо» ВЛ. Предельное равновесие подкрепленных цилиндрических оболочек//
Прикладная механика. 1973. Т.9. N 6.
310 РАСЧЕТ ЭЛЕМЕНТОВ КОНСТРУКЦИЙ НА ПРЕДЕЛЬНЫЕ НАГРУЗКИ
3. Антнпов В.А., Рубцов Б.Г. Несущая способность цилиндрической оболочки, под-
подкрепленной кольцом// Прикладная механика. 1971.Т. 7. N 5.
4. Дятлов М.И., Кабанова О.Е. Расчет несущей способности толстостенных криво-
криволинейных элементов трубопроводов высокого давления// Химическое и нефтяное маши-
машиностроение. 1977. N 1.
5. Ерхов М.И. Теория идеально пластических тел и конструкций. М.: Наука, 1978.
6. Ильюшин А.А. Пластичность. М.: Гостехиздат, 1948.
7. Косорукое С.Н. Несущая способность пластин и сферических оболочек с жестким
включением при антисимметричном нагружении// Прикладная механика. 1979. Т. 15. N
7.
8.Косоруков С.Н. О предельных нагрузках для кольцевых пластин// Прикладная ме-
механика. 1979. Т. 15. N3.
9. Куликов Ю.К., Хомяков А.М. Несущая способность тонких оболочек, нагружен-
нагруженных локальной нормальной силой// Изв.вузов. Авиационная техника. 1976. N 2.
10. Листрова Ю.П., Рудис МА Предельное равновесие тороидальной оболочки//
Изв. АН СССР. ОТН. Механика и машиностроение. 1963. N 3.
П.Малинин Н.Н. Прикладная теория пластичности и ползучести. М.: Машино-
Машиностроение, 1968.
12. Малинин Н.Н., Романов К.И., Ширшов А.А. Сборник задач по прикладной тео-
теории пластичности и ползучести. М.: Высшая школа, 1984.
13. Михалишнн М.С. Предельное равновесие сжато (растянуто)-изогнутой пологой
сферической оболочки// Прикладная механика. 1976. Т. 12. N 8.
14. Мруз 3., Савчук А. Несущая способность пластин, закрепленных по обеим
кромкам// Изв. АН СССР. ОТН. Механика и машиностроение. 1960. N 3.
15. Олешев С.С., Симонов Ю.П., Курылев В.Ф. Несущая способность круговых
сложных пластин// Проблемы прочности. 1975. N 3.
16. Олыпак В., Мруз 3., Пежина П. Современное состояние теории пластичности.
М.: Мир, 1964.
17. Писаренко Г.С., Яковлев А.П., Матвеев В.В. Справочник по сопротивлению ма-
материалов. Киев: Наукова думка, 1975.
18. Попов B.C. О построении предельной поверхности текучести// Изв. вузов. Ма-
Машиностроение. 1974. N 7.
19. Прагер В. Проблемы теории пластичности. М.: Физматтиз, 1958.
20. Пэлусами С, Линд Н. Предельный анализ несимметрично нагруженных сфе-
сферических оболочек// Тр.Амер.об-ва инженеров-механиков. Приклад, механика. 1972. Т.
39. N 2.
21. Розенблюм В.И. О расчете несущей способности идеально пластических осесим-
метричных оболочек// Исследования по упругости и пластичности. Л.: Изд-во ЛГУ. 1965.
22. Розенблюм В.И. Приближенная теория равновесия пластичных оболочек// При-
Прикладная математика и механика. 1954. Т. 18. N 3.
23. Рудицын М.Н., Артемов П.Я., Любовшнц М.И. Справочное пособие по сопро-
сопротивлению материалов. Минск: Вышейшая школа, 1970.
24. Соколовский В.В. Теория пластичности. М.: Высшая школа, 1969.
25. Справочник. Прочность, устойчивость, колебания. Т. 1, М.: Машиностроение,
1968.
26. Сулоницкий Н.З. Несущая способность круглых пластин и пологих оболочек с
радиальными ребрами// Прикладная механика. 1971. N 11.
27. Супоницкий Н.З. Несущая способность круглой пластины с односторонними ра-
радиальными ребрами// Прикладная механика. 1970. Т. 6. N 5.
28. Ходж Ф.Г. Расчет конструкций с учетом пластических деформаций. М.: Машгиз,
1963.
29. Хомяков А.М. Предельное равновесие ортогонально соединенных цилинд-
цилиндрических оболочек// Изв.вузов. Авиационная техника. 1972. N 2.
30. Чудаков П.Д. Осесимметричная осадка шероховатыми плитами// Изв. вузов.
Машиностроение. 1979. N 5.
31. Шаблий О.Н., Михалишин М.С. Несущая способность пологих оболочек враще-
вращения, материал которых имеет различные пределы текучести при растяжении и сжатии/
Проблемы прочности. 1970. N 5.
3U_
10. РАСЧЕТ ЭЛЕМЕНТОВ КОНСТРУКЦИИ
ПРИ ДИНАМИЧЕСКИХ НАГРУЗКАХ
Широко распространенные в инженерной литературе [1-18] термины "динамика",
"динамические нагрузки", "динамические явления" — вообще говоря, не имеют до сих
пор четкого определения, основанного на качественных соотношениях каких-либо па-
параметров реального многообразия механических процессов. Многочисленные определе-
определения страдают неточностью и неполнотой. Двумя наиболее характерными свойствами ди-
динамических явлений считаются наличие инерционных сил в относительном движении
частей конструкции, сравнимых по величине с внешними, действующими на систему, и
относительно высокая скорость изменения некоторых переменных (перемещений, скоро-
скоростей, ускорений, усилий, деформации и т.д.). Исследование динамических систем всегда
значительно сложнее анализа поведения статических или медленно меняющихся систем,
что связано для механических систем, во—первых, с зависимостью чаще всего внешних
воздействий от реакции системы, во—вторых с зависимостью свойств самой системы от
параметров движения. Обычно исследование динамических процессов подразделяется на
ряд этапов: строится физическая модель реальной системы, с учетом свойств материалов
определяются независимые внешние воздействия или вид зависимости их от параметров
системы; путем составления уравнений движения (или равновесия) строится матема-
математическая модель системы; выбирается способ решения полученной системы уравнений,
включая и упрощение ее; получение решения и его анализ; выбор условий проведения
контрольных экспериментов и сравнение экспериментальных результатов с расчетными
- уточнение математической (или даже физической) модели и повторные расчеты; опре-
определение критических состояний конструкции с точки зрения ее прочности или безопас-
безопасности эксплуатации и, наконец, определение коэффициентов запаса. Наиболее ответст-
ответственными и трудными в этом исследовании являются первые этапы: ошибки в построе-
построении физической модели или ее математического описания, неправильное определение
внешних усилий уже нельзя компенсировать повышением точности вычислений или ус-
усложнением применяемого математического аппарата. Физическая модель должна быть по
возможности простой и, в то же время, отражать наиболее существенные свойства систе-
системы.
Правда, само понятие "наиболее существенные свойства" трудноопределимо и в
очень многих случаях невозможно заранее сказать, какие из свойств системы окажутся
существенными для решения, какие нет.
Исследование с помощью построенной математической модели при наличии ЭВМ
принципиальных трудностей не представляет. Имеющиеся в обращении пакеты про-
программ позволяют достаточно легко получать численные решения для конкретных набо-
наборов численных значений исходных параметров. Однако аналитические решения остаются
предпочтительными, т.к. позволяют определить искомые величины в виде функций ис-
исходных параметров, поэтому упрощение математической модели с целью нахождения
аналитического решения является часто применяемой операцией.
Оценка полученного решения, за исключением достаточно бесспорных результатов,
должна включать и экспериментальную проверку решения и сравнение полученных
значений искомых величин с допустимыми. Последняя задача, ввиду своей трудности,
является чаще всего темой самостоятельных исследований.
10.1. УДАРНЫЕ НАГРУЗКИ
Существует довольно много механизмов, для которых ударные нагрузки являются
основными в процессе их эксплуатации, например, отбойные молотки или кузнечные
молоты; для других конструкций такие нагрузки, не являясь основными, случаются дос-
достаточно регулярно, например, в грузоподъемных и транспортных механизмах; наконец,
для некоторых контрукций и большей части сооружений ударное нагружение бывает
312 РАСЧЕТ ЭЛЕМЕНТОВ КОНСТРУКЦИИ ПРИ ДИНАМИЧЕСКИХ НАГРУЗКАХ
следствием аварий, стихийных бедствий и других случаев отклонений от нормальной
эксплуатации. Основной признак удара - кратковременность войздействия.
Основные понятия. С точки зрения кинематических характеристик удар является
резким изменением скоростей точек системы, происходящим в течение короткого про-
промежутка времени. С точки зрения динамики удар характеризуется возникновением (а
затем исчезновением) больших сил. С точки зрения традиционной школьной механики
удар обеспечивает выигрыш в силе при малых перемещениях точки приложения силы.
Разгоняемый силой веса в десятки или сотни килограммов молот при ударе создает уси-
усилия в сотни и тысячи тонн. Привычно связывая с телом силу его веса, можно характери-
характеризовать величину прикладываемых к телу сил их отношением к силе веса данного тела.
Если эти силы уравновешиваются силами инерции тела, то такое отношение называют
перегрузками; оно численно равно отношению испытываемого телом ускорения к уско-
ускорению земного тяготения. Во многих случаях в описании удара пользуются перегрузкой,
как мерой интенсивности ударных сил. Иногда ее называют динамическим коэффициен-
коэффициентом Kd [9, 18]. Однако, усилие при ударе чаще всего заранее определить, тем более за-
задать, невозможно. Измерение усилий также представляет сложную техническую задачу.
Более доступны для измерений и учета такие величины как количества движения соуда-
соударяющихся тел и их энергии до и после удара. Простейшие расчетные методики основаны
на определении этих величин, в то время как величины усилий, напряжений, времени
удара остаются за пределами рассмотрения. Обязательной предпосылкой механического
ударного взаимодействия является наличие относительной скорости взаимодействующих
тел к моменту их соприкосновения. Особенностью такого взаимодействия является пол-
полный или частичный обмен импульсами и энергией. Более подробное рассмотрение про-
процесса механического удара выявляет в нем наличие местных деформаций соприкасаю-
соприкасающихся поверхностей, распространяющихся со звуковой или сверхзвуковой скоростью
волн напряжений и деформаций, конечность времени контакта тел, зависящего от
начальных условий удара и свойств соударяемых тел. Явления, сопровождающие меха-
механический удар твердых тел, для которого только и применима в какой—то степени клас-
классическая теория удара, характерны и для многих других процессов, например удар твер-
твердого тела о жидкость, взрыв на поверхности твердого тела, воздействие ударной волны в
жидкости или газе, быстрое приложение или снятие нагрузки и т.д. Современные спосо-
способы исследования механического удара, основанные на учете локального поведения мате-
материала в объеме и на поверхности соударяющихся тел, используются и для решения пе-
перечисленных выше проблем.
Традиционные методы расчета удара продемонстрируем на примере удара двух твер-
твердых тел, представлемых двумя точками массой тх и т2 (рис. 1), движущимися вдоль од-
одной прямой (ось х). Не следует, вероятно, говорить [11] об абсолютно твердых телах, т.к.
в этом случае должно соблюдаться условие
сохранения кинетической энергии (аб-
(абсолютно твердые тела не способны к пре-
преобразованию кинетической энергии меха-
механического движения в другой вид энергии).
/77/ М, „
Это условие вместе с законом сохранения 0 г о=- * J?
импульса ®/о ®га
позволяет определить конечные скорости
Vj и v2 соударяющихся тел, имеющих ско- Рис. 1
роста до удара v10 и v20.
Однако, если считать, что при ударе часть кинетической энергии может переходить
в другие виды энергии (а это практически неизбежно), одного условия A) недостаточно
для определения конечных результатов удара. В этом случае необходимо найти дополни-
Ударные нагрузки 313
тельное соотношение, чтобы решить задачу в рамках механики движения точки. Такое
соотношение
vi - v2 = -*(v10 - v20) B)
было предложено Ньютоном. Коэффициент восстановления к определяется материалами
соударяющихся тел, считается независящим от относительной скорости и подлежит оп-
определению в эксперименте. Выражения A), B) позволяют найти конечные скорости
(т2 - ктх )v20 + m2(l + k)vlQ
Коэффициент восстановления может меняться от к = О (слипание двух тел в одно)
до к = 1 (абсолютно упругий отскок, соответствующий только перераспределению кине-
кинетической энергии между телами без потерь).
Экспериментальные исследования показывают, однако, что соотношение B) не вы-
выполняется: коэффициент восстановления оказывается функцией не только материалов
соударяющихся тел, но и их формы, масс и скоростей.
Понятно, что в этом случае использование соотноения B) неправомерно и приведет
к большим ошибкам в расчетах ударных взаимодействий, если использовать эксперимен-
экспериментальное значение к при величинах масс и скоростей, далеких от условий эксперимента, а
изменение формы тел может приводить к изменению величины к на порядок. Сущест-
Существенным недостатком изложенного метода является невозможность определения усилий
при ударе, а значит, и напряжений в конструкции. Для оценки этих величин в первом
приближении иногда оказывается возможным считать области контакта деформирующи-
деформирующимися, а основной массив соударяющего тела жестким. Зависимость усилия Р от дефор-
деформации (сближения) для упругих тел, контактирующих в одной точке, выражается форму-
формулой Герца:
где р — коэффициент, зависящий от упругих свойств материалов и геометрии соударяю-
соударяющихся тел в месте контакта.
Если тела контактируют сферическими поверхностями радиусов R\, R2 коэффициент
Р зависит от модуля упругости Е и коэффициента Пуассона v материала:
2Е
Для центрального удара двух тел (центры тяжести и центры кривизны поверхностей
в точке контакта находятся на одной прямой, по которой направлены также и скорости
тел) наибольшее значение ударной силы составит
,2 5
314
РАСЧЕТ ЭЛЕМЕНТОВ КОНСТРУКЦИИ ПРИ ДИНАМИЧЕСКИХ НАГРУЗКАХ
где v0 - относительная скорость тел перед ударом;
— приведенная масса системы.
При этом продолжительность соударения
Эта методика дает хорошие результаты, когда сближение тел происходит за счет
контактных деформаций. Следующей ступенью повышения точности в определении па-
параметров удара для более широкого класса конструктивных элементов является учет де-
деформаций всего объема ударяющихся тел, а не только в районе контакта. При этом дос-
достаточно хорошие результаты [1] получаются, если даже считать скорость распространения
возмущений бесконечной. Еще более точными являются методики, учитывающие ско-
скорость распространения упругих возмущений; для продольных деформаций в стержне,
равную
C)
где р - плотность материала стержня.
Для сдвиговых деформаций скорость распространения волны
Наиболее полная и точная постановка задачи достигается решением систем уравне-
уравнений сплошной среды в напряжениях или перемещениях с выполнением соответствую-
соответствующих способу закрепления краевых условий с учетом местных деформаций в зоне контак-
контакта.
Однако, за исключением простейших случаев, для которых
разные методики дают более или менее близкие результаты, поиск
решений, учитывающих распространение напряжений по соуда-
соударяющимся телам, весьма труден и зачастую не может быть доведен
до конца. Поэтому в инженерных расчетах используются прибли-
приближенные методы, значительно упрощающие используемый матема-
математический аппарат.
Удар жесткого груза по системе с малой собственной массой.
Одним из приемов, существенно упрощающих задачу удара, явля-
является разделение инерции и деформации.
Инертную массу относим к абсолютно жесткому телу, движе-
движение которого подлежит определению, а деформации к безинерци-
онному элементу. Простейший случай такого рода - удар массив-
массивного недеформирующегося тела по неподвижной стенке через
демпфер, масса которого значительно меньше массы тела (рис. 2).
Характеристика демпфера (деформируемого элемента) может быть
разной: усилие Сможет разными способами [15] зависеть от отно-
относительного перемещения х или относительной скорости х (табл. 1).
Рис.2
Ударные нагрузки
315
1. Однокомпоиеитные модели деформируемых элемеитов
1
2
3
4
5
Наименование модели
Упругая линейная
Упругая нелинейная
Вязкая линейная
Вязкая нелинейная
Жесткопластическая без
упрочнения
Символическое изображение
Р С р
р пи р
¦? = .р
Характеристика модели
Р
X
Р
Р
Р
р
/ь
,
А
Р--Р(х)
X
у t
Для простейшего случая (рис. 2) уравнение движения жесткого тела
тх
= - Р
D)
(где схема для Р по табл. 1) позволяет найти зависимость x(f) и далее любые параметры
движения, из которых наиболее часто необходимы для последующих расчетов макси-
максимальные усилия сопротивления и максимальные перемещения демпфера.
Величина максимального перемещения от контакта тела с демпфером до полного
торможения для случаев 1 и 2 табл. 1 определяет и максимальное усилие торможения,
действующее на конструкцию тормозного элемента и на конструкцию неподвижного
препятствия. Решением уравнения D) или использованием закона сохранения энергии
316
РАСЧЕТ ЭЛЕМЕНТОВ КОНСТРУКЦИИ ПРИ ДИНАМИЧЕСКИХ НАГРУЗКАХ
(здесь кинетическая энергия движущегося тела затрачивается на работу деформации
демпфера) для общего случая 2 получим
лпмх
= 2 \p(x)dx-
для случая 1
mvx = сх
О ~ |-лтах-
Надо заметить, что характеристики 1 и 2 могут быть свойственны не только упругим
элементам, но и пластическим, т.е. разгрузка может происходить с появлением оста-
остаточных деформаций.
Для случаев 3 и 4 максимальное усилие действует в момент первого контакта, когда
скорость сближения максимальна, причем если для случая 3 линейной зависимости со-
сопротивления от скорости максимальное перемещение имеет конечную величину
то для случая 4, например, Р(х) = b ¦ х2, остановки, согласно точному решению, вообще
не должно произойти. Жесткопластическая характеристика при независимости от скоро-
скорости деформации дает постоянное усилие сопротивления Ро и максимальное смещение
Реальные демпфирующие элементы, конечно, не имеют столь "чистых" характери-
характеристик, как представленные в табл. 1. Более близкими к действительности можно считать
комбинации характеристик, выражения для которых и соответствующие модели [12] при-
приведены в табл. 2.
2. Многокомпонентные модели деформируемых элементов
N°
1
2
Наименование модели
Вязкоупругая (модель Кель-
Кельвина—Фохта)
Жесткопластическая с уп-
упрочнением
Символическое изображение
—
Р-
С
-'Ч/Ч/
S
— ,..'- 1
1 1
А
-\
j
Р
Характеристика модели
Р = с
Р
Рс
•х+ Ьх
t
Ударные нагрузки
317
Продолжение табл. 2
Упруговязкая (модель Мак-
свела)
Стандартная (модель Иш-
линского Ржаницина)
С/
3
P. + P--
bc
2 * . C{C2
X + — л
C2
Упругопластическая без
упрочнения (модель Пран-
дтля)
P
Pa
-a
Упругопластическая с уп-
упрочнением
р
С/
Ро
J?
p
Pc
¦Ро
Могут быть и другие многокомпонентные модели, для
которых зависимости силы сопротивления Р от перемещения
х и скорости х могут быть легко получены, подобно приве-
приведенным в табл. 2. Последующее аналитическое или численное
решение уравнения D) позволяет найти как величины макси-
максимальных усилий сопротивления, так и максимальные пере-
перемещения. Зная усилия, можно найти напряжения и запасы
прочности.
Решение задачи не изменится, если безинерционный
демпфер установлен не на препятствии, а на подвижном эле-
элементе.
Упрощенные методы расчета на удар. Модель удара, из-
изложенная выше, слишком примитивна и во многих случаях
приводит к большим погрешностям. В первую очередь это
связано с тем, что не учитывается приобретение скорости
первоначально неподвижными элементами.
Рис.3
318
РАСЧЕТ ЭЛЕМЕНТОВ КОНСТРУКЦИИ ПРИ ДИНАМИЧЕСКИХ НАГРУЗКАХ
Иногда препятствие считают состоящим из неподвижной стенки и элемента массы
т2, соединенного со стенкой безинерционным элементом (табл. 1, 2). Чаще всего удар
подвижного элемента т{ (рис. За) по массе т2 считается абсолютно неупругим и мгно-
мгновенным, так что задача сводится к определению движения тела массой тх + т2, ударяю-
ударяющегося по демпферу с начальной скоростью v^
V, = V0
Дальше задача решается по выше приведенным формулам с учетом полной останов-
остановки слипшихся элементов массой т{ и т2. Так как кинетическая эенергия определяется
для суммарной массы гп\ + mi, то это не всегда верно [1J. Если тело тх ударяет по систе-
системе с распределенной массой (стержень, балка и т.п.), то не вся масса этой системы мо-
может считаться мгновенно присоединенной к массе т^. В этом случае вводится понятие
приведенной массы. Например, при торцевом ударе по неподвижному стержню постоян-
постоянного сечения S жесткость безинерционнного упругого элемента A, табл. 1) принимается
равной статической жесткости стержня длиной /:
с =
/ '
а масса rri2 принимается равной 1/3 массы стержня.
При ударе тела массой Ш[ по середине шарнорно—опертой балки жесткость без-
инерционного упругого элемента определяется из выражения для перемещения середины
балки длиной / с моментом инерции сечения /:
с =
48?У
/3
приведенная масса т2 принимается равной 17/35 массы балки.
В табл. 3 приведены значения отношения р* приведенных масс к реальным массам
для разных конструкций.
3. Коэффициент приведения C собственной массы конструкции
к точке удара (точка К)
Схема стержня и характер нагружения
Ударные нагрузки
319
Продолжение табл. 3
!
/
/
//////////
q
I
an
q
frrjm /»f
Ш
ГТТТТТ] /?7y
e
II
1111
' К
e
u.
s
J.JJJ ^
67
336
2 + 4c - c2 - 6c3 + 3c4
105c2(l-cJ
8 + c3(l40+231c + 99c2)
420A + cfc1
105 105c+ 35c2 2c3
140c2
¦ 3 + c c2
140c2(l - cJ
24 24c 4c2 + 8c3 c4
35c2Ec-4-c2J
320
РАСЧЕТ ЭЛЕМЕНТОВ КОНСТРУКЦИИ ПРИ ДИНАМИЧЕСКИХ НАГРУЗКАХ
Для получения более точных результатов следует отказаться от предположения о
мгновенности взаимодействия масс тх и /и2. Проще всего это сделать, вводя дополни-
дополнительный демпфер (рис. 36) между массами тх и т2, причем характер взаимодействия масс
тх, т2 может описываться одной из зависимостей табл. 1 или их комбинацией. В этом
случае задача сводится к решению системы двух уравнений. Процесс выделения жестких
масс /и; и деформируемых связей (демпферов) может быть продолжен, причем образую-
образующаяся цепочка таких масс и связей может разветвляться (рис. Зв). Такой подход называ-
называется обычно методом дискретных моделей и применяется достаточно широко как для
механических систем, реально состоящих из нескольких взаимодействующих тел, так и
для сплошных тел, искусственным образом разделяемых на отдельные элементы.
Более сложной, но и более строгой является теория удара с учетом волновых явле-
явлений. Из большой массы результатов имеет смысл привес-
привести здесь зависимость деформаций в ударяющем стержне
от скорости удара. Например, для стержня, ударяющего-
ударяющегося торцом о жесткую плоскую поверхность (рис. 4а), де-
деформации сжатия равны отношению скорости удара v к
скорости звука в стержне с:
V
Е = —,
С
а в случае упругого срежня напряжения составляют
б)
Рис. 4
Отсюда нетрудно получить значение скорости vT,
при которой в стержне появляются пластические деформации:
'"Ж
При ударе двух стержней одинакового сечения и из одного и того же материала,
движущихся первоначально со скоростями vj и v2 (рис. 4бу vi >М), напряжения со-
ставляют
F)
Если каждый из них движется навстречу другому со скоростью и, то
G)
Формулы E) - G) определяют напряжения в волне сжатия, идущей по стержню от
ударного торца в первый момент. Дальнейшее поведение стержня зависит от граничных
условий на торцах. В частности, если торцы, противоположные ударяемым, свободны
(рис. 46), то по стержням пойдут волны растяжения с такими же по величине напряже-
напряжениями E) - G), если не учитывать, конечно, рассеяние энергии в материале стержней.
Колебания конструкций 321
10.2. КОЛЕБАНИЯ КОНСТРУКЦИЙ
Появление колебательных нагрузок связано, в основном, с циклическим характером
движения большинства машин. Вследствие упругих свойств строительных и машино-
машиностроительных конструкций периодические да и непериодические воздействия приводят к
колебаниям конструктивных элементов и, как следствие, к циклически меняющимся
нагрузкам. Расчет на такие нагрузки является сейчас практически обязательным для лю-
любой более или менее ответственной конструкции.
Основные понятия. Изменения, связанные с многократным поочередным возраста-
возрастанием и убыванием параметров, характеризующих движение или напряженное состояние
конструкции, называются колебаниями. Соответствующие этому определению зависимо-
зависимости параметров от времени могут быть очень разными, но среди них можно выделить
наиболее простые и наиболее изученные — гармонические.
р = А\ cos(o)r + a). (8)
Здесь изменение параметра р от времени / характеризуется величиной амплитуды А,
круговой частотой ю и фазой а. Выражение (8) соответствует простому гармоническому
колебанию. Сложное колебание является наложением друг на друга (суммой, суперпози-
суперпозицией) нескольких или бесконечного множества простых колебаний:
1=1
Простые гармонические колебания являются периодическими, так как значения па-
раметра р повторяются через промежуток времени Т = —, называемый периодом коле-
колесо
баний. Число полных колебаний в единицу времени называется частотой колебаний и
является величиной, обратной периоду Т:
S _ 1 _ G>
Наложение двух гармонических колебаний с одной и той же круговой частотой
(одной и той же частотой/или с одинаковым периодом 7) является также простым гар-
гармоническим колебанием с той же частотой:
той же частотой:
| cos со/ + А2 cos(co/ + ср) = А ¦ cos(a>f + у),
л Ш 7i ТГл а sin ©
где А JAr + At + 2AA совф; tgy =
л Ш 7i ТГл 'а
А = JAr + At + 2A\A2 ¦ совф; tgy =
А1 + А2 cos ф
Сумма двух гармонических колебаний с разными круговыми частотами и фазами в
общем случае является непериодическим колебанием. Если отношение двух частот явля-
является рациональным числом, то суммарное колебание является периодическим с перио-
периодом, являющимся наименьшим общим кратным периодов слагаемых колебаний. Такая
сумма называется полигармоническим колебанием.
21 Том 2
322
РАСЧЕТ ЭЛЕМЕНТОВ КОНСТРУКЦИИ ПРИ ДИНАМИЧЕСКИХ НАГРУЗКАХ
Если о)[/ю2 = т/'п, где тип взаимно простые числа, то можно записать
лсо. Функция u{t) будет периодической функцией с периодом 2я/со.
Любая периодическая функция с периодом Г разлагается в ряд Фурье:
=mo,
j аи оо
u(t) = — a0 + V ak cos k&t + V bk sin feat.
A1)
Здесь flo/2 — среднее значение величины u в течение времени Т, а со = 2я/Т называ-
называется основной частотой. Компонента fljcosro/ + Ajsinotf называется основной гармоникой,
последующие — высшими гармониками. Каждой гармонике соответствует амплитуда Ак и
фаза ф*.
/JUJ
Рис.5
Множество амплитуд Аь
расположенных в порядке воз-
возрастания частот fco , называется
амплитудным спектром процесса
с периодом Т = 27г/о). Аналогич-
Аналогичное распределение фаз <рк назы-
называется фазовым спектром. На
рис. 5а дан пример амплитудного
спектра общего вида; рис. 56 ил-
"<i> люстрирует полигармоническую
функцию A0).
Процесс определения коэффициентов ряда Фурье A1) называется спектральным
анализом. При известной зависимости u(t) они вычисляются интегрированием:
ак = — \u(t) cos butdt (к = 0,1,2...);
=YJu(t)smk^tdt (к = 0,1,2...).
Если колебания непериодические (Г -> да), очевидно, выделить основную частоту
нельзя. Такой непериодический процесс представляется интегралом
Амплитудная функция определяется в виде
JI * if00 I
Jw(t)cosg>tA + Jw(T)sinu)T^ ;
Колебания конструкций 323
фазовая
Помимо амплитудного и фазового спектра для произвольного колебательного про-
процесса u(t) вводят еще целый ряд характеристик [4]:
пиковые значения А+ и А-
Л+ = |тах м(/)|; А, = |min м(г)|;
размах колебаний
AQ = max u(t) - min u(t);
среднее значение на длине реализации Т
1 Т
ucp=-ju(t)dt;
о
среднее абсолютное значение
«ср.аб =т
среднее квадратическое значение
1 о
Если u{t) представлена в виде A1)идо = 0то,
2 1 V1 л!
**ср.к ~ ^ La к'
Средние квадраты и2сркв пропорциональны энергии процесса.
Если перемещения представляются простым гармоническим колебанием (8), ско-
скорость и ускорение соответственно равны:
v = -о A sin (со t + a); w = -со A cos((o t + а) = -<о2р.
21*
324 РАСЧЕТ ЭЛЕМЕНТОВ КОНСТРУКЦИИ ПРИ ДИНАМИЧЕСКИХ НАГРУЗКАХ
Колебания дискретных систем. По аналогии с методом дискретных моделей, понятие
о котором дано выше, под дискретной системой будем понимать механическую систему,
могущую быть представленной как система материальных точек, обладающих массой и
соединенных между собой упругими или другими связями в простую или разветвленную
цепь.
Простейшим случаем такой цепи являются две точки, соединенные связью. Наибо-
Наиболее простым для исследования является поведение такой системы, если одна из точек
неподвижна и обладает бесконечно большой массой. Такую точку (тело) называют обыч-
обычно основанием.
Пусть точка конечной массы т соединена с основанием упругой линейной связью
(см. табл. 1). Уравнение движения в отсутствии внешних сил
тх = -сх
имеет общее решение
х = a cos со о ' +
где а>л = с/т; коэффициенты а = хф); Ъ = —— определяются начальным смещением от
и со
положения равновесия х@) и начальной скоростью х@). Максимальное смещение опре-
определяется выражением
лтах
Данный подход к решению справедлив при свободных колебаниях одномассовой
упругой системы. В реальных условиях колебания быстро затухают, но частота этих коле-
колебаний, называемая собственной частотой системы, играет существенную роль при иссле-
исследовании любых колебательных движений системы.
Очень часто действующие на систему внешние нагрузки имеют колебательный ха-
характер, являются периодическими. В первом приближении удобно считать их гармониче-
гармоническими функциями вида (8). При воздействии на материальную точку одномассовой сис-
системы в направлении упругой связи такая сила приведет систему в колебательное движе-
движение:
тх + сх = /*о coscojf. A2)
где Ро ~ амплитуда; ©i — круговая частота внешнего воздействия.
Частное решение уравнения A2), соответствующее установившимся колебаниям,
Р Р
х = , ° ^ cose»! t = ° .coso)! t,
\2fj
говорит о том, что амплитуда колебаний данной системы зависит от частоты а^ внешнего
воздействия и неограниченно возрастает при приближении а>! к собственной частоте сис-
системы ш0 (явление резонанса). Если учитывать силы вязкого сопротивления A по табл. 2),
то установившиеся колебания
Колебания конструкций
325
х =
0),
m
©
A3)
имеют сдвиг относительно действующего усилия:
GOlfti
у =arctg ' ;
Амплитуда колебания A3) остается конечной при любых значениях вц и при одном
и том же соотношении (О\/щ тем меньше, чем больше коэффициент вязкости ft.
Демпфирование колебаний может происходить не только за счет вязкоупругих
свойств материала, но и за счет так называемого конструкционного демпфирования, при
котором энергия поглощается за счет контактного взаимодействия деталей между собой.
Так же, как и в случае удара, часть массы деформируемого элемента можно присое-
присоединить к инерционной массе т. В качестве первого приближения можно использовать
данные табл. 3.
Если в системе имеется несколько колеблющихся сосредоточенных масс, связанных
друг с другом или с неподвижным основанием упругими связями, то разрешающие урав-
уравнения могут составляться либо как уравнения движения каждой массы под действием
внешних сил и реакций связей, либо как выражения для деформаций связей под дейст-
действием внешних сил и сил инерции колеблющихся масс.
Например для системы двух грузов, соединенных пружинами (рис. 6д), уравнения
движения каждого груза записываются в виде
A4)
B -X\) + P\ sin со if;
т2х2 =-с2(х2 -*i),
где хь х2 — смещение грузов от
положения равновесия;
Pisina^t — внешняя возбуж-
возбуждающая сила, приложенная к
ГРУЗУ /Wj.
Для балки с двумя закреп-
закрепленными на ней массами т{ и
т2 (рис. 66) выражение для по-
поперечных перемещений этих
масс уь у2 под действием инер-
инерционных сил щу\, щу'г и
внешней силы P^intoj/ имеют
вид:
а)
77777
Рис. 6
У\ = -
У2 = -
A5)
sinto,f,
326 РАСЧЕТ ЭЛЕМЕНТОВ КОНСТРУКЦИИ ПРИ ДИНАМИЧЕСКИХ НАГРУЗКАХ
где 5^ = \ |—'-—j— — перемещение /" точки от единичной силы Рк = 1 (формула Мо-
О
ра).
Если внешние силы Р^ отсутствуют, то системы уравнений A4), A5) описывают сво-
свободные колебания. Отыскивая ненулевые решения этих систем в виде
Xj = о,- sin(co Qt + a,-) или yt = a,- sin(o ot + a ,•)
приходим к системам уравнений относительно амплитуд аь а2:
A6)
Для того, чтобы системы имели ненулевые решения аь а2, определители их должны
равняться нулю, что приводит к уравнениям для определения собственных частот.
-c2 = 0;
J =° A9)
Каждое из уравнений A8), A9) имеет по два вещественных и положительных реше-
решения для coq , т.е. колебательные системы (рис. 6) имеют по две собственных частоты. Ка-
Каждой из них согласно уравнениям A6), A7) соответствует вполне определенное отноше-
отношение амплитуд aja2. Такое отношение называется собственной формой колебаний. Дви-
Движение каждой из масс представляет полигармоническое колебание:
х, = оп sin(a>0]/ + ах) + ап sin(a>02f + a2);
х2 = a2l sin(m0i/ + a,) + fl22sin(CH2/ + «2);
отношения fl2i/^u и a22fa\2 являются собственными формами колебаний, соответст-
соответствующими собственным частотам ю01 и <оО2-
В общем случае количество собственных частот и собственных форм равно количе-
количеству независимых обобщенных координат упругой системы.
При наличии внешних сил решение для установившихся колебаний
JC| = flj sina>]f ; х2 = а2
имеет вид для системы A4):
()
( +С2 -т1®*)[с2 ~ т2Щ]~ с\
Колебания конструкций 327
для системы A5):
i252i J
fl - т^Ьц 1A -
A - /njOj^Sn Hi -
«2 =
Аналогичным образом можно решать дискретные системы и с большим числом не-
независимых обобщенных координат.
Неоднородные системы A4), A5) можно решать с помощью разложения по собст-
собственным формам колебаний [11].
Например, для A4) решение ищем в виде сумм
*i = fln/i +0i2/2; *2 = «21/1 +«22/2. B0)
где ап, ап - произвольные числа, а а2\, а22 связаны с ними выражениями A6). Подстав-
Подставляя B0) в систему A4) можно прийти к системе независимых уравнений, в каждом из
которых только одна искомая функция:
/i+»S/i =lfl"
/2 +©02/2 2
ma{ + m1a1\
Поскольку в процессе решения не накладывалось условий на вид функций внешних
нагрузок, их можно брать произвольными. Для более общего случая приложения усилий
к обеим массам (рис. 6а) можно получить
* 2 f
02 2i
пца{ + m2a2\
Если ^@ и /*2@ произвольные периодические функции с периодом Т, то обозначив
правую часть, например, первого уравнения Ф](/), решение /t можно получить в замкну-
замкнутой форме:
1 Г ( т
А =75 с[ ctg^J—coscD01r -
2a>0! [_ V 2
^si
328 РАСЧЕТ ЭЛЕМЕНТОВ КОНСТРУКЦИИ ПРИ ДИНАМИЧЕСКИХ НАГРУЗКАХ
Г Т
где с= r<l>i{T)cos(u0( xdx; s= ro^TJsintuoi1^-
о о
Аналогичным образом могут рассматриваться колебания и более сложных систем.
Определив, согласна изложенному, зависимость перемещений от времени, можно
найти максимальные усилия в связях и соответствующие максимальные напряжения в
конструкциях.
Колебания систем с распределенными параметрами. Представление реальных конст-
конструкций в виде дискретных систем не всегда возможно. Во многих случаях и инертные, и
упругие свойства материалов нужно считать распределенными в пространстве.
Простейшим случаем такого рода являются продольные колебания стержней. Урав-
Уравнение для продольных перемещений u(x,t) сечений стержня, характеризующихся про-
продольной координатой х,
Лг.^Л..,!.^ B1)
dt2 дх2 р
д2и „ , „ ди
определяющее связь ускорения —т- с продольной деформацией е = —, имеет решение
дГ дх
и = Х(А cos pt + В sin pt\ B2)
где X— функция только координаты х, определяющая форму колебаний, происходящих с
собственной частотой р.
Собственные формы и собственные частоты определяются условиями на краях
стержня. Если стержень имеет свободные концы
то, подставляя решение B2) в уравнение B1), получим уравнение в обычных производ-
производных
откуда
v px . рх
X = Сл COS-*— + C-y S1I1 ¦*—-.
а а
Удовлетворяя условия B3), найдем:
с2 = 0; sin ^- = 0. B4)
а
Второе из равенств B4) является частотным уравнением и определяет набор собст-
собственных частот pi:
Колебания конструкций 329
/>,=-р 0 = 1,2....)
и собственных функций
Xt =cucos~.
Путем наложения разных частных решений вида B2) для свободных колебаний
стержня получим
Zhvcf . inat n . таЛ
cos —I At cos —— + Bj sin ——I.
'=1
Исходя из начальных условий, можно найти коэффициенты Ah Д-. Если при t = 0
то As =— \fi[x)cos—dx, Bi - —
о 0
Для стержня, один конец которого закреплен, а второй свободен,
(И).х=0 = °> (~) = °
свободные колебания определяются выражением
. inx ( . mat n . inat} .
Z. mx Г . та/ _ . таЛ . . . ,
sm IT I 'cos ~гГ + '"sin ^~J; ' =
Для стержня с обоими закрепленными концами
inat
v> . тх ( . inat п . таЛ . , _ .
и - 2^sin — \ A; cos—— +Bj sin——\; / = 1,2,3...
Еще один конец стержня свободен, а второй закреплен упруго
(ди\ Л (ди . ) п
— =0; — + Ли =0,
Кдх)Хт0 V8x )хш1
решение выражается через собственные значения Х\ :
00
и = ^ cos kjx[Aj cos kjut + 5,- sin X,-tf/),
330 РАСЧЕТ ЭЛЕМЕНТОВ КОНСТРУКЦИИ ПРИ ДИНАМИЧЕСКИХ НАГРУЗКАХ
которые являются положительными корнями уравнения Х: tg Xjl = h.
Приведем несколько решений для вынужденных колебаний.
Пусть один конец стержня закреплен, а второй в момент времени t = 0 начинает
двигаться по синусоидальному закону (н) _ = A sin со t.
_ от . , _ _
Тогда при ю ф ——; / = 1,2,3-
. х . л уг^2Аой, ,ч/ Xi sinX;t- та sin to/ . тх . ina
и = А—sin со / + > . (-1) — 5 2 sin——; где Xt =——;
' /Zi m X./ -со ' '
при ю = (л — целое положительное число)
х .
s
y 2i4B>(A./sinX//-Q>sintDr) . тх
) ,Kг ^-sin —
ftocoscoflsin —;
nn 'a
. ina
где Xi =—.
Если к свободному концу стержня в начальный момент времени приложили усилие
ДО = A sinco/, краевое условие запишется в виде
А .
5
площадь сечения стержня.
Колебания при со ф ±——^—; / = 0,1,2,3...
/=0
2/ 1 (Х\ sinX,/-u)sino)r) . B/
B/
где к$ = V
(in + lWa
Колебания при ю =
2/
2
Ах . А , 1У-2>4(оГ 2/
. B/ + 1)тгх . „ А Г 2/
xsin^ (-1) -— [
Колебания конструкций 331
где
2/
Уравнение колебаний балки под действием произвольной распределенной попереч-
поперечной нагрузки имеет вид
д v ¦) д v О\Х*Ч j EI
у +а2 у - v —L- "l
г т и
2 дХ4
dtl дХ* т т
где т = const = Sp — линейная плотность балки; / = const — момент инерции сечения;
S - площадь сечения; р — плотность.
Приведем несколько решений для часто встречающихся случаев нагружения балок.
Пусть сосредоточенная сила Р = Po$ina)\t
^ действует на шарнирно опертую балку на расстоя-
- нии с от левого конца (рис. 7). Установившиеся
вынужденные колебания определяются выражени-
выражением [16]
Рис. 7
. тс . Ых
.3 оо . Sin —— • Sin ——
l \~* I 1
Если на балку действуют несколько сил, результирующий эффект является суммой
колебаний, вызываемых каждой силой в отдельности.
Пусть балка нагружена равномерно распределенной нагрузкой q.
q =
Выражение для перемещений имеет вид [16]
тх
sinm,,.
В более общем случае возмущающая нагрузка может быть негармонической функ-
функцией времени и может меняться вдоль пролета балки. Пусть нагрузка [16] представлена в
виде q = /(r)/i(x). Разложим функцию fx(x) в ряд по собственным функциям колебаний:
. / ч . пх . 2пх . Ъюс
/i(x) = fliSin— + д2 sin —— + аз sm т
v ' I I I
2'
• ¦ • ,
l С , / \ . /TUT
где а(- = у j /i (jc) sin — rfx.
0
Выражение для перемещений можно получить в виде
332 РАСЧЕТ ЭЛЕМЕНТОВ КОНСТРУКЦИИ ПРИ ДИНАМИЧЕСКИХ НАГРУЗКАХ
тх
V
Пусть по той же шарнирно—опертой балке (рис. 7) движется постоянная сила Р со
скоростью v от левой опоры с момента t = 0. Прогиб определяется выражением
_
у ~
2/>/3
. inx . mvt
sin —— sin
Spn2 ft i2{i2n2a2 - v2/2)
. inx . i2n2at
5in — sin —j—
*V-v2/2V
B5)
Если скорость так мала, что можно положить v = 0, a vt = с, тогда второй член вы-
выражения B5), представляющий свободные колебания, исчезает, а первый (вынужденные
колебания) переходит в выражение для статического прогиба балки, вызванного силой Р,
приложенной на расстоянии с от левой опоры (рис. 7).
У =
2PV
El . me . fax
— sin — sin —.
i-1; ' l
Для балки с заделанными концами решение ищется в виде разложения по собствен-
собственным формам колебаний:
собственные формы — нормальные функции
Xj = c2(cos kjX - chkjx) + c4(sin ktx - sh^,x),
где k,l - корни уравнения cos k(l ¦ ch kf = 1;
c2 _ sh k-,l - sin kjl
c4 cosJk,/-chjt,/'
величины с2, с4 для / - й функции выбираются из условия нормировки и приведены в
таблицах нормальных функций и их производных. Для силы Р = Pq sinmj/, действующей
на расстоянии с от левой заделки, функции времени <pt получаются в виде:
/ sin со j/
Изгибающие моменты во всех случаях
Колебания конструкций 333
dx2
Колебания прямоугольной пластинки постоянной толщины h представляются урав-
уравнением
DAAw + ph^ = q(xty,t), B6)
dt2
д2 д2 * Eh1 (л
где Д = —- + —-; D = —-, г; q[x,y,t) - внешняя распределенная нагрузка.
дх2 ду2 12[l-v2J
В отсутствии внешней нагрузки решение уравнения можно искать в виде
t + Bmn sin ш mnt)Vmn,
что приводит к уравнению для собственных форм колебаний
ф^-и-О, B7)
которое для шарнирно—опертых краев пластин приводит к собственным формам колеба-
колебаний вида
. птх . %пу
sin sin ——;
a b
п2\ D
при этом собственные частоты
г2 b2
здесь a, b — размеры пластины в плане; т, п — неотрицательные целые числа.
В случае вынужденных колебаний q ф 0 можно использовать разложение внешней
нагрузки по собственным формам колебаний. Рассмотрим, например, ту же прямоуголь-
прямоугольную пластину под действием гармонической распределенной нагрузки
q[x,yyt) = 9j (x, у) sin о»]/. Подставляя в уравнение B6) искомое решение в виде
получим
DAAW - рАю,2^ = qi(x,y).
Нагрузку q и прогиб W можно представить в виде рядов по ортонормированным
формам колебаний/„,, для которых
334 РАСЧЕТ ЭЛЕМЕНТОВ КОНСТРУКЦИИ ПРИ ДИНАМИЧЕСКИХ НАГРУЗКАХ
°Ь « = />;
если
lvomnfmn(x,y), B8)
т=1л=1
оо
а Ь
где qmn ^ jjgifmndxdy.
0 0
Так как fmn удовлетворяет уравнению B7), то коэффициенты Wumn из B8) выража-
выражаются через д„„:
Для шарнирно~опертой пластины
, 2 . птх . ппу
fmn = -rrsm~rsm~r-
4ab о b
Для сосредоточенной силы Р = Р$ sin со j/ в точке с координатами х = Xq , у = у0 вы-
выражение для прогиба принимает вид
. пкуп . тпх . ппу
sin —~ sin sin -~-
b a b
Используя выражения для изгибающих моментов:
MV~D\—=-
У Kdy2
—— +v; MV~D\= + v= ; . M™ = —r—D ;
dx1 by1) У Kdy2 dx2 ) & 2 dxdy'
можно перейти к определению напряжений.
Задача динамического расчета для других случаев закрепления и других видов пла-
пластин существенно усложняется. Еще более верно это для оболочек. Но метод разложения
решения по собственным формам колебаний является достаточно универсальным [4, 13,
15, 16].
10.3. КРИТИЧЕСКИЕ СОСТОЯНИЯ МЕХАНИЧЕСКИХ СИСТЕМ
Явление резонанса является критическим состоянием для колебательной системы —
колебательные нагрузки определенной частоты и относительно небольшой амплитуды
могут привести к очень большой амплитуде колебаний и разрушению конструкции. В
некоторых случаях критическими параметрами для конструкций могут служить частоты
вращения или линейные скорости движения.
Критические состояния механических систем
335
Критические частоты вращения валов и осей. Пусть неве-
невесомый вал с насаженным диском массой т (рис. 8) имеет вер-
вертикальную ось вращения и начальный эксцентриситет диска
равен е [1]. Под действием центробежной силы диска вал изги-
изгибается и возможен режим, когда изогнутая ось вала, представ-
представляя жесткую кривую, вращается с угловой скоростью со вокруг
оси, проходящей через центры подшипников. Если упругий
прогиб в сечении с насаженным диском равен г, то можно за-
записать
тсо2G + г)
Рис.8
где с — изгибная жесткость вала в сечении с диском.
Отсюда следует, что прогиб г зависит от начального эксцентриситета и угловой ско-
скорости:
г =
2
пка е
с-тсо2
то есть существует некоторая угловая скорость шкр , при которой прогиб должен стать
бесконечно большим:
2
tot« = —•
'кр
т
Эта скорость совпадает с собственной частотой колебаний вала, рассматриваемого
как невесомая балка с жесткостью с с закрепленной на ней массой т. Относительный
прогиб вала
1
СО
кр
-1
СО
увеличивается при приближении угловой скорости к критической; при этом центр тяже-
тяжести диска будет находится дальше от оси вращения, чем центр сечения вала. Режим
со = сокр называется критическим; при этом прогиб вала может принимать весьма боль-
большие значения. В закритическом режиме со > юкр центр тяжести диска оказывается бли-
ближе к оси вращения, чем центр вала и при неограниченном увеличении со центр диска
неограниченно приближается к оси вращения — происходит самоцентрирование. Прогиб
вала при этом равен первоначальному эксцентриситету е.
Для произвольно гибкого невесомого вала с несколькими дисками число и значения
критических угловых скоростей совпадает с числом и значениями собственных частот
этого же вала; в этом случае невесомый гибкий вал рассматривается как балка с закреп-
закрепленными массами, равными массам дисков. Такой подход справедлив до тех пор, пока
момент инерции диска не слишком велик. Иначе проявляется гироскопический эффект
вращения диска, т.е. сопротивление диска повороту его оси вращения. В этом случае
критическая угловая скорость определяется из уравнения [11]
336 РАСЧЕТ ЭЛЕМЕНТОВ КОНСТРУКЦИИ ПРИ ДИНАМИЧЕСКИХ НАГРУЗКАХ
'кр
= 0,
1
где /« - момент инерции диска относительно одного из его диаметров (если диск тон-
лсий); ЬР ,(рр — прогиб и угол поворота сечения вала, в котором расположен диск, под
действием единичной силы Р = 1, приложенной в этом же сечении; Ьм ,ц>м - те же ве-
величины, но от действия единичного изгибающего момента М = 1.
Если диск нельзя считать весьма тонким, то вместо /* следует подставлять / — /j - /2,
где /t и /2 — моменты инерции диска или ротора относительно центральной оси, перпен-
перпендикулярной к плоскости диска и лежащей в его срединной плоскости соответственно.
Если приходится учитывать непрерывное рас-
распределение массы на валу (например, в случае дос-
достаточно тяжелого вала или отсутствия диска), то
критические скорости вращения будут совпадать с
собственными частотами поперечных колебаний
той же системы.
Критические состояния при вращении могут
возникать не только зр счет податливости самого
вала, но и за счет податливости подшипников в
случае их упругой подвески. Например, для жест-
жесткого ротора, закрепленного в упругих опорах (рис.
9) критическая угловая скорость определяется из
биквадратного уравнения [11]
Рис. 9
С
'кр
*кр
сха
т
= о,
где сь с2 — жесткости левого и правого подшипников соответственно:
т, /х, /у — масса и моменты инерции ротора относительно главных осей инерции;
a, b — расстояния от центра тяжести ротора до левой и правой опор; / = а + Ь.
Возникновению критического состояния может способствовать действие масляной
пленки в подшипниках [16], наличие сухого трения в опорах [15], различие главных мо-
моментов инерции вала [16]. Подробное изложение методик расчета критических чисел
оборотов можно найти в [8].
Критические скорости. В разделе, посвященном колебаниям распределенных систем,
показано, что движение постоянной нагрузки по обычной шарнирно—опертой балке
приводит к ее колебаниям; причем, при скоростях, отвечающих условию
в решении появляется особенность, приводящая к увеличению амплитуды колебаний.
Например, при / = 1 в предыдущем равенстве динамический прогиб на 50% больше наи-
наибольшего статического прогиба [16]. Такие колебания являются нестационарными и бы-
быстро затухают. Большой интерес представляют стационарные колебания, возникающие
при непрерывном перемещении нагрузки, например, по бесконечной балке на упругом
основании. В этом случае колебания с большой амплитудой возникают в случаях, когда
скорость перемещения нагрузки близка к скорости распространения бегущей волны при
свободных колебаниях балки. Уравнение колебания балки на упругом винклеровском
основании имеет вид [14]
Критические состояния механических систем
337
л 2 ^ л 4 *
ГДе4и ,—¦,*,*.—;
т - масса единицы длины балки; /с - жесткость основания; / - момент инерции сечения
балки.
Принимая нагрузку движущейся со скоростью v:
/(х, Г) =f(x-vt), можно найти прогиб под движущейся силой R.
Ур =
1
где vkp =
— критическая скорость для данного случая, соответствующая беско-
бесконечному возрастанию прогиба.
Реально прогиб ограничен наличием вязкости материала, трения и других факторов.
Критическая скорость vKp представляет собой минимальную скорость бегущей волны в
балке.
Величину
¦
J
\гг5оао
S 1DQ0
\rssn
Л
Л
0,7 0,9 V
1
1-
можно назвать дина-
мическим коэффициентом Кд. В [10] дана зависи-
зависимость коэффициента динамичности для равнопе-
равнопеременного движения от относительной скорости
у
Kj = для разных значений ускорения W. На
Vkp
рис. 10 даны кривые Кд—У1 для разных значений
коэффициента v =
Wm
Рис. 10
СПИСОК ЛИТЕРАТУРЫ
1. Александров Е.В., Соколинский В.Б. Прикладная теория и расчеты ударных сис-
систем. М.: Наука, 1969.
2. Алимов О.Д., Манжосов В.К., Еремьянц В.Э. Удар. Распространение волн дефор-
деформаций в ударных системах. М: Наука, 1985.
3. Батуев Г.С., Голубков Ю.Ф., Ефремов А.К., Федосов А.А. Инженерные методы
исследования ударных процессов. М.: Машиностроение, 1977.
22 Том 2
338 РАСЧЕТ ЭЛЕМЕНТОВ КОНСТРУКЦИИ ПРИ ДИНАМИЧЕСКИХ НАГРУЗКАХ
4. Вибрации в технике: Справочник в 6 томах. М: Машиностроение, 1981.
5. Иориш Ю.И. Виброметрия. М.: Госнаучтехиздат, 1963.
6. Кильчевский НА. Теория соударений твердых тел. Удар. Киев: Наукова думка,
1969.
7. Кильчевсжий НА. Динамическое контактное сжатие твердых тел. Удар. Киев:
Наукова думка, 1976.
8. Маслов Г.С. Расчеты колебаний валов. М.: Машиностроение, 1980.
9. Михайлов А.М. Основы расчета элементов строительных конструкций в приме-
примерах. М.: Высшая школа, 1986.
10. Муравский Г.Б., Красикова Н.П. Колебания балки на деформируемом основа-
основании при равнопеременном движении по балке сосредоточенной силы. Строительная ме-
механика и расчет сооружений. 1984, № 3.
П. Пановко Я.Г. Основы прикладной теории колебаний и удара. Л.: Машинострое-
Машиностроение, 1976.
12. Пановко Я.Г. Введение в теорию механического удара. М.: Наука, 1977.
13. Перцев А.К., Платонов Э.Г. Динамика оболочек и пластин. Л.: Судостроение,
1987.
14. Пономарев СД., Бидерман В А., Лихарев К.К. и др. Расчеты на прочность в ма-
машиностроении. М.: Машиностроение, 1959.
15- Прочность. Устойчивость. Колебания: Справочник / Под ред. Биргера И.А. и
Пановко Я.Г. М.: Машиностроение, 1968.
16. Тимошенко СП. Теория колебаний в инженерном деле. М.— Л.: Госнаучтехиздат,
1932.
17. Тимошенко СП. Прочность и колебания элементов конструкций. М.: Наука,
1975.
18. Фесик СП. Справочник по сопротивлению материалов. Киев: Будивельник,
1970.
339
11. РАСЧЕТ ПРОСТЕЙШИХ МЕХАНИЗМОВ
11.1. ЭКСЦЕНТРИКОВЫЙ ЗАЖИМ
1. Расчет эксцентрикового зажима
Условие самоторможения: при /= 0,1 D/e г 20; при/= 0,15 D/e ? 14
Параметр
Формула
Сила зажима детали эксцентриком
f-qL
1
р tg(<x + ф) + tgq>i
Момент на рукоятке эксцентрика
М = Ql = F\tg(a + ф) + tgq>! ]p
Эксцентриситет
Если угол поворота эксцентрика от начального
положения р « 180°,
5 + 8 + ~
е = —
е .
1-cosp
Если угол поворота эксцентрика р не ограни-
Радиус цапфы эксцентрика
Радиус (диаметр) наружной поверхности экс-
эксцентрика
R
е-р'
sintp''
где р' = rf'
Толщина (ширина) эксцентрика
* = 0,319
22*
340 РАСЧЕТ ПРОСТЕЙШИХ МЕХАНИЗМОВ
Продолжение табл. 1
Принятые обозначения:
Ь - длина (ширина) цапфы эксцентрика;
р' - радиус круга трения в цапфе;
/- коэффициент трения скольжения в точке зажима;
/' - коэффициент трения покоя в цапфе;
Ф, <pi - углы трения скольжения в точке зажима и на оси эксцентрика, соответст-
соответственно;
ф' - угол трения покоя в точке зажима;
s - зазор для свободного ввода зажимаемой детали под эксцентрик; s = 0,2...0,4 мм;
5 - допуск на размер зажимаемой детали от ее установочной базы до точки контак-
контакта с рабочей поверхностью эксцентрика;
/ - жесткость эксцентрикового зажима;
[а] - допускаемое напряжение в месте контакта эксцентрика с зажимаемой дета-
деталью;
М ? 2ат,
где ат - предел текучести материала эксцентрика;
[стйи1 - допускаемое напряжение на смятие для цапфы;
?\t E2 - модули упругости материалов эксцентрика и соприкасающегося с ним
элемента, соответственно;
Hi, цг " коэффициенты Пуассона материалов эксцентрика и соприкасающегося с
ним элемента, соответственно.
По полученным значениям е, г, R, В можно выбрать из соответствующих ГОСТов
конструкцию и размеры эксцентрика.
Стандартные круглые эксцентрики являются самотормозящими и имеют предель-
предельные размеры: е = 1,7 ... 4 мм; D — 32 ... 80 мм.
11.2. КЛИНОВЫЕ И КЛИНОПЛУНЖЕРНЫЕ МЕХАНИЗМЫ
Условие самоторможения:
для клина с трением на обеих поверхностях (на наклонной поверхности и на основании
клина) а < <р + (р{;
при/=/1 = 0,1 (ф = ф1 = 5Q43') a<li°;
при/-/, = 0,15 (ф = ф1 =
запас самоторможения клина
tga .'
для клина с трением только на наклонной поверхнсти а < (р(<Рх =0);
при /=0,1 а<5°43';
при/= 0,15 a < S°W;
запас самоторможения клина К = -^-.
tga
Для самотормозящих механизмов, подвергающихся сотрясениям, рекомендуется
Клиновые и клиноплунжерныо механизмы
341
2. Растет простейших клиновых механизмов (без учета трения)
Схема
Формула
342
РАСЧЕТ ПРОСТЕЙШИХ МЕХАНИЗМОВ
3. Расчет элементарных конструкций клиновых и клиноплунжерных зажимов
Схема
Формула
Для клина с трением на обеих поверхно-
поверхностях
tg(a + ф) + tgcp! '
Для клина с трением только на наклонной
поверхности
Клиновые и ютиноплунжернме механизмы
343
Продолжение табл. 3
Схема
Формула
При щ * а2
F = Q
При cti = а2 = о
штш/л
344
РАСЧЕТ ПРОСТЕЙШИХ МЕХАНИЗМОВ
Продолжение табл. 3
Принятые обозначения:
fcfhfr коэффициенты трения скольжения на наклонной поверхности, на основании
клина и в направляющих плунжера, соответственно;
/= tg Ф,
= tg
/2 = tg q>2;
Ф» Фь Ф2 " углы трения скольжения на наклонной поверхности, на основании клина и
в направляющих плунжера, соответственно;
Ф/у» Шпр " приведенные углы трения качения на наклонной поверхности и на основа-
основании клина, соответственно;
d
= — arctg/;
d
_d^
~ D
где d - диаметр оси ролика; D - наружный диаметр ролика;
Цанговые зажимы
345
Продолжение табл. 3
<Р2пр - приведенный угол трения скольжения в направляющих плунжера;
где / - расстояние от средней точки контакта консольного (одноопорного) плутгжера
с клином до середины направляющей плунжера; а - длина направляющей консоль-
ного плунжера.
В конструкциях с роликами снижаются
потери на трение, а силы зажима увеличивают-
увеличиваются на 35...50%.
В таких механизмах обычно а>10°т, они
являются несамотормозящими. Клинья само-
самотормозящих механизмов обычно имеют два
угла скоса cq и а (рис. 1), самоторможс!гие
осуществляется на втором скосе.
Рис. 1
11.3. ЦАНГОВЫЕ ЗАЖИМЫ
4. Расчет цанговых зажимов
Параметр
Формула
Осевая сила
Схема 1
При отсутствии осевого упора зажимаемой
детали (схема 1)
При наличии осевого упора зажимаемой
детали (схема 2)
Схема 2
346
РАСЧЕТ ПРОСТЕЙШИХ МЕХАНИЗМОВ
Продолжение табл. 4
Параметр
Формула
Осевая сила
В случае упора торца цанги в неподвижную
плоскость (схема 3)
Y + q>J+t8<p2
Схема 3
Сила зажима детали всеми лепестками цанги
гдеЛГ= F'r
Сила сжатия лепестков цанги (для выборки
зазора между ее губками и зажимаемой деталью)
* /3
__., , D3j f . 2sin2ai
где j = —— aj + sinaj cosai L
Для трехлепестковой цанги (из стали)
Для четырехлепестковой цанги (из стали)
Принятые обозначения:
Ф» Фь Ф2 - Углы трения скольжения на конической поверхности, на зажимающей поверхности и на
торце цанги, соответственно;
/i - коэффициент трения скольжения между зажимаемой деталью и цангой;
А - tg «и;
М- момент, передаыемый цангой;
г - радиус детали на участке зажима;
N - осевая сила, сдвигающая деталь;
к - 1,5 ... 2 - коэффициент запаса;
F) - сила, стремящаяся повернуть деталь относительно цанги;
г\ - расстояние от оси до точки приложения силы F^'\
Е - модуль упругости материала цанги;
/ - момент инерции в сечении заделанной части лепестка;
/ - расстояние от плоскости заделки лепестка цанги до середины зажимающего конуса;
w - стрела прогиба лепестка;
п - число лепестков цанги;
5 - зазор по диаметру между деталью и цангой;
a - угол конуса цанги;
cti - половина угла сегмента лепестка цанги;
з - толщина лепестка цанги в сечении его заделанной части.
Рычажные механизмы
347
11.4. РЫЧАЖНЫЕ МЕХАНИЗМЫ (ЗАЖИМЫ)
5. Расчет простейших рычажных механизмов (без учета трения)
Схема
I
i
F '
7777 ?
}
В
8
i\ л
7777 f
r
Формула для
силы
F~Q~b'
Fl
a Q+F'
b- Ql
" Q + F
a
Ft
п Q-F'
b- Ql
Q-F
определения
перемещения
a
b
_ ft
SF - -Sq -
a
b
sF=sQg
6. Расчет элементарных конструкций рычажных зажимов
Схема, формула
Схема, формула
При /j = /2 = /
F = G-
/-n/i
F-Q-
h-'чЛ
fo + lbfi
348
РАСЧЕТ ПРОСТЕЙШИХ МЕХАНИЗМОВ
Продолжение табл. 6
Схема, формула
Схема, формула
При h > h
При h = h
При h < h
Q
h + Ufi + 0,96^/o
F-Q
h + /4/2 + 0.
(h + 'b/o) Sinai +A2 cos a!
Для схемы без ролика в формуле вместо
р брать (pi.
Для практических расчетов
l2 sinaj +/r2 cos a]
При /3 > h
При /э
(/з-а^о/о^а + ф!)
h + /4/2 + 0,96r0/0
/3ctg(a
F=Q
Для практических расчетов
Для практических расчетов
Для схемы с роликом в формулах вместо
брать Ф1яр
Блочные механизмы
349
Продолжение табл. 6
Принятые обозначения:
т| - КПД, учитывающий потери от трения на оси и на участке, воспринимающем и передающем
усилие; ч = 0,85 ... 0,95;
/о, /ь h - коэффициенты трения на оси опоры, на участке, воспринимающем силу Q, и на по-
поверхности, передающей силу F, соответственно;
ФЬ ЧЧлр " Угол трения и приведенный угол трения на участке, воспринимающем силу Q, соответ-
соответственно;
где d - диаметр оси ролика; D - наружный диаметр ролика.
11.5. МЕХАНИЗМЫ БЛОЧНЫЕ, ВИНТОВОЙ И ГИДРОПРИВОД
7. Расчет простейших блочных мехплизмов (без учета трения)
Схема
Формула для определения
силы
перемещения
Sq = -Sf
Схема, формула
350
РАСЧЕТ ПРОСТЕЙШИХ МЕХАНИЗМОВ
Продолжение табл. 7
Схема
Формула для определения
силы
перемещения
SQ=-2SF
Q
2 cos a
SQ =-2SFcosa
где п - число подвижных блоков
8. Расчет простейших винтового механизма и гидропривода (без учета трения)
Схема
л
?
Формула
Q-FP
Комбинированные механизмы
351
Продолжение табл. 8
Схема
Формула
U И
*D2.
x(D2-d2)
4
JLJLp
ТУ /// / / / .
/_?_
F"p-
Принятые обозначения:
i* - шаг. резьбы;
Р>Ри Р2~ рабочее давление жидкости в соответствующих полостях гидроцилиндров.
11.6. КОМБИНИРОВАННЫЕ МЕХАНИЗМЫ
Сила зажима, развиваемая комбинированным механизмом, состоящим из несколь-
нескольких последовательно сблокированных простых механизмов (рис. 2),
где 0 - исходная сила; i - передаточное отношение сил комбинированного механизма;
/'i, *2> •••> 'к " передаточное отношение сил каждого из последовательно сблокированных
простых механизмов; к - число сблокированных простых механизмов; / ~ i\ii... iK;
Л-
КПД комбинированного меха-
механизма
М' 42f
где ль Л2» - » Лк - КПД каждого из
последовательно сблокированных
простых механизмов.
Для того, чтобы комбинированный механизм был самотормозящим, достаточно
иметь в нем хотя бы один самотормозящий простой механизм.
Ршс2
352
РАСЧЕТ ПРОСТЕЙШИХ МЕХАНИЗМОВ
9. Расяет комбинированных механизмов
Схема, формула
Схема, формула
L
ще
где
ll П
гае Ft ~ F
Комбинированные механизмы
353
Продолжение табл. 9
Схема, формула
Схема, формула
ctg(cc +p)-tg<p2
tjtjj
где Ft = F—
23 Том 2
354
РАСЧЕТ ПРОСТЕЙШИХ МЕХАНИЗМОВ
Продолжение табл. 9
Схема, формула
Схема, формула
F
h л
jL\L
ще
A-A
rae /-', =
H-3lof2
Q -
где
me Qx = /•!
Комбинированные механизмы
3SS
Продолжение табл. 9
Схема, формула
Схема, формула
где Q = /--Li
где Q = /'-J-I
h Л
м
23*
356
РАСЧЕТ ПРОСТЕЙШИХ МЕХАНИЗМОВ
Продолжение табл. 9
Схема, формула
Схема, формула
где q = F-—
f
-я
ще
где Q=
где Q = Qk щ =
Комбинированные механизмы
357
Продолжение табл. 9
Схема, формула
Схема, формула
вде Q =
где Q = BF +q){te(aK + ф^ + tgq>2] —
Принятые обозначения:
т\, Tii " коэффициенты, учитывающие потери от трения @,80...0,95);
q - сила сопротивления пружины;
М = WLp - момент на рукоятке эксцентрика;
М\ - момент, приложешшй к винту;
W- сила, приложенная к рукоятке эксцентрика;
Lp - длина рукоятки эксцентрика;
К- расстояние от оси шарнира ползуна до середины направляющей поверхности
ползуна;
р - радиус, проведенный из центра вращения эксцентрика в точку зажима;
Rl, /*i - наружный и внутренний радиусы опорного торца гайки;
R2- радиус сферы на торце гайки;
fa - коэффициент трения на оси;
/= tg ф - коэффициент трения скольжения на опорной поверхности ролика или
эксцентрика;
/l = tg ф! - коэффициент трения скольжения на скошенной поверхности клина;
h = tg Ф2 - коэффициент трения скольжения на направляющей поверхности
ползуна (плунжера) или клина (штока);
fl - коэффициент трения скольжения на торце гайки;
Ф> Фь Ф2 " утлы трештя скольжения на опорной поверхности ролика или эксцен-
эксцентрика, на скошенной поверхности клина и на направляющей поверхности ползуна
(плунжера) или клина (штока), соответственно;
Ф' - угол трения в резьбе;
Ф1лр " приведенный угол трения качения на скошенной поверхности клина;
*W=7Tarctg/l'
Фь Ф^ " углы трения скольжения в точке зажима эксцентриком и на его оси,
соответственно;
р - дополнительный угол к углу а, учитывающий потери от трения на осях;
р = arcsin/o;
Pl - угол конуса в гнезде рычага (прихвата) под сферическую гайку;
358
РАСЧЕТ ПРОСТЕЙШИХ МЕХАНИЗМОВ
Продолжение табл. 9
а' - угол подъема кривой эксцентрика в точке зажима;
V - угол подъема резьбы; tgv = ,
где Р - шаг резьбы винта;
da, - средний диаметр резьбы винта.
11.7. ПЕРЕМЕЩЕНИЕ ГРУЗА
ПО ГОРИЗОНТАЛЬНОЙ И НАКЛОННОЙ ПЛОСКОСТЯМ
10. Расчет силы тяги
Схема
Формула
а
glsina+ l ? cos a I
Принятые обозначения:
Q - вес перемещаемого груза;
/- коэффициент трения скольжения;
d - диаметр катков;
к{ - коэффициент трения качения между поверхностью качения и катками;
ki - коэффициент трения качения между катками и грузом.
Значения к\ и к? приведены в табл. 11.
Перемещение груза по горизонтальной и наклонной плоскостям 359
11. Значения коэффициентов трения качения
Сочетание соприкасающихся поверхностей
Сталь по стали
Сталь по дереву
Дерево по дереву
Столь по бетону
Дерево по бетону
к\ и кг
0,05
0,07
0,08
0,06
0,07
Для того, чтобы сдвинуть груз с места, расчетную силу тяги (для всех случаев) не-
необходимо увеличить на 50%. Тогда необходимая сила тяги
СПИСОК ЛИТЕРАТУРЫ
1. Ансеров МЛ. Приспособления для металлорежущих станков. Л.: Машинострое-
Машиностроение, 1975.
2. Горошкин А.К. Приспособления для металлорежущих станков: Справочник. М.:
Машиностроение, 1979.
3. Корсаков B.C. Основы конструирования приспособлений. М.: Машиностроение,
1983.
4. Общетехнический справочник / Под ред. Е.А.Скороходова. М.: Машиностроение,
1982.
5. Матвеев В.В. Примеры расчета такелажной оснастки. Л.: Стройиздат, 1974.
6. Гидравлика, гидравлические машины и гидравлические приводы / Под ред.
ТМ.Башты. М.: Машиностроение, 1970.
360
12. МЕХАНИЧЕСКИЕ ПЕРЕДАЧИ
Механическая передача передает непрерывное вращательное движение или преобра-
преобразует его в непрерывное поступательное.
По принципу передачи и преобразования движения механические передачи можно
подразделить на два типа: кинематические и волновые ("динамические"). В кинема-
кинематических передачах преобразование движения происходит в результате взаимного пере-
перемещения (вращательного, поступательного и т.д.) гибких и жестких звеньев как жесткого
целого (или кинематически). В волновых передачах преобразование движения осуществ-
осуществляется за счет пропускания по одному из звеньев волны продольной или поперечной
деформации; этот тип передачи применяют в механизмах, в которых требуется реализо-
реализовать очень большое передаточное отношение при ограниченных габаритных размерах.
Передачи гибким звеном в зависимости от метода силового замыкания деталей под-
подразделяют на передачи фрикционные (ременные, канатные) и зацеплением (цепные,
зубчато ременные). Передачи с жесткими звеньями подразделяют на передачи фрикци-
фрикционные и зацеплением (зубчатые, гиперболоидные и др.).
Основными внешними характеристиками передач ЯВЛЯЮТСЯ мощность
(передаваемый вращающий момент), передаточное отношение, КПД, масса и надежность
(табл. 1).
1. Основные характеристики одноступенчатых передач разных типов,
реализованные в серийных приводах
Передача
Зубчатая цилинд-
цилиндрическая
Планетарная
Коническая
Червячная
Цепная
Клиноременная
Зубчато—ременная
Цилиндрическая
фрикционная
Максима-
Максимальная
мощность,
кВт
3000
2000
500
120
200
100
100
10
Переда-
Передаточное
отноше-
отношение
1...8
3...13
1...5
5...50
1...60
1...8
1...8
1...6
Окружная
скорость,
м/с
50
50
40
25
10
25
40
25
Максима-
Максимальная ча-
частота вра-
вращения,
тыс.мшГ
150
100
50
40
10
8
30
10
КПД, %
98...99
98...99
97...98
20...70
97...98
92...94
96...98
90...98
Удельная
масса,
кг/кВт
1,8...0,4
1.0,2
2.5...0.6
4,5...0,2
10...6
5...1
4...1
30...8
Ременные передачи
361
12.1. РЕМЕННЫЕ ПЕРЕДАЧИ
а)
Ременная передача - механизм для передачи
вращения посредством фрикционного взаимодей-
взаимодействия замкнутой гибкой связи (приводным рем-
ремнем) с жесткими звеньями (шкивами).
Основные достоинства передач: простота
конструкций; сравнительно малая стоимость;
способность передавать вращательное движение
на большие расстояния и работать с высокими
скоростями; плавность работы, и малый уровень
шума; малая чувствительность к толчкам, ударам
и перегрузкам; отсутствие смазочной системы.
Основные недостатки: невысокая долго-
долговечность ремня; большие радиальные габаритные
размеры; значительные нагрузки на валы и опо-
опоры; непостоянство передаточного отношения.
Используют ременную передачу в приводах
мощностью до 50 кВт при скоростях ремня до
50 м/с. Передаточное число / - соотношение
диаметров большого и меньшего шкивов. Переда-
Передаточное отношение i < 6 для передач без натяжно-
натяжного ролика и i <, 10 для передач с натяжным роли-
роликом. Они допускают кратковременную перегрузку
до 300%.
Ременную передачу применяют обычно в
качестве быстроходной ступени привода, устанав-
устанавливая ведущий шкив на вал двигателя. Ременные
передачи могут быть: между параллельными ва-
валами (рис. 1, а), перекрестными (рис. 1, б) и по-
полуперекрестными (рис. 1, в). При этом применя-
применяются ремни плоского сечения (рис. 2, а), кругло-
круглого (рис. 2, б), клинового (рис. 2, в) и полуклино-
полуклинового (рис. 2, г).
Плоскоременные передачи. В плоскоремен-
плоскоременных передачах применяют ремни: резиноткане-
резинотканевые, кожаные и хлопчатобумажные. Резиноткане-
Резинотканевые ремни не рекомендуется использовать в среде
загрязненной парами нефтепродуктов. Кожаные
ремни не рекомендуются для эксплуатации в сре-
средах с высокой влажностью, с парами кислот и
щелочей, их отличает высокая стоимость.
Хлопчатобумажные ремни имеют относительно невысокую стоимость, характеризу-
характеризуются хорошим сцеплением со шкивом, но чувствительны к воздействию кислотных и
водяных паров. Технические данные плоских ремней приведены в табл. 2—4, а алгоритм
расчета плоскоременной передачи — в табл. 5.
Рис. 2
362
МЕХАНИЧЕСКИЕ ПЕРЕДАЧИ
2. Плоские реэинотканекые ремнн
Техническая
характеристика прокладок
Номинальная прочность,
Н/мм ширины прокладки:
по основе
по утку
Наибольшая допускаемая
нагрузка ро на прокладку,
Н/мм ширины
Расчетная толщина про-
прокладки с резиновой про-
прослойкой, мм
Поверхностная плотность
прокладки с резиновой
прослойкой, кг/м2
Число прокладок при ши-
ширине ремня В, мм:
20...71
80...112
125...560
Прокладки из ткани
Б-800
55
16
3
1,5
1,6
3-5
3-6
3-6
БКНЛ
55
20
3
1,2
1,3
3-5
3-6
3-6
ТА-150, ТК-150
150
65
10
1,2
1,3
3-4
ТК-200
200
65
13
1,3
1,4
3-4
Примечания: 1. Ткани прокладок: БК—800 — хлопчатобумажная; БКНЛ — из нитей
полиэфира и хлопка; ТК-150, ТА-150, ТК-200 - синтетическая.
2. Ширину ремня выбирают из стандартного ряда: 20, 25, 32 ...1200 мм.
3. Масса ремня, кг:
Q = (mz + bU50)b/L,
где т — поверхностная плотность прокладки, кг/мм2; z — число прокла-
прокладок; 5 — толщина прокладки; Ъ — ширина ремня, мм; L — длина ремня,
м; число 1150 — плотность резиновой обкладки, кг/м3.
3. Кожаные ремни
Толщина 5р , мм
3
3,5
4
4,5
5
5,5
Ширина Ь, мм
16, 20, 25
32, 40, 50
63,71
80,90, 100, 112
125, 140
160, 180, 200, 240, 250, 280, 355, 400, 450, 500, 560
Ременные передачи
363
4. Хлопчатобумажные цельнотканные ремни
Толщина 5р, мм
4,5
6,5
8,5
Ширина Ь, мм
30.40,50,60.75,90,100
30,40, 50,60,75,90,100,115,1?5.150, 175
50,60,75,90,100, A15), 125,150, A75), 200. B24), 250
Примечание. В скобках укатаны нерекомендуемые значения ширины ремня.
5. Алгоритм расчета плоскоременной передачи
Определяемый параметр
Частота вращения ведущего шки-
шкива, МИН
Вращающий момент на ведущем
валу, Нм
Диаметр ведущего шкива, мм
Диаметр ведомого шкива, мм
Передаточное отношение
Межосевое расстояние, мм
Угол обхвата малого шкива
Длина ремня, мм
Скорость ремня, м/с
Расчетная формула
т = «с A - я),
60/
где»с= р ;
f = 50c~l] р = 1*6;
5 = 0*1
Р ЗОР
i ~ '
№, ТОТ
2я/
где <о, = ——
Р
d2=dli(\-s),
е = 0.01 для передач с регулируе-
регулируемым натяжением ремня
d2 Щ
a = 2(dl+d2)
1 а
L = 2a + 0,5 *(</, + d2) +
+ (d2-d})
4а
гдес!|,м
11римечание
/»,. - сишропная частота враще-
вращения;
/- стандартная частота тока;
s - скольжение;
р • число пар полюсов
Р - мощность, Вт;
g>j - угловая скорость, рал/с
По найденному значению под-
подбирают из стандартною ряда
е - относительное скольжение
/12 - частота вращения ведомого
вала, мни '
Ьез учета припуска на соедине-
соединение концов
364
МЕХАНИЧЕСКИЕ ПЕРЕДАЧИ
Продолжение табл. 5
Окружная сила, Н
Натяжение ветвей, Н;
ведущей
ведомой
Ширина ремня, мм
Напряжение от силы Fi, МПа
Напряжение изгиба, МПа
F{ = F0+0,5Ft
F2=F0-0jFt
Ар]
где [р] = PoCaCvCpCQ;
/>о - приведена в табл. 2;
Ca=l-0,003(lS0-af);
Cv « 1,04-0,0004 v2;
С0»1прие<6О°;
С9г0,9прив> 60е;
С9 = 0,8 п р и в > 80е;
Ср «0J-LO;
при работе в две смены значения
СР снижают на 0,1, при трехсмен-
трехсменной работе - на 0,2; Ср = 1,0 при
пусковой нагрузке до 120% номи-
номинальной; СР = 0,9 при пусковой
нагрузке до 150% номинальной;
Ср = 0,8 при пусковой нагрузке до
200% номинальной; СР = 0,7 при
пусковой нагрузке до 300% номи-
номинальной
-4
„ F 5
d\
гдсЕи = 100...200 МПа для кожа-
кожаных и резинотканевых ремней, Еи
= 50...80 МПа для хлопчатобу-
хлопчатобумажных ремней
Fq = (То Ь8р;
во - напряжение от предвари-
предварительного натяжения ремня, оп-
оптимальное значение оь = 1,8
МПа; Ь - ширина ремня, мм; 5р -
толщина ремня, мм; Fo - пред-
предварительное натяжение ремня, Н
г - число прокладок выбираемое
по табл. 2;
[р] - допускаемая рабочая на-
нагрузка на 1 мм ширины про-
прокладки;
Св - коэффициент угла обхвата;
Cv - коэффициент, учиты-
учитывающий влияние скорости рем-
ремня;
Ср - коэффициент режима рабо-
работы;
С9 - коэффициент, учитываю-
учитывающий угол наклона линии цен-
центров передачи
Ременные передачи
365
Продолжение табл. 5
Напряжение от центробежной
силы, МПа
Максимальное напряжение,
МПа
Долговечность, ч
Нагрузка на валы передачи, Н,
при регулировании:
автоматическом
периодическом
ctv = Pv210-6,
где р= 11ОО...12ООкг/м3;
КГ - множитель для перево-
перевода <sv в МПа
сттах ** ©1 + &и "*" °v '¦>
атах й a-i 5 7 МПа — для ре-
резинотканевых и кожаных рем-
ремней;
°пшх ^ <*-i ^ 5 МПа — для
хлопчатобумажных ремней
а^м ¦ 2 • 3600Х '
где *- = т;с* = 1>5 ^-°»5'
cw = 2 при периодически из-
изменяющейся нагрузке от нуля
до номинального значения ;
с„ = 1 при постоянной нагруз-
нагрузке
р — плотность ремня
а-\ — предел выносливости
X — число пробегов ремня в
секунду; с,- - коэффициент,
учитывающий влияние пере-
передаточного отношения;
сн - коэффициент, учиты-
учитывающий влияние нагрузки.
Рекомендуемая долго-
долговечность Hq <i 2000 ч
Шкивы плоскоременных передач могут иметь внешнюю поверхность: цилинд-
цилиндрическую, выпуклую или цилиндрическую с краями в форме конусов, которые умень-
уменьшают возможность схода ремня со шкива в процессе работы, особенно при наличии не-
непараллельности осей валов, а также в быстроходных передачах.
В высокоскоростных передачах (v > 40 м/с) на шкивах выполняют кольцевые канав-
канавки, которые, как показывает практика, уменьшают "аэродинамический клин" между
ремнем и шкивом, ослабляющий сцепление между ними.
Клнноременные передачи. Алгоритм расчета и данные по клиноременным передачам
приведены в табл. 6-11.
6. Алгоритм расчета клиноременной передачи
Определяемый параметр
Частота вращения меньше-
меньшего шкива, мин
Расчетная формула
т = пс A-5)
Примечание
_
366
МЕХАНИЧЕСКИЕ ПЕРЕДАЧИ
Продолжение табл. 6
Выбор сечения ремня
Номограмма
О 5 12,5 Ц5 80 200
3,15 8 20 50 125Р,*Вт
Лередаёаепйя мощность
Вращающий момент, Н м
30/»
Диаметр меньшего шкива,
мм
3 + 4)^75"
Диаметр большего шкива,
мм
е-0,015+ 0,020
Передаточное отношение
(уточненное)
d2
-e)
Межосевое расстояние
То - высота
сечения ремня,
мм
Длина ремня, мм
L = 2а
¦ + d2)
+ ' 2 .' ^
Округлить по
табл. 7
Уточненное межосевое
расстояние, мм
а = 0,25
[Lp - ш)
-2у
\2
Lp — расчетная
длина ремня, мм
Угол обхвата,
а, =180-57-
Число ремней
PC,
z =
Ро - по табл. 8; С\ ~ по табл. 9;
при а « 180; 160; 140; 120; 100; 90; 70;
Са = 1; 0,95; 0,89; 0,83; 0,82; 0,68; 0,56
Округлить до
целого числа;
Ро — мощность,
кВт, допускае-
допускаемая для пере-
передачи одним ре-
ремнем;
Ременные передачи
367
Продолжение табл. 6
Натяжение ветви ремня, Н
Сила, действующая на вал,
Н
Рабочий ресурс передачи, ч
при : = 2 + 3; 4 + 6 и более Сг = 0,95; 0,90;
0,85
850 PC „С г ,
ZvLa
при сечении ДО), А, 5(Б), С(Я), ЩГ), ДД),
в = 0,06; 0,1; 0,18; 0,3; 0,6; 0,9
F = 2Fqz sin -J-
/ ( \*
ffn N р а~1 С С ¦
Но ^ 5000 ч при легком режиме работы;
Но ? 2000 ч при среднем;
Но ? 1000 ч при тяжелом;
для ремней сечений ДО) и А, ЩЕ), С(В) и
ДГ), ДЦ) и Е0(Е)
Nou ^ 4,6 • 106; 4,7 ¦ 106; 2^ • 106 ;
ст_1 = 7 МПа; amax = <ti + 02 + <*v
Ср — коэффици-
коэффициент режима ра-
работы; С/ - ко-
коэффициент,
учитывающий
влияние длины
ремня;
С„ — коэффици-
коэффициент угла обхвата;
Q - коэффици-
коэффициент,
учитывающий
число ремней в
передаче
в — коэффици-
коэффициент,
учитывающий
центробежную
силу (Нс2)/м2;
v, м/с
Non — базовое
число циклов
7. Клнновые ремни по ГОСТ 1284.1-89
368
МЕХАНИЧЕСКИЕ ПЕРЕДАЧИ
Продолжение табл. 7
Обозна-
Обозначение
сечения
ремня
ДО)
А
тъ)
С{В)
ДГ)
ДЦ)
ЩЕ)
d\, мм
не
менее
63
90
125
200
315
500
800
V
мм
8,5
11,0
14,0
19,0
27
32
42
И7,
мм
10
13
17
22
32
32
42
Примечания:
Го,
мм
6
8
10,5
13,5
19,0
23,5
30
л,
мм2
47
81
133
230
476
692
1172
А»
мм
400...3150
500...4500
630...6700
1800...10000
2240...14000
4000... 18000
6300... 18000
AL,
мм
25
33
40
59
76
95
120
Масса
одного
метра,
кг
0,06
0,10
0,18
0,30
0,60
0,90
1,52
1. А - площадь поперечного сечения ремня, мм2; дХ - разность между расчетной Lp и внутрен-
внутренней ЬдИ длиной ремня.
2. Стандартный ряд длин Lp : 400, 450,
500, 560, 630, 710, 800, 900, 1000, 1120, 1250, 1400, 1600,
1800, 2000, 2240, 2500, 2800, 3150, 3550, 4000, 4500, 5000, 5600, 6300, 7100, 8000, 9000, 10000,
11200, 12500, 14000, 16000, 18000.
3. В технически обоснованных случаях
600, 670, 750, 850, 950, 1060, 1180, 1320,
4750, 5300, 6000, 6700, 7500, 8500, 9500,
4. Условное обозначение ремня.
допускаются промежуточные значения ?р : 425, 475, 530,
1500, 1700, 1900, 2120, 2360, 2650, 3000, 3350, 3750, 4250,
10600,11800, 13200, 15000, 17000.
ремень сечения С(В) с расчетной длиной Д, = 2500 мм с кордной тканью в несущем слое.
Ремень С(В)-2500 Т ГОСТ 1284.1-89,
то же, с кордшнуром в несущем слое.
Ремень С(В)-2500 Ш ГОСТ 1284.1-89.
5. Основные переметры резинотканевых клиновых ремней регламентированы ГОСТ 1284.1—98,
1284.2-89, 1284.3-80.
8. Номинальная мощность />©, кВт, передаваемая одним
клиновым ремнем по ГОСТ 1284.3-80
Сече-
Сечение
ремня
(длина
1„, мм)
ДО)
A320)
du
мм
71
80
100
i
1,2
1,5
> 3
1,2
1,5
> 3
1,2
1,5
> 3
Частота вращения щ , мин '
400
0,22
0,23
0,23
0,26
0,27
0,28
0,36
0,37
0,38
800
0,39
0,40
0,42
0,47
0,49
0,50
0,65
0,67
0,70
950
0,45
0,46
0,48
0,55
0,56
0,58
0,75
0,78
0,80
1200
0,54
0,56
0,58
0,66
0,68
0,71
0,92
0,95
0,98
1450
0,63
0,66
0,68
0,77
0,80
0,82
1,07
1,11
1,14
1600
0,69
0,71
0,73
0,84
0,86
0,89
1,16
1,20
1,24
2000
0,82
0,84
0,87
1,00
1,03
1,06
1,39
1,43
1,48
Ременные передачи
369
Продолжение табл. 8
А
A700)
ЖБ)
B240)
ав)
C750)
ДО
F000)
ДЦ)
G100)
100
125
160
140
180
224
224
280
400
560
560
710
1,2
1,5
?3
1,2
1,5
>3
1,2
1,5
^3
1,2
1,5
;>3
1,2
1,5
?3
1,2
1,5
23
1,2
1,5
2:3
Ь2
1,5
>3
1,2
1,5
>3
1,2
1,5
гЗ
1,2
1,5
S3
1,2
1,5
>3
0,50
0,52
0,53
0,71
0,74
0,76
1
1,03
1,07
1Д2
1,16
1,20
1,70
1,76
1,81
2,32
2,40
2,47
3,20
3,31
3,41
4,63
4,78
4,93
12,25
12,64
13,04
20,27
20,93
21,59
24,07
24,85
25,64
34,05
35,17
36,28
0,88
0,91
0,94
1,28
1,32
1,36
1,81
1,87
1,93
1,95
2,01
2,08
3,01
3,Н
3,21
4,13
4,27
4,40
5,47
5,65
5,83
8,04
8,30
8,57
19,75
20,40
21,04
31,62
32,65
33,68
31,62
32,65
33,68
46,57
48,09
49,61
1,01
1,05
1,08
1,47
1,52
1,57
2,09
2,15
2,22
2,22
2,30
2,37
3,45
3,56
3,67
4,73
4,89
5,04
6,18
6,38
6,58
9,08
9,37
9,67
21,46
22,16
22,86
33,21
34,30
35,38
33,21
34,30
35,38
-
-
-
1,22
1,25
1,30
1,77
1,83
1,89
2,52
2,60
2,69
2,64
2,72
2,82
4,11
4,25
4,38
5,63
5,81
6,00
7,18
7,45
7,69
10,49
10,83
11,17
22,68
23,42
24,16
-
-
-
-
-
-
-
-
-
1,41
1,45
1,50
2,06
2,13
2,19
2,92
3,02'
ЗД1
3,01
3,10
3,21
4,70
4,85
5,01
6,39
6,60
6,81
7,97
8,23
8,49
11,47
11,84
12,22
-
-
-
-
-
-
-
-
-
-
-
-
1,52
1,57
1,62
2,22
2,29
2,36
3,14
3,24
3,35
3,21
3,32
3,42
5,01
5,17
5,34
6,77
7,00
7,22
8,29
В,5б
8,93
11,83
12,21
12,60
-
-
-
-
-
-
-
-
-
-
-
-
1,65
1,71
1,76
2,42
2,50
2,58
3,61
3,63
3,64
3,66
3,78
3,90
5,67
5,86
6,05
7,55
7,80
8,05
8,63
8,91
3,13
11,84
12,19
12,58
¦¦ -
-
-
-
-
-
-
-
-
-
-
-
24 Том 2
370
МЕХАНИЧЕСКИЕ ПЕРЕДАЧИ
9. Значения коэффициента CL для клиновых ремней
по ГОСТ 1284.3-80
h>
мм
400
500
560
710
900
1000
1250
1500
1800
2000
2240
2500
2800
3150
4000
4750
5300
6300
7500
9000
10000
Сечение ремня
ДО)
0,87
0,91
0,94
0,99
1,05
1,06
1,11
1,15
1,24
1,25
1,28
1,29
-
-
-
-
-
-
-
-
-
А
-
-
0,79
0,83
0,87
0,89
0,93
0,98
1,01
1,03
1,06
1,09
1,11
1,13
1,17
-
-
-
-
-
-
ад
-
-
-
-
0,82
0,84
0,88
0,92
0,95
0,98
1,00 .
1,03
1,05
1,07
1,13
1,17
1,19
1,23
-
-
-
С(В)
-
-
-
-
-
-
-
-
0,86
0,88
0,91
0,93
0,95
0,97
1,02
1,06
1,08
1,12
1,16
1,21
1,23
-
-
-
-
-
-
-
-
-
-
-
-
-
0,86
0,91
0,95
0,97
1,01
1,05
1,09
1,11
ДД)
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
0,94
0,97
1,01
1,05
1,07
10. Значения Ср для клиноременных передач от двигателей
переменного тока общепромышленного применения
Режим работы,
кратковременная нагрузка,
% номинальной
Легкий, 120
Средний, 150
Типы
машин
Конвейеры ленточные,
насосы и компрессоры
центробежные, токарные
и шлифовальные станки
Конвейеры цепные; эле-
элеваторы; компрессоры и
насосы поршневые; стан-
станки фрезерные; пилы дис-
дисковые
Ср при числе смен
1
1,0
1,1
2
и
1,2
3
1,4
1,5
Ременные передачи
371
Продолжение табл. 10
Тяжелый, 200
Очень тяжелый, 300
Конвейеры скребковые,
шнеки; станки строгаль-
строгальные и долбежные; прес-
прессы; машины для брике-
брикетирования кормов; дере-
деревообрабатывающие
Подъемники, экскавато-
экскаваторы, молоты, дробилки,
лесопильные рамы
1,2
1,3
1,3
1,5
1,6
1,7
11. Размеры профиля канавок шкивов, мм,
по ГОСТ 20889-88
Сече-
Сечение
ремня
Z
А
В
С
D
Е
т
Прим
Ч
8,5
11
14
19
27
32
42
^ Т а П г
Л
7
8,7
•10,8
14,3
19,9
23,4
30,5
i
ЧУ
Ло
2,5
3,3
4,2
5,7
8Д
9,6
12,5
'А
V,
I
ЕС
/
8
10
12,5
17
24
29
38
——
е
у
/й
V,
——
е
12
15
19
25,5
37
i
i e. Ширина обода шкива
14,5
58,0
В- (z
1
J/ /
1
34°
50...71
75...112
125...160
-
-
-
-
(хр для угла
36°
80...100
125...160
180...224
2OO...315
315...450
500...560
-
- 1) е + 2/, где z — число
канавки,°
38°
112...160
180...400
250...500
355...630
500...900
630...1120
800... 1400
40°
> 180
>450
>560
> 710
> 1000
> 1250
> 1600
ремней в передаче.
Шкивы клиноременных передач выполняют из чугуна СЧ15 и СЧ18, а при
v = 30 м/с — из стали 25Л или алюминиевых сплавов.
Передачи поликлиновыми ремнями. Поликлиновые ремни предназначены для замены
отдельных клиновых ремней или их комплектов с целью сокращения габаритных разме-
размеров.
Ремень сечения К применяют вместо клиновых ремней сечений Z и А для передачи
момента 7\ < 40 Н-м; ремень сечения Л — вместо клиновых ремней А, В, С для передачи
момента Тх < 18400 Н м; ремень сечения М — вместо клиновых ремней В, D, Е и И) для
передачи момента Т\ > 130 Нм (где 7j — момент на быстроходном валу).
Рекомендуют применять ремни с четным числом клиньев. Размеры обода шкивов
для поликлиновых ремней и размеры их сечений, длины и числа клиньев в табл. 12-14
составлены по РТМ 38-40528-74.
24*
372
МЕХАНИЧЕСКИЕ ПЕРЕДАЧИ
Сечение
ремня
К
Л
М
12. Размеры обода шкивов для лоликлиновых
t
2,4
4,8
9,5
s i
/
С
г~
ех
3,3
6,6
13,05
V/'
w.
/л
е
2,35
4,85
10,35
А
VA
/ /
г/
/ f
1
ремней, мм
X)
"ей'
Г\
0,3
0,5
0,8
п
0,2
0,4
0,6
S
3,5
5,5
10
2Д
2
4,8
7
Примечания: 1. Расчетные диаметры D шкивов: 25, 40, 45, 50, 56, 63, 71, 80, 90, 100, 112,
125, 140, 160, 180, 200, 224, 250, 280, 315, 335, 400, 450, 500, 560, 630, 710,
800, 900, 1000 мм.
2. За расчетный диаметр D принимают диаметр окружности на уровне цен-
центра расположения кордшнура. Наружный диаметр шкива Z)H = D — 2д.
3. Диапазон расчетных диаметров шкивов, мм: 25...500 для ремней сечения
К; 80...800 для ремней сечения Л и 180..Л000 для ремней сечения М.
13. Размеры поликлиновых ремней, мм
Сечение
ремня
К
Л
М
t
2,4
4,8
9,5
_
1
t
Я
4
9,5
16,7
ф=.<
0,1
0,2
0,4
п.
0,4
0,7
1
А
2,35
4,85
10,35
Примечания: 1. Расчетные длины L ремней: 400, D25), 450, D75), 500, E30), 560, F00),
630, F70), G10), G50), 800, (850), 900, (950), 1000, A060), 1120, A180),
1250, A320), 1400, A500), 1600, A700), 1800, A900), 2000, B120), 2240,
B360), 2500, B650), 2800, C000), 3150, C350), 3550, C750), 4000, D250),
4500, D750), 5000, E300), 5600, F000). В скобках указаны нерекомендуе-
нерекомендуемые длины ремней.
2. Расчетная длина ремня - это его длина на уровне расположения кордш-
кордшнура, находящегося на расстоянии 0,5 (H-h). Разность между расчетной и
наружной длиной ремня: 6,3 мм для ремней сечения К; 15,1 мм для рем-
ремней сечения Л и 21,3 мм для ремней сечением М.
Ременные передачи
373
14. Число клиньев и диапазон длин ремней
Наименование
Сечение ремней
Л
М
Число клиньев:
рекомендуемое
предельное
2-36
36
4-20
50
2-20
50
Диапазон длин L, мм
400...2000
1250...4000
2000... 6000
Графики предназначены для определения необходимого числа клиньев.
Пример условного обозначения ремня:
2500Л16 РТМ38-40528-74,
где 2500 — расчетная длина, мм, Л - сечение ремня и 16 — число клиньев.
374
МЕХАНИЧЕСКИЕ ПЕРЕДАЧИ
Исходными данными для расчета передач поликлиновыми ремнями являются пе-
передаваемая мощность Р, передаточное отношение / и коэффициент режима работы
Кр& Ср. Определяются значения Р; /; Кр D\, затем по оси абсцисс v проводится верти-
вертикаль до пересечения с кривой D\. Из полученной точки проводится горизонталь до пе-
пересечения с кривой Р. Затем из полученной точки проводится вертикаль до пересече-
пересечения с прямой Кр. Из последней точки проводится вертикаль, которая пересечет ось
абсцисс в точке & Полученное z округляется до целого числа.
Рекомендуемые значения межосевого расстояния в зависимости от передаточного
отношения i приведены ниже.
1
1,5
3
2,5
5
3,5
6
4
7 и более
4,5
Начальное натяжение, приходящееся на один клин поликлинового ремня, дано
ниже.
Сечение ремня К Л М
2.5b, Н 40...95 10...300 420...1200
12.2. ЗУБЧАТО-РЕМЕННЫЕ ПЕРЕДАЧИ
Зубчато—ременные передачи соединяют в себе достоинства ременных и цепных
приводов. Их применяют в широком диапазоне мощностей @,2...500 кВт), частот вра-
вращения [6000 (в высоконагруженных)... 18000 мин (в кинематических приводах)] и ок-
окружных скоростей @,5...80 м/с). КПД передач составляет 95...99^.
Основными конструктивными параметрами ремня являются: угол 2J3 и модуль
т = 0с, где t — шаг ремня. Модуль выбирают по стандарту в зависимости от передавае-
передаваемой мощности и частоты вращения быстроходного вала. При п = 650...3500 мин~1 су-
существует следующая зависимость между Рит.
Р, кВт
т, мм
0,05..
2;
..0,
3
18
0,27..
3;
.1,5
4
2,2..
4;
•5,5
5
7...
5;
17
7
Более 17
7; 10
Основные параметры зубчатых ремней даны в табл. 15.
15. Основные параметры зубчатого ремня
Зубчато-ременные передачи
375
Продолжение табл. 15
Параметры
Шаг ремня t, мм
Общая толщина ремня Я, мм
Высота зуба Л, мм
Наименьшая толщина зуба s, мм
Угол профиля зуба 2р°
Диаметр троса 4?, мм
Ширина ремня Ь, мм
Расстояние от оси троса до впа-
впадины ремня S, мм
Допускаемая удельная сила [Pq],
Н/мм
Модуль т, мм
2
6,28
3
U
1,8
50
0,36
8; 10;
12,5
0,6
5
3
9,42
4
2
3,2
40
0,36
12,5;
16; 20
0,6
10
4
12,57
5
2,5
4,4
40
0,36/0,65
20; 25;
32; 40
0,8
15/25
5
15,71
6,5
3,5
5
40
0,65
25; 32;
40; 50
0,8
35
7
21,99
11
6
8
40
0,65
50; 63;
80
0,8
40
10
31,42
15
9
12
40
0,65
50; 63;
80
0,8
40
Ширина ремня b выбирается в зависимости от модуля, а число зубьев Z\
го шкива — в зависимости от частоты его вращения и модуля (табл. 16).
16. Число зубьев меньшего шкива
меньше-
меньшет, мм
2
3
4
П\, МИН
5ОО...ЗООО
3500...4500
5000...6800
7000...7500
500...1000
1500...2000
25OO...35OO
4000...5000
500
1000
15ОО...2000
2500...3500
?l mini
не менее
12
14
16
18
12
14
16
18
14
16
18
20
т, мм
5
7
10
Л|, МИН
500
1000...1500
2000...3000
3500...4000
500
1000
1500
2000
500
1000
1500
2000
?l mini
не менее
16
18
20
22
20
22
24
26
20
22
24
26-28
Из остальных параметров определяют:
расчетную длину ремня / = тг т zp (zp ~ число зубьев ремня);
диаметры делительных окружностей шкивов: rft = m Z\, d2 = т zi (Z\ и г2 ~~ числа
зубьев шкивов);
наружные диаметры шкивов dal = m Z\ + 2 Л; где А = 0,6 мм при диаметре троса 0,36
мм и А = 1,3 мм при диаметре троса 0,65 мм;
376
МЕХАНИЧЕСКИЕ ПЕРЕДАЧИ
диаметры окружностей впадин: d^ = dai - 1,8m; df = da -1,8/n;
ширину шкива В = b + m;
угол впадины 20 = 50° при т = 2 мм и 2р = 40° при т ? 2 мм;
шаг ремня на наружном диаметре tp = ——.
Быстроходность передач v = 25, 35 и 40 м/с соответственно для модулей т = 2, 3 и
4...10 мм. Расчет сил зубчато—ременных передач приведен в табл. 17.
17. Расчет сил зубчато-ременных передач
Определяемый параметр
Расчетная удельная окруж-
окружная сила, Н/мм
Ширина ремня
Давление за зубьях
Натяжение ремня
Силы, действующие на
валы передачи
Расчетная формула
Pt = PoCiCzCp при / ;> 1 С, = 1,
Сг - 0,6, 0,8 и 1 соответственно
при zq = 4, 5, 6;
Ср = 1 (пусковая нагрузка до 120%
номинальной);
Ср= 1Д (пусковая нагрузка до 150%
номинальной);
С, - 1,25 (пусковая нагрузка до
200% номинальной);
Ср = 1,5...1,6 (пусковая нагрузка до
300% номинальной)
Pt-gm*2 d^pt-gmv2y
т, мм.,.2, 3, 4, 5; 7, 10;
&,, 0,32; 0,4; 0,5; 0,75; 0,9; 1,1;
кгДмсм)
Ft = P/v
F + \i» ^ r i
у = 1.7...2 при нагрузке до 14 кВт и
скорости ремня до 20 м/с;
см
zq = z\ —*-;
360е
пи 200; 400; 1000; 2000; 5000; 10000;
МИН
[pz],2,0; 1,5; 1; 0,75; 0,5; 0,35;
МПа
F0=(l,l + l$gmv2b или
т, мм 2; 3; 4; 5; 7; 10
Fq/Ь, Н/см 4; 6; 8; 10; 14; 20
Fr-(l + l,2)F,
Примечание
Q - коэффициент переда-
передаточного отношения (вво-
(вводится только для ускоряю-
ускоряющей передачи);
Сг — коэффициент,
учитывающий то, что . с
увеличением числа зубьев
Zq в зацеплении со звез-
звездочкой нагрузка на первый
зуб снижается;
Ср — коэффициент режима
работы
gm — масса 1 м ремня ши-
шириной 1 см;
v - скорость ремня, м/с;
Т\ - вращающий момент
на ведущем шкиве;
F, — окружная сила, пере-
передаваемая ремнем;
Р — передаваемая мощ-
мощность, Вт
у — коэффициент нерав-
неравномерности распределения
нагрузки между зубьями
ремня и шкива на дуге
обхвата;
Zc — число зубьев в зацеп-
зацеплении;
<xi — угол обхвата на малом
шкиве;
[/>J — допускаемое давле-
давление на зубья ремня
Цепные передачи
377
Достоинства зубчато-ременных передач: высокая нагрузочная способность и долго-
долговечность, отсутствие проскальзывания, компактность (звездочки могут иметь небольшие
диаметры), сравнительно невысокие начальное натяжение и нагрузки на валы, малошум-
ность; не требуют смазывания.
12.3. ЦЕПНЫЕ ПЕРЕДАЧИ
Цепная передача состоит обычно из ведущей и ведомой звездочек, связанных между
собой приводной цепью. Расчет цепной передачи приведен в табл. 18, а основные дан-
данные - в табл. 19—23.
18. Расчет цепной передачи
Определяемый параметр
Межосевое расстояние, мм;
оптимальное
наибольшее
наименьшее
Делительный диаметр звез-
звездочки
Наружный диаметр звездочки
Число зубьев малой звездочки
(оптимальное)
Расчетная формула
а = C0 + 50) /
«max * 80/
dd . 180
sin —
z
De = t(Kz+ 0,7) -0,3ld{;
„ ¦ 180
где Kz = ctg
Z\ =31-2/, где i = ^;
при скорости цепи
vu si м/с ; Z\ 2: 11
Примечание
f — шаг цепи, мм
Z — число зубьев звездочки
Dei и Dei — определяемые по
ГОСТ 592-81;
d\ — диаметр ролика
/ — передаточное число
378
МЕХАНИЧЕСКИЕ ПЕРЕДАЧИ
Продолжение табл. 18
Число зубьев большой звез-
звездочки
Число звеньев цепи
Уточненное межосевое рас-
расстояние, мм
Средняя скорость цепи, м/с
Шаг цепи, мм
Z2 = Z\ i, но не более 120
Д2
L, =2а,+0,5г? + —,
а
где at = —; zy = Z\ +Z2I
2я
a = 0,25t\Lt-0JSzy +
Z\ttl\
vu < 2 м/с и / = 10 + 15 - ти-
тихоходная передача;
уц = 2...6 м/с и i 5 6 - средне-
скоростная передача;
vu * 6...25 м/с и / ? 3 - быст-
быстроходная передача
i —
/ ^ 2,8 1—т—г~ 1
\zi[p]m'
ГДС -Л>э """" "д ¦"в-**Н-*м>**см "П 9
Ад = 1 при спокойной нагруз-
нагрузке; 1,25 <. Ад <, 2,5 при ударной
нагрузке;
Аа = 1 при а - C0 + 50)^,
Аа = 1,25 при о й 25 f,
Ан = 1 при наклоне до 60° и
автоматическом регулирова-
регулировании;
Ан = 1,25 при наклоне более
60°;
Аом = 0,8 при картерной смаз-
смазке;
АсМ = 1 ПРИ непрерывной
смазке;
Асм = I»3 + 1,5 при перио-
периодической смазке;
А„ = 1 при работе в одну сме-
смену;
L, — округляется до целого
числа
Уменьшается а на 0,2...0,4 %
(для свободного провисания
цепи)
Т\ — вращающий момент на
валу меньшей звездочки,
Нмм;
[/»] — допускаемое даавление,
Па;
m — число рядов цепи;
Аэ — коэффициент, учи-
учитывающий условия монтажа
и эксплуатации;
Ад - динамический коэффи-
коэффициент;
Ав - коэффициент, учи-
учитывающий влияние межосе-
межосевого расстояния;
Ан - коэффициент, учи-
учитывающий влияние наклона
цепи;
Ар - коэффициент, завися-
зависящий от способа регулирова-
регулирования;
Асм ~ коэффициент, завися-
зависящий от способа смазывания;
Цепные передачи
379
Продолжение табл. 18
Расчетное давление в шарни-
шарнирах, МПа
Коэффициент запаса проч-
прочности
Наружный диаметр звездочек
цепи приводной зубчатой, мм
Числа зубьев звездочек цепи
приводной зубчатой
Ширина зубчатой цепи
Кп — 1,25 при двусменной
работе;
Кп = 1,5 при трехсменной
работе
р F'K>
¦^оп
S Q
FtKd+Fv + Ff'
где Fv = q v2;
Ту =9,81 Kfqa,
K/= 6 при горизонтально рас-
расположенной цепи, Kf = 1,5
при наклонной (под 45°),
Kf — 1 при вертикальной
Z\ = 37 - 2/, но не меньше 17
. Zi = Z\i, но не больше 140
[Ло]
Кп - коэффициент, учи-
тываюший периодичность
работы передачи
F, — окружная сила, Н;
АоП - площадь проекции
опорной поверхности шар-
шарнира, мм2
Q — разрушающая нагрузка,
Н;
Fv — центробежная сила, Н;
Ff — сила от провисания це-
цепи, Н;
q — масса одного метра цепи,
кг/мм;
Kf — коэффициент,
учитывающий расположение
цепи
Р — передаваемая мощность,
кВт;
[P\q\ — мощность, кВт, до-
допускаемая для передачи
зубчатой цепью шириной 10
мм
19. Данные по приводным роликовым однорядным цепям ПР
по ГОСТ 13568-75
1 - соединительное звено; 2 - переходное звено
380
МЕХАНИЧЕСКИЕ ПЕРЕДАЧИ
Продолжение табл. 19
Размеры, мм
t
9,525
12,7
15,875
19,05
25,4
31,75
38,1
44,45
50,8
5,72
7,75
9,65
12,7
15,88
19,05
25,4
25,4
31,75
d
3,28
4,45
5,08
5,94
7,92
9,53
11,10
12,70
14,27
d\
6,35
8,51
10,16
11,91
15,88
19,05
22,23
25,4
28,58
Л
8,5
11,8
14,8
18,2
24,2
30,2
36,2
42,4
48,3
Ъ
17
19
24
33
39
46
58
62
72
Q,
кН
9,1
18,2
22,7
31,8
60
89,5
127
172,4
227,0
Я,
кг/м
0,45
0,75
1
1,9
2,6
3,8
5,5
7,5
9,7
¦^оп,
ММ2
28,1
39,6
54,8
105,8
179,7
262
394
473
646
Примечания. 1. Стандарт не распространяется на цепи для буровых установок.
2. Параметр А^п , мм2 — означает проекцию опорной поверхности шарнира.
Для цепей ПР у4оП = 0,28 Р, за исключением цепи с шагом 15,875, для кото-
которой Лоп = °»22 fi, и цепей с шагом 9,525 и 12,7 для которых ЛоП - 0,31 Р .
Шаг цепи t измеряют под нагрузкой, равной 0,010, где Q — разрушающая
нагрузка, д — масса цепи длиной 1 м.
3. Допускается снижение Q переходных звеньев на 20%.
20. Данные по приводным роликовым двухрядным цепям 2ПР
по ГОСТ 13568-75
/
12,7
15,875
19,05
25,4
31,75
38,1
44,45
50,8
Прим
7,75
9,65
12,7
15,88
19,05
25,4
25,4
31,75
s ч а н и е
Цепные передачи
Размеры, мм
d
4,45
5,08
5,96
7,92
9,53
11,12
12,70
14,27
8,51
10,16
11,91
15,88
19,05
22,23
25,4
28,58
А
11,8
14,8
18,08
24,2
30,2
36,2
42,2
48,3
Ь
35
41
53,4
68
82
104
110
130
А
13,92
16,59
23,78
29,29
35,76
45,44
48,87
58,55
Продолжение
G,
кН
31,8
45,4
104
114,0
177
254
344,8
453,6
Я*
кг/м
1,4
1,9
2,9
5
7,3
11
14,4
19,1
381
табл. 20
мм2
105
140
211
359
524
788
946
1292
. Обозначения такие же, как и в табл. 19; А - расстояние между плоскостями,
проходящими через середины роликов первого и второго рядов цепи.
21. Допускаемые значения частоты вращения [п{\, мин,
малой звездочки для приводных роликовых цепей нормальной серии ПР
и 2ПР (при ъх к 15)
t, мм
12,7
15,875
19,05
25,4
[п\], мин 1
1250
1000
900
800
t, мм
31,75
38,1
44,45
50,8
[/II], МИН 1
630
500
400
300
Примечание. Для передач, защищенных от пыли, при спокойной работе и надежном сма-
смазывании допускается увеличение [п\] на 30%.
22. Допускаемое давление в шарнирах цепи [р], МПа (при ъ\ - 17)
мин
50
100
200
300
500
750
1000
1250
Шаг цепи, мм
12,7
46
37
29
26
22
19
17
16
15,875
43
34
27
24
20
17
16
15
19,05
39
31
25
22
18
16
14
13
25,4
36
29
23
20
17
15
13
12
31,75
34
27
22
19
16
14
13
-
38,1
31
25
19
17
14
13
-
-
44,45
29
23
18
16
13
-
-
-
50,8
27
22
17
15
12
-
-
-
Примечания: 1. Если z * 17, то табличные значения умножают на коэффициент
Кг - 1 + 0,01 (z\ - 17). 2. Для двухрядных цепей значения [р] уве-
увеличивают на 15%.
382
МЕХАНИЧЕСКИЕ ПЕРЕДАЧИ
23. Нормативные коэффициенты запаса прочности [5]
приводных роликовых цепей нормальной серии ПР и 2ПР
мин
50
100
300
500
750
1000
1250
Шаг цепи, мм
12,7
7Д
7,3
7,9
8,5
9,3
10
10,6
15,875
7,2
7,4
8,2
8,9
10
10,8
11,6
19,05
7,2
7,5
8,4
9,4
10,7
П,7
12,7
25,4
7,3
7,6
8,9
10,2
12
13,3
14,5
31,75
7,4
7,8
9,4
11
13
15
-
38,1
7,5
8
9,8
11,8
14
-
-
44,45
7,6
8,1
10,3
12,5
-
-
-
50,8
7,6
8,4
10,8
-
-
-
-
Цепные передачи используют в качестве понижающих или повышающих для пере-
передачи вращения между параллельными валами. Передаваемая мощность обычно не пре-
превышает 100 кВт, межосевое расстояние до 6 ч- 8 м.
Цепные передачи по сравнению с ременными имеют значительно меньшие габа-
габаритные размеры и нагрузки на валы, более высокий КПД (V| = 0,96...0,98), в них ис-
исключено окружное проскальзывание цепи по звездочке. Недостатки передачи:
"вытягивание" цепей (увеличение шага цепей вследствие износа шарниров) и, как след-
следствие, необходимость применения натяжных устройств, необходимость ухода при экс-
эксплуатации (смазывание, регулирование), шумность, неравномерность хода.
Пластины цепей изготавливают из среднеуглеродистых и легированных сталей 45,
50, 40Х, 40ХН, закаливают до твердости не менее 34HRC3. Оси, втулки и призмы обычно
изготавливают из сталей 15, 15Х, 20Х, 12ХНЗА, цементируют и подвергают закалке до
твердости не менее 46HRC3. Звездочки тихоходных, слабо нагруженных передач изготав-
изготавливают из чугуна СЧ20 с закалкой или из других антифрикционных высокопрочных ма-
марок чугуна.
Звездочки быстроходных и тяжелонагруженных передач изготавливают из углероди-
углеродистых легированных сталей D5, 40Х, 40ХН) или сталей 15, 20, 12Х2Н4А с цементацией
венцов на глубину 1...1.5 мкм. Твердость поверхностей зубьев 46...56 HRC3.
12.4. ЗУБЧАТЫЕ И ЧЕРВЯЧНЫЕ ПЕРЕДАЧИ
Виды зубчатых колес. По форме делительной поверхности различают цилинд-
цилиндрические и конические зубчатые колеса. В зависимости от формы линии зуба, т.е. линии
пересечения боковой поверхности зуба с делительной, начальной или однотипной соос-
ной поверхностью различают прямые зубья, у которых линия зуба лежит в плоскости,
проходящей через ось колеса; винтовые зубья, у которых линия зуба является винтовой
линией любого вида (в том числе косые, шевронные, тангенциальные, криволинейные).
По профилю зуба различают зубья: эвольвентные, профили которых в цилинд-
цилиндрических передачах являются эвольвентными окружностями, а в конических - сфе-
сферическими эвольвентами; квазиэвольвентные (октоидальные) зубья конических колес,
образованные в станочном зацеплении плоской производящей поверхностью; циклоид-
циклоидные, профили которых — кривые циклоидного семейства; зубья колес с зацеплением Но-
Новикова, профили которых — дуги окружностей или близкие к ним кривые. Существуют
также некоторые специальные профили.
Зубчатые и червячные передачи
383
К
г)
е)
ж)
Рис.3
Виды зубчатых передач. По расположению осей колес в пространстве различают:
цилиндрические передачи, у которых оси колес переллельны, состоят из двух цилинд-
цилиндрических колес (рис. 2а);
конические передачи, у которых оси колес пересекаются, состоят из двух ко-
конических колес (рис. 36);
смешанные конические передачи (цилиндрические), оси у которых пересекаются,
состоят из цилиндрического и конического колес (рис. Зв);
гиперболоидные передачи, у которых оси колес скрещиваются, различают гипербо-
лоидные передачи первого и второго рода; к передачам первого рода относят винтовые
передачи, составленные из цилиндрических колес (рис. Зг) гипоидные передачи, со-
составленные из конических колес (рис. 3d); к передачам второго рода относят червячные
передачи (рис. Зе), спироидные (рис. Ъж) и др.
По относительному расположению поверхностей вершин и впадин колес различают
передачи: внешнего зацепления, в которых оба зубчатых колеса имеют внешние зубья;
внутреннего зацепления, в которых одно из колес имеет внешние зубья, а второе — внут-
внутренние.
По назначению различают: силовые передачи, предназначенные для передачи мощ-
мощности; кинематические передачи, т.е. передачи не передающие значительной мощности,
а выполняющие чисто кинематические функции.
384
МЕХАНИЧЕСКИЕ ПЕРЕДАЧИ
Рис.4
Параметры эвольвентного зуба,
зубчатого колеса и зубчатой пары. Геомет-
Геометрию эвольвентного зуба и зубчатого колеса
определяют:
1) диаметр основной окружности dB;
2) профиль зуба, представляющий собой
развертку основной окружности — эвольвен-
эвольвенту (рис. 4). Положение точки Y можно выра-
выразить следующими параметрами: углом раз-
развернутости Yy\ углом профиля ау; эволь-
вентным углом inv ay; диаметром окружно-
окружности dy; радиусом кривизны ру профиля в
точке У. Точка N является центром кривиз-
кривизны профиля в точке У;
3) диаметр окружности вершин аа;
4) диаметр окружности впадин df;
5) форма и расположение переходной кривой профиля зуба;
6) параметры, характеризующие относительное положение разноименных (правого и ле-
левого) профилей. К ним относятся (рис. 5): толщина зуба по основной окружности Вв\
диаметр окружности заострения d^ ; угол профиля на окружности заострения 0; угол
профиля а; модуль /и; коэффициент смещения х-
Основными параметрами зубчатой
передачи являются: число зубьев z, межо-
межосевое расстояние aai угол зацепления <хда и
передаточное отношение
'12 =
со2
Рис.5
угол профиля а = 20°;
коэффициент высоты головки зуба h*a =1,0;
коэффициент высоты ножки Ау- = 1,25;
коэффициент высоты прямолинейного участка
или передаточное число и
Исходным контуром называют рееч-
реечный контур, принятый в качестве базового
для определения теоретических форм и
размеров зубьев семейства зубчатых колес,
представителем которого он является. Па-
Параметры исходного контура стандартизова-
стандартизованы. Стандартом установлены следующие
параметры и коэффициенты исходного
контура:
* =2;
профиля (граничной высоты)
= 0,38;
коэффициент радиуса кривизны переходной кривой у
коэффициент радиального зазора С* — 0,25.
Абсолютные размеры зуба исходного контура получают умножением перечисленных
коэффициентов на модуль.
Зубчатые и червячные передачи
385
Значения модулей (мм) установ-
установлены ГОСТ 9563—74. Стандарт содер-
содержит два ряда модулей: 1) 0,05; 0,06;
0,08; 0,1; 0,12; 0,15; 0,2; 0,25; 0,3; 0,4;
0,6; 0,8; 1; 1,25; 1,5; 2; 2,5; 3; 4; 6; 8;
10; 12; 16; 20; 25; 32; 40; 60; 80; 100;
2) 0,07; 0,09; 0,11; 0,14; 0,18; 0,22;
0,28; 0,35; 0,45; 0,7; 0,9; 1,125; 1,375;
1,75-2,25; 2,75; 3,5; 4,5; 7; 9; 11; 14;
18; 22; 28; 36; 45; 70; 90.
Рис. 6
¦f» Q5 Jm
Первый ряд предпочтителен.
На рис. 6 показан исходный контур для цилиндрических эвольвентных колес с мо-
модулем > 1 мм, ГОСТ 13755—81. Это прямобочный реечный контур с равномерно
чередующимися симметричными зубьями и впадинами, переход от профиля зуба к ли-
линии впадин очерчен дугой окружности.
Исходным производящим ре-
реечным контуром (ИПРК) называют
контур зубьев рейки, заполняющей
впадины исходного контура, как от-
отливка заполняет форму. При этом
между линиями впадин ИПРК и
вершин исходного контура сохраня-
сохраняется радиальный зазор.
Параметры ИПРК составляют осно-
основу геометрии всех инструментов
реечного типа (червячных фрез, гре-
гребенок, шлифовальных кругов). При
этом, однако, реальный контур ин-
инструмента — производящий реечный
контур (ПРК) может иметь некото-
некоторые отличия от ИПРК, обусловлен-
обусловленные технологическими и эксплуата-
эксплуатационными особенностями. Отличие
параметров ПРК от ИПРК следует
учитывать при уточненных расчетах.
Зубчатое колесо с внешними
зубьями, сформированное ИПРК
при сохранении на делительной ок-
окружности толщины зуба, равной по-
половине шага и теоретического ради-
радиального зазора Ст у впадины
ИПРК, называют теоретическим
исходным зубчатым колесом (рис. 7).
Колесо, зубья которого одновремен-
одновременно заполняют все впадины теоре-
теоретического исходного колеса с сохра-
сохранением заданных радиальных зазо-
зазоров как у вершин, так и у оснований
зубьев, называют совпадающим ко-
колесом.
Рис. 7
25 Том 2
386
МЕХАНИЧЕСКИЕ ПЕРЕДАЧИ
Колесо, заполняющее впадины совпадающего колеса с внутренними зубьями и при
этом сохраняющее теоретические радиальные зазоры только у основания зубьев, называ-
называют теоретическим производящим зубчатым колесом.
Зубчатое колесо, делительная окружность которого в плотном зацеплении с исход-
исходной рейкой касается ее делительной прямой, называют колесом без смещения (рис. 8я).
Если рейка отодвинута от центра и ее делительная прямая не касается делительной ок-
окружности, смещение у колеса положительное (рис. 86), если рейка придвинута к центру
колеса и ее делительная прямая пересекает делительную окружность, смещение у колеса
отрицательное (рис. 8в).
От смещений зависят межосевые расстояния и углы зацепления передач (табл. 24).
Отношение абсолютной величины смещения к модулю называют коэффициентом смеще-
смещения х.
24. Соотношение межосевых расстояний и углов
зацепления передач
без смещения
х1 = х2 = 0
О = Q
Передача
равносмешенные
x2 ± xx =0
= 0,5m(z2 ±Z\)
am = a
положительные
x2 ± xY > 0
aw > a
отрицательные
jc2 ± JCi < 0
am <a
affi < a
Коэффициенты смещения существенно влияют на размеры колес, геометрические
показатели качества и нагрузочную способность передачи.
Расчеты на прочность. Для обоснованного назначения размеров колес необходимо
знать меру их механического взаимодействия - напряжения и деформации и их предель-
предельные оценки. Между тем достаточно точный расчет напряжений и деформаций в точках
зубчатого колеса связан со значительными математическими трудностями и может быть
реализован методами теории упругости. В связи с этим на этапе проектирования выпол-
выполняют приближенные расчеты зубьев колес: 1) на контактную выносливость; 2) на изгиб-
ную выносливость; 3) на статическую прочность; 4) поверхностей зубьев на статическую
прочность; 5) на износ; 6) на заедание.
Первый расчет — проектный, для основных параметров передачи. Второй расчет —
для определения модуля передачи после установления основных парам етров Третий и
четвертый виды расчетов — поверочные, применяют только при больших кратковремен-
кратковременных перегрузках. Пятый вид расчета выполняют для открытых передач. Шестой вид
расчета в общепромышленных сравнительно тихоходных передачах встречается редко.
Материалы зубчатых колес и способы упрочнения зубьев. Зубчатые колеса передач и
редукторов в большинстве случаев изготавливают из сталей, подвергнутых термическому
или химико—термическому упрочнению. Чугун применяют для изготовления малонагру-
женных или редко работающих передач, в которых габариты и масса не имеют опреде-
определяющего значения. Способы упрочнения зубчатых колес из стали зависят от требуемой
несущей способности зубчатых колес, марки стали, оборудования и трудоемкости изго-
изготовления (табл. 25).
Зубчатые и червячные передачи
387
25. Способы упрочнения зубчатых колес, изготовленных из стали
Способ упрочнения
Нормализация. Позволяет получить лишь назкую нагру-
нагрузочную способность. Используют для поковок и отливок из
среднеуглеродистых сталей; сохраняет точность при меха-
механической обработке; передачи хорошо и быстро прирабатыва-
прирабатываются
Улучшение. Обеспечивает свойства аналогичные по-
получаемым при нормализации, но нарезание зубьев труднее из-
за большой их твердости. Заготовки - средние по размерам
поковки и отливки из среднеуглеродистых сталей
Закалка. При нагреве ТВЧ дает среднюю нагрузочную спо-
способность при достаточно простой технологии. Передачи плохо
прирабатываются. Теряется точность вследствие коробления.
Размеры зубчатых колес практически неограничен ы. При мо-
модулях меньших 5 мм зуб прокаливается насквозь
Плазменная закалка. Обеспечивает такую же нагрузочную
способность, как и закалка с нагревом ТВЧ, но коробление
меньше. Требуется специальное оборудование. Способ от-
отличается низкой производительностью
Объемная закалка. Повышает нагрузочную способность до
средней. Технология проста, коробление умеренное. Прираба-
Прирабатывается плохо
Цементация. Обеспечивает высокую нагрузочную способ-
способность и стабильность свойств. Недостатки способа — большое
коробление
Газовая нитроцементацня. Обеспечивает весьма высокую
несущую способность и стабильность свойств. Меньшее ко-
коробление по сравнению с обычной цементацией. Требуется
уникальное оборудование
Азотирование. Обеспечивает высокую нагрузочную способ-
способность практически без коробления. Необходимо специальное
оборудование
Механическое упрочнение и электрополирование. Изломная
прочность зубьев значительно повышается накаткой впадин,
чеканкой, дробеструйной обработкой. Упрочнение достигает
40%. Электрополирование уменьшает шероховатость
Область применения
Редукторы больших разме-
размеров, индивидуальное произ-
производство, малонагруженные
передачи
Редукторы средних разме-
размеров и передачи с небольшими
нагрузками
Тихоходные передачи низ-
низкой точности. Можно уве-
увеличить нагрузочную способ-
способность передачи за счет
сочетания шестерни закален-
закаленной при нагреве ТВЧ и
улучшенного колеса
Тяжелое машиностроение,
передачи с большими модуля-
модулями, низкая точность, индиви-
индивидуальное производство
Мелкие тихоходные
зубчатые колеса низкой
точности (например, ручные
тали)
Высоконагруженные пере-
передачи малых и средних разме-
размеров разных степеней точности
Небольшие зубчатые коле-
колеса крупносерийного и массо-
массового производств
Быстроходные точные пе-
передачи, работающие без ударов
Механические свойства материалов для зубчатых колес приведены в табл. 26—29.
388
МЕХАНИЧЕСКИЕ ПЕРЕДАЧИ
26. Механические свойства сталей
Марка
стали
35
45
40Х
35ХМ
40ХН
20ХН2М
18ХГТ
12ХНЗА
25ХГМ
40ХН2МА
35Л
45Л
40ГЛ
Диаметр
Д мм
Любой
Любой
125
80
200
125
125
315
200
200
315
200
200
200
200
200
200
125
Любой
315
315
Ширина
S, мм
Любая
Любая
80
50
125
80
80
200
125
125
200
125
125
. 125
125
125
125
80
Любая
200
200
НВ серд-
сердцевины
163...192
179...207
235...262
269...302
235...262
269...302
269...302
235...262
269...302
269...302
235...262
269...302
269.-302
300...400
300...400
300...400
300...400
269...302
183...207
207..,235
235...262
HRC3 по-
поверхности
-
-
-
-
-
-
46,5.51
-
-
49...54
-
-
49...54
S7...64
57...64
57...64
57...64
51...57
-
-
-
МПа
550
600
780
890
790
900
900
800
920
920
800
920
920
1000
1000
1000
1000
980
650
680
850
От.
МПа
270
320
540
650
640
750
750
670
790
790
630
750
750
800
800
800
800
780
270
440
600
Термическая
обработка
Нормализация
Нормализация
Улучшение
Улучшение
Улучшение
Улучшение
Улучшение
+закалка ТВЧ
Улучшение
Улучшение
Улучшение
+закалкаТВЧ
Улучшение
Улучшение
Улучшение
+закалка ТВЧ
Улучшение
+ цементация
+ закалка
Улучшение
+ цементация
+ закалка
Улучшение
+ цементация
+ закалка
Улучшение
+ цементация
+ закалка
Улучшение
+ азотирование
Нормализация
Улучшение
Улучшение
Зубчатые и червячные передачи
389
Для сталей, не включенных в табл. 26 предел прочности определяют по формулам:
<тв = 3,5 НВ для высоколегированных цементуемых сталей;
ов = 3,2 НВ для всех других сталей.
При отсутствии данных усталостные характеристики сталей можно определить по
формулам:
<т_! « 0,43 ов;
т_! » 0,6 a_i .
Для унификации марок сталей в производстве и для упрощения изготовления за-
запасных частей марки сталей рекомендуется выбирать из следующего сортамента.
Нормализация 35, 45, 35Л.
Улучшение 45, 40Х, 35ХМ, 40ХН, 45Л, 40ГЛ.
Закалка при нагреве ТВЧ 35ХМ, 40ХН, 50ХН, 50.
Плазменная закалка 35ХМ, 40ХН.
Объемная закалка 45, 40Х, 35ХМ, 40ХН.
Цементация 20ХН2М, 18ХГТ, 12ХНЗА, 18Х2Н4ВА.
Газовая цементация 25ХГМ.
Азотирование (мягкое) 40ХН2МА.
27. Чугуны, применяемые для изготовления зубчатых колес,
и допускаемые напряжения в них
Марка
чугуна
СЧ15
СЧ18
СЧ20
СЧ25
СЧЗО
СЧ35
ВЧ45
ВЧ50
ВЧ60
Предел прочности
при растяжении
ав> МПа
150
180
200
250
300
350
450
500
600
Твердость,
НВ
163...229
170...229
170.. .241
170...241
187...255
197...269
140...225
153...245
192...277
Допускаемые напряжения, МПа
46
57
67
75
100
111
141
167
187
31
38
44
50
67
74
94
105
125:
244...343
255...343
255...361
255...361
280...382
296...404
336...440
336...445
354...485
390
МЕХАНИЧЕСКИЕ ПЕРЕДАЧИ
28. Бронзы, применяемые для изготовления червячных колес,
и допускаемые напряжения в них
Марка
бронзы
Бр010Ф1
Бр010Ф1
БрО1ОН1Ф1
БрО5Ц5С5
БрА9ЖЗЛ
БрА10Ж4Н4Л
Спо-
Способ
отли-
отливки
П
К
Ц
П
К
П
К
П;К
Пределы
проч-
прочности СТВ
200
255
285
150
200
392
490
590
теку-
текучести ат
100
147
165
80
90
196
236
275
Допускаемые напряжения при твердости червяка
HRG» < 46
45
57
64
35
45
81
85
101
[<т-Ы
30
41
45
25
32
63
69
81
[<т„]
135
186
206
111
132
-
-
-
HRG, ? 46
55
71
80
45
53
98
108
130
40
51
56
32
38
75
83
98
К]
168
221
246
133
159
-
-
-
Примечания: 1. К — отливка в кокиль; П — отливка в песчаную форму; Ц — отливка цен-
центробежная.
2. [а„] — допускаемые контактные напряжения; [сто/}; [b-\f\ ~~ допускаемые
напряжения изгиба.
Правила выполнения чертежей зубчатых колес, червячных колес и червяков. Правила
выполнения чертежей зубчатых колес и червяков приведены в ГОСТ 2.403—75, ГОСТ
2.405—75, ГОСТ 2.407—75. Перечисленные стандарты устанавливают минимальный пе-
перечень обязательных сведений, которые должен содержать чертеж. При необходимости
этот перечень расширяют: дают сведения об инстурменте, на котором ориентирован гео-
геометрический расчет; конкретизируют требования к нормам точности; дополняют спра-
справочные данные.
Чертеж должен содержать изображение колеса или червяка, таблицу параметров
зубчатого венца и перечень технических требований. Кроме основного изображения, на
чертеж помещают дополнительные изображения, например: профиль модифицированно-
модифицированного зуба с указанием параметров модификации; форму и параметр продольной модифика-
модификации; форму и параметр переходной кривой и т.д.
Таблицу параметров располагают на правой стороне поля чертежа и сплошными ос-
основными линиями разделяют на четыре части: основные данные, данные для контроля,
справочные данные и сведения об инструменте. Оформление таблицы может быть пол-
полным и сокращенным. В технические требования включают то, что невозможно выразить
графическими или условными обозначениями или вписать в таблицу параметров. Здесь
могут быть приведены требования к заготовке, твердости и термической обработке и т.д.
Основные стандарты по механическим передачам приведены в табл. 30 и 31.
29. Предел прочности и коэффициенты безопасности
Термическая
обработка
Нормализация,
улучшение
Объемная
закалка
Закалка при
нагреве ТВЧ
по всему кон-
контуру (модуль
Твердость зубьев HRC3
на
поверхности
в
сердцевине
НВ 180...350
46...56
57...64
27...37
Сталь
40; 45;
40Х; 40ХН;
35ХМ и др.
40Х; 40ХН;
35ХМ и др.
58;Н7
40Х;
35ХМ; 40Y
и др.
0 1- *•
а„ hm ,
МПа
2НВ+70
18HRCVH50
1,1
a f hm ,
МПа
1,8НВ
500
630
420
1,75
1стн max! »
МПа
2,8ат
2,8от
МПа
2,7НВ
1400
1260
I
Продолжение табл. 29
Термическая
обработка
Закалка при
нагреве ТВЧ
сквозная с
обхватом впа-
впадины (модуль
тп < 3I
Азотирование
Цементация и
закалка
Нитроцемента
ция и закалка
Твердость зубьев HRG,
на
поверхности
HV
550 .750
57...64
57...64
в
сердцевине
26...42
32...44
32...44
Сталь
40Х;
40ХФА;
40ХН2МА
и др.
Цементиру
емые стали
всех марок
20ХН2М;
12ХНЗА
25ХГМ
а° lim**,
МПа
17HRC3+200
1050
23HRC3
23HRC3
1,2
1.2
1,2
a f lim ,
МПа
10HRC3*+240
600
710
750
SF
1,75
1,55
1,55
К max]**,
МПа
40HRC,
30HRC3
40HRC3
40HRC3
МПа
1430
1000
1200
1500
1 Распространяется на все сечение зуба и часть тела зубчатого колеса под основанием впадины.
** Значение определяют по средней твердости зубьев: HRC3 — твердость поверхности зуба;
HRCj* — твердость сердцевины зуба.
Стандарты
393
СТАНДАРТЫ
30. Основные стандарты в области механических передач
Стандарт
ГОСТ 1284.1-89
ГОСТ 1284.2-89
ГОСТ 1284.3-80
ГОСТ 5813-76
ГОСТ 23831-79
ГОСТ 24848.1-81
ГОСТ 24848.3-81
ГОСТ 26379-84
ГОСТ 20889-88
ГОСТ 191-82
ГОСТ 228-79
ГОСТ 588-81
ГОСТ 589-85
ГОСТ 13552-81
ГОСТ 13568-75
ГОСТ 23540-79
ГОСТ 25996-83 Е
ГОСТ 16532-70
ГОСТ 13755-81
ГОСТ 2185-66
ГОСТ 9563-60
Наименование
Ремни приводные клиновые нормальных сечений. Основные
размеры. Методы контроля
Ремни приводные клиновые нормальных сечений. Технические
условия
Ремни приводные клиновые нормальных сечекий. Уасчеп передач
и передаваемые мощности
Ремни вентиляторные клиновью и шкивы для двигателей автомо-
автомобилей, тракторов и комбайнов. Технические условия
Ремни плоские приводные резинотканевые. Технические условия
Ремни клиновые вариаторные для промышленного оборудования.
Технические условия
Ремни клиновые вариаторные для промышленного оборудования.
Расчет передач и передаваемые мощности
Ремни клиновые широкие для вариаторов сельскохозяйственных
машин. Технические условия
Шкивы для приводных клиновых ремней монолитные с односто-
односторонней выступающей ступицей. Основные размеры
Цепи грузовые пластинчатые. Технические условия
Цепи якорные. Общие технические условия
Цепи тяговые пластинчатые. Технические условия
Цепи тяговые разборные. Технические условия
Цепи приводные зубчатые. Технические условия
Цепи приводные роликовые и втулочные. Общие технические
условия
Цепи грузовые пластинчатые с закрытыми валиками. Техниче-
Технические условия
Цепи круглозвенные высокопрочные для горного оборудования.
Технические условия
Передачи зубчатые цилиндрические эвольвентные внешнего за-
зацепления. Расчет геометрии
Основные нормы взаимозаменяемости. Передачи зубчатые ци-
цилиндрические эвольвентные. Исходный контур
Передачи зубчатые цилиндрические. Основные параметры
Основные нормы взаимозаменяемости. Колеса зубчатые. Модули
394
МЕХАНИЧЕСКИЕ ПЕРЕДАЧИ
Продолжение табл. 30
ГОСТ 21354-87
ГОСТ 19274-73
ГОСТ 14186-69
ГОСТ 15023-76
ГОСТ 17744-72
МР 2-24-81
МР 2-054-80
ГОСТ 12289-76
ГОСТ 16202-81
ГОСТ 19326-73
ГОСТ 13754-81
ГОСТ 19624-74
ГОСТ 25022-81
ГОСТ 2144-76
ГОСТ 9369-77
ГОСТ 17696-89
ГОСТ 19036-81
ГОСТ 19650-74
МР 2-042-80
ГОСТ 24438-80
РТМ 2-056-2-80
ГОСТ 24266-80
Передачи зубчатые цилиндрические эвольвентные. Расчет на
прочность
Передачи зубчатые цилиндрические эвольвентные внутреннего
зацепления. Расчет геометрии.
Колеса зубчатые цилиндрические передач Новикова. Модули
Передачи Новикова цилиндрические с двумя линиями зацепле-
зацепления. Исходный контур
Передачи Новикова с двумя линиями зацепления цилинд-
цилиндрические. Расчет геометрии
МР. Передачи зубчатые зацепления Новикова цилиндрические с
твердостью поверхностей зубьев НВ <, 320. Расчет на прочность
МР.
МР. Передачи зубчатые зацепления Новикова цилиндрические.
Расчет на прочность
Передачи зубчатые конические. Основные параметры
Основные нормы взаимозаменяемости. Передачи зубчатые ко-
конические с круговыми зубьями. Исходный контур
Передачи зубчатые конические с круговыми зубьями. Расчет
геометрии
Основные нормы взаимозаменяемости. Передачи зубчатые ко-
конические с прямыми зубьями. Исходный контур
Передачи зубчатые конические с прямыми зубьями. Расчет гео-
геометрии
Редукторы планетарные. Основные параметры
Передачи червячные цилиндрические
Передачи глобоидные. Основные параметры
Передачи глобоидные. Расчет геометрии
Основные нормы взаимозаменяемости. Передачи червячные
цилиндрические. Исходный червяк и исходный производящий
червяк
Передачи червячные цилиндрические. Расчет геометрии
Передачи червячные цилиндрические. Расчеты на прочность и
заедание
Передачи глобоидные. Исходный червяк и исходный произво-
производящий червяк
Редукторы общего назначения. Расчет валов
Редукторы общего назначения. Концы валов. Основные разме-
размеры, допускаемые крутящие моменты
31. Основные стандарты в области зубчатых и червячных передач
Объект
стандартизации
Основные термины,
определения
и обозначения
Расчеты геометри
Модули
Исходные контуры
Основные параметры
Допуски
Расчеты на прочность
Правила выполнения
чертежей
Передачи
цилиндрические
реечные
конические
червячные
цилиндрические
глобоидные
ГОСТ 16530-83
ГОСТ 16531-83
ГОСТ 16532-70
(внешнее зацепление);
ГОСТ 19274-73
(внутреннее зацепле-
зацепление)
ГОСТ 19325-73
ГОСТ 19624-74
(прямозубые);
ГОСТ 19326-73 (с
круговыми зубьями)
ГОСТ 9563-60
ГОСТ 9587-81
ГОСТ 13755-81
ГОСТ 2185-66;
ГОСТ 13733-77
ГОСТ 1643-81;
ГОСТ 9178-81
ГОСТ 21354-87
ГОСТ 10242-81
ГОСТ 13506-81
~~
ГОСТ 13754-81;
ГОСТ 16202-81
ГОСТ 12289-76
ГОСТ 1758-81;
ГОСТ 9368-81
ГОСТ 18498-89
ГОСТ 19650-74
ГОСТ 19672-74
ГОСТ 20184-81;
ГОСТ 19036-81
ГОСТ 2144-76
ГОСТ 3675-81;
ГОСТ 9774-81
~
ГОСТ 17696-89
—
ГОСТ 24438-80
ГОСТ 9369-77
ТОСТ 16502-83
ПоЕСКД
ГОСТ 2.403-75; ГОСТ 2.405-75; ГОСТ 2.406-76; ГОСТ 2.407-75
396 Список литературы
СПИСОК ЛИТЕРАТУРЫ
1. Авиационные зубчатые передачи и редукторы: Справочник / Под ред.
Э.Б.Вулгакова. М.: Машиностроение, 1981.
2. Анурьев В.И. Справочник конструктора—машиностроителя. Т. 1—3. М.: Машино-
Машиностроение, 1993.
3. Артоболевский И.И. Механизмы в современной технике. Т. 1—5. М.: Наука, 1976.
4. Гжиров Р.И. Краткий справочник конструктора: Справочник Л.: Машинострое-
Машиностроение, 1984.
5. Гинзбург Е.Г., Глованов Н.Ф., Фирун Н.Б. Зубчатые передачи. Л.: Машинострое-
Машиностроение, 1980.
6. Иосилевич Г.Б. Детали машин. М.: Машиностроение, 1988.
7. Крайнев А.Ф. Словарь-справочник по механизмам. М.: Машиностроение, 1987.
8. Кудрявцев В.Н. Зубчатые передачи // Справочник металлиста. Т.1. Машинострое-
Машиностроение, 1976.
9. Курлов Б.А. Расшифровка цилиндрических и конических зубчатых передач. М.:
Машиностроение, 1972.
10. Курсовое проектирование деталей машин: Учебн.пособие для учащихся машино-
машиностроительных специальностей техникумов / С.А.Чернавский, К.Н.Боков, И.М.Чернин и
др. М.: Машиностроение, 1988.
11. Орлов П.И. Основы конструирования. Т. 1—3. М.: Машиностроение, 1988.
12. Решетов Л.Н. Самоустанавливающиеся механизмы. М.: Машиностроение, 1979.
13. Справочник по геометрическому расчету эвольвентных зубчатых и червячных пе-
передач / Под ред. И.А.Болотовского. М. Машиностроение, 1986.
Муфты 397
13. МУФТЫ
Муфты - устройства для соединения валов, тяг, канатов, труб и т.п.
В зависимости от условий эксплуатации выбирают тип муфты. Если в процессе
эксплуатации соосность соединяемых валов сохраняется, то используют жесткие муф-
муфты. Для предотвращения опасных перегрузок, возникающих в результате осевых, ради-
радиальных, угловых смещений соединяемых валов, ставят компенсирующие муфты. Если
привод испытывает ударные нагрузки, то для их ослаблеття предусматривают установку
упругой муфты. Для защиты от непредусмотренных перегрузок в привод включают пре-
предохранительные муфты. Если по условиям эксплуатации необходимы частые пуски и
остановы маппш без включения муфты двигателя, то соединение осуществляют с по-
помощью сцепных муфт.
Основными данными для выбора му(|ггы служат номинальные диаметры соединяе-
соединяемых валов, расчетный вращающий момент, частота вращения и условия эксплуатации.
В общем случае расчетный вращающий момент Тр определяют с учетом влияния
инерционных масс по формуле
*р ~ *ном т * ^ ^
где Гном - номинальный вращающий момент; J\, /j - моменты инерции вращающихся
масс соответственно ведущего и ведомого валов с насаженными на них деталями, при-
приведенные к оси того вала, на который устанавливается муфта.
В ориентировочных расчетах можно использовать зависимость
Тр -крТном, B)
где Кр - коэффициент режима работы, учитывающий условия эксплуатации, значения
которого для передач от электродвигателя приведены ниже...
Конвейеры ленточные 1,25 + 1,5
Конвейеры цепные, винтовые, скребковые 1,5 + 2
Вентиляторы, компрессоры, насосы центробежные 1,25 + 2
Компрессоры и насосы поршневые . 2*3
-Станки металлорежущие: с непрерывным движением 1,25+1,5
с возвратно-поступательным движением 1,5 + 2,5
Деревообрабатывающие станки 1,5 + 2
Мельницы шаровые, дробилки, молоты, ножницы 2 + 3
Краны грузоподъемные, элеваторы 3 + 4
В передачах от поршневых двигателей значения Кр на 50...80% больше. В упро-
упрощенном расчете, используя опыт проектирования и эксплуатации машин, принимают
где Аб = 1 + 1,8 - коэффициент безопасности, учитывающий характер последствий при
выходе муфты из строя; Кя== 1 + 1,5 - коэффициент, учитывающий характер передавае-
передаваемой нагрузки (меньшие значения принимают при спокойной нагрузке, большие при
ударной и реверсивной).
398 МУФТЫ
13.1. ТИПЫ МУФТ
Муфты разнообразны по конструкции. Наиболее распространенные из них стандар-
стандартизованы. Выбор типа муфты проводят в соответствии с конструктивными особенностя-
особенностями и требованиями, предъявляемыми к приводу (машине) в целом.
Глухие муфты. Глухими называют муфты, образующие жесткое соединение валов
(составной вал). Они обеспечивают постоянное особо точное и надежное соединение
соосных валов с допускаемым смещением осей 0,002...0,005 мм; в длинных валопроводах
это требование менее жесткое.
К глухим относят втулочные и фланцевые муфты. Несущая способность втулочных
муфт ограничена обычно прочностью соединении (штифтовых, шпоночных- болтовых).
Фланцевые муфты применяют для соединения валов диаметрами 11...250 мм в диапазоне
вращающих моментов 8...4000 Нм при частоте вращения до 1000 мин для муфт боль-
большого диаметра и до 40000 мин'1 для муфт малого диаметра. Полумуфты изготавливают
литьем из чугуна или стали, а болты - из высоколегированной стали. Болты устанавли-
устанавливают в отверстия полумуфт либо с зазором, либо без зазора (с небольшим натягом). Для
передачи больших вращающих моментов применяют фланцевые муфты, у которых полу-
полумуфты снабжены торцовыми зубьями. Такие муфты соединяют с валами с помощью
сварки или эвольвентных шлицевых соединений.
Упругие муфты. Эти муфты благодаря использованию упругих силовых элементов
способны не только компенсировать радиальные и угловые смешения, но и демпфиро-
демпфировать колебания, амортизировать толчки и удары. К ним относят: упругие втулочно-
пальцевые муфты типа МУВП; упругие муфты с торообразной оболочкой; упругие муф-
муфты со звездочкой.
Упругие втулочно-пальцевые муфты применяют для передачи вращающих моментов
со смягчением ударов с помощью упругих резиновых втулок, надеваемых на пальцы. Они
получили широкое распространение, особенно в передачах от электродвигателей. Полу-
Полумуфты насаживают на концы валов с натягом с использованием призматических шпонок.
Материал полумуфт - чугун СЧ20; для быстроходных муфт применяют поковки из
стали 30 или стальное литье, пальцы получают из нормализованной стали 45, а втулки -
из специальной резины. Диапазон рабочих температур -40...+50 °С. Их работоспособ-
работоспособность определяют стойкостью втулок.
Упругие муфты с торообразной оболочкой характерны тем, что в качестве упругого
элемента используется резиновая оболочка, напоминающая автомобильную шину. Для
облегчения сборки иногда применяют разъемную, состоящую из двух половин, оболочку
или заменяют последнюю несколькими упругими хомутами, имеющими такую же форму
сечения.
Резиновая оболочка обладает большой упругостью, что придает муфте высокие ком-
компенсирующие свойства; осевое смещение 1...10 мм, радиальное 1...5 мм и угловое
1°...1°30'. Кроме того, одна полумуфта может повернуться относительно другой на угол
5°30'.
Упругие муфты со звездочкой состоят из двух полумуфт, снабженных торцовыми ку-
кулачками, между которыми помещена резиновая звездочка с четырьмя или шестью лепе-
лепестками.
Муфты просты по конструкции, имеют высокие эксплуатационные качества. К не-
недостаткам следует отнести сравнительно небольшой передаваемый вращающий момент и
необходимость сдвига валов или полумуфт при монтаже.
Компенсирующие муфты. Они обеспечивают постоянное соединение валов с компен-
компенсацией небольших радиальных, осевых, угловых и комбинированных смещений валов.
Компенсирующие муфты могут быть зубчатыми, цепными и шарнирными.
Зубчатые муфты применяют в высоконагруженных конструкциях. Муфта состоит из
двух втулок с внешними зубьями и двух обойм с внутренними зубьями. Обоймы соеди-
Типы муфт 399_
нены жестко с помощью болтов, посаженных в отверстия без зазора. Для муфт исполь-
используют эвольвентное зацепление. Большое число одновременно работающих зубьев эволь-
вентного профиля обеспечивает компактность и большую нагрузочную способность.
Детали зубчатых муфт изготавливают из стали 40 или стального литья. Зубья втулок
термообрабатывают до твердости не ниже 42HRC,, а зубья обойм - не ниже 37HRC3. Для
уменьшения интенсивности изнашивания зубьев в муфту заливают смазочный материал
большой вязкости.
Зубчатые муфты изготавливают двух типов: нормальные МЗ и удлиненные МЗП с
промежуточным валом.
Цепные муфты применяют для соединения валов с радиальным смещением до 1,2
мм и угловым смещением до 1°. Вращающий момент передается с помощью звездочек и
цепи. Соединение полумуфт с валами может осуществляться с помощью прямобочных
или эвольвентных шлицев, а также шпонками.
Достоинства муфт: простота конструкции и обслуживания, надежность, техноло-
технологичность изготовления, малые размеры и масса, удобные монтаж и демонтаж; недостаток
- наличие "мертвого" хода, который ограничивает их применение в реверсивных пере-
передачах.
Шарнирные муфты обеспечивают соединение несоосных валов, допуская наиболь-
наибольшие углы перекоса (до 45°) по сравнению с муфтами других типов. Это достигается с
помощью шарниров трения скольжения и промежуточного звена в виде параллелепипеда
с двумя отверстиями, оси которых пересекаются под прямым углом.
Сдваивая муфты, можно увеличить угол между геометрическими осями соединяемых
валов.
Управляемые (сцепные) муфты. Они предназначены для соединения или разъедине-
разъединения валов, а также валов и установленных на них деталей в подвижном или неподвиж-
неподвижном состоянии с помощью специальных механизмов управления. Их используют в меха-
механизмах при необходимости изменения режима работы. Передача вращающего момента
может осуществляться либо за счет зацепления (зубчатые или кулачковые муфты), либо
силами трения (фрикционные муфты). Конструкции управляемых (сцепных) муфт раз-
разнообразны.
Кулачковые и зубчатые сцепные муфты работают аналогично и выходят их строя из-
за износа кулачков и зубьев. Их расчет ведут в форме ограничения среднего контактного
напряжения на кулачках и зубьях. Материалами муфт служат стали 20, 15Х, 20Х и другие
с последующей цементацией или стали 40Х, 30ХН и другие с закалкой.
Фрикционные сцепные муфты передают вращающий момент между полумуфтами за
счет сил трения на рабочих поверхностях (дисковой или конической формы). Давление
на поверхностях контакта (со смазочным материалом или без него) создают с помощью
устройств и механизмов включения различного типа (пружинно-рычажных механизмов,
электрических, гидравлических и пневматических устройств).
При включении фрикционных муфт вращающий момент возрастает с увеличением
силы нажатия (контактного давления на поверхности трения). Благодаря этому можно
соединить валы под нагрузкой. Пробуксовывание муфты в процессе включения обес-
обеспечивает плавный разгон ведомого вала. Фрикционные муфты должны обладать надеж-
надежностью сцепления, высокий износо- и теплостойкостью контактирующих поверхностей.
Для уменьшения размеров, силы нажатия и увеличения передаваемого вращающего
момента можно увеличить число пар поверхностей трения, например, применяя много-
многодисковые муфты.
Предохранительные муфты. Они выполняют автоматически одну из следующих
функций: ограничение передаваемой нагрузки (предохранительные муфты); передачу
нагрузки (момента) только в одном направлении (обгонные муфты). Включение и вы-
выключение предохранительных муфт происходит обычно автоматически, поэтому их назы-
называют самодействующими или самоуправляющими. Основные требования к таким муф-
муфтам: точность срабатывания, быстродействие, надежность. Предохранительные муфты
400 МУФТЫ
служат для защиты механизмов и машин от перегрузок. Они срабатывают, если вращаю-
вращающий момент на ведомом валу механизма превышает некоторую предельную величину.
Предохранительные фрикционные муфты применяют при частых кратковременных
перегрузках, особенно при ударных нагрузках. При возрастании вращающего момента до
расчетного значения муфта начинает проскальзывать. Аналогичен принцип действия
распространенных предохранительных шариковых муфт.
Предохранительные муфты с разрушающимся элементом - штифтом - просты и на-
надежны в работе, обладают сравнительно высокой точностью срабатывания. Шгифты из-
изготавливают из хрупких материалов (высокоуглеродистой стали, чугуна, бронзы и др.),
чтобы повысить их быстродействие. После разрушения штифта (штифтов) от перегрузки
муфты разъединяется кинематическая цепь и полумуфты вращаются относительно друг
друга.
Обгонные муфты {муфты свободного хода) предназначены для передачи вращающего
момента только в одном направлении. Наибольшее распространение получили фрикци-
фрикционные обгонные муфты, передающие вращающий момент за счет заклинивания между
полумуфтами промежуточных тел (в основном роликов). Такие муфты бесшумны, ком-
компактны, могут работать при высокой частоте вращения.
Муфта свободного хода позволяет ведомому звену вращаться (например, по инерции)
при остановленном ведущем звене.
Центробежные муфты используют для автоматического соединения и разъединения
валов при достижении определенной частоты вращения. Они представляют собой сцеп-
сцепные фрикционные муфты (колодочные, дисковые и др.), а в которых нормальная сила
создается центробежными силами. Центробежные муфты позволяют во многих случаях
снизить пусковые нагрузки, так как обеспечивают разъединение ведомого и ведущего
валов до того момента, пока ведомый вал не достигнет заданной угловой скорости.
Гидродинамические муфты (гидромуфты). Гидромуфты и гидротрансформаторы со-
составляют гидродинамические передачи. Гидродинамические передачи сочетают в одном
агрегате рабочие органы двух лопастных машин - центробежного насоса и гидротурбины.
Они осуществляют перенос энергии от двигателя к приводимой машине движущимся
потоком жидкости.
Гидромуфта передает крутящий момент без изменения его по величине и знаку.
Гидромуфта состоит из двух рабочих колес: ведущего и ведомого. Гидромуфты раз-
различают: с переменным заполнением - незамкнутые (с регулируемым объемом жидкости),
которые допускают управляемое регулирование скоростей и мощности, и с постоянным
заполнением - замкнутые (нерегулируемые).
Уравнение моментов для гидродинамической муфты имеет вид
Тх+Т2 = 0, D)
а КПД муфты
П = «2/«ь E)
где 7i и Т2 - соответственно моменты на ведущем и ведомом вале; и пь п2 - частота вра-
вращения соответственно ведущего и ведомого вала.
При рассмотрении характеристик муфты частота вращения ведущего и ведомого ва-
вала принимается постоянной.
Внешняя характеристика гидродинамических муфт выражается следующей зависи-
зависимостью:
5}, F)
Типы муфт
401
где р - плотность жидкости; g - ускорение свободного падения; А. - коэффициент момен-
момента, зависящий от конструкции муфты, положения регулируемых элементов и заполнения
рабочей полости муфты жидкостью; D - характерный размер муфты (обычно максималь-
максимальный диаметр рабочей полости).
Мощность, передаваемая муфтой, определяется по формуле
G)
где т - коэффициент мощности; т = Х/716,2, если мощность выражена в л.с.
В табл. 1 приведена характеристика тяговых гидромуфт типа ТП.
1. Характеристика тяговых (предельных) гидромуфт типа ТП
1 - ведущее колесо;
2 - ведомое колес
Параметры
Передаваемая мощ-
мощность, кВт
Активный диаметр
рабочей полости,
мм
Габаритные размеры
(округленно), мм:
по диаметру
по оси
Масса (ориентиро-
(ориентировочно), кг
Примечания: 1.
2.
315
11
315
382
295
58
340
15
340
405
315
68
370
26
370
440
318
78
Муфта по ТУ24-8-563-70.
Частота вращения двигателя
400
37
400
470
380
85
420
45
420
500
395
109
450
70
450
515
390
123
500
100
500
1022
1218
471
560
160
560
920
1150
613
(насосного колеса) для всех гидромуфт состав
ляет 1480 мин'1, гидравлический х\ =
0,95.
26 Том 2
2. Схемы и расчетные зависимости муфт различных типов.
Схема, тип, муфты
Расчетная формула
Примечание
Втулка на кручение
167\
< Гт 1 Тр - допускаемый расчетный мо-
момент; D, d - соответственно наружный и внутренний диаметр
втулки, см
Штифт на срез
ТГ
Для диаметров валов
db = 4 + 100 мм
и передачи вращающих
моментов
Тр = 0,3 ч- 4000 Н м
тс р
<, Ргс J , dcp - средний диаметр втулки, см
к>
5TB(d
Р (rf 2L
Втулка на кручение
D, d - соответственно наруж-
PJ
Для dB - 10 - 100 мм и
Тр = 8 -ь 5600 Нм
ный и внутренний диаметр втулки, см; а -
dl(h-
Шпонка на смятие
|, Л - высота шпонки, см; t - глубина
шпоночного паза, см; t\ - глубина шпоночного паза втулки,
см;
/ - длина шпонки, см
О
О
Фланцевая (поперечно-свертная)
Болты на растяжение, если они установлены с зазором
Для dK = 12 + ПО мми
Тр = 15 + 10000 Нм
d - диаметр болта, см; Д) - диаметр окружности по центру
болта, см; z - число болтов;/= 0,1 - коэффициент трения
Болты на срез, если они установлены без зазора
[tcpj = @,3 » 0,4)qT ^__
Продолжение табл. 2
Продольно-свертная
Болты на силу затяжки
p
dcp - средний диаметр кольцевой поверхности трения, при-
примерно равный диаметру окружности расположения болтов,
см
Для rfB = 28 - 140 мм и
Гр = 120 + 12500 Н м
В тихоходных передачах с
частотой вращения л < 250
мин при
йъ < 100 мм и
л <; 100 мшг1 при
</,<; ПО... 140 мм
Передаваемый вращающий момент
к - коэффициент безопасности; при к
вызывает остановка машины;
Зубья на смятие
1,0 поломка не
при к = 1,2 или 1,5 - вызывает аварию соответственно од-
одной или нескольких машин; при к = 1,8 вследствие полом-
поломки могут быть жертвы; do - диаметр начальной окружности,
см, Ь - длина зуба зубчатой втулки, см;
[<уш] = 12... 15 МПа
Для йъ = 40 + 600 мм и
Гр = 710 -5- 1 000 000 Нм
в быстроходных передачах с
повышенными требованиями к
нагрузочной способности и
надежности, а также в пере-
передачах с угловым смещением
валов не более 0°15' и радиаль-
радиальным не более @,006-0,0088)А,
мм
Цепная
Передаваемый вращающий момент
Для йъ = 18 + 125 мм и
Гр = 60 + 6300 Нм в передачах
с радиальным смещением валов
до 1,2 мм и угловым до 1° (при
использовании бесшумной це-
цепи л й, 7500 мин)
Продолжение табл. 2
Схема, тип, муфты
Расчетная формула
Примечание
Кулачково-дисковая крестовая
TV-
й
Рабочие грани на среднее давление
8ГЛ
Р =
Dlh
D - наружный диаметр муфты, см; h - высота выступа проме-
промежуточного диска, входящего во впадины полумуфт, см;
[/>] < 25 МПа
Для диаметров валов
4, = 15 + 150 мм
Гц, = 120 + 10 000 Н м
в тихоходных передачах
(л < 250 мин'1) с параллель-
параллельным смешением валов до
угловым - до 0°30
Крестовая с сухарем (текстолитовым),
не стандартизована
h
Рабочие поверхности сухаря на смятие
6Г„ , ,
Для диаметров валов
4=15- 100 мм
и nmav - 8000 + 1600 мин
И - толщина сухаря, см; Ь - ширина сухаря, см;
[<тсм] = 8+10 МПа
Втулочно-пальцевая
Рабочее давление между пальцами и резиновыми кольцами
р
z - число пальцев; /) - диаметр окружности расположения цен-
центров пальцев, см; / - длина набора резиновых колец, см; dn -
диаметр пальцев, см; [р] = 2...4 МПа
Пальцы на изгиб
Для rfB = 16 + 150 мм
и Г^ = 32 + 15 000 Н-м
в передачах с радиальным
смещением 0,3. ..0,6 мм и
угловым - до 1°
[ад] = @,4 ¦*¦ Ю,5) ат материала пальцев
Продолжение табл. 2
Пальцевая с упругим диском,
не стандартизована
Диск на растяжение
2,75-
м
МЛ
при djb = 0,3 + 0,35,
b, h - соответственно ширина и высота сечения кольцевого
диска, см; D - диаметр расположения пальцев, см; dB - диа-
диаметр отверстия в диске под палец, см
Для 4, = 10 + 45 мм и
Гр = 4 * 180 Н м в быстро-
быстроходных передачах мощностью
до 10...15 кВт при понижен-
пониженных по сравнению с втулоч-
нотлальцевой муфтой требо-
требованиях к нагрузочной спо-
способности (компенсацион-ные
способности муфты возрас-
возрастают с уменьшением числа
пальцев, но не менее трех,
толщины диска и с увеличе-
нием его диаметра)
С пластинами, работающими на смятие,
не стандартизована
А-А
Упругие элементы на смятие
Для йг = 18 * 150 мм
при п - 4700 +1100 МИН
Z - число пластин; bt /, R- размеры пластин, см;
[осы] = 0,6...0,8 МПа
С резиновой звездочкой
Упругие элементы на смятие
IT
Для йъ = 12 + 450 мм
Гвр - 3 * 120 Н-м в быстро-
быстроходных передачах с
п = 3000 + 6300 мин-1
Z - число зубьев звездочки; Ь, /и R- размеры звездочки, см;
[осы] " 0,6...0,8 МПа
Продолжение табл., 2
Схема, тип, муфты
Расчетная формула
Примечание
Со змеевидной пружиной,
не стандартизована
Пружина на изгиб
p»ah 1
Для
и
20 * 140 мм
80 + 9600 H-U
t-n
bt h - соответственно ширина и толщина пружина, см; / - шаг
пружины, см; z - число зубьев полумуфт; Др - диаметр средней
окружности зубьев, см; а - координаты точки контакта пружины
с зубом относительно плоскости симметрии муфты; для муфт с
пружинами постоянной жесткости а = @,4 -г- 0,5I; / -
длина прямоугольного участка полувитка в ненагруженном со-
состоянии, см; Е - модуль упругости материала пружины, МПа;
ов — 400 * 750 МПа; / - момент инерции пружины, см*.
Муфта на максимальный угол закручивания
Tpa2B4b-l6a + 3nt)
в передачах с любой частотой
вращения валов при условии
их допускаемого смещения:
угловом до 1°15', осевом 4...20
мм и радиальном 0,5...3 мм
Кулачковая, не стандартизована
Контактные поверхности кулачков на смятие
2Г„
OL. =
Кулачки на изгиб у основания
к'
Z - число кулачков; Д^ - средний диаметр муфты по кулачкам,
см; Ъ - ширина кулачка, измеренная по радиусу, см; h - высота
кулачка, измеренная по радиусу, см; [а^] = 30 + 50 МПа; W -
момент сопротивления кулачка на изгиб; * 2: 1,5 - коэффициент
запаса прочности; с, - предел текучести материала полумуфг,
МПа
Для db = 35 -г 125 мм
в передачах, имеющих строгую
соосность и допускающих
частые пуски и остановки без
включения приводного двига-
двигателя, а также изменение ре-
режимов работы или реверсиро-
реверсирование.
Форма зубьев кулачков: а -
для передачи малых моментов
и при малой разности частот
вращения; б - для передачи
сравнительно больших момен-
моментов и при большей разности
частот вращения (число кулач-
кулачков z = 5-11); в - для работы в
тяжело нагруженных передачах
или при ручном включении
Продолжение табл. 2
Зубчатая, не стандартизована
Муфта на силу включения
2Г
f - коэффициент трения муфты по валу; d - диаметр расточки
муфты, см; a - угол профиля зубьев кулачков; ф - угол трения
Шпоночная с вытяжной или поворотной
шпонкой, не стандартизована
Муфта на силу выключения
Дисковая фрикционная,
не стандартизована
Требуемое число пар трения
Для передачи больших вра-
вращающих моментов
Многодисковая фрикционная
7 =:
Р = 1,5 т 1,2 - коэффициент запаса сцепления; D\, Di - соот-
соответственно наружный и внутренний диаметр диска, см; /^р -
средний радиус дисков, см; / - коэффициент трения;
\р\ - допускаемое давление, МПа
Передаваемый момент
Для передачи еще больших
вращающих моментов
Сила включения
Продолжение табл. 2
Схема, тип, муфты
Расчетная формула
Примечание
Коническая фрикционная,
не стандартизована
Расчетное давление
2Тп
р =
Dcp = @,6-10)*/ - средний диаметр муфты, см; d - диаметр вала,
см; / = y/sina - приведенный коэффициент трения; a - угол
конуса; b - длина поверхности трения, см
То же, при более низкой
требуемой осевой силе. Ре-
Рекомендуется
Со срезным штифтом,
не стандартизована
Диаметр штифта из условия прочности на срез
~47\
Для приводов, испытываю-
испытывающих редкие случайные пере-
перегрузки
R\ - радиус муфты до оси среднего штифта, см; т™ - предел
прочности на срез (для стали 45 и Ст5 * тср = 420 МПа);
Z = 1 + 2 - число штифтов
Пружинно-кулачковая
Кулачки на изгиб и смятие (формула расчета такая же, как для
сцепных кулачковых муфт)
Для db = 12 + 50 мм и
Ткр = 2,5 -v 337 Н-м в пере-
передачах с небольшой частотой
вращения и не-
незначительными массами со-
соединяемых частей
Пружинно-шариковая
Пружину на силу включения р = —L tg(a - ф) + — / ,
D \_ d J
D - средний диаметр расположения кулачков или шариков, см;
Ф - угол трения на кулачках или между шариками и опорной
поверхностью полумуфты; a - угол профиля кулачка или угол
касательной в точке касания шариков с опорной поверхно-
поверхностью;/= 0,15 - коэффициент трения вала и полумуфт
Для dB ~ 12 + 50 мм и
Тю = 2,5 + 337 Н-м в легких
при небольших
[кр
приводах
нагрузках
Продолжение табл. 2
Фрикционная дисковая
Фрикционная конусная,
не стандартизована
Пружина на силу срабатывания
IT
п — Р тах
D - средний диаметр поверхности трения, см;/- коэффициент
трения; z - число пар трения; а - угол конуса
Пружина на силу срабатывания
Для ch = 12 + 50 мм и
Гкр = 2,5 -г- 37 Н м в пере-
передачах, испытывающих крат-
кратковременные перегрузки или
нагрузки ударного действия
Двухколодочная центробежная,
не стандартизована
Вес одной колодки
Для автоматического
включе-ния (или вы-
выключения) ведомого вала
@,6^0,8)Л2/г(ю2-
g - ускорение свободного падения; R - радиус поверхности
трения, см; г - число колодок; ш - номинальная угловая ско-
скорость необходимая для передачи вращающего момента; щ -
угловая скорость крестовины.
Пружина на осевую силу
t
g
I - расстояние от центра вала до центра шарнира, см; /ь /2 -
расстояние от центра вала до оси соответственно первой и
второй пружин, см; а = A ¦*• 2) йв - ширина колодки, см;
Удельная нагрузка каждой колодки на шкив
Q = T/Rfz
Давление на поверхности трения
р = Q/la < [р]
Продолжение табл. 2
Схема, тип, муфты
Роликовая фрикционная обгонная,
не стандартизована
Расчетная формула
Угол заклинивания ролика
л h + r
cosB = ;
h~r
9 * 7°,
h - расстояние от центра муфты до контактной поверхности
звездочки, см; г - радиус ролика, см
Вращающий момент
Тр < 2,06RQzlr
Наибольшее контактное напряжение на сжатие между роликом
и звездочкой
\2zRsin~lr
R - радиус обоймы муфты, см; z - число роликов; / - длина
ролика, см; Q - удельная нагрузка на звездочку;
[стк] = 120 МПа
Примечание
Для передачи вращающего
момента только в одном
направлении
8
Стандарты
СТАНДАРТЫ
В табл. 3 приведены нормативные документы на муфты.
3. Стандарты
411
Стандарт
Гост 21424-75
ГОСТ 20761-80
ГОСТ 20884-82
ГОСТ 14084-93
ГОСТ 5006-83
ГОСТ 20742-81
ГОСТ 5147-80
ГОСТ 24246-80
ГОСТ 20720-81
ГОСТ 15620-77
ГОСТ 15621-77
ГОСТ 15622-77
МН 3-61
МН 5664-65
МН 5871-66
ТУ 24-8-563-70
Наименование
Муфты упругие втулочно-пальцевые.
Основные параметры. Габаритные и присоединительные
размеры
Муфты пальцевые.
Основные параметры. Габаритные и присоединительные
размеры
Муфты упругие с торообразной оболочкой. Основные па-
параметры. Габаритные и присоединительные размеры
Муфты упругие со звездочкой. Конструкция. Основные
параметры и размеры
Муфты зубчатые
Муфты цепные
Муфты шарнирные. Основные параметры. Конструкция и
размеры
Муфты втулочные
Муфты кулачково-дисковые
Муфты предохранительные кулачковые
Муфты предохранительные шариковые
Муфты предохранительные фрикционные
Муфты обгонные (свободного хода)
Муфты многодисковые-фрикционные
Муфты продольно-разъемные
Гидромуфты
СПИСОК ЛИТЕРАТУРЫ
1. Анурьев В.И. Справочник конструктора-машиностроителя. Т. 1-3. М.: Машино-
Машиностроение, 1993.
2. Артоболевский И.И. Механизмы в современной технике. Т. 1-5. М.: Наука, 1976.
3. Иоснлевич Г.Б. Детали машин. М.: Машиностроение, 1988.
4. Курсовое проектирование деталей машин./С.А. Чернавский, К.Н. Боков, И.М.
Чернин и др., М.: Машиностроение, 1988.
5. Левятов Д.С. Расчеты и конструирование машин: Учебник для техн. училищ. М.:
Высшая школа, 1979.
6. Орлов П.И. Основы конструирования. Т. 1-3. М.: Машиностроение, 1988.
7. Поляков B.C., Барабаш И.Д., Ряховский ОЛ. Справочник по муфтам/ Под ред.
B.C. Полякова, Л.: Машиностроение, 1979.
8. Расчеты деталей машин/ А.В. Кузьмин, Минск: Вышейша школа, 1986.
412 РДЦУКТОРЫ
14. РЕДУКТОРЫ
Редуктором называют агрегат, содержащий передачи зацеплением и предназначен-
предназначенный для повышения вращающего момента и уменьшения угловой скорости двигателя.
Редукторы широко применяют в различных отраслях машиностроения благодаря высо-
высоким экономическим, потребительским и другим характеристикам.
Внешние (потребительские) характеристики редукторов каждого типа определяют-
определяются следующим: передаточным числом / (частотой вращения выходного вала) - кинема-
кинематической характеристикой редуктора; вращающим моментом и допускаемой консоль-
консольной нагрузкой на выходном валу - силовой характеристикой редуктора; КПД.
По ГОСТ 16162-85Е к редукторам общемашиностроительного применения относят:
цилиндрические одно-, двух- и, трехступенчатые с межосевым расстоянием тихоходной
ступени д^ ^ 710 мм; цилиндрические планетарные одно- и двухступенчатые с радиу-
радиусом расположения осей сателлитов водила тихоходной ступени г ? 200 мм; конические
одноступенчатые с номинальным внешним делительным диаметром ведомого колеса
d й 630 мм; коническо-цилиндрические двух- и трехступенчатые с межосевым расстоя-
расстоянием тихоходной ступени а^ й 250 мм; червячно-цилиндрические двухступенчатые с
межосевым расстоянием тихоходной ступени а^ <, 250 мм.
Одноступенчатые редукторы имеют наибольшие передаточные числа: для цилинд-
цилиндрических передач до 8; для конических до 6,3; для червячных до 80.
Редукторы общемашиностроительного применения в приводах комплектуются
преимущественно четырехполюсными электродвигателями. По ГОСТ 16162-86 Е основ-
основные параметры редукторов определяют при номинальной частоте вращения быстроход-
быстроходного вала «б = 1500 мин. Допускается использование редукторов при /ig = 3000 мин,
с условием, что окружная скорость зубчатых передач не превышает 16 м/с.
Выпускаются редукторы и мотор-редукторы в широком диапазоне передаточных
чисел от /jnin = 1 (для одноступенчатых конических и цилиндрических редукторов) до
'max = 3150 (для мотор-редукторов, планетарных и некоторых других типов редукторов).
Большинство отечественных и зарубежных редукторов имеют / ? 160. Около 75% редук-
редукторов изготовлено в двухступенчатом исполнении (i = 8 •*• 40). Номинальные значения
передаточных чисел редукторов установлены двумя рядами A; 1,25; 1,6; 2; 2,5; 3,15; 4; 5;
6,3; 8; 10; 12,5; 16; 20 и т.д.).
Редукторы общемашиностроительного применения допускают вращающие момен-
моменты на выходном валу Тт = 31,5 + 125000 Н-м. Для обеспечения взаимозаменяемости ре-
редукторов составлены три ряда номинальных значений моментов Тт(Н-м). Так, ряд 1
включает значения Тт = 31,5; 45; 63; 90; 125; 180; 250; 355; 500; 710; 1000 и др.
На кинематических схемах буквой Б обозначен входной (быстроходный) вал редук-
редуктора, буквой Г- выходной (тихоходный).
Выбор горизонтальной или вертикальной схемы для редукторов всех типов
обусловлен удобством общей компоновки привода (относительным расположе-
расположением двигателя и рабочего вала приводимой в движение машины и т.д.). В редукторах
типа Ц2У использовано зубчатое эвольвентное косозубое зацепление. Промышлен-
Промышленность выпускает также подобные редукторы Ц2У-Н и Ц2Н с зацеплением Новикова
и др. Ряд этих редукторов обеспечивает вращающие моменты (на тихоходном валу)
Тт = 7000 + 50 000 Н-м при i = 8 + 50.
При раздвоенный быстроходной (или тихоходной) ступени колеса расположены
симметрично относительно опор, что приводит к меньшей концентрации нагрузки по
длине зубьев, чем при применении обычной развернутой или соосной схемы.
Типы редукторов
413
14.1. ТИПЫ РЕДУКТОРОВ
Цилиндрические редукторы применяют для передачи вращательного движения меж-
между параллельными или соосными валами (табл. 1). Эти редукторы обладают высоким
КПД @,94 + 0,98 в одной ступени) и значительной долговечностью (редукторы общего
назначения до 36 000 ч, а специальные до 50 000 ч). Они могут быть использованы в
быстроходных механизмах: входная частота вращения редукторов общего назначения до
60 с, а специальных, изготовленных с высокой точностью, более 200 с.
Недостатками этих редукторов являются: повышенная виброактивность, которую
можно снизить применением косозубых и шевронных передач; большие размеры при
высоких значениях передаточных чисел.
1. Цилиндрические редукторы
Кинематическая схема
Краткие сведения
Одноступенчатый горизонтальный с цилинд-
цилиндрическими зубчатыми колесами типа ЦУ.
Вращающий момент (на тихоходном валу)
Гт - 250 + 4000 Н м при /- 2 + 6,3
Одноступенчатый вертикальный с цилиндри-
цилиндрическими колесами;
Гт = 250 + 4000 Нм при / = 2 + 6,3
Двухступенчатый горизонтальный с цилиндри-
цилиндрическим колесами типа ЦГУ;
Гт - 250 + 4000 Нм при / = 8 + 40
414
РЕДУКТОРЫ
Продолжение табл. 1
Кинематическая схема
Краткие сведения
Двухступенчатый горизонтальный соосный;
Тт = 250 н- 4000 Н м при / = 8 + 40. Соосная
схема позволяет получить меньшую длину
Двухступенчатый горизонтальный с раздвоен-
раздвоенной первой (быстроходной) ступенью
Двухступенчатый горизонтальный с раздвоен-
раздвоенной второй (тихоходной) ступенью
Двухступенчатый цилиндрический вертикаль-
вертикальный трехосный
Типы редукторов
415
Продолжение табл. 1
Двухступенчатый цилиндрический вертикаль-
вертикальный соосный
Трехступенчатый типа ЦЗУ;
Гт = 1000 + 4000 Н м при / = 45 + 200.
Конические редукторы более сложные по сравнению с цилиндрическими (табл. 2),
служат для передачи вращательного движения между пересекающимися (обычно под
прямым углом) валами. Их КПД несколько меньше @,9 •*- 0,96 в одной ступени), ниже и
рабочие скорости.
Используют в основном одноступенчатые конические редукторы, многоступенчатые
выполняют комбинированными (главным образом коническо-цилиндрическими). Диапа-
Диапазоны передаточных чисел такие же, как у цилиндрических редукторов. Уровень виброак-
виброактивности конических редукторов с прямыми зубьями несколько выше, чем соответст-
соответствующих цилиндрических, а у редукторов с тангенциальными и круговыми зубьями при-
примерно такой же, как у косозубых цилиндрических.
К недостаткам конических редукторов можно отнести большие материалоемкость и
трудоемкость изготовления, чем цилиндрических, необходимость в осевых регулировках,
зависимость контактных напряжений в зубьях от осевого зазора в подшипниках, наличие
относительно больших подшипников на шестерне, так как она обычно имеет консольное
крепление.
416
РЕДУКТОРЫ
2. Конические и коническо-цилиндрические редукторы
Кинематическая схема
Краткие сведения
Одноступенчатый с коническими зубчатыми
колесами
Одноступенчатый конический с вертикальным
ведомым валом
Двухступенчатый горизонтальный коническо-
цилиндрический
Двухступенчатый коническо-цилиндрический
с вертикальным тихоходным валом
Двухступенчатый коническо-цилиндрический
с вертикальным быстроходным валом
Типы редукторов
417
Червячные одноступенчатые редукторы типа Ч выпускают с нижним, верхним, боко-
боковым горизонтальным и вертикальным расположением эвольвентного червяка (табл. 3).
Редукторы имеют вентилятор на валу червяка для обдува. Ряд редукторов обеспечивает
вращающие моменты (на тихоходном валу) Тт = 852 000 Н-м в диапазоне / = 8 -ь 80.
Корпусы редукторов имеют оребрения, улучшающие теплоотвод. Выходные валы
червяков конические. В зависимости от варианта сборки тихоходный вал может быть
одно- или двухконцевым, сплошным или полым.
Ряд двухступенчатых червячных редукторов типа 42 обеспечивает вращающие мо-
моменты (на тихоходном валу) Тт = 1300 -s- 1800 Н-м в диапазоне i = 100 •*¦ 6300. Редукторы
изготавливают из двух одноступенчатых редукторов, соединенных между собой. Быстро-
Быстроходными ступенями редукторов 42-125 и 42-160 являются редукторы 463 и 480, выпол-
выполненные без лап. Тихоходным ступеням этих редукторов соответствуют редукторы 4-125 и
4-160.
4ервячные редукторы применяют при передаче движения между скрещивающимися
(обычно под углом 90°) осями.
3. Червячные редукторы
Кинематическая схема
Краткие сведения
С нижним расположением червяка
С верхним расположением червяка
С вертикальным валом червячного колеса
Двухступенчатый зубчато-червячный
27 Том 2
418
РВДУКТОРЫ
Продолжение табл. 3
Кинематическая схема
Краткие сведения
Двухступенчатый червячный
Одним из существенных преимуществ червячных редукторов по сравнению с
зубчатыми является возможность получить большое передаточное число в одной ступени
(до 80 в редукторах общего назначения и до нескольких сотен в специальных редукто-
редукторах). Им присущи также бесшумность в работе, высокая плавность хода, самоторможение
(что позволяет исключить из привода тормозные устройства), а также некоторые компо-
компоновочные преимущества, например, возможность иметь двухсторонний выходной вал.
Червячные редукторы имеют относительно низкий КПД.
4. Планетарные и волновые редукторы
Кинематическая схема
Краткие сведения
Одноступенчатый планетарный:
7 - солнечное колесо;
2 - сателлиты; ,
3 - корончатое колесо;
4 - водило
Двухступенчатый планетарный
Волновой зубчатый одноступенчатый:
1 - ведущий вал;
2 - генератор волн (кулачковый);
3 - гибкое тонкостенное колесо;
4 - жесткое колесо;
5 - ведомый вал
Типы редукторов
419
Планетарные редукторы сложные (табл. 4). В них оси нескольких колес - сателлиты
- закреплены на подвижной детали (водиле).
Их КПД достаточно высок @,9 + 0,95) в одной ступени. Такие редукторы имеют
различное конструктивное исполнение в зависимости от того, какой тип передачи ис-
используется (например, зубчатые цилиндрические передачи наружного или внутреннего
зацепления, конические), какое из центральных колес неподвижно, а также от других
признаков (например, с раздвоенным сателлитом и т.д.).
Существенным преимуществом планетарных редукторов является малая удельная
материалоемкость при достаточно большой нагрузочной способности и долговечности,
что объясняется наличием многопарного зацепления (передача мощности осуществля-
осуществляется несколькими потоками) и, несмотря на это, довольно высокий КПД.
Наряду с перечисленными типами редукторов находят применение редукторы со
стероидными, гипоидными и волновыми передачами.
Волновые передачи (табл. 4) можно рассматривать как разновидность планетарных
передач, имеющих гибкое промежуточное колесо, демпфируемое при передаче вра-
вращающего момента. Передаточные числа в одноступенчатых волновых редукторах со-
составляют /' = 80 + 300 (и более). Волновые передачи обладают высокой нагрузочной
способностью благодаря многоиарности зацепления: одновременно в зацеплении может
находиться до 25 + 30% пар зубьев.
В табл. 5 приведены рекомендуемые передаточные числа редукторов.
5. Рекомендуемые передаточные числа в зависимости от числа
ступений редуктора
Редуктор
Цилиндрически й
Планетарный
Волновой
Конический
Коническо-
иилиндрический
Червячный
Червячно-
килиндри1теский
Цилиндрочервячный
Редуктор
одноступенчатый
1,6*8
2 + 6,3
3.15-12,5
4-ПО
63-J-400
80*315
1 + 63
1 + 5
8+80
8 + 63
_
_
двухступенчатый
7Д + 50
8 + 40
10+125
16 +100
6,3 + 40
6,3 + 31,5
63 + 4000
63 + 2500
25 + 400
40+250
16 + 200
16 +160
трехстуие] гатый
25 + 250
31,5+ 180
63+ 1000
80+500
20+200
25*140
200+2000
250 + 1250
-
Примечание. В числителе приведен полный диапазон применяемых передаточных чисел, в
знаменателе - рекомендуемый.
?7*
420 РЕДУКТОРЫ
Мотор-редуктор - это агрегат, совмещающий в одном корпусе электродвигатель и
редуктор. Последнее обстоятельство позволяет добиваться большой точности располо-
расположения вала редуктора относительно вала электродвигателя и уменьшает число деталей
привода. Серийно выпускают мотор-редукторы:
цилиндрические двухступенчатые соосные типа МЦ2С (Тт = 125 + 1000 Нм; часто-
частота вращения выходного вала щ = 28 + 180 мин);
планетарные - зубчатые двухступенчатые типа МПз2 G^ = 125 + 1000 Н-м;
л, - 18 + 90 мин-1);
волновые горизонтальные типа МВз G^. = 90 + 1000 Н-м; % = 5,6 + 18 мин*1).
Получили распространение навесные редукторы и мотор-редукторы. Их выходной
вал выполняется полым со шлицевым отверстием или канавкой под шпонку. Такой вал
соединен непосредственно с входным валом приводимой машины.
Мотор-редукторы предназначены для режима SI по ГОСТ 183-74 от сети перемен-
переменного тока с частотой 50 Гц и номинальным напряжением по ГОСТ 21128-75 в следую-
следующих условиях:
при постоянной и переменной по величине (в пределах допустимого момента) и
направлению нагрузке;
при вращении выходного вала в любую сторону;
основного климатического исполнения У (категория 3), Г (категория 2) при высоте
над уровнем моря до 1000 м (мотор-редукторы могут работать на высоте, большей, чем
1000 м над уровнем моря, при соблюдении требований ГОСТ 183-74); с неагрессивной,
невзрывоопасной средой, с содержанием непроводящей пыли до 10 мг/м3;
при горизонтальном положении с опорной плоскостью вниз (допускается установ-
установка мотор-редуктора под углом до 10° к горизонту с наклоном в CTopoiry выходного кон-
конца вала).
Ресурс деталей и узлов мотор-редуктора 90% (за исключением подшипников
и электродвигателя) составляет для волновых мотор-редукторов 20 000 ч; для мотор-
редукторов других типов 36 000 ч; подшипников для мотор-редукторов всех типов и
электродвигателя 10 000 ч. Наработка активных частей обмотки статора электродвигате-
электродвигателя не менее 20 000 ч. Номинальную радиальную нагрузку следует считать приложенной
в середине посадочной части выходного конца вала.
14.2. ОСНОВНЫЕ ТЕХНИЧЕСКИЕ УСЛОВИЯ
1. Зубчатые передачи редукторов должны изготовляться не ниже VII-й степени
точности.
2. Шероховатость рабочих поверхностей: червяков Ra <, 0,63 мкм (ГОСТ 2789-73);
зубьев шестерен с модулем до 5 мм Ra <. 1,25 мкм, с модулем свыше 5ммД,5 2,5 мкм;
зубьев колес с модулем до 5 мм Ra й 2,5 мкм, с модулем свыше 5 мм Rz — 20 мкм.
Для валов-шестерен, имеющих диаметр окружностей выступов меньше диаметров
рядом расположенных цилиндрических шеек, допускается шероховатость рабочих по-
поверхностей зубьев на один параметр грубее указанной выше.
3. Зубчатые колеса, изготоплсшшс с применением литых заготовок и вращающие-
вращающиеся с частотой свыше 500 мин*1, должны быть сбалансированы. Предельная величина
динамического воздействия от несбалансированной массы при расчетной частоте вра-
вращения на каждой опоре не должна превышать 200 Н, но не более Ъ% расчетной стати-
статической реакции опоры.
Предельную нссбалансироватгую массу Дт (кг) зубчатого колеса подсчитывают по
формуле
Основные технические условия 421
где AN - предельное увеличение реакции опоры; ю - угловая скорость, рад/с; R - радиус,
на котором находится несбалансированная масса Ат; I - расстояние между серединами
опор, м; а - расстояние от середины рассчитываемой опоры до середины колеса, м.
4. Припуски на механическую обработку, предельные отклонения по размерам, мас-
массе и по толщине необработанных стенок и ребер отливок должны соответствовать ГОСТ
26645-85.
5. Отклонение от параллельности осей вращения валов относительно опорных плос-
плоскостей не должно превышать:
при лапах, выполненных вместе с корпусом, более 0,1 мм на длине 100 мм;
при сьемных лапах более 0,2 мм на длине 100 мм.
6. Отклонение от плоскостности опорной поверхности основания не должно пре-
превышать: при лапах, выполненных вместе с корпусом, более 0,05 мм на длине 100 мм; при
сьемных лапах более 0,2 мм на длине 100 мм.
7. Быстроходный вал должен допускать соединение с двигателем муфтой и клиноре-
менной передачей.
8. Конструкция редуктора должна исключать течь масла из корпуса и проникнове-
проникновение внутрь грязи и воды.
9. На корпусах редуктора должны быть предусмотрены элементы для строповки при
транспортировании и во время монтажа. Более полные технические условия см. ГОСТ
16162-85.
10. На корпусах редукторов с длиной более 100С мм должны быть предусмотрены
горизонтальные обработанные поверхности для выверки редуктора при монтаже.
11. Конструкция маслоуказателя и масляных систем должна исключать возможность
их повреждения при транспортировании.
12. Редукторы должны допускать консольную радиальную нагрузку РТ, приложенную
в середине шейки тихоходного вала, не менее;
для планетарных с передаточным числом О, 12,5 и других одноступенчатых зубчатых
редукторов
для остальных редукторов
Быстроходный вал должен допускать соединение с двигателем муфтой и клиноре-
менной передачей.
В табл. 6 приведены основные типы редукторов, а ниже даны их КПД.
Цилиндрический и конический одноступенчатый 0,98
Цилиндрический и коническо-цилиндрический двухступенчатый 0,97
Цилиндрический трехступенчатый и коническо-цилиндрический
трехступенчатый 0,96
Планетарный одноступенчатый 0,97
Планетарный двухступенчатый 0,95
422
РЕДУКТОРЫ
6. Основные типы редукторов общего назначения
Тип
Зубчатый цилиндрический
одноступенчатый узкий гори-
горизонтальный типоразмеров
ЦУ-100, 160, 200, 250
То же, двухступенчатый типо-
типоразмеров Ц2У-100, 125, 160,
200, 250 с рядом крутящих мо-
моментов 250 -г 40 000 Нм и пере-
передаточными числами 8 + 40
Зубчатый цилиндрический двух-
двухступенчатый горизшгпитышй с
передачей Новикова типоразме-
типоразмеров Ц2У-315Н, Ц2У-4ООН,
Ц2Н-450, Ц2Н-500
Коническо- цилиндрический
двухступенчатый типа КЦ1
Трехступенчатый типов К1Д2-
500, 750, 1000, 1300
Червячный одноступенчатый
цилиндрический универсаль-
универсальный, без искусственного охлаж-
охлаждения
Червячный одноступенчатый
универсальный типоразмеров Ч-
40, 63, 80
Район применения,
условия работы
С умеренным климатом
(исполнение У), с сухим и
влажным тропическим климатом
(исполнение Т) категорий раз-
размещения 1-4
Тоже
Макрокл и магический с умерен-
умеренным климатом (Hcmvmeime У),
сухим и влажным тропическим
климатом (исполнение Т) катего-
категорий размещения 1-3
Млкроклиматический с умерен-
умеренным климатом (исполнение У)
категории размещении 2
Тоже
При температуре- -40 -г+40 °С; в
нсзапыленных и неагрессивных
средах; при вращении валов
в обе стороны при частоте до
1500 мин; при горизонтальной
оси червячного колеса с червя-
червяком под колесом, над ним и
сбоку от него, а также при вер-
вертикальной оси и с червяком
сбоку колеса
Млкроклиматический с умерен-
умеренным климатом (исполнение У)
категории размещения 3; на-
нагрузка постоянная и перемен-
переменная, одного направления и ре-
реверсивная; работа постоянная и
с периодическими остановками;
вращение валов в любую сторо-
сторону: частота менее 1500 мин;
температура -40 f +50 "С; в
условиях повышенной запылен-
запыленности неагрессивной среды; при
влажности при 20 °С менее 95%
Пример обозначения
ЦУ-200-2,5-12У2:
Ц - цилиндрический;
У -узкий; 200-межосевое рас-
расстояние, мм: 2,5 - номиналь-
номинальное передаточное число; 12 -
вариант сборки; У - климати-
климатическое исполнение
Ц2У-200-20-12МУЗ;
2 - двухступенчатый; М - ко-
конец выходного вала в виде
зубчатой муфты
Ц2У-315Н-25-12-УЗ;
2Н - передача Новикова
КЦ1-200-П-2-ЦУ2;
П-исполнение по передаточ-
передаточному числу; Ц - с цилиндриче-
цилиндрическим концом тихоходного вала
Тоже
РЧУ-160-40-4-2-1:
4 - схема сборки; 2 - располо-
расположение червяка; 1 - способ кре-
крепления
Ч-80-40-2-1-1-УЗ:
Ч- червячный; 2 - схема сбор-
сборки; 1 - расположение червяка
(под колесом); 1 - исполнение
без лап
Стандарты
423
Продолжение табл. 6
Зубчатый цилиндрический
одноступенчатый мотор-
редуктор типа МЦ и двухсту-
двухступенчатый типа МЦ2С
Для режима работы SI от сети
с частотой 50 Гц; нагрузка
постоянная и переменная,
одного направления и ревер-
реверсивная; вращение выходного
вала в любую сторону; основ-
основное климатическое исполне-
исполнение У (категория размещения
3) и Т (категория размещения
2) при высоте над уровнем
моря до 1000 м; окружающая
среда неагрессивная и невзры-
невзрывоопасная, с пылесодержанием
до 10 мг/м3
МЦ-1ОО-355КУЗ:
М - мотор-редуктор;
конический конец вала
К -
СТАНДАРТЫ
Стандарт
ГОСТ 16162-85Е
ГОСТ 25022-81
ГОСТ 25301-82Е
ГОСТ 25484-82Е
ГОСТ 26218-84
ГОСТ 27142-86
ГОСТ 27701-88
ГОСТ 27871-88
ГОСТ 29285-92
Наименование
Редукторы нормализованные. Общие технические условия
Редукторы планетарные. Основные параметры
Редукторы цилиндрические. Основные параметры
Мотор-редукторы. Общие технические условия
Редукторы и мотор-редукторы волновые зубчатые. Основные
параметры
Редукторы конические и коническо-цилиндрические. Основ-
Основные параметры
Редукторы червячные цилиндрические. Основные параметры
Редукторы общего назначения. Методы определения уровня
звуковой мощности
Редукторы и мотор-редукторы. Общие требования к методам
испытаний
СПИСОК ЛИТЕРАТУРЫ
1.Авурьев В.И. Справочник конструхтора-машиностроителя. Т.1-З.М.: Машино-
Машиностроение, 1993.
2. Анфнмов М.М. Редукторы. Конструкция и расчет. М.: Машиностроение, 1965.
3. Дунаев П.Ф., Лелнков О.П. Конструирование узлов и деталей машин. М.: Выс-
Высшая школа, 1985.
4. Иоснлевич Г.Б. Детали машин. М.: Машиностроение, 1988.
5. Мотор-редукторы и редукторы: Каталог. М.: Изд-во стандартов, 1978.
6. Орлов П.И. Основы конструирования: Справочно-методическое пособие/Под ред.
П.Н. Учаева. М.: Машиностроение, 1988.
7. Проектирование механических передач: Учебно-справочное пособие для втузов/
С.А. Чернавский, Г.А. Снесарев, Б.С. Козинцев и др. М.: Машиностроение, 1984.
8. Редукторы: Конструкции, расчет и испытания// Б.Л. Давыдов, Б.А. Скородумов,
Ю.В. Бубырь, Машгиз, 1963.
9. Редукторы и мотор-редукторы общемашиностроительного применения: Спра-
Справочник// Л.С. Бойко, А.З. Высоцкий, Э.Н. Галиченко и др. М.: Машиностроение, 1984.
424 ПРИВОДЫ И ДВИГАТЕЛИ
15. ПРИВОДЫ И ДВИГАТЕЛИ
15.1. НАЗНАЧЕНИЕ И КЛАССИФИКАЦИЯ ПРИВОДОВ
Привод машины (привод) - система, состоящая из двигателя и связанных с ним уст-
устройств для приведения в движение одного или нескольких твердых тел, входящих в со-
состав машины. Структурная схема привода включает двигатель того или иного типа и
трансмиссию.
Трансмиссия - устройство для передачи вращения от двигателя к потребителям
энергии; может быть механической, электрической, гидравлической, пневматической и
комбинированной.
Приводы транспортных машин, разнообразного станочного оборудования, вспомо-
вспомогательных устройств и средств механизации различных работ (стенды, установки, при-
приспособления с машинным приводом) и т.п. допускают применение стандартных двигате-
двигателей и однотипных механических передач, в том числе стандартных редукторов, что по-
позволяет отнести эти приводы к категории общего назначения.
Машинные приводы общего назначения классифицируют по ряду признаков. Ос-
Основными из них являются: число двигателей и схемы соединения их с передачами; тип
двигателя; тип передачи. Особую группу составляют приводы, в которых используют
встраиваемые двигатели или встраиваемые механические передачи - мотор-редукторы.
По числу двигателей различают приводы: групповой, однодвигательный и много-
многодвигательный. Групповым называют привод, при котором от одного двигателя посредст-
посредством механических передач приводятся в движение несколько отдельных механизмов или
машин. Привод этого типа применяется в различных строительных и погрузочно-
разгрузочных машинах. Групповой привод имеет низкий КПД, громоздок и сложен по
конструкции.
Однодвигательный привод наиболее распространен, особенно при использовании
электродвигателей. Каждая производственная машина снабжается индивидуальным при-
приводом. Если отдельные механизмы машины приводятся в движение от отдельных двига-
двигателей, то такой привод следует назвать многодвигательным. При этом два или более
двигателей могут соединяться с одной и той же передачей соответствующей конструкции.
Многодвигательный привод используется в исполнительных механизмах строительных,
путевых, грузоподъемных, транспортных и других машин и станочного оборудования и
включает электродвигатели и гидромоторы. Гидропривод в этом случае является вто-
вторичным в отличие от основного, первичного, привода гидронасоса.
По типу двигателей различаются приводы: электрические; с двигателями внутренне-
внутреннего сгорания; с паровыми двигателями; гидропривод; пневмопривод.
Приводы могут иметь следующие типы передач: цилиндрические и конические
зубчатые; червячные; планетарные; волновые; комбинированные; гидродинамические;
ременные; цепные; винт-гайка.
По расположению механизма привода в пространстве различают приводы с горизон-
горизонтальным и вертикальным тихоходными выходными валами. В зависимости от располо-
расположения привода конструируют элементы передач и выбирают тип и исполнение двигате-
двигателя.
15.2. ВЫБОР ДВИГАТЕЛЯ ПРИВОДА
Тип двигателя выбирается с учетом ряда факторов, и в том числе:
назначения механизма или машины, для которой проектируется данный привод;
наличия того или иного источника энергии;
величины потребляемой мощности;
ограничений по массе, габаритным размерам и условиям работы приводы;
Выбор двигателя привода 425
режима работы привода и обеспечения соответствующей механической характери-
характеристики.
Назначение машины обусловливает основные требования к приводу, специфику его
работы и характеристики. При этом учитываются мобильность, внешняя среда, темпера-
температурные условия, географические ососбенности и т.п. Наличие электроэнергии предопре-
предопределяет выбор электропривода как наиболее простого и надежного.
В зависимости от потребляемой мощности, а также от ограничений по массе и раз-
размерам выбирается тот или иной тип электродвигателя, либо двигателя внутреннего сго-
сгорания. Выбранный двигатель должен удовлетворять следующим условиям: обеспечивать1
момент, достаточный для разгона механизма с заданным ускорением, а при торможении
двигателем - замедление заданной величине; при работе в заданном режиме не должен
испытывать длительных перегрузок, ведущих к перегреву электродвигателя или ускорен-
ускоренному износу деталей двигателя внутреннего сгорания.
Мощность двигателя всегда относят к определенному режиму работы. При проекти-
проектировании привода внешние сопротивления и режим работы являются заданными. Раз-
Различают три номинальных режима работы двигателей: продолжительный, кратковремен-
кратковременный и повторно-кратковременный. При продолжительном режиме работы двигатель на-
нагревается до установившейся температуры в отличие от кратковременного, при котором
этого не происходит. При повторно-кратковременном режиме происходит пуск и оста-
остановка двигателя, при этом нагрев электродвигателя и возможность реализации заданной
мощности определяются продолжительностью включения (ПВ) по относительному вре-
времени за цикл, равный 10 мин. По величине ПВ различают четыре основных повторно-
кратковременных режима работы. Режим работы является продолжительным (ПВ 100%),
если время одного цикла работы превышает 10 мин.
При расчете мощности двигателя в повторно-кратковременном режиме работы воз-
возможны три случая.
1. Фактический режим работы двигателя соответствует одному из стандартных ре-
режимов; нагрузка постоянная. В этом случае по каталогу выбирается двигатель, мощность
которого при заданном ПВ равна требуемой.
2. Фактическая продолжительность включения ПВф не совпадает с номинальными
значениями ПВН; нагрузка постоянная. В этом случае двигатель выбирается по номи-
номинальной мощности
NH =*ф,/ПВф/ПВ„, A)
где #ф - фактическая мощность; ПВН - ближайшее стандартное значение ПВ.
3. Значения мощности перемены в течение цикла. В этом случае расчет проводится
в такой последовательности. Строится график изменения мощности двигателя во време-
времени за цикл и определяется ПВф. Определяется средняя статическая мощность за цикл
гП/^ B)
где К - коэффициент перегрузок при пуске и торможении; К = 1,1 -^ 1,3; Nt - различные
значения статической мощности за соответствующие промежутки г,- времени в течение
цикла продолжительностью /ц.
Полученная мощность пересчитывается по выражению A), и по величине NH выби-
выбирается двигатель соответствующей мощности. Строятся нагрузочные диаграммы меха-
механизма с выбранным двигателем по моменту М = Д/) и по силе тока двигателя / = ДО,
после чего определяется средняя квадратическая сила тока
426
ПРИВОДЫ И ДВИГАТЕЛИ
где Ilt /2, ..., 1„ - сила тока двигателя, принимается по его характеристике за промежутки
времени tlt t2,..., tH в пределах цикла продолжительностью /ц.
Вместо /э для двигателей постоянного тока с параллельным возбуждением и для
асинхронных электродвигателей можно определять средний квадратический момент
D)
Значения /э и Мэ сравниваются с номинальными значениями силы тока /н или Мн
предварительно выбранного двигателя с учетом отличия ПВф от ПВН:
н; М„
E)
В случае несоблюдения неравенства E) двигатель непригоден по нагреву и его сле-
следует заменить ближайшим двигателем большей мощности (табл. 1).
1. Формулы для определения расчетной мощности приводного двигателя
Расположение передач
в механизме
Последовательное
Параллельное:
от одного двигателя приводит-
приводится в движение несколько ра-
рабочих органов
от нескольких двигателей при-
приводится в движение один ра-
рабочий орган
Заданные
параметры
на рабочем органе
Мр, пр,
vpU yp2f ypn*
XX
Мощность, кВт
N\ = PpVp/(\03i\M)
АГ Npl+Np2+...+Njm
¦*vi ¦ »
*[Mplnpi + Mp2np2+...+Mpnnpn);
jv. + ^ + .-. + ^-VnM;
Ni + N2 + ... + NH - Mpnp(9,55 ¦ Ю3лм);
Примечание:^3* тц^г ... г\п - КПД отдельных передач; Npi, Np2,...,Pfpn - мощность на ра-
рабочих органах, кВт; N], N2, Nn - расчетные мощности двигателей, кВт; пр\,
Пр2,.,пря - частота вращения, мин*1; vph vp2, v^ - скорость рабочего органа,
м/с; Ppi, Рр2,-,Ррн - силовая нагрузка на рабочий орган, Н.
Электродвигатели 427
15.3. ЭЛЕКТРОДВИГАТЕЛИ
К основным типам современных электродвигателей переменного тока относятся
следующие.
Электродвигатели единой серии. Электродвигатели трехфазного тока единой серии
4А мощностью 0,06 + 400 кВт с высотой оси вращения 50 + 355 мм предназна-
предназначаются для привода механизмов, не предъявляющих особых требований к пусковым
характеристикам, скольжению и другим качествам при температуре окружающего
воздуха -40 + +40 °С.
По степени защиты они изготавливаются: закрытыми обдуваемыми (IP44); защи-
защищенными (IP23). Электродвигатели со степенью защиты IP44 выпускаются в трех ис-
исполнениях: на лапах М100 (основное исполнение); с лапами и фланцевым щитом М200;
с фланцевым щитом М300. Двигатели со степенью защиты IP23 выпускаются только
в основном исполнении.
Многоскоростные электродвигатели имеют синхронные частоты вращения:
1500/3000, 750/1500, 750/1000, 500/1000, 1000/1500/3000, 750/1500/3000, 750/1000/1500,
500/750/1000/1500 мюг1.
Выпускают электродвигатели для работы от сети частотой 50 и 60 Гц.
В числе модификаций производятся малошумные двигатели для работы в приводах
с повышенными требованиями к уровню шума для машин третьего класса; встраивае-
встраиваемые электродвигатели, электродвигатели со встроенной температурной защитой для
привода механизмов; электродвигатели тропического, влаго-, морозостойкого и хими-
химически стойкого исполнений.
Пример условного обозначения электродвигателя:
4АНХ315МВ4УЗ, где 4 - номер серии; А - асинхронный; Н - защищенный (способ
защиты от окружающей среды), при отсутствии этой буквы - закрытый обдуваемый; X -
сочетание чугуна и алюминия в качестве материалов станины и щитов (А - станина и
щиты алюминиевые), при отсутствии букв X и А - станины и щиты чугунные или
стальные; 315 - высота (мм) оси вала; М - установочный размер по длине станины
(либо S и X); В - длина сердечника статора (или А) при условии сохранения установоч-
установочного размера, отсутствие букв А и В означает наличие только одной длины сердечника;
4 - число полюсов; УЗ - климатическое исполнение и категория размещения.
Электродвигатели крановые и металлургические. Асинхронные электродвигатели
трехфазного тока крановые и металлургические с короткозамкнутым ротором серии
MTKF и МТКН и с фазным ротором серий MTF и МТН (в обозначении: М - метал-
металлургические и крановые, Т - трехфазного тока, F и Н - классы нагревостойкости) пред-
предназначены для привода крановых механизмов общепромышленного назначения (табл.
3), а также других механизмов с кратковременным и повторно-кратковременными ре-
режимами работы с большими крап гостями перегрузок. Для приводов, работающих в ус-
условиях повышенных температур окружающей среды (металлургическое производство г
др.), рекомендуются электродвигатели серий МТН и МТКН.
Крановые и металлургические электродвигатели обладают повышенной нагрузоч-
нагрузочной способностью, большими пусковыми моментами, малым временем разгона. Отно-
Отношение пускового (максимального) крутящего момента к номинальному колеблетсяя в
пределах 2,3 - 3,2. Диапазон рабочей температуры окружающего воздуха для крановых
электродвигателей -45 *¦ +40 "С, металлургических -45 + +50 °С.
Электродвигатели имеют синхронные частоты вращения 1000, 750 и 600 мин*1 при
работе от сети с частотой 50 Гц и соответственно 1200, 900 и 720 мин с часто-
частотой 60 Гц.
428
ПРИВОДЫ И ДВИГАТЕЛИ
3. Характеристика режимов работы крановых механизмов
Режимы
работы
Л
С
Т
ВТ
Использование кранов
по времени (ч/год)
Редкое A000)
Редкое
Среднее B500)
Среднее
Частое E000)
Частое
по грузоподъемности
Среднее @,5)
Малое @,25)
Полное (? 0,75)
Полное
Среднее
Полное
Полное
Среднее
Полное
Работа механизмов
ПВ, %
15
25
40
15
25
25 + 40
25 + 40
60
60 + 80
Число включений
в 1 ч
Менее 60
60 + 120
120 + 240
240 + 480
Примечание. Л- легкий; С - средний; Т - тяжелый; ВТ - весьма тяжелый.
Пример условного обозначения электродвигателя: МТКН311-8Т2.
Первая цифра трехзначного числа после буквенного обозначения - условная ве-
величина внешнего диаметра пакета статора; вторая - порядковый номер серии; третья -
условная длина пакета статора; последняя цифра - число полюсов электродвигателя. Для
работы в условиях тропиков вводится обозначение 12, в условиях холодного климата
ХЛ2.
Электродвигатели всех габаритов изготавливают в закрытом обдуваемом исполне-
исполнении, а с фазовым ротором пятого-седьмого габаритов, кроме того, - в защищенном ис-
исполнении с независимой вентиляцией.
В табл. 4,5 приведены основные типы электродвигателей, в табл. 6-9 приведены
данные по отечественным электродвигателям.
4. Основные типы электродвигателей и их сравнительные характеристики
Тип электропривода
Двигатели постоянного
тока с нерегулируемым
напряжением и возбуж-
возбуждением:
последовательным
параллельным
смешанным
Двигатели постоянного
тока с регулируемым
напряжением (система
генератор-двигатель)
Двигатели переменного
тока асинхронные с
короткозамкнутым ро-
ротором
Двигатели переменного
тока асинхронные с
фазным ротором
Особенности
механических
характеристик
Мягкие характеристики (жест-
(жесткость 0,5 - 15).
Жесткость - а = ДА//Дл - отно-
отношение приращения момента к
приращению числа оборотов
Жесткие естественные характе-
характеристики (жесткость 5-50); харак-
характеристики смягчаются уве-
увеличением сопротивления в цепи
якоря
Мягкие характеристики,
(жесткость 2-20)
Жесткие естественные и любой
жесткости регулировочные ис-
искусственные характеристики
Жесткие естественные характе-
характеристики (жесткость 1-30).
Смягчение характеристик дости-
достигается применением специаль-
специальных схем
Жесткие естественные характе-
характеристики (жесткость 5-25). Их
смягчение достигается уве-
увеличением сопротивления в цепи
ротора, либо применением спе-
специальных схем
Пределы и способ
регулирования
Пределы регулирования 1-4
с помощью реостата
Плавное регулирование в
пределах 1-10, а в специ-
специальных системах 1-12
В пределах 1-5 с помощью
тормозных машин, дроссе-
дросселей насыщения и т.п.; в
пределах 1-100 при токе
переменной частоты
В пределах 1-5 с помощью
тормозных машин, дроссе-
дросселей насыщения и т.п.; в
пределах 1-100 при токе
переменной частоты
Пределы
применяемых
мощностей,
кВт
До 200
Без
ограничения
мощности
До 200
Без
ограничения
мощности
До 400
До 250 + 315
Область
применения
Грузоподъемные устройства.
Механизм передвижения, а
также другие приводы, где
требуется быстрый разгон
Механизмы, где недопусти-
недопустимы значительные колебания
скорости
Механизм поворота кранов и
другие механизмы, где тре-
требуются повышенные пуско-
пусковые моменты и точность
управления
Ответственные механизмы,
где требуется широкое регу-
регулирование скорости и высо-
высокая точность движения
Широко используется в при-
приводах различного на-
назначения, особенно, если не
требуется регулирование
скорости, а также во взрыво-
безопасных устройствах
Наибольшее распростране-
распространение получили в крановых
механизмах, а также в при-
приводах различного назначения
мощностью 7 - 300 кВт
5. Выбор исполнения и тип двигателя
Характеристика помещения
(окружающая среда)
Сухое чистое, отапливаемое
Неотапливаемое и умеренно
отапливаемое, влажное
Агрессивная химическая среда
На открытом воздухе с защитой
от прямого попадания влаги
Взрывоопасное
Пожароопасное
Пыльное
Влажное
Особо сырое, насыщенное пара-
парами и едкими газами
На палубе или морском берегу
На открытом воздухе в северных
районах
Рекомендуемое
исполнение двигателя
Закрытое обдуваемое и защи-
защищенное
Закрытое
Химически стойкое
Закрытое
Взрывозащищенное
Закрытое и взрывозащищенное
Закрытое
Закрытое специальное или тро-
тропическое
Закрытое специальное
Морское
Северное
Дополнительные требования
Нет
Противосыростная изоляция
Специальное исполнение
Противосыростная изоляция
Недопустимость перегрузок
С независимой вентиляцией
Специальное исполнение
Специальное исполнение
По специальным требованиям
морского регистра
Работоспособность при низких
температурах
Тип двигателя
Допускается установка двигате-
двигателей всех типов
MTF, MTKF, MTH, МТКН, 4A
4А
4А,
мтк, мткн
мтк, мткн
Герметический водозащищен-
водозащищенный
4А-РЗ Р0М5
Специальное исполнение кра-
крановых двигателей сеоии MTF,
MTH, MTKF, МТКН
Электродвигатели
431
б. Асинхронные электродвигатели
Тип
АИ
4А
А/АЗ
А2
А4
АВ
АВМЗ
АН2
АО2
АТД2
ВАН
ВАСВ
ВАО
ДА/ДАЗ
ДАЗО
ДА302
(двухскоростные)
ДВДА
(двухскоростные)
MTKF
АТМК
4АНК, 4АК
АКН2
ДАФЗ
MTF
АСКЗ
Номинальная мощность,
кВт
0,37 ч- 315
0,06 + 400
200 + 2500
400 ч- 500 ,
200 * 1000
400 + 800
55- ПО
500 * 2000
200 + 3150
500 + 8000
250 ч- 5500
30 - 200
250 + 500
630 + 4000
160 + 2500
315 -^ 1600
500/315 + 1600/1000
1,4 4-22
470, 750
15 + 400
315 + 200
5000
1,4+30; 3+ 118
315 + 2000
Применение
Самое широкое
То же (вместо АИ)
Вентиляторы, дымососы, мельни-
мельницы, сетевые насосы
Мазутные насосы
Насосы, вентиляторы, дымососы
Конденсатные насосы
Вертикальные осевые насосы
Насосы, вентиляторы
Дымососы
Питательные насосы, быстроход-
быстроходные механизмы
Вертикальные циркуляционные
насосы
Вентиляторы градирен
Топливоподача
Дымососы, вентиляторы
Тоже
То же
Насосы
Крановые механизмы
Центробежные компрессоры
Общего назначения
Привод механизмов с частыми
пусками или тяжелыми их усло-
условиями
Привод дымососов
Привод крановых механизмов
В запыленных условиях
432
Тип
СД2
СНД-2, СДНЗ-2
сдз
БСДК, БСДКП
ВДС, ВДС2
ВСДН (СДВ)
СДК2
СДКП2
(взырвозашищенные)
СДМЗ
СДСП
(взрывозащищенные)
стд
СГДП
(взрывозащишекные)
СДСЗ-2
ПРИВОДЫ И ДВИГАТЕЛИ
7. Электродвигатели типа СД
Номинальные параметры
мощность, кВт
132 + 1000
315 + 4000
160 + 1000
200
4000 + 12 500
630 * 3200
315 + 630
315 + 5000
630 + 3200
880 + 2000
630 + 500
630 + 12 500
250 + 1000
напряжение, кВ
0,38; 6
6
0,38; 6
0,38
6; 10
6
6
6; 10
6
6
6; 10
6; 10
6
Примечание
Общее назначение
Тоже
.».
Привод компрессоров
Привод вертикальных насосов
Тоже
Привод поршневых компрес-
компрессоров
Тоже
Привод мельниц
Привод поршневых компрес-
компрессоров
Привод быстроходных меха-
механизмов
Тоже
Привод дисковых мельниц
8. Электрические мантии постоянного тока серии 2П (до 200 кВт)
с независимым возбуждением, компенсационной обмоткой общепромышленного
применения при высоте оси вращения 90 -г- 315 мм,
в общеклиматическом исполнении УХЛ4, номинальном режиме работы 1
Параметры
Мощность, кВт
Масса, кг
Частота вращения, мин'1
Номинальное напряжение, В
Электродвигатель
0,37; 0,55; 0,75; 1,1; 1,5; 2,2; 4;
5,5; 7,5; И; 15; 18,5; 22; 30; 37;
40; 55; 75; ПО; 138; 160; 200
24; 27; 36; 39; 47; 56; 86; 96;
141; 159; 213; 234; 282; 325;
340; 405; 510; 600; 740; 820;
960; 1180
500; 600; 750; 1000; 1500; 2200;
3000
ПО; 220; 440
Генератор
30; 37; 55; 75; 90; НО; 160
345; 405; 510; 640; 750; 825;
960
1000; 1500; 3000
115; 230; 460
Электродвигатели
433
9. Микродвигатели
Серия
Частота тока,
ГЦ
Номинальные параметры
мощность, Вт
напряжение, В
частота
вращения, мин'1
Асинхронные трехфазные
АОЛ
(закрытое обдуваемое
исполнение)
АПН (повышенной
надежности)
АВ
АДВ (малошумные)
ДАТ (закрытого ис-
исполнения)
50
50
50
_
400
50, 80, 120,
180, 270, 400,
600
50, 80, 120,
270, 400
18, 30, 50, 80,
120, 180, 270,
400, 600
6, 10, 16,25
40, 25, 60,
100, 250, 400,
600, 1000
127/220,
220/380
220, 380
127, 220, 380
220, 380
200, 220
1400, 2800
1390, 2750, 2800
1500, 3000
1370
5600, 7600, 10 800
Асинхронные однофазные
АОЛБ
4А
ABE
УАД:
в трехфазном
режиме
в однофазном
режиме
ДГ (конденсаторные)
КД (конденсаторные)
50
18, 30, 50, 80,
120, 180, 240,
400, 600
25, 40, 60, 90,
120, 180, 250,
370, 550, 750
10, 16, 30, 50,
80, 120, 270,
400
1,2; 1,5; 2,5;
4; 6; 7; 9; 13;
20; 30; 40; 70
1, 2, 3, 4, 5,
8, 10, 13, 15,
25, 30, 50
200, 250, 350,
550
2, 5, 6, 10, 16,
25, 40, 50, 60
127, 220, 380
220
127, 220
220
220
220
127, 220
1370, 1390, 1420,
1440, 2880, 2920,
2940
1380, 2800
1350, 2700
2700
1200, 1300, 2700
1440
1440, 2880
Синхронные
С (с постоянными
магнитами)
Г (гистерезисные)
ГТ
ДСР, ОРДидр.
(реактивные)
400
10, 13, 16
25, 27, 30, 32,
50, 135
0,6; 1,2; 1,6;
2; 3; 4; 6; 8;
10; 15; 25; 40;
60; 80; 120
0,02; 0,06; 0,09;
5,3; 7,1; 11,8
220, 380
40, 115, 127,
220
36; 115; 220
220
750, 1500
3000, 7500, 8000
6000, 8000, 12000
60,2
28 Том 2
434
ПРИВОДЫ И ДВИГАТЕЛИ
Продолжение табл. 9
Постоянного тока
ПЛ
ДПМ
СЛ
ВД
-
30, 50, 80, 120,
180, 270, 40Ь,
600
От долей до
нескольких
десятков
5,5; 9; 10; 14,5;
22; 30; 58; 77;
ПО; 170
400, 500, 1200,
3000
110, 220
12, 24, 27
110, 127
-
1400, 2700
4500, 5000, 9000,
12000
2000, 3000, 3600,
4000, 5000
30 000, 60 000,
70 000, 150 000
Упиверсялыме
УМТ
УЛ
-
5, 10, 25, 40,
55
5, 10, 18, 30,
50, 80, 120,
180, 270, 400,
600
ПО, 220
ПО, 127
1800, 2000, 2500
2000, 3000, 3600,
4000, 5000
15.4. ГИДРОДВИГАТЕЛИ
Гидродвигатели - машины, преобразующие энергию потока жидкости в механиче-
механическую энергию вращательного движения выходного вала. Гидродвигатели с ограничен-
ограниченным ходом называют гидроцилиндрами, а с неограниченным ходом - гидромоторами.
Гидромоторы могут быть низкомоментными и высокомоментными. Низкомоментные
моторы характеризуются малым значением отношения вращающего момента Мк часто-
частоте вращения л, М/п = 0,001 + 1 Н-м/мюг1. У высокомоментных гидромоторов М/п мо-
может достигать 20 000.
Различают гидромоторы шестеренные, пластинчатые аксиально-поршневые и ра-
диально-порганевые (табл. 10).
Тип
Шестеренный
Пластинчатый
Аксиально-
поршневой
Радиалыю-
поршневой
10. Сравнительные характеристики
Рабочее
давление, МПа
1000
500...1000
500...1600
1000... 1600
Объемный
КПД
0,9
0,75...0,97
0,95...0,98
0,91..0,98
кпд
0,75
0,5...0,91
0,8
0,8.-0.94
гидродвигателей
Вращающий
момент, кНм
О,О5...О,О7
0,02...18,0
0,04...1,17
0,24...3,57
Масса на единицу
мощности, кг/кВт
0,5...0,7
2...6
4...7
4...34
Гидромоторы предназначены для осуществления вращательного движения испол-
исполнительных органов различных гидрофицировшшых машин и механизмов.
Гидроцилиндры предназначены дня преобразования энергии потока жидкости в
механическую энергию возвратно-поступательного или возвратно-поворотного
(касательного) движения выходного звена и связанных с ним устройств. В соответствии
с этим различают поршневые и поворотные гидроцилиндры (табл. 11, 12).
Гидродвигатели
435
11. Основные зависимости для гидродвигателей
Определяемый параметр
Потребляемая (подводимая)
мощность, кВт
Эффективная (отдаваемая)
мощность, кВт
Потребный расход жидкости,
л/мин
Вращающий момент на вы-
выходном валу, кНм
Коэффициент изменения
частоты вращения, в зависи-
зависимости от нагрузки
Время реверса от наибольшей
частоты вращения до наи-
наименьшей
Расчетная формула
Nu=pQ/bQ
Q - 10-VAlo
*1 ™ ^нСрх/Ри)
"о ~ "
CS "о '
с = 8...40% для лопастных гид-
гидродвигателей;
с — 2.. .5% для аксиально-
поршневых
0,209(/ + /пр)
t — * '
'р т
Примечание
р - давление в системе, МПа;
Q - расход жидкости, л/мин
д - потребный расход за один
оборот гидродвигателя, смэ/об;
т)о - объемный КПД
Тн - номинальный вращаю-
вращающий момент, кН'М; рн - но-
номинальное давление
щ и п - соответственно частота
вращения выходного вала в
режиме холостого хода и под
нагрузкой, мин*1
/ - момент инерции гидро-
гидродвигателя, кг-м2; /пр - приве-
приведенный момент инерции вра-
вращающихся масс, связанных с
валом гидродвигателя, кг-м2;
Т- вращающий момент, Нм
12 Основные зависимости для гидроцнлиндров
Параметры
Расход жидкости Q (л/мин)
при заданной скорости v
(м/мин) или Аи* (рад/с)
Рабочая площадь цилиндра
F, см2:
штоковая полость
противоштоковая полость
плунжерный цилиндр
Развиваемое усилие, Н
Развиваемый крутящий мо-
момент, Нм
Мощность, кВт
Гидроцилиндры
'поступательного движения
Q'OAFy
-
момснтные (поворотные)
Р = W2FAp
й(л2-г2)
* 2 • 103
60 6-Ю4
28 ¦
436 ПРИВОДЫ И ДВИГАТЕЛИ
Продолжение табл. 12
Параметры
Время одного двойного хода, с
Гидроцилиндры
поступательного движения
АПГ
4 OU L, ( г , ¦ р_ \ j 1 а #
моментные (повороптые)'
jou 10 Q
Примечания. 1.В формулах объемный и механический КПД не учтены.
2. D, dim, Dm - диаметры цилиндра, штока и плунжера, мм; L - длина хода
поршня гидроцилиндра, мм; Ар - разность между давлениями в полостях на-
нагнетания и слива, МПа; а - угол поворота лопасти гидроцилиндра, *; Я и г -
наибольший и наименьший радиусы лопасти моментного гидроцилиндра,
мм; А/рев - время реверсирования в крайнем положении, с; b - ширина лопа-
лопасти, мм; F\ = F- /"щ,; Fi - F- Fm - ^Пшт-
15.5 РЕКОМЕНДАЦИИ ПО ВЫБОРУ ПРИВОДОВ
1. Электрические и механические параметры приводов (Л^ном» ^ном> ^нам* относи-
относительная продолжительность рабочего периода, Мщск, Мшт, Ммак> пределы регулирова-
регулирования числа оборотов и т.п.) должны соответствовать параметрам приводимых ими меха-
механизмов во всех режимах их работы в данной установке.
2. Для механизмов, сохраняющих технологическую непрерывность в работе, дол-
должен быть обеспечен самозапуск их электродвигателей после кратковременных переры-
перерывов (не более 2,5 с), связанных с перерывом питания или понижением напряжения из-
за короткого замыкания, при этом применять двигатель большей мощности, чем для
непрерывной нормальной работы, не требуется.
3. Для привода механизмов, не требующих регулирования числа оборотов, незави-
независимо от их мощности, рекомендуется применять синхронные или асинхронные элек-
электродвигатели с короткозамюгутым ротором.
4. Для привода механизмов, имеющих тяжелые условия пуска или работы, либо
требующих изменения числа оборотов, следует применять двигатели с наиболее про-
простыми и экономичными методами пуска или регулирования чисел оборотов, возмож-
возможными в данной установке.
5. Синхронные двигатели, как правило, должны иметь устройство форсировки
возбуждения или компаундирования. Синхронные двигатели в случаях, когда они по
своей мощности могут обеспечить регулирование напряжения или режима реактивной
мощности в данном узле нагрузки, должны иметь автоматический режим включения.
6. Электродвигатели постоянного тока допускается применять только в тех случа-
случаях, когда электродвигатели переменного тока не обеспечивают требуемых характеристик
или неэкономичны.
7. Пуск асинхронных электродвигателей с короткозамкнутым ротором и синхрон-
синхронных двигателей должен производиться, как правило, непосредственным включением в
сеть (прямой пуск).
При невозможности прямого пуска следует применять пуск через трансформатор или
автотрансформатор. В особых случаях допускается пуск с подъемом частоты с нуля.
Рекомендации по выбору приводов
437
13. Основные параметры привода
Определяемый параметр
Предварительная расчетная
мощность электродвигателя, кВт
Оценочный расчет мощности:
- электродвигателя, кВт
Электродвигатель грузоподъем-
грузоподъемных машин допускает кратко-
кратковременную перегрузку'И обычно
выбирается по статическому мо-
моменту с проверкой на перегрузку
при пуске.
- двигателя внутреннего сгора-
сгорания, кВт (не допускает перегруз-
перегрузки)
Мощность двигателя в период
установившегося движения, кВт
Расчетная формула
Механизм подъема
U(G + G0)v
^ 1,7-1000-л
где G - вес поднимаемого груза, Я; Go - вес грузозахватного
устройства, Я; v - скорость подъема груза, м/с; т, - КПД ме-
механизма.
1000т|
"•пуск = Мя ¦*" ™дин.пост.+Мтн.вр.»
где Л/пуС|С - пусковой момент на валу двигателя. Ни;
1# (G + Go)ZN
Мет = -—>. г - статический момент на валу эяектро-
2//т,
двигателя;
(G + Gq)vD6
А(иин пост = ¦*—-гг-1 - динамический момент от по-
7itnr\
ступательно движущихся масс;
А/дин.вр = —-—2— - динамический момент от вращаю-
*п
щихся масс;
Dq - диаметр барабана, м;
/ - передаточное число редуктора;
•Aip - приведенный момент инерции вращающихся частей,
крм2;
со - угловая скорость, рад/с;
/„ - время разгона, с;
А/„уСК-©дв
1000т,
Механизм передвижения
1000т,
где Щ - основное сопротивление передвижению
Щ -(G + gq)&w> = (g + Gq)^'^2^ ;
Wppa - дополнительное сопротивление от ветра и уклона
438
ПРИВОДЫ И ДВИГАТЕЛИ
Продолжение табл. 13
Определяемый параметр
Мощность электродвигателя
(кВт) привода конвейера в зави-
зависимости:
от производительности
от потребной тяговой си-
силы:
где
Расчетная формула
G - вес груза, Н;
Go - вес крана, Н;
/ - коэффициент трения в подшипниках (для подшипни-
подшипников скольжения - 0,1; качения - @,015...0,03);
w' - коэффициент сопротивления движению;
к = 0,5 мм - коэффициент трения качения колес по рель-
рельсам;
rfji - диаметр цапфы, мм;
D* - диаметр ходового колеса, мм;
Р - коэффициент, учитывающий дополнительно сопро-
сопротивление от трения реборд колес о рельсы (при подшип-
подшипниках скольжения - 1,25... 1,4; качения 2.5...3);
g = 9,81 м/с2 - ускорение свободного падения;
F\ - подветренная площадь крана (тележки), м2;
Fi - подветренная площадь груза, м2;
р = 1,5 МПа - расчетное давление ветра;
i = tgp' - уклон пути О' - угол наклона);
v - скорость передвижения, м/с;
Л = 0,8...0,85 - КПД механизма
хт <$V0Lr±H)
." 367
Q - производительность:
массовая - Q (т/ч),
объемная - Г(м3/ч),
штучная - Z (шт/ч).
Эти величины связаны зависимостями:
где
где
где
Q — V'p, Q = m*Z/1000,
пи - масса единицы груза, кг,
р - удельная плотность, т/м3;
Lf - длина, м;
Я - высота подъема, м (знак плюс перед Н ставят при
подъеме, а знак минус - при опускании груза);
Wq - 0,1...4,2 - обобщенный коэффициент сопротивления,
причем меньшие значения относятся к несущим конвейе-
конвейерам (ленточным, пластинчатым и т.п.), а большие - к во-
волочащим (скребковым, винтовым и т.п.).
N F°'V
1000-л**
/о - потребная тяговая сила, Н;
v - скорость движения конвейера, м/сек;
i)m - коэффициент полезного действия передаточных ме-
механизмов конвейера; r\m = 0,4...0,5.
Потребная тяговая сила
Fo - Ltj (д + до),
L - длина, м;
Л - коэффициент, учитывающий сопротивление в шарни-
шарнирах и роликах тягового органа; т\ — 0,66...0,7;
Рекомендации по выбору приводов
439
Продолжение табл. 13
Определяемый параметр
Расчетная формула
д - нагрузка на единицу длины от массы рабочей и холо-
холостой части тягового органа, Н/м;
до - 150...400 Н/м A5.3...40.7 кгс/м);
v = 0.25...6 м/мин - для непрерывно движущихся конвей-
конвейеров;
v = б... 12 м/мин - для периодически движущихся конвей-
конвейеров^
Мощность электродвигателя
насоса, кВт
1000л 1000л
где Qc - объемная производительность (подача) насоса, м3/с;
(гс - производительность(подача) насоса, кг/с;
р - плотность перекачиваемой жидкости, кг/м3;
Я - полный напор, развиваемый насосом, м столба пере-
перекачиваемой жидкости;
г\ - коэффициент полезного действия насосной установки.
С учетом перегрузки двигатель к насосу устанавливается
несколько большей мощности (NJCT), чем потребляемая (N):
где р - коэффициент запаса мощности в зависимости от ве-
величины N
N
< 1
1...5
5...50
>50
Р
2...1,5
1,5...1,2
1,2...1,15
1,1
Мощность электродвигателя
(кВт) системы, вращающейся
вокруг неподвижной оси
(Центробежные установки, махо-
маховики и т.п.)
Примечание. Наибо-
Наиболее тяжелым режимом работы
электропривода центрифуги яв-
является пуск.
Мощность электродвигателя
для привода центрифуги опреде-
определяется не по мощности, потреб-
потребной в установившемся режиме
работы, а по пусковой мощности
двигателя.
Пуск центрифуги должен
происходить плавно, и время
пуска должно выбираться таким
образом, чтобы температура об-
обмоток двигателя за пусковой
период не превышала допусти-
допустимую для данного класса изоля-
изоляции.
где Мсопр - момент сопротивления на рабочем органе, Нм;
В период разгона Мсапр— Л/вр - вращающий момент, Нм;
г\ - коэффициент полезного действия;
Вращающий момент
Мт = /в,
где / - момент инерции, кг-м2;
s - угловое ускорение, рад/с2.
Момент инерции
J=mr?,
где т - масса, кг, условно сосредоточенная в одной точке;
ги - радиус инерции, м.
Угловое ускорение
_ © _ яя
е~Т~ зоТ'
где а - угловая скорость, рад/с;
/ - время, с;
я - число оборотов, об/мин.
440
ПРИВОДЫ И ДВИГАТЕЛИ
Продолжение табл. 13
Определяемый параметр
Потребная мощность двига-
двигателя для привода высокоинерци-
высокоинерционных механизмов включает
значения статического момента
сопротивления и приведенного
суммарного момента инерции
центрифуги.
Статический момент сопро-
сопротивления
\1 — \Ж 4- \Л
где Мъ ** 23,5-10'6-Hlfin1 - мо-
момент, затрачиваемый на ме-
механическое трение ротора о
воздух;
Мт в 4,9/Лцч/ - момент тре-
трения вала в подшипниках;
Мв и Mr - Нм;
Н - высота ротора, м (для
горизонтальных центрифуг -
длина ротора, м);
D - диаметр ротора, м;
п - частота вращения ротора,
об/мин;
/ - коэффициент трения, за-
зависящий от типа подшипни-
подшипника (для сферических ролико-
роликоподшипников/= 0,06);
Шц - масса ротора центри-
центрифуги, кг,
d - диаметр вала, м;
В приведенный суммарный
момент инерции центрифуги (в
кг-м2) включается момент инер-
инерции ротора двигателя.
Время разгона принимается, в
основном, исходя из опыта экс-
эксплуатации центрифуг.
Мощность электродвигателя
вентилятора, кВт
Мощность электродвигателя
(кВт), затрачиваемого на управ-
управление трубопроводной армату-
арматурой.
Обычно крутящий момент на
шпинделе арматуры составляет
60...100% от максимального мо-
момента электропривода.
Расчетная формула
¦¦
"э = "»/лпор;
где NB = — мощность, потребляемая вентилято-
3600•1000л
ром, кВт,
V - объем перемещаемого воздуха, мэ/ч;
рь - давление, создаваемое вентилятором, Па;
Л - коэффициент полезного действия вентилятора;
Лпер - коэффициент полезного действия передачи.
N - Мп
э ~ 9554 • г\ *
где М - крутящийся момент на приводном валу, Нм;
п - частота вращения приводного вала, об/мин'1;
Л - коэффициент полезного действия электродвигателя.
Рекомендации по выбору приводов
441
Продолжение табл. 13
Определяемый параметр
Расчетная формула
При ручном дублировании крутящий момент на маховике
M=Fr,
ще F - усилие, Н;
г - радиус маховика, м.
При ручном управлении одним оператором усилие на
ободе маховика:
вертикальное на уровне груди
или пояса, Н
196 ... 834
B0 ... 85 кгс)
горизонтальное на уровне
груди, Н
176... 637
A8 ... 65 кгс)
14. Ориентировочные значения мощности двигателя главного движения станков
Тип станка
Токарный универсальный,
револьверный, патронный
Токарный многорезцовый
Сверлильный вертикальный
Радиально-сверлильный
Универсальный горизонтально-
расточной
Фрезерный консольный гори-
горизонтальный
Круглошлифовальный
Плоско-шлифовальный
Продольно-строгальный двух-
стоечный
Карусельный двухстоечный
Основной наибольший размер,
мм
Диаметр изделия D * 2А,
где h - высота центров
Диаметр над суппортом d
Диаметр сверла d
Диаметр сверла d
Диаметр шпинделя d
Ширина стола В
Диаметр изделия D ¦* 2А, диа-
диаметр и ширина круга d x b
Ширина стола Д диаметр тор-
торцевого круга d
Ширина стола В
Диаметр изделия D
Мощность двигателя главного
движения, кВт
N»0?2d
N*0Md
N т 0,08 d
и2
16000
N"ofliD-Z
N « 0,015Д
"•¦Si
60
442
ПРИВОДЫ И ДВИГАТЕЛИ
15. Ручной привод
Параметр
Расчетное усилие рабочего F.
на рукоятке
на тяговой цепи
Расчетное усилие (при проверке на прочность):
на рукоятке
на тяговой цепи
Момент на приводном (входном) валу механиз-
механизма с ручным приводом, Нм
Момент на выходном валу, Нм
Скорость подъема груза, м/с
Значения
120 Н A2 кгс) - при длительной работе;
200 Н B0 кгс) - при кратковременной работе.
200 Н B0 кгс) - при длительной работе;
400 Н D0 кгс) - при кратковременной работе.
800 Н (80 кгс);
1200 Н A20 кгс).
Л1р s ™ ' ф * " **0»
где т - число рабочих;
F - усилие рабочего, Н;
/ц - плечо рукоятки (радиус цепного коле-
колеса), м;
Ф - 0,7 + 0,8 @,8 - для одновременной ра-
работы двух человек, 0,7 - для одновремен-
одновременной работы четырех человек).
Мтр= А/р •!•%
где i - передаточное число между выходным и
входным валом лебедки; г\ - к.п.д. механизма.
m-F-vB-i\
ф Q
где m - число рабочих;
Q - вес груза, Н;
vp - скорость движения руки рабочего:
- на рукоятке - 1 м/с;
- на тяговой цепи - 0,6 м/с.
СТАНДАРТЫ
Стандарт
Наименование
ГОСТ 9630-80 Е
ГОСТ 12049-75
ГОСТ 14191-88 Е
ГОСТ 16264.0-85Е
ГОСТ 16264.1-85
ГОСТ 16264.2-85
Двигатели трехфазные асинхронные напряжением свыше 1000 В. Общие
технические условия
Двигатели постоянного тока для машин напольного безрельсового электро-
фицированного транспорта. Общие технические условия
Машины электрические вращающиеся малой мощности. Двигатели для зву-
звукозаписывающей аппаратуры и электропроигрывающих устройств бытового
назначения
Машины электрические малой мощности. Двигатели. Общие технические
условия
Двигатели асинхронные. Общие технические условия
Двигатели синхронные. Общие технические условия
Список литературы
443
Продолжение табл.
ГОСТ 16264.3-85
ГОСТ 16264.4-85
ГОСТ 16264.5-85
ГОСТ 18058-80
ГОСТ 18200-90 Е
ГОСТ 24915-81
ГОСТ 26771-85
ГОСТ 12445-80
ГОСТ 12446-80
ГОСТ 12447-80
ГОСТ 12448-80
ГОСТ 12449-80
ГОСТ 12853-80
ГОСТ 13823-78
ГОСТ 13824-80
ГОСТ 13825-80
ГОСТ 14060-68
ГОСТ 14061-68
ГОСТ 14062-68
ГОСТ 14063-68
ГОСТ 14064-68
Двигатели коллекторные. Общие технические условия
Двигатели постоянного тока бесконтактные. Общие технические условия
Двигатели шаговые. Общие технические условия
Двигатели трехфазные асинхронные короткозамкнутые погружные серии
ПЭД. Технические условия
Машины электрические вращающиеся крупные свыше 200 кВт. Двигатели
синхронные. Общие технические условия
Двигатели трехфазные асинхронные напряжением 6000 В, мощностью от
200 до 1000 кВт. Ряды мощностей и установочных размеров
Микроэлектродвигатели для игрушек. Общие технические условия
Гидроприводы объемные, пневмоприводы и смазочные системы. Номи-
Номинальные давления
Гидроприводы объемные, пневмоприводы и смазочные системы. Номи-
Номинальные частоты вращения
Гидроприводы объемные, пневмоприводы и смазочные системы. Нормаль-
Нормальные диаметры
Гидроприводы объемные, пневмоприводы и смазочные системы. Номи-
Номинальные вместимости
Пневмоприводы. Номинальные расходы воздуха
Гидроприводы объемные, пневмоприводы и смазочные системы. Присоеди-
Присоединительные резьбы
Гидроприводы объемные. Насосы объемные и гидромоторы. Общие техни-
технические требования
Гидроприводы объемные и смазочные системы. Номинальные рабочие объ-
объемы
Гидроприводы объемные и смазочные системы. Номинальные расходы жид-
жидкости
Гидромоторы шестеренные. Ряды основных параметров
Гидромоторы шиберные. Ряды основных параметров
Гидромоторы поршневые. Ряды основных параметров
Гидроаппаратура и пневмоаппаратура. Ряды параметров
Гидроаккумуляторы. Ряды основных параметров
СПИСОК ЛИТЕРАТУРЫ
1. Абрамов Е.И., Колесниченко К.А., Маслов В.Т. Элементы гидропривода: Спра-
Справочник. Киев: Техника, 1977.
2. Анурьев В.Н. Справочник конструктора-машиностроителя. Т. 1-3. М.: Машино-
Машиностроение, 1992.
3. Артоболевский И.И. Механизмы в современной технике. Т. 1-5. М.: Наука, 1970,
1971, 1973, 1975, 1976.
4. Башта Т.М. Машиностроительная гидравлика: Справочник пособие. М.: Маши-
Машиностроение, 1971.
5. Иоснлевич Г.Б. Детали машин. М.: Машиностроение, 1988.
6. Орлов П.И. Основы конструирования. Т. 1-3. М.: Машиностроение, 1988.
МАЛЬТИЙСКИЕ МЕХАНИЗМЫ
7. Расчеты деталей машин: Справ, пособие/ А.В.Кузьмин, И.М. Чернин, Б.С. Козинцев.
Минск; Вышсйша школа, 1986.
8.Смирнов АДМ Антипов К.М. Справочная книжка энергетика. М.; Энергоатомиздат
1987. .
9.Курсовое проектирование деталей машин/ СА. Чер1ювский, К.Н.Боков, И.М. Чернин и
др. М.; Машиностроение, 1988.
Ю.Машиностроительный гидропривод/ Под ред. В.Н. Прокофьева. М.; Машиностроение,
1978.
П.Приводы машин: Справочник/ В.В. Длоугий, Т.И. Муха, А.П. Цупиков, Б.В. Януш.
Под общ. ред. В.В. Длоугого, Л.; Машиностроение, 1982.
12. Справочник по электрическим машинам/ Под общ.ред. И.П.Копылова и Б.К. Клоко-
ва. М,; Энергоатомиздат, 1988.
16. МАЛЬТИЙСКИЕ МЕХАНИЗМЫ
Мальтийский механизм - устройство,
преобразующее непрерывное вращательное
движение входного звена в одностороннее
прерывистое движение выходного звена.
Механизм называют также шаговым меха-
механизмом и применяют в станках-автоматах
и автоматических линиях для транспорти-
транспортировки изделий и смены инструмента.
Механизм может быть выполнен с
внешним и внутренним зацеплением, пе-
передающим движение между валами с па-
параллельными и пересекающимися осями,
между вращающимися и поступательно
движущимися звеньями.
Наиболее распространена схема трех-
звенного мальтийского механизма с внеш-
Рнс. 1 ним зацеплением (рис. 1).
1. Параметры, характеризующие продолжительность остановки и поворота креста
мальтийского механизма с внешним зацеплением
Число
пазов
креста
Z
3
4
5
6
Угол поворота кривошипа,
соответствующий
остановке креста
2ао.« к + 2«/z
300°
270°
252°
240°
повороту креста
2а! = 2(я - ао)
60°
90е
108°
120е
Угол поворота
креста
2q>i = я - 2cti
120°
90е
72е
60°
Коэффициент
времени
работы
, *=>i/'o
0,2
0,33
0,43
0,5
Мальтийские механизмы
445
Продолжение табл. 1
Число
пазов
креста
Z
7
8
9
10
11
12
13
14
15
Угол поворота кривошипа,
соответствующий
остановке креста
2ао=л + 2«/г
231*26'
225°
220е
216е
212°44'
210°
207°42'
205°42'
204е
повороту креста
2ai = 2(я - ао)
128°34'
135°
140е
144е
147°16'
150°
162°18'
154°18'
156е
Угол поворота
креста
2q>i = я - 2а(
51°26'
45°
40°
36е
32°44'
30е
27°42'
25°42'
24е
Коэффициент
времени
работы
к - /i/fo
0,56
0,6
0,64
0,67
0,69
0,71
0,73
0,75
0,76
/i = z- 2 - время поворота креста
to = z + 2 - время остановки креста
2. Соотношения между конструктивными размерами звеньев мальтийского
с внешним зацеплением
механизма
Z
3
4
5
6
7
8
9
10
11
12
13
14
15
R/L
0,86603
0,70711
0,58779
0,50000
0,43388
0,38268
0,34202
0,30902
0,28173
0,25882
0,23931
0,22252
0,20791
S/L
0,50000
0,70711
0,80902
0,86603
0,90097
0,92388
0,93969
0,95106
0,95949
0,96593
0,97094
0,97493
0,97815
(Л - t)/L
0,366
0,414
0,397
0,366
0,335
0,307
0,282
0,260
0,241
0,225
0,210
0,197
0,186
(d + 2i)/L
0,268
0,585
0,824
1,000
1,132
1,235
1,316
1,382
1,437
1,482
1,521
1,555
1,584
dk/L
1,000
0,586
0,382
0,268
0,198
0,152
0,120
0,098
0,082
0,068
0,058
0,050
0,044
446
МАЛЬТИЙСКИЕ МЕХАНИЗМЫ
Рис. 2
Мальтийские механизмы с внешним
и внутренним зацеплением кинематиче-
кинематически эквивалентны одному и тому же ку-
кулисному механизму, отличаясь друг от
друга лишь пределами изменения угла
поворота ведущего кривошипа, на кото-
которых происходит поворот ведомого звена.
На рис. 2 сплошными линиями по-
показана схема мальтийского механизма с
внутренним зацеплением. Для простоты
изображен только один из пазов. В этом
механизме, в отличие от механизма с
внешним зацеплением, скорость центра
цевки при входе ее в паз креста оказыва-
оказывается направленной не к центру креста, а
от центра его. Крест в этом случае вра-
вращается в том же направлении, как и ве-
ведущий кривошип.
3. Параметры, характеризующие продолжительность остановки и
поворота креста мальтийского механизма с внутренним зацеплением
Число
пазов
креста
Z
3
4
5
6
7
8
9
10
11
12
13
14
15
Угол поворота кривошипа, соответствую-
соответствующий
остановке креста
2аю
60°
90°
108»
120»
128°34'
135»
140е
144»
147»16'
150»
152°18'
154» 18'
156»
повороту креста
2а,
300»
270»
252»
240»
231»26'
225»
220»
216»
212»44'
210»
207»42'
205°42'
204»
Угол
поворота
креста
2ф,
120°
90»
72»
60»
51°26'
45»
40°
36»
32»44'
30е
27»42'
25»42'
24»
Коэффициент
времени
работы
* = ti/to
5,00
3,00
2,33
2,00
1,80
1,67
1,57
1,50
1,44
1,40
1,36
1,33
1,31
11 = z + 2 - время поворота креста
/о = Z - 2 - время остановки креста
Виды мальтийских механизмов
447
16.1. ВИДЫ МАЛЬТИЙСКИХ МЕХАНИЗМОВ
4. Схемы и характеристики механизмов
№
п.п
Характеристика
Схема
Правильный четырехпрорезный маль-
мальтийский механизм. Междулучия креста 4
профилируются по дугам окружности, об-
обращенным выпуклостью к оси креста, с
радиусом, соответствующим радиусу сто-
стопорной шайбы 2, укрепленной на ведущем
валу 1. На ведущем валу укреплена также
цевка 3, заходящая при вращении в проре-
прорезы. За один оборот ведомого вала крест
четыре раза поворачивается на 1/4 оборота
и четыре раза останавливается. Неравно-
Неравномерное вращение креста вызывает дополни-
дополнительную динамическую нагрузку на него. В
случае удлинения прореза креста он обра-
обращается в качающуюся кулису, угловая ско-
скорость (со) и ускорение (s) которой показаны
на схеме б.
Часть кривых, очерченных более
жирными линиями, соответствует движе-
движению креста при отсчете q> от верхнего по-
положения на линии центров цевки 3.
¦ з
Пространственный мальтийский ме-
механизм (сферический). Ведущий и ведомый
валы мальтийского механизма расположены
под углом 90°. Ведущий вал с поводком /
вращается непрерывно, ведомый вал 3 с
мальтийским крестом 2-е остановками.
Мальтийский механизм, состоящий
из ведущего диска 2 с двумя цевками 3 и
четырехпазовой звездочки 1.
Время покоя и движения - одинако-
одинаковые.
448
МАЛЬТИЙСКИЕ МЕХАНИЗМЫ
Продолжение табл. 4
п.п
Характеристика
Схема
Восьмипрорезной мальтийский крест
A - ведущий диск, 2 - крест).
Четырехлрорезной мальтийский крест
с двумя различными паузами.
Цевки 2 расставлены под углом X, по-
поэтому одна пауза соответствует углу поворо-
поворота ведущего диска 1, равному А, - 90°, а вто-
вторая 270° - X.
Мальтийский механизм внутреннего
зацепления. Ведущий диск 2 с одной цев-
цевкой и ведомый мальтийский крест 7 вра-
вращаются в одну сторону.
Поворот креста на угол <р = 2п/к соот-
соответствует повороту кривошипа на угол
у = ж + ф. Время покоя Тп меньше времени
Tjy движения:
у 2*-ч>_2-2я .
¦* д ~ п 1 ¦
Г Т к
где it - число прорезов,
оборота ведущего диска.
Г - время одного
Мальтийский механизм. Ведущий
диск 1 с одной цевкой приводит в движе-
движение четыре креста 2. Во время поворота
одного креста остальные три стопорятся.
Неоднородный мальтийский меха-
механизм, в котором кривошип 1 сообщает кре-
кресту 2 движения нервной продолжительно-
продолжительности, пропорциональные соответственно
углам 2(90 - <р'2) и 2(90 - <р).
При построении механизма необхо-
необходимо соблюдать два условия:
к 2
* = -; m<—Y-
т 1 + f
к
где м - число цевок; к - число прорезов;
а - любое целое число.
Виды мальтийских механизмов
449
Продолжение табл. 4
п.п
Характеристика
Схема
Трехпрорезной трехцевочный без-
безударный мальтийский механизм с внешним
зацеплением:
Til + ГЛ + ГЛ = Тп1 + Та2 + Гп3 = Г/2,
где 7^ и TUi - время движения и покоя кре-
креста 1 при зацеплении его с /-ой цевкой 2,
У - длительность одного оборота ведущего
звена 3.
10
Мальтийский механизм с нерадиаль-
нерадиальными прорезами.
Цевки 2 ведущего диска 1 перемеща-
перемещаются в наклонных прорезах креста 3.
з г 1
и
Шестипрорезной мальтийский меха-
механизм, характеризующийся теоретически
безударным входом цевки в прорез и плав-
плавным окончанием поворота креста. Меха-
Механизм допускает изменение углов прореза,
установку сменных крестов с различным
числом прорезов при неизменных радиусе
R цевки и межосевого расстояния А,
12
Однородный четырехпазовый дезак-
сиальный мальтийский механизм внешнего
зацепления. Механизм теоретически без-
безударный при указанном направлении вра-
вращения. При изменении направления вра-
вращения вход цевки в прорез будет теоретиче-
теоретически безударным, выход - ударным. Стопор-
Стопорный ролик 6 стопорного механизма 3, 4, 5,
запирающий крест при его неподвижном
положении управляется кулачком 2, имею-
имеющим общую с кривошипом / ось вращения.
Число цевок
m <. 2k/(k - 2).
При изменении числа прорезов к от
трех до практического максимума число
цевок изменяется от шести до двух.
29 Том 2
450
МАЛЬТИЙСКИЕ МЕХАНИЗМЫ
Продолжение табл. 4
№
п.п
Характеристика
Схема
13 Однородный дезаксиальный четырех-
прорезной мальтийский механизм внутрен-
внутреннего зацепления.
При повороте цевки 1 на угол 2ц>1
крест 2 повернется в ту же сторону на угол
При повороте цевки на угол 2цЛ
крест неподвижен.
14 Дезаксиальный мальтийский меха-
механизм с углом поворота креста / на 180° за
один оборот кривошипа 2.
В мертвых положениях механизма,
когда цевки находятся в средней части лаза,
реверсивное вращение креста устраняется
переводными стрелками 3.
15 Мальтийский крест 2 во время паузы
фиксируется кулачком 3, вводящим ролик в
прорез креста 1.
Механизм пригоден для любого на-
направления вращения ведущего вала.
16 Ведущий диск 3 мальтийского меха-
механизма снабжен цевкой 2 овального сечения,
а прорезы четырехлучевого креста / имеют
непараллельные боковые стенки.
Механизм позволяет получить пово-
поворот креста на 1/4 оборота за 1/6 оборота
ведущего диска и работает без уларов.
17 Механизм с остановками.
Ведомому кресту 1 передается преры-
прерывистое реверсивное движение с помощью
четырехзвенника с коромыслом 2 регули-
регулируемой длины, а остановки изменяются по
фазе. За один оборот кривошипа 3 крест
имеет два периода движения и два периода
покоя.
Виды мальтийских механизмов
451
Продолжение табл. 4
№
п.п
Характеристика
Схема
18 Мальтийский механизм с неравно-
неравномерным движением цевки.
Во время движения креста на боль-
большом участке пути угловая скорость при-
приближается к постоянной. Отношение вре-
времени паузы к времени движения в этом
механизме больше, чем у обычного маль-
мальтийского механизма. Ось вращения ведуще-
ведущего кривошипа 3 и коромысла 2 с цевкой
смещены на величину е.
19 Мальтийский механизм, в котором
угловая скорость креста 1 приближается к
постоянной. В механизме, посредством
криволинейного паза в копире 2 длина г
кривошипа изменяется так, что в положе-
положениях, при которых в нормальном мальтий-
мальтийском механизме угловая скорость креста
наибольшая, в рассматриваемом механизме
длина г кривошипа, а также угловая ско-
скорость - наименьшие.
Угловые скорости со,ф и ускорение
креста е,ф могут быть найдены по формулам
v4pcosy + /ipsiny - р2
А2 - 2/ipcosy +p
>кр
sin у +
' cosy - 2Ар + р cosy +
+ Ар siny cosy - pp'siny 1 +
+ р"Ы siny - 2Арsiny cosy +p siny)
где у - угол, определяющий мгновенное
положение кривошипа отноекгельно линии
центров; р = /(у) - радиус-вектор кривой,
описываемой нентром цевки; ьа - угловая
скорость певки; А - межосевое расстояние.
А-А
452
МАЛЬТИЙСКИЕ МЕХАНИЗМЫ
Продолжение табл. 4
№
п.п
Характеристика
Схема
20
Мальтийский механизм с некруговым
движением цевки, закрепленной на шатуне
/ шарнирного четырехзвенного механизма
ОВСД. Крест 2 вращается более равномер-
равномерно, габаритные размеры механизма увели-
увеличиваются, точность вследствие износа шар-
шарниров уменьшается.
21
Шестипрорезной мальтийский меха-
механизм с некруговым движением цевки 1.
Траектория движения цевки задается про-
профилем пазовой шайбы 3 (а - траектория
движения центра цевки). Поводок 2 с пря-
прямолинейным пазом установлен на валу ме-
механизма и в период передачи движения
мальтийскому кресту перемещается в ради-
радиальном направлении.
22
Четырехпрорезной мальтийский ме-
механизм, в котором уменьшение угла пово-
поворота ведущего звена 1, необходимого для
поворота креста 2, достигается с помощью
шарнирного антипараллелограмма ОАВС,
включенного в кинематическую цепь. Для
предотвращения обратного движения звень-
звеньев при выходе из мертвого положения зве-
звенья ОА и ВС снабжены зубьями.
Виды мальтийских механизмов
453
Продолжение табл. 4
п.п
Характеристика
Схема
23
Мальтийский механизм, в котором от
равномерного вращающегося вала 3 посред-
посредством пары эллиптических колес 5 - 4 и
кривошипа 2, заклиненного на валу колеса
5, получает вращение крест 1. Поворот кре-
креста происходит при наиболее высокой ско-
скорости кривошипа 2, вследствие чего время
поворота креста уменьшается.
24
Механизм с длительной остановкой.
На ведущем валу 7 заклинено неполное
зубчатое колесо 6, несущее рычаг 1 с двумя
цевками 2 и 8. Колесо 6 зацепляется с не-
неполным звездчатым колесом 5, на валу ко-
которого заклинен кривошип 4 мальтийского
механизма. При непрерывном вращении
вала кривошип 4 часть оборота остается
неподвижным, а остальную часть оборота
вращается с угловой скоростью^ значитель-
значительно превышающей угловую скорость ведуще-
ведущего вала. Это позволяет получить необходи-
необходимое время покоя креста 3 без увеличения
времени его поворота.
25
Зубчато-цевочный механизм мальтий-
мальтийского креста с внутренним зацеплением с
тремя пазами. Звено 1, вращающееся вокруг
неподвижной оси А, имеет цевку а, входя-
входящую периодически в зацепление с прямо-
прямолинейными радиальными, симметрично
расположенными пазами d мальтийского
креста 2, вращающегося вокруг неподвиж-
неподвижной оси В.
Вращения звена 1 и креста 2 проис-
происходят в одинаковых направлениях.
26
Зубчато-цевочный механизм с запи-
запирающим пазом. Звено 1, вращающееся во-
вокруг неподвижной оси А, имеет цевку а,
последовательно входящую в зацепление с
прямолинейными радиальными, симмет-
симметрично расположенными пазами d мальтий-
мальтийского креста 2, вращающегося вокруг не-
неподвижной оси В. Звено / имеет запираю-
запирающий паз с, скользящий в период покоя
креста 2 по двум противоположно располо-
расположенным цевкам Ъ креста 2.
Вращения звена 1 и креста 2 проис-
происходят в противоположных направлениях.
454
МАЛЬТИЙСКИЕ МЕХАНИЗМЫ
Продолжение табл. 4
N°
п.п
Характеристика
Схема
27
Зубчато-цевочный механизм с двумя
цевками. Звено I, вращающееся вокруг
неподвижной оси А, имеет две цевки а,
периодически входящие в зацепление с
прямолинейными радиальными, симмет-
симметрично расположенными пазами d мальтий-
мальтийского креста 2, вращающегося вокруг не-
неподвижной оси В.
За два оборота звена 1 крест 2 делает
один оборот, имея два периода времени
движения и два периода времени покоя.
28
Цевочно-зубчатый механизм для вра-
вращения стола с остановками. Зубчатый сек-
сектор 2, вращающийся вокруг неподвижной
оси А, входит в зацепление с зубчатым ко-
колесом 3, вращающимся вокруг неподвиж-
неподвижной оси В. Цевка а колеса 3 периодически
входит в зацепление с прямолинейными
радиальными, симметрично расположен-
расположенными пазами d стола 1.
Вращения колеса 3 и стола 1 проис-
происходят в одинаковых направлениях.
29
Зубчато-цевочный механизм с изме-
изменяемым направлением вращения ведомого
колеса. Диск /, вращающийся вокруг не-
неподвижной оси А, имеет цевку а, входящую
в зацепление с прямолинейными радиаль-
радиальными, симметрично расположенными па-
пазами Ъ мальтийского креста 2, вращающего-
вращающегося вокруг неподвижной оси D. Крест 2 же-
жестко скреплен с зубчатым колесом 3, сооб-
сообщающим зубчатому колесу 4 прерывистое
движение вокруг неподвижной оси С. На-
Направление вращения колеса 4 может быть
изменено поворотом вокруг оси А рычага 5,
на котором укреплены оси D и В зубчатых
колес 3 и 6.
30
Зубчато-цевочный механизм с запи-
запирающим пазом. Звено 1, вращающееся во-
вокруг неподвижной оси А, имеет цевку а,
последовательно входящую в зацепление с
прямолинейными радиальными, симмет-
симметрично расположенными пазами d мальтий-
мальтийского креста 2, вращающегося вокруг не-
неподвижной оси В. Звено 1 имеет запираю-
запирающийся паз с, скользящий в период покоя
креста 2 по двум соседним выступам Ь. При
равномерном вращении ведущего звена 1
крест 2 вращается неравномерно и имеет
четыре периода времени движения и четыре
периода времени покоя. Вращения звена 1
и креста 2 происходят в противоположных
направлениях.
Список литературы 455
СПИСОК ЛИТЕРАТУРЫ
1. Артоболевский И.И. Механизмы в современной технике. Т. ЗМ.; Наука, 1973.
2. Атроболевскнй И.И. Теория механизмов и машин. М.; Наука, 1975.
3. Артоболевский И.И., Левнтский Н.И., Черкудивов СЛ. Синтез плоских меха-
механизмов. Государственное издательство физико-математической литературы, 1959.
4. Артоболевский И.И. Теория механизмов. М.,* Наука, 1965.
5. Артоболевский И.И. Теория механизмов и машин. Учебник для ВТУЗов. - 4-е
изд. М.; Наука. Гл. ред физ.-мат. лит., 1988.
6. Детали машин. Справочник в 3-х т. Под. ред. Н.С. Ачеркана. М.; Машинострое-
Машиностроение, 1968, 1969.
7. Детали и механизмы станков. В 3-х т. Под ред. Д.Н. Решетова. T.I, M.; Маши-
Машиностроение, 1972.
8. Кожевников СИ. Теория механизмов и машин. Изд. 4-е, М.; Машиностроение,
1973.
9. Кожевников С.Н., Есипенко Я.Н., Раскин Я.М. Механизмы. Справочник. Изд.
4-е. Под ред. С.Н. Кожевникова. М.; Машиностроение, 1976.
10. Крайнев А.Ф. Словарь-справочник по механизмам. 2- изд. М.; Машинострое-
Машиностроение, 1987.
11. Решетов Л.Н. Детали машин. Изд. 3-е. М.; Машиностроение, 1974.
12. Решетов Л.Н. Конструирование рациональных механизмов, Изд. 2-е. М.; Ма-
Машиностроение, 1972.
13. Теория механизмов и машин. Проектирование. Под ред. О. И. Кульбачного. Учеб.
пособие для машиностроительных специальностей ВУЗов. М.; Высшая школа, 1970.
456 ОБЪЕМНЫЕ ГИДРОПРИВОДЫ
17. ОБЪЕМНЫЕ ГИДРОПРИВОДЫ
17.1. ОБЩИЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
Под гидроприводом понимают совокупность устройств — гидромашин и гидро-
гидроаппаратов, предназначенных для передачи механической энергии и преобразования
движения при помощи жидкости. По принципу действия гидромашин гидроприводы
делятся на объемные и гидродинамические.
Гидропривод, содержащий объемные гидромашины, называется объемным.
Принцип действия простейшего объемного гидропривода (рис. 1) основан на практиче-
практической несжимаемости капельной жидкости и передаче давления по закону Паскаля.
Рис. L Принципиальная схема объемного гидропривода
Если пренебречь потерями давления в системе, то давление в цилиндрах 1 и 2
будет одинаковым:
p=Pl/Sl=p2/s2>
где S\ и $2 — площади поршней цилиндров 1 и 2. Учитывая практическую несжимае-
несжимаемость жидкости, можно записать: h\S\ = ^2^2 или \lSl = v2S2-
Мощность, затрачиваемая на перемещение поршня в цилиндре 1, выражается
соотношением N = P,v, = pSlvl •
Так как величина SjV, является расходом жидкости Q, то условие передачи
энергии можно представить в виде
где pQ — мощность потока жидкости; Р2\2 — мощность, развиваемая поршнем ци-
цилиндра 2, т. е. работа выходного звена, отнесенная к единице времени.
В состав объемного гидропривода входят источник энергии, объемный гидро-
гидродвигатель (исполнительный механизм), гидроаппаратура (устройства управления) и
вспомогательные устройства (кондиционеры и др.).
По виду источника энергии гидроприводы делятся на три типа.
1. Насосный гидропривод — это гидропривод, в котором рабочая жидкость пода-
подается в гидродвигатель объемным насосом, входящим в состав этого привода.
Объемная гидропередача — часть насосного привода, предназначенная для пере-
передачи движения от приводящего двигателя к машинам и механизмам.
2. Аккумуляторный гидропривод — гидропривод, в котором рабочая жидкость
подается в гидродвигатель от предварительно заряженного гидроаккумулятбра. Такие
гидроприводы используются в системах с кратковременным рабочим циклом.
3. Магистральный гидропривод — гидропривод, в котором рабочая жидкость по-
подается в гидродвигатель от гидромагистрали. Поток рабочей жидкости в гидромагистра-
гидромагистрали создается насосной станцией, питающей несколько гидроприводов (централизован-
(централизованная система питания).
Общие поняли и определения 457
По характеру движения выходного звена различают следующие объемные гид-
гидроприводы:
а) поступательного движения — с поступательным движением выходного звена
гидродвигателя;
б) поворотного движения — с поворотным движением выходного звена гидро-
гидродвигателя на угол менее 360°;
в) вращательного движения — с вращательным движением выходного звена
гидродвигателя.
Гидроприводы, в которых скорость выходного звена гидродвигателя может из-
изменяться по заданному закону, называются управляемыми. По способу регулирования
скорости гидроприводы делятся на следующие два типа:
1) с дроссельным управлением — регулирование скорости осуществляется путем
дросселирования потока рабочей жидкости и отвода части потока, минуя гидродвига-
гидродвигатель;
2) с машинным управлением — регулирование скорости происходит за счет из-
изменения рабочих объемов насоса или гидродвигателя или обеих гидромашин одновре-
одновременно.
В некоторых случаях в насосном гидроприводе регулирование производится за
счет изменения скорости приводного двигателя (электродвигателя, дизельного двигате-
двигателя и т. п.)- Такой гидропривод называется гидроприводом с управлением приводящим
двигателем.
Если в гидроприводе скорость выходного звена поддерживается постоянной
при изменении внешних воздействий, то такой гидропривод называется стабилизиро-
стабилизированным.
Особое место среди управляемых гидроприводов занимает следящий гидропри-
гидропривод, в котором движение выходного звена изменяется по определенному закону в зави-
зависимости от задаваемого воздействия, величина и характер которого заранее не извест-
известны.
Управляемые гидроприводы широко применяются в качестве приводов станков,
дорожных и строительных машин, прокатных станов, прессового и литейного оборудо-
оборудования, транспортных и сельскохозяйственных машин и т. п.
Достоинство гидроприводов:
а) возможность создания больших передаточных чисел и бесступенчатого регу-
регулирования скорости и усилий в широком диапазоне;
б) высокая удельная мощность — малая масса, приходящаяся на единицу пере-
передаваемой мощности и составляющая не более 1,2—2 кг на 1 кВт;
в) малая инерционность, обеспечивающая быструю смену режимов работы
(пуск, реверс, останов); момент инерции подвижных частей гидродвигателей в 5-^6 раз
меньше момента инерции подвижных частей электромашин той же мощности;
г) возможность простого и надежного предохранения гидропривода и машины
от перегрузок при условии заданного силового режима работы.
Недостатки гидроприводов:
а) транспортировка энергии связана с потерями, значительно превышающими
потери в электропередачах;
б) влияние эксплуатационных условий (температуры) на характеристики гидро-
гидропривода;
в) снижение КПД за счет внутренних и наружных утечек рабочей жидкости,
которые увеличиваются по мере выработки технического ресурса.
В гидроприводах применяют, в основном, давление до 20 МПа и
реже 35...7S МПа. Мощность насоса определяется по формуле
458 ОБЪЕМНЫЕ ГИДРОПРИВОДЫ
Л
10204
где Q — расчетный расход жидкости, —; р — давление жидкости, Па.
с
17.2. СВОЙСТВА И ТРЕБОВАНИЯ К РАБОЧИМ ЖИДКОСТЯМ ГИДРО-
ГИДРОПРИВОДОВ
Рабочие жидкости объемных гидроприводов должны иметь хорошие смазываю-
смазывающие свойства по отношению к материалам трущихся пар и уплотнений, малое измене-
изменение вязкости в диапазоне рабочих температур, высокий объемный модуль упругости,
малое давление насыщенных паров и высокую температуру кипения; быть нейтральны-
нейтральными к материалам гидравлических агрегатов и защитным покрытиям; обладать высокой
механической стойкостью, стабильностью характеристик в процессе хранения и экс-
эксплуатации; быть пожаробезопасными, нетоксичными, иметь хорошие диэлектрические
свойства.
В наибольшей степени этим требованиям удовлетворяют минеральные масла и
синтетические жидкости на кремнийорганической основе (силиконовые), которые и
применяются в качестве рабочих жидкостей объемных гидроприводов. Основные харак-
характеристики наиболее часто применяемых рабочих жидкостей приведены в табл. 22.
В гидроприводах, работающих в условиях низких температур, например в гид-
гидроприводах автомобилей и тракторов, эксплуатирующихся в условиях Крайнего Севера
и Сибири обычно применяют морозостойкие рабочие жидкости, у которых температура
застывания ниже -60 °С. Характеристики таких рабочих жидкостей даны в табл. 22.
Удельный вес и плотность
Плотность р (кг/м3) — масса жидкости в единице объема. Для однородной
жидкости р = м IV , где т — масса жидкости в объеме V
Удельный {объемный) вес у (Н/м3) — вес жидкости в единице объема: у =G IV ,
где G — вес жидкости.
Удельный вес и плотность связаны между собой зависимостью у = pg , где
g -9,81 м/с2 — ускорение свободного падения.
Относительная плотность 8 — безразмерная величина, равная отношению мас-
массы данной жидкости к массе дистиллированной воды, взятой в том же объеме при 4 °С:
5 = /иж/шв=уж/ув=рж/рв.
Удельный вес, плотность и относительная плотность жидкости зависят от дав-
давления и температуры.
Вязкость
Вязкость — свойство жидкости оказывать сопротивление относительному дви-
движению (сдвигу) частиц жидкости.
Дяя однородных (ньютоновских) жидкостей справедлив закон Ньютона о внут-
внутреннем трении в жидкостях
т - ±ц •— ,
dy
где т — сила сопротивления, отнесенная к единице площади, или напряжение трения;
du I dy — градиент скорости; |д — коэффициент пропорциональности, зависящий от
рода жидкости и называемый динамической вязкостью, Пас.
Свойства и требования к рабочим жидкостям гидроприводов
459
Отношение динамической вязкости к плотности жидкости называется кинема-
кинематической вязкостью V (м2/с)*
Вязкость жидкости с повышением температуры уменьшается. Влияние темпера-
температуры на динамическую вязкость жидкостей оценивается формулой М- = р>ое ° ,
где Ц и Hq — значения динамической вязкости соответственно при температуре I И
'о (°С)» а — показатель степени, зависящий от рода жидкости: для масел, например,
его значения изменяются в пределах 0,025—0,035.
Для смазочшлх масел и жидкостей, применяемых в машинах и гидросистемах,
используется формула, связывающая кинематическую вязкость и температуру:
'501
v, = v.
t
где V, — кинематическая вязкость при температуре t °C; V50 — кинематическая вяз-
вязкость при температуре 50°С; / — температура, при которой требуется определить вяз-
вязкость, °С; п — показатель степени, изменяющийся в пределах от 1,3 до 3,5 и более в
зависимости от значения Ум. С достаточной точностью п может определяться выраже-
выражением П = lg V50 + 2,7 . Значения и в зависимости от исходной вязкости V при 50°С
приведены в табл. 1.
1. Знпчения показателя степени л
V50 • 10"* , М2/С
2,8
6,25
9,0
11,8
21,2
29,3
п
1.39
1,59
1,72
1,79
1,99
2,13
г50-10^,м2/с
37,3
45,1
52,9
60.6
68,4
80,0
Л
2,24
2,32
2.42
2,49
2,52
2.56
Значения кинематической вязкости некоторых жидкостей даны в табл. 22.
При практических расчетах повышение вязкости минеральных масел в зависи-
зависимости от давления в диапазоне температур от 20 до 60 °С можно принимать по следую-
следующим приближенным данным
Давление, МПа
15
20
40
60
Повышение вязкости, %к ис-
исходной при атмосферном дав- 20—25 35—40 50—60 120—160 250—350
лении
Зависимость вязкости минеральных масел, применяемых в гидросистемах, от
давления р при возрастании его до 50 МПа можно определять с помощью приближен-
приближенной эмпирической формулы
Ур =у(\+кр),
где У к У — кинематическая вязкость соответственно при давлении р и 0,1 МПа;
к — опытный коэффициент, зависящий от марки масла: для легких масел
460
ОБЪЕМНЫЕ ГИДРОПРИВОДЫ
(v50 < 15 • 10 6 м2/с) к= 0,02; для тяжелых масел (v50 > 15 10~6 м2/с) к = 0,03.
При давлении больше 50 МПа линейность зависимости V от р нарушается, а при дав-
давлении порядка 2000 МПа минеральные масла затвердевают.
2. Динамическая вязкость некоторых масел при различных давлениях
Масло
Автол
Машинное
Трансформаторное
37
22
22
Динамиче<
П]
0,1
1,440
2,880
0,346
10
1,940
3,416
0,374
жая вязкость ji• 10 ', Пас
ри давлении, МПа
20
2,450-
4,176
0,418
30
3,060
5,184
0,489
40
3,672
6,822
0,562
>
50
4,896
8,640
0,650
В гидросистемах, предназначенных для работы в стабильных температурных
условиях при давлениях менее 10 МПа обычно применяют масла с вязкостью
20 + 40 мм2/с (при 50°С), а при давлении до 20 МПа - с вязкостью 40+60 мм2/с В
гидросистемах же прессов с давлением 50—60 МПа вязкость жидкости достигает значе-
значений 110+150 мм2/с. В гидросистемах с быстроходными насосами и в гидросистемах,
предназначенных для работы в широком температурном диапазоне и при низких темпе-
температурах, применяются масла с меньшими значениями вязкости.
Растворимость газов в капельных жидкостях и пенообразование
Обычно в масле действующей гидросистемы содержится приблизительно
от 0,5'до 5% воздуха в нерастворенном состоянии. В зависимости от конструкции и
режима эксплуатации гидросистемы содержание воздуха может повысится до 10—15%
общего объема жидкости.
Понижение давления в какой-либо точке системы (например, во всасывающем
трубопроводе) влечет за собой выделение воздуха в виде мельчайших пузырьков и обра-
образование пены.
Пена образуется также при засасывании воздуха через негерметичные стыки в
системах или при перемешивании жидкости в резервуаре незатопленными струями.
Интенсивность образования и стойкость пены в значительной мере зависит от
температуры, причем, стойкость пены в отличие от интенсивности образования с по-
повышением температуры уменьшается; при 70°С и выше пена быстро распадается.
Пена образуется, как правило, тем интенсивнее, чем ниже поверхностное натя-
натяжение и давление (упругость) насыщенного пара жидкости. Такие условия возникают
при добавлении в жидкость воды или иного активного агента.
Пенообразование резко усиливается при наличии в масле даже ничтожного
(менее 0,1% по весу) количества свободной или растворенной воды, которая способст-
способствует образованию эмульсий.
Особенно отрицательное влияние оказывает вода, находящаяся в жидкости в
виде эмульсии (однородной смеси очень мелких пузырьков воздуха и воды) высокой
дисперсности, которая не оседает под действием сил тяжести; обнаружить ее можно
лишь по помутнению: масло мутнеет при содержании в нем воды более 0,08% по весу
при 20°С.
Подобные эмульсии могут образоваться при резком изменении температуры
окружающей среды, при которой вода выпадает из раствора.
Свойства и требования к рабочим жидкостям гидроприводов
461
Растворимость газов в капельной жидкости характеризуется коэффициентом
растворимости к, который определяется отношением объема растворенного газа Vr,
приведенного к нормальным условиям @°С и атмосферное давление), к объему раство-
растворителя Уж; к=Уг/Уж.
Коэффициент растворимости зависит от свойств жидкостей и газов, а также от
температуры и давления. Растворимость газов в маслах малой вязкости выше, чем в
маслах большой вязкости. При повышении температуры их растворимость, незначи-
незначительно снижается. При повышении давления газа растворимость его в жидкостях воз-
возрастает по линейному закону.
Объем газа, который может раствориться в жидкости до ее полного насыщения,
определяется выражением
УТ
, где рх и р2 — соответственно начальное и
конечное давление газа.
Растворимость воздуха в масле до насыщения зависит от плотности масла: с
увеличением плотности растворимость воздуха уменьшается. Данные о коэффициенте
растворимости воздуха в некоторых жидкостях приведены в табл. 3.
3. Коэффициент растворимости воздуха в некоторых жидкостях при
20 °С и давлении 0,1 МПа
Жидкость
Бензин
Вода дистиллированная
Керосин
Масло:
АМГ-10
вазелиновое
велосит
веретенное АУ
к
0.2200
0.1600
0,1270
0,1038
0,0877
0,0959
0,0759
Жидкость
ГМЦ-2
индустриальное 12
индустриальное 20
трансформаторное
Спирто-тащериновая
смесь:
50:50% по объему
30:70% по объему
к
0,1038
0,0759
0,0755
0,0828
0,0392
0.0189
Рассмотренное свойство жидкости имеет важное значение для работы гидросис-
гидросистемы, т.к. присутствие газа понижает смазывающую способность масла , вызывает кор-
коррозию металлических деталей гидравлических агрегатов, а также окисление масла.
При наличии в жидкости нерастворенного воздуха нарушается плавность дви-
движения приводимых узлов, понижается производительность насосов, сокращается,
вследствие гидравлических ударов, срок их службы, а также приводит к запаздыванию
действия гидравлической системы, в особенности системы следящего типа, и к потере
ею устойчивости против автоколебаний.
Сжимаемость жидкости
Капельные жидкости являются упругим телом, подчиняющимся с некоторым
приближением (для давлений до 50—80 МПа) закону Гука. Практически большинство
жидкостей при давлениях 2040+3060 МПа превращаются в твердое тело, например,
вода при 20°С превращается в твердое тело при давлении 856 МПа.
462
ОБЪЕМНЫЕ ГИДРОПРИВОДЫ
Сжимаемость жидкости понижает жесткость гидравлической системы и приво-
приводит к прерывистому движению ее выхода, а также может вызвать нарушение ее устой-
устойчивости против автоколебаний и в частности ухудшает динамические характеристики
гидравлических следящих систем (сервомеханизмов).
Сжимаемость — свойство жидкости изменять свой объем под действием давле-
давления.
Сжимаемость жидкостей характеризуется коэффициентом объемного сжатия
В A/Па), который выражает относительное изменение объема жидкости VQ, отнесен-
отнесенное к единице давления р, и определяется по формуле
AV J_
Ар*
Знак минус в формуле обусловлен тем, что положительному приращению давления со-
соответствует отрицательное приращение (уменьшение) объема.
Если принять, что приращение давления Ар = р - р0, а изменение объема
о- Р-° —
где VhVq —объемы, а рмр0 —плотности,соответственно, при давлениях ри pQ.
Величина,обратная коэффициенту объемного сжатия, называется объемным мо-
модулем упругости жидкости Еж (Па): Еж = 1 / рр .
Различают адиабатный и изотермический модули упругости. Первый несколько
больше второго и проявляется при быстротечных модулях сжатия жидкости, например,
при гидравлическом ударе в трубах. В табл. 4 приводятся значения изотермического
модуля упругости некоторых жидкостей.
Объемный модуль упругости имеет существенное значение для динамических
характеристик объемных гидроприводов. Минеральные масла, используемые в качестве
рабочих жидкостей, имеют объемный модуль упругости от 13-Ю5 до 18-Ю8 Па. Так,
например, у веретенного масла АУ объемный модуль упругости 14,5-108 Па, а у турбин-
турбинного B2—17I08 Па. Несколько ниже объемный модуль упругости у силиконовых ра-
рабочих жидкостей. Так, рабочая жидкость ВТУ МХП 2416-54 имеет модуль упругости
10108 па.
4. Средние значения изотермического модуля упругости некоторых жидкостей
Жидкость
Алкоголь (спирт)
Бензин авиационный
Вода
Глицерин
Керосин
Масло:
АМГ 10
индустриальное
Изотермический
модуль упругости Еж,
МПа
1275
1305
2060
4464
1275
1305
1362
Жидкость
индустриальное 50
касторовое
сурепное
турбинное
цилиндровое 11
Силиконовая жидкость
Ртуть
Изотермический
модуль упругости
Еж, МПа
1473
1942
1761
1717
1768
1030
32373
Свойства и требования к рабочим жидкостям гидроприводов
463
В связи с высоким значением объемного модуля упругости жидкостей в техни-
технических расчетах сжимаемостью можно пренебречь, считая жидкость несжимаемой. Од-
Однако во многих случаях сжимаемость жидкости служит базой, на которой основана ра-
работа ряда устройств. В частности, это свойство жидкости используется для создания
жидкостных пружин и амортизаторов, давление в которых достигает 300—500 МПа.
Температурное расширение жидкостей
Температурное расширение жидкостей количественно характеризуется коэффи-
коэффициентом температурного расширения р,, представляющим относительное изменение
объема Vo при изменении температуры / на 1°С:
Коэффициент температурного расширения воды увеличивается с возрастанием давле-
давления и температуры; для большинства других капельных жидкостей р/ с увеличением
давления уменьшается.
В табл. 5 приведены значения Р, воды при различных давлениях и температу-
температурах.
5. Коэффициент температурного расширения воды
Давление ру
МПа
0.1
10
20
50
90
Температура и °С
1—10
0,000014
0,000043
0,000072
0,000149
0,000229
1—20
0,000150
0,000165
0,000183
0.000236
0,000289
40—50
0.000422
0.000422
0.000426
0.000429
0.000437
60—70
0.000556
0.000548
0.000539
0,000523
0.000514
90—100
0.000719
0,000704
0.000691
0,000661
0,000621
р, некоторых жвдкостей при 20 °С и давлении ОД МПа
Жидкость
Масло:
оливковое
сурепное
Глицерин
Ртуть
Алкоголь
Коэффициент температурного расширения p*f
0,00072
0.00090
0,00050
0.00018
0.00110
При изменении температуры и давления в небольших пределах можно принять
р, =const, и тогда объем жидкости при изменении температуры на величину t = t -10
вычисляется по формуле
при этом
Здесь V и VQ—объемы; рир0 —плотности^соответственно, при температурах ги*0.
464
ОБЪЕМНЫЕ ГИДРОПРИВОДЫ
17.3. ОБЪЕМНЫЕ ГИДРОДВИГАТЕЛИ
Гидроцнлиндры. Гидроцилиндры являются объемными гидродвигателями с прямолиней-
прямолинейным возвратно-поступательным движением рабочего органа (поршня или плунжера)
относительно корпуса цилиндра.
Рис. 2.Схемы цилиндров
На рис. 2, (а-к) приведены схемы гидроцилиндров следующих типов:
а) — двустороннего действия;
в) и е) — одностороннего действия;
и) и к) — телескопические;
ж) и з) — тандем-цилиндры.
Диаметр поршня (внутренний диаметр цилиндра) рассчитывают без учета по-
потерь трения и противодавления по выражению
~ \*Р
\%р
р
где р = рабочее давление жидкости, кГ/см2;
P = pS — усилие, развиваемое цилиндром, к Г;
S рабочая площадь (площадь живого сечения) поршня, см2.
Объем цилиндра
Vn=SH = Р—,
Р
где Н— ход поршня, см.
Движущее усилие Р на штоке цилиндра и скорость v его перемещения без учета
потерь на трение, величины противодавления и утечек жидкости определяюТпо форму-
формулам
Объемные гидродвигатели 465
Q
P = pS [кЦ; v = — [см/с],
где Q — расход жидкости, смъ/с.
Рабочая площадь поршня
nD2
S = для цилиндра, показанного на рис. 2, (а, г, ду е, ж) при подаче жидкости в
4
_ n(D2-d2)
полость, противоположную штоку, и S = — для цилиндра, показанного на
4
рис. 2, (а, г, д, е, ж) при подаче жидкости в полость со стороны штока и для цилиндра,
представленного на рис. 2, б,з.
Здесь D и d —диаметр поршня и штока.
Для гидроцилиндра одностороннего действия(рис. 2, ^рабочей площадью явля-
с nd2
ется площадь сечения штока S = .
4
Эти цилиндры просты в изготовлении, поскольку обработке подлежат лишь
поверхность d буксы под шток (скалку) и отпадает необходимость в обработке зеркала
внутренней поверхности цилиндра.
Когда требуется развить большое усилие при рабочем ходе и высокую скорость
обратного хода, применяют цилиндры с тонким штоком, работающим при рабочем ходе
на растяжение и обратном (холостом) — на сжатие. Схема включения такого цилиндра
в гидросистему представлена на рис. 2, г. Для обеспечения движения поршня в правую
сторону обе полости цилиндра закорачивают через распределитель и соединяют с насо-
насосом; в результате жидкость, вытесняемая из правой полости цилиндра, поступает в ле-
левую полость вместе с жидкостью, подаваемой насосом. При этом усилие Р\ и скорость
движения поршня определяют
Для перемещения поршня влево жидкость подается лишь в правую полость ци-
цилиндра, а левая полость соединяется с баком. Движущее усилие Р^ и скорость V2 пе-
перемещения поршня в этом случае определяются из выражений
Цилиндр, конструкция которого показана на рис. 2 д, обеспечивая требуемую
жесткость, позволяет осуществить при условии d > DI v2 большие скорости обратного
хода и большие усилия прямого рабочего хода. Этот цилиндр включают в гидросистему
так, что в правую его полость жидкость подается постоянно, в левую — при движении
поршня вправо. При соединении левой полости с баком поршень под действием посто-
постоянно действующих сил давления жидкости в правой полости будет перемещаться влево.
На рис. 2, д видно, что при d = D/^J2 площадь штока будет в 2 раза меньше
площади цилиндра; рабочие площади при движении поршня в обе стороны будут равны
S
30 Том 2
466 ОБЪЕМНЫЕ ГИДРОПРИВОДЫ
В соответствии, с этим скорости и развиваемые поршнем усилия при ходе в обе
стороны будут также равны.
При d фВ IV2 рабочая площадь равна:
Sj = тсШ2 -d2 1/4 — при движении поршня влево;
^2 = ltd2 IA — при движении поршня вправо.
В тех случаях, когда необходимо получить в обычной схеме включения цилинд-
цилиндра одинаковые усилия при постоянном давлении или одинаковую скорость при посто-
постоянном расходе жидкости, цилиндр снабжают ложным штоком того же диаметра, что л
силовой шток ( рис. 2,6.) Однако применение подобных цилиндров увеличивает габари-
габариты машины, т. к. шток выходит по обе стороны за цилиндр.
На рис. 2,е показана гидравлическая схема включения гидроцилиндра в гидро-
гидросистему с аккумулятором. При подаче жидкости через распределитель 1 в левую по-
полость цилиндра 2 его поршень будет перемещаться вправо, вытесняя жидкость из пра-
правой полости цилиндра в газогидравлический аккумулятор 3. При соединении левой по-
полости цилиндра 2 со сливной линией его поршень будет перемещаться влево под дейст-
действием жидкости аккумулятора 3. При питании левой полости цилиндра жидкостью под
давлением рн усилие, развиваемое поршнем, в конце хода
Х1 ~ , Рн л Рак.тп'
4 4
При питании цилиндра акккумулятором усилие
Р 7ф2
Р
где рн —давление питания (нагнетания);
п
о и р — максимальное и минимальное давления в аккумуляторе при изме-
* ак. max r ак min J
нении его газового объема в результате вытеснения жидкости из полости цилиндра и
наоборот.
В некоторых случаях и в частности, когда ограничена возможность применения
больших диаметров, но не ограничена длина, применяют сдвоенные (тандем) цилиндры
рис. 2, (ж, з) и строенные, последовательно соединенные.
Развиваемое усилие Р и скорость v перемещения такого двухпоршневого ци-
цилиндра определяются выражениями
P = p(S[+S2y} v = ^—,
где Si = 7iD2 /4 и ^2 =n(D2 -d2)IA — площади живых сечений поршней.
Тандем-цилиндры широко распространены в гидроусилителях систем управле-
управления самолетом, применение в которых обусловлено требованием дублирования управ-
управления.
При проектировании тандемных (двухкамерных) гидроусилителей следует
учесть возможность перегрузки цилиндра по давлению: при неблагоприятных условиях
перекрытий плугокером окон золотника в сочетании с изменением направления дейст-
действия внешней нагрузки давление может достигать четырехкратного рабочего давления.
Для получения больших ходов применяют телескопические цилиндры, состоя-
состоящие из двух и более цилиндров рис. 2, (и, к). Габариты телескопического силового ци-
цилиндра:
Объемные гидродвигатели
467
где х — число подвижных сочленений (частей).
Под телескопическим силовым гадроцилиндром в общем случае понимают си-
силовой гидроцилиндр, общий ход штоков которого превышает длину корпуса цилиндра.
Рис. 3.Схема цилиндра со ступенчатым поршнем
На рис. 3 изображена схема цилиндра со ступенчатым поршнем, применяя который
можно получить несколько скоростей поршня:
при подаче жидкости в канал 1 получим максимальную скорость
и минимальное усилие
при подаче жидкости в канал 2 получим среднюю скорость
V2 = —7 ~ ^Г
и усилие
P2=_L lp;
при подаче одновременно в каналы 1 и 2 — минимальную скорость
и максимальное усилие
kD-
Скорость обратного хода (при подаче жидкости в канал 3)
4B
V. =
и усилие при этом
Ра =
На рис.4 изображен гидроцилиндр,у которого
не шток, а корпус соединен с движущейся
частью машины. В этом случае жидкость в
цилиндр подводят через пустотелые штоки,
либо через гибкие трубопроводы (шланги).
Рис. 4. Гидроцилиндр с пустотелыми штоками
468
ОБЪЕМНЫЕ ГИДРОПРИВОДЫ
Рис. 5. Гидроцилиндр с демпфером
Для уменьшения потерь давления во входных и выходных каналах гидроцилиндров
диаметры проходных отверстий выбираются из условия, что скорость потока рабочей
жидкости не должна превышать 6 м/с. Однако для демпфирования ударов поршня о
крышки (донышки) корпуса применяют специальные способы дросселирования этих
отверстий, обеспечивающие торможение поршня в конце хода и уменьшающие ударные
нагрузки. На рис. 5 представлена простейшая схема такого демпфера. В конце хода
поршня 3 цилиндрический хвостовик 2 входит в цилиндрический канал корпуса 1,
уменьшая тем самым проходное сечение канала, по которому рабочая жидкость посту-
поступает в сливную гидролинию. Сопротивление протеканию рабочей жидкости тормозит
поршень и плавно снижает его скорость. Усилие торможения
где 5Э — эффективная площадь поршня \s
кольцевой зазор
I 5 = !; v — текущая скорость поршня; ц — динамическая вязкость; / — длина
хвостовика.
Применяются также иные схемы демпфирования большей или меньшей слож-
сложности, и ,в частности, демпферы с переменным по ходу поршня сопротивлением
(дросселированием), а в некоторых случаях — дроссели переменного сопротивления в
зависимости от температуры жидкости.
При проектировании гидроцилиндров рекомендуется выбирать следующие зна-
d
чения —-:
D
при р = 1,5 МПа —=0,3—0,35;
при р = 1,5— 5 МПа — =0,5;
при р = 5—10 МПа — =0,7.
В настоящее время серийно выпускается ряд гидроцилиндров двустороннего
действия с односторонним штоком: типа Ц, БУ-0600-00, ПГУ-ЗБ и др. Гидроцилюздры
типа Ц имеют диаметры поршней от 60 (Ц60) до 200 мм (Ц200). В большинстве
отраслей машиностроения диаметры поршней гидроцилиндров нормализованы. Напри-
Например, в станкостроении принят следующий ряд диаметров (мм): 45, 50, 65, 75, 90, 120,
150, 175, 200, 225, 250, 300, 350, 400, 500.
Объемные гидродвигатели
469
Поворотные гидродвигатели (ГОСТ 28761-90). Поворотные гадродвигатели по конструк-
конструкции подразделяются на два вида:
— гидродвигатели с преобразованием поступательного движения во вращательное;
— гидродвигатели без преобразования характера движения (шиберные гидродвигатели).
а)
L_J
Рис. б.Птюротные гидродвигателй:
а) — с преобразованием движения; б) —одношиберный; в)-— двуяпиберный
Наиболее распространены поршневые поворотные гидродвигатели, преобразуютцие
движение поршня в поворотное движение выходного звена с помощью кулисной или
зубчатой передачи.
Методика расчета гидродвигателя аналогична методике расчета поршневых гид-
гидроцилиндров, т. к. основой гидродвигателя является гидроцилиндр.
Шиберные гидродвигатели. Момент па валу поворотного гидродвигателя
где z — число шиберов;
Ь — ширина рабочей камеры (шибера);
р — давление рабочей жидкости.
За счет увеличения числа шиберов увеличивается крутящий момент на выходном валу,
но одновременно уменьшается возможный угол поворота.
Угол поворота одношибериого гидродвигателя может быть равен 270+280°.
Применение пгиберных поворотных гидродвигателей ограничивается сложно-
сложностью обеспечения надежной герметизации рабочих камер, особенно при высоких дав-
давлениях.
Поворотные гидродвигатели способны развивать большие крутящие моменты,
достигающие при давлении 20 МПа B00 кге/см*) величины 40 тм.
Важным элементом конструкции гидроцилиндров и поворотных гидродвигате-
гидродвигателей является уплотнение подвижных частей (поршня, штока, шибера, выходного вала и
т.д.). Для обеспечения высокой степени герметизации в машиностроении, в основном,
применяют резиновые кольца и манжеты. Конструкции уплотнений — гл. 5 .
470 ОБЪЕМНЫЕ ГИДРОПРИВОДЫ
Гвдромоторы. Гидромотор — это объемный гидродвигатель с вращательным движением
ведомого звена.
В машиностроении в качестве гидромоторов обычно используют объемные ро-
роторные гидромашины, в которых рабочие органы перемещаемые жидкостью, совершают
вращательное и возвратно-поступательное движения, а рабочие камеры перемещаются
из напорной полости в полость слива.
Такие гидромоторы представляют собой роторные насосы, обращенные в гид-
гидродвигатели.
В зависимости от назначения гидромоторы подразделяются на низкомоментные
и высокомоментные.
В качестве низкомоментных (с большой частотой вращения) широко использу-
используют аксиально-поршневые гидромоторы, у которых оси поршней параллельны оси блока
цилиндров или составляют с ней углы не более 45°.
Аксиально-поршневые гидромоторы по конструкции бывают с наклонным бло-
блоком типа ИМ и наклонным диском типа Г15-2.
Реже в качестве низкомоментных гидромоторов применяют шиберные, типа
МГ16-1, в которых рабочие камеры образованы поверхностями ротора, корпуса и ши-
шиберов, совершающих возвратно-поступательное и поворотное движения относительно
ротора.
Они существенно уступают аксиально-поршневым гидромоторам по экономич-
экономичности: объемный КПД < 0,8, диапазон регулирования частоты вращения 3-5-8
(Г 15-2 — 60 + 100). В качестве высокомоментных используют радиалъно-поршневые гид-
гидромоторы многократного действия, типа МР.
Для увеличения момента на валу гидромотора радиально-поршневого типа
применяют несколько рядов цилиндров (в гидромоторах МР-16 и ДП-508 — два ряда
цилиндров, Мкр до 30000 Нм при 25 мин-1).
Рассмотренные гидромоторы достаточно сложны по конструкции, дорогостоя-
дорогостоящие, имеют относительно низкий моторесурс. Поэтому в системах, где требуется высо-
высокая надежность и долговечность при низкой стоимости, применяют гидромоторы, соз-
созданные на базе шестеренных гидромашин с внешним и внутренним зацеплением
(нереверсивные моторы серии ГМШ, работающие на моторных маслах М-10Г, М-8Г,
ДП11 в интервале температур от 0 до 80° С.)
В последнее время широкое распространение получили роликолопастные гидро-
гидромоторы на номинальное давление 10—15 МПа, Мкр = \50 + 2000 Нм.
Их достоинства простота, надежность и высокий механический КПД.
Гидроаппаратура
471
17,4. ГИДРОАППАРАТУРА
Гидроаппаратом называется устройство, предназначенное для изменения
параметров потока рабочей жидкости (давления, расхода, направления давления) или
для поддержания их заданного значения.
Гидрораспределители. Гидрораспределитель — это гидроагшарат, предназначенный для
изменения направления потока рабочей жидкости в двух или более гидролиниях в
результате внешнего управления воздействия.
В машиностроении, ь основном, применяются гидрораспредслители кранового
или золотникового типа. Клапанные гидрораспределители, несмотря на их простоту и
надежность, применяются редко, т. к. для управления ими требуются значительные
усилия.
Крановые гидрораспрс делители работают, в основном, от внешнего
механического воздействия. Подвижным элементом (запорно-ретулирующим органом)
является цилиндрическая или коническая пробка, совершающая вращательное
движение. Гидрораспределители кранового типа применяются в системах с рабочим
давлением до 10 МПа.
Золотниковые гидрораспределители широко применяются в гидроприводах во
всех отраслях машиностроения. Занорно-рсгулирующий орган такого распределителя —
цилиндрический плунжер (золотник), снабженный соответствующими поясками и
кольцевыми проточками, в котором выполнены каналы (окна) для подвода и отвода
рабочей жидкости. Перемещение плунжера гидрораспределителя может осуществляться
вручную или с помощью механических, электромагнитных, пневматических или
гидравлических устройств.
По числу фиксируемых положений плунжера различают двухпозиционные и
трехпозиционные золотники. Если плунжер золотника не задерживается в среднем
положении, такой золотник называют двухлозиционным; если задерживается с
помощью каких-либо устройств — трехпозшщонным.
По величине перекрытий поясками плунжера в среднем его положении
расходных окон втулки (корпуса) различают распределители с положительным (рис. 7,
а) и отрицательным (рис. 7, б) перекрытием. Реже применяются золотники с нулевым
перекрытием (рис. 7, в).
В золотниках первого типа
(рис. 7, а) ширина А рабочего пояска у
плунжера превышает ширину t проходного
окна корпуса золотника для протока
жидкости, поэтому поясок плунжера при
симметричном его положении по
отношению к этим окнам перекрывает
h-t
соответствующее окно на длине с .
4-
-нл
У///
¦CL-EL
6}
сл
Рис. 7.Схемы перекрытий золотников
В золотниках второго типа (рис. 7, б) ширина А рабочего пояска меньше
ширины / проходного окна, в результате чего при среднем положении плунжера
золотника по обеим сторонам его пояска образуется начальный зазор, равный с .
472
ОБЪЕМНЫЕ ГИДРОПРИВОДЫ
Поскольку при условии // <t величина перекрытия с, вычисленная по выражению
с = , будет иметь отрицательное значение, подобное перекрытие окон уплотняю-
уплотняющими поисками золотника условно называют "отрицательным перекрытием".
Золотники третьего типа с нулевым
перекрытием (t = А) применяются в тех случаях, когда
требуется, чтобы при любом малом смещении плунжера
из среднего положения образовывалась расходная щель.
К подобным случаям относятся гидравлические
следящие системы.
В зависимости от конструкции золотника
рабочие полости гидродвигателя в среднем положении
плунжера либо фиксируются, либо соединяются с
резервуаром. На рис. 8 показаны возможные
соединения каналов питания при среднем положении
плунжера. В схеме с положительным перекрытием,
представленной на рис. 8, а, перекрыты все каналы
золотника; в схеме, представленной на рис. 8, б,
блокирован лишь канал питания, каналы же,
соединенные с полостями гидродвигателя, соединены с
баком; в схеме с отрицательным перекрытием,
представленной на рис. 8, в, все каналы соединены
с баком.
Расход жидкости Q и перепад давления Ар в
подводимом и отводимом потоке щели золотника
определяются по формулам
Рис. 8. Схемы канализации
золотников
и
где iS = wx — площадь проходного золотника;
w — размер проходного окна по длине окружности золотника
(для золотников в которых окна выполнены в виде круговых проточек, w - nd , где
d—диаметр плунжера);
х — смещение плунжера золотника относительно отсечных кромок (открытие
расходного окна);
ц — коэффициент расхода;
g — ускорение силы тяжести;
у — удельный (объемный) вес жидкости.
Коэффициент расхода ц для турбулентною потока, который в золотниках яв-
является преобладающим, при Re > 260 можно принимать ц = const, Для минеральных
масел и щелей с острыми кромками ц. = 0,60 + 0,62. Для закругленных кромок или
кромок с фасками ц = 0,75 * 0,8 . При Re < 200 -г 260, соответствующих малым смеще-
смещениям золотника (открытиям окон) коэффициент ц приближенно принят равным
ц = 0,5.
Скорость течения жидкости в каналах корпуса золотника и в проточках
плунжера принимают в 2 * 2,5 раза выше скорости жидкости в подводящих трубах
(практически выбирают 6 + 10 м/с, реже до 15 м/с). Площадь сечения потока жидкости
в любом месте канала составляет не менее -40-s- 50% площади сечения подводящей
Гидроаппаратура
473
трубы. Принято, что отношение квадратов площадей проходного сечения каналов
распределителя и сечения трубопровода
-2
Диаметр df, цгейки плунжера золотника должен быть таким, чтобы было
обеспечено требуемое проходное сечение между шейкой и втулкой золотника
и одновременно с этим была сохранена требуемая поперечная
жесткость плунжера; обычно соблюдается условие —L = — +—.
я 5 3
Для обеспечения герметичности минимальный диаметральный зазор в
золотниках обычно выбирается равным 0,004—0,01 мм. При более жестких требованиях
к герметичности диаметральный згпор для диаметров золотника до 25 мм и давления
р = 150 ч- 200 кГ/см2 составляет 0,004—0,007 мм.
При выборе зазоров необходимо учитывать температурное расширение
материалов, из которых изготовлены детали плунжерной пары, с тем чтобы было
устранено защемление плунжера при изменениях температуры. Изменение зазора
может быть вычислено по выражению
88+(Р)('')
где f0 и t—первоначальная и средняя температуры распределителя;
8q — зазор при первоначальной температуре;
Р и а — коэффициенты температурного расширения корпуса (гильзы) и плунжера.
При выборе диаметра плунжера исходят также из необходимости уменьшения
трения. Так как трение плунжера золотника зависит от его диаметра, величину
последнего выбирают минимальной.
Рекомендуемые размеры золотников (в мм)
Диаметр
входной трубы
6
12
18
25
38
50
» плунжера
15
22
25
30
38
50
штока плунжера
12
15
.15
18
22
30
Ширина
расходных окон
(каналов)
6
9
9
12
15
18
Минимальное
перекрытие
3
3
3
4
4
6
Ход
плунжера
3
12
12
IS
22
28
Стали для изготовления плунжеров и втулок термически обрабатываются до
высокой твердости и, при необходимости, подвергаются последующему хромовому
покрытию.
Гидрораспределители работают на минеральных маслах вязкостью 10—60 мм2/с
при температуре до 50°С. Технические данные гидрораспредслителей типа Г74 I,
предназначенных для реверсирования движения рабочих органов станков или других
машин с помощью ручного управления, приведены в табл.6.
474
ОБЪЕМНЫЕ ГИДРОПРИВОДЫ
6. Технические характеристики распределителей 174-1
Параметр
Номинальный расход, л/с
Номинальное давление, МПа
Потери давления при номинальном расходе, МПа
Утечки через зазоры при номинальном давлении, л/с
Типоразмер
174-12
0тЗ
174-13
0,6
174-14
1,2
Г74-16
2,40
0,3—8
0,2
0,0004 | 0,0009
Модификацией гидрораспределителя Г74-1 является гидрораспределитель типа
БГ74-1, отличающийся — системой фиксации золотника в характерных позициях.
Гидроклапаны. Гидроклапаном называется гидроаппарат , в котором степень открытия
проходного сечения (положение запорно-регулирующего органа) изменяется под
воздействием напора рабочей жидкости, проходящей через него. Гидроклапаны бывают
регулирующие и направляющие. К регулирующим в первую очередь относятся клапаны
давления в потоке рабочей жидкости. Наиболее широко применяются напорные и
редукционные гидроклапаны.
Напорный гидроклапан — регулирующий гидроаппарат, предназначенный для
ограничения давления в подводимом к нему потоке рабочей жидкости. По назначению
эти гидроклапаны делятся на предохранительные, которые ограничивают верхний предел
давления в системе, и переливные, предназначенные для поддержания заданного уровня
давления путем непрерывного слива рабочей жидкости во время работы.
Принцип действия всех напорных клапанов одинаков и основан на
уравновешивании силы давления рабочей жидкости, действующей на клапан, усилием
пружины или другим противодействующим устройством. Когда давление жидкости р
превышает заданный уровень рт,, запорно-регулирующий орган смещается, открывая
проход рабочей жидкости на слив. На рис. 9 представлены различные типы клапанов.
Шариковый клапан применяют обычно для малых давлений, на большие
давления и расходы более надежны конусные и плоские клапаны.Клапаны шарикового,
конусного и плоского типов рис 9, (я, б, в) применяют обычно в качестве
предохранительных клапанов, т. к. несмотря на простоту и надежность, они хорошо
работают только в случае эпизодического действия, характерного для
предохранительных клапанов. При непрерывной работе у них быстро изнашивается
седло клапана и нарушается герметичность системы.
Напорные клапаны золотникового типа рис. 9, г применяются в качестве
Y/Z6Y,
Рис. 9.Схемы предохранительных клапанов шарикового (а), конусного (б), плоского (в),
плунжерного (г) типов.
Гидроаппаратура 475
переливных клапанов, для которых характерно непрерывное движение запорно-
регулирующего органа. Основной характеристикой переливного клапана является
стабильность поддерживаемого им давления.
Гидравлическими параметрами переливного клапана являются разность
давлений (Ар) в нагнетательной и сливной линиях и расход (перепуск) в линию слива
X L. ~~ Хл "
где Ар — перепад давления на клапане;
С—жесткость пружин;
jc0 — предварительное поджатие пружины;
jcjt — конечное поджатие пружины при открытом клапане, зависящее от расхода
жидкости через клапан;
Sk — эффективная площадь, на которую действует давление р\ в нагнетательной
линии.
Расход (перепуск) Qc =QH -Qu,
где <2Н — производительность насоса;
<2Д —расход питания гидродвигателя.
Диаметр конусного и плоского (тарельчатого) клапана рис. 9, (б, в)
где d — диаметр отверстия седла клапана, причем для плоских клапанов отношение
—— больше, чем для конусных.
d
Гидравлические характеристики клапанов (коэффициенты сопротивления \ и
расхода ц) можно определять двояко; за расчетную площадь и расчетную скорость
принимают либо постоянную площадь отверстия и переменную скорость истечения в
его отверстии, либо переменную площадь щели под клапаном и приблизительно
постоянную (при данном перепаде давления на клапане) скорость истечения через эту
щель.
Для варианта постоянной скорости истечения и переменной площади
(S) коэффициент расхода
где Qc —расход (перепуск) слива;
у — объемный вес жидкости;
S—расчетная эффективная площадь проходной щели:
для плоского клапана
для конусного с углом конуса 2а
Расчетная эффективная площадь проходной щели конусного клапана
н Л
(
гяп2а],
476 ОБЪЕМНЫЕ ГИДРОПРИВОДЫ
поскольку при небольших подъемах Н «</^, вторым членом разности можно
пренебречь.
Преобладающим для рассматриваемого случая является турбулентное течение
жидкости и можно принять с достаточной точностью ц = const.
Для конусных клапанов с острой кромкой гнезда коэффициент расхода при
Re > 100 можно принять р.« 0,75.
В ряде рекомендаций коэффициент расхода принимается постоянным уже при
Re = 30+40, равным ji = 0,8. Однако допущение может быть принято для достаточно
высоких давлений и когда седло клапана выполнено с весьма острой кромкой, т. е. при
развитом турбулентном потоке. Для потока жидкости с Re < 30 коэффициент расхода
может быть вычислен по выражению
H = 0,126Re.
При наличии на седле фаски следует учитывать возможность появления при малых
подъемах затвора ламинарного режима течения жидкости в щели и соответственно
изменения (снижения) коэффициента расхода.
При достаточно больших числах Re, а именно при
Re>D+8)-103
режимы истечения через клапаны можно считать квадратичными. В этих случаях
коэффициент расхода рекомендуется принимать:
для конических и шариковых клапанов ц = 0,52 + 0,56,
а для плоских — 0,58 + 0,62.
Высота подъема затвора клапана
Высота подъема в клапанах с углом при вершине а = 90° конструктивно выбирается
обычно равной # = @,04 + 0,l>/fc. Во избежание заклинивания клапана значение а
должно быть а > 60*.
Для варианта переменной скорости истечения и постоянной площади
отверстия седла (даны размеры клапана и пружины, которой он нагружен, а также
свойства жидкости — объемный вес у и кинематическая вязкость v)
где к — коэффициент нагрузки, равный
, _ Ap-y-Ttd2
*~ АР '
Рщ. о — сила пружины при закрытом клапане (Р — сила воздействия потока жидкости
на клапан);
С — жесткость пружины (определяется по диаметру проволоки, радиусу витка, числу
витков и модулю сдвига);
Q — коэффициент сопротивления клапана
Пицюаппаратура
477
где v — скорость течения в отперепш седла.
Перепад давления на клапане
Полученные два уравнения позволяют производить подсчеты для построения
характеристики клапана Ар =/ (Qc), но так как заранее не известны числа
РсЙнольдса, то задачу приходится решать методом последовательных приближений.
Важным параметром напорных гидроклапанов является собственная частота
колебаний подвижных частей клапана. При установке клапана в системе для
предотвращения возможности возникновения резонансных колебаний надо соблюдать
соотношение ©к *©0 или Дю =|юк — с»о| — (ОД—0,15)сэ1иах, где ©к —собственная
60 \С „
частота клапана: © к = — . I— ; С — суммарная жесткость пружин; т — масел
подвижных частей; ©о — частота пульсаций давления в гидросистеме, определяемая
частотой пульсации насоса и характером работы потребителей.
Для гашения резонансных колебаний подвижных частей напорных клапанов в
некоторых случаях используют гидравлические демпферы, поглощающие энергию
колебаний. Напорные гидроклапаны устанавливают как можно ближе к тем агрегатам,
для защиты которых они предназначены.
Редукционный гидро клапан — регулирующий гидроаппарат,
предназначенный для поддержания постоянного давления в отводном от него потоке
рабочей жидкости при условии /и <p\t где р2 — давление в отводимом потоке
(давление на выходе); р\ —давление в подводимом потоке (давление на входе).
Редукционные клапаны обычно устанавливают в системах, где от одного насоса
работает несколько потребителей с разным значением рабочего давления. В этом случае
насос рассчитывается на максимальное давление, необходимое для работы одного из
потребителей, а перед другим устанавливают редукционный клапан. Кроме того, эти
клапаны являются стабилизаторами рабочего давления, поддерживающими р2 = const
при pi~var. Принципиальная схема редукционного клапана представлена на
рис. 10, а.
Рис.10. Редукционные клапаны:
а) — клапан постоянного даиления; б) — клапан постоянного перепада давлений
478
ОБЪЕМНЫЕ ГИДРОПРИВОДЫ
Если допустить, что силы трения в подвижных элементах малы, уравнение
равновесия можно записать в виде
Отсюда для достаточно эластичной пружины с малой погрешностью можно
записать:
где F,,p — предварительное усилие пружины 1, устанавливаемое регулировочным
винтом 2.
Промышленностью серийно выпускаются редукционные клапаны типа КР,
работающие на минеральных маслах вязкостью 10—50 мм2/с A0—50 сСт) при
температуре до 50°С.
7. Технические характеристики клапанов КР
Параметр
Номинальный расход, л/с
Пределы настройки давления на выходе, МПа
Номинально допустимый перепад давлений на
входе и выходе, МПа
Типоразмер
КР-12
0т40
КР-16
0,7
КР-20
1.05
КР-25
1.7
КР-32
2,70
1,5—15
1
Разновидностью редукционных клапанов является гидроклапан перепада
давления, предназначенный для поддержания заданного перепада давлений на входе и
выходе при р\>Р2 (рис. 10, б). Уравнение равновесия без учета сил трения и
диаметра отверстия а в поршне 1 можно записать в виде
откуда
В случае больших расходов через редукционный клапан с целью уменьшения
габаритов пружины используют клапаны непрямого действия, в которых управление
основным запорно-регулирующим органом осуществляется вспомогательным
устройством, работающим под действием потока рабочей жидкости с давлением pi.
Обратный гидроклапан — направляющий гидроаппарат,
предназначенный для пропускания рабочей жидкости только в одном направлении.
При изменении направления потока обратный клапан закрывается, прекращая подачу
рабочей жидкости в соответствующую гидролинию. Основные требования
предъявляемые к обратным клапанам: полная герметичность при закрытом положении
и минимальное гидравлическое сопротивление потоку в открытом положении.
Гидроаппаратура
479
В промышленных гидроприводах широко
применяются серийно выпускаемый обратный клапан
типа Г51-2 (рис. 11). При прямом направлении
потока рабочая жидкость подается через отверстие А
под клапан 1, который преодолевая усилие пружины
2, поднимается вверх и открывает проход рабочей
жидкости, при изменении направления потока клапан
1 давлением рабочей жидкости и усилием пружины
прижимается к седлу 3, перекрывая поток. Усилие
пружины незначительно и обеспечивает только
надежную посадку клапана на седло. Клапаны типа
Г51-2 работают на минеральных маслах вязкостью
10-60 мм2/с A0-60 сСт) при температуре до 50° С и
давлении до 20 МПа.
Рис. П.Обратный клапан
8. Технические характеристя
Параметры
Номинальный расход, л/с
Потери давления при номинальном
расходе, МПа
Утечка масла через клапан, л/с
Г51-21
0,13
Г51-22
0,3
л кляпя
нов Г51-2
Типоразмер
Г51-23
0,6
Г51-24
1,2
Г51-25
2,40
Г51-26
4.70
Г51-27
9.4
Не более 2
До 0,00008
До 0.00013
Разновидностью обратных клапанов является гидрозамок — управляемый
обратный клапан с управляющим воздействием на поток рабочей жидкости.
Гидрозамок пропускает жидкость только в одном направлении при отсутствии
управляющего воздействия и в обоих направлениях — при его наличии.
Гидрозамок типа КУ работает на минеральных маслах вязкостью 10—60 мм1!с
A0—60 сСт) при температуре до 50°С, номинальное давление до 32 МПа, давление
управления от 1 до 32 МПа, потери давления при номинальном расходе не бо-
более 0,4 МПа. Расход через гидрозамок зависит от его типоразмеров и находится в
пределах от 0,7 до 7 л/с.
Гидродроссели. Гидродроссель — это регулирующий гидроаппарат неклапанного
действия, представляющий собой специальное местное гидравлическое сопротивление,
предназначенное для снижения давления (энергии) в потоке рабочей жидкости,
проходящей через него.
Основной характеристикой гидродросселя является зависимость расхода Q от
перепада давлений Ар в подводимом и отводимом потоках: Q =f(Ap). По характеру
приведенной функции дроссели делятся на линейные и нелинейные.
В линейных дросселях, или дросселях вязкостного сопротивления, потери
давления определяются в основном трением жидкости в канале. В дросселях такого
типа устанавливается ламинарный режим течения рабочей жидкости, а перепад
давления практически прямо пропорционален скорости течения в первой степени.
Расход через линейный дроссель с каналами круглого сечения определяется по закону
Пуазейля:
480
ОБЪЕМЫ ЫЕ ГИДРОПРИВОДЫ
где / и d — соответственно длина и диаметр канала; V — кинематическая вязкость;
Ар — перепад давления в подводимом и отводимом потоках; g — ускорение силы
тяжести.
На рис. 12 представлена схема
регулируемого линейного дросселя, в
котором дросселирующий канал выполнен в
виде винтовой нарезки на цилиндрической
поверхности пробки 1. Жидкость подводится
к отверстию А и, пройдя через канал,
поступает к отверстию Б. Регулирование
величины Ар осуществляется за счет
Рис. 12.Линей,гый рсулнруемый дроссель треъ№щвния пробки j от„оситеЛыю
корпуса 2 с помощью рукоятки 3, благодаря чему изменяется длина канала,
соединяющего отверстия А и Б. Для канала прямоугольного сечения со сторонами а и Ь
расход выражается приближенной (формулой
Основным недостатком линейных дросселей, ограничивающим сферу их
применения, является нестабильность характеристик дросселя при изменении
температуры рабочей жидкости, обусловленная зависимостью вязкости рабочей
жидкости от температуры.
В нелинейных дросселях потери лаштения связаны с отрывом потока и
вихреобразованисм. Частным случаем нелинейного дросселя является квадратичный
дроссель, потери давления в котором прямо пропорциональны скорости во второй
степени (расхода). Потери на трепне в квадратичных дросселях практически
отсутствуют, благодаря чему расход через дроссель не зависит от вязкости жидкости, и,
следовательно, характеристика Д]юсселя остается стабильной в широком диапазоне
эксплуатационных температур. Это преимущество квадратичных дросселей определило
их широкое использование в гидравлических системах. Простейший квадратичный
дроссель представляяет собой отверстие с острой кромкой, толщина которой с=0,2—0,5
мм (рис. 13,я).
Сопротивление одпошайбового дросселя можно регулировать с помощью
дроссельной иглы (рис. 13 б, в, г).
Рис. 13.Схемы квадратичных дросселей
Гидроаппаратура 481
Расход рабочей жидкости через такой дроссель рассчитывается по формуле
где S — площадь проходного сечения; р — плотность жидкости; ц — коэффициент
расхода, значение которого постоянно для каждого типа дросселя и определяется
экспериментально. При больших значениях Re для приближенных расчетов можно
принимать ц =0,6—0,65. Площадь сечения для игольчатого дросселя (рис. 13, г)
рассчитывается по формуле
5пр - nDm sin a .
Угол а выбирают от 3 до 15 ° , обычно а =6 °.
Для получения больших перепадов давления или малых расходов при
Ар = const необходимы отверстия очень малых диаметров, что неизбежно приводит к
засорению. Кроме того, при диаметре отверстия ^ < 0,1 мм наблюдается явление
облитерации, заключающееся в зарастании отверстия вследствие отложения на твердой
поверхности его краев слоя поляризованных молекул рабочей жидкости. Поэтому на
практике в качестве настраиваемого дросселя применяют пакет дросселирующих шайб,
отверстия в которых можно сделать достаточно большими, а степень дросселирования
обеспечить числом шайб в пакете (рис. 13, д). Отверстия в шайбах пакета должны иметь
диаметр d =0,5-5-1,5 мм. Расстояние между шайбами выбирается из условия C*5) d,
толщина кромки отверстия @,5-5-1,0)*/, диаметр шайбы D 'к. lOd . При сборке пакета
шайб оси отверстий в них смещаются так, чтобы отверстия не находились одно против
другого.
Расход через дроссель, у которого расстояние между шайбами и диаметры
отверстий в шайбах равны, определяется из соотношения
К Р
где S— площадь отверстия в шайбе;
Др — перепад давления на пакете шайб;
(j, — коэффициент расхода для одной шайбы; п — число шайб в пакете (число
ступеней);
р —плотность жидкости;
к — коэффициент взаимного влияния ступеней дросселя, который может быть принят
равным 1,25.
При расчете числа шайб (числа ступеней) следует учитывать, что чем больше
число степеней, тем стабильнее коэффициент расхода по Re и, следовательно,
стабильнее характеристика дросселя в широком диапазоне температур.
Для регулирования скорости перемещения рабочих органов станков или других
машин путем изменения расхода рабочей жидкости используют регулируемые
гидродроссели двух типов: крановые и золотниковые.
31 Том 2
482
ОБЪЕМНЫЕ ГИДРОПРИВОДЫ
9. Технические характеристики крановых дросселей типа Г77-3
Параметр
Номинальный расход, л/с
Наименьший
рекомендуемый расход, л/с
Номинальное дашюнис,
МПа
Типоразмер
177-31»
0.02 .
0.01
177-3 Ш
0.05
0,0016
Г77-31Л
0.08
0,0025
177-31
0.J3
177-32Л
0,2
177-32
0,3
Г77-33
0,6
J77-34
1,2
0.004
12,5
10. Технические характеристики золотникового дросселя типа VII-2
Параметры
Номинальный расход, л/с
Номинальное даютенгю, МПа
Потери далленни при номинальном расходе через
открытый дроссель, МПа
Типоразмер
177-24
1.2
177-25
2,35
Г77-26
4,70
Г77-27
9,40
До 20
Не более 0,02
Дроссели типа Г77- 2 и Г77-3, а также типа ДО и ДР работают на минеральном
масле вязкостью 18—60 мм2/с AЯ—60 сСг) при температуре масла до 50°С.
Рекомендуется применять индустриальное масло 20 или 30 (ГОСТ 20799 88).
Дроссели типа ДО и ДР допускают использование масел вязкостью до 400 мм2/с
D00 сСт).
Рис. 14.Схема сопла-заслонки
Широкое распространение получили регулируемые дроссели "сопло-заслонка" (рис.14).
Такие дроссели представляют собой устройства, состоящие из сопла и плоской
заслонки, которая перемешается вдоль оси сопла, изменяя тем самым площадь
кольневой щели между торцем сопла и заслонкой, и следовательно, гидравлическое
сопротивление дросселя.
Размеры этого устройства обычно весьма невелики:
диаметр сопла dc — порядка 1 мм;
диаметр внешней окружности обреза сопла Dc = A,2-f \,5)dc ;
диаметр заслонки Вл - C+4>/Р;
длина цилиндрического участка сопла L = A + 2)dc .
Характеристики такого типа дросселей достаточно стабильны в широком
диапазоне изменения температур, т. к. в регулируемом зазоре преобладает турбулентный
режим течения жидкости. \
При применении такого устройства в системах гидроавтоматики определяют его
пропускную способность (расход жидкости) и силовое воздействие жидкости на
заслонку при различных дашгепиях и разных расстояниях сопла от заслонки.
Гидроаккумуляторы и гидропреобразователи 483
Без учета потерь давления в подводящих каналах сопла перепад давления на
дросселе "сопло-заслонка" определяется формулой
где Qc — расход через сопло;
\ic —коэффициент расхода;
h — зазор между соплом и заслонкой;
dc — диаметр сопла;
р — плотность жидкости.
Для приближенного определения силы воздействия потока на заслонку при
Dc
—г~ =1,2 обычно пользуются формулой
dc
4
Более подробные расчеты приведены в [4].
17.5. ГИДРОАККУМУЛЯТОРЫ И ГИДРОПРЕОБРАЗОВАТЕЛИ
Гвдроаккумуляторы. Гидроаккумулятор — это устройство, предназначенное для
аккумулирования энергии рабочей жидкости с последующим использованием этой
энергии. Гидроаккумуляторы накапливают энергию во время частичной загрузки
источника энергии гидропривода и возвращают ее в систему в период интенсивной
работы гидродвигателя.
Гидроаккумуляторы используются для уменьшения пульсаций давлений,
вызываемых работой насоса, клапанов, распределителей; для защиты системы от
возможных гидравлических ударов; для поглощения кинетической энергии при
больших инерционных нагрузках гидродвигателей, а также для компенсации изменения
объема при изменении температуры.
По способу накопления энергии различают гидроаккумуляторы:
а) грузовые(аккумулирование и возврат энергии происходит за счет изменения
потенциальной энергии груза);
б) пружинные (аккумулирование и возврат энергии осуществляется за счет упругих
деформаций пружины);
в) пневмогидроаккумуляторы (аккумулирование и возврат энергии происходит за счет
сжатия и расширения газа).
Грузовой гидроаккумулятор представляет собой цилиндр, поршень которого
находится под действием силы веса груза (рис. 15, а).
3V
484
ОБЪЕМНЫЕ ГИДРОПРИВОДЫ
Достоинством таких гидроаккумуля-
гидроаккумуляторов является постоянство давления при
их разрядке. Однако в мобильных машинах
эти гидроаккумуляторы не применяются
ввиду громоздкости и вследствие того, что
груз, обладая инерционной массой, при
вертикальных колебаниях создаст пульса-
пульсацию давления.
В пружинных аккумуляторах давле-
давление жидкости создается усилием пружины
(рис. 15 , б) и выражается зависимостью
Р =
F0+CL
Рис. 15. Гидроаккумуляторы:
а) - грузовой; б) - пружинный
где Fq — сила предварительного поджа-тия пружины 1; С — жесткость пружины;
L — длина хода поршня. Поскольку усилие пружины зависит от ее деформации, давле-
давление в аккумуляторе будет зависеть от степени его разрядки.
Для накапливания значительного количества энергии рабочей жидкости пру-
пружинные аккумуляторы можно использовать только в стационарных гидросистемах, т. к.
размеры пружин существенно увеличивают вес и габариты аккумулятора. Пружинные
аккумуляторы используют в гидроприводах с замкнутой циркуляцией рабочей жидкости
для компенсации температурных расширений, а также в некоторых системах для ком-
компенсации возможных утечек рабочей жидкости.
Выпускают следующие разновидности пневмогидроаккумуляторов (рис. 16 ):
а) без разделителя, когда рабочая жидкость находится в непосредственном контакте с
газом (чаще всего азотом). Такие аккумуляторы малоинерционны, просты по конструк-
конструкции, в них практически отсутствуют потери энергии. Однако их серьезным недостатком
является то, что газ, контактируя со свободной поверхностью рабочей жидкости под
высоким давлением, растворяется в ней и ухудшает се свойства. Кроме того, объем газа
по мере его растворения уменьшается, в результате чего возникает необходимость в пе-
периодической подзарядке пневмогидроаккумулятора газом;
б) с разделителем — рабочая жидкость отделена от газа. По конструкции разделителя
такие гидроаккумуляторы делят на три типа: поршневые — с разделителем в виде
поршня (рис.16, а); мембранные — с разделителем в виде резиновой диафрагмы
(рис.16, б); баллонные — с разделителем в виде эластичного баллона (рис. 16, в). Порш-
Поршневые аккумуляторы обладают недостатком, связанным с наличием трения поршня о
цилиндр и потерей энергии. Этот недостаток полностью устранен в мембранных и бал-
баллонных аккумуляторах. Сопротивление диафрагмы или баллона у них мало, и практиче-
практически такие гидроаккумуляторы можно считать безинерционными. Поршневые аккумуля-
аккумуляторы всегда бывают в форме цилиндра, а мембранные и баллонные наиболее целесооб-
целесообразно выполнять в виде сферы. Аккумуляторы сферической формы отличаются ком-
компактностью и малым весом. Это обусловлено особенностями сферических форм, а на-
напряжение в стенках под действием давления в два раза меньше, чем в стенках цилиндра
того же диаметра.
Гндроаккумуляторы и шлропреобразователи
485
Расчет параметров ппевмогидроаккумулитора проводится на основе уравнс1шя
политропы, охватывающего псе 1юзможные изменения состояния газа: pV" -const.
РисЛб.Пнсвмошдроаккумуляторы:^ - поршневой; б) - мембранный;
в) - баллонный
Емкость аккумулятора определяется по формуле
У~) -lit)
где Vn — полезный объем (емкость) аккумулятора; Кк — конструктивный объем
(геометрический); р„ — начальное давление газа в аккумуляторе; /»11ШХ — давление и
конце зарядки; jpUiiu —минимально допустимое давление в конце разрядки; п — пока-
показатель политропы, зависящий от отношения /»шах OJmiu и времени рабочего процесса.
Для режимов работы с временем зарядки t=\Q+\5 с можно считать л=1,3.
Для приближенных расчетов можно пользоваться следующими соотношениями:
где VT — минимально необходимый объем газового резервуара.
Гидропреобрлзователи. Гидропреобразователи — объемные машины, предназначенные
для преобразования энергии одного потока рабочей жидкости в энергию другого потока
с другим значением давления и расхода. Гидропреобразователи обычно применяются в
том случае, если необходимо получить очень высокое давление (свыше 70МПа) при
малых расходах рабочей жидкости. Часто гидропрсобразоватсли используют в гидро-
гидроприводах машин для преодоления кратковременной повышенной нагрузки, когда при-
применение дорогих насосов высокого давления нерационально. Гидропреобразователи
бывают двух типов: одинарного и двойного действия.
486
ОБЪЕМНЫЕ ГИДРОПРИВОДЫ
h
я)
а)
Рис. 17. Гидропреобразователи:
одинарного действия; б) — двойного действия
На рис.17, а приведена принципиальная схема преобразователя одинарного
действия. Давление подводимого потока рабочей жидкости р] действует на плои inдь
S = ^~—, а на выходе давление р^ — на площадь $ = —- • Из равенства сил получим
i 4 " 4
4
коэффициент усиления гидроиреобразователя i = — - = —~.
Рг d"
Преобразователь совср[иаст рабочий ход только при движении в одну сторону
(вправо). При движении влево получается холостой ход. Для устранения холостого хода
применяют гидрораспределители двойного действия (рис.17,? ). Питание полостей низ-
низкого давления р^ производится через распределитель, а заполните рабочих камер А и
Б — через обратные клапаны 1 и 2. При ходе влево заполняется камера Б, при ходе
вправо — камера А
Коэффициент усиления гидропреобразователей находится в пределах /=24-1000.
Для гидропреобразопателей двойного действия, применяемых в машиностроении,
*=3-*-7 при расходе рабочей жидкости до 2 л/с.
Кондиционеры рабочей жидкости
487
17.6. КОНДИЦИОНЕРЫ РАБОЧЕЙ ЖИДКОСТИ
Ковдицноверы рабочей жвдкости. Кондиционерами рабочей жидкости называются
устройства, предназначенные для получения необходимых качественных показателей и
состояния рабочей жидкости. В гидравлических приводах машиностроения
применяются два вида кондиционеров: отделители твердых частиц и теплообменники.
Отделитель твердых частиц — это устройство для отделения от
рабочей жидкости твердых загрязняющих примесей. Источником загрязнения могут
быть продукты износа деталей гидромашин и гидроаппаратов, посторонние частицы,
попадающие в рабочую жидкость извне, продукты окисления металлов и сплавов,
применяющихся для изготовления гидромашин.
Отделители твердых частиц характеризуются качеством (тонкостью)
фильтрации, под которым понимают способность задерживать (отделять) из рабочей
жидкости частицы соответствующих размеров. По качеству фильтрации отделители
твердых частиц бывают грубые, задерживающие частицы с условным диаметром до 100
мкм; нормальные — до 10 мкм; тонкие —до 5 мкм; особо тонкие — до 1 мкм.
По принципу действия отделители твердых частиц делятся на фильтры и
сепараторы.
Фильтр — это отделитель твердых частиц, в котором очистка происходит при
прохождении рабочей жидкости через фильтрующий элемент. В зависимости от
конструкции фильтрующего элемента фильтры бывают: щелевые (очистка происходит
при прохождении рабочей жидкости через щели фильтрующего элемента); сетчатые
(очистка осуществляется при прохождении рабочей жидкости через ячейки сетки);
пористые (очистка осуществляется при прохождении рабочей жидкости через поры
фильтрующего элемента, например, через поры керамических, малокерамических и
бумажных элементов).
В общем машиностроении в основном необходима грубая или нормальная
фильтрация, реже — тонкая. Поэтому
пористые фильтры, обеспечивающие тонкую и
особо тонкую фильтрацию, используются
редко, а наиболее широко применяют
щелевые и сетчатые фильтры.
На рис.18 приведена конструктивная
схема сетчатого фильтра типа С42,
предназначенного для очистки минеральных
масел вязкостью до 600 мм2/с F00 сСт),
выпускаемого серийно и применяемого в
гидравлических и смазочных системах машин.
Фильтр состоит из стакана 3, крышки S и
трубки 4 с закрепленным на ней
фильтрующим элементом 2. Фильтрующий
элемент — это набор перфорированных
дисков с натянутой на них сеткой.
Поступающая в фильтр жидкость проходит
через фильтрующий элемент, попадает внутрь
трубки 4 и выходит из фильтра. Отстой
периодически удаляется через сливное
отверстие с пробкой 1.
Рис. 18.Сетчатый фильтр
488
ОБЪЕМНЫЕ ГИДРОПРИВОДЫ
11. Технические характеристики фильтров С42
Параметр
Номер сетки фильтрующего элемента
(ГОСТ 6613-73)
Наименьший размер задерживаемых
частиц, мм
Пропускная способность при перепаде
давлений 0,5 МПа и вязкости 0,8 cm*/c, л/с
Рабочее давление, МПа
Типоразмер
0,05 С42
11
12
13
14
0,04
0,05
2
3
8
18
0,8 С42
11
12
13 | 14
0,071
0,08
3
8
18
35
0,15 С42
11
12
13
14
0,125
0,15
8
18
35
70
До 0,6 МПа
Пластинчатые фильтры применяют в качестве фильтров грубой очистки с
фильтрацией частиц размером не менее 0,08 мм. Конструкция таких фильтров обычно
рассчитана на установку в гидролиниях с давлением до 60 МПа.
12. Технические характеристики серийных
щелевых пластинчатых фильтров Г41
Параметр
Наименьший размер
задерживаемых частиц, лек
Пропускная способность
при перепаде давлений
0,5 МПа и вязкости
0,8 СИ2/*!; Л/С
Типоразмер
0,08 Г41
11
12
13
14
0,08
0,05
on
0 30
060
0,12 Г41
11
12
13
14
0,12
0,08
0?0
0 40
0 80
0.2 Г41
11
12
13
14
0,2
0,13
0 30
0 60
1 20
П р и м е ч а н и е. Рабочее давление до 6,6 МПа
Расчет фильтров сводится к определению потребной площади фильтрующей
поверхности исходя из заданного расхода, качества фильтрации и допустимого перепада
давлений на фильтре. Площадь фильтрующей поверхности приближенно определяется
по формуле
где Q — расход рабочей жидкости через фильтр, л/с; Р\-Рг — перепад давления, МПа;
ц — динамическая вязкость, Пас; q — удельная пропускная способность материала
фильтра, л/см2, представляющая собой пропускную способность единицы площади
материала фильтра при перепаде давлений 1 МПа и вязкости 1 Пас.
Для наиболее часто применяемых материалов фильтра можно принимать
следующие значения д: густая металлическая сетка — 0,05; сетка из хлопчатобумажной
ткани — 0,09; мягкий густой войлок толщиной 10 мм — 0,015; пластинчатый фильтр с
зазором 0,08 мм — 0,08 л/см2.
Сепараторы — это отделители твердых частиц, в которых очистка рабочей
жидкости происходит под воздействием каких—либо сил. В зависимости от физической
Кондиционеры рабочей жидкости 489
природы действующей силы сепараторы разделяются на магниптые, центробежные,
электростатические.
В гидроприводах машин применяются в основном магнитные сепараторы,
улавливающие мельчайшие ферромагнитные включения, которые появляются в рабочей
жидкости в результате приработки трущихся поверхностей деталей птдромашин.
Промышленностью серийно выпускаются магнитные сепараторы типа ФМ с
пропускной способностью от 0,1 до 7 л/су с качеством фильтрации до 0,005 мм и
перепадом давлений не более 0,025 МПа. Поскольку магнитные сепараторы могут
отфильтровывать только частицы, обладающие магнитными свойствами, то в системах
гидроприводов их обычно используют в сочетании с сетчатыми филырами.
Магнитосетчатыс фильтры типа ФМС, предназначенные для очистки
минеральных масел вязкостью до 600 мм2/с F00 сСт), имеют общую крышку с каналами
входа и выхода жидкости, к которой прикреплены стаканы сетчатого фильтра и
магнитного сепаратора.
13. Технические характеристики мягнитосегчатых фильтров ФМС
Параметр
Наименьший размер задерживаемых чпетпц, мм:
магнитных
немагнитных
Пропускная способность при перепаде даилений 1 МПа и вязкости
0,8 см2/с, л/с
Рабочее давление. МПа
Типоразмер
ФМС-12
ФМС~ 13
0,01—0,005
0.08—0,06
0,3
0.6
До 6
Рассмотренные выше фильтры рассчитаны на невысокое давление и могут
устанавливаться в основном в сливных гидролиниях. Для установки в напорной
гидролинии с высоким рабочим давлением фильтры выполняются с усиленным
корпусом. Размеры и параметры таких фильтров регламентированы: фильтры сетчатые с
тонкостью фильтрации до 10 мкм на давление до 20 МПа (ГОСТ 16026—80); фильтры
щелевые с тонкостью фильтрации до 25 мкм на давление до 16 МПа.
Включение фильтров (сепараторов) в гидросистему производится по двум
схемам: последовательное включение — через фильтр проходит вся рабочая жидкость;
параллельное — происходит фильтрация только части потока, направляемого к наиболее
ответственным агрегатам. В большинстве случаев целесообразно использовать в
гидросистеме обе схемы фильтрации, включая последовательно фильтр грубой
(нормальной) очистки, а перед ответственными агрегатами в соответствующем потоке —
фильтр тонкой очистки.
Теплообменники — это устройства, предназначенные для обеспечения
заданной температуры рабочей жидкости. Теплообменники делятся на нагреватели
жидкости и охладители жидкости. В гидравлических приводах машиностроения, как
правило, требуется охлаждение рабочей жидкости, которая, нагреваясь в процессе
работы, ухудшает свои параметры (вязкость), что приводит к снижению КПД системы и
уменьшению ее эксплуатационных характеристик.
Для гидросистем с давлением до 10 МПа температура рабочей жидкости
(минеральных масел) не должна превышать 70—80 °С, а для гидросистем с давлением
более 20 МПа — 50 °С. Тепловой расчет гидропривода ведется на основе баланса
выделяемого и отводимого количества тепла по приближенной формуле
490
ОБЪЕМНЫЕ ГИДРОПРИВОДЫ
где N— мощность, подводимая к гидроприводу, кВт; п — КПД гидропривода; а,- —
коэффициент теплоотдачи /—го участка гидросистемы, Вт/м2-град; 5,- — площадь
поверхности i—го участка гидропривода, м2; А/, — перепад температур рабочей
жидкости и окружающей среды на /-м участке гидропривода, °С.
Коэффициент а зависит от конструктивных особенностей участка
гидропривода, а также от условий обтекания его воздухом. Например, для гидробаков с
гладкими стенками а = 15 Вт/м2град — при свободной циркуляции воздуха; а-23
2&я/л#2-град — при принудительном обдуве вентилятором.
Если выделение тепла в гидроприводе превышает естественную теплоотдачу
при заданном перепаде температур At , то в гидроприводе устанавливают охладитель,
обеспечивающий принудительный отвод тепла. По конструкции охладитель
представляет собой радиатор, обтекаемый хладагентом (чаще всего холодной водой).
Для охладителей величина а в зависимости от конструкции радиатора колеблется от
ПО до 200 Вт/м2град. В гидроприводах охладители устанавливают в сливной
гидролинии непосредственно перед гидробаком. Сопротивление охладителя потоку
рабочей жидкости должно быть минимальным.
Нагреватели устанавливаются в гидроприводах при работе в условиях низких
(минусовых) температур для предотвращения льдообразования, связанного с
замерзанием конденсата пара воды, выделившейся из воздуха, а также замерзанием
воды, находящейся в масле в растворенном и нерастворенном состоянии. Наличие воды
в количестве 0,5% объема масла приводит к забиванию фильтров льдом (студенистой
эмульсией) и потере их работоспособности. Нагреватели монтируют в гидробаках и
включают перед пуском гидросистемы.
Гидробаки служат для хранения, отстоя, очистки и охлаждения рабочей
жидкости, циркулирующей в гидроприводе. Гидробаки, применяемые в гидроприводах
общего машиностроения, бывают двух типов: с атмосферным давлением и с избыточным
давлением (закрытые).
На рис.19 представлена типовая схема гидробака с атмосферным давлением.
Корпус бака 1 закрыт крышкой 2, исключающей попадание в гидробак посторонних
примесей. Через крышку 2 в бак входит труба сливной 3 и всасывающей 5 гидролиний.
Для заполнения бака в крышке установлена заливная пробка 4 с дренажным
отверстием, обеспечивающим выравнивание давлений внутри и снаружи бака, а также
отвод выделяющихся из масла газов и воздуха в атмосферу. Для предотвращения
попадания в бак пыли дренажное отверстие снабжено воздушным фильтром. В корпусе
бака установлены сливные пробки 7, расположение которых обеспечивает полное
опорожнение бака. Для этого дно бака имеет уклон 5—10° в сторону пробки.
В баке между сливной и всасывающей линиями расположена перегородка 6,
удлиняющая путь, проходимый рабочей жидкостью. Это
улучшает отделение от рабочей жидкости воздуха и повышает
эффективность охлаждения. С этой же целью труба сливной
гидролинии имеет срез под углом 45°, направленный в сторону
стенки бака.
Основные конструктивные размеры бака выбираются
из следующих условий: объем бака V =B-3)Vq (Vq —
минутная подача насоса гидропривода); высота перегородки
Рис. 19. Схема гидробака
*ч
¦
1-
-Л s
\ /
.—-—'
Г\
.
¦
¦tL.
Гидролинии 491
№=2/3 L (L — минимально допустимый уровень жидкости в баке); глубина погружения
труб сливной и всасывающей линии h^B-3)d (d — диаметр трубы); срез
всасывающей трубы должен отстоять от дна бака на расстоянии т 2.2d.
В конструкцию бака должен входить указатель рабочей жидкости, например,
мерное окно.
Насос следует устанавливать так, чтобы его высота над уровнем рабочей
жидкости в бак не превышал 700 мм. Заливку рабочей жидкости в бак целесообразно
производить через сетчатый фильтр грубой очистки, а в стенку бака рекомендуется
ввернуть магнитную пробку для улавливания продуктов износа стальных деталей. При
проектировании бака следует руководствоваться ГОСТ 12448—80.
Гидробаки с избыточным давлением применяют в некоторых гидроприводах для
обеспечения лучшего заполнения рабочих камер насосов. Герметичный бак,
представляющий собой сварной цилиндр, заполняют воздухом или инертным газом под
давлением до 0,2 МПа. В гидросистемах прессов такие баки служат для заполнения
рабочих цилиндров жидкостью при холостом ходе машины, причем давление в них
достигает 0,8—1,0 МПа.
17.7. ГИДРОЛИНИИ
Гидролинии. Гидролинией называются устройства предназначенные для прохождения
рабочей жидкости от одного гидроаппарата к другому ft процессе работы объемного
гидропривода. В гидроприводе обычно имеются: всасывающая гидролиния, по которой
рабочая жидкость движется к насосу; напорная гидролиния, где рабочая жидкость
движется от насоса, гидроаккумулятора или гидромагистрали к объемному
гидродвигателю; слитая гидролиния — рабочая жидкость от объемного гидродвигателя
движется в гидробак; гидролиния управления — рабочая жидкость движется к
устройствам управления и регулирования; дренажная гидролиния, предназначенная для
отвода утечек рабочей жидкости от гидроагентов в гидробак.
Гидролинии выполняются либо в виде трубопровода, соединяющего агрегаты и
устройства гидропривода, либо в виде каналов, полученных сверлением, литьем или
штамповкой в корпусе агрегата (устройства).
Расчет гидролиний сводится к расчету диаметра труб или каналов; расчету
потерь давления в гидролинии; расчету труб или каналов на прочность.
На основании практических данных можно рекомендовать для напорных
трубопроводов следующие величины скоростей:
давление р, кг/см1
допустимая скорость
жидкости v, м/с
10
1,3
25
2
50
3
100
4,5
150
5,5
200
6
В гидросистемах станков при коротких трубопроводах (//</< 100, где / и
d— соответственно, длина и диаметр сечения трубопровода) скорость жидкости обычно
находится в следующих пределах (в м/с):
всасывающие трубопроводы 0,5 —1,5
сливные трубопроводы открытых систем 2
трубопроводы линии управления до 5
492
ОБЪЕМНЫЕ ГИДРОПРИВОДЫ
Для длинных трубопроводов (/ ld> 100) эти данные уменьшают на 30—50 %.
В общем случае скорость выбирают такой, чтобы потери напора в трубопроводе
не превышали 5—6 % рабочего давления.
В авиационных гидросистемах скорости в напорной и сливной магистралях до-
доводят до 30 м/с.
Внутренний диаметр трубы или канала рассчитываются по формуле
12"
где Q — заданный расход рабочей жидкости через трубу или канал; dр — расчетное
значение диаметра. При выборе внутреннего диаметра трубы следует учитывать, что
диаметр должен соответствовать стандартизованному ряду, регламентированному ГОСТ
8734-75 на выпускаемые промышленностью трубы (шланги): d tdp (d — стандартный
диаметр, ближайший к расчетному).
Критерием для определения режима движения жидкости является безразмер-
безразмерное число Рейнольдса.
14. Ориентировочные значения Re,^ для некоторых
каналов и гидроагрегатов
Форма канала, виц арматуры
Круглые гладкие трубы
Гибкие (резиновые) шланги
Щели:
кольцевые гладкие:
концентрические
неконцентрические
с выточками:
концентрические
иеконцентрические
Краны распределительные
Окна цилиндрических золотников
Плоские и конусные клапаны
Прямоугольные каналы и лотки с гладкими стенками
Векр
2000—2300
1600—2000
ПОО
1000
700
400
550—750
260
20—100
1800
Для труб круглого сечения число Рейнольдса определяется по формуле
Re» =—;
*г у
для потоков произвольного поперечного сечения
ке р = или
«Г у
где v — средняя скорость жидкости;
d —диаметр трубы;
Rx — гидравлический радиус;
Х)г — гидравлический диаметр;
v — кинематическая вязкость жидкости.
Гидролинии 493
где S— площадь живого сечения потока;
х—смоченный периметр.
Режим будет ламинарным, если
Rc
и турбулентным, если
Потери напора в гидролиниях на трение по длине и в местных гидравлических
сопротивлениях определяются по формулам, а именно: на трение при ламинарном ре-
режиме — по закону Пуазейля
где v — кинематическая вязкость жидкости; / — длина трубы или участка трубы, на
которой определяется потеря напора на трение; Ў— средняя скорость жидкости; Q
— расход жидкости в трубопроводе; d — диаметр трубы; g — ускорение силы тяже-
тяжести, равное 9,81 м/с1.
При ламинарном течении в зазоре размером axb х/, где а«Ь , закон Пуазей-
ля имеет вид
Наиболее общей формулой для определения hm в трубах круглого сечения как
при ламинарном, так и при турбулентном режимах движения является формула Дарси
Здесь X — коэффициент гидравлического трения, или коэффициент Дарси.
Для определения Лда в трубах произвольного поперечного сечения в формулу
вместо d вводится гидравлический диаметр Dr. Полученная таким образом формула
является наиболее обобщенной.
Для приближенных расчетов коэффициент гидравлического трения Я, опреде-
определяется:
при ламинарном течении
при турбулентном течении
494 ОБЪЕМНЫЕ ГИДРОПРИВОДЫ
Режим течения рабочей жидкости в гидролиниях гидропривода обычно лами-
ламинарный. Но при нагревании жидкости до 80—100 °С или в случае применения разжи-
разжиженного масла возможен и турбулентный режим.
Потери напора в местных сопротивлениях определяются по формуле Вейсбаха
где С — коэффициент местных сопротивлений.
Значения коэффициентов местных потерь для некоторых местных сопротивле-
сопротивлений гидрояиний гидроприводов определяются экспериментально для каждого вида ме-
местного сопротивления и в ориентировочных расчетах могут приниматься: для плавных
колен под углом 90 ° с радиусом изгиба C - 5)d С, = 0,12—0,15; для поворота под пря-
прямым углом в сверленных или штампованных каналах С, = 2; для внезапного расширения
при входе в гидроцилиндр, аккумулятор, фильтр: при ламинарном режиме ? = 2, при
турбулентном — С, = 1; для мест соединения труб между собой или присоединения к
агрегатам с помощью арматуры С, = 0,1—0,15; для прямоугольных тройников при отводе
потока под углом 90 °С (рис 20, а): для отводимого потока С, - 0,9—1,2, для транзитного
— ? = 0,1—0,2; для прямоугольных тройников: при разделении потока (рис. 20, б)
С = 1—1Д при слиянии потоков (рис. 20, в) С, - 2—2,5; вход в трубу, снабженный при-
приемной сеткой и клапаном ? = 5—10; переходной расширяющийся конус
(</2 *2^1 )С = 5; переходной сужающийся конус (d2-*®?di)С = 0,10; предохранитель-
предохранительные и обратные клапаны (без учета усилия пружины) Q = 2—3.
о
Рис. 20. Разветвление потока жидкости
Вместо того, чтобы подсчитывать потери напора в каждом отдельном местном сопро-
сопротивлении, можно выразить их через равное им сопротивление, оказываемое эквива-
эквивалентной длиной /^щ прямого участка трубопровода
экв
Гкдролинии
495
Пользуясь этим методом, можно расчет потерь напора в трубопроводе производить по
суммарной длине действительных и эквивалентных участков трубопровода. Табличные
значения X, Q и 1^ - [3, 5|.
Расчет труб на прочность сводится к определению стенок. Для тонкостенных
труб толщина стенок определяется по мюрмулс
где р — максимальное давление рабочей жидкости; [а] — допускаемое напряжение
материала трубы (канала) на разрыв.
Для стальных труб из стали 20, 35, .40 допускаемое напряжение
[<т] =400—500 МПа, для труб из цветных металлов и сплавов [а] =200—250 МПа. При
искажении цилиндрической формы трубы [а] должно быть уменьшено на 25%. Коэф-
Коэффициент запаса прочности обычно выбирают равным 3.
Если 5 расчетная получилась малой, то, учитывая возможность внешних меха-
механических повреждений, ее не следует выбирать менее 0,8—1 мм для цветных металлов
и 0,5 мм — для сталей. Величина 6 для труб, как и внутренний диаметр, выбирается по
ГОСТ 8734-75 или - [т.1, гл. 41.
Трубопроводы, из которых монтируют гидролинии в гидроприводах, но конст-
конструкции можно разделить на жесткие и гибкие. Жесткие трубопроводы в основном из-
изготовляют из стальных бесшовных холоднотянутых труб, или из труб цветных металлов:
меди или алюминиевых сплавов.
Соединение жестких трубопроводов, их присоединение к гидроагрегатам и j-ид-
роаппаратам должно быть надежным в смысле прочности и герметичности.
/ 7
Рис. 2 [.Соединения трубопроводов:
а) — пайка (сварка); 6) — ршиальцонкой; в) — по внутреннему г) — с врезающимися кольцами; д) — фланцевое
496 ОБЪЕМНЫЕ ГИДРОПРИВОДЫ
В гидроприводах применяют следующие типы соединений:
а) пайка (сварка) — в машиностроении применяются редко, только для трубопроводов,
не подлежащих демонтажу. При пайке (сварке) труб 1 пользуются переходными втулка-
втулками 2, как это показано на рис 21, а;
б) соединение с развальцовкой (рис 21, б) применяется для труб диаметром до 30—35
мм, изготовленных из цветных металлов или ковкой стали, допускающей развальцовку
в холодном состоянии. Соединение с развальцовкой отличается простотой, но может
применяться при давлегп-ги не более 20 МПа и имеет ограниченное число повторных
демонтажей вследствие затвердения материала и порчи развальцованной части трубы.
Трубы 1 соединяются переходником 3 с помощью ниппеля 2 и двух накидных гаек 4;
в) соединение трубопроводов I по внутреннему конусу (рис 21, в) используется для гид-
гидросистем с рабочим давлением до 65 МПа при необходимости частого демонтажа гид-
гидролиний. Герметичность этого соединения обеспечивается контактом шарового ниппе-
ниппеля 3 с конической поверхностью штуцера 2 с помощью накидной гайки 4. Этот тип со-
соединений наиболее широко применяется в гидросистемах тракторов, дорожных и
строительных машин. Типы и размеры арматуры для соединения по внутреннему кону-
конусу указаны в ГОСТ 16039-70-^16078 70;
г) соединение трубопроводов -с врезающимся кольцом (рис. 21, г) распространено в гид-
гидросистемах , работающих при высоких давлешгях. Это соединение — простое но конст-
конструкции и обеспечивает надежную герметизацию при давлениях до 63 МПа за счет вре-
врезания кольца 2 из твердой цементируемой стали в более мягкий материал трубы 3, при
этом накидная гайка 4 навинчивается на штуцер 1. Типы и размеры арматуры для со-
соединений с врезающимся кольцом указаны в ГОСТ 15763-91-5-23358-87;
д) фланцевое соединение трубопроводов (рис. 21, д) применяется для стальных труб
диаметром свыше 40 мм, причем для низких давлеггай фланец 2 соединяется с трубой 1
с помощью резьбы, а для высоких — сваркой. В некоторых системах высокого давления
используют трубы, откованные вместе с фланцем. Уплотнение фланцев обычно осуще-
осуществляется с помощью мягких металлических прокладок 3 (медных или алюминиевых)
или резиновых колец. Типы фланцев арматуры соединительных частей трубопроводов
указаны в ГОСТ 12815 80.
Гибкие трубопроводы применяют для соединения элементов гидропривода, ко-
которые расположены на подвижных частях машин и могут перемещаться друг относи-
относительно друга. В качестве гибкого фубопровода в основном применяют резинотканевые
шланга, называемые рукавами высокого давления (РВД). Рукав имеет внутренний рези-
резиновый слой, затем хлопчатобумажный слой, металлическую оплетку и снова толстый
резиновый слой, предохраняющий рукав от повреждения. В зависимости от количества
металлических оплеток рукава высокого давления делятся на три типа:
I тип — с одной металлической оплеткой, рассчитанный на давление до 20 МПа;
II тип — с двойной оплеткой (давление до 30 МПа);
III тип — с тройной оплеткой, применяются для высоких давлений при внутреннем
диаметре до 40 мм. Основные размеры РВД регламештированы ГОСТ 6286-73.
В общем маиганостроснии рукава высокого давления используются при давле-
давлении до 16 МПа и температуре до 100 °С. При давлении до 4 МПа обычно применяют
рукава с двойной хлопчатобумажной оплеткой. Нормальная работа рукавов гарантиру-
гарантируется в течение 6 месяцев. Соединение рукавов, как и жестких трубопроводов, ироишо-
дится с помощью присоединительной арматуры.
Основные требования к монтажу трубопроводов следующие:
1) не допускаются вмятины на трубах и искажение их цилиндричности;
Гидролинии 497
2) радиус изгиба жестких трубопроводов R>D-2)dT (</T —наружный диаметр тру-
трубы);
3) радиус изгиба рукавов зависит от типа рукава и в среднем принимается
Л ^ A2- 18)*/в (du— внутренний диаметр трубы);
4) для уменьшения возможности резонансных колебаний крепления труб к основанию
машины (станине станка) должны быть расположены друг от друга на расстоянии
Присоединение трубопроводов к вращающимся узлам гидропривода произво-
производится с помощью специальных шарнирных соединений, которые могут иметь одну, две
и более степеней свободы.
Соединения трубопроводов приведены в гл. 5.
Резонансные колебания трубопроводов. Возникновение изгибных колебаний в результате
пульсаций давления жидкости обусловлено тем, что изогнутая труба будет стремиться
под действием давления жидкости распрямиться; в результате при пульсирующем дав-
давлении жидкости изогнутый участок трубы может вступить в изгибные колебания. При
совпадении частоты пульсаций давления в гидросистеме с собственной частотой коле-
колебаний (или одной из ее гармоник) рассматриваемого участка трубопровода возникнут
резонансные колебания последнего, амплитуда которых может достигать 10—15 мм
и более.
Частота собственных колебаний какого- либо участка трубопровода зависит от
ряда факторов и в частности от характера заделки его концов. При жесткой заделке
обоих концов, что соответствует распространенному в практике способу крепления тру-
трубопроводов, эту частоту собственных колебаний прямолинейного стального трубопро-
трубопровода можно определить с учетом веса заполняемой его жидкости по выражению
где L — расстояние между опорами, см;
Е — модуль упругости материала, кГ/см2;
J — момент инерции сечения трубы, см4;
g — ускорение силы тяжести, см/сек2;
GT и G* — вес погонного сантиметра трубопровода и жидкости, I кг/см.
Частота собственных колебаний изогнутого участка трубопровода выше при
всех прочих одинаковых условиях частоты прямолинейного участка, причем это пре-
превышение зависит от радиуса изгиба трубы. На частоту собственных колебаний трубо-
трубопровода несколько влияют величины внутреннего давления и скорости течения жидко-
жидкости. С учетом влияния этих факторов выражение для вычисления частоты собственных
колебаний примет вид
V2
где Р= pS + т—f кГ,
nzEJ
jPjcp = — значение критической силы по Эйлеру, кГ,
р — давление жидкости в трубопроводе, кГ/см2;
S — площадь внутреннего сечения трубопровода, см*;
32 Том 2
498 ОБЪЕМНЫЕ ГИДРОПРИВОДЫ
т — масса жидкости на единицу длины, кг-сек2/см;
v — скорость течения жидкости в трубопроводе, см/сек.
Наблюдения показывают, что частота рассматриваемых колебаний труб гидро-
гидросистем машин обычно превышает 100 гц и соответствует порядку частот возмущающих
импульсов, действующих в гидросистемах.
Гидравлический удар. В связи с применением высоких скоростей течения жидкостей в
трубопроводах гидросистем современных машин (в ряде случаев эти скорости достигают
30 м/сек), а также в связи с распространением в них быстродействующих распредели-
распределительных устройств (скорости переключения доведены до тысячных долей секунды) важ-
важное значение приобретают вопросы, связанные с эффектом гидравлического удара, при
котором забросы давления могут достигать четырехкратной величины рабочего давле-
давления в гидросистеме. Подобные забросы снижают ресурс работы трубопроводов, агрега-
агрегатов, а в отдельных случаях могут вызывать их разрушение; в частности, при гидро-
гидроударах наблюдаются случаи разрушения охлаждающих радиаторов, корпусов фильтров и
прочих гидроагрегатов. Кроме того, ударные забросы давления служат ложными сигна-
сигналами, вызывающими нежелательные срабатывания датчиков и реле различных автома-
автоматических гидравлических приборов.
Из многообразия возможных форм задающих возмущений, вызывающих гид-
гидравлический удар, рассматриваются лишь случаи возмущения,, вызванные скачкообраз-
скачкообразным изменением скорости жидкости, при котором гидравлический удар достигает мак-
максимального значения.
Расчет величины ударного давления производят, пользуясь уравнением живых
сил, согласно которому кинетическая энергия движущейся жидкости преобразуется в
работу упругой деформации стенок трубы и сжатия жидкости. Для случая мгновенного
полного перекрытия прямолинейного отрезка простого трубопровода, заполненного
движущейся жидкостью, ударное повышение давления Арп может быть вычислено по
уравнению Н.Е. Жуковского
где р — плотность жидкости;
а — скорость ударной волны (скорость распространения импульса давления) в жидко-
жидкости, заключенной в трубе;
Vo — начальная скорость движения жидкости в трубе (до начала перекрытия трубо-
трубопровода).
Приведенное выражение будет справедливо, если перекрытие трубопровода
произошло "мгновенно", т. е. для случая, когда время t перекрытия трубопровода
меньше значения так называемого периода трубопровода (фазы удара) т , под которым
понимается время пробега ударной волной двойной длины рассматриваемого участка
трубопровода (от задвижки до источника расхода и обратно):
2L
/<т = —,
а
где L — длина участка трубопровода от источника расхода до задвижки.
При этом условии перекрытие трубопровода заканчивается до того, как обрат-
обратная ударная волна, отраженная от источника расхода, вернется к задвижке. Гидравличе-
Гидравлический удар при этом определится полной потерей жидкостью скорости, в соответствии
с чем повышение давления будет максимальным. Подобный гидравлический удар при-
принято называть полным или прямым.
При условии t >x = 2L/a ,т. е. при более медленном, чем рассмотрено выше,
перекрытии трубопровода, ударное повышение (заброс) давления определится лишь той
Гидролинии 499
частью начальной скорости жидкости aV = v0 — v ,которая будет потеряна (погашена)
за время, равное периоду трубопровода т . При этом условии обратная волна, отра-
отразившись от источника расхода, возвратится к задвижке (крану) раньше, чем трубопро-
трубопровод будет полностью перекрыт. Подобный удар принято называть непрямым или не-
неполным.
Ударное повышение давления в этом случае определится выражением
где AV = v0 — V — уменьшение (потеря скорости жидкости в трубе), вызванное час-
частичным перекрытием ее задвижкой, за время, равное периоду трубопровода т ;
v0 — начальная скорость движешш жидкости (скорость до начала перекрытия трубы);
v — измененная скорость жидкости (скорость к моменту прихода к задвижке обратной
ударной волны, отраженной от источника, расхода).
Допустив, что изменение скорости потока в трубе протекает равномерно, рас-
расчетное значение потери скорости av за время т можно приближенно вычислить по
выражению
Заброс давления л/;н при непрямом (неполном) ударе (t > г) может быть вы-
вычислен также по выражению
С учетом предыдущих уравнений последняя зависимость может быть представ
лена в виде
Упругая деформация стенок стального трубопровода снижает скорость ударной
волны по сравнению со скоростью в случае абсолютно жестких стенок практически
на 9%, причем это снижение будет тем больше, чем выше при всех прочих равных ус-
условиях отношение —. Величина ударного давления в стальных трубах превышает при
S
одинаковых условиях ударное давление в трубах из медных и алюминиевых сплавов.
Практически величина ударного давления в них на 8 — 10% ниже, чем в стальных.
Заброс ударного давления в трубопроводе уменьшается с повышением местных
гидравлических потерь, которые вызывают также затухание (демпфирование) колебаний
и уменьшают их длительность. Учитывая демпфирующий эффект местных сопротивле-
сопротивлений, их часто используют для гашения гидравлического удара. Для этой цели в трубо-
трубопровод устанавливают одну или несколько дроссельных шайб, с помощью которых дос-
достигается сглаживание фронта ударной волны и смягчение эффекта гидравлического
удара на участке после дросселя.
Повышение давления при гидравлическом ударе в каком-либо трубопроводе
гидросистемы вызывает в результате возмущения давления эффект гидравлического
32*
500 ОБЪЕМНЫЕ ГИДРОПРИВОДЫ
удара во всех отводах от него, в том числе и тупиковых, вследствие деформации его
стенок и движения жидкости к тупику.
Скорость а ударной волны (импульс давления) в упругой жидкости, заключен-
заключенной в упругий трубопровод, определяется по уравнению
где р—плотность жидкости;
d и 5 — внутренний диаметр и толщина стенки трубы;
Еж — объемный модуль упругости жидкости; для деаэрированного минерального масла
можно принять Еж = 1,6 • 104 кГ/см2;
Е— модуль упругости материала трубы; для труб из стали 12Х18Н9Т можно принимать
Е = 2Л06 кГ/см2.
В соответствии с этим выражение для вычисления ударного давления в упругой
трубе (Е * оо) при полном (прямом) ударе примет вид
где 1 — скорость звука в упругой жидкости, заполняющей трубу с упруги-
ми стенками (Е * да).
Эта скорость для воды в стальных трубах с отношением 3 < — < 20 равна
о
а=1445 м/с ; для деаэрированного очищенного от воздуха минерального масла
а = 1320* 1440 м/с; для применяющейся в гидросистемах масляной смеси АМГ-10 при
/=20°С, 0=1290м/с.
Для трубы с абсолютно жесткими стенками (Е - со) скорость распространения
ударной волны равна скорости распространения звука в данной жидкой среде с плотно-
плотностью р и объемным модулем упругости Еж:
Некоторые типы и параметры насосов
501
17.8. НЕКОТОРЫЕ ТИПЫ И ПАРАМЕТРЫ НАСОСОВ
По характеру силового воздействия на жидкость различают насосы
динамические и объемные.
Силовое воздействие на жидкость осуществляется: в проточной камере,
постоянно сообщающейся со входом и выходом насоса; в объемном насосе в рабочей
камере, периодически изменяющей свой объем и попеременно сообщающейся со
входом и выходом насоса.
К динамическим насосам относятся:
1. лопастные (центробежные, осевые);
2. электромагнитные;
3. насосы трения (вихревые, шпековые, дисковые, струйные и др.).
К объемным насосам относятся:
1. возвратно—поступательные (поршневые и плунжерные, диафрагменные);
2. крыльчатые;
3. роторные (роторно—вращательные, роторно—поступательные).
15. Основные технические характеристики цент
Марка насоса
Подача,
мУч
Напор, м
Мощность
насоса, кВт
робежных насосов
КПД насоса,
%
Примечание
Центробежные
Группа 1. Для воды и сходных по вязкости и химической активности жидкостей
К8/18+Л290/30
Д2ОО-95+Д5ООО-32
ЦНС 38-44...220 -
ЦНС-66...330
8-5-290
200+5000
38+60
18+30
95+32
44...220+66...330
0,8+28
80+500
7,5...35+17...87
51+82
70*83
6,5...68+70
Группа 2. Для нефтепродуктов
бНДв-Ч; бНДв-Б
8НДв-Ч;
8НДв-Нм
12НДс-Нм
14НДс-Н
360
720
1260
1260
46
89
64
37
60,5
216
250
147
75
81
88
87
Жидкости,
кроме морской
воды, теперату-
рой до 85 °С
Группа 3. Дня химически активных, нейтральных, токсичных
и взрывоопасных жидкостей и сжиженных газов
ЦГЗ/32
Щ50/50; ЦГ50/12.5
ЦП00/50;
ЦГ200/50
1.5ХГ-6; 1,5ХГ6х2;
1,5ХГ63хЗ
1.5ХГ-3
2ХГ-3; 2ХГ-4
2ХГ-5; 2ХГ-6
2ХГ-9
ЗХГ-6
ЗХГВ-7х2
4ХГВ-6;
4ХГ-12
ХБ20/19О
ХБ45/165
ХБ160/165;
ХБ160/210
ХБ5.00/190;
ХБ500.260
АХ8/18+АХ500/37
3
50
100; 200
8
8
20
20
20
45
45
90
90
20
45
160
500
8+500
32
50; 12,5
50
18; 35; 53
53
88; 61
44; 31
18
54
90
85; 143
33
190
165
165; 210
190; 260
18+37
2,2
15; 3
30; 45
2,8
2,8
14; 10
4,5
2,8
14
20
40
14
33
42
101;.150
354; 528
1+67
-
-
-
-
-
-
-
-
-
-
-
-
31
42
70
70
40+77
Вязкость и
плотность жид-
жидкостей и сжи-
сжиженных газоп
не более
40 мм2/с и
1600 кг/м*
502
ОБЪЕМНЫЕ ГИДРОПРИВОДЫ
Типы насосов:
К и КМ — консольные и консольно-моноблочные, горизонтальные одноступенчатые с
рабочими колесами одностороннего входа;
Д —одноступенчатые с двусторонним входом с осевым разъемом корпуса;
ЦНС — многоступенчатые секционные (от 2-х до 10-ти ступеней);
НД — одноступенчатые с рабочими колесами двустороннего входа жидкости (бензин,
керосин, дизельное топливо, сырая нефть);
ЦГ — герметичные одноступенчатые с рабочими колесами одностороннего входа;
ХГ и ХГВ — герметичные, соответственно одно—, двух— и трехступенчатые (приставка
"В" для вертикальных насосов);
ХБ — горизонтальные многоступенчатые секционные;
АХ — абразивно-химические горизонтальные консольные одноступенчатые.
Осевые насосы. Осевые насосы могут быть жестколопастными, в которых
положение лопастей рабочего колеса относительно ступицы постоянно, и поворотно-
лопастные, в которых положение лопастей рабочего колеса может регулироваться.
Осевые насосы обладают высокой подачей и малым напором. Коэффициент
быстроходности иs =500—1000 (ns —частота вращения насоса, подобного данному,
который при напоре 1 м подает 0,075 м3/с жидкости). Осевые насосы типа О служат для
подачи пресной и морской воды температурой до 35 °С.
Осевые насосы с поворот! 1ыми лопастями типа ОП предназначены для подачи
технически чистой воды до 35*50 °С, а также пресной и морской воды до 45 °С.
Основные параметры осевых насосов типа О и ОП
Подача, м*/ч
Напор, м
Мощность насоса, кВт
1764ч-! 63440
2,7*27,8
26-И0100
Достоинством их является простота и компактность конструкции, а также возможность
перекачивания загрязненных жидкостей.
Шестеренные насосы. Шестеренные насосы выполняются с шестернями
внешнего и внутреннего зацепления.
Наибольшее распространение имеют насосы с шестернями внешнего зацеп-
зацепления.
При вращении шестерен жидкость, заполтЕяюгцая впадины между зубьями,
переносится из полости всасывания в полость нагнетания.
16. Основные параметры шестеренных насосов
Тип насоса
НШ ...
НМШ ...
Ш ...
ШГ ...
ШФ ...
ВТ ...
Г ...
Подача, л/мин
10-=-345
25,5+163
23,3*600
23,3*233
23,3*275
12,3*104
12,3*133
Данление нагнетании,
МПа
2,5*14
0,25*1,6
1,6*1,4
0,6*1,4
14*0,3
2,5
2,5
Мощность насоса,
кВт
0,67*30,7
1,8*5
0,75*7,2
0,75*7,2
1,1*6,0
1,0*5,8
1,0*7,2
Объемный КПД, %
85*92
85
-
-
-
76*91
76*92
Некоторые типы и параметры насосов
503
Насосы НШ и НМШ предназначены для нагнетания рабочей жидкости в
гидравлические системы тракторов, подъемных землеройных» дорожно-строительных,
транспортных и других сельскохозяйственных машин.
Насосы Ш предназначены для подачи масла, нефти, мазута, дизельного
топлива; насосы ШГ — для подачи парафина, нефти, мазута температурой менее 100 °С
и v до 6-Ю м 2/с; насосы ШФ предназначены для подачи масла, нефти, дизельного
топлива температурой до 90 °С.
Насосы ГП-2 и БГП-2 используются в системе станочных гидроприводов.
Винтовые насосы. В зависимости от числа винтов различают одно-, двух-, трех- и
многовинтовые насосы. Наибольшее распространение получили трехвинтовые насосы с
циклоидальным зацеплением, обладающие рядом существенных достоинств:
высоконапорностью, равномерностью подачи и бесшумностью работы.
Основные параметры трехвинтовых насосов типа ЗВ ...
Подачи (не менее), л/мин 3,33 -ь 1500
Давление нагнетания, МПа 0,45 * 16
Мощность насоса (не более), кВт 0,5 + 80
Насосы предназначены для подачи минеральных масел, нефтепродуктов и других
хорошо смазывающих и неагрессивных жидкостей.
Пластинчатые насосы. Пластинчатый насос — разновидность шиберных, т. е. роторно-
поступательных насосов с вытеснителями в виде шиберов — пластин. Пластинчатые
насосы бывают однократного, двукратного и многократного действия. Насосы
однократного действия могут быть регулируемыми и нерегулируемыми. Насосы
двукратного и многократного действия нерегулируемые.
Регулирование рабочего объема и реверс подачи пластинчатого насоса
однократного действия осуществляется изменением величины и знака эксцентриситета,
для чего необходим специальный механизм, смещающий центральную часть статора
относительно ротора.
В пластинчатом насосе двукратного действия подача жидкости из каждой
рабочей камеры за один оборот ротора производится дважды. Внутренняя поверхность
статора в таком насосе имеет с [гениальный профиль, сходный с эллиптическим, с дпумя
входными и двумя выходными окнами, расположенными диаметрально
противоположно.
17. Основные параметры регулируемых пластинчатых
Параметр
Давление на выходе из насоса, МПа:
номинальное
максимальное
минимальное
Номинальная подача, л/мим
Диапазон регулирования подачи, л/мин
Номинальная мощность. кВт
Мощность при давлении на выходе равном нулю,
кВт
Коэффициент подачи, %
КПД. % ^
Количество циклов изменения подачи в минуту
при номинальном давлении
насосов типа Г12-5
Типоразмер
Г12-53ЛМ
6,3
10.0
1,0
24,6
8,0— 24,6
3.6
0,4
85
70
100
Г12-54ЛМ
6.3
10,0
1.0
55,5
10,0 — 55,5
8,1
0.8
85
70
70
П2-55ЛМ
6.3
10.0
1.0
102.0
15.0 — 102.0
13,2
1,5
88
80
60
504
ОБЪЕМНЫЕ ГИДРОПРИВОДЫ
18. Основные параметры пластинчатых нерегулируемых насосов
с постоянным рабочим объемом
Тип насоса
ri2-2MLr-12-3M
БГ12-2М
БП2-4
Подача (не менее),
л/мин
5^-200
5,4*109
3,3*16,7
Давление
нагнетания, МПа
6,3
12,5
10
Номинальная
мощность, кВт
1,1+26,1
2*52
1,34*4,0
КПД, %
55*87
55*85
40*71
Все перечисленные выше насосы предназшчаются для нагнетания рабочей
жидкости (чистого минерального масла) в гидравлические системы металлорежущих
станков, литейного и сварочного оборудования, прессов, автоматических линий и других
стационарных машин, работающих в закрытых помещениях.
Аксиальные роторно-поршневые насосы. Роторно-поступательный насос, в котором
вытеснители имеют форму поршней (плунжеров, шаров), а рабочие камеры ограничиваются
вытеснителями в цилиндрических полостях ротора, называется роторно-поршневым.
Роторно-поршневой насос, у которого ось вращения ротора параллельна осям
рабочих камер и вытешштельной или составляет с ними угол менее 45 °С, называется
аксиальным. Аксиальные роторно-поршневые насосы бывают двух разновидностей; насосы
с наклонным блоком й насосы с наклонным диском. У первых — ось вращения ведущего
вала и ось ротора пересекаются, образуя угол, у второй разновидности насосов оси ведущего
вала и ротора совпадают.
Большое распространение, особенно в гидроприводах, получили насосы с
наклонным блоком.
19. Основные параметры секционных нерегулируемых аксиально-поршневых
насосов типов НС... и НА
Параметр
Номинальная подача насоса, л/мин
Номинальное давление на выходе. Ml ТА
Мощность, кВт
Объемный КПД насоса, %
Вид насоса
Порпптспой
11ласти11чатый
Поршневой
Пластинчатый
Поршневой
Пластинчатый
Поршневой
Пластинчатый
Тип насоса
нем
5,25*45
3,85*17,55
32*40
6,3 max
4,3*29,5
88*94
80*94
НЛ
5,25*45
-
32*40
3.3*26.8
-
88*94
20. Основные парамет)
Тип насоса
Г /3 3
НАР
НА4М
НАД1*
Подача, л/мин
100*200
22*200
58,5—17,5
92—27,5
104—31
184—55,5
205 шах
56,5*100
мы регулируемых аксиально-поршневых насосо!
Номинальное давление на
выходе, МПа
16
20
20
Мощность насоса,
кВт
29*64
8.5*75
21.1; 6.9
34,2: 10.7
38,6; 12.3
67; 21,3
75
21,7*37,6
1
кпд
88*85
86*90
83*89
87—88
Примечания: 1.* Для насосов НАД1 диапазон настройки давлешш 5—20 МПа.
2. Для насосов ПЗ-35 диапазон регулирования подачи (отношештс ми-
минимальной подачи к номинальной) 3/20, для насосов ПЗ-36 - 1/10.
В данном разделе даны основные параметры насосов, имеющих наиболее широкое
применение в различных отраслях промышленности.
Масла и смазки
505
Технические характеристики других типов и видов насосов (крыльчатых,
диафрагменных, вихревых, струйных, водокольцевых и т. п) приведены в стандартах,
каталогах, справочниках и специальной литературе.
17.9. МАСЛА И СМАЗКИ
ГОСТ 26191-84 предусматривает разделение, в зависимости от назначения масел и
смазок на следующие группы:
1. Авиационные масла (МС-20, МС-20С, ...)
2. Моторные масла (М-вВ^ М-10В2, М-20Г2 ...)
3. Трансмиссионные масла (Таг 10, ТАП—15В, ...)
4. Турбинные масла (Т22, Т30, T46, T57,...)
5. Компрессорные масла (К—12, Кс—19, ...)
6. Масла для компрессоров холодильных машин (ХФ12—16, ХФ22—24, ...)
7. Электроизоляционные масла (Т-750, Т—1500, ПТ, ...)
8. Рабочие жидкости для гидросистем (АМГ-10, АУ, РМЦ, АЖ-12Т, ...)
9- Цилиндровые масла C8, 52, ...)
10. Вакуумные масла (ВМ-1, ВМ~3, ВМ~5, ...)
11. Масла для прокатных станов (П— 28, ПС—28, ...)
12. Индустриальные масла (И-5А, И-SA, И-12А, И-20, И-30А, ...)
13. Масла приборные (МВП, МЗ-52, ...)
Пластичные масла
1. Антифрикционные смазки (солидол, графитная (УСсА), ЦИАТИМ-201,
ЦИАТИМ-221, Литол-24, ГОИ~54п, ...)
2. Канатные смазки (Торсиол—55, КФ-10, ...)
3. Уплотнительные CNfa3KH (ЦИАТИМ-205, ...)
При назначешш смазочных материалов в технику северного и тропического
исполнения учитываю! требования ГОСТ 14892—69 и ГОСТ 15156—84.
21. Основные группы и подгруппы смазочных масел
Группа
Моторные
Трансмиссионные
Турбинные
Индустриальные
Масла различного назначения
Подгруппа
Универсальные
Карбюраторные
Дизельные
Для механических передач
Для гидромеханических передач
Для гидростатических передач
Газотурбинные
Турбинные общего назначения
Индустриальные общего назначения
Компрессорные
Цилиндровые
Холодильные
Изоляционные
506
Om>LMHI>IE ГИДРОПРИВОДЫ
Номенклатура показателей качестип масел установлена ГОСТ4.24—84 и включает пока-
показатели:
назначения
сохраняемости
эргономические
безопасности
(смазывающая способность, физико-химические показатели,
кор1хглюнпая и защитная способность, склонность к отложенн-
ям, нрокачивасмость, испаряемость, совместимость, электроизо-
электроизоляционная способность);
(стабильность состава, вязкости, гигроскопичность, растворяе-
растворяемость, срок сохраняемости);
(токсичность, предельно допустимая концентрация парой в иоз-
лухе);
(температура пепышки, самовоспламенения).
22. Отдельные показатели качества масел, применяемых в гидросистемах
Марка
рабочей
жидкости
Плотность
при 20°С.
кг/м3
Вязкость. мм2/с (сСт)
при 50°С
при минус.
температуре
Кислотное
ЧИСЛО, Ml'
КОН на 1г
масла
Температура, °С
застывания
ПСПЫ1ЛКИ
самовос-
самовоспламенения
АИ-12А;
-12Ai
И-20А
И-ЗОА
И-40А
(взамен
И-45)
И-50А
(взамен СУ)
Турбинное
Т-22
АМГ-10
РМЦ
РМ
Веретен-
Веретенное АУ
Прибор-
Приборное МВП
Трансфор-
Трансформаторное
Т-750
Трансфор-
маторное
Т-1500
Силиконо-
Силиконовая
жидкость
880
890
890
900
910
900
850
845
845
884...894
900
895
885
13...17
(+40"С)
2Q...3S
(+40°С)
41...5I
(МОТ)
61...75
(+40°С)
30.110
(+40°С)
20...23
не менее
10
не менее
8,3
3.8...4.2
12...И
6.5...8.0
j[e Оолее
1250
(-50°С)
не более
915
(-4П°С)
не более
350
(-40°С)
1600
(-30-С)
иоо
(-30°С)
250
0,02
0,03
0,05
0,05
0,05
0,02
0.03
0,02
0,02
0,07
0.03
0,01
0,01
минус 30/12Ai
минус 15
минус 15
минус 15
минус 15
минус 15
минус 15
минус 70
мшгус 60
минус 60
минус 45
минус 60
минус 55
минус 45
ниже
минус 70
165/12Ai
170
200
210
220
225
180
93
125
125
163
125
135
135
ПО
250
217
217
2X0
300
Примечания: 1. При работе с маслами должны применяться илдинидуальиые средства зашиты
согласно Типовым правилам, утвержденным в установленном порядке (по степени оозлеисшия на
организм человека относятся к 4-му классу опасности в соответствии с ГОСТ!2.1.007-76)
2. В скобках указано рапсе принятое обозначение марок масел.
Масла и смазки
507
23. Назначение и применение масел
Марка масла
Область применения
Рабочие жидкости, применяемые в гидросистемах
Индустриальные ДИ-12А
ГОСТ 20799-88
Индустриальные
И-20А]
5Г^?д1 ГОСТ 20799 88
Турбинное Т-22
ГОСТ 32-74
Рабочая жидкость в обьемных гидроприводах, работающих в
закрытых помещениях и на открытом воздухе, для поршне-
поршневой 1руппы аммиачных компрессоров и других видов обору-
оборудования. Втулки, подшипники веретен ровничных и других
машин, шпиндели металлорежущих станков, работающих с
частотой вращения до 5000 мин*1, направляющие бабок
фильерно-расточных, фильерно-полировочных и других
станков, подшипники маломощных электродвигателей с
кольцевой системой смазки.
Рабочие жидкости в гидравлических системах станочного
оборудования, автоматических линий, прессов, смазки
мало- и средненагружениых зубчатых передач, направляю-
направляющих качения и скольжения станков.
Гидросистемы промышленного оборудования, строительных,
дорожных и других машин, работающих на открытом воздухе
(И-30А) в интервале температуры от минус 5°С до
плюс 70°С при длительном режиме эксплуатации.
Смазочные системы подшипников и вспомогательных меха-
механизмов паровых и газовых турбин, нагнетателей, турбоком-
турбокомпрессоров различного назначения, системы регулирования
этих машин.
Морозостойкие рабочие жидкости
АМГ-10 ГОСТ 6794-75
РМЦ ГОСТ 15819-85
РМ ГОСТ 15819-85
Веретенное ЛУ
ГОСТ 1642-75
Приборное МВП ГОСТ 1805-76
Трансформаторное
ГОСТ 982-80 Т- 750
Т-1500
Силиконовая жидкость
ВТУМХП2416-54
Гидросистемы (в основном) летательных аппаратов, эксплуа-
эксплуатируемых в условиях низких температур. Рабочий диапазон
температур:
АМГ-10 — от минус 60 до плюс 125°С;
РМЦ — от минус 40 до илюс.60оС.
Гидросистемы автоматического управления, работающие при
температурах от минус 40 до плюс 55°С.
Гидросистемы различных машин и механизмов. Обеспечива-
Обеспечивает пуск при температуре до минус 30°С. Кратковремен-
Кратковременный допустимый верхний предел до плюс 65°С, а для
отдельных видов техники — до 125°С.
Оптимальный температурный режим от 50 до 60°С.
Контрольно-измерительные приборы, работающие при
температуре от минус 60 до плюс 110°С.
Трансформаторы и выводы с напряжением до 750 кВ.
Электрооборудование линий электропередач постоянного
тока с напряжением до 1500 кВ.
В шдроприводах, работающих в условиях низких температур
Крайнего Севера и Сибири (гидроприводы автомобилей и
тракторов).
Предел рабочих температур от минус 60 до плюс 100°С
508
ОБЪЕМНЫЕ ГИДРОПРИВОДЫ
24. Основное назначение и применение смазок
Наименование
смазки
Солидол
синтетический
ГОСТ 4366-76
Солидол
жировой
ГОСТ 1033-79
Графитная
(УСсА)
ГОСТ 3333-80
Литол-24
ЦИЛТИМ-201
ГОСТ 6267-74
ЦИАТИМ-205
ГОСТ 8551-74
ЦИАТИМ-221
ГОСТ 9433-80
ВНИИНП-207
Основное назначения
Относительно грубые узлы тре-
трения механизмов и машин:
транспортных средств, сельхоз-
сельхозтехники, ручного инструмента,
шарнирных соединений и т. п.
Относительно грубые узлы тре-
трения механизмов и машин:
транспортных средстп, сельско-
сельскохозяйственной техники, ручного
инструмента, шарнирных соеди-
соединений и т. п.
Узлы трения скольжения тяже-
лонагруженных тихоходных ме-
механизмов: рессоры, подвески
тракторов, открытые зубчатые
передачи и т. п.
Основные узлы трения колесных
и гусеничных транспортных ма-
машин и тракторов, индустриаль-
индустриальных механизмов, электромашин
и т. п.
Узлы трения, работающие с ма-
малым усилием сдвига при невысо-
невысоких нагрузках
Резьбовые соединения трубопро-
трубопроводов и арматуры, работающих в
кислотах, щелочах, спиртах
Подшипники качения электро-
электромашин систем управления, при-
приборов с частотой вращения
до 10000 мин. Для смазывания
узлов трения и сопряженных
поверхностей "металл - резина",
"металл - металл4
Подшипники качения электро-
электромашин и стартер генерато-
генераторов с частотой вращения до
10000 мин
Особенности применения
Водостойкая. Солидол С предназначен для
заправки в узлы трения ручным солидоло-
нагнетателем при температуре минус 20°С;
пресс-солидол С — для заправки в узлы
трения ручным солилолонагнетателсм при
температуре ниже минус 20°С. Температур-
Температурный диапазон от минус 20 до плюс 65°С. В
достаточно мощных механизмах работоспо-
работоспособна при температуре до минус 50°С
Водостойкая, для смазывания узлов трения
качения и скольжения машин и механиз-
механизмов, работающих при температурах от ми-
минус 25 до плюс 65°С
Температурный диапазон от минус 20 до
плюс 60°С
Многоцелевая. Водостойкая. Температур-
Температурный диапазон от минус 40 до плюс 12()°С.
Смазка сохраняет работоспособность в те-
течение непродолжительного времени при
температуре плюс 130°С
Не рекомендуется применять при длитель-
длительном контакте с водой. Работоспособна при
остаточном давлении 666,5 Па Eмм рт. ст.).
Температурный диапазон от минус 60 до
плюс 90°С
Температурный диапазон от минус 60
до плюс 50°С, в подвижных соедине-
соединениях минимальная температура смазки —
минус 20°С
Гигроскопична. Работоспособна при оста-
остаточном давлении 666,5 Па E мм рт. ст.). Не
растворима в воде, не действует на поли-
полимерные материалы и резину. Температур-
Температурный диапазон от минус 60 до плюс 150°С
Влагостойкая. Длительно работоспособна
при остаточном давлении 666,5 Па E мм
рт. ст.). Температурный диапазон от минус
60 до плюс 200°С
Масла и смазки
509
Продолжение таблицы 24
Наименование
смазки
Паста
ВНИИНП-225
ГОСТ 19782-74
ВНИИНП-231
ВНИИНП-233
ВНИИНП-275
ВНИИНП-279
ГОСТ 14296-78
ВНИИНП-282
ГОСГ 24926-81
Основное назначения
Подвижные и неподвижные
резьбовые соединения
Закрытые черня чдго-винтовые
механизмы, подшипники каче-
качения и скольжения с небольшой
скоростью движения
Подшипники качения и сколь-
скольжения с карательным движени-
движением; сопряженные поверхности
"металл-резина"
Силовые винтовые пары и дру-
другие подвижные соединения
Разъемы, клапаны, подшипники
качения, работающие в атмо-
атмосферном воздухе и в агрессивных
средах
Узлы автоматики и дыхательной
арматуры, работающие со всеми
агрессивными средами, в том
числе с газообразным кислоро-
кислородом
Особенности применения
Температурный диапазон от минус 60 до
плюс 250°С (для алюминиевых сплавов), до
плюс 350°С (для нержавеющих сталей), от
минус 40 до плюс 300°С (для малооборот-
малооборотных узлов трения)
Работоспособна при остаточном давлении
666,5 Па E мм рт. ст.). Температурный
диапазон от минус 60 до плюс 250°С
Температурный диапазон от минус 40 до
плюс 250°С
Работоспособна в условиях радиации. Тем-
Температурный диапазон от минус 20 до
плюс 250°С
Антифрикционно-уплотнительная. В агрес-
агрессивных средах работоспособна при темпера-
температурах от минус 50 до плюс 50°С, на воздухе
при температуре от минус 50 до плюс 150°С
Антифрикционно-уплотнительная. Темпе-
Температурный диапазон от минус 45 до
плюс 150°С
СПИСОК ЛИТЕРАТУРЫ
1. Башта Т.М. Машиностроительная гидравлика: Справочное пособие. М.; Машино-
Машиностроение, 1971.
2. Башта Т.М., Руднев С.С, Некрасов Б.Б. и др. Гидравлика, гидромашины и гидро-
гидроприводы. М.; Машинострое1ше, 1982.
3. Идельчик И.Е. Справочник по гидраплическим сопротивлениям. М.; Машинострое-
Машиностроение, 1975.
4. Некрасов Б.Б. Гидравлика и ее применение на летательных аппаратах М.; Машино-
Машиностроение, 1967.
5. Справочное пособие по гидравлике, гидромашинам и гидроприводам /Под ред. Некра-
Некрасова Б.Б. Минск.;Выш. шк. 1985.
6. Правила 28-64. Измерение расхода жидкостей, газов и паров стандартными диа-
диафрагмами и соплами. М.; Изд-во стандартов, 1978.
7. Свешников В.К., Усов А.А. Станочные гидроприводы: Справочник. М.; Машино-
Машиностроение, 1982.
8. Справочник по гидравлическим расчетам /Под ред. П.Г. Киселева. М.; Энергия, 1974.
510
ПРИЛОЖЕНИЯ
I. ИСТЕЧЕНИЕ ЖИДКОСТИ ЧЕРЕЗ ОТВЕРСТИЯ И НАСАДКИ
Расход жидкостей через отверстия и насадки определяется по формулам
Q = \i-SopgHo или Q = \xSol2g ^ ,
где #о — напор;
р — давление жидкости;
ц — коэффициент расхода, \i = eq>,
здесь 8 — коэффициент сжатия струи,
е = —— = —— ; (Sq—площадь отверстия)
Ф — коэффициент скорости,
1
Ф =
здесь С, — коэффициент сопротивления отверстия (для идеальной жидкости С, - 0).
В случае, когда размер отверстия мал по сравнению с напором Hq и размерами резер-
резервуара и стенки резервуара и свободная поверхность жидкости не влияют на приток
жидкости к отверстию, то наблюдается совершенное сжатие (рис. 1,2).
Рис. 1. Истечение из резервуара
через малое отверстие
Рис. 2. Истечение через круглое отверстие:
а) — в тонкой стенке; б) — с острой кромкой.
В этом случае значения коэффициентов расхода ц следующие:
npnRc<15 ii = q>= ;
25 + jxRe
при Re «350 ц-0,69;
при больших значениях Re ju = 0,59 — 0,6;
при Re > 104 ц = 0,59+Ы
Для практических расчетов при истечении маловязких жидкостей (вода, бензин, керо-
керосин) принимают следующие осредненные значения:
// = 0,61; б = 0,63; <р = 0,97; $ = 0,065.
Истечение жидкости через отверстия и насадки
511
Несовершенное сжатие струи возникает тогда, когда на формирование струи оказывает
влияние близость боковых стенок резервуара, причем отверстие расположено на оси
симметрии резервуара (рис. 3).
Отношение коэффициентов сжатия
струй выражается значением
Рис. 3.Схема несовершенного сжатия струи
док (короткая труба длиной /=B + 6
принимаются коэффициенты:
8 8
где п -— — отношение площади отверстия
к площади поперечного сечения резервуара.
Для маловязких жидкостей принима-
принимаются значения:
Ф = 0,97; С -0,065.
При истечении через цилиндрический наса-
без закруглеггая входной кромки) — рис. 4
/ 2
а)
Рис. 4.Схема истечения через цилиндрический насадок.
для маловязких жидкостей (больших чисел Re) ц. = <р = 0,8; С, = 0,55.
При истечении жидкости под уровень или истечении через затоплешюе от-
отверстие (рис. 5?расход жидкости и скорость истечения определяются формулами
м.
Рис. 5. Истечение под уровень
где Hq — разность гидростатических напоров по
обе стороны стенки, т.е расход и скорость не зависят
от высоты расположения отверстия в стенке.
Коэффициенты сжатия 8 и расхода ц при
истечении под уровень можно считать теми же, что
и при истечении в воздух.
512
ПРИЛОЖЕНИЕ
И. ГИДРАВЛИЧЕСКИЕ СТРУИ
Для водяных струй, вытекающих из насадка диаметром d со скоростью v в не-
неподвижную воду, средняя скорость в сечении струи, удаленной на расстояние х от на-
насадка, согласно В.М. Коновалову,
где т — опытный коэффициент, равный 2,90.
К незатоплениым струям относятся струи жидкости, вытекаюпще в воздушное
пространство: пожарные, гидромониторные, фонтанные и др. В незатопленных струях
жидкости, вытекающих из сопла (насадка,вспрыска) диаметром d в воздушное про-
пространство, различают три характерные части: компактную (непосредственно после вы-
вылета из насадка), раздробленную и распыленную (рис. 6). В компактной части струя
характеризуется сплошностью движения, в раздроблешгой части струя состоит из от-
отдельных расширяющихся струек; расп ыленная часть — из отдельных капель.
По данным Н.П. Гавырииа, длина начального участка незатопленной водяной
струи определяется выражением х д - 145г/.
Высота вертикальной струи Лн
(рис. 6, а) приближенно определяется по
формуле
V
где // = скоростной напор, под ко-
2g
торым жидкость вытекает из насадка
(v — скорость на выходе); \|/ — опытный
коэффициент, который вычисляется по
приближенной формуле
0,25
^'~ d +0ДШ3 '
d—диаметр насадка, мм.
Значения v|/, приведены ниже:
а)
ССПрЪКК
Рис. б.Незатопленные (свободные) струи
d, мм
Высота компактной части струи вычисляется по приближенной формуле
10
0,0228
13
0,0165
16
0,0124
19
0,0097
22
0,0077
25
0,0061
где р— опытный коэффициент, зависящий от высоты струи Ав. Числеттыс значения
Р, применяемые на практике, даются ниже
Гидравлические струи
513
Л,
р
м
7
0,840
9,5
0,840
12
0,835
14,5
0,825
17,2
0,815
20
0,805
22,9
0,790
24,5
0,785
26,8
0,760
30,5
0,725
Длину компактной части наклонной гидромониторной струи — дальность боя
(рис. 6, б) — приближенно можно определить по эмпирической формуле Н.П. Гавыри-
на:
где d—диаметр насадка, мм;
Н— напор на выходе из насадка, м\ "
0 — угол наклона струи к горизонту, град.
Формула справедлива при d =5 — 50 мм, © =5 — 32° и Н = 30 — 80 м. Наи-
Наибольшая дальность боя струи получается при 0 =30° и Н =35 м, а также при 0 =35° и
.№=10 м. Теоретически наибольшая дальность имеет место при 0=45°.
Для определения дальности полета дождевальной струи, вытекающей из даль-
ноструйного дождевального аппарата, Ф.И. Пикаловым получена эмпирическая форму-
формула
где Lp — дальность полета, отсчитываемая в горизонтальной плоскости, м;
Н— напор у выходного сечения насадка, м;
d — диаметра насадка, м.
Формула справедлива при
Я/f/^lOOO. При вращении аппарата
дальность полета дождевальной струи
уменьшается на 10—15%.
Воздействие струн на неподвижные прегра-
преграды. Сила воздействия струи на неподвиж-
неподвижную плоскую стенку большой площади,
расположенную перпендикулярно к оси
струи N -N (рис. 7), теоретически опре-
определяется из уравнения количества движе-
движения
,,2
N
Рис. 7. Натекание струи на нормальную стенку F = — SqVq
где Sq — площадь сечения струи;
Vq — скорость струи, вытекающей из сопла (насадка).
Если площадь стенки соизмерима с площадью сечения струи, то сила воздейст-
воздействия будет несколько меньше.
В случае, если неподвижная стенка имеет форму желоба и расположена под
углом а к направлению струи (рис. 8), теоретическая сила воздействия струи определя-
определяется выражением
cosot.
33 Том 2
514
ПРИЛОЖЕНИЕ
Сила воздействия струи па истюдвижную поиерхносгь, отклоняющую поток на
180° (рис. 9), теоретически и два раза больше, чем в случае, показанном на рис. 7, и
определяется выражением
Рис. 8. Натекаиис струи
на наклонную стенку
Рис. 9. Поверхность, отклоняющая
поток на 180°
Если плоская пластина (рис.7) движется в направлении оси струи со скоростью
и, то сила воздействия па псе струи
F-2r.-sJV°'uJ -2 Г, —
2g 2g
где И' = Vq -|/ — относительная скорость.
HI. ОСНОВНЫЕ ЗАКОНЫ ДВИЖЕНИЯ ГАЗОВ
Газы, в том числе и воздух, подчиняются в основном приведенным ранее для
капельных жидкостей зависимостям и характеризуются теми же физическими показате-
показателями и единицами измерения.
Принцип действия шзоных (пневматических) систем основан на тех же законах,
что и гидравлических, однако расчеты газовых систем имеют особешюсти, обуслоилен-
ные в основном сжимаемостью газа.
Течение газа не подчиняется законам установившегося течения капельных жид-
жидкостей, согласно которым скорость жидкости в каждой точке магистрали определяется
ее координатами и не зависит от времени. При заполнении сжатым газом (воздухом),
находящимся иод постоянным давлением какой-либо емкости (силового цилиндра и
пр.), газ в начальный момент, когда давление п этой емкости минимальное, будет про-
проходить с максимальной скоростью, которая по мере выравнивания давлении в подво-
подводящей магистрали и заполняемой емкости будет понижаться, достигая при полном вы-
выравнивании нулевого значения. Так как при заполнении емкости давление в ней повы-
повышается при практически постоянном объеме (без совершения внешней работы), темпе-
температура газа повышается.
Поскольку расчет течения газа с учетом указанных особенностей представляет
известные трудности, при практических расчетах исходят из условия, что при устано-
установившемся процессе весовой расход газа G, проходящего п единицу времени через лю-
любое поперечное сечение воздухопро1юда (магистрали) плошадыо 5, остается , вследствие
неразрывности потока, постоянным:
G = yvS-const,
где v и у - средняя скорость и объемный вес газа;
Оспопмыс злкоиы диижепия газов 515
G
Так как объемный расход газа О — \S ~ — по пути течения по трубопроводу не со-
Г
храняется постоянным, а увеличивается вследствие расширения, обусловленного пони-
понижением давления, средняя скорость газа по длине трубопровода (v = Q/S) будет по-
повышаться, а температура — понижаться.
Обычно рассматриваются два случая течения: адиабатическое и изотермическое.
Ввиду сложности определения величины показателя политропы течения газа
по трубе с учетом теплообмена с материалом трубы и окружающей средой приближен-
приближенные расчеты часто производят исходя из условия изотермного режима течения, т.е. до-
допускают, что газ протекает с постоянной температурой, равной температуре его в бал-
баллоне. Для труб с отношением / Id в пределах 1000—12000, где / и d— длина и диаметр
трубы, при коэффициенте расширения газа /у о I Pi от 0>5 до 0,8 подобное допущение
почти не искажает результатов расчетов (показатель политропы колеблется в пределах
1,1 > к > 1). При этом условии можно считать вязкость газа по длине трубопровода
также постоянной, а следовательно, неизменным сохраняется и число Рсйпольдса, вы-
выражение для которого при весовом расходе можно представить в виде
4р<7 AG AG
\?Q — !— =
ncfyv
где \i- vp —среднее значение абсолютной вязкости газа (см. Т.1, Приложение);
р п у = средние значения плотности и объемного веса газа;
d— диаметр трубопровода.
Однако режим течения газов в трубах распространенных пневматических систем
преимущественно турбулентный.
Потери напора при течении газа в трубе при этом режиме могут быть с доста-
достаточной точностью вычислены путем подстановки средних для данных условий значений
входящих в него параметров.
Коэффициент сопротивления X обычно определяется по выражению
Л = 0,3164 Re*0'25.
Среднее значение коэффициента сопротивления X рассчитывают также для
турбулентного режима течения (для 2 103 < Re< 108) по приближенному эмпириче-
эмпирическому выражению
где Л и h/d— величины абсолютной и относительной шероховатости трубы.
Средние значения давления р^ и температуры jTqi газа вычисляется при по-
литропном расширении по выражениям
1/Аг
1 (p2tPl) -
к-\ 1 /„_ ,,,.\ltk
33*
516
ПРИЛОЖЕНИЕ
1 ср "
1 (л/а)
(*-!)/*
г-к
Рх)
Мк
Г.,
где pQ и 7о — начальное давление и температура ( °К) газа;
p2lр\ — степень расширения газа;
р\Ир2 — начальное и конечное давление газа.
Средний объемный вес газа вычисляется по выражению
Рср
л^ср
где R — газовая постоянная при среднем давлении
я температуре
при полит-
ропном расширении.
Принимая во внимание, что величина весового расхода газа через трубопровод
сечением S равна G =
vr
средняя скорость газа выразится так:
У =
G
Sy
op
На рис. 10, а приведены графики зависимости X от числа Рейнольдса для труб
с различной относительной шероховатостью (Л Id), и на рис. 10, б— опытная кривая
среднего значения коэффициента X при течении воздуха в типовой цельнотянутой
стальной трубе.
Ofi
06
шштт
5SB
Щ
——
U-
к
N
V
N
\
>
О 02 ОМ 06 06
Рис. 10. Зависимость коэффициента сопротивления X
от числа Re для труб различной шероховатости
Осиоппые законы движения газон
517
Весовой расход газа через трубопровод длиной L с сечением S при турбулент-
турбулентном режиме течения можно вычислить по выражению
1
где р\ \\Т\ —давление и температура (°К)газа па входе в трубопровод;
L — длина трубопровода;
R — средняя величина газовой постоянной;
d— диаметр трубопровода;
S— сечение трубопровода;
В — коэффициент, зависящий от степени расширения газа и величины показателя по-
политропы к.
Значение коэффициента В может быть вычислено в общем случав по выраже-
выражению
2-к
в_
к-\
Pi)
Pi)'
Кривые зависимости В для различных значений параметров /н I Pi и * приве-
приведены на рис. 10, в.
Показатель политропы к при течении газа в трубопроводе определяется в зави-
зависимости от степени его расширения р2 I Pi* a также от величины Т\ (на входе) и Т2
(на выходе) температур по выражению
1-
Р\
Если наполнение или опорожнение некоторой газовой емкости происходит
через короткий патрубок или отверстие, при котором заметного теплообмена с внепгней
средой не происходит, показатель политропы будет близок к к — 1,4.
Потери напора при течении газа через местные сопротивления часто определя-
определяют по общей формуле
v2r
где ?—опытный коэффициент местного сопротивления;
у и у — скорость течения газа и объемный его вес (объемная плотность) за местным
сопротивлением.
Полагая процесс течения политроштым, расчет весового расхода через дрос-
дроссельное отверстие можно производить для распространенного режима:
G =
i
RT.(k-])
2lk
(Jk+1)/*
Pi
где
—давление газа на входе в местное сопротивление и на выходе из него;
518 ПРИЛОЖЕНИЕ
R — газовая постоянная реального газа;
Т\ —температура газа на входе в местное сопротивление ,°К;
S— площадь проходного сечения местного сопротивления;
(j, = 8ф — коэффициент расхода;
z = Sn IS — коэффициент сжатия струи;
Ф — коэффициент сопротивления отверстия;
к — показатель политропы;
Sn и 5 —площадь потока в сжатом сечении и площадь отверстия;
Р2 IР\ — степень расширения газа.
Коэффициент расхода для распространенных местных сопротивлений можно
принимать: для внезапного сужения трубопровода |i« 0,8 и для внезапного расшире-
( R Л
ния ц * 0,7; для поворота трубы под углом 90° — > 3 ц = 0,94 + 0,95. Часто пользуются
\а )
упрощенным выражением
G = fiSj2gy(Pl-p2) = fiSJ^r (/>, - Р2)
Вес газа, который необходимо подать в емкость объемом Vq, для того чтобы
повысить давление внейс р$ до р^, можно определить по выражению
RT
где pQ мрк —давление газа в емкости в начале и в конце заполнения.
В предположении адиабатического истечения идеального газа из резервуара в
среду с давлением р через отверстие или насадок следует прежде всего определить от-
отношение давлений (/>//>о) и сравнить его с критическим, определяемым по выраже-
выражению
к
У _ V -
1Л =\
При к = 1,4 (для воздуха и двухатомных газов) критическое отношение давлений равно
[ \p*cons? (р} ( 2 Л о,4 псоо, 1П
I YH — =— = 0^28 (рис. И).
При р /р0 >(р IРо) расход газа
кр
>> к
2
1 1
к+\~
Р]~к'
, „ „ где S — площадь отверстия;
Рис. 11. Зависимость весового расхода
газа от отношения р
Основные законы движения газов
519
а скорость истечения
к~\
1-1-^
к-\
к
При pfpo <(plpo) расход воздуха и скорость истечения определяются по форму-
формулам
2 V-1
I
где при к = 1,4 v|/ = 2,15.
= a = Wg-k-.b.^ Л.
где />о, Y о и ЗГЬ — паралтетры газа в резервуаре.
Влияние сопротивления и сжатия струи при истечении газа может быть уточне-
уточнено введением коэффициентов скорости <р и сжатия е, произведение которых равно
коэффициентам расхода \х. Числешгые значения этих коэффициентов для малых ско-
скоростей в первом приближении могут быть приняты такими же, как и для несжимаемой
жидкости.
СПИСОК ЛИТЕРАТУРЫ
1. Баигга Т.М. Машиностроительная гидравлика: справочное пособие. М., Машино-
Машиностроение, 1971.
2. Некрасов Б.Б. Гидравлика и ее применение на летательных аппаратах. М., Машино-
Машиностроение, 1967.
3. Справочное пособие по гидравлике, гидромашинам и гидроприводам/ Под. ред.,
Б-Б Некрасова. Минск., Выпг. шк., 1985.
520 ОГЛАВЛЕНИЕ
ОГЛАВЛЕНИЕ
стр.
1. ПОКРЫТИЯ (ВЖ.Фшшшип) 3
1.1. Коррозия металлов ; 3
1.2. Гальванические покрытия. 4
1.3. Лакокрасочные покрытия :. . . 6
Список литературы 17
2. КОНСТРУИРОВАНИЕ ЛИТЫХ ДЕТАЛЕЙ (ВЖПавельев) 17
2.1. Способы литья 17
2.2. Конструктивные элементы деталей, полученных литьем в песчаные фор-
формы 18
2.3. Нанесение размеров иа чертежах литых деталей 22
2.4. Допуски размеров, формы, расположения и неровностей поверхностей
отливок 24
2.5. Стандарты на отливки из различных металлов, используемые при проек-
проектировании 31
Список литературы 31
3. СОЕДИНЕНИЯ ТИПА ВАЛ-СТУПИЦА (ВЖ.Бакуменко) 32
3.1. Штифтовые соединения 32
3.2. Шпоночные соединения 36
3.3. Шлицевые соединения 42
3.4. Призматические соединения 48
3.5. Клеммовые соединения 49
3.6. Соединения с натягом 50
3.7. Конусные соединения 55
3.8. Фланцевые соединения 58
3.9. Соединения с коническими затяжными кольцами ¦. 59
3.10. Клеевые соединения 59
3.11. Рифленые соединения 60
Список литературы 60
4. ПОДШИПНИКИ (ВЖ.Комаров) 61
4.1. Радиальные подшипники скольжения 61
4.2. Подшипники качения 70
4.3. Подшипниковые узлы. . . 80
4.4. Посадки подшипников 81
ОГЛАВЛЕНИЕ 521
Список литературы 84
5. УПЛОТНЕНИЯ (АВ.Кудрявцев, О.Р.Михалева) 85
5.1. Материалы для уплотнений 86
5.2. Неподвижные соединения. 112
5.3. Клапанные уплотнения . .. . 115
5.4. Подвижные соединения 116
Стгсог литературы 121
6. МЕТОДЫ РАСЧЕТА И НОРМЫ ПРОЧНОСТИ (С.Н. Косорукое) 122
6.1. Общие сведения. 122
6.2. Р_.счет конструкций по допускаемым напряжениям . 124
6.3. Прочность при циклических напряжениях 126
6.4. Предельные нагрузки 128
6.5. Коэффициенты запаса по допускаемым перемещениям 128
6.6. Расчет на устойчивость 129
Список литературы 134
7. РАСЧЕТ БАЛОК И СТЕРЖНЕЙ (В. Б. Свечников, СИ. Косорукое) 135
7.1. Геометрические характеристики сечений ¦ • • • 135
7.2. Расчет стержней постоянного сечения на растяжение-сжатие и изгиб . . 138
7.3. Расчет прямых стержней постоянного сечения на устойчивость 142
Список литературы 147
8. РАСЧЕТ ДЕТАЛЕЙ И ЭЛЕМЕНТОВ КОНСТРУКЦИЙ (ВЖБакуменко,
В.А. Бондарей ко, Ю.В.Берсенев) 148
8.1. Расчет гибких нитей ¦ 148
8.2. Стержневые системы (фермы) 152
8.3. Расчет звездообразной фермы 154
8.4. Расчет стержневой подвески 156
8.5. Расчет деталей на кручение 159
8.6. Брусья большой кривизны , 161
8.7. Расчет валов и осей 164
8.8. Частные случаи расчета колец, шпангоутов 175
8.9. Поворотная деформация кольца 181
8.10. Расчет кольцевого бурта с учетом сдвиговых деформаций. . 185
8.11. Расчет пластин 186
8.12. Расчет мембран . 197
8.13. Прочность и жесткость сферических оболочек под сосредоточенными
нагрузками . 200
8.14. Расчет различных деталей и соединений 207
522 ОГЛАВЛЕНИЕ
8.15. Пружины 232
8.16. Резиновые упругие элементы 254
8.17. Система классов точности балансировки и методические указания .... 255
8.18. Определение расчетных усилий для аппаратов колонного типа от ветро-
ветровых нагрузок 270
Список литературы 277
9. РАСЧЕТ ЭЛЕМЕНТОВ КОНСТРУКЦИЙ НА ПРЕДЕЛЬНЫЕ НАГРУЗКИ
(С.Н. Косорукое) 278
9.1. Условия текучести 279
9.2. Определение предельных нагрузок 284
Список литературы 309
10. РАСЧЕТ ЭЛЕМЕНТОВ КОНСТРУКЦИЙ ПРИ ДИНАМИЧЕСКИХ НА-
НАГРУЗКАХ (СНЖосоруков) 311
10.1. Ударные нагрузки 311
10.2. Колебания конструкций 321
10.3. Критические состояния механических систем 324
Список литературы 337
11. РАСЧЕТ ПРОСТЕЙШИХ МЕХАНИЗМОВ (Ю.П.Воронцов) 339
П.1. Эксцентриковый зажим. . 339
11.2. Клиновые и клиноплунжерные механизмы 340
11.3. Цанговые зажимы 345
11.4. Рычажные механизмы (зажимы) 347
11.5. Простейпгае механизмы 349
11.6. Комбинированные механизмы 351
11.7. Перемещение груза по горизонтальной и наклонной плоскостям 358
Список литературы. 359
12. МЕХАНИЧЕСКИЕ ПЕРЕДАЧИ (Г.Ф.Свааов) . 360
12.1. Ременные передачи 361
12.2. Зубчато-ременные передачи 374
12.3. Цепные передачи 377
12.4. Зубчатые и червячные передачи 382
Стандарты 393
Список литературы 396
ОГЛАВЛЕНИЕ 523
13. МУФТЫ (Г.Ф.Свалов) 397
13.1, Типы му(*гг 398
13.2. Схемы и расчетные зависимости 402
Стандарты 411
Список литературы 411
14. РЦДУКТОРЫ (Г.Ф.Свалов) 412
14.1. Типы редукторов 413
14.2. Основные технические условия 420
Стандарты 423
Список литературы 423
15. ПРИВОДЫ И ДВИГАТЕЛИ (Г.Ф.Свалов) 424
15.1. Назначение и классификация приводов 424
15.2. Выбор двигателя привода 424
15.3. Электродвигатели. 427
15.4. Гидродвигатсли 434
15.5. Рекомендации по выбору приводов . . 436
Стандарты 442
Список литературы 443
16. МАЛЬТИЙСКИЕ МЕХАНИЗМЫ (Г.Ф. Свалов) 444
16.1. Виды мальтийских механизмов 447
Список литературы 455
17. ОБЪЕМНЫЕ ГИДРОПРИВОДЫ (ВЖБакуменко, В.Н.Финашж) 456
17.1. Общие понятия и опредслетптя 456
17.2. Свойства и требования к рабочим жидкостям гидроприводов 458
17.3. Объемные гидродвигатели 464
17.4. Гидроаппаратура 471
17.5. Гидроаккумуляторы и гидропреобразователи 483
17.6. Кондиционеры рабочей жидкости 487
17.7. Гидролинии 491
17.8. Некоторые типы и параметры насосов . . 501
17.9. Масла и смазки 505
Список литературы 509
524 ОГЛАВЛЕНИЕ
ПРИЛОЖЕНИЯ 510
I. Истечение жидкости через отверстия и насадки ¦ 510
II. Гидравлические струи 512
III. Основные законы движения газов 514
Список литературы 519
Стр.
40
76
135
158
174
176
203
205
207
218
219
221
223
225
227
225
246
247
248
Строка
3-я схема,
11-я снизу
Левый эскиз
рисунка 6
заменяется
Рис. 1
4-я снизу
11-я снизу
6-я снизу
3-я сверху
Таблица 30
Таблица 30а,
1-я сверху
4-й эскиз,
2-я снизу
Колонтитул
2- снизу
2—ой эскиз
нижний
рисунок
1-я сверху
В
"Обозначения"
табл. 49
ввести 4—ю
строку
Поправки в томе 2
Напечатано
Л/в<; 0,166 MF+3/D)[<rCM]
т
1
ч
j
А
Г
11
ш
п
J
, \Ma1+Jyax-^Ma2-Jya^+AWyal
3'4 2я-]| гшу
2г-Гго
го
2я
3
.2
а2 = VI
0,0653-10
0,0336 10
0,0189 10*1
0,0115 -КГ1
0,0074 • 10~2
0,00502-10
/w(«)
напряжения
Прочность и жесткость
сферических оболочек
кр = ^кР
F
bhf[vH]
6L
1
... табл. 48
—
Должно быть
Мв ^0,166 bKb + 6JD)[<rcJ
5^Э
пГ
а
1
dA
1 1ма2^уа^(Ма2^Л)*+АШуа*
Ь'4 2я\ 2М/у
2г-1"т0
X
N = — -cos/?-/7 sin/?
2ж ^2 J
сг2 = wj
0,0653
0,0336
0,0189
0,0115
0,0074
0,00502
/»<«>
напряжения (оценочные)
Расчет различных деталей
и соединений
екр=^кР
61
L
... табл. 49
L — расстояние от заделки консоль-
консольных пружин до линии действия
силы
Продолжение таблицы
Стр. Строка
Напечатано
Должно быть
279
Фор-
Формула E)
да1
<т2)
-сг3)
J + (aj - о-3 J
-о- =0
296
4-й
эскиз
заме-
заменяется
12-я
снизу
пласти
пластин
303
Табли-
Таблица 11,
допол-
дополнить
заголо-
заголовок
некруглых пластин
некруглых пластин (опертых по
контуру)
нервной
неравной
а процессе
в процессе
17.7
Гидро-
Гидролинии,
2-ая
сверху
8-й
эскиз,
3-я
8^я
1-я
сверху
Краткий справочник
конструктора нестандартного оборудования
Том 2.
Оригинал-макет изготовлен издательско-полиграфическим центром
Тамбовского государственного технического университета (ТГТУ),
Издательство "Машиностроение"
107076, Москва, Стромынский пер. д. 4
Подписано к печати 9.01.97 г. Формат 70x100 716
Объем 42,57 усл. печ. л. Тираж 4000. Заказ 55.
Отпечатано в издательско-полиграфическом предприятии "Зауралье".
640627, г. Курган, ул. К. Маркса, 106.
УВАЖАЕМЫЕ ЧИТАТЕЛИ !
Заказы на справочник направлять по адресу:
456770 г. Снежинск Челябинской области, а/я 131
Тел/факс C5172) 3-64-73, тел ^2-72-53- J
УВАЖАЕМЫЕ ГОСПОДА !
Для приготовления любых сортов пива, включая и фирмен-
фирменные - 12% светлое "Снежинское" и 16% темное "Дмитрий", изго-
изготавливаемых по рецептуре Российского института пивоварения,
научно-техническая фирма "БС" предлагает Вам минипивзаводы на
1000 и 2000 Л/сутки.
Минипивзаводы спроектированы и изготовлены НТФ "БС"
с учетом анализа импортных пивзаводов и отличаются от аналогов:
отечественных — компактностью, малой энергоемкостью и эсте-
эстетичным внешним видом оборудования;
зарубежных — рентабельностью и безотказностью при использова-
использовании отечественного сырья.
Минипивзаводы поставляются комплектно со всем необхо-
необходимым оборудованием для производства, доставки и реализации
пива потребителям.
Многолетняя эксплуатация минипивзаводов, сданных НТФ
"БС" "под ключ", в различных городах России, включая г. Сне-
Снежинск, показала их высокую надежность и экономичность.
Фирма может поставлять отдельные виды.оборудования:
• нагреватель газовый для технологических линий;
• установку подготовки "ледяной" воды (льдогенератор);
• пластинчатый теплообменнику насосы;
• пульты управления и измерения;
• комплект минибарного оборудования для розлива пива в торговых
точках.
456770 г. Снежинск Челябинской обл. а/я 131
Тел/факс C5172) 3-64-73, тел. -2-72-52, 3-26-87
3 if/6