/











































































































































Текст
Е. И. Несис
МЕТОДЫ
МАТЕМАТИЧЕСКОЙ
ФИЗИКИ
Допущено Министерством просвещения СССР
в качестве учебного пособия для студентов
физико-математических факультетов
педагогических институтов
МОСКВА • «ПРОСВЕЩЕНИЕ» • 1977
530.1
H55
Несис Е. И.
Н55 Методы математической физики. Учебн. пособие
для студентов физ.-мат. фак. пед. ин-тов. М.,
«Просвещение», 1977.
199 с. с ил.
В книге изложен учебный материал по математической теории поля,
дифференциальным уравнениям в частных производных и линейной
алгебре в объеме, соответствующем учебной программе по курсу «Методы
математической физики» для физико-математических факультетов
педагогических институтов.
60602-569
НТ03(03)-7729 77 530,1
® Издательство «Просвещение», 1977 г.
ПРЕДМЕТ МАТЕМАТИЧЕСКОЙ ФИЗИКИ
Физика в своем историческом развитии постепенно
превращалась из науки описательной в науку точную. Для
характеристики различных явлений и процессов,
происходящих в природе и технике, физики все шире
используют математические методы, или, как принято говорить,
соответствующий математический аппарат.
Для этой цели пришлось прежде всего ввести меру
канедого физического свойства. Пока физики имели дело
с простейшими свойствами тел, в качестве меры каждого
из них можно было ограничиться скалярными величинами,
обычно показывающими, во сколько раз мера данного
свойства у рассматриваемого тела больше некоторого
единичного масштаба. Так были введены такие скалярные
величины, как длина, площадь, объем, масса, время, температура,
электрический заряд, энергия и т. п.
Со временем выяснилось, что для количественного
описания быстроты движения, изменения этой быстроты,
взаимодействия тел и т. п. скалярные величины не
подходят, В этих случаях оказались пригодными более сложные
математические величины—направленные отрезки, или
векторы.
В конце XIX века физикам стало ясно, что для
характеристики деформаций, инерции при вращательном
движении, усилий в деформированных твердых телах и
т. п. необходимы величины еще более сложной
математической природы — тензоры.
С другой стороны, развитие количественных методов
показало, что одно и то же физическое свойство в разных
точках исследуемого объекта может принимать различные
значения, и поэтому для математического описания
необходимо знать совокупность значений соответствующей
величины во всех точках рассматриваемого объекта. Так в
3
физике постепенно сложилось представление о
математическом поле—области пространства, каждой точке которого
соответствует определенное значение некоторой физической
величины.
Поля бывают скалярные, векторные и тензорные.
Каждое из них, в свою очередь, может быть стационарным
(если физическая величина в каждой точке области со
временем не меняется) или нестационарным. Ясно, что
стационарное поле есть функция координат х, у, г точек
пространства, а нестационарное поле представляет собой
функцию четырех переменных: координатх, у,ги времени t.
Введение понятия поля сыграло в физике такую же
прогрессивную роль, как в свое время появление в
математике понятия переменной величины.
Основная задача математической физики—это
аналитическое исследование скалярных, векторных и тензорных
полей физических величин.
В математической физике рассматриваются две
проблемы— прямая и обратная.
Прямая проблема состоит в следующем. Задано
правило определения интересующей нас физической
величины в любой точке пространства, т. е. задано поле;
требуется установить характер этого поля, т. е. быстроту его
изменения от точки к точке. Изучением дифференциальных
свойств различных полей занимается математическая
теория поля.
Обратная проблема состоит в нахождении
некоторой физической величины, т. е. конкретного вида
математического поля, если известны условия, в которых
находится физический объект.
Приведем пример. Пусть сплошной металлический
цилиндр касается нижним основанием горячей воды (Г = 7\),
а остальная его поверхность окружена холодным воздухом
(Т = Т0). Физически ясно, что внутри цилиндра вследствие
теплопроводности материала установится тепловое
равновесие и образуется стационарное скалярное поле
температур Т = Т(х, у, г) (рис. 1). Вид этого поля можно
определить аналитически.
В общем случае любое физическое явление или процесс
представляет собой изменение каких-либо физических
величин (скалярных, векторных, тензорных) в пространстве
и во времени. Поэтому математическое поле, вообще
говоря, описывается функциями четырех независимых
переменных х, у, z, t. И задача состоит в нахождении этих функций.
4
Для нахождения неизвестных
функций нужно, исходя из
управляющих данным физическим явлением
закономерностей, составить
функциональные уравнения, решая которые
можно будет найти искомые функции.
По причинам, которые мы выясним
ниже, эти функциональные уравнения
обычно представляют собой
своеобразные дифференциальные уравнения, —---а^ ■ ^-^
в которых искомая функция зави- fe^.=?^r-^7-=?-5
сит от нескольких переменных.
Изучением методов составления Рис#
и, главное, интегрирования уравнений
такого рода занимается вторая часть математической
физики—теория дифференциальных уравнений в частных
производных.
Совокупность теории поля и теории дифференциальных
уравнений в частных производных образует так
называемую классическую математическую физику.
Однако за последние несколько десятков лет в связи
с успехами теории относительности и открытием
качественно новых, квантовых свойств у микрочастиц (молекул,
атомов, ядер, электронов и т. п.) задачи математической
физики значительно расширились: появилась
необходимость в изучении полей комплексных величин в
комплексном пространстве, в использовании для их исследования
не только методов математического анализа, но и
сравнительно новой математической науки—линейной алгебры,
являющейся своеобразным сочетанием алгебраической
теории систем уравнений первой степени и аналитической
геометрии «-мерных плоских пространств. Этим вопросам
посвящена третья часть предлагаемого пособия.
Часть первая
МАТЕМАТИЧЕСКАЯ ТЕОРИЯ ПОЛЯ
Глава I.
СКАЛЯРНЫЕ, ВЕКТОРНЫЕ И ТЕНЗОРНЫЕ ПОЛЯ НА ПЛОСКОСТИ
Чтобы максимально облегчить изучение математической
теории поля, мы в этой главе ограничимся рассмотрением
простейших стационарных полей на плоскости и будем
пользоваться только прямоугольными декартовыми
координатами.
§ 1. Скалярное иоле и векторное поле его градиента
Скалярным полем называется область плоскости,
каждой точке которой сопоставляется некоторое значение
скалярной величины ф.
Так как произвольная точка на плоскости
характеризуется координатами х, у или радиус-вектором г, то
аналитически любое скалярное поле может быть задано либо
в виде функции координат ф = ф(х, у), либо в функции
-*
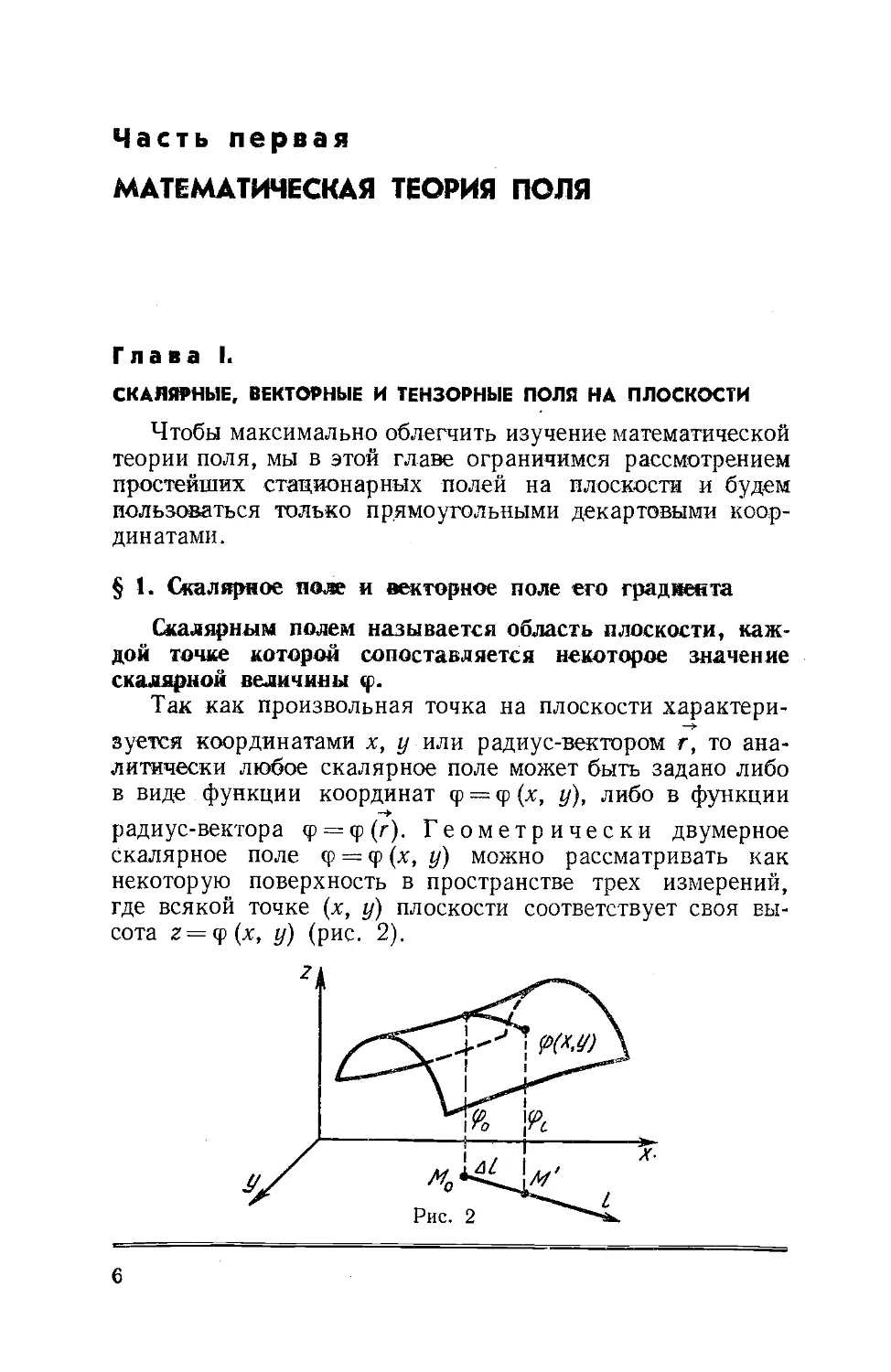
радиус-вектора ф = ф(г). Геометрически двумерное
скалярное поле ф = ф (х, у) можно рассматривать как
некоторую поверхность в пространстве трех измерений,
где всякой точке (х, у) плоскости соответствует своя
высота г = ф(х, у) (рис. 2).
6
Как известно из дифференциального исчисления,
важнейшей аналитической характеристикой функции одной
переменной S — f (t) является ее производная -д-,
определяющая быстроту изменения зависимой переменной S
с изменением аргумента t. Какая же величина играет
роль производной в случае скалярного поля ф = ф (х, у)?
Пусть ф (х, у) является в заданной области
непрерывной, однозначной и дифференцируемой функцией
координат х и у. Чтобы дать количественную характеристику
быстроты изменения скалярной величины ф в окрестности
произвольной точки М поля, введем понятие производной
по данному направлению.
Производной скалярного поля ф = ф(х, у) по
некоторому направлению I называется предел отношения
приращения зависимой переменной а этом направлении к
перемещению, когда последнее стремится к нулю:
di IJZ м > W
где ф0 и ф2—значения скалярной функции ф
соответственно в рассматриваемой точке М и соседней точке М',
отстоящей от М на расстоянии Л/ вдоль выбранного
направления / (см. рис. 2).
Очевидно, что величина -~ зависит от выбора
направления /. И поскольку через точку на плоскости можно
провести бесчисленное множество различных направлений,
то может показаться, что для дифференциальной
характеристики скалярного поля необходимо задать в каждой
точке (х, у) бесконечное количество производных ~ по
всевозможным направлениям, проходящим через эту точку.
Оказывается, однако, что вследствие непрерывности
и однозначности функции ф = ф (х, у) для определения
скорости ее изменения вдоль произвольного направления I
достаточно знать только две производные по двум взаимно
перпендикулярным направлениям, скажем -~ и -~ . Чтобы
в этом убедиться, введем представление об
эквипотенциальных линиях (линии уровня), представляющих собой
геометрическое место точек, которым соответствует одно
и то же значение скалярной величины ф. Ясно, что
уравнение эквипотенциальной линии имеет вид ф (х, #)=Ф,=
=const. Меняя значение постоянной ф,-, получим семей-
7
■ръу)
ство линий уровня. Следует иметь в виду, что при
геометрической интерпретации поля все эти линии лежат не на
поверхности г = ц>(х, у), а на плоскости XOY, каждая из
них представляет собой множество точек, которым
соответствуют равные высоты г (рис. 3). У температурного
поля линии уровня представляют собой изотермы; у
электростатического поля—это линии равного потенциала.
Если на плоскости изобразить эквипотенциальные
линии, соответствующие значениям скалярной функции <р =
= <Pi. Ф2. Фз.'---. Для которых <рА+1 —<pft = const (рис. 3),
то по виду семейства этих линий можно будет качественно
8
нудить о быстроте изменения поля в любой точке по любому
йаправлению: где гуще расположены линии уровня, там
скалярная величина ср изменяется быстрее. Однако для
количественной характеристики поля этого недостаточно.
Пусть нас интересует скорость изменения скалярной
величины ф в окрестности точки М, в которой ср = сра
(рис. За). Проведем через М эквипотенциальную линию
MN. Кроме того, построим близкую к MN линию
уровня M'N', соответствующую несколько большему значе-
нию потенциала ср2 = <р3 + Дф- Пусть вектор ММ' = \ММ' \ п
направлен вдоль нормали к ММ в сторону возрастания
Ф, а вектор MN'= \MN'\l—вдоль произвольного на-
правления (где пи/ —единичные векторы,
направленные соответственно вдоль ММ' и MN').
Из рисунков 3 и За ясно, что производные от ф по
направлениям п и I соответственно равны:
дп MM' dl MN"
где пределы берутся при условии, что М'N'
неограниченно приближается к MN, т. е. \ММ' \—>-0 и|УИЛ/'|—>-0.
Так как при приближении M'N' к MN треугольник
MM'N' можно считать прямоугольным, то |ЛШ'|=
= \MN'\cos (I, n), и мы приходим к соотношению
# = gcos(0). (2)
Отсюда следует, что в любой точке поля производная по
нормали к линии уровня больше производной по. любому
другому направлению. Зная производную -^-, можно по
формуле (2) вычислить производную по произвольному
направлению /, проходящему через рассматриваемую точку.
Поскольку производная функции ф = ф (х, у) по
нормали к эквипотенциальной линии играет особую роль для
дифференциальной характеристики скалярного поля, то
оказалось полезным ввести понятие градиента.
Градиентом скалярного поля ф (х, у) в данной точке М
называется вектор, направленный по нормали п к
проходящей через точку М линии уровня (в сторону возра-
9
стания ср) и численно равный производной от ср по этому
направлению:
gradcpE=vcp = J|n. (3)
Из (2) и (3) следует, что производная по любому
направлению равна проекции градиента на это направление:
^- = grad,(p. (4)
В частности, производные вдоль осей координат равны:
|j = grad,<P,
дц, . \ (5)
Читая равенства (5) справа налево, можно градиент
определить по-иному.
Градиентом скалярной функции ср (х, у) называется
вектор, у которого проекции на оси координат равны
соответственно частным производным от ср по х и у:
gradcp = Vtp = |^+|^7. (6)
Отсюда вытекает следующее выражение для абсолютного
значения градиента, т. е. длины вектора V<p:
lgrad.l_IV.pl-/(f)4(f)2. (7,
Наконец, исходя из равенства (4) можно дать еще одно
определение градиента.
Градиент скалярного поля ср(х, у) в произвольной
точке — это вектор, направленный в сторону быстрейшего
возрастания функции в окрестности точки, равный
производной от функции ф по этому направлению.
Из всего сказанного следует, что построенный в
некоторой точке скалярного поля вектор Уф полностью
характеризует аналитические свойства функции ф (х, у)
в окрестности этой точки. Таким образом, для
аналитической характеристики всего скалярного поля необходимо
знать векторы 7ф во всех точках этого поля, иными
словами, нужно знать векторное поле градиента.
->
Если каждой точке г (х, у) некоторой части плоскости
->
сопоставляется определенная векторная величина а, то
-»-> ->
говорят, что задано векторное поле а (г) или а {х, у).
10
Векторные поля графически изображают
направленными отрезками, нанесенными в точках, отстоящих друг
от друга на равных расстояниях.
->
Заметим, что поскольку вектор а на плоскости
определяется двумя скалярными проекциями ах и ау, то
задание векторного поля а (х, у) эквивалентно заданию двух
скалярных полей ах(х, у) и ау(х, у). В результате мы
приходим к заключению, что дифференциальной
характеристикой («производной») скалярного поля <р (х, у),
заданного в некоторой области плоскости, является векторное
поле grad cp (х, у), определенное в той же области.
Рассмотрим несколько примеров.
1. Задано скалярное поле cp = (x2 + J/2)-1^2 = h'r. Определить
векторное поле градиента.
Воспользуемся для этой цели формулой (6). Так как
дф х д<р __ у
~дх~~~ (x2 + J/2)3/2 ^У~ ~Ъ2 + У2)3''2' '
то
grad ф = —^ ,
где r = xi + yj.
Выясним смысл полученного решения. Легко видеть,
что эквипотенциальные линии рассматриваемого
скалярного поля удовлетворяют уравнению типа х2 + у3 = const,
т. е. представляют собой окружности с центром в начале
координат.
Поскольку по условию ф зависит только от
расстояния г, то в пространстве трех измерений эта функция
геометрически изобразится поверхностью вращения.
Сечением этой поверхности плоскостью у = 0 будет линия
Ф = \/х, представляющая собой равнобочную гиперболу,
асимптотами которой являются оси х и ср.
Следовательно, поверхность ф (х, у) есть гиперболоид
вращения (рис. 4, а). Ясно, что в любой точке плоскбсти
XOY направление быстрейшего возрастания высоты
поверхности ф совпадает с направлением к центру. При этом,
как ясно из вида этой поверхности, крутизна подъема ср
при приближении к центру возрастает все быстрее. Это
соответствует тому, что длина вектора Уф вдоль
направления к началу координат возрастает обратно пропоп-
11
Рис. 4
ционально квадрату радиус-вектора точки:
lvq>l=>
Графическое изображение векторного поля grad cp
приведено на рис. 4,6.
Теперь рекомендуем читателю самостоятельно решить
и проанализировать примеры 2 и 3.
2. Определить и графически изобразить векторные поля гради-
ентов скалярных функций: а) ф = *2 + </2> б) ф = (с, г)
(с—постоянный вектор).
Рис. 5
12
Ответ: a) grad<p = 2r, б) grad<p = c.
3. Определить вид скалярного поля ф (х, у) и геометрически
изобразить его, если поле его градиента определяется формулой v<f =
->
= а— (рис. 5, а).
Ответ: <р = а ух2 -\-у2 = аг; поверхность <р (х, у)
представляет собой конус с вершиной в начале координат
(рис. 5,6).
§ 2. Аналитическое определение понятия вектора
Перейдем к более глубокому знакомству с векторными
величинами и векторными полями. Как уже отмечалось,
исторически векторное исчисление возникло в связи с
потребностью физики количественно описывать быстроту
движения, изменения быстроты движения, взаимодействия
тел. Соответствующие величины имеют не только модуль,
но и направление.
Если бы даже все физические величины обладали скалярным
характером, то и в этом случае математическая физика не могла бы
обойтись без векторов. Ведь быстрота изменения скалярной функции
двух переменных ф (х, у) не может быть охарактеризована скалярной
функцией; для этого нужна переменная векторная величина уф (*>#)>
играющая роль производной скалярного поля.
Правда, на первый взгляд представляется, что для указанной
да> дц>
цели можно воспользоваться скалярными величинами -—- и -~,
дх ду
которые, как может показаться, лишь для удобства объединены в
вектор Уф-
Однако более внимательное рассмотрение показывает, что это не
дф дт
так. Дело в том, что частные производные -J- и -~, строго говоря,
не являются скалярными (иногда их называют псевдоскалярами).
Ведь значения этих частных производных зависят не только от вида
функции ф (х, у), но и от выбора осей координат. Выбрав по-иному
направления этих осей, мы получим для указанных производных
другие значения.
Нетрудно убедиться, что причиной таких свойств скалярных про-
Зф дф
изводных -г1- и -т— является то, что они являются проекциями
дх ду г
вектора фф.'на оси координат.
Непосредственный аналитический смысл, зависящий только от
вида скалярного поля ф (х, у), имеет в любой точке поля вектор уф,
в то время как его проекции —- и -— зависят еще от выбора осей
X и Y.
13
Следовательно, дифференцирование скалярных полей с
неизбежностью приводит нас к необходимости выйти из класса скалярных
функций в более широкий класс функций—векторных функций.
Векторы, т. е. направленные отрезки, представляют
собой определенные геометрические объекты. Как известно
из аналитической геометрии, векторы можно складывать
(по правилу параллелограмма), умножать на числа,
умножать друг на друга скалярно и векторно, производить
над ними также другие геометрические операции.
Последние значительно упрощаются и сводятся к
алгебраическим операциям, если воспользоваться методом
координат и каждый вектор а характеризовать его
скалярными проекциями ах и ау на оси X и Y. Правда, эти
проекции, как мы уже отмечали, не являются истинными
скалярами, ибо, выбрав новые оси координат X' и У,
мы для характеристики того же вектора а получим новые
проекции а'х и ау, связанные со старыми ах и ау
известными из аналитической геометрии формулами:
а'х = ах cos (хГ^~х) + ау cos (х^у), )
а'у = ах cos (у', х) + ау cos (у', у). )
Но так или иначе, выбрав определенную систему коор-
динат и сопоставляя каждому вектору а пару чисел ах
и ау, мы получили возможность различные
геометрические действия с векторами выполнять с помощью хорошо
известных операций над числами. Так, например, суммой
-> -* ->•
двух векторов а и Ь называется вектор с, проекции
которого равны суммам соответствующих проекций слагаемых:
->■
сх = ах-\-Ьх, су = ау-\-Ьу\ произведением вектора а на
число X называется новый вектор, проекции которого
равны %ах и Кау и т. п.
Однако дальнейшее развитие векторного исчисления
показало, что введение скалярных проекций,
определяющих произвольный вектор, позволяет сверх этого более
глубоко взглянуть на векторные величины, рассматривая
их не как геометрические, а как некоторые
алгебраические объекты. А именно, можно дать следующее
аналитическое (алгебраическое) определение вектора.
Вектором называется некоторая величина а,
характеризуемая в каждой системе координат XOY двумя
скалярами ах и аи, которые при переходе к другой системе
14
.координат X'OY' преобразуются с помощью формул (8)
в новые скаляры а'х и а',,.
Конечно, это определение векторной величины
значительно сложнее геометрического, но оно имеет три
важных преимущества.
Во-первых, е его помощью легко обобщить
понятие вектора не только на реальное трехмерное
пространство, но и на вещественные и комплексные пространства
любого числа измерений. Такое обобщение, как мы
увидим ниже, оказалось весьма плодотворным для
современной физики.
Во-вторых, определив вектор аналитически, мы
можем отвлечься от его непосредственного образа,
абстрагироваться от наглядных представлений о направленном
отрезке и рассматривать его как величину произвольной
физической природы. Так, например, известно, что любой
цвет можно получить путем смешения в определенных
пропорциях трех красок основных цветов (красного,
зеленого и синего). Поэтому каждый цвет можно рассматри-
~>
вать как некий пространственный вектор а с тремя
компонентами акр, а3еЛ. 0СИН, характеризующими
концентрации соответствующих красок.
Наконец, аналитический подход позволяет обобщить
понятие вектора и ввести более сложные математические
величины — тензоры второго и более высоких рангов,
которым вообще не соответствуют наглядные геометрические
образы. (С этой точки зрения вектор есть тензор первого
ранга.)
Однако наряду с достоинствами, алгебраическое пред-
ставление вектора а в виде проекций ах и ау обладает
и существенным недостатком: ведь проекции зависят не
только от определяемого ими вектора, но и от выбора
системы координат.
Говоря словами известного советского геометра
П. К. Рашевского, «при координатном методе
исследования на изучаемую геометрическую картину
накладывается случайный выбор координатной системы, и те
аналитические данные, которые мы получаем, отражают
не только то, что нас интересует, но и то, что вовсе не
интересует и что без надобности усложняет результаты.
Возникает потребность в сложных построениях научиться
отделять геометрически существенное от случайно
привнесенного выбором осей координат».
15
Последняя задача частично решается путем
установления так называемых инвариантных соотношений между
скалярными проекциями, определяющими вектор, или
скалярными компонентами более сложной математической
вел и чи ны — тензора.
Ясно, что хотя значения ах и ау и зависят от выбора
осей координат, тем не менее они определяют
геометрический объект—вектор. Следовательно, между ними
должны существовать одна или несколько зависимостей,
которые характеризуют внутренние геометрические
свойства этого объекта, не зависящие от выбора
координатной системы и называемые инвариантами:
ФК> аи)=Ф(а'х, <g = inv.
Каждый инвариант имеет непосредственный
геометрический (или физический) смысл. Легко видеть, что в слу-
чае плоского вектора а, определяемого двумя
скалярными компонентами (проекциями) ах и ау, инвариантным
соотношением является функция ах-\-а2и, равная квадрату
длины вектора, это соотношение инвариантно к повороту
прямоугольных осей координат, ибо, возведя в квадрат
равенства (8) и сложив их, получим:
а* +а'у =al + al.
§ 3. Векторные поля и их дифференциальная
характеристика
->
Пусть каждой точке г (х, у) плоскости (или части ее)
~> ->
соответствует некоторый вектор а (г), т. е. имеется
векторная функция координат или векторное поле. Как
определить быстроту изменения векторной переменной а
в окрестности произвольной точки М? Ясно, что это
задача дифференциального исчисления и она сводится
->
к определению производной векторной функции а по век-
->
торному аргументу г.
Как и в случае скалярного поля, начнем с
определения производной по данному направлению /:
где аа и at— значения векторной функции а в точке М
и близкой к ней на прямой / точке Mt.
16
Из (9) следует, что производная -тт- есть величина
векторная. Для другого направления /', проведенного
через точку М, получим другой вектор -^. Но это не
значит, что для полной дифференциальной
характеристики векторного поля в данной точке необходимо знать
-*■
бесконечное количество производных от а по всем
всевозможным направлениям.
Оказывается, что, как и в случае скалярного поля,
достаточно знать всего две векторные производные по
двум взаимно перпендикулярным направлениям, скажем
—* ->
-д— и -д— . Дело в том, что производная по любому дру-
да
гому направлению весьма просто выражается через -д—
да _ „ „ "*
и -д— . Действительно, всякий вектор а полностью
определяется в системе координат XOY двумя скалярными
компонентами ах и ау. Поэтому любому векторному полю
а (х, у) всегда в этой системе координат можно
сопоставить эквивалентную совокупность двух скалярных полей
ах(х, у) и ау (х, у). А так как производной скалярного
поля является градиент, мы получаем, что пара векторов
\ах и Vay, построенных в интересующей нас точке
векторного поля, полностью характеризует в ее окрестности
-> -*■
поведение функции а(г).
Но можно ли отсюда заключить, что производной век-
->
торной функции а(х, у) является пара векторов уах и
Va„? Внимательное рассмотрение существа дела
показывает, что на этот вопрос следует ответить отрицательно.
Подобно тому как в случае скалярного поля <р (х, у)
д(р дю „ „
частные производные ^ и — представляли собой
псевдоскалярные величины (их значения зависели не только от
вида функции <р (х, у), но и от выбора осей X и Y), в случае
векторного поля а (х, у) градиенты \ах и \ау являются
псевдовекторами, ибо они не имеют инвариантного смысла,
а зависят от выбора осей координат. Ведь, выбрав новые
оси X' и У, мы тому же векторному полю а (х, у) сопоставим
17
два других скалярных поля а'х(г) и а'у(г) и поведение
функции а в окрестности рассматриваемой точки будет
определяться другой парой векторных величин \а'х и ^а'у.
Все это наводит нас на мысль, что в случае
векторного поля имеет место такое же положение, что и в
случае скалярного поля. Мы уже знаем, что поведение
скалярной функции ф (г) характеризуется в каждой системе
координат своей парой скалярных величин ~ и ~ ,
которые являются компонентами вектора 7ф, имеющего
непосредственный, инвариантный, не зависящий от выбора
системы координат смысл. Точно так же поведение век-
торной функции а (г) в любой системе координат
характеризуется парой векторных величин Чахн ^ау. Поскольку,
однако, характеризующая поведение функции а (г)
производная должна иметь объективный, инвариантный смысл
и не должна зависеть от выбора осей, то следует
рассматривать \ах и \ау как векторные составляющие в
данной системе координат некоей более сложной величины,
->
называемой тензором и обозначаемой в виде -zr. Тензор
dr
da , _> ,~\
—^- и является производной векторной функции а(г).
dr
Из всего этого, в частности, следует, что тензор
представляет собой инвариантную математическую величину,
которая в каждой системе координат определяется парой
векторных составляющих, подобно тому как вектор есть
инвариантная величина, определяемая в каждой системе
своей парой скалярных компонентов.
Перейдем теперь к подробному изучению тензорных
величин.
§ 4. Тензоры и их свойства
Тензором называется величина П, характеризуемая
в системе координат XOY двумя векторами рх и р ,
преобразующимися при переходе к другой системе
координат Х'ОУ в векторы р'х и р'у по формулам:
p; = pxcos(xQ) + Pycos(/r>). | (Ш,
Р'у = Т>* cos (г/Vx) + pycos (yTy). )
18
Векторы рх и ри называются составляющими тензора
П по осям X и У. Подчеркнем, что рх и ру не являются
какими-то частями тензора (тензор есть единая
величина), а лишь характеризуют эту величину в данной
■системе координат. В другой системе координат мы
получим другие составляющие, причем каждая «новая»
составляющая зависит от всех «старых» составляющих.
Подобно выражению вектора через компоненты а =
= axi-\-a..j, принято записывать тензор через составляю-
щие Yl—pxi + ptlj. (Следует иметь в виду, что эта за-
пись символическая: px-i— не скалярное произведение
двух векторов.)
Так как рх и ру—векторы, то их можно разложить
на компоненты:
-» -» ->
-» -» -»
py=p,jJ+Pyyi-
Отсюда ясно, что тензор П можно также определить
четырьмя скалярными величинами, называемыми
компонентами тензора, которые записываются в виде
таблицы (матрицы):
Рхх Рхд
I РуХ Руу
В тензорном исчислении стремятся к максимальному
сокращению математической записи, для чего переимено-
-* -* -* -*
Бывают координаты х, у в х1, х2, а орты г, / в r\, i2, тогда
для каждого вектора можно написать:
- 4,-
4 = 1
Аналогично для тензора получим:
П =
n=2vp*-
Соответственно в матричной форме:
П =
Ри
Рп
Pis
Ргг
19
Если обозначить cos(x,-, xk) = aJk, то формулы
преобразования компонентов вектора запишутся так:
Аналогично запишется формула для преобразования
~* VI ~*
составляющих тензора p'h = ZiakiPi- Легко показать, что
для компонентов тензора формула, связывающая «старые>:
компоненты с «новыми», будет выглядеть так:
P« = SSa*r«j*P«- (П)
Отсюда видно, что «новые» компоненты тензора являются
линейными комбинациями «старых».
Таким образом, можно дать другое определение
понятия «тензор».
Тензором называется величина, характеризуемая в
системе координат ХОУ совокупностью четырех чисел рк1,
записываемых в виде матрицы :
П= Ри Pl%
Р21 Р22
и преобразующихся при переходе к другой системе
координат X'OY' по формулам (11).
Так как мы рассматриваем только прямоугольные
декартовы системы координат, то тензоры, о которых мы
говорим, называются ортогональными аффинными
тензорами второго ранга. Обычные векторы представляют
собой тензоры первого ранга. А скалярные величины
могут быть названы тензорами нулевого ранга.
Еще раз подчеркнем, что каждый тензор П имеет
непосредственный, инвариантный смысл, хотя в различ-
-»
ных системах координат его составляющие рк и
компоненты рн выглядят по-разному.
-> ->
(Можно сказать, что составляющие тензора р1 и рг
являются «векторными проекциями» тензора П на оси
координат Xj и х2, а компоненты рп, р12, р21,
р22—соответствующими «скалярными проекциями векторных
проекций» тензора.) Поэтому для тензорного исчисления
значение имеют только те свойства компонентов тензора,
которые справедливы в любой системе координат, т. е,
являются инвариантными.
20
Исходя из этого рассмотрим некоторые простейшие
типы тензоров.
1. Нулевым тензором 0 называется тензор, все
компоненты которого равны нулю:
О 01
о о г
0 =
2. Единичным тензором 7 называется тензор,
составляющими которого явля'ются орты / и /, а матрица
компонентов имеет вид:
. |1 0
7 Но 1
Легко проверить с помощью формулы (11), что у
тензоров б и / их компоненты сохраняют свои значения
в любой системе координат.
3. Тензор S называется симметричным, если его
компоненты удовлетворяют условию sJk = skj, т. е. его матрица
имеет вид:
а Ь\
4. Тензор А называется антисимметричным, если
ау7г = — ahj, т. е. его компоненты образуют следующую
матрицу:
' 0 Ъ\
~Ъ 0|j-
Ясно, что свойства симметричности и
антисимметричности — инвариантны.
5. Частным видом тензоров являются диады D,
составляющие которых (в любой системе координат!) суть
коллинеарные векторы. Очевидно, что у диады строки
и столбцы матрицы компонентов пропорциональны друг
другу, а ее определитель равен нулю.
В произвольной системе координат матрица диады
имеет вид:
. II a ■ Ь
Я =
|| са г,
~> ->
Заметим, что два вектора i и Ь можно умножать не только
-+ -» -> -> -> -,
скалярно (a, b) и векторно [а, Ь], но и те н з о р н о {а,Ь\ ■
21
Тензорным произведением векторов а (а1У а2) и Ь {Ьг, Ь2)
называется тензор, компоненты которого образуют
следующую матрицу:
1аА аА
D^{a, b\
a2bi
a2b2
Рекомендуем читателю убедиться, что компоненты ajb^
действительно преобразуются по тензорному закону (11).
Поскольку строки и столбцы матрицы отличаются
постоянным множителем, то полученный тензор D является
диадой, составляющие которой равны D1 ~агЬ и Д2 =«А т- е-
коллинеарны второму сомножителю Ь. Отсюда вытекает,
что при повороте осей координат направление в
пространстве составляющих диады не меняется, а их длины
меняются совместно с проекциями первого сомножителя а.
Кроме того, ясно, что тензорное произведение векторов
некоммутативно, т. е.
{а, ~Ь}Ф{Ь, а}.
-> ->
Только в том частном случае, когда а я b являются кол-
линеарными векторами, их тензорное произведение
образует симметричную диаду и не зависит от порядка
сомножителей.
Упражнение
1. В некоторой системе координат тензор имеет вид:
1 2 У"Ъ
Ответ:
Вычислить его компоненты и графически изобразить его
составляющие в новой системе координат, повернутой относительно старой
на угол 60°.
2f3 0
5/2 У~Ъ
2. В системе координат XOY математическая величина
характеризуется матрицей:
— 1 2
4 0
22
В другой системе X'OY'', повернутой на 45° относительно не-
штрихованной, эта же величина определяется матрицей:
5/2 — 1/2
3/2 —7/2
Выяснить, является ли данная величина тензором.
3. В каком случае матрица тензорного произведения двух пек-
торов содержит только один ненулевой элемент?
4. В какой системе координат одна из составляющих диады
D = {a, b) обращается в нуль? Чему в этом случае равна длина
второй составляющей? Является ли инвариантом суммарная длина
—> _}
составляющих диады \ Di-\-D2\'?
§ 5. Тензорная алгебра
Над тензорами как своеобразными математическими
величинами, характеризующими определенные физические
свойства реальных тел, можно производить ряд
алгебраических операций: складывать, умножать на числа,
умножать тензор на тензор и др. Поэтому множество тензоров
образует алгебру, являющуюся обобщением векторной
алгебры.
Поскольку тензор в любой системе координат
характеризуется скалярными компонентами pjk, то естественно
любое действие над тензорами определять как операцию
над компонентами; при этом результат операции должен
быть инвариантен относительно преобразования координат.
Перейдем к ознакомлению с простейшими
алгебраическими операциями над тензорами.
1. Суммой двух тензоров П' и Й* называется тензор
П = П' + П",
компоненты которого равны суммам компонентов
слагаемых:
Pjk = P'jk + Pjk.
2. Произведением тензора П на число X называется
тензор <5йГ=Ш, компоненты которого tJb, равны
произведению соответствующих компонентов pJk на К:
tjk ~ ЬР/к-
Обобщением операций 1 и 2 являются линейные
комбинации нескольких тензоров. Пусть даны п тензоров
23
П', П", ...,П(П) и п чисел \lt X2, ...,Хп; линейная
комбинация
Х1Й' + Х,Й*+...+Х„Й'»>
есть некоторый тензор Ш, компоненты которого tjk суть
линейные комбинации соответствующих компонентов p'fg;
tjk = hP'ik + Kfi'ik + ■■■+ Ьпр%\
3. Перестановкой индексов (транспонированием)
называется операция, превращающая тензор П с
компонентами pjk в транспонированный тензор II, компоненты
которого Pjk — pkj. Так, если
A_|Pll Pl2
то
Pll Р21
Р\г Р22
В частности, в случае симметричного и антисимметричного
тензоров S = S и Л = —А.
Следствием из рассмотренных трех операций является
утверждение, что любой тензор П всегда можно
представить (и притом единственным образом) в виде суммы
симметричного и антисимметричного тензоров:
Действительно, переставляя индексы у каждого из
тензоров этого равенства, получим:
U = S — A.
Складывая и вычитая оба эти тензорных равенства,
находим, что
S = i-(n + ft) и Л = у(П— ft). Таким образом, П =
= 1(Й + П)+4-(П-Й).
4. Скалярным произведением тензора П = г'1р1+/„р2
-> -> -»
на вектор а = i1al + '2fl2 справа называется новый век-
24
Й =
тор а' = (П, а) = I, (р, a) +1\ (р, а). Иными словами, ком-
поненты нового вектора а' = t,aj + i2a'2 равны:
ai = pna1+p12a2,
(12)
02 = ^21^ + ^22^2.
или (в сокращенной записи):
a'/ = 2/V*a*- (12')
5. Скалярным произведением тензора II =i1p1-\-i2p2
на вектор а = i^ + i2a2 слева называется вектор а" =
= (а, П)= (a, j'l)p1 + (a, i2)p2. Компоненты вектора а
равны
al = aj>n + a,Pn, \ 13
a2 = aiPi2 + a2P22. 1
или (в сжатой форме):
Легко видеть, что скалярное произведение тензора
П на вектор а слева равно произведению
транспонированного тензора II на тот же вектор справа, и наоборот:
(ft,.a)=(a, ft).
Отсюда далее вытекает, что в случае симметричного
тензора S скалярное произведение его на произвольный
вектор не зависит от порядка сомножителей (это произведение
коммутативно):
(S, а) = (a, S).
Произведение же антисимметричного тензора А на вектор
антикоммутативно:
(А,а) = -(а, А).
Заметим, что для вычисления компонентов векторов
а' =(П, а) и а"— (а, П) удобно пользоваться известными
правилами умножения матриц, рассматривая любой вектор
25
как некоторую столбцевую или строчную матрицу
а =
а,
или а = (а1; а2):
а' = (П, а) =
а" = (а, П) = (а1, а2)
Pi! Pl2
Р21 Ргг
Pli
2
Pli
Pll«l+Pl2«2
Pnai + p2ia2)
= (а1р11 + а2р21, ...)•
IP21 P221
В первом случае мы получили вектор а' в виде столбце-
вой матрицы, во втором—вектор а" в виде строчной.
6. Скалярным произведением двух тензоров П и Sii
называется тензор Ф, матрицы компонентов которого равны
произведению матриц тензоров сомножителей, т. е. срАг =
-■= ZPk/t/i-
Ф = П<57Г =
PnPi
\P21P2
'll'l2
'21^22
P1J11 + Pl2^21 PlJ 12 + P12U2 \
Р21П1 "Г Ръ%*г\ P2i'i2 "ГРгг'гг I
Кроме перечисленных, существует еще ряд более сложных
операций над тензорами, но мы их рассматривать не будем.
§ 6. Тензор как аффинор
Тот факт, что при умножении тензора П на вектор а
получается не зависящий от системы координат новый
вектор а', позволяет рассматривать тензор не только как
математическую величину, но и как некий оператор,
превращающий один вектор в другой. Вообще, оператором,
или преобразованием, называют правило, сопоставляющее
функции и (х) определенную функцию v(x). Операторы,
которые прямые линии преобразуют в прямые, называют
аффинорами.
С различными свойствами операторов мы подробнее
познакомимся в ч. III, а сейчас ограничимся тем, что
любой тензор можно рассматривать как аффинор и,
наоборот, каждому аффинору можно сопоставить некоторый
тензор. Поэтому можно дать новое определение тензора.
Если некоторый оператор П, характеризующийся в
каждой системе координат своей четверкой чисел ри, р12, р13,
р14, преобразует произвольный вектор а в новый вектор
а' по линейным формулам(12), той есть аффинор (тензор).
26
Отсюда получается критерий, с помощью которого
■можно судить, является ли математический объект II,
определяемый в каждой системе координат своей матрицей
чисел:
Ри Ры\
тензором или нет. А именно, пусть некоторый вектор а
характеризуется (в данной системе координат)
определенной столбцевой матрицей (,/). Ясно, что в результате
умножения квадратной матрицы ||р^|] на матрицу-столбец
( М мы получим новую столбцевую матрицу:
\62/ xPmAx + PjA
В различных координатных системах элементы Ьх и Ь2
будут выглядеть по-разному, но если всегда они харак-
->
теризуют один и тот же вектор Ъ, то матрица \pjk\
определяет тензор (или аффинор) П.
Применим теперь этот критерий для получения явного
вида тензора как производной векторной функции по век-
торному аргументу. Пусть дано векторное поле а (г). При
бесконечно малом смещении dr из некоторой точки поля
-> —>-
в соседнюю точку функция а получает приращение da.
-* -»
Чтобы связать da и dr, выберем какую-нибудь
координатную систему с осями Хг и Х2. Каждую точку поля
будем определять не вектором г, а числами хг и х2, а
векторную функцию a(r) = a(xlt х2) заменим полностью
эквивалентной системой двух скалярных функций
координат а1(х1, х2) и a2(xltx2). Соответственно вектор
приращения функции da будет характеризоваться двумя
скалярными дифференциалами da1(x1,x2) и da2(xlt х2). По
правилам дифференцирования функций нескольких
переменных мы вправе записать:
. да2 , , да, , ( U*)
da2=-^dx1 + T±dx2.}
27
Если бы мы выбрали иную систему координат (Х[, XI),
то рассматриваемые векторы имели бы другие компоненты:
-> -> -»
а(а[, а2), da(da[, da2), dr(dx'lt dx2).
Соответственно равенства (14) приняли бы форму:
da[
даг , . dai , ,
= —= ах, И—-,dx2,
дхх дх2
dcu
да2
дач
(14')
■—7 ах^ -]—; ах2.
дх\ дх-2
Сопоставляя равенства (14) и (14'), можно убедиться, что
в каждой системе координат имеется своя четверка ска-
дал да, да, да,
лярных величин ■— , ~ , д-5, =-*, которая компонентам
ОХ\ ОХ2 ОХ^ ОХ%
вектора dr (dxlt dx2) линейным образом сопоставляет
компоненты одного и того же вектора da (dalt da2).
Следовательно, эта совокупность чисел образует
аффинор, называемый тензором-производной векторной
функции по векторному аргументу и обозначаемый так:
d«i дах i
da дхг дх2
d7~ д^1 д1ж
дхх дх2
Этот тензор полностью характеризует быстроту изменения
->
зависимой переменной а. Равенства (14) могут быть
теперь записаны в тензорном виде:
/\
* ->
da
(15)
da =
,d?\
dr J
(16)
§ 7. Главные направления тензора
Мы уже неоднократно отвечали, что при скалярном
умножении тензора на вектор получается новый вектор,
вообще говоря, отличный от первоначального как по
модулю, так и по направлению.
Оказывается, и мы сейчас убедимся в этом, у тензоров
существуют некоторые главные направления на плоскости,
такие, что, воздействуя тензором на вектор а, взятый
вдоль такого направления, получим новый вектор а', кол-
линеарный первоначальному. Иными словами, если на-
28
правление вектора а совпадает с главным направлением
Тензора П, то (П, а) = Ка. Скалярная величина К
называется главным или собственным значением тензора; она
показывает, во сколько раз тензор П изменяет длину
векторов, расположенных вдоль главного направления
{поэтому число К еще называют коэффициентом
растяжения).
Выясним, сколько главных направлений имеет данный
тензор и как они ориентированы на плоскости. Запишем
векторное равенство (17) в проекциях на оси координат:
Pual+Pi2a2 = ka1,
Рца1 + Рг2а2^^а2.
Эту систему уравнений можно представить так:
(Ри — k)ai + p12a2 = 0,
Pii^ + ip^—h)a2=0.
(18)
Полученная система однородных линейных уравнений
относительно а1 и а2 имеет ненулевые решения только в том
случае, если определитель системы равен нулю:
■ К
■К
Ра-
Ра
Ри
Р22-
= 0.
(19)
В развернутом виде это уравнение, называемое
характеристическим, имеет вид:
К-К(ри + р»)+ РпП Р'2 =0. (19')
Из него находим собственные значения К. В том случае,
когда оба корня Х{ и Х„ действительны, мы получим,
вообще говоря, два главных направления. Действительно,
подставляя в (18) последовательно значения А,, и Ки, мы
для каждого из них получим соответствующие отношения
-> ->
компонентов векторов а1 и а". Главные направления оп-
ределяются углами а, и а,, между векторами а1 и а" и
осью Хх:
tgcc,
tg«i
а\)\
h — Pn ._
Pl2
.hi — Pn.
Pl2
P21
h — P22'
. P21
h\ — P22'
(20)
(20')
29
Легко понять, что в случае трехмерного тензора мы
с помощью аналогичных рассуждений получили бы
кубическое характеристическое уравнение, которое имеет по
крайней мере одно действительное значение (остальные
ДЕа корня могут быть мнимыми). Поэтому у
пространственного тензора всегда существует либо одно, либо три
главных направления.
В дальнейшем мы будем рассматривать наиболее
важный для практики класс симметричных тензоров, у
которых, как можно показать, главные значения X являются
действительными числами.
Можно также доказать, что главные направления, или
оси симметричного тензора в общем случае, когда корни
различные (к1Ф'к11), взаимно перпендикулярны. И только
в случае кратных корней (Х, = ХП) все направления на
плоскости являются главными и в качестве осей тензора
можно выбрать любые два взаимно перпендикулярные
направления. (Почему так ведут себя тензоры с
одинаковыми главными значениями, станет ясно из
последующего.)
Задача. В системе XOY тензор 5 характеризуется матрицей:
II-? -Л-
Найти его главные направления.
Решение. Составляем характеристическое уравнение:
2-Х —1 _п
— 1 2-Х ~и
или
Х2_4Х + 3 = 0.
Отсюда % — 2 ± 1. Следовательно, главные значения
тензора равны Хг = 3, Ки=\. Подставляя в (20) значение
^! = 3, получаем первое главное направление:
tg«i = TTT = -l. «i=1350.
Аналогично для второго главного направления:
tgccn = y= + l, «„ = 45°.
Таким образом, главные направления пересекаются под
прямым углом (рис. 6).
30
Рис. 6
Поскольку симметричный тензор всегда имеет два
взаимно перпендикулярных направления, естественно
рассмотреть представление тензора в системе координат, оси
которой совпадают с главными осями этого тензора.
Обозначим компоненты тензора S в такой
координатной системе через sjfe. Умножив скалярно S на орты
^(1, 0) и t"2(0, 1) главных осей, получим:
(S, Г1) = х/1,
(S, г2) = ^цг2.
Спроектировав каждое из этих равенств на обе оси
координат и принимая во внимание формулы (18), мы легко
получим, что six = ^i» s22 = ^н, sj2 = s2l = 0- Поэтому тензор,
приведенный к главным осям, имеет диагональный вид:
а его составляющие направлены вдоль координатных осей
-> -> -> -*
и соответственно равны: 51 = Х1г1, s2 = Xni2.
Мы знаем, что, хотя компоненты тензора принимают
в разных системах координат различные значения,
существуют некоторые инвариантные соотношения между
компонентами, верные в любой системе.
Чтобы установить вид этих соотношений, учтем, что
у каждого тензора имеются свои главные направления
и соответствующие им главные значения Хг и Кп, которые
имеют непосредственный геометрический или физический
смысл, не зависящий от выбора осей координат.
31
С другой стороны, главные значения определяются
из характеристического уравнения (19'), коэффициентами
которого являются некоторые функции компонентов
тензора. Для того чтобы значения корней ^, и кп этого
уравнения не зависели от выбора системы координат,
коэффициенты квадратного уравнения должны быть
неизменными. Отсюда мы получаем два инварианта, связанные
с главными значениями по теореме Виетта:
Inv1 = pn + p11 = XI + X„,
Inv, =
= hK\-
Pll Pi»
P21 Ргг
Сумма диагональных элементов тензора и определитель
матрицы его компонентов не зависят от системы
координат и являются основными инвариантами двумерного
тензора.
§ 8. Тензорный эллипс
Тензору, вообще говоря, нельзя сопоставить
определенный геометрический образ (и этим, в частности,
объясняется трудность усвоения тензорного исчисления).
Однако в случае симметричных тензоров, с которыми
обычно имеют дело в физике, такое наглядное
представление возможно. А именно, каждому неособенному
симметричному тензору1 можно сопоставить на плоско
сти центральную коническую кривую—эллипс (чаще всего)
или гиперболу.
Рассмотрим симметричный тензор
у которого s12 = s21.
Попытаемся определить геометрическое место точек,
описываемое векторным уравнением:
(г, S?) = l, (21)
-» -» -»
где r = xi-\-y']—текущий радиус-вектор точек исследуемой
линии. Если бы тензор S был равен единичному тензору /,
то уравнение (21) приняло бы, очевидно, форму (г, г) = 1
1 Неособенным называется тензор, определитель матрицы которого
не равен нулю.
32
или (в координатной записи) хг + у2=1, т.е. выражало
бы собой окружность.
В общем же случае, когда $ф1, уравнение (21) опи-
сывает более сложную кривую. Мы знаем, что (Sr) есть
некоторый вектор г', определяемый согласно (12)
следующим образом:
7' = (S, r) =l(sux + sny) + j (s21x + s22y).
(Мы временно возвратились к обозначениям координат
через х, у вместо xlt х2, чтобы удобнее было сопоставить
наши соотношения с обычными формулами аналитической
геометрии.) Умножая теперь скалярно г на г', получаем
уравнение второй степени:
Sllx* + 2s12xy + s22y*=:\. (22)
Поскольку его дискриминант совпадает с определителем
тензора S, который по предположению не равен нулю,
то уравнение (22) описывает центральную кривую второго
порядка — эллипс или гиперболу. Связь между симметрич-
ным тензором 5 и соответствующей ему линией (г, Sr) = 1
становится особенно ясной, если их выразить в системе
координат, совпадающей с главными осями тензора. По^
скольку в этом случае матрица компонентов тензора S
принимает диагональный вид:
О
О
s22
где Su = Xj, s§3 = Л.ц, то уравнение кривой (г, Sr) = 1
тоже упрощается:
У*
lAi ' 1Ац
1.
(23)
Отсюда сразу вытекает, что
в случае, когда К1 > 0, Хп >0,
мы имеем эллипс, а при 'к1 > О,
^,и < О (или
наоборот)—гиперболу. Заметим, что если
оба главных значения ^ и Хи
отрицательны, то уравнение
(23) описывает мнимый
эллипс.
Рис. 7
33
Определим теперь точки пересечения тензорного эллипса
с осями координат. Из уравнения (23) ясно, что на главных
осях эллипс отсекает отрезки х0 = ±|/ 1Д,, у0 = -±V 1Лц-
Полагая попеременно t/ = 0 и х = 0, мы для всех других
направлений осей координат аналогично найдем из
уравнения (22), что эллипс пересекает ось абсцисс в точках
х = ± —-f= и ось ординат в точках у = + - ,— .
V Sii У Saa
Таким образом, зная тензорный эллипс, можно
графически определить диагональные элементы этого тензора
в любой системе координат с помощью соотношений
Sll=l/x2, s22=l/t/2 (рис. 7).
Глава М.
ОРТОГОНАЛЬНЫЕ ВЕКТОРЫ И ТЕНЗОРЫ
В ТРЕХМЕРНОМ И МНОГОМЕРНОМ ЕВКЛИДОВЫХ
ПРОСТРАНСТВАХ. ВЕКТОРНЫЙ АНАЛИЗ
В предыдущей главе мы познакомились с простейшими
двумерными векторами и тензорами. Теперь мы обобщим
полученные там соотношения на наиболее важный для
практики случай реального трехмерного пространства,
а также на пространства более высоких размерностей.
При этом по-прежнему будем пользоваться
прямоугольными декартовыми координатами.
§ 1. Векторы и тензоры в я-мерном пространстве
Обобщая понятие двумерного вектора, данное в § 2
предыдущей главы, назовем n-мерным вектором а
величину, характеризуемую в каждой системе координат п
скалярными компонентами alt а2, ..., ап, которые при
повороте осей координат преобразуются по определенному
линейному закону:
a^hikak, (1)
где коэффициенты $ik характеризуют n-мерный угол
поворота координатных осей. (Свойства этих коэффициентов
будут подробно рассмотрены в ч. III.)
34
Всякий n-мерный вектор можно представить в таком
виде:
а= 2 ikak,
-> -* ->
где/х, /а, ..., in—орты осей координат.
Длиной Еектора а называется величина
|a| = Ka? + aS+...+<
(2)
(3)
не зависящая от выбора координатной системы.
В частности, трехмерный вектор записывается в виде:
-» -> -» -»
a = г'^! + i 2a2 + гяа3
или, что то же самое, в виде:
a -— axi + ay/ + azk.
Аналогично обобщается понятие тензора второго ранга:
n-мерным тензором П называется величина,
характеризуемая в каждой системе координат п векторными состав-
ляющими р1У р2, ..., рп, либо п2 скалярными
компонентами ри, р12, ..., рпп, причем и составляющие, и
компоненты при повороте осей координат преобразуются по
линейным законам (см. ч. III):
ft
Р/к = 2Щ$кгР1Г.
I г
Всякий n-мерный тензор можно в данной системе
координат выразить либо через составляющие —
П = Zikpk,
h
либо в виде n-рядной матрицы компонентов-
Рп Р,2 • • • Рлп
П
• Рт
Pnl Рп2
г пп
(4)
(5)
Компоненты n-мерного тензора образуют п инвариантов,
каждый из которых является суммой всевозможных
диагональных миноров различных порядков /С= 1, 2, . .., п.
35
В частном случае трехмерного пространства тензор
характеризуется тремя составляющими;
Й = (»1.7>г) + Й.7'») + 0я, Р») или П = (рх, i) + (ру, ]) + (рг, k)
либо девятью скалярными компонентами:
П =
Ра
Ра
Ри
Pi2
Р22
Рз2
Pis
Р23
Раз
-
II
Рхх Рху Рхг
Рух Руу Руг
Ргх Ргу Ргг
Ясно, что у трехмерного тензора имеется, вообще говоря,
три взаимно перпендикулярных главных направления и
три главных значения Я, ДПДШ. Симметричному
неособенному тензору в трехмерном пространстве соответствует
центральная поверхность второго порядка (в системе
главных осей):
х2 . у2 г2
Щ^ЩцМ/Ащ
= 1.
(6)
При этом в зависимости от знаков собственных значений
^i> ^н> Vi эта поверхность принимает следующие формы:
1) Я,, > 0, Хи > О, КШ > 0 — эллипсоид,
2) A,j > 0, Ки > О, КШ < 0 — однополостный гиперболоид,
3) A,j > 0, ки < 0, кш < 0—двухполостный гиперболоид,
4) Я, < 0, Ки < О, КШ < 0—мнимый эллипсоид.
На практике чаще всего встречается первый случай.
Поэтому принято поверхность (6) называть тензорным
эллипсоидом (хотя в тех случаях, когда реализуются
условия 2) и 3), она будет гиперболоидом).
Инвариантами трехмерного тензора являются:
Ii = Pii + P22 + Pa
-■ %■, -\- %п -f- Х-
ш>
(7)
/,=
Pii Pi2
P2i P22
+
Pii Pis
Pei Рзз
/, = detfl =
+
P22 Р2З
PS2 РзЗ
Pii Pi2 Pii
P21 P22 Pis
Psi
Рз2 РзЗ
— V-п + hhn + ^i An»
(7')
— AjA^Ajjj.
(7")
Перейдем теперь к рассмотрению примеров различных
физических тензорных полей в реальном трехмерном
пространстве.
36
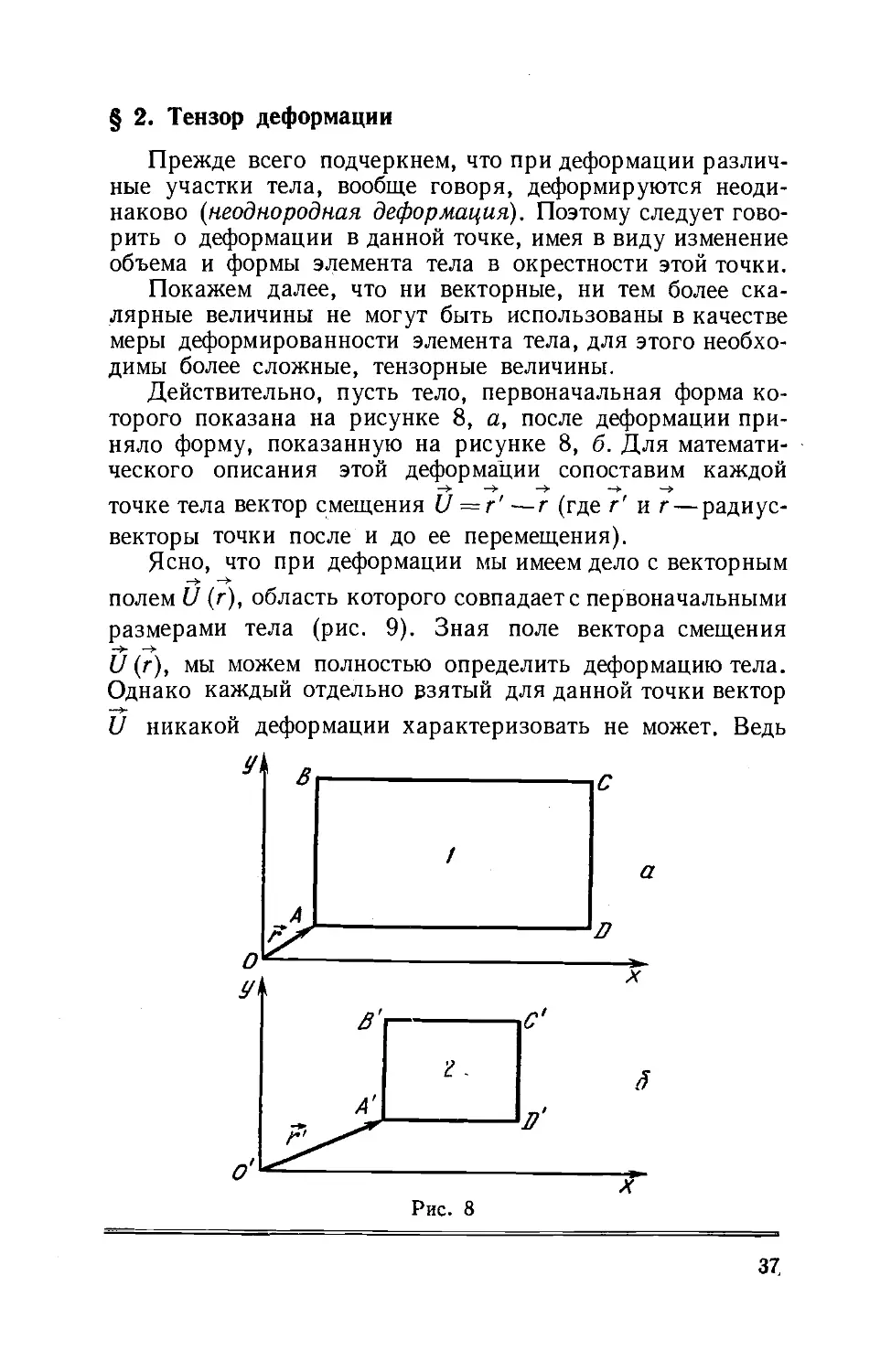
§ 2. Тензор деформации
Прежде всего подчеркнем, что при деформации
различные участки тела, вообще говоря, деформируются
неодинаково (неоднородная деформация). Поэтому следует
говорить о деформации в данной точке, имея в виду изменение
объема и формы элемента тела в окрестности этой точки.
Покажем далее, что ни векторные, ни тем более
скалярные величины не могут быть использованы в качестве
меры деформированности элемента тела, для этого
необходимы более сложные, тензорные величины.
Действительно, пусть тело, первоначальная форма
которого показана на рисунке 8, а, после деформации
приняло форму, показанную на рисунке 8, б. Для
математического описания этой деформации сопоставим каждой
точке тела вектор смещения U = г' —г (где г' и г — радиус-
векторы точки после и до ее перемещения).
Ясно, что при деформации мы имеем дело с векторным
->■ ->
полем U (г), область которого совпадаете первоначальными
размерами тела (рис. 9). Зная поле вектора смещения
U (г), мы можем полностью определить деформацию тела.
Однако каждый отдельно взятый для данной точки вектор
U никакой деформации характеризовать не может. Ведь
i
?'
в'
А'
г.
г'
в'
X
5
Рис. 8
37,
Рис. 9
если и соседние точки сместились на такую же величину
—>- -►
V, т. е. если в окрестности данной точки U = const, то
рассматриваемый элемент тела вообще не деформирован,
хотя вектор смещения U не равен 0.
Отсюда ясно, что степень деформации в каждой точке
тела определяется не вектором смещения U в данной точке,
а относительным изменением этого вектора в ее
окрестности. Может поэтому возникнуть предположение, что
искомой характеристикой является производная векторной
-> -» du
функции U (г), представляющая собой тензор —-^. Легко,
йт
однако, убедиться, что производная —- не всегда харак-
dr
теризует деформацию. Действительно, если, например,
тело целиком повернулось на некоторый угол, то вектор
смещения U не равен нулю и изменяется от точки к точке;
dU
при этом тензор —— заведомо отличен от нуля, хотя ни-
dr
какого изменения объема или формы не произошло. Чтобы
стало яснее, в чем дело, разложим тензор-производную на
симметричную и антисимметричную части;
€-(€) +(4) .
dr \dr Js \dr J л
Ниже будет показано, что антисимметричная часть тензора-
производной совпадает с так называемым ротором (или
—>■ -*
вихрем) векторного поля U (г) и характеризует поворот
38
элемента объема в пространстве. Симметричная же часть
„ dU j.
производной —=г полностью определяется деформацией те-
dr
ла и называется тензором деформации:
U =
ди
1 fduY
ди
дх 2 \ ду ^ дх
ди,. я,,.
duz . дих
дх "^ dz
'Л
диу
ду
И
и
1 /
т 1
'<Ч
ч dz
диу
dz
+
4-
)
duz \
dx J
duz\
dy J
duz
dz
(8)
Как уже отмечалось, каждому симметричному тензору
можно сопоставить определенный эллипсоид.
В главе I был указан общий метод нахождения эллипса,
соответствующего двумерному тензору. Оказывается,
однако, что для характеристики деформации удобнее
геометрически интерпретировать тензор 0 эллипсоидом
деформации, который строится иначе. Способ построения
последнего мы изложим на примере деформации плоского
сечения тела.
Окружим рассматриваемую точку плоскости
окружностью единичного радиуса; ее уравнение в координатах, как
известно, имеет вид: х2 + г/2=1, или в векторной форме
-*- ->
(г, г)= 1. В результате деформации, характеризуемой тен-
-^ —>
зором U, каждый радиус-вектор г преобразуется в новый
вектор г' = (£/, г), а указанная окружность — в новую
линию, которая представляет собой геометрическое место
концов радиус-векторов г'. Поскольку U является
линейным оператором (аффинором), то ясно, что уравнение
преобразованной линии также будет второй степени.
Окружность деформируется в другую линию второго порядка.
Более того, можно заведомо утверждать, что эта линия есть
эллипс, ибо, как это ясно из физического смысла, главные
значения А,, и Я,и тензора деформации всегда величины
положительные (при X < О тело должно было бы в
результате деформации «вывернуться наизнанку»). Естественно
назвать эллипс, полученный из окружности в результате
деформации эллипсом деформации. Определим вид этого
эллипса. Полагая как обычно, что симметричный тен-
зор U неособенный, можно из равенства г' = (U, г) выра-
39
зить г через г :
7ф-\ ?),
где О"1 — симметричный
тензор, обратный О, т. е.
U~1U = I. Подставляя те-
перь значение г в уравне-
х -*■"-*
о ние окружности (г, г) = 1,
получим:
Так как для симметрично-
Рис. 10 го тензора порядок сомно-
_> _> жителей безразличен, т. е.
Ф~1, r) = (r, U~l), то приходим к следующему
уравнению для эллипса деформации:
(г', О'2 г')=1, (9)
где г' — текущий радиус-вектор точек кривой.
Неоднократно уже отмечалось, что проще всего выглядит уравнение
эллипса в системе координат, оси которой совпадают с
главными осями тензора. Несложно убедиться из
геометрических соображений, что при возведении в степень тензора
его главные оси не меняются, а главные значения степени
тензора равны степени главных значений тензора. Поэтому
приведенный к главным осям тензор 0~2 принимает вид:
1/А? 0
0 lAf,
Следовательно, в результате скалярного умножения £/~2на
радиус-вектор r' = xi-{-yj получается новый вектор г":
(10)
и-
Л, Л,,
Подставляя (10) в (9), получаем слева скалярное произведе-
ние векторов (г', г"), так что уравнение кривой
принимает вид:
*2 , t/2
Л, Л,,
= 1.
(П)
Это и есть уравнение эллипса деформации. Его оси
совпадают с главными осями тензора U, т. е. с направлениями
наибольшего и наименьшего растяжений (или сжатий, если
40
Я<1). Зная эллипс деформации, можно весьма просто
->
определить, в какой вектор г' превращается любой век-
->
тор г (рис. 10). Подчеркнем, что для характеристики
деформации всего тела нужно знать множество эллипсов
в каждой точке тела (поле тензорных эллипсов).
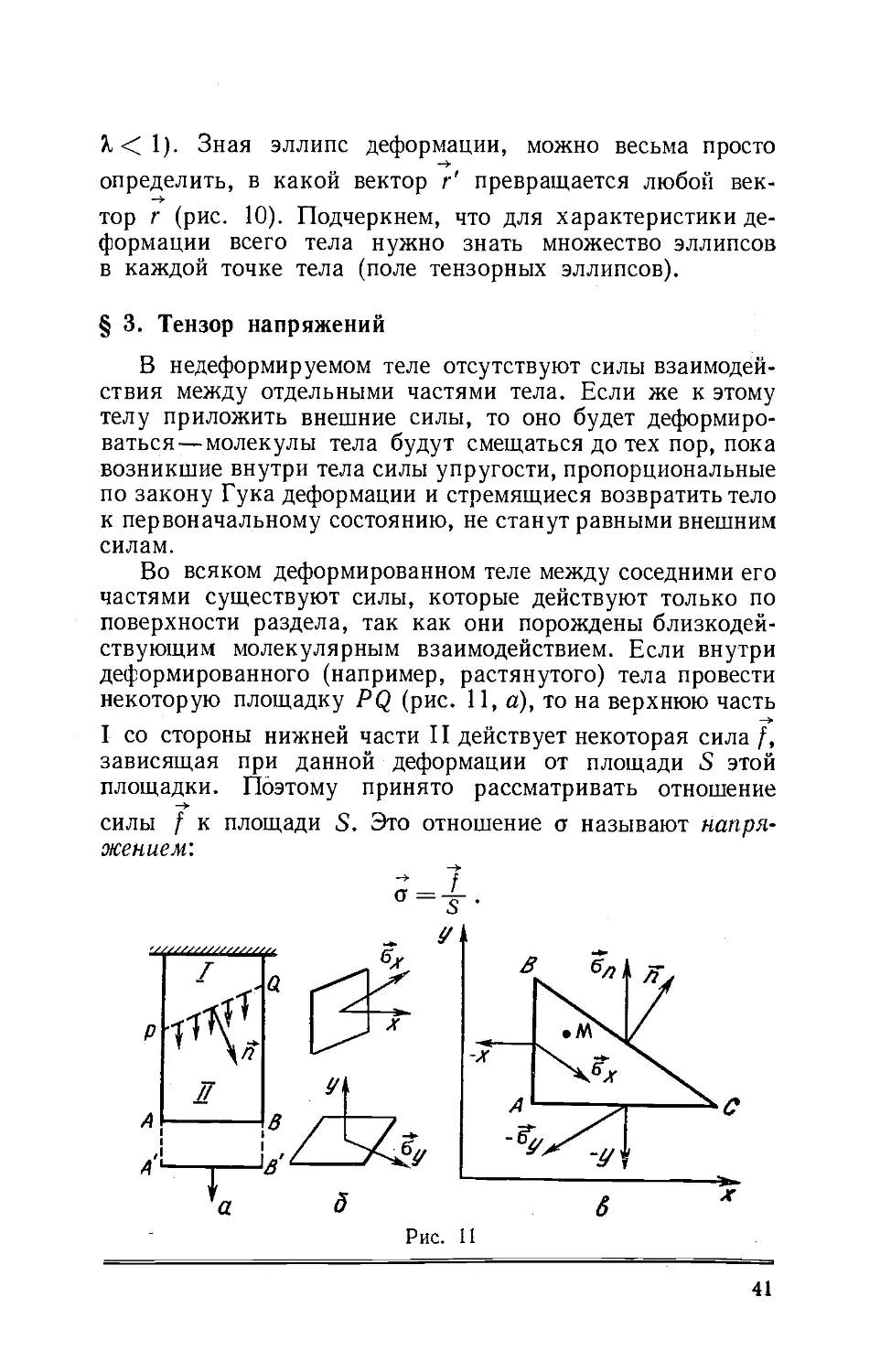
§ 3. Тензор напряжений
В недеформируемом теле отсутствуют силы
взаимодействия между отдельными частями тела. Если же к этому
телу приложить внешние силы, то оно будет
деформироваться-— молекулы тела будут смещаться до тех пор, пока
возникшие внутри тела силы упругости, пропорциональные
по закону Гука деформации и стремящиеся возвратить тело
к первоначальному состоянию, не станут равными внешним
силам.
Во всяком деформированном теле между соседними его
частями существуют силы, которые действуют только по
поверхности раздела, так как они порождены
близкодействующим молекулярным взаимодействием. Если внутри
деформированного (например, растянутого) тела провести
некоторую площадку PQ (рис. 11, а), то на верхнюю часть
I со стороны нижней части II действует некоторая сила /,
зависящая при данной деформации от площади S этой
площадки. Поэтому принято рассматривать отношение
площади S. Это отношение а называют напря-
силы / к
жением:
'-i
{/
1
в
-х
*
бл,
1 ff/
>£г >v
<У<у\
Рис.
41
Ясно, что вектор напряжения а"не обязательно
перпендикулярен площадке и зависит как от точки, выбранной
внутри тела, так и от ориентации площадки. Если мы
рассматриваем определенную точку, то, говоря о
напряжении в ней, необходимо указать направление нормали,
характеризующей ариентацию площадки, и отмечать это
соответствующим индексом. Так, ах—напряжение для пло-
->
шадки, нормалью которой является ось X, оу—напряжение
для площадки, перпендикулярной оси Y и т. д. (рис. 11,6).
Поскольку через точку внутри тела можно провести
бесчисленное множество по-разному ориентированных
площадок, то может показаться, что для полного знания
напряжений в этой точке нужно определить бесконечное
количество векторов о для всех площадок. Оказывается,
однако, что напряжения в каждой точке образуют тензор
-» -» ->
и поэтому достаточно знать три напряжения <УХ, оу, о2 по
трем взаимно перпендикулярным площадкам, чтобы можно
было вычислить напряжение ап для проведенной через эту
точку произвольно ориентированной площадки с
нормалью п.
Итак, покажем, что напряжение представляет собой
тензорную величину. Для простоты рассмотрим плоское
деформированное тело. Вырежем мысленно вокруг
рассматриваемой точки М внутри тела бесконечно малый
треугольник ABC (рис. 11, б). Поскольку этот
треугольник, как и все тело, неподвижен, то сумма всех сил,
действующих на него, равна нулю. На грань АВ
действует сила, равная —ах-|ЛБ|. Здесь знак минус
объясняется тем, что нормаль к площадке АВ направлена
в сторону, противоположную оси X. Аналогично на
грань АС действует сила — оу-\АС\, и, наконец, на грань
ВС — сила +ап-\ВС\. Таким образом,
on-\BC\~ox-\AB\ — ol-\AC\=:0.
Но, как ясно из рисунка, | АВ \ = \BC\-cos(n, x) и \АС\ =
= |ВС |-cos(л, у). Подставляя значения \АВ\ и | АС\ в
предыдущее равенство и производя сокращение, получим:
a„ = crxcos(rt,x) + crycos(rt,«/). (12)
42
Так как направление площадки ВС и нормали п
выбрано произвольно, то согласно (12) оказываются выпол-
ненными условия того, что ах и оу являются
составляющими тензора сг (см. соотношение 10 в главе I). Не должно
смущать то обстоятельство, что векторы ох, аи и оп
построены в разных точках — ведь треугольник ABC
бесконечно мал.
л.
Легко доказать, что тензор напряжений о является
симметричным тензором. Диагональные компоненты охх,
оуу, ozz называются нормальными, а недиагональные —
аху, oxz, oyz—сдвиговыми. Если тензор привести к
главным осям, то он примет диагональный вид:
о =
°11
0
0
0
°22
0
0
0
о
(13)
Главные значения тензора Х1=о11, ^ц~о22, Xlu=oiS3
называют главными напряжениями. Уравнение поверхности
напряжений имеет вид:
Так как значения X,, Хп, Хт могут в этом случае быть
как положительными, так и отрицательными, то эта
поверхность представляет собой либо эллипсоид, либо
гиперболоид (одно- или двухполостный).
§ 4. Тензор инерции
Важной характеристикой механических свойств
твердого тела по отношению к вращательному движению
является его тензор инерции /. Известно, что моментом
инерции тела относительно некоторой оси называется
сумма произведений масс всех точек его на квадрат
расстояния их от этой оси:
/=2«vi.. (14)
Момент инерции служит мерой инертности тела при
вращательном движении, т. е. играет такую же роль, как
масса тела в поступательном движении. Формулы
механики вращательного движения аналогичны
соответствующим формулам поступательного движения. Так, кинети-
43
ческая энергия тела при его вращении вокруг некоторой
оси с угловой скоростью равна:
Гвр=4/со*. (14')
Уравнение динамики вращательного движения подобно
второму закону Ньютона:
А(/й)) = м,
где М — момент силы. Однако, несмотря на такое
сходство, между динамикой поступательного движения и
динамикой вращательного движения имеется и существенное
различие: в то время как масса тела т есть скалярная
величина, момент инерции / является величиной
значительно более сложной природы. Действительно, для
одного и того же тела момент инерции может принимать
бесчисленное количество значений в зависимости от
выбора оси. Разберем этот вопрос подробнее.
Произвольное движение тела всегда можно
представить как сумму поступательного движения некоторой
точки, выбираемой за начало координат, и вращения тела
вокруг начала координат. При этом выражение для
кинетической энергии выглядит наиболее просто, если
поместить начало вращающейся системы координат в центр
инерции тела.
Поэтому в дальнейшем мы будем говорить о моментах
инерции тела относительно осей, проходящих через центр
инерции. Но ведь и таких центральных осей можно
провести по различным направлениям бесчисленное
множество, а значит, существует такое же множество
соответствующих (центральных) моментов инерции.
Мы, однако, покажем, что момент инерции
представляет собой симметричный тензор и поэтому достаточно
знать шесть его скалярных компонентов в некоторой
системе координат, чтобы определить его компоненты для
любой другой тройки взаимно перпендикулярных осей.
Общее выражение для кинетической энергии системы
материальных точек имеет вид:
W=±^mkvl. (15)
44
Абсолютную скорость точки можно представить как сумму
скорости центра инерции и скорости, обусловленной
вращением тела вокруг него:
w* = oI + K '*]■ (16)
Подставляя (16) в (15), получаем:
W = Т v°£ ть + £m* ^о' К '*D +\lLmkК О*]2-
* * /г
(15')
Так как ^тк равна массе тела яг и по правилам сме-
к
шанного произведения
(f0, К rk]) = (rk,[v0, со]),
то второе слагаемое в (15') можно представить в
следующем виде:
Из механики известно, что радиус-вектор центра
инерции определяется по формуле:
-> IV"*
к
Но так как начало координат мы совместили с центром
-» ->
инерции, то ге = 0, или ^mkrk = 0. Поэтому второе сла-
k
гаемое в (15') пропадает.
Итак,
W = у mvl + -g £m* U '*?■
Из векторной алгебры известно, что
[а, Ь]2 = а2Ь* — (а, by.
Поэтому
W = \mvt + \^mk(^rl-(^,'}kY). (17)
к
Формула (17) показывает, что кинетическая энергия тела
состоит из энергии его поступательного движения №пост =
= -=■ mvl и кинетической энергии, зависящей от угловой
.45
скорости со энергии вращательного движения:
Рассмотрим последнее выражение подробнее. Поскольку
е>2/1 = (со! + со* + со2,) (4 + У! + 4) и (ю?А)2 =
(co^x + co^ + co^)2,
то для кинетической энергии вращательного движения
имеем следующее равенство:
W вр = у£ mk \(у£ + z\) со! + (4 + г!) со* + (х% + у\) со2 -
—2 {хкук(лх(ац + xkzhaxaz + ykzkaya2)\.
(18)
Обратим внимание на то, что в частном случае, когда
ось вращения направлена вдоль одной из координатных
осей, например вдоль оси X, выражение (18) упрощается
и принимает вид:
где 1Х — момент инерции относительно X. Это наводит на
мысль, что если ввести симметричный тензор,
компоненты которого образуют матрицу
2 mk (У'1+г1) — 2 mkxkyk — 2 mhxkzk
— 2 ткУЛ 2 mk (4 + г\) — ^mkykzk
— 2 m^x* — 2 "V*& 2 mk (4 + г/*)
(19)
то можно будет выражение (18) записать кратко так:
1
/
W
вр"
(со, /со).
(20)
Эта формула является обобщением равенства (14'), и
поэтому / естественно назвать тензором инерции.
Прежде чем перейти к подробному анализу свойств
тензора инерции, покажем, что он действительно является
тензором. Для этого рассмотрим матрицу:
у2 -f г2 — ху — хг
— ух х2 + г2 — г/г
— гх —гу х2 + #2
46
Она, очевидно, представляет собой разность двух
тензоров: единичного тензора /, умноженного на квадрат
радиус-вектора г2 = х24-г/2 + г2, и симметричной диады
-> ->
{г, г]. Следовательно, по правилам тензорной алгебры
величина R представляет собой тензор:
R = r4-{r, r].
Несложно проверить далее, что матрица / является
суммой произведений масс (скаляров) каждой точки тела на
тензоры Rk для этих точек, т. е. I = ^ткЯк. Отсюда
к
вытекает, что / есть тензорная величина.
Перейдем теперь к анализу матрицы компонентов(19),
характеризующей тензор инерции /. Его диагональные
элементы I хх, 1\ц и 122 являются моментами относительно
осей х, у и z. Недиагональные элементы 1ху, 1хг и I г
называют полярными или центробежными
моментами инерции, однако они не имеют простого физического
смысла.
Тензор инерции, как и всякий симметричный тензор,
имеет три взаимно перпендикулярные главные оси
инерции, которым соответствуют главные моменты
инерции /11( /22, /33.
В системе главных осей тензор инерции принимает
диагональный вид:
hi О О
7= о /22 о .
о о /33
При этом вращательная кинетическая энергия выражается
весьма просто:
И^вр == у ('ii«i2 + ^г»! +'зз®з)-
Симметричному тензору / сопоставляют эллипсоид
инерции (r,Ir) = \, уравнение которого в главных осях
имеет вид:
/п*2 + /22г/2 + /3з22 = 1. (21)
(Это уравнение всегда определяет именно эллипсоид, ибо,
как ясно из физических соображений, моменты инерции
/11( /22 и /33 не могут быть отрицательными.)
Вид эллипсоида инерции зависит от распределения
масс в теле; он отсекает на произвольной оси 0 отрезки,
равные \\VKu (гДе Лш— момент инерции относительно
оси U).
Если тело обладает определенной симметрией в
распределении масс, то такой же симметрией, очевидно,
должен обладать и эллипсоид инерции. Это обстоятельство
весьма облегчает нахождение вида эллипсоида инерции.
Допустим, что тело обладает плоскостью симметрии,
совпадающей с координатной плоскостью YOZ. Тогда
ясно, что ось X является одной из главных осей инерции,
а две другие лежат в указанной плоскости. Если тело
обладает осью симметрии, то она является также осью
эллипсоида и, следовательно, главной осью инерции.
Легко видеть, что если порядок оси симметрии, скажем
оси Z, выше второго, то в качестве остальных двух
главных осей можно взять любые два взаимно
перпендикулярных направления в плоскости XOY. При этом моменты
1ХХ и I у равны между собой. Действительно, если
порядок симметрии оси равен 4 (рис. 12, а), то при повороте
параллелепипеда на угол 90° эллипсоид инерции не должен
измениться —он является эллипсоидом вращения. Отсюда
следует равенство двух его полуосей (рис. 12,6).
2 ч
Л
i
Рис. 12
48
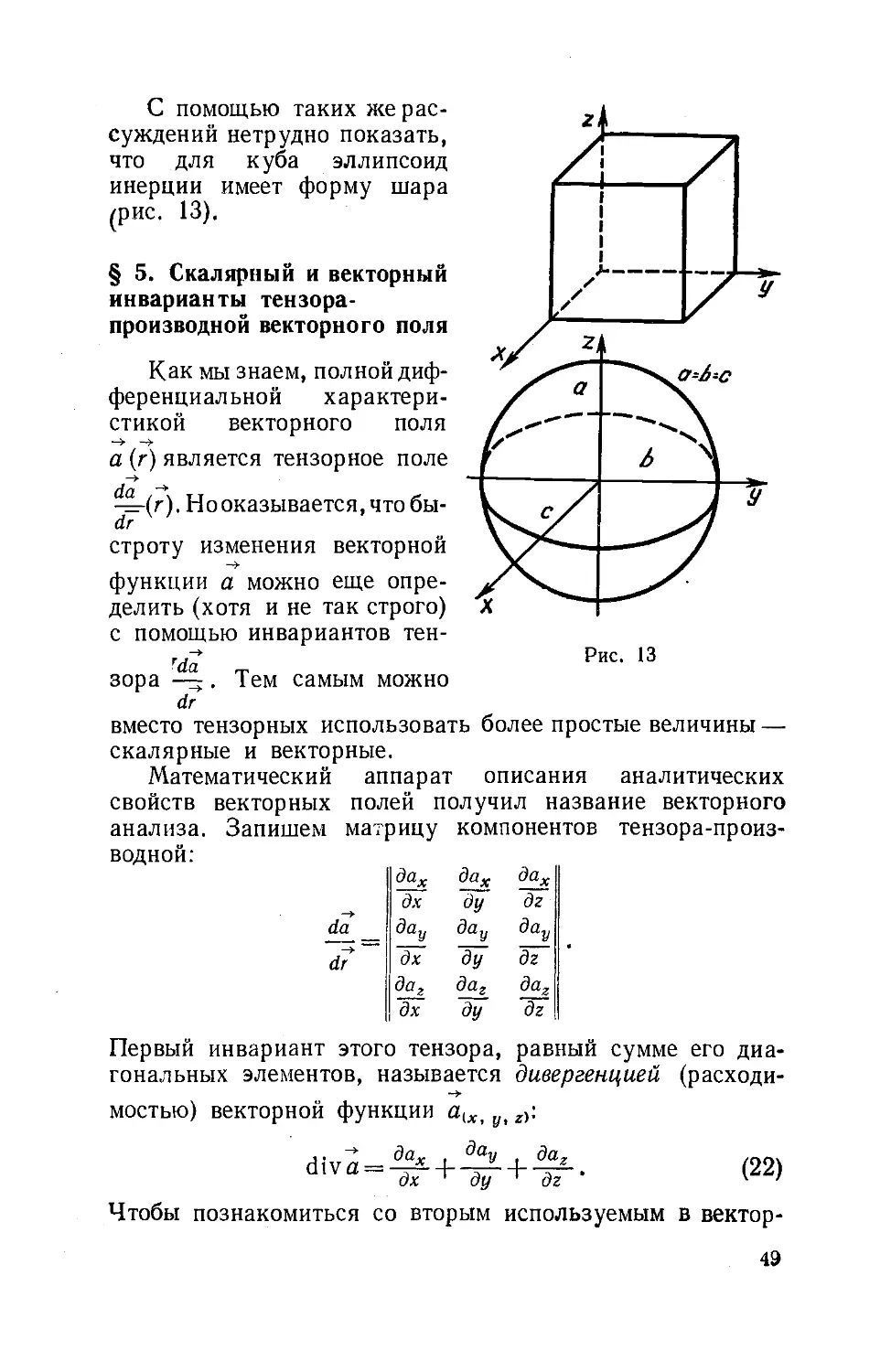
С помощью таких же
рассуждений нетрудно показать,
что для куба эллипсоид
инерции имеет форму шара
/рис. 13).
§ 5. Скалярный и векторный
инварианты тензора-
производной векторного поля
Как мы знаем, полной
дифференциальной
характеристикой векторного поля
-> -»
а (г) является тензорное поле
-»
^^(г).Нооказывается.чтобы-
dr
строту изменения векторной
функции а можно еще
определить (хотя и не так строго)
с помощью инвариантов тен-
-»
зора -tj . Тем самым можно
dr
вместо тензорных использовать более простые величины —
скалярные и векторные.
Математический аппарат описания аналитических
свойств векторных полей получил название векторного
анализа. Запишем матрицу компонентов
тензора-производной:
Рис. 13
da
d?
дах
дх
дац
дх
да,
дх
дах
ду
да,,
ду
даг
ду
дах
дг
<3а,
дг
да,
дг
Первый инвариант этого тензора, равный сумме его
диагональных элементов, называется дивергенцией (расходи-
мостью) векторной функции au, yi г):
diva
"* да.
да,,
да.
(22)
дх ' ду ' дг '
Чтобы познакомиться со вторым используемым в вектор
49
ном анализе инвариантом тензора ■—■-, разложим этот тен-
dr
зор на симметричную и антисимметричную части:
dr
Выпишем в явном виде матрицу антисимметричного
тензора:
А = -
о (дйх дйу \ (да" да* \
\ ду дх J \ дг дх J
I dav dax \ „ / дау даг \
\ дх ду J \ дг ду J
дх
' да
/_^£___^М ( даг даУ \ Q
\ дх дг J \ ду dz J
(23)
Будучи антисимметричным, тензор А определяется по
существу тремя скалярными компонентами. Поскольку и
векторные величины в трехмерном пространстве
характеризуются тремя компонентами, то возникает естественный
вопрос: нельзя ли антисимметричной части
тензора-производной сопоставить некий вектор? Что бы это было
возможно, компоненты тензора и компоненты вектора
должны при повороте осей координат меняться
одинаковым образом. Оказывается, что такое явление
действительно имеет место.
Итак, антисимметричному тензору А можно
сопоставить соответствующий вектор со, называемый ротором
(или вихрем) векторного поля со = rot а; его компоненты
определяются так:
со,
даг
дОу
' дг
да,
да.
%=■
дг дх '
При этом матрица А принимает вид:
со,
дОу
дх
дох
' ду '
(24)
A=i
-со,
со
О
со.
Таким образом, вектор
rota
-(
даг
dJh
' дг
-> /dav
даЛ-t ,
дОу
дх
дох
' ду
k (25)
50
эквивалентен антисимметричному тензору А и
представляет собой векторный инвариант тензора-производной.
->
Совокупность двух величин—скаляра diva и вектора
->
rota,—являющихся инвариантами тензора-производной
->
-^, может служить дифференциальной характеристикой
dr
-> ->
векторного поля a (r). Каждая из этих величин имеет
непосредственный физический и геометрический смысл,
который мы выясним ниже.
Однако сначала необходимо ответить на следующий
-> ->
вопрос: как могут скаляр diva и вектор rota,
определяемые в совокупности четырьмя числами, характеризо-
-* ->
вать векторное поле а (г), т. е. выполнять ту же задачу,
->
что и тензор ——, определяемый девятью скалярными
dr
-> ->
числами? Конечно, diva и rota, называемые иногда ска-
-> ->
лярной и векторной «производными» функции а (г), не
->
da r,
эквивалентны в точности тензору-производной —. В то
dr
время как тензор-производная однозначно и полностью
характеризует в окрестности рассматриваемой точки
пространства быстроту изменения векторной переменной a,
дивергенция и ротор этой функции описывают ее
поведение неполно и неоднозначно. Это значит, что могут
существовать две различные векторные функции a (r) и
-> ->-*■->->
Ъ(г), у которых diva = div& и rot a = rot b, хотя
-> -у
da , db r^ ,. "*■ ."*
—-^Ф—;. Однако если diva и rota известны в каждой точке
dr dr
-> ->
поля и на его границах, то сама векторная функция а (г)
определяется однозначно.
§ 6. Физический и аналитический смысл дивергенции
векторного поля
Пусть в некоторой области задано векторное поле
скоростей текущей жидкости v (r). Легко видеть, что через
произвольную малую площадку dS за одну секунду про-
51
Рис. 14
текает то количество
жидкости, которое
заполняет объем
наклонного цилиндра с
основанием dS и образующей
v (рис. 14). Поскольку
высота цилиндра равна
проекции образующей
-»
на нормаль п к
площадке dS, то объем
вытекшей жидкости
составляет величину
dN = vn dS, (26)
называемую потоком вектора v через площадку dS. В
общем случае потоком произвольной векторной функции
а (/") через конечную поверхность о называют двойной
интеграл по этой поверхности от dN:
N = ^andS.
s
Если поверхность S является замкнутой и ограничивает
объем V, то поток вектора а через нее
N = &a„dS
определяет объем жидкости, вытекающей (при N >0)
из V в окружающее пространство или, наоборот,
втекающей (при N < 0) внутрь объема v за единицу
времени.» Из геометрических соображений ясно, что значение
потока через некоторую замкнутую поверхность S связано
-»
с тем, как быстро меняется величина вектора а вдоль
векторных линий (или линий тока) внутри
рассматриваемой области.
Нетрудно доказать следующее утверждение, известное
как теорема Гаусса—Остроградского.
Поток N переменного вектора а через произвольную
замкнутую поверхность S равен (тройному) интегралу от
дивергенции этого вектора по объему V, ограниченному
этой поверхностью:
N = $andS=^divadV. (28)
52
Применяя это равенство к небольшому объему AV,
ограниченному малой поверхностью AS, можно приближенно
записать:
откуда
АЛ/ = dp andS » diva-AV,
AS
,. -» дл/
diva»-^
Понятно, что это приближенное равенство выполняется
тем точнее, чем меньше рассматриваемый объем AV. Исходя
из этого, мы приходим к другому определению
дивергенции вектора.
-> -»
Дивергенция векторного поля а (г) в данной точке
равна пределу отношения потока АЛ/ через малую
поверхность AS, окружающую эту точку, к объему AV,
ограниченному этой поверхностью, при стремлении последнего
к нулю:
л- ~* dN /от
dlYa=w- (29)
Если а означает скорость жидкости, то diva в данной
точке равна отношению объема жидкости dN, вытекшей
за единицу времени из бесконечно малого объема dV,
к величине dV. Отсюда и произошел термин дивергенция
(расходимость): жидкость растекается из тех точек (ис-
точников), где div a > 0, и, наоборот, стекается туда, где
diva < 0 (стоки).
->
Величину diva называют поэтому мощностью
источника. В качестве примера рассмотрим следующие плоские
векторные поля (рис. 15):
-> ->-> ->-*-> -> _*_»
"* г xi-\-yi 7* г xi-\-yi -* г xi-\-yi
Найдем их дивергенции:
,. - дах . дау 1 1
divfe = ^ + ^ = 0,
дх ' ду '
,. -» дсх . дсу 1 1 . г.
53
\
\
i.\/z
/
7/^
/
I
/
"7/\\-
o~(n=Const
■7Ь ~1
b(r)~
^
~~yj%
t
/
Следовательно, каждая точ-
ка поля а (г) является
источником, мощность
которого убывает с расстоянием
от начала координат
пропорционально 1/г; поле
Ь (г) не имеет источников;
а в каждой точке поля
с (г) имеется сток,
мощность которого убывает
пропорционально 1/г3.
Чтобы эти выводы
стали понятными, примем, что
а, Ь и с представляют
собой скорости плоского
течения воды в бассейне
неизменной глубины.
Рассмотрим тонкий слой F,
ограниченный двумя
коаксиальными
цилиндрическими поверхностями Sx и
S2 (рис. 16).
Если объемы жидкости
JV, и Nx, вытекающие и
втекающие из F
через Sj
v\
Рис. 15
С(Г)
ТГ^.1
Г'
и S2, одинаковы, то
источников (положительных
или отрицательных) в F
не существует. Когда же
ЫхфЫ2, в слое F
существуют либо источники
(при N2 > ./V,), либо стоки
(при Nt<N,).
Заметим теперь, что площади S± и S2 ограничивающих
слой F цилиндрических поверхностей пропорциональны
радиусу цилиндра г. Поэтому только у поля b(r), для
которого модуль скорости \b\~-, объем протекающей
через цилиндрическую поверхность жидкости N =
= |b|-S = const.
54
Vt^T4l
У поля же а (г) модуль ско- 3i
рости равен единице (|а| —1) и
поток N = S растет с
удалением от центра (через большую
поверхность S2 вытекает воды
больше, чем втекает через 5Х).
Это возможно только в том
случае, если в полу бассейна
имеются источники, из которых
вода поступает в бассейн.
Наоборот, в случае поля
с (г) скорость \с\ с расстоянием
убывает пропорционально —г , в
то время как площадь растет
пропорционально г.Поэтому по-
->
ток жидкости N = | с | • S в целом
уменьшается. Иными словами,
N2<.N1. Это возможно, если часть воды уходит из
бассейна через пол.
Перейдем теперь к выяснению аналитического смысла
дивергенции как скалярной производной векторной функ-
-> ~>
ции а (г). Для этого прежде всего введем понятие
векторной трубки. Векторной линией называется кривая,
касательная к которой в каждой точке поля совпадает
по направлению с переменным вектором в этой точке.
Цилиндрическая криволинейная поверхность, образующие
которой являются векторными линиями, называется
векторной трубкой (рис. 17).
Пусть теперь рассматриваемое векторное поле а(г)
таково, что во всех его точках diva = 0. Такое поле
принято называть вихревым или соленоидальным.
Рис. 16
Рис. 17
55
Легко убедиться с помощью формулы Гаусса — Остро-
->
градского, что в таком поле поток вектора а через
произвольное поперечное сечение трубки есть величина
постоянная:
J J andS= J J andS = const.
Если же поле не является вихревым (diva^O), но в ок-
рестности некоторой точки diva = 0, тогда для двух
близких сечений ASX и AS2 тонкой трубки, охватывающей
эту точку, имеем (с точностью до малых высшего порядка):
ai2)-AS2 = a<I1>-AS1.
Это приближенное равенство тем точнее, чем тоньше
векторная трубка и короче расстояние между
рассматриваемыми сечениями. Таким образом, если в некоторой
точке поля diva = 0, то поток вектора через соседние
сечения тонкой трубки неизменен: dN = andS = const.
Вблизи же тех точек, где diva^O, поток dN вдоль
узкой векторной трубки увеличивается (при diva>0)
->
или уменьшается (при diva<0).
Другими словами, если сечение векторной трубки
постоянно, то численное значение diva в данной точке М
поля характеризует быстроту изменения длины вектора а
вдоль векторной линии, проходящей через М.
§ 7. Физический и аналитический смысл ротора
векторного поля
Прежде всего заметим, что определяемый формулой (25)
->
вектор rot а можно еще представить в виде символического
определителя третьего порядка:
-> —> н>
i j k
д д д
дх ду дг
ах ау аг
Для выяснения физического смысла ротора рассмотрим
сперва плоские векторные поля v(x,y), где v—линейная
£6
rota =
(30)
скорость частиц сплошной среды. В этом случае v2 и
производные по г обращаются в нуль и мы получаем:
rot v-
i 1
д_ д_
дх. ду
аг
а
у
д_?у_даЛ-£
дх ду J '
(30')
Отсюда видно, что ротор в каждой точке направлен
перпендикулярно плоскости векторного поля ХОУ.
Положим вначале, что движение совершает плоское
твердое тело (тонкая пластина). Как известно из
механики, скорость его перемещения всегда можно
представить в виде суммы поступательного и вращательного
движений:
v = v0 + [a, Г],
где v0—скорость центра инерции тела (скорость
поступательного движения тела), [со, г]—линейная скорость
вращения вокруг центра инерции произвольной точки
тела, радиус-вектор которой равен г, со— вектор угловой
скорости, направленный по оси вращения, 'одинаковый
для всех точек тела (и = const). Так как поступательная
скорость у всех точек твердого тела одинакова (v0 = const),
то ясно, что roty0 = 0. Следовательно,
rot v = rot [и, г].
Выберем оси координат таким образом, чтобы ось
вращения тела совпала с 0Z, а плоскость X0Y—с плоскостью
движения пластины, тогда ах = ())у = 0 иг = и, а точки
тела характеризуются только двумя координатами (х, у).
Поэтому согласно правилам векторного умножения
векторов:
[ow] =
0
k
и
0
:—и yi-\- axj.
Подставляя в формулу (30') компоненты вектора [со, г],
получим:
rot [и, г] = 2о)й,
57
или
rot v = 2(0.
(31)
Ротор линейной
скорости твердого тела есть
вектор, равный
удвоенной угловой скорости
его вращения.
Поскольку у твердого
тела угловая скорость
со постоянна, то
векторное поле rot v также яв-
Рис jg ляется постоянным (рис.
18).
Знание ротора векторного поля весьма важно для
определения циркуляции вектора по произвольному
замкнутому контуру.
Пусть в поле а (г) задана направленная замкнутая
линия L (направление обхода линии принято таким,
чтобы ограничиваемая этой линией поверхность оставалась
слева). Тогда криволинейный интеграл вектора по линии
L называется циркуляцией Г:
Г = ^ aldl = § 2dT= (ft (ax dx + aydy + a2dz). (32)
L L L
Циркуляция обладает свойством аддитивности. Это
свойство состоит в следующем. Положим, что контур L, по
которому определяется циркуляция Г, ограничивает
поверхность S. Разобьем последнюю на части St и S2,
ограничиваемые контурами L, и L3 (рис. 19). Поскольку
интегралы по внутренним участкам этих контуров одинаковы
Рис. 19
Рис. 20
58
по модулям, но имеют противоположные знаки, то
г = г1+г2.
Таким образом, циркуляция, «порожденная» на
поверхности S, равна сумме циркуляции Гх и Г2,
«порожденных» частями этой поверхности Sx и S2. Учитывая это,
можно ввести понятие «плотности порождения циркуля-
dT „
ции»-т^-, отнесенной к единице площади поверхности.
Рассмотрим плоское векторное поле а(х, у). Выберем
в нем бесконечно малый прямоугольник (рис. 20) с
площадью AS и вычислим циркуляцию АГ по его контуру
(AL). Очевидно,
АГ = J (ax dx + ay dy) = ^axdx + ^aydy+<\j ax dx+ \ ay dy.
Д£ (1) (2) (3) (*)
Можно показать, что с точностью до бесконечно малых
высшего порядка -
где п—единичный вектор нормали к площадке AS. В
общем случае трехмерного поля и произвольно
ориентированной площадки циркуляция по бесконечно малому
замкнутому контуру определяется такой же формулой,
поэтому всегда
% = rotna, (32)
т. е. rota есть предел отношения циркуляции у atdl по
нормальному малому контуру AL к величине площадки AS,
ограниченной этим контуром при AS->-0.
Если в пространстве задана конечная замкнутая
кривая L, ограничивающая поверхность S, то получаем
интегральное равенство, называемое теоремой Стокса:
j)a,a7=^rot„~a-a\S. (33)
L S
Циркуляция переменного вектора а по произвольной
замкнутой кривой L равна потоку ротора этого вектора
через поверхность S, опирающуюся на контур L.
Для выяснения аналитического смысла ротора как
векторной производной векторного поля и (г) (для нагляд-
ности положим, что и — вектор смещения точек
сплошной среды) поступим следующим образом. Рассмотрим
тонкую векторную трубку, внутри которой находится
точка М, и проведем через эту точку нормальное сечение
AS, которое с точностью до малых высшего порядка
можно считать плоским. Построим теперь в каждой точке
площадки AS векторы udx (где Ат—некая малая
величина, которую для краткости назовем «относительным
параметром смещения»). Ясно, что геометрическое место
концов векторов и-Ах образует новое сечение AS'
векторной трубки. Площадка AS' не только смещена
относительно AS, но и отличается от нее как по форме, так
и по ориентации в пространстве. Эти изменения харак-
•*-
„ du
теризуются тензором-производной — , причем его симмет-
dr
ричная часть us определяет деформацию площадки AS,
а антисимметричная часть rot u определяет величину ее
поворота в пространстве. Угол Аср поворота площадки,
как нетрудно показать, равен
Дф = у rot и- Ат.
Это приближенное равенство становится точным в
пределе при Дт->0:
rotu = 2^. (34)
Понятно, что множитель 2 не имеет принципиального
значения, поэтому можно сделать следующий вывод.
Ротор векторной функции характеризует быстроту
поворота сечения векторной трубки при перемещении его
точек на расстояния, пропорциональные векторам и.
В том случае, когда векторная функция н = »(г)
определяет поле скоростей частиц деформируемого тела,
остается справедливой формула (31), полученная нами
для твердого тела, т. е.
—»- —у
rot о = 2со.
Ротор линейной скорости в каждой точке равномерно
движущейся сплошной среды равен удвоенному вектору
угловой скорости вращения элемента объема,
окружающего данную точку.
60
%OtV ,,
Точки поля, где rot v Ф 0, называются вихрями
потока. Наглядное представление о роторе скорости можно
получить с помощью такого примера. Пусть скорости
частичек воды на поверхности реки образуют некоторое
векторное поле Нх,у). Бросим в реку множество
небольших полосок фанеры. В тех местах, где полоски плывут
поступательно, не вращаясь, roty = 0. Наоборот, на
участках потока, гдего^^О, т.е. где существуют вихри,
полоски фанеры будут вращаться, и тем быстрее, чем
больше по модулю rot v.
На рисунке 21, а и б графически представлены
векторные поля rot и плоских течений жидкости, для
которых скорости заданы формулами:
а) Г=г2[«Г0, г], б) ^Г=у[«Г0, г], где ю0 = const.
§ 8. Оператор Гамильтона
Большинство дифференциальных операций в теории
поля упрощается при введении оператора Гамильтона,
называемого еще символически вектором «набла» (у):
• ° I • ° I U °
(35)
С его помощью основные действия по
дифференцированию скалярных и векторных функций сводятся к
соответствующему умножению оператора у на эти Функции.
61
Градиент скалярного поля
-tdq,
grad ф:
"1"5ф
dx+ify + k
~дц>
Tz
можно представить как произведение вектора у на ска"
ляр <р:
gradtp = ycp. (36)
Дивергенцию векторного поля а
diva = ^ + -^ + ^
дх ' ду ' dz
можно рассматривать как скалярное произведение
векторов у на вектор а:
diva = (y,a). (37)
Ротор векторного поля а
д_ д_ д_
дх ду dz
ах ау аг
rot a =
совпадает с векторным произведением оператора у на а:
-> -»■
rot a = [у, a]. (38)
->
Наконец, тензорное произведение у на вектор а
представляет собой транспонированный тензор-производную:
/ da.\
\d?)'
{V.«}
дах
дх
дах
ду
дах
dz
day
дх
дау
ду
дау
dz
даг
дх
даг
ду
даг
дг
(39)
Преимущество пользования оператором Гамильтона
заключается в том, что, выполняя различные другие
дифференциальные действия над скалярными и векторными
функциями, можно рассматривать у формально как
обычный вектор и применять к нему правила векторной
алгебры. Нужно только учитывать, что у есть
дифференциальный оператор, обладающий свойствами производной.
Отсюда вытекает ряд следствий.
62
1. Так как оператор у является линейным, то
результат его применения к сумме двух функций равен
сумме произведений оператора у на каждое слагаемое:
у(Ф + ф) = УФ + уф, или grad (ф + ф) = grad ф +grad г|>,
(у, a + ft) = (y, а) + (у, b), или div(a + 6) = diva + div&,
[у, a + ft] = [y, а]-]-[у, b], или rot (a + b) = rot a + rot b.
2. Поскольку у—дифференциальный оператор, то в
тех случаях, когда функции ф или а являются
постоянными, уф = 0, (у, а) = 0, [у,а] = 0.
3. Результат действия дифференциального оператора у
на произведение двух скалярных функций или на
произведение скалярной и векторной функций равен сумме
произведений каждого -г множителя на результат
применения оператора ко второму сомножителю:
у (фф) = ф • уф -f- ф • уф, или grad (ф\|э) = tygrad ф + ф grad ф,
(у, ц>а) = (а, уф) + ф(у, а), или div(фa) = (a, gradф) +
+фdiva, (40)
[у, фа] = ф[у, й] + [уф, а], или rot (фа) =
= (prota-f[grad(p, а].
С помощью оператора Гамильтона легко вычисляются
различные вторые производные скалярных и векторных
функций.
Скалярное поле ф (г) имеет одну производную — век-
тор §^ф. Векторное же поле а (г) характеризуется
двумя первыми производными: скалярной diva и векторной
rot a. Следовательно, в математической теории поля встре-
-» —»-
чаются три первые производные: grad ф, diva, rota.
Легко видеть, что скалярное поле diva и векторные по-
ля grad ф и rota характеризуются пятью вторыми
производными: divgrad9, rot grad ф, grad diva, divrota,
rot rot a. Определим каждую из этих вторых
производных с помощью оператора у.
G3
1. Величину divgradcp мы получаем в результате
двухкратного скалярного применения оператора у:
divgrad<p = (v, УФ) = (У, У)ф = У2ф-
По правилам возведения в квадрат вектора получаем
для у2
V2 = (
1 дх + ' ду + R дг J ~ дх2 + ду2 + dz2
Оператор V2 широко применяется в математической
физике и называется оператором Лапласа или
лапласианом. Он обозначается греческой буквой Д (дельта).
Итак,
divgrad <р = Д<р. (41)
2. Для получения величины rot grad ф необходимо
применить оператор V сначала скалярно, и затем век-
торно:
rot grad tp = [V, Уф].
Вынося скалярный множитель ф за скобки и учитывая,
что векторное произведение двух одинаковых векторов
всегда равно нулю, получим:
IV. У]Ф = 0-
Следовательно, имеет место тождественное равенство
rot grad tp = 0, (42)
означающее, что потенциальное поле не имеет вихрей.
3. Величина divrota представляет собой смешанное
произведение трех сомножителей:
divrota = (V, [V, a]).
Производя циклическую перестановку, получаем:
(V, [V, a]) = ([V, V], aj = 0.
Итак, divrota всегда равна нулю:
divrota = 0. (43)
Физический смысл этого тождества заключается в том,
что вихревое поле не имеет источников (векторные линии
не имеют ни начала ни конца, они либо замкнуты, либо
уходят в бесконечность).
4. Вторая производная rot rot a может быть
представлена как двойное векторное произведение:
rotrota = [v, [V, a]].
64
По правилам векторного умножения
[V, [V, fl]] = V(V, a) — (V, V)fl.
Значит,
-> -> ->
rot rota = grad diva — Aa. (44)
5. Из предыдущей формулы получаем выражение для
второй производной graddiva:
grad diva = rot rota + Aa. (45)
§ 9. Формулы Грина
В качестве приложений полученных в предыдущем
параграфе результатов выведем часто применяемые в
математической физике так называемые формулы Грина.
Для любого векторного поля согласно теореме
Гаусса—Остроградского имеет место равенство:
Щ diva-dV=§ands. (28)
V s
Положим теперь, что
а (г) = Ф (Г) .6(7), (46)
где ф и b—некоторые скалярная и векторная функции
координат.
Согласно соотношению (40)
-> -> ->
div (фб) = (b, grad ф) + Ф div b.
Сделаем еще предположение, что векторное поле b (r)
потенциально, т. е. что
1 {r) = grad ф (г). (46')
Подставляя это выражение в предыдущее равенство,
получаем:
div a = div (ф grad \|з) = (grad ф, grad г|з) + ф • Аф. (47)
Поскольку согласно (46) и (46') a = фgrad'l|), то
*. = Ч>5?- <48>
65
Следовательно, равенство Остроградского — Гаусса
принимает вид:
JJJ(V9-Vl> + q>-Al>)dt; = <S>q>gfdS. (49)
v s
Это первая формула Грина.
Применяя равенство (47) к векторной функции а —
= г[>-grad ф, получаем:
W(Vt-V<P + t-V<p)dy = ^gdS. (50)
V S
Вычитая последнее из (49), приходим ко второй
формуле Грина:
V S
§10. Классификация векторных полей
Как мы знаем, любое векторное поле а (г)
аналитически характеризуется двумя «производными»: скалярной
-> -*
div а и векторной rot а. Простейшими классами
векторных полей являются такие, у которых в каждой точке
одна из производных равна нулю.
1. Поле называется безвихревым, если
roU = 0. (52)
Несложно убедиться, что безвихревое поле является
полем потенциальным, т. е. при выполнении усло-
вия (52) всегда можно подобрать такое скалярное поле ср (г),
для которого наше векторное поле является полем
градиента этого скалярного поля:
а= gradф. (52)
Основное свойство потенциального поля состоит в
равенстве нулю циркуляции вектора по произвольной
замкнутой кривой:
r = fa,dl=0. (52')
Необходимость этого условия очевидна. Действительно,
66
(j)aLdl=[
в потенциальном поле а1-=~-, поэтому
L L
Нетрудно доказать и достаточность этого условия.
Из основного свойства следует, что в потенциальных
полях криволинейный интеграл от вектора a = grad<p от
точки М (xlt ylt zx) до точки N (х2, г/2, z2) зависит не от
вида кривой интегрирования, а только от значения
потенциала ф в начальной и конечной точках:
N 2
j at dl = j -^ dl = ф (x2, yit zi) — (p(x1, ylt гг).
M 1
Примером потенциального векторного поля является поле
консервативных сил (гравитационное поле,
электростатическое поле и т. п.), в котором работа этих сил при
2
перемещении частиц из одной точки в другую А= \ F dl
1
не зависит от выбора траектории.
Характерным для потенциальных полей является
наличие эквипотенциальных поверхностей, между которыми
векторы поля направлены в сторону возрастания
потенциала.
Итак, всякое потенциальное поле бесциркуля-
ц и о н н о. С другой стороны, по теореме Стокса
aLdl = ^ rotna-dS.
Поэтому тождественное обращение в нуль циркуляции
вектора приводит к выполнению условия безвихревости
rota = 0.
-»
Следовательно, условия потенциальности (a = grad ф),
->
безвихревости (rota = 0) и бесциркуляционности
(\агс//^0} векторного поля полностью эквивалентны.
Возможность представления векторной функции в виде
градиента скалярной функции имеет большое значение
в математической физике, ибо изучение векторного поля
а (г) в этом случае сводится к исследованию намного
f
67
более простого скалярного поля ф (г). При этом скаляр-
на» функция^, ф (г) называется скалярным потенциалом
-»■ ->
даняого вентерного поля а (г).
2. Векторное поле а (г), у которого
diva = 0, (54)
является полем без источников и называется соленоидаль-
ным или трубчатым.
Согласно формуле (43) дивергенция от ротора
произвольного вектора всегда равна нулю:
divrot& = 0. (43)
Сопоставляя (43) и (54), мы можем векторное поле а (г)
представить как ротор некоторого другого векторного
-> ->■
поля b(r):
a = rot ft. (55)
Иными словами, соленоидальное поле является
вихревым.
-> -»
Основным свойством соленоидального поля а (г) является
->
равенство нулю потока вектора а через произвольную
замкнутую поверхность в пространстве поля:
аа dS э 0. (56)
Это непосредственно следует из формулы
Гаусса—Остроградского (28). В частности, если в качестве S выбрать
поверхность некоторой части векторной трубки, то мы
придем к установленному еще в § 6 выводу о постоянстве
в вихревом поле напряжения вдоль векторной трубки.
(Напряжением / векторной трубки в данном сечении S
называют поток вектора а через это сечение: / = \ \ andS.)
Из основного свойства соленоидальных полей
вытекает, что векторные линии у них не имеют ни начала,
ни конца, они либо замкнуты, либо уходят в
бесконечность.
-* -*■ -> ->
3. Поле а (г), у которого и diva = 0, и rota==0 не
имеют ни источников, ни вихрей. Такое поле одновре-
£8
менно и потенциально и соленоидально (вихревое и
безвихревое).
Рассмотрим, какими свойствами обладает такое век-
-* -> -*
торное поле. Поскольку rot а = О, то а(г) можно
представить в виде градиента скалярного поля:
a = grad(f>.
->
Так как diva = 0, то, взяв дивергенцию от предыдущего
равенства, получим, что потенциал ср должен
удовлетворять условию
divgradcp=0,
или
Дср = 0. (57)
-> ->
Итак, векторное поле а (г), у которого обе производные
->■ ->
тождественно равны нулю (diva = 0, rota = 0), всегда
можно представить в виде градиента скалярной
функции ф, удовлетворяющей уравнению Лапласа:
^4- — 4- — = 0
дх2 ду2 "•" дг2
4, Важность изучения потенциальных и вихревых
полей становится особенно ясной, если принять во
внимание теорему Гельмгольца.
Всякое однозначное, непрерывное и гладкое векторное
поле а (г) можно представить в виде суммы
потенциального и вихревого полей:
с (г) = grad9(?) +rot *Г(г). . (58)
->
При этом векторный потенциал Ъ всегда можно выбрать
->■ ->
так, чтобы div & =0. А поскольку divrot&s=0 и
divgrad ф = Аф, то источники исходного поля diva
выражаются через лапласиан Дф и не зависят от Ь.
§11. Физические векторные и тензорные поля
в четырехмерном пространстве-времени
В настоящем параграфе мы рассмотрим примеры
четырехмерных векторных и тензорных величин,
встречающихся в физике.
69
Математический аппарат теории относительности
пользуется своеобразным пространством четырех измерений,
где три измерения хх, х2, х3 берутся по обычным осям
координат X, Y, Z (пространственные оси), а четвертым
измерением х4 служит мнимая координата ict (гдег' = |/^—1,
с—скорость света, t—время). Такое пространство
называют псевдоевклидовым (см. ч. III); оно обладает
некоторыми своеобразными свойствами, на которые мы
укажем ниже.
Каждая точка характеризуется четырьмя
координатами, из которых три—х,, х2, х3 являются
действительными числами, а четвертая х4 — мнимая. Прямолинейный
отрезок, соединяющий две точки М (х[, х'2, х3, х'„) и
N (x'i, х2, х3, х"ц), представляет собой четырехмерный
вектор a = MN, компоненты которого ak = xl—x'k (где k=- l,
2, 3, 4). Согласно формуле (3) квадрат длины
четырехмерного вектора
|fl|» = fl? + flj + fl! + fl!
в отличие от евклидова пространства может из-за
мнимости at быть не только положительной, но и
отрицательной величиной, а также равняться нулю.
Скалярное произведение двух четырехмерных векторов
в псевдоевклидовом пространстве определяется по
аналогии с обычным скалярным произведением (в трехмерном
пространстве) так:
(а, &) = а1&1 + аа&2 + а3&з + аА-
При этом, как легко убедиться, стоящая справа сумма
произведений компонентов является инвариантом, не
меняющимся при повороте четырехмерной системы
координат.
Однако в отличие от обычного пространства вели-
—> —у
чина (а, Ь) может быть не только положительной, но
и отрицательной, а также равняться нулю. В последнем
случае векторы а и Ь называют взаимно
перпендикулярными.
Два четырехмерных вектора а и b можно
перемножить тензорно, в результате чего получается четырех-
70
мерная диада
аА
а2Ьх
аА
аД
аА
а2Ь2
а3Ь2
atb2
аф3
«А
а3Ь3
аА
аА
a2bt
a3bt
atbt
D = {a, b}
Однако векторное произведение четырехмер-"
ных векторов существенно отличается от векторного
произведения в трехмерном пространстве. Дело в том, что
векторное произведение двух векторов любой
размерности, по-существу, является антисимметричным
тензором, равным удвоенной антисимметричной части диады.
В случае трехмерного пространства этот тензор
О аД —аД axb3-^aA
£>л= аД —аД О a2b3 — a3b2
оД — аА a3b2 — a2b3 О
имеет три существенно различные компоненты
можно сопоставить трехмерный вектор
и ему
[а, Ь] =
1
а„
Jx "у "г
В случае же четырехмерного пространства
антисимметричная часть диады содержит 6 компонентов типа Dik =
= atbk—akbit в то время как вектор в четырехмерном
пространстве имеет только 4 компонента. Следовательно,
антисимметричному тензору DA никакой вектор
сопоставить нельзя. Мы приходим к выводу, что роль вектор-
-> ->
ного произведения двух четырехмерных векторов а и b
играет антисимметричный четырехмерный тензор
D;
0
аД —аД
a3bl—a1b3
aib1 — а А
понять, что
«Л" «А
0
a3b2 — a2b3
аД —аД
из шести
ахЬ3 — аА
a2b3—a3b2
0
аД —аД
аД—а А
a2bt—аД
a3bt—atb3
0
его компонентов три
Легко понять, что из шести его компонентов три
являются действительными, а остальные три (содержащие
индекс «4») — мнимыми. Подобным же образом обобщаются
на случай четырехмерного пространства остальные
операции векторной и тензорной алгебры.
71
Рассмотрим подробнее четырехмерные
дифференциальные операции векторного анализа.
Проще всего эти операции обобщаются с помощью
четырехмерного векторного оператора набла:
„^. д,^д,-*д.-?д ,rm
V='ia£+li^+l.!T,+ ,'av (59)
Градиентом скалярной функции в четырехмерном
пространстве называется четырехмерный вектор:
4
gradq^Yq) = £?*!*. (60)
Четырехмерной дивергенцией векторной функции а (г)
назовем инвариантную величину:
4
diva^(y,fl) = Ee. (61)
к "
В частности, если вектор а является четырехмерным
градиентом скалярной функции ср, то, подставляя (60) в (61),
получаем:
4
diva = divgrad ф = У! ~. (62)
кд*к
Эту величину обозначают символом Пф (где
□—четырехмерный лапласиан, или даламбериан). С помощью
оператора V легко получается выражение и для
дифференциальной операции, называемой четырехмерным ротором:
-> ->
rota = 2{V • а\А =
« /5% дщ\ fdai даЛ Iдах да4
\дх2 dx-i) \дх3 дхх) \дх4 дх1
(даг даЛ ~ / да^ даЛ I да^ даЛ
\дхг дх2) \дх3 дх2) \дх4 дх2)
з &h\ Iдч даЛ q Id<h &h.
\ дх3) \дх2 дх3) \dxt дх3
= 2
да3 даг\ (да.
~дх
( dat dch\ f да^ даЛ f да^ da,\ ~
\dxt дхц) \дх2 dXf] \дх3 дх4)
Величина rot я представляет собой удвоенную
антисимметричную часть тензорного произведения векторов V и
а (диады).
72
Наконец, производная четырехмерной векторной функ-
ции а по радиус-вектору г представляет собой тензор:
5=1-1На
да
дг
(64)
После такого краткого ознакомления с четырехмерным
пространством-временем приведем несколько примеров
конкретных физических векторных и тензорных полей.
1. С точки зрения теории относительности электрическое
и магнитное поля являются различными аспектами
единого электромагнитного поля. Последнее можно
характеризовать четырехмерным вектором Ф, называемым
электромагнитным потенциалом, компонентами которого являются
величина i<p (где ср — скалярный электрический потенциал,
a i = У — 1) и проекции Ах, Ау, Аг на координатные оси
векторного магнитного потенциала А.
Потенциал электромагнитного поля образует в
четырехмерном пространстве-времени векторное поле:
Ф(7) = Ф(АХ, Ау, Аг, йр).
2. Как известно из теории электричества, потенциалы
Ф и А являются косвенными характеристиками
электрического и магнитного полей. Непосредственно эти поля
определяются векторами напряженностей £ и Я. В
четырехмерном пространстве напряженность
электромагнитного поля представляет собой антисимметричный тензор:
О
-Н,
Н,
Н„ —Нг
iEY
1Е„
Нх
О
IE.
—iEx
-iEy
—iEz
О
(65)
действительные компоненты которого характеризуют- маг-
—у —>-
нитное поле Н, а мнимые—электрическое поле Е. Между
напряженностью F и потенциалом Ф электромагнитного
поля существует простая четырехмерная
дифференциальная связь
P = rot$,
73
являющаяся обобщением известного из электродинамики
—>- ->-
соотношения Н = rot А. Таким образом, математически
электромагнитное поле в четырехмерном пространстве-
времени образует тензорное поле F{r).
3. В классической механике количество движения
материи может быть охарактеризовано двумя различными
->
величинами — вектором импульса Р (с компонентами mvx,
mvy, тиг) или скаляром Е = -^-, выражающим собой
кинетическую энергию тела.
Согласно теории относительности обе эти величины
объединяются в единый четырехмерный вектор импульса G
с компонентами ( mvx, mvy, mv2, — Е J . Точно так же
четырехмерным вектором является в механике теории отно-
—>-
сительности сила К.
Поэтому и основной закон динамики — второй закон
Ньютона—записывается в четырехмерной форме так:
<Ю ■*
где т—так называемое собственное время, измеряемое по
часам движущегося тела.
Глава III
ТЕОРИЯ ПОЛЯ В КРИВОЛИНЕЙНЫХ СИСТЕМАХ
КООРДИНАТ
В предыдущих главах мы пользовались только
прямоугольными декартовыми координатами. Однако при
решении многих задач математической физики удобно
применять криволинейные координаты.
§ 1. Криволинейные координаты
Если декартовы координаты х, у, z являются взаимно
однозначными функциями других трех
переменных qx, q2, q3
* = x(qlt Яг, <7з)> У = У(Ч1, Ч» Ч»)> z = z{qlt qv q3), (1)
74
n
?'
-.с
Чг
V
r-C \
9>
-с
то переменные величины qlt
q%, <7з называются
криволинейными координатами.
Если, сохраняя одну из
величин <7/ постоянной,
остальным двум координатам
будем сообщать всевозможные
значения, то получим
поверхность, называемую
координатной поверхностью. Ясно,
что для каждой системы
координат существуют три
семейства координатных
поверхностей: <7, = const, q2 =
= const, <7з = const.
Линии пересечения двух
координатных поверхностей
называются координатными
линиями; их именуют той
координатой, которая вдоль
них меняется. За
положительное направление
координатной линии принято
считать то, вдоль которого
соответствующая переменная
увеличивается.
Очевидно, что через
каждую точку пространства
проходят по три взаимно
пересекающиеся координатные
поверхности и по три координатные линии (рис. 22).
Рассмотрим наиболее часто встречающиеся в
математической физике криволинейные системы координат.
Цилиндрическая система координат. Криволинейные
координаты р, ср, г (рис. 23) связаны с декартовыми
координатами соотношениями:
x = pcos9, # = psin9, 2 = z. (2)
Цилиндрические координаты изменяются в пределах:
0<р<оо, 0<ф<2я, —оо <2< + оо.
Координатными поверхностями р = const являются
коаксиальные цилиндры с осью Z. Семейство поверхностей
Ф = const— это полуплоскости, ограниченные осью Z.
Рис. 23
75
Рис. 24
Семейство поверхностей
z == const— это плоскости,
перпендикулярные оси Z.
Координатные линии р
представляют собой
полупрямые, начинающиеся на
оси Z; семейство линий
Ф — это окружности в
плоскостях 2 = const с центром
на оси Z; линии г—это
прямые, параллельные 0Z.
Частным случаем
цилиндрической системы
является (двумерная)
полярная система координат
(Р, Ф)-
Сферическая система. Криволинейные координаты г,
8, ф (рис. 24) связаны с декартовыми формулами:
# = г этЭсоэф, y = r s'mQsinq, 2 = rcos0 (3)
и изменяются в пределах 0 ^г< оо, О^б^я, 0^ф^2л.
Координатными поверхностями г = const являются
концентрические сферы; поверхностями 0 = const — конусы
С осью Z; поверхностями ф = const — полуплоскости,
ограниченные осью Z.
Координатные линии г — это радиусы, линии 8 —
меридианы, линии ф—параллели.
Если криволинейная система координат обладает тем
свойством, что в любой точке пространства проходящие
через нее три координатные линии взаимно
перпендикулярны, то система координат называется ортогональной.
Легко убедиться, что и цилиндрическая и сферическая
системы принадлежат к классу ортогональных. Ясно, что
различные векторные и тензорные соотношения имеют
в ортогональных системах координат более простой вид,
чем в произвольных (неортогональных) системах
криволинейных координат. Поэтому полезно сформулировать
условия, которым должны удовлетворять функции
*(<7i. <72» <7з), y(<li, 02. <7з). z(<7i, q2, qa), чтобы
координатная система была ортогональной.
Как известно из аналитической геометрии,г условие
перпендикулярности двух прямых, образующих с осями
координат углы а, {J, у и а', |J', у', сводится к равенству:
cosa-cosa'-j-cosfi-cosp' + cos у-cos у' = 0.
76
Поскольку косинусы углов между касательной к
координатной линии <7/ с прямоугольными осями координат
х, у, г пропорциональны соответствующим частным про-
дх дц дг
изводным -j— , 3е:, -д—> то мы получим следующие
условия взаимной перпендикулярности координатных кривых
4i и <7/
дх дх , ду ду . дг дг ~ ,;.
~Wi"dqj"Т'Wi'Щ "Wi"Щ'~ ' ^'
Чтобы криволинейная система координат qlt qit q3 была
ортогональной, ее координатные линии должны
представлять собой три взаимно перпендикулярных семейства
кривых и, следовательно, функции x(qlt q2, q3), y(qlt q2, q3)
и z(qlt q2, q3) должны удовлетворять трем условиям
типа (4). В математической физике чаще всего
пользуются ортогональными системами координат. Поэтому
в дальнейшем, говоря о криволинейных координатах,
будем всегда считать их ортогональными.
§ 2. Коэффициенты Лямэ
Выразим прежде всего элемент дуги ds. В
прямоугольных декартовых координатах, как известно,
ds*=dx2 + dy* + dz\ (5)
Дифференцируя равенство (1), получим:
, дх , , дх , , дх ,
dx = Widqi + W2dq2 + ^dq3,
dy^^dq.+^-dq.+^-dq,,
d')
dz = W^qi + Widq*+'d%dq*-
Подставляя (Г) в (5) и принимая во внимание условие
ортогональности (4), найдем, что
ds*=Hldql+H\dq\ + H\dq\, (5)
где Hit Нг, Н3 — так называемые коэффициенты Лямэ,
определяемые следующей формулой:
«.-/(£)■+(£)•+(£)■. ">
(Обратим внимание на то, что равенство (6) не содержит
произведений dqtdqj. Ясно, что это является следствием
ортогональности координат qlt q2, qs.)
П
Коэффициенты Лямэ
Hj устанавливают связь
между прямоугольными
декартовыми и
криволинейными
ортогональными координатами.
Положение криволинейной
системы относительно
декартовой не влияет на
вид этих
коэффициентов. Как ясно из самого
вывода, коэффициенты
Лямэ имеют
инвариантный характер и
однозначно определяют данную криволинейную систему
координат.
Из формулы (6) следует, что элемент дуги
координатной линии равен
ds = Hidql. (8)
Отсюда для коэффициента Лямэ получаем выражение
Рис. 25
//'=>7'
(9)
показывающее, что И{ характеризует быстроту изменения
длины дуги координатной линии при варьировании этой
координаты. Легко видеть, что площадь элементарного
криволинейного квадрата и объем элементарного кубика,
стороны которых являются отрезками координатных
линий (рис. 25), определяются с точностью до бесконечно
малых второго порядка равенствами:
da =-■ И {Н/iqtdqj, (10)
dV-=HlHiH3dqidq2dqs. (11)
Легко показать, что коэффициенты Лямэ для
прямоугольной декартовой системы координат равны Нх = Ну=
— Hz—\, для цилиндрической
(Рг ф, г) — И0 - 1, Н9 = р, Hz = 1, (12)
для сферической
(г, 9, у) — Нг=\, Ha = r, H„ = r sine. (13)
Примеры
1. Показать, что плоская эллиптическая система координат
(|, tj), определяемая соотношениями
х = ch I• cos ц, j/ = sh£-sinri, (14)
78
ортогональна, и вычислить
коэффициенты Лямэ для этой
системы координат.
Чтобы найти вид
координатных линий,
преобразуем формулы
(14) двумя способами:
х
?h? = cosrl.
ih| = smr,,
COST]
■=ch:
sin r)
Одну из переменных
можно исключить, если
равенства (14') возвести
ные в квадрат равенства
х2
Рис. 26
в квадрат и сложить, а возведен-
(14") вычесть друг из друга:
■2
Г
ch£«
shg2"
У2
1.
(15)
1.
Из (15)
(16)
ЛИНИИ Г) (ВДОЛЬ
cos1* i\ sin* т]
вытекает, что координатные
которых £=const) являются эллипсами, оси которых
совпадают с декартовыми осями координат. Более того,
поскольку большая и малая полуоси равны соответственно
a = ch | и fo = sh£, то фокусное расстояние c = V~a2—b2=\,
т. е. одинаково для всех |. Это значит, что семейство
координатных кривых т) есть семейство софокусных
эллипсов (рис. 26). Характер второго семейства координатных
кривых следует из выражения (16). А именно, положив
в нем г) = const, находим, что линии | представляют собой
семейство гипербол с теми же фокусами, что и у эллипсов.
Проверим теперь, выполняется ли условие
ортогональности. Для этого вычислим частные производные:
дх . с. ди , *. дх
■=cosT]-sh|, ^ = sinT].ch|, -щ
ду
dt
= — ch l-sin т],
дц
= sh g-cosft.
Пользуясь этими выражениями, убеждаемся в том, что
дх дх .ду ду „
Щ "дх\ + Щ "дц ~~ '
т. е. что линии | и ц взаимно перпендикулярны.
79
Наконец, вычислим коэффициенты Лямэ. Прежде всего
легко убедиться, что коэффициенты Я| и Яп равны между
собой и выражаются так:
#6 = #4=Kcos'8Ti-sh8£+'sin»'Ti.cha£/
Учитывая, что sin2 г)= 1—cosar) и ch2i = l+sh2|,
получаем окончательно:
Hk = H^V shn + sin^.
(17)
2. Показать, что плоская параболическая система координат
(и, v), связанная с прямоугольными декартовыми координатами
(х, у) соотношениями
1
x = j(u — v),
является ортогональной. Определить коэффициенты Лямэ.
(18)
Чтобы найти уравнения координатных линий и и у,
выразим каждую из этих переменных через х и у:
u = x + W + «/2, v-.
-х + ]/х* + у*. (19)
Семейство координатных линий и мы определим, положив
в (19) v=c:
с = — х + Ух* + у\
г/2 = 2сх + с2.
Это—симметричные
относительно оси X софокусные параболы
с фокусом в начале координат и
вершинами в точках х = — с/2
(кривые слева на рисунке 27).
Аналогично, общее уравнение
координатных кривых v при
и = с' имеет вид:
г/2 = — 2с'х + с'\
отсюда ясно, что линии v также
представляют собой соосные
параболы с фокусом в точке О,
но повернутые в
противоположную сторону (кривые справа
на рис. 27).
Взаимная перпендикуляр-
Рис. 27 ность кривых и и v устанавли-
80
вается с помощью условий (4) и (18):
djcdx.dydy «
ди dv'dudo
Для коэффициентов Лямэ получаем следующие
выражения:
§ 3. Основные дифференциальные операции
в криволинейных координатах
1. Градиент скалярной функции. Как было показано
в главе I, градиент скалярной функции ф представляет
собой вектор grad ф, проекция которого на произвольное
направление / равна производной от ф по этому
направлению:
где dl—длина отрезка, взятого вдоль направления /.
Пусть вектор grad ф задан в некоторой точке
пространства М. Через нее проходят три взаимно
перпендикулярные линии qx, q2, q3. Проведем в точке М
касательные к этим линиям и вдоль этих касательных отложим
(в направлении возрастания координат) единичные орты
ei, e2> ез (Рис- 28). Эта тройка ортогональных ортов,
называемая базисом (или репером), образует локальную
Рис. 28
81
(местную) прямоугольную систему координат. Ясно, что
в характеризуемых криволинейными координатами точках
пространства реперы будут, вообще говоря, разные.
Проекция вектора grad cp на направление координатных линий
(т. е. на касательные к этим линиям в точке М) равна:
<gradf),. = g,
где dst—длина дуги координатной кривой qt. Но
согласно (8) dsi^Hf-dqi. Поэтому
Следовательно, градиент скалярной функции в некоторой
точке пространства определяется в криволинейной системе
координат тремя проекциями на координатные линии,
проходящие через эту точку:
grad ю =-п--^--е, +-п- -^- е2 + -тт- 3х-е3. (22)
Необходимо только иметь в виду, что в отличие от
прямоугольных координат компоненты градиента (grad?. cp)
меняются от точки к точке не только вследствие того, что
<р — переменная величина, но, вообще говоря, еще из-за
непостоянства значения Я,- и непостоянства направления
в пространстве соответствующего орта et.
2. Дивергенция векторной функции. В главе III была
выведена формула, которая может служить инвариантным
определением дивергенции:
uiva = -w. (23)
Здесь dV—элемент объема, выражающийся в
криволинейных координатах согласно (11) формулой dV —
= Н\Н\Н3dq1dq2dqs, a dN определяет поток вектора через
малую замкнутую поверхность Да, ограничивающую
объем dVj
dN =<jj>a„da.
До
В качестве элементарного объема dV выберем
криволинейный кубик, гранями которого являются участки
координатных поверхностей (см. рис. 25). Рассмотрим
две грани, перпендикулярные qx — левую / и правую 2.
82
Площадь грани / равна:
da1 = H2(q1)H3(q1)dq2dqs.
Соответственно площадь грани 2 запишется так:
da2 = H2 (q1 + dqy) H3 (q1 + dqj dq2dqs.
Пусть переменный вектор а в точках элементарной
->
грани / принимает значение a(q1), а в точках грани 2—
соответственно a (q1-{-dq1). Так как координатная линия qi
перпендикулярна к обеим этим граням, то нормальные про-
екции векторов a (qj и a{q1-\-dq1) с учетом направлений
нормали принимают значения: —aQl (qj и aQi(q1-{-dq1).
Поэтому результирующий поток вдоль qx равен:
dN„, = — а,,//, (^) На (qt) dq2dq3 + a„, (q, +dqx) H (qt +dqj X
или, пользуясь формулой Тейлора и отбрасывая малые
высших порядков,
dNqi = -^ (H2H3aqi) dqx dqt dqs.
Полный же поток через все грани кубика определяется
равенством:
dN = {-щ;(н^^)+-щ;^н^)+
+ -£;(HlHiatl)}dq1dqidq3. (24)
Подставляя это соотношение в (23) и учитывая (11),
получаем выражение для дивергенции в криволинейных
координатах:
+ ^(н^^) + ^(иг^^)}- (25)
3. Оператор Лапласа. В прямоугольных декартовых
координатах оператор Лапласа, или лапласиан,
представляет собой сумму вторых частных производных по
координатам:
Чтобы получить выражение лапласиана в криволинейных
83
координатах воспользуемся соотношением:
A«p='div grad ф. (2G)
Обозначим gradф = a. Тогда согласно (2.1)
li Hi dqi T
Используя формулу (25), в которую вместо aq подставим
Оф
■7/7дГ» приходим к искомому выражению:
' 1 [ а /я,я, д \ л (нхн3 д
ЯгЯ2Я3 \ dqt V Hi Л/i ) ^ dqt \ Яа dq2
'HtH2 д
+
+
dq3
Я3 dq3
)■
(27)
4. Ротор векторной функции. Для получения
выражения ротора в криволинейных координатах будем
исходить из инвариантного соотношения (32) главы II:
dT
rot„a =
da
(28)
Выберем в качестве элементарной площадки da малый
криволинейный четырехугольник ABCD, стороны
которого являются отрезками координатных линий q^ и q3.
Ясно, что нормаль к этой площадке направлена вдоль qt
(рис. 29). Согласно (10)
do = HiH3dq2dq3.
Что касается циркуляции по периметру
четырехугольника
9*J dT=$aidl,
м
то для ее определения
необходимо вычислить
криволинейный
интеграл по каждой из
четырех сторон
прямоугольника:
В С D А
/-5 + S+S+S-
М A BCD
При этом нужно учесть,
во-первых, что длина
Рис. 29
84
стороны прямоугольника согласно(8)равна dli = Hi-dqh и,
ВО-в т о р ы х, что в данном случае рассматривается
двумерное векторное поле в точках координатной поверхности
qt — const, так что a = a(q2, q3). Следовательно,
в
l^dl^aMH^q^dqz, где a, = aw
А
И
А
\aldl = — a3(q2)H3(qi)dq3.
D
Аналогично для остальных двух сторон:
с
J at dl = а3 (<?2 + dq2) Hs fa2 + dq2) dq3,
в
I at dl = — a2 (q3 + dq3) Ht (q3 + dq3) dq2.
в
D
Складывая второй интеграл с третьим и четвертый с
первым и пользуясь формулой Тейлора, получаем:
dT = [^- (а8#8) —^ №)] dq, dqa. (29)
Подставляя значения dT и do в (28), найдем для
проекции ротора на направление qt:
Г0Ча-я2я3\ a?g а?, ;• W
Теперь понятно, что полное выражение вихря через его
проекции на локальные орты криволинейной системы
координат имеет вид:
j i |.а («iffi) д(д3Щ? ,
"^Яз^И а?, л?, Г2_г
Примеры.
1. Написать выражения дифференциальных операций grad и,
div a, rot а и Ди в цилиндрической системе координат р, <р, г.^
Как было показано в § 2, коэффициенты Лямэ в
рассматриваемом случае имеют следующие значения: Яр= 1,
85
rot.
Я„, = р, Нг—\. Поэтому согласно формуле (22)
, ди -' , 1 ди ~* . ди ~* /г,пк
ёШи = Гре1+7^е2+ше3. (32)
Пользуясь формулой (25), получаем выражение для
дивергенции: -> , ,д да<р\ . даг .„-,
dlva=7k(pap)+-^r+^- (33)
Точно так же, подставляя в (27) значения
коэффициентов Лямэ, получим:
. 1 д I ди\ , 1 д2и , д2и /пл.
*и = 7 *[<>*)+ ■?!& + !*• (34)
Наконец, написав формулу (30) в применении к
цилиндрическим координатам и подставив в нее значения
коэффициентов Лямэ, получим выражения для проекций вихря:
, -* 1 да, дач> , -* дар да,
р р бф дг ф dz dp '
-* -*
2. Написать выражения для grad и, diva, rota и Да в
сферической системе координат г, 0, ф.
Учитывая, что Нг=\, Hq — г и Нч> = г$'тв и
поступая так же, как в предыдущем примере, получаем
выражения для дифференциальных операций в сферической
системе координат.
Градиент скалярной функции выразится формулой:
, ди ~* . 1 ди -* . 1 ди -» .„,,.
ё!гайи=-¥е1+ттеш+7Ш^-^еа, (36)
дивергенция векторной функции—формулой:
div a = 4-2- (r2ar) H Цг — (sin9ae) -f —Lg -^ . (37)
ra dr r' r sin 6 00 ч 0/ r sin 0 бф v '
Подставляя в (37) вместо aq, соответствующие проекции
(grad и)„, получаем лапласиан скалярной функции:
\ д f „ ди\ . 1 д f . adu\ , I б2ф /оох
Для проекций вихря получаются следующие формулы:
, -* 1
rot, a = ——
_(аф51п9)-^,
, - 1 Г 1 da r д(г%)1 .„„.
го1эа = -[—-g-a- g^\, (39)
го1фа = |[|(те)-^] .
Часть вторая
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
В ЧАСТНЫХ ПРОИЗВОДНЫХ
Глава I.
ВЫВОД ОСНОВНЫХ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
МАТЕМАТИЧЕСКОЙ ФИЗИКИ.
ОБЩИЙ ИНТЕГРАЛ ЭТИХ УРАВНЕНИЙ
§ 1. Поперечные колебания струны. Волновое уравнение
Струна—это тонкая, гибкая натянутая нить,
закрепленная в двух точках. Если струну отклонить от
положения равновесия (которое на рисунке 30, а совпадает
с осью X), то она будет совершать поперечные колебания.
Будем обозначать смещение точек струны через и. Ясно,
что и является функцией координаты х и времени t:
и = и(х, t). (1)
Задача состоит в том, чтобы найти положение струны
в любой момент времени, т. е. найти явный вид
функции (1). Мы сейчас покажем, что при малых
отклонениях функция и (х, t) удовлетворяет определенному
линейному дифференциальному уравнению в частных
производных. Выделим элемент струны ds, который в
начальный момент имел длину dx (рис. 30, б). По формуле
квадрата длины
элемента дуги имеем:
ds2 = dx2 + du2
или
"^/■' + (S)2-
Так как мы
рассматриваем малые колебания,
ди ..,
для которых 5- <5? 1, то
под корнем можно
пренебречь квадратом про-
87
изводной и в первом приближении считать, что dsmdx.
Поскольку в этом приближении струна не является
растяжимой, мы вправе считать натяжение струны Т
неизменным по величине.
Применим теперь к рассматриваемому элементу струны
второй закон Ньютона: произведение массы dm = p-dx
, - , дги
(р—линейная плотность) на ускорение -^ равно сумме
сил, приложенных к элементу. Полагая струну очень
тонкой, можно пренебречь весом любого ее элемента и
-» ->
учитывать только силы натяжения Т1 и Т2, действующие
с обеих сторон. При этом нужно иметь в виду, что хотя
натяжение вдоль струны по модулю постоянно, оно
в отклоненной струне меняется по направлению от
точки к точке.
Далее, так как колебания являются поперечными
(вдоль оси V), то нас интересует только сумма
вертикальных проекций сил (сумма горизонтальных
составляющих, очевидно, равна нулю):
pdx~^- = T2a+Tltt. (2)
Легко видеть, что
r^-rsine, и r2a = rsine2.
Для малых колебаний углы д1 и 92 малы и можно
приближенно (с точностью до малых второго порядка)
принять
sine^tge^^ и sine2«tge2 = ^-y^
Следовательно, правая часть уравнения (2) сводится
к выражению
г«+г--г [(£)„„-(£).]■
Разложим теперь в ряд Тейлора f^j
дх)х+ах-\дх)х+[дх*)х ■**+■•• «
Тогда с точностью до малых второго порядка
1"~~ ~дх*
T2a+Tla=T^dx. (3)
Подставляя (3) в (2), приходим
к равенству
Введя обозначение
j = v\ (5)
получаем уравнение свободных Рис. 31
колебаний струны:
д2и __ 2 <^и /т\
dt2 ~v дх*- 1 '
Как всегда в механике, одного лишь уравнения
движения (I) для определения формы струны в любой момент
времени недостаточно. Необходимо еще задать начальные
условия, т. е. положение ее точек и их скорости в момент
^ = 0:
u\t=o=4>(x), &\ts0=y(x)- (6)
Кроме того, нужно еще указать, что происходит на
концах струны, т. е. задать граничные условия. Для струны,
закрепленной с обоих концов, граничные условия имеют
вид:
и^о=0. и\хы = 0. (7)
Таким образом, колебания струны описываются
одномерным волновым уравнением (I). Если поперечные
колебания совершает натянутая упругая пленка (мембрана)
(рис. 31), то соответствующее волновое уравнение
является двумерным:
£—(£+£)• «'>
При этом начальные условия, определяющие положения
и скорости точек мембраны, имеют вид:
и |<=0 = ф (х, у), ■£ |<=о = if (х, у).
Что касается граничного условия, то, поскольку
мембрана вдоль контура L обычно закреплена, оно принимает
форму:
«|z.=0.
Еще более общий случай . мы получаем, когда
колебания (продольные) совершают частицы сплошной среды.
89
Это—случай акустических колебаний.
Дифференциальное уравнение для таких колебаний становится
трехмерным волновым уравнением:
или (в сокращенной записи):
д2и , .
Здесь и (х, у, г, t) — потенциал скоростей движения
точек среды, v—скорость звука в данной среде.
Начальные условия записывают в такой форме:
«|<=о =4>(х, у, г), ■£ =Ц(х, у, z).
t=o
Граничное же условие обычно выражает тот факт, что на
границе с твердой непроницаемой поверхностью S сосуда,
в котором находится упругая среда, нормальная
составляющая скорости частиц равна нулю:
an \s
Следует отметить, что трехмерным волновым уравнением
описываются не только акустические, но и
электромагнитные волны, распространяющиеся в вакууме.
А именно, для напряженностей электрического и
магнитного полей имеют место уравнения:
А Г • д*Ё Г,
где с—скорость света в вакууме.
§ 2. Уравнение теплопроводности
Если температура в различных точках тела
неодинакова, то в нем происходит перераспределение тепла в
соответствии с эмпирическим законом Фурье, согласно
которому количество тепла dQ, протекающее через малую
площадку с площадью dS за короткий промежуток
времени, прямо пропорционально площади dS, длительности
90
промежутка dt и производной от температуры по
нормали к площадке:
dQ=-kd-tdSdt, (8)
где k — коэффициент (внутренней) теплопроводности
вещества.
Введем понятие вектора плотности теплового пото-
->
ка ц, совпадающего по направлению с градиентом
температуры, а по модулю равный количеству тепла,
протекающего за одну секунду через единичную площадку,
расположенную перпендикулярно к градиенту
температуры. Тогда закон теплопроводности принимает векторную
форму:
9 = — fcgradT. (9)
Происхождение знака минус в (8) и (9) понятно: градиент
направлен в сторону возрастания температуры, а тепло
течет к более холодным точкам тела.
Перейдем теперь к выводу дифференциального
уравнения распространения тепла. Пусть имеется однородное
тело, температура внутри которого является функцией
координат х, у, г и времени t:
Т = Т(х, у, г, t).
Для общности предположим, что внутри тела
существуют источники тепла, мощность которых равна
Q(x, у, z, t). Выделим в теле некоторый малый объем AV
и составим его тепловой баланс. За время dt в нем
выделится количество теплоты:
AQ=dt J Q(x, у, z, t)dV. (10)
Часть этого тепла AQ' идет на повышение температуры
элемента AV, а остальная доля AQ" из-за
теплопроводности уйдет в окружающие слои тела.
Сначала определим AQ'. Количество тепла,
необходимое для повышения температуры бесконечно малого
элемента dV от Т (t) до T(t + dt), равно:
dQ'=cpdV[T(t + dt) — T(t)]^cp^dtdV,
где с—удельная теплоемкость тела, р — его плотность.
91
Интегрируя это равенство по объему AV, получим:
AQ' = dt jcpgfdK. (11)
AV
Чтобы определить AQ", учтем, что за одну секунду через
поверхность AS, ограничивающую объем AV, протекает
количество теплоты
§qJS.
as
Поэтому
AQ"=dt§qndS. (12)
AS
Приравнивая AQ сумме AQ' и AQ'", получаем:
§QdV = jcpf dV+§ qndS. (13)
AV AV AS
В этом равенстве стоят интегралы по разным
переменным. Поэтому применим к последнему из них теорему
Остроградского—Га усса:
§ qndS = С div qdV.
as &
Тогда равенство (13) примет вид:
j cp 6J dV + j div qdV = f QdV,
AV AV AV
ИЛИ
j \C9§ + divq-Q]dV = 0.
AV
Поскольку это соотношение справедливо для
произвольного объема AV, то должно быть равным нулю само
подынтегральное выражение:
ОТ -*
cp-gj + divq—Q=0.
Подставляя сюда значение q из (9), получаем:
cp~-div(kgradT) = Q. (14)
Так как по предположению тело однородно, то
коэффициент теплопроводности k является величиной постоян?
92
ной. Поэтому
div (k grad T) = k div grad T.
В ч.1 было показано, что div grad T = Л7\ Учитывая это,
приходим к следующему дифференциальному уравнению
распространения тепла:
cp¥L = k-AT + Q(x, у, г, t). (14')
Рассмотрим частные случаи этого уравнения.
1. Распространение тепла без тепловыделения. Если
внутри рассматриваемой области нет источников тепла, т. е.
Q = 0, то уравнение (14') принимает более простой вид:
5 = «-ЛГ, (П)
k
где а = так называемый коэффициент температуро-
ср
проводности.
2. Установившийся поток тепла. Для стационарного
процесса теплообмена, т. е. когда температура в каждой
точке тела не меняется со временем [зт = и). уравнение
теплопроводности приобретает форму так называемого
уравнения Пуассона:
ЛГ = -р, (II')
Q
где Р = ¥.
3. Установившийся поток тепла без тепловыделения.
дТ
В этом случае и Q = 0, и jt = 0, поэтому распределение
температуры в теле подчиняется уравнению Лапласа:
АГ = 0. (II")
Уравнение нестационарной теплопроводности
д£ = а-АТ
dt
содержит производные второго порядка по координатам
х, у, г и производную первого порядка по времени t.
Поэтому для однозначности его решения должны быть
заданы одно начальное условие и два граничных условия
для каждой координаты.
Стационарные уравнения Пуассона и Лапласа не
содержат переменной t, так что в этом случае необходимы
только граничные условия.
93
Начальное условие обычно состоит в том, что
температура всех точек тела в момент t—О является
определенной функцией координат:
T\t=o = f(x, у, г). (15)
Что касается граничных, или краевых, условий,
то при решении физических задач они бывают трех видов.
В случае краевых условий первого рода задается
температура на поверхности S тела в любой момент
времени:
T\s =ф(х, у, г). (16)
(В общем случае функция ф может зависеть и от t, но
обычно температура на поверхности постоянна.)
При краевых условиях второго рода температура
на поверхности неизвестна, но указывается тепловой
поток q, вытекающий или втекающий через поверхность,
как функция координат точек поверхности:
Чп = У(х, У, г),
где п—единичный вектор нормали к поверхности.
Так как согласно (9) <?„=—к -т- , то граничные
условия имеют дифференциальный характер:
£ = !>(*, У, г). (16')
Наконец, краевые условия третьего рода являются
обобщением условий первого и второго рода:
d-T-hT\s = F(x, у,г). (16")
Постоянная h называется коэффициентом внешней
теплопроводности. Равенство (16") применяется в случае
процесса теплоотдачи (охлаждения), т. е. переноса тепла от
тела к окружающей среде. Согласно эмпирическому закону
Ньютона количество тепла, отдаваемого элементом
поверхности dS с температурой 7\ за время dt в окружающую
среду с температурой Т0, прямо пропорционально разности
Т1—Т0 и величинам dS и dt:
dQ = a(Tl—T0)dSdt.
Множитель пропорциональности а называется
коэффициентом теплоотдачи.
94
Таким образом, тепловой поток q, вытекающий из тела
наружу, равен:
q = a(X1-T0). (17)
С другой стороны, такой же тепловой поток должен
подводиться изнутри путем теплопроводности. Поэтому
согласно (9)
*=-*§■ <17'>
Приравнивая правые части (17) и (17'), получаем:
dT а (т Т
Обозначив отношение a/k через h и учитывая, что T1 = T\S,
приведем последнее равенство к виду:
§-hT\s = hT,.
Температура среды Т0 и коэффициент h в разных точках
поверхности раздела сред, вообще говоря, различны. Если
известна их зависимость от координат, то произведение
/гТ0 представляет собой определенную функцию
координат F (х, у, г), и мы приходим к граничным условиям
третьего рода (16").
§ 3. Основное уравнение электростатики
Основным физическим законом электростатического
поля является теорема Гаусса.
Поток напряженности Е через произвольную
замкнутую поверхность равен (в абсолютной системе единиц)
умноженной на 4я алгебраической сумме зарядов,
находящихся внутри этой поверхности:
^ £„ ds = 4п 2 е,-. (18)
S i
В общем случае электрические заряды распределены
по объему с некоторой плотностью р = р (х, у, г). Поэтому
вместо суммы в правой части (18) появляется интеграл:
§ EndS=4n\9dV. (19)
S V
В обеих частях этого равенства интегрирование
производится по разным переменным. Поэтому, применив к (19)
95
теорему Остроградского — Гаусса:
(f EndS='\divE-dV,
s v
получаем:
J(div£—4np)dV. (20)
v
Так как объем V в (20) является произвольным, то равно
нулю само подынтегральное выражение и мы переходим
к дифференциальной форме теоремы Гаусса:
div£ = 4jtp, (21)
представляющей собой в теории электричества третье
уравнение Максвелла. Из электродинамики известно, что
электростатическое поле потенциально:
£=_gradcp, (22)
где ф—электрический потенциал. Учитывая это, можно
уравнение (22) записать в таком виде:
divgrad ф = Аф= —4яр.
Это — основное дифференциальное уравнение
электростатики— уравнение Пуассона. В системе единиц СИ это
уравнение записывается проще:
Аф = — р.
G его помощью можно установить вид скалярного поля
потенциала ф, если известно распределение зарядов в
пространстве р (х, у, г).
Если же в некоторой области зарядов нет (р = 0), то
потенциал ф (х, у, г) удовлетворяет уравнению Лапласа:
Дф = 0.
§ 4. Уравнение переменного электромагнитного поля
в потенциалах
Как известно из теории электричества
(электродинамики), заряды и токи создают в пространстве электриче-
ское и магнитное поля Е и Я, между которыми
существует сложная функциональная связь. Важнейшей задачей
электродинамики является определение вида этих функций
Е(х, у, г, t) и Н(х, у, z, t) по заданному распределению
неподвижных и движущихся зарядов.
96
Как впервые показал Максвелл, основные опытные
законы, описывающие свойства электромагнитного поля,
носят дифференциальный характер, т. е. позволяют
непосредственно определить вид только производных от
векторных полей Е и Н. Но так как каждое векторное
поле имеет две пространственные производные
(скалярную—дивергенцию и векторную — ротор), то для
полного описания электромагнитного поля должны быть
заданы четыре дифференциальных уравнения, которые
называют уравнениями Максвелла.
В вакууме они имеют следующий вид (в абсолютной
системе единиц):
а) div£ = 4np, в) div # = 0,
б) rot £=_-_, г) rotH = ~!+T-w.
Здесь р — плотность зарядов, /—■ плотность токов,
с—скорость света.
Разберем вкратце физический смысл каждого уравне-
ния. Уравнение (a) div£ = 4rtp означает, что источниками
электрического поля являются заряды, причем мощность
источника равна 4лр.
Уравнение (в) div# = 0 означает, что магнитное поле
не имеет источников, т. е. является вихревым векторным
полем. Уравнение (б) rot Е= -=гг представляет собой
закон электромагнитной индукции в дифференциальной
~* 4я ~* 1 дЕ
форме. Наконец, уравнение (г) rot Н = —/-) ^- обоб-
щает закон Био—Савара, отличаясь от него членом —-^- ,
характеризующим так называемый ток смещения.
Последние два уравнения показывают, что причинами
возникновения и изменения электромагнитного поля
являются не только наличие электрических зарядов, но и
движение этих зарядов, а также изменение со временем
самого поля. Благодаря этому возможно существование
магнитного поля, хотя в природе нет магнитных зарядов,
а также существование свободного электромагнитного
поля в пространстве, лишенном как зарядов, так и токов.
97
Интегрируя уравнения Максвелла, можно в принципе
определить электрическое и магнитное поля Е (г, t) и
H{r,t). Но как это можно сделать практически? Ведь
это сложная система взаимосвязанных векторных
дифференциальных уравнений в частных производных.
Оказывается, что задача значительно упрощается
введением двух вспомогательных величин—скалярного
электрического потенциала ср и векторного магнитного потен-
циала А, определяемых равенствами:
Н = rot A, (23)
£= — gradф—Т1Г. (24)
Накладывая еще дополнительное условие Лоренца
div/+1-^ = 0 (25)
и подставляя (23), (24) и (25) в уравнения Максвелла,
получаем два аналогичных дифференциальных уравнения
для каждого из потенциалов:
Дф—-р|тг = —4яр, (26)
bt-ig — Zt <27,
Рассмотрим уравнение (26), которое еще можно записать
так:
□ Ф = — 4яр, (III)
где □—оператор Даламбера. Это уравнение называют
уравнением Даламбера. Заметим, что в частном случае
стационарного (неизменного во времени) поля
даламбериан превращается в обычный лапласиан А и
уравнение Даламбера переходит в известное нам уже
уравнение Пуассона: Аф = — 4лр.
В другом частном случае, когда в переменном
электрическом поле отсутствуют заряды (р = 0), уравнение
Даламбера сводится к трехмерному волновому уравне-
. 1 д2ш
нию Аф=—-^р-, описывающему волны,
распространяющиеся со скоростью с.
98
Наконец, если поле со временем не меняется и в нем
отсутствуют заряды, уравнение Даламбера вырождается
в уравнение Лапласа Дф = 0.
•§ 5. Уравнение Шредингера
Изучение физических свойств молекул, атомов и
составляющих их частиц привело в начале XX века
исследователей к убеждению, что в микромире существуют
свои законы, качественно отличные от законов макромира.
Постепенно сущность этих законов была раскрыта и к
концу двадцатых годов в атомной физике сложилась стройная
логическая система—квантовая механика.
Основное утверждение квантовой механики заключается
в том, что поведение любой микрочастицы (скажем,
электрона) описывается некоторой (вообще говоря,
комплексной) функцией координат и времени \!р (х, у, z, t), причем,
квадрат модуля этой функции |i[)|2 характеризует
плотность вероятности, т. е. вероятность нахождения частицы
в единице объема пространства.
В стационарных случаях, т. е. когда функция i|),
которую обычно называют волновой функцией, не зависит
от времени, ее можно определить, решая так называемое
уравнение Шредингера:
A^ + ^(E-U)^ = 0, (IV)
где т — масса частицы, Ть—постоянная Планка, V —
потенциальная энергия, которая должна быть задана условиями
задачи, Е — полная энергия частицы, играющая роль
параметра.
Поясним подробнее последнее утверждение. Поскольку
квадрат волновой функции |i[)|2 имеет смысл плотности
вероятности, то г|>функция должна еще удовлетворять
естественным физическим условиям: она должна быть
непрерывной, однозначной и конечной; интеграл же,по всему
бесконечному пространству от |i[)|2 по самому смыслу
этой величины есть вероятность достоверного события,
т.е. \|i[)|2d£'=l (условие нормировки).
При этом оказывается, что во многих случаях не при
любых значениях полной энергии Е решение уравнения
Шреди-нгера может удовлетворять указанным физическим
условиям. Решая это уравнение и накладывая на ty стан-
99
дартные условия, мы определяем все значения энергии Е,
которыми может обладать микрочастица при заданных
условиях.
Уравнение Шредингера является основным
дифференциальным уравнением квантовой механики и,
следовательно, одним из самых распространенных типов
уравнений в частных производных математической физики.
Мы познакомились с рядом дифференциальных
уравнений математической физики. Прежде чем перейти к
рассмотрению и»х решений, сведем в единую таблицу основные
типы этих уравнений:
1) -^- = v2au—волновое уравнение,
дТ
2) --^г = а-Ь.Т — уравнение теплопроводности,
3) Аф = 0—уравнение Лапласа,
4) Дф = —р—уравнение Пуассона,
5) Пф = — Р — уравнение Даламбера,
6) Д'ф + (Я — l/)ij) = 0 — уравнение Шредингера.
§ 6. Понятие об общем интеграле уравнения
в частных производных
Каждое уравнение в частных производных, как и
обыкновенное дифференциальное уравнение, в
подавляющем большинстве случаев имеет бесчисленное множество
частных решений. Таким образом, любое
дифференциальное уравнение (как обыкновенное, так и в частных
производных) определяет, вообще говоря, некоторый класс
удовлетворяющих этому уравнению функций, совокупность
которых образует так называемый общий интеграл (общее
решение).
Однако между общими решениями обыкновенных
дифференциальных уравнений и общими решениями
уравнений в частных производных имеется существенное
различие, из-за чего методы нахождения этих решений в
конкретных частных задачах различны.
Рассмотрим обыкновенное дифференциальное
уравнение п-го порядка:
f(x,y,y',y' «/<">) = 0.
Его общий интеграл, как известно, представляет собой
некоторое семейатво функций, зависящее от п произволь-
100
ных постоянных (параметров):
y = F(x,c1,c1, ...,сп).
Любое частное решение получается из него, если
параметрам си са, . .., сп придать определенные значения.
Например, в случае уравнения у" + У = О общий интеграл
имеет вид:
i/ = c1cos t-\-c2 sin t.
Если в начальный момент времени t = 0 искомая
функция у {х) должна удовлетворять условиям y/t=0 = 1, y'/t=o =
= 1, то мы легко найдем соответствующие значения
параметров ct и с2, подставив в общее решение эти
начальные значения для у и у':
у (0) = ct cos 0 + с2 sin 0 = 1,
у'л = — сг sin 0 + с2 cos 0=1,
откуда ^=1,^ = 1. Следовательно, соответствующее
частное решение запишется так:
у— cost-\- sin t.
У дифференциального уравнения в частных
производных общий интеграл содержит, как мы сейчас увидим,
произвольные функции, количество которых
равно порядку уравнения.
Пусть дано уравнение:
Найдем его общий интеграл, т. е. функцию и (х, у),
удовлетворяющую (28). Для этого сначала запишем это
уравнение в виде:
I (£)-»■
Поскольку производная по х от величины, стоящей в
скобках, равна нулю, то последняя является некоторой
произвольной функцией от у:
Поэтому
и (х, у) = $ / (у) dy.
Но интегрируя произвольную функцию f{y), получим
новую, также произвольную функцию, скажем F (у), плюс
101
произвольная функция Ф (х) переменной х (последняя
играет роль постоянной интегрирования у обыкновенных
дифференциальных уравнений).
Таким образом, общий интеграл уравнения второго
порядка (28)
и (х, y) = 0>(x) + F (у)
содержит две произвольные функции.
Еще один пример. Найдем общее решение уравнения
второго порядка:
^^|И = 0. (29)
Подставим его в форме:
Тогда сразу ясно, что -=- = / (х), где / (х) — какая угодно
функция. Интегрируя последнее равенство, находим:
"(*. У)= \f(x)dy + (f(x),
или окончательно:
"(*. y)=yf(x) + 4>(x),
где ф (х)—тоже произвольная функция от х.
Следовательно, и в этом случае общий интеграл
содержит две произвольные функции.
Легко убедиться, что такое положение имеет место и
для более сложных уравнений в частных производных.
Ниже будет показано, например, что с помощью замены
переменных общее уравнение второго порядка
«£+»&+<&-<> (30)
сеодится к одному из простейших уравнений — (23) или
(24). Поэтому его общий интеграл также содержит две
произвольные функции, положим Ф (х) и F (у).
Чтобы теперь из общего интеграла уравнения в
частных производных найти определенное частное решение,
нужно найти конкретный вид функции Ф(х) и F(y).
Однако — и в этом состоит причина существенного
различия методов решения уравнений обыкновенных и в
частных производных —из-за чрезвычайной общности
общего интеграла уравнения в частных производных, как
102
правило, очень трудно из него выделять нужное
конкретное решение.
Поэтому в математической физике изучают главным
"образом методы непосредственного нахождения частных
решений, удовлетворяющих определенным начальным и
граничным условиям.
Следует тем не менее иметь в виду, что общий
интеграл несет важную информацию о процессе, описываемом
дифференциальным уравнением в частных производных, и
эта информация может во многих случаях оказаться весьма
полезной и для получения ответа на данную физическую
задачу.
В заключение настоящего параграфа покажем, как
можно найти общее решение уравнения (30). Полагая, что
коэффициент сфО, введем новые независимые переменные:
Ъ = х + %уу, y]=x + Kiy, (31)
где К1 и Я,2 пока произвольные, но различные (иначе |
и т) не будут взаимно независимы) числа.
Так как
ди ди dl , ди дц ди ди
дх — dl дх ' дг\ дх — dl, ' дц
и
ди ди д\ ди дц « ди . . ди
ду — dl ~ду~"■"~дц ду ~~ 1 ~Щ~ ' 2 lh)
то имеет место соответствие
L 1,1 1 % l,i 1
дх ~^ dl + дц ' ду ~^ 1 dl + 2 дц '
Поэтому
(Ри___д_ (ди_\ _ (_д_ _5_\ / ди_ ди_\ _ dht_,9 д*и д3ц
дх* — дх \ дх J [ dl ~т~ &г) ) { dl ~г дт] ) dl2 ^~1 д1дч\~т~Ыр*
дги _ / д д \ (л ди_ . ди\_* дЧ
дТ5~у~ Vdl + дц Д1 di +Л2 лг; -^ -щ* +
д2и Л д . 3 \ Л ди , ди \ . , <52и ,
+ 2^2^ + '^^-.
Умножим эти вторые производные соответственно на а,
Qb и с и затем их сложим. Тогда левая часть уравне-
103
ния (30) примет вид:
л дги ОЕ) д2и „ д2и ,„„,
А!р+£В?т + С^' (32)
где
A=a + 2bK1 + cKf,
В-в + &(Я,1 + Я.,) + о11Я,1. (32')
Рассмотрим теперь вспомогательное квадратное уравнение
с№ + 2Ш + а**0. (300
Его корнями являются
ЛЬ* с
В зависимости от значения дискриминанта D = b* — ас
возможны три случая:
1) если D > 0, то корни kt и Х2 действительны и
различны; уравнение принадлежит к
гиперболическому типу;
2) если D < 0, то корни A,x и Ха комплексны и
различны; уравнение (30) является
эллиптическим;
3) если D = 0, то корни Я,х и Х2 действительны и
равны между собой; уравнение называется
параболическим.
Допустим сначала, что D=^0. Тогда выберем в
качестве параметров Kt и I, в (31) следующие значения:
\
—b + D . _—b — D
kl r > '"2
К
Тогда коэффициенты А и С в (32) обращаются в нуль, в
то время как ВфО. Поэтому уравнение (30) в
переменных g и ц принимает простейшую форму (28):
Shi =Q
Общее решение этого уравнения нам известно:
u = U>(l) + F(n).
Возвращаясь к старым переменным хну, получаем
окончательно:
u=<D(3i + Xiy) + F(x + K1y). (33)
В том случае, когда уравнение (30) является параболи-
104
ческим, т. е.
D = 62 —йс = 0,
примем Я, = , аХ2 — произвольным. Тогда согласно (32')
Л = 0, СфО, а коэффициент В равен нулю при любом
К2. Таким образом, уравнение (30) сводится к более
простому (29):
Его общий интеграл, как показано было выше, имеет вид:
и = л/(£) + ф(1).
Возвращаясь к первоначальным переменным х и у,
получаем общий интеграл:
и = (х + %2у) f(x + Кху) + ф (х + Кф), (34)
который также содержит две произвольные функции / и ф.
В следующем параграфе приводится пример, в котором
удается получить частное решение из общего.
§ 7. Колебания бесконечной струны
Пусть совершающая колебания упругая струна
является столь длинной, что ее можно считать бесконечной.
Требуется найти смещение любой точки в произвольный
момент времени, начальная форма струны и скорости ее
точек заданы.
На языке математической физики эта задача
формулируется следующим образом* найти функцию и = и (х, г),
удовлетворяющую волновому уравнению:
dt* ~v дх* (дЬ>
и начальным условиям:
n Cvl
dt t-,o
Поскольку струна является бесконечной, то граничные
условия не нужны. Такая задача более проста и является
частным случаем так называемой задачи Коши.
Начнем с нахождения общего интеграла уравнения
(35). Запишем это уравнение в следующем виде:
д2и 1 д*и „ „
*_. = Ф(*). Jr. =Ф(*). (36)
105
Следуя методике решения уравнения (30), расскютреинш
в предыдущем параграфе, «ыгаинем коэффициенты
уравнения (35):
й=1> 6 = 0, с= — l/v2.
Диеврдаиишнт 0=Ьг—«с = —>0, так что усмешке
принадлежит к гиперболическому типу. Подставляя
значения этих коэффициентов в -квадратное уравнение (30'),
получаем:
-4^+1=0,
откуда X = zkv. Вводя теперь новые переменные:
| = х-{-Xtt = х-{-vt; r\ = x-\-XJ =x—vt,
приведем уравнение (35) * простейшему виду:
Таким образом, искомая функция и (х, t) согласно (33)
предыдущего параграфа равна сумме двух проиавольных
функций:
U=<X>(x + vt) + F(x—vt). (33')
В указанном виде решение волнового уравнения было
впервые получено Даламбером. Выясним его физический
смысл.
Примем для простоты, -что Ф = 0 и смещение
колеблющихся точек определяется соотношением:
Ui = F(x—vt). (33")
Возьмем произвольную точку х. В момент времени / = 0
смещение этой точки равно F (х). Легко видеть, что точно
такое же смещение будет в более поздний момент t > 0
у точки с координатой x + vt. А это значит, что
отклонение и перемещается вдоль струны вправо со скоростью v.
Перемещение в пространстве некоторого переменного
(чаще всего периодического) процесса с постоянной
скоростью представляет собой распространение прямой волны.
Аналогично решение £/2 = Ф (х-f у0 описывает
обратную волну, распространяющуюся с той же скоростью
вдоль струны влево. Следовательно, решение (33')
представляет собой сумму (сунес позицию) прямой и
обратной волн.
ГО6
l/l
^x
Попытаемся теперь
выбрать произвольные
функции'Ф и F так, чтобы
выполнялись начальные
условия (36). Подставляя в
(33') значение ^ = 0, мыв
соответствии с (36) найдем,
что
<$(xy+F(x) = v(x). (37)
Если, же. подставить
значение /==0 в производную
от (33'), то получим:
и[Ф'(х) — Г (*)] = *(*)■
(38)
Равенства (37) и (38)
образуют систему уравнений-- с
двумя неизвестными1 функ- ис*
циями Ф (х) и F (х). Чтобы
определить их, продифференцируем (37у и сопоставим с (38):
Q>'(x)-hF'(xl=-tf(x),.
Ф<(х)—Г(х)^^(х).
(37')
Отсюда легко находим, что
Ф' (х) =4 (V +| *) . F' (х)=1 [¥ —f*J • (Щ
Интегрируя эти равенства, установим^ явявгй вид фувя*
ций Ф'(х) и F'(x). Таким» образом/, рендаше Даламбера
задачи Коши для бесконечной струны принимает следую»
щую форму:
x+vt
и(х, t) = -j{[v(x + vt)+<f(x—vtffl+± j- *(*>**■ (40)
х- vt
Выясним физический смысл этого решения на двух
частных случаях.
1. Пусть начальные скорости точек струны равны нулю
(ф = 0), а начальное смещение имеют только точки на
участке (— /, /), как показано на рисунке 32, а:
Ф (х) = 0, если> | х\ > /,.
\Щ
Решение (40) принимает вид:
и(х, t)=-j[<p(x-vt) + cp(x + vt)l (41)
т. е. представляет собой сумму двух волн,
распространяющихся со скоростью v вправо и влево, амплитуды которых
равны половине амплитуды начального смещения -гф(х).
Поэтому, чтобы построить форму струны в некоторый
момент времени t > 0, нужно график половинного смещения
сдвинуть вправо и влево на симметричные отрезки vt
и графически сложить эти кривые (рис. 32, б).
После момента t—— распространяющиеся в
противоположные стороны «половинные» волны уже не
накладываются друг на друга и расходятся в разные стороны
(рис. 32, в, г).
Последим теперь за поведением точки струны, не
получившей начального смещения (координата которой х > I
или х <—/). Ясно, что до тех пор, пока t < -=-
аргумент функции ф (х—vt) будет больше /, так что смещение
равно нулю (и = 0) и Точка находится в покое. Это будет
х /
продолжаться до момента tl= , когда передний фронт
о , Х-\- I
волны достигнет точки х. Затем, в момент t2 = , когда
задний фронт достигнет точки х, эта точка вновь
возвращается в состояние покоя и будет далее оставаться в покое
все время. Между моментами tx и t2 волна проходит через
точку х-, заставляя ее отклоняться.
2. Пусть начальное смещение ф = 0, а функция гр-(дс)
отлична от нуля в интервале (—I, I). Этот случай
реализуется в результате удара по струне молоточка ширины 2/
(рис. 33, а).
В этом случае решение (41) имеет следующий вид:
x+vt
u(x,t).= -^ § *(г)йг. (42)
x-vt
Обозначим -х— \ ф (г) dz «= X (х). Тогда
U(x,t)**b(x + vt)—k(x—vt). (43)
108
Таким образом, и в этом
случае по струне идут две
волны: прямая и обратная.
В момент t = 0 нижний и
верхний пределы интегрирования
в (42) совпадают. Поэтому
ы = 0 (рис. 33, в). С
ростом t интервал
интегрирования, равный 2vt,
увеличивается, а вместе с ним
увеличивается и величина интеграла
x+vt
С -ф (z) dz (рис. 33, в). Когда
x-vt
t достигает значения l/v,
точка х = 0 испытывает
наибольшее отклонение, равное
(рис. 33, г)
i
L^(z)dz=h.
2v
В дальнейшем с ростом t
величина этого отклонения больше
не меняется. Все другие
точки струны достигают этого
максимального смещения в
более поздние моменты
времени:
Рис. 33
после чего они как бы «застывают» (рис. 33, д, е).
Глава II.
НАХОЖДЕНИЕ ЧАСТНЫХ РЕШЕНИИ УРАВНЕНИЙ
В ЧАСТНЫХ ПРОИЗВОДНЫХ ПУТЕМ РАЗДЕЛЕНИЯ ПЕРЕМЕННЫХ
В этой главе мы рассмотрим ряд примеров,
иллюстрирующих сущность одного из простейших способов решения
уравнений в частных производных—метода Фурье.
109
§ 1. Охлаждение стержня конечной длины
Пусть концы тонкого теплопроводного стержня
длиной / погружены в тающий лед и температура стержня
в начальный момент времени (£ = 0) зависит от его
координат по некоторому закону Т — \ {х). Найдем
температуру в любой точке стержня в произвольный момент
времени.
Сформулируем проблему аналитически.
Так как в стержне нет тепловыделения и тепло
распространяется только вдоль стержня, т. е. по оси X, то
уравнение теплопроводности принимает вид:
ср дТ __ д2Т ...
k dt ~ дх2 • "'
Начальное условие запишется так:
П=о = ф(*>- (2)
Граничных условий должно быть два, ибо уравнение
содержит вторую производную по переменной х; они,
очевидно, сводятся к равенствам:
Л*=о = 0, Г|Л=г = 0. (3)
Итак, нужно найти функцию Т = Т (х, t),
удовлетворяющую уравнению (1) и условиям (2) и (3).
Прежде чем решать эту задачу, упростим уравнение (1),
введя замену переменной t:
— t = x. (4)
Тогда, как легко видеть, уравнение теплопроводности
принимает форму:
дТ__^Т_ .
дх ~ дх2 ' ^ i
а условие (2) запишется в виде:
Г|т=0 = ср(х). (2')
Что касается краевых условий (3), то они остаются
неизменными. Будем теперь искать функцию Т (х, т),
удовлетворяющую уравнению (Г) в виде произведения двух
функций, каждая из которых зависит от одной переменной:
Т(х, x) = X(x)Y(x). (5)
Тогда
%■ =.А (х) У (т) и§ = X" (х) У (х).
НО
Подставжи эти выражения в (Г):
X(x)Y'(x) = X"(x)Y(x).
Разделив это равенство на XY, получШК
Y' X"
К(т)- Х(х) •
(6)
В левой части имеем функцию от времени т, а в правой —
функцию от координаты х. Такое равенство возможно
тогда и только тогда, когда обе эти функции равны одной
и той же постояшой, которую обозначим через—%г. Таким
образом, уравнение (6) распадается на два обыкновенных
дифференциальных уравнения:
Х" + к*Х(х) = 0, (7)
Г + Х2К(т) = 0. (8)
Интегрирование этих линейных- уравнений не
представляет труда. Общее решение уравнения- (7), ка« известно,
имеет вид:
Х(х) = А cos Хх + В sin %х, (9)
где А и В— произвольные постоянные.
Что касается уравнения первого порядка (8), то оно
решается элементарно. Запишем его в виде:
и разделим переменные:
-у-= — л2 ах.
Беря интегралы от правой и левой частей, находим:
1пК = —Я2т + 1пС,
где- С — постоянная интегрирования. Произведя далее
потенцирование, получим выражение для функции Y (х):
Y(x) = Ce-*-\ (10)
Ясно, что произведение X (х) Y (т) будет удовлетворять
уравнению (1'), но необходимо еще выполнить условия
(2') и (3). Так как на концах стержня Т |х=0 = Т |*=г = 0,
то в нуль должна обращаться в этих точках и
функция Х(х):
*(0)=0, Х(1)=0. (3')
111
Чтобы удовлетворить этим равенствам, нужно
соответствующим образом выбрать постоянные А, В и X.
Начнем с первого равенства (3'). Подставляя в (9)
значение х = 0, имеем:
X(0) = 4cosO + BsinO = 0, (11)
отсюда заключаем, что следует выбрать Л=0.
Таким образом, функция X (х) принимает вид:
X=BsinXx. (9')
Потребуем далее, чтобы она удовлетворяла и второму
условию (3'):
X(l) = BsinM=0.
Здесь имеются две возможности: либо В = 0, либо sin Х1=0.
Но решение В=0 использовать нельзя, так как в этом
случае получается так называемое тривиальное решение
Х=0 и Т — 0, не имеющее физического смысла. Остается
принять такое значение параметра X, чтобы sinX/=»0.
Отсюда XI —пп (где п= 1, 2, 3 ...; значение п = 0
исключаем, так как оно также привело бы к тривиальному
решению). Следовательно, постоянная X может принимать
ряд дискретных значений:
Л» = «-у- - " (12)
Заменяя в (9') X его значениями, приходим к множеству
функций:
XH(x) = BHsm^-, (13)
где Вп — произвольные постоянные, каждая из которых
удовлетворяет граничным условиям (3'). Аналогично,
подставляя (12) в (10), получим множество функций К(т):
К„(т)=С„е~^, (И)
где С„ — произвольные постоянные. Произведения
функций Хп (х) и Yn (т)
Тп(х, т) = Л1пзш-^е"2^г (15)
Ггде числа М„ = ВпС„) есть функция двух переменных.
Ясно, что любая функция Тп (х, т) удовлетворяет как
уравнению (Г), так и краевым условиям (3).
112
Чтобы решить задачу, нам остается выбрать
коэффициенты Мп таким образом, чтобы удовлетворить еще
начальному условию (2'). Анализ этого вопроса, однако,
показывает, что поскольку в начальный момент времени
(т = 0) функция Тп обращается в
Тп{х, 0)=M„sin^,
то никаким выбором коэффициента Мп нельзя будет, вообще
говоря, удовлетворить начальному условию:
7\,|т=о = Ф(*).
Имеется, однако, другая возможность. Так как любая
линейная комбинация частных решений
дифференциального уравнения также удовлетворяет ему, то согласно
методу Фурье следует из решений (15) составить ряд,
сумма которого запишется так:
Т(х, T)=£r„ = £M„sin^e~^\ (16)
Если этот ряд сходится и его можно дифференцировать,
то он тоже является решением уравнения (Г),
удовлетворяющим краевым условиям (3).
Выберем теперь значения коэффициентов Мп таким
образом, чтобы ряд (16) при т = 0 удовлетворял
начальным условиям (2'), т. е. чтобы имело место равенство:
00
£MBsln^=q>(*). (17)
п= 1
Из теории рядов Фурье известно, что любая
непрерывная 1 функция ф (х) (а с такими функциями мы только
и будем встречатьсй в математической физике), заданная
в интервале (0, /), может быть разложена в ряд Фурье:
00
<p(*)~I>«»in2r. О»)
где ф„—так называемые коэффициенты Фурье, опреде-
1 Согласно теореме Дирихле функцию ф (х)~ можно разложить
в ряд Фурье и в том случае, если она имеет конечное число точек
разрычч.
113
ляемые по формуле:
Ф„ = -|-£ф-(*)8щ^Ж*. (19)
о
Сопоставляя равенства (17) и (18), мы должны заключить,
что если в качестве постоянных Мп брать коэффициенты
Фурье ф„, то условие (17) выполняется и ряд
Т(х, Т) = ^ф„5т^е"^т (20)
п=\
удовлетворяет не только уравнению (Г) и граничным
условиям (3'), но и начальным условиям (2'). Следова-
тельно, функциональный ряд (20) представляет собой
решение нашей задачи.
В заключение сделаем два замечания.
1. Для того чтобы ряд (20), строго говоря, являлся
определенным частным решением дифференциального
уравнения (1), он должен сходиться и притом так, чтобы его
можно было почленно дифференцировать дважды,
функция ф (х) должка удовлетворять условиям Дирихле и пр.
Однако в конкретных физических задачах все эти условия
обычно выполняются.
2. Хотя решение (20) содержит сумму бесконечно
большого числа слагаемых, при решении реальных
физических задач в большинстве случаев м&жно ограничиться
несколькими первыми членами.
§ 2. Колебания струны конечной длины
Решим методом Фурье задачу о смещениях точек
закрепленной с обеих концов струны^совершающей колеба^
ния с заданными начальными условиями. Иными словами,
найдем функцию U (x, t), удовлетворяющую волновому
уравнению:
а также краевым и начальным условиям:
^U=o = 0, U\x=l = 0,' (22)
tf|t=o = «P(*), Tjjr , =Ф(*). (23)
Как и в предыдущем параграфе, ищем решение в виде
произведения двух функций:
U(x, t) = X(x)T(t). (24)
114
Взяв вторые частные производные от U по х и t и д©д-
ртавив их в уравнение (21), получим равенство:
XT' = v*X"T.
Разделив его на произведение v2XT, мы отделим
переменные :
Как уже говорилось в § 1, равенство (25) возможно только
в том случае, если обе части его порознь равны одной
и той же постоянной. Обозначив последнюю через —X2,
приходим к двум обыкновенным дифференциальным
уравнениям второго порядка:
Х" + РХ(х) = 0, (26)
Г + иЫТ(4) = 0. (27)
Общие решения их известны:
X^Acoslx + B-sinlx, (28)
T = CcosvKt + DsmvKt, (29)
где А, В, С, D и %—произвольные постоянные. Их нужно
выбрать такими, чтобы удовлетворить условиям (22)
и (23). Начнем с граничных условий. Ясно, что искомое
решение будет им удовлетворять, если функция X (х)
обратится в нуль при х = 0 и х = 1. Наложив сначала
требование, чтобы X (0) = 0, мы согласно равенству (28)
получим:
X (0) = A cos 0 -f В sin 0 = 0,
откуда найдем, что А — 0. Поэтому выражение (28)
упростится:
X (х) = В sin U. (28')
Теперь потребуем, чтобы Х(/) = 0, т. е.
Bs'mU = 0.
Отбрасывая тривиальное решение В = 0, приходим к
трансцендентному уравнению для определения X:
sinW = 0.
Отсюда
hl — nn,
или
К^. (30)
Л6
Подставляя (30) в (28'), получим множество функций от xi
Хп = Вп$тп-^, (31)
обращающихся на концах интервала (0, /) в нуль и
удовлетворяющих уравнению (26).
Аналогично, подставляя в решение (29) значение % из
(30), получаем семейство функций от t, удовлетворяющих
уравнению (27):
T.-C.coe^ + D.slnMKf. (32)
Умножив (31) и (32), мы получим согласно (24)
совокупность функций:
Un(x, t)^Mncos^t+ Nnsm^t)sin^ (33)
(где Мп = ВпВп и Nn — BnDn), каждая из которых
удовлетворяет уравнению (21) и краевым условиям (22).
Такими же свойствами, очевидно, будет обладать любая
линейная комбинация из частных решений Uп. Чтобы
удовлетворить еще начальным условиям (33), составим
бесконечный ряд функций U„, сумма которого
запишется так:
00
ип=Z (M«cos—' + N"sin —f)s,n T •
(34)
Если этот ряд сходится и его можно почленно дважды
дифференцировать как по х, так и по / (эти условия
обычно выполняются), то сумма (34) будет удовлетворять
уравнению (21) и условиям (22). Как ясно уже из
предыдущего примера, идея метода Фурье заключается в том,
чтобы путем соответствующего выбора коэффициентов Мп
и N п членов этого ряда удовлетворить и начальным
условиям (33). Это значит, что нужно потребовать, чтобы
при подстановке в (33) значения £ = 0 выполнялось
равенство:
U
Аналогично после подстановки ^ = 0 в выражение,
полученное почленным дифференцированием по времени
суммы (34), должно иметь место равенство:
п=1
116
Ясно, что для выполнения условий (35) и (36) постоянные
Мп и Nn—r- должны быть соответственно равны
коэффициентам Фурье фп и я|)п. Иными словами, нужно
принять
Afn==<pn==-^<p(x)sin^dx (35')
о
и
Nn = J-^n = ^~[^(X)sm~dx. (36')
о
Подставляя указанные значения коэффициентов Мп и N„
в ряд (34), получим функцию в виде следующей суммы
ряда:
со
wit ±\ V1 I nnv ± I ' I • ЛЛУ j\ • ЯЛ^ ,л->
U(x, t)=2^l<encos-rt+ — qnsm-rt\sm~r. (37)
л=1 ч
В предположении, что имеет место сходимость и диффе-
ренцируемость ряда, эта функция и является искомым
решением. Рассмотрим его физический смысл.
Каждый член ряда можно представить в виде:
и л ■ f rmv , , о \ . пп
^„ = ^„sin(-r/+P„Jsin-T
В таком виде он описывает так называемую стоячую волну
или собственное .колебание: все точки струны совершают
гармонические колебания с собственной циклической
„ rmv „ Л . ппх „
частотой ю„ = -}-, амплитудой Ansm—r- и одинаковой
начальной фазой Р„; они одновременно (синфазно)
достигают максимальных отклонений или положения равновесия
(рис. 34).
Наименьшая собственная частота юг = — =-у-1/—
называется частотой основного тона; тоны кратных частот
называются гармониками или обертонами. Частота a>t
тем выше, чем короче и легче струна и чем больше ее
натяжение Т. На рисунке 34 изображены картины
колебаний основного тона (я = 1) и первых двух обертонов
(« = 2 и га = 3). Таким образом, ряд (37) является суммой
или суперпозицией стоячих волн с кратными
частотами.
117
",
Лучностб
Личность Пучность
n=Z
*--.
Узел
L *
Личность Пучность Личность
/7*3
''Узел
—-/'
Рис. 34
Как известно, звуки подразделяют на музыкальные,
или ноты, и немузыкальные, или шумы; ноты
порождаются периодическими, а шумы — непериодическими
колебаниями. В излучаемой музыкальным инструментом ноте
всегда присутствует несколько тонов—основной тон и
обертоны. Обычно амплитуды гармоник быстро убывают
с ростом их номера. Поэтому решающий вклад в ноту
вносит основной тон. Обертоны придают звуку тот или
иной тембр. Следовательно, физически полученное
решение, которое мы запишем теперь в виде:
И =£ 4nsin(««i/+P,,)sin2r>
(37')
означает, что струна излучает музыкальную ноту, частота
которой равна ~; определяемая начальными условиями
совокупность амплитуд А1г Аг, ... характеризует спектр
(тембр} этой ноты.
§ 3. Решение задач» Дирихле для круга
Мы уже отмечали, что различные физические процессы с
математической точки зрения могут быть совершенно подобными. Поэтому
в математической физике стремятся разработать единые методы
решения задач, объединяющие множество аналогичных проблем.
118
С таким положением мы уже стаякивааксь на примере аадачи
Коши для волнового уравнения. Другой тмгешйй задачей Такого рода
является задача Дирихле: найти -фумнцие U (х, у, г) (непрерывную
вместе со своими производными второго порядка в заданной
области), удовлетворяющую уравнению Лмммса AU =0« «збрацающуюся
на пвверяюсти S в заданную функцию координат.
Рассмотрим для простоты и даределюшости следующий частный
случай задачи Дирихле: найти распределение температуры Т (х, у)
для точек круглой пластинки, если на ограничивающей ее
окружности G поддерживается неизменная температура, «данным «бразти
аамюпщая от кеердянат окружности. Иными словами, необходимо
найти регулярную функцию Т (х, у), удовлетворяющую в точках
круга уравнению ДГ = 0 и краевому условию T\0 = f(x, у).
Ясно, что задачу проще всего решать в полярной (плоской
цилиндрической) системе координат (р, ф). Согласно гл. III, ч. I,
уравнение Лапласа в полярной системе координат имеет вид
(см. гл. III, ч. I):
д*Т 1 дТ 1 &Т .
Соответственно краевое условие принимает вид:
7,|р=а = ^(Ф). (39)
Согласно методу Фурье будем искать решение (38) в виде:
Г(р, ф) = Я(р)Ф<Ф). (40)
дТ д*Т дЧ
Определяя отсюда -^-, -^-g- , -r—j и подставляя их в (38), получим:
Я»+-1я')ф(ф)+-^Ф"(ф)=0. (40')
Умножим последнее равенство на р2//?Ф:
Поскольку по обе стороны знака равенства стоят функции от
различных независимых переменных, то такое равенство возможно только
тогда, когда обе части равны одной и той же постоянной, которую
обозначим через — Я2. Тогда мы приходим ж двум Обыкновенным
дифференциальным уравнениям:
р2Я"+рЯ'-Я2Я=0, (41)
Ф" + А,2Ф=0. (42)
Общий интеграл линейного уравнения (42) нам хорошо знаком:
Ф (ф) = A cos А,ф -\-£ sin А,ф. (43)
Приступим к решению нелинейного уравнения (41). Для этого прежде
всего используем так называемое условие ц-иклтности, характерное
для криволинейных координат. Оно заключается в том, что и
граничная функция f{y), и искомое решение U (p, up) должны быть
периодическими по переменной ф, т. е.
Дф + 2п) = ^(р)
я
£/(р, ф + 2л) = £/(р, <р).
119
Отсюда, очевидно, следует, что и функция Ф (<р) должна
удовлетворять условию цикличности:
Ф(ф + 2п) = Ф(ф). (44)
Но так как Ф (ф) есть линейная комбинация функции sin Яф и cos Яф,
то для выполнения условия (44) должны выполняться равенства:
sin (Яф + Я-2п)=«ш Яф,
cos (Яф + Я-2п) = cos Яф.
Параметр Я должен, следовательно, быть целым числом п (где
га = 0, 1, 2, ...). С учетом этого обстоятельства получаем согласно
(43) множество функций Ф (ф):
фп(ф) = Л„ cosn(f-\-Bn sin гаф. (43')
Подставляя теперь в (41) вместо Я2 его значение гаг, получаем!
ра/?" + р/?'-яа/? = 0. (4Г)
Это—дифференциальное уравнение типа Эйлера, характерным
свойством которого является равенство у всех его членов произведения
степени независимой переменной на порядок производной.
Уравнение Эйлера решается сравнительно просто. Его частное
решение ищут в виде:
R = PS,
где s —пока произвольная постоянная. Найдя производные/?'=sp'J~1
и R"—s(s—1)р*-2, подставляем их в (41'). После сокращения на
общий множитель р*, приходим к равенству:
s(s —l) + s—лг = 0
или
s2 = n2.
Отсюда
s= ± п.
Таким образом, для каждого значения коэффициента п в (41')
имеется свое сбщее решение:
/?„(р) = С„р»+£>„р-«.
Но так как нас интересуют только регулярные функции, то следует
положить D„ = 0 (в противном случае в точке р = 0 величина Rn
обратится в бесконечность).
Следовательно, удовлетворяющее физическим условиям решение
уравнения (41') имеет вид:
/?„(р) = С„р«. (45)
Перемножая теперь Rn (p) и Ф„ (ф), мы согласно (40) получим
дискретную совокупность функций:
Тп (Р, ф) = (Мп cos лф + N„ sin лф) р™ (46)
фде Мп = АпСа> ^n = Brfin)' удовлетворяющих исходному
уравнению (38), а также •естественным физическим условиям периодичности
(однозначности) и регулярности. Чтобы еще удовлетворить
граничному условию (39), составим бесконечную сумму:
Т (р, ф) = 2 (Мп cos "Ф + Nn Sin ЛФ) Р" (47)
/1=0
120
и выберем коэффициенты Мп и Nn таким образом, чтобы при р = а
этот ряд сходилдя к функции f (ф):
00
2 (Mncos nq>-fW„sin яф)а"=/(ф). (48)
п=о
Из теории рядов Фурье известно, что шщктически любую функцию
/(ф) можно разложить в ряд по синусаиЯ йосинусам:
00
/(ч>) = 2 <#'cos n<p+/"} 8in ««)• (4Q)
л = 0
где ffi и $>— коэффициенты Фурье при соответствующих косинусах
и синусах ряда, причем
2Л
/я' = — \ /(ф)С08Яф<*ф,
О
2Я
^ = ^-^ / (ф) Sill Пф Лр.
о
Нулевые коэффициенты определяются следующими формулами:
2Я
#>=,<), ^=ij /<Ф)*Р.
о
Сопоставляя равенства (48) и (49), заключаем, чго для выполнения
краевого условия (48) нужно положить:
М„а» = /!?, Nnan = №.
Таким образом, решение задачи Дирихле для круга может быть
представлено в следующем виде:
О п=\
(Г Т )
X < сое Лф \ f (ф) cos лф йф+sin яф \ / (ф) sin яф dtp } . (50)
I « о J
§ 4. Стационарное распределение температуры
в прямоугольном брусе
Рассматриваемая задача формулируется так: одна из граней
длинного прямоугольного бруса (рис. 35) поддерживается при
заданной температуре, на остальных гранях Т = 0; иайти установившуюся
температуру в произвольной точке внутри бруса.
Из симметрии бруса ясно, что температура от Z не зависит и
что можно ограничиться рассмотрением сечения в плоскости XOY.
Задача состоит в определении функции Т = Т (х, у), удовлетворяющей
121
уравнению стационарной
теплопроводности :
(fif Я2-Г
и двум парам краевых
условий:
, = 0,
(52)
= 0.(53)
Рис. 35
7Vo = 0. T\y
Как обычно, ищем решение
в виде:
Т{х, y) = X(x)Y(y). (54)
Дифференцируя (54) дважды
по х и у и подставляя в (51),
получаем:
л:'т + лу=о.
Умножая последнее равенство на l/(XY), разделяем переменные:
Х"/Х = — Y"/Y.
Приравнивая обе части постоянной X2, приходим к обыкновенным
линейным дифференциальным уравнениям:
X" — №Х = 0, (55)
К" + Я2Г = 0. (56)
Решение уравнения (56) мы уже неоднократно записывали:
Y (у) =С eos Xy + D sin Ху. (56')
Что касается уравнения (55), то его решение, как известно,
отличается только тем, что вместо тригоночметрических оно содержит
гиперболические функции:
X(x) = AchXy + BshXy. (55')
Выберем теперь постоянные А, В, С, D и X так, чтобы
удовлетворить граничным условиям (62) и (53). Удобнее начать с (53) как
более простых. Итак,
Г(0)=С = 0.
Следовательно,
-Г (#)=■£> sin Аг/. (56)
Наложив второе граничное условие по у:
r(6) = £>*in46 = 0,
приходим к выводу, что
где п — 1, 2, 3
Отяода
*6=71Я,
*»=*«£.
122
Подставляя эти диекрегаые звачения параметра" к в (55*), получаем
множестве функций X (х) иУ (у):
v . , плх . „ , плх
X„ = ^l„ch-^—f-BnSh-y-,
K„ = Z)„sinf*
Перемножив теперь Х„,(х) на Yn(y), находим^ совокупность функций
Тп.(х, у), удовлетворяющих уравнению (51) и краевым условиям' (53):
™ , ч f *л .ппх . .. ,плх\ . ппу /с„
Тп(х, y)=tMnch-^—f-JV„sh—j sin-^. (57)
Теперь осталось удовлетворить условиям (52). Но первому из них,
а именно Т \х=0 = 0, мы сразу же удовлетворим, положив Мп = 0.
Таким образом, совокупность функций:
Tn = Nnsh — sm-j2 (57')
удовлетворяет не только уравнению (51), но и трем (нулевым)
краевым условиям. Чтобы удовлетворить последнему граничному условию
T\x-a = f(У)> составим бесконечную сумму:
T(x,y)=j^Nnsbn-fs\n?f (58)
и=1
и подберем коэффициенты Nп таким образом, чтобы ряд п ри х —> а
сходился к функции / (у):
п
_. ... пла
Отсюда видно, что постоянные множители N„sn,—г— должны являться
коэффициентами fn разложения в ряд Фурье функции / (у) по синусам:
Отсюда
., , пла ,
Nn = -b—, (59)
. пла v '
Sh—
где
ь
/«=у \ f (У) sin ~ dy.
о
Подставляя значения коэффициентов Nn в ряд (58), получаем
окончательно:
£h плх
T(*.y) = Zfn-±-asinn-f. (60)
«= 1 sh —r-
о
123
Полагая, как это обычно бывает, что этот ряд сходится достаточно
хорошо, можно утверждать, что его сумма удовлетворяет все»*
условиям задачи и является ее решением.
§ 5. Охлаждение тонкой пластины
Пусть в начальный момент у пластины, толщина которой
значительно меньше длины и ширины (рис. 36), температура была
распределена по закону T\t-o = F(x). Охлаждение пластины происходит
по закону Ньютона, т. е. при х = ± а
— к
дТ_
дх ''
аТ.
Определим температуру произвольной точки в любой повледующий
момент времени.
Сформулируем задачу аналитически: необходимо найти функцию
Т (х, у), удовлетворяющую одномерному уравнению теплопроводности:
дТ__к_д*Т
~b~t ср дх2
и условиям: начальному
и граничному
T\t=o = F(x)
дТ
Zx-+hT
i*=±e
=0.
(61)
(62)
(63)
Приступаем к решению задачи.
Прежде всего, как и в § 1, введем новую независимую перемен-
k
ную т=— t. Тогда
уравнение (61) упростится:
дТ_
д2Т
''дх2'
(61')
Рис. 36
Ищем его интеграл в виде
произведения:
Т(х, x) = X(x)Y(x). (64)
Подставляя (64) в (61),
получаем:
X~~Y '
Приравнивая обе части одной
и той же постоянное —X2,
приходим к двум
обыкновенным уравнениям:
Х" + к2Х = 0,
Y'+k2Y = 0.
124
Решения их нам хорошо известны:
X (х) = A cos кх+В sin кх, (65)
K(T) = ce"VT. (66)
Поскольку в рассматриваемом случае граничные условия не
являются нулевыми, то возникает новая ситуация. Так как условия
слева и справа от плоскости х — 0 совершенно одинаковы, то в
начальный момент времени температура должна была быть
распределенной симметрично:
F(x) = F(-x).
Поэтому и в последующем распределение температуры должно
оставаться симметричным. Таким образом, функция X (х) должна быть
четной, т. е.
Х(-х) = Х(х).
Отсюда вытекает далее, что коэффициент В в (65) равен нулю
и вид функции X (х) упрощается:
X (х) = A cos кх. (65')
Поскольку в краевое условие (63) входит только производная по х
и Т (х, т) = Х (х) Y (т), то функция X (х) должна удовлетворять
условию:
Х'(а) + ЛХ(а) = 0. (63)
Используя (65'), получаем:
— А к sin ка 4- НА cos ка — О,
откуда
и
tg ka=j. (67)
Равенство (67) является трансцендентным уравнением для
определения к. Будем решать это уравнение графическим способом, для чего
сначала умножим числитель и знаменатель правой части на число а:
ha
tg*a = 0. (67')
Обозначим временно ka — z и построим в системе координат (г, и)
графики кривых ul = tgz и «2 = — (рис. 37). Ясно, что гипербола
«2 пересечет семейство тангенсоид бесчисленное множество раз. Это
значит, что уравнение (67') имеет бесконечное множество корней,
причем с ростом г — кп точки пересечения zh приближаются ккпа = пл
(где и = 1, 2, ...), так как tg гп—уО. Отметим, что кп суть корни
уравнения (67'). Отсюда получается множество функций X (х),
удовлетворяющих граничному условию (63'):
Xn(x) = Ancosknx. (65")
Подставляя (65") и (66) в (64), получаем множество функций:
-Я2 т
Тп = Мпе п cos kn х,
удовлетворяющих уравнению (61) и граничному уолоцию (68). Чтобы
получить решение, удовлетворяющее еще и на^ЗЛЫГбму условию,
125
Рис. 37
составляем уже известным нам приемом бесконечную сумму:
™ -Jl3 Т
Т(х, %) = ^Тп=^М.пе п cosX„x. (68)
п = \ п
Выясним теперь, каковы должны быть коэффициенты Мп, чтобы при
т—»-0 ряд, получающийся из функции Тп, сходился к заданной
функции F (х), т. е. чтобы
со
2 M„.co.sl4fx=F(x). (69)
Во всех предыдущих примерах мы сталкивались с разложением
функции в ряд по синусам и косинусам кратных аргументов,
т. е. с рядами Фурье. В левой части же равенства (69) стоит
бесконечная сумма косинусов, аргументы которых отличаются
нецелочисленными множителями %п.
Легко, однако, показать, что функции cos %n x являются взаимно
ортогональными, т. е.
а
cos A„xcos l,nx-dx — Q.
—а
С другой стороны, они не нормированы, т. е.
а
[ cos2Хпйхф 1.
«-а
В тее^ци (рядов »Фурье доказывается, «то (Произвольную функцию
f,(x) можно рвадешвль в дад ло.семенаву ортогональны х,*енарми-
Д26
роваиных фуякчи* XtW> Х2 (xfa...:
/<*)=2Глл,<*).
п
Но в отличие от обнчннк рядов Фурье обобпдато-ъге коэффиггнелтш
Фурье /„ определяются по формуле:
а "1-1 а
^ Xldx J f{x}.X„{x\dx.
-a J -a
Таким образом, для удовлетворения условия (69) необходимо
положить произвольные числа Мп равными обсбщенным коэффициентам
Фурье:
а
\ F (х) cos X„x-dx
Mn = Fn = =2-- .
fn =
\ cos2 Xnx-dx
Подставляя теперь значения Мп в (68), получаем окончательное
выражение для искомой функции Т (х, t):
2, -—№
Т (х, 0=2 F"e °Р cos Х"х- (7°)
л = 1
§ 6. Озслаясдепие бесконечного» стержня
Пусть температура тонкого теплопроводного стержня бесконечной
длины в начальный момент была распределена по закону:
T\t=o = f(*). (71)
Определим температуру в каждой точке стержня в любой
последующий момент времени t > 0.
Ясно, что это частный случай задачи Коши, которая сводится
к определению функции Т (х, т), удовлетворяющей уравнению
<Эт dx* W
k \
где т = — М и начальному условию (71).
С физической точки зрения эта задача аналогична,
рассмотренной в § 1 этой главы с тем отличием, что здесь нет граничных
условий. Ясно поэтому, что, разделяя переменные по методу Фурье,
можно представить решение уравнения (72) в виде:
Т(х, x) = (Acoslx + BsinXx)e"'KH. (73)
В случае стержня конечной длины / мы определяли из граничных
условий дискретное множество возможных значений параметра Я;
m
j-де каждому значку п соответствуют некоторые коэффициенты А„
и Вп. Чем длиннее стержень, тем гуще множество значений Хп
(расстояние между Хп и Хп+1 равно -г и стремится к нулю, когда /—►<»).
Поэтому для бесконечного отержня X может иметь любое значение
от 0 до оо.
Таким образом, каждому значению X соответствует частное
решение:
Тк (х, т) = [А (X) cos Хх + В {X) sin Xx] e~kH. (73)
Общее решение получается из частных решений (73'), не
суммированием, а интегрированием по параметру X:
СО 00
Т(х,т)=[ TKdX=[[A(X)coskx + B(X)sit\Xx]e-VxdX. (74)
о о
Полагая, что интеграл (74) сходящийся и дифференцируемый по х
и т (это обычно имеет место), можно быть уверенным в том, что
функция Т (х, т) удовлетворяет уравнению (72). Но решение еще
должно удовлетворять начальному условию:
со
Т | т=0= С [А (X) cos Xx-\-B(X) sin Xx] dX = f (x). (75)
о
Отсюда видно, что задача свелась к разложению произвольной
функции f(х) в интеграл Фурье, являющийся обобщением
понятия ряда Фурье.
В теории интеграла Фурье доказывается, что любая
непрерывная функция f(x), удовлетворяющая условию
ос
5 \f(x)\dx< оо,
— оо
может быть представлена в виде интеграла от гармонических
функций cos Xx и sin Xx, частота которых X пробегает непрерывную
совокупность значений:
00
f(*)=\ If с М cos Xx + 'fs(X)sin Xx] dX, (76)
о
где
00 СО
fe(k)z=— С f(x)cosXxdx, fs(X)=— \ f (x) sin Xx dx. (77)
— 00 —00
Подставляя значения Фурье-преобразований fc(k) и fs (Я)
в интеграл (76), получаем:
00 Г +00 00 "I
/(*) = — С cos Ал С /(g)cosA£dg+sinte С /(|)sinX6dg Л,
О L —оо —со J
128
или
f(x) = — \dX \ f(£)(cos*xcos*£ + sin**sin*g)d|.
О -00
Учитывая, что выражение в круглых скобках есть косинус разности,
приходим к иному выражению для интеграла Фурье:
ОО 00
/(*) =
iM'e-
) cos Я (g —: jc) d|.
(78)
Таким образом, если в качестве коэффициентов А (Я) и В (Я) в (74)
выбрать соответственно
то интеграл
A(k) = fe(k). B(X)=fs(k),
CD
Т (х, т) =-i С [Д, (Я,) cos Я*+^ (Я,) sin U] (Г^Я (79)
является решением рассматриваемой задачи.
Другая, эквивалентная форма этого решения получается из (78):
(80)
Последний интеграл можно еще преобразовать, меняя порядок
интегрирования:
оэ оо
Т {х, т) = 1 j Ш d£ j г"»* cos Я (Б -.х) Л. (80')
-со О
Обозначив |—x = q, можно внутренний интеграл свести к
известному в математике определенному интегралу:
К
(т, q) = —[ е~т%* cos Xqdk = j=
"J 2 V^jit
21
"4т
(81)
Т
Заменяя обратно q через % — х и подставляя (81) в (80'), получаем
окончательно:
Т(х, т) =
со (i;-*)2
j f(E)e~~"~dE.(82)
2 /j
Чтобы понять физический смысл
полученного решения, допустим,
что в начальный момент времени
(т = 0) температура бесконечного
стержня была равна нулю
всюду, кроме окрестности точки х = 0,
где Т = Т„ (рис. 38). Можно
себе представить, что в момент
I
т
♦ъ
х
Рис. 38
129
4t d\
т=0 элементу длины 2ft стержня сообщили некоторое количество
тепла Q0 = 2hcpT0, которое вызвало повышение температуры на этом
участке до значения Т0.
Следовательно, формула (82) принимает вид:
ft (6-х)' h
Т(х,х) = —^= f 7>~ " <% = %- Г
2 /ят J 4ft /ят ср J
-ft -ft
Будем теперь уменьшать ft, устремляя его к нулю, считая
количество тепла <20 неизменным, т. е. введем понятие мгновенного
точечного источника тепла напряжения Q0, помещенного
в момент времени т = 0 в точке х = 0. При этом распределение
температур в стержне будет определяться формулой:
(1-х)'
Т (х, %)--
Qo
'2ср V
ят ft_^o2ft J
«ft.
или
Т{х,х) = Qor_e
2ер у ят
х»
4Т
(83)
В частности, если Q0 = cp, то температура любой точки стержня
х
в произвольный момент времени t = — (а — коэффициент
температуропроводности) может быть найдена по формуле:
х*
1 „ ш
T(x,t)--
2 Vnat
(84)
Графически решение для различных моментов времени представлено
на рисунке 39. Заметим, что величина
ср jj T(x, t)dx
есть общее количество тепла, полученное стержнем к моменту
времени t:
Рис. 39
(?(0 =
■ф!
Т(х, t)dx =
Ф
2 /j
it J '
х'
"4<" «to.
Но последний (справа) интеграл
есть интеграл Пуассона:
130
Поэтому получаем, что
Q (t) — ср = Q0 = const,
что согласуется с законом сохранения энергии.
Глава III.
ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ МАТЕМАТИЧЕСКОЙ
ФИЗИКИ В ЦИЛИНДРИЧЕСКОЙ СИСТЕМЕ КООРДИНАТ
§ 1. Решение уравнения Лапласа в цилиндрических
координатах. Уравнение Бесселя
Как показано было в ч. I, уравнение Лапласа в
цилиндрических координатах имеет следующий вид:
Будем искать решение этого уравнения методом Фурье,
имея в виду, что искомая функция U (p, <p, z) зависит от
трех переменных.
Положим, что
(7(р, Ф, z) = V(p, г)Ф(ф) (2)
и подставим это произведение в (1). Тогда
о2
Если полученное равенство умножить на т^=- и член,
зависящий от ср, перенести вправо, то придем к
равенству:
_£_д_( dV_\ , p^<W_ Ф"
V dp \y dp J~ V Зг2 Ф(ф)"
Но равенство двух функций от различных аргументов
возможно тогда и только тогда, когда обе они равны
одной и той же постоянной. Обозначая эту постоянную
через v2, получаем два уравнения:
JLAfp^M,^— v2_0 (3)
V dp \р dp J^ V дг*У ~U' W
Ф" + \2Ф (ф) = 0. (4)
Поскольку (3) является уравнением в частных
производных, то применим к нему метод Фурье с целью
разделения переменных. Итак, пусть
V[p,z) = R(p)Z(z), (5)
J31
Деля (3) на р2 и подставляя в него (5), приходим опять
к равенству:
Делим далее на произведение RZ и переносим вправо
член, зависящий от г:
\ d v2 7"
(рЯ')-
рЯ dp ^ ч 7 р2 Z(2) -
Мы получили равенство двух функций от различных
аргументов. Приравнивая обе части этого равенства
постоянной %2, получаем два обыкновенных дифференциальных
уравнения:
-p4(p*')+[p-fl*=°- (в)
Zr—k*Z = 0. (7)
Ясно, что совокупность уравнений (4), (6) и (7)
эквивалентна исходному уравнению Лапласа (1) и позволяет
в принципе определить функции Ф (ср), R (p), Z(z), а
следовательно, и искомую функцию U, которая согласно (2)
и (5) равна:
£/(р, Ф, z) = /?(p)<D(q>)Z(z). (8)
Поскольку дифференциальные уравнения (4) и (7)
являются хорошо известными линейными и однородными
уравнениями второго порядка, то их общие решения
можно сразу же написать:
Ф (ф) = A cos vy + B sin vcp, (9)
Z(z) = CchXz+DshXz. (10)
Таким образом, задача сводится к решению
дифференциального уравнения (6) с переменными коэффициентами.
Его, очевидно, можно представить так:
£+*£+(*■-£)*=»■ <6'»
Если ввести новую независимую переменную х = А,р, то
(6') несколько упрощается и принимает форму так
называемого уравнения Бесселя:
Интегралы этого уравнения Rv (x) называются
цилиндрическими функциями или функциями Бесселя.
Перейдем теперь к рассмотрению методов определения
решения уравнения (11),
132
§2. Решение уравнения Бесселя. Функции Бесселя
Запишем уравнение Бесселя в виде:
■4Г + 4-/ + (1—5)^ = ° (12)
и будем искать его решение в форме ряда:
у = х*21а*х*=2а*х*+*. (13)
ft = 0 k = Q
Первая и вторая производные этого ряда запишутся так:
У'= S a*(* + s)x*+—», (13')
ft = 0
y"=5jak(k + s)(k + s-l)xk+°-*. (13»)
k = 0
( v2 \ 1
Умножим (13) на ( 1 j\ и (13') — на— и полученные
выражения вместе с (13") подставим в (12):
2 akxk+s + -5} akxk+s~* Uk+s) (k+s—l) + (k + s)—v2] = 0.
Произведя сокращение на xs~2 и упрощения в
квадратных скобках, преобразуем это тождественное равенство
следующим образом:
Sfl*x*'+'^ —2 apt* [(* + «)'—v»].
fc = 0 k = Q
Ряд слева начинается с хг, а ряд справа—с х в
нулевой степени. Отсюда следует, что коэффициенты перед х9
и х1 равны нулю:
a0(s2-v2) = 0, (14)
aJO + s)1 —v*] = 0. (14')
Что касается коэффициентов при более высоких
степенях х, то они должны удовлетворять рекуррентному
равенству:
a*-. = -a*[(* + s)*-v*]f (15)
где k = 2, 3, ... .
Из (14) вытекает, что s = ±v и ах = 0. Положим
сначала, что s=+v, тогда согласно (15)
fl* = —*(4+2v)' (15'>
где k = 2, 3 Поскольку ах = 0, то и все
последующие нечетные коэффициенты а3, аъ, а7, ... также
133
Рис. 40
равны нулю. Что касается четных коэффициентов, то их
легко выразить через а по формуле (15'):
а2 =
а0
2(2 + 2v)
'(1+v) '
0(f
4(4+2v) 24-2(l+v)(2 + v)'
а„ь = -
(-D*Oo
• (16)
22*/г! (l+v)(2 + v) ... (fe + v)
Подставляя (16) в (13), получаем частное решение
уравнения Бесселя (12):
(— l)**2*+v
л(*)=м*)=£
^0 22*.fe!(l+v)(2 + v) ... (fe + v) '
(17)
С помощью признака сходимости Даламбера можно
показать, что ряд (17) сходится при любых значениях х.
Характеризуемая им функция Iv(x) называется бесселевой
функцией первого рода порядка v.
Бесселевы функции первого рода /v (x) хорошо
изучены, для них составлены таблицы.
При х^> 1 функцию Бесселя можно заменить ее
асимптотической формулой:
/-
V ю
/v (*) ■■
■ COS X
""Г'
■т).
(18)
из которой видно, что для больших х кривая Iv(x)
приблизительно представляет собой затухающую косинусоиду
(на рисунке 40 приведен график бесселевой функции
нулевого порядка). Ясно, что функции Iv(x) имеют
бесчисленное множество корней &' (где /в = 1, 2, ...), для которых
134
y2(x) = I_v(x) = a0Yi
Итак, функция Бесселя первого рода Iv(x) является
одним частным решением yt(x) уравнения (12). Чтобы
написать его общее решение, нужно знать второе линейно-
независимое частное решение у2(х). В теории бесселевых
функций показывается, что в том случае, когда
параметр v является не целым числом, это второе частное
решение можно получить, положив s = —v:
^ [ ' . (17')
Это тоже бесселева функция первого рода, но
отрицательного порядка, ее график подобен затухающей
косинусоиде.
В случае нецелочисленности v общий интеграл
уравнения Бесселя имеет вид:
y(x) = C1Iv(x) + C2Iv(x). (19)
Однако, если v есть целое число (v = п), то
функция /_„ (х) отличается от Iп{х) только постоянным
множителем (—1). Иными словами, 1„{х) и /_„(л:) линейно-
зависимы и из них общий интеграл нельзя составить.
В этом случае в качестве второго независимого
частного решения выбирают функцию Бесселя второго рода
Yn(x), которую еще называют функцией Неймана.
Мы не будем строго выводить выражение для Yп (х),
а ограничимся ее асимптотической формулой,
справедливой при х^>1:
Yn(x)
V пх
sin х—
(20)
Рис. 41
133
Наиболее существенное свойство функции У„ состоит
в том, что при х—»0 функции Неймана любого порядка
стремятся к бесконечности:
У„(0) = -оо. (20')
На рисунке 41 приведен график функции Неймана
нулевого порядка. Таким образом, при v = n общий интеграл
уравнения Бесселя (12) выражается следующей формулой:
y(x) = C1Ia(x) + CiYn(x). (21)
В следующем параграфе рассматривается конкретный
пример, в котором используются функции Бесселя.
§ 3. Решение задачи Дирихле для цилиндра
Пусть дан цилиндр высоты h и радиуса а (рис. 40), на боковой
поверхности и верхнем торце которого температура равна нулю, а на
нижнем торце поддерживается постоянная температура по закону
T = F(p). Найдем распределение температуры в таком цилиндре.
Чтобы сформулировать задачу аналитически, примем во внимание,
что из ее условий вытекает симметричность распределения температуры
по углу <р. Поэтому j-=0 и уравнение Лапласа упрощается:
\_д_( дТ\,6РТ_
р др\Рдр J+dz2-
=0.
(22)
Граничные условия выражаются так:
(23)
T\z=o = F(p). (24)
Согласно методу Фурье представим искомую функцию в виде
произведения:
Г (p. z) = tf(p)Z(z).
(25)
T-F(fi)
Рис. 42
Подставив это произведение в исходное
уравнение (22), имеем:
Деля это равенство на RZ и перенося
второе слагаемое вправо, получаем:
pRdp{pK,~' Z(zy
Приравнивая, как обычно, обе части
равенства постоянной —Л2, приходим к двум
130
обыкновенным дифференциальным уравнениям:
Г—A.2Z(z)=0, (26)
JTp{pR') + k~R = ° (27)
Общий интеграл уравнения (26) записывается сразу:
Z(z) = AchXz + Bsh\z. (28)
Что касается (27), то сно является уравнением Бесселя нулевого
порядка от независимой переменной (А,р):
R"+— R' + X2R = 0. (27')
Его общее решение согласно (21) имеет вид:
R(p)=CI0(XP)+DY0(Kp). (29)
Из условия конечности решения во всех точках цилиндра следует,
что D=Q. В противном случае для точек на оси г, т. е. при р = 0,
мы бы получили R—>• оо (так как |К0(0)| = оо).
Итак,
Я(р) = С/0(Ьр). (29')
Потребуем теперь, чтобы на поверхности цилиндра У?(а) = 0;
Г0(ка)=0. (30)
Отсюда находим параметр к:
to
А,а=|°, или *.„=— , (31)
где |п — корни бесселевой функции нулевого порядка. Подставляя
(31) в (29), получаем:
tfn(p)=<Vo(?°£). (3?)
Умножая (32) на (28), находим множество функций:
Тп (р, г)= [м„ ch (l°n -1) + Nn sh (t°n -i) J /0 (tf-jL) , (33)
удовлетворяющих уравнению (22) и первому из граничных
условий (23).
Чтобы удовлетворить еще второму граничному условию (Т |г=л=0),
необходимо положить
Af„ch (|S A)+ fl„sh(E; £)=<)• (34)
Отсюда
,Vn = M„cth^°A). (35)
Подставляя (35) в (33) и учтя формулу для гиперболического синуса
137
разности двух углов, мы приходим к соотношению:
/.(ES4). <36>
Нам осталось еще удовлетворить граничному условию (24). Для этого
составим из решений Тп бесконечную сумму:
r(P.2)=2>„=I>n V.^J'.(4) <37>
я=1 n=i sh 6в—' у
о
и потребуем, чтобы при z = 0 она сходилась к F (р):
Г (Р. 0) = £ Ain/„ (& -£.) =/? (р). (38)
Задача теперь свелась к разложению функции F (р) в ряд по
бесселевым функциям нулевого порядка.
В теории цилиндрических функций доказывается, что две
различные функции одного порядка обобщенно ортогональны,
т. е.
|р/.(*!£)'.(й.£)ф=о
о
при тф п. Поэтому любую функцию F (р) можно разложить в ряд
Фурье—Бесселя:
^(Р)=£ /Vo (Й £) . (39)
п=1
При этом коэффициенты Фурье—Бесселя Fn вычисляются по формуле
Таким образом, полагая Mn = Fn, получаем окончательное решение
задачи в виде суммы ряда:
со sh{^——-)
„, *(Bi) — - «"
138
Глава IV.
ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ МАТЕМАТИЧЕСКОЙ
ФИЗИКИ В СФЕРИЧЕСКОЙ СИСТЕМЕ КООРДИНАТ
§ 1. Решение уравнения Лапласа в сферических
координатах. Уравнение Лежандра
Уравнение Лапласа в координатах (г, 9, ф)
записывается так:
.,, 1 д ( 9ди\ . 1 д [ . ади\ . I д3и л
(1)
Следуя методу Фурье, ищем решение этого уравнения
в виде произведения:
U (г, 9, cp) = R(r)Y(Q, Ф). (2)
Подставляем (2) в (1), получаем:
Y d i ,na , R I 1 д ( ■ dY \ , I d*Y\ n
Умножим это равенство на r*/RY, приводим его к виду:
^W) = ±AY, (3)
где Л—так называемый оператор Лежандра, равный
sln9M )+7^!м\- (4)
(sin 0д9 \° дд] ^"sin^ <*ра
Приравнивая обе части равенства (3) постоянной X,
приходим к двум уравнениям:
dr
Ur*R')-%R=0, (5)
AY—XY = 0. (6)
Уравнение (6) в развернутом виде выглядит так:
sin e 59 V ае у ^ sin2 e a<p2
Как видно, это уравнение в частных производных.
Поэтому вновь применим метод Фурье.
Представим Y (9, ф) в виде произведения:
Y = V(Q) Ф(Ф) (7)
139
и подставим это выражение в (6'). Тогда
sin9 d0 V dQ J ~ sin2G dcp
Умножив последнее равенство на mi/ и разделив
переменные, приходим к равенству:
sin в d , . „,,,. , л . „г, Ф°
-т-ш (sin QV) +2isii^0 = -.
Приравнивая обе части постоянной — v2, получаем два
обыкновенных дифференциальных уравнения:
Ф" + г2Ф = 0, (8)
-iiT|(siner)+(X-el5e)v(e) = 0. (9)
Решение уравнения (8) нам удобнее представить в пэка-
зательной форме:
Ф (ф) = Ае1^ + Be-'V(P. (10)
Так как обычно функция Ф(ф) удовлетворяет условию
цикличности
Ф(Ф + 2я) = Ф(Ф),
то можно сделать вывод, что значение v не может быть
произвольным, а обязательно является целочисленным:
v = m= 1,2
Следовательно, функция (Ф) ф принимает форму:
Ф = Аётч> + Ве-'Ш<Р, (10')
а уравнение (9) соответственно запишется так:
d92^sin9 dQ + {* sin29y\ u' ^ >
Уравнение (9') называют обобщенным уравнением Ле-
жандра. Если ввести новую независимую переменную
x = cos0 (при этом—1 <1 х < 1) и обозначить V(Q) = y(x),
то обобщенное уравнение Лежандра принимает обычный
виДх): т2
(1-х2)г/"-2хг/Ч-%-Т^г/ = 0. (11)
*) Действительно, x = cos9, dx =—sin9d9. Поэтому
dV dydx . „ ,
d0 dxdQ "
d2V _ d ( dV\ _d fdV_\dx_ „
d92 —d9^d9 }~Tx\dQ ) d0_( Л:,!/•
d2V dV
Подставляя -j^- и -rg- в (9), приходим к (11).
140
При m = 0 это уравнение имеет более простую форму
уравнения Лежандра:
(1-х2)у"-2ху' + %у = 0. (12)
Таким образом, задача свелась к нахождению решений
уравнения Лежандра (9') и радиального уравнения (5).
Обозначая их интегралы соответственно через V (6) и R (г),
представим искомую функцию в форме следующего
произведения:
и (г, е, Ф) = я(г)К(е)Ф(«р), (13)
где Ф(ф) имеет вид (10').
Перейдем теперь к изучению методов решений
уравнений (9') и (5).
§ 2. Решение уравнения Лежандра
Будем искать интеграл уравнения Лежандра (12)
с переменными коэффициентами в виде ряда:
у{х)= 2 <****• (14)
k = о
Дифференцируя (14), получаем:
00
У'= Я kakx*-\ (14')
k = О
00
yn^^ik(k — \)ahxk-\ (14")
k = о
Умножив у" (х) на (1—х2) и у' на 2х и подставив
полученные выражения в (12), приходим к равенству:
СО со - се
(1— х2) 2 k(k—\)akx*-*—2x 2 ka„xk-l+% 2 а*х*=0.
k = 0 к=0 *=о
Перенесем все члены, содержащие х в й-й степени, вправо:
со со
2 *(*—I)a*x*-* = S [k(k—l) + 2k — Makx*,
k = о *= о
ИЛИ Ю 3D
2 k(k-\)a^~*^ 2 [С*+1)*-Х]а*х*. (16)
k = 0 *= 0 ч '
Поскольку согласно (15) должно иметь место равенство
коэффициентов при одинаковых степенях в обеих частях
равенства, то
(k + 2)(k + \)ah+2 = [k (k+ 1)-Цак.
141
Отсюда получаем рекуррентную формулу:
_k(k + l)—k ,1Д.
позволяющую выразить все четные коэффициенты ряда
(14) через а„ и все нечетные через ах.
Таким образом, ряд (14) с коэффициентами,
определяемыми по формуле (16) и с произвольными значениями
аа и а1г является общим решением уравнения Лежавдра (12).
Обратим теперь внимание на то, что согласно
равенству (16) при а1 — 0 все нечетные коэффициенты ряда (14)
обращаются в нуль (а3 = а& = а7 = . .. =0). При этом
получим «четный» ряд:
у0 (х) = а0 + а2 + а2х* + а4х4 -f- ..., (17)
являющийся частным решением уравнения (12).
Аналогично, положив а„ = 0 (но а%ФЩ, получим «нечетный»
ряд:
у1(х) = а1х + аах* + аъх*+... , (18)
представляющий собой второе частное решение
уравнения (12). При этом коэффициенты рядов (17) и (18)
вычисляются по формуле (16).
Таким образом, общее решение исходного уравнения
можно записать так:
у(х) = Ау9(х) + ВУ1(х). (19)
Однако задачу еще нельзя считать решенной. Дело в том,
что в математической физике нас интересуют не любые
решения, а только такие, которые удовлетворяют
условиям однозначности, непрерывности и конечности. Анализ
же рядов (17) и (18) показывает, что последнему
требованию они, вообще говоря, не удовлетворяют. И только
в том частном случае, когда какой-нибудь из этих
рядов «обрывается» на некотором члене и содержит
конечное число слагаемых, т. е. представляет собой
многочлен, условие ограниченности выражаемой им функции
выполняется на всем отрезке — 1 ^ х ^ 1. Это может
иметь место, если согласно формуле (16) обратится в нуль
какой-нибудь коэффициент; тогда и все последующие
коэффициенты автоматически станут нулевыми.
Остается заметить, что при а, =^=0 коэффициент а,+2
исчезает только в том случае, если постоянная Я равна
142
произведению двух последовательных целых чисел / и
% = 1(1+1). (20)
Только при выполнении равенства (20) можно получить
конечные решения уравнения Лежандра (12). При четном /
следует выбрать частное решение у0 (х), которое в этом
случае будет представлять собой многочлен 1-й степени.
Если же I нечетно, то в многочлен 1-й степени обратится
ряд, определяющий у1(х).
Таким образом, удовлетворяющее условию (20)
уравнение Лежандра
(l-x*)y"-2xy' + l(l+\)y = 0 (12')
имеет ограниченное решение, которое представляет собой
многочлен 1-й степени. При четном I это решение имеет
вид:
у0=а0 + а2х* + ...+atxl, (18')
а при нечетном I оно имеет вид:
у1 = а1х + а3х3 + .,. +atxl. (19')
Коэффициенты ак и в том, и в другом случае
определяются через произвольно выбранные а0 или ах по
формуле:
а*+2- (k + 2)(k+l) йк- <lb'
Многочлены (18') и (19'), у которых соответствующие
коэффициенты а0 или аг выбраны таким образом, чтобы
в точке х = \ значения этих многочленов были равны 1,
принято называть полиномами Лежандра и обозначить
через Рг (х).
Резюмируя, можно сказать, что уравнение
Лежандра (12) только при \ = 1(1 + 1) имеет ограниченные на
отрезке —1^а:^1 решения, которые с точностью до
постоянного множителя являются полиномами Лежандра
Pt(x).
§ 3. Полиномы Лежандра
Познакомимся подробнее со свойствами различных
полиномов Лежандра.
Прежде всего найдем полиномы наименьших степеней
/=0, 1,2,3. При / = 0 мы имеем многочлен нулевой
степени, которым является коэффициент а0. Но чтобы
143
Р„(1)=1, нужно принять а„ = 1. Итак,
/>,(*) = 1.
При / = 1 получаем многочлен первой степени, он
имеет вид ахх. Чтобы при х = 1 этот многочлен был
равен 1, необходимо принять ах = 1. Следовательно,
Р1(х)=х.
При 1 = 2 у многочлена второй степени a0-f-aax2
коэффициент аа согласно (16') должен быть равен —За„.
Поэтому
ЛЛ*) = а0—За0х\
Чтобы при этом Р2(1) = 1, постоянную а0 нужно выбрать
равной —7г> так что
Pt(x) = ±(3*-l).
При / = 3 у многочлена третьей степени ахх-\-а3х*
коэффициент а., выражается через ах по формуле (16')
так:
_ 1-2^3.4 _ 5
йз— 3^2 ttl~ 3 а!"
Таким образом,
Р3{х) = а1(х— -|*3).
В точке х = 1
Р3(1) = -|а1.
Чтобы Р3==1, надо принять а1 = — 3/2. Следовательно,
Р'•(*)= j(5*3-3x).
Вычисление полиномов Лежандра более высоких
степеней таким методом довольно громоздко. Удобнее для этой
цели пользоваться так называемой формулой Родриго:
(Рекомендуем читателю с помощью этой формулы
вычислить Pt{x) для всех / от 0 до 5.)
Графики нескольких низших полиномов Лежандра
приведены на рисунке 43.
J44
Полиномы Лежандра
обладают важным
свойством ортогональности,
выражающимся аналитически
в том, что интеграл от
произведения двух различных
полиномов равен нулю:
1
\Р,(х)Р» (x)dx = 0,
-1
если V Ф1.
До сих пор мы говорили
о решении простого
уравнения Лежандра (12),
являющегося частным случаем
обобщенного уравнения Лежандра (11). Оказывается, что
конечными решениями (11) являются так называемые
присоединенные полиномы Лежандра Pf"> (x),
определяемые следующей формулой Родриго:
— Ит
PrW = d-*,),E=^W. (22)
Обратим внимание, что при т > / имеет место
тождество P(im) (x)s=0. Поэтому каждому значению /
соответствует / + 1 присоединенных полиномов Лежандра
РГ (х),
где т = 0, 1, 2 /.
В качестве примера найдем все присоединенные
полиномы, соответствующие 1 = 2.
Параметр т в этом случае может принимать значения
О, 1,2, т. е. возможны три полинома: Р$» (х) = Р2 (х), Р?>
и'Р£>(х). Найдем каждый из них.
Из предыдущего мы знаем, что Pf> — Р2 (х) = у (Зх2—1).
Далее, по формуле (22) находим:
=,3(1—*»).
Р0 \pjx\
P,Q>(*) = (1-*,)1/*S
d2
Р?{х) = (\-х*)-й>
(За:2 —1)
(За:2 — 1)
145
§ 4. Сферические и шаровые функции
Вернемся к задаче, сформулированной в § 1. Поскольку
уравнение (11) получилось из (9') заменой независимой
переменной cos0 = x, то ясно, что уравнение (9') имеет
конечлые решения только в том случае, когда К = 1(1+ 1).
Это уравнение принимает при этом форму:
Интеграл этого уравнения имеет вид
F(e) = P(;m>(cose). (23)
Таким образом, чтобы найти функцию U (г, 0, ф) =
= R (r)-V(0)-Ф(ф), осталось еще найти R(r), являющееся
решением «радиального» уравнения (5). Раскроем в этом
уравнении скобки и заменим К произведением /(/ +1):
r*R" + 2rR' — l(l +1)# = 0. (5')
Это—дифференциальное уравнение типа Эйлера. Поэтому
будем искать его решение в виде:
R = rs. (24)
Подставив в (5') R и его производные /?'' = sr5-1 и 7?" =
= s(s—l)rs~2, получим:
s(s— \)rs + 2srs—l(l+\)rs = 0.
Сокращая на rs и произведя сложение общих членов,
приходим к соотношению:
s(s + l) = l(l + l)t
откуда
st = l, s2 = -(Z + l).
Следовательно, общее решение уравнения (5') имеет вид:
Я = С/' + С2г-(г+1>.
Так как нас интересуют только конечные решения
для всех внутренних точек шара (в том числе и центра,
где г = 0), то необходимо положить С2 = 0. Тогда
/? = С/'. (25)
Следовательно, в соответствии с равенством (7),
конечными решениями уравнения (6) являются сферические
функции:
КГ» (9, ф) = V (О) Ф (q>) = Pf> (cos 9) е± "■». (26)
146
Ясно, что для каждого / имеется 2/ + 1 сферических
функций, соответствующих т — О, 1, ...,/.
Произведение радиальной функции R = rl на любую
сферическую функцию У/™' (Э, ф) согласно (2) является
частным ограниченным решением уравнения Лапласа:
UT (г, 9, ф) = г1У\т (0, ф) = rlPjm) (cos9)-e± lmxf. (27)
Функции Uf" {r, 0, ф) называют шаровыми. Общее
решение уравнения (1) имеет вид:
00 /
U (г, Э, ф) = 2 2 С|1В г'Р'Г (cos Э) (Ае^ + Ве-1^). (28)
/=0 т=0
В следующем параграфе рассмотрен пример решения
уравнения (1) для конкретной физической задачи.
§ 5. Стационарное распределение температуры в шаре
Пусть на поверхности шара радиуса а температура
поддерживается постоянной, равной /(0). Найдем
установившееся распределение температуры Т(г, 0, ф) внутри
шара.
Задача сводится к решению уравнения Лапласа:
ДГ = 0 (29)
при граничном условии Т \r=a = f (Q).
Приступая к его решению, прежде всего учтем, что
вследствие независимости температуры на поверхности от
долготного угла ф не может зависеть от этой координаты
и температура внутренних точек шара, т. е. Т = Т(г, 0).
Поэтому уравнение Лапласа (1) упрощается и принимает
вид:
Отсюда следует, что параметр пг равен нулю и Т =
= R (г) У (б), причем V (в) удовлетворяет простому
уравнению Лежандра (12).
Следовательно, шаровые функции (27) принимают вид:
TI(r,e) = r'P/<cos9), (31)
и общее решение (28) запишется так:
да
Г (г, в) = 2 С/Р, (cosв). <32)
147
Дело свелось, следовательно, к такому выбору коэффи*
циентов этого ряда, чтобы при г—>-а последний член
сходился к f(Q):
T\r=a=icta'Pl(cose) = f(Q). (33).
1 = 0
Ранее было отмечено, что полиномы Лежандра образуют
ортогональное семейство функций и что поэтому любую
функцию f (x) можно разложить в ряд по этому семейству:
f(*)=Sfi^i(*). (34)
1=0
где коэффициенты Фурье—Лежандра определяются по
формуле:
fl-2J^1]f(x)Pl(x)dx. (35)
-1
Сопоставляя (33) в (34), заключаем, что
Сг=А (36)
где
я
fI=^±iff(e)P,(cose).sinerfe. (35')
о
Подставляя (36) в (33), получаем окончательное решение
задачи в виде функционального ряда:
П'. 9) = Е f,(^)4(cosG). (37)
i=o ч '
Глава V.
МЕТОД ФУНКЦИЙ ГРИНА
До сих пор мы решали дифференциальные уравнения
в частных производных методом разделения переменных.
Другим распространенным в математической физике
методом решения таких уравнений является метод функций
Грина. Он состоит в том, что сначала находят некоторое
специальное решение задачи того же типа, а затем через
него в квадратурах выражают интеграл исходной задачи.
Ниже мы подробнее ознакомимся с сущностью этого
метода на конкретных примерах.
148
§ 1. Метод Грина решения
краевых задач
Пусть нужно найти
функцию ф (х, у, z),
удовлетворяющую в области V уравнению
Лапласа:
Дср=0 (1)
и удовлетворяющую на
границе этой области условию:
Ф Is = /(*', У', г'). (2) Рис. 44
Возьмем внутри области V некоторую точку Мв и
окружим ее маленькой сферой s объема v и радиуса г0 (рис. 44).
Применим теперь формулу Грина (51, ч. II) к области
V =V—v, ограниченной двумя поверхностями S и s:
J»iq>-<tAt)dK_^(*|S._q)|b)ds +
+/(♦*'-»£)*■ <3>
S
Поскольку эта формула справедлива для произвольных
функций ф и т|з, то выберем в качестве ф искомую
функцию ф(х, у, г), удовлетворяющую условиям (1) и (2),
а под г|) будем понимать так называемую функцию Грина G,
которая определяется равенством:
G(x, у, z)= — + H(x, у, г), (4)
где г — расстояние произвольной точки от Ме. Функция
Н(х, у, г) удовлетворяет в области V уравнению Лапласа:
ДЯ = 0 (5)
и принимает на поверхности S = S(x', у', z') значения:
Н(х', у', г')^Н{?') = —jr, (6)
где г' — расстояние точек поверхности S от точки М0.
Так как 1/г удовлетворяет уравнению Лапласа во всех
точках, отличных от Мо(г = 0), то согласно (4) и (5),
функция i|) = G(x, у, z) является решением уравнения
Лапласа Дя|) = 0 в области V, причем на поверхности S
в соответствии с (4) и (6):
ip\s = G(x',-y', г') = 0.; (7)
149
Поэтому соотношение (3) принимает вид:
S s
Поскольку согласно (2) cpjs = /(*', у', z')> то это
равенство можно записать так:
/(б£-*ж)*=^ <;■>-!-<«. да
s S
Вычислим теперь левую часть (8), которую для
краткости обозначим через /:
S
Подставляя сюда значение функции Грина G из (4) и
вспоминая, что радиус малой сферы s есть /■„, разобьем / на
два интеграла 1Х и /2:
'-'.+ '.-#{(7r + »)*-*s(i+*))* "°>
s
Применим теперь ко второму интегралу /3 формулу Грина:
/2 = $(ЯДср — (f-AH)dv.
V
Но согласно (1) и (5) функции ф и Я удовлетворяют
уравнению Лапласа во всей области V, в том числе и у.
Поэтому /2 = 0 и в (10) остается одно слагаемое:
'-W{i*-ȣ(i)}*- <">
S
Так как г0 есть радиус сферы s, т. е. является величиной
постоянной, то
S S
150
где
Рассмотрим подробнее первое слагаемое:
s
По теореме о среднем
s
где (-Д) — значение --Д- в некоторой точке сферы s. Поэтому
выражение (13) обращается в малую величину
4лго©.
которая при стягивании сферы s к точке М0 стремится
к нулю пропорционально г0:
Um4,,.(g)-0.
Теперь обратимся ко второму слагаемому в (12):
д ( 1
S
Поскольку
д I 1 \ д ( 1
то применение теоремы о среднем к интегралу (14) дает:
§ ф тк (77)ds = 7" 4nr°<ф> = 4я <Ч)>'
где <ср>—значение функции ф в некоторой точке сферы s.
В пределе при г„-—>-0 величина <ф> стремится к
значению функции ф в точке М0. Следовательно,
lim
д ( 1
^i ir=4n,fW- <15>
Вернемся теперь к исходному равенству (8). Поскольку
интеграл в правой части распространяется по
поверхности S, он не может зависеть от радиуса малой сферы s.
Следовательно, и левая часть не зависит от г0.
Подставляя (15) в равенство (8), получаем:
s
151
или
Ф(М0) = —±ff(7')^dS. (16)
s
Так как М0 — произвольная точка области У, то эта
формула представляет собой решение рассматриваемой задачи,
если известна функция Грина G. Иными
словами, задача свелась к определению функции Н (х, у, г),
удовлетворяющей условиям (5) и (6):
АЯ = 0 и H\S=— — .
Ясно, что, вообще говоря, последние не намного проще
исходных условий (1) и (2). Однако для некоторых типов
областей V и ограничивающих их поверхностей S
функция Грина может быть легко построена и в этих случаях
искомое решение сводится к вычислению интеграла в
правой части (16).
Ниже приводятся два примера, когда удается
определить функцию Грина для задачи Дирихле.
§ 2. Функция Грина для шара
Пусть область V является шаром радиуса а, а точка М0
лежит внутри шара на оси X, имея координаты (х0, 0, 0).
Построим точку М*0 ( — ,0,0), которую назовем сопря-
женной относительно ограничивающей шар сферы
(рис. 45). Нетрудно убедиться, что для каждой точки N,
лежащей на сфере, отношение | NM*e |/| NMe | есть величина
постоянная. Действительно, треугольники OM0N и ONM*0
к ( \ОМ0\ \ON\
подобны это следует из того, что — —
\ON\ \ом1\ '
Поэтому отношение длин и оставшихся третьих сторон
|ЛШ0| к |ЛШ£| также равно xja, т. е. не зависит от
положения N на сфере.
Теперь можно утверждать, что для произвольной
точки М внутри шара функция
G{M) = T—r-7* <17)
(где г = | ЛШ01, г*=\ММ\\) является функцией Грина.
152
Чтобы проверить
это, достаточно
показать, что Я(М)=
а 1
= ———
удовлетворяет внутри шара V
уравнению А#=0, а
на поверхности шара
H\s=-t-
Так как г* =
= | ММ'0 | для любой
точки внутри шара
есть
величина,отличная от нуля, то во всей области V
Что касается второго условия, то ясно, что
а 1
Рис. 45
Но
или
H\S = H(N) =
NM0
[ NM*0
'NMa\
Xn
a
Xq
NMo
a
NMn
Следовательно,
tfb=-T
Таким образом, функция (17) является функцией Грина
для рассматриваемой задачи.
Чтобы теперь мы могли воспользоваться общей
формулой (16), вычислим еще производную -т- на сфере:
dG_
6R
R=a
dR
R = a
где R — радиус-вектор любой точки М шара,
отсчитываемый от центра. На рисунке 45 ясно, что r2 = R2 + x'l —
— 2/?x0cosy. Поэтому
153
Полагая, что R = a, получаем:
-(-
dR\r
a — x0cosy ,щ
R=a (a2+*?-2a*0coSY)8/2 *
Если вместо х0 подставить а2/я0, мы найдем значение
производной ± (р)к=в:
д ( 1 \ аде0 — a2 cos у
(19)
дс0 U-+— -2-cosy
После упрощений, приходим к выражению:
д I \_\ _ _*о х0 — a cos у
dR\r*)R=a~ a2 (a* + x2o — 2ax<)cosy)3'2'
Объединяя (18) и (19), определяем входящую в (16)
производную:
SHs=_^(a2 + *°~2a*°COSY)_3/2- (20)
Подставим теперь это выражение в (16), получаем
решение задачи Дирихле для шара в виде квадратуры
(искомую функцию вместо ср обозначим через U):
u W=~L§ mr^f^—-^f <*')dS- (21)
4яа j (а2 4_ х0 — 2адс0 cos у) '
В общем случае, когда точка УИ0 обладает произвольными
сферическими координатами г0, 0О, ф0, это решение
удобнее представить в сферической системе координат (dS =
— a2 sin 9 dQ dtp):
2Я Я
"W-^f 1(а.+^-Со5,)«"9''>)5'П9'""">' (22)
где нетрудно показать,
cos у = cos9cos0o + sin0sin 0ocos(cp — ф0). (23)
Интеграл (22) называется интегралом Пуассона для шара.
В том случае, когда задача Дирихле является
плоской и область определения функции U представляет
собой круг радиуса а, интеграл Пуассона принимает
более простой вид:
и<м.)=и{гА)-Ц „+,._L,L,,,VW^ <24>
154
Интересно заметить, что ранее (гл. II, § 3) мы решили
аналогичную задачу методом Фурье и получили решение
для круга в виде ряда. Можно легко показать, что эти
два решения эквивалентны.
§ 3. Функция Грина для полупространства
Пусть нужно найти функцию U (х, у, г),
удовлетворяющую в полупространстве z > 0 уравнению Лапласа
AU = 0 и принимающую на плоскости XOY (z — 0)
заданное значение:
£/U = /(*.'</)•
Как и в случае конечной области V, представляем
функцию Грина для произвольной точки верхнего
полупространства (z > 0) в виде двух слагаемых:
С(М) = 1 + Я(М), (25)
где г = | ММ01 есть расстояние произвольной точки М
от некоторой фиксированной М0(х0, у0, z0). Что касается
функции Н (М), то она по-прежнему удовлетворяет двум
условиям ДЯ = 0 и H\z=a— г, здесь
r'=NM0—расстояние от М0 до любой точки N (х', у') на плоскости
2 = 0. Поскольку G(iV) = 0, то решением задачи является
функция:
U (М.) = U (х0, у0, г.) = - ^ J / (х, у) U dS. (26)
s
Ясно, что
dG _ _dG_ I
дп s~ дг |2=о"
Поэтому
+ со
U(x0,y0,z0) = ^^f(x,y)^z=odxdy. (27)
+ со
В качестве функции Н (М) = Н (х, у, z) выберем величину
Н(х,у,г) = —р, (28)
где г* = | ММ*01 есть расстояние от текущей точки М до
точки М*0(х0, у0, 20), сопряженной точке М0 (рис. 46).
155
Несложно убедиться,
что функция (28)
удовлетворяет и •
уравнению Лапласа Д# = 0
и граничному
условию
H\S = H(N) =
= Я(х,</,0Н
поскольку г ' =
= \M\N\=\MJl-\=r'.
Подставляя (28) в (26)
и записывая
полученное выражение в
развернутом виде, находим для функции Грина следующее
выражение:
G(x, у, г)--
1
I
У\х-х0)* + (у-у0)*+(г+г^ '
Дифференцируя эту функцию по г, получаем:
дв _ 2?о
dz [(*-*e)»-f-&-ye)»+zS]8'* '
Подставляя (30) в (27), приходим к окончательному
выражению:
U (х0, Ув, 20) =
+ 00
= ^1^(х'У)Их-хоГ + (У--УоГ + 41-а,^х(1у, (31)
(29)
(30)
являющемуся решением рассматриваемой задачи.
Часть третья
ЛИНЕЙНАЯ АЛГЕБРА
Глава I.
ЭЛЕМЕНТЫ ЛИНЕЙНОЙ АЛГЕБРЫ
В физике, как и других науках, часто приходится
рассматривать различные совокупности объектов,
объединенных некоторым общим признаком. С точки зрения
математики такая совокупность образует множество, а
каждый ее объект называют элементом множества. В
зависимости от числа содержащихся в них элементов
множества бывают конечные и бесконечные.
Множество считается заданным, если о любом
предмете можно сказать, принадлежит он этому множеству
или нет. Обычно множества определяются либо заданием
всех их элементов, либо путем указания
характеристического свойства, коим обладают только элементы данного
множества. Так, точки окружности образуют бесконечное
множество, элементы которого (точки) объединены тем
свойством, что все они равноудалены от центра.
Линейная алгебра рассматривает множества, в которых
возможны определенные алгебраические операции.
Если указан закон, по которому каждой паре
элементов а и Ь, взятых в определенном порядке из
множества М, однозначным образом ставится в соответствие
третий элемент с, также принадлежащий этому множеству,
то говорят, что в множестве М определена
алгебраическая операция, которую называют сложением (или
умножением):
a + b—с (или ab = c).
Обратим внимание на то, что алгебраические операции
обладают следующими свойствами:
1) операцию можно осуществить над любой парой
элементов данного множества;
2) операция определяется однозначно, т. е. для
каждой пары элементов она выполняется единственным
способом и результат оказывается также единственным;
157
3) получающийся в итоге операции над двумя
элементами множества новый элемент обязательно принадлежит
к тому же множеству.
Если результат алгебраической операции не зависит
от порядка участвующих в ней элементов, т. е. а-\-Ь =
= Ь-\-а (или ab = ba), то операция называется
коммутативной (перестановочной); в противном случае
алгебраическая операция некоммутативна. Операции еще
подразделяют на ассоциативные (сочетательные), если (а-\-Ь)-\-
-j- c — a-\-(b-\-c), и неассоциативные, если результат
операции над тремя элементами зависит от последовательности
ее выполнения между парами элементов.
Среди множеств, в которых возможны алгебраические операции,
современная алгебра изучает прежде всего следующие:
Группы—множества с одной ассоциативной операцией (не
обязательно коммутативной).
Кольца — множества с двумя алгебраическими ассоциативными
операциями (сложением и умножением), связанные дистрибутивным
(распределительным) свойством:
а (Ь + с) = аЬ + ас.
Поля—коммутативные кольца, в котором есть нулевой и
единичный элементы 0 и 1, причем для каждого ненулевого элемента а
существует обратный элемент а-1, т. е. аа_1=1.
Легко убедиться в том, что каждое из множеств
чисел—рациональных, действительных, комплексных — образует поле.
По определению алгебраическая операция есть
действие над элементами одного и того же множества. Однако
для решения многих практических задач пришлось
обобщить понятие операции, применяя ее к элементам из
разных множеств.
Так, пусть дано множество векторов, характеризующих
электрическое поле, созданное точечным зарядом q, т. е.
векторное поле Е (г). Если величину заряда изменить
в а раз (а—любое действительное число), то векторы на-
->
пряженности Е в каждой точке также изменят свою длину
в а раз.
Следовательно, возникает необходимость ввести
операцию умножения элементов векторного множества S на
элементы числового поля Р. В современной алгебре под
~>
понятием вектор а понимают абстрактную математическую
величину, характеризующуюся в n-мерном пространстве
п скалярными числами — координатами {alt a2 а„},
158
лишь бы для таких величин была указана операция
сложения.
Таким образом, современная алгебра наряду с
группами, кольцами и полями изучает также абстрактные
векторные множества, для которых определена еще
операция умножения любого его элемента на произвольное
число из некоторого поля Р.
В частности, предметом линейной алгебры являются
такие векторные множества, для которых операции
сложения и умножения на число удовлетворяют ряду
рассматриваемых ниже условий. В этом случае множество
векторов называют линейным (или аффинным) векторным
пространством.
Основная задача линейной алгебры — это изучение
линейных пространств и аффинных преобразований таких
пространств.
§ 1. Линейное векторное пространство
Множество векторов R образует линейное (аффинное)
пространство, если для всех элементов из R заданы
операции сложения и умножения на числа1, причем обе эти
операции удовлетворяют следующим условиям:
а) коммутативности —
" + Н+"1; (D
Ха =аХ )
б) ассоциативности—
(a + b) + c = a + (b + c)\
Я. (ца) = (Afi) а )
в) дистрибутивности—
K(a + b) =ka + Xb )
(к-\-ц) а = ka + iia
г) существует единственный нуль-вектор 0, такой, что
для любого вектора а имеет место равенство
а + 0=а; (IV)
-►->-»-> ->
1 Векторы с = а-{-Ь и d = Xa принадлежат векторному множеству,
-> ->
если только а и Ъ—элементы этого множества.
159
; (Ш)
д) для всякого ненулевого вектора а существует един-
->
ственный противоположный вектор —а, который в сумме
->■
с а дает нуль:
а + (-а) = 0; (V)
е) при умножении произвольного вектора а на число 1
вектор не меняется:
1-а = а. (VI)
Такое громоздкое определение вызывает обычно у начинающего
некоторое недоумение, возникают вопросы: почему рассмотренное
множество называют линейным пространством? Почему каждый
вектор этого множества обязательно должен обладать свойствами (I) —
(VI)? и т. п.
Чтобы ответить на эти вопросы и пояснить геометрическую
сущность указанного определения, познакомимся немного с методологией
современной геометрии.
Геометрия как математическая наука о пространственных
отношениях и формах тел пользуется двумя основными методами:
синтетическим (или собственно геометрическим) и
аналитическим. Первый был развит еще геометрами древности и прежде всего
Евклидом. В этом методе все выводы и рассуждения строятся на
чисто геометрической, наглядной основе, с привлечением
пространственного опыта; по существу синтетический метод состоит в
оперировании самими геометрическими образами и понятиями.
Типичными примерами применения синтетического метода в
элементарной математике являются задачи на построение и
доказательство теорем о равенстве треугольников путем наложения.
Аналитический метод берет начало с работ известного
французского математика Декарта, введшего в первой половине XVII века
в геометрию систему координат и сопоставившего каждой точке
пространства тройку чисел х, у, г. Это позволило сначала свести
простые геометрические понятия и выводы к числам, уравнениям,
вычислениям (аналитическая геометрия), а затем решать и более тонкие
геометрические задачи с помощью аппарата математического анализа
(дифференциальная геометрия). Этот метод по существу слил в одно
целое геометрию, алгебру и анализ. Примерами применения этого
метода являются тригонометрические и алгебраические способы
решения различных элементарных геометрических задач.
В современных геометрических теориях аналитический, метод
играет важнейшую роль, он применяется не только для доказательства
различных теорем, но и для определения исходных, основных
геометрических понятий.
Дальнейшим развитием этого метода в геометрии явились
векторное и тензорное исчисления, позволившие аналитически характеризо-т
вать геометрические объекты и соотношения инвариантным (не
зависящим от выбора системы координат) способом.
Действительно, основному геометрическому объекту — точк«
сопоставляется р а д и у с - в е к т о р, так что произвольной области
пространства, представляющей собой непрерывное множество точек,
160
приводится в соответствие векторное множество. Умея оперировать
с векторами, мы, очевидно, можем любую геометрическую задачу
решить методами векторной алгебры.
Векторное исчисление оказалось наиболее удобным
аналитическим аппаратом для исследования геометрии того
или иного пространства. Но для того чтобы с помощью
векторов можно было изучать геометрические свойства
данного пространства, нужно сформулировать основные
определения и операции над векторами как направленными
отрезками, соединяющими две точки, т. е. построить век-
торно-алгебраическую аксиоматику, из которой все
утверждения и факты указанной геометрии вытекали бы как
следствия.
Ясно, что каждой геометрии соответствует своя
совокупность аксиом. При пользовании синтетическим методом
это — геометрические аксиомы. Когда же исследование
пространственных соотношений производится с помощью
векторного анализа, используются эквивалентные
геометрическим алгебраические аксиомы. Так, определения
понятия вектора и правил действия над векторами будут
различными для геометрий на плоскости и сфере, ибо
геометрические аксиомы этих геометрий различны
(например, кратчайшим расстоянием на сфере является не
прямая, а дуга большого круга).
Легко видеть, что условия (I)—(VI), которым должны
удовлетворять векторы двумерного линейного
пространства, выполняются для обычной плоскости. Точно так же
удовлетворяют этим условиям векторы реального
трехмерного пространства, поскольку мы считаем его
евклидовым или плоским (лишенным кривизны). Заметим, что
великий Лобачевский впервые понял, что вопрос об ев-
клидовости нашего пространства не является столь
простым, как считалось ранее, что ответить на него может
только опыт; иными словами, решить задачу о кривизне
реального пространства должны не математики, а физики.
В дальнейшем эту замечательную мысль развил немецкий
математик Риман, который показал, что плоское,
евклидово пространство является простейшим частным случаем
пространств различной кривизны. Соответственно,
евклидова геометрия представляет собой предельный вид более
общей римановой геометрии.
Согласно общей теории относительности четырехмерное
пространство-время не является плоским (евклидовым),
161
его кривизна переменна и определяется наличием грави-
тирующих масс вблизи рассматриваемой точки.
Ясно, что линейное пространство—это обобщение
геометрического понятия плоского пространства, в частности
плоскости (когда размерность пространства равна 2).
Отсюда следует, что линейная алгебра—это
аналитический аппарат изучения абстрактной геометрии «-мерных
плоских пространств.
Но и геометрия простейшего плоского пространства
содержит огромное множество геометрических свойств,
которые желательно разбить на отдельные классы.
«Первоначально геометрия вообще не расчленялась.
Она изучала главным образом метрические—связанные
с измерением размеров фигур—свойства пространства.
Лишь попутно рассматривались обстоятельства, связанные
не с измерением, а с качественным характером взаимного
расположения фигур, причем уже давно замечали, что
часть таких свойств отличается своеобразной
устойчивостью, сохраняясь при довольно существенных искажениях
формы и изменениях положения фигур» (А. Д.
Александров).
Немецкий математик Клейн сформулировал общий
принцип классификации геометрических свойств:
рассматривая различные группы преобразований пространства,
объединяют в один класс те геометрические свойства
фигур, которые сохраняются при тех. или иных
преобразованиях. Иными словами, пространственные свойства как
бы расслаиваются по их устойчивости.
Представим себе, что на квадратной плоской
резиновой пленке нарисован круг с двумя взаимно
перпендикулярными диаметрами. Если мы равномерно растянем
пленку вдоль одной стороны квадрата, то круг
превратится в эллипс и углы между диаметрами уже не будут
прямыми (рис. 47). Таким образом, мы видим, что такая
равномерная линейная деформация существенно изменила
ряд геометрических свойств пространства. Однако
некоторые свойства при этом сохранились. Так, не нарушилась
прямолинейность диаметров, точка пересечения диаметров
делит их пополам (как в круге) и т. д.
Геометрические свойства, которые сохраняются при
равномерном растяжении или сжатии пространства в трех
взаимно перпендикулярных направлениях (такие
преобразования называются аффинными), образуют так
называемую аффинную геометрию. К аффинным свойствам отно-
162
Рис. 47
сятся прямолинейность линии, параллельность прямых,
пересечение медиан треугольника в одной точке и др.
Напротив, метрические свойства—длина отрезков,
площадь фигур, углы между прямыми и т. п.—сохраняются
только при ортогональных преобразованиях,
сводящихся к простому "повороту (или движению)
пространства как целое. Геометрические свойства, остающиеся
неизменными при ортогональных преобразованиях образуют
евклидову геометрию.
Если резиновую пленку закрепить на жестком каркасе,
то единственным возможным преобразованием
пространства будет его вращение (или движение). При этом
неизменными будут как аффинные, так и метрические
свойства, которые в совокупности составляют евклидовы
свойства пространства. Аналогично свойства,
сохраняющиеся при проективных или конформных (сохраняющих
углы) преобразованиях, образуют соответственно
проективную и конформную геометрии.
Если в обычной евклидовой геометрии мы отвлекаемся
от реальных свойств тел, кроме геометрических, то при
выделении из нее классов как бы совершается дальнейшее
абстрагирование от всех других геометрических свойств,
кроме тех, которые рассматриваются в данном классе.
Так, изучая аффинные свойства, можно мыслить себе
некоторое «воображаемое» пространство, в котором все
фигуры не обладают никакими другими геометрическими
свойствами, кроме аффинных. Ясно, что аксиоматика
геометрии такого абстрактного пространства будет более
проста (содержит меньшее число аксиом), чем аксиоматика
евклидовой геометрии. Следствия из этой аксиоматики
характеризуют аффинные свойства фигур в обычном
пространстве.
Из изложенного понятно, что аффинные свойства
являются более глубокими, чем метрические. Еще более
163
глубокими геометрическими свойствами являются
топологические, сохраняющиеся при самых различных
непрерывных (топологических) преобразованиях пространства.
Так, при любой непрерывной деформации (без разрывов)
резиновой пленки окружность может принять
произвольную форму, но будет оставаться замкнутой линией.
Изучением таких свойств занимается топология, а
абстрактное пространство, в котором фигуры обладают только
топологическими свойствами, называют топологическим
пространством.
Вернемся теперь к определению понятия линейного
пространства. Легко проверить, что условия (I—VI)
описывают не метрические свойства плоского пространства,
а только его аффинные свойства. Поэтому можно
утверждать, что линейное пространство—это абстрактное
аффинное пространство любого конечного числа измерений.
§ 2. Размерность линейного пространства
Как известно, пространство как форма существования
материи, т. е. наше реальное пространство, имеет три
измерения—длину, ширину и высоту. Тем не менее в
теоретической физике широко используют как некую
математическую абстракцию пространство большего числа
измерений. Поэтому изучение линейных пространств любого
числа измерений имеет важное значение для
математической физики. Чтобы выяснить, как определяется
размерность пространства, введем понятие линейной
независимости векторов.
-> -> ->
Векторы а1( а2, ...,ап называются линейно независи-
-> -> ->
мыми, если равенство alal + aia2+ .. . +анап=0 возможно
только при аг = а2 = ... = а„ = 0.
Иными словами, ни один из векторов а,- нельзя
представить в виде линейной комбинации (п—1) остальных
п
векторов. Если же равенство 2afta/s = 0 может быть удов-
k
-+
летворено хотя бы при одном ненулевом а,-, то векторы alt
а2, ..., ап являются линейно зависимыми. В этом случае
всегда можно один из векторов представить в виде
линейной комбинации остальных:
a,- = P>i+ • ••P,-i«,-i + P<+ia<+i+ •••+М«-
164
Теперь можно перейти к определению размерности
пространства.
Рассмотрим прямую (одномерное пространство). Ясно,
-> ->
что любые два вектора а и Ь на ней могут отличаться
только численным множителем:
-> ->
Ь = аа.
Это значит, что в одномерном пространстве имеется
только один линейно независимый вектор.
Соответственно на плоскости (двумерное пространство)
всегда можно выбрать два линейно независимых вектора
-> ->
ах и а2 (для этого достаточно, чтобы они не были колли-
->
неарными). Но любой третий вектор Ь на этой плоскости
-> ->
можно разложить по этим векторам at и а2, т. е.
представить в виде линейной комбинации:
_> _>
Ь = а1а1-{-а2а2.
В трехмерном евклидовом пространстве всегда можно
выбрать три некомпланарных линейно независимых век-
тора av а2, а3. Но любые четыре вектора обязательно
линейно зависимы:
-> -> -> ->
b = агаг + а2а2 + <%3аз-
Приведенные примеры показывают, что максимальное число
линейно независимых векторов пространства совпадает
с размерностью этого пространства.
Естественно поэтому ввести такое определение.
Линейное пространство называется /г-мерным, если
в нем существует п и только п линейно независимых
векторов.
„ -* -*
Совокупность п линейно независимых векторов е1г е2,
..., еп /г-мерного пространства называется базисом этого
пространства.
Нетрудно убедиться в том, что не только в обычном
трехмерном, но и пространстве любой размерности
справедливо следующее утверждение:
В /г-мерном пространстве можно каждый вектор я
представить, и притом единственным образом, как линейную
комбинацию векторов базисд: x = xiel + ^ie2+ ... +хпеп.
165
Числа xlt х2, ...,хп называют координатами вектора х
в данном базисе.
Наконец, очень просто проверить, что при сложении
двух векторов х и у их координаты складываются, а при
умножении вектора х на число X его координаты
умножаются на это число.
Важным понятием линейной алгебры является
изоморфизм.
Линейные пространства R и R' называются изоморф-
-> ->
ными, если между векторами х из R и векторами х' из
R' можно установить такое взаимно однозначное соот-
-*■ -> ->
ветствие х<г+х', что если вектору х соответствует век-
-*■ -> -> -» ->
тор х', а вектору у—>-#', то: а) вектору х-\-у соответ-
-> -► -►
ствует вектор х' -\-ух и б) вектору Хх соответствует век-
-*■
тор 'кх'.
Можно показать, что все пространства, имеющие одну
и ту же размерность п, изоморфны друг другу и,
наоборот, пространства различной размерности заведомо не
изоморфны друг другу.
Изоморфизм векторных множеств различной природы
позволяет переносить любой результат, вытекающий из
свойств линейных операций для данного множества, на
произвольное другое изоморфное множество. При этом
конкретная природа как самих элементов, так и операций
над ними может быть совсем различной.
Существенным свойством линейных пространств
является наличие в них подпространств.
Подпространством R' пространства R называется такая
совокупность элементов из R, которая сама образует
линейное пространство относительно определенных в R
операций сложения векторов и умножения вектора на число.
Примером подпространства в множестве векторов
обычного трехмерного пространства является произвольное
множество компланарных векторов, образующих
двумерное векторное пространство, соответствующее плоскости
в реальном пространстве. Обратим внимание, что далеко
не всякая совокупность элементов линейного
пространства образует подпространство. Очевидно, чтобы
последнее имело место, необходимо, хотя этого и не достаточно,
чтобы указанная совокупность включала нулевой
элемент.
т
Ясно, что размерность любого подпространства не
Превосходит размерности своего пространства.
Существует весьма простой общий способ выделения
из любого линейного пространства R некоторых
подпространств. Выберем в R произвольную совокупность век-
->->■->■
торов а, Ь, с, .. . и составим из них множество
всевозможных линейных комбинаций. Легко видеть, что
полученное таким образом векторное множество образует
определенное подпространство, порожденное векторами а,
-у -у
Ь, С
Подпространство n-мерного пространства, порожденное
k линейно-независимыми векторами е1( е2, ..., ек, является
->■ ->■ ->■
/г-мерным (векторы е1( е2, ..., ек образуют базис этого
подпространства).
Очевидно, что любое n-мерное пространство содержит
подпространства всех меньших измерений.
Простейшее подпространство—это нулевое, содержащее
один нулевой элемент. Следующим являются одномерные
пространства, базис каждого одномерного пространства
-у
состоит из одного вектора ех. Ясно, что указанное
одномерное подпространство представляет собой множество
векторов вида aelt где а — произвольное число. Множество
aet по аналогии с обычным пространством называют
прямой в линейном пространстве R «-измерений.
Совершенно так же двумерное подпространство с ба-
зисными векторами ех и е2, представляющие собой мно-
->■ -*
жество векторов вида a1exJr<x2e2 (где ах и
а2—произвольные числа), можно назвать плоскостью в R. Если п > 3,
то по аналогии можно построить трехмерное подпростран-
-►->■->■
ство {гиперплоскость) а1е1-\-а2е2-\-а3е3.
§ 3. Евклидово' пространство
Ранее мы уже отмечали, что рассматривавшиеся до
сих пор линейные или аффинные пространства беднее по
своим геометрическим свойствам, чем обычное евклидово
пространство. Это объясняется тем, что в них не
определены метрические понятия—длина вектора, угол
между двумя векторами, площадь фигуры и т. п.
167
Для того чтобы превратить двумерное аффинное
пространство в евклидово, нужно, очевидно, резиновую пленку
натянуть на жесткий каркас, так чтобы ее более нельзя
было подвергнуть такому растяжению или сжатию. Все
геометрические свойства фигур, расположенные на такой
«затвердевшей» пленке, будут уже относиться к евклидовой
геометрии: они будут сохраняться только при вращении
плоскости как целого (ортогональное
преобразование). На такой «затвердевшей» плоскости
метрические понятия принимают однозначный смысл.
Итак, чтобы линейное пространство превратилось в
евклидово, нужно сформулировать еще ряд
дополнительных аксиом, из которых как следствия будут вытекать
все метрические свойства пространства. Ясно, что эти
аксиомы можно выбрать различными эквивалентными
способами.
Но, оказывается, наиболее удобным для наших целей
является введение определения (аксиомы) скалярного
произведения векторов.
Линейное пространство R называется евклидовым,
-► ->■
если каждой паре векторов х, у из R поставлено в
соответствие действительное число, называемое скалярным
->■ ->■
произведением (х, у), которое обладает следующими
свойствами :
->■ -► -► -►
1) (*> У) — (У> х) — (коммутативность),
-> -» -> ->
2) (Кх, у) = Х(х, у) — (X—действительное число),
->■->■->■ -> -> ->■-»•
3) {хг-\-хг, y) = (xlt y) + (xit у) — (дистрибутивность).
4) Скалярный квадрат произвольного вектора (х, х)
является положительной величиной, только (0, 0) = 0.
В полученном таким образом евклидовом пространстве
легко определяются и другие метрические свойства.
->■
Длиной вектора х называют корень из его скалярного
квадрата
|*| = +/(*,*). (1)
Углом между векторами х и у называют число <р,
определяемое формулой:
(*> У) ih\
Ф = arccos v_^ g4- • (")
168
Ясно, что определения (1) и (2) распространяют свойства
скалярного произведения в обычном пространстве на
произвольные евклидовы пространства.
В частности, два вектора х и у называются орто-
~+ ->
гональными, если (х, у) = 0.
Легко убедиться, что для двух ортогональных век-
торов х и у имеет место равенство
\х + У\* = \х\* + \У\*'
представляющее собой теорему Пифагора.
Можно также доказать, что для произвольных двух
векторов х и у имеет место неравенство Коши — Буня-
ковского:
(х,у)*<(х,х)-(у, у). (3)
В отличие от аффинного пространства, где все базисы
(косоугольные декартовы координаты) равноправны, в
евклидовом пространстве существуют особенно удобные
базисы—о ртогональные.
-> -> ->
Если п ненулевых векторов elt ег еп попарно
ортогональны, то они образуют ортогональный базио
в «-мерном евклидовом пространстве R.
Чтобы это определение имело смысл, нужно доказать,
->' -* ->
что векторы elt е2, ..., еп линейно независимы. Нетрудно
убедиться, что так оно и есть.
Можно еще доказать, что во всяком линейном
пространстве существуют ортогональные базисы. При этом
векторы-ортогонального базиса можно еще
нормировать, т. е. выбрать их такими, чтобы каждый имел
единичную длину. Следовательно, векторы ортогонального
базиса удовлетворяют равенству:
- - /1 при i = k,
(*/. **)=\ о при 1фк. W
Благодаря наличию условия (4) очень просто выражается
скалярное произведение (х, у) двух векторов:
х = ZiXtet и у= 2лУ1е!>
i=i i
•* - -Ь
(х, У) = *i0i + хм + • • • + х„у„ = 2j xtyt. (5)
■ i
169
Если же в евклидовом пространстве базис является
аффинным, то выражение будет более сложным:
(*. 5) =ss £«*#*,
(6)
где коэффициенты gik{et, ек) можно рассматривать как
элементы так называемой фундаментальной п-рядной
симметричной матрицы
(7)
(где gik — gki)' характеризующей базис пространства.
В случае ортонормированного базиса фундаментальная
матрица принимает простейший вид:
9*11
100 ...
010 ..
001 ..
000 ..
0
0
0
1
(7')
Далее легко проверить, что в ортонормированном базисе
координаты любого вектора x = 2Jciei СУТЬ скалярные
произведения этого вектора на соответствующие базисные
векторы:
х,= <х, ег). (8)
Отсюда ясно, что координаты вектора совпадают с его
проекциями на базисные векторы (оси координат).
Заметим, что такое утверждение не имеет места в
аффинном базисе.
В ортонормированном базисе согласно (5) квадрат
вектора равен сумме квадратов его координат:
(*)' = (х, x) = xt + xi+ ... +х* = 2*?. (5')
i
Отсюда для длины вектора получаем формулу:
\x\ = Vxt + xl+... + x%. (9)
170
§ 4. Комплексное линейное пространство
До сих пор мы имели дело только с пространствами
над полем действительных чисел. В квантовой механике
особое значение имеют линейные пространства над полем
комплексных чисел—комплексные векторные пространства.
Все аффинные свойства действительного
пространства, рассмотренные в § 1, справедливы и для
комплексного пространства. Незначительные изменения
появляются только при введении метрических понятий.
Комплексное пространство U называется евклидовым
(или унитарным), если каждой паре векторов х, у из U
поставлено в соответствие комплексное число (х, у),
называемое скалярным произведением, и выполняются
следующие аксиомы:
-> -> -> ->
1) (*i У) — (У> х)* (значок* означает комплексное
сопряжение),
2) (Хх, У) = Нх,р, ^
3) (*1 + *2, У) = (х1, У) + {хг, у),
4) (х, х) есть действительное положительное число.
Легко видеть, что эта система аксиом отличается от
системы аксиом действительного евклидова пространства
только первой' аксиомой, согласно которой при
перестановке векторных сомножителей скалярное произведение
меняется на комплексно-сопряженное. Это отличие не
ведет к глубоким различиям, но некоторые особенности
появляются. Так, в то время как в действительном про-
-> -*• -> ->
странстве (х, Ху) = 'к(х, у), в комплексном евклидовом
-*■ -> -*■ -*■
пространстве (х, Ху) = %* (х, у).
Основные метрические понятия для унитарного
пространства вводятся совершенно аналогично тому, как они
вводятся для действительного евклидова пространства.
Длиной вектора называют величину
\х\=+У (х, 1с).
Так как скалярное произведение двух векторов,
вообще говоря, комплексно, то нет смысла определять
угол между векторами: рассматривают только случай,
когда векторы ортогональны.
171
Векторы х и у называют ортогональными, если
■+> -> ->->->-►
{х, у) = 0. Очевидно, что и (у, х) = (х, у)*=0.
Вся теория действительного евклидова пространства
легко переносится на унитарное пространство. Если, на-
пример, векторы хну характеризуются в п-мерном
унитарном пространстве комплексными координатами
(*i, х2 хп) и (У» Уг Уп\ то скалярное
произведение этих векторов равно
(х, y) = 2ixiy*i.
В частности, для скалярного квадрата имеем:
хг = {х, х)=2*?-
Глава II.
АФФИННЫЕ ПРЕОБРАЗОВАНИЯ
§ 1. Линейные операторы и операции над ними
Ранее мы уже встречались с понятием линейного
оператора (аффинора) в обычном евклидовом пространстве.
Сейчас приведем общее определение аффинного
преобразования, или линейного оператора, в произвольном
(действительном или комплексном) n-мерном пространстве R.
Линейным оператором А в пространстве R называют
->
правило или закон, который каждый вектор х из R пе-
->
реводит в вектор у из этого же пространства
у = Ъ(х) (1)
и подчиняется условиям:
А (хх + х2) = A (*i) + А(х2),
A (he) = 1% (х).
С геометрической точки зрения линейные преобразования
замечательны тем, что сохраняют аффинные свойства
пространства. Среди линейных преобразований особую
роль играют простейшие операторы: а) единичный, или
172
(2)
тождественный оператор /, ставящий в соответствие каж-
дому вектору этот же самый вектор, т.е. 1х = х;"б) ну-
левой оператор 0, который любому вектору х сопостав-
^ /Ч
ляет нулевой вектор—Ojc = 0; в) оператор подобия А,
сопоставляющий всякому вектору х новый вектор,
отличающийся от х одним и тем же численным МНОЖИТе-
лем—Ах = кх (где X — const).
Познакомимся теперь.с количественной
характеристикой различных линейных операторов.
Пусть е13 ег еп — некоторый базис в /г-мерном
пространстве R и А — линейный оператор в R. В резуль-
тате действия аффинора А на. базисные векторы е{ полу-
->
чатся некоторые векторы е\, которые можно
рассматривать как новый базис:
е\ = Aet.
Нетрудно убедиться, что всегда существует линейный
/\
оператор А (и притом только один), переводящий базис
-+ -> ->■-»■
ех,. .еп в базис е[.. .е'п.
Положим, что векторы е\ выражаются через векторы
старого базиса е,- с помощью соотношений:
e<=fliA+ +а1пеп,
\ (3)
еп — ®niei Т" г аппеп > j
или (в сокращенной записи):
*1=2лЩ#к- (3')
k
Легко видеть, что преобразование (3) удовлетворяет
условиям (2) и является поэтому аффинным. С точки зрения
алгебры отличительной особенностью этих
преобразований является линейность функций, связывающих старые
и новые базисные векторы. Коэффициенты aik определяют
173
я-рядную матрицу:
fli.a,
.а,
■ а,
(4)
которая называется матрицей линейного оператора А.
Таким образом, в заданном базисе elt e2, ..., еп каж-
/\
дому линейному оператору А соответствует
определенная матрица Л = ||а/Л||. И обратно — каждой матрице А
отвечает некоторый линейный оператор А, определяемый
формулами (3) или (3').
Иными словами, аффинные преобразования можно
описывать с помощью матриц и матричное исчисление
является наиболее удобным алгебраическим аппаратом для
изучения линейных операторов в векторных
пространствах конечного числа измерений.
Подчеркнем, что линейный оператор имеет инвариант-
->
ный смысл—он превращает вектор х в определенный век-
->
тор у, независимо от выбора базиса, однако вид
соответствующей матрицы при изменении базиса меняется.
Линейные операторы можно складывать и умножать.
/\ /\
Суммой двух операторов А и В называется оператор
л /\ /\
С=А-\-В, результат действия которого на произвольный
вектор х равен сумме результатов действия на этот век-
тор операторов А и В:
/\-+ /\-+ /\-+
Сх = Ах + Вх.
Легко видеть, что операция сложения ассоциативна и
коммутативна. Любой оператор А можно умножить на
числа X из поля Р.
/\
Произведением оператора А на число К называется опе-
ратор D — XA, действие которого на произвольный век-
->
тор х равно умноженному на число X результату дейст-
/\
вия на этот вектор оператора А:
Dx = XAx.
174
Таким образом, множество линейных операторов
образует линейное пространство.
Оказывается, однако, что для элементов этого
линейного пространства имеет смысл еще операция
умножения двух операторов.
л. /\
Оператор С называется произведением оператора В на
л. -*
оператор А, если для любого вектора х
Сх = В(Ах).
Произведение линейных операторов В и А также являет-
ся линейным оператором (§*= В А.
Легко проверить, что, вообще говоря, произведение
операторов некоммутативно: ВА Ф АВ. Можно сказать,
что линейное пространство линейных операторов
образует некоммутативную алгебру. Тем не менее среди
множества операторов могут встретиться такие пары
коммутирующих операторов, произведение которых
перестановочно:
Л, /Ч /\ /Ч
FG = GF.
В частности, единичный вектор / коммутирует с любым
другим оператором. Встречаются еще антикоммутирую-
щие операторы, которые при перестановке меняют знак
произведения:
FG = — GF.
Очевидно, что операторы можно возводить в
произвольную целую степень:
Ап^АА...А.
п раз
Умея находить сумму и произведение линейных опе-
раторов, можно найти любой полином от оператора А.
Так, если
P(t) = aBt>" + a1t>"-l+...+aBl
есть некоторый многочлен т-й степени переменной t,
то под полиномом Р (А) понимают линейный оператор
Р (А) = ааМ + а,/--1 + ... +ап.
175
Оператором, обратным к А, называют оператор А~1,
удовлетворяющий условию А~ХА = АА~Х = /. Не для
всякого оператора существует обратный. Операторы, имеющие
соответствующие обратные операторы, называются
невырожденными. Ясно, что для невырожденных операторов
имеет смысл возведение в целую отрицательную степень:
/\ /\ /ч /\ /\
А-" = (А-1)=А-1-А-1.. .А-1.
^ v —
л раз
Поскольку каждый линейный оператор А характеризует-
ся в некотором базисе е,- определенной матрицей А, то
матрицы также образуют некоммутативную алгебру, в
которой сумме, произведению и степени операторов
соответствуют суммы, произведения и степени их матриц.
Вырожденным операторам, не имеющим обратных
операторов, соответствуют особые матрицы, определители
которых равны нулю.
/\ -> —>■
Если оператор А преобразует вектор х в вектор у,
-> ->
то у называется образом вектора х, а х—прообразом век-
->
тора у. Совокупность ТА всех образов называется об-
/\
ластью значений линейного оператора А. Она образует
некоторое подпространство линейного векторного
пространства R. Размерность подпространства ТА называют
рангом оператора А и обозначают ZA.
Для каждого оператора А можно, вообще говоря,
выделить из всего множества векторов линейного
пространства R некоторое подмножество МА таких векторов х,
что Ах = 0. Подмножество МА образует в R
подпространство, называемое ядром оператора А, размер-
/\
ность тА ядра называется дефектом оператора А.
Можно показать, что сумма размерностей
подпространств ТА и МА равна размерности линейного пространства R,
т. е. сумма ранга и дефекта оператора равна я:
Га + гпа = п.
Другими словами, каждый линейный оператор А
разбивает все множество векторов пространства R на два не-
176
пересекающихся (т. е. не имеющих общих элементов)
подмножества:
TA.+ MA = R.
/\
В частности, если оператор А невырожден, то его дефект
равен нулю и МА = 0. В этом случае ранг оператора г А
равен размерности п пространства R.
Пусть, например, линейное пространство R
представляет собой множество всевозможных радиус-векторов ре-
ального трехмерного пространства, а оператор А
проецирует эти радиус-векторы на плоскость XOY. Ясно, что
векторы, коллинеарные оси Z, образуют одномерное
подпространство МА. Проекции же векторов образуют
двумерное множество ТА, так что гА-\-тА — Ъ.
Матричное исчисление широко используется в
современной теоретической физике. Поэтому перейдем к более
подробному изучению соответствующих операторам
матриц и действиям над ними.
§ 2. Матричная алгебра
Матрицей порядка пхт называют математическую
величину А, характеризуемую пхт числами,
расположенными в виде прямоугольной таблицы из п строк и
т столбцов:
лмК-*11=
аа аы
*%т
В физике обычно встречаются квадратные матрицы
порядка п~%п:
А =
Hi
Ы%
столбцевые матрицы порядка п х 1
у^И,
ш
т
и строчные матрицы порядка 1х/г:
¥ = IIUI|=(1»i,1>. Ч>„).
Матрицы А и В одинакового порядка равны между
собой (А = В), если равны все соответствующие элементы
этих матриц, т. е. aik — bik.
Суммой матриц А к В (одинакового порядка)
называется матрица С = Л + В, у которой каждый элемент
равен сумме соответствующих элементов слагаемых
матрицы:
c,k = aik + bik.
Произведением матрицы А на число % называют
матрицу D = 'kA, элементы которой dik = %aik.
Произведением матрицы А порядка пхт на
матрицу В порядка шх1 называют матрицу С —А-В, у
которой элемент cik равен- сумме произведений всех
элементов г'-й строки матрицы А на соответствующие элементы
k-то столбца матрицы В:
т
Cik = ^aifijk- (2)
/'
Заметим, что произведение матриц определенно лишь
тогда, когда число столбцов у матрицы А равно числу
строк у матрицы В.
Матрицу А, получаемую из А заменой строк
столбцами и наоборот, называют транспонированной матрицей
<*/* = <**,■• ._
Если А = А, то матрица А называется симметричной
(ai!t = ak!). Если же Л =—А, то матрицу А называют
антисимметричной {ап = —аь;У; все ее диагональные
элементы равны нулю (akk=0). Отметим, что имеет место
тождественное равенство (АВ) = В- А.
Легко видеть, что матрица А, транспонированная по
отношению к матрице А порядка пхт, имеет порядок
тхп. В частности, строчная матрица ¥ и столбцевая
матрица ¥ являются взаимно транспонированными.
Ясно, что квадратную га-рядную матрицу /4 = ||a,-ft||
можно умножать на столбцевую матрицу У^Ц^-Ц
порядка raxl только справа, а на строчную W = |ф,-||— слева;
178
при этом в первом случае получается матрица-столбец,
а во втором — матрица-строка. Символически это
изображают так:
□ хП = П.
□ х □ = □.
Очевидно, что при умножении матрицы-строки порядка
(1хл) на матрицу-столбец порядка (их!) получается
матрица порядка 1x1, т. е. попросту число:
*-*Р = (й, ф2 t„)x
W>J
= ^A+M>*+...+'lMV
При перемножении двух квадратных матриц порядка
лхл получается квадратная матрица того же порядка:
ахонз
Произведение матриц, как и операторов, вообще говоря,
некоммутативно:
АВфВА.
Среди квадратных матриц особую роль играют
диагональные матрицы, у которых отличны от нуля только
элементы с одинаковыми индексами:
ап 0 ... О
0а„... О
О О
. а„
(К
Ясно, что соответствующий диагональной матрице опера-
тор А «растягивает» векторы базиса е1% е2, ..., еп
соответственно в Xj, X2, ..., Хп раз:
-* ->
е\ = Хе;.
В частности, если Х1 = Ха= ... =Хи = с, то такой ска-
179
л я р ной матрице
Л =
соответствует линейное преобразование подобия Л,
равномерно «растягивающее» в с раз (или «сжимающее»—при
с < 1) все базисные векторы.
Наконец, единичному и нулевому операторам
соответствуют матрицы:
П
1
1
И 0:
о о
0 0
о о
Важной характеристикой всякой матрицы А является
ее определитель det А. Всякая неособенная матрица А
/для нее d&tA^O) имеет обратную матрицу Л-1:
A2i Am
л-> =
ill
^
d
d
где d=?deM, AtJ — алгебраическое дополнение ее
элемента а/у. Очевидно, что А-А~1 = А~1-А = 1.
Легко убедиться, что определитель произведения двух
квадратных матриц С = А-В равен произведению
определителей сомножителей:
det С = det Л -det В.
Если матрица Л содержит комплексные элементы, то
вводят понятие комплексно-сопряженной по отношению к Л
матрицы Л*, элементы которой a*ik отличаются от
соответствующих элементов aik только комплексным
сопряжением:
alk = (aik)*.
Ясно, что если А* = А, то матрица Л является
действительной.
180
Матрица А*, получаемая из А путем
транспонирования ее и комплексного сопряжения называется эрмитово-
сопряоюенной матрицей по отношению к матрице А:
afk = ah.
Если А+=А, то матрица А называется эрмитовой или
самосопряженной. Такие матрицы широко используются
в квантовой механике.
Важным понятием матричной алгебры является ранг
матрицы.
Рангом матрицы А называется наивысший порядок г
отличных от нуля миноров, составленных из элементов Л.
Ясно, что в случае квадратных матриц порядка п их
ранг может принимать значения от 0 (для нулевой
матрицы) до п для неособенных матриц, определитель
которых отличен от нуля.
§ 3. Исследование линейных преобразований
с помощью матриц. Характеристический многочлен
Выберем в /г-мерном линейном пространстве R неко-
торый базис elt ег, ..., еп и рассмотрим векторную
матрицу-столбец:
ь
<?2
компонентами которой являются базисные векторы. Пусть
/\
в результате линейного преобразования А каждый век-
--►
тор в/ «старого» базиса превратится в соответствующий век-
тор е\ «нового» базиса: Aei = e'i. Тогда это
преобразование в матричной форме примет следующий вид:
ЛТ = Ф'Г (3)
где А — матрица линейного оператора А, а У — векторная
столбцевая матрица нового базиса:
хр>
еп >
Понятно, что обратное преобразование, превращающее
—>- —>•
новый базис W в старый W, записывается аналогично:
A~lV = W. (3')
Будем далее развивать матричную символику с целью
изучения линейных преобразований.
->
Координаты произвольного вектора х в n-мерном
пространстве можно объединить в единую матрицу-строку:
Ф = (*1. Х2 Х„).
Поскольку векторы базиса образуют векторную матрицу-
—>-
столбец W, то произвольный вектор
- -> -►
х = 2 х,е,-
можно рассматривать как произведение строчной
матрицы Ф на столбцевую матрицу W:
* = (*! ••• «»)•
■ Ф-W.
(4)
В ином базисе е[, ..., е'п, связанном с исходным преоб-
разованием А, тот же вектор будет определяться
матричным равенством:
X — (Xi . . . Хп) •
{ еп )
= Ф'-ЧГ'.
(4')
182
Выясним теперь, как связаны координаты х\ вектора
->
в новом базисе г|/ с координатами х1 того же вектора
->
в старом базисе г|з.
Приравняв правые части (4) и (4') и подставив в (4')
вместо матрицы г|з ее значение из (3'), получим:
ф'.¥' = Ф-Л-1-¥'.
Отсюда
ф'=ФЛ-1.
Транспонируя это матричное равенство, приходим к
соотношению:
ф' = Д-1.ф,
или (в развернутом виде):
v«y
(х^
= а-*
(5)
Итак, в то время как базисные векторы е{
преобразуются с помощью матрицы А, координаты векторов
преобразуются с помощью обратной транспонированной
матрицы Л-1.
л.
Всякий линейный оператор А характеризуется в
каждом базисе своей матрицей, поэтому необходимо еще
установить аналитическую связь между матрицами,
определяющими один и тот же оператор в различных базисах.
Пусть базисы ¥ =
( -*
I enJ
и ¥' =
связаны между
собой матрицей преобразования С:
¥' = С¥.
Пусть, кроме того, существует некоторый линейный опе-
ратор А, матрица которого в базисе ¥ имеет вид A = ||а,-Д
а в базисе ¥' он принимает вид Л'=||а|*||. Задача
сводится к установлению зависимости между А' и А.
183
Оказывается (доказательство приводить не будем), что
А' = С~1АС. (6)
Следовательно, каждому линейному оператору в данном
линейном пространстве соответствует бесчисленное
множество подобных матриц А, А', А", ..., каждая из ко-
торых описывает оператор А в своем базисе. Две подобные
матрицы связаны друг с другом соотношением А'—С'1 АС,
где неособенная матрица С характеризует линейное
преобразование соответствующих базисов. Обратим внимание
на то, что определители всех подобных матриц "между
собой равны. Нетрудно также доказать, что и следы
подобных матриц одинаковы. (Следом матрицы называют
сумму всех ее диагональных элементов аи + ам+... +
+ а„„ = Еа,-,-.) Иными словами, определитель и след
матрицы преобразования являются инвариантами.
Уже при изучении двумерных тензоров мы установили,
что обычно существует некоторая преимущественная
система координат, в которой матрица компонентов тензора
имеет простейший вид.
Перейдем теперь к решению аналогичной задачи в
общем случае комплексного линейного пространства п
измерений.
Пусть дан оператор А, который каждому вектору х
рассматриваемого пространства ставит в соответствие
->
новый вектор у. Если при действии этого оператора на
~>
некоторый вектор х получается вектор, отличающийся
от первоначального численным множителем
Ах = кх, (7)
то ненулевой вектор х называется собственным вектором
Л
оператора А, а число %—собственным значением1.
Каждый линейный оператор может иметь несколько
-* ~>
различных собственных векторов хг, х2 Понятно, что
~> ~>
если х—собственный вектор, то и ах (где а—любое число)
тоже является собственным вектором; но такие два кол-
линеарных вектора не считаются существенно различными.
1 Заметим, что в случае действительного векторного пространства
собственные числа А, являются действительными.
184
Чтобы определить собственные векторы оператора А,
учтем, что при действии А на такой вектор х должно
выполняться равенство (7), т. е.
(А—Х1)х = 0. (7')
Поскольку х Ф О, то отсюда следует, что матрица А—к!
особенная, и ее определитель равен нулю:
«11—
«21
««1
к
«12 «13 •
«22 ^ «2» •
«Л2 «ИЗ • '
•• «In
«2И
• «яп —
Это—характеристическое уравнение оператора А. Его
левая часть
P(X) = V + Cn_1V-1+...+C1X + C0 (9)
называется характеристическим полиномом. Его
коэффициенты Сп_! и С0 выражаются так:
Cn_i = Sp^, C0 = det4.
Как известно из алгебры, в поле комплексных чисел
уравнение n-й степени Р(к) — 0 имеет п корней, часть из
которых могут быть кратными.
Таким образом, любой линейный оператор в м-мерном
комплексном пространстве имеет п собственных значений
Xt, К2 Кп. Поступая так же, как при нахождении
главных направлений плоского тензора (см. гл. I), мы
для каждого собственного значения Kk найдем соответ-
-*■
ствующий собственный вектор хк. При этом можно
доказать, что если собственные значения At, X2, ..., kk
попарно различны, то соответствующие им собственные
-> -> ->
векторы ху, хг xk линейно независимы.
Отсюда следует, что если все п корней
характеристического полинома Р (X) различны, то оператор в
комплексном пространстве имеет п линейно независимых
собственных векторов. Такой оператор называют оператором
простой структуры.
Матрицу оператора простой структуры А всегда можно
привести к диагональному виду, для этого следует в
качестве базиса n-мернрго пространства выбрать его соб-
185
ственные векторы. В этом случае мы получим:
/xX-i ==z Л.Х.,
Ах2 = .. .К2х2,
Ах„ — ... г.„х„
Поэтому матрица оператора А принимает форму:
а.
А =
К
К
Следует заметить, что различие собственных чисел является
достаточным, но не необходимым условием для простоты
структуры оператора. Возможны отдельные случаи, когда
оператор имеет п линейно-независимых векторов, хотя
некоторым из них соответствуют одинаковые собственные
значения. Ясно, что в «собственном» базисе матрицы
таких операторов также будут диагональными; только вдоль
диагонали будут встречаться одинаковые числа %(= Kk.
Однако в подавляющем большинстве случаев операторы
с кратными собственными числами не имеют простой
структуры и их матрицы не могут быть приведены к
диагональному виду. Отсюда ясно, что операторы простой
структуры являются частным видом линейных операторов.
(Оказывается, что специальным выбором базиса можно
несколько упростить и матрицы операторов непростой
структуры, сводя их к треугольной1, квазидиагональнойг
1 Треугольной называется матрица, у которой все элементы,
расположенные ниже (или выше) главной диагонали, равны нулю:
ап а12 а1з
О а22 аг
О 0 а3
2 Квазидиагональной называется матрица, у которой вдоль
главной диагонали стоят квадратные блоки, или «подматрицы», а все
остальные элементы равны нулю:
, ;0 О О О
/1п :' 0 0 0 0
Q Q
!А™!0 0
о о
о о L
0 0 0 0 I a
о о о о i 3
186
или канонической (жордановой)1 форме.) Но
соответствующая теория довольно сложна, и мы ограничимся
рассмотрением наиболее простых и важных для
математической физики классов линейных операторов сначала
в комплексном пространстве, а затем — в действительном.
В заключение этого параграфа приведем без
доказательства еще два важных свойства матриц:
1. Пусть Р (К) есть характеристический полином
матрицы А, тогда Р(Л) = 0 (теорема Гамильтона — Кели).
2. Если \lt %%, ..., %п являются собственными
значениями матрицы А, то собственными значениями
некоторого матричного многочлена Р (А) являются числа Р (К^),
Р(%2), ..., Р(К).
Отсюда вытекает, что след степени матрицы равен
сумме степеней собственных значений матрицы-основания:
SpA* = W + %¥+...+%«?■
§ 4. Линейные преобразования в унитарном пространстве
Пусть в комплексном евклидовом пространстве задан
некоторый линейный оператор А. Можно доказать, что
в этом пространстве всегда существует (и притом только
один) сопряженный ему оператор А + ,
удовлетворяющий условию
(Ах, у) = (х, % + у), (10)
-» -»
где х и у—произвольные два вектора унитарного
пространства. На основании первой аксиомы скалярного
произведения в комплексном пространстве можно
определение (10) записать в эквивалентном виде:
Су, Ах) = (х, А + у)\ (10')
Операция сопряжения, т. е. переход от Л к А + , обладает
1 Канонической называется квадратичная матрица, у которой
каждый диагональный блок имеет форму:
Xk
0
0
1 0
Ч 1
0 Xk
где размерность подматрицы равна кратности собственного числа А.&.
187.
вытекающими из определений (10) или (10') следующими
простыми свойствами:
(Я+)+=:2, (кА)+ = Х*А+, (А + )~1=(А-1)+,
(А +5)+ = Л+ + В+, (А-В)+ = В+-А + .
Рассмотрим матрицы сопряженных операторов в некото-
ром ортонормированном базисе ev e% еп. Пусть
Л=|а,А|| и А+— ||аА||. Применяя операторы А и А+ к ба-
—>
зисным векторам е,-, легко убеждаемся, что
atk = а*Ы,
т. е. матрицы А я А+ являются эрмитово-сопряженными:
А+ = А*. Операция эрмитового сопряжения в
определенной степени напоминает переход от данного числа а к его
комплексно-сопряженному а*.
Среди комплексных чисел те, для которых а = а*,
являются действительными. Аналогичное положение имеет
место у линейных операторов. Если линейный оператор S
равен своему сопряженному оператору:
S = S\ (11)
то он называется самосопряженным (или эрмитовым).
Очевидно, что матрица самосопряженного оператора
является эрмитовой, т. е. aik = a"ki. (В действительном
пространстве матрица самосопряженного оператора
симметрична.)
Можно доказать следующие утверждения.
1. Любой линейный оператор А может быть
представлен так:
A^S.+ iS,,
где Sj и S2—самосопряженные операторы. (Отсюда
вытекает, что среди всех линейных операторов
самосопряженные операторы играют такую же роль, какую
играют действительные числа среди всех комплексных.)
/\ /ч
2. Если St и S2 — самосопряженные линейные опера-
торы, то их произведение S1-S2 будет самосопряженным
тогда и только тогда, когда операторы Sx и S2 между
собой коммутируют.
188
3. Если самосопряженные операторы St и S,
коммутируют, то все их п собственных векторов совпадают.
(Справедлива также обратная теорема.)
Выбрав в качестве базиса единую систему собственных
векторов, мы обе самосопряженные матрицы St и S2
одновременно приведем к диагональному виду.
Поскольку самосопряженные операторы широко
используются в квантовой механике, то познакомимся
подробнее с их свойствами.
1. Собственные значения самосопряженного оператора
действитель н ы.
->
В самом деле, пусть х—собственный вектор, а к—
соответствующее собственное значение эрмитового опера-
/\ ^-> -> ^-> -^
тора S, т. е. Sx = kx. Тогда согласно (10) (Sx, x) =
-> ^ -> /\ /\
— (х, S+x). Но в силу самосопряженности S+=S, по-
этому, подставляя вместо Sx равную ему величину кх,
получаем:
(кх, х) = (х, кх).
Поскольку мы рассматриваем комплексное евклидово
пространство, то, вынося к за скобки, имеем:
к (х, х) = к* (х, х),
откуда
к = к*,
что и доказывает действительность числа Я.
/\
2. Если S — самосопряженный оператор в п-мерном
унитарном пространстве, то все его п собственных
векторов взаимно ортогональны.
Если выбрать в качестве базиса указанные взаимно
ортогональные собственные векторы, то матрица оператора
примет диагональный вид.
Итак, в комплексном евклидовом пространстве векторы
самосопряженных операторов, являющихся обобщением
понятия симметричных преобразований действительного
пространства, образуют и-мерную систему ортонормиро-
ванных векторов.
Аналогичным свойством обладает другой класс
комплексных операторов—унитарные. Линейный оператор С/
189
называется унитарным, если
/\ /\ Л.
(12)
Отсюда сразу следует, что U+ = U~1.
Чтобы подробнее познакомиться с унитарными опера-
торами, рассмотрим скалярное произведение (Ux, Uy).
Применяя к нему условие сопряженности (10), приходим
к равенству
(Ux,Uy) = (x,U+-Uy).
Принимая во внимание условие унитарности (12),
получаем окончательно:
/\ -* /\ -* -* ->
(Ux, Uy) = (x,y).
Всякий унитарный оператор U в унитарном
пространстве сохраняет скалярное произведение для любых двух
векторов этого пространства.
В частности, при х = у
(Ux, Ux) = (х, х).
Унитарный оператор не меняет длин векторов.
Выясним условия, которым удовлетворяют
унитарные матрицы U, соответствующие унитарным
операторам.
Пусть в некотором ортонормированном базисе в /г-мер-
ном унитарном пространстве оператору U соответствует
матрица
t/ =
ип u12
«2! "22
"« um
и„
Тогда сопряженному оператору U+ будет соответствовать
матрица
ип иа ... u„i
* * *
«12 «22 • • • «л
1>' =
«1л Ч2п
190
Из условия унитарности следует, что
'1
{/.£/* = / =
1
1
Следовательно, в соответствии с правилом умножения
матриц
( I шита »=/',
2или%={ п • '•■ 412')
Матрица 8/' является унягеардвй, есл» сумма ирвизве-
дений элементов какой-либо строки (столбца) на
соответствующие комплексно-сопряженные элементы другой
строки (столбца) равны 0, а сумма квадратов модулей
элементов любой строки (столбца) равна единице.
Условие (12') имеет простой геометрический смысл.
Пусть ех, ег, ..., еп—некоторый ортонормированный ба-
зис. Тогда, как несложно убедиться, векторы Uelt
Ue2, . .., Ue„ также образуют ортонормированный базис,
так как
/w л-» { 1 при i~k,
(Uelt Uek) = { . . *
v ' *' I, 0 при 1фк.
л.
Линейный оператор U является унитарным, если он
переводит ортонормированный базис в другой, также
ортонормированный базис.
Матрицы унитарного оператора U, как и
самосопряженного оператора, можно привести к простейшему
диагональному виду:
(К
U =
Здесь собственные числа Xif %v . .., Кп по модулю равны I.
Итак, мы установили, что самосопряженные и
унитарные операторы обладают системой взаимно ортого-
191
яальных собственных векторов. Оказывается, что и
самосопряженные, и унитарные операторы являются
частными типами более широкого класса нормальных
операторов, обладающих- указанным свойством.
Оператор N называется нормальным, если он
коммутирует со своим сопряженным:
л л л. л.
N-N+=N+-N. (13)
Теорема: Для того чтобы у оператора N
существовал ортогональный базис, необходимо и достаточно, чтобы
л
N был нормальным оператором, т. е. удовлетворял
условию (13).
Докажем сначала необходимость. Пусть в некотором
ортогональном базисе (который без ограничения общности
можно считать нормированным) матрица Л имеет
диагональный вид:
(К
А =
S»/
Тогда в этом базисе сопряженная матрица А*, очевидно,
равна:
'К
л* =
л2
л„
п)
т. е. она также является диагональной. Но диагональные
матрицы между собой всегда перестановочны: АА* — А*А.
Следовательно, оператор А нормальный.
Из основного свойства нормальных операторов
вытекает, что их матрицы всегда можно привести к
диагональному виду.
§ 5. Линейные операторы в действительном евклидовом
пространстве
Хотя вещественное евклидово пространство является
частным случаем комплексного евклидова (унитарного)
пространства, свойства линейных операторов,
действующих в этих пространствах, могут существенно отличаться.
192
Основная теорема алгебры справедлива только в поле
комплексных чисел. Поэтому характеристическое
уравнение det (А — К1) = 0 может не иметь ни одного корня
в поле действительных чисел (все собственные значения
у А комплексные). В этом случае у оператора А не
существует ни одного собственного вектора; так, линейный
оператор в реальном пространстве, поворачивающий
плоскость XOY вокруг оси Z на любой угол а, отличный от
180° (точнее афкъ, где k = 0, 1, 2, ...), не имеет ни
одного вектора, который бы после поворота остался кол-
линеарным первоначальному.
Чтобы глубже изучить свойства линейных операторов
в евклидовом пространстве, познакомимся с понятием
инвариантного подпространства.
/\
Пусть А — линейный оператор в линейном «мерном
пространстве R (которое может быть как действительным,
так и комплексным). Линейное подпространство /?, назы-
вается инвариантным относительно А, если в резуль-
тате действия оператора А на любой вектор х из Rt по-
лучается новый вектор Ах, также принадлежащий
подпространству Rt.
Ясно, что инвариантное подпространство является
обобщением множества векторов, коллинеарных собственному
вектору оператора. В частности, совокупность векторов
->
из R, коллинеарных некоторому собственному вектору х
оператора А, образует одномерное инвариантное
подпространство.
Приведем еще пример. Если оператор А совершает
поворот реального трехмерного пространства вокруг оси Z,
то инвариантным подпространством здесь являются: а)
множество векторов, расположенных вдоль оси Z (одномерное
подпространство) и б) совокупность векторов в плоскости
XOY (двумерное подпространство).
Теперь мы можем сформулировать важную теорему
о линейных операторах в действительных линейных
пространствах.
У всякого линейного оператора А в вещественном
аффинном n-мерном пространстве R существует одномерное
или двумерное инвариантное подпространство.
Мы не будем строго доказывать эту теорему, а приведем
193
качественные рассуждения, подтверждающие ее справедлив
вость. Выберем в R некоторый базис е1г е2. • • •. еп; пусть
оператору А в этом базисе соответствует матрица A — \\aik\\.
Составим соответствующее характеристическое уравнение
n-ой степени:
det(i4 — Л/) = 0.
Обозначим через А,0 корень этого уравнения. Могут
представиться два случая.
1. Корень А,0—число действительное. Тогда, как легко
видеть, существует п действительных чисел xlt х2, .. ., хп,
которые можно рассматривать как координаты в выбранном
базисе такого вещественного вектора х, что
Ах = К0х.
->
Но в этом случае множество векторов ах образует
одномерное инвариантное подпространство, аналогично тому,
что имеет место в случае комплексного пространства.
2. Корень А,„—число комплексное (A,0=a + Pt). Этот
случай не имеет аналогии в комплексных пространствах.
Координаты xk собственного вектора,
соответствующего такому А,0, являются, очевидно, комплексными.
Обозначим их в виде li + Tijt, gj + rijt, .... %n-\rr\ni. Тогда
можно записать следующую систему уравнений:
S «jk Ни + 4*0 = (« + РО (h + V).
fe=I
где /=1, 2, ..., п. Приравнивая соответственно
действительные и мнимые части, получим две системы уравнений:
л
2 a/*£* = «S/—N/.
л
2 a/ftTl* = aTi/+Pi/-
я=1
Рассматривая теперь \lt £2, ..., \п и соответственно г\и
т)2, ..., г]п как координаты действительных векторов
х и у, можно предыдущие равенства записать в
операторной форме:
£=«-Ру, (14)
Ау=ау + $х.
194
А это означает, что двумерное подпространство, порожден-
ное векторами х и у, инвариантно относительно опера-
/\
тора А.
Перейдем теперь к рассмотрению самосопряженных
операторов в евклидовом (вещественном) пространстве.
Поскольку элементы матрицы в этом пространстве
действительные числа, то условие самосопряженности операторов
(aik = ali) сводится к равенству aik = aki.
Чтобы линейный оператор был самосопряженным,
необходимо и достаточно, чтобы его матрица в
ортонормированием базисе была симметрична.
Очевидно, что и в действительном евклидовом
пространстве справедливо рассмотренное в § 4 свойство
самосопряженных операторов.
Существует ортонормированный («собственный») базис,
в котором симметричная матрица S, соответствующая само-
/\
сопряженному оператору S, принимает диагональный вид.
Познакомимся теперь с понятием ортогонального
оператора.
Линейный оператор А действительного евклидова
«-мерного пространства R называется ортогональным, если он
сохраняет неизменным скалярное произведение любых двух
векторов из R:
(Ах, Ау) = (х, у).
В частности, полагая х = у, получаем:
(Ах)* = (х)\
Это значит, что ортогональный оператор сохраняет длины
векторов. Ясно, что ортогональный оператор в
действительном евклидовом пространстве играет такую же роль,
что и унитарный оператор в комплексном евклидовом
пространстве.
Так как в евклидовом пространстве угол между век-
'торами определяется по формуле
созФ=-^4-
и при ортогональном преобразовании и числитель и
знаменатель не меняются, то ортогональный оператор
сохраняет углы между векторами.
195
Как и унитарный оператор в комплексном
евклидовом пространстве, ортогональный оператор в
действительном евклидовом пространстве переводит ортонормирован-
ный базис в другой ортонормированный базис.
Поскольку в действительном пространстве U+ = О, то
условие унитарности матрицы UU+ = I сводится к
условию ортогональности
ЛЛ = /, (15)
или (что совершенно эквивалентно)
А~1 = А. (15')
Так как определитель произведения матриц равен
произведению определителей матриц-сомножителей, то из (15)
следует, что у ортогональной матрицы
(det Л)2 = 1, или det Л = ± 1.
Ортогональные преобразования А, определитель
которых равен +1, называются собственными, а те, у
которых det А = — 1 —несобственными.
Рассмотрим сначала ортогональное преобразование А
в одномерном пространстве, порожденном некоторым
->■ ->
вектором е. Ясно, что е является собственным вектором
/^ ^-> -+
оператора А. Поэтому Ае = Хе.
С другой стороны, по условию ортогональности
(Ае, Ле) = (е, е).
Следовательно,
X2 (е, е) = {е, 7),
откуда к — ± 1.
Итак, в одномерном пространстве существует лишь
/\ ■*■"' -+ •
два ортогональных оператора: собственный А^х—х и не-
собственный А2х = — х.
Перейдем теперь к рассмотрению двумерного
пространства с ортонормированный базисом е1 и ег. Пусть орто-
тональный оператор А в этом базисе имеет матрицу
А-Х л
\\с а
причем det A = ad—bc=\.
196
Поскольку А—ортогональный оператор, то обратная
матрица А'1 равна транспонированной Л:
II я . С II
d '
'Л-х =
Определяя же обратную матрицу А 1 непосредственно и
учитывая, что det Л = 1, получаем:
\\ — с а
Приравнивая правые части этих равенств, приходим к
выводу, что а — d и Ь = — с. Поэтому матрица А имеет вид:
Л =
| а —Ь
\ Ь а
и det А = а2 -{-№ = 1. Заметим, что собственные числа здесь
мнимы и матрицу нельзя привести к диагональному виду.
Вводя обозначения a = coscp, fr = sinq>, убеждаемся
в том, что всякий собственный ортогональный оператор А
в двумерном пространстве имеет в ортогональном базисе
матрицу вида:
cos<p —sin ф J
sin ф cos ф ||'
Геометрически это соответствует повороту плоскости как
целое на угол ф.
л.
Если же ортогональный оператор А несобственный,
т.е. detA=ad—bc=— 1, то характеристическое
уравнение Я2—(a + d) 'к—1=0 имеет действительные корни
X— ± 1 и, следовательно, два взаимно перпендикулярных
-» -*
собственных вектора е1 и е2. Тогда матрица А может
иметь только один из двух видов:
А=--
или
0
Геометрически это означает зеркальное отражение
относительно одной из осей координат.
ОГЛАВЛЕНИ Е
Предмет математической физики 3
Часть первая.
МАТЕМАТИЧЕСКАЯ ТЕОРИЯ ПОЛЯ
Глава I. Скалярные, векторные и тензорные поля на плоскости 6
§ 1. Скалярное поле и векторное поле его градиента —
§ 2. Аналитическое определение понятия вектора 13
§ 3. Векторные поля и их дифференциальная характеристика . . 16
§ 4. Тензоры и их свойства 18
§ 5. Тензорная алгебра 23
§ 6. Тензор как аффинор 26
§ 7. Главные направления тензора 28
§ 8. Тензорный эллипс * 32
Глава II. Ортогональные векторы и тензоры в трехмерном и
многомерном евклидовых пространствах. Векторный анализ 34
§ 1. Векторы и тензоры в «-мерном пространстве —
§ 2. Тензор деформации 37
§ 3. Тензор напряжений 41
§ 4. Тензор инерции 43
§ 5. Скалярный и векторный инварианты тензора-производной
векторного поля 49
§ 6. Физический и аналитический смысл дивергенции
векторного поля 51
§ 7. Физический и аналитический смысл ротора векторного поля 56
§ 8. Оператор Гамильтона («Набла»-исчисление) 61
§ 9. Формула Грина .- . . . 65
§ 10. Классификация векторных полей 66
§ 11. Физические векторные и тензорные поля в
четырехмерном пространстве-времени 69
Глава III. Теория поля в криволинейных системах координат 74
§ 1. Криволинейные координаты —
§ 2. Коэффициенты Лямэ 77
§ 3. Основные дифференциальные операции в криволинейных
координатах 81
Часть вторая
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ В ЧАСТНЫХ ПРОИЗВОДНЫХ
Глава I. Вывод основных дифференциальных уравнений
математической физики. Общий интеграл этих уравнений .... 87
§ 1. Поперечные колебания струны. Волновое уравнение ... —
§ 2. Уравнение теплопроводности 90
§ 3. Основное уравнение электростатики 95
§ 4. Уравнение переменного электромагнитного поля в
потенциалах 96
§ 5. Уравнение Шредингера 99
§ 6. Понятие об общем интеграле уравнения в частных
производных 100
§ 7. Колебания бесконечной струны 105
Глава II. Нахождение частных решений уравнений в частных
производных путем разделения переменных , 109
§ 1. Охлаждение стержня конечной длины ПО
198
§ 2. Колебания струны конечной длины 114
§ 3. Решение задачи Дирихле для круга 118
§ 4. Стационарное распределение температуры в прямоугольном
брусе 121
§ 5. Охлаждение тонкой пластины 124
§ 6. Охлаждение бесконечного стержня 127
Глава III. Интегрирование уравнений математической физики в
цилиндрической системе координат 131
§ 1. Решение уравнения Лапласа в цилиндрических
координатах. Уравнение Бесселя —
§ 2. Решение уравнения Бесселя. Функции Бесселя 133
§ 3. Решение задачи Дирихле для цилиндра 136
Глава IV. Интегрирование уравнений математической физики в
сферической системе координат 139
§ 1. Решение уравнения Лапласа в сферических координатах.
Уравнение Лежандра —
§ 2. Решение уравнения Лежандра . 141
§ 3. Полиномы Лежандра 143
§ 4. Сферические и шаровые функции 146
§ 5. Стационарное распределение температуры в шаре 147
Глава V. Метод функций Грина 148
§ 1. Метод Грина решения краевых задач 149
§ 2. Функция Грина для шара 152
§ 3. Функция Грина для полупространства , . 155
Часть третья.
ЛИНЕЙНАЯ АЛГЕБРА
Глава I. Элементы линейной алгебры 157
§ 1. Линейное векторное пространство . 159
§ 2. Размерность линейного пространства 164
§ 3. Евклидово пространство 167
§ 4. Комплексное линейное пространство 171
Глава II. Аффинные преобразования 172
§ 1. Линейные операторы и операции над ними —■
§ 2. Матричная алгебра 177
§ 3. Исследование линейных преобразований с помощью матриц.
Характеристический многочлен 181
§ 4. Линейные преобразования в унитарном пространстве . . . 187
§ 5. Линейные операторы в действительном евклидовом
пространстве 192