/






























































































































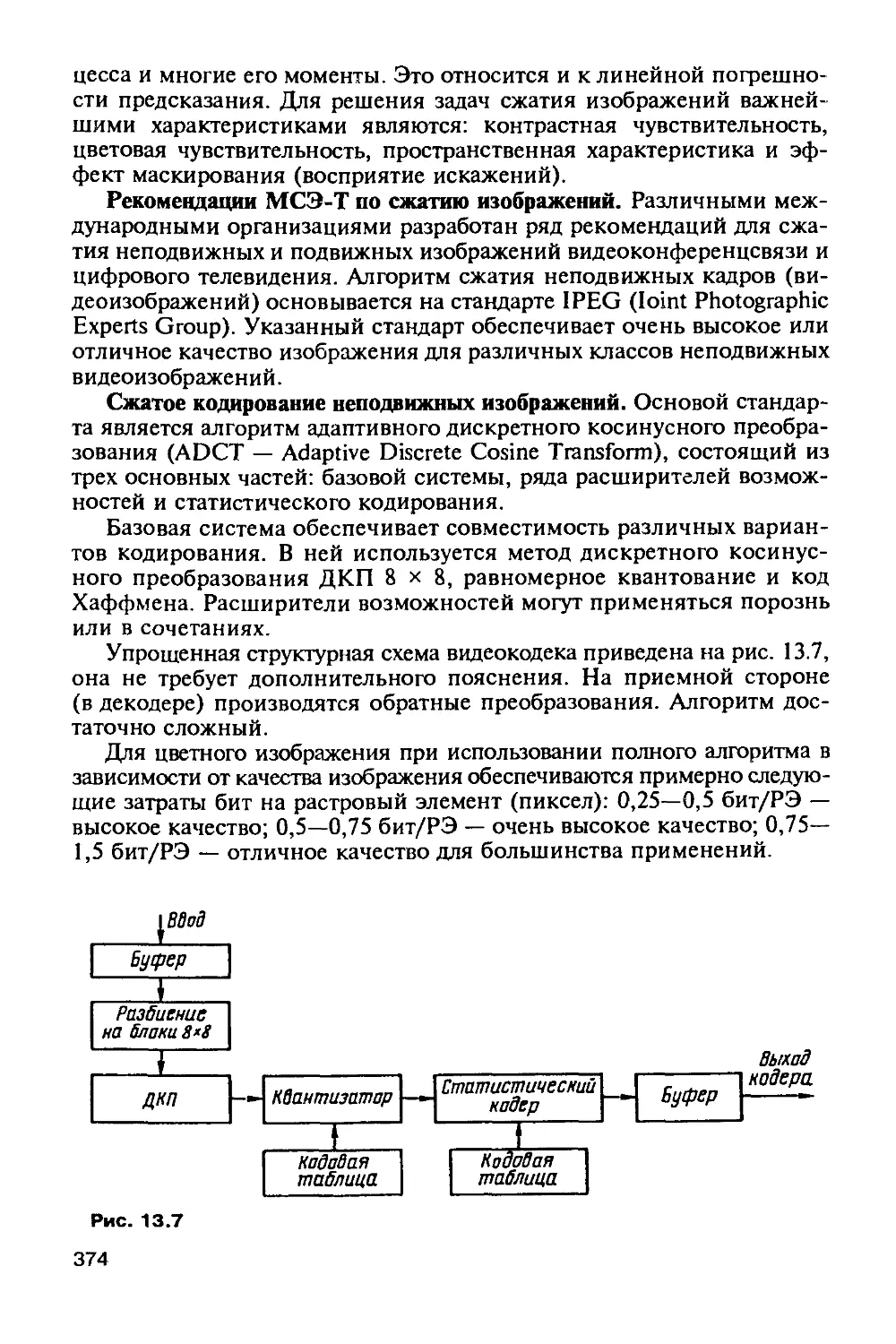





















Текст
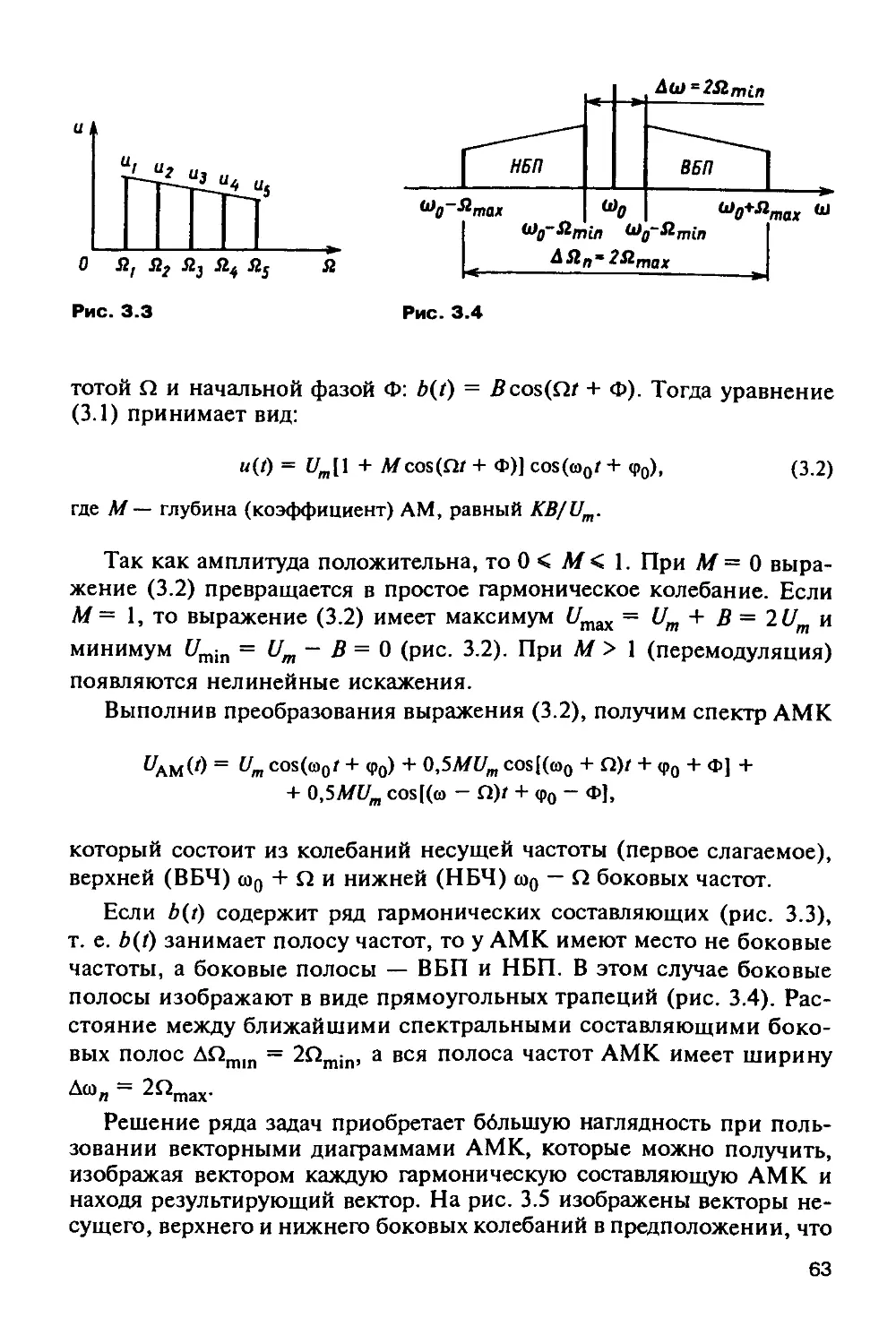
Г. В. ГОРЕЛОВ, А. Ф. ФОМИН,
А А ВОЛКОВ, В. К. КОТОВ
ТЕОРИЯ ПЕРЕДАЧИ
СИГНАЛОВ
НА ЖЕЛЕЗНОДОРОЖНОМ
ТРАНСПОРТЕ
ИЗДАТЕЛЬСТВО •ТРАНСПОРТ»
Г. В. ГОРЕЛОВ, А. Ф. ФОМИН,
А. А. ВОЛКОВ, В. К. КОТОВ
ТЕОРИЯ ПЕРЕДАЧИ
СИГНАЛОВ
НА ЖЕЛЕЗНОДОРОЖНОМ
ТРАНСПОРТЕ
Утверждено
Департаментом кадров
и учебных заведений МПС России
в качестве учебника
для студентов вузов
железнодорожного
транспорта
МОСКВА "ТРАНСПОРТ" 2001
УДК 621.391:656.254.075.8
ББК 39.278
Т-33
Теория передачи сигналов на железнодорожном транспорте: Учеб, для вузов ж.-д.
трансп. / Г. В. Горелов, А. Ф. Фомин, А. А. Волков, В. К. Котов. М.: Транспорт,
2001 415 с
Изложены основные положения теории передачи сигналов, общая характери-
стика задач этой теории, в частности задач железнодорожного транспорта, даны их
решения. Приводятся методы математического описания сообщений, сигналов,
помех в каналах железнодорожной связи, методы управления информационными
параметрами сигналов, информационные характеристики источников сообщений,
сигналов, помех и каналов. Рассмотрены вопросы помехоустойчивости передачи
дискретных и непрерывных сообщений, кодирования, а также принципы построе-
ния многоканальных систем передачи, оценка и повышение эффективности пере-
дачи информации.
Ил. 193, табл. 20, библиогр. 24 назв.
Книгу написали: д-р техн, наук, проф. Г. В. Горелов — гл. 1, 2, 4, 5; д-р
техн, наук, проф. А. Ф. Фомин — гл. 6—8, 13, 14, пп. 10.2, 10.3, 12.9, заключение,
приложения 1 и 2; д-р техн, наук, проф. А. А. Волков — предисловие, гл. 3, 11, 12
(кроме п. 12.9), пп. 10.4—10.7; канд. техн, наук, доц. В. К. Котов — гл. 9, п. 10.1.
Рецензенты: д-р техн, наук, проф. М. Д. Венедиктов (МТУСИ) и замести-
тель руководителя Департамента сигнализации, связи и вычислительной техники
МПС России Ю. И. Филиппов
Заведующий редакцией Н. Л. Немцова
Редактор М. В. Пономаренко
Учебное издание
ГОРЕЛОВ ГЕОРГИЙ ВЛАДИМИРОВИЧ,
ФОМИН АЛЕКСЕЙ ФЕДОРОВИЧ,
ВОЛКОВ АНАТОЛИЙ АЛЕКСЕЕВИЧ,
КОТОВ ВЛАДИМИР КИРИЛЛОВИЧ
ТЕОРИЯ ПЕРЕДАЧИ СИГНАЛОВ НА
ЖЕЛЕЗНОДОРОЖНОМ ТРАНСПОРТЕ
Технический редактор Н. И. Горбачева
Корректор В. Т. Агеева
Изд лиц № 010163 от 2102 97
Подписано в печать 01 1100 Формат 60x88 1/16
Усл печ л 25,48 Уч -изд л 25,36 Доп тираж 3000 экз
Заказ 1 S 8 С 003 Изд № 1-1-1/5 № 6926
Государственное унитарное предприятие ордена
’’Знак Почета" издательство "ТРАНСПОРТ",
107078, Москва, Новая Басманная ул , 10
АООТ "Политех-4
129110, Москва, Б Переяславская ул , 46
ISBN 5-277-02229-5
ISBN 5-277-02229-5
9 785277 022290
© Коллектив авторов, 1999
© Оформление, иллюстрации,
издательство "Транспорт”, 1999
ПРЕДИСЛОВИЕ
В последнее десятилетие XX века произошла научно-техническая
революция в области транспортной связи, в основе которой лежат два
крупных достижения фундаментальной науки середины нашего сто-
летия: общая теория связи и микроэлектронная элементная база. Ос-
нову теории связи составляют теоремы о потенциальных возможно-
стях передачи информации по каналам связи и принципы ее
реализации.
На железнодорожном транспорте активно внедряются спутниковые,
волоконно-оптические системы связи, системы с шумоподобными сиг-
налами, подвижной радиосвязи: сотовая, транкинговая и др. Доступ
подвижного объекта к стационарным сетям связи осуществляется с
помощью радио. Произошло объединение в разумном сочетании про-
водной и радиосвязи, широко- и узкополосных, аналоговых и дис-
кретных систем связи. В очередной раз проявился фундаментальный
диалектический закон единства противоположностей.
По прогнозам международных экспертов, XXI век должен стать ве-
ком глобального информационного обеспечения. Его основой будет
информационная инфраструктура, а составляющими — мощные
транспортные сети связи и распределенные сети доступа, предостав-
ляющие услуги (информацию) пользователям. Основные тенденции
развития связи — цифровизация, интеграция сетей, коммутационного
и оконечного оборудования, что позволяет значительно повысить эф-
фективность связевого ресурса.
Передача информации на железнодорожном транспорте ведется в
специфических условиях воздействия сильных и разнообразных помех.
Поэтому системы связи должны обладать высокой помехоустойчиво-
стью, что имеет большое значение для безопасности движения. К сис-
темам связи предъявляются также требования высокой эффективности
при относительной простоте технической реализации и эксплуатации.
Это значит, что надо передавать наибольшее или заданное количество
информации (сообщений) наиболее экономичным образом (по за-
тратам энергии и полосе частот) в заданное время. Последнее дос-
тигается благодаря использованию наиболее современных способов
передачи (кодирования и модуляции) и приема (декодирования и де-
модуляции). Перечисленные вопросы подробно излагаются в данном
учебнике.
Для правильного понимания принципов функционирования дейст-
вующих и перспективных систем передачи информации специалисту в
3
области автоматики, телемеханики и связи необходимо знать основные
положения теории сигналов, информации, модуляции, оптимального
приема и помехоустойчивого кодирования, принципы построения
многоканальных систем передачи, высокоскоростных модемов, сжа-
тия сообщений и др. Эти вопросы составляют содержание данного
учебника. Особое внимание в нем уделено основным принципам и
методам современной теории передачи сообщений, которые находят
самое широкое применение на практике. Этим в основном отличается
данный учебник от других аналогичных, последний из которых был из-
дан 10 лет тому назад.
Глава 1
ОБЩИЕ СВЕДЕНИЯ О ТЕОРИИ СВЯЗИ
1.1. ПРЕДМЕТ ОБЩЕЙ ТЕОРИИ СВЯЗИ
Допустим, что можно осуществить некоторую последовательность
операций по преобразованию сигналов. Когда это необходимо или
желательно, какие преимущества дают эти преобразования, какие ог-
раничения при этом следует учитывать? Ответы на эти и подобные во-
просы составляют основу того, что называют теорией связи. Значение
теории связи особенно усилилось в последнее время в связи с появ-
лением технических средств, которые позволяют осуществлять опера-
ции во много раз более сложные, чем это было раньше.
В 1924 г. начало теории связи положила работа Найквиста, в ко-
торой он приходит к выводу, что число разрешенных или различимых
импульсов, которые могут быть переданы по каналу с ограниченной
полосой частот в единицу времени, пропорционально ширине полосы
частот этого канала. Максимальное число разрешенных импульсов N,
передаваемое в течение интервала времени Т, через канал с шириной
полосы частот F находится по формуле
N = kTF,
где к — коэффициент пропорциональности, зависящий от формы импульса и
способа определения полосы частот; к < 2.
В 1928 г. Хартли связал результат Найквиста с ограничениями на
точность приема импульса и в результате получил ограничение коли-
чества данных, которые надежно могут быть переданы по физическо-
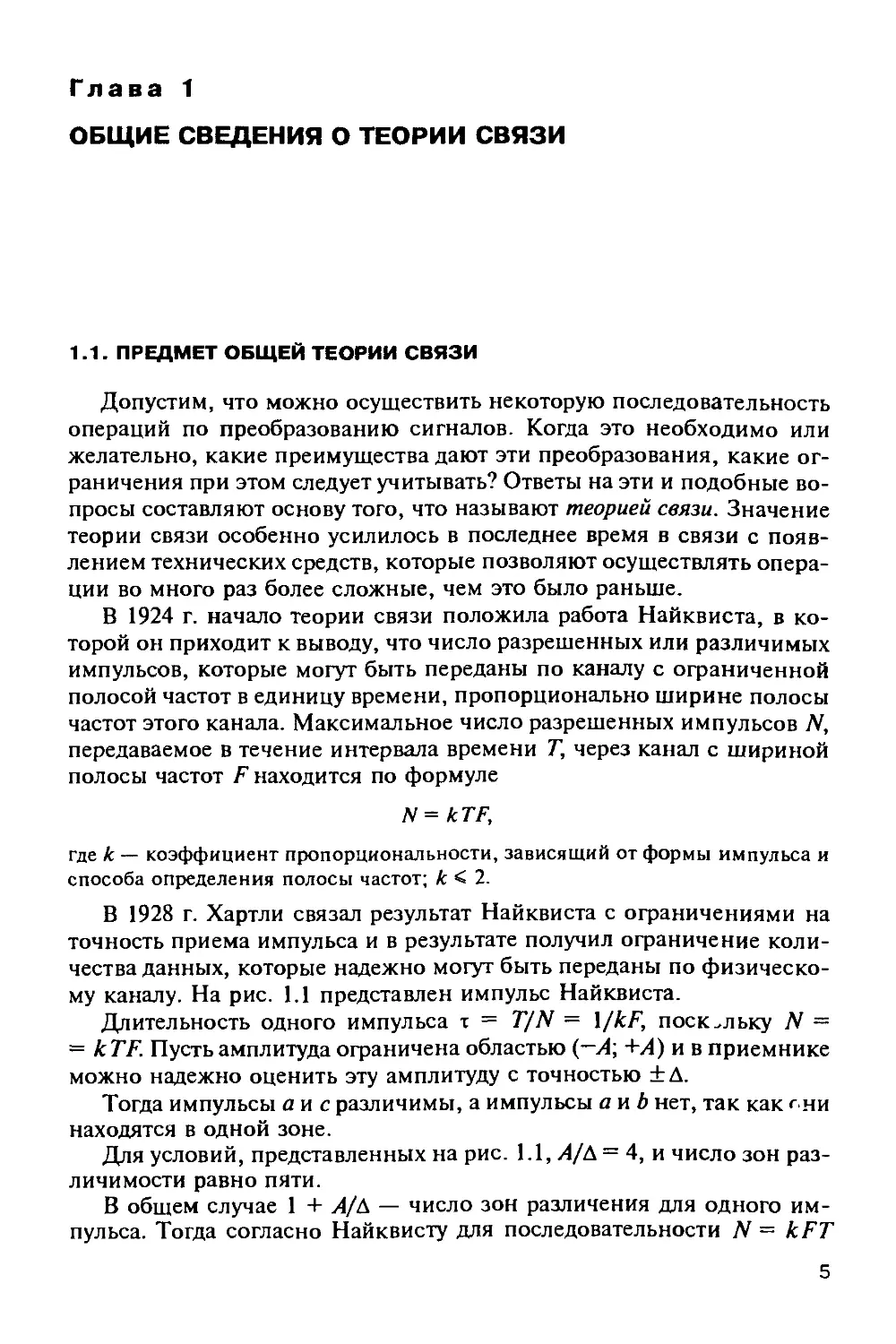
му каналу. На рис. 1.1 представлен импульс Найквиста.
Длительность одного импульса т = T/N = \/kF, поскольку N —
= kTF. Пусть амплитуда ограничена областью (—А; +Л) и в приемнике
можно надежно оценить эту амплитуду с точностью ±Д.
Тогда импульсы а и с различимы, а импульсы а и b нет, так как гни
находятся в одной зоне.
Для условий, представленных на рис. 1.1, Л/Д = 4, и число зон раз-
личимости равно пяти.
В общем случае 1 + Л/Д — число зон различения для одного им-
пульса. Тогда согласно Найквисту для последовательности N = kFT
5
Рис. 1.1
импульсов число различаемых за интервал времени Т сигналов
Л/= [1 + (Л/Д)]*^Т Для примера kFT= 6 (рис. 1.2) имеем М= 15 625.
Таким образом Хартли впервые попытался установить связь ме-
жду значением интервала Т, в течение которого передается сигнал
с шириной полосы частот канала F, наибольшим значением сигнала
А, точностью приемника Д и допустимым числом сообщений М. Тео-
рия связи устанавливает более точные соотношения, но такого же ти-
па. Связь тесно связана со случайными процессами. Если бы, напри-
мер, слушатель (абонент) точно знал, что именно и с какой интонацией
должен сказать говорящий, то не существовало бы необходимости
слушать, поэтому проблемы связи не существует, если отсутствует
случайный источник сообщения.
Но проблема связи не существует и тогда, когда отсутствуют слу-
чайные помехи во время приема сигнала. Поясним это примером.
Пусть необходимо передать содержание книги или документа, объем
используемого при этом алфавита вместе со знаками препинания со-
держит 2б = 64 символа. Тогда каждому из этих символов можно со-
поставить шестизначное двоичное число, например: а = 000000, б =
= 000001, <? = 000010, ..., 9 = 111111. Тогда все содержание книги (до-
кумента), может быть записано в виде одной длинной последова-
тельности:
001010, 010001, ..., 011111 (от первой буквы до последней точ-
ки), которую можно представить как число, заключенное между
0 и 1: 0,001010010001...011111.
Это число можно передать одним импульсом Найквиста (рис. 1.3).
Однако такой способ абсурден и невыполним, поскольку случайные
6
помехи не позволяют реализовать
такую точность определения ам-
плитуды.
Хартли, хотя и понимал важ-
ность влияния помех, не учитывал
того обстоятельства, что любой
приемник иногда неправильно
оценивает амплитуду независимо
от выбранного параметра кванто-
вания по уровню Д.
В 1924 г. эту проблему частич-
но решил Винер, который для
системы, представленной на рис.
1.4, решил задачу оптимальной
линейной фильтрации, т. е. по-
строил линейный фильтр, выход-
Рис. 1.3
ной сигнал которого Х(/) является наилучшей в среднем квадратиче-
ском приближении копией Х(/).
Винер впервые ввел в технику связи понятие оптимальность, од-
нако предстояло решить много задач, например, связанных с преоб-
разованием сообщения Х(/) в передаваемый сигнал S(t), т. е. связан-
ных с задачей модуляции (рис. 1.5).
Задачи выбора оптимальных преобразований вида Х(/) -> S(t) не ре-
шались, пока в 1944 г. Райс не разработал способы описания шумовых
эффектов, а в 1947 г. Котельников не проанализировал все виды мо-
дуляции и не установил фундаментальные и предельные ограничения
на всевозможные будущие системы модуляции и приема сигналов.
В 1948 г. появилась работа Шеннона, которая опровергала оши-
бочное представление о том, что шум (помеха) накладывает неизбеж-
ные ограничения на точность связи. Шеннон вводит понятие пропу-
скной способности канала С и показывает: если число М сообщений
Рис. 1.4
I n.(t)
Рис. 1.5
7
кг к функция длительности сигнала Твозрастает достаточно медленно
(Л/ < 2СТ), то выбирая Тдостаточно большим, можно в принципе по-
лучить сколь угодно высокую точность передачи, используя достаточно
длинные сигналы. Шеннон показал также, что надежная связь невоз-
можна, если М > 2СТ. Начиная с 1948 г. большая часть исследований
в теории связи посвящалась обобщению результатов и применению их
в инженерной практике.
1.2. ТЕРМИНЫ И ПОНЯТИЯ ТЕОРИИ СВЯЗИ
Сообщение и сигнал. Понятие "информация" и "сообщение" часто
употребляют как синонимы.
Информация — совокупность сведений о каких-либо событиях, яв-
лениях, предметах. Для передачи и хранения информации используют-
ся различные знаки (символы), позволяющие выразить, представить ее
в некоторой форме. Это могут быть слова, фразы, рисунки и т. д.
Сообщение — это совокупность знаков, содержащих ту или иную
информацию. Например, в телеграфии сообщение — это текст, т. е.
последовательность букв и цифр. В телефонии сообщение — это не-
прерывное изменение во времени звукового давления (передающее не
только содержание, но и интонацию, тембр, ритм и т. д.), в телевиде-
нии сообщение — это изменение во времени яркости элементов изо-
бражения.
Передача сообщения (а следовательно и информации) на расстоя-
ние осуществляется с помощью какого-либо материального носителя
(бумага, магнитная лента и т. д.) или физического процесса (звуковые,
электромагнитные волны, электрический ток и т. д.).
Сигнал — это физический процесс, отображающий (несущий) пе-
редаваемое сообщение. Чаще всего используются электрические сиг-
налы, определенные током или напряжением. Сигнал формируется
изменением тех или иных параметров физического носителя по зако-
ну передаваемого сообщения (модуляция).
Сообщения могут быть или не быть функциями времени (речь в те-
лефонии и текст в телеграфии, передача подвижного или не подвиж-
ного сообщения), сигнал же всегда является функцией времени.
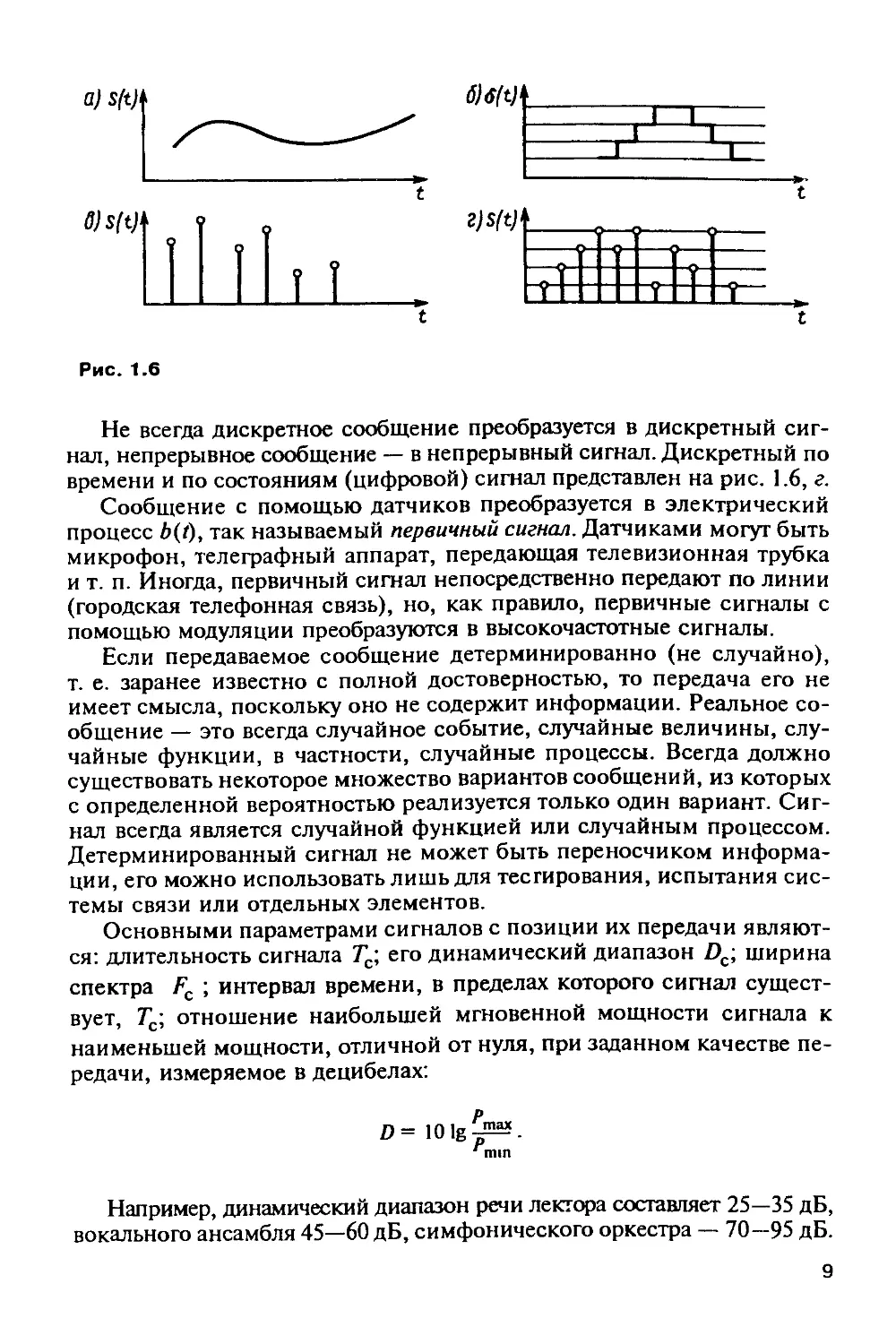
Основные виды сигналов. Если сигнал принимает любые значения
в некотором интервале, его называют непрерывным по состояниям
(рис. 1.6, а). Если сигнал представляет собой функцию S(t), прини-
мающую только определенные дискретные значения (в простейшем слу-
чае 0 и 1), то сигнал называют дискретным по состояниям (рис. 1.6, б).
Если сигнал задается на всей оси времени t, то его называют непре-
рывным (аналоговым, поскольку является копией, аналогом непре-
рывного сообщения), а если лишь в некоторые дискретные моменты
времени tn, то дискретным по времени (рис. 1.6, в).
8
Рис. 1.6
Не всегда дискретное сообщение преобразуется в дискретный сиг-
нал, непрерывное сообщение — в непрерывный сигнал. Дискретный по
времени и по состояниям (цифровой) сигнал представлен на рис. 1.6, г.
Сообщение с помощью датчиков преобразуется в электрический
процесс bit}, так называемый первичный сигнал. Датчиками могут быть
микрофон, телеграфный аппарат, передающая телевизионная трубка
и т. п. Иногда, первичный сигнал непосредственно передают по линии
(городская телефонная связь), но, как правило, первичные сигналы с
помощью модуляции преобразуются в высокочастотные сигналы.
Если передаваемое сообщение детерминированно (не случайно),
т. е. заранее известно с полной достоверностью, то передача его не
имеет смысла, поскольку оно не содержит информации. Реальное со-
общение — это всегда случайное событие, случайные величины, слу-
чайные функции, в частности, случайные процессы. Всегда должно
существовать некоторое множество вариантов сообщений, из которых
с определенной вероятностью реализуется только один вариант. Сиг-
нал всегда является случайной функцией или случайным процессом.
Детерминированный сигнал не может быть переносчиком информа-
ции, его можно использовать лишь для тестирования, испытания сис-
темы связи или отдельных элементов.
Основными параметрами сигналов с позиции их передачи являют-
ся: длительность сигнала Тс; его динамический диапазон Dc; ширина
спектра Fc ; интервал времени, в пределах которого сигнал сущест-
вует, Тс\ отношение наибольшей мгновенной мощности сигнала к
наименьшей мощности, отличной от нуля, при заданном качестве пе-
редачи, измеряемое в децибелах:
0 = 10 lg^.
'mm
Например, динамический диапазон речи лектора составляет 25—35 дБ,
вокального ансамбля 45—60 дБ, симфонического оркестра — 70—95 дБ.
9
Ширина спектра Fc характеризует скорость изменения сигнала внутри
интервала его существования. Для любого сигнала можно указать диа-
пазон частот, в пределах которого сосредоточена его основная энергия.
Очень часто в технике связи спектр сигнала преднамеренно ограничи-
вают в связи с ограниченностью полосы пропускания аппаратуры и
линии связи. Такое сокращение спектра производят исходя из задан-
ного искажения сигнала. Например, в телефонии при организации
служебной телефонной связи требуется обеспечить необходимую раз-
борчивость и узнаваемость корреспондента. Для этого достаточно ис-
пользовать составляющие спектра речевого сообщения 300—3400 Гц.
Ширина спектра телевизионного сигнала зависит от четкости изобра-
жения. При стандарте 625 строк верхняя частота спектра составляет
6 мГц. Ширина спектра телеграфного сигнала зависит от скорости те-
леграфирования И Обычно верхняя частота Fc = 1,5 К, где V— число
символов в секунду, Бод.
Спектр модулированного сигнала обычно шире спектра первично-
го сигнала и зависит от вида используемой модуляции.
Можно использовать такую обобщенную характеристику, как объ-
ем сигнала Vc = Тс Dc Fc.
1.3. СИСТЕМА ЛИНИИ И КАНАЛ СВЯЗИ
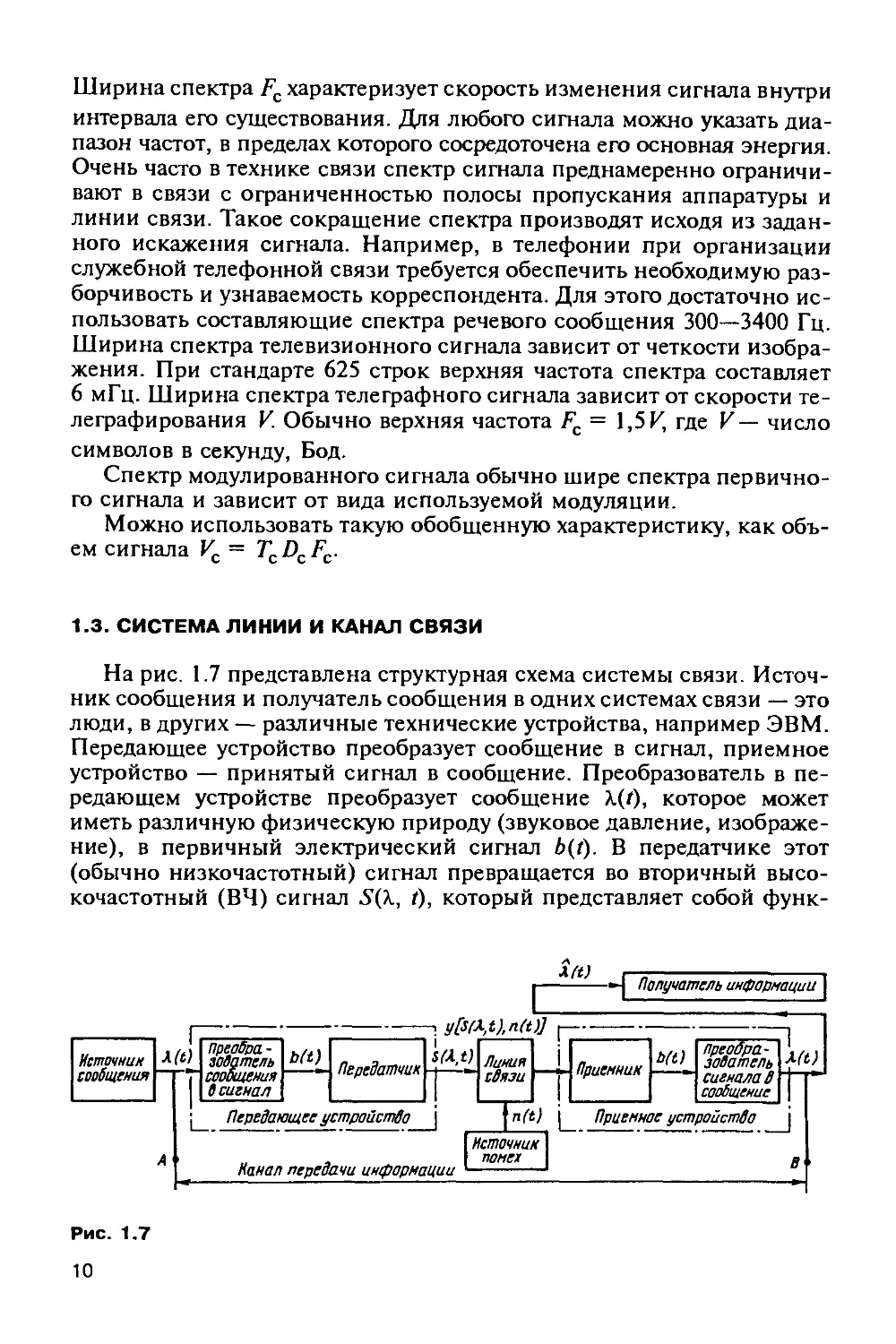
На рис. 1.7 представлена структурная схема системы связи. Источ-
ник сообщения и получатель сообщения в одних системах связи — это
люди, в других — различные технические устройства, например ЭВМ.
Передающее устройство преобразует сообщение в сигнал, приемное
устройство — принятый сигнал в сообщение. Преобразователь в пе-
редающем устройстве преобразует сообщение Х(Г), которое может
иметь различную физическую природу (звуковое давление, изображе-
ние), в первичный электрический сигнал b(t). В передатчике этот
(обычно низкочастотный) сигнал превращается во вторичный высо-
кочастотный (ВЧ) сигнал 5(Х, t), который представляет собой функ-
Рис. 1.7
10
цию не только времени t, но и сообщения X. В результате этого пре-
образования (модуляции) сигнал приводится к виду, пригодному для
передачи по используемой линии связи. Преобразование сообщения
в сигнал должно быть обратимым, иначе часть информации будет по-
теряна даже при отсутствии помех.
Линия связи — это среда, используемая для передачи сигнала от пе-
редатчика к приемнику. В системах электрической связи — это двух-
проводная цепь, симметричный электрический, коаксиальный или
волоконно-оптический кабель; в системах радиосвязи — доминантная
область, т. е. область пространства, в которой распространяются элек-
тромагнитные волны от передатчика к приемнику. При передаче сиг-
нала по линии связи он может искажаться из-за воздействия помех
л(г). В результате на выходе линии связи сигнал описывается функцией
у[5(Х, г), «(/)]. Приемное устройство, принимая и обрабатывая этот сиг-
нал, в начале формирует копию первичного сигнала b (г) на выходе при-
емника, а затем копию X переданного сообщения. Иначе говоря, при-
емник на основе анализа у[5(Х, t), n(t)] должен определить, какое из
возможных сообщений передавалось. Приемное устройство, как пра-
вило, наиболее ответственный и сложный элемент системы связи.
Система связи — совокупность технических средств для передачи
сообщения от источника к потребителю (передающее устройство, линия
связи, приемное устройство). Системы связи по виду передаваемого со-
общения можно разделить на телефонные, телеграфные, фототелеграф-
ные, телевизионные, телеметрические, телеуправления, передачи данных
и т. д. По назначению телефонные и телевизионные системы делятся
на вещательные, обеспечивающие высокое качество воспроизведе-
ния, и профессиональные, имеющие специальное применение.
Канал связи — совокупность технических средств, обеспечивающих
передачу сигнала от некоторой точки А системы до точки В. Эти точки
могут быть выбраны произвольно, лишь бы между ними проходил
сигнал. Часть системы связи, расположенная до точки А, является ис-
точником сигнала для этого данного канала. Если сигналы, поступаю-
щие на вход канала и снимаемые с его выхода, являются дискретными
по состояниям, то канал называется дискретным. Если же эти сигналы
являются непрерывными, то канал называется непрерывным. Канал
может быть дискретным или непрерывным независимо от характера
сообщения. В одной и той же системе связи можно выделить как дис-
кретный, так и непрерывный каналы в зависимости от выбора места
расположения точек А и В.
Непрерывный канал связи, так же как и сигнал, может характери-
зоваться тремя параметрами: временем Тк, в течение которого по ка-
налу ведется передача; динамическим диапазоном DK и полосой про-
пускания FK.
Динамический диапазон канала — это выраженное в децибелах
отношение допустимой мощности передаваемого сигнала к мощности
11
неизбежно присутствующей в канале помехи. Каналы могут быть про-
водной электросвязи, коротковолновой радиосвязи. Общие признаки
непрерывного канала следующие. В большинстве своем каналы ли-
нейны (применим принцип суперпозиции), продукты нелинейных
преобразований малы. На выходе каналов, даже при отсутствии по-
лезного сигнала, всегда имеются помехи. Сигнал при прохождении ка-
нала претерпевает задержку по времени и затухание по уровню. Всегда
в реальном канале имеют место искажения сигнала из-за несовершен-
ства характеристик канала и изменения характеристик (параметров) ка-
нала во времени. Обобщенной характеристикой канала является его
объем (или емкость канала)
Ик = TKDKFK.
Необходимым условием неискаженной передачи сигнала по кана-
лу является условие Ус < Ук. Процесс модуляции, т. е. процесс пре-
образования обычного сигнала в высокочастотный, предназначен для
согласования сигнала с каналом, т. е. для выполнения условия Ис < Ик.
В простейшем случае сигнал согласуется с каналом по всем трем па-
раметрам, т. е. выполняются три условия: Тс < Тк, Dc < DK, Fc < FK.
При этом выполняется условие Ис < Ик, и объем сигнала полностью
совпадает с объемом канала. Но условие Ис < Ик может выполняться
и в том случае, когда одно или два из этих трех неравенств (Тс < Тк,
Dc < DK, Fc < FK) не выполняются, т. е. производится "обмен" дли-
тельности на ширину спектра, ширины спектра на динамический диа-
пазон и т. д.
Пример. Записанный на магнитную ленту телефонный сигнал, имеющий
ширину спектра 3 кГц, необходимо передать по каналу связи с шириной по-
лосы пропускания 300 Гц. Это можно сделать, воспроизводя при передаче сиг-
нал со скоростью, в 10 раз меньшей той скорости, на которой он был записан.
При этом все частоты спектра исходного сигнала уменьшаются в 10 раз, но во
столько же раз увеличивается время передачи. При приеме сигнал записыва-
ется на магнитную ленту и затем воспроизводится со скоростью, в 10 раз боль-
шей. Можно передавать сигналы быстрее, чем они создавались, если полоса
пропускания канала шире ширины спектра сигнала.
Большой интерес представляет собой возможность "обмена" дина-
мического диапазона на полосу пропускания. Например, используя
широкополосные, помехоустойчивые виды модуляции, можно переда-
вать сообщение с динамическим диапазоном 60 дБ по каналу, в котором
сигнал превышает помеху всего лишь на 20 дБ. При этом используется
полоса пропускания канала, в несколько раз более широкая, чем спектр
передаваемого сообщения.
Систему связи называют многоканальной, если она обеспечивает
передачу нескольких сообщений по одной общей линии связи.
12
1.4. МНОГОКАНАЛЬНЫЕ СИСТЕМЫ СВЯЗИ
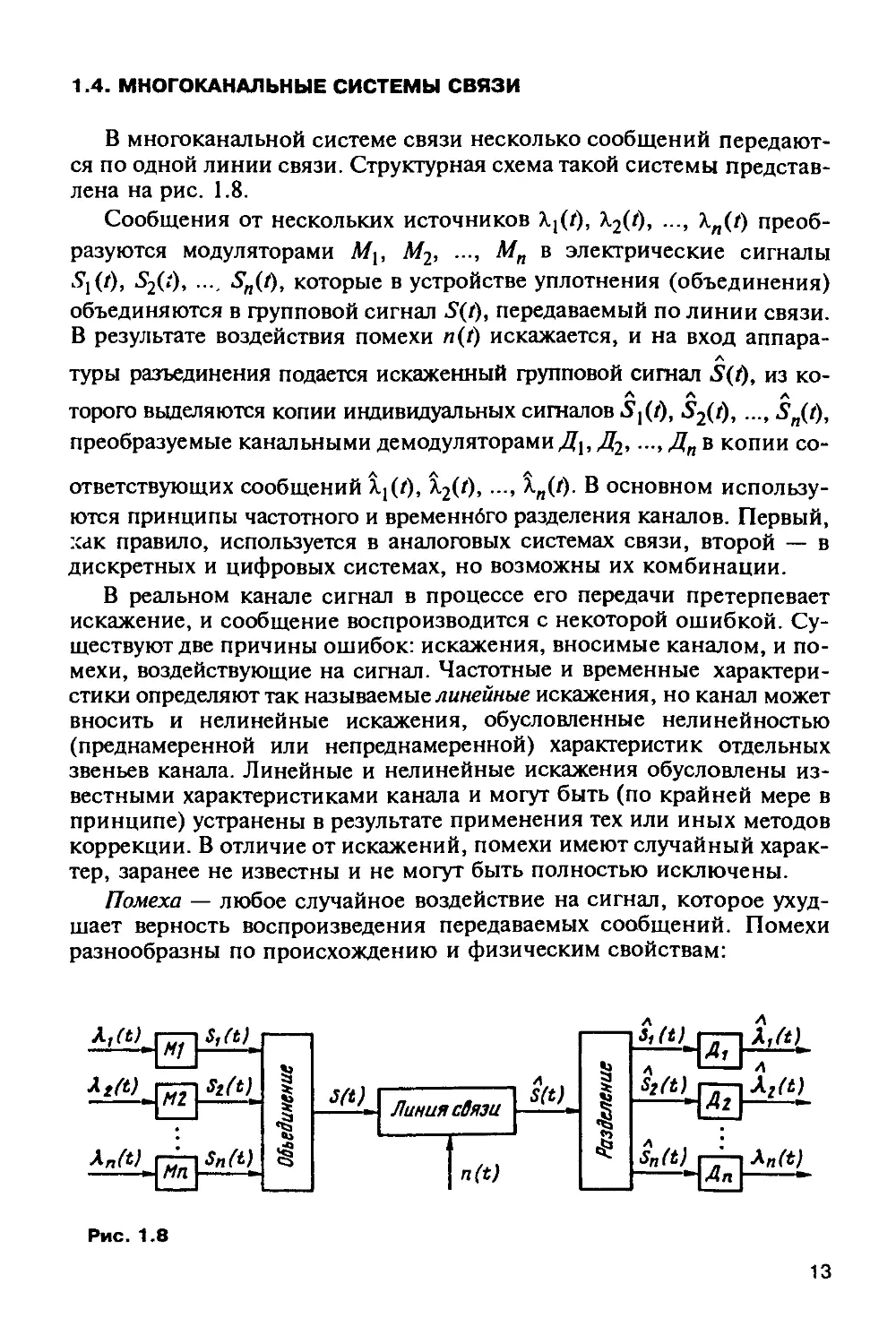
В многоканальной системе связи несколько сообщений передают-
ся по одной линии связи. Структурная схема такой системы представ-
лена на рис. 1.8.
Сообщения от нескольких источников Х](г), Х2(0, , 1п(г) преоб-
разуются модуляторами Мх, М2, , Мп в электрические сигналы
S2(i), .... Sn(t), которые в устройстве уплотнения (объединения)
объединяются в групповой сигнал S(t), передаваемый по линии связи.
В результате воздействия помехи л (г) искажается, и на вход аппара-
туры разъединения подается искаженный групповой сигнал 5(0, из ко-
торого выделяются копии индивидуальных сигналов S^i), S2(t), Sn(t),
преобразуемые канальными демодуляторами Д{, Д2,Дп в копии со-
ответствующих сообщений Х.](0, •> ЧДО- В основном использу-
ются принципы частотного и временнбго разделения каналов. Первый,
хак правило, используется в аналоговых системах связи, второй — в
дискретных и цифровых системах, но возможны их комбинации.
В реальном канале сигнал в процессе его передачи претерпевает
искажение, и сообщение воспроизводится с некоторой ошибкой. Су-
ществуют две причины ошибок: искажения, вносимые каналом, и по-
мехи, воздействующие на сигнал. Частотные и временные характери-
стики определяют так называемые линейные искажения, но канал может
вносить и нелинейные искажения, обусловленные нелинейностью
(преднамеренной или непреднамеренной) характеристик отдельных
звеньев канала. Линейные и нелинейные искажения обусловлены из-
вестными характеристиками канала и могут быть (по крайней мере в
принципе) устранены в результате применения тех или иных методов
коррекции. В отличие от искажений, помехи имеют случайный харак-
тер, заранее не известны и не могут быть полностью исключены.
Помеха — любое случайное воздействие на сигнал, которое ухуд-
шает верность воспроизведения передаваемых сообщений. Помехи
разнообразны по происхождению и физическим свойствам:
Рис. 1.8
13
атмосферные (в радиоканалах, обусловлены электрическими про-
цессами в атмосфере, энергия их в основном сосредоточена в диапа-
зонах длинных и средних волн);
индустриальные (возникают в результате резких изменений тока в
электрических цепях различных устройств, например, электрического
транспорта, системах зажигания двигателей и т. п.);
помехи от посторонних радиостанций и радиоканалов (возникают
из-за нарушения регламента рабочих частот, недостаточной стабиль-
ности элементов схем, плохой фильтрации гармоник сигнала, нели-
нейных процессов в каналах "перекрестные помехи");
импульсные шумы и прерывания связи (в проводной связи им-
пульсные шумы определяются, например, работой устройства автома-
тической коммутации каналов);
внутренние шумы аппаратуры (присутствуют во всех диапазонах,
обусловлены хаотическим движением носителей зарядов в усилитель-
ных элементах, резисторах; особенно проявляются на сверхвысоких
частотах, где остальные помехи невелики).
В общем случае влияние помехи и(/) на передаваемый сигнал 5(1, /)
может быть описано оператором y(t) = И[5(Х(Г), «(/)]. В частном слу-
чае, когда этот оператор выражает сумму, — y(t) = 5(1, г) + л (г), то
помеху называют аддитивной. Если оператор выражает произведение
y(t) = 5(Х, t)n(f), то помеху называют мультипликативной.
Мультипликативная помеха возникает из-за изменения во времени
амплитудных и фазовых характеристик канала, например при прохо-
ждении сигнала через среду с изменяющимися во времени парамет-
рами; при многолучевом распространении радиоволны и т. д.
Среди аддитивных помех различного происхождения особое место
занимают флуктуационные (флюктуационные) помехи, которые, как
правило, являются непрерывными, случайными, нормальными (гаус-
совскими) процессами. Источником таких помех являются входные
элементы или цепи приемных устройств.
Импульсные помехи — это хаотическая последовательность корот-
ких импульсов (как правило, это помехи индустриального происхож-
дения, например на железных дорогах от устройств контактной сети).
Между сигналом и помехой отсутствует принципиальное различие,
они существуют в единстве. Например, излучение радиопередатчика
является полезным сигналом для "своего" приемника и помехой для
других приемников.
1.5. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ СИСТЕМЫ СВЯЗИ
При оценке работы системы связи необходимо прежде всего учесть
обеспечиваемые точность и скорость передачи сообщения, т. е. опре-
делить качественные и количественные характеристики системы. В
реальной системе связи качество передачи зависит от степени иска-
14
жения принятого сообщения. В правильно спроектированной и тех-
нически исправной системе искажение сообщения обусловлено лишь
искажением помех, при этом качество передачи полностью определя-
ется помехоустойчивостью системы.
Помехоустойчивость — это способность системы противостоять
вредному воздействию помех на передачу сообщения. Поскольку воз-
действие помех проявляется в отличии принятого сообщения от пере-
данного, то количественно помехоустойчивость может характеризо-
ваться степенью их соответствия — верностью. Количественная мера
верности зависит от характера сообщений и претензий (требований)
получателя. При передаче дискретных сообщений влияние помехи
проявляется в приеме вместо переданного элемента сообщения, дру-
гого (ошибке). Количественной мерой здесь является вероятность
ошибки или любая монотонная функция этой вероятности. В систе-
мах телеграфии вероятность ошибки может задаваться не хуже 10~4,
__g _о
при передаче данных этого мало, и задают 10 ,10
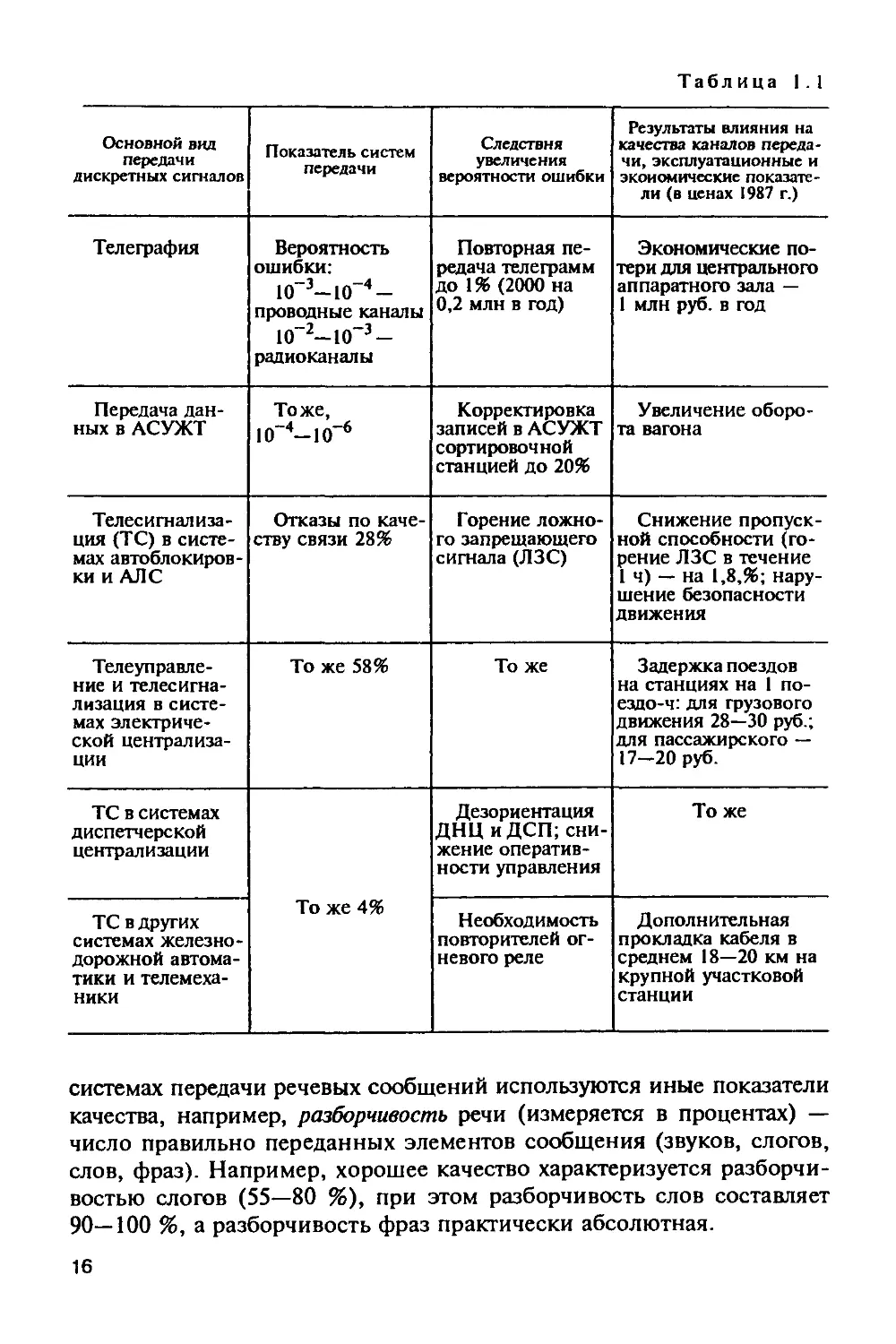
О значительном влиянии качества каналов на эксплуатационную ра-
боту различных систем автоматики, телемеханики и связи свидетельст-
вуют данные, приведенные в табл. 1.1, которые получены при анализе
алгоритмов и устройств помехоустойчивого приема дискретных сиг-
налов в железнодорожных системах передачи дискретных сигналов.
При передаче непрерывных сообщений верность представляет со-
бой соответствие принятого сообщения Х(/) переданному Х(г). Она
оценивается расстоянием между сообщениями или погрешностью по
разным критериям.
Определяя текущую погрешность е(г) = Х(/) - 1(г), можно оценить
верность по критерию усредненной текущей погрешности
г
е = i Je(/)d/.
о
Часто используется критерий среднего квадратического отклоне-
7
ния 82 = 1 Je2(r)dr.
0
Может использоваться критерий р[е(г) < е0], где />[•] — вероят-
ность; е0 — заданный порог.
В аналоговых системах любое малое воздействие на сигнал в про-
цессе его передачи по каналу приводит к искажению сообщения, и аб-
солютно точное восстановление сообщения невозможно. В дискретных
или цифровых системах ошибка возникает только тогда, когда иска-
жение в результате воздействия помехи превышает некоторый порог. В
15
Табл ица 1.1
Основной вид передачи дискретных сигналов Показатель систем передачи Следствия увеличения вероятности ошибки Результаты влияния на качества каналов переда- чи, эксплуатационные и экономические показате- ли (в ценах 1987 г.)
Телеграфия Вероятность ошибки: 10-3-10-4- проводные каналы ю-2—ю-3 — радиоканалы Повторная пе- редача телеграмм до 1% (2000 на 0,2 млн в год) Экономические по- тери для центрального аппаратного зала — 1 млн руб. в год
Передача дан- ных в АСУЖТ Тоже, 10-4—10-6 Корректировка записей в АСУЖТ сортировочной станцией до 20% Увеличение оборо- та вагона
Телесигнализа- ция (ТС) в систе- мах автоблокиров- ки и АЛ С Отказы по каче- ству связи 28% Горение ложно- го запрещающего сигнала (ЛЗС) Снижение пропуск- ной способности (го- рение ЛЗС в течение 1 ч) — на 1,8,%; нару- шение безопасности движения
Телеуправле- ние и телесигна- лизация в систе- мах электриче- ской централиза- ции То же 58% То же Задержка поездов на станциях на 1 по- ездо-ч: для грузового движения 28—30 руб.; для пассажирского — 17—20 руб.
ТС в системах диспетчерской централизации Дезориентация ДНЦ и ДСП; сни- жение оператив- ности управления То же
ТС в других системах железно- дорожной автома- тики и телемеха- ники То же 4% Необходимость повторителей ог- невого реле Дополнительная прокладка кабеля в среднем 18—20 км на крупной участковой станции
системах передачи речевых сообщений используются иные показатели
качества, например, разборчивость речи (измеряется в процентах) —
число правильно переданных элементов сообщения (звуков, слогов,
слов, фраз). Например, хорошее качество характеризуется разборчи-
востью слогов (55—80 %), при этом разборчивость слов составляет
90—100 %, а разборчивость фраз практически абсолютная.
16
Г лава 2
ОСНОВЫ ТЕОРИИ НЕМОДУЛИРОВАННЫХ СИГНАЛОВ
2.1. ДЕТЕРМИНИРОВАННЫЕ СИГНАЛЫ
Детерминированными называются сигналы, заданные вполне опре-
деленной функцией времени, например:
5(/) = £/msin(<oo/ + <р0),
где амплитуда Um, частота <оо, фаза <р0 — известные заданные величины.
Случайный (стохастический) сигнал изменяется во времени слу-
чайным образом, т. е. представляет собой случайный процесс. Ква-
зидетерминированный (по сути случайный) процесс представляется
реализациями, которые описываются функциями времени определен-
ного вида, содержащими несколько случайных параметров, например
S(f) = Umsin[со0/ + <p(r)]. При известных Um и ю0, <p(z) — случайная из-
меняющаяся во времени фаза. Такие сигналы описывают большое
число сигналов-"переносчиков", у которых один из параметров (в дан-
ном случае фаза) изменяется по закону сообщения (модулируется со-
общением).
Периодический сигнал — это сигнал, любое значение которого по-
вторяется через период Т, т. е. S(t) = S(t + Т), — °° < t < °о (последнее
приводит к тому, что ни один реальный сигнал не может быть перио-
дическим).
Непериодическим называется детерминированный сигнал, не удов-
летворяющий этому условию.
Энергия и мощность детерминированного сигнала. Требуется, чтобы
информация передавалась с заданным качеством при минимальном
значении энергии. Если детерминированный сигнал S(t) представляет
собой напряжение или ток, то его мгновенная мощность, выделяемая
на сопротивлении 1 Ом, P(t) = S2(i).
Энергия этого сигнала в интервале времени (ta, tb)
•ь •ь
E = J P(t)dt = J S2(/)d/.
17
Средняя мощность этого сигнала в этом же интервале
'ь
/>cp = ^=r47j/>(/)d/=f,
Ь "'а
где {ь - G = Т-
Например, в одном периоде Го = 2л/со0 гармонического сигнала
'о
S(t) = cos(co0T) содержится энергия Е= J cos2co0/d/= То/2, а средняя
О
мощность Рср = E/Tq = 1/2.
Если на интервале Е= tb~ ta заданы два детерминированных сиг-
нала 5,(г) и 52(/), то энергия и мощность их суммы соответственно
'ь
% = J 15,(0 + 52(r)2)dr = £, + + 2£,2;
'ь 'ь
Pz = Р\+ Р2 + Р\ъ Р\2 = J5,(052(/)d/; Р,2 = 1 j5,(052(0d/.
’а ‘а
где £,2> Р,2 — соответственно взаимные энергия и мощность этих сигналов
(энергия и мощность их взаимодействия).
Сигналы 5,(/) и 52(/) называют ортогональными, если £12 = 0.
В этом случае Ех = Е, + Е2, Р£ = Р, + Р2.
Корреляционные характеристики детерминированных сигналов.
Часто возникает необходимость выяснения степени сходства различ-
ных сигналов, например сигнала и его оценки.
Взаимная корреляционная функция — это количественная мера, на-
пример в единицах мощности, степени сходства сигналов 5,(f) и 52(г):
т
2
RS.S,W = >im 7 f 5,(/)52(/- x)d/,
T
2
где т — временной сдвиг сигналов относительно друг друга.
Взаимная корреляционная функция может принимать положи-
тельные значения, когда с ростом одного сигнала другой также уве-
личивается, отрицательные значения, когда с уменьшением одного
18
сигнала другой увеличивается, и значение, равное нулю. По мере из-
менения т характер корреляции может меняться.
Автокорреляционная функция характеризует связь между сигналом
и смещенной на интервал т его копией:
т
2
Я,(т) = lim 1 [ S(/)5(/-x)d/.
т
2
По мере увеличения т корреляционные связи у всех сигналов (кро-
ме периодических) ослабевают, уменьшаются и в пределе при т -> оо
Rs(t) стремится к нулю.
Корреляционная функция четная, т. е. Rs(t) = Rs(—т). При т = О
автокорреляционная функция достигает максимального значения,
равного средней мощности сигнала:
т
2
Я5(0) = lim 1 f ^(/Jd/.
Т-> ml J
T
2
По приведенным формулам вычисляют корреляционные функции
сигналов с бесконечно большой энергией и ограниченной мощно-
стью, например периодических сигналов. Корреляционная функция
сигнала с ограниченной энергией
Я/г)= J 5(/)S(/-x)dr.
В этом случае максимальное значение Я5(0) корреляционной функ-
ции равно энергии сигнала. По этой формуле вычисляется корреляци-
онная функция детерминированного сигнала конечной длительности.
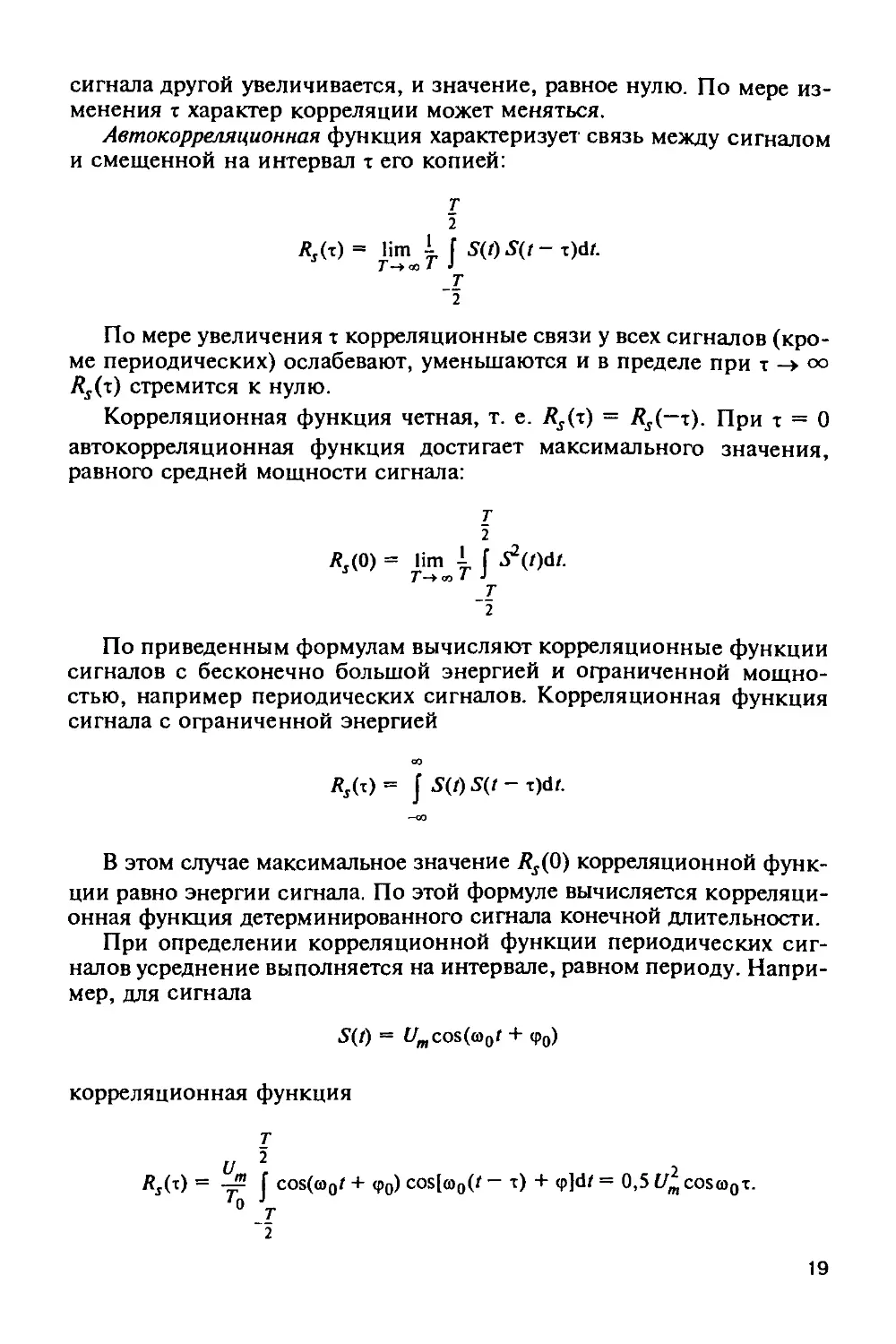
При определении корреляционной функции периодических сиг-
налов усреднение выполняется на интервале, равном периоду. Напри-
мер, для сигнала
S(t) = Um cos(<o0r + <р0)
корреляционная функция
Я/т) =
т
! 2
I cos(<o0/ + ф0) cos[<00(/ _ т) + <₽]d' =
0 т
2
0,5 U2 coso)0x.
19
Рис. 2.1
Кривые автокорреляционных функций для четырех детерминиро-
ванных сигналов приведены на рис. 2.1, а, б. С корреляционными
функциями связаны спектральные характеристики.
Спектры детерминированных сигналов. Периодический детермини-
рованный сигнал может быть разложен в ряд Фурье — спектральное
представление (спектр) сигнала в базисе гармонических функций:
СО
S(t) - у + £ (лпСО5Л®0' + Ansinn®o0,
л= 1
Т Т
2 2
где ап = у J 5(/)cos(n<o0/)d/, bn = 1, j S(/)sin(n<ooz)d/ Или
Т Т
~2 *2
5(/) = у + £ C„cos(no)0/ +ф„),
п- 1
20
где С„ = ja2n + b2n, <р„ = -arctgl -2 или
°п = c„cosq>„; ьп = “сл51пФл-
Воспользовавшись формулой Эйлера cos(nco0z) =
можно записать комплексную форму ряда Фурье:
1 J'n,a>o . 1
2е +2e
5(Z) =
jnt<s>a -jntaB Jnt<s>a
°„e------------------ + bn‘----------
-Jntaa
-е
У
" ( jntuin ~jnta>n
+(on+Jb„)e
03 JffttOQ
E (an~Jb„)e или
• +/Я(0л/
5(0 = X Спе 0
Q л m_
2 + S
= fo
2
5(0 = ±
1
2
i-де C„= ^(o„-j6„)= ^С„е^п.
Здесь С n — комплексная амплитуда
значения ап и Ьп в последнюю формулу,
и-й гармоники. Подставляя
получаем:
т
2
с„= 1 J5(z)/”“°d/. (2.1)
_т
2
Рассмотрим спектр периодической последовательности прямо-
угольных импульсов (рис. 2.2). Подставляя в формулу (2.1) функцию,
описывающую представленный на рис. 2.2 сигнал, получаем
с -и} U _ Ulu^(n^u/2)
п т \ в nT«,0 -j Т nr /2
-2!
2
Cn=^sincpp>).
п у \ 2 '
Огибающая Сп дискретного
спектра С п и фаза <рл представлены
на рис. 2.3. В случае непериоди-
ческого детерминированного сиг-
нала спектр может быть получен
21
Рис. 2.3
как результат предельного перехода при Т -» °° и tu = const. В этом
случае получаем так называемые прямое и обратное преобразования
Фурье:
S(<o) = j S(t)e y'md/; 5(/) = j- J S(a>)ey'mda>.
Спектральная плотность
S(o) =
где 5(ш) — амплитудно-частотная характеристика (АЧХ) непериодического
сигнала; <р(ш) — фазо-частотная характеристика (ФЧХ).
Модуль спектральной плотности 5(<в) непериодического импульса
и огибающая Сп дискретного спектра периодической последователь-
ности таких же импульсов совпадают по форме.
22
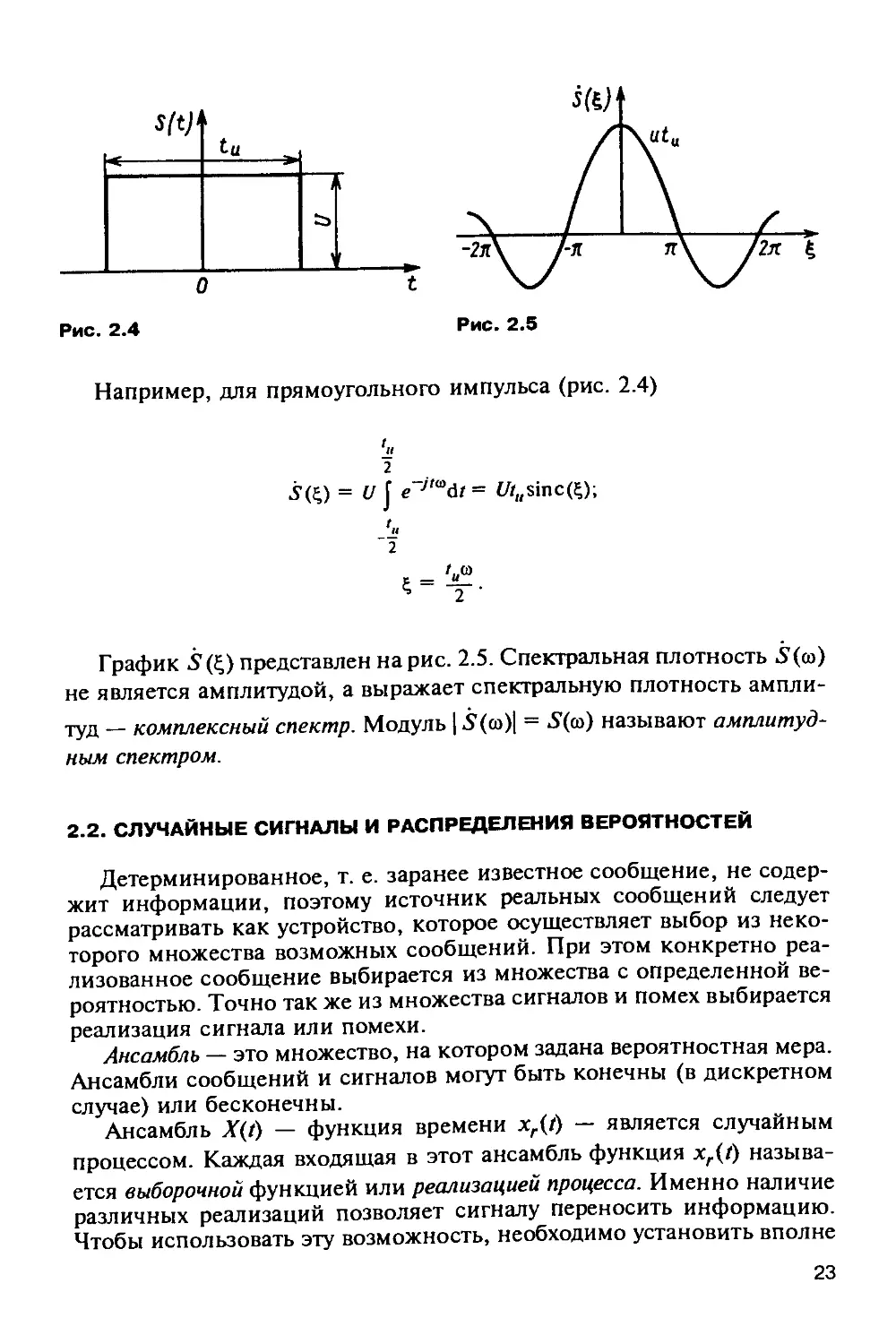
Например, для прямоугольного импульса (рис. 2.4)
2
5(£) = U J е_у'шс1Г= W„sinc(5);
г
4 2
График 5(^) представлен на рис. 2.5. Спектральная плотность 5(<в)
не является амплитудой, а выражает спектральную плотность ампли-
туд — комплексный спектр. Модуль 15'(и)| = 5"(а>) называют амплитуд-
ным спектром.
2.2. СЛУЧАЙНЫЕ СИГНАЛЫ И РАСПРЕДЕЛЕНИЯ ВЕРОЯТНОСТЕЙ
Детерминированное, т. е. заранее известное сообщение, не содер-
жит информации, поэтому источник реальных сообщений следует
рассматривать как устройство, которое осуществляет выбор из неко-
торого множества возможных сообщений. При этом конкретно реа-
лизованное сообщение выбирается из множества с определенной ве-
роятностью. Точно так же из множества сигналов и помех выбирается
реализация сигнала или помехи.
Ансамбль — это множество, на котором задана вероятностная мера.
Ансамбли сообщений и сигналов могут быть конечны (в дискретном
случае) или бесконечны.
Ансамбль X(t) — функция времени xr(f) — является случайным
процессом. Каждая входящая в этот ансамбль функция xr(t) называ-
ется выборочной функцией или реализацией процесса. Именно наличие
различных реализаций позволяет сигналу переносить информацию.
Чтобы использовать эту возможность, необходимо установить вполне
23
определенное соответствие между каждой реализацией сообщения и
каждой реализацией сигнала. Поскольку помехи также являются слу-
чайными процессами, то по реализации принятого сигнала можно
лишь с некоторой вероятностью судить о том, какое именно сообще-
ние было передано.
В общем случае случайный процесс X{t) считается полностью за-
данным, если для любого набора моментов времени Zp /2, ..., tn и лю-
бых значений сигнала Х|, х2, —, хп можно вычислить вероятность того,
что в указанные моменты времени сигнал X(t) принимает значения,
не превышающие хх, х2, ..., хп, т. е. F(X|, х2, ..., хп; tx, t2, ..., tn) =
= P{X(tx} < x„ X(t2) < x2, ..., X(t„) < x„}, где P{X(tx) < xx, X(t2) < x2, ...,
X(tn) < jq} — совместная вероятность событий, записанных в скобках.
X(tk) — это случайная величина, так называемое сечение случайного
процесса в момент времени tk.
Функция F(xx, х2, ..., х„; fj, t2, ..., Гл) — л-мерная функция распреде-
ления вероятностей процесса, хь х2, ..., хп — ее аргументы, tx, ..., tn —
параметры. Случайный процесс полностью задан, когда для любого п
и любых значений Г|, t2, ..., tn можно найти £(•).
Если существуют частные производные функции распределения
по всем хк, то можно определить л-мерную плотность распределения
вероятностей (ПРВ) дифференцированием по всем аргументам:
х„; t2.
И-СХр х2,
t = anF(X|,x2,...,xn; /|./2, ..../„)
л ах|Эх2...ахл
Очевидно, зная плотность, можно определить функцию интегри-
рованием:
х( Хп
F(xx, х2, ..., хп; t2, .... /„) = j ... j *v(xb x2, ..., x„; tx, t2, ..., Z„)dx|dx2...dx„.
-CO -CO
В частном случае одномерного распределения (п = 1) получаем:
00
н>(х, t) > 0 при всех значениях х, J w(x, t)dx =1; 0 < F(x, t) < 1;
-СО
/(оо, t) = 1; Г(—оо, t) = 0; j »v(a, z)da = F(x, t).
—00
Стационарный процесс — это случайный процесс, у которого оп-
ределенная группа вероятностных характеристик не изменяется при
24
сдвиге начала отсчета, т. е. при замене аргумента t на (г + т), где т —
произвольный интервал времени. Различают стационарность в узком
(строгом) и широком смыслах. Процесс стационарен в узком смысле,
когда л-мерные распределения вероятностей не изменяются во вре-
мени (не зависят от выбора момента начала отсчета), т. е., если гово-
рить о плотности, то для любого лит справедливо равенство
H-Oq, х2, ..., хл; /], /2, ..., /„) = *v(x,, х2, ..., хл; /, + т, t2 + т, ..., tn + т).
Процесс называют стационарным в широком смысле, когда его сред-
нее значение (математическое ожидание) и дисперсия вообще не зависят
от времени, а корреляционная функция зависит лишь от т = t2 — ?|.
Процесс стационарный в узком смысле стационарен и в широком,
но не наоборот.
По виду закона распределения вероятностей случайные процессы
делятся на две группы: гауссовские (нормальные), негауссовские.
Нормальным называется процесс, у которого любая л-мерная плот-
ность распределения вероятностей
и-(Х], х2, ..., х„; tn) = /4лехр< - £ £ ctj^xi~ a№j- °?1 Г ’
I <==I у- I J
где /4Л; Су; ah су — постоянные, определяемые выбором сечений ..., /л и свя-
занные между собой.
В частности, в одномерном случае для нестационарного процесса
w(x, t) = —— exp(-t*~°Ml |,
ч/2ла(0 l 2a (/) J
для стационарного процесса формула упрощается:
н>(х) = exp I I.
V2rta I 2a2 J
Случайные сигналы могут быть непрерывными по состоянию и
времени; дискретными по состоянию и непрерывными по времени,
непрерывными по состоянию и дискретными по времени, дискрет-
ными по состоянию и времени.
Случайные процессы могут быть трех типов: совершенно случай-
ные, марковские, немарковские.
Совершенно случайный процесс (белый шум) — процесс, последую-
щие параметры которого статистически не зависят от предыдущих.
Такой процесс полностью определен одномерной ПРВ.
25
Марковский процесс — процесс, у которого зависимость текущего зна-
чения параметра от предыдущего не распространяется далее непосредст-
венно предшествующего момента. Такой процесс определяется одномер-
ной начальной ПРВ и ПРВ перехода из одного состояния в другое.
К немарковским процессам относятся остальные случайные процессы.
2.3. ЧИСЛОВЫЕ ХАРАКТЕРИСТИКИ СЛУЧАЙНЫХ СИГНАЛОВ
Среднее значение случайного процесса по ансамблю (математиче-
ское ожидание)
X(t) = mx(t) = = j xw(x, t)dx,
-CO
где Л/[Т(/)] — символ операции определения математического ожидания.
Более строго следовало бы записать
Л/[Х(/)] = j awx(a, /)da.
—00
Математическое ожидание — детерминированная функция време-
ни. Разность между случайным процессом и его математическим ожи-
данием называют центрированным процессом:
о ___
X = X(t) — X(f).
Значение mx(t} при каждом значении аргумента t равно математи-
ческому ожиданию значения случайной функции X(t) при данном t.
Дисперсия случайного процесса (центральная моментная функция
второго порядка) — математическое ожидание квадрата соответствую-
щего центрированного процесса.
Дисперсия вычисляется по формуле
, 0, " ,
a*(r) 3 [*(/)] = Л/(Х2(О] = Р[Х(0] = J k - mx(0]2w(x, /)dx.
—00
Дисперсия характеризует степень рассеяния возможных реализа-
ций случайного процесса от его среднего значения и характеризует эту
степень в квадратичной форме.
Часто используют такую характеристику как среднее квадратиче-
ское отклонение
26
Средний квадрат — это моментная функция второго порядка, ма-
тематическое ожидание квадрата самого (не центрированного) случай-
ного процесса:
Пх(о = * (0 = [X(f) + mx(J)f = WOT + 2X(f)mx(f) + m‘(f) = a2x(t) + m2x(t).
поскольку X(f) = 0, mx(t) = mx(t).
У стационарных случайных процессов, как было отмечено ранее,
mx(t) = тх = const, ax(t) — crx = const, r]x(t) ~ Лх ~ const.
Если стационарный эргодический процесс X(t) является напряже-
2 2
нием или током в нагрузке сопротивлением 1 Ом, то цх = X (t) яв-
2 --- 2
ляется полной средней мощностью процесса, тх = [ X(t) ] — мощно-
2 0 2
стью постоянной составляющей, ох = [Х(0] — мощностью
переменной составляющей.
Важно правило "Трех сигм": с той или иной вероятностью р можно
утверждать, что значения непрерывного случайного процесса X(t) не
выходят за пределы тх ± Зох (для нормального процесса р = 0,997).
Согласно неравенству Чебышева, вероятность р не может быть мень-
ше 8/9.
Кроме средних значений по ансамблю, можно определить среднее
значение случайного процесса по времени. Для стационарного фи-
нитного (заданного на интервале от до Г2) процесса можно опреде-
лить постоянную составляющую z-й реализации
!2
'i
Для процесса, заданного на всей оси времени,
I
2
Xi(t) = lim 1 J x, (t)dt.
т
2
27
Постоянные составляющие от времени не зависят, но являются
случайными величинами, поскольку их значения зависят от реализа-
ции сигнала.
Переменная составляющая i-й реализации процесса X(t)
Xj-M = х,(0 - x,(z).
Мощность переменной составляющей также является не завися-
щей от времени случайной величиной:
для финитного процесса
‘1
xl = -Ц- Гх?(ОйЛ (2.2)
Z2-/| J
'1
для прочих процессов
т
2
х\ = Ит 1 f xl (2.3)
T-»m T J
7
*2
Стационарный процесс называют эргодическим, если для него усред-
нение по времени по одной достаточно продолжительной реализации
приводит к тому же результату, что и статистическое усреднение, т. е.
постоянная составляющая равна математическому ожиданию, мощ-
ность переменной составляющей равна дисперсии и т. п.
Стационарность — необходимое, но не достаточное условие эрго-
дичности. Эргодичность требует того, чтобы результаты усреднения
по времени различных реализаций совпадали друг с другом и с ре-
зультатом усреднения по множеству:
Йх,(/)] = F[xy(/)] = F И(/)].
Эргодичность заключается в том, что реализации процесса "похо-
жи" друг на друга.
Эргодичность существенно упрощает определение вероятностных
характеристик (распределений вероятностей, числовых характери-
стик), поскольку они могут быть определены по одной реализации (не
надо производить усреднение по множеству), например определение
одномерной интегральной функции F(t} сводится к измерению отно-
сительного времени пребывания реализации х(Г) ниже заданного
уровня анализа.
28
2.4. ПРИМЕРЫ РАСПРЕДЕЛЕНИЯ ВЕРОЯТНОСТЕЙ СИГНАЛОВ
И ПОМЕХ В СИСТЕМАХ ЖЕЛЕЗНОДОРОЖНОЙ АВТОМАТИКИ,
ТЕЛЕМЕХАНИКИ И СВЯЗИ
Флуктуации фазы Д<р полезней) сигнала в системах контроля со-
стояний рельсовых линий (КРЛ) с когерентными приемниками в лет-
ний период являются нормальными стационарными процессами со
средним значением аД<р = 73,6° и средним квадратическим значением
оД<р = 0,83°. В осенний период может быть использовано распределе-
ние Вейбулла И^Дф) = аР(Дф“ 1)е с параметрами а = 31,11 и
Р = 75,84.
Плотность распределения вероятностей импульсной составляю-
щей помех, создаваемой в каналах КРЛ со средней частотой 175 Гц пе-
ременным тяговым током, может быть аппроксимирована выражением
1Г(//) = 'exp
21/4
(lnt/)2-(lnt/m)2
где Um — пороговое значение, разделяющее флуктуационную и импульсную ком-
поненты помех; Z — параметр формы распределения; 4 — дисперсия помехи.
Распределение максимальных значений выбросов помех при элек-
тротяге постоянного тока подчиняется гамма-распределению;
И/(х) = --1-----х“е-х/₽, 0 < х < оо,
Р“+ Г(а+ 1)
где Г(») — гамма-функция, а = 16,31 и р = 4,12.
Распределение длительности импульсных помех в каналах КРЛ с
частотами настройки 25 и 175 Гц также хорошо аппроксимируется
гамма-распределением, а распределение интервала в потоке помех —
логарифмически нормальным (при 25 Гц) и экспоненциальным (при
75 Гц) распределениями.
При исследовании радиолокационных измерителей параметров
движения отцепов на сортировочных горках доказано, что для плот-
ности распределения вероятности сигналов, отраженных от движу-
щихся отцепов, могут быть использованы распределения Накагами и
Вейбулла, а для плотностей распределения вероятностей выбросов их
огибающих — логарифмически нормальный закон. Плотность рас-
пределения вероятностей амплитуды U огибающей отраженного сиг-
нала описывается распределением Накагами:
=ш®т и1т ~ 1ехрНгЬ и> °’
где m и П - параметры сигнала.
29
При исследовании сетей технологической радиосвязи метрового
диапазона на железнодорожных станциях и узлах выявлено, что возни-
кающие при перемещениях абонентов пространственные флуктуации
напряженности поля характеризуются распределением вероятностей
амплитуд основных поляризационных компонентов, подчиняющихся
закону Рэлея—Райса, а плотность распределения вероятностей ре-
зультирующей амплитуды напряженности Е электрического поля вто-
ричного излучения описывается законом Рэлея:
W(E) = expf-^1,
2
где — дисперсия напряженности поля.
Для анализа систем железнодорожной связи большое значение
имеет правильный подбор модели речевого сообщения сигнала. Од-
номерная плотность распределения вероятностей англо- и русскоя-
зычного речевых сигналов X(t) может быть аппроксимирована фор-
мулами Давенпорта, Ричардса, А. И. Величкина соответственно:
^(х) =
х2
2ах
Х2-
при ст = 1,21-1,23; ог = 0,1—0,118,
х| х2
Ифс) = 'ехр(—fc|x|),
Zi
к = JL(L + 1), £ = 0,5—1,
И/(Х) = -ДА
ехр
2аД
0,5
Дяа
ехр --^4
2ail
ас = 0,1 ах; аг = 1,4ах,
а также гиперэкспоненциальным распределением
стх z(a + p)
при к = 0,617.
В последнем выражении р2 и а2 представляют собой дисперсии
2 2
гласных и согласных звуков, причем р = 200a для русскоязычного
речевого сообщения.
Сопоставление аппроксимаций представлено кривыми (рис. 2.6):
кривая 1 — экспериментальная плотность распределения вероятно-
стей, кривые 2—5 — аппроксимации Давенпорта, Ричардса, А. И. Ве-
личкина и гиперэкспоненциальная соответственно.
30
Гиперэкспоненциальное распределение может быть использовано
и для аппроксимации экспериментальной функции Гэ(0 распределе-
ния вероятностей длительности речевых импульсов, последовательно-
стью которых представляется речевой сигнал. На рис. 2.7 представле-
ны зависимости 1 — Гэ(г); 1 — F(t) — 0,7е 444г + 0,Зе г700*.
31
2.5. КОРРЕЛЯЦИОННЫЕ ХАРАКТЕРИСТИКИ СЛУЧАЙНЫХ СИГНАЛОВ
Ковариационная функция (иногда ее называют корреляционной) — это
характеристика нецентрированного случайного процесса. Она представ-
ляет собой математическое ожидание произведения двух его сечений:
00 оо
<2> = K(,ti)K(,t2) = J J X\X2W(X\, х2, Ц, /2)dX|dx2>
где н'(х1, х2, t2) — двумерная (совместная) плотность распределения веро-
ятностей процесса в этих сечениях.
о
Точно так же, но уже для центрированного процесса X(t) опреде-
ляется корреляционная функция случайного процесса X(t):
со 00
'2) = XttiW-h) = J J 1*1 - И*2 “ *('2) 1 *2; fi’ ^ydx^.
Корреляционная функция (ее иногда называют автокорреляцион-
ной) характеризует связь между значениями одного и того же случай-
ного процесса в различные (два) моменты времени.
Взаимная корреляционная функция случайных процессов X(f), Y(i):
СО со
= X(ti)Y(t2) = J J (Xj - %(r() ][y2 - Г(Г2) ], w(xp JY, /], /pdXj, dy2,
где »?(•) — двумерная плотность распределения вероятностей сечений процес-
са Х(/) в момент времени и процесса У(Г) в момент времени t2.
Для стационарного случайного процесса корреляционная функция
/?x(r(, Z2) является лишь функцией разности т = t2 - т. е. Rx(t\, t2) =
= /?х(т) не зависит от размещения начала отсчета.
Удобнее пользоваться нормированными корреляционными функ-
циями, производя деление,
t2) на Bx(t, t) = nx(/)
или
2
Ях(/], /2) на Rx(t, t) = <тх (/).
Например, нормированная корреляционная функция (коэффици-
ент корреляции) стационарного процесса
32
Основные свойства
процесса:
корреляционной функции стационарного
/?х(т) = Лх(-Т); I Лх(т)| < Ях(0) = ах; lim Rx (г) = 0.
Т—>СО
Последнее условие показывает, что чем дальше друг от друга рас-
положены два сечения случайного процесса, тем в меньшей степени
они статистически зависят друг от друга.
Корреляционную функцию не всегда удобно использовать при
расчетах и инженерных оценках. Поэтому часто используют величи-
ну, определяющую корреляционные связи между сечениями случай-
ного процесса, — интервал корреляции.
Интервал корреляции дает ориентировочное представление о том, на
каких интервалах времени в среднем имеют место корреляции между зна-
чениями случайного процесса.
Существует множество способов определения интервала корреляции:
1) хк = ть если при т > Tj коэффициент корреляции |гх(т)| пренеб-
режимо мал, например, 0,1, т. е. |гх(тр| = |гх(Т])| = 0,1 (рис. 2.8);
2) хк — т2, где т2 — эго основание прямоугольника с высотой равной 1,
равновеликого фигуре, ограниченной модулем нормированной кор-
реляционной функции и осью т (рис. 2.9):
х2 = J KWH*;
о
3) т3 = | rx(T)dT и т. д.
Используется большое число аппроксимаций корреляционной
функции сигнала, т. е. аналитических выражений, которые приме-
I к I5S
33
няются для описания экспериментальных корреляционных функ-
ций сигнала:
J) rx(x) = 5(т);
2) гх(т) = ехр(— 4Д/|т|);
3) гх(х) = ехр(—4Д/2т2);
4) гх(х) = 51пс(2лД/т);
5) гх(х) = 51ПС2(2лД/т);
6) гх(т) = е “(T)cos(2n/!T);
7) гх(т) = (1 + 8Д/М)ехр(-8Д/|т[);
8) гх(х) = е~4Л/5|т| у ; 5 = ], 2, ...
J- 1
В выражении аппроксимации использована 5-функция, имеющая
свойства:
О,
|Лх).
/(*),
ь
а
х< а, х> Ь;
х — а, х — b\ I
а <х< Ь\
6(х) = 0, х* 0; | 6(ij)dij = 1.
-да
Представленные аппроксимации имеют достаточно важное значение.
Например, известно, что для того чтобы стационарный гауссов-
ский процесс был марковским, необходимо и достаточно, чтобы его
корреляционная функция описывалась формулой 2).
Формула 6) хорошо аппроксимирует корреляционные функции ре-
чевых сообщений на русском и английском языках. В первом случае
а ~ 1000 Гц,/| — 400 Гц (для сравнения можно отметить, что интервал
корреляции составляет единицы миллисекунд, а длительности звуков
от 25 до 250 мс).
Приведем несколько примеров корреляционных функций случай-
ных сигналов и помех в системах железнодорожной автоматики, те-
лемеханики и связи.
Корреляционная функция случайного сигнала об изменениях во вре-
мени сопротивления изоляции рельсовой линии может быть аппрокси-
мирована с использованием формулы 6) с параметрами а = 0,262 1/ч;
/| = 0,00924 1/ч и средним квадратическим отклонением 0,71 Ом • км.
34
При исследовании системы автоматического управления загради-
тельной сигнализацией на железнодорожных переездах доказано, что
нормированную корреляционную функцию мешающих отражений
радиолокационного сигнала можно определить, используя аналити-
ческое выражение 3) при
4n(4 + 0,5Q2A2) ’
где Д — ширина полосы шумового радиолокационного сигнала; Q — параметр,
зависящий от его несущей частоты.
2.6. СПЕКТРАЛЬНЫЕ ХАРАКТЕРИСТИКИ СЛУЧАЙНЫХ СИГНАЛОВ
Спектральная плотность мощности (энергетический спектр) ^(со)
выражает зависимость от частоты средней мощности стационарного
случайного сигнала X(t), приходящейся на единицу полосы частот, и
имеет размерность энергии (Вт/Гц).
Согласно теореме Винера—Хинчина энергетический спектр стацио-
нарного случайного процесса и его корреляционная функция связаны
парой преобразований Фурье:
СЮ во
5х(а>) = J Ях(т) = ± J 5х(Ш)Ла>.
—СЮ
Поскольку энергетический спектр и корреляционная функция яв-
ляются четными, то:
сю оо
Sx(co) = 2| Ях(т) coscozdv, Ях(г) = 1 j Sx(co)coscoTdco.
О О
Для нормированных функций:
СО
gx(co) = 2 j FjCOcosaKdr; гх(т) = i jgx(co) cosco cdco.
О о
Во многих случаях удобнее использовать односторонний энергети-
ческий спектр (заданный для положительных значений частоты):
5х0(ю) = 25х(ш).
35
При этом
&о<®) = 4J rx(t)cos<otdT,
о
СЮ
гх(т) = J gx0(co)coscotdT.
о
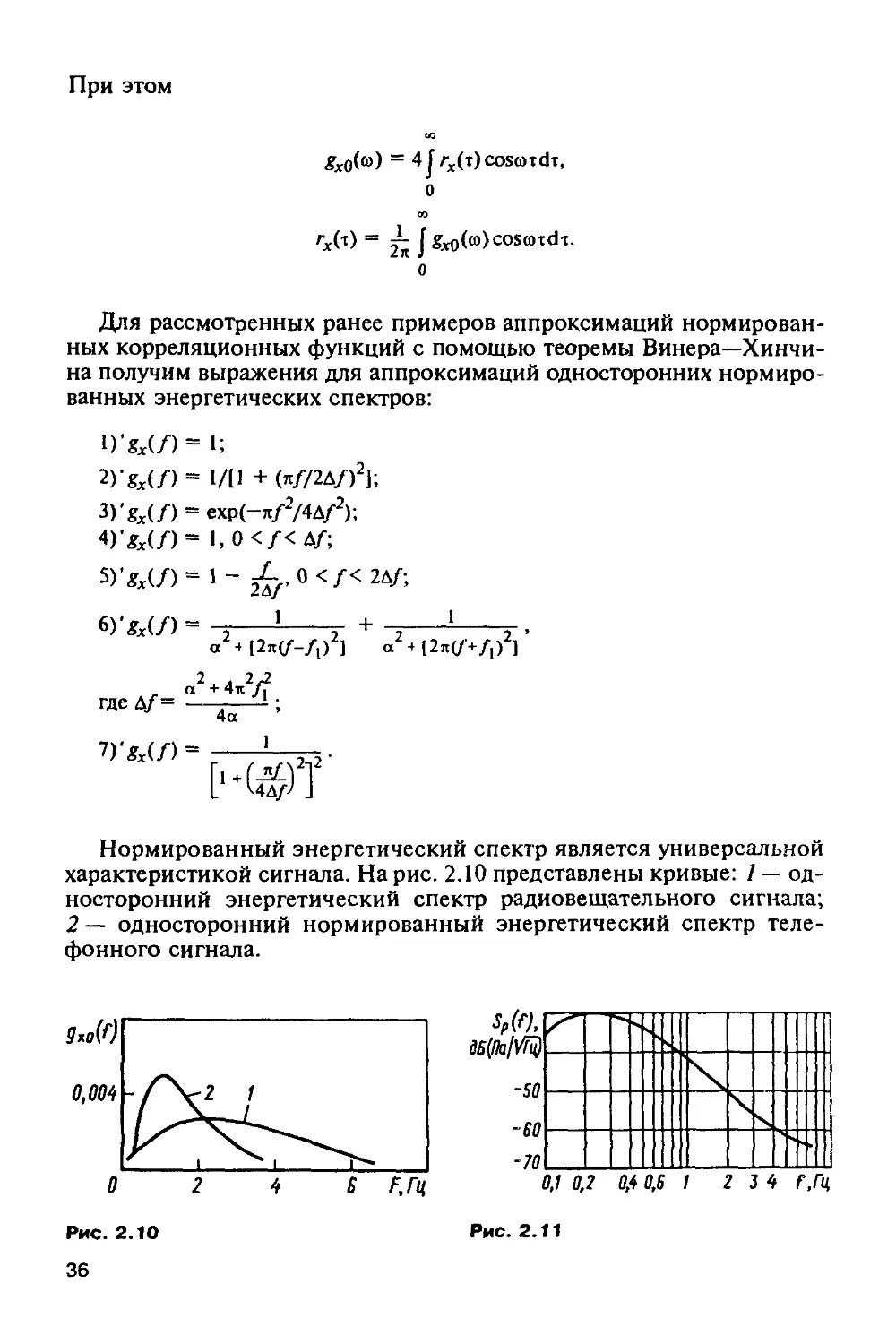
Для рассмотренных ранее примеров аппроксимаций нормирован-
ных корреляционных функций с помощью теоремы Винера—Хинчи-
на получим выражения для аппроксимаций односторонних нормиро-
ванных энергетических спектров:
l)’gx(/)= 1;
2)’gx(/) = 1/U + (я//2Д/)2];
3)'gx(/) = ехр(—л/2/4Д/2);
4)'gx(/)= 1,0</< ДГ;
5)’gx(/)=l~ ^.,0</<2ДГ;
6)'gx(/) = -2----’----2 + -2-----*----2 ,
7)'gx(/)
2-.2 ’
Нормированный энергетический спектр является универсальной
характеристикой сигнала. На рис. 2.10 представлены кривые: 1 — од-
носторонний энергетический спектр радиовещательного сигнала;
2 — односторонний нормированный энергетический спектр теле-
фонного сигнала.
36
Из записанных выше соотношений следует - [ 5 (co)dco = с2 =
Л J Л х
О
= Ях(0) — мощность стационарного случайного сигнала. С использова-
нием этого выражения (условия нормировки) можно уточнить описанное
выше применение в случае речевого сигнала формул 6) корреляционной
функции и энергетического спектра 6)Как правило, на входе системы
связи используется предварительное ограничение спектра речевого со-
общения фильтром нижних частот ФНЧ с частотой среза Fcp. Энер-
гетический спектр сигнала на выходе такого фильтра
W = a2(l + A/)aU--------!---т + -2---?----г|; 0</<F
1а +[2л(/--/1)2] а2Ч2л(/-+/,) Р
Значение коэффициента М определяется из условия нормировки
М= 1 - 1 arctg(2^~—) - -arctg(2^ + g) ,
Л V К ' л 4 л 7
где В = gR = g-^L ;g=f~.
1+g2
В рекомендации Р.51 Международного консультативного комитета
по телеграфии и телефонии МККТТ представлен график спектраль-
ной плотности Sp(f) звукового давления для искусственного голоса
(рис. 2.11) при условии, что суммарный уровень звукового давления
составляет 4,7 дБ/Па.
Для тех же условий предложена аппроксимация спектральной плот-
ности St(f) интенсивности звука
St(f) = -376,44 + 465,4391g/— 157,74 5(lg/)2 + 16,7124(lg/)3.
Частота f измеряется в герцах, а значения спектральной плотности
интенсивности звука в децибелах относительно уровня 1 пВт/м2 на
1 Гц на частоте f (уровень интенсивности звука 1 пВт/м2 соответствует
порогу слышимости).
Для Sp(f) и Sj(f) (а при линейном преобразовании в микрофоне —
для спектральной плотности мощности речевого сигнала на выходе
микрофона) может быть предложено общее выражение нормирован-
ной спектральной плотности
3(f) = -465,74581 + 465,4391g/— 157,745(lg/)2 + 16,7124(lg/)3.
Отметим достаточную близость предложенных выше аппроксима-
ций Sx(f) и S(f). Далее представлена зависимость от частоты /0 (цен-
37
тральной в полосе шириной 1/3 октавы) разности 5 суммарных уров-
ней, определенных в полосе частот для Sx(f) и S(f) по отношению к
суммарному невзвешенному уровню:
/о, Гц... 100 125 160 200 250 315 400 500 630 800
8, %... 0,15 -1,31 -3,83 -6,04 -6,32 -1,70 6,62 6,45 1,95 0,19
/о. Гц... 1000 1250 1600 2000 2500 3150 4000 5000 6300 8000
8, %... 0,04 0,02 0,40 0,47 0,46 0,41 0,33 0,25 0,16 0,05
Часто различные случайные процессы сравнивают по ширине по-
лосы их спектра (т. е. используют характеристики, аналогичные ин-
тервалу корреляции). Ширина полосы спектра сигнала может быть
определена разными способами:
1) ширина спектра на каком-то уровне, часто на уровне 0,5 (рис. 2.12);
2) эффективная ширина спектра. По правилу эквивалентного пря-
моугольника (рис. 2.13):
о 2тз
Параметр Д/использован выше в аппроксимациях корреляцион-
ных функций и энергетических спектров.
Случайный процесс называют белым (белый шум), если его спектр
равномерный, т. е. имеет постоянное значение ^(со) — const при всех
значениях частот. Белый шум описывается выражениями 1) и 1)'(см.
выше). В этом случае используется аналогия с белым светом, т. е.
электромагнитными волнами, имеющими равномерный спектр в об-
ласти видимых частот. Согласно равенству гх(х) = 5(т), любые сколь
угодно близкие сечения белого шума оказываются некоррелирован-
ными. Белый шум — это не реальный физический процесс, а матема-
тическая идеализация потому, что его мощность
а3 = Ях(0) = 1 j 5x(ffl)dco = оо.
о
38
S'(f)
6} Rx(t)
-F
Рис. 2.14
F f
3 r
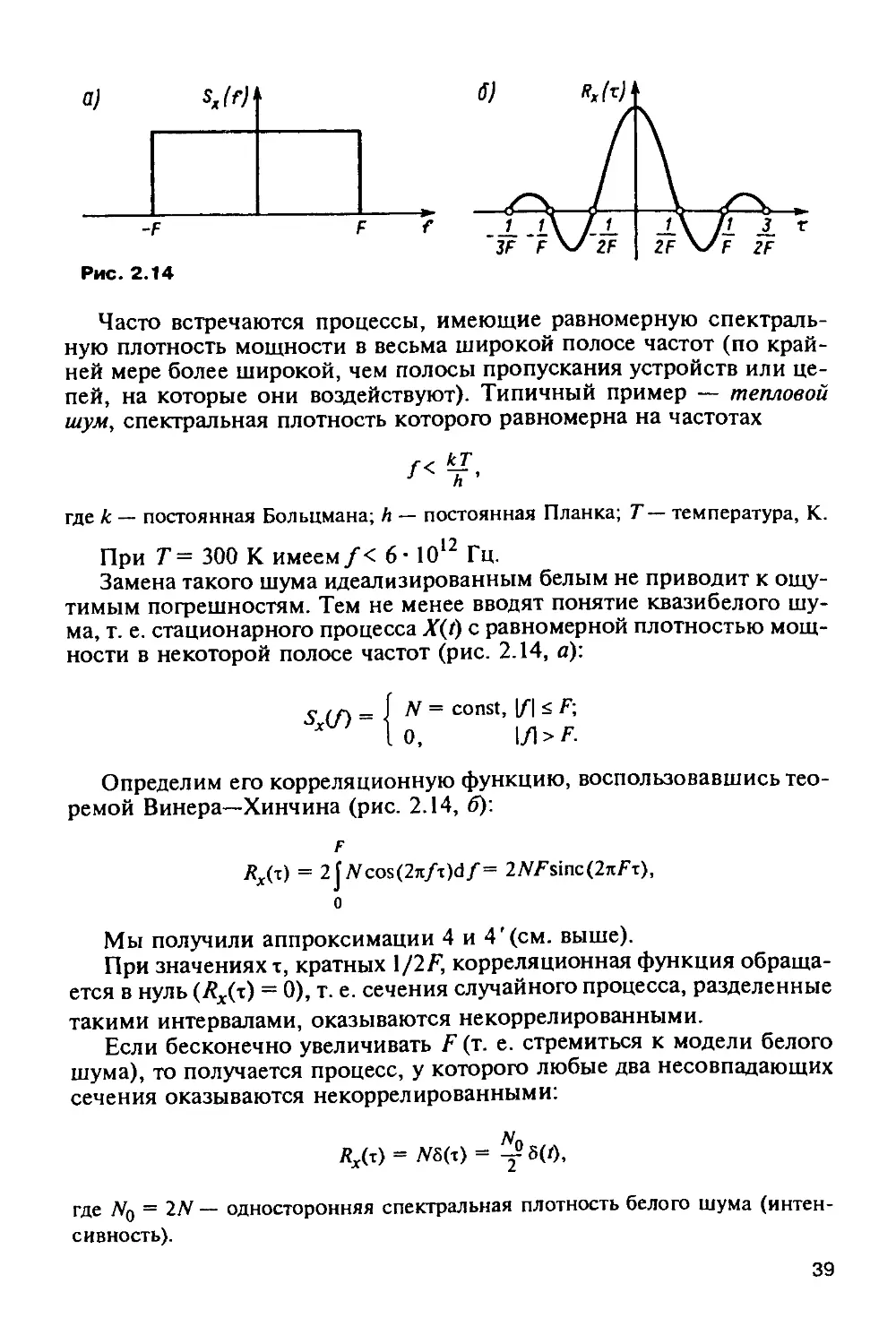
Часто встречаются процессы, имеющие равномерную спектраль-
ную плотность мощности в весьма широкой полосе частот (по край-
ней мере более широкой, чем полосы пропускания устройств или це-
пей, на которые они воздействуют). Типичный пример — тепловой
шум, спектральная плотность которого равномерна на частотах
где к — постоянная Больцмана; Л — постоянная Планка; Т — температура, К.
При Т = 300 К имеем/< 6 • 1012 Гц.
Замена такого шума идеализированным белым не приводит к ощу-
тимым погрешностям. Тем не менее вводят понятие квазибелого шу-
ма, т. е. стационарного процесса X(t) с равномерной плотностью мощ-
ности в некоторой полосе частот (рис. 2.14, а):
/л _ I N = const, (/] < F;
Х 1 0, 1/1 > F.
Определим его корреляционную функцию, воспользовавшись тео-
ремой Винера—Хинчина (рис. 2.14, 6):
Rx(r) = 2jJVcos(2jt/r)d.f= 2^sinc(2nFt),
Мы получили аппроксимации 4 и 4'(см. выше).
При значениях т, кратных 1/2F, корреляционная функция обраща-
ется в нуль (Лх(т) = 0), т. е. сечения случайного процесса, разделенные
такими интервалами, оказываются некоррелированными.
Если бесконечно увеличивать F (т. е. стремиться к модели белого
шума), то получается процесс, у которого любые два несовпадающих
сечения оказываются некоррелированными:
Лх(т) = 7У8(т) = -у 8(0,
где No = IN — односторонняя спектральная плотность белого шума (интен-
сивность).
39
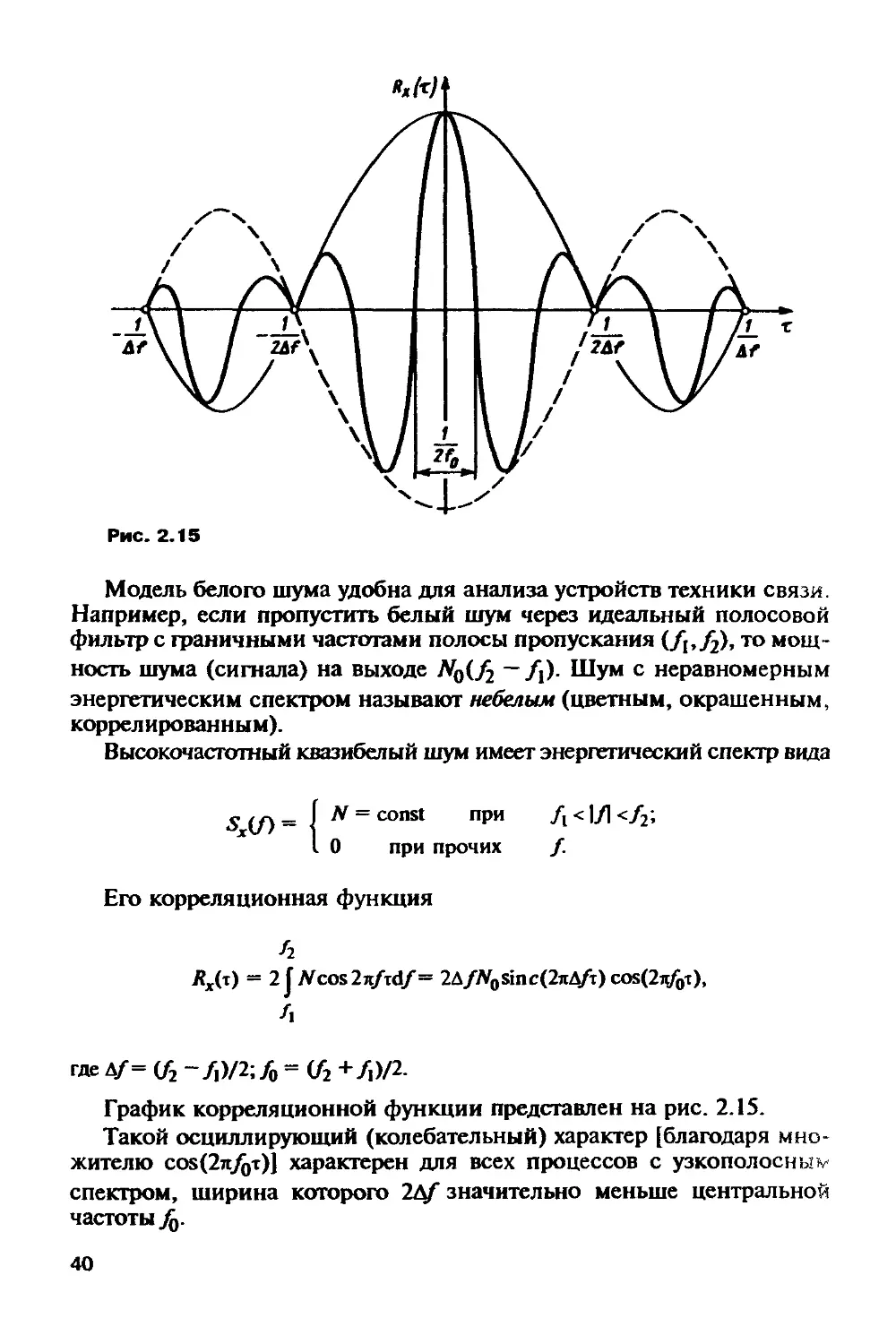
Модель белого шума удобна для анализа устройств техники связи.
Например, если пропустить белый шум через идеальный полосовой
фильтр с граничными частотами полосы пропускания (J\,fj), то мощ-
ность шума (сигнала) на выходе — /j). Шум с неравномерным
энергетическим спектром называют небелым (цветным, окрашенным,
коррелированным).
Высокочастотный квазибелый шум имеет энергетический спектр вида
S ( N = const ПРИ Л < И <Л;
I 0 при прочих /.
Его корреляционная функция
h
Rx(t) — 2 j Ncos 2nfidf= 2A//Vosinc(2itA/r) cos(2it^T),
A
где ДГ= (f2 -/!)/2;/o = (fl +f}/2-
График корреляционной функции представлен на рис. 2.15.
Такой осциллирующий (колебательный) характер [благодаря мно-
жителю сов(2л/0т)] характерен для всех процессов с узкополосные
спектром, ширина которого 2Af значительно меньше центральной
частоты fQ.
40
2.7. МАРКОВСКИЕ СЛУЧАЙНЫЕ СИГНАЛЫ
Пусть задана дискретная случайная последовательность A(tK) эле-
ментов, которые могут принимать значения at, а2, ..., ат. Можно на-
писать пример реализации такой последовательности:
= 4”; АЫ = 42); АМ> = 43) • •АЫ> =
Нижний индекс обозначает элемент (ik = I, 2, т), верхний —
момент времени или порядок следования.
Вероятность появления отрезка реализации такой последователь-
ности, состоящей из п элементов
р<«Я’. JS....«8’.......................................СА’,).
Здесь p(4Z,/aH*>. ~ условная вероятность появления эле-
мента ain в момент 1п при условии, что в предыдущие моменты времени осу-
ществлялась реализация ал, аа, .... а,„- |. Такие последовательности могут
быть использованы, например, для описания сообщений передаваемых по те-
леграфу, т. е. для описания последовательности букв. Эти отрезки последова-
тельности очевидно имеют различные вероятности появления.
Например, при п = 5 появление в телеграмме слова "Поезд" оче-
видно более вероятно, чем появление слова "Рыбак".
Простейший вид случайной последовательности наблюдается, ког-
да появление того или иного элемента не зависит от предыдущих. Та-
кая последовательность независимых элементов называется последо-
вательностью Бернулли:
Р<ал1>. «д’. 4?) = Р(«.т)Р(«а>. -- ₽<«<»)•
Важным видом случайной последовательности зависимых элемен-
тов является цепь Маркова. В простой цепи Маркова условная веро-
ятность появления элемента aik полностью определена, если известен
предыдущий элемент aik_ f:
....
Для вычисления вероятности отрезка простой цепи Маркова дос-
таточно знать переходные вероятности р(а(/а^ появления элемента ah
если предыдущий элемент ау-.
Обобщением простой цепи Маркова являются сложные марковские
цепи порядка г, в которых вероятность появления элемента полностью
41
определена, если известны предшествующие г элементы. Такие после-
довательности достаточно точно могут описывать рассмотренные вы-
ше текстовые последовательности.
Непрерывные марковские процессы являются аналогом простых
марковских цепей, когда при известном значении X(tk_ 0 = хк _ ] ве-
роятность значения X(tk) = хк при условии (tk > tk_ 0 не зависит от
значений в любые более ранние моменты времени. Для таких процес-
сов условная плотность распределения вероятностей
tk/xx, х2, ..., xk~i; /2, ..., tk_ () = ы(хк, tk/xk_ „ tk_ ,).
Отсюда следует, что для марковского процесса в моменты времени
< t2 < ... < tn имеется многомерная плотность
“(*! х2, ..., х„; t2, l„) = <й(Х1, Ц)<о(х2, t2/X\, qJoHxj, t3/x2, t2),
<o(x„, t„/x„_ ,, /„-!).
2.8. АНАЛИТИЧЕСКОЕ ДИСКРЕТНОЕ ОПИСАНИЕ ДЕТЕРМИНИРОВАННЫХ
И СЛУЧАЙНЫХ СИГНАЛОВ. ОБОБЩЕННЫЙ РЯД ФУРЬЕ
Аналитическое описание (представление) сигналов называют ап-
проксимацией. Оно определяет приближенное представление сигна-
лов через более простые (элементарные) сигналы. В рамках линейных
представлений детерминированный или случайный сигнал S(i) может
быть точно или приближенно представлен в виде линейного функ-
ционального ряда
Ni
= £5^(r),
<t = o
где 5 (t) — аппроксимирующая функция, в общем случае отличная от S(t), что
отмечено знаком над символом ее обозначения; Nk — длина ряда (число чле-
нов разложения) конечная или бесконечная; Sk — весовые коэффициенты или
координаты функции S(t); Wk(t) — элементарные сигналы, составляющие
систему функций (тригонометрические, полиномы Лежандра, Котельникова,
Бесселя, сплайн функции и т. п.).
Систему функций {И^(/)} называют базисной, а описанное пред-
ставление — разложением сигнала по системе базисных функций. В
заданной системе {И^(/)} каждая функция И^(/) определяется своим
местом, т. е. номером К или переменной, однозначно связанной с но-
мером, например частотой со.
42
Базисная функция И^(?) является функцией двух переменных: дис-
кретной К и непрерывной t. Весовой коэффициент Sk (или координа-
ты) является функцией дискретной переменной К.
Таким образом, аналитическое представление непрерывного сиг-
нала S(t) совокупностью координат 50, S], Sk (поиск координат с
помощью оператора представления А) и восстановление (оператор В)
по этим координатам исходного сигнала S(t) можно записать в виде
50, 5„ 5* = Л{5(/)};
5(Z) = 5{50, 5], Sk}.
Оператор А реализуется на передающей стороне, а оператор В — на
приемной. В общем случае представление сопровождается текущей
погрешностью е(0 = S(i) — S(i).
С одним и тем же оператором А могут использоваться различные
операторы В и наоборот. Таким образом, задача дискретного аналити-
ческого представления сводится к совместному выбору пары операто-
ров А и В, обеспечивающих заданную погрешность представления е.
В случае использования линейных операторов представления А и
восстановления В на интервале представления Т
A{S(t)} = {5*} = JVk(t)S(t)At, к = 0, 1, ..., Nk, (2.4)
т
Nk
B{SQ, ..., SNk} = S (/) = £ sk ^(t), (2.5)
* = o
где Vk, Wk — соответственно весовые и базисные функции.
В зависимости от того, каким образом выбрана система весовых
функций Vk{t), координаты могут представлять собой:
коэффициенты некоторого ряда типа ряда Фурье. При этом опе-
ратор Л{«} описывает обобщенное аналитическое дискретное пред-
ставление, в частном случае
^(0 = ^(г);
текущие мгновенные значения сигнала (отсчеты) S(tk) в моменты
времени tk. В этом случае Vk(t) — 8(/ — tk). При этом выражение опе-
ратора Л{«} описывает дискретное представление отсчетами;
конечные разности, когда весовая функция Vk(t) является линей-
ной комбинацией отсчетов.
43
Таким образом, можно выделить три основные класса аналитиче-
ских дискретных представлений сигнала в виде обобщенного ряда Фу-
рье, отсчетов, конечных разностей.
2.9. РАЗЛОЖЕНИЕ СИГНАЛОВ В ОБОБЩЕННЫЙ РЯД ФУРЬЕ
ПО СИСТЕМАМ ОРТОГОНАЛЬНЫХ ФУНКЦИЙ
Рассмотрим основные свойства системы ортогональных функций.
Систему действительных функций И^г), ..., И^(/) назы-
вают ортогональной на отрезке [ta; tb\, если выполняется условие
J И<(0 Hzjt(/)dz = 0 при всех к * i.
'ь
При этом полагают, что ни одна из функций системы не равна тож-
дественно нулю, т. е.
fa
J (z)d/ * 0.
'ь
Нормой функции И^(г) называют параметр
а
МН=
Функция И^(г), для которой выполняется условие
'ь
imii2 = j^wdr= i,
называют нормированной, а систему ортогональных нормированных
функций — ортонормированной системой. Система ортогональных
функций является полной (замкнутой), если не существует такой
функции S(t), для которой было бы справедливо равенство
ь
J S(f) = 0; k=0, 1,2..........
44
Перейдем теперь к обобщенному ряду Фурье.
Если сигнал S(t) имеет ограниченную энергию (интегрируется в
квадрате), т. е.: j S2(/)dr < оо, а непрерывные функции И^(/) образуют
полную ортогональную систему, то сигнал S(t) может быть представ-
лен в виде линейного ряда — обобщенного ряда Фурье:
= 5о^о(О + ^(г) + ... + SNWN(t), (2.6)
в котором коэффициенты (координаты)
'ь
—Ц J S(t)Wk(t)dt. (2.7)
п ,а
Докажем верность выражения (2.7), для чего умножим обе части
обобщенного ряда Фурье (2.6) на И}(/) и проинтегрируем полученное
выражение в пределах отрезка [/„, fy]:
Sb Sb Sb 5Л
J Wj(tyS(tydt = J S0W0(t) Wfrydt + J 5! ^,(0 »<(Odr + ... + J SNWN(ty Wfrydt.
'b
Учитывая, что Г SkWk(t) W<(/)dz = 0 при к ф i можно записать
Sb
j Wk(fyS(tydt — J SkWk{t)Wk[fydt.
*a ra
Поскольку координата Sk не зависит от времени, то
&Ь &Ь
J w^(05(/)d/=5j W'iGW,
гл 'а
откуда и следует выражение (2.7).
Дискретную функцию Sk аргумента к называют спектром сигнала,
а составляющую 5^И^(/) — спектральной составляющей. Таким обра-
зом, обобщенный ряд Фурье (2.6) представляет собой сигнал в виде
суммы спектральных составляющих, т. е. в виде элементарных коле-
45
баний (сигналов) И^(/), взятых с весами Sk. В качестве системы ор-
тонормированных базисных функций могут использоваться различные
полиномы: Лежандра, Чебышева, Уолша, Хаара, тригонометрические
полиномы и др.
При обобщенном дискретном представлении по ортогональным
полиномам разложение в ряд (дискретизация) производится по фор-
муле (2.7), а восстановление по формуле (2.6).
Сравнивая формулу (2.7) с формулой (2.4) и формулу (2.6) с формулой
(2.5), можно сделать вывод, что при использовании ряда Фурье весовые
коэффициенты функции совпадают с координатными Vk(t) = И^(/).
Рассмотрим пример использования системы ортонормированной
функции Уолша, но сначала запишем функцию номера i из системы
функций Радемахера на интервале представления Тот аргумента (те-
кущее время) V.
rad;(T, /) = sign(sin2'y) .
Здесь sign(«) — знаковая функция, определяемая следующим образом:
sign/ 1 О’
I -1 х<0.
Система функций Радемахера не является полной, при ее допол-
нении образуется система функций Уолша.
Представляя номер функции Уолша п в виде двоичного числа
к, к,
п = 2 1 + 2 2 + ... + 2 р, К{ < К2 < ... < Кр,
запишем функцию Уолша л-го номера на том же интервале представ-
ления Т:
Wal„(T, 0 = rad^ +, (Г, /)rad^ +, (Т, t) • • • rad^+, (Г, /).
Например, при л = 5
Wal5(7', f) = rad^T, /)rad3(r, /),
-О , -2
поскольку л = 2 + 2 .
На рис. 2.16 представлены первые восемь функций Уолша. Функция
Уолша достаточно просто реализуется. Например, для первых восьми
функций Уолша схема формирования представлена на рис. 2.17.
46
Рис. 2.16
ла40 = ^(? о----------------------------------------------------►и'а£0
Рис. 2.17
“'al,
"al?
w<43
"alt,
W^5
w'l6
"al?
47
2.10. ОЦЕНКИ ПОГРЕШНОСТИ АНАЛИТИЧЕСКОГО
(ДИСКРЕТНОГО) ПРЕДСТАВЛЕНИЯ
Существует множество способов оценки погрешностей аналитиче
скоро представления.
Текущая (мгновенная) погрешность e(r) = 5(t) — S(f). Может быть
использовано несколько приближений на интервале Т (т. е. опреде-
ление близости исходного и представленного сигналов). В случае рав-
номерного приближения может использоваться величина
Етах = тах[Е(П].
Ze Т
Критерий среднего квадратического приближения
<4 = - S(/)}2]df.
Часто при анализе стационарных случайных сигналов эта погреш
2
ность приводится к дисперсии сигнала, gs, т. е. получается приве-
денная средняя квадратическая ошибка
2
82 = ^пр
пр 2
Она является отношением мощности шума представления к мощ-
ности сигнала.
В технике связи при передаче сигнала для оценки качества работы
часто используют отношение мощности сигнала к мощности шума
(эту оценку выражают в децибелах):
ОСШир= lOlgf-L).
2.11. ГЕОМЕТРИЧЕСКОЕ ПРЕДСТАВЛЕНИЕ СИГНАЛОВ
И ИХ РАЗЛОЖЕНИЕ В ТРИГОНОМЕТРИЧЕСКИЙ РЯД
В геометрии каждая точка в пространстве представляется коорди-
натами. Точка на прямой представляется одной координатой, точка на
плоскости — двумя, в /n-мерном пространстве — /n-координатами. Ес-
ли эта точка может перемещаться в определенном направлении, то
она будет иметь число степеней свободы, соответствующее разрядно-
сти пространства.
48
Если сигнал разложен по системе координатных функций И^(г),
т. е. представлен в виде линейного усеченного ряда с т = Nk + I чле-
нами, то это означает, что сигнал полностью определяется /«-коорди-
натами или имеет т степеней свободы. Задавая значения координат,
можно получать различные сигналы.
Для определенного множества (ансамбля) сигналов можно пред-
ложить геометрическую модель в виде многомерного пространства, в
котором каждой точке соответствует определенная реализация сигна-
ла, а координаты этой точки равны коэффициентам Sk.
Систему ортонормированных функций, которая может быть ис-
пользована в качестве системы базисных функций, могут образовы-
вать гармонические функции, что очень распространено, поскольку
гармонические функции (так же, как и функции Уолша) легко гене-
рируются. Если сигнал представлен в виде суммы гармонических коле-
баний с различными частотами (соответствуют номеру "к” в системе),
то это означает, что произведено спектральное разложение сигнала в
базисе гармонических функций. Сумма этих гармонических состав-
ляющих образует спектр сигнала.
Произвольный сигнал S(t) конечной мощности можно разложить
Т'о Т'о. „
на интервале (— у , у ) в ряд по полной системе ортонормированных
гармонических функций с частотами, кратными частоте Ц, = 2к/Т0:
5(t) = £ Sk И^(0 = у + £ (atcosKV + (2.8)
4 = 0 t=0
где Oq/2 — постоянная составляющая 5(0-
Коэффициенты akn Ьк в соответствии с выражением для определе-
То/2
j 5(0 И^(0<1Г вычисляются по формулам:
-Го/2
ния координат St = ——
II м2
Zp
2
«о= у- f ДОл: «к =
'о 3
Zp
2
Zp
2
bk= ~ f 5(0sinKV<U
3o 3
Zb
2
о
2
£ f 5(0 coskQotdt;
'о J
Zp
2
49
Выражение (2.8) определяет ряд Фурье, рассмотренный выше. Ра-
нее был рассмотрен экспоненциальный или комплексный ряд Фурье,
который использует систему базисных функций {exp(jKQQt)}.
2.12. ПРЕДСТАВЛЕНИЕ НЕПРЕРЫВНЫХ СИГНАЛОВ ОТСЧЕТАМИ.
ИНТЕРПОЛЯЦИЯ
При дискретизации по времени в качестве координат сигнала ис-
пользуют текущие его значения, так называемые отсчеты (выборки)
S(t2),..., S(tn) в моменты времени (моменты дискретизации, точки
опроса) tt, t2, .... tn. Таким образом, при представлении отсчетами ко-
ординаты Sk = S(tk) (рис. 2.18).
На передающей стороне сигнал представлен отсчетами. На прием-
ной стороне по этим отсчетам в результате интерполяционной обра-
ботки осуществляется восстановление сигнала.
Мгновенные отсчеты могут быть представлены в виде дельта-функ-
ции 8(«). Наиболее часто осуществляется периодическая дискретизация
(периодический опрос), когда при определенном к:
(к+1~1к= То = const-
Периодический опрос просто реализуется электронными ключе-
выми схемами. При периодической дискретизации для последова-
тельных отсчетов можно записать:
5*(Г)= £ 5(O[( = itro = £ S(kT0)8(t- кТ0) = S(t) £ 5(/-А:Г0).
к - -СО fc = -со fc = -СО
В общем случае процесс интерполяции непрерывного сигнала S(t)
по его отсчетам S(t) = 5(/fc) может быть описан следующим образом:
Nk Nk
S(i) = S(tk) Wk(t -tk) = £ ~ kTo)<
k~0 k = 0
где S(t) — оценка восстанавливаемого
сигнала; Nk + \ — число отсчетов сиг-
нала, участвующих в интерполяции;
5(/^) — отсчет сигнала в Jt-й момент
времени (с учетом его зашумленности
в процессе передачи по каналу связи);
^„(•) — элементарная интерполяци-
онная функция, импульсная характе-
ристика интерполятора.
Сигнал на выходе интерполя-
тора определяется как линейная
50
Рис. 2.19
сумма его реакций на отсчеты, т. е. для интерполятора справедливо
свойство суперпозиции (рис. 2.19).
Теорема Котельникова. Теорема Котельникова была доказана в
1933 г. в виде теоремы о функциях с финитным спектром, за рубежом —
в виде теоремы отсчетов (приписывают Клоду Шеннону); отчасти
предвосхищена Найквистом в 1924 г. В качестве интерполяции между
равно отстоящими точками она была рассмотрена в 1915 г. Виттаке-
ром. Теорема Котельникова — основа теории дискретного представ-
ления отсчетами.
Существо теоремы следующее. Функцию S(f) с финитным (огра-
ниченным) спектром можно точно восстановить (интерполировать)
по ее отсчетам S(kT0), взятым через интервалы То < 1/2F, где F— верх-
няя частота спектра функции. Это осуществляется с помощью ряда
Котельникова
со
5(0 = 5(0 = £ 5(^0) WK(t-kTQ),
к = -«>
где в качестве интерполирующих функций В^(») используются функ-
ции отсчетов
- кТ0) = sine [2лГ(Г - ЛГ0)].
Эти функции представляют со-
бой весовую или импульсную ха-
рактеристику идеального ФНЧ.
Передаточная функция идеально-
го ФНЧ (рис. 2.20)
0, 1/1 > F.
51
Процесс восстановления сигнала рядом Котельникова отражен
на рис. 2.21. Функция sinc[2^F(/— ^Т^)] = 1 при 1 = кТ0 и равна 0 в
момент дискретизации t = iT0, i * к, где i принимает целочисленные
значения (кроме к).
Если допустить, что сигнал S(t) имеет конечную длительность Т и
ширину спектра F, то для его представления потребуется М= 2F7'не-
зависимых отсчетов.
Докажем теорему Котельникова. На рис. 2.22, а представлена пе-
риодическая последовательность единичных импульсов
(/(/)= £ 8(г-ЛГ0) = J
к = —м _
-<tF-2F О 2F IF f
Рис. 2.22
52
Спектр U(f) = ^2 Fb(f- 2kF) представлен на рис. 2.22, б:
—со
S(f) = [5(/) {/(/)] W(f).
Поскольку операции свертки на временнбй оси соответствует
операция умножения в частотной области или на оси частот, то об-
ратное преобразование Фурье при применении его к последнему вы-
ражению дает:
5(0 = [5(Of/(OWO = W £ 5(08(/- кТ0).
кх-<п
Меняя порядок интегрирования (в свертке) и суммирования, мож-
но записать
5(0= £ J [5(a)8(a-A:7’0)]^O-a)da= £ S(kT0) W(t - кТ0),
к - -со - со к ~ -со
что и требовалось доказать.
Таким образом, процедура (для которой сформулирована теорема
Котельникова), определяемая уравнением S(f) = [5(/)i/(/)] W(f) сво-
дится к тавталогии: берется функция на ограниченной области зада-
ния, повторяется, отделяется от периодически повторяемых копий и
получается исходная оригинальная функция (рис. 2.22, в, г, д). Усло-
вие S(f) = 0 при |/| > /’является весьма существенным. Если оно не
соблюдается, то возникают искажения сигнала, называемые искаже-
нием перехлестывания (рис. 2.23). Поскольку в ситуации, иллюстри-
руемой рис. 2.23, не выполняется условие теоремы Котельникова и
F> 1/2Т0, где F— верхняя частота спектра, То — период дискретиза-
ции, то точное восстановление сигнала невозможно (мощность шумов
перехлестывания определяется площадями заштрихованных фигур на
рис. 2.23).
53
Из-за того, что нереализуемы функции, идеально ограниченные по
полосе частот, искажение перехлестывания присутствует всегда. Эти
искажения делают пренебрежимо малыми, выбирая период дискрети-
зации То соответствующим образом. Например, в цифровых системах
передачи (ИКМ-30 и др.) при верхней частоте спектра речевого сиг-
нала F = 3400 Гц можно в соответствии с теоремой Котельникова
иметь с запасом частоту дискретизации l/T^ = 8000 Гц, что соответ-
ствует периоду То = 125 мкс.
2.13. ИНТЕРПОЛЯЦИЯ АЛГЕБРАИЧЕСКИМИ ПОЛИНОМАМИ
Если на интервале интерполирования Г= Л^Тц, где То — период дис-
кретизации, задано N + 1 точек опроса или моментов дискретизации Го,
/р ..., tn и значения отсчетов сигнала в этих точках 3"(г0), 5(/]), ..., S(tn),
то можно реализовать алгебраический полином P/^t) степени N, который
проходит через N + 1 заданную точку, принимая в ней значение S(tk):
N
S (/) = PN(t) = = «о + а1‘ + а2* + - + aNtN-
к=о
Чтобы определить коэффициент ак этого многочлена, необходимо
решить систему N + 1 уравнений:
S(tk) — oq + a\tk + a2tk + ... + N= 0, 1, 2, ..., N.
При использовании полинома Лагранжа нулевой (TV = 0), первой
(W= 1) и второй (W = 2) степеней получаем соответственно ступен-
Рис. 2.24
54
чатую, линейную и квадратичную интерполяции. Наиболее проста
ступенчатая интерполяция ИНП. В этом случае функция S(f) заменя-
ется ступенчатой, т. е. горизонтальными линиями на протяжении пе-
риода TQ (рис. 2.24).
Как следует из временных диаграмм, ступенчатый несимметрич-
ный интерполятор имеет следующую структурную схему, состоящую
из линии задержки на один период, вычитающего устройства и ин-
терполятора (рис. 2.25).
При линейной интерполяции (ИПП) непрерывные сообщения за-
меняются функцией,состоящей из отрезков прямых линий (рис. 2.26).
Линейный интерполятор вносит запаздывание на период То. Ли-
нейный интерполятор может быть получен соединением двух каска-
дов ступенчатого интерполятора.
При использовании алгебраического полинома бесконечной степе-
ни весовая (интерполяционная) функция описывается функциями Ко-
тельникова, и такой интерполятор представляет собой бесконечное
число ступенчатых интерполяторов с бесконечной задержкой сигналов.
2.14. ОЦЕНКА ПОГРЕШНОСТИ ИНТЕРПОЛЯЦИИ
И ЧАСТОТЫ ДИСКРЕТИЗАЦИИ
Рассмотрим этот вопрос на простейшем примере интерполятора
нулевого порядка ИНП (рис. 2.27). Пусть S(t) — центрированный слу-
чайный процесс. В текущий момент времени t текущая погрешность
е(0 = 5(0 - S(t).
55
Усредненный по времени средний
квадрат погрешности
<4 = ± f A/[e2(/)]d/= ± J
°т0 0 то
- + M(52(rt)]}dr =
то
= f [2<4 - 2/?s(t)]dt =
‘о •
Если воспользоваться значениями
2
дисперсии сигнала 8пр, то получим
погрешности, приведенной к
8пр =2
то
1-^г f <sO)dT
Рассмотрим модель экспоненциальной корреляционной функции
[см. п. 2.19, аппроксимация 2)]:
г5(т) = ехр(-4Д/М).
Тогда
= 2 - х(1 - е 2/х);
_ Fo
Х 2Sf'
где Fo — абсолютная частота дискретизации; Fo = \/Т0; Sf— эффективная ши-
рина спектра.
Таким образом, задаваясь частотой опроса (дискретизации х),
можно определить погрешность восстановления и наоборот.
2
При любом способе интерполяции зависимость 8пр (х) монотон-
но убывает, т. е. с увеличением частоты дискретизации погрешность
убывает.
Отношение "с и гнал/шум" восстановления
ОСШ = 101g(l/82p).
56
Для рассмотренного примера ИНП задаваясь частотой дискре-
тизации 8 кГц, и А/= 2000 Гц (для речевого сообщения) х = 2,
5др = 2 — 2(1 — е 2/2) = 0,74, ОСШ= 1,3 дБ, что характеризует очень
низкое качество (высокое качество воспроизведения речи характеризу-
ется значением 20 дБ). Используется грубая процедура интерполирова-
ния ИНП, которая обычно применяется в простейших телеметрических
системах. Если же полагать, что восстановление осуществляется ФНЧ,
близким к идеальному (именно такой способ восстановления исполь-
2
зуется в системах ИКМЗО), то погрешность 5пр для приведенных ус-
ловий равна нулю.
Оценка по критерию среднего квадрата (или отношения "сигнал/шум"
по мощности) результирующего влияния различных факторов осуще-
ствляется по-разному для систем телемеханики и связи.
При анализе телемеханических систем передачи информации ис-
пользуется так называемое сложение в квадратуре: если известны, на-
2 2
пример, оценки 5КВ и 5дискр средних квадратов погрешности кван-
тования и дискретизации, то средний квадрат результирующей по-
грешности
~ 5дискр •
При исследовании систем связи поступают иначе.
Различная природа стационарных, не связанных с речным сообще-
нием шумов и шумов, коррелированных с ним, определяет различную
степень их влияния на субъективную оценку качества передачи речи.
Коррелированные с речевым сообщением шумы оказывают сущест-
венно меньшее отрицательное воздействие на качество. Это не позво-
ляет непосредственно суммировать мощности стационарных шумов
аналоговых каналов и коррелированных с сообщением шумов в сме-
шанном аналогово-цифровом канале.
Обозначим через ОСШЭКВ эквивалентное отношение мощности
сигнала к мощности стационарного шума в незанятом канале (экви-
валентность определяется как соответствие абонентских оценок влия-
ния обеих категорий шума).
Зависимость ОСШЭКЯ от ОСШкорр (отношение мощности сигнала
к мощности шума, коррелированного с речевым сообщением) без уче-
та добавочного стационарного шума незанятого канала (так называе-
мого, фонового шума) экспериментально определена и представлена
в рекомендациях МККТТ компанией AT&T и почтовым ведомством
57
Рис. 2.28
Великобритании в виде аппрокси-
маций (значения ОСШ выражены в
децибелах):
ОСШЭКВ = QfiTl ОСШ^р +
+ 1,26ОСШКОрр - 5,08;
ОСШЭКЪ = 0,0602 ОСШ^ +
+ 0,285 0СШкорр + 1,07.
Зависимость ОСШЭКЛ и ОСШКорр
приведена на рис. 2.28.
Аппроксимацию
осшэкв = ОСШфон{1 -
- ехрИоЛбООИф^ - 0,7) f 21I
К '-шфои> J J
следует использовать вместо
приведенных выше, когда
ОСШкорр > -0,006 ОСШ^ + 0,55ОСШфон + 1,1,
где 0СШфОН — отношение мощности сигнала к мощности фонового шума.
2.15. ДИСКРЕТНЫЕ РАЗНОСТНЫЕ ПРЕДСТАВЛЕНИЯ.
ДЕЛЬТА-ПРЕДСТАВЛЕНИЯ
На первом этапе формируются отсчеты (координаты) сообщения,
затем с учетом вероятностных свойств сообщения на основании кон-
кретных 2V— 1 предыдущих отсчетов предсказывается очередной отсчет.
Предсказанные значения 5пр(^) сравниваются с действительным зна-
чением S(tk). При этом формируется разность предсказания А-го по-
рядка
AWSV*) = S(tk) - Snp(tk).
Структурная схема устройства, осуществляющая разностные пред-
ставления, приведена на рис. 2.29.
В частном случае использования, например, разностного представ-
ления первого порядка
д('> = S(tk) - S(tk- ,). Snp(tk) = S(tk _ ,)
в качестве прогнозирующего устройства может использоваться линия
задержки на период опроса.
58
Приемное устройство
Компаратор
Рис. 2.30
При одинаковой точности восстановления использование разно-
стного представления сокращает объем передаваемой по каналу ин-
формации, т. е. разностное представление более эффективно по срав-
нению с представлениями отсчетов.
При достаточно большой частоте дискретизации разности между со-
седними отсчетами могут быть достаточно малыми и поэтому могут кван-
товаться только на два уровня, т. е. формируется сигнал 0, если Д^ =
(N\
= S(tk) < 0, или сигнал 1 в противном случае (Л = S(tk) > 0), т. е. ко-
ординаты сообщений 1 и 0 указывают лишь знак соответствующей раз-
ности. Существует большое число видов 5-представления (5-модуляции).
Структурная схема устройства, обеспечивающего такое представ-
ление, приведена на рис. 2.30.
Выходной сигнал компаратора
g(t) = sign[A5(01-
На выходе передающего устройства формируется последователь-
ность двоичных сигналов 5д(г). При интегрировании этой последова-
тельности в интеграторе, расположенном в цепи обратной связи, фор-
мируется прогнозируемый (аппроксимирующий) сигнал 5пр(г) в виде
ступенчато изменяющегося напряжения. Такой же сигнал формируется
на выходе интегратора в приемном устройстве. Частота следования им-
59
пульсов на выходе 5-модулятора (частота тактовых точек) f0 = 1/Г0 зна-
чительно больше частоты опроса по теореме Котельникова. Сигнал
ошибки Д5(0 - S(t) — Snp(t) квантуется компаратором в пределах ±1,
что соответствует квантованию знака ошибки.
Выходной сигнал компаратора g(0 = sign[A5(/)] "опрашивается" с
периодом То, и в результате формируется последовательность 5Д(/)
При отрицательной крутизне исходного сигнала 5(z) модулятор фор-
мирует больше отрицательных импульсов, чем положительных, при
положительной крутизне — наоборот. В областях экстремумов исход-
ного сигнала, где его крутизна близка к 0, числа положительных и от-
рицательных импульсов примерно одинаковы. Поэтому получается
среднее значение 5Д(/), примерно равное среднему значению крутиз-
ны исходного сигнала.
Демодулятор линейной классической 5-модуляции (ДМ) состоит
из интегратора и простейшего фильтра нижних частот. Если последо-
вательность 5Д(0 передается по каналу без ошибок, то в результате
интегрирования на приемной стороне получается сигнал5пр(/), тож-
дественный сигналу обратной связи в модуляторе.
Ступенчатая форма этого сигнала сглаживается фильтром нижних
частот, и в итоге получается копия исходного сообщения S(t).
Главным недостатком 5-модуляции является так называемая, пере-
грузка по крутизне (рис. 2.31).
Если приращение е аппроксимирующего сигнала 5пр(/) уменьшать
при постоянной тактовой частоте, то возникает ситуация, когда аппрок-
симирующий сигнал не успевает за исходным. Это явление называют пе-
регрузкой по крутизне. Рассмотрим, каким условиям должен удовлетво-
рять, например, гармонический сигнал (тестовый, детерминированный
сигнал), чтобы не было перегрузки. При перегрузке на выходе модулятора
формируются импульсы одинаковой полярности (рис. 2.32). Максималь-
ная скорость увеличения сигнала 5пр(г) у — г/Т0 — ej0. Для гармониче-
ского сигнала S(t) = £csin(2n/.Z) скорость S'(t) = Ec2nfccos(2nfcf), откуда
максимальная скорость увеличения сигнала S(f) у = Ec2nfc. Поэтому
условие отсутствия перегрузки для гармонического сигнала Ec2nfc < ef0.
60
Глава 3
УПРАВЛЕНИЕ ИНФОРМАЦИОННЫМИ ПАРАМЕТРАМИ
3.1. АНАЛОГОВЫЕ ВИДЫ МОДУЛЯЦИИ
Общие вопросы
Сообщение а(Г) преобразуется с помощью датчиков в пропорцио-
нальную электрическую величину b(t) — первичный сигнал. При пе-
редаче речи такое преобразование выполняет микрофон, а при пере-
даче изображения — телевизионная камера и т. д. Первичный сигнал
обычно является низкочастотным колебанием (НЧ). В некоторых слу-
чаях, например при обычной городской телефонной связи, его пере-
дают непосредственно по проводной линии связи. При передаче по
радио или многоканальной проводной линии первичный сигнал пре-
образуется в высокочастотное (ВЧ) колебание в результате модуля-
ции, которая представляет собой изменение одного или нескольких
параметров вспомогательного ВЧ колебания S(t) по закону передавае-
мого сообщения a(t). Немодулированное ВЧ гармоническое колеба-
ние S(i) = Umcos(wQt + ф0) = C/mcos0(r), где амплитуда Um, круговая
частота соо, фаза ф0 могут быть постоянными или медленно меняю-
щимися величинами, а 0(Г) = соо/ + ф0 — полный угол (фаза) колеба-
ния в момент времени t.
Различают два основных вида (класса) модуляции гармонических
колебаний: амплитудную при изменении Um и угловую при измене-
нии 0(Г) по закону передаваемого сообщения a(t).
Модулированные сигналы различаются также по виду модулирую-
щего сигнала b(t) и модулируемого колебания S(t). В качестве моду-
лируемого (сигнала-переносчика) используется гармоническое коле-
бание, периодическая последовательность импульсов, шумоподобные
сигналы (ШПС), а в качестве модулирующего — непрерывные (ана-
логовые), аналого-импульсные, цифровые и дискретные сигналы. Со-
ответственно и модуляции разделяются на аналоговую, аналого-им-
пульсную, цифровую и дискретную.
Амплитудная модуляция
При амплитудной модуляции (AM) в ВЧ гармоническом колебании
«(/) = cos(ci)0r + ф0) частота со0 и фаза ф0 постоянные, а амплитуда
Um(t) = Um + kb(t) изменяется по закону модулирующего сигнала b(t)
61
вокруг среднего значения Um. Здесь к — постоянный во времени ко-
эффициент пропорциональности, выбранный так, чтобы амплитуда
Um(t) была всегда положительна. Тогда уравнение
u(t) = [Um + kb(t)] cos (oof + фо)
(3.1)
описывает амплитудно-модулированное колебание (АМК). Его гра-
фик приведен на рис. 3.1. Выражение (3.1) представляет собой урав-
нение прямой линии относительно первичного сигнала b(t), поэтому
амплитудную модуляцию называют линейной системой. В простей-
шем случае b(t) является гармоническим колебанием с круговой час-
62
Рис. 3.3
и
О
Л
тотой Q и начальной фазой Ф: b(t) = Bcos(Qr + Ф). Тогда уравнение
(3.1) принимает вид:
u(t) = Um[ 1 + Мcos(Q/ + Ф)] cos(w0/ + <р0), (3.2)
где М — глубина (коэффициент) AM, равный
Так как амплитуда положительна, то 0 < М < 1. При М = 0 выра-
жение (3.2) превращается в простое гармоническое колебание. Если
М = 1, то выражение (3.2) имеет максимум (/max = Um + В = 2Um и
минимум t/min = Um - В = 0 (рис. 3.2). При М > 1 (перемодуляция)
появляются нелинейные искажения.
Выполнив преобразования выражения (3.2), получим спектр АМК
^Am(0 = COS(fflo/ + Фо) + COSK®0 + Q.)t + ф0 + Ф] +
+ 0,5MUm cos[(<o — Q)t + Фо ~ Ф],
который состоит из колебаний несущей частоты (первое слагаемое),
верхней (ВБЧ) со0 + Q и нижней (НБЧ) со0 — Q боковых частот.
Если b(t) содержит ряд гармонических составляющих (рис. 3.3),
т. е. b(f) занимает полосу частот, то у АМК имеют место не боковые
частоты, а боковые полосы — ВБП и НБП. В этом случае боковые
полосы изображают в виде прямоугольных трапеций (рис. 3.4). Рас-
стояние между ближайшими спектральными составляющими боко-
вых полос AQmin = 2Qmin, а вся полоса частот АМК имеет ширину
Дсол = 2Qmax.
Решение ряда задач приобретает ббльшую наглядность при поль-
зовании векторными диаграммами АМК, которые можно получить,
изображая вектором каждую гармоническую составляющую АМК и
находя результирующий вектор. На рис. 3.5 изображены векторы не-
сущего, верхнего и нижнего боковых колебаний в предположении, что
63
ось проекций вращается по часовой
стрелке с угловой скоростью <оо, а мо-
дулирующий сигнал — гармонический.
При этом несущее колебание изобра-
жается неподвижным вектором длиной
Um под углом <р0 к начальному положе-
нию оси проекции. Верхнее и нижнее
боковые колебания изображаются век-
торами одинаковой длины MUmp., но
под разными углами к начальному поло-
жению оси: под углом Фо + Ф — для ВБЧ
и под углом <р0 - Ф — для НБЧ. Вектор
Рис. 3.5 ВБЧ вращается против часовой, а вектор
НБЧ — по часовой стрелке с угловой
скоростью Q. Со временем сумма векторов боковых частот будет изме-
няться по модулю, но всегда находиться на линии вектора несущего ко-
лебания, совпадая или не совпадая с ним по направлению. Поэтому мо-
дуль суммарного вектора АМК тоже будет меняться со временем.
Амплитудный модулятор. Устройства, с помощью которых формиру-
ется АМК, называются амплитудными модуляторами. Таким устройст-
вом в передатчике является его выходной каскад (мощный), который
выполняется на транзисторе. В нем AM осуществляется благодаря из-
менению напряжения смещения на базе транзистора или его коллек-
торного напряжения. В первом случае AM называется базовой, а во
втором — коллекторной. Возможна комбинированная AM.
На рис. 3.6 приведены схема модулятора базовой AM и спрямлен-
ная проходная характеристика транзистора ik = /(е6) при Ек = const.
В этом модуляторе транзистор VT включен по схеме с общим эмит-
тером. На его базу (вход) поступают колебание несущей частоты <оо и
параллельно НЧ, модулирующее напряжение b{t), а также постоянное
напряжение смещения Eq. На коллектор транзистора подается напря-
жение питания Ек через колебательный контур, который настроен в
резонанс с колебанием несущей частоты <оо. Дроссель L и конденсатор
образуют Г-образный фильтр, который не пропускает ВЧ-колебания
в источник постоянного напряжения. Фильтр создает высокое сопро-
тивление токам высокой частоты и незначительное — токам низкой
частоты. Напряжение смещения на базе транзистора £^.м = Eq + b(t) из-
меняется по закону й(0, а ВЧ колебание несущей частоты — вокруг b(i)
как вокруг своего среднего значения, создавая однополярные импуль-
сы коллекторного тока разной амплитуды, пропорциональной b(i).
На коллекторном контуре выделяется коллекторное напряжение пер-
вой гармоники этих импульсов, отчего образуется AM, соответствую-
щая выражению (3.2).
64
Отметим, что AM — нелинейный процесс, поскольку при этом ВЧ
напряжение несущей частоты отсекается снизу проходной характери-
стикой транзистора (см. рис. 3.6), образуя импульсы коллекторного то-
ка. Это достигается выбором постоянного напряжения смещения на ба-
зе (рабочей точки) вблизи излома проходной характеристики
транзистора. В линейном режиме, которому соответствует значение Е$,
в середине линейного восходящего участка проходной характеристи-
ки, а результирующее базовое напряжение не выходит за его пределы,
AM невозможна. В этом случае линейная сумма напряжений базовой
цепи без изменения пройдет в коллекторную цепь, колебательный
контур которой выделит только колебание несущей частоты, так как
он на нее настроен.
Если в схеме (см. рис. 3.6) вторичную обмотку трансформатора Т
отключить от базовой цепи и подключить к коллекторной цепи по-
следовательно с колебательным контуром, то будет иметь место схема
коллекторной AM. Работу такого модулятора можно пояснить с по-
мощью выходной характеристики транзистора и нагрузочной прямой.
Модулятор коллекторной AM работает в перенапряженном режиме.
Коллекторная AM обеспечивает больший КПД передатчика, мень-
шие нелинейные искажения сигнала по сравнению с базовой AM и
поэтому она используется в мощных передатчиках.
65
Демодулятор AM сигналов. В демодуляторе происходит процесс,
обратный AM. Задачей демодулятора (детектора) является выделение
из AM колебания переданного сигнала 6(Г), т. е. его огибающей.
В демодулятор входят нелинейный йли линейный элемент, но с пе-
ременными параметрами, а также фильтр нижних частот (ФНЧ). Ча-
ще используется детектор огибающей или синхронный детектор. На
рис. 3.7 приведена схема последовательного диодного детектора оги-
бающей, состоящего из последовательно включенных источника AM
сигнала (вторичная обмотка трансформатора), диода D (нелинейного
элемента) и ФНЧ в виде АС-цепи, а также представлены спрямленная
вольт-амперная характеристика (ВАХ) диода и временное диаграм-
мы, поясняющие работу детектора. Диод пропускает на свой выход
только часть AM колебания с огибающей, т. е. осуществляет отсечку
снизу AM колебания, отчего появляется постоянная составляющая Е
на выходе ФНЧ, закрывающая диод. Поэтому рабочая точка Е пока-
зана левее точки пересечения ВАХ и оси абсцисс. Через точку Е про-
ходит ось t (времени), вдоль которой как вокруг среднего изменяется
входной AM сигнал. Штриховая линия, проходящая через точку из-
лома ВАХ параллельно оси /, показывает, какая часть AM колебания
отсекается диодом. Эта часть создает импульсы тока диода. АС-цепь
выделяет огибающую b(t) и отфильтровывает ВЧ составляющие.
Конденсатор С быстро заряжается через диод с малым внутренним
сопротивлением до пикового значения импульса и медленно разря-
66
жается через резистор R большого сопротивления в паузах между им-
пульсами. Поэтому ЯС-цепь выделяет среднее значение этих импуль-
сов, пропорциональное их огибающей.
Достоинства и недостатки AM. Достоинства — простота схемных реа-
лизаций, а недостатки определяются следующим. Из выражения (3.2)
следует, что амплитуда модулированного колебания изменяется от
l/min = — Л/) до t/max = Um(\ + М), а мощность соответственно
от Л™ = - ЛП2 ДО Лпах = + где Рн = ^/2ЯН - мощ-
ность колебания несущей частоты на нагрузке Ян.
Средняя мощность AM колебания за период низкой частоты Т
и2 т и2 т
= 2^ Т I ^M (Od/ = |f(l + Mc0SQt)2dt = Рн(1 + 0.5Л/2).
При М = 1 мощность Рта* = 4РН и Рср — 1,5РН. Отношение Рср/Ртах =
= 0,375 < 1, т. е. передатчик плохо используется по мощности, что яв-
ляется существенным недостатком AM. Это происходит потому, что
ббльшая часть общей генерируемой мощности расходуется на переда-
чу колебания несущей частоты, которое не несет передаваемой ин-
формации. Эта часть при М — 1
где Рбок — мощность колебания обеих боковых полос, равная М21/^/0,25ЯН.
Устранить данный недостаток можно исключением из АМК со-
ставляющей несущей частоты; AM без несущей называется балансной
модуляцией (БМ).
Балансная модуляция
Балансно-модулированное колебание (БМК) определяется выра-
жением (3.2) без несущей:
“bmW = cos(w0/ + фо) = kb(t)S{f),
(3.3)
т. е. оно получается в результате перемножения модулирующего сигнала
b(J) и сигнала-переносчика S(i). Если оба сигнала гармонические:
/>(г) = l/cosar и S(0 = I/mcoso0z, то
БМК иБМ(0 = k.UUm cosQ/cos<o0/ =
= 0,5JWI/m[cos(w0 + О)/ + cos(w0 - Q)/J,
(3.4)
67
Рис. 3.8
Рис. 3.9
Рис. 3.10
следовательно БМК состоит только из двух боковых частот (полос):
верхней со0 + Q и нижней — Q. Процесс перемножения этих сиг-
налов поясняется рис. 3.8 а, б, в. На рис. 3.8, г показан частотный
спектр этого БМК. Очевидно, что полоса частот БМК такая же, как
и АМК: Д/БМ = 2Fmax, а боковые полосы отстоят друг от друга на
Устройство, реализующее выражение (3.3), представляет собой ба-
лансный модулятор-перемножитель сигналов. Мощный каскад моду-
лятора выполняется на основе двухтактной транзисторной схемы
(рис. 3.9). Однако на ее выходе присутствуют не только две боковые,
но и модулирующий сигнал b(t), что является недостатком схемы, хо-
тя его можно устранить, усложнив схему. Если же модулятор выпол-
нить по двойной двухтактной схеме (рис. 3.10) (диодной), то на его
выходе сигнал b{t) будет отсутствовать.
Демодуляция БМК осуществляется когерентным или синхронным
детектором. Каждый из них состоит из перемножителя сигналов П и
фильтра нижних частот (ФНЧ), подключенного к его выходу (рис. 3.11).
В блоке П перемножаются между собой БМК и опорное колебание
иоп(г). Если последнее совпадает с колебанием несущей частоты
«он(0 ~ т- е- У них одинаковые частоты и фазы или фазы жестко
связаны между собой, то детектор называ-
ется когерентным. Если же совпадают толь-
ко частоты, а фазы разные, то детектор на-
зывается синхронным. Для АМК можно
использовать только когерентный детек-
тор, в противном случае напряжение его
выходного сигнала меняется во времени.
Рис. 3.11
68
Для детектирования БМК может использоваться любой из назван-
ных детекторов. Будем считать, что моп(0 = kS(f), т. е. используется
когерентный детектор. В его блоке П перемножаются между собой
входное БМК [см. выражение (3.3)] и опорное колебание
uon(z) = kS(t) = kUcosw0t
так, что на выходе перемножителя получается колебание
«„(Г) = kb(t) S2(t) = kb(t) U2 cos2o>0' = kb(J) и2 14 C°s2b?c>/ = L к U2 b(t) + ВЧ;
ФНЧ отфильтровывает ВЧ составляющие и на его выходе имеет место
переданный сигнал b(t).
Обе боковые полосы БМК несут одну и ту же информацию. На
входе перемножителя когерентного детектора имеется сигнал
un(f) = 1/БМ(0 kS(t) = £t7[cos(o)0 + + cos(w0 - Q)t]kUm coso>0/,
а на выходе ФНЧ —
«ф(0 = 0,5kUUm(cosnt + cosQZ) = 0,5kUm[b(i) + 6(Z)] = kUmb(f),
что подтверждает сказанное. Поэтому одну из них можно исключить,
а сообщение передавать с помощью другой. Это сокращает полосу
частот передаваемого сигнала в 2 раза и увеличивает помехоустойчи-
вость связи. Такая передача называется однополосной или передачей
одной боковой полосы частот (ОБП AM). При этом модуляция назы-
вается однополосной.
Однополосная модуляция
Известно несколько методов формирования одной боковой поло-
сы частот AM колебания (ОБП AM): фильтровой, фазовый, фазо-
фильтровой, фильтро-фазовый, синтетический и др. Основным из
них является фильтровой метод, суть которого определяется структу-
рой БМК [см. выражение (3.4)], откуда полосовым фильтром выделя-
ется одна боковая полоса:
u0(t) — £Zcos(co0 + Cl)t.
На рис. 3.12 приведена структурная схема формирования ОБП AM,
состоящая из перемножителя П и полосового фильтра ПФ. Блок П
выполняется чаще всего по кольцевой диодной схеме (двойной ба-
лансной) (см. рис. 3.10), на выходе которой нелинейные искажения
69
Рис. 3.12
сигнала минимальны, отсутствуют модули-
рующий сигнал b(t) и колебание несущей час-
тоты S(t). В качестве ПФ чаще всего использу-
ются электромеханические фильтры (ЭМФ),
обычно работающие на несущей частоте
500 кГц. На более высокой частоте труднее
выдержать требуемую крутизну 0,1 дБ/Гц ска-
тов ее амплитудно-частотной характеристики
(АЧХ), при которой нерабочая боковая полоса
подавляется на 60 дБ. Если несущая частота > 500 кГц, то требуется
как минимум два преобразования частоты, т. е. надо соединить по-
следовательно как минимум два формирователя (см. рис. 3.12). При-
чем у второго преобразователя несущая fa > fa так же как у третьего
Лз > fal- Поэтому фильтровой метод формирования ОБП AM назы-
вают еще и методом последовательных преобразований.
Достоинством фильтрового метода формирования однополосного
сигнала является высокая степень подавления нерабочей боковой по-
лосы (60 дБ), недостатком — громоздкость схемы.
Фазовый метод формирования вытекает из выражения однополос-
ного сигнала:
“о(О = kUUm c°s(<i>o + = kUUm(cos<OQt cos ГД — sinsin Qt)
для верхней боковой полосы (ВБП). Для НБП знак в этом выражении
меняется на обратный, так что в общем виде
u0(t) = kUUm(cos<i>0t cosClt + sin<o0ZsinQf) - k[S(t)b(f) + S(i)b(t)]. (3.5)
В выражении (3.5) верхний знак относится к ВБП, нижний — к
НБП; b (г), S(t) — преобразованные по Гильберту функции b(t), S(t),
т. е. квадратурные b(t), S(t), сдвинутые по фазе на 90°.
На рис. 3.13 приведена структурная схема формирователя ОБП AM
фазовым методом согласно правой части выражения (3.5): ПФВ— по-
лосовой фазовращатель на 90° сигнала />(/); П1и П2— перемножители
сигналов; Г — генератор колебания несущей частоты; ФВ — фазовра-
щатель на 90° колебания несущей частоты; ФИ— фазоинвертор; Е —
сумматор. Работа схемы определяется выражением (3.5).
На выходе перемножителей П1 и П2 присутствуют колебания:
«„l(0 = kb(j)S(i) = kUcos£2tUmcosa>0t = 0,5kUUm[cos(<o0 — Г2)/ + cos(co0 + Q)Z];
un2(f) = kb(f)S(f) = kUsin ntUmsin<aQt = 0,5kUUm [cos(w0 — cos(co0 + Г2)/],
которые в сумме (на выходе блока Е) дают uz(Z) = иП1 + МП2 =
- kUUmcos(m0 — Si)t — НБП, а их разница uz(r) = мп1(г) ~«п2(/) =
= kUUm cos(co + Q)Z — ВБП.
70
Метод называется фазовым потому, что в нем нерабочая боковая
полоса подавляется благодаря фазовой компенсации. Степень этого
подавления, дБ
а = 20 1g
- 2acosA<p + 1
где а, Д<р — соответственно амплитудная и фазовая погрешности.
При a = 1 (что несложно выполнить) а = 20 lg|sin(0,5A<p)|. Чтобы
получить а = 60 дБ, как и при фильтровом методе, надо иметь Д<р = 7
что нереально из-за наличия блока ПФВ. Известные ПФВ на 90° обес-
печивают минимум Д<р = Г, чему соответствует а = 40 дБ < 60 дБ, и
то только в лабораторных условиях и в полосе частот речевого сигнала
ДГ = 3,1 кГц. Реально Д<р > Г и а <40 дБ, что является недостатком
фазового метода, сдерживающим его широкое использование. Дос-
тоинство метода —- простота схемы формирователя: ОБП AM фор-
мируется в результате одного преобразования частоты теоретически
на любой несущей и может иметь относительно высокую мощность.
Согласно выражению (3.5) колебание ОБП AM состоит из двух
БМК, одно из которых квадратурно другому. По отношению к пе-
редаваемому сигналу b(j) выражение БМК (3.3) представляет собой
прямую линию, проходящую через начало координат, и поэтому БМ
является линейной системой модуляции; ОБП AM тоже линейная
система модуляции, поскольку состоит из двух БМК, но считается
косвенной из-за квадратуры второго слагаемого. Балансная и ампли-
тудная модуляции являются линейными и прямыми системами мо-
дуляции.
В демодуляторе сигналов ОБП AM (когерентном, синхронном)
трудно получить опорное колебание. Его сравнительно просто полу-
чить по двум боковым полосам (АМК, БМК), а по ОБП AM — зна-
чительно сложнее. В связи эта проблема решается использованием
высокостабильных генераторов на передающей и приемной сторонах.
Допустимый асинхронизм, т. е. разница несущей частоты ОБП AM и
опорного колебания, v = 10 Гц для телефонной связи. Для высокоху-
дожественной передачи речи или музыки v — 1—2 Гц. По этим циф-
рам можно определить допустимую относительную нестабильность
частоты генераторов. Опорное колебание можно формировать по
передаваемому остатку колебания несущей частоты (пилот-сигна-
лу), но это не выгодно энергетически.
Так как однополосная модуляция представляет собой линейное
транспонирование спектра модулирующего сигнала bify вверх по шка-
ле частот, а демодуляция — вниз, то детектор сигнала ОБП AM можно
выполнить на базе формирователя сигнала ОБП AM фазовым мето-
дом (фазовый метод детектирования ОБП AM). Схема такого детек-
тора (рис. 3.14) конструктивно отличается от схемы формирователя
(см. рис. 3.13) тем, что введены два ФНЧ, подключенные к выходам
71
Рис. 3.13
Рис. 3.14
перемножителей П, а блок ПФВ подключен не ко входу П2, а к его вы-
ходу через ФНЧ2. Такое устройство позволяет детектировать ОБП AM
колебание с подавлением зеркальной помехи. Это значит, что можно
детектировать колебание, состоящее из двух боковых полос, несущих
различную информацию:
и(<) = Z7j(O sin(<o0 + Oj)/ + t/2W sin(e>0 — Ci^t.
Пусть такое колебание поступает на сигнальные входы перемно
жителей П1 и П2детектора (см. рис. 3.14). С генератора Глодается ко-
лебание Uq(z) = (/0sinco0z на опорный вход П1 непосредственно, а на
опорный вход П2 — через фазовращатель ФВ на 90°:
«02(0 = l/0COS<00r.
На выходе ФНЧ этих перемножителей получаем сигналы:
«ф](0 = cosily + 0,5Ц)1/2(0 cosfi2r;
«ф2(0 = -0,5t^Lf|(l) sinfli/ + O,5L/oL/2(O sinO2/.
Синусоидальные составляющие «ф2(0 в блоке ПФВ преобразуются
в косинусоидальные, так что на выходе сумматора S напряжение
«х(/) = cosfty. т- е- продетектирована ВВП и подавлена ниж-
няя. Если же вычесть из «ф](0 напряжение Иф2(Г), то получим
“е(0 = cosQjZ, т. е. продетектирована НБП и подавлена верхняя
или наоборот. Сложение или вычитание этих колебаний осуществля-
ется ключом Кл (см. рис. 3.14).
Если передача ведется только на ОБП ДМ, то колебание на месте
второй боковой будет зеркальной помехой, которая подавляется в
данной схеме. Степень этого подавления а определяется погрешно-
стью А<р ПФВ на 90*. Данным методом зеркальная помеха подавляется
не только на низкой, но и на любой промежуточной частоте. Фазовый
72
метод преобразования частот позволяет существенно (на 40 дБ) уве-
личить избирательность по зеркальному каналу приемника независи-
мо от вида модуляции входных сигналов, в том числе и ЧМ сигналов
железнодорожной радиосвязи.
На железнодорожном транспорте AM непосредственно не исполь-
зуется (кроме внутрипоездного радиовещания). Она используется как
промежуточный вид модуляции в детекторах ЧМ сигналов приемни-
ков железнодорожных радиостанций. В этих детекторах входной ЧМ
сигнал постоянной амплитуды преобразуется в AM (точнее в АЧМ)
колебание, после чего детектируется амплитудным детектором. Одна
боковая полоса частот (ОБПАМ) используется в многоканальной свя-
зи (МКС) с частотным разделением каналов (ЧРК), проводной, ра-
диорелейной и др.; БМ является промежуточной при формировании
ОБП AM.
Угловая модуляция
При угловой модуляции (УМ) по закону передаваемого сообщения
изменяется полный угол (фаза) ц/(0 гармонического несущего или
поднесущего колебания [см. выражение (3.1)]. В свою очередь УМ
подразделяется на фазовую (ФМ) и частотную (ЧМ) модуляции.
Фазомодулированным колебанием (ФМК) называется колебание
«ф„(0 = Vmco&{m0t + v(01,
у которого сдвиг фазы изменяется от начального значения <р0 пропор-
ционально модулирующему сигналу 6(0-
ф(0 = ч>о +
где к — размерный постоянный коэффициент пропорциональности.
Поэтому
Ифм(0 = Um СО*1“о' + Фо + (3.6)
Уравнение (3.6) является нелинейным по отношению к модулирую-
щему сигналу 6(0, поскольку он находится под знаком тригонометри-
ческой функции. Поэтому ФМ является прямым нелинейным видом
модуляции. В простейшем случае b(i) — гармоническое колебание:
6(0 = U co&(Qi + ф),
при котором
Ифм(0 = Ут «»1®о'+ Фо + cos<™ + ф)) =
= Um cos[w0t + Фо + «фи cos(fU + ф)]. (3.7)
73
Рис. 3.15
Величина Мфм — kUназывается индексом ФМК или девиацией фазы
и численно равна максимальному отклонению начальной фазы коле-
бания от среднего значения <р0.
На рис. 3.15, а приведены временная зависимость т cos(Q/+ <р) для
Ф = л/2 рад.; на рис. 3.15, б — ФМК (сплошная линия) и смодули-
рованное колебание несущей частоты (штриховая линия) ф0 = 0.
При т sinQZ > 0 ФМК отстает, а при т sinQZ < 0 опережает по фазе
колебание несущей частоты. Этот фазовый сдвиг максимален по мо-
дулю при sinQ? = +1, а при sinOr = 0 — отсутствует.
Частотно-модулированным (ЧМК) называется колебание, у кото-
рого частота <£>(?) изменяется относительно среднего значения а>0 про-
порционально сравнительно медленному модулирующему сигналу b(t):
<о (/) = <оо + kb(t).
Аналитическое выражение ЧМК:
t t
u4M(f) = t/mcosv(0 = i/mcos jw(/)d/= Um cos j [<a0 + kb(t)\At =
о о
t
= Um cos[w0/ + q>0 + £jZ>(r)dr],
0
Можно рассматривать как ФМК, у которого фаза изменяется про-
порционально не модулирующему сигналу b(t), а интегралу от него.
74
Поэтому частотная модуляция является нелинейной интегральной
системой в отличие от ФМ (прямой нелинейной системы).
В простейшем случае
b(t) = f/cos(fif + q>)
и тогда
t
«чм(0 = t/m cos[&>0/ + фо + £t/fcos(n/ + ф)сй] =
о
= {/mcos[w0/+ ф0 + ^5ш(П/ + ф)] = (/mcos[w0f + ф0 + msin(n/ + ф)]. (3.8)
Здесь т = kU/CL является индексом ЧМ, который пропорционален
амплитуде U модулирующего сигнала b(t) и обратно пропорционален
его частоте Q. Произведение kU= Д<од называется девиацией частоты —
наибольшее мгновенное отклонение частоты от среднего значения <о0.
Поэтому т = ДШд/Q.
На рис. 3.15, в приведена временная зависимость нчм(/). При
msinQZ > 0 частота w(/) > w0 с максимумом при sinQ/ = 1, а при
msinQf < 0 наоборот, со(/) < <о0 с минимумом при sin Ш = —1. При
sin Qt — 0 частота со(/) = <о0.
Так как частота <£>(?) и фаза <р(/) связаны между собой известным со-
отношением w(/) = dq>(/)/dZ, то ФМ всегда сопровождается ЧМ и на-
оборот.
У рассмотренного выше ФМК круговая частота
w(0 = [“o'+ ч>о + ^<01 = “о +
Следовательно, ФМК можно рассматривать как ЧМК, у которого
частота изменяется пропорционально не модулирующему сигналу b(j),
а его производной по времени:
дй(0 = ^.
В случае гармонического закона модуляции
Ф0 + mcos(Qz + ф)] = (1>0 — mfisin(fiz + ф).
at at
Так как максимальное значение sinQZ = 1, то Д<отах = тО. = kUQ
является максимальным отклонением частоты ФМК от среднего зна-
75
чения <о0, т. е. девиацией частоты. Следовательно, при ФМ девиация
частоты пропорциональна не только амплитуде (т = kU), но и частоте
О модулирующего сигнала b(i). В рассмотренном ЧМК девиация час-
тоты от Q не зависит. Это значит, что ЧМ, сопровождающая ФМ, яв-
ляется искаженной. Ее можно исправить, исключив Q из девиации,
интегрируя по времени модулирующий сигнал b(t):
t t
bH(f) = Jb(t)dt = j Ucos(Qi + <p)d/ = sin(fii + q>) + C.
0 0
Подставляя bK(j) в последнее выражение, получим неискаженную
(истинную) ЧМ, которая называется косвенной, так как получена из
ФМ. Аналогично можно получить и косвенную ФМ. Для этого со-
гласно выражению (3.7) надо модулирующий сигнал подавать на ЧМ
модулятор через дифференцирующее по времени устройство.
И ФМК [см. выражение (3.7)] и ЧМК [см. выражение (3.8)] можно
представить одним выражением угловой модуляции (УМК):
“ум(О = Um cos[to0r + Фо + m sin (ГН + ф)]. (3.9)
Если при гармоническом законе модуляции т = kU/Q., то выраже-
ние (3.9) представляет собой ЧМК, если же т = kU, а <р отличается на
л/2 рад., то выражение (3.9) представляет собой ФМК.
Для определения спектра ФМК и ЧМК преобразуем выражение (3.9)
по формуле косинуса суммы двух аргументов:
«ум(0 — Um cos(w0/+ ф0) cos[zh sin(П/ + ф)] — Um sin(w0/ + Фо) sin |/н sin(fM + ф)]
и воспользуемся соотношениями теории Бесселевых функций:
sin (ли sin О/) — 2 22 72л(/л) sin |(2л — 1)П/;
и= 1
cos(/nsinfii) = 1$(т) + 2 /2л(/л) соз(2лП/).
«= I
В результате получим
“ум(0 = Um COS(w0i + ф0) + ит 22 4('W) COS[(w0 + Л П)/ + ф0 + Лф] +
Л= 1
+ ит 22 (-1)Л /л(от)со5[(<о0 - п n)Z + Фо - лф], (3.10)
и= 1
где 1п(т) — функция Бесселя первого рода л-го порядка от аргумента т.
76
т=1
шв-ЗЯ | Шр~Я______________________j_______j и |___________
1 (1>В-2Я I шд шд+2Я ы0+ЗЯш
Рис. 3.18
Данное выражение представляет собой разложение ФМК и ЧМК
на гармонические составляющие при гармоническом законе модуля-
ции с частотой Q гармонической несущей. Даже в этом простейшем
случае ФМК и ЧМК имеют теоретически бесконечный спектр, кото-
рый состоит из составляющей несущей частоты соо (первое слагаемое)
и двух боковых полос частот (второе и третье слагаемые): верхней
(ВБП) <о0 + пП и нижней (НБП) соо — пС1 (рис. 3.16). Нечетные гар-
моники НБП противофазны нечетным гармоникам ВБП, о чем гово-
рит множитель (—1)" в НБП. Амплитуды боковых частот пропорцио-
нальны 1п(т) и достаточно быстро убывают (хотя и немонотонно) с
увеличением номера гармоники п. Ширина спектра ограничивается
(1 + т + Jm) парой боковых составляющих, когда пренебрегают бо-
ковыми частотами, амплитуды которых составляют 1 % и менее ам-
плитуды немодулированной несущей. В этом случае ширина спектра
сигнала с УМ
д/ум = 2F(1 + т + J^). (3.11)
При т » 1 можно пренебречь слагаемым . Есть и другие ана-
логичные формулы. Сложнее определить ширину спектра ФМК и
ЧМК при случайном модулирующем сигнале.
Однако и в этом случае пользуются формулой (3.11), подставляя в
нее максимальную частоту модулирующего сигнала F = Fmax и мак-
симальный индекс т = ттах.
Особенностью спектра ЧМК в отличие от ФМК является незави-
симость его ширины [см. формулу (3.11)] от частоты модуляции F.
С увеличением F индекс модуляции т = Д/^/F уменьшается, спек-
тральные составляющие "раздвигаются", а учитываемое их количество
2(1 + т + Jm) = 2(1 + + уменьшается. При ФМК индекс т
не зависит от F. Поэтому с увеличением /"ширина спектра увеличи-
вается. При этом спектральные составляющие, не изменяясь по ам-
плитуде и количеству, "раздвигаются" по частоте.
77
При т «1 можно учитывать по одной верхней и нижней боковым
составляющим, тогда ширина спектра сигнала с УМ будет такой же,
как у сигнала с AM: Д/ум = Л/АМ = 2Fmax.
Его структура
"ум(') - COS(w0/ + ф0) + cos[(d> + П)Г + ф0 + ф] -
mUm
----2~ cos|(w0 - Q.)t + Фо “ ф]
отличается от структуры АМК лишь знаком (минус) нижнего боково-
го колебания. Однако именно этот минус приводит к преобразованию
АМК в сигнал с УМ. На рис. 3.17 приведена векторная диаграмма сиг-
нала с УМ при т 1. Из-за упомянутого знака (минус) результирую-
щее колебание боковых частот всегда перпендикулярно вектору несу-
щей, а результирующий вектор изменяется не только по углу <р(г), но
и амплитуде, что обусловлено пренебрежением боковыми составляю-
щими более высокого порядка и приближенностью выражения. У
АМК результирующий вектор боковых всегда находится на линии
вектора несущей, поэтому УМ отсутствует.
Сигнал с УМ имеет ту же мощность, что и немодулированное ко-
лебание, хотя и содержит не только несущую, но и боковые полосы
частот. С увеличением т происходит перераспределение мощности в
спектре и может отсутствовать составляющая частоты <о0, что сущест-
венно повышает эффективность использования передатчика.
Фазовый модулятор. В простейшем случае фазовый модулятор вы-
полняют на одиночном колебательном контуре, перестраиваемом по
частоте по закону передаваемого сообщения (рис. 3.18). Для этого к
контуру подключен варикап (variable capacitor) — конденсатор пере-
менной емкости Св через разделительный конденсатор Ср. На варикап
подаются постоянное напряжение смещения Есм со средней точки по-
тенциометра Rn и последовательно низкочастотное модулирующее на-
пряжение b(i), которые изменяют Св. Конденсатор Ср, исключает ко-
Рис. 3.18
78
роткое замыкание напряжения смещения £см через цепь, состоящую из
последовательно включенных вторичной обмотки трансформатора Т,
дросселя L, обмотки контура LK. Эквивалентная емкость контура
' = г + ________в Р-
кэ к с„ + с
в р
Это значит, что Ср осуществляет также неполное подключение ва-
рикапа к контуру. Дроссель L, имея высокое сопротивление для вы-
сокочастотного колебания несущей частоты со0 (хдр = со0£др), не про-
пускает его на свой выход и исключает шунтирование контура
емкостями цепей, подключенных к дросселю L. Для модулирующего
сигнала b(i) сопротивление L незначительное, так как Q << со0. На
рис. 3.19 приведена зависимость емкости варикапа Св от напряжения
и на нем, которая является нелинейной. Напряжение смещения Есм
определяет начальную емкость варикапа Св0 (рабочую точку), отно-
сительно которой изменяется переменная составляющая, пропорцио-
нальная модулирующему сигналу b(t).
Физическая основа работы фазового модулятора определяется фа-
зочастотной характеристикой (ФЧХ) колебательного контура:
<р = arctgo,
где а — обобщенная расстройка контура.
Обобщенная расстройка контура
я= 2Д®0,
“О
где <оо, Q — соответственно резонансная частота и добротность контура; До —
отклонение входной частоты <о от резонансной, т. е. До = <о0 — со.
Последнее означает, что <р =
= ф](а) = ф2(ш) ~ ФзСА®)- На рис. 3.20
приведена ФЧХ, имеющая линейный
участок в окрестности точки а — 0
(о = со0), достигающий ±30°, и гори-
зонтальные асимптоты фас — ±90°;
ФЧХ определяет фазовый сдвиг вы-
ходного сигнала относительно высо-
кочастотного входного в зависимо-
сти от его частоты со или расстройки
Дсо = со0 — со. Последнее может быть
достигнуто изменением резонанс-
ной частоты контура со0 при посто-
янной частоте входного сигнала со и
Рис. 3.19
79
Рис. 3.20
b(t) = 0. Если напряжение смеще-
ния Есм определяет резонансную
частоту контура <о0 = со, то ф = 0.
При изменении Есм емкость ва
рикапа и эквивалентная емкость
контура изменяются. При Св < Сю
эквивалентная емкость контура
уменьшается, а его резонансная
частота возрастает и становится
равной ш0|, и ФЧХ смещается
вправо (штриховая линия Г). По-
скольку при этом несущая частота
входного сигнала ш не измени-
лась, то фаза выходного сигнала
определяется кривой 1: ср] > 0.
Это значит, что выходное напря-
жение несущей частоты отстает по
фазе относительно входного на
угол ср = ср, > 0. Если же емкость варикапа Св > С^,, то ФЧХ смещается
влево (кривая 2) относительно со. В этом случае ф = ф2 < 0. Можно счи-
тать, что ФЧХ не смещается благодаря £см (сплошная линия), а ра-
бочая точка "скользит" по ней пропорционально Есм. Эта пропорция
соблюдается при работе на линейном участке ФЧХ. Следовательно,
ФЧХ является статической модуляционной характеристикой, опреде-
ляющей ФМ при подаче модулирующего сигнала 6(0-
Используются не только одиночные, но и связанные контуры (от
двух до четырех), каждый из которых настроен в резонанс с входным
сигналом. В этом случае максимальный линейный участок ФЧХ воз-
растает до значения, определяемого формулой Аф^д — ±(л — 1)л/2 рад,
где п — число связанных контуров. При л = 2 значение Дф^ =
== я/2 рад = ЗДфидр Если же л = 4, то Дф^ = 9Афмл1.
Частотные модуляторы. Эти модуляторы могут быть выполнены по
косвенному или прямому методу модуляции. По косвенному методу
они представляют собой фазовые модуляторы с интегратором на их
модулирующем входе. Модуляторы с прямым методом ЧМ представ-
ляют собой автогенераторы, управляемые по частоте по закону пере-
даваемого сообщения.
Как известно, частота колебаний простейшего АС-автогенерато-
ра приближенно определяется резонансной частотой его колебатель-
ного контура
<»rs
80
Поэтому управлять частотой
®г, т. е. осуществлять ЧМ, можно,
изменяя непосредственно (пря-
мо) эквивалентную емкость кон-
тура Скэ или индуктивность £кэ
по закону модулирующего сигна-
ла b(t). Отсюда и название — пря-
мой метод ЧМ.
На рис. 3.21 приведена схема
простейшего частотно-модулиро-
ванного транзисторного LC-ав-
тогенератора, в котором частота
автоколебаний шг изменяется в
результате изменения емкости варикапа Св, подключенного к кон-
туру автогенератора также, как и в случае фазового модулятора (см.
рис. 3.18). По приведенной формуле шг = 1/(7Л»^кэ) и зависимости
Св = /(и) (см. рис. 3.19) можно построить зависимость шг = j\Ecu),
представляющую собой статическую модуляционную характеристику
(СМХ), на которой имеется линейный (рабочий) участок, середина
которого должна соответствовать частоте автоколебаний генератора в
режиме молчания, когда отсутствует модулирующее напряжение
[/>(/) = 0]. При подаче последнего будет иметь место линейная зави-
симость частоты автоколебаний со(/) от b(t): со(/) = соо + kb(f), т. е. ЧМ.
Если в автогенераторе (см. рис. 3.21) отключить обратную связь Ьж
и подать колебание несущей частоты от внешнего источника на базу
транзистора VT, то получится схема фазового модулятора (генератора
с независимым возбуждением).
Частотная модуляция может осуществляться не только в LC, но и
в ЛС-автогенераторах, мультивибраторах, блокинг-генераторах раз-
личного типа. Активным элементом в них может быть не только тран-
зистор, но и другие элементы, в том числе интегральные микросхемы.
Детекторы ФМ-колебаний. Такие детекторы обычно представляют
собой частотные детекторы с интеграторами на их выходе. Возмож-
ность такого детектирования ФМ-колебаний вытекает из того, что
частотный детектор выделяет переданный сигнал из ЧМ-колебания,
в котором он находится под знаком интеграла [(см. выражение 3.8)].
Поэтому частотный детектор — дифференцирующее устройство, и
напряжение на его выходе
"вых(0 =
где — размерный коэффициент пропорциональности.
Ясно, что <р(г) получается в результате интегрирования по времени
выходного сигнала частотного детектора.
81
Рис. 3.22
Этот способ используют при детектировании колебаний с медленно
меняющейся фазой, т. е. в тех случаях, когда производная фазы по
времени конечна, например, при передаче речи. При скачкообразном
изменении фазы, а также при необходимости сравнения фазы прини-
маемого с фазой опорного (эталонного) колебания применяются спе-
циальные фазовые детекторы, например балансный фазовый дискри-
минатор (рис. 3.22, а), состоящий из двух последовательных диодных
детекторов. Входное напряжение Ифм(г) подается на оба диода в про-
тивофазе, а опорное и0(/) — в фазе, как и в когерентном детекторе
(см. рис. 3.11). Для описания работы данного фазового детектора при-
мем следующие условия: амплитудные детекторы на диодах KD/и VD2
идентичны, имеют коэффициент передачи кд и работают в линейном
режиме:
М|(/) = i/| cos(<o/ + ф|); u0(t) = Uo cos(<o/ + <p0), ф = ф] — ф0;
постоянные времени цепей R1C1 и R2C2 (ФНЧ) значительно больше
периода используемых колебаний.
Пользуясь теоремой косинусов (рис. 3.22, б) находим амплитудно-
фазовую характеристику данного дискриминатора:
Ц.ых = М 7^0 + °-25 и\ + Щ COS(P “ 7^0 + 0,25 t/12-(/0(/1cosV).
При Uo = 0,5(7] данная зависимость (7ВЫХ = /(ф) наиболее линейна, а
детекторная характеристика
^вых = 2ЛдЦ)(|со50,5ф| - |sin0,5ф])
представлена на рис. 3.22, в. Точки ф = л, 2л и т. д. считаются нера-
бочими. Чтобы работать на линейном участке в окрестности точки
Ф = л/2 надо опорное колебание и0(г) сдвинуть по фазе на угол л/2 рад
относительно входного сигнала. Режим работы (70 3> (7] используется
крайне редко. При низкой несущей используется двойная балансная
82
Рис. 3.23
схема — кольцевая (см. рис. 3.10). Кроме линейного иногда исполь-
зуется квадратичный режим работы дискриминатора:
<4ых = М ) = 4М1Ц) COStp,
т. е. имеет место линейное умножение сигналов И](Г) и w0(Z). В качестве
фазового детектора можно использовать различные ключевые схемы,
нагруженные на ФНЧ.
Детекторы ЧМ-колебаний. Детекторы представляют собой сочета-
ние избирательной линейной системы, преобразующей ЧМ в AM, и
обычно двух амплитудных детекторов. В состав частотного детектора
обычно входит ограничитель амплитуды входного сигнала, чтобы она
не влияла на выходной сигнал. В качестве линейной системы обычно
используются резонансные колебательные контуры, а в качестве де-
текторов — последовательные диодные детекторы AM колебаний. В
схеме дробного детектора ЧМ колебаний (рис. 3.23, а) (типовой схеме
железнодорожных радиостанций) оба контура настроены в резонанс
на несущую частоту входного ЧМ сигнала. Обмотка подключена к
средней точке обмотки £2 и они магнитно связаны (А/) с обмоткой Lt.
Диоды подключены к вторичному контуру согласно, и поэтому съем
83
продетектированного напряжения осуществляется с помощью мосто-
вой схемы, состоящей из резисторов RI, R2 и конденсаторов CI, С2.
Обычно R1 — R2, a Cl = С2. Напряжение на вертикальной диагонали
моста всегда постоянно из-за согласного включения диодов и стаби-
лизировано также конденсатором большой емкости (обычно электро-
литическим). Поэтому выходное напряжение снимается с горизон-
тальной диагонали моста, в которую включен конденсатор СЗ, через
который выпрямленные токи протекают встречно, выделяя в нем пе-
реданный сигнал. Фильтр ФНЧ, состоящий из R3, С4, Лп, отфильт-
ровывает его и подает в усилитель звуковых частот.
Преобразование в связанных контурах ЧМ в ДМ, а точнее в АЧМ,
удобнее пояснить с помощью векторных диаграмм. Пусть напряже-
ние в первичном контуре Uy Ток /(, протекающий по обмотке L1,
сдвинут по фазе на 90° относительно Uy В обмотке L2 наводится
ЭДС Ем = ±jaMI, где М — взаимоиндукция между обмотками L1 и
L2, которая питает вторичный контур. Если входной сигнал не моду-
лирован и настроен в резонанс с контурами (/=Jqi = Jq2 = То), то во
вторичном контуре будет иметь место последовательный резонанс,
когда фаза тока /2 совпадает с фазой напряжения Ем, а напряжение на
вторичной обмотке U2 — QEM =jaMI\ Q, где Q — добротность контура
(для определенности у £м выбран знак плюс). Множитель./= V-Т ука-
зывает на то, что вектор U2 сдвинут по фазе на 90° относительно век-
тора Uy К каждому диоду приложено напряжение, равное геометри-
ческой сумме или разности векторов Щ и 0,5 U2:
(7д1 = (73 + о,5с72; (7д2= (73-о,5{72.
Векторная диаграмма для данного случая (/=Toj — J02 ~fo) пред-
ставлена на рис. 3.23, б. Модуль |6/д1| = | (7д2|, поэтому выпрямленное
напряжение в горизонтальной диагонали моста равно нулю. Если час-
тота входного сигнала />7о] = Тб2 (Рис- 3-23, в), то ток /2 отстает от
Ем на острый угол а, а вектор й2 всегда перпендикулярен вектору /2.
В результате этого вектор U2 поворачивается на угол а, поэтому
< ^2-
На выходе дробного детектора появляется напряжение с отрица-
тельным знаком. При f < f0 (рис. 3.23, г) ток /2 опережает Ем на не-
который острый угол и, по аналогии имеем Ual > Ua2. На выходе дроб-
ного детектора появляется напряжение с положительным знаком.
Зависимость выходного напряжения ивых от частоты входного сигнала f
(детекторная характеристика) показана на рис. 3.23, д.
Детектор называется дробным потому, что его выходное напряже-
ние определяется отношением (дробью) напряжений на конденсато-
84
pax моста Cl и C2. Его также называют детектором отношений. В дроб-
ном детекторе паразитная AM подавляется в 30—60 раз, и поэтому
необязательно использовать амплитудный ограничитель на его входе.
Это достоинство данного детектора. Недостаток — сложность схемы.
Известны другие схемы частотных детекторов с описанным фазовым
преобразованием модуляции, которые называют стандартными частот-
ными демодуляторами в отличие от следящих (синхронно-фазового, со
следящим фильтром, отрицательной обратной связи по частоте).
Частотная модуляция используется во всех железнодорожных ра-
диостанциях, причем, в радиостанциях типа ЖРУ — косвенная ЧМ,
а типа "Транспорт" — прямая. В первых используется дробный детек-
тор ЧМ колебаний, а во вторых — детектор, выполненный на основе
кварца. В более ранних радиостанциях также использовалась ЧМ.
3.2 АНАЛОГО-ИМПУЛЬСНЫЕ ВИДЫ МОДУЛЯЦИИ
В аналого-импульсных видах модуляции сигналом-переносчиком
является периодическая последовательность видеоимпульсов, которая
характеризуется амплитудой, длительностью, частотой следования,
фазой (временном положением) импульсов. В связи с этим различа-
ют амплитудно-импульсную (ДИМ), широтно-импульсную (ШИМ),
частотно-импульсную (ЧИМ) и фазо-импульсную (ФИМ) модуля-
ции, при которых непрерывные (аналоговые) сигналы дискретизиру-
ются во времени. Поэтому частоту следования импульсной поднесу-
щей выбирают в соответствии с теоремой Котельникова.
Термин "аналого-импульсная модуляция" для радиотехнических
систем передачи означает двойную модуляцию: первичную модуля-
цию импульсной поднесущей передаваемым аналоговым сообщением
(АИМ, ШИМ, ФИМ) и вторичную модуляцию несущего гармониче-
ского колебания напряжением,полученным от первичной модуляции.
Вторичной может быть любая из непрерывных модуляций: AM, ОБП
AM, ЧМ, ФМ. Часто аналого-импульсные системы передачи обозна-
чают двумя группами букв: АИМ-ФМ, ФИМ-ЧМ и др.
Аналого-импульсные виды модуляции широко используются в
перспективных системах многоканальной связи с временном разде-
лением каналов, в том числе в цифровых системах спутниковой, со-
товой, волоконно-оптической связи, в системах с шумоподобными
сигналами и др.
Амплитудно-импульсная модуляция
Амплитудно-импульсная модуляция (АИМ) — простейший вид
модуляции периодической последовательности импульсов (импульс-
ной поднесущей) (рис. 3.24, а), амплитуда которых изменяется по за-
85
кону изменения модулирующего аналогового сигнала (рис. 3.24, б) об-
разуя АИМ (рис. 3.24, в). Различают два вида ДИМ: АИМ-1 и АИМ-2.
При АИМ-1 амплитуда каждого импульса поднесущей в течение всей
его длительности ти повторяет закон изменения модулирующего сиг-
нала. При АИМ-2 амплитуда каждого импульса последовательности
определяется значением модулирующего сигнала в некоторый фик-
сированный момент времени, например значением, соответствующим
моменту начала этого импульса (рис. 3.24, г). Различие между АИМ-1
и АИМ-2 становится незначительным, если длительность импульса ти
поднесущей очень мала. Поскольку это условие обычно выполняется,
то в дальнейшем цифры у АИМ приводить не будем.
Немодулированная периодическая последовательность импульсов
поднесущей (см. рис. 3.24, а) раскладывается в ряд Фурье:
а “ т ып*П°-Ти
jh(0 = у + £ Uo + 2T^U0 Y 2~w|~ COS*W.
*= 1 0 0 ьч 0 и
где ти, То, Uo — соответственно длительность импульсов, период импульсной
последовательности, амплитуда.
Для нахождения спектра АИМ-сигнала надо в предыдущую формулу
вместо Uo подставить выражение £/0[1 + МдимЦ/)], где Л/АИМ ~ глу-
бина (коэффициент АИМ), а Х(г) — нормированный модулирующий
сигнал, т. е. сигнал b(t), максимальный уровень которого равен единице.
Рис. 3.24
„И1 П 1Т~7Г-п-г
t
з) '
Лс SIq ZSIq 3Sl0 ш
Рис. 3.25
86
Если X(f) = cosQ/, то
S(k, t) = Uo + U0MAnM cos Я/ +
'о '0
+ 2 у Mi £ 2^2^21^(i + л/АИМcosq/)cosfctv
0 *=l "
Спектр сигнала АИМ содержит постоянную составляющую
Л/ ти
мо-
дулирующий сигнал (2-е слагаемое) и набор поднесущих Qq, 2Qq,... , kClg
с двумя боковыми полосами кЩ ± Q (рис. 3.24, д).
Модуляторы сигналов АИМ. Модуляторы представляют собоп
перемножители, на один вход которых подается колебание смоду-
лированной импульсной несущей или поднесущей, а на другой —
модулирующий аналоговый сигнал b(f). Чаще всего в качестве мо-
дуляторов используются ключевые схемы, которые математически
эквивалентны перемножителям. И те, и другие могут быть выпол-
нены на транзисторах или диодах, ключи же — и на интегральных
микросхемах (ИМС).
На рис. 3.25 представлена ключевая схема АИМ, выполненная на
ИМС К176КТ1 или К561КТЗ. Аналоговый сигнал подается на выход
через контакт ножек 2, 1, который замыкается при наличии управ-
ляющего импульса на управляющем входе 13 и размыкается при его
отсутствии.
Демодулятор АИМ сигналов. Демодулятором может быть ФНЧ,
выполняющий роль интерполятора, что следует из последнего выра-
жения. Следовательно амплитуда сигнала на выходе ФНЧ относитель-
но мала, и поэтому непосредственное выделение полезного сигнала с
помощью ФНЧ недостаточно эффективно. Для повышения эффек-
тивности используют усилители и расширители видеоимпульсов.
Широтно-импульсная модуляция
При ШИМ по закону аналогового модулирующего сигнала
b(f) (рис. 3.26, а) изменяется ширина (длительность) импульсов
(рис. 3.26, б) поднесущей при постоянстве их амплитуды и частоты
следования; ШИМ иногда называют длительно-импульсной моду-
ляцией (ДИМ). Различают одно- и двустороннюю ШИМ. При од-
носторонней ШИМ изменение ширины импульса происходит лишь
благодаря смещению среза импульса (ШИМ-1) (рис. 3.26, в), а при
двусторонней — срезу и фронту импульса (ШИМ-2) (рис. 3.26, г).
Наиболее широко применяется односторонняя ШИМ. Для нахож-
дения спектра ШИМ-сигнала представим немодулированную после-
87
а) ъ
Вход
о—
Рис. 3.27
довательность импульсов в виде:
—о
*vn
о----
выход
“= + \ £ ПГ
* i= 1 '
и будем полагать, что модулирующий сигнал изменяется по гармони-
ческому закону, при котором ширина импульса
О — 5>ти = Oq + ДО sin О/,
где ДО — девиация длительности импульса.
Подставляя это значение в в предыдущее выражение, получим
спектральный состав ШИМ-сигнала:
%
2х
и —
«> sin^(0o + AOsinQ/)
+ £2 sin CH + ± V —i--------------cosfcfV
2я я x-, к
k= 1
Спектр ШИМ сигнала имеет много общего со спектром ДИМ сиг-
нала, но отличается более сложной структурой. В нем имеются неис-
каженные составляющие полезного сигнала и составляющие вида
кО$ ± /Q. Участок спектра, занимаемый полезным сигналом, может
быть "засорен" комбинационными частотами вида Ц) — /Q, что может
вызвать дополнительные его искажения.
Модулятор сигнала с ШИМ удобнее всего выполнять на ИМС
К1006ВИ1 (таймере), схема которого показана на рис. 3.27. На вход 2 по-
дается импульсная поднесущая, а на 5— аналоговый модулирующий
сигнал b(t). Сигнал ШИМ снимается с вывода 3. Демодулятором сиг-
нала ШИМ чаще всего бывает ФНЧ.
88
Фазо-импульсная модуляция
При фазо-импульсной модуляции (ФИМ) по закону модулирую-
щего аналогового сигнала />(/) изменяется только временнде положе-
ние видеоимпульсов поднесущей, а их амплитуда и длительность ос-
таются неизменными. Если продифференцировать по времени сигнал
ШИМ, то получатся положительные и отрицательные импульсы. По-
ложительный импульс соответствует фронту сигнала ШИМ, а отри-
цательный — его срезу. При односторонней ШИМ положительные
импульсы неподвижны, а отрицательные — смещаются пропорцио-
нально модулирующему сигналу b(t) по оси времени. Неподвижные
импульсы могут быть устранены с помощью однополупериодного вы-
прямителя с активной нагрузкой, а оставшиеся импульсы представляют
собой ФИМ-сигнал. Модулятор ФИМ сигнала в этом случае состоит из
модулятора ШИМ, к выходу которого подключено дифференцирую-
щее устройство ДУ и однополупериодный выпрямитель ОВ с актив-
ной нагрузкой (рис. 3.28). Иногда к выходу ОВ подключают одновиб-
ратор для получения импульсов строго прямоугольной формы,
модулированных по фазе (времени). Для обеспечения демодуляции и
синхронизации часто ФИМ-сигнал представляют в виде серии (суммы)
так называемых опорных и измерительных импульсов. Положение
опорных импульсов на оси времени неизменно, а измерительных — из-
меняется. Интервал времени между опорными и измерительными им-
пульсами является носителем полезной информации.
Аналитическое выражение ФИМ-сигнала имеет вид:
S(b, i)=U0^ S„(iK - xabk),
к- 1
где Uo — амплитуда импульса; 5И(/) — функция, описывающая огибающую из-
мерительного импульса; тд — девиация временного положения измерительно-
го импульса; Ьк — значение передаваемого сообщения в момент времени tk
Частотный спектр ФИМ сигнала аналитически сложно представить.
Приближенное выражение для амплитуды передаваемого гармониче-
ского сигнала в спектре ФИМ
и„(/) = Я^р? Ц) cos Яг,
‘о
где Я — частота сообщения; ги — дли-
тельность импульса.
Амплитуда передаваемого сиг-
нала в спектре ФИМ очень мала
(намного меньше, чем в спектрах
АИМ, ШИМ) и является функци-
Рис. 3.28
89
ей модулирующей частоты Q, т. е. искажена. Поэтому демодуляция
сигналов ФИМ с помощью ФНЧ непосредственно невозможна. Их
преобразуют в сигналы АИМ или ШИМ. Если передаются опорные и
измерительные импульсы, то ФИМ легко преобразовать в ШИМ с по-
мощью триггера, подавая на вход S опорные, а на R — измеритель-
ные импульсы. Далее сигналы ШИМ демодулируют с помощью ФНЧ.
Частотно-импульсная модуляция
Частотно-импульсная модуляция (ЧИМ) осуществляется с помощью
импульсных автогенераторов, например мультивибратора Роера, симмет-
ричного транзисторного мультивибратора с пониженным коллекторным
питанием, интегральных микросхем типа К1008ПС1, К1108ПП1 с боль-
шой протяженностью линейного участка статической модуляционной
характеристики. Сигнал ЧИМ можно получить двусторонним ампли-
тудным ограничением аналогового сигнала. Сигналы ЧИМ и ФИМ
связаны между собой также, как и аналоговые ЧМ- и ФМ-сигналы.
Детектор сигнала с ЧИМ. Детектор может быть выполнен по схеме,
показанной на рис. 3.29, а. В его состав входят: канальный фильтр Ф;
амплитудный ограничительно, дифференцирующая цепь ДЦ-, двухпо-
лупериодный выпрямитель с активной нагрузкой ДВ\ одновибратор
ОВ; детектор с удвоением напряжения Д. Работа схемы детектора по-
ясняется с помощью временных диаграмм (рис. 3.29, б).
иов
О
%
О
Рис. 3.29
90
Пройдя узкополосные цепи канала связи, ЧИМ-сигнал становится
похожим на аналоговый ЧМ-сигнал, показанный на рис. 3.29 б. В бло-
ке АО он глубоко ограничивается по амплитуде с двух сторон, так что
на его выходе имеют место одинаковые импульсы иао(/) прямоуголь-
ной формы, но разной частоты следования и длительности. В блоке
ДЦэти импульсы дифференцируются по времени, в результате чего на
его выходе напряжение идц(/) представляет собой их фронты и срезы.
Последние представляют собой очень узкие разнополярные импуль-
сы, которые в блоке ДВ преобразуются в однополярные идв(г), увели-
чивая тем самым частоту следования в 2 раза. В блоке ОВ формируются
одинаковые импульсы прямоугольной формы одной длительности, но
разной частоты следования, которые поступают на вход блока Д.
Принципиальная схема блока Д приведена на рис. 3.29, в: на выходе
схемы имеет место переданный аналоговый сигнал ид(/). В некоторых
случаях блок ОВ исключают.
Высокая стабильность параметров данного детектора (без регули-
ровки) обусловили широкое применение его даже для аналоговых ЧМ
сигналов. Недостатком этого детектора является меньшая помехо-
устойчивость связи по сравнению с детекторами, выполненными на
колебательных контурах.
На железнодорожном транспорте аналого-импульсные виды модуля-
ции используются в основном в радиорелейных системах (ФИМ-ЧМ), а
также в цифровых системах передачи.
3.3. ЦИФРОВЫЕ ВИДЫ МОДУЛЯЦИИ
Цифровые виды модуляции обеспечивают передачу аналоговых со-
общений в цифровой форме. Системы цифровой передачи подразделя-
ются на три основных класса: системы с импульсно-кодовой модуля-
цией (ИКМ); системы с дифференциальной ИКМ (ДИКМ); системы
с дельта-модуляцией (ДМ).
Импульсно-кодовая модуляция
Импульсно-кодовой модуляцией (ИКМ) называется преобразова-
ние, включающее в себя дискретизацию непрерывного сообщения по
времени через интервалы времени Д/, квантование по уровню полу-
ченных отсчетов й(Лдг) и кодирование квантованных значений />кв(Д0
(рис. 3.30, а). Исходный непрерывный сигнал показан в виде непре-
рывной кривой с ограниченным спектром. Непрерывная шкала уров-
ней передаваемого сообщения b(t) (ось ординат) разбивается (кванту-
ется) на определенное число уровней квантования. Через равные
интервалы времени Д/ = 1/(2FB) на оси абсцисс (теорема Котельнико-
91
ва) в точках rb t2 и т. д. происходит дискретизация (АИМ) непрерыв-
ного процесса b(t), в результате чего получаются отсчеты мгновенных
значений й(ЛДГ), которые на рис. 3.30, б обозначены точками. Кванто-
вание по уровню означает округление мгновенных значений отсчетов
до ближайших разрешенных уровней квантования 6КВ(Д/) (рис. 3.30, б),
перекрещенные точки. Кодирование сводится к записи номера кван-
тованного уровня отсчета чаще всего в двоичной системе счисления,
например на рис. 3.30, в — трехразрядным кодом. Эти три операции
осуществляются на передающей стороне в аналого-цифровом преоб-
разователе (АЦП), а на приемной стороне — наоборот в цифро-ана-
логовом преобразователе (ЦАП).
Могут использоваться и другие системы счисления. Любое число
в произвольной системе счисления может быть записано в виде ком-
бинации элементарных цифр
*-1
£= Р,а'= Роа° + ₽!<?' + Р2я2 + - + Р*-[в* *,
/ = 0
где к — разрядность кода, т. е. число используемых в кодовой комбинации эле-
ментарных символов (цифр); р, — разрядная цифра, принимающая значения
0, 1,2,..., а — 1 и указывающая, на какой позиции (в каком разряде) должна
стоять та или иная цифра; а — основание кода.
Возникающую погрешность округления е(Г) (рис. 3.30, г) при кван-
товании нельзя устранить, но можно контролировать, поскольку она
не превышает половины шага квантования 5. Погрешность квантова-
ния, представляющая собой разность между исходным сообщением b(t)
и сообщением, восстановленным по квантованным отсчетам, называ-
ется шумом квантования. Важной особенностью шума квантования,
отличающей его от аддитивных шумов, является то, что он возникает
92
одновременно с появлением сообщения b(t). Шум квантования кор-
релирован с сообщением и имеет тем меньшую мгновенную мощ-
ность, чем меньше уровень сообщения. В современных системах
ИКМ используют неравномерное квантование, при котором малые
уровни сигнала квантуются с меньшей ошибкой, чем большие. Изме-
няя шаг квантования пропорционально уровню входного сигнала, от-
ношение мощностей Рс/^кв будет сохраняться постоянным при изме-
нениях этого уровня.
Условно неравномерное квантование можно представить как по-
следовательное соединение устройства компрессии уровня входного
сигнала и равномерного квантователя. Для сохранения постоянства
/5С//’КВ в широком диапазоне входных уровней характеристика ком-
прессии должна быть близкой к логарифмической. Компрессия (сжа-
тие) уровня входного сигнала производится на передающей стороне,
а на приемной — экспандирование (расширение), при котором восста-
навливается исходный динамический диапазон. Оба этих процесса на-
зываются компандированием. Характеристики компрессора и экспанде-
ра должны быть взаимно обратимыми. Амплитудная характеристика
компандера описывается так называемым Л-законом или ц-законом.
При нелинейном кодировании процессы квантования и кодирования
обычно объединяют, а нелинейная квантующая характеристика фор-
мируется непосредственно в кодере. В кодере европейской системы
иерархии применяют квазилогарифмическую характеристику Л-зако-
на с линейным касательным отрезком следующего вида:
, signx, хе[0; 1/Л]
у — I + 1ПЛ ,
It signx, хе [1/Л; 1]
1 + 1пл
где А = 87,6 — параметр компрессии; х = «вх/«вхтах; У = "Вых/"выхтах-
Плавная характеристика компрессии заменяется ломаной линией,
состоящей из прямолинейных отрезков-сегментов, приближенно ап-
проксимирующих указанный закон сжатия динамического диапазона
передаваемых сигналов. Для систем с восьмиразрядным кодировани-
ем МСЭ-Т рекомендует характеристики компрессии, состоящие из
16 сегментов по восемь для положительных и отрицательных областей
изменения сигнала, каждый из которых содержит 16 уровней линей-
ного квантования.
Шум квантования — одна из причин, приводящая к отличию при-
нятого сообщения от переданного в системе с ИКМ. Другая причина —
помехи в канале, которые накладываются на передаваемые символы
кодовых комбинаций и могут вызвать ошибки. Ошибки в символах
при отсутствии избыточности приводят к ошибочному декодирова-
нию кодовой комбинации. В результате этого действительно передан-
93
ное дискретное значение сообщения заменяется другим возможным
(не обязательно ближайшим); погрешность зависит от того, какие из
символов кодовой комбинации приняты с ошибкой. Эту составляю-
щую шума называют шумом ложных импульсов. Следовательно, при
оценке помехоустойчивости следует учитывать суммарный шум из-за
квантования и ложных импульсов при декодировании. Шум кванто-
вания не связан с помехами. Его можно сделать сколь угодно малым,
увеличив число уровней L = ак. При этом придется увеличивать число
кодовых символов, приходящихся на каждый отсчет, а следовательно
сокращать длительность символа и расширять спектр сигнала в канале.
Таким образом, как и при помехоустойчивых аналоговых видах мо-
дуляции, снижение этого шума достигается благодаря расширению
спектра сигнала. Шум ложных импульсов является аномальным и оп-
ределяется помехами в канале и видом модуляции несущей. При рас-
ширении спектра сигнала мощность аномального шума, как правило,
возрастает. Можно сказать, что вероятность аномальной ошибки Ран
определяет верность оценки сообщения, а средняя квадратическая
ошибка е~2(/) (нормальная) — точность (качество) этой оценки.
Аналого-цифровой преобразователь (АЦП). Преобразователь пре-
вращает аналоговый сигнал в цифровой. По структуре построения
АЦП делятся на два типа: с применением цифроаналогового преоб-
разователя (ЦАП) и без него.
На рис. 3.31 приведена структурная схема АЦП поразрядного типа
с ЦАП. Основными ее блоками являются компаратор К, регистр сдвига
PC, регистр кода РК, ЦАП. Регистр кода РК состоит из Л5-триггеров,
число которых равно числу разрядов кодового слова. Выходы регистра
PC соединены с Л-входами соответствующих триггеров регистра РКче-
Рис. 3.31
94
рез схемы совпадения И} —Ип1 и с их 5-входами непосредственно, на-
чиная с (и — 1)-го триггера и ниже. Выход каждого триггера соединен
со своим входом ЦАП. К прямому входу компаратора К подключен
выход ЦАП, а к его инверсному — входной сигнал прямоугольной
формы (АИМ-2). Выход компаратора К соединен со вторым входом
всех схем совпадения Ип—И\. На вход С регистра PC подаются сдви-
гающие импульсы СИ с генератора ГСИ через схему совпадения Иц.
Тактовые импульсы ТИ с генератора ГТИ поступают на 5-вход триг-
гера циклов ТЦ, на D-вход регистра PC, на 5-вход л-го триггера РК и
Я-входы всех остальных триггеров. Я-вход ТЦ соединен с последним
выходом PC, а выход ТЦ — со вторым входом схемы Иц. Последняя
является ключом для СИ. Аналогичные функции выполняют и схемы
Яя-Я,.
Работа АЦП происходит следующим образом. Тактовый импульс с
ГТИ поступает на 5-вход ТЦ и одновременно на D-вход PC, 5-вход
триггера Tn РК и на Я-входы всех остальных его триггеров. От этого
ТЦ переводится в состояние 1, на выходах п регистров PC и РК тоже
появляется 1, а на остальных выходах РК — 0. Выходной код РК пре-
образует ЦАП в опорное напряжение соответствующего значения (70,
которое поступает на прямой вход компаратора К На его инверсный
вход подается напряжение отсчета (7ВХ непрерывного сообщения. Ес-
ли (7ВХ < Цц, то на выходе Сформируется сигнал 1, который поступает
на вторые входы всех схем совпадений Ип—И\. Так как в данный мо-
мент 1 имеется только на первом входе схемы Ип, то этот сигнал по-
дается на выход последней и переводит триггер Тп РК в положение 0.
Если же £/вх > 11ц, то на выходе К будет 0, и сброса 1 в триггере Тп не
произойдет. Так проверяется истинность старшего и остальных раз-
рядов кодового слова. Поскольку ТЦв состоянии 1, то импульс сдвига
СИ с генератора ГСИ пройдет через схему Иц на С-вход регистра PC
и сдвинет 1 с л-го в (и — 1)-й его выход. На прямом входе К имеется
новое значение 11ц, которое сравнивается с (7ВХ для определения ис-
тинного значения (п — 1)-го разряда и т. д. Когда 1 дойдет до конца
регистра PC, на выходе РК сформируется полный цифровой код дан-
ного отсчета, и переведется в нулевое состояние ТЦ, закрыв тем са-
мым ключ Иц до прихода очередного тактового импульса. С приходом
последнего процесс повторяется.
Частота следования СИ должна быть как минимум в п раз больше
частоты следования ТИ (п — разрядность кодового слова), а длитель-
ность отсчета на входе К должна быть такой, чтобы в течение этого
времени сформировался и был считан соответствующий код.
Цифроаналоговый преобразователь (ЦАП). Преобразователь пре-
вращает код в аналоговый сигнал. На рис. 3.32 приведена структурная
схема трехразрядного ЦАП с суммированием напряжений на аттенюа-
95
торе сопротивлений. Преобразователь состоит из триггеров, образую-
щих регистр кода РК, ключей Ал, источника напряжения Е, матрицы
R—2R (аттенюатора). Число триггеров в РК соответствует числу раз-
рядов входного кодового слова, а число ключей — в 2 раза больше.
Прямой выход каждого триггера РК соединен с управляющим входом
ключа Кл 1, а его инверсный выход — с управляющим входом ключа
Кл О, т. е. каждый триггер управляет работой своей пары ключей. Вы-
ходы этих ключей соединены между собой и подключены к узлу Л мат-
рицы через резистор 2R. Через ключ Кл 1 подается напряжение Е в
матрицу R—2R, а через ключ Кл О — нулевое напряжение (земля).
Работа ЦДЛ происходит следующим образом. Пусть в регистр РК вве-
дено кодовое слово, соответствующее числу (отсчету) G = (4)10 = (100)2,
где индекс указывает систему счисления. В этом случае триггер Т3 на-
ходится в состоянии 1, в третьем (старшем) разряде открыт ключ Кл 1,
а в остальных разрядах — триггеры находятся в состоянии 0 и открыты
ключи Кл О. Преобразовывая матрицу R.—2R в эквивалентную схему,
можно показать, что выходное напряжение ЦДЛ t/BUX = UA3 = Е/3. Ес-
ли же в РАТзаписано число (7= (2)ю = (010)2, то выходное напряжение
Ц>ых = = 0«5Е/3. При числе G = (1)10 = (001)2 напряжение
<7ВЫХ = 0,25£/3. В общем случае при л-разрядном регистре
«4ых = | ~1 " *Р. + 2" “ Ч -1 + - + Pi) “ j Е2~(а ~
т. е. пропорционально значению числа G, введенного в РК.
Рис. 3.32
Преимущества и недостатки цифровых систем передачи (ЦСП). Ос-
новным техническим преимуществом ЦСП по сравнению с непре-
рывными системами является их высокая помехоустойчивость. Это
преимущество наиболее сильно проявляется в ЦСП с многократной
ретрансляцией (переприемом) сигналов, например в радиорелейных,
кабельных линиях связи большой протяженности. В таких непрерыв-
ных системах помехи и искажения отдельных звеньев обычно накап-
ливаются. В ЦСП для ослабления эффекта накопления помех при пе-
редаче с ретрансляциями кроме усиления применяют регенерацию
импульсов, т. е. демодуляцию с восстановлением переданных кодовых
символов и повторную модуляцию на переприемном пункте. При
этом аддитивная помеха со входа ретранслятора не поступает на его
выход. Однако она вызывает ошибки при демодуляции, что переда-
ется на следующие регенераторы. Ошибки все же накапливаются, но
значительно меньше, чем при отсутствии регенерации. При цифровой
передаче непрерывных сообщений верность передачи можно повы-
сить, применяя помехоустойчивое кодирование. Высокая помехо-
устойчивость ЦСП позволяет осуществить неограниченную дальность
связи при использовании каналов сравнительно невысокого качества.
Другое преимущество ЦСП — широкое использование современной
элементной базы цифровой вычислительной техники и микропроцес-
соров. Недостатком ЦСП является то, что высокая помехоустойчи-
вость ЦСП достигается благодаря расширению спектра ИКМ сигнала
по сравнению со спектром исходного непрерывного сообщения. Если
ширина исходного сообщения Fc, то минимальная частота дискрети-
зации Fq = 2FC (теорема Котельникова). Каждый отсчет после кван-
тования может принимать L = (22?тах/Дб) + 1 возможных дискретных
значений и заменяется при кодировании комбинацией из л = log А
двоичных импульсов. Следовательно, длительность каждого импульса
не может быть больше, чем т„ = l/2Fcn, а необходимая полоса частот
д/и= ё- = Fcn-
хти
Это значит, что спектр цифрового сигнала шире спектра исходного
непрерывного сигнала в У] = &fa/Fc = п раз. Обычно для связи число
разрядов в кодовом слове л = 8. Как правило, в ЦСП используется
вторая ступень модуляции, отчего спектр дополнительно расширяется
в у2 раз, так что общее его расширение у = у] • у2. При вторичной мо-
дуляции: для ОБП AM у2 = 1 и у = У1 • Уг — п ~ 8 раз; для AM, БМ у2 = 2
и у = у]у2 = 2п = 16; для ЧМ у2 = 2(1 + т + Jm) и для т = 1,5 (под-
вижная радиосвязь) значение у2 = 7,5 и у = 7,5л = 60.
В ЦСП производится "обмен” мощности сигнала на полосу частот,
как и в помехоустойчивых аналоговых системах модуляции (ЧМ, ФМ,
4г, •> 97
ФИМ). Отношение мощности сообщения к мощности шума на вы-
ходе аналоговой системы растет пропорционально квадрату ширины
спектра сигнала (в надпороговой области), в то время как в ЦСП это
с 1 ношение растет значительно быстрее — экспоненциально. Не су-
ществует систем модуляции более близких к идеальной, чем ЦСП, ес-
ли спектр передаваемого сообщения равномерный.
Дифференциальная ИКМ
Дифференциальная ИКМ (ДИКМ) является системой с предска-
занием. Основная идея предсказания заключается в устранении из-
быточности, содержащейся в отсчетах сообщения. Так в отсчетах
by, b2, ..., bt_ । содержится определенная информация об отсчете й(.
Это значит, что по предыдущим можно предсказать данный отсчет Ь,
с определенной ошибкой е(/). Но раз значение Ь, предсказывается, то
оно известно (не случайно) и, следовательно не несет информации,
являясь избыточным. Его можно исключить, вычитая из реального от-
счета bh в результате чего останется только сигнал ошибки предска-
зания е(/) (случайная величина): е(/) = Z>( — Z>/np. В ней содержатся но-
вые сведения (информация), и поэтому ее передают в линию связи.
В ЦСП сигнал е(/) подвергается обычным операциям квантования и
кодирования, в результате чего получается сигнал ДИКМ. Поскольку
е(г) <К bj, то при том же числе уровней квантования отсчета, что и при
ИКМ, уменьшается шум квантования. Если же последний сохраняет-
ся прежним, то можно уменьшить разрядность кода и, следовательно,
скорость передачи информации, что эквивалентно ее сжатию.
На приемной стороне ДИКМ имеется такой же предсказатель, как
и на передающей. Поскольку он оперирует с теми же предыдущими
отсчетами, предсказанное им значение нового отсчета Z>/np будет та-
ким же, как и на передающей стороне. Добавив к нему принятое зна-
чение ошибки предсказания е (г), можно восстановить переданный
отсчет: b (к) = Ьвр(к) + е (/), где значок л сверху означает, что данный
элемент искажен помехами в линии связи.
На рис. 3.33 в общем виде представлена структурная схема системы
передачи с предсказанием, реали-
зующая сказанное. Она содержит
предсказатель ПР; линию связи
ЛС; сумматор S. Работа схемы яс-
на из вышеизложенного. Требует-
ся только уточнить, что представ-
ляет собой предсказатель ПР.
Рис. 3.33
98
Когда предсказанное значение отсчета й/ пр представляет собой взве-
шенную сумму предыдущих отсчетов: bjnp = (abt + bbi + cb3 + ...) ±5,
где 5 < 0,5Дй, то имеет место линейное предсказание. Это простейший,
широко используемый случай предсказания. Коэффициенты а, Ь, с
подбираются из условия минимума среднего квадратического значения
е(Г), т. е. из условия ё2(Г) = 0. Структурная схема линейного предсказа-
теля ПР согласно предыдущему выражению показана на рис. 3.34. Она
состоит из линии задержки с отводами, разделительных каскадов РК,
потенциометров Лп, дифференцирующего суммирующего усилителя
ЦСУ. Отводы линии задержки остоят друг от друга на расстоянии, со-
ответствующем промежутку времени между отсчетами. С помощью
этой линии запоминаются предыдущие отсчеты Ь{ _ \,Ь(_ 2,.... Каждый
отвод линии задержки подключен к одному входу дифференциального
суммирующего усилителя ДСУчерез разделительный каскад РК и по-
тенциометр Лп, устанавливающий абсолютное значение соответст-
вующего коэффициента (а, b или с, ...). Знак коэффициента (+ или —)
задается подключением потенциометра Rn к одному или другому вхо-
ду ДСУ. В последнем случае вычитается предсказанное значение из
действительного так, что на его выходе получается сигнал ошибки
предсказания:
Е(0 = Ь,(к) - binp(k).
Вычитание предсказанного значения Ь1Пр(к) эквивалентно смеще-
нию порога квантования сообщения на величину binp(k). В системах
с ДИКМ применяют неравномерное квантование сигнала ошибки
е(/), поскольку наиболее вероятны малые ошибки.
Известно большое число вариантов технического осуществления
ДИКМ с линейным предсказанием. На рис. 3.35 показана типичная
eft)
Выход
Рис. 3.34
99
Передатчик Приемник
Рис. 3.35
схема ДИКМ, по которой проводилось большинство исследований. В
ней имеются квантователь КВ; предсказатель ПР, остальные элементы
такие же, как в схеме (см. рис. 3.33). Ошибка квантования
Е/ — ei — екв/ — ~~ ^inp ~ екв| ~ — (^/пр + еквД — ~
В качестве критерия оценки качества работы системы выбирается
отношение "сигнал—шум":
f А) = __ <*?> <*?> <Е?>
'Ав/дикм (.(bj-bj)2) <Е(2> (е?> (Е2)
где знак () означает усреднение.
Второй множитель в этом выражении представляет собой отноше-
ние сигнал—шум при ИКМ, а первый характеризует при одинаковых
параметрах квантователей преимущество системы ДИКМ. Оно долж-
но быть максимально возможным.
В случае преобразования речевого сигнала, являющегося нестацио-
нарным процессом, его функция автокорреляции зависит от времени.
Следовательно, для получения оптимальных характеристик коэффици-
енты предсказания о(-должны изменяться, что требует адаптивного по-
строения системы. Кроме адаптации о,- в современных системах ДИКМ
используется адаптация и в квантователе.
Система ДИКМ с адаптацией предсказателя и квантователя назы-
вается адаптивной ДИКМ (АДИКМ). Разработана Рекомендация G
721 МККТТ, которая определяет алгоритм АДИКМ на скорость пе-
редачи 32 кбит/с, вместо 64 кбит/с при ИКМ. В кодере рекомендуется
использовать адаптивный предсказатель 6-го порядка (W = 6).
100
Дельта-модуляция
Корреляция между отсчетами возрастает по мере сокращения ин-
тервала между ними. Поэтому при большой частоте дискретизации
число уровней квантования сигнала ошибки е(/) можно уменьшить до
двух и перейти к одноразрядным системам. Такой способ кодирова-
ния называется дельта-модуляцией (ДМ). Ее можно рассматривать как
частный случай ДИКМ, когда квантование сигнала ошибки предска-
зания осуществляется на два уровня, и соответственно частота дис-
кретизации равна скорости передачи.
Квантованный сигнал ошибки при ДМ
ekbW = iW&b,
где у(Л) = J +1> если е(*)>0;
I -1, если е(£) < 0.
По существу сигнал на выходе дельта-модулятора содержит лишь
сведения о полярности (знаке) сигнала ошибки (Рис. 3.36, в). На при-
емной стороне интегратор прибавляет или вычитает Д/>, обеспечивая
уменьшение погрешности между значениями отсчетов и восстановлен-
ными значениями. Принцип формирования сигнала ДМ показан на
рис. 3.36, а. Отсчеты Ь(к) передаваемого сообщения сравниваются с
квантованным отсчетом ЬКЪ(к — 1), полученным в результате сумми-
рования предыдущих квантованных сигналов ошибки
_ л-1 Л- 1
\в (* - о = Z екв (о = д6 Е но-
i=0 1 = 0
Рис. 3.36
101
Если b(k) > bKB(j — 1), квантователь KB формирует значение
у(Л) = 1, в противном случае у (Л) = —1. Полученные символы у пере-
даются по каналу связи (линии). Одновременно импульсы Дбу(0 по-
ступают на интегратор (сумматор) И для формирования квантованно-
го отсчета />кв(0, который сравнивается с очередным отсчетом
сообщения. На выходе сумматора квантованный сигнал имеет вид
ступенчатой функции (рис. 3.36, б). Каждый импульс +1 увеличивает,
а каждый импульс —1 уменьшает ступенчатую функцию на один шаг
квантования 6b.
Операцию декодирования сигнала ДМ на приемной стороне вы-
полняет интегратор (сумматор) //такой же, как и на передающей сто-
роне, на выходе которого при отсутствии ложных импульсов получа-
ется ступенчатое напряжение b кв(')- После его сглаживания в фильтре
нижних частот ФНЧ получим функцию b(t), достаточно близкую к пе-
реданной b(t). Разность b(t) — b(t) представляет собой шум кванто-
вания. Его значение тем меньше, чем выше частота дискретизации
и чем меньше шаг квантования &.Ь. Однако выбирать слишком ма-
лый шаг 6b нельзя во избежание дополнительных искажений, назы-
ваемых перегрузкой по наклону, вызываемых тем, что ступенчатая функ-
ция не успевает следить за быстрыми изменениями сообщения b{t)
(рис. 3.36, г).
Условием неискаженной передачи является неравенство:
!*'(') Imax Д'< Д*-
Для реализации этого неравенства используют адаптивную ДМ
(АДМ). В этом случае на передающей стороне (рис. 3.37, а) в цепь об-
ратной связи, т. е. последовательно с интегратором И включают ре-
шающее устройство РУ, управляющее шагом квантования 6b. Если
Рис. 3.37
102
знак приращения остается постоянным в течение трех-четырех интер-
валов дискретизации, то это означает наличие перегрузки, и РУ уд-
ваивает амплитуду импульсов, поступающих на вход интегратора И1
с импульсного усилителя ИУ. Если и в этом случае знак приращения
не изменяется, то размер шага Ab снова удваивается и т. д. (рис. 3.37, б).
По сравнению с ИКМ и ДИКМ сигнал ДМ имеет значительно
большую частоту следования, и на каждый отсчет приходится один
импульс, в то время как при ИКМ — несколько (разряды). Поэтому
при одинаковой верности передачи частота следования импульсов
при ИКМ и ДМ примерно одинакова. Обе эти системы занимают
примерно одинаковую полосу частот. Существенным преимуществом
систем передачи с ДМ является сравнительная простота их кодирую-
щих и декодирующих устройств. Кроме того, шум ложных импульсов
при ДМ меньше, чем при ИКМ при одинаковой вероятности ошибки
в канале. К недостаткам ДМ можно отнести явление размножения
ошибок, создаваемых ложными импульсами (как и при ДИКМ), а
также возможность перегрузки по наклону.
Системы цифровой связи широко используются на железнодо-
рожном транспорте: в спутниковой связи МПС России — АДИКМ,
в радиорелейной связи — ИКМ, ДМ, в волоконно-оптической, ка-
бельной - ИКМ (ИКМ-30, ИКМ-120 и др.).
В июле 1997 г. Коллегия МПС утвердила "Концепцию создания циф-
ровой сети связи МПС России", так что в будущем цифровые системы
найдут еще большее применение на железнодорожном транспорте.
3.4. ДИСКРЕТНЫЕ ВИДЫ МОДУЛЯЦИИ
При дискретной модуляции модулирующим является дискретный
(цифровой) сигнал, а модулируемым — обычно гармоническое коле-
бание. При дискретном модулирующем сигнале модуляции часто на-
зывают манипуляциями. Они бывают: амплитудной (АМН), частотной
(ЧМН), фазовой (ФМН) и относительной фазовой (ОФМН).
Важным параметром способа манипуляции является число вари-
антов сигнала на выходе модулятора и демодулятора (модема) или
число вариантов манипулируемого параметра выходного сигнала. Это
число называют позиционностью сигнала и способа манипуляции.
Словосочетание "ти-позиционная ФМН” означает, что каждый элемент
сигнала на выходе модулятора имеет одну из т допустимых начальных
фаз. Если все т вариантов сигнала равновероятны, то производитель-
ность модулятора как источника информации на входе непрерывного
канала связи прямо пропорциональна двоичному логарифму числа /и:
к - log2/n. Эту величину называют кратностью модуляции, ибо она
показывает, во сколько раз увеличивается информационная емкость
данной системы по сравнению с двухпозиционной (однократной)
системой при той же длительности элементарного символа. Наиболее
103
часто позиционность выбирают так, чтобы она равнялась целой сте-
пени числа 2, тогда кратность к — целое число.
На рис. 3.38 показаны сигналы для простейших способов двухпо-
зиционной (однократной) модуляции сигнала-переносчика в виде
гармонического колебания. На рис. 3.38, а показан двоичный сигнал
на входе модулятора в виде двухполярных импульсов, отображающих
двоичные символы 0 и 1, на рис. 3.38, б—г — сигналы на выходе иде-
ального модулятора при использовании двухпозиционной АМН, ЧМН,
ФМН. Эти сигналы отражают основополагающую особенность систем
цифровой передачи сообщений — принцип дискретности сигнала в
канале связи.
Для каждого из приведенных способов модуляции допускаются з
канале только два варианта сигнала. При АМН эти варианты записы-
ваются в общем виде на интервале одной посылки 0 < t < Т следую-
щим образом:
«AM I0 = Um Sinfao' + Фо); иАМ2<0 = 0
Варианты являются неравноценными. При ЧМН ичм,(/) =
= sin(<a11 + q>[); иЧМ2(0 ~ Ця8Щ(со2/+ <р2), причем на рис. 3.38, а
©I = 2 л/Т, а со2 = 4л/Т. Такие сигналы относятся к классу ортогональ-
ных в усиленном смысле сигналов, поскольку интеграл от их произве
дения на интервале [О, Т] равен 0 при любых фазах <р( и <р2. Сигналы
104
с ЧМН не всегда являются ортогональными. В системах с узкополос-
ными ЧМН сигналами используется условие приближенной ортого-
нальности:
|о>2 ~ w11 — kln/T,
где к — целое число.
Если используются широкополосные ЧМН сигналы, то условие
приближенной ортогональности может быть достигнуто увеличением
разности между частотами и 02-
Сигналы с ЧМН (см. рис. 3.38, в) относятся к классу ЧМн-сигналов
с непрерывной фазой, в которых начальная фаза очередного элемента
сигнала вне зависимости от его частоты равна фазе, которой закон-
чился предыдущий элемент. Такие сигналы обеспечивают большую
помехоустойчивость, чем в случае произвольных начальных фаз.
Сигнал двухпозиционной ФМН на интервале одной посылки
О < t < Т аналитически выглядит так:
«фм1М = tffflsin(<or +<р0);
«фм2(0 = Цп8т(а)Г + Ф0 + л) = -t/msin(wz + ф0),
(см. на рис. 3.38, г при со = 4п/Т и <р0 = 0). В общем случае варианты
двоичного сигнала с ФМН имеют некоторую произвольную начальную
фазу <р0 и отличаются фазовым сдвигом сигнала на 180°, т. е. знаком.
Поэтому такие сигналы называют противоположными в отличие от ор-
тогональных сигналов с двухпозиционной ЧМН.
Интерес к цифровой передаче сообщений с помощью ФМН вызван,
в первую очередь, тем, что согласно фундаментальным результатам тео-
рии потенциальной помехоустойчивости среди всех двухпозиционных
сигналов противоположные потенциально обладают наибольшей поме-
хоустойчивостью. Однако на пути реализации этого преимущества
имеются трудности, в том числе принципиальные.
Демодулятор сигналов с абсолютной ФМН может быть только ко-
герентным; в нем должны формироваться и храниться образцы вари-
антов передаваемого сигнала, достаточно точно совпадающие с ним
по частоте и фазе. Это важное условие было бы выполнено, если бы
удалось установить, какому из передаваемых двоичных сигналов это
опорное колебание соответствует. Последнее принципиально нераз-
решимо, если не вводить в передаваемый сигнал каких-либо призна-
ков, например синхроимпульс или избыточный элемент. Если же это-
го не делать, то имеет место неопределенность начальной фазы или
неоднозначность решения для абсолютной ФМН, что явилось главной
причиной для перехода к относительной ФМН (ОФМН).
Проблема неопределенности при ОФМН решается путем вычисле-
ния разницы фаз соседних посылок, которые неизменны и равны 0
105
или 180°. На рис. 3.38, д показан сигнал ОФМН, который состоит из
таких же модулированных по фазе на 180° посылок, что и сигнал с аб-
солютной ФМН (см. рис. 3.38, г), но отличается тем, что у ОФМН фаза
данной посылки зависит не только от передаваемого символа, как при
ФМН, но и от начальной фазы предыдущей посылки. Принцип фор-
мирования начальных фаз таков: если на данной посылке передается
двоичный символ 0, то фаза устанавливается такой же, как у преды-
дущей посылки (разность фаз равна нулю); если же на данной посыл-
ке передается символ 1, то ее фаза изменяется на 180° по сравнению
с фазой предыдущей посылки (разность фаз равна 180°).
При ОФМН переданный двоичный символ определяется двумя по-
сылками сигнала, и все методы приема сигналов с ОФМН основаны
на сравнении начальных фаз двух соседних посылок. В связи с этим
для передачи первого двоичного символа в системе с ОФМН необходи-
ма одна дополнительная посылка сигнала, переданная собственно пе-
ред началом сеанса связи и играющая роль отсчетной (см. рис. 3.38, <?).
В системе с ФМН после изменения полярности опорного колебания
все последующие символы принимаются наоборот: единицы нулями,
а нули — единицами. Это так называемая "обратная работа", которая
имеет место до следующего скачка фазы опорного колебания или
входного сигнала. В системе с ОФМН скачкообразное изменение по-
лярности опорного колебания приводит к одиночной ошибке и не
имеет никаких других отрицательных последствий. Однако этот ре-
зультат достигается ценою следующих условий: вероятность ошибки
увеличивается примерно вдвое; требуется передача одной отсчетной
посылки в начале сеанса связи; в цифровом потоке возникают, в ос-
новном, двойные ошибки, что усложняет кодек при использовании
корректирующих кодов; модем с ОФМН сложнее модема с ФМН.
Отметим, что прием сигналов с ОФМН может осуществляться не
только когерентным, но и некогерентными методами.
Перечисленные выше характеристики и особенности различных
видов манипуляций являются общими. Остановимся конкретнее на
каждом из них.
Однократная абсолютная ФМН
Фазоманипулированное колебание (ФМК) может быть записано
в виде:
ыфм(0 = um sin[w0' + ДфТ(0 + 4>ol =
= Um cos[Aq>Y(Z)] sin(coor + <p0) + Um sin[A<py(Z)] cos(co0Z 4 q>0),
где y(r) — функция, определяющая закон изменения фазы Дф.
106
Ширина спектра ФМК наибольшая, если у(/) — периодическая
функция на интервале Т= 2т0, где т0 — длительность элементарной
посылки, т. е.
у(0 =
1 при 0 < t< т0
-1 при -т0</<0.
Подставив это значение y(z) в предыдущее выражение, получим
"фм(0 = ^„(cosAqi, Sin(wo' + Фо) + r(Osin/Upcos(co0r + <р0)].
Во втором слагаемом функция у(/) вынесена из-под знака синус, по-
скольку последний — нечетная функция, а у(/) принимает значения ± 1.
Косинус не "реагирует" на изменение знака своего аргумента, поэтому
в первом слагаемом у(/) отсутствует. Представим у(/) рядом Фурье:
у(/) = 2 £ l,-cos*n sin knt
к-> 1
Тогда ФМК запишется в виде:
21/
«фм(0 = l/mcosAq>sin(co0/+ <р0) + —-sinAcp cos(<a0Z + q>0) х
€О у
х £ c°s.fo sinfcQf = t/mcosAq>sin(co0Z + q>o) + ~ sinAcp х
*= 1
х £ 1 ~ c°sft- [sin(cooZ + k£lt + <р0) — sin(coo/ — kilt + Фо)1-
к = 1
Отсюда следует, что спектр ФМн-сигнала содержит составляющую
несущей частоты (первое слагаемое) и две боковые полосы теорети-
чески бесконечной ширины. Уровень составляющей несущей частоты
определяется множителем, т. е. зависит от Дф. При манипуляции фазы
на 180° угол Дф = л/2 рад и, следовательно, составляющая несущей
частоты отсутствует, а вся энергия ФМн-сигнала содержится только в
боковых полосах. Амплитуды боковых составляющих также зависят от
Дф, но по закону вшДф, а не совДф.
Фазовый манипулятор на 180°. Манипулятор может
быть выполнен на перемножителе сигналов или на ключевой схеме,
одна из которых показана на рис. 3.39. К выводам 2 и 4 ключей под-
водятся противофазные колебания несущей частоты от генератора,
107
Рис. 3.39
выполненного на элементах DD1.1 и DD1.2. Манипулирующий сигнал
b(t) подается на управляющий вход 13 непосредственно и на управляю-
щий вход 5 через инвертор. При b(f) = 1 замыкается контакт 1, 2, и на
выход ключа поступает колебание одной фазы. При этом контакт 3, 4
разомкнут. Если же b(t) — 0, то наоборот, замыкается контакт 3, 4, а кон-
такт 1, 2 — разомкнут, и на выход ключа поступает колебание несущей
частоты противоположной фазы. Так осуществляется ФМН на 180°.
Детектор ФМн-сигналов (когерентный детектор). Детектор состоит
из перемножителя сигналов с интегратором или ФНЧ на его выходе. В
нем принятый ФМн-сигнал перемножается с опорным колебанием, ко-
герентным ФМн-сигналу. Устройство, формирующее опорное коле-
бание, называют выделителем опорного колебания (ВОК). Оно может
работать по специальному синхросигналу и информационному коле-
банию. По принципу построения различают пассивные (разомкну-
тые) и активные (замкнутые) ВОК. Активные ВОК реализуются в виде
устройств фазовой автоподстройки частоты (ФАПЧ), где опорное ко-
лебание формируется управляемым автогенератором.
Наибольший интерес в задачах когерентной обработки ФМн-сиг-
налов представляют методы ВОК по информационному сигналу. По-
скольку информационная фаза сигнала является случайной, то мето-
ды построения ВОК основаны на снятии фазовой манипуляции. Эта
операция называется ремодуляцией, а методы выделения опорных ко-
лебаний из информационного сигнала различают и классифицируют
по способу ремодуляции. Известно пять основных классов ВОК, от-
личающихся способом ремодуляции сигнала: умножение частоты, ум-
ножение фазы, приведение фазы, прямая ремодуляция принятого сиг-
нала и регенерация и ФМн-сигнала. Как правило, при всех способах
ремодуляции ВОК может быть построен по пассивным и активным
схемам. Пассивную схему ВОК с умножением частоты называют схе-
мой Пистолькорса, а активную с умножением частоты — схемой Си-
форова. Схема Пистолькорса — самая первая схема ВОК, получившая
108
Рис. 3.40
широкое распространение. Она сравнительно проста, устойчива в ра-
боте и не подвержена ложным захватам, как замкнутые системы с ис-
пользованием управляемых генераторов. В схеме когерентного детек-
тора (рис. 3.40, а) ВОК по схеме Пистолькорса обведен штриховой
линией. В его состав входят удвоитель частоты УЧ, фильтр второй гар-
моники Ф2, делитель частоты в 2 раза (ДЧ), фильтр первой гармоники
Ф1, фазовращатель ФВ. Первый блок — удвоитель частоты является
ремодулятором, а его работа поясняется временными диаграммами
(рис. 3.40, б). Сигнал на выходе удвоителя частоты состоит из четных
гармоник, и поэтому фильтром Ф2 выделяется самая мощная из них —
вторая. После деления ее на 2 в блоке ДЧ на выходе фильтра Ф1 по-
лучается опорное колебание. Фазовращатель компенсирует временную
задержку опорного колебания в выделителе.
Исследования показали, что в схеме Пистолькорса, как и во всех
других схемах ВОК, фаза опорного колебания неоднозначна (0 или
180°). Положение усугубляется и тем, что даже при правильной на-
чальной фазировке в реальных каналах связи всегда имеются причи-
ны, вызывающие спонтанное "перескакивание" фазы опорного коле-
бания и приводящие к "обратной работе": помехи в тракте опорного
колебания, переходные процессы в схеме, изменения питающих на-
пряжений и ряд других воздействий, учесть которые невозможно.
Для устранения обратной работы фазового детектора предлагалось
применить ряд мер, в том числе, уменьшение угла манипуляции Д<р.
В этом случае в спектре ФМн-сигнала сохраняется составляющая не-
сущей частоты, которая выполняет роль пилот-сигнала и содержит
информацию о начальной фазе когерентного опорного колебания.
109
Хотя эти меры и устраняют обратную работу, но заметно увеличивают
вероятность ошибки приема элементарного символа:
р0 = 0,5 — ф(./2 Aosin Д<р),ф(х) =
о
2
гдеф(х) — интеграл вероятностей; й0 — отношение энергии элементарного
символа Е к спектральной плотности мощности No гауссовых помех: Лд = E/No.
Увеличение р0 происходит не только благодаря уменьшению угла
Дф, но и уменьшению h^: часть общей генерируемой мощности сиг-
нала Рс — Е/т0, (где т0 — длительность элементарного символа) рас-
ходуется на передачу составляющей несущей частоты. Это означает,
что обратная работа детектора устраняется из-за потери преимуществ
ФМН на 180°, что недопустимо. Однако эту потерю можно исключить
[16], если угол манипуляции Дф уменьшить не на передающей, а на
приемной стороне делением частоты входного ФМн-сигнала в п раз
(л — целое число). При делении частоты в это же число раз делится
полная фаза сигнала. Это значит, что ФМн-сигнал с разделенной в п
раз частотой аналитически записывается следующим образом:
«фмМ = Uo sin [? ' + + • (3 12)
Так как у(Г) = ±1, то данное выражение можно записать в виде:
"фм(') = Ц)[СО5^ siC°'+ + Y(Osin^e cos(^r+^)]. (3.13)
Первое слагаемое — составляющая несущей частоты. При ФМН на
180° значение Дф = 90°, и поэтому при отсутствии деления частоты
(п-l) первое слагаемое равно нулю, так как cos 90° = 0. При делении
частоты на п (п > 1) cos^j- * 0, в спектре ФМН колебания присутствует
составляющая несущей частоты с амплитудой UH = 170 cos , пока-
занная на рис. 3.41, а. При п = 2 значение амплитуды (7Н = 0,707 UQ, ко-
торое с ростом п увеличивается, асимптотически приближаясь к (70. Эта
составляющая несущей частоты когерентна ФМН сигналу и жестко с
ним связана. Поэтому ее надо выделить и сформировать по ней опорное
колебание, чтобы исключить обратную работу фазового детектора.
На рис. 3.41, б представлена структурная схема такого когерентно-
го (фазового) детектора, состоящего из последовательно включенных
110
блоков: делителя частоты в п раз выделителя несущей ВН\ фазо-
вого детектора ФД, второй вход которого соединен с выходом ДЧ че-
рез линию задержки ЛЗ.
На выходе ДЧимеет место сигнал (3.13), а на выходе ВН— его пер-
вое слагаемое, которые перемножаются между собой в блоке ФД. На
выходе ФНЧ последнего имеет место переданный сигнал
“вых(') = кД‘)’
где к — коэффициент пропорциональности.
Операции деления и умножения частоты используются в детекторе
Пистолькорса, рассмотренного выше, в котором вначале производит-
ся умножение, а потом деление частоты. При умножении структура
ФМн-сигнала разрушается полностью, отчего вносится неоднознач-
ность и неустойчивость фазы опорного колебания к различным воз-
действиям. В данной схеме (см. рис. 3.41, б) первым блоком является
делитель частоты в п раз, в котором структура ФМн-сигнала не раз-
рушается, а в его спектре появляется составляющая несущей частоты,
когерентная ФМн-сигналу и жестко с ним связанная.
Манипулятор однократной ОФМИ. Во многих случаях формирова-
ние сигнала с ОФМН целесообразно свести к формированию сигнала
с абсолютной ФМН на 180° перекодированием (или разностным, диф-
ференциальным кодированием) передаваемой двоичной комбинации.
Алгоритм перекодировки прост. Если обозначить через Ьп = ±1 ин-
формационный символ, подлежащий передаче на n-й посылке сигна-
ла, то перекодированный в соответствии с правилами ОФМН символ
bnk~ Ьп® Ьп _ \ , где ® — суммирование по модулю 2 данной n-й и пре-
дыдущей (п — 1)-й посылок. Перекодированный сигнал следует по-
дать на низкочастотный вход манипулятора абсолютной ФМН на 180°.
Соответствующая структурная схема манипулятора ОФМН показана
на рис. 3.42. Работа кодера поясняется табл. 3.1, в первой строке ко-
торой записан исходный код, поступающий на вход 1 сумматора, во
111
второй — код с выхода сумматора (3-я строка), задержанный на эле-
ментарный символ, на что указывают стрелки. При этом предполага-
ется, что в начальном состоянии сигнал на выходе сумматора Ьгк = О,
что соответствует и второму его входу. Сумма по модулю 2 сигналов
обоих входов 1+0=1 первого столбца табл. 3.1 записывается на пе-
ресечении второй строки второго столбца и т. д. Под табл. 3 1 пока-
заны исходный и перекодированный видеоимпульсы. Последний по-
ступает на низкочастотный вход манипулятора абсолютной ФМН на
180° (блок ФМ), на высокочастотный вход которого подается колеба-
ние несущей частоты от генератора Г. Кодер состоит из сумматора
по модулю 2, линии задержки ЛЗ на длительность элементарного сим-
вола т = Т. Выход сумматора соединен со вторым его входом через ЛЗ.
При ОФМН переданный двоичный символ определяется двумя по-
сылками. Поэтому варианты сигналов с однократной ОФМН записы-
ваются на интервале двух посылок от 0 до 2 Г:
„ /Л_ t/msin(<ar+q>0), 0</<Г
Umsrn[<a(t- 7) + Фо], Т< t<2T
"фм2<0 -
Umsin(a>t+ <р0), 0</<7'
-t/msin[<a(f- 7) + ф0], Т<К2Т0.
Сигнал ИфМ|(г) соответствует передаче разности фаз Д<р = 0, а сиг-
нал «фм2(0 — разности фаз Д<р = я рад. Если в посылке длительности
Тукладывается целое число периодов колебания несущей частоты, то
на интервале 0 < t < 2Т
"фм1(0 = Цп sin(<ar + ф0); ифм20) = sgn(sin^) Um sin(<of + ф0).
112
Рис. 3.42 Рис. 3.43
Сигнал «фМ](0 в этом случае не имеет скачка фазы внутри интервала
[О, 2Г], а сигнал «фм2(0 имеет скачок на л рад в момент t= Т, что вы-
ражается через знаковую функцию sgn.
Варианты сигнала с однократной ОФМН на одной посылке являются
противоположными, как и при ФМН, а на интервале двух посылок —
2T
ортогональными, что вытекает из равенства J ифМ1(0 ифм2^)^ О,
о
справедливого при любых <р0.
Демодулятор сигналов с однократной ОФМ„ (рис. 3.43). Демодуля-
тор содержит тот же, что и демодулятор ФМн-сигналов, фазовый де-
тектор, состоящий из перемножителя 77 с ФНЧ на его выходе, на вто-
рой вход которого подается опорное колебание с ВОК, совпадающее
по фазе с одним из вариантов принимаемого сигнала. Последующее
вычисление разности фаз и определение переданного двоичного сим-
вола осуществляется в декодере ДК, подключенном к выходу ФНЧ фа-
зового детектора. Декодер представляет собой сумматор по модулю 2,
оба входа которого соединены между собой через линию задержки ЛЗ
на интервале элементарного символа т.
Данный демодулятор ОФМн-сигналов является когерентным,
обеспечивающим наибольшую помехоустойчивость приема. Извест-
ны также и некогерентные демодуляторы: автокорреляционный, оп-
тимальный некогерентный.
Для составления математических алгоритмов работы демодулято-
ров удобно представить посылки сигналов «фм1(/) и «фм2(0 в виде век-
торов Un _ ! и Un функционального пространства сигналов, а иска-
женные помехой посылки Zt(t) и Z^t) — в виде векторов: Zn, Zn _ i
функционального пространства сигналов и помех. Согласно скаляр-
ному произведению двух векторов угол между ними
cos А,<р; = (Уп-|) ’ |Ш-.| ’
113
т
здесь (Z„, Zn _ |) = |Zn(/)Zn _ ](z)dr — скалярное произведение векторов Zn и
0
Z„ _ f, |Zn|, |Zn _ ! | — их длины (норма):
ГТ ГТ
|Z„_,|= JZ„2_,(0dr;|Zn|= fZ„2(t)dr.
No No
Для определения переданного информационного символа следует
найти Длф^ по предыдущей формуле и сравнить его с возможными
значениями Длф,-. Переданной считается та разность фаз, которая бли-
же других к принятому значению Длф^. При однократной ОФМН име-
ются два варианта передаваемых разностей фаз: Длф( = 0 и Длф2 — п рад,
а косинус этих разностей принимает значения ± 1. Следовательно, при
однократной ОФМН определение переданного символа сводится к оп-
ределению знака созДлф^ согласно предыдущей формуле:
Ьп = sgncos&nq>£,
т. е. переданный на л-й посылке информационный символ Ьп равен
знаку косинуса Длф^. Так как произведение норм векторов положи-
тельно, то bn = sgn(Z„Z„ _ |). Это значит, что для определения пере-
данного информационного символа нужно найти знак скалярного
произведения векторов Zn и Zn _ р
Последнее выражение является фундаментальным для теории
ОФМН. С его помощью можно получить и классифицировать мате-
матические алгоритмы приема сигналов с ОФМН, которые по суще-
ству отличаются способом (алгоритмом) вычисления скалярного про-
изведения.
Манипулятор однократной ЧМ„. Манипулятор выполняется обычно
на автогенераторе, у которого изменяется параметр частотно-задаю-
щей цепи по закону манипулирующего сигнала b(t). На рис. 3.44 пред-
ставлена схема такого манипулятора, у которого частота изменяется в
результате переключения кварцев КВ1 и КВ2. Так как используется
один автогенератор (элементы DD\.1, DDX.2), то при скачкообразном
изменении частоты фаза изменяется плавно.
Эффективная полоса частот ЧМн-сигнала
А/эс = 1 (Л/чмп 4 1),
*с
где тс — длительность элементарного символа; Л/чмп — пиковый (максималь-
ный) индекс ЧМН.
114
Рис. 3.45
В свою очередь
М = 2F т
УГ/ЧМП Х/ДП1С’
Пиковая девиация частоты
Лхп = (/1 - /2)0,5,
где /| — частота единиц, а/2 — частота нулей.
Следовательно, разнос частот— f2 = 2Рдп. Так как Рдп = Л/чмп/2тс,
а для ортогональных двоичных ЧМн-сигналов Л/чмп > 1, то/j — f2 > 1 /тс.
Демодуляторы сигналов с однократной ЧМИ. Широко используются
схемы узкополосного приема двоичных ЧМн-сигналов по огибающей,
по мгновенной частоте и широкополосного приема с последетектор-
ным интегрированием. На рис. 3.45 представлена схема демодулятора
по огибающей, состоящая из узкополосных фильтров Ф1 и Ф2, ам-
плитудных детекторов АД1 и АД2, вычитающего устройства В и ре-
шающего устройства РУ. Фильтры Ф1 и Ф2 настроены на частоты J\
и f2 элементарных посылок. Напряжения с выхода детекторов АД 1 и
АД2 сравниваются между собой в схеме вычитания В, знак напряже-
ния на выходе которого определяется знаком ббльшего из них. По по-
лярности этого напряжения в блоке РУ формируется решение о пе-
редаче символа (1 или 0). Фильтры Ф1 и Ф2 — квазиоптимальные,
согласованы с входным сигналом только по эффективной полосе про-
пускания &f3. Если входной сигнал имеет вид прямоугольных импуль-
сов, а фильтры представляют собой одиночные колебательные конту-
ры, то Д/э = 0,65/тс, где тс — длительность элементарного символа.
Схема приема по мгновенной частоте состоит из узкополосного
фильтра и частотного детектора (дробного или др.).
Широкополосный прием с последетекторным интегрированием
применяют при относительно низкой стабильности частоты.
115
Амплитудный манипулятор. Манипулятор представляет собой пе-
ремножитель колебания несущей частоты и манипулирующего сигна-
ла, изменяющегося от 0 до +Um, а не от — Um до +Um, как при ФМН
на 180° (см. рис. 3.38, б). Поскольку при передаче паузы колебание на
выходе манипулятора отсутствует, то амплитудную манипуляцию
(АМН) называют системой с пассивной паузой. Амплитудным манипу-
лятором может быть контакт ключа (реле), через который подается
колебание несущей частоты (см. рис. 3.24). Контакт в этом случае за
мыкается и размыкается по закону манипулирующего сигнала. Имен-
но такой манипулятор используется в железнодорожной числовой ко-
довой автоблокировке, в ВОСП для управления работой лазера.
Сигнал АМН можно записать в виде
“Ам(') = т(') sin(<00r + ф0),
где у(0 — функция, определяющая закон изменения амплитуды.
Ширина спектра АМн-сигнала наибольшая, если у(/) периодична
на интервале Т= 2т0:
г(') =
1, 0</<т0,
0, -тс</<0.
Представим у(/) рядом Фурье:
y(z) = 0,5+1 1 sinArQr.
к = I
Тогда АМн-сигнал
"amW = + Е 1 ' sinW/) sin(<oor + Фо).
к- 1
Огибающая его спектра
Я(<о) =
sin0,5(<o - <i>0)t0
О,5(ш-ш0)т0
Ширина полосы частот АМн-сигнала такая же, как и у сигнала
ФМН, ОФМН на 180°, т. е. значительно мёньшая, чем при ЧМН.
116
Колебания ЧМН, ФМН, ОФМН на 180° можно разложить на два ко-
лебания с АМН, причем, каждая АМН при ЧМН имеет одинаковую ам-
плитуду, но разную несущую частоту или ^), а при ФМН — одну
несущую, но противоположные фазы и равные амплитуды. Колебание
ФМН можно разложить и на одно колебание АМН удвоенной ампли-
туды плюс противофазное колебание несущей частоты, амплитуда ко-
торого в 2 раза меньше амплитуды сигнала АМН. Колебание ОФМН
выражается через АМН также, как и ФМН.
Демодулятором АМН сигналов является обычный детектор огибаю-
щей или синхронный (когерентный) детектор (см. рис. 3.7, 3.11).
По сравнению с другими видами манипуляции АМН обеспечивает са-
мую низкую помехоустойчивость приема: для достижения заданной ве-
роятности ошибки мощность АМн-сигнала должна быть в 4 раза больше
мощности ФМн-сигнала и в 2 раза больше мощности ЧМн-сигнала.
Модуляция шумоподобных сигналов-переносчиков
Шумоподобные сигналы (ШПС) обладают уникальными свойства-
ми, очень важными для практики, что является причиной повышенного
интереса к ним. К таким свойствам ШПС относятся: возможность вес-
ти устойчивый прием, когда уровень сигнала ниже среднего уровня
помех (скрытность передачи); работа в занятых диапазонах частот, по-
скольку селекция таких сигналов осуществляется по форме; обеспе-
чение повышенной помехоустойчивости к узкополосным непрерыв-
ным и импульсным помехам; повышенная помехоустойчивость при
наличии многолучевости (мультипликативных помех); наиболее точ-
ное измерение параметров движения объекта (скорости, координаты
и др.); совмещение различных функциональных задач.
Шумоподобные сигналы не являются случайными, поскольку
формируются по определенному алгоритму. Однако их свойства близ-
ки к свойствам шума, ограниченного по частоте: энергоспектр почти
постоянен, а функция корреляции имеет узкий основной пик и неболь-
шие боковые "выбросы” (отсюда и название ШПС). Шумоподобные
сигналы представляют собой цифровые последовательности длины М
(А/-последовательности). Поскольку неизвестен закон чередования
единиц и нулей в ^-последовательности, то они получили также на-
звание псевдослучайных последовательностей. Такую последователь-
ность проще всего сформировать с помощью регистра сдвига с логи-
ческой обратной связью.
Наибольшие возможности ШПС обеспечивают в цифровых систе-
мах передачи информации. С помощью ШПС-переносчиков искусст-
венно расширяется полоса частот информационного цифрового сигна-
ла. Для этого информационный цифровой сигнал с элементарной
117
посылкой длительности Тперемножается с ШПС, длительность посыл-
ки которого т0 Т. Если цифровой сигнал знакопеременен (+1, —1) и
имеет прямоугольную форму, то при перемножении имеет место аб-
солютная ФМН на 180’ ШПС-переносчика прямоугольной формы ин-
формационным цифровым сигналом тоже прямоугольной формы. От
этого элемент информационного сигнала разбивается на N бинарных
(двоичных) элементов:
# = Т/х0 = = В,
где В — база сигнала.
Поскольку 5 » 1, то ШПС являются широкополосными < 1/т0 » 1/7У
В узкополосных системах 5=1. Базу ШПС можно рассматривать как
параметр, характеризующий сознательно введенную в сигнал избыточ-
ность, которая определяет перечисленные выше достоинства ШПС.
На рис. 3.46, а представлена структурная схема модулятора ШПС-
переносчика цифровой системы передачи. В состав схемы входят: ис-
точник цифровой информации ИЙ, перемножитель сигналов П; ге-
нератор ШПС ГШПС; синхронизатор С; балансный модулятор БМ;
генератор гармонической несущей Г; усилитель У. Цифровой сигнал
(I или 0) из блока ИИ поступает на один вход перемножителя П, на
другой вход которого подается ШПС с генератора ГШПС. Фаза сиг-
нала на выходе блока //равна 0, если передается 1. В противном слу-
AMJimnnnmp
Рис. 3.46
118
Рис. 3.47
чае она равна 180°, что соответствует ФМН на 180° (рис. 3.46, б). На
элементарной посылке цифрового сигнала Т с блока ИИ укладывается
N = T/tQ элементарных посылок длительности т0 ШПС. Так как ши-
рина спектра ШПС Г = 1/т0, то база ФМн-сигнала В = FT — N » 1.
В блоке БМ информационный ШПС переносится на рабочую частот'
передатчика и после усиления в блоке У излучается антенной А.
В приемнике (рис. 3.47) сигнал проходит через смеситель СМ, перено-
сится с помощью гетеродина Г на промежуточную частоту, усиливается
в усилителе промежуточной частоты УПЧи обрабатывается согласован-
ным фильтром СФ. С выхода СФ сигнал поступает на синхронизатор
С и решающее устройство РУ. Синхронизатор осуществляет поиск
ФМн-сигнала по частоте и времени, накапливает сигнал для увеличе-
ния надежности синхронизации, управляет режимом работы РУ. После
окончания поиска и вхождения в синхронизм на выходе РУ появляется
информационная последовательность в виде двоичных символов, ко-
торая передается получателю информации ПИ.
Рассмотренные модулятор и демодулятор ШПС являются простей-
шими и далеко не единственными.
Минимальная частотная манипуляция
Минимальная частотная манипуляция (МЧМН) представляет со-
бой частотно-фазовую манипуляцию (ЧФМН).
На интервале одного символа О...ТС сигнал Л/-позиционной ФМН
(ФМН-Л/) имеет вид:
5,(0= i/0cos(<o0/-(₽;), (3.15)
Дискретные значения фазы сигнала ф,- = InaJM, где М — число
возможных сигналов, а,- — Л/-е символы, выбираемые из множества
(0, 1, 2, ..., М — 1). Обычно Л/= 2К, где К — кратность ФМН. Тогда ка-
ждый Л/-ый символ а, соответствует набору из К= log2Af двоичных ин-
формационных символов (битов) длительности Тс — КТ, где Т — дли-
тельность одного бита, определяющая скорость манипуляции V = - .
119
В общем случае ФМН колебание 5(/) = U0cos(<o0t — <р(/)) можно
представить в виде суммы квадратурных составляющих:
S(f) = [t/(jCOS<p(Z)]cos<0Q/+ [t/osincp(0]sine>o/ =
= (/0[/(/)cos<a0/ + {TfOsinoQ/], (3.16)
где /(/) = cosq>(/), Q(f) — sin<p(/), a <₽(/) — параметр, определяющий закон из-
менения фазы несущей.
Манипулирующие функции /(/) и Q(t) задают в виде:
кл = Ъ,апр^~пТ^’ = 2?»^“ лГс)’
л л
где ап, Ьп — информационные символы; />(/), 9(0 — элементарные модули-
рующие сигналы в квадратурных каналах.
Последовательности ап и Ьп получают разделением исходной ин-
формационной последовательности Э(/) на четные и нечетные сим-
волы. Модулирующие сигналы p{t) и q{t) выбирают такими, чтобы при
последовательной передаче они не перекрывались во времени в квад-
ратурных каналах во избежание межсимвольной интерференции.
Согласно введенным обозначениям
/2(0 + 02(0 = const, (3.17)
чему удовлетворяют элементарные модулирующие сигналы в виде
прямоугольных импульсов
И0 = 9(0 =
1 при Osts Тс,
0 при Тс< t<0.
При этом двоичные информационные символы ап и Ьп полагаются
равными ±1. В данном случае имеет место двукратная ФМН (ДФМН).
При одновременной смене символов в каждом из квадратурных ка-
налов происходит скачок фазы на п радиан, вызывающий провалы
огибающей до нуля, что нежелательно. Во избежание этого сигналы
Т
в одном из каналов смещают на время у . Для сужения ширины спек-
тра ФМ—сигнала фронты прямоугольных манипулирующих импуль-
120
сов скругляют, преобразуя последние в полупериоды косинусоиды.
В этом случае сигналы выбираются в виде:
•
р(0 = • ±cos' $ при T<t<. Т \
0 при Т<К-Т;
9(0 = ±sin| л А 2 7> при 0</^2Г;
0 при 2Г</<0 ;
(3.18)
Так как символы ап и Ьп в квадратурных каналах смещены на вре-
мя Т, то модулированный сигнал (3.15) приобретает вид:
•Я0 = t/o[Sa'>cos(W)COS“°/+ ZV'hCttQ5'""»'] . (3.19)
|_ л л J
или в развернутом виде при четырех возможных комбинациях знаков
а и b на интервале длительности 0...27’ модулирующих сигналов в
квадратурных каналах:
МО = tf0|cos(3f)cos“oz + sin(j7)sin“o'j = TjQ.
при а = 1; Ь = 1.
Аналогично
$|(9 = Ц)со5(“о,+
•МО = "Ц)с°5(й)о,+
•М*) = -t/0COs(<i>0/+ уу)
при а = 1; b = 1;
при а = -1; Ь = -1;
при а = -1; b = 1;
(3.20)
Фаза сигналов линейно изменяется со временем t на величину
Дф = со знаком плюс или минус и в конце длительности Т эле-
ментарного символа это изменение достигает +| радиан при передаче
единицы и —5 радиан при передаче нуля. Можно построить древо-
видную характеристику изменения фазы за несколько тактов. Ясно,
что в момент передачи очередного бита информации фаза сигналов не
имеет разрывов. Частота же манипулированного сигнала, как произ-
водная по времени от фазы, меняется скачком максимально на
Это значит, что девиация частоты при МЧМН Дш? = Если послед-
121
нюю выражать в Герцах, то Л/= -Д- = , где V — скорость передачи
° 4Т 4
цифровой информации.
1 F
Кроме того, &fg = 2^, = , где FM — максимальная частота мани-
пулирующего (входного) сигнала. По определению индекс МЧМН
АЛ Ли ПС
m = —* = —= 0,5, что и определило название данного метода мо-
дуляции.
Отметим, что структура каждого из сигналов 50(т), ..., 53(/) совпа-
дает со структурой одной боковой полосы частот AM колебания
(см. п. 3.1): верхней (<о0 + 0,5Пм) или нижней (<о0 — 0,5Пм), положи-
тельного или отрицательного знака. Это значит, что МЧМН представ-
ляет собой специфическую частотно-фазовую манипуляцию (ЧФМН),
в которой ЧМИ осуществляется благодаря переходу с нижней на верх-
нюю или с верхней на нижнюю боковую частоту AM колебания, а
ФМН — благодаря изменению фазы на 180’ каждой из названных бо-
ковых частот. Закон этих ЧМН и ФМН определяется структурой вход-
ного цифрового сигнала.
Из выражения (3.19) следует, что алгоритм формирования МЧМН
совпадает с алгоритмом формирования ОБП AM фазовым методом
(см. п. 3.1).
На рис. 3.48, а представлена структурная схема модулятора МЧМН, где
К — коммутатор; Т — блок смещения последовательности на время Т,
П — перемножители сигналов; ФВ — фазовращатель на 90°; S — сумматор
Входной цифровой поток 9(т) в коммутаторе К разделяется на две
последовательности п(Г) и b(t), как показано на рис. 3.48, б. Первая по-
следовательность a(j) поступает на один вход перемножителя П1 не-
посредственно, а вторая b(t) — на вход П2 через блок Т, где она сме-
щается на время Т, как показано на рис. 3.48, б [диаграмма b(f)].
Функция скругления cos[yy) подается на второй вход П1 непосред-
ственно и на второй вход П2— через фазовращатель на 90°. Входные
информационные символы прямоугольной формы a(t) и b (/) в блоках
П1 и /72 преобразуются в косинусоидальные и синусоидальные соот-
ветственно, как показано на рис. 3.48, б, которыми осуществляется
двойная фазовая манипуляция в блоке ДФМ (см. рис. 3.48, а).
На рис. 3.48, в представлена структурная схема демодулятора сиг-
налов МЧМН, где П — перемножители сигналов; И — интеграторы;
РУ — решающие устройства, в которых определяют полярности симво-
лов в каналах; К — коммутатор. Для работы этих устройств необходимы
сигналы тактовой синхронизации ТС. В коммутаторе К происходит пре-
122
образование решений в квадратурных каналах в последовательности
символов на выходе демодулятора.
Сигналы МЧМН принимают с учетом формы элементарных моду-
лирующих сигналов (3.18), которые играют роль весовых функций
опорных колебаний cos(^y)cosa)0r и sin(^y)sinw0/. При интегриро-
вании результатов обработки в каналах учитывается смещение сигна-
лов в квадратурных каналах на интервал Т. Сигналы (3.20) на интер-
вале 2 Г образуют ансамбль биортогональных сигналов. Поскольку имеет
место фазовое разделение каналов, то помехоустойчивость их приема та-
кая же, как и у сигналов однократной ФМН, т. е. самая высокая.
8 Е
Спектральная характеристика сигналов МЧМН (?(/) = —х
п
х 1 + eosin FT , гдс р_ ОТКЛОНСНИе текущей частоты спектра otJq =
2я
[3]. Спектр убывает со скоростью, пропорциональной , где V —
скорость передачи информации. При ФМН это убывание пропорцио-
нально 2. Если же используется МЧМН с предмодуляционной га-
6) cos(Xt/ZT)cosw0t
Рис. 3.48
123
уссовской фильтрацией информационных символов, то скорость спа-
дания спектра пропорциональна 4. Данная формула позволяет
оценить ширину основной полосы частот Fq сигнала МЧМН по уров-
ню —3 дБ относительно максимума спектра: Fq — 0,64 И
МЧМН находит свое применение в цифровых сотовых системах
связи и является перспективной для спутниковых систем, поскольку
существенно повышает их эффективность.
Сигнально-кодовые конструкции
Абсолютная ФМН на 180° является теоретически оптимальным ме-
тодом передачи дискретных сообщений при двоичном коде. Можно
увеличить помехоустойчивость передачи двоичных сигналов, исполь-
зуя сигнально-кодовые конструкции (СКК) на базе ФМН. Это одна из
наиболее перспективных областей теории и техники цифровой пере-
дачи, в которой возможен "прорыв" к качественно новым результатам;
СКК объединяют операции кодирования и модуляции в единую про-
цедуру, в которой иногда трудно отделить собственно кодирование от
модуляции. Прием СКК осуществляется исключительно как прием
всего сигнально-кодового блока. При этом операции демодуляции и
декодирования не разделяются, а решение принимается не поэле-
ментно, а для всего сигнально-кодового блока. В этом случае реали-
зуется основной постулат системного подхода: оптимизация в целом
дает выигрыш по сравнению с оптимизацией по частям.
Фазовые СКК в сочетании с приемом их в целом позволяют получить
одновременно большую скорость передачи и малую вероятность ошибки
приема при ограниченных частотных и энергетических ресурсах.
Теория формирования и приема в целом фазовых СКК — довольно
сложная область современной теории связи, находящаяся на этапе
становления. Поэтому для разъяснения ее сути остановимся на про-
стом примере. Для этого потребуется сравнительная оценка помехо-
устойчивости многопозиционных ФМН колебаний. Расположим на
к к
окружности радиуса R сигнальные точки, число которых tn - a = 2 ,
на равных расстояниях с угловым интервалом <р = 2ъ/т рад. Радиус ок-
ружности R — JE, где Е — энергия посылки сигнала. Если на посылке
передается гармоническое колебание u(t) = 6/wsin(<o •/+<₽) длитель-
ности Т, то
Г- I г 2 1 Un,JT
R = JE = If tCsin (и • t+ <p)dz = -m - .
. J 72
™ о
Это значение R совпадает с евклидовым расстоянием между цен-
тром окружности и любой ее точкой.
124
На рис. 3.49, а показан двухпозиционный (однократный) ФМН —
сигнал с фазами Ойл рад. и соответствующим кодом 0 и 1. Расстояние
между сигнальными точками на окружности в данном случае = 2jE.
Это максимально возможное расстояние между точками круга радиуса
R — JE, которое полностью определяет потенциальную помехоустой-
чивость данной двухпозиционной системы. Действительно, верность
ошибки приема элементарного символа противоположных сигналов
(сигналов с однократной ФМН)
где И(х) — дополнение интеграла вероятностей до единицы; No — односто-
ронняя спектральная плотность мощности аддитивной гауссовской помехи с
равномерным энергетическим спектром.
В общем случае расстояние между двумя гармоническими сигна-
лами 5| и S2 длительности Т, отличающихся друг от друга только фа-
зой <р, определяется выражением
rf(5b S2) =
7 ГТ
j[5I(/)-52(0]2d/ = / j[t/sin(<at + <p)- t/sin<B/]2d/ =
О зо
= J1E J\ - созф = 2./£51п(0,5ф),
указывающим на справедливость предыдущей формулы для сигналов
с ФМН любой кратности. Расстояние d2 = является отсчетным
значением, с которым сопоставляется расстояние между вариантами
125
сигнала в различных многопозиционных системах. Для трехпозици-
онного сигнала, представленного на рис. 3.49, б,
Ф = 120’ и d3 = J3E ~ \,TijE < d2.
Параметр d удобен и для качественного сопоставления различных
систем сигналов.
Рассмотрим трехразрядную двоичную кодовую комбинацию. Всего
имеется 2=8 таких безызбыточных комбинаций. Они вписаны в
столбцы 1—3 табл. 3.2. Эти комбинации можно представить с помо-
щью однократной ФМН, сопоставляя каждому двоичному символу
фазу 0 или л рад., как показано в столбцах 4—6 табл. 3.2. При этом ми-
нимальное расстояние между соответствующими комбинациями на
интервале трех посылок (0, 37) t/min = d2 = 2jE, где Е — энергия по-
сылки сигнала длительности Т(см. рис. 3.49, а). Те же трехразрядные
двоичные комбинации можно закодировать с помощью двухразряд-
ного троичного кода, содержащего символы 0, 1,2. Всего двухразряд-
ных троичных комбинаций З2 = 9, т. е. одна комбинация оказывается
лишней по сравнению с трехразрядными двоичными комбинациями.
Ее можно использовать для контроля правильности поддержания син-
хронизма. В столбцах 7, 8 табл. 3.2 приведена кодировка восьми ис-
ходных трехразрядных двоичных комбинаций двухразрядными троич-
Таблица 3.2
Деся- тичное число Двоичный код (2, 3) Однократная ФМН или ОФМН Троичный код (3, 2) С и гнал ьно-кодовая конструкция
0 1 2 3 4 5 6 7 8 9 10 11 12
0 0 0 0 0 0 0 0 0 0 0 0 0
1 0 0 1 0 0 л 0 1 2 0 2л/3 4л/3
2 0 1 0 0 Л 0 0 2 1 0 4л/3 2л/3
3 0 1 1 0 л л 1 0 2 2л/3 0 4п/3
4 1 0 0 Л 0 0 1 1 1 2л/3 2л/3 2л/3
5 1 0 1 л 0 л 1 2 0 2л/3 4л/3 0
6 1 1 0 л л 0 2 0 1 4л/3 0 2 л/3
7 1 1 1 л л л 2 1 0 4тс/3 2л/3 0
2 2 2 4л/3 4л/3 4л/3
126
ними числами. Для составления искомой СКК добавим к каждой
безызбыточной двухразрядной комбинации троичного кода еще один
проверочный троичный символ (столбец 9), причем такой, чтобы сум-
ма трех символов по модулю 3 была равна 0. Сформированный код
(3, 2) приведен в столбцах 7—9 табл. 3.2. Сопоставим символы этого
кода посылки ФМ|Т сигнала с тремя разрешенными фазами 0,2л/3 и
4тс/3 рад (см. рис. 3.49, б). В результате получим СКК, три посылки ко-
торой имеют фазы, указанные в столбцах 10—12 табл. 3.2. Эта конст-
рукция является шестимерной, поскольку содержит три двухмерных
сигнала. Она имеет большую скорость передачи, чем однократная ФМН:
log23 > log22 . Расстояние между соседними векторами (гармониче-
скими сигналами) J3mjn = J6E = 2,45jE, что на 1,76 дБ больше d2mjn.
Отметим, что указанный выигрыш в энергетическом расстоянии
реализуется только в случае идеального когерентного приема в целом
трех посылок сигнала. Для этого необходимо сформировать в прием-
нике восемь колебаний, совпадающих по фазам посылок с варианта-
ми СКК (столбцы 10—12 табл. 3.2). Затем с помощью фазовых детек-
торов-корреляторов следует вычислить интегралы от произведений
(свертки) принятого сигнала и указанных опорных колебаний. Реше-
ние о переданной трехразрядной комбинации принимается по макси-
мальному из полученных значений. В данном случае можно просто
реализовать прием сигналов с абсолютной ФМН, используя кодовую
комбинацию 222 (последняя строка табл. 3.2). Именно в начале сеанса
связи передается синхросигнал, с помощью которого устанавливается
однозначное соответствие между фазами опорных колебаний и пере-
даваемых трехразрядных комбинаций. После этого при безошибоч-
ном приеме никакое сочетание разрешенных кодовых комбинаций не
сформирует на своем стыке неиспользуемую комбинацию 222. Сле-
довательно, отсутствие на выходе приемного устройства комбинации
222 является признаком правильности поддержания синхронизма. Ес-
ли же она появляется, то имеет место нарушение правильного соответ-
ствия между фазами опорных колебаний и передаваемых сигналов. По
этому признаку можно осуществить повторное вхождение в фазовый
синхронизм и восстановить правильную работу приемного устройства.
Рассмотренная простейшая СКК позволяет сохранить ту же ско-
рость передачи, как и в случае однократной ФМН, и несколько умень-
шить вероятность ошибки.
Глава 4
ЭЛЕМЕНТЫ ТЕОРИИ ИНФОРМАЦИИ
4.1. ДИСКРЕТНЫЙ ИСТОЧНИК СООБЩЕНИЙ.
КОЛИЧЕСТВО ИНФОРМАЦИИ
Чтобы иметь возможность сравнивать между собой различные ис-
точники сообщений, каналы и другие элементы системы связи,необ-
ходимо ввести количественную меру, которая позволяла бы оцени-
вать, содержащуюся в сообщениях, сигналах информацию.
Строгие методы такой оценки предложены в 1948 г. К. Шеноном,
что послужило началом построения теории информации.
Дискретный источник выдает сообщение а, принадлежащее неко-
торому конечному ансамблю Л (а е А). Определим количество инфор-
мации, содержащееся в этом сообщении, используя три исходных ес-
тественных (очевидных) требования:
1) количество информации должно быть аддитивной величиной,
т. е. в двух независимых сообщениях количество информации опре-
деляется как сумма количеств информации в каждом из них (теле-
грамма с N поезда и расписание поездов, необходимые для встречи);
2) количество информации в сообщении о достоверном событии
равно 0 (солнце встает на востоке);
3) количество информации не должно зависеть от качественного
содержания сообщения (степени важности, возможных последствий
его передачи, эмоциональной окраски и т. п.).
В общем случае сообщение а из ансамбля А характеризуется веро-
ятностью р(а), что источник формирует или посылает это сообщение,
т. е. количество информации 1(a), содержащейся в сообщении а долж-
но быть функцией от вероятности р(а).
Воспользуемся далее требованием 1) (требованием аддитивности).
Пусть <7| и д2 — Два независимых сообщения. Вероятностьр(Д], д2)то-
го, что источник выдаст одно за другим эти два сообщения
Р(«1, а2) = р((ц)р(а2),
где р(а(), р(л2) — вероятности формирования сообщения а< и а2 соответст-
венно.
128
Общее количество информации i(at, а2), содержащейся в этих двух
сообщениях, согласно условию аддитивности определяется как сумма
количеств информации в каждом из них:
/(л,, а2) = i(ai) + Иа2)-
Таким образом, надо найти функцию от вероятности р(«) такую,
чтобы при перемножении двух аргументов значения функции скла-
дывались. Этому условию удовлетворяет только логарифмическая
функция
Ца) = Alog[p(a)|,
где к — произвольный коэффициент.
Логарифм, вообще говоря, может быть взят по любому основанию.
Эта формула может быть использована для определения количества
информации, содержащейся в сообщении а. Эта формула удовлетво-
ряет и требованию 2): в случае достоверного события вероятность со-
общения р(д) = 1. Тогда количество информации согласно получен-
ной формуле:
i(a) = к log 1 = к • 0 = О,
Поскольку р(а) < 1, и следовательно, logp(a) < 0, то, чтобы измерять
количество информации неотрицательными числами, выбираем зна-
чение коэффициента к = — 1:
Ца) = -logp(a) = log^L .
Основание логарифма чаще всего в формуле для определения ко-
личества информации выбирают равным двум. Получаемая при этом
единица информации носит название двоичная единица, или бит. Она
равна количеству информации, содержащейся в сообщении о событии,
происходящем с вероятностью р(д) = 0,5 (о событии, которое равнове-
роятно может происходить или нет):
/(«) = logjjjL = log2 2 = 1 бит.
Такая единица наиболее удобна потому, что в современной вычис-
лительной технике, технике связи широко используются двоичные
коды, двоичные дискретные устройства.
5 Jjk
129
В дальнейшем, записывая обозначение log, будем подразумевать,
что речь идет о двоичном логарифме:
Количество информации в сообщении тем больше, чем оно менее
вероятно или чем оно более неожиданно.
Если дискретный источник передает последовательность зависи-
мых между собой сообщений, то получение предшествующих сооб-
щений может изменить вероятность последующего сообщения, а сле-
довательно, и количество информации, содержащейся в нем:
4.2. ЭНТРОПИЯ
Количество информации является случайной величиной, посколь-
ку сами сообщения случайны. Очевидно, что для количества инфор-
мации существует свое распределение вероятностей, которое зависит
от распределения вероятностей сообщения в ансамбле. Поэтому удоб-
нее для характеристики всего ансамбля (источника сообщения) ис-
пользовать математическое ожидание количества информации, кото-
рое называют энтропией:
Я(Л) = Лф(д)] = Л/flog--^-1,
где Н(А) = Л/^log^J—J — энтропия дискретного источника сообщения.
Усреднение производится по всему ансамблю, с учетом всех веро-
ятностных связей между сообщениями. Чем больше энтропия источ-
ника, тем больше степень неожиданности передаваемых им сообщений
в среднем, т. е. тем больше неопределенность ожидаемого сообщения
в среднем. Поэтому энтропию часто называют мерой неопределенности
сообщений. При этом под неопределенностью понимают неопределен-
ность, существующую до того как сообщение принято. После приема
(если, конечно, он заведомо верен и производится безошибочно) вся-
кая неопределенность устраняется. Количество информации можно
расценивать как меру уменьшения неопределенности.
Энтропия — основная информационная характеристика источни-
ка сообщений. Чем больше энтропия, тем труднее запомнить сообще-
ние и передать его по каналу связи. Как правило, чем больше энтро-
пия, тем больше энергетические затраты на передачу сообщения.
130
Основные свойства энтропии сле-
дующие:
энтропия неотрицательна Н(А) > 0 и
равна 0 только для "вырожденного" ан-
самбля, когда одно сообщение переда-
ется с вероятностью р(а) = 1, а другие
с нулевой вероятностью;
энтропия аддитивна; это приводит к
тому, что если рассматривать последо-
вательность п сообщений как одно ук-
рупненное, то энтропия источника та-
ких укрупненных сообщений будет в п
раз больше по сравнению с энтропией
исходного источника;
если ансамбль содержит к различных
сообщений (к — объем алфавита источника), то Н(А) < log А: (равно в
том случае, когда все сообщения равновероятны и независимы).
В частном случае двоичного источника без памяти (к = 2; со-
общения передаются статически независимо друг от друга) энтро-
пия максимальна в том случае, когда р(а{) — р(а2) = 0,5, при этом
Н(А) = log А: = log 2 = 1. В этом случае график зависимости энтропии
от вероятности появления того или иного сообщения примет вид,
представленный на рис. 4.1.
Для данного источника без памяти с объемом алфавита к
Н(А) = A/[log^.] = J^log-J^.
Пусть, например, к = 32 (модель источника-алфавита русской или
английской речи). Тогда при условии равновероятности выбора букв
по последней формуле определим:
32
Я(Л) = Ей10g2 Т/й = 32 J2 •5 = 5 бит/буква.
I
Можно было получить этот результат иначе:
Н(А) = log Л = log232 = 5 бит/буква.
Если буквы алфавита передаются не хаотически, то они передают-
ся не равновероятно (сравним появление букв "е" и ”ъ”) и зависимо,
энтропия ансамбля уменьшается. Например, для текстов художествен-
ной прозы энтропия составляет 1,5 бит/буква, для ансамбля поэтиче-
ских произведений — примерно 1 бит/буква (рифма и ритм вносят до-
полнительные вероятностные связи), для ансамблей текстов телеграмм —
менее 0,8 бит/буква (однообразие текстов).
131
Введем понятие избыточности источника с объемом алфавита к:
= Я-Я(Л) = logt-ЖЛ)
Л Н logit
которая определяет, какая доля максимально возможной для данного
алфавита энтропии не используется источником. Для рассмотренного
примера для поэтических произведений х = (5 — 1)/5 = 0,8.
4.3. ВЗАИМНАЯ ИНФОРМАЦИЯ
Энтропия ансамбля — среднее количество полной информации,
содержащейся в сообщении. Определим теперь информацию, содер-
жащуюся в одном ансамбле относительно другого (например, в ан-
самбле принятых сигналов относительно ансамбля переданных сооб-
щений). Рассмотрим объединение двух дискретных ансамблей А и В,
в общем случае зависимых.
Пусть р(ак, Ь/) — совместная вероятность реализации ак и bt ан-
самблей А и В.
Тогда совместная энтропия ансамблей А и В
Н(А, В) = М\log—Ц-1,
L pfa^
а условная энтропия
Н(А/В) = M[\og—Ь-1.
L р{ак/Ь1)}
Математическое ожидание ансамбля берется по объединенному
ансамблю А В.
Если память у источников отсутствует, то
Из теоремы умножения вероятностей
р(а, Ь) = р(а)р(Ь/а) = р(Ь)р(а/Ь)
следует, что
Н(А, В) = Н(А) + Н(В/А) = Я(В) + Н(А/В)\
Н(А, В) = Л/Flog J = м[log 1 - logp(o) - logp(A/a)] =
L p(a)p(o/a)J
= Л/Flog 4-1 + Л/Flog—J—1 = H(A) + H(B/A).
L p(a)J L p{b/a)S
132
Для условной энтропии справедливо условие
О < Н(А/В) < Н(А).
Равенство Н(А/В) = 0 при р(ак, bt) = 1 при каждом bf. Зная реали-
зацию ансамбля В, можно точно установить реализацию ансамбля А.
Другой крайний случай равенства Н(А/В) = ЩА) имеет место при
р(ак/Ь[) = р(ак) при всех а и Ь. Последнее равенство означает, что со-
бытия а и b независимы. В этом случае знание реализации ансамбля
В не уменьшает неопределенность ансамбля А, т. е. В не содержит ни-
какой информации относительно А.
В общем случае Н(А/В) < Н(А), и знание реализации ансамбля В
снижает в среднем первоначальную неопределенность ансамбля А.
Естественно назвать разницу Н(А) — Н(А/В) количеством информа-
ции, содержащейся в В относительно А. Ее также называют взаимной
информацией между А и В:
ИЛ, - Н<Л, - Н{лт -
Если воспользоваться теоремой умножения, то последнему выра-
жению можно придать симметричный вид:
КА, В) = Л/Flog •
L р(ак)р(Ь}>
Взаимная информация измеряется в тех же единицах, что и энтро-
пия, например в битах. Величина 1(А, В) показывает число в среднем
бит информации о реализации ансамбля А, наблюдая реализацию ан-
самбля В.
Основные свойства взаимной информации следующие:
1) КА, В) > О (равенство при независимости А и В);
2) 1(А, В) = 1(В, А), т. е. В содержит столько информации относи-
тельно А, сколько А относительно В. Это свойство вытекает из сим-
метрии
/(Л, В) = М Г log :
L p(ak)p(bj)
3) I(A, В) < Н(А) (равенство, когда по реализации В, можно одно-
значно восстановить А);
4) /(Я, В) < Н(В) (равенство, когда по реализации А, можно одно-
значно восстановить В);
133
5) I(A, A) = H(A) (полагая B = А и учитывая, что H(A/A) = 0 имеем:
1(А, В) = Н(А) - Н(А/В) = 1(А/А) = Я(Л).
Это позволяет интерпретировать энтропию источника как его соб-
ственную информацию, т. е. информацию.содержащуюся в ансамбле
А о самом себе.
Из свойства 3 следует^что энтропия ансамбля А представляет собой
максимальное количество информации, которое может содержаться в
ансамбле А относительно любого другого ансамбля.
Пусть А — ансамбль дискретных сообщений, В — ансамбль дискрет-
ных сигналов, в которые преобразуются сообщения А, тогда ЦА, В) = Н(А)
в том и только том случае, когда преобразование А в В обратимо. При не-
обратимости имеем неравенство КА, В) < Н(А), и разность Н(А) — 1(А, В)
можно назвать потерей информации при преобразовании Я в В. Ее на-
зывают также ненадежностью. Следовательно, информация не теря-
ется только при обратимых процессах.
Если Т — среднее время передачи одного сообщения, то
Н\А, В) = 1 Н(А, В); Г(А, В) = 11(А, В).
Получили выражения для энтропии и количества информации,
рассчитанные не на одно сообщение, а на единицу времени. Величина
Г(А, В) называется скоростью передачи информации от Л к В.
Пусть V — ансамбль сигналов на входе дискретного канала, a Z —
ансамбль сигналов на его выходе. Тогда скорость передачи информа-
ции по каналу может быть определена в виде:
/’(И, Z) = H\V) - H\V/Z) = H'(Z) - H'tZ/V).
Согласно этому выражению можно составить модель канала (рис. 4.2),
где Н'( V) — производительность дискретного источника на входе ка-
нала; /'(И, Z) — скорость передачи информации по каналу; H\Z) —
производительность канала; Н’( V/Z) — скорость утечки информации
при ее передаче по каналу; H\Z./V} — скорость поступления посто-
ронней информации, не имеющей отношения к ансамблю Исигналов
H'(v/Z) H'(z/V)
Рис. 4.2
на входе и создаваемой присутст-
вующими в канале помехами. Со-
отношение Н'( V/Z) и H\Z/V} за-
висит от свойств канала.
Если сигнал передается по ка-
налу с узкой (недостаточной для
удовлетворительного воспроизве-
дения сигнала) полосой и с низ-
ким уровнем помех, то теряется
часть полезной информации, но
134
почти не добавляется бесполезной. При этом Я'( V/Z) » HXZ/V}. Ес-
ли же сигнал воспроизводится точно, но в паузах внятно прослуши-
ваются "наводки" от соседних каналов, то, почти не теряя полезной
информации, можно получить много дополнительной (как правило,
бесполезной). При этом H\V/Z} « H\Z!V}.
4.4. ЭФФЕКТИВНОЕ КОДИРОВАНИЕ
Пусть А — источник последовательности элементов сообщений
(знаков) с объемом алфавита К и производительностью Н\А) — 1 Н(А).
Для передачи по дискретному каналу нужно преобразовать сообщение
в последовательность кодовых символов так, чтобы эту кодовую по-
следовательность можно было затем декодировать (предполагается,
что помехи отсутствуют, поэтому рассматриваемую ниже теорему
часто называют теоремой кодирования для канала без помех). Для
этого необходимо, чтобы скорость передачи информации от источ-
ника к коду Г (А, В) равнялась производительности источника Н'(А)\
Г(А, В) = Н\А),
Однако Г(А, В) < Н’(В), поэтому необходимым условием для ко-
дирования является Н\В) > Н\А), Н(В) > у Н(А);
'к 'с
VKH{B) > VCH(A), (4.1)
где Ик = 1/Тк (Тк — число кодовых символов); Ис = 1/Тс (Тс — число сооб-
щений, передаваемых в секунду).
Рассмотрим для простоты только двоичный код, при котором алфа-
вит В состоит только из двух символов: 1, 0. Тогда Н(В) < log22 = 1 бит,
поэтому необходимое условие (4.1) сводится к условию
и
> Я(Л). (4.2)
Однако условие (4.2) представляет собой среднее число кодовых сим-
волов, приходящееся на одно элементарное сообщение. Таким образом,
для возможности кодирования и однозначного декодирования необходи-
мо, чтобы среднее число двоичных символов на сообщение было не
меньше энтропии Н(А). Это условие является почти достаточным, на ос-
новании теоремы кодирования для канала без помех. Ее содержание за-
ключается в том, что, передавая двоичные символы со скоростью VK,
можно закодировать сообщения так, чтобы передавать их со скоростью
где е — сколь угодно малая величина.
135
Если передаются равновероятные и независимые сообщения, то
Н(А) = log К, при К = 2" можем записать, что Н(А) = п.
Используя для передачи каждого сигнала последовательность из п
двоичных символов, получим к различных последовательностей, и
можно каждому сигналу сопоставить одну из кодовых последователь-
у
ностей и так, что Vc = и теорема справедлива даже при е = 0. Та-
ким же образом можно закодировать сообщение любого источника с
объемом алфавита К, затрачивая и0 = log К двоичных символов на эле-
ментарное сообщение, и в том случае, если сообщения передаются не
равновероятно и (или) зависимо. Однако здесь Н(А) < log К и сфор-
мулированная теорема утверждает, что возможно более экономичное
кодирование с затратой и » Н(А) символов на сообщение. Относитель-
ная экономия символов: (и0 — и)/и0 = х-
Избыточность определяет допустимую степень сжатия сообщения.
4.5. ИНФОРМАЦИЯ В НЕПРЕРЫВНЫХ СИГНАЛАХ
Пусть S — случайная величина, представляющая собой сечение
(отсчет) случайного сигнала с плотностью распределения вероятно-
стей ш(5) (рис. 4.3). Разобьем область значений этой случайной вели-
чины на интервалы А5. Вероятность того, что значение случайной ве-
личины попадает в интервал (Sk, Sk + ]), т. е. вероятность события
Sk < S < Sk + А5, приближенно может быть определена в виде <о(5)А5,
причем тем точнее, чем меньше А5.
Степень неожиданности такого события может быть, как и прежде,
определена в виде:
,О8{р(5л<5<5* + Л5)} ~ 1ОВ{<в(5)Л5
Если не уточнять значение 5 в
пределах каждого интервала, а за-
менить их отсчетами Sk в начале
интервала, то непрерывный ан-
самбль заменится дискретным с
энтропией
Будем повышать точность оп-
ределения величины S, уменьшая
величину А5. При этом в пределе,
136
т. е. при S -> 0, мы должны получить энтропию непрерывной случай-
ной величины S:
lim Л/flog—L-J = lim M flog -L- + log-LI =
A5->0 L 6e>(5)A5J A5->0 L ffl(S) A5J
lim Л/flog—L-l + lim Л/flog-L] = Л/flog-y-1 + lim Л/ flog -LI.
д5-»о L e>(5)j д5-»о L aSJ L e>(5)J a$-»o L a5j
Второе слагаемое стремится к бесконечности и, кроме того, не за-
висит от распределения вероятностей случайной величины S.
Таким образом, собственная информация непрерывной случайной
величины бесконечно велика (для того чтобы точно задать значение
непрерывной случайной величины десятичной дробью, необходимо
сообщить бесконечное количество цифр в разрядах). Несмотря на это,
полученное выражение не является бесполезным.
Первое слагаемое конечно, его называют дифференциальной энтро-
пией:
А(5) = A/[log-J^] = /в, (5) log^dS-
Дифференциальная энтропия в отличие от обычной не может рас-
сматриваться как мера собственной информации. Информационный
смысл имеет не сама дифференциальная энтропия, а разность двух
дифференциальных энтропий.
Определим количество взаимной информации между двумя слу-
чайными величинами 5 и U. В случае дискретных ансамблей (случай-
ных величин) А и В мы имели для взаимной информации
ЦА, В) - Л/flog
По аналогии для 5 и U'.
I(S,U)^ lim Л/flog = lim М f log =
' ’ bU-*O L ьш(5)Д5ш(Ц)ДИ д1/-»0 L <o(S)<o(l/)J
Д5-»0 Л5-»О
= Л/flog
Таким образом, количество взаимной информации, в отличие от
собственной, конечно (в случае непрерывных случайных величин).
137
С помощью простых преобразований последнего выражения получим
I(S, U) = Л/Tlog =
= Miog-^-1 -Miog—1—1 = h(S) - h(S/U),
L <o(5)J L co(o/l/)J
где A(5) — дифференциальная энтропия случайной величины 5, h(S/U) — ус-
ловная дифференциальная энтропия.
Таким образом, получим тот же результат, как и в случае дискрет-
ного источника:
1(А, В) = Н(А) - Н(А/В),
который отличается лишь тем, что характеристики энтропии замене-
ны на характеристики дифференциальной энтропии.
Основные свойства взаимной информации полностью сохраняют-
ся и здесь. В качестве примера рассмотрим важный для практики слу-
чай нормальной случайной величины х.
Найдем Л(х):
<x-«)2
, , _ 1 2а2
ж'
<х~а>2'
h(x) — fco(x) log —1— dx = fco(x) log V2n<re 2a
J <b(x) J
(х~а.
2а2
| ш (x)dx +
+ 12^ | ш (х)(х — o)2dx =
2а
+ ‘°^а2
2а2
+ iloge =
иа2 + logVe = \ogj2nea2 ,
h(x) = log J2 лea2.
Таким образом, дифференциальная энтропия гауссовской непре-
рывной случайной величины не зависит от математического ожида-
ния и монотонно возрастает по мере увеличения дисперсии.
Из всех непрерывных случайных величин х с одинаковыми дис-
персиями о2 наибольшую дифференциальную энтропию имеет слу-
чайная величина с нормальным распределением [см. формулу (3.13)].
138
Глава 5
ПРОПУСКНАЯ СПОСОБНОСТЬ КАНАЛА СВЯЗИ.
ТЕОРЕМЫ ОПТИМАЛЬНОГО КОДИРОВАНИЯ
5.1. ПРОПУСКНАЯ СПОСОБНОСТЬ ДИСКРЕТНОГО КАНАЛА СВЯЗИ
Скорость зависит не только от свойств самого канала, но и от
свойств, подаваемого на его вход сигнала Поэтому скорость
передачи информации не может характеризовать канал как средство
передачи информации. Найдем способ оценки способности канала
передавать информацию.
Вначале рассмотрим дискретный канал, через который в единицу
времени передается Vсимволов из ансамбля с объемом алфавита т.
При передаче каждого символа в среднем по каналу проходит ко-
личество информации
1(А, В) = Н(А) - ЫА/В) = Н(В) - Н(В/А),
где А и В — ансамбли дискретных случайных символов соответственно на вхо-
де Л и выходе В канала.
Лишь Н(А) определяет собственную информацию передаваемых
символов и определяет источник сигналов на входе, не зависит от
свойств канала.
Пусть на вход канала подаются сигналы от различных источников
с разными распределениями вероятностей р(А), но при одинаковых
значениях т и V. Для каждого источника количество информации, пе-
редаваемое по каналу, конкретно. Максимальное количество инфор-
мации, взятое по всем возможным источникам, характеризует канал и
называется пропускной способностью канала (в расчете на один символ):
Ссим = max/(Л, В).
сим
Чаще пользуются понятием пропускной способности канала С в
расчете на единицу времени, бит/с
С - max/'(Л, В), С= ИСсим.
139
Определим пропускную способность симметричного канала без
памяти. Симметричный канал без памяти — это дискретный канал, в
котором каждый передаваемый кодовый символ, принимается оши-
бочно с вероятностью р и правильно с вероятностью (1 ~ р). Причем
в случае ошибки вместо переданного /-го символа может быть с рав-
ной вероятностью принят любой другой из т символов. Таким обра-
зом, условная вероятность того, что принят символ bj, когда на самом
деле был передан символ а,:
р(Л,./Я/) = ПР” , Ссим = тах[Я(В) - Н(В/А)],
l-р, при / = j
Я(В/Л) = Л/flog-J— 1 =plog^ +(1-P)log >
L p(b,/a,)J p l-p
Условная энтропия не зависит от распределения вероятностей в
ансамбле А и определяется только переходной вероятностью канала:
Сейм = тах[Я(В) - р log - (1 - р) log рУ -
Поскольку в правой части равенства только Н(В) зависит от рас-
пределения Р(А), то максимизировать надо Н(В). Можно показать,
что максимум Н(В) = log/n и реализуется в том случае, когда все сим-
волы bj равновероятны и независимы (это достигается тогда, когда
входные символы равновероятны и независимы):
«%>- s-’ww--)- i s-’iw М1 '»Л] - £•
я<л> 1ое(йУ ~|о8"-
Ссим = lo8m + pi°e + (1 ~р) iog(i -р),
С= И [log да - plog —- + (1 - р) log(l - р\
Еще более упрощая задачу, переходят к двоичному каналу, т. е. т — 2
(рис. 5.1):
С= И[1 +plogp + (1 -p)log(l -р)].
При р = 1/2 пропускная способность равна 0: С = 0. Это ситуация
так называемого обрыва канала, когда последовательности символов
140
на входе и выходе канала незави-
симы. В этом случае можно, напри-
мер, значение символа на выходе
определить бросанием монеты.
В случае р = 0 (канал без шу-
мов — ошибок не происходит)
пропускная способность макси-
мальна. Когда р — 1, то, подвергая
инверсии все выходные символы,
можно получить правильный ре-
зультат.
Рис. 5.1
5.2. ПРОПУСКНАЯ СПОСОБНОСТЬ НЕПРЕРЫВНОГО КАНАЛА
Пусть канал имеет ограниченную полосу пропускания шириной F.
Сигналы U(f) и Z(t) соответственно на входе и выходе канала в этом
случае могут согласно теореме Котельникова определяться своими от-
счетами, взятыми через интервалы 1/2F, тогда пропускная способ-
ность непрерывного канала Сот, приходящаяся на один отсчет, опре-
деляется (по аналогии с дискретным каналом) в виде:
Сот = max/(И, Z) = max[A(Z) - h(Z/U)].
Пропускная способность С может быть определена в виде суммы зна-
чений Сот, взятой по всем отсчетам за единицу времени (за 1 секунду).
При этом, естественно, дифференциальная энтропия вычисляется с
учетом вероятностных связей между отсчетами.
Рассмотрим непрерывный канал без памяти с аддитивным, белым
гауссовским шумом. Пусть канал имеет полосу пропускания шириной
F. Средняя мощность сигнала [дисперсия С/(/)] не превышает задан-
ного значения Рс. Мощность (дисперсия) шумов в полосе Fравна Рш.
Отсчеты входного и выходного сигналов и отсчеты шума связаны ме-
жду собой формулой
Z= U+ N,
где N — отсчет шумов.
Поскольку N имеет нормальное распределение с нулевым матема-
тическим ожиданием, то и условная плотность ay{Z/U) при фиксиро-
ванном значении Кнормальна с математическим ожиданием Ии дис-
персией Рш. Пропускная способность, приходящаяся на отсчет,
Сот = max Ж Z) - max[A(Z) - h(Z/U)].
со(£7) <»(£/)
141
Ранее для случайной величины х получили
й(х) = log-Jlnec2.
Можно показать, что условная энтропия
h(Z/U) = log 72^,
тогда
maxA(Z) = log72ne(Pc + Рш).
Согласно свойству (4.13)
сот = log72ле(Рс + Рш) - log72nePUI = | log
= |10g^!
х г ш
Переходя к вычислению пропускной способности С, заметим, что
информация, переданная за несколько отсчетов, максимальна в том
случае, когда отсчеты независимы.
Некоррелированными (а для гауссовских случайных величин неза-
висимыми) являются отсчеты, разделенные интервалом времени 1/2F.
Число таких отсчетов в секунду 2F, поэтому С = 2fCOT, тогда
С= F log (1 + —I — формула Шеннона.
Если бы мощность сигнала не была ограничена, то пропускная
способность канала была бы сколь угодно большой. Пропускная спо-
собность равна 0, когда отношение Рс/Рш ~ 0. С увеличением этого
отношения пропускная способность растет, но относительно медлен-
но (по логарифмической зависимости). Формула Шеннона указывает
на возможность обмена полосы пропускания на мощность сигнала и
наоборот. Но поскольку С зави-
сит от /^линейно, а от отношения
сигнал/шум Рс/Рш — по логариф-
мическому закону, то компенси-
ровать возможное сокращение
полосы пропускания из-за нали-
чия мощности сигнала невыгодно.
Пропускная способность зави-
сит от ширины полосы канала не-
линейно (рис. 5.2). Поскольку
Рш = N^F, где No — односторон-
няя спектральная плотность, мощ-
ности, то
142
с=М, + й=fiogein(1 +й-
Максимальный объем информации, который можно в среднем пе-
редать по непрерывному каналу за время Тк,
Ик= СТК = ГКГК logfl + А].
Если » 1, то log 11 + « log = DK, Ик = TKFKDK (см. п. 1.3).
к ‘ Ш'
5.3. ТЕОРЕМА КОДИРОВАНИЯ ДЛЯ КАНАЛА С ПОМЕХАМИ
Теорема кодирования — это фундаментальная теорема теории ин-
формации — основная теорема кодирования Шеннона для случая
дискретного источника (рис. 5.3).
Если производительность источника сообщений Н'(А) меньше
пропускной способности канала С, т. е. Н'(А) < С, то существует спо-
соб кодирования (преобразования сообщения в сигнал на входе кана-
ла) и декодирования (преобразования сообщения в сигнал на выходе
канала), при котором вероятность ошибочного декодирования и не-
надежность Н'(А/А) могут быть сколь угодно малы. Если Н'(А) > С,
то таких способов не существует.
Для восстановления по пришедшему сигналу переданного сообще-
ния необходимо, чтобы сигнал содержал о нем информацию, равную
энтропии сообщения 1(А, В) = Н(А), следовательно, для правильной
передачи сообщения необходимо, чтобы скорость передачи на участке
от источника сообщения к каналу (участок АВ) была равна произво-
дительности источника Г(А, В) — Н'(А).
Поскольку скорость передачи информации не может превышать
значение пропускной способности канала С = max/'(А, В) по различ-
ным распределениям вероятностей р(А), то условие Н'(А) < С явля-
ется необходимым для точной передачи сообщения. Является ли это
условие достаточным? Естественно, при С > Н'(А) можно передавать
Рис. 5.3
143
такие сигналы, что величина Г (В, В) достигает значения Н'(А). Но
величина Г {В, В) — это скорость передачи информации о сигнале В,
а не сообщении А, поэтому возникает вопрос: "Можно ли установить
такое соответствие (код) между ансамблями А и В, чтобы вся инфор-
мация, полученная на выходе канала о сигнале В, была в то же время
информацией о сообщении Л?" Положительный ответ на этот вопрос
можно получить в простейшем случае, когда в канале отсутствуют по-
мехи и сигнал принимается безошибочно, тогда Г(В, В) = Н'(В).
Если между ансамблями А и В есть взаимооднозначное соответст-
вие, то по принятому сигналу можно однозначно восстановить сооб-
щение. Если же в канале присутствуют помехи и сигнал В принима-
ется с ошибками, то Г (В, В) < Н'(В), но скорость передачи
информации от ансамбля сообщений к ансамблю сигналов на входе
канала и скорость передачи информации по каналу очевидно должны
быть равны, т. е. Г(А, В) = Г (В, В), Г (А, В) = Н'(А). Поэтому полу-
чается, что Н'(В) > Н'(А). Это значит, что производительность источ-
ника сигналов должна быть больше производительности источника
сообщений, т. е. ансамбль сигналов В кроме информации об ансамбле
сообщений А содержит дополнительную собственную информацию.
Часть информации об ансамбле сигналов В в процессе передачи
по каналу теряется. Возникает вопрос: "Можно ли осуществлять ко-
дирование так, чтобы терялась только дополнительная (избыточная)
часть собственной информации ансамбля В, в то время как инфор-
мация об ансамбле А сохранилась?" Теорема Шеннона дает на этот
вопрос почти положительный ответ с той лишь поправкой, что ско-
рость "утечки" информации Н’{А/А) не равна 0, но может быть сде-
лана сколь угодно малой.
5.4. ЭПСИЛОН-ЭНТРОПИЯ
Источник непрерывных сообщений может выдавать за время Тлю-
бую из бесконечного множества реализаций. Если определить энтро-
пию и производительность такого источника (в результате предельно-
го перехода), то они окажутся бесконечными.
Для передачи непрерывного сообщения с абсолютной точностью
необходимо передавать бесконечно большое количество информации,
что естественно нельзя сделать за конечное время по каналу с конеч-
ной пропускной способностью. Тем не менее непрерывные сообще-
ния (телефонные, телевизионные, телеметрические) все же передают-
ся. Это объясняется тем, что на практике никогда не требуется
абсолютная точность воспроизведения. А для передачи, пусть с очень
144
высокой, но ограниченной точностью, требуется конечное количество
информации (также как и в случае передачи дискретных сообщений).
Пусть допустимая неточность воспроизведения измеряется неко-
торым малым параметром е. Минимальное количество информации,
которое требуется передать по каналу связи для того, чтобы воспро-
извести непрерывное сообщение с неточностью не более допустимой,
предложили (Колмогоров) называть £-энтропией.
Критерий е может быть любым. Будем называть два варианта непре-
рывного сообщения, различающихся не более чем на е, эквивалентны-
ми. Например, при телефонной связи один и тот же текст, разборчиво
прочитанный разными дикторами, представляется эквивалентными со-
общениями, хотя эти сообщения могут отличаться даже по спектру.
Критерием эквивалентности здесь является разборчивость.
Будем считать сообщением первичный сигнал B(f). В большинстве
случаев это случайный центрированный процесс (тх = 0) с дисперсией
2
или мощностью (при предположении стационарности процесса)
Под вероятностью передачи непрерывного сообщения будем понимать
вероятность того, что принятое сообщение b (/) эквивалентно передан-
ному b(t). Текущая погрешность воспроизведения е(г) = b (Г) — b(j).
Примем, что среднее значение ё(/) = 0, т. е. систематическая по-
грешность отсутствует. Будем считать сообщения эквивалентными,
/ 2
если а/е (Г) < Eq.
Определим теперь Е-энтропию. Взаимная информация 1(В, В) ме-
жду двумя нетождественно равными непрерывными сообщениями в
общем случае конечна. Причем это количество информации 1(В, В)
зависит не только от статистики процесса £(/), которую определяет
дифференциальная энтропия
й(6) = M[log^] = J<»(B) log ^dB,
В
но и от критерия эквивалентности, который определяется условной
вероятностью <а(В/В), а следовательно, и условной дифференциаль-
ной энтропией h(B/B).
Е-энтропией называется минимальное количество информации,
содержащейся в сообщении B(t) относительно сообщения В(/), при
котором они еще остаются эквивалентными.
Н^В) = min ДВ, В) = h(B) — max.h(B/B).
145
Минимизация проводится по всем условным распределениям w( b /Ь),
для которых выполняется условие
e-энтропия определяет количество существенной информации в
одном отсчете непрерывного сообщения. Рассмотрим наиболее про-
стой случай, а источник — гауссовский, когда сообщение B(f) пред-
2
ставляет собой стационарный гауссовский процесс; рв = о в. Посколь-
ку B(t) = B(t) — е(0, то h(B/B) при заданном сообщении B(t)
полностью определяется шумом воспроизведения е(/), поэтому
max h{B/B) = тахй(е).
Если шум воспроизведения е(0 имеет фиксированную дисперсию
2 2
(или фиксированную мощность) аЕ = е (/), то й(е) согласно свойству
(3.13) имеет максимальное значение при нормальном распределении:
тахй(е) = log ^2леаЕ .
2
При заданной мощности сигнала св дифференциальная энтропия
гауссовского источника
й(В) = log ес2в.
Таким образом, Е-энтропия гауссовского непрерывного источника,
приходящаяся на один отсчет,
_____ ____ 2
ЯЕ(В) = logjlnec} - log^eo* = ^log^f.
Величина р0 = авпредставляет собой минимум отношения "сиг-
нал-шум", при котором сообщения B(t) и B{f) остаются еще эквива-
лентными.
Производительность источника непрерывных сообщений — это
количество информации, которое необходимо передать в единицу
времени для того, чтобы восстановить сообщения при заданном кри-
терии эквивалентности.
146
Если источник выдает независимые отсчеты непрерывного сооб-
щения дискретно со скоростью V, то его е-производительность
И; (В) = ИЯЕ(В) = Ий(В) - log^ea,2].
e-производительность называют также скоростью создания инфор-
мации при заданном критерии верности.
Для источника непрерывных сообщений, ограниченных полосой Fc,
согласно теореме Котельникова шаг дискретизации Д/ = 1/И= 1/2FC.
Если спектр сообщения в полосе Fc равномерен, то эти отсчеты мож-
но считать некоррелированными, а для гауссовского источника неза-
висимыми
2
Д’(В) = 2Д Д(В), Д(В) = Fc log = Fc logp0.
Количество информации, выдаваемое гауссовским источником за
время Тс, определяется так:
2
TcFclog^f,
2
где log -| = Д. — динамический диапазон; Ис = Тс ДД. — объем сигнала, ко-
торый равен максимальному количеству информации, содержащейся в сигна-
ле длительностью Гс (см. п. 1.3).
Для канала с пропускной способностью С, ко входу которого под-
ключен источник с Е-производительностью Н^(В), Шеннон доказал
2
следующую теорему: если при заданном критерии е0 эквивалентности
сообщений источника сообщений его Е-производительность меньше
пропускной способности канала, т. е. < С, то существуют спо-
собы кодирования и декодирования, при которых неточность воспро-
изведения сообщений на приемной стороне будет сколь угодно близка
к Eq . Если НЦВ) > С, то таких способов не существует.
Теорема Шеннона определяет предельные возможности согласо-
вания источника непрерывных сообщений с непрерывным каналом.
Оптимальное или рациональное кодирование непрерывных сооб-
щений без их дискретизации во времени при передаче по непрерыв-
ному каналу пока не находит приемлемой реализации.
147
В простейшем случае, когда канал имеет полосу пропускания, ох-
ватывающую весь спектр сообщения, а уровень аддитивных помех
достаточно низок, используется непосредственная передача непре-
рывного сигнала B(t) без модуляции (обычная телефонная связь в пре-
делах одной АТС).
р
Если на выходе канала —- > р0, то воспроизведенное сообщение
* ш
будет эквивалентно переданному. В общем же случае, как это следует
из теоремы Шеннона, это условие не обязательно для восстановления
сообщения с заданной точностью. Необходимо лишь, чтобы пропу-
скная способность канала превышала е-производительность источ-
ника. При этом условии можно преобразовать сообщение в сигнал
таким образом, чтобы отношение мощности Рв восстановленного
сообщения к мощности шума воспроизведения РЕ на выходе прием-
ника было больше р0, хотя в канале, т. е. на входе приемника имеет
место отношение
что достигается применением помехоустойчивых методов модуляции.
Глава 6
АПОСТЕРИОРНЫЕ ВЕРОЯТНОСТИ
И ОПТИМАЛЬНЫЙ ПРИЕМ СИГНАЛОВ
6.1. ОСНОВНЫЕ ЗАДАЧИ И КРИТЕРИИ ОПТИМАЛЬНОГО ПРИЕМА
Одной из центральных задач при исследовании (синтезе и анали-
зе)различных систем передачи является задача определения опти-
мального алгоритма обработки (приема) сигналов в условиях воздей-
ствия помех.
Задача оптимального приема дискретных и импульсных сигналов
формулируется следующим образом. Предположим, что на вход при-
емника на интервале (О, Т) поступает колебание y(t), которое является
функцией полезного сигнала s(k, t), переносящего сообщение А (не-
прерывное А или дискретное А,-), и аддитивной помехи л(/):
у(/) = 5(Х, /) + «(/) при 0 < t < Т. (6.1)
Статистические характеристики сообщения и помех считаются час-
тично или полностью известными.
В общем случае приемное устройство производит над у(0 некото-
рую операцию £/[•] так, что на выходе приемника получается оценка
сообщения или решение А = С/[у(Г)]. Операция (/[•], которая произ-
водится в приемнике над y(t) для образования решения (оценки) А,
называется правилом решения.
Приемники сигналов, обеспечивающие в определенном смысле
минимальные искажения сообщения А при приеме сигналов в усло-
виях воздействия помех, называются оптимальными или идеальными.
В зависимости от назначения приемника, критерии и количественные
характеристики искажений могут быть разными.
В теории оптимального приема в качестве обобщенного критерия
качества приема сигнала принимается так называемый средний риск [1]
Л = J(A, А) = j J ЛА, А) ИА, A)dAdA, (6.2)
Л А
где /(А, А ) — функция потерь (стоимости, штрафа или цены за неправильные
решения), которая выбирается исходя из задач приема и может быть простой,
149
квадратичной и т. п.; Л и Л — области всех возможных значений А. и Л; w(A.,
Л ) — совместное распределение Л и Л .
Оптимальным правилом решения называется такое, которое обес-
печивает минимум среднего риска R, т. е. при котором выражение
(6.2) минимально.
Выражение (6.2) при регулярном решении можно также предста-
вить в виде:
R = ^w(y)Rydy, (6.3)
где Ry — условный риск, Ry = |w>,(A)/(A, A )dX, здесь wy(X) — апостериорная
л
(условная) плотность распределения вероятностей.
Из приведенных формул видно, что средний и условный риски за-
висят лишь от произведения функции потерь J(k, А.) и апостериорной
вероятности и^(А.) (плотности распределения вероятностей). Таким
образом, оптимальное приемное устройство прежде всего должно вы-
числять апостериорное распределение и^(А.) для всего диапазона воз-
можных значений X и на основании ее анализа принимать решение,
наилучшее с точки зрения некоторого критерия J(K, А.). Известно, что
в ряде весьма важных случаев минимизация среднего или условного
риска при различных функциях потерь приводит к решающему правилу
по максимуму апостериорной плотности распределения вероятностей
(АПРВ). Основное внимание будет уделено именно применению алго-
ритмов максимальной апостериорной вероятности (апостериорной
плотности распределения вероятностей) и максимального правдопо-
добия, которые при определенных условиях сводятся к другим (на-
пример, минимизации средней квадратической погрешности, средней
вероятности ошибки в приеме элементарного символа и т. п.).
6.2. АПОСТЕРИОРНЫЕ ВЕРОЯТНОСТИ
Рассмотрим алгоритмы вычисления апостериорных вероятностей
при различных моделях сигналов полностью известных, с неизвест-
ной начальной фазой и амплитудой, флуктуирующими существенны-
ми параметрами.
Апостериорная вероятность при полностью известных сигналах. Ес-
ли передаваемое сообщение представляет собой непрерывную случай-
ную величину А., то м^,(А.) является апостериорной плотностью распре-
деления вероятностей. Если передаваемое сообщение А.,- — дискретная
150
случайная величина (дискретное сообщение), то му(Х,) есть распре-
деление апостериорных вероятностей. Апостериорная (послеопыт-
ная) плотность распределения параметра X при приеме колебания y(t)
может быть найдена на основании теоремы умножения [12]:
^(Х) = w(A) и-х(у) = k1W(X) wK(y),
где ну (у) — условная вероятность у при данном А, часто называемая функцией
правдоподобия (показывает степень правдоподобия при данном А получить у);
н>(у) — безусловное распределение вероятностей у; w(A) — априорное распре-
деление вероятностей A; Kt — нормируемый множитель.
Следует отметить, что иу(у), w(y) и (А) — многомерные условные
и безусловные плотности распределения вероятностей случайного ко-
лебания у(/). Колебания у(/) необходимо рассматривать как вектор-
столбец, определяемый своими координатами в Н-мерном простран-
стве У= (ур у2, ..., yff), что эквивалентно представлению у(/) в виде
совокупности мгновенных значений (отсчетов), взятых в моменты
времени t2, tH.
Если передаваемое сообщение на интервале наблюдения являет-
ся неизменным, то коэффициент может быть найден из условия
нормировки соответственно для непрерывного X и дискретного А;-
сообщения
Jwy(A)dA = 1, или £ = 1>
л 1= 1
где А — область (шкала) всех возможных значений А; а — число дискретных
сообщений.
Поэтому
кх = [j wA(x)dM '
л
При равномерном распределении и’(А) = 1/А = const можно запи-
сать (когда w(A)— неизвестно)
Wy(A) = X2wxO')- (6.4)
Таким образом, при равномерной априорной плотности распреде-
ления сообщения А определение ну (у) сводится к вычислению функ-
ции правдоподобия иу(у). В теории и на практике оптимального прие-
ма широко используется алгоритм максимального правдоподобия,
151
когда в качестве оценки берется абсцисса точки максимального зна-
чения функции правдоподобия в виде:
для непрерывных сообщений
А. = max{wx(y)} = arg max{wx(y)}, (6.5)
X 6 Л X € Л
для дискретных сообщений (сигналов)
А. ( = max {wx(y)} = atg max {^(у)}, (6.6)
ie I, a ie I, a
при нулевом математическом ожидании.
В дальнейшем в основном будут рассматриваться алгоритмы макси-
мального правдоподобия.
В общем случае определение wx(y) представляет собой весьма
сложную задачу, когда принятое колебание представляет собой адди-
тивную смесь сигнала и помехи [см. выражение (6.1)] и многомерные
плотности вероятности помехи известны, функция правдоподобия
вычисляется сравнительно легко и по виду совпадает с плотностью
распределения для помехи л(/).
При непрерывном наблюдении можно записать
»*х(у) = *п1у(0 _ 01- (6.7)
При дискретном наблюдении выражение для функции правдопо-
добия будет иметь вид:
*10') = “'лО'ь -- Ун) = “'nlb'i “ 4А., zi>L [ун ~ *(А., /н)]} =
= wn0ij,..., лн), (6.8)
гае nh = yh - sa(A.); ja(A) = s(A, th).
Если предположить, что выборки (отсчеты) помехи лА = n(th) пред-
ставляют собой гауссовские случайные величины, образующие про-
цесс с независимыми значениями (белый шум), выражение (6.8) мож-
но записать в виде произведения одномерных плотностей:
и
»*х(У)= П»*п[Уа-^(М], (6.9)
й = 1
гае ^п1ул - sA(X)l =
I
exp
Г V 2
- £ Яа/2стл
- 1
152
Выполнив в выражении (6.9) возведение в квадрат = [уА — j(X, Г)]2
получаем
г н
1 2
н\(и = *зсхр —4 Е^
2ояА=1
ехр Г-^1 expfo(X)],
L 2a2J
где Я= 2Д/,Т= Т/То - число некоррелированных (независимых) отсчетов на
2
интервале наблюдения; стя = 7У0Д£ = N0/2T0 — дисперсия помехи в полосе Л/э;
No — спектральная плотность помехи типа белого шума; То — период опроса.
Тогда, учитывая, что уА — ShW + nh, получим
нн н
ЯМ = 4i Е y/isOhW = 4 Е 5а(х)^Л(х) + -±2 Е ялА)Л(Х) =
®я А = 1 2®я » = 1 2ая А = 1
= «(Х) + Л(Х). (6.10)
Выражение (6.10) представляет собой функцию взаимной корре-
ляции между принятыми колебаниями у(г„) и ожидаемым (опорным)
сигналом-переносчиком 50(Х), которая должна рассчитываться для
всех значений сообщения X (непрерывного или дискретного) и сос-
тоит из сигнальной g(X). и помеховой Л(Х) составляющих.
Средняя энергия сигнала, в общем случае зависящая от сообщения
К или Xz (например, при АИМ- и АМ-сигналах),
н
Е(Х) = Х5А(Х).
А
При непрерывном наблюдении функция взаимной корреляции (пе-
реходя к пределу от То -> 0)
т
?(Х) = |у(0 «(X, f)dz = 9(Х) + А(Х) =
т Т
= тг 0«(Х, 0 + ~ f«(OXXo. Odt (6.11)
я0 J No J
Множитель
г н
1 V1 2
еХР "—2 Е Ун
L 2ст» А = 1
не зависит от X и может рассматри-
ваться как величина постоянная.
153
При использовании сигналов, энергия которых не зависит от X
(т. е. Е(Х) = Е= const), множитель ехр
- 2ол-
может быть также вклю-
чен в постоянный коэффициент.
При указанных допущениях выражение (6.9) можно записать так:
и’хО') = к4 exp[g(X)J
(6.12)
и соответственно с учетом выражения (6.5)
X = тах{<7(Л)}.
Л
Свойства функции взаимной корреляции. Таким образом, при ис-
пользовании алгоритма максимального правдоподобия вычисление
?(Х) является достаточным. В этом случае функция ^(Х) представляет
собой выходной эффект оптимального приемно-фильтрующего уст-
ройства. Если требуется определить лишь наиболее вероятное сооб-
щение X, когда априорные вероятности всех сообщений равны, то вы-
числение wy(X) или и\(у) эквивалентно вычислению лишь ?(Х).
Как следует из выражений (6.10) и (6.11), для получения </(Х) не-
обходимо располагать копией сигнала на приемной стороне. Устрой-
ства, вычисляющие <?(Х) для одного значения X, при непрерывном
(рис. 6.1, а) и дискретном (рис. 6.1, б) наблюдениях называется кор-
релятором, а приемник, вычисляющий <?(Х), — корреляционным. Фор-
мирование ?(Х) при приеме радиосигналов обеспечивает так называе-
мый оптимальный когерентный прием, когда опорные радиосигналы
совпадают с принимаемыми с точностью до фазы.
Как видно из выражения (6.10), функция взаимной корреляции
?(Х) состоит из сигнальной и помеховой составляющих g(X) и й(Х).
Сигнальная составляющая
Я(Х)= ^гс(Х) = 2а2гс(Х), (6.13)
Ло
Т
где Е= р2(Х, z)dz — энергия сигнала (при непрерывном наблюдении); а2 —
о
отношение энергии сигнала Е к спектральной плотности белого шума No; гс —
нормированная корреляционная функция сигнала по передаваемому сообще-
нию X; Хо — значение передаваемого сообщения.
154
Рис. 6.1
Величина
т
гс(Л, Хо) = гс(Х) = 1 z)dz. (6.14)
о
Отсюда
ЯМтах = «тах = 2«2, так как гс (°) = гс (* = М = 1
Вторая составляющая в выражении (6.10) Л (А.) (обычно называемая
шумовой или помеховой) представляет собой функцию взаимной кор-
реляции между сигналом и помехами.
Среднее значение шумовой функции Л(Х) — 0, а дисперсия о2 = 2а2.
Отношение квадрата максимального значения сигнальной функ-
ции g(X) к дисперсии шумовой функции Л(Х)
Рвых = (ЛУАЛых = («max/®2) = 2а2 = , (6.15)
ал
где рс — мощность сигнала s(k, t); Н — число отсчетов при дискретном на-
блюдении на интервале Т.
Операция образования функции взаимной корреляции (6.10) обес-
печивает наилучшую фильтрацию сигнала из гауссовского шума, да-
вая по сравнению с другими операциями максимальное отношение
сигнала к шуму на выходе коррелятора [см. выражение (6.15)].
Подобное качество фильтрации и 5^ых может обеспечить также со-
гласованный фильтр (см. гл. 10).
Структура функции взаимной корреляции при приеме аналоговых им-
пульсных широкополосных сигналов типа АИМ-ЧМ и ФИМ. Широко-
полосными указанные сигналы называются в том случае, когда их число
степеней свободы М (индекс пиковой модуляции) больше единицы:
Л/= Д/?эс7'и > 1,
где Д/^ — эффективная ширина спектра импульсного сигнала; 7И — время
наблюдения при ФИМ или длительность сигнала при АИМ-ЧМ.
В этом случае функцию правдоподобия или функцию взаимной
корреляции на шкале передаваемого сообщения Л можно разбить на
два участка: сигнального пика g(X.) и шумовой дорожки й(Х). Первый
155
участок, образуемый главным пиком g(k), определяет точность, с ко-
торой может быть оценено значение передаваемого сообщения Хо
(или соответствующего параметра сигнала: частоты, временного по-
ложения и др.). Шумовая функция й(Х) на этом участке приводит к
некоторым флуктуациям максимума сигнальной функции g(k) вдоль
оси абсцисс и соответственно при больших значениях отношения "сиг-
нал-помеха" — к небольшим нормальным погрешностям в оценке пе-
редаваемого сообщения (или соответствующего параметра сигнала).
Эти погрешности обычно не выходят из области сигнального пика g(X)
и обычно характеризуются дисперсией нормальной погрешности, оп-
ределяемой, например, на основании теории статистических оценок
(см. п. 8.3). Они характеризуют точность передачи (измерений).
Второй участок шумовой дорожки образуется в основном шумовой
составляющей й(Х) функции взаимной корреляции <?(Х) и состоит из
последовательности изолированных и случайно возникающих сигна-
лоподобных выбросов (пиков). Чем меньше отношение "сигнал—по-
меха", тем чаще и более четко они проявляются.
В этом случае функция правдоподобия и функция взаимной кор-
реляции могут иметь мультимодальный характер. В результате этого
один из шумовых выбросов может превысить по амплитуде сигналь-
ный пик (при пороговом алгоритме работы решающего устройства
превысит порог) и воспринимается в качестве сигнального, что при-
водит к появлению ненормально большой аномальной погрешности
в оценке передаваемого сообщения (или измеряемого параметра сиг-
нала). Аномальные погрешности обычно оцениваются по вероятности
их появления на шкале сообщения (ран) и характеризуют достовер-
ность приема.
Из-за указанных явлений оценка помехоустойчивости аналоговых
широкополосных сигналов при оптимальном и любом реальном прие-
ме должна проводиться по двум указанным показателям: дисперсии
2
нормальной погрешности он и вероятности появления аномальных
ошибок ран (см. п. 8.3).
Гауссовские плотности распределения вероятностей для выходно-
го эффекта q(k) определяются выражениями:
при отсутствии полезного сигнала ^(0) = q
при наличии полезного сигнала <?(Л) = q
(6.16)
w[g(X)] =
2 2'
(9-Рвых)
2РвЫХ
156
Структурная схема приемника при полностью известных сигналах.
Как следует из выше изложенного, полная схема оптимального при-
емного устройства должна состоять из приемно-фильтрующего уст-
ройства, вычисляющего апостериорную плотность распределения ве-
роятности или функцию взаимной корреляции #(Х) для всей шкалы
передаваемого непрерывного X или всех дискретных сообщений X, и ре-
шающего устройства, выдающего оценку передаваемого сообщения,
например, в соответствии с алгоритмом максимального правдоподобия.
Для построения схемы оптимального корреляционного приемного
фильтрующего устройства, обеспечивающего вычисление ^(Х) для
всех возможных значений X, могут быть использованы: многоканаль-
ные схемы одновременного анализа, одноканальные схемы с после-
довательным анализом, комбинированные схемы. При помощи этих
схем имеется возможность последовательного или параллельного на-
хождения значений функции <?(Х) во всей априорной области переда-
ваемого сообщения.
Один из вариантов функциональной схемы многоканального оп-
тимального корреляционного приемника с одновременным вычисле-
нием </(Х) для всех значений непрерывного параметра X или а дис-
кретных сигналов представлен на рис. 6.2. Схема такого приемника
состоит из пк схем одноканальных корреляторов, генератора опорных
сигналов и решающего устройства. На каждый перемножитель со схе-
мы генератора опорных сигналов подаются свои опорные сигналы,
представляющие собой копии полезных сигналов с дискретными зна-
чениями сообщений X. Разность между соседними значениями сооб-
щений берется для всех каналов одинаковой. Число каналов пк долж-
но выбираться исходя из требований точности воспроизведения
функции <?(Х) по ее дискретным значениям. Минимальное число ка-
налов, очевидно, может быть взято, равным числу степеней свободы
Рис. 6.2
157
сигнала переносчика, приходящего за один независимый отсчет со-
общения (Л/» Л/ел), или числу дискретных сигналов $(1,, г). Часто для
перекрытия шкалы непрерывного сообщения число каналов пк = М+ 1.
Приведенная схема корреляционного приемника является опти-
мальной и для приема полностью известных дискретных сигналов,
причем число каналов (корреляторов) пк должно быть равно числу
дискретных сигналов а, т. е. пк - а.
Решающее устройство работает как детектор максимального сиг-
нала (ДМС), выделяя из а сигналов сигнал с максимальной амплиту-
дой в конце тс.
Апостериорная вероятность для сигнала со случайной амплитудой и
начальной фазой. Модель сигнала со случайной амплитудой Ас и на-
чальной фазой <р можно, например, представить в виде:
s(k, t, Ас, <р) = Асi[(z) cos[<oqZ + 0С(Л, f) + ф], 0 < t < тс, (6.17)
где Ас > 0 — амплитуда, являющаяся постоянной величиной в течение дли-
тельности сигнала и распределенная по закону, например, Релея, Накагами и
хо
др.; 5|(/) — огибающая с единичной энергией (J 5, (tyit = 1); 0С(Х, 0 — мед-
о
ленно меняющаяся функция времени, обусловленная частотной или фазовой
модуляцией; ф — неизвестная случайная начальная фаза, обычно равномерно
распределенная на интервале [0, 2л].
Уравнение для апостериорной вероятности, считая параметры Ас и
Ф несущественными, запишем так:
wy(k) = J |ну(Х, Ас, ф) »(ЛС, ф)дфс!Лс. (6.18)
2it о
Принимая Ас, X и ф статистически независимыми
w(X, Ас, ф) = w(X) н’(Лс)и>(ф),
можно записать
wy(X) = J»(ЛС)[ J wy(^ Л- Ч>)**'(<p)d<pjdHc. (6-19)
о 21t
Найдем сначала интеграл в квадратных скобках, обозначив его че-
рез <оу(к, Ас). Рассмотрение этого интеграла имеет самостоятельное
значение для случая оптимального приема сигналов с неизвестной на-
чальной фазой.
158
Выражение для апостериорной вероятности и^(Х, Ас) при гауссов-
ском распределении помехи
wy{\, Лс) = кх w(k, Лс) Z0[|g(X, Лс)|],
где /0[»] — модифицированная функция Бесселя нулевого порядка [12].
Здесь
[|<7(Х, Лс)|] = Лс Jg?(X) + ^(X) (6.20)
является модулем (огибающая) комплексной корреляционной функ-
тс
ции; ?(Х, Ас, <р) с Ас = 1, где qx 2U) = у Jy(0^i,2(^> *№ ~ квадратур-
0 о
ные составляющие функции взаимной корреляции; 5,(Х, /), s2(k, t) —
квадратурные, т. е. сдвинутые на 90°, опорные сигналы.
При работе приемника в соответствии с алгоритмом максимально-
го правдоподобия, учитывая монотонность функции Бесселя /о[0],
необходимой и достаточной операцией оптимального приемника яв-
ляется вычисление модуля функции взаимной корреляции |?(1)|.
Структурная схема устройства, вычисляющего модуль |<?(Х)| для од-
ного значения Х,при непрерывном наблюдении приведена на рис. 6.3.
Это устройство обычно называется коррелятором с квадратурными ка-
налами. Модуль функции взаимной корреляции можно также полу-
чить, используя оптимальный согласованный фильтр и детектор оги-
бающей (рис. 6.4).
На выходе рассмотренных приемников отношение "сигнал—поме-
ха" также определяется выражением (6.13) или (6.14). При случайной
амплитуде сигнала Ас структурная схема приемника будет такой же
как на рис. 6.2, изменятся лишь закон распределения модуля функции
взаимной корреляции.
Приведем выражения для ПРВ входного эффекта |?(Х)| при нали-
чии флуктуаций только фазы и амплитуды сигнала.
Если во входном колебании y(t) полезный сигнал отсутствует, то
выходной эффект |?(0)| распреде-
лен по закону Релея:
Г 2 1
и’[к(0)|] = ехр —
Рвых I- 2рвых-
где |g(0)| = q определяется формулой
(6.20), а РВЬ1Х — формулой (6.14) при
(6.21)
Рис. 6.3
гс = 1.
159
yitj
Согласованный, фильтр
[ - - — , у
-—Амплитудный детектор ।— -»
Рис. 6.4
Если во входном колебании y(f) присутствует сигнал с неизвест-
ной фазой и параметром X, то ПРВ определяется обобщенным за-
коном Релея:
ИкМП = -^-ехр
Рвых
г 2 4
Я +РВых
1 2
2РВЫХ J
(6.22)
W)
Соответственно при флуктуациях амплитуды и фазы выражение (6.22)
можно записать в виде
w(kU)|] = ЯРвыхО + °>5Рвых
) ’ехр
2 2
L 2р^ых(1 + 0,5p2bIX)J
(6.23)
6.3. АПОСТЕРИОРНЫЕ ВЕРОЯТНОСТИ И СТРУКТУРА ОПТИМАЛЬНЫХ
ПРИЕМНИКОВ СИГНАЛОВ СО СЛУЧАЙНЫМИ СУЩЕСТВЕННЫМИ
СОПУТСТВУЮЩИМИ ПАРАМЕТРАМИ
Неинформативные сопутствующие параметры сигналов обычно
подразделяются на существенные и несущественные. К существен-
ным сопутствующим параметрам относится прежде всего время при-
хода и частота сигнала, так как усреднение по времени прихода и час-
тоте приводят к существенному ухудшению помехоустойчивости.
Фаза сигнала при когерентном приеме также относится к существен-
ным параметрам.
При приеме сигналов со случайными существенными параметрами
необходимо проводить измерение (оценку) этих параметров и форми-
ровать опорные сигналы для оптимальной корреляционной обработки
с учетом этих измерений. Измерение существенных случайных пара-
метров обеспечивает обычно специальное устройство, часто называе-
мое системой синхронизации.
Выражение для апостериорной плотности распределения вероят-
ностей относительно информационного параметра (сообщения) X.
имеет вид:
иу(х) = J »»>*. (X) wy(bj)dbj,
где wy(bj) — апостериорная плотность распределения существенного парамет-
ра Ь} сигнала (частоты, фазы, временной задержки); wyb^ (А) — апостериорная
плотность распределения сообщения А при условии, что сопутствующий па-
раметр сигнала bj известен.
160
Рис. 6.5
Если wv(hy) достаточно узка (когда измерение параметра сигнала bj
возможно с достаточной точностью), так что при интегрировании ее
приближенно можно принять за дельта-функцию, то
Wy(6y) = 8(6у - bj),
Vх) “ wybjW = wy(V*/), (6.24)
где bj — оценочное значение неизвестного параметра bj, которое может быть
получено, например, на основании критерия максимального правдоподобия
или другим методом.
Итак, в условиях случайности (неопределенности) относительно
некоторых существенных параметров сигнала оптимальный прием-
ник должен формировать функцию правдоподобия wx(y) или функ-
цию взаимной корреляции «/(Х) при оценочных значениях неизвест-
ного параметра сигнала bj.
Рассмотрим структурную схему оптимального корреляционного
приемника а дискретных сигналов со случайными существенными
параметрами (рис. 6.5), содержащую обычный корреляционный при-
емник, дополненный устройством оценки (синхронизации) неизвест-
ных существенных параметров сигнала-переносчика (начальной фазы
<р и тактовой частоты £2у). Система синхронизации может работать
только по информационным сигналам или для ее функционирования
могут передаваться специальные синхронизирующие сигналы. Так
как в условиях помех оценить параметры bj можно лишь с определен-
ной погрешностью, то помехоустойчивость таких приемников ниже,
чем приемников полностью известных сигналов.
161
6.4. ОСНОВНЫЕ СООТНОШЕНИЯ ТЕОРИИ ОПТИМАЛЬНОГО
И АСИМПТОТИЧЕСКИ ОПТИМАЛЬНОГО ПРИЕМА
ПРИ НЕГАУССОВСКИХ ПОМЕХАХ С НЕЗАВИСИМЫМИ ЗНАЧЕНИЯМИ
В реальных условиях помехи в большинстве случаев имеют нега-
уссовские законы распределения. Рассмотрим структуру приемников
для этого случая.
Предположим, что на вход приемника поступает аддитивная смесь
импульсного сигнала •$(>., t, b,) и помехи n(f)
Y(t) — sfk/, t, bj) + n{t), при 0 < t < тс.
Здесь s^kj, t, bj) — сигнал длительности тс, являющийся функцией
передаваемого сообщения времени t и случайных параметров (су-
щественных или несущественных) сигнала Ь, (частоты, фазы, времен-
ной задержки) при полностью известных сигналах bj = 0 для всех j.
Рассмотрим алгоритм максимального правдоподобия [см. выраже-
ния (6.5), (6.6), (6.12)], где для аддитивной помехи с независимыми
значениями wy(X) и 1п[и\(у)] соответственно определим выражения
вида (6.9)—(6.10) (см. п. 6.1):
н
*\(у) = П In “ ja<x> fyJ;
A = 1
С н i
= lid w„ \yh - sh(k, *,.)!
Ц= i J
(6.25)
(6-26)
где wn(n1; ..., nH) — //-мерная ПРВ негауссовской помехи; bj — неинформа-
тивный параметр сигнала.
При экспоненциальном характере wn(n) или его экспоненциаль-
ной аппроксимации выражение для q(X) можно записать в виде:
?(*) = £Z0[yA-5A(\.,/,*y)]. (6.27)
А = 1
В этом выражении
является характеристикой оптимального блока нелинейного преобра-
зования. Структурная схема такого оптимального приемника приве-
162
дена на рис. 6.6 и содержит информационные каналы и канал оценки
параметров bj - каналы высокочастотной, тактовой СВС, СТС син-
хронизации. Согласно выражению (6.27) оптимальный алгоритм
приема сигналов является нелинейным (с нелинейностью вида
ln[wn(n)]) и только в частном случае, когда помеха является гауссов-
ской обращается в линейный корреляционный алгоритм.
Алгоритм (6.27) является оптимальным при помехе, имеющей лю-
бое распределение. При этом оптимальность работы данного алгорит-
ма не нарушается при любых отношениях "сигнал—помеха", так как
при его синтезе на значение отношения "сигнал—помеха" не накла-
дывалось никаких ограничений.
Техническая реализация алгоритма (6.27) сводится к нелинейному
преобразованию [по закону lnwn(n)] разности у(г) — 5,(Х„ бу) в виде
функции 2о(и) и последующему интегрированию (суммированию) на
интервале длительностью тс. Этот алгоритм не имеет в своем составе
операции умножения, что делает его в некоторых случаях более про-
стым в технической реализации. Однако опорные сигналы на при-
емной стороне должны формироваться с точностью до амплитудно-
го значения.
Установим связь оптимального приемника с асимптотически оп-
тимальным приемником (АОП). Концепция асимптотически опти-
мальных алгоритмов приема (обработки) сигналов состоит в том, что
при дискретном наблюдении, неограниченном увеличении выборки
(Я-> оо) и стремлении амплитуды сигнала к нулю $,(/) -> 0 отыски-
вается асимптотически достаточная статистика, распределение кото-
рой сходится к нормальному [12]. Принимается, что асимптотически
оптимальный приемник (АОП) также работает в соответствии с пра-
вилом максимального правдоподобия. Разложим выражение (6.27) в
БНП
Рис. 6.6
163
ряд Тейлора вокруг точек yh и, отбросив все члены выше первого по-
рядка, найдем алгоритм асимптотически оптимального приемника:
н
£Zeo(yA)5A(X,9,
Л= 1
(6.29)
в котором
Zao(yh> = d ln wn(y^/dy
(6.30)
является характеристикой асимптотически оптимального блока нели-
нейного преобразования (БНП) мгновенных значений входного ко-
лебания.
Асимптотически оптимальный приемник дискретных сигналов
(рис. 6.7, а, б) состоит из приемника, оптимального по отношению к
гауссовской помехе (например, корреляционного) и безынерционного
нелинейного преобразователя БНП с амплитудной характеристикой,
зависящей от одномерной плотности распределения помехи wn(n) в
соответствии с выражением (6.30). При гауссовской помехе алгоритм
(6.29) переходит в алгоритм (6.10). Таким образом, АОП является ча-
стным случаем более общего оптимального алгоритма (6.27), когда со-
блюдается условие малости сигнала.
Если в выражении (6.29) формально дискретные операции заме-
нить соответствующими аналоговыми, то приближенно при Н » 1
Рис. 6.7
164
алгоритм (6.29) для непрерывного времени можно записать в виде
(Г0->0)
9(М ~ у- [ Zao 1Я0] *(>-. f)d'-
(6.31)
Максимальное отношение "сигнал—помеха" (при bj = 0) на выходе
2
оптимального приемника при гауссовских помехах рВЬ|Х г и асим-
птотически оптимального приемника при негауссовских широкопо-
2
лосных помехах с симметричным распределением рвых н г соответ-
ственно при дискретном и непрерывном времени наблюдения
определяется выражением [12]
Рвых н г = Рвых г РаО = РсНР/а1 = ^Рао/^О = 2“2РаО > (6-32)
в котором
Н ТС
Рс = i z ^2(М « 7- / Ах, t)dt
Л= I с 0
является средней мощностью элементарного сигнала s(kb t); Н= ic/T$ — число
независимых выборок на длительности сигнала тс-символа; о2 — дисперсия по-
мехи; £[ = Рстс — энергия сигнала (символа); No = 2 о2 То — эквивалентная
спектральная плотность мощности белого (например, негауссовского) шума;
a2 = E^/Nq — отношение энергии сигнала к спектральной плотности мощ-
ности помехи.
При неточном измерении флуктуирующих параметров сигнала bj
отношение "сигнал—помеха" меньше значения, определяемого выра-
жением (6.32):
Рвых = 2а2гс(0, Дбу)p„o , (6.33)
где гс(0, Д/у) — нормированная функция корреляции сигнала по соответст-
вующему параметру bj- &bj = (bj — bj) — погрешность в оценке параметра bj.
В соответствии с выражением (6.15)
Рвых г —
165
представляет собой отношение "сигнал—помеха" на выходе приемни-
ка, оптимизированного к гауссовскому белому шуму. В выражении
(6.33) параметр
05
Мао = стп7фп1 = стп f и,п(")П2и’п<л)с,л <6-34)
—СО
представляет собой коэффициент, характеризующий амплитудное по-
давление негауссовской помехи в асимптотически оптимальном БНП
по сравнению с линейным приемником при воздействии гауссовской
помехи.
Значение
00
/фп1 = [ wn(M)|}2wn(n)dM (6.35)
—СО
отражает информацию по Фишеру относительно помехи с одномер-
ным распределением wn(n).
2
Всегда цао > 1, причем равенство имеет место лишь при гауссов-
ской помехе. На рис. 6.8 приведены выражения и графики для обоб-
щенной гауссовской ПРВ помех wn(n), характеристик БНП ZaH(n) и
,, 1
коэффициентов амплитудного подавления цао :
а) — wn(n); обобщенное гауссовское распределение
и-(л) = А(у) exp{[-Ti(anv)[n[]v}> А(у) = , n(o, v) = ± *Z2;
6) -Z(n) = -£- = 1п(апу)Г|лГ - ’sgn n;
on
v2r(3W2v^l)
B) “ Mao = CTn f lnwn(«)] B'n(")dw- Mao = --'
В случае гауссовского распределения нелинейный четырехполюс-
ник превращается в линейный с коэффициентом передачи
Z(y) = Z(n) = у/ст2 = л/ст2 , /фп1 = 1/о2 .
Схема приемника вырождается в схему оптимального корреляци-
онного приемника, причем ца0 = 1. Отметим, что БНП, характерн-
ее
Рис. 6.8
стика которого согласована с ПРВ помехи в соответствии с выраже-
нием (6.30) и>п(и) изменяет отношение "сигнал—помеха" на его выходе
2 2
в цао раз. Получить в аналитической форме выражение для рвых и
цао при оптимальном приеме в соответствии с алгоритмом (6.27) при
негауссовских помехах пока не удалось.
Приведенные и другие данные показывают, что нелинейное ам-
плитудное подавление негауссовских помех может быть весьма суще-
ственным, причем подавление тем сильнее, чем сильнее распределе-
ние помехи отличается от гауссовского.
Анализ показывает, что асимптотически оптимальный приемник
сигналов с неизвестной равномерно распределенной фазой и флук-
туирующими амплитудой и фазой, отличается от аналогичной схемы
в случае гауссовской помехи (см. рис. 6.5) наличием на входе блока
нелинейного безынерционного преобразования.
В ряде случаев, особенно при использовании радиоканалов, когда
используются узкополосные радиосигналы, а помехи также имеют по-
лосовой спектр, структура асимптотически оптимального приемника
в общем случае получается отличной от полученной для широкопо-
лосных негауссовских помех [25].
При работе в реальных условиях из-за неполной априорной ин-
формации о помехах и других причин точное согласование характе-
ристики БНП в АОП с ПРВ помехи в большинстве случаев оказыва-
ется затруднительным. В этом случае коэффициент амплитудного
167
подавления при симметричных
wn(n) определяется выражением
относительно нуля распределениях
оо
Мрв = °п J Zp(n)"n(ri'
(6.36)
где Zp(n) — реальная характеристика БНП.
В зависимости от степени согласования Zp(n) и wn(n) коэффициент
2 с ,
цр может быть больше или меньше единицы.
Учитывая, что часто условия асимптотически оптимального прие-
ма и сделанные допущения не соблюдаются, приведенные расчетные
2 2
выражения для цОа и цра следует рассматривать как оценки "сверху”,
не всегда достижимые.
В реальных условиях использования нелинейной обработки вслед-
ствие изменения статистических характеристик помех и невозможности
(или нежелательности) построения адаптивных нелинейных преобра-
зователей имеет место ухудшение подавления помех по сравнению с
оптимальным БНП.
В табл. 6.1 представлена матрица значений коэффициента подав-
2
ления цра =/(v, Pj) для обобщенного гауссовского представления по-
мехи w(n, и) при условии, что в качестве БНП могут использоваться
различные нелинейности Zp(n, и(), определяемые по выражению (6.29)
для того же обобщенного гауссовского распределения с параметром Рр
Таблица 6.1
Параметр БНП Параметр помехи, v
0,6 0,8 1,0 2,0 5,0 10,0
0,6 28,4 3,0 0,97 0,16 0,08 0,07
0,8 19,4 4,2 1,82 0,43 0,23 0,21
1,0 11,7 3,8 2,0 0,63 0,38 0,35
2,0 1.0 1,0 1.0 1.0 1,0 1,0
3,0 0,09 0,2 0,33 0,85 1,39 1,57
10,0 0 0 0 0,003 1,06 3,18
168
При v = V] характеристика БНП согласована с ПРВ помехи, и
2 2
цра = рао, значения которых приведены по диагонали матриц. Эти
значения совпадают со значениями, приведенными на рис. 6.8.
Из табл. 6.1 следует, что несогласованность характеристики БНП
с ПРВ помехи может в отдельных случаях приводить к существенному
ухудшению помехоустойчивости приемника.
2
Коэффициент цра позволяет сравнить приемники с различными
БНП с оптимальным или реальным приемником без БНП.
Из приведенных данных следует, что в общем случае при неполной
априорной информации о помехах характеристика БНП должна быть
адаптивной или робастной (от английского слова "robust" — грубый,
стабильный) {12, 25J.
Проведенные исследования показывают, что при синусоидальных
помехах достаточно эффективным робастным БНП является нели-
нейность с зоной нечувствительности, а при импульсных помехах —
ограничитель с логарифмической нелинейностью или БНП бланки-
рующего типа.
Оптимальные приемные устройства при работе в коррелированных
помехах должны содержать обеляющий фильтр (декоррелятор помехи
ДКП) для подавления коррелированной помехи, который часто на-
зывается частотным.
Подавление гауссовской помехи происходит только вследствие ее
декорреляции. При негауссовской коррелированной помехе подавле-
ние имеет место благодаря декорреляции и нелинейному подавлению.
В общем случае линейный декоррелятор помехи должен быть со-
гласован со спектральной плотностью мощности (корреляционной
функцией) помехи и спектром полезного сигнала. Расчет линейных
оптимальных обеляющих фильтров можно выполнять на основании
теории согласованной фильтрации (см. п. 10.3) или теории оптималь-
ной линейной фильтрации (см. п. 8.1).
Глава 7
СТАТИСТИЧЕСКАЯ ТЕОРИЯ ОБНАРУЖЕНИЯ
И РАЗЛИЧЕНИЯ СИГНАЛОВ
7.1. КРИТЕРИИ И АЛГОРИТМЫ ОПТИМАЛЬНОГО ОБНАРУЖЕНИЯ
СИГНАЛОВ ПРИ БЕЛОМ ГАУССОВСКОМ ШУМЕ
Пусть принятое колебание
y(t) = Xs(t) + n(t), 0 < / > тс, (7.1)
где n(t) — белый гауссовский шум (помеха); s(t) — полезный полностью из-
вестный сигнал; тс — длительность сигнала.
Параметр X является неизвестным и может принимать только одно
из двух значений: X = 1 [в принятом колебании y(t) присутствует сиг-
нал 5(0] и X = 0 (в принятом колебании сигнал отсутствует).
По принятой реализации y(t) необходимо оптимальным образом
установить, присутствует или отсутствует сигнал. Задача оптимально-
го обнаружения является частным случаем задачи различения (распо-
знавания) сигналов.
Наиболее широко используются два критерия оптимального обна-
ружения: идеального наблюдателя и Неймана-Пирсона. На основании
общей теории оптимального приема (см. гл. 6) оптимальный обнару-
житель в обоих случаях должен вычислять апостериорные вероятно-
сти или однозначно связанные с ними функции правдоподобия или
функции взаимной корреляции для двух указанных случаев наличия
и отсутствия сигнала. В большинстве случаев необходимой и доста-
точной операцией является вычисление функции взаимной корреляции
и сравнение ее с определенным оптимальным образом подобранным по-
рогом. Часто (особенно в радиолокации) с порогом сравнивается от-
ношение правдоподобия.
Основными элементами оптимального обнаружителя являются
коррелятор (или эквивалентный ему согласованный фильтр) и поро-
говое устройство, выполняющее роль решающего устройства.
Критерий идеального наблюдателя применяется, когда известны ап-
риорные вероятности наличия сигнала w(l) и отсутствия сигнала w(0).
При наличии помех решение о наличии или отсутствии сигнала
всегда сопровождается ошибками двух видов: при отсутствии сигнала
170
принимается неправильное решение о его присутствии; при присут-
ствии сигнала принимается решение о его отсутствии.
Обозначим соответствующие вероятности через р0 = р(1/0) и
Р{ = /’(0/1):
СО Н
Pq = j w(q/0)dq, р\ = j w(q/\)dq, (7.1)
н о
где и>(?/0) = н>0(?) = и>п(?), w(q/\) = (?) = и>сп(?) — апостериорные плотности
вероятности функции q соответственно при отсутствии и наличии сигнала.
Параметр
’с
? = 2|y(/)^(/)d//^ (7.2)
о
представляет собой функцию взаимной корреляции, являющуюся ло-
гарифмом функции правдоподобия [см. формулу (6.12)].
Средняя вероятность суммарной ошибки
Pz = Рй +Р\, (7.3)
а вероятность правильного обнаружения сигнала
(7.4)
Согласно критерию идеального наблюдателя пороговый уровень Н
устанавливается таким, чтобы вероятность правильного обнаружения
была максимальной, а вероятность pz — минимальной.
В соответствии с выражением (6.10) решение о наличии сигнала
принимается при выполнении неравенства (при непрерывном време-
ни наблюдения) с учетом выражения (6.3)
?(1) = 2p(/)5(/)d//y0 > E/No + 1п[и>(0)/и>(1)] = й, (7.5)
О
хс
где Е = j[s2(z)]dr — энергия сигнала на интервале тс; No — спектральная плот-
fl
ность мощности помехи типа белого шума.
Рис. 7.1
171
Из формулы (7.5) следует, что значение функции взаимной корре-
ляции сравнивается с порогом
Н = E/Nq + in w(0)/w( 1). (7.6)
Структурная схема устройства обнаружения приведена на рис. 7.1.
Критерий Неймана—Пирсона применяется в основном в радиоло-
кации и железнодорожной автоматике, когда априорные вероятности
w(l) и w(0) неизвестны или вероятности р0 и существенно нерав-
нозначны.
Если априорные вероятности неизвестны, то задача обнаружения
сигнала решается на основании отношения правдоподобия. Для пол-
ностью известных сигналов при непрерывном времени наблюдения:
А(1) = exp
-j 1Я0 - •?(j')]2d'/A,0}|/exp -j n2(f)At/Nn} s h0
о ' о
или
9=2jy(r)J(0d//M) *
0
(7.7)
(7.8)
t. e. если отношение правдоподобия (функция взаимной корреляции)
превышает порог Н, то принимается решение о наличии сигнала, в
обратном случае принимается решение об отсутствии сигнала.
Вероятности р0 и в радиолокации часто называются соответст-
венно вероятностью ложной тревоги и пропуска сигнала (цели):
F=Po и дпр = Р|.
Вероятность правильного обнаружения обычно обозначается D.
Можно показать, что критерии идеального наблюдателя и Нейма-
на-Пирсона базируются на отношении правдоподобия (функций
взаимной корреляции) и отличаются правилом выбора порога.
В случае присутствия детерминированного сигнала функция вза-
имной корреляции при гауссовской
помехе имеет гауссовскую ПРВ
со средним значением и дис-
персией:
«1 = 2£/У0 = РвЫХ г;
о2 = 2£/У0 = РвЫХ г.
172
При отсутствии сигналаy(t) = л(/) функция взаимной корреляции так-
же имеет гауссовскую ПРВ w0(q), причем = 0, = 2E/N0 = р8ЫХ г.
Плотности вероятности w0(g) и W[(q) изображены на рис. 7.2.
7.2. РАСЧЕТ ВЕРОЯТНОСТЕЙ ПРАВИЛЬНОГО ОБНАРУЖЕНИЯ И ЛОЖНОЙ
ТРЕВОГИ ПРИ РАЗЛИЧНЫХ МОДЕЛЯХ СИГНАЛОВ И ПОМЕХ
Подробный анализ проведем лишь для простейшего случая обна-
ружения детерминированного сигнала. Для других случаев приведем
конечные результаты.
Обнаружение детерминированного сигнала. В соответствии с кри-
терием Неймана—Пирсона должна задаваться вероятность ложной
тревоги, т. е. вероятность превышения помехой порогового уровня Н
(Е= р0):
F= j w0(<7)d9 = ПЯ/(2£/У0)|/2]. (7.9)
н
00
Здесь ГДзс] = (1/(2тг),//2] |ехр(—z/2)dz < 1/2 — дополнение к интегралу вероят-
ностей (см. приложение 1).
При этом вероятность правильного обнаружения
D = J W{{q)dq = И1Л7(2£/^о)'/21 - (2E/No)'/2}. (7.10)
н
Формулы (7.9) и (7.10) показывают, что Fm Л однозначно опреде-
ляются отношением порогового уровня Н к отношению "сигнал—по-
меха" 2E/N0.
При применении критерия Неймана—Пирсона значение вероят-
ности ложной тревоги F задается заранее. Пороговый уровень Н на-
ходится после этого из формулы (7.9), а результирующая вероятность
обнаружения D определяется по формуле (7.10) для детерминирован-
ного сигнала.
В частности, на основании изложенного правила из выражения (7.9)
находим пороговый уровень //пор для критерия Неймана—Пирсона
Япор= ЛаагсИ(Г). (7.11)
173
Решая совместно уравнения (7.11) и (7.9), находим
р2 = 2а2 = аге Г(Г) + аге Г(1 - D),
где символ аге означает обратную функцию.
На рис. 7.3 дана зависимость вероятности правильного обнаруже-
ния D от отношения "сигнал—помеха" [2E/N0]1^2 для различных зна-
чений вероятности ложной тревоги F.
На рис. 7.4 представлено семейство рабочих характеристик обна-
ружителя детерминированного сигнала в белом гауссовском шуме для
различных значений отношения "сигнал—помеха" pr = (2E/N0)1^2.
Обнаружение сигнала со случайной начальной фазой при белом га-
уссовском шуме. Сигнал со случайной фазой
s(t) = Um cos(2nft + 0); 0 < t < T.
Все параметры сигнала предполагаются известными, за исключе-
нием начальной фазы 0, которая считается случайной равномерно
распределенной величиной на интервале (—л, +л). Основные соотно-
шения для этого случая применительно к задаче обнаружения сигнала
приведены в п. 6.2. В частности, выражение для плотности распреде-
ления вероятностей выходного эффекта обнаружителя при наличии и
174
Рис. 7.5
отсутствии сигнала соответственно определяются (при условии, что
амплитуда сигнала не флуктуирует) зависимостями (6.22) и (6.23).
Структурная схема обнаружителя приведена на рис. 7.5 и соответ-
ствует схеме (см. рис. 6.4).
В соответствии с критерием Неймана—Пирсона соответственно
вероятность ложной тревоги и вероятность правильного обнаружения
F= J H>(2/0)de = ехр(—Лд/2), Но = Л/(£^/2)|/2, (7.12)
"о
00
D~ j w(Q/l)dQ (выражается через табулированную функцию) [26J,
«о
где НО/1) = Will?11; w<O/0) = w0[|?|].
На рис. 7.6 приведены расчетные графики для вероятности пра-
вильного обнаружения D как функции отношения "сигнал—помеха"
для различных значений вероят-
ности ложной тревоги Г для сиг-
нала со случайной фазой.
Сравнение этих кривых с кри-
выми (см. рис. 7.4) показывает,
что для получения данной вероят-
ности обнаружения D при одина-
ковой вероятности ложной тревоги
F при случайной начальной фазе
требуется ббльшее отношение "сиг-
нал-помеха”.
Аналогично могут быть полу-
чены соответствующие зависимо-
сти для других моделей сигналов и
помех [26].
Обнаружение сигналов при
асимптотически оптимальном прие-
ме и негауссовских помехах. В со-
ответствии с данными пп. 6.3, 7.1
и 7.2 структурная схема обнару-
жителя состоит из оптимального
обнаружителя при гауссовской
Рис. 7.6
175
помехе и включенного перед ним безынерционного нелинейного пре-
образователя БНП, характеристика которого связана с ПРВ помехи и
определяется формулой (6.30).
Соответственно расчет вероятности ложной тревоги и правильного
обнаружения может рассчитываться по формулам (7.9)—(7.11), если в
них под отношением энергии сигнала к спектральной плотности
мощности понимать отношение на выходе БНП с учетом подавления
негауссовской помехи, т. е. (соответственно при непрерывном и дис-
кретном наблюдении):
Рнег = Е mL /No = РСН /2ол. (7-13)
где ц2 — коэффициент подавления негауссовской помехи, определяемый по
формуле (6.34); Рс — мощность сигнала; Н — число выборок (отсчетов) на ин-
2
тервале наблюдения; ол — дисперсия помехи.
В частности, вероятность ложной тревоги F и правильного обна-
ружения D при асимптотически оптимальном обнаружении полно-
стью известного сигнала в соответствии с формулами (7.9)—(7.13)
СО
F= fH-0(9)d<7= V[Hfaao(2E/N0')1'2]; (7.14)
о
«О
О = f B>((9)d9 = Н|Я/цао(2Е/^)|/2] - ц(2£/^)1/2}. (7.15)
о
Расчет параметров обнаружения F и D при негауссовских помехах
может вестись по графикам (см. рис. 7.3—7.6), если под рвых понимать
I 2 2~ 2
^2а цао при гауссовских помехах = 1.
7.3. ОПТИМАЛЬНОЕ РАЗЛИЧЕНИЕ СИГНАЛОВ
Задача обнаружения сигнала является частным случаем задачи раз-
личения сигналов, широко встречаемой в цифровых системах связи.
Структурные схемы оптимальных приемников "а" дискретных
сигналов различных моделей приведены на рис. 6.1—6.5. Приемни-
ки работают по критерию максимума функции правдоподобия или
однозначно связанной с ней функцией взаимной корреляции <?(%,) и
обеспечивают минимально возможную вероятность ошибки при прие-
ме сигналов (Рош = min).
176
Рассмотрим первоначально задачу различения двух симметричных
дискретных сигналов, когда априорные вероятности сигналов и их
энергии одинаковы:
w(\>) = w(\)> •£<) = £- = £-
Пусть принимаемое колебание представляет собой сумму
у(0 = s&h f) + л(0, 0 < t < Т,
где дискретное сообщение А,- может принимать одно из двух значений
(О или I). По принятой реализации y(t) нужно решить, какое сообще-
ние А/ передано, т. е. какой из сигналов х(Аф, t) или s (A.], t) присутст-
вует в реализации y(i).
В соответствии с критерием максимального правдоподобия (иде-
ального наблюдателя) правило решения можно записать в виде
т
?(Ар = 2р(01-Фо, 1) - Old'/A'o > h = 0. (7.16)
о
На основании сравнения функций взаимной корреляции прини-
мается решение о наличии сигнала «(Aq, Zo), если q > 0; при q < 0 при-
нимается решение о наличии сигнала j(Aj, t).
Структурная схема приемника, соответствующая выражению
(7.16), приведена на рис. 7.7; она отличается от схемы на рис. 7.4 (роль
решающего устройства ДМС в ней выполняют вычитающее и поро-
говое устройства).
При форме записи (7.16) случайная величина <?(AZ) в случае при-
сутствия одного из сигналов л(А,, Z) имеет гауссовскую ПРИ со сле-
дующими характеристиками:
mi = 2E(i - rc)/N0, о2 = 4£(1 - гс)/У0,
где гс — нормированный коэффициент взаимной корреляции между сигнала-
ми s(A|j, г) и j(X| , /)-
Рис. 7.7
177
Параметр
т
rc = rc(^i, s0) = Js(X0, 0 J(^i> *№ (7-17)
Вероятность неправильного решения
Рош = 0,5 j w(qt)dqt + j H?0)d<fol = И1£(1 - гсЖ]}1/2,
(7.18)
H---I — Дополнение к интегралу вероятностей [см. формулу (7.9) и прилож. 1].
Более подробно методика расчета помехоустойчивости различ-
ных дискретных сигналов при оптимальном приеме будет рассмот-
рена в п. 7.4.
В современных системах передачи дискретных сообщений в боль-
шинстве случаев используются оптимальные приемники корреляци-
онного типа. Приемопередатчики таких систем обычно называются
модемами (модулятор-демодулятор). Разработано значительное число
различных рекомендаций МСЭ-Т к модемам различного типа. Моде-
мы и рекомендации к ним классифицируются по различным призна-
кам и назначению.
В частности, по каналам связи, по которым они должны работать,
модемы подразделяются на предназначенные для работы по: каналам
телефонного типа (так называемые ТЧ-модемы); физическим линиям
связи (ФЛ-модемы); волоконно-оптическим линиям; радиоканалам
(радиомодемы); а также в надтональной области по занятым линиям
связи (обеспечивают дополнительное уплотнение обычно проводных
каналов на частотах выше 10 кГц).
Типы и основные параметры ФЛ-модемов, обеспечивающие пе-
редачу данных по физическим (металлическим) линиям, регламен-
тируются государственным стандартом. Такие модемы (в зависимо-
сти от конкретной модификации могут работать на скоростях от 0
до 144 кбит/с с использованием различных видеокодов (Манчестера,
Миллера и др.).
Типы и основные параметры ТЧ-модемов регламентируются реко-
мендациями МСЭ-Т серии V.
В соответствии с рекомендациями МСЭ-Т ТЧ-модемы имеют сле-
дующие характеристики: скорость передачи 2,4—4,8 кбит/с (V.27);
2,4—4,8—9,6 (V.29); 2,4—9,6 (V.31); метод манипуляций соответствен-
но V.27; V.29 и V.31 — ОФМ-4-8; ОФМ-8; АОФМ-16; наличие дуп-
лекса с четырехпроводным окончанием, полудуплекса с двухпровод-
ным окончанием, адаптивного автоматического корректора, стыка С2
(RS232), протокола передачи синхронного, протокола обменного с
ООД синхронного и асинхронного, скремблера и дескремблера.
178
7.4. ПОМЕХОУСТОЙЧИВОСТЬ ОПТИМАЛЬНОГО ПРИЕМНИКА
ДИСКРЕТНЫХ СИГНАЛОВ
Оценка помехоустойчивости дискретных сигналов базируется на
теории обнаружения и распознавания сигналов. В качестве основного
показателя помехоустойчивости систем передачи дискретных сообще-
ний без памяти обычно используется средняя (полная) вероятность
ошибочного приема элементарного сигнала (символа) рош (часто на-
зывается также коэффициентом ошибок).
Пусть известен ансамбль а-дискретных сигналов и априорные ве-
роятности каждого сигнала (сообщения) w($z) = w(Xz), а также все ус-
ловные вероятности трансформации одних сигналов (сообщений) в
другие ру = p(sh Sj), задаваемые обычно в виде матрицы вероятностей
трансформации. Вероятность возникновения ошибки при передаче
z-ro сигнала рош = ру. Средняя вероятность ошибки может быть
найдена усреднением условных вероятностей ошибки по всем сигна-
лам с учетом априорных вероятностей их передачи w(jz):
Рош = X Ру- (7-19)
i
Если все сообщения (сигналы) равновероятны, w(jz) = \/а и все ру
не зависят от / и j, то
Рош = “ VPij- (7-2°)
Следует отметить, что общая теория помехоустойчивости систем с
производным ансамблем дискретных сигналов отсутствует. Однако
для многих важных случаев с помощью более или менее искусствен-
ных приемов удается получить точные решения или приближенные
оценки для рош.
Ниже будут рассмотрены вопросы оценки вероятности ошибки в
распознавании дискретных сигналов при оптимальном и асимптотиче-
ски оптимальном приемах при гауссовских и негауссовскйх помехах.
Примем, что используется алгоритм максимального правдоподобия
теории распознавания (6.5), согласно которому приемник (см. рис. 6.2)
каждый раз выдает на выходе тот сигнал sk (сообщение Хк), которому
соответствует наибольшее значение выходного эффекта q(sk) = q(kk).
Очевидно, вероятность ошибочного решения при этом будет зависеть
от законов распределения вероятностей коэффициентов g(Xz) в кана-
лах, где имеются сигнал и помеха wcn(^) и лишь помеха wn(gz), ко-
торые зависят от модели сигнала-переносчика и канала передачи.
179
Дискретные значения выходного эффекта g(Xz) оптимального при-
емно-фильтрующего устройства определяются выражениями (6.10),
(6.12) и (6.19), а их плотности распределения вероятностей соответ-
ственно при наличии на входе 1-го сигнала wcn(0z) и при его отсутст-
вии wn(gz) для всех каналов часто принимаются одинаковыми и неза-
висимыми:
wcn(<7,) = “’сгМ) = wcn(9); wn(9,) = wn(qk) = н>п(<7) = и-п(й).
В частности, развернутые выражения для wn(q) и wcn(9) при раз-
личных моделях ортогональных сигналов и помехи в виде белого га-
уссовского шума при непрерывном наблюдении соответственно:
при полностью известных сигналах (по закону Гаусса)
wn(?) = wn(A) = (71/2я2сЧ) ехр[-<?2/2 • 2«11; (7.21)
и’спО?) = ( Jl/2Tt2af ) ехр[—(q - 2а, )2/2 • 2а2 ];
при сигналах с неизвестной начальной фазой (соответственно по
законам Рэлея и Райса):
wn(?) = wnW = (?/2сЧ ) ехР[_92/2 • 2a2 ]; (7.22)
wcn(9) = (?/2ai) expl"(Я2 + 4af )/2 • 2a2 ]/0(?2a2 /2af), (7.23)
2 r-
где a! — отношение энергии элементарного дискретного сигнала Et к спек-
тральной плотности мощности белого шума No; /0(») — функция Бесселя.
Если используются не ортогональные, а равноудаленные сигналы
с коэффициентом взаимной корреляции rc(Sj, Sj), то в выражениях для
wn(q) должны учитываться математические ожидания "остатка" (кор-
реляции) сигналов 2a2 rc(sf, Sj).
Во всех приведенных выражениях и в дальнейшем произвольный
постоянный коэффициент для выходного эффекта <7(XZ) оптимального
приемника выбран таким, что дисперсия шумовой функции A(XZ) и
амплитуда полезного сигнала при выходе равны одной и той же ве-
личине 2a2 [см. формулу 6.11].
Помехоустойчивость полностью известных сигналов. Рассмотрим
методику вычисления рош на примере оптимального приема по мак-
симуму правдоподобия (см. рис. 6.2) равноудаленных (эквидистант-
ных) rc(sh Sj) = const полностью известных сигналов с одинаковой
энергией £, = Ej = Е} = const.
180
Значение выходного эффекта (например, напряжения) в канале,
где есть сигнал sk, обозначим qk = Н = 2oq + hk, а в канале, где нет
сигнала, qf = й( = h. Вероятность превышения величиной Л напряжения
Н обозначим Р](Л > Н). Тогда вероятность непревышения величиной
Л напряжения Н:
[1 -р^,> /01,
vur px{h > Н) - f>vn(/i)d/i= [ wn(A)dA.
д 7 2 ,
2ct j + л
Здесь wn(A) — wn(<?() — плотность распределения вероятностей в ка-
налах (на участках), где имеется лишь шум (помеха) и в общем случае
остаток сигнала.
В этом случае вероятность того, что во всех (а — 1) каналах, где
нет сигнала, напряжения окажутся меньшими Н, следующая: [1 —
— P\(h > Н)]а ~ '. Сигналы в каналах считаются независимыми, т. е.
rc(st, Sj) = 0.
При малых значениях px(h > Н) « 2/а; [1 — px(h > Н)]а~ 1 »
» 1 - (а - 1)р,(Л > Н).
Очевидно, что правильное распознавание сигнала будет иметь ме-
сто лишь в том случае, если выходной эффект Л-го канала (в котором
присутствует сигнал) окажется по амплитуде больше выходных эф-
фектов всех остальных (а — 1) каналов, где нет сигналов, величины qx,
q2, qt будут меньше Н.
Вероятность ошибки в опознании элементарного символа
со
Рош = 1 - Рправ = 1 - J [1 - Pi(A > Я)]° " 1
-со
- (а - 1) JPl(ft > H)wcn(H)dH. (7.24)
—SO
Теперь все необходимые расчетные соотношения могут быть най-
дены подстановкой соответствующих формул для wcn(H) и wn(A), на-
пример (6.14) в выражение (7.24). В общем случае интеграл (7.24) не
выражается в элементарных функциях, и расчет по приведенной фор-
муле может быть выполнен лишь численным интегрированием.
В общем случае рош зависит от модели, вида и ансамбля сигнала
(полностью известные сигналы, сигналы с неизвестной начальной фа-
зой, сигналы со случайной амплитудой и начальной фазой и т. п.), оп-
181
ределяющих выражения для wn(<j) и wcn(<y), а также от вида взаимно
ковариационной матрицы rc(Sj, Sj), характеристик помех и отношения
"сигнал—помеха" на входе.
Получим расчетные выражения для рош при оптимальном приеме
а-ортогональных сигналов (гс = 0) при белом гауссовском шуме. Ор-
тогональные сигналы с одинаковой энергией являются частным слу-
чаем равноудаленных (эквидистантных) сигналов.
Полностью известные сигналы. Подставляя формулу (6.14) в выра-
жение (7.18) и учитывая, что дисперсия помехи = 2а2, обозначая
у = h/<5h, получим
рош= 1 -(1/V2HJH - O)]°_1exp(-y2/2)dy. (7.25)
-ОО
Вычисления по этой формуле возможны лишь численным интег-
рированием. Это выражение, впервые полученное В. А. Котельнико-
вым, упрощено рядом авторов. В частности, при рош <0,1, rc(s(, Sj) = 0
и а » 1 выражение (7.25) может быть представлено в виде
Рош ~ (° “ В = E\/No- (7-26)
В этой формуле И(<Х]) — дополнение к интегралу вероятностей:
И(а!) = (1/72^ ) J exp(-?/2)dz < 1/2.
“1
Ортогональные сигналы с неизвестной начальной фазой. Подстав-
ляя формулу (6.22) в выражение (7.24), после некоторых упрощений
можно получить
Рош = 1 - J (1 - е~у/2)а - lye~W2 + “4(72 a,y)dy «
“1
«[(«- 1)/2]ехр(—aJ/2). (7.27)
Из выражений (6.20)—(6.21) для рош следует, что помехоустойчи-
вость а ортогональных сигналов в большой степени зависит от модели
2
сигналов, причем наибольшая помехоустойчивость при заданных а и
а имеет место у полностью известных сигналов.
182
При оптимальном приеме полностью известных равноудаленных
сигналов, имеющих одинаковую энергию, приближенное выражение
для рош можно также получить на основании формулы (6.19)
Рош х (° “ 1) И(°Ч 71 ~rc(.si<sj)
(7.28)
В этой формуле нормированный коэффициент взаимной корреля-
ции между сигналами s(, Sj
rc(sh = (!/£,) p,(f)
(7-29)
Для ФМ сигналов коэффициент rc(sh Sj) зависит от сдвига по фазе
Д0 между сигналами и при прямоугольной форме импульсов опреде-
ляется выражением
rc(St, Sj) = cos ДО.
Для ЧМ сигналов коэффициент rc(sh Sj) зависит от отношения раз-
ности частот к длительности символа тс и определяется выражением
rc(sh Sj) = sin(m,- - шу)тс/(ш,- - шу)тс.
Для двоичных ЧМ сигналов оптимальным значением коэффици-
ента является rc(sQ, 50 » —0,2.
Как показано В. А. Котельниковым, ансамбль оптимальных дис-
кретных равноудаленных сигналов, при использовании которых обес-
печивается минимальная рош, должен иметь оптимальный коэффици-
ент взаимной корреляции гСопт(5;> = ~^la — 1-
В частности, при а — 2 имеем rc(5(-, sy) = -1. Таким rc(sz, sy) обладают
противоположные ФМ сигналы со сдвигом фаз на 180°. При этом ве-
роятность ошибки на основании выражения (7.28)
Рош= ’'(Тга,).
(7.30)
При применении многоосновных дискретных а-сигналов, когда
а » 2, близкими к оптимальным являются ортогональные сигналы
(например ЧМ).
Для расчета вероятности рош При использовании любой а-системы
дискретных сигналов различных моделей (передаваемых по любому
183
каналу) может использоваться так называемая верхняя аддитивная
граница
< (я “
где тахр( у — максимальная по всем параметрам i, j вероятность ошибки в
двоичной системе с сигналами s,(l), sy(0-
На рис. 7.8 и в табл. 7.1 приведены расчетные формулы и результаты
расчета рош при оптимальном приеме дискретных двоичных полностью
известных сигналов (сплошные линии) и сигналов с неизвестной на-
чальной фазой (штриховые линии). Из приведенных зависимостей
следует, что оптимальный некогерентный прием сигналов с неизвест-
ной начальной фазой несущественно уступает когерентному. Из по-
лученных формул и графиков также видно, что наивысшей помехо-
устойчивостью из двоичных сигналов обладают противоположные
сигналы с ФМ, далее следуют оптимальные и ортогональные сигналы
с ЧМ и затем сигналы с AM.
Помехоустойчивость дискретных сигналов со случайными сущест-
венными параметрами. Как указывалось в п. 6.4, при приеме дискрет-
ных сигналов со случайными существенными параметрами следует из-
мерять параметры и формировать опорные сигналы, необходимые для
оптимальной корреляционной обработки с учетом этих измерений.
Принимая во внимание, что эти измерения случайных существенных
параметров могут проводиться лишь с определенной погрешностью, ве-
роятность ошибки в опознании элементарных сигналов (символов) яв-
ляется функцией погрешностей с(- в измерениях этих параметров (час-
тоты, временной задержки, фазы сигнала при когерентном приеме).
Степень влияния неидеальности измерений на помехоустойчивость
зависит от отношения энергии дискретных сигналов к спектральной
плотности мощности белого шума в информационном канале, каче-
ства работы системы синхронизации [вида ПРВ w(e;) и его характе-
ристик}, вида функции корреляции сигнала гс(6,— 6,) = rc(ey) по со-
ответствующему параметру Z>;-.
Если с течением времени сдвиг по соответствующему параметру
изменяется случайным образом с плотностью вероятности w(e,-), то
средняя вероятность ошибочного приема элементарного символа мо-
жет быть найдена усреднением по всем возможным значениям соот-
ветствующих погрешностей в оценке параметров:
00 ОО
А>шср = J - рош(еЬ --Е»)*(Е|. e„)de,, ..., de„.
184
Таблица 7.1
Метод Вероятность ошибки Р^
передачи приема Гауссовская помеха Негауссовская помеха
ФМ2 Оптималь- ный коге- рентный PtTSap « —1—ехр(-а,) 27яа| Г(^“1Вра)
ОФМ2-1 Оптималь- ный корреля- ционный 1 2 iexp(-af) I 2 ^ХР^РрОЦ )
ОФМ2-2 2Г(Т2а,) [1- ГсДа,)] « X 2Г(72а,) гкЛари-ИсЛа,)] х х гжТгцрар
ФМа < < r(72a,ppasin5)
ОФМа - aK^,/2a|Sin5} ~ oV(j2ppalSin5)
мчм2 Оптималь- ный коге- рентный K(V2a,) Г(^а1Ира)
чма (ортого- нальная) (a-l)K(a]) х *-zlexp|--d (а-1)Г(а,Ира)
Оптималь- ный некоге- рентный -гехр(-т) z22, "“’exnf —2~ ехР| 2~ 1
чм2 Оптималь- ный когерент- ный /ичм х «0,7; гс = —0,2 KG/Uap Г(Л2а1Ира)
ам2 Оптималь- ный коге- рентный И(а|/У2) Г(а,Ира/72)
ФМ-ФМ ФМ-ЧМ ЧМ-ФМ чм-чм Г{а1[1-гс(х0.х1)]} x И(а,) И(а,[ I - rc(J0, jj))} « * ^(рраа!)
185
Снижение помехоустойчивости в приеме сигналов со случайными
существенными параметрами происходит прежде всего вследствие
уменьшения значения отношения "сигнал—шум" на выходе приемно-
фильтрующего устройства и увеличения остаточных напряжений пе-
реходных процессов от предыдущих сигналов.
Если, как и раньше, предполагать, что в качестве выходного эф-
фекта приемно-фильтрующего устройства используется функция вза-
имной корреляции (6.12), то максимальное значение отношения
мощности сигнала к мощности шума на выходе коррелятора или СФ
-)
(рс/рп)вых “ 2а1 гс(°. Е/)>
где rc(0, е() = 1/£(|sjt)s(on(r, bt)dt— нормированный коэффициент корреля-
ции между входным и опорным сигналом по случайному параметру рас-
стройка по информационному параметру принята равной 0.
В частности, можно показать, что при квазикогерентном приеме
двоичных ФМ, ЧМорт и AM сигналов при наличии только сдвига по
фазе на угол (р между принимаемым и опорным сигналами выражение
для рош принимает вид
Рош = ^“1- COStp), (7.31)
где И(х) — дополнение к интегралу вероятности [см. выражение (6.20)]; у —
коэффициент, зависящий от вторичной манипуляции (уфм ~ -Л-; Гчморт ~
7дм ~ 1/*/2).
При записи формулы (7.31) учитывалось, что rc(0, ip) = cosip.
Если предположить, что при когерентном приеме ФМ сигналов
фаза опорного сигнала относительно принимаемого случайно и мед-
ленно изменяется с известной плотностью распределения вероятно-
7С
стей w(ip) в интервале (—л, +л), то рош = | K(^aIcos(p)w(<p)dq>.
-7С
Результаты численного интегрирования этого выражения в пред-
положении, что w(ip) описывается гауссовским законом, приведены
на рис. 7.9 (где — дисперсия фазовой погрешности).
Помехоустойчивость дискретных сигналов при асимптотически оп-
тимальном приеме и негауссовских помехах с независимыми значения-
ми. Помехоустойчивость может рассчитываться по формулам (6.29)—
(6.22) и формулам, приведенным в табл. 7.1, если в них под отношением
"сигнал—помеха" понимают отношение мощности сигнала к мощ-
ности помехи на выходе коррелятора с учетом подавления помехи в без-
186
инерционном нелинейном преобразователе (БНП): а2 БНП = а2 цао .
Коэффициент цао определяется выражением (6.35).
В частности, выражение для рош при асимптотически оптимальном
приеме равноудаленных полностью известных a-сигналов одинаковой
энергии при дискретном и непрерывном наблюдении примет вид
Рош « (в - 1)И[РСЯ Мао(1 - ''сА- W2°n ]‘/2} «
« (« - 1) HaiPaod - Гс<^ (7.31)
где Рс — мощность сигнала; Н— число независимых выборок на длительность
символа тс; rc(5„ j) — нормированный коэффициент взаимной корреляции
между сигналами <т2 — дисперсия помехи.
2
Как указывалось, при белом гауссовском шуме цао = 1 формула
(7.32) преобразуется в формулу (7.30).
Система синхронизации во избежание существенного снижения
помехоустойчивости должна обеспечивать отслеживание по фазе с
2 2
дисперсией погрешности аф < 0,01 рад .
Кроме точности слежения за фазой при оценке системы синхро-
низации должны учитываться также срывы синхронизации (переско-
ки фазы).
187
Вероятность перескоков фазы на (±2л/а) рад на выходе системы
ВС должна быть на несколько порядков ниже, чем вероятность ошиб-
ки в приеме элементарного символа рош. Следует отметить, что влия-
ние фазовой погрешности на рош более существенно сказывается при
приеме ФМ сигналов, чем двоичных ФМ сигналов из-за возникнове-
ния взаимных помех между синфазным и квадратурным каналами.
Влияние систем тактовой синхронизации. Система тактовой син-
хронизации (СТС) предназначена для формирования сигналов такто-
вой частоты, которая определяет границы элементарных символов,
относительно которых выбирается момент взятия отсчета в решаю-
щем устройстве. В спектре случайного дискретного сигнала может со-
держаться периодическая и случайная составляющие. Для обогаще-
ния спектра периодической составляющей используются нелинейные
преобразования, чаще всего полученные формированием фронтов
символов до и после решающего устройства и выделением из после-
довательности фронтов тактовой частоты резонансным фильтром или
системой ФАПЧ.
Разброс моментов пересечения реализаций сигналов нулевого уров-
ня (джиттер) непосредственно влияет на помехоустойчивость. Считает-
ся, что оптимальный момент взятия отсчета (принятия решения) соот-
ветствует моменту времени, где имеется узел глазковой диаграммы.
Любое отклонение приводит к ухудшению помехоустойчивости.
В общем случае влияние погрешности тактовой синхронизации на
помехоустойчивость зависит от вероятности наличия или отсутствия
перехода символов. Если два последовательных прямоугольных сим-
вола разнополярны, то математическое ожидание сигнала на выходе
коррелятора уменьшается в (1 — 2|^т|/тс) раз, где — временная по-
грешность синхронизации; тс — длительность элементарного символа.
Например, при приеме ФМ сигналов условная вероятность ошибки
Рошфм2 = И2а,(1 - 2|^т|/тс)],
где — дополнение к интегралу вероятностей.
Численные расчеты на ЭВМ при различных предположениях отно-
сительно ПРВ временных флуктуаций системы тактовой синхрониза-
ции показывают, что для того чтобы система тактовой синхронизации
несущественно снижала помехоустойчивость (увеличивала вероятность
рош по сравнению с идеальной системой), необходимо, чтобы отно-
сительная статическая погрешность слежения за границами элемен-
тарных символов не превышала ^тСТ = £хСт/тс 0>05, а дисперсия от-
2
носительной погрешности не превышала величины < 0,01.
Соответственно уменьшение значения уровня сигнала на выходе
коррелятора в результате совместного влияния неидеальности высо-
188
кочастотной и тактовой частоты при условии, что они восстанавли-
ваются из разных сигналов,
±[1 ~ 2|£т|/тс] = cos Ед.
Важным параметром СТС является также перескок фазы на выходе
на ±2л рад, что приводит к пакету ошибок длительностью примерно
равной постоянной времени СТС. Поэтому вероятность перескока
фазы в СТС должна быть не меньше Ю-10. Выполнение указанных
требований приводит к необходимости построения весьма узкополос-
ных СТС.
Если известны статистические характеристики погрешностей в
формировании сигналов высокочастотной ^ф и тактовой синхрони-
зации в предположении их медленного изменения, то средняя веро-
ятность ошибки в опознании элементарного символа рошср может
быть вычислена как функция этих погрешностей по формуле (7.29)
РоШ.Ср = |рош(5ф. d^T,
где рош(^ф, ljt) — вероятность ошибки в опознании элементарного символа, как
функция погрешностей соответствующих систем синхронизации; со-
вместная плотность распределения вероятностей погрешностей высокочас-
тотной £ф и тактовой ijT синхронизации.
Погрешности высокочастотной ^ф и тактовой синхронизации
являются статистически независимыми (если они получаются из раз-
личных сигналов) или прямо пропорциональны друг другу (если они
получаются из одного и того же сигнала).
При независимости погрешностей высокочастотной и тактовой
синхронизации
^ф, Q = и’ЙФ)»*'(^)-
В том случае, если опорные сигналы высокочастотной и тактовой
синхронизации формируются из одного сигнала, т. е. взаимосвязаны,
ухудшение помехоустойчивости из-за наличия одновременно погреш-
ностей высокочастотной и тактовой синхронизации всегда меньше,
чем ухудшение, связанное лишь с погрешностью оценки фазы высо-
кочастотной синхронизации. Таким образом, в указанном случае дос-
таточно рассматривать лишь погрешность высокочастотной синхро-
низации.
Вопросы синтеза и анализа систем высокочастотной и тактовой
синхронизации будут рассмотрены ниже.
Чем больше коэффициент амплитудного подавления негауссов-
ских помех ЦаО, тем выше помехоустойчивость (меньше рош). Выиг-
189
рыш в помехоустойчивости при равной мощности помехи будет тем
больше, чем сильнее плотность распределения вероятности помехи
отличается от гауссовской (см. рис. 6.8).
Очень часто при расчете помехоустойчивости многоосновных и
корректирующих кодов определяют зависимостьрош не от энергии £1,
затрачиваемой на передачу элементарного сигнала (символа) с дли-
тельностью тс, а от энергии £б, затрачиваемой на передачу одной дво-
ичной единицы информации (бита).
При использовании простых кодов с основанием а и одинаковой
энергией на символ (£t = Ej) Е\ и £б связаны между собой соотно-
шением £] — £6log2a.
При использовании простых двоичных кодов выражения для ве-
роятности ошибки в приеме элементарного сигналарош и вероятности
ошибки на бит совпадают. В частности, при оптимальном приеме
ФМ2-сигналов в БГШ
Рош = = K(J2£^Vq).
Соответственно, при использовании корректирующих кодов энергия
£| элементарного символа связана с энергией Е§ бита соотношением
Е\ = £бЛ
где R = к/п — скорость кода.
Сигнал на выходе когерентного демодулятора (или согласованного
фильтра) идентичен сигналу с импульсами БВН (без возврата к 0). От-
ношение "сигнал—помеха" на входе решающего устройства когерент-
ного демодулятора сигналов с несущей такое же, как для систем с пе-
редачей импульсами постоянного тока, несмотря на то, что система с
несущей и двумя боковыми требует удвоенной полосы, поскольку при
когерентной демодуляции на выход проходит только половина мощ-
ности шума из полосы модулированного сигнала.
Вероятность ошибки при передаче двоичными символами посто-
янного тока разной полярности
Рош = l/2erfcZ = K(V2Z), Z= С/с/72аш;
2 f-'2
erfcZ= 1 - erf(Z) = 1 - 4 [e dr.
190
7.5. МЕТОДЫ ПОВЫШЕНИЯ ДОСТОВЕРНОСТИ
ПЕРЕДАЧИ ДИСКРЕТНЫХ СООБЩЕНИЙ
Для обеспечения необходимой достоверности передачи команд в
системах, связанных с безопасностью движения и работающих в ус-
ловиях комплекса сильных помех и других дестабилизирующих фак-
торов (например, ненадежность работы отдельных элементов и узлов
системы), может оказаться недостаточно полученных оптимальных
алгоритмов. В указанных условиях необходимо использовать допол-
нительные меры повышения достоверности передачи команд.
Разработано большое число различных методов повышения поме-
хоустойчивости (достоверности) (ПДИ), только полная классифика-
ция которых по различным признакам могла бы занять несколько
страниц. Рассмотрим лишь системы, имеющие непосредственное от-
ношение к телемеханическим и связевым системам.
Системы с повторением сообщений. Наиболее простым и легко реали-
зуемым на существующей аппаратуре способом повышения достоверно-
сти в каналах без обратной связи является многократное повторение
сообщений. При таком способе за истинное сообщение принимается та-
кое, которое имеет наибольшее число совпадений в многократно при-
нятой последовательности. Близок многократному повторению способ
повышения достоверности, использующий одновременную передачу
одной и той же информации по нескольким параллельно работающим
каналам связи. Обычно в таких системах (как, впрочем, и в первых)
используется мажоритарный принцип. При этом число каналов или
число повторений должно быть не менее трех. Системы с многократ-
ным повторением подразделяют на системы со сравнением кодовых
комбинаций (слов) и сравнением разрядов (элементарных символов)
в принятых кодовых комбинациях. В общем случае при посимвольном
сравнении общее число правильно принятых кодовых комбинаций
больше, чем при групповом сравнении кодовых комбинаций (так как
в повторных кодовых комбинациях могут быть искажены разные раз-
ряды), однако приемная аппаратура при этом сложнее.
Если предположить, что ошибки при приеме соседних элементар-
ных символов в кодовом слове являются независимыми, то в системах
с пятикратным повторением и посимвольным сравнением (или после
мажоритарной обработки методом трех из пяти) вероятность ошибки
Рошп= £<^Рош<1 -Рош)5"', (7-33)
/= 3
где рош — средняя вероятность ошибки при приеме элементарного символа;
= 5!(/!(5 — /)!) — число сочетаний из п = 5 по I = 3.
191
Соответственно вероятность ошибочного (искаженного) приема
/^-символьной кодовой комбинации при пятикратном повторении ка-
ждого символа
Риск5 = 1 - П - Рош п(5)]*= - 15Л^Ш +
+ 6Л^Ш (7.34)
Последнее выражение действительно при крош «С 1.
В подобной системе с повторением и сравнением кодовой комби-
нации (групповой проверкой) вероятность риск при крош «С 1 опреде-
ляется по формуле
Риск.5 » Рош - (2Л - I) 15Л3РОШ + ... « f 0^р3ош (7.35)
Недостатком указанных способов является недостаточно эффек-
тивное использование избыточности (пропускной способности кана-
ла). Указанного недостатка в определенной мере лишены системы с
исправлением ошибок (с корректирующими кодами), однако они име-
ют более сложное аппаратурное исполнение. Из рассмотренных систем
с повторением более эффективна система с посимвольной проверкой
[см. формулы (7.34) и (7.35)[.
Сделанный вывод относится к случаю, когда ошибки в канале вза-
имно независимы, и вероятность возникновения ошибок большой
кратности мала.
В тех случаях, когда ошибки группируются, кодирующие и деко-
дирующие устройства получаются сложными. В таких устройствах
лучше применять системы с многократным повторением, которые ме-
нее чувствительны к группированию ошибок.
Системы с прерыванием. В системах с прерыванием на определенное
время прекращается передача или прием сообщений как недостовер-
ных. В различных системах передачи по разным причинам (глубоких за-
мираний сигналов, группирования ошибок в результате воздействия
сильных и достаточно продолжительных помех) периоды "хорошего"
состояния каналов чередуются с периодами "плохого" состояния. В
периоды "хорошего" состояния сообщения передаются с весьма малой ве-
роятностью ошибок, а в периоды "плохого” состояния вероятность ошиб-
ки в приеме элементарного двоичного символа может достигать 0,5, при
этом пропускная способность канала может приближаться к 0. В такие
периоды было бы целесообразно передачу или прием прекращать. За-
дача состоит в том, чтобы "известить” приемник или передатчик о со-
ответствующем состоянии канала.
Включение системы передачи в разрешенные интервалы времени
и выключение в неразрешенные осуществляют различными способа-
ми, например с помощью приемника (фиксатора) сильных помех или
192
с применением обратной связи. Один из способов в системах с обрат-
ной связью называют зондирующим ключом. Идея этого метода состоит
в том, что вместе с сообщением или непосредственно перед ним по-
сылается некоторая заранее установленная комбинация — "ключ". Ес-
ли приходит именно эта, а не какая-либо другая кодовая комбинация,
приемник открывается и пропускает комбинацию, несущую сообще-
ние. В противном случае приемник не открывается, а передатчик по
истечении некоторого времени ожидания, не получив квитанцию или
получив неверную квитанцию, повторно посылает то же сообщение.
При получении верной квитанции передатчик передает новое сооб-
щение с прежним или с другим ключом. В условиях прерывистой свя-
зи таким способом можно увеличить пропускную способность систе-
мы передачи.
Системы с обратной связью. Возможны различные способы ис-
пользования систем с обратной связью. Обычно системы с обратной
связью делят на два класса: системы с управляющей обратной связью
(УОС) (с решающей обратной связью — РОС) и системы с информа-
ционной обратной связью (ИОС).
В системах с УОС приемное устройство на основании анализа при-
нятого сигнала (например, обнаружителя ошибки) принимает реше-
ние о необходимости повторения или об изменении способа передачи
и по обратному каналу передает определенный приказ передающему
устройству (например, о повторении передачи). Передатчик повторя-
ет, дополняет или изменяет сообщение (или метод передачи). Такие
системы называются также системами с решающей обратной связью.
Из систем с УОС широко распространены системы с автоматиче-
*• ким обнаружением ошибок, передачей по обратному каналу сигнала
'Запрос" и повторной передачей искаженной кодовой комбинации
(или символа); такие системы обычно сокращенно обозначают АЗО.
В системах АЗО (в отличие от корректирующих кодов) избыточность
является величиной переменной, зависящей от вероятности ошибки
символа Рош в канале.
В системах с ИОС приемная сторона только информирует передаю-
щее устройство о том, какое принято сообщение. Передающее устрой-
ство сравнивает переданное сообщение с информацией, полученной по
обратному каналу, и извещает приемное устройство о результатах срав-
нения, принимая необходимые меры в случае обнаружения ошибок,
например повторяет ошибочно принятые отрезки сообщения, изменяет
способ передачи и т. д. В отличие от систем с УОС в системах с ИОС
не требуется кодировать сообщения с избыточностью.
Кроме УОС и ИОС возможно построение систем с комбинирован-
ной обратной связью (КОС), в которых используется избыточное ко-
дирование, а анализ сообщений осуществляется на приемной и пере-
дающей сторонах.
Простейшим методом ИОС является метод полной обратной про-
нерки и повторения. В такой системе с ИОС и независимыми ошиб-
Пк
193
ками в каналах вероятность необнаруженной ошибки равна произве-
дению вероятностей ошибки в прямом О’]) и обратном каналах (р2):
Риск = Р1Р2 • (7.36)
Если Р] и р2 велики, то система с полной трансляцией дает неудов-
летворительные результаты.
Помехоустойчивость корректирующих кодов. В качестве одного из
основных показателей помехоустойчивости ЦСП обычно использует-
ся средняя (полная) вероятность ошибочного приема элементарного
символа (сигнала), обозначаемая рош.
В общем случае в кодовой комбинации, состоящей из п символов,
может быть искажено от одного до всех п символов. Вероятность того,
что кодовая комбинация принята хотя бы с одной ошибкой (вероят-
ность аномальной ошибки ран в кодовом слове), зависит от вероятно-
сти искажения элементарного символа рош, закономерности распре-
деления ошибок, характерной для канала связи, вида кода и метода
декодирования.
При лрош « 1 в системах с простым кодированием и БГШ подавляю-
щую долю ошибок составляют одиночные ошибки, тогда вероятность
Ран « фош(1 - Рош)л - * « 1 - (1 - рош)" « лрош. (7.37)
Из полученных выражений следует, что ран зависит от качества ка-
нала связи, характеризуемого рош, и длины кодового слова п.
Помехоустойчивость систем передачи с корректирующими кодами
зависит от свойств используемого кода и алгоритма декодирования,
применяемого для обнаружения и исправления ошибок.
Обычно помехоустойчивость корректирующих кодов оценивают
по вероятности правильного декодирования кодовой комбинации
(слова или блока) или по некоторой эквивалентной вероятности на
одну двоичную единицу полезной информации.
Блочные коды. Вероятность рош в общем случае зависит от вида и
модели сигнала, вида и интенсивности помех, метода приема и отно-
шения "сигнал—помеха" на входе приемника (см. п. 7.3).
В плотно упакованных корректирующих блочных кодах возникно-
вение любых (эе + 1) элементарных ошибок в кодовой комбинации
(слове) приводит к неисправляемой ошибке, причем при воздействии
БГШ возникающие в различных разрядах кодового слова ошибки
можно считать независимыми (эе — число исправляемых ошибок).
194
При указанных допущениях вероятность искажения кодового сло-
ва в блочных кодах при поэлементном приеме в режиме исправления
ошибок определяется неравенством (при прои1 < 1)
Ран < Е CJ„ (1 - рош)" = 1 - X Рош - Рош)" »
(7.38)
где рош — вероятность ошибки в опознании элементарного символа; С^4 1 —
число сочетаний из п по эе + 1.
В выражении (7.38) равенство имеет место при использовании со-
вершенного кода. При использовании простого кода пользуются вы-
ражением (7.37). Следует отметить, что в таких кодах могут исправ-
ляться некоторые ошибки и более высокой кратности, чем эе. Однако
такая возможность в этом случае не учитывается.
На рис. 7.10 приведены результаты расчетов вероятности ошибки
на двоичный разряд рош на выходе декодеров блочных циклических
кодов, а также графики рош при простом кодировании с ФМ2. Номера
кривых соответствуют номерам кодов (1—8), приведенным в табл. 7.2
(А = к/п — скорость передачи). На рис. 7.10 обозначены лишь неко-
торые кривые, вошедшие в табл. 7.2.
Для каналов с двоичной ФМ2
Т’ош = ) = И(^£б7л)о), (7.39)
где а, = aj — отношение энергии сигнала £б двоичного символа к спек-
тральной плотности мощности белого шума No.
195
Таблица 7.2
Параметр 1 2 3 4 5 6 7 8 9
п 63 127 255 511 1023 31 63 127 127
к 51 — 206 420 827 20 44 84 84
эе 5 8 14 22 42 6 8 14 14
я 0,81 0,83 0,81 0,82 0,81 0,65 0,7 0,7 0,7
Окончание табл. 7.2
Параметр 10 11 12 13 14 15 16 17
п 1023 31 63 127 1023 31 63 1023
к 667 15 35 63 502 10 23 337
эе 73 8 12 22 118 12 16 180
я 0,65 0,48 0,56 0,5 0,49 0,32 0,36 0,33
Анализ полученных данных показывает, что выигрыш по помехо-
устойчивости при использовании блочных корректирующих кодов
можно получить лишь при достаточно большой длине кодов (л > 100).
Сверточные коды. Рассмотрим помехоустойчивость сверточных
кодов при использовании алгоритма максимального правдоподобия
Витерби. При таком алгоритме декодирования, если в канале про-
изойдут ошибки, кратность которых превысит корректирующую спо-
собность сверточного кода [ж > {df— 1)/2], это приведет к ошибкам
в одном или нескольких информационных символах на выходе деко-
дера (</у— свободное расстояние кода, которое является мерой разли-
чия двух наиболее близких кодовых комбинаций бесконечной длины).
Расстояние d? в значительной мере определяет помехоустойчивость
сверточного кода.
В общем случае строгий расчет вероятности ошибки в кодовом
слове при сверточном кодировании достаточно сложен, поэтому мы
рассмотрим лишь упрощенную методику расчета предположения, что
ошибочные события происходят редко. Если принять, что двоичные
кодовые слова (последовательности) различаются к символами, то
расстояние между путями решетчатой диаграммы, соответствующими
этим последовательностям,
где у — коэффициент, зависящий от метода передачи и приема (в частности,
при когерентном оптимальном приеме двоичных ФМ-сигналов уфм = 2, при
196
двоичных ортогональных ЧМ-сигналах учм = 1); Et — энергия элементарного
сигнала, которая связана с энергией на один бит передаваемой информации
зависимостью Ех = E6R (соответственно а, = aj? Я; Я — скорость передачи).
В рассматриваемом случае вероятность ошибочного выбора пути
при когерентном приеме двоичных символов (при dj= к) определя-
ется выражением
Л>ш б « №E6R/N0), (7.40)
где И(х) — дополнение к интегралу вероятностей.
Асимптотический энергетический выигрыш от сверточного коди-
рования можно установить, сравнивая аргументы функции И(х) в вы-
ражениях (7.31) и (7.39), где вероятность ошибки в приеме элемен-
тарного сигнала рош и вероятности ошибки на бит совпадают.
2
На рис. 7.11 приведены зависимости ЯошЛаб) для систем с ФМ2,
со сверточным кодированием и декодированием по алгоритму Витер-
би с мягким решением при различных параметрах кодов и кодовых
скоростях, а также графики рош при простом кодировании с ФМ2. Но-
мера кривых соответствуют номерам кодов с характеристиками, при-
веденными в табл. 7.3 (см. рис. 7.10 и табл. 7.2).
197
Таблица 7.3
Номер кода К R df Номер кода К R df
1 3 8 6 3 5
2 4 10 7 4 6
3 5 12 8 5 7
4 6 13 9 6 8
5 7 15 10 7 10
11 8 10
В частности, при скорости передачи R = к/п = 0,74-0,8 и длине кода
примерно 127—255 энергетический выигрыш при блочном кодирова-
нии может составлять 2—3 дБ, а при сверточном — 6—7 дБ.
Из приведенных данных следует, что наиболее предпочтитель-
ны коды с малой скоростью. Анализ данных показывает, что даже
применение сравнительно коротких сверточных кодов с декодиро-
ванием по алгоритму Витерби с мягким решением позволяет по-
лучить достаточно высокие показатели по помехоустойчивости с
простыми и блочными кодами. Переход к жесткому решению на
выходе демодулятора приводит к снижению помехоустойчивости
примерно на 2 дБ.
Отметим, что декодеры Витерби в большой степени подвержены
воздействию пакетов ошибок, что объясняется сравнительно малой
длиной кодовых комбинаций. То же самое можно сказать и о декоде-
рах блочных кодов со сравнимой длиной.
Для повышения помехоустойчивости декодеров Витерби при воз-
действии пакетов ошибок часто используют перемежение.
Перемежение символов. Для каналов с группированием ошибок
применяют специальные коды и метод перемежения символов или де-
корреляция ошибок. Он заключается в том, что символы, входящие в
одну кодовую комбинацию, не передаются непосредственно друг за
другом, а перемежаются символами других кодовых комбинаций. Если
интервал между символами, входящими в одну кодовую комбинацию,
сделать длиннее "памяти" канала (времени группирования ошибок), то
в пределах кодовой комбинации (слова) группирования ошибок не бу-
дет, и кодовую комбинацию можно декодировать, как в канале без па-
мяти (с независимыми ошибками).
Методы борьбы с замираниями. Замирание представляет собой яв-
ление, характерное для большей части радиоканалов: коротковолновых,
подвижной транспортной и сотовой связи и т. д. В каналах с замира-
198
ниями сигнал распространяется по нескольким путям (так называе-
мое многолучевое распространение). В результате интерференции ко-
лебаний с различными амплитудами и фазами возникают глубокие
флуктуации (вплоть до полного пропадания) интенсивности (ампли-
туды) принимаемого сигнала.
Для борьбы с замираниями при многолучевом распространении
широко используют различные методы разнесенного приема: по вре-
мени, частоте, на разнесенные антенны, поляризационное разнесение,
разнесение по отдельным лучам (прием отдельных лучей). Суть разне-
сенного приема состоит в стремлении образовать несколько каналов, по
возможности с независимыми замираниями. Сигналы нескольких ка-
налов можно использовать по-разному: просто суммировать, суммиро-
вать с определенными весами или выбирать канал, сигнал в котором
в данный момент больше.
Методы борьбы с межсимвольной интерференцией. Реальные кана-
лы транспортной связи имеют конечную полосу пропускания и не
идеальные частотные и фазовые характеристики. В результате пере-
ходных процессов происходят амплитудные и временное искажения
дискретных сигналов, которые обычно называют межсимвольными.
Для ослабления влияния межсимвольных искажений используются
корректирующие устройства, сигналы специальной формы, специ-
альные коды.
В системах передачи дискретной информации широко начинают
использовать адаптивные корректоры амплитудно- и фазочастотной
характеристик канала. Такие корректоры непрерывно следят за усло-
виями передачи по каналу и перестраиваются так, чтобы обеспечить
наилучшую коррекцию изменяющихся указанных характеристик ка-
нала по рабочим сигналам.
Использование помехоустойчивых методов передачи и приема. Су-
щественный вклад в повышение достоверности передачи дискретных
сообщений в условиях различных помех может внести правильный
выбор метода передачи и приема дискретных сигналов.
Как уже указывалось, из двоичных дискретных сигналов наиболь-
шей помехоустойчивостью обладают сигналы с ФМ и ОФМ, при мно-
гоосновном кодировании — сигналы с ЧМ, однако при этом они за-
нимают более широкую полосу частот.
В этих условиях ограниченной полосы пропускания канала выбор
метода должен решаться на основе компромисса между ФМ (ОФМ)
и ЧМ сигналами.
Оптимальными по помехоустойчивости приемниками при различ-
ных видах помех являются приемники корреляционного типа, допол-
ненные блоками нелинейного подавления (БНП) при негауссовских
(прежде всего импульсных) помехах (см. гл. 6).
Одним из наиболее эффективных методов подавления негауссов-
ских помех является нелинейная обработка сигналов, которая в об-
щем случае может проводиться в нескольких блоках (сечениях) при-
199
емника [1, 2]. В частности, при приеме аналоговых сигналов с угловой
модуляцией в приемнике возможны три вида нелинейной обработки:
амплитудная на входе демодулятора (в блоке высокочастотной фильт-
рации) из-за негауссовской плотности распределения входной поме-
хи; фазовая в демодуляторе из-за негауссовской плотности распреде-
ления вероятностей фазовых флуктуаций; амплитудная на выходе (в
блоке низкочастотной фильтрации) из-за негауссовской плотности
распределения погрешности приема на выходе демодулятора в основ-
ном за счет аномальных выбросов.
Для борьбы с синусоидальными (сосредоточенными по спектру)
помехами наиболее широко используются режекторные заградитель-
ные фильтры, которые выполняют роль декоррелятора помех, осуще-
ствляющего частотное подавление таких помех. Заметим, что до по-
следнего времени нелинейные методы борьбы с синусоидальными
помехами не использовались.
Рассмотренные методы повышения достоверности передачи дис-
кретных сообщений широко используются в сотовых и транкинго-
вых системах радиосвязи, например по стандартам GSM, ТЕТРА и
ТЕТРАПОЛ.
7.6. ПОМЕХОУСТОЙЧИВОСТЬ НЕПРЕРЫВНОЙ АВТОМАТИЧЕСКОЙ
ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ
Передача информации в кабину машиниста осуществляется с по-
мощью систем автоматической локомотивной сигнализации (АИС).
Наиболее широкое распространение получила система АЛС непре-
рывного типа (АЛСН). В этой системе предусмотрен один частотный
канал, организуемый по рельсовой линии, частота несущей которого
в зависимости от вида тяги равна 25, 50 или 75 Гц. Для передачи ин-
формации использованы амплитудная манипуляция несущей и чи-
словое кодирование сообщений. Кодовые комбинации, используемые
в системах АЛСН, приведены на рис. 7.12.
Приемник сигналов АЛСН состоит из последовательно соединен-
ных полосового фильтра ПФ с эффективной полосой пропускания
&F = 14 Гц, амплитудного детектора сообщений, фильтра нижних час-
тот ФНЧ, решающего порогового устройства и дешифратора кодовых
команд.
Особенностью работы системы АЛСН является то, что она функ-
ционирует в условиях воздействия интенсивных помех, создаваемых, в
основном, токами тяговой сети. Развитие сети электрифицированных
железных дорог с увеличением мощности подвижного состава (ЭПС) и
тяговых подстанций характеризуется непрерывным ростом токов, про-
текающих по рельсам. На участках железных дорог переменного тока их
амплитуда достигает нескольких сотен ампер. Это приводит к повыше-
нию уровня помех в канале системы АЛС. Другой характерной особен-
200
ностью помех, создаваемых токами тяговой сети, является априорная
неопределенность и изменяемость во времени статистической структу-
ры, характеристик и параметров мешающих сигналов.
Для оценки степени помехозащищенности приемника сигналов
АЛС от мешающего действия помех необходимо располагать данными
о статистической структуре помех, знать законы распределения веро
ятностей мгновенных значений и огибающей помехи и сигнала, а так-
же оценку параметров этих законов.
Поэтому прежде всего рассмотрим имеющиеся данные о статисти-
ческих характеристиках помех в рельсовых цепях. Затем рассмотрим
методику расчета вероятностей ошибок элементарных символов при
использовании амплитудной манипуляции (AM) и дадим количест-
венную оценку помехозащищенности (правильного приема и транс-
формации) передаваемых в АЛСН команд (КЖ, 3, Ж), используя ре-
зультаты, приведенные в пп. 6.1 —6.2. Команды КЖ, Ж и 3 управляют
огнями локомотивного светофора и контрольными органами, прове-
ряющими наличие условий, обеспечивающих безопасность движения.
При этом локомотивный светофор дает четыре сигнальных показа-
ния: зеленый огонь (3) при приближении к путевому светофору с зеле-
ным огнем; желтый (Ж) при приближении к светофору с желтым огнем;
(КЖ) при приближении к закрытому путевому светофору; красный
огонь после прекращения приема кодовых сигналов КЖ.
Для того чтобы иметь возможность оценить помехозащищенность
АЛСН необходим критерий (показатель) оценки. Наиболее широко
при сравнении систем передачи дискретных сигналов используется
средняя (по всем кодовым символам) вероятность ошибочного прие-
ма элементарного дискретного сигнала (символа) рош или вероятность
ошибочного приема (искажения) кодовой комбинации риск.
Рис. 7.12
20)
В телемеханических системах типа АЛСН целесообразно исполь-
зовать следующие вероятности: подавления (пропуска) передаваемой
команды Рпод; образования ложной команды (трансформации) рп =
правильного приема команд Рправ-
Команды телеуправления и телесигнализации в системах
АЛСН могут передаваться кодом, состоящим из отдельных эле-
ментарных символов (сигналов). В этом случае прежде всего не-
обходимо знать соответствующие вероятности на элементарный
символ рпод|, рЛ| и риск[ = рош, относящиеся к искажению эле-
ментарных символов.
Величины рпод, рл и риск для кодовых комбинаций и элементарных
символов в общем случае зависят от метода передачи и приема команд
и характеристик канала связи (характеристик помех в канале). По-
скольку априорные вероятности передачи тех или иных дискретных
команд обычно не известны, оценка помехоустойчивости должна
производиться по условным вероятностям. Однако для того, чтобы
иметь возможность рассчитать трансформацию одной команды в дру-
гую, например команды КЖ в команду Ж или в 3, необходимо иметь
расчетные выражения для вероятности пропуска /’(0/1), ложной тре-
воги /’(I/O) в приеме элементарного символа. При передаче одной из
трех команд наиболее опасным является трансформация команды КЖ
в команды Ж и 3.
Оценка помехоустойчивости приемника АЛСН двоичных AM сигна-
лов. При некогерентном приеме амплитудно-модулированных коле-
баний (AM), т. е. когда сведения о фазе сигнала отсутствуют, единствен-
ным критерием, позволяющим отличать символ, соответствующий 1 от
паузы, является амплитуда колебаний. Если напряжение на выходе
детектора приемника превышает пороговое значение UQ, то фиксиру-
ется сигнал 1; если это напряжение ниже UQ, то фиксируется сигнал 0.
В соответствии с этим устройство преобразования сигнала приемника
состоит из полосового фильтра, обеспечивающего защиту от сосредо-
точенных помех и снижение уровня флуктуационных помех, усили-
теля, амплитудного детектора огибающей, фильтра нижних частот,
подавляющего остатки несущей и высшие гармоники на выходе де-
тектора, и порогового решающего устройства, принимающего реше-
ние о посылке 1 или 0.
Ошибки при приеме возникают, если:
при передаче 1 суммарное напряжение сигнала и флуктуационной
помехи на выходе приемника t/cn ниже порогового t/0, т. е. t/cn < UQ.
Вероятность такой ошибки (пропуска)
/’(0/1) ~ /’[^сп < Ц)Ь
202
при передаче 0 напряжение помех Un больше Uo, т. е. Un > UQ. Ве-
роятность такой ошибки (ложная тревога)
р(1/0) = р[Ц, > 3)1-
Найдем расчетные выражения для р(0/1) и р(1/0) при флуктуаци-
онных и импульсных помехах.
Оценка влияния флуктуационных гауссовских помех. Плотность ве-
роятности огибающей суммы синусоидального сигнала и флуктуаци-
онной помехи на выходе линейного детектора подчиняется обобщен-
ному закону Рэлея:
w( Uc„) = ^ехр
,|ЧпЧпс'
4)1—~
4 ап '
(7.41)
где Ucn — мгновенное значение огибающей суммы сигнала и помехи; Umc —
амплитуда полезного сигнала; а2 = — дисперсия флуктуационной по-
мехи; 10{х) — модифицированная функция Бесселя нулевого порядка, от мни-
мого аргумента.
Полагая в выражении Umc = 0, получим распределение вероятно-
сти для огибающей помехи (простой закон Релея)
и
w(un) = -fexp—.
I Щ
(7.42)
В соответствии с приведенными выражениями для распределений
(7СП и вероятности указанных ошибок соответственно
р(0/1)= J н-(t/cn)dt/cn; />(1/0) = J w(t/„)d(t/„). (7.43)
о и0
Подставляя в выражение (7.43) соответственно формулы (7.41) и
(7.42), получим следующие приближенные выражения для вероятно-
стей ложной тревоги F = Р(0/1) и пропуска элементарного символа
(сигнала) />пр = р(0/1):
р(1/0) = р(0/1)«ехр
(7.44)
/7(1/0)=
V an j
Здесь Р(х) = ~ jexp(—Z2/2)dZ — дополнение к интегралу вероятностей.
203
Если принять, что пороговый уровень UQ = 0,5 Umc, то
p(l/0) = exp(-j);
P(O/1)=^^ =
(7.45)
Расчетные графики по приведенным формулам для вероятности
обнаружения элементарного сигнала D = 1 — рпр = 1 — р(0/1) в зави-
симости от отношения "сигнал—шум" и допустимой вероятности
ложной тревоги приведены на рис. 6.6. При этом вместо параметра
р = J2E/NO должен использоваться параметр h = ^рс/о^ .
Полная (средняя) вероятность ошибки рош = р(0)р(1/0) + р(1)р(0/1),
где р(0) и р(1) — априорные вероятности 1 и 0. Подставив значение
Bz(t/cn) и ЙХЦ,) для случая равной вероятности посылок 0 и I, получим
{z 7^"\ 1
ехр(—Л2) F(Zq h) + ехр |. (7.46)
zo
Здесь F(Zq, h) = | хехр(—^/2)1й(х^2 A)dx — табулированная функ-
0
ция; Zq = t/0/o„; (4эф/оп = Л [26].
Вероятность рош зависит от превышения сигнала над помехой h,
оптимального значения порога {70опт ® 0,5 Umc.
При малых значениях h (высокий уровень помех или слабый сиг-
нал) величина рош возрастает из-за увеличения вероятности ложных
тревог р(1/0). В этих условиях оптимальными оказываются большие
значения напряжения порога ограничения Uq, вероятность ложных
тревог снижается.
Для ориентировочных подсчетов средней вероятности ошибки,
возникающей под влиянием флуктуационных помех, можно восполь-
зоваться приближенной формулой
Рош 2 ехР(“ 4 ) ’
(7-47)
дающей при рош > 10 3 погрешность не более 20 %. Расчетные гра-
фики зависимости средней вероятности ошибки рош от отношения
204
"сигнал—шум" (белый гауссовский) для различных методов манипу-
ляции и демодуляции приведены на рис. 7.8.
Оценка помехоустойчивости при наличии общих замираний. Рас-
смотрим канал с белым шумом и общими замираниями, которые про-
являются в изменении сигнала на выходе приемника. Если скорость
изменения коэффициента передачи канала мала по сравнению со ско-
ростью передачи посылок (тк » тс), то за время длительности посылки
условия приема сигнала не меняются, и решающая схема, используе-
мая для канала с постоянными параметрами, сохраняет помехоустой-
чивость. Однако достоверность принимаемых символов меняется во
времени в зависимости от амплитуды сигнала А. Поэтому можно вве-
сти условную вероятность ошибки рош(Л). Поскольку коэффициент А
принимает случайные значения, то качество передачи информации
можно задавать средней вероятностью ошибки рош ср.
Оценим, как влияют общие замирания на помехоустойчивость и на-
дежность для двоичной системы. Вероятность ошибки при некогерент-
ном приеме является функцией отношения "сигнал—шум" А2. Среднюю
вероятность ошибки при медленных общих замираниях сигнала можно
оценить, усреднив р0Ш(Л) по закону распределения И^А):
СО 00
Рош ср = рош(Л) W(A)dA = рош(Л) H^(A)dA. (7.48)
о о
Тогда для канала с рэлеевскими замираниями при некогерентном
приеме AM-сигналов
Рош ср ~ 2 ’
2 "ср
(7.49)
2 2
где Лср — среднее значение Л .
Сравнивая формулы для вероятности ошибки в канале с замира-
ниями (7.49) и без замирания (7.46), видим, что для получения оди-
наковой вероятности ошибки, например 10 4, необходимо увеличить
мощность сигнала в канале с замираниями примерно в 600 раз. no-
скольку зависимость вероятности ошибки от параметра п — моно-
тонно убывающая функция экспоненциального характера, то любые
флуктуации относительно среднего значения Аср приводят к увеличе-
нию вероятности ошибки независимо от вида распределения W(h).
Вероятность ошибки />ош ср недостаточно полно характеризует ка-
чество приема, особенно при передаче сообщений, длительность ко-
торых соизмерима с интервалом корреляции замираний. В этом слу-
чае вероятность правильного приема сообщений в различных сеансах
205
будет разной. В такой ситуации часто пользуются понятием надежно-
сти по помехоустойчивости (рош < Рдоп)-
При низкой достоверности и надежности принимаемой информа-
ции в канале с замираниями требуются специальные меры для их по-
вышения. Увеличение мощности передатчика неэффективно.
Принципиально в приемнике можно избавиться от флуктуаций
уровня сигнала на входе решающей схемы, если, например, длитель-
ность сигнала сделать обратно пропорциональной коэффициенту пе-
редачи канала по мощности.
Оценка вероятности трансформации комавды КЖ в команды Ж и 3.
Строгий расчет вероятности перехода (трансформации) одной коман-
ды в другую с неизвестным времени перехода и отличающейся дли-
тельностью элементарных символов, затруднителен. Поэтому прове-
дем расчет при следующих допущениях:
вероятности пропускар(0/1) и ложной тревоги р( 1/0) являются из-
вестными, одинаковыми и постоянными для всех элементарных сим-
волов рассматриваемых команд;
рассматриваемые команды представим в виде 14- разрядного дво-
ичного кода с одинаковой длительностью символов 0,12 с;
в приемнике обеспечивается идеальная (жесткая) посимвольная
синхронизация; ошибки символов в кодовом слове являются незави-
симыми.
Рассматриваемые команды в виде двоичных последовательностей
следующие:
КЖ - 11000001100000; 3 -11101101100000; Ж — 11101110000000.
Определим сначала вероятность трансформации команды КЖ в
команду 3.
Для такой трансформации необходимо, чтобы в третьем элемен-
тарном символе произошла ошибка типа ложной тревоги (0 -> 1), а в
пятом и шестом — ошибка типа пропуска сигнала (1 -> 0). Все осталь-
ные символы должны быть приняты верно.
В соответствии с теоремой умножения можно записать
Р(3/КЖ) = р2(0/1)р(1/0)р7(0/0)р4(1/1). (7.50)
Учитывая, что р( 1/1) = 1 — р(0/1) и р(0/0) = 1 — р( 1/0), получим
р{3/КЖ) =р2(0/1)р(1/0)[1 -р(0/1)]4{1 -р(1/0)]7. (7.51)
Для трансформации команды КЖ в команду Ж необходимо, чтобы
в третьем, пятом, шестом и седьмом символах произошла ошибка ти-
па ложной тревоги (0 -> 1), а в восьмом и девятом — ошибка типа про-
пуска сигнала (1 -> 0). Все остальные символы, из которых две еди-
ницы и шесть нулей, должны быть приняты верно.
206
Тогда вероятность трансформации команды КЖ в команду Ж будет
определяться выражением
Р(Ж/КЖ) = р2(0/1 )/(1/0)[ 1 - р(1/0)]6 [ 1 - р(0/1)]2. (7.52)
Определим теперь условную вероятность правильной передачи ко-
манд. Для правильной передачи команд (заданной комбинации) необ-
ходимо, чтобы были правильно переданы все ее элементы (символы).
Тогда, например, правильный прием команды КЖ будет определяться
выражением
р(КЖ/КЖ) = Р1О(0/0)/( 1/1) = (1 - р(0/1 )]4 [1 - р(1/О)]10. (7.53)
В рассматриваемом случае вероятность правильного приема ко-
манды КЖ определяется в основном вероятностью ложной тревоги
при приеме элементарного сигнала и является при заданном й2 = 8
выше требуемой.
Расчеты показывают, что при выбранных методах передачи и прие-
ма, кодирования и дешифрации и сделанных приближениях надеж-
ный прием команд малая вероятность трансформации команд могут
быть обеспечены лишь при отношениях "сигнал—помеха" на входе
приемника й2 > 10.
Для систем железнодорожной автоматики первой категории веро-
ятность образования (трансформации) ложной команды не должна
превышать 10~ 12-Н0-13.
Глава 8
ОПТИМАЛЬНАЯ ЛИНЕЙНАЯ И НЕЛИНЕЙНАЯ
ФИЛЬТРАЦИЯ И ОЦЕНКА ПАРАМЕТРОВ СИГНАЛА
8.1. ОПТИМАЛЬНАЯ ЛИНЕЙНАЯ ФИЛЬТРАЦИЯ
НЕПРЕРЫВНЫХ СЛУЧАЙНЫХ СИГНАЛОВ
При решении многих практических задач, относящихся к приему
непрерывных сигналов (в связи, радиолокации, измерительной тех-
нике и т. д.) важное значение имеет выделение полезного сигнала (со-
общения) Х(0 некоторой линейной системой (фильтром) из аддитив-
ности смеси сигнала и помехи л(г):
у(0 = >-(0 + «(0-
(8.1)
Полезное сообщение и помеха предполагаются независимыми ста-
ционарными эргодическими случайными процессами с известными
корреляционными функциями или спектральными плотностями
мощностей. Задача состоит в том, чтобы по наблюденной в заданном
интервале реализации процесса у(1) наилучшим (оптимальным) обра-
зом оценить реализацию полезного сообщения X(f) и определить оп-
тимальный алгоритм фильтрующей системы. В качестве критерия оп-
тимальности могут использоваться минимум средней квадратической
погрешности, максимум апостериорной вероятности и т. п. Такие
фильтры широко применяют, например, при непосредственной пере-
даче речи, в приемных устройствах, включенных после детектора (или
в самом детекторе), в устройствах автоматики и телемеханики.
В зависимости от времени наблюдения и момента получения выход-
ного сигнала (например, сообщения) Х(Г) выделяют различные случаи
фильтрации. Мы рассмотрим лишь случаи простой физически реали-
зуемой и нереализуемой фильтрации (сглаживания, воспроизведения).
Если фильтр для обработки использует все предыдущие и после-
дующие значения y(f), т. е. °о </<<», то такой фильтр физически не-
реализуем, потому что в нем не соблюдается условие физической реа-
лизуемости Ж(Г — т) — 0 при t < т, так как отклик не может опережать
воздействие. При использовании для обработки сигнала полубеско-
нечного интервала времени 00 < t < т, т. е. настоящего момента и всего
прошлого, фильтр физически реализуем. Рассмотрим эти случаи. Оп-
тимальный фильтр можно искать в классах линейных и нелинейных
208
фильтров. Рассмотрим только линейные оптимальные фильтры, ко-
торые в случае гауссовских сигналов и помех не хуже нелинейных,
т. е. абсолютно оптимальны. Вопросы нелинейной фильтрации будут
рассмотрены в п. 8.2. Задачу можно решать при непрерывном и дис-
кретном наблюдении, во временной и частотной областях. Рассмот-
рим решение задачи линейной фильтрации в частотной области при
непрерывном времени наблюдения, как наиболее наглядной.
Оценка погрешности линейной фильтрации. Мгновенная текущая
погрешность в воспроизведении сигнала X(Z) на выходе линейного
фильтра е(Г) = Xfl(r) — 1 (Г). Структурная схема образования текущей
погрешности е(Г) приведена на рис. 8.1, а. Она состоит из реальной
фильтрующей системы, на вход которой поступает смесь сигнала и
помехи у(0, и идеальной фильтрующей системы, на вход которой по-
ступает только полезный сигнал Х(г). Обозначим комплексный коэф-
фициент передачи реальной системы а комплексный коэффи-
циент передачи оптимальной системы ИЙопт(/<в).
В общем случае перед оптимальной системой (фильтром) может
ставиться дополнительная задача по линейному преобразованию сиг-
нала (дифференцированию, интегрированию и т. п.), что и описыва-
ется комплексным коэффициентом Йо(/<в). При простой фильтрации
(воспроизведении) = 1,0 и Лф(/) = Х(г). Рассматриваемая струк-
турная схема легко преобразуется в эквивалентную (рис. 8.1, 6), в со-
ответствии с которой погрешность линейной системы состоит из двух
составляющих: динамической и помеховой. Их спектральные плотно-
сти мощности соответственно:
5ед(ш) = ! ЖоОв») “ HWP-W; (8.2)
5£П(и) = |И'(у<В)|25п(ш), (8.3)
где (ш) и 5п(<в) — спектральные плотности мощности соответственно сиг-
нала A.(z) и помехи л(0-
Так как спектральная плотность алгебраической суммы независи-
мых процессов равна сумме спектральных плотностей составляющих,
Рис. 8.1
209
то выражение для дисперсии (средней квадратической) погрешности
фильтрации будет иметь вид
00
= степ + | J -Si(a>)da> =
-со
со со
= ± f l^oO’o») - ^(/ш)|2 5»d«> + ± f I ГЦ»|2 5П (<e)d<e. (8.4)
Zn J J
-СО -00
При простой фильтрации, учитывая, что Ид (/со) = 1,
00
<\ = 7- f И’ “ ИфЪ)!2^^) + ] И/(/ш)|25п(ш)]с/с1>. (8.5)
ля J
Из выражений (8.4) и (8.5) следует, что в общем случае дисперсия
погрешности фильтрации состоит из двух составляющих: динамиче-
2
ской и помеховой. Полученные выражения для могут использо-
ваться для анализа и синтеза конкретной фильтрующей системы. Могут
решаться задачи частичного и полного синтеза фильтрующей системы.
Под задачей частичного синтеза (ее часто называют задачей оптимиза-
ции параметров) понимается нахождение оптимальных параметров
фильтрующей системы с заданной структурной схемой (например, с за-
данной передаточной функцией), при которых показатель оптималь-
ности достигает экстремума (например, дисперсия погрешности
фильтрации минимальна).
Под задачей полного структурного синтеза понимается нахожде-
ние оптимальной характеристики фильтрующей системы [например,
= опт], при которой обеспечивается экстремум показателя опти-
мальности (например, минимум дисперсии погрешности фильтрации).
Минимизация дисперсии погрешности. Для минимизации диспер-
сии погрешности следует минимизировать правую часть выражения
(8.5) соответствующим выбором передаточной функции WX/co). Для
этого, очевидно, 5х(<о) и 5п(со) должны быть известны, т. е. заданы. Если
на ИХдо) не налагается никаких ограничений (например, требований
физической реализуемости), то, поскольку подынтегральное выраже-
ние всегда положительно, значение интеграла становится наименьшим
при минимальном значении интегрируемой функции для каждого со.
Передаточная функция ИХ/со) должна быть действительной и поло-
жительной, т. е. И'О’со) = ИХсо) и вносить нулевой фазовый сдвиг на
всех частотах. Продифференцировав подынтегральное выражение по
ИХсо) и приравняв результат 0, получим
{^(Ш)[1 - И^со)]2 + 5п(о)И'2(ш)} =
= — 2[1 - И^О))]^®) + гИ'МЛ’пф) = 0. (8.6)
210
О а) и о
Рис. 8.2
Как отмечалось, при выводе равенства (7.6) принималось, что
Ж(7©) = Ж(ш), т. е. изучаемый оптимальный фильтр должен вносить ну-
левой фазовый сдвиг на всех частотах. При таком допущении выражение
|1 - ИЧ/ш)|2 = ^2(“) “ 2 Ж(ш) cosq> + 1
минимально при <р = 0.
Из выражения (8.6) получим
(8.7)
Выражение (8.7) определяет линейный (в общем случае нереали-
зуемый) фильтр, который минимизирует дисперсию погрешности ме-
жду сигналом на его выходе и полезным сигналом на входе. Из этого
выражения следует, что если спектральные плотности мощности
сигнала и помехи не пересекаются, то на частотах, где 5х(со) * 0, час-
тотная характеристика фильтра Жопт(<о) = Ж(со) = 1 (рис. 8.2, а). При
пересечении кривых спектров 5х(ш) и 5п(со) на участке перекрытия
спектров амплитудно-частотная характеристика фильтра тем мень-
ше, чем меньше соотношение между спектральными составляющи-
ми сигнала и помехи (рис. 8.2, б). Следовательно, оптимальный
фильтр подавляет в возможно большей степени спектральные со-
ставляющие помехи, воспроизводя с минимальными искажениями
составляющие сигнала.
Выражение для минимального значения дисперсии погрешности
фильтрации на основании выражений (8.5) и (8.7) при простом вос-
произведении
2 = ± Г
emin 2п J
—------и----dm.
£z(m) + ^п(«)
(8-8)
Из выражения (8.8), в частности, следует, что если спектры по-
лезного сигнала и шума не перекрываются, т. е. 5х(со)5п(со) = 0, то
211
°emin = °- В другом, крайнем случае, когда 5х(со) «С 5п(а)), имеем:
^опт(“) “ W/-W;
Когда 5х(со) » 5п(со), имеем Жопт(со) = 1,
СО
CTsmin к J 5n(m)dm = °п .
-СО
2 2
т. е. дисперсия погрешности равна дисперсии помехи oEmin » сгп.
Рассматриваемый оптимальный фильтр оценку сигнала Х(г) выдает
на основе обработки реализации y(i) бесконечной длительности. По-
этому определяемая выражением (8.8) погрешность имеет предельное
минимальное значение, которое не может быть достигнуто ни в какой
реальной линейной системе.
Хотя приведенные соотношения соответствуют физически нереали-
зуемому оптимальному фильтру, они весьма полезны, так как любой
физически реализуемый фильтр не может дать меньшей погрешности.
Условие физической осуществимости означает, что для фильтра-
ции используется только предыстория процесса y(t) до момента вре-
мени, когда проводится оценка процесса. Строгое решение задачи с
учетом условия физической реализуемости фильтра весьма громозд-
ко, поэтому приведем лишь некоторые конечные выражения для весь-
ма важного случая, когда помеха представляет собой аддитивный бе-
лый гауссовский шум 5п(со) = No = const, а спектральная плотность
мощности сигнала 5х(со) — рациональную функцию, стремящуюся
при со -> сю к 0. В этом случае выражения для оптимальной переда-
точной функции физически реализуемых фильтров и минимальной
дисперсии погрешности имеют следующий вид:
П-wwiL = ; я'оптОи) = 1 - -; (8.9)
CTemin = Jlnp + dffl- <810>
-СО
В формуле (8.9) для Жопт(/го) знак "+" означает операцию взятия
реализуемой части от разложения на элементарные дроби.
212
Методы, основанные на теории линейной фильтрации, разработа-
ны достаточно полно и затрагивают вопросы экстраполяции и интер-
поляции, задачи с изменяющимися во времени характеристиками, а
также критерии, отличающиеся от критерия наименьшей средней
квадратической погрешности (дисперсии). Методы теории линейной
фильтрации широко используются также в системах с обратной свя-
зью: в демодуляторах и системах синхронизации (см. п. 8.4).
Рассчитаем дисперсию погрешности фильтрации сигнала (сообще-
ния) Х(г), спектральная плотность мощности которого описывается
полиномом Баттерворта (13.2) в белом гауссовском шуме n(t) со спек-
тральной плотностью мощности No.
Подставляя выражение (13.2) в формулу (8.8) для физически не-
реализуемого фильтра, имеем выражение для приведенной к дис-
персии погрешности
X2 - / 2 - (t + 2kh2dn * У/(2*>~1 /Й tn
бе “ СТЕ /СТХ - ~ " S,П 2к) ’ (8.11)
где А2 = ст2/ст2 ~ отношение дисперсии сообщения ст2 к дисперсии шума ст2
в полосе Fc (отношение "сигнал-шум" на входе фильтра).
Соответственно подставляя выражение (13.2) в формулу (8.10) для
физически реализуемого фильтра, имеем
52 =ст2/а2 = ^(sinAy'[(l+2^sinA)1/(2i)_i]. (8.12)
При к = 1 и использовании физически реализуемого фильтра имеем
б
2
С
2
Результаты расчета 3Е для нереализуемого и реализуемого фильт-
ров приведены соответственно на рис. 8.3, а и б. Эти зависимости по-
зволяют сделать ряд важных выводов. Дисперсия погрешности фильт-
рации в большой степени зависит от вида спектральной плотности
мощности сообщения (параметра к). Причем наиболее благоприят-
ным для фильтрации является сообщение с ограниченным спектром
(к = °о), а наименее благоприятным — сообщение с однополюсным
спектром {к = 1). При к > 4 качество фильтрации фильтра близко к
качеству фильтрации сообщения с ограниченным спектром (к = о°);
выигрыш оптимального физически нереализуемого фильтра 3Е по
213
сравнению с физически реализуемым также увеличивается с возрас-
танием параметра к, характеризующего вид спектральной плотности
мощности сообщения. Причем при к = 1 максимально возможный
выигрыш составляет 2 раза (3 дБ), а при к = °° с увеличением й он
может быть значительно больше.
Рассмотренные оптимальные линейные фильтры, обеспечивающие
минимальную среднюю квадратическую погрешность в воспроизведении
непрерывного сигнала, не следует путать с оптимальным согласованным
фильтром, рассмотренным в п. 10.1, и обеспечивающим на своем выходе
максимальное отношение "сигнал-помеха ". Последний используется для
обнаружения и распознавания отдельных сигналов (см. гл. 7) и оценки
отдельных параметров сигналов (см. п. 8.3).
8.2. РЕКУРРЕНТНЫЕ АЛГОРИТМЫ КВАЗИОПТИМАЛЬНОЙ ЛИНЕЙНОЙ
И НЕЛИНЕЙНОЙ ФИЛЬТРАЦИИ И ДЕМОДУЛЯЦИИ
В связи с внедрением цифровых методов обработки сигналов ши-
рокое распространение получают рекуррентные (повторяющиеся) ал-
горитмы фильтрации и демодуляции. Рекуррентные алгоритмы оце-
нивания позволяют вести обработку сигналов в реальном масштабе
времени и в ряде случаев компенсировать недостаток априорной ин-
формации, используя с течением времени текущую информацию.
Часто рекуррентные алгоритмы более просто реализуются при вычис-
лении и моделировании на ЭВМ. Их широко применяют в теории ли-
нейной (фильтр Калмана) и нелинейной марковской фильтрации и
демодуляции.
Предположим, что на вход приемного устройства поступает адди-
тивная смесь сигнала s(X(r), И = а-(Х, 0 и помехи n(t). На интервале на-
блюдения Т из входного процесса выбирают значения y(th) = yh через
интервал То.
214
Уравнение наблюдения имеет вид
y(fh) = Ун = (н) + п((л> = + "л. (813)
где й = 1, 2, Н\ Н= Т/То.
Для сокращения записи параметр t не будем учитывать. Предпо-
лагается, что сообщение (модулирующая функция) Х(/) и помеха л(Г)
являются произвольными, взаимно независимыми стационарными
случайными процессами с известными многомерными (й-мерным)
плотностями распределения вероятностей
w(kA) = w(A.!, А.2, Ц); кп(лА) = н>п(П|, л2, .... nh).
Рекуррентные соотношения для АПРВ. На основании формулы (6.3)
запишем выражение для апостериорной плотности распределения ве-
роятностей значений сообщения X,- для всех моментов времени i < й
после получения очередного наблюдения:
>vy(kh) = Аг, ..., ХА) = *iaw(A.,, А2> ..., у2...уА/А.!, .... Л.А) =
= ku,w(kh)w„(nh). (8.14)
В этой формуле й1А = [w(y(, ..., уА)]~* — нормирующий коэффи-
циент, зависящий только от плотности распределения вероятностей
наблюдений w(yb ..., yh); wn(nh) — функция правдоподобия, совпа-
дающая с многомерной плотностью распределения вероятностей ад-
дитивной помехи [см. формулу (6.8)]:
= И'кО**) = »*П[У1 - *(М> Ун ~ ХЛ.А)].
Представим многомерные плотности распределения вероятностей
сигнала и помехи, входящие в правую часть формулы (8.14) в виде
произведения условных и безусловных плотностей:
НАр ..., Аа) = н>(А|, ..., Л.А _ р w(kh Al.Л.А _ ,);
> лл) = ^("ь -> «Л-l)Wn(«A/«|, . лА — [) (8.15)
где п, = у; - j(A.;).
В соответствии с формулой (8.14)
Wy(kh~ ’) = Й1А_ |И’(Л.1, ..., Аа_ 1)»*п(л1. лА — 1)- (8.16)
Подставляя выражение (8.16) в формулу (8.15), получим рекур-
рентное уравнение для определения АПРВ:
ну(АА) = й2лН^А1, Ч- Own(nh/nl’ nh- i)WyCkh~ (8.17)
где й2А = klh/kl А - i — нормирующий коэффициент.
215
Пользуясь критерием максимального апостериорного распределе-
ния, можно получить несколько оценок значений сообщения по вы-
численной согласно выражению (8.17) апостериорной плотности рас-
пределения вероятностей.
В качестве наиболее просто осуществимой оценки можно принять
оценку по максимуму так называемой финальной апостериорной
плотности распределения вероятностей му(Х.А):
ХА = arg max и-(ХА). (8.18)
которая определяется усреднением АПРВ по первым значениям Х(, Х2,...,
А.а _ 1 (рассматривая их как несущественные): иу(Х.Л) = j..jw>,(X1,
Х2,..., A.A)dA.], dk2,..., dkA _ । и представляет собой одномерную плотность
распределения вероятностей последнего значения сообщения ХА. При
этом оценки формируются последовательно и называются текущими.
Выражение для финальной АПРВ в рекуррентной форме в пред-
положении, что Л.(/А) представляет собой непрерывную последова-
тельность Лр Х2, —» ^-h ПРИ независимых наблюдениях, можно полу-
чить многократным интегрированием:
*у(М = ^{...^„(Лй/лр .... лА_ .... а.а_ i)»^AA- 1W
<П2, .... dXA _ I = k3h wn|yA - j(Xa)] w3(lA). (8.19)
Входящую в формулу (8.19) величину
~ - 1) “'О-лАь •••> - i)d^i, dX2, ..., dA.A _ [ (8.20)
следует рассматривать как плотность распределения вероятностей экс-
траполированного значения сообщения на шаге h при наличии данных
наблюдений yt, у2, ..., уА _, на шагах 1, 2,..., (й — 1) (экстраполирован-
ная АПРВ).
В соответствии с выражением (8.19) апостериорная вероятность на
шаге й пропорциональна произведению функции правдоподобия и
экстраполированной плотности распределения вероятностей на этом
шаге. Начальным значением финальной АПРВ му(1А) служит апри-
орное распределение сообщения w(l).
К сожалению, даже при сделанных допущениях уравнения для
апостериорной плотности распределения вероятностей и фильтрации
(8.19) и (8.18) в общем случае не имеют строгого решения.
Наибольшее распространение получил приближенный способ, при
котором финальная апостериорная плотность распределения вероят-
216
ностей wy(kh) аппроксимируется гауссовской плотностью распределе-
ния (гауссовское приближение):
Г А 2‘
7=— ехр —
(8.21)
где ХА — оценка, реализующая максимум плотности распределения вероят-
ностей на шаге й; а^А — дисперсия апостериорного распределения (оценки
сообщения).
Входящая в формулу (8.21) дисперсия оценки сообщения
аеЛ = И* lnWy(A.A)/dA.AJ-1.
Гауссовское приближение является весьма эффективным методом
решения задач, хотя область его применения недостаточно изучена,
особенно при негауссовских сообщениях и помехах. Пока прибли-
женно можно утверждать, что при негауссовских помехах условие
гауссовской аппроксимации требует не только малой дисперсии апо-
стериорного распределения о^А и относительно высокой точности
предварительной оценки (например, экстраполяции 5-,A), но и соблю-
2
дения условия То « ткп (где То — шаг дискретизации; ткп — ин-
тервал корреляции помехи; ткк — интервал временной корреляции со-
общения).
Гауссовское приближение (8.21) представляет собой фактически
разложение логарифма апостериорной плотности распределения ве-
роятностей WyCkfj) (8.19) в ряд Тейлора как функции одной перемен-
ной ХА около значения некоторой предварительной (опорной) оценки
ХА и ограничение двумя членами разложения. Опорная точка разло-
жения ХА может выбираться различными способами. Для определен-
ности будем считать ХА = ХэА, где ХэА — экстраполированное на один
шаг значение оценки на шаге й, которое может быть определено из ре-
шения уравнения
217
Выполнив разложение (7.19) и ограничиваясь двумя членами, по-
лучим
In wy(xh) = wy(Kh)h + In »y(XA)k 4 (X* - U +
fi эл 'ЛГ'Н **
+ | —2In "Ж -1 - ^)2- <8-23)
2 dXA A эА
В общем случае разложение в ряд Тейлора должно соответствовать
мерности соответствующих плотностей распределения вероятностей
сообщения и помех. Естественно, что ограничение разложения одно-
мерным рядом приводит к потере качества фильтрации и демодуляции
вследствие неоптимальности декорреляции помехи и предсказания со-
общения.
Подставляя в уравнение (8.18) выражение (8.23) с учетом выражений
(8.21) и (8.22), получим систему нелинейных рекуррентных уравнений
квазиоптимальной демодуляции (фильтрации):
Ч = Kh + yh - «KhHBn&h - *(U)]; (8-24)
= {^’X(U) + в 'Пул - «
-2(y„)r(U-i)- (8 25)
В формуле (8.24)
в„). = d In wn[yA - s(^A)]/d^A = s^h)Z(yh - s^/,) = s^h)Z(nh).
Здесь = ds(^A)/d^A;
2{yh ~ *(M = -d In wn[yA - ^(^A)]/d^A = ± [-In wn(«A)]|„л = >a_j(4a) =
= Z(nh) « Z(yA);
= -d2ln>v3(^A)/dX2A; B;\ = -d2 In wn[yA - 12A .
Уравнение (8.24) определяет алгоритм работы формирования оп-
тимальной оценки, а уравнение (8.25) — алгоритм формирования апо-
стериорной дисперсии. Отметим также, что В^ характеризует дис-
персию экстраполированной оценки, а В^ — дисперсию единичного
замера 1А в момент h и совпадает с известной формулой Крамера—Рао
(см. формулу 8.30).
Структурная схема демодулятора, моделирующая уравнения (8.24) и
(8.25), приведена на рис. 8.4. Квазиоптимальный демодулятор состоит
218
из двух взаимосвязанных каналов: канала оценки 1А и канала апосте-
риорной дисперсии оЕЙ. Демодулятор является дискретным рекуррент-
ным следящим фильтром. Причем при использовании для передачи со-
общения 1(f) угловой модуляции демодулятор является дискретной
системой фазовой автоподстройки частоты, а при 5(1, 0 = 1(f) — моди-
фицированным дискретным фильтром Калмана. Схема демодулятора
содержит: блок нелинейной экстраполяции (предсказания) сообще-
ния БНЭС, работа которого описывается уравнением (8.22); блок фор-
мирования сигнала-переносчика и его производной по сообщению
БФСП (при угловой модуляции управляемый по частоте генератор);
блок нелинейного (в общем случае инерционного) преобразования
БНИП с характеристикой Z[yh — 5(1,A)], выполняющий роль дискри-
минатора; блок формирования коэффициентов БФК с характеристи-
кой , определяемой в соответствии с выражением (8.25), а также
два перемножителя и два сумматора. Величина, обратная коэффици-
енту ц/л, характеризует дисперсию апостериорного распределения де-
модулируемого сообщения;
2 -1
СТЕЛ = V*
Если функцию Z[yh — s(ig/,)] разложить в ряд по степеням малого
параметра 5 и не учитывать малые члены J2, то в структурной схеме не
нужно вычитающее устройство.
Полученное уравнение демодулятора является нелинейным и опи-
сывает нестационарный режим работы. Нелинейность полученных
уравнений характеризуется в общем случае негауссовостью сообще-
ния (что определяет нелинейность операций, выполняемых для фор-
мирования экстраполированной оценки) и негауссовостью помехи и
нелинейным кодированием сообщения в сигнале [что определяется
Рис. 8.4
219
вычислением В^, В^'х, В^х, Z(n)]. Нестационарность режима опре-
деляется в общем случае нестационарностью сообщения Х(г), помехи
л(/) и демодулятора. Однако нестационарность остается, даже если X.(z)
и n(t) стационарны. Это обусловлено процессом установления апосте-
риорной дисперсии.
В стационарном режиме слежения, когда апостериорную дис-
персию фильтрации на соседних шагах можно считать постоянной
2 2 2
(оеЛ = оЕ А_ , = оЕ), структурная схема, приведенная на рис. 8.4, мо-
жет быть значительно упрощена. В ней может отсутствовать блок фор-
мирования коэффициентов, так как можно рассчитать заранее.
Вычисление апостериорной дисперсии. Апостериорная дисперсия
= оЕл характеризует текущую погрешность фильтрации (демоду-
ляции) и является величиной случайной, так как наблюдаемый сигнал
{уЛ} и сообщение {Х.А} имеют случайный характер. Поэтому дисперсия
погрешности фильтрации может быть найдена усреднением (в общем
случае по множеству и времени) текущей погрешности оЕЙ по всем
возможным значениям сообщения и помехи).
Развернутое выражение для усредненной дисперсии погрешности
фильтрации (демодуляции) в стационарном режиме работы можно по-
лучить на основании усреднения составляющих в зависимости (8.25). В
частности, развернутое выражение для приведенной погрешности де-
модуляции ФМ-сигналов, когда сообщение X(z) представляет собой
простейший гауссовский марковский процесс, а помеха негауссовская
с независимыми значениями, будет иметь вид
52 = а2/а2 = [ 11 + 4r\^P.klZZ_ 11 (8.26)
Е Е Ц
где ст2 — дисперсия сообщения; — коэффициент корреляции между сосед-
ними значениями (отсчетами) сообщений и Л.А_ Л/фМ^ — эффективный
индекс фазовой модуляции; р2х — отношение сигнал — помеха*на входе де-
модулятора в единичном замере; ц2о — коэффициент подавления негауссов-
ских помех, определяемый по формуле (6.34).
В этой формуле
= ехр(—QCTO) « 1 - ПСТО; Рвх = ^э/стп >
220
где U3 — эффективное значение ФМ-сигнала; — дисперсия помехи.
Из этого выражения следует, что приведенная дисперсия погреш-
2
ности демодуляции 5Е уменьшается с увеличением отношения "сиг-
2
нал—помеха" р эффективного индекса фазовой модуляции ,
DA <РМ^ *
2
коэффициента подавления негауссовских помех цао и коэффициента
корреляции гк.
Если принято, что j(XA) = Х(/А) = ХА, = oj, U3C = 1, =
2 2 2
= йвх = ах/оп , то задача демодуляции сведется к задаче фильтрации
простейшего марковского сообщения в негауссовской помехе с неза-
висимыми значениями.
Приведенная методика может также использоваться для синтеза и
анализа систем высокочастотной и тактовой синхронизации [26].
8.3. ТЕОРИЯ ОЦЕНОК ПАРАМЕТРОВ И ОПТИМАЛЬНЫЙ ПРИЕМ
АНАЛОГОВЫХ ИМПУЛЬСНЫХ СИГНАЛОВ
Оценка помехоустойчивости аналоговых импульсных сигналов ба-
зируется на теории оценок и теории распознавания. Рассмотрим оценку
помехоустойчивости аналоговых импульсных сигналов АИМ-ЧМ и
ФИМ-АМ при оптимальном и асимптотическом приеме с так назы-
ваемой простой обработкой сигнала. Выбор указанных сигналов оп-
ределяется их высокой помехоустойчивостью, причем их энергия не
зависит от передаваемого сообщения, которое на интервале наблюде-
ния считается постоянным. В оптимальных приемных устройствах ра-
зомкнутого типа с простой обработкой сигналов решение принима-
ется лишь на основании анализа смеси сигнала и помехи в одиночном
импульсном сигнале, используемом для передачи одного отсчета со-
общения, т. е. принимаемые импульсные сигналы обрабатываются
независимо друг от друга, а непрерывное сообщение Х(/) восстанав-
ливается интерполирующими устройствами.
Примем, что при оптимальном и асимптотически оптимальном
приемах импульсных широкополосных сигналов используется алго-
ритм максимума функции правдоподобия (взаимной корреляции). При
таком алгоритме приема могут возникать так называемые нормальные
и аномальные погрешности [см. п. 6.1]. Однако сигнальный пик q(X)
распознается с минимальной вероятностью аномальной погрешности
2
ран, а его максимум фиксируется с минимальной дисперсией стн нор-
2
мальной погрешности. Рассмотрим методику расчета ран и 8ан .
221
Оценка вероятности появления аномальной погрешности. Задачу
распознавания сигнального пика q(k) можно сформулировать так. За-
ведомо известно, что на анализируемой шкале передаваемого сооб-
щения Л имеется сигнальный пик q(k). Под влиянием помехи на ука-
занной шкале может оказаться несколько сигналоподобных выбросов
q(k), среди которых необходимо распознать сигнальный. При работе
устройства распознавания по максимуму q(k) вероятность ошибочного
решения, характеризуемая ран, равна вероятности того, что один из шу-
мовых выбросов на шкале Л превысит по амплитуде сигнальный пик.
Строгое решение такой задачи встречает непреодолимые матема-
тические трудности. Поэтому рассмотрим одну из приближенных ме-
тодик расчета.
Любая реализация шумовой функции й(Х) на шкале сообщения Л
может быть разделена приближенно на Л/® Л/е* [где гк — ширина сиг-
нального пика <?(Х)| статистически независимых участков. Такое де-
ление реализации выходного эффекта оптимального приемника q(k)
на М участков равноценно тому, что передаваемое сообщение (сиг-
нал) имеет не бесчисленное множество, а всего лишь М дискретных
значений. При хорошо сформированной корреляционной функции
сигнала М сигналов можно приближенно считать взаимноортогональ-
ными. Так как мы рассматриваем лишь аналоговые сигналы, энергия
которых не зависит от X, то для расчета ран можно использовать раз-
работанную методику расчета вероятности ошибок при оптимальном
приеме М ортогональных сигналов, имеющих одинаковую энергию
(см. п. 7.4).
Как и при различении дискретных сигналов вероятность появле-
ния аномальных погрешностей ран зависит от отношения энергии сиг-
нала к спектральной плотности мощности а , широкополосности сиг-
нала М и модели сигнала (полностью известный сигнал, сигнал с
неизвестной начальной фазой или флуктуирующий сигнал), вида и
интенсивности помех.
В частности, для полностью известных сигналов при оптимальном
(гауссовская помеха) и асимптотически оптимальном (негауссовская
помеха) приемах в соответствии с выражениями (7.24) и (7.31), в ко-
торых М = а; гс = 0, можно записать
да
Ра»в1- JU ~Р1(Я> W)]M-1wcn(//)d//K(M- 1)И(аМао®
-да
«(М- 1)И
(8.27)
222
В этой формуле
со
Р1(?>Я) = JWn(A)dA,
н
где wn(A) — плотность распределения вероятностей q(X) соответственно на
участках только с помехой ?(Х) = Л (Л); wcn(7/) — на участке с сигналом и по-
мехой ?(Х) = g(X) + Л(Х).
При оптимальном и асимптотически оптимальном некогерентном
приемах на основании выражений (7.27) и табл. 7.2:
, 2 2.
Ран* -P^J- (828)
Аномальные погрешности могут оцениваться также и по значению
дисперсии погрешности.
Оценка дисперсии нормальной погрешности. Нормальные погреш-
ности при оптимальном приеме аналоговых импульсных сигналов и
условии правильного распознавания сигнального пика q(K) возникают
вследствие флуктуации сигнального типа g(X) (вдоль оси абсцисс X) под
воздействием шума Л(Х).
Для определения количественных характеристик нормальных по-
грешностей могут использоваться различные критерии и подходы.
Наиболее общим критерием является критерий минимума среднего
риска, который при квадратической функции потерь переходит в кри-
терий минимума средней квадратической погрешности. Последняя
при симметричности апостериорного распределения Wy(X) совпадает
с критерием максимума апостериорной вероятности или максимума
функции правдоподобия и’х(у).
Для того чтобы проверить насколько эффективна процедура оцен-
ки по максимуму правдоподобия, следует вычислить смещение и дис-
персию оценки. Однако непосредственно сделать это часто бывает
трудно. Поэтому для расчета дисперсии наиболее широко применяют
два подхода: в качестве дисперсии оценки используют границу Кра-
мера—Рао; дисперсию оценок вычисляют последовательными прибли-
жениями по малому параметру (разложения функционала правдоподо-
бия в ряд Тейлора и ограничения несколькими членами этого ряда).
В соответствии с теоремой Крамера—Рао дисперсия любой несме-
щенной оценки (если они существуют) параметра может быть найдена
на основании формулы [12, 14]
> /ф'м = «{[Д £2 1пи'хО')]} (8.29)
где /ф(Х) — количество информации по Фишеру, содержащееся относительно
параметра X в многомерной функции правдоподобия wx(y); /»{•} — знак мате-
223
магического ожидания; н\(у) — условная плотность распределения вероятно-
стей выборочных значений у (функция правдоподобия).
При некоррелированных помехах
я
*х(у) = «'„{tn ~ *(х. 'i)L •••> 1ун ~ /„)]! = fj «'„[у* - ja(x)1;
й = 1
Я
£ in wx(y) = £ Д In Wn[yA - sh(Ml =
Л= 1
где лА = yA - sh(X).
Информация по Фишеру относительно X при помехе с одномер-
ным распределением шп(л)
V» - "fe f hr]2 - i ЙгГ
I ’ й = 1L J a=1LO«-J
где
f 21 2
Лря1 = тИД •"«'„(и)] [ = |[Д 1пи,п(«)]
2
Для помехи типа белого гауссовского шума /ф„1 = 1/а„, и диспер-
сия нормальной погрешности при дискретном и непрерывном време-
ни наблюдения
(8.30)
Оценка нормальной погрешности но критерию максимального прав-
доподобия. Так как функция правдоподобия является монотонной
функцией функции взаимной корреляции <?(Х), то оптимальной оцен-
кой можно считать абсциссу максимума кривой q(X), определяемую из
выражения
d/dX(?(X)J = 0 при 51 = V (8.31)
Такую оценку часто называют наиболее вероятной, так как X = Х„,
ще Х„ — наивероятнейшее значение передаваемого сообщения X.
При условии воздействия слабой помехи разложим функцию вза-
имной корреляции в ряд Тейлора относительно наивероятнейшего
значения и ограничимся тремя членами
<?(Х) = ?(ХН) + (X - XH)d/d g(XH) + 0,5(Х - XJ2 й2/&Х2 (8.32)
224
из которого получим выражение для оценки максимального правдо-
подобия
Xm = Хн - [d/dX ?(XH)l[d2/dЬ2?(МГ*- (8-33)
Отметим, что разложение в ряд Тейлора (8.32)равноценно аппрок-
симации гауссовской плотностью распределения вероятностей выход-
ного эффекта <?(Х) около точки Хн. Считается, что <?(Х) является ана-
литической функцией и дифференцируема требуемое число раз.
Учитывая большое отношение "сигнал—помеха" в выражении [см.
формулу (6.10)J, получим
?(Х) = g(X) + А(Х) « g(X),
т. е. можно не учитывать помеховую составляющую й(Х).
Значение сигнальной составляющей функции <?(Х) определяется
выражением (6.12)
g(X) = 2а2гс(Х), где а2 = E/No.
Выражение для апостериорного распределения оценки сообщения
Хт следующее:
w-(Xm) = (2а2{ехр[~2а2гс"(Х)(Х " UV (8-34)
Здесь гс" (X) — вторая производная нормированной к энергии сиг-
нала функции взаимной корреляции сигнала по передаваемому по-
стоянному на интервале наблюдения сообщению (измеряемому пара-
метру) X, в точке ее максимального значения:
г т
«Х) = (1/£)Jj(Xh, /)5"(ХН + е, /)dr = (1/£)J[S'(X, Z)]2dr.
о о
Из-за четного характера сигнальной функции g(X) относительно
точки X = Хн все производные нечетного характера от нее в этой точке
равны нулю. Это означает, что математическое ожидание погрешно-
сти равно нулю:
/и(Х) = d/dXg(X) = 0,
т. е. оценка неэнергетического постоянного сообщения (параметра) в
первом приближении не смещена и асимптотически эффективна.
225
Дисперсия нормальной погрешности на основании выражения (8.32):
стн = 1/2а2<'(^)
(8-35)
и совпадает с оценкой по Крамеру—Рао (8.30). Знак " при гс”(Х) не
учитывается.
Таким образом, первое приближение для дисперсии нормальной
погрешности при использовании неэнергетических параметров сиг-
нала обратно пропорционально отношению "сигнал—помеха " по
энергии и кривизне сигнальной функции g(k) в ее максимуме. Оценка
по формуле (8.33) является несмещенной, асимптотически эффектив-
ной, так как удовлетворяет границе Крамера—Рао (8.30) со знаком ра-
венства. Эффективная несмещенная оценка определяется как оценка
с минимальной дисперсией.
2
Оценка стн может проводиться лишь для тех сигналов, у которых
функция гс(Х) является аналитической (имеет вторую производную) в
точке максимального значения.
Часто бывает удобно оперировать нормированной (приведенной), на-
2
пример к дисперсии сообщения дисперсией погрешности. В этом слу-
чае выражение для приведенной дисперсии можно представить в виде
5h=”h/^ = 4-2’ (836)
каМ
где к — числовой коэффициент, зависящий от вида сигнала и вычисляемой
погрешности (приведенной к 1, шкале или эффективному значению) и метода
вычисления числа М\ М — число степеней свободы сигнала-переносчика, ха-
рактеризующее его относительную широкополосность (Л/2 = 2г” (к)/к).
Выражения для Е, rc, М, гс"(Х) и А для некоторых импульсных сис-
тем передачи приведены в табл. 8.1.
Оценка приведенной дисперсии нормальной погрешности при
асимптотически оптимальном приеме в негауссовских помехах с не-
зависимыми значениями при непрерывном и дискретном времени на-
блюдения на основании выражения (8.33) с учетом формулы (6.35)
может проводиться по формуле
ЛЛ?а2Ц2о кМ*РсН^ ’
где ц2о — коэффициент подавления негауссовских помех.
226
227
Метод передачи Вид сигнала s(X, t) £
АИМ-ЧМ £/mcos[(<o0 + ПДХ)/ + <р01 при 0 < t < ти U2 у т и 2
-у212 ume cos[((i>o+ ОДХ)/ + ф0] 2А
ФИМ-АМ sinfi (Г-т.к) U- Пе(Г-тд1) COS<“0' + «>0) 2Пе
-!2(t-rM2 Ume со5(ш0Г+ф0) 2А
Таблица 8.1
= гс(е) (е = X — Лф) М = Л/е* к
sinSVHE ПдтиЕ „2 2 Пдти 3 Пдти л 2 2Т
-nje/8r2 е 21 4у2 Пд ./2лу л
Sin£l„T„€ с д ПЛЕ _2 2 П.т_ с Д 3 Пстд л 2 2Т
-2т2(гдЕ/2)2 е 2 2 'l тд 2^д 7S л
8.4. ПОМЕХОУСТОЙЧИВОСТЬ И ЭФФЕКТИВНОСТЬ АНАЛОГОВЫХ
СИСТЕМ С УГЛОВОЙ МОДУЛЯЦИЕЙ ПРИ ОПТИМАЛЬНОМ ПРИЕМЕ
Из аналоговых непрерывных систем с AM, БМ, ОМ, УМ вследст-
вие простоты технической реализации и высокой помехоустойчиво-
сти в различных системах (особенно в радиосистемах, в том числе со-
товых и транкинговых) наиболее широко используются системы с
угловой (ФМ и ЧМ) модуляцией.
При непрерывном наблюдении сигнал с угловой модуляцией
s(k, i) = (Um/2) sin{wor + 6C(X, r) + y},
где 0C(X, /) — фазовый угол, содержащий информацию о модулирующем со-
общении Х(Г).
В частности, при фазовой модуляции 0С(Х, /) = Л/фМХ(Г), где
^фм ~ индекс фазовой модуляции. При частотной модуляции
t
0С(Х, /) = Од|Х(т)с1т, где Од — угловая девиация частоты.
На основании теоретических и практических исследований дока-
зано (см. п. 8.2), что оптимальный приемник сигналов с УМ по струк-
туре представляет собой систему фазовой автоподстройки частоты
ФАПЧ (аналоговой, импульсной или цифровой). Такой демодулятор,
выполненный на базе системы ФАПЧ, часто называется синхронно-
фазовым (СФД).
Предположим, что на вход демодулятора поступает аддитивная
смесь
y(t) = s(X, /) + n(i),
где X(r) — сообщение в виде стационарного гауссовского процесса с известной
спектральной плотностью мощности Sx(w), например описываемой полиномом
Баттерворта [см. формулу (13.2)]; «(/) — помеха в виде белого гауссовского шума.
Структурная схема системы передачи с ЧМ и СФД приведена на
рис. 8.5, где собственно система ФАПЧ включает в себя: фазовый дис-
криминатор ФД, фильтр нижних частот ФНЧ1 и местный управляе-
мый по частоте генератор ЧМГ. Структурная схема системы ФАПЧ в
фазовых координатах приведена на рис. 8.6, где г| < 1 — коэффициент
Рис. 8.5
228
Рис. 8.6
потерь в ФД, вызванных его нелинейностью. Если нелинейное звено
ФД одним из способов линеаризации заменить на линейное, то полу-
чится обычная линейная следящая система. Для этого, например, дос-
таточно допустить, что дисперсия фазовой погрешности слежения не
.2.2 .
превышает некоторое пороговое значение (ст0 < ст0пор).
Случайное сообщение Х(/) на выходе системы воспроизводится в
виде оценки X (/). Качество передачи сообщения характеризуется пре-
жде всего значением нормальной приведенной дисперсии погрешно-
сти, определяемой при ФМ выражением
5Е2 = 5е/Л/^мэ> (8.38)
где 50 = — 9Г(Г)]2} — дисперсия фазовой погрешности слежения;
Л/фм э — эффективный индекс фазовой модуляции.
Дисперсия нормальной погрешности учитывает не только погреш-
ности из-за помех, но и динамические погрешности в демодуляторе.
Одновременно с нормальными погрешностями при приеме сигна-
лов с УМ на СФД могут возникать так называемые аномальные по-
грешности, приводящие в большинстве случаев к срыву слежения
СФД. В качестве критерия срыва слежения могут использоваться раз-
личные показатели, например, среднее число срывов слежения в еди-
ницу времени и др. Аномальные погрешности типа срыва слежения
характеризуют достоверность (надежность) работы СФД.
Надежность слежения СФД косвенно может оцениваться также по
2
пороговой дисперсии фазовой (временнбй) погрешности ст0пор.
Исходя из экспериментальных и теоретических расчетов при от-
сутствии начальной расстройки между номинальной частотой прини-
маемого сигнала и номинальной частотой ЧМГ (местного генератора
системы ФАПЧ), часто пороговая дисперсия
стпоР = °>25 рад2-
229
При этом считается, что СФД работает в близком к линейному ре-
жиму, и появлением срывов слежения можно пренебречь.
Помехоустойчивость оптимального линеаризированного СФД. Диф-
ференциальное уравнение, описывающее работу СФД (ФАПЧ), пред-
ставляет собой нелинейное стохастическое дифференциальное урав-
нение высокого порядка, аналитическое решение для которого может
быть получено для некоторых частных случаев. Нелинейность ФАПЧ
определяется нелинейностью фазового дискриминатора ФД, а стохас-
тичность — случайным характером сообщения Х(/) и помехи n(i).
Помехоустойчивость оптимального СФД. Вопросы полного синтеза
системы передачи различных стационарных случайных гауссовских со-
общений при использовании УМ и синхронно-фазовых демодуляторов
при различных исходных предпосылках (физической реализуемости и
нереализуемое™ систем передачи в случае введения и без введения оп-
тимальных предыскажающих и корректирующих цепей, использования
ЧМ и ФМ сигналов и некоторых других) исследовались в ряде работ.
Приведем методику и основные результаты синтеза физически реа-
лизуемых систем передачи классов ФМ и СФД, а также сформулируем
основные результаты имеющихся исследований для других случаев.
В частности, выбор оптимальной физически реализуемой переда-
точной функции линеаризованного СФД при передаче сообщений,
5х(ы) которых определяется полиномом Баттерворта (13.2), приводит
на основании формулы (8.10) к следующему выражению для мини-
мальной дисперсии фазовой погрешности сложения:
= -А_ [(1 + 2а2 Л/фМэ П2)1/2* - И < <4 . (8.39)
анЛ
Здесь
2 _ sin(it/2fc)
“н NO2&FX NO2FC (п/2к)
представляет собой отношение мощности сигнала к мощности шума
в удвоенной эффективной полосе сообщения &FX; к — степень поли-
нома Баттерворта.
При выводе соотношения (8.39) принималось, что спектральные
плотности мощности фазы сообщения и помехи соответственно:
? Л'п Nn
•W = л/фм W; 3» =
где л — коэффициент линеаризации ФД; л < 1; No — спектральная плотность
белого шума; иэ — эффективное напряжение сигнала с УМ.
230
При этом считалось, что ФД является идеальным.
Соответственно на основании выражений (8.38) и (8.39) имеем
2
°б
S
2
е
2 IU + 2ан Л/*МэЛ2)1/2* - 1].
анЛ/фмэ>1
(8.40)
Полученное выражение устанавливает взаимосвязь между 5 и па-
раметрами ан, Л/фМ , к при условии работы СФД в линейном режиме,
т. е. при большом отношении "сигнал-шум" на выходе приемника.
Из выражения (8.40) следует, что значение 5Е от Л/фм соблюдается
2
лишь в надпороговой области, т. е. в области больших значений ан.
Как уже отмечалось, при приеме сигналов с УМ на СФД надпорого-
вый режим работы СФД соблюдается до тех пор, пока дисперсия фа-
э
зовой погрешности о0 будет меньше некоторого порогового значения
2 2
Од (Уд
® епор
(8.41)
Таким образом, для достаточно обоснованного синтеза необходи-
2 2
мо ан и Л/фмэ выбрать так, чтобы о0, определяемое выражением
(8.40), удовлетворяло неравенству (8.41).
2 2
При заданных требованиях к оЕ и о0 на основании уравнения
(8.40) оптимальное значение
= О°пор/5-
Подставив это выражение в формулу, получим
с2 _ - 2 2
2ан пор Од
пор
2 2
j , ан порстеПорП
к
2x2*
I
- -1
(8.42)
2
П
Зависимости (8.41) и (8.42) являются основными для расчета по-
мехоустойчивости и пороговых свойств оптимальных систем передачи
непрерывных сообщений с ФМ и СФД.
Введем параметр
“уел = ан пор °епорт12’ (8.43)
231
который назовем условным пороговым отношением "сигнал-шум" на
2 2
входе приемника, так как он зависит от значений параметров и ц .
° пор
Тогда из уравнения (8.42) получим
2 у2к ,-1
5с2=2аЦ[1+^] -1J . (8.44)
Зависимость (8.44) для некоторых значений к показана на рис. 8.7.
Анализ показывает существенную зависимость помехоустойчиво-
сти СФД от спектрального распределения мощности ^(ш); причем при
заданных требованиях к 5е наименьшее значение Оу^ требуется при
равномерном характере 5х(ш) (к -> °о), а наибольшее при к = 1. При
других видах 5х(ш), имеющих к > 2, зависимости аусл = /(бЕ) лежат ме-
жду указанными выше значениями.
Полученные таким образом выражения д ля оценки помехоустойчи-
вости систем передачи определяют потенциальные возможности систе-
мы передачи с ФМ и СФД, Однако при к > 1 оптимальные передаточ-
ные функции СФД трудно реализуемы, и поэтому выражения для
порогового а„ показывают предел, к которому можно стремиться. В
связи с этим часто используются квазиоптимальные СФД с заданной
передаточной функцией и оптимальными параметрами. Рассмотрим
методику нахождения оптимальных параметров у линеаризованного
квазиоптимального СФД.
Помехоустойчивость квазиоптимального СФД. При частотном син-
тезе СФД по минимуму дисперсии погрешности исходным уравнени-
ем является уравнение (8.5), после взятия интегралов в котором по-
лучается выражение для дисперсии фазовой погрешности
сте =/<“н > Уь РЛ
где у; — относительный параметр демодулятора (например, коэффициент уси-
ления, постоянные времени и т. п.), от которого дисперсия погрешности за-
висит экстремально; р,- — другой параметр сигнала или демодулятора.
„ 2
Задача нахождения минимума дисперсии погрешности ае = min
сводится в этом случае к нахождению минимума функции по несколь-
ким переменным dog/dy,— 0 (где i = 1,2, ...). Решением этой системы
уравнений, являются выражения для оптимальных параметров и ми-
нимальной дисперсии демодуляции.
Рассмотренные методики полного и частичного синтезов опти-
мальных и квазиоптимальных СФД по минимуму дисперсии суммар-
ной погрешности совпадают с задачей оптимизации таких демодуля-
торов по пороговому значению отношения "сигнал-помеха " на входе.
232
В частности, при баттервортовском сообщении Л(/), к оо и При ус-
тановке в петле СФД пропорционального интегрирующего фильтра
»-ф1 = П + (р/о»2)1/[* + W
Выражения для оптимальных параметров СФД и порогового зна-
чения отношения "сигнал-шум" при ЧМ [12, 20]:
^2опт
®пор
Гуопт - *yoirr/Qc - [5(у1 + D]
где ку — коэффициент усиления петли СФД; у1 = а^/Ц..
Сравнение различных методов приема ЧМ сигналов. Полученные рас-
четные зависимости позволяют провести сравнения по помехоустойчи-
вости различных методов приема ЧМ сигналов при работе в условиях
флуктуационных помех типа белого гауссовского шума. Для наглядно-
сти и удобства сравнения различных методов приема ЧМ сигналов на
рис. 8.8 приведены приближенные зависимости а^пор =/(6^), полу-
ченные для случая передачи непрерывного сообщения с равномерным
233
спектром и условия, что широкополосность системы передачи опти-
мальна. Кривая 1 приведена для оптимального СФД второго порядка
2
при о0 — 0,25, кривая 2 — для оптимального физически реализуе-
мого СФД при Од = 0,25, кривая 3 — для оптимальной физически
°пор
нереализуемой системы с ФМ и СФД. Здесь же приведены зависимо-
сти для идеальной по Шеннону системы передачи (кривая 4) в пред-
положении, что система занимает бесконечно широкую полосу частот
(см. п. 14.4). Также приведена кривая при приеме на СЧД (стандарт-
ный частотный дискриминатор).
На основании приведенных данных можно сделать следующие
выводы:
система передачи с ЧМ и оптимальным физически реализуемым СФД
требует примерно на 8 дБ больше порогового значения отношения "сиг-
нал-помеха" на входе, чем идеальная по Шеннону система передачи;
СФД второго порядка с оптимизированными параметрами проиг-
рывает оптимальному физически реализуемому СФД по пороговому
значению примерно 0,7—0,8 дБ;
при высоких требованиях к качеству передачи сообщения (8Е < 0,1)
СФД по помехоустойчивости и пороговым свойствам значительно пре-
восходит стандартный частотный дискриминатор. При сравнительно
низких требованиях к качеству передачи (8Е >0,1) хорошими пороговы-
ми свойствами обладает и СЧД, например, на расстроенных контурах;
помехоустойчивость и пороговые свойства рассмотренных помехо-
устойчивых демодуляторов, например СФД полностью реализуются
лишь при выборе оптимальной широкополосное™ Л/Опт, которая долж-
на быть шире, чем при использовании менее помехоустойчивых демо-
дуляторов, например СЧД;
на помехоустойчивость систем передачи с ЧМ влияют не только
вид демодулятора и его характеристики, но и ограниченность дина-
мического диапазона телефонного сигнала, использование предыска-
жающих и корректирующих фильтров, а также компандирование ре-
чи. Применение, например, предыскажений спектра речевого сигнала
с последующей обратной коррекцией на выходе приемника позволяет
получить выигрыш в снижении выходного шума на несколько децибел.
Было проведено достаточно строгое сравнение по помехоустойчи-
вости различных методов приема ЧМ сигналов лишь при воздействии
флуктуационных помех типа белого гауссовского шума. Однако на ос-
новании данных, приведенных в п. 6.4, можно утверждать, что при
адекватных условиях использования (например, при нелинейной об-
работке с одинаковым нелинейным безынерционным преобразовани-
ем) полученные результаты и выводы по сопоставлению различных ме-
тодов приема ЧМ сигналов качественно сохраняются и при воздействии
негауссовских помех, например импульсных или синусоидальных.
Приведенная методика синтеза и анализа СФД может использо-
ваться для синтеза и анализа систем высокочастотной и тактовой син-
хронизации в приемниках дискретных сигналов [20].
234
Глава 9
ЭЛЕМЕНТЫ ТЕОРИИ ПОМЕХОУСТОЙЧИВОГО
КОДИРОВАНИЯ
9.1. ОСНОВНЫЕ ПОНЯТИЯ
При передаче информации по каналам связи возникают ошибки
вследствие помех и искажений сигналов. Для их обнаружения и ис-
правления используются помехоустойчивые (корректирующие) коды.
Помехоустойчивыми называют коды, позволяющие обнаруживать и
(или) исправлять ошибки в принятом сообщении. Способность кода
к обнаружению и исправлению ошибок основана на введении избы-
точности в кодируемое сообщение. Избыточные символы формиру-
ются по определенным правилам и называются проверочными или кон-
трольными. Увеличение числа таких символов в кодовой комбинации
повышает обнаруживающую и исправляющую способности кода, но
приводит к снижению скорости передачи информации.
Упрощенная схема системы передачи информации при помехо-
устойчивом кодировании приведена на рис. 9.1.
В общем случае под кодированием понимается замена последователь-
ности символов сообщения от дискретного источника информации с
алфавитом А последовательностью символов кодирующего устройства
(кодера) с алфавитом А\. Различают два вида кодирования: блочное и
непрерывное.
При блочном кодировании последовательность символов сообще-
ния разделяется на блоки из к символов, которые преобразуются в
блоки из п символов кода (п > к). Символы сообщения источника на-
зывают информационными. Последовательность из п символов на вы-
ходе кодера называется кодовой комбинацией или кодовым словом. Со-
вокупность кодовых слов образует (п, к) код. Коды, комбинации
которых содержат одинаковое число символов, называются равномер-
Е-(еъ ег,...еп)
Рис. 9.1
235
ными. Их применение, в отличие от неравномерных кодов, упрощает
схемы кодеров и декодеров.
Если при кодировании информационная последовательность не
разделяется на блоки, то код называется непрерывным. Такие коды так-
же называют древовидными или цепными. Блочные коды можно рас-
сматривать как частный случай непрерывных.
При известном размещении информационных и проверочных
символов в кодовой комбинации код называется систематическим.
Обычно информационными являются первые к символов кодовой
комбинации.
Множество символов, из которых состоит кодовая комбинация,на-
зывается алфавитом кода, а число различных символов в алфавите —
основанием кода. Наибольшее распространение получили двоичные
коды с основанием кода, равным двум.
Помехоустойчивые коды, включая двоичные, делятся на линейные и
нелинейные. Наиболее распространены линейные, равномерные, двоич-
ные коды, кодовые комбинации которых образуют линейное простран-
ство относительно операции поразрядного сложения по модулю 2.
Сложение по модулю 2(mod2) осуществляется по следующим пра-
вилам: 0 + 0 = 0;0 + 1 = 1;1 + 1= 0 или 1 = -1 — это значит, что
операции сложения и вычитания по mod2 совпадают.
Кодовые комбинации таких кодов могут быть представлены в виде
векторов в и-мерном линейном пространстве или многочленов (по-
линомов) от формальной переменной х степени п — 1.
Представление кодовых комбинаций как векторов в и-мерном про-
странстве позволяет определить расстояние между ними, называемое
расстоянием Хэмминга. Под ним понимается количество символов,
которыми одна комбинация отличается от другой. Например, между
комбинациями Щ — 110110 и U2 — 011001 расстояние d(U\, U2) — 5,
так как они содержат 5 несовпадающих символов. Расстояние Хэм-
минга совпадает с весом суммарной комбинации (Ц + U2) = d(Ux, U2),
под которым понимается число ее ненулевых символов. Понятие веса
применимо к любой комбинации кода. Например, комбинация Щ
имеет вес = 4, так как содержит 4 единицы, а вес W(U2) = 3.
Построение помехоустойчивых кодов основано на использовании
алгебраических структур (групп, колец, полей), определяющих прави-
ла формирования кодовых комбинаций, обнаружения и исправления
ошибок в них.
Для передачи кодовых комбинаций между кодером и декодером
используется дискретный канал связи — совокупность технических
средств, включая среду распространения, сигналы на входе и выходе
которого принимают конечное число значений. Простейшей моде-
лью дискретного канала является двоичный канал связи с помехой,
аддитивно взаимодействующей с сигналом. Помехой, или вектором
ошибки, в таком канале называется последовательность из п симво-
236
лов Е= (ер е2, ея), которую надо поразрядно сложить по модулю 2
с переданной кодовой комбинацией U, чтобы получить принятую:
U'— U+ Е. Символы вектора ошибки е, = 1 означают наличие ошибки
в принятой комбинации U', а е,- = 0 — отсутствие ошибки. Число не-
нулевых символов вектора ошибки Е называется весом или кратно-
стью ошибки q. Кратность ошибки является случайной величиной,
принимающей значения от 0 до и.
Если символы кодовой комбинации в таком канале искажаются с
одинаковой вероятностью ре, т. е. р(е,= 1) = ре, i — 1, 2, и, то канал
называется двоичным симметричным без памяти, а ошибки — незави-
симыми. В этом случае распределение вероятностей ошибки q-Vi крат-
ности в кодовых комбинациях (и, к) кода является биномиальным:
/*„(9)= C’p’(l-Pe)"-’ (9.1)
где С„ — число сочетаний из п символов по q.
Например, ре — 1 • 10-4, а п = 5. Тогда вероятности ошибки первой,
второй и пятой кратностей соответственно:
Р1 = С* р’ (1 -/>е)4 = 5 • 10~4;
/>2 = С^^(1 -ре)3 = РЮ"7;
/>5 = р5с (1 - ре)° « 1 • IO'20
Из их сравнения следует, что в каналах с независимыми ошибками
наиболее вероятны одиночные ошибки. Этот результат обосновывает
использование помехоустойчивых кодов для обнаружения и исправ-
ления ошибок малой кратности в каналах с независимыми ошибками.
Чаще встречаются каналы, в которых ошибки группируются в пакеты.
Под пакетом ошибок понимается вектор ошибки из п символов, из
которых / подряд (от 2 до л) искажены или начинаются и заканчива-
ются ошибками, между которыми могут быть искаженные и неиска-
женные символы. Например, векторы ошибки Е1 — 001111100...0;
Е2 — 001100100...0; Е3 — 001010100...0 содержат пакеты ошибок из
4 символов I — 4. Под действием ошибок комбинация на выходе ка-
нала связи t/'отличается от комбинации на входе канала U'. Для оцен-
ки информационных символов по принятой комбинации U' исполь-
зуется декодирующее устройство (декодер). При декодировании
решаются две задачи: оценивание переданной кодовой комбинации и
формирование информационных символов. Наиболее сложной явля-
ется первая задача декодирования. При равной вероятности кодовых
237
комбинаций ее оптимальное решение обеспечивает метод максималь-
ного правдоподобия.
В случае двоичного симметричного канала функция правдоподо-
бия определяется вероятностями векторов ошибки:
д.
P(.U'/U) = />(£,) = р '(1 - ре)" (9.2)
где qt — вес вектора ошибки £,• = U + U'.
Из формулы (9.2) следует, что P{U'/U) максимальна, если qj мини-
мальна. Тогда оценкой U является кодовая комбинация, искажение ко-
торой для получения принятой комбинации t/'имеет минимальный вес:
U = U'+ Е,.
Если таких векторов ошибок Et несколько, то наиболее вероятный
из них определяется случайным выбором.
В целом сложность процедуры декодирования зависит от длины
кодируемых информационных последовательностей, правил кодиро-
вания, типа канала связи (односторонний, двусторонний) и характера
ошибок в нем (независимые или пакеты ошибок).
В железнодорожных системах автоматики, телемеханики и связи
наибольшее распространение получили двоичные линейные коды.
Поэтому далее рассматриваются коды, относящиеся к классу двоич-
ных линейных кодов.
9.2. ПРИНЦИП ОБНАРУЖЕНИЯ И ИСПРАВЛЕНИЯ ОШИБОК
В (л, к) КОДАХ. КОРРЕКТИРУЮЩАЯ СПОСОБНОСТЬ КОДА
Для того чтобы код обнаруживал и исправлял ошибки, множество
всех возможных комбинаций кода 2” разделяется на два непересекаю-
щихся подмножества: разрешенных (кодовых) 2к и запрещенных 2” — 2к
комбинаций. Кодер использует только разрешенные комбинации. За-
прещенные комбинации не используются при передаче, а могут об-
разовываться только под воздействием помехи.
Принцип обнаружения ошибок заключается в том, что декодер оп-
ределяет принадлежность принятой комбинации коду. Если комби-
нация принадлежит коду, то принимается решение, что ошибок нет.
Если же принятая комбинация является запрещенной, то принимает-
ся решение о наличии ошибки. Код может обнаруживать ошибки, ес-
ли число запрещенных комбинаций 2” — 2к > 0. Ошибки нельзя об-
наружить только в тех случаях, когда одна кодовая комбинация
перешла в другую под воздействием помехи. Вероятность обнаруже-
ния ошибок (л, к) кода определяется выбором разрешенных кодовых
комбинаций и не зависит от свойств дискретного канала связи.
238
Принцип исправления ошибок состоит в том, что все множество
комбинаций кода 2” разделяется на 2к непересекающихся подмно-
жеств, которые называются областями решений. Каждая область реше-
ния соответствует одной из разрешенных кодовых комбинаций. Если
принятая комбинация попадает в одну из 2* областей, то принимается
решение о передаче кодовой комбинации, соответствующей этой об-
ласти. Исправление ошибок будет происходить в тех случаях, когда
кодовое слово и принятая запрещенная комбинация относятся к од-
ной области решений. В каждую область решений включают такие
запрещенные комбинации, при приеме которых наиболее вероятной
является одна из разрешенных кодовых комбинаций (и, к) кода, что
соответствует принципу максимального правдоподобия.
При передаче равновероятных кодовых комбинаций (и, к) кода
распределение комбинаций по областям решений определяется толь-
ко характером ошибок в канале связи. Например, в двоичном сим-
метричном канале наиболее вероятны ошибки малой кратности (см.
п. 9.1). Поэтому разбивка запрещенных комбинаций между областями
решений должна осуществляться так, чтобы прежде всего исправля-
лись ошибки малой кратности. Для этого кодовые комбинации выби-
раются так, чтобы при ограниченном числе запрещенных комбинаций
обеспечить возможность исправления ошибок малой кратности. Для
однозначного декодирования каждая из запрещенных комбинаций
должна входить только в одну область решений, тогда эти области не
перекрываются.
Различия в комбинациях (и, к) кодов как векторов линейного
и-мерного пространства определяются расстоянием Хэмминга между
ними d(Ut, Uj), которое изменяется от 1 до п. Очевидно, что среди
комбинаций (п, к) кода можно выбрать такие, расстояние между ко-
торыми, например, не менее двух, и их использовать при кодировании
комбинаций и передавать в канал связи. Такие комбинации являются
кодовыми или разрешенными, а остальные — запрещенными. Мини-
мальное расстояние между всеми кодовыми комбинациями называет-
ся минимальным кодовым расстоянием t/min и определяется как вес
кодовой комбинации Uj, наименее отличный от нулевой комбинации
Uq, всегда принадлежащей коду t/min = W(Uj, UQ). Минимальное ко-
довое расстояние можно использовать для оценки обнаруживающей
и исправляющей способности (п, к) кодов.
Для обнаружения ошибки в принятой комбинации достаточно, что-
бы ее кратность q (или вес ошибки) была меньше минимального кодо-
вого расстояния t/min. В этом случае принятая комбинация считается за-
прещенной. Тогда кратность ошибки связана с t/min соотношением:
?0 = rfmin-L <9-3)
239
Для исправления ошибок необходимо, чтобы области решений не
перекрывались, и каждая из запрещенных комбинаций входила толь-
ко в одну область .Чем дальше граница области от кодового слова, тем
большей кратности ошибка может быть исправлена при передаче дан-
ной кодовой комбинации. Допустим, что границы областей двух со-
седних кодовых слов соприкасаются, и расстояние между словами
Тогда ошибки <?-й кратности, попадая в одну из областей реше-
ний, будут исправляться. Эго возможно при (rfmin — 1)/2. Таким об-
разом максимальная кратность исправляемых ошибок связана с Jmin
соотношением:
9Я=[Ц^]. (9.4)
где квадратные скобки означают целую часть числа.
Код позволяет также исправлять некоторые ошибки кратности,
большей qn, если принятая искаженная комбинация не выходит из об-
ласти решений для переданного кодового слова.
Как следует из выражений (9.3), (9.4), для повышения кратности
обнаруживаемых или (и) исправляемых ошибок требуется увеличивать
минимальное кодовое расстояние dmin, а значит число избыточных
символов кода. Поэтому одной из задач теории кодирования является
построение кодов с минимальным числом проверочных (избыточных)
символов при заданном rfmin. Общего решения этой задачи не суще-
ствует, однако известны граничные соотношения для определенных
классов кодов. Так, например, нижнюю границу для числа избыточ-
ных (контрольных) символов (л, к) кодов можно определить, если
приравнять число исправляемых ошибок, равных числу запрещенных
комбинаций 2" — 2*, к числу всех ошибок кратности от 1 до л любой
из 2 кодовых комбинаций:
^ис
2я - 2* > 2* £ С’
9 = 1
ИЛИ
’не
2п~к- 1 >2*£ С’. (9.5)
?- 1
Из выражения (9.5) следует, что для исправления ошибок первой
кратности параметры (и, к) кода связаны соотношением
2я-*—1>л. (9.6)
240
Учитывая формулу (9.4), выражение (9.5) может быть представлено
в виде
(л ~ к) >
'og? L с’
? = °
(9.7)
Это выражение называется границей Хэмминга для числа контроль-
ных символов кода.
Если при некоторых пик неравенства (9.5)—(9.7) переходят в ра-
венства (л, Л)7код называется совершенным или плотноупакованным.
Такие коды исправляют все ошибки только кратностью до qK =
= 0,5[rfmin — 1] и ни одной ошибки более высокой кратности. Плот-
ноупакованным и коды называют потому, что все запрещенные ком-
бинации попадают внутрь областей решений.
К совершенным относятся три типа линейных кодов: двоичный
код нечетной длины с повторением, коды Хэмминга и код Голея.
Код с повторением (л, 1) содержит две кодовые комбинации, со-
держащие один информационный символ и л — 1 проверочных, ко-
торые повторяют информационный:
° = = °3 = = °л- I-
Одна кодовая комбинация этого кода состоит только из нулей,
другая — из единиц. Минимальное кодовое расстояние dmin = л и
q0 = п- 1,9ИС= |уу]-
Коды Хэмминга, предложенные Р. Хэммингом в 1948 г., относятся
к (л, к) кодам, исправляют все одиночные ошибки, имеют минималь-
ное кодовое расстояние </min = 3, q0 = 2, q„c = 1. Коды Хэмминга об-
разуют следующий ряд: (3,1), (7,4), (15,11), (31,26), (63,57), (127,120)...
Следовательно, число проверочных символов растет значительно
медленнее числа информационных. Это означает, что выгодно ко-
дировать более длинные информационные последовательности. Для
этих кодов достигается нижняя граница числа проверочных символов
л — к = log2(fl + 1).
Код Голея (23,12) имеет dmin = 7, qQ = 3 и является совершенным,
поскольку п — к — 23 — 12 = log2 (С^3 + С23 + С^3 + С^3 ).
Значительно шире класс квазисовершенных кодов, которые
исправляют все ошибки кратности до qKC, часть ошибок кратности
<7ИС + 1 и ни одной ошибки 5олее высокой кратности.
241
9.3. ЛИНЕЙНЫЕ, БЛОЧНЫЕ (л, к) КОДЫ
Линейным (п, к) кодом называется совокупность 2к кодовых ком-
бинаций из общего 2Л всех возможных комбинаций, удовлетворяющая
определенному правилу кодирования. Кодовые комбинации U, систе-
матического блочного (л, к) кода записываются в виде
(°1> °2> °3> Р ак + 2- -•> ап)>
где О],ак — число к информационных символов; ак + ], ап — число (л — к)
проверочных (избыточных) символов.
Числа кип определяют скорость передачи информации кодом,
равную к/n двоичных единиц на один символ.
Помехоустойчивость (л, к) кода оценивается с помощью мини-
мального кодового расстояния </min или числом обнаруживаемых и ис-
правляемых ошибок <?и). Комбинации линейного (л, к) кода можно
рассматривать как векторы в л-мерном пространстве, координатами
которого являются двоичные символы. Для комбинаций линейного
(л, к) кода определены операции сложения (t/z + Uj), умножения на
скаляр a(aUj), удовлетворяющие условиям коммутативности, ассо-
циативности и дистрибутивности.
Способы задания линейного (л, к) кода представляют собой
разные формулировки правила кодирования, формирования кодовой
комбинации по известным информационным символам. Линейные
(л, к) коды могут быть заданы с помощью уравнений формирования
и проверок производящей G и проверочной Н матриц.
Формирование проверочных символов (л, к) кода заключается в
сложении по модулю 2 определенных информационных символов:
*
°*+/= j=^-,n~k, (9.8)
/= I
где ру — коэффициенты, принимающие значение 0 или 1 в зависимости от
участия информационного символа а, в формировании проверочного ак + j.
Уравнений формирования столько, сколько проверочных симво-
лов в кодовой комбинации (л, к) кода — (л — к). Если уравнения фор-
мирования переписать в виде
к
X aiP,j + ак +J = °> <9-9>
<= I
то образуются уравнения проверок, используемые при декодировании
принятой из канала комбинации. Уравнение (8.9) называют обобщен-
242
ной проверкой на четность, так как оно показывает, сумма каких ко-
довых комбинаций должна быть четной, т. е. равна 0 по модулю 2.
Линейный (л, к) код задается указанием базиса ^-мерного подпро-
странства, который содержит к линейно независимых комбинаций
(векторов) длины л. Линейно независимыми называются такие к ком-
к
бинаций l/|, U2, Uk, для которых a, U/ = 0 только при всех а( = О,
1= 1
i — 1, ..., к.
В качестве базисных удобно выбрать информационные комбина-
ции, расположенные по осям координат ^-мерного подпространства
и образующие единичную подматрицу /. Совокупность к базисных
комбинаций образует производящую (порождающую) матрицу G, из
к строк и л столбцов, состоящую из единичной (информационной)
подматрицы / размерностью (кхк) и проверочной матрицы Р размер-
ностью [(л — к)хк\ : <7 = т. е.
(7 =
(9.10)
в которой Ру в подматрице Р выбираются таким образом, чтобы обес-
печивалось заданное минимальное кодовое расстояние dmin (л, к) ко-
да. Минимальное кодовое расстояние dmin определяется минималь-
ным весом строки (или строк) матрицы <7: </min = или числом
единиц в ней.
Строки матрицы <7 являются линейно независимыми, что обеспе-
чивается единичной подматрицей /, и позволяют любую кодовую
комбинацию (л, к) кода представить в виде
к
U=aiU6l+a2U62 + ... + akU6k~ ^atU6i (9.11)
1= I
или в матричной форме U = AG, где А — информационная последо-
вательность символов Oj, о2, ..., ак.
Наличие единичной подматрицы / в производящей матрице <7 яв-
ляется признаком систематического (л, к) кода. Это следует из фор-
мулы (9.9), так как первые к символов кодовой комбинации совпада-
ют с информационными символами.
Если матрица <7 не содержит единичную подматрицу I, то код яв-
ляется несистематическим. Это возможно при выборе в качестве ба-
243
зисных иных линейно независимых комбинаций Л-мерного простран-
ства. Проверочная матрица Н представляет собой символическую
запись уравнения проверок (9.9), в которой единицами обозначаются
символы, участвующие в проверках, а нулями все остальные символу
комбинации (л, к) кода. Матрица Нсостоит из (л, к) строк и л столб-
цов и для систематического (л, к) кода имеет вид
Н—[рТ1п_к] —
Ри/’г! • -Pkl
Р\2Р22'Рк2
10...О
01...0
(9.12)
Pln-kP2n-k--Pkn-k 0С-" 5
Проверочная и производящая матрицы удовлетворяют уравнению
т
HG = 0, если они задают один и тот же (л, к) код. Для кодовых ком-
бинаций (л, к) кода выполняется равенство, справедливость которого
проверяется при декодировании:
UHT = 0,
(9.13)
индекс Тозначает транспонирование матрицы.
Рассмотрим задание кода Хэмминга для исправления однократных
ошибок на примере кода (7,4). Составим три уравнения формирова-
ния проверочных символов кода (по числу проверочных символов в
кодовой комбинации):
1
°1 + о2 + о4 = °бк
в| + а + а4 = а7 J
(9.14)
Здесь выполняется сложение по модулю 2.
Из уравнений формирования легко получаются уравнения проверок:
в| + + а3 + а5 = 0
в| + а2 + а4+ а6 = 0
Л| + а3 + а4 4 л7 = 0
(9.15)
Проверочная и производящая матрицы кода соответственно сле-
дующие:
110100
101010
0 1 10 0 1
(7 =
1 0 0 0 1 1 1
0 10 0 110
0010101
< 0 0 0 1 0 1 Ь
(9.16)
Я =
244
Как видно из матрицы G
</min = 3, так как вес третьей и чет-
вертой строк одинаков и равен 3.
Кодеры для линейных (л, Л)
кодов могут быть построены на
основании соотношения (9.8),
определяющего способ формиро-
вания кодовой комбинации по за-
данным информационным симво-
лам. Структурная схема кодера,
формирующего проверочные сим
волы в соответствии с уравнения-
ми (9.9) для систематического ко- Рис. 9.2
да Хэмминга (7,4)^ приведена на
рис. 9.2. Кодер содержит семиразрядный регистр сдвига PC и три сум-
матора по модулю 2. Четыре информационных символа at—a4 посту-
пают от источника информации ИИ в PC. Сложением по модулю 2 оп-
ределенных информационных символов [см. уравнение (9.9)] за один
такт формируются проверочные символы а5—а7, которые записывают-
ся в PC. После чего сформированная таким образом кодовая комби-
нация U поступает из PC в канал.
Декодирование линейных (л, к) кодов состоит в обнаруже-
нии и (или) исправлении ошибки в принятой комбинации U'. Для
этого определяется синдром (признак) принятой комбинации U' =
= (о,, oj, o-J, ..., а; )
С= (cj, с2, с3, ..., с„ _*) = U'HT.
(9-17)
Синдром представляет собой вектор-строку из (л — к) символов q,
с2, с3, ..., с„ которые при подстановке формулы (9.12) в выражение
(9.14) можно представить в виде
к
cj = X рУ + ak+j’ *’ л - к.
i = 1
Так как принятая комбинация (/'может отличаться от переданной
кодовой комбинации U на величину ошибки U'= U + Е, то синдром
С определяется только вектором ошибки Е
С= U'HT= (U+ Е)НТ= UHT+ ЕНТ = ЕНТ, (9.18)
поскольку UHT — 0 [см. формулу (9.13)]. Из соотношений (9.13) сле-
дует, что С = 0, когда ошибки в комбинации (/'не было (£ = 0), или
под воздействием ошибки (£ * 0) одна кодовая комбинация перешла
в другую кодовую комбинацию.
245
Если С * 0, в принятой комбинации имеется ошибка, и для ее об-
наружения необходимо вычислить синдром.
Исправление ошибок в принятой комбинации возможно, если ус-
тановлено взаимно однозначное соответствие между синдромом и
конфигурацией ошибки (однократная, двухкратная и т. д.). Такое со-
ответствие можно установить подстановкой вектора ошибки Е = (els
е2, .... еп) в выражение (9.18), тогда
С=
/= 1
(9.19)
т
где Hj — столбец проверочной матрицы.
Из формулы (9.19) следует, что при однократной ошибке е( (вектор
ошибки Евида 100...О, 010...0, ...00...1) синдром совпадаете z-м столб-
цом матрицы Я или z-м искаженным символом принятой комбинации.
Взаимно однозначное соответствие между синдромом С и ошибкой <?,,
обеспечивается, если столбцы проверочной матрицы различные и не
нулевые. В случае ошибки второй кратности е(, еу (вектор ошибки Е
вида 101...0, 011...0, ...10...1) синдром формируется сложением z-ro и
/-го столбцов матрицы Н, при этом их сумма не должна совпадать ни
с одним из столбцов матрицы. Такое условие может быть обеспечено
определенным выбором матрицы Н.
По вычисленному синдрому С = (q, с2, ..., с„) осуществляется
оценка символов ё( вектора ошибки Е и оценка символа переданной
комбинации
а /= а- + е,- = а,- + е(- + ё(-;
a j правильна, если правильно оценен символ помехи ё,- = аг
Рассмотрим процедуру декодирования на примере кода Хэмминга
(7,4). Схема декодера (рис. 9.3) содержит регистр сдвига, в который из
канала поступает комбинация U'. Три сумматора по модулю 2 осуще-
ствляют три проверки в соответствии с соотношениями (9.15). Выхо-
ды сумматоров подводятся на вход схемы ИЛИ для фиксации одно-
кратных и двухкратных ошибок и на входы четырех дешифраторов
ошибок (схема И) по числу информационных символов комбинации.
При поступлении всей комбинации в PC ее символы в соответствии
с соотношениями (9.15) подаются на три сумматора для выработки со-
ставляющих синдрома С — (ср с2, с3). Если составляющие синдрома
равны, то согласно уравнениям проверок (9.15) ошибки в принятой
комбинации не было или данной проверкой она не обнаружена. Если
246
же хотя бы один из с(* О, то имеется ошибка. Таким образом, синдром
ошибки представляет собой совокупность результатов уравнений про-
верок, которая соответствует z-му столбцу матрицы Н и Z-му искажен-
ному символу принятой комбинации. Так как столбцы матрицы Н
различны [см. соотношение (9.15)], то однократные ошибки будут ис-
правлены. Для этого в схеме декодера установлены дешифраторы
ошибок (схемы И), настроенные на комбинации, соответствующие
первым четырем столбцам матрицы Н.
Допустим, что при проверке комбинации на наличие ошибки на
выходах сумматоров получена комбинация вида 111. Тогда на выходе
схемы ИЛИ появятся единицы, что означает наличие ошибки, и на
выходе первого дешифратора также появится 1, а значение а1 в PC из-
менено на обратное. Это означает, что для кода Хэмминга оценка
символа осуществляется по правилу о(• = о( + 1.
Недостатком такой схемы декодера является быстрое увеличение
количества дешифраторов ошибок при возрастании числа информа-
ционных символов (п, к) кода, что ограничивает их применение и тре-
бует использования линейных кодов, позволяющих уменьшить объем
оборудования декодера.
9.4. ЦИКЛИЧЕСКИЕ (л, к) КОДЫ
Определение. Способы задания и кодирования. Линейный (л, к) код
называется циклическим, если при циклическом сдвиге символов ко-
довой комбинации на один разряд вправо (влево) образуются комби-
нации, также принадлежащие коду.
247
Для алгебраического описания циклических (п, к) кодов каждой
комбинации U— (ab о2, о3, дл) ставится в соответствие многочлен
(полином) U{x) — адх° + «qx* + ajx2 + ... + о„ _ jx” - 1 от формальной
переменной х. Умножение на х увеличивает степень многочлена U(x) и
вызывает удлинение кодовой комбинации на один символ. Чтобы из-
бежать увеличения степени U(x)f^ заменяют на 1 (х" = 1 или х" — 1 = 0):
хЩх) = х(аох° + OjX1 + ... + ап _ ^х? ~ ') =
= аох+ OjX2 + ... + ап_2х?~ ' + ап- ап- I + «ох + “l*2 + — + ап-2^~ '•
Для множества многочленов, соответствующих л-символьным
комбинациям^вводятся операции сложения, вычитания, умножения,
совпадающие с обычными операциями над многочленами. Сложение
коэффициентов многочлена выполняется по модулю 2, при этом опе-
рации сложения и вычитания совпадают. Умножение многочленов
выполняется по модулю многочлена х* — 1, причем х” — 1 = х" + 1.
Таким образом, для описания и построения циклических кодов ис-
пользуется алгебра многочленов по модулю х" + 1, называемому мо-
дулем по умножению.
При представлении кодовых комбинаций многочленами, цикличе-
ским (п,к) кодом называется множество многочленов Ц(х) степени не
больше л — 1, которые делятся без остатка на некоторый многочлен
g(x) степени л — к, называемый производящим (порождающим).
Многочлен g(x) является производящим для циклического (л, к)
кода, если он является делителем многочлена х” + 1, т. е.
V + 1 = g(x)h(x),
где Л(х) — многочлен степени к, называемый проверочным многочленом (л,к)
кода, который также как и g(x)задает циклический (л, к) код.
Циклический (п,к) код имеет минимальное кодовое расстояние
если вес комбинации, соответствующий производящему много-
члену g(x), не менее rfmin. Это означает, что количество слагаемых
производящего многочлена g(x) должно быть не менее
Производящий многочлен g(x) циклического кода, исправляющий
однократные ошибки, является неприводимым, т. е. делится сам на
себя и на 1. Для исправления ошибок ббльшей кратности g(x) раскла-
дывается на множители gz(x), число которых равно кратности ошибки
и каждый из них является неприводимым.
Допустим, что требуется построить циклический (л,к) код (7,4), ис-
правляющий все однократные ошибки. Производящий многочлен
g(x) такого кода имеет степень п — к — 3 и число слагаемых не менее
248
трех, так как минимальное кодовое расстояние кода rfmin = 3. В каче-
стве g(x) выберем многочлен вида х3 + х + 1. Убедимся, что он явля-
ется производящим для кода (7,4), для чего разделим модуль по ум-
ножению х + 1 на х3 + х + 1:
х4 + х5 + х3 + 1
х4 + х3 + х
х3 + х + 1
X3 + X + 1
Многочлен х4 + х2 + х + 1 является проверочным Л(х). Так как де-
ление выполнено без остатка, то многочлен х3 + х + 1 является про-
изводящим для кода (7,4). По многочленам g(x) и Л(х) могут быть по-
строены производящая (G) и проверочная (Я) матрицы.
Производящая матрица G содержит четыре строки, образованные
комбинациями из семи символов, соответствующими многочленам
g(x), g(x)x, g(x)x2, g(x)x3 и дополненными нулями:
^,(x) = g(x)= I + х + х3; U{ = 1101000; U2(x) = xg(x) =x + x2 + x4; У2 = 0110100;
U3(x) = x2g(x) = x2 + x3 + x5; U3 = 0011010; t/4(x) = x3g(x) = x3 + x4 + x6;
U4 = 0001101;
1 1 0 1 0 0 o'
0110100
0011010
< 0 0 0 1 1 0 1 /
Проверочная матрица H содержит три строки, образованные ком-
бинациями, соответствующими многочленам Л(х), й(х)х, Л(х)х?:
1110 10 0
Н = 0111010
,0011101
249
Сравнение полученных матриц с матрицами (9.10) линейного кода
(7,4) показывает, что они отличаются расположением столбцов, по-
этому коды, им соответствующие, являются эквивалентными.
При заданном g(x) кодовые многочлены t/((x) систематического
кода образуются по правилу
U(x) = /(х)х" " к + А(х), (9.20)
где /(х) — многочлен, соответствующий информационной последовательно-
сти из ^-символов; Л(х) — остаток от деления многочлена 7(х)х" " * на g(x).
Рассмотрим пример для кода (7,4). Пусть /= 1001, ей соответствует
/(х) = 1 + х3. Многочлен /(х)х” к = (1 + х3)х3 = х3 + х6 разделим на
g(x) = 1 + х + х3:
х6 + х3 X3 +х+ 1
х6 + х4 + X3 X3 + X
х4 + х2 + X
х2 + X -А(х)
Кодовому многочлену U(x) = /(х)х” “ к + Я(х) = х6 + х3 + х2+х со-
ответствует кодовая комбинация 1001110, в которой четыре первые
символы — информационные (1001), три оставшиеся — проверочные.
Схема кодера, реализующего алгоритм кодирования (9.20)>строится
по производящему многочлену g(x) и представляет собой схему деления
на g(x). Один из вариантов схемы показан на рис. 9.4. Схема состоит из
п — ^-элементов регистра сдвига D-триггеров (5f—53) и сумматоров по
модулю 2, число которых равно числу знаков сложения в g(x). По-
Рис. 9.4
250
Рис. 9.5
строение схемы основано на представлении g(x) = 1 + х + х3 в виде
g(x) = gQX° + g[Xl + g2J + g3x3, где gQ = gi = g3 = 1, g2 = 0.
Для кода (7,4) структурная схема кодера приведена на рис. 9.5. Ра-
боту схемы удобно рассматривать по тактам, поскольку в качестве эле-
ментов регистра сдвига обычно используются D-триггеры. Для опи-
сания их состояния вводится понятие задержки D на один такт.
Состояние элементов PC определяется следующими соотношениями:
= D(l + S2 + S3Y, S2 = DSf, Si = DS2.
Исходное состояние D-триггеров — нулевое. Схема работает сле-
дующим образом. Первые четыре такта ключ К находится в положе-
нии 1, и информационная последовательность / из четырех символов
поступает в канал и на вход схемы, где происходит ее деление на g(x).
После 4-го такта ключ К переходит в положение 2, закорачивая вход
сумматора I. В результате этого состояние 5| после 5-го такта остается
нулевым до конца работы схемы. Начиная с 5-го такта в канал посту-
пают три проверочных символа с выхода сумматора П, которые фор-
мируются сложением состояний S2 и S2(S2 + 53). Работа схемы при
подаче на ее вход последовательности /= 1001, /(х) = х3 + 1 поясняется
табл. 9.1. Кодер работает 7 тактов по числу символов в кодовой ком-
бинации (и = 7). В первые 4 такта в канал поступают информацион-
ные символы (к = 4), а с 5-го по 7-й такты — проверочные (и — к = 3).
Декодирование циклических кодов. Декодирование основано на
том, что любой кодовый многочлен Ц(х) делится на производящий
многочлен g(x) без остатка. Если принятая комбинация не принадле-
Таблица 9.1
Такт Положение ключа К / Состояние элементов PC и
Sx si 52 + 53
1-й 1 0 0 0 1
2-й 0 1 0 0 0
3-й 1 0 0 1 0 0
4-й 1 1 0 1 1
5-й 0 0 1 0 1 1
6-й 2 0 0 0 1 1 1
7-й 0 0 0 0 0 0
8-й — 0 0 0 0 0
251
жит циклическому коду, то соответствующий ей многочлен U'(x) =
— U(x) + Е(х) не делится на g(x), т. е.
£1*) = = 1М + Е[х) (9 2в
g(x) £(*) g(x) ’ V '
где С(х) — остаток от деления U\x) на g(x)\ С(х) = E(x)/g(x).
Из формулы (9.21) следует, что многочлен остатка С(х) определя-
ется только многочленом ошибки £(х) и не зависит от кодового мно-
гочлена U(x). Когда Е(х) принадлежит циклическому коду, тогда £(х)
делится на g(x) и С(х) = 0. Если £(х) не принадлежит коду, то С(х) * 0,
Это позволяет по ненулевому остатку С(х) отделения U'(x) на#(х) об-
наружить ошибки.
Соответствующие однократным ошибкам многочлены С/х) полу-
чаются делением на g(x) многочленов помехи вида £(х) = х” ~где
/= 1,л — номер искаженного символа комбинации (л, к) кода. Им
соответствуют комбинации, которые являются столбцами провероч-
ной матрицы Я линейного кода и представляют собой соответствую-
щие синдромы С в соответствии с формулами (9.16).
При ошибке q-й кратности остаток С(х) определяется суммой
многочленов остатков, соответствующих однократным ошибкам,
так же как для произвольного линейного кода синдром определя-
ется сложением столбцов матрицы Нв соответствии с соотношения-
ми (9.16). Таким образом остаток С(х) является синдромом ошибки
в циклических кодах.
Определение синдрома делением U(x) на g(x) требует меньше обо-
рудования, чем его вычисление в соответствии с формулой (9.19). Та-
ким образом, основным элементом в схеме декодера циклического
кода, как и в кодере систематического кода, является схема деления,
называемая генератором синдромов (ГС). Обобщенная структурная
схема декодера циклического кода приведена на рис. 9.6.
Сложность декодера определяется дешифратором ошибок и суще-
ственно зависит от кратности исправляемых ошибок. При однократ-
ной ошибке дешифратор имеет один выход и (л — к) входов. В случае
ошибок второй кратности дешифратор имеет п выходов, объединен-
ных схемой ИЛИ.
Рис. 9.6
252
При исправлении ошибок кратности <?ис число выходов дешифратора
9ис q
<= 1 <•= 1
(л-1)1
быстро возрастает при увеличении числа символов кодовой комбина-
ции п и кратности ошибки qKC. Известны различные схемы декодиро-
вания циклических кодов, но все они основаны на вычислении син-
дромов ошибки в соответствии с соотношениями (9.16) и построены
на схемах деления £(х) на q(x).
Рассмотрим один из вариантов на примере кода (7,4), исправляю-
щего однократные ошибки. Он основан на вычислении синдрома од-
нократной ошибки в старшем разряде комбинации (л, к) кода при де-
лении многочлена ошибки £(х) = х” 1 на q(x) и его использовании
для исправления ошибки в любом символе принятой комбинации. Вы-
числение этого синдрома осуществляется схемой деления (см. рис. 9.5),
на вход которой подается вектор ошибки Е = 1000000, многочлен
ошибки £(х) = х6.
Состояние элементов £]—£3 схемы деления показано в табл. 9.2.
Начиная со 2-го по 8-й такты оно соответствует составляющим син-
дромов ошибки соответственно в первом (младшем) разряде кодовой
комбинации [такт 2 (100)], во втором разряде [такт 3 (010)] и т. д. до
8-го такта, которому отвечает синдром С= 001. В этом легко убедить-
ся, подав на вход схемы векторы ошибки вида £ = 0100000, 0010000
и т. д. Если продолжить сдвиг составляющих синдромов после 8-го
такта, то можно убедиться, что они повторяются. На этом свойстве
цикличности составляющих синдромов (состояний £]—£3) основано
исправление однократных ошибок. Для этого в качестве дешифратора
ошибки используется схема И, имеющая три входа и один выход, на-
строенная на синдром С = 001.
Алгоритм декодирования следующий:
поступающая из канала комбинация U в течение 7-ми тактов за-
писывается в регистр сдвига и одновременно делится на производя-
щий многочлен g(x) в схеме ГС. Если ошибки в комбинации Uне было
или данной проверкой она не обнаружена, то состояние элементов
£]—53 ГС на 8-м такте будет нулевым (С = 000). При наличии ошибки
в комбинации U состояние элементов ГС отлично от нулевого и оп-
ределяет составляющие синдрома С;
начиная с 8-го такта символы комбинации U "выталкиваются" из
PC, а ГС осуществляют циклический сдвиг составляющих синдрома
С'до момента установления элементами £]—53 состояния 001, на ко-
торое настроена схема И;
253
на выходе схемы И появляется 1, которая подается на вход сумма-
тора; на второй вход сумматора из PC поступает искаженный символ.
Этому алгоритму соответствует схема декодера (рис. 9.7). Ключ К1
размыкается после 7-го такта, когда комбинация U полностью поступи-
ла в PC, а ключ К2 после 11-го такта, когда четыре информационных
символа выйдут из PC. В общем случае схема работает 2п тактов. В дан-
ном случае, учитывая, что код систематический, то достаточно 11 тактов
работы для исправления ошибок только в информационных символах.
В табл. 9.3 приведено состояние элементов ГС при поступлении из
канала искаженной комбинации U'= 1011110 (неискаженная комби-
нация U = 1001110).
Таблица 9.2
Такт Е *1 *2 *3
1-Й 1 0 0 0
2-й 0 1 0 0
3-й 0 0 1 0
4-й 0 1 0 1
5-й 0 1 1 0
6-й 0 1 1 1
7-й 0 0 1 1
8-й 0 0 0 1
9-й 0 1 0 0
10-й 0 0 1 0
11-й 0 1 0 1
Таблица 9.3
Такт Е *1 *2 *3
1-й 1 0 0 0
2-й 0 1 0 0
3-й 1 0 1 0
4-й 1 0 0 1
5-й 1 0 0 0
6-й 1 1 0 0
7-й 0 1 1 0
8-й 0 1 1 1
9-й 0 0 1 1
10-й 0 0 0 1
254
Как видно из табл. 9.3, на 10-м такте ГС приходит в состояние 001,
срабатывает схема Я, и 1 с ее выхода поступает на сумматор, на другой
вход которого поступает искаженный символ. В результате сложения
происходит исправление ошибки.
Мажоритарное декодирование циклических кодов. Сложность де-
шифратора ошибок в схеме декодера (см. рис. 9.6) требует использо-
вать другие методы декодирования циклических кодов при больших
п и <?ис. Одним из них является мажоритарное декодирование, которое
применимо к любым линейным кодам.
Принцип мажоритарного декодирования состоит в том, что для ка-
ждого символа кодовой комбинации могут быть получены несколько
оценок. Решение о переданном символе принимается по большинству
одинаковых оценок. Основой для получения различных оценок одно-
го и того же символа являются уравнения проверок или проверочная
матрица Н.
Различают разделенные (независимые) и связанные (зависимые)
оценки. Разделенными называют оценки, в которых любой символ
принятой комбинации участвует не более чем в одном из уравнений
оценок, в противном случае оценки являются связанными. Они харак-
теризуются коэффициентом связанности а, который равен макси-
мальному числу оценок, содержащих один и тот же символ.
Общее количество оценок для исправления ошибок кратности дис
№2а^ис+1. (9.22)
Например, для кода (7,4), исправляющего однократные ошибки,
минимальное число оценок N = 3, если коэффициент связанности
а = 1, т. е. оценки являются разделенными. Для составления оценок
на примере кода (7,4) воспользуемся проверочным многочленом
й(х) = 1 + х + х2 + х4 и запишем матрицу Н, в которой первая строка
соответствует проверочному многочлену, вторая получена двумя цик-
лическими сдвигами первой, третья — двумя сдвигами второй:
Н =
1 110 10 0
10 10 0 1 1
10 0 1110,
255
Выпишем три оценки по строкам матрицы Н:
й| = а2 + аз + as', oi = аз + ag + a-j\ = а4 + а$ + а6.
Из уравнений оценок следует, что они являются связанными, по-
скольку символы я3, а5 и а6 участвуют в оценках дважды, т. е. а = 2.
Поэтому для исправления однократных ошибок в данном случае тре-
буется 5 оценок [см. формулу (9.22)].Недостающие две оценки полу-
чим сложением трех строк матрицы Н — ai = а2 + а4 + а7; очевидная
оценка = Яр Схема мажоритарного декодера в первом такте работы
приведена на рис. 9.8. Входящий в схему мажоритарный элемент И
(пороговый элемент и схема И) дает на выходе 1, если 1 подается на
бблыпую часть входов, например, на три из пяти.
В следующий такт символы в регистре сдвигаются на 1, осущест-
вляется оценка а2 и т. д.
а 2 — а2, а 2 — я3 + а4 + а^; й 2 = я3 + а$ + Л]; й 2 = а4 + а2 + я,; а 2 = + а2.
Мажоритарный декодер требует меньше оборудования, чем цик-
лический, особенно, для кодов с разделенными оценками, содержа-
щими малое число символов в каждой оценке.
9.5. СВЕРТОЧНЫЕ КОДЫ
Определение, способы задания и кодирования. Сверточные коды
относятся к непрерывным кодам. Эти коды имеют большую избыточ-
ность, характеризуются простотой реализации кодирующих устройств
и наиболее пригодны для исправления пакетов ошибок.
Сверточными коды называют потому, что кодовое слово можно
рассматривать как отклик (свертку) кодера, являющегося линейной
системой, на входную информационную последовательность.
256
Сверточные коды делятся на систематические и несистематиче-
ские. В систематических кодах за информационными символами сле-
дуют проверочные. Такое разделение символов позволяет упростить
формирование оценок информационных символов на приемной стан-
ции. В систематических сверточных кодах кодовое слово состоит из N
блоков длиной л0 с к информационными символами, что определяет
скорость кода к/п$. Проверочный символ блока зависит от информа-
ционных символов из Nблоков. Это определяет основное отличие свер-
точных кодов от блочных. Если N = I, сверточный код превращается в
блочный. Произведение Nhq называют кодовым ограничением.
Для получения кодового слова систематического сверточного кода
требуется по известным информационным символам найти провероч-
ные и расположить их на определенных позициях блока л0.
Сверточный код может быть задан несколькими способами:
применением л0 — 1 рекуррентных соотношений, определяющих
проверочные символы по известным информационным;
с помощью производящего многочлена g(x) = gQ + gtx + ... + gmxf"
при кодировании одной информационной последовательности k = 1.
Степень#(х) определяет число блоков, проверочные символы которых
зависят от информационных, т. е. W = /л + 1. При кодировании к ин-
формационных последовательностей сверточный код задается с по-
мощью к(пц — к) производящих многочленов;
с использованием графа и кодовой решетки, а так же производя-
щей и проверочной матриц.
Рассмотрим пример простейшего сверточного кода, в котором ка-
ждому информационному символу at соответствует один провероч-
ный bj. Для такого кода Л = I, л0 = 2, W= 2, скорость кода к/п0 = 1/2.
Кодовое слово является полубесконечной последовательностью сим-
волов aQb0, «]/»], «2^2,..., ajb„ ... Проверочный символ кодового слова
определяется через информационные линейным рекуррентным соот-
ношением
Ь,= а, + а, (9.23)
Порождающий многочлен кода g(x) = + g^x = 1 + х. При извест-
ной информационной последовательности I и g(x) определяются про-
верочные символы сверточного кода. Например, информационная по-
следовательность имеет вид/= 101100..., гдел0 = 1, = 0, аг = 1, а3 = 1,
а4 = 0, л5 = 0. Ей соответствует многочлен /(х) = 1 + х2 + х3 + ... Тогда
проверочные символы
Ь(х) = l{x)g{x) = /(х)(1 + х) = 1 + х + х2 + х4.
9
257
Этому многочлену соответствует последовательность />=11101, где
Ьо =!,/>] = 1, b2 = 1, bj = 0, />4 = 1 — проверочные символы. Кодовая
последовательность U= 1101111001. Граф сверточного кода показан
на рис. 9.9.
Используя рекуррентное соотношение (9.23), можно составить
систему проверок для символов, появляющихся на выходе кодера,
а0 + *0 = 0
а0 + а1 + Ь, = 0
а । + а2 + Ь2 = 0
а2 + аз + Ьз ~ 0
Используя проверки как строки проверочной матрицы, составим
проверочную матрицу кода
11000...
1011000...
001011...
00001011...
< ...........
Схема кодера такого кода приведена на рис. 9.4 и может быть по-
строена по соотношению (9.18) или производящему многочлену g(x).
ft
Мо
го
го
10
*3
10
1_
о
Рис. 9.9
00
01
06,
~01
го
11
00
11
01
11
00
06)
~оГ
258
Декодирование сверточных кодов. Для декодирования комбинаций
сверточных кодов разработаны алгебраические и вероятностные мето-
ды. К алгебраическим методам относятся пороговое (мажоритарное) де-
кодирование, к вероятностным — последовательное декодирование и
декодирование по максимуму правдоподобия (алгоритм Витерби).
Алгебраические методы основаны на выполнении уравнений про-
верок, связывающих информационные и проверочные символы. Ве-
роятностные методы основаны на поиске пути по графу (кодовому де-
реву), ближайшего к принятой последовательности.
При пороговом декодировании для каждого блока п0 вычисляется
синдром. Например, для кода, рассмотренного выше, в соответствии
с рекуррентным соотношением />z = at- + ai+ р
Cj = bj + cij + ctj _ । = e* + + ez_ !; 7 = 1, 2, 3, ...;
i > > b , a , a
ci +1 = bl•+1 + ai•+ I + ai= e<+1 + ei+1 + ei -
где e*, e°, e“+ । , ef+1 — компоненты вектора ошибки 7-го блока на позициях
информационных и проверочных символов.
Если Cj= 1, то фиксируется наличие ошибки. В случае с, = 0 наи-
более вероятно, что символы а,, />,, а,-_ j неискажены, однако при ис-
кажении двух символов из трех с,- = 0.
Правило оценки компонента вектора ошибки определяется соот-
ношением
е“ = (с, + ez_, ) + ci+ ,.
(9.24)
Оценка информационного символа осуществляется по правилу
Л . а
а = а,- + е,- .
(9.25)
Компонент вектора ошибки е“_ j может быть оценен неверно, то-
гда его подстановка в выражение для с,- увеличивает вероятность не-
правильного решения при оценке ajt которая используется для оце-
нивания + \ и т. д., т. е. возникает эффект размножения ошибок.
Для повышения достоверности декодируемых символов необходимо
анализировать достаточно длинную последовательность синдромов
С' _ р ch ci+ i, ..., cj + k, что обычно выполняется в алгоритмах веро-
ятностного декодирования, которые обеспечивают лучшую помехо-
устойчивость.
259
Структурная схема декодера, построенная в соответствии с прави-
лами (9.24), (9.25) для сверточного кода 1/2, к = 1, п0 = 2, приведена
на рис. 9.10.
При декодировании комбинаций сверточных кодов с большей из-
быточностью и ббльшим кодовым ограничением, чем рассмотренный
код, применяется последовательное декодирование и декодирование
по максимуму правдоподобия. Отличие между ними состоит в том,
что при последовательном декодировании определение правильного
пути по кодовому дереву на каждом шаге осуществляется с учетом
всех предыдущих. Принятие решения при декодировании по макси-
муму правдоподобия (алгоритм Витерби) осуществляется на каждом
шаге с учетом предыдущего. Мерой похожести принятой последова-
тельности на переданную является расстояние Хэмминга.
9.6. ПРИМЕНЕНИЕ ПОМЕХОУСТОЙЧИВЫХ КОДОВ В СИСТЕМАХ
ЖЕЛЕЗНОДОРОЖНОЙ АВТОМАТИКИ, ТЕЛЕМЕХАНИКИ И СВЯЗИ
Помехоустойчивые коды в системах железнодорожной автоматики
и телемеханики используются преимущественно для обнаружения
ошибок различной кратности.
В системах телемеханики наиболее широко используются коды с
постоянным весом. Кодовые комбинации таких кодов содержат по-
стоянное число единиц и нулей. Общее число разрешенных комби-
наций определяется числом сочетаний , где п — число символов
в кодовой комбинации, т — число единиц в ней. Поэтому эти коды
называют также кодами на одно сочетание. Коды имеют минимальное
кодовое расстояние t/min = 2 и обнаруживают однократные ошибки.
Разновидностью кода с постоянным весом, используемого, напри-
мер, в системе станционной кодовой централизации (СКЦ), является
распределительный код. Все комбинации этого кода имеют вес, рав-
ный единице, т. е. в любой комбинации из п символов содержится
только одна единица.
В системах телемеханики распределительный код используется для
кодирования номера команды, содержащегося в исполнительной час-
ти кодовой комбинации. Для кодирования адреса группы объектов в
избирательной части кодовой комбинации применяется код с боль-
260
шим числом единиц. Например, по каналу телеуправления системы
СКЦ передаются кодовые комбинации, исполнительная часть кото-
рых определяется кодом с}0, а избирательная часть — кодом .
В агрегатной системе диспетчерской централизации (АСДЦ) для
обнаружения ошибок используются систематические помехоустойчи-
вые коды: код Бауэра, являющийся разновидностью кода с простым
повторением, и код с одной проверкой на нечетность (проверкой по
паритету). Принцип кодирования кодом Бауэра состоит в повторении
информационной последовательности из к символов, если она содер-
жит нечетное число единиц, и инверсном повторении информацион-
ных символов — при четном числе единиц. Например, информаци-
онным последовательностям 0111 и 0101 соответствуют кодовые
комбинации = 01110111 и U2 = 01011010. Очевидно, что избыточ-
ность кода Бауэра равна 0,5.
В комбинациях кода с проверкой на нечетность используется один
проверочный символ, при сложении которого с информационными
символами по модулю 2 их сумма равняется единице.
Вероятность появления необнаруженной ошибки Рно в коде Бау-
эра для комбинаций из п символов
d г /^2 /1 \0,5л 2i2 z ^2 ч2 4
^но ~ I ^п/2 РЛ} Ре) I ~ ( Сп/1) Рс >
где С„/2 — число сочетаний из п/2 элементов по 2; рс — вероятность оши-
бочного приема символа кодовой комбинации.
При п = 8 и ре = 1'10 4 вероятность появления необнаруженной
ошибки Рно = 3,6- 10-15.
Вероятность появления необнаруженной ошибки в коде с провер-
кой на нечетность
/-,2 2 *» «.л 2 2
Рно= СпР'О -Ре) а СпРС-
Если рс = 1 • 10“4 и л = 8, то Рно = 2,8 • 10 7. В перспективных
микропроцессорных системах железнодорожной автоматики и теле-
механики для обнаружения неисправностей в отдельных платах и уз-
лах используется так называемый сигнатурный анализ, основанный
на принципе декодирования циклических кодов и заключающийся в
том, что тестовая последовательность, поступающая с выхода контро-
лируемой платы или узла, делится в схеме деления на некоторый про-
изводящий многочлен g(x). Остаток от деления является признаком
неисправности.
В применяемых на железнодорожном транспорте цифровых сис-
темах связи и передачи данных наибольшее распространение получи-
261
ли циклические коды для обнаружения ошибок различной кратности,
называемые кодами циклической проверки избыточности (CRC — Cyclic
Redundancy Check), а в сотовых системах связи с подвижными объек-
тами также и сверточные коды для исправления независимых ошибок
в сочетании с устройствами перемежения. Например, в модемных
протоколах коррекции ошибок и протоколах каналов передачи кадров
в сетях передачи данных используется код CRC с производящим мно-
гочленом g(x) ~ х16 + х12 + х5 + 1. Код CRC-16 содержит 16 прове-
рочных символов, имеет минимальное кодовое расстояние t/min = 4 и
позволяет обнаруживать ошибки до третьей кратности включительно.
Вероятность обнаружения ошибок кодом CRC
Ро = 1 “ — ’
2т
где т — степень производящего многочлена g(x).
Так код CRC-16 позволяет обнаружить 99,9985 % ошибок. Наряду
с ним в модемных протоколах V42 используется код CRC с производя-
щим многочленом g(x) = х32 + х26 + х23 + х22 + х16 + х12 + х11 + х10 +•
+ х8 + х7 + х5 + х4 + х2 + х+1и Jmin = 15.
В сетях высокоскоростной передачи данных (ATM сетях) исполь-
зуются укороченные циклические коды БЧХ (Боуза—Чоудхури—Хо-
квингема). Например, для обнаружения ошибок до третьей кратности
и исправления ошибок первой кратности в заголовках ячеек ATM ис-
пользуется код CRC с производящим многочленом g(x) ~ х8 + х2 + х + 1.
Для обнаружения однократных и двукратных ошибок в протокольных
блоках данных ATM сетях используется CRC код с производящим
многочленом g(x) = х4 + х + 1 и Jmin = 3.
Принцип циклической проверки избыточности кодами CRC ана-
логичен принципам кодирования и декодирования циклических ко-
дов и состоит в следующем. На передающей станции определяется ос-
таток от деления информационного многочлена (информационной
последовательности) на производящий многочлен g(x), который в виде
проверочных символов передается после информационных символов в
общем блоке данных. На приемной станции выполняется деление при-
нятой последовательности на#(х), и в случае получения остатка отде-
ления принимается решение о наличии ошибки.
Для защиты от ошибок в радиоканалах подвижной связи стандарта
GSM используются циклические и сверточные коды в сочетании с пе-
ремежением. Перемежение символов передаваемой последовательно-
сти обеспечивает преобразование пакетов ошибок в независимые
ошибки и состоит в том, что подлежащая передаче по радиоканалу ко-
262
довая комбинация длиной п записывается по строкам в матрицу раз-
мером Л] л2
flII flI2 flI3 ••• aInl
a2l a22 a23 a2nt
, an2l an22 an23 fln2n! ,
затем считывается по столбцам в виде последовательности «и a2i «31
°л21 °12 а22— ап22 ••• и передается в канал. В результате символы сооб-
щения «и «21 «31—» которые в исходной последовательности следовали
друг за другом, передаются в канал с интервалом л2 символов, который
называется глубиной перемежения. Увеличение глубины перемежения
повышает эффективность сверточного кодирования, но приводит к
задержке передаваемых символов.
На выходе канала происходит обратная перезапись принятой по-
следовательности символов. Запись осуществляется по столбцам, счи-
тывание — по строкам. В восстановленной последовательности паке-
том ошибок оказываются искажены несмежные, разбросанные по
всей длине п ~ п1 = л2 символы, что упрощает их исправление свер-
точным кодом.
Для исправления независимых ошибок в полноскоростных каналах
связи систем GSM используется сверточный код со скоростью 1/2 и
к = 5. Декодирование сверточного кода осуществляется по алгоритму
Витерби.
Рассмотренный пример кодирования—декодирования сообщений
в сотовых системах связи стандарта GSM характерен для всех систем
связи с подвижными объектами и представляет собой один из вари-
антов каскадного кодирования—декодирования.
Как следует из приведенных примеров, в системах связи и телеме-
ханики наибольшее применение получили помехоустойчивые коды
для обнаружения и исправления однократных ошибок. Это обуслов-
лено двумя факторами: недостатками, связанными с применением
помехоустойчивых кодов и организацией каналов в системах связи
и телемеханики. Недостатком применения помехоустойчивых кодов в
системах передачи информации является то, что методы помехоустой-
чивого кодирования не адаптированы к изменяющейся помеховой об-
становке, поэтому избыточность (проверочные символы) приходится
вводить, ориентируясь на самый неблагоприятный случай. В осталь-
ное время при низком уровне помех скорость передачи информации
по каналу ниже возможной.
263
Принципы кодирования и декодирования помехоустойчивых ко-
дов разработаны главным образом в предположении передачи инфор-
мации по двоичному симметричному каналу связи, что не всегда вы-
полняется.
Необходимость обеспечения высокой верности передачи информа-
ции в условиях помех требует применения сложных помехоустойчивых
кодов и, как следствие, сложных и дорогостоящих кодирующих и де-
кодирующих устройств. Эти недостатки сводятся к минимуму, если
использовать двусторонние (дуплексные) каналы систем связи и
телемеханики, когда сообщения передаются в прямом и обратном
направлениях. В этом случае имеется возможность повысить по-
мехоустойчивость их передачи благодаря использованию обратного
канала: при обнаружении ошибок в принятой комбинации ее переда-
ча повторяется. В некоторых системах передачи данных однократные
ошибки исправляются, а ошибки большей кратности обнаруживают-
ся. Повторение происходит до тех пор, пока не произойдет передача
без ошибок. Системы передачи с обратной связью обладают свойст-
вом адаптации: они автоматически меняют скорость передачи инфор-
мации при изменении уровня помех в каналах связи.
В зависимости от того, на какой стороне системы передачи инфор-
мации принимается решение о повторении комбинации и способа ис-
пользования обратной связи различают системы с информационной
обратной связью и системы с решающей обратной связью. Структур-
ные схемы таких систем приведены соответственно на рис. 9.11, а, б.
Блок
Блок
Рис. 9.11
264
В системе с информационной обратной связью на передающей стан-
ции сообщение от ИИ кодируется простым неизбыточным кодом, вво-
дится в блок памяти и передается по прямому каналу. На приемной
станции сообщение записывается в блок памяти и передается по обрат-
ному каналу на передающую станцию, где сравнивается с переданным
сообщением. При их совпадении передается следующее сообщение, в
противном случае, передается сигнал стирания, и процесс повторяется.
Наибольшее распространение на железнодорожном транспорте
получили системы с решающей обратной связью, в которых сообще-
ния кодируются избыточным кодом, обнаруживающим ошибки, за-
писываются в блок памяти и передаются в канал. Принятая кодовая
комбинация декодируется с обнаружением ошибок (реже с исправле-
нием однократных ошибок). Если ошибок не обнаружено, то декоди-
рованное сообщение поступает к получателю. При обнаружении оши-
бок комбинация стирается, и по обратному каналу передается сигнал
переспроса, который представляет собой специальную кодовую ком-
бинацию. На время ее передачи прекращается передача других сооб-
щений по обратному каналу. Принятый сигнал вызывает повторную
передачу кодовой комбинации, хранящейся в блоке памяти.
Глава 10
СОГЛАСОВАННЫЕ ФИЛЬТРЫ
10.1. ОБЩИЕ ПОЛОЖЕНИЯ
Известно, что с поступлением на вход линейного фильтра единич-
ного импульса 5(1) на выходе возникает отклик h(t), называемый им-
пульсной характеристикой фильтра. Допустим, что на вход линейного
фильтра с импульсной характеристикой h(t) подается сигнал Sj(t), дей-
ствующий на интервале (О, Г]. Тогда выходной сигнал U(t) определя-
ется сверткой
т
U(t) = j5,(/)A(r- т)<1т.
о
Сходство интеграла свертки с корреляционным интегралом пока-
зывает, что для осуществления оптимального приема сигнала y(t) =
= Sj(t — t0) + n(t) достаточно пропустить его через фильтр с импульс-
ной характеристикой h(f) = aS(tQ - t), где a, t0 — постоянные, и зафик-
сировать значение выходного сигнала в момент окончания сигнала на
его входе, в момент /0 > Т. Такой фильтр называется согласованным
с сигналом Sj(t):
т
R(T) = орДТ- т)А(Г- т)<1т.
о
Импульсная характеристика согласованного фильтра h(t) пред-
ставляет собой с точностью до постоянного множителя зеркальное
отображение сигнала 3,(1), с которым фильтр согласован (рис. 10.1).
Для того чтобы выходной сигнал фильтра U(t) в какой-то момент
времени был наибольшим, надо учесть, что необходимое для этого со-
средоточение энергии составляющих сигнала на выходе фильтра мож-
но получить только после поступления всей энергии входного сигнала
Sj(t), т. е. после его окончания, /0 = Т.
266
Передаточная функция A'C/w) согласованного фильтра с импульсной
характеристикой h(t) определяется прямым преобразованием Фурье
СО СО
K(j<s>) = J А(0 ехр(-ja>t)dt = a J S(T— t) exp(-jmz)dz = {т = Т— г} =
-СО —СО
03 *
= a J 5(т) ехр{—т)]<1т = а5(уш) ехр(—/ш Т), (10.1)
-СО
*
где S(Jtsi) — комплексно-сопряженный спектр сигнала 5,(0-
Из выражения (10.1) следует, что амплитудно-частотная характе-
ристика фильтра определяется амплитудным спектром сигнала 5z(z):
|*(»| = |-У(»|.
Фазо-частотная характеристика 6(со) фильтра обратна по знаку фа-
зовой характеристике <р(со) сигнала
0(<о) = —[<р(ш) + шГ],
где ш Т — задержка сигнала на время Т.
В соответствии с рис. 10.1 можно утверждать, что h(t) и как
функции времени, состоят из одних и тех же частотных составляю-
щих, но фазы этих составляющих, образующих А (г), противоположны
фазам составляющих
При подаче на вход такого фильтра сигнала Sj(t) со спектром
|S(jco)|ey4>m на его выходе получается сигнал со спектром |5(jco)|2. Это
означает, что согласованный фильтр усиливает спектральные состав-
ляющие с большими амплитудами и подавляет составляющие с ма-
лыми амплитудами. Таким образом, согласованный фильтр не сохра-
няет форму входного сигнала
у| Si(t) hf<)
о т 2Т t Рис. 10.1
267
В выходном сигнале все частотные составляющие находятся в фазе
и, следовательно, при t = Тдают всплеск мгновенного значения на-
пряжения, определяемый энергией сигнала
СО
Е = у- f |5(/m)|2d<o.
Z7C J
Соотношение "сигнал-шум" (S/N) на выходе фильтра в момент
времени Топределим при условии, что помеха, действующая на входе
фильтра, представляет собой белый шум с равномерной спектральной
плотностью Nq/2'.
S . х
N 2к
со 2
J 5(/<o)^(/w)exp(/co ro)dw
-СО
0,5^|^Q'<o)|2d<o
(Ю.2)
Применяя неравенство Буняковского—Шварца к числителю фор-
мулы (10.2), получим
И ,
S = Jr |5(/<o)|2dti> - 2Е
N 2п J O,5Wo No'
Рассмотрим примеры согласованных фильтров.
Согласованный фильтр для прямоугольного видеоимпульса. Пусть
для передачи определенного элементарного сообщения (символа ко-
довой комбинации) используется видеоимпульс (рис. 10.2).
Рассмотрим задачу построения фильтра, согласованного с этим
импульсом. Спектр напряжения импульса U(t) определяется прямым
преобразованием Фурье
5(У«) = J U(t) ехр(-ja>t)dt = J A exp(-ym/)d/= ~ О — е ушГ)-
-СО -СО
Согласованный фильтр в соответствии с формулой (10.1) имеет пе-
редаточную функцию
K(j<o) = S(j(o)e~J<aT = ±(e-/m7'- 1)е“-/ш7'= 1 (1 - е“/<лГ).
Таким образом, передаточная функция фильтра полностью совпа-
дает со спектральной плотностью напряжения S(ja) прямоугольного
видеоимпульса.
268
Pus. Ю.З
Передаточная функция фильтра включает в себя две простые
функции частоты:
К(ш) = + К2(»,
где Х^С/ш) = 1//ш; = 1 — ехр(—/шТ).
Заметим, что K\(ja) может быть реализована с помощью интегри-
рующей цепи, ее условное обозначение показано на рис. 10.3. Функ-
ции ЛГ2(./<о) соответствует параллельная цепь с линией задержки на
время Т и вычитающее устройство.
Временная диаграмма работы фильтра при использовании идеаль-
ной интегрирующей цепи приведена на рис. 10.4.
Сигнал на выходе фильтра при поступлении на его вход сигнала,
с которым он согласован, обладает свойствами функции автокорре-
ляции. Максимум функции приходится на момент окончания вход-
ного сигнала t = Т и численно равен его энергии. При поступлении
на вход фильтра сигнала, с которым он не согласован, сигнал на вы-
ходе фильтра обладает свойствами функции взаимной корреляции.
Фильтр, согласованный с радиоимпульсом. Допустим, надо построить
фильтр, согласованный с радиоимпульсом U(t) = /4cos<d0z, 0 < t < Т
(рис. 10.5). Пользуясь преобразованием Фурье, запишем выражение
для спектральной плотности напряжения сигнала U(iy.
« Т
S(J<a) = J U(t) ехр(-ja>l)dl = |(/lcosm0z) ехр(—/m0df =
-оо О
т
= J {ехр + ехр (-/ш0 /) ехр(-уш r)dr =
о
_ д Гсхр(/Т)(ы0 - оз) - 1 ехр(-у7)(о>о4 <о) - Г
У(ФО + 01) J ’
(10.3)
2
у(ш0 - “)
Передаточную функцию фильтра определим, исходя из выражения
-/<>0 т
(10.2), для чего умножим первое слагаемое этого выражения на е ,
У<оот
а второе на е
269
В результате получим
. а ГехР(-7“ Л - exp(->07) схр(-уы 7)- cxp(-y<oQ Г)'
Л(/й>) — j--------------------------------------------
Л“о - “)
7(“о + “>
Пусть соотношение между частотой заполнения радиоимпульса и
его длительностью таково, что а>оТ= 2пк, где к — целое число. Тогда
е±Ушо = е±у211*. Выполняя преобразования с учетом последнего выра-
жения, получим
*О)=Л*(1 -е
COq-CO
(Ю.4)
Множитель <р<п/(а>о — <d2) в выражении (10.4) представляет собой
характеристику резонансного высокодобротного контура, имеющего
Таблица 10.1
Вид сигнала Частотная характеристика фильтра (схема, ее формирующая) К
Прямоугольный радиоимпульс Прямоугольная Гауссовская 0,91 0,94
Гауссов радиоимпульс Прямоугольная Гауссовская 0,94 1,0
Прямоугольный радиоимпульс Одиночный резонансный контур Двухкаскадный резонансный контур 0,9 0,93
270
резонансную частоту соо, равную
частоте заполнения радиоимпуль-
са. Таким образом, фильтр, согла-
сованный с прямоугольным радио-
импульсом, реализуется схемой
(рис. 10.6). Временная диаграмма
работы фильтра приведена на
рис. 10.7.
Рассмотренные схемы фильт-
ров являются оптимальными. Ча-
ще, для фильтрации сигнала на фо-
не помехи вместо согласованных
используются фильтры, характе-
ристики которых лишь частично
согласованы с характеристиками
сигнала. Такие фильтры называ-
ют квазиоптимальными.
В табл. 10.1 приведены различ-
ные типы квазиоптимальных
фильтров систем с ЧМ и норми-
рованные значения отношения
"сигнал-шум" на выходе таких
фильтров к отношению "сигнал-
шум" на выходе согласованного
фильтра К. Квазиоптимальные
фильтры обеспечивают отношение "сигнал-шум", близкое к макси-
мально возможному для согласованных фильтров.
10.2. СОГЛАСОВАННЫЙ ФИЛЬТР ПРИ КОРРЕЛИРОВАННОЙ
ГАУССОВСКОЙ ПОМЕХЕ
Теорией согласованной фильтрации можно воспользоваться при
приеме полностью известных сигналов на фоне стационарной по-
мехи л(/) с произвольной спектральной плотностью мощности 5п(со).
В данном случае передаточная функция фильтра для обеспечения
максимального отношения "сигнал-помеха" должна быть согласована
не только с амплитудным спектром сигнала ус(Усо), но и со спектраль-
ной плотностью мощности помехи 5п(со).
Наиболее простым способом отыскания требуемой передаточной
функции согласованного фильтра И^фО’со) является приведение по-
мехи n(t) к белому шуму. В этом случае оптимальное фильтрующее
устройство можно представить в виде двух последовательно соеди-
ненных четырехполюсников (рис. 10.8). Первый четырехполюсник
271
Wo6(ja,)
у ft) y'(t)
------ W,(/W) Wz(ju)
представляет собой декоррелятор
q (обеляющий фильтр — Й^Осо) с
передаточной функцией
Рис. ю.8 И'О) = И^С/о») =
= [^(О)/^)]'/2, (Ю.5)
где А’п(О) — спектральная плотность мощности преобразованной помехи (бе-
лого шума) на выходе декоррелирующего фильтра, равная спектральной плот-
ности исходной помехи на частоте о = 0;
Sn(0) = ^(ушУ^^а») = const. (Ю.6)
Спектр полезного сигнала на выходе первого четырехполюсника
искажен:
•Те ) = Jc О) W'ogO )• (1 °- 7)
Для обеспечения оптимальной согласованной фильтрации в белом
шуме второй четырехполюсник должен иметь в соответствии с выра-
жением (10.3) комплексный коэффициент передачи
W2(jw) = ks?(jv>) = ks*(j<a) Оо))е’УШ'° ; (Ю.8)
•гс’*(» = О)
где к — произвольная в общем случае комплексная постоянная; 5с'*(уш) —
функция, комплексно сопряженная с тс'(/ш), т. е.тс'*0«о) = Jc'(~/со); t0 — время
задержки сигнала на выходе фильтра, соответствующее наибольшему значе-
нию сигнала.
Передаточная функция оптимального линейного фильтра, состоя-
щего из двух четырехполюсников, предназначенных для фильтрации
полезного сигнала с частотным спектром sc(j<o) на фоне случайной
коррелированной помехи n(t) со спектральной плотностью мощности
5п(<о), определяется выражением
И'сфО) = ^Об0“) и^Оо) = W И'обОо))^*0'0 =
= ks*0®У ^(Доу2/"'0 = ^Ш/° • <10-9)
•V®)
Следует отметить, что оптимальная фильтрация сигнала у(/) со
спектром 5(со) на фоне случайной коррелированной помехи со спек-
тральной плотностью мощности •£„(<») эквивалентна оптимальной
фильтрации сигнала со спектром
5Э(» = 5cOo>)I5n(0)/5n(o>)]1/2.
272
Сигнал с частотным спектром 5э(<о) назовем эквивалентным сиг-
налом. Его энергия
E,-2-LJkO«)l2^!/-- (10.1W
-00
Из сопоставления выражений (10.3) и (10.9) следует, что частотная
характеристика согласованного фильтра при коррелированной помехе
обратно пропорциональна спектральной плотности мощности помехи
5п(<о), чего нет при белом шуме. Это определяет важность тех компо-
нентов спектра полезного сигнала, при которых интенсивность поме-
хи меньше.
Соответственно максимально возможное отношение мощности
2
сигнала sc(i) к мощности помехи Ра = ап на выходе оптимального со-
гласованного фильтрующего устройства
“ 2оэ = £ J l|scO‘o)l2/^(<o)]d<o = , (10.11)
-00
где Еэ — энергия сигнала со спектром s3(J<o).
Описанная методика позволяет получить физически реализуемые
СО
результаты лишь в том случае, когда j []5,c(j<o)]2/^S’fl(co)ld<o сходится.
-СО
Для всех рациональных спектров коррелированного шума сущест-
вуют линейные обеляющие фильтры.
Рассматриваемая задача оптимальной согласованной фильтрации
известного сигнала в коррелированном шуме может рассматриваться
не только описанным выше методом декорреляции, но и другими ме-
тодами [5], которые дают одинаковые результаты.
Пример. Предположим, что помеха л(1) представляет собой реализацию
случайного стационарного в широком смысле процесса с нулевым средним
значением, дисперсией о„ и двусторонней спектральной плотностью мощно-
сти 5п(<о), в общем случае описываемой полиномом Баттерворта
2
где к — степень полинома Баттерворта; Г2П — ширина спектра помехи на
уровне 0,5.
273
Сигнал представляет собой колоколообразный импульс
j(/) = Um ехр (-у2/2),
где Um — амплитуда сигнала; у — параметр, характеризующий широкополое-
ность сигнала.
Амплитудный спектр такого сигнала
°° . U Л (
= [ s(f)e = —— ехр—2— , (10.13)
Д т 1 4VJ
а энергия
<о Г
Е = f 52(Z)dZ = .
—00
Расчет комплексных коэффициентов передачи оптимальных фильтров для
этого случая математически труден и мы не будем его приводить.
Подставляя выражения (10.12) и (10.13) в формулу (10.11), получим после
интегрирования выражение для максимального значения отношения "сигнал-
помеха" р2ых на выходе оптимальных согласованных фильтров с учетом де-
корреляции помехи (при у/Ц. » 1):
Рвых = {U2m(n/2k)/Jln sin(л/2Л)1[^5 + (2к~ 1)!!(^-)2*’*] «
«\U2m (2к- 1)!!(л/2Л)/^ a2 sin (п/2*)] ()2*~ ‘ , (10.14)
где (2к — 1)!! — факториал, взятый по нечетным числам.
Из выражения (10.14) следует, что отношение "сигнал-помеха" на выходе
СФ при коррелированных помехах возрастает увеличение отношения поло-
сы сигнала к помехе (у/Пп) и коррелированности помехи, характеризуемой ко-
эффициентом к.
Соответственно эффективность оптимальной фильтрации с учетом декор-
реляции определяется коэффициентом частотного подавления помехи
2 _ 2 .2
Мч Рвых'Рвх
гДе Рвх - Um /<гп •
Из полученных выражений
фильтрации (и помехоустойчивость приема) тем выше, чем больше широкопо-
лосность сигнала относительно помехи, характеризуемая отношением v = у/Пп,
и выше сосредоточенность спектра (коррелированность) помехи n(t), харак-
274
и (2&-1)1!(я/2&) 1
«/2nsin(K/2/:) '•nir
следует, что эффективность согласованной
теризуемая для рассматриваемого класса помехи степенью полинома к (чем
выше значение к, тем выше эффективность фильтрации).
Полученное решение и вывод являются достаточно очевидными, так как,
когда помеха имеет узкий по сравнению с сигналом спектр, для получения на
выходе согласованного фильтра ббльшего (максимального) отношения "сиг-
нал-помеха" достаточно вместо СФ включить режекторный фильтр с полосой
режекции, равной ширине спектра помехи.
10.3. СТРУКТУРА ОПТИМАЛЬНОГО КОРРЕЛЯЦИОННОГО ПРИЕМНИКА
ПРИ ВОЗДЕЙСТВИИ КОРРЕЛИРОВАННОЙ ГАУССОВСКОЙ ПОМЕХИ
В главах 6 и 7 рассмотрены структурные схемы оптимальных при-
емников корреляционного типа, работающих по алгоритму макси-
мального приемника при воздействии гауссовских и негауссовских не-
коррелированных помех типа белого шума. При этом показано, что
оптимальным выходным эффектом такого приемника является функ-
ция взаимной корреляции, вычисляемая для каждого значения переда-
ваемого сообщения в соответствии с выражениями при непрерывном
времени наблюдения:
при гауссовском белом шуме в соответствии с формулой (6.11)
т
q(k) = 2jy(/)5(X, Od//JVo; (10.15)
о
при негауссовском белом шуме в соответствии с формулой (6.12)
т
q(k) = 2jZ(t)S(k, f)dt/N0. (10.16)
о
При гауссовских и негауссовских коррелированных (окрашенных)
помехах оптимальный (и асимптотически оптимальный) приемник
также должен вычислять функцию взаимной корреляции, но модифи-
цированную. В частности, при коррелированной гауссовской помехе,
задаваемой многомерной плотностью распределения вероятностей и
корреляционной функцией, выражение для функции взаимной кор-
реляции имеет вид [5]
т
9(Х)= Jy(')i>(b, Odr, (10.17)
о
где и(Х, t) — опорный сигнал для перемножителя коррелятора, связанный с
корреляционной функцией помехи.
275
Этот сигнал определяется выражением
т
р(Х, г) = J5(X, 0<2п(',, z)dz, (10.18)
о
где Cn(Z|, Z) — функция, обратная функции корреляции помехи. Функция
Q(tt, Z) определяется из интегрального уравнения
т
г%(z., z) Cn(z2, № = ~
о
где S(Z2 — Z[) — дельта-функция.
Возможные варианты структурных схем устройств, формирующих
функцию q(X) для одного текущего значения сообщения в соответст-
вии с выражением (10.17), могут иметь различный вид [5J: корреля-
тора с обеляющими фильтрами; коррелятора с оценивающе-вычитаю-
щим устройством; коррелятора с опорным сигналом у(Х, I).
Структурные схемы корреляторов приведены на рис. 10.9, а—в.
При белом гауссовском шуме функция
и(Х, z) = 2s(X, f)/N0",
выражение (10.17) принимает вид выражения (10.15).
Вычисление функции Qn(z) определяет декорреляцию помехи ее
оценкой и вычитанием из y(t).
В заключение отметим, что наличие корреляции помехи позволяет
повысить отношение "сигнал-шум" на выходе коррелятора и соответ-
ственно повысить верность (помехоустойчивость) передачи. Для реа-
лизации этой возможности следует выбирать оптимальную систему
сигналов, причем чем выше корреляция помехи и широкополоснее
полезный сигнал относительно помехи, тем выше верность (помехо-
устойчивость) приема.
276
При гауссовской марковской помехе, задаваемой двухмерной
плотностью распределения вероятностей с коэффициентом /-^отно-
шение "сигнал-помеха" на выходе коррелятора [5]
Рвых = 2а2/(1 - /•„)
10.4. ДИСКРЕТНЫЙ СОГЛАСОВАННЫЙ ФИЛЬТР
Дискретный согласованный фильтр (ДСФ) предназначен для об-
работки непрерывных (аналоговых) сигналов. Это устройство состоит
(рис. 10.10) из перемножителя П с гетеродином П, первого решаю-
щего устройства 1РУ, регистра сдвига PC. Принцип действия ДСФ ос-
нован на квантовании непрерывного колебания (рис. 10.11) по вре-
мени и амплитуде. Непрерывное радиочастотное колебание с выхода
линейной части приемника с помощью перемножителя П переводит-
ся в область видеочастот, проходит через фильтр нижних частот ФНЧ
и поступает на первое решающее устройство 1РУ. Напряжение на вхо-
де 1РУ имеет вид, показанный на рис. 10.11, а, б. Первое решающее
устройство состоит из двустороннего амплитудного ограничителя ДО
и каскада совпадения И. В 1РУ сигнал дискретизируется по времени
и амплитуде на два значения: 1 и 0. Напряжение на выходе 1РУ пред-
ставлено на рис. 10.11, в. Устройство 1РУ принимает решение о знаке
непрерывного колебания в момент отсчета. Регистр сдвига PC выпол-
нен на .©-триггерах и является дискретной линией задержки. При неко-
герентном приеме на каждый сигнал должно приходиться по два квадра-
турных канала, выполненных по структурной схеме (см. рис. 10.10), но
с двумя опорными колебаниями cosco0/ и sin со0/.
Свойства ДСФ имеют много общего со свойствами обычного ли-
нейного согласованного фильтра (ЛСФ). Однако напряжение на вы-
ходе ДСФ не является автокорреляционной функцией (АКФ) сигна-
ла, которая имеет место на выходе ЛСФ. На рис. 10.12 представлены
ненормированная АКФ сигнала Баркера с числом символов N = 11 и
напряжение на выходе ДСФ. Напряжение на выходе ДСФ отличается
от напряжения на выходе ЛСФ не только дискретной структурой, но
Рис. 1O.1O
277
и формой: уровень боковых пиков другой, и имеется значительная по-
стоянная составляющая (штриховая линия). Это объясняется тем, что
основным элементом ДСФ является регистр сдвига РС.
Допустим, что ДСФ осуществляет когерентный прием дискретного
фазоманипулированного (ФМН) сигнала с числом символов N = В и
энергией Е. Вероятность ошибки приема рд » I — <b(j4E/itNQ), где
Ф(х) — интеграл вероятности. Если же прием сигнала осуществляет-
ся ЛСФ, то вероятность ошибки рп » [1 —<b(j2E7N^)] < рл. Это оз-
начает, что максимальные потери в ДСФ в отношении "сигнал-шум"
составляют л/2 раз или 2дБ. Вероятность ошибки при некогерент-
ном приеме с помощью ДСФ и при Д-» °° определяется выражением
рл « 0,5 ехр(—E/tiNq), т. е. потери также равны л/2.
Помехоустойчивость ДСФ (см. рис. 10.10) зависит от времени при-
хода сигнала. Это значит, что необходима синхронизация по тактовой
частоте, с которой размещены импульсы в сигнале. При неидеальной
тактовой синхронизации отношение "сигнал-шум"
где т — временное отклонение тактовой синхронизации; т0 — длительность
импульса ФМН сигнала.
Для того чтобы ДСФ был инвариантен относительно времени при-
хода сигнала, можно построить квазиоптимальный ДСФ по схеме (см.
рис. 10.10), расширяя полосу ФНЧ до Д/= 2/т0 и удваивая тактовую
частоту импульсов и число ячеек в регистре сдвига. Квазиоптималь-
ный ДСФ проигрывает оптимальному в отношении "сигнал-шум" в
среднем на 1, а максимально на 4,5 дБ.
Рис. 10.11
Рис. 10.12
278
10.5. ЦИФРОВЫЕ СОГЛАСОВАННЫЕ ФИЛЬТРЫ
Фильтр ДСФ обеспечивает прием информации с относительно ма-
лыми ее потерями (примерно 2—4 дБ). Квантование входного сигнала
в ДСФ производится на два уровня, что обеспечивает простоту ДСФ
и надежность его работы. Для уменьшения потерь необходимо увели-
чивать число уровней квантования. В этом случае каждый отсчет вход-
ного сигнала представляется в цифровом виде (в виде кодовой после-
довательности), ДСФ превращается в цифровой согласованный
фильтр (ЦСФ).
Пусть входной сигнал квантуется на п уровней: п = 2т, где т — чис-
ло разрядов в кодовой последовательности. Если ФМН сигнал состоит
из N импульсов, то общая память ЦСФ равна mN.
На рис. 10.13 приведена упрощенная схема ЦСФ. Входной сигнал
после переноса в область видеочастот поступает на вход дискретиза-
тора Д, который превращает непрерывный сигнал в дискретный. Ана-
лого-цифровой преобразователь АЦП преобразует каждый аналоговый
отсчет в кодовую последовательность КП из т символов и направляет
Рис. 10.13
символы поразрядно в соответствующие ДСФ. Число ДСФ равно чис-
лу разрядов т. Каждый из них оптимально обрабатывает последова-
тельность разрядов и передает их в цифроаналоговый преобразователь
ЦАП. Если число уровней квантования велико, то сигнал на выходе
ЦАП должен иметь форму АКФ на выходе ЛСФ. Известно несколько
модификаций ЦСФ.
10.6. ДИСКРЕТНО-АНАЛОГОВЫЙ СОГЛАСОВАННЫЙ ФИЛЬТР
Принцип действия дискретно-аналогового согласованного фильт-
ра (ДАСФ) поясняется рис. 10.14. Непрерывное колебание 7V дискре-
тизируется по времени и каждое выборочное значение запоминается
на интервале квантования. Непрерывное колебание заменяется дис-
кретно-аналоговым. Для обработки такого колебания необходимо
иметь дискретно-аналоговую линию задержки (ДАЛЗ). В ячейках па-
мяти в течение интервала квантования должны храниться выбороч-
ные значения, которые были записаны в начале этого интервала.
В следующем такте каждое выборочное значение должно быть пере-
писано в последующую ячейку памяти.
279
Рис. 10.15
На рис. 10.15 приведена структурная схема ДАСФ. Последний со-
стоит из дискретизатора Д, дискретно-аналоговой линии задержки
ДАЛЗ, усилителей У, фазовращателей ФВ, сумматора Е; ДАЛЗ состоит
из последовательно включенных ключей А'и ячеек памяти Я. Ключ К1
(К2) переносит информацию с предыдущей ячейки памяти в после-
дующую. Ритмом работы ДАСФ управляет генератор тактовых им-
пульсов Г. Дискретизатор Д преобразует непрерывное колебание в
дискретно-аналоговое в соответствии с рис. 10.10. С выхода каждого
отвода ДАЛЗ (с выходов Я) напряжение поступает в усилитель У и фа-
зовращатель ФВ, а затем суммируется в блоке Е. Помехоустойчивость
ДАСФ такая же, как и помехоустойчивость ЛСФ.
10.7. ПРОГРАММИРУЕМЫЕ СОГЛАСОВАННЫЕ ФИЛЬТРЫ
На рис. 10.16 приведена структурная схема программируемого со-
гласованного фильтра (ПСФ). Основными блоками ПСФ являются
два регистра — две дискретные линии задержки. Сдвиговая (сигналь-
ная) линия задержки СДЛЗ служит для создания сдвинутых на такт
копий входного сигнала, которые поступают на перемножители П. На
вторые входы перемножителей поступают постоянные напряжения,
равные отсчетным значениям опорного сигнала, от дискретной опор-
ной линии задержки {ОДЛЗ). Напряжения на выходах ОДЛЗ постоянны
и изменяются лишь при смене опорного колебания. Последователь-
ность напряжений на выходах ОДЛЗ устанавливается в соответствии с
кодовой последовательностью входного сигнала по команде, которая
обеспечивает передачу требуемой кодовой последовательности от по-
стоянного запоминающего устройства ПЗУ. По сути ОДЛЗ является
280
Рис. 10.16
оперативным запоминающим устройством. Умножение копий вход-
ного сигнала, изменяющихся по времени, на постоянные значения
опорного сигнала, эквивалентно умножению входного сигнала на им-
пульсную характеристику согласованного фильтра. Сумматор произ-
водит операцию суммирования, что эквивалентно интегрированию в
корреляционном интеграле.
Для работы ПСФ в области видеочастот необходимо перенести
спектр частот с помощью смесителя СМ частоты (перемножитель на
входе), отфильтровать его и произвести дискретизацию и квантование
входного сигнала (1РУ) также, как в ДСФ. Перенос сигналов на ви-
деочастоту необходим в том случае, когда СДЛЗ и ОДЛЗ выполнены
на элементах цифровой техники.
Глава 11
ПРИЕМ НЕПРЕРЫВНЫХ СООБЩЕНИЙ
11.1. ОБЩИЕ ПОЛОЖЕНИЯ
Непрерывные сообщения представляют собой некоторый процесс
(первичный сигнал) b(t), который может непрерывно изменяться во
времени и принимать любую форму. Такие сообщения встречаются в
телефонии, радиовещании, телевидении и др. Сообщение b(t) в этих
случаях рассматривается как реализация некоторого случайного про-
цесса B(f). Непрерывные сообщения могут передаваться непосредст-
венно или с помощью модуляции. В первом случае передаваемый сиг-
нал пропорционален передаваемому сообщению: S(t) = kb(t), где к —
постоянный множитель, во втором — сигнал S(t, b(t)) является неко-
торой функцией передаваемого сообщения b(t). При ЧМ и ФМ эта
функция нелинейна, а при AM, БМ, ОБП AM — линейна. Отсюда и
названия линейных и нелинейных видов модуляции.
Будем полагать, что сигнал на входе приемника представляет собой
суммарное колебание переданного сигнала 5[z, />(/)] и шума N(t):
Z{t) = Sit, b{t}} + n(t).
Шум n(i) — стационарный гауссовский процесс с односторонней
спектральной плотностью мощности No.
Необходимо из входного сигнала Z(i) получить (восстановить) пер-
вичный сигнал b (г), наименее отличающийся по некоторому критерию
от переданного сообщения b(t). Воспроизводимое с некоторой погреш-
ностью b (/) называют оценкой сообщения (процесса). Следовательно,
задачу приема непрерывных сообщений можно рассматривать как за-
дачу оценки процесса. При непосредственной передаче S(t, b) = kb(t),
что соответствует линейному случаю или отсутствию модуляции, вы-
числение оценки сводится к линейной фильтрации сигнала. При пе-
редаче с помощью модулированных сигналов S(t, b) оценка сообще-
ния о (г) в приемнике определяется (вычисляется) демодулятором, в
котором сигналы детектируются и обрабатываются. Во многих случаях
эта обработка сводится к методам фильтрации и может осуществляться
до и после детектора. Оптимальный демодулятор в общем случае пред-
282
ставляет собой нелинейное устройство (нелинейный фильтр), обеспе-
чивающее наилучшее (по заданному критерию) выделение сообщения
b(i) из принятого сигнала Z(t). Теория оптимального приема непрерыв-
ных сообщений впервые была разработана В. А. Котельниковым.
11.2. КРИТЕРИИ ПОМЕХОУСТОЙЧИВОСТИ ПРИЕМА
НЕПРЕРЫВНЫХ СООБЩЕНИЙ
Мерой помехоустойчивости при передаче непрерывных сообще-
ний может быть степень отклонения полученной оценки b (t) от пе-
реданного сообщения b(t). Обычно применяется среднее квадратиче-
~2 —~ 2
ское отклонение или средний квадрат ошибки £ (г) = [£(/)- 6(г)] ,
где усреднение берется по всем возможным реализациям b(t) и b (t) с
учетом совместного распределения со (b, b). Разность e(i) = b(t) — b(t)
можно рассматривать как помеху на выходе приемника. Величина
~2
£ (Г) = Pz — мощность помехи на выходе приемника. Мощность пере-
~2
даваемого сообщения считается заданной: Р= b (t). Тогда можно оп-
ределить отношение "сигнал-шум” на выходе приемника: рвых = Рс/Рш.
Во многих случаях в качестве критерия помехоустойчивости прини-
—2
мают не средний квадрат ошибки е (/), а отношение мощности сиг-
нала к мощности шума на выходе приемника рвых. Это отношение мо-
жет быть улучшено приемником, что зависит не только от способа
приема, но и от вида модуляции. Поэтому помехоустойчивость сис-
темы передачи непрерывных сообщений удобно оценивать выигрышем
g — . При g > I отношение "сигнал-шум" при демодуля-
Рвх ‘t ‘ш
ции улучшается, а при g < 1 — ухудшается. В различных системах
сигналы могут иметь различную ширину спектра, и поэтому при
сравнительной оценке систем связи следует определять реальный или
обобщенный выигрыш системы через отношение мощностей сигнала
не к мощностям помехи, а к их средним спектральным плотностям:
-= Р^ых. = Рвых = (11J)
Рвх “Рвх “
’ _ Р _ г . — Рс — _ р _ F
Рвых — р /г — Рвых^е’ Рвх р ~7р Рвха ~р »
Гz гс ш О с
где F— ширина спектра сигнала; Fc — ширина спектра сообщения.
283
В системах непосредственной и однополосной передачи, в которых
сигнал пропорционален передаваемому сообщению S(t, b) = kb(t),
ширина спектра F= Fc и рвых = рвх выигрыш g и обобщенный выиг-
рыш g' одинаковы: g = g'= 1. Это означает, что введенный критерий
выигрыша сводится к сравнению систем передачи непрерывных со-
общений с системой непосредственной или однополосной передачи.
В определении обобщенного выигрыша (11.1) рассматривается от-
ношение мощности сигнала к мощности помехи на выходе и входе де-
тектора (приемника). Поэтому g'— обобщенный выигрыш не системы,
а только ее части — приемника. Именно поэтому в линейном детекторе
(синхронном) в частности однополосных сигналов всегда g = 1 неза-
висимо от мощности входного сигнала Рс и пикфактора кп передавае-
мого сообщения b(t). Помехоустойчивость g' зависит от Рс и кп, по-
этому используют рекомендованное МККР компаундирование —
сжатие уровня b(t) на передающей и расширение его на приемной сто-
роне. Эти противоречия можно исключить, уточнив определение g'.
Понятие "обобщенный выигрыш системы" предполагает превыше-
ние помехоустойчивости исследуемой системы 1 над помехоустойчи-
востью другой системы 2, принятой за эталонную:
g' = (П.2)
Рвых2
В качестве эталонной целесообразно взять однополосную систему
2
(линейную) с пикфактором сигнала в ней &пэ = 2, т. е. с однополос-
ным сигналом постоянного уровня. При равномерной плотности
мощности флуктуационных помех No на входе эталонной системы 2
отношение мощности сигнала к мощности шума
Рвх2 - “т----
*пЛо"2
2ЛГОЯ2 РВЫХ2’
а на выходе исследуемой, в данном случае однополосной, системы 1
где Uml — амплитуда напряжения сигнала на входе приемника; Пх — полоса
пропускания приемника.
Согласно выражению (11.2)
= Рвых! П2 = .2. (11.3)
8 Рвых2". W if
284
где — отношение мощности сигнала исследуемой системы к мощности
сигнала эталонной системы.
Если эти мощности равны между собой, то
if’=2/^. (11.4)
Для некомпрессированного речевого сигнала к2п = 10 и g' = 0,2.
При глубокой компрессии (клиппировании) к2 = 2 и g' = 1. Назван-
ные противоречия сняты. Согласно определению (1 l.l)g'= 1 является
частным случаем определения (11.2).
Критерий выигрыша у в помехоустойчивости одной системы отно-
сительно другой определяется отношением обобщенных выигрышей
этих систем :
у = = Рвых1 Рвых2 _ Рвых!
Рвыхэ Рвыхэ Рвых2
и не зависит от эталонной системы.
Новое определение g' согласно формуле (11.2) позволяет определить
помехоустойчивость не только линейной, но и нелинейной системы.
11.3. ОБОБЩЕННЫЙ ВЫИГРЫШ СИСТЕМЫ С УГЛОВОЙ МОДУЛЯЦИЕЙ
Для произвольного отношения мощностей ЧМ-сигнала и флуктуа-
ционного шума на входе приемника р спектральная плотность мощ-
ности шума на выходе стандартного частотного детектора (СЧД)
(7(F) = (I - e^G^F) + e~pG2(F) + G3(F).
В этом выражении третьим слагаемым можно пренебречь ввиду его
малости. Тогда мощность шума на выходе СЧД
Рш = J G(F)dF=(l- е p)22N0W2F3J3U2m +е рл 72/7FB£(3,2),(l 1.5)
о
где No — спектральная плотность мощности флуктуационного шума на входе
приемника; Um — максимальное (пиковое) значение сигнала; FB — верхняя
модулирующая частота; П — полоса частот ЧМ-сигнала на входе СЧД; £(х) —
дзета-функция Римана: £(3,2) = 2,61237.
Будем полагать, что на входе СЧД имеется идеальный амплитуд-
ный ограничитель. Тогда для произвольного р мощность ЧМ-сигнала
на выходе
/>свых= «дэ(’
где <1>дэ — дисперсия девиации частоты.
285
Отношение мощности ЧМ-сигнала к мощности флуктуационного
шума на выходе СЧД для любого р
р = Рсвых =_______________°>2Дэ<.'-е~Р)2_________ =
Рш вых _ е-р 2 2Дд з+ e-Pnj2F п<;(3,2)
U2 3
т
3 (fo^\2
- т J-£n
, . 3,14- 1,41-2,61237-3 ит -р,. -pf2 П
(6,28)2 °
где — пикфактор модулирующего сигнала; f^n = Knfa3 — пиковая девиация
частоты.
2
Обозначим Um /(2 • 2N0FB) = рАМ — отношение мощностей "сигнал-
шум" на входе приемника в полосе AM сигнала; I7/FB — отношение по-
лосы частот ЧМ сигнала к ОБП AM; fgn/FB = т — пиковый индекс ЧМ.
Тогда
*рАм©2
Р/и _ _ _2 '
1+ 1,76рАМ<Гр(1-е'₽) П
Сделаем дальнейшее преобразование этой формулы. Будем счи-
тать, как обычно, что амплитудно-частотная характеристика (АЧХ)
усилителя промежуточной частоты (УПЧ) приемника имеет вид гаус-
совской кривой. Тогда дисперсия помех на входе СЧД а2 = N0I7, а
множитель
При этом
= п рП
Рам 2Non2FB 2 ’
З^Пр
л._________к2
1 + 0,88П2ре~р(1 -е“р)'
Учтем также, что
е
е Р(1 — е р) 2 = е рер(е2
е2Г2 =
1
2(chp- 1) ’
где chp = (e** + е р)/2 — гиперболический косинус.
286
Тогда
2 п
п =-12_____________Пр
РтЧМ 2
кп l-t-0,44 ,П£
ch р - 1
(11.6)
Пользуясь формулами (11.6) и (11.2) определим для общего
случая.
При равномерной плотности мощности флуктуационного шума на
входе приемника однополосных сигналов
2/2 г/2
Р0 = п ”°— ~ т0 - = Рвых 0 = Pm О’
*п<ЛП0 *по*(Л
а на входе приемника ЧМ-сигналов
Рчм _
итЧМ
2ЛГоячм
_ „ < V)2
где q - Ячм/Я0; X- Um4M/Um0.
Подставляя значение рчм в правую часть выражения (11.6), после
преобразований получим выигрыш в помехоустойчивости системы
ОБП AM по сравнению с системой, использующей ЧМ:
У = _2_ ± 1 + 0,22——
РтЧМ Зт2 Л2О Л2 ] JРо*по* ) _ j
I 2? )
(И.7)
Расчеты по формуле (11.7) при
+ т +
ставлены графически на рис. 11.1
в виде кривых 1—4 при следую-
щих параметрах: т = 1,5 «(для кри-
вых 1 и 2); т = 0,75 (для кривых 3
и О; к^ = Л2О = 10 (для кривых 1 и
3); кв = к^о = 3 (для кривых 2 и 4).
Все кривые имеют области (точ-
ки) излома монотонности: кривая 1
п₽и Роп = 12 Р33 и ПРИ Ро > Роп зна'
чение уоч = —5 дБ; кривая 2 при
Роп = 24 Раза и ПРИ Ро > Роп зна’
%= 1; FB = 3400 Гц; Пчм = 2FB(1 +
т); FB = Пп = 3400 Гц; т —
2
1,5 или 0,75; кп = 10 или 3 пред-
287
Le-iMe уоч = 0. Для минимального значения р0 min — 10 дБ значение
уо„ ~ +8 дБ (кривые 2 и 4).
Точки излома кривых называются пороговыми точками или просто
порогами. Порог характерен для нелинейных систем: ЧМ, ФМ. Ли-
нейные системы — беспороговые. Различают надпороговую область
"-'М, когда р> рл, подпороговую, когда р < рл и пороговую при р = рл.
Обычно работают в надпороговой области ЧМ. При определенном
уменьшении отношения "сигнал-шум" р на входе СЧД нарушается
пропорциональное уменьшение отношения "сигнал-шум" рт на его
выходе. Это уменьшение происходит все более быстро, наступает по-
рог помехоустойчивого приема ЧМ сигналов. В связи с этим зависи-
мости рт =f(p) часто называют пороговыми кривыми. Наступление по-
рога происходит постепенно. Несмотря на это для сравнения свойств
различных сигналов и приемников удобно определять пороговую точ-
ку, например, по пересечению продолжений подпорогового и надпо-
рогового участков кривой, по перегибу кривой и т. д.
Порог сопутствует любому виду модуляции, создающему выигрыш
в отношении "сигнал-шум". Малые относительно сигнала шумы по-
давляются сигналом на выигрыш g. Когда шумы больше сигнала, воз-
никает обратное явление — подавление сигнала шумом. Это эффект
подавления на нелинейном устройстве слабого сигнала сильным. При
этом не требуется, чтобы средняя мощность шума превышала мощ-
ность сигнала. Как только всплески огибающей шума, превышающие
амплитуду сигнала, станут достаточно частыми и продолжительными,
дум на выходе СЧД станет быстро расти. Поэтому на пороговых кри-
вых отклонение от надпороговой части начинается раньше, чем при
равенстве эффективных значений сигнала и помехи (уже при их от-
ношении в 5—12 дБ).
Обобщенный выигрыш системы с ЧМ в надпороговой области
при условии что Х= 1; &2О = 2, а выражение в квадратных скобках
формулы (10.7) равно 1. Если последнее больше 1, то область ЧМ —
пороговая или подпороговая.
В приемниках ФМ сигналов в качестве демодуляторов использу-
ются СЧД, к выходам которых подключены интеграторы. Будем счи-
тать те интеграторы идеальными, у которых частотный коэффициент
пеоедачи Я(со) = 1/jco. Спектральная плотность мощности флуктуаци-
онного шума на выходе интегратора GK(F) = (7(F)|/7(<o)|2 = G(F)/(o2.
Выполнив преобразования, аналогичные ЧМ, получим выигрыш в
288
помехоустойчивости системы ОБП AM по сравнению с системой, ис-
пользующей ФМ,
.2
.. — Р|»ОМ — *п 2 1
ТОФ ----~ ~2 -Г ~2
ртФМ т кпо х
] + 0,295——
, chf ЕрМ _ 1
к 2q J
(11.8)
По сравнению с выражением (11.7) в формуле (11.8) отсутствует
множитель 3 в знаменателе, а в квадратной скобке стоит коэффициент
0,295 вместо 0,22. Так что пороговые кривые у^ мало отличаются от
кривых (см. рис. 11.1).
Согласно формуле (11.8) в надпороговой области ЧМ обобщенный
2 2
выигрыш системы с ФМ g^M = 1/Уоф = т /кп при тех же условиях,
что и
Полученные формулы gqM и £ф’м совпадают с аналогичными фор-
мулами согласно определению (11-1).
11.4. ОПТИМАЛЬНАЯ ДЕМОДУЛЯЦИЯ НЕПРЕРЫВНЫХ СИГНАЛОВ
Для простоты анализа будем считать, что: первичный сигнал b(t)
принимает значения от +1 до —1; реализация сообщения имеет конеч-
ную длительность Т; спектр сообщения ограничен частотами от 0 до FB.
При этих условиях функции b(t) могут быть разложены по ортогональ-
ному базису <рк(0 и представлены в виде усеченного (конечного) ряда
/>(/)= ^Акфк(/),
4= 1
где Ак — случайный коэффициент, определяющий передаваемое сообщение;
v = Т/Д/ = 2ТТВ согласно теореме Котельникова.
Следовательно, при известной системе базисных функций <рк(/) пе-
редача непрерывного сообщения b(t) эквивалентна передаче v значе-
ний коэффициентов (параметров) А^. Влияние помех приводит к то-
му, что каждый параметр А.к принят с некоторой погрешностью ДА^,
и оценка сообщения
Ь (/) = £ (Ак + ДАк)ч>к(0 = />(/) + е(/),
4 = 1
где е(/) = ДЛ(1) = £ ДА-КФК(О — погрешность воспроизведения сообщения
4= 1
(шум на выходе приемника).
10 { !К
28S
Таким образом, задача оптимального приема непрерывного сооб-
щения b(t) сводится к задаче совместного оптимального приема со-
вокупности многих параметров X = (Хь Х2, •••> М- Это значит, что по
принятой реализации Z(t) = S(t, b) + n(t) необходимо восстановить пе-
реданное сообщение b(t) с возможно большей точностью хотя бы при
слабых помехах. Из-за шума в канале и случайного характера Хк точ-
ное его измерение невозможно. Можно лишь указать приближенную
его оценку. Очевидно, что вся информация о переданном параметре
Хк содержится после приема колебания г(0 в апостериорном распре-
делении со(ХД). Согласно формуле Байеса со(ХД) = со(Х) co(^/X)/co(z). На
основе анализа co(X/z) принимается решение об оценке передаваемого
параметра Хк. При больших отношениях "сигнал-шум” co(X/z) имеет
максимум в окрестности истинного значения параметра X. Поэтому в
качестве оценки целесообразно взять то значение Х|, которое обраща-
ет в максимум функцию co(X/z).
Во многих случаях априорная плотность вероятности со(Х) неизвест-
на, и ее полагают равномерной: со(Х) = const на некотором интервале Л.
При этом координата максимума со(ХД) совпадает с соответствующей
координатой условного распределения со(^/Х), которое называют
функцией правдоподобия. В этом случае правило максимума апостери-
орной вероятности переходит в правило максимума правдоподобия.
Оценка параметра X определяется из условия [со(^/Х)] = 0. Оценку
параметра по этому критерию называют максимально правдоподобной.
Заменим белый шум квазибелым, имеющим ту же одностороннюю
спектральную плотность мощности No, но в некоторой полосе частот
F= К/1Т, где А’» 1. Пусть вначале будет г(0 — шум. Возьмем на такто-
вом интервале Аравноотстоящих сечений через Д/= 1/27г= Т/К. Отсчеты
Z\, Z2, Zk в этих сечениях для квазибелого гауссова шума независимы,
и поэтому А-мерная плотность вероятностей для взятых отсчетов
к
wki, z2,.... гк; г,, t2, .... = n(t)-----exp Г—L £ и2(0],
(а72я) u 2a / = j
_ N
где a2 — N0F = —2 — дисперсия (мощность) квазибелого шума.
2Af
При передаче сигнала z{t) = S(t, b) + n(t), n(t) = z(t) ~ S(t, b). Под-
2
ставляя значения о и n(f) в предыдущее выражение и расширяя по-
лосу частот F, получим
f т 1
ш(Л/г) = km(b) ехр -! [ г(0 - S(t, b)2dt f,
I J
где к — некоторая постоянная, которая может быть вычислена из условия нор-
мирования j<o(Z>/z)dZ> = 1.
ь
290
Преобразуем показатель экспоненты в последнем выражении:
T
,2,
T -1 Г T
± J 52(/, b)dt exp 2- J lit) S(t, b)dt
co(6/z) = £p(6)exp \z\t)dt exp -
L N° о J L
Первый экспоненциальный множитель не зависит от Ь, и его можно
включить в постоянную К. Если энергия сигнала Е не зависит от Ь,
то второй множитель ехр[—E/No] также можно включить в постоян-
ную Лр Тогда
a(b/z) = ka(b) ехр[?(6)];
т
q(b) = ^-fz(t)S(t,b)dt.
Отсюда следует, что при известной априорной вероятности опре-
деление апостериорной вероятности сводится к вычислению функции
q(b), т. е. к скалярному произведению принятого колебания z(f) на
переданные (ожидаемые) сигналы 5(/, Ь). Принтом апостериорное
распределение a>(b/z) максимально или при со (Л) = const имеет ми-
нимум по b(t).
т
({?(/) “ S(t, b)]2dt= min.
О b
Во многих случаях для приближенного нахождения q(b) целесооб-
разно применение простых следящих устройств. При передаче непре-
рывных сообщений сигнал S(t, b) не является полностью известным.
Однако обычно имеется некоторая априорная информация об этом
сигнале. Известны, например, несущая частота, вид модуляции, ши-
рина спектра сигнала и т. п. Часть информации можно получить в ре-
зультате наблюдения за принятой реализацией сигнала z(t) в преды-
дущем промежутке времени. В результате имеется возможность
определить оценку сигнала 5(/, Ь) и вычислить функцию q(b) для
этой оценки:
т
q(b) = fz(t)S(t, b)dt.
Эту функцию можно найти с помощью фильтра с переменными
параметрами (рис. 11.2) или схемы следящего коррелятора (рис. 11.3).
Каждая из этих схем имеет основной информационный канал, на вы-
ходе которого получается оценочное значение b (/) передаваемого со-
общения, и канал обратной связи, с помощью которого в схеме
к I * 291
Рис. 11.2
Рис. 11.3
(см. рис. 11.3) формируется опорный сигнал S(t, b), а в схеме (см.
рис. 11.2) посредством управляющего элемента УЭ изменяются па-
раметры следящего фильтра СФ так, чтобы он был согласован с не-
прерывно изменяющимся ожидаемым сигналом S(t, Ъ). В схеме (см.
рис. 11.3) с помощью УЭ изменяется модулируемый параметр несу-
щего колебания, формируемого генератором Г. При частотной моду-
ляции таким параметром будет частота, при ФИМ — сдвиг импульсов
по времени и т. п. Фильтр нижних частот (ФНЧ) в этой схеме выпол-
няет роль интегратора на интервале наблюдения Т= 1/(2FB), где FB —
максимальная частота в спектре передаваемого сообщения b(t).
Рассмотренные схемы квазиоптимальные, поскольку получаемая
оценка 5(/, Ь) не является наилучшей из возможных. При различных
видах модуляции принцип следящего приема остается одним и тем
же. Вид модуляции определяет параметр, за которым должно осуще-
ствляться слежение, т. е. оптимальный приемник должен с наимень-
шей ошибкой следить за передаваемым случайным колебанием b(f).
Схемы следящего приема позволяют реализовать помехоустойчи-
вость, близкую к потенциальной. При линейной модуляции опти-
мальный приемник (демодулятор) можно реализовать разомкнутой
схемой с когерентным детектором (рис. 11.4).
Определим помехоустойчивость систем связи при оптимальном
приеме. Эту потенциальную помехоустойчивость можно вычислить, не
уточняя структуры оптимального демодулятора, для чего достаточно уз-
нать, что он выдает решение b (/), соответствующее максимуму q(b).
Геометрически модуляцию можно рассматривать как отображение
пространства сообщений В в пространство сигналов S, а демодуляцию —
как обратное отображение. При демодуляции помеха л(/) на входе
Рис. 11.4
приемника отображается в по-
грешность оценки сообщения
(шум на выходе приемника) е(/).
Рассмотрим прием непрерыв-
ного сообщения на фоне белого
гауссовского шума л(/) со спек-
тральной плотностью No. При
достаточно слабом шуме погреш-
292
ностье(г) = b(j) — b(f) представляет собой также гауссовский процесс
со спектральной плотностью Gz(t), которую определим. Для этого вос-
пользуемся геометрическим представлением. В пространстве сигналов
каждой реализации сигнала S(t, b) при различных Ь соответствует точ-
ка. Если S зависит непрерывно от Ь, что имеет место во всех аналого-
вых системах связи, то все эти точки образуют некоторую кривую
(рис. 11.5). Принятый сигнал z(r) является также точкой в пространстве
сигналов, не лежащей из-за помех на кривой 5(/, Ь). Максимально
правдоподобная оценка £ соответствует тому сигналу 5(/, b), который
изображается на сигнальной кривой точкой, ближайшей к точке z-
Обозначим Д5= S(t, b) - S(t, b), где b — действительно переданное
сообщение. При малой помехе и, следовательно, малом отклонении
Д5отрезок между S(t, b) и S(t, b) можно аппроксимировать прямой
линией, которая является касательной к линии сигнала в точке S(t, b).
Тогда д5 представляет собой проекцию вектора п на эту прямую:
Д5= Дй|{ =
со
где Л|(/) — составляющая шумового вектора в пространстве сигналов, пред-
ставляющая собой низкочастотный гауссовский процесс со спектральной
плотностью No в полосе частот от 0 до FB, Ab = b — b.
Тогда сообщение на выходе приемника
Л(/) = Л(/) + ДЛ = Л(0 + и1(0/||
Чем больше производная dS/db, тем меньше шум, накладываемый
на выходное сообщение, т. е. тем выше
помехоустойчивость. Отсюда следует,
что шум на выходе приемника е(/) —
= «1(0/|| — гауссовский процесс с
односторонней спектральной плотно-
стью мощности Gz(f) = •
Здесь квадрат частной производной ус-
редняется по времени и по ансамблю
B(f) (линии сверху).
Следовательно, при прямых систе-
мах модуляции шум на выходе прием-
ника квазибелый, т. е. имеет равномер-
ный спектр в полосе частот Ев.
Рис. 11.5
293
В случае интегральных систем сообщение B(f) входит в выражения
сигнала под знаком интеграла:
|5(т)<1т, t
о
S(B, t) = S
= t),
t
где v(z) = |5(т)с1т.
о
Так как B(t) = B(t) + e(/), to
v (0 = + je(Odf = vW + 4(0-
о о
Следовательно,энергетический спектр шума на выходе приемника
для таких систем можно определить как энергетический спектр произ-
водной £'(/). На основании известной теоремы о спектре производной
С£(Л = (2я/)2С5(/),
где Gf(t) определяется по формуле для если в последней вместо под-
’ ь д в
ставить dS/dy.
Следовательно, для интегральных систем энергетический спектр
шума на выходе приемника
С£(/) = (2л/)2 ,
Уду!
т. е. он — параболический (пропорционален квадрату частоты /).
Здесь волнистая и прямая линии означают усреднение по времени и
ансамблю соответственно.
Мощность шума на выходе приемника в полосе частот от 0 до FB
Л,
Рв = J
о
Мощность сообщения Рв на выходе приемника, равную B2(t),
можно выразить через пикфактор сообщения
кп = |5(/)| тах/7й2(О-
294
Учитывая принятое нормирование сообщения |Z?(/)|max = 1, полу-
2 2
чим В (/) — Рв = 1/£п. Тогда отношение мощностей "сигнал—шум" на
выходе приемника
„ = = 1
Рвых р F
‘г 2 в
О
Выигрыш g и обобщенный выигрыш g’KaK отношение мощности
сигнала к спектральной плотности мощности помех на выходе при-
емника, деленное на такое же отношение на входе приемника, соот-
ветственно
*(Л <_ £ _ N0F
2 “ 2 '•
f <№* кпРс f
О О
где а = F/FB.
Отметим, что полученные результаты справедливы для любой ин-
тенсивности помех при линейных методах модуляции и для слабых
помех в случае нелинейных видов модуляции.
g= ^вы-х
Рвх
11.5. ПОМЕХОУСТОЙЧИВОСТЬ СИСТЕМ ПЕРЕДАЧИ
НЕПРЕРЫВНЫХ СООБЩЕНИЙ
Для передачи непрерывных сообщений по каналу связи применя-
ют различные виды модуляций: AM, БМ, ОБП, AM, ЧМ, ФМ (см.
главу 3). Определим потенциальную помехоустойчивость этих систем
по приведенным выше формулам (см. п. 11. 4).
Амплитудная модуляция формирует сигнал
S(t, В) = £/0{1 + A/5(0]cos©0/,
где глубина модуляции М <. 1, т. е.
= JW(/0cosa0/; = 1 f (f£)2d'= U M2U*COs2aotdt =
CD \aDj / J 'CD' I J
°° 0 0
T
= a/2[/q J (1 + cos2ffl0/)d/ = 0,5M2Uo .
о
Энергетический спектр шума на выходе приемника AM сигналов
295
Мощность сигнала на входе приемника
Рс = s\t, В) = у J [1 + Л/В(0] cos2<o0/d/ =
О
„2Т ___ __________
= 2IP1 + 2МВ(() + М2в\(} ](1 +cos2ffl0/)d/.
О
Поскольку сообщение — центрированный процесс, B(f) = 0 и
2 2 2
вследствие принятой нормировки В (О = l#(7)lmax/£n, то =
= O,5t/o(l + М2/1?п ). Здесь и далее предполагается, что со0Г» 1, и по-
Т
1г - . sinlfflnT „ , _
этому 2. cos2conra/= ----1. чем можно пренебречь.
7 J u 2<ооГ
О
При AM полоса частот сигнала на входе приемника Нравна удво-
енному значению полосы частот сигнала на его выходе, т. е. F= 2FW
Поэтому
= а Л? = 2М2 М2
оАМ ? 7 7 J > *АМ э ’
м2+к2 л/2+<
Поскольку М< 1, к2п min = 2, то gAM max « 0,7 и g/M max = 0,33, т. е.
система AM дает проигрыш. Это обусловлено тем, что лишь неболь-
шая часть мощности сигнала заключена в боковых полосах, несущих
полезную информацию.
Сравним помехоустойчивости однополосной модуляции (ОБП AM),
рассмотренной в п. 11.2, с AM:
= #обп = 2^ . м2
» _ » 7* э ? *
£лм л; лг+*„
2 2
Если кп = 2 = min для ОБП AM и AM, то у = 3. Если же Лпо = 2
для ОБП AM, а £„ = 10 для AM, то у = 11. Именно это значение у
приводится в случае goEn - 1 •
При балансной модуляции (AM без несущей) сигнал формируется
в результате простого перемножения первичного сигнала B(i) и коле-
бания-переносчика:
S(t, В) = в(ОЦ)С°5<о0/.
296
Средняя мощность такого сигнала
— и2
Рс = 0,5 52(0 = 0,5-5,
*п
2 2
а (д$/дВ) = 0,5 С/о. С учетом этих соотношений имеем gBM = 2;
ggM ~ 1• поскольку а = 2.
Выигрыши gBM и ggM не зависят от пикфактора сообщения, что
не соответствует действительности. Используя новое определение g'
(см. п. 11.2) найдем
_ т 2 > — 2
£БМ ^“5 ’ &БМ j *
*п
Системы AM, БМ, ОБП AM — линейные, поэтому полученные вы-
ше соотношения для оптимального приемника справедливы при слабых
и сильных помехах на входе. Эти соотношения определяют предель-
ную (потенциальную) помехоустойчивость систем. Выясним, реали-
зуется ли эта помехоустойчивость при обычных способах приема в ре-
альных приемниках? Для этого рассмотрим прием сигналов AM
линейным детектором огибающей и когерентным детектором. Перед
детектором обычно включают фильтр, пропускающий частоты сигна-
ла. Шум на его выходе представляет собой узкополосный процесс, ко-
торый можно разложить на две квадратурные составляющие:
N(t) = Nc(t) coso)0t - Ns(t) sina>0/,
где Nc(t), Ns(l) — гауссовские процессы co спектральной плотностью 2N0.
Тогда принимаемое колебание на входе детектора
Z(0 = S(t, В) + N(t) = [i/0(l + + ?VC(0] cos co q/ - ^(0sincoo/.
Огибающая этого колебания
U= Uo( 1 + A/5(0) + Nc(f)]2 + N*(J)
выделяется на выходе линейного детектора огибающей. При слабой
помехе квадратурной составляющей Ns(f) можно пренебречь. Если ис-
пользовать когерентный (синхронный) детектор, то квадратурная со-
ставляющая Ns(t) отсутствует при слабой и сильной помехах.
Подобрав усиление приемника так, чтобы в отсутствие шума ко-
лебание на его выходе равнялось первичному сигналу B(t), при нали-
чии шума, получим
5(0 = 5(0 + = 5(0 + М0.
297
Шум на выходе приемника N(f) = Nc(t)/MU$ является нормальным
флуктуационным колебанием с нулевым средним значением. Энерге-
тический спектр этого колебания
м2и20
что совпадает с полученным выше значением Gz(f) для оптимального
приемника AM сигналов.
Таким образом, обычный приемник с когерентным (синхронным)
приемником реализует потенциальную помехоустойчивость при любом
уровне помех на его входе, а приемник с линейным детектором оги-
бающей — только при их малом уровне. При детектировании сигналов
БМ и ОБП AM синхронным детектором потенциальная помехоустой-
чивость реализуется при любом уровне помех на входе приемника.
Фазовая модуляция также относится к прямым системам модуля-
ции, но к нелинейным. При ФМ сигнал
S(t, В) = l/0cos[ct>0/ + mB(t)],
где т — индекс ФМ или девиация фазы.
Для такого сигнала
р
(Ж - ней)*- />.- 1
о о
1N„ 2 2
г i л — о „ _ m „ _ *фм _ т
2„2’^>м 2 ’ a t2 ’
т U0 кП кп
что совпадает с результатом, полученном в п. 11.3 для надпороговой
области ФМ.
Частотная модуляция относится к интегральным системам моду-
ляции. Сигнал при ЧМ
S(t, В) = £/0cos[o>0/ + Дшц>(0],
Т
где Ли — девиация частоты; <р(/) = |5(г)<1т.
о
Для такого сигнала
= —Дш UQ sin[mQ/ + Дшч>(/)],
р р
1)’ - и©2-'- i <
о о
298
Энергетический спектр шума на выходе приемника ЧМ-сигналов
С-<Л - 2S! $
поэтому
= 3^g,
, к2
J ЩЮ
о
. _ «чм — -im2
«ЧМ - — -
кп
что также совпадает с результатом, полученным в п. 11.3 для надпо-
роговой области ЧМ.
При ЧМ также, как и при ФМ, выигрыш может быть значительно
больше единицы, и достигается это расширением полосы частот сиг-
нала (увеличением индекса модуляции т).
Частотная и фазовая модуляции являются примерами систем, в ко-
торых верность передачи сообщений при данном уровне помех может
быть повышена не только в результате увеличения мощности сигнала,
как это имеет место при линейных видах модуляции, но и благодаря
расширению полосы частот, занимаемой сигналом. Эти выводы и по-
лученные соотношения для ЧМ и ФМ справедливы лишь при малом
уровне помех, т. е. в надпороговой области. Пороговая и подпороговая
области ЧМ, ФМ рассмотрены в п. 11.3.
11.6. ПОТЕНЦИАЛЬНАЯ ПОМЕХОУСТОЙЧИВОСТЬ МНОГОСТУПЕНЧАТЫХ
МЕТОДОВ МОДУЛЯЦИИ
Во многих реальных системах связи (системы радиосвязи, много-
канальные проводные системы, телеметрические и др.) канальный
сигнал образуется в результате применения нескольких последова-
тельных методов модуляции (многоступенчатая модуляция). Модули-
рующим сигналом для каждой следующей степени модуляции явля-
ется модулированный сигнал, полученный на предыдущей ступени.
Практическое распространение получили системы с двукратной мо-
дуляцией ОБП AM — ОБП AM, ОБП AM — ФМ и др.
Если на всех ступенях применяют прямые виды модуляции, то по-
тенциальная помехоустойчивость определяется просто: общий выиг-
рыш (и обобщенный) является произведением выигрышей для каж-
дой ступени:
л л
«= ГК *'= ГК
/=1 <=1
Это обусловлено тем, что при обратном процессе (демодуляции)
шум не меняет своей структуры, т. е. остается белым. Он является по-
299
мехой для следующей ступени демодуляции, при анализе которой на-
до использовать пикфактор модулирующего сигнала кп предыдущей
ступени. Если же на какой-либо одной ступени или нескольких сту-
пенях применяется непрямой метод модуляции, то помеха на выходе
соответствующего демодулятора уже не является белым шумом, т. е.
спектральная плотность мощности последнего не постоянна. В этом
случае ко входу следующей ступени демодуляции подключают четы-
рехполюсник — выравниватель амплитуды спектра помехи, так назы-
ваемый отбеливающий фильтр Котельникова, после чего задача реша-
ется методом прямых систем модуляции.
Порог помехоустойчивости наблюдается по обеим модуляциям,
если они не прямые. Если один из методов прямой, то порог опреде-
ляет непрямая модуляция. Например, в системе с модуляцией ЧМ-
АМ-порог определяется ЧМ. Для снижения порога при ЧМ приме-
няют различные схемы следящих демодуляторов, в частности, схему
с обратной связью по частоте, синхронно-фазовый демодулятор и де-
модулятор со слепящим фильтром.
Пример. Определить помехоустойчивость железнодорожной радиосвязи,
использующей аналоговую ЧМ с девиацией частоты АД = 3 кГц для поездной
радиосвязи (ПРС) и = 5 кГц для станционной радиосвязи (СРС). Пикфактор
речи в квадрате = 10, максимальная частота речевого сигнала FM = 3,4 кГц.
Решение. В надпороговой области ЧМ обобщенный выигрыш, характери-
зующий помехоустойчивость, g' = Зт'/к^ . Для ПРС индекс ЧМ т = 3/3,4 = 0,9
и g = 0,24. Для СРС т = 5/3,4 = 1,5 и g' = 0,675.
В обоих случаях g'< 1. Для нахождения g'v пороговой и подпороговой об-
ластях ЧМ надо воспользоваться формулой (11.7) и рис. 11.1. В этих областях
ЧМ я'тем более меньше единицы. Поэтому представляют интерес методы уве-
личения помехоустойчивости железнодорожной радиосвязи.
11.7. УВЕЛИЧЕНИЕ ПОМЕХОУСТОЙЧИВОСТИ
ЖЕЛЕЗНОДОРОЖНОЙ РАДИОСВЯЗИ
Увеличение помехоустойчивости достигается в результате исполь-
зования управляемого слогового компандирования. Обобщенный вы-
игрыш g' всех аналоговых видов модуляции обратно пропорционален
2
квадрату пикфактора кп модулирующего сигнала, который для речи
равен 10. Если кп уменьшить, то увеличится g', т. е. помехоустойчи-
вость связи. Пикфактор уменьшается при сжатии (компрессии) ам-
плитуды модулирующего сигнала, достигая минимального значения
£„ = 2 = min, когда компрессия переходит в жесткое амплитудное ог-
раничение (клиппирование). Следовательно, клиппирование обеспечи-
вает выигрыш в помехоустойчивости в 5 раз. Однако при клиппирова-
300
нии безвозвратно теряется информация, имеющаяся в огибающей, а
также качество и натуральность речи. Поэтому используется не клип-
пирование, а компрессия на 45 дБ с восстановлением огибающей на
приемной стороне в результате расширения (экспандирования) оги-
бающей компрессированного речевого сигнала. Компрессию и экспан-
дирование называют компандированием. При компрессии на 45 дБ вы-
игрыш в помехоустойчивости меньше пяти.
Чтобы компрессия и экспандирование были обратимыми их осу-
ществляют по одному и тому же закону — закону огибающей слогов речи.
Для этого вместе с информационным компрессированным сигналом на
приемную сторону передается огибающая слогов речи с помощью ЧМ
колебания поднесущей частоты Fq = 2850 Гц. Огибающая слогов речи
занимает полосу частот всего 10 Гц, и при индексе ЧМ т - 4,5 полоса
частот ЧМ-колебание А/чм = 180 Гц. При такой узкой полосе канал
огибающей не имеет помех, и поэтому порог в нем отсутствует. Под
это ЧМ-колебание полоса частот речевого сигнала сокращается свер-
ху до 2750 Гц, и результирующее колебание, получаемое их частотным
уплотнением, не выходит за стандартную полосу частот речевого сиг-
нала. Сказанное поясняется упрощенной структурной схемой ком-
пандера (рис. 11.6, а, 6), обведенной штрих-пунктирной линией. На
рис. 11.6 имеются: М — микрофон; МУ — микрофонный усилитель;
К, К1 — компрессор уровня; ДО — детектор огибающей; ЧМ — час-
тотный модулятор; Z — сумматор; ПРД — передатчик; А — антенна;
ПРМ— приемник; Д—детектор; Ф1, Ф2— полосовые фильтры; ЧД —
частотный детектор; Э, Э1 — экспандер; УЗЧ — усилитель звуковой
частоты; Т — телефон.
Компрессор и экспандер являются внешними блоками по отноше-
нию к передатчику и приемнику. Поэтому управляемое слоговое ком-
пандирование (УСК) можно использовать в проектируемых радио-
станциях и в радиостанциях, находящихся в эксплуатации.
Рис. 11.6
301
Надо отметить, что МККР рекомендовал УСК для однополосной
модуляции (ОБП AM) для того, чтобы помехоустойчивость связи
превосходила помехоустойчивость при ЧМ. В начале уже отмеча-
лось, что компандирование применимо ко всем видам аналоговой
модуляции, в том числе и к ЧМ, используемой во всех железнодо-
рожных радиостанциях.
В радиостанции с ЧМ в канале огибающей имеют место две ступени
модуляции ЧМ, а в информационном — одна. Соответственно в при-
емнике в канале огибающей имеется два детектора ЧМ сигналов, а в ин-
формационном — один. Помехоустойчивость системы с ЧМ и УСК оп-
ределится по формуле (11.7), где пикфактор результирующего сигнала
где х — это отношение амплитуд ЧМ-сигнала канала огибающей Um чм и
компрессированного речевого сигнала Um к информационного канала
— чм/^т к)'
Оптимальное значение х определяется из условия максимума по-
мехоустойчивости системы в целом, что имеет место при максималь-
ных и равных обобщенных выигрышах обоих каналов: g, — g^. Оп-
ределение не вызывает труда в отличие от g2, поскольку в канале
огибающей используется поднесущая частота. Для нахождения g2 не-
обходимо определить спектральную плотность мощности помех на
выходе второго детектора. Спектральная плотность мощности помех
2 *2
на входе второго детектора о2 и на выходе первого а( определяются
одной и той же зависимостью
.2 _ С /<ч V
2 2
где &.fm, О|, U3 — девиация Ч1стоты, спектральная плотность мощности по-
мех, мощность сигнала на входе первого детектора соответственно.
Величина о*2 пропорциональна квадрату частоты f 2 Для канала оги-
бающей, расположенного в верхней части полосы стандартного телефон-
ного канала о*2 имеет наибольшее значение. Так как полоса частот этого
канала очень мала (180 Гц) по сравнению с полосой информационного
канала (2450 Гц), то можно считать, что на входе второго детектора
где = Fo = 2850 Гц — поднесущая частота.
302
При этом на выходе второго детектора
.2 Y
°2 - Чад-д/J
а согласно общей формуле
. _з Лп fWm}2
g2 ’
где Л/2 — девиация частоты на поднесущей; Fm = Г2 — F\ — полоса частот сиг-
нала на выходе второго детектора; Кр — отношение уровней суммарного сиг-
нала Ц- = 1 и ЧМ-колебания на входе второго детектора: Кр = 1/С/чм.
Сделаем преобразования в выражении:
+ ^/^22)-
Поскольку Fl = 0, то — F3 = FF2. Отношение t\f2/F2 ~ т2 —
индекс ЧМ на поднесущей, a Л/т = где — коэффициент про-
порциональности.
Поэтому
, = , т2 Д^^ЧМ = , т2 *2{/ЧМ е- =3^1 = з^1- УЧм)12
S1 k2 If2 к2 2f2 ’ 8' к2 F2 к2
*n2 2J2 *п2 2->2 Кп1 Г1ВКП1
так как U{ + t/4M = Uz = 1. В этом случае условие оптимизации g,' = g2'
принимает вид квадратного уравнения
^чм+Д«.м-Д-0.
поскольку кп2 « Лп1 = Л (глубокая компрессия),^ = Fo = 2,85 кГц s
=/1в = 2,75 кГц.
Отсюда
^чм= -Ь (71+ 272^2 - D-
m2J2
Поскольку т2 = 4,5, то t/4M = 0,4255; соответственно Щ = 1 - t/4M =
= 0,5745 их = U4M/U{ = 0,74. Тогда k2nZ = 2(1 + х)2/( 1 + х2) = 3,896,
а выигрыш в помехоустойчивости у = Ю/Лп1 = 2,57 раза или 4 дБ, что
существенно.
303
11.8. ПРИЕМ СИГНАЛОВ С ДОПОЛНИТЕЛЬНЫМ ПОДАВЛЕНИЕМ
ЗЕРКАЛЬНОГО КАНАЛА
Современные радиоприемники супергетеродинного типа, т. е. с
преобразованием частоты входного сигнала^ в более низкую, проме-
жуточную Упр. Но при преобразовании частоты открываются дополни-
тельные (ложные) каналы приема, что снижает помехоустойчивость
приема, избирательность, электромагнитную совместимость уст-
ройств. Особенно опасным является зеркальный канал, поскольку он
ближе остальных к основному каналу (отстоит от него на 2fn^) и его
труднее всего отфильтровать (подавить) преселектором.
Снижение названных показателей пропорционально числу преоб-
разований частоты. Поэтому это число стали сокращать до минималь-
но возможного — одного. Однако в спутниковых системах связи этого
делать нельзя, хотя там используется более двух преобразований час-
тоты. Например, в земной станции МПС "Алиса-45" имеет место три
преобразования частоты плюс как минимум одно преобразование на
борту (ИСЗ). В результате этого зеркальный канал в этой станции со-
гласно ее описанию подавляется всего на 35 дБ, что очень мало. Для
сравнения отметим, что в станционной радиосвязи системы "Транс-
порт" зеркальный канал подавляется на 80 дБ, что больше 35 дБ в
2,3 раза. Поэтому желательно изыскать метод дополнительного по-
давления зеркального канала в приемнике.
Во всех приемниках основное подавление зеркального канала осу-
ществляет преселектор, представляющий собой полосовой фильтр,
настроенный на сигнал основного канала. Поскольку зеркальный ка-
нал расстроен на 2/Jip относительно преселектора, то скаты его ам-
плитудно-частотной характеристики (АЧХ) ослабляют (подавляют)
этот канал, как показано на рис. 11.7. Преселектор подключается ко
входу преобразователя приемника и осуществляет частотное разделе-
ние каналов (ЧРК) — основного и зеркального (см. гл. 12). В преоб-
разователе основной и зеркальный каналы переносятся на одну, про-
межуточную частоту/пр * 0 точно также, как две боковые полосы AM
Рис. 11.7
304
сигнала в когерентном детекторе переносятся на одну несущую час-
тоту fH — 0. Поэтому сигнал основного и зеркального каналов можно
рассматривать как две боковые полосы AM колебания, несущие раз-
личную информацию. Как показано в гл. 3, фазовый метод однопо-
лосного (когерентного) детектирования позволяет выделить сигнал
одной боковой полосы (одного канала) и подавить сигнал другой бо-
ковой полосы (другого канала), т. е. осуществить ЧРК бесфильтровым
методом (с помощью фазовращателей).
На рис. 11.8 представлена структурная схема приемника с одним
преобразованием частоты и с дополнительно введенными элемента-
ми, обведенными штрих-пунктирной линией. В состав схемы входят:
антенна А, преселектор ПРС, преобразователи П с гетеродином Г, фа-
зовращатель ФВ на 90’, полосовой ФВ (ПФВ) на 90’, фазоинвертор
ФИ, сумматор Е, фильтр сосредоточенной селекции ФСС, УПЧ и де-
тектор Д. В этой схеме зеркальный канал подавляется фильтровым ме-
тодом (преселектором ПРС) и методом фазовой компенсации (допол-
нительно введенными элементами). Это разновидность частотно-
фазового разделения каналов (см. гл. 12).
Процесс дополнительного (фазового) подавления зеркального ка-
нала в преобразователе опишем аналитически.
Пусть на входах преобразователей П имеют место сигналы основ-
ного ис(0 и зеркального и3(/) каналов:
wbxW = "с(0 + “э(0 ~ sinl«c*+ 0с(хс- 01 + sin(te3z + 03(Хз, I)],
где 0(Х, f) — составляющая фазы сигнала, несущая информацию о передавае-
мом сообщении Х(/).
На другие входы преобразователей П подается колебание гетеро-
дина иг(г) = UT sin со г/ непосредственно или через фазовращатель ФВ
на 90’ uT(f), причем шг > шс. Как известно, преобразователи сигналов
305
в эквивалентные представляют собой перемножители сигналов, в ре-
зультате чего на их выходах получаем колебания:
"«1W = "вх(0«г(0 = о,5г/с г/г cos[(or - ос)/ - ос(хс, о] +
+ 0.5Ц.Ц. cos[(co3 — шг)/ + 03(2.3, /)]+ ВЧ,
"Л2(О = «вх(0«г(0 = -0,5Ц.Ц sin[(wr - ос)/ - 0с(Хс, 0] +
+ 0,5 Ц Ц sin[(co3 — cor)Z + 03(А.3, /)] + ВЧ.
В блоке ПФВ синусоидальные составляющие последнего выраже-
ния преобразуются в косинусоидальные [йл2(/)] так, что на выходе
сумматора получается сигнал
«х(0 = "Л1(О “ "л2(0 = UcUr cos[wnp' “ 01 + ВЧ.
Высокочастотные (ВЧ) составляющие отфильтровываются в ФСС,
осуществляющим избирательность по соседнему каналу.
Зеркальный канал подавлен в результате фазовой компенсации.
Степень этого подавления Дф определяется фазовой погрешностью
Дф поворота фазы сигнала на 90’ в блоке ПФВ согласно выражению
Дф = —20 lg[sin(0,5Acp)]. В этом случае не учитывается амплитудная
погрешность ввиду ее малости. Не учитывается также и погрешность
Дф] фазового сдвига на 90° в блоке ФВ, поскольку он работает на од-
ной частоте, когда легко добиться Дф, = 0. Для реального значения
Дф = Г значение Дф = 40 дБ для любого приемника, в том числе и же-
лезнодорожной радиосвязи. Суммарная степень подавления зеркально-
го канала фильтровым (ПРС) и дополнительным (фазовым) методами в
спутниковой станции МПС "Алиса-45" д£ = дпрс + Дф = 35 + 40 = 75 дБ,
чего достаточно.
В СВЧ диапазоне блоки ФВ и ПФВ можно выполнить с помощью
мостовых квадратурных устройств: двухшлейфового направленного
ответвителя или ответвителя на связанных линиях, волноводах с ре-
шеткой индуктивных штырей.
В поездной радиосвязи (ПРС) можно исключить зеркальный и
другие побочные каналы приема, переходя с супергетеродинного при-
емника на приемник прямого усиления. Это возможно, так как час-
тота входного сигнала ПРС^ = 2,13 МГц в 5 раз меньше промежу-
точной (единственной) частоты приемника станционной радиосвязи
(ПРС)/пр = 10,7 МГц.
306
11.9. ПОМЕХОУСТОЙЧИВОСТЬ СТАНЦИОННОЙ И ПОЕЗДНОЙ
РАДИОСВЯЗИ НА СКОРОСТНЫХ УЧАСТКАХ
Станционная радиосвязь осуществляется на метровых волнах
(МВ), а поездная на скоростных участках движения — на дециметро-
вых волнах (ДМВ). Как уже отмечалось, во всей железнодорожной ра-
диосвязи используется ЧМ.
На территории больших городов, железнодорожных станций,
вдоль транспортных магистралей в область пространства между пере-
дающей и приемной антеннами МВ и ДВМ попадает большое количе-
ство препятствий сложной и разнообразной конфигурации, которые,
являясь эффективными переизлучателями электромагнитной энер-
гии, придают волнам указанных диапазонов многолучевой характер
распространения. Это приводит к сложной зависимости усредненной
напряженности поля £'ср вдоль трассы связи от расстояния, длины
волны и высоты установки передающих и приемных антенн. Если на-
пряженность поля Е выявлять через небольшие расстояния, в преде-
лах которых поглощающие свойства среды распространения, а следо-
вательно и величина £ср, остаются практически постоянными, то
можно наблюдать отклонения Е от Еср. Эти мелкомасштабные вариа-
ции Е определяют тонкую структуру электрического поля вдоль трас-
сы движения транспортного средства. При анализе структуры элек-
трического поля на расстояниях в несколько десятков длин волн
наблюдаются крупномасштабные вариации напряженности поля Е с
отклонением Еср от значения, обусловленного закономерностями из-
менений поглощающих свойств среды распространения. Свойства
среды распространения на локальных участках лучше всего описывает
рэлеевская модель канала (на территории крупных городов и желез-
нодорожных узлов) и райсовская модель (на перегонах между желез-
нодорожными станциями). Участки пространства с глубокими вариа-
циями напряженности поля Е удобно аппроксимировать двухлучевой
моделью. Крупномасштабные флюктуации Е моделируются логариф-
мически нормальным законом распределения. Наибольшая интен-
сивность флюктуаций имеет место в многолучевом канале рэлеевско-
го типа, поэтому в нем и проведем сравнение помехоустойчивости.
Мелкомасштабные флюктуации, имея малый пространственный пе-
риод, вызывают ускоренные вариации параметров сигнала в прием-
никах возимой и стационарной радиостанции. Быстрые замирания
сигналов вызывают флюктуации отношения сигнал—шум р на выходе
стандартного частотного детектора (СЧД) и, следовательно, всегда су-
ществует конечная вероятность того, что текущее значение р будет ниже
порогового рп, когда связь нарушается. Кроме того, при р < рп подав-
ляется сигнал в тракте НЧ, что можно рассматривать как появление в
нем дополнительной шумовой составляющей; быстрые флюктуации
мгновенной частоты воспринимаются детектором как паразитная
307
ЧМ, вызывающая появление в тракте НЧ напряжения помехи. Для
определения средней мощности сигнала и шума при наличии рэлеев-
ских замираний разработан квазистатически й метод, позволяющий
выражать сигнал и шум в виде функций только одного мгновенного
значения р в полосе промежуточной частоты с последующим усред-
нением его по всем значениям и добавлением отмеченных шумовых
компонент.
Флуктуирующий сигнал при замираниях представляют в виде про-
изведения исходного сигнала и случайного процесса ц(/), называемого
мультипликативной помехой. Последняя всегда сопровождается адди-
тивными, т. е. помехами, которые не перемножаются, а складываются
с исходным сигналом.
Оценку помехоустойчивости связи при воздействии мультиплика-
тивных и аддитивных помех проводят в два этапа. На первом этапе оп-
ределяют отношение мощностей сигнала Рс и шума Рш при отсутствии
мультипликативных помех см. п. 11.3. Затем на втором этапе опреде-
ляют это отношение квазистатическим методом (см. п. 11.2).
Статистика отношения сигнал—шум в тракте НЧ определяется
только закономерностями быстрых замираний сигнала на входе прием-
ника и для рэлеевской модели многолучевого канала характеризуется
выражением со (р) = ехр (—р/ро)/р, где р0 — усредненное р за временной
интервал, сравнимый с периодом медленных замираний.
Усредненное по всем р значение мощности полезного сигнала
W W -£
Лзчмвых — J Л:чмвых(р) M (p)dp — J “дэ ( ’ е ) е dp —
О О
= о)дэ 2ро (1 + р0)(1 + 2р0).
2
где (одэ — дисперсия девиации частоты и шума.
00 Л/ 2 Ро
Ливых = J [(1 - ₽’Р)2 + е“Ря;[2]Я^(3,2)] dp =
О
= ^0 F3-----^0— + л /(2]ЯГ ;(3,2) —,
//2 3 в (1 +р0)(1 + 2р0) 1+Ро
м
где No — спектральная плотность мощности флюктуационного шума на входе
приемника; UM — пиковое значение сигнала; FB — верхняя модулирующая час-
тота; П — полоса частот ЧМ-сигнала на входе приемника; £(3,2) = 2,61 — дзе-
та-функция Римана.
308
При составлении среднего отношения мощностей сигнал—шум в
тракте НЧ в последнем выражении необходимо добавить, как уже от-
мечалось, две шумовые составляющие. Первая из них, характеризую-
щая подавление сигнала шумом,
“ _ р0
Л = (^снч - Цзнч)2 - кэС - ^Р(-Р)) - j4,(’ - : =
L О р° J
= ^Ur0-P)2
__ 2 2 2
или после усреднения по р Ps = содэ р0(1 + Pq) (1 + 2р0). Вторая со-
ставляющая обусловлена флюктуациями мгновенной частоты на входе
приемника. Спектральную плотность мощности вызванного при этом
шума на выходе детектора для частот, близких к частоте звукового спек-
тра, можно найти по функциям корреляции. Корреляционная функция
случайной частоты многолучевого сигнала в канале рэлеевского типа
совпадает с аналогичной характеристикой производной фазы узкопо-
лосного нормального шума и имеет вид 2?ш(т) = = {[—(Л0'(т))2 +
+ /?о(т) /?о (т)]/2Лд (т)} ln[ 1 — Rq (т)]. Функция автокорреляции сиг-
налов в направленном вертикальном электрическом вибраторе
транспортного средства, движущегося в электрическом поле, Bz(x) —
= G2J0(Qgx) ехр(/юот), где Q.g = сооу/с — максимальный допплеров-
ский сдвиг частоты стационарного передатчика.
Определяя по Bz{t) нормированную функцию автокорреляции
и ее производные, получаем функцию корреляции сигнала в антенне
2
подвижного объекта 2?ш(т) = —0,5Qg[l — J|(Qgx)/QgTJ0(QgT) +
+ J?(QgT)/J02(QgT)] In 11 - J02(Qgx)]-
2 2
Аналогично и для стационарного объекта /?ш(т) = —0,5Qg са In [ 1 -
- ехр(—Q2 о2 т2)], где о2 — дисперсия разброса отраженных волн в
пучке.
Согласно формуле Винера—Хинчина, спектральная плотность
мощности сигнала для стационарной радиостанции 5ш(со) =
= 2рю(т) coscoxdT = 0,5QgoaР~3/2 exp(-co2/4pQ2 g2 ).
о Р= ।
309
Вычисление спектральной плотности мощности сигнала в антенне
подвижного объекта возможно только приближенными методами:
(ЗП ехр(-со/5П ) при 0<о)/2Р $3,5;
(ndg/a> при o/2fig> 3,5.
Что касается стационарного объекта, то для него Ра найдем точно
по выражению 5ш(а>):
К = f sf(f)df= л2с2 Ф2 у 1 F -ф ,
min
где Ф(и) = —2— fexp (—z2/2)dz — функция Крампа.
\[2n] J
о
Легко доказать, что данный ряд сходится.
1Fa
Для подвижной радиостанции мощность Р" = j бл/^exp^-^-j d/x
F Д
min
X J (2л2F^/f)df= 2л^[15(ехр(-£т;п/5£д) - 0,24) + л 1п(^тах/7Гд)].
7'л
Реальная помехоустойчивость приема ЧМ-сигналов в многолучевом
канале оценивается отношением ртчм = ?Счмвых/(^швых + ?s +
Подставляя сюда значения числителя и знаменателя, согласно выше-
изложенному, получаем для подвижной радиостанции
Р£чм = (3«2лр//Г2)/{1 + 0,44л2(1 + 2Ро)/Ро + Зот2лр0/2Л'2(1 + Р0) +
+ h^2(l + Ро)(1 + 2Ро)/4л F2axPo][15(exp(-Fmin/5£g) - 0,24) +
+ nln(Fmax/7/y},
для стационарной радиостанции
Р^м = (Зт2Яр/ЛГ2)/{1 + 0,44л2(1 + 2Ро)/Ро + Зт2пРо/2К2„ (1 + р0) +
+ <3оа + РоХ1 + 2Р0)/8^тахР0 Х
X
00 ( F
Zl гтах
Р ®W[2P]/=_a
р = 1 L *
( F
- ф ____т|п -
W[2p]Fga
310
Так как рчм = ром^0/2п и ром = рт ом, то выигрыш в помехоустой-
чивости ОБП AM перед ЧМ для подвижной радиостанции
Кч = Ртом/Ртчм = (2^2/Зт2^20){1 + 0,44л2(1 + 2р0)/р0 +
+ Зт2пр0/1К20 (1 + р0) + (nF2(l + р0)(1 + 2р0)/4тсГ2ахр0) х
х [15(ехр(-Fmin/5Fg) - 0,24) + п ln(Fmax/7Fg)]}.
Для стационарной радиостанции
Точ = Ртом/Ртчм = (2*2/3m2 tf20) {1 + 0,44л2(1 + 2р0)/р0 +
+ Зт2лр0/2Х’2о(1 + р0) + (За2 F2n(i + р0)(1 +2р0)/8Г2ахр0) х
Проанализируем полученные результаты. В формулах для у”ч, у£ч по-
следним слагаемым можно пренебречь ввиду его малости. В самом деле,
скорости движения наземного транспорта не превосходят 300 км/ч, чему
соответствует Fg < 100 Гц на рабочей частоте/. = 300 МГц.
Для стандартного телефонного канала Fmax = 3400 Гц и поэтому
2 2
множитель в последнем выражении (Fg/Fmax) — (100/3400) =
= 8,6 • 10~4 « 1. Кроме того, р0 > 3. В таком случае у”ч = усоч — уоч.
Теперь определим численное значение уоч. Для речи кп = 10, а в же-
лезнодорожных радиостанциях СРС т = 1,5. Для Лоп = 2 значение 1 /уоч
есть обобщенный выигрыш ЧМ сис-
темы согласно новому его определе-
нию (см. п. 11.2), т. е. 1 /уоч = g4'M- Для
названных параметров
= 1,48(1 + 2411^0 + 2,5-^-].
4 Р0 1 + Р(У
Результаты расчета по этой фор-
муле представлены графически на
рис. 11.9. При pg = 6 имеет место по-
311
рог ЧМ. В надпороговой области ЧМ (р0 = 21) значение ~
= 1,3-10 2, что меньше, чем при действии только аддитивных помех
(см. п. 11.3) на 16,6 дБ.
Следует отметить, что для ЧМ в канале с релеевскими замирания-
ми синтезирован нелинейный фильтр на базе фазовой автоподстрой-
ки частоты (ФАПЧ) с добавлением цепи автоматической регулировки
усиления (АРУ), работающей так, что осуществляется подавление сла-
бого сигнала и большое усиление сильного. Расчет показывает, что
средняя ошибка фильтрации при этом такая же, как и в отсутствие за-
мираний.
Глава 12
ПРИНЦИПЫ ПОСТРОЕНИЯ МНОГОКАНАЛЬНЫХ
СИСТЕМ ПЕРЕДАЧИ
12.1. ТЕОРЕТИЧЕСКИЕ ПРЕДПОСЫЛКИ РАЗДЕЛЕНИЯ КАНАЛОВ
Линия связи — наиболее дорогостоящий элемент системы свя-
зи. Поэтому целесообразно по ней вести многоканальную передачу
информации, так как с ростом числа каналов N увеличивается ее
пропускная способность С. Причем, должно выполняться условие:
N
С > 22 Як, где Як ~ производительность k-го канала.
*= I
Основная проблема многоканальной передачи — разделение ка-
нальных сигналов на приемной стороне. Сформулируем условия этого
разделения.
Пусть необходимо организовать одновременную передачу несколь-
ких сообщений по общему (групповому) каналу, каждое из которых
описывается выражением
Sk(t) = QwHO, (12.1)
где цк — функция переносчика; Ск — некоторый коэффициент, отображаю-
щий передаваемое сообщение.
N N
Групповой сигнал S(t) — Sk(t) = 22 ^к^к^ преобразуется в
к =l к = l
линейный 5Л (/), который передается в линию связи. На приемной сто-
роне происходит обратное преобразование. Для разделения группово-
го сигнала на N канальных сигналов необходимо иметь N разделяю-
щих устройств. Сигнал данного к-го канала выделяется полностью,
если устройство выделения не реагирует на сигналы других каналов.
Математически это означает, что
^{5,(0} = I 5*(0 ПРИ ' =*’ (12.2)
I 0 при z* к,
где гк — оператор выделения А-го канала,
313
или с учетом формулы (12.1)
С^*(/) при i = к;
О при i*k.
гк{С^,(Т)} =
Иначе говоря, приемник обладает избирательными свойствами по от-
ношению к сигналу Sk(i). Потребуем, чтобы устройства выделения
были линейными, когда удовлетворяется принцип суперпозиции:
гк = {^(О + S2(/)} = (/)} + г*{52(/)}.
Чтобы разделяющие устройства были в состоянии различать сиг-
налы отдельных каналов, должны существовать определенные призна-
ки, присущие только данному сигналу (например, амплитуда, частота
или начальная фаза гармонического (непрерывного) сигнала-перенос-
чика. Поэтому условие разделения сигналов можно записать так:
'•ЛЧ'.О)} = Г/к, '> к= 1,2,..., N, (12.3)
где у/к — отклик разделяющего устройства на канальный сигнал причем
у(К = 0 при iк и у/к * 0 при i = к.
Если теперь подействовать оператором гк на обе части тождества
Скч/Л(0 = 0, полученного согласно равенству (12.1), то, принимая
*= 1
во внимание формулу (12.3) и принцип суперпозиции, получим
г N л N
Е QM0 = Е с<гк{ч',(')} = скукк = о.
1(>1 J /=1
Но укк * 0, тогда равны нулю все СК при к = 1, 2, ..., N. Иначе го-
воря, условие линейного разделения (12.2) будет выполняться лишь
тогда, когда канальные сигналы линейно независимы. Условие линей-
ной независимости сигналов является необходимым и достаточным
для разделения сигналов линейными устройствами. Это условие было
впервые сформулировано в 1935 г. русским ученым Д. В. Агеевым. Ча-
стный случай линейно независимых сигналов — ортогональные сиг-
налы. На плоскости сигналы изображаются векторами 5] и S2. Если
их скалярное произведение (5(52) = || ЦЗ2И cosq>= 0> то эти векторы
являются ортогональными. В данном случае угол между ними
S. 5,
<о = arccos—!—-— = ±- рад.
Ф RIRI 2
314
Здесь круглые скобки означают скалярное произведение векторов,
а двойные прямые линии — модуль вектора. Скалярное произведение
совпадает с интегралом от произведения сигналов по времени, задан-
ных на интервале [О, Г]. Поэтому частным случаем ортогональных
сигналов являются функции, не перекрывающиеся между собой по
времени, а также с неперекрывающимися спектрами. Наряду с этим
существуют ансамбли ортогональных сигналов, совмещенных по вре-
мени и спектру. Ортогональность обеспечивается различием их по
форме. Отметим, что ортогональность сигналов — достаточное, но не
необходимое условие.
Если не учитывать действие помех, то безразлично, выбраны сиг-
налы-переносчики {yz(/)} ортогональными или линейно-независимы-
ми. В любом случае их максимальное число равно размерности про-
странства 2FT, называемой базой сигнала. Здесь F— полоса частот, а
Т —длительность сигнала. Если же учитывать влияние помех, то пре-
имущество ортогональных сигналов неоспоримо, так как только в
этом случае их энергия используется полностью.
В связи с вышеизложенным различают частотное, фазовое, вре-
менное разделение каналов, а также разделение сигналов по форме и
другим признакам, которые подробно рассматриваются ниже.
12.2. ЧАСТОТНОЕ РАЗДЕЛЕНИЕ КАНАЛОВ
Структурная схема многоканальной системы связи (МКС) с час-
тотным разделением каналов (ЧРК) приведена на рис. 12.1, где обо-
значено: ИС — источник сигнала, М( — модулятор, Ф/ — фильтр /-го
канала, 2 — сумматор сигналов, ГН — генератор несущей, ПРД — пе-
редатчик, ЛС — линия связи, ИП— источник помех, ПРМ— прием-
ник, Д — детектор, ПС — получатель сообщения.
Рис. 12.1
315
При ЧРК сигналы-переносчики имеют различные частоты/ (под-
несущие) и разнесены на интервал, больший или равный ширине
спектра модулированного канального сигнала. Поэтому модулирован-
ные канальные сигналы занимают неперекрывающиеся полосы час-
тот и являются ортогональными между собой. Последние суммируют-
ся (уплотняются по частоте) в блоке Z, образуя групповой сигнал,
которым модулируется колебание основной несущей частоты/^ в бло-
ке М. Для модуляции канальных переносчиков можно применять все
известные способы. Но более экономично полоса частот линии связи
используется при однополосной модуляции (ОБП AM), так как в этом
случае ширина спектра модулированного сигнала минимальна и равна
ширине спектра передаваемого сообщения. Во второй ступени моду-
ляции (групповым сигналом) чаще также используется ОБП AM в
проводных каналах связи. Такой сигнал с двойной модуляцией, после
усиления в блоке ПРД передается по линии связи в приемник ПРМ,
где подвергается обратному процессу преобразования, т. е. демодуля-
ции сигнала по несущей в блоке Д для получения группового сигнала,
выделения из него канальных сигналов полосовыми фильтрами Ф( и
демодуляции последних в блоках Д . Центральные частоты полосовых
фильтров Ф,- равны частотам канальных переносчиков, а их полосы
прозрачности — ширине спектра модулированных сигналов. Откло-
нение реальных характеристик полосовых фильтров от идеальных не
должно влиять на качество разделения сигналов, поэтому используют
защитные интервалы частот между каналами. Каждый из фильтров Ф
приема должен пропускать без ослабления лишь те частоты, которые
принадлежат сигналу данного канала. Частоты сигналов всех других
каналов фильтр должен подавить.
Частотное разделение сигналов идеальными полосовыми фильтра-
ми математически можно представить так:
\ = J S(x)gK(t — т)с!т,
—со
где gK(t) — импульсная реакция идеального полосового фильтра, пропускаю-
щего без искажений полосу частот к-го канала.
В спектральной области такое преобразование соответствует умно-
жению спектра группового сигнала на /7-образную функцию.
Телефонные каналы могут вторично уплотняться дискретными
сигналами.
Основные достоинства ЧРК: простота технической реализации,
высокая помехоустойчивость, возможность организации любого числа
каналов. Недостатки: неизбежное расширение используемой полосы
частот при увеличении числа каналов, относительно низкая эффек-
тивность использования полосы частот линии связи из-за потерь на
расфильтровку; громоздкость и высокая стоимость аппаратуры, обу-
316
словленные в основном большим числом фильтров (стоимость фильт-
ров достигает 40 % стоимости системы с ЧРК). На железнодорожном
транспорте разработана МКС с ЧРК типа К-24Т, в которой исполь-
зуются малогабаритные электромеханические фильтры.
12.3. ФАЗОВОЕ РАЗДЕЛЕНИЕ СИГНАЛОВ
Фазовое разделение сигналов основано на различии фаз сигналов
и осуществляется когерентным детектированием. Рассмотрим множе-
ство гармонических сигналов:
5](0 = /1, sin(m0/ +<р,);
S2(/) = /l2sin(<oo/+ФгК
S^t) = ^51П(<00/+Флг)>
(12.4)
имеющих одну и ту же частоту со0, но разные начальные фазы фк. Под-
лежащая передаче информация содержится в изменениях их амплитуд
Ак. Если это изменение аналоговое, то формула (12.4) — колебание с
аналоговой балансной модуляцией (БМ), а если дискретное и разно-
полярное, то — с фазовой манипуляцией (ФМН) на 180°. При одно-
полярных импульсах Ак выражение (12.4) представляет собой колеба-
ние с амплитудной манипуляцией (АМН).
Среди множества сигналов [см. формулу (12.4)] лишь любые два
являются линейно-независимыми. Это значит, что на одной несу-
щей частоте со0 при произвольных значениях амплитуд Ак и фаз фк
можно обеспечить лишь двухканальную передачу. На практике ис-
пользуются значения ф2 — Ф1 = л/2 рад., при которых S^i) = Л1 sinco0r,
а 52(0 = ^2 sin(a>0/ + = ^2 COSwoA Видно, что сигналы 5,(0 и S2(t)
ортогональны между собой, что обеспечивает реализацию системы и
улучшает ее энергетические показатели. Примером реализаций этих
положений является модулятор — демодулятор сигналов с двойной
Рис. 12.2
317
относительной фазовой манипуляцией (ДОФМН) на 180°, структур-
ные схемы которых приведены на рис. 12.2, а, б, где обозначено: И —
источник информации, К— кодер, Г— генератор несущей, ФМ — фа-
зовый модулятор, ФВ — фазовращатель на 90°, Z — сумматор, ФД —
фазовый детектор, КГ — когерентный гетеродин, ДК— декодер.
В блоке К исходный код преобразуется в относительный А, кото-
рый поступает на низкочастотный (НЧ) вход модулятора ФМ, пред-
ставляющего собой перемножитель сигналов. С генератора Г подается
колебание несущей частоты мн(Г) = sin со0г на высокочастотный (ВЧ)
вход ФМ1 непосредственно и на ВЧ вход ФМ2— через фазовращатель
ФВ на 90°. В результате на выходе модуляторов получаются сигналы:
“ФМ1(0 = Л1«н(0 = sin<oor;
“ФМ2<0 = ^2«н(0 = ^2sin(®0< + ,
которые суммируются в блоке Z и передаются на приемную сторону, где
поступают на сигнальные входы фазовых детекторов ФД. С когерентного
гетеродина КГ опорное колебание и0(г), совпадающее по фазе и частоте
с колебанием несущей частоты ин(/) генератора Г передатчика, подается
на опорный вход ФД1 непосредственно и на опорный вход ФД2 через фа-
зовращатель ФВ на 90°. ФД представляет собой перемножитель сигналов
на выходе ФНЧ. На выходах ФД1 и ФД2 образуются сигналы:
ИДК1(0 ~ ~ Ml sinwg/ + Л2 sin (<OgZ + Tt/2)] SillOg/ = 0,5^4( + B4\
«дкг(0 = wx(0 “o(0 = Mj sin wg/ + Я2 sin(<oo/ + it/2)] sin (wgf + = 0,5Я2 + ВЧ.
В блоках ФДотносительный код А преобразуется в исходный. Таким
образом, фазовые детекторы, являющиеся когерентными, полностью
разделяют квадратурные (ортогональные) сигналы. Поэтому помехо-
устойчивость ДОФМН такая же высокая, как и при однократной ОФМН.
Следует отметить, что ортогональными являются и сигналы МКС с
ЧРК. Поэтому последние можно разделять по методам ФРК, т. е. поло-
совые фильтры можно заменить на фазовращатели. Фактически это будет
частотно-фазовое разделение каналов (ЧФРК). Рассмотрим его отдельно.
12.4. ЧАСТОТНО-ФАЗОВОЕ РАЗДЕЛЕНИЕ КАНАЛОВ
На рис. 12.3 приведена структурная схема передатчика, а на
рис. 12.4 — приемника сигналов МКС с ЧРК фазовым методом. На
этих рисунках полностью показан только один из п идентичных ка-
налов, а об остальных говорят стрелки у соответствующих блоков. На
рис. 12.3 обозначено: М— микрофон, МУ— микрофонный усилитель,
ПФВ — полосовой фазовращатель на 90°, П— перемножитель сигна-
лов, Г — генераторы поднесущих и несущей частот, ФВ — фазовра-
318
щатель на 90“ колебаний несущих частот, ФИ — фазоинвертор, Z —
сумматоры. На рис. 12.4 к названным обозначениям следует добавить:
ФОК — формирователь опорного колебания, КД — когерентный детек-
тор, У — усилитель, BF — телефон. Когерентный детектор на рис. 12.4
представляет собой формирователь однополосного сигнала фазовым ме-
тодом (см. рис. 12.3), у которого к выходам перемножителей П подклю-
чены ФНЧ, а ПФВ со входа П2 переключен на его выход через ФНЧ.
С микрофона М речевой сигнал b\(t) = t/1(/)cosip1(r), где U(t), <p(r)
— соответственно амплитуда и фаза данного сигнала, усиленный в
МУ, поступает на низкочастотный вход (НЧ) П1 непосредственно и на
НЧ вход П2 — через ПФВ на 90°. С генератора П поступает колебание
поднесущей частоты мн1 (/) = t/cosco^Ha ВЧ вход П1 непосредственно
и на ВЧ вход П2 — через ФВ1 на 90° |ин1(/)]. На выходе этих множи-
телей имеют место колебания:
"П1(0 = *1(')“нг(0 = °>5i/lW U\ {COS[й,/ - <₽!(/)! + COS[<0]f +
"П2(0 = b 1(0“н1<0 = O.St/^OmcOSlwjr - <Pj(01 “ СО8[И1/ + <Р](/)]}.
При включенном ФЯна выходе канального сумматора Z 1 имеет ме-
сто верхняя боковая полоса (ВВП) uzl(t) = U^i) U{ cos[co|Z + ф^/)]. Если
Рис. 12.3
Рис. 12.4
319
ФИ о~ключен, то имеет место НБП. Сигнал «Е1(0 поступает на один
вход сумматора Zn, на другие входы которого подаются сигналы других
каналов. На выходе блока Z„ имеет место групповой сигнал, по которому
формируется ОБП AM на рабочей частоте соо передатчика тоже фазовым
п
методом: и(/) = Uj(i)cos[(co0 + at)t + срДг)]. Как видно, фазовым ме-
/ == 1
годом разделяются боковые полосы уже на передающей стороне.
Сигнал u(t) после усиления в блоке У поступает через линию свяги
и усилитель приема Уна сигнальные входы приемника (см. рис. 12.4).
Если при этом на опорные входы когерентного детектора КД подать ко-
лебание с КГ на частоте, равной несущей частоте передатчика со0 + под-
несущая частота данного (г-го) канала со,, то на выходе КД можно вы-
делить фазовым методом сразу два канала: данный (z-й) и соседний
(/ - 1)-й, если передача ведется на ВБП как в нашем случае, если же
используется НБП, — то данный и соседний сверху каналы. Иначе го-
воря, используется только одна ступень демодуляции, что будет уточ-
нено ниже. На выходе КД могут перекрываться по спектру только дан-
ный (/-й) и соседний нижний (с — 1)-й каналы при работе на ВБП
Сигналы же остальных каналов оказываются вне полосы частот ФНЧ
данного детектора. Поэтому для упрощения анализа будем считать,
что на сигнальных входах КД (П1 и П2) действует групповой сигнал,
состоящий только из двух названных сигналов:
"bx(0 = Ц - 1(0 COS[(<00 + <0,- ])/ + ф;_ ](/)) +
+ U,(t) cos[(<o0 + со,)/ + ф,(/)].
С когерентного гетеродина КГ поступает колебание и0(/) =
= Uq cos(<d0 + со,)/ на опорный вход П1 непосредственно и на опорный
вход П2 — через ФВ на 90°.
В результате перемножения сигналов на выходе ФНЧ названных
блоков имеются колебания:
мф/1(0 = О,5ЛГ6/о/ Uj(t) cos<p,(/) + U-, _ [(/) cos[(<o, - со,- _ р/ - ф,!(/)];
“ф/2<о = 0,5A'i/0l- -Ц(0 51Пф,(/) + и, .. ](/) sin[<0,- — <о, _ р/ - Ф,^/)!,
где К — коэффициент пропорциональности.
Напряжение поступает на одни входы сумматоров Z1 и Z2.
Синусоидальные слагаемые «ф,-2(0 в блоке ПФВ преобразуются в ко-
синусоидальные, после чего они поступают на другой вход Z1 через
ФИ и 1 а другой вход Z2 непосредственно. В результате этого на выходе
сум игторов имеются сигналы:
сигнал /-го канала
иЕ1(/) ~ KUqU,(0 cos<p,(/);
320
инверсный по спектру сигнал (/ — 1)-го канала
иЕ2(0 = КЩ U^t) cos|Aco - <р, _ Д/)],
где Аса = ш,- — Шу _ j.
В действующих МКС Дш/2л = 4 кГц. Это значит, что ширина спек-
тра сигнала на выходе (/ — 1)-го канала по-прежнему равна 3,1 кГц,
но спектр Fmjn — Fmax = 0,6 — 3,7 кГц смещен на 0,3 кГц вверх и по-
этому стандартный ФНЧ срежет часть полосы частью 300 Гц сверху.
Во избежание этого в случае ЧФРК следует канальные поднесущие ус-
танавливать не через 4, а через 3,7 кГц.
Сигнал их2(г) не пригоден для практического использования, так как
его спектр смещен вверх и инвертирован. Поэтому его следует еще раз
когерентно продетектировать по опорному колебанию u0(f) = Uo cos Ди t,
что не показано на рис. 12.4.
12.5. ВРЕМЕННбЕ РАЗДЕЛЕНИЕ КАНАЛОВ
Многоканальные системы передачи с временном разделением ка-
налов (ВРК) широко применяются для передачи аналоговой и дис-
кретной информации.
Временное разделение каналов возможно лишь в случае импульсной
модуляции. При большой скважности между импульсами одного кана-
ла остается большой промежуток времени, в котором можно разместить
импульсы других каналов. Все каналы занимают одну и ту же полосу
частот, но линия связи используется поочередно для периодической пе-
редачи канальных сигналов. Частоту повторения канальных сигналов
выбирают согласно теореме Котельникова. Для синхронизации работы
переключателей передатчика и приемника передают вспомогательные
синхронизирующие импульсы, для которых отводят один или несколь-
ко каналов. При ВРК используют различные виды импульсной моду-
ляции в каналах: ФИМ, ШИМ, ИКМ, ДМ и др. Для радиолиний при-
меняют двойную модуляцию: ИКМ-ОФМН, ФИМ-ЧМ и др.
На рис. 12.5 приведена структурная схема МКС с ВРК, где обо-
значено: М— модулятор, ПБ— промежуточный блок, ГИ— генератор
импульсов, СТ — счетчик, ДС — декодер, ГН — генератор несущей,
ПРД — передатчик, ЛС — линия связи, ИП — источник помех, ПРМ —
приемник, Д — детектор, ВС И — выделитель синхроимпульса, И —
схема совпадения. Блоки ГИ, СТ,ДС образуют распределительную ли-
нию РЛ, которая обведена штриховой пунктирной линией. Первый
импульс ГИ появляется на первом отводе ДС, второй — на втором и
т. д., N-й импульс — на N-м (последнем). Следующий импульс N + 1
появится вновь на первом входе ДС и далее процесс повторяется. На
отводах ДС образуются периодические последовательности импуль-
сов, сдвинутые во времени друг относительно друга. Первая последо-
! 1 3 п ПК
321
Рис. 12.5
вательность импульсов поступает на управляющий вход формиро-
вателя синхроимпульсов ФСИ, остальные — на входы канальных
модуляторов М (первая ступень модуляции). На их вторые входы по-
ступают передаваемые информационные сигналы, которыми модули-
руются высокочастотные импульсы с ДС по одному из их параметров
(амплитуде, длительности и т. д.).
Сказанное поясняется временными диаграммами (рис. 12.6, а—г)
для случая АИМ в канальных модуляторах Л/,. Последние представ-
ляют собой дискретизаторы, выполненные на ключевых схемах или
мультиплексорах. Рассмотрим сначала модуляторы АИМ на ключах,
число которых N = 4. Причем первый канал отведен под синхроим-
пульс, а три остальных — под информационные сигналы. Синхросиг-
нал СС отличается от информационных импульсов каким-либо пара-
метром, например длительностью или амплитудой. Первый импульс
с Г И (рис. 12.6, д) открывает первый ключ, формируя СС на его вы-
ходе, второй импульс — второй ключ и пропускает на свой выход со-
ответствующую часть сигнала первого канала, третий импульс — часть
сигнала второго канала и так до четвертого импульса. Пятый импульс
вновь формирует СС и т. д. Поскольку выходы всех ключей соединены
между собой параллельно, то суммарный (групповой) сигнал состоит
из неперекрывающихся во времени импульсов. В этом случае говорят,
что каналы уплотнены во времени. Далее групповой сигнал (рис. 12.6, ё)
после усиления в блоке ПБ поступает в качестве модулирующего на
вторую ступень модуляции М, после чего он усиливается в блоке ПРД
и по линии связи поступает на приемную сторону.
Сразу же отметим, что на практике чаще всего используется не
АИМ, а ИКМ, в состав которой входит и АИМ. Остальные же опе-
рации ИКМ (квантование по уровню, кодирование) должны осуще-
ствляться в блоке ПБ.
322
На приемной стороне сигнал
с линии поступает в ПРМ, где он
фильтруется, усиливается, а за-
тем детектируется в блоке Д (см.
рис. 12.5) для получения группо-
вого сигнала (см. рис. 12.6, ё).
Если в каналах использована
АИМ, то групповой сигнал после
усиления в блоке ПБ поступает
сразу на одни входы всех схем сов-
падения И, на другие входы кото-
рых подаются импульсы синхро-
сигнала СС (рис. 12.6, ж) с выхода
распределителя РЛ. Работа по-
следнего такая же, как и на пере-
дающей стороне, за исключением
того, что ГИ синхронизирован им-
пульсами СИ, выделенными из
группового сигнала. Каждая схе-
ма совпадения И открывается на
время, определяемое длительно-
стью импульса распределителя, и
пропускает на свой выход сигнал
своего канала. В схемах И и осу-
ществляется ВРК (рис. 12.6, з—к).
На выходе каждой такой схемы
имеется ФНЧ, который выполняет
t
функции второй ступени демоду- рис. 12.е
ляции, преобразуя сигнал АИМ в
передаваемый аналоговый сигнал. Если же канальные сигналы циф-
ровые (с ИКМ), то в блоке ПБ приемника должно иметь место деко-
дирование, преобразующее ИКМ в АИМ. Далее групповой сигнал с
АИМ разделяется описанным выше способом.
Схемы //приемника выполняют роль временных параметрических
фильтров или ключей. Оператор, описывающий работу ключевого
фильтра,
со
Гк = {5(0} = J 5(т)пк(/, T)dx,
где весовая функция г|к(Л т) представляет собой дельта-функцию 5(/ — т):
Пк(', т) =
8(/-т) при te Ык;
0 при t<t At*,
здесь Д/к — интервал времени, в течение которого передаются сигналы Л-го
канала.
1
323
При ВРК тоже имеют место взаимные помехи, которые обуслов-
лены двумя причинами: линейными искажениями и несовершенст-
вом синхронизации. Действительно, при ограничении спектра импуль-
сов (линейные искажения) их фронты "заваливаются", и импульсы
одного канала накладываются на импульсы другого, от чего и обра-
зуются переходные помехи. Для снижения их уровня вводят защитные
интервалы, что соответствует некоторому расширению спектра сиг-
нала. Эффективность использования частотного спектра при ВРК
практически (не теоретически) хуже, чем при ЧРК: с увеличением
числа каналов растет полоса частот. Зато при ВРК отсутствуют помехи
нелинейного происхождения и аппаратура значительно проще, а пик-
фактор сигнала меньше, чем при ЧРК. Существенным преимущест-
вом ВРК является высокая помехоустойчивость импульсных методов
передачи (ИКМ, ФИМ и др.). При ВРК просто выделить каналы на
приемной стороне без какого-либо ограничения их качества. Аппара-
тура имеет малые размеры, массу, что обусловлено широким исполь-
зованием интегральных микросхем, элементов цифровой вычисли-
тельной техники, микропроцессоров. Основной недостаток ВРК —
необходимость обеспечения синхронизации передающей и приемной
сторон системы передачи.
Отметим, что при ВРК канальные сигналы ортогональны между
собой, поскольку они не перекрываются во времени. Это значит, что
при их передаче может быть использовано и фазовое разделение ка-
налов (ВФРК). Примером тому может являться однополосная пере-
дача цифровых сигналов, минимальная частотная манипуляция и др.
12.6. ДРУГИЕ СПОСОБЫ РАЗДЕЛЕНИЯ КАНАЛОВ
Частотно-временное разделение каналов (ЧВРК) применяют для
того, чтобы использовать преимущества ЧРК и ВРК. Системы с ЧВРК
строятся по следующему принципу: предварительно производится
разделение каналов по времени, а затем образовавшиеся группы ка-
налов подают на вход системы с частотным разделением, в которой
каждая группа каналов работает на своем несущем колебании. При та-
ком комбинированном методе уплотнения линии значительно увели-
чивается число каналов и существенно упрощается аппаратура по
сравнению с системами только с ЧРК. ЧВРК используется в диспет-
черской централизации.
Разделение каналов по форме (РКФ) лежит в основе построения ши-
рокополосных систем связи с шумоподобными сигналами (ШПС) —
переносчиками. Сущность селекции сигналов по форме заключается
в следующем. Определяют взаимную энергию принятого сигнала Z(t)
и передаваемых сигналов 5Д0, i = 1, 2, ... Принимают решение, что
324
передавался тот сигнал, взаимная энергия которого с принятым мак-
симальна. Например, если
т т
JZ(z)S,(/)dz> JZ(z)5K(z)dz,
о о
то принимается решение о передаче сигнала 5Д0-
Отметим, что для случайных сигналов-переносчиков взаимная
энергия пропорциональна взаимокорреляционной функции. На прак-
тике используются слабо коррелированные сигналы-переносчики, вза-
имная энергия которых много меньше энергии каждого сигнала.
Шумоподобные сигналы различной формы удовлетворяют усло-
вию линейной независимости (см. п. 12.1). Для их передачи можно ис-
пользовать одну и ту же полосу частот линии связи и передачу вести
в одном и том же интервале времени. Поэтому эффективность ис-
пользования линии связи в этом случае существенно возрастает. Для
разделения канальных сигналов в приемнике наиболее часто исполь-
зуют квазиортогональность ШПС.
Кодово-адресное разделение каналов (КАРК) сочетает в себе пре-
имущества ЧРК, ВРК и разделения сигналов по форме. Рассмотрен-
ные в предыдущих параграфах системы МКС с ортогональными сиг-
налами требуют для нормальной работы той или иной синхронизации:
точного совпадения спектра сигнала с полосой пропускания канала
при ЧРК; точного совпадения временных интервалов передачи сиг-
налов определенных каналов при ВРК; точного определения момен-
тов начала и конца тактового интервала в системах с разделением сиг-
налов по форме; точной установки момента отсчета в системах с
согласованными фильтрами.
В ряде случаев осуществить точную синхронизацию затруднитель-
но, например при использовании оперативной спутниковой связи,
связи с большим числом подвижных объектов и пр. В этих случаях
становятся предпочтительными системы асинхронной МКС, когда
сигналы всех абонентов передаются в общей полосе частот, а каналы
не синхронизированы между собой. Поскольку в таких системах за ка-
налами не закреплены ни частотные, ни временное интервалы и вре-
мя работы каждого канала произвольно, то такие системы называют
системами со свободным доступом к линии связи или системами с не-
закрепленными каналами. Каждому абоненту (станции) присваивает-
ся адрес, который представляет собой определенную кодовую комби-
нацию, известную всем абонентам системы. По такому адресу и
происходит разделение каналов, поэтому такие системы часто назы-
вают асинхронно-адресными. Связь между любыми двумя абонентами
может осуществляться в любое время и вне зависимости от использо-
вания линии в это время другими абонентами. Основным фактором,
сдерживающим рост числа одновременно работающих абонентов, яв-
ляется увеличение уровня взаимных помех. В качестве сигналов-пе-
325
Рис. 12.7
реносчиков используют ансамбль сигналов, обладающих хорошими
корреляционными свойствами и прежде всего малыми значениями
взаимокорреляционной функции. Такие сигналы, как известно, на-
зываются квазиортогональными. Они могут быть дискретными и не-
прерывными.
Важным достоинством МКС с КАРК является высокая эффектив-
ность, помехоустойчивость и надежность связи, более низкая стои-
мость аппаратуры по сравнению с системами ЧРК.
Разновидностью КАРК является способ статистического разделе-
ния сигналов. Сущность его заключается в том, что в трансверсальном
фильтре (рис. 12.7) содержащим линию задержки ЛЗ с отводами и фа-
зоинверторами ФИ, подключенными к схеме совпадения И с решаю-
щим устройством РУ на выходе последнего возникнет импульс тогда
и только тогда, когда на все его входы одновременно поступают им-
пульсы одного знака.
12.7. КОМБИНАЦИОННОЕ РАЗДЕЛЕНИЕ КАНАЛОВ (КРК)
Оно основано на различении в комбинациях элементов передавае-
мых канальных сигналов. Рассмотрим простейший случай передачи
цифровых сигналов только двух каналов (К = 2). Будем полагать, что
они двоичные, т. е. с основанием кода а = 2, а их элементы строго син-
хронизированы между собой (табл. 12.1). Максимальное число воз-
к
можных комбинаций цифровых элементов двух каналов т = а =4,
что отражено числом элементов первых двух столбцов табл. 12.1.
Таблица 12.1
I-й канал 2-й канал Номер комбинации Фаза Частота
0 0 0 Ч>0 /о
1 0 1 <Р1 /1
0 1 2 Ч>2 fl
1 1 3 Ч>3 fl
326
В каждой строке табл. 12.1 элементы каналов представляют собой
запись номера комбинации символов в двоичной системе счисления,
если считать элементы 1-го канала младшими разрядами. Этот номер
комбинации записан третьим элементом в третьей строке табл. 12.1 в
десятичной системе счисления, а их последовательность образует по-
следовательность натурального ряда. Каждый такой номер несет две
двоичные единицы информации, т. е. два бита или один дибит. Сле-
довательно, вместо двух элементов можно передавать один, соответ-
ствующий номеру комбинации, изменением какого-либо параметра
высокочастотного колебания u(i) = Ucos(co0Z + <р), например, изме-
нением фазы <р,- (третья строка) или частоты/• = (четвертая строка).
На практике чаще используется управление фазой <р, поскольку фа-
зовая манипуляция (ФМН) обладает наибольшей помехоустойчиво-
стью при наименьшей ширине спектра ФМН сигнала. На рис. 12.8
приведена структурная схема цифрового манипулятора двукратной
(четырехфазной) ФМН. Она содержит генератор импульсов Г, фазос-
двигающую цепочку ФСЦ, коммутатор К с полосовым фильтром ПФ.
Обычно ФСЦ представляет собой кольцевой регистр, выполненный
на двух .D-триггерах, а коммутатор К — мультиплексор. На выходе та-
кой ФСЦ имеют место импульсные последовательности со сдвигом фаз:
О, л/2; п; Зл/2 рад, поэтому мультиплексор должен иметь четыре ин-
формационных и два адресных входа, как это показано на рис. 12.8.
На адресный вход АО подается сигнал первого канала (первая строка
табл. 12.1), а на А1 — сигнал второго канала (вторая строка). Их ком-
бинация определяет подключение на выход мультиплексора сигнала
соответствующей фазы (третья строка), в результате чего имеет место
двукратная ФМН: 0—180° в синфазном канале и (90—270)° — в квад-
ратурном канале. Отметим, что полоса частот и помехоустойчивость
приема сигналов двукратной ФМН такие же, как и у сигналов одно-
кратной ФМН, т. е. полоса — наименьшая, а помехоустойчивость наи-
большая по сравнению с другими видами манипуляции.
Уплотнять комбинационно можно не только два, но и три, четыре
и большее число каналов. При этом ФСЦ должна обеспечить ш = 2к
фазовых сдвигов через Д<р = 360 °/т, а мультиплексор должен иметь
tn информационных и к адресных входов.
В табл. 12.2 приведены элементы четырех каналов (строки второго
столбца), которые представляют собой запись в двоичной системе
счисления чисел натурального ряда (первый столбец), т. е. номера их
комбинации. Из этой таблицы следует, что при переходе от 7 к 8 со-
ответствующая кодовая комбинация 0111 изменяется во всех позици-
ях (1000), хотя добавляется только одна единица. Это существенно
327
снижает быстродействие автоматизированных систем. Во избежание
этого натуральный двоичный код заменяется на код, в котором каж-
дая последующая комбинация отличается от предыдущей только в од-
ной позиции. Таким свойством обладает код Грея (третий столбец).
Для перевода комбинации натурального двоичного кода в комбина-
цию кода Грея надо первую сложить по модулю 2 с этой же комби-
нацией, сдвинутой на один разряд вправо, у которой отброшен ее
младший разряд и добавлен 0 перед старшим разрядом.
Код Грея является единственным оптимальным манипуляционным
кодом в наиболее распространенных двух- и трехкратных фазовых сис-
темах, в которых передаются путем комбинационного уплотнения со-
ответственно два и три канальных сигнала. При использовании кода
Грея наиболее просто реализуется операция комбинационного разде-
ления каналов — операция фазовой демодуляции (приема).
Алгоритм идеального когерентного приема сигналов в канале с бе-
лым гауссовским шумом на интервале длительности Т, как известно,
Таблица 12.2
Десятичное число Натуральный двоичный код Код Грея Десятичное число Натуральный двоичный код Код Грея
0 0000 0000 8 1000 1100
1 0001 0001 9 1001 1101
2 0010 ООН 10 1010 ПН
3 ООП 0010 11 1011 1110
4 0100 оно 12 1100 1010
5 0101 0111 13 1101 ЮН
6 оно 0101 14 1110 1001
7 0111 0100 15 1111 1000
328
формулируется так: из совокупности известных равномощных сигна-
лов S^t), S2(z), ..., Sm(T) переданным считается сигнал если
т т
JZ(t) Stfdt > JZ(t) (12.5)
о о
где Z(t) — принятый сигнал, a j = 1,2, ...;/* i.
Удобнее в качестве опорных колебаний S(t) в восьмифазной сис-
теме выбрать четверку сигналов /(/) со сдвигом по фазе на — л/8 ра-
диан (рис. 12.9). В этом случае переданный информационный символ
и соответствующая ему кодовая комбинация полностью и однозначно
определяются набором знаков (sgn) проекций принятого сигнала Z(t)
на указанные опорные колебания /j(r):
т
sgn Zj = sgnf Z(t)fj(t)dt, j= 1, 2, 3, 4.
о
В табл. 12.3 представлены эти наборы для четырех проекций
(sgnZ\ — sgnZ4) при всех восьми вариантах передаваемой фазы сигна-
ла. В столбцах (6|, Ь2, 63) этой таблицы приведены двоичные кодовые
комбинации, соответствующие манипуляционному коду Грея. Эти
комбинации находятся также в первой половине табл. 12.2, если от-
бросить в ней первый столбец с нулями, а в оставшихся столбцах нули
заменить на +1, а единицы — на —1. Из табл. 12.3 следует: = sgnZy,
b2 = sgnZf, by — —sgnZ2 sgnZ4, что и определяет структуру комбина-
ционного разделения сигналов.
На рис. 12.10 приведена структурная схема такого разделителя —
демодулятора, реализующая описанный выше алгоритм (12.5) с опор-
ными колебаниями/(/) (см. рис. 12.9). Известны и другие реализации
данного алгоритма. Структурная схема когерентного детектора сигна-
лов двукратной ФМН, наиболее часто используемой на практике, при-
Таблица 12.3
i <Р/» рад- jgnZ, sgnZl jg«Z4 *1 *2 *3
1 0 + 1 + 1 -1 -1 + 1 + 1 + 1
2 тс/4 + 1 + 1 + 1 + 1 + 1 + 1 -1
3 х/2 -1 + 1 + 1 + 1 + 1 -1 -1
4 Зя/4 — 1 -1 + 1 + 1 + 1 — 1 + 1
5 Я -1 -1 + 1 + 1 -1 — 1 + 1
6 5я/4 -1 -1 -1 -1 -1 — 1 -1
7 Зя/2 + 1 -1 -1 -1 -1 + 1 -1
8 7л/4 + 1 + 1 -1 -1 -1 + 1 + 1
329
ведена на рис. 12.11, а, а опорные колебания и проекции на них сиг-
налов 5,(0 — на рис. 12.11, б.
Предполагается, что варианты начальных фаз <pf = 0; <р2 = ^ ; <р3 = л;
Ф4 = Зл/2 (см. рис. 12.11, б), а манипуляционный код — код Грея. Раз-
деленные сигналы двух каналов
т т
bt = sgnfZ(t) cos (и t + <p — -j) df; b2 = sgn |Z(t) sin(co t + <p — 5) d/.
о о
Отметим, что MKKTT согласно рекомендациям У26 и У27 предла-
гает несколько иные правила кодирования фаз для сигналов ФМН и
ОФМН (табл. 12.14).
Равномерное размещение всех сигнальных точек на окружности,
т. е. использование равномощных сигналов, отличающихся лишь фа-
Рис. 12.10
Рис. 12.11
330
зой, является оптимальным для систем, позиционность которых т не
более четырех (т < 4, а кратность к < 2). При т > 4 оптимальными яв-
ляются неравномощные сигналы, отличающиеся фазой и амплитудой и
размещенные равномерно внутри окружности радиусом /?= jEmax, где
Етах — максимально допустимая энергия сигнала. С точки зрения
теории модуляции, такие сигналы относятся к модулированным по
комбинированному способу, при котором одновременно изменяют-
ся несколько параметров сигнала — в данном случае амплитуда и
фаза или разность фаз. Это — амплитудно-фазовая модуляция
(АФМН) или АОФМН.
Простейший принцип построения сигналов с АФМН состоит в том,
что сигнальные точки размещаются на двух концентрических окруж-
ностях. На рис. 12.12 показан восьмипозиционный сигнал с АФМН,
где сигнальные точки обозначены крестиками. Четыре сигнала раз-
мещены на окружности радиусом R = JE, а четыре — на окружности
радиусом г < R со сдвигом по фазе на л/4 рад. Данная совокупность
сигналов оптимизируется по критерию максимума минимального
расстояния между сигналами выбором отношения R/r. Оптимальное
Таблица 12.4
Число фаз Код Фаза, град.
т = 2 (к = 1) 1 180
0 0
т = 4 (к = 2) — 1-й вариант 00 0
01 270
10 90
11 180
т = 4 (к = 2) — 2-й вариант 00 45
01 135
10 315
и 225
т = 8 (к = 3) 000 45
001 0
010 90
011 135
100 270
101 315
но 225
но 130
331
значение R/r= 2 cos 2L = 1,932, при котором минимальное расстояние
между сигналами
</8 = 0,73 JE.
Это расстояние несколько меньше, чем у системы восьмипозицион-
iibiX ChfiiaHuD, расположенных На ОДКОи GXpyXkiiGCTH /< ,
ds = 0,765 JE. Следовательно, в случае трехкратной системы размеще-
ние сигнальных векторов на двух концентрических окружностях вместо
одной не дает выигрыша. Оптимальной по критерию максимум мини-
мального расстояния d& оказывается простейшая зосьмипозицксяная
система с АФМН, у которой семь сигналов размещены равномерно на ок-
ружности радиусом R = JE, а восьмой сигнал равен нулю (рис. 12.13).
Минимальное расстояние у этой системы </8 = 0,86,/Ё > 0,765 JE. Не-
достаток всех сигналов с АФМН — их неравномощность, вызывающая
определенные трудности при их передаче по каналу связи, особенно
при наличии в них нелинейностей, и при реализации их оптимальной
обработки. Несмотря на это, АФМН широко применяется на практи-
ке, например, в цифровых спутниковых системах связи, так как при
возрастании т равномощные ФМН сигналы быстро теряют помехо-
устойчивость. Для анализа этого вопроса обратимся к рис. 12.14, где
показаны две системы сигналов с ФМН и АФМН кратности к — 4. Точ-
•9
т 0,73 У?-
Рис. 12.12
332
ками на окружности радиусом R = JE обозначены 16 вариантов сиг-
нала с ФМН, которые размещены равномерно вдоль окружности с ша-
гом л/8 рад. Обычно они кодируются четырехразрядными двоичными
комбинациями четырехкратного кода Грея (см. табл. 12.2). Однако в
данном случае код Грея не единственно оптимальный манипуляци-
онный код. Расстояние между ближайшими сигнальными ’’очками в
16-позиционной системе с ФМН или АФМН </16 (ФМН) = 0,39 JE, что
соответствует проигрышу более 14 дБ по сравнению с двухпозицион-
ной системой.
Система из 16 сигналов с АФМН обозначена на рис. 12.14 крестика-
ми. Нечетные сигналы этой системы равномерно размещены на окруж-
ности с большим радиусом с интервалом л/4 рад., которые совпадают с
нечетными сигнальными точками системы ФМН. Четные сигналы сис-
темы с АФМН равномерно размещены на окружности с меньшим ра-
диусом г < R с тем же интервалом тг/4 рад. и с общим сдвигом относи-
тельно нечетных вариантов на л/8 рад. Минимальное расстояние между
точками системы максимизируется выбором R/r= 2cos5tt/24 = 1,587,
при котором </16 (АФМН) = 0,482./£, что больше J16 (ФМН) — 0,39-/Ё.
В качестве второго примера на рис. 12.15 приведена 16-позицион-
ная система сигналов с АФМН, в которой сигнальные точки, обозна-
ченные крестиками и пронумерованные, расположены в узлах квад-
ратной решетки. Диагональ большого квадрата решетки равна
диаметру описанной вокруг него окружности 2R = 2/Ё. На окруж-
333
ности для сопоставления размещены 16 сигнальных точек системы с
ФМН. Обе сопоставляемые системы имеют одинаковое ограничение
максимальной мощности сигнала, которая в системе с АФМН дости-
гается при передаче сигналов с номерами 3, 7, 11 и 15. При таком ус-
ловии минимальное расстояние между сигнальными точками </16
(АФМН) = J1E/3 = 0,47 Это больше, чем в системе с 16-позици-
онной ФМН, и почти столько же, сколько в системе сигналов с АФМН
(см. рис. 12.14).
Наибольший эффект дает переход от ФМН к АФМН в системах с ог-
раниченной средней мощностью. В этом случае сигнальные точки 3, 7,
11 и 15 системы сигналов (см. рис. 12.15) будут лежать на окружности
радиусом R > JE и, следовательно, минимальное расстояние будет
больше, чем 0,47 JE, в то время как для сигналов с ФМН все парамет-
ры, в том числе и минимальное расстояние, сохраняются прежними,
так как для этих сигналов средняя и максимальная мощности равны.
Рассмотренные многопозиционные сигналы с ФМН и АФМН наи-
более часто используются в системах цифровой связи. В радиоканалах
почти исключительное применение находят сигналы с одно-, двух- и
трехкратной ФМН и АФМН , а также основанные на них сигнально-
кодовые конструкции (см. главу 3). В каналах проводной и радиоре-
лейной связи, кроме них, используются четырехкратные сигналы с
АФМН и сигналы более высокой кратности (пяти- и шестикратные).
Сигналы с многократной АФМН обычно используются для достижения
высоких удельных скоростей цифровой передачи в каналах с жестким
ограничением полосы частот и сравнительно хорошей энергетикой.
Алгоритм приема сигналов 5//) = o/sin(co/ + <₽,), где i = 1,2, ..., т,
в канале с гауссовским некоррелированным шумом может быть сфор-
мулирован так: фиксируется переданный i-й вариант сигнала, если
при всех j i справедливо неравенство
т т
f [х(0 - 5,(/)]2d/ < J[x(/) - 5//)]2d/, j = 1, 2, ..., m,
о 0
которое в сокращенной форме имеет вид:
т
i = arg min j [x(0 — S)(/)]2dt,
j = \, 2, ..., m.
При цифровой обработке переходят от высокочастотного сигнала
[см. формулу (12.1)] к его отображению в двумерном пространстве.
334
Проекции принятого сигнала х(Г) и сигналов (12.1) на опорное коле-
бание wc(/) = aQ sin (о / + <р0) с произвольной амплитудой а0 и фазой <р0
имеет вид:
т т
Xq = jx(r)о0 sin(<ot + 4>0)dz; y0 = Jx(t) cos(<u / + <p0)dr;
o o
т т
xj = JS№ °0 sin(a>r + 4>o)dz; yj = JSj(f) aQ cos (co r + <p0) dt.
О о
Тогда оптимальный алгоритм i = argmin[(A^ - Xj)2 + (y0 — y,)2],
j = 1, 2, m.
Если принятый сигнал содержит на интервале N посылок сигнала
S^t) в смеси с гауссовским шумом, то максимально правдоподобные
N N
оценки X! и у! будут х ] = 1 у! = - ^ уОл, где Xq„, уОл про-
п = 1 п = I
екции х^ и у0 на интервале л-й посылки. Данные оценки являются не-
смещенными и эффективными. Из них можно сформировать несме-
щенные и эффективные оценки Xj и у у. Для этого введем обозначение
Ф/ = <р 1 + Афу, где Дфу — известная разность фаз между сигналами Sj(t)
и ^(Г), и преобразуем Xj и yj следующим образом:
г „ т
а-
Xj- Jay sin(<o/ + фу) e0 sin(co/ + tpo)dz = Jfl! sin(<a/+ ф! + Дфу)а0 х
о 1 о
х sin (а> z + Фо)й/ =
°1
(%! COS Дфу — У] sin Дфу).
Аналогично находится уу. Заменив теперь х1 и у[ их оценками,
получим:
aJ.
ai
(х [ cos Дфу — у ] sin Дфу);
У]
а, _ .
(х | 51ПДф,- + у ! СО5Дф.).
а. * J J
Эти алгоритмы решают задачу когерентного приема многопозицион-
ного АФМН сигнала при наличии специального синхросигнала. Соответ-
ствующая структурная схема демодулятора приведена на рис. 12.16, ко-
торая не нуждается в комментариях. Отметим только, что декодер ДК
преобразует это решение в двоичную кодовую комбинацию в соответ-
ствии с используемым манипуляционным кодом. Рассмотренные ал-
335
Рис. 12.16
горитм и схема ориентированы на прием сигнала с абсолютной
АФМН, так как наличие синхросигнала (см. главу 2) исключает неоп-
ределенность начальной фазы, препятствующую применению абсолют-
ной ФМН. Отметим также, что этот алгоритм может быть использован
и в случае, когда синхросигнал отсутствует и "подстройку" проекций
образцов сигнала приходится вести непосредственно по информаци-
онным посылкам.
При оптимальном когерентном приеме двоичных сигналов с ФМН
любой кратности вероятность ошибки приема элементарного символа
[см. формулу (3.21)1
Ро = V^/2N0) ,
где И(у) — дополнение интеграла вероятности до единицы: И(у) = [ е df;
Jin 3
у
d — минимальное расстояние между сигналами (соседними); No — односто-
ронняя спектральная плотность мощности аддитивной гауссовской помехи с
равномерным энергетическим спектром. Расстояние между двумя гармониче-
скими сигналами Sx(f) и 52(г) длительности Т определяется выражением
d(S{, S2) = I j[Sl(O-S2(O]2<lr ~ / j[t/sin(o/+<p)-Z/sinorj2dr =
To to
= Ju2T(l - costp) = J4EC sin(O,5tp),
где Ec — энергия посылки, равная и2ТГ1\ q> — разница фаз сигналов. Энерге-
тические затраты на передачу одного двоичного символа (бита) Е§ = E/\og2m =
336
— £c/iog2 2k = Ez/k, где к — кратность ФМИ, определяющая ее фазность т = 2к.
Отсюда d = j4kE& sin(0,5<р), тогда
( /4££Rsin'’(0,5<p)l Г j2kEfr . 1
A) = И —ЧлГ—~ = V Hr sin(°>5<P) •
z/vo J LN ' o
Результаты расчетов по этой формуле представлены на рис. 12.17
в виде кривых для разных к и ф = 360 °/2к. На рис. 12.17 представлены
аналогичные кривые для АФМН, рассчитанные по исходной формуле
при d (АФМн-8) = 1,5497^6 и d (АФМн-16) = 1,265 JE6. С ростом
кратности манипуляции к > 2 вероятность ошибки приема резко воз-
растает. Так как фазовый (когерентный) детектор не реагирует на
квадратурный сигнал, то при двукратной ФМН и АФМН в последней
формуле к — 1.
Комбинационное разделение ЧМн-сигналов реализуется несколь-
ко иначе. На передающей стороне частоты (см. табл. 12.1) форми-
руются в автогенераторе подключением к его колебательной системе
(IC-контуру) дополнительных конденсаторов с помощью того же
мультиплексора MS (рис. 12.18) для двукратной ЧМН. На приемной
стороне колебания этих час i-л расфильтровываются, детектируются
по амплитуде и подаются на канальные фильтры (разделяются) со-
гласно табл. 12.1.
В случае многократной ФМН или АФМН занимаемая полоса частот
почти не расширяется с ростом кратности, но вероятность ошибки
увеличивается очень быстро, и для сохранения требуемой верности
передачи необходимо увеличивать мощность сигнала. Такие системы
пригодны в тех случаях, когда существуют жесткие ограничения по-
лосы пропускания канала, а мощность сигнала практически не лими-
Рис. 15? (3
337
тирована. В случае многократной ЧМН занимаемая полоса частот с
ростом кратности увеличивается экспоненциально при ортогонально-
сти передаваемых сигналов. При этом вероятность ошибки в каждом
канале возрастает очень медленно. Поэтому такие системы применя-
ются в тех случаях, когда используемый канал обладает большими час-
тотными ресурсами, но его энергетические возможности ограничены.
На железнодорожном транспорте используется двукратная ОФМН
в системе автоматической локомотивной сигнализации (АЛС-Е),
трехфазная ОФМН — в системе диспетчерской централизации "Луч",
многократная ЧМН (11 частот) — в радиостанциях станционной ра-
диосвязи системы "Транспорт”.
12.8. РАЗДЕЛЕНИЕ КАНАЛОВ С ДВОЙНОЙ МОДУЛЯЦИЕЙ СИГНАЛОВ
Двойная модуляция — аналоговая с постоянной амплитудой сиг-
налов, например ЧМ, и дискретная: фазовая манипуляция ФМН или
относительная ФМН (ОФМН) на 180°. Сигнал ЧМ является колебани-
ем несущей частоты для ФМН. Мощность ЧМ- и ФМн-колебаний
одинакова и равна общей генерируемой мощности передатчика.
Принцип разделения этих сигналов (каналов) очевиден: следует вход-
ной сигнал с ЧМ-ФМН подать сразу на два детектора — на частотный
через удвоитель частоты и на фазовый непосредственно, опорным ко-
лебанием которого является сигнал со входа частотного детектора,
разделенный по частоте в два раза. Однако в этом случае вероятность
ошибки приема ФМн-колебания увеличивается на величину Роп, по-
скольку ширина полосы частот опорного тракта фазового детектора
при ЧМ много больше, чем при гармонической несущей, когда можно
принять Роп = 0.
На рис. 12.19 приведена структурная схема детектора сигнала с
двойной модуляцией ЧМ-ФМН, в которой исключено это увеличение
вероятности ошибочного приема дискретного сигнала [2]. Устройство
Рис. 12.19
состоит из детектора аналогового
ЧМ-сигнала (верхний горизон-
тальный ряд блоков), фазового
детектора ФД и устройства устра-
нения ЧМ во входном сигнале.
Последнее представляет собой две
замкнутые петли блоков вокруг
автогенератора АГ.
Работа детектора сигналов
ЧМ-ФМН происходит следующим
образом. Входной сигнал ЧМ-
ФМН поступает на частотный де-
338
тектор ЧД через последовательно включенные полосовой фильтр ПФ,
ограничитель амплитуды ОА, удвоитель частоты УЧ. С выхода блока
ОА сигнал ЧМ-ФМН поступает также на фазовый детектор ФД через
линию задержки ЛЗ и устройство устранения ЧМ. В блоке удвоения
частоты УЧ устраняется ФМН на 180° и увеличивается в два раза не
только несущая частота, но и ее девиация, отчего возрастает ампли-
туда сигнала на выходе ЧД. Этот сигнал поступает к получателю и од-
новременно на один вход [управитель частоты (варикап) Уп2] автоге-
нератора АГ. Выход АГ соединен со вторым его входом через
последовательно включенные перемножитель сигналов П, ФНЧ, вто-
рой управитель частоты Уп1, образующие петлю фазовой автопод-
стройки частоты (ФАПЧ). В целом — это синхронно-фазовый демо-
дулятор (СФД). Известно, что колебания автогенератора АГ в СФД
повторяют входной сигнал ЧМ-ФМН. Аналоговый сигнал с выхода ЧД
осуществляет в ЯГ противофазную ЧМ, "стирая" тем самым ЧМ в его
колебании, и поэтому на выходе АГ имеет место только ФМН на гар-
монической несущей. С выхода АГ сигнал ФМН поступает на один
вход фазового детектора ФД непосредственно и на второй его вход —
через систему синхронизации СС, например по схеме Пистолькорса.
Гармоническая несущая ФМН сигнала позволяет считать как обычно
вероятность ошибочною приема в опорном тракте (СС) Роп = 0.
12.9. СИСТЕМЫ СИНХРОНИЗАЦИИ
Назначение, классификация и требования к системам синхрониза-
ции. В большинстве случаев нормальное функционирование различ-
ных систем передачи информации требует обеспечения определенной
синхронизации в работе передающей и приемной аппаратуры. Эта
функция возлагается обычно на специальные системы синхрониза-
ции. От помехоустойчивости и качества их работы зависит помехо-
устойчивость и качество работы системы передачи в целом. Системы
синхронизации формируют на приемной стороне специальные син-
хронизирующие сигналы (далее синхросигналы), синхронные с соот-
ветствующими сигналами, формируемыми на передающей стороне с
учетом искажений, появившихся при распространении сигналов по
каналу передачи.
Все многообразие задач, стоящих перед системами синхронизации,
можно разделить на два больших класса: синхронизация коммутатор-
ных устройств с целью обеспечения временного разделения сигналов
(например, в системах с временным разделением каналов); синхро-
низация работы устройств приема и обработки сигналов с целью по-
вышения их помехоустойчивости (например, при приеме сигналов со
случайными параметрами).
339
Реальные каналы передачи являются каналами с переменными па-
раметрами.
Оптимальный прием сигналов со случайными параметрами (см.
п. 6.4) требует оценки (измерения) существенных параметров (часто-
ты, времени запаздывания, фазы) таких сигналов. Эти измерения и
возлагаются на системы синхронизации.
Практические задачи синхронизации в системах передачи можно
обеспечить тремя системами (подсистемами) синхронизации: высо-
кочастотной, поэлементной (тактовой), групповой (в общем случае
также может полразделяться на несколько подсистем).
Задача высокочастотной синхронизации обычно возникает при ис-
пользовании додетекторной корреляционной обработки сигналов. В
этом случае в точке приема необходимо получить образцы высокочас-
тотных сигналов, частоты которых в любой момент времени должны
быть равны или близки частотам несущих или поднесущих принимае-
мых сигналов. В случае когерентной обработки это равенство должно
выполняться с точностью до фазы. В частности, задача обеспечения
высокочастотной синхронизации возникает во всех случаях исполь-
зования ФМН сигналов.
Задача поэлементной (тактовой) синхронизации состоит в обеспе-
чении на приемной стороне фиксации временных границ элементных
сигналов, соответствующих наименьшему подлежащему фиксации
временнбму интервалу, формируемому на передающей стороне. Фор-
мирование таких сигналов может быть необходимым для обеспечения
оптимальной последетекторной обработки сигналов и разделения сиг-
налов по своим каналам. В аналоговых системах передачи такими эле-
ментарными сигналами обычно являются канальные интервалы (ин-
тервалы времени, отводимые для передачи по одному каналу), а в
цифровых системах — элементарные информационные символы.
Восстановление колебаний тактовой частоты может осуществлять-
ся несколькими способами. Например, после демодуляции сигнала с
несущей путем отслеживания переходов в сигнале в виде импульсов
постоянного тока.
Колебания тактовой частоты можно восстановить независимо от де-
модуляции сигнала путем, например, детектирования огибающей ФМН
сигнала, пропущенного через фильтр с существенно суженой полосой.
Групповая синхронизация должна обеспечивать фиксацию вре-
менных границ определенных групп элементарных сигналов, напри-
мер слов, циклов, кадров и т. п.
В некоторых системах передачи могут одновременно действовать
все три указанных вида подсистем синхронизации.
Синхросигналы высокочастотной и поэлементной синхронизации
обычно имеют периодическую структуру. Синхросигналы групповой
синхронизации могут быть как периодическими, так и образовывать
случайный поток, например, при использовании буферного запоми-
нающего устройства на передающей стороне и (или) методов сжатия,
340
основанных на передаче существенных координат (выборок). При пе-
риодической структуре различных синхросигналов они обычно выби-
раются кратными друг другу, что существенно облегчает задачу их вы-
деления и формирования. В частности, в цифровых системах передачи
с циклическим (периодическим) опросом, когда могут действовать все
три указанных вида синхронизации, частоты перечисленных видов
синхронизации могут выбираться кратными друг другу.
Например, можно принять, что каждый кадр (группа посылок) со-
держит Л| слов, каждое слово состоит из символов, а каждый сим-
вол длится только л3 периодов высокочастотного несущего или под-
несущего колебания. В этом случае все виды синхронизации можно
осуществить после того, как будет установлена синхронизация по кад-
рам. Это может быть сделано соответствующим умножением частот
или делением периода кадра. Заметим, что все виды синхросигналов
по одному высокочастотному синхросигналу получить нельзя из-за
невозможности разрешения неоднозначности.
Однако в большинстве практических случаев это оказывается не-
разумным по двум причинам:
из-за повышения (при прочих равных условиях) погрешности син-
хронизации с уменьшением частоты следования синхронизирующих
посылок, так как, например, дисперсия отслеживания временнбго ин-
тервала связана с дисперсией отслеживания фазы следующим
выражением:
2 _ 2
О, = ав/Пгр.
где Цр — частота следования групповых посылок:
пгр ~ 2’t/7'rp-
Из этой зависимости видно, что с уменьшением частоты Qrp дис-
2
Персия погрешности от будет увеличиваться;
из-за увеличения времени вхождения в синхронизм системы в це-
лом (при определенных ограничениях на сложность аппаратуры).
Поэтому на практике сначала устанавливают синхронизацию по
более высокой частоте, например, высокочастотной несущей или час-
тоте элементарных символов, а затем по словам и кадрам. Часто в та-
ких системах по каналу передаются (или в информационном сигнале
содержится) по крайней мере два, а иногда и все три синхросигнала.
В большинстве случаев синхронизация начинается с разрешения наи-
меньших неоднозначностей, т. е. синхронизации символов (или слов).
Затем происходит синхронизация интервалов более высоких порядков
(циклов).
По методу формирования синхросигналов системы синхронизации
подразделяются на системы с автономным источником (хранителем
341
эталона времени), с передачей синхросигналов по отдельному каналу,
с выделением синхронизирующей информации из рабочих информа-
ционных элементов.
Несмотря на кажущуюся простоту, реализация первого способа со-
пряжена с некоторыми трудностями, связанными с использованием
весьма высокостабильных генераторов и с необходимостью их фази-
рования при перерывах связи, а также с действием мультипликатив-
ных помех в канале передачи.
При применении второго способа по радиоканалу передаются не-
которые вспомогательные сигналы (вспомогательная синхроинфор-
мация). Их обычно называют синхросигналами, или маркерами.
Для обеспечения выделения синхросигналов из общего сигнала не-
обходимо их какое-либо отличие от информационных. Объем пере-
даваемой синхронизирующей информации может быть различным и
составлять до 50 % емкости канала.
Второй способ позволяет построить весьма эффективные системы
синхронизации. Однако его использование приводит к расходу на пе-
редачу синхросигналов дополнительной мощности и полосы частот.
Кроме того, вследствие различных искажений в канале на приемной
стороне могут возникать нарушения в фазовых соотношениях между
синхронизирующими и информационными сигналами.
Передача синхронизирующей информации по информационному
каналу (называемая иногда синхронизацией по информационным по-
сылкам) имеет ряд существенных достоинств и в последнее время ин-
тенсивно развивается. Основное достоинство этого метода — эффек-
тивное использование пропускной способности канала передачи.
По способу формирования (выделения) синхросигнала на прием-
ной стороне системы синхронизации обычно подразделяют на непре-
рывные (инерционные), безынерционные (стартстопные или шаго-
вые с одноразовым запуском), инерционные с подтверждением.
Инерционные способы формирования предусматривают обязательное
наличие цикличности в синхросигнале. При этом методе задача системы
синхронизации сводится к формированию периодического сигнала с за-
данной точностью и достоверностью по частоте и фазе. Обычно это
осуществляется узкополосными фильтрами или следящими измери-
телями частоты и фазы типа систем фазовой или импульсно-фазовой
автоподстройки частоты [12].
В безынерционных системах синхронизации обеспечивается вре-
менная фиксация каждого передаваемого синхросигнала (маркера).
Иногда безынерционную синхронизацию подразделяют на стартстоп-
ную, шаговую и комбинированную. При шаговой синхронизации
формируется очередная метка (граница) временнбго интервала фик-
сацией лишь каждого принимаемого синхросигнала.
При стартстопной синхронизации формируется один или несколь-
ко производных синхросигналов. При этом исходный синхросигнал
является стартовым для формирования производных сигналов. В бе-
342
зынерционных системах синхронизации комбинированного типа ис-
пользуется обычно шаговый принцип синхронизации с дополнитель-
ным фазированием по группам.
В инерционной системе синхронизации с подтверждением исполь-
зуют различные логические схемы анализа цикличности, защиты и
накопления с целью повышения помехоустойчивости безынерцион-
ной системы синхронизации.
Применение того или иного метода формирования синхросигнала
на приемной стороне зависит прежде всего от периодичности структуры
сигнала, по которому формируется синхросигнал на приемной стороне.
В ациклических системах передачи, очевидно, возможно использование
лишь безынерционного способа формирования синхросигнала.
Применение того или иного из перечисленных метопов синхрони-
зации зависит также от того, насколько сильным по энергетическому
потенциалу выбран селектирующий признак синхросигнала (марке-
ра). Если имеется возможность применения маркеров с большой
энергией, то обычно используют безынерционный стартстопный, или
шаговый, принцип синхронизации. Если система должна работать в
условиях сильных помех и нет возможности выделить на синхронирую-
щий канал достаточно энергии, то обычно используют непрерывные
системы синхронизации. Однако при этом не должна игнорироваться
и инерционность системы, характеризуемая временем вхождения в
синхронизм. В отдельных случаях требование по быстродействию сис-
темы (по минимуму времени вхождения в синхронизм) может ока-
заться решающим. В промежуточных случаях используются инерци-
онные системы синхронизации с дополнительным подтверждением
цикличности.
Одна из структурных схем приемника КИМ2-ФМ сигналов системы
передачи с тремя системами синхронизации приведена на рис. 12.20.
Приемник состоит из высокочастотной части (ВЧ), информационного
канала, содержащего фазовый дискриминатор ФД, интегратор и ре-
шающее устройство РУ: системы высокочастотной синхронизации
СВС, в состав которой входит узкополосный полосовой фильтр "пи-
лот-сигнала" ПФ и система фазовой автоподстройки частоты ФАПЧ-В-,
системы тактовой синхронизации СТС, содержащие схему выделения
символьной частоты СВСЧ и систему фазовой автоподстройки с де-
лителем частоты Д\ в петле. С помощью делителя Д2 получается син-
хросигнал условной частоты Fcn, системы кадровой синхронизации
СКС, выполненной в виде инерционной системы с подтверждением,
включающей в себя схему выделения маркера кадра СВМК и схему за-
щиты и подтверждения СЗП. Эта схема предназначается для синхро-
низации коммутаторного устройства КУ, состоящего из распредели-
теля импульсов и сборки ключевых схем. Коммутаторное устройство
работает в шаговом режиме с дополнительной кадровой фазировкой.
Передача "пилот-сигнала" используется редко.
343
Выходы каналов
Рис. 12.20
В системы ФАПЧ-В и ФАПЧ-Т входят фазовый детектор ФД
фильтр нижних частот ФНЧ и генератор частотно-модулированных
сигналов.
На выходе системы имеются четыре импульсных последовательно-
сти: с частотой следования кадров FK, слов Fr„, символов Дим и не-
сущей FB.
Требования к системам синхронизации. Обобщенным требованием
к системам синхронизации является обеспечение минимума потерь
информации благодаря их работе при минимальных энергетических,
частотных и информационных затратах. Это, в частности, означает,
что система синхронизации должна обладать высокой помехоустой-
чивостью [т. е. обеспечивать формирование сигналов в условиях по-
мех с требуемыми точностью и достоверностью при возможно мень-
шем (минимальном) отношении сигнала к шуму на входе] и большим
быстродействием (т. е. затрачивать минимальное время на вхождение
в режим синхронизма при включении и перерывах в связи).
Точность работы системы синхронизации обычно характеризуется
средней квадратичной погрешностью в фиксации временнбго поло-
жения или фазы синхросигнала.
344
Достоверность работы системы синхронизации обычно определя-
ется вероятностью срыва синхронизации за определенное время ра-
боты, в результате которого теряется информация. Вполне естествен-
но, что вероятность срыва синхронизации (как аномального явления)
всегда должна быть намного меньше (во всяком случае на несколько
порядков) вероятности появления аномальных ошибок в информаци-
онном канале.
Определить требования к точности и достоверности синхрониза-
ции возможно лишь на основе анализа влияния неидеальности син-
хронизации на помехоустойчивость приема того или иного вида сиг-
налов — переносчиков.
Предположим, что система синхронизации предназначается для
фиксации границ элементарных символов, необходимых для работы
устройства их опознания. В общем случае вероятность появления
ошибки в опознании двоичных сигналов с неидеальной синхронизаци-
ей (с неизвестной временной задержкой) зависит от отношения энергий
2
сигналов к шуму aj, вида вторичной манипуляции, формы огибающей
элементарных символов, плотности распределения вероятности по-
грешности в оценке временной задержки принимаемых символов.
Система синхронизации несущественно снижает помехоустойчи-
вость (например, приемника двоичных сигналов), т. е. не приводит к
значительному увеличению рош, если она обеспечивает отслеживание
временного положения границ элементарных символов со средней
квадратичной ошибкой ot, много меньшей длительности элементар-
ного символа тс, т. е. от ® (0,1 — 0,01)тс. Соответственно вероятность
срыва синхронизации должна быть на несколько порядков меньше ве-
роятности появления аномальных ошибок в опознании элементарных
символов, т. е. рср << рош.
Если предположить, что система синхронизации предназначается
лишь для фиксации границ слов и кадров, необходимых для правиль-
ного декодирования слов и распределения их по своим каналам, то
поскольку в таких системах имеется отдельная система тактовой син-
хронизации, то к такой системе групповой синхронизации обычно
особых требований к точности работы не предъявляется, однако на-
дежность ее работы должна быть весьма высокой.
Итак, в общем случае помехоустойчивость систем синхронизации
должна оцениваться по точности и достоверности (надежности) рабо-
ты. При этом, как отмечалось, не должно игнорироваться и быстро-
действие системы, так как в разных системах срыв синхронизации мо-
жет приводить к различным потерям информации в зависимости от
быстроты восстановления синхронизма (быстродействия системы).
Безынерционные системы синхронизации. При безынерционной
(например, шаговой или стартстопной) синхронизации решение о на-
345
чале любого временного интервала принимается непосредственно по
результатам фиксации синхросигнала (маркера), присущего данному
временнбму интервалу. Наиболее широко безынерционные системы
синхронизации используются для обеспечения групповой синхрониза-
ции преимущественно с ациклической (но необязательно) структурой
синхросигнала в системах передачи с временном разделением каналов.
Структурная схема приемного устройства безынерционной кадро-
вой стартстопной системы синхронизации приведена на рис. 12.21.
Система синхронизации СКС обеспечивает кадровую синхронизацию
(фазирование) распределителя импульсов. Переход распределителя из
одного рабочего состояния в другое (последовательное открывание
ключевых схем) может происходить автоматически или под действием
специальных импульсов продвижения, получаемых от системы такто-
вой синхронизации СТС. Рассматриваемая система синхронизации
состоит из дешифратора (фильтра) маркера ДшМ и фиксатора вре-
менного положения маркера ФВП (решающего устройства). Дешиф-
ратор маркера представляет собой фильтрующее устройство, создаю-
щее на. выходе наибольшее значение отношения "сигнал-помеха".
В идеальном случае дешифратор должен представлять собой опти-
мальный согласованный с маркером фильтр.
Помехоустойчивость такой системы синхронизации будет опреде-
ляться точностью и надежностью фиксации каждого из маркеров на
оси времени. Расхождение по фазе между передающим и распределе-
нием происходит только в течение одного цикла (кадра).
Для оценки помехоустойчивости таких систем синхронизации мо-
жет использоваться теория помехоустойчивости импульсных сигналов
с фазоимпульсной модуляцией (см. п. 8.3). В общем случае помехо-
устойчивость таких систем синхронизации зависит от оптимальности
приемно-фильтрующего и решающего (фиксирующего) устройств.
В частности, при использовании оптимального согласованного с мар-
кером фильтра и решении по максимальному значению максималь-
ного из выбросов напряжения на интервале наблюдения Т (периода
следования маркера) точность и надежность некогерентного фикса-
Рис. 12.21
346
тора маркера в условиях воздействия белых гауссовских шумов будет
определяться выражениями, подобными (8.28) и (8.35):
2 _ 2 и
at 1/2ан гт '
2 2
где ат —дисперсия оценки временного положения маркера; ам — отношение
энергии маркера к спектральной плотности мощности белого шума Ng :
т
Е2Ы = f^M(OdC
о
гт" — вторая производная нормированной функции корреляции маркера 5м(г);
дан — вероятность появления аномальной погрешности в оценке временного
положения маркера; М — число взаимно ортогональных маркеров, которое
может разместиться на незащищенном интервале наблюдения Т.
В этих формулах
т
£ = J-j5M(/)5M(/+T)d/; М«Т/хк,
м о
где тк — интервал корреляции:
00
Tr« J|rT|dT,
-со
SM(t + т) — сигнал маркера.
При использовании порогового алгоритма работы решающего уст-
ройства надежность работы такой системы синхронизации может оце-
ниваться по вероятности ложной тревоги рлт и пропуска маркера рпр,
методика расчета которых подробно рассмотрена в п. 7.2.
В интересах обеспечения заданного качества фиксации маркеров
(ат и ран) при минимальном значении и отношения сигнал-шум на
входе характеристика г? или Л/должна выбираться оптимальной.
Методика оптимизации подобно рассмотренной в работах [12, 25J.
Следует отметить, что безынерционные (например, стартстопные)
системы синхронизации обладают малым временем восстановления
синхронизма. Нетрудно показать, что это время равно примерно по-
ловине периода Т следования маркеров.
Инерционные системы синхронизации с подтверждением. Системы
с подтверждением используются в системах с групповой синхрониза-
цией в случаях, когда надежность фиксации единичного синхросигнала
347
(маркера) для обеспечения безынерционного стартстопного метода
синхронизации является недостаточной, а инерционный (непрерыв-
ный) метод синхронизации нежелателен из-за аппаратурных сообра-
жений или недопустимо большого времени вхождения в синхронизм.
В инерционных системах синхронизации с подтверждением в той
или иной степени используется свойство цикличности (периодично-
сти) синхросигналов, что позволяет повысить надежность работы сис-
темы (уменьшить вероятность ложного обнаружения и пропуска мар-
кера кадра). Это достигается введением в схему устройства анализа
цикличности, защиты и накопления (см. рис. 12.19). Принципиально
за счет накопления в таких системах может быть повышена и точность
фиксации.
Различают одно-, двух- и трехрежимные системы синхронизации
с подтверждением. Однорежимные системы работают в режиме поис-
ка и имеют защиту от пропуска маркера или его ложного возникно-
вения. Двухрежимные системы могут работать в режиме поиска и син-
хронизации и имеют защиту от пропуска маркера и от его ложного
возникновения. В этих системах трудноустранимо противоречие ме-
жду помехоустойчивостью и высоким быстродействием. Наиболее пол-
ный анализ цикличности проводится в трехрежимных системах, имею-
щих три режима работы: поиска, контроля, синхронизации. Диаграмма
синхронизации приведена на рис. 12.22. Переход от одного режима к
другому осуществляется по результатам анализа числа обнаружений и
пропуска маркера исходя из предположения, что используется поро-
говая схема фиксатора (решающего устройства). В соответствии с
приведенной диаграммой система работает следующим образом. В ре-
жиме поиска система является незащищенной и реагирует на любой
сигнал, появляющийся на выходе фиксатора маркера, т. е. любой сиг-
нал на выходе дешифратора фазирует распределитель. В общем случае
появления /обнаружений маркера схема переходит в режим контроля,
в котором фиксируется факт возникновения очередного маркера ров-
но через цикл. В этом режиме распределитель также фазируется лю-
бым маркером. Если в течение некоторого фиксированного количе-
ства циклов контроля т будет отмечено не менее тп защищенных
подтверждений, схема переходит в режим синхронизма (захвата). В этом
режиме распределитель управляется только тактовыми импульсами от
системы тактовой синхронизации. При числе подтверждений менее
порогового значения схема переходит обратно в режим поиска. Если
в режиме синхронизма (захвата)
отмечается пропуск подряд в к
циклах, схема переходит в режим
поиска.
Обычно число обнаружений
маркера в незащищенном состоя-
нии берется равным единице, так
как с увеличением числа е > 1 бу-
дет возрастать время нахождения
348
системы в незащищенном состоянии, а стало быть, и потери инфор-
мации. Параметр к влияет на помехоустойчивость системы. С первого
взгляда кажется, что его следует выбирать как можно большим. Од-
нако следует учитывать, что сбой синхронизации может произойти не
только из-за помех, но и вследствие аппаратурных причин. При этом,
естественно, желание уменьшить число к и его выбирают обычно рав-
ным нескольким единицам. Одним из способов устранения этого
противоречия является изменение порога срабатывания в фиксаторе
маркера при переходе от режима поиска и контроля (здесь более опас-
ны ложные обнаружения маркера) к режиму синхронизма, где более
опасны пропуски маркера.
Параметр т, равный числу циклов контроля достоверности марке-
ра, определяет быстродействие системы синхронизации. С возраста-
нием т удлиняется режим контроля, что при срывах синхронизации
увеличивает время срыва, а стало быть, и потерю информации. По-
этому обычно т выбирают равным единице, т. е. контроль проводится
на протяжении лишь одного цикла. Считается, что вероятность лож-
ного захвата (вероятность появления двух ложных маркеров на рас-
стоянии одного цикла) ничтожно мала.
Помехоустойчивость систем синхронизации с подтверждением це-
лесообразно характеризовать вероятностью срыва, под которой пони-
мается вероятность перехода из режима синхронизма в режим контроля
с неверной фазой. Для перехода системы синхронизации из режима
синхронизма в режим поиска необходимо, чтобы произошло к пропус-
ков маркера подряд. Учитывая статистическую независимость этих со-
бытий в соответствии с теоремой умножения вероятность такого пере-
™Pnep = Рпр'
Если при нахождении схемы в режиме поиска не возникает ни од-
ного ложного маркера, то после появления / истинных маркеров схема
вновь перейдет в режим синхронизации и срыва синхронизации не
произойдет. Срыв синхронизации наступает тогда, когда в незащи-
щенном режиме поиска протяженностью / циклов появится хотя бы
один ложный маркер. Пренебрегая вероятностью многократного по-
явления ложного маркера, вероятность появления хотя бы одного
ложного маркера в течение / циклов
Р^лт — — Рлт^ ~
Учитывая статистическую независимость перехода системы из ре-
жима синхронизма в режим поиска и контроля с неверной фазой, ве-
роятность срыва синхронизации будет определяться выражением:
~ РперРлт * /
"ср 1 _ п "пр '/'лт-
1 ^пр
так как обычно / = 1; рср * pknpPm-
349
При этом можно также показать, что при достаточно малых рпр и
рлт среднее время восстановления синхронизма Тпер » (к + 0,5) Т.
Нетрудно видеть, что системы с подтверждением обладают значи-
тельно более высокой надежностью (помехоустойчивостью), чем бе-
зынерционные стартстопные системы. Однако системы синхрониза-
ции с подтверждением являются более сложными.
Непрерывные (инерционные) системы синхронизации. Такие систе-
мы синхронизации используются при циклической структуре синхро-
сигналов в интересах повышения помехоустойчивости их выделения.
Синхросигналы могут передаваться по отдельному каналу или выде-
ляться из информационных сигналов.
Наиболее широко инерционные системы синхронизации приме-
няют для получения высокочастотной и поэлементной синхрониза-
ции, но могут использоваться для формирования сигналов групповой
синхронизации. Основным устройством инерционной системы син-
хронизации являются различные системы фазовой автоподстройки
частоты (ФАПЧ). Это связано с тем, что система ФАПЧ является оп-
тимальным (в смысле помехоустойчивости) устройством, предназна-
ченным для слежения за периодическим сигналом произвольного ви-
да (гармоническим, импульсным) (см. п. 8.2).
Предположим, что система синхронизации предназначается для
формирования высокочастотного опорного сигнала, необходимого для
оптимальной корреляционной обработки ИКМ2-ФМ сигнала. Ука-
занный опорный сигнал можно получить двумя способами: из самого
информационного сигнала с использованием различных схем систем
синхронизации и из специального передаваемого так называемого
"пилот-сигнала", представляющего собой остаток неподавленной не-
сущей (см. рис. 8.20). В обоих указанных случаях основным узлом сис-
темы синхронизации является система ФАПЧ.
Для выделения опорного синхросигнала из информационного и
ФМ сигнала применяют различные схемы, разработанные Д. В. Агее-
вым, В. И. Сифоровым, А. А. Пистолькорсом, Костасом и другими.
Такие схемы часто называют по именам их авторов.
Некоторые способы выделения несущей для системы высокочас-
тотной синхронизации основаны на нелинейном преобразовании
ФМ-сигнала. Таким является метод умножения частоты, который мо-
жет быть реализован путем возведения принимаемого сигнала в "а"
степень, где а — основание используемого кода.
Вариант структурной схемы такой высокочастотной системы синхро-
низации для четверичного ФМ-сигнала представлен на рис. 12.11. При
4 4
возведении входного сигнала в четвертую степень s (t) = sin (соо/ +
+ ф, + <р0) можно выделить четвертую гармонику cos(4<o0/ + 4ф;- + 4<р0).
При этом фазовый сдвиг 4ф(- при любом из возможных ф;- = 0, л/2, л, Зл/2
кратен 2л. В результате такого умножения частоты, в спектре появля-
350
ется дискретная составляющая учетверенной частоты 4ф0, которая вы-
деляется обычно системой ФАПЧ, при этом ЧМГ системы ФАПЧ ра-
ботает на учетверенной частоте. В этом случае частота ЧМГ делится
на 4 для получения опорных сигналов. В процессе деления на 4 легче
реализовать фазовращатель, на четырех выходах которого можно по-
лучить сдвинутые по фазе на 90” опорные колебания с частотой со0.
Принципиально системы ФАПЧ и системы высокочастотной син-
хронизации могут выполняться в аналоговой, аналого-цифровой и
цифровой форме. Синтез, анализ и расчет различных оптимальных и
квазиоптимальных систем ФАПЧ может производиться по методи-
кам, приведенным в п. 8.4.
Глава 13
СЖАТИЕ РАЗЛИЧНЫХ НЕПРЕРЫВНЫХ
И ДИСКРЕТНЫХ СООБЩЕНИЙ
13.1. ОСНОВЫ ОБЩЕЙ ТЕОРИИ СЖАТИЯ НЕПРЕРЫВНЫХ СООБЩЕНИЙ
В связи с бурным развитием цифровой элементной базы и цифро-
вых вычислительных машин, а также достоинств цифровых методов
представления, обработки, передачи и хранения разнообразной ин-
формации главным направлением развития систем связи, телевиде-
ния и информационно-измерительных систем различного назначения
являются разработка и внедрение цифровых методов и устройств об-
работки, преобразования и передачи сигналов.
Однако использование цифровых методов представления и пере-
дачи приводит к необходимости многократного увеличения полосы
занимаемых частот и соответственно возрастания скорости передачи
различных видов сообщений (речи, графики, различных видов видео-
изображений, мультимедиа и т. д.). Даже внедрение высокоскорост-
ных систем плезиосинхронной и синхронной иерархии на волоконно-
оптических линиях связи не успевает за все возрастающими потреб-
ностями в объемах и скоростях передачи различных сообщений. Эта
проблема может быть решена разработкой эффективных методов
цифрового преобразования — сжатия (кодирования) различных сооб-
щений. Сразу же отметим, что поскольку большинство непрерывных
сообщений — нестационарные случайные процессы, то эффективные
методы сжатого преобразования должны быть в большинстве случаев
адаптивными.
Основной объем сообщений в цифровых системах передачи со-
ставляют аналоговые сообщения (речь, видеоизображения, телемет-
рия, мультимедиа и др.). Поэтому основные методы сжатия различных
сообщений основываются на цифровых методах их представления и
преобразования. При этом сжатие непрерывных сообщений включает
в себя использование сжатия цифровых потоков.
Цифровым представлением аналогового случайного процесса s(<)
будем называть преобразование каждой реализации этого процесса на
интеэзале наблюдения Тн в совокупность чисел бу, по которым дан-
ная реализация может быть восстановлена в аналоговой форме s(t) с
погрешностью, не превышающей допустимую.
352
Задача определения эффективного (сжатого) цифрового представ-
ления непрерывного процесса (поля) может решаться на основании
различных подходов. Во-первых, потенциальные возможности сжатия
тех или иных сообщений могут быть определены на основании теории
информации. Во-вторых, вопросы сжатия конкретных сообщений мо-
гут решаться на основании рассмотрения соответствующих оптими-
зационных задач при выполнении основных операций при цифровом
преобразовании этих сообщений.
Преобразование непрерывных сообщений в цифровую форму
включает в себя обычно (но не обязательно) три основных операции:
дискретизацию по времени; квантование по уровню; кодирование (в
общем случае статистическое и помехоустойчивое). Каждая из этих
операций может быть выполнена с использованием различных алго-
ритмов. Задача состоит в том, чтобы определить оптимальные (или
квазиоптимальные) алгоритмы, обеспечивающие наиболее экономич-
ное (сжатое) цифровое представление исходного сообщения при до-
пустимой погрешности представления (обычно в среднем квадрати-
ческом смысле).
Часто на практике операции дискретизации и квантования могут
аппаратурно совмещаться, а оптимальное (квазиоптимальное) кван-
тование заменяться эквивалентными оптимальным нелинейным пре-
образованием или оптимальным статистическим кодированием.
Основные положения теории информации по сжатию информации.
Потенциальные возможности сжатия непрерывных случайных процес-
сов и полей могут быть определены на основании понятия и свойств эп-
силон-энтропии, под которой понимают минимально допустимое зна-
чение объема информации (например, в битах) Нэ(з) при заданной
погрешности воспроизведения (например, приведенной дисперсии
погрешности).
Эпсилон-энтропией определяют нижнюю грань средней взаимной
информации между исходным $(/) и восстановленным $(/) процесса-
ми. В частности, при стационарном гауссовском случайном процессе
эпсилон-энтропия каждого независимого отсчета этого процесса бу-
дет определяться выражением [12, 25]
/э($) = 0,5 log [- а2р (s)/a2(s)], (13.1)
где 52(г.)пр = а2р (e)/a2(s) — приведенная дисперсия погрешности восстанов-
ления (представления); a2(s) — дисперсия исходного процесса.
Соответственно эпсилон-энтропия случайного гауссовского про-
цесса с N независимыми отсчетами
Я,(5) = Л7э0).
12 )ак I5S э' э
353
Методика расчета нижней грани количества информации при
цифровом представлении аналоговой случайной величины с произ-
вольным законом распределения приведена в работе [2]. Причем от-
счет негауссовской величины содержит меньшее количество инфор-
мации, чем гауссовской при той же погрешности восстановления.
Эпсилон-энтропия случайного процесса зависит не только от тре-
буемой точности восстановления (воспроизведения), но и от спек-
тральной плотности мощности (СПМ) сообщения (сигнала) и его за-
кона распределения. В частности, если предположить, что СПМ
гауссовского процесса описывается полиномом Баттерворта степени
к (в общем случае), то
5(®) =
2
°? 2я sin(n/2&)
1 + (<о/Пс)2А: Пс (л/2*)
(13.2)
где Г2С — характеристическая угловая частота процесса на уровне 0,5,
то требуемая скорость передачи (эпсилон-энтропия), бит/с, будет оп-
ределяться зависимостью [25]
l4k2sin(n/2k) .
2t-ll 2
л/ (2к- 1)я8£
(13.3)
Cp/Fc, двоичные единицы
Рис. 13.1
которая в виде графиков приведена
на рис. 13.1. Из графиков видно, что
эпсилон-энтропия возрастает с уве-
личением требований к точности
восстановления ширины спектра Пс
и уменьшением степени полинома к
(порядка дифференцированности про-
цесса).
Важно отметить также следую-
щий постулат: при заданных харак-
теристиках процесса s(Z) и заданной
приведенной дисперсии погрешно-
сти 52(е)пр отклонение восстанов-
ленной оценки s(/)) от s(t) эпсилон-
энтропия инвариантно к выбору ме-
тодов преобразования (представле-
ния, восстановления).
Соответственно потенциальные
возможности сжатия цифровых сооб-
щений и потоков могут быть определе-
ны на основании понятия и свойств
энтропии и пропускной способности
дискретного источника и канала связи.
354
В теории информации показывается, что максимальная произво-
дительность дискретного источника (максимальная энтропия источ-
ника) достигается при условии, когда дискретные сообщения источ-
ника независимы и имеют равномерное распределение. Напомним,
что энтропия дискретного источника определяет в среднем количест-
во информации, которое содержит источник сам о себе.
Из сказанного следует, что оптимальное цифровое представление
аналогового процесса должно включать в себя по крайней мере две
процедуры:
преобразование аналогового процесса (при заданном виде закона
распределения) в последовательность независимых координат и вы-
полнение условия эквивалентности (эквиэнтропийности), опреде-
ляющего сохранение количества информации при преобразованиях;
безызбыточное статистическое (энтропийное) кодирование каж-
дой координаты, которое может осуществляться без потерь.
Уравнение эквиэнтропийности определяет сохранение количества
информации при преобразованиях и позволяет вычислить дисперсию
выходной величины. Соответственно сжатие цифровых сообщений
должно подвергаться безызбыточному статистическому кодированию.
Отметим, что ни в одном реальном цифровом потоке практически ни-
когда не соблюдается условие независимости и равновероятности по-
явления цифр (букв, координат). Неравномерность распределения и
взаимозависимость приводят к уменьшению степени неопределенно-
сти (энтропии) одной цифры (буквы, координаты), т. е. в сообщении
содержится много "лишней" информации.
Теоретически коэффициент сжатия
/Гсж= Яр/logTV, (13.3)
где Яр — среднее количество информации, содержащейся в одной букве из N
реального текста, бит/буква; log Я — количество информации при независи-
мости и равновероятности букв в тексте из N букв.
Рассмотрим коротко эффективные методы сжатия сообщений при
отдельных операциях цифрового преобразования.
13.2. ЭФФЕКТИВНЫЕ МЕТОДЫ ЛИНЕЙНОГО РЕГУЛЯРНОГО
ДИСКРЕТНОГО ПРЕДСТАВЛЕНИЯ НЕПРЕРЫВНЫХ ПРОЦЕССОВ
Дискретное представление непрерывных сигналов (сообщений)
есть процесс преобразования функции непрерывного времени s(f) в
функцию дискретного времени s(Zz), представляемую совокупностью
координат (величин), по значениям которых может быть получена
оценка исходного непрерывного сообщения s(t). Дискретное пред-
ставление относится к аналитическому описанию сложных сигналов
(функций) s(t) через более простые элементарные сигналы.
12*
355
При линейных представлении и восстановлении, которые наибо-
лее широко используются, операторы дискретизации А и восстанов-
ления В имеют следующий вид:
= Si = A[s(01 = J W)s(t)dt, i = 0, 1, 2, ..., Nk, (13.4)
т
"k
S (0 = 5[*0’ S1> - = E*z^O). (13.5)
z=o
где !<(/), H<(z) — соответственно весовые и базисные (координатные) функ-
ции, которые должны быть нормированы так, чтобы произведение [ И(Г) ^(z)]
имело размерность, обратную времени t\ Nk + 1 — число используемых коор-
динат s(; Т— интервал наблюдения.
В зависимости от выбора системы весовых функций Vj(i) в фор-
муле (13.4) координаты сообщения могут представлять собой:
коэффициенты некоторого ряда при этом выражение (13.4) оп-
ределяет обобщенное дискретное представление; в частном случае
Vj{t) = B<(z) и представляют собой ортогональные функции;
текущие мгновенные значения (отсчеты, выборки), когда V^i) =
= 5(/ — 0, где 5(/— Z,) — дельта-функция Дирака; при этом выражение
(13.4) определяет дискретное представление по выборкам (отсчетам);
конечные разности, когда ЙЛ(/) являются линейной комбинацией
выборок и некоторые другие.
Для каждого из указанных классов весовых функций разработаны
алгоритмы и найдены аналитические выражения для оптимальных и
квазиоптимальных систем базисных функций W<(Z) = опт.
Рассмотрим коротко основные из этих алгоритмов и проведем их
сравнительную оценку по эффективности. Под оптимальным дис-
кретным представлением аналогового сообщения (сигнала) s(t) е S(t)
понимается использование (нахождение) такой пары операторов А и В,
которая обеспечивает минимальный объем (или минимальную ско-
рость передачи, бит/с) сообщения при заданной погрешности восста-
новления (или, что эквивалентно, минимальную погрешность восста-
новления при заданном объеме сообщения). В общем случае как
исходный сигнал может быть непрерывным $(/) или дискретным s(^),
так и базисные функции могут быть непрерывными И<(/) или Дис-
кретными И<(/'л).
Отметим, что дискретизация отсчетами (выборками) обычно явля-
ется первичным дискретным представлением, на основании которого
ищется более эффективное дискретное представление.
Оптимальные и квазиоптимальные обобщенные дискретные пред-
ставления. При обобщенной дискретизации обычно !<(/) = W<(Z), и в
качестве весовых (базисных) функций используются различные орто-
356
тональные полиномы (Карунена—Лоэва, Лежандра, Чебышева, Уол-
ша, Хаара, Ддамара, Гильберта и др.), а также гармонические функции
(ряд Фурье) [1, 12, 20].
При разложении сигнала по любым ортогональным базисным
функциям приведенная средняя квадратическая погрешность (дис-
персия) представления
лг-1
5пР = 1 - L 8пР(*),
к = 0
(13.6)
2 2 2
где ?V — степень используемого полинома; 5пр(Л) = a (k)/as — приведенная
дисперсия Л-й координаты; = Рср — дисперсия (мощность) исходного сиг-
нала s(J).
Из перечисленных полиномов оптимальным является дискретное
разложение Карунена—Лоэва (каноническое представление). Коор-
динаты этого представления, вычисляемые как коэффициенты орто-
гонального разложения сообщения s(0 по собственным функциям
интегрального уравнения Фредгольма 2-го рода с ядром, равным кор-
реляционной функции сообщения, сразу получаются взаимно некор-
релированными и, следовательно, дополнительного декоррелирую-
щего преобразования не требуют.
Естественным критерием при выборе множества сохраняемых ко-
эффициентов преобразования является сохранение только М коэффи-
циентов (из N), имеющих наибольшие дисперсии, остальные (N—M)
коэффициенты можно отбросить.
Этот критерий выбора числа коэффициентов преобразования час-
то называется дисперсионным. В
качестве примера на рис. 13.2
приведены распределения диспер-
сий коэффициентов разложения
2
оЕ при пяти различных преобра-
зованиях: дискретного косинус-
ном (ДКП), Хаара, Фурье, Уол-
ша, Ддамара и Карунена—Лоэва
(JV — номера коэффициентов) [1].
Из приведенных графиков следу-
ет, что распределение дисперсий
коэффициентов ДКП почти пол-
ностью совпадает с соответствую-
щим распределением дисперсии
преобразования Карунена—Лоэва.
Дискретное косинусное пред-
ставление (ДКП) последователь-
357
ности отсчетов sn, п = 0, 1, ..., N — 1 определяется известным соотно-
шением, коэффициентами которого являются Lk:
ЛГ-1
Lk = £ S„ cos k = 0, 1,..., N- 1. (13.7)
n = o
При ограничении количеством коэффициентов Nk < N обратное
ДКП запишется в виде
LkC0^-i2^. (13.8)
к = I
Оптимальные н квазноптимальные разностные представления. Один
из распространенных алгоритмов сжатия различных случайных сиг-
налов при их цифровом представлении основан на использовании ко-
нечных разностей, являющихся линейной комбинацией выборок.
В литературе часто этот метод сжатия называется дифференциальной
импульсно-кодовой модуляцией (ДИКМ), который имеет много раз-
новидностей. Рассмотрим вначале существо этого метода. Естественно,
будем при этом интересоваться прежде всего оптимальными и квази-
оптимальными разностными алгоритмами. Рассмотрим лишь дискрет-
ное представление стационарных процессов. Вопросы адаптивного
разностного представления (АДИКМ) описаны в п. 13.5.
Как показано О. Н. Новоселовым [25], одним из оптимальных дис-
кретных представлений стационарных гауссовских процессов является
последовательность разностей между каждой очередной координатой
исходного аналогового сигнала s(k) и ее оптимальным предсказанным
(экстраполированным) значением s(k) = опт. Иными словами — это
последовательность текущих значений погрешности оптимальной ли-
нейной (экстраполяции) предсказания:
еэ(Л) = s(k) - 5Э(£); еэ(0) = 5(0), (13.9)
где
к-I
$#) = ^a(k,j)s(jy, к>\. (13.10)
7= о
Величина 5Э(А:) называется линейной средней квадратической рег-
рессией координаты s(k) на все предыдущие координаты {s(j), j < к} и
является оптимальной экстраполированной оценкой по критерию ми-
нимума дисперсии экстраполяции в отсутствии помех. При этом обес-
печивается минимальная дисперсия погрешности экстраполяции D(k\
Полином в правой части формулы (13.10) называется экстраполирую-
щим. В расчетах коэффициентов a(k,j) и дисперсии D(k) оптимальной
358
экстраполяции используется элемент матрицы, обратный корреляци-
онной матрице координат {5(0), 5(1), ..., s(k)} размером (к + 1)(£ + 1).
Важнейшими свойствами рассматриваемого оптимального дискрет-
ного представления гауссовского сообщения (процесса) являются:
линейность, независимость координат з(к), минимальность диспер-
сии D(k) его координат, поскольку они равны дисперсии погрешно-
сти оптимальной экстраполяции, которая минимальна в классе ли-
нейных оценок.
При переходе к цифровому представлению минимальность диспер-
сий координат гарантирует минимальность числа символов кодового
слова координаты. Расчетные выражения для приведенной дисперсии
погрешности оптимальной экстраполяции (предсказания) на один шаг
по ДГ отсчетам различных сообщений приведены в табл. 13.1 [2, 5].
Последовательность разностей вида (13.9) при неоптимальной экс-
траполяции часто называют дифференциальным (обобщенно-разно-
стным) представлением процесса s(k). Разностное представление, оп-
ределяемое как последовательность конечных разностей, является
частным случаем дифференциального представления, когда экстрапо-
ляция выполнена по фактическим отсчетам {s(k — TV), ..., s(k — 1)} с
помощью интерполяционного полинома Лагранжа степени N — 1.
В работе [25] показано, что экстраполяцию на один шаг полино-
мом Лагранжа степени N — 1 = I, равной порядку дифференцируемо-
сти (в среднем квадратичном смысле) случайного процесса, можно
считать квазиоптимальной экстраполяцией по критерию минимума
Таблица 13.1
Характеристика сообщения Приведенная дисперсия погрешности оптимальной линейной экстраполяции (на один шаг по N отсчетам) 8^0 - 8^, , где v = fo/2/^
Класс ds Нормированная функция корреляции гх(т) N = 1 ^= 2 3 N —* од
cf e-V 2тс V 2я V 2я V 2я V
С‘ (1 + Qc|r|)e_neW 2 Я 3 V 8я3 3v3 5я3 3 2,47 V
f Пст . Пс1тП 75 l Л Ji) 2 тс 2 V 472л3 3v3 5^я3 4v3 3 1,75 V
<7 sinI2cT Пст 2 тс 4я4 45 v4 6 const V 0
359
дисперсии погрешности экстраполяции. Эта дисперсия совпадает с
2
дисперсией 5р (N) конечной разности порядка N= 1 + 1, построенной
на отсчетах s(k — N), s(k — N+ 1), s(k — 1), s(k) и близка к мини-
мальному значению дисперсии экстраполяции (табл. 13.2).
Программная и аппаратурная реализация рассмотренных алгоритмов
линейного предсказания зависит от вида исходного сигнала и его стати-
стических характеристик (измерительный, речь, изображение и т. п.), от
требований к эффективности и качеству сжатого сигнала, допустимой
скорости реализации.
Эффективность того или иного метода предсказания обычно оце-
нивается коэффициентом сжатия Ксж на данном временнбм интервале
(сегменте), равным отношению дисперсии исходного сигнала 52(5) на
входе к дисперсии погрешности предсказания 82(е)пр:
АГсж=-|^-. (13.П)
8 <£)пр
Величина Ксж показывает, во сколько раз линейный предсказатель
уменьшает мощность (дисперсию) входного сигнала и таким образом
Таблица 13.2
Характеристика сообщения Приведенная дисперсия конечной разности (порядка Л) 8^, где v = F$/1FC
Класс ds N= 1 W= 2 N = 3 W=4
G° 2я V 4я V 12я V 40я V
Cs (1 + nc|t|)e"ncW 2 я 3 V 8 л3 3v3 3 V 32л3 3v3
( n.T п.|тГ| -OJ.I/72 l Л Ji) 2 я 2 V 4,У2л3 3v3 2j2n3 3 V 16^/2я 3v3
Cs (l + ЯСМ + x е~Пс!’! 2 я 3v2 4 я 4 V 44я^ 15v5 32л5 9v5
sinQcT Пст 2 я 3v2 4 я 6 л 7 6 /V 8 я 9v8
360
позволяет, хотя и косвенно, оценивать эффективность линейного
предсказателя.
Мерность и порядок используемого предсказателя зависят от кор-
реляционных свойств сигнала и допустимой сложности и могут быт
достаточно высокими (например, 10—20-го порядка для сжатия речи).
Для бесконечно дифференцируемого процесса предельное значе-
2
ние погрешности экстраполяции очевидно: 83jfc0 —> 0 при /V -> о°.
Из табл. 13.2 видно, что для недифференцируемого процесса (/ = 0)
минимальная погрешность экстраполяции достигается при предска-
зании по одному отсчету (W= 1), что вполне естественно, так как этот
процесс марковский.
Как видно из сравнения табл. 13.1 и 13.2, при W= 2 для однократно
дифференцируемых процессов оценки совпадают в пределах вычис-
лительной погрешности.
13.3. ЭФФЕКТИВНЫЕ МЕТОДЫ КВАНТОВАНИЯ
Погрешности квантования — специфические неустранимые по-
грешности любых цифровых систем передачи непрерывных сообще-
ний. Они возникают вследствие замены истинного значения коорди-
нат сообщения (например, выборок) их разрешенным квантованным
уровнем. Погрешность квантования — случайная величина, и в общем
случае ее плотность распределения вероятностей (ПРВ) зависит от
ПРВ сообщения, способа разбивки шкалы и способа отождествления
истинного значения с квантованным уровнем.
Если распределение w(j) неравномерное (например, гауссовское),
то для обеспечения минимума дисперсии погрешности квантования
при заданном числе уровней квантования квантование должно быть
неравномерным. Причем участки шкалы, характеризуемые малой ве-
роятностью, должны квантоваться с ббльшим шагом.
Разработаны оптимальные и квазиоптимальные алгоритмы нерав-
номерного квантования для различных видов ПРВ исходного сооб-
щения. Для низкоскоростной передачи сообщений с использованием
адаптивных предсказателей (АДИКМ) число уровней квантования
должно быть малым. Поэтому для обеспечения достаточного динами-
ческого диапазона необходимо обеспечивать адаптивное квантование
с различной шириной шага и определенное взаимодействие между
адаптивными квантователем и предсказателем. Например, если ско-
рость передачи достигает предельной, шаг квантования увеличивается,
чем уменьшается объем подлежащей кодированию информации. Если
скорость передачи позволяет, то наоборот, шаг квантования может быть
уменьшен для получения более высокого качества изображения. Могут
использоваться и другие алгоритмы адаптивного квантования.
Весьма перспективным считается векторное квантование. Оно эф-
фективно, когда требуемое число битов на одну координату мало (ме-
361
нее одной двоичной единицы). Обычно векторный квантователь состо-
ит из множества, называемого кодовой книгой, содержащей / кодовых
векторов размерности К. Если кодовая книга создана и она имеется
на передающей и приемной сторонах, то при получении номера ин-
декса вектора приемник выбирает из своей кодовой книги соответст-
вующий вектор и заполняет им необходимое место (например, на изо-
бражении).
13.4. СТАТИСТИЧЕСКОЕ КОДИРОВАНИЕ
Статистическое (энтропийное) кодирование используется для
уменьшения избыточности (сжатия) сообщений в цифровой форме,
обусловленной неравновероятностью и зависимостью элементов ко-
довой последовательности.
Код, уменьшающий избыточность, можно построить в разных ва-
риантах, но во всех случаях часто встречающиеся высоковероятные
элементы или буквы должны кодироваться короткими кодовыми ком-
бинациями, а для реже встречающихся можно применять более длин-
ные кодовые комбинации. Простейшим кодом такого типа является
код Морзе. Необходимо также, чтобы короткие кодовые комбинации,
соответствующие высоковероятным элементам, не совпадали с нача-
лами более длинных. В противном случае невозможно правильно де-
кодировать закодированное сообщение.
На возможность такого кодирования, учитывающего статистиче-
ские свойства сообщений, указал Шеннон, а удобное правило (алго-
ритм) этого кодирования предложил Фэно. Поэтому коды такого рода
называются статистическими (эффективными), или энтропийными, а
также кодами Фэно—Шеннона. Алгоритм статистического кодирова-
ния Фэно—Шеннона заключается в следующем (см. п. 44).
1. Подлежащие кодированию элементы сообщений располагаются
в первом столбце таблицы в порядке убывания их вероятностей.
2. Элементы сообщений разбиваются на две группы с примерно
равными суммарными вероятностями. Элементам первой группы в
качестве первого знака кодовой комбинации приписывается 0, а эле-
ментам второй группы — 1.
3. Элементы, входящие в каждую из групп, вновь разбиваются на
две группы с примерно равными суммарными вероятностями. Эле-
ментам вновь полученных первых групп в качестве второго знака ко-
довой комбинации приписывается 0, а элементам вторых групп — 1.
4. Этот процесс продолжается, пока в каждой из групп не останет-
ся по одному элементу.
Второй алгоритм статистического кодирования, дающий примерно
такой же результат, предложен Хаффменом. Алгоритм заключается в
размещении элементов сообщений (букв) и их вероятностей также в
первых двух столбцах таблицы. Последующие столбцы таблицы запол-
362
няются вероятностями, причем последние две заменяются их суммой.
Затем все вероятности опять располагаются в порядке их убывания. По
построенной таблице, начиная с последнего столбца, строится граф. За-
тем каждой выходящей из любого узла ветви приписывается 1, если она
обладает большей вероятностью, и 0, если ее вероятность меньше.
Отметим, что разработано значительное количество вариантов ал-
горитма Хаффмена. В одних вариантах используются готовые кодовые
таблицы, в других кодовая таблица строится на основе стандартного
анализа файла. Применяются и другие методы кодирования. Напри-
мер, в популярных телефаксах III группы по классификации МККТТ
используются встроенные татистические таблицы кодирования изо-
бражений. В этих таблицах содержится информация не о частоте по-
явления комбинаций, а о частоте появления черно-белых линий раз-
личной длины. В частности, в деловой корреспонденции самая
распространенная строка — это пустая линия длиной 215 мм, которая
кодируется самой короткой последовательностью и т. д.
В последнее время в низкоскоростных кодеках широко использу-
ются арифметические коды и коды Lempel-Ziv-Welch.
13.5. ОСОБЕННОСТИ СЖАТИЯ РЕЧЕВЫХ СИГНАЛОВ
Основные статистические характеристики речевых сигналов. Речевой
сигнал является существенно нестационарным случайным процессом,
у которого в зависимости от диктора, типа микрофона и других причин,
а также во времени изменяются все статистические характеристики,
включая плотность распределения вероятностей. Однако в большин-
стве литературных источников приводятся некоторые усредненные по
времени (или множеству) характеристики.
В качестве усредненных характеристик обычно указывают следую-
щие. Спектральная плотность мощности речевого сигнала обычно
описывается полиномом Баттерворта второго порядка. Самая низкая
частота речевого сигнала обычно принимается равной 0,3 кГц, верх-
няя частота большинства стандартов 3,4 кГц. Однако для служебной
связи используют и более низкие верхние частоты — 2,3—3,0 кГц.
Ширина динамического диапазона может составлять 50—60 дБ. Плот-
ность распределения вероятностей аппроксимируется по-разному: рас-
пределением Лапласа, гамма-распределением, составным распределе-
нием в виде взвешенной суммы гауссовского и гамма-распределения и
некоторыми другими. Часто допускается, что ПРВ речевого сигнала
близко к гауссовскому с изменяющейся интенсивностью (дисперсией),
что, в основном, определяется большим различием в дисперсии глас-
ных и согласных звуков. Дисперсия гласных может в десятки раз пре-
вышать дисперсию согласных звуков. Часто гласные и согласные раз-
личаются по признаку интенсивности. Гласные содержат основной
тон, а согласные представляют собой шумовой сигнал.
363
Весьма важная характеристика речевого сигнала — частота основ-
ного тона, которая изменяется во времени, зависит от человека и ле-
жит в диапазоне 100—250 Гц (более низкая у мужчин).
Некоторые примеры графиков фонограмм (отдельных фрагментов
реализаций) речи приведены на рис. 13.3, 13.4. На рис. 13.3 представ-
лены реализации и статистические характеристики женской речи, на
рис. 13.4 — мужской: сами фонограммы в виде выборок (рис. 13.3, а,
13.4, а); оценки нормированной функции корреляции г(0 в зависи-
мости от числа отсчетов (рис. 13.3, б, рис. 13.4, б) (стрелками на гра-
фиках отмечен период основного тона, обусловленный квазиперио-
дическими колебаниями голосовых связок); оценки спектрограмм для
тех же фрагментов речи (рис. 13.3, в, 13.4, в); гистограммы ПРВ для
приведенных и последующих реализаций (рис. 13.3, г, 13.4, г), под ко-
торыми в виде столбика приведены цифровые значения в виде числа
уровней квантования соответственно для математического ожидания
М], дисперсии D, коэффициента асимметрии Ас и эксцесса Эк.
На основании анализа многочисленных данных можно сделать
следующие выводы:
1. Речевой сигнал является существенно нестационарным процес-
сом, у которого во времени (и по множеству) изменяются все стати-
стические характеристики: плотности распределения вероятностей
(ПРВ), моментные функции, спектральные и корреляционные харак-
теристики.
2. Отличительная особенность речевого сигнала как случайного
процесса — наличие как кратковременных (на интервалах в 3—20 вы-
борок), так и протяженных (на интервалах 60—120 выборок) корре-
ляционных связей, обусловленных основным тоном.
3. В связи с отмеченным адаптивные предсказатели в системах с
АДИКМ должны представлять собой инерционные нелинейные уст-
ройства и учитывать негауссовость распределений, кратковременные
и долговременные статистические связи в сигнале.
4. На интервалах времени в 128—512 выборок с частотой f0 = 8,0 кГц
(10—40 мс) речевой сигнал можно приближенно рассматривать как
локально стационарный.
5. Возможность существенного сжатия речевых сигналов связана с
большой избыточностью первичного представления выборками и
особенностью слуха.
Рекомендации МСЭ-Т (ITU-T) и основные характеристики низко-
скоростных кодеков речи. Низкоскоростной кодек речи должен удовле-
творять следующим требованиям: качество передачи речевого сигнала
должно соответствовать шести—семи-разрядной ИКМ; временная за-
держка при преобразовании сигнала с полосой 3,1 кГц не должна пре-
вышать 4—5 мс; характеристики кодека должны обеспечиваться при
работе с вероятностями ошибок в канале 0,01—0,001; качество речи не
должно снижаться при многократных синхронных преобразованиях,
а при асинхронных преобразованиях снижение должно быть неболь-
шим; кодек должен быть прозрачен для передачи данных на тональ-
ной частоте.
364
/ сегмент в сегмент
-9,4 -14,8 -4,7 -8,5 -7,1 -7,6 ~6,6 -7.3 т,
40192 39625 14857 1369 289 461 132 202 05
-0,27 0,18 0,36 -0,67 -1,51 ~1,04 -1,87 ~1,91 Ас
3,26 3,80 3,22 2,70 4,27 7,60 8,04 6,10 Зк
Рис. 13.3
365
0) 1-й отсчет 11203
Число отсчетов 200
Мужской
1 сегмент 8 сегмент
г)
-7,8 -5,0 -7,1 -7,8 -7,0 -8,1 -8,1 -7fi т,
20200 13230 7183 1128 82 88 87 656 Ds
-0,02 0,28 0,15 -0,70 -2,38 ~3,32 -3,13 ~0,56 Дс
2,36 2,32 2,86 4,43 7,61 8,36 8,04 5,43 Зк
Рис. 13.4
366
Основные рекомендации МККТТ по низкоскоростным кодекам
речи с шириной полосы 300—3400 Гц приведены в табл. 13.3.
Как видно из табл. 13.3 одним из основных алгоритмов сжатия в
низкоскоростных кодеках речи является алгоритм адаптивного линей-
ного предсказания (АДИКМ). Рассмотрим коротко эти алгоритмы.
Реализация нелинейных адаптивных предсказателей, учитывая нега-
уссовость речи, пока находится в стадии исследования, поэтому рас-
смотрим лишь адаптивные линейные предсказатели.
Комбинированные адаптивные линейные предсказатели в кодеках
речи. Адаптивные системы с ДКИМ имеют много разновидностей и
рассмотрены в большом числе работ. Во многих работах описаны ис-
следования систем АДКИМ, предназначенных для передачи речи и
изображений, где достигнуты существенные результаты.
Рассмотрим сначала коротко алгоритм наиболее распространенно-
го и достаточно сложного кодирования АД КИМ с передачей парамет-
ров передачи и квантования (рис. 13.5). На этом рисунке ЗУ — запо-
минающее устройство, в котором запоминаются входные данные на
время сегмента обработки Тн = ТОН, где Н— число выборок; То — пе-
риод опроса, необходимого для формирования оценок параметров aik
в устройстве оценок УО, в котором они могут, если необходимо, кван-
товаться и передаваться на приемное устройство; У/7р — устройство
предсказания, в котором используются параметры ajk, УАК — устрой-
ство управления адаптацией квантователя; сигнал управления кванто-
вателем bk с УАК подается на УКВ и также передается на приемное уст-
ройство; УКв — устройство квантования; Дкв — декодер квантователя,
в котором восстанавливается значение квантованной разности по ко-
довым словам ск, одновременно передаваемым на приемное устройство.
Схема декодера, согласованного с изображенным на рис. 13.5 пе-
редающим устройством, приведена на рис. 13.6. Соответствующие
сигналы а,-, Ьк и ск в декодере снабжены знаком. В более сложных уст-
ройствах вводят дополнительные блоки, в простых устройствах ряд
блоков, приведенных на рис. 13.6, 13.5 отсутствует.
Следует отметить, что наибольшее распространение получили
АДКИМ с линейным предсказанием, при котором предсказанное
Таблица 13.3
Рекомендация, год Алгоритм Скорость передачи, кбит/с
G.711 ИКМ 64
G.721, 1988 г. АДИКМ 32
G.728, 1991 г. CELP 16
G.729, 1996 г. GS-ACELP 4,8-16
Примечание. АДИКМ — адаптивная дифференциально-кодовая модуляция; CELP —
линейное предсказание с кодовым возбуждением; GS-ACELP — линейное предсказание с
кодовым возбуждением и алгебраической кодовой книгой.
367
значение сигнала 5пр(Л) выражается взвешенной суммой предшест-
вующих значений (прямое предсказание):
»о
JnpW = (13.12)
<= i
где a-t — коэффициент предсказания; Мо — число предшествующих отсчетов
сигнала, участвующих в предсказании (это число определяет порядок пред-
сказания, так при Мо = 1 соответствующий предсказатель называют предска-
зателем 1-го порядка, при Мо — 2 — 2-го порядка и т. д.).
Адаптивные предсказатели можно классифицировать также по
способу адаптации — прямой или обратной. Предсказатели с прямой
адаптацией вычисляют коэффициенты предсказания ah минимизируя
значение среднего квадрата погрешности предсказания:
к г "о -12
°пР = X ’
(13.13)
* = 0L
где К выбирают так, чтобы использовать для вычисления определен-
ный сегмент сигнала, на котором он может считаться локально ста-
ционарным.
Рис. 13.5
Рис. 13.6
368
Поскольку формула (13.7) содержит член з(к), описывающий вход-
ной сигнал передатчика, которого нет в приемнике, приемнику должен
быть передан набор коэффициентов а,- с тем, чтобы оба предсказателя
стали идентичными (отсюда и название "прямое предсказание").
Предсказатели с обратной адаптацией предсказания вычисляют
коэффициенты по последовательности з(к), минимизируя значение
среднего квадрата погрешности
Кг *о -12
апр = Е sw“ ЕМ(*-о
*«oL ы
(13.14)
Поскольку величина 5пр(^) имеется как в передатчике, так и в при-
емнике, передавать приемнику какую-либо дополнительную информа-
цию, помимо погрешности предсказания Епр(^), нет необходимости.
Оценка параметров а, предсказания проводится различными мето-
дами: максимального правдоподобия, наименьших квадратов, Юла—
Уолкера, поочередными (лестничное оценивание), рекуррентным и др.
Если оценки параметров формируются по блочным алгоритмам, то
для их расчета следует зарегистрировать фрагмент реализации в запо-
минающем устройстве (ЗУ) на время вычисления, а затем, получив а(,
построить оценки предсказания кпр(£) (см. рис. 13.24).
Недостаток прямого предсказания заключается в том, что инфор-
мация о предсказателе должна передаваться приемнику. Кроме того,
коэффициенты и квантованный сигнал погрешности предсказания
имеют разную чувствительность к ошибкам передачи, поэтому нужны
две разные схемы кодирования. При фиксированной скорости пере-
дача коэффициентов а( приемнику уменьшает число бит, приходя-
щихся на долю погрешности предсказания.
Напротив, при обратном предсказании никакой другой информа-
ции, помимо Епр(Л), для адаптации не требуется. Это означает, что в
отличие от прямого предсказания алгоритмы вычисления коэффици-
ентов предсказателя должны быть реализованы и в приемнике. Таким
образом, при прямом предсказании необходим более сложный пере-
датчик, а при обратном — более сложный приемник.
Для того чтобы предсказатель мог предсказывать значения, охва-
тывающие интервал корреляции, он, по-видимому, в ряде случаев
должен иметь весьма сложный порядок. Реализация такого предска-
зателя является весьма сложной и требует использования современ-
нейших вычислительных средств.
Более простой, но достаточно эффективный адаптивный предска-
затель может использоваться при наличии квазипериодических со-
ставляющих в сигнале, когда избыточность сигнала устраняется двумя
устройствами: долговременным предсказателем который удаляет
квазипериодические свойства из сигналами кратковременным пред-
369
сказателем Л/2, который удаляет информацию о кратковременной
корреляции. Соединение их может быть разным.
Передаточные функции такого комбинированного предсказателя
описываются через ^-преобразование следующим образом:
ЛЬ
-Л/, 2 -1
^(г) = рг W2(z) = £ aiZ '. (13.15)
/= 1
Коэффициенты для ^(z), т. е. 0 и М\, могут быть получены сле-
дующим образом. Вначале определяем период квази гармонической
составляющей сигнала М\ по максимальному значению нормирован-
ной корреляционной функции:
К г К К -11/2
r(M{) = ^s(k)s(k-М{)/ м1> (13.16)
1 !-*= 1 *= 1
Оптимальное значение A/lopt определяется исследованием функ-
ции г(Л/|) на максимум в зависимости от М\. Определив оптимальное
значение Мх opt можно найти
К к
Pop. = z W s(k - Мх opt)/ £ s\k - Mlopt).
k= 1 *= 1
В процессе анализа значения квазипериода гармонической состав-
ляющей Л/] и коэффициентов а( обновляются примерно через интер-
вал корреляции.
Адаптивные квантователи по уровню для обеспечения высокого
сжатия и низкоскоростной передачи с помощью АДКИМ должны
иметь малое число уровней квантования, поэтому необходимо обес-
печивать адаптивное квантование и определенное взаимодействие ме-
жду адаптивным квантователем и предсказателем.
Предложено большое множество различных методов адаптивного
квантования без нулевого уровня или с ним, с прямым или обратным
квантованием, с памятью на одно слово, компенсацией квазигармо-
нической составляющей и др.
Из-за нестационарности измерительного сигнала последователь-
ность погрешности предсказания епр(Л) также оказывается нестацио-
нарной даже при адаптивном предсказании. Задача адаптивного пред-
сказания состоит в том, чтобы шаг квантования dKB или уровни и
пороги квантования изменялись, например, в соответствии с изме-
няющейся дисперсией погрешности предсказания (лучше с измене-
нием ПРВ погрешности предсказания).
370
Таким образом, чтобы минимизировать дисперсию погрешности
квантования для известного или предлагаемого закона распределения
входного сигнала (погрешности предсказания), значения параметров
квантователя нужно выбирать оптимальными:
Адаптация квантователя может быть прямой (по входу) и обратной (по
выходу). При прямом алгоритме на вход 1 (см. рис. 13.5) поступает реа-
лизация погрешности предсказания Епр(Л), по которой определяется ее
дисперсия Z)(e). Она используется д ля нормировки ен(Л) = e(A)/Z)(e), а по-
роги и уровни рассчитываются для D(t) = 1.
В декодере квантователя вместе с декодированием выполняется и де-
нормирование е(Л) = ен(Л)/Л(е). Сигнал Ьк должен предаваться на при-
емное устройство.
При обратной адаптации с квантователя сигнал с выхода УКв по-
ступает на вход 2УАК. Квантователи с обратной адаптацией подстраи-
вают размер шага только на основе погрешности квантования, и при-
емник дополнительной информации не получает.
Дальнейшее повышение эффективности систем сжатия на базе
АДКИМ связано с использованием методов сокращенного представ-
ления и передачи погрешности предсказания (например, векторного
квантования и статистического кодирования), а также адаптивных ли-
нейных предсказателей.
Эффективность того или иного метода предсказания обычно
оценивается коэффициентом сжатия Ксж на данном сегменте, рав-
ным отношению дисперсии речевого сигнала на входе к дисперсии
погрешности предсказания, определяемым в соответствии с фор-
мулой (13.11).
На эффективность предсказателя влияют методы реализации
предсказывающих фильтров (лестничные, трансверсальные и др.)
и методы вычисления и оптимизации коэффициентов a(z), Л(/)
и Л/р
Примерные значения коэффициентов Ксж имеют следующие зна-
чения: от кратковременного предсказания 6—10-го порядка 9—16 дБ;
от предсказателя основного тона 1—3-го порядка 4—12 дБ; суммар-
ный выигрыш может составлять 18—22 дБ.
Вместе с тем, следует отметить, что в разных источниках имеется
значительный разброс в оценках Ксж того или иного метода пред-
сказания.
Коэффициенты долговременного предсказателя />(<) и Л/j и
кратковременного предсказателя а(0 должны определяться опти-
мальным образом, минимизируя дисперсию погрешности предска-
зания.
Для обеспечения определенной комфортности шума квантования
в низкоскоростных кодеках речи вводятся также специальные шумо-
вые фильтры с определенной передаточной функцией.
371
13.6. ОСОБЕННОСТИ СЖАТИЯ ВИДЕОИЗОБРАЖЕНИЙ
Задачи сжатия различных изображений. Существуют большие по-
требности в передаче различных неподвижных и подвижных изобра-
жений, а также в других услугах: видеоконференцсвязь, видеофония,
обмен накопленными образовательными или развлекательными база-
ми данных, передача видеоизображений в реальном и нереальном
масштабах времени, обмен программами между студиями и компью-
терами и т. п. Передача таких изображений в цифровой форме требует
особенно высоких скоростей и соответственно использования сжатия.
Можно сказать, что интенсивное развитие методов и устройств
сжатия различных видеоизображений стимулируется в настоящее вре-
мя развитием цифровых сетей интегрального обслуживания ЦСИО
(ISDN — Integrated Service Digital Network) и технологии "мультимедиа".
Возможности сокращенного описания изображений обусловлива-
ются в основном двумя факторами. Первый связан с ограничениями
зрительного восприятия получателя, благодаря которым исходное
изображение можно без ущерба для субъективного качества аппрок-
симировать другим, более простым, экономно описываемым изобра-
жением (первичное сжатие), допуская потерю качества. Второй опи-
рается на избыточность цифрового представления изображений.
Известно и разрабатывается значительное число методов сжатия
телевизионных и видеосигналов с учетом указанных факторов. К пер-
вой (первичной) группе методов следует отнести: кодирование с пред-
сказанием (например, видео АДИКМ); линейное кодирование с пре-
образованием (обычно с использованием ортогональных рядов Фурье,
Карунена—Лоэва, Адамара, Хартли, Гильберта, косинусного и др.);
межкадровое кодирование, основанное на том, что большинство изо-
бражений незначительно изменяется от кадра к кадру; прореживание
отсчетов (и кадров) с последующим их восстановлением интерполя-
цией и экстраполяцией; кодирование с расчленением изображения на
фрагменты; гибридное (комбинированное) внутри- и межкадровое
кодирование, представляющее собой различные сочетания перечис-
ленных методов кодирования с преобразованием, и некоторые другие.
Ко второй группе методов статистического сжатия следует отнести:
использование кода Хаффена и его модификаций; арифметические и
другие коды.
В современных устройствах сжатия видеоизображений также ис-
пользуются различные комбинации из первой и второй групп. Неко-
торым особняком от этих двух групп методов изображения стоит так
называемый фрактальный метод сжатия, а также новое преобразова-
ние Wavelet.
Статистические характеристики различных изображений. Каждое
изображение с вероятностной точки зрения (которая в последнее вре-
мя является доминирующей) можно рассматривать как временною
выборку из двумерного случайного поля. При этом наиболее полно
372
эта выборка характеризуется многомерной совместной плотностью
распределения вероятностей ПРВ всех элементов изображения.
Часто множество отсчетов изображения одного кадра можно рас-
сматривать как Q-мерный вектор. Объем видеоизображений характе-
ризуется форматом изображения (числом строк и столбцов), опреде-
ляющим число растровых элементов (РЭ), или пикселов, и числом
уровней квантования (глубиной) — бит/РЭ или бит/пиксел. Обычно
изображения квантуются на 256 уровней, что соответствует 8 бит на
растровый элемент (8 бит/РЭ).
Основные характеристики видеоформатов CIF (Common Intermt-
diate Format) и QCIF (Qurter CIF) для алгоритма H.261 приведены в
табл. 13.4.
Соответственно требуемая скорость передачи при двоичной ИКМ
будет составлять: для черно-белого телевидения 50 Мбит/с, для цвет-
ного 150—200 Мбит/с, для цифровой факсимильной связи 1,0 Мбит/с,
для видеотелефона и видеоконференции 80—100 Мбит/с.
При сжатии цветного видеоизображения чаще всего используется
раздельное сжатие яркостного и цветоразностных сигналов. Считается,
что такое разделение обеспечивает более эффективное сжатие. Следует
отметить, что в телевизионном изображении имеет место сильная кор-
реляция не только между элементами в строке, между строками, но и
между кадрами.
Случайные поля (изображения) по своему строению значительно
сложнее случайных процессов, так как, во-первых, их реализация яв-
ляется функцией нескольких переменных, во-вторых, значительно ус-
ложняется понятие марковости.
Сигнал, описывающий поле, может описываться по-разному. Это за-
висит от метода упорядочения(элементов) серии, когда про любые два
элемента поля можно сказать, что один из них предшествует другому. Су-
ществует множество вариантов такого упорядочения. В двумерном случае
чаще всего применяются пилообразная и треугольная развертки. В ре-
зультате развертки поле преобразуется в случайную последовательность,
которая часто описывается линейной авторегрессионной моделью.
Реальные телевизионные и другие видеосигналы являются суще-
ственно нестационарными случайными процессами (полями), когда
от блока (сегмента) к блоку (сегменту) может изменяться ПРВ про-
Таблица 13.4
Сигнал, частота кадров Формат CIF Формат QCIF
линий/кадр пиксел/линий лииий/кадр пиксел/линий
Сигнал яркости, Y Каждый сигнал цветности (СЬ, Сг) Частота кадров, Гц 288 144 29,97 360 (352) 180 (176) 144 72 29,97 180 (176) 90 (88)
373
цесса и многие его моменты. Это относится и к линейной погрешно-
сти предсказания. Для решения задач сжатия изображений важней-
шими характеристиками являются: контрастная чувствительность,
цветовая чувствительность, пространственная характеристика и эф-
фект маскирования (восприятие искажений).
Рекомендации МСЭ-Т по сжатию изображений. Различными меж-
дународными организациями разработан ряд рекомендаций для сжа-
тия неподвижных и подвижных изображений видеоконференцсвязи и
цифрового телевидения. Алгоритм сжатия неподвижных кадров (ви-
деоизображений) основывается на стандарте IPEG (loint Photographic
Experts Group). Указанный стандарт обеспечивает очень высокое или
отличное качество изображения для различных классов неподвижных
видеоизображений.
Сжатое кодирование неподвижных изображений. Основой стандар-
та является алгоритм адаптивного дискретного косинусного преобра-
зования (ADCT — Adaptive Discrete Cosine Transform), состоящий из
трех основных частей: базовой системы, ряда расширителей возмож-
ностей и статистического кодирования.
Базовая система обеспечивает совместимость различных вариан-
тов кодирования. В ней используется метод дискретного косинус-
ного преобразования ДКП 8x8, равномерное квантование и код
Хаффмена. Расширители возможностей могут применяться порознь
или в сочетаниях.
Упрощенная структурная схема видеокодека приведена на рис. 13.7,
она не требует дополнительного пояснения. На приемной стороне
(в декодере) производятся обратные преобразования. Алгоритм дос-
таточно сложный.
Для цветного изображения при использовании полного алгоритма в
зависимости от качества изображения обеспечиваются примерно следую-
щие затраты бит на растровый элемент (пиксел): 0,25—0,5 бит/РЭ —
высокое качество; 0,5—0,75 бит/РЭ — очень высокое качество; 0,75—
1,5 бит/РЭ — отличное качество для большинства применений.
Рис. 13.7
374
Кодирование изображения по алгоритму IPEG обычно начинается
с преобразования цветного пространства в сигнал яркости К и два цве-
торазностных сигнала U, И (К, СЬ, Сг). Хотя это и необязательно, од-
нако такой подход, как уже указывалось, позволяет повысить эффек-
тивность сжатия.
После преобразования цветового пространства обычно, но необя-
зательно, проводится прореживание (U, У) данных цветности. При
прореживании отбрасываются цветоразностные компоненты строк
или столбцов пикселов с определенными номерами (например, каж-
дой второй строки и каждого второго столбца).
Следующий этап процедуры сжатия заключается в преобразовании
небольших блоков изображения с помощью двумерного дискретного
косинусного преобразователя.
Заметим, что обычно при передаче телевизионного изображения
затрачивается 8 бит/РЭ. Таким образом, в соответствии со стандартом
IPEG обеспечивается сжатие неподвижных изображений примерно в
8—20 раз.
Сжатое кодирование подвижных изображений. В настоящее время
имеется два основных стандарта в области сжатого кодирования под-
вижных изображений: стандарт МСЭ-Т Н.261 используется в основ-
ном для задач видеоконференцсвязи и видеотелефонии с использова-
нием ЦСИО; стандарт MPEG (Moving Picture Experts Group) обладает
более широкими и универсальными возможностями.
Алгоритм сжатия по этому стандарту базируется на трех основных
операциях: компенсации движения на основе предсказания (АДИКМ)
между кадрами; дискретном косинусном преобразовании (ДКП) по-
грешности предсказания, полученной в результате первой операции
сжатия; статистическом кодировании.
В стандарте MPEG использованы некоторые рекомендации из
стандарта Н.261.
Чтобы обеспечить в изображении на приемной стороне плавность
движения объектов и сохранить при этом их четкость, передается ин-
формация о скорости и направлении движения. Такую информацию
называют вектором движения. При этом осуществляется кодирование
сигнала с компенсацией движения и использованием двух—четырех
последних кадров. Каждый кадр вначале делится на микроблоки, со-
стоящие из блоков по 16 х 16 элементов изображения по яркости и
двух соответствующих блоков по 8 х 8 элементов для двух компонен-
тов цветности. Блок 16 х 16 по яркости далее делится на четыре блока
8x8. Сигнал обрабатывается с применением двухмерного дискрет-
ного косинусного преобразования (ДКП), которое выполняется на
основе сравнения блоков 8x8 текущего кадра (64 коэффициента) и
соответствующих блоков предыдущего кадра плюс информация о дви-
жении (предсказанные блоки).
Оценка движения осуществляется сравнением текущего блока 16x16
элементов по яркости с предыдущим блоком (тем же блоком в пре-
375
дыдущем кадре). Сравнивается несколько таких блоков в определен-
ных местах кадра и выбирается пара блоков с минимальным общим
абсолютным изменением по отношению к предыдущему кадру. По-
ложение выбранного блока в кадре и называется вектором движения.
Дополнительное повышение эффективности получается кодировани-
ем коэффициентов ДКП статистическим кодом переменной длины
Хаффмена.
Основная идея ДКП [см. формулы (13.7), (13.8)] состоит в разло-
жении кодируемой реализации сигнала по косинусному ортогональ-
ному базису с последующим поэлементным квантованием получен-
ных коэффициентов. Энергетические спектры сигналов изображений
достаточно быстро убывают с возрастанием номера спектрального ко-
эффициента в базисе дискретного косинусного преобразования. Из-
вестно также, что искажение модулей коэффициентов преобразова-
ния сигнала для этого базиса до известных пределов мало сказывается
выход
Вход
Дополнительная
информация
Рис. 13.9
376
на качестве восстановления изображения. При этом часть коэффици-
ентов, дающих наименьший "вклад" в суммарную энергию сигнала, от-
брасывается. Экономия в полученном цифровом представлении сиг-
нала достигается главным образом за счет этого отбрасывания.
Как уже указывалось, использование ДКП объясняется еще и тем,
что оно для большого класса изображений хорошо аппроксимирует
оптимальное дискретное представление Корунена—Лоэва, имеет ал-
горитм быстрого преобразования, просто в реализации и обеспечивает
при этом существенное сжатие. Выходная информация ДКП пред-
ставляет собой матрицу коэффициентов, отражающих распределение
энергии в двумерной частотной области.
Коэффициенты ДКП сканируются по зигзагу, результирующая по-
следовательность содержит длинные цепочки нулей, при этом особенно
в концевой части последовательности. Одна из задач предложенного ал-
горитма — "собрать" все нули по возможности вместе, что облегчает
дальнейшую процедуру эффективного статистического кодирования.
После преобразования сигнал обрабатывается равномерным кванто-
ванием. Шаг квантования может регулироваться в соответствии со ско-
ростью передачи, характеризуемой степенью занятости буферного ЗУ.
Упрощенная структурная схема кодера и декодера MPEG приве-
дена на рис. 13.8, 13.9, где введены обозначения: ДКП — дискретный
косинусный преобразователь; ОДКП — обратный дискретный коси-
нусный преобразователь.
Считается весьма перспективным и частично используется в
MPEG векторное квантование(см. п. 2.2).
Выполнение стандарта MPEG гарантирует для различных форма-
тов видеоизображений высокое качество при следующих скоростях
передачи: видеотелефон (352 х 240 х 30 Гц) — 0,2—0,5 Мбит/с; ви-
деотелефон (720 х 486 х 30 Гц) — 0,5—1,0 Мбит/с; вещательное те-
левидение (960 х 486 х 30 Гц) — 6—10 Мбит/с. Следует отметить, что
обычно стандарты определяют процедуры сжатия (кодирования) и де-
кодирования, а не сами схемные и алгоритмические решения, этим
самым они дают возможность их совершенствования. Уже разработа-
ны и ведется дальнейшее совершенствование СБИС и высокоэффек-
тивных сигнальных процессоров для видеокодеков различного назна-
чения. В частности, разработаны более совершенные алгоритмы
сжатия телевизионных изображений по стандарту MPEG-2.
Основной рекомендацией по сжатию видеоизображений для орга-
низации видеоконференцсвязи являются Н.261 и Н.320.
Глава 14
ПОМЕХОУСТОЙЧИВОСТЬ И ЭФФЕКТИВНОСТЬ
РАЗЛИЧНЫХ СИСТЕМ ПЕРЕДАЧИ ДИСКРЕТНЫХ
И НЕПРЕРЫВНЫХ СООБЩЕНИЙ
14.1. КРИТЕРИИ СРАВНЕНИЯ И ОПТИМАЛЬНОСТИ СИСТЕМ ПЕРЕДАЧИ
При разработке и проектировании систем передачи, а также при
выборе имеющихся систем стремятся сделать (выбрать) систему в оп-
ределенном смысле оптимальной. Под оптимальной системой пони-
мают "наилучшую" в том или ином смысле систему. Очевидно, для того
чтобы из множества систем выбрать "наилучшую", необходимо иметь
критерий для количественного сравнения систем.
Критерий должен выражаться числом или совокупностью чисел,
зависящих от характеристик системы передачи. В то же время крите-
рий сравнения должен сам представлять собой наиболее важную ха-
рактеристику (характеристики) рассматриваемой системы, т. е. такую,
которая наиболее полно отражает назначение системы. Если крите-
рий выбран, то под оптимальной понимают систему, которая обеспе-
чивает экстремум (минимум или максимум) выбранного критерия.
Характерной чертой любой задачи определения оптимальной систе-
мы является наличие противоречивых факторов, по-разному влияющих
на выбранный критерий оптимальности.
Метод определения оптимальной системы и сама оптимальная
система зависят не 1олько от принятого критерия, но и от исходных
данных, характеризующих условия ее применения (например, харак-
теристики сообщений, сигналов и помех), от класса допустимых сис-
тем, из которых выбирается оптимальная система.
Назначение любой системы передачи — обеспечить передачу мак-
симального или заданного количества информации в отведенное вре-
мя, с требуемым качеством. Поэтому, естественно, в качестве крите-
рия сравнения и оптимальности систем передачи выбирают прежде
всего те или иные вероятностные показатели качества передачи сооб-
щений. В частности, в качестве критериев сравнения (и соответственно
оптимальности) передачи непрерывных сообщений могут использо-
г2
ваться: минимальная суммарная средняя квадратичная погрешность ох,
максимальное отношение сигнала к шуму на выходе, минимальная
вероятность аномальной ошибки Ран и некоторые другие.
378
Критериями сравнения и показателями качества передачи дис-
кретных сообщений могут быть: минимальная вероятность ошибки в
опознавании элементарного символа Рош; минимальная вероятность
ошибки в приеме кодового слова Ран{минимальная трансформация
команд и некоторые другие.
При этом одной из исходных величин при сравнении должна быть
скорость передачи информации, которая может выражаться числом
передаваемых двоичных единиц информации или независимых отсче-
тов сообщений в секунду.
Следует отметить, что рассмотренные критерии являются в неко-
тором смысле частными, так как в общем случае требуемая верность
передачи может быть достигнута различными средствами: при различ-
ных энергетических затратах, при различных затратах полосы частот.
В разных ситуациях может назначаться различная цена на полосу час-
тот и мощность сигнала. Так, в частности, в наземных линиях связи
весьма высокой может быть цена на полосу частот, в космических ра-
диолиниях — на мощность сигнала, а занимаемая полоса частот может
в некоторых случаях не лимитироваться.
В последнее время в качестве критериев сравнения и оптимально-
сти систем используются энергетические и информационные крите-
рии, а также критерий занимаемой полосы частот.
Обобщенным энергетическим критерием оптимальности (помехо-
устойчивости) различных систем передачи является минимум порого-
вого отношения энергии сигнала Е к спектральной плотности мощно-
сти 7V0 помехи, при котором в заданных условиях еще обеспечивается
требуемое качество передачи, т. е.
“nop = (Wo)nop =/l(SH) = min; rfnop = Ран ^/2(5l) = min- (14.1)
где 6y, бн, Р„.„, Р.и — показатели качества передачи.
а»’ п’ ОШ ип *
Из определения предлагаемого критерия помехоустойчивости сле-
дует, что он является более общим и включает в себя частные показа-
тели (критерии) помехоустойчивости: 5Н и Ран, 5£, (Рс/Ли)вых или Л>ш-
Следует отметить, что оценка различных систем передачи в соот-
ветствии с этим критерием требует рассмотрения работы систем в по-
роговых режимах, т. е в условиях воздействия сильных помех с учетом
нелинейных явлений, сопровождающих этот режим.
Для оценки энергетической эффективности метода передачи и
приема может также использоваться р-эффективность
Р2 = PC/(NOR) = PCT/(NORT) = a2/Zp, (14.2)
2
где р — эффективность, показывающая какое отношение удельной энергии к
шуму затрачивается на передачу одной двоичной единицы информации (чем
меньше, тем лучше); R — скорость передачи информации, двоичные единицы/с;
/р — количество переданной информации в двоичных единицах за время Г; Рс —
мощность сигнала.
379
Оценивать системы по занимаемой полосе частот (показателю за-
нимаемой полосы частот) целесообразно так. Во-первых, по числу
степеней свободы сигнала-переносчика, приходящемуся на один от-
счет сообщения, равному отношению эффективной ширины спектра
сигнала-переносчика &f3C к удвоенной ширине спектра сообщения
AFX в предположении, что система работает в пороговом режиме, т. е.
Л/= Д/эсЛгдГэс) = Д/эс7’= min. (14.3)
Во-вторых, по величине aj-эффективности (удельного расхода полосы
частот), показывающей, какая полоса частот или число степеней свободы
М расходуются на передачу одной двоичной единицы информации:
<х/= Д/эс/Л = Д/ЭС77(ЛП = М/1р. (14.4)
В качестве обобщенного информационного критерия системы пе-
редачи информации как с точки зрения использования мощности
(энергии) сигнала, так и полосы частот может также использоваться
информационный КПД, определяющий эффективность системы пе-
редачи информации:
П = Л/Спр = RT/( Спр Т) = 1р/1пр, (14.5)
где Спр, Znp — соответственно предельная скорость и количество информации
(пропускная способность) в шенноновском канале.
Информативный КПД (^-эффективность) дает в некотором смыс-
ле обобщенную оценку эффективности системы передачи информа-
ции с точки зрения использования как мощности полезного сигнала,
так и полосы частот, занимаемой им.
Следует отметить, что нет и, очевидно, не может быть единого и
всеобъемлющего критерия оптимальности так же, как нет и, очевидно,
не может быть единой и всеобъемлющей методики синтеза оптималь-
ной системы. Поэтому различные методы передачи можно сравнить по
одному из рассмотренных критериев, при некоторых фиксированных
исходных данных, зависящих от условия использования.
14.2. СРАВНЕНИЕ РАЗЛИЧНЫХ МЕТОДОВ ПЕРЕДАЧИ
ДИСКРЕТНЫХ СИГНАЛОВ
В качестве обобщенного критерия помехоустойчивости систем
ПДИ, работающих в условиях воздействия аддитивного белого гаус-
совского шума, будем применять показатель удельного расхода энер-
гии сигнала для передачи двоичной единицы информации при обес-
380
печении заданной достоверности, например Рош (энергетическая, или
P-эффективность). В соответствии с формулой (14.2)
2 Л. ^стс
(14.6)
По значению удельного расхода полосы частот на одну двоичную
единицу или по частотной эффективности (су-эффективности), пока-
зывающей полосу частот или число степеней свободы сигнала-пере-
носчика, требуемые для передачи двоичной единицы информации. В
соответствии с формулой (14.4)
а = ЛЛс = Л4стс = М1 =
f R Лтс /| log2a'
(14.7)
При сравнении различных систем ПДИ по критериям р2 и су оп-
ределяют значения удельного расхода полосы частот суй вероятность
ошибки при передаче одной двоичной единицы полезной информа-
ции Рдв (или Рош) как функции удельного расхода энергии р2 и осно-
вания кода а.
Эквивалентная вероятность ошибки на одну двоичную единицу Рдв
для симметричного однородного канала при кодировании без избы-
точности с использованием кода с основанием а связана с вероятно-
стью ошибки в принимаемом элементарном символе Рош соотноше-
нием Р^в /’oul/log2G-
Сравнение СПД по помехоустойчивости. Для наглядности и удоб-
ства сравнения различных методов передачи и приема дискретных
сигналов по помехоустойчивости в табл. 7.2 и на рис. 14.1, 14.2 и 7.8
приведены соответственно аналитические и графические зависимости
Рош =/(«]) и Рош = /(р) для некоторых наиболее широко используе-
мых видов и моделей сигналов и оптимальных методов приема.
Анализ приведенных формул и графиков показывает следующее.
Из простых двоичных кодированных сигналов наиболее высокой по-
мехоустойчивостью обладают сигналы с ФМ. Помехоустойчивость
ортогональных сигналов возрастает с увеличением основания кода и
максимальна при равенстве требуемого числа кодовых комбинаций
(числа команд) основанию кода, т. е. Nk — а.
Некогерентный прием рассматриваемых сигналов сравнительно не-
значительно уступает по помехоустойчивости когерентному приему.
При достаточно больших индексах соответствующей модуляции ко-
лебаний несущей частоты помехоустойчивость сигналов-переносчиков
с дополнительной поднесущей частотой колебаний типа ФМ-ФМ,
ФМ-ЧМ, ЧМ-ФМ, ЧМ-ЧМ аналогична помехоустойчивости ЧМ-сиг-
381
налов. При малых индексах модуляции тчм и /Пфм указанные системы
проигрывают системам с простой ЧМ.
Сравнение систем по занимаемой полосе частот. Эффективная ши-
рина спектра дискретных видеосигналов зависит от формы символов,
порядка их чередования и в общем случае определяется соотношени-
ем Д/эв = v/tc. Для различных форм символов v = 0,5-? 1,5.
Ширина спектра дискретных радиосигналов или сигналов тональ-
ной частоты зависит от вида вторичной манипуляции.
При амплитудной манипуляции (AM-сигналы) наибольшую шири-
ну спектра имеет последовательность чередующихся символов 0 и 1.
При прямоугольной огибающей почти 90 % всей мощности сигнала
заключено в полосе &/эв = 1/тс, охватывающей колебания несущей
частоты и боковые частоты, создаваемые первой гармоникой частотой
манипуляции/^, = 1/(2тс). Считают, что применением некоторых ме-
тодов растягивания фронтов символов удается обеспечить качествен-
ный прием при ширине спектра » 1/тс.
Рис. 14.1
382
Эффективная ширина спектра Рош
ЧМ-сигналов зависит от метода е
манипуляции: с разрывом и без
разрыва фазы. 2
Более узкую полосу частот име- Ю'г
ют ЧМ-сигналы без разрыва фазы, в
которые и наиболее широко при- *
меняют. Если ширину спектра та- г
ких ЧМ-сигналов определять как t0-s
для аналоговых ЧМ-сигналов, то в
ч
« 2дЛХтчмп + 1) “ 7 ('"чмп + г
F F с
где '"чмп = ту = г = 2/дп*с - пи- 6
лгв гс Ч
ковый индекс частотной манипуля-
ции, здесь Fan = — максималь- W *
ная пиковая девиация частоты.
Для ортогональных ЧМ-сигна- рис
лов обычно принимают > 1,
для оптимальных — тчмп « 0,7, для сигналов с минимальной ЧМ
/пЧМп ~ °,5- На практике удовлетворительная с точки зрения помехо-
устойчивости эффективная полоса частот ЧМ-сигналов получается
при расчете по формуле Д/*. ® 2/пчмп/тс.
При использовании ортогональных ЧМ-сигналов с а > 2 эффек-
тивная полоса частот /\/эс = а/хс. Эффективную ширину спектра при
использовании многоосновных ФМ- и ОФМ-сигналов определяют
обычно как и при AM на уровне пропускания первых гармоник наи-
высшей частоты манипуляции, т. е. Д^с ~ 1/тс-
Из этих зависимостей видно, что наиболее узкую полосу частот за-
нимают сигналы с фазовой и относительной фазовой манипуляцией,
причем расход полосы частот на одну двоичную единицу информации
в таких системах уменьшается с увеличением основания кода. Наиболее
широкую полосу частот занимают ортогональные сигналы типа ЧМ с
а > 2, а также сигналы с дополнительной поднесущей частотой. Полоса
частот ЧМ-сигналов возрастает с увеличением основания кода а.
Сравнение систем по энергетической р2 и частотной суэффективно-
2
стям и условиям обмена между ними. Между энергетической р и час-
тотной оу эффективностями на основании выражений (14.6) и (14.7)
можно получить следующую зависимость:
р2 = Pcaf/NQ\fx, (14.8)
где Рс — мощность сигнала.
383
Очевидно, система передачи тем лучше, чем меньше показатели р2
и су при заданной достоверности передачи, характеризуемой Рош или
Рдв. В цифровых системах передачи возможен обмен энергии сигнала
2
на занимаемую полосу частот (параметр р обменивать на параметр су)
и наоборот. Рассмотрим условия такого обмена.
Минимальное значение параметра р2 получается в "идеальной” по
Шеннону системе передачи, пропускная способность которой, бит/с,
(при этом Рош -> 0)
С-Л/“'Ч, + Л&)
и соответственно
Р2 = [log/l + Г'. (14.9)
А()С No^f-X [ I N0^fx).
Тогда на основании формулы (14.9) с учетом выражения (14.7) получим
р2 = су(2 Z-l). (14.10)
На рис. 14.1 приведены зависимости р2 = /(су) при передаче раз-
личных дискретных сигналов (Рдв = 10~3): по "идеальной” по Шенно-
ну системе (кривая 7); с использованием модуляции ФМа (кривая 2),
ЧМсрт, когерентный прием (кривая 5), ЧМорт, некогерентный прием
(кривая 4), 0ФМа-1 (точка 5), AM (кривая 6), ЧМ, прием реальный
на СЧД (точка 7), ЧМ/ФМ (кривая 8), МЧМ (кривая 9). Кривая 1
рассчитана по формуле (13.7). Эта кривая и выражение (13.7) харак-
теризуют условия наилучшего предельного эквивалентного обмена
2
между р и су.
В реальных системах передачи вероятность ошибки имеет всегда
конечное значение. Для этих систем, задаваясь Рош или Рдв, можно от-
2 2
дельно определить р и суи построить зависимости р = В ча-
стности, при оптимальном некогерентном приеме а ортогональных
сигналов с ЧМ на основании выражения для Рош, приведенного в
табл. 7.2,
где а2 = E\/Nq — отношение энергии одного символа к No, а — основание кода.
384
Откуда
в2 =-2_ in Г <а- '> 1.
Iog2a L21og2a?aBJ
При а = 2 и Рда = 10~3 получим р2 = 12,4. Соответственно для этого
случая ау= 2,0. Полученные значения для р и ау отмечены на кривой 4
(см. рис. 14.1).
Аналогично полученные зависимости р = /(ay) для других методов
передачи и приема также приведены на рис. 14.1 в виде соответствую-
щих точек, соединенных линиями. Расчеты выполнены для Рю = 10~3.
Цифры у кривых означают основание кода а.
Сравнение приведенных на рис. 14.1 зависимостей позволяет раз-
бить рассмотренные методы передачи на две группы. К первой группе
можно отнести системы: АМа, ОФМа, ФМа. Сигналы этих систем име-
ют хорошие показатели по занимаемой полосе частот, причем наилуч-
шей из них в энергетическом отношении является система ФМа. Для
такой системы может оказаться целесообразным использование кодов
с основанием а = 4—16. Дальнейшее увеличение основания приводит
к резкому возрастанию расхода энергии на передачу двоичной едини-
цы информации. Подобные значения а рекомендуется МККТТ.
Вторую группу составляют системы с ортогональными сигналами, на-
пример, типа ЧМа, КФИМа-АМ. Из кривых, приведенных на рис. 14.1,
видно, что увеличение основания кода а этой группы сигналов более
16—32 также нецелесообразно, так как дает незначительный выигрыш
2
в параметре р и резкий проигрыш в параметре ay.
Наибольший практический интерес представляет использование
сигналов типов ФМа?4Ма- При этом следует иметь в виду, что приме-
нение биортогональных сигналов может дать некоторый дополни-
тельный выигрыш в параметре р или ay.
Сделаем некоторые замечания по фазовой манипуляции. Обычно
считают, что применение синхронного детектора и интегральной обра-
ботки видеосигнала позволяет достаточно точно реализовать потенци-
альную помехоустойчивость ФМ-сигнала. Однако при этом не учиты-
вают два важных фактора: во-первых, интегральный способ обработки
является оптимальным только для прямоугольных символов и белых
аддитивных шумов.
В реальных системах всегда происходит искажение символов
вследствие переходных процессов, во-вторых, наличие шума в опор-
ном канале ухудшает когерентную демодуляцию и вызывает дополни-
тельные ошибки.
Экспериментальные исследования показывают, что если полоса
пропускания додетекторного тракта Д/,р = = 1/тс (что соответст-
1 3 Зак I 'S
385
вует оу= 1), то энергетические потери по сравнению с идеальной ФМ2
составляют примерно 1,6 дБ. Соответственно при Д/Пр = 1,5/тс энер-
гетический проигрыш равен 0,9 дБ, а при Д7^р = 2/тс (ау= 2 как при
ЧМ2) энергетические потери незначительны (около 0,6 дБ).
В последнее время значительный интерес проявляют к сигналам
многофазной манипуляции ФМа (а > 4) и минимальной частотной
манипуляции (МЧМ). Как видно из приведенных расчетных выраже-
ний (см. табл. 6.3), вероятность Рош при многофазной ФМ с а > 4 дос-
таточно сильно увеличивается, однако такая система занимает более
узкую полосу частот.
При обработке двух соседних символов сигналов МЧМ и Д/, тс » 0,5
вероятность ошибки Рош в такой системе такая же, как и при коге-
рентной двоичной ФМ. При одновременной обработке трех символов
обеспечивается повышение помехоустойчивости по сравнению с ФМ
на 0,9 дБ. При этом система МЧМ занимает примерно такую же по-
лосу, как и ФМ.
Помехоустойчивость систем с корректирующими кодами. Примене-
ние корректирующих кодов позволяет повысить верность (достовер-
ность) передачи, либо при заданной верности энергетическую эффек-
тивность системы. Корректирующие коды могут использоваться как
для исправления, так и для обнаружения ошибок в кодовом слове.
При передаче непрерывных сообщений цифровыми методами дос-
таточно широко используются для обработки аномально-искаженных
отсчетов (координат) с последующим восстановлением отбракованных
координат (например, интерполяцией). Указанные методы приближа-
ются по эффективности к нелинейным методам обработки сигналов
с аномально засоренными координатами [25].
Можно показать, что вероятности обнаруженной ошибки и соот-
ветственно неисправленной ошибки при поэлементном приеме кодо-
вого слова для плотноупакованных блочных кодов при условии неза-
висимости элементарных символов будут:
^но=1- ЕС'Р'ш(1-Рош)я-'« сГ’р^1; (14.11)
/ = 0
Рни=1-1- ХС>'ш(1-Рош)я-'« С+„' Р^, (14.12)
/ = о
где Рош — вероятность ошибки в одном разряде слова, постоянная для всех
разрядов; t, и эе — гарантированное число соответственно обнаруженных и ис-
правленных ошибок.
Последние приближения имеют место при пРои1 <0,1.
Результаты расчетов показывают, что выигрыш по энергетической
эффективности повышается с увеличением длины кода п и ростом
386
требований к верности передачи Рош. В частности, при скорости пе-
редачи R = к/п а 0,74-0,8 и длине кода п — 1274-255 энергетический вы-
игрыш может достигать 2 4-3 дБ (см. рис. 7.10).
При использовании сверточных кодов энергетический выигрыш
при близких к блочным кодам параметрах может достигать 6—7 дБ
(см. рис. 7.11). Естественно, частотная эффективность при использо-
вании корректирующих кодов снижается. Более подробные и точные
данные можно найти в работе [3].
Весьма перспективным считается использование сигнально-кодо-
вых конструкций. Как уже указывалось, модемы и кодек, рассчитан-
ные для гауссовского канала, могут оказаться мало эффективными
для канала с искажениями и негауссовскими помехами. Поэтому важ-
нейшей задачей является согласование модема и кодека с параметра-
ми непрерывного канала (см. п. 7.5).
Дальнейшее повышение эффективности различных систем пере-
дачи связаны с эффективным энтропийным кодированием источника
(данных, рассмотренных в главах 4 и 13).
14.3. ПОМЕХОУСТОЙЧИВОСТЬ И ЭФФЕКТИВНОСТЬ ЦИФРОВЫХ
СИСТЕМ ПЕРЕДАЧИ НЕПРЕРЫВНЫХ СООБЩЕНИЙ С ИКМ И ДИКМ
Общие сведения о современных цифровых системах передачи. Раз-
витие цифровой техники сделало возможным цифровую передачу раз-
личных сообщений (речи, видео, факса, данных и др.), их интеграцию
и коммутацию, а также построение цифровых сетей.
Основой построения цифровых систем передачи на первом этапе
явилась импульсно-кодовая модуляция (ИКМ). При ИКМ непрерыв-
ное сообщение преобразуется в цифровую форму. В качестве стандар-
та преобразования речи принята дискретизация с частотой = 8 кГц
и квантование по уровню на 256 уровней (8 двоичных разрядов на от-
счет). Система с ИКМ является системой с временном разделением
каналов со скоростью передачи 64 кбит/с. Восьмиразрядные слова от
каждого канала передаются поочередно (см. табл. 13.3). Число кана-
лов составляет 32.
Передача в системе ИКМ по магистральным линиям ведется при
помощи двоичного кода, который не допускает появление постоян-
ной составляющей в спектре последовательности. Для устойчивой ра-
боты систем с ИКМ используется синхронизация трех типов: тактовая
(символьная), словная (по словам) и кадровая. Для создания систем
с большим числом каналов используются вторичная, третичная груп-
пы и т. д. Таким образом, создается иерархическая система передачи
с коэффициентом, равным четырем.
Одним из эффективных решений проблемы использования суще-
ствующих кабельных линий на железнодорожном транспорте для вы-
сокоскоростной передачи является использование технологии HDSL
13
387
(High-bitrate digital sabscriber loop) — высокоскоростная передача дан-
ных по абонентским линиям. Аппаратура HDSL выпускается в двух
модификациях: на скорость цифрового потока 2,048 Мбит/с и диапа-
зон скоростей от 48 до 2,048 кбит/с.
Аппаратура HDSL используется для высокоскоростных каналов
передачи данных, соединительных линий АТС, для уплотнения або-
нентских линий и совместно с мультиплексорами для интегрирования
данных и речи с одновременным ее сжатием. Аппаратура HDSL под-
ключается к цифровым входам/выходам (например, АТС) через стан-
дартный интерфейс G.703.
Использование волоконно-оптических линий связи (ВОЛС) по-
зволяет реализовать новые принципы построения цифровых систем
передачи (ЦСП), которые воплощены в аппаратуре синхронной циф-
ровой иерархии (CUH)(SDH-Synchronous digital hierarchy). Системы
СЦИ являются следующим поколением ЦСП после плезиохронной
цифровой иерархии (ПЦИ) — Plesiochronous digital hierarchy (PDH).
ПЦИ имеет ряд недостатков, один из основных — отсутствие средств
сетевого автоматизированного контроля и управления, без которых
невозможно создать надежную сеть связи. К ПЦИ относятся и систе-
мы с ИКМ.
Зарубежными фирмами выпускается оборудование СЦИ на следую-
щие скорости передачи: 155 Мбит/с (STM-1), 622 Мбит/с (STM-4),
2488 Мбит/с (STM-16).
Задача любой сети, а том числе и цифровой, — обеспечение одно-
временных соединений между рядом различных терминалов. В соот-
ветствии с технологией построения наиболее широко используются
цифровые сети интегрального обслуживания ЦСИО (ISDN — Inte-
grated services digital network).
Одна из основных причин создания ЦСИО (ISDN-Integrated serv-
ices digital network) — необходимое расширение сферы информацион-
ных и других услуг как по объему, скорости передачи, так и сервису,
обеспечение связи методом коммутации каналов (КК) и методом ком-
мутации пакетов (КП) или гибридным методом и некоторые другие
принципы.
Таким образом, в ЦСИО на основе единых принципов построения
и функционирования с использованием ограниченного числа много-
функциональных интерфейсов "пользователь—сеть" интегрируется не
только коммутационное и передающее оборудование, как в инте-
гральной цифровой сети связи ИЦСС, но и различные виды переда-
ваемой информации (речь, данные, видео и др.), методы коммутации
каналов КК и пакетов КП, различные виды обслуживания (сокращен-
ный вызов, обратный вызов, переадресация вызова и др.).
Одними из главных элементов оборудования являются цифровые
кроссовые коммутаторы и различные мультиплексоры. Оконечные
мультиплексоры служат для преобразования входящего компанентно-
го потока в одиночную линейную скорость. В большинстве случаев
388
оконечные мультиплексоры могут иметь низкоскоростной кодек ре-
чи, например по рекомендации МККТТ G.729, что позволяет непо-
средственно подключать телефонные аппараты и телефонные линии
(см. табл. 13.3).
Следует отметить, что почти во всех современных цифровых сис-
темах передачи (мобильных сотовых, транкинговых, спутниковых)
широко используется сжатие различных сообщений (речевых, видео и
т. п.), принципы сжатия различных сообщений достаточно подробно
рассмотрены в главе 13. Современные высокоэффективные методы
сжатия являются гибридными (одновременно используется несколько
методов).
Однако практически во всех низкоскоростных кодеках речи и ви-
деоизображений в качестве одного из основных методов сжатия при-
меняется адаптивная дифференциальная импульсно-кодовая модуля-
ция (АДИКМ).
Уделим основное внимание рассмотрению цифровых систем пере-
дачи с ИКМ и ДИКМ при использовании оптимальных приемных
устройств элементарных дискретных сигналов разомкнутого типа с
простой обработкой без избыточных кодов, когда сначала восстанав-
ливаются выборки измерительного сообщения, а непрерывный про-
цесс восстанавливается интерполирующими устройствами.
При передаче непрерывных сообщений по цифровым системам с
ИКМ и ДИКМ следует выделить следующие основные виды (состав-
ляющие) погрешностей: временндй дискретизации (интерполяции),
квантования и аномальные. Возникновение указанных погрешностей
связано с основными преобразованиями непрерывных сообщений в
цифровых системах передачи: дискретизацией по времени, квантова-
нием по уровню, кодированием и передачей.
Вопросы оценки погрешностей временндй дискретизации (интер-
поляции) рассматривались в п. 2.13. Здесь будут рассмотрены вопросы
оценки погрешностей квантования и аномальных погрешностей в
цифровых системах передачи с ИКМ и ДИКМ.
Оценка погрешностей квантования в системах передачи с ИКМ. По-
грешности квантования являются специфическими неустранимыми
погрешностями цифровых систем передачи. Они возникают вследст-
вие замены истинного значения сообщения X [или координат сооб-
щения Х(/к)[ разрешенным квантованным уровнем Х-. Погрешность
квантования каждой выборки — случайная величина и в общем случае
ее плотность распределения вероятностей зависит от распределения
вероятностей сообщения, способа разбивки шкалы и способа отожде-
ствления истинного значения с квантованным уровнем. Известно, что
если априорное распределение передаваемого сообщения X [или вы-
борки сообщения Х(ГК)] равномерно н>(Х) = 1/Л, то оптимальным по
389
критерию минимума средней квадратичной погрешности квантова-
ния является равномерное квантование с шагом [1.2]
л ___ ^max ^min — Л
кв £„-1 £кв-1’
где — число уровней квантования; £кв — 1 — число интервалов (шагов)
квантования; Л — шкала сообщения: Л = Xmax - Xmin.
Число уровней квантования
£кв = "*>
где а — основание кода; к — число разрядов кода.
Погрешности квантования при малом шаге квантования прибли-
женно характеризуются:
равномерной плотностью распределения вероятностей погрешно-
сти квантования
Г -Ь., при -Д /2 < е < +Д /2
m’(skb) = ;
^0 — вне этого интервала
нулевым математическим ожиданием
ДКВ/2
'"кв = J Екви'(Екв)<1екв = °;
-Лк./2
дисперсией
Акв _ Л2 а Л2
12 12U-KB-')2 12А2в‘
Соответственно приведенная к дисперсии гауссовского сообщения
к Л /36 дисперсия погрешности квантования
2
2 = °кв
'кв 2
36 ~ _3_
пгг ,,2 2к ‘
12(2.^ 1) а
(14.13)
Для гауссовского закона распределения сообщения принималось,
что шкала сообщения Л » 6ох; где о2 — дисперсия сообщения Х(0-
Оценка погрешности квантования при ДИКМ. При разностном
представлении обычно сначала квантуются выборки, затем образуют-
ся конечные разности (см. п. 2.15). Поскольку они получены из вы-
390
борок, шаг квантования их значений Дкв можно принять таким же, как
и для выборок. Однако диапазон значений конечных разностей (шка-
ла) Лр будет меньше. При гауссовском законе распределения процесса
Х(0 такой же закон распределения будет и у конечных разностей, по-
этому их шкалу можно принять Лр » 6орЛ^ [где орЛг — среднее квад-
ратичное отклонение разности Д^Ц^)] (см. табл. 13.2), В остальном
методика оценки погрешности квантования аналогична соответст-
вующей методике для дискретизации выборками. Учитывая сказанное
и заменяя Л на Лр вместо выражения (14.13) получим
8
2
КВ
Лкв
„ 2
12с3
(14.14)
где 8^ = — приведенная дисперсия конечной разности Д/УХ(/К) по-
рядка N (см. табл. 13.2); кр — число разрядов кода, используемого для пред-
ставления конечных разностей.
Заметим, что при ДИКМ обычно берется а = 2.
Из сопоставления выражений (14.13) и (14.14) для приведенных дис-
персий погрешности квантования при ИКМ и ДИКМ видно, что при
одинаковом числе уровней квантования (LKB или к) дисперсия погреш-
ности квантования при ДИКМ в §2pN раз меньше, чем при ИКМ.
Оценка аномальных погрешностей при ИКМ. Под действием помех
в канале передаваемые дискретные сигналы искажаются, в результате
чего вместо одного значения кодового слова (выборки сообщения)
фиксируется другое, т. е. возникают аномальные погрешности. Эти
погрешности в цифровых системах передачи с ИКМ могут принимать
лишь дискретные значения еан = РанЛкв = (^кв — ^кв)дкв 1где Ран —
значение аномальной погрешности, выраженной числом шагов кван-
тования и принимающей значения (LKB — 1) < Ран < +(^кв — В1- Ука-
занные погрешности характеризуют достоверность передачи сообще-
ний. В качестве критерия достоверности целесообразно использовать
или вероятность появления аномальной погрешности при передаче
одного отсчета (координаты) сообщения Ран или приведенную дис-
2
Персию аномальной погрешности 5ан .
Оценка вероятности аномальных погрешностей Раи при ИКМ. В об-
щем случае в кодовой комбинации, состоящей из fc-символов, может
быть искажено от одного до всех fc-символов. Вполне очевидно, что
вероятность аномальной погрешности Ран (вероятность того, что ко-
довая комбинация будет принята хотя бы с одной ошибкой) зависит
и от вероятности искажения элементарного символа Рош, которые мо-
391
гут быть разными, и закономерности распределения ошибок, харак-
терной для того или иного канала передачи.
Рассмотрим канал передачи, в котором ошибки при приеме эле-
ментарных символов в кодовой группе с простым кодированием мож-
но считать независимыми, а вероятность искажения каждого из раз-
рядов кодовой комбинации одинаковой и постоянной. Для этого
случая вероятность того, что среди кодовой комбинации длиной в к
символов встретится ровно / ошибочных, может быть определена на
основании формулы Бернулли:
Л>ш = Л(1)= <4 7^(1
В этой формуле с\ — число сочетаний из к по 1 (1 — кратность
ожидаемой ошибки):
С} =«/(!!(*- I)!].
Напомним, что вероятность ошибки в одном разряде слова Рош за-
висит от метода передачи (основания кода, метода манипуляции и ко-
эффициента взаимной корреляции между сигналами), метода приема,
вида помехи и отношения сигнал-помеха на входе приемника.
В общем случае вероятность появления аномальной ошибки в
приеме кодового слова (вероятность того, что кодовая комбинация бу-
дет принята хотя бы с одной ошибкой)
к к
= Е Л>ш(1) = Е с{ Р^{\ - Рош)к~ '. (14.15)
7-1 7=1
При АРОШ 1 вероятность PaH(J) быстро уменьшается с ростом /
и подавляющую долю ошибок составляют одиночные ошибки. В этом
случае сумма (14.15) хорошо аппроксимируется первым членом:
Л>,< « QPOU1 = (1 - Рош)* " 1 « 1 - (1 - Рош)* - АРОШ.
Из полученного выражения видно, что Рш зависит от качества ка-
нала передачи, характеризуемого Рош, и длины кодового слова к.
Оценка дисперсии аномальной погрешности. При использовании
простых кодов дисперсия аномальной погрешности может быть най-
дена на основании общего правила определения дисперсии случай-
ных величин.
В общем случае при использовании многоосновного кода вследст-
вие действия помех может произойти ошибка в любом разряде. Учи-
тывая, что любое число при многоосновном коде можно записать в
виде суммы, аномальную ошибку, выраженную числом шагов кван-
392
тования при равномерном распределении сообщения, можно предста-
вить в виде
*-1
Ран = = ^0а° + Si"' + + • + 1°* ’“Дев- £кв-
1 = 0
где LKB — переданный уровень квантования; LKB — принятый уровень кван-
тования.
В этой формуле а — основание кода, £,• — разрядная цифра, которая
представляет собой случайную величину, принимающую одно из сле-
дующих значений: если символ принят верно, то = 0, если допущена
ошибка, то 5,- может принимать значения от ±1 до +(а — 1).
Знак + берется, когда разрядная цифра переходит с большего зна-
чения в меньшее.
Считая ошибки в разрядах независимыми и учитывая, что диспер-
сия суммы случайных величин равна сумме дисперсий отдельных со-
ставляющих, выражение для дисперсии аномальной ошибки, выра-
женной числом шагов квантования, будет иметь вид:
*-1 к-1
Л(Ран)= = £(я')2й(а (14.16)
1 = 0 i = 0
где £>(£,) — дисперсия случайной величины одинаковая для всех разрядов.
Если число разрядных цифр (0, 1, 2, 3, 4, ..., л — 1) в среднем во
всех кодовых словах можно приближенно считать одинаковым и все
кодовые слова предполагаются при передаче равновероятными, то
распределение ошибок в симметричном канале оказывается близким
и симметричным и средняя ошибка будет равна нулю. Дисперсия слу-
чайной величины £ определяется зависимостью
а- 1
Пф= £^М), (14.17)
5 = 0
где ш(£) = Р(£,) — вероятность трансформации одних элементарных сигналов
в другие Pv.
Если все уровни передаваемого сообщения равновероятны и все
элементарные символы передаются с одинаковой помехоустойчиво-
стью, то [см. формулу (6.17)]
ЛО = РошКа - О- (1418)
Подставляя выражения (14.17) и (14.18) в формулу (14.16), получим
Л(Ран)=^ Е(«')2Е^
|=о 5=0
393
Учитывая, что сумма возрастающей геометрической прогрессии со
2
знаменателем а
;=о а -1
а сумма конечного числового ряда
о- 1
Ze2 — а{а- 1)(2а- 1)
6
5 = 0
окончательно имеем
«(Ран) = ^Д-12)(а-*-1) Рош. (14.19)
6(а- 1)
Дисперсия аномальной ошибки, выраженная в единицах переда-
ваемого сообщения,
стан = Дкв «(Ран) “ 4 «(Ран) = 4 «(Ран) = * Т (»4.20)
Дисперсия погрешности, приведенная к дисперсии гауссовского
сообщения,
2
•2 - аан — 6(2д- 1 )а n — IЭ р
ан 2 2 'ош ~
ах а-1
(14.21)
При а —2 второе приближение будет точным. Из полученного при-
ближенного выражения видно, что дисперсия аномальной погрешно-
сти зависит лишь от вероятности ошибки в элементарном символе
Рош- Строго говоря, выражения (14.20) и (14.21) получены для равно-
мерного распределения сообщения. Однако можно показать, что при
достаточно высоких требованиях к точности передачи закон распре-
деления и'(Х) несущественно влияет на 5ан.
Оценка аномальных погрешностей при ДИКМ. Строгий расчет ано-
мальных погрешностей в цифровых системах передачи с ДИКМ с уче-
том размножения и накопления аномальных погрешностей весьма
сложный. Здесь будет дана лишь приближенная оценка Ранр и 5анр в
системах с ДИКМ без учета размножения аномальных погрешностей.
Напомним, что процесс накопления и размножения аномальных по-
грешностей в системах передачи с ДИКМ состоит в том, что ошибоч-
ный прием одной кодовой комбинации ведет к искажению не только
394
данного отсчета (координаты) сообщения, но и ряда последующих от-
счетов, поскольку предсказанные значения очередного отсчета на пе-
редающей и приемной сторонах будут отличаться. Существуют раз-
личные способы уменьшения влияния этого эффекта.
2
При указанном допущении для расчета Ранр и 5анр может быть ис-
пользована изложенная методика расчета при ИКМ с учетом того, что
динамический диапазон изменения конечных разностей Лр и число
разрядов в кодовой комбинации Лр будут менее соответствующих зна-
чений при ИКМ. Тогда в соответствии с выражениями, приведенными
выше, будем иметь:
/’анр “ *РЛ>Ш; (14.22)
5а2нр « и/’ошЗрУ- (14.23)
Из сопоставления выражений (14.15) и (14.22), (14.21) и (14.23)
видно, что при одинаковом качестве канала передачи, определяемом
2
Рош в системе с ДИКМ обеспечивается в 5рЛГ раз меньшее значение
2
приведенной дисперсии аномальной погрешности 5анр и в кр/к раз
меньшее значение Ран, чем в системе передачи с ИКМ.
Оценка суммарной погрешности. Явление порога и оптимизация па-
раметров ЦСП с ИКМ. Учитывая, что погрешности интерполяции,
квантования по уровню и аномальные (от помех в канале) в системах
с ИКМ можно считать приближенно независимыми, выражение д ля при-
веденной дисперсии суммарной (результирующей) погрешности в рас-
сматриваемых цифровых системах передачи можно представить в виде:
si «8^ + Уф(8^в + 5а2„),
где 52н — приведенная дисперсия интерполяционной погрешности; уф — ко-
эффициент фильтрации интерполирующего устройства по отношению к шу-
мам квантования и канала, Уф ~ 1 -
При передаче случайных величин или, когда интерполяционную
погрешность можно не учитывать,
si = st + »t •
Рассмотрим этот случай несколько подробнее. При передаче слу-
чайных величин с гауссовским законом распределения с помощью
ИКМ на основании выражений (14.13) и (14.21) приведенная диспер-
сия суммарной погрешности
si = st + st « А + 12РОШ. (14.24)
395
Развернем это выражение для конкретного случая. В частности,
при оптимальном некогерентном приеме многоосновных ортогональ-
ных сигналов (например, вида ИКМа-ЧМ) развернутое выражение
для приведенной дисперсии суммарной погрешности
5^ « + 6(« - l)exp(-SL) = + 6(« - l)exp(-^} . (14.25)
В формуле (14.25) вероятность ошибки в опознании элементарного
символа Рош при заданных сигналах и методе приема определялась по
формуле (7.27):
/ 2\ 2 2
Л>ш = ехР = ехр9ь) = ехр(-57й) ’ (,4-26)
где а2 — отношение энергии сигнала (£= £|Л), отводимой для передачи ко-
дового слова (одного отсчета сообщения) к спектральной плотности мощно-
сти шума No; М — число степеней свободы сигнала-переносчика, приходя-
щихся на одно кодовое слово (один отсчет сообщения).
В этой формуле
2 2 ,
а = ot| к;
М — ак = Л/ЖЛТС,
где Д/^ — ширина спектра сигнала-переносчика; Д/эс к а/тс; ДТС — время, от-
водимое для передачи кодового слова.
Время, отводимое для передачи кодового слова, Д Тс = кхс. Обратим
внимание на то, что в цифровых системах передачи с ИКМ число Л/иг-
рает ту же роль, что и индекс соответствующей модуляции в аналоговых
широкополосных системах.
Результаты расчета зависимо-
сти 5Х =/(а) по формуле (14.25)
для значений к = 5, 7, 10 и Лкв =
- 25, 27, 210 для двоичных сигна-
лов вида ИКМ2-ЧМ и ортого-
нальных вида КАИМ-ЧМ, когда
каждый уровень передается своим
ортогональным ко всем осталь-
ным сигналом, т. е. а = LKB при-
ведены на рис. 14.3. Как видно,
зависимости, как и в аналоговых
широкополосных системах пере-
дачи, носят ярко выраженный по-
роговый характер.
396
Пороговый характер такой зависимости проявляется в том, что при
2
определенных значениях а небольшое его уменьшение приводит к
достаточно резкому увеличению суммарной погрешности. Как и в
аналоговых широкополосных системах передачи с УМ и ФИМ, при-
чиной этого эффекта являются аномальные погрешности, вклад ко-
2
торых в 5Х резко возрастает по мере уменьшения а ниже некоторого
значения, часто называемого пороговым. Как и в аналоговых широ-
кополосных системах передачи, рассматриваемые зависимости могут
быть разбиты на три области: надпороговую, пороговую и подпоро-
говую. Отличие приведенных зависимостей от подобных зависимо-
стей для широкополосных аналоговых непрерывных и импульсных
систем передачи состоит в том, что в цифровых системах передачи при
значениях а, ббльших пороговых, 5Х остается постоянной (определя-
ется погрешностью квантования), в то время как в аналоговых систе-
мах передачи погрешность 5Х уменьшается (определяется нормальной
погрешностью) с увеличением а.
Из полученных выражений и рис. 14.3 также видно, что при исполь-
зовании для передачи непрерывных сообщений дискретных сигналов
(как и широкополосных аналоговых сигналов) существует оптимальное
число Л/опт (оптимальная широкополосность), при котором заданное
значение 5Е обеспечивается при минимальном пороговом значении
2
отношения сигнал/шум апор.
Из приведенных зависимостей также видно, что система передачи,
использующая Л/ортогональных (КАИМ-ЧМ) сигналов, обладает бо-
лее высокой помехоустойчивостью, чем система, использующая дво-
ичные (ИКМ-ЧМ) сигналы [излом характеристики 5Х =/(а) наступает
при меньших значениях а]. Для передачи рассматриваемых сообще-
ний с заданной &Е при минимально возможном пороговом значении от-
ношения сигнал/шум апор, приходящимся на один отсчет сообщения
(одно кодовое слово), число разрядов к, а стало быть, и число Мследует
выбирать оптимальными. Это связано с тем, что с увеличением числа
2 2
уровней квантования (к или М) 5КВ убывает, а 5ан возрастает. В общем
случае подход к нахождению £ОПТ(Л/ОПТ) зависит от цены аномальных
погрешностей и погрешностей квантования. Так, если предположить,
что аномальные погрешности и погрешности квантования должны
одинаково влиять на результирующую погрешность, т. е. принять
5^ = 8,и = 0,55у , то получим следующие выражения:
Ro arl 1 i* “
а2 « -L (A) in ;
пор -UJ La2]
Л/опт = аА:опт == 2hwln^ ’
(14.27)
(14.28)
397
Рис. 14.4
которые в графическом виде приведены на рис. 14.4. Полученные ана-
литические зависимости и графики могут использоваться для выбора
оптимальных параметров системы передачи (&опт, Л/опт) и расчета по-
рогового значения отношения сигнала к шуму апор в зависимости от
2
требований к качеству передачи 5Z в системе с ИКМ.
Оценка суммарной погрешности и оптимизация параметров в ЦСП
ДИКМ. При рассматриваемых допущениях и исходных данных на ос-
новании выражений (14.14), (14.23) и (14.25) дисперсия суммарной
приведенной погрешности передачи сообщения с ДИКМ
2\-i
Sep » S2^
7 •Э / CLt
5а„р s 5рУ + 6<я - 1)ехр1-^
Lfl р 4
~ я2
~ °pN
' 3
2М /я
La
Мр = акр.
+ 6(а — 1)ехр
(14.29)
(14.30)
Из сравнения выражений (14.26) и (14.29) видно, что по форме они
идентичны, однако при прочих равных условиях (кр — к, Мр — М) дис-
2
Персия суммарной погрешности в системе передачи с ДИКМ в 5рЛГ
раз меньше, чем в системе передачи с ИКМ. Это говорит о том, что
ЦСП с ДИКМ по сравнению с системами ИКМ при одинаковых тре-
2
бованиях к 5Х будут более помехоустойчивыми и занимать более уз-
кую полосу частот.
Приближенный расчет апор и Л/опт для ЦСП при использовании
ДИКМа-ЧМ сигналов и оптимального некогерентного приемника
можно вести по формулам (14.27) и (14.29) и расчетным графикам (см.
398
рис. 14.4), если положить, что требуется обеспечить дисперсию сум-
2 2 2 2
марной погрешности бЕр = 8х/5рЛ^, где — приведенная дисперсия
2
суммарной погрешности в системе с ИКМ; 5рЛ, — приведенная дис-
персия конечной разности при ДИКМ, в общем случае зависящая от
метода формирования конечной разности (см. п. 2.15 и табл. 13.2).
На основании полученных и других расчетных формул и графиче-
ских зависимостей можно сделать следующие выводы:
1. Из рассмотренных ЦСП наибольшей помехоустойчивостью об-
ладает система с ДИКМ. Эти системы занимают и более узкую полосу
частот.
2. Наиболее узкую полосу частот при прочих равных условиях за-
нимают системы передачи, использующие ОФМ- и ФМ-сигналы. В
системах передачи, использующих многоосновные ортогональные сиг-
налы, полоса занимаемых частот возрастает с увеличением основания
кода а. Наиболее широкую полосу частот занимают системы передачи
с ИКМ, использующие М ортогональных сигналов, когда каждый уро-
вень квантования передается своим ортогональным сигналом.
Аппаратура образования дискретных каналов, предназначенных
для передачи непрерывных (прежде всего речевых) и дискретных сиг-
налов, имеет много разновидностей. Поэтому для обеспечения воз-
можности совместной работы различных типов оборудования с раз-
личными каналами передачи имеются рекомендации международных
консультативных комитетов по телеграфии и телефонии МСЭ-Т и ра-
дио МККР. Ряд этих рекомендаций положен в основу государствен-
ных стандартов (ГОСТ) (см. главу 13).
Проведенная сравнительная оценка простейших цифровых систем
без сжатия ИКМ и со сжатием ДИКМ показала, что система с ДИКМ
имеет более высокую помехоустойчивость, занимает более узкую по-
лосу частот и соответственно требует меньшей скорости передачи ин-
формации.
Более сложные современные низкоскоростные кодеки речи и ви-
деоизображений (см. главу 13) позволяют получить еще большие вы-
игрыши по помехоустойчивости и полосе занимаемых частот.
14.4. ПОТЕНЦИАЛЬНАЯ ПОМЕХОУСТОЙЧИВОСТЬ ИДЕАЛЬНЫХ
ПО ШЕННОНУ СИСТЕМ ПЕРЕДАЧИ ДИСКРЕТНЫХ
И АНАЛОГОВЫХ СООБЩЕНИЙ
Рассмотрим сначала проблему передачи аналогового сообщения по
произвольной системе передачи с произвольной модуляцией на осно-
вании теории информации и, в частности, теории эпсилон-энтропии.
Эпсилон-энтропия H(s) определяет минимальное количество ин-
формации, которое необходимо для передачи или представления не-
прерывного сообщения (в принципе с различным законом распреде-
399
ления и спектральной плотностью) с заданной верностью (например,
с заданной дисперсией погрешности).
Отметим, что функция Н(з) описывает свойства источника, а не
канала или системы. H(s) — это нижняя граница дисперсии (СКО) по-
грешности фильтрации и демодуляции, достижимой любой системой
(аналоговой или цифровой). Эта граница обеспечивает меру сравне-
ния любых интересующих нас систем.
Рассмотрим сначала гауссовский стационарный процесс s(t) с ог-
раниченным в пределах О—Fc (Гц) спектром. Считая, что в единицу
времени образуется Fo = 2FC отсчетов (выборок) суммарная энтропия
процесса в единицу времени
H(s) = Fc log(l/52), (14.31)
2 2 2
где бЕ = аЕ /а (s) — приведенная дисперсия погрешности представления.
Соответственно для гауссовских процессов со спектром Баттервор-
та [см. формулу (13.2)] можно получить приближенное выражение для
H(s) в виде формулы (13.3).
Заметим, что выражение (13.3) определяет среднее количество ин-
формации между s(t) и которое требуется для обеспечения при-
2
веденной дисперсии погрешности бЕ .
Из выражения (13.3) при к -> °о можно получить выражение (14.31),
что вполне естественно.
Некоторые численные результаты расчета по формуле (13.3) при-
ведены в табл. 14.1.
Из приведенных расчетных данных видно, что эпсилон-энтропия
увеличивается с ростом требований к точности восстановления и
уменьшению коэффициента к полинома, характеризующего неравно-
мерность спектра.
Методика расчета нижней грани количества информации при
цифровом представлении случайного процесса с произвольным зако-
ном распределения приведена в работе [20]; причем негауссовский
Таблица 14.1
8, ff(j)/2Fc> бит
к = 1 к = 2 к — <о
10 1,83-10 Н.4 3,32
102 1,84- 104 64 6,65
103 1,84- 10б 304 9,95
400
процесс при одинаковой дисперсии содержит меньшее количество
информации, чем отсчет гауссовского процесса.
Для передачи этой информации от передатчика к приемнику не-
обходимо иметь канал с пропускной способностью С > H(s).
Как известно, пропускная способность канала с белым гауссов-
ским шумом и спектральной плотностью сообщения 5(<о), двоичные
единицы/с, [2]
С= 0,5jlog2 [1 + 5(<o)/^]d<o/(2it).
о
Рассмотрим прежде всего случай, когда имеется канал с белым га-
уссовским шумом и строго ограниченной полосой пропускания О—F*.
Достигаемая при этом пропускная способность, двоичные единицы/с,
определяется формулой Шеннона:
С = Fk log( 1 + Pc/N0Fk). (4.32)
Если в этой формуле полосу пропускания канала Fk устремить к бес-
конечности, то получим канал с бесконечно широкой полосой пропус-
кания, имеющей пропускную способность, двоичные единицы/с
= lim lF*log(l + Pc/N0Fk)] = log ePc/N0 = 1,44Рс/ЛГ0. (14.33)
Таким образом, пропускная способность шенноновского канала с
бесконечной шириной полосы пропускания определяется формулой
(14.33). При выводе этой формулы использовалось соотношение
lim {In (1 + ?)} = z-
z-»o
Рассмотрим несколько примеров, определяющих предельную по-
мехоустойчивость передачи дискретных и непрерывных сообщений
по каналу Шеннона.
1. Предположим, что для передачи одной двоичной единицы ин-
формации используется длительность символа тс, тогда, умножив пра-
вую и левую части выражения (14.33) на тс, получим
Стс = 1,44PctcAT0 = 1 двоичную единицу
или
а2 = Pjc/N0 = E/No = 0,69. (14.34)
Из полученного выражения видно, что в идеальной по Шеннону
системе передачи с бесконечной шириной полосы и помехой типа бе-
лого гауссовского шума на передачу 1 двоичной единицы информа-
ции требуется тратить отношение энергии Е = Рстс сигнала к спек-
тральной плотности белого шума No, равное 0,69.
401
Заметим, что даже при оптимальном приеме сигналов с ФМ тре-
буется значительно большее отношение сигнал/шум (см. п. 7.4).
2. Предположим, что спектр передаваемого сообщения принадле-
жит к классу Баттерворта [см. формулу (13.2)], а ширина полосы га-
уссовского канала стремится к бесконечности: Fk -> оо. Найдем зави-
симость вида а„ = PC/(NO2FC) =f{H(s)}.
Энтропия H(s) для этого класса спектров определяется формулой
(13.3) и приведена на рис. 13.1. Теперь можно найти зависимость тре-
буемого отношения сигнал/шум в полосе Fc в зависимости от требо-
„ 2
вании к качеству передачи 5Е, положив
//(s) = 1,44Рс/ЛГ0,
(14.35)
где Н(з) определяется формулой (13.3).
Результаты расчета по формуле (14.35) приведены на рис. 14.5.
Следует отметить, что графики, приведенные на рис. 13.1 и 14.5,
отличаются между собой только
тем, что по горизонтальной оси
отложены разные величины.
Как и следовало ожидать, по-
мехоустойчивость передачи улуч-
шается по мере увеличения по-
рядка спектра к.
Если сообщение имеет ограни-
ченный спектр в пределах О—Fc,
то из выражения (14.35) при ши-
рине полосы канала, стремящей-
ся к бесконечности (Fk -> °°), по-
лучим
«2 = 0,5 ln(l/g2), (14.36)
где а2н = РС/(ЛГО2ГС).
Полученное выражение совпа-
даете выражением (14.31) для H(s),
деленной на Fc.
Как и следовало ожидать, со-
гласно результатам теории фильт-
рации (см. гл. 8) помехоустойчи-
вость системы улучшается по
мере увеличения порядка спектра
Баттерворта к.
402
Из формулы (14.31) следует, что когда имеется канал со строго ог-
раниченной полосой пропускания Fk, пропускная способность ка-
нала увеличивается пропорционально логарифму от отношения сиг-
2
нал/помеха ан.
Полученные выражения для эпсилон-энтропии и помехоустойчи-
вости идеальных по Шеннону систем передачи, как уже указывалось,
позволяют сравнивать с определенными нижними границами другие
системы.
В частности, как было показано в п. 8.4, для достижения такой же
дисперсии погрешности оптимальной системе с угловой модуляцией
требуется примерно на 6 дБ больше мощности, чем наилучшей воз-
можной системе.
3. Сравним некоторые цифровые системы передачи со сжатием с
шенноновскими системами. Приближенная попытка сравнения циф-
ровых систем с ИКМ без сжатия и с ДИКМ (с простейшим сжатием)
сделана в п. 14.3 при учете всех основных составляющих погрешностей:
временнбй дискретизации, квантования и аномальных ошибок в кана-
ле. Также показаны преимущества систем с ДИКМ (со сжатием).
В гл. 13 рассмогрены более сложные цифровые системы с комби-
нированным сжатием речевых сигналов и сигналов видеоизображе-
ния. Представляет интерес провести сравнение приведенных в главе
13 систем со сжатием речи с потенциально возможными шеннонов-
скими системами.
Относительно шенноновской системы предполагаем, что передачу
по каналу можно осуществлять со скоростью сколь угодно близкой
пропускной способности канала при сколь угодно малой вероятно-
стью аномальных ошибок. Это означает, что точность передачи в ней
будет зависеть лишь от погрешностей квантования. Причем эта по-
грешность будет определяться эпсилон-энтропией.
В качестве реальной цифровой системы с эффективным сжатием
можно взять систему для передачи речи, выполненную в соответствии
с рекомендацией G.729 (см. табл. 13.3) и обеспечивающую передачу
речи со скоростью 4,8 кбит/с.
В качестве модели речевого сигнала примем гауссовский случай-
ный процесс с ограниченным спектром Fc — 0—3400 Гц. Также будем
считать, что речевой сигнал передается в такой системе с приведенной
дисперсией 5^ = 10 — 10 , что примерно эквивалентно использо-
ванию семи—девяти разрядного двоичного кода.
Эпсилон-энтропия такого речевого сигнала в соответствии с фор-
мулой (14.31) будет определяться значением
H(s) = 3400 log(l/52 ) = 24-34 кбит/с. (14.37)
403
Из сравнения скорости передачи в системе, выполненной по ре-
комендации G.729 (4800 бит/с), со скоростью, определенной по фор-
муле (14.37) следует, что по пропускной способности система G.729
является якобы более эффективной, чем идеальная система по Шен-
нону. Сравним эти же системы по требуемому пороговому отноше-
нию сигнал—помеха на входе приемника, обеспечивающего одинако-
вое качество передачи.
Учитывая выражение (14.34) и требуемое пороговое отношение
сигнал-помеха на двоичную единицу в системе G.729 порядка 4—6
(с учетом использования корректирующих кодов) получим, что в
этой системе в секунду должно тратиться примерно отношение сиг-
нал-помеха, равное 4800 • 5 = 24000, а в идеальной системе Шен-
нона порядка 30000 • 0,69 = 20700, т. е. примерно соизмеримое с ре-
альной системой.
Получается, что идеальная система по Шеннону уступает по ряду
важнейших показателей реальной системе с достаточно эффективным
сжатием. Этого, казалось бы, не должно быть, что можно объяснить
несколькими причинами: во-первых, некоторой неадекватностью
сравнения и исходных данных. Это прежде всего относится к модели
речи, принимаемой в виде стационарного гауссовского процесса (что
не соответствует действительности), во-вторых, особенностями и
высокой чувствительностью слухового аппарата, в-третьих, речевой
сигнал несет в себе значительный объем смысловой информации,
которая никак не учитывается количественной теорией информации
(эпсилон-энтропией). Указанные и другие причины, очевидно, и при-
водят к пародоксальному результату.
ПРИЛОЖЕНИЕ 1
ТАБЛИЦА ДОПОЛНЕНИЯ К ИНТЕГРАЛУ ВЕРОЯТНОСТЕЙ
Интеграл вероятностей
00 2
V(x) = (1/Л^ ) f dz = а - 10-у,
х
где а — значение, считанное из таблицы
X 0 1 2 3 4 5 6 7 8 9 У
0,0 5,000 4,960 4,920 4,880 4,840 4,801 4,761 4,721 4,681 4,641 1
0,1 4,602 4,562 4,522 4,483 4,443 4,404 4,364 4,325 4,286 4,247 1
0,2 4,207 4,168 4,129 4,090 4,052 4,013 3,974 3,936 3,897 3,859 1
0,3 3,821 3,783 3,745 3,707 3,669 3,632 3,594 3,557 3,520 3,483 1
0,4 3,446 3,409 3,372 3,336 3,300 3,264 3,228 3,192 3,156 3,121 1
0,5 3,085 3,050 3,015 2,981 2,946 2,912 2,877 2,843 2,810 2,776 1
0,6 2,743 2,709 2,676 2,643 2,611 2,578 2,546 2,514 2,483 2,451 1
0,7 2,420 2,389 2,358 2,327 2,297 2,266 2,236 2,206 2,177 2,148 1
0,8 2,119 2,090 2,061 2,033 2,005 1,977 1,949 1,922 1,894 1,867 1
0,9 1,841 1,814 1,788 1,762 1,736 1,711 1,685 1,660 1,635 1,611 1
1,0 1,587 1,562 1,539 1,515 1,492 1,469 1,446 1,423 1,401 1,379 1
1,1 1,357 1,335 1,314 1,292 1,271 1,251 1,230 1,210 1,190 1,170 1
1,2 1,151 1,131 1,112 1,093 1,075 1,056 1,038 1,020 1,003 0,9853 1
1,3 9,680 9,510 9,342 9,176 9,012 8,851 8,691 8,534 8,379 8,226 2
1,4 8,076 7,927 7,780 7,636 7,493 7,353 7,215 7,078 6,994 6,811 2
1,5 6,681 6,552 6,426 6,301 6,178 6,057 5,938 5,821 5,705 5,592 2
1,6 5,480 5,370 5,262 5,155 5,050 4,947 4,846 4,746 4,648 4,551 2
1,7 4,457 4,363 4,272 4,182 4,093 4,006 3,920 3,836 3,754 3,673 2
1,8 3,593 3,515 3,438 3,362 3,288 3,216 3,144 3,074 3,005 2,938 2
1,9 2,872 2,807 2,743 2,680 2,619 2,559 2,500 2,442 2,385 2,330 2
2,0 2,275 2,222 2,169 2,118 2,068 2,018 1,970 1,923 1,876 1,831 2
2,1 1,786 1,743 1,700 1,659 1,618 1,578 1,539 1,500 1,463 1,426 2
2,2 1,390 1,355 1,321 1,287 1,255 1,222 1,191 1,160 1,130 1,101 2
2,3 1,072 1,044 1,017 0,9903 0,9642 0,9387 0,9137 0,8894 0,8656 0,8424 2
2,4 8,198 7,976 7,760 7,549 7,344 7,143 6,947 6,756 6,569 6,387 3
2,5 6,210 6,037 5,868 5,703 5,543 5,386 5,234 5,085 4,940 4,799 3
2,6 4,661 4,527 4,396 4,269 4,145 4,025 3,907 3,793 3,681 3,573 3
2,7 3,467 3,364 3,264 3,167 3,072 2,980 2,890 2,803 2,718 2,635 3
2,8 2,555 2,477 2,401 2,327 2,256 2,186 2,118 2,052 1,988 1,926 3
2,9 1,866 1,807 1,750 1,695 1,641 1,589 1,538 1,489 1,441 1,395 3
405
Продолжение прилож. 1
X 0 1 2 3 4 5 6 7 8 9 У
3,0 1,350 1,306 1,264 1,223 1,183 1,144 1,107 1,070 1,035 1,001 3
3,1 9,676 9,354 9,043 8,740 8,447 8,164 7,888 7,622 7,364 7,114 4
3,2 6,871 6,637 6,410 6,190 5,9 5,770 5,571 5,377 5,190 5,009 4
3,3 4,834 4,665 4,501 4,342 4,189 4,041 3,897 3,758 3,624 3,495 4
3,4 3,369 3,248 3,131 3,018 2,909 2,803 2,701 2,602 2,507 2,415 4
3,5 2,326 2,241 2,158 2,078 2,001 1,926 1,854 1,785 1,718 1,653 4
3,6 1,591 1,531 1,473 1,417 1,363 1,311 1,261 1,213 1,166 1,121 4
3,7 1,078 1,036 0,9961 0,9574 0,9201 0,8842 0,8496 0,8162 0,7841 0,7532 4
3,8 7,235 6,948 6,673 6,407 6,152 5,906 5,669 5,442 5,223 5,012 5
3,9 4,810 4,615 4,427 4,247 4,074 3,908 3,747 3,594 3,446 3,304 5
4,0 3,167 3,036 2,910 2,789 2,673 2,561 2,454 2,351 2,252 2,157 5
4,1 2,066 1,978 1,894 1,814 1,737 1,662 1,591 1,523 1,458 1,395 5
4,2 1,335 1,277 1,222 1,168 1,118 1,069 1,022 0,9774 0,9345 0,8934 5
4,3 8,540 8,163 7,801 7,455 7,124 6,807 6,503 6,212 5,934 5,668 6
4,4 5,413 5,169 4,935 4,712 4,498 4,294 4,098 3,911 3,732 3,561 6
4,5 3,398 3,241 3,092 2,949 2,813 2,682 2,558 2,439 2,325 2,216 6
4,6 2,112 2,013 1,919 1,828 1,742 1,660 1,581 1,506 1,434 1,366 6
4,7 1,301 1,239 1,179 1,123 1,069 1,017 0,9680 0,9211 0,8765 0,8339 6
4,8 7,933 7,547 7,178 6,827 6,492 6,173 5,869 5,580 5,304 5,042 7
4,9 4,792 4,554 4,327 4,111 3,906 3,711 3,525 3,348 3,179 2,019 7
5,0 2,866 2,722 2,584 2,452 2,328 2,209 2,096 1,989 1,887 1,790 7
5,1 1,698 1,611 1,528 1,449 1,374 1,302 1,235 1,170 1,110 1,052 7
5,2 9,964 9,442 8,946 8,476 8,029 7,605 7,203 6,821 6,459 6,116 8
5,3 5,790 5,481 5,188 4,911 4,648 4,398 4,161 3,937 3,724 3,523 8
5,4 3,332 3,151 2,980 2,818 2,664 2,518 2,381 2,250 2,127 2,010 8
5,5 1,899 1,794 1,695 1,601 1,512 1,428 1,349 1,274 1,203 1,135 8
5,6 1,072 1,012 0,9548 0,9010 0,8502 0,8022 0,7569 0,7140 0,6735 0,6352 8
5,7 5,990 5,649 5,326 5,021 4,734 4,462 4,206 3,964 3,735 3,519 9
5,8 3,316 3,124 2,942 2,771 2,610 2,458 2,314 2,179 2,051 1,931 9
5,9 1,818 1,711 1,610 1,515 1,425 1,341 1,261 1,186 1,116 1,049 9
6,0 9,866 9,276 8,721 8,198 7,706 7,242 6,806 6,395 6,009 5,645 10
6,1 5,303 4,982 4,679 4,394 4,126 3,874 3,637 3,414 3,205 3,008 10
6,2 2,823 2,649 2,486 2,332 2,188 2,052 1,925 1,805 1,693 1,587 10
6,3 1,488 1,395 1,308 1,226 1,149 1,076 1,009 0,9451 0,8854 0,8294 10
6,4 7,769 7,276 6,814 6,380 5,974 5,592 5,235 4,900 4,586 4,292 11
6,5 4,016 3,757 3,515 3,288 3,076 2,877 2,690 2,516 2,352 2,199 11
6,6 2,055 1,922 1,796 1,678 1,568 1,465 1,369 1,279 1,195 1,116 11
6,7 1,042 0,9731 0,9086 0,8483 0,7919 0,7392 0,6900 0,6439 0,6009 0,5607 11
6,8 5,231 4,880 4,552 4,246 3,960 3,692 3,443 3,210 2,993 2,790 12
6,9 2,600 2,423 2,258 2,104 1,960 1,826 1,701 1,585 1,476 1,374 12
406
Окончание прилож 1
X 0 1 2 3 4 5 6 7 8 9 У
7,0 1,280 1,192 1,109 1,033 0,9612 0,8946 0,8325 0,7747 0,7208 0,6706 12
7,1 6,238 5,802 5,396 5,018 4,666 4,339 4,034 3,750 3,486 3,240 13
7,2 3,011 2,798 2,599 2,415 2,243 2,084 1,935 1,797 1,669 1,550 13
7,3 1,439 1,336 1,240 1,151 1,068 0,9910 0,9195 0,8531 0,7914 0,7341 13
7,4 6,809 6,315 5,856 5,430 5,034 4,667 4,326 4,010 3,716 3,444 14
7,5 3,191 2,956 2,739 2,537 2,350 2,176 2,015 1,866 1,728 1,600 14
7,6 1,481 1,370 1,268 1,184 1,086 1,005 0,9297 0,8600 0,7954 0,7357 14
7,7 6,803 6,291 5,816 5,377 4,971 4,595 4,246 3,924 3,626 3,350 15
7,8 3,095 2,856 2,641 2,439 2,253 2,080 1,921 1,773 1,637 1,511 15
7,9 1,395 1,287 1,188 1,096 1,011 0 93% 0,8602 0,7934 0,7317 0,6747 15
8,0 6,221 5,735 5,287 4,874 4,492 4,140 3,815 3,515 3,238 2,983 16
8,1 2,748 2,531 2,331 2,146 1,976 1,820 1,675 1,542 1,419 1,309 16
8,2 1,202 1,106 1,018 0,9361 0,8611 0,7920 0,7284 0,6698 0,6159 0,5665 16
8,3 5,206 4,785 4,398 4,042 3,714 3,413 3,146 2,881 2,646 2,431 17
8,4 2,232 2,050 1,882 1,728 1,587 1,457 1,337 1,227 1,126 1,033 17
8,5 9,480 8,697 7,978 7,317 6,711 6,154 5,643 5,174 4,744 4,348 18
8,6 3,986 3,653 3,348 3,068 2,811 2,575 2,359 2,161 1,978 1,812 18
8,7 1,659 1,519 1,391 1,273 1,166 1,067 0,8763 0,8933 0,8174 0,7478 18
8,8 6,841 6,257 5,723 5,234 4,786 4,376 4,001 3,657 3,343 3,055 19
8,9 2,792 2,552 2,331 2,130 1,946 1,777 1,623 1,483 1,354 1,236 19
9,0 1,129 1,030 0,9404 0,8584 0,7834 0,7148 0,6522 0,5951 0,5429 0,4952 19
9,1 4,517 4,119 3,756 3,425 3,123 2,847 2,595 2,365 2,155 1,964 20
9,2 1,790 1,631 1,486 1,353 1,232 1,122 1,022 0,9307 0,8474 0,7714 20
9,3 7,022 6,392 5,817 5,294 4,817 4,382 3,987 3,627 3,299 3,000 21
9,4 2,728 2,481 2,255 2,050 1,864 1,694 1,540 1,399 1,271 1,155 21
9,5 1,049 0,9533 0,8659 0,7864 0,7142 0,6485 0,5888 0,5345 0,4852 0,4404 21
9,6 3,997 3,627 3,292 2,986 2,709 2,458 2,229 2,022 1,834 1,663 22
9,7 1,507 1,367 1,239 1,123 1,018 0,9223 0,8358 0,7573 0,6861 0,6215 22
9,8 5,629 5,098 4,617 4,181 3,786 3,427 3,102 2,808 2,542 2,300 23
9,9 2,081 1,883 1,704 1,541 1,394 1,261 1,140 1,031 0,9323 0,8429 23
10 7,620 24
ПРИЛОЖЕНИЕ 2
ТАБЛИЦА ГАММА-ФУНКЦИИ
Гамма-функции
Г(х) =
О
Для больших значений аргумента справедливо равенство
Г(х) = (х - 1) Г(х - I) = (х - 1 )(х - 2) Г(х - 2) = ...
Например, для х = 4,7 получим
Г(4,7) = 3,7 • 2,7 • 1,7 • 0,9086 = 15,43.
Для малыхх < 1 и отрицательных (кроме х= 0, -1, —2,...) значений аргумента спра-
ведливо выражение
Г(х) = Г(х + 1)/х = Г(х + 2)/|х(х + 1)1 = ...
Например, для х — 0,7 и х = —3,2 найдем
Г(0,7) = Г(1,7)/0,7= 1,298;
Г(—3,2) = Г(1,8)/{(—3,2)(—2,2)(-1,2)(—0,2)(0,8)} = 0,689.
X Г(х) X Г(Х) X Г(х) X Г(х)
-0,5 -2,542 1,225 1,0 1,0 1,5 0,886
1/4 3,625 5/4 0,906 1,1 0,95 1,6 0,893
1/3 2,678 4/3 0,892 1,2 0,918 1,7 0,908
0,5 1,772 5/3 0,902 1,3 0,897 1,8 0,931
2/3 1,354 7/4 0,919 1.4 0,887 1,9 2,0 0,961 1,0
Гамма-функция Г(х + 1) = х.
408
ЗАКЛЮЧЕНИЕ
Промышленно-развитые страны вступили в новый постиндустри-
альный период своего развития — период информатизации. Информа-
тизация — слово сравнительно новое в современном научно-техниче-
ском лексиконе. Информатизация — это комплекс мер, направленных
на обеспечение полного использования достоверных, исчерпываю-
щих и современных знаний во всех значимых сферах человеческой
деятельности.
Информация, т. е. совокупность знаний о фактических данных и
зависимостях между ними, становится стратегическим ресурсом об-
щества.
Наука, занимающаяся изучением методов представления, накоп-
ления, передачи и обработки информации с помощью ЭВМ, называ-
ется информатикой. Техническими средствами освоения такого стра-
тегического ресурса являются электронные вычислительные машины
(компьютеры) и средства связи.
Современные системы связи являются "нервной системой" чело-
веческого общества. При этом связь становится одной из самых нау-
коемких отраслей промышленности.
Курс "Теория передачи сигналов в системах железнодорожной ав-
томатики, телемеханики и связи" занимает одно из центральных мест
среди фундаментальных дисциплин, определяющих профессиональ-
ную подготовку инженеров МПС России по специальности 2107 —
"Автоматика, телемеханика и связь на железнодорожном транспорте".
Под теоретическими основами связи понимают науку о передаче ин-
формации на расстояние с помощью различных технических средств в
условиях воздействия различных помех. В учебнике сконцентрирова-
ны теоретические основы разнообразной техники связи с учетом спе-
цифических особенностей ее использования на железнодорожном
транспорте. Основные закономерности теории распространяются и на
другие классы технических систем: автоматики, телемеханики, вычисли-
тельной техники, информатики, радиолокации, радионавигации и т. п.
В любых областях техники связи и управления происходят разно-
образные процессы преобразования сигналов. Поэтому основное вни-
мание в этой книге уделяется процессам преобразования сигналов.
409
Разнообразные системы связи на железнодорожном транспорте
предназначаются прежде всего для повышения эффективности опе-
ративного управления перерабатывающим и перевозочным процес-
сом. Грамотное проектирование и эксплуатация разнообразных сис-
тем связи и управления на железнодорожном транспорте требует
подготовки специалистов с глубокими знаниями теоретических основ
и закономерностей передачи разнообразных сообщений по разнообраз-
ным каналам железнодорожной связи (радио, в том числе спутниковых,
сотовых, транкинговых, проводным, в том числе волоконно-оптиче-
ским, рельсовым, смешанным, т. е. радиопроводным) в условиях дей-
ствия сильных разнообразных помех (флюктуационных, импульсных,
синусоидальных), а также возможностей технической реализации
систем на современной микроэлектронной элементной базе и пер-
спектив их развития на железнодорожном транспорте.
Системы связи на железнодорожном транспорте должны быть ча-
стью единой автоматизированной системы связи (ЕАСС) страны.
Многообразие задач, стоящих перед разработчиками техники свя-
зи (в том числе и прежде всего на железнодорожном транспорте),
можно свести к повышению помехоустойчивости и эффективности,
которые между собой тесно взаимосвязаны.
Проблема эффективности связи состоит в том, чтобы передавать
наибольшее количество информации (сообщений) в заданное время
наиболее экономным образом (в смысле использования полосы час-
тот, затрат энергии и стоимости).
Под помехоустойчивостью понимается способность систем связи
противостоять вредному действию разнообразных помех, обеспечивая
необходимое качество (верность) передачи сообщений. Системы же-
лезнодорожной связи и автоматики функционируют в сложных усло-
виях помеховой обстановки при воздействии комплекса флюктуаци-
онных, импульсных и синусоидальных помех и должны обеспечить
высокую достоверность передачи, так как их работа связана с безо-
пасностью движения.
Повышение помехоустойчивости и эффективности достигается по-
средством использования наиболее совершенных (оптимальных) спо-
собов передачи (кодирования и модуляции) и приема (демодуляции и
декодирования), а также зависит от того, насколько полно используют-
ся в системах априорные сведения о сообщениях, сигналах и помехах.
В учебнике излагаются общие закономерности передачи дискретных
и непрерывных сообщений по каналам железнодорожной связи и
управления в условиях флюктуационных, импульсных и синусоидаль-
ных помех. Особое внимание уделено теории сигналов и их дискрет-
ному представлению, теории информации, теории оптимального приема
и кодирования, а также сжатию речевых, видео- и цифровых сообщений.
Сравниваются различные системы передачи и определяются на-
правления технической реализации современных систем и перспек-
тивы их развития на железнодорожном транспорте.
Каковы же рекомендации излагаемых теорий и перспективы раз-
вития систем железнодорожной связи?
410
Фундаментальные теоремы теории информации определяют потен-
циальные возможности пропускной способности различных каналов
связи и потенциальную помехоустойчивость при передаче дискретных
и непрерывных сообщений, чем позволяют выявить возможные резер-
вы повышения эффективности и помехоустойчивости систем переда-
чи информации благодаря совершенствованию способов модуляции,
кодирования, демодуляции и декодирования.
Теория оптимального приема указывает пути построения помехо-
устойчивых методов обработки в условиях воздействия различных по-
мех (гауссовских и негауссовских). В частности, теория оптимального
приема показывает, что эффективными методами борьбы с негауссов-
скими помехами являются нелинейные методы обработки сигналов
(оптимальные, адаптивные, робастные).
Общая теория оптимального приема имеет ряд разветвлений: тео-
рию обнаружений сигналов, теорию различения сигналов, теорию
оценки параметров и теорию фильтрации и демодуляции, которые дос-
таточно подробно рассмотрены в главах 6, 7 и 8.
Применение различных помехоустойчивых кодов и использование
помехоустойчивых декодеров позволяют построить системы с доста-
точно высокой информационной, энергетической и частотной эф-
фективностью. Весьма перспективным является правильное сочета-
ние корректирующих кодов и многоосновных сигналов.
Исследование помехоустойчивости широкополосных систем передачи
(ЧМ, ФИМ, ИКМ) с учетом нормальных и аномальных составляющих
погрешностей позволяет оптимальным образом выбирать широкополое -
ность соответствующих сигналов, при которой обеспечивается наивыс-
шая помехоустойчивость, и улучшаются пороговые свойства таких систем
передачи. Теория также показывает, что процесс кодирования и модуля-
ции, а также демодуляции и декодирования следует рассматривать как
единый процесс и оптимизировать их одновременно.
В связи с бурным развитием цифровой элементной базы и цифро-
вых сигнальных процессоров, а также цифровых методов представле-
ния, обработки, передачи и хранения разнообразной информации
главным направлением развития современных систем связи, телеви-
дения и информационно-измерительных систем различного назначе-
ния являются разработка и внедрение цифровых методов и устройств
обработки, преобразования и передачи сигналов.
Однако использование цифровых методов передачи (ЦСП) приво-
дит к необходимости многократного увеличения полосы занимаемых
частот и соответственно скорости передачи различных видов сообще-
ний (речи, графики, различных видов видеоизображений, мультиме-
диа и т. д.). Эта проблема может быть решена применением эффек-
тивных методов цифрового преобразования — сжатия (кодирования)
различных сообщений. Поскольку большинство непрерывных сообще-
ний являются нестационарными случайными процессами, то эффек-
тивные методы сжатого преобразования должны быть адаптивными.
По указанным причинам в учебнике значительное внимание уде-
ляется цифровым методам передачи и обработки сигналов, особое
411
внимание — описанию речевых и видеосообщений (глава 9). Рассмот-
рены основы общей теории описания сообщений на основе количе-
ственной теории информации и оптимизации основных операций
(дискретизации, квантования и кодирования) при преобразовании
непрерывных сообщений в цифровую форму. На основании понятий
Е-энтропии и пропускной способности дискретного канала определе-
ны потенциальные возможности по сжатию непрерывных сообщений
с различной спектральной плотностью мощности. Наиболее эффек-
тивными методами линейного регулярного представления являются:
представление Корунена—Лоэва, дискретное косинусное представле-
ние и представление конечными разностями определенного порядка.
Эффективными методами квантования являются неравномерное
квантование, зависящее от плотности распределения вероятностей
исходного сообщения. Вместо неравномерного квантования могут ис-
пользоваться также оптимальное нелинейное квантование и энтро-
пийное кодирование.
Все более широкое использование волоконно-оптических линий
связи (ВОЛС) на железнодорожном транспорте позволяет реализовать
новые принципы построения цифровых систем передачи (ЦСП), ко-
торые воплощены в аппаратуре синхронной цифровой иерархии
(СЦИ) (SDH — Synchronous digital hierarchy). В соответствии с техно-
логией построения СЦИ наиболее широко используются цифровые
сети интегрального обслуживания — ЦСИО (ISDN — Integrated serv-
ices digitalnetwork).
Одной из основных причин создания ЦСИО является необходимое
расширение сферы информационных и других услуг по объему, ско-
рости передачи и сервису, обеспечение связи методами коммутации
каналов (КК), коммутации пакетов (КП) или гибридным методом и
др. Таким образом, в ЦСИО на основе единых принципов построения
и функционирования с использованием ограниченного числа много-
функциональных интерфейсов "пользователь—сеть" интегрируется не
только коммутационное и передающее оборудование, как в инте-
гральной цифровой сети связи, но и различные виды передаваемой
информации (речь, данные, видео и др.), методы коммутации (кана-
лов КК и пакетов КП), различные виды обслуживания (сокращенный
вызов, обратный вызов, переадресация вызова и др.).
Предлагается внедрение для обеспечения поездной, станционной
и ремонтной оперативно-технологической работы перспективных со-
товых и транкинговых систем радиосвязи.
Проведенное сравнение по помехоустойчивости и эффективности
различных систем передачи дискретных и непрерывных сообщений
позволяет грамотно выбирать, проектировать и эксплуатировать раз-
личные системы передачи. Сравнение различных систем передачи дис-
кретных сообщений проводится по нескольким показателям: удельному
расходу энергии сигнала для передачи одной двоичной единицы ин-
формации; удельному расходу полосы частот на одну двоичную еди-
ницу информации и др.
412
СПИСОК ЛИТЕРАТУРЫ
1 . Ахмед Н., Рао К. Р. Ортогональные преобразования при обработке циф-
ровых сигналов / Под ред. И. Б. Фоменко. М.: Связь, 1980. 248 с.
2 . А. с. 1461356 СССР, МКИ Н04В 7/00. Система связи.
3 . Банкет В. Л., Дорофеев В. М. Цифровые методы в спутниковой связи.
М/ Радио и связь, 1988. 239 с.
4 , Ван Трис Г. Теория обнаружения, оценок и модуляции. Т. 2. /Под ред. В. Т. Го-
ряиенова. М.: Сов. радио, 1975. 344 с.
5 ,Венедиктов М. Д., Волков А. А., Горелов Г. В. Управляемое сло-
говое компандирование в системах передачи информации. Учеб, пособие. М.: МИИТ,
1995. 77 с.
б .Волков А. А. Обобщенный выигрыш системы//Радиотехника. 1995. № 6.
С. 26-27.
7 -Вол ко в А. А. Повышение помехоустойчивости систем с ЧМ//Радиотехника.
1996. № 3. С. 19-21.
8 .Волков А. А. Новые методы построения систем связи с ЧРК//Электросвязь.
1995. № 6. С. 18-20.
9. Горелов Г. В., Волков А. А., Шелухин В. И. Каналообразующие
устройства железнодорожной телемеханики и связи. М.: Транспорт, 1994. 238 с.
10. Зюко А. Г. и др. Теория передачи сигналов. М.: Радио и связь, 1986. 303 с.
11. Каллер М. Я., Фомин А. Ф. Теоретические основы транспортной связи.
М.: Транспорт, 1989. 382 с.
12. Кр ас ко в с к и й А. Е. Синтез и анализ алгоритмов и устройств помехоустой-
чивого приема дискретных сигналов в железнодорожной технологической связи. ЛИ-
ИЖТ. 1987. 131. с.
13. Назаров М. В., Прохоров Ю. Н. Методы цифровой обработки и пе-
редачи речевых сигналов. М.: Радио и связь, 1985. 176 с.
14. Окунев Ю. Б. Цифровая передача информации фазомодулированными сиг-
налами. М.: Радио и связь, 1991. 295 с.
15. Пат. РФ № 2113062, МКИ H04L 27/227. Формирователь опорного колебания для
детектирования фазоманипулированных сигналов. Бюл. № 16, 1998.
16. Рекомендации МККТТ по сжатию речи G.721, G.728, G.729.
17. Рекомендации МККТТ по сжатию видеоизображений JPEG, Н.261, MPEG.
18. Руководство по описанию системы "Стандарт-В" спутниковой системы связи
ИНМОРСАТ. Приложение I. Описание системы кодирования речи. Вып. 1, 1988.
19. Статистические характеристики фазы в системах КРЛ с когеретными при-
емниками // Микроэлектронные системы управления движением поездов / Межвуз.
сб. науч. тр. МИИТ. 1993. Вып. 876. С. 16—21.
20. Статистические характеристики пропаданий доплеровских сигналов в изме-
рителях ближнего радиуса действия // В. И. Шелухин и др. / МИИТ. М.: 1991. 39
с.
21. Фомин А. Ф. и др. Цифровые информационно-измерительные системы. М.:
Энергоатомиздат, 1996. 446 с.
22. Фом и н А. Ф. Анализ методов и международных стандартов по сжатию изо-
бражений // Электросвязь. 1994. № 5. С. 16—19.
23. Фомин А. Ф. и др. Сравнение адаптивных линейных устройств предска-
зания для кодеков речи с АДИКМ, АДМ // Электросвязь. 1994. № 10. С. 27—29.
24. Шелухин О. И. Корреляционные функции колебаний, модулированных по
амплитуде и фазе случайными процессами // Изв. вузов СССР. Сер. Радиоэлектроника
1976. Т. 19. № 7.С. 125-128.
413
ОГЛАВЛЕ НИЕ
Предисловие............................................................ 3
Глава 1
Общие сведения о теории связи
1.1. Предмет общей теории связи........................................ 5
1.2. Термины и понятия теории связи.................................... 8
1.3. Система линии и канал связи...................................... 10
1.4. Многоканальные системы связи..................................... 13
1.5. Основные характеристики системы связи............................ 14
Глава 2
Основы теории немодулироваиных сигналов
2.1. Детерминированные сигналы........................................ 17
2.2. Случайные сигналы и распределения вероятностей................... 23
2.3. Числовые характеристики случайных сигналов....................... 26
2.4. Примеры распределения вероятностей сигналов и помех в системах же-
лезнодорожной автоматики, телемеханики и связи.................... 29
2.5. Корреляционные характеристики случайных сигналов................. 32
2.6. Спектральные характеристики случайных сигналов................... 35
2.7. Марковские случайные сигналы..................................... 41
2.8. Аналитическое дискретное описание детерминированных и случайных
сигналов. Обобщенный ряд Фурье.................................... 42
2.9. Разложение сигналов в обобщенный ряд Фурье по системам ортогональ-
ных функций....................................................... 44
2.10. Оценки погрешности аналитического (дискретного) представления . . 48
2.11. Геометрическое представление сигналов и их разложение в тригономет-
рический ряд.................................................. 48
2.12. Представление непрерывных сигналов отсчетами. Интерполяция . . . 50
2.13. Интерполяция алгебраическими полиномами................... 54
2.14. Оценка погрешности интерполяции и частоты дискретизации .... 55
2.15. Дискретные разностные представления. Дельта-представления .... 58
Глава 3
Управление информационными параметрами
3.1. Аналоговые виды модуляции........................................ 61
3.2. Аналого-импульсные виды модуляции................................ 85
3.3. Цифровые виды модуляции.......................................... 91
3.4. Дискретные виды модуляции........................................ ЮЗ
Глава 4
Элементы теории информации
4.1. Дискретный источник сообщений. Количество информации............ 128
4.2. Энтропия ....................................................... 130
414
4.3. Взаимная информация.............................................. 132
4.4. Эффективное кодирование.......................................... 135
4.5. Информация в непрерывных сигналах................................ 136
Глава 5
Пропускная способность канала связи. Теоремы оптимального кодирования
5.1. Пропускная способность дискретного канала связи.................. 139
5.2. Пропускная способность непрерывного канала....................... 141
5.3. Теорема кодирования для канала с помехами........................ 143
5.4. Эпсилон-энтропия................................................. 144
Глава 6
Апостериорные вероятности и оптимальный прием сигналов
6.1. Основные задачи и критерии оптимального приема . . .............. 149
6.2. Апостериорные вероятности........................................ 150
6.3. Апостериорные вероятности и структура оптимальных приемников сигна-
лов со случайными существенными сопутствующими параметрами. . . 160
6.4. Основные соотношения теории оптимального и асимптотически оптималь-
ного приема при негауссовских помехах с независимыми значениями 162
Глава 7
Статистическая теория обнаружения н различения сигналов
7.1. Критерии и алгоритмы оптимального обнаружения сигналов при белом
гауссовском шуме................................................. 170
7.2. Расчет вероятностей правильного обнаружения и ложной тревоги при
различных моделях сигналов и помех .............................. 173
7.3. Оптимальное различение сигналов.................................. 176
7.4. Помехоустойчивость оптимального приемника дискретных сигналов . . 179
7.5. Методы повышения достоверности передачи дискретных сообщений 191
7.6. Помехоустойчивость непрерывной автоматической локомотивной сигна-
лизации ......................................................... 200
Глава 8
Оптимальная линейная н нелинейная фильтрация и оценка параметров сигнала
8.1. Оптимальная линейная фильтрация непрерывных случайных сигналов 208
8.2. Рекуррентные алгоритмы квазиоптимальной линейной и нелинейной
фильтрации и демодуляции......................................... 214
8.3. Теория оценок параметров и оптимальный прием аналоговых импульсных
сигналов......................................................... 221
8.4. Помехоустойчивость и эффективность аналоговых систем с угловой моду-
ляцией при оптимальном приеме.................................... 228
Глава 9
Элементы теории помехоустойчивого кодирования
9.1. Основные понятия................................................. 235
9.2. Принцип обнаружения и исправления ошибок в (л, к) кодах. Корректи-
рующая способность кода.......................................... 238
9.3. Линейные, блочные (л, к) коды.................................... 242
9.4. Циклические (л, к) коды.......................................... 247
9.5. Сверточные коды.................................................. 256
9.6. Применение помехоустойчивых кодов в системах железнодорожной авто-
матики, телемеханики и связи..................................... 260
Глава 10
Согласованные фильтры
10.1. Общие положения................................................. 266
10.2. Согласованный фильтр при коррелированной гауссовской помехе 271
415
10.3. Структура оптимального корреляционного приемника при воздействии
коррелированной гауссовской помехи............................... 275
10.4. Дискретный согласованный фильтр............................ 277
10.5. Цифровые согласованные фильтры............................. 279
10.6. Дискретно-аналоговый согласованный фильтр.................. 279
10.7. Программируемые согласованные фильтры...................... 280
Глава 11
Прием непрерывных сообщений
11.1 Общие положения............................................. 282
11.2. Критерии помехоустойчивости приема непрерывных сообщений . . . 283
11.3. Обобщенный выигрыш системы с угловой модуляцией............ 285
11.4. Оптимальная демодуляция непрерывных сигналов............... 289
11.5. Помехоустойчивость систем передачи непрерывных сообщений. . . . 295
11.6. Потенциальная помехоустойчивость многоступенчатых методов модуляции 299
11.7. Увеличение помехоустойчивости железнодорожной радиосвязи . . . 300
11.8. Прием сигналов с дополнительным подавлением зеркального канала . 304
11.9. Помехоустойчивость станционной и поездной радиосвязи на скоростных
участках......................................................... 307
Глава 12
Принципы построения многоканальных систем передачи
12.1. Теоретические предпосылки разделения каналов............... 313
12.2. Частотное разделение каналов............................... 315
12.3. Фазовое разделение сигналов................................ 317
12.4. Частотно-фазовое разделение каналов........................ 318
12.5. Временнде разделение каналов............................... 321
12.6. Другие способы разделения каналов.......................... 324
12.7. Комбинационное разделение каналов (КРК).................... 326
12.8. Разделение каналов с двойной модуляцией сигналов........... 338
12.9. Системы синхронизации...................................... 339
Глава 13
Сжатие различных непрерывных н дискретных сообщений
13.1. Основы общей теории сжатия непрерывных сообщений........... 352
13.2. Эффективные методы линейного регулярного дискретного представления
непрерывных процессов............................................ 355
13.3. Эффективные методы квантования............................. 361
13.4. Статистическое кодирование................................. 362
13.5. Особенности сжатия речевых сигналов........................ 363
13.6. Особенности сжатия видеоизображений........................ 372
Глава 14
Помехоустойчивость в эффективность различных систем передачи дискретных и
непрерывных сообщений
14.1. Критерии сравнения и оптимальности систем передачи............ 378
14.2. Сравнение различных методов передачи дискретных,' сигналов .... 380
14.3. Помехоустойчивость и эффективность цифровых систем передачи непре-
рывных сообщений с ИКМ и ДИКМ....................................... 387
14.4. Потенциальная помехоустойчивость идеальных по Шеннону систем пере-
дачи дискретных и аналоговых сообщений.............................. 399
Приложения:
1. Таблица дополнения к интегралу вероятностей...................... 405
2. Таблица гамма-функции............................................ 40?
Заключение...........................................................409
Список литературы....................................................413