


































































































































































































Автор: Пельпор Д.С. Михалев И.А. Бауман В.А.
Теги: динамика кинетика воздушный транспорт авиация и воздушные соединения воздушные линии и аэропорты физика авиация
ISBN: 5—06—001186—0
Год: 1988




S3».
ГИРОСКОПИЧЕСКИЕ г si
СИСТЕМЫ
Гироскопические
приборы
и системы
Под редакцией
доктора технических наук,
профессора Д.С. Пелъпора
^7 Издание второе
переработанное п дополненное
О
[опущено Министерством высшего
и среднего специального образования СССР
в качестве учебника для студентов вузов,
обучающихся по специальности
*Гироскопические приборы и системы»
@
МОСКВА
ВЫСШАЯ ШКШ1Л-
1988
ББК 39.57
Г51
УДК 531.383
Рецензенты- кафедра «Гироскопические приборы и устройства»
Саратовского политехнического института
(зав. кафедрой — д-р техн, наук, проф. П. К. Плотников);
Д-р техн, наук, проф. Б. И. Назаров
Гироскопические системы. Гироскопические при-
Г51 боры и системы: Учеб, для вузов по спец. «Гироскоп,
приборы и устройства»/Д С. Пельпор, И А Миха-
лев, В. А. Бауман и др.; Под ред. Д. С. Пельпора.—
2-е изд., перераб. и доп.— М. Высш, шк., 1988.—
424 с.: ил.
ISBN 5—06—001186—0
Книга является продолжением учебника «Гироскопические системы.
Теория гироскопов и гнростабилмзаторов», вышедшего в издательстве
в 1986 г.
В учебнике излагается теория гироскопических приборов и устройств,
входящих в системы ориентации и стабилизации летательных аппара-
тов. Во 2-м издании (1-е — 1971 г.) подробно рассмотрены теория и
расчет погрешностей современных <пропрпборов, инерциальных курсо-
пертикалей и пцюггабнлизаторов, а также бесплатформеиных систем
ориентации.
2706000000(4309000000)—270 ББК 39.57
001(01)—88 88 6П5.8
ISBN 5—06—001186—0 © Издательство «Высшая школа», 1988
ПРЕДИСЛОВИЕ
Учебник «Гироскопические системы», состоящий из
трех книг; «Теория гироскопов и гиростабилизаторов»,
«Гироскопические приборы и системы», а также «Эле-
менты гироскопических приборов»,— соответствует про-
грамме основного специального курса, изучаемого сту-
дентами специальности «Гироскопические приборы и уст-
ройства».
Рассмотренные во второй книге теория и методы рас-
чета гироскопических датчиков первичной информации,
физических маятников и акселерометров, гироскопиче-
ских приборов и систем ориентации являются естествен-
ным продолжением теории и методов анализа гироскопов
и гиростабилизаторов, изложенных в первой книге на-
стоящего учебника.
Гироскопические системы ориентации позволяют по-
лучить необходимую информацию для автоматического
управления летательными аппаратами (ЛА) автономны-
ми методами, без каких-либо иных, не зависящих от
внешних помех источников информации (локация, радио-
навигация, астроориентация и др.).
В первом и втором разделах книги рассматриваются
теория и методы расчета гироскопических датчиков пер-
вичной информации, физических маятников и акселеро-
метров, входящих в состав гироскопических приборов,
гиростабилизаторов и прецизионных систем’ориентации.
Датчики первичной информации в основном определяют
погрешности гироскопических приборов, гиростабилиза-
торов и систем ориентации.
Третий раздел включает в себя теорию и методы рас-
чета гироскопических вертикалей и курсовых приборов и
систем, входящих в состав систем ориентации летатель-
ных аппаратов
В четвертом разделе излагаются теория и методы
расчета погрешностей прецизионных систем ориентации,
основанных на применении пространственных гироскопи-
ческих стабилизаторов. В этом же разделе рассматрива-
ются типовые схемы бескардаппых систем ориентации,
а также методы начальной выставки (ориентации) и ка-
3
либровки систем ориентации в процессе предполетной
наземной подготовки.
В пятом разделе рассмотрены гироскопические систе-
мы ориентации, пассивной и активной стабилизации и
управления спутниками Земли. Принципы построения
гироскопических систем ориентации, стабилизации и уп-
равления спутниками существенно отличаются от прин-
ципов построения подобных систем, применяемых для
стабилизации различных приборов и устройств, устанав-
ливаемых на борту летательных аппаратов.
Введение, гл. 1, 2, 9, 12 и 13 написаны Д. С. Пельпо-
ром; § 3.1, 3.2 (гл. 3) — С. Ф. Коноваловым; § 3.3—3.4
(гл. 3), гл. 4 и 5 — В. А. Д^атвеевым, гл. 6 и 7 — В. А. Ба-
уманом, гл 8 — И. А. Михалевым, гл. 10 и 11 —
В. В. Ягодкипым. В основу книги положен переработан-
ный с учетом современного состояния данной отрасли
материал учебника «Гироскопические системы. Гироско-
пические приборы и системы», вышедшего в издательстве
«Высшая школа» в 1971 г., в написании которого прини-
мали также участие профессора П. В. Бромберг и
Е. А. Никитин и доцент А. А. Балашова.
Авторы выражают благодарность заслуженному дея-
телю науки и техники РСФСР, Д-ру техн, наук, проф.
Б. И. Назарову, а также сотрудникам кафедры гироско-
пических приборов и устройств Саратовского политехни-
ческого института, возглавляемой д-ром техн, наук
П. К. Плотниковым, за полезные замечания, сделанные
при рецензировании рукописи.
Авторы
ВВЕДЕНИЕ
Широкое развитие и применение гироскопических си-
стем и приборов ориентации и навигации летательных
аппаратов, судов, подводных лодок и других подвижных
объектов обязано замечательному свойству их автоном-
ности, которое заключается в том, что приборы и систе-
мы, основанные на применении гироскопов, в отличие от
радиолокационных и оптических систем ориентации и на-
вигации определяют положение подвижных объектов без
каких-либо физических связей с Землей, не защищенных
от внешних искусственных воздействий, создающих поме-
хи в работе этих систем или приводящих к полному на-
рушению их работоспособности.
Формирование структурных схем автономных систем
ориентации, применяемых на летательных аппаратах в
соответствии с классификацией, представленной на
рис. В.1, развивается по трем основным направлениям:
1 Системы, основанные на совместном применении от-
дельных курсовых приборов и систем и гировертикалей.
2. Прецизионные системы, формируемые с использовани-
ем пространственных гироскопических стабилизаторов.
3. Бесплатформеиные (бескардаиные системы ориента-
ции), чувствительными элементами которых являются
гироскопические датчики первичной информации, изме-
ряющие углы или угловые скорости поворота ЛА н ли-
нейные ускорения (акселерометры и физические маятни-
ки). Эти датчики устанавливаются непосредственно на
борту ЛА и работают совместно с цифровой или анало-
говой вычислительной машиной, непрерывно производя
расчет углов курса, крена и тангажа или иных парамет-
ров определяющих ориентацию ЛА относительно базо-
вой системы координат
Для измерения углов курса, крепа и тангажа, отсчи-
тываемых, например, относительно географического ко-
ординатного трехгранника, на борту ЛА необходимо
определить направление истинной вертикали и мериди-
апа- Для определения направления истинной вертикали
служит физический маятник (или акселерометр). Плечо
идеального физического маятника, установленного па
5
основании, неподвижном относительно Земли, распола-
гается по направлению истинной вертикали, и, следова-
тельно. в этом случае маятник является указателем
направления истинной вертикали. Астатический гироскоп
не обладает естественным свойством избирательности по
отношению к направлению истинной вертикали, а в те-
чение длительного времени сохраняет неизменным на-
правление главной оси по отношению к инерциальному
пространству. В гировертикалях для определения направ-
ления истинной вертикали одновременно используется
свойство астатического гироскопа сохранять направле-
ние главной его осн в инерциальном пространстве и свой-
ство избирательности короткопернодического физическо-
го маятника (или акселерометра) по отношению к на-
правлению истинной вертикали В простейшем случае
гироскопическая вертикаль представляет собой астатиче-
ский гироскоп, направление главной оси которого коррек-
тируется моментными датчиками по направлению плеча
физического маятника. Точность гировертикали зависит
от точности определения направления истинной вертика-
ли физическим маятником (акселерометром). Однако
даже в установившемся режиме полета по локсодромии
с неизменным географическим курсом п постоянной ско-
ростью с ростом скорости попета отклонение положения
равновесия физического маятника от направления истин-
ной вертикали (навигационная погрешность гироверти-
кали) достигает нескольких градусов. При этом погреш-
ности гироскопической вертикали, корректируемой
короткопериодическим физическим маятником, примерно
такие же, как и погрешности физического маятника.
Основы прикладной теории гироскопов изложены в
трудах А. Н. Крылова. Б. В Булгакова, Е. Д. Николаи,
Б. И. Кудревича, С. С. Тихмепева, Г. Клейна, А. Зоммер-
фельда, Р. Граммеля, М. Шулера и др. Современное раз-
витие прикладная теория гироскопов получила в работах
А. 10. Ишлипского. Я. Н. Ройтенберга, С. С. Ривкина,
П. В. Бромберга, Я. Л. Лунца. Д. М. Климова, В. И. Кош-
лякова, Б. И. Назарова, А. А. Одинцова. М. А. Павлов-
ского, А. В. Репникова и др.
Теория погрешностей гировертикалей с невыключа-
емой маятниковой коррекцией разработана Б. В. Булга-
ковым и С. С. Тихмеиевым в 1937 г. [9].
В неустаповивтпемся режиме полета отклонения фи-
зического маятника от направления истинной вертикали
столь значительны, что при допустимо малой скорости
7
прецессии гироскопа в режиме коррекции погрешности
гировертикали превышают установленные пределы.
Аналитические зависимости отклонений физического
маятника от направления истинной вертикали в неуста-
новившемся режиме полета, полученные в гл. 1, позво-
ляют рассчитать погрешности гировертикали в полете, а
также принять меры для их уменьшения (выключение
коррекции при вираже, изменение скорости полета и др.).
Развитие отечественной авиации привело к необхо-
димости повышения точности гировертикалей путем час-
тичного и полного выключения коррекции гировертикали
в иеустановившемся режиме полета [5]. С ростом ско-
ростей полета появилась необходимость в исследовании
методов снижения навигационных погрешностей и по-
грешностей, возникающих при полном отключении маят-
никовой коррекции в гировертикалях повышенной точно-
сти (для скоростных самолетов). В гировертикалях
повышенной точности необходимо применять точные гиро-
скопы, обладающие малой собственной скоростью пре-
цессии 0,5... 1,0 град/ч [36].
В 1923 г. М. Шулер сформулировал теорему, соглас-
но которой математический или физический маятник, об-
ладающий периодом 84,3 мин и находящийся до начала
движения в положении равновесия, совпадающем с на-
правлением истинной вертикали, ни при каких ускорени-
ях точки его подвеса во время ее движения по поверхно-
сти земной сферы не выйдет из положения равновесия,
т. е. плечо маятника всегда будет оставаться в положе-
нии равновесия [57]. Исследование движения физическо-
го маятника в иеустановившемся режиме полета показы-
вает, что условие его невозмущаемостп при произвольном
движении точки его опоры по поверхности земной сферы
определяется равенством ml/A = \/R, содержащим
лишь физические константы маятника л?, I и А, ие зави-
сящие от ускорения go силы ньютонова притяжения
к Земле, а зависящие от радиуса R Земли (в общем слу-
чае от расстояния точки опоры маятника от центра Зем-
ли). Период колебаний физического маятника М. Шуле-
ра (84,3 мин), инвариантного к ускорениям точки его
опоры, зависит от широты места, скорости полета и ряда
других причин, а следовательно, не является неизменной
константой, определяющей условия его невозмущаемо-
сти.
В 1932 г. советский ученый Е. Б. Левенталь предло-
жил первую схему модели невозмущаемого физического
8
маятника, состоящую из гироскопа, акселерометра и ин-
тегратора, используемую при разработке современных
невозмутцаемых гировертикалей и инерциальных навига-
ционных систем.
Теория модели физического маятника (так называ-
емой гировертикали с интегральной коррекцией) была
разработана Б. В. Булгаковым [45] в 1938 г. Возмож-
ность построения таких систем с использованием прин-
ципа силовой гироскопической стабилизации показана
Б. В. Булгаковым и Я Н. Ройтепбергом (1946, 1948) [8].
В дальнейшем С. С. Тихменевым, Д. С. Пельпором
(1954) [53, 32] показано, что наиболее точной является
пространственная гировертикаль с интегральной коррек-
цией, платформа которой ориентирована в азимуте по
азимутально свободному гироскопу ((ot=0).
Такие прецизионные гировертикали инвариантны к ус-
корениям, возникающим в полете только при отсутствии
демпфирования длиппопериодических собственных коле-
баний гироскопов.
Возможность построения невозмущаемых гироверти-
калей с затуханием длиннопериодических колебаний в
установившемся режиме полета и выключения затухания
при ускорениях рассматривалась в работах [32, 34]. Пре-
цизионные пространственные гировертикали такого типа
с интегральной коррекцией, поплавковыми интегриру-
ющими гироскопами и динамически настраиваемыми
гироскопами, входящие в состав прецизионных систем
ориентации и инерциальной навигации, устанавливаются
на различных типах самолетов. Собственная скорость
прецессии гироскопов прецизионных гировертикалей
составляет 0,1—0,01 град/ч. Положение равновесия не-
возмущаемой гировертикали с интегральной коррекцией
не только в полете, ио и в точке, неподвижной отпоен
тельно Земли при цд=0, не совпадает с положением
равновесия короткопериодического физического маятни-
ка, устанавливающегося по направлению истинной вер-
тикали. Перед полетом прецизионная гироскопическая
вертикаль выставляется в положение равновесия с по-
мощью специальной системы начальной ориентации. Для
точной начальной выставки гировертикали необходимы
гироскопы, обладающие малой собственной скоростью
прецессии (0,01—0,001 град/ч). Методы начальной вы-
ставки гировертикалей с интегральной коррекцией, бес-
карданных систем ориентации и платформ гироскопиче-
ских стабилизаторов систем наведения баллистических
о
ракет имеют общие принципиальные основы и вынесены
в отдельную главу [27].
Важной задачей построения систем ориентации явля-
ется определение направления меридиана. Существует
автономный метод непосредственного определения на-
правления горизонтальной составляющей 17 cosip векто-
ра U скорости суточного вращения Земли, расположен-
ного в плоскости географического меридиана, и горизон-
тальной составляющей Йм cos 6 вектора Пм напряженно-
сти магнитного поля Земли, расположенного в плоскости
магнитного меридиана.
В 1852 г. Л. Фуко указал на принципиальную воз-
можность определения направления географического ме-
ридиана н широты места с помощью гироскопа с двумя
степенями свободы. Первые корабельные гирокомпасы
созданы в 1908—1909 гг. и представляли собой гироскопы
с тремя степенями свободы. В дальнейшем в 1925—
1927 гг. созданы более совершенные двухроторные гиро-
компасы. На неподвижном основании в современных ги-
рокомпасах, так же как и в гирокомпасе Фуко с двумя
степенями свободы, восстанавливающим моментом, удер-
живающим главную ось гироскопа в положении равно-
весия на направлении меридиана, является гироскопи-
ческий момент HU cos <р sin р (см. кн. 1, гл. 5), где р —
угол отклонения вектора R от составляющей U cos ip ско-
рости О суточного вращения Земли, отсчитываемой в го-
ризонтальной плоскости. В полете положение равновесия
главной оси гирокомпаса отклоняется от направления
составляющей скорости U cosip суточного вращения Зем-
ли на значение скорости вращения, обусловленной гори-
зонтальной составляющей v/R скорости полета, и, сле-
довательно, не совпадает с направлением меридиана.
Отклонение положения равновесия главной оси гиро-
компаса, называемое скоростной девиацией, на самоле-
тах достигает 180° (при ObOjR^cosqi). В этом случае
гирокомпас непригоден для эксплуатации на самолетах,
а тем более на ракетах. Положение равновесия главной
оси гирокомпаса совпадает с направлением меридиана
только на основании, неподвижном относительно Земли.
На летательных аппаратах гирокомпасы находят при-
менение при предполетной начальной выставке систем
ориентации; на судах и подводных лодках при относи-
тельно малой скорости v движения скоростные погрешно-
сти гирокомпаса незначительны. В морском флоте
гирокомпасы непригодны для эксплуатации в полярных
10
широтах. Наличие маятниковости при ускорениях порож-
дает у гирокомпаса баллистические девиации, которые
снижаю гея путем настройки гирокомпаса па период
84,4 мин.
Магнитный (или индукционный) компас определяет
направление магнитного меридиана, которое пе совпада-
ет с направлением географического (истинного) мериди-
ана, а составляет с ним угол Дм, называемый магнитным
склонением, которое для разных пунктов Земли различно
по величине и знаку и меняется со временем. В некото-
рых районах Земли, особенно в полярных широтах, ве-
личины магнитных склонений достигают десятков гра-
дусов.
Значительные погрешности в определении направле-
ния магнитного меридиана вносят магнитная девиация
компаса Дмк и погрешность Ли от наклона магнитного
элемента. Магнитный чувствительный элемент, установ-
ленный в кардановом подвесе, представляет собой фи-
зический маятник. При этом в полете возникают коле-
бания магнитного элемента вокруг горизонтальной оси
и порождают значительные короткопериодпческие по-
грешности в определении магнитного меридиана В авиа-
ции широкое распространение получили гиромагнитные
компасы, в которых показания курсового гироскопа
корректируются магнитным компасом. Первая схема
гиромагнитного компаса, нашедшая применение в авиа-
ции, была разработана в 1935 г. в СССР Д. А. Браслав-
ским, М. Г Элькиидом и М. М. Качкачьяном. При ско-
рости прецессии, порождаемой корректирующим момен-
том, амплитуда погрешностей, вносимых короткоперио-
днческими отклонениями магнитного чувствительного
элемента, значительно уменьшается курсовым гироско-
пом. Точность гиромагнитных компасов невысока (не
превышает одного или нескольких градусов) и для на-
чальной выставки прецезионных систем ориентации
магнитные чувствительные элементы пе применяются.
Гиромагнитные компасы, так же как и гирокомпасы, не-
пригодны для эксплуатации в высоких широтах. В авиа-
ции широко распространены гироскопические указатели
Направления ортодромии (УНО), представляющие собой
азимутально свободные гироскопы, корректируемые в
азимуте моментными датчиками или путем вращения
шкалы гироскопа с угловой скоростью, равной верти-
кальной составляющей £/sin<p скорости суточного вра-
щения Земли. При выдерживании по такому прибору no-
li
стоянпого курса самолет совершает полет по заданной
ортодромии.
УНО обеспечивает полет по заданному ортодромиче-
скому курсу в любых географических широтах, в том
числе и на полюсах Земли. Принципиальной особен-
ностью УНО является отсутствие восстанавливающего
момента, удерживающего в равновесии главную ось
гироскопа па направлении заданной ортодромии. Для
обеспечения требуемого качества такого прибора в экс-
плуатации необходимы прецизионный гироскоп с собст-
венной скоростью прецессии 0,1—0,5 град/ч и средства
для точной его начальной выставки относительно направ-
ления географического меридиана. В прецизионной си-
стеме ориентации точность работы гироприборов сущест-
венно увеличивается при размещении их па гироппагфор-
ме, установленной в карда новом подвесе пли подвесе
иного типа, обеспечивающем ей три степени свободы от-
носительно корпуса ЛА. Помимо обеспечения возмож-
ности сохранять неизменной ориентацию платформы в
пространстве такие подвесы в значительной степени изо-
лируют установленные на гироплатформе гироскопы и
акселерометры от влияния угловых колебаний и вибра-
ции корпуса ЛА.
Трехосный карданов подвес не обеспечивает полной
свободы углового маневра ЛА в связи с тем, что при по-
вороте последнего вокруг промежуточной оси подвеса
на угол 90° его рамы складываются и нормальное функ-
ционирование системы нарушается. Для обеспечения
всеманевренности ЛА в гироскопической системе ориен-
тации используются дополнительные рамы со следящими
системами, обеспечивающими нормальное функциониро-
вание гиростабилпзатора при выполнении маневра. Про-
странственные гиростабилизаторы представляют собой
многоканальные замкнутые взаимосвязанные динамиче-
ские системы, для обеспечения устойчивости движения
которых применяют корректирующие устройства и мест-
ные обратные связи. Представляя собой сложные элек-
тромеханические устройства, современные прецизионные
системы ориентации с поплавковыми гироскопами явля-
ются дорогими и имеют значительные массу и габариты.
Особенностью применения вибрационных гироскопов ро-
торного типа для построения относительно дешевых, лег-
ких и малогабаритных пространственных систем ориен-
тации является динамическая настройка гироскопа па
условие компенсации моментов сил инерции кольца под-
12
веса ротора моментами от упругих деформаций подвеса.
Гироскопы с такой настройкой его параметров называ-
ются динамически настраиваемыми гироскопами (ДНГ)
п по своим свойствам при идеальной настройке являют-
ся интегрирующими гироскопами абсолютной угловой
скорости платформы с коэффициентом передачи, близ-
ким к единице. Такой коэффициент передачи ДНГ по-
зволяет построить такую платформу с установленными
на ней ДНГ, которая обладала бы свойствами, эквива-
лентными свойствам трехстепенного астатического гиро
скопа высокой точности. С этой целью к следящим систе-
мам платформы, выполняющим функции совмещения
осей приводных двигателей гироскопов с векторами соб-
ственного вращения роторов гироскопов, предъявляются
высокие требования по точности стабилизации платфор-
мы (порядка 1... 3 угл. мин) На примере построения
прецизионной курсовер гикали на ДНГ для самолетов
рассмотрены принципы построения и элементы теории
такой системы.
В бесплатформенных, или бескардаппых, системах
ориентации и навигации гироскопы и акселерометры ус-
танавливаются непосредственно на корпусе ЛА либо
монтируются в специальные блоки чувствительных эле-
ментов. Сигналы этих датчиков поступают на вход ЭВМ,
которая решает задачу ориентации аналитически, как бы
заменяя собой карданов подвес и координатный преоб-
разователь гироплатформы.
Наибольшее распространение в бесплатформенных
системах ориентации и навигации получают прецизион-
ные датчики угловых скоростей (ДУС) и гироскопы на
электростатическом подвесе, определяющие углы пово-
рота ЛА вокруг центра его масс; также ирпользуются
угловые и линейные акселерометры, установленные оп-
ределенным образом на корпусе ЛА. В отличие от систем
ориентации с гироплатформами в бесплатформенных си-
стемах гироскопические датчики и акселерометры рабо-
тают в более тяжелых условиях эксплуатации вследствие
изменения расположения приборов по отношению к на-
правлению гравитационного поля Земли, больших скоро-
стей и ускорений, возникающих при вращении, колеба-
ниях и вибрации корпуса ЛА.
Точность же измерения угловых скоростей, ускорений
или угловых перемещении ЛА должна быть того же уров-
ня, который достигнут в системах платформенного типа.
Достижение требуемой точности в более тяжелых усло-
13
виях эксплуатации представляет собой исключительно
сложную техническую задачу.
В бесплатформеиных системах ориентации и навига-
ции, используемых на отдельных космических летатель-
ных аппаратах и в авиации, осуществляют различные
методы вычисления параметров ориентации, основанные
па применении углов последовательных поворотов, на-
правляющих косинусов, параметров Родрига — Гамиль-
тона и др. При аналитическом моделировании опорной
системы координат, основанном па использовании углов
последовательных поворотов ЛА в форме Эйлера и др.,
не обеспечивается всеманеврепность полета. ЭВМ при
этом как бы моделирует карданов подвес, рамки кото-
рого могут сложиться в полете. Применение, например,
аппарата направляющих косинусов не накладывает ни-
каких ограничений на маневр ЛА и эквивалентно ис-
пользованию невыбиваемого карданова подвеса плат-
формы.
Погрешности гироскопических систем ориентации
как бесплатформениого, так и платформенного типов и
другие важные их характеристики в основном определя-
ются характеристиками датчиков первичной информации
в реальных условиях их эксплуатации.
Существует два пути повышения точности гироско-
пов:
1) совершенствование элементной базы приборов.
2) учет погрешностей гироскопа в процессе эксплуа-
тации (например, с помощью алгоритмической компен-
сации модели погрешности в бортовой ЭВМ). Методика
определения модели погрешности поплавкового интегри-
рующего гироскопа, рассматриваемая в книге, использу-
ется ври оценке модели погрешностей и других типов
гироскопов, работающих в условиях действия перегру-
зок. Возрастают требования по уменьшению времени
готовности гироприбора, его размеров и металлоемкости.
Этим требованиям отвечают вибрационные гироскопы.
Из рассматриваемых в книге двустепенных и трехстепен-
ных роторных вибрационных гироскопов, осцилляторных
гироскопов, твердотельных волновых гироскопов наибо-
лее широкое применение находят трехстепенные ротор-
ные вибрационные гироскопы с динамической настрой-
кой. ДНГ позволяют уменьшить массу и размеры
гиросистемы, в несколько раз снизить время ее готовно-
сти по сравнению с гиросистемой иа двусгепепных гиро-
блоках. Рассматриваются модель погрешностей ДНГ,
14
выбор его параметров в режиме свободного гироскопа
в ДУС-
Перспективными направлениями в развитии современ-
ного гироприборостроения являются разработка, приме-
нение и внедрение оптических гироскопов с использова-
нием лазеров в качестве источника света (в световолокон-
ном гироскопе), построенных по принципу пассивного
интерферометра, или в качестве резонатора и источника
излучения активной среды лазерного гироскопа, постро-
енного на принципе активного интерферометра. Оптиче-
ские гироскопы позволяют получить малое время готов-
ности прибора, повысить срок службы, обеспечить его
работу в условиях больших перегрузок. В связи с разви-
тием электроники внедрение оптических гироскопов бу-
дет расширяться; дальнейшее повышение точности этих
приборов связано с развитием алгоритмической и схем-
ной компенсации погрешностей наряду с уменьшением
размеров электронных схем.
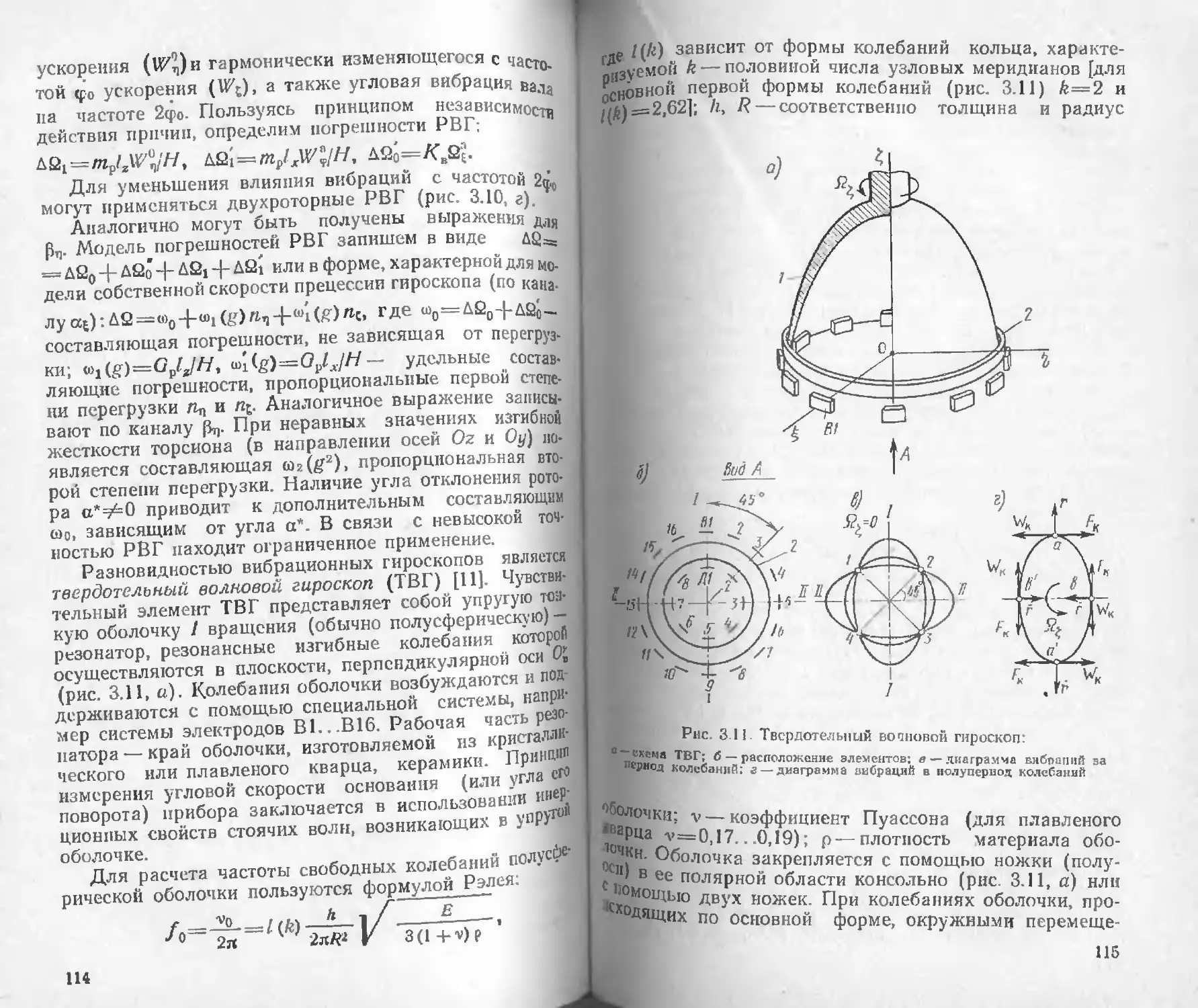
В отличие от лазерного гироскопа стоячая волна в
твердотельном волновом гироскопе (ТВГ) возбуждается
в упругой тонкой оболочке и ее свойства используются
для измерения угловой скорости основания, на котором
установлен прибор. ТВГ может обеспечить малое время
готовности прибора и работу в условиях больших пере-
грузок. Здесь основными проблемами являются исследо-
вание причин погрешностей, создание оболочки с задан-
ными характеристиками, а также системы съема и обра-
ботки информации.
Датчики угловых, скоростей — эго один из основных и
наиболее совершенных чувствительных элементов систем
управления, стабилизации и навигации. К характеристи-
кам ДУС предъявляются жесткие требования. Так, верх-
ний диапазон скоростей, измеряемых современными
ДУС, соответствует десяткам и сотням градусов в секун-
ду. Верхний диапазон частот входных воздействий, в ко-
тором ДУС обязан обеспечивать измерение угловой ско-
рости, достигает 100 Гц. Прецизионные ДУС бесплат-
форменных инерциальных систем должны иметь разре-
шающую способность до тысячных долей градусов в час
и линейность до 10~3%, причем эти ДУС должны фор-
мировать выходной сигнал в цифровом виде. В широком
Диапазоне варьируются требования к массовым и габа-
ритным параметрам приборов; из-за миниатюризации
ДУС в последнее десятилетие значительно уменьшились
15
величины собственного кинетического момента их гиро-
скопов.
Основное внимание в книге уделено рассмотрению
особенностей различных конструктивных схем ДУ С и нх
сопоставлению; выведены соотношения для расчета инст-
рументальных, методических и динамических погрешно-
стей ДУС; приводится анализ конструктивных и схемных
решений, направленных на повышение точности ДУС.
На космических летательных аппаратах (КЛА) и
спутниках Земли применяют пассивный и активный мето-
ды стабилизации. При пассивной гироскопической ста-
билизации гироскопы с большими собственными кинети-
ческими моментами (//=10... К)3 Н-м-с) одновременно
служат для непосредственного подавления моментов
внешних сил, действующих на КЛА, демпфирования соб-
ственных колебаний системы, для определения отклоне-
ний КЛА от заданной опорной системы координат, т. е.
для его ориентации.
В пространственной гравитационно-гироскопической
системе расположение определенным образом двух по-
плавковых гироскопов и соответствующий выбор соотно-
шения моментов инерции спутника относительно главных
его осей инерции обеспечивают ориентацию и пассивную
стабилизацию спутника относительно трех осей орби-
тальной опорной системы координат. Помимо восстанав-
ливающих гироскопических моментов, стабилизирующих
поперечную ось спутника на направлении вектора £20
орбитальной скорости вращения и демпфирования собст-
венных колебаний спутника вокруг связанных осей, в
центрально-симметричном гравитационном поле Земли
возникают восстанавливающие гравитационные моменты,
стабилизирующие его вокруг поперечной и продольной
осей.
При активной гироскопической стабилизации откло-
нение спутника или КЛА от заданной опорной системы
координат определяется с помошью гироскопов с малы-
ми собственными кинетическими моментами (//==
= 10-2... 10-’ Н-м-с) системами ориентации (ДУС, гиро-
орбитант, гироскоп в кардаповом подвесе и др.), а для
подавления моментов внешних сил при стабилизации
КЛА служат гироскопы с большими собственными кине-
тическими моментами, главные оси которых принудитель-
но поворачиваются управляющими двигателями вокруг
осей, лежащих в экваториальной их плоскости. Каждый
гироскоп развивает соответствующий гироскопический
момент, уравновешивающий момент внешних сил, дейст-
вующих на КЛА, и, следовательно, превращается в гиро-
привод.
Гироскопический привод управления и система пас-
сивной стабилизации КЛА не требуют расхода рабочего
тела, что является важным преимуществом по сравне-
нию с газовым или реактивным приводом КЛА. Кроме
того, гиропривод обладает свойством усиления стабили-
зирующего или управляющего момента, действующих па
КЛА по сравнению с моментом, развиваемым двигате-
лем, управляющим гироскопом гиропривода.
Важным преимуществом обладает гиропривод, пред-
ставляющий собой два спаренных гироскопа с тремя сте-
пенями свободы и обеспечивающий независимую стаби-
лизацию и управление КЛА вокруг двух его связанных
осей.
16
ЧАСТЬ 1
ПРИБОРЫ СИСТЕМ ОРИЕНТАЦИИ
РАЗДЕЛ 1
ФИЗИЧЕСКИЕ МАЯТНИКИ
Астатические гироскопы (и гиростабилизаторы) не
обладают естественным свойством избирательности по
отношению к направлению истинной вертикали, а сохра-
няют неизменное направление главной оси по отношению
к инерциальному пространству. При этом для автоном-
ной стабилизации гироскопа (или платформы гиростаби-
лизатора) на направлении истинной вертикали исполь-
зуются свойства избирательности плеча короткопериоди-
ческого физического маятника по отношению к
направлению истинной вертикали. За направление истин-
ной вертикали выбирается направление плеча коротко-
периодического физического маятника, точка подвеса
которого установлена неподвижно на поверхности'
Земли.
Даже в установившемся режиме полета плечо корот-
копериодического физического маятника устанавливает-
ся не по направлению истинной вертикали, а по направ-
лению кажущейся вертикали. В системах ориентации и
навигации при определении направления истинной верти-
кали в гировертикалях одновременно используются свой-
ство астатического гироскопа сохранять направление
главной его оси Ог неизменным в инерциальном про-
странстве и свойство избирательности короткопериоди-
ческого физического маятника к направлению истинной
вертикали.
Для изучения движения физического маятника преж-
де всего определим проекции возникающего в полете ус-
корения вершины О'географического координатного опор-
ного трехгранника на его ребра.
18
ГЛАВА 1
ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ РАВНОВЕСИЯ
ФИЗИЧЕСКОГО МАЯТНИКА
1.1. Проекции ускорения вершины опорного
координатного трехгранника на его ребра
При составлении уравнений движения физического
маятника (или акселерометра) в подвижной опорной си-
стеме координат необходимо получить аналитические
выражения проекций U7,, и абсолютного ускорения
точки О вершины выбранного опорного координатного
трехгранника на его ребра. Для этого воспользуемся из-
вестными формулами [см. (3.18) кн 1]
d-D
в которые для географического трехгранника (см. § 4.1
кп. 1) из (4 7) (см. кн. 1) подставим значения проекций:
WE= — vN/R, cos<?-\-ve/R,
и'—f/sin (1.2)
переносной скорости вращения трехгранника, а также
значения проекций абсолютной скорости вершины О ко-
ординатного трехгранника, в нашем случае равные:
—-]-/?(/cos <р; *1/4=^; V\=-yA. (1.3)
Согласно (1.1), (1.2) и (1.3), в проекциях на оси геогра-
фического опорного координатного трехгранника после
соответствующих преобразований получаем:*
w'/t=^£—(‘4yv‘y£//?)tg<p+-aAT;_E//?—2vNU sin <p4-2?'ftZ7 cos
1Г/1=4.— U2R cos2 4 2vEU cos <p;
w +(f£ IR) tg T+vN-vh!R 4- U2R sin <p cos <p 4-
-J-2^67 sin <p. (1.4)
В первом приближении (1.4) определяют проекции
абсолютного ускорения вершины О географического
трехгранника Otrfc па его ребра (для сферической моде-
ли Земли) при ориентации осей Og, Oq в плоскости, пер-
пендикулярной радиусу сферической Земли (а не в плос-
19
кости горизонта). При рассмотрении движения гироско-
пических систем следует определить направления к
центру Земли (ось 01.) вектора Go силы ньютонова при-
тяжения к Земле и вектора G силы тяжести (ось 0£')
(рис_ 1.1, а) (см. гл. 4 кн. 1). Сила тяжести <7=(7п+с'
где С= (G0/g0) sin ф cos <р.
Горизонтальная плоскость Земли, перпендикулярная
вектору О силы тяжести для сферической модели Земли
(ось О£'), не перпендикулярна радиусу R (пл.
Земли п не является касательной к сферической модели
поверхности Земли. Во втором приближении конфигура-
цию Земли представляют эллипсоидом Красовского (см.
гл. 4 кн. 1); в этом случае горизонтальная плоскость яв-
ляется касательной к поверхности эллипсоида. Направ-
ление истинной вертикали определяем для точки О'
(рис. 1.1, а), расположенной на поверхности Земли.
В общем случае вследствие несферичпости формы и
изменения удельной массы в различных точках Земли
направление вектора ускорения £п=(3п/т силы ньютоно-
ва притяжения к Земле массы т, расположенной в точ-
ке О', не совпадает с направлением к центру Земли (ось
Ot), а составляет с ним угол Ri (рис 1.1, а).
Ускорение возникает под действием силы Gn в том
случае, когда масса т свободно падает па Землю. Если
масса т лежит неподвижно па поверхности Земли то
ньютонова сила притяжения прижимает массу т к Зем-
ле с силой Go.
Для определения ускорения, возникающего при дви-
жении летательного аппарата и формирования коррек-
тирующих моментов, действующих па гироскоп и удер-
живающих ось его ротора па направлении истинной вер-
тикали, применяют акселерометры, или физические
маятники. Простейшая принципиальная схема акселеро-
метра изображена на рис. 1.1,6. где представлен ннлинд
рическнй корпус <?, в полости которого вдоль оси О1а
корпуса перемещается груз 2. обладающий массой пг
Цилиндрические пружины 1 связаны с грузом 2 и корпу-
сом 3. Перемещение груза 2 относительно корпуса опре-
деляется с помощью потенциометрического датчика 5.
Щетка 6 потенциометрического датчика перемещается
вместе с грузом 2, а потенциометр закреплен неподвижно
в корпусе 3 акселерометра, установленного иа ЛА 4.
Если на груз 2 в направлении оси OZ.A внешние силы
не действуют, то он удерживается пружинами 1 в таком
положении, что сигнал 1га, снимаемый с потенциометра5,
л равен нулю. Вначале суточным вращением Земли во-
круг осн Мира пренебрегаем. Представим себе, что ЛА
неподвижно расположен на Земле так, что направление
осн Ol,a корпуса цилиндра акселерометра совпадает с
направлением вектора Gc силы ньютонова притяжения
груза к Земле (рис. 1.1, 6). Под действием силы Go пру-
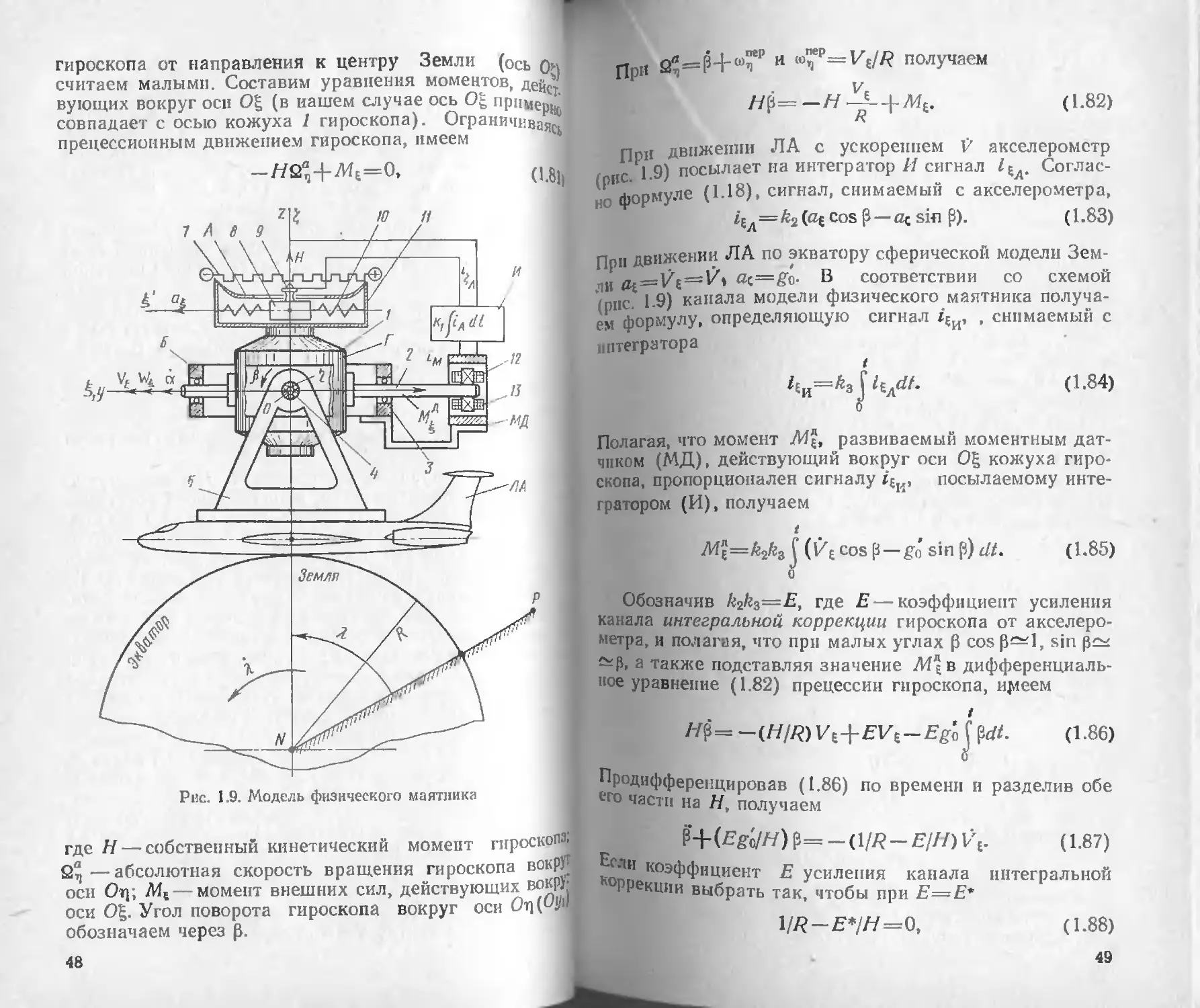
Рис. 1.1. Определение направлений истинной и кажущейся
вертикали
21
20
жины / деформируются на величину Дл^д и развивают си-
лу F упругости, равную ЛДхСд, где k — жесткость пру,
жины. В положении равновесия F=k-bXtA—G0, а сле-
довательно,
/сд=Л1ДхСл=(Л1/Л)О0, (1.5)
где ki — коэффициент пропорциональности.
Акселерометр, установленный на ЛА, расположенном
на Земле, как показано на рис. 1.1, б, измеряет силу С;,
ньютонова притяжения к Земле. Теперь полагаем, что ЛД
вместе с акселерометром, который расположен так, что
направления его оси О^а и вектора Go совпадают (как
это представлено на рис. 1.1, б, в), свободно падает на
Землю (рис. 1.1, в). Дифференциальное уравнение отно-
сительного прямолинейного движения материальной точ-
ки массы т в соответствии с уравнением (1.5) (см.кн. 1)
^®?д=Дпн-|-ф!д, (1.6)
где Ч0£л=&хс — относительное ускорение материальной
точки т\ Fm—FCA-\-G0=—kb.x-\-Gz—сумма внешних
сил, действующих па груз 2 в направлении оси О?л;
Ф*д =—mw‘A~ переносная сила инерции; И1*Д = 7УС—
ускорение центра масс ЛА в направлении оси OgA, яв-
ляющееся переносным для груза 2. При этом для груза
получаем
шДлг.л=— k ДхСд Go—/на?'д=—/глСд 4-G04- Ф<д. (1.7)
В установившемся свободном падении ЛА и груза ак-
селерометра ДхСд=0 и уравнение (1.7) принимает вид
ЛДхСа=О0—/п^0=О04-ФСд. (1.8)
Так как Go=/ng0, то /гДлСд=0,
ДхСд=0 и /Сл=0. (1.9)
Согласно (1.9), при свободном падении ЛА под дей-
ствием силы GoA и груз акселерометра (рис. 1.1, в) под
действием силы Go падают с одинаковым ускорением
при этом деформация ДлСд пружины равна пулю и сиг-
нал /цд, снимаемый с потенциометра 5, 6 акселерометра.
также равен пулю. Акселерометр пе измеряет ускорение
L свободного падения ЛА.
Определим, с каким ускорением ауСд в направлении
действия силы Go* должен двигаться ЛА для того, чтобы
переносная сила иперции Ф'*==—/п-ау^пмитпровала дей-
ствне па груз акселерометра силы Go. Согласно уравне-
нию (1.7), при ДхСд = Дл<д=0
фса= — mwl*A==Go=mgo==mgo (1.10)
илп __ .V 1
^A=~g0. (1.П)
Переносное ускорение «у*д ЛА в дальнейшем обознача-
ем go! иг<>|=|Яо|- Здесь go —ускорение, сообщаемое гру-
зу силой Go, a go=ie/c* — ускорение ЛА, необходимое для
имитации действия силы Go на груз. Подставляя значе-
ние силы Go из (1.Ю) в (1.7), для установившегося ре-
жима движения получаем
kДхсд=—т<щ — mw 1Л = — т +go) ; (1-12)
пли
ДлсА = —J'(w<a+£'o)’ (1-13)
Из (1.13) видно, что акселерометр измеряет сумму
ускорений: те'д— переносное ускорение, Wc*=go— пере-
носное ускорение, необходимое для имитации переносной
силы иперции Ф^д—mgo=Go.Сумму ускорений ®c+go=
=«с называют кажущимся ускорением. В общем случае,
когда векторы we и go не лежат на одной прямой, а рас-
полагаются произвольно, вектор а кажущегося ускорения
определяется суммой векторов-
tt=wc4-go- (1-14)
При этом направление вектора g'o не совпадает ни с на-
правлением истинной вертикали, ни с направлением к
Центру Земли. Угол между направлением к центру Зем-
ли и вектором g-u(g0) обозначаем через еь Для опреде-
ления направления кажущейся вертикали и проекций
22
23
<2t, ал и flj вектора а кажущегося ускорения па ребра
географического трехгранника Ogr]g проецируем вектор
ускорения go на оси Og, От] и 0g:
gt=O; ^ч=Cosine,; gi=gocosei; (1.ДЯ
при этом
af=U/e; tt4=Wz,+fi'os’n ei> ac=^c+?oc°ssl, (1.15a)
а также при vfl = i>il=O для горизонтального полета, со-
гласно (1.4), (1.15) и (1.15а), получаем
aE=‘Uy.--~(,u£'OjV//?)tg<p — 2vNU sin <?;
a4=^+(®£//?)tgS,+i/2/?sin ®cos<? 4-
-\-2vEU sin <p-)-gosin e,;
at== — —(72/?c°s2<p-|-2‘O£O cos?+й'(1 cosei- I
(1.16)
Формулы (1.16) определяют проекции вектора а ка-
жущегося ускорения иа ребра географического трех- ;
граппика Ogrjg. Проекции а$, ап и (1.16) кажущегося
ускорения а непосредственно измеряются акселеромет-
рами Аь Ап и Аш (рис. 1.2, а), установленными на иде-
альной гироплатформе (П) системы ориентации так, что
измерительные оси О^а, Ог]а, О^а правого координатно-
го трехгранника 0£дт)а£л расположены параллельно
осям 0g, От), 0g географического координатного трех-
гранника Ogr]g.
Если вершина О координатного трехгранника OgAf]/U
платформы (П) вместе с акселерометрами Аг, Ап и Аш
движется с кажущимся ускорением а, проекция которого
на измерительную ось От)А равна const, то
в положении равновесия для сообщения грузу 2 ускоре-
ния к нему следует приложить силу F, равную та^
и направленную в сторону ускорения щ/. Такую силу
F^=—kLx^A развивают пружины 3, где k— жесткость
пружин 3, а перемещение груза 2 вместе со щет-
кой 4 потенциометрического датчика Очевидно, что в по-
ложении равновесия
—та*л — АДх*4=0 (1-Ш
или &х*чА——(injk) а’А-
Початая, что сигнал 1т1А (напряжение или ток), еннма-
тый с потенциометрического датчика, пропорционален
еi ейному перемещению щетки 4 по обмотке 5 потенцио-
метра, имеем
/*д=/г1Дл*л=(/г1/Л)77гд*л=М*>г (1-18)
r ie k2= (k\/k)m— соответствующий коэффициент про-
п циональности сигнала 1Ч,А проекции а,д кажущегося
v рения а платформы (П) на измерительную ось
Oi|i(n)- Так же определяются основные статические ха-
Рис. 1.2. Расположение акселерометров на платформе:
па! ?рнс,,таЧпя акселерометров; П — платформа; ! — корпус акселсромет-
и • 1*РУз; о —пружина; 4 — щетка потенциометра; 5 — обмотка потен-
циометра; б — расположение кажущегося ускорения
РЗктерпстики акселерометров А, и Аш. Согласно (1.16),
роекцпи и а,, кажущегося ускорения а в соответствии
с лРниятым здесь расположением опорного географиче-
<Ого к°ординатпого трехгранника OgTjg содержат про-
24
26
екции gjsinej и go cose, ускорения go- При этом н ак
селерометры Ац и А(П помимо проекций абсолютного
ускорения платформы (П) также измеряют и проек.
ции go sin е, и gocosej ускорения gc', направленного в
сторону, противоположную ускорению g0(|go|=|g0|).
Полагая для вершины О трехгранника непо-
движного относительно Земли, в формулах (1.16)
0- аЕ=аЕ, а-^—а^ ас—находим угол е от.
клонения направления истинной вертикали (ось 0^') от
направления к центру Земли (ось OQ к северу (в плос-
кости меридиана):
tgeAf = —
+ gp Sin g]
W’ + gpeosiH
(1.19)
где UZ, и Wc— ускорения вершины О трехгранника, не-
подвижного относительно Земли. Подставляя значения
UZ4 и UZt из (1.4), получаем
f/2R sin cos ч> -I- gn sin ti
tge"=----------—(1.20)
g0 cos *i — U2 R cos2 у
Зная, что go cos ej U2R cos2 <p и углы e и ei малы,
можно пренебречь в знаменателе (1.20) U2R cos2ф и
принять cosei«l, sinei«E|. В результате приближенно
имеем
tgeAr<seAr^f/2/? sin ® cos<p/go-|-ei- (1-21)
Обозначая угбл t72/?sin2 tf>/(2gp) через Е2, получаем
— <р1=е1-|~ег = 13,6' sin 2<о, (1.22)
где фц — геоцентрическая широта места; eI=4,6/sin2(p
(см. кн. 1).
Отклонение направления истинной вертикали (ось
О£') от направления к центру Земли (ось О£) к западу
при UZE=O
^=4=-=-^--------------=0. (1.23)
«С cos 81
Физический (или математический) маятник, точка 0
подвеса которого неподвижна относительно Земли, в по-
ложении равновесия устанавливается по направлению
ной вертикали. Таким образом, направление истии-
исТИверГцкалн в любой точке, неподвижной относительно
*’оП hi определяется с помощью физического маятника.
~ем‘ при строительство наземных сооружений и состав-
нйи географических карт в картографии и геодезии
обходимо точно знать направление истинной вертика-
Не или расположение плоскости истинного горизонта,
ггеопендикулярпой направлению истинной вертикали.
Определим проекцииа^, ат.о и кажущегося уско-
рения а движения вершины О ортодромического опорно-
го координатного трехгранника О|0»]о£о на его ребра (см.
1 гл. 4). Преобразовав проекции щ и ап кажущегося
ускорения а на ребра географического трехгранника
13 ег0 проекции aio и аЪо на ребра ортодромическо-
го трехгранника Ogoi)o?o (рис. 1.3), получаем:
fl£o=aE cos ф* sin ф*. cos ф*—aEsin ф*,
ас0=ас- (1.24)
Направления осей О? и Otjo совпадают. Угол между ося-
ми т] и т)о, € и равен ф". Формулы для преобразования
проекций vn и ve относительной скорости о движения
начала О географического трехгранника в ее проекции
®Eo на ребра ортодромического трехгранника 0£оТ)о£о
получаем согласно рис. 1.3:
c»s ф’Ч-г'Е» sin ф*,
г’£='»Е.со8ф*-1-'п,10 sin ф*. ^=0. (1.25)
Подставляя в (1.24) значения а71, из (1.16), vN и
Vr из (1.25), а также замечая, что в полете по ортодромии
при отклонении 6=0 от заданной ортодромии скорость
вращения географического трехгранника вокруг на-
правления к центру Земли (ось О£) согласна (4.7) и (4.9)
(см. кн. 1) отличается от скорости од,, вращения ортодро-
мического трехгранника 04т)о?с на величину ф*, равную
ф*=-Сп£//?)(ёт, (1-26)
после соответствующих преобразований получаем:
sin <p cos ф sin ф*-|-2'z>4ot7 sin <р
+go sin elsin фк,
U2R sin <pcos ф sin ф*-|-2'пЕ(/7 sin ? +
4-gosin e£ cos Ф*.
27
26
va + v.
aCe=------—— — U'2^ cosa <f>+2®n„£7 cos <p sin ф* —
— 2г>Ео7/ cos <? cos Ф* -|- go COS <4.
(1.27)
Рис. 1.3. Схема разложения кажущегося
ускорения
Формулы (1.27) определяют проекции вектора а ка.
жущегося ускорения на ребра ортодромического коорда,
натпого трехгранни-
ка OgoT)ogo в полете
по ортодромии при
6=0. Пользуясь со-
ответству ю щ ими
формулами преобра-
зования координат,
аналогичным обра-
зом можно опреде-
лить проекции век-
тора а кажущегося
ускорения на ребра
скоростного O£iT]itiii
орбитального О$о
T]ogo трехгранников.
Если, например,
измерительные оси Og/ и Og/ акселерометров наклоне-
ны по отношению к осям Og и 0g географического коор-
динатного трехгранника на угол р, то в соответствии с
рис. 1.2,6 проекции кажущегося ускорения па оси О(Ц и
0g/ таковы:
a^A—az cos р — az sin p, a^=cccosP4-aEsin p, а сигналы,
снимаемые с акселерометров Aj и Ищ в установившемся
режиме движения системы, будут
kA==k2aiA=k2 (uE cos р—Ос sin р),
4Л=А2асл=/е2(асСО5 ₽—sin р), (1.27а)
где /г2 — соответствующий коэффициент пропорциональ-
ности [см. (1.18)]. Опорные координатные трехгранники
иногда называют горизонтными, полагая, что одна из их
осей проходит через центр земной сферы и совпадает с
направлением истинной вертикали, а две другие осн ле-
жат по касательной к земной сфере и одновременно в
плоскости горизонта. Исключением является лишь коор-
динатный трехгранник эллиптической орбиты. При этом
для физической реализации опорного координатного
гоанника C^g в полете необходимо изучить методы
Р Мной реализации плоскости горизонта, возможной
aBJauieM случае (например, с помощью платформы, удер-
живаемой какими-либо чувствительными элементами в
\оскостп горизонта). Кроме того, опорные оси коорди-
ПдТ должны быть определенным образом ориентированы
азимуте (по направлению географического меридиана,
в плоскости ортодромии и т. д.). В этом случае необходи-
мо изучить автономные методы определения направления
меридиана, ортодромии или плоскости орбиты и способы
их возможной физической реализации, например, путем
абилизации той же платформы с помощью каких-либо
чувствительных элементов на заданном направлении в
м те. Физический маятник и акселерометр служат
для непосредственного определения направления истин-
ной вертикали на Земле (ow = oc=0), а также широко
применяются в гироскопических системах ориентации и
навигации для определения направления истинной вер-
тикали в полете. Для автономного определения направ-
ления меридиана, ортодромии или плоскости орбиты ис-
пользуются различные гироскопические устройства. При
этом исследование движения физического маятника по
отношению к перечисленным выше подвижным опорным
системам координат в полете в прикладной теории гиро-
скопов приобретает исключительно важное значение.
§ 1.2. Определение положении равновесия
физического маятника при движении точки
его опоры по земному экватору
Рассмотрим частный случай движения физического
маятника при перемещениях точки его опоры относитель-
но Земли. Представим себе, что точка О опоры физиче-
ского маятника движется по поверхности сферической
модели Земли (рис. 1.4, а) в плоскости, перпендикуляр-
ной оси Мира, неподвижной в инерциальном пространст-
ве (движение точки О по экватору Земли).
Скорость V движения точки О по экватору представ-
ляет собой алгебраическую сумму переносной скорости
VC=1W точки О, возникающей вследствие суточного
вращения Земли, и скорости Vr движения точки О отно-
сительно Земли, т. е. V=Vr+RU.
Вершину географического трехгранника Ogqg совме-
Щаем с точкой О опоры маятника (М), совпадающей с
сью Ох его вращения, перпендикулярной плоскости эк-
29
28
ватора Земли, направление оси Ох неподвижно в iIIiep
циалыюм пространстве. Ось Og совпадает с направлю
пнем к центру Земли, а если пренебречь малым углом,
то и с направлением истинной вертикали (ось 0g'); Ось
0g лежит на пересечении плоскости экватора с плОс.
костью горизонта; Ох, Оу, Oz — оси, связанные с телоц
физического маятника (М), представляющие собой глав.
Рис. 1.4. Физический маятник в полете по экватору:
а — определение положения физического маятники; б — определение ми»
мента от переносной силы инерции
ные оси его инерции. Дифференциальным уравнением
движения физического маятника (М) вокруг оси Ох.
приведенным к форме Д’Аламбера, для случая, когда
направление оси Ох его вращения неизменно в инерци-
альном пространстве, будет
-А2“+А!х=0, (1-28)
где А— осевой момент инерции маятника относителых
оси Ox; абсолютное угловое ускорение маятника,
А1Ж — момент внешних сил. Ось Ох направлена перпен-
дикулярно плоскости чертежа и на рис. 1.4 не показана-1
Абсолютная скорость вращения маятника вокруг оси
Ох 2“=—р—X, а угловое ускорение
= —р—X, (1-2Ч
где р — угол отклонения маятника от направления к №
тру Земли (ось 0g); Л —угол поворота оси 0g, отсчит«1
ваемый от плоскости Па, неподвижной в инерциальио
пространстве, А2?— инерционный момент, определи
нй ту часть момента внешних сил, которую необходи-
мо приложить к маятнику для сообщения ему углового
МО 1
У Момент Мх внешних сил включает в себя
момент M°r = 0J. sin р=дг^0/ sifi p, согласно рис. 1 4,6,
сипы Go ньютонова притяжения к Земле (прп условии,
ч > плечо / маятника мало по сравнению с радиусом сфе-
ы Земли Силу Go ньютонова притяжения мас-
сы т маятника в первом приближении полагаем постоян-
ной и соответствующей расположению центра его масс
О,-,г на поверхности сферы радиуса
момент сил инерции Л4"н, возникающий вокруг оси
Ох прн движении вершины географического трехгранни-
ка с тангенциальным IX и нормальным (центростреми-
тельным) ускорением V2//?:
M'x=-mlV cos p-wi/V^sin р//?==
= -G0Z(l/cosB+V2sin ?/R)/g0-, (1.29)
момент AfxC внешних сил, возникающий вследствие
несовершенства опоры оси маятника и др. Для рассмат-
риваемого здесь физического маятника с идеальной опо-
рой /И?=0.
Согласно рис. 1 4 имеем:
Х=И//?; [X=1Z/Z?; /?=const. (1.30)
Подставляя значения моментов из (1.28а), (1.29) и (1.30)
в дифференциальное уравнение (1.28), получаем
^+G0Z (go -1/2//?) sin p/g^=G0ZI/ cos p/^-
- AV/R=(ml cos AIR) V. . (1.31)
Момент инерции А физического маятника отпоситель-
Ш е(Г ^Л)можно определить по формуле (теорема
А==Аом+т1\ (].32)
Где А°м~ момент инерции физического маятника отио-
ителы о оси Ох', параллельной оси Ох и проходящей
м 'ез Центр Ом его масс. Если предположить, что вся
м е^а маятника целиком сосредоточена в точке Ом, а
Довательио, момент инерции Аом маятника относи-
тельно оси Ох равен нулю, то физический маятник пре-
30
31
вращается в математический. Момент инерции Лм Мат
матического маятника относительно оси Ох его качай»»
равен
Ам=тР. (1.^
В практических приложениях для короткопериодцЧс
ских маятников (1<CR) и при ограниченном углей
(| РI <90°—Др) (Др — малый угол) инерционный Mosier
AV/R, стоящий в правой части (1.31), по сравнению с
моментом (Go/Aro) IV cos Р очень .мал, поэтому им обычщ
пренебрегают. Действительно, подставляя вместо момец.
та инерции А физического маятника (l<g.R) соответст-
вующее ему значение (1.33) момента инерции Ам мате.
матического маятника и сравнивая инерционные момец.
ты, стоящие в правой части (1.31), имеем
OJV cosP/gi=m/l/ cosfl, mPVIR, (l.?3a]
а их отношение 6= (Z//?)cos fl.
Из (1.33a) видно, что инерционный момент nilvl/^
возникающий при переносном повороте маятника с угло-
вым ускорением П/Д, равен инерционному моменту
mlV, умноженному па дробь 1/R. Для короткопериоднче-
ских маятников, используемых при коррекции движения
гироскопов различных приборов, плечо маятника / не
превышает нескольких сантиметров. Пусть 1=1 см, ра-
диус Земли Д=637 ООО 000 см, в этом случае при Ар=Г.
fl»89° cos 1(3=0,0175, в пашем примере отношение ба
ей10~е. Даже при (3=89° моментом mlvl/R по сравнению
с mlV cos (3 можно пренебречь. При сделанных допуще-
ниях приближенное дифференциальное уравнение (1.311
короткопериодического маятника принимает вид
ДЗ -4—^2-1 (go —1 sin (3= IV cos Р
л0 V R / g0
или
ДВ-(-С0/[1 — (—Y] sin P = 1/cos {?, (1-М
L \ v’k ] J gG
Где l/K='|Z/?0J£r'c^8000 м/с —первая космическая ско-
рость.
Если скорость V движения точки О подвеса маятн11
ка мала___по сравнению с VK (у корабля, самолет1
V<^VR^0 =8000- м/с), то в первом приближении
«стремительным ускорением V2/R по сравнению с ус-
воением go пренебрегают и положение равновесия
н==0) короткопериодического маятника определяется
венством (1-34), в котором также полагаем p=v0=
Lconst- Тогда
(1-35)
Если представить себе ракету, скорость полета кото-
рой близка к космической и величина центростремитель-
но ускорения V2/R сравнима с ускорением gG= — go
с11лы ньютонова притяжения к Земле, то в этом случае
центростремительным ускорением V2/R пренебрегать
нельзя и, следовательно,
tg^e^V0Kgo-V20/R). (1.36)
Формула (1.36) справедлива лишь в первом прибли-
жении в предположении, что ускорение Ёо относительно
невелико, а скорость И на малом отрезке времени мож-
но принять почти постоянной и равной Ио.
В условиях невесомости, например на спутнике Зем-
ли, у= Ук, a go'— VKZ/R—0 и, согласно (1.36), отклоне-
ния короткопериодического маятника от направления ис-
тинной вертикали становятся неопределенными или рав-
ными ±90° при малом ускорении VQ. В общем случае,
согласно (1.15а), при ф,=/=0 составляющая кажущего-
ся ускорения на ось Ot,
Яс=М^с-|-£0='ПЛ-|-£-0, (1-37)
а отклонение направления кажущейся вертикали от ис-
тинной
tgZ=^M- . (1.38)
При этом статическое положение равновесия короткопе-
риоднческого физического маятника будет
tg Pi>=tg X=at/£zc=IZ^/(ift-|-g-o). (1.39)
При свободном падении физического маятника, установ-
ленного на ДА, vh~g'o, а следовательно,
tgPv = l/tUo + go) = OA U=-^o). (1-40)
При этом статическое отклонение Р(- физического маят-
ка от направления истинной вертикали становится не-
32
определенным. В полете по баллистической траектоп
статическое положение равновесия физического маятн
ка также оказывается неопределенным. Если представ!
себе физический маятник с большим периодом собств?1
ных колебаний, для которого при каком-либо почти ц”'
стояпном угле инерционные моменты G0/Vcosfi/‘
и A Vo/R равны или I(Go/go) I cos р — А//?] 1/0= О, н НМеЛ
в виду, что G0lpo=rn, то, согласно (1.31), получим
m/cospo=4//? (1Л|)
и правая часть дифференциального уравнения (1.31) об.
ращается в нуль. Однако такое условие в общем случае
зависит от угла р и точно выполняется только при
В этом случае
ml[A=\IR. (1.42)
Условие (1.42) певозмущаемости физического маятника
ускорением V при р=0 не зависит от силы Go ньютоно-
ва притяжения к Земле, а зависит лишь от радиуса R
той сферы, по которой движется точка О его опоры.
В левой части (1.42) содержатся лишь физические кон-
станты маятника. Н
Если угол р мал, то, принимая sin р=р, a cos psi,
уравнение (1.31) моментов, действующих вокруг оси Ох
преобразуем к виду
Др+Ы (go- V2//?) ?=(ml-A/R)\/. (1.43'
Здесь Др и (A/R)V— инерционные моменты, возника-
ющие при вращении маятника вокруг осн Ох с угловня
ускорением р и Р//? в относительном и переносном дви-
жении. Инерционный момент mlV возникает при движе-
нии вершины опорного координатного трехгранник
с ускорением 'С'.
Представим себе, что плечо I физического маятник»
точно следит за направлением истинной вертикали >
вращается вокруг Земли с угловым ускорением 1. Пег
вый инерционный момент (при р=0) 2W"h>=j4V71w
=Л?., возникающий при переносном вращении Ф113’
ческого маятника вместе с направлением истинной вер
тикали, необходимо преодолеть соответствующим мсп’Ч
том Я4ВС< внешних сил, при этом
Л1^1=Ж"В1=ЛЙ//?. (И
Второй инерционный момент пеобходиМо
преодолеть другим моментом внешних сил:
ЛГ11=Л4711=_те/1?>
(1.45)
Еспи рассматриваемые здесь инерционные моменты
pf““i и 'll”"11 равны, то также равны и моменты
jf'i и внешних сил, но направлены в противопо-
ложные стороны и суммарный момент внешних сил, дей-
ствующих вокруг оси Ох, равен нулю. Следовательно, н
сумма инерционных моментов TI4”"i и /И"нп равна нулю.
Инерционные моменты (A/R) у и —tnlv равны, если
алгебраическая сумма Ay/R—mly=Q, или
(A/R-ml)V=Q,
(146)
т. е. при условии, что A/R=ml. В нашем случае правая
часть равенства (1.43) обращается в нуль при любом
значении ускорения V точки подвеса физического маят-
ника. На направлении истинной вертикали физический
маятник при условии (1.46) находится в положении рав-
новесия, несмотря на то что плечо его вращается отно-
сительно инерциального пространства с изменяющимся
во времени ускорением Л. При условии (1.46) для удер-
жания плеча / маятника на направлении истинной вер-
тикали в нсустановпвшемся режиме движения точки О
его подвеса (Ё=#0, Л=#0) нет необходимости в прило-
жении момента внешних сил вокруг оси Ох его враще-
ния.
В общем случае, согласно (1.34), период собственных
незатухающих колебаний физического маятника равен
Т=2л |/ДДЦ/).1Д/ 1-(I//I/K)2, (1.47)
Из (1.47) видно, что период Т собственных незатуха-
ющих колебаний невозмущаемого физического маятника
зависит от отношения абсолютной скорости V движения
точки его подвеса по земной сфере к первой космической
скорости Ук. Кроме того, период Т собствепнных колеба-
ний невозмущаемого физического маятника в отличие от
Условия (1.42) его невозмущасмости зависит от силы Go,
значение которой уменьшается с увеличением высоты h
полета. Для спутника, скорость которого равна первой
космической скорости, период собственных колебании
"аятника равен бесконечности и его движение неустой-
п»—
34
35
чиво, так как коэффициент при угле р становится равные
пулю (1.43). Следовательно, в общем случае период!
собственник колебаний невозмещаемого физического I
маятника не является физической константой маятник
определяющей свойства его невозмущаемостп по отноШе’
нию к ускорениям I/.
В теории невозмущаемого физического маятника при.
ппмают, что VzjR<^g‘o, центростремительным ускорецв.
ем Vz/R пренебрегают по сравнению с go и, согласно
(1.43),
Р4-(<?0//Д)₽=(/п//Д- i/R)V, (1.48)
а при условии (1.42) имеем
Я-Л=0. (1.49)
Если начальные условия выбрать так, что при (=0
р=р0) р=.р0, то частным решением дифференциального
уравнения (1.49) будет
Р= 1/ cos (+ -J . (l.oii)
Г so т 1<о }
Принципиальная возможность создания не возмуща-
емого ускорениями физического маятника впервые пока-
зана немецким ученым М. Шулером в 1923 г.
В соответствии с (1.50) идеальный физическим мэят-
пик после отклонения па угол р0 при начальной угловой
скорости Ро совершает гармонические колебания, сим-
метричные относительно изменяющегося в инерциальном
пространстве направления к центру Земли независим
от ускорения Й, возникающего при движении точки и
опоры физического маятника по земной сфере. При этак,
согласно (1.48), при Е=0 период собственных колсОа-1
ний физического маятника
7 =—=2^1/"—— = 2л1/ —4— (1-1
п V Gol У mgj.
и при условии (1.42)
7=2,^/^ O'Sl
(для Земли 7?=6370 км, £'=9,81 м/с, 7=84,3
Следовательно, не возмущаемый ускорениями V Ф113 I
ески» маятник, расположенный иа поверхности Земли
4 обычно называемый маятником М Шулера, обладает
периодом собственных незатухающих колебаний, равным
84.3 мин-
Рассмотрим возможности технической реализации фи-
зического маятника. Известно, что физический маятник
обладает наименьшим периодом 7 собственных колеба-
I при условии, что его плечо I* равно радиусу
р=| ДоЛ1упего инерции, где — момент инерции
физического маятника относительно центра Ом его масс
(/•=р). С увеличением или уменьшением плеча / по от-
ношению к I* период Т собственных колебаний физиче-
ского маятника увеличивается. При значительном увели-
чении плеча I физический маятник превращается в ма-
тематический и период его колебаний
7=2л | //яо. (1.53)
Если 7=84,3 мин, то получаем l~Ro, т. е. математи-
ческий маятник должен иметь длину I, равную радиусу
Ro Земли. Очевидно, что создать такой математический
маятник не представляется возможным. Обратимся к фи-
зическому маятнику с малым плечом /. Например, если
физический маятник представляет собой гонкое кольцо
радиуса г, то момент инерции относительно центра Ом
его масс
= (Е54)
Полагая, что плечо / маятника с периодом 7=84,3 мин
мало по сравнению с радиусом г кольца (г^>/), считаем
момент инерции Ао маятника относительно точки О его
одвеса примерно равным моменту инерции Аом- Тогда
в соответствии с условием (1.42) невозмущаейости физи-
ческого маятника получаем
/=^-=-^=-^-. (1.55)
/и7?0 mRo Ro
^°пог9Я г==0>25 м=25 см, имеем плечо маятника /=
~0,2о /6 370 000^ 10-в м^0,01 мкм. Создание такого фи-
ического маятника при современном состоянии техники
0 Ряду технических причин невозможно.
36
§ 1.3. Определение положения равновесия
физического маятника при произвольном движении
точки О его опоры по земной сфере
Представим себе физический маятник (рис. 1.5), под.
вешенный в идеальном кардановом подвесе, который yd
тановлсн на платформе (П), расположенной в плоскости
касательной к поверхности земной сферы. В качестве
опорного координатного трехгранника Ogi]£, неизменно
связанного с платформой, принимаем географический
трехгранник. Такой физический маятник имеет относи,
тельно платформы две степени свободы поворот вокруг
оси Oyt (совпадающей с осью О£) рамки карданов-а под.
Определим ипершюппые моменты 7И"Н и Л1“к, воз-
яюшие при движении вершины О опорного коордипат-
П*го рехгранника с кажущимся ускорением а, проекции
второго на ребра трехгранника 0^^ равны aE, а» и at,
я инерныопные силы — та*, -та* —та^. Согласно
а с ] 6 н 1.7, инерционные силы раскладываем на на-
веса на угол а и поворот
Рис. 1 5. Физический маятник
вокруг оси вращения маятника
па угол 0. Вершину О
трехгранника Охуг,
связанного с физиче-
ским маятником, поме-
щаем в точку пересече-
ния осей его подвеса.
При этом ось Ог также
проходит через центр
масс (ЦМ) маятника,
а ось Оу, перпепдику!
лярная плоскости Охг,
образует с осями Ох,
Оу правую систему ко-
ординат. Считаем, что
оси Ох, Оу н Ог явля-
ются главными осями
г
ид
та^ <ж>ji
mo.
fill] Strip
ma^cosfi
ma^cosa
bln a
1
Рис. 1.6. Разложение ииерци- Рис. 1.7. Разложение инерци-
онных сил та^ и та z очных сил та и та^
та. sina
инерции маятника. Осе-
вые моменты инерции, взятые относительно осей Охи
Оу, считаем одинаковыми и обозначаем через А, а осе-
вой момент инерции вокруг оси Ог — через С. Углы п«
р поворота маятника в дальнейшем считаем малыш-
При выводе дифференциальных уравнений движения фи-
зического маятника воспользуемся простыми необобщен-
ными уравнениями Эйлера (см. кн. 1), составленным»
применительно к опорной системе с началом О коорди-
нат, движущейся с ускорением W7. При этом иперШ10^
пые моменты, возникающие при движении вершины
опорного координатного трехгранника с ускорение
W, включаем в состав моментов Мх, Му внешних си<
ЛЙд. — (Л — С) 2(/2JS=Af.v; (1$
AQy 4~(Л — С) QXQ^=Му.
правление оси Ог маятника и на направление, ей перпен-
дикулярное. При этом составляющие инерционных сил,
перпендикулярных осн маятника, создают моменты во-
круг осей Ох и Оу:
Мх'— —ml («е cos Р — щ sin р);
1-х (Е57)
= — zraZ(rz4cos6Z-f-Oc sin a) ,
Пользуясь формулами (1.15а), составленными приме-
нительно к опорному географическому координатному
трехграннику, запишем выражения для проекции о-, а,„
t кажущегося ускорения на оси 0£, От] и
«E=U7t; = sin 6l; o^^-J-gocosej. (1.58)
ем0Дставляя значения at, a,,, at из (1.58) в (1.57), получа-
^ri=~_/n4'^zEc0sp—(W^-l-goCose^sHi pj, (1.59)
" sin s1)cosa4-(lt7c-J_gQcose1) sifi aj.
39
38
Согласно (1.57) получаем, что в статическом положен^ I
равновесия маятника при 7И”я=0 и Му =0
__ ^+gQsinei 1
ga— ec IFC + #o c°s ч ’ I
«f I (1,60)
й ac 1ГС + gz cos ч j
Подставляя значения абсолютных угловых скоростей , В
2Х = —p-|-iOxP = —?— ШЧ’ = P=u4"u4i
2г = «Ч> (1-61)
и инерционных моментов 7ИЯН и 7И"низ (1.59) в (1.56) Л
полагая, что для идеального карданова подвеса моменты
внешних сил (в том числе и момент сил сухого трения)
равны пулю, а также
(w//A)g>)=n2, '(1.62) I
где я = КО(//А — частота собственных незатухающих
колебаний маятника, после деления обеих частей ра-
венств (1.56) па А получаем
а + /?-2 (1 4- W Jge) a ~ — 1,д — «2 (W7 ^Ра+е0 ~
_(С-А)/А(«>,+₽)!^с, М
р_|_/?2(1 _|-lV'(.i/go)ps — т^+//2^./Ао+(С — А)/А 6ч
Определим статические погрешности короткоперпади-
чсского физического маятника в том случае, когда трех-
гранник неподвижен (V№=Ve=0) отпосителъЯ
Земли (например, при л2=1000 1/с2; 7=0,2 с), при эт 1
в уравнениях (163) полагаем
a=p^a=e=u;4=u;E=0, a>^=wu4=const, и>е=.»°=сО'1И
U7t=W7*=const, 1^=1^=const, UZe=UZt=const ]
получаем
17* + g(>j C — A l ,
aCT=^- A i+w*lgo n2 J
_ C - A J___________________. ‘foe
lc,r= + + A ‘ l+W*c/go &
40
Оценивая величину утла aCT отклонения маятника, со-
ответствующего вторым членам в правой части (1.64),
получаем
С — J।
А ‘ 1+l^/g' ’
а также, согласно (1.64), при
4=0 о>°=4/cos <?; sin <р; п?= 1000 1/с2;
<р=45°; Т=0,2 с; u){Ju)°/,i2=(/2si-n <pcos<p/n2=
=(7,3-10-5)2/1000 = 5-10-1= s (1,1. ю-7'.
Таким образом, угол аСт(0ст) отклонения короткопе-
риодического маятника, соответствующий второму члену
первого равенства (1.64), составляет величину меньшую,
чем 10-7 угловой секунды, а второй член второго равен-
ства равен нулю.
В первом приближении статические отклонения ко-
роткопериодпческого физического маятника в соответст-
вии с (1.64) равны
aLT = —7) -bgoSlJ/tVZс 4~g(l) = —
(1.65)
Короткопериодический физический маятник в стати-
ческом положении равновесия (<хст, 0СТ), согласно (1.60),
устанавливается по направлению кажущейся вертикали.
В частности, для трехгранника ОЕл]£, неподвижного от-
носительно Земли U7^=t/2/^sin <p0cos<p0; 117*=0; U7(=
= — (У2/? cos2 ®0 и, согласно (1.65), получим
- ₽~=0. (1-66)
#0 — LPR cos2 <РО
^роткопериодический физический маятник в гиро-
опических системах используется в качестве чувстви-
П1по10ГО элемента> предназначенного для совместного с
вептСКОГ1аМИ точного определения направления истинной
ЯаппИКа’ПИ (гиРовеРтикаль> курсовертикаль, указатель
мая-п ПеНИЯ °Р™ДР°м«и. гиромагнитные компасы, гиро-
всего1!,К’5иР0компас и ДР-) в полете. При этом прежде
зическ Обходимо определить положения равновесия фи-
°го маятника в установившемся режиме полета,
41
когда его отклонение от направления истинной вертй
кали минимально.
В качестве примера определим положение равновесв 1
короткопериодического физического маятника в устану
вившемся горизонтальном полете (щ,=0) по локсодРо
мии * с постоянным географическим курсом и пост^
янной относительной скоростью Vq=const. В соответсь
вин с рис. 1.8 имеем
VN=Ио cos %—const;
И£=1/о sin ф0=const. (1.67)
_ При этом для географического опор.
5 кого трехгранника Ogvjt; в (1.16) п
(1.65) полагаем
Рис. 1.8. Разложе-
ние вектора ско- vN='VE=0, VE=C.onst, ®дг== const
рости
(1.68)
и получаем
««=----~ =
«с
U2R sin <f cos <f — v*E tg <f/R 4- 2v£U sin 4 4- go sin si
go cos »i — IR2R cos2 <f — (fg 4- ^n)I^ + 2veU cosy ’
(Щ
vEvN + sin у
g'o cos «1 — IRR cos2 <f — (vE + vzn)/R 4- 2v£U cos ?
Формулы (1.69) в случае корогкопериодического фи-
зического маятника лишь приближенно определяют ста-
тические его отклонения (аст, £ст), так как координата?
представляет собой переменную величину, зависящую01
времени, а следовательно, правые части равенств (1.69)
являются периодическими функциями времени. ОднаМ
практически в установившемся режиме полета они изИ
пяются с весьма большим периодом гак, что в перв011
приближении статические отклонения (а<т, Рст) впо№
можно принять равными динамическим. В правые часЛ
* Локсодромия представляет собой траекторию, пересекаю
все меридианы под равными углами.
42
авенств (1.69) входят составляющие CJ2R sin ср cos <р и
</2/?cos2<P центростремительного ускорения, возникающе-
го вследствие переносного движения (суточное вращение
Земли): составляющие ^tg<p//?, и vNvEX
центростремительного ускорения, возникающе-
в полете по локсодромии — криволинейной траектории,
расположенной на сферической поверхности; составля-
ющие 2veU sin <р; 2vEU cos ф и 2c>A-(7sin <р кориолисова
ускорения, возникающие в результате сложного движе-
ния (относительная скорость о0 и переносная угловая
скорость (7 суточного вращения Земли). Знаменатели
дробей, стоящих в правых частях равенств (1.69), можно
представить в виде
/ £/-</? cos2? 4- (vE 4- v^)/R — 2vД/ccs у \
PijCOsej I 1 —-------------
\ g0 COS Bj J
(1.70)
Дробь, стоящая в скобке при относительно малой ско-
рости (самолет, корабль, подводная лод-
ка и др.), практически значительно меньше единицы;
cosei=i. Поэтому в первом приближении можно счи-
тать, что знаменатель дроби в формулах (1.69) примерно
равен g'o, a t/2/?sin <pcos<f’/gocose14-tgel^<? — <pt
гласно рнс. 1.1, а) т. е. представляет
<р—ф! географической и геоцентрической
Тогда окончательно получаем
vE U sin <р
-(? — ?!)--7ГТ tg <р------,
Rgo So
vTfvE 2oA,t/sin<f
^0 go
Из (1.71) видно, что в установившемся
по локсодромии с постоянным компасным курсом (ф=
=1l’o==const) и постоянной скоростью V=u0=const
положение равновесия короткоперподического физиче-
ского маятника (аст, рСт) не совпадает с направлением
нстинной вертикали, а отклоняется от него на зиачи-
тельнь1й угол, достигающий нескольких угловых граду-
°0- Угол (ф—<р,) по-прежнему определяет отклонение
^правления истинной вертикали от направления к цен-
РУ Земли и достигает максимальной величины 11,6' при
43
(со-
собой разность
широт места.
(1-71)
режиме полета
<р=45°. В результате возникновения центрострем11тедь I
ного ускорения tg <?/Rg'o и *uNvE tg <p/(/?gn> в полете n 1
локсодромии положение равновесия физического маятн М
ка отклоняется от направления истинной вертикали и пп
скорости щ.=300 м/с па широте <р=80° достигает 28'И
а при скорости и£=1000 м/с и широте <р=80° состав
ет 5°20'. ‘1
При возникновении .кориолисова ускорения положен™
равновесия 2л rU sin cp/go и '2л NU sin tp/go физического
маятника отклоняется от направления истинной вертвка.
ли и при скорости о£=300 м/с на широте <р=80° д0С111’
гает 15', а при скорости ик— 1000 м/с и широте <р=8д-
составляет 50'. В неустановившемся режиме полета при
йе^=0 и on^O отклонение положения равновесия (а тем
более динамические погрешности) короткопериодическо-
го физического маятника может достигать нескольких
десятков угловых градусов. При этом погрешности гиро-
скопических вертикалей, использующих в качестве чув-
ствительных элементов короткопериодические физические
маятники, значительны. Погрешности физического маят-
ника уменьшаются, если установившийся режим опреде-
ляется в полете не по локсодромии, а по ортодромии
В полете по ортодромии (дуге большого круга Земли)
радиус кривизны траектории полета в плоскости гори-
зонта равен бесконечности, а следовательно, центростре-
мительное ускорение, возникающее при полете по локсо-
дромии, обращается в нуль. В полете по ортодромии
положение равновесия физического маятника отклоняет-
ся от направления истинной вертикали только при воз-
никновении кориолисова ускорения и составляет угол
tg[&=2-B0(7 sin
Короткопериодический физический маятник даже в i
установившемся режиме полета не устанавливается по
направлению истинной вертикали, поэтому при определе-
нии направления истинной вертикали с помощью корот-
копериодического физического маятника его погрешно- <
сти могут быть уменьшены внесением поправок в соот-И i
ветствии с формулами (1.71). Вместе с тем в § 1.2 ДЛЯ
частного случая полета по экватору показано, что ес-Я
выбрать параметры маятника согласно условию (1’-'Я
то длипнопериодический маятник при движении точки
опоры с ускорением пе отклоняется от направления И1'
тинной вертикали. Для доказательства этой принцип*»
альной возможности создания физического маятника, и 1 I
тного к ускорению при любом движении точки
вар1,аИ по поверхности сферической модели Земли,
еГ°.°Пем чТО полет происходит в плоскости, касатель-
п°.аГаземиой сфере, и с относительно малой скоростью
- ч о центростремительным ускорением 1^П=У2//? по
^п’виению с ускорением go можно пренебречь (IKt=0).
п сеЬернческой модели Земли также полагаем, что си-
направлена по радиусу Земли (ej — O) Проекции
? абсолютного ускорения летательного аппарата
"соответствии с принятыми допущениями определяются
по формулам (11)'-
(1.72)
а также
(1.73>
В соответствии с (1.72), (1.73) дифференциальные урав-
нения (1.63) движения физического маятника примут
вид
wE= — V\/R‘, <°7]=V'V/?.
a-|-//-2a=
л2-4- +
S0
vt
шс>
2 . С — Л
п? —7-4----— х
во А
(1.74)
wc.
Если выбрать период собственных колебаний физиче-
скогс маятника
Г=^_=2л1/ /?0/^
п
а круговую частоту /г = 1// g’//?0, то первые члены пра-
вых частей равенств (1.74) обращаются в нуль. Преобра-
уем вюрые члены правых частей равенств (1.74)
( П.2
. [/ w _ EKt <Ос _
£ С AR А 1
I CV с-А •
-^‘4-^+— «<->о
(1.75)
к виду
(1.76)
44
45
(1-74)’
При условии (1.75) первые члены выражений (1.7g)
ращаются в нуль и дифференциальные уравнения '• -®
упрощаются:
a~t-n2a=—
“,и<-
(1.77
плат.
Полагаем, что угловая скорость вращения плат
формы, на которой установлен физический маятник, во.
круг направления к центру Земли (ось О£) равна нулю
Принятое допущение (ыЕ=0) пе накладывает каквц
либо ограничений на движение ЛА по поверхности сфе-
рической Земли или какой-либо иной сферы, концентра,
ческой по отношению к поверхности Земли. Платформа
(П) поворачивается с угловой скоростью вместе с
трехгранником независимо от вращения ЛА вокруг
оси О£. При <оЕ=0 правые части равенства (1.77) обра-
щаются в нуль и, следовательно,
а + №)«=0, ₽+Uo/Z?)₽=O (1.71
Невозмущаемость физического маятника (1.78) вы-
полняется с точностью до погрешностей, определяемых
малыми моментами, стоящими в правой части (1.771.
Следовательно, и при малой угловой скорости иг враще-
ния трехгранника вокруг оси Ot, певозмущаемосп
физического маятника практически не нарушается.
Общими решениями дифференциальных уравнении
(1.78) будут
а=Ла sin (ni-j- ха), ₽=А₽ sin (/г/+хр)> 0
где Аа, Ар и Ха, хе — соответственно начальные амплиту-
ды и фазы колебаний физического маятника, определи
мые начальными условиями: при /=0, а=«о>
₽=ро, р=р0 имеем
Д, =/аН«^2; Ap=V ₽о+?о/п2;
tg Х« = па0/й0-, tg х₽ =nWo-
(1.601
-О z_a V и- « . VV
Физический маятник, моменты сопротивления двМИ
нию в опорах которого равны пулю, с псрийЧ0"!
RfJg'Q совершает незатухающие гармоничеекч
колебания около направления к центру Земли с амп
46
й A Af зависящей от начальных условий. Положе-
тудой
ав’новесия физического маятника с периодом
н"е9 i (для сферической модели Земли и движе-
рГ0 Опоры по поверхности Земли) совпадает с
нВЯ Т<влеиием вектора силы Go ньютонова притяжения
Н°”Рмче ( следовательно, и к центру Земли) и пе зави-
к эе ог абсолютных скоростей (VE, в ускорений
сИ.т у ) возникающих в полете. Положение равновесия
Г’*‘ческого маятника, точка опоры которого неподвижна
<*’И30с[1телы1о Земли, не совпадает с направлением силы
(^тяжести, а следовательно, и с направлением истинной
вертикали.
Изложенная здесь теория короткопериодических и не-
возмушаемых физических маятников способствует более
глубокому пониманию физических процессов, рассмат-
риваемых при изучении теории прецизионных гироверти-
калей п инерциальных систем навигации.
§ 1.4. Модель невозмущаемого физического маятника
Рассмотрим принцип построения модели невозмуща-
емого физического маятника, предложенного советским
ученым Е. Б. Левенталем в 1932 г. На рис. 1.9 показан
одпн из каналов модели физического маятника, состоя-
щий из гироскопа (Г) в кардаповом подвесе, акселеро-
метра (А), интегратора (И) и моментного датчика (МД).
Гироскоп в кардаповом подвесе представляет собой ко-
жух 1 с помещенным внутри него ротором (на рис. 1.9
не показан), полуоси 2 которого вращаются на подшип-
никах 3, расположенных па наружной рамеб. Наружная
рама на подшипниках 4 поворачивается относительно
орпуса 5. На наружной раме 6 установлен, магнит 12
моментного датчика (МД). Статор 13 МД установлен па
полуоси 2 кожуха 1. На кожухе 1 гироскопа расположен
акселерометр (А), состоящий из корпуса 11, груза 8,
ружин 10 и потенциометра 7. 9. Модель физического
ятпика также включает в себя интегратор сигнала,
пимаемого с потенциометра акселерометра (А) (см.
т 1-1). Второй канал модели физического маятника на
Рис. 1.9 не показан. Корпус 5 гироскопа установлен на
е тельном аппарате (ЛА), совершающем полет по эк-
атору модели сферической Земли со скоростью V и ус-
Ha'3e,IIIei''1 Сила Go ньютонова притяжения тел к Земле
Равлена к ее центру. Углы отклонения оси Oz ротора
47
гироскопа от направления к центру Земли (ось Qm
считаем малыми. Составим уравнения моментов, дей^.
вующих вокруг осн Og (в нашем случае ось Og прццерцИ
совпадает с осью кожуха 1 гироскопа). Ограничивая^!
прецессионным движением гироскопа, имеем
— №^-|-AIe=0, (1.81}
Рис. 1.9. Модель физического маятника
где Н — собственный кинетический момент гироскопа.
2" — абсолютная скорость вращения гироскопа вокрУЛ
оси Отр, Mt — момент внешних сил, действующих вокрн
оси О£. Угол поворота гироскопа вокруг оси 0т](ь'!,11
обозначаем через 0.
При и ®Тр=^£//? получаем
/ур=_/7-^-4-ЛГ£. (1.82)
При движении ЛА с ускорением V акселерометр
1 9) посылает на интегратор И сигнал Z£yl. Соглас-
но формуле (1-18)» сигнал, снимаемый с акселерометра,
/Ед=k2 (а£ cos 0 — ас sin 0). (1.83)
Поп движении ЛА по экватору сферической модели Зем-
пи а,=;1/£==1/» a£=go- В соответствии со схемой
(опс 1-9) канала модели физического маятника получа-
ем формулу, определяющую сигнал /£и, , снимаемый с
интегратора
l^k^i^df. (1.84)
о
Полагая, что момент ТИ£, развиваемый моментным дат-
чиком (МД), действующий вокруг оси Og кожуха гиро-
скопа, пропорционален сигналу »£ , посылаемому инте-
гратором (И), получаем
t
J (l/£ cos p—go sin 0) dt. (1.85)
о
Обозначив k2ks=E, где E— коэффициент усиления
канала интегральной коррекции гироскопа от акселеро-
метра, и полагая, что при малых углах 0 cos 0—1, sin р~
—р, а также подставляя значение УИ’в дифференциаль-
ное уравнение (1.82) прецессии гироскопа, идоеем
t
/-/р = - (ВД) V£ -ф EVK - Ego J $dt. (1.86)
Продифференцировав (1.86) по времени и разделив обе
его части на Н, получаем
₽+(^/7) ₽= — (1/7? — Е/Л) ГЕ. (1.87)
копп коэФфнциеит Е усиления канала интегральной
РРекции выбрать так, чтобы при Е=Е*
1//?-Д*//7=0, (1.88)
48
49
то E* = H/R, а круговая частота
п=\/Г(Е/Н)к'о (|J
собственных колебаний гироскопа при Е=Е* paB1;j
"Иg'o/R. При этом дифференциальное уравнение (1ц 1
движения гироскопа принимает вид
Р+«2Р=0 или ^-р=0. (1 J
Уравнение (1.90) канала модели невозмущаемого фц.
зического маятника, которая представляет собой так на-
зываемую гировертикаль с интегральной коррекцией
инвариантную к ускорению ЛА, полностью совпадаете
дифференциальным уравнением (1.49) физического ма-
ятника. Условие (1.88) невозмущаемости модели
(рис. 1.9), так же как и условие (1.42) невозмущаемости
физического маятника, зависит от физических констант
канала гироскопа Н, Е*, а также от величины и радиусай!
сферы Земли. При движении точки О опоры гироскопа!
вокруг земной сферы ось Ог собственного вращения го-
роскопа должна при любой скорости V следить за осью
05, направленной по радиусу R Земли. Скорость поворо-
та направления оси 05 равна
Х=К£//?, (1-9П
где h— долгота места, отсчитываемая от некоторого на-
чального направления NP (рнс. 1.9). Если ось Ог соб-
ственного вращения гироскопа следит за направлением
оси 05, то скорость 2“ прецессии гироскопа в любой мо-
мент времени должна быть равна угловой скорости ?., 11
Р=0; при этом
О^МЦН.
Согласно (1.85), при р=0
Mt=E*Vi
(1.»
(1.91
и, следовательно,
Сравнивая правые части равенства (1.92) и
(1Я
(kJ
сравнивая правые чачи равспчва ••
непосредственно вытекающие из физических рассУ^И
.. » nnnviTaoM vrnnnup П R81 нсво.чмушаемости кай*
ний, получаем условие (1.88) невозмущаемости
физического маятника. Помимо точной стабили-
м0' эСи Oz гироскопа по направлению вектора силы (70
^аЦИонова притяжения к Земле, совпадающей здесь с
пЬ1°Т в пением к центру Земли, еще одной важной осо-
НаП^остью модели невозмущаемого физического маятни-
бе11Н яется возможность непосредственного определения
наЯ ’ IUI |7{ скорости движения вершины О координат-
ного трехгранника О5т]5, необходимой при определении
н0Гигацнонных параметров летательного аппарата. Из
Н 93)* следует, что момент коррекции, действующий
-пуг осн 05 гироскопа и обеспечивающий слежение
В°и Oz за осью 05, пропорционален скорости УЕ. Измеряя
ток протекающий в обмотке МД (рис. 1.9) гировертика-
тп ’можно определить проекцию VE абсолютной скорости
1А на ось Ос,. Пользуясь формулой (1.91), с помощью
соответствующего счетно-решающего устройства можно
пределить текущее значение долготы X места летатель-
ного аппарата.
Из проведенного анализа следует, что простейшая мо-
дель физического маятника обладает свойством невоз-
мущаемостн по отношению к ускорениям в частном слу-
чае полета по экватору земной сферы.
Гировертикаль с интегральной коррекцией, облада-
ющая свойством инвариантности по отпошпнию к уско-
рениям, возникающим в произвольном горизонтальном
полете, представляет собой более сложную гироскопиче-
скую систему. Теория такой гировертикали излагается в
гл. 8 и 9.
Методы начальной выставки гировертикали с инте-
гральной коррекцией по направлению истинной вертика-
ли рассматриваются в гл. 11.
ЛЛВЛ 2
ДВИЖЕНИЕ ГИРОСКОПИЧЕСКОГО
МАЯТНИКА В ПОЛЕТЕ
Механическим устройством, в котором наиболее ес-
тественно сочетаются свойства физического маятника и
гироскопа, является гиромаятник. Исследования динами-
1 относительного движения гиромаятника получили
сестороннее развитие в классической и прикладной
гироскопов. Прецизионные гиромаятниковые уст-
стпС1Ва С пеРи°Д°м 84,4 мин находят применение в про-
Раиственных гирокомпасах (см. гл. 7). Их используют
51
50
также в качестве чувствительных элементов инерц11а
пых навигационных систем.
§ 2.1. Уравнения движения гироскопического
маятника
Гироскопическим маятником называется сильиетрц,
пый гироскоп, неподвижная точка О (рис. 2.1) кот пОг'
расположена на оси Oz его симметрии, центр оке
масс (ЦМ), также расположенный на оси Oz, сдеЛ
относительно неподвижной точки О на величину I.
рис. 2.1 изображен гиромаятник, представляющий собой |
гироскоп в кар чановом подвесе. Ось Оу{ наружной рам .
карданова подвеса установлена па платформе (П), рас
положенной в плоскости, касательной к земной сфере Г
Опорный трехгранник О^т]£ жестко связан с платформой
Ротор (Р) гироскопа, вращающийся относительно ко-•
жуха (К) с угловой скоростью <р. вместе с кожухом по-
ворачивается относительно наружной рамки (HP) карда-
нова подвеса па угол 0 (на рис. 2.1 0=0), а наружиаИ
рама — относительно платформы, а следовательно, и от-
носительно опорного трехгранника Осргё па угол а Таким
образом, ротор гироскопа имеет три степени свобода
(углы а, [1 и <( ) относительно платформы. Для исследр-'
ваппя движения гиромаятника рассматриваем те ясе си-
стемы координат, что п при рассмотрении движения
физического маятника. Ограничиваясь исследованием!
лишь прецессионного движения гиромаятника, предста-
вим уравнения его прецессии в виде
-HQng-]-Mx=0, №?4-^=0. (2.П
В дальнейшем полагаем, что углы аир поворот*
гироскопа относительно платформы малы, а угловая ско-
рость ьц вращения опорного трехгранника вокруг
оси равна пулю (w^=0). При этом находим прнбля-1
женные значения угловых скоростей (рис. 2.1)
2а —— Р—2^
а также, согласно (1.59), приближенные значения
ментов для сферической модели Земли и при совладев
направления силы тяжести с направлением к центр)
Земли:
Мх^-т1\^ + т1 Л
— ml (go4-U^c)a.
I 2.1. Определение углов отклонения гироскопического маят-
ника от направлений истинной вертикали
52
Подставляя значения угловых скоростей Q° и Из I
и моментов Мх и Му из (2.3) в дифференциальные
нения (2.1), имеем
— Н(и u>{) = tnlW\— ml (g’o4- W'c) 1
- Н (р4-®,) =mZUZ,4-znZ (go+Гс) а. j (И
Поделив обе части равенств (2.4) на Н и разделяя перс
менные, получаем
а—I
Uo+U7t)a=-®,-^-UZ1,= -^-^.V4. ’
Для горизонтального полета полагаем в первом при
ближении для относительно малой скорости V полет
Ц7с=0. Обозначая
mlg'^H=n, (2.5
где п— частота свободных прецессионных колебаний п
ромаятника, н последовательно исключая из (2.5) коо|
дииату а, а затем координату р, получаем
a 4- п2и. =
п2
«О
Ие
Р4-п2Р=
Здесь V{, V,), VE, l/n, ... — абсолютные скорости и ускоре-
ния движения точки О подвеса гиромаятника, вклю*
ющие в себя движение относительно Земли и врашс"
Земли. По аналогии с физическим маятником paccw
рпм в первом приближении движение гиромаятника,™
ладающего относительно большой частотой п собстввв
ных его колебаний, т. е. п2go//?.
В отличие от короткопериодических физических на
ников гиромаятники с относительно большой частоте!
собственных колебаний находят непосредственное л
менепие только в пространственных гирокомпасах. I
„2 Определение положения равновесия
гнро конического маятника в полете
В дифференциальных уравнениях (2.6) полагаем Уп=
• L.q а также V\=VE=Const, при этом первое урав-
н^не (2.6) принимает вид
а -ф-п2а = ~ (п/Я) И°. (2.7)
Согласно второму уравнению (2.5), имеем р= (l/zz)a.
Общим решением дифференциального уравнения (2.7)
будет
а= — _^-4-5i sinnZ-|-52cosn/, с,
Rn (-i.oj
p=St cos nt — S2sin nt.
Полагая, что при t— 0 a=0=O, находим значения по-
стоянных S, и S2 интегрирования и частные решения
уравнений (2.8):
у° Vго у2
а=------5-4----— cos nt р—-------L sin nt. (2.^)
Rn ' Rn r Rn
Исключая из решений (2.9) время t, находим уравнение
траектории апекса Е гироскопа на изображающей плос-
кости:
[а 4- И^/(/?«)]2 4- ₽2= [l^/(/?zz)]2. (2.10)
Траектория апекса Е гироскопа (рис. 2.2, а) гиромаятни-
ка на изображающей плоскости Ос,'г]' при движении
точки О его опоры с постоянной абсолютной скоростью
Т\= const по дуге большого круга Земли (рис. 2.2, б)
представляет собой окружность радиуса Vj/(/?n). Оси
0s' и Orf (рис. 2.2, а), относительно которых движется
апекс Е гиромаятника в плоскости О^'т]', в пашем случае
^одвижпы в инерциальном пространстве, так как ci>t=
—О- При движении точки О опоры гиромаятника по по-
хиости земной сферы апекс Е (рис. 2.2, а) гироскопа
жется вокруг центра Оь определяющего скоростную
^Рсшностьаг=-^'(/?«) гиромаятника согласно (2.9)
uw 0)’ В СТ0Р0ПУ> противоположную направлению вра-
п"я стрелки часов и совпадающую с направлением
1 аЩения ротора гироскопа вокруг главной его оси Oz
рис. 2.1). Положение равновесия гиромаятника
55
54
(точка 0{), согласно (2.10), не совпадает с напряп^д
ем истинной вертикали (точка О) на величину скорое
ной его погрешности av, физическая причина вознпЗ
вепия которой заключается в следующем. ТрехграцД
О|т]£ вращается вокруг оси От] с переносной уГЛов
скоростью Цер=И°//? (см. рис. 2.1). Для того чтобы
правление оси Oz гиромаятника
И},
относительно трехгра8
Рис. 2.2. Определение скоростной погрешности гиромаят- I
инка
ника О£т]£ оставалось неподвижным, необходимо, чтобы
его ось Oz такте вращалась в инерциальном простра»
стве с угловой скоростью ^p=Vl/R.
Прецессия гироскопа вокруг оси От] с угловой ско-
ростью S" возникает под действием момента со-
здаваемого силой тяжести G при отклонении оси Ог ог
направления осн Ot, на угол а——av- В этом случае при
малом угле а
М°=— Gia, (2.111
а скорость прецессии гироскопа
2“ =М°/Н = - (Gl/H) а. (2-Ч
В положении равновесия гиромаятника и>ч=2ф а сЛв
довательно, 1Я
~(Gl!H)av^V\!R. <2J3L
При этом
где n=Gl/H.
Н
Gt
_1
Rn
«I/ R
оПоЖепии равновесия гиромаятника (a*=av, Р*=
В относительно опорной системы координат Ogr)S>
юшейся с постоянной угловой скоростью «>ч=V\/R,
BPalQz его отклонена от направления истинной вертика-
°СЬна угол в плоскости Oll£ (см- Рис- 21> о), перпен-
ЛЙ , я[,пой вектору Pj абсолютной скорости движения
днкул I ОПОрЬ1 гиромаятника по поверхности земной
^Определим баллистическую погрешность гиромаятни-
возникающую при полете с ускорением VE(Vn).
Kd’ Полагаем, что точка О опоры гиромаятника соверша-
т равномерно-переменное движение с постоянным уско-
венпем ^е=const и скоростью VE (Vn=l/n=0). При
этом определенная прежде скоростная погрешность av
поткопериодического гиромаятника относительно ма-
ia поэтому в первом приближении угловой скоростью
V /? переносного вращения опорного трехгранника
О’ пренебрегаем. Тогда, по-прежнему обозначая в диф-
ерёпциальных уравнениях (2.5) mgl/H=n и полагая
1Рс=0, имеем
а — п$= — nVp!go, р‘4-па=0. (2.15)
Исключая из первого дифференциального уравнения
(2.15) движения гиромаятника координату а=—(1/п) р,
подучаем
p_j_n2? = tt2y0/g;. (2.16)
Решением дифференциального уравнения (2.16) будет
V?
sin tit-\-S2cos nt. (2.17)
во
При этом
и— —(1//л) 6= —Sj cos nt -)-S2 sin tit. (2.18)
МН при/=o a=p=o, TO S1=O, S2=-V^,
^Довательно, решениями дифференциальных уравне-
1111 (2 15) будут
fI = -(l/^')sin tit, B=-(l/M(l-cos//Z). (2.19)
' 1J1R)‘iai1 113 (2-19) время t, получаем уравнение траек-
,н Движения апекса Е гироскопа на изображающей
57
56
плоскости
Рис. 2.3. Определение
траектории движения ги-
ромаятника при ускорС’
пни
а34-(^-ЙМ2=(^Ы2. {2 [
представляющей собой окружность с центром 0^-1
щенным относительно начала О координат (рис. 2.3)*
₽к=^£/£о(ак=О) и радиусом r=V°(jgo- В нашем Л
чае при начальных условиях (1=0, а=р=0) движу.
апекса Е гироскопа происходит из начала О коордйв'
и гироскоп совершает равном-
ную коническую прецессию у
круг направления кажупнД
вертикали, соответствующе,
центру (ак=0, pK=(/^/g') 0KpJ
ности, описываемой апексом £ I
изображающей плоскости 0N
движение апекса Е по OKpyJ
СТИ происходит В сторону, ПрОТ1
воположную вращению стреЛ
часов (при ф>0). Из рис. 2»
видно, что максимальные ба.чц
стические погрешности гиромая;
ника как указателя направлен
истинной вертикали равны
а^=±У°е/^, ₽r=2V0^
и могут достигать весьма значительных величин (напря
мер, нескольких десятков угловых градусов). Факпга
ски же баллистические и скоростные погрешности rnpi
маятника возникают одновременно; следовательно, Л
щая погрешность гиромаятника как указателя наврав.’
пня истинной вертикали, согласно (2.14) и (2.21), v
жет достигать еще больших значений. Из рассмотрений
здесь частных случаев движения гиромаятника по ЛЧ
верхпости земной сферы следует, что гиромаятник в 0J
личие от физического помимо баллистической погрешч
сти обладает еще и скоростной av, [Зю О-111*
параметры гиромаятника, как и в случае физическ®
маятника, можно выбирать так, что его баллистичевИ
погрешности оказываются равными пулю. Действе
но, если частота п колебаний гиромаятника равна
T'=2n/n колебаний гиромаятника
(перИ Ч) тО дифференциальные уравнения (2.6)
MiJOT вид . / \ )
равен
прини-
(2.23)
Перепишем дифференциальные уравнения
операторной форме — sj-
(2.23) в
u== —
(2.24)
кращая левые и правые части равенств (2.24) па
s*4---при любом виде функций времени 1^(0
/?
получаем частное решение дифференциальных
(2.2' пип (2.23):
и КЛ/),
уравне-
«х=------4=- УЕ; Р= - , ‘ У,- (2.25)
Р g0R
Общим же решением дифференциальных уравнений
23), представляющим собой сумму частных п общих
решений соответствующих однородных дифференциаль-
ных уравнений, будет
"---7^‘Ve+“"sta(^/r^''+z*)’
f=tvfe’y’+?»cos(/4'+»)'
(2.26)
ь Ио. Ро и %а, 3(1, зависят от начальных условий.
^=()СЛ^_В Рассматриваемый начальный момент времени
toT(M=0, то Движение гиромаятника, параметры
Р го удовлетворяют условию (2.22), определяется
58
59
решениями (2.25) и ось Oz гиромаятника в любой J
мент времени t находится в положении равновесия **
ответствующем произвольно изменяющимся во вппмХ
составляющим Ё$(0 и Ёт)(О абсолютной скорости
движения точки О его опоры. Физическая Сущц2Я
свойства инвариантности гиромаятника по отноще^у1
к ускорению Ё движения точки О его опоры заключаЯ
ся в следующем. Представим себе, что в какой-то •
мент времени /' при движении точки О его опоры со Л
ростью гиромаятник находится в положении рав.
весия, определяемом его скоростной погрешностью пИ
г. е. согласно (2.13)
' н |
“1'=~«•
и пусть с течением времени при t>tr скорость V;(j|
как-то изменяется (Ёе(()#=О), а составляющие У
Ёг] скорости и ускорения точки О опоры гиромаятиик|1
как и в прежних примерах, остаются равными ну>
(Ёп= Ёп=0), тогда при IZ'=O
₽к=----— И'=0. (2Л
1 GIR ' '
Гиромаятник в любой момент времени (/^/') находив
в положении равновесия, и отклонение оси Oz ответе»
вует скоростной его погрешности
аи=----— (2-1
V GIR 6 j
при условии, что относительная угловая скорость!
вращения оси Oz вокруг оси Ос, равна скорости ау из»
нения скоростной погрешности ау гиромаятника, тЛ
(oE=av, или
w^av=-HVi/(OlR). (2-Я
Замечая, что переносная угловая скорость ш; вр31“
ния трехгранника равна нулю (V,]=0), полу«ч
значение абсолютной угловой скорости St" отклонен
направления Oz, соответствующего положению равн0'г<
сия ау гиромаятника:
* т"/
a ---__(/Е.
GIR
(!.»
-кОрОсть же прецессии 2" оси Oz гиромаятника возни-
в результате действия момента Л4""=щ/1/Е от
h «еносных сил инерции при движении точки О его опо-
ры с ускорением Ё{:
2?=-Л^7// = -(,ra/W) rt. ,(2.32)
Если представить себе, что угловая скорость 2? враще-
ния направления оси Oz, соответствующая изменению
положения равновесия ау гиромаятника, и скорость 2"
прецессии вектора FJ (ось Oz) гироскопа равны, то ги-
ромаятник находится в положении равновесия при лю-
бых значениях скорости 14(/) и ускорения Ё*(/) точки
О его опоры. При этом, согласно (2.31) и (2.32), условие
инвариантности гиромаятника по отношению к ускоре-
нию t'i(t) принимает вид 2“=ы£, - ~
ЙЕ=-----".---нли
Н ">g0!R
Из (2.33) получаем
т. е.
(2.33)
(2.34)
Условие (2.34) настройки гиромаятника, инвариантного
го отношению к ускорению Ё^ точки О его опоры, пол-
ностью совпадает с условием (2.22). Если условие на-
стройки (2.34) гиромаятника не выполняется, то гиро-
маятник пе следит за положениями его равновесия
(2.29), а совершает вокруг этого положения равновесия
коническую прецессию. В отличие от условия настройки
(1-42) физического маятника, инвариантного по отноше-
нию к ускорению V точки О его подвеса, условие на-
стройки (2 34) гиромаятника, инвариантного» к ускоре-
ниям Ё, зависит от ускорения go, а следовательно, не
может быть выполнено на спутнике (в условиях певесо-
*1СС1И) пн при каких параметрах гиромаятника. Условие
настройки (2.34) гиромаятника также нарушается при
вертикальных перемещениях (Ёл) точки О его опоры.
Условие настройки (2.34) гиромаятника, ипварнант-
Ноб П° Отношеиию к ускорениям V, выполняется при
L Ых Движениях точки О его опоры по поверхности
‘Ры^в Том чнсле и прИ прОИзволЬных поворотах вен-
гра р — У.ТгТ I/2 /->
По ’ абсолютной скорости точки О его
е вокруг направления истинной вертикали (напри-
60
61
мер, при вираже). Здесь в отличие от условия настрой
(1.42) физического маятника условие настройки 2;/
обеспечивающее инвариантность гиромаятника по O1J
шению к ускорениям V, не зависит от способа ориентЯ
ровки (ci)E=#0) осей карданова подвеса гиромаятнщЯ
в азимуте.
Если представить себе два гиромаятника с периода
7’=84,3 мин, роторы гироскопов которых вращаются { I
противоположных направлениях, и построить биссектр^!
су угла, образованного осями (Oz) собственного црЗI
щения гироскопов, то в идеальном случае направлений
такой биссектрисы совпадает с направлением к центр- I
Земли (для случая сферической модели Земли); угол
между осями Oz собственного вращения роторов гир0. |
скопов пропорционален абсолютной скорости V движь
пия точек О опоры гиромаятников, а плоскость, заклю !
чающая эти оси Oz, перпендикулярна направлению век-
тора V абсолютной скорости движения точек О опора.
Такое гироскопическое устройство может служить чув-ч
ствителытым элементом системы инерциальной навита-1
ции, измеряющим абсолютную скорость F движения то-
чек О подвеса гиромаятников, а также направление (
центру земной сферы. Инструментальные погрешности!
гироскопов, нарушение условия настройки (2.34) гиро-
маятников, вертикальные ускорения Vn ЛА порождают
коническую незатухающую прецессию гиромаятников к
незатухающие колебания как-либо построенной биссек <
трисы угла, образованного осями (Oz) роторов гнроско ।
пов с периодом, равным 84,3 мин. Демпфирующие уст-
ройства, способствующие погашению собственных коле-
баний гиромаятников или вышеуказанной биссектриса,
нарушают условия их невозмущаемостн н порождают
баллистические погрешности системы.
РАЗДЕЛ 2
ГИРОСКОПИЧЕСКИЕ ДАТЧИКИ
ПЕРВИЧНОЙ ИНФОРМАЦИИ
Для управления движением того или иного объе j
(самолет, ракета, космический летательный аппа"
управляемый снаряд и т. и.) необходима первичная
формация о параметрах его движения. Гироскопы 1
получить информацию как о параметрах, ха-
зволяю' щЯХ вращательное движение объекта (углы
рак 1 5 угловые скорости и ускорения), так и о пара-
повор°т характеризующих его поступательное движение
weTpa0noe ускорение, скорость и перемещение). Первые
(11,не юТСя в составе гироскопических систем ориента-
11 П°и стабилизации и предназначаются для определения
ЦИ” цей ориентации объекта в пространстве и придания
теКж,еМой ориентации. Вторые находят применение при
пешении навигационных задач.
" В настоящее время в гироскопических системах
ценгации, навигации и стабилизации подвижных объ-
в основном применяются двухстепенные и трехсте-
пенные гироскопы, основанные иа использовании
свойств быстровращаюгцегося ротора. Также интенсивно
рабатываются и получают применение некоторые
новые типы гироскопов, например оптические или лазер-
ные. В качестве источника первичной информации о вра-
щательном движении объекта они используют оптиче-
ское излучение лазера.
Высокая точность измерений, требуемая от гироско-
пических датчиков первичной информации, привела к
использованию в их конструкциях наряду с обычным
шарикоподшипниковым подвесом поплавкового, газово-
го, магнитного и электростатического подвесов.
В составе гироскопического датчика первичной ин-
формации широко используются современные прецизи-
онные элементы автоматики (датчики углов и моментов,
различные электронные устройства).
ГЛАВА 3
ДАТЧИКИ УГЛОВ И УГЛОВЫХ СКОРОСТЕЙ '
Гироскопические измерители угловой скорости пред-
назначены для измерения скорости вращения объекта
новация) и используются как чувствительные эле-
енты (датчики) в системах автоматического управле-
ч стабилизации и как визуальные приборы.
Кооаб СовРемеипых самолетах, ракетах и космических
Чрнм ЛЯХ 1пРос«°пические измерители угловой скорости
Для е”Я10Тся 8 демпферах рыскания, тангажа и крена
Чостй1уЧШСНПя хаРактсРистик устойчивости и управляе-
самолета, а в автопилотах и системах автомати-
63
62
ческого управления САУ— для введения в управЛя F
щую функцию сигнала, пропорционального угловой
рости. Кроме того, они нашли широкое применены ° 1
приборах управления, наведения и стабилизации сам6
наводящихся снарядов, а также в системах прицедЛ
ния танков и самоходных установок и в авиациониц
прицелах для выработки угла упреждения встречи сиг
ряда с целью На спутниках и космических кораблях Л
приборы используются для демпфирования угловДI
колебаний объекта, а также в системах ориентацдР
объекта в пространстве, например в бесплатформен^
системах инерциальной навигации, где угловое положе
пие объекта определяется путем интегрирования показа-
пий гироскопических измерителей угловой скорости.
Схемы и конструкции приборов должны обеспечь
вать измерение угловой скорости с требуемой точностью
в заданном диапазоне частот вибрационных и лппейпщ
перегрузок при возможных климатических воздейст-
виях.
Принцип действия различных гироскопических изме-
рителей угловой скорости основан на использоваши
свойств гироскопов с двумя п тремя степенями свободы
зские измерите-
датчиками угла-
in. Кинематиче-
§ 3.1. Гироскопические измерители угловой
скорости, построенные на базе двухступенного
гироскопа
Кинематические схемы. Гироскопические измерите-
ли угловой скорости принято называть
вой скорости ДУС или гиротахометрами. -------------
скис схемы ДУС показаны на рис. 3.1. ДУС представтя
ет собой гироскоп с двумя степенями свободы, врашена;
которого вокруг оси рамки ограничено упругой связи
с корпусом прибора. Упругая связь может реализовы-
ваться либо посредством механической пружины -
«ДУС с механической пружиной» (рис. 3.1, а), либо noI
средством следящей системы — «компепсациопн
ДУС» (рис. 3.1, б), В литературе компенсационное
ДУС также часто называют «ДУС с обратной связью* I
или «ДУС с электрической пружиной». ДУС с механв I
ской пружиной подробно рассмотрен в кн. I, поэтом)
здесь основное внимание будет уделено приборам я0'1
пенсационпого типа. Здесь О^т]^— система коорД”113
связанная с основанием прибора; Q<, Q,b —проекШИ
угловой скорости вращения основания на оси 01,, V)'
64
Рпс. 3.1. Кинематические схемы ДУС:
tins с «сханичсской пружиной; б — компенсационный ДУС; I — подвиж-
п- ,, гиР°скопа. в состав которого входят рамка гироскопа (кожух) с за-
"Ч’ескяя „ 1 ® ,'с1' Ротором и гидродвигателем; 2 —опоры рамки; 3— меха-
Ии Датчи УЖИнп- — демпфер; 5 — датчик угла; б — датчик момента (пока-
*U1 ои , Н0Мс"та магии юэлектрического тина с подвижным магнитом и
“жпымн управляющими обмотками); 7 —усилитель; Кат — высокоста-
, Сильное (эталониое) сопротивление
1757
Og; Oxyz— система координат, связанная с рамкой о
Ох направлена вдоль оси рамки. Oita совпадает с ос^ I
ОЕ, н направлена в противоположную сторону. Осн О
Oz лежат в плоскости, перпендикулярной оси Ох, й J
разуют в пей правую систему координат. Ось Ог_
собственного вращения ротора гироскопа, вдоль котор0»
направлен вектор кинетического момента ЛГ—CQ, Гд
С и Q — соответственно полярный момент инерции и ckq.
рость вращения ротора.
В исходном состоянии ось Оу совпадает с осью 0>
а ось Oz — с осью Оц.
Принцип действия прибора. Рассмотрим случай, ког-
да основание вращается только вокруг оси 0L Прй
этом вокруг оси Ох. рамки гироскопа возникает гироско
пичсский момент Afri. Под действием Mrt рамка и ротор
начнут ускоренно поворачиваться вокруг оси 0g в на
правлении, при котором вектор Н по кратчайшему пути
движется к Q;. Такое вращение гироскопа с угловой ско
ростыо р вызывает появление гироскопического моми-
та ЛГГ2=Яр. стремящегося совместить вектор Н с векто-
ром р по кратчайшему пути. Момент Мг? уравновешива-
ется реакциями R в опорах и не сказывается па
движении гироскопа
По мере поворота рамки на угол р происходит дефор-
мация пружины, в результате чего к рамке прикладыва-
ется момент М„р. направленный в сторону, противопо-
ложную гироскопическому моменту, и замедляющий
движение рамки. Величина М„Р=К„Рр, где Кпр — угло-
вая жесткость пружины.
Когда Мпр сравняется с Мг\ и закончится переходный
процесс, длительность которого определяется инсриноя-
постно подвижного узла и уровнем демпфирующих сил.
создаваемых демпфером, движение рамки гироскопа
вокруг оси 0g прекратится. При этом реакции в опора*
вызванные моментом МГ2. пропадают.
Из условия равенства в новом положении равпове^*|
гироскопического момента М, । и момента пружины-5
получим установившееся значение угла поворота рам I
вокруг оси Ох
приборе предусматривается датчик угла поворота
В в кинематической схеме (рис. 3.1, а) в качестве
рамкю чнка использован потенциометр.
rJKR компенсационных ДУС (рис. 3.1, б) но мере накоп-
я гироУзлоМ Угла Р возрастают выходной сигнал
Л€ 1 ка угла (Уду=Кдур, выходной сигнал усилителя
пЗТ'^К сОду И ток <1=0ус/(/?дм+7?эт), протекающий в
У>еавляЮ1ЦИХ обмотках датчика момента. Здесь Кду —
-'"эФфициент передачи датчика угла, Кус — коэффициент
1Л«Л1ИЯ усилителя, /?дм— сопротивление обмотки уп-
)С,вЛеиня датчика момента. Под действием тока i дат-
а. момента развивает момент МДм=КДм1 (КДм — кру-
зн; моментной характеристики датчика), направлен-
ий в сторону, противоположную моменту 2ИГ1. Когда
м станет равным Afri и окончится переходный процесс,
вожение рамки гироскопа вокруг оси 0g прекратится.
При этом из условия равенства моментов Мч и А1дм в
положении равновесия следует, что установившееся зна-
чение тока
i=(////<AM)2cCospyCT. .(3.2)
Если угол руст мал (cos рус» ~ 1), то 1= (Н/КЛы)^,
а выходной сигнал ДУС
Л/уст=(///?этЖдД^. (3.3)
т. е. ток i или падение напряжения па эталонном сопро-
тивлении можно использовать для измерения угло-
вой скорости (Для измерения Qj не следует исполь-
зовать выходное напряжение усилителя 0yc=i(/?3T+
+/?дм) Так как обмотка управления датчика момента
выполняется из медного провода, то RMI будет значи-
тельно меняться при изменении температуры прибора и
рассматриваемом случае соответственно /?дн будет из-
меняться выходной сигнал ДУС.)
Влияние на работу ДУС составляющих и уг-
°вои скорости вращения основания. Измерительная
Ось и ось чувствительности ДУС. Рассмотрим случай,
когда и отличны от нуля. Составляющая угловой
корости вращения основания вокруг оси 0g приведет к
явлению гироскопического момента Л4гз=Н£2£, стре-
мя II си ^егося по кратчайшему пути повернуть вектор Н до
?уст== (/7/^p)Sc‘cospyc, умещения с вектором Qfc. Этот момент уравновешива-
Если руст мал (cospyCT«l), то значение ру<т nponj к 4^™ Реакций * в 0,,оРах Рамки и в сл*чае их
ционально угловой скорости и его можно испоЛ^ Пр, ^««ого выполнения не скажется на поведении
вать в качестве информации о Для регистрации У • 3%
67
66
Составляющая угловой скорости основания Q n i
наличии угла р приведет к возникновению гироскопии*
ского момента М1д=НОч sin р, который стремится col
местить по кратчайшему пути векторы Н и Q,]. Этот j J
мент при направлениях fij и йц (рис. 3.1, а) будет уме^|
шать угол Руст, вызванный угловой скоростью |
Новое установившееся значение р (fJycTi) опред^
ся из равенства моментов
// (2j COS Йуст! Sin pyCTi) ^GipPyctl- (3 4
Величина й^соэруст!—Q4sinpyCTi представляет собо|
проекцию угловой скорости основания на ось Оу гигД
скопа (Qv). Отсюда следует, что Русп^ (Д/АпР)2р, т,
прибор измеряет величину проекции угловой скород
основания на ось гироскопа Оу. Поэтому ось Оу гнро.
скопа принято называть осью чувствительности ДУС, I
В паспортных данных ДУС указывается, что он пред-
назначается для измерения скорости вращения основа-
ния вокруг оси О£*, положение которой определяет
базовыми посадочными поверхностями прибора. Эл
ось называется измерительной осью ДУС. Вследствие
технологических причин ось может быть отклонена!
от оси Ot, на угол у, который называют базовой погреш-
ностью прибора. В идеальном случае оси 01, и Ot;* сов-
падают. В дальнейшем полагаем угол у равным нулю я
будем называть измерительной осью прибора ось 01
Уравнения движения. Основные характеристики при-
бора, Составим уравнение движения гироузла (ряс
3.1, а) вокруг оси Ох. Для этого воспользуемся принци-
пом Д’Аламбера, согласно которому совокупность мо-
ментов сил инерции, условно приложенных к движуще!
муся телу, уравновешивает моменты всех внешних сил <
внешних реакций, приложенных к данному телу. Опре
делим эти моменты.
1. Инерционный момент ЛД|=А0(Р+2е),
/*с — момент инерции гироузла относительно оси ™
р и Qj — угловое ускорение вращения рамки относите^
но основания и угловое ускорение вращения основам
вокруг оси О£. ,.
2. Момент, создаваемый демпфером,
Для конструкции демпфера, изображенного на рис-
при малых углах р
• Уцельная сила демпфирования; I—расстояние
гяс “ вращсния Ох до линии действия силы демифиро-
т [й_____линейная скорость движения поршня отпо-
В1 И,1пьно цилиндра демпфера; D — удельный момент
С11ТС Лнрования (коэффициент демпфирования),
К'|П I и рос топический момент
»fx3= — ,44г1ф-7Иг4= —/7'(ЙС cos 3 — 2Ч sin р)=
— //(2с cos р—2Ч sin р) —C(0,5Sc sin 2р—0,52, X
X sin 2р-|- cos 2р),
//'=://-|-С2г; 2Z=2.] cos р-|-2с sin р.
где
В рассматриваемом здесь случае считаем, что в при-
боре используется синхронный гиромотор, у которого
тор находится в согласованном положении с вращаю-
ичся магнитным полем, создаваемым обмотками дви-
еля. Если статор двигателя вместе с прибором разво-
р чнвается с постоянной угловой скоростью £2г, то это
we дополнительное к S2 вращение получает и ротор,
Поэтому в формулу для 7Йхз вошло значение кинетиче-
кого момента ///=С(Й+ QZ) — H+CQZ. То же будем
иметь и для асинхронного гиромотора, если его сколь-
жение слабо зависит от реакций в главных опорах.
4. Момент центробежных сил иперции
Л1х8. Полагая оси Оу, Oz главными осями инерции гнро-
зла, запишем
—(#0 ^1)
где Во=Л + В|, Ci — моменты инерции гироузла и рамки
относительно осей Оу и Oz.
Так как Q!/=Q£cosp—Qnsinp, то Al:i4=(Bo—Ci)X
P.52q sin 28 —-0,52^ sin 28 -|- 2C24 cos 2p) .
5-Момент сил сухого трения Мхц—М sign р,
или сокращенно Мх5= + , где М — амплитуда момен-
1а сил сухого трения, приведенная к оси Ох.
Полагаем, что М остается постоянной величиной не-
зависимо от значения угловой скорости р.
При р=0 момент трения Мх$ может принимать зна-
ча» в пределах ±А1 Он равен активному моменту,
РСМяЩемуся вызвать поворот вокруг оси О£, и нанрав-
1 в сторону, противоположную активному моменту.
69
68
6. Момент несбалансированности (1
вижн о го узла Л}разб. Он определяется маятн ”
востью гироузла, пс устраненной при изготовлении и
гулировке прибора.
7. Момент от упругой связи гироузЛав
основанием Мх6. Для ДУС с механической npvaJl
пой Л1хс=М„р=/(прР. Для компенсационного ду
Мх6==Л'1дм+Мподв1 где пода =/Сип дф момент, Во.чиД
кающий вследствие жесткости элементов подвески mJ
узла /Сподв (в случае использования подвеса на растя»
ках, пендельфсдерах и т. д.). К. моменту М|]ОДВ отщ-сц
также моменты, возникающие при деформациях ток.
подводов. Момент А1дм найдем иа основании таких с-здз
ношений:
^дм—1"АГЛМ, i — . Uyz—К луЛ усрф (/0 I
/<эт г
^ВЫХ
где С/оус-—нулевой сигнал усилителя.
Если <7оус=0, то
Коэффициент К называют жесткостью компенсационно
го контура ДУС или жесткостью электрической пр,
жины.
Приравняв к нулю сумму внешних и инерциониш'
моментов, получим уравнение движения гироузла Да
ДУС с механической пружиной оно имеет вид
Л0(НЛ)ф- Е>₽-фКир₽-7/2сСО5 0-ф//2, sin рф I
-ф(В0 — С, —С)-(0,52? sin 20—0,52* sin 2рф 2С2, cos$1
± /Ир ф-Л4Разбф-/их=о, (3;
где Мх— сумма всех внешних неучтенных момент»
приложенных к гироузлу. II
Преобразовав (3.7), будем иметь
A)P+^₽+Kiip₽=^sccos Р —/72ч sin 0— 11
— (Во—Со) (0,52? sin 20-0,52* sin 20ф-2с2ч cos 2?) I
+/Ир —/14разб— Мх — Л02ь
r^Co=^C+Cl — момент инерции гироузла относительно
Г Ог Если в этом уравнении приравнять правую часть
Н ЛЮ. ТО получим дифференциальное уравнение, ха-
h ктеризуюшее собственное движение системы Лор +
+Р₽+КпР0=О. или
₽Ч-2улоР+лоВ=О, (3.9)
где По — частота собственных недемпфированных коле-
б ннй прибора; % — декремент затухания собственных
колебаний прибора. Иногда х называют относительным
коэффициентом затухания:
(3.10)
Прнх<1 решение уравнения (3.9) имеет вид
P=[(Boyno + --r^_ ) sin T/0rrZ72Z +
4-PoCoszioK 1-х2/] е~ х«<ф
гте ро. Ро — начальные угол и скорость поворота гиро-
узла
Если х>С то собственное движение гироскопа носит
апериодический характер. Поскольку этот случай редко
пстречается на практике, мы его рассматривать не бу-
дем.
Таким образом, собственное движение гироузла ДУС
представляет собой постепенно затухающие колебания
вокруг положения равновесия (при 0 это положе-
ние руст=0). Частота собственных затухающих колеба-
ний гироузла
в| п=и0 V1 —у2. (3.11)
Вынужденное движение гироузла порождается мо-
ентами, находящимися в правой части уравнения (3.8).
к как прибор предназначен для измерения состав-
июШей Qt угловой скорости основания, то здесь полез-
HIJM будет только член HQr cos 0, а остальные моменты
бораПаЮТ П0ЯВЛснне погрешностей в показаниях при-
Положив Йч, Qj, р, р равными нулю, а Во=Со, £2t=
~~const и учитывая малость р, получим равенство, опре-
якццее статическое установившееся значение угла:
70
71
({уст=(/‘/йс + Л7р.—Л1разв —Л4л)//<пр- Выходной С11г 1
ДУС
U yct— /С упРуст 4" оу и = ',/ (В/2с -Р /Ир —2^рвзб'~Л1 )!J I
^Пр »
4~^0уп —ЛсТек2с4-^0уп> (3. |
где Куп — передаточный коэффициент датчика угд»
ДУС и усилительно-преобразующсго устройства (прй
его наличии) Для схемы, изображенной на рцс д Д
ХУп ===;/СдУ=(Упнт/(2Рп), где Кду коэффициент переду
датчика угла; (7,тт—напряжение источника, питающее
обмотку потенциометра; 2р„— угол намотки потенции
метра; (/оуп— нулевой сигнал усилительно-преобразув-!
щего устройства (постоянное напряжение на выхоJ
усилителя при отсутствии управляющего сигнала на eixij
входе).
Одной из основных характеристик прибора является
коэффициент Й£;тек= (t/yC1—t/Oyn)/2c, называемый чувег-
витальностью ДУС (не путать с порогом чувствительно. >
сти!). Принято также называть Л^ек крутизной выходам'
характеристики прибора или масштабным коэффициент
том.
Обычно прибор характеризуется значением
бгуСг ( Н- Qt ,„ик) — б^усг (— шак)
/7г =----------------------------------
2fic й
Стах
ГДС (/уст ( + Qjmax) И (/уст (— fifmax) ВЫХОДНЫС СИГ11в
ДУС, соответствующие максимальным положительном;
и отрицательному значениям измеряемой угловой скоро
сти fit-
Датчики угловой скорости с. механической пружине!
просты по конструкции, удобны в эксплуатации, похЮ
ляют путем выбора жесткости механической пружниЧ I
осуществлять измерение 2^ в широком диапазоне знги
ннй и при этом малогабаритны. Поэтому их применяй’
в тех системах управления, где к точности измерен®
S2j не предъявляют высоких требований.
Если требуется измерить £2С с точностью свй®
0.5. ..I %, то используют компенсационные ДУС, так**
сделать это с помощью ДУС с механической пружив
сложно. ДУС с механической пружиной представв
собой разомкнутую измерительную систему, и no3T<J|
как следует из равенства (3.12), на его точности ней
средственно сказываются нулевой сигнал Uoyu и изм«Ч
(3.13,
коэффициентов передачи датчика угла и усилитель-
преобразующего устройства.
11 уравнение движения гироузла компенсационного
дуС имеет вид
Лр? + W4",,олн^ 4" лм == cos р — /72^ sin р—
_-/02r—(Во —Со)(0.52с sin 23 — 0,52* sin 2p-f-
4-2с2чcos28) + /Ир -/Иразб-/Ил. (3.14)
Здесь /Иди определяется соотношениями (3.5), (3.6).
Используя (3.5), (3.14), найдем значения угла руст и
установившегося выходного сигнала компенсационного
Д1УС для случая, аналогичного (3.12):
Руст ----(//2с + М ₽ — Л4Разб — Л4Ж) — 1
1\ ~г Акодн I
^.1>1
и —
° уст
(3.15)
О ус-
(/?Эт4" (К4" К подв)
-----Аду/<ус/?Д-----(№с + /И₽ -Мразб-
(/?ЭТ + /?лм) [К + Хпохп)
-Л(г)4-----— (1 ——-1—
Лэт 4" /?ЛМ \ К 4* К„ОЛВ
В компенсационных ДУС всегда обеспечивают вы-
полненпе условия К5>КП0дв. Тогда
Нусх^-^Г(/72С + /И. -/Иразб-/Ил)=/щгек2с, (3.16)
т. с. UycT практически не зависит от Аду, Лус и (/Оус. Та-
ким образом, погрешности компенсационного ДУС, оп-
ределяемые нулевым сигналом усилителя и .нестабиль-
ностью коэффициентов передачи датчика угла и усилите-
ля. будут значительно меньше, чем аналогичные
погрешности ДУС с механической пружиной.
Физически нечувствительность ДУС к изменениям
мер’ ^Ус Н К ^Оус можно пояснить на следующем при-
Пусть ДУС, у которого/1/р =/Иразб = /Их=0, t/oyc = 0,
«олв=0 измеряет постоянную угловую скорость
огДа в соответствии с (3.14), (3.5) и (3.15) в устаиовив-
де^СЯ реЖиме и руСт=//2с/Л’. Если на выхо-
да -С1,лителя появится нулевой сигнал (/Оус, то в цепи
пка момента возникнет дополнительный ток /о=
72
73
= £Л>ус/(Яэт+/?дм) и датчик начнет развивать Мом
превышающий Под действием избыточного мом^'И
та гироузел станет отклоняться и сигнал датчика С I
скомпенсирует UOycT. В новом положении равной
гироузла равенство моментов /7Q[ и Кяы1 восстановит!I
а следовательно, восстановится прежнее значение вЛ
ходкого сигнала ДУС 1=Н^/КЯМ- При этом повое умЯ
новившееся значение
будет отличаться от начального. Таким образом, в кох.1
пепсационном ДУС влияние t/oye устраняется за сче
смещения установившегося положения гироузла. Аймон
гичным образом в нем компенсируется изменение коэф-
фициентов КЯу и /Сус.
Частоты колебаний щ По и декремент затухания J
компенсационного ДУС определяют с помощью соотн»|
шепин (3.10), (3.11), заменив в них Кпр на К. (при это»
пренебрегают/С,(сда«С/С). II
В том случае, когда коэффициент механической
демпфирования колебаний гироузла D мал и соответсм |
вующее ему значение декремента %<0,5, в усилится,
компенсационного ДУС устанавливают корректируя I
щую цепь (обычно дифференцирующее звено), обеспечм |
вающую гак называемое «электрическое» демпфирова-
ние колебаний гироузла. 11
§ 3.2. Погрешности датчиков угловых скоростей
В измерителе угловой скорости должны обсспеч*
ваться пропорциональность и однозначное соответстйв
между С7ОЫХ и Вместе с тем в уравнениях, описывав
щих движение гироузла и формирование выходного Я
пала реальных ДУС, содержится целый ряд членов I
коэффициентов, наличие и нестабильность которых ®
рушают это условие и приводят к образованию погре-1
ностей прибора. Так, наличие момента инерции гироуЯ
А о и демпфирования является причиной возпикновей
динамической погрешности ДУС. Моменты А
//Sin sin [3 при этом вызывают методические погреыЯ
сти. Наличие членов Afp Л4разб, 7/Оус, (Во — Со)(О>& -J
Xsin 2р — 0,5П2 sin 2₽ + йсЩ cos 2₽), нестабильность И
74
центов Н, Кпр, Клм, Куп, /?эт приводят к появлению
^’’умснтальиых погрешностей.
“11СпР намические погрешности При использовании
•Глчя измерения изменяющейся во времени скорости
a д, из-за наличия нсзакоичившихся переходных
°бЪеКссов? определяемых инерционностью гироузла и
рр01(ЧиеМ' демпфирующего момента, показания ивых
-VC будут отличаться от значения /zEtckHe. Разница меж-
х и httei&t, является динамической погрешностью
i ора которую определяют в зависимости от его на-
учения.
Если используется в качестве чувствительного
мента системы автоматической стабилизации самоле-
та пли какого-либо другого подвижного объекта, то в
ехническом задании на разработку ДУС оговаривается
ппамическая погрешность измерения им гармонически
изменяющейся угловой скорости. Значение выходного
нгиала ДУС при sin со/ найдем с помощью ча-
тных решений уравнений (3.8) или (3.5), (3.14), пола-
гая в них равными нулю 2,» 2е, Л4раз6 и Мх и счи-
тая угол ₽ малым: /7вых=/ктекЛПсл sin (ю/— ц), где
).= 1, .! - — коэффициент динамической
Г (1 -“2/«б) +4Х2“2/«с
восприимчивости прибора; р—arctg2-/n0/(/?e —<«2)—от-
ставание по фазе гармонического выходного сигнала
ДУС от Динамическую погрешность ДУС в этом слу-
чае принято представлять в виде двух составляющих.
1ервая составляющая
д*ип=а-1) (з.17)
характеризует погрешность измерения прибором амнли-
гармоннческого сигнала. В качестве второй псполь-
'ТСЯ фазовый сдвиг ц. Из формул для ц и Ддин видно,
ЧТО ДУС способен с малыми искажениями амплитуды и
Ф зы измерять угловую скорость только на участке,
те собственная частота колебаний прибора по значи-
^ч° превышает частоту возмущения со. При проекти-
ровании приборов для конкретных объектов разработчи-
цею ТеХ|1И4еском задании задают максимально возмож-
на частоту (Отах колебаний объекта. Если ДУС
eoro^33^34611 для ИС1,0ЛЬЗ°вания в качестве чувствитель-
автопЛСМеПТа демпФсРа рыскания (крена, тангажа) или
= 1 то обычно его собственная частота п0—
•• 10)«тах.
75
Декремент затухания собственных колебаний nv.
также существенно влияет на динамическую погп ’
ность. Для минимизации погрешности значение вгЯ
рают в пределах от 0,5 до 0.8. При этом ДУС имеет i L
меньшее время переходного процесса.
Например, ДУС автопилота имеет пп~20 Гц, ya^-l
Требуется определить погрешности ДУС Дл„н ц '
кающие при измерении угловой скорости, гармсш;;П *1
изменяющейся с частотой 5 Гц. Согласно (3.17) нахщТД
Адин
I?
0,5°.
«
л / 2л-5 V
+ 4-°’Пй^о~)
-34, а н-arctg--------
6 <2я-20)г- (2я-5)2
При использовании в качестве чувствительного элемент^
в бесплатформсиной системе инерциальной навигация
(БИНС) ДУС работает совместно с интегратором, иа
дящим в состав вычислительного устройства. На выхм
интегратора формируется сигнал А7( = /Сн J" Г/выд//, гэ
А”и — масштабный коэффициент интегратора.
Если ДУС не имеет динамической погрешности, т:
Г/Вых=/ьГ2е. Полагая чувствительность ДУС /гЕ посте»"1
пой, получим сигнал с интегратора
м
A7i = /CH/?c I Qr.dt —
9
где — угол поворота основания ДУС вокруг оси Oj 11
время измерения.
Найдем изображение сигнала на выходе интегратор |
для реального ДУС с передаточной функцией
U7 (S) 1 -|_27Л/д0+^).
«С (5)
соответствующей уравнениям (3.8) и (3.14), (3.5) .
s — оператор Лапласа. Для нулевых начальных услоад I
N2(s) = Kn(W(s)/s) fit(s) — изображение сигнала с 1
тегратора у реального ДУС. I
Изображение динамической погрешности измеРд I
угла а£ Aat(s) =[М ($)—А2 (s)]/(Au/7E). Так как Ail4 1
= Аийейе(х)/$, то
<3>
V о , х 2 (У./"о) + G2/no)
Дас(5)-Йс(5)-
Попагая скорость QE медленно изменяющейся по
пению с периодом собственного движения ДУС
cPf^O) получим приближенное значение погрешности
Измерения угла аЕ:
Дас(/)=йс(/)-2у/я0. (3.19)
Таким образом, динамическая погрешность определе-
ния угла поворота объекта с помощью ДУС и интегра-
тора пропорциональна значению угловой скорости объ-
кта в момент измерения и не зависит от характера ее
изменения до момента измерения. Как и в нервом рас-
смотренном случае динамическая погрешность будет
м меньше, чем больше собственная частота По колеба-
ний дус.
Например, ДУС БИНС установлен на основании,
разворачивающемся вокруг оси О£. Максимальное зна-
чение £>Е^1 град/с= 1/57,3 1/с. Определить частоту п0
ДУС с %=0,7, при которой выполняется условие ДаЕ^
^Ю"=4,85-10-5 рад. Согласно (3.19),
М*
"о=------
2-0,7
— 504 1/с = 80 Гц.
Дас 57,3-4,85-10-5
Влияние на динамическую погрешность нежесткости
конструкции ДУС. При изложении принципа действия
ДУС применялись свойства двухстепенного гироскопа.
Гироскоп рассматривался идеализированным, т. е. все
элементы его полагались абсолютно жесткими и люфты
в опорах — отсутствующими. Такой подход оправдан,
поскольку позволяет описать работу прибора, однако он
не всегда раскрывает физические процессы, имеющие
место в приборе. Так, рассматривая принцип действия
ДУС, мы полагали, что реакции в опорах возникают
ВСлеДствне появления угловой скорости гироузла р, в
10 время как в действительности все движения в прибо-
ре появляются при взаимодействии втулок опор с осью,
е,.ВСЛедств11С возникновения реакций в опорах.
Можно дать следующее более полное описание двн-
е1|ия гироскопа с учетом упругой податливости элемен-
°пор рамки. При этом переходим к рассмотрению
77
76
движения гироскопа с тремя степенями свободы
3.2). В исходном состоянии основание неподвижно
гироскоп находится в положении, при котором пружи .
не деформирована. Пусть с некоторого момента времен*
основание начинает поворачиваться вокруг оси О£ Н
скоростью Тогда вследствие инерционности rnpoy3J°
Рис. 8.2. ДУС с нежесткими опорами рамки
начнется деформация опор 2 и под действием момента
реакций опор у гироскопа возникает движение с угловым
ускорением а и угловой скоростью а вокруг осн 01, в
сторону движения основания. При этом возникнет гиро-
скопический момент Мп—На. Под действием М,\ гнро-
узел с угловым ускорением р и угловой скоростью ₽
начинает поворачиваться вокруг оси в направлении,
при котором Н по кратчайшему пути движется к а- Та*
как из-за инерционности гироузла р нарастает постепен-
но, то постепенно нарастает и гироскопический моМеи1
Mi2=/7p, увеличивающий реакции в опорах. Из-за на-
личия угловой скорости основания £2^ в опорах проД0’’
жают нарастать деформации, поэтому вызванный «м
момент реакций опор будет превышать M-si ускоре’111
а сохранится; Мг1, р и ЛГгг будут нарастать. Эти пР°пе^
сы ограничиваются начавшейся деформацией пруД°,и '
78
юшей момент Мир, направленный в сторону, про
^Еположиую Мп. и препятствующий нарастанию р. По
ТЯВ°ч«ииИ переходных процессов получим a=Q[, M-i =
оКЖ2 ==7Ипр» а реакции в опорах—равными нулю. Так
установившемся режиме гироузел не взаимодейст-
ьаК с опорами, то его поведение можно рассматривать
8 /прецессию гиРоскопа вокруг оси под действием
мента Afnp с угловой скоростью ci=A'fnp/// = Q£;. Очс-
ы что наличие нежесткости опор затягивает пере-
ные процессы в ДУС, в связи с чем увеличиваются
„нампческие погрешности прибора. К аналогичным
последствиям приводит нежесткость других элементов
конструкции прибора (оси и опор ротора, рамки, кор-
пусных элементов), а также нежесткое крепление кор-
пуса ДУС к объекту. В результате собственная частота
колебаний прибора оказывается меньшей, а динамиче-
ские погрешности-— большими по сравнению с их рас-
четными значениями.
Оцепим влияние нежесткости конструкции на приме-
ре прибора с нежесткими опорами рамки (этому случаю
соответствует схема ДУС с упругими опорами рамки,
например пендсльфедерами или растяжками). Обозна-
чим а угол отклонения оси гироскопа в плоскости рамки
при упругих деформациях рамки и составим уравнения
малых колебаний гнроузла ДУС относительно осей Ох
и О£, полагая при этом все моменты, вызывающие по-
явление методических и инструментальных погрешностей
Д С, равными нулю:
( A0^D^ + K^-Ha=HQ.,
I — Воа~ OtJa — l<vu — /7р=0. ,
дееь Во—момент инерции гнроузла относительно осн
У (для приборов, имеющих жидкостное заполнение,
к° должен учитывать момент инерции присоединенной
гнроузлу жидкости); К,,—-жесткость опор рамки;
коэффициент демпфирования колебаний гироузла
а (у газозаполпеппых приборов D,j мал и определя-
ли51 ,механическнМи потерями. В приборах с жидкост-
Лемг ?аполненнем велик и определяется жидкостным
ИЫ к нР°ваннем); К—жесткость механической пружи-
*»пр или жесткость компенсационного контура.
76
Характеристический полином для (3.20) запищем
виде
Ло52+ Z?s 4-К; -Hs, I
Н s’, B0s2 -|- K>{/s |
Развернув Д и приравняв его нулю, получим характерц
стическое уравнение системы (3.20):
Ку
’A()Dy + B0D-
i Ку i
0.
У Ку
(3.21)
Гироузел реальных конструкций ДУС с нежестким
опорами имеет два колебательных движения: высоко
частотные колебания, вызванные пежесткостыо опор, ц
низкочастотные колебания, определяемые жесткостыо!
механической пружины или жесткостью компенсацией
ного контура. Если ограничиваться рассмотрением толь-
ко таких ДУС, то для них (3.21) будет иметь две парк
комплексных корней Si,2 и с существенно различны
ми модулями. Применяя метод Лобачевского — Греффе,
найдем приближенные значения этих корней из уравне-
ний
Л0Д0 2 , А0°У +
-----S1 2
Ку
^,и-л+^4-+-г=0’(3-221
Ку 1 Ку
•К,+К=0. (3.231
Ку
Корни si,2 соответствуют высокочастотному, обычно
быстро затухающему движению рамки, не оказывающе-
му существенного влияния па динамическую погрет
ность ДУС. Частота собственных недемпфированных
колебаний для него
1 ГАоК у + ВйК + И2
(3.24)
"т=
Корпи Кз.4 характеризуют медленные колебанияр«Ч
ки, определяющие динамическую погрешность 1
происходящие с частотой
А0В0
п.2=
_________К________
К №
Л) I- Во +
Кг/ Ку
п0 в (З.С
+ КуАо
иближеином равенстве (3.25) учтено, что обыч-
V A' a Частота недемпфированных коле-
но «2 ПРИ бесконечном увеличении Ку стремится к
ба1111 е tie, определяемой формулой (3.10), а при ограпи-
чаСТ х жесткостях имеет величину, меньшую этого зпа-
чеНП Для определения динамической погрешности
*116 с нежесткой конструкцией в формулах (3.17) и
/319) вместо пи необходимо подставить значение нг.
Например, у ДУС с подвесом на растяж-
х /7=20 сН-см-с; Л0=2-10 2 сН-см-с2; Ку=
1000 с Н см/рад. Оценим влияние нежесткости подве-
са на собственную частоту недемпфированных колеба-
ний ДУС- Согласно (3.25),
л __
Л0
----------- 0,45.
202
5000-2-10’ 2
№_
КуА0
Методические погрешности ДУС. Согласно выбран-
ному методу измерения, все показания ДУС относят к
В то же время установлено, что прибор измеряет проек-
цию угловой скорости основания Данное обстоятель-
ство и является одной из причин возникновения методи-
ческой погрешности прибора, которую часто называют
погрешностью из-за «перекрестной» чувствительности
ДУС (т. е. из-за чувствительности ДУС при наличии
угла р к составляющей проекции угловой скорости осно-
вания на ось Огр «перекрестную оси» О£). «Перекрест-
ая» чувствительность ДУС может приводить как к из-
менению масштабного коэффициента прибора /1£тСк, так
к появлению на выходе ДУС ложного постоянного
сигнала.
Рассмотрим случай, когда идеальный ДУС с мехапи-
ческоп пружиной ('Alp=Alpa36=MJt=0, В0=С„, ДОуп = 0)
ходится на основании, вращающемся с постоянной
ловой скоростью. Если при этом йч=0, то определя-
6 tn 2) установившееся значение выходного сигнала
criift ч==,2оТ При Й„=#0 с учетом мало-
Т" Риз (3.8), (3.12) найдем
(2ч Ф 0)=1/<уп/(/<1.р + Н211)1 №.. (3.26)
яР)1бо!щеЛЬПаЯ ПОгРешн°сть масштабного коэффициента
Разнос-/’ ?ызванная йп и определенная как отношение
'чтек при наличии и отсутствии S2n к /г,1Тек при
81
so
Отсутствии йч, будет
алСтв1(=/Уач/(/<„р+//2ч).
Так как Кпр^>ЯЙп, то
^Стек ~ T/S^/TC Пр. (3.‘7)
Для определения погрешности компенсацпоннл
ДУС в (3.27) следует заменить КПр на К.
Рис. 3.3. Механизм возникновения погрешпо
сти ДУС при наличии угловых колебаний ос-
нования (два полупериода)
Например, ДУС имеет 77=100 сН-см-с, Кпр=
=2-103 сН-см/рад (соответствует руСт = Г при й:=
=20 град/с). Определить погрешность ДУС бЛ^ек при
£2ч=2О град/с = 20/57,3 рад/с. Согласно (3.27),
8ЛСтек = - • 100« 2%.
ек 2-103.57,3
Так как Тг^тек зависит от £2П, то при одновременны!
угловых колебаниях основания вокруг осей О? и
из-за параметрического детектирования на выходе До-
будет появляться ложный постоянный сигнал.
Пусть колебания носят гармонический характер. РЧ
смотрим механизм возникновения погрешности (рис. 3.3
На рисунке показаны положения гироузла, соответству
ющие его максимальным отклонениям в первый (°) *
второй (б) полу периоды йс. Здесь мы полагали частот
колебаний <о малой и поэтому фазу отклонений гирЧ
ла — соответствующей фазе £2С. Из рисунка следует. Ч
в течение рассматриваемых полупсриодов на гПр°У3
действует неизменный по знаку добавочный гироскоШЧ
ский момент ДМ, вызванный £2Ч. Оценим величину
82
сти для случая идеального ДУС с механической
rPcUnl<Loft Воспользуемся уравнением (3.8) и, положив
л| ^отклонения гироузла малыми (sinp=f, cosp=0),
олУ‘",м
Л0В+£)р+Кпр₽=НЙ;-р/72Тр (3.28)
2 ==2пл(вн1 — '0; St=2СЛ sin <«/. Будем решать это
^ЛЛеренциальное уравнение с гармонически изменяю-
Л,'мся коэффициентом при р методом последоватсльно-
Ш'приближения. Чтобы получить решение в первом при-
1жении, вторым членом правой части (3.28) пренеб-
аеМ Частным решением упрошенного уравнения
является выражение
Pi=(/-Z/Кnp) X2c/sin («>/ —р).
Для получения решения во втором приближении зна-
ние р во втором члене правой части (3.28) заменим
па рь Тогда
Д0?+^+^..Р?=^2с-(^2^Л2ел/^1.р)Х
X sin (<>/ —v) sin (ш/ — р)
или
+МН- кпр?=Я2С - /7^2чл2ел/(2^пр) fcos (р - v) -
— cos (2u)/ — p — •*){.
Решение уравнения даст второе приближение по
илу р:
Рн=—-------sin (к>1 — р)---* ,А cos (р - v) +
Дир 2Д„Р
-J- Л cos (2п>/ — е), (3.29)
? 11 е — соответственно амплитуда и фазовый сдвиг
“УЖдсиных колебаний прибора с двойной частотой
в°змущения.
|)ц^Т0*’ое приближение показывает, что центр колеба-
ВетстЮДПИЗКН0Г0 узла смещается на значение, соот
УюШее следующей погрешности измерения:
а«' = -У” XcuslH-v).
*'\пр
(3.30)
83
Для компенсационного ДУС определяется I
формуле (3.30), только в этом случае в ней заменяв!
Я„р на /<.
Если колебания основания носят случайный Xana I
тер (Пс, Qn —стационарные случайные функции), I
Pi= f W(г) 2с{I — r) dr, (33
где ну(т)—функция веса ДУС. Тогда добавочная сое-
тавляющая момента в правой части уравнения второе
приближения равна j w(r)2c(Z — t) dr и, следом
о
тельно, погрешность ДУС, определяемая постоянно;
составляющей второго приближенного решения,
Т Г* ОО
2coi —f Йг (Z) С w (T)Qz(t — т) dr
г-*о I J .)
о L о
г
2ч(/)Ис(/-т)Л
о
и>(т)/?В(;Вч(т)</г, (3-И
6
где Rerj2 (.x) — функция взаимной корреляции меж?
проекциями угловой скорости на оси Ot и Oq.
Для снижения погрешности от перекрестной угловой
скорости увеличивают жесткость пружины (жестксЯ
компенсационного контура). Малогабаритные ДУС и4*
юг меныпне погрешности, что объясняется меньшим эн»
чепием Н в них.
Например, определить максимальную погрешней
Q:Oi для ДУС с /7= 100 сН-см с, К1)|>=2- Ю3 сН-см/Н
%=0,7, установленного на основании, совершающем уг»
вые колебания с амплитудами угловых скоростей (У ]
=fi^=10 град/с= 10/57,3 1/с. Так как х=0,7, то
В наихудшем случае имеем X—1, cos (ц—v) = l-
согласно (3.30),
2 , =-----100-J°-_f°---_ 7 ю_.; j, _ 0 04 граДИI
2-10’-57,3-57,3-2
Еще одной причиной возникновения методической
I ешности ДУС является инерционный момент А^,
.кающий при ускоренных разворотах основания
в031”г оси Ос. Величина погрешности ДУС соответствуй
скорост»
(3.33)
Для уменьшения погрешности от переносного угло-
ого ускорения Qj необходимо стремиться проектировать
пнбор с минимально возможным моментом инерции
гнроузла Д<>. Это не только уменьшает погрешность Q£02>
и н способствует повышению собственной частоты при-
бора по, что улучшает его динамические характеристики.
В прецизионных измерительных системах влияние
усмотренных методических погрешностей устраняют,
используя для определения угловой скорости два одина-
ковых ДУС с противоположно направленными вектора-
ми кинетического момента.
К методическим погрешностям ДУС также часто от-
носят погрешность, вызванную эффектом некоммутатив-
ное™ конечных поворотов (17]. Ее называют также «ие-
голономной ошибкой», «ошибкой сканирования», или
«эффектом конечных вращений» [49].
Указанная погрешность не является методической
погрешностью ДУС, поскольку не зависит от его кине-
матической схемы и от его параметров, а определяется
свойствами механических систем, подчиненных неголо-
номным связям.
Рассмотрим проявления эффекта пекоммутативности
применительно к ДУС. Пусть основание, па котором
установлен прибор, совершает движение, иллюстрируе-
мое рис. 3.4, а. Здесь из исходного положения ДУС с
основанием последовательно разворачивается на 90° во-
круг осей Сэр Og и вновь Отр Очевидно, что появивший-
ся^ концу цикла сканирования поворот основания на
90’ вокруг оси Og не будет сопровождаться появлением
сигнала па выходе ДУС, поскольку при указанном дви-
жении проекция угловой скорости основания на ось чув-
ствительности ДУС Og равна пулю. Таким образом, ДУС
1е реагирует на угловую скорость поворота основания
^округ оси Og, возникающую в процессе ее сканирующе
Движения. Нерсгистрируемую при этом угловую ско-
сКдТ|' можно определить, дав следующее геометриче-
ое истолкование процессов. Для этого рассмотрим ме-
84
85
ханическую модель, показанную на рис. 3.4, б. ц
сканирующем движении оси О£ около неподвижЛ
оси О£0 (угол сканирования —тр) плоскость псрекд
тывается без скольжения по поверхности круглого k0Hv’
Рис. 3.4. К эффекту неком мутатнвн ости:
/ — направление сканирования; 2 — движение луча ОА
са, имеющего при вершине угол (л/2)—ф. След, остав-
ленный на плоскости линией ее контакта с конусом, за
полный цикл движения показан на рис. 3.4, в.
Если в начале сканирующего движения в плоскости
gOr) было выбрано направление, отмеченное лучом <' I
то к концу цикла из-за разницы длин окружности, леж '
щеп в основании конуса и окружности, описаннон
плоскости радиусом, равным образующей конуса, пр
изойдет разворот этого луча в положение 0А\. Наб-4
86
находящийся на положительной части оси
да1?иг плавный поворот луча О А на угол (р=
от“е,._cosip) в направлении, противоположном скаии-
цИю Такое же значение имеет телесный угол у.
описанный в процессе сканирующего движения осью О£.
По у можно судить об угле ср, определяемом эффектом
коммутативности, и в случае произвольного сканирую-
щего движения оси О£.
Не воспринимаемая участвующим в сканирующем
Движении ДУС угловая скорость
Йсоз=Т/Г, (3.34)
Л р —период сканирования.
* ассмотР11м теперь случай, когда ДУС установлен па
ког°ВаНИИ’ совеРшаюшем колебательное движение во-
•10м Авух в„3аимно перпендикулярных осей, например на
е*Цениой в карданов подвес / платформе 2 .(рис. 3.5),
87
которая совершает колебательные движения вокруг
Ог1 и Охь [Рассматриваем ДУС, не имеющий погрещ®
сти (3.30), (3.32).] Очевидно, что ввиду способа крепВ°’
пия платформы к основанию вращение ее вокруг осн пй
отсутствует. Однако в отклоненном па угол Н положу *
платформы на ось чувствительности ДУС будет npjl
цироваться угловая скорость вращения у и Поэтому n 1
колебательном движении платформы на выходе Дуг
появится сигнал. Измеряемая ДУС угловая ск0ро^
Qs=i(psinO, или для малых 6 — Qc=<pfi.
Еслп колебания гармонические [ср=срл sin ы/, 0=0 у
Xsin (wZ+g)], то
cos <»/0л sin (»)/-[- р)=
fsin p-j-sin (2w/ + p)]. (3.35)
Таким образом, хотя основание ДУС и не имеет раз-
ворота вокруг оси go, в показаниях ДУС будет содер-
жаться сигнал, соответствующий постоянной угловой
скорости
йС0=
А А
sin уь.
(3.36)
Если колебания носят стационарный случайный харак-
тер, то
г
1 irn 4- [ ®(/) 0 (/) dt—R^- (0),
У—> ОО / , J
о
(3.37
Где /?е^(0) — значение функции взаимной корреляции
процессов 0 и ср при т=0.
Очевидно, что измеряемая в рассматриваемом случи-
угловая скорость 2;о, определяемая соотношения»
(3.36) и (3.37), численно равна и обратна по зпакуЯ
грешности £2^03, которая возникала бы вследствие эффЧ
та некоммутативпости при таком же коническом двия|
нип оси Og в случае отсутствия ограничения врашс (
платформы вокруг оси Ogo- J
Погрешность, вызванная эффектом некоммутап•
сти, может быть достаточна велика. Так, при гарм
чсских колебаниях с Од=срл=1° и со=1 1ч,
= 180 град/ч. Особенно существенна рассмотрение
66
погреш-
тол
Рис. 3.6. Выходные статические харак-
теристики реального и идеального ДУС
грпх
ость в бесплатформенных системах инерциальной
rPCIII,,atinn, где ее следует учитывать в ЦВМ, например,
нав||Г Сработки сигналов с трех ДУС, имеющих взаим-
'Те\пенд11Куляриые оси чувствительности.
Ин ’Р ментальные погрешности ДУС. Инструмен-
те погрешности обусловливаются несовершенством
та они’нпя элементов прибора. К ним относят погреш-
ать от момента сил
сухого трения, мо-
мента несбалансиро-
ванности гироузла
относительно оси <Jx,
нестабильности па-
аметров элементов
q'yC (кинетического
момента гпромотора,
напряжения питания
атчпка угла, кру-
тизны механической
пружины и дрейфа
ее нулевого положе-
ния. дрейфа нулево-
го сигнала датчика
,гла) и от ряда дру-
гих факторов, рас-
смотренных ниже.
В результате действия причин, вызывающих иистру-
ментальные погрешности, реальная статическая характе-
ристина/ДУС будет отклоняться от расчетной линейной
зависимости 2 между (7П11Х и Qj (рис. 3.6). Это откло-
нение принято характеризовать следующими погрешно-
стями, указываемыми в паспорте ДУС: нулевым сигналом
ДУС порогом чувствительности отклонением
"асштабпого коэффициента hz от расчетного значения и
табильностью /г£ (во времени и при изменениях тем-
еРатуры), нелинейностью выходной характеристики,
•фейфом ЙСо при изменении температуры, дрейфом Цс(1
Р« динамических воздействиях.
* ассмотР1,м подробно причины возникновения каж-
\чс.||,113шназванпЬ1х погрешностей и меры, способствующие
пРнн ЛеВ°Й СИгнал ДУС. Нулевым сигналом ДУС
"ivmc™ Называть постоянную или медленно измеияю-
(Р«с 3 6?° в,)еМенп составляющую сигнала ДУС (70
•«) на его выходе при отсутствии измеряемой ско-
89
рости Йс. Этот сигнал часто называют аддитивной с
ставляющей погрешности прибора.
В ДУС с механической пружиной такой сигнал ВЬ13
вается несовпадением положений гироузла, при которц
пружина находится в недеформнрованном состояцв*|
(«нуль» пружины) и выходной сигнал датчика угЛ
равен нулю («нуль» датчика угла). Причинами нссовпа*
дсния могут быть погрешность взаимной выставки <ц4
лей» датчика угла и механической пружины (Ропр).допу'
ценная на стадиях сборки и регулировки прибора, меГ
ленное смещение «нуля» пружины вследствие старения
нагрева и гистерезисных явлений (А₽о), а также времен'
ной и температурный дрейф «нуля» датчика угла и yen.,
лительно-преобразующего устройства (Ц>ус). С учетом
(3.12) найдем
2со< = 1^уп (Ропе + АрОцр) 4* Uoycl/^c- (3.38)
Для ДУС компенсационного типа основными причинами
возникновения являются:
погрешность взаимной выставки «нуля» датчика угла
и положения, при котором равен нулю момент, вызван
ный деформациями токоподводов. В случае использова-
ния для крепления гироузла упругих подвесов типа рас-
тяжек, пендельфедеров и т. д. следует рассматривать
смещение «нуля» датчика угла Роподв относительно поло
жения, в котором равен нулю суммарный момент от
деформаций токоподводов и упругих элементов подпески
гироузла;
нулевой сигнал Umc усилителя компенсационного
контура.
С учетом (3.15) получим
£ —— ^яочвРоиоли !^ЭТ f |К\ д
Rat Ч" \ К + Киояп / А;.
(3.39)
Здесь уровень Йро4 будет тем меньше, чем меньше жест-
кость Кподв. I
Как в ДУС компенсационного типа, так и в ДУС с
механической пружиной причины, вызывающие появле-
ние зависят от температуры. Поэтому в паспортии11
данных прибора указывают температурный коэффиЧ
ент изменения ЙС0(ТКЙС0).
Погрешность Qt(M принято разделить па систематич\
скую (Паснет) и случайную (Йсослуч) составляют" •
90
оПЬЗуюшей ДУС системе управления объектом
ИСП может быть учтена расчетным путем в ЦВМ.
при разработке ДУС основное внимание уде-
,10?тся обеспечению минимума йсослуч, для чего стремят-
яйСТ анить нестабильность приводящих к появлению
сй ^факторов. При оценке Ц^ослуч следует учитывать так-
•‘?’наличие в выходном сигнале ДУС высокочастотного
Ъ ,а возникающего из-за не устраненной при изготов
111 и гиромотора динамической несбалансированности
вНьа, и низкочастотного (единицы герц) шума, вы
*! кого медленно затухающими колебаниями ротора
т резисного гиромотора около синхронного положе-
ня Если вследствие технологических причин вектор 11
дуС нс перпендикулярен оси подвеса рамки Og, то эти
колебания, появляющиеся, например, при изменениях
напряжения источника питания гиромотора или при из-
менениях момента трения в подшипниках маховика,
дут приводить к колебаниям рамки вокруг оси 0^.
К погрешности Qy, относится составляющая сигнала
ДУС, вызванная моментом центробежных сил инерции,
2-о6=(50—Co)-(O,52^shi 2р — 0,522 sin 2р-|-2с2Т1 cos 2р)/Л7.
Для ее уменьшения следует обеспечивать равенство
н Со- Данная составляющая погрешности может учиты-
ваться расчетным путем в бортовой ЦВМ
Погрешности от разбалансировки ги-
оувла. Если основание ДУС имеет ускорение или
ДУС находится в поле силы тяжести, то к й;0 добавится
ставляющая Л1разб//7, определяемая моментом разба-
лансировки гироузла. Обычно эту составляющую погреш-
ности выделяют отдельно и называют погрешностью от
избалансировки гироузла, в то время как погрешности,
иределяемыс (3.38) и (3.39), называют составляющими
улевого сигнала ДУС, не зависящими от ускорения.
рипята следующая классификация погрешностей, выз-
ванных разбалансировкой: от статической несбаланси-
рованности гироузла; от упругой разбалансировки гиро-
• Ла ПРИ поступательных ускорениях; от упругой разба-
н вкц гироузла при вибрации.
СаЛаеРВая погрешность возникает из-за некачественной
Нз "С11РОвки /ироузла при сборке прибора, а также
ироуВреМеНИЙХ й температурных смещений центра масс
Стати^а В пРоцессе хранения и эксплуатации прибора.
роузлЧеС.КУЮ несбаланС11рованпость (маятниковость) ги-
а стремятся свести к нулю, однако ее невозможно
91
сделать меньшей, чем отношение момента сил треп. 1
Л1тр.рег, имевшего место в опорах гнроузла ца стали4
балансировки, к ускорению силы тяжести. Тогда велиц.’1
на максимального момента, вызванного статической р I
балансировкой, в полетных условиях с укореняем а Н<Ц‘
Мрааб шах^ (^тр.рег, 0
Причины возникновения двух других погрешностей
связаны с наличием нежесткости и --- *
гнроузла, влияние которых рассмотрено в кп. 1. -
Порог чувствительности ДУС (ЙЕт1п) По
порогом чувствительности ДУС подразумевается мяин-
мальпая угловая скорость Qpnin, которая способна выз-
вать устойчивое изменение выходного сигнала, превыше-
ющее уровень случайных изменений Qt0 (т. е. минимали
ное изменение угловой скорости Qc от ее нулевого значь
пия), которое «чувствует» прибор Иногда на практике
вместо порога чувствительности пользуются понятием
разрешающая способность ДУС, под которым подразу-
мевают минимальное приращение угловой скорости £>.,
способное вызвать различимое изменение выходного сиг-
нала ДУС. Это понятие является более полным и вклю-
чает в себя порог чувствительности (при Qc=0). Причи-
нами возникновения погрешности Qtinm для ДУС с меха-
нической пружиной и для приборов компенсационного
типа являются моменты от сил сухого трения в опорах
рамки ДУС, демпфере и в потенциометрическом датчике
Помимо этого в ДУС с механической пружиной Ндаш
определяется разрешающей способностью датчика угла
Pmin (для потенциометрических датчиков угла эта вели-
чина соответствует шагу намотки провода). Для появле-
ния на выходе ДУС с механической пружиной сигнала
необходимо, чтобы гироскопический момент ДПсшы пРе’
вышал момент трения М} и момент, развиваемый меха-
нической пружиной, который возникает при поворот
гироузла на угол Ршщ. Отсюда
| +АГщФпнп)/// + 2сОслуч-
В компенсационных ДУС при условии малых Ли*
рты практически нс будет сказываться на поско
ку влияние pmin будет компенсироваться в процессе авт
колебаний, возникающих в компенсационном коп™
ДУС, использующем датчик угла с ртш- Поэтому Л |
(ЗЛИ
м леи содержащий рпнп, следует исключить из (3.41)
< последующих формул.
" "в общем случае
|М,; |=МЧ-КгыжЛ+ /<«,. осА (3-42)
у*==2Л'1о+Л1п — момент трения, не зависящий от
(3.40) I fie \,зки на опоры (здесь Л40—момент трения подшнп-
I нВя не зависящий от нагрузки; Л4П — момент трения,
Д" ”“?7шпи1;теЧ 1 И-тяпаемый потенциометром); /СТр.рад, Лтр.ос — коэффи-
нерав гожесткостн I .. трения подшипников при радиальном и осевом
[О В КН 1 I йИРНТ®1 *1 л Г)
• I „дГ|Л-жепнях; А, К— осевая и радиальная составляющие
1 Л г> -----
нагружениях; А, К осевая и радиальная составляющие
акций опор [19]:
А=таь А)=|
(3.43)
где
Rt=
mat. при znac>2/7Qj/£,
2№.
—при тщ.
(3.44)
Здесь аф а{, а* — проекции ускорения, при котором ДУС
должен обеспечивать измерение угловой скорости йрпш/
/.—расстояние между подшипниками.
Условно полагая в (3.42)
R=m |/ +
(погрешность в этом случае невелика и идет в запас точ-
ности) и подставив значение /Л4^| в (3.41), получим
^emin^"( * “Ь Лп₽. ..।п) 7/ -J-2К
тр.рад^Ь/£ +
(/(.ц,-j-а\ -ф- Кт1,.0<#е) -Ь^соелуч* (3-46)
Коэффициент т]Н«g/Д™, где g — ускорение силы
тяжести, а Дгы=///Сгм — добротность гиромотора (Gr„ —
ес гиромотора).
Добротность Д гиромоторов ДУС 3...10 смс. Из ана-
Ш13Э (3-46) следует, что путем увеличения кинетичсско-
юмента И можно обеспечивать улучшение разрешаю-
Возеи способности ДУС. Однако так как при этом будут
ннзй СГать °Дновременно масса гироузла и реакции опор,
анные моментом А/Q^ то для каждого типа опор
(3.45)
92
93
прибора существует предел уменьшения £?Спнп с ростом J I
Уменьшается £2tmin в основном за счет уменьшения Л I
мента сил трения в приборе, для чего применяют: j
подвеску гироузла с помощью плоских пружин (п 1
дельфедеров), выполняющих одновременно функции I
хапической пружины (рис. 3.7, а);
----3
9
Рим. 3 7. Конструктивные схемы ДУС:
HIM. □ AXVUVJjy Java ______
а — с опорой на пендельфадерах: б — с Комбинированным подвесом: °"
торспопом и двумя шарикоподшипниками типа «гладкой втулки»; г — потж
новый ДУС !
комбинированный подвес, состоящий из упругого эле-
мента и шарикоподшипника (рис. 3.7, б). В данной коЛ'
струкции прибора упругий элемент выполняет функв
радиальной и осевой опоры и механической пруж11" |
Для создания большой радиальной и осевой и малой кр.
тильдой жесткостей упругий элемент делают в виде кр
В комбинированном подвесе (рис. 3.7 б) исполь-
т°вИ“я шарикоподшипник типа «гладкой втулки», имею-
эуеу момент трения (по сравнению с радиальным и
Ш,|й „льно-упорным шарикоподшипниками). Иногда в
рЯуС с комбинированным подвесом используются два
™ икоподшипника типа «гладкой втулки» (рис. 3.7, в).
л8'5 эт м от упругого элемента не требуется большая
пиальиая жесткость и в качестве него может исполь-
□оваться торсион;
гидростатическую разгрузку опор (применяется в вы-
коточных компенсационных ДУС). Рамка гиромотора 5
таких приборах (рис. 3.7, г) представляет собой гер-
м тичный корпус 14, имеющий обычно цилиндрическую
* рму К торцам корпуса крепятся роторы датчиков
4 а 8 и момента 3, 1, в качестве которых па рисунке
зображены магнитоэлектрический датчик момента и
индукционный датчик угла. Корпус 14 с размещенным
внутри него гиромотором 6 и укрепленными на его тор-
ах элементами в приборах с гидростатической разгруз-
кой опор называется поплавком и размещается внутри
герметичной поплавковой камеры 15 (корпуса прибора),
'олость прибора между поплавком и поплавковой каме-
ой заполняется вязкой жидкостью 16, плотность кото-
рой обычно ~2 г/см3. Для компенсации температурных
изменений объема находящейся в полости жидкости в
рнборе предусматривается сильфон (на рисунке не по-
казан). Остальные позиции на рисунке: 9— статор дат-
чика угла, 4 2— наружный магнитопровод и магнит
моментного датчика; 3, 1 — катушки и каркас ротора
датчика момента; 13 — кронштейн; 12, 10 — подвижная
и неподвижная колодки токоподводов; 11 — ленточный
токоподвод.
Размеры поплавка прибора с гидростатической раз-
грузкой опор выбираются так, чтобы при рабочей тем-
пературе прибора масса поплавка т„ была равна массе
ьытеспенной им жидкости тж, а центры масс и давления
плавка совпадали и находились па оси подвеса, обес-
ншаемой подшипниками 7. Приборы с гидростатиче-
разгрузкой опор принято называть поплавковыми.
на nr?*' движепви поплавкового прибора с ускорением а
менноПЛаВОК де,°1ствУет инерционная сила т„а. Одновре-
iiacT с ЭТИМ инеРцио,,ные силы будут действовать на
возник 1 Н<ИДКОСТ11- находящиеся в зазоре. В результате
ПоПлавп°икеГО ПеРепада сидростатического давления на
ок будет действовать архимедова сила тка, на-
94
95
правленная в сторону, противоположную тпа, и уравцОв I
шикающая ее. Реакции в опорах, вызванные ииерцИ(Л1 I
ными силами, будут равны нулю, и, следовательно I
порожденные ими составляющие момента трення в э10.' |
случае отсутствуют. Поэтому приборы с гидростатцЧе I
ской разгрузкой обладают высокой разрешающей СПо' I
собностыо.
Если температура прибора будет отличаться от рабо- I
чей, то из-за температурного расширения жидкости |
равенство mn и тж нарушится. При этом реакции и по- I
грешность 'Qtmin можно определить, воспользовавшись {
формулами (3.43)...(3.46), подставляя в них вместо щ I
разность (т„—т>к). Для обеспечения нулевой плавучести I
поплавка (тп=тж), а также для стабилизации вязкости I
жидкости, выполняющей одновременно функцию рабоче- I
го тела демпфера в условиях, когда температура окру- I
жающей среды изменяется, приборы термостатирукд. I
В этом случае (3.46) примет вид
+ ^^.1.р.|,ад2е/А 4- Йсосу,,. (3.47)
Например, определить порог чувствительности ДУС
с подшипниками, имеющими А'тр.рад=8-10 3 см (соответ-
ствует камневому подшипнику с диаметром цапфы 1 мм),
при температуре нулевой плавучести поплавка, есчп
М* — 0, L=5 см, Qj=10 град/с. Согласно (3.47), получим
2Cinln=2-8-10-3-10/5=3,2-10~2 град/с=115 грац/ч. |
Наличие 52» существенно ограничивает разрешающую
способность ДУС даже при полной гидростатической
разгрузке опор. Поэтому в ДУС бесплатформенных
инерциальных систем, где требуется обеспечивать высо-
кую точность при наличии значительных £2-г, в качестве
опор применяют магнитные подвесы или виброоп^И
имеющие малые Атр.Р1Д, Атр.ос и Л10. В таких приборах
обеспечивается порог чувствительности 10-3...КУ'1 град/ч
[50].
Поплавковые приборы дорогие, поэтому их примени
ют только в тех случаях, когда требуется высокая точ-1
ность измерения 52с-
В менее ответственных случаях используют приб°Рв' |
имеющие конструкцию, аналогичную изображенной в I
рис. 3.7, г, в которых не выполняется условие w{ll=sW*F
Такие ДУС в отличие от поплавковых (с полной гйДИI
статической разгрузкой опор) носят название ‘ I
жидкостным заполнением. Широкое применение нхоОУ |
» мас-
(3.16),
и
^Сте к
(3.49)
с иали-
существенно меньшими по сравнению с поплав-
№леН, дус габаритами. Жидкость в таких приборах
ь°вЫрТся рабочим телом демпфера, улучшает теплоотда-
яв’ кду элементами ДУС, обеспечивеат смазку под-
чУ ов. Кроме того, она эффективно препятствует
П'И-П льиым, радиальным движениям поплавка и угло-
3K,m* движениям его вокруг осей Ot, и Ch] при ударных
ВЫ действиях и вибрации [29]. Благодаря этому обеспе-
В°3ается ударо- и вибропрочность прибора при использо-
Члнпн малогабаритных опор поплавка.
В удьтипликативные погрешности ДУС.
определяются нестабильностью н нелинейностью ---
штабного коэффициента ДУС. Согласно (3.12) •’ 1
ДУС с механической пружиной
Л<тек=— ---+ (М р »
'Упр
а для компенсационного ДУС
Мх),
•\МЛ
где Л/?с(/Иг;, 7ИД.) — погрешность Л£, связанная
нем моментов Л4 • и Мх.
Основными причинами возникновения нестабильно-
сти чувствительности ДУС с механической пружи-
ной являются временная и температурная нестабиль-
ность II, Кир и Куп- Для обеспечения стабильного И в
ДУС применяются только синхронные гиродвигатели.
Стабильность Кпр обеспечивается выбором качественного
материала для изготовления пружины, режимов ее тер-
мообработки, использованием качественной заделки пру-
жин. Поэтому влияние указанных параметров на неста-
тлыюсть Дйс может быть значительно ослаблено. Для
обеспечения постоянства Ауп = АдуАу. Апреобр, где АлРеОг>р—
’"ффицнепт передачи аналого-цифрового преобразова-
ния (при его наличии в составе ДУС), требуется стабн-
iio3H^nvaTb напРяжение питания датчика угла и совмест-
vc с УС использовать качественные измерительные
/< ' ”тели и преобразователи. Обычно нестабильность
иосп'лт еТпЯ основно'1 причиной возникновения погреш-
ВаНИИ ДУС с механи'1еск°й пружиной. При использо-
vDn„! Такях ДУС удается обеспечить стабильность hr на
-Ровне ^0,1...0,5%.
*"1757
(3.48)
97
96
В компенсационных ДУС достигается значитель
более высокая стабильность (до сотых и тысячн?0
долей процента). Здесь помимо использования синхроЗ
ного двигателя и обеспечения стабильной частоты пи/
ющего двигатель напряжения особое внимание уделя/
ся качественному выполнению моментного датчика ппп'
бора и стабильности эталонного сопротивления. °"
Температурную нестабильность чувствительности ft.»
паспорте прибора характеризуют температурным коэф,
фициентом изменения чувствительности /^("ГКй.).-
ТКйс
(3.50)
где ftt(72)—масштабные коэффициенты ДУС, оп-
ределенные по ,(3.12), (3.16) для случаев, когда темпе-
ратура прибора была равна Л и 1^.
Нелинейность выходной характеристики ДУС с меха-
нической пружиной определяется зависимостью жестко-
сти пружины и Кау от угла поворота гироузла и нелиней-
ностью усилителыю-преобразующего устройства. Кроме
того, она может появиться вследствие нелинейной зави-
симости момента Мх (в него, например, входят моменты
от токоподводов, моменты магнитного взаимодействия
гнроузла с внешними магнитными полями и ферромаг-
нитными элементами корпуса прибора, и т. д.) от угло-
вого положения гироузла.
Нелинейность компенсационных ДУС в основном
определяется зависимостью крутизны моментного датчи-
ка от углового положения гироузла.
Нелинейность выходной характеристики ДУС опре-
деляется экспериментально. В паспорте указывается
погрешность нелинейности ДУС, отнесенная к диапазону
измерения fitmax,
ЙСтек (ЙС + аСр) — МЙС + Qq>) (3.51)
^СйСгпах
§ 3.3. Интегрирующие гироскопы
Интегрирующий гироскоп ИГ предназначен для нзмв
рения малого угла поворота основания и применяется в
качестве чувствительного элемента индикаторно-силово
го гиростабилизатора ГС, а также используется в c,iCT
мах стабилизации и управления ЛА, КЛА. ИнтегрирУ10,
98
• гироскоп представляет собой двухстепенной гиро-
>иИИ с демпфирующим устройством, которое создает мо-
сК т сил вязкого трения вокруг оси гироузла. Демпфи-
М1?Н щие устройства бывают пневматические, жидкостные,
^'ектрические. Последние реализуются в виде системы
обратной связью, состоящей из датчика угла, усилите-
с дифференцирующего звена, датчика момента. Наи-
большее распространение получили ИГ с гидростатиче-
ской разгрузкой опор гнроузла, который выполняется в
виде поплавковой камеры с гиромотором. Демпфирую-
щий момент возникает в основном за счет момента сил
вязкого трения при движении поплавка в жидкости; за-
зор между корпусом и поплавком выполняют малым:
5=0,1...0,2 мм. Такие ИГ называют поплавковыми ПИГ
(рис 3.8).
Принцип действия ИГ основан на использовании
свойств двухстепенного гироскопа, у которого при вра-
’щении основания прибора с угловой скоростью ЙОСи воз-
никает гироскопический момент Л1г=ДХН<1сн, под дейст-
вием которого гироузел поворачивается относительно
корпуса с угловой скоростью р. Демпфирующее устрой-
ство создает вокруг оси гнроузла момент £>р, где D —
удельный демпфирующий момент. В установившемся ре-
жиме измерений гироскопический момент Мх уравнове-
шивается демпфирующим моментом Мх =£)р [35].
Считаем угол р поворота гпроузла вокруг оси Ох
малым, а проекцию абсолютной скорости вращения осно-
вания Qocu{£2*, Й», Q.) на измерительную ось Оу равной
%=2'=2ccosp — 24sin Тогда Мх—Ныу
или, используя понятие передаточного чис-
-1а ИГ .[35], получим Проинтегрируем по-
лученное равенство:
J 2с(/)Л+51 = гДФ-}-51,
/
(/){//— малый угол поворота основания;
6
$
постоянная интегрирования; при нулевых началь-
ых Условиях / = 0, ДТ=б, S,=0.
(3.52)
99
Угол поворота р гироузла ИГ вокруг оси Ох проПо
аномален Д'Г поворота основания вокруг осн О^у а с **’
маемое с датчика угла напряжение Uвык = к
ХДТ=ЛДЧ/, где h—KUylIID — крутизна выходной ха?ак
теристики или чувствительность ИГ; Л'ду — ««•'- н к‘
рактеристики датчика угла.
,, mir.
;МУ1»пилЯ .-
~ крутизна ха"
Рис. 3.8. Схема поплавкого ИГ:
а — принципиальная; б — конструктивная; 1 — ротор; 2 —
поплавок; 3—корпус; 4— датчик угла; 5 —опора ротора;
6—датчик момента. 7 — элементы системы термостати-
роааиия; 8— сильфон
При анализе погрешностей ИГ необходимо учитывая
нестабильность Д/г чувствительности, величина котога
зависит от нестабильности кинетического момента •
удельного демпфирующего момента ДО, крутизны хар Ч
теристики датчика угла ДЛдУ и определяется вЫР
нием
АЛ = ft }/(A/7///)2 + (Д£>/£>)2 + (Д/< 1У/ЛЛДУ)2-
100
Пая достижения стабильности чувствительности в ИГ
тьзуют синхронные гистерезисные гиромоторы с си-
BC»woii управления по частоте вращения ротора, обеспе-
СТС пошей стабильность частоты его собственного враше-
lllBt на уровне сотых долей процента, прецизионные
|1,й,ц1К[1 угла с разрешающей способностью, равной до-
1аТ. угловой секунды, а также применяют специальные
,йпь1 по повышению стабильности величины удельного
' емпфпруюшего момента.
Для ПИГ ZJ=2.nr^Znp/(9Slo), где ц — динамическая
вязкость жидкости; 6 —радиальный зазор, см; г1Ь /п —
соответственно радиус и длина поплавка, см. В ПИГ
применяют тяжелые фторорпанические и другие жидко-
сти с плотностью р=1,9...2,4 г/см3, позволяющие обеспе-
чить разгрузку опор благодаря выталкивающей силе G,K
жидкости (рис. 3.8, а), уравновешивающей силу тяжести
гироузла G. Однако р. и р в значительной степени зави-
сят от температуры. Поэтому в ПИГ предусматривают
систему термостатирования прибора, состоящую из дат-
чиков температуры, усилителя и обмоток обогрева. Точ-
ность поддержания температуры в диапазоне 70...85°C
составляет 1...0,1 °C и зависит от правильно выбранного
расположения датчиков температуры и алгоритма управ-
ления системой термостатирования. Обеспечение ста-
бильности характеристик теплового поля прибора спо-
собствует сохранению статической балансировки прибо-
ра относительно оси гироузла, пулевой плавучести
G—бж=ДС-»-0, точностных характеристик ПИГ [26].
Применение системы термостатирования сокращает вре-
мя готовности прибора с момента запуска гиромотора, по
истечении которого характеристики прибора отвечают
ыдаиным техническим требованиям. Для компенсации
меняющегося объема жидкости при изменении’темпера-
тУры применяют сильфон. Его устанавливают так, чтобы
в процессе работы его поверхность оказывала давление
(без образования газовых пустот) па жидкость.
Равнения движения ИГ. При анализе диффе-
Шаальпых уравнений движения двухстепенного гиро-
кона выберем систему координат Ogrjj;, связанную с его
'ованнем; Oxyz — систему осей Резаля, связанную с
Осев'310М И ЯВЛЯЮ1йУ1ося системой главных центральных
и инерции ротора_и рамки (поплавка). В начальном
ili0n°WeillH1 СЧ11таем G±O£; оси Оу (или Оу} для плат-
1мы гнростабилизатора) и совпадают. Оси Оу и
101
Ox — соответственно измерительная (входная) и
(выходная) ИГ.
Воспользуемся уравнением (5.3) [35] движения цв,.
степенного гироскопа и запишем их для ИГ при вращ
нии основания с абсолютной угловой скоростьЛ
Г2-).
(Д Л1) -|- /ГШу — — C—СО (3 ^
где А, С — экваториальный и осевой моменты инерщЛ
ротора; /1|, Bh С}— моменты инерции поплавка относив
только осей
Ох, Оу, Oz; 2Л.= — р — 2е; «^=2с cos₽ —2Ч sin р;
о>*=2С sin Р cos р; 2,,;
Н=Стро — собственный кинетический момент гироскопа-
А1л.=Лр-|-ЛС-|-7Ид"р, где М”х —возмущающие (вред,
ныс) моменты, действующие вокруг осп Ох (моменты
трения, сил тяжести и инерционных сил при разбаланси-
ровке гироузла, тяжеиия токопроводов и датчика угла
и др.); Мг"₽ —управляющий момент, развиваемый дат-
чиком момента с целью компенсации погрешностей гиро-
скопа или управления платформой ГС.
Полагая в (3.53) АС"|,==0. получим следующее диффе-
ренциальное уравнение движения ИГ:
Дор+Dp=/72с cos р - sin р - А Д+
+(С+Ci - А - BJ 2С2, - 7И", (3.54)
где А0=А+А1— момент инерции гирозула относительно
осп Ох.
Левая часть (3.54) характеризует собственное движе-
ние гироскопа. В правой части содержатся члены, опре-
деляемые моментами: возмущающими М"-, гироскопиче-
ским от перекрестной угловой скорости £2Ч, инерционны-
ми от £2Ъ QCQ„, которые вносят погрешности в измерение
угла ДЧГ поворота основания вокруг оси 0£-
Рассмотрим движение гироскопа при малых Р и от‘
сутствии возмущающих и управляющих моментов:
Дор+£)р=№с. (34
Передаточная измерительная функция ИГ в соответ!
ствии с (3.55) имеет вид
Гинг (s)=P (s)/2c ($)=H/[s 0%$ + D)]=(7|s (Гх+ Di-
102
— постоянная времени ИГ как апериодиче-
Г1ег0 звена. При ^OU7’*r(5)^Z/s представляет собой
сК°рпаточную функцию интегрирующего звена; для ПИГ
£(1 ,-5)-10-г ’с.
I Амплитудные и фазовые частотные ха -
. к т ернстнки ИГ определяются в соответствии с
выражением М/и (s):
Д (<»)=(1 -|- 7’2«>2)-015; <р (о>)=—arctg (Г и).
Рис. 3.9. К определению характеристик ПИГ:
а — влияние нежссткости крепления ротора; б — возмущающие мо-
менты. действующие вокруг осн Од-
Постоянная времени Т определяет поносу частот неиска-
женных измерений угла поворота Д’И основания.
Нежесгкость подвеса ротора гироскопа увеличивает
Т. Обозначим приведенную угловую жесткость упругих
связей ротора с корпусом /(Пр (рис. 3.9, а). Считаем, что
гироскопический момент Яр уравновешивается упругим
моментом /(прак. Уравнения движения ИГ запишем в ви-
де 4oP+Dp=//(fit^aK); Хприк=//р и, исключая ак, по-
учим после преобразований
s (Г' s +1) Р С»)=t 2с (s),
где Т'H2K»p)/D и Т'>Т. Наличие нежестко-
сти подвеса ротора как бы увеличивает приведенный мо-
J*®ht инерции на величину Н~К^ и ухудшает динамику
Определим моменты реакций в опорах подвеса ИГ,
Установленного на ВращаЮщейся вокруг оси О£(ЧГ=
Г;%пах) платформе, считая, что гироскопический момент
Уравновешивается полностью моментом реакции
°ПоР FrL (рис. 3.9,а), т. е. H$~FrL при ра=р. В соот-
103
ветствии с (3.52) |3=i4rraax и значение силы реакции Па
опору равно FJ?=//p/b=/7t4rxnax/bI т. е. с увеличение»!
i нагрузка па опоры возрастает. Поэтому для ПИГ fj
= 3...8. В случае использования принципа ИГ в гироппТ,
воде [35] для гашения колебаний КЛА i увеличиваю*'
до 50... 100. Из этих же соображений ограничивают мак.
симальную угловую скорость управления ГС или кпд
«>упр = Л4Г/А/.
При анализе точности ИГ, как и для трехстепенных!
гироскопов, пользуются понятием собственной скорости
прецессии ССП, имея в виду, что третья степень свободу
реализуется либо платформой, либо объектом, на кото-
ром установлен ИГ. Обозначим угловую скорость плат-
формы (объекта) £2С=Ч)' и уравнение движения (3.54)
запишем в виде
£>₽=//'Г -М". (3.56)
С другой стороны, при наличии постоянного момента 41°,
действующего вокруг оси 0£ н являющегося причиной
возникновения ‘И, в установившемся режиме движения в
соответствии с правилом прецессии
(3.57)
Сравнивая (3.56) и (3.57), получим
W=M"/H+(DifT) (3-58)
Если ИГ используется в ГС. то. обозначая Чг—а (о —
малый угол отклонения платформы ГС) и интегрируя в
интервале от 0 до t при нулевых начальных условиях, по-
лучим
а = (ЛГ*///)/-|-р*/7. (3.59)
В установившемся режиме движения ГС 714? = ./Ивнеш-
ний момент, действующий вокруг оси стабилизатора им
уравновешивается моментом разгрузки 44P=Ai₽ В
= где £| — крутизна канала линейной систем!
разгрузки. Подставив значение р* в (3.59), получим 1
a=wc,/ + ^1/(Z£I).
Вторые члены выражений (3.58) и (3.60) указывают «
погрешность стабилизации объекта (платформы) с Р ।
104
мКНутой (3.58) и замкнутой (3.60) системой стабили-
3° ни [35]- Собственная скорость прецессии шса==/Ид/Н
^певеляет в этих выражениях составляющую погреш-
ности стабилизации и>с,/=(/Ид///)/, вносимую ИГ.
рассмотрим модель ССП при наличии кажущегося ускорения
iUV'x Й'ю Й'J- Если центр масс гнроузла смещен па /{/ж, lVl 1г},
'о вокруг оси В03|1ИКает момент (рис. 3.9, б)
А1^ = — mWzly — mWylz, (3.61)
Я1 _ масса гнроузла. При наличии ускорения за счет остаточной
павучести, конвекционных потоков жидкости и ее массовых сил
„пераенрсделення жидкости по объему в ПИГ возникает возмуща-
uiiUHi момент, пропорциональный составляющей ускорения Wx:
M^=KKWX, (3.62)
гяе f(„ — коэффициент пропорциональности, определяемый конструк-
аней прибора и характеристиками жидкости. Запишем векторы I u IV
в виде
WyJ
Wz k
и, учитывая (3.61) н (3.62), получим
Ai; = -W|Zx»ij \-KiKWx. (3.63)
Инерционная сила rnvW (здесь mv — масса ротора) вызывает уп-
ругую деформацию элементов крепления ротора 6р{бж, 6W, 6J. Вве-
ы обозначение матрицы податливостей (податливость—величина,
обратная жесткости):
Чех
Кух
КХУ Hxz
'^УУ ИУ2
Чгх Hzz
эффицнент податливости, например хЖ1Л по своему физическому
числу представляет собой упругое смещение центра масс ротора по
с" Г* ,,*1И еди,,1,Ч1*ой нагрузке, действующей вдоль оси Оу. При
спет вин силы, например гПрИ^, центр масс ротора смещается нс
лько в направлении действия этой силы по осн Oz, ио и в направ-
mW1*’ ,1еР,,еидикУляР1,ых оси Oz, т. е. вдоль оси Ох на величину
ini lXat* И вдоль оси Оу па величину Причиной такого яв-
пя может быть, например, возникновение потоков жидкости при
“ нации сильфона или поплавка, перемещение ротора в газодп-
'<.;1Ы1Ческнх опорах в радиальном направлении прн действии осевой
Упругое смещение ротора определим как произведение инерциоп-
С,,-Ш niplV на податливость х:
105
Wx~i
Wy~J «
Wz k
(3-ty
Сила гИр'Ж при наличии упругих смещений ротора создает нокп
оси Ох момент
Л4Ж=—/ПрРрХ 1^1 i.
Раскрывая (3.65) и учитывая (3.64), получим
Л1Д. = —/Лр [(xz^ — хуу) W JUZ'у 4- xzx\PrxWry +
(3.65)
+ XzyWy — XyxWxWz ~ хУг^г] • (3.68)
Обозначив момент Мс, не зависящий от ускорения, с учетом (3.63) п
(3.66), получим
At; = Мо + т (Wylz - Wzly) + КИДГХ - т2 [xzyW2 -
— XyzWz 4- (xzz — Хуу) WZWу 4- xzxWXWу — %yj^xWz], (3.67)
и ССП поплавкового интегрирующего гироскопа
“сп х М"]Н = “о + 4" +
+ "ул®^у + “zz^z 4" wzyWzWy + “‘xyWxWtl -р
+ “jrz^XWZ = b)Q 4- Ш| (#) riy 4- u>j (g) nz 4-
-I- “1 U) nx 4- “2 (£2) пгПу 4- “2 U2) n2v 4-
4- “2 Of2) nz 4- “2 (g2) nxn,j 4- Ы2" (g2) nxnz , (3.68)
где cjo=A4o/W — составляющая ССП, ие зависящая от ускорения и
определяемая, в частности, составляющей момента сил трения опор,
моментами тяжения датчика угла, токоподводов, взаимоденстшю11
ферромагнитных масс поплавка с внешним магнитным нолем, момен-
тами, вызванными течением жидкости в зазоре при изменении тем-
пературы; <*>!<£) = ^xg = GiziH-, <e,'x(g) — vxxg = GiyiH— >даь-
ные составляющие ССП, вызванные смещением центра масс riipo-
узла вдоль осей Oz и Оу, вследствие несовершенства статичсско
балансировки поплавка, деформаций деталей при изменении темп |
ратуры; “>jf) = “»? = ^/W- удельная составляющая ^сП|
возникающая, в частности, из-за силового воздействия Ж11'1К?^!
при движении поплавка относительно поплавковой камеры, дефор
цни сильфона; “2(g2)=“zy^2 =°р(хуу ““ хгг)/(4— удельная cocfl’
ляющая ССП из-за неравиожесткости крепления ротора в осе1р'цГ,
радиальном направлениях [35] (обычно х21>ир1/, однако для
работающего в условиях значительных перегрузок, K0HcrP^KT..0J){^B
и технологическими мероприятиями стремятся добиться ра0Н
кости
106
^хиаУ «z(^2> = “w£2 = ~,
• r3) = ^xyg2 = — 'ffexlH, u>2 (№) = ^xzg2 = G^tyx/H—удель-
. составляющие ССП, вызванные нсжесткостыо крепления ротора,
и JIt подстрочный индекс х указывает на направление деформа-
1 второй— па направление силы, вызывающей эту деформацию;
Оь Пу, rh}=W/g— условная линейная перегрузка.
/1* *fjpn' наличии камиевых опор увеличиваются составляющие ССП
он, юн. Юж- Для уменьшения момента трения камиевых опор при-
едяют принудительную вибрацию элементов этих опор с помощью,
пример пьезоэлементов и электромагнитных устройств. Для умснь-
шеиия возмущающих моментов (до I0~s Гс-см=10-9 Н-м и менее)
„меняют магнитные подвесы.
Математическая модель ССП состоит из девяти ос-
тавляющих, которые определяются в процессе пспыта-
1Й ПИГ. Для приборов средней точности ограничивают-
Я тремя удельными составляющими ССП ®о, <oj(g),
В процессе испытании находят систематическую со-
ппляющую ССП, которая может быть определена для
данного прибора и в дальнейшем учтена при обработке
данных в бортовой ЭВМ. Случайная составляющая ССП,
включая и случайную погрешность компенсации систе-
матической составляющей ССП, вызывает погрешность
опредепення угла поворота платформы и входит в каче-
стве весомой составляющей ошибки системы ориентации.
Случайная составляющая ПИГ зависит от его конструк-
ции; при применении камиевых опор опа равна IO-1...
.10~- град/ч; магнитных подвесов—10 3 град/ч и ме-
нее.
Средняя угловая скорость платформы ГС при малых
определяется в соответствии с (3.54):
<а) = /?21]?(0)4-П-1^(0) +
+ (С +СХ - Л1 -50 /У-1/?есвт<(0)4- <%..). (3-69)
ГДе А*2£ (0), /?асяч(0) — начальные значения вза-
н'1ных корреляционных функций /?огр(т), (т),
среднее значение ССП.
.,а . еРВые гр» члена выражения (3.69) определяют так
цЛ^ваемую динамическую составляющую ССП ГС [35].
инмиые корреляционные функции/?аТ1 (г), (т) на-
х°Дятся при расчете динамики системы стабилизации.
107
Приближенно <а> можно рассчитывать как сред!)е
квадратическое значение цля случайных величин, вхо\я
щих в (3.69), при максимальном значении р, £2,1( А А
ысп- При плохо спроектированном ГС (или КЛА) возни'
кают колебания платформы (основания), которые прцВо
дят к погрешностям [ 24, 35] измерения угла а (ндц ip]
Поплавковый интегрирующий гироскоп является пре
цпзиоппым прибором, поэтому при его проектировании
конструировании и изготовлении осуществляется комп-
лекс мер, способствующих повышению его точиостаых
характеристик:
тщательная статическая балансировка, устраняющая
дифферент поплавка (см. рис. 3.8, б) при Дд->0 и обеспе-
чивающая совмещение центров масс (точка О) поплав-
ка с центром давления (точка О") и одновременно с
осью Ох, т. с. поплавковый гироузел, находясь в жидко-
сти требуемой плотности, должен обладать пулевой пла-
вучестью AG->0, не иметь дифферента Ад->0 п быть
уравновешенным Z->0 относительно этой оси (приложе-
ние сил G и G-,K в точке О);
термостатпровапие прибора с высокой точностью под-
держания температуры жидкости (0.1...1°С) и деталей
прибора;
применение безгпсгерезисиых магнитных подвесов с
малым уровнем возмущающих моментов вместо Камне-
вых упор;
использование газодинамических опор ротора (вмес-
то шарикоподшипниковых);
экранирование прибора ог магнитных полей и размаг-
ничивание детален прибора;
применение безмоменгных токоподводов;
обеспечение постоянства физико-химических свойств
поддерживающей жидкости, отсутствие в иен посторон-
них частиц и пузырьков газа;
обеспечение высокой культуры производства: изготов-
ление основных деталей с точностью выдерживания раз-
меров до долей микрометра, обеспечение сверхчпетоты
сборочных участков, технологической дисциплины.
§ 3.4. Датчики угловых скоростей,
выполненные на базе вибрационных гироскопов
Вибрационные гироскопы используют в качестве ДЖ
Наибольшее распространение получили роторные впОЯ
цпопные гироскопы РВГ [5, 35].
108
Роторный вибрационный гироскоп, схема которого
.„едена на рис. 3.10, а, представляет собой ротор 3
Р? ьцО), укрепленный на валу 6 с помощью упругого
^°сиона’2. выполненного с прямоугольным, круглым
Т°п крестообразным сечением. Вращение вала с часто-
Рис. 3.10 Принципиальная схема РВГ и его элементов
тон Цо осуществляется электродвигателем 7. Датчики уг-
ла 5, 8 5-ДУп 8-ДУ; измеряют углы поворота ротора 3
относительно корпуса прибора рп и а*. Угловую скорость
корпуса в инерциальном пространстве в проекциях на
оси системы координат СК Ogpg, жестко связанные с
"нм. обозначим через QOcH{£U, QJ. ДУ& измеряет
'гол щ поворота ротора вокруг оси Og, а ДУП— угол р71
вокруг оси Оц. На рис. 3.10, б показана схема измерения
Угла а{ отклонения ротора относительно оси Og с помо-
щью двух ДУг (включенных по дифференциальной схе-
Ме). Для управления гироскопом используются датчики
•'юмепта ДМ 1 и 4 (рис. 3.10, а), создающие моменты со-
ответственно вокруг осей Ор и 0g. На рис. 3.10, в при-
ведена схема возникновения момента Мям при наличии
тока в катушке магнитоэлектрического ДМ.
109
Для анализа погрешностей РВГ обратимся к уравнениям
движения в осях Oxyz, связанных с ротором (см. (10.1) в [35])-
его
ВЛ-(С1-Л1)Й/2ж = АГ:-с. (з.тоу
где Ль Ci, С| — моменты инерции ротора относительно главных це-
тральных осей Oxyz\ й*, Rv, fi2— проекции абсолютных у}.'
ловых скоростей ротора на оси Oxyz-, Мп^ = Мв^= —ka — £> а_|_
Ч-А1"( +Л1У'1,р —момент внешних сил, действующий вокруг осп
торсиопа Oiji(Oy), здесь k — угловая жесткость торсионов, Д
удельный демпфирующий момент, «—угол поворота ротора относи-
тельно вала, 4?^',, — соответственно возмущающие и управ-
ляющис моменты. Согласно рис. 3.10, а, найдем fix, йи, Q, д1я Ма
лых а
йх = (й? sin <р — £J^ cos ?) cos а — (йс 4- эд) sin а «
r; й{ sin <f — Й^ cos <р — а (2? + эд); Й7 = а 4- ЙЕ cos? 4-
4- sin ?; fl* = (эд 4- Йс) cos а 4- (ЙЕ sin <р —
— cos ?) sin а к эд 4- эд = 1 — const.
Выражения для Ry и firfix при малых а и fi0cn<Sq>o запишем, пре-
небрегая квадратами й£. й^, Qc и их произведениями:
Qa » а — эд (й£ sin ? — Йц cos <р) 4- ЙЕ cos ? 4- 1Ц sin ?;
Й^йд. ss — а ( ?ц 4- 2эдЙс) 4- (ЭД + 2С) (й£ sin <f — Й, cos?).
Дифференциальные урлвнеииия движения РВГ в подвижной СК
Oxyz с учетом принятых допущений:
Bia 4* + [^ + (Ci — ^1) ( ЭД 4- 2эдйс)] а —
= (Cj + В1 — А) эд-(Й£ sin <f — й^ cos у) —
— Й! (Й£ cos Ч 4- sin V) + MBUt 4- (3-7*)
Введем обозначения: Во=Л4-(Ci—Л) То! Н=(С+В1—4|)<jpii«Ci<po-
Если не учитывать влияния параметров йс, М^"р, ЙЕ,
то уравнение (3.71) примет вид
а + 2$<i>0a 4- sin (эд< — S). (З-7^
где Й! = V4- ЙВ1 tg » = Уч/Й£! а'о = /Во/Bt - собственная ча-
стота незатухающих колебаний ротора; /(2<oo^i)—степень
затухания,
ПО
решение (3.72) для малых £<1:
а = sin (<fOf — Ь — х>»
(3.73)
= {[i—(фо/<оо)2)г+(25фи/ы0)2) “°-5 — коэффициент динамично-
го ’___базовый сдвиг вынужденных демпфированных колебаний,
ьтш л * 2 .2.
Igx = 2e«oo4,0/(wo —М-
Рассмотрим дорезонансный режим работы РВГ (фьСыс
вХ«о.х«1);
О -г 8in ('•№* — В) = НВ0 (2£ Sin <f — a, cos <F). (3.74)
Еспи на оси торснопа поставить ДУ с сииусно-косннуспым пре-
образованием сигнала, то можно выделить две измеряемые компо-
ненты угловой скорости Q- и £2.|? Однако съем сигнала с вращаю-
щегося вала затруднителен и датчики угла ДУ6 и ДУл рас-
полагают на корпусе; (7выхЕ = Кдуа£, (7выхЧ = Кду₽ч, где Кду —
Крутизна харакгсрисгики ДУ. Зависимость между а и «Е, ЕЦ уста-
новим с помощью соотношений сферического треугольника (на рис.
3,[0. а заштрихован):
а£ = а cos <?; ₽ч = а sin у. (3.75)
В соответствии с (3.74) и (3.75)
аЕ= а cos <?=НВй ‘ (0,52t sin 2? — 2, cos2 <р)=
—fi! (—2,)4-2е sin 2ф0( — 2Ч cos 2<f>0t), (3.76)
где Л|=/У/(2Во)—чувствительность РВГ. Аналогично,
по другому каналу ДУц
?ч=а sin ^—fii (2$ + 2Е cos 2<р0/ — 2П sin 2у0(). (3.77)
При наличии £2« и Qn ротор совершает колебания с
двойной частотой 2<ро вращения вала около положения
равновесия, смещенного относительно начального его по-
ложения на ai* и Рц*:
аЕ= buxS= fiiQ-ц, (3 78)
Р^=/1|2е, 67ВЬ1Х^=/Сд^'/ад2е й;2Е»
На выходе ДУЕ п ДУ„ появляется сигнал, постоянная со-
ставляющая которого модулирована двойной частотой
вращения вала. Чувствительность РВГ при фс<С(±>о мала:
Для увеличения сигнала (например,
вдвое) можно ввести синусно-косинусное преобразование
сигнала на частоте 2ф0 в соответствии с (3.76) и (3.77).
. Рассмотрим настройку РВГ на резонанс <ро=соо, при кото-
рое увеличивается его чувствительность. Условие настройки при
j4i=Bj имеет вид
k = (Xj + Bi - Ci) $ «ли k — (2Л1 - Ci) % = 0. (3 d
Уменьшая жесткость торсионов, изменяя моменты инерции
регулируя частоту вращения, добиваемся настройки РВГ на резон^8
Наличие перекрестном угловой скорости вносит расстрой'1*1,
РВГ, являясь одной из причин погрешностей прибора [см. (3 7|н
При резонансе X=Xm»x=4>ftBI/Da ; х=0,5я (3.73) прад.
ретает вид
а = — HD^Qi cos (<ро^ — ®).
С учетом (3.75) и (3.80) запишем:
аЕ=а cos <р=—Л2 (2£ 4-2Е cos 2<р0/ 4~ sifi
₽ч=а sin <р= —й2 (2, — 2Ч cos 2<р</ Ц- 2Е sifi 2<р0/),
(3.80)
(3,81)
где А2=Я/(2Е»а)—чувствительность РВГ при настрой-
ке его на резонанс.
Постоянные составляющие углового отклонения
а£=—Л22с; рч= —/z22, вокруг осей Ос, и Or] пропорцио-
нальны угловым скоростям £2» и £2П поворота корпуса во-
круг тех же осей в отличие от дорезонансного режима
согласно (3.78). Величина Da— малая и /122>Л(. Так как
степень затухания мала, то малейшее изменение настрой-
ки приводит к изменению выходной характеристики
РВГ; Uвыхе— —Л2/Сду2Е =—/г22Е; UВЬ1Хч = —Л-22,.
С уменьшением Da увеличивается чувствительность
РВГ, однако возрастают требования по обеспечению
стабильности удельного демпфирующего момента, опре-
деляемого конструкционным демпфированием материа-
ла, трением в заделках торсионов, сопротивлением вра-
щению ротора в газовой среде. Поэтому выбирают мате-
риалы торсиопа и вид его заделки такими, чтобы обес-
печивались малые коэффициенты внутреннего трения,
конструкционного демпфирования, а также наполняют
корпус маловязким газом (водородом с добавкой гелия)
при малых давлениях (менее 700 Па).
Нестабильность чувствительности приводит к погреш-
ности прибора Д20=1ДЛц2)/А'(2)] 2E<„.,uri).Нестабильность
ДЛц?) определяется изменениями частоты вращения <ре.
жесткости k, перекрестной угловой скоростью £2р измг’
нениями крутизны характеристики ДУ Ялу, моментов
инерции ротора. При работе РВГ в резонансном режимч
112
^стабильность ДЛ'а зависит от изменений удельного
ыпфирук>щего момента и частоты .фо, моментов инер-
ции ротора. Изменения Дйа демпфирующего момента
могут быть существенны из-за изменения параметров
газовой среды, старения материала торсиона. Для бес-
ппатформенных гиросистем целесообразно использовать
дорезонансный режим работы РВГ, при котором легче
беспечить постоянство выходной характеристики прп-
ра. Определим основные погрешности РВГ, зависящие
От кажущегося ускорения И7Я, U7J, смещения
е11Тра масс ротора на l{lx, lv, lz} относительно точки О,
также от угловой вибрации на двойной частоте враще-
ния. Воспользуемся выражением (3.71) при »ро<С<о0)
н оценим погрешность измерения угловой скорости
£>n= const при наличии внешних моментов /И”, и угло-
вой вибрации основания вокруг оси sin 2cp0f:
В(а—Н (Q^sin^ —S^cos®)—/?12cCos'p-f-.<'W£,. (3-82)
Определим проекцию момента, вызванного инерцион-
ной силой fiipW па ось Oyt, полагая Жч= U7^=const;
U7e=0; cos <р0£ и угол а малым:
^.^М°у,-}-тр1х\Уг-тр\^х1г^М°^
+cos <р, (3.83)
где Щр — масса ротора; — постоянный момент во-
круг оси Otii. С учетом выражений (3.82), (3.83) запи-
шем (3.75):
at=acos <р=/1г7?^1(2$ sin <р —2^ cos?)cos ср —
cos2<p-|- BolM°Ul cos cos29 +
4- cos2 <p. (3.84)
выделим составляющие (3.84), которые не зависят от
времени:
-\-mpWXlxH-^-\-KaQ\, (3.85)
%в= (С—Ai—В1)кр0/(277) характеризует снижение
ияния угловой вибрации; Л» 0,01.
оидно, что причиной погрешности РВГ являются сме-
ИИе центра масс ротора при наличии постоянного
113
ускорения ($%)и гармонически изменяющегося с часто
той ф0 ускорения (1ГЕ), а также угловая вибрация ва-ц
па частоте 2<ро- Пользуясь принципом независимости
действия причин, определим погрешности РВГ; '
, де[=ир/XW°4IH, Дйо=/Св2^.
Для уменьшения влияния вибраций с частотой 2п’
могут применяться двухроторные РВГ (рис. 3.10, г) "°
Аналогично могут быть получены выражения дл„
рп. Модель погрешностей РВГ запишем в виде д£>^.
— Д20 Д2о + Д21 + Д21 или в форме, характерной для мо-
дели собственной скорости прецессии гироскопа (по кана-
лу ае): AS «с, где «>0=Д20-[-дй;_
составляющая погрешности, не зависящая от перегруз-
ки; w1(^)=Gpy//, u>J(g)=Op/x/// — удельные состав-
ляющие погрешности, пропорциональные первой степе-
ни перегрузки и Аналогичное выражение записы-
вают по каналу fo. При неравных значениях изгибной
жесткости торсиона (в направлении осей Oz и Оу) по-
является составляющая юД^2), пропорциональная вто-
рой степени перегрузки. Наличие угла отклонения рото-
ра а*#=0 приводит к дополнительным составляющим
ыо, зависящим от угла а*. В связи с невысокой точ-
ностью РВГ находит ограниченное применение.
Разновидностью вибрационных гироскопов является
твердотельный волновой гироскоп (ТВГ) [II]. Чувстви-
тельный элемент ТВГ представляет собой упругую тон-
кую оболочку 1 вращения (обычно полусферическую) —
резонатор, резонансные изгибные колебания которой
осуществляются в плоскости, перпендикулярной оси 0J
(рис. 3.11, а). Колебания оболочки возбуждаются и под
держиваются с помощью специальной системы, напри-
мер системы электродов В1...В16. Рабочая часть резо-
натора — край оболочки, изготовляемой из кристалли-
ческого или плавленого кварца, керамики. Принцип
измерения угловой скорости основания (или угла его
поворота) прибора заключается в использовании инеР’
ционных свойств стоячих волн, возникающих в упрут0’
оболочке. , .
Для расчета частоты свободных колебаний полус.
рической оболочки пользуются формулой Рэлея:
2rt v 2л/?* V 3(1 + v)p
114
/ (/г) зависит от формы колебаний кольца, характе-
г^3уемой k — половиной числа узловых меридианов [для
Рсновной первой формы колебаний (рис. 3.11) k=2 и
ц£)г=2,621; h, R— соответственно толщина и радиус
Рис. 3 11 Твердотельный вопновой гироскоп:
°"n<?XCMe ТВГ; б — расположение элементов; в — диаграмма влбпапий за
период колебаний; г — диаграмма вибраций в иолу период колебаний
^болочки; v — коэффициент Пуассона (для плавленого
’ арца v=0,17 0,19); р—плотность материала обо-
Оболочка закрепляется с помощью ножки (полу-
св ее полярной области консольно (рис. 3.11, а) или
'ОМощью двух ножек. При колебаниях оболочки, про-
сящих по основной форме, окружными перемеще-
115
Ниями точек 1, 2, 3, 4 (рис. 3.11, в), называемых 1/зл0Л((
диаграммы вибраций (ДВ), можно пренебречь ес’
основание неподвижно, то пучности ДВ, возникающее
при колебании оболочки, находятся в первый 11Олупер1Юа
колебаний па линии I—I (рис. 3.11, в) и во второй по-
лупсриод—на липни 11—11. При вращении оболочечни]
го резонатора с угловой скоростью возникает измене-
ние положения ДВ относительно корпуса прибора в за-
висимости от величины и знака £2^- Фиксируя их
определяют угловую скорость или угол поворота осно-
вания, па котором установлен ТВГ. Регистрация амп-
литуды колебаний оболочки осуществляется с помоц1,1
системы съема информации, включающей в себя датчи-
ки перемещений Д1...Д8 (рис. 3.11, б). В качестве
датчиков перемещений применяют емкостные и оптиче-
ские датчики. Схема возбуждения колебаний оболочки
на частоте резонанса с постоянной амплитудой опреце-
ляет принцип формирования выходного сигнала ТВГ.
При позиционном возбуждении (например, с помощью
электродов В1...В16) выходной сигнал пропорцноналет
измеряемой угловой скорости £2;; при параметрическом
возбуждении (например, с помощью кольцевого Л элек-
трода 2) выходной сигнал пропорционален углу поворо-
та основания.
Рассмотрим режим позиционного возбуждения, когда
оболочка возбуждается с помощью электродов В1...В16.
Напряжение возбуждения питания (с частотой v0 п амп-
литудой Uo) в этом случае зависит от угла характе-
ризующего положение ДВ по отношению к неподвиж-
ным электродам: U—Uocosqcosvot. Благодаря этому
при £2j=0 (с точностью до погрешностей) ДВ неизмся-
по ориентирована определенным образом относительно
основания прибора. Действительно, если на одну из пар
электродов возбуждения, например В1 и В9, подать
переменное напряжение, изменяющееся с собственной
частотой vo резонатора /, то переменная разность потен-
циалов между электродами и стенками резонатора соз-
даст переменную силу. Возникнут изгибные колебания
резонатора, характеризуемые ДВ. На выходе датчике3
Д1 и Д5, расположенных в пучностпых участках ДЧ
возникает сигнал, который подается в цепь обрати0
связи системы возбуждения для поддержания постояв
ной амплитуды вибраций на резонансной частоте, б»
налы датчиков Д2, Д6, Д4, Д8, расположенных в Уза 1
ДВ, равны нулю (для идеального резонатора). 0дна
116
,можпо возникновение рассогласования по углу меж-
® колебаниями оболочки по двум взаимно перпендику-
Чрным осям Г—I, Н—II, например вследствие погреш-
' детей геометрической формы резонатора и электродов.
ТпГ1й Л-™ устранения этого рассогласования на датчн-
х Д2. ДО появляются сигналы, которые через усили-
тесь поступают на соответствующие электроды. Мини-
мально возможный сигнал, поступающий с датчиков,
расположенных в узлах ДВ, принимают за нулевой.
Чтобы уменьшить сигнал, проводят предварительную
балансировку резонатора. Для этого изменяют массу
чубцов на кромке рабочей части оболочки, добиваясь
равенства частот колебаний резонатора, а также кор-
ректируют начальную форму ДВ, ее параметры и поло-
жение. При вращении основания с абсолютной угловой
скоростью ДВ изменяет свое положение благодаря
кориолисовым силам инерции. Поясним это па упрощен-
.юй модели (рис. 3.11, г). Материальные точки а, а', Ь,
Ь' совершают колебания с относительной скоростью г—
=4v0cosvo/ и участвуют в переносном движении с угло-
вой скоростью й*. Это приводит к появлению кориолисо-
ва ускорения 1V'K=2£V, кориолисовой силы для массы
Am FJt=A/nU7K и момента Л4ЯЯ'==—AIw,==2AmWS'r1[-r==
—2A?wAv6Si; sin 2v0Z, вызывающих пзгибную деформа-
цию. Появляется несовпадение направлений сил возбуж-
1СПНЯ с направлением колебаний резонатора, и диаграм-
ма вибраций отстает от последнего направления на угол
4o=arctg(QE/c/I), амплитуда колебаний также стано-
вится зависимой от : A=cl„> V здесьй.,й2— ха-
рактеристики прибора [II] Определяя параметры коле-
баний с помощью датчиков Д2, Д6, Д4, Д8, сигнал с
вторых зависит от Qj, измеряют угловую , скорость
«снования, на котором установлен ТВГ. Таким образом,
Жм позиционного возбуждения реализует
Режим работы ТВГ в качестве ДУС.
Рассмотрим режим параметрического воз-
буждения резонатора. Начальное возбуждение
колебаний резонатора создается электродами позицион-
ного возбуждения, которые впоследствии отключаются,
* постоянная амплитуда колебаний поддерживается
ольцевым электродом 2 (рис. 3.11). Напряжение пита-
„1я К|*льцевого электрода в этом случае не зависит от
-гла <р п определяется формулой U=U0 cos2v0I. При
Раметричсском возбуждении ДВ не связана с основа-
117
нисм, происходит р а з в я з к а ее ориентации относи
тельно корпуса прибора. Начальная ориентация Дз
случайна и зависит от геометрии, однородности распре
деления массы по объему оболочки и т. д. С помощью
датчиков перемещений определяют положение ДВ; пр(
этом на неподвижном основании с помощью обратно^
связи системы возбуждения электродов BL..B16 доби-
ваются такого положения ДВ, при котором ее узлы на-
ходятся против датчиков перемещений; тогда сигналы с
датчиков Д2, Д6, Д4, Д8 имеют минимальный (нулевой)
сигнал. После этого ТВГ готов к работе. При паличич
проявляются инерционные свойства стоячей вол-
ны резонатора. Его волновое поле вращается относитель-
но тела резонатора со скоростью прецессии wn<Q>. фц_
зическая причина прецессии — кориолисовы силы инер-
ции, рассмотренные выше. Зависимость между ско-
ростью прецессии <оп и входной угловой скоростью Q.
при изгибных колебаниях резонатора (без учета растя-
жения поверхности резонатора) имеет вид <i>lt= (A‘2-_
—l)Qg/(£2 + 1). Угол поворота ДВ относительно корпуса
<Р*=(“>„ - 2с) t = -2SC//(A2 +1)= -2 (А2+1 )-i. дф, (3.86)
где ДЧГ — угол поворота основания относительно инер-
циального пространства Выражение (3.86) показывает,
что в режиме возбуждения ТВГ работает как интегри-
рующий (или свободный гироскоп). При fe=2 <р«=
= —0,4AvF; иа практике —0,28ДЧг. Для определе-
ния угла ср* используют систему датчиков перемещений.
Преимущества ТВГ по сравнению с традиционным гиро-
скопом следующие: отсутствие вращающихся частей, ма-
лое время готовности, возможность работы в условиях
больших перегрузок, возможность кратковременной ра-
боты (до нескольких минут) при отключенной системе
возбуждения, малая масса прибора. Однако наличие
погрешностей гироскопа, трудность изготовления резо-
натора с малой погрешностью геометрических форм,
высокие требования к его материалу, системе съема ин-
формации ограничивают его применение.
ГЛАВА 4
ОПТИЧЕСКИЕ ГИРОСКОПЫ
Перспективными являются схемы оптических гиро-
конов, используемых в качестве чувствительных эле-
ментов бесилатформеипых инерциальных навигационных
систем (БИМС), устройств коррекции показаний навига-
ционных систем Различают две схемы оптических гиро-
скопов пассивного кольцевого интерферометра и актив-
ного интерферометра (кольцевой лазер с оптическим
резонатором). Для пассивного интерферометра лазер
используется только в качестве внешнего источника
излучения. В схеме кольцевого лазера его активная сре-
да введена в оптический контур резонатора.
§ 4.1. Пассивный интерферометр
Рассмотрим принцип действия пассивного интерферо-
метра (рпс. 4.1), представляющего 'собой замкнутый
кольцевой световод, в котором луч 3 света от внешнего
источника (обычно лазера) разделяется с помощью оп-
тического устройства 4 на два встреч-
но направленных луча: 1 и 2. Кольце-
вой световод и устройство разделения
лучей реализуются с помощью свето-
волоконной оптики, применение кото-
рой позволяет значительно увеличить
длину хода лучей. Интерферометр
меет регистрирующее устройство, со-
стоящее, например, из оптического
меептеля лучей 1 и 2 и фотоприемпи-
ка. Лучи выводятся из контура, опти-
Рис 4.1. Схема
пассивного интер-
ферометра
тески смешиваются, а на площадке
фотоприемника образуется интерфе-
ренционная картина, состоящая из
светлых и темных полос. Если угловая скорость
•ч = 0 основания в инерциальном пространстве,
разность хода лучей Д£°—Z.i —£z=0, что соответст-
вует неизменной интерференционной картине (при отсут-
гг-ии потерь в световолокне). При появлении абсолгот-
воя угловой скорости йс=#0 путь луча 2 увеличивается,
,^Уча 1 — уменьшается (согласно рис. 4.1, на величину
7~ао). Разность хода лучей —Ц приводит к их
фазовому сдвигу и, следовательно, линейному сдвигу
ТеРференцнопных полос на площадке фотоприемника,
119
величина которого пропорциональна измеряемой уГло
вой скорости Qc- Определим аналитическую завнСпм0с '
фазового сдвига от £2С. Изменение путей лучей / и 2 пш
отсутствии потерь в контуре за время to обхода лучом
контура L со скоростью света с равно
=2л7?2£2{;/с. Длина хода лучей L(=2n/?—/;
а их разность
Д£=£2-Л=2/=4л Wc=(4S/c) (4<1)
где S — площадь, охватываемая оптическим контуром
Разности ЛЬ хода лучей соответствует разность вре’
мени возвращения лучей в исходную точку
д/=/1—/2=д£/с=(45/с2)2с. (4,2)
Фазовый сдвиг интерференционных полос равен
&<f=.f0M=(4Sf(>lc2') 2С= /7иес. (4.3)
где f0 — частота электромагнитного излучения, для пас-
сивного интерферометра /o=const; /zn=4S/0/c2— мас-
штабный коэффициент или чувствительность пассивного
интерферометра. Формула (4.3) показывает, что, изме-
ряя оптическим устройством сдвиг интерференционных
полос Дер» можно измерить угловую скорость. Однако
масштабный коэффициент оптического пассивного ин-
терферометра Ли мал, поэтому надо увеличивать пло-
щадь контура. Напомним, что в известных опытах Сань-
яка — Майкельсона для определения угловой скорости
суточного вращения Земли площадь оптического контура
достигала сотен квадратных метров. С увеличением пло-
щади контура возрастают энергетические потери. Все
это привело к тому, что реализация схемы ДУС на базе
пассивного интерферометра стала возможной только в
связи с развитием световолоконпой оптики и примене-
нием лазера. Если количество оптических контуров пло-
щадью S, образованных двумя световолокнами, лп, то
ha=4SnvfoC~2 может быть увеличен (пи^10а). Светове?
локонпые гироскопы применяют для гиросистем средней
точности из-за малой их себестоимости по сравнению,
например, с лазерным ДУС.
§ 4.2. Лазерный датчик угловой скорости
Рассмотрим схему активного интерфероне*
р а — кольцевого оптического квантового генератора,
торый называют лазерным ДУС (ЛДУС). Принаи
120
ьное отличие этой схемы от схемы световолоконного
Иоскопа состоит в том, что активная среда лазера
Решается в контур оптического резонатора, предстан-
щего собой систему зеркал пли призм (рис. 4.2, а).
Поп включении источника питания 4 и возбуждения
Дивной среды 3 в колебательной резонансной системе
Рис. 4.2. Лазерный ДУС
возникают свободные электромагнитные колебания, ко-
торие усиливаются благодаря наличию активной среды
лазера и оптического резонатора (в качестве активной
среды применяют атомы газов). Атомарный газовый
лазер обладает наибольшей когерентностью и высокой
монохроматичностью. Ширина спектральной линии газо-
вого лазера в 104 раз меньше, чем ширина спектральной
линии квантового генератора па рубине. Это объясняет-
ся большими расстояниями между атомами, а следова-
тельно, меньшим их взаимодействием. Применяют в ос-
новном гелий-неоновые лазеры. Гелий не участвует в
излучении, а обеспечивает эффективное возбуждение
нейтральных атомов неона. Отношение парциальных
давлений пеона и гелия равно 0,073.. .0,2. Возбуждение
активной среды осуществляется тлеющим зарядом с
мощью высоковольтного (5. ..10 кВ) постоянного на-
пряжения пли высокочастотным (102.. 103 МГц) сравни-
тельно низковольтным напряжением. При возбуждении
^аза спонтанное излучение атомов получает максималь-
на усиление в направлении, совпадающем с оптической
п 1,0 Резо11атоРа. возвращается с помощью зеркал (или
иаеЗМ РсзонатоРа н активную среду, которая обеспечи-
j, Дальнейшее усиление (благодаря стимулированно-
У излучению лазера). Усиление продолжается до тех
121
пор, пока плотность энергии в волне не достигнет такого
значения, при котором коэффициент усиления уменьшит,
ся вследствие эффекта насыщения. Система входит в
автоколебательный режим работы подобно автогенера.
тору; при этом функцию положительной обратной связи
выполняют активная среда с резонатором. Установив-
шейся генерации иа частоте fa соответствует равенство
усиления среды и суммарных потерь в резонаторе От-
ношение энергии N3, поступающей в резонатор, к потере
энергии Л?п (при отражении и дифракции) характеризу-
ется коэффициентом добротности Q. Вводя коэффициент
потери энергии т]п, определим потери энергии за время
/з обхода лучом резонатора: Л^п=т]пЛ?э/^о=ПпЛ'эс//,о и
Q=2.-rfc>A^U/ (т]пЛ^эС) =2лЛ0/(Ь]п). По сравнению с доб-
ротностью пассивного интерферометра добротность v
кольцевого лазера высокая (Q=l09).
В режиме генерации устанавливаются две встречные
бегущие волны генерации — лучи I и 2, пути которых на
неподвижном основании полностью совпадают, частоты
пх равны fi=f2 (без учета потерь). Часть энергии лу-
чей выводится па регистрирующее устройство, состоящее
из оптического смесителя и фотоприемника. Лучи сме-
шиваются с помощью полупрозрачного 7 и отражающего
8 зеркал (рис. 4.2, а). Лучи 1 и 2 частично проходят
через зеркало 7. Луч 2, отражаясь от зеркала 8, вновь
попадая на зеркало 7, смешивается с лучом 1, образуя
неподвижную (при S2f=O) интерференционную картину
на фоточувствителыюй площадке фотопрнемника 6.
На рис. 4.2, б показан вариант схемы вывода энергии
(?^0,1%) с помощью оптического смесителя, состоящего
из прнзмы 5 с углом при вершине 9Оэ+0, зеркала резо-
натора 4 с диэлектрическим покрытием 3. Интерферен-
ционная картина, образованная смесителем лучей / и
на поверхности 6 фотоприемника, образует чередующие-
ся темные и светлые полоски шириной Л=%/ здесь
к— длина волны; п — показатель преломления призмы.
Так, для 6=20", ?„=0,633 мкм Д=2,25 мм. При
ток на выходе фотопрнемника отсутствует, так как ИН|
терференцнонпая картина неподвижна. В идеальном
кольцевом лазере частоты лучей при равны меЯЧ
собой: /1=/г=/0- Наличие угловой скорости
приводит к изменению длины путей лучей 'с .
рис. 4.1); следовательно, и частот генерации •'7*
h>/i- При этом разность частот &f=fi—fi (а не сЛ
122
. 3 как в пассивном интерферометре) пропорииональ-
угловой скорости Qj. Интерференционная
►яртнна перемещается с частотой Д/ и па выходе фото-
пцемпика возникает переменный ток, частота которого
"^меряется прибором 5 (рис. 4.2, а). Измеряемая часто-
j пропорциональна измеряемой угловой скорости,
принцип работы кольцевого лазера можно пояснить и
следующим образом. Две встречно бегущие электро-
магнитные волны кольцевого лазера образуют стоячую
иолну неподвижную в инерциальном пространстве. Для
чоячеп волны характерно наличие узлов, т. е. мест, где
ямнлнтуда колебании равна нулю, и пучностей (срав-
нить с ТВГ). Наблюдатель, смотря сверху на оптический
контур (если бы это было возможно), фиксировал бы
темные точки — узлы на светящемся кольце, неподвиж-
ном в инерциальном пространстве. Вращение основания
II инерциальном пространстве с частотой £2г приведет к
перемещению узлов и пучностей волны относительно
наблюдателя. Если считать, что от каждой темной
точки идет импульс, то число их зависит от угла по-
ворота основания, а частота следования пропорцио-
щльна
Необходимым условием работы ЛДУС является вы-
голнение основного условия генерации, кото-
рое означает кратность периметра L длине световой вол-
пи X:
L=nik=mclf, (4,4)
где ш—целое число, пт as 10s.. 10е; f, X— частота и дли-
а волны генерируемого излучения.
При работе прибора стараются обеспечить одчюмодо-
аый режим генерации, добиваясь монохроматического
ЗДучения. Для существования генерации на основной
юперечноп моде используют металлическую диафрагму
(Кольцо), вводимую в поле генерации. Заметим, что ге-
нерация зависит от спектральных характеристик зеркал,
годности изготовления оптических деталей, тока газово-
го Разряда. Так, отклонение от параллельности двух
Ясских зеркал на 5" может вызвать исчезновение ге-
*^Рации. Равенство частот и генерации при йг;=
W обеспечивается выполнением условия строгой сим-
'1риц потерь энергии во встречных лучах подбором
‘'Ракгернстики элементов резонатора (зеркал, диафраг-
123
мы и среды), осуществлением конструктивных п техио
логических мер по стабилизации периметра прибора
Выше указывалось, что усиление излучения стара|От
ся обеспечить на одной длине волны. На самом деЛа
усиление идет в некотором диапазоне частот, Ш|1рцПа
которого определяется доплеровской кривой усиления
При наличии теплового движения атомов активного ве-
щества в направлении z со скоростью Vz из-за эффеКт8
Доплера происходит смещение частоты излучения на Ве,
личину voVz/c, где v0— частота перехода частицы пр||
Гг=0. Атомы движутся хаотично, и форма линии уси-
ления определяется функцией распределения (максвел-
ловского) излучающих частиц по скорости и представ-
ляет собой гауссову функцию:
б’д(/)=С?оехр ([-2уТГ2(/0—^Д/д1]2}, (4.5)
где kf п=2 Kln2/0lZz/c— ширина контура при значе-
нии бд=0,5бо, Гц (Д/д достигает 1...2-103 МГц). При
прохождении волны с частотой /п через среду с допле-
ровским контуром усиления волна взаимодействует с
группой атомов, имеющих проекцию скорости К=
=с(1—fn/fo) на направление z распространения излуче-
ния. Это уменьшает усиление активной среды, и па кри-
вой бд (/) образуется провал в некотором интервале
±Д/п относительно частоты f„, который характеризует
уровень потерь. Величина А/п увеличивается по мере ро-
ста интенсивности излучения и определяется диапазоном
изменения энергетических уровней атомов. Для неона
ширина спектральной 2Л/П линии составляет около не-
скольких сотен мегагерц (на половине максимума уси-
ления) . Поддержание генерации в диапазоне частот воз-
можно для тех длин волн, которые соответствуют (4.4).
Разность частот между соседними модами равна Д/.м=
=/л'+1—In—c/L, При £=0,4 м разность частот равна
750 МГц. Вместо предполагаемого выше одномодового
режима генерации в резонаторе появляются колебания
на нескольких частотах; следовательно, на выход.
ЛДУС возникает целый спектр разностных частот пр
f2f=7^0. I
Стараясь обеспечить одномодовый режим ielie*’)a
ции, регулируют усиление активной среды так, что
всех модах, кроме основной, потери резонатора нс h
пепспруются.
124
§ 4.3. Выходная характеристика лазерного
датчика угловой скорости
Определим выходную характеристику идеального
эльцевого лазера при отсутствии потерь в контуре и
энергетических связей между лучами. При наличии угло-
вой скорости основания Q; в соответствии с (4.4) часто-
гы генерации лучей равны fi=mc/Lit f2=mc/Lz. Учиты-
вая (4.1). найдем разность частот: Д/=/2 — ft=mc X
Х(£Г'—£Г’)-'= tnc[(L-l)-i—(L + /)-*]» mcAL/(L2—
Рис. 4.3. Характеристики ЛДУС с учетом:
а — зоны захвата; б — дрейфа
—Д£г). Считая £^>Д£= (4S/c)Qt и учитывая (4.4), по-
лучим
Lf=mc • 452с/(£2е)=4S2t/(Zl)=Л2С, (4.6)
где h=4S/(lX) —масштабный коэффициент (пли чувст-
вительность) лазерного ДУС.
Для увеличения h необходимо настраивать резона-
тор так, чтобы излучение рабочего вещества происходи-
ло на минимальной длине волны ?umin (для неона Xmin=
=0,633 мкм).
Масштабный коэффициент ЛДУС может быть высо-
ким (так, для квадратной формы при 1=20 см, Х=
=0.633 мкм h= 1,26-104 Гц-с/рад)..
На рис. 4.3, а показана идеальная выходная харак-
теристика— прямые /. Из рисунка видно, что съем сиг-
нала, осуществляемый по частоте, пе дает возможности
определить знак угловой скорости Для этого исполь-
^'•от два фотоприемника, смещенные друг относительно
РУга па 0.25Д, что соответствует сдвигу фаз между
•^Налами 0,25Дф=2л/4=0,5л. По отставанию или опе-
125
режению фаз первого и второго фотоприемников с по
мошыо логической схемы определяют знак g ’
суммировать импульсы, частота следования которцу
пропорциональна Af, то можно получить информацию об
угле А'Г поворота основания; при пулевых начальных
условиях N^=h 2с (t) dt — АДЧ’’, где Л\ — число им.
о
пульсов за время t.
Заметим, что если характер излучения многомодо-
вый [см. (4.5)], то спектр частот при £2^0 равен
=4SQd (LXfi), где — длина волны Л\-й моды.
При определении характеристик ЛДУС нельзя игно-
рировать наличие энергетических связей, существующих
между лучами вследствие обратного рассеивания на
элементах резонатора, оптической неоднородности актив-
ной среды. Так как колебания при малых й; происходят
с близкими частотами, то при определенных условиях
благодаря энергетической связи встречных воли частоты
колебаний сближаются (fa-^fi) и возникает синхрони-
зация. При вращении основания с некоторой углевой
скоростью разность частот Д/=0. Иными слова-
ми, возникает зона нечувствительности (захвата)
ЛДУС (см. кривые 3). Для оценки влияния энергетиче-
ской связи рассмотрим фазовые соотношения между
встречными волнами с помощью векторных диа-
грамм [7].
Векторная диаграмма встречных волн Е, и Е? без
учета связи показана на рис. 4.4, а, па котором направ-
ление отсчета выбрано произвольно. Частоты вращения
векторов Ei, Еъ равны
w2(i)=(йо (—) Q> бД w=«>0 (-)я —(0о (±) 0,5А.' 2с, (4.7)
где h'—2nh — безразмерный масштабный коэффициент.
Разность фаз встречных волн
ДТ(О=?2(О—?i(O=A' [ Qz(t)dt. (4.8)
о
волн (рис-
Учтем потери энергии и взаимовлияние _ ..
4.4, б). Для этого введем векторы потерь %Ei и вР
щающиеся с частотами «ц и Коэффициенты связи
примем постоянными (в действительности это ком
лексиые величины) и малыми (10-4.. .10~5). Нали’Ч
связи приводит к модуляции интенсивности волны и
щенению фазовых соотношений между волнами. Круго-
ые частоты и ы2 генерации волн по-прежнему опре-
деляются из условия: после обхода волной контура L
за время to фаза волны изменилась бы на 2л=<иц2)/0»
с другой стороны, 0)1(г)/с±Ду=2л, где ±Ду— угол меж-
ду векторами 2?ц2) и Е/ру- Тогда wi/o=“)1/o-[-Ду; <и2/0==
=ш./0-ДТ и
0)2—wJ==<02—(Bj — 2Ду/^’ = А'2с—2с/,-1Ду. (4.9)
Рис. 4.4. Векторные диаграммы ЛДУС
Обозначая о>2—<01=<?(Д<р)Д//=Д<р, получим
Дср + гсГ-’Дч^А'Йс- (4.10)
Из треугольника диаграммы рис. 4.4, б найдем
AV~sin Ду^х s*n Д'рДгДГ1^Xsin Д<р.Подставив Ду в
(4.10), получим уравнения, которые определяют*фазовые
соотношения между встречными волнами кольцевого ла-
зера с учетом энергетической связи
db<fldt-\-2сЕ~л1 sin Дср-А'йс- (4.11)
^Обозначив ic=Q;/QH, £2H=2cx/(L-/i'), преобразуем
.______4 Ду________________4 Ду______
h‘ (2С — 2„ sin Ду) Л.' Вн(х — sin Ду)
Полученное выражение является табличным интегра-
оы- Для случая х> 1 и нулевых начальных условий ин-
126
127
теграл равен:
.12 , xtgO,5A«>—1 tcc л
/ =---- — . arctg-, - ------Р-о 1J <Sj=xO. (4 in»
А'2Н /х2-1 Ь Vv? - 1 '
Определим из выражения (4.12) Дер:
&?=2arctg {к-1 [1 -4-Ух2 —1 tg (0,5й'2>, Ух2 —1/)]|; (4.13)
Прих»1 выражение (4.13) приобретаем вид Д<р==/г'ш
т. е. характеристика ЛДУС при xS>l соответствует пря-
мым 1 (см. рис. 4.3), так как
Найдем среднее значение частоты за время /=р
соответствующее Дф=2л (4.12),
7=2(А'-2И Ух2^!)"1 arctg J-(x2-l)-o>q%
^2л/(Л'2н/х2-1)
и среднее значение частоты за время Т
|<х2-Л=лУё2-22. (4.14)
Видно, что, несмотря на вращение основания, при Qc^
;gQc разность частоты остается равной нулю. Иначе
говоря, частоты встречных волн становятся при
равными (fi=fz), наступает синхронизация, или
«захват частот». Иа выходной характеристике ЛДУС
появляется зона нечувствительности 2Q„, где Qn опреде-
ляется формулой
211=2сх/(Л/«')=^х/(4л5). (4.15)
Значение достигает сотен градусов в час, например
при 1=0,633 мкм, S=100 см2, Qn~300 град/ч.
Скорость Qu может быть снижена до нескольких десят-
ков градусов в час путем применения современных кон-
струкций и технологии изготовления элементов резона-
тора, повышения качества и технологической культуры
сборки. Неоднозначность энергетических связен приво-
дит к неоднозначности характеристики прибора при
возрастании и убывании появляется зона гистерезис-
ности характеристики вблизи ±йн (см. на рис. 4.3, о
область, образованную кривыми 2 и 3).
Для уменьшения влияния зон нечувствительности ч
гистерезисности характеристики необходимо выбрать
бочую точку в зоне ее линейности (точка а на криво» '
рис. 4.3, а). Это осуществляется введением допСМ»111
тельного устройства — частотной подставки ЛДУС, кого
128
реализуется механическим или магнитооптическим
^собом. Так, при применении постоянной механической
подставки (поворотного стола) обеспечивается постоян-
ное вращение с угловой скоростью 2°> 2тах+^А,
е Вшах — максимальная измеряемая угловая скорость;
коэффициент запаса (Лп=10... 30). Тогда характе-
истика ЛДУС ограничена линейным участком в диапа-
зоне 2n-2<»ax и 2п + 2.пвх- Применение постоянного
вращения позволяет определить знак Qt без дополни-
тельных устройств; однако этот способ требует увеличе-
ния габаритных размеров прибора, дополнительного пре-
цизионного привода, специальной системы обеспечения
стабильности Поэтому преимущество имеет под-
ставка, осуществляющая колебания корпуса по гармони-
ческому закону 'F=Wnsin vVlt (или по закону прямо-
угольника). При этом параметры колебаний подставки
выбирают таким образом, чтобы время прохождения зо-
ны нечувствительности |Чг|<Йц было мало. Тогда мож-
но считать, что рабочая точка а характеристики (рис.
4.3, а) мгновенно переходит в точку а' при смене знака
(vn4ziT>S2max+/Sn£M. Выбор vn зависит от величины и
спектрального состава £2^ и обычно лежит в пределах
fn=40.. .400 Гц, а амплитуда Чгп=1,5.. 15'. Большее
значение Ч'п и f„ выбирают для ЛДУС с меньшим пери-
метром.
Подставка реализуется упругой подвеской корпуса
прибора, которому с помощью возбудителя сообща-
ются колебания заданной частоты f„. Ее целесообразно
выбирать близкой к частоте собственных угловых коле-
баний корпуса на упругом подвесе; угловая жесткость
кк крепления корпуса с моментом инерции 1К вокруг оси
подвеса равна kK=v*JK. Центр масс прибора располага-
ют в центре жесткости подвеса. Преимуществом элек-
тромеханической знакопеременной подставки является
фостота конструкции наряду с возможностью получе-
ния высоких точностных характеристик.
Применяются также магнитооптические подставки на
магнитооптических невзаимных элементах, использую-
щих ячейки Фарадея и другие, которые вводятся в кон-
РР ?.птпческого резонатора. Эффективная разница хода
)Чей обеспечивается за счет различных параметров
.Реды при прохождении лучей в одну и другую сторону.
в К’ -Г|учи света, поляризованные по кругу и помещенные
постоянное магнитное поле, имеют различные коэффи-
И757 129
П1ЮВТЫ Hi—/?2=Л« преломления (эффект Фарадея) Ко.
торое и вызывает их частотное смещение [47]: д/Пр==
=An/f0L-|> здесь I — длина преломляющего вещества
Однако в связи с технологическими проблемами п влия-
нием магнитооптических подставок на характеристики
лазера они не нашли широкого применения. Наличие
нулевого сигнала ЛДУС приводит к сдвигу его характе-
ристик влево или вправо (прямые 4 на рис. 4.3, б), ве.
личину йДР=А/:д1>/Л называют скоростью дрейфа нуля
ЛДУС; с учетом йдр характеристика (3.46) имеет в,и
Д[=/г(Ос+£2дР). Причинами появления дрейфа (А/др^о
при Qr=O) являются неодинаковые условия прохожде-
пня лучей 1 и 2 за счет певзаимного изменения коэффи-
циентов преломления среды, например из-за эффекта
Френеля — Физо. В движущейся со скоростью v среде
скорость распространения лучей У=сл~,±п(1—п~!)]
где п — коэффициент преломления. Знак плюс в форму-
ле соответствует движению среды по направлению луча.
Значение Йдр определяется по формуле Пдр=2(/12—
— 1)п/п/(7г?Х), где /0 — длина участка с движущейся
оптической средой
Изменения длины периметра (даже па 0.017.) вслед-
ствие изменения температуры окружающей среды на-
грева корпуса газом, деформаций приводит к значитель-
ной скорости дрейфа нуля йдр. При изготовлении корпу-
са используют материалы с малым коэффициентом ли-
нейного расширения (ситалл, кварц, кернит). Однако без
принятия специальных мер нестабильность неримстоа.
например, призменного резонатора достигает (10...
L02)?l. Поэтому предусматривают активную систему ста-
билизации периметра, представляющую собой систему
автоматического регулирования, управляющий сигнал
которой определяется в соответствии с характерными
точками кривой усиления активной среды и подается ня
устройство перемещения одного из зеркал резонатора.
Причиной появлений магнитного поля и ЛДУС, соз-
дающего также неодинаковые условия прохождения ЛУ-
чей, являются элементы частотной подставки, блока пи-
тания, внешние источники магнитного поля. Чувствя
тельность к магнитным полям оценивается до значения
1 Гц/э. Для уменьшения влияния магнитного поля прибор
экранируют, применяя многослойные пермаллоевЫ1
экраны I
Скорость дрейфа нуля определяют в зависимости
времени работы прибора в одном запуске (т. е. вкл10
130
л от запуска к запуску за заданное время. Стабиль-
11Исть скорости дрейфа нуля ЛДУС в запуске составляет
Н211Мерно 0,01 ..0,1 град/ч (стабильность скорости дрей-
нуля характеризуется среднеквадратическим откло-
нением ее величины от установившегося значения).
Н Перспективной схемой компенсации постоянной со-
ставляющей скорости дрейфа являются применение
принудительного вращения блока ЛДУС, состоящего из
трех приборов.
Погрешность ЛДУС также определяется нестабиль-
ностью ДА масштабного коэффициента Л и зависит от
нестабильности коэффициента преломления активной
среды, изменения периметра.
Значение h измеряется для конкретного прибора на
вращающейся платформе путем сравнения фиксирован-
ного угла поворота ЛДУС в инерциальном пространстве
с числом импульсов его выходного сигнала. Для 1г—
= 1,6...3,3 дуг. с/имп нестабильность масштабного коэф-
ицпенга достигает 10_С..10~5.
Выходная характеристика ЛДУС зависит от измене-
ния эксплуатационных условий: угловых колебаний, из-
менения параметров окружающей среды (температуры,
магнитного поля и др.), вибраций. При совпадении ча-
стоты биений с частотами возмущении возникают зоны
параметрического резонанса и характеристика имеет так
называемые «полочки» синхронизации, на которых при
изменении угловой скорости выходной сигнал по частоте
остается неизменным. Это возникает и при применении
знакопеременной частотной подставки. Для уменьшения
зон синхронизации применяют колебания подставки по
закону (t) = 'F,u cos Vnl/ _ <pii2 cos V112/ q r0(jU снизить
влияние вибраций, конструкцию прибора выполняют
Жесткой. Постоянные линейные перегрузки практически
не влияют на параметры ЛДУС. (В литературе приво-
дятся примеры применения лазерных гироскопов до
1 ерсгрузок 500 ед. и выше.)
Для приближенной записи модели ошибок (скорости
Дрейфа) ЛДУС воспользуемся (4.14), считая ^др=^0, а
й—1^п/(Г2{+£2Д1,)]<^1 (без учета угловой скорости под-
С|«вки):
Д/= /; (2, йдр) К1 -147(S2C + Цф)Р
^T(2c + Liw,)(l-0,5p^
5*
131
При нестабильности масштабного коэффициента Д/г^
угловой скорости частотной подставки AQn для выход'
пой характеристики ЛДУС запишем Af »й(йЕ+^др)
—0,5р2) +ДЛ(Qj+Пдр) + (й +Д/ОДИи, здесь р«Йн/(р2;+
Ч-Йп+Пдр). Пренебрегая величинами второго порядка
малости, получим
Д/ Л£2С + ДЛ2с + ЛЙ,Р - О,5Лр2„ + 7/Д2„. (4.16)
Модель ошибок ЛДУС в соответствии с (4.16) запишем
в традиционной форме ССП гироскопа (см. § 3.4):
Д2с=й0-|-2др4'2и + Д2п» (4.17)
где Qo= (Д/г//г)Йс — составляющая ошибки, вызванная
нестабильностью масштабного коэффициента; 2', ==
——О,5рЙн— составляющая ошибки, определяемая зоной
захвата. При большой угловой скорости подставки Йп^
ZS=103QH требования по величине AQn высокие;
Д£2п/£!п<10_7. Модель (4.16) используют для прибли-
женной оценки точности ЛДУС.
§ 4.4. Конструкция лазерного датчика угловой
скорости
Рис. 4.5. Модульная конструк-
ция ЛДУС
10 а в 16
Конструкцию ЛДУС выполняют монолитной, исполь-
зуя материал с малым коэффициентом линейного рас-
ширения. В корпусе (блоке)
имеются отверстия и поло-
сти для каналов резонато-
ров, катодов п анодов, си-
стемы крепления прибора.
Известны конструкции, в ко-
торых в одном моноблоке
выполнены три ЛДУС [47].
Периметр ЛДУС L=20..
45 см, масса прибора 1,5. •
2,3 кг. Стремление к техно-
логичности конструкции,
полной автоматизации ир°'
цесса сборки, снижению
стоимости н простоте обслу-
живания серийных инерци-
альных систем привело раз-
работчиков к созданию модульной конструкции ЛДУ ]
Один из вариантов такой конструкции кольцевого ла>
ра фирмы «Sperry» приведен на рис. 4.5. ЛДУС пРе
132
пнист собой кервнтовый моноблок 5 треугольного
ГТ8ц'ческого резонатора, в котором имеются каналы 4.
пП ном из плеч резонатора установлена стеклянно-ме-
" ддичсская трубка 6 с гелиево-неоповой смесью газов.
П*тя уменьшения потерь света и обеспечения линейной
очярпзании излучения окна ориентированы под углом
р Брюстера к оси резонатора. Возбуждение газовой сме
Рис. 4.6. Структурная схема ЛДУС:
/ — оптический резонатор. 2 — фотопрпемннк и усилитель; 3 — формирова-
тель; 1 — система определения знака угловой скорости; 5 — реверсивный счет-
чин; й —система питания подставки; 7 — система выравнивания добротности.
6 — система стабилизации мощности; Р —блок поджига; 10 — источник пита-
ния; // — система стабилизации периметра; 12 — частотная подстапка; AI —
чувствительный элемент: /4 — система предварительной обработки информа-
ции; /5 — система стабилизации параметров; 16— блок питания
с» осуществляется высоковольтным электрическим раз-
рядом с помощью двух металлических анодов 8, распо-
ложенных на оптических окнах, и алюминиевого цилин-
дрического катода 7. Выходное зеркало 2 пропускает
около 0,1% падающего на пего излучения, которое через
смеситель 3 подается па фотоприемник 1. Для* обеспече-
ния подстройки периметра зеркало 9 установлено на
пьезоэлектрическом приводе 10, состоящем из двух кон-
центрических пьезокерамических цилиндров. Зеркало 11
с Магнитным покрытием выполняет и функции невзаим
него элемента (частотной подставки). Направление на-
магниченности покрытия периодически реверсируется с
помощью соленоида.
Для повышения точности ЛДУС имеет различные
подсистемы управления его работой, регулирования и
^стройки прибора. На рис. 4.6 показана структурная
133
К основным преимуществам ЛДУС относятся: бот
шой диапазон измеряемых угловых скоростей; Отс ’ь
вне перекрестных связей, возможность работы при бот
ших постоянных линейных и ударных перегрузка I
малая потребляемая мощность; большой срок службы-
низкая стоимость серийных систем; возможность спиже'1
ння времени готовности.
Развитие лазерной и вычислительной техники позво
ляет создавать ЛДУС с погрешностью измерений
•=а 10-2 град/ч.
ГЛАВА 5
ГИРОСКОПЫ с ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ
Трехстепенные гироскопы находят широкое примене-
ние в качестве чувствительных элементов систем ориен-
тации, стабилизации и навигации подвижных объектов
(ЛА, судов и др.), используются как измерители углово-
го положения или стабилизаторы на заданном направ-
лении объектов (приборов, прицелов и др.) относительно
опорной системы координат. Три степени свободы гиро-
скопа обеспечиваются кар чановым подвесом или бескон-
тактным подвесом сферического ротора.
Теория трехстепенного гироскопа изложена в первой
части учебника. В настоящей главе рассмотрены приме-
ры схем гироприборов на базе трехстепенного гироскопа
и проанализированы основные погрешности этих при-
боров. § * * * * *
§ 5.1 Гироскопы в кардановом подвесе
В зависимости от кинематической схемы различают
трехстепенные гироскопы с внешним и внутренним кар-
даповым подвесом. Применение внутреннего карданов**
подвеса позволяет уменьшить габариты прибора, часто
такой подвес выполняют вращающимся вместе с рото-
ром. Выбор схемы прибора определяется его назначе-
нием и условиями эксплуатации.
Начальная выставка трехстепенного гироскопа осу-
ществляется относительно опорной системы коорд***121,
связанной с корпусом, за счет применения арретиру10'
щнх устройств или относительно заданной опорной ед
стемы координат с помощью систем начальной выставки-
134
зонтальной и азимутальной коррекции прибора,
ГО^!ДНПХ астрономических, лазерных, оптических и ра-
21 ° систем. Для осуществления движения объекта по за-
ДИнной траектории в гнроприборах предусматривают
да‘ граммиые механизмы, благодаря которым сигнал,
Рис. 5.1. Гирогоризонт (ГГ) и гнровертикант (ГВ).
о —схема установки ГГ н ГВ; Л — схема начальной выставки ГВ; в —к вы-
воду уравнений движений гироскопа
пропорциональный разности между программным значе-
нием величины угла и ее текущим значением, подается
в систему управления траекторным движением объекта.
В качестве примеров применения трехстепенного ги-
роскопа в кардановом подвесе рассмотрим приборы для
пределения углового положения ЛА — гирогоризонт
(П ) и гнровертикант (ГВ), являющиеся чувствитель-
ными элементами системы стабилизации и управления
(рис. 5.1, а). С помощью ГГ определяется угол О
нгажа ракеты и по нему выполняется программное
Управление. Выходной сигнал с датчика угла ДУд про-
Г10РЦионалеи величине (й„р— 0), где О, р —программное
135
значение угла -О. Для осуществления программного паз
ворога применяются механизмы с шаговым двигателе^
1, разворачивающим базу 2 датчика угла ДУВ, на Кото
рой крепится корпус потенциометра (или статор), ОТно’
сительно его щеток (или ротора), ГВ определяет углу
рыскания г|? и вращения у, сигналы ДУФ и ДУ7 подаются
в систему стабилизации ЛА, который во время полета
удерживается в плоскости стрельбы. В корпусе ЛА об-
щая плата приборов ГГ и ГВ выставляется с помощью
метрологических средств (уровней, оптических средств)
так, чтобы наружные оси подвесов были параллельны
соответствующим осям стартовой системы координат
Фиксация подвижных элементов приборов относительно
его корпуса осуществляется арретирующим механизмом.
Перед полетом включают прибор с последующим Сго
разарретированием. Арретирующий механизм выполняет
роль системы грубой начальной выставки гироскопов,
погрешности которой определяются погрешностью
ориентирования корпуса прибора, неточностью изготов-
ления арретира. Для точной начальной выставки гнро
скопа применяются автоматические системы приведения
(коррекции). На рнс. 5.1, б показана схема приведения
ГВ в исходное положение. Ось наружной рамы ГВ на
старте выставлена в плоскости горизонта. Система на-
чальной выставки имеет горизонтальную ДУ1—ДМ1 и
азимутальную ДУ2 — ДМ2 системы коррекции. Чувст-
вительным элементом горизонтальной коррекции явля-
ется маятниковое устройство или акселерометр 3. При
отклонении наружной рамы от вертикальной плоскости
выходной сигнал с датчика угла ДУ1 акселерометра по-
дается на датчик момента ДМ1, который развивает во
круг оси внутренней рамки момент, вызывающий пре-
цессию главной оси гироскопа к плоскости горизонта:
«и—>0 с точностью до погрешности выставки Аав. В си-
стеме азимутальной выставки используется сигнал с
ДУ2. Выключатели BI и В2 служат для отключения
системы выставки перед полетом.
Воспользуемся уравнениями движения гироскопа (351
в кардаповом подвесе, пренебрегая центробежными
инерционными моментами и инерционными моментами
при ускоренном переносном вращении. Составляющие
абсолютной угловой скорости опорной системы коорДЧ
нат (рис. 5.1, в) на ее оси обозначим cos, <”ц. °*-
Проекции абсолютной угловой скорости вращения внут
ренней рамки па оси Ох и Оу системы координат Оху >
136
жестко с пей связанных, равны
2".= —P4-o>cC°su — «>,)sin a, 2^=а cos р 4'
-|-ид cos р — sin р («\ cos а -f- <«>с sin а). (5.1)
г,ЛпЧнячая приведенные моменты инерции гироскопа
°р°з Ло=Л+Ль /0=p2+H + ^)cos2p + C1Sin2₽]
/Десь Л— экваториальный момент инерции ротора; Ль
k Ci — моменты инерции внутренней рамки относитель-
но осей Ох, Оу, Ог\ Л 2 — момент инерции наружной
рамки карданова подвеса относительно оси Oz/i), запи-
шем приближенные дифференциальные уравнения дви-
жения гироскопа
-J6a + /7 cos р-214-/и;;с=0,
Ло0-Я21+7ИГ=О,
где /И**, — моменты внешних сил, действующих
вокруг осей Оу\ и Ох. Полагая a=a0+Aa; Р=Ро+ДР.
где Да, Д₽ — малые величины, преобразуем (5.2) с уче-
том (5.1) к виду
70Ди4-/7Др cos р0=Н cos Ро(и>с cos «0— s*n Со)4'-Му,с;
t (5.3)
Л0Др—//Да cos р0=Н [«д cos р0 — sin р0 («>ч cos а0 -f-
(5.2)
-)-wcsin a0)J—/И1‘с.
Проанализируем основные погрешности гироскопа,
ограничиваясь noi решпостью по координате а.
Погрешность от переносной угловой
скорости основания. Полагая нутационные коле-
бания затухающими: /Иу1с=/И1’с=0, получиц из (5.3)
Даш= — од + tg Ро (1йч cos a0 -f- wc sin cQ. (5.4)
Второе слагаемое зависит от угла р0, который мо-
жет быть определен из первого уравнения (5.3). При
ориентировочных расчетах для схемы ГВрОт =у-[-|«>сх
к cos 7-|~Л4®-с(// cos у)-1]/. При выборе схемы расположе-
ния гироскопа стремятся обеспечить малый угол Р0) . Со-
I
С|являющую погрешности гироскопа Даш= fwe(/) di учи-
тывают при обработке информации.
137
Погрешность, определяемая собстве
ной скоростью прецессии (ССП) гироскоп*1'
[35]. В конструкции гироскопа широко применяются 3
качестве опор карданова подвеса шарикоподшипниковьо
опоры, момент сил трения которых зависит от осевог
Ло и радиальной Fr нагрузок: Muin^M0+krFr+haFai г 1
Мо — составляющая момента сил трения, не зависящая
от нагрузки на опоры; kr, ka — коэффициенты момента
сил трения, определяемые с учетом конструкции шарм
коподшипниковых опор и условий эксплуатации. При
наличии перегрузок n{nx=Wx/g; ny=Wy!g\ nz=Wxin\
радиальная сила, действующая на опоры гироузла (рис
5.1, в) ГВ, равна Fr=mVW2a-\-W'j=tirG, здесь G —
вес гироузла; пг=пиг= |/л2-]"пг» а осевая сила Fo==
=mWx=nxG. Составляющие ССП гироскопа, вызван-
ные моментом Л4ШП, при И cospo~77 имеют вид
“ш»=«в.= Мшп//-/==“о + 0,11-(Я) «г+ш1.г (£) «X. (5.5)
где ш0‘^М^Н; ™lr(g)=krG/H; ^^=^0//-/.
Момент, вызванный статической разбалансировкой ги-
роузла 1{1Х, 1е, 1г} и действующий вокруг его оси, при
линейных перегрузках, равен
Мрб—mW ylx—mWtlу — Glgtiy—Glyttg.
Соответствующие этому моменту составляющие ССП
«рЬ=<ор6=ш1!/ (Я) +wu (£) (5.6)
где <»1у{g^GljH-, (g)=—Gly/H.
Составляющая ССП, вызванная моментом нсравножесг-
кости (см. § 3.5) конструкции крепления ротора, рав-
на [35]
a>i«=U)H«= — (2/V)-’ ml (kz1 — kyl) WtWy=w2 (g2) ntnv,
(5.7)
где kz, ky — приведенные линейные жесткости упругий
связей ротора с корпусом в осевом и радиальном на-
правлениях; <o2(g2)= — (2/У)-1 GpfeH.It, здесь k„M=k7 —h
— коэффициент неравпожесткости; Gp — вес ротора.
Динамическая неуравновешенность ротора, возме-
щающие моменты токоподводов МТК, моменты тяжения
датчиков угла Л7ДУ, моменты Мк, вызванные взаимодей*
138
гем ферромагнитных масс прибора с внешним маг-
СГ|тнЫМ полем, и другие вызывают дополнительную со-
“тавчяюшую ССП, пе зависящую от перегрузки:
«)o=(Aa)cp+(^TK + yWAy-r-^bt4"-") Д-1,
где (ДЙ)сР— постоянная составляющая ССП, вызванная
1ИНамнческой неуравновешенностью ротора 135].
1 Погрешности начальной выставки и
е м а и н ф о р м а ц и н. Пусть система начальной вы-
ставки имеет пропорциональную характеристику, т. е.
моменты, развиваемые ДМ1 и ДМ2, соответственно рав-
нЫ М|=Д|Ов, М2=£2рв, где £1(2)—крутизна характери-
стики систем начальной выставки. Уравнения движения
гироскопа имеют вид (5.3), в которых Ма^=Мг‘У1—Е2^
— £ia„, здесь МкУг, /И."— возмущающие
моменты. Считая, что осуществлена грубая выставка ги-
роскопа, определим погрешности его начальной выстав-
ки как статическое отклонение оси Oz одноосного гиро-
стабплизатора при действии моментов с учетом погреш-
ностей датчиков угла н акселерометра:
Др„=My.Ez 1 ДГ1 cos Др„ (<ч cos Дап —
- sin Дап)-|- Д^у^еУ^т^+ю^ + Дрду,
Д«„ (т* юЕ) 4- Дав,
(5.8)
где лг“((л)=:7ИЛ(У1)//7; ei(2> = Ец^;Н. Если в качестве
опорной выбрана географическая система координат, то
«{=«£,. = И sin гр; со£=сот]г = {7 cos <р. Погрешности вы-
ставки могут быть уменьшены до долей угловых минут;
при этом выбор £i и £2 ведется как выбор коэффициен-
тов усиления каналов гиростабилнзатора [35]. Погрешно-
сти съема информации Дфду, Дуду по углу рыскания ф
и углу вращения у определяются характеристиками дат-
чиков углов ДУЧг и ДУТ.
Обозначим карданные погрешности свобод-
ного гироскопа Д«к [35]; суммарную постоянную состав-
ляющую скорости прецессии гироскопа на качающемся
^сновании а„, а соответствующее отклонение оси гиро-
скопа за время /к, при котором происходят колебания
°сновання с частотой у<нн здесь п„— частота пута-
ад,1> Д«,=а,7|£. С учетом (5.4)...(5.7), o>0=wq4~u)o мо-
139
дель ССП при наличии линейных перегрузок запишем
в виде
<“с« («)=‘”о+ u*lr (g) + (g) «г + ‘“14, (g) Пу +
+ (g) 'Д +w2 (g2) tlz'ly + Д<“«. (5.9)
где Лсосл — случайная составляющая ССП. Величины (й
удельных составляющих ССП wi(g), <02(g2) определяют
при испытаниях гироприборов на стендах, позволяющий
осуществлять различную ориентацию гироскопа по от-
ношению к плоскости горизонта и меридиану. Для пре-
цизионных гироскопов в соответствии с (3.68) учитывают
все девять составляющих ССП. При пх—nu=tiz=n вы.
ражеине упрощается:
‘“сп («) = («о + ‘“1 (g)« +l“2(g2) «2 + Д®сл. (5.10)
где <»! (g)=wlx+‘»iJ/ +‘“u+ К2‘“ц.
Приведем пример записи удельных составляющих
ССП гироскопа:
w0=2 град/ч; <1)1(д)=0,8 град/(ч-сд);
<»2(g2)=0,02 град/(ч-ед2);
составляющая Д(1><л=0,2 град/ч в одном запуске прибо-
ра, Д1»;Л=О,6 град/ч от запуска к запуску прибора.
Заметим, что удельные составляющие ССП зависят
от времени работы прибора, условий его эксплуатации.
Это затрудняет учет погрешности гироскопа, вызванной
ССП, например, в бортовой ЭВМ.
Зная зависимость перегрузки п(1) удельных состав-
ляющих ССП от времени, определяют суммарную по-
грешность гироскопа
Д'р=|/^ Даш+Дав + ДаС1,+ Дфду+Дак +Да,»
i
где Aacll=J
о
Повышение точности гироскопа осуществляется с°1
вершснствовапием элементной базы и, как следствк.
уменьшением возмущающих моментов, повышением точ-
ности съема информации, а также введением алгоригмп-
ческой компенсации составляющих погрешности гнр°
скопа с учетом определения удельных составляют11-4
140
ГСП на стартовой позиции, повышением точности обра-
ботки выходной информации.
§ 5.2. Сферические гироскопы
В сферических гироскопах три степени свободы вра-
щения ротора обеспечиваются сферической опорой.
Рис. 5.2. Сферические гироскопы:
с прянюдом ротора от электродвигателя; б — с приводом ротора за счет
вязкого трения: в — электростатический; г — со сферической шарикопод-
шипниковой опорой; б — гидродинамический
ГС качестве опор сферического гироскопа (рис. 5.2) при-
меняют: газодинамические опоры, электростатические и
магнитные подвесы, шарикоподшипниковые сферические
и гидродинамические опоры.
141
Составим уравнения движения сферического гнроСКо.
па. В качестве опорном выберем СК (рис. 5.3). По-
ложение СК Ох'у'г', связанной с вращающимся ротором
относительно СК OsH? характеризуется углами а, р, а
положение осей Рсзаля Ox, Ot/, Oz—углами а. р. Счи-
Рие 5.3. Системы координат
сферического гироскопа
тая экваториальные Мо,
менты инерции ротора 4==
= В. запишем уравнения
движения ротора в осях
СК Ох', Оу', Oz'-
-|-(С-/)2г'Й^=ЛГг‘.'
Д2у, _ (С-Л) =
CQZ> = M^,
(5.11)
где Sv, Q!!', 2Z'— проекции
мгновенной угловой скоро-
сти вращения ротора в
инерциальном п р ост р а нс гве;
— проекции моментов внешних сил: момента
двигателя, момента сил сопротивления (значок ' в даль-
нейшем опускаем)- Причинами моментов сил сопротив-
ления являются силы вязкого трения среды при враще-
нии ротора, моменты электромагнитной природы. Обо-
значим удельные моменты сил вязкого трения Dx, Ву,
(обычно DX=D^=D, а О>Ог).
Рассмотрим случий работы гироскопа на выбеге при Мх'с =
= —Решение третьего уравнения (5.11) имеет вид Qz=<fQe г,
где Т,— С/П*— постоянная времени затухающего движения гироско-
па вокруг оси Oz; Q.=qb при (=0. Введем обозначение комплекс-
ного числа йк = £1х-4-/Я[/> с помощью которого преобразуем первое
и второе уравнения (5.11) к виду Лй* ’г/Йд. = [/(С — Л) ¥о е г~
—Р|г//. Интегрируя это выражение при (=0, |Й|,| = Й^ п фазе
-о
tpi=O, после преобразований подучим ЙА. '
здесь Т,,= ГX=A/D и обычно 7’д<Гг. Угол <р, поворота_р/, от его
начального положения (между векторами £2Х и й,,) равен
<?! - (> - с-//Гг) (С - /1) Л-«; I й« | =- ?ое~' Тх. Обозна-
чим %, угол между вектором мгновенной угловой скорости рон>па
У=2л4-£!г и осью Oz гироскопа; тогда tgxi=| й*1 / | й* *ЯХ0^
142
z *; здесь tg%.j= ^л/ч>о- При f-+<x> угол х,—>-0, если
г^,[х или CD>AD,, что соответствует стремлению совмещения
.. тора fi”мгновенной угловой скорости гироскопа с осью Oz фигу-
DLj' (конус полодии стягивается к осп Oz [351). Амплитуда путацп-
011НЫХ колебаний также затухает: tg х=АЙЛ/(СЯх) =/1 tg уи/С.
Ппн Т:<^х вектор Q стремится стать перпендикулярным оси Oz
1 нутационные колебания гироскопа становятся расходящимися.
Условия устойчивости работы сферического гиро-
скопа:
ЛС>/Л,А
(5.12)
РрИ С=А необходимо, чтобы D>DZ, что выполняется
на практике. Например, для электростатического гиро-
скопа момент сопротивления вращению вокруг эквато-
риальных осей ротора зависит от вектора магнитной ин-
дукции В„ (О ~ а вокруг осп Oz определяется в ос-
новном газодинамическим моментом, который по вели-
чине значительно меньше. Для обеспечения С>?1 полую
сферу такого гироскопа выполняют с внутренним утол-
щением стенок в ее экваториальной области. Для гиро-
скопа па сферической шарикоподшипниковой опоре зна-
чения О и Ьг примерно очного порядка, поэтому условие
(5.12) выполняют за счет геометрии ротора (рис. 5.2,а);
при этом вводят дополнительные демпфирующие устрой-
ства в виде дополнительных специальных обмоток па
статоре двигателя пли электромеханических демпферов,
обеспечивающие условие D>DZ и способствующие зату-
ханию нутационных колебаний. Частота нутационных ко-
лебаний гироскопа /ги=С(['0/Л. Как и в случае малых
значений D и Dz, при С=Л, цн=<р0 необходимо приме-
нять специальные меры по демпфированию нутационных
колебаний.
Сферические гироскопы применяют для измерения уг-
лового положения объекта или платформы ГС. Гироско-
пы БИНС устанавливают па боргу объекта и использу-
ют гироскоп в качестве самостоятельного элемента си-
стемы ориентации и навигации. Так как статор привод-
ного двигателя установлен на корпусе прибора (рис.
5.2, и, в, г, д), то при его отклонении относительно рото-
ра возникают проекции момента двигателя AfJ на оси
и Оу. Проекции момента АГС‘ па оси Ох, Оу, Oz рав-
ны:
/Их=—AffSina; —AfJcosasinB;
143
Mz= М* cos a cos ff.
Считая углы а и (J малыми, а значит, — /Ищ;
= —Л1?Р; MRz^Ml= — Dji^ запишем прецессионные
приближенные уравнения движения гироскопа при Стп==
=//=const; С=А (рис. 5.3):
-/Уа-Ма + Л1"-с=0; -//р-Л^рЦ-Л^О, (5.13)
где AfJc, —проекции момента внешних сил, не 33.
висящего от а и р, на оси Ох и Оу.
При Л4^с=/И^с=0 решение (5.13) для начальных ус-
ловий (=0, а=а0, Р=Ро имеет вид а=а1)е~8*; р=
= poe-ef, где г=МуН — удельная скорость прецессии,
вызванная моментом двигателя. В установившемся ре-
жиме /->оо, а->0, ₽->0 и ось Ог сферического гироскопа
стремится совместиться с осью 01, статора приводного
двигателя, т. е. теряются свойства свободного гироскопа.
Для снижения е необходимо уменьшать момент сил со-
противления Е>г<р0 вращающегося ротора.
При определении ССП гироскопа воспользуемся
уравнениями (5.13), полагая а=а*; р= р*; Мд-‘с=М
М;-С=М” :
а = MBxCjH=а*Т~1 Ц- “си;
р=р*Т-1(5.14)
где
T=Tt=HlD#r=ClDt (5-15)
—- постоянная времени прецессионного движения сфе-
рического гироскопа; юсп=/Их/А/; о>С11=Л! “///. Из (5.14)
видно, что ССП гироскопа имеет позиционные члени
а*/Т и р*/Т и составляющую, определяемую возмущаю-
щими моментами Модель ССП с учетом (5.10) предста-
вим в приближенном виде:
mcn = “о7&* + <О0 + wl <£> Л + to2 (S2) л2 + —. <5-1б)
где о1О7. = 1/7’; &* —угол отклонения оси гироскопа отно-
сительно О£.
Для прецизионных гироскопов при разработке модели
ССП необходимо учитывать дополнительные составляю-
щие ССП, например в соответствии с (3.68). При обра-
144
ботке информации с целью алгоритмической компенса-
ции методических и инструментальных погрешностей
сферических гироскопов в бортовых ЭВМ водят до не-
скольких десятков коэффициентов, учитывающих специ-
фику конструкции.
Конструкции сферических гироскопов разнообразны
и определяются назначением и условиями эксплуатации
системы ориентации и навигации. На рис. 5.2, а, б приве-
чены схемы гироскопов с газодинамической опорой 3 ро-
тора 2, отличающиеся конструкцией привода ротора.
Статор двигателя 1 привода (см. рис. 5.2, а) расположен
па корпусе 4. Ротор 2 схемы, изображенной на рис. 5.2, б,
приводится во вращение за счет сил вязкого трения. Эта
схема близка к схеме гироскопа с внутренним вращаю-
щимся кардаповым подвесом. Такие схемы позволяют из-
мерять ограниченные углы поворота объекта и применя-
ются в индикаторных гиростабилизаторах, головках са-
монаведения [28], [59].
На рис. 5.2, а показана схема гироскопа низкой точ-
ности со сферической шарикоподшипниковой опорой 3.
Статор двигателя 1, установленный на корпусе 4, приво-
дит во вращение колоколообразный ротор 2, торцовая
поверхность которого используется для формирования
сигнала датчиком 5 по углу его отклонения относитель-
но корпуса вокруг осей подвеса.
Для систем низкой точности, работающих в условиях
больших перегрузок, используют гидродинамический
подвес ротора гироскопа (см. рис. 5.2,6). Взаимодейст-
вие стйтора 1 и ротора 2 двигателя приводит во враще-
ние полую сферу — ротор гироскопа. Устройства 4, рас-
положенные в корпусе 3, служат для определения углов
поворота корпуса относительно ротора гироскопа.
Прецизионные гироскопы строятся на баве подвеса
ротора в магнитном или электростатическом поле. Это
электростатические и криогенные гироскопы, а также
гироскопы с магнитным подвесом, На рис. 5.2, в показа-
на схема прецизионного гироскопа (<оо= 10~* град/ч).
состоящего из ротора 1, приводимого во вращение с по-
мощью двигателя, статор которого условно показан об-
мотками 2; электростатического подвеса ротора (элект-
роды <?); системы съема информации с помощью оптиче-
ских датчиков 5; системы начальной выставки и демпфи-
рования нутационных колебаний (катушки 4) ; герметич-
ного корпуса с системой термостатирования; микропро-
цессорной системы компенсации погрешностей. Ротор ги-
145
роскопа представляет собой обычно полую сферу из бе-
риллия диаметром 2,5...5 см, с толщиной стенок 0 3
0,5 мм, массой 2...6 г, утолщенной в области экватори-
альной плоскости (С>Л). Зазор между керамическим
корпусом и поверхностью сферы колеблется в пределах
от 0,02 до 1 мм. Требования к геометрии и мнкрогеомет-
рии сферы, чистоте поверхности очень высокие (гак, не-
сферичность при начальном изготовлении достигает де-
сятых долей микрометра). Изменение макрогеометрни
сферы в процессе вращения может достигать значитель-
ных величин (например, для алюминиевой сферы диа-
метром 2,5 см при (]5О=6- 10ч об/мин увеличение его до-
стигает 6 мкм), и это необходимо учитывать. В конст-
рукции необходимо совместить точку приложения сил,
действующих па сферу, с ее центром, чтобы свести к ми-
нимуму уровень вредных моментов. После разгона гиро-
скоп работает на выбеге, его характеристики обычно ста-
билизируются не ранее нескольких десятков часов. Демп-
фирование нутационных колебаний гироскопа при разго-
не п начальной выставке осуществляется специальными
катушками (с использованием поля токов Фуко на сфе-
ре). Глубокий вакуум 1,33- (10~®...10-7) Па обеспечивается
специальными микронасосами Наличие вакуума умень-
шает возможность пробоя подвеса, но напряжение пита-
ния стараются ограничить (при достижении заданной
жесткости подвеса) обычно до 150...250 кВ/см. В процес-
се храпения и эксплуатации прибора детали выделяют
газ. поэтому, несмотря па работу микронасоса, опасность
пробоя с течением времени возрастает. Поэтому необхо-
димо соблюдать культуру производства; поверхность
сферы должна быть обезжирена, обезгажена. Важной
проблемой является отвод теплоты в основном лучеис-
пусканием, которое приводит к изменению геометрии ро-
тора, погрешности съема сигнала. Необходимо оптимизи-
ровать подачу мощности на поверхность сферы, так как
мощность излучения с поверхности сферы мала и состав-
ляет несколько десятков милливатт. Это не позволяет
использовать магнитные поля высокой напряженности и
иметь большие моменты двигателя. Поэтому время за-
пуска велико (несколько часов) и сравнимо с постоян-
ной времени начальной выставки.
Подсистема съема информации для полой сферы
обычно оптическая, па ее поверхность наносится специ-
альный рисунок, который считывается тремя (для приме-
нения в БИНС) оптическими датчиками, расположенны-
146
ми ортогонально (см. рис. 5.2,в) на корпусе гироскопа.
Возможен способ получения информации об угловом по-
ложения осп фигуры при наличии специальной радиаль-
। oft разбалансировки сферического цельного ротора ма-
чого диаметра [32]. По мере решения проблемы повы-
шения надежности прибора, совершенствования техноло-
гии область применения электростатических гироскопов
расширяется.
В связи с развитием криогенной техники, позволяю-
щей улучшить характеристики сферических гироскопов
[32]. представляется перспективным применение сфери-
ческих криогенных гироскопов, работающих при темпе-
ратуре, близкой к абсолютному нулю.
§ 5.3. Динамически настраиваемые гироскопы
Вибрационные роторные трехстепенные гироскопы с
внутренним карданов! 1м подвесом [5, 28, 35], в которых
упругие моменты торсионов компенсируются инерцион-
ными моментами вращающихся колец подвеса при дина-
мической настройке, называют динамически настраивае-
мыми гироскопами (ДНГ). ДНГ применяются в качест-
ве чувствительных элементов трехосного индикаторного
тростабнлизатора, а также БИНС. В нервом случае
ДНГ работают в режиме свободного гироскопа, во вто-
ром — в режиме датчика угловой скорости. На рис. 5.4, а
показана принципиальная схема ДНГ; оси СК Ос,, Ор,
СО; жестко связаны с корпусом прибора. Двигатель 4
приводит во вращение вал 3, на котором с помощью уп-
ругого подвеса установлено кольцо 2, связанное упругим
подвесом с ротором 1. При динамической настройке при-
бора можно считать, что ось ротора гироскопа сохраняет
свое положение в инерциальном пространстве неизмен-
ным (с точностью до погрешностей). Тогда, измеряя уг-
ловое положение ротора относительно корпуса прибора
в плоскости Og-p вокруг осей Ot и Отц получают с по-
мощью датчиков углов 5 и 8 информацию об углах аЕ и
Рч поворота корпуса (или платформы), па котором уста-
новлен ДНГ. Так как ДНГ работает в схеме индикатор-
ного гпростабплизатора пли в режиме обратной связи по
Моменту (схема ДУС), то углы отклонения ротора малы
(не более нескольких угловых минут, обычно <Г) Дат-
,|,Ки момента 6 и 7 используют для управления гпроско-
ч°м. В зависимости от количества кардановых колец раз-
личают однокольцевые (рис. 5.4,0), двухкольцевые (рис.
147
>.4, г, д) ii «-кольцевые гироскопы. Дополнительные
юльца уменьшают погрешности прибора. Так, с помо-
цыо второго кольца карданова подвеса па порядок
уменьшаются погрешности, вызванные угловой вибраци-
ей вала или корпуса па двойной частоте 2<р0 вращения
Рис. 5.4. Динамически настраиваемый гироскоп
ротора. Соединение колец подвесов осуществляется по-
следовательно (рис. 5.4, а) или параллельно (рис. 5.4, д').
Схема параллельного соединения колец находит более
широкое применение. Для прецизионных ДНГ количест-
во колец ограничивают двумя, исходя из технологических
возможностей.
Уравнения движения ДНГ. В [32, 35] приве-
дена методика составления дифференциальных уравне-
ний движения одпокольцевого ДНГ: выводится уравне-
ние движения кольца (см. § 3.5) во вращающейся систе-
ме координат Ox^tjiZi (рис. 5.4, б) и определяется момент
реакции кольца, приложенный к ротору, а затем состав-
ляется уравнение движения ротора в неподвижной от-
носительно корпуса системе координат OgntJ или в аста-
тической системе координат Ох'у'г' (рис. 5.4, о), которая
вращается относительно неподвижной системы коорди-
нат с угловыми скоростями а6, рч, по не участвует во
148
вращении с частотой вращения ротора. Внешними мо-
ментами, действующими на ротор, являются момент ре-
акции кольца, упругие и демпфирующие моменты тор-
спонов, а также момент сопротивления вращению рото-
ра Л1А
Уравнения движения одпокольцевого гироскопа в не-
подвижной системе координат Ogi-jf; без учета составляю-
щих моментов, изменяющихся с двойной частотой враще-
ния [5, 35], имеют вид:
(А + 0.5В,) Щ + 0,5 + D₽) «е - 0,5 [(A , -ф Bj -
— Cj)?O—(^а+^р)1 tPo₽’l 4"
+0,5 (Da + D₽) -1-0,5 47 ° P4 = - (A + 0,5B()
- |C+0,5 (С, + В, - A)I + 7И Г;
(5.17)
(A + 0,5Bj) p4+0,5 (Do D?) ?, - 0,5 [(A -f-B, -
— Ci) <pi)—(^a4”^p)l £4— (c+ А)?са£ —
—0,i ( -ф Dp) —0,oyWzOE== ~(4-|-0,5Bi)ш,-|-
-Ф1С4-О»5( i4-^i—А)]?оше4-c* )
где A, C — экваториальный и осевой моменты инерции
ротора относительно осей Ох, Оу, Oz, являющихся глав-
ными центральными осями инерции ротора; At, В\, Ct —
моменты инерции кольца относительно осей Oxi, Оу\,
Ozi, являющихся главными центральными осями инер-
ции кольца; ka, /гр, Da, Dp — угловые жесткости торсионов
и удельные демпфирующие моменты вокруг осей торсио-
иов; а5, р„—углы поворота ротора относительно непо-
движной системы координат; соь соч — переносные угло-
вые скорости поворота корпуса прибора вокруг осей Og
и Оц; 7И£’С, AT,0 — проекции внешних моментов.
Введем обозначения:
•^4"0>5Bi=A; (C-j-Bi)^о=/7; 0,5 [(A4“^i— —
— (^a4*^₽)] — Co‘, O,5(Da-|-Dp) = Do;
0,5 l(/Ja 4-Dp) o0-]-/M"|=/C0; A1°=D?-TO.
При «>£=wn —0; /Vf£’c=c = 0 дифференциальные урав-
нения свободного движения гироскопа примут вид
149
Аае — ДЛЧ А —0; 1
.... z (о. 1J
Af'1! А ^Л)?Ч — ’iu.1, A?4 0Ы5 =
При динамической настройке Во=О, т. е.
(/?а -j- Лр)—(Д1 -|- Bi—Со 'ро=0; ka 4*k?—(A a Bi—ад.
(5.19)
Основным условием устойчивости ДНГ при Во=О яв-
ляется [35]
C-]~Si^> Д-[-^>5^1- (5.20)
Учет влияния неточности динамической настройки
ДВ0 и наличия момента сопротивления вращению Л1® ро-
тора приводит к более жесткому условию:
С+Д^н^+О^+ДВо, (5.21)
где p=(DB + D$-\-D )/(Dtt-)-C>p); £>, удельный момент сил
вязкого сопротивления (в основном газодинамического)
вокруг оси Oz. Так как условие динамической настройки
выполняется с высокой точностью Д/?о ~ 10_? (&a+&e), а
ротор вращается в разреженной газовой атмосфере, то
условие (5.20) незначительно отличается от (5.21) и вы-
полняется с запасом: (С4-В))/(2Д+В,) «0,90...0,95.
Уравнения движения однокольцевого гироскопа с уче-
том моментов, изменяющихся с двойной частотой 2q>
вращения вала, и моментов, действующих вокруг осей
ротора и привода, до значений второго порядка малости
относительно at, в неподвижной системе координат
имеют вид (при <р=И=О)
0,5 (2А А АAA cos 2rf) A O.SAfci s’n 2? A
+0,5 [Я + Л+-2А? sin 2? + (£>a -fJp) x
X cos 2cp] O:+(C + A +A COS 2<p) cp?n +
+ О,5(£)а-Г>р)3, sin 2?+0,5^ |(/+ + Dp)?-
— Alp£+(C+A)?+tti cos s>n 2®| —
— 0,5at [(2Zj—С,) ?-A«AAAffi sin 2<p —
(5.22)
(
i
— bi cos 2<p[ —Alp'cos f+Л1ру sin ф=2И,^':;
0,5 (2Л+A ~ A c°s 29) f*ij+0,5A«e sin 2'? A
150
4-0,5 [Da4~ А4-2Д^ sin 2<₽—(Da—Dp) cos 2срГ₽ч—
—(C 4- A — A cos 2y) <рщ 4- 0,5 (Da — Dp) u6 s in 2<?—
—0,5aE [(Da 4- AO ?—А1рг4- (C 4“ A) ?—°i cos2<p—
— bi sin 2<f>J — 0,5рч [(2Д — CO <p2 — (Ла 4-Л₽) —
(5.22)
—ai sin 2^4-^005 2<pJ — Af®’‘ sin <f> — M"py cos<p=
=Л1®'С,
)
где ?—фЛ fli—(Р4-А)?— О4рг4-(А — А)?*»
^i=(Cj—2А) ?24"^а—^р>
здесь A1px(i/z) — проекции момента внешних сил на оси
Ох, Оу, Oz, связанные с ротором.
Анализ уравнений (5.22) позволяет учесть влияние
моментов сопротивления вращению ротора на точность
ДНГ, а также определить его погрешности при угловых
вибрациях вала на двойной частоте вращения.
При составлении уравнений движения ротора двух-
кольцевого ДНГ добавляется еще одно уравнение второ-
го кольца и определяется соответствующий момент ре-
акции, действующий на ротор [35]. Поскольку ось вто-
рого кольца развернута на 90° по отношению к оси пер-
вого кольца, происходит взаимная компенсация инерци-
онных моментов на двойной частоте вращения. Прибли-
женные дифференциальные уравнения двухкольцевого
ДНГ с параллельным соединением колец при <р=<ро!
Oa—Dr,=^D', /4|=/Й2= А—О, iot=
= <>^=0 имеют вид ♦
(А 4-ВО 4- 2D(1&4- [2А - (2А1 - С.) ае -
-?0(С4-2А1) рч-2Пф0рч=<с;
, (О
А+А) 4- 2Dpn 4- [2А - (2Aj - со +
+ (С 4-2А,) + 2Dm=7И“’С.
Условие динамической настройки при вышепринятых
Допущениях: 2k— (2А{—Ci) <ро- В уравнениях (5.23) мо-
менты, изменяющиеся с двойной частотой вращения, от-
сутствуют, т. е. ДНГ с двухкольцевым подвесом нечув-
161
ствителен к внешним угловым вибрациям на двойной
частоте вращения. Благодаря этому двухкольцевые ДНГ
находят широкое применение. Для n-кольцевого подвеса
условия, при которых в уравнениях будут отсутствовать
моменты, изменяющиеся с двойной частотой вращения
[28, 35] при А/=А; С,—С; В,=А, имеют вид Vsinzy(==
г-1
п п
=2cos2Y(-; Vsin2y(=0, где у.; —угол между (i-H)-M
i-i i-i
и t-м кольцами. Отсюда выражение для угла между (/+
+ 1)-м t-м кольцами будет y==’Y<+i—у1=±л(п—1)п~>.
Для двухкольцевого ДНГ у=0,5л; трехкольцевого ДНГ
у=2л/3 и т. д. Условие динамической настройки «-коль-
цевого ДНГ-
Пог реши ос г и ДНГ Точность ДНГ, измеряю-
щего угловое отклонение платформы индикаторного ГС,
во многом определяется собственной скоростью прецес-
сии (ССП) гироскопа ®оп. Причины возникновения ССП
ДНГ разнообразны: несовпадение центров масс ротора
и колец с точкой пересечения осей подвеса [5, 35], кон-
структивно-технологические погрешности элементов под-
веса п его деформации при перегрузках и изменении тем-
пературы окружающей среды, газодинамические момен-
ты сопротивления вращению ротора, демпфирующие мо-
менты вокруг осей карданова подвеса, нарушение усло-
вия динамической настройки, влияние магнитного поля.
При определении ССП, возникающей под действием
внешних моментов 7И£Х и Л4°‘с, пользуются прецессион-
ными уравнениями ДНГ [35], полагая Во=О, ф=<ро»
wj=(on=0 и пренебрегая демпфирующими и инерцион-
ными моментами в (5.17):
(C-J-tf,) М,=<с, 1 (5.24)
-(С + Д1)?оа£=<с, ^=й^-М^!Н )
Проекции возмущающего момента удобно определять
относительно подвижной системы координат, а затем на-
152
хоцнть проекции его на неподвижные оси Ogr|£, связан-
ные с корпусом прибора:
^•c=7WyCcostp-j-AlJc sin <р, 7ИчС=Л1уС sin <р— Aft'cos <?.
(5.25)
Определим возмущающие моменты и ССП ДНГ.
Ряс. 5.5. К расчету погрешностей ДНГ
Возмущающий момент, вызванный ста-
тической несбалансированностью рото-
ра [5, 35], при постоянной линейной пере-
грузке. Рассмотрим физику возникновения возму-
щающего момента вследствие статической несбалансиро-
ванности ротора OM=l=/=Q, где l{lx, lv, 1г} — смещение
Центра масс ротора (рис. 5.5, а). Пусть корпус прибора
наклонен относительно горизонтальной плоскости па
угол (). Проекции силы тяжести на оси Ох, Оу, Oz (рис.
5.5, а, б):
Ох— — Ор cos 0 sin <р; Оу= —Gp cos 0 cos
Сг= — Ор sin 0. (5.26)
Проекции возмущающих моментов, вызванных несовпа-
дением центра масс ротора и точки пересечения осей
153
подвеса, на оси Ох, Оу, Oz определим в соответствии с
рис. 5.5, б:
М = GJy — Gylt = — Gp s in 0Z(/ -ф Gp cos 6 cos <p/2, |
Afp=GvZ2— GJX= — Gp cos 0 sin <pZx-]-Gp sin 61 x. j
Переходя к неподвижной системе координат, по
(5.25) получим
AJ£=Gp sin 6 (Zv cos <p — ly sin <₽); M*— — Gp cos 0Z2-|-
+ Gp sin 0(Z.V sin cp-J-Zp cos <p). (5.28)
Постоянная составляющая ССП возникает вследствие
осевого смещения 1г центра масс ротора вдоль оси Ог в
соответствии с (5.24):
a?=GpZa cos 0/Z7. (5.29)
Полученный результат можно получить и в неподвиж-
ной системе координат: M\=Gplz cos 0. Воспользуемся
этим приемом для определения ССП при наличии кажу-
щегося постоянного ускорения Wn, V7J, считая
«Ь= РЛ=0.
Моменты, развиваемые инерционными силами tnpW,}
и WplV'e иа плече 1г, создают моменты Л1£=
=— mplzV(\\ при этом соответствующие составляющие
ССП равны
(,>ь=mvlzV7riH~l='''i (я) —
(5.30)
где (#) — lzGp/H—удельная составляющая ССП, за-
висящая от g- пп, п-ъ — линейные перегрузки (в едини-
цах).
Возмущающий момент, вызванный сме-
щением центра масс ротора ДНГ вследст-
вие не ж ест к ост и опор упругого подвеса.
Если учитывать нежесткость элементов конструкции
ДНГ, то смещение центра масс его ротора во вращаю-
щейся системе координат изменяется под действием сил
тяжести или инерционных сил. Дифференциальные урав-
нения движения центра масс ротора в предположении
линейности жесткостных характеристик элементов гиро-
скопа (при отсутствии начального смещения центра масс
ротора) с учетом выражений (5.26) па неподвижном ос-
164
новании имеют вид [35]:
zn1,x4-<vx-]-/\x= — Op cos 0' sin ср,/-]-/7*;
т рУ + dy 'y+kyy — — Gp cos 0' cos <?0Z -ф Fy;
(5.31)
wipz-]-4Zzz-|-£2£= —Gpsin O',
где dx, dv, ds — удельные коэффициенты демпфирования
или коэффициенты диссипативных сил, возникающих при
поступательных перемещениях ротора за счет конструк-
ционного демпфирования, сил трения в заделках упругих
элементов; kx, kv, kz — приведенные линейные жесткости
крепления ротора вдоль осей Ох, Оу, Oz; Fx, Fv— проек-
ции суммы кориолисовых и центробежных сил инерции.
Проекции суммы кориолисовых и центробежных сил
определяются выражениями F х=тр^х-{-2ту^у, Fy—
=т^оУ — 2mv<o(>x (рис. 5.5, в). Подставляя значения Fx,
Fy в (5.31), получим
mvx-{-dxx-\-(kx— Шрфо) х — 2mv<f0y =
= — Gp cos 0' sin cp0Z,
mpy + dyij + (ky — mv$) y-\-2mpt?ox=
(5.32)
= —Op cos 0' cos %/,
mpz-\-dzz-\-ktz= —Op sin O'.
Кориолисовы силы инерции порождают связи между
движениями гироскопа, определяемыми координатами х
и у, повышая порядок дифференциального уравнения до
четвертого.
Решения первого и второго уравнений (5.32) имеют
вид
х(0=Ах sin (?0/ — zr), f/(Z)= —Дясо8(<р0/ —/J , (5.33)
где Ах, Ау, %х, — соответственно амплитудные и фазо-
вые характеристики упругих колебаний гироскопа [35].
Зная величины смещения центра масс ротора, согласно
(5.28) определяем в неподвижной системе координат
при z=4=—Gpsinf)7&2 проекции возмущающего мо-
мента:
^ЕЛ=Ор sin 0' [х (/) cos iot — у (0 sin <р(/],
M*—kz ‘GpCos О' sin О' -j-Gp sin O' [x(0 sin -]-
+y(/)cos ф0/] .
(5.34)
155
Подставляя значения полученных моментов в (5.22), Оп.
ределяют погрешности ДНГ. Корни характеристического
уравнения системы (5.32) имеют вид
^1.2,3,4 =
= + —0,5 (ftjr+^+^'po) ±0,5 |/(zz2—Пу) 8(/;.д-
где п'х=кл/тр, na=kalmf.
Если жесткости крепления ротора в радиальном на-
правлении равны, то пх=пу=пг и Xi,2=±/zz1; Хз,4=±//г2,
где rii—rir—<р0; Иг=Иг+<ро — собственные частоты неза-
тухающих упругих колебаний ротора. При zzr=2ф0 полу-
чаем /г1=ф0; п2=Зф0. Амплитудные характеристики
Ах ('Po)=g cos 0' (пу — 4<ро)/[2 (л.х+ Пу) ^о—пхПу] ,
Ay (%) = g cos О' [п'х — 4?о)/ [2 («х + «,,) фо — пхпи | .
Выделим постоянные составляющие моменты из выраже-
ний (5,34):
= — О,5С7р sin 0' (Ах sin AtJ sin /у),
7l4^K=(2zz2) 1 Gvg si 20' +0,5Gp sin O' (Ax cos yx ± (5.35)
-J-A^coszj,),
где nt=kjmr
Для дорезонансной области упругих колебаний при
<y)z> 4?о;
Хх=Хда=0; Ах=—gcos07«„; A</=gcosO'/«x
М0; /И^к=0,5Gpg sin20' (zz?2 - О.бл^2- 0,5zzJ2)
(5.36)
При kx=ky=kr', nx—nv=nr (5.36) принимает вид
Af"2t=O,5Gpg sin 20' (zz?2 — «Г2) =0,5Gp^BK sin 20', (5.37)
где Анж=Л7* — ^71 —коэффициент неравножесткости уп-
ругого подвеса ротора ДНГ в осевом (г) и радиальном
(г) направлениях. Коэффициент перавпожесткости kwt=
=0 при kr=k;i. Это условие, используется на практике
для уменьшения момента М™‘ Формула (5.37) аиало-
156
г1Г1на выражению для момента перавножесткости креп-
ления ротора гиромотора [35] и может быть найдена
непосредственно с помощью рис. 5.5, г:
M”*=l'zGv cos 6' — l'yOv sin 0'=Л7’Ор sin D'Op cos 6' —
—k^Gv sin 6'Op cos 0' =0,5Opfeini( sin 26'.
При наличии линейных перегрузок пя в формулах GP
заменяют на плСр, а угол 0' отсчитывают от направле-
ния действия перегрузки. Зависимость (5.37) использу-
ют при испытаниях ДНГ для выделения составляющей
ССП, пропорциональной g1 (максимальное ее значение
при 0х=45°).
Обозначим удельную составляющую ССП, вызванную
неравпожесткостыо крепления ротора в осевом и ради-
альном направлениях, через <o2(g2) =0,5/eH}KG2p//7; тог-
да, согласно рис. 5.5, а,
0»£»=<‘>2(j?s)«£«с; (5.38)
При вибрации па частотах, близких к резонансным, мо-
мент, вызванный нежесткостью крепления ротора, воз-
растает и его определяют [35] с учетом фактических
значений амплитудных и фазовых характеристик си-
стемы:
/И"*=0,25/Пр (ач2) sin 20в (ХрЛ7* — Х2/г7*) cos е, (5.39)
где a, v — соответственно амплитуда и частота линейной
вибрации; 0В — угол между осью Oz и направлением
вибрации; Лг— коэффициенты динамичности и фаза
ea?er"«ez, определяемые экспериментально или по мето-
дике, приведенной в [35].
Возмущающий момент, вызванный осе-
вой вибрацией ротора, при наличии ста-
тической несбалансированности рстора
(см. § 3.5). Рассмотрим причину возникновения возму-
щающего момента при осевой вибрации ротора по гар-
моническому закону z=za sin (сро^+фо) с частотой враще-
ния фо при наличии его радиального смещения центра
масс ротора (рис. 5.5, д) и учтем упругое смещение рото-
ра вследствие упругой податливости карданова под-
веса в осевом направлении. В центре масс ротора прило-
жены центробежная Дц=дгр/Хфои инерционные Лии==
Д,ш = »г„н силы. Суммарный момент, действую-
щий вокруг оси Оу,
157
Ai;=m‘zlx - x+*MFH. (.5.40}
Величина zM определяется из решения дифференциально-
го уравнения движения ротора (вдоль оси Oz); щЛ ,
+</ггж+/г^м=myosin (<?0/+Ф0). Представим <Л, в B|J.
AezM=Z4Jsin (VtHai); тогда ~z“i?c sin
Подставив г, zM, zM в (5.40), получим
/Иу = — OTP/Vza% sin (®0/ -Но) +^Р4/Л-<Ро sin (-HJ -
— m.za,,lx?о sin (<р0/ +фч)’.
Моменты сил Гц и F„„ во вращающейся с угловой ско-
ростью фо системе координат Oxyz взаимно уравновеши-
ваются. Инерционная сила Гяп образует момент вокруг
осп Оу, проекции которого на неподвижные оси имеют
вид (5.25): 714^=714” cos «р,/; 714^=714“ sin ®0/.Выделим по-
стоянные составляющие этих моментов:
714“.= — O,5wzpZvza^ sin %; 714")»= — Q,5mvlxza$ cos %.
(5-41)
В результате колебаний ротора в осевом направлении
с частотой q?o и при 1х=£0 возникает постоянная состав-
ляющая возмущающего момента (5.41), направление ко-
торого зависит от сдвига фаз фо колебаний ротора, но не
зависит от величины упругого смещения гм ротора в на-
правлении осн Oz и центробежной силыИр/д. <рп, а также
остается неизменной при резонансе упругих колебаний
ротора в осевом направлении. Составляющие ССП, выз-
ванные моментами 7И"«, М"}», при наличии перегрузок
равны
iu6=wi(S)/rncos%; 'O4=w'i(.i;)rtB sin %, (5.42)
где wJ(^)=O.5Gp/^.; iiK=za$/p.
Погрешности, вызванные квадратур-
ными возмущающими моментами в ДНГ.
В отличие от возмущающих моментов силы тяжести и
инерционных сил при наличии ускорения, вектор кото-
рых перпендикулярен нх направлению, в ДНГ возникает
так называемый «квадратурный» момент. Вектор квадра-
турного момента коллинеарен вектору силы, его вызы-
вающей. Квадратурный возмущающий момент возника-
158
ет> например, вследствие конструктивно-технологиче-
ского несовершенства упругого подвеса, непересечепня
осей подвеса, линейного н углового несовпадения глав-
ных осей податливости упругих элементов на из-
гиб с осями подвеса, предварительного закручивания
элементов вокруг своих осей из-за технологических по-
грешностей, неравного значения линейных жесткостей
каждого элемента и опоры в целом, наличия диссипатив-
ных моментов и др. [5, 28]. Так, для опор подвеса, со-
стоящих из плоских пружин, основными причинами по-
явления квадратурных моментов вследствие несовершеп
ства подвеса являются линейное осевое и угловое сме-
щение в зазоре заделки, линейное боковое смещение и
наклон взаимно перпендикулярно расположенных пру-
жин, боковое смещение двух компланарных пружин и
осевое смещение другой пары пружин опоры подвеса,
скручивание пружин. Из-за многообразия причин появ-
ления квадратурных моментов рассмотрим возникнове-
ние лишь некоторых из них.
Квадратурный момент, вози и кающий
из-за относительного угла поворота двух
упругих опор (горснонов) вокруг осп, па-
раллельной оси подвеса. Этот момент появляет-
ся при наличии разности упругих моментов торсиопов
при действии силы Р(ч<) вдоль оси подвеса, которая ра-
стягивает один торспон и сжимает другой. Разность уп-
ругих моментов торсиопов ДМ=k0 (ф|—ф2) + Р(<р)е(ф| +
+фг), ГАе k0— жесткость торсиона без учета растяги-
вающей (сжимающей) силы; е — конструктивный пара-
метр, зависящий от формы упругости элемента; для крес-
тообразного сечения е=Ь2/(6/); фь ф2— углы поворота
торсиопов.
Для упрощения полагаем ф1=ф2-1-|Дф; ф2— 0; Дф=
—Дф.7. Тогда, например, выражение момента действую-
щего вокруг оси Оу будет AM„=PLi (<р)тДф„.
Проекции этого момента в системе координат О£т|£,
согласно (5 25) М;=ДМ,7 cos гр; М,1=ДМ!/sin ср. Опреде-
лим эти моменты при действии силы тяжести G=GP+
+ ыи, где Gr и GK— соответственно сила тяжести ротора
и колец, считая
Ру (?)=G cos <р; ЛД—Р(/ (о) еДф^ cos = ОеДФу cos2 ср;
Mi}—Ру (Ср) еДфу Sill <?—О.бОеДф^ sin 2<р.
159
Постоянная составляющая возмущающего квадратур,
кого момента, направленного параллельно силе G, его
вызывающей,
X=0,5еДф/?=0,5ад,
где qu=>-A^„m— коэффициент квадратурного момента
плп квадратурная маятниковость. Аналогично, для по-
стоянной составляющей квадратурного момента, выз-
ванного ДМх= Рх(<р) еД\[ы, где Px(<p) = Gpsin<p,
7И£=О,5<7х£.
Здесь qx—FAtyxmp.
Суммарный квадратурный момент, вызванный отно-
сительными углами разворота (закрутки) торсионов
Д^х, Лф?о
Хкп=О.5(7х+<7р)^- (5.43)
При постоянном кажущемся ускорении B^j+Й7,
квадратурный момент
Л4екв=О,5 (v.v + ffp) 1^=0,5? (?,-]-<7p)/ze:
Al* кв=0,5 (<?,. 4- qy) VPr,=0,5? (qr ?,,) п-ц. (5.44)
Выражением (5.44) пользуются при испытаниях ги-
роскопов, определяя qx, qy. Для этого разворачивают
корпус прибора па углы 0К (0; 90°) вокруг оси и оп-
ределяют Л4*к„, ЛДкв при !$?;.=.£ cos 0K; Wn=g sin 01:.
Обозначим 0,5 (qx+qy)g/H, равную (оКв(?), тогда в
соответствии с (5.44) при постоянных линейных перегруз-
ках гц, п,, ССП будет
°>ЕKB=wxB ("')0,ч кв=‘°кв (₽) 'Ч- <5-45)
При ускорениях, меняющихся с частотой 2<ро, возни-
кают дополнительные составляющие квадратурных мо-
ментов. Так, при VP-,]— 0, W\= cos 2tp0Z вокруг осп Ol
возникает дополнительная постоянная составляющая
возмущающего момента:
дМе= -0,25т^еДф,;= -0,25^Гг
ДЛ4;=О,25«74.и/ь ДЛ4*'кп=0, ДМ^О,25 UZ*.
(5.46)
При Wi = UZ* sin 2<р0/.
A7WU=0; ДА1;кп=0,25{qx-qu)W\. (5-47)
160
Выражения (5.44) ...(5.47) используются для определе-
,я величин углов относительного поворота («закрут-
ки») ДФ*» Дф>/ торсионов в собранном ДНГ. Компенси-
руется квадратурный момент Д4*„Д7ИкН устранением
начальной закрутки торсионов (менее Г). Заметим, что
момент 7И*п проявляет себя и при отсутствии вращения
ротора.
Если имеется односторонняя (а не встречная) за-
крутка торсионов, то это приведет к угловому отклоне-
нию ротора от плоскости, перпендикулярной оси враще-
ния, на угол во (так называемое торцовое биение рото-
ра). Углы йо зависят от конструкции и технологии изго--
товления прибора и достигают значений 1...20'. При на-
личии Оо н вращении ротора возникают центробежные
инерционные моменты, действующие на ротор и стремя-
щиеся совместить ось ротора с осью его вращения. Эти
моменты являются причиной возникновения квадратур-
ных моментов [5, 28], если линейные жесткости торсио-
иов вдоль их осей кручения (па сжатие или растяжение)
неравны между собой: /&-/•?&>; kyi ССП гиро
скопа (при прямоугольном сечении упругого элемента)
определяется по формуле
atKB=Gp^:)08A.v/(12///), (5.43)
где 8/гд.= Д^/Лх=2(/гД-^)/(/глг1-]-А;2) -
относительная разница линейных жесткостей торсионов
(па сжатие или растяжение); b—ширина прямоуголь-
ного сечения торсиопа; I— длина торсиона. Этот момент
проявляет себя только при вращающемся роторе ДНГ
Для его уменьшения необходимо, чтобы ЛЛ2—
т. е. й^1=й]-2. ,
Квадратурный момент, возникающий
н р и разности линейных жесткостей (на сжа-
тие или растяжение) пары торсионов (их нерав-
кожесткости), образующих ортогональные оси
подвеса, т. е. при k*x—knu=(kxi-]-kx^ — (^1+^2) -#0
п наличии непересечения Да осей Оги Оу подвеса. Ме-
тодика определения этого вида квадратурного момента
аналогична изложенной выше. Составляются уравнения
вижепия ротора в системе координат, связанной с ва-
•юм; находятся упругие смещения центра масс ротора
Ч опредепяются амплитуда и фаза вибрации ротора па
Двойной частоте вращения, которая возникает при kx =Д
6'1757 161
Если вибрация ротора происходит с частотой 2ф0
вдоль оси Оу, то Д//=Х(Лш', v) sin [2ф(/+б(Д(о', v)]-
здесь v=2<po/mo/,
coq = j/(AJl. -f- ^>/(2от,,)-1; До/=— ^)/(2тр)-1,
и возникает инерционная сила ггуЛу. Возмущающий мо-
мент, вызванный этой силой, гщЛукг. Выделяя его по-
стоянную составляющую, находят ССП гироскопа. Для
уменьшения этого момента необходимо подбирать А*==
а также избегать совпадения собственной частоты
«>о с двойной частотой вращения 2ф0.
Квадратурный момент, возникающий
при нарушении перпендикулярности плос-
кости, в которой лежат оси подвесов (торсионов), к
оси вала и наличии разбалансировки в ради-
альном направлении 1Х. Пусть 1{1Х, 0, 0), а р—угол на-
клона плоскости торсионов относительно плоскости, пер-
пендикулярной оси вала. На рис. 5.5, е, ж показаны два
положения ротора при ф=0 и ф=л, из которых видно,
что проекция силы тяжести на плечо 1Х вызывает квад-
ратурный момент Af„=Gptgp/x. Постоянная составляю-
щая его в проекции на ось Од будет 7Ие1П,~0,50р/лр.
Этот момент может быть устранен радиальной баланси-
ровкой.
Заметим, что квадратурные моменты могут прояв-
ляться в упругом подвесе без вращения ротора (от угла
относительного закручивания торсионов Дф*.^ радиаль-
ной разбалансировки при перекосах осей торсионов,
пространственной анизотропии перекрестного шарнира),
а также при вращении ротора (от линейной неравно-
жесткости торсионов, несовершенства опор привода, ко-
торые приводят к вибрациям на двойной частоте, и др.).
Погрешности ДНГ, установленного на
платформе, которая совершает гармони-
ческие угловые колебания. Погрешность ДНГ
при наличии угловых колебаний платформы рассмотре-
на в [35]. Если колебания корпуса гироскопа происходят
по гармоническому закону Ф=фо8!п(2фП^+е), то посто-
янная составляющая ССП ДНГ, возникающая при уг-
ловых колебаниях, равна <оп^О,25(/га-[-/гр)ф0//7- В двух-
кольцевом ДНГ ось подвеса второго кольца перпенди-
кулярна оси подвеса первого, а инерционные моменты
колец, являющиеся причиной погрешности при угловой
162
вибрации вала (корпуса) на двойной частоте вращения,
компенсируют друг друга, т. е. <о*=0, что соответствует
уравнениям (5.23).
Погрешности, вызванные диссипатив-
ными моментами. В [35] дается теоретический
анализ влияния диссипативных моментов на движение
гироскопа с внутренним упругим кардановым подвесом.
Здесь ограничимся лишь первыми приближениями (при
вышепрпнятых допущениях) и представим (5.17) в виде
—2(C-|-Bi)<poctE — (^а Ч~ Тоае~®’
Получим решение уравнений, обозначая £>=0,5(Оа+
+Д₽+П»):
₽ч=₽Чо ехр ( — //Г); аЕ=аЕо ехр (— //Г),
ГЛе T=H/D(f,G=(C + Bl)/D—постоянная времени пре-
цессионного движения ДНГ, являющаяся важной харак-
теристикой прибора (обычно Т=60...200 с). ССП, выз-
ванная диссипативными моментами,
<очг=:Рч== —; ы^т-=<1е= — щ/Г» (5.49)
где а*, р*— угловые отклонения ротора в неподвижной
системе координат (обычно не более Г); зависят от зна-
чения Т.
Погрешность, вызванная неточностью
динамической настройки. Динамическая (ре-
зонансная) настройка прибора осуществляется путем из-
менения моментом инерции колец А/, Bi, Ci, жесткости
/г₽£ торсионов и частоты вращения ротора <ро. В при-
борах настройка осуществляется изменением* жесткости
упругих элементов (уменьшением площади сечения уп-
ругого элемента специальными технологическими опе-
рациями— шлифованием с последующей доводкой) или
моментов инерции колец с помощью специальных вин-
тов или удалением материала лазерным (или искровым)
методом. При испытании макетных образцов приборов
настройка осуществляется изменением частоты враще-
ния ротора. Динамическая настройка производится на
час готе ф0=<с0=|/ (Аа-[-йр)/(Д1-[-Д1—СД-
Определим неточность динамической настройки ДВо
из-за нестабильности частоты Д(ро=Дф/фо, где Дср0— от-
с* 163
носительное значение нестабильности частоты. Опреде-
лим АВ0 как производную функцию (5.19) Во(д):
ДВ0 « 0,5[йа + АР - (А, 4- В. - СО /]'=
= — Д?о Ml + Вх — Q) <$.
ССП с учетом (5.17), (5.25) и вышеприпятых допу-
щений
шЕнс=иЕ = —• [ (С4" Д() <fo] =
= — (*«+А’₽) = — л\.с₽*>
*ЧС= - (*«+МA?oat/y~1=LAvHe«t.
(5.50)
где Avllc= (/го+АР) Afp0//_|.
Уровень поддержания стабильности частоты высокий.
Обычно применяется синхронный гистерезисный двига-
тель привода, имеющий систему управления по частоте
и специальный источник питания, поэтому Аср()'~ 0,005...
0,01. Углы отклонения ас, [Цне превышают Г
Модель ССП ДНГ. Анализ погрешностей показы-
вает, что ССП ДНГ можно представить четырьмя основ-
ными составляющими: еоо не зависит от ускорения;
(нп, л.£) пропорциональна первой степени перегрузки и
определяется моментом, вызванным смещением цент-
ров масс ротора и колец; 6>КВ («„, п£) пропорциональна
первой степени перегрузки и определяется квадратурны-
ми моментами; wz(«2) пропорциональна второй степени
перегрузки и определяется перавножесткостью конст-
рукции крепления ротора и колец Составляющая сто за-
висит от постоянной времени Т (5.49), от углов откло-
нения 8* (с^, р*| и Дтио, которая определяется неточно-
стью динамической настройки (5.50), кинематикой под-
веса, а также некоторой величиной ССП <ви, не завися-
щей о г Т, 0*, Av,,.'. Запишем упрощенную модель ССП
ДНГ [ср. с (5.16)] с учетом (5 30), (5.38), (5.42), (5.45).
(5.46).. (5.50) в виде
to£cn=«’oE+wi (£)«е—‘"кВ(.«?)Лч4-м2(.€2)«е«с. ) (5 5])
+®t (й) «ч4~®кп <£> «е + ®2 (£2) ПЧПЬ J
где woE==t,)nE— Т-'а*— <о01=шиЧ — 7’-%—
Выражение используется при определении точности
ДНГ, составляющих ССП при испытаниях прибора, вве-
164
депип алгоритмической компенсации составляющих
ССП с учетом их изменения во времени, от перегрузки,
температуры окружающей среды.
Основными элементами конструкции ДНГ являются
ротор, карданов подвес с упругими осями и элементами
регулировки, датчики угла (ДУ), датчик момента (ДМ),
привод с двигателями и опорами, корпус. В качестве
двигателя ДНГ получили распространение синхронные
П1С1Срезиспые двигатели со специальными электронны-
ми схемами управления, обеспечивающие высокую ста-
бильность вращения. Двигатель как источник теплоты и
магнитных полей удален от подвеса. В качестве ДУ при-
меняются индукционные, оптические датчики угла и дру-
гие, обычно торцового исполнения. Пределы углового от-
клонения ротора в рабочем режиме малы (пе более 1...
5'), поэтому ДУ должны обладать высокой чувствитель-
ностью («Г'). ДМ выполняются магнитоэлектрически-
ми (см. рис. 3.10, в). Корпус прибора герметизируется,
внутри корпуса прибора обычно находится водородпо-ге-
чиевая смесь (давление 0,65—4 кПа). Материал корпу-
са— пермаллой, который экранирует гироскоп от маг-
нитных полей. На рис. 5.6 показана конструктивная схе-
ма двухкольцевого ДНГ с монолитным подвесом ротора.
Технологические методы уменьшения погрешностей
ДНГ (методы, обеспечивающие точное изготовление де-
талей, сборку, балансировку и регулировку) в значи-
тельной степени способствуют эффективности конструк-
тивных методов повышения точности гироскопа: выбору
жесткости подвеса, моментов инерции, газодинамических
характеристик, введению термостатирования, устройств
компенсации, регулировок. Настройка, балансировка и
регулировка ДНГ имеют своп особенности.
К операциям настройки и балансировки
относятся: динамическая балансировка ротора, вращаю-
щихся частей вала привода; радиальная и осевая балан-
сировка, т. е. совмещение центра масс ротора и колец с
Цеди ром упругого подвеса; динамическая настройка при-
бора по условию В()=0.
Динамическая балансировка вала привода осущест-
вляется с помощью корректировочных масс, жестко свя-
занных с приводным валом или перемещением вращаю-
щейся части чувствительного элемента (ротора с карда-
човым подвесом) относительно оси приводного вала. По-
следний способ более сложен, однако позволяет совме-
стить точку пересечения осей подвеса — центр масс—с
165
осью вращения привода, а следовательно, свести к мн.
лимуму внутреннее напряжение в материале горснопов
приводящее к квадратурным моментам.
Рис. 5.6. Конструктивная схема двухкольцевого ДПГ:
/ — ротор; 2 — рамка ДМ; 3— подвес: 4 — винты динамической настройки’. 5 —
крышка; 6—токоподвод; 7 — пружина обеспеченнч стабильности предвари-
тельной осевой нагрузки; в —статор двигателя; 9—ротор двигателя; JV-~
шарикоподшипниковая опора; И—корпус; 12— статор ДУ; 13— магнпт ДМ
Основной схемой испытаний при динамической на-
стройке является схема перекрестной «элект-
рической пружины» (рис. 5.7, а), когда сигнал с
ДУ подается па соответствующий ДМ. Регулированием
величин моментов инерции (или ka, kfj <р) добиваются
выполнения условия Во = О, регистрируя соответствую-
щий сигнал в цепи обратной связи.
166
Регулировка прибора представляет собой техно-
логические операции, не связанные с перемещением кор-
ректировочных масс на вращающихся элементах ДНГ и
осуществляемые путем изменения относительного поло-
жения элементов прибора, выставки элементов в процес-
се сборки, подбора пара-
метров газовой среды, ре-
гулирования параметров
электрической схемы.
ДНГ, применяемые в
качестве чувствительных
элементов индикаторных
ГС, имеют преимущества
перед гироскопами на ша-
рикоподшипниковых под-
весах силовых ГС из-за
малых габаритов и массы
при сохранении точност-
ных характеристик (ы0^
^0,1 град/ч), возможно-
сти измерения углов по-
ворота (или угловых ско-
ростей) платформы во-
круг двух взаимно пер-
пендикулярных осей Og,
01]. Малые габаритные
размеры ДНГ, а также
масса (не превышает
400 г) прибора и его эле-
ментов, отсутствие жид-
кости в отличие от поп-
Рис. 5.7. К пояснении работы схе-
мы ДНГ—ДУС
лавковых гироскопов по-
зволяют создавать при-
боры с малым временем
готовности (несколько
минут и менее), по истечении которого его характеристи-
ки отвечают требованиям. Введение системы термоста-
тировання, применение методов экстраполяции ССП и
компенсации составляющих ССП с помощью алгоритмов
снижают время готовности до малых величин.
Конструкция ДНГ позволяет применять прогрессив-
ные производительные технологические процессы при его
изготовлении, автоматизировать процесс изготовления и
сборки прибора в серийном производстве, применять
микропроцессорную и вычислительную технику. Это спо-
167
собствует снижению стоимости приборов при их серий-
ном изготовлении. Недостатком конструкций ДНГ явля-
ется пониженная ударостойкость и вибропрочпость.
Режим динамически настраиваемый гироскоп—дат-
чик угловой скорости (ДНГ—ДУС) обеспечивается вве-
дением схемы обратной связи по моменту (рис. 5.7, а),
которую называют перекрестной электрической пружи-
ной. Уравнения движения ДНГ—ДУС соответствуют
(5.17). В случае преобразования уравнений (5.17) по
Лапласу для построения структурной схемы ДНГ—ДУС
проекции моментов , ТИ™ заменяют выражениями
7Wr(s)=H^(s)-^4(s)WZ(lc(s); At^=^(s)+/Cat(s) X
Х1ГОС(5), где Foc(s)—передаточная функция обратной
связи по моменту; К — коэффициент усиления цепи об-
ратной связи; Af^(s)— изображения по Лапласу
проекций возмущающих моментов, действующих па ро-
тор гироскопа. Структурная схема ДНГ — ДУС при <оЕ=
—const, (!)„= const, lF0C(s) = l, Л4"($)=0 с уче-
том перекрестных связей показана на рис. 5.7, б. в кото-
ром обозначено ir„(s) = (/l0s2+D0s—В0)/(К+Ка). Пе-
редаточная измерительная функция при А'Э>Ко; К^>В0-,
<os=const; w„=const имеет вид
aF (s) В„ (s)
“E (s> “4 («)
=________________1)___________________
(7 4* 'Z&F 4- 1) (Удв2 2$nT3s +1)
где K^H^K + K^ Тг=НЦК + К0У, Т^А^{аНУ,
б2=а~^7~[д°~Лп(^я/<0)]; r3=y///(/<+/Q’
здесь а= Ун*+Е>1-2А0В^Н\ H^C+Q^iCt+B!-
— A)|'-?o~(^_hO>5Ci) <р0; ТУ* =/zH—частота нутационно-
го движения; Тз — постоянная времени прецессионного
движения гироскопа.
Выбор параметров ДНГ—ДУС ведется методами,
разработанными в теории систем автоматического регу-
лирования.
На основании, вращающемся с постоянной угловой
скоростью, прецессионные уравнения ДНГ в соответст-
вии с (5.17) и (5.18) при W'Oc(s) = l будут
168
+(Ko+'<) +М;
- Н ая - (Ко+К) ае=Н -f-М
При Л4Ё=Л4^=О и /<»К0 получим рп=—(Hi/K)®п;
й.;=—т. е. ДНГ при наличии обратной
связи по моменту измеряет угловую скорость основания.
Стабильность крутизны характеристики ДНГ—ДУС во
многом определяется стабильностью коэффициента
датчика момента, которая зависит от тепловых процес-
сов прибора, параметров магнитной системы. Моменты
и Л4е определяют в соответствии с (5.51) точность
прибора. ДНГ—ДУС находит применение в БИНС.
РАЗДЕЛ 3
ГИРОСКОПИЧЕСКИЕ ПРИБОРЫ
Наиболее распространенными гироскопическими при-
борами, используемыми в системах ориентации подвиж-
ных объектов, являются гироскопические вертикали (ГВ)
н курсовые гироскопические приборы (К.ГП).
Гировертикаль представляет собой гироскопический
прпбор, построенный па базе астатического гироскопа с
тремя степенями свободы (или двухосного гиростабили-
затора), с коррекцией ог маятниковых чувствительных
элементов. Она выдает информацию об углах крепа и
тангажа подвижного объекта, которая может сниматься
с визуальных указателен, а также передаваться в систе-
му ориентации объекта и другим потребителям. На
КЛА применяют гировертикали с коррекцией от оптико-
механической инфракрасной вертикали (ИКВ).
Курсовые гироскопические приборы, используемые па
подвижных объектах (гирокомпасы, гиромагнитные и
тнроипдукционные компасы, указатели направления ор-
тодромии и др.), выдают информацию об ориентации
этого объекта в азимуте. Эта информация может сни-
маться с визуальных указателей, а также передаваться
в системы ориентации и навигации объекта и другим по-
требителям. Курсовые гироскопические приборы, пред-
назначенные для использования на неподвижном отно-
169
сигельно земли основании (наземные гирокомпасы) поз-
воляют задавать и определять ориентацию устройств ц
объектов различного назначения в азимуте относитель-
но направления географического меридиана.
ГЛАВА 6
ГИРОСКОПИЧЕСКИЕ ВЕРТИКАЛИ
Гироскопические вертикали (гировертикали) предназ-
начены для определения направления истинной вертика-
ли на движущихся объектах. Являясь одним из прибо-
ров системы ориентации подвижного объекта, они при-
меняются как датчики углов крена и тангажа летатель-
ного аппарата (или датчики аналогичных углов па дру-
гих движущихся объектах) и служат для создания на
движущемся объекте площадки, стабилизированной в
плоскости горизонта.
Снимаемые с измерительных осей прибора электриче-
ские сигналы используются в пилотажных, навигацион-
ных, радиолокационных системах, визуальных указате-
лях и т. и.
Гироскопические приборы, применяемые непосредст-
венно для визуального определения положения самолета
относительно плоскости горизонта, называют авиагори-
зонтами. На неподвижном относительно Земли основа-
нии направление истинной вертикали можно определить,
например, с помощью короткопериодического физичес-
кого маятника или уровня. Однако плечо короткоперио-
дического маятника, установленного на движущемся
объекте, отклоняется к направлению кажущейся верти-
кали (см. гл. I).
При некоторых эволюциях самолета (вираж, петля)
погрешности такого маятника практически могут дости-
гать нескольких десятков градусов и более. Поэтому он
непригоден для непосредственного определения и зада-
ния направления истинной вертикали.
В отличие от маятника астатический гироскоп менее
подвержен действию ускорений и сохраняет неизменным
направление главной оси в инерциальном пространстве.
Если главную ось астатического гироскопа установить
по направлению истинной вертикали, то с течением вре-
мени она отклонится от вертикали вследствие суточного
170
вращения Земли и перемещения объекта относительно
нее. Кроме того, гироскоп не свободен от моментов со-
противления в осях подвеса, которые вызывают его пре-
цессию от первоначального положения. Такой гироскоп
может использоваться в качестве гировертикали лишь ог-
раниченное время. Для придания ему избирательности
к направлению истинной вертикали используется физи-
ческий маятник, который либо непосредственно дейст-
вует на гироскоп за счет смещения центра масс послед-
него (гиромаятник; см. гл. 2), либо используется как
чувствительный элемент, управляющий прецессией ги-
роскопа п осуществляющий его коррекцию.
Гировертикали, сочетающие астатический гироскоп с
коррекцией от маятникового чувствительного элемента,
позволяют создать динамическую систему, обладающую
избирательностью маятника и безынерционпостью пре-
цессии гироскопа, достаточно низкочастотную, и, следо-
вательно, менее подверженную действию кратковремен-
ных либо быстро меняющихся ускорений, чем физиче-
ский маятник, используемый отдельно. Такие схемы по-
строения гировертикали получили широкое распростра-
нение (см. § 6.1, 6.2).
Гировертикали с простейшей коррек-
цией обладают невысокой точностью (порядка 0,5...2°)
и применяются, например, в качестве визуальных при-
боров и чувствительных элементов автопилотов. В гиро-
вертикалях повышенной точности (порядка 5..J0' в уста-
новившемся режиме полета) применяют более сложные
типы коррекции, например интегральную и маятниковую
в сочетании с внешней коррекцией от счетно-решающих
устройств (или БЦВМ), получающих информацию от
других приборов (см. § 6.4). Такие гировертикали могут
использоваться, например, для стабилизации прицелов и
аэрофотоаппаратов.
Особую группу представляют прецизионные ги-
ровертикали (с точностью до 0,5...2'), построенные
на инерциальных принципах, использующие свойства ма-
ятника с периодом 84,4 мин. Они применяются в систе-
мах инерциальной навигации (см. гл. 8, 9).
Гировертикали повышенной точности и прецизионные
гировертикали обычно строятся па основе двухосного
или трехосного гиростабилизатора с малой ССП а в ка-
честве чувствительных элементов системы коррекции
применяются прецизионные акселерометры.
171
§ 6.1. Уравнения прецессии гировертикали
Типичная схема гировертикали с коррекцией от ма-
ятникового чувствительного элемента (рис. 6.1) прет-
ставляет собой астатический гироскоп 1 с тремя степе-
нями свободы, иа внутренней рамке (кожухе гнромого-
ра) которого установлены два маятниковых чувствигель-
Рис. 6.1. Схема гировер гикали
пых элемента 6 п 5 системы коррекции, а по осям на-
ружной и внутренней рамок карданова подвеса располо-
жены коррекционные двигатели 2, 3 — исполнительные
элементы системы коррекции гировертикали. На осях
карданова подвеса также установлены датчики съема
показаний прибора 7, 4 (например, потенциометры уг-
лов крепа и гапгажа).
Маятник 5 электрически связан с коррекционным дви-
гателем 3, а маятник 6—с коррекционным двигателем 2.
172
Если главная ось Oz гироскопа отклонена от направ-
ления истинной вертикали на угол а, то с маятникового
элемента 6 снимается управляющий сигнал, являющий-
ся функцией угла «, который поступает на коррекцион-
ный двигатель 2, создавая момент МК1 действующий во-
круг оси кожуха гироскопа. При этом ось Oz гироскопа
прецессирует к истинной вертикали. Аналогично работа-
Рис. 6.2. Характеристики коррекции гировертикали
ет система коррекции, состоящая из маятника 5 и кор-
рекционного двигателя 3, при отклонении оси Oz гиро-
скопа относительно истинной вертикали на угол 0. По
характеру зависимости момента коррекции от угла от-
клонения оси Oz гироскопа относительно направления
истинной вертикали, фиксируемого маятниковым чувст-
вительным элементом, различают следующие основные
типы коррекции гировертикалей:
пропорциональная (линейная), когда корректирую-
щий момент пропорционален углу отклонения гироскопа
(рис. 6.2, а);
постоянная (релейная), когда величина момента кор-
рекции постоянна, а его знак изменяется при изменении
знака угла отклонения гироскопа (рис. 6.2, б);
смешанная (линейная с ограничением), когда в диа-
пазоне углов ±Ф коррекция пропорциональная, а за
пределами этой области — постоянная (рис. 6.2, в).
173
Реальные характеристики могут отличаться от при-
веденных, имея зоны гистерезисностн или нечувствитель-
ности.
На рис. 6.2 изображены характеристики MXK=f(a)
для постоянной коррекции с зоной нечувствительности
(г) или гистерезисностн (д) и для смешанной коррек-
ции с зоной гистерезисностн (е).
Реальные конструкции маятниковых чувствительных
элементов отличаются от приведенных, однако в первом
приближении их характеристики могут быть сведены к
указанным выше.
Составим уравнения прецессии гировертикали, пред-
ставленной на рис. 6.1, относительно подвижной опорной
прямоугольной правой системы координат Ogrqitj, свя-
занной с траекторией движения опоры гироскопа [35].
Здесь ось O£i направлена вдоль истинной вертикали, а
ось Отц — вдоль проекции вектора скорости полета на
горизонтальную плоскость.
Составляющие абсолютной угловой скорости этой си-
стемы координат
cos <р sin ф—('£>//?), <«ч1=U cos <р cos ф.
<dh=Z7 sin (6.1)
где U — угловая скорость суточного вращения Земли;
v — скорость летательного аппарата относительно Земли;
<р — географическая широта места; ф— географический
курс вектора скорости; т=и/р — угловая скорость раз-
ворота летательного аппарата вокруг оси ОЕ^ относи-
тельно Земли; р — радиус геодезической кривизны тра-
ектории; R — радиус Земли. С кожухом гироскопа свя-
жем правую прямоугольную систему координат Oxyz.
Ось Oz направим по оси собственного вращения ротора
гироскопа, ось Ох — по оси поворота кожуха гироскопа
в наружной раме, а ось Ozlt — перпендикулярно плоско-
сти, заключающей ось Ох и ось поворота наружной рамы
в корпусе прибора. Ось наружной рамы направим по
оси Ц|, а положение оси собственного вращения гиро-
скопа z относительно вертикали (ось ОЕд) определим уг-
лами аир поворота соответственно вокруг оси Отц на-
ружной рамы и оси кожуха гироскопа Ох.
Положительные направления отсчета углов а и р и
угловых скоростей аир показаны на рис. 6.2 круглыми
стрелками и векторами соответственно. Углы а и р оп-
174
ределяют погрешности гировертикали и в дальнейшем
предполагаются малыми.
Для составления уравнений движения прибора ис-
пользуем уравнения прецессии гироскопа
-HQX=MUK + MUC, (6.2)
где Qx, Q</ — проекции абсолютной угловой скорости ги-
роскопа на оси Ох и Оу, МХк, Мук— моменты, создавае-
мые устройствами маятниковой коррекции гировертика-
ли; Мхе, МуС — моменты внешних сил.
Проецируя на оси Ох и Оу относительные угловые
скорости гироскопа а, р и переносные угловые скорости
гироскопа, т. е. угловые скорости юЕ1, соС1 системы
координат найдем выражения для Q* и
= (6*3)
Поделив (6.2) на H и подставляя (6.3), получим
a — “аР — %к ^ие—О,
Р — <вЕ14_<йС1а4"2лк4"2хс==0,
(6.4)
где £1ук=Мхк!Н, йкк= —Мук!Н — скорости прецессии ги-
ровертикали от моментов коррекции; £lVc=Mxc,/H, £2*с=
=—Мус/Н — собственные скорости прецессии гировер-
тикали, вызванные моментами внешних сил. Уравнения
(6.4) являются общими для гировертикалей с различны-
ми видами коррекции, построенными по схеме рис. 6.1.
Для составления уравнений прецессии для гировертика-
ли с конкретным видом коррекции надо найти выраже-
ния для корректирующих моментов.
Для наглядности графического истолкования движе-
ния главной оси Oz гироскопа часто малые углы а и р
рассматриваются как прямоугольные координаты апек-
са Е гироскопа на изображающей плоскости (см. рис.
6.1).
§ 6.2. Гировертикали с ограниченной линейной
коррекцией
Из простейших гировертикалей (см. рис. 6.1) широ-
кое распространение получила схема с ограниченной ли-
нейной коррекцией. В качестве маятникового чувстви-
тельного элемента коррекции, устанавливаемого на ко-
жухе гироскопа, используется жидкостный переключа-
.176
тель (рнс. 6.3). Он представляет собой сосуд, состоящий
из медного основания 4, герметично соединенного с ме-
таллическим колпачком 5. В основании вмонтированы
Н.П.
2 3
Рис. 6.3. Жидкостный пере-
ключатель
четыре контакта, изолированные от него втулками 2.
Сосуд заполнен токопроводящей жидкостью 6 так, что
при горизонтальном положении основания оставшийся
пузырек воздуха 1 симмет-
рично перекрывает контак-
ты 3 примерно наполовину.
Внутренняя поверхность
основания выполнена по
сфере большого радиуса. От
радиуса сферы зависит зона
пропорциональности харак-
теристики жидкостного пе-
реключателя (в различных
модификациях жидкостного
переключателя она состав-
ляет 10...30 угл. мин).
В схеме прибора, изобра-
женной на рис. 6 4, каждая
пара противоположных кон-
тактов жидкостного пере-
ключателя / подключается
к крайним точкам управ-
ляющих обмоток одного из
коррекционных двигателей
3, 4, а средние точки жидкостного переключателя и уп-
равляющих обмоток питаются от двух фаз источника
переменного тока 36 В, 400 Рц. От трех фаз переменного
тока питается и статор 2 гиромотора. При отклонении
оси гироскопа от вертикали пузырек воздуха займет в
сосуде жидкостного переключателя крайнее верхнее по-
ложение и перекроет контакты несимметрично. Возник-
шая разность токов в управляющих обмотках вызовет
появление момента в коррекционном двигателе и, следо-
вательно, прецессию гироскопа к направлению истинной
вертикали.
Определим скорость прецессии гироскопа от моментов
коррекции. Если угол отклонения оси Oz гироскопа от
кажущейся вертикали не превышает зоны пропорцио-
нальности Ф (см. рис. 6.2, е), то коррекция действует
как пропорциональная. Если это отклонение превышает
Ф, то корректирующий момент остается неизменным,
т. е. коррекция действует как постоянная. Если пара-
176
метры продольной и поперечной коррекций одинаковы,
то выражения для скоростей прецессии от коррекции
можно представить в виде
2 = [ —есЧ при | ut | <Ф,
i'K 1+A.i при I щ | >Ф;
2 f при | | < Ф,
(± kn при | Pi | >Ф,
Рис. 6.4. Принципиальная электрическая схема гиро-
вертикали
где аь Pi — углы, определяющие отклонение осп Oz ги-
роскопа от направления кажущейся вертикали:
«1=а —Хъ ?1=Р— /г! (6.6)
здесь уь у2 —углы, определяющие отклонение «кажущей-
ся вертикали от истинной:
Xi —arctg(aEi/g), X2=arctg(rz41/g); (6.7)
°:i. ani — составляющие ускорения вдоль осей Ogi и Отр;
в—крутизна характеристики коррекции гировертикали
Для пропорционального ее участка; Л=еФ—-максималь-
ное значение скорости прецессии от коррекции.
Для нормальной работы гировертикали необходимо,
чтобы корректирующие моменты вызывали прецессию
гироскопа со скоростью, превышающей угловую скорость
поворота направления истинной вертикали места в про-
177
странстве и собственную скорость прецессии гироскопа.
В этом случае необходимо, чтобы
k>U-\-
^rnax //? + 2с- (6.8)
Для исследования движения гировертикали со сме-
шанной коррекцией используются уравнения (6.4), где
Qa-k и П)/к определяются по (6.5).
Рассмотрим движение гировертикали для некоторых
случаев ее эксплуатации и определим возникающие при
этом погрешности.
Прямолинейное движение с постоянной скоростью.
Под прямолинейным движением па поверхности Земли
условно понимают либо движение по произвольной дуге
большого круга, называемое ортодромией, либо движе-
ние с постоянным географическим курсом, называемое
локсодромией (исключая районы высоких широт, где дви-
жение по локсодромии становится явно криволинейным),
в зависимости от метода навигации движущегося объек-
та. В этом случае v=const, а р=оо или велико. По оси
Ogi возникает ускорение a$i=—2(7osin<p—(о2/р)- Уско-
рение anj=O, a^^g, если g^> (v2/R) +2Uv При уста-
новившемся движении объекта гироскоп, прецес-
сируя к положению равновесия, войдет в зону пропор-
циональной характеристики коррекции. При этом, пре-
небрегая малыми членами со^а, с учетом (6.1) и
(6.5) ... (6.7) уравнения примут вид
а-|-еа=—(7 coscpcos'l’+Qpc+efad/g), 1
р-|-ер= — (7 cos <р sin 9— 2ХС — (v/R). J
Точное решение этих уравнений сложнее, чем в пре-
дыдущем случае, так как здесь <р и ф — переменные. Од-
нако, учитывая, что при ограниченных скоростях v дви-
жения объекта эти углы изменяются медленно, можно
решать эти уравнения с достаточной степенью точности,
принимая их правые части постоянными. В этом случае
частные решения уравнений (6.9), определяющие уста-
новившиеся погрешности гировертикали при прямолиней-
ном движении, примут вид
а*=ас-|-а„; Р*=₽с»
где ас, Ре — скоростные девиации гировертикали:
— U cos ч? cos ф 4-
«с=-------------------*
Q U cos <р sin ф -|- (v//?) + fij
ГС
(6.П)
178
ail—навигационная погрешность гировертикали, связан-
ная с ускорениями, возникающими при движении по ор-
тодромии или локсодромии:
“и=Ле1/^= —2t/-u sin — ^2/(pg). (6-12)
Максимальные значения скоростных девиаций
I «с I п,вх=(^+2,с)/Е. (6-13)
I ₽с I п.ах = (^ + йг/е)/Е + %1ах/(Е^)-
Навигационная погрешность гировертикали различ-
на при движении по ортодромии и локсодромии.
При движении по ортодромии (р —со)
а„ = — 2(7v sin <p/g (6.14)
представляет собой погрешность, возникающую вследст-
вие кориолисова ускорения.
Эту погрешность можно оценить по графику, изобра-
женному па рис. 6.5, а.
При движении по локсодромии угол 4i=const (ф=0),
с>/р= (п/Д) tgipsinty. Подставив это в (6.12), получим
• 27Л/sin <р v2tg<₽ . ,
а„ =---------------sin (6.15)
g Rg i
Эта формула определяет локсодромическую погреш
кость гировертикали. Соответствующая зависимость при
г[)=90° представлена на рис. 6.5, б.
Движение с продольным ускорением. При наличии
продольных ускорений у объекта (например, набор ско-
рости или торможение) пузырек воздуха в жидкостном
переключателе из-за действия сил инерции на жидкость
сместится в продольном направлении, электрический
мост разбалансируется и на коррекционный дригатель 3
продольной коррекции (см. рис. 6.1) поступит управля-
ющий сигнал. Коррекционный двигатель разовьет мо-
мент, который вызовет прецессию гироскопа к направ-
лению кажущейся вертикали.
Определим погрешности гировертикали для случая,
когда набор скорости самолетом происходит с постоян-
ным ускорением a4i=a=const.
Время движения самолета с ускорением
ty=&vla, (6.16)
где До — изменение скорости самолета за время дейст-
вия ускорения.
179
Обычно при наборе скорости самолетом ускорения та-
ковы, что кажущаяся вертикаль отклоняется от истинной
на угол ... 12е, значительно превышающий зону
пропорциональности жидкостного переключателя ф.
Следовательно, продольная коррекция работает в основ-
ном в зоне постоянной характеристики.
Рис. 6.5. Навигационная погрешность гировертикали
при движении но ортодромии («) и локсодромии (6)
Если пренебречь влиянием вращения Земли (w5I =
=(i)ni=(i>ti=0) и моментами сопротивления в осях пре-
цессии гироскопа (йхс=£2®с=0), то уравнение движения
гировертикали в продольной плоскости (6.4) с учетом
(6.5) ... (6.7) примет вид
[1=+Л:Р1, (6.17)
где Pi=3 — Ха, zj=arctg(<z/g)^<i/g. (6.18)
Если в начале действия ускорения гировертикаль не
имела погрешностей (р=0 при (=0), то pi = p—уг<0
и ось гироскопа начинает прецессировать по направле-
нию кажущейся вертикали:
Р=Лр/. (6.19)
Максимальная погрешность гировертикали р^ах будет
иметь место при таком ускорении а*, когда за время
180
движения с ускорением 1и* ось гироскопа отклонится до
кажущейся вертикали (с точностью до зоны пропорцио-
нальности Ф).
Полагая p=%2, подставляем соответствующие их вы-
ражения из (6.19) и (6.18) с учетом (6.16):
a*=\f k^vg. (6.20)
Максимальная погрешность гировертикали при дей-
ствии постоянного ускорения
iw=a*/g=j/'/fefa A-zj/g • (6-21)
При движении с ускорением а>п* время /у уменьшается
и погрешность гировертикали будет меньше рта7: и оп-
ределится по формуле
р^Лр/^йр.Д-0/a. (6.22)
При ускорении аса* ось гироскопа дойдет до кажу-
щейся вертикали, но погрешность гировертикали по-
прежнему будет меньше ртах:
P=a/g-. (6.23)
Например, если задано Ао=100 м/с, /гП1=3 град/мин и
требуется определить максимальную погрешность ргаах
гировертикали, то, произведя решение по формуле (6.21),
получим
р,1ШХ= 1/ 3'100 - 57,3=5,4°.
1,,,ах Г 57,3-9,8
Продольные ускорения могут возникать при горизон-
тальном полете самолета, сопровождающемся длиннопе-
риодическими колебаниями (типа фугоидных). В этом
случае будем считать, что линейная скорость самолета
изменяется по закону п = и0+Дп sin vt, где у —угловая
частота длинпопериодпческих колебаний; До — амплиту-
да колебаний скорости.
При этом возникает ускорение
cos'С (6.24)
Инерционные силы отклоняют чувствительный элемент
продольной маятниковой коррекции гировертикали, что
приводит к включению соответствующего коррекционного
Двигателя и к прецессионным колебаниям оси фигуры
пироскопа относительно истинной вертикали. Если счи-
тать, что в этом случае амплитуда колебаний кажущей-
181
ся вертикали Zo=Aov/gsCO, то коррекция гировертика-
ли будет работать в зоне пропорциональности. При этом
получим уравнение движения гировертикали в продоль-
ной плоскости из (6.4), полагая «1i=w1)i = toSi = 0,
=0, с учетом (G.5) ... (6.7):
p-|-ej3=Zoecosv/. (6.25)
Установившиеся колебания гироскопа у направления
истинной вертикали рк определяются частным решением
уравнения (6.25)
& = JgL- COS (V/ - 83), (6.26)
у в2 4- v2
где 83=arctgG/e).
Из (6.26) следует, что амплитуда колебаний гиро-
вертикали меньше амплитуды колебаний кажущейся
вертикали. С уменьшением крутизны коррекции в ампли-
туда колебаний гировертикали уменьшается. Однако сле-
дует иметь в виду, что минимальное значение е ограни-
чено допустимыми значениями скоростных и статических
погрешностей гировертикали, которые при уменьшении е,
согласно (6.11), возрастают. Если зона пропорциональ-
ности жидкостного переключателя мала, т. е. Ф<%о
(пли Ф=0), то появляется систематическое отклонение
оси гироскопа от вертикали [37].
Вираж. При правильном выполнении виража самолет
разворачивается вокруг вертикальной осп с постоянной
угловой скоростью ю, а центр масс самолета движется
по дуге малого круга с постоянной линейной скоростью!)
и возникает центростремительное ускорение сои. Вслед-
ствие этого в гировертикали, выполненной по обычной
схеме (см. рис. 6.1), маятниковый чувствительный эле-
мент поперечной коррекции отклоняется от истинной вер-
тикали и включает коррекционный двигатель 2, который
развивает момент, вызывающий прецессию гироскопа от
истинной вертикали, что обычно приводит к накоплению
значительных погрешностей [36].
Существуют различные способы уменьшения погреш-
ностей гировертикалей на вираже [37, 36]: отключение по-
перечной коррекции либо полное отключение маятнико-
вой коррекции, наклон оси ротора гировертикали вперед
по полету и др.
Рассмотрим поведение гировертикали при отключе-
нии поперечной коррекции. Не будем учитывать влияние
182
вращения Земли, так как 67 sin ср, a U cos ср поворачи-
вается относительно осей О«ь Orj1 с угловой скоростью
виража и ие вызывает появления систематических по-
грешностей, Полагаем, что моменты сопротивления в
осях подвеса отсутствуют. С учетом принятых допущений
в уравнениях (6.4), считая QIC=fi;,c=o)tI=tonI=Ql/K=
=s=0; соб=<о, получим
а—<1>р_0; Р4-<оа-|-2ЛК=0. (6.27)
Учитывая, что продольное ускорение ап1 = 0, выражение
(6.5) для Qa-k примет вид
( ер при |р| < Ф,
( +Ар при |₽|^>Ф.
(6.27а)
Если апекс гироскопа находится вне зоны пропорцио-
нальности, где | pj >Ф и уравнения (6.27) примут вид
а—шр=О; Р4*<ма=+Ар. (6.276)
Решая (6.276), получим
a=Ui cos («^4-8i) + р=—аг sin (mf-f-Bj), (6.27в)
где а*=± (&₽/со); и 61 — постоянные, определяемые из
начальных условий.
Выражения (6.27в) определяют движение гироскопа
па вираже. В полярной системе координат с апексом в
точке с координатами а* и р*=0 это движение характе-
ризуется радиусом-вектором Г1 = рг(и — a*)2-f-P2=a1 и
полярным углом ©1, определяемым по формуле tg<7i =
= p/(a—a*)=—tg (ы( + 61). Таким образом, движение
апекса гироскопа происходит по дуге окружности радиу-
сом Г1 с угловой скоростью —со, равной угловой ско-
рости виража по значению, но противоположной по на-
правлению.
Если апекс гироскопа находится в зоне пропорцио-
нальности, то | р| <Ф и уравнения (6.27) примут вид
а —<о£=0; р4-<»а-|-ер=0. (6.27г)
Решая систему уравнений (6.27г), получим
+ р = (6.27д)
где |х112=0,5е + 0,5 )/е2 —4<о2— корни характеристиче-
183
скоро уравнения для системы (6.27г); сь с2 — постоянные
зависящие от начальных условий.
Выражения (6.27д) определяют движение апекса щ.
роскопа к началу координат а=0, р=0. Спектр траек-
торий движения апекса гироскопа на вираже представ-
лен на рис. 6.6. Влияние кулоновского трения в осях
Рис. 6.6. Отклонение поперечной коррекции (е>2со):
а —левый вираж (w>0); б —правый вираж (ы<0)
подвеса гировертикали на ее погрешности при вираже
подробно рассмотрено в [37, 36] и др.
В случае полного отключения коррекции на время
виража (йт„=£2г/к=0) гировертикаль превращается в
астатический гироскоп и скорость нарастания се погреш-
ностей а и р на основании (64), (6.1) будет приближен-
но определяться из уравнений
а — и>В= —U cos cos ф 4* Qu<.,
р-[-о)а= — U cos <р sin ф — (v/R) — Qxc.
(6.28)
Выше при исследовании гировертикалей предполага-
лось, что центр тяжести гироскопа совпадает с пересече-
нием осей карданова подвеса. Иногда при изготовлении
гировертикалей оставляют нижнюю маятниковость, од-
нако это приводит к появлению дополнительных погреш-
ностей у гировертикали при эволюциях объекта. Для
гировертикали с сильной радиальной коррекцией
(е^> 2]/#//?) астатический гироскоп является наивыгод-
иейшим [7]. Наличие нижней маятниковое™ допустимо
лишь в пределах точности изготовления прибора. Сме-
щение центра тяжести подвеса гироскопа в направлении,
перпендикулярном оси собственного вращения гироскопа
184
(боковая маятпнковость), приводит к появлению момен-
тов статической разбалансировки. Вследствие этого сме-
щается положение равновесия гировертикали с пропор-
циональной и смешанной коррекцией при равномерном
движении объекта и увеличиваются погрешности при
наличии ускорений.
В условиях эксплуатации возможны линейные и уг-
ловые вибрации и колебания основания, на котором ус-
танавливается гировертикаль. При таких режимах сво-
бодный гироскоп в кардаповом подвесе в общем случае
имеет систематическую скорость прецессии, отклоня-
ющую ось его собственного вращения от заданного на-
правления (см. кп. I). В гировертикалях ось гироскопа
будет либо удерживаться у направления вертикали си-
стемой коррекции (при постоянной коррекции), либо по-
дучит статическую погрешность (при пропорциональной
и"смешанной коррекциях). В режимах отключения кор-
рекции наличие этих факторов обычно ведет к увеличе-
нию собственной скорости прецессии гироскопа и к на-
коплению дополнительных погрешностей. В первом при-
ближении можно учесть эти факторы, определив соб-
ственную скорость прецессии (см кн. 1) и рассматривая
ее как скорость Qxc, П!7С прецессии от вредных моментов
в уравнениях движения гировертикали (6.4). При высо-
кочастотных колебаниях основания прибора нельзя
идеализировать работу маятниковых чувствительных эле-
ментов системы коррекции гировертикали и поэтому не-
обходимо учитывать их динамические характеристики.
Гировертикали, применяемые па летательном аппара-
те для измерения углов крена и тангажа, обычно распо-
лагают так, чтобы ось наружной рамки карданова под-
веса была параллельна его продольной оси. В этом слу-
чае углы, измеряемые датчиками съема сигналов 7 и 4
(см. рис. 6.1), равны соответственно углам крена у и тан-
гажа -й летательного аппарата (если ось собственного
вращения гироскопа остается вертикальной) При лю-
бом другом расположении карданова подвеса появляют-
ся погрешности в измерении углов крена и тангажа, на-
зываемые обычно карданными погрешностями, гироверти-
кали. Если, например, ось наружной рамки карданова
подвеса гировертикали расположена параллельно попе-
речной осн летательного аппарата, то карданные погреш-
ности гировертикали [37] определяются по формулам
^=arc(tg\}/cosy) —&, Ду= arcsiii (cos & sin у) — у. (6.29)
185
Ранее рассматривались режимы эксплуатации гировер.
тикалей, когда ось наружной рамы карданова подвеса
располагалась по продольной осп объекта и сохраняла
горизонтальное положение.
При наличии, например, у самолета угла тангажа О
любые моменты Ми и 2И„, действующие по осям наруж-
ной и внутренней рамок кардапова подвеса, вызывают
прецессию оси гироскопа вокруг осн внутренней н на-
ружной рамок с угловыми скоростями $=МЯ!(Н cos S),
a=MJ(H cos ft). Следовательно, при продольном ус-
корении под действием момента коррекции п моментов
сопротивления скорость прецессии гироскопа к направ-
лению кажущейся вертикали увеличивается в 1/cos fl раз,
что приводит к соответствующему увеличению погреш-
ностей гировертикалей. То же будет при вираже самоле-
та с креном, если ось наружной рамки кардапова подвеса
располагается параллельно поперечной осп самолета.
Для маневренного ЛА при углах fl, близких к 90°, по-
грешности гировертикали (см. рис. 6.1) становятся недо-
пустимо большими п даже возможен выход гировертика-
ли из строя. Теория этого явления и схемы гировертика-
лей, применяемых для маневренных летательных аппа-
ратов, рассмотрена в кн. 1 (§ 7.5).
§ 6.3. Центральные гировертикали
На современных самолетах широко применяются цен-
тральные гировертикали типа ЦГВ и МГВ [3]. обеспечи-
вающие выдачу сигналов углов крена и тангажа для
различных потребителей (автопилотов, навигационных
устройств, визуальных указателей и т. д.). Построение
таких гировертикалей осуществляется с использованием
принципа силовой гироскопической стабилизации (см.
кн. 1), позволяющего обеспечить независимость показа-
ний прибора от моментов, действующих по осям карда-
нова подвеса (моменты трения, остаточной несбаланси-
рованности, моменты, создаваемые датчиками съема сиг-
налов, и др.).
Гировертикаль МГВ-1С (рис. 6.7) представляет собой
двухосный силовой гироскопический стабилизатор с кор-
рекцией от маятниковых чувствительных элементов. Ста-
билизируемая в плоскости горизонта платформа 23 явля-
ется внутренней рамой карданова подвеса. Она может
поворачиваться относительно наружной рамы 6 карда-
186
нова подвеса вокруг оси Ох и вместе с наружной ра-
мой— в корпусе прибора 3 вокруг оси Oyi. Ось Ot/i обыч-
но ориентируется параллельно продольной оси самолета.
На платформе установлены два двухстепенных гироско-
па 22 и 11. Оси кожухов гироскопов Oxj и Оу2 находятся
Рис. 6.7. Двухгироскопная силовая гировертикаль
в плоскости платформы, причем ось Oxj параллельна
осн Ох платформы, а ось Оу2 перпендикулярна ей.
Оси роторов 10 и 24 гироскопов 11 и 22 в среднем по-
ложении перпендикулярны плоскости платформы, а век-
торы кинетических моментов гироскопов направлены в
противоположные стороны. С индукционных датчиков
углов прецессии 16 и 19 снимаются сигналы, пропорцио-
нальные углам поворота гироскопов в подшипниках 9 и
25 относительно платформы, которые поступают на уси-
лители 13 и 20, а затем на соответствующие двухфазные
индукционные двигатели ДМ-01А силовой стабилизации
187
14 и 17. Коррекцию платформы к горизонтальной плос-
кости выполняют моментные датчики 26 и 8 (представля-
ющие собой катушку в магнитном поле), которые полу,
чаю г сигналы от жидкостных маятниковых чувствитель-
ных элементов 27 и 12, установленных на платформе.
Маятниковый чувствительный элемент представляет со-
бой цилиндрический стеклянный сосуд, в который впаяны
платиновые контакты с выводами. Трубка заполнена то-
копроводящей жидкостью так, что остается газовый пу.
зырек, перекрывающий в горизонтальном положении
верхние контакты примерно наполовину. Зона пропор-
циональности чувствительного элемента ±9'.
Информация об углах крена в тангажа снимается с
сипусно-косинусных трансформаторов 15, 21 и потенцио-
метров /. 2, 4, 5.
Для ускоренного грубого приведения оси Oz плат-
формы в вертикальное положение при запуске прибора
служат горизонтальные маятники 7 и 18, сигналы с кото-
рых (при нажатии па кнопку «Арретир») поступают па
двигатели стабилизации 14 и 17. Двигатели развивают
моменты, заставляющие гироскопы прецессировать до
упоров, после чего платформа, как обычное негироско-
пическое тело, ускоренно движется к плоскости горизон-
та и после нескольких колебаний приходит в горизон-
тальное положение с погрешностью ±1,5°. При отпуска-
нии кнопки «Арретир» цепь сигналов с маятников 7 и 18
разрывается и гировертикаль переходит в обычный ре-
жим работы.
Основными возмущающими моментами, вызывающи-
ми отклонение платформы от заданного положения в
пространстве, являются моменты сил сопротивления в
осях прецессии и для некоторых режимов в осях стаби-
лизации, а также инерционные моменты рам карда нова
подвеса и платформы, возникающие при угловых коле-
баниях самолета (см. кн. 1). Особенностью рассмотрен-
ной гировертикали является то, что на вираже по осям
прецессии гироскопов Ол*1 и Оу5 возникаю г гироскопиче-
ские моменты Мг=Н(л sin о и Ны sin р, которые приводят
к дополнительным погрешностям прибора; здесь в и р —
углы отклонения гироскопов, вызванные наличием воз-
мущающих моментов вокруг осей кардаиова подвеса;
о) — угловая скорость виража.
Эти погрешности устранены в схеме четырехгироскоп-
ной двухосной вертикали, отличающейся от рассмотрен-
ной схемы тем, что разгрузкой каждой из осей подвеса
188
платформы управляют два гпромотора с параллельно
расположенными осями прецессии (гнромоторы связаны
между собой кинематически). Векторы кинетических мо-
ментов каждой пары гироскопов направлены в противо-
положные стороны. Возникающие при вираже гироско-
пические моменты Мг, направленные по осям прецессии,
взаимно уравновешиваются в каждой паре гироскопов
Рис. 6.8. К составлению уравнений двухгироскоп-
иой гировертикали
и практически не оказывают влияния па погрешности
I провертикали.
Силовые гировертикали обладают рядом преимуществ
перед обычными несиловыми вертикалями:
моменты, развиваемые устройствами для съема сиг-
налов с осей кардаиова подвеса, компенсируются систе-
мой силовой разгрузки и практически не снижают точ-
ности силовой гировертикали;
кожухи гиромоторов поворачиваются относительно
платформы па малые углы, что упрощает задачу созда-
ния безмоменгных токоподводов;
наличие малых осевых люфтов в осях прецессии гиро-
скопов пе приводит к появлению моментов дебаланса от-
носительно этих осей, и, следовательно, точность гиро-
вертикали не снижается.
Составим уравнения прецессионного движения для
Двухгнроскопной гировертикали (рис. 6.8). При этом
предполагаем, что параметры гиростабилпзатора выбра-
ны так, что выполняются требования к устойчивости и
качеству. Будем изучать движение осн платформы отно-
сительно системы координат Ogii]i£i, абсолютные угло-
вые скорости которой toji, w,ii, tori определяются выраже-
ниями (6.1). Наружную ось кардаиова подвеса направим
189
по оси Ог)ь Положение оси Oz платформы относительно
вертикали (ось Ogi) определим углами а, р пово-
рота соответственно вокруг осн Отр и оси Ох. Положи-
тельные направления отсчета углов и, р и угловых ско-
ростей а, р показаны па рис. 6.8, а. Углы а, р в даль-
нейшем полагаются малыми. Гироскопы отклоняются
относительно платформы па малые углы р, о и имеют
угловые скорости р, о (рис. 6.8, б). По принципу Д’Алам-
бера составим уравнения моментов относительно осей
Ох1 и Оуц кожухов гироскопов:
^Шг/+^1',»Я + ^Х1к + ^Х1с==0> 1 (6 30)
Здесь Мхп(, Му2к— корректирующие моменты, зависящие
от сигналов с маятниковых чувствительных элементов;
Alsic, Mv2c— моменты сопротивления, приложенные к ко-
жухам гироскопов; ws, ау, ы2—проекции абсолютной уг-
ловой скорости платформы па ее оси Ох, Оу, Oz. Первые
два члена в каждом из уравнений (6.30) представляют
собой гироскопические моменты.
Выражения для <иж, ®у, найдем, проецируя на оси
Ох, Оу, Oz, связанные с платформой, угловые скорости
а, Р> «м. “ni.
и>х= —р—о)С1а
шу=а—wCiP4-w4i,
<02^юа.
(6.31)
Поделив (6.30) на И и подставив в них (6.31), полу-
чим
а — “ciP+^i ~^£/к=—0)cia + 2j/c» 1 (6.32)
₽+0Jua — °Д1 + 2хк= “‘"ciP — J
где Qxk=—Му^/Н, QyK=—MxlK/H — скорости прецес-
сии гировертикали от моментов коррекции; Qxc=Mw2c/^’
Qvc=—Мх\,-/Н — скорости прецессии гировертикали от
моментов сопротивления (собственные скорости прецес-
сии).
Обычно характеристика жидкостного маятникового
чувствительного элемента имеет небольшую зону про-
порциональности Ф. При этом скорости прецессии гиро-
190
вертикали от моментов коррекции Пхк, (Эрк определяются
выражениями (6.5).
На неподвижном основании и при прямолинейном
движении (й£1=0или мало) поведение двухгироскопной
силовой гировертикали мало отличается от поведения
одпогироскопной гировертикали.
При рысканиях самолета пли при вираже (wji«(o)
на погрешности двухгироскопной вертикали влияют от-
клонения р и о гироскопов относительно платформы, вы-
званные моментами, которые действуют на платформу.
Рассмотрим, например, правильный внраж (ыС1=ю=
=const). Пусть на платформу действуют постоянные
моменты Мх и Му. При этом гироскопы отклоняются па
углы рст = const и Ост = const.
Считаем, что продольная коррекция — релейная
(Ях1к=М. а поперечная — отключена (Я!;2к=0). Пре-
небрегаем составляющими вращения Земли и моментами
сопротивления в осях прецессии to5i=tuni='O,
=Afy2c=0. В рассматриваемом случае (6.32) примут вид
а — =—<паст, р <оа=—А’р — юрст. (6.33)
Наличие в (6.33) постоянных членов юрСт<осТст равно-
сильно возникновению собственной скорости прецессии
у платформы. Действительно, пока продольная коррек-
ция удерживает апекс платформы па оси 0{а (прп этом
р=0), ось Oz платформы прецессирует в поперечном на-
правлении с угловой скоростью а=—юсгст, накапливая
погрешность.
§ 6.4. Гировертикали повышенной точности
В обычных гировертикалях маятниковая иоррекцпя
заставляет прецессировать ось гироскопа в пространстве
вслед за вертикалью места и удерживает ее у направле-
ния вертикали при наличии моментов сопротивления в
подвесе. Поэтому, например, для постоянной и смешан-
ной коррекций опа не может быть меньше определенно-
Ю значения, определяемого неравенством (6.8). При на-
личии же относительно большой скорости прецессии от
коррекции у гировертикали появляются большие погреш-
ности при режимах движения объекта, сопровожда-
ющихся длительными ускорениями (набор скорости, ви-
раж, длинноперноднческие колебания н т. п.). Чтобы
уменьшить скорость прецессии от маятникового чувстви-
191
тельного элемента, в гировертикалях повышенной точно-
сти но осям KapianoBa подвеса прикладывают специаль-
ные моменты, формируемые с помощью счетно-реша-
ющих устройств. Эти моменты вызывают прецессию оси
гироскопа с угловой скоростью изменения направления
вертикали места в абсолютном пространстве, происходя-
щую вследствие вращения Земли и перемещения объек-
та относительно Земли. При этом маятниковая коррек-
ция освобождается от функции слежения за истинной
вертикалью места и может быть значительно уменьшена.
Собственная скорость прецессии может быть снижена за
счет применения астатического гироскопа прецизионного
изготовления (с применением вращающихся опор, жид-
костных и газовых подвесов) или двухосной гиростаби-
лизнроваппой платформы. При движении объекта, со-
провождающемся односторонними ускорениями (вираж,
набор скорости, торможение и т. п.), в гировертикалях
повышенной точности маятниковая коррекция отключа-
ется. Однако здесь ие накапливаются большие погреш-
ности при длительных ускорениях, так как видимый
уход оси гироскопа от вращения Земли и перемещения
объекта относительно Земли в основном компенсированы
за счет моментов, формируемых с помощью счетпо-реша-
ющпх устройств, а собственная скорость прецессии гиро-
скопа относительно мала *.
Одна из возможных схем гировертикали повышенной
точности представлена па рис, 6.9. Входными параметра-
ми счетно-решающей схемы прибора являются путевая
скорость v, географическая широта <р и географический
курс ф, получаемые соответственно от централи скорости
12, навигационного автомата 11 и курсовой системы 10.
Счетно-решающая схема включает синуспо-косннуспые
механизмы 9 и 14, множительные устройства 1, 3, 5, 13
и суммирующее устройство 4. Входные сигналы счетно-
решающей схемы поступают на моментные датчики 6 и
7 коррекции гировертикали и создают моменты, вызыва-
ющие прецессию оси гироскопа с угловой скоростью из-
менения направления вертикали места в абсолютном про-
странстве. На моментные датчики би 7 поступают также
сигналы от жидкостных маятниковых элементов. Вы-
ключатель коррекции 8 служит для отключения маятпн-
* Впервые эгот принцип построения гировертикали повышенной
точности был высказан Д. С. Пслыюром в 1954 г. и им же предло-
жен вариант принципиальной схемы такой гировертикали [32, 36J-
192
новой коррекции при вираже, наборе скорости и других
пеустановившихся режимах. Выходной сигнал 2 может
быть использован для введения поправки по крену на
кориолисово ускорение. Уравнение для гировертикали
повышенной точности получим из (6.4), дополнив их
Рис. 6.9. Структурная схема гировертикали повышенной
точности .
скоростями прецессии гироскопа от моментов, формиру-
емых счетно-решающими устройствами схемы:
а-Ью’П — — Ц/к— &1/с MxjH
Р — 4* Ясс — MyjH ==0;
(6.34)
где M"s, Му—моменты, формируемые счетно-решающим
устройством. Практически моменты/Их и Му обеспечива-
ют компенсацию видимого ухода осн гироскопа с по-
7—1757 193
грешностями
=«"чх — М^Н; Дю£1 = —<оЕ1 — Му/Н. (6.35)
В идеальном случае, когда Дсо51=0, Д(оп] = О, с учетом
(6.1) из (6.35) получим
М''хн=Н^гЛ = Ни cos<pcos<)>, 1
п (6.36)
Мук= (U cos<р sin ф-|-г)//?). 1
Формирование моментов по зависимостям (6.36) яв-
ляется функцией счетно-решающего устройства схемы.
С учетом (6.35) уравнения (6.34) примут вид
шар—aa*=si,c—дю,ь 1
P+“cia4-2jrK=—йжс — Д«>£1. J
Варьируя выражениями (6.36) для моментов, определя-
ем приближенные выражения для погрешностей ввода
сигналов компенсации видимого ухода гироскопа:
Дшч1=Д ]U) U cos <р cos ф —
— UД<р sin <р cos фДф cos <р sin ф,
Д<ог1 = (ДЛ4^и/77)= (A(//(/)(7cos<psin ф — | (6.38)
— U&f sin <р sin ф -|- UДф cos <р cos ф -ф-
4-Дт)//?-(<п//?)(Д/?//?),
где А(7/(7, Л/?//? — соответственно относительные погреш-
ности введения констант U и R; Дф и Д<р — погрешности
введения соответственно географического курса и широ-
ты места, До — погрешность введения путевой скорости.
Обычно в гировертикалях повышенной точности при-
меняется маятниковая коррекция смешанного типа.
В этом случае скорости прецессии от коррекции QXK и
Qj/k определяются согласно (6.5). Для случая прямоли-
нейного движения с постоянной скоростью уравнения
(6.37) примут вид
—Д(очх-|-еае1/^, р-|-е₽= — 2ХС — Дю^. (6.39)
Установившиеся погрешности гировертикали опреде-
ляются частными решениями уравнений (6 39):
ас1==_^_2^+Л1_, ест=—^1. (6.40)
е a g sc
194
Здесь Qt/e/е, —Qxc/e и —Aw^/e, —До>Е1/е— соответствен-
но ьогрешиосги вертикали вследствие собственной пре-
цессии гироскопа и прецессии, возникающей из-за неточ-
ного ввода моментов от счетно-решающих устройств;
Oll/g'— погрешность, зависящая от метода навигации и
определяемая по (6.12), (6.14), (6.15): an—au/g—
~2Uv sin ф/g—о2/(pg)- Эта методическая погреш-
ность при необходимости исключается с помощью счет-
но-решающих устройств либо наклоном маятника попе-
речной коррекции на угол ан, либо введением поправки
на угол ан при съеме выходного сигнала по крену.
Если при длительных линейных ускорениях (набор
скорости, горможепие) отключить маятниковую коррек-
цию (е=0), то
а — 2,/с— Дшщ, (5=— ЙЛ.С—
и гироскоп будет медленно прецессировать из верти-
кального положения. В идеальном случае если йЯс=
=£2ус=0, Дсол1=Дь)51=0, то а=0, р=0 и ось гироскопа
сохраняет вертикальное положение.
В случае отключения коррекции на вираже уравне-
ния (6.37) будут
а—o>f)=Q//c — р-(-<»а==—2fC— Д«ц.
Эти уравнения определяют движение апекса гиро-
скопа по дуге окружности относительно центра с коор-
динатами
а*=(—2ХС — Дш£1)/о>, ?*^=(2yc — До>,1)/( —«>).
Более подробные сведения о гировертикалях повы-
шенной точности можно найти в [36, 39].
§ 6.5. Гировертикали для космических летательных
аппаратов
Для определения направления вертикали на КД А в
условиях невесомости обычная гировертикаль с коррек-
цией от маятниковых элементов непригодна, так как в
этих условиях маятник практически теряет избиратель-
ность и его положение становится неопределенным. Для
коррекции гироскопа (или гиростабилизатора) па КЛА
может быть использован оптический построитель верти-
кали [28].
7‘ 195
Одна из возможных структур такой ГВ представлена
на рис. 6.10, а. На внутренней раме 2 двухосного гиро-
стабилизатора установлен оптический построитель 7 с
коническим обзором земного горизонта. Чувствительны-
ми элементами построителя являются телескоп 5 с фо-
Рис. 6.10. Схема гироскопической вертикали
тоэлемснтами и зеркало 6, приводимое во вращение во-
круг оптической оси телескопа. Отклонение оптической
оси телескопа вместе с гиростабилизатором относитель-
но геоцентрической вертикали (прямой, проведенной пз
центра Земли в точку подвеса гиростабилизатора) вы-
зывают сигналы фотоэлементов, которые после усиления
разделяются коммутатором 3 на составляющие, пропор-
циональные углам отклонения телескопа а и р в двух
взаимно перпендикулярных направлениях относительно
центра Земли. Эти сигналы подаются на корректиру-
ющие двигатели 1 и 9, моменты которых вызывают пре-
цессию гнростабилнзатора в сторону совмещения оптиче-
196
cKOii оси телескопа с направлением геоцентрической вер-
-цнсалп. Углы тангажа и крепа КЛА измеряются
датчиками углов 8 и 4, расположенными на осях подвеса
гнросгабплнзатора.
Для описания движения системы можно ограничить-
ся прецессионной теорией гиростабплизатора. Нутацион-
ными колебаниями можно пренебречь, так как возму-
щающие моменты, действующие на гировертикаль со
стороны КЛА, находятся в сравнительно низком диапа-
зоне частот.
Составим уравнения движения гировертикали. Для
этого примем следующие обозначения (рис. 6.10, б):
0&орТ]ор£ор — орбитальная система координат; Oxyz—
система координат, жестко связанная с гироплатформой;
а, Р— углы отклонения гпроплатформы относительно ор-
битальной системы координат; б, х— углы прецессии
гироскопов относительно гироплатформы; £2ср — орби-
тальная угловая скорость КЛА; ф— угловая скорость
КЛА относительно орбитальной системы координат во-
круг вертикали места; (ож, — проекции абсолютной
угловой скорости гироплатформы па ее оси Ох, Оу, Oz,
которые определим как
шх=ф-|- йор sin ф cos а-|-ф sin а,
и^г^созасоБ^ — 2ор sin ф sin а cos р-|-
+ а sin р — йор cos ф sin р,
<и,== а cos р — 20₽ cos ф cos Р — ф'cos а sin р -ф-
sin ф sin а sin р.
Для малых ф, аир аппроксимация дает
<ол=р+2орФ+фа,
“/г=Ф4-йр-2оРв
<п4=а —2ор—ФР-
Суммы моментов, действующие па гироскоп вокруг
осей прецессии,
^7Иг.= — Н со5 8(р-|-2ОрФ4-ф“) —
-Н sin 6(ф4-ар-2орр)—/г2р-|-Меп=0, I
- • I (6,41)
Д Мк= — И cos х (а — йОр — фр) ф- ।
-]-//8«х(ф4-ар—20РР) —Л2а + ЖХв=0. ]
197
Суммы моментов, действующих на гироплатформу во-
круг осей стабилизации,
cos 8(8-|-а —2ор —фр)-|-
+ 4* мх в+^2<х—мт=о,
^мя=н cos х(х+Р+е0РФ+i«)+
(6.42)
+Л1Х + 7Игв+А2р_Л4гв=О.
Последние два члена в этих уравнениях представляют
собой моменты реакции, действующие на гироплатфор-
му со стороны гироскопов.
Поделив все члены двух первых уравнений па /7,
учитывая малость углов б и х и введя обозначения'
k\/H=a, получим уравнения пре
цессиопного движения платформы гирооптической верти-
кали в следующем виде:
р4-рр=щ8в-(^4-фа+20Гф), |
«+ра=пгхв+(20Р+Ф?4-фх). (
(6.43)
Подставив в (6.42) выражения (6.41) для моментов
(Л2а—Мхв), (Л2р—7Ивв) и поделив на Н, получим урав-
нения прецессионных движений гироскопов относитель-
но платформы:
г’-|-з8=—хф—тЛв, х-|-ох=8ф—тгп. (6.44)
В частном случае если ф=ф0=соп51 /Псв=соп81,
fliHB=const, то уравнения (6.43) примут вид
Для положения равновесия платформы
?ст== (^4 в ^орФоУр» (^хв ^ор)/!1-
Погрешности гировертикали можно уменьшить за счет
увеличения крутизны сигнала у. контура оптической кор-
рекции. Гирооптическая вертикаль используется в КЛА
для полета высотой более 150 ...200 км. С ее помощью
осуществляется визирование планет, телесный угол ко-
торых не менее 2... 3°. Современные гирооптические вер-
тикали имеют точность порядка 1... 1,5°. Параметры ги-
рооптической вертикали о, у. выбирают из условий устой-
чивости движения гпросистемы, заданного качества
переходных процессов и точностных характеристик.
198
ГЛАВА 7
КУРСОВЫЕ ГИРОСКОПИЧЕСКИЕ ПРИБОРЫ
Курсовые гироскопические приборы предназначены
для определения одного из параметров угловой ориента-
ции объекта — курса объекта. Курсом называется угол,
составленный проекцией продольной оси объекта па
плоскость горизонта с плоскостью меридиана. Различают
курсы географический (отсчитываемый от плоскости
географического меридиана), магнитный (отсчитываемый
от направления магнитного меридиана), ортодромический
и ДР-
Существует ряд гироскопических и гиромагнитных
приборов, предназначенных для определения курса объ-
екта: гирокомпасы, гиромагнитные компасы, указатели
направления ортодромии и др.
Гирокомпас, построенный на основе гироскопа с дву-
мя степенями свободы, может использоваться для опре-
деления направления географического меридиана толь-
ко на неподвижном относительно Земли основании.
Гирокомпасы, обладающие свойством гироскопиче-
ского маятника устанавливаться (при затухании колеба-
ний) по направлению горизонтальной проекции вектора
суточного вращения Земли, получили распространение
па морских кораблях. На самолетах гирокомпасы пе
используются из-за больших погрешностей, обусловлен-
ных скоростной девиацией.
В авиации широко применяются гиромагнитные и ги-
ронпдукционпые компасы, которые позволяют снизить
динамические погрешности, присущие магии гному компа-
су при эволюциях самолета. При полете в высоких широ-
тах гиромагнитные н гпронндукционные компасы, так
же как и магнитные, обладают большой погрешностью
из-за уменьшения горизонтальной составляющей напря-
женности магнитного поля Земли. В этом случае приме-
няются гирополукомпасы (ГПК) или указатели направ-
ления ортодромии (УНО), использующие свойство сво-
бодного гироскопа сохранять неизменным направление
в пространстве главной осп вращения. Указатель на-
правления ортодромии не имеет собственной направля-
ющей силы, устанавливающей его в плоскость мериди-
ана, и, кроме того, может с течением времени отклоняться
От заданного направления. Поэтому требуется перио-
дическая корректировка его показаний.
199
На самолетах обычно устанавливают несколько кур.
совых приборов, не только гироскопические, но и магнит-
ный и индукционный компасы, астрокомпас, радиоком-
пас и другие с различными принципами действия, ком-
плексное использование которых позволяет избавиться
от недостатков и погрешностей, присущих каждому из
них при автономном использовании.
На КЛА для определения угла его отклонения от
плоскости орбиты (угла рыскания) применяется так на-
зываемый гироорбитант. Принцип действия этого прибо-
ра аналогичен принципу действия гирокомпаса, в кото-
ром роль маятника выполняет пружина или датчик мо-
мента цепи обратной связи, создающие соответствующий
момент, действующий па гироскоп.
§ 7 Т. Гирокомпасы
Гирокомпас (ГК), построенный на базе гироскопа с
тремя степенями свободы со смещенным центром тяже-
сти, который первоначально был предназначен для оп-
ределения географического курса на морских кораблях,
является одним из самых первых гироскопических при-
боров.
Простой маятниковый гирокомпас. Принцип действия
простого маятникового гирокомпаса (ГК) покажем па
модели (рис. 7.1, а), представляющей собой гироскоп с
тремя степенями свободы, ось наружной рамы которого
вертикальна, а центр масс смещен на некоторую величи-
ну / вдоль оси перпендикулярной плоскости, заключа-
ющей оси собственного вращения ротора Ог и кожуха ги-
роскопа Ох.
Рассмотрим вначале работу ГК на неподвижном от-
носительно Земли основании. Проследим за движением
апекса Е гироскопа на изображающей плоскости П. ес-
ли вначале вектор П направлен вдоль географического
меридиана на север Из-за наличия вертикальной состав-
ляющей вращения Земли Hsincp апекс гироскопа начнет
отклоняться от точки С4 к точке 1 влево. При этом на
ось Ох проецируется горизонтальная составляющая вра-
щения Земли t/cosip и вектор Н поднимается над плос-
костью горизонта. Возникающий при этом маятниковый
момент будет вызывать прецессию гироскопа, замедля-
ющую движение апекса гироскопа влево, и в точке 1
оно прекратится. На участке /—2 скорость прецессии от
маятникового момента превосходит U sin <р и апекс дви-
200
етСЯ вправо. В точке 2 момент от маягпика достигает
максимального значения. На участке 2—3 проекция
l/cos<p на ось Ох изменит знак, апекс начнет опускаться,
маятниковый момент уменьшается, скорость движения
Рис. 7.1. Принципиальная схема гирокомпаса
апекса в азимуте уменьшается и в точке 3 обратится в
нуль. На участке 3—О( скорость прецессии гироскопа в
азимуте ог маятникового момента меньше I/sin<p и апекс
движется к исходной точке Оц Таким образом, апекс
гироскопа совершает незатухающие колебапир по эллип-
су, вытянутому в азимуте, центр которого находится в
плоскости меридиана.
К затуханию собственных колебаний ГК приводит,
Например, смещение плеча маятника на небольшой угол
е к востоку (рис. 7.1, б) либо закрепление па кожухе
гироскопа сообщающихся сосудов с жидкостью, соеди-
ненных тонкой трубкой (рис. 7.1, в). В первом случае
появляется вертикальная составляющая маятникового
момента, приводящая к затуханию собственных колеба-
ний П{; во втором—к затуханию колебаний приводит
момент, возникающий вследствие запаздывания перете-
кания жидкости в сосудах при колебаниях ГК.
201
Рис. 7.2. К составлению урав-
пений движения гирокомпаса
Составим уравнения движения ГК- В качестве опор,
ной выберем географическую систему координат
в которой ось О£ направим по истинной вертикали, j
ось Oiy—на север (см. кн. 1). Полагаем, что ось наруж.
ной рамы прибора удерживается в вертикальном поло-
жении. Положение осей Ре-
заля Ох, Оу, Oz относитель-
но системы координат
определяется углами к> |
(рис. 7.2). Учитывая маят-
пиковость в приборе, счита-
ем, что угол р мал.
Запишем уравнения пре-
цессии гироскопа:
Qy=MxIH, QX=—MVIH.
(7.1)
Из рис. 7.2 находим с уче-
том малости р
2Л= —р—<•>$ cos а — si-п а,
2i/=«-4“wc4*(wcs*n а—"^cos а)р,
(7.2)
где шЕ, (оч, «с — угловые скорости системы координат
«4=—*^//?, w4 = Z7 cos <«с=7/sin
(7.3)
Полагаем, что точка подвеса ГК движется произволь-
но по горизонтальной поверхности Земли. Маятниковые
моменты AfXM и Мум определим приближенно, приложив
в центре масс гироскопа силы тяжести G и инерции
О •
~v N от ускорения vn:
Л*хм=О4(₽+^/£)- AfSM=—eGZCp+^/g). (7.4)
Подставляя (7.2) и (7.4) в (7.1) и пренебрегая величи-
ной sin а—cos а, малой по сравнению с h=Gl/H,
получим приближенные уравнения прецессии гироком-
паса
202
cosa-|-l'>v)sin a -|-eA (P4-—j--^-=0,
где h — скорость прецессии от максимального маятнико-
вого момента GI,
Ь—ОЦН', (7.6)
Д1*, М*— возмущающие моменты.
Рассмотрим движение ГК для некоторых случаев его
эксплуатации и определим возникающие при этом по-
грешности.
Неподвижное основание. При этом v^=Ve=
=0, <p=const, а из (7.3) следует, что (о£=0, a>n=(7 cos<p,
<о£= U sin <р. Полагаем моменты 7WJC=7WZ/=O, а угол
а— малым.
При этом уравнения (7.5) примут вид
а—Лр=—47 sin <р, р-|-47 cos <ра-|-еЛ₽=0- (7.7)
Для положения равновесия ГК, полагая а=р=0,
получим
В*=47 sin <?//*, a*=etg<p. (7.8)
Угол (Г определяет отклонение осн гироскопа от плос-
кости горизонта, а угол а* — отклонение от плоскости
меридиана в азимуте и называется девиацией от затуха-
ния. При отсутствии затухания (е=0) погрешность а* =
=0. Гирокомпас с гидравлическим успокоителем (см.
рис. 7.1, в) такой погрешности не имеет. Характеристиче-
ский полипом
Д (р)—p2-(-sAp-|-//t7cos'p, (7.9)
соответствующий уравнениям (7.7), при выполнении ус-
ловия е <^2]/47cos<p//z имеет комплексные корни
иЬ2=— 0,5e/z + iV~hU cos <р —(0,5е/?)2, (7.10)
определяющие собственные затухающие колебания ГК с
периодом
Т3=----- 2я . (7.11)
р hU cos <f — (0,5eft)'-
203
Учитывая в (7.7) возмущающие моменты М*— const
и Му — const, найдем дополнительные погрешности ГК-
в* Л1* • /W*e । Ми
р* = —---- (Хг=:—--------- -I-—— . (7 19ч
Hh HU cos <е 1 HU cos <р '
Обычно угол е<§С 1 и погрешность си в большей мере
зависит от моментов сопротивления по оси Оу..
Движение корабля с постоянной ско-
ростью. Предполагаем, что корабль идет на тихой
воде при отсутствии качки. В этом случае const
t»E=const и при отсутствии моментов /И* и М* урав-
нения (7.5) примут вид
а4-о>с — ЛЙ=О 1
. (7.13)
cos a-(-w4 sin аЦ-еЛР — 0. J
Получим координаты р** и а** положения равновесия
ГК, полагая а=0=О, учитывая (7.3) и считая, что демп-
фирование отключено (е=0):
U sln f + ?
.... •
h
tg a**=----— =--------—-----
RU cos <f 4- vE
(7.14)
Угол a“ называют скоростной девиацией ГК. Для ко-
раблей иe-^RU cos ср. исключая районы полюсов, п ско-
ростная девиация мала. Ее обычно вычисляют п исклю-
чают из показаний прибора. Из (7.14) следует, что ГК
практически нельзя использовать для скоростных объек-
тов, так как при больших скоростях движения ошибка а**
может быть любой -в пределах ±180°), а при скорости
vE——RO cos tp ГК теряет направляющий момент, уста-
навливающий ось его ротора по направлению меридиана.
Движение корабля с ускорением. В общем
случае движение корабля сопровождается ускорениями.
Корабль может в течение некоторого времени набирать
пли уменьшать скорость или же совершать маневры с из-
менением курса, например полную пли частичную цир-
куляцию. Во всех этих случаях простой ГК накапливает
большие погрешности, называемые баллистическими де-
виациями, если не приняты специальные меры для их
устранения.
204
Подробный анализ этих погрешностей при различных
движениях корабля с ускорением можно найти в [7, 37,
52]. Наиболее эффективным методом устранения балли-
стических девиаций является настройка ГК на период
Шулера с отключением демпфирования.
Учитывая, что для корабля vE<^RU, пренебрежем в
(7.3) членами, зависящими от vE. Полагаем Л1х=Л'/!/=0
и угол а малым. При отключенном демпфировании (е=
=0) уравнения (7.5) примут вид
a — f^=hiNlg—t/sincp, 1 (715)
cosr<?a='yyV//?. ]
Разделяя переменные, приведем (7.15) к виду
а+А2а = —!-------Д- (i’/v + £ W.
Шсоз<р kv (7 16)
p-p2p=(l/2)H2sin 2? + (^//?)(Г-/г2//гЬ,
где k — частота собственных незатухающих колебаний
ГК:
k= \'rGlU cos у/Н—У MJ cos<p, (7.17)
А,¥=)/г£г//?— частота колебаний математического маятни-
ка, длина которого равна радиусу Земли.
Если параметры прибора выбрать так, чтобы fe=/ev,
то при любой функции vN=vjf(t) частным решением
(7.16) будет
а* = (7.18)
/?trcos<j> 1 2А2
и, следовательно, гирокомпас без затухания с периодом
Шулера Тш~ 2л/kv^ 84,4 мин не имеет баллистических
девиаций, если в начале движения корабля положение
осн ротора гироскопа определялось уравнениями (7.18),
а лишь обладает скоростными погрешностями. При этом
отношение Gl/Н необходимо изменять в соответствии с
шпротой места корабля, что практически достигается из-
менением либо /7, либо GI.
Рассмотренная выше схема однороторного ГК обла-
дает значительной погрешностью при качке корабля,
что является существенным ее недостатком. Эта погреш-
ность называется интеркардинальной девиацией, так
как на кардинальных курсах /V, S, Е, W опа отсутствует,
205
а па промежуточных между ними курсах (интеркарД11.
нальных) достигает максимального значения.
Рассмотрим физическую сущность этой погрешности
При движении корабля курсом ф (рис. 7.3, а) из-за пе-
риодической бортовой качки возникает ускорение W=
Рис. 7.3. К пояснению иитеркардппальной погрешности
= IV/Osin р/, направленное к борту корабля (И70— ампли-
туда ускорения, р — частота качки корабля), которое
можно представить составляющими
1^!= sin ф sin р7, U/j=iro cos ф sin р/, (7.19)
направленными на север и запад соответственно. Так как
однороторный ГК обычно подвешивается в дополнитель-
ный карданов подвес (рис. 7.3, б) и центр тяжести всего
ГУ смещен вниз относительно точки подвеса, то под дей-
ствием сил инерции (P/g) W2 весь ГК отклоняется вокруг
направления N—S па угол у, следуя в первом прибли-
жении за кажущейся вертикалью, т. е.
sin р/. (7.20)
g S
При этом инерционная сила (G/g) приложенная к
центру тяжести гироскопа, создает вокруг оси Ох внут-
ренней рамы гироскопа момент
Mjr=(O/^)ZU/i=(G/g)/U70 sin ф sin pZ. (7.21)
206
Полагая, что угол х мал, с учетом (7.20) найдем вер-
тикальную и горизонтальную составляющие момента Мх:
GlW?} sin 2ф
MAX==-------—-------(1 -cos 2|А/),
(7.22)
МХГ^МХ.
Постоянная составляющая момента Mxt==GlW% X
X sin 2<р/(4д2) и уравновешивается направляющим мо-
ментом ГК, возникающим при отклонении оси фигуры
гироскопа от плоскости меридиана на угол ам, представ-
ляющий собой интеркардниальную девиацию.
Имеем
HU cos<p-a„=G/U7osin 2Ф/(4^2),
откуда
GIWq sin 2ф
^g2HU cosy
(7.23)
Интеркардинальная девиация устраняется в двух- и
трехроторных гирокомпасах, в которых гироскопическая
система в процессе качки корабля удерживается в гори-
зонтальном положении.
Двухроторный гирокомпас. Благодаря использованию
двух гироскопов в приборе интеркардинальная девиа-
ция практически отсутствует. Чувствительный элемент
прибора выполнен в виде герметичного полого шара —
гиросферы, внутри которой помещены два гироскопа,
устройство для погашения колебаний и другие элементы
(рис. 7.4). Гиросфера плавает в поддерживающей жид-
кости внутри другой сферы, называемой следящей сфе-
рой. Центр масс гиросферы находится ниже метацентра,
что придает ей эффект нижней маятниковости. Для цент-
рирования гиросферы в следящей сфере используется
специальный магнитный подвес. Трехфазный ток для
питания гпромоторов и других элементов подводится со
следящей сферы через поддерживающую жидкость к
электродам, расположенным на экваторе и полюсах ги-
росферы.
Следящая сфера подвешена в корпусе ГК и с по-
мощью специального двигателя следит за положением
гиросферы в азимуте. Управляющий сигнал па двигатель
поступает при нарушении равенства управляющих то-
ков, протекающих между электродом-полупоясом на ги-
207
росфере и электродами-пластинами, расположенными
на следящей сфере. Опа предотвращает увлечение гнро-
сферы жидкостью при циркуляциях корабля, а также
обеспечивает дистанционную передачу показаний ГК
без снижения его точности. Подробнее двухроторный ГК
описан в [23]. В гиросфере расположены два одинаковых
5
Рис. 7.4. Гнросфера
гироскопа с двумя степенями свободы, связанные меж чу
собой рычажным механизмом, благодаря чему они могут
поворачиваться вокруг осей, параллельных вертикальной
осп гиросферы, иа один и тот же угол б, по в разных на-
правлениях. Среднее звено рычажного механизма соеди-
нено с корпусом гиросфсры пружинами (рис. 7.5) так,
что при певращакнцихся роторах векторы собственных
моментов гироскопов П' составляют один и тот же угол е
с линией север — юг гиросферы. Алгебраическая сумма
проекций собственных моментов гироскопов на линию
восток — запад гиросферы всегда равна нулю, а сумма
проекций па диаметральную линию север—юг Н=
= 21V cos (е—-6).
При вращении гиросферы вокруг вертикальной осп
(угол а) и горизонтальной линии восток—запад (угол р)
двухгироскоппая система ведет себя так, как будто име-
ет один гироскоп с собственным моментом, равным Н=
=211' cos (е—б*) и направленным к северу вдоль диамет-
ральной линии гиросферы, причем (е—6*) определяет
угол между осью IV и линией север—юг при запущенных
208
гироскопах после погашения всех собственных колеба-
ний. При вращении вокруг линии север—юг (ось Oz па
рис. 7.4) двухгироскопная система ведет себя совсем не
так, как однороторный ГК. В этом случае оба гироскопа
будут поворачиваться вокруг осей кожухов в разные сто-
роны так, чтобы по кратчайшему пути совместить свои
векторы Н' с вектором угловой скорости вынужденного
вращения. Равнодействующая гироскопических момен-
тов, возникающая при таком движении, направлена
вдоль оси Oz в сторону, противоположную вращению
гиросферы Опа противодействует моменту, вызывающе-
му вращение гиросферы. Таким образом, гиросфера ока
зывается гироскопически стабилизированной вокруг
оси Oz.
В одпороториом ГК такая стабилизация отсутствует
Суммарный гироскопический момент, приложенный к ги-
росфере, Mz=—2/7'6 sin (б—6) и уравнение прецессии ги-
росферы вокруг оси Oz
Gly=GL(vElg)—2/7'8 sin (s —8),
где Gl — маятниковый момент гиросферы.
Гироскопические моменты, возникающие при враще
пии гнросферы с угловой скоростью <иг=у+ О cos <р+
+ 4e/R, должны уравновешиваться моментом от упругих
сил пружин При этом уравнение равновесия моментов,
направленных вдоль оси кожухов, имеет вид
® г \ Л
(7.24)
2Н
sin (е —8) —х sin 8 cos 8=0,
(7.25)
где x sin 6 cos 6 — момент пружин относительно осей ко-
жухов; х=2с1Д£052Л-1 — удельный момент пружин
(рис. 7.5); С| — коэффициент жесткости одной пружины;
А Го—начальное удлинение пружины.
Для малых углов 6 (7 24) и (7.25) будут
Gly=Gl/vElg—2/7'8 sin е, ] _ „„
) (7.26)
277' cos sin s —x8=0. )
Для положения равновесия системы, полагая у=б=
=0, у=0, vE=0, получим
у*=0, 8*=
г V
U cos 9 + —;
(7.27)
209
Разрешая (7.26) относительно у, имеем
•у-|-Л'2у=Л'2
(7.28)
где
k‘
Vgik
2Н' sin е
(7.29)
Для качки корабля в соответствии с (7.19) полагаем
приближенно Ve~—U72=—Р70 cos ip sin Учитывая,
что для двухроторного гирокомпаса р»k'kv (Tv=
=84,4 мин, Т'х 15 мин, Т^СОД мин), получим прибли-
женное частное решение уравнения (7.28):
y~(A7p-)2(UW-
(7.30)
Таким образом, амплитуда вынужденных колебаний ги-
росферы, а следовательно, и иптеркардииальная девиа-
ция двухроторпого ГК уменьшаются в (р/й')2 Раз по
сравнению с девиацией однороторного ГК. Для погаше-
ния колебаний в двухроторном ГК используется гидрав-
лический успокоитель.
Гирогоризонткомпас. Завершением развития двухро-
торного ГК явилось создание двухроторного пространст-
венного ГК, или гирогоризонткомпаса, период колебаний
гиросферы которого относительно любой оси равен
84,4 мин. Схема гирогоризонткомпаса принципиально от-
личается от схемы, представленной па рис. 7.4, тем, что
начальный угол е установки осей гироскопов выбирается
здесь равным 90°. При певращающихся роторах пружи-
ны устанавливают векторы Н' вдоль липни запад—восток
гиросферы навстречу друг другу. Уравнения связанных
колебаний рассматриваемой гироскопической системы в
углах у, б получаются из (7.24) и (7.25) при е=90°. Та-
ким образом,
Qly=Gl<vElg — 2//'8cos8, I (7 31)
cos <p-|-»£,//?) cos 8 —xsifi 8 cos 8=0. )
В положении равновесия (у=6=Й£—0)
Y*=0,
. 2/7' (U cos <p + v IR} 2H'U cos <p очч
sin 8* =---------------------------- , (I
к
я
210
Цз второго уравнения (7 32) найдем
8 cos 8=-^-(у+-^). (7.33)
Подставляя 6 cos 6 в первое уравнение (7,31) и произво-
дя несложные преобразования, приведем его к виду
7.28), только теперь
A'=]/g7x/(2A/'). (7.34)
Частота незатухающих колебаний в углах а, 0 опреде-
ляется формулой (7.17), в которой Н следует положить
равным алгебраической сумме проекций собственных
моментов гироскопов Н' па ось Oz в положении их от-
носительного равновесия.
Таким образом, Н=2Н' sin б*, или с учетом (7.32)
H = cosy/и. (7.35)
При таком Н, согласно (7.17), k=Jt'. Таким образом,
для рассматриваемой схемы периоды связанных колеба-
ний гироскопической системы в углах а, р и у, 6 совпа-
дают и, что очень важно, не зависят от шпроты места,
так как происходит саморегулирование И по широте <р
изменением угла между осями гироскопов. Далее, при-
равнивая k=k'=kv, из (7.34) получим соответствующее
значение для удельного момента пружины
х=(4//'2£)/(О//?), (7.36)
при котором все собственные колебания протекают с пе-
риодом 84,4 мин. При этом прибор, используемый в ка-
честве ГК и гирогоризонта, не будет иметь баллистиче-
ских девиаций. В приборе будут отсутствовать динами-
ческие ошибки только в том случае, если в начальный мо-
мент t—t0 все углы а, 0, у, 6 имеют значения а*', 0*', у*, 6".
В противном случае в приборе кроме скоростных ошибок
будут возникать погрешности, обусловленные собствен-
ными колебаниями гиросферы. Гпрогоризоиткомпас яв-
ляется более сложным прибором, чем гирокомпас, так
как он содержит три следящие системы, с помощью ко-
торых можно ие только передавать курс корабля, по и
регистрировать углы бортовой и килевой качки корабля.
Волее подробно гпрогоризоиткомпас рассмотрен в
[45, 15]. Несколько другое изложение этого материала
можно найти в [52]. В указанной литературе гравитаци-
онное поле Земли считалось центральным.
211
В качестве указателя вертикали гирогоризопткомпас
вообще не имеет скоростных девиаций, т. е. у*=0, Р*=0.
Условие невозмущасмости (7.36) сохраняется без изме-
нения.
Гирогоризопткомпас как бы завершает тот этап раз-
вития гирокомпасов, когда считалось, что для повыше-
ния точности прибора нужно ограждать его чувствитель-
ный элемент от внешних воздействий. В таких приборах,
например, скоростная девиация не уничтожалась, а учи-
тывалась в показаниях прибора и т. д.
В гироскопах направления, наоборот, управление
скоростью прецессии гироскопа осуществляется посред-
ством корректирующих двигателей. Управляющие сигна-
лы вырабатываются в этом случае счетно-решающими
устройствами, обрабатывающими навигационную инфор-
мацию. Подобный принцип корректирования можно при-
менить также в гирокомпасе. Принцип корректирования
с использованием внешней информации таит в себе но-
вые возможности и, пожалуй, больше соответствует тех-
ническим идеям нашего времени. Некоторые вопросы
корректируемых гирокомпасов можно найти в [52, 20].
Наземные гирокомпасы. Наземные гирокомпасы
(НГК) предназначены для работы на неподвижном отно-
сительно Земли основании. К ним относятся маркшей-
дерские, артиллерийские, геодезические (гиротеодоли-
ты), топографические и другие гирокомпасы [13, 27, 45].
Основным требованием, предъявляемым к большин-
ству НГК, является малое время определения направле-
ния меридиана (5... 15 мни) при высокой точности (до
1 .. 10') н ограниченных габаритах.
На рис. 7.6 приведены две схемы НГК. принципиаль-
но представляющие собой разновидности однорогорного
маятникового гирокомпаса.
На рис. 7 6, а дана схема маркшейдерского НГК с
подвесом на шпиле. Чувствительный элемент ГК пред-
ставляет собой гиромотор 1, помешенный в поплавок 2,
взвешенный в жидкости 3 и центрируемый с помощью
шпиля 5. Поплавок поджимается к шпилю гидростати-
ческими силами, несколько превышающими его вес. Под-
вод питания к гиромотору осуществляется через поддер-
живающую токопроводящую жидкость и бесконтактные
кольцевые токоподводы, расположенные на поплавке и
корпусе 4 прибора (на рисунке не покаазны). Устрой-
ство для съема показаний состоит из зеркала 6', укреп-
ленного на поплавке, и автоколлимата 7.
212
На рис. 7.6, б приведена схема геодезического НГК с
торсионным подвесом чувствительного элемента 2. Для
предотвращения закручивания горсина 3 предусмотрена
следящая система, состоящая из фотоэлектрического дат-
чика угла 4, 7, усилителя 6' и двигателя 5. Питание к
гиромотору подводится через ленточные токоподводы
(на рисунке не показаны). Из-за отсутствия движения
основания в НГК нет скоростных и баллистических де-
виаций (и без настройки на период Шулера).
Рнс. 7.6. Разновидности НГК
Для уменьшения времени готовности НГК период его
колебаний делают малым за счет увеличения маятнико-
вости Однако при этом следует учитывать, что повыша-
ется чувствительность ГК к угловым колебаниям и виб-
рациям основания, которые могут возникать при эксплу-
атации прибора.
Для построения НГК используются также гироскопы
с двумя степенями свободы. Классической схемой такого
прибора является ГК, построенный на основе двухсте-
пенного гироскопа Фуко первого рода, получивший на-
звание гиродеклинометр. С принципом работы ГК Фуко,
его теоретическими основами и погрешностями можно
ознакомиться в § 54 (см. кн. 1). Там же показана невоз-
можность использования НГК на подвижном основании.
В последнее время получают распространение схемы
НГК С использованием прецизионного датчика угловой
скорости [45]. В схеме НГК рис. 7.7, а чувствительным
элементом является ДУС с электрической обратной
связью, представляющий гироскоп с двумя степенями
213
свободы, сигнал с датчика угла (ДУ) которого посту-
пает па усилитель обратной связи (УОС) и далее на
моментный датчик гироскопа (ДМ). ДУС устанавлива-
ется на платформе с вертикальной осью. С помощью
следящей системы, включающей в себя датчик угла ДУ
ДУС, усилитель УСС и следящий привод (СП), плат-
Рнс. 7.7. НГК на основе ДУС с электрической обратной
связью (а) н астатической электрической обратной связью
К)
форма следит за движением ДУС относительно его вы-
ходной оси. При отклонении оси ротора гироскопа Oz от
плоскости меридиана па входную ось ДУС проецируется
горизонтальная составляющая угловой скорости враще-
ния Земли cjr=t/cosq>. ДУС измеряет эту угловую ско-
рость, и с датчика угла (ДУ) снимается сигнал, который
через усилитель поступает на следящий привод СП.
Последний приводит платформу, а вместе с пей и гиро-
скоп (ось Oz) в плоскость меридиана. При этом проек-
ция юг на входную ось обращается в нуль и сигнал с ДУ
в СП не поступает. Отсчет показаний производится по
положению следящей платформы па объекте. Погреш-
ность прибора существенно зависит от возмущающих
моментов, действующих вокруг выходной оси ДУС.
В положении равновесия платформы момент Мх уравно-
вешивается гироскопическим моментом НU cos <р-Дф и
возникает погрешность ГК
Дф1=Л1л/(//47со8ф). (7.37)
214
Так, при МХ/Н=О,О\. град/ч на широте <р=60° погреш
ность Аф1 = 4,6 угл. мин. Следовательно, для точного ГК
необходим прецизионный ДУС.
Погрешность ГК возникает и при неточной установке
выходной оси Ох ДУС в вертикальное положение. На-
пример, при отклонении оси Ох от плоскости меридиана
на малый угол б на входную ось ДУС Оу проецируется
вертикальная составляющая вращения Земли U sin <р.
Полная угловая скорость, которую измеряет ДУС,
Юг= | (St/ sin <р)2 -|-(t/ cos <р)2. В положении равновесия
платформы гироскопический момент от «г обращается в
нуль и вектор Н будет коллинеареп д>г. Он составит с
направлением меридиана угол Дфг:
tg 8 tg'f. (7.38)
U cos
Например, при 6 = 0,1° и <р=70° погрешность Дф2=0,27".
На рис. 7.7, б представлена схема построения НГК
па основе ДУС с астатической электрической обратной
связью.
ДУС представляет собой двухстепенной гироскоп,
сигнал с датчика угла ДУ которого поступает па усили-
тельпо-интегрирующее устройство ИУ и далее па датчик
момента гироскопа ДМ. В положении равновесия гиро-
узла угол его поворота относительно выходной оси равен
нулю. ДУС устанавливается па платформе (П) так, что-
бы его выходная ось, так же как и ось вращения плат-
формы, была вертикальна.
Ток I, поступающий па датчик момента ДМ, измеря-
ется в трех положениях платформы: 1) в исходном поло-
жении платформы, курс ф которого нужно определить;
2) после поворота платформы из исходногр положения
на угол л/2(ф1=ф+л/2); 3) после поворота платформы
из предыдущего положения на угол л/2 (ф2=ф+л) • Для
этих положений платформы получаем уравнения равно-
весия гироузла ДУС:
cos <р sin )
Л1В -\-НU cos <р cos <b=ki2, > (7.39)
/Ип —A/t/costpsin9=/j/3, J
где Mn — момент сопротивления в выходной оси ДУС;
— момент, развиваемый датчиком момента ДМ. Пред-
полагается, что за время измерений параметры k, Мв, Н
216
не изменились. Из (7.39) можно получить формулу для
вычисления курса (азимута) платформы в ее исходном
положении:
|=arctg ( . (7.40)
\ 2*2 — »1 — »з/
Определение ф по (7.40) может осуществляет вся вычис-
лительным устройством (ВУ) с учетом знаков числителя
и знаменателя. В этой схеме исключается погрешность
от постоянной составляющей момента Мв. В реальных
условиях погрешность ГК будет зависеть от возможной
нестабильности параметров k, Н, Мв во время измерений,
что не учитывается в уравнениях (7.39), а также от точ-
ности вычисления ф. К погрешностям прибора приводят
угловые колебания и вибрации основания, возможные
при его эксплуатации, а также наклоны его выходной
осн (эта погрешность рассмотрена выше).
§ 7.2. Указатели направления ортодромии
Указатель направления ортодромии (УНО) представ-
ляет собой трехстепенной астатический гироскоп в кар-
дановом подвесе, ось наружной рамы которого устанав-
ливается вертикально. Прибор имеет устройства гори-
зонтальной и азимутальной коррекции. Устройство
горизонтальной коррекции (рис. 7.8) состоит из индук-
тивного датчика угла ДУ1, сигнал с которого поступает
на датчик момента ДМ1. Развиваемый ДМ1 момент за-
висит от угла р отклонения оси Ог гироскопа от перпен-
дикуляра к оси наружной рамы. Он вызывает прецес-
сию гироскопа, восстанавливающую нарушенную перпен-
дикулярность его осей. Такую коррекцию называют
межрамочной.
В указателе направления ортодромии с маятниковой
коррекцией (рис. 7.9) горизонтальная коррекция осуще-
ствляется по сигналу, поступающему с жидкостного
маятникового переключателя ПЖ, укрепленного на
кожухе гироскопа, на моментный датчик ДМ1 Такую
коррекцию называют маятниковой. При отсутствии уско-
рений она стабилизирует ось Ог гироскопа в плоскости
горизонта.
Гироскоп, имеющий только горизонтальную коррек-
цию, называется азимутально свободным. На неподвиж-
ном основании (и при движении объекта по ортодромии)
он имеет кажущуюся скорость прецессии в азимуте а,
216
равную вертикальной составляющей суточного вращения
Земли: сс=—Usintp. Компенсация такого ухода оси гиро-
скопа в схеме (рис. 7.8) осуществляется формированием
на моментном датчике ДМ2 момента, вызывающего пре-
цессию гироскопа в азимуте с угловой скоростью
U sin <р.
Рис. 7.8. Указатель направления ортодромии с меж-
рамочной коррекцией
На схеме (рис. 7.9) положение гироскопа в азимуте
не корректируется, а производится лишь вращение шка-
лы прибора относительно наружной рамы гироскопа
интегрирующим двигателем (ИД), управляемым счетно
решающим устройством навигационной системы. Пока-
зания прибора отсчитываются по шкале против индекса,
укрепленного на корпусе прибора. УНО не имеет направ-
ляющего момента, способного привести его ось к нап-
равлению меридиана, поэтому шкалу прибора необходи-
мо предварительно установить в заданное положение в
азимуте, используя внешнюю информацию.
Рассмотрим УНО, установленный на объекте, движу-
щемся вдоль ортодромии. Свяжем с ортодромией траек-
торную систему координат O£i4i£i- Проекции w,lh <oti
217
угловой скорости этой системы координат па ее оси при
о> = 0 определятся выражениями (6.1):
== — U cos <р sin ф — (и//?); »Ч1=U cos <р cos ф,
<ое1=7/ sin <р.
Рис. 7.9. Указатель направления ортодро-
мии с маятниковом коррекцией
Положение трехгранника OXYZ, связанного с объектом,
относительно OgiTiiSi определится углом тангажа fl и
крена у, углом сноса пренебрегаем (рис. 7.10, а). Проек-
ции угловой скорости трехгранника OXYZ па его оси при
•у=ф=0:
cos & 4~ <оС1 sin 1),
Sr=—<«4isin $ cosy-)-«>£! sin уcos & cos у, (7.42)
=<«711 sin 8 sin у «a cos у—4 cos 8 sin y.
Ось наружной рамы гироскопа Otji направим вдоль
оси OY. Положение гироскопа относительно трехгранни-
ка OXYZ определится углами а и р (см. рис. 7.8).
218
Используем прецессионные уравнения движения ги-
роскопа
/У |а cos S-|-2r cos р —(Sxcos а —Qz sin a) sin p] =
(7.43)
/У (p-|-2z cos а-|-2х sin a)=/M1(1/cos B.
Рис. 7.10. К выводу уравнений
ортодромии:
а — системы координат; б — чувствительный элемент горизон-
тальной коррекции
Введя в (7.43) моменты горизонтальной М* и азиму-
тальной Мха коррекции, получим общие уравнения для
УНО в виде
a = — 2r -|- (S% cos а — Qz sin a) tg P'-|---------------------------——
I Mxb
' tfcosp ’
(7.44)
//cos p
„ . л . Mylf,
sin a — Qz cos a -------------,
H cos p
где Mxb, MVb — моменты сопротивления в осях кардано-
ва подвеса.
Выражение (7.44) для а определяет погрешность в
сохранении главной осью УНО заданного относительно
ортодромии направления в азимуте. Второе уравнение
(7.44) определяет работу горизонтальной коррекции
прибора.
219
Для УНО с маятниковой горизонтальной коррекцией
смешанного типа (см. рис. 7.9)
?+/!<’». (М5
I — L sign (р+/.), если | р -{- х | > а0,
где %-—угол между проекцией кажущейся вертикали на
плоскость Оух и осью Oz/i (рис. 7.10, б); по— угол, соот-
ветствующий линейному участку характеристики коррек-
ции; L — максимальное значение момента коррекции;
E=L/ac— крутизна коррекции на линейном участке ее
характеристики.
Из рис. 7.10, б
tRX=^o4i- (7-46)
где azo, — проекции кажущегося ускорения па оси Oz0
и Оу\.
Для УНО с межрамочной коррекцией (см. рис. 7.8)
Л;1 = [-г₽. если|Р|<«0. (7.47)
( —Zsignp, если | р | >о0.
Рассмотрим вначале горизонтальное движение объек-
та (0=у=0) по ортодромии со скоростью u=const. Из
(7.41) и (7.42) получим
2jrewqi=Ucosycos ф, Sr=‘»ci=U sin <р,
2Z= —Ucos<psin ф—zj/ZV- (7.48)
Так как горизонтальная коррекция удерживает ось Oz
гироскопа вблизи плоскости горизонта, то угол (р+х)
мал и для УНО с маятниковой горизонтальной коррек-
цией
Мки1= - Д(Р-1-х). (7.49)
С учетом (7.48) и (7.49) второе уравнение (7.44) примет
вид
^+е(Р+х)=£7 cos<р sin (ф—о)+(»//?) cos а-|-/Ир1в///,
(7.50)
где s—EfH.
Установившаяся ошибка по углу р определяется част-
ным решением (7.50):
V
U cos <р sin (ф — a) 4- — cos a .,
;----5-------х + 4^. («О
220
где (2Uv sin ф/g) sin a — смещение положения равно-
весия жидкостного переключателя вследствие кориоли-
сова ускорения. Из первого уравнения (7.44) найдем
а=—£7..sin ф-|—--------cos<pcos (ф—а)+
Н cos р L
+— sin а] tg Н-----. (7.52)
R J Н cos ₽
Из (7.52) можно выделить составляющие погрешности
УНО: «1 — погрешность от неточности компенсации вер-
тикальной составляющей угловой скорости суточного
вращения Земли,
г г I /Ига
а.= — U sin фЧ----------
1 * 1 R
(7.53)
В схеме рис. 7.8 для компенсации вертикальной состав-
ляющей угловой скорости суточного вращения Земли на
моментном датчике ДМ2 с помощью вычислительного
устройства формируется момент Mta—NU sin <рп. ко-
торый вызывает прецессию гироскопа в азимуте с угло-
вой скоростью
NU sin уп
0,"а= Л/cosp ’
(7.54)
где N — крутизна характеристики моментного датчика;
Фп—сигнал широты, вводимой с ВУ. В идеальном слу-
чае если —tp и N=H cos р, то tt>ya = U sin qj и ai=0.
Пусть ДУУ, AU, Дф, Д/7, Др будут определять отклонения
соответствующих параметров от их правильных значе-
ний. Тогда, варьируя обе части (7.54), представим ошиб-
ку (7.53) в виде
<h=U shi<p(-^—^--l-ctgT-Дф-------^-+Aptgp].
(7.55)
В схеме рис. 7.9 используется другой метод азимуталь-
ной коррекции, когда положение гироскопа в азимуте не
корректируется, а производится только вращение шкалы
прибора относительно наружной рамы гироскопа инте-
грирующим двигателем (ИД), управляемым счетио-ре-
Шающим устройством навигационной системы, с угловой
221
скоростью (0ш= sin ф. В этом случае погрешность ком-
пенсации U sin <р
С4ш==(7 sin cp(A(7/£7-|-A<pctg<p). (7.56)
На погрешность компенсации здесь не влияет нестабиль-
ность кинетического момента гироскопа Д// и Др (в от-
личие от предыдущего метода).
Второй составляющей погрешностью УНО аг являет-
ся кинематическая погрешность из-за отклонения оси Ог
от плоскости горизонта:
«2— cos ср cos (ф — сОЦ-и/У? sin a] tg р. (7.57)
Полагая для идеального гироскопа Л4,у1в=0 и под-
ставляя (7.51) и (7.57) с учетом малости р, получим
а2=[(/ cos <р cos (ф—a)-j-(®//?)sifl а] X
X |~ 47 cos ? sin (Ф — °) + W#) cos а 58>
Составляющая этой погрешности %=2Uv sin <p/g, завися-
щая от кориолисова ускорения, отсутствует в УНО с
межрайонной коррекцией (см. рис. 7.8), так как в этом
случае выражение (7.47) не зависит от % и, следователь-
no, в (7.49), (7.50) и (7.51) следует считать %=0. В этом
случае (7.58) примет вид
а2мр=cos <р cos (ф—а) Z- sin иj X
fZ cos <р sin (Ф — а) + (v//?) cos а j . (7 эд
Максимальное значение этой погрешности
«u=(^v/j?)Z • (7-60)
(7.61)
Погрешность аг\,Р—>-0 при е->°о, т. е. для релейной гори-
зонтальной коррекции УНО.
Третья составляющая погрешности УНО
а М*°
3 Н cos ₽
Это инструментальная погрешность, вызванная возмуща-
ющими моментами, действующими вокруг оси Ох. На
инструментальных погрешностях УНО остановимся
позже.
222
Рассмотрим погрешности УНО, возникающие при
наклоне оси Оу\ наружной рамы. Считаем, что движение
объекта происходит по ортодромии с постоянной скоро-
стью, но углы крена и тангажа не равны нулю и
y=sconst, const Если пренебречь кориолисовым уско-
рением, то можно считать, что на оси Oz0 и Оу} прибора
проецируются только ускорения силы тяжести, т. е.
__ gxn _ g (sin S cos a + cos 8 sin у sin a) __
Z -gyi g cos»cosy
=tg В -°—°- 4- tg Y sin a. (7.62)
cos у
Для малых 0 и у из (7.62) приближенно получим
X~ftcos a-|-Y sin а. (7.63)
Для УНО с маятниковой горизонтальной коррекцией
второе уравнение (7.44) с учетом (7.49) и (7.63) примет
вид
• ^^(/1 п
Р<Р+ х)= sin а - cos а + — .
Для установившегося режима р—0 и приближенно
р _ -Qxsina-azcos<x (7 б4)
в е.Н cos Р
При углах б, у порядка нескольких градусов и достаточ-
но большой крутизне коррекции е первыми двумя члена-
ми в правой части (7.64) можно пренебречь и принять
pss— •/= — (Hcos a-f-ysiii а). (7.65)
В данном случае составляющая погрешности УНО ai
на основании (7.44) и (7.65) примет вид
^=-2},+^2—. (7.66)
Н cos у.
Подставляя в (7.66) Qr из (7.42) и полагая, что до
наклона УНО азимутальная коррекция была идеальной,
1 е МХ!>1Н — U sin <р, получим
Ui—U sin <p(I/cos.y — cos$cosy)-|-
-|-<041 sin Pcosy—0>u sin Y, (7.67)
гДе и «ж определяются по (7.41).
223
Для УНО с межрамочной коррекцией, полагая в
(7.67) х=0, получим
а1мр= t7sin (1 —cos 6 cos у)+<«ч1 sin & cos у — ы£1 sin у.
(7.68)
На основании (7.44) при малом угле р составляющая
погрешности УНО
a2=(Qxcos a — Qz sin а) В. (7.69)
Полагая углы () и у малыми, из (7.42) получим
2x=<0’ii4“u>Cl®’ Qj,=u){1 — «ат- (7.70)
Подставляя (7.70) и (7.65) в (7.69) и опуская члены
второго порядка малости, получим выражение погреш-
ности «2 для УНО с маятниковой коррекцией:
a2=(w£l sin а — cos а) (О cos а-|-V s'n а)- (7-71)
Подставляя в (7.71) значения ©л и <uni из (7.41), окон-
чательно получим
а2=[(7 cos<p"cos(ф — a)-J-(•#//?) sin а[(0 cos а -}-у sin а).
(7.72)
Для УНО с межрайонной коррекцией определим р
из (7.64), полагая %=0 и M/zlD=0:
р=( — 2xsina — Szcosa)/e. (7.73)
Подставляя (7.73) и (7.70) п (7.69), после преобразова-
ний получим
«2Ьф=«2Мр-|-(‘”с1/®) [(^'M + Y^Osin 2a-|-
+ (»<u£l — ywni)cos2a|. (7.74)
При наклоне наружной рамы УНО возникает (в общем
случае) карданная погрешность, обусловленная геомет-
рией самого карданова подвеса гироскопа и свойством
трехстепенного гироскопа оказывать сопротивление изме-
нениям направления своей оси в пространстве. Как пока-
зано в [35], погрешность можно определить по формуле
Д«к=ф —aretgi
tg ф C()s У — sln У sin 9 4- cos ft sin у зес Ф tg p \
cos ft -J- cos ft sec ф tg p /
(7.75)
224
r^e р“—угол, составленный осью Oz с плоскостью гори-
зонта. В УНО обычно угол р мал, поэтому для расчетов
погрешности карданова подвеса можно использовать бо-
лее простую формулу
дак=ф—arctg [(tg ф cos у — sin у sin &)/cos 8]. (7.76)
В отличие от предыдущих погрешностей, увеличиваю-
щихся с течением времени, карданная погрешность Дак
Рис. 7.11. Карданные ошибки
для заданного курса ф зависит лишь от наклона объекта
ио отношению к плоскости горизонта. После выравнива-
ния объекта в плоскость горизонта геометрическая по-
грешность карданова подвеса обращается в пуль. Для
случая УНО с подвижной шкалой в формулах (7.75),
(7.76) нужно заменить ф на а, так как ось Oz может за-
нимать произвольное положение в азимуте.
На рис. 7.11 представлено семейство кривых кардан-
ных ошибок для различных углов у (при •0 = 0).
Рассмотрим погрешность УНО с маятниковой коррек-
цией при движении объекта по ортодромии с ускорением и
(режим набора скорости или торможения). Полагаем
Ф=у==О, а=0. В этом случае tg^X—v/g. Так как
обычно v/g>ao, то маятниковая коррекция в основном
работает в релейной зоне и уравнение движения УНО
8—1757 225
вокруг оси Ох получим из (7,50), заменив пропорцио-
нальную коррекцию на релейную:
P+£slgnf₽-|--^={/ cost sin ф+4--1—(7.77)
\ S / К п
здесь k=l/Н — максимальное значение скорости прецес-
сии от коррекции, которое должно удовлетворять ус-
ловию
k >U +ъ№-\-Му1в1Н. (7.78)
Если при (=0 р=0, то из (7.77) получим 0=—/г-р
4-(7cos <р sin ф-I- (v/R) + (Му1в/г1). При этом накаплива-
ется угол 0, пока есть ускорение либо пока ось Oz не от-
клонится до кажущегося горизонта (в худшем случае)
на угол Ртах^^/гДи/д-. Появление угла 0 приводит к
кинематической погрешности УНО, определяемой по
(7.69). Для уменьшения этой погрешности маятниковую
коррекцию УНО при движении с укореняем отключают.
Аналогичной погрешности УНО с межрамочной коррек-
цией не имеет. При гармонических колебаниях объекта
(самолета) вокруг продольной оси Ох (у—То sin v t) уст-
ройство горизонтальной коррекции порождает прецессию
гироскопа УНО вокруг оси наружной рамки кардаиова
подвеса с угловой скоростью ак. Для УНО с межрайон-
ной пропорциональной коррекцией [35]
«к= —7" Уо^2 - 9 sin 2«-
4 б- v2
Для УНО с межрамочной релейной коррекцией
я y0v'2fe cos а
к— 4 л'2 kt
-L----г-------
4 yS sin2 а
(7.79)
(7.80)
Влияние колебаний основания па УНО с линейной п
релейной маятниковой коррекцией подробно рассмотре-
но в [37 и 15]. Горизонтальная коррекция приводит к по-
явлению собственной скорости прецессии УНО и при
более сложных движениях объекта (см. кн. 1), когда
ось Оу\ наружной рамы гироскопа описывает конус (ви-
раж, боковое движение самолета). При угловых колеба-
ниях основания с относительно высокими частотами
необходимо учитывать собственную скорость прецессии
УНО, порождаемую инерцией рам кардаиова подвеса и
226
моментами реакции в опорах гироскопа [35], которая
можег быть значительной в случае резонансных явлений,
ц и оценке погрешностей УНО необходимо также учи-
тывать собственную скорость прецессии гироскопа аз
(7.61). порождаемую моментами, действующими вокруг
оси Ох гироскопа, среди которых наиболее характерны
моменты трения в опорах, тяжсния токоподводов, момен-
ты статической разбалансировки гироузла, моменты ог
неравножесткости конструкции гироузла вдоль осей Oz
и Оу и др., которые определяют с учетом конкретных
условий эксплуатации прибора.
Устранение ошибок стабилизацией положения прибо-
ра. Накопление ошибок во многих случаях происходит
от того, что оси кардаиова подвеса не сохраняют в про-
странстве определенное положение. Так возникла ошиб-
ка от наклона оси внешней рамы при компенсации верти-
кальной составляющей скорости вращения Земли, а так-
же карданные ошибки. То же самое имело место при
качке объекта и на вираже, когда линии действия мо-
ментов коррекции поворачиваются в пространстве с
осями кардаиова подвеса и меняют направление вдоль
этих осей. Это приводило к появлению постоянных со-
ставляющих моментов, обусловливающих систематиче-
ское накопление ошибок.
Эти ошибки можно полностью устранить или умень-
шить, если ось наружной рамы прибора стабилизировать
в пространстве вдоль местной вертикали. Существуют
различные схемы решения такой задачи. Одна из воз-
можных схем такой стабилизации представлена на
рис. 7.15. На площадке, помещенной в кардановом под-
весе, устанавливается УНО (или ГПК). Площадка по-
средством быстродействующей следящей системы с дис-
танционной передачей показаний стабилизируется в
плоскости горизонта по сигналам гировертикали. Точ-
ность стабилизации прибора зависит от точности гиро-
вертикали и дистанционной следящей системы. Допусти-
мые статическая п динамическая ошибки системы
стабилизации зависят от класса точности прибора. Полу-
ченные выше формулы позволяют правильно сформули-
ровать необходимые требования к системе. Отмстим, что
точность стабилизации может также зависеть от взаим-
ной ориентации осей кардановых подвесов гировертика-
ли и стабилизируемой площадки.
Некоторые вопросы подобного типа, связанные с гео-
метрией кардановых подвесов, рассмотрены в [15]. При
8* 227
указанной выше стабилизации прибора межрамочная
горизонтальная коррекция имеет преимущество перед
маятниковой коррекцией.
§ 7.3. Гиромагнитные компасы
Гиромагнитные компасы служат для навигационных
и пилотажных целей: с их помощью летчик или штурман
определяет магнитный или географический курс самоле-
та или выполняет развороты самолета на заданный угол,
Гиромагнитные компасы в ряде случаев используются в
Рис. 7.12. Схема дистанционного гиромагнитного ком-
паса
качестве чувствительных элементов автопилотов. В гиро-
магнитном компасе объединены в одну систему магнит-
ный (или индукционный) компас и гирополукомпас
(ГПК). Такая схема позволяет снизить ошибки, прису-
щие магнитному компасу и гпрополукомпасу в отдель-
ности.
Вариант принципиальной схемы дистанционного ги-
ромагнитного компаса представлен па рис. 7.12. В состав
прибора входят магнитный датчик, гирополукомпас, уси-
литсльно-суммирующее устройство (УС) и указатели
курса (УК). Сигнал с датчика угла ДУ1 магнитного
компаса и с датчика угла ДУ2 гирополукомпаса посту-
пает на УС. Усиленная разность этих сигналов поступает
на моментный датчик ДМ1, который создает момент ази-
мутальной коррекции гирокомпаса, вызывающий прецес-
228
сию его главной оси к направлению меридиана, опреде-
ляемого магнитным датчиком. Показания магнитного
курса снимаются с дистанционных указателей (УК).
Магнитный датчик устанавливается в крыле или
хвосте самолета, т. с. там, где его показания меньше
искажаются за счет влияния магнитных полей, возника-
ющих из-за наличия па самолете ферромагнитных масс,
функционирования электрооборудования и т. п. Гиропо-
лукомпас обычно устанавливается либо на доске летчи-
ка. либо в фюзеляже самолета с последующей дистанци-
онной передачей его показаний.
Магнитный датчик подвешивается в карданов подвес
так, что он превращается в физический маятник. При
отсутствии ускорений ось вращения стрелки (картушки)
компаса занимает вертикальное положение. Погрешно-
сти гиромагнитного компаса в значительной мере зави-
сят от погрешностей магнитного компаса.
Идеальный магнитный компас показывает направле
пне магнитного меридиана, которое отличается от истин-
ного (географического) на угол Дм, называемый магнит-
ным склонением. Магнитное склонение определяется по
специальным картам и учитывается в показаниях гиро-
магнитного компаса. Однако остаются погрешности при-
бора от неточности знания магнитного склонения и ввода
этой поправки.
Наличие на объекте стальных и железных масс вызы
вает угловое отклонение Лк картушки компаса от направ-
ления магнитного меридиана, называемое магнитной
девиацией компаса. Для устранения магнитной девиации
применяют входящий в комплект компаса специальный
девиационный прибор, в который помещают магнит и
бруски из мягкого железа для создания при настройке
сил, компенсирующих влияние на МК местнцх магнит-
ных полей и уменьшающих магнитную девиацию до не-
скольких градусов.
Для автоматического устранения остаточной магнит-
ной девиации в гиромагнитных компасах применяют так-
же специальные лекальные устройства (рис. 7.13).
Однако полностью устранить магнитную девиацию нс
удается, так как опа изменяется при изменении угловой
ориентации самолета, при перемещении механизмов,
органов управления, шасси и т н. При движении само-
лета по локсодромии, при разгоне и торможении, при
вираже появляется ускорение и вместе с маятниковым
подвесом отклоняется от вертикали ось картушки.
229
Выключатель коррекции
При этом проекция вектора 7/м напряженности маг-
нитного поля Земли на плоскость картушки (вдоль кото-
рой устанавливается магнитная система) изменит свое
направление относительно оси наклона картушки. По-
явится погрешность магнитного компаса Лфм, называе-
мая поворотной погрешностью [37]:
дфм=фм-]-агс1ё [(tg 8 sin р—sin cos p)/cos фм], (7.81)
где фм — угол, составляемый осью наклона картушки с
направлением магнитного меридиана; р — угол,^состав-
ляемый осью картушки с направлением истинной верти-
кали; б — угол наклонения вектора Ны к плоскости гори-
зонта.
При установившемся движении по ортодромии маят-
ник (а вместе с ним и ось картушки) отклоняется [см.
(615)] от истинной вертикали в плоскости, перпендику-
лярной направлению полета, на угол
ам— —-в2 sin ф tg <?/(/?£) — 27/w sin у/p. (7.82)
Полагая приближенно р=ам, ф = фм и подставляя
(7.82) в (7.81), найдем погрешность магнитного компа-
са, которая практически повторяется гиромагнитным
компасом.
При полете с ускорением v маятник отклоняется в
продольной плоскости от истинной вертикали на угол
$K~v/g. Погрешность магнитного компаса найдем, под-
ставляя в (7.81) р»—рм=—v/g и фм=ф+л/2, так как в
этом случае ось наклона картушки перпендикулярна
направлению полета.
Если угол v/g мал, то погрешность магнитного ком-
паса
Дфм= — (v/g)tgb. . (7.83)
Ось гироскопа гиромагнитного компаса, прецессируя со
скоростью азимутальной коррекции const, при ре-
лейной характеристике азимутальной коррекции достиг-
нет этой погрешности, если время действия ускорения
(y=Av/i>>>(v/kag)iQb. В противном случае погрешность
гиромагнитного компаса будет меньше и определяется
как
Дфгм1с=*в (Д«/®) • (7.84)
При правильном вираже самолета угол отклонения маят-
ника равен углу крена самолета у и ось наклона маят-
231
ника (продольная ось самолета) поворачивается в гори-
зонтальной плоскости с угловой скоростью виража ш
(<о>0 для левого виража) так, что
Фм=Фмо-‘й/- (7.85)
Погрешность гиромагнитного компаса на вираже макси-
мальная при развороте самолета на 180° начиная с курса
фмо=+л/2 или —л/2. В этом случае примерно в течение
полупериода виража поворотная погрешность магнитно-
го компаса (7.81) имеет постоянный знак [37] и ГПК
прецессирует под действием азимутальной коррекции в
одном направлении, накапливая погрешность
дФг.пах=^7'/2=лМ'>- (7.86)
При развороте самолета на следующие 180° эта по-
грешность уменьшается до нуля. Для уменьшения по-
грешностей гиромагнитного компаса при полетах с уско-
рением и на вираже скорость ka азимутальной коррекции
следует уменьшать, однако прп этом должно выполнять-
ся условие
^arntn >77 sin <f+(®£//?)tg¥+Qc, (7.87)
где S2C — собственная скорость прецессии гироскопа.
В гиромагнитном компасе азимутальную коррекцию па
вираже обычно автоматически отключают специальным
выключателем коррекции ВК (рис. 7.13). При этом при-
бор работает в .режиме ГПК. Чтобы исключить погреш-
ности прибора, связанные с наклоном наружной рамы
гироскопа, последний устанавливают на стабилизирован-
ное в плоскости горизонта основание (см., например,
рис. 7.15). Если характеристика азимутальной коррек-
ции имеет зону пропорциональности, то нужно учитывать
и статические погрешности следящей системы.
В настоящее время более распространен другой тип
гиромагнитного компаса — гироиндукционный компас
(ГИК), в котором в качестве магнитного чувствительно-
го элемента (ЧЭ) используется индукционный чувстви-
тельный элемент, а положение гироскопа в азимуте не
корректируется (рис. 7.13) [3]. Для того чтобы в прямо-
линейном полете наклоны самолета нс вызывали север-
ной поворотной погрешности, ЧЭ располагают в карда-
новом подвесе так. чтобы центр масс узла ЧЭ находился
ниже точки пересечения осей карданова подвеса. Полу-
чившаяся таким образом маятниковость при отсутствии
232
ускорений обеспечивает горизонтальность ЧЭ. Гироин-
пукционный компас состоит из ГПК 4, индукционного
Магнитного элемента 17, коррекционного механизма 14
с лекальным устройством 15, устраняющим девиацию
магнитного элемента, указателя 8 с лекальным устройст-
вом 9, устраняющим погрешности дистанционных пере-
дач, и выключателя коррекции 2, разрывающих цепь ази-
мутальной и горизонтальной коррекции ГПК на вираже.
Кольцевой потенциометр 21 коррекционного механиз-
ма 14 неподвижно укреплен на самолете. При рассогла-
совании направления результирующего магнитного пото-
ка в индукционном ЧЭ с потоком в соединенном с ним
сельсине коррекционного механизма 14 двигатель 19,
управляемый усилителем 18, отрабатывает сельсин 16 в
согласованное положение. При рассогласовании щеток
потенциометра 21 коррекционного механизма и азиму-
тального положения гироскопа (вследствие причин, ука-
занных выше) потенциал, снимаемый с диаметральных
отводов потенциометра 21 коррекционного механизма, не
будет равен нулю и электрический сигнал, преобразован-
ный усилителем 20, приведет во вращение двигатель 7,
который через редуктор повернет три щетки 3 кольцево-
го потенциометра 5 гироскопа в сторону поворота гиро-
скопа. Как только угол поворота щеток станет равным
углу отклонения гироскопа, потенциал, снимаемый с
потенциометра коррекционного механизма, станет рав-
ным нулю и дальнейшее движение щеток 3 по потенцио-
метру 5 прекратится. Питание от потенциометра 5 гиро-
скопа поступает не только на щетки потенциометра кор-
рекционного механизма, по и на три щетки кольцевого
потенциометра 10 указателя. В указателе разность по-
тенциалов, снимаемая с диаметральных отводов потен-
циометра 10, пройдя через усилитель 11, приведет во
вращение двигатель 12, поворачивающий через редуктор
Щетки потенциометра 10 до тех пор, пока указанная раз-
ность потенциалов не станет равной нулю. Очевидно,
угол поворота двигателя 12 (щеток) пропорционален
углу поворота самолета относительно гироскопа. Следо-
вательно, если соединить с двигателем 12 шкалу 13 ука-
зателя, то по нему можно определить курс. Для умень-
шения передаточного числа редуктора 6, который связы-
вает двигатель 7 со щетками потенциометра 5 гироско-
па. и сокращения времени согласования положения
Щеток потенциометра 21 коррекционного механизма и
Щеток 3 потенциометра 5 гироскопа служит кнопка 1
233
Погрешности ГИК аналогичны погрешностям предц.
дущей схемы ГМК, однако для ГИК следует считать,
что /га-—максимальная скорость поворота щеток 3 от
двигателя 7. Более подробно погрешности ГМК и Г1Щ
рассмотрены в (37, 39].
§ 7.4. Единые курсовые системы
На борту летательного аппарата направление мери-
диана можно определить с помощью компаса, радиоком-
паса и астрокомпаса [3].
Магнитный компас определяет направление горизон-
тальной составляющей магнитного поля Земли. Направ-
ление меридиана получают, прибавляя к показаниям
компаса поправки на девиацию и магнитное склонение.
Показания магнитного компаса неустойчивы вследствие
влияния ускорений, возникающих при движении лета-
тельного аппарата, и девиаций. Погрешности магнитною
компаса могут достигать нескольких градусов. Ось ро-
тора гироскопа гнрополукомпаса обладает способностью
сохранять свое положение неизменным относительно
неподвижных звезд. Однако вследствие вращения Зем-
пи и собственных уходов гнрополукомпас с течением
времени накапливает погрешность.
Гиромагнитный дистанционный компас с магнитным,
индукционным или другим чувствительным элементом
обладает по сравнению с магнитным компасом большей
устойчивостью показаний. Радиокомпас позволяет по-
лучить курсовой угол передающей радиостанции (КУР),
точность определения которого 1...2°.
Астрономический компас определяет угол между на-
правлением меридиана и плоскостью вертикали небес-
ного светила. При определении курса но астрокомпасу
должны быть учтены координаты местоположения лета-
тельного аппарата и вращение Земли. Погрешности аст-
рокомпаса соизмеримы с погрешностью магнитного ком-
паса.
Эти приборы, основанные на разных принципах дей-
ствия, на современных самолетах могут быть объедине-
ны в единую курсовую систему, которая в комплексе от-
личается новыми качествами. Особенностью единой кур-
совой системы является наличие единого указателя, ра-
ботающего от различных датчиков курса, что обеспечи-
вает получение курса при любых условиях полета.
234
Дублирование датчиков и наивыгоднейшие связи
между приборами, входящими в курсовую систему, поз-
воляют получить гибкую систему, в которой недостатки
одних датчиков в данных условиях полета компенсиру-
ются преимуществами других. В ряде случаев объедине-
ние датчиков в единую курсовую систему позволяет но-.
Рис. 7.14. Структурная схема санной курсовой системы:
УЛ — указатель летчика: Дарк— поправка на раднодевиацню;
Ч*—угол курса; УШ—указатель штурмана; Дм — поправка но
магнитное склонение: Y — угол крена, $ — угол тангажа;
$1п <р — поправка на вращение Земли; ft — угловая скорость
самолета; У ЛК— указатель астрокомпаса; -фи — истинный курс;
АК — астрокомпас; ГПК — гирополукомпас; МК — магнитный
компас; П — переключа гель; КМ — коррекционный механизм;
Дк—поправка на магнитную девиацию
лучить большую точность измерения курса, чем при из-
мерении его отдельными приборами. На рис. 7.14 изоб-
ражена структурная схема курсовой системы, в которой
на единый указатель работают магнитный датчик (МД),
астрономический датчик (АД) гирополукомпаса (ГА) и
автоматический радиокомпас (АРК). Для уменьшения
карданных ошибок наружная рама гирополукомпаса ста-
билизируется от гировертикали (ГВ), коррекция кото-
рой отключается при длительно действующих горизон-
тальных ускорениях с помощью выключателя коррек-
ции (ВК). Для компенсации «уходов» в азимуте из-за
вращения Земли гирополукомпас корректируется сигна-
лами, пропорциональными вертикальной составляющей
скорости вращения Земли.
235
Единая курсовая система является также датчиком
курсовых сигналов для различных ее потребителей на
летательном аппарате (навигационного координатора,
автопилота и др.).
На рис. 7.15 представлена электрокинематическая
схема единой курсовой системы, составленной на осно-
вании блок-схемы рис. 7.14. Основой этой системы явля-
ется ГПК, который помимо обычных внутренней I и на-
ружной 2 рамок подвеса имеет вспомогательные рамки
о’ и 4 для исключения карданных ошибок ГПК, вызывае-
мых продольными и поперечными кренами самолета. Уг-
лы наклона рамок 3 и 4 относительно самолета, изме-
ренные сельсинами CZ2 и С*2, сравниваются с углами по-
ворота ГВ, измеренными сельсинами Сг1 и Cxi.
Сигналы рассогласования через усилители У1 и У2
подаются па электродвигатели Д« и Дгг отработки ра-
мок 3 и 4. В результате ось вращения рамки подвеса гн-
рополукомпаса удерживается на направлении вертикали
и карданная погрешность гирополукомпаса исключается.
Выключатель коррекции реагирует на угловую скорость
разворота to и отключает магнитный и астрономический
датчик 4 от ГПК Одновременно выключатель коррек-
ции отключает маятниковую коррекцию ЭП горизонталь-
ной оси ротора ГПК. В выключателе коррекции (ВК)
имеется реле времени, которое разрывает электрические
цепи только после того, как длительность виража пре-
высит определенное время, выбранное из условия, чтобы
накапливание погрешностей в курсовой системе не пре-
вышало допустимого значения.
Сигналы магнитного датчика через коррекционный
механизм (КМ) передаются иа ГПК с помощью следя-
щей системы, состоящей из вращающегося трансформа-
тора ВТ», усилителя У4, электродвигателя Д» и сельси-
на Сф.
Переключатель (П) служит для перехода с магнит-
ного датчика на астрономический (АД), который следит
за Солнцем с помощью фотоэлемента (ФЭ), усилителя
У5. электродвигателя Др и измеряет бортовой пеленг р
Солнца Астрономический курс фа получается в резуль-
тате вычисления фа —А—р, где А — азимут Солнца, вы-
рабатываемый с помощью вычислителя азимута. Это вы-
числение производится с помощью дифференциального
сельсина ДС и вращающегося трансформатора BTS, по-
лучающих сигнал от сельсина Сц.
236
Рис. 7.15. Эластрокинсматическая схема единой курсовой и
стемы
Магнитный или астрономический курсы сравнивают-
ся с курсом ГПК с помощью сельсина CV2, а электро-
двигатель Дг/ через редуктор отрабатывает статор сель-
сина CV2, ротор которого связан с осью рамки 2 подве-
са ГПК.
Выходной сигнал этого сельсина подается иа единый
указатель курса (УК). На этом же указателе можно от-
считать показания радиокомпаса (РК). Так как при от-
ключении выключателем коррекции магнитных датчи-
ков (МД) и астродатчиков (АД) «уход» ГПК вызывает
погрешности в отсчете курса по указателю, то в единых
курсовых системах с отключающимися на вираже дат-
чиками курса применяют прецизионные ГПК. При прак-
тическом выполнении единой курсовой системы для ле-
тательных аппаратов в комплект приборов включают
два гироагрегата, два радиокомпаса и необходимое ко-
личество указателей. В зависимости от условий полета
схема позволяет осуществить три режима работы: маг-
нитной и астрономической коррекции и гирополукомпа-
са. В качестве примера может служить система ТКС-П2
[3].
§ 7.5. Гироорбитанты
Гироорбитант (гироорбита) — прибор, предназначен-
ный для имитации па КЛА плоскости орбиты и измере-
ния угла рыскания спутника. Принцип работы этого при-
Рис. 7.16. Простейшая схема орби-
тального 1ирокомпаса
бора такой же, как у
простого маятникового
гирокомпаса (см. §
7.1), поэтому его ино-
гда называют орби-
тальным гирокомпасом.
Простейшая схема
гнроорбптанта пред-
ставлена на рис. 7.16.
Прибор представляет
собой астатический ги-
роскоп, ось наружной
рамы которого выстав-
ляется по геоцентриче-
ской вертикали (на-
правление от центра
Земли к спутнику) с
помощью специальных
238
средств, например с помощью инфракрасной вертикали,
flo оси внутренней рамы карданова подвеса установлен
межрамочный датчик угла (ДУ), сигнал с которого, про-
порциональный углу р, поступает на моментный датчик
дМ1, создавая момент, аналогичный маятниковому мо-
менту гирокомпаса, и па моментный датчик ДМ2, созда-
вая момент, необходимый для демпфирования собствен-
ных колебаний прибора. С потенциометра (П) снимает-
ся выходной сигнал, пропорциональный углу рыскания
КЛА.
Рассмотрим движение КЛА по круговой орбите во-
круг Земли, которую приближенно принимаем за одно-
родный шар {37]. На рис. 7.16 показана правая опорная
система координат Ось Ос,2 направлена по гео-
центрической вертикали, ось Ogs — по касательной к ор-
бите по движению спутника, ось Orja — перпендикуляр-
но плоскости орбиты. Положение прибора относительно
этой системы координат определяется углами аир. Аб-
солютная угловая скорость трехгранника равна
орбитальной угловой скорости ПОр=^ос/7?с и направлена
по оси От]2, т. е. 0)^2—ЙОр. a <Bj2=<i»t2=0. При этом урав-
нения движения гироорбитанта будут аналогичны урав-
нениям движения (7.7) простого маятникового гироком-
паса при условии, что последний установлен неподвиж-
но па экваторе (<р=0), a Z7=£2Op- Не меняя обозначения
остальных констант, получим для гироорбитанта при
Дор
а=ftp, р= — eftp — £2ора. (7.88)
Уравнения (7.88) определяют затухающие колебания
оси Oz гироскопа около положения равновесия а* —
= р*=0 с периодом Гс=2л/|/ А2ор—(0,5еА)2- Таким об-
разом, после погашения собственных колебаний ось фи-
гуры гироскопа устанавливается перпендикулярно плос-
кости орбиты.
Время обращения первых искусственных спутников
около Земли было равно примерно 90 мин, что в 16 раз
меньше суток. Отсюда следует, что при прочих равных
условиях направляющий момент гироорбитанта в 16 раз
больше направляющего момента земного гирокомпаса,
находящегося па экваторе.
Рассмотрим некоторые погрешности прибора.
Ошибки наклона. Плоскость, перпендикуляр-
ную оси наружной рамы, назовем плоскостью чувстви-
239
тельности гироорбитанта Направляющий момент гиро-
орбитанта определяется проекцией угловой скорости
Qop на его плоскость чувствительности. При повороте
оси наружной рамы, а следовательно, плоскости чувст-
вительности па угол у около оси, составляющей с осью
О»1 угол фн, возникает ошибка наклона прибора, фор-
мально определяемая из (7.76) при 6=0 и ф=фи:
— arctg(tg<|)„ cosy). (7.89)
Кроме ошибки наклона возникает еще ошибка, обу-
словленная функционированием горизонтального коррек-
тора, обеспечивающего затухание колебаний. Нетрудно
установить, что проекция скорости П()р на ось наружной
рамы равна —ПОр sin фп sin у, а проекция Пор на плос-
кость чувствительности Qop= У1 — sm^sfr^y. В рас-
сматриваемом типе гироорбитанта (рис. 7.16) затухание
обеспечивается моментом с вертикальной осью, поэто-
му при указанных выше обстоятельствах в нем должна
возникать ошибка
а**=— etgy, (7.90)
причем
siny=sin<|>llsiny. (7.91)
Эта ошибка является аналогом девиации от затухания,
определяемой второй формулой (7.8). Общая ошибка
при наклоне прибора определяется алгебраической сум-
мой (7.89) и (7.90).
Четвертные девиации. Пусть ось наружной
рамы совершает малые гармонические колебания у=
=уо sin р/ около местной вертикали. Ось колебаний со-
ставляет с направлением оси Оцг, с которым приблизи-
тельно совпадает ось гироскопа, угол фн. При малых ко-
лебаниях углы поворота можно раскладывать как соот-
ветствующие им векторы угловой скорости. Тогда, оче-
видно, оси карданова подвеса будут колебаться около
осп гироскопа по закону у0 cos фн sin р/, а угол между
перпендикуляром к плоскости наружной рамы и осью
гироскопа — по закону уо sin фп sin р/. При периодиче-
ском изменении этого угла азимутальный и горизонталь-
ный корректоры будут прикладывать к гироскопу момен-
ты, направленные соответственно по осям внутренней и
наружной рам подвеса, изменяющиеся по закону
240
f/fry0 sin фн sin p-f и ДеЛу0 sin фн sin pt, где H—собствен-
ный момент гироскопа.
Тогда проекция первого момента па местную геоцент-
рическую вертикаль спутника равна Hhyo sin ф„ созфн X
X sin2y2, а проекция второго момента па плоскость «го-
ризонта»— Нъкуо sin фн cos Фн sin2p/. Если в уравнени-
ях (7.88) учесть скорости, обусловленные постоянными
составляющими полученных проекций, и пренебречь гар-
моническими составляющими двойной частоты, то
e/iVn
а=Лв-------— sin 2ф„,
4
fj—е/ip —2ора + -^р- sin 2ф„.
В положении равновесия
а
(*2+1)Л¥? .
-----------sin 2Ф,..
42о₽ Y‘
(7.92)
(7.93)
Формула (7.93) определяет четвертную девиацию гиро-
орбитанта. Для уменьшения этой ошибки нужно увеличи-
вать точность стабилизации оси наружной рамы прибо-
ра около местной вертикали и не выбирать параметры
h и е чрезмерно большими.
Влияние несферичпости Земли. Несфе-
рпчиость Земли вызывает медленное вращение плоско-
сти орбиты вокруг оси Мира. Это явление называется
регрессией узлов. Узлами называют точки на небесной
сфере, в которых орбита пересекается с экватором. Узел,
в котором спутник переходит из южного полушария в
северное, условно называется восходящим. Вращение
плоскости орбиты происходит так, что восходящий узел
перемещается по экватору против направления обраще-
ния спутника. Для круговых орбит искусственных спут-
ников Земли скорость регрессии (град/сут)
«>рег=4г cos i, 4r за 10 (-у-)7/2, (7.94)
где Д>=6378 км—экваториальный радиус земного сфе-
роида; Rc— радиус круговой орбиты спутника; i — угол
наклона плоскости орбиты к плоскости экватора.
Для круговых орбит с Rc—Rs=200 км <»ре1. = 9 град/
сУт Проекции вектора шрег на орбитальные оси О^2, Отр,
241
Ots соответственно равны — сорвг cos i sin i cos Qop/;
—w^rXeos’ j; — U>£.r cos i sin i sin i2opZ. При этом начало
отсчета времени совпадает с моментом прохождения
спутника через восходящий узел.
Уравнения движения гироорбитанта (7.88) с учетом
скорости регрессии (если пренебречь величиной <»pCrCos2z
по отношению к ЙОр) примут вид
a=Afi-|-‘operCos i sin i sin 2ор/, 1
p= — eZzp — 20pa -|- ^per cos i sin i cos 20f/. J
После погашения собственных колебаний устанавлива-
ется режим вынужденных колебаний с частотой йор, ко-
торый определяется соответствующим частным решени-
ем уравнений (7.95):
ыре1, cos i • sin l 2shZ sin Qop/ -J- (Л2 _ epp _ e2ft2) cosQopZ
aycr= % (Л-20р)2 4-е2Л2 •
(7.96)
Здесь нельзя допускать резонансных явлений, возникаю-
щих при /г=£20р. т. е. при совпадении частоты недемпфи-
рованных колебаний гироорбитанта ХЛ20р со скоростью
Qop обращения спутника около Земли. Это требование
противоречит условию настройки периода собственных
недемпфированных колебаний земного гирокомпаса на
период Шулера, равный времени обращения искусствен-
ного спутника Земли на нулевой высоте. При такой на-
стройке эффект регрессии узлов вызывает в гироорби-
танте резонанс. Резонансный пик зависит от величины
затухания. Так, по (7.96), амплитуда колебаний при ре-
зонансе
Цамил= <rC0St'Sint' (7.97)
Для спутника, находящегося на высоте 200 км от Земли,
период обращения равен примерно 1,5 ч «>рег =9 град/
сут. Отношение o>^ei./2Op^2'. Тогда для орбиты с накло-
ном 1=45° и при коэффициенте демпфирования е=0,02
имеем Камплг?« 100'.
242
На рис. 7.17 представлена еще одна схема гироорби-
танта. По этой схеме управление азимутальным двша-
телем осуществляется
линейной комбинацией
сигналов межрамоч-
ного датчика угла и вы-
ходного устройства ин-
тегрирующего мотора.
Интегрирующий мотор
охватывается отрица-
тельной обратной
связью. Управление им
осуществляется тем же
самым датчиком угла.
При подходящем выбо-
ре знаков управляю-
щих сигналов и стаби-
лизации оси наружной
рамы вдоль местной
вертикали прибор бу-
дет аналогом гироком-
паса с гидравлическим
успокоителем. Гироор-
бптант, построенный по
такой схеме, не имеет
девиации затухания.
Рис 7.17. Схема орбитального ги-
рокомплекса с интегрирующим
двигателем
ЧАСТЬ 2
ГИРОСКОПИЧЕСКИЕ СИСТЕМЫ
РАЗДЕЛ 4
ГИРОСКОПИЧЕСКИЕ СИСТЕМЫ ОРИЕНТАЦИИ
Гироскопические системы ориентации (ГСО) служат
для определения углового положения движущегося объ-
екта (самолета, ракеты, КЛА и т. п.) относительно неко-
торой опорной системы координат, связанной с гироплат-
формой или вычисляемой аналитически на основе изме-
рений каких-либо отдельных параметров ориентации
(углов, угловых скоростей или ускорений). В соответст-
вии с этим ГСО в настоящее время разделяют на два
класса: платформенные и бесплатформенные (бескар-
данные), В первом применяются гироскопические стаби-
лизированные платформы (ГСП), которым сообщаются
три угловые степени свободы относительно корпуса объ-
екта с помощью подвеса того или иного типа. В зависи-
мости от типа движущегося объекта и его назначения
платформа может стабилизироваться относительно инер-
циального пространства (ГСП баллистических ракет)
либо корректироваться относительно плоскости местного
горизонта и в азимуте (курсовертикали самолетов). Во
втором реализуется бесплатформенная схема построения
ГСО иа основе гироскопических датчиков, устанавливае-
мых непосредственно на корпусе ЛА. Опорная система
координат при этом вычисляется с применением БЦВМ
путем интегрирования и преобразования сигналов гиро-
скопических датчиков. При этом бортовые цифровые вы-
числительные машины как бы моделирует карданов под-
вес гироплатформы [27], [39].
244
ГЛАВА 8
ПРОСТРАНСТВЕННЫЕ ГИРОСКОПИЧЕСКИЕ
СИСТЕМЫ ОРИЕНТАЦИИ НА ДИНАМИЧЕСКИ
НАСТРАИВАЕМЫХ ГИРОСКОПАХ
Пространственная гироскопическая система угловой
ориентации объекта использует в качестве чувствитель-
ных гироскопических элементов два динамически наст-
раиваемых вибрационных гироскопа роторного типа.
Эта система по существу является трехосным гпростаби-
лизатором с индикаторным режимом стабилизации плат-
формы. Теория такой системы рассматривается на при-
мере курсовертикалн с интегральной коррекцией плат-
формы в положение истинной вертикали. Точная стаби-
лизация платформы позволяет решать кроме задачи оп-
ределения угловой ориентации и навигационную задачу
определения текущего местоположения объекта в про-
странстве.
§8.1. Гироскопическая курсовертикаль
на динамически настраиваемых гироскопах
Одним нз перспективных путей создания прецизион-
ной системы пространственной ориентации для самоле-
тов является применение в качестве гироскопических
элементов стабилизации динамически настраиваемых
вибрационных гироскопов роторного типа (см. гл. 4).
Примером принципа построения гироскопической си-
стемы пространственной ориентации самолетов и ее тео-
рии в этой главе является система ориентации в виде
курсовертикалн индикаторного типа, построенной на ис-
пользовании в качестве измерителей угловых координат
ее платформы динамически настраиваемых гироскопов
(ДНГ).
Схема такой курсовертикалн представлена на рис.
8.1. Платформа 10 имеет три степени свободы вращения
вокруг осей опорной системы координат О£от]о£;о. С этой
целью она помещена в карданов подвес, состоящий из
вертикальной рамы 12 и горизонтальной рамы 1. Для
непрерывного измерения углового положения самолета
в полной сфере его угловых координат курсовертикаль
снабжена дополнительной рамой 2 подвеса платформы
(показана штриховой линией в виде бюгеля), так на-
зываемой следящей рамой крена (для самолетных си-
стем ориентации).
245
На платформе установлены два одинаковых динами-
чески настраиваемых гироскопа: ДНП и ДПГ2. Каждый
гироскоп имеет ротор в виде кольца, связанный через
упругие юрсиопы и кольцо подвеса с валом приводного
двигателя. Таким образом, ротор каждого ДНГ имеет
три степени свободы относительно платформы 10.
Рис. 8.1. Схема курсовсртикали на ДНГ
Гироскоп ДНГ1 устанавливается на платформе 10
так, чтобы ось вращения приводного вала его двигателя
ориентировалась параллельно осн Охп платформы. Ги-
роскоп ДНГ2 установлен на платформе с направлением
оси вращения приводного вала его двигателя парал-
лельно оси Оуи платформы, ортогональной к оси Оха
платформы.
Для измерения угловых’ координат отклонения плат-
формы относительно гироскопов ДНП и ДНГ2 послед-
ние снабжены датчиками углов 7 и 11 на ДНП и 3, 6
на ДНГ2. Угол поворота платформы вокруг оси Ох„ из-
меряет датчик угла 3 гироскопа ДНГ2, угол поворота
платформы вокруг оси Оу,,—датчик угла 11 гироскопа
246
ДНП. Угол поворота платформы вокруг оси Oz„ изме-
ряется датчиком угла 7 относительно гироскопа ДНГ1
и датчиком угла 6 относительно гироскопа ДНГ2 (из-
быточная информация). Якорем датчиков углов служат
роторы гироскопов.
С осями вращения рам кардаиова подвеса платфор-
мы связаны следящие двигатели СДЫ, СД0, СДгп, управ-
ляемые сигналами, пропорциональными углам рассогла-
сования платформы и гироскопов, которые измеряются
датчиками углов 11,3, 7 и 6. Следящие двигатели СД«,
СДи и СДгп осуществляют согласование однозначного
положения осей OxD, Оуп, Ozu платформы с направлени-
ем векторов собственных кинетических моментов гиро-
скопов. Оси Ои' и Ov'o рам 12 и 1 кардаиова подвеса
платформы, с которыми связаны следящие двигатели
СД„ и СДа соответственно, при вращении самолета во-
круг оси Ог„ платформы изменяют свое направление от-
носительно платформы с гироскопами (осей Охп, Оуп).
Если при этом возникают рассогласования между
платформой и гироскопами вокруг осей Охп и Оу„ плат-
формы, то сигналы управления двигателями СДИ и СДа
формируются из сигналов рассогласования с датчиков
углов 11 и 3 путем их линейного преобразования из си-
стемы осей Оуп координат платформы в сигналы
в системе осей Ou, Ov0 кардаиова подвеса платформы.
Это преобразование осуществляется преобразователем
координат 13, который представляет собой поворотный
трансформатор (фазовращатель) с трехфазным стато-
ром, расположенным на раме 12, н двухфазным ротором,
расположенным на осн Ozn платформы (т. е. он связан
с платформой).
Управление двигателем СДгп, приводящим в движе-
ние платформу вокруг осп Ozn, осуществляется по авто-
номному каналу от сигнала рассогласования платфор-
мы либо с гироскопом ДНП (снимаемого с датчика уг-
ла 7), либо с гироскопом ДНГ2 (снимаемого с датчика
угла 6).
Для превращения данной гироскопической платфор-
мы в курсовертикаль необходимо прежде всего стабили-
зировать платформу (оси Охп, Оу„) в плоскости, парал-
лельной истинному горизонту, или ориентировать ось
Ozn по направлению силы тяжести — равнодействующей
ньютоновой силы притяжения Земли и центробежной си-
лы от суточного вращения Земли. Чувствительным эле-
ментом такого направления в неподвижной точке отно-
247
сительно земной поверхности является физический маят-
ник или акселерометр (см. гл. 1). На платформе уста-
новлены два акселерометра и Аг, измеряющие откло-
нения платформы вокруг осей Охп и Оуп. Сигналы с ак-
селерометров поступают на датчики моментов коррекции
S' и 4 гироскопов ДНП и ДНГ2 соответственно. Прецес-
сия гироскопов от воздействия моментов коррекции об-
разует углы рассогласования платформы и гироскопов
вокруг осей Охп и Оуп платформы. По сигналам, пропор-
циональным этим углам, следящие системы двигателей
СДЦ и СД0 стабилизируют платформу с гироскопами в
положение, соответствующее равновесному состоянию
акселерометров. Стабилизация платформы в плоскости,
параллельной плоскости истинного горизонта, позволяет
стабилизировать платформу с помощью тех же ДНП и
ДНГ2 по избранному направлению на земной поверх-
ности в плоскости горизонта. Для ориентации платфор-
мы в азимуте в самолетных курсовертикалях использу-
ются два основных режима. Первый состоит в использо-
вании платформы, работающей как азимутально свобод-
ный гироскоп направления. В этом случае для измере-
ния курсового угла самолета необходимо в приемном
сельсине сигнала с оси Ozn платформы, расположенном
в указателе угла курса, ввести поправку иа вертикаль-
ную составляющую скорости U sin <р вращения Земли.
Второй — режим гиромагнитного или гироиндукциоппого
компаса, используемый для определения отклонения от
заданного географического (геомагнитного) курса.
В этом случае сигнал рассогласования азимутального
положения платформы и дистанционного магнитного
компаса, измеряемый в дистанционном указателе гиро-
магнитного курса, используется для коррекции и согла-
сования платформы с магнитным компасом. С этой
целью сигнал коррекции платформы в азимуте поступает
на датчик моментов 8 коррекции ДНП, создающий мо-
мент коррекции вокруг осп, параллельной оси Оу„ плат-
формы, что и вызывает прецессию гироскопа ДНП. При
этом возникающий угол рассогласования платформы и
гироскопа Д11Г1 вокруг оси Ozn измеряет датчик угла 7,
сигнал с которого поступает на следящий двигатель
СДгп, согласующий платформу с ДНП в азимуте. Ана-
логичное рассогласование платформы с ДНГ2 вокруг
оси Ozn измеряется датчиком угла 6, которое также мо-
жет использоваться для управления следящим двигате-
лем СДгп платформы. Однако, этот сигнал в данном слу-
248
чае является избыточной информацией о рассогласова-
нии платформы с ДНП. Датчик момента 5 ДНГ2 приме-
няется для азимутальной коррекции ДНГ2 к платформе.
§ 8.2. Пространственная ориентация самолета
Пространственная ориентация самолета определяется
относительно земной поверхности тремя угловыми коор-
динатами: углами Чгк курса (или углом Ао азимута), &
тангажа и у крена (рис. 8.2, 8.3).
Опорной системой осей координат, относительно ко-
торой производится отсчет угловых координат самолета,
является правая си-
стема ортогональных
осей координат
OgonoCo, У которой
ось O'Q0 направлена
по истинной верти-
кали (вверх). Если
принять в качестве
модели формы Зем-
ли сферу радиуса
равновеликую по
объему земному
сфероиду, и считать,
что истинная верти-
каль со направлена
по нормали к по-
Рпс. 8.2. Ориентация самолет*! в систе-
ме координат О£|(ч„£о
верхпости сферы
Земли, то две другие осн От|о будут лежать в плос-
кости истинного горизонта (рпс. 8.4) Направление этих
осей в плоскости горизонта относительно земной поверх-
ности выбирается в зависимости от конкретной задачи.
Другая система ортогональных осей, координат
имеет также две оси Ои и Ovo, расположенные в
плоскости горизонта (см. рис. 8.3). При точном располо-
жении осей Ох„ и Оу„ платформы в плоскости истинного
горизонта ось Ои совпадает с осью рамы /, а ось Оп0 —
с осью рамы карданова подвеса платформы. Относи-
тельно опорных осей О£о, Oi|o положение осей Ои, Ov0 в
плоскости горизонта опредепяется азимутальным углом
1о. Система осей координат Ouvtfco связана с траектори-
ей самолета. Ось Ova направлена по касательной к тра-
ектории центра масс самолета (при горизонтальном по-
лете), а ось Он— по касательной к сферической нормали
траектории центра масс самолета.
249
Сферической нормалью кривой на некоторой сфериче-
ской поверхности называется дуга большого круга сфе-
ры, лежащая в плоскости, перпендикулярной к кривой в
данной точке местоположения центра масс самолета.
Таким образом, оси Ou, Ovo связаны в горизонтальной
плоскости с направлением траектории полета, поэтому
Рис. 8.3. Изменение угловых координат самолета
система осей Ouvato координат называется сопровож-
дающей.
В авиации распространенной опорной системой коор-
динат является также географическая правая система
ортогональных осей координат ОВсфСо- Ось О^о, как и у
первых двух систем, направлена вверх по истинной вер-
тикали. Ось Ot]iV направлена по касательной к меридиа-
ну на север, а следовательно, ось ОЕе — по касательной
к параллели местоположения самолета на восток (рис.
8.3, 8.4). У этих систем одна из осей O'Q0 общая и на-
правлена по истинной вертикали места, а две другие оси
лежат в горизонтальной плоскости.
Система ортогональных осей координат XYZ связана
с самолетом (см. рис. 8.2, 8.3). Ее положение определя-
ется углами Tin, fl и у относительно осей ОЕ0, Оф, О£п н
углами Ф'к, О, у относительно осей О&> Огщ, О£0. Следу-
250
ст отметить, что вектор путевой скорости vc самолета
будет направлен по оси Оа0, если углы скольжения и
сноса самолета равны пулю.
В том случае, когда курсовой угол XFK=—Ло, оси
н Oc,0r Otic соответственно совпадают. Согласно рис.
8.3, измерение угла Чгк курса (или Ло) производится
сельсином-датчиком Ск курса; угол О тангажа — сельси-
ном-датчиком Ст, а угол у крена — сельсином-датчиком
Сад.
Сельсин CyIt служит для управления двигателем Д1ф
следящей рамы 2 крена и измеряет угол отклонения оси
Он' рамы 1 подвеса платформы относительно плоскости
осей Ол'п, Оу„ платформы. Если угол тангажа 0=0 и
продольная ось самолета ОХ оказывается совмещенной с
осью Ovc, то в этом случае всякое отклонение рамы 1
относительно платформы вокруг оси Ov0' измеряется
сельсином Сук и через следящую систему рамы 2 крена
устраняется без влияния на точность измерения других
251
угловых координат (курса и тангажа) самолета (см. рис
8.3).
При й=/=0, согласно рис. 8.3, движение следящей ра-
мы 2 крена вокруг оси ОХ порождает вращение кардано-
ва подвеса (рамы / и <3) вокруг осн 0zn платформы, что
является причиной образования погрешности в измере-
нии текущего угла курса сельсином Ск. Для устранения
этого явления система управления следящей рамой кре-
па снабжается специальным вычислителем — регулято-
ром сигнала управления (см. рис. 8.1). Сигнал управле-
ния движением рамы 2 (см. рис. 8.3) формируется из
двух сигналов отклонений рамы 1 вокруг осей Опо и Ozn,
что позволяет производить непрерывное измерение теку-
щих углов ХРК, и у самолета с допустимой точностью
при всех их изменениях.
Для того чтобы рассматриваемая гироскопическая
платформа служила материализованной моделью опор-
ной системы осей координат О£0т]о£о и по ней с заданной
точностью определялись значения углов •& и у самолета
в любых летных условиях, необходимо прежде всего ста-
билизировать плоскость осей Ох„, Оуп платформы парал-
лельно плоскости истинного горизонта, т. е. плоскости
осей О£п, От]о, или, согласно рис. 8.3, стабилизировать
ось Ozn платформы по направлению истинной вертикали.
Как уже отмечалось ранее, чувствительным элемен-
том к направлению силы тяжести в неподвижной точке
относительно земпой поверхности является физический
маятник или акселерометр. С целью коррекции платфор-
мы с гироскопами к положению ее осей Оха, Оу» в плос-
кость истинного горизонта на платформе установлены
два акселерометра: и А2 (см. рис. 8.1).
Рассмотрим равновесные положения акселерометров
А, и А2 установленных на платформе курсовертикали
(рис. 8.5), в опорной системе осей координат О£0т)о£о.
Согласно рис. 8.4, проекции вектора абсолютной уг-
ловой скорости осей Ogc, Orjw, О^о географической систе-
мы координат на эти оси равны
Е R di
(8.1)
+ tZ/? COS f yF
v V
0>Со=(/ sin <р-|—-Mg<p=—
(8.2)
(8-3)
252
где Ve= f//?cos<p + v£; R — радиус земной сферической
поверхности; vc — восточная составляющая скорости са
молота относительно Земли; ulV— северная составляю-
щая скорости самолета относительно Земли; qi— геогра-
фическая шпрота места, принимаемая при сферической
форме Земли равной геоцентрической широте.
Рис. 8.5. К уравнениям движения чувствительных
элементов акселерометров
Проекции абсолютной угловой скорости вращения
опорной системы координат на ее оси имеют вид
<»eo=‘°E£‘cos0%+Тк)sin (АН- (8.4)
= c°s (До-Ь^Гк)“Ь'0ЕЕ s^n (8.5)
^о=(У е/ЯНКЪ <8-6)
нли после подстановки (8.1), (8.2), (8.3) в (8.4), (8.5) и
(8.6) получаем
”’Е0=---[V/у cos(A0+'F1()+ VEsin (A0 + 4J'K)b
+ <8,7)
А
loc„=(V£//?)tg^.
253
Если W — вектор линейного абсолютного ускорения
движения точки О начала системы координат Og0i]o^o
(рис. 8.5), то его составляющие—проекции на оси будут
определены как
(8.8)
^ч.=^+‘«СУе.-‘«еУ?.. (8-9)
^Со = Vt +“E»V?o - «Ц<У Е.- (8.10)
Проекции абсолютной линейной скорости V" начала
системы координат О|от]о£о для случая горизонтального
полета имеют вид
П= VE cos (До+<FK) - vN sin (Ло-I- »FK);
V%=vN cos + VE sin (Ло-|- ^к);
(8.11)
v?0=o.
Так как ^Со—то, считая, что Л0+ч1гн=
=const, локальные производные проекций V“„ и Vjj,
представим в виде
y^l^cosMo+'IQ-^sm (ЛО+'УК), (8.12)
Й^=^со8(Д0 + Фк)+И£5т (ДО+»ГК). (8.13)
После подстановки (8.7) н (8.11) ... (8.13) в (8.8)...
(8.10) и некоторых преобразований получаем
W'eo=^cos (Ло+ЧГК) — -vN sin (Ло W‘K) —
— 2(7sin <р sin (Д0+?гк) — %UvN sin <р х
X cos(/0-prK)— ^^1е<рсо8(Л0+ЧГк)—
—-z-tg®sin (ЛоН-Фк)—7?(72sin <ocos<p X (8J4)
X sin (Д0 + ^к);
U710==‘o/vcos(^o_bvlJK)_b'af s>n (4+'I’K) +
-\~'2U'Oe sin <o cos (Ло+ ’FK)~2(^v sin <p x
X sin (Ло+»FK) - tg <p sin (Ло iTK) -|-
i
254
—-^tg?cosG40-}-<lfK)-|-A?Grasin cpcos<p x
f\
X cos (? -j- li K);
(8Л4)
-]- 2U vE cos <p U2R cos2 <p
где — путевая скорость самолета. В част-
ном случае, когда оси О£0, Оцо совмещены с географиче-
скими осями 0^5, Otjw, т. е. когда Ао+Чгк=О (рис. 8.4),
(8.14) принимают вид
UZ£o=nz6 =i)E — V-^~ tg ср - WvN sin <p,
к
VF4o=l^4/v=^+2t7®£ sin<p+-^tg<p +
(8.15)
urc =
-f-AV2 sin cpcos<p,
—-—|- 2С/’'У£- cos <p -|- RU2 cos2 <p
R ,
Так как равновесное положение физического маятни-
ка (акселерометра) в неподвижной точке относительно
земной поверхности, определяющее направление силы тя-
жести, есть направление равнодействующей силы ньюто-
нова притяжения к Земле и центробежной силы от су-
точного вращения Земли (рис. 8.6, а), то при принятой
сферической модели Земли сила тяжести направлена по
нормали к поверхности сферы, т. е. ее радиусу. Согласно
(8.14), проекции абсолютного ускорения начала осей ко-
ординат в неподвижной относительно Земли точке на
осн будут
\Г£о= — U2R sin ср cos ср sin (.Ао-|-Ф1(),
W?l0=U2R si n <р cos «р cos (До ф- Ч^),
uz°,=—г/2/? cos2 ср.
(8.16)
Эти составляющие центростремительного ускорения
точек на поверхности Земли вместе с составляющими ус-
корения g' земного тяготения определяют относительное
равновесное положение физического маятника иа земной
поверхности в точке, неподвижной относительно земной
255
поверхности. Направление их равнодействующей и при-
нимается за истинную вертикаль места на земной поверх-
ности.
На рис. 8.6, а показаны направления силы Р тяжести
как равнодействующей сил F земного тяготения и цент-
робежной Q На рнс. 8.6, б представлены вид на плос-
кость истинного горизонта со стороны положительного
Рнс. 8.6. Определение полей тяготения и силы тяжести для
сферической модели Земли
конца оси О^0 (истинной вертикали) и положение про-
екции ускорения g'„N поля тяготения и проекции центро-
стремительного ускорения, взятого с обратным знаком,
на плоскость горизонта (—(72J?sin<pcos<p).
Проекции ускорения силы Р тяжести иа осн О£0, Оцо,
О£о получаем в следующем виде:
Агы= — sin (4+фк> + ^2;? sin <р cos <р X
X sin(71o-|-4Q=0,
c°s (Л+^к) — U2R sin <f> cos ? X
X cosM0+ ФК)=О,
Ac0=tfc.+U2R c°s2 <? ~ — g' + U 2R cos2 <? = — g0,
(8.17)
где go — ускорение силы тяжести.
Так как g'io= — g^ sin (Д„-|~ »ГК), g\,=g\N cos (Ло+
то
256
gEo=gl + ^2#sin ? cos<p sin + sin cp cos <p cos (Ло+WK)= 0, gco=&o+fJ2R cos2 <p= - g0. (8.18)
Из (8.18) получаем проекции ускорения земногс пня на оси: Яе,= —£/2/?sin <pcos<psin тяготе-
^=U2R sin <pcos cpcosHo + 'Fj, gto=— So~ £/2/?eos2<p. (8.19)
Движение начала координат системы О£0т]о£о вместе
с самолетом относительно земной поверхности порожда-
ет кажущееся ускорение
a=W—g', (8.20)
которое в проекциях на оси Og0, Oq0, О£0 имеет состав-
ляющие
«£. —АЧ«> «к,= ^0-/ч». "с. = ^с. — (8-21)
Согласно формулам (8.21), (8.14) и (8.19) получаем про-
екции кажущегося ускорения а на оси О^о, От^о, О^0:
аи—-йЕсо5 (Д0+^к) — vN sin H0-)-»FK) —
— 2Uve sin <psin (Л0-|-Чгк)—26^ sin ср x
X cos(^0-|-Wx) —^^-tg<pcos(/40 + ’FK) —
A
—^-tg<psin(>lo+'FK),
t\ *
ai.=vN cos (Ло ЧГK) vE sin (Ло-f- Чгк) -J- (8.22)
-|-2(7т>я sin <p 005(^0-)-'^)—2UvNs\f\ <p x
X sin (До + Фк) - V-^L. tg <? sin (Ло + 4\)+
i\
. V'e
+ -£- tg <p cos <Л0-Ь W^),
К
wc
Cc.=----— — vE cos 4> + g0-
A I
9-1757
257
Из формул (8.22) проекций кажущегося ускорения сле-
дует, что если начало координат опорной системы коор-
динат OgoTjo^o движется относительно земной поверхно-
сти даже с постоянной скоростью (o£=const, vN==
—const), то уже в этом случае равновесное положение
физического маятника изменяется, так как составляю-
щие кажущегося ускорения по горизонтальным осям
О|о и От]о не равны пулю, т. е. если O£=ocsin4fK=
= const, o,v=yccos4fl(=const, то, согласно (8.22),
— (264 sifi <Р+-^г tB? si« '1Гк) cos Ао,
/ v? \
«ч»= — skl Н—7-rtg? sin WK sin Ao,
\ J
f V2 \
<kt = ~ ---C0S * Sin + ) •
\ к /
(8.23)
Акселерометры А, и A2 с линейным перемещением их
подвижных масс показаны на рис. 8.5: Ai ориентирован
своей измерительной осью параллельно оси Охп плат-
формы, А2 — параллельно оси Оуп платформы.
Акселерометры — одпокомпонеитные, т. е. они изме-
ряют только одну из составляющих вектора кажущегося
ускорения платформы. Акселерометр А] измеряет со-
ставляющую кажущегося ускорения по оси Охп
платформы, акселерометр Аг — составляющую ау ка-
жущегося ускорения по оси Оуп платформы
Ориентация акселерометров на платформе показана
на рис. 8.1 и рис. 8.5. Координаты ха0 и уа0 определяют
нейтральное положение центров масс подвижных эле-
ментов акселерометров; координаты ха и уа являются пе-
ремещениями подвижных элементов акселерометров от-
носительно их нейтральных положений.
Уравнение движения подвижного элемента акселеро-
метра А( является уравнением составляющих сил по оси
Ох„ платформы (согласно рис. 8.5, по оси чувствитель-
ности или измерительной оси акселерометра)
(^д‘н<х gxu) —Fхц>
(8.24)
где
(8.25)
258
U’xn — проекция вектора абсолютного ускорения начала
координат О на ось Ох„ платформы; IVZXII— ускорение
центра масс подвижного элемента акселерометра в си-
гтеме осей Oxn, Оуп, Ozn платформы; проекция ус-
корения земного тяготения на ось Ох„\ та—масса по-
движного элемента акселерометра; Fxn — сумма проек-
ций позиционной упругой центрирующей силы, силы
демпфирования, сил от помех и других на ось Охп.
Согласно рис. 8.5, проекции абсолютного ускорения
центра масс самолета (начала О системы координат
0|о1]о£о) па оси Ол'ц, Оуа, Ozn платформы имеют вид
U7,.n=U75o (cos a cos ф — sin a sin ф sin p)-|-
cos p sin ф -|- UZCt ( — sin a cos ф —
— cos a sin Osin p);
—cos a sin ф —sin a cos ф sin p)+
-}-U/,n cos p cos ф+^с. (sin a sin ф —
—cos a cos ф sin p);
MZ>n=Wu sin a cos P -|- IFsin p Ц- U7Co cos a cos p,
(8.26)
где UZEu, lFCo определяются по формулам (8.8),
(8.9,) (8.10); a, p, ф— угловые координаты платформы
относительно системы координат ОВоЦо^о-
При малых отклонениях a, iP, ф платформы (8.26)
можно представить в виде
^п=^+^Р+^Со. I
(8.27)
Согласно рис. 8.5, координатами центра масс по-
движной части чувствительного элемента акселерометра
А! в системе осей Oxn, Оу„, Oz„ платформы в нейтраль-
ном положении будут хао, 0, 0 соответственно, а для ак-
селерометра Аг они равны 0, уао, 0. Для акселерометра
А| ускорение центра масс его подвижного элемента в на-
правлении оси чувствительности Охп в системе коорди-
нат Ox„ynzu равно
VF'xn=xa — (ш’11-|-«>211)(лв(1-|-А:в). (8.28)
9’
259
Правую часть уравнения (8.24) представим в виде
Fхи " ^аха ’ fха~\~ л*н> (8.29)
где da — удельная сила демпфирования движения чувст-
вительного элемента акселерометра; f — удельная упру-
гая сила центрирующего устройства; FXI1 — прочие силы
(от помех).
Проекции ускорения силы земного тяготения на оси
Ох,„ Оуп платформы равны
gxn Й€о“|“^1оФ I (g
I
После подстановки (8.25), (8.28) и (8.29) в (8.24) по-
лучаем уравнение акселерометра А1 в следующем виде:
таха -|- daxa 4~ [/ —,п-а (°4« 4~Шгп)1 ха~
== —gx и) ~1~тв хв0 (шуч -}~te'zii) 4~F xuj (8.31)
аналогично, для акселерометра Аа
—та (шхп 4-ш*ч)] Уй —
= —та№ уп — gy^~\'ma,Jalt (“х и 4~ и) 4~ ди, (8.32)
где Юхн, Шуи, Огп — проекции абсолютной угловой скоро-
сти платформы па ее оси Охп, Оуп> Ozn.
Согласно рис. 8.5, угловые скорости <щп, со//п, <щп вра-
щения платформы вокруг осей Охп, Оуп, Ozn равны
“хп— —Р cos ф + и cos р sin ф-|-u>50 (cos a cos ф —
— sin а sin ф sin Р) 4~‘% cos р sin ф —
— о*с„ (sin а cos ф cos a sin ф sin р),
«>,,„=а cos ₽ cos ф+Р sin ф—o>to (cos а sin ф ф-
4- sin а cos ф sin р)4-°)ч0 cos р cos фф-
4-in{o (sin а sin ф — cos а cos ф sin р),
<о2П=ф-|-а sin Р+«>е, sin а cos р-|-
4- w4c sin P4~t»co cos a cos p,
или для малых углов а, р, ф отклонения платформы от-
носительно опорной системы координат 0£от]о£о
260
01 л и = — ? + °Ч« 4“ "Ч<4 — "Ч-«»
wu И=О 4- °Ч—“>с.₽ — ЧЛ
wz ..=’?+"’с» -I- wtoa + й,чЛ
(8.34)
Уравнения акселерометров Л] и Л5 можно сущест-
венно упростить при следующих практических условиях:
1. Акселерометр является прибором для измерения
кажущегося ускорения самолета, частота изменения ко-
торого лежит в диапазоне низких частот (от 0,05 Гц и
ниже). Для измерения ускорений с малыми амплитуд-
ными и фазовыми искажениями акселерометры для пре-
цизионных гироскопических систем ориентации выполня-
ют е собственной частотой ">a—Vflma недемпфирован-
ных колебаний, значительно большей (порядка 80...
200 Гц), чем частота изменения измеряемых кажущих-
ся ускорений. По этой причине собственным движением
подвижного чувствительного элемента акселерометра
можно пренебречь.
2. Динамически настраиваемый вибрационный гиро-
скоп выполняет роль эквивалента свободного гироскопа,
если он установлен на платформу, следящую за движе-
нием его вектора собственного кинетического момента
и не допускающую больших угловых рассогласований с
ним. В рабочем режиме при угловых рассогласованиях,
платформы и гироскопов в 2...3х следящие двигатели на-
чинают движение платформы, а скорости слежения не
превышают ш*п=шСо порядка 0,6...
1 град/мнп, т. е. в правых частях уравнений акселеро-
метров Ai п Аг инерционными членами OToxfl0(w^11-|-4»Li)
и Л1аУао (wxи 4“ w?n) вполне можно пренебречь. При отме-
ченных условиях уравнения (8.31), (8.32) представим в
следующем виде:
fxa=-ma(Wxn-gx^ ,
fya=-ma(WUn-gyB),
где W\.„ — g'XB—axn, Wgn~g'yB=agn — проекции кажу-
щегося ускорения начала координат О на оси Охп, Оуп,
Ozn платформы. Прочие силы FVI„ Fljn считаем малыми
и их пе учитываем. Используя формулы (8.27) и (8.30),
первое уравнение (8.35) для акселерометра А| запишем
в виде
(8.35)
Aa=_ma[U7Ew„gxo4-(W74o-g;)6-(irc.-fto)aj. (8.36)
261
Правая часть этого уравнения представляет собой сум-
му трех слагаемых — сил инерции, каждая из которых
создает составляющую смещения ха подвижного элемен-
та акселерометра Аь Проведем оценку каждого слагае-
мого правой части (8.36).
Для первого слагаемого правой части (8.36) пред-
ставим
(8.37)
Составляющая ускорения земного тяготения по осн
Ogo может быть оценена согласно (8.19):
|"j,|=|—£7z/?sin <рcos® sin (Ao-j-^K £72/?~
^3,45-Ю-з^,
где go — ускорение силы тяжести. Уравнение (8.37)
представим в следующей форме:
- mag\0gi) = fx„, -I- та^усх. (8.38)
Ойо справедливо, если
а — Sie = sin ? cos f sin (Aq + wK) (8 39)
y" go go
или
-maW^=fxal + magoaycx. (8.40)
Аналогично, для второго слагаемого правой части
(8.36)
—f>‘tJty=fxai, (8.41)
или — OTa,^ — mo(Wn,~-g'^^fxn2-\-m„g0ayc^, (8.42)
' -?TJO U2R sin V cos ? cos (Ло 4- WK) ,o доч
где аусг=--------=—-------------------------• (о-ча;
go go
Если угол отклонения платформы 'ф = 1°, тогда, со-
гласно (8.19),
sin tpcos? соя(А0+фк)|-< (72/?ф^6- 10~5g0.
т. е. это значение близко к порогу чувствительности пре-
цизионного акселерометра и в уравнении (8 41) им мож-
но пренебречь и считать, что
~tnaW^ = fxat.
(8.44)
262
Наконец, третье слагаемое правой части уравнения
(8.36)
—ma(W^—gi)a=fxat. (8.45)
Согласно (8.22),ate=lVq,—gc’0=(—©I//?)—2t/T)£ cos «р+^о»
Например, если ос=500 м/с и vE=vc и ср=О (полет на
восток по экватору), имеем
Г Со - -O,OO4go - O,OO74go+g0= -0,0114-0+g0^g0
и уравнение (8.45) примет вид
—ftiag^=fxa,. (8.46)
Объединяя (8.40), (8.44) и (8.46) в одно выражение, по-
лучаем
fxa^magQ (а--------+ -|-ayJ , (8.47)
\ go )
Где Х&—'• Ха\ -|- Ха2
Если ос=0 (равновесие акселерометра в неподвижной
точке на земной поверхности) и а=0, ф—0, то
IV^O= — U2R sin cos <f sin (Ao '?,.),
aycT= U2R sin <p cos cp sin (Ao + WK)/g0,
откуда следует, что x«=0.
Аналогично (8.47) получаем уравнение акселеромет-
ра Л2:
. w — Wr ф \
Л/о= ЗД (?------------------------— + Ру- ’ (S.48)
\ Лго / •
где yer = уа t —|- уа а —|- y(f 8, Г^уст ’ f>iuJ£*o ’
и».., ч - - sin у cos у cos (До + v,.)
Следует отметить, что если считать модель земной
поверхности в виде сферы, а силу тяготения Земли —
центральной, направленной по радиусу сферы, то квази-
статнческие уравнения акселерометров для той же плат-
формы будут такими, как (8.47) и (8.48), но ауст и руСт
в них следует считать равными нулю.
263
§ 8.3. Уравнения движения системы ориентации
Уравнения движения платформы курсовертикалц
представим в опорной системе координат О£одо£о. в ко-
торой ранее определены уравнения движения чувстви-
тельных элементов акселерометров Ai и Аг, установлен-
ных на платформе.
Рис. 8.7. Движения гироскопов ДНП и ДНГ2 с платформой
Расположение гироскопов ДНП и ДНГ2 на платфор-
ме и их системы координат представлены на рис. 8.7.
Положение платформы относительно осей О£0, Одо, Oto
определено угловыми координатами а, р и ф. По осям
Ох„ и Оуп платформы расположены оси вращения при-
водных двигателей гироскопов ДНП и ДНГ2 соответст-
венно. В центре масс ротора и кольца подвеса ротора
ДНП расположена вершина трехгранника OxtoyioZto-
Оси О|Хю, О|£/|0, OiZio соответственно параллельны осям
Одо, О£о. В центре масс ротора и кольца подвеса
264
ротора ДНГ2 расположена вершина трехгранника
02^'20^20^20, оси которого параллельны осям Ogo, От)0,
О^п- Согласно рис. 8.7, полярные оси C^-Vi и О2уг роторов
ДНП и ДНГ2 определим относительно опорной системы
0£от)о£о координатами «ц и ф1для ротора ДНП ирг и фг
для ротора ДНГ2. В исходном положении (при
а[=0, ф*=0 и рг=О, фг=О оси OjXi и о2уг ориентирова-
ны соответственно параллельно осям Og0 и Orjo).
Для измерения угловых координат платформы отно-
сительно гироскопов ДНП и ДНГ2 служат, как уже от-
мечалось в § 8.1, датчики углов индуктивного или ем-
костного типа (см. рис. 8.1). И в том и в другом вариан-
тах статорная их часть закреплена на корпусе ДНГ или
на платформе. Роль якоря этих датчиков выполняют ро-
торы ДНП и ДНГ2.
В качестве угловых координат платформы относи-
тельно ДНП и ДНГ2 приняты: для ДНГ1 — сп, и
для ДНГ2 — р2, фг- Чтобы пе усложнять чертеж, на рис.
8.8, а показана опорная система координат Ogo^ogo, от-
носительно которой задано положение платформы. Оси
ее представляют связанный с ней трехгранник Ox„ynzu,.
Здесь же показан трехгранник Olxtyiz1, связанный с ки-
нетической осью х/' ротора ДНП Положение трехгран-
ника Oxiy'iz'i относительно осей Ogo, 0i]o, Ogo определе-
но координатами «> и <pi (рис. 8.7). Координаты положе-
ния осн Ox’i ротора ДНП относительно платформы обо-
значены через сц и ф1 и измеряются датчиками углов.
Плоскость, в которой измеряется угол af рассогласова-
ния платформы и оси OjXi" ротора гироскопа, и след
ОрТо этой плоскости на плоскости платформы хвОув по-
казаны па рис. 8.8, а пунктиром. Угол ф, ’измеряется
между осями OiXo и О1ХП. На рис. 8.8 из сферического
четырехугольника получаем соотношения
cos Xn, %i=cos(a —rxt)costpi = cos(ip —фОсозаь (8.50)
cos jfi, y'=cos Cj cos (90—Ф+Ф1)= cos (90 —Ф*) cos B-|-
или
-|-sm (90—Ф*)ski ? cos (90 —a*),
cosxi, y^cosaj sin (ф —<]>!>=
= sin ф* cos £-j- cos ф* sin 0 sin a*.
(8.51)
(8.52)
265
Полагая угловые отклонения гироскопа ДНГ1 и
платформы малыми, из (8.52) получаем
ф—ф1~фь (8.53)
т. е. ф—ф*=Ф1» где ф, — координата ДНГ1 относительно
платформы. После подстановки (8.53) в (8 50) полу-
чаем
cos (а — at) cos фТ=cos cti cos фь
откуда
a — ai=aj. (8.54)
Рис. 8.8. Определение координат платформы относительно ДНП:
о — ориентация ДНП и платформы, б — сферический четырехугольник
На рис. 8.9, а показаны та же опорная система коор-
динат О^оро^о и то же расположение платформы (трех-
гранника Ох„упгп) и трехгранник Ox'itjiz-i, связанный с
кинетической осью О2уз ротора ДНГ2 Положение трех-
гранника O2Xitj2Z2 относительно осей О£0, Оро, О£о оп-
ределено координатами и ф*. Координаты оси Оу2 ро-
тора ДНГ2 относительно платформы обозначены р2 и фг-
Рис. 8.9 Определение координат платформы относительно ДНГ2:
° —ориентация ДПГ2 и пла: формы: б — сферический четырехугольник
bP"s!/o^B
266
267
Из рис. 8.9, а и 8.9, б следует
cos y’z — cos р2 cos (90—ф2-|-ф) —
— cos (90 -|-фг) cos a-J-sin (90-J-ф*) sin a cos (90 — p ),
или после преобразований
cos p2sin (ф—'•2)=sin 'j’cosa — совф* sin a sin p2*
и при малых углах отклонений платформы и ротора
ДНГ2 имеем ф —ф2^фг—“К, т. е. ф2=ф—ф*. Согласно
рис.8.9, а, из сферических треугольников т^'гуч и >)оу’гп
можно определить
cos В* cos ф*= sin р sin р2+cos В cos р2 cos (ф — ф2),
и при малом значении ф—фг=фг cos p2^cos(f — р2), т. е.
&=₽-& (8-%)
Таким образом, в общем случае малых отклонений
гироскопов ДНП и ДНГ2 и платформы от опорной си-
стемы осей координат можно полагать, что координаты
гироскопов относительно платформы равны.
для ДНП
at = a — а?, ф1=ф —ф* (8 56)
и для ДНГ2
р2=р —р*. ф2==ф—ф*. (8.57)
Для анализа курсовертикалн, основанной на исполь-
зовании динамически настраиваемых гироскопов ДНП
и ДНГ2, воспользуемся уравнениями движения ДШ
(см. кп. 1 и гл. 4). В соответствии с принятой системой
координат Og0i]o^o для платформы и гироскопов ДНП
и ДНГ2 представим уравнения движения ДНП, отне-
сенные к осям платформы Охп, Оуп, Ох„, в следующем
виде:
aiH—У(^аг4"^фг)ai_l~(£-|-А)Ц>Ф1 —
- -(3+4)i„-(c+ С1+Л|;В|)
Sowzn+-M y>iv
( a +V (^r+I^Hj-tC+A) йоа\=
= — + у- ) 1С»п +(с+ С| 1 2 1 ~ И + ^г'1ин-
(8.58)
268
Диалогичные уравнения движения ДНГ2 имеют следую-
щую форму:
[a (^₽.+Аг)₽2+(С-1-^1)й0Ф2=
= (л -*4) ;‘"-(с+С1+Л4‘) Q^~
Д 40 Фг + — 04 + Ат) Фг ~ (£ 4" А) ^оРг —
—(ЛН4)^-(С+С‘+Л2~В1 ) S0^n+^2nH,
где А — главный момент инерции ротора относительно
осей z/i и 21 для ДНП н относительно осей x-i и z2 для
ДНГ2 (см. рис. 8.7); С — главный момент инерции рото-
ра относительно осей Ох{ для ДНП и Оу-> для ДНГ2;
Д] — главный момент инерции кольца подвеса ротора
вокруг оси крутильной жесткости внутреннего торсиопа
ДНП и ДНГ2; Bt— главный экваториальный момент
инерции кольца подвеса вокруг оси, перпендикулярной
оси крутильной жесткости торсиопа ДНП и ДНГ2;
С’| — главный момент инерции кольца подвеса ротора
ДНП (ДНГ2); Йо=(М-М(А+В1-А)— квадрат
частоты вращения приводного двигателя (условие дина-
мической настройки гироскопов); k\ и k2— угловые же-
сткости торсионов подвеса ротора ДНП, (ДНГ2);
DarD^Dfr — удельные моменты демпфирования ротора
и кольца подвеса; си, ф1 — координаты оси Oxi ротора
ДНП относительно платформы; fj2, ф2 — координаты
осн у2" ротора ДНГ2 относительно платформы (осей
хп, у,„ г„) ; шЛП, ®^п, ®zn — проекции вектора абсолютной
угловой скорости вращения платформы на оси х„, уп, z„,
определяемые согласно (8,33) и (8.34);
М*'2вп, ^г,2вя~_ внешние моменты, действующие на ги-
роскопы.
Абсолютные угловые скорости трехгранника Ox\tj\Z\
ДНП (см. рис. 8.7) равны
Нх—Чп+^СОВО! (8.60)
и абсолютные угловые скорости трехгранника Ox-iy-izz
ДНГ2
p2fl ~ -^,,+kcoi ф2, ф2а— ‘°zu4-': Cos р2. (8.61)
269
Из (8.60) и (8.61) получаем
а1 — а1а—,одп» р2=^2л_Ьш1п» | (8 6 >)
Ф1 = Ф1а —Ф2=к» — *°«n I
и соответственно
а1 = а1а—“jn' р2=Г2я“Ь<охп' 1 (8.63)
'jl = K—Ф2 = Ф«в —“jn- J
После подстановки в (8.58) и (8.59) производных
координат гироскопов относительно платформы из (8.62)
и (8.63) получаем следующие уравнения движения ги-
роскопов ДНП и ДНГ2:
М -|---j «lad ~ (Дхг~Ь U1 4"(^ + А) Йоф1д =
=Qaow»n+^'1B11;
(а + 40 '-ha + ~ (Da г+^Фг) Ф1 — (С+АI) £oaIn =
— — Q&owy n +
(л +~) L +0- (ад) ₽2+(С+л.) s0-L =
^Q20«’2tl-Af^2iui;
(А +-^0'Йга + -^~ (^Pr+^r)fe— +А) so?2a=
=Q^n+^2Bii,
где Q=(Ad-Bi—Cj)/2.
Предполагается, что моменты от аэродинамического
сопротивления сведены к малой величине и не учитыва-
ются, поэтому в уравнениях в качестве демпфирующих
членов представлены моменты конструкционного трепня
упругого подвеса гироскопов
Нутационные движения быстро затухают от малых
по величине демпфирующих моментов, а Q«0, поэтому
пренебрегаем инерционными членами, представленными
первыми слагаемыми уравнений. В этом случае рассмат-
риваются прецессионные движения ДНП п ДНГ2, ха-
рактеризуемые следующими уравнениями:
270
(С+А) ЦгРи—1 вн,
(С -|~ А) 20<Х1а= —^г'1вн’
(С + А)Ц)йа— — М^2„„’ ) п -
J (О.б/)
(C+A)eo^=-№W ]
Применение динамически настраиваемых гироскопов
в качестве индикаторов угловых отклонений платформы
предполагает точное согласование платформы с гироско-
пами, не допускающее больших углов рассогласования
между ними. Это объясняется следующим. Динамически
настроенный гироскоп проявляет свои свойства как эк-
вивалент свободному гироскопу с высокой точностью,
если отклонения вектора собственного кинетического
момента гироскопа относительно направления оси его
приводного двигателя достаточно малы (единицы угло-
вых минут).
Точное согласование платформы с гироскопами повы-
шает точность начальной выставки платформы в гори-
зонте и азимуте. Поэтому обеспечению высокой точности
и качеству переходных процессов слежения платформы
за положением гироскопов в чисто индикаторных систе-
мах ориентации придается большое значение.
При рассмотрении коррекции гироскопов с платфор-
мой по вертикали и в азимуте будем полагать, что плат-
формой выполняется точное слежение (без ошибок) за
положением гироскопов. Это соответствует тому, что
выражения (8.56) и (8.57) обращаются в ноль, т. е. для
гироскопа ДНП
aj=a—а*=0, Ф1=ф— ф*=0, (8.68)
а для гироскопа ДНГ2
р2=р_&=0, ф2=ф-ф!=0. (8.69)
Из (8.68) и (8.69) следует, что ф*=фг, т. е. если у ги-
роскопов ДПГ1 и ДНГ2 есть собственная скорость пре-
цессии в углах 'И и фг, то она должна быть одинаковой
по модулю и знаку (в том случае, когда коррекция в
азимуте отсутствует). Так как практически это условие
271
не выполняется, то для управления следящей системой
платформы в азимуте (угол ф) используется один сигнал
рассогласования либо с гироскопа ДНП (по углу ф]),
либо с гироскопа ДНГ2 (по углу ф2). Например, управ-
ление движением платформы в азимуте осуществляется
по углу рассогласования ф1=ф—'?*, измеряемому дат-
чиком сигнала угла ф! с ДНГ1. В этом случае гироскоп
ДНГ2 корректируется к положению его оси Оуг ротора
в плоскость осей Оуп, Oz„ платформы. Это дает возмож-
ность однозначно и точно поддерживать направления
осей Oxi и Оу2 роторов ДНП и ДНГ2 соответственно
по осям Ох„ и Оу„ платформы и, следовательно, по осям
чувствительности акселерометров. С этой целью гиро-
скоп ДНГ2 снабжается радиальной коррекцией в азиму-
те по своему углу ф2 рассогласования с платформой,
поддерживающей ось Оуг ротора в плоскости ynOzn
платформы (рис. 8.9). Акселерометры А( и А2, установ-
ленные па платформе, преобразуют смещения ха и уа
их подвижных элементов в электрические сигналы па
пряжения, согласно (8.47) и (8.48), они равны
?i=ka ^sp-(a-W^ + W^-+a\ ;
/ \ Но /
e^ka )
J \ go '
и используются для формирования моментов коррекции
платформы.
Для построения точной базы ориентации самолета и
сведения к минимуму погрешностей стабилизации плат-
формы относительно плоскости горизонта в условиях
движения самолета с ускорением применяется так назы-
ваемая интегральная коррекция платформы. С этой
целью формируются алгоритмы моментов коррекции,
состоящие из алгоритмов моментов, пропорциональных
проекциям кажущихся ускорений на оси чувствительно-
сти (измерительные оси) акселерометров, и моментов,
равных интегралам по времени от тех же проекций ка-
жущихся ускорений. Эти моменты создаются датчиками
моментов (см. рис. 8.1) гироскопов ДНГ1 и ДНГ2 и со-
ответственно равны
272
(8.70)
где p.i, р2 — коэффициенты моментов позиционной ра-
диальной коррекции; vi, V2— коэффициенты моментов
интегральной коррекции.
Курсовую часть системы рассмотрим с коррекцией
платформы к магнитному меридиану. В этом случае рас-
сматривается режим определения географического курса
в полете самолета по заданной локсодромии. Если d.—
угол магнитного склонения, то угол магнитного курса
Ч'м=Чгк—d, где. Тк— курсовой угол относительно зем-
ного меридиана.
Для гироскопа ДНП, по которому осуществляется
слежение платформы в азимуте, если ф — отклонение
платформы ог ее равновесного положения относительно
магнитного меридиана, а ошибка в определении положе-
ния его есть VFM, момент коррекции ЛГ- гироскопа
ДНП с платформой, создаваемый вокруг оси /л датчи-
ком момента, равеп
Л1;;=-ЛИ(|-ДФМ). * (8.71)
Движение ДНГ2 в азимуте (в угле Чгг) происходит,
как ранее отмечалось, в режиме коррекции относительно
плоскости i/uOzu платформы. Момент коррекции гироско-
па ДНГ2
Л!1', =Л2ЧГ2. (8.72)
После подстановки (8.70) (8.71) и (8.72) в (8.66) и
(8.67) получаем
273
(С+А1)20ф;а=-*м(ф-ДЧГм)+/И> ;
"iBH
(С4- А1)Й0«1а= —Pl (a — — ° -+ 4- aycTj —
-*i f fa --+ W'^ 4- ctyJ dt-\-M'z. ;
J \ go / Ibh
0
(C 4~ Aj) Й0ф2в = — Л2ф2 4~ Al х» ;
2в H
. . П7 — w- ф x
C 4-A) s0₽2a=-p2 (₽—-*- 4- ₽ycT) -
c ! V? - W, ф X
c .
j \ So /
(8.73)
На основании (8.62) и (8.34) запишем выражения
абсолютных угловых скоростей гироскопов ДНП и
ДНГ2:
Ф1а=Ф1 4-°,гп:=Ф1 4"Ф + “С. +“So«+u>4oP ;
а1а= а1 4- шуц—а1 + a + 0)Чо “ “ЕоФ —“СоР 5
Фгв=Фг — юхп — Фл 4- Ф 4“ l% 4~ wEoa 4- “’jo?!
p2a = ?2 — “л п — ?2 4“ Р — “Ео — ‘''’.’оф 4~ “Соа •
(8.74)
Если движения платформы точно повторяют движе-
ния гироскопов (для ДНП —в углах а=а* и ф=ф1*,
а для ДНГ2 — в угле р={32), то относительные скорости
платформы по отношению к гироскопам равны пулю:
ai=0, р2=0 и Ф1=0; ф2#0- (8.75)
Уравнение (8.73) движения ДНП вместе с платфор-
мой вокруг оси Огп платформы с учетом (8.74) и (8.75),
считая, что в формулах (8.74) члены а>еоа и со,кр малы,
представим в виде
Ф 4-е1Ф= -sin <р 4- tg <р4-е^фн) , (8.76)
где
(C + Ai)e0
274
Если считать, что q)=const, rf=const, A4rM=const и
i)£=const, то при пулевых начальных условиях
RU sin <р + v _ tg v \ . „
--------\Z„_g \ (1 _ (8.77)
чЯ )
Уравнение движения ДНГ2 относительно платформы
с учетом (8,74) и (8.75) имеет вид
ф2+е2ф=-(ф+6/8Ж т + tg?) .
(8.78)
&2
где е2=------------.
(С + ЛО2о
Используя производную от интеграла (8.77), получим
ф2+е2ф2= —
'U sin <p + -^-tg<p'
(1 — е-61').
Уравнения (8.73) движения платформы с ДНП и
ДНГ2 относительно плоскости £оОт]о горизонта, полагая,
что моменты помех М'> и М' > равны нулю, предста-
1пн 2рп
вим в следующей форме:
V1
(С + Л1)0.
У!. + 'М
go
(С 4- At) Йо J
Е.-*-н
go
'уст
Н2
4t+<%«---(С + Л)Й,
Wr — W. ф
Чо_____сот
go
(8.79)
ГРуст) (С4-Л1)й0 J
О
go
tit.
VZ
Н
а—
При идеальной работе следящих систем платформы,
полагая, что а=а*и и ф— ф*; и рЕврг,
получаем уравнения (8.79) в следующем виде;
275
t a* -|- ea* 4- q J a? (/) dt — — wt($ = 0
(Wc 4- IT- ф! \ = -«4+E — — +«Уст 4- \ Ko /
₽‘4-e₽z4-<7 J p2(0<^—<ono^4-wc<>a*= 0 (8.80)
/ W w, Ф? \ —<o. 4-e ,0 '° 2 -LH 1 1
—шкоП c 1 „ 1 Pycrl 1 \ So /
+ <7 (’ 4-PycxW \ o0 / 0 1
где
е = н п = V| = v2
(С + Л1)й0 (С + ЯоОо’ 4 (С + Л1)20 (С + Л^Ц).
Переходя к дифференциальной форме записи урав-
нений (8.80) движения платформы с гироскопами, пред-
ставим их в виде
«1 4- ecii — ‘°ЕоФ1 — <оЕоФ1 —о,Сор2 — •%,₽«=
••+Ча—+
/ 1Г + Н7 Ф? \
+4 +м=
(8.81)
р2 4 ^4-^2 —^О*'2 — o,ro'l2 4"WCcal4"tnCoCl =
/ П7 Ф? — IT, ф! . \
=‘»Ео + * _|_р _|_
\ Ко /
276
Полагая, что движение самолета происходит по тра-
екториям, близким к горизонтальным, будем считать,
что проекции абсолютной линейной скорости на истин-
ную вертикаль (ось О£о) малы, т. е. !/"„ 0.
Тогда на основании (8.8) и (8.9) получаем
^40=^0 + Vt«>co. (8.82)
После подстановки проекций ускорений (8.82) и их про-
изводных в (8.81) получаем
«I + s«* -И Ча1 ~ «’ЕоФТ “ °ЧоФ* " <°СоЙ — (,)Со?2 —
V ® V" —о. —о, +(V, +V? wr 4-Kf <ЬГ УР?
___ __Ер I g Ео Т]о Со Т)о Со Т* 7]о U Со r to 1р/Т1 I
R go
№ <И + V" <о. ф* . \ ,
+е
go !
_ va ш +(iz" +v? Ш. '
£o___?]o Co \ Tjo__Ed Coj
1 7ауст»
Р* + е?2+q$ — ^Tto'1’2—«’Пофг+wCo“‘+'%а' ==
уа
=____
R г
Va + V?w,
_|_е-'10
(8.83)
-(Р* -v" й. )<£
\ СО_____I|o to____Т]о Ip/'*
go
Т)о <0 ll _ р I
Руст I Т
go /
go
— е
Здесь в правых частях уравнений сделана замена:
^B=Vl/R. (8.84)
Это получается из выражений абсолютных угловых ско-
ростей
^=-V^/R-, y^Vl/R. (8.85)
Рассмотрим некоторые варианты режимов работы ги-
роскопической платформы.
277
1. Если сохранить только чисто интегральную кор-
рекцию (исключить затухание, полагая е=0), заменяя
в (8.83) значения w,1(), «^„согласно (8.84) и
(8.85), то уравнения (8.83) в этом случае принимают
вид
a t 1 — «kofc — <оСокг= (—-М (V?o + У?,оф1) —
\ So к /
—ЧП-^К + <7аУсп
к Ло
p2~|“<7?2-|-“CoaI “|-WCoai
f—
U'O
“I +
Л. /
. (8.86)
к £0
Если коэффициент q интегральной коррекции вы-
брать так, чтобы q=g0/R, то уравнения (8.86) преобра-
зуются к виду
(8.87)
*\ к
₽2 ?2“Нчсоа1 +о,Со«1= —~ фа +
r\ f\
+|М-№к+-^.
Из (8.87) следует, что настройка интегральной коррек-
ции на условие q=golR еще не решает вопроса устра-
нения погрешностей стабилизации платформы, если
платформа с гироскопами не является системой, абсо-
лютно свободной в азимуте (т. е. она ориентирована,
например, по географическим осям координат или по
какой-либо другой, ие инерциальной системе коорди-
нат).
2. Если платформа ориентируется в азимуте по
идеальному, свободному гироскопу и при этом wu=0;
«>Со=0> тогда система уравнений (8.83) движения плат-
формы с гироскопами относительно плоскости £от]о
278
истинного горизонта принимает вид
iii4"eoi-b?«i=f—-7 (^?о + ^чоФ1) +
+— (И“о + V^;+ ^оЙ Wycr)~
Ео
V" ..
---Ф1 + ?аУст»
₽2+е₽‘+?₽*=(т—
+—(H“o-V^-V“.&Wycr) + Ф’ + ^уст-
Ео К
(8.88)
В этом случае следует считать коррекцию гироскопа
ДНП с платформой в положение магнитного меридиана
(т. е. в географических осях координат) отключенной и
в первом уравнении (8.73) полагать £м=0 Но так как
следящие системы платформы приняты идеальными и
считается, что ф=фц то, следовательно, платформа
вместе с гироскопом ДНП становится в азимуте сво-
бодной. Гироскоп ДНГ2 по-прежнему корректируется в
азимуте по платформе и можно считать, что сле-
довательно, ф2=Ф = Ф1-
Если демпфирование в (8.88) считать равным нулю
(е=0) и выполняется условие пастройки q—q0!R ин-
тегральной коррекции, а также если принять во внима-
ние, что фг=фь уравнения (8.88) получаем в следую-
щем виде:
va
"*_i So ___ Но | Ео „
«Н—^-«i=--------Ф1 п—7 “уст. •
а (8.89)
ф;+-^-Ру„.
*\ f\ К
)
На основании формул (8.7), (8.11) и рис. 8.4 представим
Vt^E.+Rt/coscpcos’iF,,; I (8 90)
V“o=т’ю + cos ? sin Ч?„, |
Где гР11=71о-ЬЧгк.
Если теперь на датчике момента коррекции гироско-
па ДНП (см, рис. 8.1) создать момент коррекции, по-
279
рождающий скорость прецессии ДНП в азимуте вместе
с платформой, равную угловой скорости '|'i=4/sin <р, то
платформа может служить указателем ортодромии. Пос-
ле подстановки фх = U sin <р и использования формул
(8.90), (8.39) и (8.49) получаем уравнения (8.89) в виде
U sin v
сц4-^-аТ=-----52----
••• p-n « U sin ф
К к
(8.91)
где
cos 11гп+^/г sin ЧТ,,, cos ЧГ„—vN sin ЧГ„.
Из (8.91) следует, что платформа с гироскопами со-
вершает незатухающие гармонические колебания с пе-
риодом 7'1|=2л84,4 мин. Практическая реали-
зация такой системы невозможна, так как в этом слу-
чае при наличии всегда имеющихся инструментальных
погрешностей начальной выставки платформы с гироско-
пами система будет иметь непрерывные гармонические
колебания около положения равновесия (при = const
и const):
* U sin » v, U sin ф
—52——д.
go go
Сведение к нулю собственного демпфирования движений
платформы с гироскопами также является идеализиро-
ванным случаем, не соответствующим практическим ус-
ловиям. Поэтому на основании полученных результатов
анализа можно заключить, что введение интегральной
коррекции платформы с гироскопами ДНП и ДНГ2 и
настройка ее на условие q=go/R позволяют обратить в
ноль только часть баллистической девиации, т. с. пер
вые члены правых частей уравнений (8.88).
Демпфирование собственных движений платформы с
гироскопами (радиальная, позиционная коррекция,
е#=0) определяет другую часть баллистической девиа-
ции платформы, т. е. вторые слагаемые правых частей
уравнений (8 88).
В результате при выполнении условия настройки (/=
=go/R уравнения (8.88) представляются в следующем
280
виде
U*+ «I+?oi=—-(^Eo Ф1 +ёоауст) ~
go
v“ -.
----Ф1+?ауст.
К
₽2Че^ + ^2=— Vl Й + fioPy J +
go
+ ^~ Ф?+Act-
(8.92)
Для уменьшения погрешностей стабилизации платфор-
мы, возникающих на режимах полета с ускорениями,
следует выключать демпфирование (позиционную, ра-
диальную коррекцию).
§ 8.4. Следящие системы платформы
Следящие системы платформы выполняют функ-
ции слежения платформы за положением векторов соб-
ственных кинетических моментов гироскопов ДНП и
ДНГ2. С этой целью гироскопическая платформа прост-
ранственной ориентации, расположенная в кардановом
подвесе, снабжается тремя следящими системами (см.
рнс. 8.1).
Следящие системы осуществляют управление движе-
нием платформы вокруг осей Ou, Ov0, Oz„ карданова
подвеса, помещенного в дополнительную следящую раму
по углу крена. Следящие двигатели СДи, СДи, СДгп
платформы связаны или непосредственно с осями подве-
са платформы (безредукторнын вариант), или через ме-
ханические редукторы. Как было уже отмечено, управ-
ление следящими двигателями осуществляется по сиг-
налам рассогласования платформы и гироскопов ДНП
и ДНГ2.
Так как двигатели СД„ и СД„ связаны с осями и' v'o
карданова подвеса и могут вместе с осями Ou', Ov'0 за-
нимать относительно платформы, а следовательно, и
гироскопов ДНП и ДНГ2 любое положение в азимуте
(под любым углом Ло), то в связи с этим управление
Двигателями СДи и СДа необходимо производить от об-
щего сигнала, состоящего из сигналов рассогласования
платформы и гироскопов, измеренных в системе осей
0£о, (рис. 8.10). Это объясняется тем, что непосред-
281
ственное, прямое измерение положения платформы отно-
сительно гироскопов ДНП и ДНГ2 осуществить в коор-
динатах <pi и Xi вокруг осей Ои', Ov'0 карданова подвеса
технически сложно.
Поэтому применяется линейное преобразование сиг-
нала управления для двигателей СДк и СД„ с помощью
преобразователя координат.
Рис. 8.10. К выводу уравнений следящих систем
платформы
Введение такого преобразования координат <ц, р2
платформы в системе осей Og0, Оцо> измеренных датчи-
ками углов а> и Рз гироскопов ДНГ! и ДНГ2, в коорди-
наты (ф|, xi) в системе осей Ои, Ovo позволяет получить
при определенных условиях практически инвариантное
выражение моментов следящих двигателей СД„ и СДс
вокруг осей Ох„, Оу„ платформы по отношению к углу
Ао разворота карданова подвеса относительно плат
формы.
В следящих системах приборного типа применяются
двигатели постоянного и переменного тока. Для выпол-
нения функций следящего двигателя платформы в систе-
ме пространственной гироскопической ориентации лета-
тельных аппаратов применяются бсзредукторные двига-
тели постоянного тока с механическим или электронным
устройством коммутации управляющего тока. При этом
282
в качестве ротора двигателя используется многополюс-
ный постоянный магнит с радиальным полем намагни-
чения, а статорная обмотка, соединенная с выходом уси-
лителя-преобразователя с обязательным фазовым де-
тектором, является управляющей обмоткой. Применение
такого типа исполнительного двигателя позволяет полу-
чить следящую систему с большим коэффициентом по-
лезного действия, высоким быстродействием и относи-
тельно малыми габаритами. Однако усилптельно-иреоб-
разующее электронное устройство вместе с электронным
коммутатором довольно сложно и менее надежно.
При применении двигателя переменного тока исполь-
зуются двухфазные асинхронные двигатели с амплитуд-
но-фазовым управлением. Здесь нс требуется таких
сложных преобразований, как фазовое детектирование
выходного сигнала мощности для управления двигате-
лем постоянного тока. В этом случае схема усиления
является более простой и надежной, так как сам двига-
тель переменного тока в данном случае является фазо-
чувствительным элементом. Недостатком применения
двухфазных управляемых двигателей в следящих систе-
мах приборного типа является низкое значение их КПД
и необходимость введения в следящую систему механи-
ческого редуктора между двигателем и платформой.
Рассмотрим в качестве следящих двигателей плат-
формы использование двигателей переменного тока с
амплитудным управлением. Обычно для достижения вы-
сокой жесткости механической характеристики двигате-
ля применяются двухфазные асинхронные двигатели с
большим критическим скольжением (3 йй 2.. .3). В этом
случае пусковой момент Мдл (им) двигателя определя-
ется по формуле [56]
2СД*
Мдп= —> sin G=CJCJ,,, (8.93)
“оО Ь
здесь —амплитуда напряжения на обмотке возбуж-
дения статора, В; Ull0— амплитуда напряжения на об-
мотке управления статора, В; гг— активное сопротив-
ление ротора, Ом; <а0 — синхронная скорость вращения
магнитного поля статора, 1/с; 6 — угол сдвига фаз на-
пряжений на обмотках возбуждения и управления, град;
a=UyJUb—Wy/wB — коэффициент трансформации —
отношение числа эффективных витков обмотки управле-
283
ния к числу эффективных витков обмотки возбуждения;
2СЛ sin О
Смп = -°—-----коэффициент пускового момента двига-
«>0Л26
теля по напряжению, Н-м/В. При малых значениях на-
пряжения па обмотке управления (и?) двигателя
(т. е. при «^0,2. ..0,3) можно считать, что механические
характеристики асинхронного двухфазного двигателя
представляют собой спектр параллельных прямых, опи-
сываемых уравнением
А1 дв = мп^ Уо — /1“дв> (8.9 4)
ГПС f - дЛТдв . Во
ГДе Jl—— • -- 2 '
“О dv <1>ог 2
— коэффициент момента
собственного демпфирования двигателя, Н-м-с (жест-
Рис. 8.11. Преобразование
координат платформы ило-
ентелыю горизонта из си-
стемы осей £()Т]о в системе
осей uv0
кость механической характери-
стики двигателя); т=солв/<»о —
относительная скорость враще-
ния ротора двигателя.
Согласно рис. 8.11 и 8.12,
момент следящего двигателя
СДи, приведенный к оси Ои
кардаиова подвеса платформы,
согласно (8.94), равен
(8.95)
где пи=йдВ/х — передаточное
число редуктора от двигателя
к оси Он подвеса платформы,
т. е.
ли пи (СМп77Уо /”iWuXi), (8.96)
момент двигателя СД0, приведенный к оси Оуо кардано-
ва подвеса платформы, равен
Мдво — я^о (СМ|ДУо —/1<одв), (8.97)
где яг>0=«>дВ/'Р1 — передаточное число редуктора от дви-
гателя к оси Уо подвеса платформы; /Идг,д=/г4,о(СМ1ДУо —
—/j^MP1). Аналогично, момент двигателя СД211, приведен-
ный к оси Oz„ платформы,
Af лгп=пга (Cn.,U Уо — fj(uxn), (8.98)
284
где Пгп=юдв/(ф—л о)—передаточное число редуктора
от двигателя СДгп к оси Ог„ платформы;
Л4дг1 = /1ги (Смп(7у.
где ф'1 = ф — До.
Представим коэффициент пускового момента двига-
тели равным
2С7 sin 6
Снп=—Ч—=£//„„ sin е,
WQf*2V
где Ад=2/(и>0г2&)
Рис. 8 12. Определение моментов следящих двигателей платфор-
мп
Согласно принятым обозначениям моменты двигателей
СД„ и СДv, действующие вокруг осей Ои и Ov0 подвеса,
равны
MKU=tittkKUyaU,„.sin 0„ - (8.99)
Mnv=nvJi,!JUtUK<> sin 6V—fxn^. (8.100)
Далее полагаем, что напряжения на обмотках возбужде-
ния для двигателя СДи равны
ttB„=t7B.sin (n;-|-<i>o0—t/B.cos(n/2-J-‘°(/) (8.101)
и для двигателя СДИ
^B„=f7B.coso>0/- (8.102)
285
Напряжение на обмотках управления двигателей
СД„ и СДи является общим и равным
l«isin (“V +А)> — Mos (<»</-}-Ло)| (8-103)
с двумя амплитудами (7у1 = цоЛац t/y2=poftp2, где k —
крутизна датчиков угла гироскопов ДНП и ДНГ2; ц0 —
коэффициент усиления усилителя, общего для двигате-
лей СДи и СДа; Ло— угол разворота осей uvc кардапова
подвеса в азимуте относительно платформы (см. рис.
8.3, 8.12).
Напряжение иу управления двигателями СДЦ и
СДа формируется преобразователем координат (по фа-
зе) и датчиками углов сц и Ра рассогласования платфор-
мы и гироскопов (по амплитуде) и общим линейным
усилителем с коэффициентом усиления ро. В соответст-
вии с (8.99), (8.100), (8.101), (8.102) и (8.103) выраже-
ния моментов двигателей получаем в следующем виде:
момент двигателя СДи
Л4ДИ= —/(„ajsin Л0-|-Л^2Со5 Ло-ф-ТУц/! (8.104)
и момент двигателя СДИ
Л4ДОв = — COS Ло — sin Ло — TV^i, (8.105)
где
V’==-f j
Для платформы с четырехрампым подвесом момепты
следящих двигателей СДи и СДО, приведенные к осям
Охп, Оуп платформы, равны
Млх = Мли cos Лп — М.~, sin Лп, 1
0 (8.107)
sin Л0 + /Идо sin Ло, j
или после подстановки выражений (8.104) и (8.105) по-
лучаем
M«jrn=P2(Ku c°s2 A0-\-Kv sin2 Л0)ф-
a, sin ЗЛо-ЦА^ф! sin cos Ло) ;
MaUu = — «1 (Ки sin2 Ло -\-Kv cos2 Ло) —
—^°~Кц sin sjfl cos .
(8.108)
286
Согласно рис. 8.10, если через z„ обозначить единич-
ный вектор оси Огп платформы, его составляющие по
осям Ou, Ov0, О£0 можно представить выражением
«1 pin cosy/
Уо sinXi
Ло Leos COS X!
sin До sin P4~cos Ло cos р sin а
cos До sin р— sin Ло cos р sin а
cos а ’Cos р
(8.109)
откуда получаем
sin cos Xi = sin Ао sin р-|- cos Ло cos р sin а,
sin -/j^cos zlosin р —sin X^cospsin а (8.110)
и для малых отклонений платформы от плоскости гори-
зонта (еоОт]о) можно считать
<р1 = р sin Л0+а cos/0, xi=₽cos Ло —a sin".A0 (8.111)
и при угле Ло=сопз1
<р! = Р sin Л0-фа cos Ло, y.i=pcos До— a sin Ло. (8.112)
После подстановки (8.112) в (8.108) получаем
Мдхп=В2 cos* 2 sin2H0)+
ai sin 2Л0+Р(^sinM0+7V„ cos2 Ло)+
а sjn
МКУп— — И1 (Ки sin2 Ло+ЛГр cos2 Ло) —
_sjn 2Д0—a (2VU sin2 Ло 1 Nv cos2 Ло)—
sin 2А
2 1 0 )
(8.113)
При условиях Ku=Kv=Ko и Nu=Nv=N0, выполняе-
мых, например, при nu=nv, и одинаковых характеристи-
ках двигателей СД« и СДу моменты (8.113) этих двига-
телей, приведенные к осям Охп и Оу„ платформы, равны
287
М^ДД+ДР- 1
М^п= -Kout — Noa, J
(8.114)
т. е. достигается инвариантность моментов двигателей
СД„ и СДи, приведенных к осям Охп, Оуп платформы,
в отношении угла Ло разворота карданова подвеса отно-
сительно платформы. Момент следящего двигателя
СДгп представим формулой
(8.115)
где /<1 = Н1*«»п^в0(Н-м/рад),
(Н-м-с).
Для большей наглядности уравнения движения плат
формы представим в системе осей Oiivot#, связанной со
сферической нормалью траектории движения самолета
(см. рис. 8.10). Тогда в уравнениях движения платформы
моменты следящих двигателей СД„, СДЬ-, СДгп будут
представлены формулами (8.104), (8.105) и (8.115).
Если обозначить через <f>i и /л относительные координа-
ты гироскопической базы ДНГ1 и ДНГ2, определяющие
положение плоскости, заключающей полярные оси
Oxi и Оу-2 роторов гироскопов ДНП и ДНГ2 относи-
тельно плоскости ^оОт]п опорной системы координат и
измеряемые вокруг осей Ov0 и Ои, то значения их, выра-
женные через относительные координаты cq и р* гиро-
скопов ДНП и ДНГ2 в системе координат OfcoTjoSo,
равны (см. рис. 8 11)
<p*=a*cos Д+P’sin Д,
X*=p2Cos Д—a* sin Д.
Согласно (8.56), (8.57), (8.111) и (8.116), углы рас-
согласования платформы и гироскопов представим в
виде
A«Pi=?i — — аГ) cos Д + (р —P*)sin Д,
ЛХ1=7.1~Х*=(Р~P*)cos Д—(a —a*) sin Д,
или, так как а—а*=ил и р— р-*=р2, получаем
Т1 — ?*=«! cos Д+Р2 sill Д:
Х1 — Х*=Д COS Д — Qj БН1Д.
(8.116)
(8.117)
(8.118)
288
Используя выражения моментов двигателей СДи,
СДо, согласно (8.104), (8.105) и (8.118), получим
ЛГди=/<ц(х1-Х*) + ЛГ„х1, 1 (8.119)
ЛГдг,= — К*(<h — <?*) — J
н так как ф1=ф—фь где ф* —отклонение гироскопа
ДНП относительно оси О^о> то момент двигателя СДгп
платформы, согласно (8.115), равен
7Илг;==-А'1(ф-фТ)-Мф. (8.120)
Здесь считаем, как и ранее, что управление следящим
двигателем СДгп осуществляется по сигналу датчика
угла ф| гироскопа ДНП. Приводные двигатели гироско-
пов ДНП и ДНГ2 установлены на платформе. Их кине-
тические моменты По ориентированы по направлениям
осей Охп и Оуп платформы (см. рис. 8.7). При малых
углах а, (3, ф отклонений платформы относительно
опорной системы координат будем считать, что векторы
Но кинетических моментов приводных двигателей гиро-
скопов совпадают с направлениями осей Ogo (для ДНП)
и От]о (для ДНГ2). Тогда при тех же условиях малых
отклонений платформы и при угле Ло разворота осей
карданова подвеса и, v0 в азимуте относительно осей
Ojo, От]о проекции кинетических моментов По привод-
пых двигателей на оси Ои', Otjq равны
и' 7/n(cos A4-sin А), 1
0 01 ° (8.121)
по Но (cos Ло — sin Ло). ]
Абсолютные угловые скорости вращения платформы
вокруг осей Ои', Ov0, Ozn равны
(0«*= — XiCos ^o_bOJ’ic s*11 ^о»
“>=?1 + cos Ло —»e. sin Ao,
о
“гп=Ф+[йс0»
(8.122)
где wto> «Tje, <oCo угловые скорости вращения трехгранника
^6oi]oto опорной системы координат. Тогда гироскопиче-
ские моменты платформы в проекциях па оси Ои', Ovv,
Ог„ будут равны
10—1757 289
й'
v0
Z„
/70(cos Ao— sin Ao) «>гп1
-/70(cos Д04- sin /0)<ozn;
A/0(cos Ao4- sin Л0)ю^— /70(cos Ao— sin A0)o>u/
и после подстановки из (8.122) получаем
и' Но (cos Ло— sin Ад) (ф-J-wc.) ;
г»о -А/о (cos Ло4-sin До) (ф+<*><;„) ,
z„ ^O[(?i4-Z.) cos -A+Gi -X.) si«
Полагая, что A0=const, абсолютные угловые ускорения
платформы вокруг осей Ои', О vq, Oz„c учетом прибли-
женных формул (8.122) равны
w«»a = ~Xi4~<ou cos7104-w4o sin Ао,
= <Р1+«Ч cos Ао — (iEo sin Ао,
'“гпа=Ф+1%-
Если платформа имеет нижнюю маятниковость, то с уче-
том всех моментов уравнения движения платформы во-
круг осей Ои', О Уо, Oz„ имеют следующий вид:
— Ju-^,1' 4" Но (Ф+'%) • (cos Ао — siп Ао) + Л1лм. +
4-/PnZ1-zW.n/ry4-/M,z =0;
0 ви
— — Но (Ф+(ч) (cos Ао4- sill Ao)4-M т>-
~ + т и' + А1./г11=0;
(8.123)
(8.124)
(8.125)
— AnWjtn+^oK'Pi + x.)005 А + (Т1—Z,) x
X sin Ao -f- o>4e—«>J -J- M Mn -|- Mmm=0.
Здесь /—координата центра масс платформы распо-
ложенного на оси Огп\ Рп — сила тяжести платформы;
гпп — масса платформы; U7u>, W ,— проекции липейпо-
о
го кажущегося ускорения центра масс платформы; Ju;
J v', Jtu— моменты инерции платформы с соотвстствую-
290
щими рамами кардаиова подвеса и следящих двигателей
и их редукторов, приведенные к осям Он', Ovy, Oz„.
Предполагается, что это главные моменты инерции от-
носительно этих осей. После подстановки значений угло-
вых ускорений (8.124) и моментов следящих двигателей
(8.119) и (8.120) получаем уравнения движения плат-
формы:
Л'Х1 АМ>Ф <cos Ао— sin А> AMXi АМХ1 А
А^пХ1=А' (“Ео cos Ло+‘% sin А) —
—//о1йсо <cos A—sin A) AM'X*A"M^O’—
--Af«'uni
Az<?i А^оФ(с°8 44'si|1A)’l'^v?t4'^»Ti A /C 1(?r.
4) (8.1 2b)
-ИРи?1= —A' (<«»«cos A— A sin A) —
0
—^oi°to (cos A Asm A) A Arai/^A
Лиф—MK'PiA xi) cos/l0+(<f>i —Xi) sin Aj A
АМФ1 АМФ= —Ап°ЧоА^о(“эо we»)+^«hb»’
Собственное движение платформы определяется урав-
нениями
A'Xi A n «-Xi А (к и А ^и) xi А н оФ <cos А ~
— sin До)=О;
Jv'it A Мо А+(Kv AIPJ ?i А1 АФ (cos А А
О I)
A sin Д0)=О;
АиФ А МФ а о—М ((^1A xi)Cos А А
A(ti—Xi)sh1A]=0-
(8.127)
После введения линейного неопределенного оператора
дифференцирования по времени D=d!dt характеристи-
ческий определитель системы представим в виде
10*
291
Д(£>)
0 /70(cos?l0—
— sin A0)D
Jv,^+Nv,D+ H0(cos^04
° 4-sin/%)L>
**T*\ и
-w0(cos4+ /г11£>24мд>4
4sin?l0)Z9 4ATi,
где
или
Ju,D2-\-Nu.D-\-
0
—/70(cosЛо—
— sin Ло) D
(8.128)
Ku=^Ku + lPn-, k'v=kv+ip„
&(D)=(jtl>D2-\-Nu>L)-\-K'u) + X
X (J^+N.D-^Kd + iJu'O^N^JJ^K’u) X
X (cos До + sin Д0)2 (J^/J2+N^D+</) X
X (cos j%— sin Ио)2 H^D2.
В развернутом виде этот определитель получает следую-
щий вид:
Д (D)=J„zJo J211O« + -J- JvJ9nNu. 4- 7
о ко 0
+Л'ЛПА^ Z?s_|_ [/„,.Hg(cos404-sin Л0)2+
"№у'Но (cos -^o — sin Л)2 ~b •!u'Jv’^Ki 4-
+Jx/'N.l'Nl+JvJtnKi + JznNl.'Nv' +
^4+ [Mj(cosA,+ (8‘129)
4 sin ?l0)2A/'4 4- Ht (cos Д) — siп До) TV^4
-yjzuNv.Ku' 4 JtnNu-K’^+Jt,cNlK'le +
4 +J.,'NlK'v^Jv. N.rK, +
0 0 0
292
j Р3Ц-|>/o(cos yl0-f-sin Ло)2/Cu> 4~
_|_ Ho (cos /0 — sin Дс)2 +JInK'U'K'v' 4-
[' 0 (i
4- JJ<'wKl+
»' о о 0
+ NU’Kv'Ki+J,.JV-K^ + [N^K'^-Y
+ MX4- N^KA D+K'U.K'V'K1.
о ) n
(8.129)
Числовая сравнительная оценка слагаемых в одно-
родных коэффициентах показывает, что практические
значения параметров системы таковы, что слагаемые с
множителем Но (подчеркнуты линией) на 3. ..4 порядка
меньше, чем остальные слагаемые в тех же однородных
коэффициентах характеристического определителя. По-
этому при формировании структуры схемы управления
следящими двигателями и при оценке устойчивости сле-
дящих систем платформы можно в определителе (8.129)
членами с множителем Но пренебречь. Это означает, что
гироскопические моменты платформы //оыЛП, НоЫуп,
//o©zn> возникающие от приводных двигателей гироско-
пов, невелики и их можно не учитывать. В этом случае
гироскопические связи между каналами стабилизации
платформы отсутствуют (матрица коэффициентов систе-
мы уравнений движения платформы становится диаго-
нальной) и характеристический определитель (8.129)
системы принимает вид
Д (D)=(JU^+N.^+K'U') (4'£,2+7Vv'-D4-<a) х
Х(/1пО2фЛ^ + /(,). (8.130)
Если при этом считать, что <o?e=«>ij,=wc.=0, <%,=
= w,it =шСо — 0, М =0, Mv- —0, W/„/=const,
вн Опп
IV'. —const,
о
то уравнения (8.126) движения платформы представля-
ются тремя независимыми уравнениями следящих си-
стем:
293
JU'7.y + Nu-Ъ = ]
/„4‘1+^Л+/<>1=Л'1,'т?+«1/1^'; (8J31>
о о о 0
АиФ АМ + к |Ф=к 1Ф1.
Уравнения (8.131) представляют собой идеальные стати-
ческого типа системы стабилизации платформы в задан-
ном положении (xi, <»i, |i) , определяемом гироскопами
ДНП и ДНГ2 относительно опорной системы координат
^ё«т)о^о, принимаемой в данном случае абсолютно не-
подвижной. Для (8.131) условием статического равно-
весия следящих систем платформы при Xi=const,
const, ty*=const, U'Z ,=const, UZ„<=const являются
с 0 0
координаты платформы
Хуст Ки7л 0
0 (8.132)
Руст к‘, -%
’1’ус г = фТ,
т. e. маягпиковость платформы и моменты инерционных
сил от ускорений Wu> и W • порождают статические
о
ошибки стабилизации платформы относительно истин-
ного горизонта. При рассмотрении свойств ДНГ и на-
стройки его параметров на резонансную частоту (см.
кн. 1) было отмечено, что он в этом случае проявляет
свойство свободного гироскопа при условии совмещения
оси вращения его приводного двигателя с полярной осью
ротора гироскопа. Назначение следящих систем стаби-
лизации платформы в том, чтобы с заданным быстродей-
ствием и качеством переходного процесса свести к нуле-
вым значениям рассогласования(/t — /i, 'fi — <?*, ф—ф1)
платформы и гироскопов ДНИ и ДНГ2.
В условиях действия на платформу внешних возму-
щений, например в виде моментов (постоянных по вели-
чине и направлению пли переменных во времени), пеоб-
294
ходимо системы трехосной стабилизации платформы
строить астатическими как в режиме управления следя-
щими системами стабилизации платформы от ДНП и
ДНГ2, так и в режиме воздействия на платформу внеш-
них моментов. По этим причинам следящие системы ста-
билизации платформы должны обладать по крайней ме-
ре свойством астагизма второго порядка. Это условие
также необходимо для повышения точности начальной
Рис. 8.13. Расчетная структурная схема канала стабилизации и уп-
равление гиронлатформы
выставки платформы в горизонте и в азимуте. Исходя
из этих условий формируется структурная схема по-
строения следящих систем стабилизации и управления
движением платформы курсовертикалн.
В качестве примера структурной схемы построения
такой следящей системы платформы представлена схе-
ма (рнс. 8.13) канала стабилизации и управления по
координате %| [см. первое уравнение (8.131)], в соответ-
ствии с которой уравнения составляющих звеньев сле-
дящей системы платформы в операторной форме записи
при нулевых начальных условиях будут следующими:
двигатель с редуктором и платформой
(7> + l)sz1(s)=fei«y(s)—rau-B„(s), (8.133)
здесь в соответствии с ранее введенными обозначениями
J V JV
усилитель мощности
(,Tys -j- 1) иу (s)=kyMi (s), (8.134)
295
где Ту — постоянная времени усилителя; ky — коэффи-
циент усиления.
Для снижения влияния электромеханической инерции
следящего двигателя с платформой (8.133) и усилителя
мощности (8.134) вводится гибкая обратная связь по
угловой скорости движения платформы, придающая вме-
сте с тем системе свойство астатизма первого порядка
(внутренний контур схемы).
При этом сигнал управления определяется из урав-
нения
Tv
A«(s)=/Zi(s)—Лос ———sZi(s), (8.135)
J S + I
где kac — коэффициент усиления гибкой обратной связи,
В-с; Т — постоянная времени гибкой обратной связи, с.
Для придания следящей системе платформы свойства
астатизма второго порядка в дополнение к коррекции в
контуре угловой скорости вращения платформы вводится
в прямой канал позиционного сигнала управления (с ко-
эффициентом усиления k„ пускового момента двигателя)
звено интегральной коррекции (реализуемое на типовой
микросхеме операционного усилителя), что дает
И1(5)=А!и-^ + 1 AZ1(s),
$
(8.136)
где Ta=kBlk„—постоянная времени прямой цепи с ин-
тегральным управлением, с; kn— постоянная интегри-
рующего звена, В/с.
Единичная обратная связь платформы с гироскопами
ДНП п ДНГ2
AZi(^) = xT(s)—xi(s)- (8-137)
Система уравнений канала стабилизации и управления
платформы по координате % (s) получает вид
(7> -ф 1) sZ1 ($)— Му (s)= — mu> нн (s),
(Гу5 -ф-1) «у (s) —АуЛ/z ($)=0,
(s)-b(rs+ l)Azz(s) —(7s-|- l)zz1(s)=O,
(s) — k„ (Tns + 1) ДХ1 (s)=0,
7.! (S) — Д'/д (s) = /*(S),
(8.138)
характеристический определитель системы
296
A(s) =
(7>+Ds -Л, 0 0 0
0 7ys+l 0 0
k0CTs^ 0 Ts+1 -(Г®+1) 0
0 0 0 s ~/U7>+l)
-1 0 0 0 1
(8.139)
или
i(S)=T7yTss+(r7y+?’.7'+r7)S4
+(7\+Ty + T+k^T) S3+
+(k^ykJT,, + 1) s2+kxkyku (Г+7'1:) s + kxkykn.
(8.140)
С учетом обозначений
ТлТуТ=Т2\ ТяТу-\-ТлТ-\-ТуТ=Т1,
Tll-\-Ty-\-T-\-k2T=T0\ (8-141)
получаем
A (s)=T&5 4. T +T0s3+(k0TT„ + 1) s2+k0 (T+Г,,) s + k0.
Из системы уравнений (8.138) получаем изображение
Afti(s) ошибки слежения платформы за командой /i(s),
т. е. за смещением гироскопической базы, определяемой
гироскопами ДНП и ДНГ2:
, [(Гis + 1) (7'ys + I) (Г5 + I) + Л2П] T„s^i (s)
AXi («)---------------------------------------
A(s)
(8.142)
Аналогично получаем выражение для изображения
&Xi(s) ошибки стабилизации платформы при действии
на платформу внешнего момента rnu>m(s)-.
AX1(5)==_^+1)(r\+/!)g7',,^B,1(Sj- (8. ИЗ)
Д(5)
Согласно теоремам операционного исчисления о на-
чальном и конечном значениях можно заключить, что
если изображение syj(s) в (8.142) представляет ско-
рость дрейфа гироскопической базы (плоскости осей
Oxi и Oy’i собственного вращения роторов гироскопов),
297
то при постоянном значении скорости дрейфа ошибка
стабилизации платформы Ayvl (t) =0
Если на платформу действует постоянный по величи-
не внешний момент 7ИЦ,11Н вокруг оси Он', то, согласно
(8.143), ошибка стабилизации платформы A^i (/)=().
Кроме обеспечения заданной точности стабилизации в
установившемся режиме работы системы следует при-
дать надлежащее качество стабилизации платформы в
условиях внутренних и внешних возмущении. Особен-
ностью вибрационных гироскопов роторного типа с ди-
намической настройкой является их режим работы, со-
провождаемый колебаниями ротора с частотами ди-
скретного спектра н>2—Qo, 2Q0, ш2 + йо, где Qo — частота
динамической настройки гироскопа.
Внешнее возмущение иа одной из этих частот или
близких к ним (например, вибрация места установки
прибора) может привести к резонансным явлениям Кро-
ме того, ротор ДНГ, имеющий колебания с указанным
спектром частот, служит якорем датчика угла отклоне-
ния гироскопа относительно платформы и, следователь-
но, является источником помехи в сигнале измерения
угловых отклонений платформы относительно ДНГ.
В соответствии с этим необходимо при создании про-
странственной системы ориентации на ДНГ решить сле-
дующие задачи:
обеспечить виброизоляцию платформы и ДНГ, уста-
новленных на ней, от воздействия вибраций и других
внешних возмущений, в первую очередь в полосе частот
(сиг—Qo) •. • (£2о+<о2);
так как регистрация угловых отклонений платформы
относительно гироскопов (ДНГ) производится в системе
осей, связанных с платформой, то в составе сигналов
датчиков углов отклонений будут гармонические состав-
ляющие с частотами собственных колебаний ДНГ (ю2—
—Qo), 2£2о, (£2о + (о2). Поэтому для выделения основного
сигнала измерения угловых Отклонений платформы не-
обходимо в цепь датчик угла — усилитель — преобразо-
ватель— следящий двигатель платформы включить
фильтр, заграждающий прохождение сигналов, модули-
рованных частотами спектра (©2—Йо), 2£j0, (йо+юг);
контуры всех следящих систем платформы должны
выполнять функцию фильтра нижних частот, диапазон
которых определяется частотами угловых колебаний
самолета, и обеспечивать необходимое качество переход-
ных процессов стабилизации платформы, учитывая, что
298
следящие системы должны работать в диапазонах очень
малых допустимых рассогласований платформы с гиро-
скопами ДНП и ДПГ2 (около 5. ..10'). Это условие
требует качества переходных процессов в виде апериоди-
ческих или почти апериодических функций.
ГЛАВА 9
ГИРОСКОПИЧЕСКАЯ СИСТЕМА ОРИЕНТАЦИИ
С ПОПЛАВКОВЫМИ ИНТЕГРИРУЮЩИМИ
ГИРОСКОПАМИ
Наиболее высокая точность определения углов стаби-
лизации платформы гиростабилилатора на направлении
истинной вертикали и заданной ортодромии достигается
в системе ориентации, представляющей собой простран-
ственный гироскопический стабилизатор с поплавковы-
ми гироскопами и интегральной коррекцией (рнс. 9.1)
(см. § 1.4). Здесь на платформе пространственного ипди-
каторно-сплового гпростабнлнзатора установлено три
прецизионных поплавковых гироскопа НГц ПГ2, ПГ3 и
три прецизионных акселерометра Аь Аг, Аз. Сигналы,
снимаемые с акселерометров, поступают на первые ин-
тегрирующие двигатели ИД>, ИД2, а затем па вторые —
ИДз и ИД4 (для большей наглядности па кинематиче-
ской схеме (рис. 9.1) в качестве интегрирующих уст-
ройств представлены интегрирующие двигатели]. После
первого интегрирования сигналы, снимаемые с потенцио-
метров интегрирующих двигателей П( и П2, поступают
на моментные датчики МД1 и МД2, установленные на
осях прецессии поплавковых гироскопов ПГ|’и ПГ2. Сиг-
налы, снимаемые с потенциометрических датчиков П3 и
П„ после второго интегрирования, используют для опре-
деления координат местоположения ЛА (например, гео-
графической широты и долготы в системе инерциальной
навигации). Сигналы, пропорциональные углам курса,
тангажа и крена, снимают с датчиков углов Д(, Д2 и Дз-
Таким образом, схема, представленная на рис. 9.1,
является комплексной, так как одновременно включает
в себя элементы прецизионной системы ориентации и
инерциальной системы навигации.
Сигналы, снимаемые с интегрирующих двигателей
299
Рис. 9.1. Схема прецизи
пипой курсовертикали
ИД| и ИД2 поплавковых гироскопов ПГ1 и ПГ2, сначала
поступают на координатный преобразователь (КП), а
затем на обмотки управления разгрузочными двигателя-
ми РД1 и РДП (см. кн. 1, гл. 20 При составлении
дифференциальных уравнений движения системы ориен-
тации модель Земли принимаем сферической, а силу
ньютонова притяжения к Земле направленной к ее
центру. В качестве опорных осей координат принимаем
правый трехгранник O|r|u, расположенный на Земле так,
что его вершина О совпадает с центром масс ЛА и дви-
жется произвольно по сферической поверхности Земли,
ось направлена по радиусу, а оси О| и Оц лежат в
плоскости, касательной к поверхности Земли. Систему
Oxyz связываем с внутренней рамой карданова подвеса,
ось Ох направляем по оси внутренней рамы, ось Oz—•
по оси вращения платформы, а ось Оу — перпендикуляр-
но плоскости Oxz так, чтобы трехгранник Oxyz был пра-
вым. Оси Ох0, Оуо, Ог0 связываем с платформой и рас-
полагаем так, что в начальном положении оси систем
Охог/г0 и Oxyz полностью совпадают, а при поворотах
платформы вокруг оси Oz0(Oz) оси Ох и Охо, Оу и Оу о
образуют угол е. При определении углов отклонения
платформы относительно опорного координатного трех-
гранника Ogrjt принимаем a~^<t>ry0{t)dt, р=—j«>Zo(/)dt
о б
t
и ф= Ju>z^(/)rZ/, которые представляют собой интегра-
лы от проекций Юд.„, и mZ|i малой относительной угло-
вой скорости в/ на связанные оси Ox0, Оу0 и Ог0 (рис.
9.2. а). При этом если сами отклонения осей координат
Охо, Оу0, Oz0 от опорных осей координат О|,.Оц, 01, не-
значительны, то углы а, [} и е представляют собой малые
углы поворота платформы вокруг осей координат Ол'о,
Ct/o, Oz0 с точностью до первого порядка.
При составлении дифференциальных уравнений дви-
жения системы воспользуемся дифференциальным урав-
нением движения гиростабилизатора (см. кн. 1, гл. 20).
Согласно (20.12) (см. кн. 1), при Aip=0, Апсг=0,
AinT=0 получим приближенные дифференциальные
уравнения моментов гироскопов, установленных на плат-
форме ГС, действующих вокруг осей Ozj, 0гц и Охш
прецессии гироскопов:
301
2AfeI=-//1wXo+AfP = 0,
2^и=^Ло + Л10=0,
=-//x0+^x=°-
(9.1)
При (Л+А|)р=О, p=o
[A2+(A+^1)Cos2P+C1sifi2₽]-^-=0, Coe=O и e=O,
cos p
Рис. 9.2. К выводу уравнений движения курсовертикалн
согласно (20.14) (см. кн. 1), получаем приближенные
дифференциальные уравнения моментов гироскопов,
действующих вокруг осей Ох0, Оу0 и Oz0:
2 ^=//^+^+^=0,
Му.-----^2° — ^Уиа ~4~ Му* — 0,
У Мго=//8^+^ет+Л4:;,:=0.
(9.2)
302
Составим дифференциальные уравнения, определяю-
щие сигналы, снимаемые с акселерометров и интегри-
рующих устройств и поступающие па моментные датчи-
ки гироскопов.
Сигналы (токи), снимаемые с акселерометров Д и
Аг, по аналогии с (1.83) и согласно рис. 9.3, а, б, будут
1Ъа—— Л (a,) cos р—acsi« ₽), Gz= — A(atcos а—atsin и).
(9-3)
Рнс. 9.3. К определению проекций кажущихся ускорений
на оси платформы
Для принятого здесь расположения трехгранника
и силы Go ньютонова притяжения к Земле, а также при
Пй=0 и 6/i=0 имеем:
a1)=UZ1); a^~Wg, a^ — go.
(9.4)
При малых углах а и р отклонения платформы относи-
тельно трехгранника Og’lS полагаем sinu^a; sin р~р;
cos am 1, cos fim 1 и получаем
hA= — k(WT — ,
ir<?
a-----7-
Дл= — g(fi)=kg'o
Моменты, развиваемые моментными датчиками МД1 и
МД2, пропорциональны токам и /е поступающим
303
на их обмотки с акселерометров:
=AAiu^o Р------г-
\ ,
/Иа =kl'tiZA=kkigl (а — Дг-
(9.6)
Сигналы (токи), снимаемые с акселерометров А] и
А2 (см. рис. 9.1), также поступают на обмотки интегри-
рующих двигателей И1Д1 и И2Д2. С потенциометриче-
ских датчиков П] и П2 интегрирующих двигателей сни-
маются сигналы z\n и пропорциональные углам 6Р
и Са поворота щеток потенциометров:
^Ч„=^₽> = (9.7)
На обмотки моментных датчиков МД1 и МД2 поступают
токи 1^ и /Ед, посылаемые потенциометрами Hi и П2
интегрирующих двигателей Hi и Иг, а датчики МД! и
МДг развивают моменты
А4р = kzi=А2А38р, А4а = Л3г =k2k$a. (9.8)
Скорость бр(Са) вращения выходного вала интегри-
рующего двигателя, а следовательно, и щетки потенцио-
метра пропорциональна току, поступающему на двига-
тель:
Йс = ^ЕЛ=^О (а~Т0‘)-
(9.9)
Корректирующие моменты, развиваемые моментными
датчиками МД1 и МД2, согласно (9.6) и (9.8), принима-
ют вид
Mt=Mf А4 £= Л&! gj | р---- 14- А2Л38р,
\ ео /
Мо=7Иа+7И”=АА^ (а-------А^ + МД-
(9.10)
При малых угла а, р и е, согласно рис. 9.2, а, имеем
Ро» ш^о— ав»
(9.11)
304
а также
«)ср,
Ра ~ ₽ “Ь WE + WC®«
еа ~ е + ШС + (0чР + ш1а-
(9.12)
Полагая, что моменты, в общем случае равные
М ($) = ^0®У (S) р (S), Му„ = k°yDVD (s) а ($) и (s) г (s)
(см. (9.2) и § 13.2 кн. 1), каналов разгрузки обеспечи-
вают эффективное подавление моментов Л4Хо, Л4Уо, /И7о
внешних сил, действующих вокруг осей кардаиова подве-
са и приведенных к осям Oxo, Оу0, Ог0, связанным с
платформой гиростабилизатора. При этом собственная
скорость прецессии гироскопов, порождаемая моментами
МуС„ и в дальнейшем считается малой (см.
кн. 1, гл. 20). Подставляя в (9.1) из (9.10) значения
моментов Л4Р и Ма, получаем
Н£а+^itfoP - kkxWn++ ЛГрС=0,
Н2аа~}~ k^g'oa — kkiW(, 4-^38а +-/Иа’С= 0,
(9.13)
где AJp’c и 7И»С— прочие моменты внешних сил, дейст-
вующих вокруг осей Ozi и Огц (см. рис. 9.2, а).
Вначале рассматриваем движение платформы ГС
только вокруг осей Охо и Оуо, полагая, что скорость еа
ее вращения мала и в первом приближении можно при-
нять Еа=0. Исключая из (9.9), (9.12) и (9.13) 6Р и 6О>
получаем
Р+еР+с₽+«>са+®са=“е+ с (W^/go) ~Ь
+ е(^ч//Го) — mf,
(X ~|— £CZ ~|— Cd —-|-С (11/е/^о) -ф
1
(9.14)
-b-s(Wg'o) —то,
где НХ=Н^=Н, ^kykgdH, тР=Мврс/Н, та=М™!Н,
C=kk<2kJzigblH, 11/5=0, еа=0.
Для гировертикали с интегральной коррекцией без зату-
хания (е=0), учитывая, что
^1=^4-!/^, П/Е = 1/?-1/>с, (9.15)
305
имеем
u +«а — “cF ““cP = — ( ------— 'l — c —— ojc -ф ш
\ я .?0 ) go
P + CP+ юса-фа>е<1 = — ---—'j V"-\-c—
X к go J go
(9.16)
Допустим, что c=go/R, <oc=O, а для поплавкого ги
роскопа с идеальными опорами принимаем р=о=0 и
mp—riia=0. Тогда получаем
a+(£o//?)a=O, p+(go/^)p=0. (9.17)
Решениями дифференциальных уравнений (9.17) при
начальных условиях t=0, a=a0, 0=flo, ct=Uo, 0=0о
будут
a=l/’a§-|-(/?/g-0) accos (HW + xJ , Q JR
________________ (У. 1O)
p = Иро 4- (/?/g0) Po cos (VgJRt + X2) ;
tgz.i=(«0/p0)V/?/g0; tgx2=({VPo) V Wo> <9-19>
а также 7CK=24//?/&=84,3' (см. § 1.4). Из (9.18) и
(9.19) следует, что гироскопическая вертикаль с инте-
гральной коррекцией, идеальными гироскопами и перио-
дом собственных колебаний 7'ск=84,3', скорость вРа*
щсния платформы которой вокруг направления к цент-
ру Земли равна пулю (установленная в начале полета
так, что ось Oz платформы совпадает с направлением к
центру Земли), сохраняет это направление независимо
от режима горизонтального полета. Гировертикаль не
обладает ни скоростными, пи баллистическими погреш-
ностями. Однако вследствие несовершенства гироскопов
гиростабилизатора ось Oz платформы отклоняется от
направления к центру Земли и совершает около этого
направления незатухающие колебания с 71Ск=84,3'.
В длительном полете погрешности гировертикали с
интегральной коррекцией без затухания с течением вре-
мени нарастают. Рассмотрим движение гировертикали
с включенной квазиупругой радикальной коррекцией
(е=/=0). При этом в случае ориентации платформы с
акселерометрами (или маятниками) по азимутально
свободному гироскопу (со*=О) для горизонтального по
лета уравнения (9.16) гировертикали с затуханием при
нимают вид
306
«+ *i+«i=e( , 1 (9 20)
Не₽+^=е(1/Ж)- I
Исследование решений дифференциальных уравнений
(9.20) показывает, что погрешности такой гировертика-
ли, например с затуханием е= 1,41 И с, соответствую-
щим предельно апериодическим свободным колебаниям
гироскопов, на вираже и в полете с ускорением достига-
ют значений порядка 1...2° и, следовательно, при ускоре-
ниях коррекцию затухания следует выключать. При оп-
ределении погрешностей гировертикали в установившем-
ся режиме полета с включенной радиальной коррекцией
(е=1,41|/с) воспользуемся очевидными зависимостями
y"=l/4-|-7?i/cos<psin<}>, Vf=Vt+/?/7cos'pcos<J>, (9.21)
где ф— угол, составленный направлением осн с на-
правлением па север (вектор U cos ср) (см. рис. 9.2, б).
Географический трехгранник О£гт]г£г вращается в
пространстве с абсолютной скоростью ©, проекции кото-
рой на оси Ogr, От]г. соответственно будут
- VN/R=
®чг=U cos <р -ф VE/R ,
(9.22)
'%.=(/ sin <р-ф(1/£//?) tg <р=ф.
Дифференцируя (9.21) по времени и используя оче-
видные соотношения Уц——Vwsini|) +Vtcosip, V4=
= ГмС08ф + Ге simp, получаем (см. рис. 9.2, в)
sin <р-ф/?(72 sin <pcos<pcos ф,
V° = Vi — VrtU sin <p-|-/?(72sin <pcos <psin ф.
Дифференцируя (9.24) по времени, имеем ’
-фViU Sin ?+ I/e w‘°-sy- 4-
t\
(9.23)
(9.24)
-ф l/yv(72cos2<pcos'p-]-l/£f72sin2® sin фф-
-ф RU3 sin2 tp cos <p sin ф,
V?=- V^U sin <p+v4 _|_
к
ф-I/hU2 cos 2<p sin ф — VEU2 5И12<рсо5ф —
—/?(73si«2<f>cos ф.
307
Подставляя значения V° и V\ из (9.25) в (9.20)
для полета по азимутально свободному гироскопу
(при е= 1,41 Vс), получаем
а-|-1,41 )^са-|-са= —( V\ — V^U sin у—
о \
1 z VnU cos у , , , , ,
— 1/\ —----— 4- VnU2 cos 2у sin ф—
R
— VEU2 sin 2 у cos ф — RU2 sin2y cosy cos ф j ;
[i’+ 1,41 / p\_|_ VfU sin у+
go \
+ l/E 4. vNU2 cos 2® cos Ф+
-|- VEU2 sin2 f sin ф-|-/?0/3 sin2ycos у sin ф j.
(9.26)
1
В стационарном режиме полета по азимутально сво-
бодному гироскопу в частном случае при V5=0, Vn=V
и 1/ч=1/Е = 1/ч = 1/Е=0 правые части (9.26) в соответ-
ствии с (9.22) являются функциями времени, поскольку
координаты ip и ф в процессе полета изменяются, а так-
же вследствие вращения географических осей системы
координат Осг^г относительно инерциальных осей си-
стемы координат OgaTioSa с угловой скоростью имеем
—'j'=(l/e/A’)tgy-|-i/siny, y=VN/R, (9.27)
В частном случае если скорость направлена по оси
От] (см. рис. 9.2, в), то Vcosip, V£=Vsinip, a ip=
= Vcosip//?. Умножая левую часть первого равенства
(9.27) на (V/R) cosip, а правую часть на <р согласно пер-
вому равенству (9.22) и деля обе части па cosip, полу-
чаем
V/cosi • , sj-ysinH •
/? \cos у cos2 у )
cos2 у
или
V ( cus у cos фф + sin у sm фу
/? \ cos2 у
— I/
(9.28)
308
Дифференциал функции sin tp/cos <р равен d (sin qp/cos tp) =
= (cos <p cos +sin ф cos <pdrp)/cos2 <p; следовательно,
интеграл дифференциального уравнения (9.28) получа-
ем в виде (V7/?)(sin Ф/'со5<р)= — £/ J где S —
постоянная интегрирования, зависящая от начальных
условий. После интегрирования имеем
-|t=arcsin {R/V) \U cos<pln(cos<?)-|-S cos<p|. (9.29)
Так как при cos <р in (cos <р)—<-е, при <р->л/2
cos <р hi (cos <p)—>-0, при <p->-n cos In (cos <p)->—с, то ф яв-
ляется периодической функцией qp с периодом 2л. Прак-
тически (например, при скорости полета 1000 м/с) ф
меняется весьма медленно по сравнению с периодом соб-
ственных колебаний гировертикали с интегральной кор-
рекцией (Гск=84,3 мин). При этом динамические откло-
нения гировертикали не превосходят удвоенных статиче-
ских отклонений. Числовая оценка статических погреш-
ностей гировертикали при У=500 м/с и <р«-ф«30”
показывает, что в иеустановившемся режиме полета
можно пользоваться практически с точностью до 1 угл.
мни дифференциальными уравнениями
a-f-1,41 Yса-|-са = 1 ’t.1,— (v\ —1А/7 sin <р),
* о
₽+1,41 угёр+ср=1,4|,Гс (Уч + 1/^ sin <?).
g о
(9,30)
В общем случае вектор скорости V не совпадает с
направлением оси От), а составляет с ней угол К, кото-
рый в первом приближении принимаем за курс самоле-
та. При этом согласно рис. 9.2, б получаем
Vn=VcosK; V^VsinK,
У1=(/ cos K-2V sin KK-V cos KK2-V sin KK,
Ve=17 sin /С+2У cos KK-V sin KK2+V cos KK.
.(9.31)
После подстановки Vn, Vj и V’n, Pg в (9.30) получаем
<z-|-1,4-1 ]/Ъа-4-са — -—•* ^~(V sin A-{-
go
+21/ cos К К - V sin К K2 + V cos К К -
— V oosKU sifKp-}-!/ sin К KU sin <p),
(9.32)
309
₽+ 1,41 Кер 4-ер = 1,4'?-(!/ cos /С—21/ sin К К -
— V cosATC2—V sin KK-\-V sin KU sin у 4"
-\-V cos KKU sin c?).
Если платформа гировертикали, а вместе с ней акселе-
рометры и вектор скорости V разворачиваются в азиму-
те с угловой скоростью t/sinep (указатель направления
ортодромии), то
K=—U sin <р, K=—U cos<pp= — U cos<f>(l/N'R).
Если в полете по ортодромии астатический трехгран-
ник (<oj=O) О£г)£ в какой-то момент времени совпадает
с географическим трехгранником то V4=VcosA’.
Подставляя значения К и К в (9.32), в стационарном
режиме полета (17=р=0) получаем
«41,41 ]/Гса4си=—с-(2VOU'Z sin2у sin К4
» о \
4- U cos2 К cos ,
Р4-1,41 ]/ср + ср = -1,4'/с- (2У0и2 sin2<р cos К -
8 о \
(9.33)
Vn
----— U cos <р si и К cos
R
Согласно (9.33), статические погрешности гировертика-
ли в установившемся режиме полета по ортодромии
аст— —Ml ё ( 2V0U2 sin2 <? sin К 4-
8 о \
V2 \
4--^-cos2/<17 cos <р I ,
₽ст= —,4‘J °- ('ZVQU‘z sin2 ср cos К —
ь о \
—^2- U cos <р sin К cos /<) .
(9.34)
Например, для <p=K=30°, Уо=ЗОО м/с, согласно (9.34),
получаем аст=0,116', ₽ст=—0,3'. Считая, что динамиче-
310
ские отклонения при выбранных параметрах системы не
превышают удвоенных статических, можно принять по-
грешности гировертикали с интегральной коррекцией в
установившемся режиме полета по ортодромии меньши-
ми Г.
Обращаясь к дифференциальным уравнениям (9.32)
движения гировертикали, определяем допустимую не-
чувствительность выключателя коррекции затухания по
угловой скорости Кд разворота самолета и ускорению Йд.
Вначале полагаем, что полет происходит с постоянной
скоростью V=Vo=const, и определяем связь допусти-
мого значения KA=const и статического отклонения рСт.д
для установившегося режима движения платформы. Со-
гласно первому уравнению (9.32), получаем
Рстл=----'/4!г' У о cos ККЛ (/<я+U sin <р). (9.35)
Г с S О
Например, для Кд=10-Б с-1 Vo=300 м/с,
£7=7,3-10-5 с-1, go=9,81 м/с2,-Кс= KgV^—2-lO-ic-1
получаем
Вст =--------------зоо-10-5-7,3-10-5^0,5'.
1 ,л 2-10—1-9,81
Согласно второму дифференциальному уравнению (9.32),
Йд=Аго /с₽ст.л/( 1,414/ sin ср sin К)- (9.36)
Полагая /(=0, ф=90°, а также рст.д=0,5', получаем
9,81 /9,81/0 370 000-0,5 к , 9
V—1—-—-—---------------1—=^5 см/с2.
я 1,41-7,3-10-5-3340
При разработке схем и конструкций выключателей
коррекции (см. гл. 5, 6) необходимо иметь в виду, что
выключение коррекции затухания должно происходить
лишь при длительном вращении самолета с угловой ско-
ростью К одного знака. При периодических изменениях
скорости V полета и угловой скорости /< вращения са-
молета коррекция затухания не должна выключаться.
Значения и /д определяют необходимый порог чувст-
вительности датчика угловой скорости и акселерометра.
Однако при больших значениях А и Р алгоритм форми-
рования каналов выключения коррекции затухания целе-
сообразно определять с учетом переходного процесса
движения гировертикали.
311
Решениями дифференциальных уравнений (9.32) для
частных случаев, когда Д'=Л'д=const, а Ё=0; V=V0=
=const, а К=0, при нулевых начальных условиях будут
«= V0(l—e-°-7}/7'cosCiO.
°Т С (9.37)
₽=Ко (1 - cos с»/),
где И б! — частота незатухающих колебаний платформы.
Если
то
где f* — время, отсчитываемое от того момента, при ко-
тором угловая скорость X достигает значения /<д или ус-
корение Ё— значения Ёд. В этом случае коррекция вы-
ключается при выполнении равенств
и (W>),=^,.^f~. (9.39)
В систему выключения коррекции по-прежнему необ-
ходимо вводить элемент задержки времени срабатыва-
ния реле выключения па t*, выполняющий роль фильт-
ра низкочастотных колебаний самолета, возникающих в
канале выключателя коррекции затухания.
Для определения допустимого времени выключения
коррекции затухания и определения зависимости его от
собственной скорости прецессии платформы полагаем,
что собственная скорость прецессии «Особ порождается
моментом All" внешних сил, равным гироскопическому
моменту (Л4|пс=//юсо6). Тогда при е=0, согласно
(9.20), получаем
На -\-Нс § ad^—Ho>co6-j-S. (9.40)
Обозначая Jarf/=Z при c=g'c/R, с точностью до
постоянной интегрирования S имеем 2 + (g'olR)Z=<i>co6-
312
Решением последнего дифференциального уравнения
при и>сой=<»соо=const будет
Z =-5-0,^+S, sin 4z£o77? + $2 cos t VgjR. (9.41)
go
Если при (=0 Z—0, то Si=0, S2= — (R/g0)ac„<j и, сле-
довательно,
Z = — w°o6---* - Шсоб cos tV^TR. (9.42)
go go
Дифференцируя (9.42) по времени, получим
Максимальная погрешность атах> накопленная гиро-
вертикалью за время, равное четверти периода собствен-
ных ее колебаний, будет «п>ах—“’сов 1/ —; за время С,
Г go
значительно меньшее четверти периода ТСк/4«21 мин
собственных колебаний гировертикали, погрешность
а/.^Шсоб I/ —sin 2л——. (9.44)
go Т ск
Если время выключения коррекции затухания принять
равным (* = 5 мин, то при собственной скорости ее пре-
цессии Шс«б = 1; 0,5; 0,1 град/ч точность измерения на-
правления истинной вертикали соответственно будет
а,. = 5°, 2°30', 30".
шах
В случае комплексного использования системы (см.
рис. 9.1) для ориентации и навигации для вращения
платформы гиростабилизагора в соответствии с измене-
нием направления заданной ортодромии на •моментный
датчик гироскопа МД3 поступает сигнал, пропорциональ-
ный вертикальной составляющей (7 sin ф скорости U су-
точного вращения Земли. При этом в показания акселе-
рометров Ai и А2, корректирующих отклонение оси Oz
платформы от направления истинной вертикали, следует
вводить поправку на1/(7 (sin <p/go) половины отношения
кориолисова ускорения к ускорению силы ньютонова
притяжения к земле. Если платформу гиростабилизато-
ра используют только для ориентации, то более целесо-
образны стабилизация платформы гнростабилизатора по
азимутально свободному гироскопу и ввод поправки на
313
вращение Земли, например, путем вращения статора
сельсина Дь а не платформы с угловой скоростью
U sin ср. В этом случае пет необходимости вводить по-
правку в показания акселерометров.
Прецизионная система пространственной ориентации
ЛА, представленная на рис. 9.1, нс содержит элементов
схемы начальной ориентации платформы в азимуте и
по направлению к центру Земли. Методы начальной
ориентации (выставки) платформы с заданной точно-
стью п в допустимое время рассматриваются в гл. 11.
Канал измерения ортодромнчсского курса в системе ори-
ентации обычно дублируется каналом измерения гиро-
магнитного курса, методы определения которого излага-
ются в гл. 6.
Сигналы, снимаемые с акселерометров системы ори
ептацни, одновременно поступают в систему инерциаль-
ной навигации, а сигналы, снимаемые с датчиков углов
курса, крена и тангажа, посылаются на другие потреби-
тели этих координат (прицелы, головки самонаведения,
аэрофотоаппараты, указатели курса и плоскости гори-
зонта и др.) [28], [59].
ГЛ Л ВЛ 10
БЕСПЛАТФОРМЕННЫЕ СИСТЕМЫ ОРИЕНТАЦИИ
Рассмотренные выше пространственные гироскопиче-
ские системы ориентации содержали гироплатформы,
физически реализующие (с точностью до погрешностей)
опорные системы координат, относительно которых оп-
ределяется текущая угловая ориентация ЛА. Задача
ориентации в этих системах решалась геометрически пу-
тем непосредственного измерения угловых отклонений,
характеризующих взаимное положение корпуса прибора,
связанного с ЛА, и гироплатформы.
Эта задача может быть также решена аналитически
на основе измерений отдельных угловых параметров дви-
жения ЛА при последующем преобразовании получен-
ных сигналов пли их интегрировании. Системы ориен-
тации, чувствительные элементы которых (гироскопы,
угловые акселерометры и др.) установлены непосредст-
венно па корпусе ЛА, а его положение относительно осей
опорной системы координат вычисляется, называются
бесплатформенными или бескарданными (БСО). Обыч-
314
по БСО входят в состав бесплатформенпых инерциаль-
ных навигационных систем (БИНС) и обеспечивают ре-
шение задачи ориентации, заменяя собой инерциальную
курсовертикаль (ИКВ) или гпростабплизированную
платформу (ГСП). Они могут быть использованы и са-
мостоятельно для определения угловой ориентации ЛА
относительно какой-либо системы координат, неизменно
ориентированной в инерциальном пространстве. Эта осо-
бенность БСО обусловлена тем обстоятельством, что
применяемые в качестве измерительных устройств гиро-
скопы или угловые акселерометры способны измерять
абсолютные угловые параметры движения, а не относи-
тельные.
Для определения ориентации ЛА относительно какой-
либо вращающейся опорной системы координат (напри-
мер, горизонтально]"!) необходимо знать угловую ско-
рость ее вращения в инерциальном пространстве и учи-
тывать эту скорость при вычислениях. При этом реше-
ние задачи ориентации относительно вращающейся опор-
ной системы координат реализуется в схеме, когда БСО
входит в состав БИНС, определяющей координаты мес-
тоположения ЛА и его линейную скорость полета в си-
стеме координат, связанной с Землей.
Основными достоинствами БСО и БИНС по сравне-
нию с платформенными системами являются меньшие
размеры п массы элементов и системы в целом; большая
надежность системы; меньшее потребление электроэнер-
гии; меньшая стоимость; простота эксплуатации и ремон-
та и др.
Вместе с тем па пути создания БСО и БИНС имеют-
ся серьезные технические трудности, главными из кото-
рых являются необходимость разработки гироскопов и
акселерометров, обеспечивающих требуемую точность
измерений в значительно более широком диапазоне из-
менения входных параметров и в более тяжелых усло-
виях эксплуатации (на корпусе ЛА); значительно боль-
ший объем вычислений, вызванный необходимостью ана-
литического моделирования опорной системы координат
п преобразования сигналов акселерометров и гироско-
пов; необходимость разработки совершенных методов на-
чальной ориентации (выставки) и калибровки БСО и
некоторые другие.
Следует также иметь в виду, что ра^рнботка БСО и
БИНС ведется одновременно с совершенствованием
принципов построения и конструкций элементов ИНС
315
платформенного типа. К настоящему времени получены
достаточно высокие результаты в процессе производства
гнростабилизировапных платформ. Наряду с увеличени-
ем точности и повышением надежности здесь достигнуто
снижение массовых и габаритных характеристик и упро-
щение обслуживания.
Сравнительный анализ платформенных и бесплатфор-
мепных систем ориентации и навигации показывает, что
платформенные ИНС менее критичны к общим источни-
кам ошибок, так как гироскопы и акселерометры, уста-
новленные на платформу, в значительной степени изоли-
рованы от действия различных возмущений, их надеж-
ность достаточно высока, а достигнутый уровень точно-
сти навигации характеризуется погрешностями порядка
единиц километров за час полета.
Однако, несмотря на отмеченные выше трудности,
БСО и БИНС интенсивно разрабатываются и успешно
реализуются на объектах самого различного назначения,
конкурируя по ряду показателей с системами платфор-
менного типа.
В качестве измерителей угловых параметров движе-
ния в БСО могут быть использованы трехстепенные ас-
татические гироскопы (например, на электростатическом
подвесе), одноосные гиростабилизаторы, датчики угло-
вых скоростей (в том числе лазерные), угловые и ли-
нейные акселерометры, приборы, выполненные на осно-
ве вибрационных гироскопов, и некоторые другие. Вы-
рабатываемые этими приборами сигналы поступают на
вход вычислительного устройства (ВУ), где они соответ-
ствующим образом преобразуются или интегрируются.
§ 10 I. Бесплатформенные системы ориентации,
основанные на применении датчиков
угловых скоростей
Обычно в составе БСО используется блок чувстви-
тельных элементов, состоящий из трех ДУС, оси чувст-
вительности которых взаимно перпендикулярны. Так же
разрабатываются системы с избыточным количеством
измерителей (четыре, шесть и более), что позволяет уве-
личить точность и надежность получения информации о
параметрах движения объекта. Принципиальная схема
БСО с тремя гироскопическими ДУС приведена на рис.
10.1.
316
В блоке чувствительных элементов смонтированы
ДУС, оси чувствительности которых ориентированы
вдоль осей OX, OY, 07, прямоугольной системы коор-
динат OXYZ. Реагируя на угловые скорости вращения
Рис. 10.1. Принципиальная схема бссплачформенной системы ориен-
тации на трех гироскопических ДУС:
ДУ — датчик угла; ДМ — датчик момента; —эталонный резистор в цени
обмотки датчика момента; У—усилитель ,
основания йх, й¥ и Йг. представляющие собой проекции
вектора й абсолютной угловой скорости вращения ЛА
на оси ОХ, ОУ и OZ, эти приборы вырабатывают соот-
ветствующие сигналы, являющиеся первичными для ре-
шения задачи ориентации в БСО. Аналогично строится
БСО при использовании в качестве ДУС трех лазерных
гироскопов (ЛГ) (рис. 10.2, а), каждый из которых име-
ет ось чувствительности, ориентированную вдоль одной
из осей прямоугольной системы координат OXYZ, связан-
ной с ЛА (рис. 10.2,6). Сигналы с выходов отдельных
317
ЛГ поступают в систему предварительной обработки ин-
формации (СПОИ), а затем на вход БЦВМ, где они со-
ответствующим образом преобразуются и интегриру-
ются.
Рис. 10.2. DCO на трех лазерных гироскопах-
СПОН — система предварительной обработки информации; fi, L, fa — сигиа
лы ЛГ
Независимость показаний этих датчиков от смежных
угловых скоростей обеспечивается высокой точностью
монтажа отдельных измерителей или точностью изготов-
ления монолитного трехкомпопентиого блока лазерных
гироскопов, смонтированного в корпусе блока чувстви-
тельных элементов БСО
Бесплагформенные системы ориентации, использую-
щие в качестве параметров ориентации углы последова-
тельных поворотов ЛА. В механике полета ЛА и в си-
стемах ориентации, в частности, находят применение
различные последовательности поворотов тела на конеч-
ные углы, известные как углы Эйлера, Крылова, Резаля
и др. Используя систему трех углов последовательных
поворотов ф—&—у, аналогичную введенным выше так
называемым самолетным углам, но отсчитываемым от
осей неподвижной системы координат (рис. 10.2, б),
можем определить проекции вектора Q абсолютной уг-
318
левой скорости ЛА па связанные с ним оси OXYZ в
виде
Sv=y-Hs'n Sy=<j>cosftcos Y~Hsin y;
Qz= ft cos у — Ф cos ft sin y.
Угловые скорости S2X, Qj., Qz измеряются ДУС, оси
чувствительности которых ориентированы вдоль осей
OX, OY, OZ. Пренебрегая вначале погрешностями изме-
рений, па основании (10.1) определим угловые скорости
отдельных конечных поворотов:
ф=(2 „cosy — sin у) -Ц-,
y=SA. — (S7cosy—Sz’sin'y);tg ft,
ft = 2^ sin у + 2Z cos Y-
Интегрируя их, получим углы конечных поворотов
t
Ф= f (₽« cos у — 2г sin у) —- dt,
J * cos ft
Y = C [Sx — (Sy cos Y — S2sin Y)tgft]<//,
a'
(S„ sin у + 2Z cos y) dt,
l
(10.3)
характеризующие ориентацию ЛА co связанной с ним
системой OXYZ относительно неподвижной системы ко-
ординат
В (10.3) начальные значения углов if, О*, у— нулевые.
Принципиально возможен случай ненулевых начальных
условии, когда в момент времени i/=0 системы коорди-
нат OXYZ и ОЕл]?, рассогласованы на углы ф=1|>о, 0=0о,
Y=Yo- Тогда (10.3) будут
/
ф=С (S cosy —Szsin у)—
J J COS <}
о
Y = f )St—(Sy cos у — 2Z sin y) tg ftj dt + y0.
6
t
0 = j* (Sy sin y+2, cos Y) dt + ft0.
6
(10.4)
319
Функциональная схема БСО, реализующей вычисление
углов ориентации «ПА ф, б’, у на основе измеренных зна-
чений составляющих £2*, Qv, Qz вектора £2 абсолютной
угловой скорости, приведена на рис. 10.3 Основными
элементами вычислительного устройства ВУ являются
функциональные преобразователи вида sin у, cosy, cos О,
Рнс. 10.3. Функциональная схема БСО, использующей в ка-
честве параметров ориентации углы ф, 1), у
igO, а также интегрирующие и суммирующие устройст-
ва. Аналогично решается задача ориентации н при ис-
пользовании в качестве датчиков первичной информации
угловых акселерометров (например, гироскопических
[17D- . . .
Угловые ускорения £2Ж, £2У, £2Z измеряют тремя угло-
выми акселерометрами, оси чувствительности которых
ориентированы вдоль осей OX, OY, OZ прямоугольной
системы координат OXYZ, связанной с ЛА.
После интегрирования измеренных угловых ускоре-
ний получают угловые скорости
t t
2Х == С Qxdt -|- 2"; Qu— J Qydt + 2°;
б О
i
2г=[йл^+2^, (10.5)
о
320
в которых й,, й?/, й« —составляющие вектора 42" абсо-
лютной начальной угловой скорости по осям OX, OY, OZ.
В соответствии с (10.1) угловые скорости
Й1.=у-|-,!> sin I', Й, =0 cos t) cos у-|-
-J-flsiny, й3= 8 cos у — '?c°s 0 sin у, (10.6)
на основании которых, как и в случае использования ги-
роскопических ДУС, определяют угловые скорости ф, у.
6 в виде (10.2), а затем и углы поворота ЛА ф, у, О в вп
те (10.3) или (10.4).
Рассматривая выражения (10.1)...(10.4), отмечаем на-
личие особых значений углов fl, при которых задача ори-
ентации решена быть не может. Так, при <T=jt/2cosfl=
= 0, a I/cos 0=tg 0 — оо. Поэтому область допустимых
углов 0- должна быть ограничена. Обычно принимают
|О|^70°. При больших значениях углов наблюдается
явление, подобное складыванию рамок карданова подве-
са, имеющее место в системах ориентации платформен-
ного типа. Следует также отметить сложность реализа-
ции вычислений тригонометрических функций углов и их
произведений. Эти факторы ограничивают возможности
использования рассмотренных выше алгоритмов при ре-
шении задач ориентации на ЛА маневренного тина.
Если в процессе полета ЛА угол у не превышает еди-
ниц градусов, то при cosy = l, a sin у—у выражения
(10.2) приобретают вид
(Sff - Йя¥) -Ц: Y=Q v - ~ -’»V) ‘5»•
а чек Я
6=йчу+йг. (10.7)
Выражения (10.2) еще больше упрощаются, если
угол у удерживается автопилотом в пределах малых зна-
чений (Дуа?0). Тогда
ё=Й,,/соь&, y=L\ —» = йг. (10.8)
Для ЛА, имеющих ограниченные по величине углы fl.
функции cos fl н tg О1 могут быть представлены в виде
первых двух членов, разложенных в ряд:
cos &= 1 — м2/2; 1S ’* 3. (10.9)
С точностью до 0,01 % это соответствует углам 0.
меньшим 13 и 10°.
11-1757
321
Бесплатформенные системы ориентации, использую,
щие в качестве параметров ориентации направляющие
косинусы. Наиболее распространенными на практике па-
раметрами ориентации, используемыми в настоящее вре-
мя в БСО, являются направляющие косинусы. Девять
косинусов углов между шестью осями координат ОХУ/.
и однозначно определяют их взаимную ориентацию
и могут быть представлены в виде
5 ч t;
А’................«ц «|2 «13
V . ..... «21 «2У «2:1
Z.................«л «32 «33
или соответствующей матрицы
(«и а12 а13
11>1 «22 гз
31 «зг азз
(10.10)
в которой элементы а,у являются косинусами углов меж-
ду соответствующими осями двух систем координат
OXYZ и OgT)£ при переходе от системы к системе
OXYZ:
rtn=cos(?, .v);
ft21 = COS(*, 17);
(Z31 = cos(?, г);
a12=cos(4, л');
«22= COS (7), //);
a32=cos(q, г);
«13 —cos(C> x),
a23=cos (C, y),
aa3=cos(C, ~).
(10.11)
Направляющие косинусы могут быть рассчитаны, если
известны углы конечных поворотов ДА при любой из
возможных последовательностей их применения.
Так, при принятой ранее последовательности поворо
тов ДА на углы ф, &, у и переходе от опорной системы
координат к связанной с ДА OXYZ на основании
рис. 10.2,6 получаем матрицу общего поворота
А=А(Л&Аф=
, cos<|> cos ft sin ft
siiiy sin 0— cos ft cos у
— cosy cos 'psi и ft
cosysi<np-|- —cos ft sin у
\ -|-ski у cos <|> sin 0
—sin | cos ft i
sin у cos ф -|-
-|-cos у sin ф sin ft >
cos у cos ф —
— sin у sin ф sin ft /
(10.12)
32S
в которой A,f, Ao, А, — матрицы, соответствующие от
цельным последовательным поворотам ЛА па углы ф,
О', У-
(zeos'i 0 —sin'Д
0 10 1.
\sin Ф 0 сояф'
(cos 0 sin 0 О\
— sin 0 cos О О I > 1
О О Г
/1 О О X
А к = I () cos у sin У 1 •
'О —siny cosy7 1
(10.13)
Матрицы А,;,, Ао, Ат перемножаются в последователь-
ности, обратной поворотам ЛА на углы ф, О, у. Обрат-
ному переходу от системы координат OXYZ к системе
соответствует матрица С, 1ранспоиированная по от-
ношению к матрице А,
С= А'=А,>А{}А|
f cosфcosз sinysintji— cos ysin'Ь-f- 1
—cos V cos ф sin >i Д sin у cos ф sin »
— sin 5) cos 1) cos у —cos .> sin у
—sin ф cos 0 sin у cos ф -j- cos у cos ф —
* -{-cos у sin ф sin .1 —sin у sin ф sin В
(10.14)
с элементами С//, которые получают, заменяя в (10.12)
строки столбцами и наоборот.
Метод определения направляющих косинусов через
углы последовательных поворотов приводит к необходи-
мости вычисления произведений двух или трех функций
синусов н косинусов угловых параметров ориентации,
что представляет достаточно сложный и громоздкий про-
цесс. Поэтому направляющие косинусы чаще использу-
ются в качестве самостоятельных параметров ориента-
ции, поскольку они могут быть вычислены аналитически,
если известны их начальные значения С/у и угловые ско
рости fix, fiy, fix, с которыми система OXYZ вращается
относительно неподвижной системы координат OgnL [5].
Ц« 323
Действительно, из теоретической механики известно,
что дифференцирование вектора /ё, определяющего мес-
тоположение точки в системе координат OXYZ (коорди-
наты л*, у, г), даег линейную скорость
V=dR!dt=k (Ю.1Г»
с проекциями 14, Vy, V, на оси системы OXYZ.
Если эта система координат вращается с угловой
скоростью (2 относительно некоторой неподвижной си-
стемы координат Ogqg, то абсолютная линейная скорость
точки
»/« jt 1
(10.16)
В (10.16) первый член в правой части представляе» го
бой скорость точки в системе координат OXYZ, а второй
учитывает факт вращения этой системы относительно
неподвижной системы координат Og»]?.
Векторному уравнению (10.16) соответствуют три
скалярные, определяющие проекции вектора V абсолют-
ной линейной скорости точки на оси подвижной системы
OXYZ в виде
V'z/==i/ + 22A'-G.lz,
^=24-9^ —
(10.17)
В матричном виде операция дифференцирования век-
тора R по времени в базовой системе координат
определяется выражением
(10.18)
Дифференцирование вектора (ё во вращающейся си
стеме координат OXYZ представляется как
(10.19)
321
Векторному произведению QXR в матричной форме
записи соответствует произведение кососимметричной
матрицы
/О —2г 2Д
6=1 2г 0 — Qj (Ю..20)
\2„ 2Х О J
на матрицу-столбец
(х \
У - (Ю.21)
z /
Поэтому по аналогии с (10.16) можем записать матрич-
ное выражение
(Ул. \ / х \ /0 •—2г 2Д / х \
Vu ]=1 у ]+(йг 0 -2Л j I у 1, (10.22)
Vt / \ z / \2У 2д 0 / \ z /
которому также соответствует система трех уравнений
(10.17).
Координаты точки в подвижной и неподвижной систе-
мах координат связаны матричной зависимостью
X ' \ (ап «12 «13\ /6
У 1 — 1 °21 °22 °23 1 1 ’’I
Z ' 'й31 °32 «33/ \ С
(10.23)
которая характеризует преобразование координат, т. е.
переход от координат точки в неподвижной системе ко-
ординат OJjrjj; к координатам той же точки в подвижной
системе 0ХУ2. Матрица А (с элементами о[Л) характери-
зует именно этот переход.
При обратном переходе от координат точки в системе
OXYZ к координатам в системе О£ц£ используется мат
рпца С=АТ, транспонированная по отношению к матри-
це А. Соответствующее преобразование координат выра-
жается матричной зависимостью вида
R=CR', (10.24)
— матрица-столбец из координат точ
11 *-1757
325
(х\
У I— то же, в системе OXYZ;
z J
С —матрица преобразования координат при переходе от
системы OXYZ к системе
(Си С12 С13\ /<2ц Л21 <23Л
С21 С22 С13 |“1 ®12 Й22 й32 I • ( 0.25)
<?31 С32 С33^ 'Й13 й23 aS3'
Для установления связи направляющих косинусов с
угловыми скоростями £2Л, Qs, £2г, с которыми подвижная
система координат вращается относительно неподвиж-
ной (базовой), продифференцируем по времени выраже-
ние (10.24), считая R, С и R переменными.
R=CR'4-CR' = C(R'+ACR'). (10.26)
Поскольку уравнения (10.26) и (10.22) эквивалентны
по геометрическому смыслу, из их сравнения следует,
что AC=Q или
С —С2=0.
(10.27)
Уравнение (10.27) хорошо известно в теории инерци-
альной навигации [4] как матричное дифференциаль-
ное уравнение Пуассона, связывающее производную С
от матрицы направляющих косинусов С с самой матри-
цей и угловыми скоростями Йх, Qv> йг, с которыми систе-
ма координат OXYZ вращается относительно вычисляе-
мой (базовой).
Таким образом, если в БСО используются датчики
абсолютных угловых скоростей, измеряющие составляю-
щие вектора Q по осям подвижной системы координат
OXYZ, связанной с ЛА, в виде £Д-, йг, то направляю-
щие косинусы могут быть рассчитаны путем интегриро-
вания матричного уравнения Пуассона (10.27):
f cll С12 С1з\ /С11 С12 С13 1
^21 ^22 ^23 I I С?! ^22 ^23
^С31 С32 ^ЗЗ/ ' С31 ^32 ^33?
®у
0 -2Х
Йд. о .
(10.28)
326
Последнее эквивалентно девяти уравнениям первого по-
рядка
Сц — Cl'2^z — С21 — CT&Z — C2^yt
С12~С 13^X — Cj j 22, С22=С232Л- C2lQgt
сгз~ си^у — с12^х» с2з=с212;/ — с222 л;
с31=с322 Озз2^>
O32=с332х — c3i2z,
С33= С 31^(/ С82^Л'»
(10.29)
составляющим три изолированные группы уравнений, оп-
ределяющие направляющие косинусы какой-либо одной
из строк матрицы С Уравнения, входящие в данную
группу, могут быть решены в отдельности путем интегри-
рования при учете начальных значений направляющих
косинусов. Па основании (10.29) можем определить:
Си = j (cl2Sa ~ Cir2,z) dt 4- Си.
О
f
С12 = 1 (С132 v — сп2г) dt+C12,
О
t
Cis = J (С11Ц/ — С122я) dt+C13,
0
1
C2i — f (,^22^z С232у) dt С41 >
0
t
C22 ~ (c2s2x—c2i2z) dt С22»
6
1
C23 = j (C212# — cZ22.v) d t + C23;
0
J
(10.30)
(10.31)
11**
327
С31-- С (<?з2Йг • CggQy) df-j-Cgl
С32 — J (С33^.г — С31^2) dt —|~С32 1
о
(10.32)
СзЗ = J (С312Г/ — <чД) dt + Сзз.
о
Из анализа выражений (10.30), (10.31), (10.32) мож-
но заключить, что процедура вычислений направляющих
косинусов должна быть организована с использованием
принципа обратной связи по замкнутой схеме, приведен-
ной на рис. 10.4
На входы отдельных интеграторов подаются разности
произведений направляющих косинусов на соотвстству-
щие угловые скорости, измеренные с помощью ДУС. На-
чальные значения направляющих косинусов Сц вычисля-
ются заранее и характеризуют начальное рассогласова-
ние осей систем OXYZ и OljqJ;
Зная элементы Сц матрицы С, можно при необходи-
мости рассчитать углы последовательного поворота сис-
тем в форме Эйлера, Крылова и др. Так, при исиользо-
Рис. 10.4. Функциональная схема БСО, использующей в ка-
честве параметров ориентации направляющие косинусы
328
вании введенных ранее абсолютных углов ф, •8', у на ос-
новании выражений для элементов матриц Л и С можем
определить
i>=arcsin <?21, y=arctg(—с23/с22), 'p = arctg(—c31/fn).
(10.33)
Случай, когда моделируемая система прямоугольных
координат является подвижной. На ЛЛ типа самолета
важно определить его ориентацию огноси гельно какой-ли-
бо подвижной системы координат, вращающейся относи-
тельно инерциального пространства. Такой системой коор-
динат, в частности, является введенный выше сопровожда-
ющий координатный трехгранник Ogt]£ (OENH) географи-
ческой системы координат R, <р, X (см. рис. 10.2). При
использовании в целях навигации географической сфери-
ческой системы координат R, ср, ?. (R=>R3+h) этот трех-
гранник вращается относительно инерциального прост-
ранства с угловыми скоростями Йе, On, Йц, определяе-
мыми выражениями
QE——vN/R, Qn=U cos y-[-vE/R, (10.34)
Q„=U +
где Ve и Цдг — горизонтальные составляющие вектора t>
путевой скорости самолета; 7?— радиальное расстояние;
U—угловая скорость суточного вращения Земли.
Задача ориентации в данном случае сводится к опре-
делению взаимного углового положения осей двух вра-
щающихся систем координат: связанной с ЛА системы
OXYZ и трехгранника OENH.
Взаимная ориентация двух систем координат может
быть определена инерциальными методами при извест-
ных абсолютных угловых скоростях их вращения отно-
сительно инерциального пространства. Применяя урав-
нение Пуассона к задаче определения ориентации, свя-
занной с ЛА системы координат OXYZ с измеренными
значениями угловых скоростей йх, й^, й2, вычисляют
матрицу направляющих косинусов:
t
С= f СЙ</7-|-С°. (10.35)
о
Зная абсолютные угловые скорости Йе, йя, йп, с кото-
рыми вращается горизонтальная система осей OENH
329
относительно инерциальной системы например в
виде (10.34), аналогично рассчитывают матрицу
t
В=[ Вй^// + В°, (10.36)
а
где £21 — кососимметричная матрица из проекций £2Е, £2Л-,
£2«:
(О — Syy £2уу
£2„ 0 —
— 2 у £2у? 0
(10.37)
Для определения матрицы D, соответствующей пере-
ходу от подвижной системы координат OXYZ к горизон-
тальной системе OENH, учитывают, что D=BTC, Произ-
водная по времени от произведения двух матриц
D^=BC|-BC. (10.38)
Интегрируя (10.38), получают искомую матрицу
t t
D= j ВгСо7 + J BrQft 4- D°, (10.39)
о 0
в которой производные от матриц С и В определяются
как С=С£2, В=В£2ь а Вт есть матрица, транспонирован-
ная относительно матрицы В. Из анализа полученных
выражений следует, что задача определения взаимной
ориентации двух вращающихся систем координат может
быть решена в случае, когда БСО входит в состав БИНС,
решающей задачу навигации по определению координат
местоположения и скорости ЛА относительно выбранной
системы навигационных координат.
В БИНС на основе вычисленных значений относитель-
ных линейных скоростей ив и Одг н известных R и U по
формулам (10.34) рассчитываются угловые скорости £2В.
£2Д-, £2//, необходимые для вычисления матриц В и Вт.
В БИНС ЛА также находят применение параметры
Эйлера, Родрига — Гамильтона, кватернионы, параметры
Кейли — Клейна [17, 47] и некоторые другие, использо-
вание которых обычно приводит к некоторому сокраще-
нию объема вычислений.
Методические и инструментальные погрешности БСО.
Работа любой из рассмотренных выше систем ориента-
ции сопровождается noi решностямн методического и ин-
330
струменталыюго характера. К методическим относятся
погрешности, обусловленные упрощениями математиче-
ских зависимостей, решаемых в БСО, а также погрешно-
сти метода вычисления.
Инструментальные погрешности вызываются ошибка-
ми измерений угловых скоростей в реальных условиях
полета, а также ошибками устройств, обеспечивающих
начальное ориентирование (выставку) БСО. При исполь-
зовании в БСО, основанных па применении в качестве
параметров ориентации углов ф, 0, у последовательных
поворотов ЛА, упрощенных кинематических зависимо-
стей. например в виде (10.7), возникают методические
погрешности в определении угловых скоростей:
Дф=—Ц- (2„ cos у — 2Z sin у — Qv+2ZY).
COS V
&Y=— (Qy cos y — sin y — +SaY) tg &,
Д9=2у sin y — S^cos y — 2^?+®»- (10.40)
Погрешности обусловлены заменой функции sin у ее ар-
гументом, т. е. углом у- Интегрируя (10.40), получают по-
грешности ориентации:
t t
Лф= дфг/Z-{-Дф0, Ду= j” Ayf//-|-AYo.
6 6
i
= J ДМ/4-Д&0. (10.41)
о
В (10.41) составляющие Дфп, Дуо. Айо— ошибки началь-
ной ориентации (выставки) БСО. Рассматривая выраже-
ния (10.40) и (10 41), замечаем, что при упрощении ки-
нематических зависимостей, закладываемых в основу
работы БСО, возникают погрешности ориентации, зави-
сящие от углов О' и у, а также угловых скоростей Q</,
27, с которыми ЛА совершает маневрирование. Для чис-
ловой оценки возможных значении суммарных погрешно-
стей Дф, Ду и Д-& необходимо задать углы # и у, а также
угловые скорости йж, Qv, в виде известных функций
времени. Погрешности ориентации накапливаются со вре-
менем, поскольку в БСО осуществляется операция инте-
грирования измеренных угловых скоростей или ускоре-
ний. Для оценки характера изменения этих погрешностей
331
рассмотрим отдельные составляющие суммарных погреш
постен в виде (10.41).
Так, например, на основании последнего выражения
системы (10.41), полагая fiz=0, получим частную по-
грешность ориентации
i
Дй = —f 2/;(у —sin у)^(. (10.42)
6
зависящую от угловой скорости £2У и угла у.
Для получения точного значения погрешности, имею-
щей место к моменту времени t, необходимо задать функ-
ции времени и у. Приближенную числовую оценку по
грешности получим, полагая, например, £2y=const, а у =
= Як/. Тогда па основании (10.42) получим
t t
Д11=—j1 QyQxtiit-|- 2/z sin 2Л.М/=
о б
t t
=—272Л /rf/-j-2₽ j* sin Qxtilt=
о о
==-272х(^/2)+(2у/9.г)(1 - cosQa2). (10.43)
В составе погрешности ориентации но оси тангажа име-
ют место составляющие, пропорциональные (/2/2) и (1—
—cos Q.v(), имеющие различные знаки и взаимно исклю
чающие друг друга при малом времени полета t. По-
грешность сильно возрастает при увеличении времени
полета.
Например, оценим погрешность определения угловой
ориентации ЛА по углу 0, возникающую в процессе ра
боты БСО, построенной по упрощенному алгоритму
(10.43) при Пу=0.5 град/с; Я.г=0,05 град/с и (=40 с. На
основании выражения (10.43) вычисляем
ДО=2„2, (/2/2)+(2,/2^(1 — cos 2Д.()=
.---0,5-0,05.402 0_5_ 57 3 j _ cos Зо)== _0)33о.
57,3 ' 0,05
При 7= 100 с АО = —2,18°.
Аналогично, па основании первого выражения систе-
мы (10.41) можем получить частную погрешность опре-
деления угла рыскания
t
Дф= —f —!—(2zsin у — QJdt, (10.44)
J cos S
о
332
зависящую от угла тангажа О, крепа у и угловой скоро-
сти Уг. Погрешность возрастает при увеличении угла
тангажа
На участках траектории ЛА с постоянным углом О
погрешность в угле рыскания ф нарастает в соответствии
с выражением
t
ДФ=------!— t 2-(sin у—у)<// (10.45)
cos D J
о
аналогично погрешности (10.43).
Работа БСО также сопровождается инструментальны-
ми погрешностями отдельных элементов и ошибками на-
чальной ориентации системы. Так, на основании упро-
щенных выражений для угловых скоростей -ф, у, О' в виде
(10.8), в частности, следует, что АО—ДЙг. При ДНг=
=дуг(0
t
Д& = Г Д2г (/)<//. (10.46)
При постоянной погрешности измерения скорости
(ЛУг=сопз1); ДФ=Д£2гЛ Полагая, например, что ДУС
имеет постоянную суммарную погрешность Дйг= 1X
Х10~3 град/с, а время полета ЛА t— 100 с, получаем по-
грешность ориентации A&= 1 • 10-3-100=0,1 град.
В БСО, предназначенных для работы в составе БИНС
самолетов, точность измерения угловых скоростей с при-
менением прецизионных ДУС должна быть на уровне,
характеризующем скорость собственной прецессии (дрей-
фа) гироскопов ИНС платформенного типа. Для совре-
менного этапа развития систем иперциальиай навигации
самолетов это уровень, характеризуемый погрешностями
измерении, меньшими 0,01 град/ч [4, 12, 38 и др ].
Погрешности начальной ориентации БСО па непо-
движном основании, как правило, не должны превосхо-
дить десятых долей угловой минуты.
При использовании в БСО в качестве параметров
ориентации направляющих косинусов па основании
(10.28) можем записать выражение;
ДС=ДСО4-СДУ, (10.47)
которому соответствуют три группы выражений для про-
изводных от погрешностей определения направляющих
333
косинусов, каждая из которых характеризует ошибки оп-
ределения ориентации одной из осей системы OtpjL от-
носительно OXYZ, связанной с ЛЛ, в следующем виде;
Л£ц — Д<?122г с12Д£2г — ДСийу—с 13Д2у,
ДС|2= ДС[32 £1зД£2
ДС1з= ДСц2^-|-С11Д£2^ ДС12ОЛ С^ДЭ^
Д^21 = ДС22Йг-{-С22^^г — АС2з2р *-23^^,
Дс22=Дс23Дл 4" — Дс2|2я с2{Д!2г,
Д^23—Дс^к^ -j- C^I^Qy — Дс22^.г — ^22^^Л’
ДС31 = Д^З‘2^Я 4“ ^32^2г — Д<7<ц2//*— СязДЯр,
(10.4В)
(10.49)
Д^32—ДСвд&д. 4" ^ЗЗ^^Я- СздД2г, j
Дс33= Дс312р -|- С31 Д2у — Дсз2йа — С32Д2Л. ]
Интегрируя эти выражения на определенном участке
полета ЛА, например в интервале времени от 0 до /,
можно получить частные погрешности определения ори-
ентации:
Дсц=(’ Дёпс7; A<42=J Lcviiit и т. д. (10.51)
о о
В выражениях (10.48)... (10.50) ДЙХ» ДП</, Дйг— по-
грешности измерения абсолютных угловых скоростей, а
Лец, Дс‘|2 и т. д. — погрешности вычисления направляю-
щих косинусов на рассматриваемом участке полета ЛА.
При расчете величин возможных погрешностей ориен-
тации, соответствующих рассматриваемому участку по-
лета ЛА, с использованием (10.48) ... (10.51) необходимо
задать все входящие в них величины в виде известных
функций времени.
Для оценки характера изменения погрешностей рас-
смотрим отдельные составляющие суммарных погрешно-
стей ориентации. Так, например, погрешность скорости
изменения направляющего косинуса Дс21 частично обус-
ловлена погрешностью измерения скорости Д£2^=Д£21,(()
и определяется зависимостью Дса1=—СгзД^//. интегрируя
334
которую в промежутке времени от 0 до / получаем
Дс’21 — — С с^О.у(Н.
(10.52)
Задав значения с23 и AS2i„ можно вычислить частную по-
грешность ориентации Дс'2) Выражения (10.50), (10 51)
для погрешностей определения скорости изменения на-
правляющих косинусов и самих направляющих косину-
сов соответствуют общему случаю пространственного
вращения ЛА.
Рассмотрим частный случай, когда ЛА совершает в
пространстве плоский поворот по тангажу вокруг оси
0“ неподвижной -системы координат с абсолютной
угловой скоростью S2t=Qz. За начальное примем угловое
положение ЛА, когда оси систем координат OXYZ и
совпадают.
На основании рис. 10.2,6 составим выражение для
матрицы А, характеризующей переход от неподвижной
системы координат О£т)£ к связанной с ЛА системе ко-
ординат OXYZ, в виде
(cos & sin & 0
— sin 1) cos & 0
0 0 1
(10.53)
Матрицу С=АГ, отражающую переход от системы коор-
динат OXYZ к системе координат запишем в виде
(cos 8 —sin & 0 \
sin 8 cos& 0 ]• (10.54)
0 0 1/
Согласно (10.28), при Qz#=0 и Q!/ = Qx = 0 получим че-
тыре уравнения для определения направляющих косину-
сов Си, С)2, c2i и с22:
—0; С12-|-Сц2г—0;
с.д—с.,2£1г=0; с224_с212г—0.
(10.55)
Варьируя уравнения (10.55), определим погрешности в
определении скорости измерения направляющих косину-
сов:
335
ACi i=Д Ci2^z 12^2^,
Д^12= —ДСцй2 — ^цД^г >
Дс-д = Дс2222' 1~ ^ггД®»»
Д^22~ —ДС-21^2 — СдД!^.
(10.56)
Интегрируя их в интервале времени от 0 до I при извест-
ных законах изменения во времени входящих в них пе-
ременных величин, получим
t А
Дсц = (ДС12122-|-е12Д2г)г//,
о
ДС12—- — (ДСцЙ^ -{- СцД(2х) di,
о
(10.57)
Лс-а = j’ (Де222г -|- сг2ДЙг) dt,
о
Ьс.а= — С (До212г+с21Д22)г//.
Рассмотрим подробнее в качестве примера первое вы-
ражение системы (10 57) в виде
t г
Дсп = J Д<ч22/^+ [ С12Д2г^- (10.58)
о 6 :
Последнее характеризует линейную часть погрешности
определения в процессе работы БСО направляющего ко-
синуса сц. Для расчета погрешности Лец необходимо за-
дать входящие в (10.58) Дс12, fiz, <Д2 и A^z в виде извест-
ных функций времени I. Полагая, например, в (10.58)
Qz=const; Cis — —sin QzC Дс]2 = const и Айг=const, можем
получить
Дсн = Де122г/ — (1 — cos Sz/). (10.59)
иг
Выражение (10.59) позволяет рассчитать линейную часть
погрешности определения направляющего косинуса сц,
соответствующего времени полета ЛА t.
Задача анализа погрешностей ориентации существен-
но усложняется, когда БСО входит в состав БИНС [4,
14, 38, 41].
336
§ 10.2. Бесплатформенные системы ориентации,
основанные на применении свободных гироскопов
Типовой схемой БСО, входящей в состав БИНС и со-
ответствующей современному этапу развития инерциаль-
ных систем, является система, основанная на применении
двух гироскопов с электростатическими подвесами и бор-
тового вычислитель-
ного устройства
(ВУ) цифрового ти-
па [55].
В состав БИНС
кроме БСО также
входят три одноос-
ных акселерометра,
осп чувствительно-
сти которых выстав-
ляются при монтаже
параллельно осям
прямоугольной си-
стемы координат
OXYZ, связанной с
ЛА.
Принципиальная
схема БСО. Сфери-
ческие роторы гиро-
скопов (рис. 10.5)
приводятся во вра-
щение с частотой по-
рядка (20...30) • 103
об/мин с помощью
специальных обмо-
Рис. 10.5. Принципиальная схема БСО на
двух электростатических гироскопах:
ЭСГ — электростатический гироскоп; Д — оп-
тический датчик; Н — кинетический момент
ротора гироскопа
ток, создающих вращающееся магнитное • поле. После
отключения питания роторы вращаются по инерции в
глубоком вакууме, удерживаясь в подвесах силами эле-
ктростатического поля. Сохраняя с достаточно высокой
точностью (<одР=^10-3 град/ч) стабильность направления
своих осей собственного вращения в пространстве, они
позволяют реализовать на ЛА некоторую неподвижную
приборную систему координат, используемую в качестве
опорной при решении задачи ориентации в БСО.
В процессе начальной ориентации оси собственного
вращения роторов выставляются относительно корпуса
прибора в определенное положение, как правило, обра-
зующее две взаимно перпендикулярные оси Ох и Оу при-
337
борной системы координат Oxyz. В момент старта ЛА
система начальной выставки роторов гироскопов отклю-
чается и последние сохраняют с точностью до погрешно-
стей ортогональность своих осей в полете.
Если пренебречь погрешностями выставки и установ-
ки гироскопов со связанной с ними системой координат
Oxyz относительно OXYZ, связанной с ЛА, то их теку-
щую угловую ориентацию можно определить с помощью
оптических или емкостных датчиков, расположенных в
корпусах отдельных гироскопов.
При малых углах относительного поворота двух сис-
тем, что характерно для применения электростатических
гироскопов в составе ИНС платформенного типа либо па
ЛА, не маневрирующих в полете, задача съема сигналов,
пропорциональных малым угловым отклонениям, реша-
ется достаточно просто с использованием датчиков оп-
тического или емкостного типа.
В БСО съем высокоточной информации об относи-
тельном угловом положении двух систем координат при
отсутствии ограничений, налагаемых на угловые манев-
ры ЛА, представляет собой исключительно сложную
техническую задачу.
Рассмотрим вариант использования оптических сис-
тем, позволяющих определять как углы относительного
поворота соответствующих осей координат, так и направ-
ляющие косинусы. Па рис 10.5, а приведена принципи-
альная схема системы съема информации, состоящей из
трех ортогонально расположенных оптических датчиков,
осн которых с точностью до погрешностей установки па-
раллельны соответствующим осям системы координат
OXYZ, связанной с ЛА. Каждый оптический датчик со-
стоит из источника света и приемника с элементом, реа-
гирующим па отраженный от зеркально обработанной по-
верхности ротора гироскопа луч света. Оси оптических
датчиков составляют с осью собственного вращения ро-
тора первого гироскопа углы, косинусы которых
aI1=cos(A', х)\ «u=cos(K,,rx): al3=cos(Z, х) (10.60)
однозначно определяют ориентацию оси Ох вращения
ротора гироскопа в системе координат, образованной
оптическими осями датчиков, а стало быть, и в системе
OXYZ, связанной с ЛА.
Для построения приборной системы координат Oxyz
необходимо зафиксировать в инерциальном пространстве
338
еще одно направление, не коллинеарное первому. Такое
направление образует ось собственного вращения второ-
го гироскопа, также снабженного тремя оптическими дат-
чиками, аналогичными рассмотренным выше, но опреде-
ляющими направляющие косинусы а21, а22, Л2з> характе-
ризующие ориентацию оси собственного вращения рото-
ра второго гироскопа в системе осей OXYZ.
Для обеспечения высокой точности работы БСО необ-
ходимо, чтобы оси вращения гироскопов были взаимно
ортогональными. При обеспечении требования ортого-
нальности направляющие косинусы «ц, ац, ai3 и а2Ь о22,
д23, являющиеся элементами первой и второй строк опре-
деляемой в БСО матрицы ориентации А, полностью ха-
рактеризуют взаимную ориентацию осей двух систем
координат: Oxyz и OXYZ.
Недостающие элементы матрицы А легко восстанав-
ливаются с использованием известных алгебраических
соотношений между этими элементами [4]:
Ли-|-0124-013= 1, 0214“ 022 4-023= 1,
oil 4“a324-a33==
о'ц 4-о л 4~оз1 — 1» 0124-0224*032= 1,
о?з 4* O2.3 4- O33 = I;
апа12 4“ °21а22 4“ а3!й32== О»
O12O13 4"fl22O23 4-О32О33=0,
ОцО13 4~ О21О33 4“ О3|о33 = 0,
а11а21 4“ О1г022 4~ а13а23 = 0 >
О21а314- О22о32 4“ О23О33 = 0,
ацО31 4“ О12О32 4- а13°33 — 0-
(10.61)
(10.62)
При решении навигационных задач приходится опре-
делять проекции вектора а кажущегося ускорения ЛА па
оси неподвижной системы координат Oxyz, связанной с
гироскопами. Измеренные же значения кажущихся уско-
рений ах, a!h az являются проекциями этого ускорения на
оси системы координат OXYZ, связанной с ЛА
Для преобразования измеренных кажущихся уско-
рений ах, ау, аг к осям неподвижной системы координат
Oxyz используется матрица С=АТ, транспонированная
относительно матрицы А.
339
Для преобразования измеренных ускорений к осям
подвижной горизонтальной системы координат OENH
используют выходные данные ИНС.
Определение направляющих косинусов при примене-
нии оптической системы съема информации. При враще-
нии сферического ротора первого гироскопа оптические
оси датчиков пересекают поверхность сферы в точках,
лежащих па окружностях, плоскости которых перпенди-
кулярны оси вращения ротора, а радиусы связаны с на-
правляющими косинусами Оц, а13 зависимостями
гп=/?1/Г1— ah; г12=Т?И1 — rK=RИ1 — а™,
(10.63)
где R— радиус сферической поверхности ротора.
На основании (10.63) можем определить направляю-
щие косинусы:
«н=4«12=4 ^=7^-4.
к к к
(10.64)
Для определения направляющих косинусов с помо-
щью (10.64) необходимо измерять радиусы окружностей
Гц, >Ti2> Из, что технически сложно осуществить.
Представим (10.64) в виде
(10.65)
и выразим направляющие косинусы через относительные
величины (Гц/R), (r^/R), (rl3/R)t которые могут быть из-
мерены в процессе работы оптических датчиков следую-
щим образом. На поверхность ротора наносят две тонкие
черные линии (риски), проходящие через ось вращения
ротора и делящие окружности радиусов г в отношении
(r/R).
Очевидно, что при r=R отношение r/R=l и две точ
ки линий 1 и 2 лежат на одной прямой. При г=/?/2 от-
ношение г//?=1/2 и две точки линий 1 и 2 делят окруж-
ность радиуса г в отношении 1/2 и т. п.
При г=0 отношение r/R = 0 и линии сливаются у по-
люсов в точки.
340
Для измерения относительных величин используют
дискретный метод, основанный на заполнении промежут-
ков времени между моментами прохождения оптическим
датчиком двух липин высокочастотными импульсами
стабильной частоты. При прохождении первой черной
линии (риски) через оптическую ось датчик вырабаты-
вает импульс, замыкающий с помощью триггера элек-
тронный ключ в цепи первого счетчика импульсов, ка-
либрующих временной интервал между точками / и 2.
В момент прохождения оптической осью второй линии
вырабатывается импульс, перебрасывающий триггер и
размыкающий электронный ключ. Одновременно импуль-
сы подаются па второй счетчик и т. д.
Отношение rjR определяется как отношение числа им-
пульсов, калибрующих отрезки дуг окружностей между
линиями 1 и 2 и 2 и 1.
Определив Гц/Д, rl2/R, ris/R, рассчитывают «н, «)2,
«и согласно (10.65). Оценивая рассмотренный выше спо-
соб определения направляющих косинусов, отмечаем его
недостатки, связанные с необходимостью дополнительных
вычислений по формулам (10.65) и зависимостью резуль-
татов вычислений «и, «12, «is от радиуса сферы R, кото-
рый может изменяться.
Отмеченные выше недостатки могут быть устранены
при установлении непосредственной связи между отрез-
ками окружностей и соответствующих им центральных
углов с величинами направляющих косинусов. На осно-
вании рис. 10.5,6 можем записать
—=а ; =а12; (Ю.66)
2л -1п 2л —2n-Z13 13
где 1ц, li2, ll3 — центральные углы между точками липни
I и 2, соответствующие измеряемым направляющим ко-
синусам; «п, «12, «1з — направляющие косинусы.
При Гц — R луч оптического датчика осн ОХ скользит
по окружности экватора сферы, а косинус угла, образо-
ванного осью вращения ротора с оптической осью этого
датчика, равен 0. Следовательно, /ц/(2л—1ц) =0. Две ли-
нии у экватора сливаются в точку.
При ru cos (A\~x) 7^ 0 и /ц/(2л —/ц>у-0.
При приближении оптической линии датчика к полю-
су сферы Г| !-*() cos (X, х)-*4, а следовательно, и отноше-
ние ——------* 1.
2л — 1и
341
Дуги окружностей радиуса гц->-0 делятся линиями 1
и 2 в отношении 1 : 1, сливаясь в точку при /ц = 0. Оче-
видно, что точность определения направляющих косину-
сов, близких по абсолютным величинам к пулю и едини-
це, не является высокой, поскольку линии 1 и 2 при этих
значениях сливаются в точку. Поэтому обычно за началь-
ное принимают положение, при котором оптические оси
всех трех датчиков находятся на окружности, располо-
женной иод углами 45° к плоскости экватора ротора, а
направляющие косинусы au=aI2=ai3= И2/2, или 0,707.
Например, необходимо рассчитать угловое расстояние
I между двумя точками линий 1 и 2, принадлежащими
окружности радиуса г, соответствующей углу а между
оптической осью датчика и осью вращения ротора, рав-
ному 45°.
В соответствии с (10.66) //(2л—/)=cosa. При а —
= 45° cos a==0,7071
cos а _2-3,1416-0,7071
1 -f- [cos g 1 -f- 0,7071
2,60256(^149°).
Формирование матрицы направляющих косинусов.
С помощью рассмотренной выше оптической измеритель-
ной системы, состоящей из трех пар оптических датчи-
ков, установленных в корпусах гироскопов параллельно
осям системы координат OXYZ, связанной с ЛА, можно
определить шесть направляющих косинусов йн, aI2, «13.
°2ь о22, о23, характеризующих при условии соблюдения
ортогональности осей роторов гироскопов их ориентацию
относительно осей системы Oxyz. Недостающие три на-
правляющие косинуса о3|, й32, «зз. образующие третью
строку матрицы ориентации А, можно рассчитать, исполь-
зуя алгебраические выражения (10.62), например, в виде
«11«12 + «21«22 + «31«32= 0;
^t2al3~l~ а22^23~1~ ^3^33—0; (10.67)
а11а 13 ~Ь «21« 23 «31«33 — 0-
Выражения (10.67) образуют систему из трех урав-
нений с тремя неизвестными, решение которой существу-
ет, но пе является однозначным. Действительно, перепи-
сав эту систему в виде ai3«32=A, Оз2«зз=В, «з1«зз=С',
можно определить
«32—1/ " 2, » «31 » «33----7—«32‘ (10.68)
’ С А
342
Как видим, результаты вычислений направляющих
косинусов «зь «зг, «зз нс являются однозначными. Неод-
нозначность получаемых решений может быть частично
преодолена при рассмотрении задачи ориентации в век-
торно-матричной форме. Известно, что ориентация твер-
дого тела со связанной с ним системой координат OXY7.
в пространстве определена, если с пей связаны по край-
ней мере два пеколлипеариых вектора. Обычно оси сис-
темы прямоугольных координат задают тремя единичны-
ми векторами Л'°, Y0 и Z0, которые связаны между собой
векторными зависимостями вида
А'° х F°=Z°; Г° X Z°=Х°; Z° X У°=Г°. (10.69)
Определим проекции единичных векторов па оси системы
Охуг, связанной с гироскопами:
^=a1!>4-al2Fo'+«13ZO,
y^a2^0+a.^°-[-a.23Z\ (10.70)
z°=a3VX° -|- a32P° + a33Z°.
Векторным уравнениям (10.70) соответствует матричное
уравнение вида
(л°\ /ап а12 а13\М°\
У° 1 = 1 «22 а-& )1Г° )• (10.71)
г0/ \«з1 «32 a3J\Z°J
где «31, «32, «зз — элементы третьей строки матрицы А,
функционально связанные с элементами перрон и второй
строк:
«31 — «12«23 «13«22> «32==«13«21 — «1!«23>
«33==«11«22 — «12«21* (10.72)
Таким образом, при известных значениях шести на-
правляющих косинусов, входящих в состав .первых двух
строк матрицы А, неоднозначности решений пе сущест-
вует, так как все недостающие элементы А определяются
со своими знаками.
Однако, как это отмечалось выше, точность определе-
ния направляющих косинусов в окрестностях точек пе-
343
ресечения линий 1 и 2 на поверхности сферы не являет
ся высокой. Наибольшую точность имеют измерения, со-
ответствующие расположению оптических осей датчиков
в области средних широт сферических роторов гироско-
пов. Поэтому для определения матрицы А, характери-
зующей взаимную ориентацию двух прямоугольных сис-
тем координат OXYZ и Охуг. целесообразно использовать
три наиболее точно определенных направляющих коси-
нуса, пе принадлежащих какой-либо одной строке или
столбцу матрицы А, находя остальные ее элементы рас-
четным путем с использованием зависимостей (10.61) и
(10.62). Неоднозначность же получаемых решений может
быть преодолена логическим путем при учете знаков сиг-
налов измеряемых направляющих косинусов.
Так, например, если в процессе работы оптических
датчиков точно измерены направляющие косинусы «и,
«12 и «23, то вначале рассчитывают направляющий коси-
нус «13 = 1 1 —(«п+«1г), используя для определения
его знака сигнал соответствующего оптического датчика.
Зная «|з и «из, рассчитывают направляющий косинус
«зз= 1^1 — («13-)-«2ч), также учитывая знак сигнала со-
ответствующего датчика.
Затем используют систему четырех алгебраических
уравнений с четырьмя неизвестными в виде
а12й13"|_«22а2з4_«а2®83==0,
«п«12 "Ь «з^ггН- «з1«з2~0>
«12«13 «21«23 + «31«33 = 0 >
а11«21 "Ь «12«22 “Ь «13«23 — О,
в результате решения которой определяют направляющие
косинусы «21, «22, «31 И «32-
Погрешности работы БСО, основанной па нспользо
нации двух свободных гироскопов, обусловлены такими
факторами, как нарушение ортогональности осей гиро-
скопов вследствие их дрейфа относительно инерциально-
го пространства, погрешности нанесения рисунка на по-
верхность сферического ротора и ошибки съема ин-
формация с помощью оптических датчиков, ошибки на-
чальной выставки гироскопов, погрешности вычислений
и др.
344
ГЛАВА //
НАЧАЛЬНОЕ ОРИЕНТИРОВАНИЕ (ВЫСТАВКА)
ГИРОСКОПИЧЕСКИХ СИСТЕМ ОРИЕНТАЦИИ
Одной из задач, решаемых в период подготовки сис-
темы ориентации или навигации к работе, является на-
чальное ориентирование (выставка) гироплатформы
(ГП) с акселерометрами относительно соответствующих
осей базовой системы координат.
Наибольшее распространение получил геометриче-
ский способ выставки, при котором ГП автоматически
приводится в требуемое положение перед стартом ЛА
(самоорпентируется). Однако в последнее время и в
БСО, в частности, получает распространение так назы-
ваемый аналитический способ выставки, основанный на
расчете взаимной начальной ориентации приборной и
базовой систем координате использованием в этих целях
сигналов акселерометров и гироскопов, входящих в со-
став самой гироскопической системы ориентации. Поэто-
му под начальным ориентированием (выставкой) в на-
стоящее время понимают согласование или определение
углового положения приборной системы координат Oxyz,
связанной с гироскопами и акселерометрами, относитель-
но базовой.
В процессе геометрического ориентирования гиро-
платформа при необходимости может быть приведена в
любое положение перед стартом ЛА. Однако в большин-
стве используемых в настоящее время ГСО, входящих в
состав инерциальных систем навигации и наведения, та-
ким положением ГН является горизонтальное, а процесс
выставки разделяется на приведение ее в плоскость го-
ризонта и в требуемое положение в азимуте.
Основными показателями качества процесса являют-
ся точность и время выставки. С целью уменьшения вре-
мени при одновременном обеспечении требуемой точно-
сти процесс обычно разбивают на 2...3 этапа ускоренной
(УВ) н точной (ТВ) выставки. Процесс точной выставки
ГП в плоскость горизонта, как правило, осуществляется
путем подачи сигнала акселерометра или какого-либо
другого измерителя ее углового отклонения от плоскости
горизонта на датчик момента гироскопа по схеме, анало-
гичной рассмотренной в гл. 6 схеме построения вертика-
ли на борту ЛА. Приведенная с требуемой точностью в
плоскость горизонта ГП самоориентируется должным об-
разом в азимуте. Для решения этой задачи используют-
345
ся как автономные (выставка по корпусу или гирокомпа-
сирование), так и неавтономные (например, оптические)
методы.
Наиболее сложную задачу представляет собой на-
чальное ориентирование ГСО в условиях подвижного
основания и в полете. В качестве примеров можно отме-
тить системы выставки ГП самолетов палубной авиации
или крылатых ракет, размещенных па самолете-носи-
теле [58].
§ 11.1. Прецизионные акселерометры, используемые
в качестве датчиков сигналов угловых отклонений
Акселерометры, применяемые в системах инерциаль-
ной навигации или наведения с целью выработки сигна-
лов первичной информации о линейных параметрах дви-
жения ЛА, также используются в качестве датчиков
сигналов угловых отклонений ГП от плоскости местного
горизонта при выставке. Современный уровень погреш-
ностей этих акселерометров позволяет получить доста-
точно высокую точность выставки в условиях неподвиж-
ного основания [26, 12].
Так, например, при пороге чувствительности Да=
^l-IO-eg акселерометр вырабатывает сигнал при углах
отклонения, больших 0,2".
Реальная точность горизоптированпя ГП обычно не-
сколько ниже, что в первую очередь связано с относи-
тельным характером неподвижности ЛА в условиях его
подготовки к полету (работа двигателей, действие ветра,
колебания грунта и др.). Погрешности горизоптированпя
существенно возрастают при выставке ГП в условиях
подвижного осповнаия или в полете.
Типовые схемы прецизионных акселерометров. Исклю-
чительно высокие требования, предъявляемые к навига-
ционным акселерометрам по точности, диапазону изме-
рений, стабильности и надежности, привели к разработке
устройств, относящихся к классу замкнутых систем авто-
матики непрерывного или дискретного действия. Наи-
большее распространение получили однокомпонентные
акселерометры осевого и маятникового типов, различаю-
щиеся способом подвеса чувствительного элемента и ха-
рактером его движения относительно корпуса прибора.
Также находят применение двух- и трехкомпонентпые
акселерометры и другие устройства совмещенного типа.
Для удобства сравнения рассмотрим две схемы акселе-
346
рометров, в которых используются однотипные функцио-
нальные элементы (датчики перемещений и датчики
силы).
В осевом акселерометре (рис. 11.1, п) линейное пере-
мещение массы т относительно корпуса происходит за
счет деформирования упругого элемента (УЭ) подвеса,
с помощью которого эга масса крепится к корпусу при-
бора (пружины, мембраны, растяжки).
Рис. 11.1. Осевой и маятниковый акселерометры компенса-
ционного типа
В отличие от него в маятниковом акселерометре
(рис. 11.1, б) чувствительный элемент, выполненный в
виде маятника, закреплен в корпусе с помощью опор
скольжения или упругой подвески. Как в осевом, так и
в маятниковом акселерометрах перемещение массы т
приводит к появлению сигнала датчика 17 А, который пос-
ле усиления и преобразования в усилителе акселеромет-
ра (УА) поступает на исполнительный элейент — магни-
тоэлектрическое устройство, создающее силу (или мо-
мент), уравновешивающую силу инерции Ги=тя. Аксе-
лерометры с «электрической» пружиной обычно строятся
по компенсационной схеме со съемом сигнала в виде
падения напряжения па эталонном резисторе R3T, вклю-
ченном в цепь обмотки датчика силы (ДС) или датчика
момента (ДМ.). Компенсационная схема построения
акселерометра позволяет обеспечить независимость его
показаний от изменений напряжения питания, приводя-
щих к изменению коэффициентов передач датчика пере-
мещений и усилителя акселерометра. При обеспечении
347
устойчивости движения и требуемых динамических ха-
рактеристик акселерометра как измерительного устрой-
ства в установившемся режиме работы прибора сигнал
на его выходе
^ВНх=^в(«+д®)> (П-1)
где ka — масштабный коэффициент, или коэффициент
передачи акселерометра; а — кажущееся ускорение ЛА в
проекции на ось чувствительности прибора; Дгг— сум-
1 У
Рис. 11.2. Схема ПМА компен-
сационного типа
марная погрешность измере-
ния ускорения.
Оценивая две принципи-
ально различные конструк-
тивные схемы акселеромет-
ров, можем отметить сле-
дующие их особенности.
Осевой акселерометр не реа-
гирует па перекрестные (бо-
ковые) ускорения, перпенди-
кулярные оси чувствитель-
ности прибора, однако в нем
труднее осуществить подвес
ЧЭ без трения. При приме-
нении упругого подвеса не-
обходимо выбором соответ-
ствующего материала обе-
спечить высокую стабиль-
ность и однозначность его
характеристики (отсутствие гистерезиса). В маятнико-
вом акселерометре легче реализуется безмоментный (на-
пример, поплавковый) подвес ЧЭ, однако акселерометру
присущи методические погрешности, обусловленные его
чувствительностью к перекрестным ускорениям при на-
личии углового отклонения маятника р=?^0.
Поплавковые маятниковые акселерометры. Па
рис. 11.2 приведена конструктивная схема поплавкового
маятникового акселерометра (ПМА), в котором обеспе-
чиваются гидростатическая разгрузка опор от влияния
сил сухого трения и демпфирования за счет сил вязкого
треиия. Сравнивая ПМА с прецизионным ДУС (см.
гл. 3), убеждаемся в сходстве схем их построения. Раз-
нице только в том, что в акселерометре с помощью дат-
чика момента (ДМ) компенсируется момент силы инер-
ции Mn=rnla^ в то время как в ДУС — гироскопический
момент Мт=Н£1д. Поэтому в соответствии с (3.2) и
348
рис. 11-2 уравнение движения ЧЭ относительно оси его
подвеса в корпусе прибора будет
Dp+Ср=ml a^ — mla^ — {J —Jz) 2r 2C —
+ (Л -/,) el₽ -(Л - Л) 2?p 4-Afy - м лм. (11-2)
Здесь сохранены обозначения, использованные выше при
рассмотрении уравнений ДУС, а a-v az— проекции век-
юра а кажущегося ускорения на оси и О£, связанные
с основанием прибора. Уравнение (11.2) описывает дви-
жение ЧЭ акселерометра на подвижном основании, ког-
да абсолютные угловые скорости и ускорение
£>л не равны нулю.
Эти угловые параметры вращения основания вызы-
вают погрешности в работе акселерометра, аналогичные
погрешности ДУС. Они проявляют себя и при работе
акселерометра в системе начального ориентирования,
особенно в случае наличия угловых перемещений и коле-
баний корпуса ЛА в период подготовки его к старту.
Рассматривая динамические свойства акселерометра как
системы автоматики, уравнение (11.2) можно упростить,
включив моменты от переносного движения основания в
состав момента Му:
+ Dp+СВ=mlaz -|- Му - Мдм. (11.3)
При рассмотрении динамических свойств акселерометра
и вопросов устойчивости необходимо учитывать инерци-
онность цепи обмотки датчика момента, обусловленную
постоянной времени этой цепи
(11.4)
здесь L — индуктивность; — омическое сопротивление
цепи обмотки ДМ.
На основании структурной схемы ПМА, приведенной
на рис. 11.3, составим ири Мдм=Сэпр передаточные функ-
ции акселерометра: разомкнутой системы
W (s) = —----------2™--------- (Ц.5)
ДМ (s) (/ys2 + Ds+C) (Z3s +1)
замкнутой системы как следящей за моментом MK(s)
Ф, (s)= ^М-Ф- =--------------£»------------ ; (11.6)
JW„(s) (Z^2-I-Ds4-C)(r3s+1) + Csi,
замкнутой системы акселерометра как измерителя уско-
рения a(s)
. (Ц.7)
a(s) (JfzS2+Ds-bC)(7,»s+ 1)-|-CS11
349
Рассмотрим характеристическое уравнение системы
+ (Jy + DT э) s2 + (Z> + C7\) s + (C + Cs„)=0, (11.8)
где C3n=k,kkyk3knb, — жесткость «электрической» пру-
жины.
При положительных коэффициентах характеристиче-
ского уравнения (11.8) условие устойчивости по Гурвицу
имеет вид
(Jy 4- DTJ (D + СТ s) —JtJT3 (С + Сэв) >0, (11.9)
Рис. 11.3 Струкгурипя схема ПМА
из которого следует, что для обеспечения устойчивости
движения акселерометра необходимо, чтобы
Устойчивость повышается при увеличении коэффициен-
та D вязкого трения, уменьшении момента инерции Jv и
постоянной времени Т3. Увеличение жесткости упругого
подвеса акселерометра ведет к увеличению устойчиво-
сти, по отрицательно влияет на точность измерений.
Потеря устойчивости движения акселерометра при С^О
наступает, когда
С & I I £)Сгэ « ц,
Св,,>7Г+7Г+'ТГ' ( }
При С=0 получаем акселерометр с астатизмом пер-
вого порядка с передаточной функцией разомкнутой си-
стемы
W (s>=------Л--------> (11-12)
U Vs + О (ГaS -|- 1) S
где К— Сэп/£)— коэффициент передачи разомкнутой си-
стемы; Tq=JvID — постоянная времени ЧЭ.
Условие устойчивости при С=0 имеет вид
Св..<-у-+~. (П.13)
J у * »
350
Постоянная времени Т3 уменьшается с уменьшением
индуктивности L и увеличением сопротивления R цепи
обмотки датчика момента и выходного каскада усилите-
ля акселерометра УА. В частном случае при Т3—0 на
основании передаточной функции (11.7) получаем
гг ,(s)=------------------а($). Пренебрегая значепи
Jys^ + Ds + C + С3„ н
ем С по сравнению с Ст, можем записать
Z7 (s)=^az.. -----------’------a(s),
Х Адн 7-^2 + 2£(1r0s 4-1
в котором TQ=yrJy/C3n — постоянная времени, с; £о=
=(£>/2)/7^; — относительный коэффициент демпфиро-
вания. Движение акселерометра характеризуется урав-
нением колебательного звена с переходной характери-
стикой:
i/вых (О=АЛ 1-е Л
COS 01/4~ - . - sin и>/
a, (U.14)
где ю = о>0 I'l—1 — Ео-
'о
По окончании переходного процесса выходное напря-
жение акселерометра Uaax==kaa. При С=0 и 0=0 аксе-
лерометр приобретает астатизм второго порядка с пере-
даточной функцией разомкнутой системы
ц/ ______ А/дм (s) __А_____
' Д/Л($) (Гэ$4-1)№ ’
(11.15)
где К—Сэп/Jy — коэффициент передачи разомкнутой си-
стемы.
Акселерометр структурно неустойчив и требует кор-
рекции его динамических свойств с помощью пассивных
или активных корректирующих устройств в составе уси-
лителя акселерометра.
Так, например, при наличии коррекции
VJZK (Д)- ^ЛМ(5)__ /<(7У+1)
£M(s) (7-sS-l-1)(Г25 +1)«2 ’
_ AfttM(s) _______________К (Tis +1) _________
Л4И (s) T3T2si + (Т3 + Г2) + S2 + KrlS -Ь К
351
Акселерометр устойчив при
(Гэ+Л) к Л - (Гэ + т2у к-(Тат2у > о,
или
(11.16)
Интегрирующие акселерометры. На практике получи-
ли распространение как осевые, так и маятниковые инте-
грирующие акселерометры с непрерывным или дискрет-
Рис. 11 4 Схема осевого интегрирующего ак-
селерометра с гидродинамическим подвесом ЧЭ
пым (цифровым) выходом. В принципе это приборы
более высокого ранга по сравнению с обычными (пеип-
тегрнрующими) акселерометрами, выходные сигналы
которых, как правило, подлежат последующему интегри-
рованию в системе навигации или наведения.
На рис. 11.4 приведена схема осевого интегрирующе-
го акселерометра с гидродинамическим подвесом ЧЭ.
В корпусе 1 акселерометра помещена герметичная ци-
линдрическая трубка 3, заполненная тяжелой жидко-
стью 4. Трубка приводится во вращение с помощью
электродвигателей 2 и 5. Внутри трубки находится но
плавок 6, который является чувствительным элементом
прибора. По отношению к жидкости поплавок имеет из-
быточную плавучесть и при отсутствии вращения всплы-
вает и прижимается к верхней стенке трубки.
При вращении трубки с жидкостью возникают цент-
робежные силы, которые центрируют поплавок и таким
образом практически полностью исключают силы куло-
352
оВа трения поплавка о стенки трубки. Осью чувстви-
тельности прибора является ось вращения трубки и по-
плавка. При наличии ускорения в направлении оси Ол-
па" поплавок действует выталкивающая сила FB— (рж—
—pn)vna (здесь рж и рп соответственно плотности жидко-
сти и поплавка; щ, —объем поплавка), которая уравно-
вешивается силой вязкого трения поплавка о жидкость
где О — коэффициент вязкого гренпя; х —ско-
рость перемещения по-
плавки! относительно кор-
пуса прибора.
Из равенства сил по-
лучаем (рж—рп)ипс==Вх,
откуда (прихо=О)
/
(11.17)
о
— коэффициент.
Для выработки вы-
Рис. П.5. Интегрирующий акселе-
рометр с цифровым выходом
ходкого сигнала, пропор-
ционального перемещению поплавка относительно кор-
пуса, используют датчики электролитического и транс-
форматорного типов. Сигнал на выходе акселерометро
при этом пропорционален проекции вектора кажущейся
скорости ЛА па ось чувствительности прибора. Акселе-
рометр характеризуется исключительно высокой чувст-
вительностью к угловым наклонам платформы относи-
тельно плоскости горизонта и сравнительно низкой ста-
бильностью коэффициента передачи Д' вследствие силь-
ной эавиепмостн свойств жидкости от температуры. Точ-
ность интегрирующего акселерометра повышается при
стабилизации рабочей температуры жидкости.
Рассмотрим поплавковый маятниковый интегрирую-
щий акселерометр с цифровым выходом.
В отличие от рассмотренного выше ПМА с непрерыв-
ным выходом управление датчиком момента здесь осу-
ществляется от импульсного источника тока, управляе-
мого электронным ключом (ЭК) по схеме, приведенной
па рис. 11.5. В системе регулирования учитывается фаза
сигнального напряжения датчика угла, изменяющая
знак момента Д1дм. Интегрируя (11.3) при С=0 и Ро=0
353
в интервале времени от 0 до t, можно записать
I t t
4?+ D[i=ml J axdt - J M^dl + J M’ydt. (11.18)
0 0 0
Условием компенсации моментов, соответствующим
р = 0, является равенство
(11.19)
При релейно-импульсном управлении датчик момен-
та прикладывает относительно оси подвеса поплавка
знакопеременные импульсы момента, интеграл по време-
ни от которых выражается зависимостью
(млм^=(М-МЛ4°М1ДТ,
б
где (М—N) — разность между положительными и отри-
цательными
Разность
рости ЛА
импульсами; —площадь импульса.
(М—N) пропорциональна кажущейся ско-
ml
(11.20)
о
измеренной с погрешностью Д1/“ = ^M‘udt. Помимо рас-
о
смотренных выше обычных и интегрирующих акселеро-
метров в инерциальных системах навигации и наведения
находят применение струнные акселерометры акселеро-
метры с электромагнитными и электростатическими под-
весами ЧЭ и гироскопические интеграторы линейных
ускорений.
§ 11.2. Начальное ориентирование гироскопических
систем платформенного типа
Основным прибором гироскопической системы ориен-
тации платформенного типа, входящей в состав аппара-
туры инерциальной системы навигации или наведения,
является гироплатформа, стабилизируемая в простран-
стве тем или иным методом. В зависимости от своего на-
значения в общей системе управления ЛА в полете она
может быть управляемой, неуправляемой или частично
управляемой (например,свободной в азимуте).
354
Гироплатформа является неуправляемой, если с мо-
мента старта ЛА она сохраняет (с точностью до погреш-
ностей) неизменной ориентацию своих осей относительно
инерциального пространства. Гироплатформа — управля-
емая, когда ее оси разворачиваются в пространстве опре-
деленным образом, моделируя какую-либо подвижную
систему координат, например горизонтальную, ориенти-
рованную географически или ортодромнчески.
Полностью управляемыми в полете являются инер-
циальные курсовертнкалн (ИК.В) самолетов, гиростаби-
лизаторы головок самонаведения, антенн радиолокаторов
и ДР- Управление платформой, как правило, осуще-
ствляется с помощью датчиков моментов, воздействую-
щих на гироскопы определенным образом и вызываю-
щих их прецессию совместно с платформой относительно
инерциального пространства. Управление также реали-
зуется путем разворота объекта, установленного в допол-
нительный подвес, относительно гиростабилизированной
платформы либо относительно самих гироскопов (МНС
геометрического типа). В процессе же начальной ори-
ентации практически все ГП являются управляемыми
(корректируемыми) и могут рассматриваться как следя-
щие системы по всем трем своим каналам стабилизации.
Рассмотрим уравнения прецессионного движения ГП в
процессе выставки, взяв в качестве примера самолетную
ИКВ, основанную на применении трех двухстепенных
силовых или поплавковых гироскопов.
Уравнения ГП в режиме геометрической выставки в
исходное положение перед стартом ЛА. При произволь-
ной начальной ориентации ГП со связанной с пей при-
борной системой координат Oxyz относительно осей стар-
товой системы координат (рис. 11.6) их взаимное
угловое положение характеризуется матрицей А (10.11)
или транспонированной относительно нее матрицей С=
=АТ.
Относительно географического трехгранника OENH
система Ogr]^ обычно развернута вокруг вертикальной
оси ОН на азимутальный угол Ао.
Обозначив через Un, проекции вектора О угло-
вой скорости суточного вращения Земли на осн системы
координат О£т]£, можем определить
Uk = U cos <р0 cos Ао; Un=U sin %; (1L21)
Uz= — U cos <p0 sin Ac.
355
Также определим проекции этого вектора на оси сис-
темы координат Oxyz, связанные с ГП:
у Е Ч 4~д23^С>
Ux—a3lU £ -|- a32U ч с,
(11.22)
характеризующие факт вращения Земли совместно с ГП
в пространстве. Сформулируем задач)' геометрической
Рис. 11.6. К определению проекции U на прибор-
ные оси Ос, Оу, Ог
выставки ГП в исходное положение перед стартом ЛА.
В процессе геометрической выставки ГП в плоскость го-
ризонта и в азимуте необходимо отработать имеющиеся
рассогласования и привести систему координат Oxyz в
положение Ogr^, когда UX=U^; UU=U^ Uz=Ul.
Погрешности угловой ориентации должны быть и
допустимых пределах при всех возможных значениях
азимута Ло. Рассматривая процесс точной выставки ГП
в требуемое положение перед стартом ЛА (рис. 11,6).
определим проекции Ux, Uy, Uz вектора U на оси
Ox,Oy,Oz, воспользовавшись матрицей малых угловых
отклонений платформы а, р, о:
7/A / 1 р
LU=l-p 1 «к-
Дг/ \ а —0 1/ W
(11.23)
356
Матричному выражению (11.23) соответствуют урав-
нения
их=и^+и^-и\и,
Uu=L\-l^U^
иг=их^-и^-и^.
(11.24)
Проекции абсолютной угловой скорости Й платформы
на оси Ох, Оу, Oz получим, учитывая относительные угло-
вые скорости а, а, (3, с которыми платформа вращается
относительно Земли (рис. 11.6):
= 4Д-1- IJ$ — U^i,
2^=и 4 — (Др-]- Uсэ,
«д=Р+^-НЛ«-£М
(11.2.5)
С другой стороны, абсолютные угловые скорости
платформы в проекциях па оси Ох, Оу, Oz могут быть
записаны в виде
1л=2*4-£$; Sw=2„+$?, 2г=аЛ-О5. (11.26)
где 2у, 2л—угловые скорости прецессии ГП.и соот-
ветствующих гироскопов под воздействием моментов кор-
рекции; 2.J, 2j, 2л — собственные скорости прецессии
(дрейфа) гироскопов осей Ох, Оу, Oz.
Приравнивая угловые скорости (11.25) и (11.26),
определим относительные угловые скорости ГП а, а,
в = 2_v -!г 2' - U; - U ч8 + U^a,
р— 2л 4" 2г — U— Uч3.
(11.27)
.Моменты коррекции должны быть сформированы та-
ким образом, чтобы углы а, а, р были отработаны в про-
цессе самоориентации ГП с требуемой точностью.
Законы управления, используемые при приведении
П1 в исходное положение перед стартом «ПА С целью
приведения ГП в исходное положение перед стартом ЛА
используются различные законы управления (коррек-
ции), обеспечивающие требуемую точность при задан-
ном времени процесса.
357
Точная выставка в системе с пропорци-
ональной (позиционной) коррекцией. Ис-
пользуя в качестве ЧЭ горизонтальных каналов системы
выставки ГП в плоскость горизонта обычные (иеннтсгрн-
рутощие) акселерометры, запишем моменты коррекции:
Mi= —.н/гаА’уА(Мэ; — гДе g—§6го) — уско-
рение силы тяжести; А’а, Ау, 1гаы— коэффициенты пере-
дач акселерометра, усилителя коррекции и датчика мо-
мента соответственно.
Соответствующие угловые скорости прецессии запи-
шем в виде
s.r= - /Ср, - /<аЧ- (11.2R)
Аналогичную скорость прецессии Г11 в азимуте
получим, применив в качестве ЧЭ системы по азиму-
тальному каналу прецизионный датчик угла в виде вра-
щающегося трансформатора или автоколлиматора
(M2=kakykwa).
Перепишем (11.27) в виде
3 4-^3 = ^.-^-U<u,
dq- /<2«=sS-/A-il^eN-^c3.
(11.29)
Выражения (11.29) свидетельствуют о наличии пере-
крестных связей между отдельными каналами в процес-
се ТВ, обусловленных проекциями Lft, на оси
системы Oxyz при углах а, 0, а, не равных нулю. Однако
эти связи не являются сильными и при рассмотрении
вопросов динамики их можно не учитывать, а (11.29)
считать независимыми:
/'i3-r3 = 3«-, 7'3а4-а=а*, (11.30)
где Tl=l/K}; T2=\IKz: 7'3—1/А3 —постоянные времени
отдельных независимых процессов выставки; (Si—U
/Л\; o* = (S,' —//4)//<2; ^.=(Sz — О\)!К3 — установив-
шиеся (статические) погрешности
Рассмотрим в качестве примера первое уравнение
(11.30), полагая 2,'=const. При наличии начального от-
клонения ГП от плоскости горизонта о=сто и o,=consl
3,58
ло уравнение имеет такое решение:
”=(’0—(11.31)
Оно характеризуется экспоненциальной зависимостью
угла о от времени с постоянной времени
T^ilK^HKgk^k^.
Под воздействием момента коррекции Л1к=Л'1о гиро-
платформа отрабатывает начальное рассогласование оо
со скоростью
(П.32)
уменьшающейся по мере ее приближения к установив-
шемуся положению о=о*. Погрешность выставки о*=#0
существенно необходима в системе с пропорциональной
коррекцией, поскольку за счет нее и соответствующего
сигнала па выходе акселерометра (По=§/гаа*) обеспе-
чиваются слежение ГП за плоскостью горизонта, враща-
ющейся вокруг оси 0g с угловой скоростью t/g=
— U cos q () cos Ло, и компенсация 2* ф 0.
Максимальная скорость отработки соответствует на-
чалу процесса выставки и равна
атах
°0~ °* (М1(),ппх
71 Н
(11.33)
Поскольку момент (Лтк)тах, развиваемый датчиком
момента по оси подвеса гироузла, обычно мал и пе пре-
вышает нескольких десятков Гс-см, скорость отработки
мала и процесс выставки
(рис. 11.7). Вследствие
нелинейности характерис-
тики цепи коррекции при
больших Оо этот процесс
имеет два существенно
различных участка: дви-
жение с максимальной
скоростью прецессии со-
гласно (11.33) и движе-
ния с убывающей ско-
ростью (11.32), когда
датчик момента начинает
работать в линейной зоне
его выходной характерц-
имеет длительный характер
Рис. 11.7. Переходный процесс в
системе ТВ пропорционального
типа
359
стики. Линейная зона по координате <> ограничена зави-
симостью о.ч= (Л1к)тах/(//Л|). Процесс выставки не име-
ет перерегулирования и считается законченным при до-
стижении требуемой точности, характеризуемой отноше-
нием 6р=Одоп/со- Задав точность выставки бр, находят
время данного этапа регулирования tP—Ti 1п(1/6Р).
Анализируя выражения (11.30), легко убедиться в
том, что статические погрешности горизонтальных кана-
лов системы в режиме ТВ существенно зависят ог широ-
ты <р0 и от ориентации данной оси стабилизации ГП по
отношению к плоскости меридиана (Ао#=0).
Погрешность горизонтировапия максимальна при
расположении оси стабилизации ГП в плоскости мери-
диана. При расположении оси стабилизации по линии
восток — запад погрешность от переносной угловой ско-
рости Uт—Ucos<ро отсутствует Этим можно воспользо-
ваться для определения значения собственной скорости
прецессии в процессе предстартовой калибровки систе-
мы ГП. Так как скомпенсировать можно лишь постоян-
ную (систематическую) составляющую скорости £2* , то
в составе погрешности выставки будет иметь место
погрешность от се случайной составляющей.
Помимо рассмотренных выше погрешностей выстав-
ки, обусловленных и S';. /6 0, следует учитывать
погрешности акселерометра, используемого в качестве
измерителя углового положения ГП по отношению к
плоскости горизонта. Погрешность акселерометра вида
А«=const приводит к появлению дополнительной пог-
решности горизонтировапия Ао=Дп/^, пе зависящей от
коэффициента передачи К,.
ТВ в системе с интегральной к о р р е к ц и е и.
При решении задачи построения вер шкали в полете
интегральная коррекция с настройкой параметров систе-
мы на период Т0=2л]/ А7я^84,4 мин (при /?=/?,-»)
обеспечивает невозмущаемость инерциальной гироверти-
кали силами инерции и широко используется в пани
гации.
Рассматривая процесс ТВ при неподвижном основа-
нии, например по координате р, па основании (11,29)
можно записать
(11.31)
Сформировав закон управления по скорости в вице
360
g“==----L- CprZZ, после дифференцирования (11.34) по
Уо J
времени получим
(Да-ф^о, (11.35)
где frt0= i/T0 — частота собственных незатухающих ко-
лебаний гировертикали, 1/с.
Система возмущается первыми производными от 2Z.
а и о н совершает при этом длиннопериодические неза-
Рис. 11.8. Структурная схема капала ТВ инерцналыюй
гировертикали
тухающие колебания с частотой то- При постоянных
значениях Se, а, и п [Зот^О колебания происходят отно-
сительно смещенного от плоскости горизонта положения
в соответствии с решением неоднородного уравнения
(11.35):
fl=p0 cos«\/ -ф (2г — L\a -ф Uгр) (1 — cos «>оО.
Для обеспечения демпфирования колебаний гиро-
вертикали и ускорения самого процесса п схеме гиро-
вертикали используют прямые п обратные связи, изме-
няющие се структуру.
На рис. 11.8 приведена структурная схема одного из
вариантов решения этой задачи. Демпфирование в сис-
тему введено посредством обратной связи, охватываю-
щей акселерометр и первый интегратор. Коэффициент
усиления этой цепи—К,. Для уменьшения времени вы-
ставки предусмотрено введение второй корректирующей
Цепи с коэффициентом усиления Лф/До, что приводит к
увеличению частоты собственных колебаний системы.
12—1757 361
На основании структурной схемы получаем уравне-
ния ошибки:
Р + Л\Р4“(1 + АГг)<0о? = —Д с-)- Qz -[* A i —
«о
—(А (° “Ь^ч (ядЬ^А0) • (П.Зб)
Введение прямых и обратных связей по схеме, при-
веденной на рис. 11.8, привело к увеличению частоты
колебаний системы в |/14-А'2 Раз и демпфированию
этих колебаний с относительным коэффициентом зату-
хания
Однако в системе ТВ имеет место установившаяся
ошибка
/2 %—(О»—£/£«+£/чв) •
S (l+K2)“0
в основном обусловленная погрешностью акселерометра
Да=/=0, не зависящей от коэффициентов усиления К\ и
Къ, и собственной скоростью прецессии гироскопа и
платформы Q 0.
Точная выставка в системе с интеграль-
но-позиционной коррекцией. Для демпфирова-
ния колебаний ГП в процессе выставки может быть ис-
пользован метод нитегрально-позициоиной коррекции
(рис. 11.9).
В применении к каналу горизоптирования ГП по ко-
ординате р в процессе ТВ реализуется коррекция
£Й=К1[Ж1 jW] . (П-38)
где Ki=gkakyk^lH — коэффициент передачи цепи про-
порционального типа; li — коэффициент передачи инте-
грирующего устройства. Подставив (11.38) в третье
уравнение (11.27), получим уравнение ошибки процесса
ТВ-
P+^iP+^i f ^i=QCz-Ui-U(a-[-U^. (Ц.39)
Продифференцировав (11.29) по времени, получим диф-
ференциальное уравнение второго порядка р +ATiP 4~
+ /<1/1?=2г — ДАо-Ь^ч0, или после приведения к стан-
362
дартпому виду
P4-2^p4-<o2p=Sz - Up + U^,
(11.40)
в котором 5=K-ili — относительный коэффициент
демпфирования; ю=|/ЛГ1/1 —частота собственных неза-
тухающих колебаний, 1/с.
Рис. 11.9. Интегрально-позиционное управление
ГГ1.В процессе ТВ
Процесс ТВ имеет колебательный характер и опреде-
ляется начальным отклонением ГП от плоскости гори-
зонта р = ро и производными от величин а и о. В
установившемся режиме ТВ (при 2 = и — о=0)
статические погрешности отсутствуют. Однако, как и в
ранее рассмотренных вариантах ТВ ГП р пропорцио-
нальной и интегральной коррекцией, на точность выстав-
ки влияет погрешность акселерометра типа Аа^О, кото-
рая вызывает погрешность горизоитирования платфор-
мы Др=.Да/£. Действительно, полагая Да=const,
(11.39) можно записать в виде
V+Kitt+te/gH-Kili
^Q'-Ui-Up+U^. (11.41)
После дифференцирования получим
?+^iP+Kil£=£ - Up - Utf - (Да/g). (11.42)
363
Из (11.42) заключаем, что в установившемся режиме
горизонтнровапня ГП имеет место погрешность, обус-
ловленная ошибкой акселерометра как измерителя уско-
рений.
ТВ в системе с интегрирующими акселе-
рометрами При использовании в качестве ЧЭ по
горизонтальным каналам интегрирующих акселеромет-
ров демпфирование колебаний осуществляется примене-
нием в составе усилителя корректирующего устройства
в виде пассивного или активного четырехполюсника.
В частности, коррекция динамических свойств системы
может быть осуществлена с помощью корректирующего
контура форсирующего типа с передаточной функцией,
содержащей в качестве сомножителей операторы
(TjS-1-l) и (ГгЗ-Ы)-1 при Ti>T2. Уравнение ГП в режи-
ме ТВ при этом имеет вид
“2 ‘2 ‘2 S
а—~ ц, (И-43)
Для обеспечения требуемого качества процесса выс-
тавки ГП в плоскость горизонта воспользуемся методом
стандартных коэффициентов [21], представив характери-
стическое уравнение системы в виде
(11-44)
в котором Д|, Л2 — постоянные коэффициенты; й0 — не-
которая частота колебаний, выбираемая из условия
обеспечения требуемого качества процесса регулирова-
ния по времени. Приравнивая соответствующие коэффи-
циенты уравнений (11.43) и (11.44), получаем систему
трех алгебраических уравнений
-^-=Д22§; (И-45>
на основании которых
(П.46)
Йд
364
Неизвестные пока коэффициенты At и Аг, а также
частоту Qo выбираем из условия получения желаемой
переходной характеристики системы, как следящей за
угловым положением плоскости горизонта в простран-
стве. Согласно [1; 18], переходный процесс в автоматиче-
ской системе с одним нулем является близким к опти-
мальному и характеризуется зависимостью, приведенной
па рис. 11.10 при А 1=5,1
и Л2=6,35. Характерце-л1о
тпческое уравнение 1,0
(II.44) при этих зпаченн- g
ях коэффициентов /I, и Л2 '
имеет три вещественных 0,6
отрицательных корня,
свидетельствующих об ус- '
гойчивости движения си- 0,2
стемы. Иа рнс. И.10 пе-
реходная характеристика 0 1 2 3 « 5 г
построена В функции без- рпс ц,ю. Переходная характерн-
размерного времени т= стика Л(т)
Задавшись временем
tp процесса регулирования, рассчитывают £2о ='tp/,/p. ко-
эффициент передачи К и постоянные времени 7\ и Т2.
В установившемся режиме процесса выставки (при 0=
=а=<т=£2гс=0) погрешность горизонтнровапня обус-
ловлена лишь нечувствительностью акселерометра к уг-
ловым отклонениям ГП, меньшим Ap>=Aa/g.
Например, требуется рассчитать параметры коррек-
тирующего контура и коэффициент передачи системы
выставки ГП в плоскость горизонта, основанной иа ис-
пользовании интегрирующего акселерометра, обеспечи-
вающие требуемое качество процесса — перерегулиро-
вание ос12% и /р=0,5 с при /7=0,1 Н-м-с
(1000 Гс-см-с).
В соответствии с рис. 11.10 при тР=5 рассчитываем
Г1о=Тр//р=5/0,5= 10 с-1, затем определяем постоянные
времени
7\—A JQo=6,35/10=0,635с,
7\ = 1/(А20)= 1/(5,1 10)=0,0196 с;
коэффициент передачи
/С=2о/А= 102/5,1 = 19,6 1/с2;
365
коэффициент передачи цепи коррекции
/<к=///<= 0,1 • 19,6. = 1,96 Н • м/с.
Выставка ГП в азимуте методами гирокомпасирова-
ния. Под гироскопическим компаснрованием (ГК) в на-
стоящее время понимают способы автономной геометри-
ческой выставки или аналитического определения
угловой ориентации ГП в азимуте относительно направле-
ния истинного меридиана (по вектору f7r=l/cos<po).
Такне способы гирокомпасирования имеют ограничен-
ную область применения по широте, поскольку при
Существенное значение имеют точность
и время гирокомпасирования, также зависящие от широ-
ты места Цо. Рассматриваемый метод носит характер
проблемы, в процессе решения которой разработано до-
статочно большое количество возможных вариантов.
Простое (одинарное) геометрическое
гирокомпасирование. По окончании выставки
ГП в плоскость горизонта выходные сигналы акселеро-
метров в системах ci этического типа (или выходные сиг-
налы интеграторов в астатических системах) содержат
информацию об азимутальном угле .а, на который плат-
форма развернута относительно плоскости меридиана в
азимуте (см. рис. 11.6, при /1о=0).
В установившемся режиме ТВ сигнал «восточного»
акселерометра L/a=g7eao* при фиксированном значении
угла a— const содержит составляющую (gka/Kt)Ut cosa,
а сигнал «северного» акселерометра 6"a=g7eap»— сос-
тавляющую вида (glia/Кз) Ur sin (gka/K3) Ura. Послед-
няя позволяет осуществить управление ГП в азимуте,
используя сигнал этого акселерометра при гирокомпаси-
ровании. При простом гирокомпасировании сигнал «се-
верного» акселерометра после дополптелиного усиления
подается на датчик момента (ДМ) азимутального гиро-
скопа Г! (рис. 11.11), вызывая прецессию ГП в сторону
отработки этого угла, т. е. ее самоориентацию в азимуте
ио проекции Uг—U cos<fo вектора U.
Рассмотрим этот вопрос применительно к ИКВ с про-
порциональной коррекцией платформы относительно
плоскости горизонта, имеющей также связь с выхода
«северного» акселерометра Aw через усилитель с коэф-
фициентом передачи /еу с датчиком момента азимуталь-
ного гироскопа Г(.
366
Положив в (11.21) /o=O. получим
а С па оси системы координат
направлениями ON, ОН, ОЕ:
проекции векто-
совп а дающие с
Z7E=f/r=t/cos<p0, f/4=4/B=t7si<i<p0,
ис=иЕ=о.
(11.47)
Рис. 11.11. Геометрическое гирокомпасирование инерциальной курсо-
вертнкалл в азимуте
Воспользовавшись уравнениями (11.29) и учтя в них
(11 47) и рассмотренную выше связь, запишем
a — —Uг — £7п['-(~2.г, •
a-(/<2+7/r)B=-f/n4-2^
(11.48)
В отличие от (11.29) в (11.48) введена скорость прецес-
сии 2!) ГП по координате а под воздействием момента
Л1к=^/еа/гу|/гдМр ^2^—-уу-=/<2^ , пропорционального от-
клонению р ГП от плоскости горизонта. Первое уравне-
ние системы (11.48) можно рассматривать отдельно, пре-
небрегая проекцией угловой скорости (7вр~0.
367
Оно описывает процесс приведения ГП в плоскость
горизонта по координате о со статической погрешностью
-UT +
о#=--------- в установившемся режиме работы си-
стемы ТВ. Второе и третье уравнения должны рассмат-
риваться совместно, поскольку угловая скорость U,a су-
щественно влияет па работу системы выставки в азиму-
те. Действительно, исключая из двух последних уравне-
ний поочередно переменные р и а и пренебрегая С/г по
сравнению с К2, можем получить
а + + K2Ura=2' - K3UK+К32‘ + 7<//ва + KA
(11.49)
М-*з₽+K2U^UrUB-UrQcy + Uj 4-
Динамические свойства системы ГК характеризуют-
ся уравнениями
a+2^ +4*=Йр + KaUn+KsQy+K2Uj>+ЛГ22^
(11.50)
и Ас+s'.
где и0=|Л/<2(/г—частота собственных незатухающих
колебаний системы ГК; Во=—/Сз)' K2Uт — относитель-
ный коэффициент демпфирования.
Процесс ГК характеризуется затухающими колеба-
ниями платформы по двум координатам аир относи-
тельно некоторых смещенных положений, определяемых
статическими погрешностями системы. Динамическими
характеристиками процесса являются частота о)о и коэф-
фициент демпфирования go. В связи с малостью величины
Ur частота колебаний «о мала, что требует примене-
ния в азимутальном канале усилителя с большим коэф-
фициентом усиления k2(K2=gkakykw(H). Период собст-
венных незатухающих колебаний То связан с частотой
ыо соотношением
То=2л/ш0= 2л У \KK2U cos <р0). (11.51)
При наличии затухания (go#=0) частота затухающих
колебаний ад=о)0фЛ1—а период 7'=2л/«>= То/\ 1—Во.
Пример. Рассчитать динамические характеристики процесса ГК
при/<2 = 2.5с^1, К3 = 0,4 с^1 н tf0 = 60°. Определяем частоту
368
собственных незатухающих колебаний
wo = /K^costo = 1/ — = 0,009534 с-4 период
11 ' 5/,3-3600
f0— 2л/ы0 == 6,28/0,00953-1 = 6594с (=: 11 мин), относительный
коэффициент демпфирования So = 0,5/<3<й0 = 0,5-0,4-0,009534 =
= 0,019,
Погрешности гирокомпасировании. Пос-
ле затуханья колебаний процесс ГК характеризуется
установившейся (статической) погрешностью вида
(11.52)
Основными составляющими этой погрешности явля-
ются следующие:
погрешность ai=[/<3/(/<2t/r)| 2^ обусловленная собст-
венной скоростью прецессии азимутального гиро-
скопа из-за вредных моментов, действующих по оси его
подвеса в корпусе гироблока. Опа также зависит от
отношения коэффициентов передачи Кз/Кг и шпроты
места фц. Оценим погрешность при 2^,=0,02 град/ч,
<Го=60 и К2=Кз а1=2^/(/г = 0,02/(15-0,5) = 0,00267
(9,16')- Погрешность уменьшается при уменьшении
отношения Кз/К2. Это связано с уменьшением коэффи-
циента затухания g0 и увеличением частоты ц>0;
погрешность а2=Кз(Ув/(К2ит) =—обус-
ловленная вертикальной составляющей (7В угловой ско-
рости вращения Земли, также зависит от широты <р0 и
соотношения коэффициентов /<з/^2- Погрешность недо-
пустимо велика и при рассматриваемой схеме ГК может
быть уменьшена лишь за счет уменьшения отношения
^з/Кг. Погрешность а2 отсутствует при /<3=0 (Во=0),
однако это ведет к незатухающему характеру колебаний
ГП как по координате а, так и по координате |3 относи-
тельно плоскости горизонта;
погрешность a3=(’L,B/r/r)o=tg<|.’o<j обусловлена ста-
тической ошибкой горнзоптирования ГП по углу о и мо-
жет быть уменьшена увеличением коэффициента Kv,
погрешность а4=2г/£7г=2г/(Г/ cos<p0) обусловлена
собственной скоростью прецессии «восточного» ги-
роскопа 2^ ф 0. Опа объясняется необходимостью
компенсации этой угловой скорости составляющей
угловой скорости суточного вращения Земли вида (Ла.
369
Эта погрешность не зависит от коэффициентов Кг и К3
н при заданной широте <ро может быть уменьшена за счет
применения более точного гироскопа либо путем выяв-
ления в процессе ГК систематической составляющей
дрейфа с целью ее последующей компенсации.
Отмечая определенные технические трудности обес-
печения высоких динамических свойств и статической
точности процесса ГК, рассмотрим основные пути уве-
личения точности и сокращения времени
гк.
1. Режимы ускоренной выставки (УВ) ГП в плос-
кость горизонта и в азимуте. Время выставки ГП при
больших начальных углах о0, ссо, р0 можно существенно
сократить, разбив процесс, например, на два этапа: уско-
ренной (грубой) и точной выставки.
2. Увеличение точности ГК за счет уменьшения коэф-
фициента относительного демпфирования (при увели-
чении частоты (й0 собственных незатухающих колебаний
ГП в азимуте).
Уменьшение £0 ведет к уменьшению статических оши-
бок ой и <х2> однако при этом колебательный процесс ста-
новится практически незатухающим. Колебания по коор-
динате а происходят относительно смещенного на Да,
положения ГП в азимуте.
Ориентация ГП в азимуте относительно плоскости
меридиана с точностью до суммарной погрешности Да»
при этом может быть определена по точкам ее реверсии.
3. Компенсация вертикальной составляющей угловой
скорости суточного вращения Земли UB=U sin <р0 путем
подачи соответствующего сигнала в датчик момента
азимутального гироскопа Гь При обеспечении соответ-
ствующей скорости прецессии ГП в азимуте погрешность
«2=—(К3/К-2) (UB/Ur) практически может быть сведена
к нулю.
4. Проведение ГК в несколько этапов. Оно предусмат-
ривает развороты платформы в различные положения,
позволяющие произвести калибровку угловых скоростей
Q' и Qj гироскопов и в последующем скомпенсировать
соответствующие погрешности.
Для уменьшения влияния скорости дрейфа 2г «вос-
точного» гироскопа на точность ориентации ГП в азиму-
те при простом ГК применяют так называемое «двойное
гирокомпасирование», которое в свою очередь проводит-
ся в два этапа. На первом этапе производятся калибров-
370
ка скорости дрейфа Qz и компенсация ее систематиче-
ской составляющей. Для определения Qz платформу раз-
ворачивают на угол л/2. При этом ось Ок платформы
оказывается ориентированной по линии запад — восток,
относительно которой вращение Земли отсутствует:
Ус=О, а ось чувствительности «восточного» акселеро-
метра лежит в плоскости меридиана. Сигнал иа выходе
этого акселерометра пропорционален ££ и может быть
равен нулю.
После компенсации угловой скорости £2? платформа
возвращается в исходное положение с целью осущест-
вления второго этапа ГП по сигналу «северного» акселе-
рометра. Погрешность второго этапа «двойного гироком-
пасирования» оценивается с помощью формулы
где Д£2г — нескомпенсироваиная часть угловой скорости
На практике используются и другие способы иденти-
фикации дрейфов гироскопов и их компенсации, позволя-
ющие увеличить точность ГК в основном за счет увели-
чения его продолжительности.
5. «Аналитическое» гирокомпасирование, основанное
па вычислении азимутального угла Ао= —а с использо-
ванием сигналов акселерометров при осуществлении вы-
ставки ГП в соответствии с рис. 11.11 Используя третье
уравнение системы (11.21) и рассматривая задачу выс-
тавки в первом приближении, можем записать
— Z7 cos <f>0 sin Ао=— [К/Сз- (11.54)
Выходной сигнал «восточного» акселерометра Ua=
Поэтому из (11.54) можем определить
Ao=arcsln----------С/а. (11.55)
gkJJ COS Vo
Погрешности расчета угла определяются многими
факторами, зависящими от погрешностей горизонтнро-
вапия ГП по координатам р и о, от стабильности пара
метров системы и величины сдвига пуля акселеромет-
ра Да.
371
§113 Начальное ориентирование (выставка)
бесплатформенных систем ориентации (БСО)
понимают геометрический
Рис. 11 12. К определению началь-
ной ориентации БСО
При бесплатформепной схеме построения системы
ориентации гироскопы и акселерометры размещаются
непосредственно на корпусе ЛА или монтируются в бло-
ки, которые затем жестко укрепляются па нем (см.
рис. 10.1, 10 2). Поэтому под начальной выставкой БСО
соб согласования прибор-
ной системы координат
Oxyz, а следовательно, и
системы координат OXYZ,
связанной с корпусом ЛА,
с осями стартовой систе-
мы Oi-ijy, определенным
образом ориентированной
в азимуте относительно
осей географической си-
стемы QENH, либо ана-
литический метод опреде-
ления параметров ориен-
тации, характеризующих
начальное положение
осей Ох, Оу, Oz относи-
тельно OENH.
Не рассматривая под-
робно первый способ, от-
метим, что его техническая реализация при высоких тре-
бованиях к точности н времени процесса выставки очень
сложна. Поэтому наиболее перспективным методом вы-
ставки как бесплатформенных, так и платформенных
гироскопических систем ориентации, находящихся в фик-
сированном положении относительно корпуса ЛА, в на-
стоящее время является аналитический способ.
Произвольная начальная ориентация БСО в про-
странстве. Пе налагая никаких ограничений на началь-
ную ориентацию приборной системы координат Оху?,
связанной с осями чувствительности гироскопов и аксе-
лерометров, относительно осей системы координат
OENH, рассмотрим вариант, когда в этой системе ис-
пользуются углы последовательных поворотов ф0, <)о, уо
(рис. 11.12). За исходное примем положение, когда ЛА
ориентирован в восточном направлении, а осн Ох и Оя
горизонтальны.
372
При переходе от неподвижной относительно Земли
системы координат OENII к приборной Oxyz в соответ-
ствии с рис. 11.12 используется матрица М°, которая мо-
жет быть получена перемножением (в последовательно-
сти. обратной поворотам) матриц отдельных преобразо-
ваний координат
М”=МьМооМФо, (11-56)
в которой
(cos Фо sin % 0\
О 0 11,
sin ф0 —COS % О/
(cos Do sin Do 0\
—sin fi0 cos &0 0 J
0 0 1/
/1 ° 0 \
Mio=l0 cosy0 sinVcj-
\0 —sin y0 cosYq'
После перемножения этих матриц в соответствии с
(11.56) получаем матрицу
М°=
(cos Оо cos % cos &0 sin ф0 sin &0 \
sin Yo sin ф0 — —cos Yo sin Л) sin % — cos y0 cos &o
—cos Yo sin So cos фо —sin Yq cns-l>0
sin Yo sin cos %+ sin To sin *0 sin ф0-— —sin y0 cos &o
4-cos Yo sin Фо — cos Y0cos'b0 f
(11.57)
На основании (11.57) и рис. 11.12 определяем про-
екции векторов g и U па осп приборной системы коор-
динат Oxyz в виде
)?х= —Я sin Во; gv=—g cos Yo cos Bo;
sin YqCos &0; (11.58)
373
Ux=Ur cos &o sin Фо + UB sin ®o'-
— (7r(cos Yo sin &0 sin ф0+sin y0 cos ф0) +
+ Un cos Yo&o:
^z=t/r(sin Yosin So sin %—cos у0со8ф0) —
— t/B sin Y0 cos %;
(11.59)
где
UT=U cos <p0; sin To-
Согласно (11.58) и (11.59), определяем
&0=arcsin(—gjg), (11.60)
Yo=arcsin (gjVg2—g2) = arctg (—gx[gy); (11.61)
. • v SID On /14 CCH
Фп=a rcsi n — --5 —, (11.62)
To t7rcos&0
Определив начальные значения углов ориентации 1%,
Yo, фо, рассчитывают направляющие косинусы тц, обра-
зующие матрицу М° начальной ориентации вида (11.57).
Анализируя (11.62) для угла ф0, характеризующего
ориентацию БСО в азимуте, при различных значениях
географической широты <рп, легко заключить, что при
<р=л/2 U|~0 и задача ориентации решена быть не
может.
При расположении БСО на Экваторе фо=О, <7в=0, а
UT—U и расчетная формула (11.62) приобретает вид
ф0=arcsin (Ux'iU cos00).
В частном случае при О'о—0 ij>0=arcsin (UxjU).
/ Рассмотрим вариант, когда в качестве параметров
ориентации в БСО используются направляющие коси-
нусы irtij. Для формирования матрицы Мс начальной
ориентации системы Oxyz относительно системы коорди-
нат OENH (рис. 11.13) определяют проекции вектора g
на оси Oxyz в виде
gx= ~g cos <pI3.= — gml3,
gy= —g cos f 23= —gm2s, (11.63)
gz=gCOS<p33=£7?l33.
Из этих выражений можно определить направляю-
щие косинусы mI3, m2z, т33, образующие третий столбец
374
матрицы М°:
mvr=—gjJg‘, m2S=—gy/g; m^=gjg. (11.64)
Для вычисления направляющих косинусов /nls, т2!,
Шз2, образующих второй столбец матрицы М°, составим
Рис. 11.13. К определению направляющих косину
сов, характеризующих начальную ориентацию БСО
(аналитическое гирокомпасирование)
выражения для проекций вектора С на оси системы ко-
ординат Oxyz:
UX = UB COS Uт COS <Р12==^п/П1з4-
cos <p234-(7r cos r-f22=U nm23-fU rm22, (11.65)
cos <p33-f-i/rcos ^2=U
Из (11.65) получаем
z«I2= (Ux — UBml3)/Ur,
m22=(LJ у U ntn2^/U Ti
т23^(иг-ипт^)!иг. (11.66)
По рассчитанным шести элементам матрицы М° вы-
числяют се первый столбец, т. е. направляющие косину-
375
сы /?2ц, т2\ н /п3|, используя функциональную связь меж-
ду соответствующими элементами матриц в виде
ти = /Ящ/Изг — т/г22тозз>
Г1^21 — т1'2тЗЗ — T72i327l32,
тп31 ~ т1зт22 — nti2m2i-
(11.67)
Малые угловые отклонения БСО от плоскости гори-
зонта. В процессе подготовки ЛА к старту его корпус,
как правило, занимает положение, близкое к плоскости
горизонта, пли вертикали места. В случае малых угло-
вых отклонений, когда с достаточной точностью можно
заменить функции синусов углов самими углами, на ос-
новании рис. 11.13 можем получить направляющие
косинусы niij:
ml3=cos cp13=sin ctI3=su13,
т23— COS ф23~ 1.
w33=cos 4=33= si» »зз~азз;
(11.68)
/п12=(7/^ —Z7na13)/(/r,
/«22 —— W.
m32~ (Uz U пО-Зз)/^г’>
/»Н = ^23^32 — '«22^33>
Wjl = 27212^33 — m\3m3'lt
,n3l — 13^22 —
(11.69)
(11.70)
Рассмотрим погрешности выставки, обусловленные
погрешностями в работе акселерометров. В соответствии
с (11.63)
sin ct33.
(11.71)
Продифференцировав (11.71) и перейдя от дифференци-
алов к приращениям, можем определить погрешность
А £г= Д.ф sh 1 а -|- А'; Cos а Да >
(11.72)
где а=азз.
При малых углах а поворота БСО относительно
плоскости горизонта sina=a, cosa=l (11.72) прини-
мает вид
Ag,= Ag«+gAa.
(11.73)
376
Погрешность измерения угла а
lSa=(>llg}—^g/g)a,
(11-74)
где Д£гл=Аа+еа— погрешность акселерометра от сдви-
га нуля и нестабильности коэффициента передачи.
Погрешность определения угла ориентации а зависит
от погрешности акселерометра и погрешности расчета и
ввода в БЦВМ значения ускорения g в точке старта ЛА.
х Влияние сдвига нуля акселерометра на точность выс-
тавки определяется зависимостью ka=kajg, характер-
ной для случая абсолютно неподвижного основания БСО
в процессе начальной выставки. Погрешность расчета и
ввода в БЦВМ величины g(hglg) должна быть обеспе-
чена па уровне, не превышающем суммарной погрешно-
сти акселерометра, используемого в БСО.
Для современного этапа развития инерциальных сис-
тем и, в частности, БСО это уровень, характеризуемый
погрешностями порядка 10~5...10~6 и меньше. При опре-
делении направляющих косинусов tn]3, т33, образу-
ющих третий столбец матрицы М°, с помощью (11.79)
имела место избыточность. Для задания ориентации век-
тора g в системе координат Oxyz достаточно иметь два
измерения, например направляющие косинусы т]3 и т33.
Третий может быть рассчитан с помощью зависимости
/п2з—1'1 ~(/rei3~h ,п1з^‘ Это позволяет избежать расчета
п ввода в БЦВМ вектора g в точке старта ЛА, исполь-
зуя для определения направляющих косинусов ;п13 и Шзз
сигнал вертикального акселерометра gz^g- Расчетные
формулы (11.75) при этом приобретают вид
g.v/gy, rn23^=]/ 1 -(mi3-j-m3S).
Рассмотрим погрешности определения азимута БСО.
В соответствии с (11.70) (Ух=С/гсо8'0051пфо+(7в51П йо-
Погрешность измерения этой скорости
oL\.=AHrcos&n sin %—-(7Г sin % shi%&&0-|-
4-t/rcos 00cos<po&%+A(/nski %-]-(/„ cos % A %. (11.75)
При малых значениях углов «с
дцд+ад-0+дцд+</„д&0. (11.76)
При учете погрешности ввода в БЦВМ угловой скорости
вращения Земли
377
Д67Г=Д67 cos (f>0 —sifi «р0Дф0, |
Д4/В=ДЕ7 sin <p0-|-t/cos <р0Дч>0. J k
Следовательно, погрешность определения азимута Дф0
будет зависеть от AU, AUr и AUB, а также от значений
самих углов -фо и й0-
РАЗДЕЛ 5
ГИРОСКОПИЧЕСКИЕ СИСТЕМЫ ОРИЕНТАЦИИ
И СТАБИЛИЗАЦИИ КОСМИЧЕСКИХ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
ГЛАВА 12
ДВУХГИРОСКОПНАЯ ПРОСТРАНСТВЕННАЯ
ГРАВИТАЦИОННО-ГИРОСКОПИЧЕСКАЯ СИСТЕМА
ОРИЕНТАЦИИ И ПАССИВНОЙ СТАБИЛИЗАЦИИ
СПУТНИКА В ОРБИТАЛЬНОЙ СИСТЕМЕ
КООРДИНАТ
Двухгироскоппая гравитационно-гироскопическая
система предназначена для ориентации и стабилизации
спутника вокруг центра его масс в орбитальной системе
координат. Возникающие в центрально-симметричном
гравитационном ноле Земли или какой-либо иной пла-
неты гравитационные моменты определенным образом
ориентируют спутник относительно направления грави-
тационного поля Земли (эффект гантелей). При соответ-
ствующем выборе соотношения моментов инерции спут-
ника относительно главных осей его инерции достигается
пассивная трехосная стабилизация спутника в орбиталь-
ной системе координат, называемая его либрацией. (Об
образовании восстанавливающего момента вокруг нор-
мальной оси спутника при естественной его стабилиза-
ции в орбитальной системе координат см. кн. 1.)
В астрономии широко известен так называемый эф-
фект либрации Луны, вследствие которого Луна повер-
нута к Земле всегда только одной стороной. Однако при-
менение эффекта либрации для стабилизации спутника
Земли возможно лишь при малых возмущающих момен-
тах, действующих па спутник, и при низких требованиях
к точности ориентации осей спутника относительно орби-
тальной системы координат. В гравитационно-гироско-
378
лнческой системе для повышения точности ориентации
сПутника относительно орбитальной системы координат
ла" борту устанавливается два поплавковых гироскопа с
изумя степенями свободы, обеспечивающие затухание
собственных колебании вокруг центра масс и сообщаю-
Рис 12.1. Кинематическая схема двухгироскопной грапитацнонио-
гнроскоиичеекой системы стабилизации ,
щпх восстанавливающие моменты, действующие вокруг
продольной и нормальной осей спутника.
Кинематическая схема гироскопической системы, рас-
положенной в корпусе спутника 4, представлена на
рис. 12.1. ОХ, ОУ, OZ — связанные оси координат спут-
ника. Роторы гироскопов помещены в кожухах 1 и 9 и
вращаются вокруг осей Oz' и Oz" с большими угловыми
скоростями Qz> и (роторы па рис. 12.1 пе показаны).
Кожухи гироскопов 1 и 9 закреплены внутри цилиндри-
ческих поплавковых камер 2 и 6, вращающихся вокруг
379
осей Oix' и 02х" их прецессии. Поплавковые камеры по-
мещены в цилиндрические полости 3 и 5 корпусов гиро.
скопов и взвешены в специальной жидкости. При враще-
пин поплавковых камер вокруг осей О\х' и О2х" прецес-
сии гироскопов вследствие большой вязкости жидкости
при малых зазорах между цилиндрическими поверхно-
стями поплавка и корпуса прибора возникают значитсль-
Рпс. 12.2. Расположение координатных осей гироскопа
пые диссипативные моменты, пропорциональные угловым
скоростям Pi и |32 вращения поплавков вокруг этих осей.
Вокруг осей Oix' и О2х" также действуют моменты,
развиваемые установленными в корпусах гироскопов спи-
ральными пружинами 10 и //. Для создания гравитаци-
онного момента, действующего на спутник вокруг стаби-
лизируемых в горизонтальной плоскости осей ОХ и OZ,
используется штанга 7 с расположенным па ее конце
грузом 8.
На рис. 12.2, а для наглядного представления распо-
ложения трехгранников Ox'y'z' и Ox"y"z", связанных с
кожухами гироскопов (см. рис. 12.1) относительно трех-
гранника OXYZ, начала Oi и О2 координатных трехгран-
ников Otx'y'z' и О2х"у"г", совмещены с началом О трех-
гранника OXYZ. Положение же трехгранников Ox'y'z' и
Ох"у"г" определяется путем последовательных поворотов
относительно трехгранника OXYZ-. вначале трехгранни-
ков Ox'y'z' и Ox"y"z" на угол х вокруг осн OZ в поло-
жение Oxryvzr, а затем трехгранника Ox'y'z' вокруг оси
Охг(Ох") иа угол рь а трехгранника Ох"у"г" также во-
круг оси Олг (Ох") па угол — Векторы Нх и Н2 собст-
380
вСиных кинетических моментов раскладываем на оси Ozr
п Оуг и, согласно рис. 12.2,6, получаем составляющие
/7, cos Pi и //2cos[J2 на ось Ozt, составляющие sin pt
и — /72 sin р2 на ось Оуг.
Измерительные оси Оу' и Оу" гироскопов перпенди-
кулярны плоскостям Ox'z, Ох‘
бу, углы и—р2.
Полагаем, что спутник дви-
жется по круговой орбите с уг-
ловой скоростью Qop=Q, на-
правленной по отрицательной
осн Ос, орбитального трехгран-
ника
На рис. 12.3 представлено
расположение связанного коор-
динатного трехгранника OXYZ
относительно орбитального ко-
ординатного трехгранника
Рис 12.3. Расположение ко-
ординатных осей спутника
Проекции<о,г, пе-
реносной угловой скорости Q
на ребра связанного трехгран-
ника OXYZ имеют вид
<‘>х= —S sin <р cos &,
(«у = Q(sin ф sin & cos у -f- cos 4 sin у),
Wz= S (cos ф cos у — sin ф sin 0 sin y),
(12.1)
где ф— угол рыскания; у — угол крепа; -О—угол танга-
жа спутника.
Угловой скоростью регрессии орбиты (см. кн. 1,
гл. 4) пренебрегаем. Проекции «>х, «>у, и? относительных
угловых скоростей ф, й, у трехгранника OXYZ на его
ребра будут:
«>x=4sin O-f-y,
lUy = ф cos 0 cos у 4-li sin у,
i»z=^cosy—'^sin у.
(12.2)
Полагая углы ф, & и у малыми п равными A-ф, ДО и Ду,
получаем проекции 6>x, fflr и «г угловой скорости вра-
щения трехгранника OXYZ иа его ребра в первом при-
ближении:
381
wx йД’р —|— Ду,
<or 2Ду-|-Д<р,
u»z~ 2-|-Дй.
(12.3)
Для составления дифференциальных уравнений дви-
жения КЛА, отнесенных к главным осям OX, OY, OZ его
иперции, воспользуемся простыми (необобщеннымн)
уравнениями Эйлера, записанными в общепринятых обо-
значениях:
J хшх — у — Jz) ‘”f10z — 21Л4 х >
J у® г — (*^ z — Jх)x^z== 21 А/ у,
J z^z — б? х — J Х^у ’ 21,
(12-4)
где Jx, Jy, Jz — осевые моменты инерции КЛА, взятые
относительно главных осей OX, OY, OZ его инерции;
"ZMx, ZMY, ZMz — проекции суммы моментов внешних
сил, действующих на КЛА.
Согласно (12.3) и (12.4), получаем дифференциаль-
ные уравнения движения КЛА первого приближения для
случая малых углов Дф, Дй, Ду:
JzAy (Jх -ф-^у —Jz)2Дф — (Jу —J %) й2Ду—ИД4
JуДФ"Ь(^х~|-/у —Jz) QAy-bOAz—Jх) 22Дф=2Л1у,
JZA» = 2/WZ.
(12.5)
Если моменты инерции спутника с закрепленными па
нем шгаигой и грузом удовлетворяют условию Jx>J\<
<Jz, а Лх=Л, то вокруг осей OX, OY и OZ образуются
моменты гравитационных сил [46] для малых углов Дф,
ДО и Ду, приближенно равные
М°х^ :—322 (Jz—Jy) Ду;
MGz^ -—3S? (./ х—J у)
Му^ 0.
(12.6)
По аналогии с движением самолета и в соответствии
с (12 5) вращение вокруг оси 07, называем продольным
движением, а совокупность его вращений вокруг осей ОХ
и ОУ (креп и рыскание) — боковым движением спутника.
382
При продольном движении спутника в образовании
гироскопических моментов, стабилизирующих спутник
вокруг оси OZ, участвуют составляющие Hi sin 0( и
//, sin pz собственных кинетических моментов Hi и Н%
гироскопов Г, и Г2 составляющие же Hi cos 0i и W2cosp2»
направленные по оси OZ, не образуют гироскопических
моментов вокруг оси OZ. При боковом движении спутни-
ка в образовании гироскопических моментов, стабилизи-
рующих спутник вокруг осей ОХ и OY, участвуют состав-
ляющие Hi cos 01 и H2cos02 собственных кинетических
моментов Hi и Н2 гироскопов Г1 и Г2, направленные по
оси Ozr(OZ) Все это делает возможным разделить дви-
жение спутника, стабилизируемого гироскопами Г[ и Г2
вокруг центра его масс (в первом приближении), на два
независимых: продольное и боковое. Важная особенность
бокового движения спутника заключается в том, что
составляющие Л/iCosPi и //2cosp2 участвуют в создании
восстанавливающих гироскопических моментов, пропор-
циональных отклонениям оси OZ спутника от направле-
ния вектора Q орбитальной скорости его вращения. От-
клонения оси OZ определяются углами у крена и ф ры-
скания спутника от оси —орбитального координатно-
го трехгранника Ogrj£. Для обеспечения демпфирования
колебаний спутника вокруг трех его осей OX, OY, OZ
векторы Hi и Н2 собственных кинетических моментов
гироскопов удерживаются под углами pt и с помощью
противоположно закрученных спиральных пружин, об-
ладающих жесткостью Ki и Д2- При составлении диф-
ференциальных уравнений движения системы вначале
обратимся к модели продольного движения спутника,
управляемого гироскопами Ti и Г2.
§12.1. Продольное движение спутника
Модель продольного движения спутника с пассивным
гироскопическим стабилизатором (рис. 12.4) можно
представить в виде так называемого плоского гиромаят-
ника с двумя поплавковыми гироскопами. Спутник в его
продольном движении здесь представляет рама 13, кото-
рая поворачивается вокруг оси OZ. с угловой скоростью
ДФ тангажа. На раме крепятся штанга 9 с грузом 8 и
корпуса 1 и 4 поплавковых гироскопов 5 и 11, которые
Установлены в цилиндрических поплавковых камерах 6
и 12, плавающих в вязкой жидкости 7, 10. Поплавковые
383
камеры вращаются вокруг своих осей Ох' и Ох". С ра.
мой 13 связал координатный трехгранник OXYZ, ось Оу
которого направлена вверх перпендикулярно плоскости
заключающей ось OZ рамы и оси Ох' и Ох" прецессии
Рис. 12.4 Схема мололи продольной стабилизации спутника
гироскопов 5 и 11, ось ОХ образует с осями ОУ и OZ
правый координатный трехгранник Оси OX, OY и OZ —
главные оси инерции спутника. Па осях Ох' п Ох" гиро-
скопов 5 и 11 располагаются спиральные пружины 2 и 3,
связанные с корпусами 1 и 4 гироскопов.
Оси Oz' и Oz" и собственные кинетические моменты
Hi и Н2' гироскопов 5 yl 11, направленные в противопо-
ложные стороны, в начальном положении параллельны
оси OY Векторы угловых скоростей A[3i и др2 вращения
384
Рис. 12.5. Расположение координат-
ных осей модели продольной стаби-
лизации спутника
гироскопов вокруг осей Ох' и Ох" направлены в сторо-
ны противоположные осям Ох' и Ох" прецессии. Оси
системы координат представляют собой орбиталь-
ный координатный трехгранник, ось Og которого перпен-
дикулярна плоскости орбиты, ось От] направлена по век-
тору орбитальной
скорости спутника, ось
01 — по радиусу круго-
вой орбиты. Вектор Q
орбитальной скорости
направлен по отрица-
тельной оси 01. Для со-
ставления дифференци-
альных уравнений мо-
дели продольного дни
женпя спутника преж-
де всего определим ги-
роскопические момен-
ты, развиваемые гиро-
скопами вокруг осей
Ох', Ох" и 0Z.
При исследовании продольного движения полагаем,
что боковое движение спутника отсутствует (Дф=Ду=
= 0). Вокруг оси Ох' (рис. 12.5) на кожух гироскопа
действует гироскопический момент
(A-& + S)=/71 sin рддё + а), (12.7)
а вокруг осн Ох" -— момент
/и;2=//2(Д&+й)=/72 sin ₽2(Д&4-2).
Н\ = Н1 sin Pf, /У2=/У2 sin р2.
На спутник вокруг оси OZ действуют гироскопические
моменты
Мг^+г2^Н1 sin рД+7/й sin р2р2. (12.8)
Полагая, что Р1=Р1+Дрц Р2=— Рг + ДРг. согласно (1.27),
в первом приближении имеем
//j sin р?Д& 4- 771 sin р?2 4* /7fcos pi’2APi -|-
+z/t cos Р?Д&Дрь
/и;2. -Н2 sin рЗда — /72 sin $2±H2 cos р?2Др2 4-
4- Z72 cos Р2ДВ др2,
Hl sin Р1ДР1-/У2 sin $Др2.
(12.9)
385
(12.10)
Вокруг оси OZ спутника действует момент гравитациоп-
ных сил (12.6), а вокруг осей Ох' и Ох" гироскопов —
упругие моменты /GPi и /(г₽2, развиваемые спиральными
пружинами, и моменты и П2р2, создаваемые демп-
фирующей жидкостью поплавков, а следовательно,
Л1^+л=^₽1+рД=/с1^-|-^д₽1+д1д₽1,
Л1?:+Д=о2+z>2p;= _/с2$0+к2др2+ад2.
Подставляя моменты (12.6) и (12.9), действующие па
спутник вокруг оси OZ, в последнее уравнение (12.5),
отнесенное к главным осям OXYZ инерции спутника при
ох=о)у=0, р,=р2=₽°, Н\—Н2—Н (в соответствии с
рис. 12.4) и пренебрегая последними двумя членами в
(12.9), получаем
Jzb$+Зй2 (Jx - J у) Д&—Н sin р° (Др, - др2)=0. (12.11)
Для гироскопа 11 (см. рис. 12.4), пренебрегая малым
последним моментом Н\ cos p°Ai&Api, согласно (12.9) и
(12.10), имеем
ЪМХ, = 0; Д,ДР1 -f- Нх sin р?Д11 + Нх sin pjs +
+ /Лсовроадр, +
(12.12)
здесь Д1 — момент инерции гироскопа относительно осп
Ох'. Если для пружины 2 угол 8? равен углу — pi°
предварительной ее закрутки, необходимому для созда-
ния момента, компенсирующего гироскопический момент
АЛ sin [^2, который возникает при вращении спутника
с орбитальной угловой скоростью Q, то, согласно (12.12),
в положении равновесия при M"x-=K$i имеем
ЛС? Кф?0
-------=-------— й или
Hi sin Ро Н1 sin Ро
pF’z^SHi p?S/K,. (12.13)
Момент развиваемый пружиной 2, порождает
прецессию гироскопа 11с орбитальной угловой ско-
ростью Q. С учетом (12.13) уравнение (12.12) прини-
мает вид
Д1др1-|-П1Д,р1-|-(Я1 cos pfe-b/G) Др, + Нх sin р?Дв-|_Л4"-,с=
=0. (12.14)
2^
386
Для гироскопа 5 также, пренебрегая малым последним
моментом //2 cos р°Д6Д₽2 (для пружины 3 рг=р2°)> полу-
чаем
S7Ux»=0; Д2Д82 — H2sin — Н2 sin ₽j24-
+Я2cos К2Д₽2+а2Д?2+ж-==0; (12.15)
здесь (й°— угол предварительной закругки спиральной
пружины 3, определяемый из выражения
ЛТ^=-/<28§°.
Момент М'х",развиваемый пружиной 3, порождает
прецессию гироскопа 5 с орбитальной угловой скоростью
й (рис. 12.4):
м
Нг sin ро
ТУ 2 sin ₽о
ИЛИ
(12.16)
fj00 ^2 sin ₽0 п
—-------------------------------У;
с учетом (12.16) уравнение (12.15) преобразуем к виду
д2дё+/?2Др2+(/7.2 cos pSs -I- Кг) Д?2 - ^2 sin р5д » +
~|_7И"'«=0. (12.17)
В дифференциальное уравнение (12.11) движения спут-
ника вокруг оси OZ входит гироскопический момент
Mz——Н sin р° (ДР1—Др2), содержащий разность угло-
вых скоростей Др,—др2. Для согласования формы за-
писи (12.14) и (12.17) с уравнением (12.11) вычитаем
почленно из левой части (12.14) левую часть (12.17) и
при условии, что Л|=Д2=Л; Di=Z)2=£>; =
получаем К^Кг^К; ₽?=р§=р°;
Д U?! - Д₽2) 4- D (Др! - ДР2)+(// cos р°В + К) (ДР1 - Д₽2) +
2Н sin р°Д» +Л4В;? -Л4>с=0. (12.18)
Если в системе продольной стабилизации каждый из
гироскопов 5 и 11 рассматривать как датчик угловой
скорости (см. гл. 3), то, согласно (12.14) и (12.17), при
A1"’?=A1j.c=0 получаем уравнения движения гироско-
пов:
387
•• , о, • , Н\ cos р?Й 4- К\
Д₽1 +-V- ДР1 + ——----------— ДР.=
Л[ Л|
= —sin р°ДО;
*о" I О2 дг; , H-2eos₽$Q + /<2 А0
Др2 П--Т~ Д₽2 Ч------------Др2—
А2 а2
=-^-sin ЙДЙ.
А2 1
(12.19)
Здесь
Лнд=(^1 cos Pi2 и Ппл=(1~12 cos р?2 Ч"-^).^
— частоты собственных колебаний датчиков угловой
скорости — гироскопов 11 и 5 соответственно.
Реакция датчиков угловой скорости 5 и 11 на гармо-
нические колебания спутника Д-&=Д'&а cos vt, Д0=
——Д-flov sin vf при <^«чд в первом приближении
определяется частными решениями
ApL
/71 sin
Hi cos ₽'/ + Ki
A&ov sinv/,
Ap*=-
Hj sin Pg
H2 cos P2 -|- Ki
sin v/.
(12.20)
Из (12.20) видно, что фазы колебаний датчиков угловой
скорости 5 и И при низкой частоте v возмущающих ко-
лебаний отличаются на 180°, а следовательно, для сим-
метричной системы при
₽?=р2=₽Р; |ДР1| = |Д{Ц=|др|
разность бр=ДР1—Др2 с учетом знаков углов Др( и
Др2 принимает вид
Вр=ДР1-|-Др2=2Др. (12..21)
Здесь пружины 2 и 3 при гармонических колебаниях
(12.20) спутника способствуют согласованному движе-
нию гироскопов 5 и 11 подобно спарнику в гирораме
(см. кн. 1, гл. 17). Если вокруг оси OZ спутника действу-
ет момент внешних сил Мгьс и этот момент уравновеши-
вается гироскопическими моментами, развиваемыми
обоими гироскопами при равномерном их распределений
388
яа ось OZ, то при Н\—Н2=.Н каждый
прецессирует с угловыми скоростями
<•'/2
др =-------£----
11 Я sin ро
Др2= £-------.
11 И sin рп
из гироскопов
(12.22)
Подставляя значения ДPi и ДРа в выражение М\ —
==// sin Р°(ДР1—ДРа), для суммы гироскопических мо-
ментов с явным учетом знаков получаем
Mrz= —Н sin р° (Др, + Др2). (12.23)
Обозначая по-прежнему ДрН-ДРг==бр,
(12.18) и (12.11) перепишем в виде
лар+яар4-(я cos р° К) г₽ 4-
4-я sin род&о= _л£-,с4-де
У2Д§ -|- 3S2 (Jx — JY) ДО -
уравнения
(12.24)
— Я sin p°Sp=M5c.
Дифференциальные уравнения (12.24) продольного дви-
жения спутника, стабилизируемого гравитационно-гиро-
скопической системой, позволяют определить реакцию
спутника па моменты Mzct действующие вокруг его оси
07, а также па момептыЛС? и внешних сил, дейст-
вующие вокруг осей Ох' и Ох" прецессии гироскопов 5
н 11.
Полагая в (12.24) Л4"/с=7И^=Л1гС=О и исключая
из (12.24) бр, получаем характеристическое уравнение
продольного движения спутника
AJ^ 4- DJzV?+|ЗД (Jx - Jу) S2 4-:
4- J z (H cos p°S 4- K) 4- 2Я2 si n* p°] h2 4~
4- w {j x - j у) sv 4- з (я cos p°s 4- Ю (J x - J у) s2=o.
(12.25)
Если при Jx>Jv и Я>0 коэффициенты характеристиче-
ского уравнения положительны, то из последнего усло-
389
вия Гурвица, определяющего устойчивость продольного
движения спутника (12.25), при D>0 получаем
6/72 sin2 р° > 0. (12,26)
Следовательно, движение системы устойчиво при лю-
бом Н и р°=/=0. Для наглядного представления продоль-
ного движения спутника, стабилизируемого гравитаци-
онно-гироскопической системой, опять обратимся к про-
стой модели системы (см, рис. 12.4), представляющей
собой одноосный двухгироскопный стабилизатор с ниж-
ней маятпиковостыо (/(Z=G/) и с поплавковыми гиро-
скопами, движение которых ограничено спиральными
пружинами с жесткостями и К2- При поворотах мо-
дели, установленной на неподвижном основании вокруг
оси OZ, возникает момент Л4Х силы тяжести, равный
Mz =—GI sinAfr?^; —О/Д&=—А^ДЙ.
В соответствии с рис. 12.4 при А—Л2=Л; 7(,=
=Az=K\; Dy=D2—D для неподвижной опорной систе-
мы координат получаем дифференциальные урав-
нения движения модели:
(/л«2+О0д&=^Р+ж?, | (12 27)
(4s2 + Dxs-|-/<x)8p=- 2//$Д&4-А1“ )
В уравнении (12.27) собственный кинетический мо-
мент Н соответствует составляющей Н sin р°, жесткость
Кх пружины модели соответствует жесткости К+
+ Hcosp°Q, а крутизна GI момента, создаваемого ниж-
ней маятниковостью GI,— крутизне 3 (1Х—Jv) S22 грави-
тационного момента. Исключая из (12.27) координату
бр н полагая Л4Х = 7ИХ=О. находим дифференциальное
уравнение свободного движения модели, составленного
в полном соответствии с (12.24):
Д7хдТ-|- L)xJzt& -\-(AGl+JZKX + 2/72) Д& +
+ £Х0/Д&+0//<ХД{)=0, (12.28а)
а также характеристическое уравнение модели
AJZ^ + +(AQl + JZKX + 2 /72) и2 +
-\-DxGl\>.+Glkx=Q, (12.286)
Из (12.286) следует, что устойчивость движения мо-
дели (спутника) в продольном движении обеспечивается
при /G>0 и 7)*>0.
390
Поплавковые гироскопы, взвешенные в вязкой жид-
кости, развивающие демпфирующие моменты
и £)Х«ДР2 вокруг осей Ох' и Ох" их прецессии, и спираль-
ные пружины 2 и 3, создающие позиционные моменты
/GApi и Кх&?>2, необходимы для обеспечения устойчиво-
сти продольного движения спутника (модели), придания
системе свойств избирательности к направлению истин-
ной вертикали, определяемой последним членом GlKxM
в уравнении (12.28), а также для создания момента
(12.13), необходимого для слежения спутника за на-
правлением истинной вертикали.
Устойчивость движения модели (см. рис. 12.4), ими-
тирующей продольное движение спутника, следует из
условий Гурвица. При положительном коэффициенте Dx,
согласно последнему определителю Гурвица, получаем
Dzx Jz (AGl + 2№) GI > AJzDxG2lz+
-YGlK^l^, (12.29)
или
ZG/-|-/z/<J.+2/y2>/G/+Jz^, (12.30)
или
|^| >0.
(12.31)
Из (12.31) следует, что движение гироскопической
системы устойчиво при любом значении | Н\ >0. При
DX=Q условие положительности коэффициентов харак-
теристического уравнения не выполняется и система
(12.286) оказывается на границе колебательной устой-
чивости. При Ох=0 характеристическое уравнение
(12.286) принимает вид
AJ z[x4 -4- (AGl+JZKX + 2№) и2+GIKX = 0. (12.32)
Обозначая р.2=х, получаем квадратное уравнение
AGl+JzKx + 4H2 cdKx n
------ ------x 4----——0,
AJZ
(12.33)
Решением которого будет
± ^\AOl+JzKx+ZH*\ x
39!
Х1/ 1-
^AJZGIKX
[AGl + J zKx+'2H*yi
(12.34)
Преобразуем подкоренное выражение (12.34) к виду
, 4ЛО//<„
1----------------------------= 1 — Д,
и, считая величины A, Gl, Kx малыми но сравнению
•I z и H, полагаем
Д=
— <К (12’35)
' Z Z !
При этом J/1—Д раскладываем в степенной рядив
первом приближении получаем значения корней Х| и х^
уравнения (12.34)
2Н2 AGl \AJZ А )
Кх + Кх
Xi
(12.36)
и значения корней |ii,2 и рз»4 характеристического урав-
нения (12.32)
Корни pi,? н |.1з,4 определяют низкие и высокие частоты
/?1 и «2 собственных незатухающих колебаний модели.
Низкая частота колебаний модели плоского гиромаят-
ника (12.20) равна
Если пренебречь влиянием гироскопических моментов на
движение модели (//=0), а также положить А —О, то
tii=ni'=VGl/Jzt (12.39)
392
где tii — частота собственных колебаний физического
маятника вокруг оси Oz (с остановленными роторами
гироскопов).
Из сравнения (12.38) и (12.39) следует, что гироско-
пы 5 и 11 (см. рис. 12.4) к моменту инерции /г физиче-
ского маятника добавляют приведенные моменты инер-
ции (2//2/Да) + (AGl/Kx). При этом с увеличением соб-
ственного кинетического момента Н первое слагаемое
2Н~1Кх может превысить момент инерции Д; влияние
второго слагаемого практически несущественно.
Высокая частота собственных колебаний модели
равна
При остановленных роторах гироскопов (Н=0)
(12.41)
и Пу2 представляет собой частоту упругих колебаний
гироскопов 5 и 11 вокруг осей Ох' и Ох" с остановлен-
ными роторами (/У=0). Из сравнения (12.40) и (12.41)
следует, что при вращении роторов гироскопов 5 и 11
вокруг осей Oz' и Oz" к жесткости Кх пружины гироско-
пов добавляется жесткость 2Н2Нг гироскопов, характе-
ризующая их квазиупругие свойства (см. кн. 1, гл. 2). С
увеличением собственных кинетических моментов Н вы-
сокая частота п2 собственных колебаний_возрастает и
/2№
----- пезатухаю-
ЛЛ
щих нутационных колебаний гироскопов. Формулы
(12.39) и (12.40) позволяют оценить частоты (периоды)
собственных незатухающих колебаний модели продоль-
ных колебаний спутника.
Диссипативные моменты Л1£'= ПрАрп Л1*- = £)рДР2,
развиваемые поплавками гироскопов 5 и 11, способству-
ют эффективному затуханию высокочастотных, а также
и низкочастотных колебаний. При этом основная часть
продольного движения спутника определяется его низко-
частотными, медленно затухающими колебаниями, про-
исходящими в плоскости, перпендикулярной оси 07,.
Здесь продольное движение спутника подобно движению
плоского двухгиросконпого маятника. Упругие моменты,
развиваемые пружинами 2 и 3 (см. рис. 12.4), удержи-
13—1767 393
вают оси роторов гироскопов в плоскостях, параллель-
ных плоскости OXY качаний маятника, и согласуют зна-
чения углов Др( и др2 поворота гироскопов вокруг осей
Ох' и Ох" так, что в процессе стабилизации спутника
|Api|«|Ap2|.
Формулы (12.38) и (12.40) необходимы для прибли-
женной оценки динамических характеристик спутника.
При Кх—>0 частота пг+оо, время переходного процесса
при стабилизации спутника нарастает, а сам процесс
стабилизации становится неэффективным.
§ 12.2. Боковое движение спутника
В соответствии с рис. 12.1, 12.2 и моделью бокового
движения спутника два поплавковых гироскопа Г] и Г3
(рис. 12.1) при Н{~Н2 = Н заменяем одним поплавко-
вым гироскопом 5 (рис. 12.6) с собственным кинетиче-
Рис. 12.6. Схема модели систем! i стабилизации бокового
движения спутника
394
ским моментом J70=2flrcosp°. В механической модели
спутник представляет собой внутреннее кольцо 4, распо-
ложенное относительно орбитального координатного
трехгранника Og-qg так, что ось ОХ внутреннего кольца
в начальном положении направлена по оси От), совпа-
дающей с вектором V скорости движения спутника на
орбите, в сторону, противоположную оси Кольцо 4
установлено в наружной раме 3 на подшипниках 6, а
рама 3 в подшипниках 1 в корпусе 2, вращающемся во
круг оси 0g, перпендикулярной плоскости чертежа с
орбитальной угловой скоростью Q. Ось Оух вращения
рамы 3 совпадает с осью 0g, направленной по радиусу
к круговой орбите. Ось 0Y лежит в плоскости кольца 4
и перпендикулярна оси ОХ и образует с осями ОХ и 0Z
правый координатный трехгранник, связанный с коль
цом (спутником). Направления осей OX, OY, 0Z в на-
чальном положении совпадают с направлениями орби-
тальных осей Og, Or), 0g; оси ОХ и OZ направлены в
стороны, противоположные положительным направле-
ниям осей Ог) и 0g. Во внутреннем кольце 4 помещен
поплавковый гироскоп 5, обладающий относительно
кольца двумя степенями свободы; Др и кр — углы пово-
рота гироскопа 5 вокруг осей Ох/ прецессии и оси Oz
собственного вращения гироскопа. Ось Ох/ прецессии
расположена в плоскости OXY кольца 4 и наклонена к
оси ОХ на угол %г. Ось 8 поплавка .9 гироскопа 5 жестко
связана с его кожухом и с кольцом 4 (спутником) спи-
ральной пружиной 7. Трехгранник Ох/y/z/ связан с ко-
жухом гироскопа 5. Положение гироскопа 5 модели от-
носительно внутреннего кольца 4 определяется малым
углом Др, а положение кольца 4 относительно опорного
орбитального трехгранника Ogqg— малыми углами Ду
и Дф поворота кольца 4 относительно рамы 3 и поворота
рамы 3 относительно корпуса 2 модели. Ось 0Z кольца
4 при Ду=Дф=О совпадает с направлениями оси—0g
и вектора Q орбитальной скорости вращения спутника.
Влиянием движения карданова подвеса п основания 2
на движение кольца 4 (моделирующего спутник) прене-
брегаем, так как карданов подвес вместе с основанием
в механической модели служит лишь для наглядного
геометрического представления углов Ду и Дф. При со-
ставлении дифференциальных уравнений движения внут-
реннего кольца 4 (спутника) наружную раму 3 считаем
невесомой. Определим гироскопические моменты (рис.
13’
395
12.6), развиваемые гироскопом 5 вокруг осей Охг и Оуг:
Му = -//0оЛ, ЛГ- = Н0^г. (12.42)
Гироскопический момент Л4у действует на кожух гиро-
Г
скопа 5, а момент ЛГ, через опоры полуосей <8 кожуха
гироскопа непосредственно сообщается спутнику (внут-
реннему кольцу 4).
Гироскопический момент раскладываем на свя-
занные оси ОХ и OY (рис. 12.7):
Мх=Му sin хг=/70 sin хг«’“'. )
(12.43)
МГГ=МТ. cos cos Xr‘V-
& Г Г '
Раскладывая угловые скорости со* и а>у па оси Охг и Оуг,
имеем (рис. 12.7)
Рис. 12.7. Расположение гиро-
скопических осей модели систе-
мы боковой стабилизации спут-
ника
“ Х>=шх COS Хг~<0У sin Хг •
Г
sin Хг 4- »‘r COS хг.
(12.44)
а также определяем состав-
ляющую абсолютной угло-
вой скорости кожуха гиро-
скопа
w“,==iox —A{J=wxcosXr—
г г
—«>у sin Хг — (12.45)
и получаем значения гиро-
скопических моментов:
7Wx=/Vosin Хг (<ох cos хг —«>у sin хг — Д₽);
(12.46)
Afy = /70cosXr(wx cos хг—wr sin хг —ДР)-
Согласно (12.3), определяем приближенные зависимости
угловых скоростей соЛ и «у от Aip, Ду и Q:
о>х= Ду —2Дф, Д’р -J- 8Ду. (12.47)
Подставляя значения переносных угловых скоростей (ох.
396
wf из (12.47) в (12.46), в первом приближении получаем
гироскопические моменты, непосредственно действующие
на спутник:
Mxj = ~-//Fo s'n 2Х1-ДТ — ^osir|2Zi’M*~
—7^0 sin 2угЙДф — Ho sin2xrS&Y — //osin угД?; (12.48)
( V} Alj-J ----^-/70sin 2xrA'j>-|-//0cos2 хгду —
—sin 2хгаДу — /70 cos2 хг2Дф — /70cos /ГД₽-
По аналогии с моментом Мгу- значение момента Л4С,
действующего па кожух гироскопа, после подстановки
из (12.42) и (12.47) в первом приближении будет
= — Яо cos хгДф — cos /г2Ду — А/о sin хгДу +
-|-/Vosin (12.49)
Вокруг оси ОХг, кроме того, действуют моменты упругих
сил спиральной пружины /<0Др, демпфирования £0Др,
а также инерционный момент ЛцДр и момент /И"'прочих
внешних сил. Уравнение моментов, действующих на ко-
жух гироскопа вокруг осн Ох,, в форме Д’Аламбера при-
нимает вид
А4Л- = 0; А0Др° — /Уо cos хгМ> — Но cos у.г2ДV —
—/70sin yrAv4-^osin хг2Д’Ц-/70ЙДр-f-
+ /СоДр+П0Др4-Л1в;^О. (12.50)
Сумма моментов, развиваемых пружиной и демпфером,
действующих вокруг оси Ох,- сообщается кольцу 4 (см.
рис. 12.6), при этом знаки моментов К0АР и ДоДРь дей-
ствующих на спутник, противоположны их знакам в
(12.50). Согласно (12.50), сумма моментов У /И£", дей-
ствующих вокруг оси Охг на спутник при Л4”'С =0, равна
Л4^ = —/<0Др— £)ор=АоД[? —A/Ocos ХгАФ~
397
— HQ cos хг2Дт — Но sin хгДу -\-HQ sin хгЙДф Ц-Яойдр.
(12.51)
Раскладывая сумму моментов V ЛГЗ на оси ОХ ц
OY согласно рис. 12.8, получаем
(2^)"=-2"<=i"zr <1М2)
Y rns/r
[ пичсскнх моментов
Подставляя значения суммы моментов ТИд" в (12.52),
имеем
(2 714Jr)V=АДР" cos Zr — "о cos2 ХгДФ —
— О,5Но sin 2/ГДу — Но cos2 у Г2Д у -{-
-|- Z/o sin 2уг2Дф-|-О,5//о cos уг2Др, (12.53)
а также (2 МуХ'— sin Хг + ^о sin2 хгДт+
-j-O,5//osin 2/1Дф-|-0,5//()s*n 2фг2Ду — Но 51п2угЙДф—
— Ни sin хг2Др. (12.54)
Складывая суммы моментов (2^-^)' и (2 * ДС^”
ствующих на спутник вокруг оси ОХ, получаем
2 м*=(2 ^4+(2 ^)’=v₽e cos Xr -
— /70Дф — А/02Ду — /70 sin угД р -j- //0 cos хг9Д₽- (12.55)
Складывая суммы гироскопических моментов f2
и (2 ^Иг)", действующих на спутник вокруг оси ОК
имеем
398
V My = (2 Mr)' + (2 м)"= -А0Д?а Sin *r ф-
I -|~Л70Ду — А/СЙД'Ь — 7/0 cos Хгй₽ — s’n Х.г®лР- (12.56)
Подставляя моменты (12.55), (12.56) и (12.6), дей-
ствующие вокруг связанных осей ОХ и ОУ спутника в
(12.5) движения спутника, в операторной форме записи
имеем
{Лх$2 4" 4~ 4 (7Z— J r) S2} ду+ [//о — (J x~^J y—Лг)®1 X
X дДф + но (sin -y rs — cos х,.й) Д8=
{Jys- 4- [H0Q+(Л-Л) а2]} д* - I^o - (Jx 4- Jy -
) — Jz)S]sAy-|-/yo(cosxrs-|-sin yrS) AP=AfFC. (12.57)
В (12.55) и (12.56) малыми инерционными моментами
A0APasinx, и A0APacosxr пренебрегаем.
Уравнение (12.50) движения гироскопа вокруг оси
Охг перепишем в операторной форме; малым инерцион-
ным моментом ЛпДр“ в (12.50) также пренебрегаем и по-
лучаем
[Z?os+(/У02 4-^о>1 д?~ Ио <cos Хг$ — sin Хг2) Д’? —
—/70(sin '/rs-|-cosy,.S) Ду= — 7И5Л (12.58)
Пренебрежение инерционным моментом А0Аря при-
водит к потере нутационных колебаний гироскопа в
(12.57), (12.58).
Дифференциальные уравнения (12.57) и (12.58) бо-
кового движения спутника, стабилизируемого гравита-
циопио-гироскопической системой, позволяют определить
реакцию системы на моменты 7И5?С и Мус, действую-
щие на спутник вокруг осей ОХ и ОУ, а также на мо
менты 7И”'е, действующие вокруг оси Охг прецессии
гироскопа. Исключая из (12.57) и (12.58) углы Дф и Ар,
получаем характеристическое уравнение пятой степени:
»о1154-«1Р-44-й2!а34-«з1а24-«4!14- &s=0. (12.59)
Значения коэффициентов характеристического урав-
нения (12.59), представляющие сложные алгебраические
выражения, здесь не приводятся. Анализ уравнения
(12.59) показывает, что система спутник —гиростабили-
затор при отключении пружин 7, 10 и // (Ао=О) нахо-
399
дится на границе устойчивости (определитель систему
(aia2—поа3)Х(п3а4—ЯгЯб) —(«1^4—«о«5)2=О). При этом
пружины 10 и 11 необходимы в системе гравитационно-
гироскопической стабилизации (см. рис. 12.1)" для обес-
печения устойчивости движения спутника при любом
угле Хг, определяющем расположение гироскопов в плос-
кости OXY симметрии спутника. Исследования движе-
ния, методика расчета и выбора параметров системы
спутник — гиростабилизатор сложны и в настоящем
учебнике не приводятся. Здесь для выяснения принципи-
альных особенностей гироскопической стабилизации бо-
кового движения спутника двумя поплавковыми гиро-
скопами в (12.57) и (12.58) влиянием моментов гравита-
ционных и центробежных сил пренебрегаем, полагая
осевые моменты инерции спутника одинаковыми (7Л=
=JY=] z=J), а также угол х^—45°. Тогда, согласно
(12.57) и (12.58), при М"х—Мус получаем
/52Ду4-^02Ду + Я0хДф4-/70 (s—2) др=О,
Л>2Дф + Л7сЙДф-/70sAy+/70 (s-}-2) Др=О, (12.60)
DsAp+(/Уй2 + /Q др - /70 (s - 2) Д !> -
-/7о-^-($+2)Д?=О.
Коэффициенты характеристического уравнения (12.59)
для системы (12.60) принимают вид
a0=J'2D,
-\-hopq+^kd,
(jQ2+[l+2^-] K^=H^+
+ //^<0+2/70./еК();
a^K^HlQ2.
(12.61)
}
400
Пользуясь известными критериями устойчивости и каче-
ства систем автоматического регулирования и распола-
гая коэффициентами (12.61) характеристического урав-
нения (12.59) в первом приближении, можно выбрать по
возможности оптимальные параметры рассматриваемой
системы стабилизации бокового движения спутника.
Например, непосредственно -из (12.61) следует, что
устойчивость модели (спутника) при боковом движении
так же, как и в продольном, обеспечивается при £>>0 и
Д0>0. Следовательно, поплавковый гироскоп, взвешен-
ный в вязкой жидкости со спиральной пружиной 7 (см.
рис. 12.6) или 10 и 11 (см. рис. 12.1), создающей демп-
фирующие и позиционные моменты вокруг оси Охг его
прецессии, необходим для обеспечения устойчивости бо-
кового движения спутника (модели), придания свойств
избирательности системе, а также для слежения попе-
речной оси OZ спутника за направлением вектора Q
орбитальной скорости вращения спутника.
Из (12.61) также следует, что боковое движение
спутника устойчиво, если /?о>О и й>0, //о<О и Q<0,
так как при этом направления векторов По и Q пример-
но совпадают.
При относительно малом коэффициенте D демпфиро-
вания частоты затухающих колебаний системы близки
к частотам незатухающих ее колебаний. Для определе-
ния частот собственных колебаний системы стабилиза-
ции бокового движения спутника воспользуемся (12.59)
и (12.61), где полагаем 0=0. При этом в (12.61) коэф-
фициенты а0—а2—а4=0 и характеристическое уравне-
ние (12.59) принимает вид
[л4+(а3/а1)(х2+я3/я1 = 0. (12.62)
Если коэффициенты аь аз, аъ удовлетворяют условию
Д=4«1а5/«з < 1, (12.63)
то приближенные значения корней цнг и ц34 биквадрат-
ного уравнения (12.62) будут
Н2— + J Нал— ± / аз!а\- (12.64)
Подставляя значения коэффициентов а3, «5 из (12.61)
в (12.63), получаем
Д
4//<о22(1 4- ,, + „г Ко)
1.
(12.65)
401
Из (12.65) непосредственно следует, что условие Д<1
выполняется при относительно малом значении жестко-
сти Л'о спиральной пружины 7 (см. рис. 12.6) или пру-
жин 10 и II (см. рис. 12.1). При относительно малом Ло
и H0>JQ значения коэффициентов «t и а3 и условие
(12.65) в первом приближении принимают вид
a, Hlj (14- а3 s (12.66)
д 4/<о(1 +za/wo) < !
/22
(12.67)
Подставляя приближенные значения коэффициентов аь
а3, «3 в (12.64), имеем
Н,2= ± J VKJJ, Нз,4~ ± /2 Г1/(1 + /2/Но). (12.68)
Приближенному значению корня соответствует
частота упругих колебаний спутника п'ц—VKJJ вокруг
оси Охг (см. рис. 12.6 и 12.9), происходящих относитель-
но гироскопа 5, главная ось OzT вращения которого со-
храняет неизменное направление в инерциальном про-
странстве. При поворотах спутника вокруг оси Охг
взаимодействие между спутником и гироскопом осуще-
ствляется упругими моментами, развиваемыми спираль-
ной пружиной 7 (см. рис. 12.6), и моментами, создавае-
мыми вязкой жидкостью, заполняющей зазор между по-
плавком и корпусом гироскопа. Спиральная пружина 7
обеспечивает необходимое взаимное расположение спут-
ника и гироскопа.
Приближенному значению корня ц314 при //03>Л2
соответствует частота вращения спутника на
орбите (ц3,4~7П) (см. кн. 1, гл. 21). Сделанные здесь
приближенные оценки частот собственных колебаний
бокового движения спутника справедливы лишь при
относительно малом значении жесткости Ко спиральной
пружины. С увеличением спиральных пружин 10 и 11
(см. рис. 12.1) или 7 (см. рис. 12.6) относительные скоро-
сти Др] и Д02 вращения гироскопов вокруг осей их пре-
цессии снижаются и диссипативные моменты
и Л4*« = /?Др2, развиваемые поплавками гироскопов,
уменьшаются. Увеличение жесткости 1(0 спиральных
пружин 10 и 11 приводит к связыванию гироскопов с
корпусом спутника и снижению эффективности затуха-
ния боковых, продольных собственных колебаний систе-
мы спутник — гиростабилизатор.
402
Динамические процессы в гравитационно-гироскопи-
ческой системе стабилизации характеризуются малыми
восстанавливающими моментами, удерживающими спут-
ник в орбитальной системе координат, и медленно зату-
хающими низкочастотными колебаниями cnyi пика вокру!
центра его масс. Такая система пригодна для стабили-
зации спутника при действии вокруг его центра масс
малых возмущающих моментов при низких требованиях
к точности угловой стабилизации и качеству его пере-
ходных процессов.
ГЛАВА 13
ГИРОСКОПИЧЕСКИЙ ПРИВОД С ДВУМЯ
СПАРЕННЫМИ ГИРОСКОПАМИ
Задача активной стабилизации в управления враща-
тельным движением ЛА в полной сфере может быть
решена с помощью трех одноосных двухроторпых гиро-
скопических стабилизаторов (гирорам) (см. кн. 1,
гл. 23). Схема пространственной системы гироскопиче-
ской стабилизации и управления, практически не огра-
ничивающей вращательного движения КЛА, содержит
шесть гироскопов.
Для тех же целей может быть использован гиропри-
вод (рис. 13.1, а), представляющий собой два спаренных
гироскопа, каждый из которых обладает тремя степеня-
ми свободы. Такой гиропривод обеспечивает стабилиза-
цию п управление движением КЛА вокруг двух осей
стабилизации (например, осей ОХ н OZ), стабилизация
же КЛА вокруг третьей связанной с ним осн OY может
быть осуществлена с помощью одноосного ГС. При этом
активная система пространственной стабилизации и
управления КЛА содержит только три гироскопа [ак-
тивный метод стабилизации и управления
КЛА п апр и мереодноосногоГС излагается
(см. кн. 1, гл. 23)] Здесь же рассмотрим задачу о стаби-
лизации КЛА при его вращении вокруг двух связанных
осей ОХ и OZ, осуществляемом с помощью гиропривода,
представляющего собой два трехстепенных гироскопа,
спаренных с помощью кардановых подвесов и ленточ-
ных передач.
Схема привода гиростабилизатора, состоящего из
двух спаренных между собой относительно параллель-
403
Рис. 13.1. Схема гироиривода, представляющего собой два спаренных гироскопа с тремя степенями свободы.
ных осей Ол’ и Ох'1, а также Оу\ и О*/}1 гироскопов,
включает в себя роторы и кожухи 1 и 23 (роторы гиро-
скопов находятся внутри кожухов и на рисунке не пока-
заны). Осн 5 и 14 кожухов / и 23 поворачиваются в опо-
рах наружных рам 9 и 18, которые имеют полуоси 11 и
21, наружные рамы 9 и 18 и вместе с полуосями И и 21
поворачиваются в подшипниках 10 и 22 относительно
корпуса КЛА. Специальные полуоси 2 и 24 кожухов ги-
роскопов с помощью вилок 3 и 28 связаны с рамками 4
и 12, поворачивающимися па полуосях 8 и /7 в подшип-
никах 5 и 16 относительно корпуса КЛА. Полуоси 8 и 17
рамок 4 и 12 связаны ленточной передачей 26 со шкива-
ми 25 и 27; полуоси 11 и 21 наружных рам 9 и 18 карда-
нова подвеса также связаны ленточной передачей 19 со
шкивами 13 и 20.
§ 13.1. Уравнения движения гироскопов
С наружной рамой 9 карданова подвеса связаны оси
Hix', 0{у\ и Oizl; с кожухом гироскопа — оси OjX1, Oil/1
O|Zr; с рамкой 4 — ось О|Х', а углы щ и определяют
направление оси OiZ* ротора гироскопа относительно
опорных осей OJ, О|У, 0{Z координат*, связанных с
КЛА (рис. 13.1, б).
Составим приближенные уравнения движения гиро
скопа 1 рис. 13,1 в в осях, связанных с наружной ра-
мой 9 карданова подвеса (в осях карданова подвеса).
Моментами инерции рамки 4 пренебрегаем Тогда в соот-
ветствии с обозначениями, принятыми в гл. 6 кн. 1, по-
лучаем:
2^1=0, -+ cos₽!«>“,+^)с +Л1уу?’=0;
5j —7/j cos i4*7/j sin Pi°>zi₽4-
4-Ai74-Aiy,;p=o. (i3.i)
При этом следует также учитывать момент М' [ =
о
== —Т/i sin р! х , действующий на КЛА, и его состав-
* Па рис. 13.1, б начало О трехгранника OXYZ (см. рис. 13,1, а)
совмещено с началом трехгранника OlxlyIzl.
405
ляющие Му— —Hi ski Pi«>“icos at и Mz— —Hi sin x
Xsinaj, также действующие на КЛА.
Моменты внешних сил Af®jc и управляющие мо-
о и\
менты М у"р, АР^действуют вокруг осей OtXo(Z) и Оу\{Х)
Моменты Ма\ и Л-f j'P раскладываем па оси Oix1 »
с о
OiZo- При этом момент
ЖЛ1=(ЛГ£+M^cosaj (13.2)
действует на кожух гироскопа, а момент
M'I=/'M"-r + My:^sifia1 (13.3)
'о \ о о J
через связи действует на КЛА.
Момент М. 1» действующий на КЛА, раскладываем
о
па оси ОУ и OZ:
Му=М'г1 cosa]= ]₽\ sinajcosaj,
° ° 7 (13.4)
М'г=М^ sin sin2a1.
Вокруг осн OZ КЛА также действует момент реакций
двигателя 7
+ (13.5)
и, следовательно,
Mz=A1z + ^z= - (Kj+ Afx;P) cos2“i- <13-6>
Опоры рамки 4 (рис. 13.1, а) считаем идеальными и
моментами сопротивления, возникающими в ее подшип-
никах, пренебрегаем. Уравнение движения гироскопа Г1
согласно (13.2) с учетом моментов внешних сил 2W“‘i и
о
управляющего момента МТ действующих непосред-
о
ственно вокруг оси OiXo рамки 4, будет (рис. 13.2,6)
406
Л'о ‘a w COS Pl a - i. Sin Pt nep ।
-------ш Л — " 1----<rt,,I + П1--Wz> I
cos at л cos ai *'t cos at о
+ 7Ил+Л?уД,р=0, (13.7)
О "О
где
= — р -]“<0^Р=‘°™Р cos ai — ыу ₽ sin at;
<i>^jp= — р -f- о>^р cos a>—a>zpai sin at -{- (i,rep sin ai -}-
-f-wyepai cosaj; <o“i=ai4-®x₽; i =<*1 + “л1’» (13.8)
"i i
а также
(ojF=wrp cos at 4-w™₽ sin aP (13.9)
r-r v а а нер
Подставляя значения угловых скоростей<ох1, <ог1
в (13.1) и (13.7), составляем уравнения моментов для
гироскопа Гь
Aft/1=0; —j\p-i—Jo^'x —7/j cos PtPi 4*
4-Л/1 cos Pj cosat«>“₽4-//1 cos Pi sin а^г P4-
+Af-+Af^=°;
У M „i=0; —-— pi — ДошгР+-Ло tg Ufo/Pat —
о cos ai
- Aj tg ajio'r p - ЛИ'Ч - at -
cos a!
_Я1 sin Pi«r p+A/1 tgai sin р^/Ч
cos ai
4-aCc+ag₽=:0, (13.10)
о о
а также получаем моменты реакций двигателя 15, дейст-
вующие на КЛА:
VM1=-Ai;r-Ai7,
AuU "1 "J
и составляющие гироскопического момента и момен-
тов (13.4) и (13.6);
407
2Afr = —//i sin p. cos 4- M"'ic sin ax x
x xo
X cos сц -J- Mv'iP sin ctj cos сц;
о
2Mz= —Hi sin pi sin dfo"] — 7U^iccos2di —
о
— TW4‘pcos2d1.
о
Из (13.10) и (13.11), принимая иное, чем для гиро-
скопа Г1, направление собственного кинетического мо-
мента Н2 и действие кинематических связей гироприво-
да (передаточное число ленточных передач t=—1), оп-
ределяемых соотношениями Я2 =—lit, а2=—du р2=
=—рь получаем уравнения моментов, развиваемых ги-
роскопом Г2:
2 =0; У£’а2 - Л1 «Т - Н2 cos р2р2 -
— Н2 cos d2 cos p2<»zp 4* H2 sin d2 cos р2«уе p 4*
+ «+«=0; y^tn=0;
-----— P2—Ло* «>!гР -f- Ay'tg d2mz Pa2 4"
cos a2
4-Ao' tgd2^e₽4-A"a2o>r-H2^&- „
COS 02
+ /73£S±R<u-p+/72 sin ₽2(йГ_
COS 02
- h2 tg d2 sin P^r 4- 4-ж^=о.
с о
Моменты, развиваемые гироскопом Г2, приводим к
осям х’ и i/о, для чего умножим левые части (13.12) на
— 1 и сложим их с левыми частями (13.10) в предполо-
жении, что
Л=Л'=Л-> Aq=Ao =А0, | Hi | = | H2 | = | H | ;
| d! | = | d2 | = I a 1 ; | p! | = | рг | = | p | , (13.13)
(13.11)
(13.12)
а также, полагая /И^"р=/И’'ц=О, получим уравнения
моментов, развиваемых гироскопами Г[ и Г2 и действую-
ще
щих вокруг осей Охо и О#’ гироскопа П:
2/И1 и=0; — 2J0u +2AZ cos a cos MrP+M"'i +
+Л^₽-Л1^=0; 2^’iBl,=0;
2 -^-p-2AtgawrP-2A<.>yepa-2// w3F₽-U
cos a cos a
+2/7 tga sin ^F+^-TM^, +7И^=0. (13.13а)
0 о 0
Моменты (13.13a) действуют вокруг осей гироскопа
и его рамки 4. При приведении моментов, развиваемых
гироскопом Г2, к осям гироскопа Г; инерционные мо-
менты
—/“«I?, — //2cosP2₽2 и /Z2sin a3cosp2wrp» (13.14)
действующие вокруг оси О//", а также инерционные мо-
менты
-Vga^r; (13.15)
— Z72a2 cos< ₽2/cos а2 и /72 sin р2<+4’ , действующие вокруг
оси Ох!’ при условии (13.13) уравновешиваются соответ-
ствующими инерционными моментами гироскопа Г( При
этом в ленточных передачах возникают моменты реак-
ций связей, действующие вокруг осей КЛА. Согласно
рис. 13.1,6, моменты и 7И н можно заменить пара-
fl
ми Fir и F2r, образуемыми силами Ft и Г2, растягиваю-
щими ленту, натянутую на шкивы 27 и 25. Силы реак-
ций /?| и Т?2 в опорах осей рамки 4 (гироскопа и 25
(гироскопа Г2) при условии (13.13) образуют пару
М=2/?1Г=-2Г1г=-2Л1х1.. (13.16)
Согласно (13.13), (13.14) и (13.15), F. = F2, 7?t=/?2.
При J?Afx=2/?1r== —2F1r= —2714^ получаем мо-
менты, действующие вокруг осей OX, OZ КЛА:
£ТИ£= -2M'yi== —2J0o»xP —2//cosjip +
+2/7 sin a cos р«Г+27И^; ^z = -
= - 2A'^z₽ - 2Л tg a<+epa - 2H a + 2MBJ. (13.17)
u cos a о
409
Обращаясь к формулам (13.11), также определяю-
щим моменты, сообщаемые КЛА гироскопом Гь опреде-
ляем по аналогии с (13.11) моменты, сообщаемые КЛА
гироскопом Г2, и приводя их к осям OX, OY и OZ при
условии (13.13), получаем:
У Alk'H= -7И^-«-Жр;
My 11 = — 2/7 sin p cos a<u“i -f- M^i sin a cos a —
— АГ'ц sin a cos a 4- APT sin a cos a =
о о
= — 2/7 sin p cos2 aa>zP -j- 2/7 sin p sin a cos си»гер-|-
-|~ APf sin a cos a — sin a Cos a 4“ Al jP sin a cos a;
о о о
У M'z11 = - /M"J cos2 a - Al cos2 a - ATT cos2 a.
о о 0
(13.18)
Согласно (13.11), (13.13а), (13.14), (13.15), (13.17),
(13.18) при Af“jc =АГ"ц и Af“j==Af“n, окончательно на-
“o yi о о
ходим выражения развиваемых гироприводом действую-
щих на КЛА моментов в следующем виде:
У " = -2/7 cos рр4-2/7. sin a cos р4ер-
- 27о;т - А1^р; 2 а4 11 = - 2/7 sin Р cos2 ашГ+
Ц-2/7 sin р sin a cos aco'y ₽-j- APT sin a cos a;
о
SM 'z 11 = - 2/7 -a _ 2 Аоа>гp -
cos a
— 2A0 tg a«>zPa — Af^p cos2a. (13.19)
§ 13.2. Уравнения движения системы
КЛА—гиропривод
Приближенные дифференциальные уравнения (13 13)
и (13.19) гиропривода позволяют сформировать каналы
410
управления КЛА вокруг осей ОХ и OZ и исследовать
особенности автоматического управления и стабилизации
КЛА. Из (13.19) видно, что управляющие гироскопиче-
ские моменты Afxyn₽=—2А/р cos р и 7И£у|“’=—2//acos р/
cos а действуют вокруг осей ОХ и OZ КЛА соответствен-
но. При составлении дифференциальных уравнений дви-
жения системы КЛА-—гиропрнвод в первом приближе-
нии полагаем М”? = — Daa; ЛГ''С=-ОрРг Коэффициенты
О о
Da., Du должны быть определены с учетом влияния цепи
обратной связи, реализуемой с помощью тахогенерато-
ров (см. кн 1, гл. 23). При малых углах Ду, Aft, Дф по-
ворота КЛА считаем, что «т^Д'!», ю'^’^ьДй-
Добавляя к моментам (13.19) инерционные моменты
—УдДу, —J'z^\ развиваемые КЛА, и моменты внешних
сил М"х, действующие на КЛА, пренебрегая отно-
сительно малыми инерционными моментами
2/7 sin a cosР«™р; 2А0tgau>yC|',
2А0 tg txo>'zpa 2Aocu™pa; 2H tg asm p«>zP,
в дифференциальных уравнениях (13.13) и (13.19) (углы
и и р считаем ограниченными) в первом приближении
для системы КЛА — гиропривод получаем
-(Jx+2J0)AY-2/7cospP+/W^c-Aiy1^ =0;
V m =0; -(Л+2А0)д&-2#-^а +
cos а
4-Atr-Aq₽=0; 2^>=0;
— 2J0a4-2/7cosa созрд&+Aty£p—2A)ea q: Mi =0;
X1 M r=0; 22/7-5^-Ду+
-fo cos a cos a
4-Л1УТ'+2£>(ф ± /Ир =0, (13.20)
о
где J x, J'y, Jz — моменты инерции КЛА относитель-
но главных осей OX, OY,,OZ; + Ма и + /Ир—моменты
сил сухого трения.
411
Пренебрегая в первом и втором уравнениях управля-
ющими моментами /Иу"р и ЛР’"Р« малыми по сравнению
о *1
с управляющими гироскопическими моментами AlSr"1'—
= —'2Н cos₽9 п 7Vlzy"r'——277а-cosp/cos ci, а также пола-
гая ?=Р0Н-Д₽, а=и0-|-Да, 7И^ = №• =0, получаем при-
ближены ic уравнения движения системы КЛА —гиро-
привод для малых изменений Да и Ар углов а и р:
УлДу+2/7со5₽0Д₽=/ИГ;
2 др—2/7 Ду -4- 2Д3Д0= — /И V— /И"f;
COS «о COS Ио хо ло
JzA& + 2№^-Aa=2Wzc, (13.21)
cos а0
2А0Да - 2/7 cos а0 cos р0Д» + 2РвДи=7ИУ ,1‘р+7И";С,
"о *ч
где JJz=J z-\-'2J
Физическое объяснение причин отсутствия в диффе-
ренциальных уравнениях (13.21) гироскопических мо-
ментов, порождаемых переносными поворотами КЛА во-
круг осей ОХ п 07, аналогично объяснениям, данным в
гл. 7 кп. I при рассмотрении движения гирорамы Два
первых и два последних дифференциальных уравнений
(13.21) по своей структуре совпадают с приближенными
дифференциальными уравнениями (17.11) (см. кп. 1)
движения гирорамы.
Вместе с тем структура дифференциальных уравне-
ний (13.21) движения КЛА, управляемого гироприводом
со спаренными гироскопами с тремя степенями свободы,
для каждого из каналов стабилизации практически не
отличается от структуры [см. (23.19) кн I] дифферен-
циальных уравнений движения ГС, рассматриваемого
изолированно от двух других каналов стабилизации.
При пассивной гироскопической стабилизации КЛА в
дифференциальных уравнениях (13.21), полагая управ-
ляющие моменты /Иу,1'р=7Иу"р=0и исключая из первых
i п
двух уравнений координату Др, а из вторых — Да, полу-
чаем
Ay+-v- cos а0Ду-[—cos2p0Ay=
Ac A0Jx
412
^'xDt о , M"x
д7,+^дё + да=Л^+4У . (13.22)
/о /о/X •! № X -<Х
Статические погрешности системы при
Л1х=Л1(х=const и Mzc=Mz=const Ду=Ду=0 будут
Дуст=Л!хО3 cos а0/(2//2 со52р0); 1 (13.23)
Д »И=М ОД2№ cos2 Ро>- I
Если моменты сил вязкого трения £)рр=0 п £>tla=0,
то статические погрешности системы равны нутационным
броскам (см. § 6.3 кп. 1)
М°ХЛО
М’ст~ 2H2cos«?0 ’ [ (13 24)
л4'/о
д&ст=--------
“ 2/7* cos2 ₽о
При активной гироскопической стабилизации, по ана-
логии с (23.18) н рис. 23.1 кп. 1, полагая
Му?= -^лДу-^лДу; МуЧ1'=-Ех^-Ех^,
хо 1
получим
УхДу 4-2// cos ₽0Др=/Илс;
—др 4- др=
Dp cos «о
Ех , В v+2//cosPo/cos ao • х0
----Ду 4- •-------------------Ду -*---J
2Dp 2Dp 2D?
J,Д&4-2Н Да = Mxc-,
cos «о
Да 4- Да = —— Д Ь
D 2D
а а
E"z 4- 2/7 cos Pq cos Oq
2D
a
M’f
д&4-----
1 2D
(13.25)
Структура уравнений (13.24), (13.25) полностью со-
ответствует структуре уравнений (23.18) — (23.20) кн. 1,
413
и, следовательно, дальнейшее аналитическое исследова-
ние движения КЛА, управляемого гироприводом, может
быть выполнено по аналогии с одноосным активным ги-
ростабилизатором (см. кн. 1, гл. 23).
Укажем на преимущества и недостатки гнропривода,
представленного на рис. 13.1, по сравнению с «активной»
стабилизацией КЛА с помощью гироскопов с двумя сте-
пенями свободы. Гироскопический стабилизатор, пред-
ставляющий собой два спаренных гироскопа с тремя сте-
пенями свободы, так же как и два одноосных гиростаби-
лпзатора, обеспечивает стабилизацию и управление КЛА
вокруг двух осей стабилизации и обладает рассмотрен-
ным прежде (см. кн. 1, гл. 23) свойством «усиления» уп-
равляющих моментов.
Гиропривод обладает гем же преимуществом, что и
два одноосных гпростабплпзатора с двумя спаренными
гироскопами (гирорамы), практически заключающимся
в отсутствии связей между движениями КЛА вокруг
главных его осей (OX, OY, OZ), порождаемых гироско-
пическими моментами (см. кн. I, гл. 17). Вместе с тем
конструкция подвеса гнропривода с двумя спаренными
трехстепенными гироскопами представляется достаточно
сложной.
Общий метод формирования каналов активной си-
стемы гироскопической стабилизации и управления КЛА
с помощью двухгироскопиого привода с двумя спаренны-
ми гироскопами с гремя степенями свободы (см. рнс.
13.1) тот же, чю при формировании активной системы
одноосной гироскопической стабилизации и управления
КЛА (см. кн. 1, рис. 22.1) с использованием тахогенера-
тора в канале обратной связи гиропривода. В качестве
чувствительных элементов активной гироскопической си-
стемы стабилизации и управления для получения сиг-
налов, пропорциональных углам крена Ау и тангажа АО
[см. (13.24)], на борту КЛА устанавливают гироверти-
каль для определения угловых скоростей Ду(соА) и
АО(®л) —датчики угловых скоростей
ЗАКЛЮЧЕНИЕ
Во втором издании учебника «Гироскопические систе-
мы. Гироскопические приборы и системы» изложены
принципы построения гироскопических приборов и си-
стем ориентации подвижных объектов, даются теория и
методы их анализа, рассмотрены пути повышения точно-
сти гиросистем. Обращено внимание на широкое приме-
нение современных гироприводов и гироскопических при-
боров (поплавковых, оптических, динамически настраи-
ваемых гироскопов и др.) в системах ориентации, нави-
гации и управления летательными аппаратами.
Повышение точностных характеристик гпроприбора
осуществляется путем совершенствования его конструк-
ций и элементной базы, рационального выбора парамет-
ров, введением алгоритмической компенсации погрешно-
стей измерения прибора с учетом модели погрешности
гироскопа в заданных условиях эксплуатации. Анализ
погрешностей гироскопов, проведенный в данной книге,
может служить основой для определения модели погреш-
ностей гиросистемы в зависимости от вида подвижного
объекта и условий его эксплуатации. Определение моде-
ли погрешностей гироскопов, развитие аналитической ба-
зы для исследования гироприборов и систем с использо-
ванием ЭВМ может служить предметом самостоятельной
научно-исследовательской работы студентов. Материал
учебника, являясь основой изучения студентами гироско-
I пических приборов и систем, требует дальнейшего его со-
I вершепствования при изучении перспективных направле-
нии гироскопии, например, оптических, криогенных, элек-
тростатических, твердотельных, волновых гироскопов,
гироприводов, беснлатформенных систем ориентации
на базе сферических, динамически настраиваемых,
. лазерных гироскопов и др., применения мпкропроцессор-
I ной техники при создании приборов и систем.
Использование современных достижений в области
конструирования гироприборов, широкое внедрение вы-
. числительной и микропроцессорной техники обеспечива-
I ют снижение себестоимости гиросистем при улучшении
их технических характеристик.
415
СПИСОК ЛИТЕРАТУРЫ
1 Бесекерский В А., Попов Е. П. Теория автоматического регу.
лировання.—М Наука, 1975.
2. Боевкин В. И. и др. Ориентация искусственных спутников в
гравитационных и магнитных полях.—М.: Наука, 1976.
3. Браславский Д. А., Логунов С. С., Пельпор Д. С. Авиационные
приборы и автоматы.— М.: Машиностроение, 1978.
4. Бромберг П. В. Теория инерциальных систем навигации.— М.:
Наука, 1979.
5. Бромберг П. В., Пельпор Д. С. Авиационные гироскопические
вертикали. Труды НИСО.— М.: Изд-во БНТ ЦАГИ, 1948.
6. Брозгуль Л. И-, Смирнов Е. Л. Вибрационные гироскопы
//История механики гироскопических систем.— М.: Наука, 1975.
7. Булгаков Б. В. Прикладная теория гироскопов.— М.: ГИТТЛ,
1955.
8. Булгаков Б. В., Ройтенберг Я. //. К теории силовых гироско-
пических горнзонтов//Изв. АН СССР ОТН, 1948, № 3.
9. Булгаков Б. В., Тихменев С. С. Теория гпрогоризонта Сперри
с маятниковой воздушной коррекцией//Ученые записки МГУ. Меха-
ника, 1937, вып. 7.
10. Бычков С. И., Лукьянов Д. П., Бакаляр А. И. Лазерный ги-
роскоп.—М.: Советское радио, 1975.
II. Виноградов Г. М„ Родионов Е. М., Шабаев В. И. О дрейфе
ДНГ от остаточных напряжений в торсионах подвеса и его диагио-
стика//Изв. вузов, 1977, № 2.
12. Вопросы ракетной техники.— М.: Мир, 1974, № 2.
13. Воронков И. Н, Кутырев В. В., Ашимов И М. Гироскопиче-
ское ориентирование.—М.: Недра, 1980.
14. Журавлев В. Ф., Климов Д. М. Волновой твердотельный ги-
роскоп.—М.: Наука, 1985.
15. Ишлинский А. Ю. Механика гироскопических систем.—М.:
Изд-во АН СССР, 1963.
16. Ишлинский А. Ю. Теория гироскопов; Курс лекцпй//Изд-во
МГУ, 1974.
17. Ишлинский А. 10. Ориентация, гироскопы и инерциальная
навигация.— М.: Наука, 1976.
18. Колосов Ю. А., Ляховецкий Ю. Г., Рахтеенко Е. Р. Гироско-
пические системы. Проектирование гироскопических систем.— М.:
Высш, шк., 1977. Ч. II.
19. Коновалов С. Ф., Никитин Е. А., Селиванова Л. М Проекти-
рование гироскопических систем.—М.; Высшая школа, 1980. Ч. 3.
20. Кошляков В. И. Теории гироскопических компасов.— М.: На-
ука, 1972.
21. Красовский А. А , Поспелов Г. С. Основы автоматики и тех-
нической кибернетики.— М.-Л.г Госэнергоиздат, 1962.
22. Криксунов Л. 3., Усольцев И. Ф. Йнфракрасньк устройства
самонаведения управляемых снарядов.—М.: Сов. радио, 1963.
416
23. Кудревич Б. И. Теория и практика гироскопического компа-
са.— М.: Военмориздат, 1939. Т. IV.
24. Кузовков И. Т. Модальное управление и наблюдающие уст-
ройства— М.: Машиностроение, 1974.
25. Лурье Л. И. Аналитическая механика.—М.: Физматгиз, 1961.
26. Навигация, наведение и стабилизация в космосе/Под ред.
Дж. Э. Миллера.— М.: ^Машиностроение, 1970
27. Назаров Б. И., Хлебников Г. А. Гирбстабилнзаторы ракет.—
М.: Воениздат, 1975.
28. Неусыпин А. К. Гироскопические приводы.— М.: Машино-
строение, 1978.
29. Никитин Е. А., Балашова А. Л. Проектирование дифференци-
рующих и интегрирующих гироскопов и акселерометров.— М.: Маши-
ностроение, 1969.
30. Одинцов А. А. Теория и расчет гироскопических приборов.—
Киев: Вища школа, 1985.
31. Павловский М. А.. Збруцкий A. В. Динамика роторных виб-
рационных гироскопов.— Киев: Вища школа, 1984.
32. Пельпор Д. С. Курсовые гироскопические стабилизаторы.—
М.: Изд-во МВТУ им. Баумана, 1954.
33. Пельпор Д. С., Колосов Ю. Л., Рахтеенко Е. Р. Расчет и про-
ектирование гироскопических стабилизаторов.— М.: Машиностроение,
1977.
34. Пельпор Д. С. Прецизионная гировертикаль с интегральной
коррекцией//! 1зв. вузов, 1972, № 6.
35. Пельпор Д. С. Гироскопические системы. Ч. I — М.:
Высш, шк., 1971.
36. Пельпор Д. С. Гироскопические приборы и автопилоты.— М/
Машиностроение, 1964.
37. Гироскопические системы. Ч. П/Под ред. Д. С. Пельпора —
М.: Высшая школа, 1971.
38. Пельпор Д. С., Осокин 10. А., Рахтеенко Е. Р. Гироскопиче-
ские приборы систем ориентации и стабилизации.— М.: Машинострое-
ние, 1977.
39. Пельпор Д. С., Ягодкин В. В Гироскопические системы. Ч. 1:
Проектирование гироскопических систем.— М.: Высшая школа, 1977.
40. Пельпор Д. С. Гироскопические системы ориентации и ста-
билизации.— М.: Машиностроение, 1982.
41. Пельпор Д. С. Гироскопические системы. Теория гироскопов и
гиростабилизаторов.— М.: Высшая шкоча, 1986. Ки. 1.
42. Питман Дж.. Гудсон Р. Поведение гироскопических приборов
ври воздействии случайных внбраций//Проблсмы гироскопии.— М.:
Мир, 1967.
43. ИВУЗ Приборостроение. 1985, № II. Тематический выпуск.
44. Помыкаев И. И., Селезнев В. П„ Дмитроченко Л. А. Навига-
ционные приборы и системы.— М.: Машиностроение, 1983.
45. Развитие механики гироскопических и инерциальных систем.—
М.: Наука, 1973.
46. Раушенбах Б В.. Токарь Е. Н. Управление ориентацией кос-
мических аппаратов,—М.: Наука. 1974.
47. Репников А. В.. Сачков Г. П„ Черноморский А. И. Гироско-
пические системы.— М : Машиностроение, 1984.
48 Ринкин С. С. Статистический синтез гироскопических уст-
ройств.— Л.: Судостроение, 1970,
49. Ригли У.. Холистер У., Денхард У. Теория, проектирование
и испытания гироскопов.— М.: Мир, 1972.
417
50. Розенблатт К. М. Стабильный, легкозамепяемый, малог 1б<
ритный гироскоп для бескарлаиных систсм//Электроиика, 1970, № 11.
51. Ройтенберг Я. Н. Многогироскоппая вертикаль ГТПМ, 1946,
№ 10, пып. 1.
52. Ройтенберг Я- //. Гироскопы.— М.: Наука, 1975.
53. Тихменев С. С. О положении равновесия физического маятни-
ка, установленного на подвижном основании. Элементы точных при-
боров.— М.: Обороигиз, 1954.
54. Федоров Б. В., Шереметьев А. Г., Умников В. Н. Оптический
квантовый гироскоп.-—М.: Машиностроение, 1973.
55. Фролов В. С. Самолетовождение с помощью приборов инер-
циальной навигации.— М: Транспорт, 1975
56. Электропривод систем управления летательных аппаратов
/Под редакцией Б. И. Петрова.— М.: Машиностроение, 1973.
57. Фридлендер Г. А. Инерциальные системы навигации.— М.:
ГИ Физматлитература, 1961.
58. Липтон А. Выставка инерциальных систем на подвижном
основании. М.. 1971.
59. Лазарев Л. П. Инфракрасные и световые приборы самона-
ведения и наведения летательных аппаратов. М., 1976.
предметный указатель
Авиагоризонт 170
Акселерометр 5, 20, 248, 252,
258, 303, 346
j— интегрирующий 352, 364
— поплавковый маятниковый
348
Вираж 182
Гировертикаль 7, 170
— двухгнроскопная 190
— космического летательно! о
аппарата 195
— повышенной точности 191
— прецизионная 171
— силовая 189
—. уравнения прецессии 172,
197
—центральная 186
Гирогоризоитк ом пас 210
Гиродеклипометр 213
Гирокомпас 10, 169, 199
— двухроторный 207
-----пространственный 210
— магнитный 228, 248
—• — дистанционный 234
I .— -—С ИНДУКЦИОННЫМ чувств!!-
тельным элементом 232
— маятниковый 200, 212
I —наземный 212
—, погрешности— см. «Девиа-
ция»
Гирокурсовсртикаль 245, 247
— па ДНГ 245
I----. уравнения движения 264
Гироорбитант 238
—, плоскость чувствительности
239
•—, уравнения движения 241
Гиропласформа 345, 354
—, выставка 354
—,—'В азимуте гирокомпаси-
рованием 366
—,--------, погрешности 369
—,--------, увеличение точно-
сти 370
—, — с интегральной коррек-
цией 360
—, — с интегрально-позицион-
ной коррекцией 362
—, — с интегрирующими аксе-
лерометрами 364
—, — с пропорциональной кор-
рекцией 358
Гнрополукомпас 234
Гиропривод 17, 403
Гпросистема ориентации 244,
299
----бссплатформенная 13, 244,
314
-------.выставка 372
------ —, погрешности 330
—------с датчиками угловых
скоростей 316
------ — со свободными гироско-
пами 337
----и стабилизации КЛА 378
---------двухгнроскопная 383
----платформенная 244
-------—, выставка 354
----с поплавковыми интегри-
рующими гироскопами 299
-------- — — , уравнения дви-
жения 301
Гироскоп азимутально-свобод-
ный 216
— динамически настраиваемый
13, 147, 223, 245, 261, 284
-------одпокольцевой, модель
ССП 164
---------, настройка и балан-
сировка 165
---------.регулировка 167
---------—.уравнения движе-
ния 148
— интегрирующий 98
----,амплитудная в фазовая
частгп ные характеристики
103
— — поплавковый 99, 299, 383
----,собственна я скорость
прецессии 105
•---.уравнеция движения 102
— оптический 15, 119
----лазерный 120
-------, выходная характери-
стика 125
-------,конструкция I32
— -----.основное условие ге-
нерации 123
— — — .скорость дрейфа ну-
ля 130
----, пассивный интерферо-
метр 119
— поплавковый 383
— сферический 111
— твердотельный волновой 14,
114
419
-------, возбуждение 117
-------.диаграмма вибраций
116
— трехстепенной в кардаповом
подвесе 134
---------, погрешности кар-
данные 139
— -------, — начальной вы-
ставки 139
---------, — от переносной уг-
ловой скорости основания
137
---------, — от собственной
скорости прецессии 138
—--------, — от съема инфор-
мации 139
Гиросфера 207
Датчик угловой скорости 15,
64, 310, 348, 388
-------динамически настраи-
ваемый 168
—------, жесткость компенса-
ционного контура 70
-------, крутизна выходной ха-
рак теристики 72
----—лазерный 119
-------, масштабный коэффи
цпент 72
•------, ось измерительная 68
-------, ось чувствительности
68
— — —, погрешность 74
— — —, — аддитивная состав-
ляющая 90
-------,— динамическая от
нсжссткости конструкции 77
-------, — инструментальная
систематическая 90
— — —,------случайная 90
--------,— методическая от
инерциальных свойств гиро-
узла 85
— — —, — —• от перекрестной
угловой скорости 81
-------. —• — от эффекта нс-
коммутативпости конечных
поворотов 85
-------, принцип действия 66
-------поплавковый 383
----— с механической пружи-
ной 64, 72
----— с электрической пружи-
ной 64, 70, 213
----—, уравнения движения
68
420
-------, частота собственных
колебаний 71
-------,чувствительность 72
Движение спутника боковое
391
----продольное 383
— прямолинейное с постоянной
скоростью 178
----с продольным ускоренн-
ом 179
Девиация баллистическая 204
— интеркардипальная 205
— магнитная 11, 229
— от затухания 203
— поворотная 231
— скоростная 10, 204
— четвертная 240
Косинусы направляющие 322,
338
----матрицы 342
----при применении оптнчс
ской системы съема 340
Коррекция гировертикали ма-
ятниковая 171
-------смешанного типа 173
----постоянная 173
----пропорциональная 173
—।-----ограниченная 175
----смешанная 173
— гироскопа интегральная 49
----маятниковая 216
-------горизонтальная 216,
220
— —межрамочная 216, 221
— платформы интегральная
272, 278
Курс 199
Курсовая система 234
Либрация 379
Локсодромия 42
Маятник гироскопический 52
— —, скоростная погрешность
----, частота колебаний 37,
54, 58
—короткоиериодический 40
— математический 8
— иевозмущаемый 8, 34. 47
— физический 8, 20, 248, 255
— Шулера 37
Направление истинной вертика-
ли 5, 18, 256
Ориентация самолета простран-
ственная 249
Ортодромия 44, 178, 216
— .нормаль сферическая 250
Погрешность гировертикали
178, 197, 313
•---карданная 185
-----от вибрации основания
, 185
----от гироскопических мо-
ментов 188
----от маягинковостн 184
----скоростная 179
----статическая 177, 310
I—-----на вираже 182
-------при продольном уско-
рении 179
-----установившаяся при пря-
молинейном движении 178
—гироорбитанта от наклона
239
----от действия горизонталь-
ного корректора 240
-----от песфернчпости Земли
241
— динамически настраиваемо-
го гироскопа от гармониче-
ских угловых колебаний плат-
формы 162
-------— от диссипативных
моментов 163
---------от квадратурных воз-
мущающих моментов 158,
159, 161. 162
— — — — от неточной динами-
ческой настройки 163
--------—от осевой вибрации
ротора 157
---------от смещения центра
масс ротора 154
---------от статической не-
сбалансированности ротора
153
— указателя направления орто-
дромии 219
—--------инструментальная
222
---------карданная 224
---------кинематическая 222
---------'компенсации 221
---------от наклона осн на-
ружной рамы 223
---------при гармонических
колебаниях основания 226
-------— при движении с ус-
корением 225
---------способы устранения
227
Регрессия узлов 241
Система координат географи-
ческая опорная 19, 250, 301
----горизонтальная 28
----сопровождающая 250
— следящая платформы 281
Сфера следящая 207
Угол самолетный 318
Узел восходящий 241
Указатель направления орто-
дромии 11, 199, 216
Ускорение кажущееся 23
— центростремительное 255
Эллипсоид Красовского 20
ОГЛАВЛЕНИЕ
Предисловие................................................ 3
Введение................................................... 5
Часть 1. Приборы систем ориентации
Раздел 1. Физические маятники.............................. 18
Г лава I. Определение положения равновесия физического ма-
ятника ................................................... 19
§ 1.1. Проекции ускорения вершины опорного координат-
ного трехгранника на его ребра......................... 19
§ 1.2. Определение положения равновесия физического ма-
ятника при движении точки его опоры по земному
экватору............................................... 29
§ 1.3. Определение положения равновесия физического ма-
ятника при произвольном движении точки О его опо-
ры но земной сфере..................................... 38
§ 1 4 Модель невозмущаемого физического маятника . . 47
Глава 2. Движение гироскопического маятника в полете ... 51
§ 2.1. Уравнения движения гироскопического маятника 52
§ 2.2. Определение положения равновесия гироскопическо-
го маятника в полете . ................................ 55
Раздел 2. Гироскопические датчики первичной информации . . 62
Глава 3. Датчики углов и угловых скоростей................ 63
§ 3.1. Гироскопические измерители угловой скорости, по-
строенные на базе двухстепенного гироскопа ... 64
§ 3.2. Погрешности датчиков угловых скоростей........ 74
§ 3.3. Интегрирующие гироскопы......................... 98
§ 3.4. Датчики угловых скоростей, выполненные на базе
вибрационных гироскопов............................... 108
Глава 4. Оптические гироскопы............................ 119
§ 4.1. Пассивный интерферометр........................ 119
§ 4.2. Лазерный датчик угловой скорости............... 120
§ 4.3. Выходная характеристика лазерного датчика угло-
вой скорости.......................................... 125
§ 4.4. Конструкция лазерного датчика угловой скорости 132
Глава 5. Гироскопы с тремя степенями свободы............. 134
§ 5.1. Гироскопы в кардаповом подвесе................. 134
§ 5.2. Сферические гироскопы.......................... 141
§ 5.3. Динамически настраиваемые гироскопы............ 147
422
Раздел 3. Гироскопические приборы..............
Глава 6. Гироскопические вертикали ........
§ 6.1. Уравнения прецессии гировертикали .
§ 6.2. Гировертикали с ограниченной линейной коррекцией
§ 6.3. Центральные гировертикали................
§ 64. Гировертикали повышенной точности ' ’ ' '
§ 6.5. Гировертикали для космических летательных аппа-
ратов .......................................
Г лава 7. Курсовые гироскопические приборы..............
§ 7.1. Гирокомпасы..................................
§ 7.2. Указатели направления ортодромии.............
§ 7.3. Гиромагнитные компасы........................
§ 7.4. Единые курсовые системы......................
§ 7.5. Гяроорбитапты................................
169
170
172
175
186
191
195
199
200
216
228
234
238
Часть 2. Гироскопические системы
Раздел 4. Гироскопические системы ориентации.................... 244
Глава 8. Пространственные гироскопические системы ориента-
ции па динамически настраиваемых гироскопах . . . 245
§ 8.1. Гироскопическая курсовертикаль па динамически
настраиваемых гироскопах............................. 245
§ 8.2. Пространственная ориентация самолета . ... 249
§ 8.3. Уравнения движения системы ориентации .... 264
§ 8.4. Следящие системы платформы. 281
Глава 9. Гироскопическая система ориентации с поплавковы-
ми интегрирующими гироскопами............................ 299
Глава 10. Бссплатформенпыс системы ориентации................. 314
§ 10.1. Бесплатформсипые системы ориентации, основан-
ные па применении датчиков угловых скоростей 316
§ 10.2. Бесплатформеппые системы ориентации, основанные
иа применении свободных гироскопов.................... 337
Глава II. Начальное ориентирование (выставка) гироскопиче-
ских систем ориентации.................................. 345
§ 11.1. Прецизионные акселерометры, используемые в ка-
честве датчиков сигналов угловых отклонений . 346
§ 11.2. Начальное ориентирование гироскопических систем
платформенного типа ................................. 354
§ 11.3. Начальное ориентированно (выставка) бссплатфор-
менных систем ориентации (БСО)....................... 372
Раздел 5. Гироскопические системы ориентации н стабилиза-
ции космических летательных аппаратов..................... 378
Глава 12. Двухгироскоппая пространственная гравнтацнонио-
гироскопнчсская система ориентации и пассивной
стабилизации спутника в орбитальной системе ко-
ординат .................................................. 378
§ 12 1. Продольное движение спутника....................... 383
§ 12.2. Боковое движение спутника.......................... 394
423
Глава 13. Гироскопический привод с двумя спаренными гиро-
скопами .......................................... .... 403
§ 13.1. Уравнения движения гироскопов.................405
§ 13.2. Уравнения движения системы КЛА— гнропрнвод 410
Заключение.............................................. 415
Список литературы....................................... 416
Предметный указатель................................... 419
Учебное издание
Дмитрий Сергеевич Пелыюр,
Иван Александрович Михалев,
Владимир Александрович Бауман,
Валерий Александрович Матвеев,
Владимир Владимирович Ягодкни,
Сергей Феодосьевич Коновалов
ГИРОСКОПИЧЕСКИЕ СИСТЕМЫ
Гироскопические приборы
и системы
Зав. редакцией Н И. Хрусталева. Редактор И. А. Кузьмина. Мл. редактор
М. В. Никифорова. Художник А. А. Камаев. Худ. редактор В. И. Мешалкнн.
Технический редактор Е. И. Герасимова. Корректор Г. И. Кострнкова.
ИБ № 6771
Изд. № Стд—556. Сдано в набор 16.11.87. Полп. в печать 21.03.88. Т—08665.
Формат 84X108'/». Бум. тип № 2. Гарнитура литературная. Печать высокая.
Объем 22.26 усл. иеч, л. 22.26 усл. кр.-отг 21,71 уч.-изд л.
Тираж 6000 экз. Зак. No 1757. Цена I р. 20 к.
Издательство «Высшая школа», 101430, Москва, ГСП-4, Неглнниая ул..
Д. 29/14.
Московская типография № 8 Союзполиграфпрома при Государственном
комитете СССР по делам нздатетьетв, полиграфии и книжной торговли.
101898. Москва, Центр, Хохловский пер., 7.