












































































































































































































































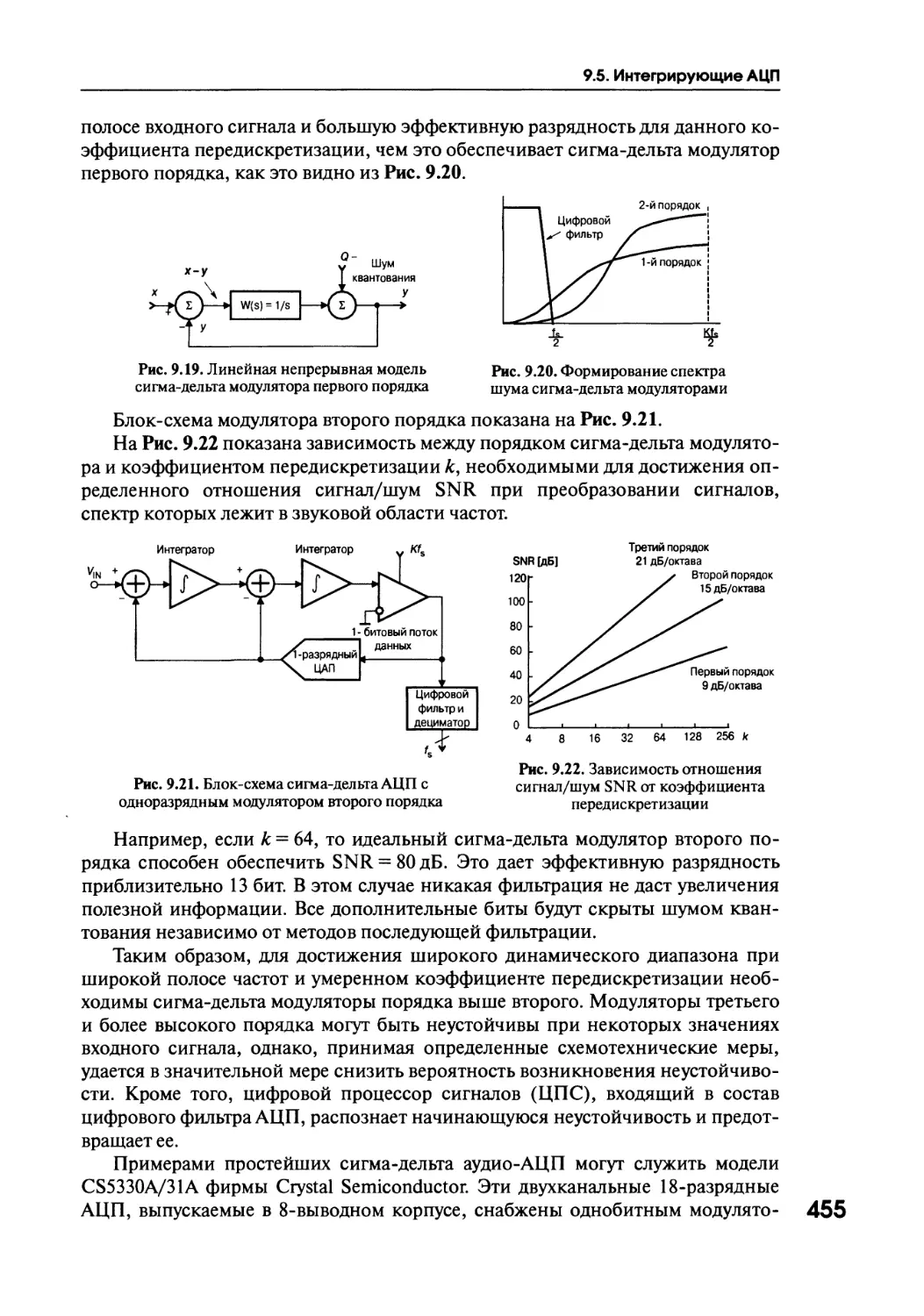

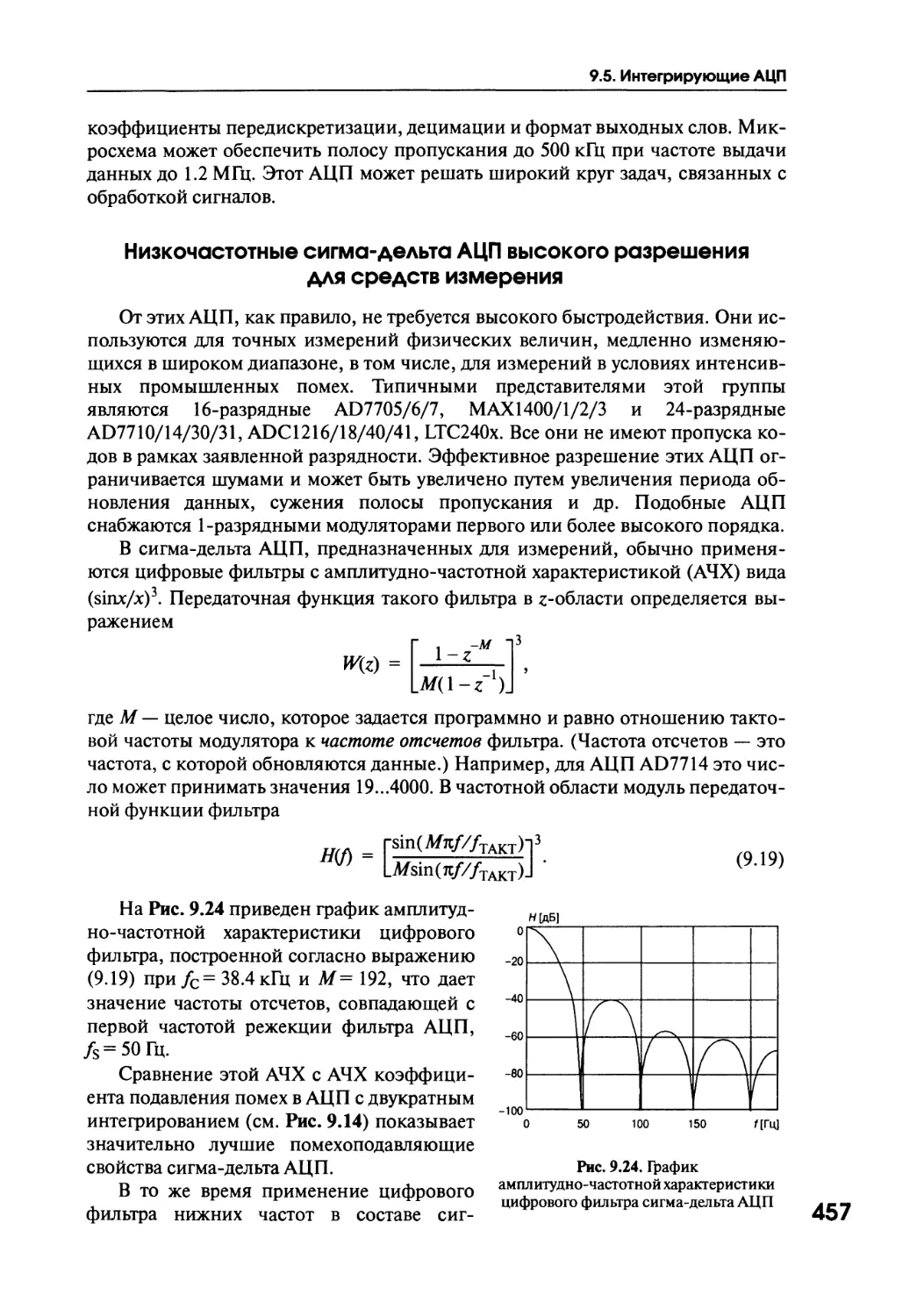








































Автор: Волович Г.И.
Теги: электротехника микрорадиоэлектронная аппаратура микроэлектроника электроника схемотехника
ISBN: 5-94120-074-9
Год: 2005


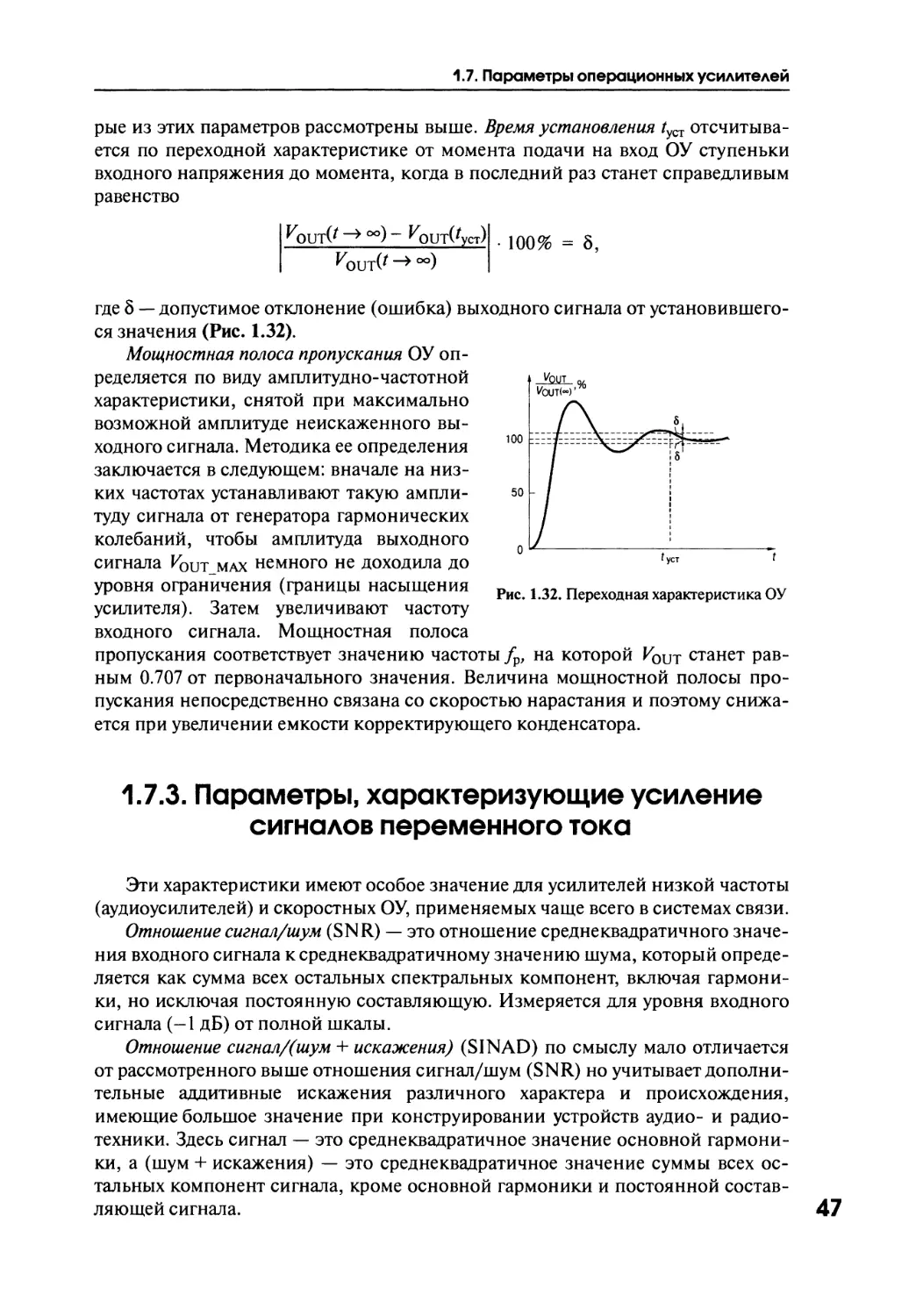
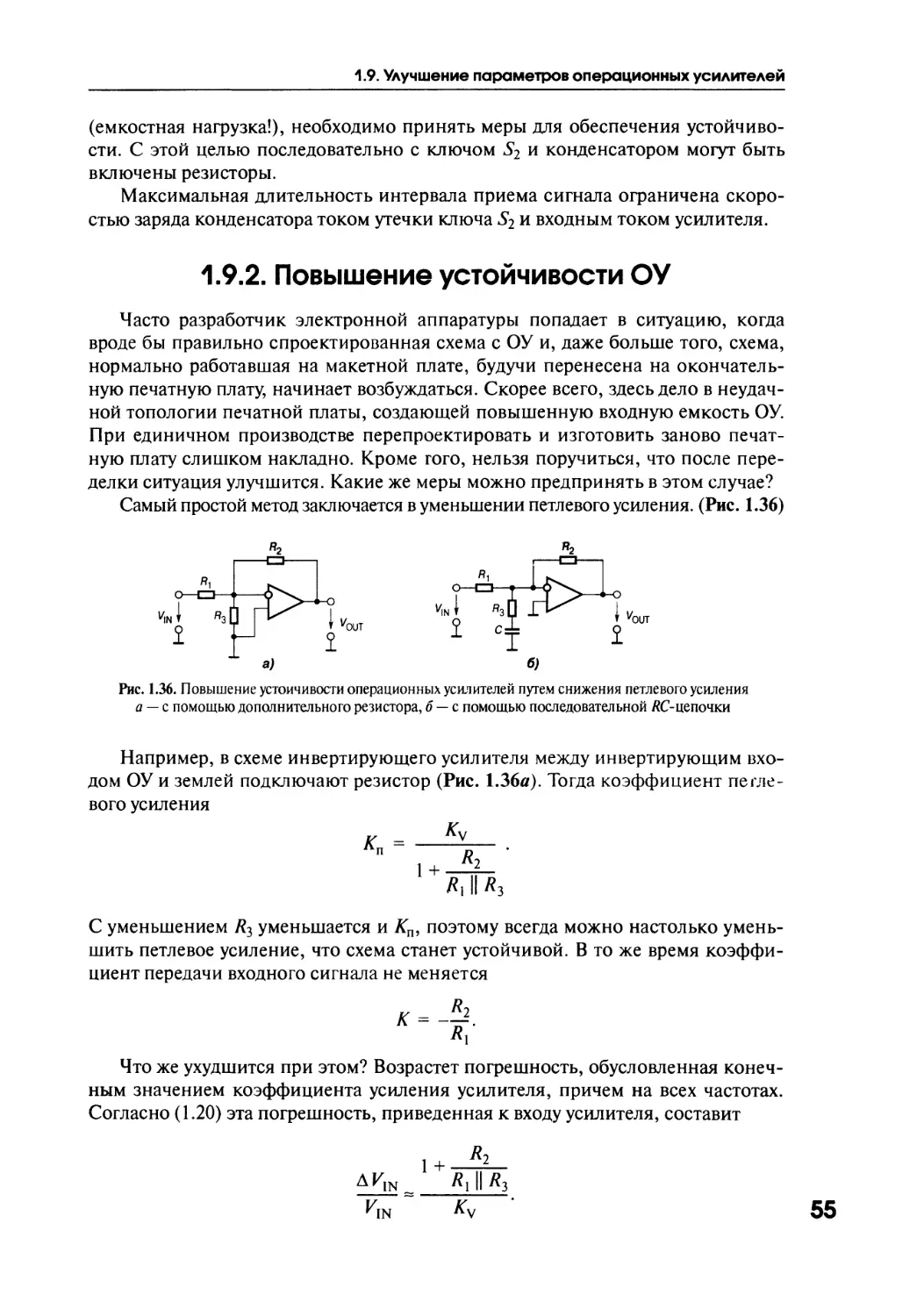
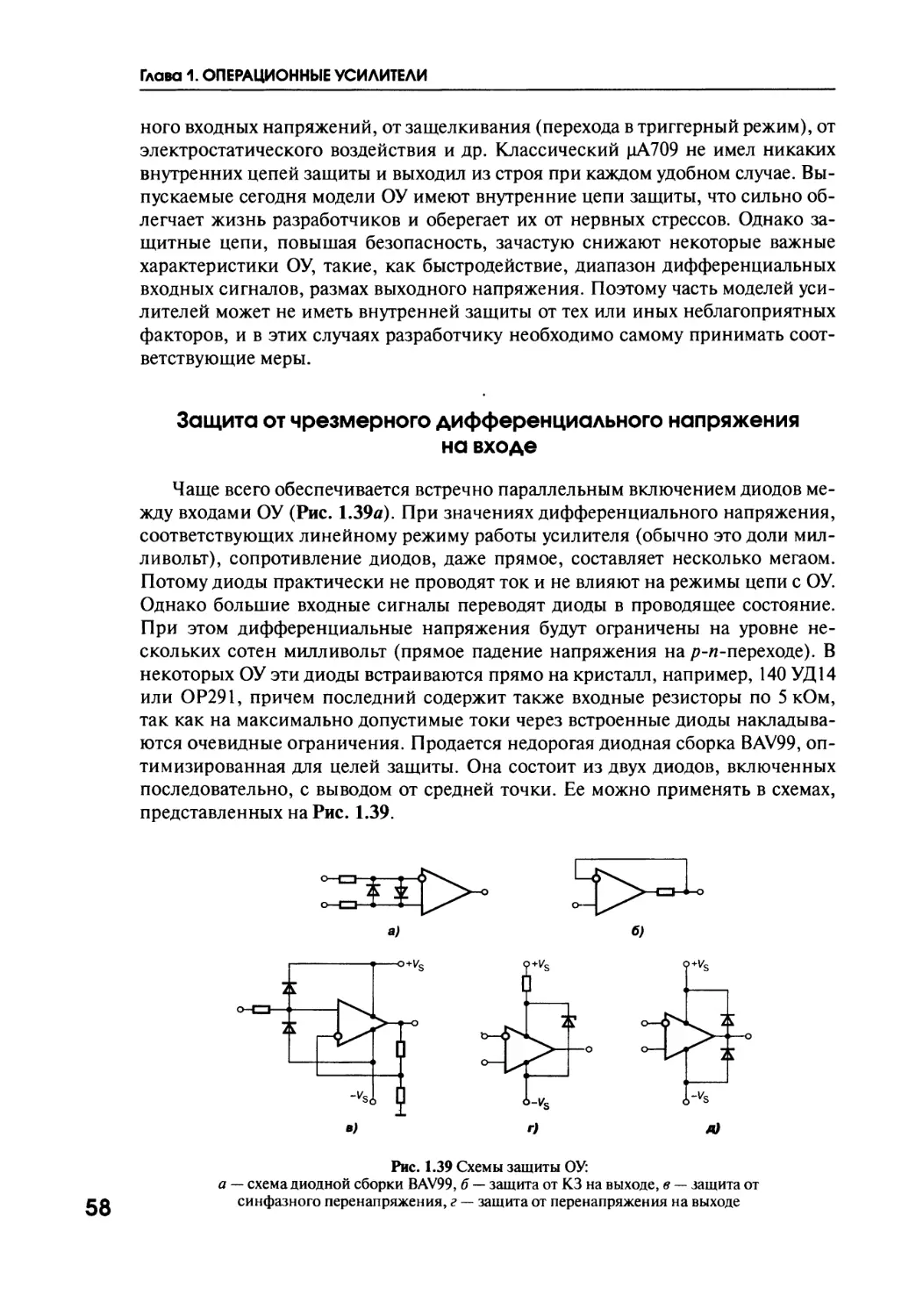
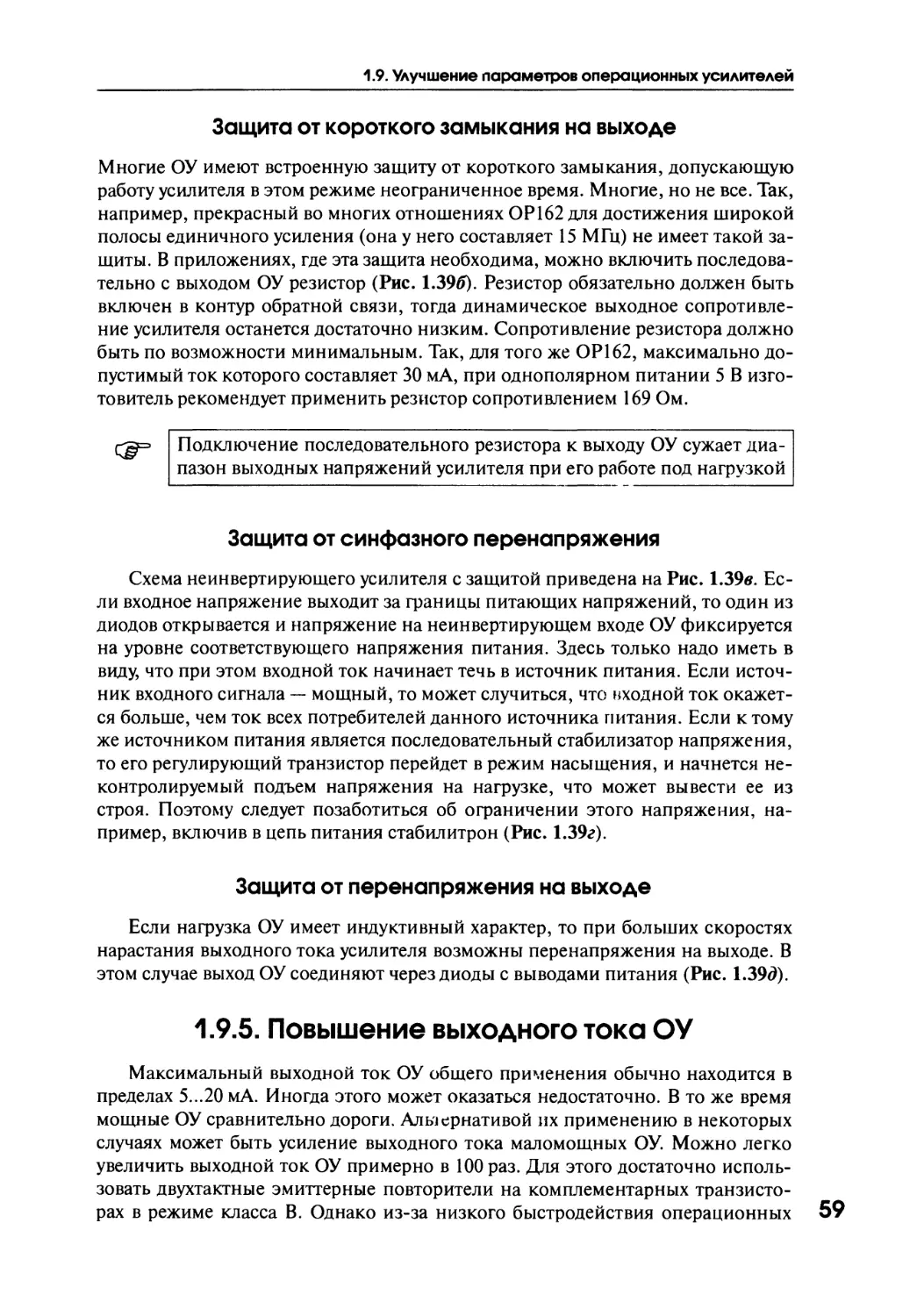
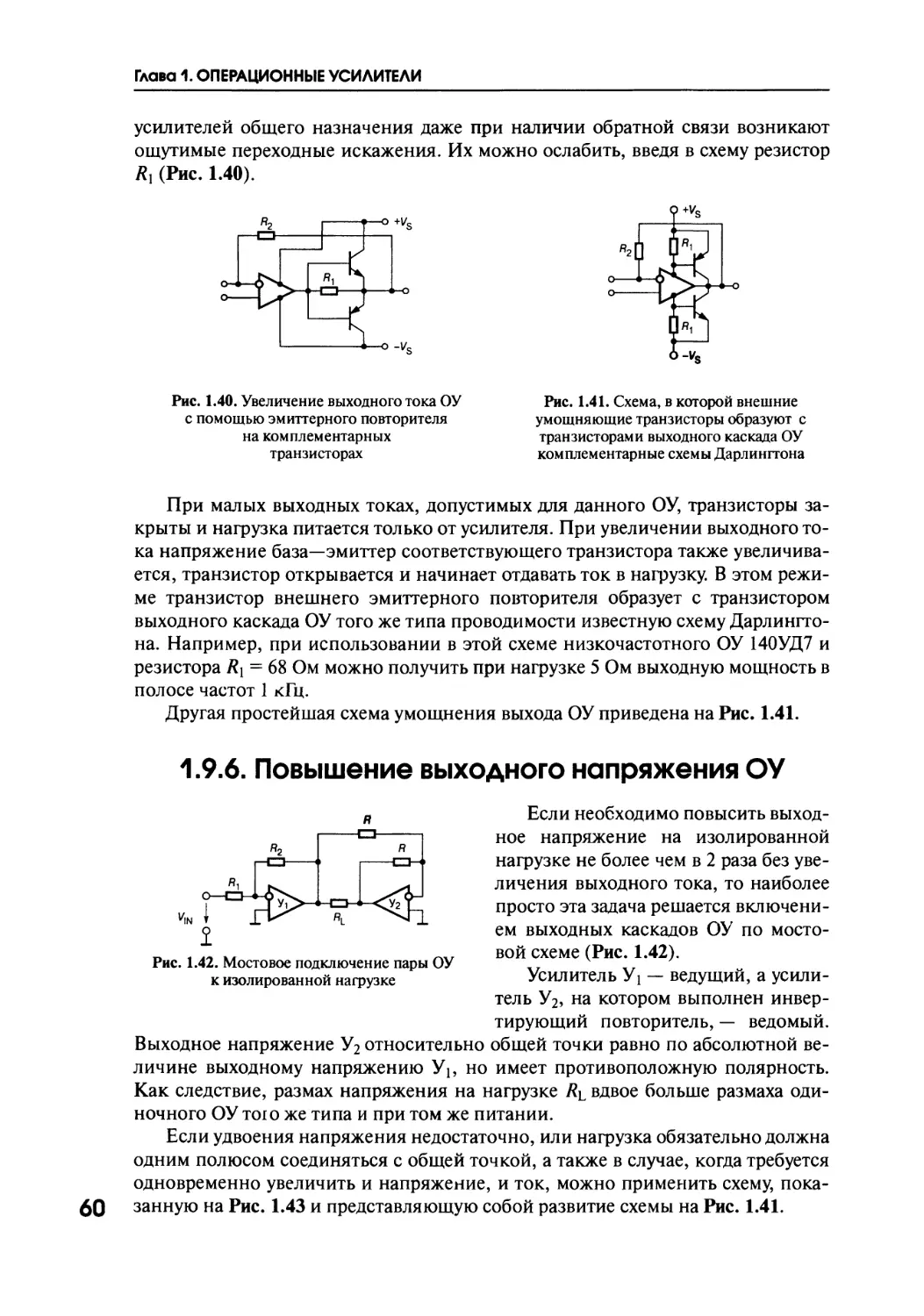
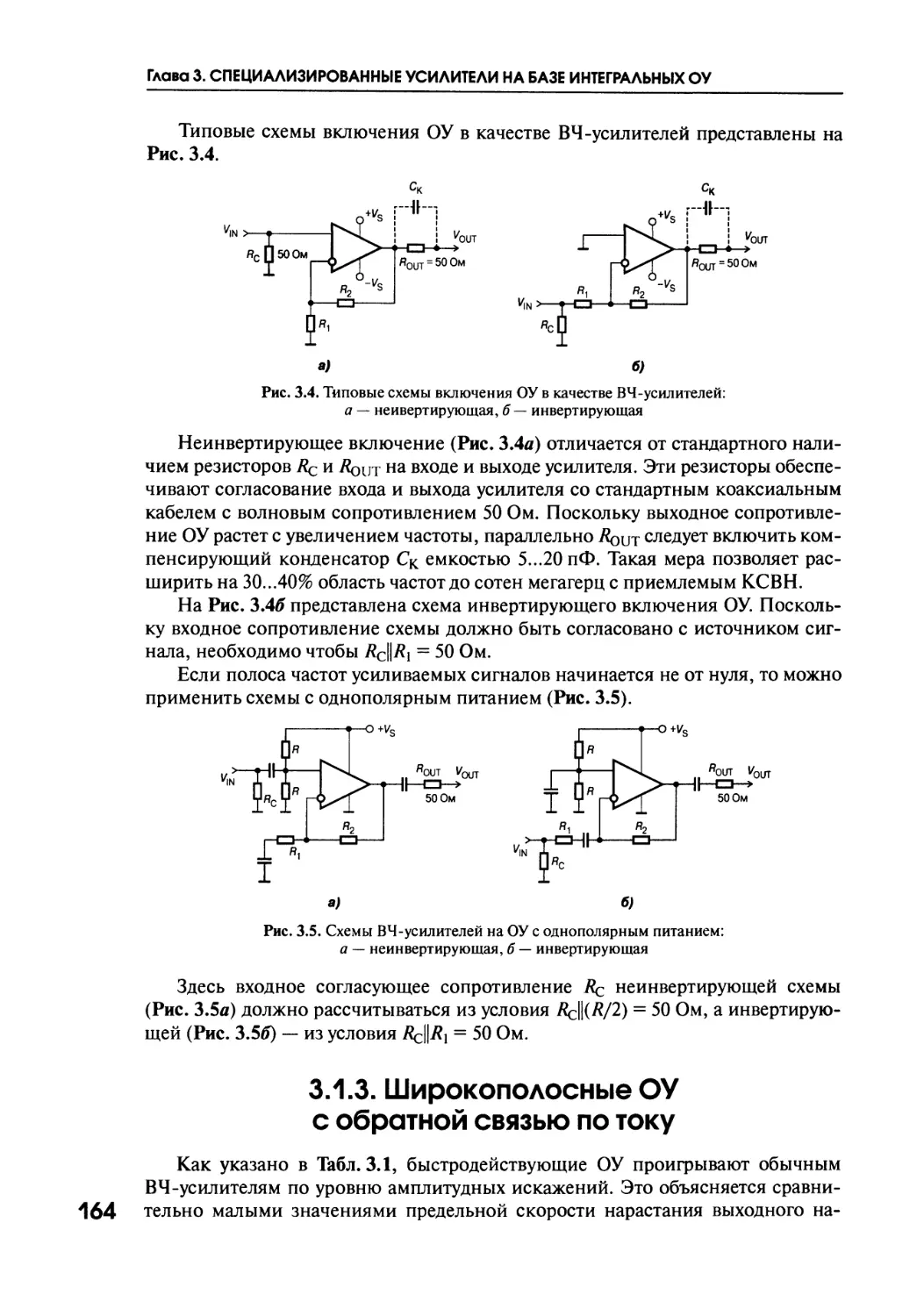
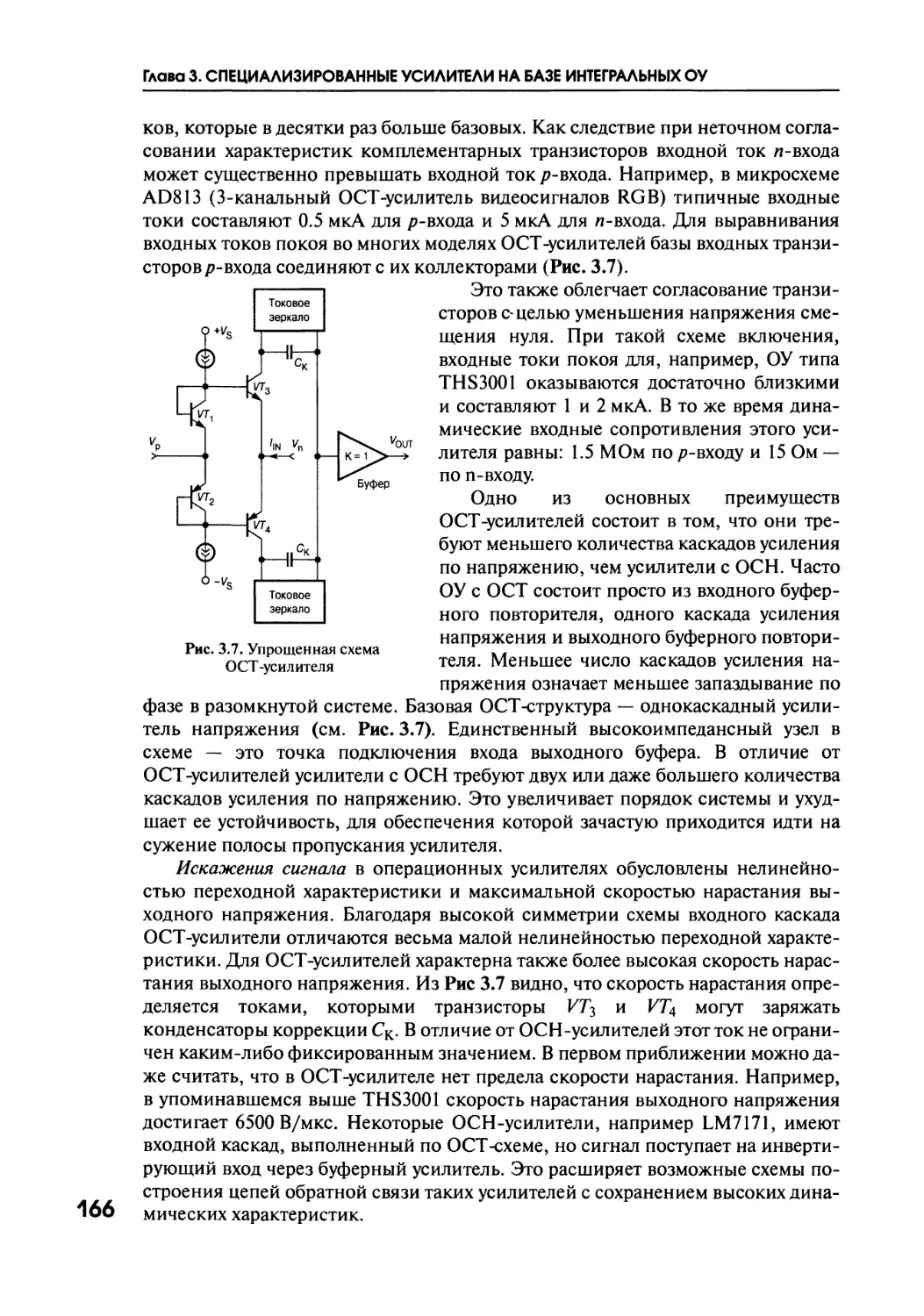
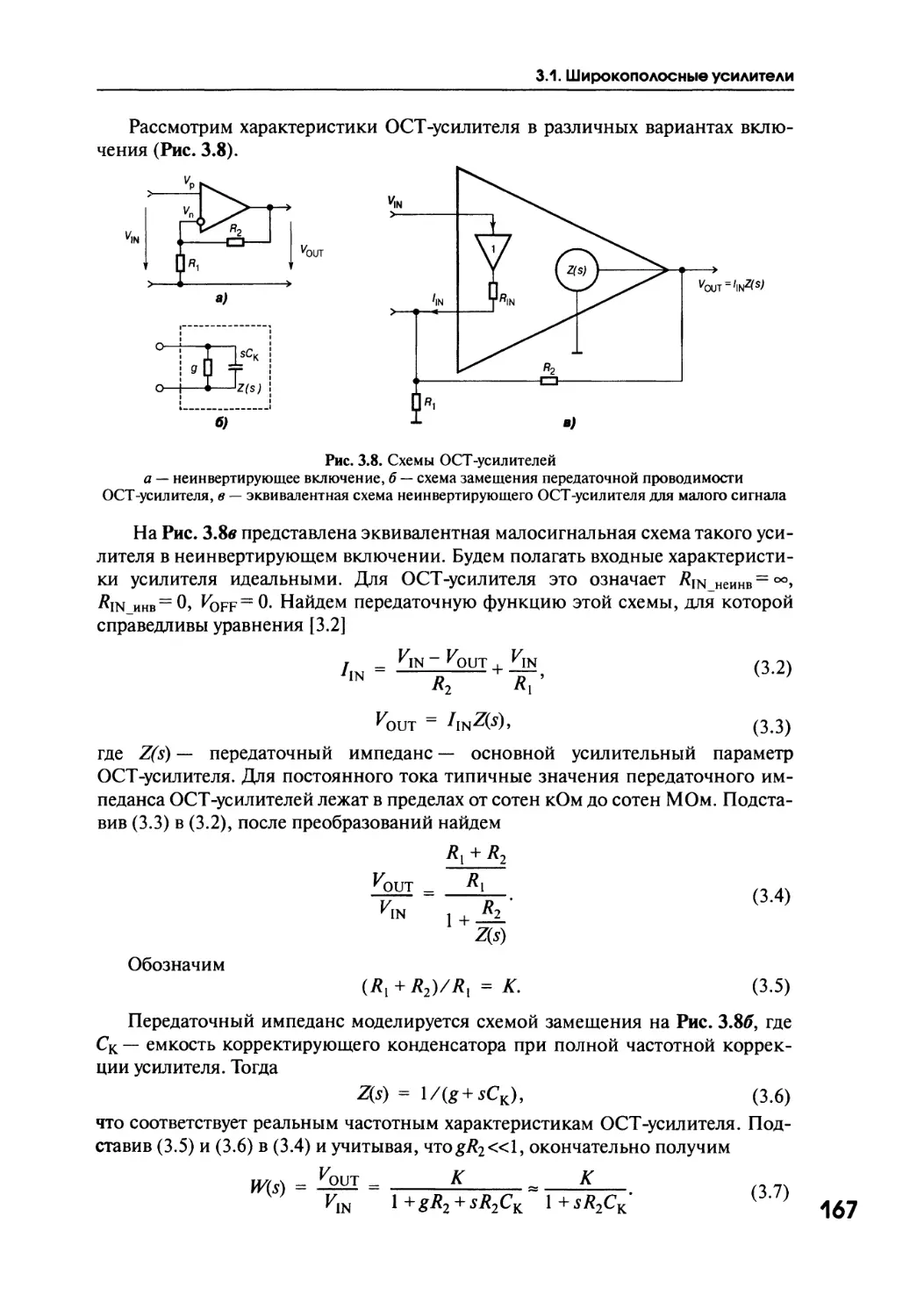
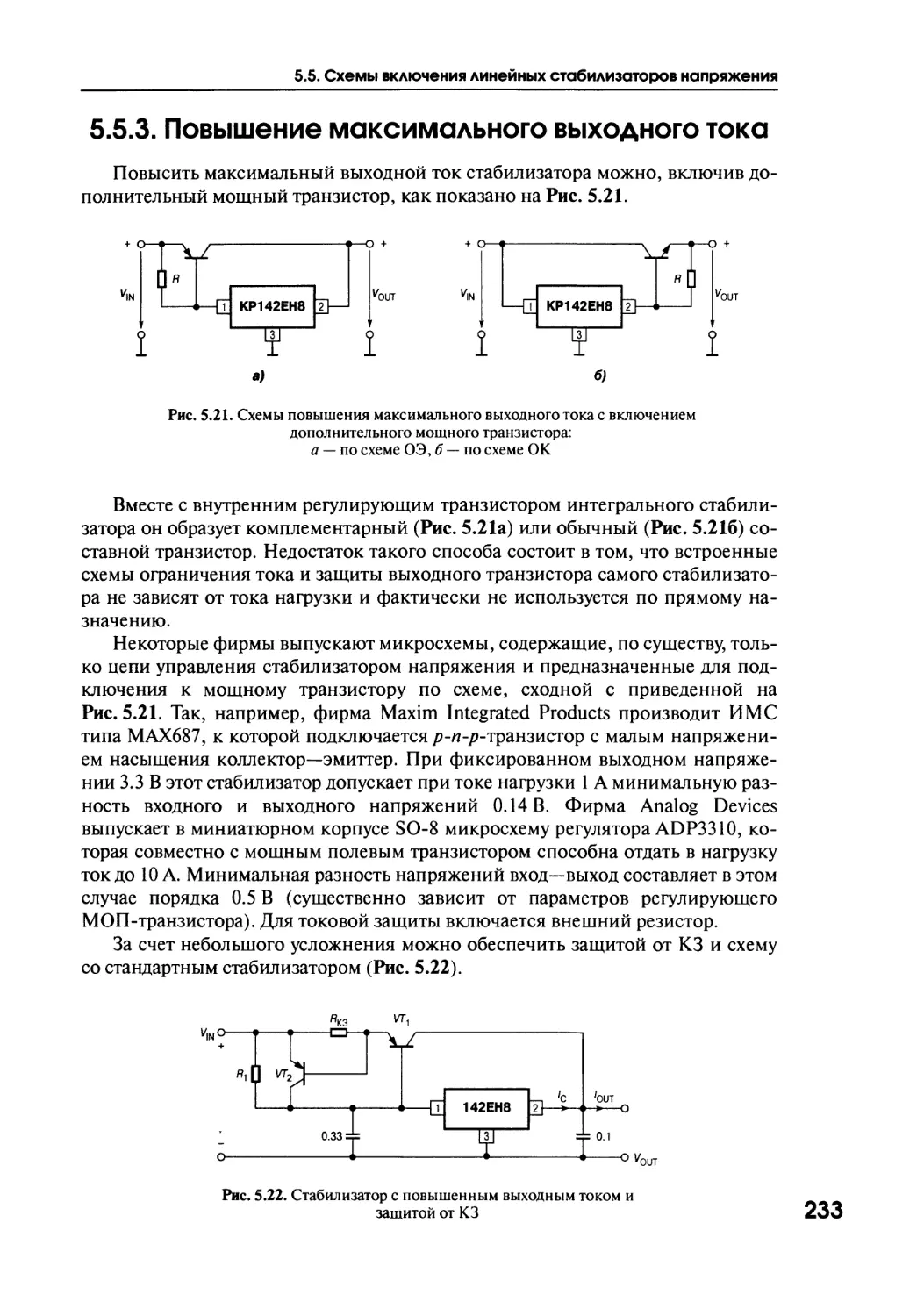
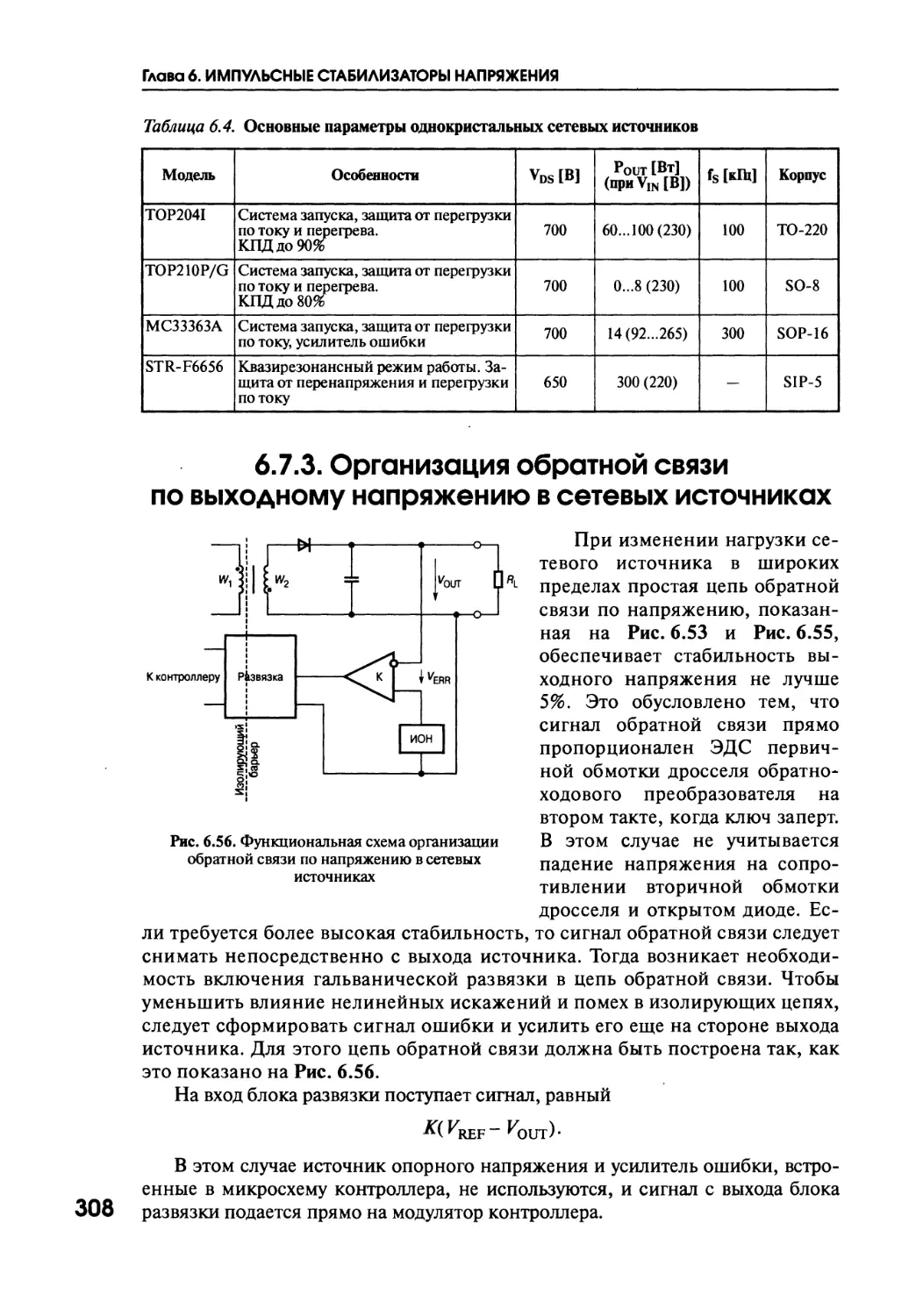
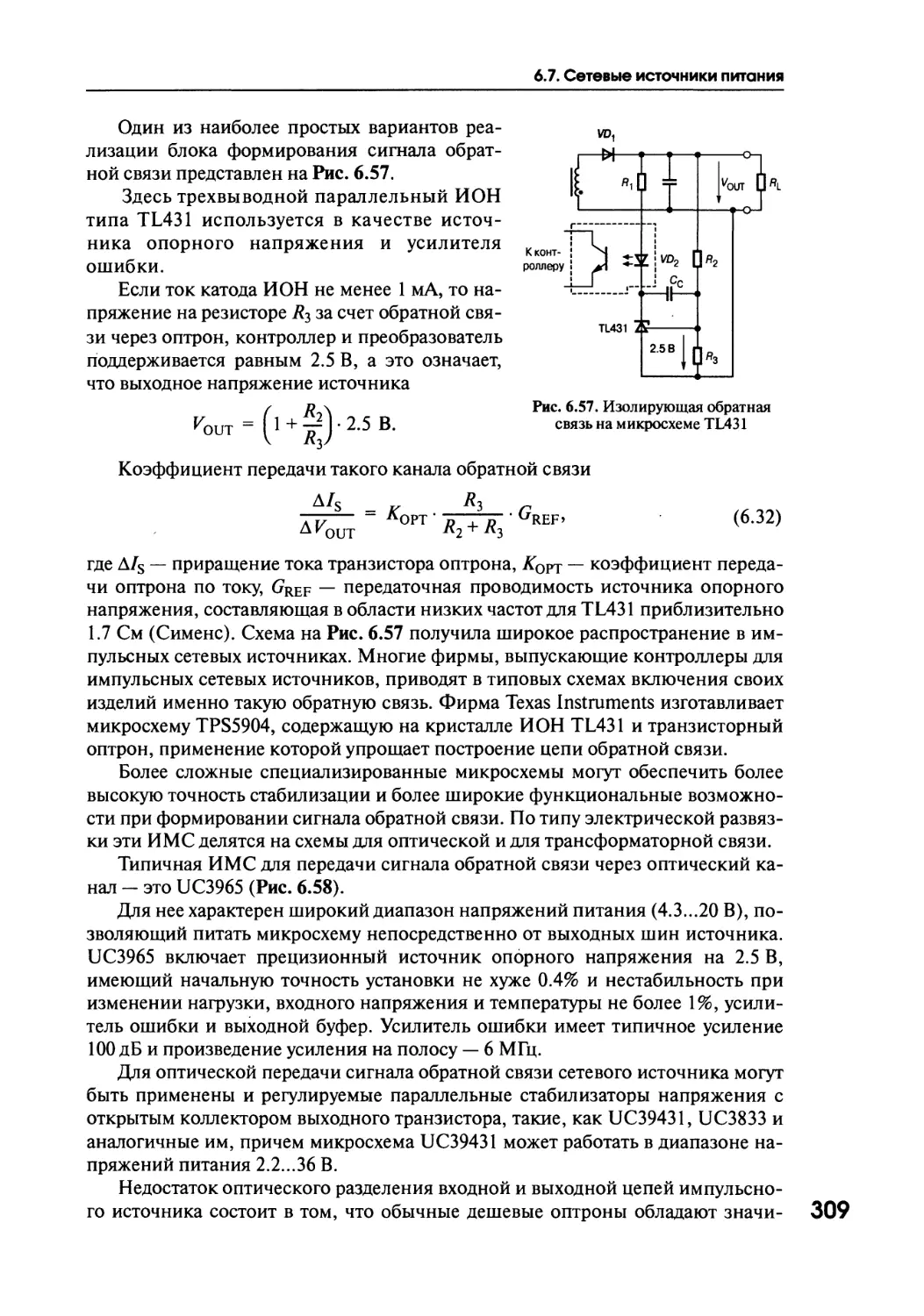
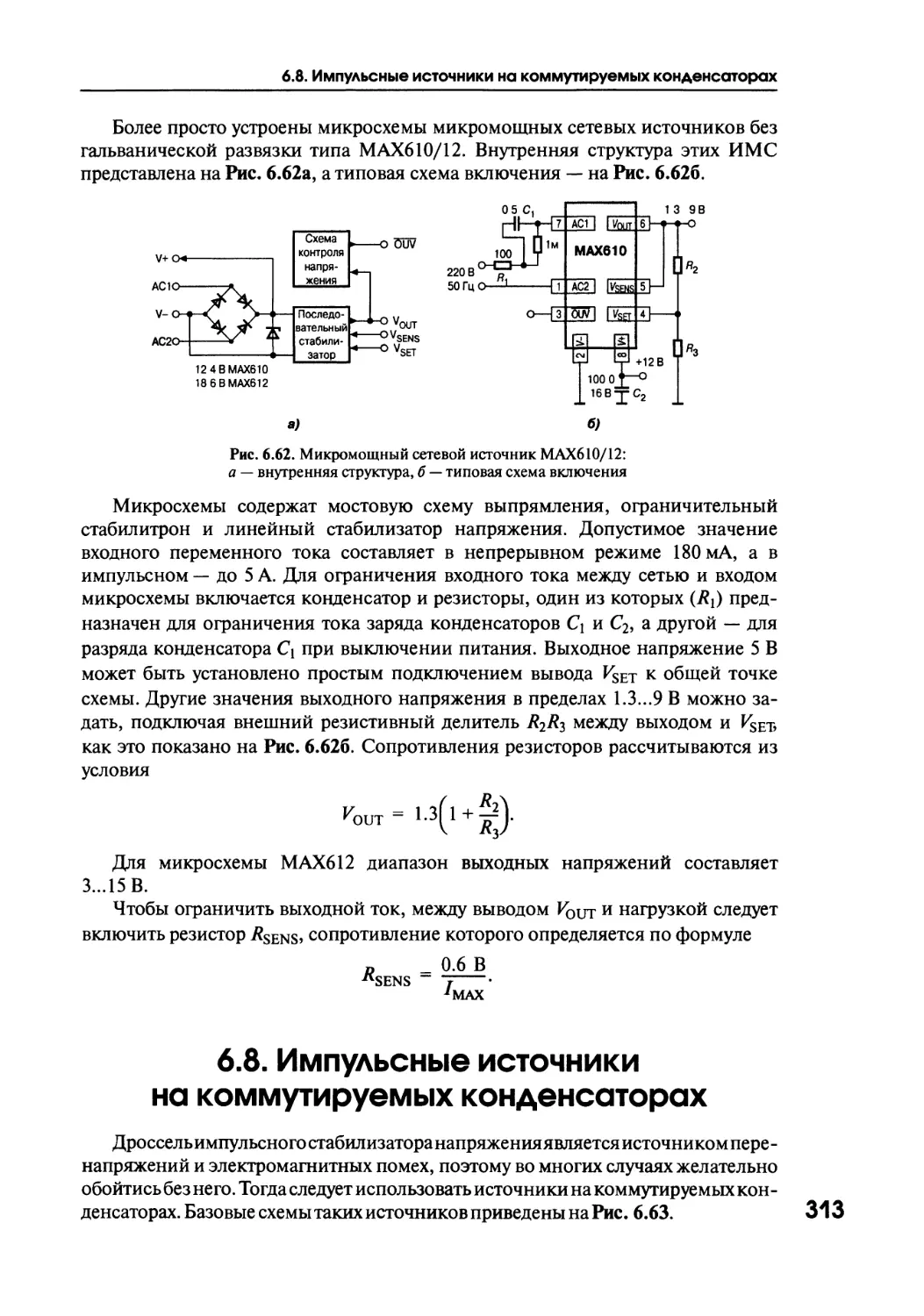
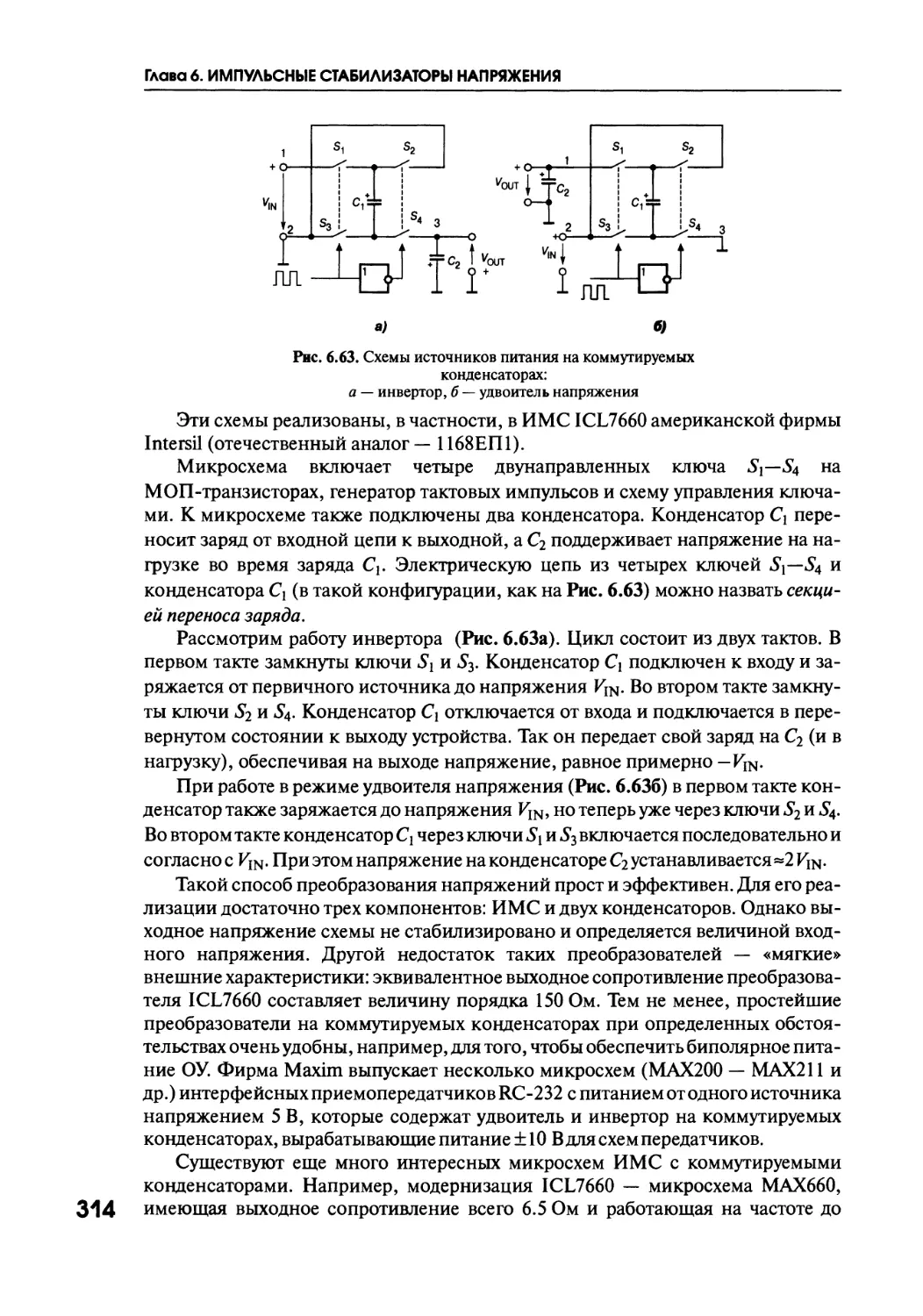
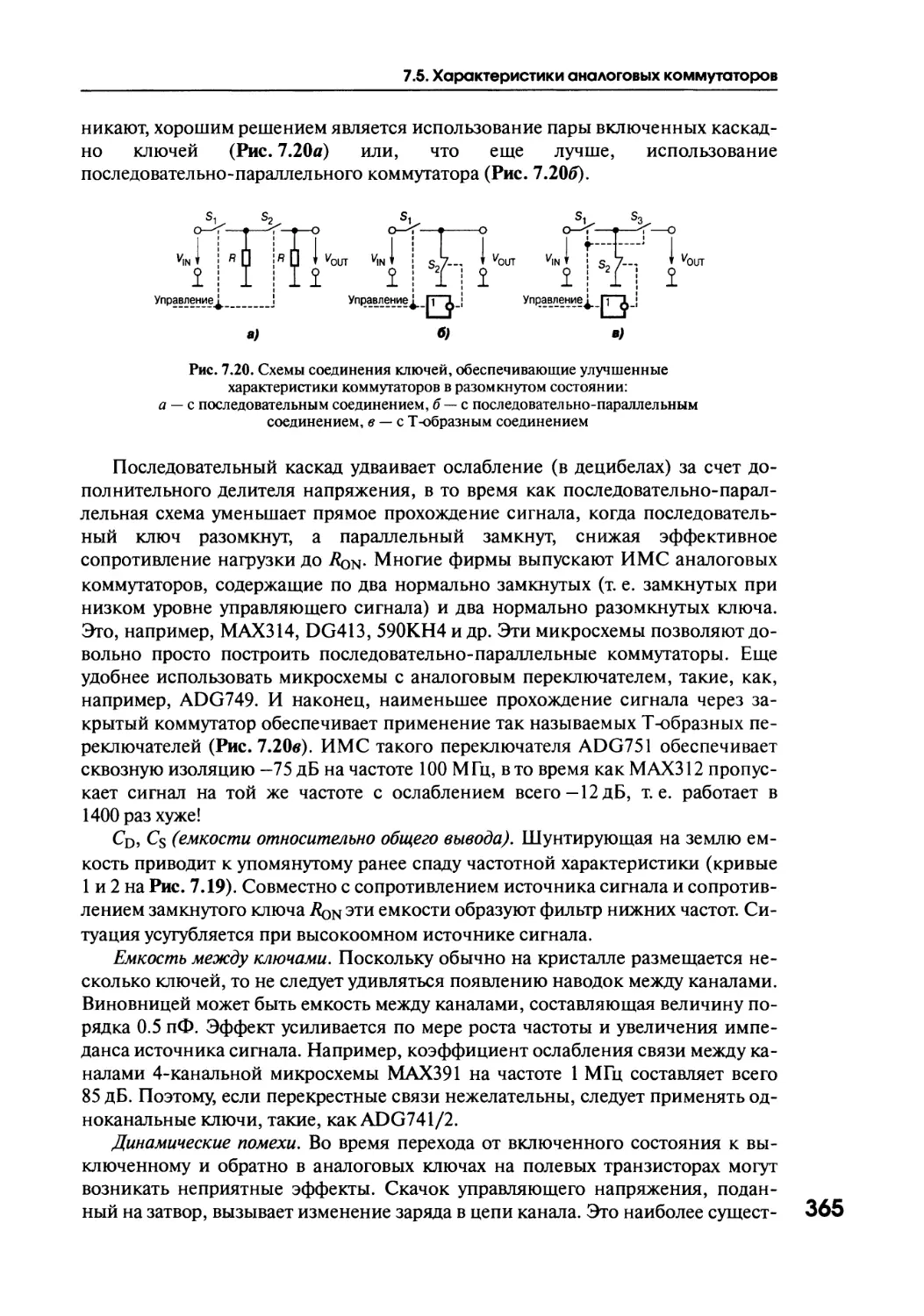
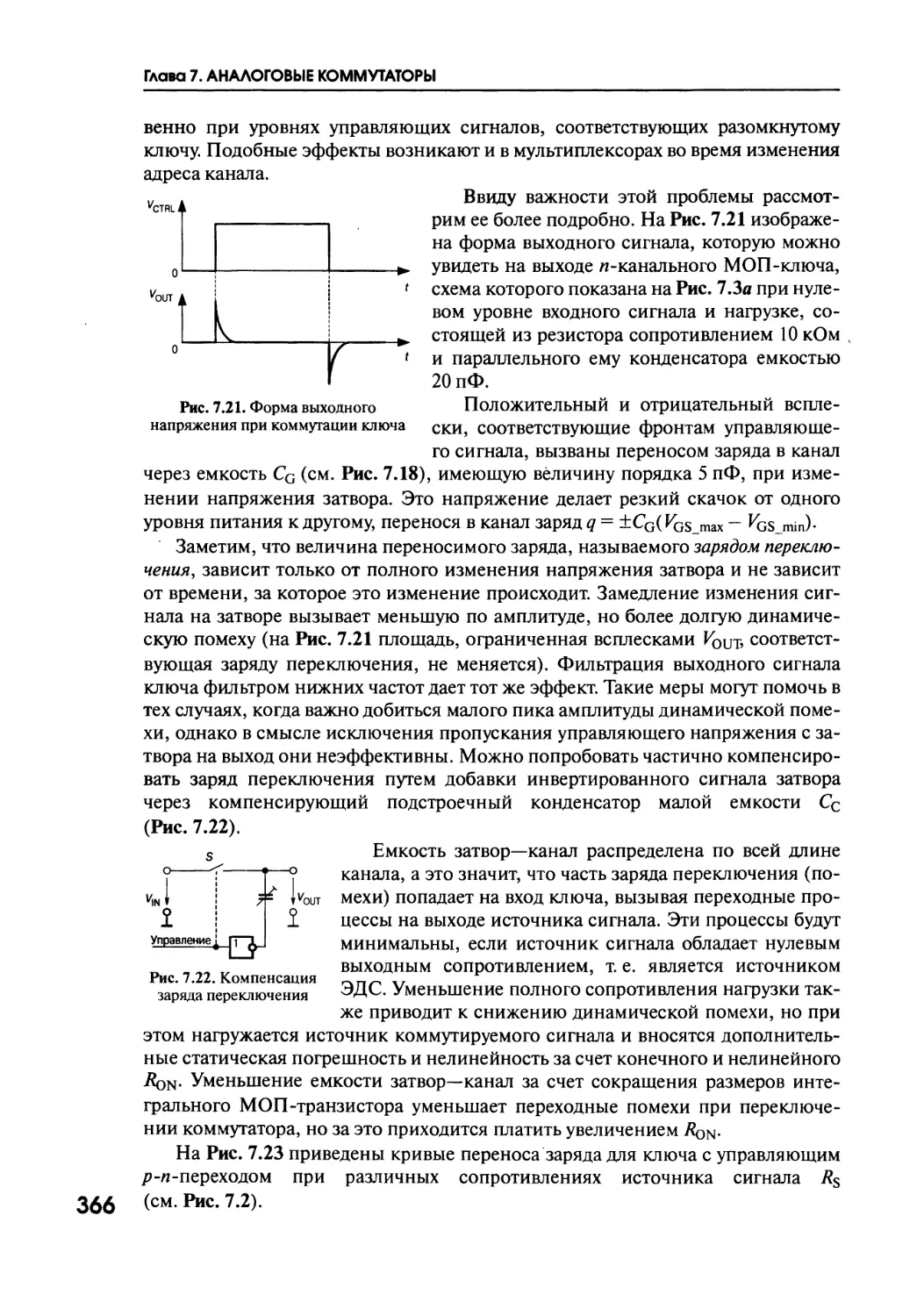
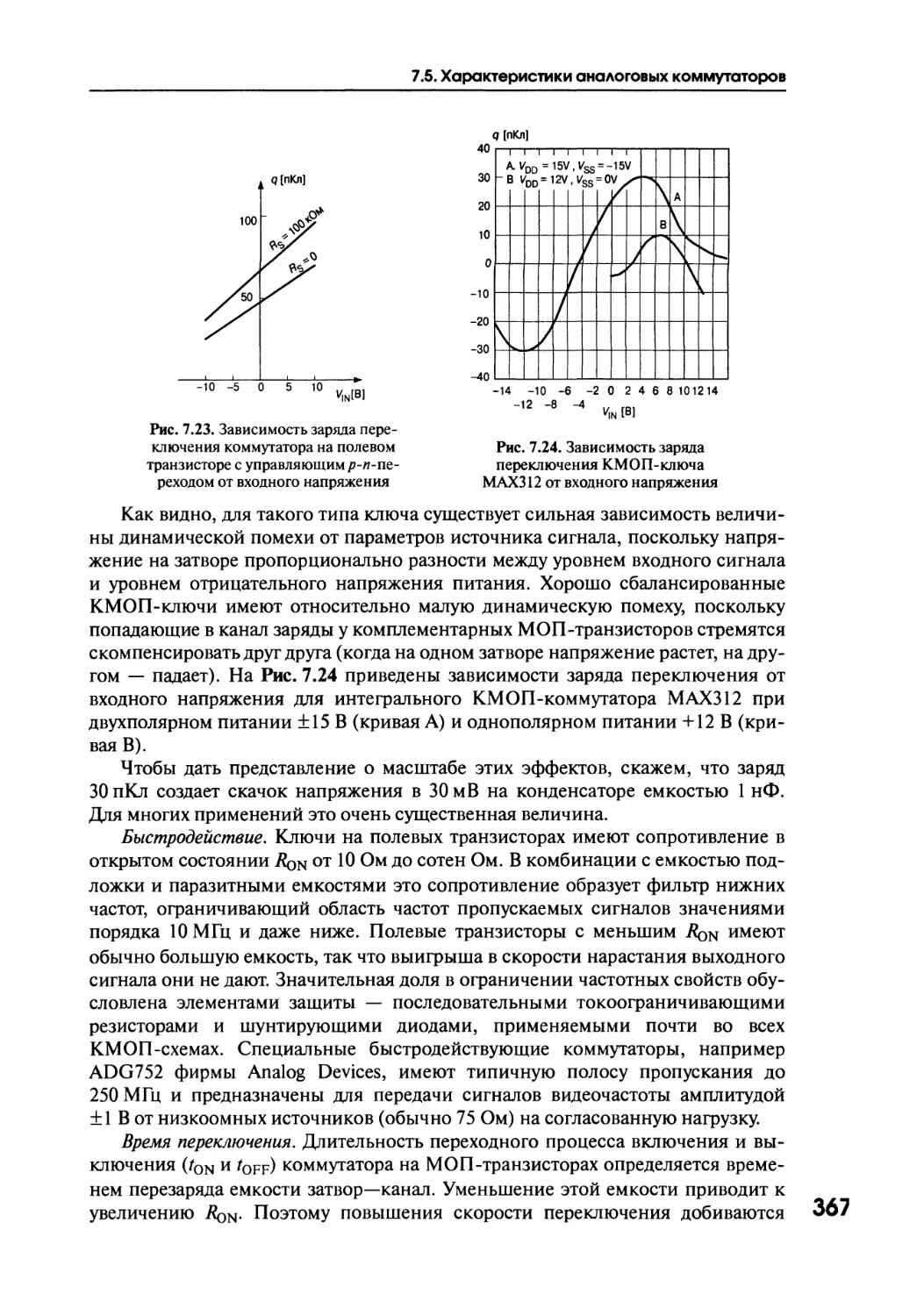
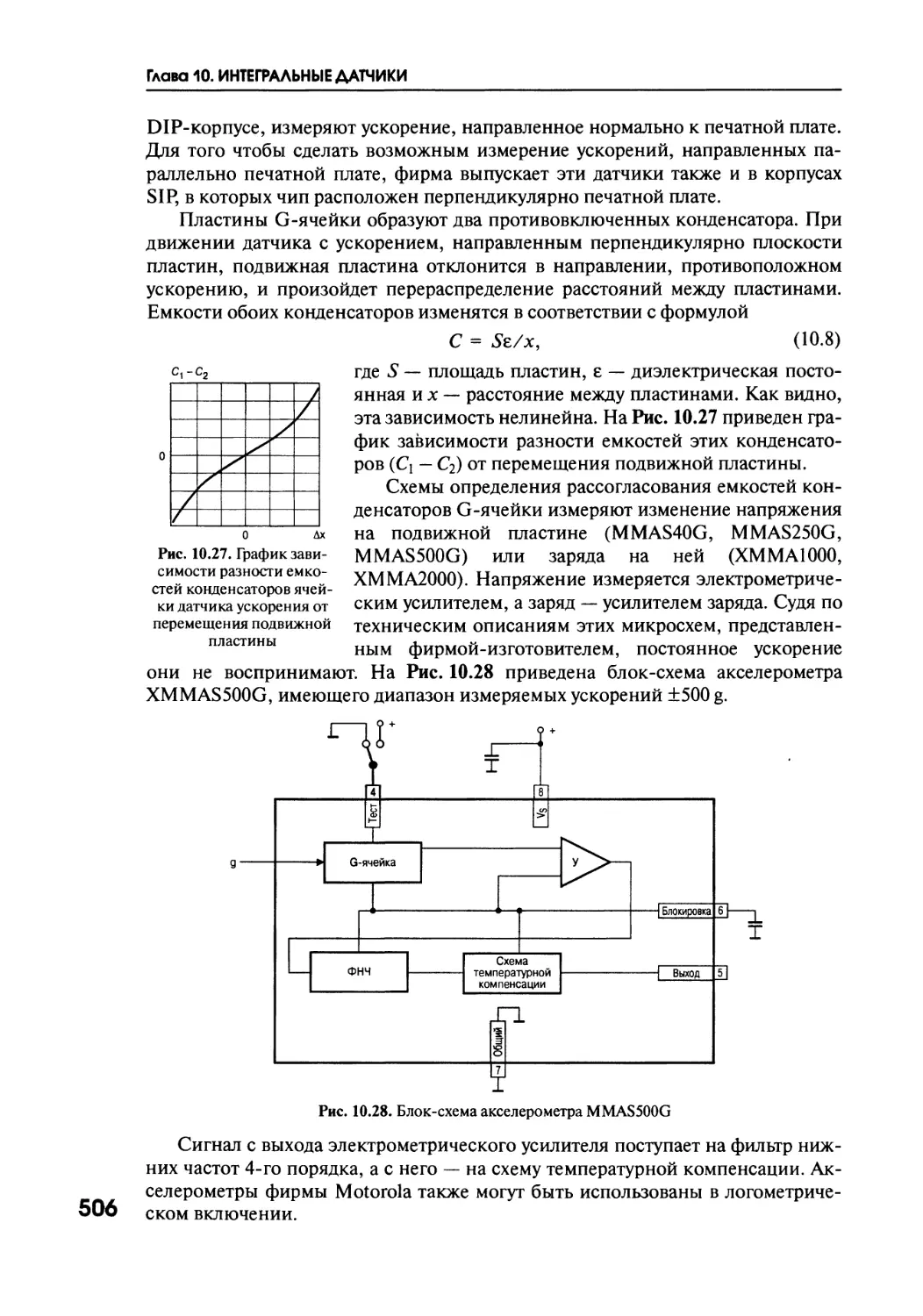
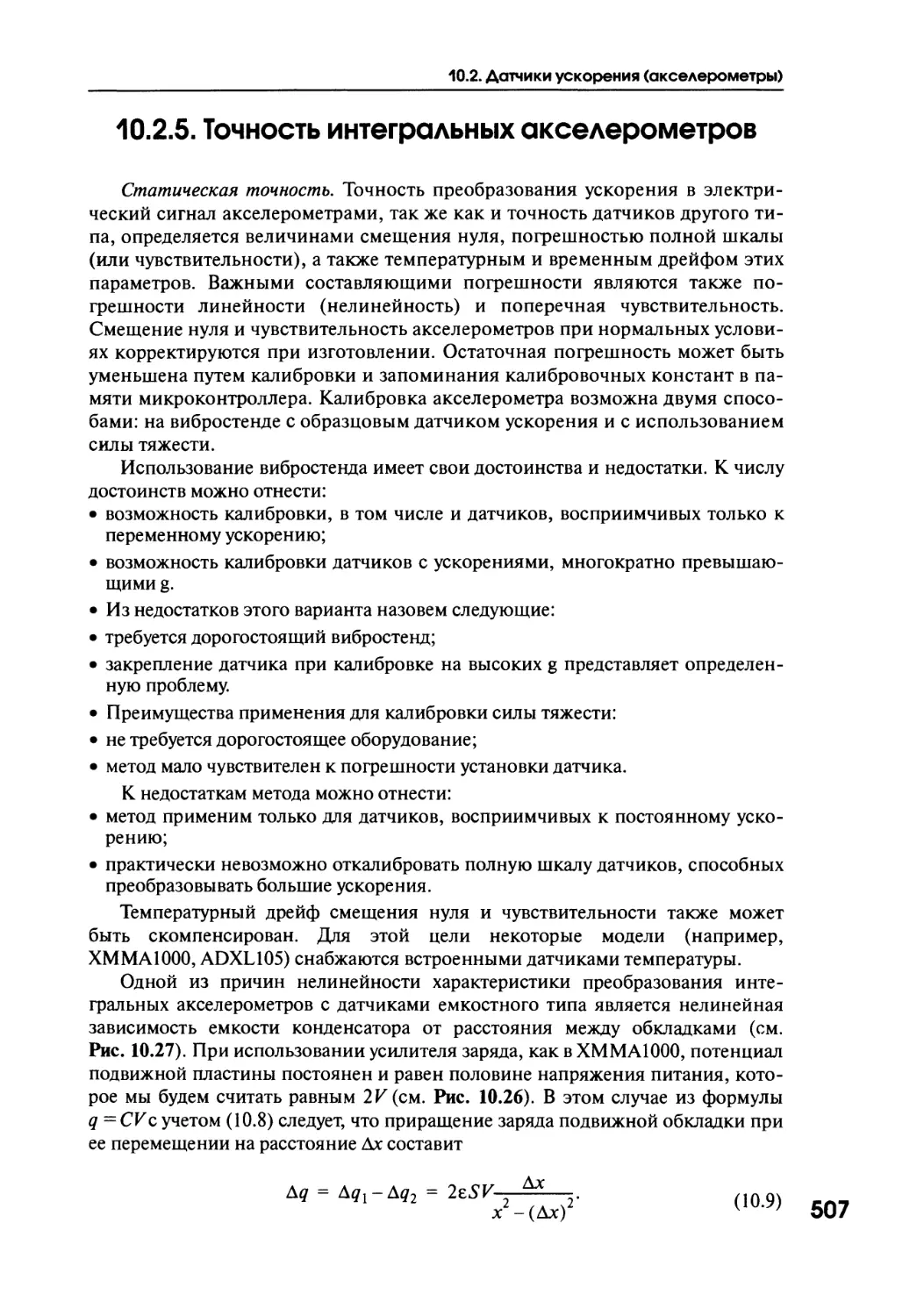
Текст
Г. И. Волович
Схемотехника
аналоговых
и
аналого-цифровых
электронных устройств
Москва
Издательский дом «Додэка-ХХI»
2005
УДК 621.3.049.774.3
ББК 32.844.1
В68
В68 Волович Г. И. Схемотехника аналоговых и аналого-цифровых
электронных устройств. — М.: Издательский дом «Додэка-ХХI», 2005. — 528 с.
ISBN 5-94120-074-9
Освещены свойства и особенности применения аналоговых и аналого-цифровых
интегральных микросхем: операционных усилителей, компараторов, таймеров, фильтров,
линейных и импульсных стабилизаторов напряжения, коммутаторов, микросхем АЦП и ЦАП,
различных датчиков.
В книге нашли отражение последние достижения в элементной базе, при этом основное
внимание уделено схемотехнической реализации различных функций электронных
устройств. Рассмотрены схемы линейного и нелинейного преобразования сигналов,
измерительные и вычислительные схемы, активные электрические фильтры, генераторы и
перемножители сигналов, специализированные усилители (широкополосные, изолирующие,
измерительные и др.), источники опорного напряжения, различного типа цифроаналоговые
и аналого-цифровые преобразователи, схемы датчиков температуры, ускорения, давления,
влажности, магнитного поля.
Книга полезна специалистам в области электроники, автоматики, вычислительной
техники, а также аспирантам и студентам соответствующего профиля.
УДК 621.3.049.774.3
ББК 32.844.1
Г. И. Волович
СХЕМОТЕХНИКА АНАЛОГОВЫХ И АНАЛОГО-ЦИФРОВЫХ
ЭЛЕКТРОННЫХ УСТРОЙСТВ
Ответственный редактор Р. Г. Алексанян
Научный редактор В. В. Россельс
Художественный редактор М. С. Коршунова
Технический редактор В. И. Матвеева
Графики А. Н. Клочков, Н. М. Хлебосолова
Верстальщик А. Ю. Анненков
Издательский дом «Додэка-ХХI»
ИД № 02041 от 13.06.2000 г.
ОКП95 3000
105318 Москва, а/я 70
Тел./факс: @95) 366-24-29, 366-81-45
E-mail: books@dodeca.ru; red@dodeca.ru
Подписано в печать 27.01.2005. Формат 70x100/16. Бумага типографская № 2.
Гарнитура «NewtonC». Печать офсетная.
Объем 33,0 п. л. Усл. печ. л. 42,9. Тираж 1500 экз. Изд. № 015. Заказ № 260.
Отпечатано с готовых диапозитивов в ОАО «Типография Новости».
105005 Москва, ул. Ф. Энгельса, 46
©Волович Г. И., 2005
ISBN 5-94120-074-9 © Издательский дом «Додэка-ХХI>, 2005
ОГЛАВЛЕНИЕ
ПРЕДИСЛОВИЕ 9
ВВЕДЕНИЕ 11
Глава 1. ОПЕРАЦИОННЫЕ УСИЛИТЕЛИ 13
1.1. Общие сведения 13
1.2. Идеальный операционный усилитель 15
1.3. Основные схемы включения операционного усилителя 16
1.3.1. Дифференциальное включение 16
1.3.2. Инвертирующее включение 17
1.3.3. Неинвертирующее включение 18
1.4. Внутренняя схемотехника операционных усилителей 19
1.4.1. Требования к ОУ 19
1.4.2. Блок-схема операционного усилителя 20
1.4.3. Стандартная схема операционного усилителя 23
1.5. Схема замещения операционного усилителя 24
1.5.1. Входное сопротивление схемы 25
1.5.2. Выходное сопротивление схемы 25
1.6. Коррекция частотной характеристики 26
1.6.1. Частотные характеристики ОУ 27
1.6.2. Полная частотная коррекция 29
1.6.3. Внешняя частотная коррекция 32
1.6.4. Скорость нарастания 33
1.6.5. Компенсация емкостной нагрузки 34
1.7. Параметры операционных усилителей 35
1.7.1. Точностные параметры 35
1.7.2. Динамические параметры ОУ 46
1.7.3. Параметры, характеризующие усиление сигналов переменного тока 47
1.7.4. Эксплуатационные параметры ОУ 48
1.8. Типы операционных усилителей 49
1.9. Улучшение параметров операционных усилителей 53
1.9.1. Снижение напряжения смещения нуля 53
1.9.2. Повышение устойчивости ОУ 55
1.9.3. Снижение токов утечки 56
1.9.4. Защита операционных усилителей 57
1.9.5. Повышение выходного тока ОУ 59
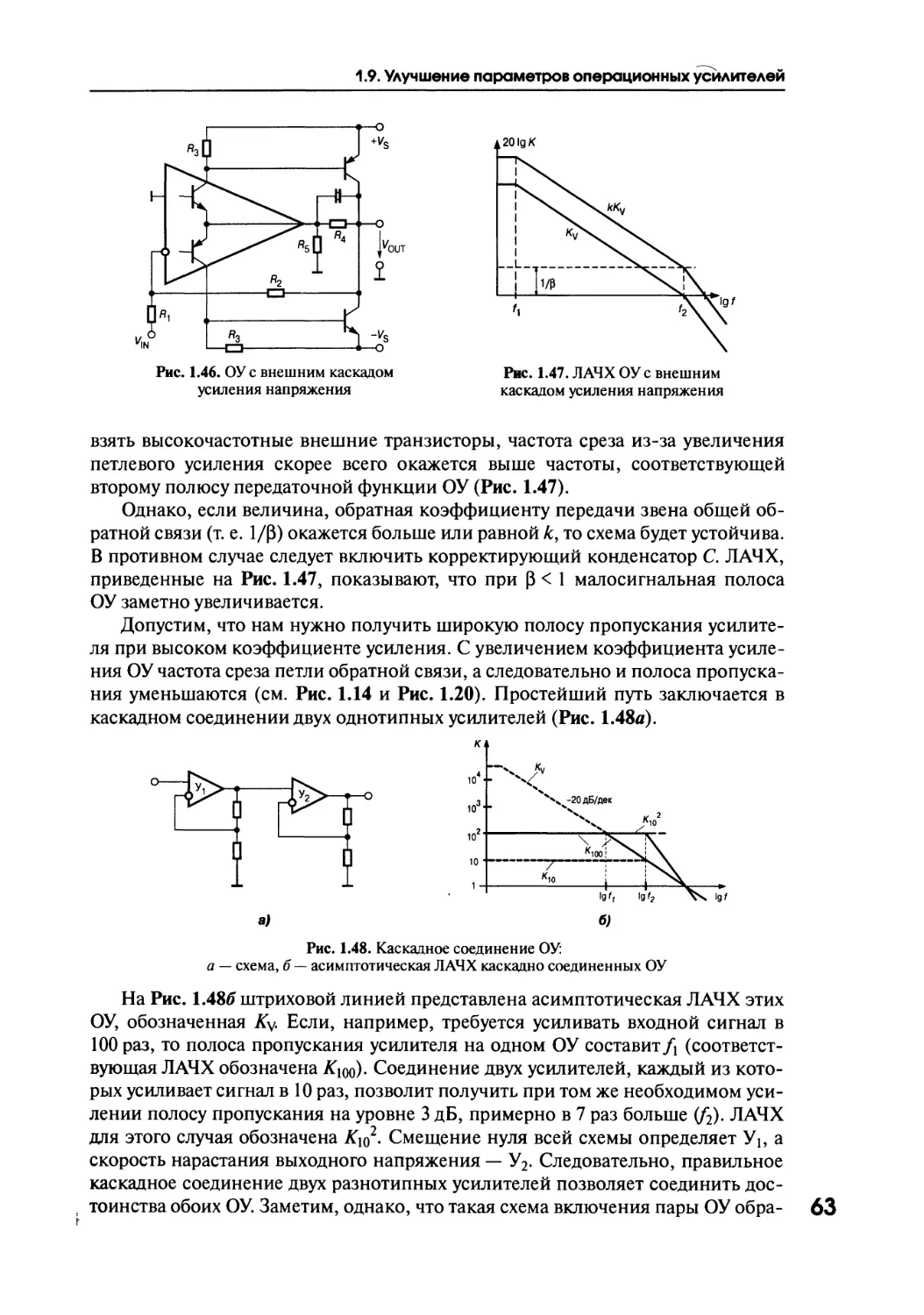
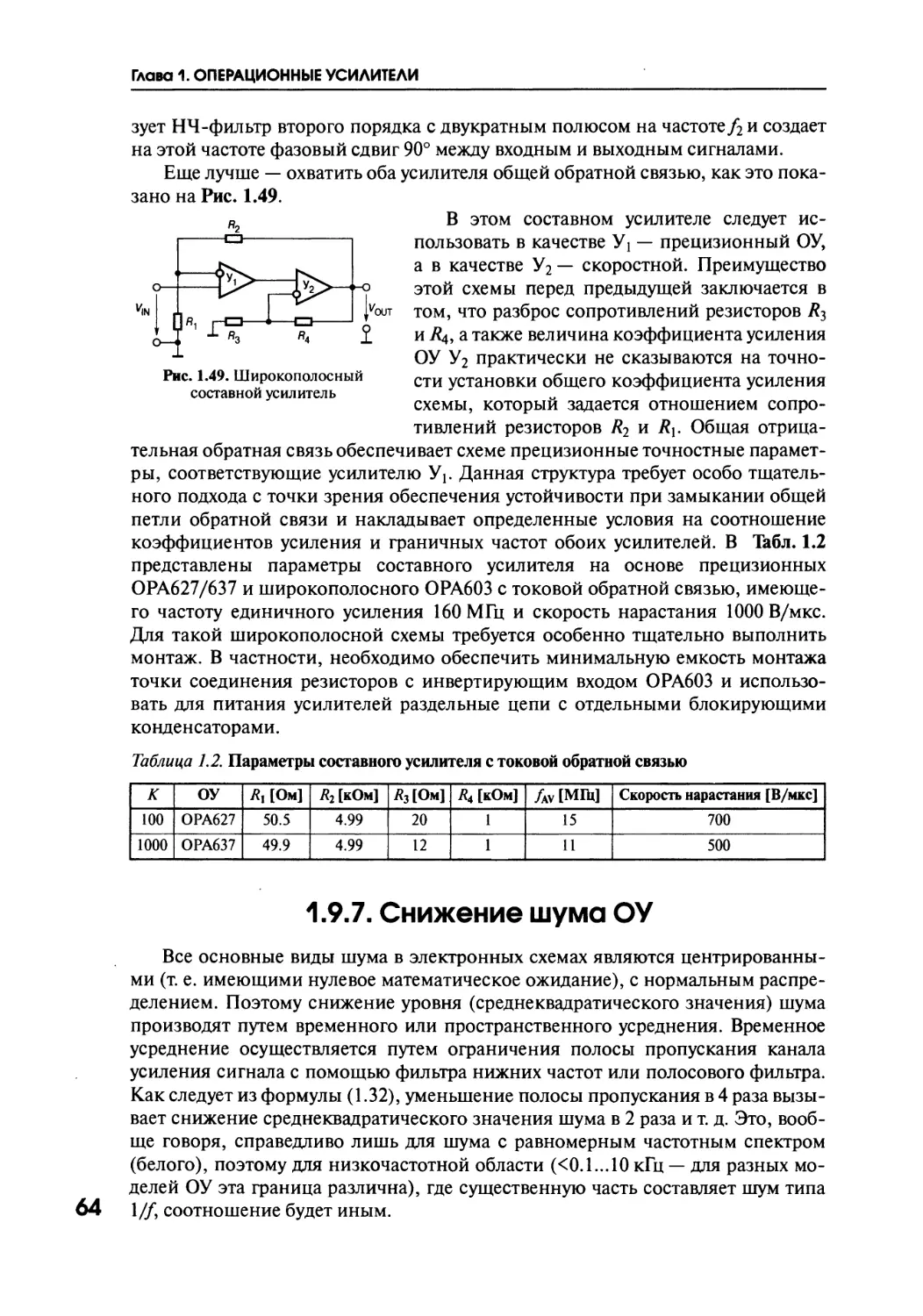
1.9.6. Повышение выходного напряжения ОУ 60
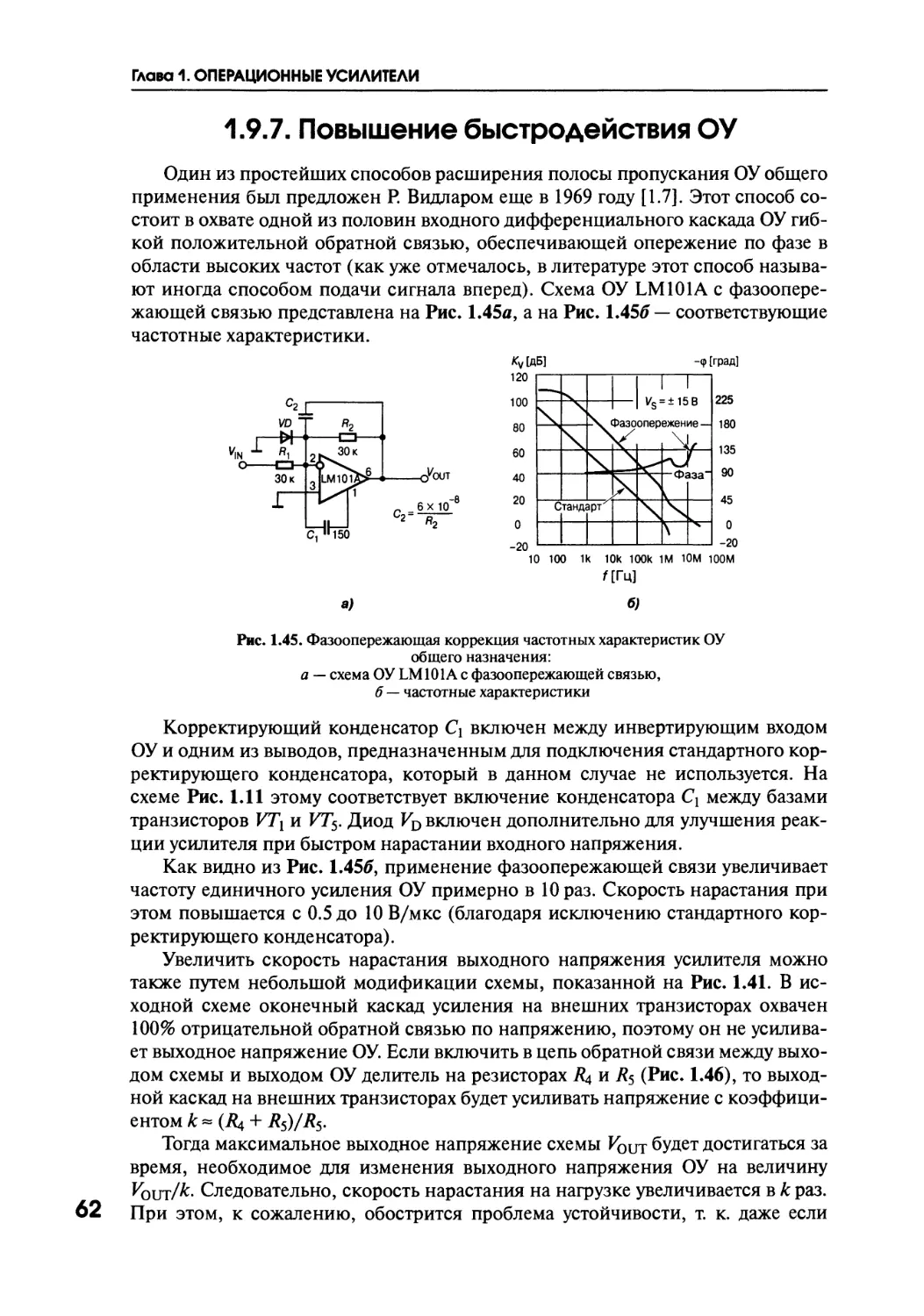
1.9.7. Повышение быстродействия ОУ 62
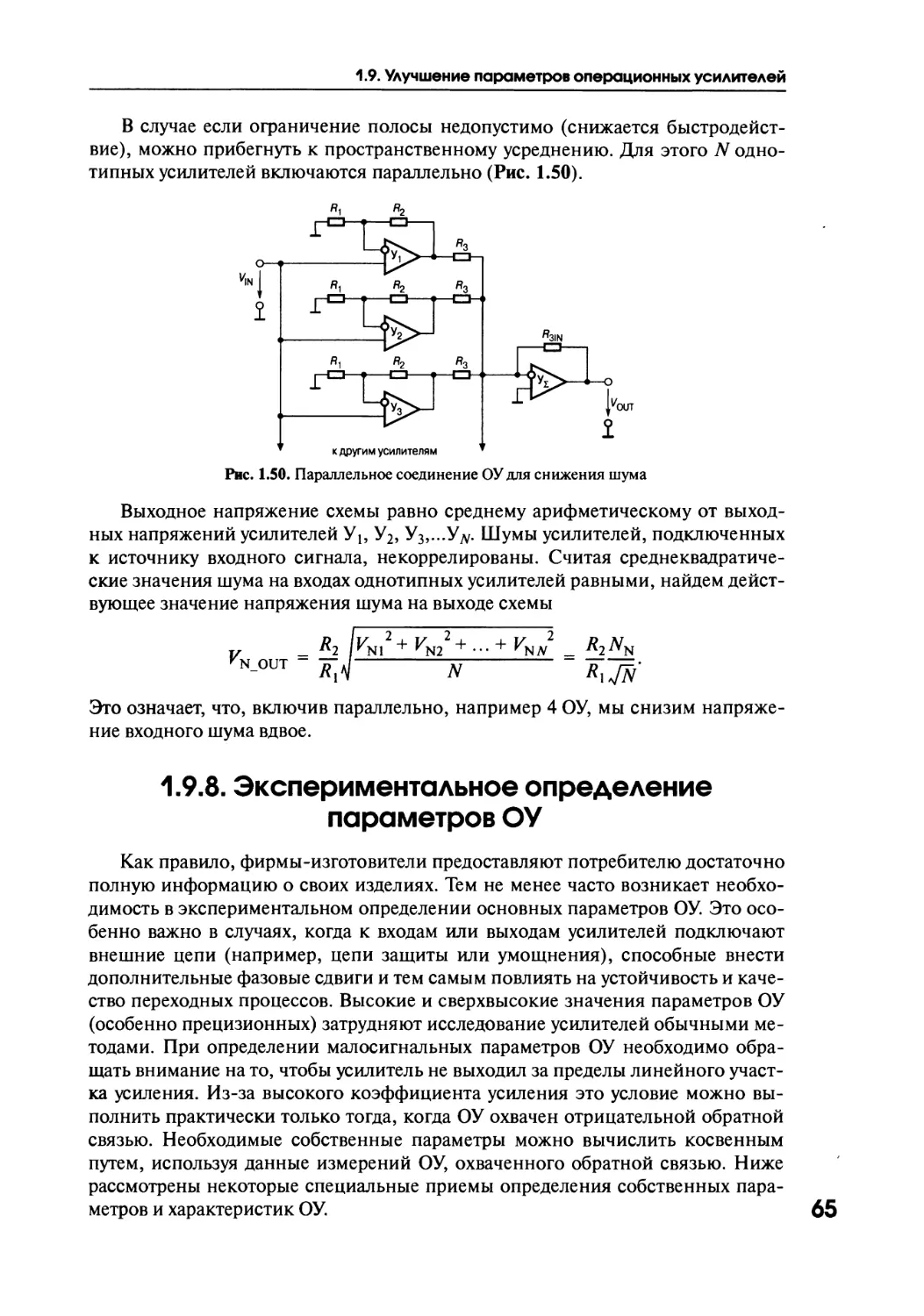
1.9.7. Снижение шума ОУ 64
1.9.8. Экспериментальное определение параметров ОУ 65
з
ОГЛАВЛЕНИЕ
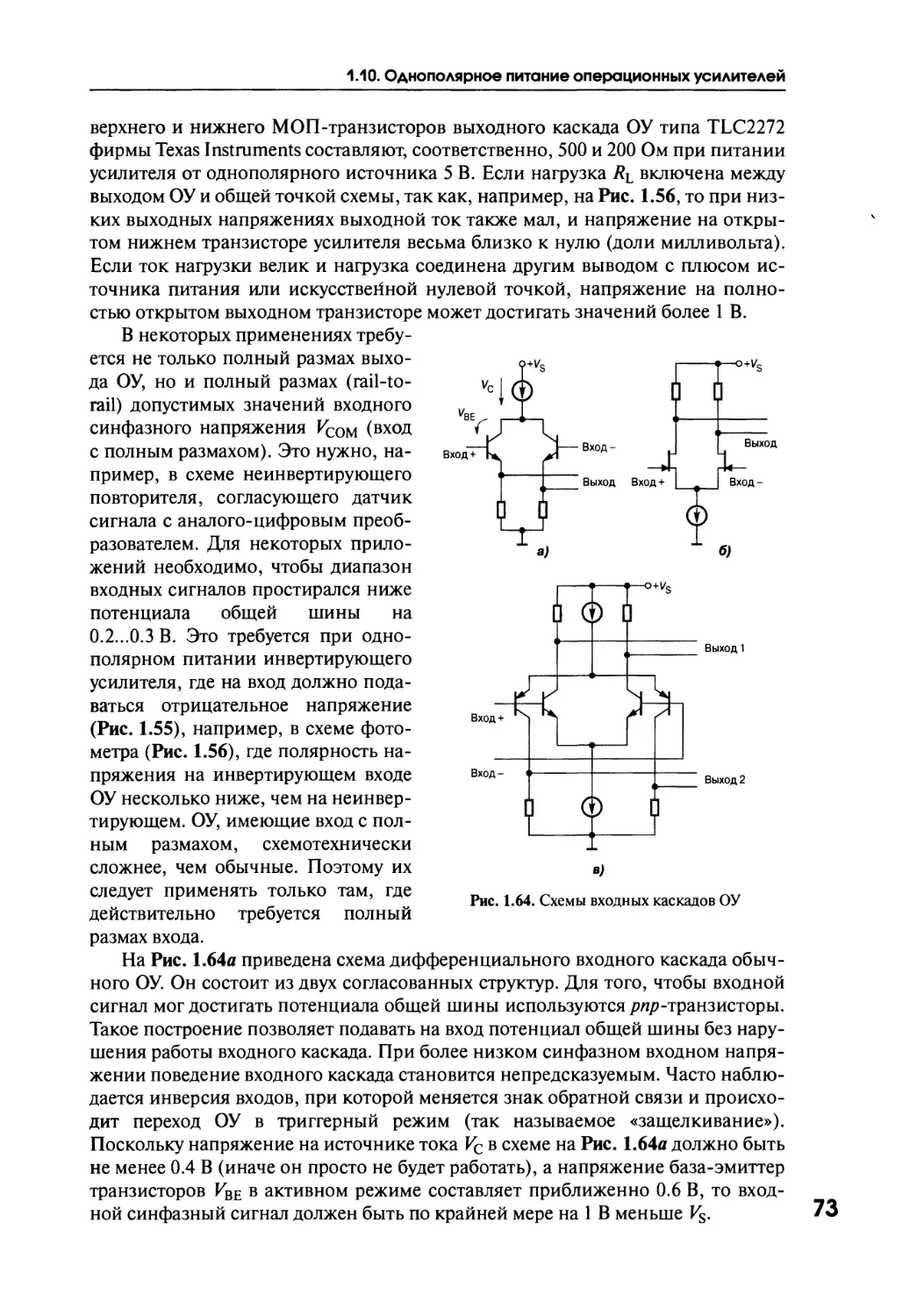
1.10. Однополярное питание операционных усилителей 67
1.10.1. Общие сведения 67
1.10.2. Смещение ОУ с однополярным питанием 68
1.10.3. Введение искусственной нулевой точки 70
1.10.4. Расширение динамического диапазона 71
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ 77
2.1. Линейные аналоговые вычислительные схемы на ОУ 77
2.1.1. Схема масштабирования 77
2.1.2. Схема суммирования 78
2.1.3. Схема интегрирования 79
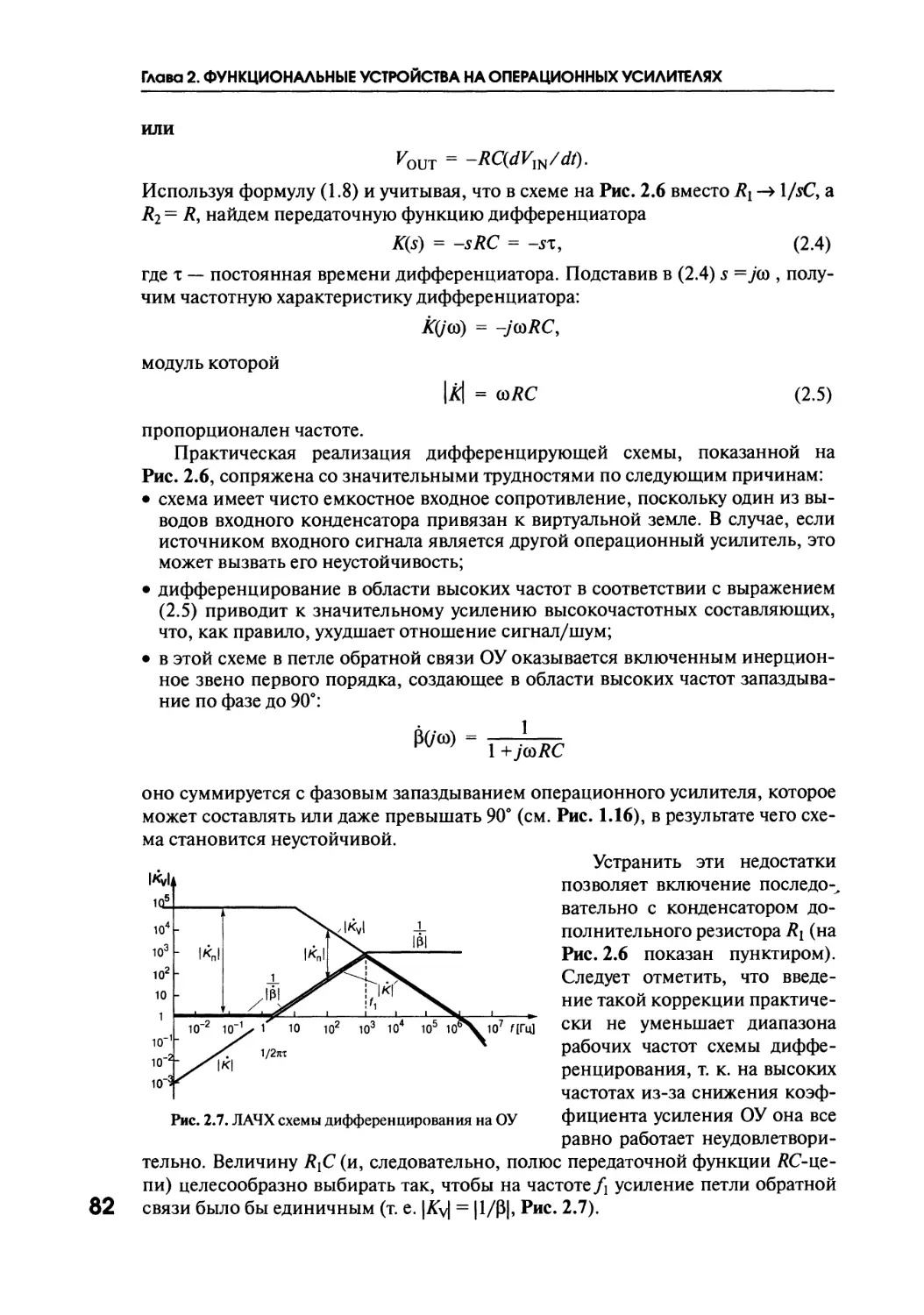
2.1.4. Схема дифференцирования 81
2.2. Схемы линейного преобразования сигналов 83
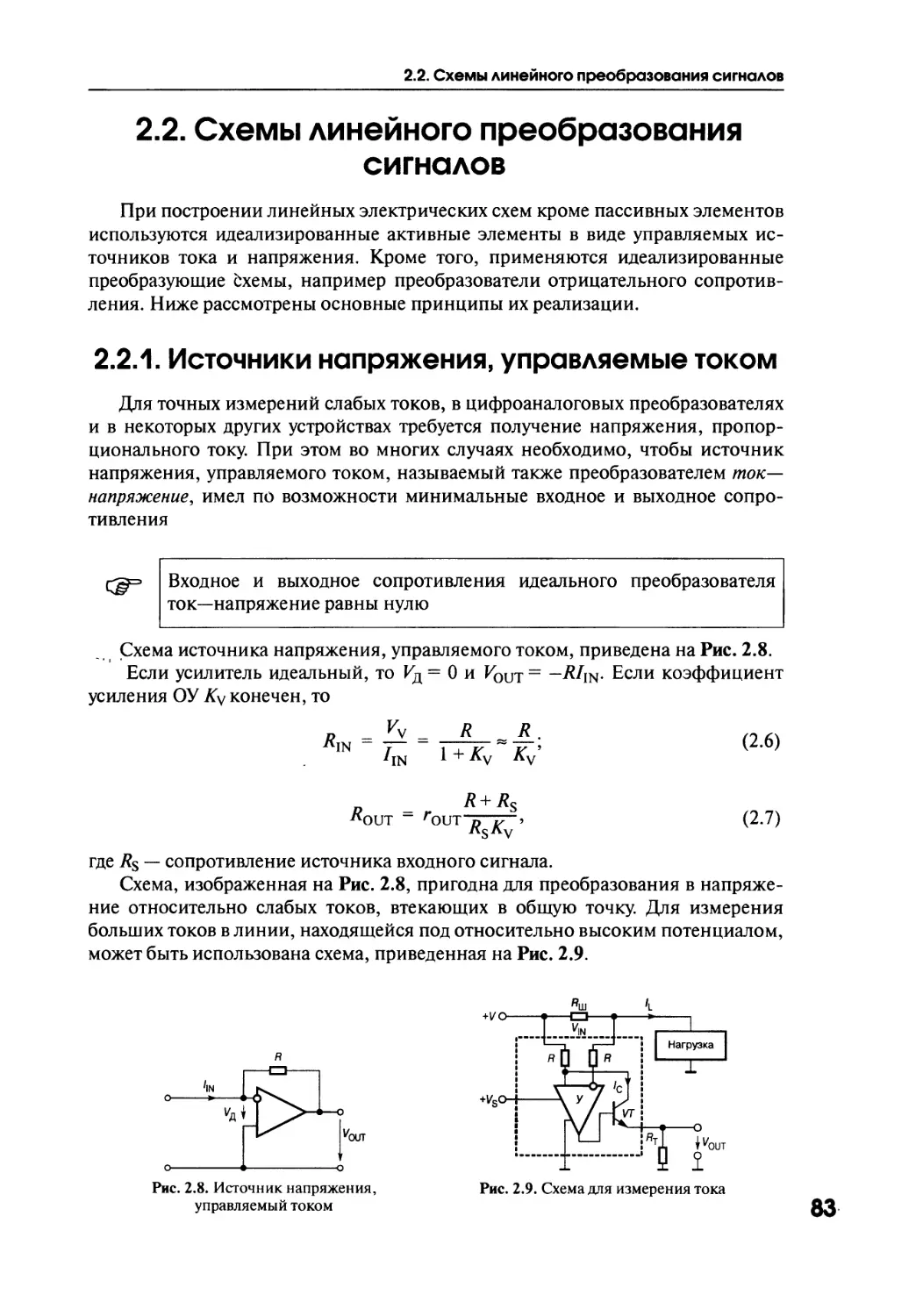
2.2.1.Источники напряжения, управляемые током 83
2.2.2. Источники тока, управляемые напряжением 84
2.2.3. Инверторы сопротивления 90
2.2.4. Гираторы 91
2.3. Активные электрические фильтры на ОУ 95
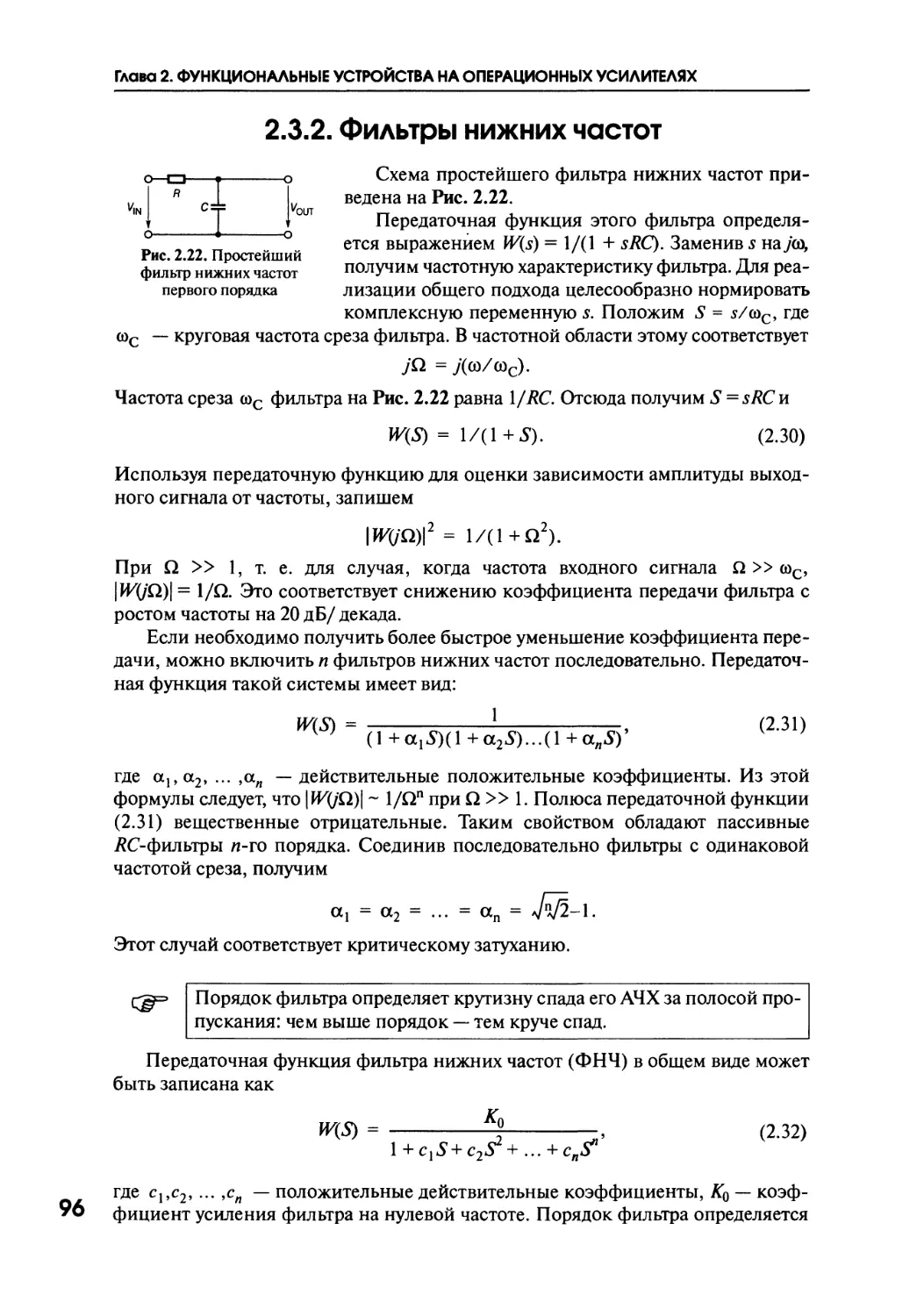
2.3.1. Основные понятия 95
2.3.2. Фильтры нижних частот 96
2.3.3. Фильтры верхних частот 99
2.3.4. Полосовые фильтры 100
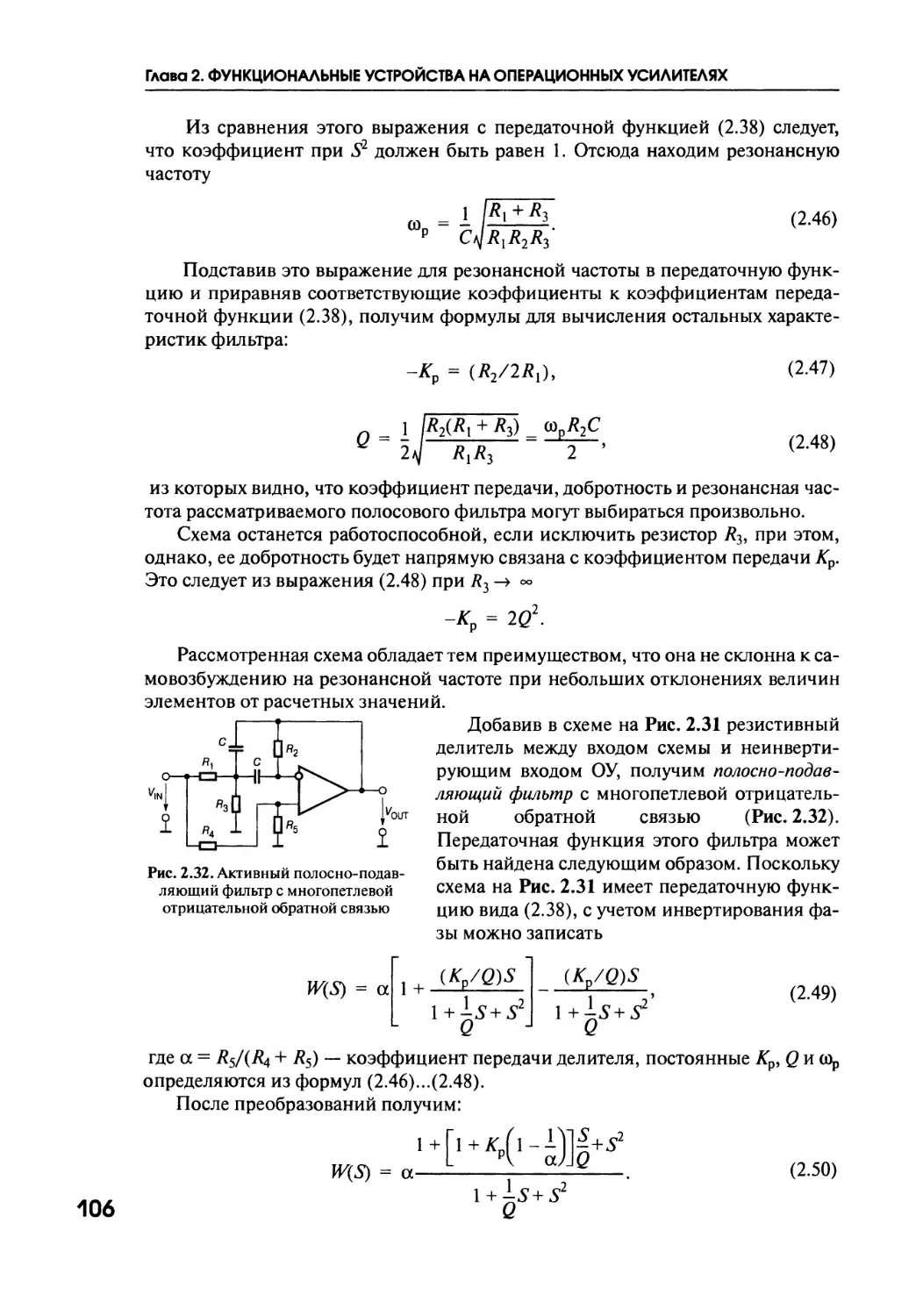
2.3.5. Полосно-подавляющие фильтры 101
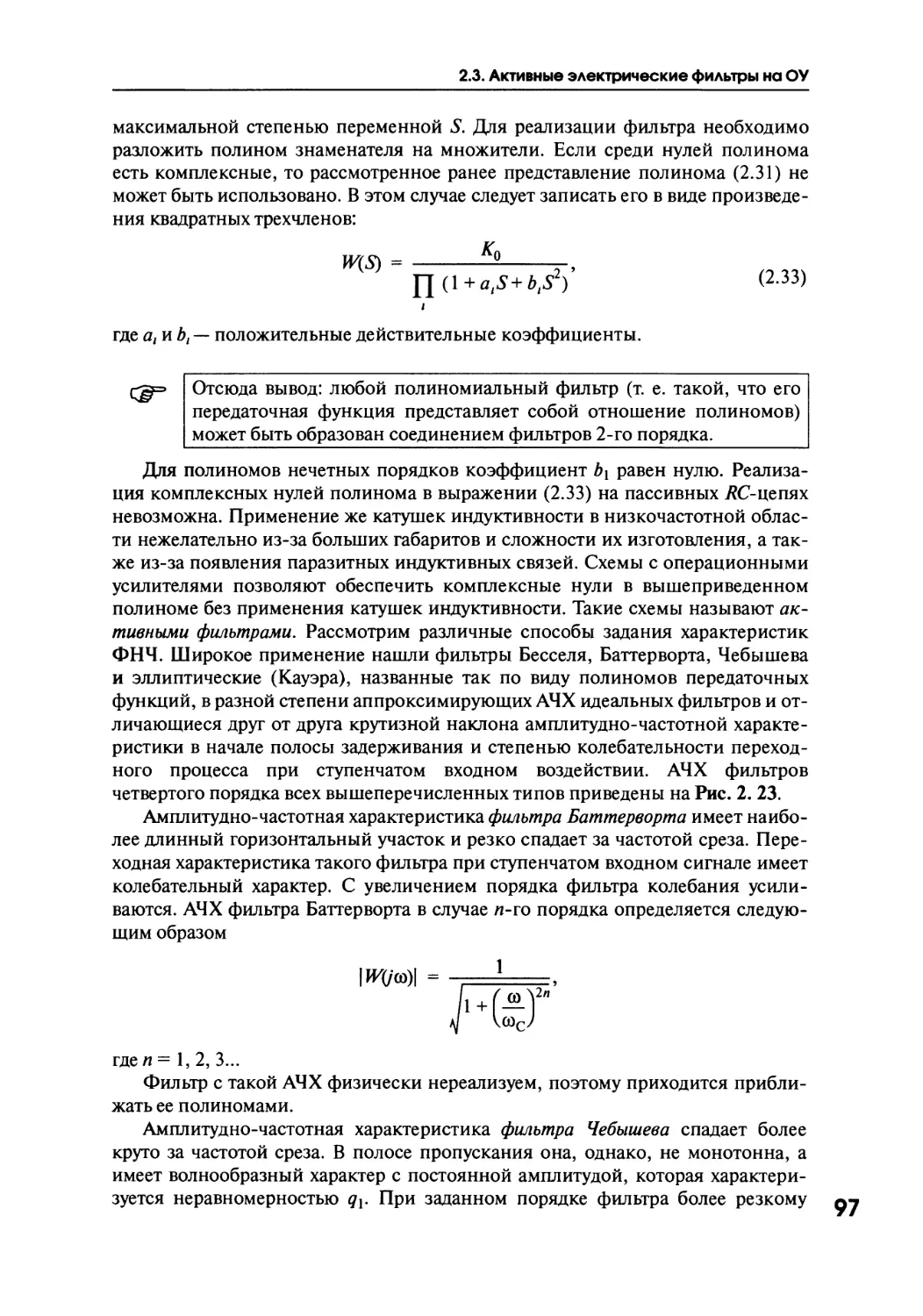
2.3.6. Реализация фильтров на операционных усилителях 102
2.3.7. Реализация активных фильтров на основе метода переменных состояния 108
2.3.8. Фазовые фильтры 111
2.4. Измерительные усилители 114
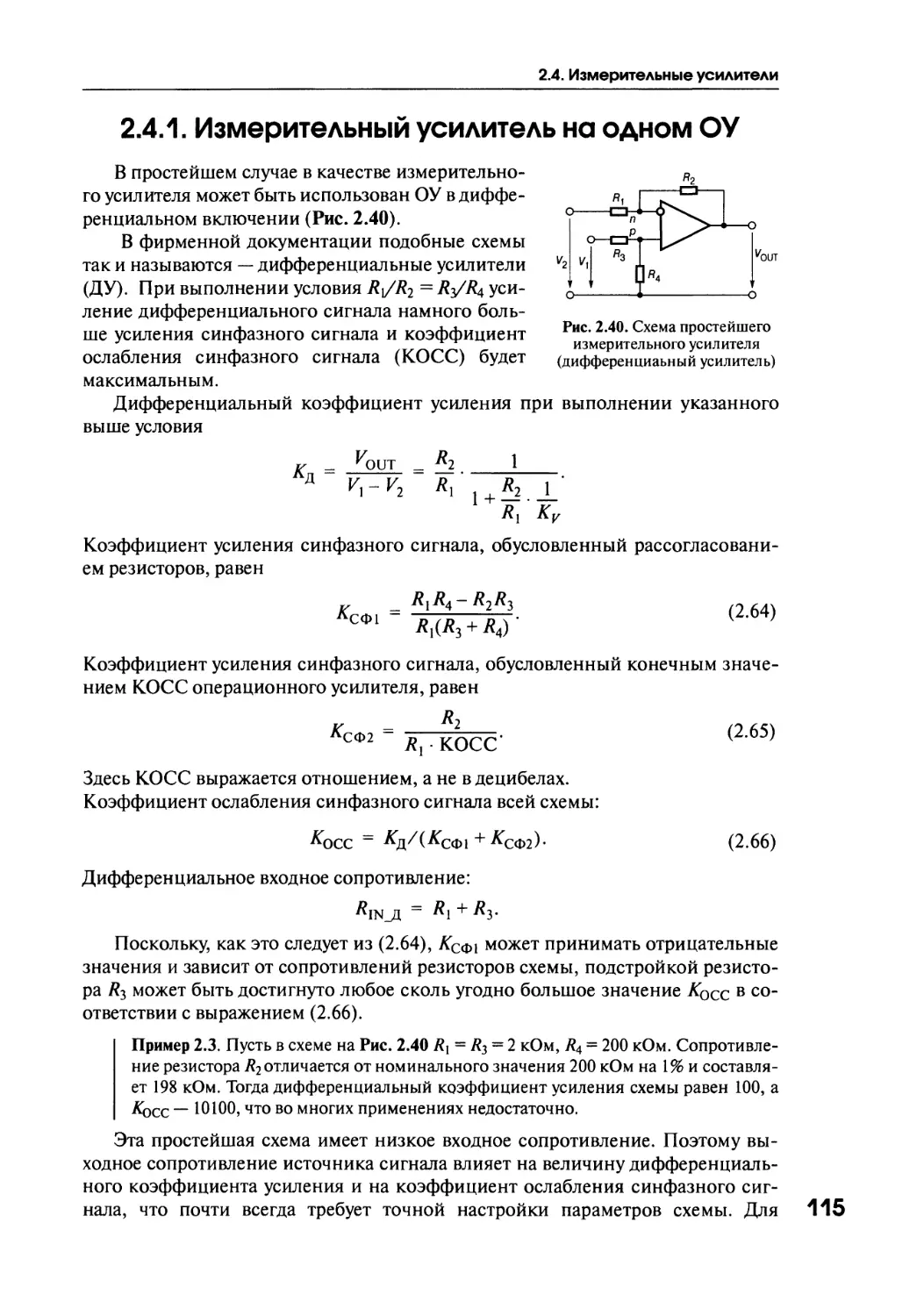
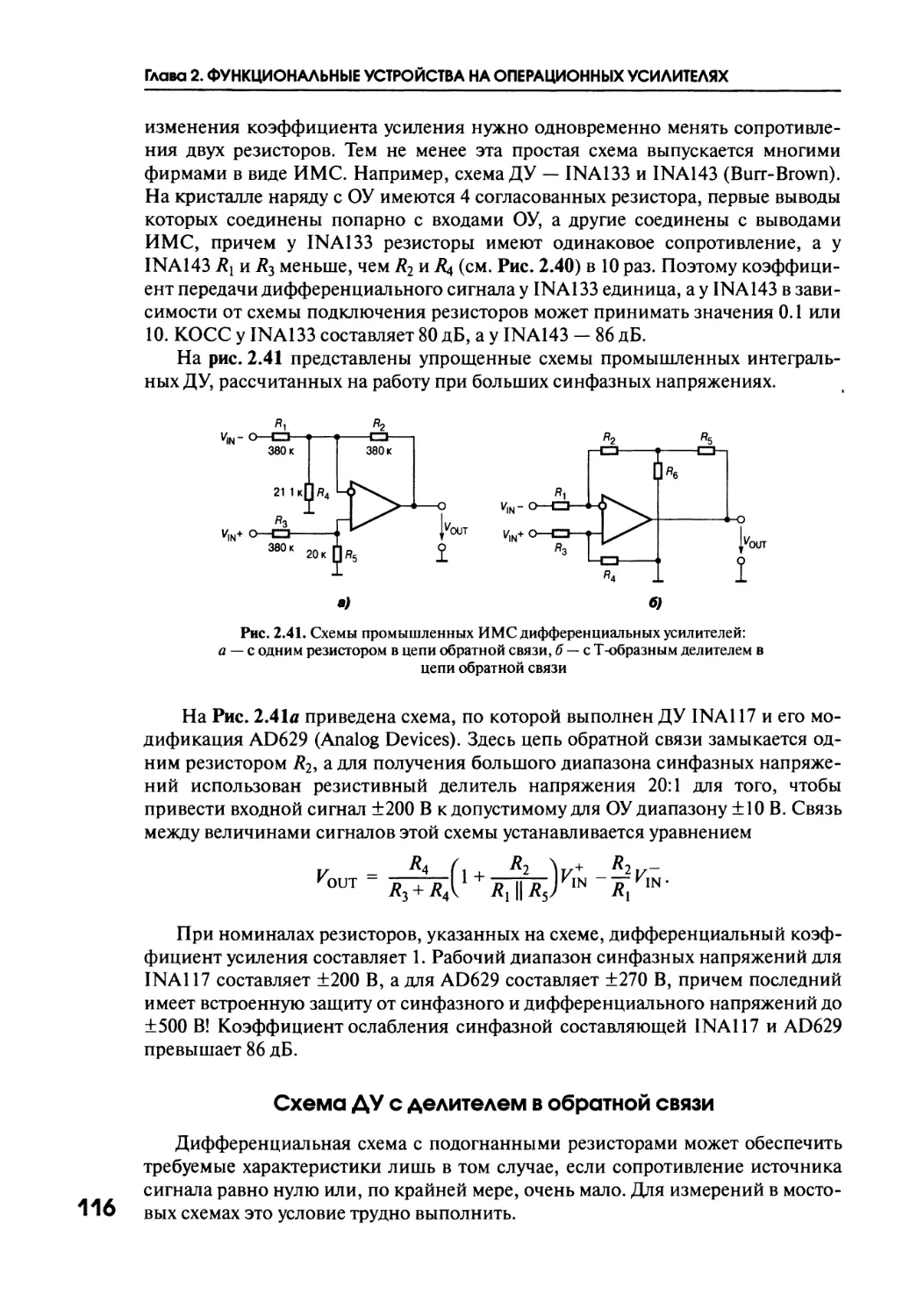
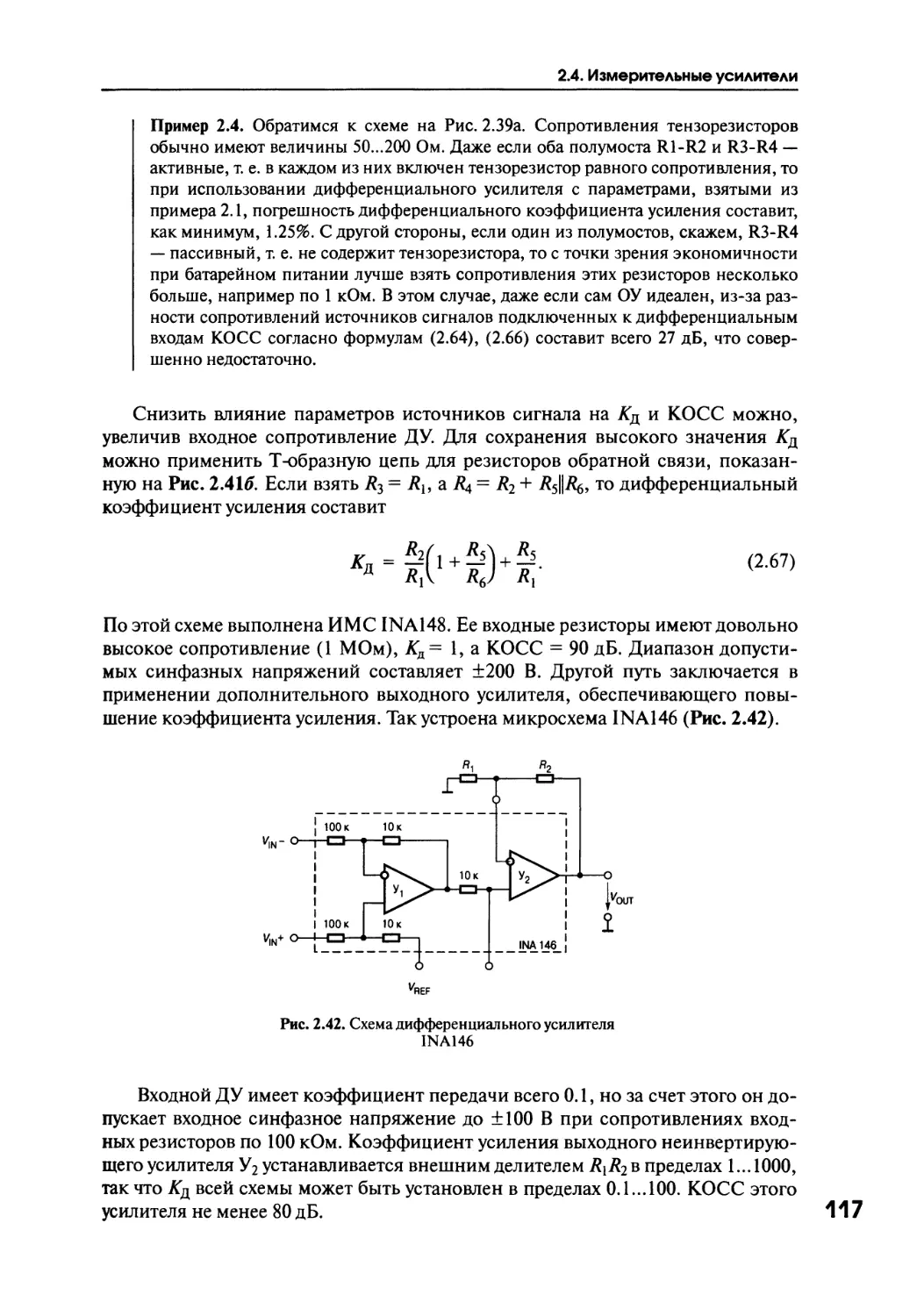
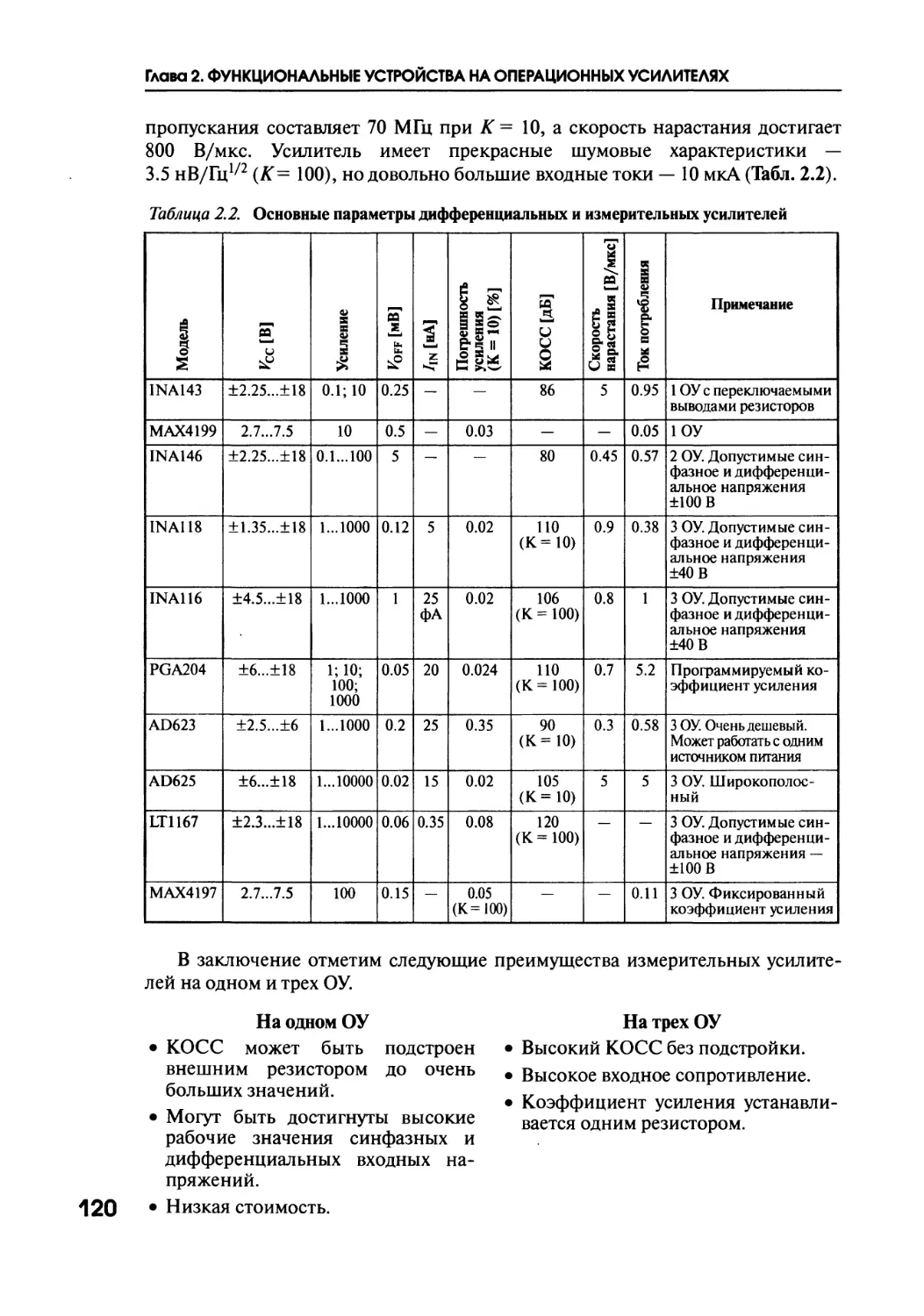
2.4.1. Измерительный усилитель на одном ОУ 115
2.4.2. Измерительный усилитель на двух ОУ 118
2.4.3. Измерительный усилитель на трех ОУ 118
2.4.4. Применение измерительных усилителей 121
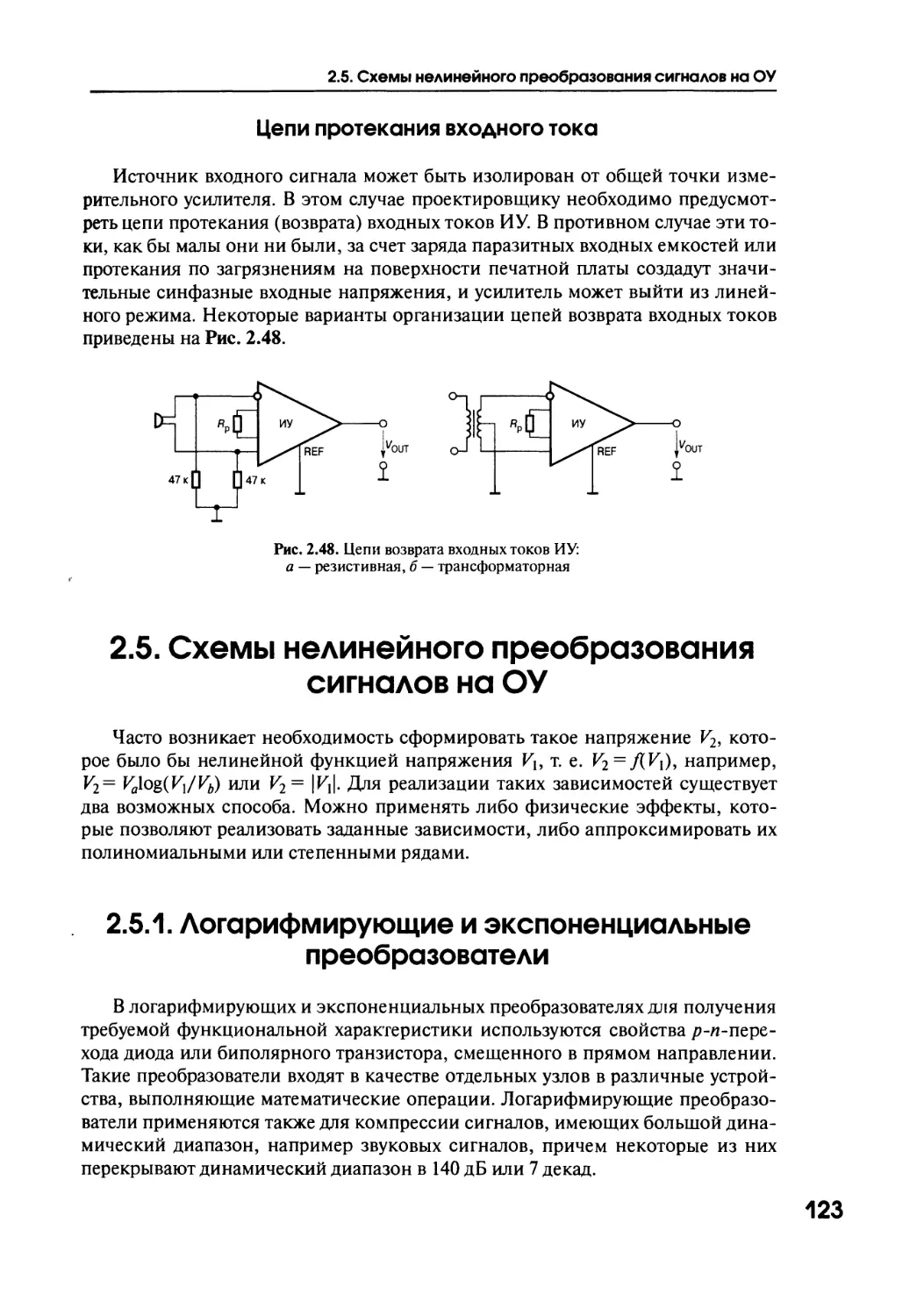
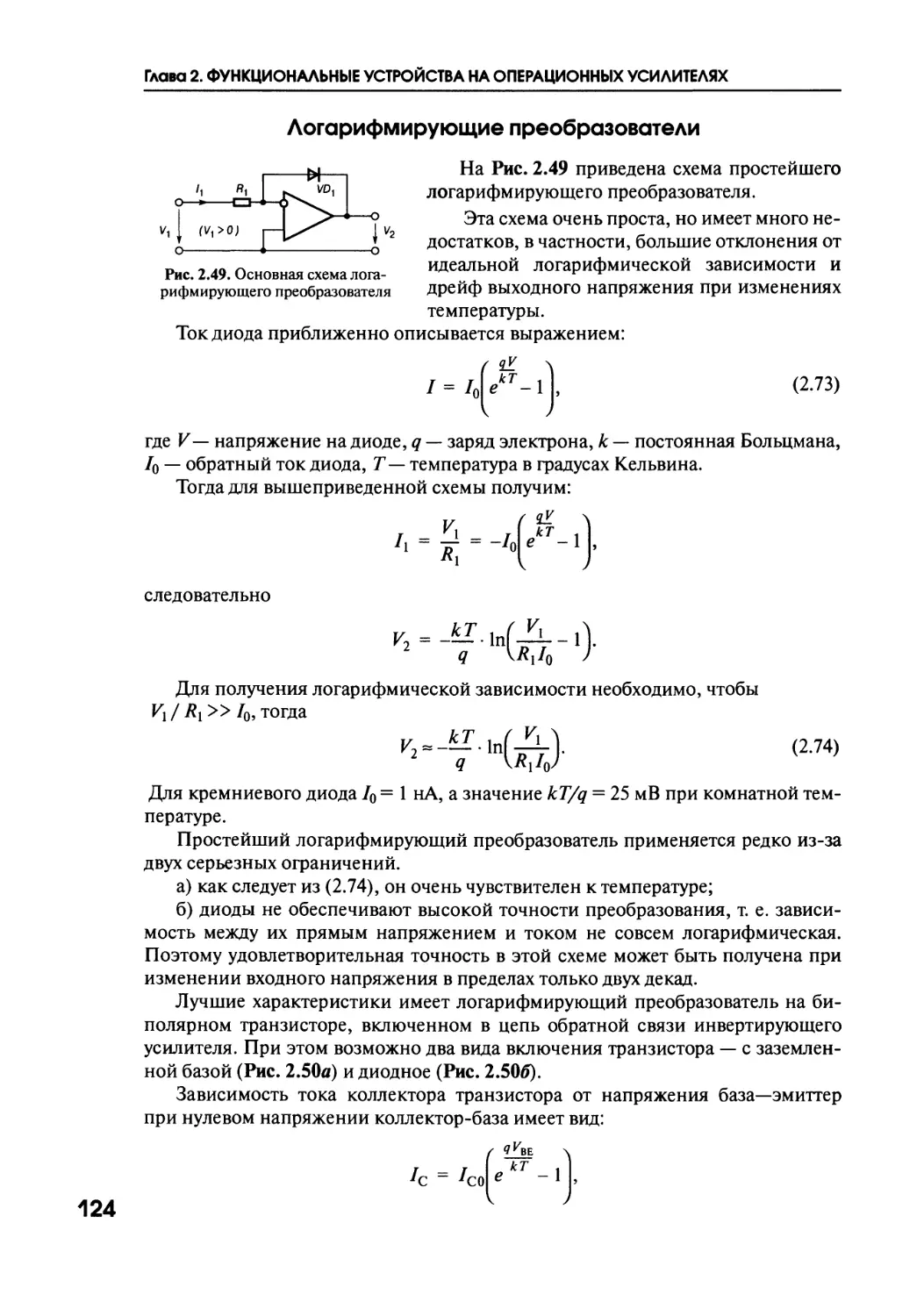
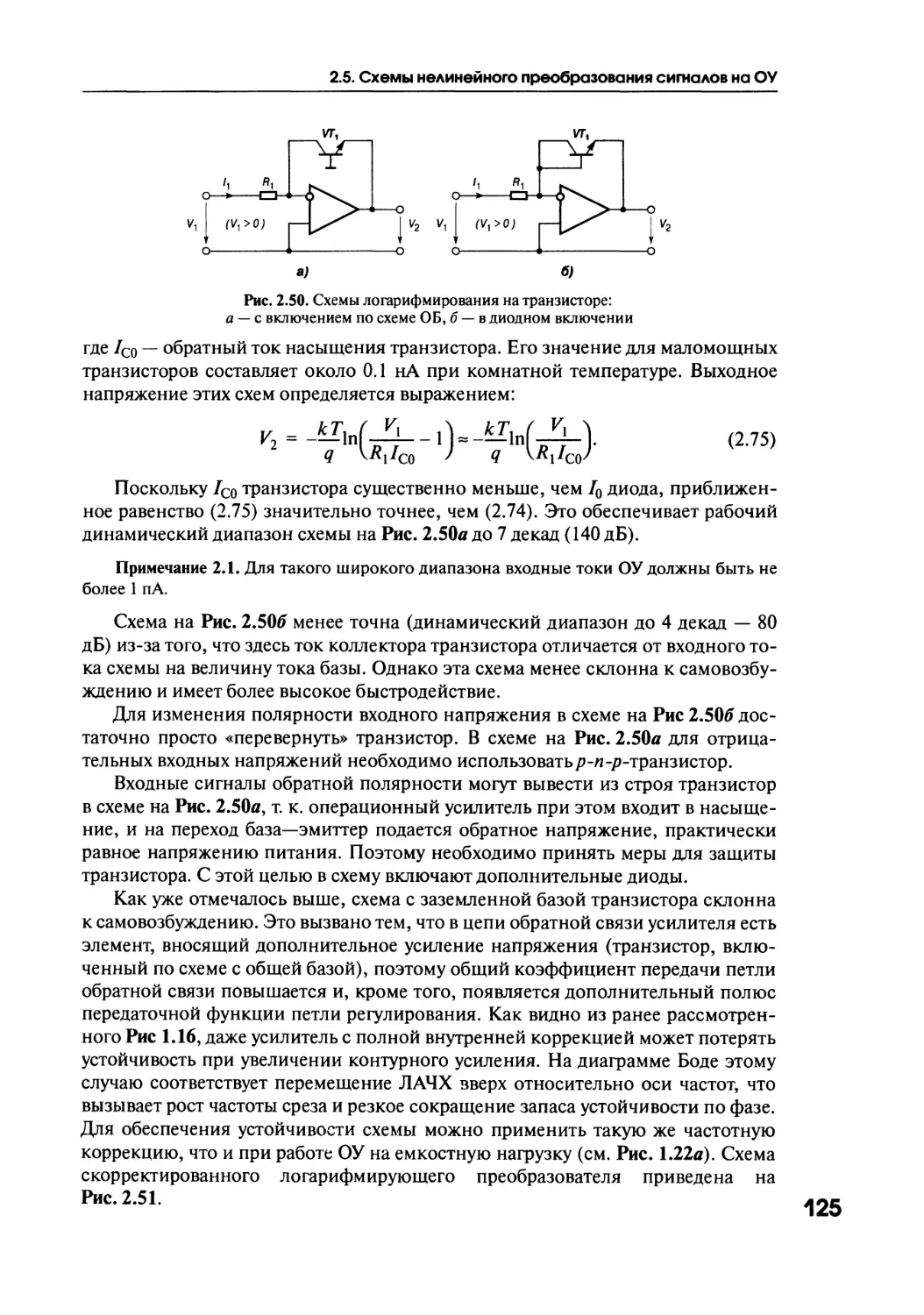
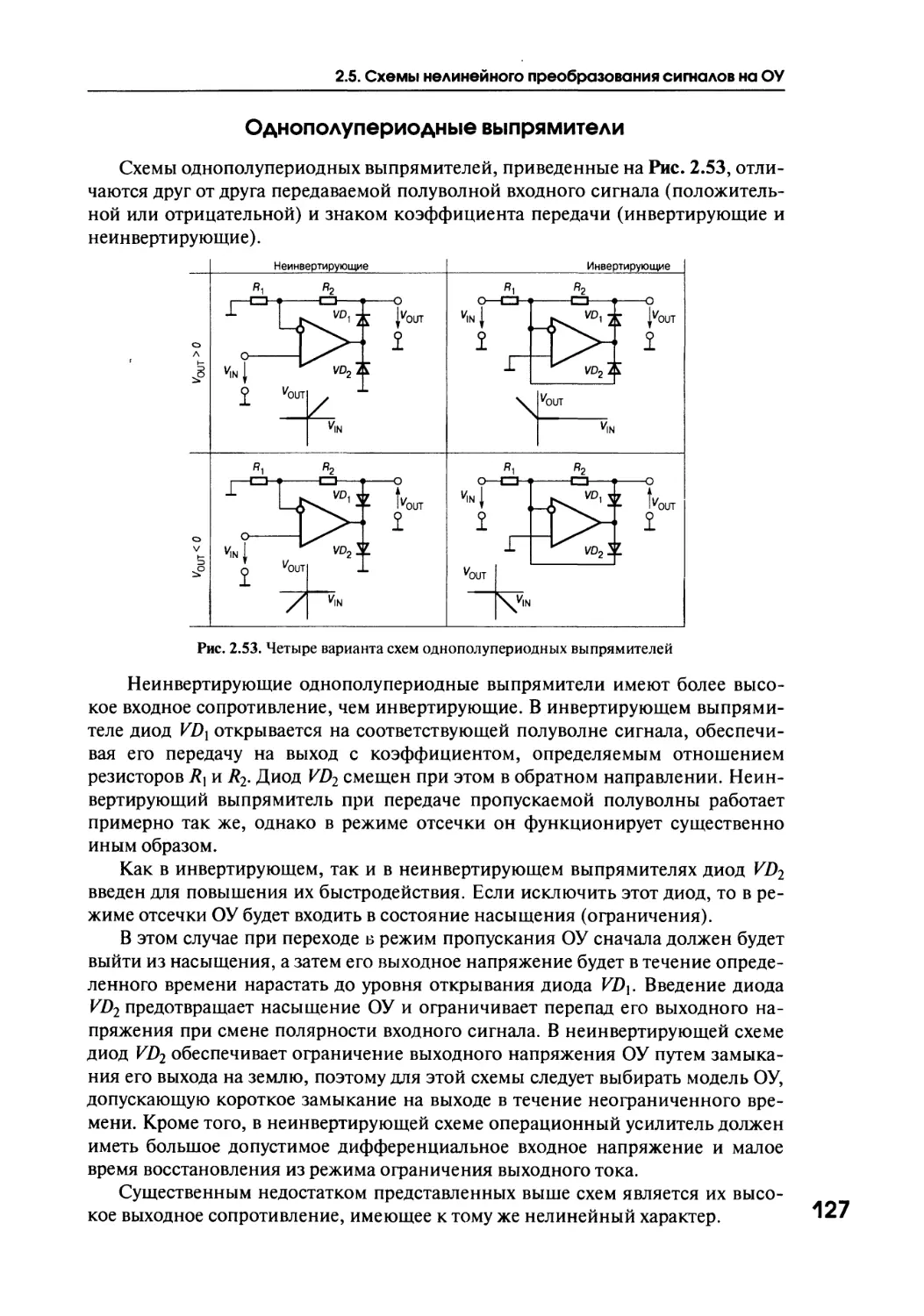
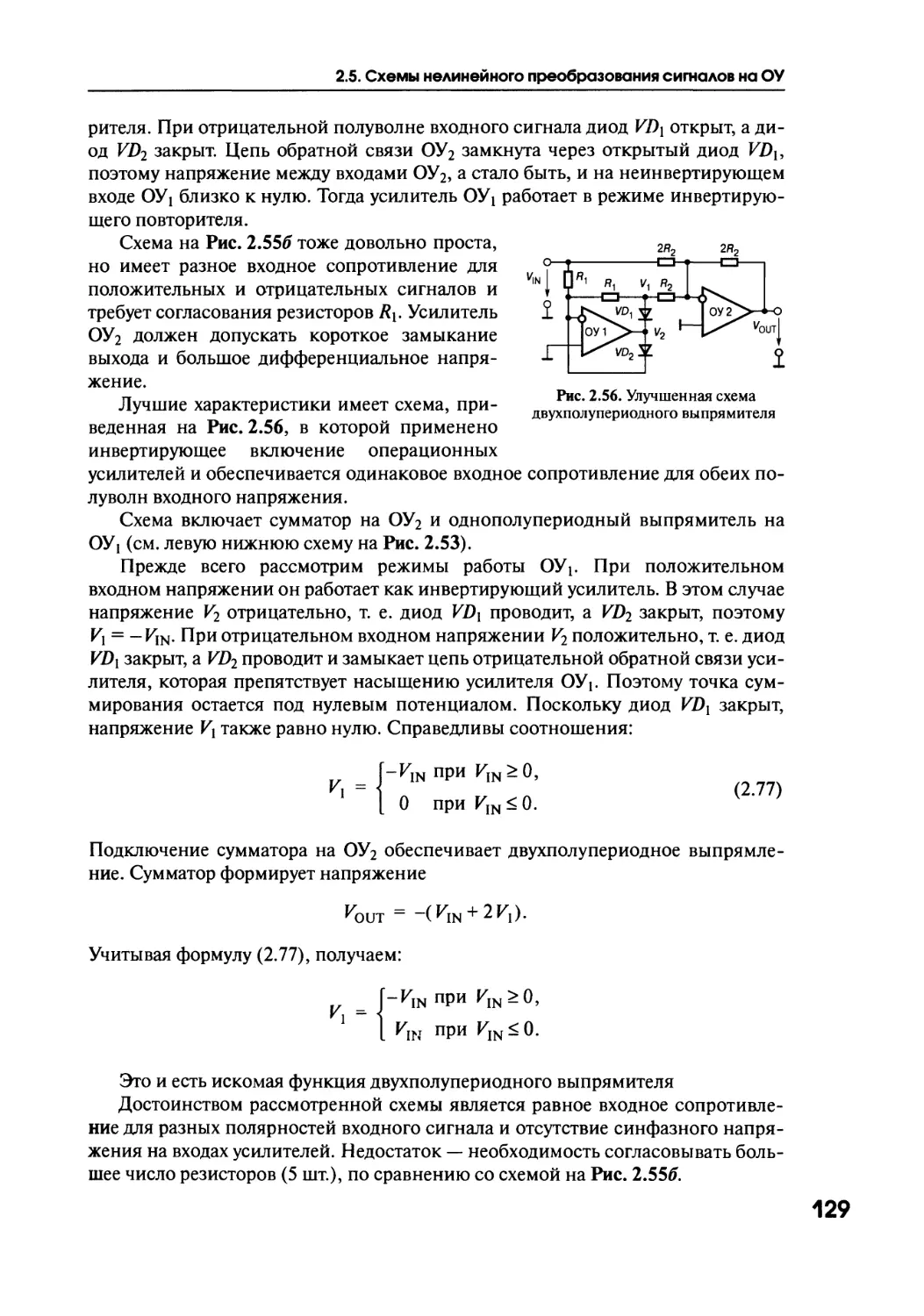
2.5. Схемы нелинейного преобразования сигналов на ОУ 123
2.5.1. Логарифмирующие и экспоненциальные преобразователи 123
2.5.2. Прецизионные выпрямители на ОУ 126
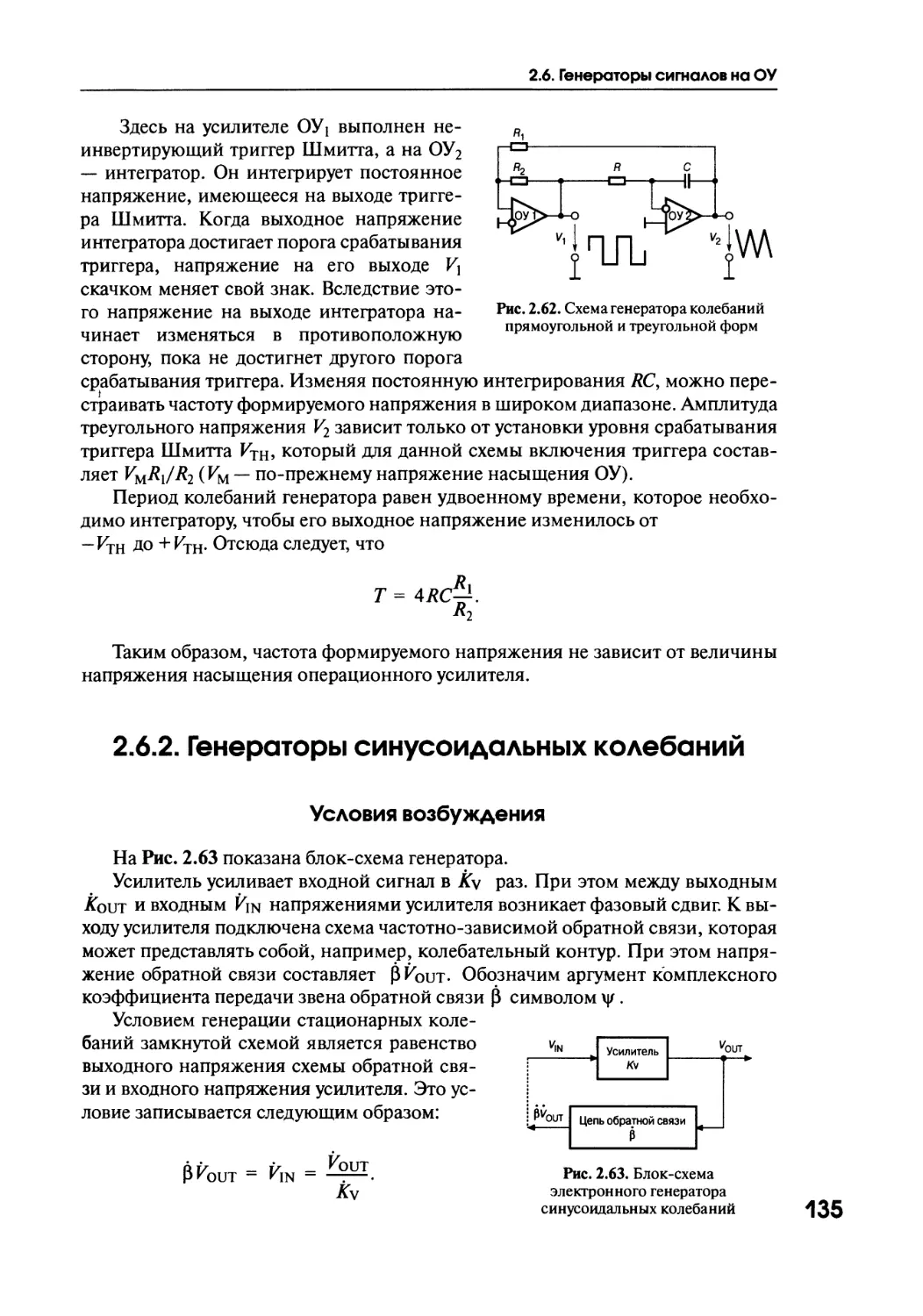
2.6. Генераторы сигналов на ОУ 131
2.6.1. Релаксационные генераторы 131
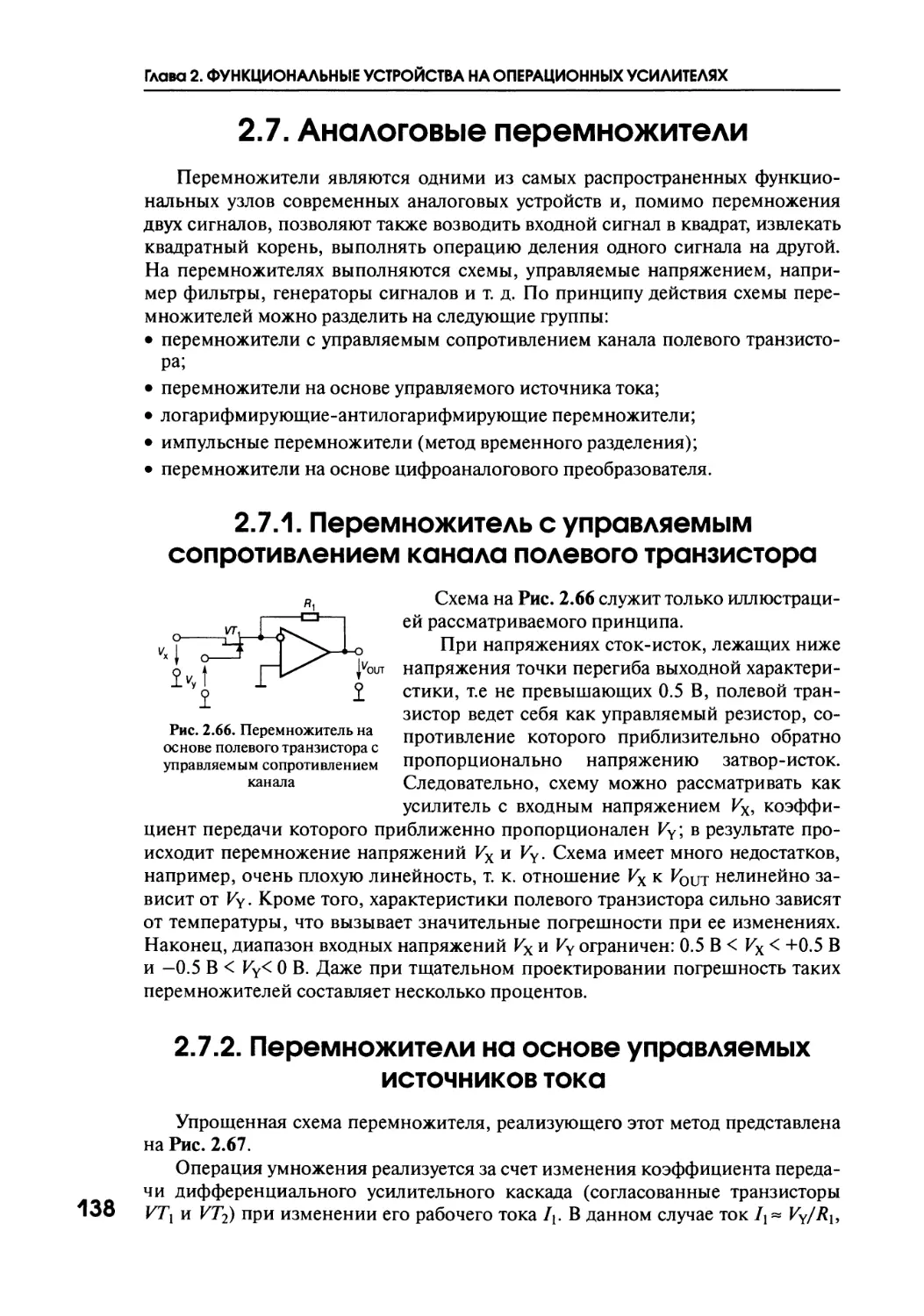
2.6.2. Генераторы синусоидальных колебаний 135
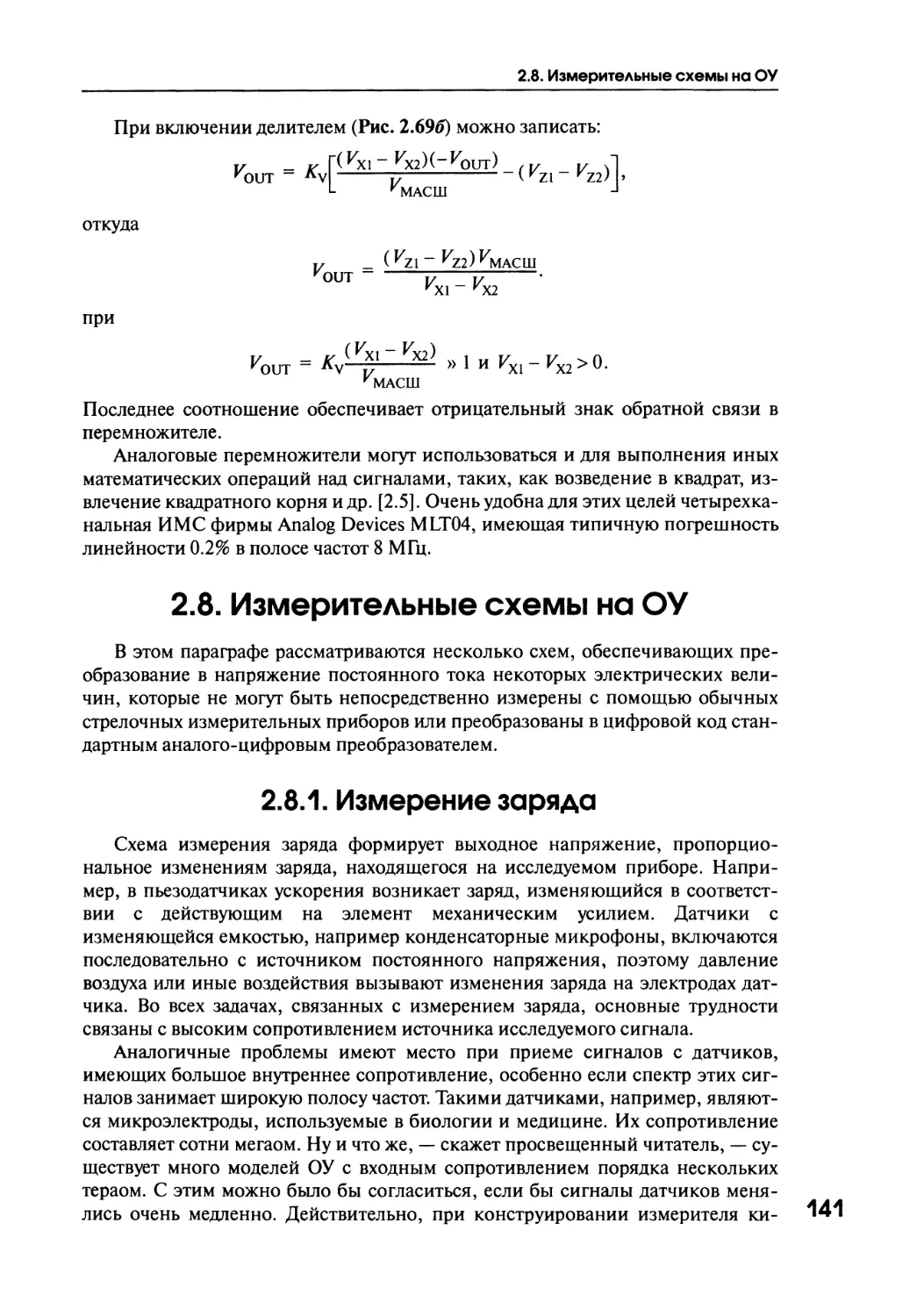
2.7. Аналоговые перемножители 138
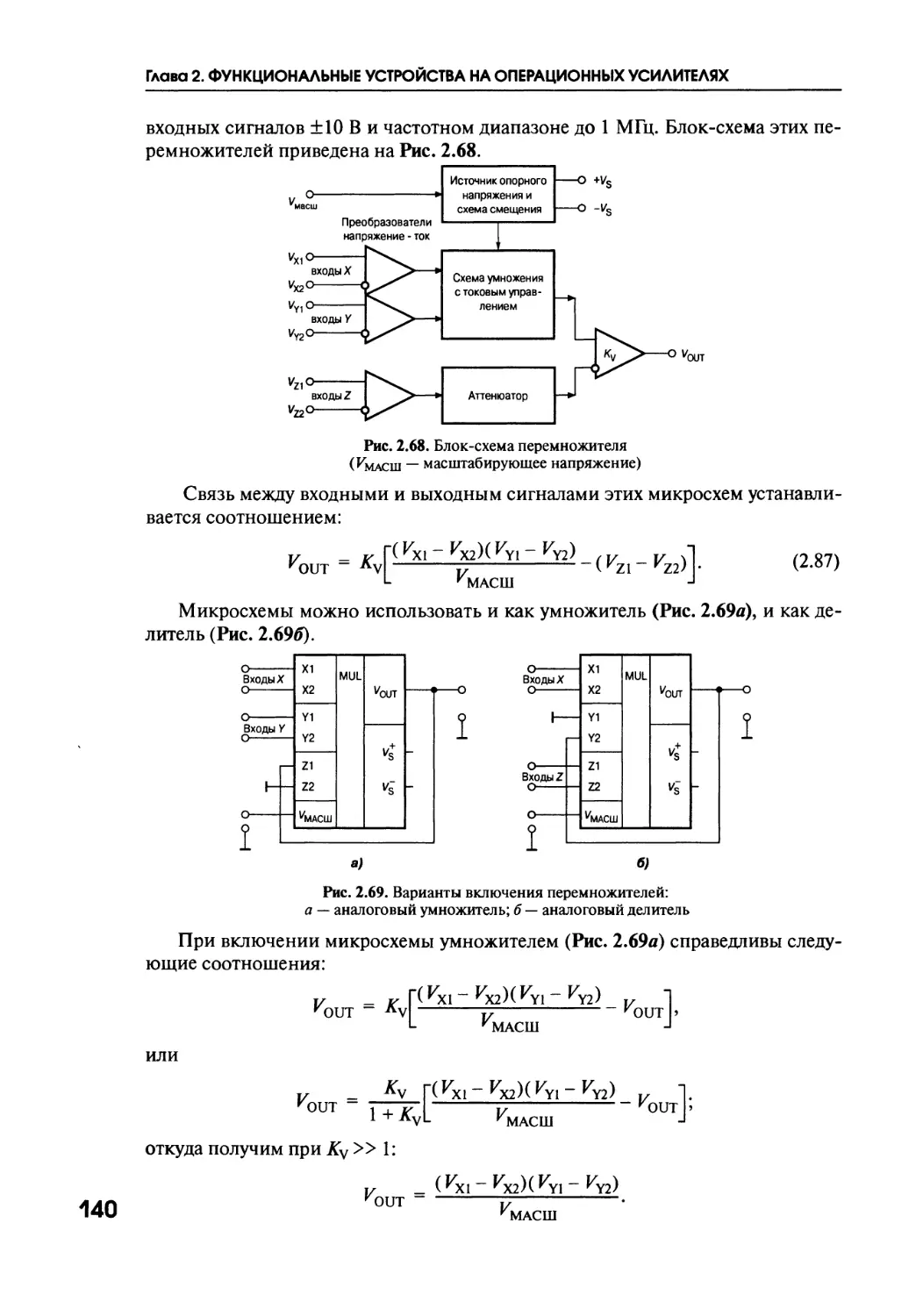
2.7.1. Перемножитель с управляемым сопротивлением канала полевого транзистора 138
2.7.2. Перемножители на основе управляемых источников тока 138
2.8. Измерительные схемы на ОУ 141
2.8.1. Измерение заряда 141
2.8.2. Измерители амплитуды (пиковые детекторы) 143
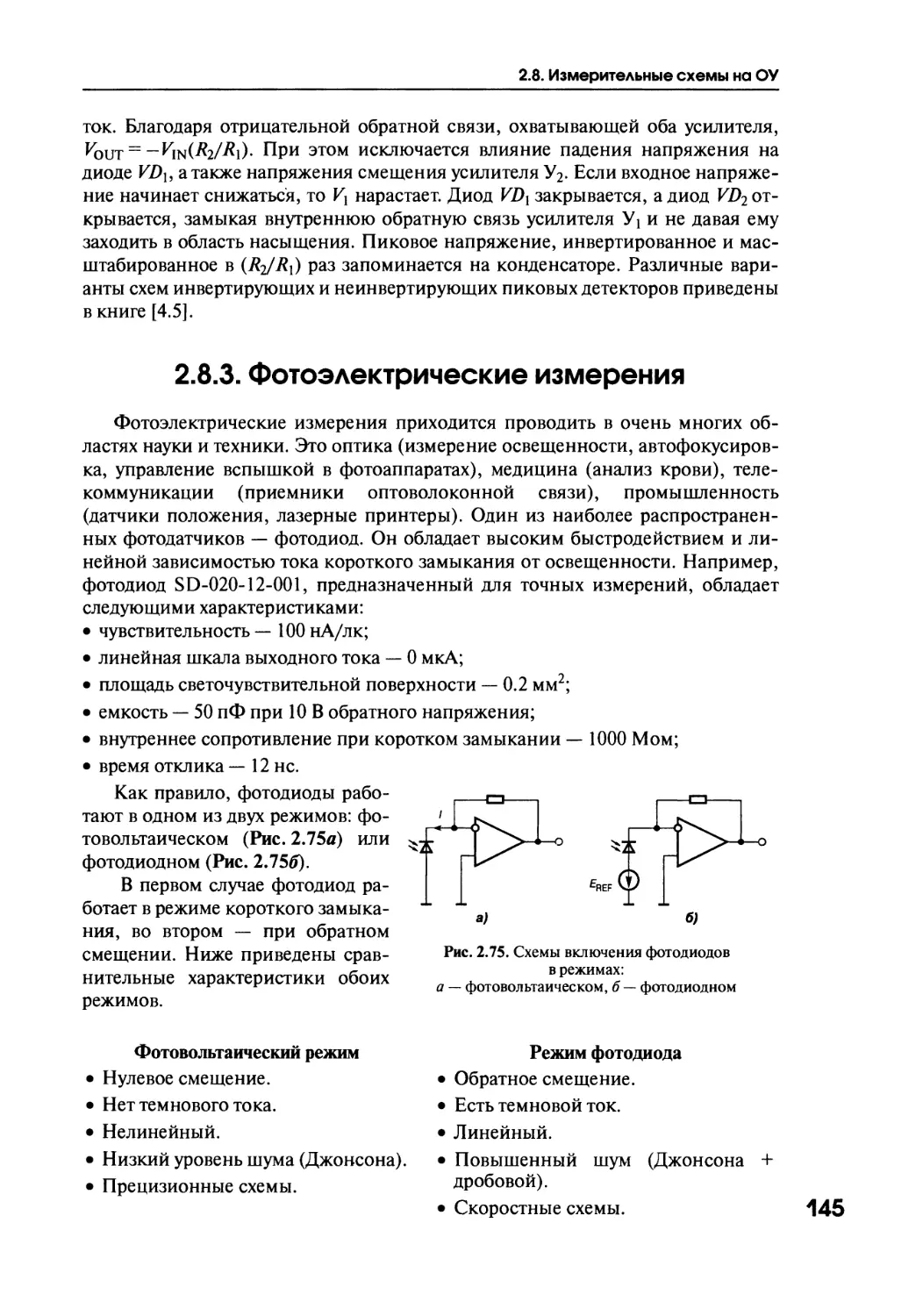
2.8.3. Фотоэлектрические измерения 145
2.8.4. Мостовые измерительные схемы 147
2.8.5. Измерение температуры 150
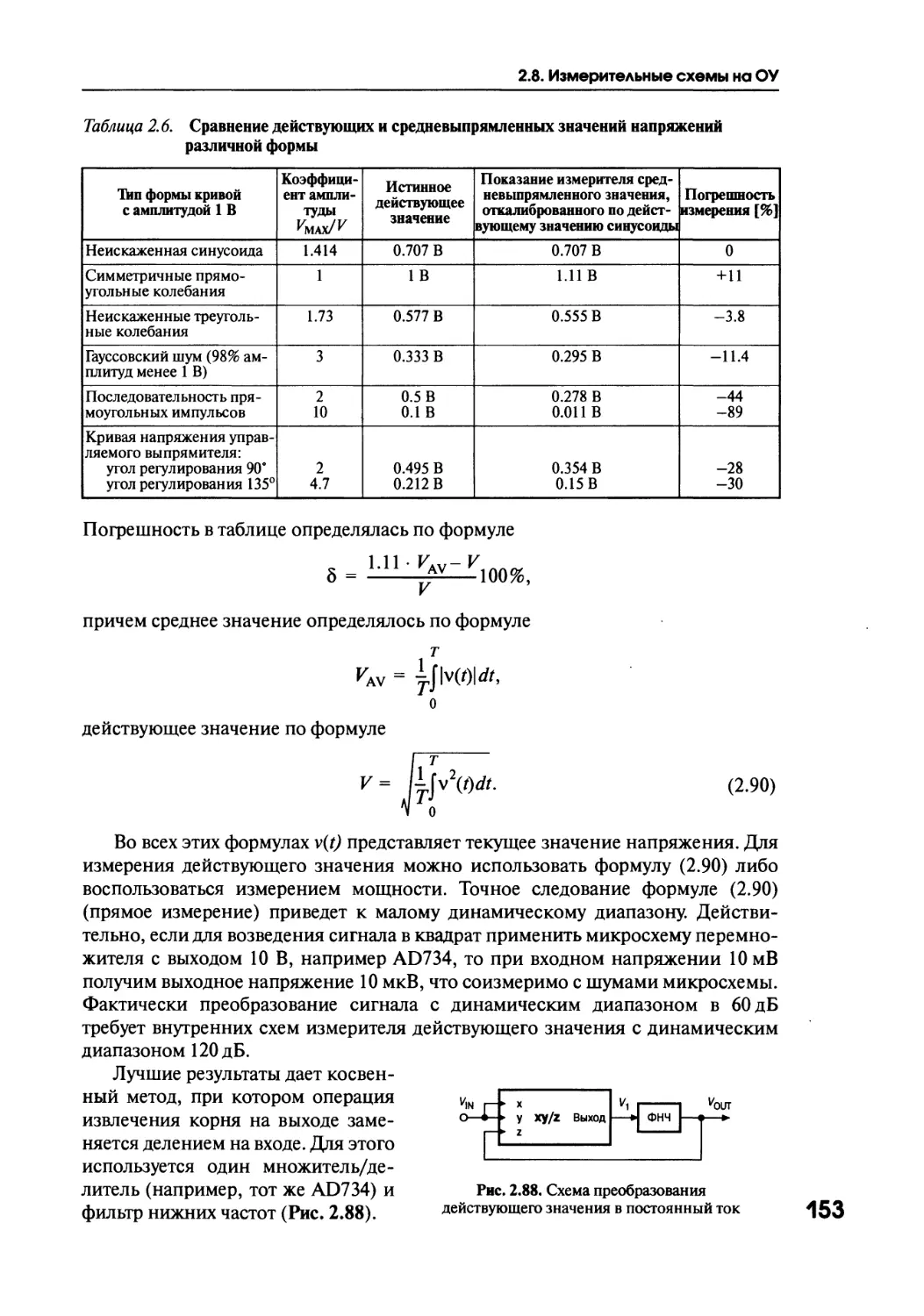
2.8.6. Измерение действующего значения 152
Глава 3. СПЕЦИАЛИЗИРОВАННЫЕ УСИЛИТЕЛИ НА БАЗЕ ИНТЕГРАЛЬНЫХ ОУ 160
3.1. Широкополосные усилители 160
3.1.1. Работа транзисторного усилительного каскада на высоких частотах 161
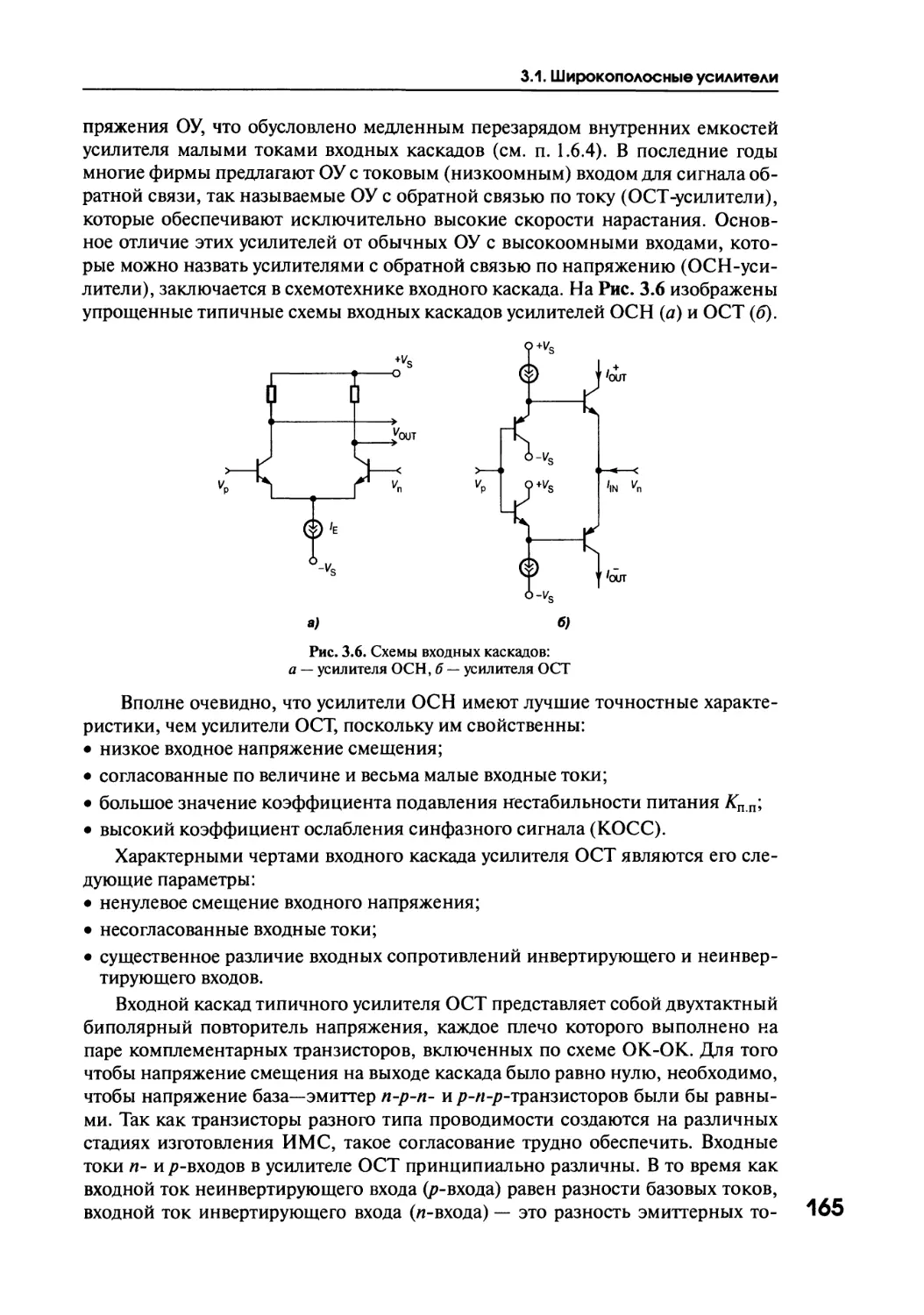
3.1.2. Применение операционных усилителей для усиления радиочастотных сигналов 163
3.1.3. Широкополосные ОУ с обратной связью потоку 164
3.1.4. Усилители дифференциальных линий 170
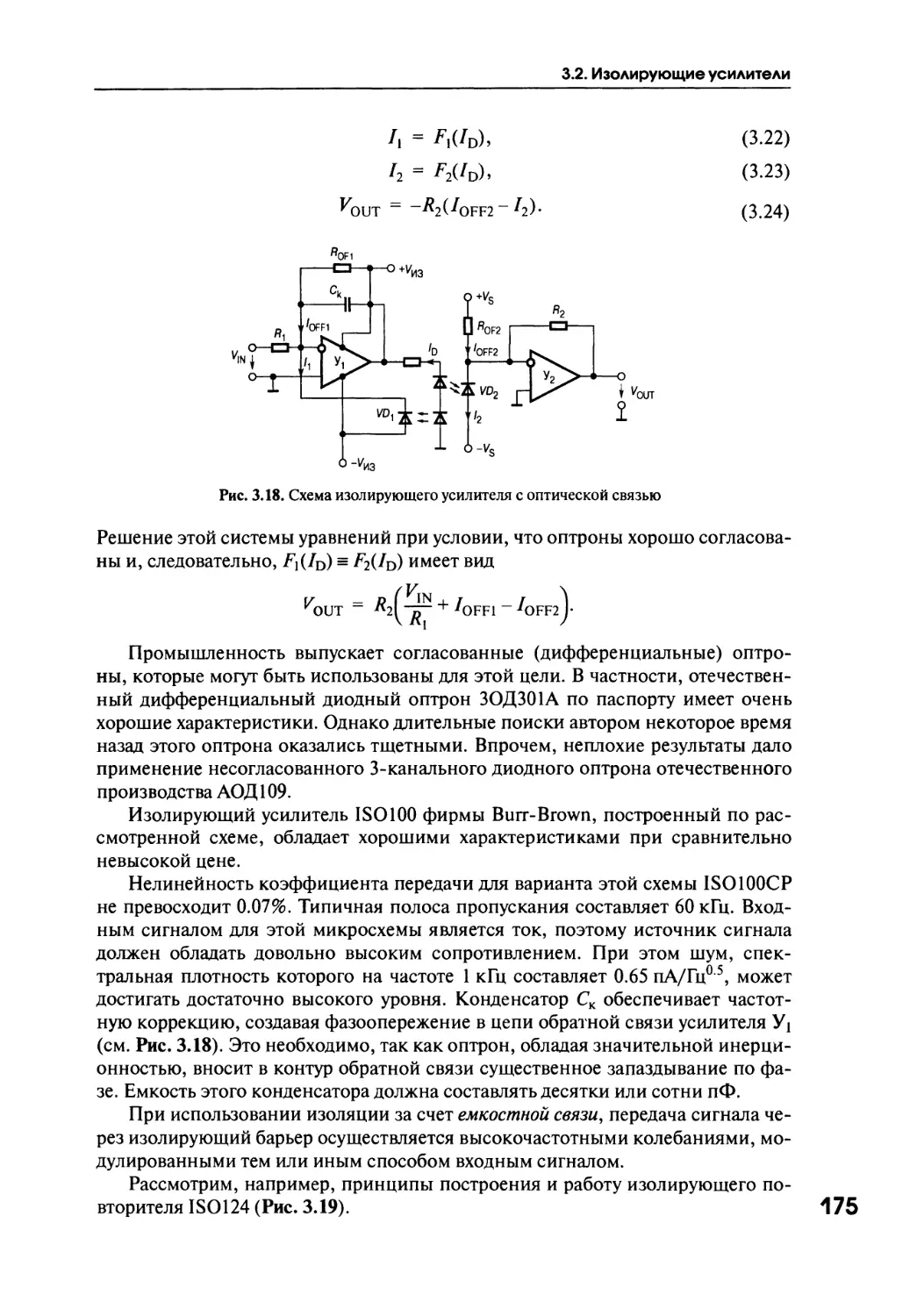
3.2. Изолирующие усилители 174
3.3. Усилители класса D 178
3.3.1. Общие сведения 178
4
ОГЛАВЛЕНИЕ
3.3.2. Виды широтно-импульсной модуляции 178
3.3.3. Схемотехника выходных каскадов усилителей класса D 180
3.3.4. Промышленные типы усилителей класса D 182
3.3.5. Помехи, порождаемые усилителями класса D и борьба с ними 183
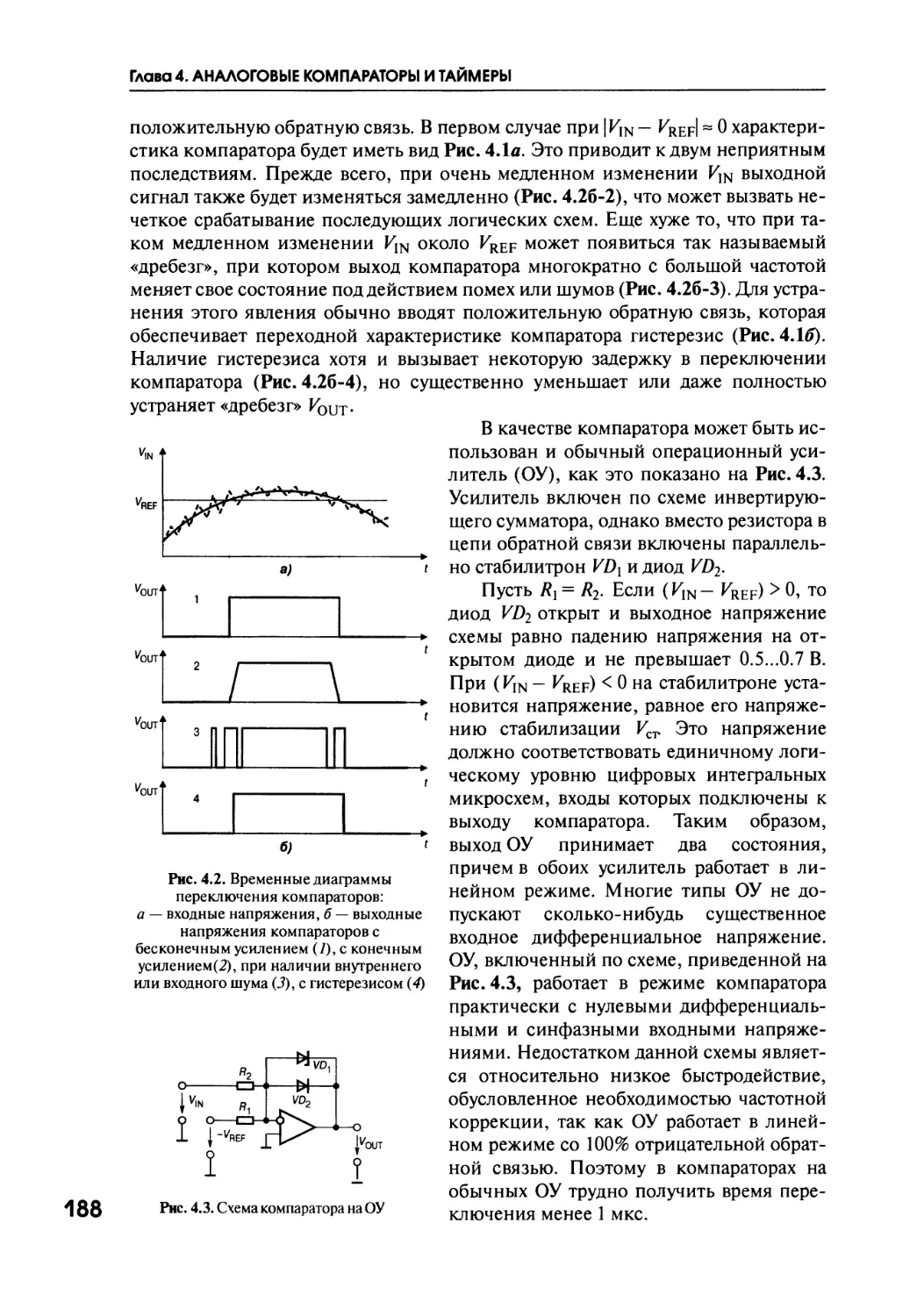
Глава 4. АНАЛОГОВЫЕ КОМПАРАТОРЫ И ТАЙМЕРЫ 187
4.1. Общие сведения о компараторах 187
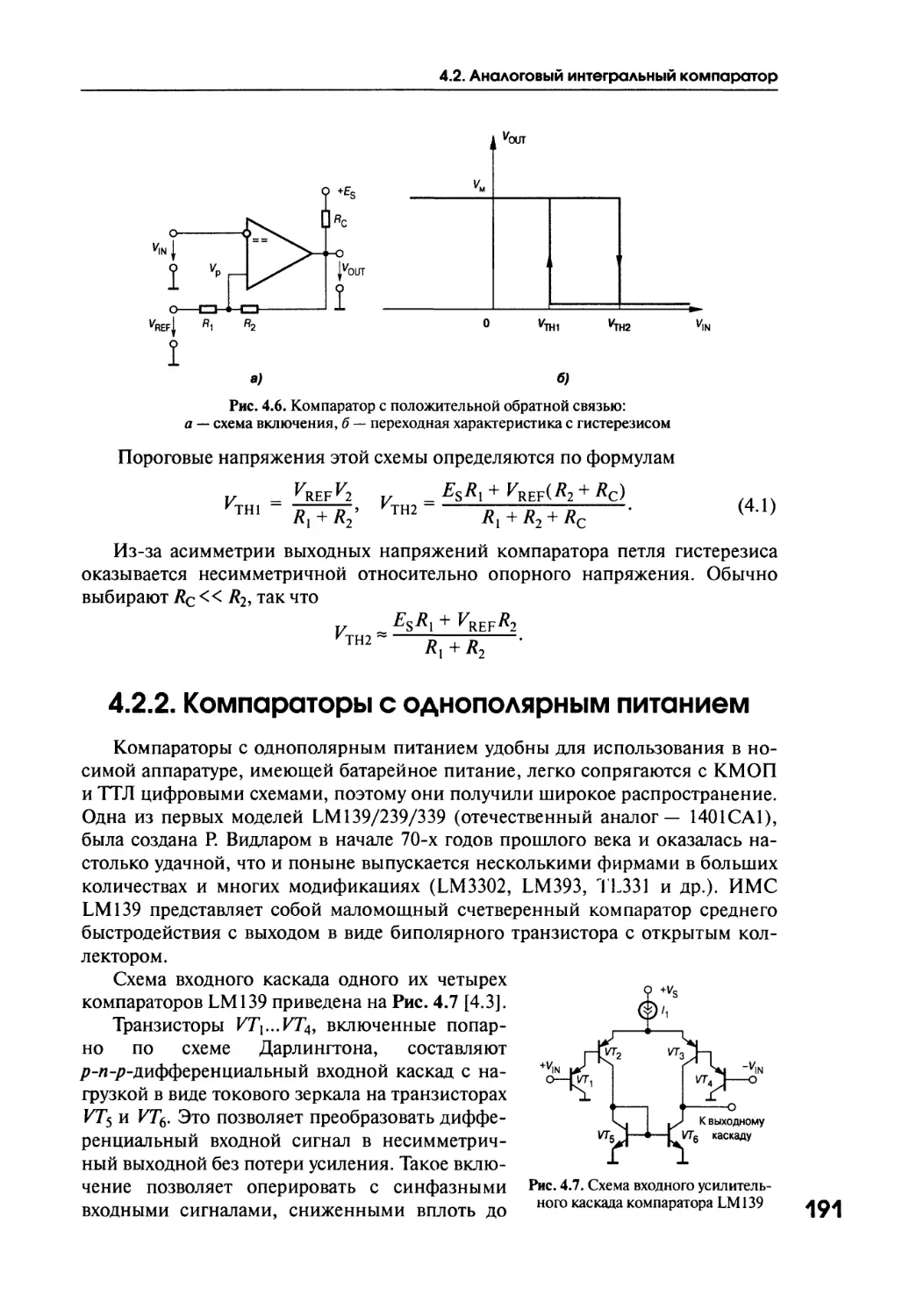
4.2. Аналоговый интегральный компаратор 189
4.2.1. Принципы построения интегральных компараторов 189
4.2.2. Компараторы с однополярным питанием 191
4.2.3. Скоростные компараторы 192
4.3. Применение компараторов 194
4.3.1. Двухпороговый компаратор 194
4.3.2. Детектор пересечения нуля 195
4.3.3. Сравнение напряжений противоположной полярности 195
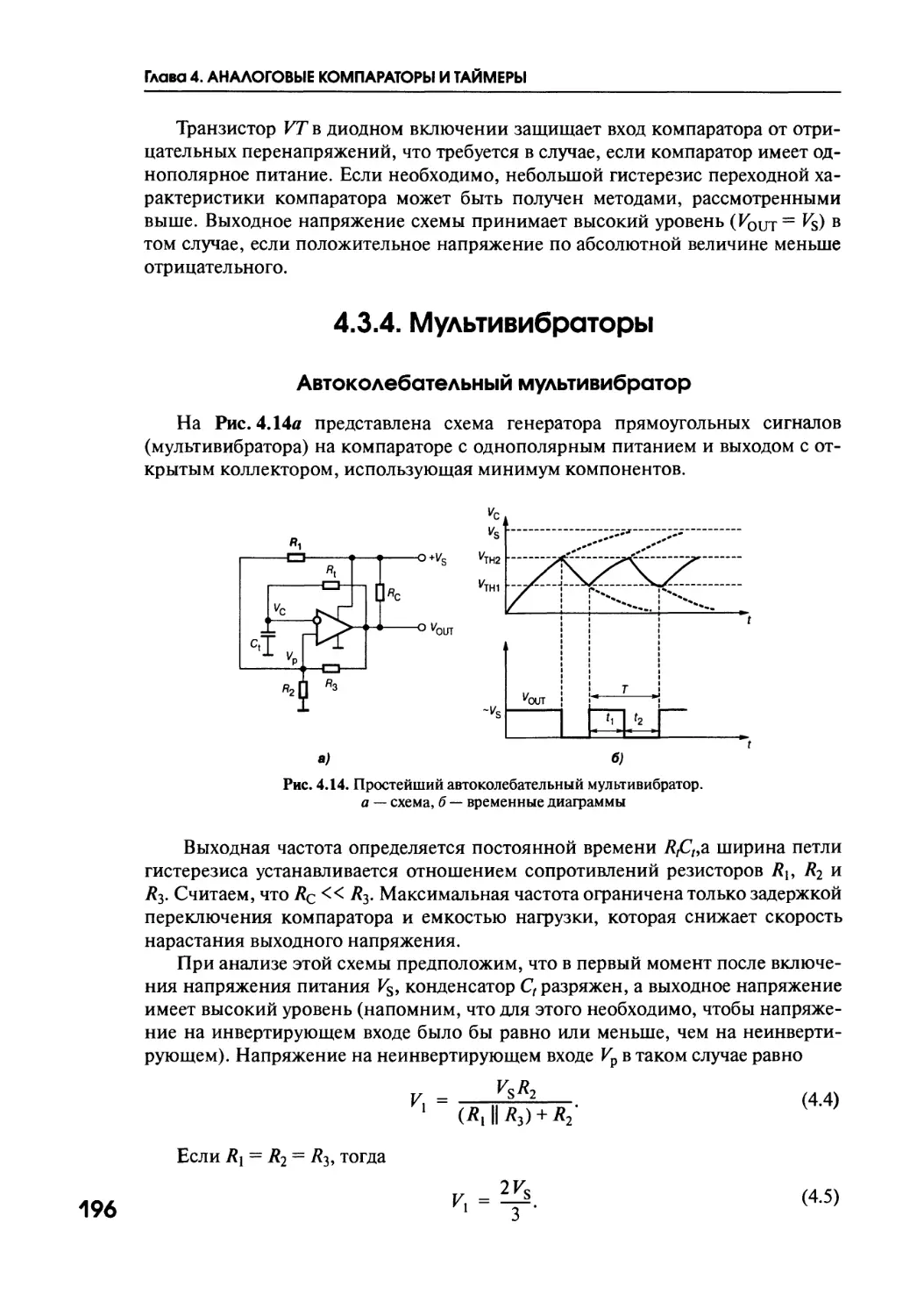
4.3.4. Мультивибраторы 196
4.3.5. Применение компаратора в качестве ОУ 198
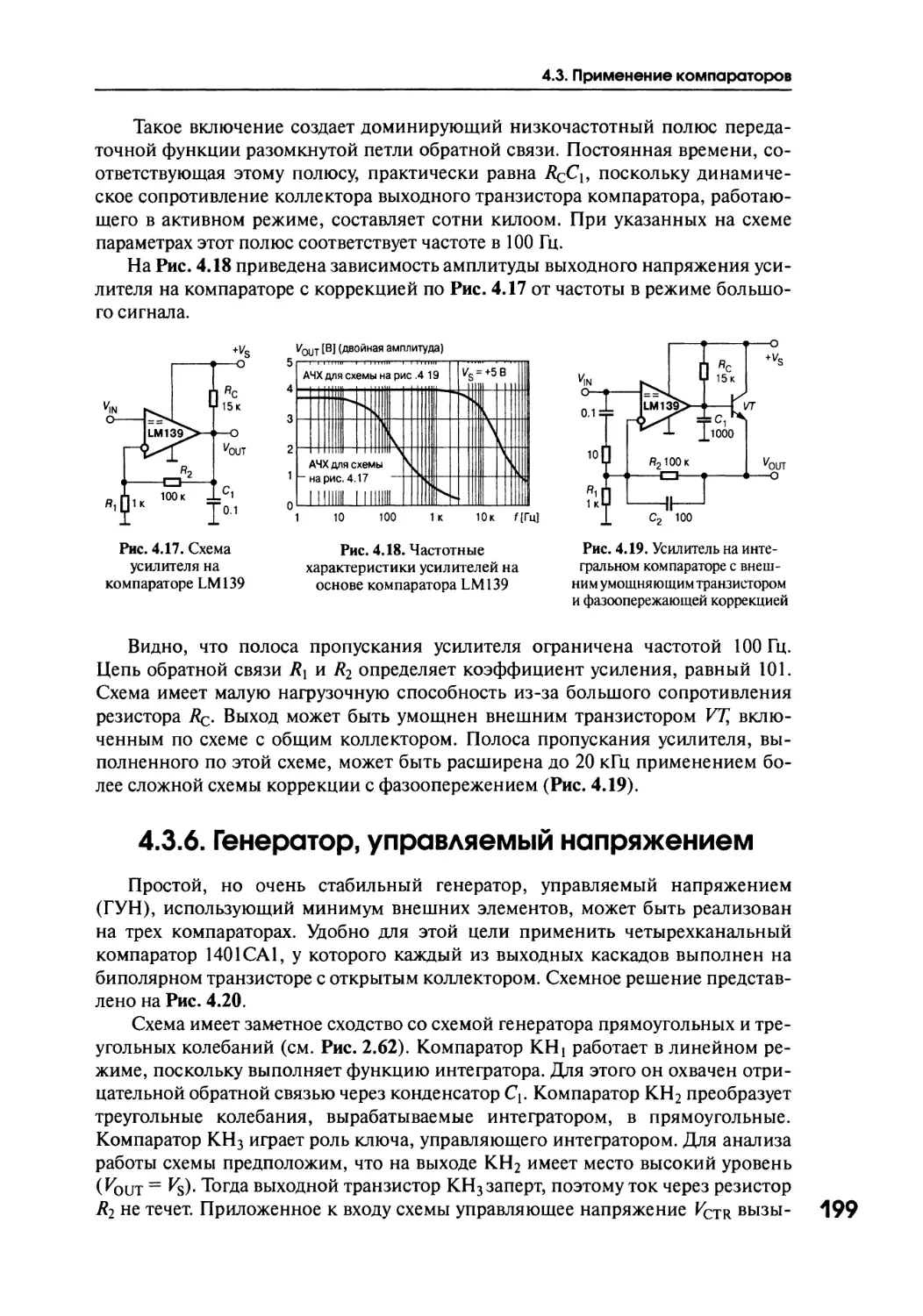
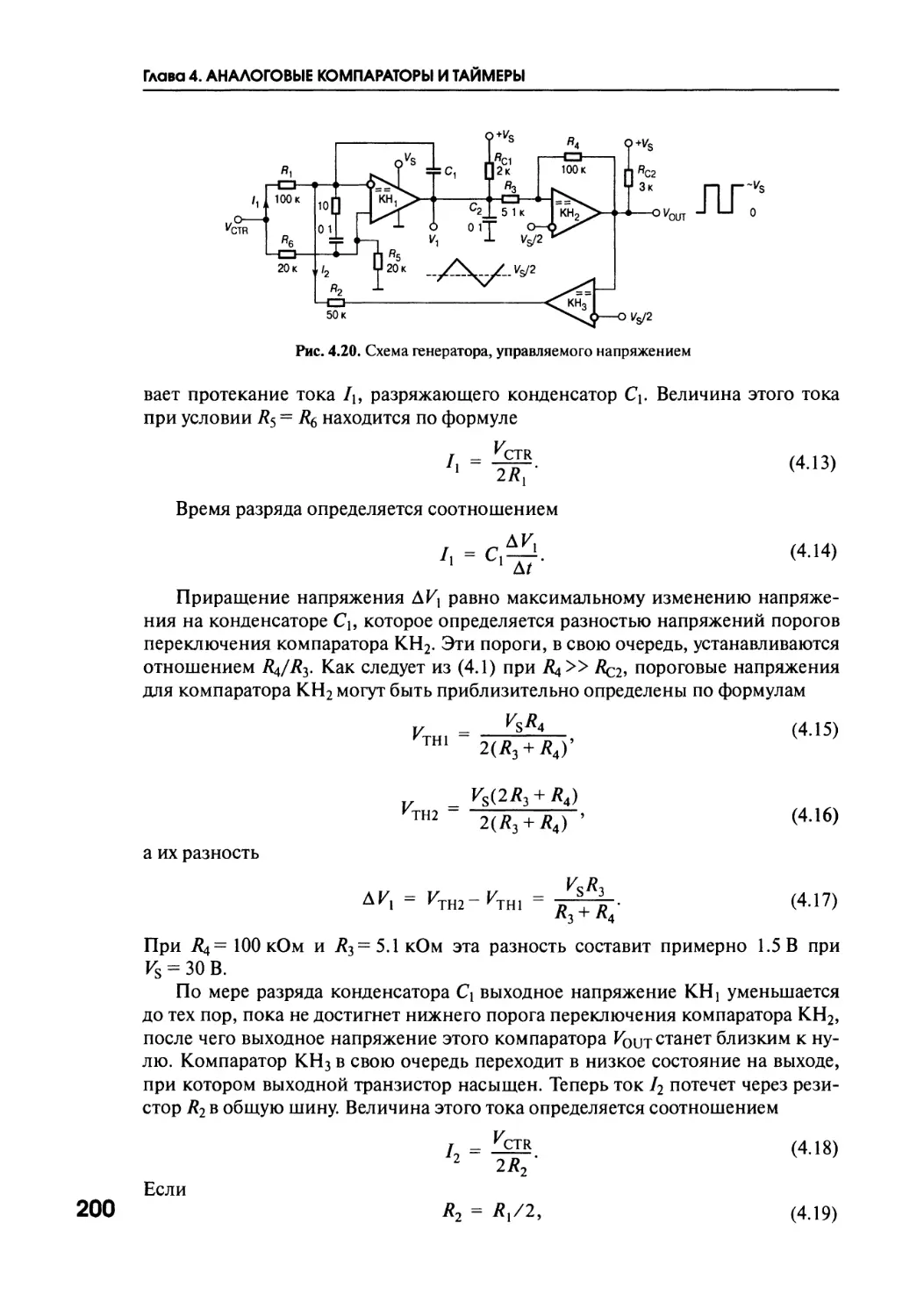
4.3.6. Генератор, управляемый напряжением 199
4.3.7. Логические элементы 201
4.3.8. Одновибраторы 203
4.3.9. Генератор временных задержек 206
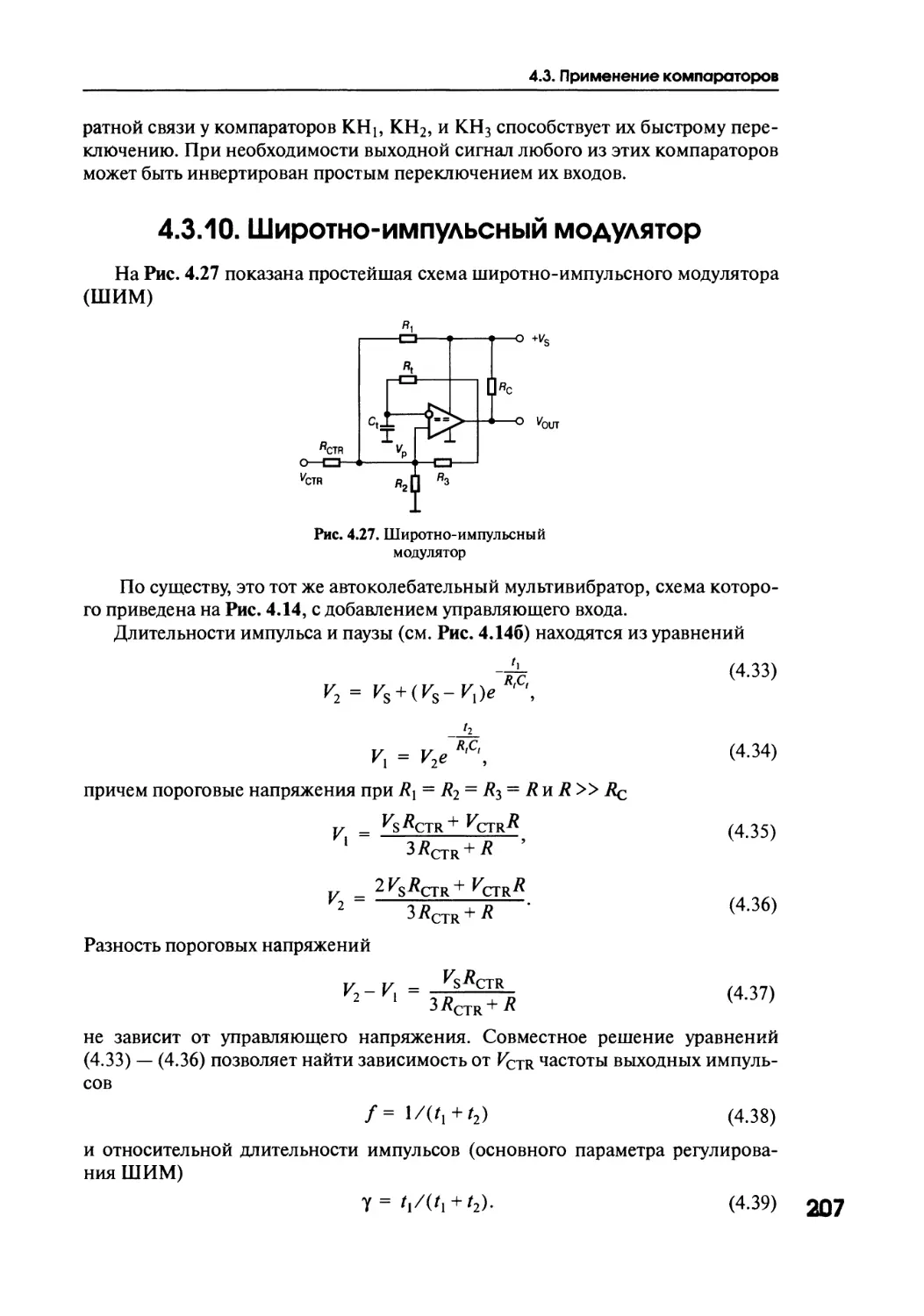
4.3.10. Широтно-импульсный модулятор 207
4.3.11. Двухполупериодный выпрямитель 208
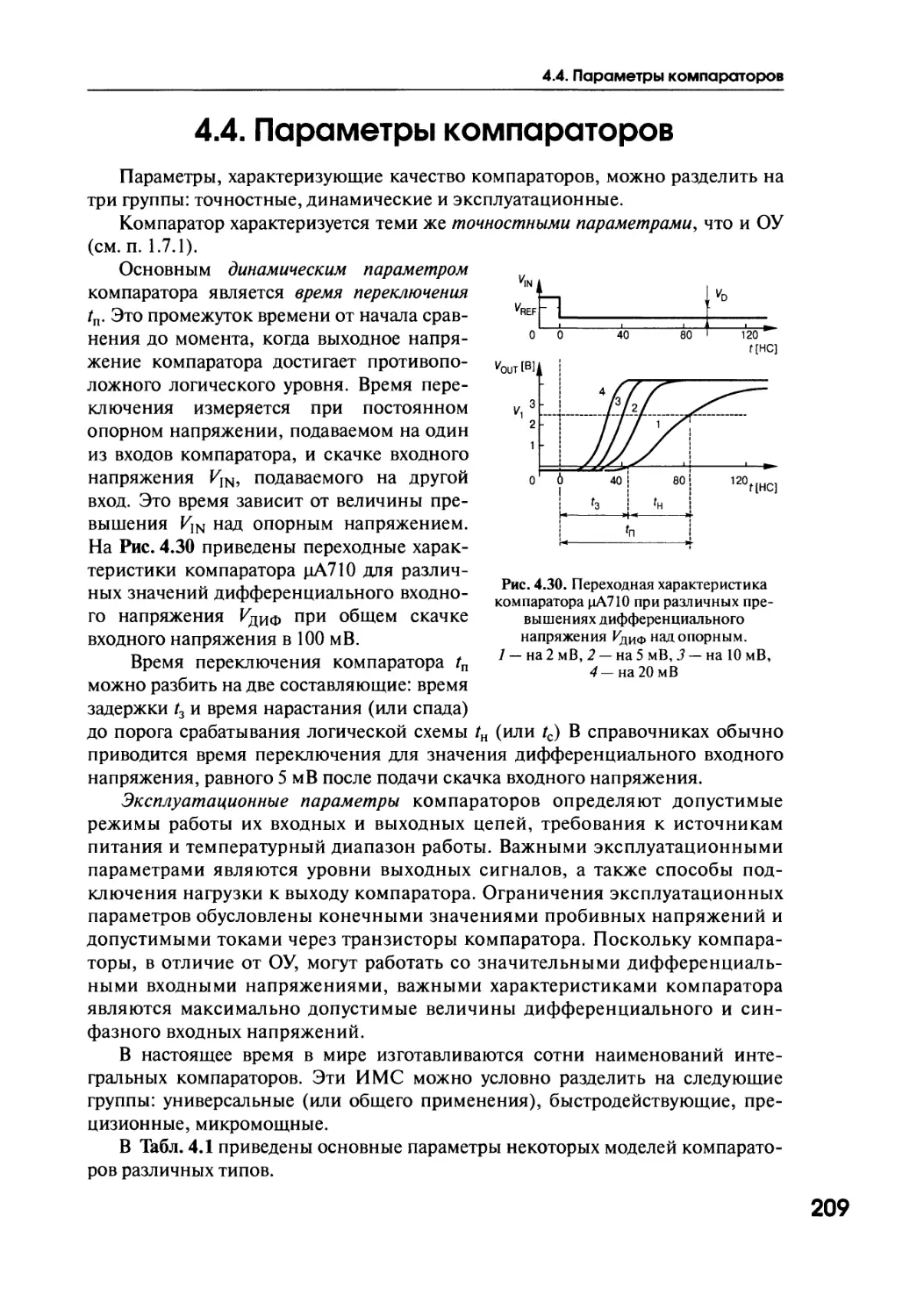
4.4. Параметры компараторов 209
4.5. Аналоговые таймеры 210
4.5.1. Таймер NE555 210
4.5.2. Основные схемы включения таймера 212
4.5.3. Типы интегральных таймеров 214
Глава 5. ЛИНЕЙНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ 217
5.1. Общие сведения 217
5.2. Схемотехника линейных стабилизаторов напряжения 217
5.2.1. Базовая схема линейного стабилизатора напряжения 218
5.2.2. Интегральный линейный стабилизатор напряжения 219
5.2.3. Стабилизация отрицательных напряжений 221
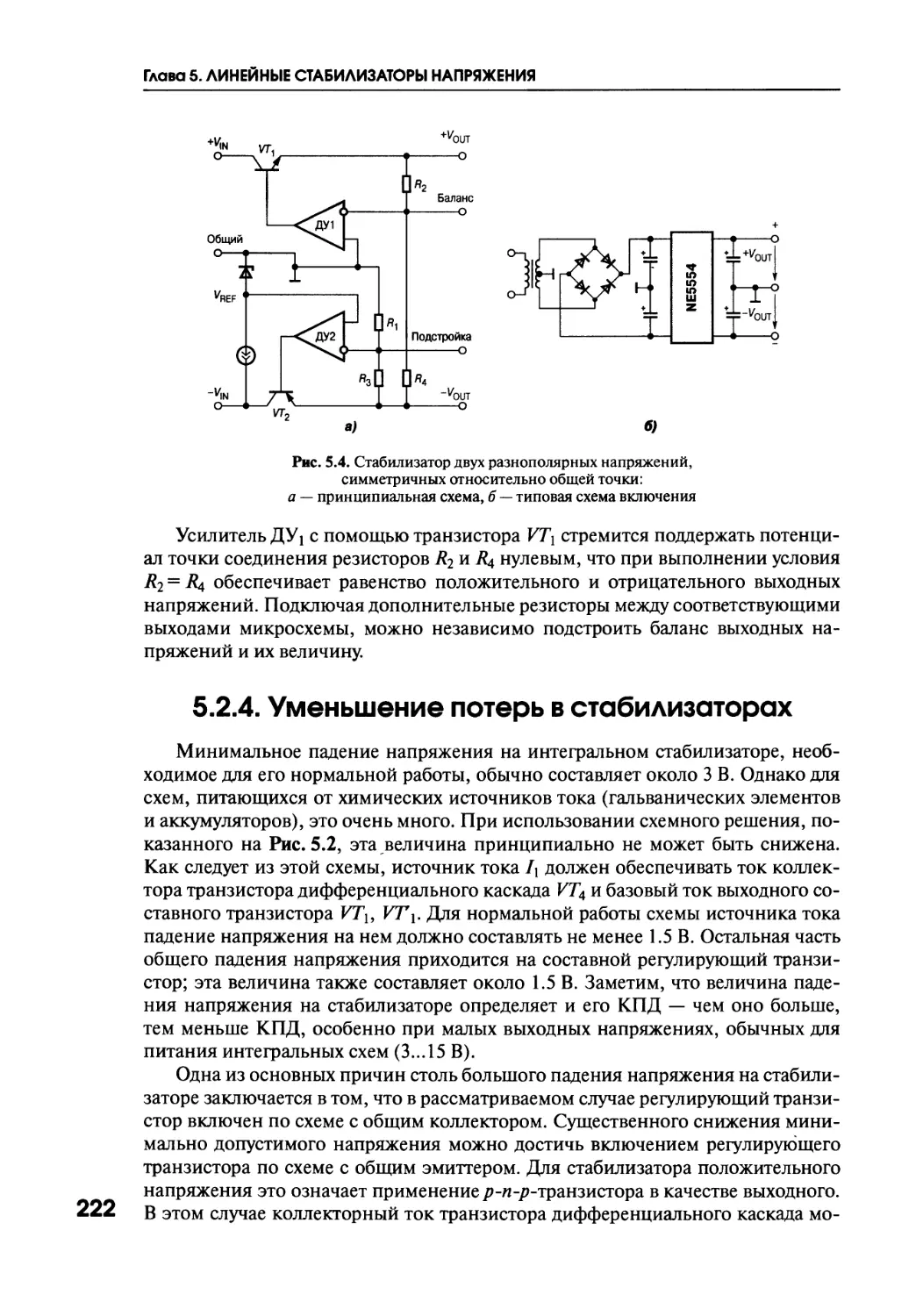
5.2.4. Уменьшение потерь в стабилизаторах 222
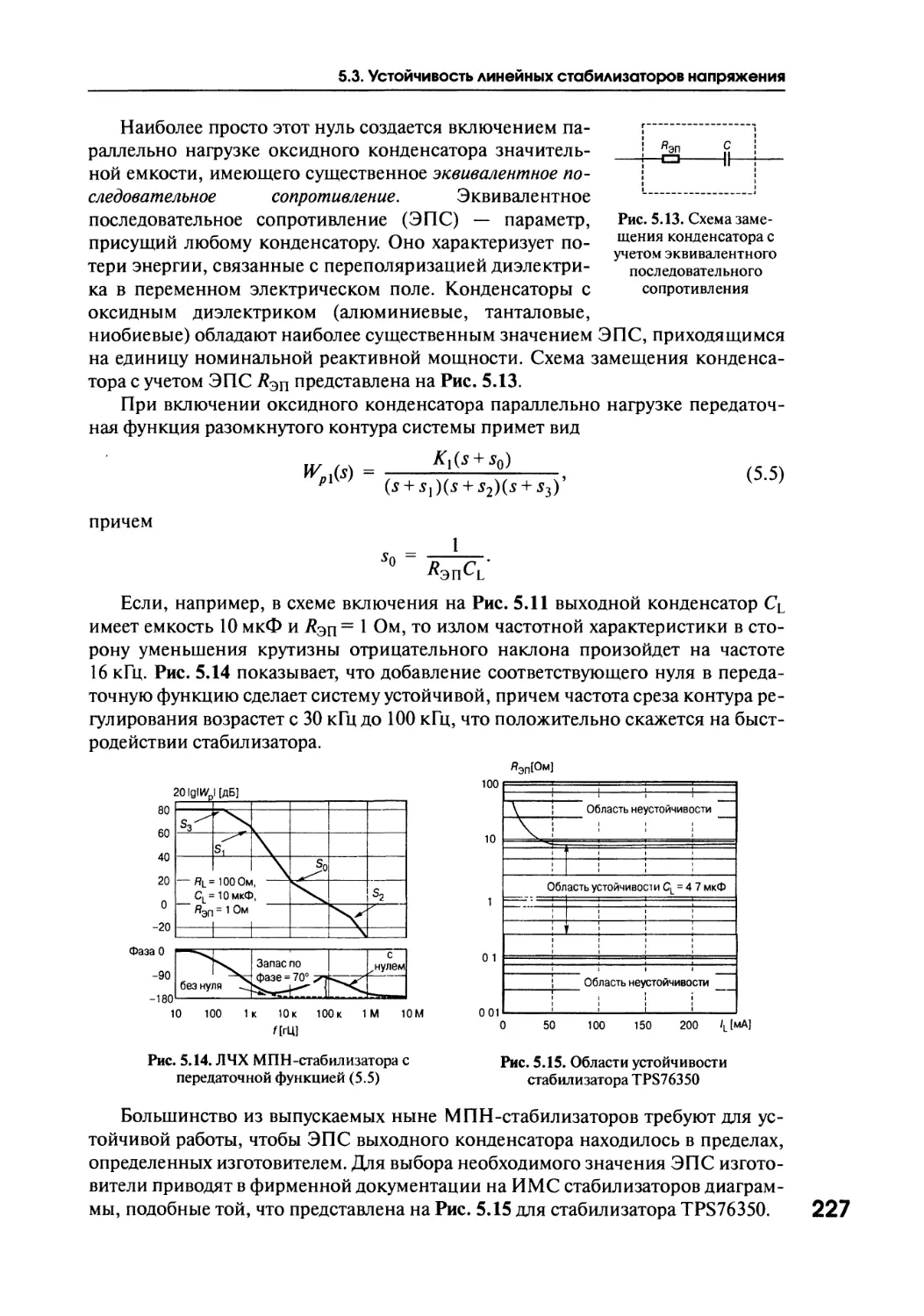
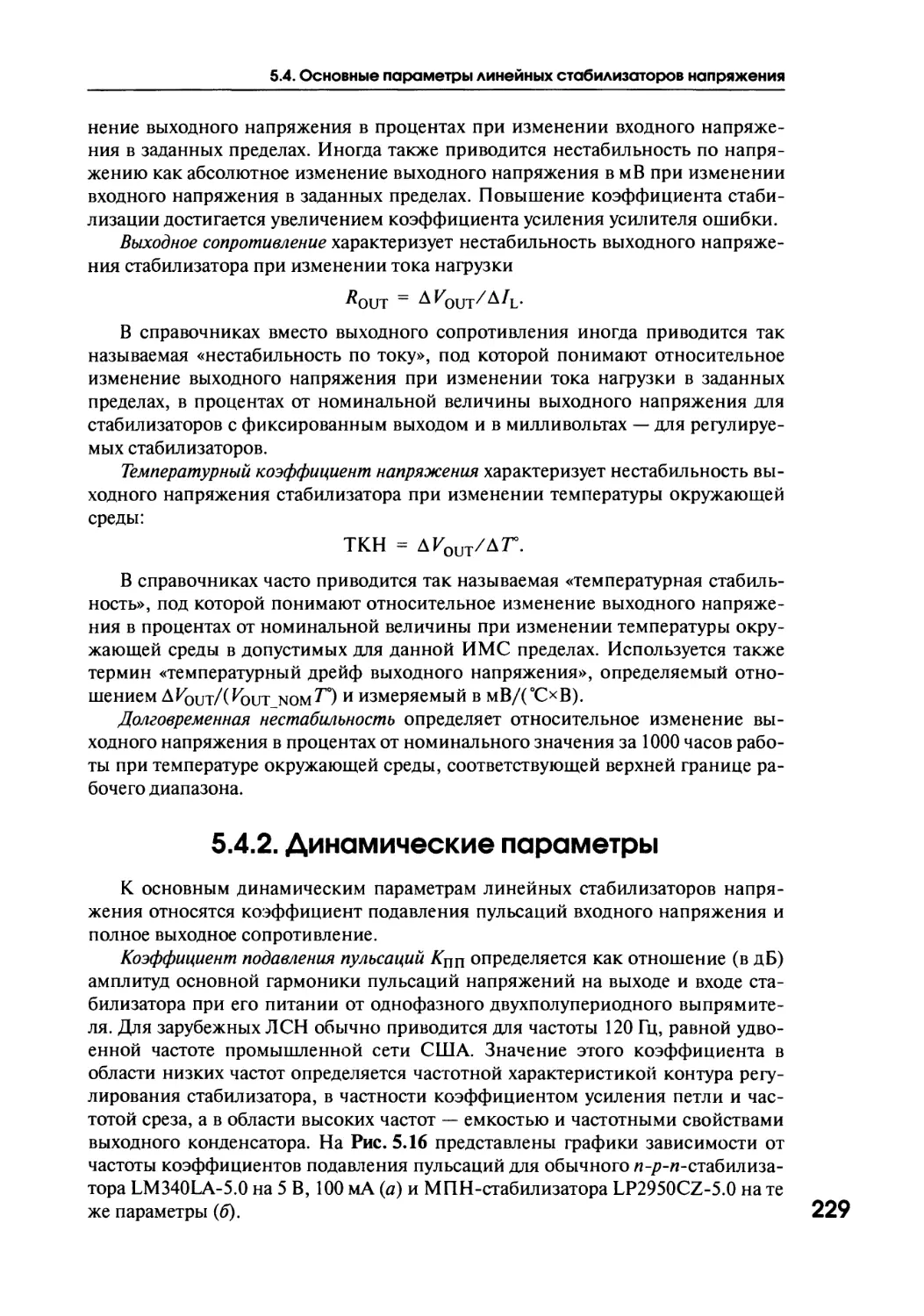
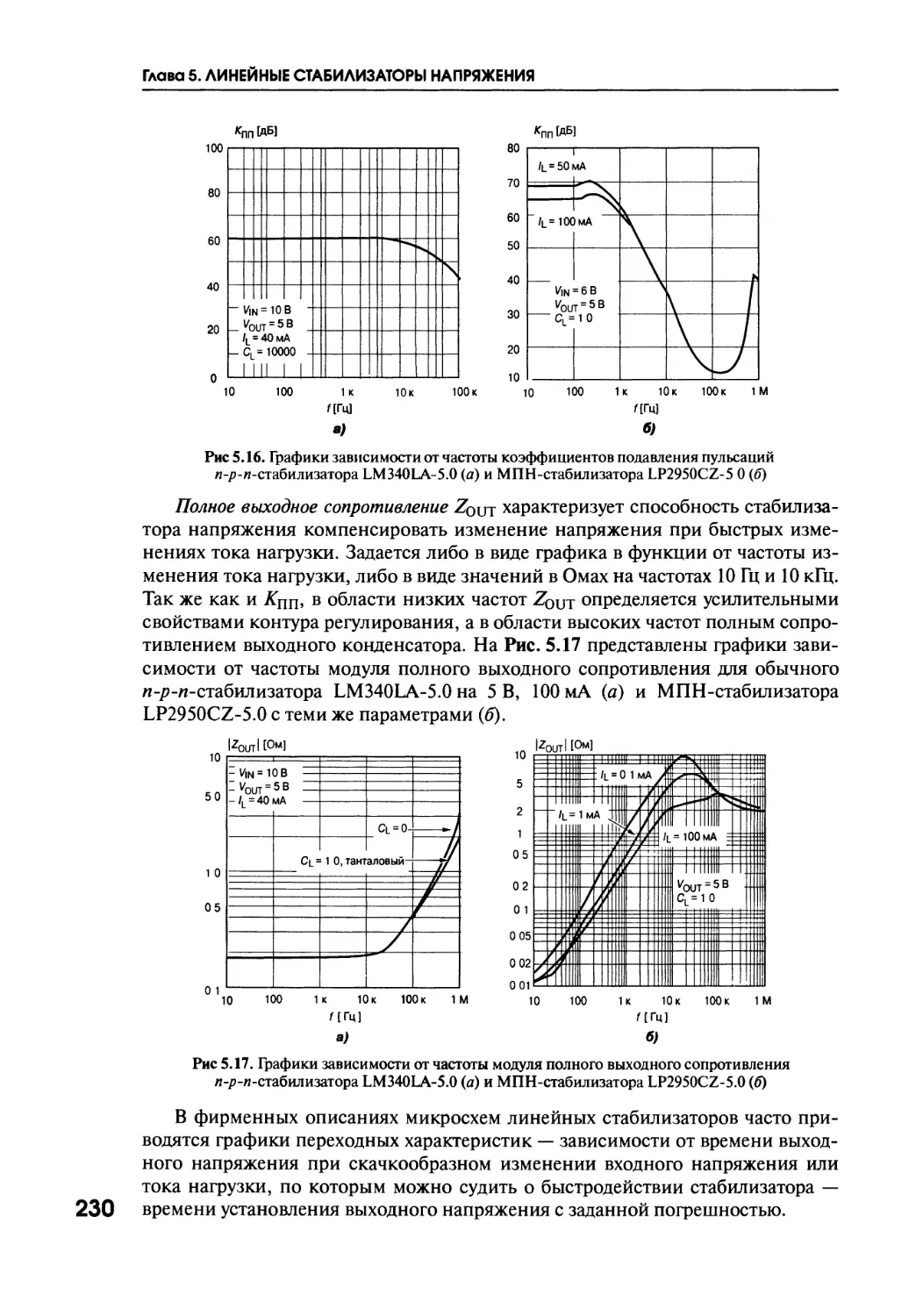
5.3. Устойчивость линейных стабилизаторов напряжения 224
5.3.1. Устойчивость n-p-n-стабилизаторов 224
5.3.2. Устойчивость МПН-стабилизаторов 225
5.4. Основные параметры линейных стабилизаторов напряжения 228
5.4.1. Точностные параметры 228
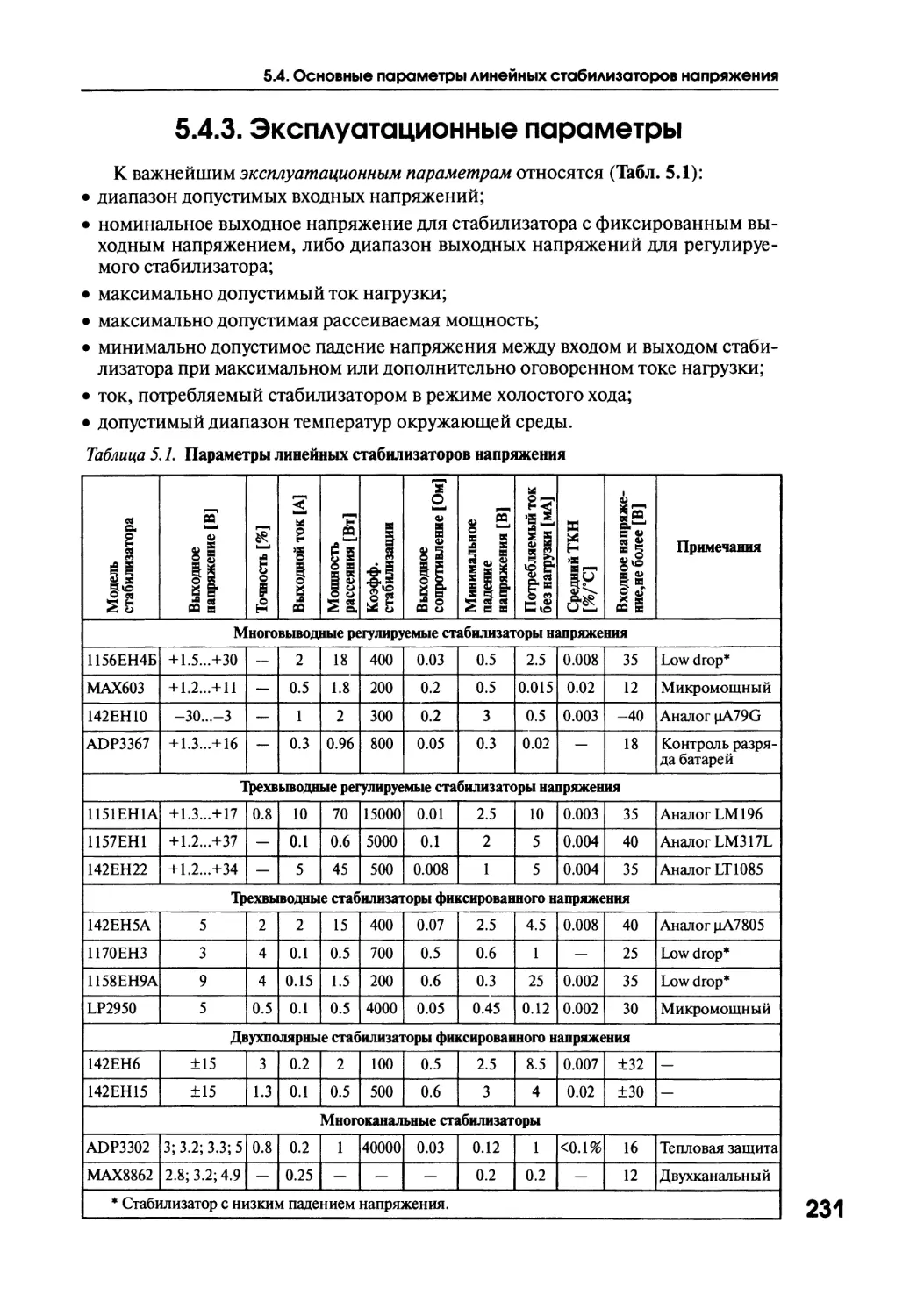
5.4.2. Динамические параметры 229
5.4.3. Эксплуатационные параметры 231
5.5. Схемы включения линейных стабилизаторов напряжения 232
5.5.1. Типовое включение 232
5.5.2. Увеличение выходного напряжения 232
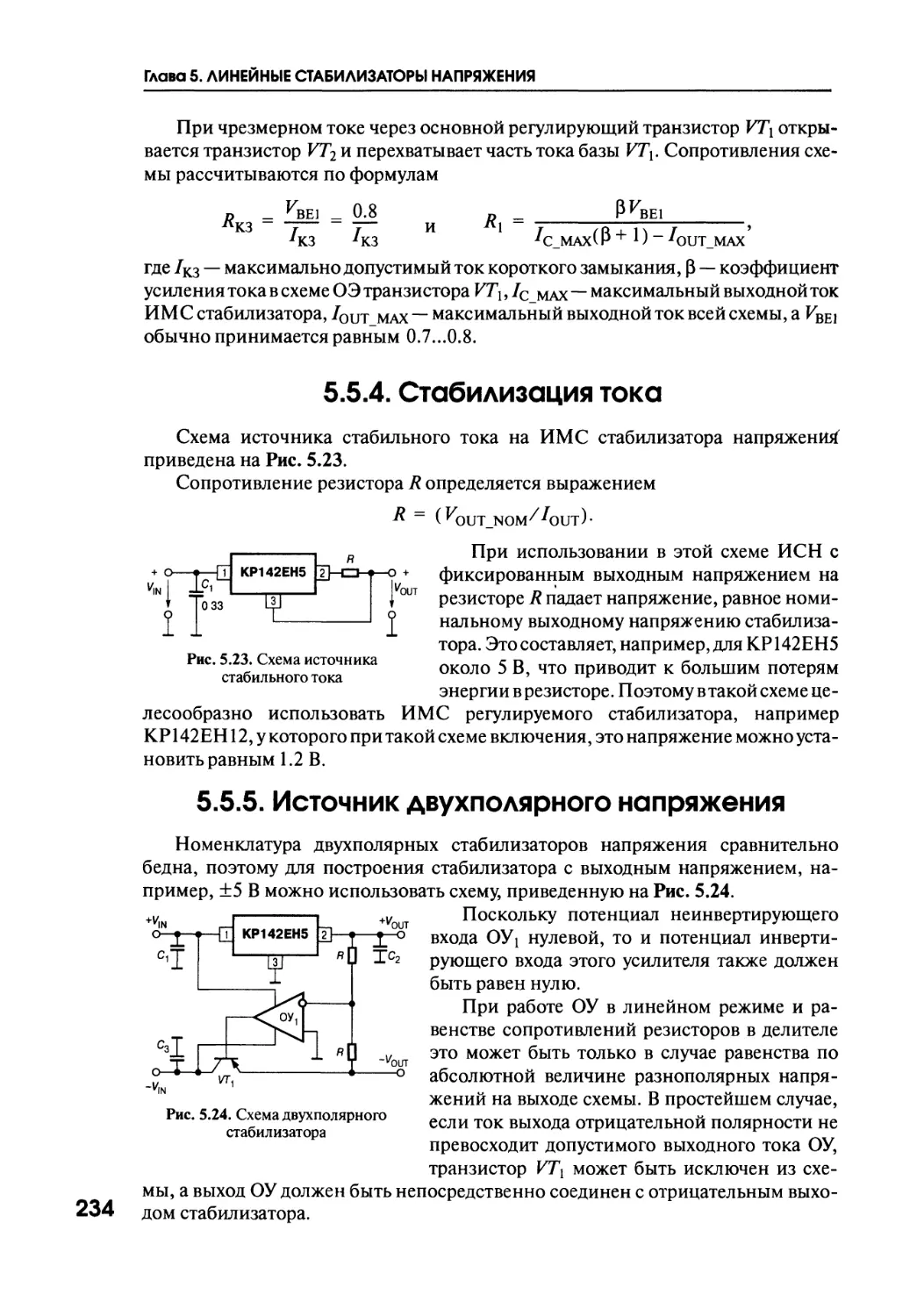
5.5.3. Повышение максимального выходного тока 233
5.5.4. Стабилизация тока 234
5.5.5. Источник двухполярного напряжения 234
5.5.6. Стабилизатор переменного напряжения 235
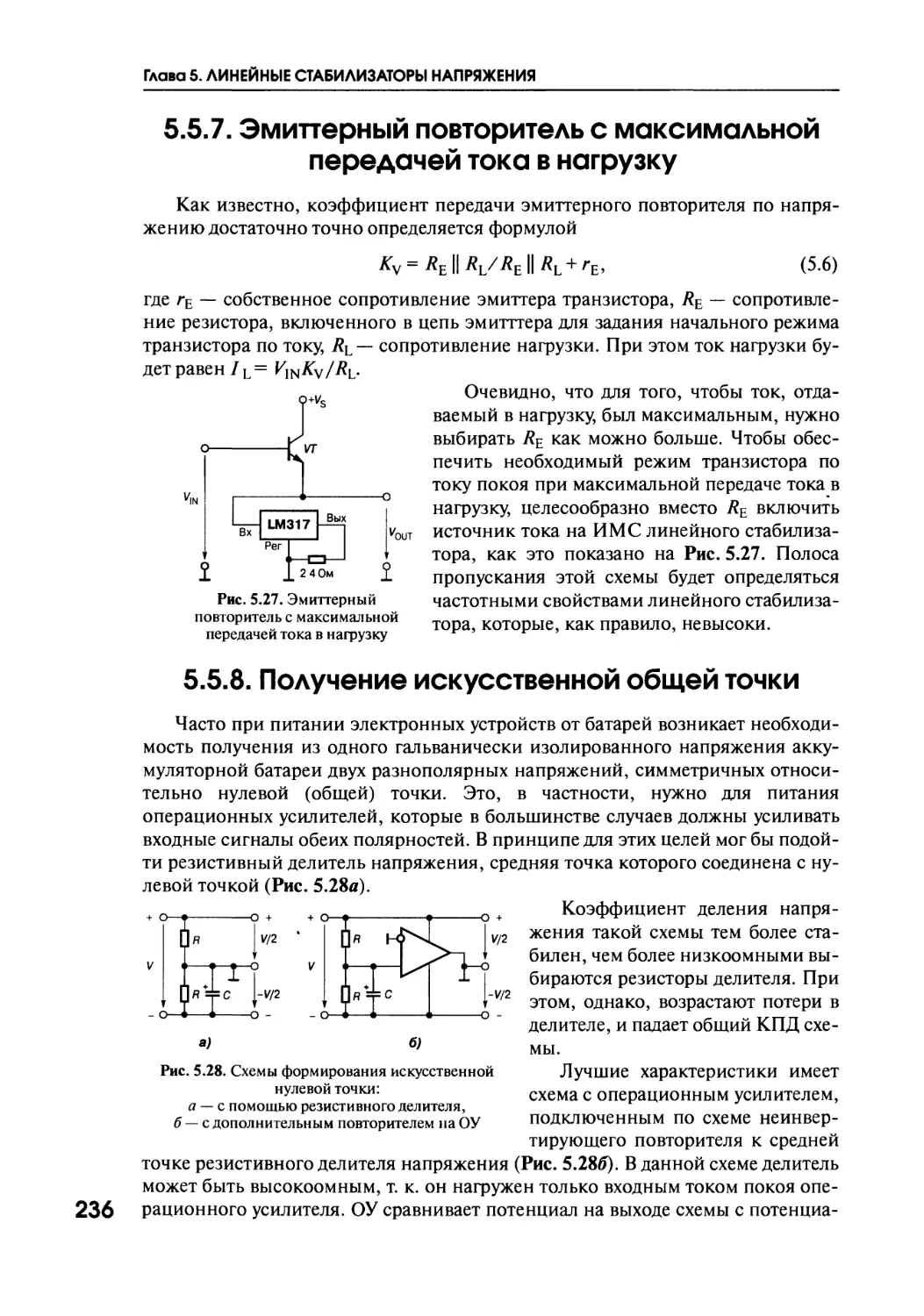
5.5.7. Эмиттерный повторитель с максимальной передачей тока в нагрузку 236
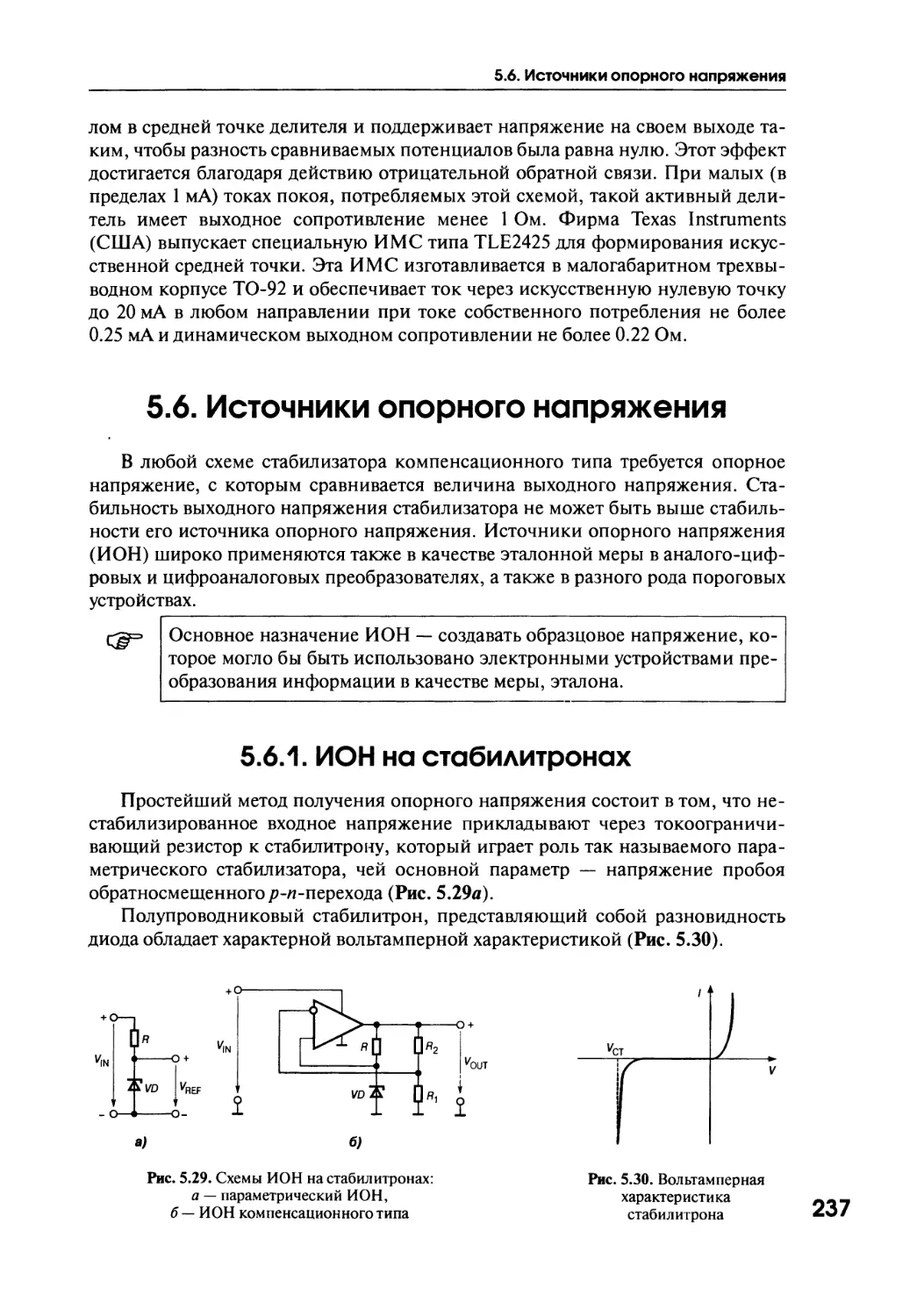
5.5.8. Получение искусственной общей точки 236
5.6. Источники опорного напряжения 237
5.6.1. ИОН на стабилитронах 237
5.6.2. ИОН на напряжении запрещенной зоны 239
5.6.3. ИОН на полевых транзисторах 244
5.6.4. Устойчивость ИОН 245
5
ОГЛАВЛЕНИЕ
5.6.5. Параметры источников опорного напряжения 247
5.6.6. Применение ИОН 253
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ 260
6.1. Общие сведения 260
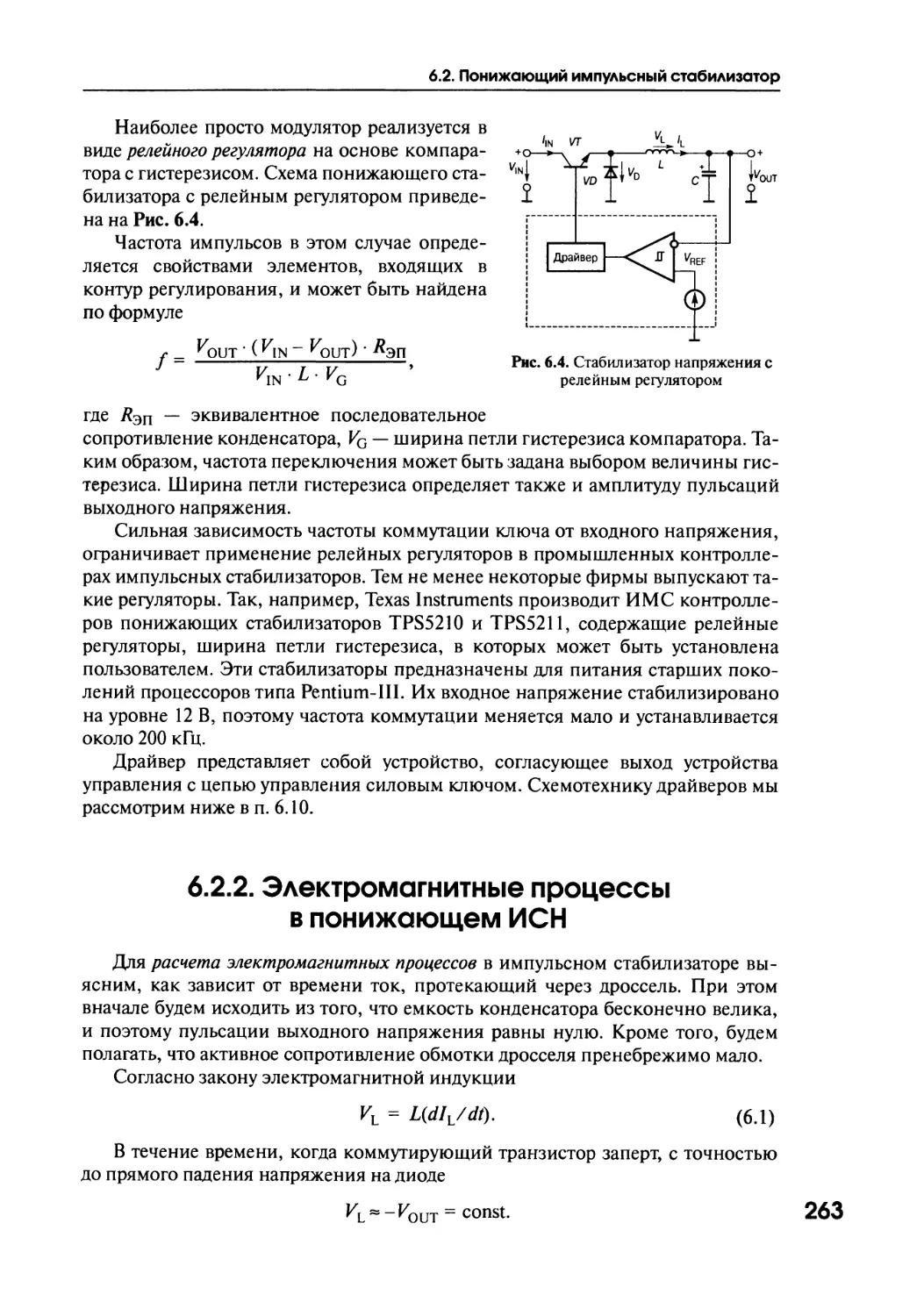
6.2. Понижающий импульсный стабилизатор 262
6.2.1. Схема понижающего импульсного стабилизатора напряжения 262
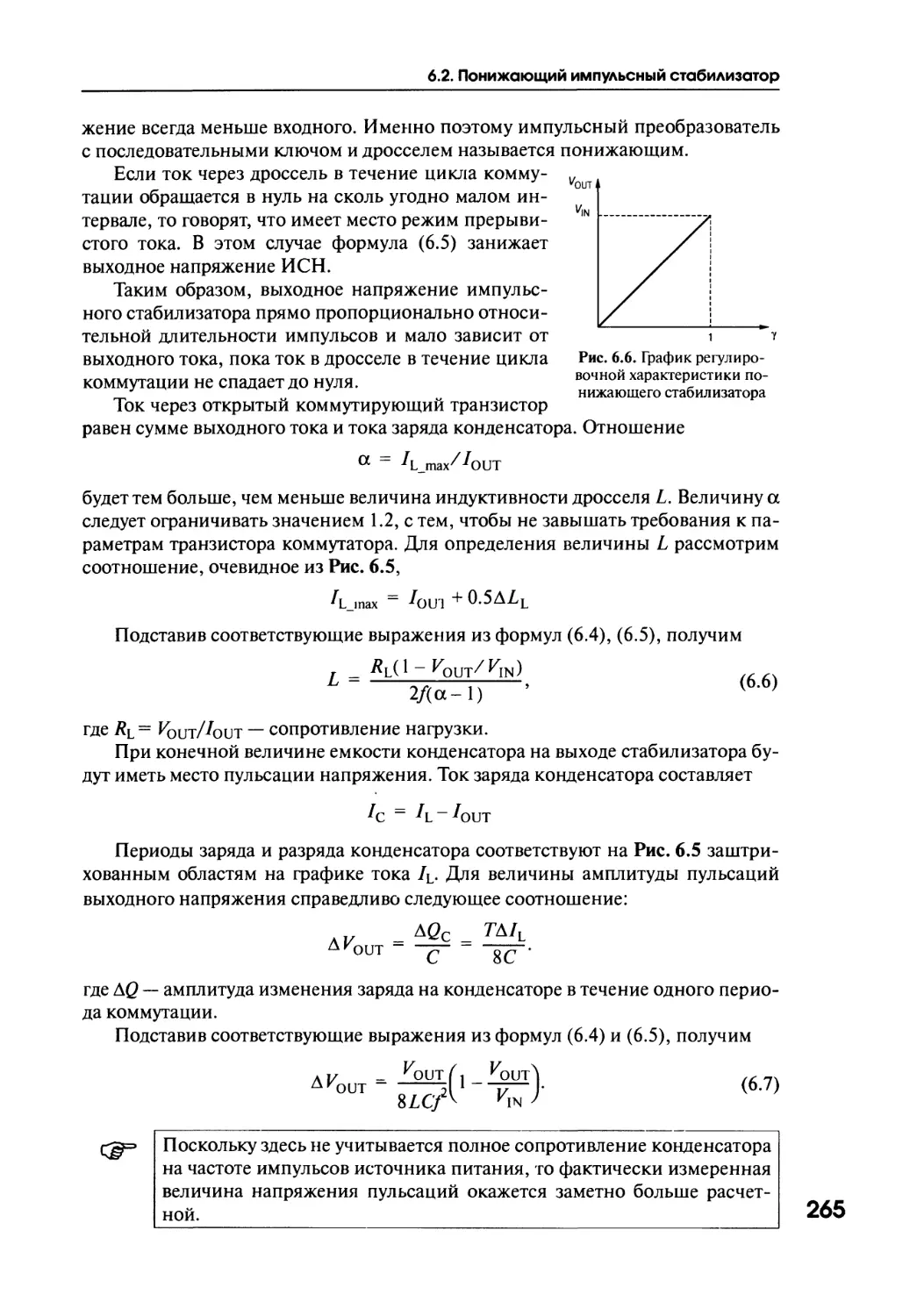
6.2.2. Электромагнитные процессы в понижающем ИСН 263
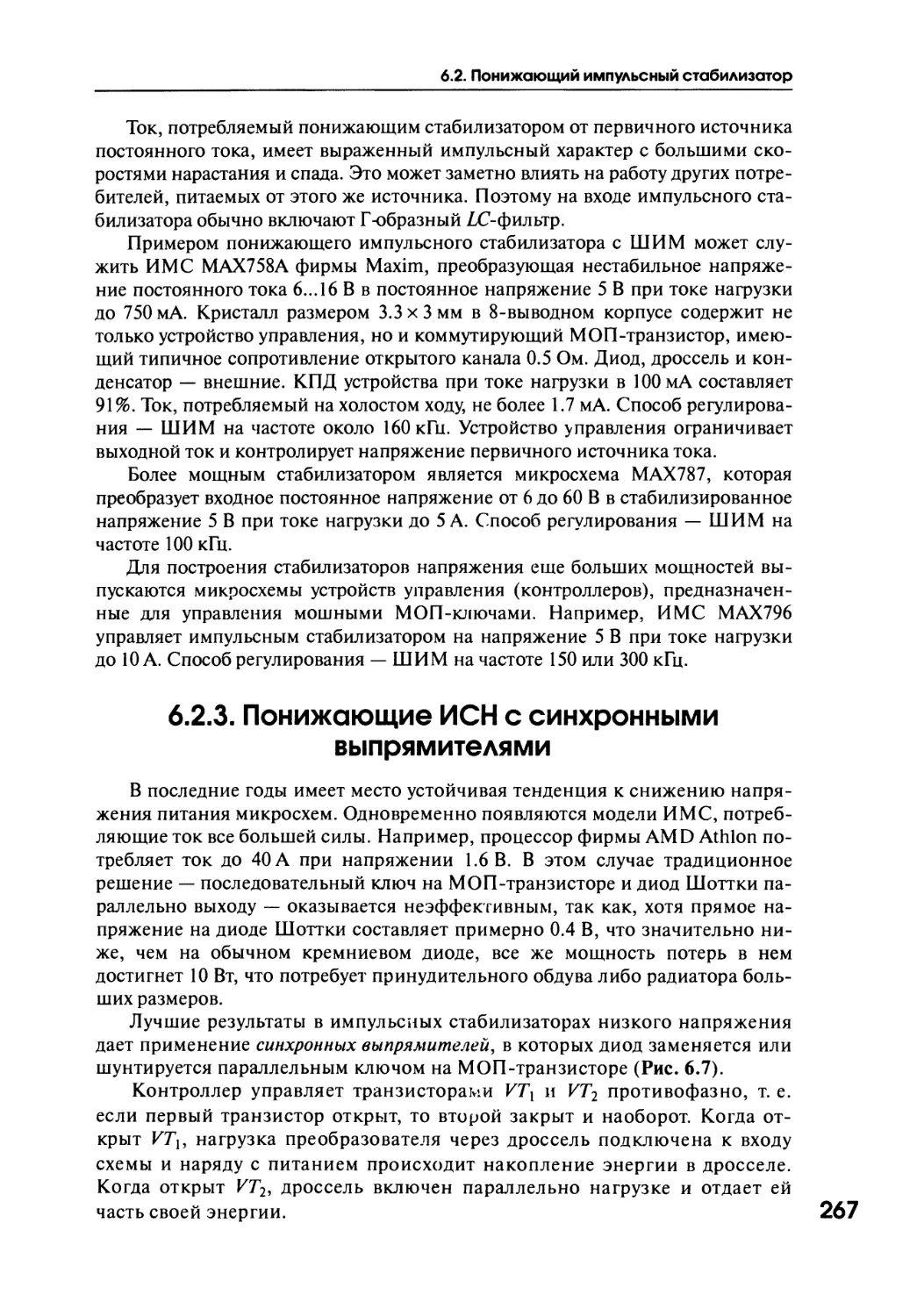
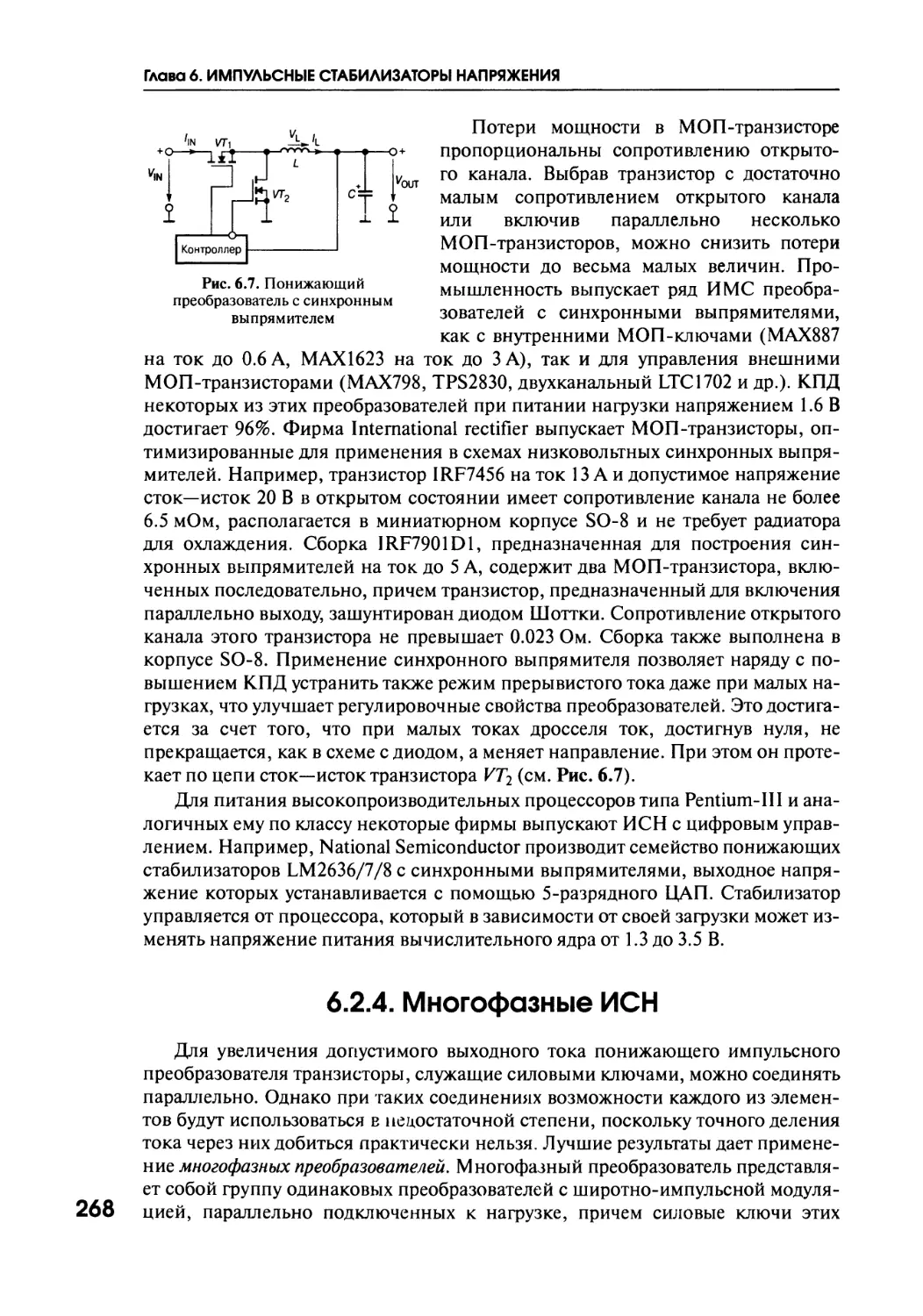
6.2.3. Понижающие ИСН с синхронными выпрямителями 267
6.2.4. Многофазные ИСН 268
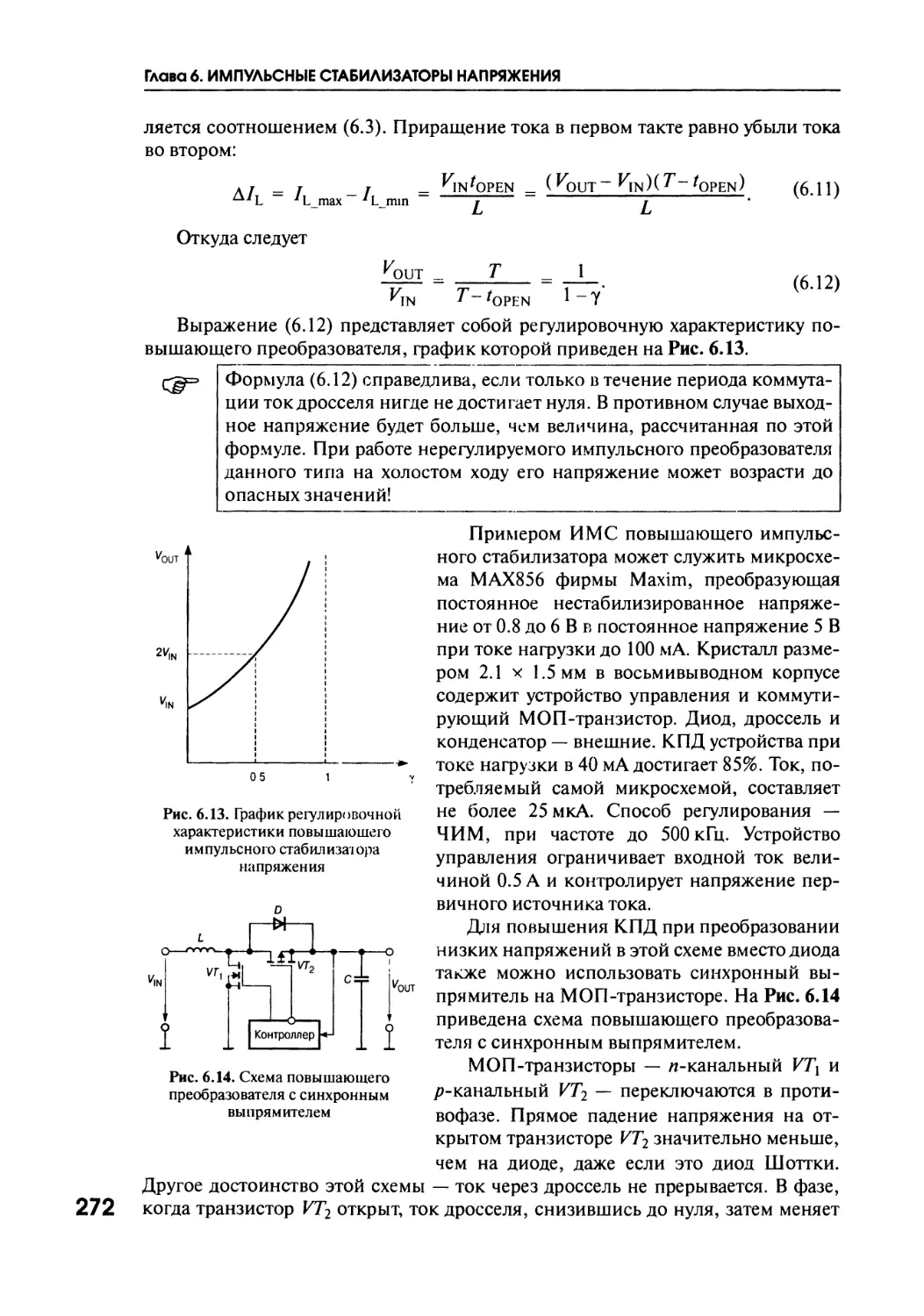
6.3. Повышающий импульсный стабилизатор 271
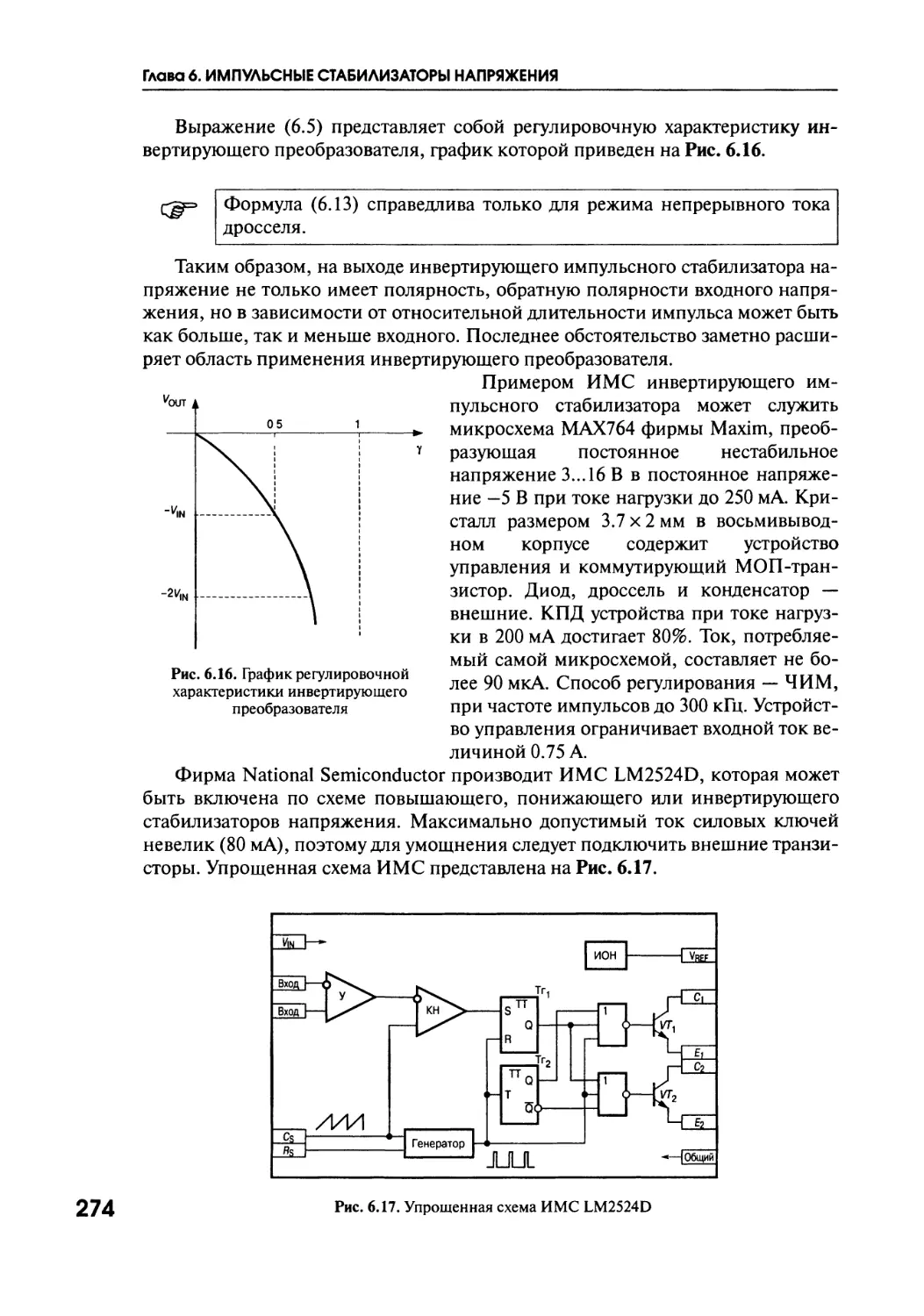
6.4. Инвертирующий импульсный стабилизатор 273
6.5. Составные схемы ИСН 275
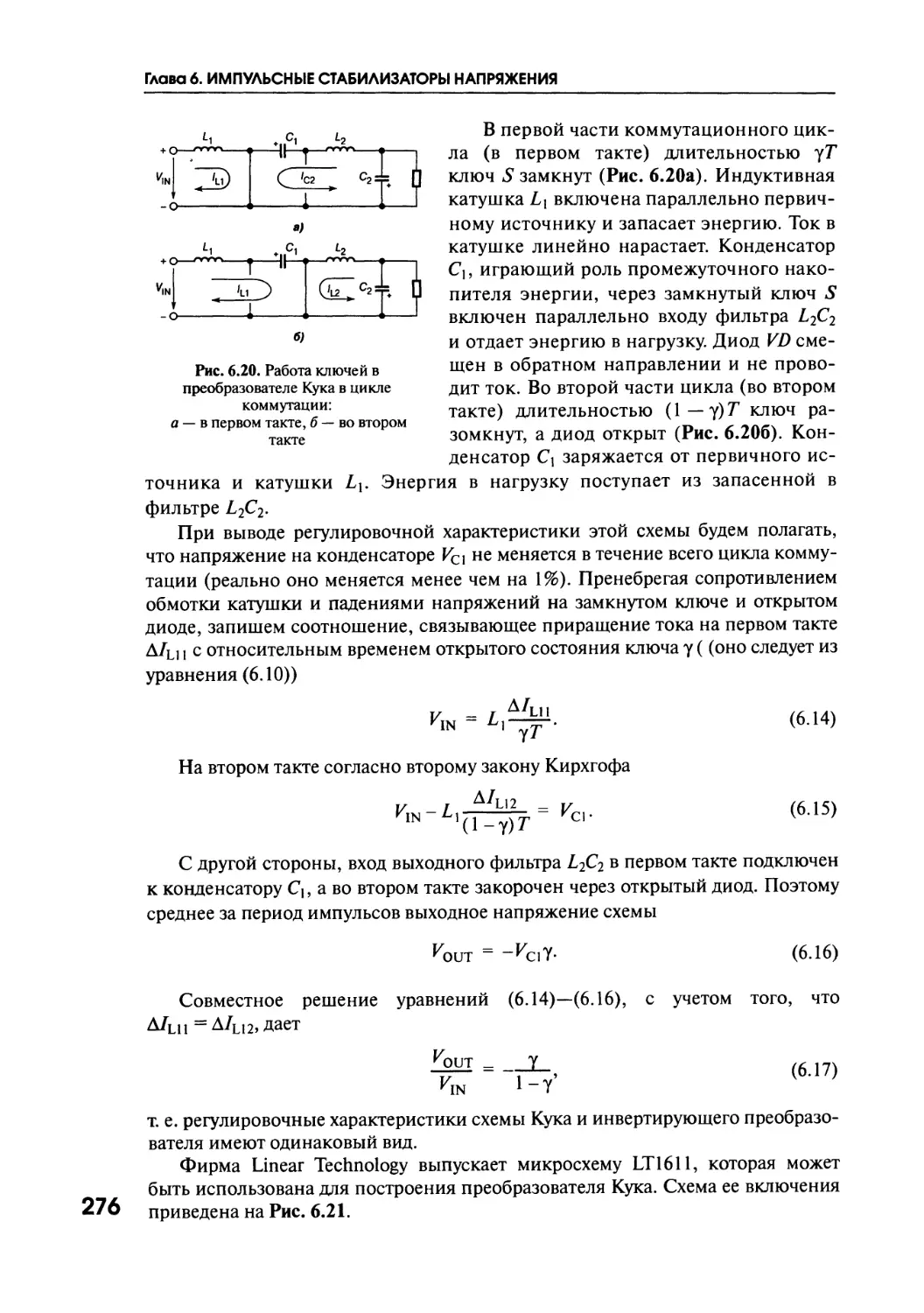
6.5.1. Схема Кука 275
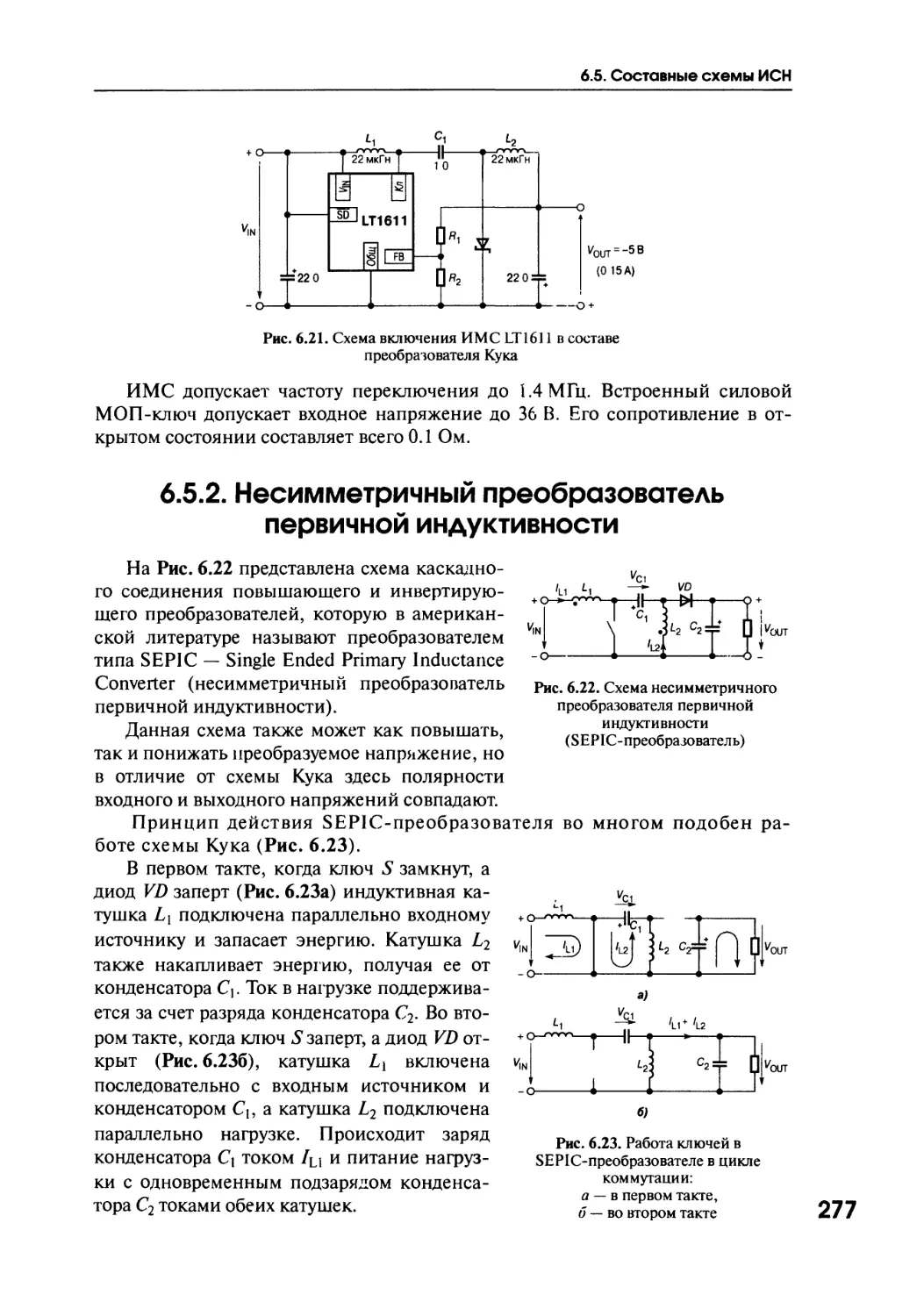
6.5.2. Несимметричный преобразователь первичной индуктивности 277
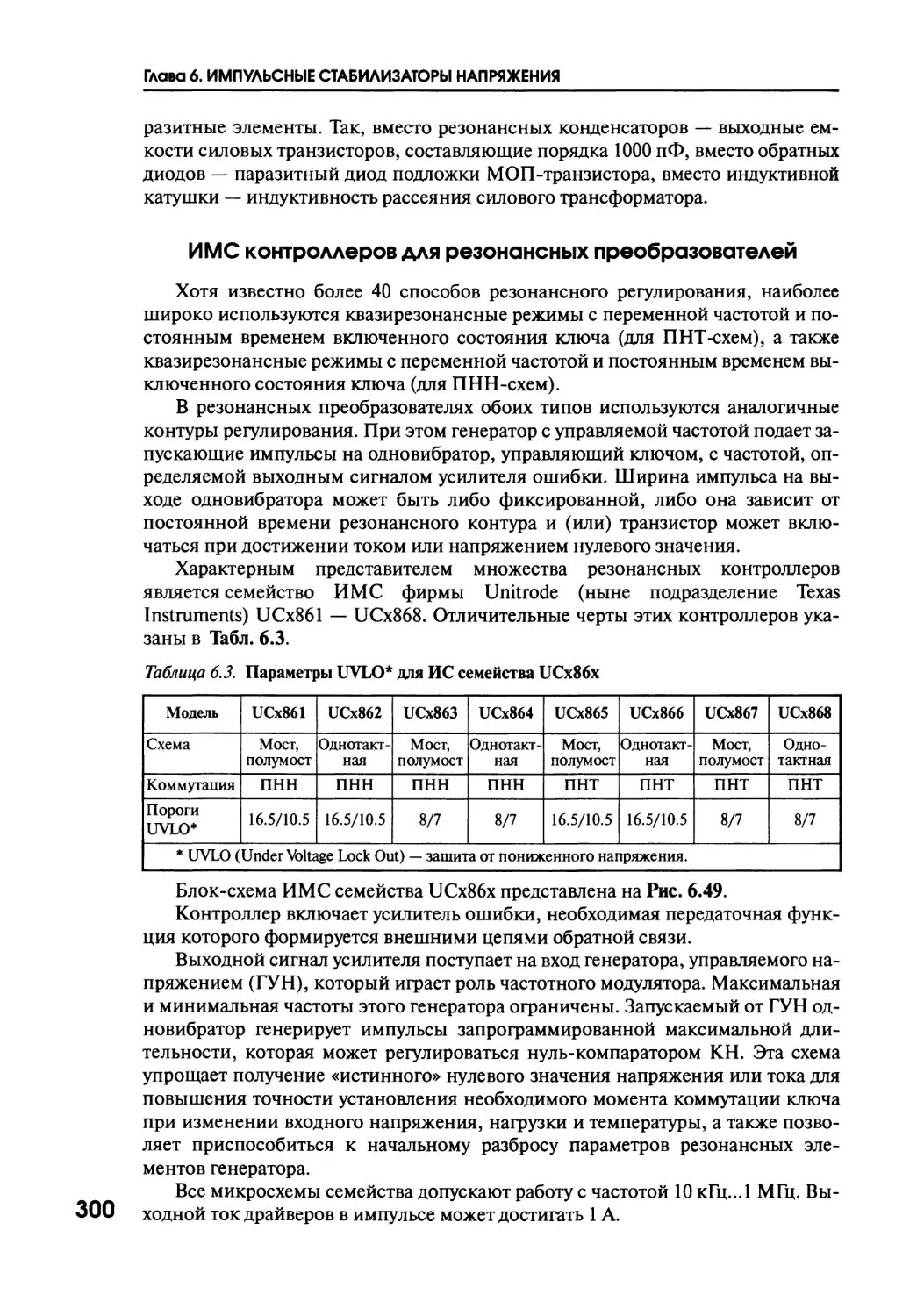
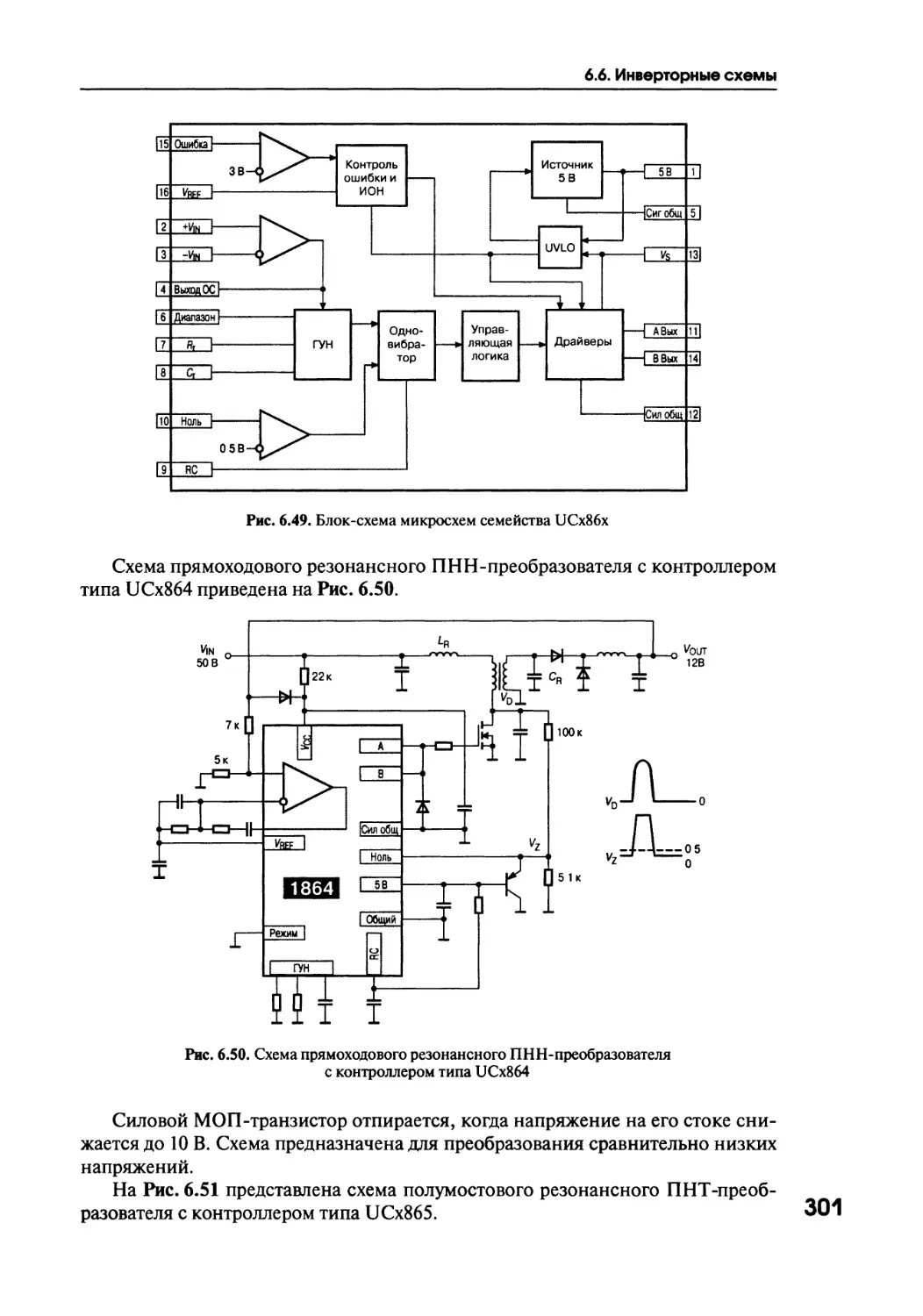
6.6. Инверторные схемы 280
6.6.1. Общие сведения 280
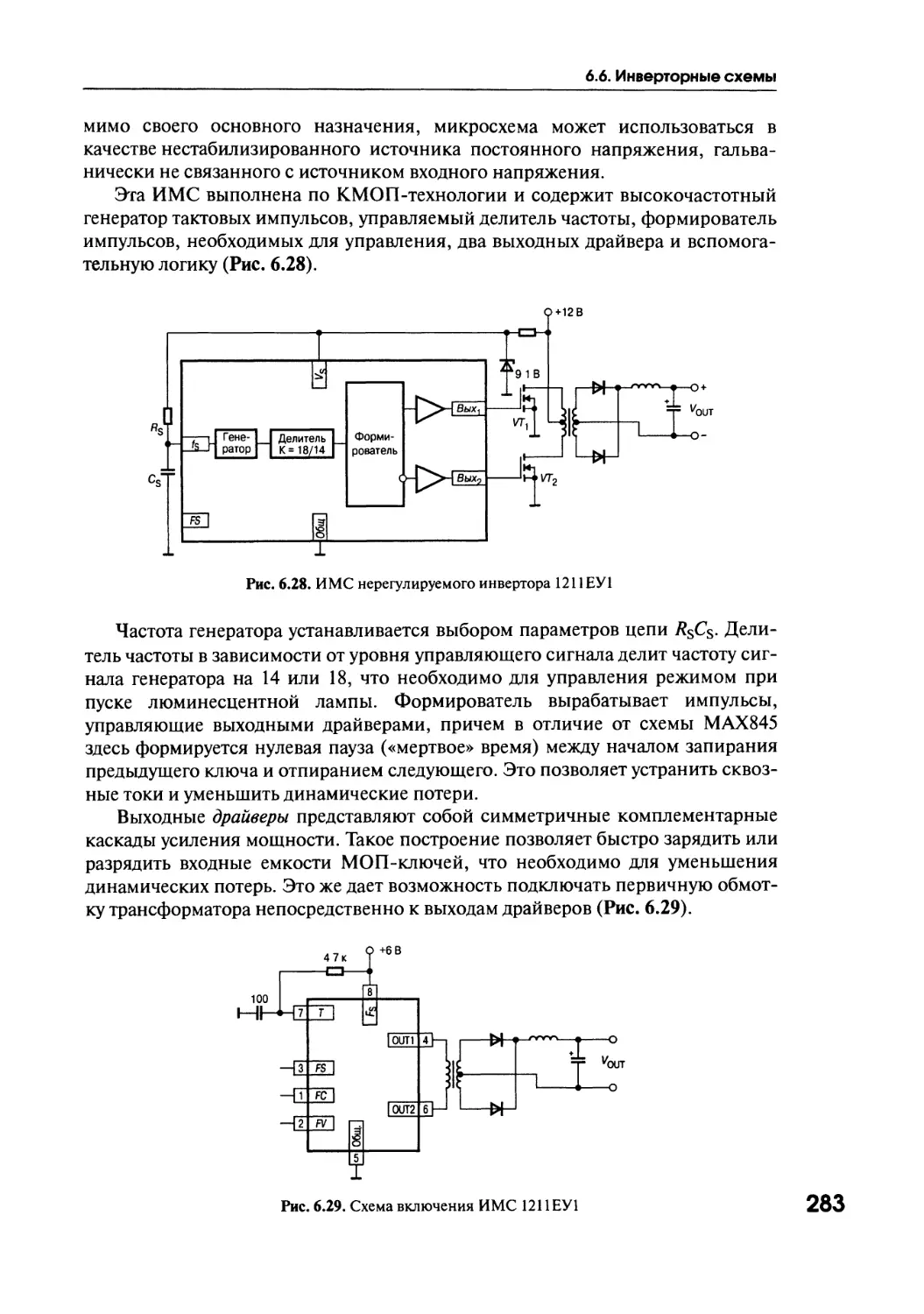
6.6.2. Нерегулируемые инверторы 281
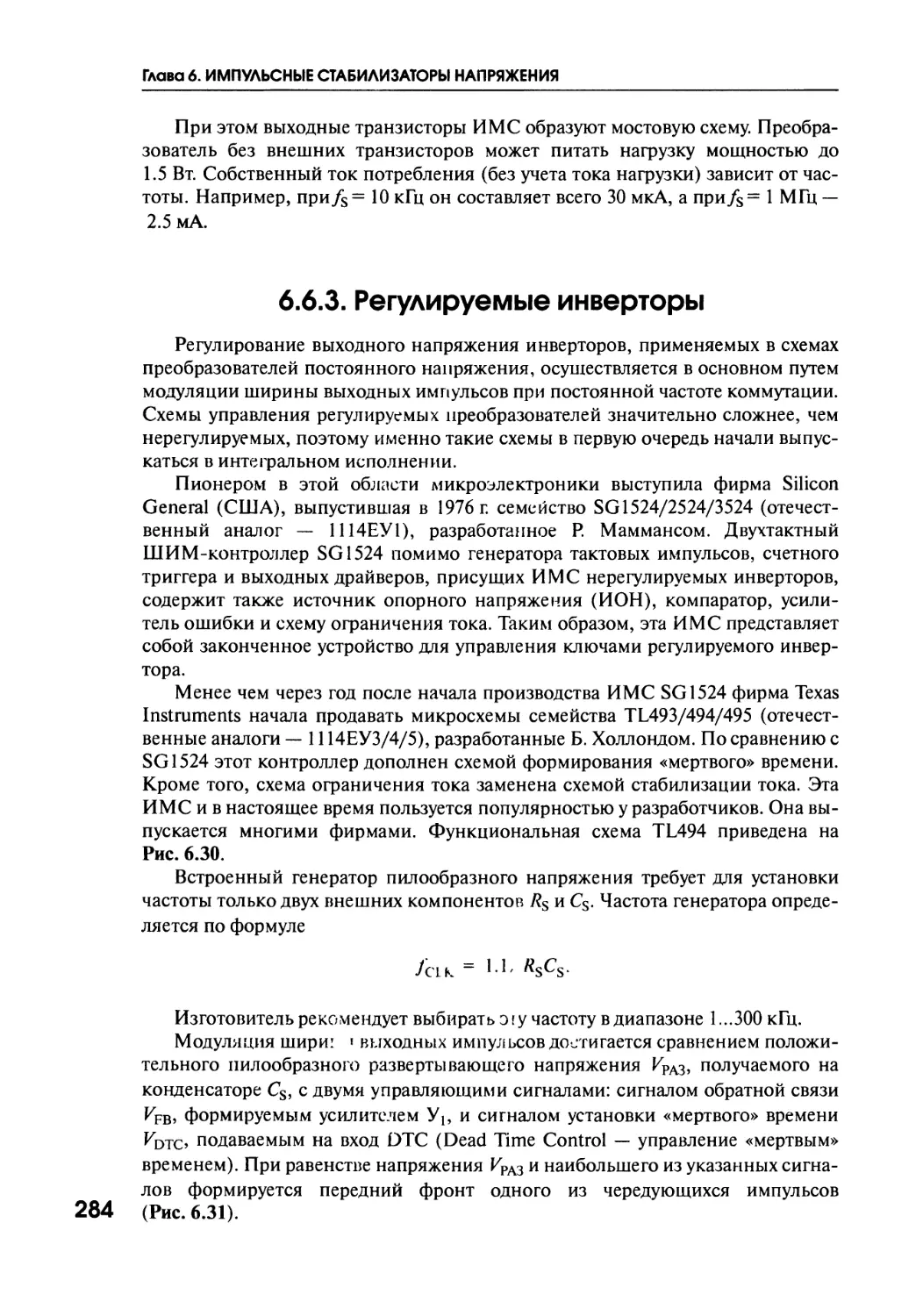
6.6.3. Регулируемые инверторы 284
6.6.4. Однотактные инверторы 288
6.6.5. Резонансные инверторы 295
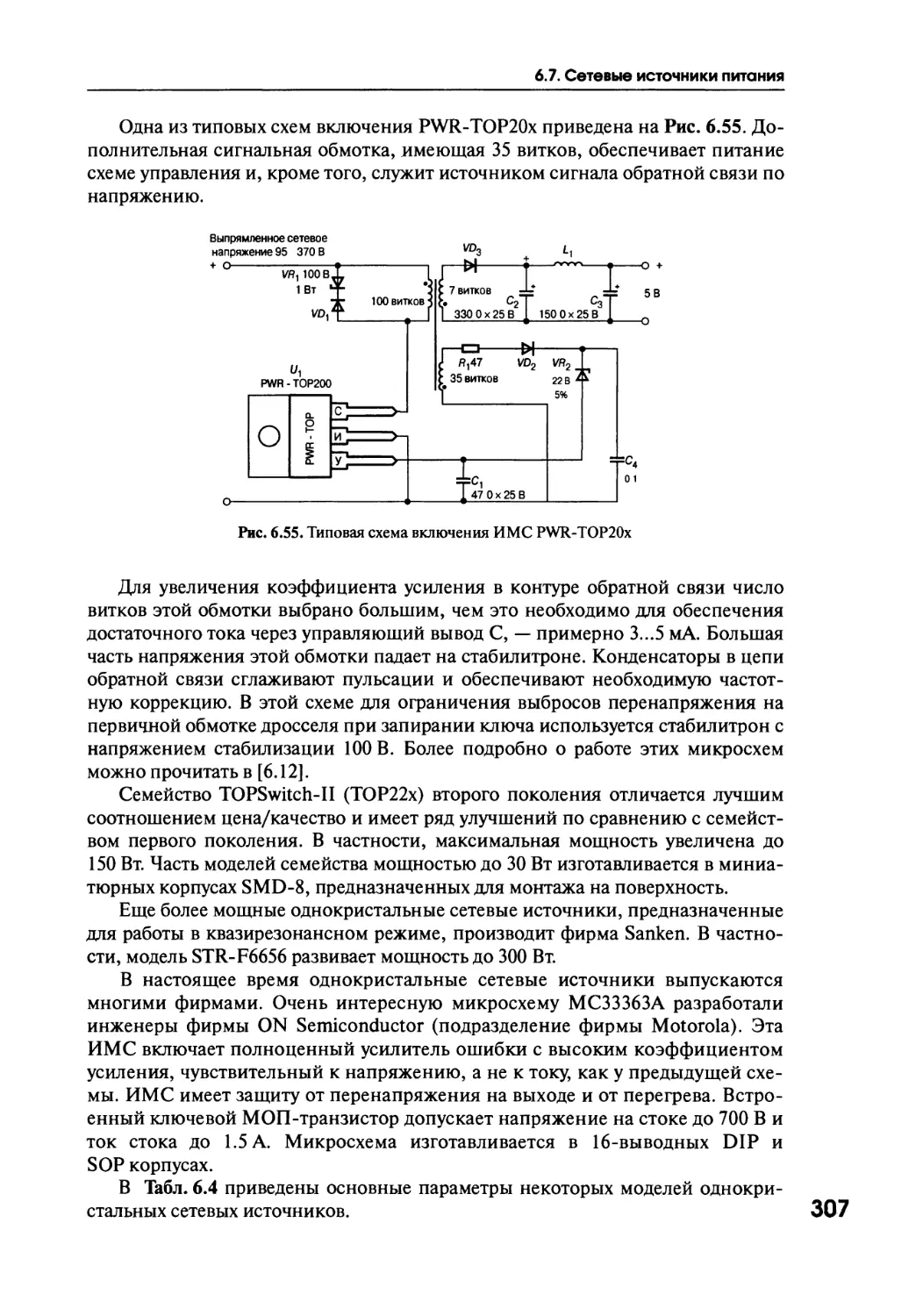
6.7. Сетевые источники питания 303
6.7.1. Общие сведения 303
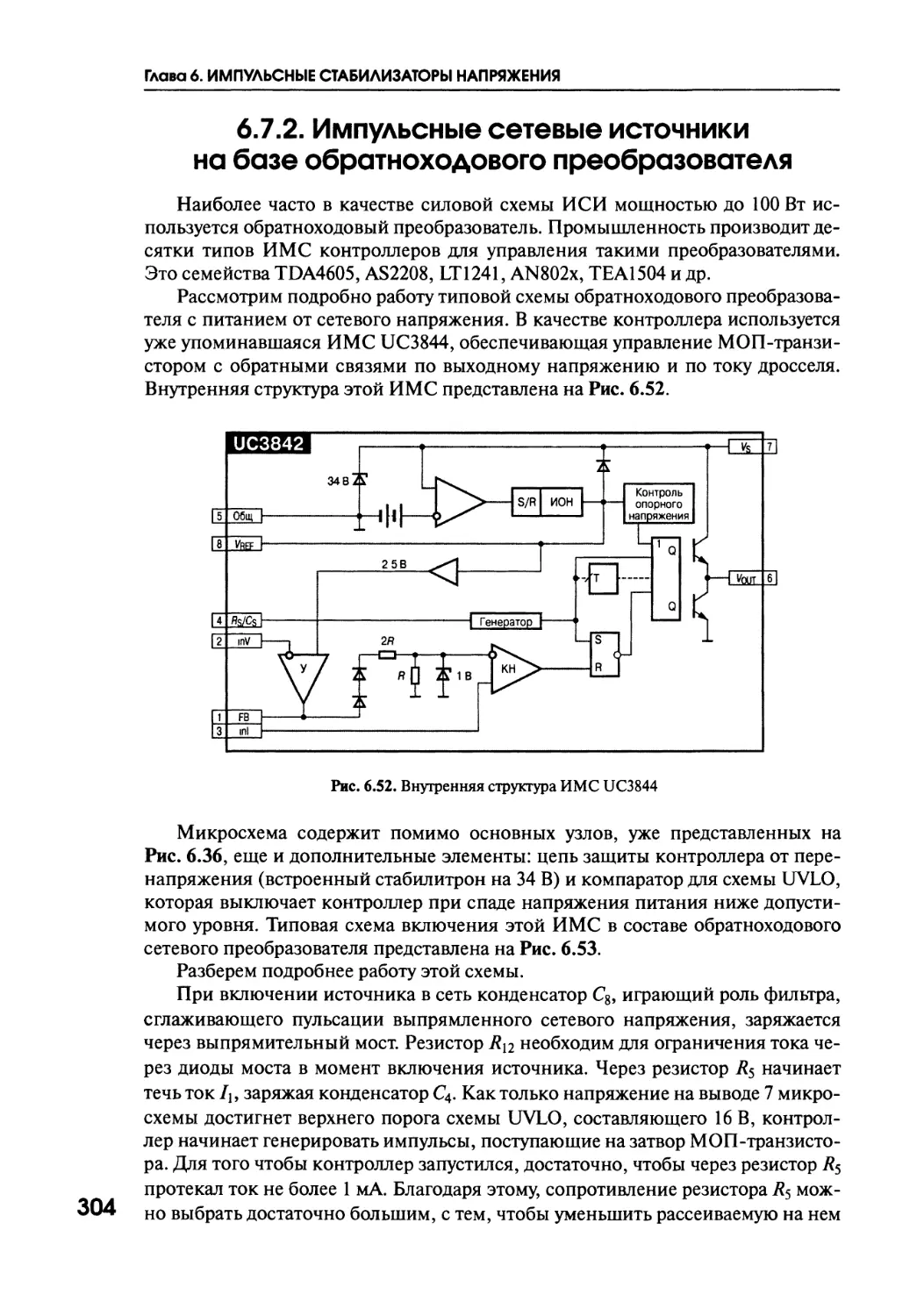
6.7.2. Импульсные сетевые источники на базе обратноходового преобразователя 304
6.7.3. Организация обратной связи по выходному напряжению в сетевых источниках 308
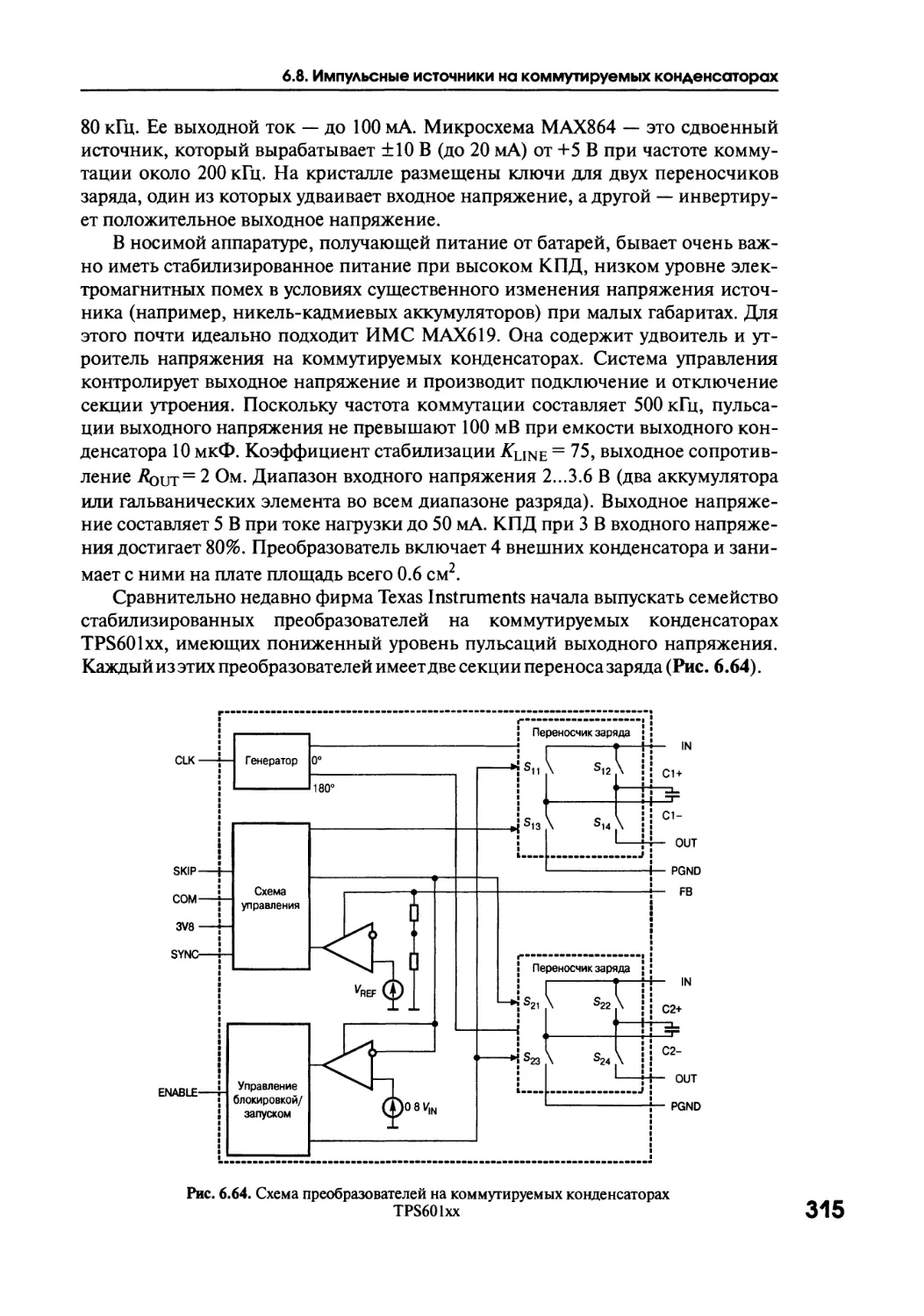
6.8. Импульсные источники на коммутируемых конденсаторах 313
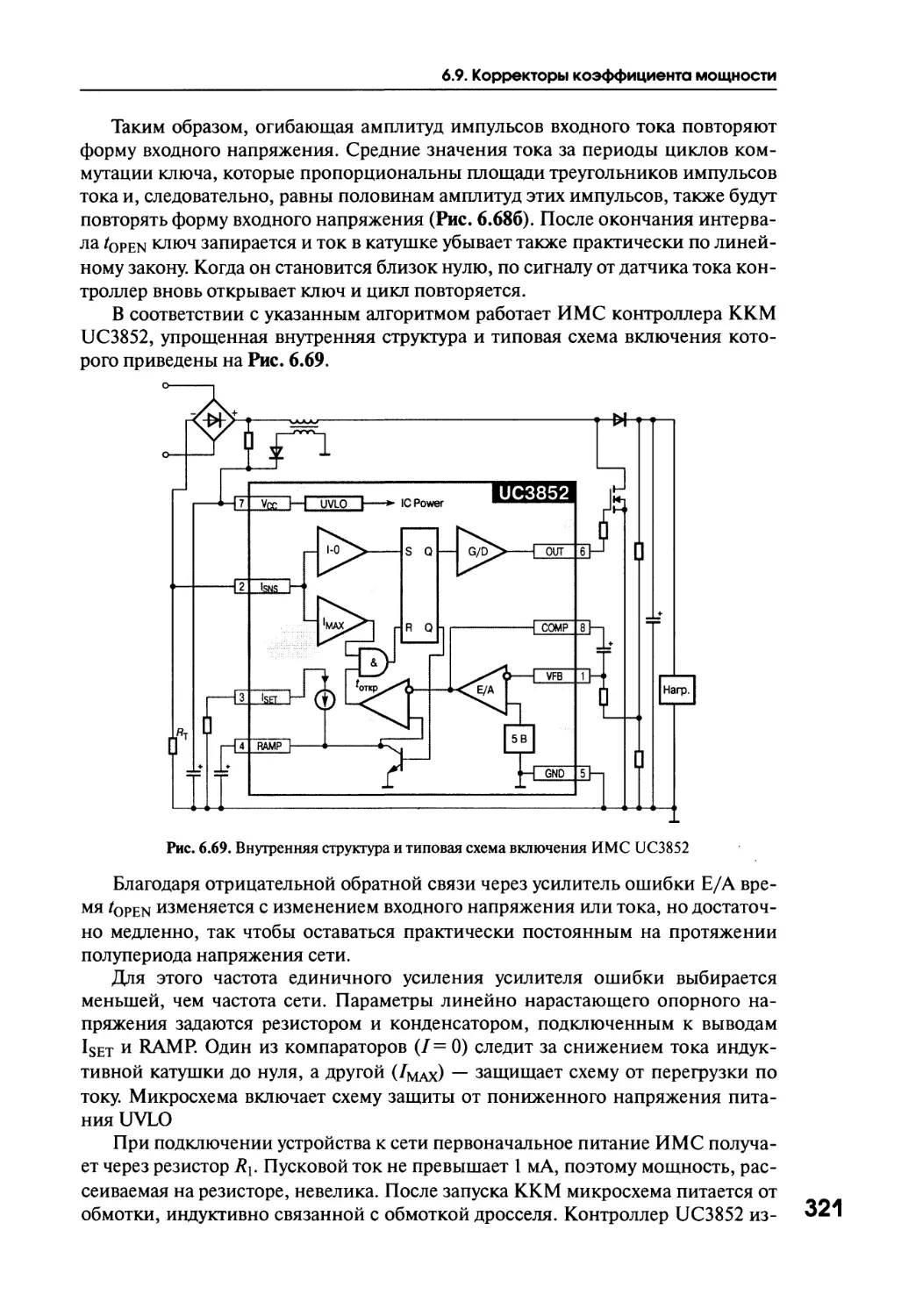
6.9. Корректоры коэффициента мощности 318
6.9.1. Общие положения 318
6.9.2. Алгоритмы формирования кривой входного тока 319
6.9.3. Контроллеры ККМ для сетей с широким диапазоном напряжений 323
6.10. Драйверы 325
6.10.1. Общие сведения 325
6.10.2. Схемы драйверов биполярных транзисторов 326
6.10.3. Драйверы МОП- и IGBT-транзисторов 327
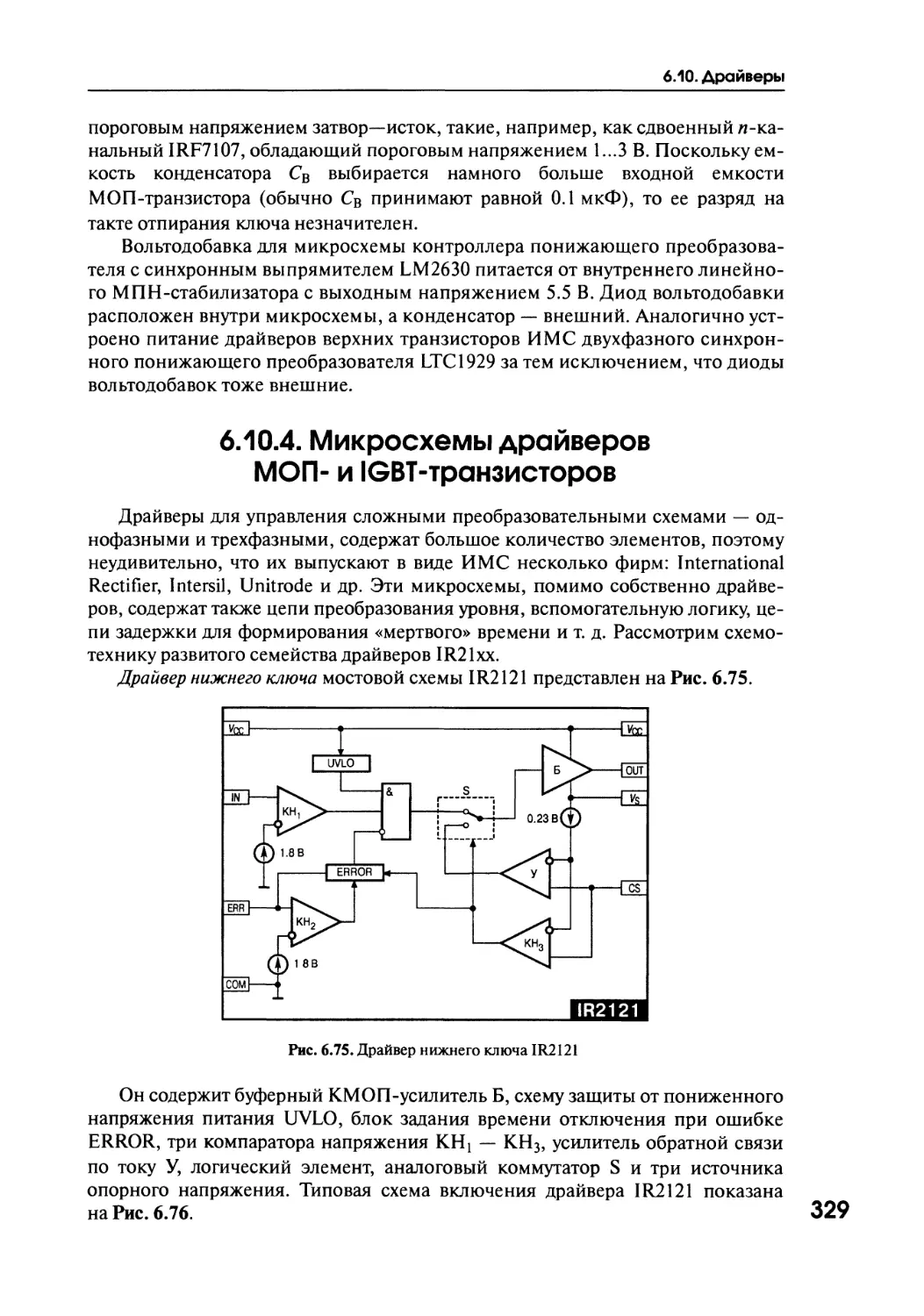
6.10.4. Микросхемы драйверов МОП- и IGBT-транзисторов 329
6.11. Устойчивость импульсных стабилизаторов напряжения 333
6.11.1. Общие сведения 333
6.11.2. Устойчивость импульсных стабилизаторов с обратной связью по напряжению 333
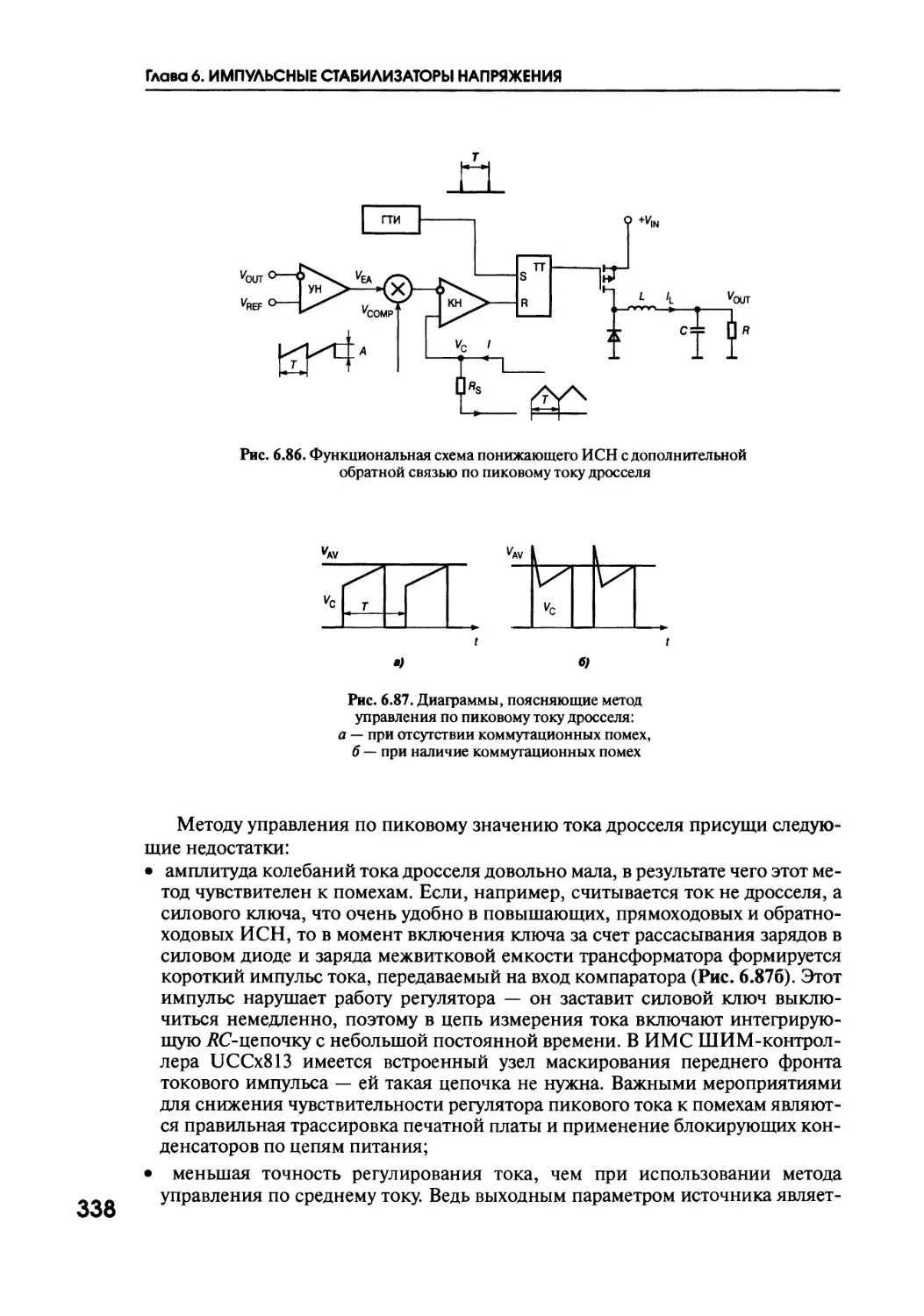
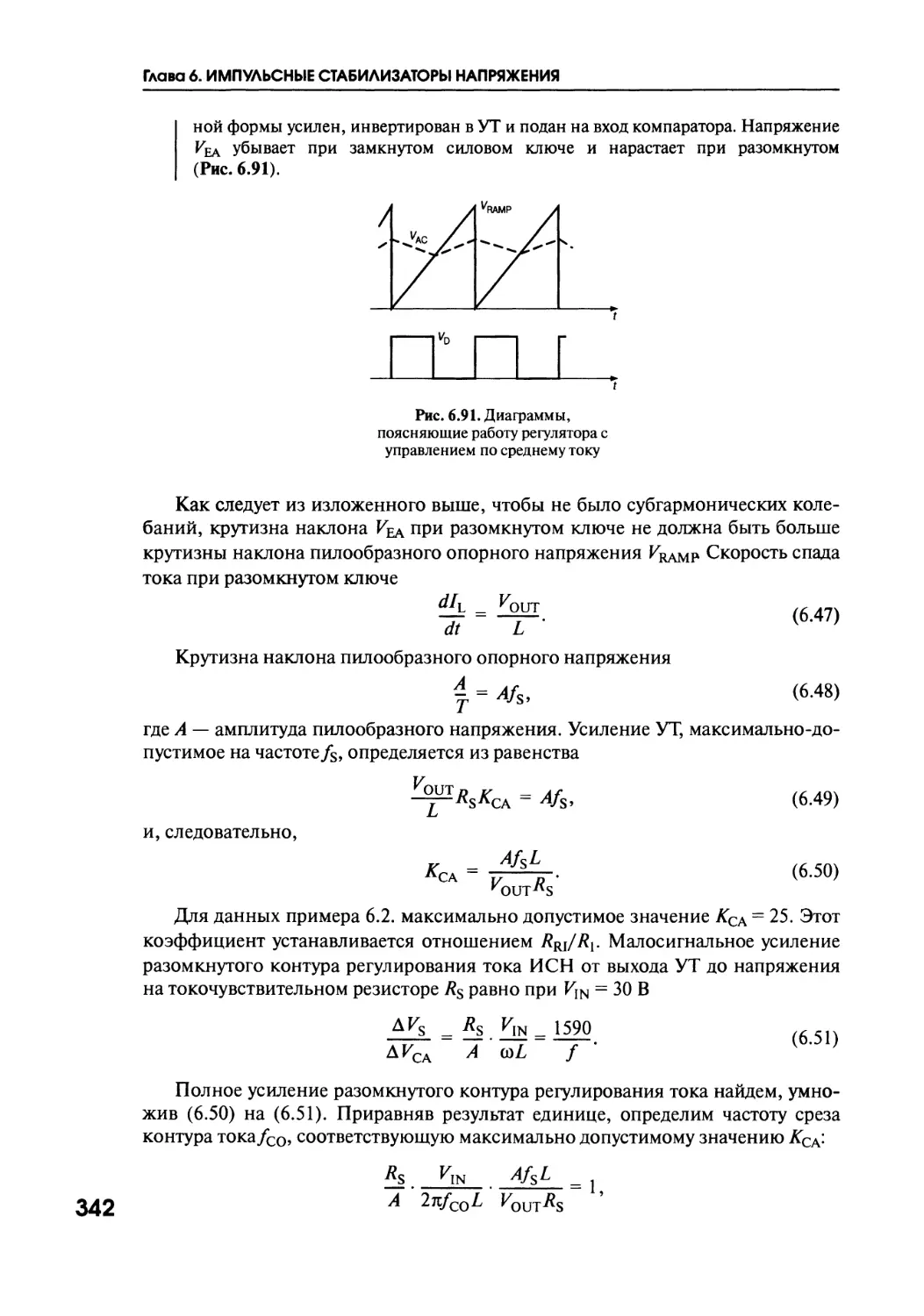
6.11.3. Устойчивость импульсных стабилизаторов с дополнительной обратной связью
по току дросселя 336
6.11.4. Особенности анализа устойчивости ИСН с силовыми трансформаторами 344
Глава 7. АНАЛОГОВЫЕ КОММУТАТОРЫ 349
7.1. Общие сведения 349
7.2. Электронные коммутаторы 350
7.3. Коммутаторы на полевых транзисторах 350
7.4. Промышленные аналоговые коммутаторы 353
7.4.1. Простейшие коммутаторы 353
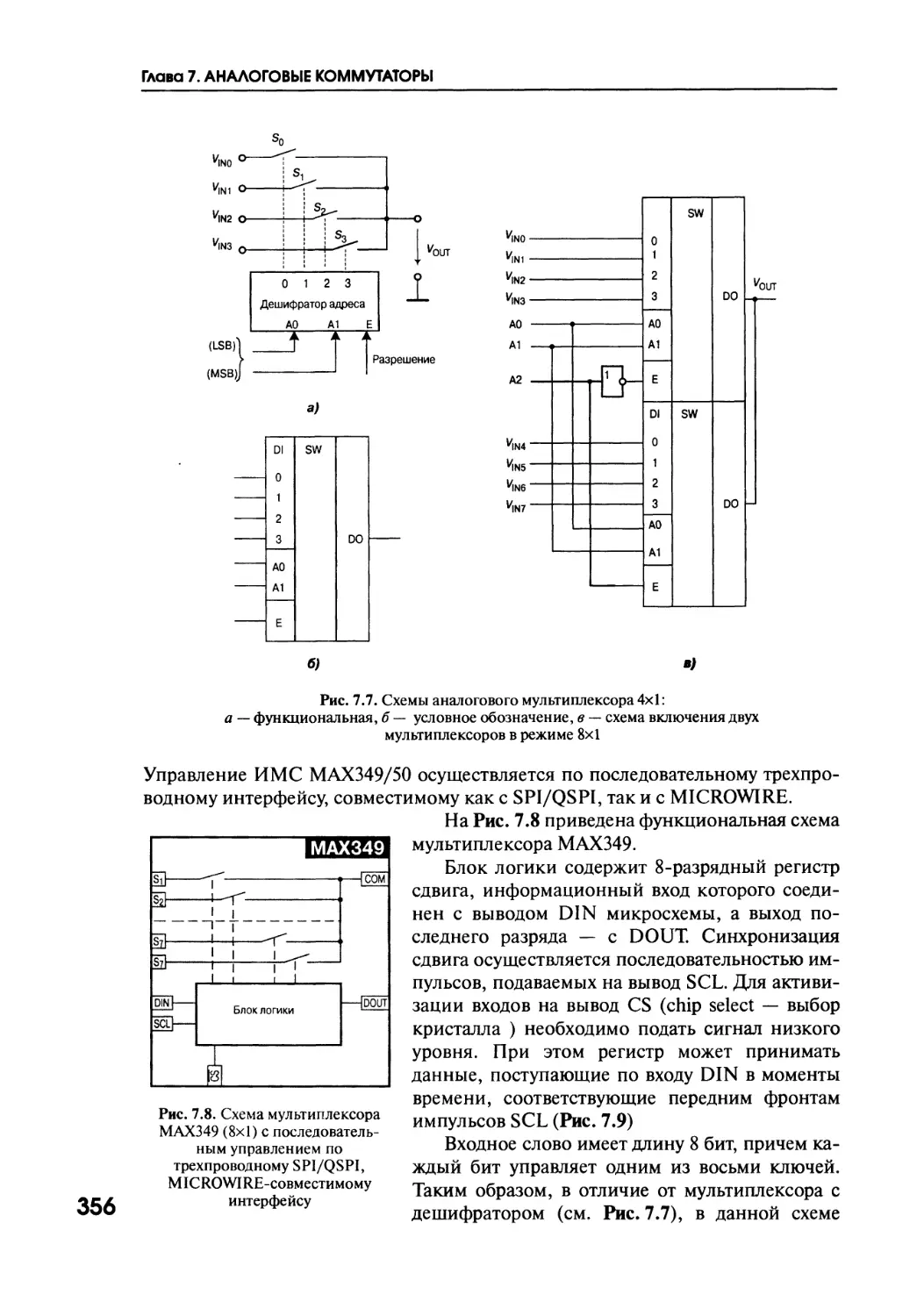
7.4.2. Аналоговые мультиплексоры 355
7.4.3. Матричные коммутаторы 358
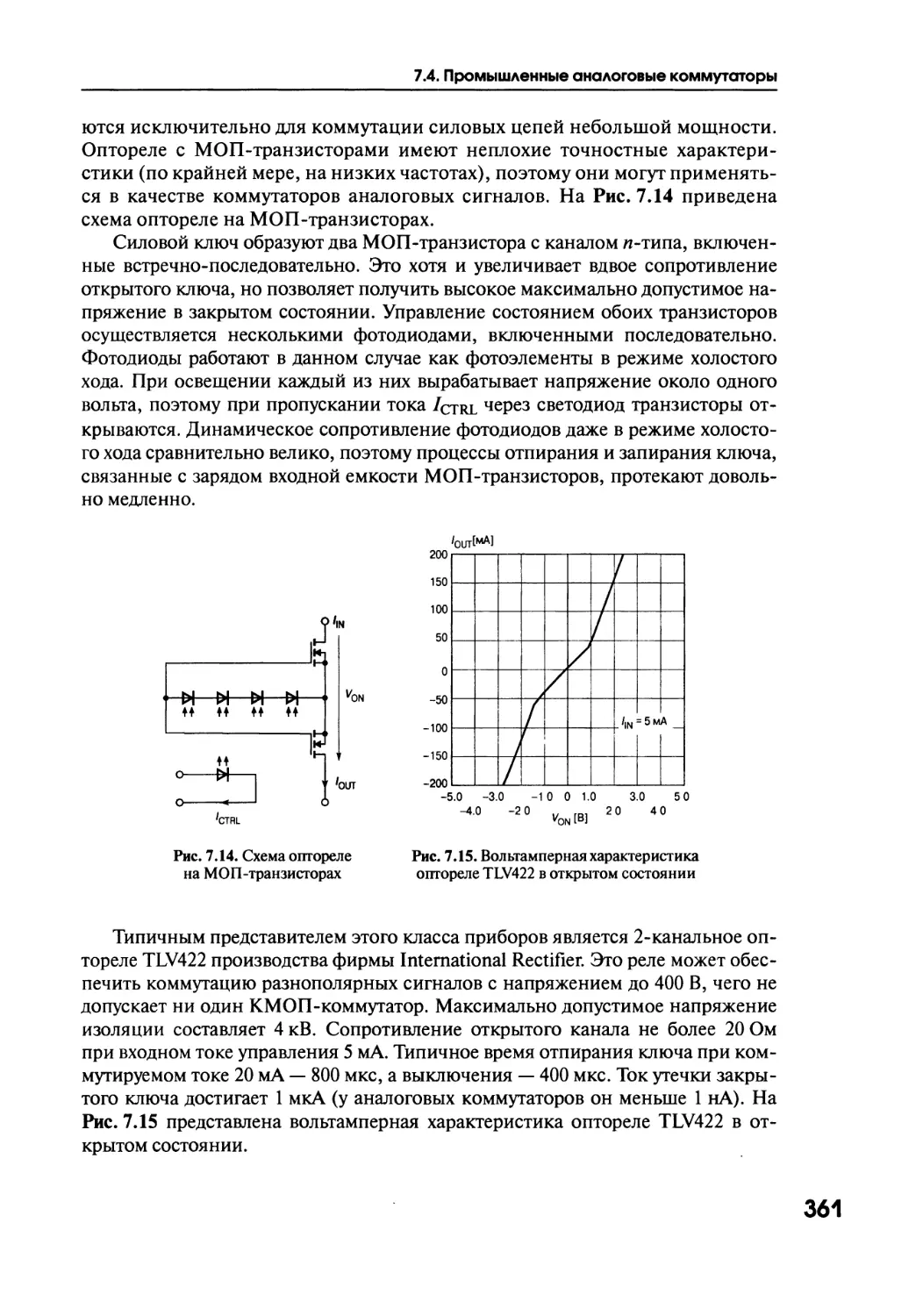
7.4.4. Оптореле 360
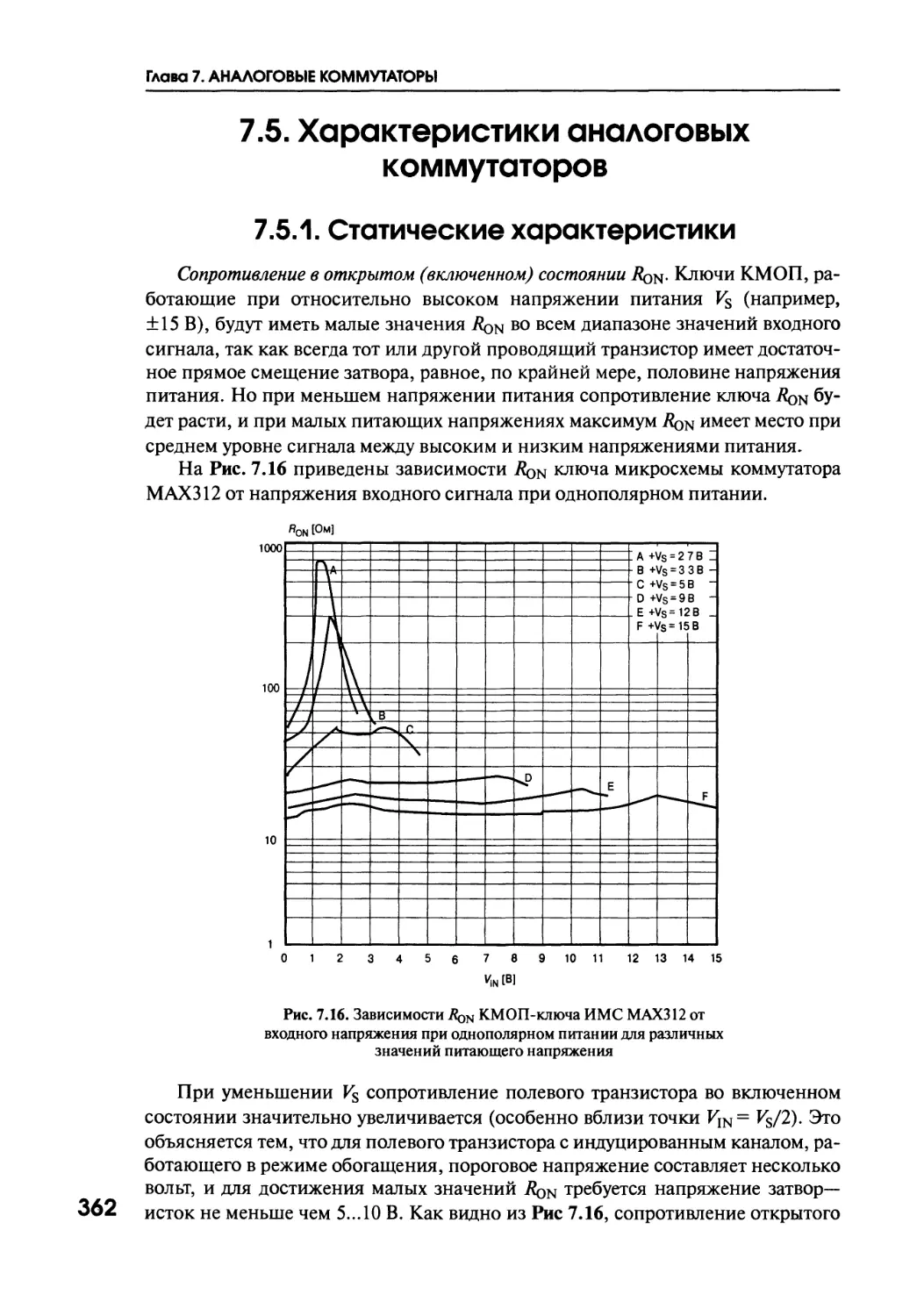
7.5. Характеристики аналоговых коммутаторов 362
7.5.1. Статические характеристики 362
7.5.2. Динамические характеристики 364
7.5.3. Эксплуатационные параметры 368
7.6. Применение аналоговых коммутаторов 369
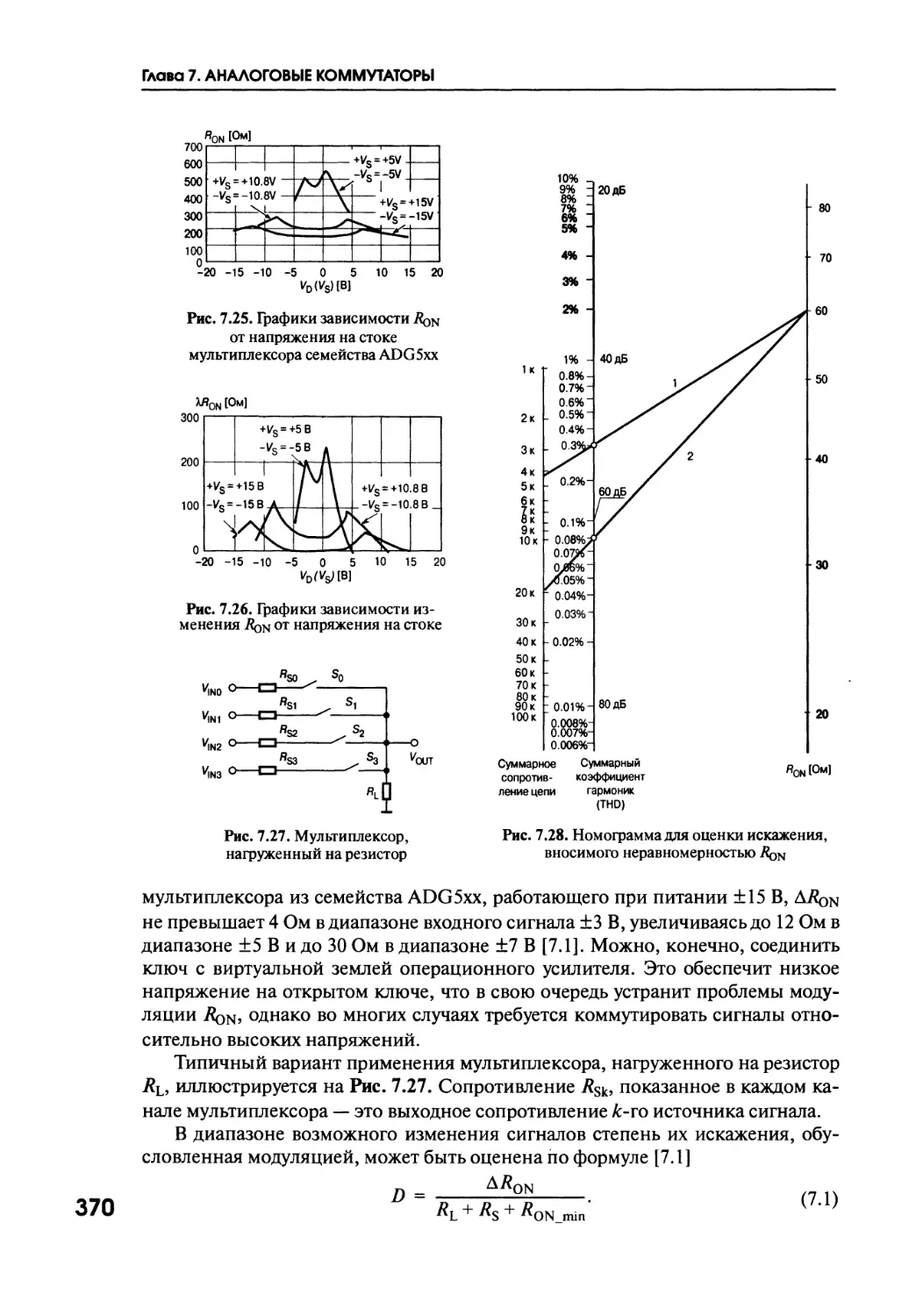
7.6.1. Влияние нелинейности аналоговых коммутаторов на искажения передаваемых сигналов 369
6
ОГЛАВЛЕНИЕ
7.6.2. Защита коммутаторов от перенапряжений 371
7.7. Устройства выборки-хранения 372
7.7.1. Схемы устройств выборки-хранения 372
7.7.2. Основные характеристики УВХ 375
7.7.3. Применение УВХ 380
7.8. Устройства на переключаемых конденсаторах 382
Глава 8. ЦИФРОАНАЛОГОВЫЕ ПРЕОБРАЗОВАТЕЛИ 387
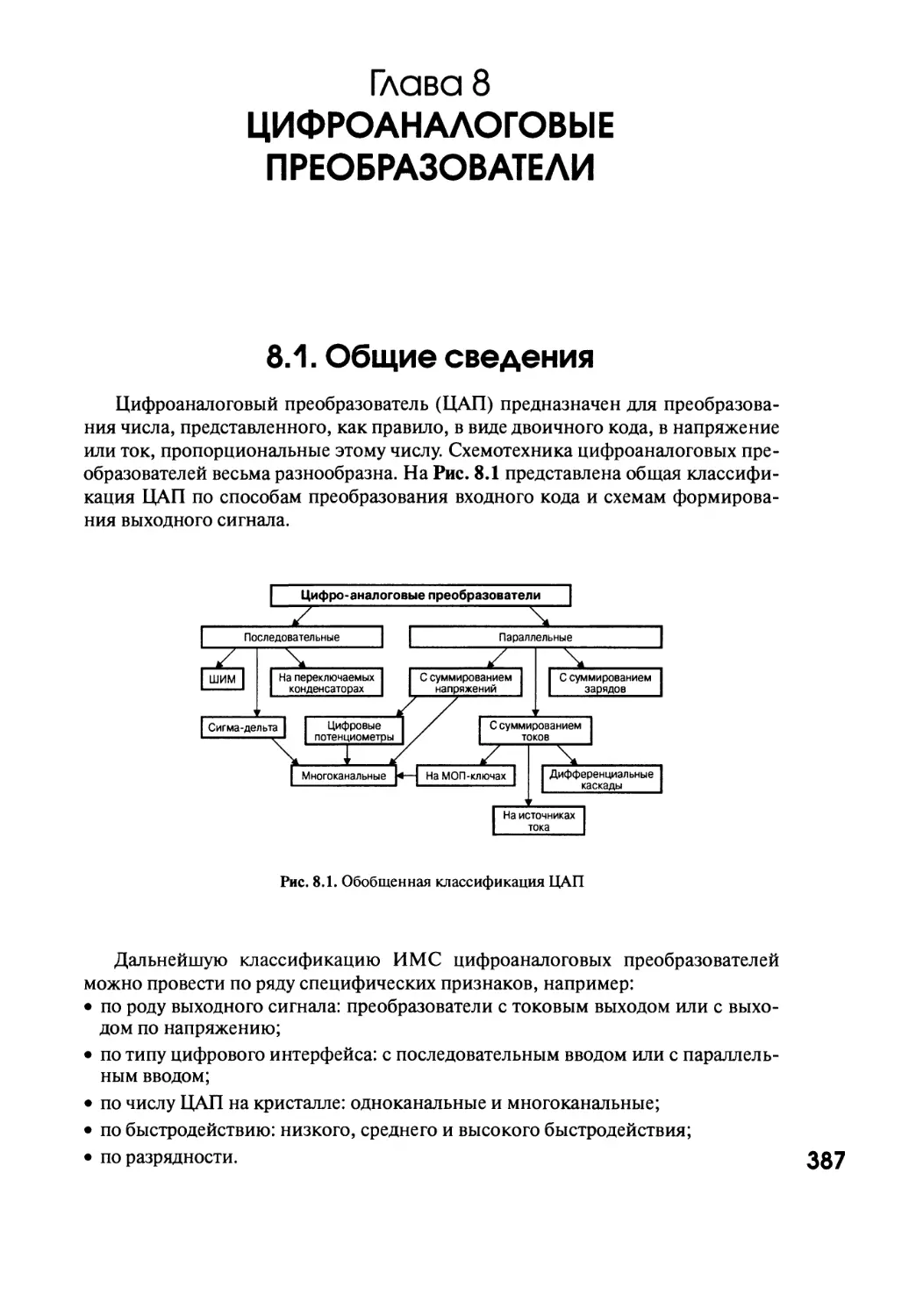
8.1. Общие сведения 387
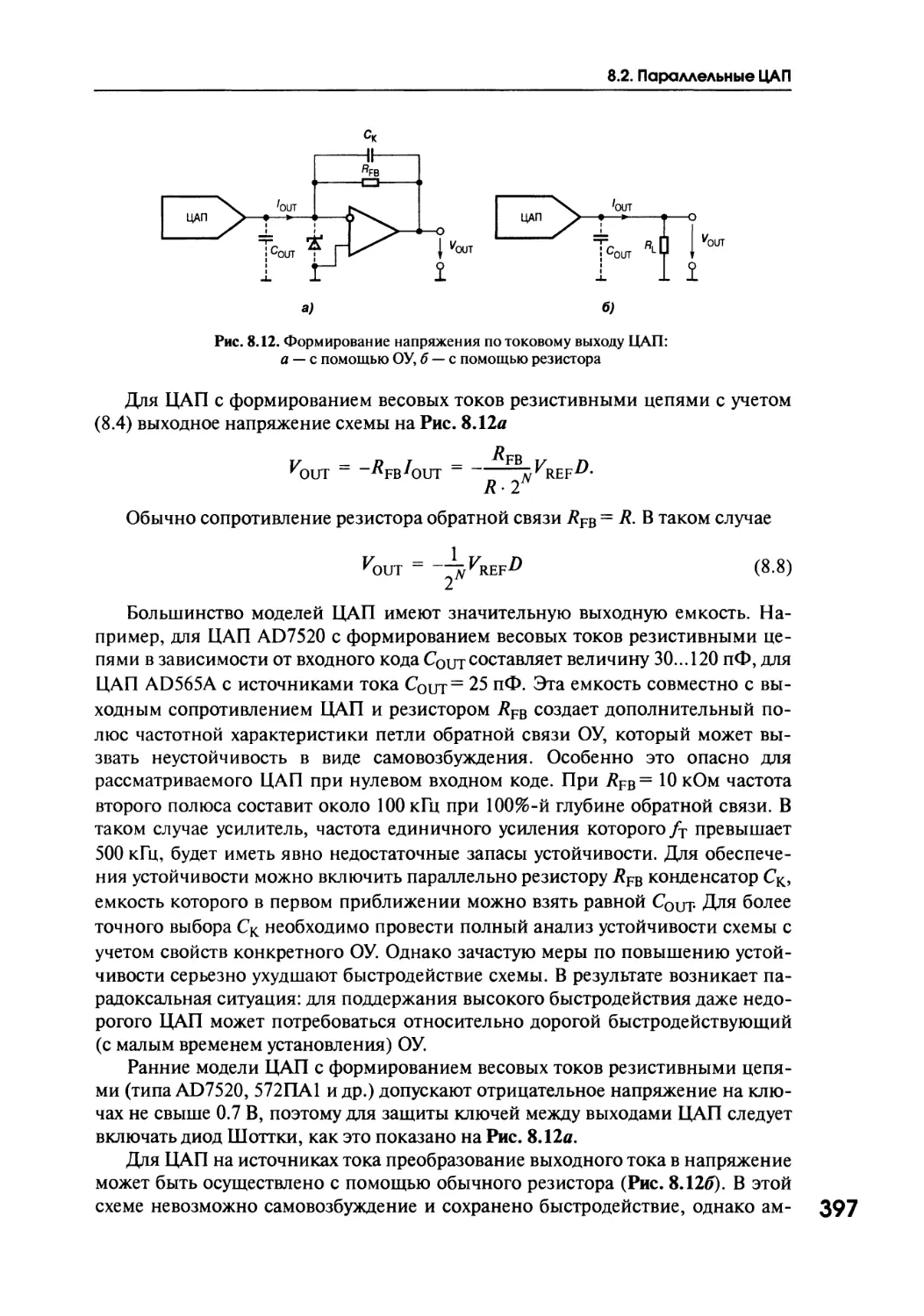
8.2. Параллельные ЦАП 388
8.2.1. ЦАП с суммированием весовых токов 388
8.2.2. Параллельный ЦАП на переключаемых конденсаторах (ЦАП с суммированием зарядов) 400
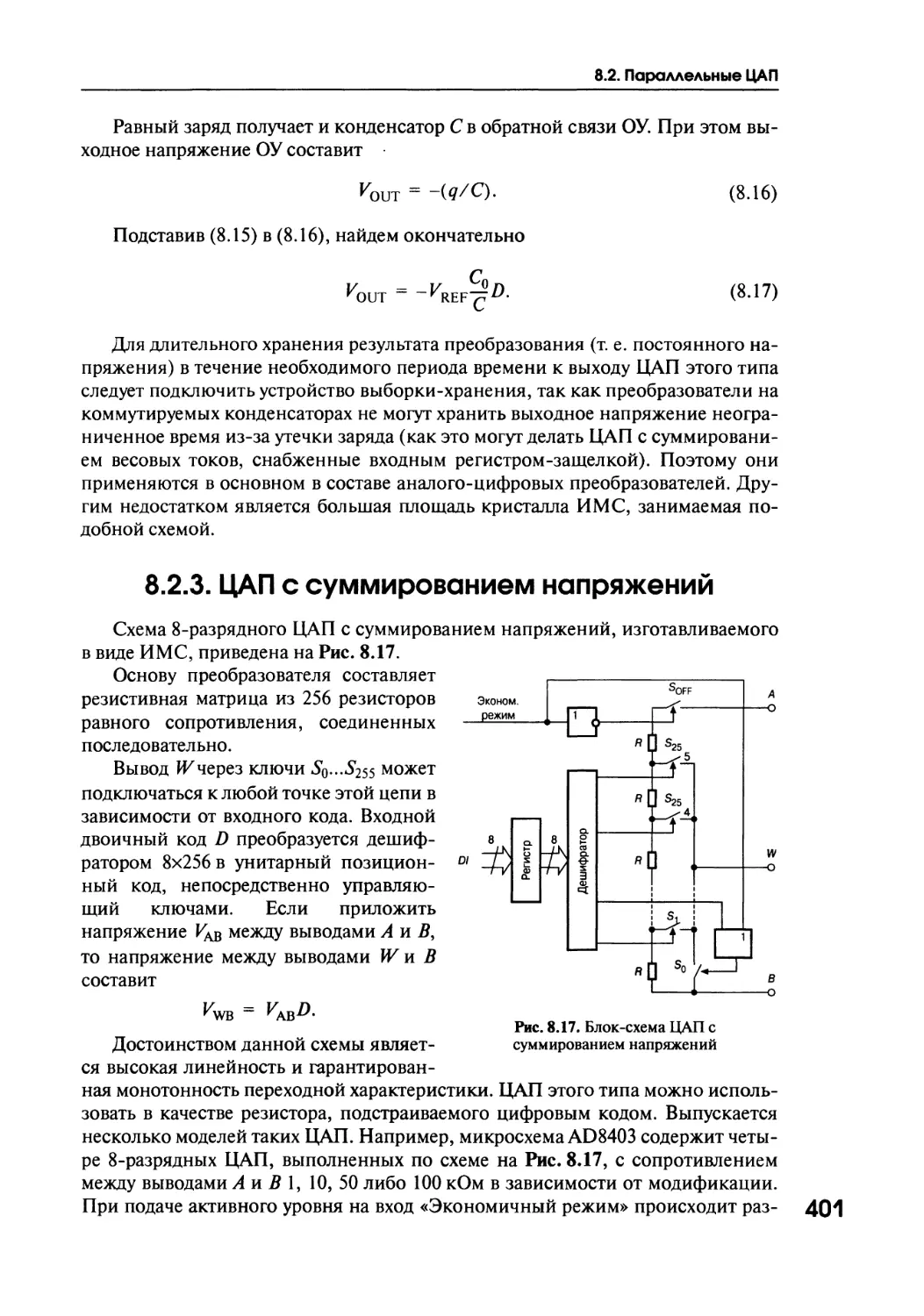
8.2.3. ЦАП с суммированием напряжений 401
8.3. Последовательные ЦАП 403
8.3.1. ЦАП с широтно-импульсной модуляцией 403
8.3.2. Последовательный ЦАП на переключаемых конденсаторах 404
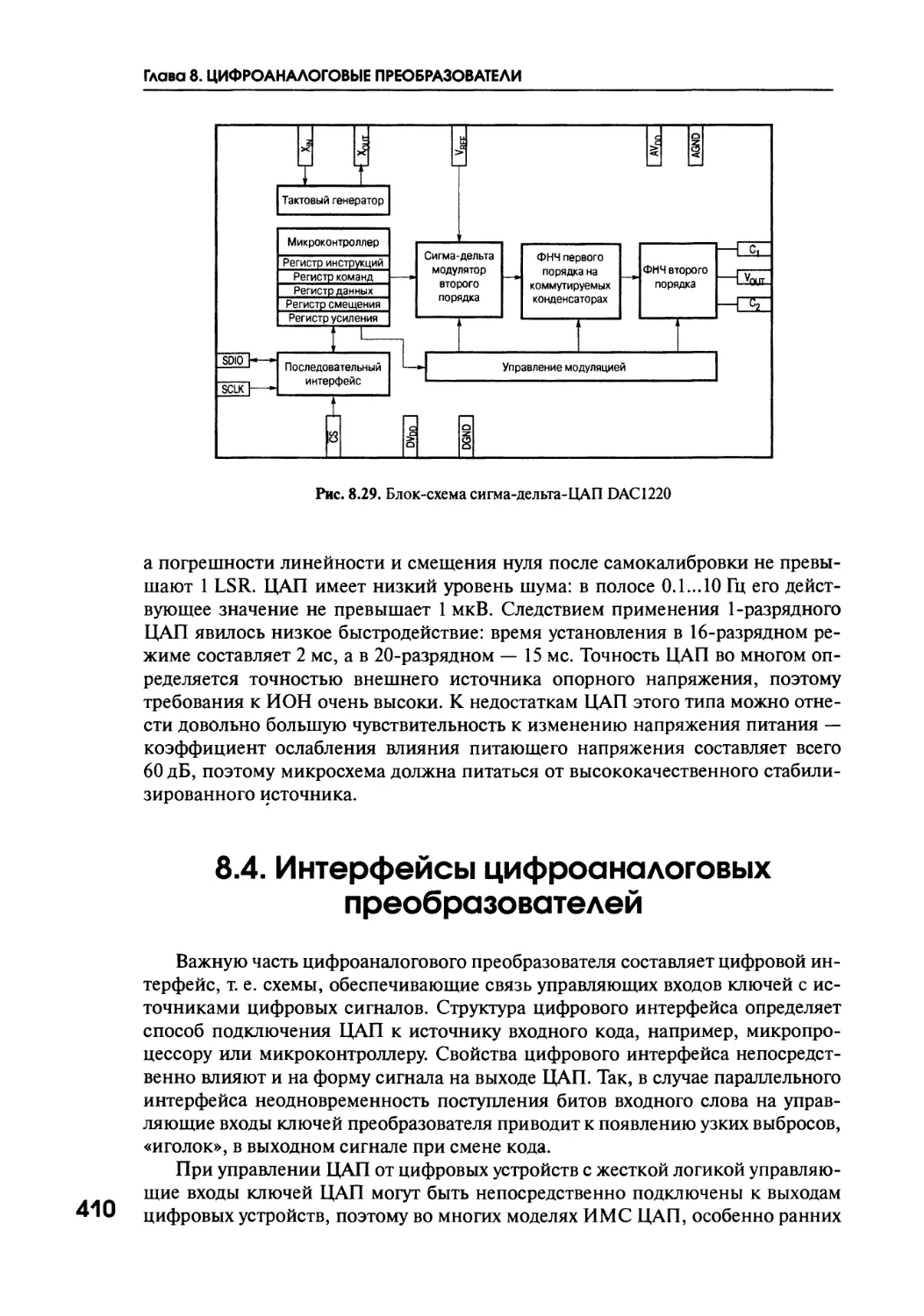
8.3.3. Сигма-дельта-ЦАП 405
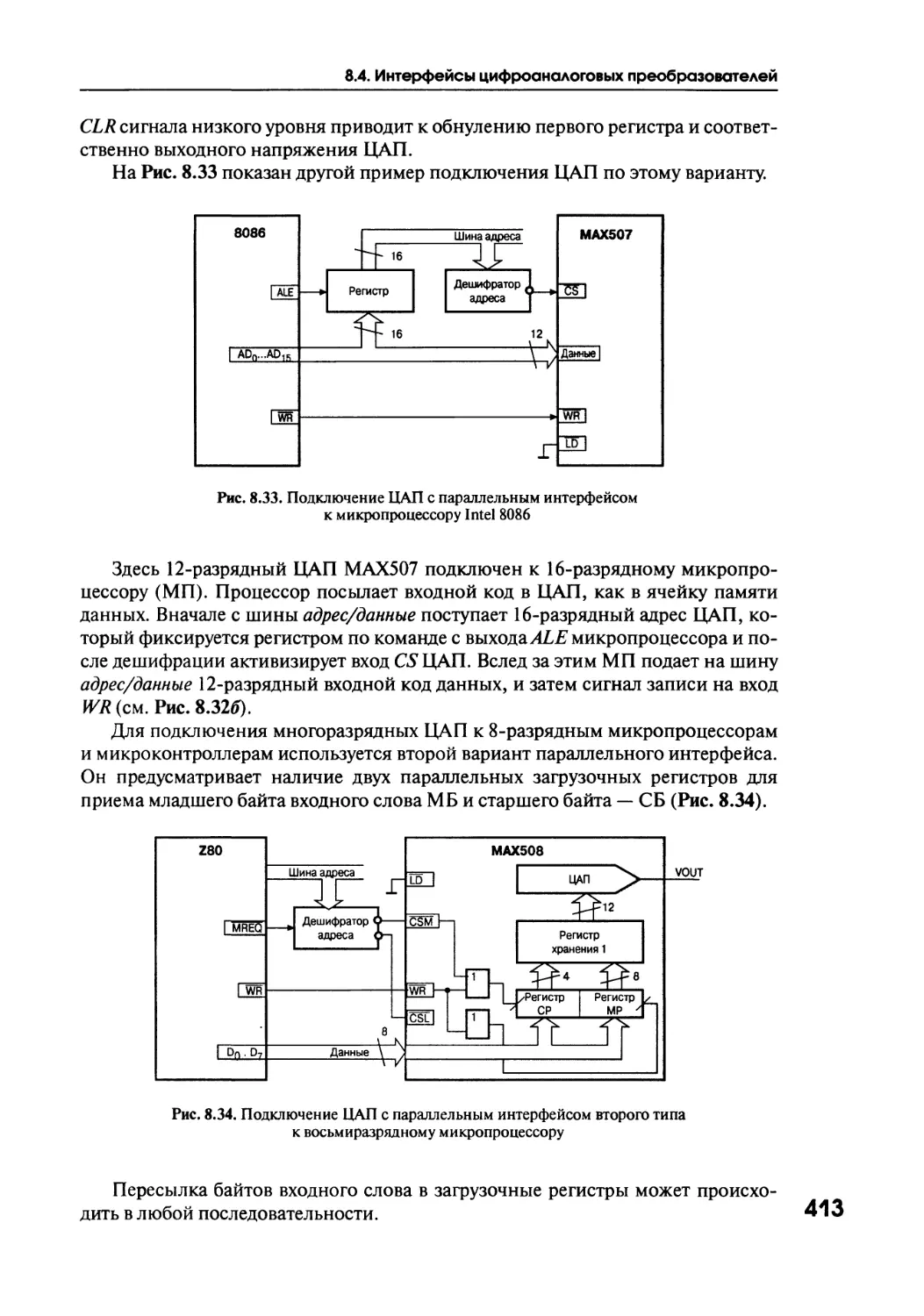
8.4. Интерфейсы цифроаналоговых преобразователей 410
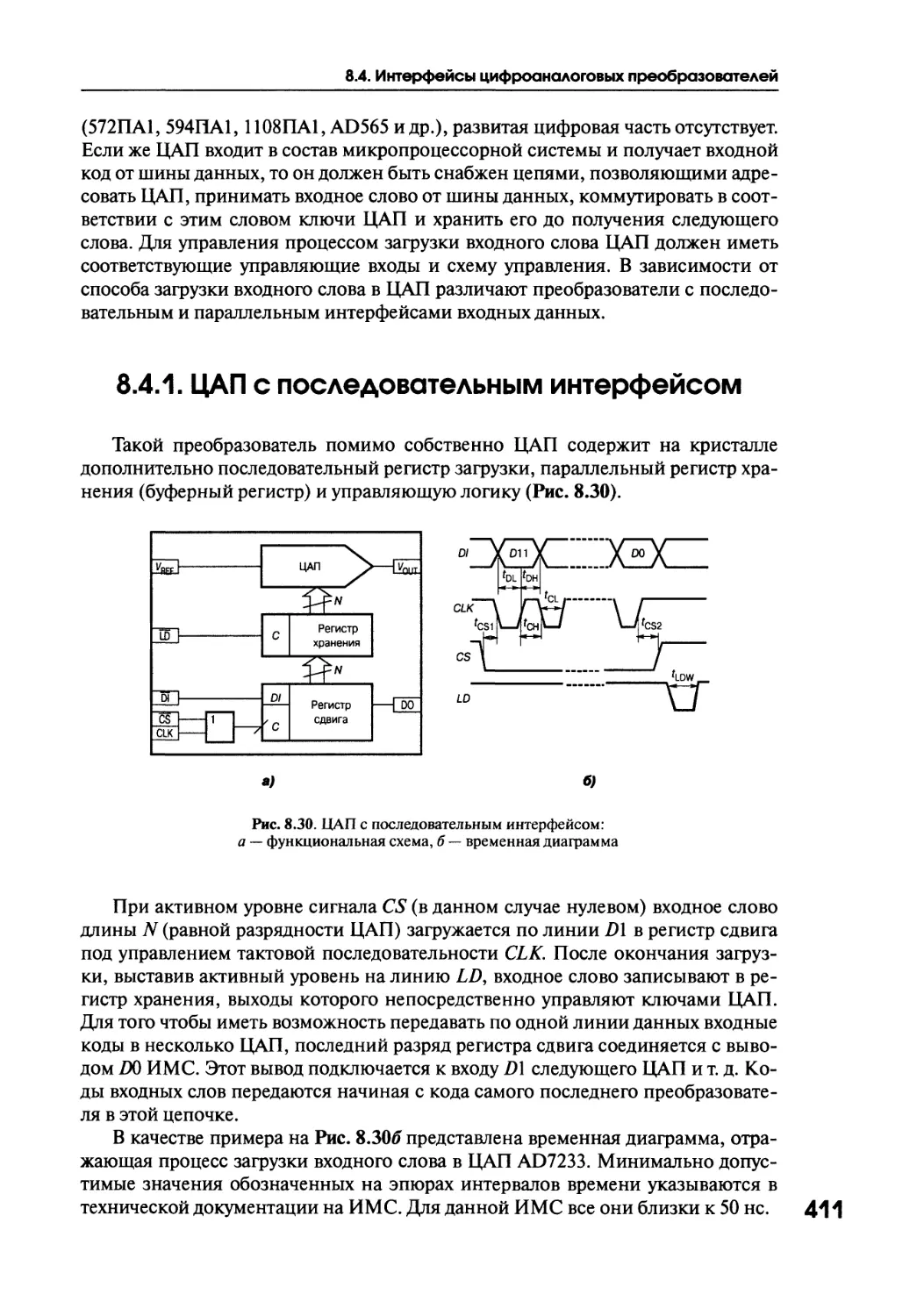
8.4.1. ЦАП с последовательным интерфейсом 411
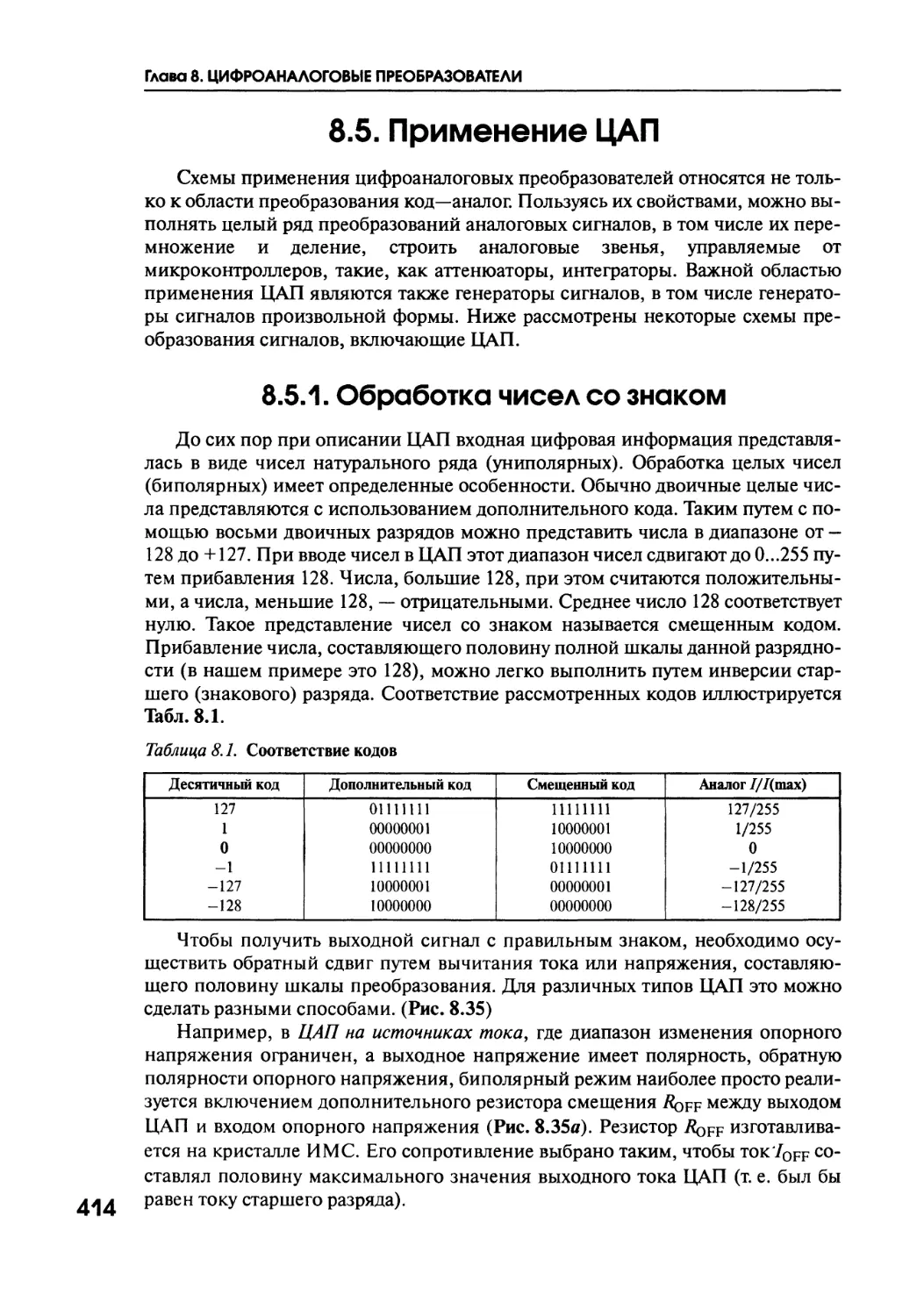
8.4.2. ЦАП с параллельным интерфейсом 412
8.5. Применение ЦАП 414
8.5.1. Обработка чисел со знаком 414
8.5.2. Перемножители и делители аналоговых сигналов 416
8.5.3. Аттенюаторы и интеграторы на ЦАП 418
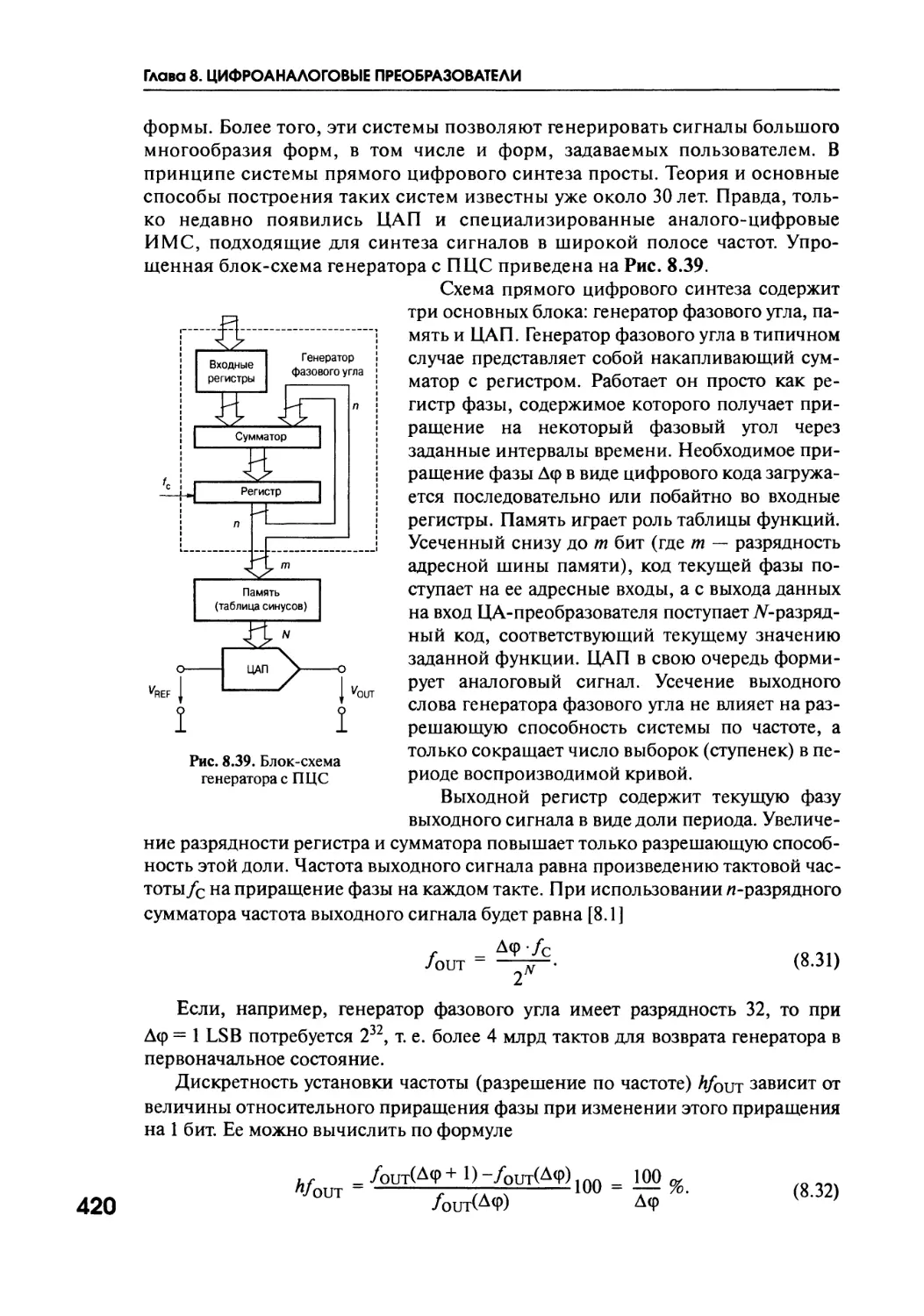
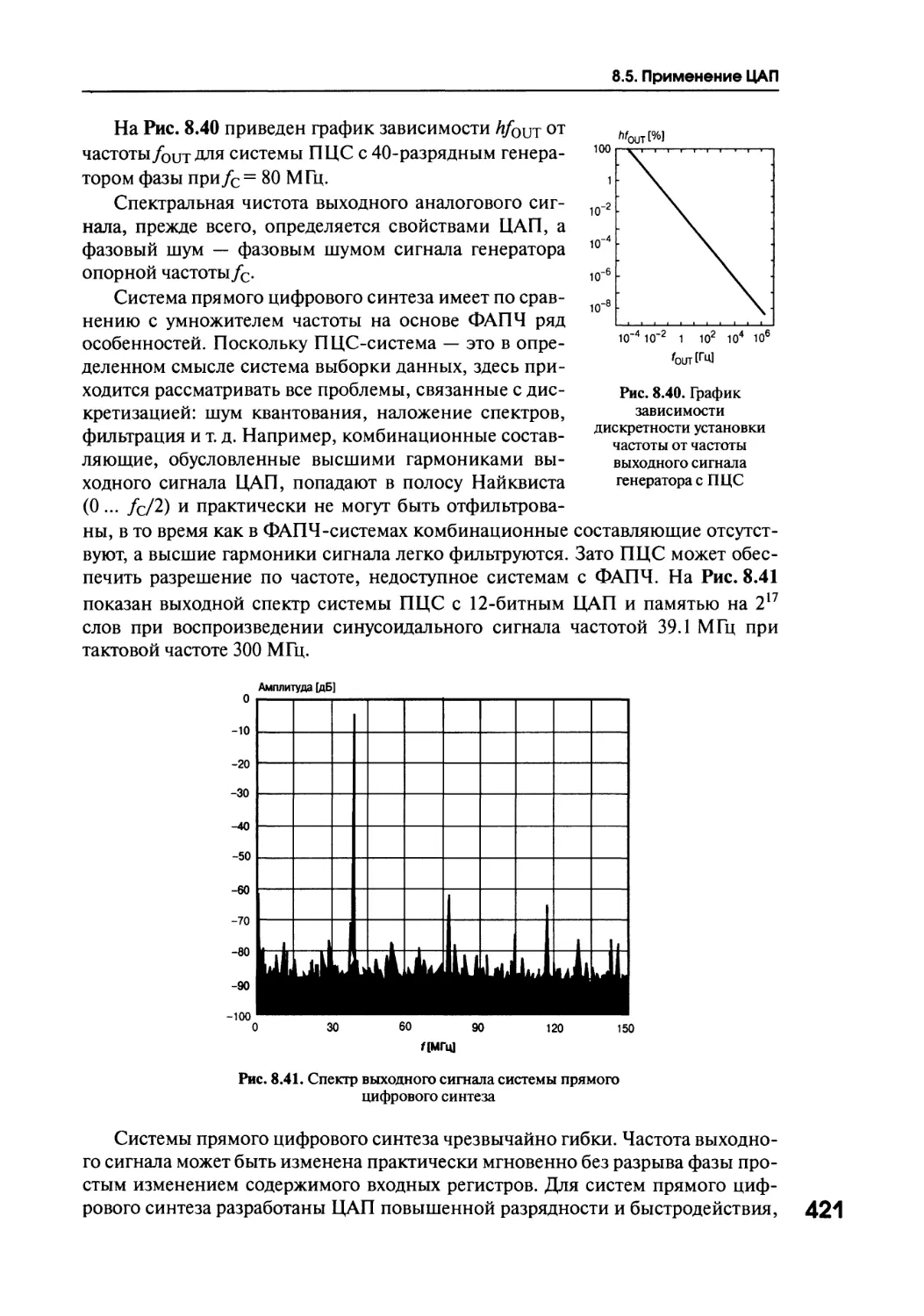
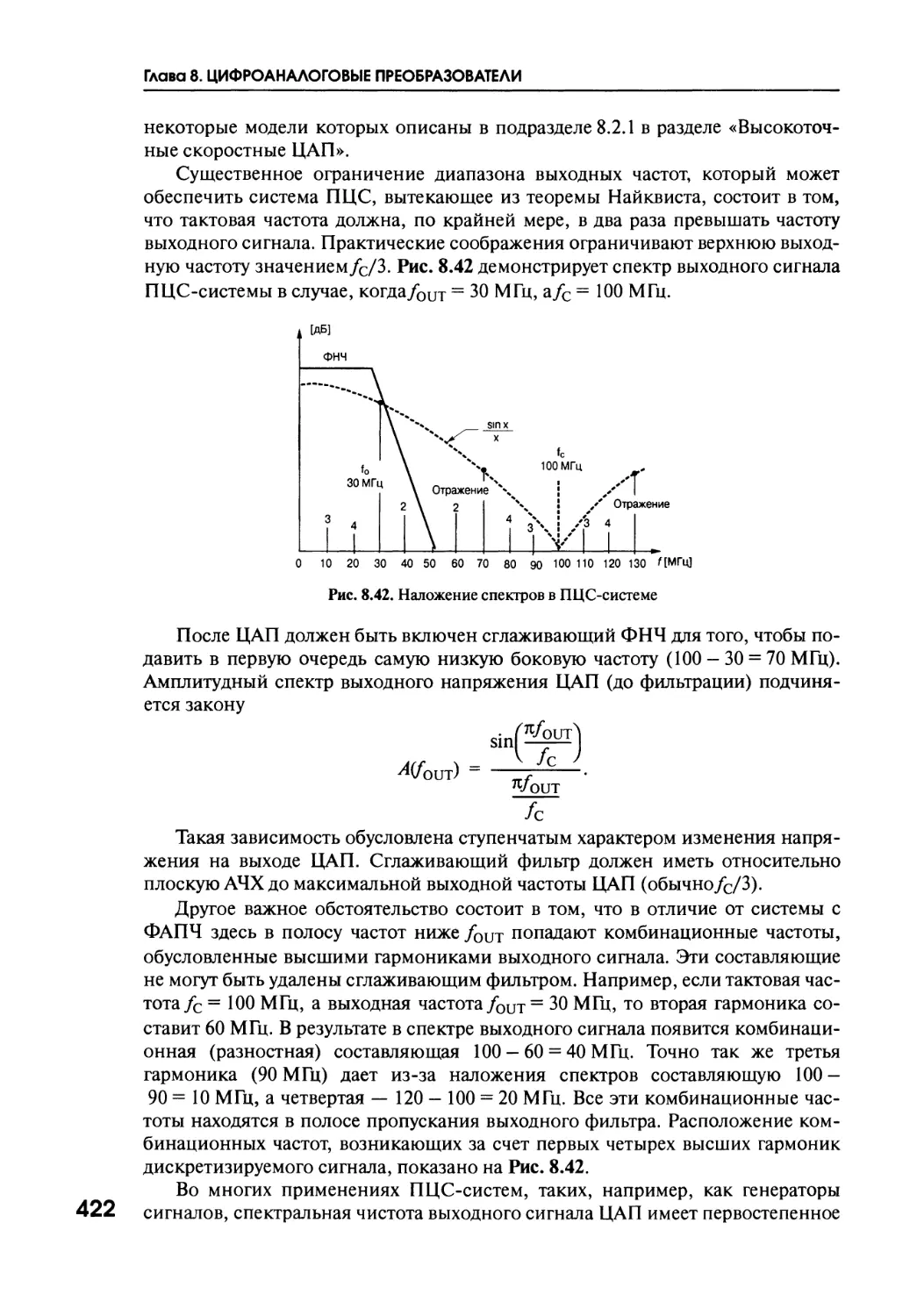
8.5.4. Системы прямого синтеза сигналов..... 419
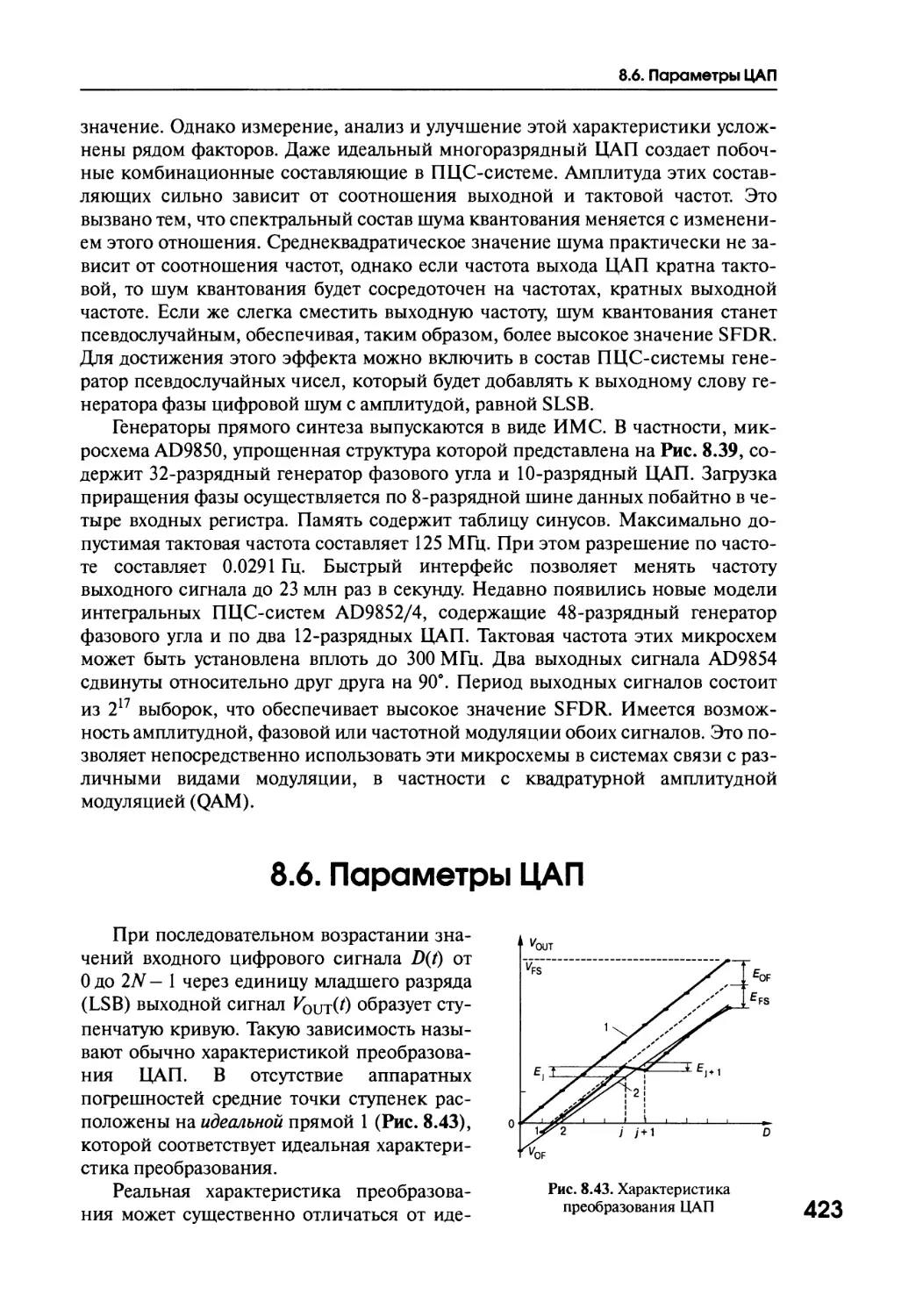
8.6. Параметры ЦАП 423
8.6.1. Статические параметры 424
8.6.2. Точность воспроизведения сигналов переменного тока 425
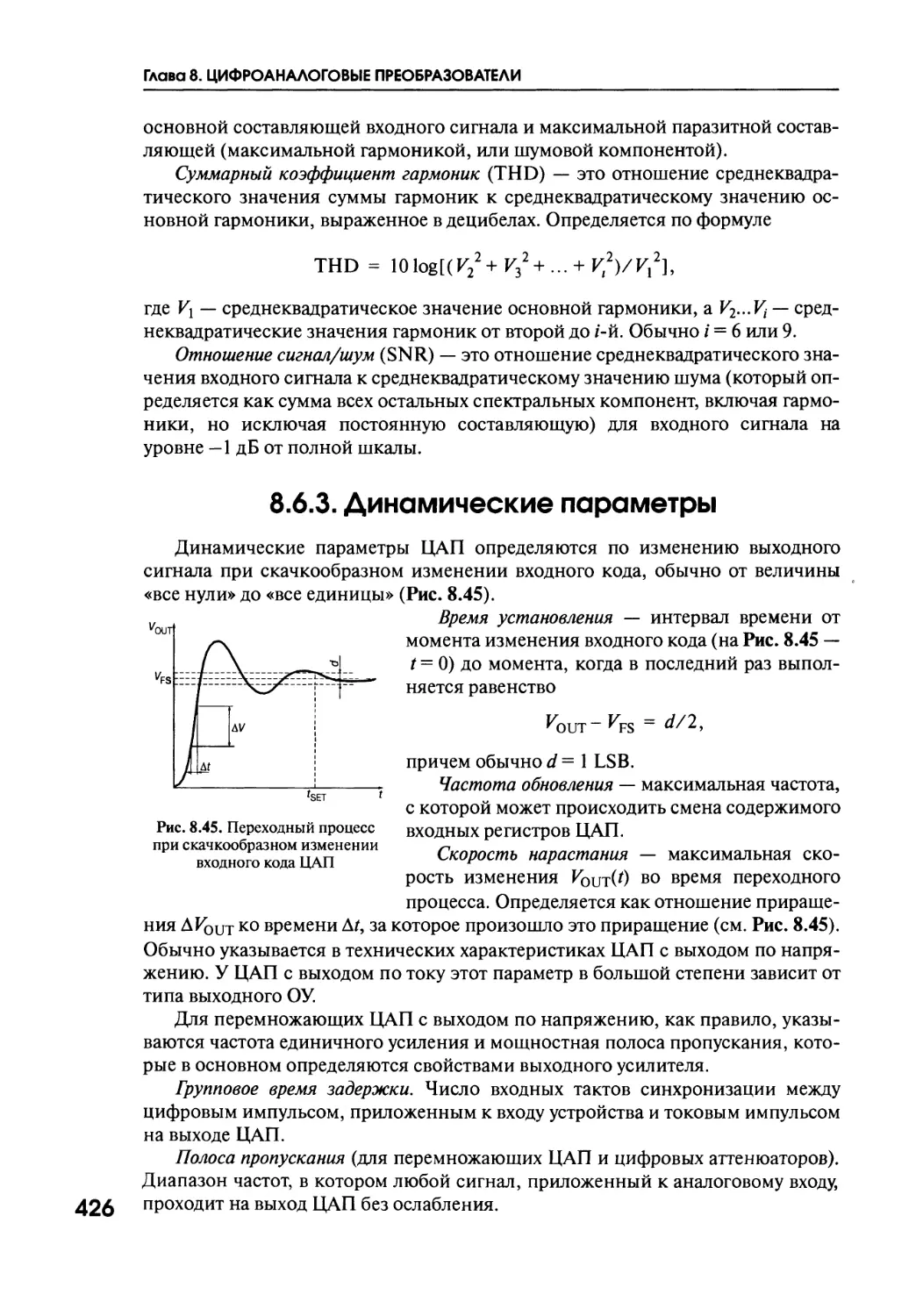
8.6.3. Динамические параметры 426
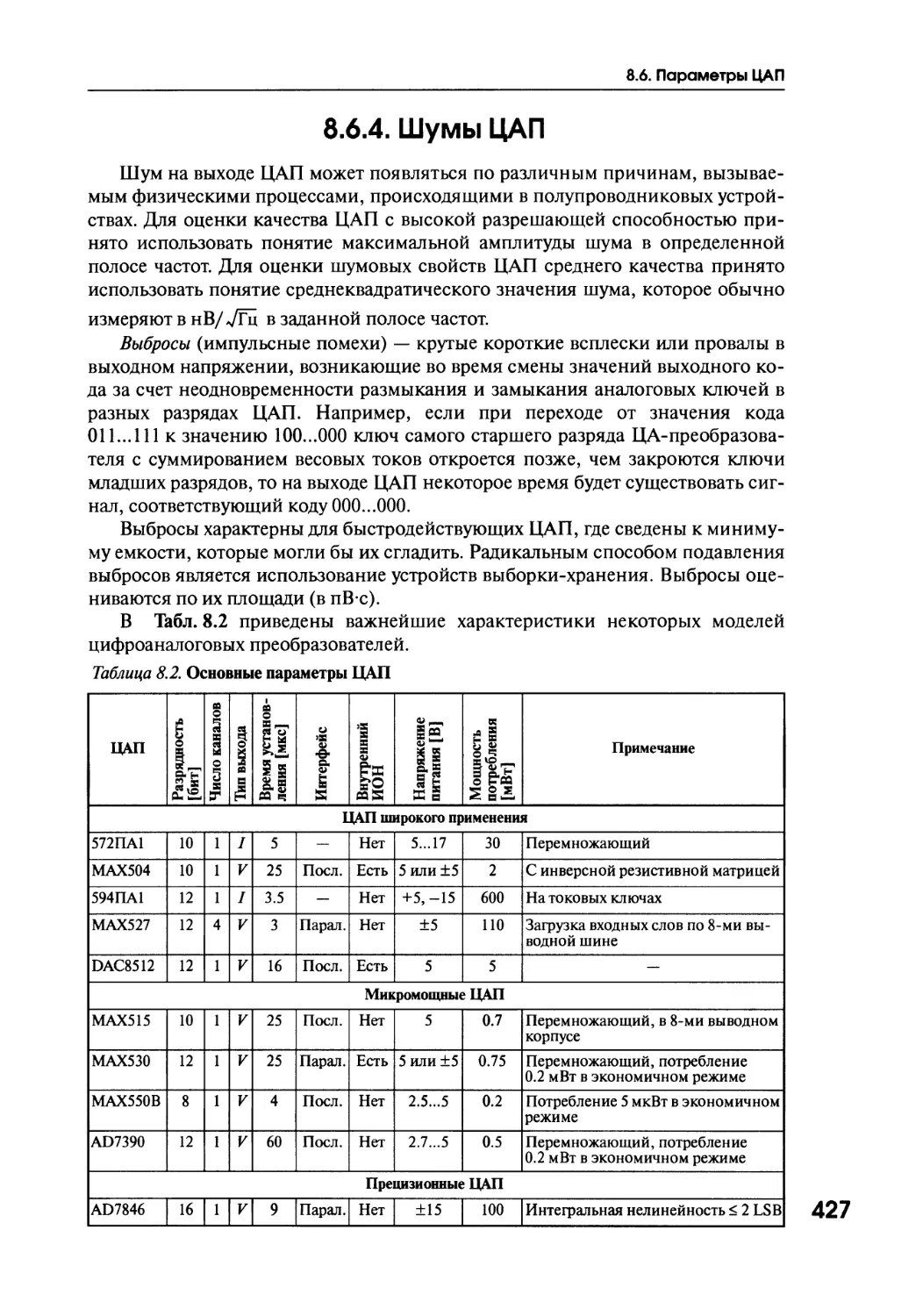
8.6.4. Шумы ЦАП 427
Глава 9. АНАЛОГО-ЦИФРОВЫЕ ПРЕОБРАЗОВАТЕЛИ 431
9.1. Общие сведения 431
9.1.1. Процедура аналого-цифрового преобразования 431
9.1.2. Апертурная погрешность 432
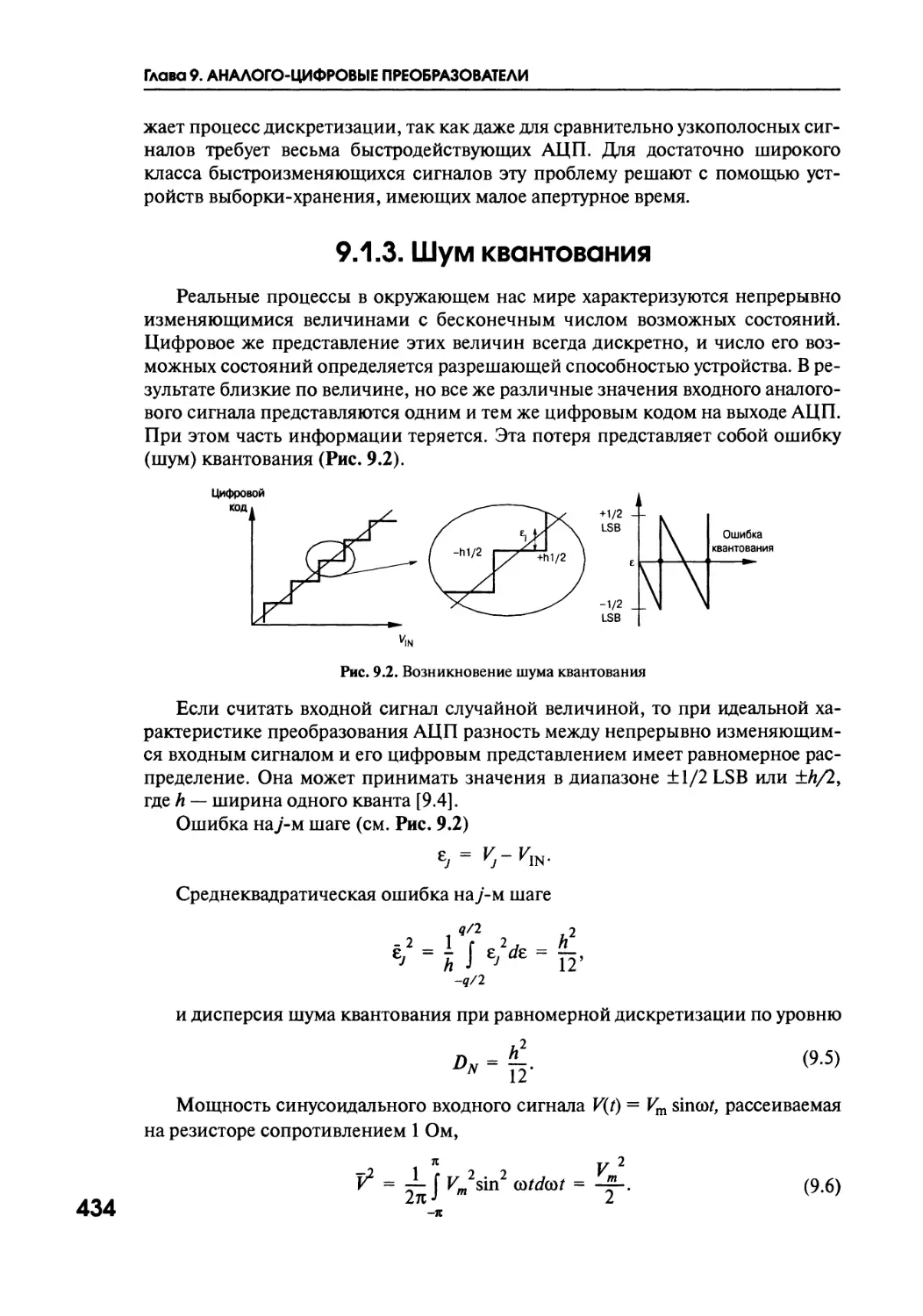
9.1.3. Шум квантования 434
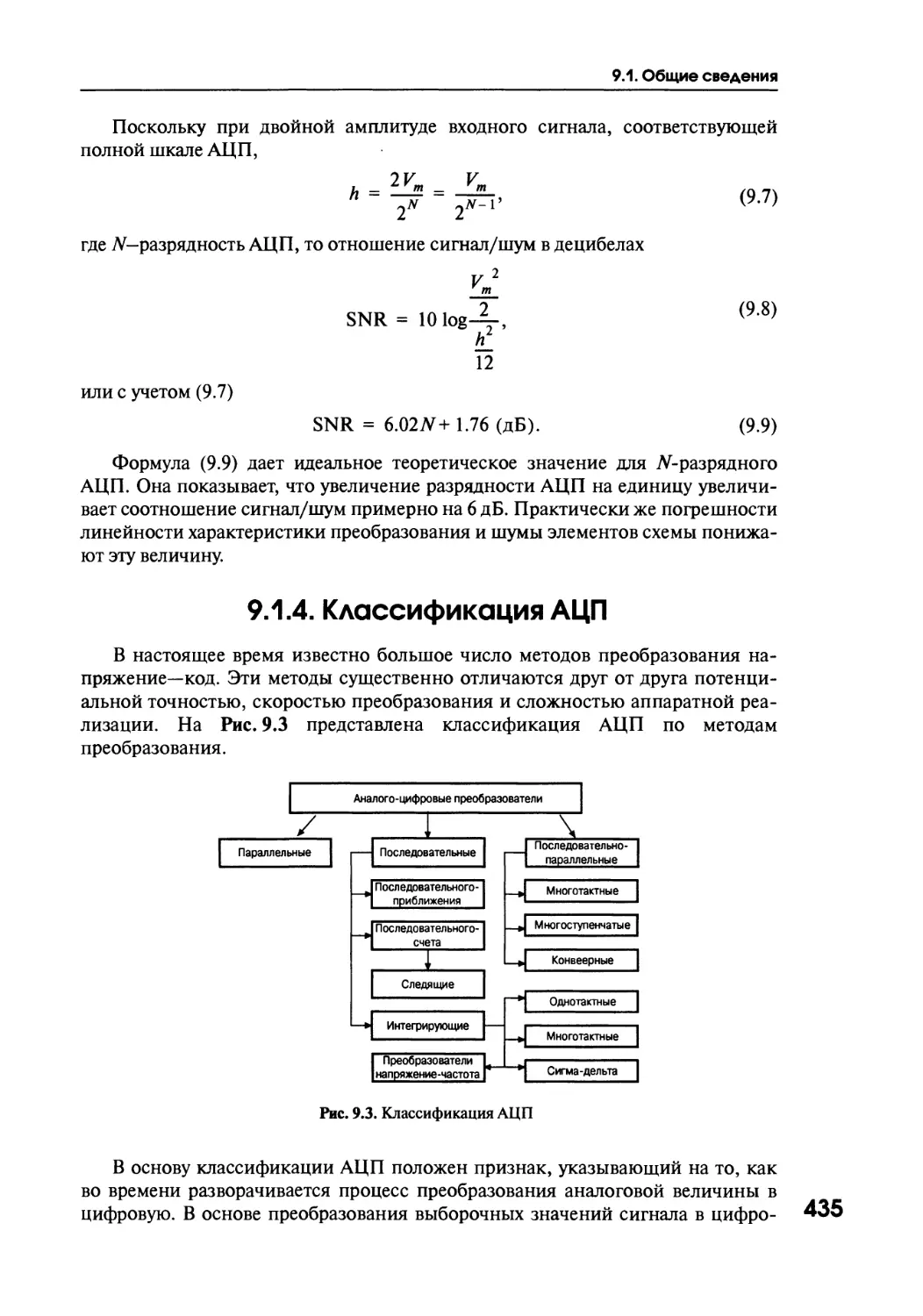
9.1.4. Классификация АЦП 435
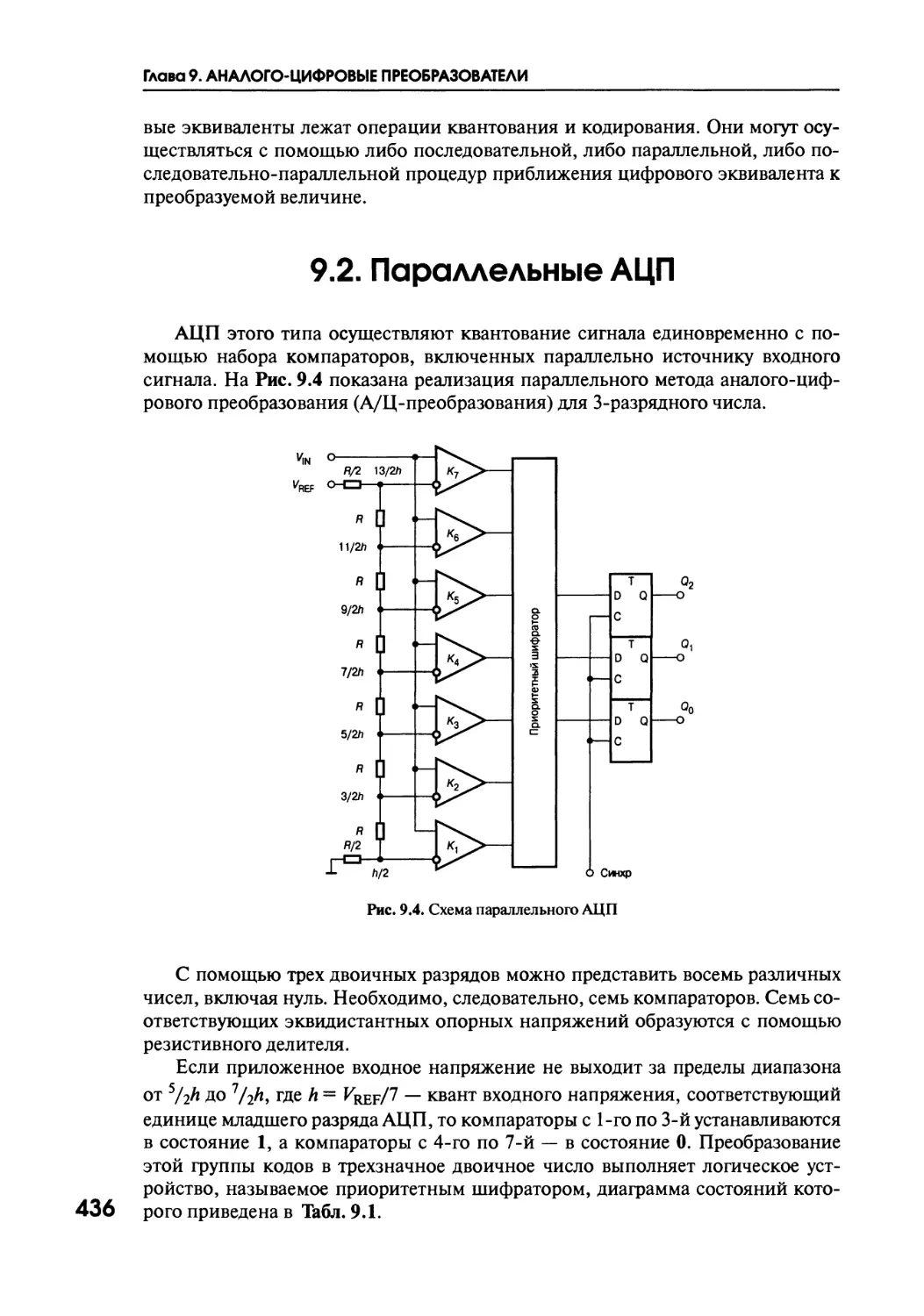
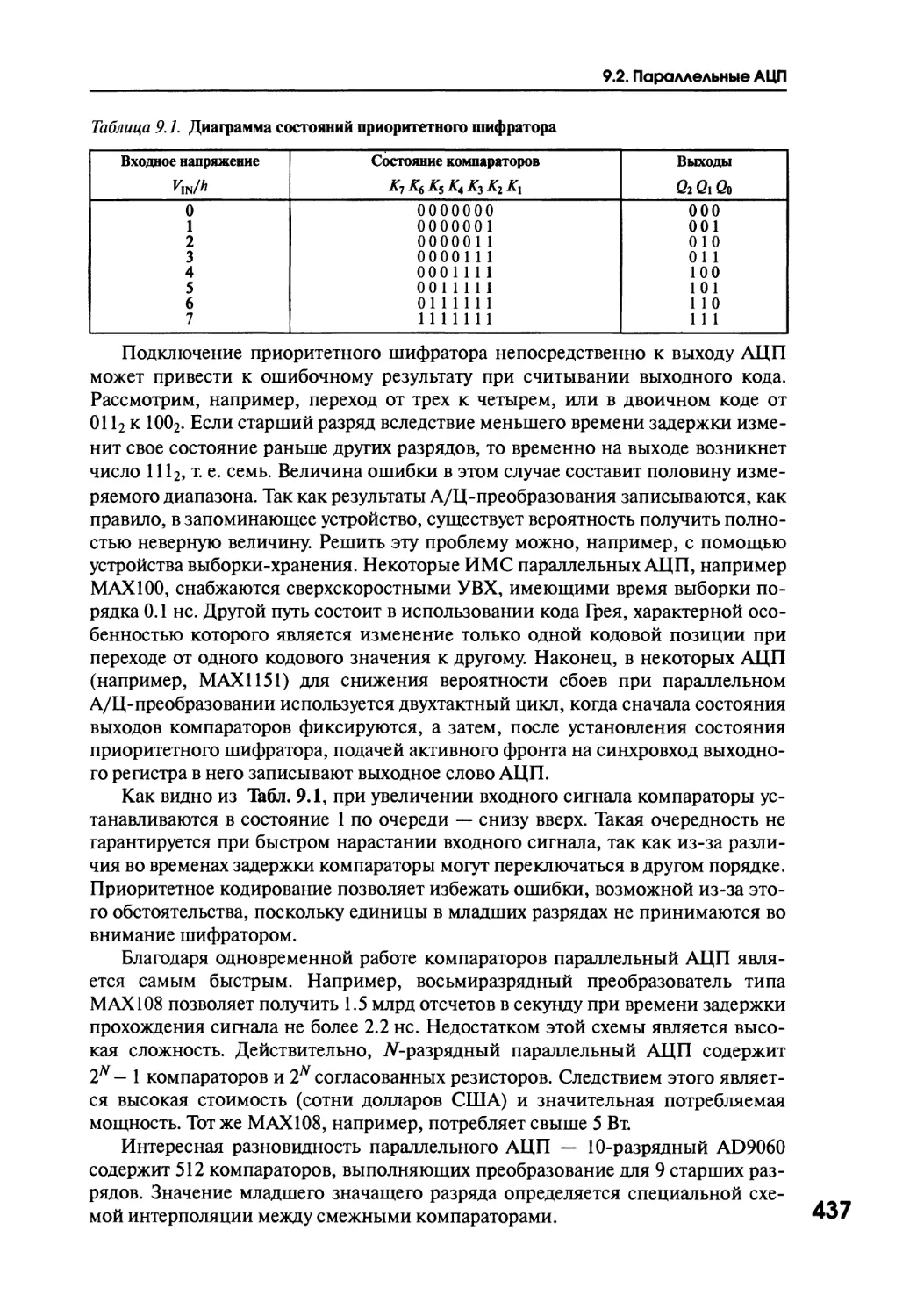
9.2. Параллельные АЦП 436
9.3. Последовательно-параллельные АЦП 438
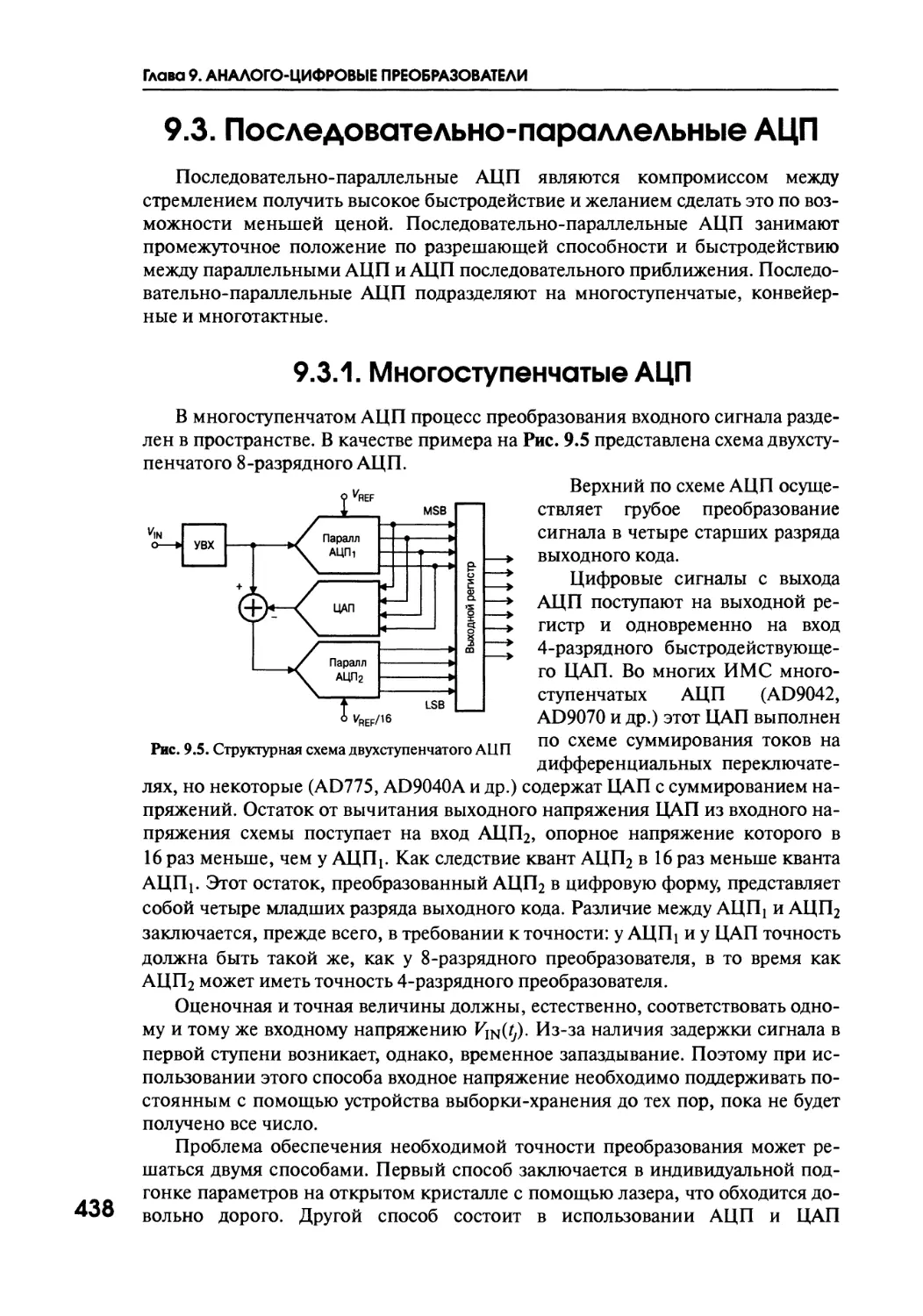
9.3.1. Многоступенчатые АЦП 438
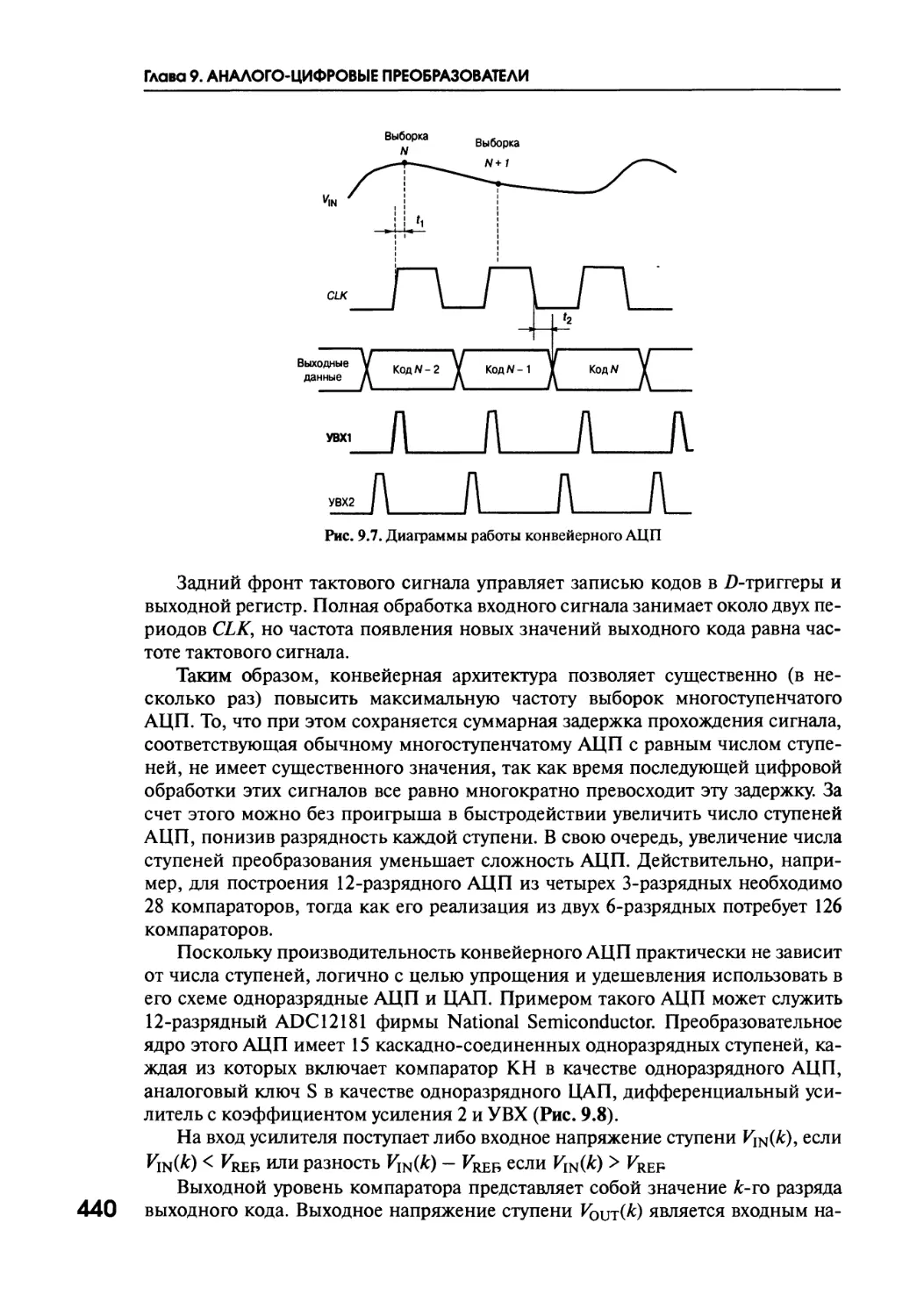
9.3.2. Конвейерные АЦП 439
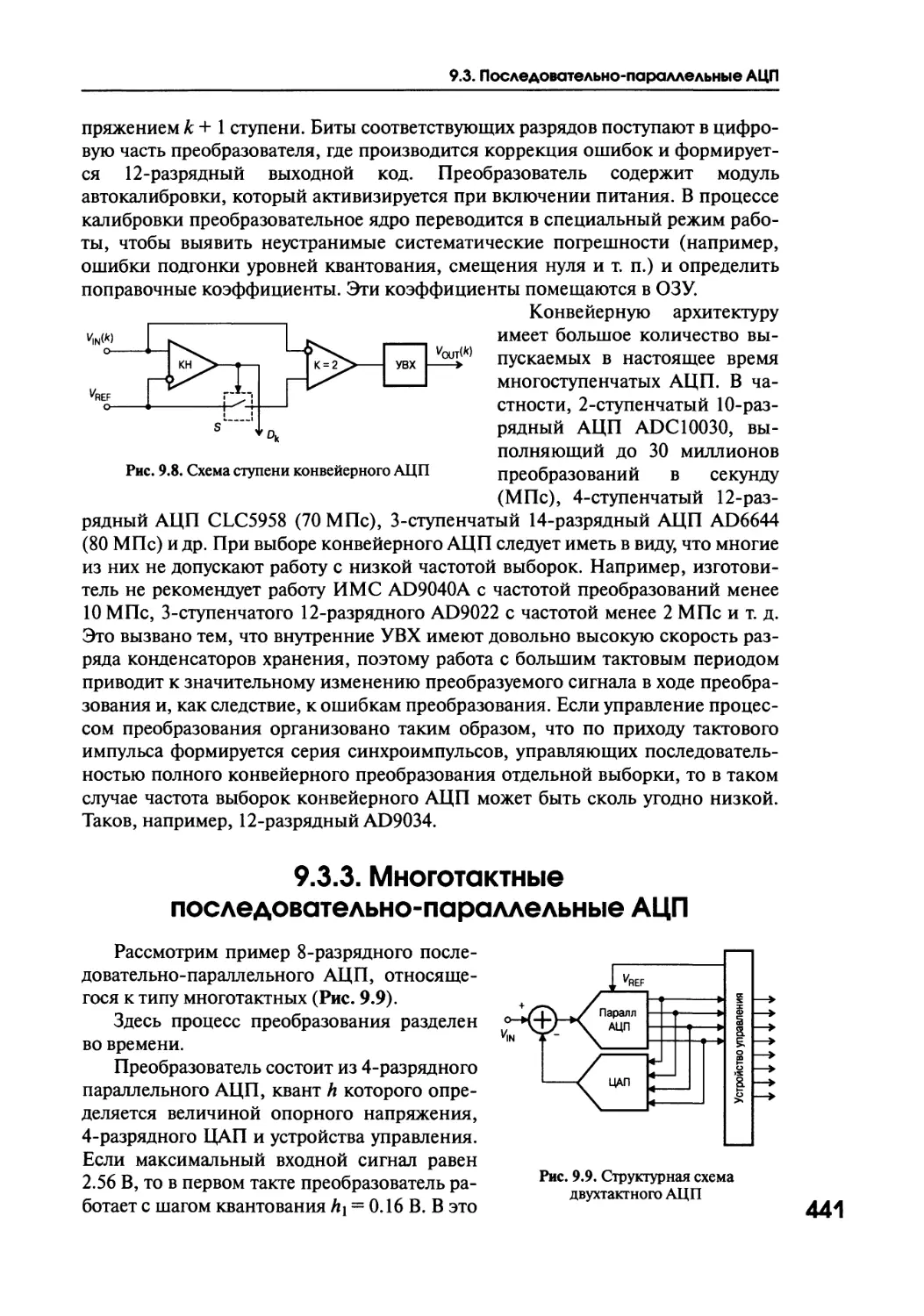
9.3.3. Многотактные последовательно-параллельные АЦП 441
9.4. Последовательные АЦП 442
9.4.1. АЦП последовательного счета 442
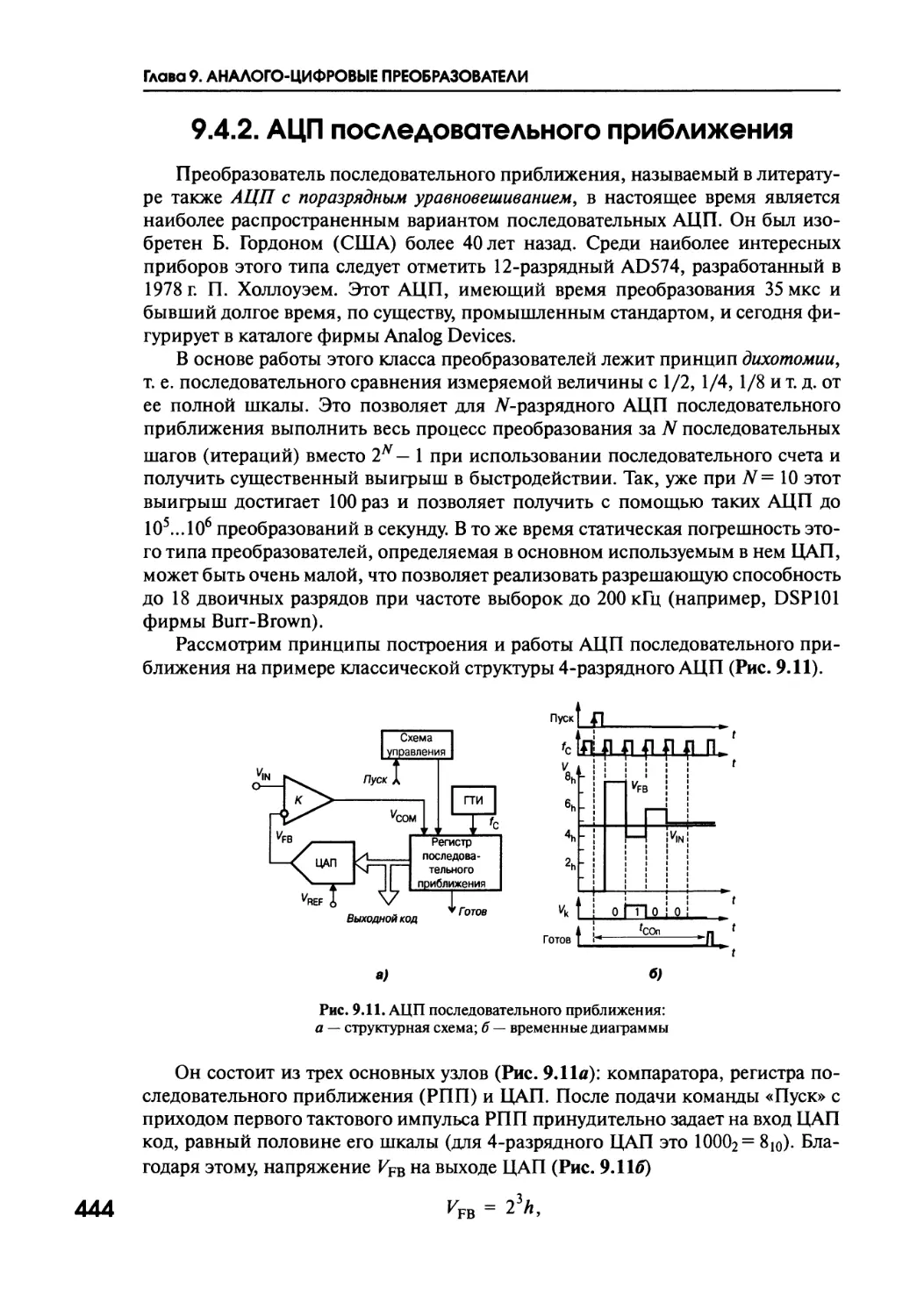
9.4.2. АЦП последовательного приближения 444
9.5. Интегрирующие АЦП 446
9.5.1. АЦП многотактного интегрирования 446
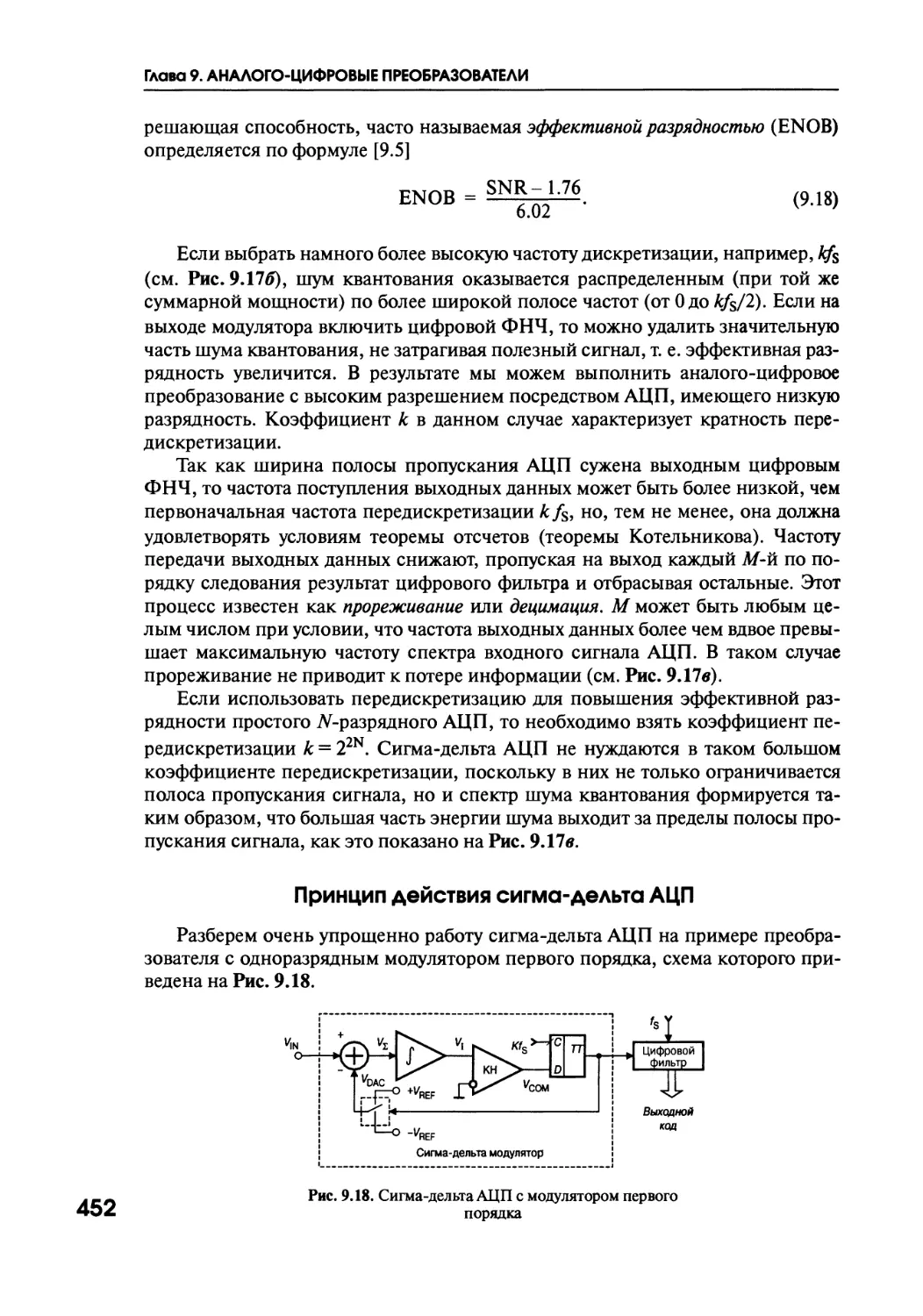
9.5.2. Сигма-дельта АЦП 450
9.5.3. Преобразователи напряжение—частота 458
9.6. Интерфейсы АЦП 460
9.6.1. Общие сведения 460
9.6.2. АЦП с параллельным интерфейсом выходных данных 461
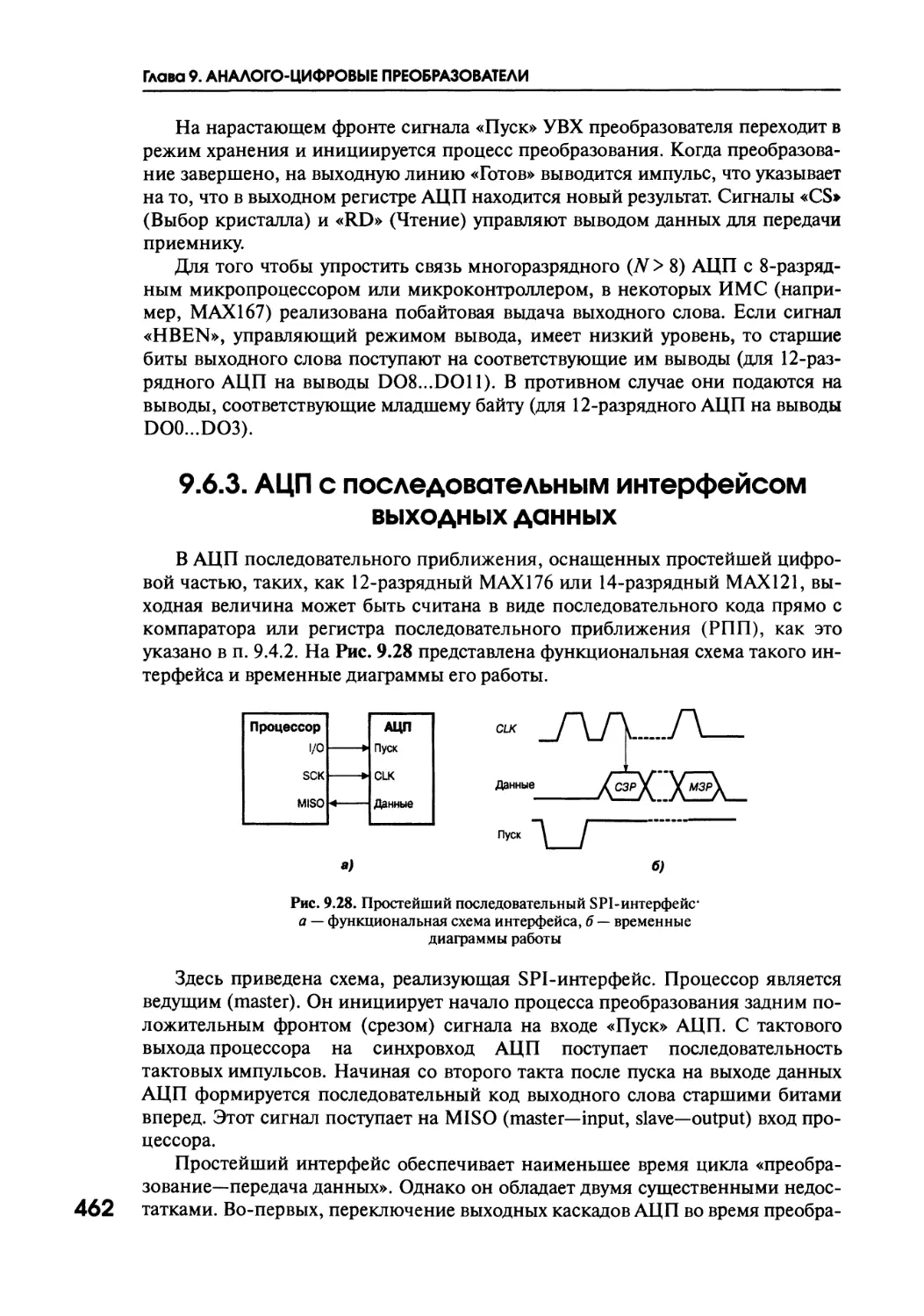
9.6.3. АЦП с последовательным интерфейсом выходных данных 462
9.6.4. Последовательный интерфейс сигма-дельта АЦП с процессорами 463
9.7. Параметры АЦП 464
9.7.1. Статические параметры 465
9.7.2. Динамические параметры 467
7
ОГЛАВЛЕНИЕ
9.7.3. Шумы АЦП 467
9.7.4. Параметры, характеризующие качество преобразования сигналов переменного тока 468
9.8. Применение АЦП 471
9.8.1. Системы сбора данных 471
9.8.2. Кодеки 474
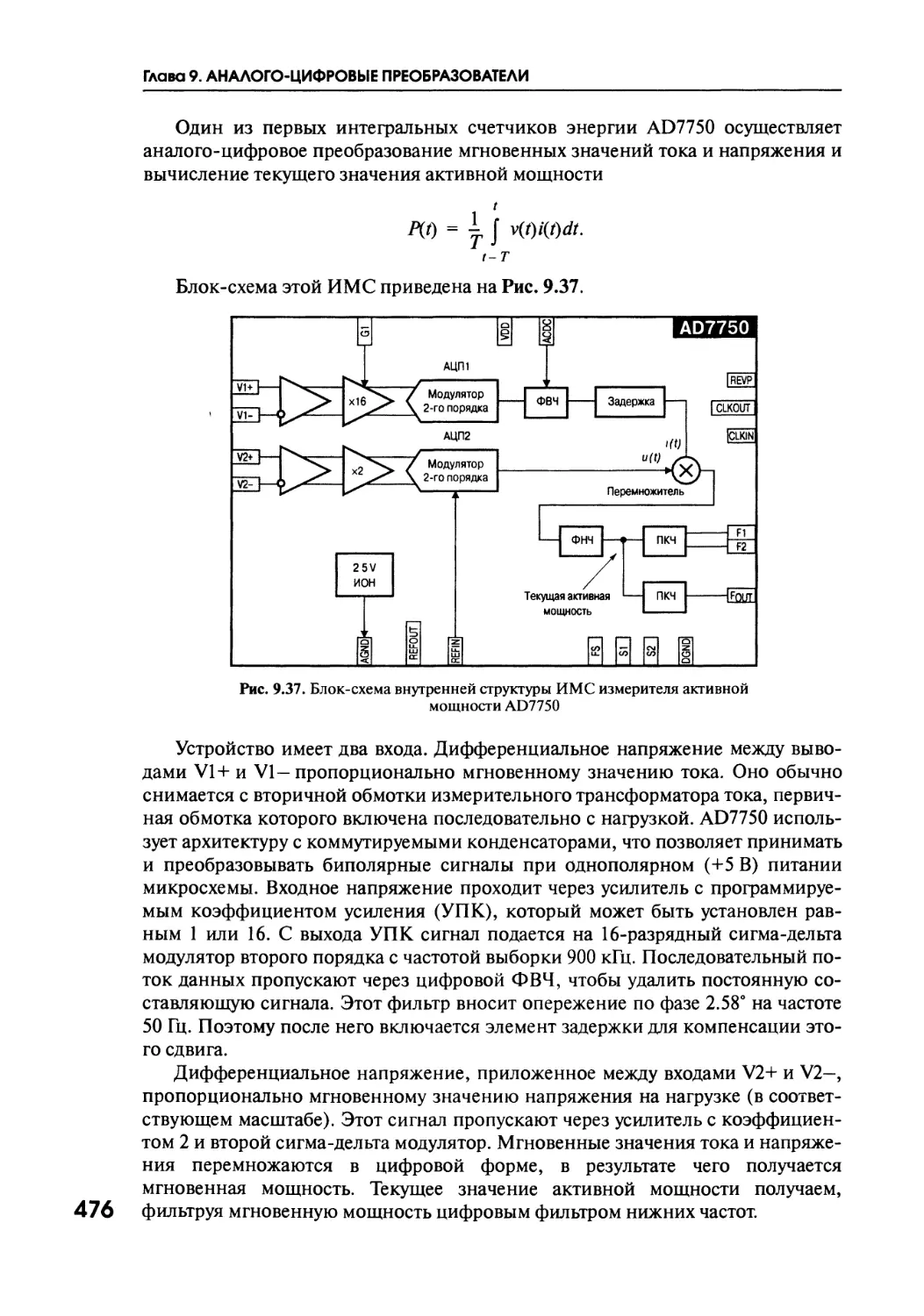
9.8.3. Измерение энергии 475
9.8.4. Управление двигателями переменного тока 477
Глава 10. ИНТЕГРАЛЬНЫЕ ДАТЧИКИ 484
10.1. Датчики температуры 484
10.1.1. Интегральные датчики температуры на биполярных транзисторах 484
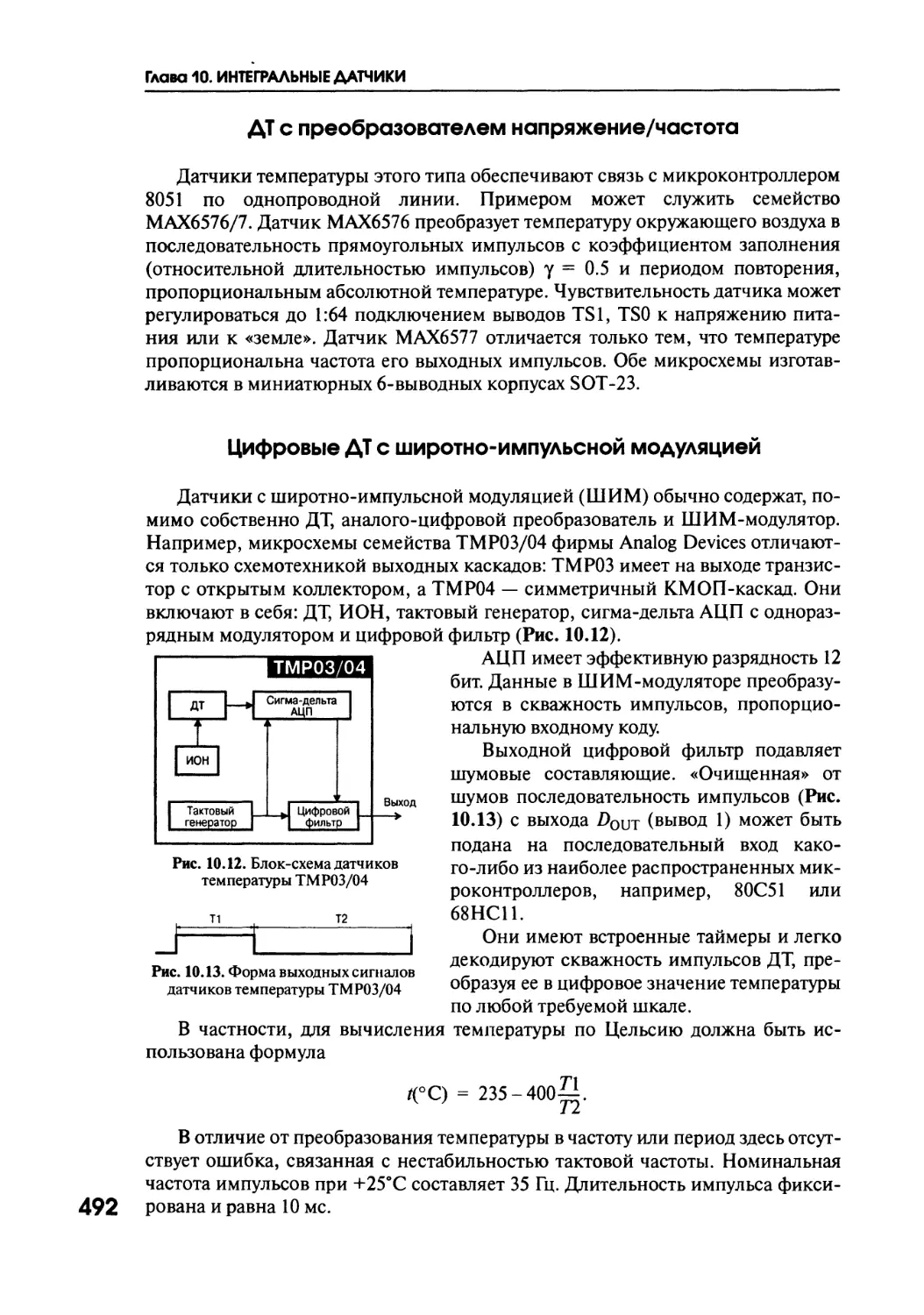
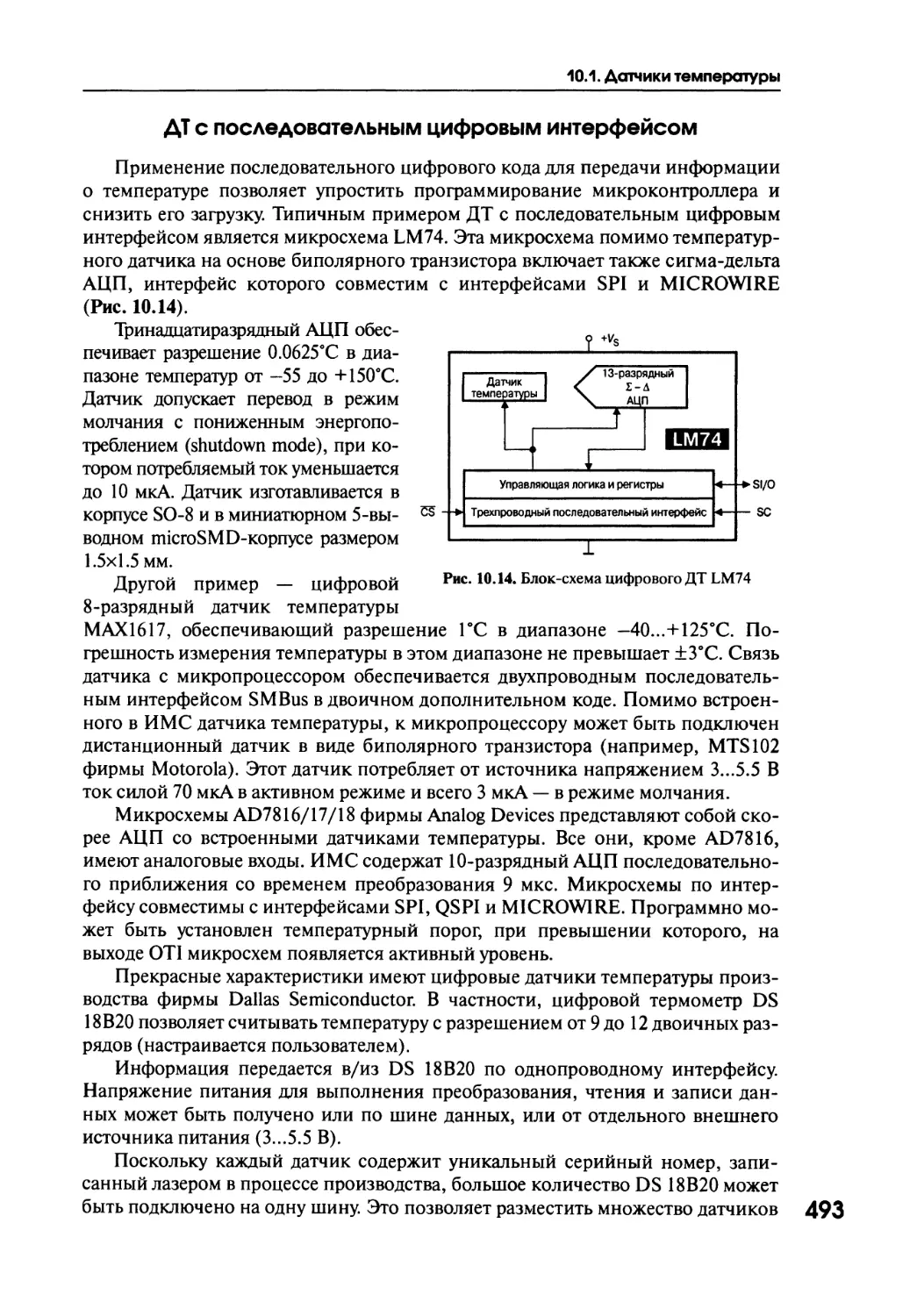
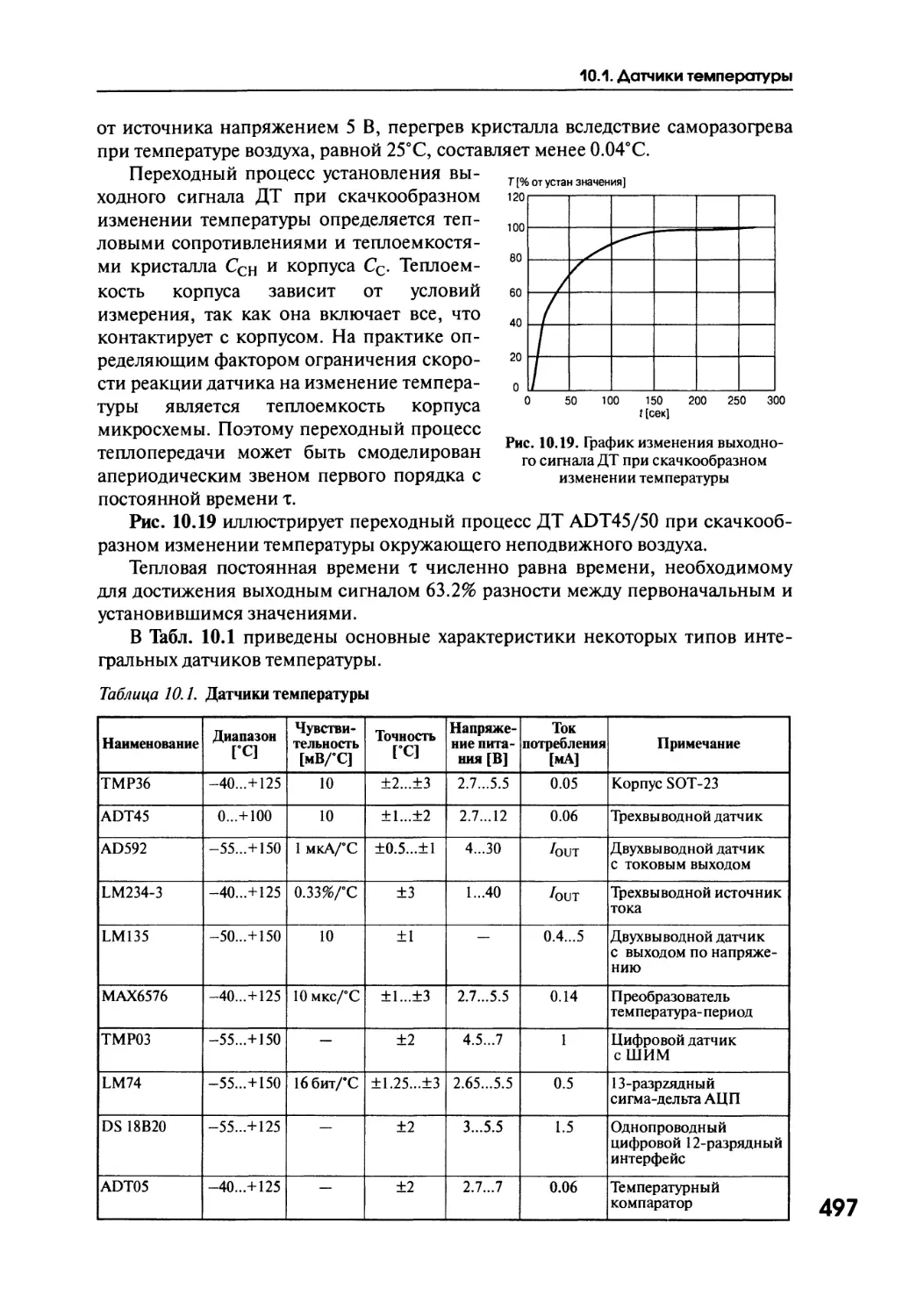
10.1.2. Датчики температуры с цифровым выходом 491
10.1.3. Температурные компараторы 495
10.1.4. Точность датчиков температуры 496
10.2. Датчики ускорения (акселерометры) 498
10.2.1. Общие сведения 498
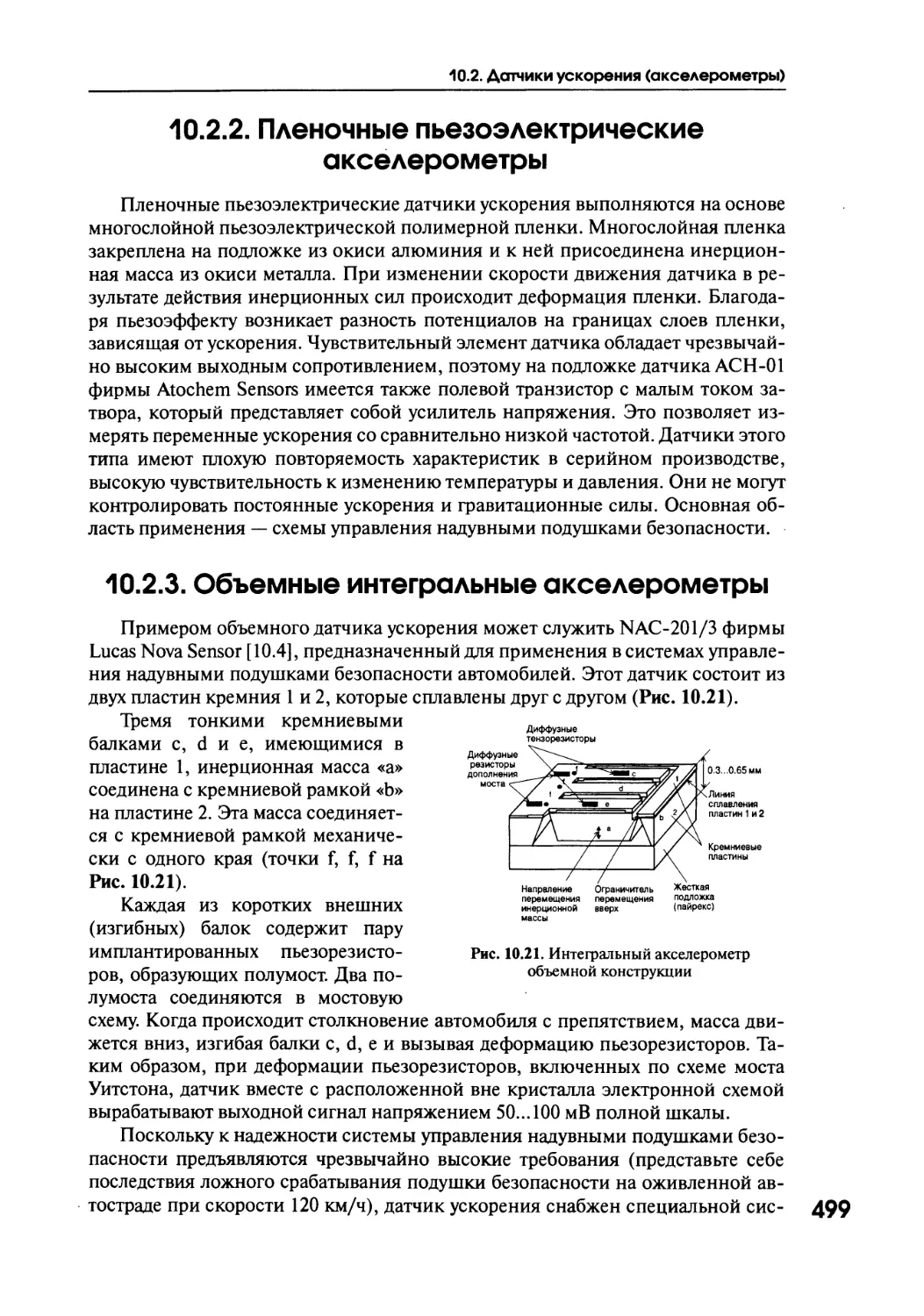
10.2.2. Пленочные пьезоэлектрические акселерометры 499
10.2.3. Объемные интегральные акселерометры 499
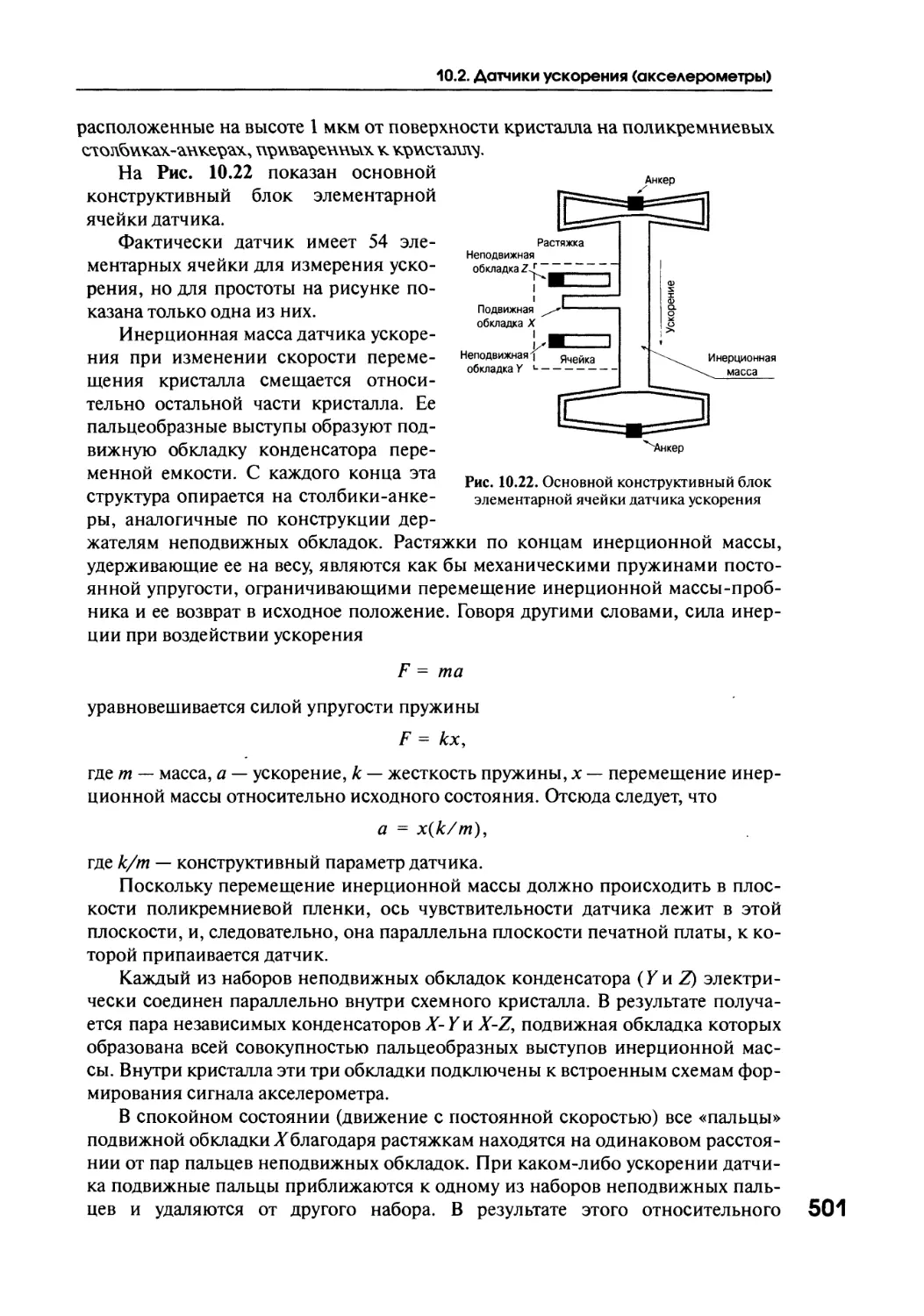
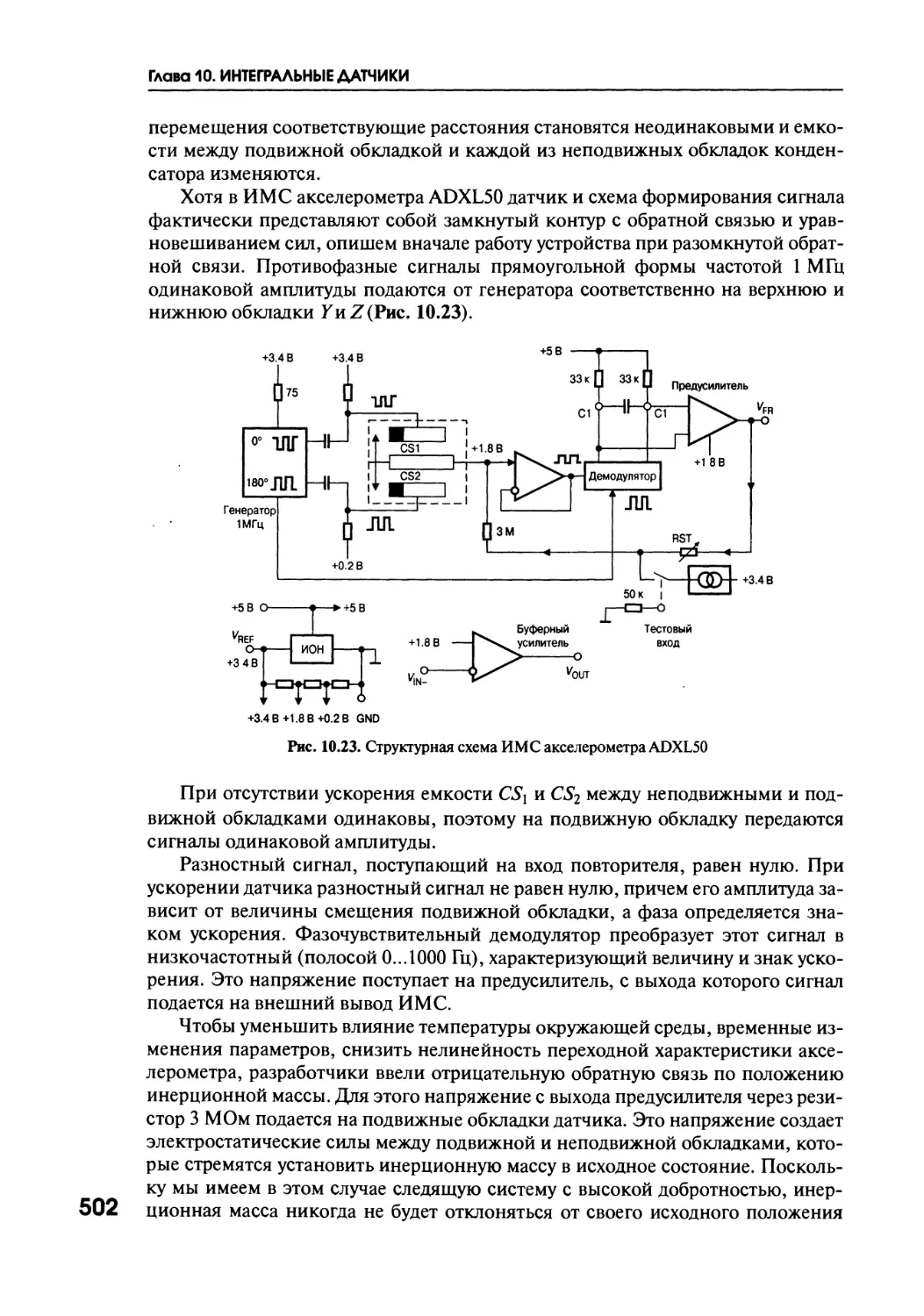
10.2.4. Поверхностные интегральные акселерометры 500
10.2.5. Точность интегральных акселерометров 507
10.3. Датчики давления 510
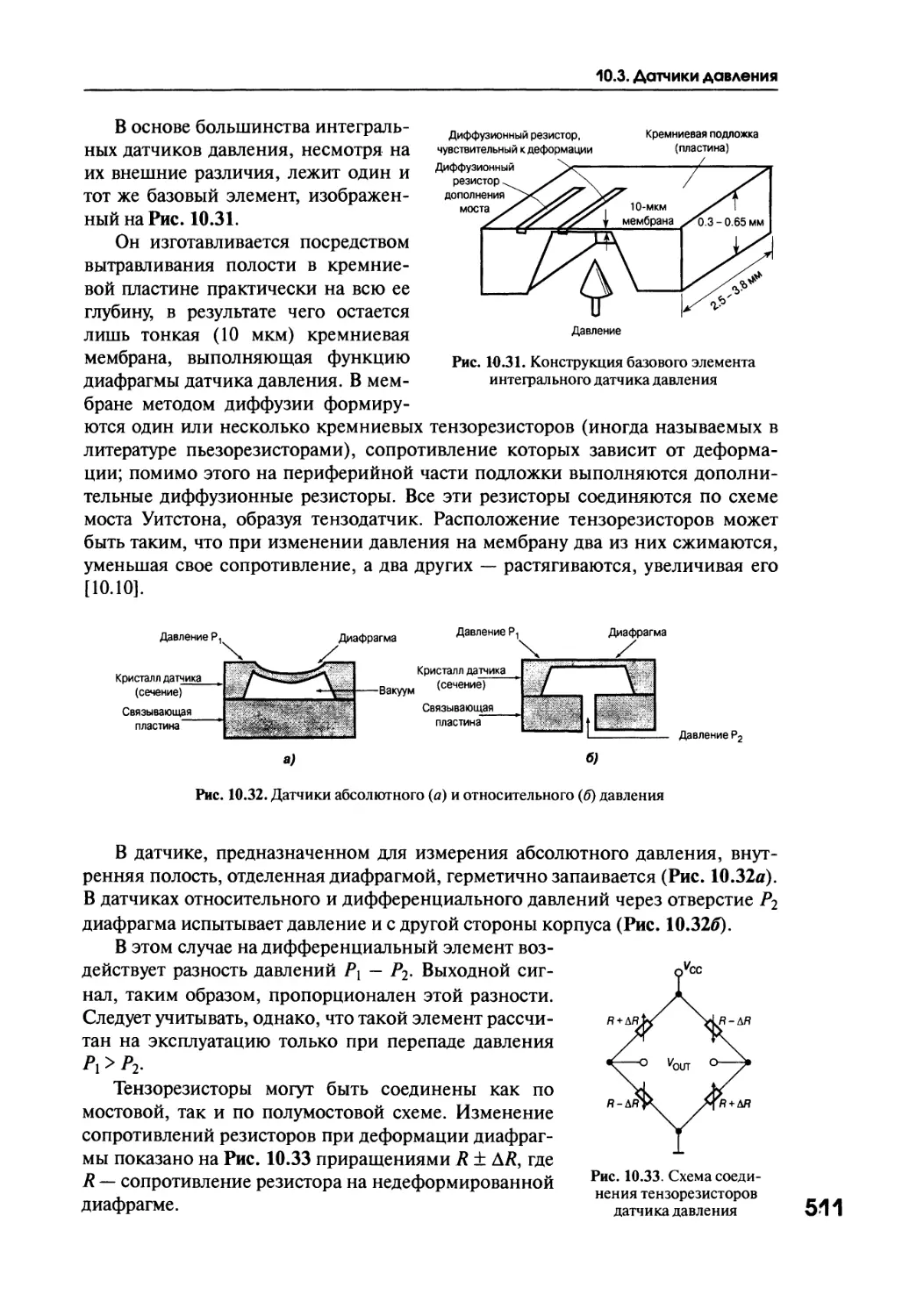
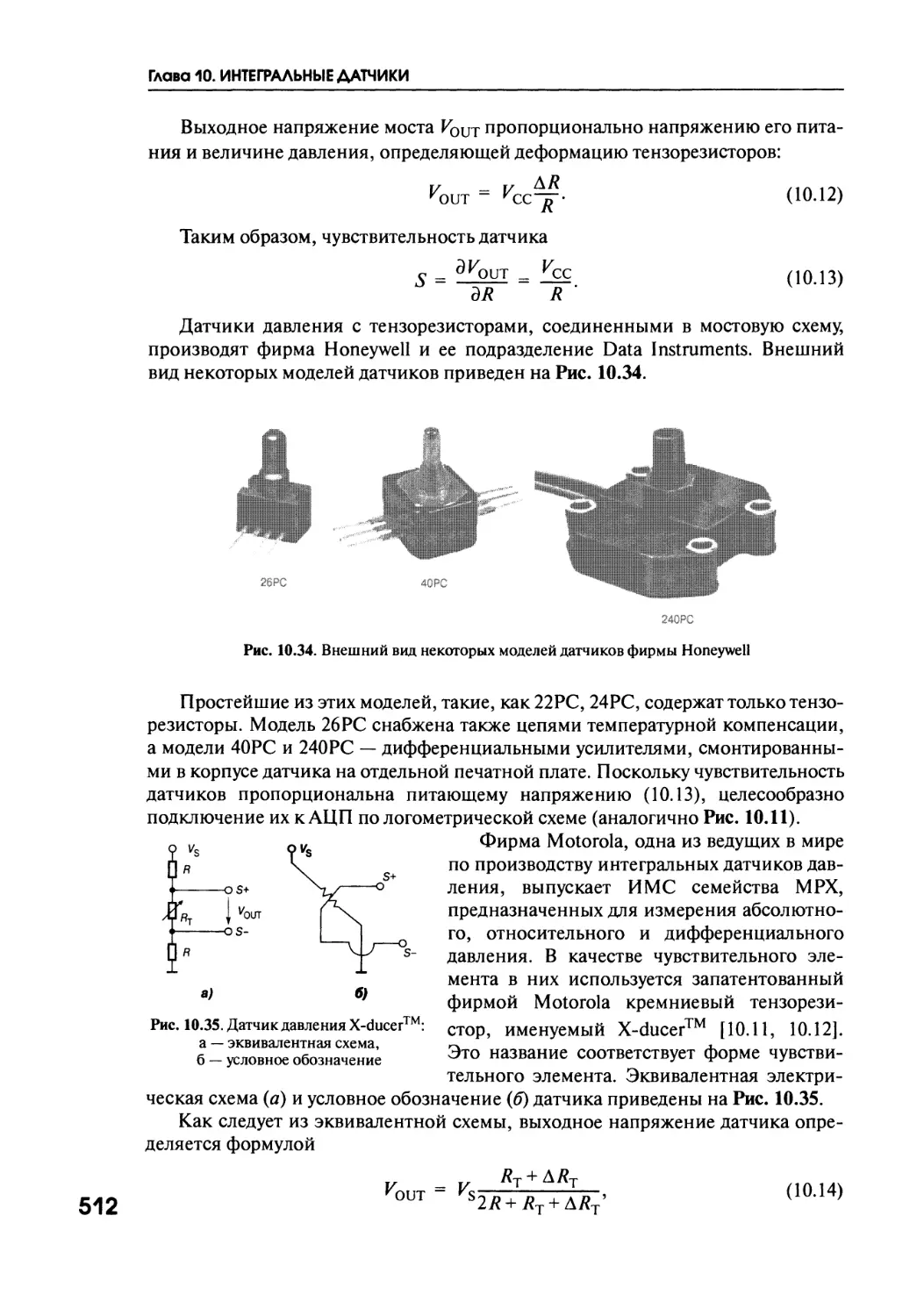
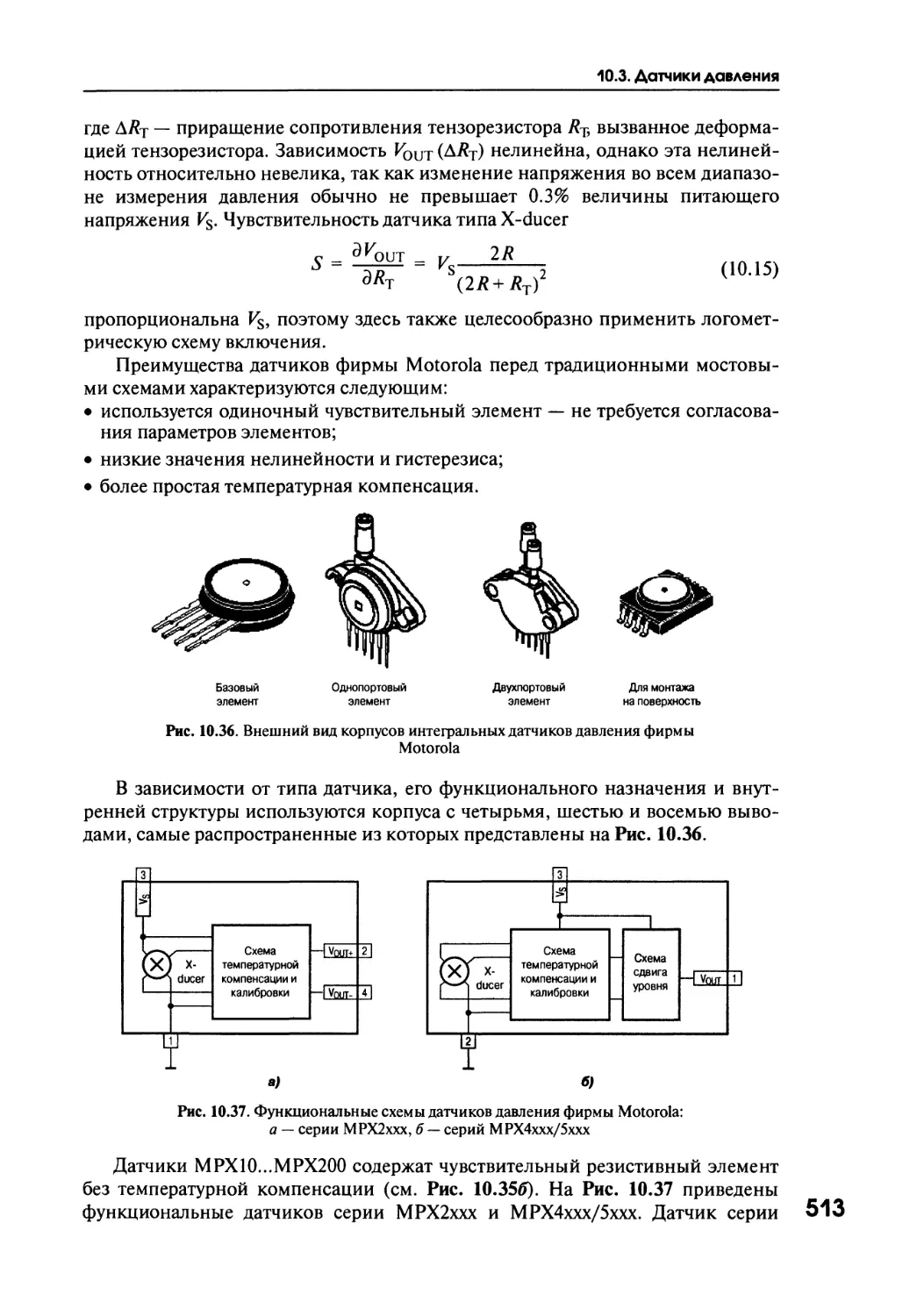
10.3.1. Устройство датчиков давления 510
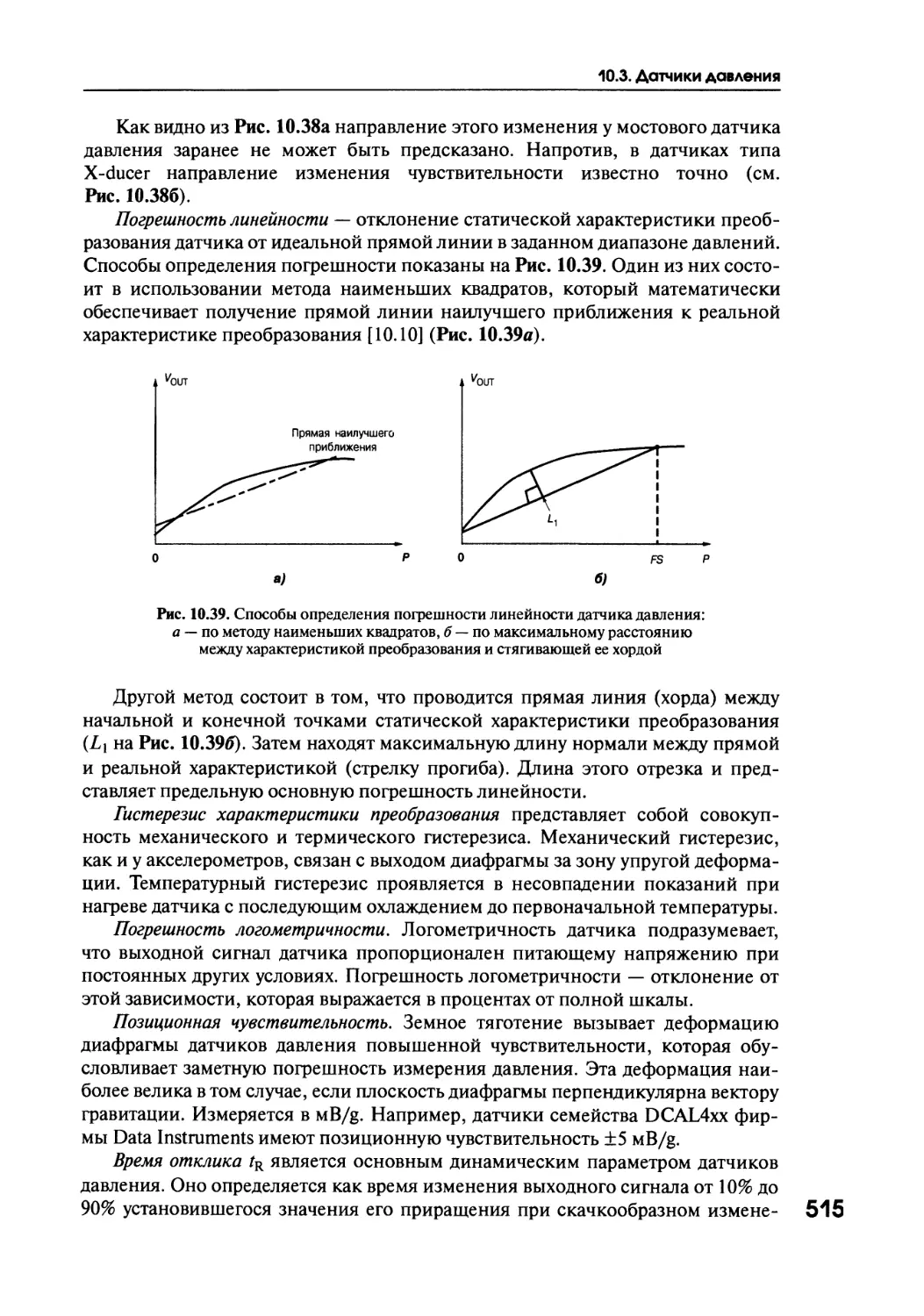
10.3.2. Точность датчиков давления 514
10.4. Датчики влажности (гигрометры) 516
10.5. Датчики магнитного поля 518
10.5.1. Принцип действия датчика Холла 518
10.5.2. Интегральные датчики Холла 520
10.5.3. Применение датчиков Холла 522
10.5.4. Основные характеристики датчиков Холла 525
ПРЕДИСЛОВИЕ
Полупроводниковая электроника представляет собой одну из наиболее
динамично развивающихся областей техники. Для современной электроники
более, чем для чего бы то ни было иного, справедливы слова Черной Королевы из
«Алисы в Зазеркалье» Льюиса Кэрролла: «...здесь, знаешь ли, приходится
бежать со всех ног, чтобы только остаться на том же месте. Если же хочешь
попасть в другое место, тогда нужно бежать, по крайней мере, вдвое быстрее!» В то
же время по причине, неизвестной автору, объемы вузовских курсов по
электронике и схемотехнике постоянно сокращаются. Многолетний опыт автора в
преподавании курсов электроники и схемотехники студентам вузов, а также
руководство дипломным проектированием и научной работой аспирантов
показывают, что при неплохом знании основ цифровой электроники большинство
выпускников вузов не готово к самостоятельной разработке аналоговых
устройств. Американские специалисты в области аналоговой техники считают,
что, для того чтобы выпускники вузов, решившие специализироваться в
области аналоговой техники, «...действительно могли принять на свои плечи
настоящую нагрузку, требуется от 5 до 10 лет...», в то время как «...этот уровень в
области цифровых схем может быть достигнут за год...» (Электроника. 1993. № 11/12.
с. 38). Выход один — молодым инженерам следует осваивать современную
аналоговую схемотехнику самостоятельно, и в этом им могут помочь советы
опытных специалистов, а также (и прежде всего) — книги.
Из литературы по схемотехнике, изданной на русском языке, наиболее
значительными представляются «Полупроводниковая схемотехника» У. Титце и К.
Шенка, 1982 г. и двухтомник «Искусство схемотехники» П. Хоровица и
У. Хилла, 1993 г. В этих замечательных книгах сделана попытка объять
необъятное: изложить всю современную электронику, включая дискретные
полупроводниковые приборы, цифровые и СВЧ-устройства. Как следствие некоторые
важные вопросы, такие, как интерфейсы аналого-цифровых и
цифро-аналоговых преобразователей, динамика и устойчивость линейных и импульсных
стабилизаторов напряжения и некоторые другие оказались практически
незатронутыми. Кроме того, с момента написания этих книг прошло уже более 10 лет и
за это время не только кардинально улучшились параметры уже известных
типов интегральных микросхем, но и появились новые виды, такие как
интегральные акселерометры и другие интегральные датчики, измерители энергии,
9
ПРЕДИСЛОВИЕ
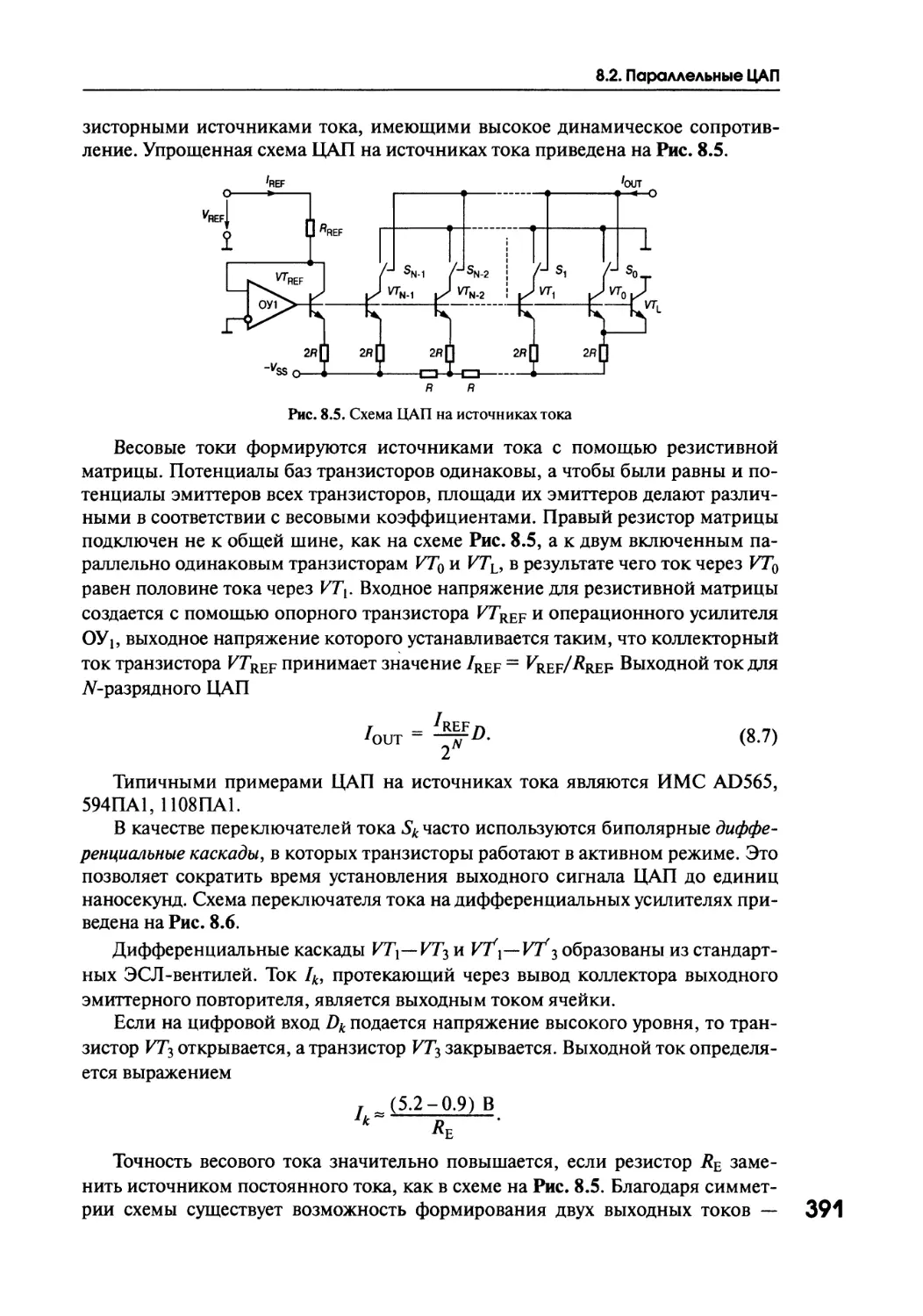
xFET-источники опорного напряжения, микросхемы прямого цифрового
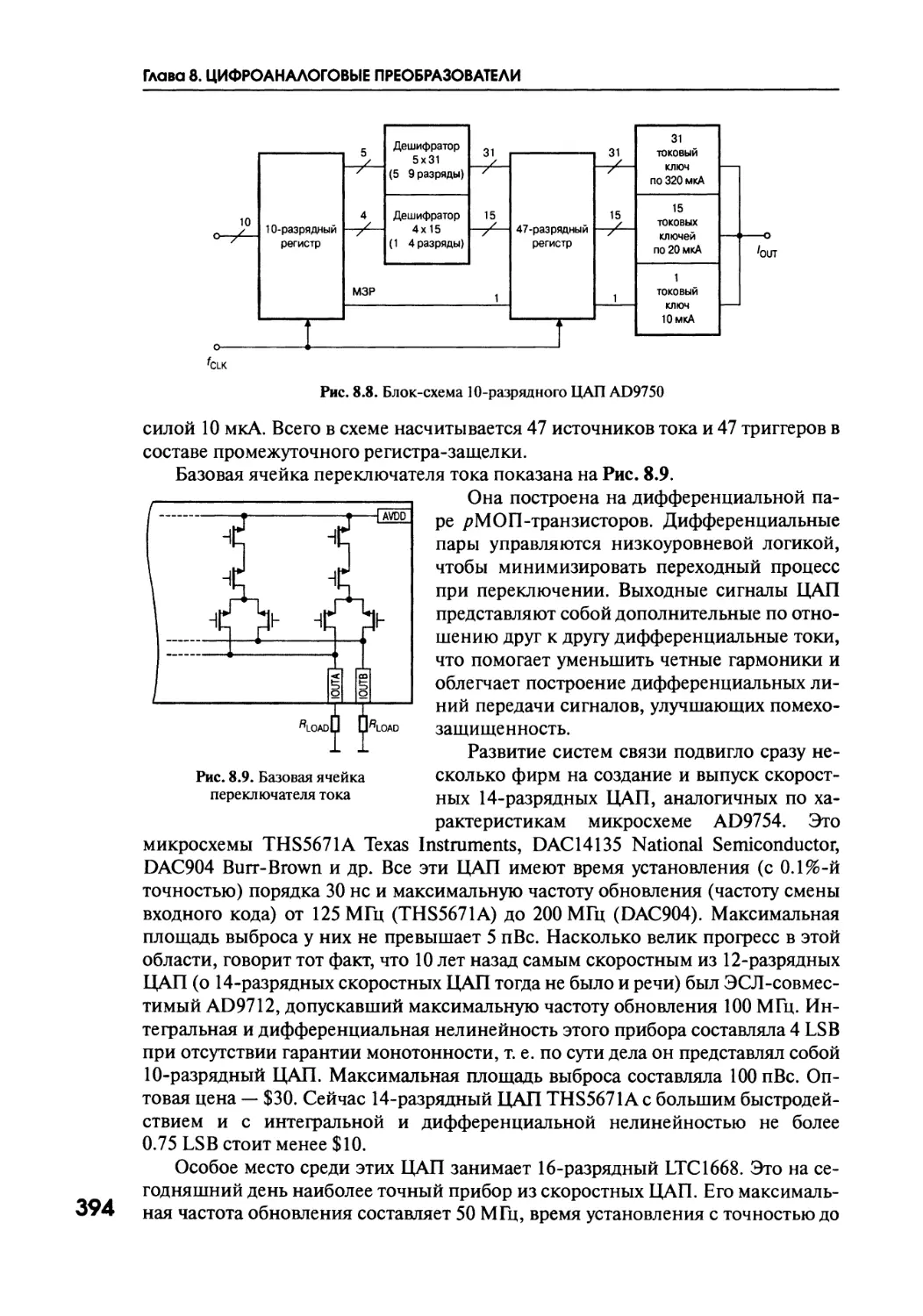
синтеза, конвейерные и сигма-дельта АЦП, усилители мощности класса D и др.
Предлагаемая читателю книга освещает ограниченную, но очень важную
область полупроводниковой схемотехники: принципы построения, свойства,
схемотехнику и особенности применения аналоговых и аналого-цифровых
интегральных микросхем (ИМС). В этой книге не рассматриваются технологии
производства микросхем, почти не уделено внимания конструкции
интегральных транзисторов, диодов, резисторов и других элементов — читатель может
получить эти сведения в специальной литературе. Внутренняя схемотехника
ИМС рассмотрена достаточно упрощенно.
Для того чтобы создать у читателя хотя бы самое общее представление о
возможностях современных аналоговых и аналого-цифровых микросхем, в книге
приведены наиболее важные параметры ряда современных промышленных
типов ИМС.
При написании этой книги автор попытался осветить, наряду с чисто
техническими вопросами, и основные исторические вехи в развитии аналоговой
интегральной схемотехники, отметить наиболее яркие творческие удачи ее
разработчиков. Все принципы построения микросхем, а также схем их
применения, несомненно, являются продуктами творчества. Именно это
обстоятельство и позволяет (конечно, с определенными оговорками) назвать аналоговую
схемотехнику искусством. К этому можно добавить, что по количеству патентов
аналоговая схемотехника многократно превосходит цифровую. А патент — это
продукт творчества, не в меньшей степени, чем произведение искусства.
Автор предполагает, что читатели уже изучили основы электротехники и
электроники и, в том числе, пусть на элементарном уровне, цифровую технику
и начала теории автоматического управления. По цифровой технике можно
рекомендовать, помимо уже упоминавшихся книг, прекрасно написанный
учебник «Цифровая схемотехника» профессора Е.П. Угрюмова и «Основы
цифровой электроники» Р. Токхейма. По теории автоматического управления
различных по объему и научному уровню учебников очень много. Например,
основные сведения содержит компактный учебник «Основы теории и элементы
систем автоматического регулирования» В.В. Солодовникова, В.Н. Плотникова
и А.В. Яковлева.
Автор выражает благодарность всем коллегам, принявшим участие в
обсуждении материалов этой книги, и в особенности дочери Татьяне, взявшей на себя
большой труд по технической подготовке текста и рисунков.
10
ВВЕДЕНИЕ
Аналоговые устройства обработки сигналов продолжают занимать важное
место в промышленной электронике. Это объясняется тем, что большинство
типов первичных преобразователей физических величин — датчики
температуры, давления и пр. — являются источниками аналоговых сигналов, а многие
исполнительные элементы в объектах управления — электродвигатели,
электромагниты и т.п. — управляются непрерывно изменяющимся электрическим
током. Сложные системы управления, основой которых являются цифровые
вычислительные комплексы, сопрягаются с объектами управления и датчиками
с помощью аналоговых и аналого-цифровых устройств. Все это стимулирует
ежегодное появление в мире многих десятков новых моделей аналоговых и
аналого-цифровых интегральных микросхем (ИМС). С точки зрения технологии
изготовления ИМС делятся на полупроводниковые (монолитные,
твердотельные) — изготавливаемые целиком на одной пластине кремния и гибридные — у
которых резисторы, конденсаторы и соединительные проводники
изготавливаются методами пленочной технологии, а бескорпусные активные элементы в
виде чипов приклеиваются на пассивную часть схемы. Гибридные ИМС дороги,
менее надежны и применяются обычно в тех случаях, когда отсутствуют
монолитные ИМС с необходимыми параметрами. Поэтому большинство
современных моделей ИМС монолитные.
История интегральных микросхем началась 12 сентября 1958 г., когда в
лаборатории фирмы Texas Instruments Джеком Килби (Jack S. Kilby) был
продемонстрирован генератор сигналов, изготовленный им на кусочке германия
размером 11x1.5 мм. Прологом этого события явилось изобретение Джином Хорни
(основателем фирмы Fairchild Semiconductor) планарного транзистора В 2000 г.
Дж. Килби за изобретение интегральной схемы был удостоен совместно с
российским физиком Ж. И. Алферовым Нобелевской премии по физике
Появление интегральной микросхемы было вызвано стремлением снизить стоимость и
повысить надежность электронных устройств за счет параллельного
изготовления в едином технологическом процессе как активных элементов
(транзисторов и диодов), так и пассивных (резисторов и конденсаторов). Впоследствии
оказалось, что совместное изготовление транзисторов позволило лучше
согласовать их характеристики, а это очень важно, например, для входных каскадов
операционных усилителей. Расположение транзисторов в непосредственном
11
ВВЕДЕНИЕ
тепловом контакте друг с другом обеспечило повышение температурной
стабильности аналоговых схем, а микроскопические размеры и близость
элементов друг к другу — повышение их быстродействия.
Парадоксально, но в 1958 г. даже в США промышленность оказалась не
готова к восприятию интегральных микросхем, несмотря на то, что проблемы,
связанные с увеличением числа компонентов в одном изделии, уже тогда
стояли очень остро. Всерьез тогда ими заинтересовались только военные. Только
после того, как при участии все того же Дж. Килби был изготовлен первый
микрокалькулятор, началось бурное развитие микросхемотехники и технологии ее
реализации. Промежуточные (далеко еще не окончательные) итоги этого
развития мы можем наблюдать сейчас. Если в 1958 г. одиночный транзистор с
посредственными, по нынешним понятиям, характеристиками стоил $10, то
сегодня за те же деньги можно прибрести модуль памяти, содержащий несколько
сотен миллионов транзисторов.
Во многом благодаря развитию интегральных схем, мировой рынок
электроники вырос с $29 млрд. в 1961 г. до $1150 млрд. в 2000 г., причем доля
собственно микросхем составила в 2000 г. $177 млрд. Несмотря на доминирование на
рынке цифровых электронных компонентов, процентная доля аналоговых
устройств с 1970 г. все время остается на одном и том же уровне - примерно
20...25%. Все это позволяет считать, что квалифицированные специалисты по
аналоговой схемотехнике будут востребованы еще многие годы.
Глава 1
ОПЕРАЦИОННЫЕ УСИЛИТЕЛИ
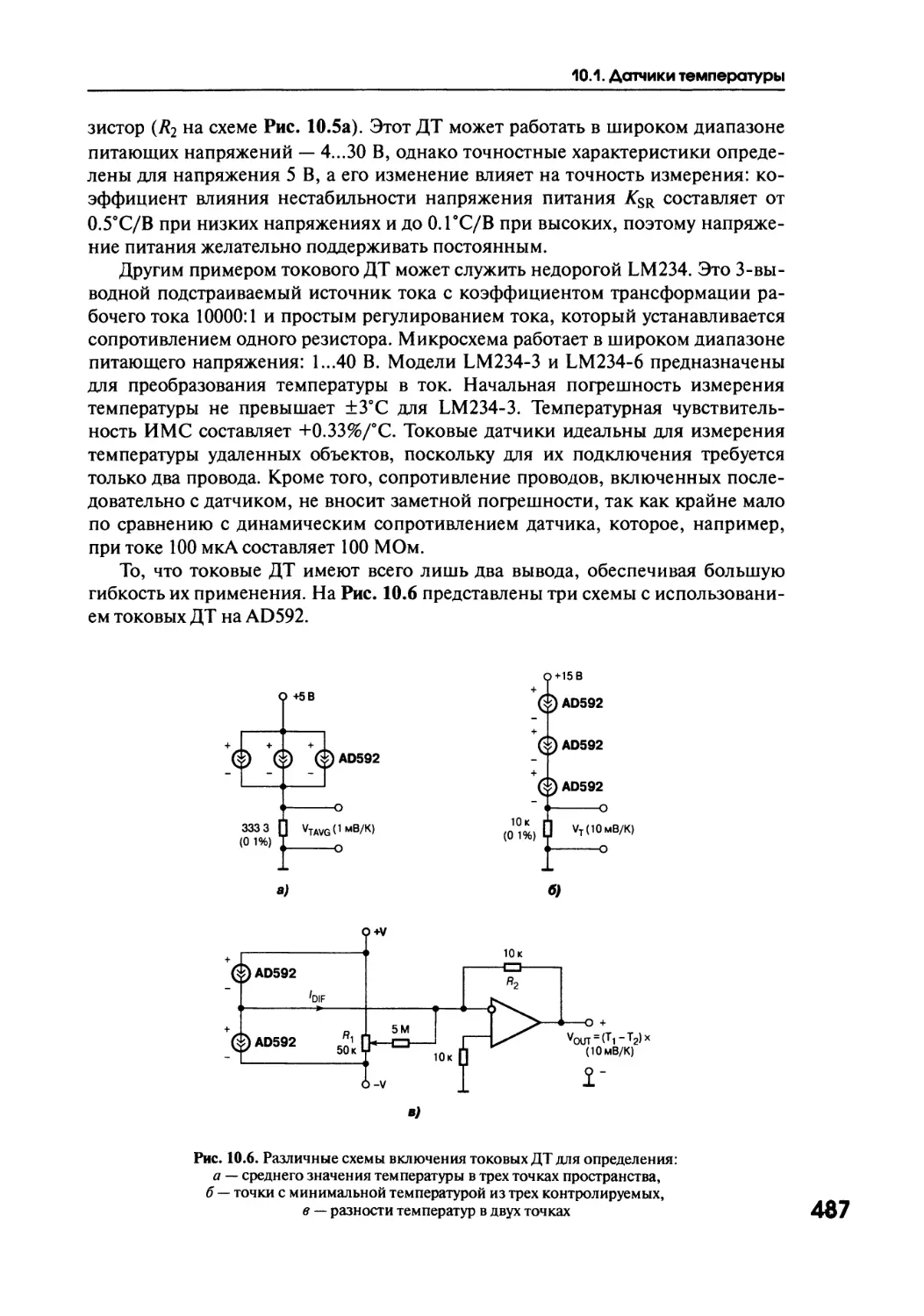
1.1. Общие сведения
Операционный усилитель (ОУ) был создан для выполнения математических
операций в аналоговых вычислительных машинах. Первый ламповый ОУ K2W
был разработан в 1942 году Л. Джули (США). Он содержал два двойных
электровакуумных триода. Первые ОУ представляли собой громоздкие и дорогие
устройства. С заменой ламп транзисторами операционные усилители стали
меньше, дешевле, надежнее и сфера их применения расширилась. Первые
операционные усилители на транзисторах появились в продаже в 1959 году. Р. Мал-
тер (США) разработал ОУ Р2, включавший семь германиевых транзисторов и
варикапный мостик. Требования к увеличению надежности, улучшению
характеристик, снижению стоимости и размеров способствовали развитию
интегральных микросхем. Первый интегральный ОУ ?A702 (отечественный
аналог — 140УД1), имевший рыночный успех, был разработан Робертом Видла-
ром (R.J. Widlar) в 1963 году. Этот усилитель имел низкий коэффициент
усиления, большие входные токи и несимметричный выход (разное выходное
сопротивление для положительной и отрицательной полуволн выходного сигнала).
Через два года Р. Видлар разработал усилитель ?A709 [1.1, 1.2], трехкаскадный с
большим коэффициентом усиления и симметричным выходом, но сложной
схемой коррекции частотной характеристики (отечественный аналог —
153УД1). Усилитель ?А709 нашел широкое распространение в массовой
аналоговой аппаратуре обработки данных. Ежегодный мировой выпуск этой ИМС
оценивался в 1970 г. на уровне 20...30 млн. шт. Решениями, примененными в
этом ОУ, была в значительной мере подготовлена схемотехническая база для
следующих поколений операционных усилителей.
В 1967—1968 годах Р. Видлар разработал двухкаскадный LM101 [1.3] и его
усовершенствованный вариант LM101A (отечественные аналоги
соответственно 153УД2 и 153УД6). Эти усилители явились настоящим прорывом в
аналоговой интегральной схемотехнике. Для них характерны простая схема частотной
коррекции (всего один конденсатор), высокий коэффициент усиления (до
150000) и малые входные токи (особенно у LM101A). Усилители LM101 и
LM101A в отличие от ?A709 не требовали внешних цепей защиты входа и
выхода, что весьма упрощало их применение. Р. Видлар вышел за рамки привычных
представлений о транзисторе как о трехэлектродном приборе. В его новых
разработках транзисторы имели по несколько коллекторов и эмиттеров, поэтому
принципиальные схемы ОУ стали значительно отличаться от традиционных. 13
Глава 1. ОПЕРАЦИОННЫЕ УСИЛИТЕЛИ
В настоящее время номенклатура ОУ насчитывает сотни наименований.
Операционные усилители выпускаются в малогабаритных корпусах и очень
дешевы, что способствует их массовому распространению.
Операционные усилители представляют собой усилители
постоянного тока с высоким коэффициентом усиления, дифференциальным
входом и малыми значениями напряжения смещения нуля и входных
токов.
Неинвертирующий
вход
По размерам и цене ОУ общего применения практически не отличаются от
отдельного транзистора. В то же время преобразование сигнала схемой на ОУ
почти исключительно определяется свойствами цепей внешних обратных
связей и отличается высокой стабильностью и воспроизводимостью. Кроме того,
благодаря практически идеальным характеристикам ОУ реализация различных
функциональных схем на их основе оказывается значительно проще, чем на
дискретных транзисторах. Поэтому операционные усилители стали сегодня
основой элементной базы (своего рода «кирпичиками») во многих областях
аналоговой схемотехники.
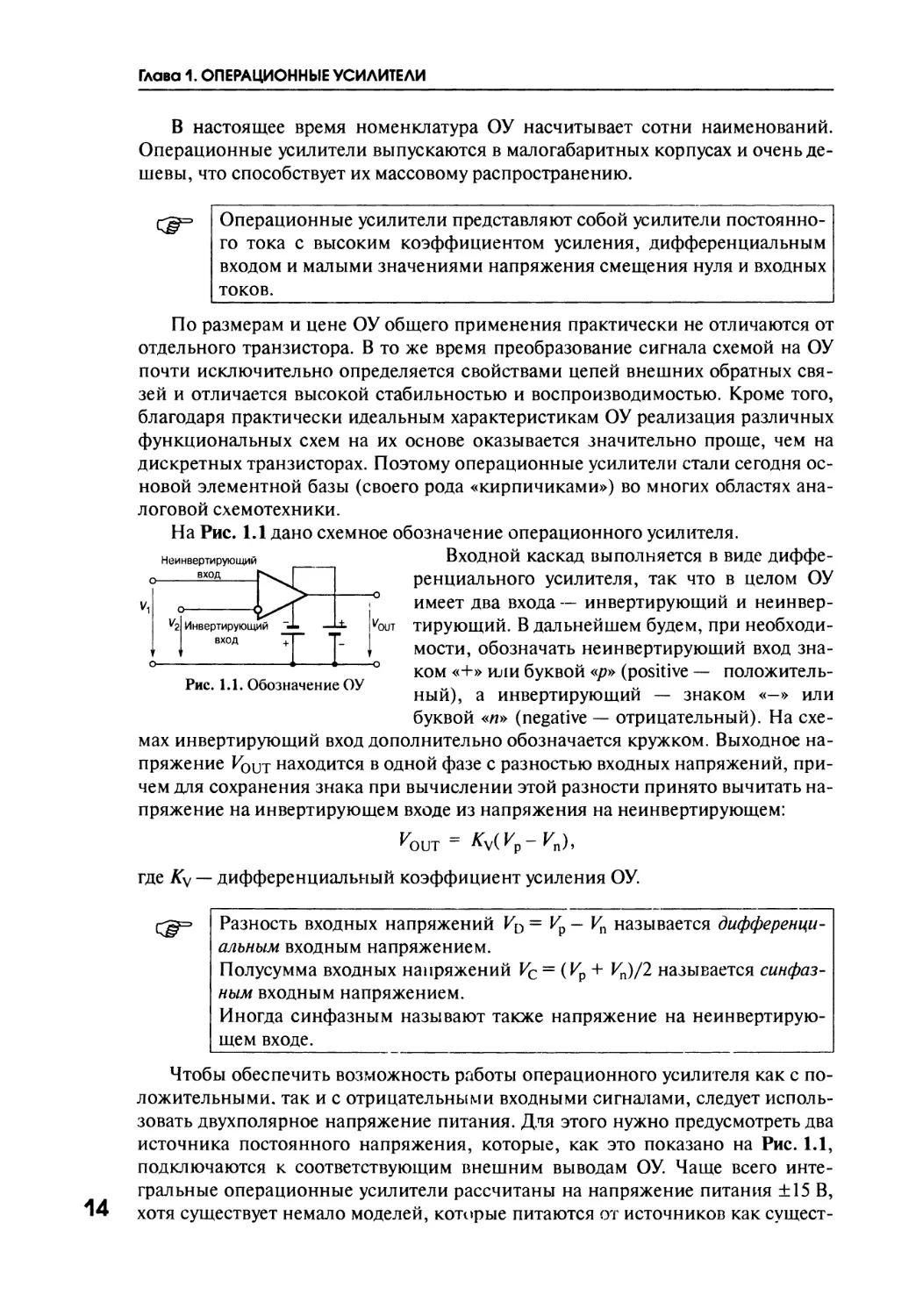
На Рис. 1.1 дано схемное обозначение операционного усилителя.
Входной каскад выполняется в виде
дифференциального усилителя, так что в целом ОУ
имеет два входа — инвертирующий и
неинвертирующий. В дальнейшем будем, при
необходимости, обозначать неинвертирующий вход
знаком «+» или буквой «р» (positive —
положительный), а инвертирующий — знаком «—» или
буквой «п» (negative — отрицательный). На
схемах инвертирующий вход дополнительно обозначается кружком. Выходное
напряжение Коит находится в одной фазе с разностью входных напряжений,
причем для сохранения знака при вычислении этой разности принято вычитать
напряжение на инвертирующем входе из напряжения на неинвертирующем:
Vout = Kv(Vp-Vn),
где Ку — дифференциальный коэффициент усиления ОУ.
Рис. 1.1. Обозначение ОУ
Разность входных напряжений VD = Ур — Vn называется
дифференциальным входным напряжением.
Полусумма входных напряжений Vc = (Кр + Vn)/2 называется
синфазным входным напряжением.
Иногда синфазным называют также напряжение на
неинвертирующем входе.
14
Чтобы обеспечить возможность работы операционного усилителя как с
положительными, так и с отрицательными входными сигналами, следует
использовать двухполярное напряжение питания. Для этого нужно предусмотреть два
источника постоянного напряжения, которые, как это показано на Рис. 1.1,
подключаются к соответствующим внешним выводам ОУ. Чаще всего
интегральные операционные усилители рассчитаны на напряжение питания ±15 В,
хотя существует немало моделей, которые питаются от источников как сущест-
1.2. Идеальный операционный усилитель
венно большего, так и заметно меньшего напряжения. В дальнейшем,
рассматривая схемы на ОУ, мы, как правило, не будем указывать выводы питания.
Наконец, очень важное обстоятельство: операционный усилитель почти
всегда охвачен глубокой отрицательной обратной связью, свойства которой и
определяют свойства схемы с ОУ.
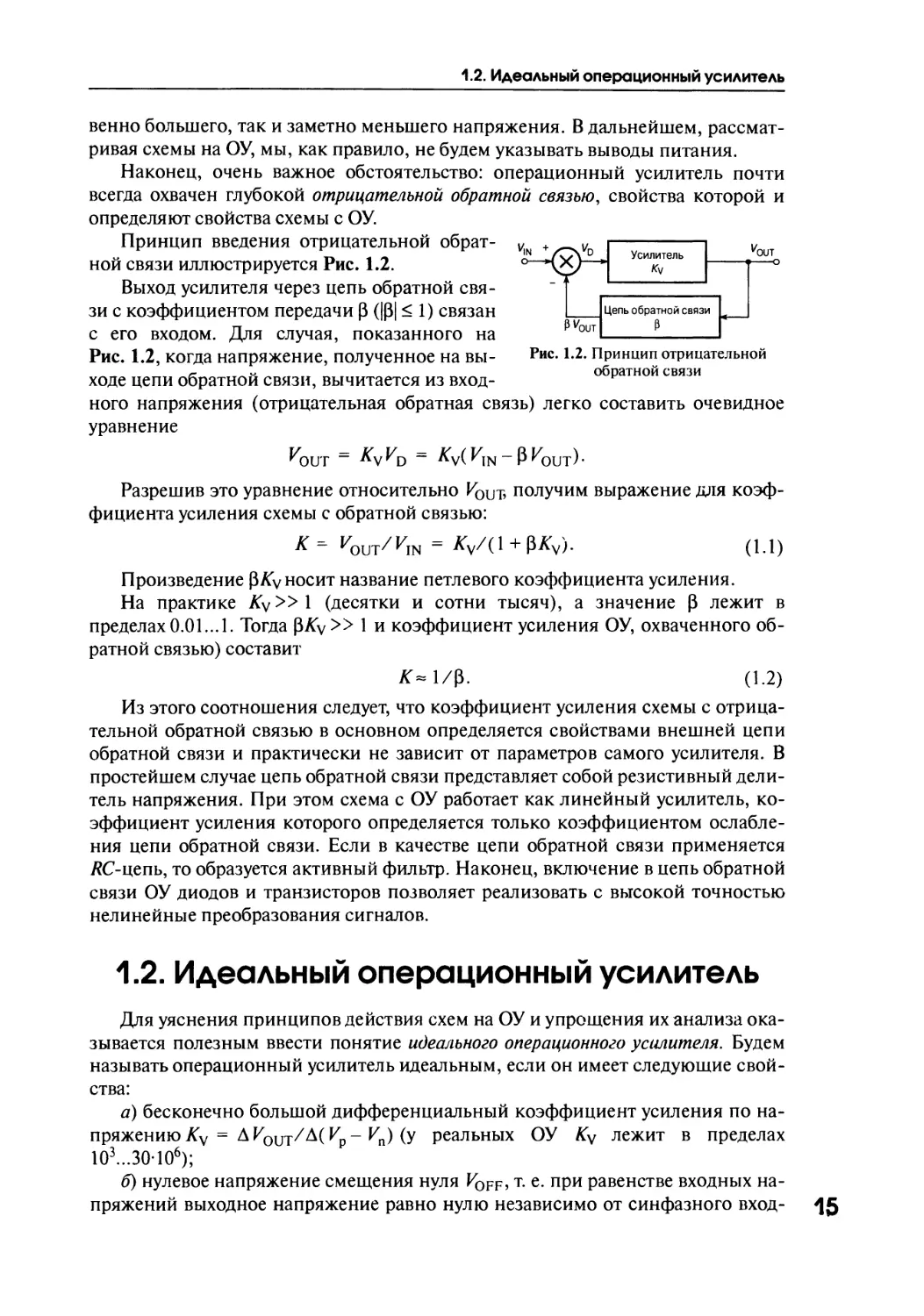
Принцип введения отрицательной
обратной связи иллюстрируется Рис. 1.2.
Выход усилителя через цепь обратной
связи с коэффициентом передачи р (|р| < 1) связан
с его входом. Для случая, показанного на
РИС. 1.2, когда напряжение, полученное на ВЫ- Рис. 1.2. Принцип отрицательной
ходе цепи обратной связи, вычитается из вход- ратной связи
ного напряжения (отрицательная обратная связь) легко составить очевидное
уравнение
Разрешив это уравнение относительно Коиъ получим выражение для
коэффициента усиления схемы с обратной связью:
Произведение pAVносит название петлевого коэффициента усиления.
На практике Ку» 1 (десятки и сотни тысяч), а значение р лежит в
пределах 0.01...1. Тогда PAV » 1 и коэффициент усиления ОУ, охваченного
обратной связью) составит
Из этого соотношения следует, что коэффициент усиления схемы с
отрицательной обратной связью в основном определяется свойствами внешней цепи
обратной связи и практически не зависит от параметров самого усилителя. В
простейшем случае цепь обратной связи представляет собой резистивный
делитель напряжения. При этом схема с ОУ работает как линейный усилитель,
коэффициент усиления которого определяется только коэффициентом
ослабления цепи обратной связи. Если в качестве цепи обратной связи применяется
RC-цепь, то образуется активный фильтр. Наконец, включение в цепь обратной
связи ОУ диодов и транзисторов позволяет реализовать с высокой точностью
нелинейные преобразования сигналов.
1.2. Идеальный операционный усилитель
Для уяснения принципов действия схем на ОУ и упрощения их анализа
оказывается полезным ввести понятие идеального операционного усилителя. Будем
называть операционный усилитель идеальным, если он имеет следующие
свойства:
а) бесконечно большой дифференциальный коэффициент усиления по
напряжению/Tv = А Коит/А(Кр-Кп) (у реальных ОУ Ку лежит в пределах
1О3...ЗО-1О6);
б) нулевое напряжение смещения нуля K0FF, т. е. при равенстве входных
напряжений выходное напряжение равно нулю независимо от синфазного вход- 15
Глава 1. ОПЕРАЦИОННЫЕ УСИЛИТЕЛИ
Рис. 1.3. Типичная ЛАЧХ
операционного усилителя
ного напряжения (у реальных ОУ Voff> приведенное к входу, находится в
пределах A мкВ ... 50 мВ);
в) нулевые входные токи по обоим входам (у реальных ОУ они лежат в
пределах от сотых долей пА до единиц мкА);
г) нулевое выходное сопротивление (у реальных маломощных ОУ от
десятков Ом до единиц кОм);
д) коэффициент усиления синфазного сигнала равен нулю;
е) мгновенный отклик на изменение входных сигналов (у реальных ОУ
время установления выходного напряжения лежит в пределах от единиц не до
сотен мкс).
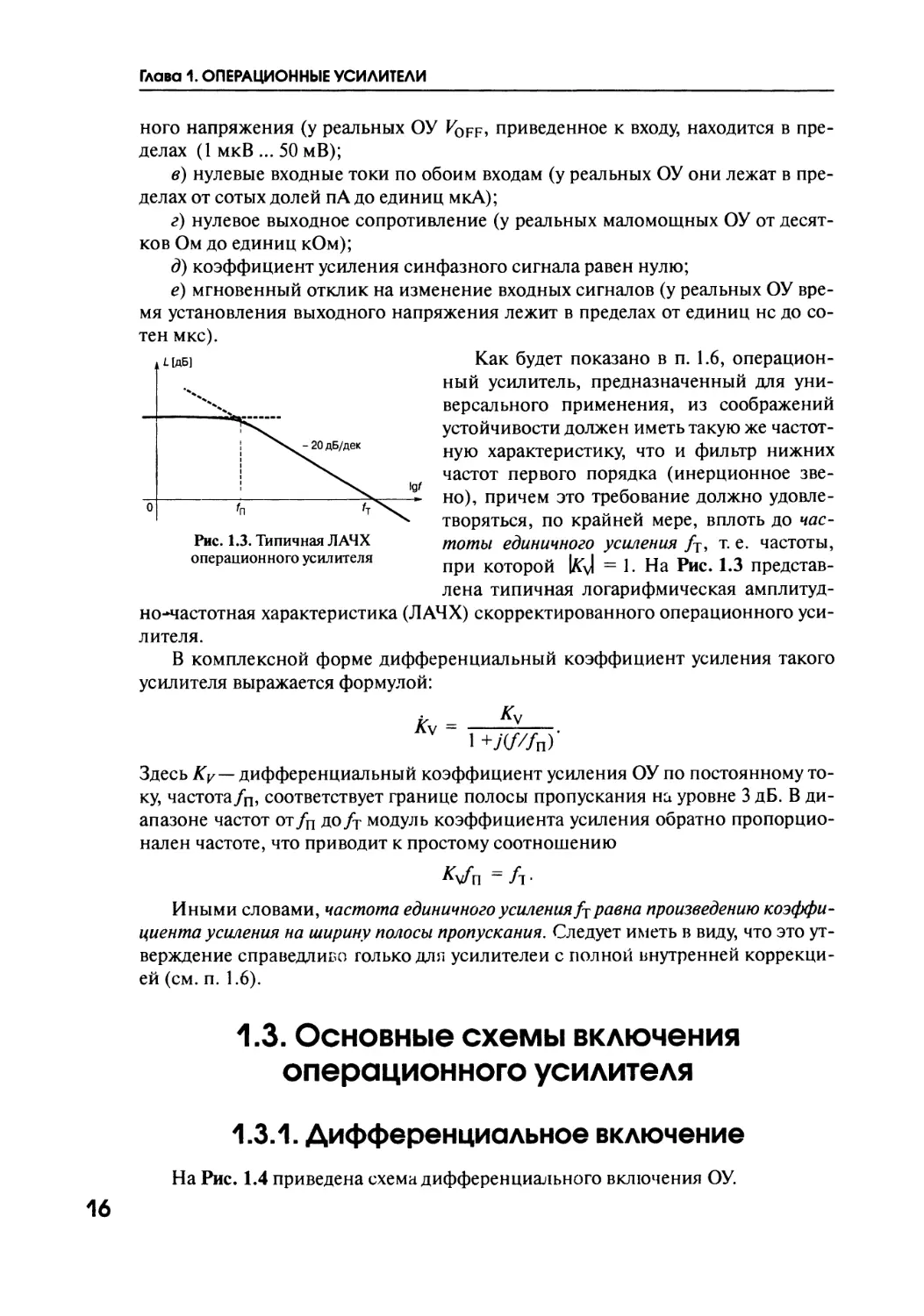
Как будет показано в п. 1.6,
операционный усилитель, предназначенный для
универсального применения, из соображений
устойчивости должен иметь такую же
частотную характеристику, что и фильтр нижних
частот первого порядка (инерционное
звено), причем это требование должно
удовлетворяться, по крайней мере, вплоть до
частоты единичного усиления /т, т. е. частоты,
при которой kvl = 1. На Рис. 1.3
представлена типичная логарифмическая
амплитудно-частотная характеристика (ЛАЧХ) скорректированного операционного
усилителя.
В комплексной форме дифференциальный коэффициент усиления такого
усилителя выражается формулой:
16
Здесь Ку— дифференциальный коэффициент усиления ОУ по постоянному
току, частота/п, соответствует границе полосы пропускания на уровне 3 дБ. В
диапазоне частот от fп до fт модуль коэффициента усиления обратно
пропорционален частоте, что приводит к простому соотношению
Иными словами, частота единичного усиления fj равна произведению
коэффициента усиления на ширину полосы пропускания. Следует иметь в виду, что это
утверждение справедливо только для усилителей с полной внутренней
коррекцией (см. п. 1.6).
1.3. Основные схемы включения
операционного усилителя
1.3.1. Дифференциальное включение
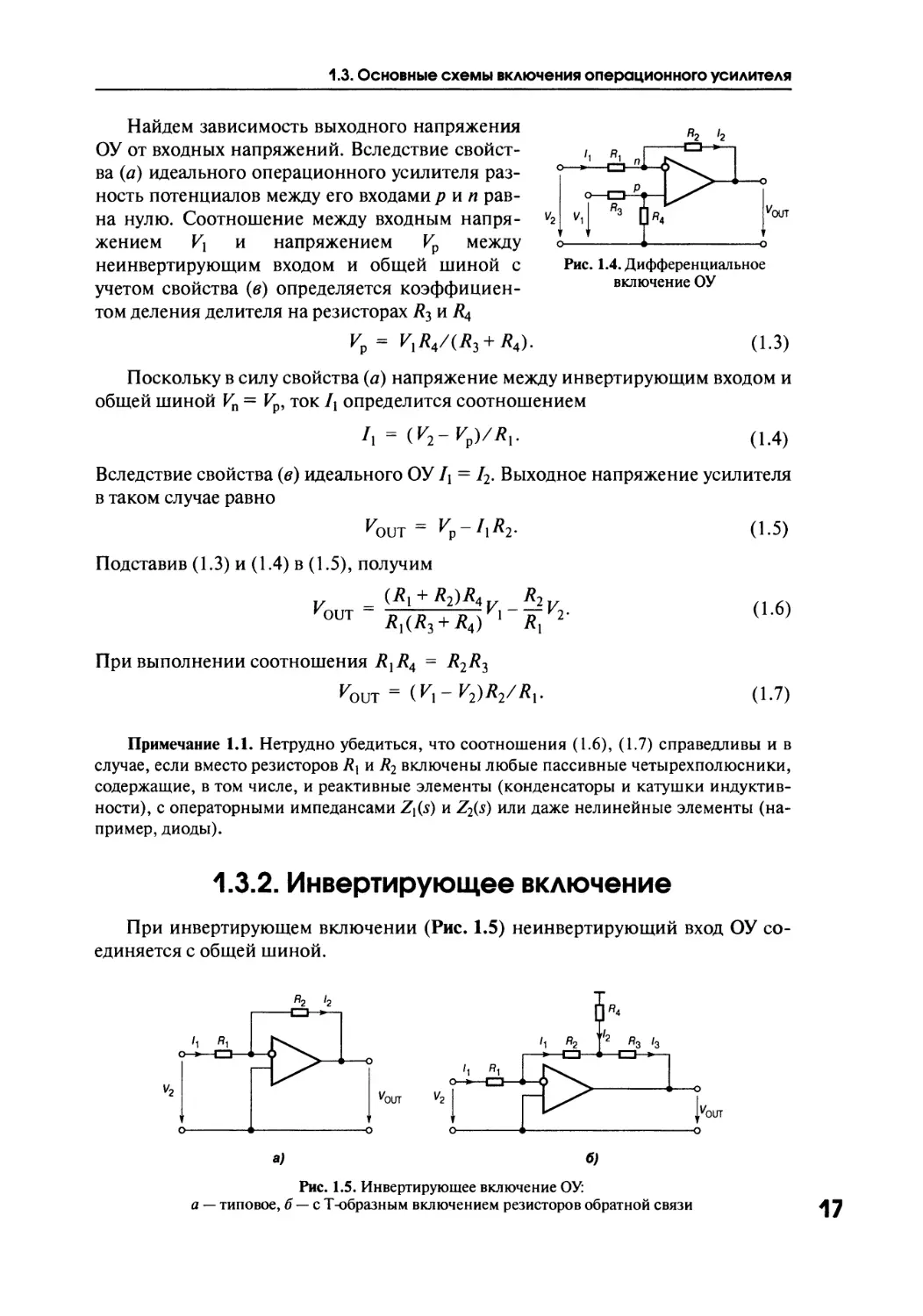
На Рис. 1.4 приведена схема дифференциального включения ОУ.
1.3. Основные схемы включения операционного усилителя
Найдем зависимость выходного напряжения
ОУ от входных напряжений. Вследствие
свойства (а) идеального операционного усилителя
разность потенциалов между его входами p и n
равна нулю. Соотношение между входным
напряжением Vx и напряжением Vp между
неинвертирующим входом и общей шиной с
учетом свойства (в) определяется
коэффициентом деления делителя на резисторах /?3 и Л*
Рис. 1.4. Дифференциальное
включение ОУ
A.3)
Поскольку в силу свойства (а) напряжение между инвертирующим входом и
общей шиной Vn = Kp, ток 1{ определится соотношением
h = (V2-Vv)/Rv A.4)
Вследствие свойства (в) идеального ОУ /1 = /2. Выходное напряжение усилителя
в таком случае равно
A.5)
A.6)
A.7)
Примечание 1.1. Нетрудно убедиться, что соотношения A.6), A.7) справедливы и в
случае, если вместо резисторов R1 и R2 включены любые пассивные четырехполюсники,
содержащие, в том числе, и реактивные элементы (конденсаторы и катушки
индуктивности), с операторными импедансами Z1(s) и Z2(s) или даже нелинейные элементы
(например, диоды).
1.3.2. Инвертирующее включение
При инвертирующем включении (Рис. 1.5) неинвертирующий вход ОУ
соединяется с общей шиной.
Рис. 1.5. Инвертирующее включение ОУ:
а — типовое, б— с Т-образным включением резисторов обратной связи
17
При выполнении соотношения
Подставив A.3) и A.4) в A.5), получим
Глава 1. ОПЕРАЦИОННЫЕ УСИЛИТЕЛИ
Выбрав /?4 сравнительно малым, можно получить очень высокий
коэффициент усиления схемы при достаточно высоком #iN.
1.3.3. Неинвертирующее включение
При неинвертирующем включении
входной сигнал подается на
неинвертирующий вход ОУ, а на инвертирующий
вход через делитель на резисторах Я\ и R2
поступает сигнал с выхода усилителя
(Рис. 1.6).
В типовой схеме (Рис. 1.5а) R3 = «>, a R4 = О и из A.6) следует
A.8)
Таким образом, выходное напряжение усилителя в инвертирующем
включении находится в противофазе по отношению к входному. Для этой схемы
коэффициент усиления входного сигнала по напряжению в зависимости от
соотношения сопротивлений резисторов может быть как больше единицы, так и
меньше единицы.
Найдем входное сопротивление схемы. В силу свойства (а) при заземленном
неинвертирующем входе потенциал незаземленного инвертирующего входа
также равен нулю. По вышеназванной причине инвертирующий вход в этой
схеме иногда называют виртуальным нулем, или мнимой землей. При этом
входной ток схемы /, = V2/Rl.
Следовательно, входное сопротивление схемы /flN — R\.
Если от схемы требуется высокое >силение, то согласно A.8) придется
применить резистор R\ с очень низким сопротивлением, или высоокоомный
резистор R2. В первом случае низкое /?iN = R\ нагрчжает источник входного сигнала,
во втором — снижается стабильность коэффициента усиления. Задача успешно
решается применением в цепи обратной связи четырехполюсника в виде
Т-образно включенных резисторов (Рис. 1.50). На основании свойств (б) и (в)
идеального ОУ и законов Кирхгофа можно записать систему уравнений
электрического равновесия схемы, где через фа обозначен потенциал общей точки
резисторов обратной связи,
Разрешив эту систему уравнений для отношения К)ит/^2> найдем коэффициент
усиления схемы:
Рис. 1.6. Неинвертирующее включение ОУ
1.4. Внутренняя схемотехника операционных усилителей
Видно, что выходной сигнал синфазен входному и коэффициент усиления
по напряжению не может быть меньше единицы. В предельном случае, если
выход ОУ накоротко соединен с инвертирующим входом, этот коэффициент
равен единице. Такие схемы называют неинвертирующими повторителями и
изготавливают серийно в виде отдельных ИМС по несколько усилителей в
одном корпусе. Входное сопротивление этой схемы в идеале бесконечно. Далее
будет показано, что у повторителя на реальном операционном усилителе это
сопротивление конечно, хотя и весьма велико.
Упрощенный анализ схемы с операционным усилителем, работающим
в линейном режиме, существенно облегчают две предпосылки:
Разность потенциалов между входами равна нулю.
Входные токи усилителя равны нулю.
1.4. Внутренняя схемотехника
операционных усилителей
1.4.1. Требования к ОУ
Для обеспечения достаточной устойчивости и выполнения математических
операций над сигналами с высокой точностью реальный операционный
усилитель должен обладать следующими свойствами:
• высоким коэффициентом усиления по напряжению, в том числе и в области
нулевых частот;
• малым напряжением смещения нуля;
• малыми входными токами по обоим входам;
• высокими входными сопротивлениями по обоим входам:
• низким выходным сопротивлением;
• амплитудно-частотной характеристикой с наклоном в области высоких
частот —20 дБ/дек вплоть до частоты единичного усиления fT (см. п. 1.6).
Из п. I следует, что операционный усилитель должен быть усилителем
постоянного тока (УПТ) с высоким коэффициентом усиления по напряжению и,
следовательно, содержать несколько каскадов усиления. Однако, как будет
показано в п. 1.6, с ростом числа каскадов усиления увеличивается опасность
нарушения устойчивости ОУ с обратными связями и усложняются цепи
коррекции. Даже усилители всего лишь с тремя каскадами усиления напряжения
(например, 140УД2, 153УД1, 551УД1) требуют столь сложных схем включения, что
разработчики стараются избегать их применения. Чтобы уйти от многокаскад-
ности, приходится использовать усилительные каскады с очень высоким
коэффициентом усиления по напряжению. Большие трудности проектирования '^
Найдем коэффициент усиления схемы К, предположив, что в A.6) при
дифференциальном включении V2 = О, /?3 — 0, а Л4 = °°. Получим
A.9)
Глава 1. ОПЕРАЦИОННЫЕ УСИЛИТЕЛИ
усилителей постоянного тока связаны также с обеспечением малого смещения
нуля ОУ.
Смещение нуля ОУ проявляется в том, что при входном
дифференциальном напряжении, равном нулю, выходное напряжение принимает
некоторое значение, не равное нулю. Обычно определяют смещение
нуля через приведенное ко входу напряжение смещения (или входное
напряжение сдвига), под которым понимают такое
дифференциальное напряжение ^off^ которое нужно приложить к входу усилителя,
чтобы его выходное напряжение стало равным нулю.
Смещение нуля, по сути, является аддитивной погрешностью выполнения
математических операций ОУ над входными сигналами. Смещение нуля может
иметь существенные температурный и временной дрейфы. Операционные
усилители на дискретных транзисторах имели значительное смещение нуля,
связанное с неидентичностью транзисторов. Только применение и
усовершенствование интегральной технологии, позволившей изготавливать парные
транзисторы дифференциального каскада в едином производственном цикле и на
расстоянии нескольких микрон друг от друга, привело к существенному
снижению смещения нуля и его временного и температурного дрейфов.
20
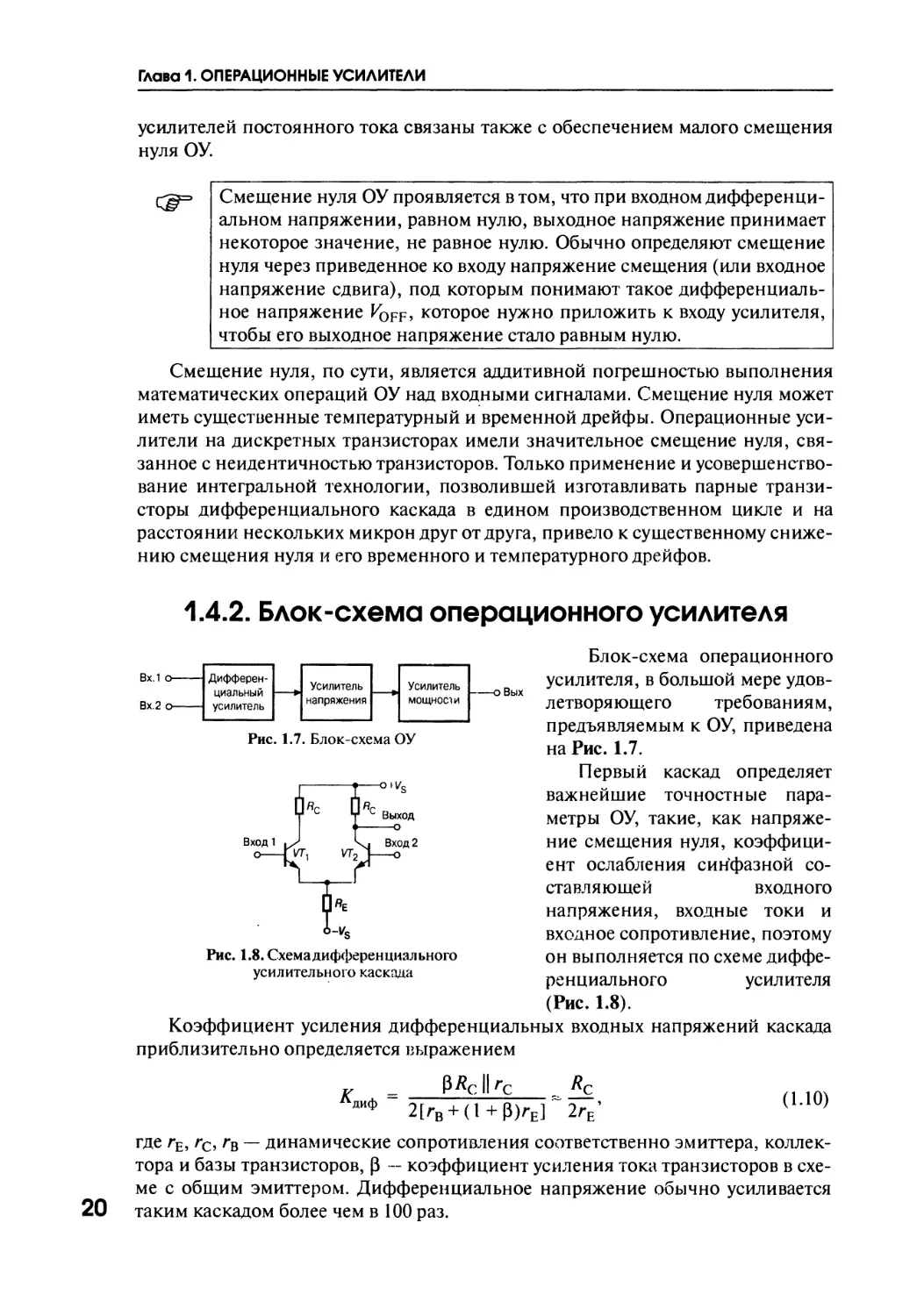
1.4.2. Блок-схема операционного усилителя
Блок-схема операционного
усилителя, в большой мере
удовлетворяющего требованиям,
предъявляемым к ОУ, приведена
на Рис. 1.7.
Первый каскад определяет
важнейшие точностные
параметры ОУ, такие, как
напряжение смещения нуля,
коэффициент ослабления синфазной
составляющей входного
напряжения, входные токи и
входное сопротивление, поэтому
он выполняется по схеме
дифференциального усилителя
(Рис. 1.8).
Коэффициент усиления дифференциальных входных напряжений каскада
приблизительно определяется выражением
Рис. 1.8. Схема дифференциального
усилительного каскада
A.10)
где гЕ, гс, гв — динамические сопротивления соответственно эмиттера,
коллектора и базы транзисторов, C ¦— коэффициент усиления тока транзисторов в
схеме с общим эмиттером. Дифференциальное напряжение обычно усиливается
таким каскадом более чем в 100 раз.
1.4. Внутренняя схемотехника операционных усилителей
Для того чтобы определить коэффициент усиления синфазного сигнала, на
оба входа дифференциального усилителя нужно подать одно и то же
напряжение KIN. В этом случае оба транзистора со своими коллекторными нагрузками
включены по существу параллельно. Через резистор RE протекают оба эмиттер-
ных тока. Поэтому
(lid
Сопротивление гЕ обычно много меньше RE и им пренебрегают.
Коэффициент ослабления синфазного сигнала (АГосс) определяется как отношение
Коэффициент ослабления синфазного сигнала — важный параметр
операционного усилителя, характеризующий его точность при
дифференциальном включении. КОСС численно равен отношению
синфазного входного напряжения к дифференциальному входному
напряжению, вызывающим одно и то же приращение выходного
напряжения ОУ. Измеряется обычно в дБ.
Пример 1.1. В дифференциальном каскаде использованы транзисторы с
сопротивлением эмиттера гЕ = 250 Ом. Сопротивления резисторов Rq = RE = 75 кОм. В
этом случае Лдиф = 150, А^ф = 0.5, А^осс = 300. При питании от источников ±15 В
ток покоя цепей коллекторов равен 100 мкА при напряжении на коллекторах
относительно общей точки 7.5 В.
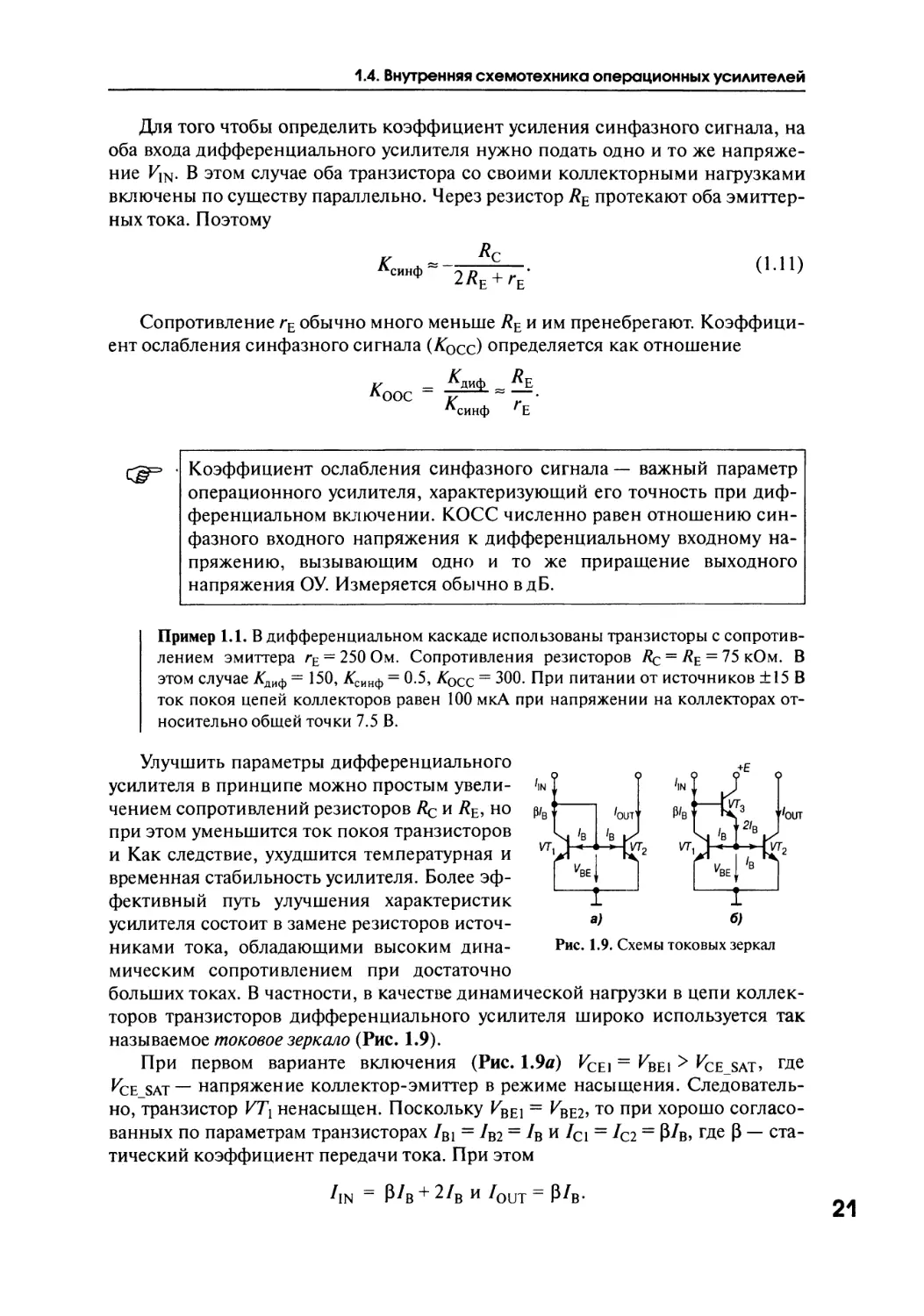
Учучшить параметры дифференциального
усилителя в принципе можно простым
увеличением сопротивлений резисторов Rq и Re, но
при этом уменьшится ток покоя транзисторов
и Как следствие, ухудшится температурная и
временная стабильность усилителя. Более
эффективный путь улучшения характеристик
усилителя состоит в замене резисторов
источниками тока, обладающими высоким
динамическим сопротивлением при достаточно
больших токах. В частности, в качестве динамической нагрузки в цепи
коллекторов транзисторов дифференциального усилителя широко используется так
называемое токовое зеркало (Рис. 1.9).
При первом варианте включения (Рис. 1.9а) VCE] = FBE1 > VCE_SAT, где
K:e sat~ напряжение коллектор-эмиттер в режиме насыщения.
Следовательно, транзистор VT\ ненасыщен. Поскольку КВЕ1 = КВЕ2, то при хорошо
согласованных по параметрам транзисторах /Bi = /В2= /в и /ci = /с2= Р^в> где р —
статический коэффициент передачи тока. При этом
Рис. 1.9. Схемы токовых зеркал
21
Глава 1. ОПЕРАЦИОННЫЕ УСИЛИТЕЛИ
где р3 — коэффициент усиления тока базы транзистора VTh т. е. погрешность
равенства входного и выходного токов в р3 раз меньше, чем в схеме на Рис. 1.9а.
Токовое зеркало на Рис. 1.96 было впервые использовано в качестве нагрузки
входного дифференциального каскада в усилителях цА741 и LM101.
Использование токовых зеркал в качестве динамической нагрузки
дифференциального каскада и в качестве источника тока в цепи эмиттеров позволяет
получить коэффициент усиления входного дифференциального напряжения на
одном каскаде свыше 5000 (при условии, что нагрузка на выходе усилителя
отсутствует) и Aqcc свыше 105 A00 дБ). Выпускаются усилители, например цА776
(отечественный аналог — 140УД12), у которых в схеме почти нет резисторов, а
динамические нагрузки и источники стабильного тока представляют собой
систему токовых зеркал, ток которых устанавливается одним внешним
резистором.
Огромное динамическое сопротивление токового зеркала RD как
коллекторной нагрузки, увеличивая усиление, заметно ухудшает частотные свойства
дифференциального каскада, так как постоянная времени паразитной
отрицательной обратной связи, обусловленной емкостью коллекторного перехода Ссв>
пропорциональна этому сопротивлению. Частотные свойства каскада
аналогичны частотным свойствам фильтра нижних частот первого порядка, т. е.
каскад имеет частотную характеристику передачи малого сигнала вида
22
Эффект Миллера состоит в том, что в инвертирующем усилительном
каскаде малая емкость между входом и выходом (между базой и
коллектором каскада с общим эмиттером) динамически увеличивается за
счет усиления схемы по напряжению, что эквивалентно включению
между входом каскада и общей точкой конденсатора с емкостью .
Отсюда
Таким образом, поскольку р» 1, выходной ток схемы почти повторяет
входной, почему эта схема и называется токовым зеркалом.
Лучшими характеристиками обладает токовое зеркало, схема которого
приведена на Рис. 1.96. Как видно из этой схемы, разность входного и выходного
токов схемы при идеальном согласовании транзисторов VT{ и VT2 равна току
базы транзистора VTy Несложно убедиться, что в этом случае
(Ы2)
причем постоянная времени
(эффект Миллера). Полоса пропускания каскада
A.13)
1.4. Внутренняя схемотехника операционных усилителей
Пример 1.2. В дифференциальном каскаде (см. Рис. 1.8) использованы
транзисторы с сопротивлением эмиттера гЕ = 250 Ом и с емкостью ССв = 5 пФ.
Динамическое сопротивление нагрузки каскада за счет применения токового зеркала
составляет 500 кОм. В этом случае согласно A.10) АдИф = 1000. Постоянная времени
дифференциального каскада тду = A + ^дИф)О;в^о = 2.5 мс, а полоса
пропускания/п = 1/Aтстду) = 127 Гц , т. е. довольно узкая.
Для улучшения частотных свойств дифференциальных усилителей
необходимо устранить влияние эффекта Миллера. Эта задача решается путем
стабилизации либо потенциала коллектора транзистора, на базу которого поступает
входной сигнал, либо потенциала базы транзистора, в цепь коллектора
которого включена нагрузка. Оба варианта представлены на Рис. 1.10.
На Рис. 1.10а приведена так называемая
каскодная схема. Здесь каскад с общим
эмиттером на транзисторе VT} управляет каскадом
с общей базой на транзисторе VT2. Потенциал
коллектора транзистора VT\ фиксируется
практически на уровне E0F. Поэтому
обратной связи по напряжению коллектора нет. Ток
коллектора транзистора VT? практически
равен току коллектора транзистора КГЬ поэтому
усиление по напряжению каскодной схемы
такое же, что и в схеме с общим эмиттером.
Поскольку потенциал базы транзистора VT2
фиксирован, эффект Миллера не
проявляется. Эта схема применена Р. Видларом в
конструкции ОУ повышенной ючности LM108
(отечественный аналог— 140УД14) [1.4].
В схеме на Рис. 1.106 Эмиттерный повторитель управляет каскадом с общей
базой. Потенциал колектора транзистора УТХ и потенциал базы транзистора VT2
зафиксированы, поэтому эффект Миллера отсутствует. Такое включение
использовали практически в одно время Р. Видлар в ОУ LM101 и Д. Фуллагар
(один из основателей фирмы Maxim Integrated Product) в ОУ цА741.
1.4.3. Стандартная схема операционного
усилителя
Операционные усилители универсального применения должны
обеспечивать значительно больший дифференциальный коэффициент усиления, чем
способен дать один каскад. Поэтому они строятся в основном по двухкаскад-
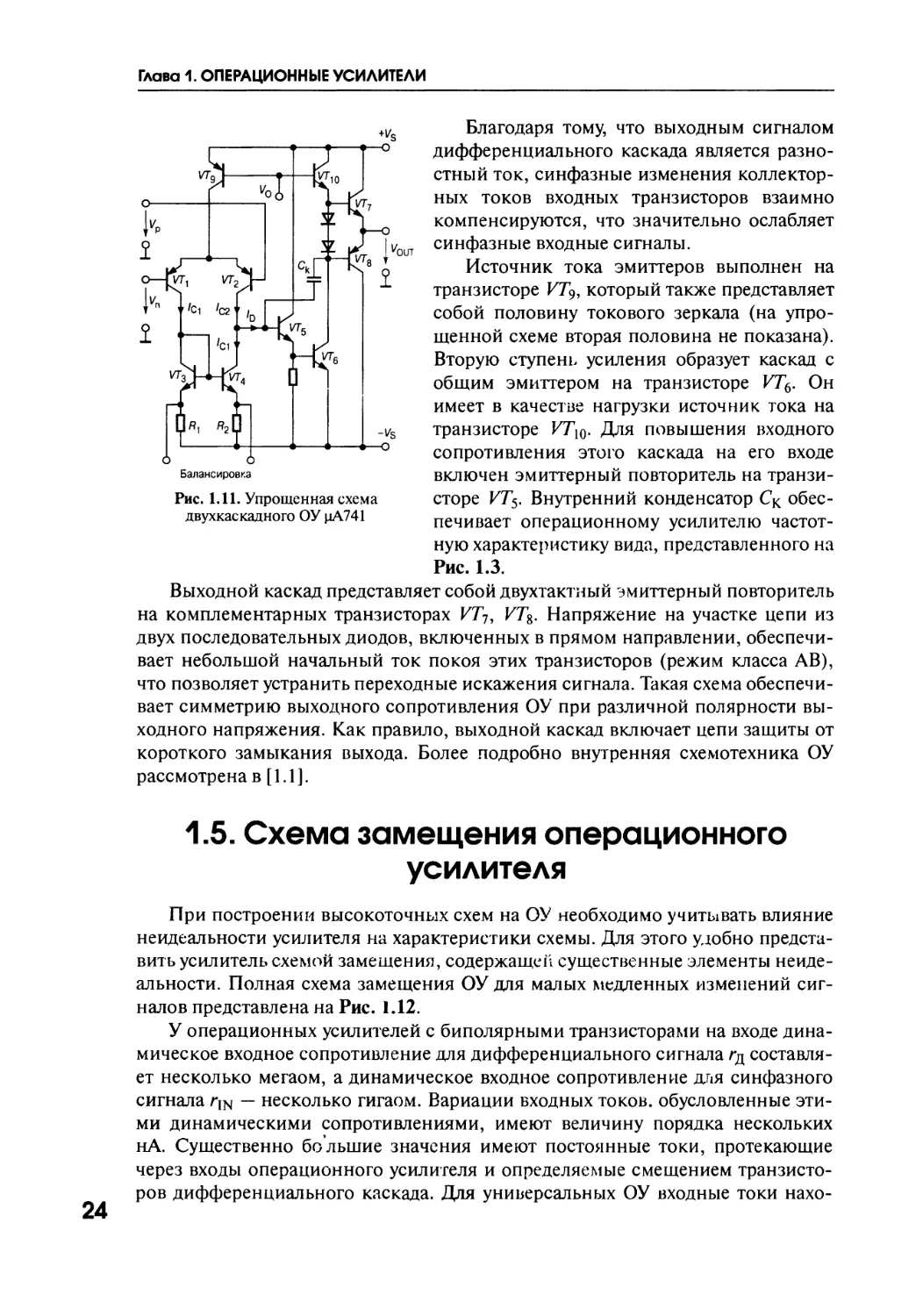
ной схеме. Упрошенная схема ^классического» двухкаскадного ОУ }дА741
(полная схема включает 24 транзистора) приведена на Рис. 1.11.
Входной каскад выполнен по схеме дифференциального усилителя на
/?-л-/?-транзисторах VT\ и VT2. В качестве нагрузки использовано токовое
зеркало на л-/?-я-транзисторах УТЪ и VT4. Для выходного тока входного каскада,
следовательно, можно записать следующее соотношение:
Рис. 1.10. Составные каскады с
улучшенными частотными свойствами:
а — схема стабилизации потенциала
коллектора входного транзистора;
б — схема стабилизации потенциала
базы выходного транзистора
23
Глава 1. ОПЕРАЦИОННЫЕ УСИЛИТЕЛИ
Рис. 1.11. Упрощенная схема
двухкаскадного ОУ цА741
24
Благодаря тому, что выходным сигналом
дифференциального каскада является
разностный ток, синфазные изменения
коллекторных токов входных транзисторов взаимно
компенсируются, что значительно ослабляет
синфазные входные сигналы.
Источник тока эмиттеров выполнен на
транзисторе КГ9, который также представляет
собой половину токового зеркала (на
упрощенной схеме вторая половина не показана).
Вторую ступень усиления образует каскад с
общим эмиттером на транзисторе VT6. Он
имеет в качестве нагрузки источник тока на
транзисторе КГ10. Для повышения входного
сопротивления этого каскада на его входе
включен Эмиттерный повторитель на
транзисторе VT5. Внутренний конденсатор Ск
обеспечивает операционному усилителю
частотную характеристику вида, представленного на
Рис. 1.3.
Выходной каскад представляет собой двухтактный Эмиттерный повторитель
на комплементарных транзисторах VT7, VT%. Напряжение на участке цепи из
двух последовательных диодов, включенных в прямом направлении,
обеспечивает небольшой начальный ток покоя этих транзисторов (режим класса АВ),
что позволяет устранить переходные искажения сигнала. Такая схема
обеспечивает симметрию выходного сопротивления ОУ при различной полярности
выходного напряжения. Как правило, выходной каскад включает цепи защиты от
короткого замыкания выхода. Более подробно внутренняя схемотехника ОУ
рассмотрена в [1.1].
1.5. Схема замещения операционного
усилителя
При построении высокоточных схем на ОУ необходимо учитывать влияние
неидеальности усилителя на характеристики схемы. Для этого удобно
представить усилитель схемой замещения, содержащей существенные элементы
неидеальности. Полная схема замещения ОУ для малых медленных изменений
сигналов представлена на Рис. 1.12.
У операционных усилителей с биполярными транзисторами на входе
динамическое входное сопротивление для дифференциального сигнала гд
составляет несколько мегаом, а динамическое входное сопротивление дъя синфазного
сигнала rIN — несколько гигаом. Вариации входных токов, обусловленные
этими динамическими сопротивлениями, имеют величину порядка нескольких
нА. Существенно большие значения имеют постоянные токи, протекающие
через входы операционного усилителя и определяемые смещением
транзисторов дифференциального каскада. Для универсальных ОУ входные токи нахо-
1.5. Схема замещения операционного усилителя
Рис. 1.12. Схема замещения
реального операционного усилителя
для малых сигналов
Рис. 1.13. Схема неинвертирующего
усилителя с учетом собственных
сопротивлений ОУ
Эта величина даже для операционных усилителей с биполярными
транзисторами на входах превышает 109 Ом. Следует, однако, помнить, что речь идет
исключительно о динамическом сопротивлении; это значит, что изменения
входного тока малы, тогда как среднее значение входного тока может
принимать несравненно бо льшие значения.
1.5.2. Выходное сопротивление схемы
Реальные операционные усилители довольно далеки от идеала в отношении
выходного сопротивления. Так, рассмотренный выше ОУ типа jjA741 имеет
гОит порядка 1 кОм. Однако благодаря отрицательной обратной связи по
напряжению динамическое выходное сопротивление схемы на ОУ существенно
уменьшается. Физически это объясняется тем, что при снижении выходного
напряжения схемы, вызванном падением напряжения на гОит при
подключении нагрузки, снижается и напряжение обратной связи, что приводит к
увеличению дифференциального входного напряжения и, как следствие, к
возрастанию выходного напряжения практически до исходного значения.
25
дятся в пределах 10 нА...2 мкА, а для усилителей с входными каскадами,
выполненными на полевых транзисторах, они составляют доли нА.
Проиллюстрируем влияние собственных входных и выходных
сопротивлений ОУ на примере схемы неинвертирующего усилителя (Рис. 1.13).
1.5.1. Входное сопротивление схемы
Благодаря наличию обратной связи к сопротивлению гл приложено очень
малое напряжение
где р = R\/(R\ + R2) — коэффициент передачи делителя в цепи обратной связи.
Таким образом, через это сопротивление протекает только ток, равный
PiAbO + ^vP)« Поэтому дифференциальное входное сопротивление, благодаря
действию обратной связи, умножается на коэффициент 1 + AfvP- Согласно
Рис. 1.13 для результирующего входного сопротивления схемы имеем
Глава 1. ОПЕРАЦИОННЫЕ УСИЛИТЕЛИ
Подтвердим сказанное расчетом. Выходное сопротивление операционного
усилителя, не охваченного обратной связью, определяется выражением
Для усилителя, охваченного обратной связью, в соответствии со схемой на
Рис* 1.13, эта формула принимает вид
A.13)
Величиной тока, ответвляющегося в делитель напряжения обратной связи, в
данном случае можно пренебречь. Подставив в последнее выражение величину
dVD из A.14) с учетом A.13), получим искомый результат:
Если, например, Р = 0.1, что соответствует усилению входного сигнала в
10 раз, а Ку=\05, то выходное сопротивление усилителя цА741 снизится с
1 кОм до 0.1 Ом, что справедливо в пределах полосы пропускания усилителя/п,
которая для |дА741 составляет всего только 10 Гц. На более высоких частотах
выходное сопротивление ОУ с обратной связью будет увеличиваться, т. к.
величина |j5Tv| с ростом частоты будет уменьшаться со скоростью 20 дБ на декаду
(см. Рис. 1.3). При этом оно приобретает индуктивный характер и на частотах,
превышающих/г, становится близким к величине выходного сопротивления
усилителя без обратной связи.
1.6. Коррекция частотной характеристики
Вследствие наличия паразитных емкостей и многокаскадной структуры
операционный усилитель по своим частотным свойствам аналогичен фильтру
нижних частот высокого порядка. Системы такого рода, имеющие большой
коэффициент усиления, при наличии обратной связи склонны к
самовозбуждению (потере устойчивости) Это проявляется в том, что даже при отсутствии
сигнала на входе системы на ее выходе могут возникать стационарные или
прерывистые колебания относительно большой амплитуды, вплоть до полного
размаха выходного напряжения. В результате схема, спроектированная, казалось
бы, по всем правилам радиотехники, оказывается неработоспособной. Вопрос
2о этот чрезвычайно важен, поэтому остановимся на нем подробнее.
При работе усилителя, охваченного обратной связью, величина VD не остается
постоянной, а изменяется на величину
A.14)
Для усилителя с линейной передаточной характеристикой изменение
выходного напряжения составляет
1.6. Коррекция частотной характеристики
Поведение ОУ в переходных процессах при малых изменениях сигналов
можно математически описать линейным дифференциальным уравнением.
Преобразование этого уравнения по Лапласу дает возможность представить
отношение переменных величин на входе и выходе усилителя в удобной
алгебраической форме
A.15)
причем на практике в данном случае всегда п> т. Нули полинома в числителе
называются нулями передаточной функции, а нули полинома в знаменателе —
ее полюсами. Из теории систем автоматического управления известно, что
устойчивость системы с обратной связью (в нашем случае усилителя)
определяется расположением на комплексной плоскости корней характеристического
уравнения
Если все без исключения корни уравнения A.16) располагаются в
левой полуплоскости — усилитель с обратной связью устойчив. Если
хотя бы один из корней этого уравнения находится в правой
полуплоскости — усилитель неустойчив (критерий Михайлова).
Подставив в A.15) s =j@, получим частотную характеристику усилителя
1.6.1. Частотные характеристики ОУ
Наиболее удобно исследовать
устойчивость усилителей по
диаграммам Боде, на которых
амплитудно-частотная и фазо-частотная
характеристики изображаются
асимптотически в логарифмическом
масштабе, и называются
соответственно ЛАЧХ и ЛФЧХ. Эти
характеристики легко определяются
экспериментально и позволяют достаточно
просто и наглядно судить об
устойчивости конкретного ОУ и осуществить
подбор корректирующих цепей.
Типичные асимптотические ЛАЧХ и
ЛФЧХ ОУ без частотной коррекции в
функции циклической частоты
/= (й/2к приведены на Рис, 1.14.
Рис. 1.14. Типичные логарифмические
амплитудно-частотная и фазо-частотная
характеристики некорректированного ОУ
27
A.16)
Здесь $(s) — передаточная функция звена обратной связи.
Функцию Ау(со) называют амплитудно-частотной, а ф(со) — фазо-частотной
характеристиками.
Глава 1. ОПЕРАЦИОННЫЕ УСИЛИТЕЛИ
Асимптотической называется характеристика, образованная
соединенными отрезками касательных, проведенных к точной ЛАЧХ с
наклоном, кратным 20 дБ/дек. Асимптотическая ЛАЧХ позволяет легко
определить полюса и нули передаточной функции усилителя,
которые находятся в точках пересечения асимптот.
На частоте/i находится первый (самый низкочастотный) полюс
передаточной функции, который определяется инерционным звеном с максимальной
постоянной времени. Обычно полюс, соответствующий частоте /j, определяется
частотными свойствами второго каскада ОУ— усилителя напряжения. Фазовый
сдвиг на частоте первого полюса —45° (если пренебречь влиянием следующих
полюсов). Коэффициент усиления в области частот от /J до /2 убывает со
скоростью —20 дБ/дек. Выше частоты /2 (второй полюс) начинает действовать
второе инерционное звено (как правило, это инерционность входного
дифференциального усилителя), теперь коэффициент усиления убывает со
скоростью —40 дБ/дек, а фазовый сдвиг между Ко и Коит приближается к —180°.
Частота, при которой выполняется условие ф = -180°, называется
критической (соКр или/КР).
Частота, при которой модуль коэффициента усиления петли
обратной связи (коэффициента петлевого усиления) | Ки \ = \ $Ку | = 1,
называется частотой среза (соСР или/СР).
В соответствии с логарифмическим вариантом критерия Найквиста для
минимально-фазовых систем, к которым можно отнести ОУ с отрицательной
обратной связью, усилитель будет устойчив, если для логарифмических частотных
характеристик разомкнутой петли обратной связи р К v выполнено условие
/ср</кр- A.18)
Для минимально-фазовых систем вид ЛАЧХ однозначно определяет вид
ЛФЧХ. Поэтому для суждения об устойчивости усилителя достаточно иметь
перед глазами только ЛАЧХ.
28
Для устойчивости усилителя с обратной связью необходимо и
достаточно, чтобы точная ЛАЧХ петли регулирования пересекала ось
частот с наклоном меньшим (по абсолютной величине), чем 40 дБ/дек.
К— для инвертирующего включения,
для неинвертирующего включения. ' * ''
Согласно выражениям A.8), A.9), между (J и коэффициентом усиления
входного сигнала К для схемы с идеальным ОУ существует следующая
взаимосвязь:
В соответствии с изложенным в п. 1.3 как для инвертирующего, так и для
неинвертирующего включения ОУ при резистивной обратной связи
коэффициент передачи звена обратной связи C определяется формулой
1.6. Коррекция частотной характеристики
При резистивной обратной связи ЛФЧХ петлевого усиления совпадает с
ЛФЧХ усилителя, а ЛАЧХ петли проходит на 20lg(l/P) ниже ЛАЧХ усилителя,
так что частота среза/СР соответствует точке пересечения графика ЛАЧХ
усилителя с горизонтальной прямой, проведенной на 2Olg(l/(J) выше оси частот. На
диаграмме Рис. 1.14 видно, что при больших значениях К (и соответственно
малых Р) условие A.18) выполняется, причем имеется достаточный запас
устойчивости по фазе. Однако, при К< 200 операционный усилитель с частотными
характеристиками, такими, как на Рис. 1.14, теряет устойчивость.
Степень устойчивости, а также мера затухания переходных процессов
приближенно определяется запасом устойчивости по фазе ос. Под этой величиной
понимается дополнительный до 180° угол к фазовому запаздыванию на
критической частоте:
а = 180°- Ф(/КР)
На Рис. 1.15 представлены типичные
графики переходных функций (реакций на
единичный скачок входного напряжения)
операционного усилителя, включенного по схеме не-
инвертирующего повторителя при различных
запасах устойчивости по фазе а D5°, 65° и 90°).
По диаграмме Боде разомкнутого ОУ
можно непосредственно определить, какая
величина затухания окажется у схемы усилителя с
заданным значением р. Для иллюстрации на
Рис. 1.14 приведен пример оценки запаса
устойчивости для петлевого усиления
1/р = 8000. При этом из диаграммы находим/СР = 100 кГц и а = 65°. Как видно
из Рис. 1.15, в этом случае переходный процесс практически не имеет
колебаний, заметных при запасе по фазе 45°. В случае более глубокой обратной связи
величина а быстро уменьшается и при 1/р = 200 достигает нуля.
1.6.2. Полная частотная коррекция
Если операционный усилитель разрабатывается для универсального
применения, то фазовое запаздывание его частотной характеристики при |AV| > 1
должно быть меньше 120°. При этом для любого коэффициента обратной связи
0 < р < 1 запас устойчивости по фазе будет составлять не менее 60°. Это
требование выполняется путем коррекции частотной характеристики, причем
коррекция производится так, чтобы при |Ал/| > 1 она была аналогична характеристике
фильтра нижних частот первого пор5щка (т. е. имела бы вид, показанный на
Рис. 1.2). Так как нежелательные инерционные звенья с частотами среза/2 и/3,
(Рис. 1.14), не могут быть устранены из схемы усилителя, то необходимо путем
подбора конденсатора коррекции Ск (см. Рис. 1.11) настолько уменьшить
частоту полюса^ основного инерционного звена, чтобы условие |Av|< 1 было бы
выполнено до того, как начнет сказываться влияние второго инерционного
звена. Для выполнения этого условия достаточно удовлетворить соотношение:
/!</2/А^@)э
где К у @) — коэффициент усиления ОУ на нулевой частоте. 29
Рис. 1.15. Переходные
характеристики ОУ, охваченного
обратной связью
Глава 1. ОПЕРАЦИОННЫЕ УСИЛИТЕЛИ
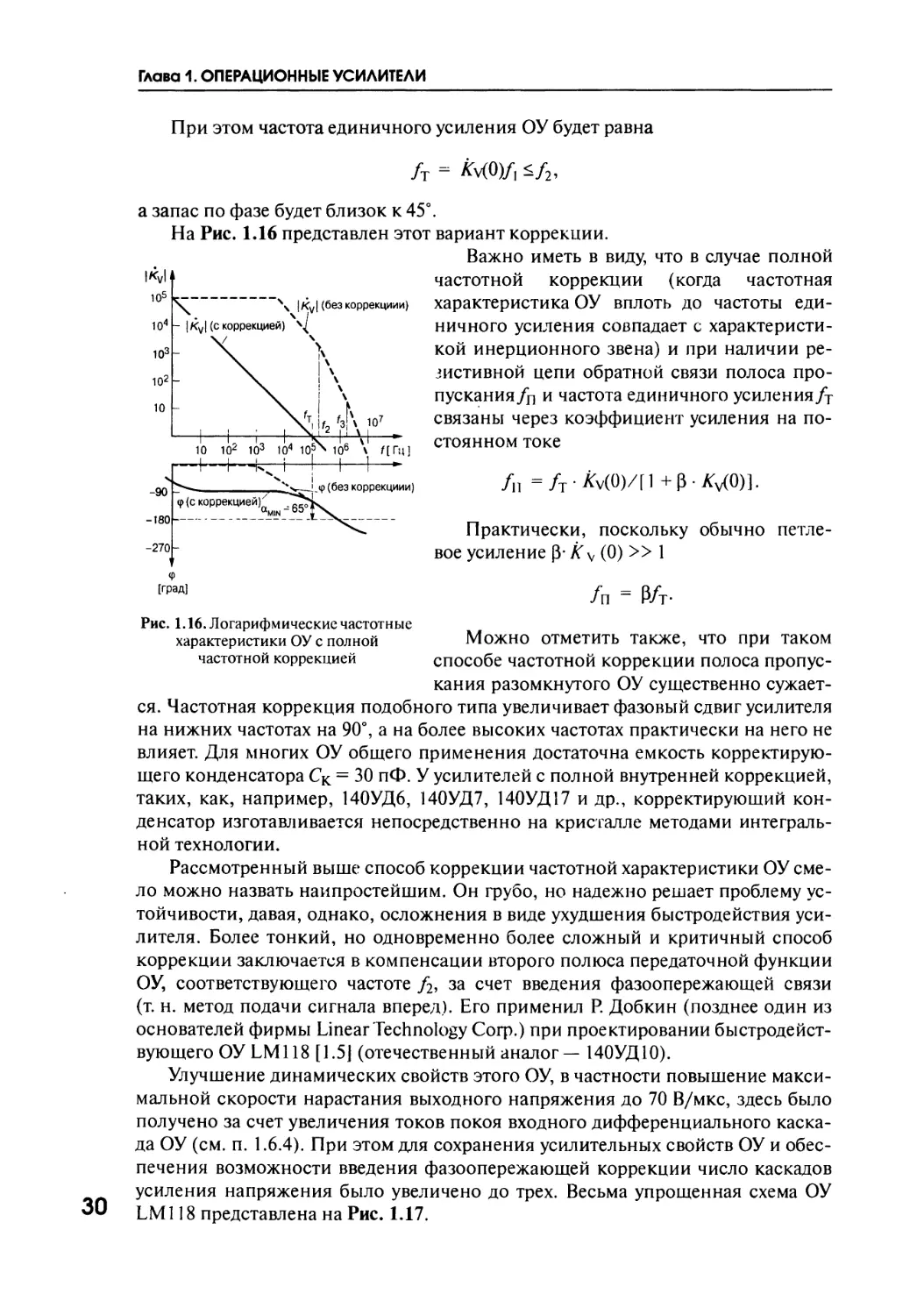
а запас по фазе будет близок к 45°.
На Рис. 1.16 представлен этот вариант коррекции.
Важно иметь в виду, что в случае полной
частотной коррекции (когда частотная
характеристика ОУ вплоть до частоты
единичного усиления совпадает с
характеристикой инерционного звена) и при наличии ре-
зистивной цепи обратной связи полоса
пропускания /п и частота единичного усиления fT
связаны через коэффициент усиления на
постоянном токе
Практически, поскольку обычно
петлевое усиление р- К\ @) >> 1
Рис. 1.16. Логарифмические частотные
характеристики ОУ с полной
частотной коррекцией
30
Можно отметить также, что при таком
способе частотной коррекции полоса
пропускания разомкнутого ОУ существенно
сужается. Частотная коррекция подобного типа увеличивает фазовый сдвиг усилителя
на нижних частотах на 90°, а на более высоких частотах практически на него не
влияет. Для многих ОУ общего применения достаточна емкость
корректирующего конденсатора Ск = 30 пФ. У усилителей с полной внутренней коррекцией,
таких, как, например, 140УД6, 140УД7, 140УД17 и др., корректирующий
конденсатор изготавливается непосредственно на кристалле методами
интегральной технологии.
Рассмотренный выше способ коррекции частотной характеристики ОУ
смело можно назвать наипростейшим. Он грубо, но надежно решает проблему
устойчивости, давая, однако, осложнения в виде ухудшения быстродействия
усилителя. Более тонкий, но одновременно более сложный и критичный способ
коррекции заключается в компенсации второго полюса передаточной функции
ОУ, соответствующего частоте /2, за счет введения фазоопережающей связи
(т. н. метод подачи сигнала вперед). Его применил Р. Добкин (позднее один из
основателей фирмы Linear Technology Corp.) при проектировании
быстродействующего ОУ LM118 [1.5J (отечественный аналог — 140УД10).
Улучшение динамических свойств этого ОУ, в частности повышение
максимальной скорости нарастания выходного напряжения до 70 В/мкс, здесь было
получено за счет увеличения токов покоя входного дифференциального
каскада ОУ (см. п. 1.6.4). При этом для сохранения усилительных свойств ОУ и
обеспечения возможности введения фазоопережающей коррекции число каскадов
усиления напряжения было увеличено до трех. Весьма упрощенная схема ОУ
LM118 представлена на Рис. 1.17.
При этом частота единичного усиления ОУ будет равна
1.6. Коррекция частотной характеристики
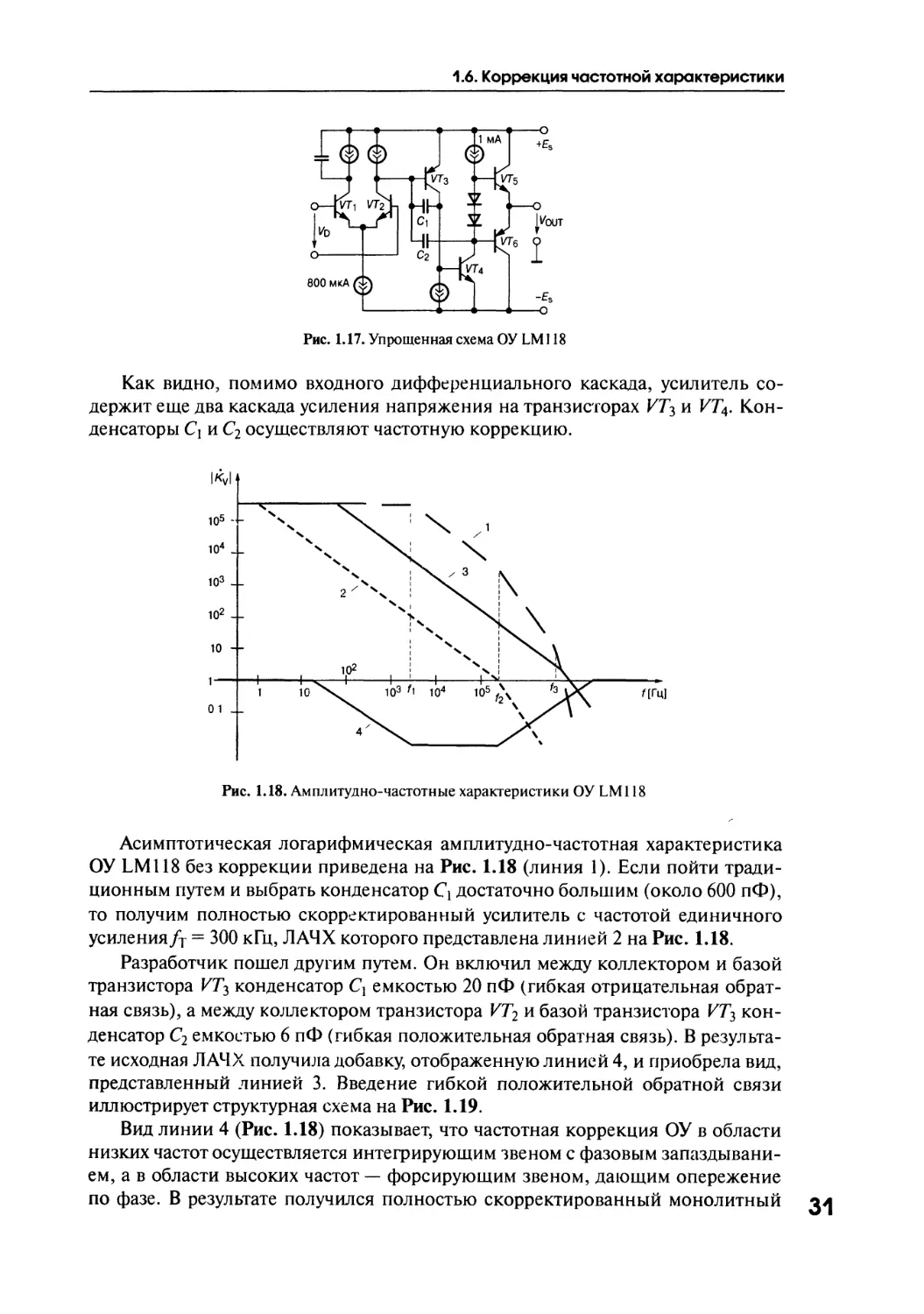
Рис. 1.17. Упрощенная схема ОУ LM118
Как видно, помимо входного дифференциального каскада, усилитель
содержит еще два каскада усиления напряжения на транзисторах К7з и КГ4-
Конденсаторы Q и С2 осуществляют частотную коррекцию.
Рис. 1.18. Амплитудно-частотные характеристики ОУ LM118
Асимптотическая логарифмическая амплитудно-частотная характеристика
ОУ LM118 без коррекции приведена на Рис. 1.18 (линия 1). Если пойти
традиционным путем и выбрать конденсатор С\ достаточно большим (около 600 пФ),
то получим полностью скорректированный усилитель с частотой единичного
усиления/т = 300 кГц, ЛАЧХ которого представлена линией 2 на Рис. 1.18.
Разработчик пошел другим путем. Он включил между коллектором и базой
транзистора КГ3 конденсатор Сх емкостью 20 пФ (гибкая отрицательная
обратная связь), а между коллектором транзистора VT2 и базой транзистора УТЪ
конденсатор С2 емкостью 6 пФ (гибкая положительная обратная связь). В
результате исходная ЛАЧХ получила добавку, отображенную линией 4, и приобрела вид,
представленный линией 3. Введение гибкой положительной обратной связи
иллюстрирует структурная схема на Рис. 1.19.
Вид линии 4 (Рис. 1.18) показывает, что частотная коррекция ОУ в области
низких частот осуществляется интегрирующим звеном с фазовым
запаздыванием, а в области высоких частот — форсирующим звеном, дающим опережение
по фазе. В результате получился полностью скорректированный монолитный
31
Глава 1. ОПЕРАЦИОННЫЕ УСИЛИТЕЛИ
Рис. 1.19. Структурная схема ОУ с фазоопережающей
коррекцией
ОУ с частотой единичного усиления 15 МГц, что для начала 70-х годов
прошлого века было рекордным достижением.
Следует отметить, что введение гибкой положительной обратной связи с
использованием форсирующей цепочки значительно сложнее коррекции
интегрирующим звеном. Здесь требуется проведение тщательных расчетов,
поскольку даже небольшая ошибка в оценке параметров корректирующих элементов
может привести к резкому ухудшению устойчивости усилителя.
1.6.3. Внешняя частотная коррекция
Полная частотная коррекция операционного усилителя гарантирует
достаточный запас устойчивости по фазе для резистивной отрицательной обратной
связи с любыми параметрами. Однако, как уже отмечалось, этот способ плох
тем, что ширина полосы пропускания усилителя, охваченного обратной
связью, обратно пропорциональна общему коэффициенту усиления схемы К.
Смысл этого соотношения наглядно пояснен на Рис. 1.20.
32
Рис. 1.20. Зависимость полосы пропускания от коэффициента усиления при
подстраиваемой частотной коррекции
При менее глубокой обратной связи для стабилизации усилителя
достаточно было бы меньшего снижения усиления в области средних и высоких частот,
так как в этом случае точка I p A'vl = 1 достигается при I Ку\ = 1/C > 1. Как
видно из Рис. 1.20, при 1/р = 10 ширину полосы пропускания ОУ без обратной
связи можно безболезненно увеличить с 10 до 100 Гц уменьшением С^ с 30 до 3 пФ.
При этом полоса пропускания усилителя с обратной связью возрастет со
100 кГц до 1 МГц.
1.6. Коррекция частотной характеристики
Для того чтобы можно было осуществить подобные изменения частотной
коррекции, выпускаются операционные усилители, у которых отсутствует
встроенный корректирующий конденсатор, а вместо этого выведены
соответствующие точки схемы (например в ОУ 153УД6, 140УД14) для подключения
внешней цепи коррекции. В других вариантах, например, в ОУ 544УД2,
осуществляется неполная частотная коррекция с уменьшенным значением
корректирующей емкости. Для подключения дополнительного конденсатора (в случаях,
когда надо обеспечить устойчивость при значениях р, близких к единице) также
имеются соответствующие выводы. В паспортных данных некоторых типов ОУ
указываются минимальные значения коэффициентов усиления ОУ в
неинвертирующем включении, при которых усилитель сохраняет устойчивость.
Например, для ОУ AD840 это значение составляет 10, для ОРА605 — 50 и т. д.
Некоторые фирмы выпускают усилители с одинаковой схемотехникой, но
отличающиеся наличием или отсутствием встроенного корректирующего конденсатора.
Например, ОУ типа ОР27 и ОР37 (отечественные аналоги соответственно
140УД25А...Г и 140УД26А...Г). Первый из них имеет встроенный
корректирующий конденсатор, частоту единичного усиления/г = 8 МГц, максимальную
скорость нарастания 2.8 В/мкс и работает устойчиво вплоть до 100% обратной
связи. ОУ типа ОР37 не имеет корректирующего конденсатора. Его частота
единичного усиления/г = 60 МГц, скорость нарастания 17 В/мкс. Он работает
устойчиво, если коэффициент усиления входного сигнала более пяти.
В комплексе мероприятий по обеспечению
устойчивости схемы с операционным усилителем
(особенно быстродействующим) важное место
занимает его правильный монтаж. Проводники,
соединяющие резисторы обратной связи с
инвертирующим входом усилителя, должны иметь
минимальную длину. При невыполнении этого правила
на входе ОУ образуется паразитная емкость,
которая при наличии близлежащих площадок или
слоев заземления может составлять 0.4 пФ на
миллиметр проводника. Эта емкость совместно с резисторами обратной связи
образует дополнительное инерционное звено в петле обратной связи, уменьшающее
запас устойчивости по фазе. Некоторую компенсацию этого эффекта дает
включение форсирующего конденсатора Сф равной емкости между выходом ОУ
и инвертирующим входом (Рис. 1.21).
1.6.4. Скорость нарастания
Наряду со снижением полосы пропускания усилителя частотная коррекция
с включением конденсатора Ск (Рис. 1.11) дает еще один нежелательный
эффект: существенно снижается скорость нарастания выходного напряжения.
Максимальное значение скорости нарастания р определяется в основном
скоростью заряда корректирующего конденсатора:
33
Рис. 1.21. Компенсация
фазового запаздывания, вносимого
входной емкостью ОУ
Глава 1. ОПЕРАЦИОННЫЕ УСИЛИТЕЛИ
Вследствие относительной малости этой величины при быстрых изменениях
выходного напряжения возникают характерные искажения сигнала, которые
не могут быть устранены путем введения отрицательной обратной связи. Их
называют динамическими искажениями. Если входной сигнал усилителя
синусоида, то чем больше ее амплитуда, тем при меньшей частоте появляются
динамические искажения.
1.6.5. Компенсация емкостной нагрузки
Если операционный усилитель работает на емкостную нагрузку (например,
на несогласованный ВЧ-кабель), то последняя вместе с выходным
сопротивлением усилителя образует фильтр нижних частот, который вносит
дополнительное фазовое запаздывание выходного напряжения (образует дополнительный
полюс передаточной функции усилителя). Все это уменьшает запас
устойчивости по фазе, и схема усилителя может самовозбуждаться уже при
незначительной величине нагрузочной емкости, т. е. система теряет устойчивость и
переходит в режим генерации колебаний. Порой достаточно коснуться выхода
усилителя щупом осциллографа, чтобы усилитель начал самовозбуждаться. Для
устранения этого явления в цепь обратной связи включается дополнительный
форсирующий конденсатор Сф (Рис. 1.22а).
Рис. 1.22. Компенсация емкостной нагрузки включением:
а — форсирующего конденсатора Сф, б — последовательной цепи Я^Ск
параллельно выходу
В этом случае цепь обратной связи представляет собой интегро-дифферен-
цирующее фазоопережающее звено, создающее в окрестности частоты среза
положительный фазовый сдвиг, компенсирующий запаздывание, вносимое
емкостью нагрузки. Недостаток этого решения — при значительных выходных
токах снижается динамический диапазон выходного напряжения за счет падения
напряжения на резисторе Яф.
Вместо этого можно включить параллельно выходу последовательную
цепочку ЛкОс (Рис. 1.226). В области высоких частот эта цепь ведет себя как
резистор, шунтируя емкость нагрузки CL и тем самым уменьшая порождаемое ею
фазовое запаздывание (а зачастую и петлевое усиление). Рекомендуется
выбирать Ск = E...10)CL и Як = @.3...0.7)гОит •
34
Максимальный выходной ток дифференциального каскада (см. Рис. 1.11)
равен току источника в цепи эмиттеров транзисторов VT{ и VT2. Принимая его
равным 20мкА, найдем для емкости корректирующего конденсатора
Ск = 30 пФ:
1.7. Параметры операционных усилителей
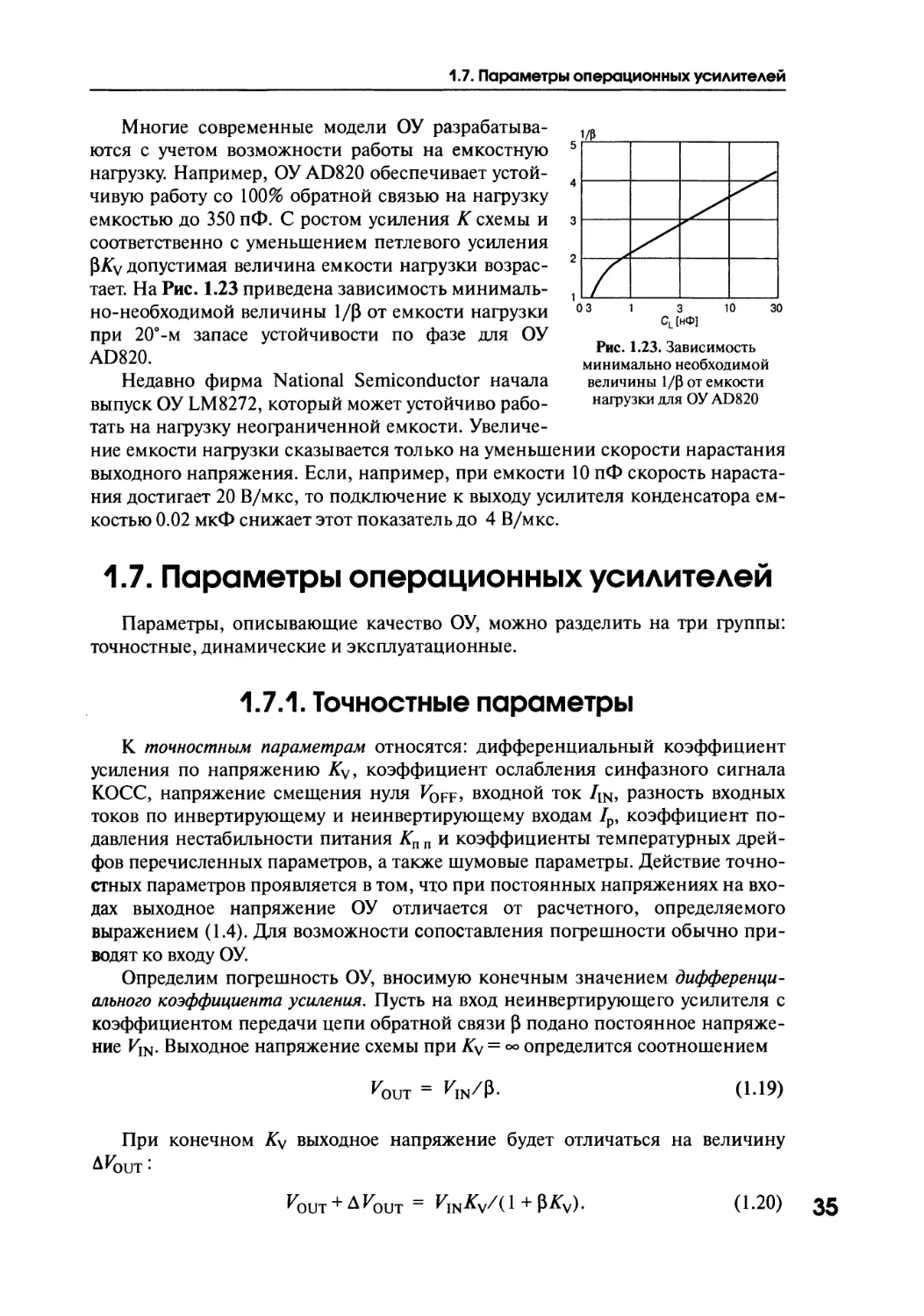
Многие современные модели ОУ
разрабатываются с учетом возможности работы на емкостную
нагрузку. Например, ОУ AD820 обеспечивает
устойчивую работу со 100% обратной связью на нагрузку
емкостью до 350 пФ. С ростом усиления К схемы и
соответственно с уменьшением петлевого усиления
рАу допустимая величина емкости нагрузки
возрастает. На Рис. 1.23 приведена зависимость
минимально-необходимой величины 1/Р от емкости нагрузки
при 20°-м запасе устойчивости по фазе для ОУ
AD820.
Недавно фирма National Semiconductor начала
выпуск ОУ LM8272, который может устойчиво
работать на нагрузку неограниченной емкости.
Увеличение емкости нагрузки сказывается только на уменьшении скорости нарастания
выходного напряжения. Если, например, при емкости 10 пФ скорость
нарастания достигает 20 В/мкс, то подключение к выходу усилителя конденсатора
емкостью 0.02 мкФ снижает этот показатель до 4 В/мкс.
1.7. Параметры операционных усилителей
Параметры, описывающие качество ОУ, можно разделить на три группы:
точностные, динамические и эксплуатационные.
Рис. 1.23. Зависимость
минимально необходимой
величины 1/р от емкости
нагрузки для ОУ AD820
1.7.1. Точностные параметры
К точностным параметрам относятся: дифференциальный коэффициент
усиления по напряжению Ку, коэффициент ослабления синфазного сигнала
КОСС, напряжение смещения нуля K0FF, входной ток /IN, разность входных
токов по инвертирующему и неинвертирующему входам /р, коэффициент
подавления нестабильности питания КП п и коэффициенты температурных
дрейфов перечисленных параметров, а также шумовые параметры. Действие
точностных параметров проявляется в том, что при постоянных напряжениях на
входах выходное напряжение ОУ отличается от расчетного, определяемого
выражением A.4). Для возможности сопоставления погрешности обычно
приводят ко входу ОУ.
Определим погрешность ОУ, вносимую конечным значением
дифференциального коэффициента усиления. Пусть на вход неинвертирующего усилителя с
коэффициентом передачи цепи обратной связи р подано постоянное
напряжение FIN. Выходное напряжение схемы при Ку = ©о определится соотношением
A.19)
При конечном К\ выходное напряжение будет отличаться на величину
ЬУоиг:
A.20) 35
Глава 1. ОПЕРАЦИОННЫЕ УСИЛИТЕЛИ
36
откуда находим окончательно относительную погрешность, приведенную ко
входу:
Из последнего выражения следует, что погрешность преобразования входного
сигнала схемой на ОУ обратно пропорциональна коэффициенту петлевого
усиления. Для гармонических сигналов можно получить аналогичное
соотношение:
Коэффициент усиления ОУ существенно зависит от сопротивления
нагрузки RL. Это связано с тем, что снижение сопротивления нагрузки оконечного
каскада приводит к уменьшению эквивалентного сопротивления нагрузки
предыдущего каскада усиления напряжения, и как следствие, к снижению его
коэффициента усиления. В качестве примера на Рис. 1.24 приведены зависимости
Ку (RL) при различных напряжениях питания для ОУ AD820, а на Рис. 1.25 его
статические переходные характеристики при различных сопротивлениях
нагрузки. При низких сопротивлениях нагрузки отчетливо виден нелинейный
характер статических характеристик ОУ.
Рис. 1.24. Зависимости усиления ОУ
AD820 от нагрузки
Рис. 1.25. Статические переходные
характеристики ОУ AD820 при
различных сопротивлениях нагрузки
Снижение коэффициента усиления при уменьшении сопротивления
нагрузки может быть использовано для повышения устойчивости ОУ. Если
усилитель возбуждается на плате, порой достаточно подключить параллельно его
выходу дополнительный резистор, чтобы ОУ «успокоился».
Погрешность, обусловленная синфазным входным напряжением ОУ, может
быть определена следующим образом. Выходное напряжение усилителя являет-
Как следует из A.19), соответствующее отклонение, приведенное к входу, с
точностью до величин второго порядка малости:
Вычтя из A.20) A.19), получим
A.21)
ся функцией как дифференциального VD = Vp - Кп, так и синфазного
Vc = (Vv + Vn)/2 входных напряжений:
Приращение этого напряжения определяется соотношением
или
где Кс — коэффициент усиления синфазного сигнала. При АКоит = 0 из
последней формулы следует:
Коэффициент ослабления синфазного сигнала показывает, какое значение
дифференциального входного напряжения AVD следует приложить к входу
усилителя, чтобы скомпенсировать усиление входного синфазного сигнала. КОСС
тесно связан по величине с дифференциальным коэффициентом усиления ОУ.
Найдем погрешность, обусловленную смещением нуля усилителя. Смещение
нуля ОУ проявляется в наличии постоянного напряжения на выходе усилителя
при отсутствии входного напряжения. Обычно определяют смещение нуля,
приведенное к входу, т. е. смещение выходного напряжения, умноженное на
коэффициент передачи цепи обратной связи р. Смещение нуля является
результатом действия двух факторов: собственно напряжения смещения Poff» и
постоянных входных токов усилителя /in и /in (см. Рис. 1.12). Величина Vo^
определяется в основном разбросом напряжений Э-Б-переходов входных
транзисторов дифференциального каскада в усилителях на биполярных
транзисторах или напряжений затвор—исток в ОУ с полевыми транзисторами на
входах. Эта величина составляет 0.1 ...5 мВ для усилителей общего назначения с
биполярными и 0.5...20 мВ с полевыми транзисторами на входе. Путем лазерной
подгонки удается уменьшить смещение нуля до 10 мкВ (МАХ400М) у первого
типа усилителей и до 100 мкВ (ОРА627В) у второго. Дальнейшее снижение
смещения нуля достигается применением цепей внешней балансировки или схем
автоматической компенсации смещения нуля.
Для ручной балансировки некоторые усилители (например, 140УД7,140УД8
и др.) имеют специальные выводы (см. Рис. 1.11), к которым подключается
подстроечный резистор. При перемещении движка, подключенного к выводу
источника отрицательного напряжения, изменяется соотношение
сопротивлений резисторов в цепях эмиттеров транзисторов КГ3, VT4 токового зеркала, а
это приводит к изменению баланса дифференциального усилительного
каскада. Балансировочные выводы имеют и прецизионные ОУ (например, МАХ400 и
140УД25).
Ручная балансировка усложняет изготовление и эксплуатацию электронных
устройств, поэтому в тех случаях, когда требуется очень малое смещение,
применяют различные системы автоматической компенсации.
В ранних моделях ОУ, в том числе ламповых, широко применялся метод
компенсации смещения нуля, основанный на структуре модулятор—усилитель
37
Глава 1. ОПЕРАЦИОННЫЕ УСИЛИТЕЛИ
переменного тока — демодулятор (МДМ). Изготавливалась даже микросхема с
каналом МДМ 140УД13. Однако в настоящее время эта схема практически не
применяется из-за плохих частотных свойств и высокого уровня помех. Кроме
того, для реализации канала МДМ требуется много внешних элементов.
Лучшими характеристиками обладают усилители с периодической
компенсацией дрейфа нуля [6] (в переводной литературе такие ОУ обычно называют
усилителями со стабилизацией прерыванием)(Рис. 1.26).
38
а общее усиление Kw = К1К2.
Как правило, в виде ИМС реализуются дифференциальные ОУ. На
Рис. 1.266 приведена схема ОУ с периодической компенсацией дрейфа,
наиболее часто применяемая на практике. Ее отличие от предыдущей схемы состоит в
том, что оба усилителя У\ и У2 имеют вспомогательные инвертирующие входы
(IN.J и IN.2), по которым осуществляется компенсация. Усилители имеют
практически тождественные характеристики.
Как и ранее, цикл работы схемы состоит из двух фаз, повторяющихся с
периодом Гц — фазы автокоррекции нуля и фазы усиления.
Рис. 1.26. Схемы ОУ с периодической компенсацией дрейфа:
а — простая, б — усложненная
На Рис. 1.26л приведена упрощенная схема простейшего инвертирующего
ОУ с периодической компенсацией дрейфа, в состав которого входит основной
У{ и вспомогательный У2 усилители с коэффициентами усиления Кх и К2 и
напряжениями смещения нуля J'offi и ^off2 соответственно, два ключа S\ и S2,
два запоминающих конденсатора С\ и С2 и генератор периодических импульсов
УГ, управляющий работой ключей (на схеме не показан). Усилители, входящие
в состав схемы обычно выполняются по КМОП-технологии и потому обладают
довольно значительным смещением нуля.
Период прерывания состоит из двух частей. В первой части периода оба
ключа находятся в положении 2, усилитель У! усиливает сигнал как обычный
ОУ, а усилитель У2 отсоединен от входа и охвачен 100% отрицательной обратной
связью. При этом конденсатор С\ заряжается до значения напряжения
смещения нуля У2. Во второй части периода оба ключа переключаются в положение 1.
При условии Vw = 0 (речь идет о дрейфе нуля) напряжение на входе и выходе
усилителя У2 не меняется, что равносильно тому, как если бы смещение нуля У2
было равно K)FF2/^2- Усилители при этом положении ключей включены
последовательно, поэтому смещение нуля всего ОУ, приведенное к инвертирующему
входу У!
1.7. Параметры операционных усилителей
Таким образом, K0Ffi и ^off2 снижают свой вес в выходном напряжении в G{ раз
по сравнению со входным дифференциальным напряжением. 39
I. Фаза автокоррекции нуля. Ключи S\ и ?3 замкнуты, S2 и S4 — разомкнуты.
Вход усилителя коррекции нуля У2 замкнут, а его выход подключен к
запоминающему конденсатору С2. Напряжение на его выходе
A.22)
где К— коэффициент усиления усилителя по основному входу, G —
коэффициент усиления усилителя по вспомогательному входу. Из A.22) следует
2. Фаза усиления. Ключи S2 и S4 замкнуты, S{ и ?3 ~ разомкнуты. Вход
усилителя коррекции нуля У2 подключен к входу всего усилителя, а его выход
соединен со вспомогательным входом основного усилителя. В таком случае
A.24)
Напряжение на конденсаторе С2 в фазе усиления практически совпадает с
выходным напряжением усилителя У2 в фазе автокоррекции
A.25)
A.26)
Подставив A.23) и A.25) в A.24), получим
Поскольку напряжение смещения нуля меняется очень медленно, будем
считать его в цикле постоянным. Тогда A.26) перепишется в виде
A.27)
A.28)
A.29)
Выходное напряжение усилителя У1
Но в этой фазе
Поэтому
Перегруппировав A.29), получим
Если принять, что Кх = К2 » 1и Gx - G2 » 1, то GXK2 » K{. Тогда приближенно
A.30)
Глава 1. ОПЕРАЦИОННЫЕ УСИЛИТЕЛИ
Один из первых ОУ с периодической компенсацией дрейфа ICL7650
(отечественный аналог — 140УД24) был создан на фирме Intersil (США) почти 20 лет
назад. Этот усилитель имеет внутренний генератор синхроимпульсов,
работающий с частотой около 200 Гц. Типовая емкость двух внешних конденсаторов
хранения 0.1 мкФ. Смещение нуля при комнатной температуре не превышает
5 мкВ. Поскольку усилитель выполнен по КМОП-технологии, его входные
токи составляют менее 10 пА. Недостатком этого усилителя, как и большинства
других усилителей с периодической компенсацией дрейфа, является
значительный шум, вызванный, в первую очередь, инжекцией заряда при коммутации
МОП-ключей схемы компенсации нуля.
В настоящее время выпускаются модели с пониженным уровнем шума
(ICL7652) и со встроенными конденсаторами хранения (МАХ430, AD8571;
последний имеет сдвоенный и счетверенный аналоги).
В конце 80-х годов прошлого века в фирме Maxim Г. Шаффер создал два
прецизионных трехкаскадных ОУ МАХ425 и МАХ426 с уникальными
параметрами: Kw= 108, K0FF< 1 мкВ, причем декомпенсированный МАХ426 развивает
скорость нарастания выходного напряжения до 5 В/мкс. Для уменьшения
фликкер-шума (или как его еще называют 1/У-шума), возникающего из-за
случайных колебаний процесса диффузии в транзисторе и преобладающего в
области инфранизких частот, входы и выходы входного дифференциального
каскада меняются местами с частотой 300 Гц. В результате полярность шума
входных транзисторов периодически меняется (при этом спектр шума переносится
в более высокочастотную область), а полярность сигнала остается неизменной.
В результате размах напряжения шума в полосе 0.1... 10 Гц не превышает
0.5 мкВ. Смещение нуля и его дрейф снижаются цифровым методом.
Усилители имеют в своем составе два цифроаналоговых преобразователя (ЦАП) —
16-разрядный, управляющий смещением нуля первого каскада, и 8-разрядный,
обслуживающий второй каскад. Цикл установки нуля занимает 125 мс и
автоматически повторяется примерно 1 раз в минуту, если нет запрета. Цикл
начинается с того, что инвертирующий вход отключается от внешних цепей и
соединяется с неинвертирующим. Устанавливается последовательным
приближением смещение нуля второго каскада до значения ниже 50мкВ, а затем
16-разрядный ЦАП уменьшает напряжение смещения до значения около
0.1 мкВ. Этот схемотехнический прием позволил снизить температурный
дрейф смещения до практически неизмеряемой величины 0.02мкВ/°С, а
временной — до 0.1 мкВ/год. Анонсированные в 1989 году по цене 7.5 долларов
за штуку в партии по 100 штук, эти усилители уже 5 лет спустя отсутствовали в
каталогах фирмы. По-видимому, они опередили свое время.
В 1999 году фирма Analog Devices начала выпускать семейство
прецизионных усилителей AD8601/2/4 с иным видом цифровой подгонки смещения нуля.
На кристалле усилителя встроена цифровая часть, включающая нечто вроде
упрощенных цифроаналоговых преобразователей. После изготовления
микросхемы осуществляется цифровая подгонка при низких и высоких уровнях
синфазного входного напряжения, затем по специальному выводу программируется
встроенная память путем пережигания перемычек. Этот способ настройки
оказывается дешевле, чем лазерная подгонка элементов на открытом кристалле.
Такие ОУ при очень низкой цене ($0.65 за одноканальный и $1.59 за счетверен-
40 ный варианты при продаже партиями по 1000 шт.) обладают начальным смеще-
1.7. Параметры операционных усилителей
Величину /IN называют в технических характеристиках ОУ входным током, а
/р— разностью входных токов. Анализ выражения A.31) показывает, что
составляющая А V, вызванная входным током, может быть устранена правильным
выбором соотношения резисторов в цепях инвертирующего и неинвертирую-
щего входов, другую же составляющую AV, обусловленную разностью входных
токов, можно уменьшить, только выбирая номиналы резисторов по
возможности минимальными.
Пример 1.2. Для снижения смещения нуля инвертирующего усилителя, имеющего
существенные входные токи, следует между неинвертирующим входом и общей
точкой схемы включить компенсирующий резистор RK (Рис. 1.27).
Сопротивление этого резистора определяется соотношением: RK = RxRJiRx + Ri).
Заметим, что в ранних моделях ОУ разность пг>
входных токов /р достигала значений соизмеримых
с входным током /IN. Например, усилитель ОР27
имеет /IN = 10 нА, а /р = 7 нА. В таком случае
меры, подобные приведенным в примере 1.2,
малоэффективны. В некоторых новых моделях входные
токи в значительной мере выравнены. В
частности, входной ток усилителя ОР196 составляет
/IN = 10 нА, а разность /р = 1.5 нА.
Входные токи ОУ с биполярными транзисторами на входе можно
уменьшить, если подключить к входам ОУ источники тока, равные по величине
входным, но противоположного направления. Именно так достигается снижение
входного тока прецизионного ОР177 до типичного значения 1 нА. При этом
вследствие разброса параметров входной ток может принимать отрицательные
значения (до —0.2 нАу ОР177).
Входные токи ОУ с полевыми транзисторами на входах настолько малы, что
составляющая смещения нуля, обусловленная входными токами, пренебрежимо
мала по сравнению со смещением, вызванным разбросом напряжений затвор-
исток, и никаких мер по снижению этой составляющей обычно не принимают.
На точность преобразования постоянного входного сигнала существенное
влияние оказывают температурные дрейфы напряжения смещения ЭК0РР/ЭГи
входного тока Э/цм/ЭГ. Особенно существенное влияние может оказать дрейф
прогрева, который проявляется при быстром изменении температуры в первое 41
Рис. 1.27. Включение
компенсирующего резистора
нием нуля не более 300 мкВ, типичным температурным дрейфом 2 мкВ/°С и
частотой единичного усиления 8 МГц.
Постоянные входные тсш/,протекая по резисторам цепей обратной связи и
источников сигналов, создают разность падений напряжения AV. Например, в
дифференциальной схеме включения ОУ (Рис. 1.4) эта разность определяется
выражением:
Обозначим
Тогда
A.31)
Глава 1. ОПЕРАЦИОННЫЕ УСИЛИТЕЛИ
время после включения питания. При этом приращение FOff может быть
существенно больше значения, получаемого при медленном изменении
температуры. Это явление связано с возникновением термического градиента внутри
подложки микросхемы. Наибольшее влияние разницы температур проявляется в
парных транзисторах дифференциального усилительного каскада, где она
нарушает баланс дрейфов их эмиттерно-базовых напряжений. Длительность
процесса установления температуры может достигать несколько десятков секунд.
Поскольку при увеличении выходного напряжения нагруженного усилителя
кристалл микросхемы разогревается за счет увеличения потерь в транзисторах
выходного каскада, происходит дополнительное смещение нуля ОУ, т. е.
возникает термическая обратная связь, которая в зависимости от конструкции
кристалла может быть как положительной, так и отрицательной. Эта связь может
повлиять на дифференциальный коэффициент усиления операционного
усилителя по постоянному току.
Важное значение имеет также временной дрейф, который обычно
определяется как приращение напряжения смещения за месяц или за 1000 часов работы.
Коэффициент подавления нестабильности питания КПП обычно определяют
как отношение статического (т. е. очень медленного) изменения напряжения
одного из источников питания обычно на 1 В к приведенному к входу ОУ
соответствующему изменению выходного напряжения ДКОит- Обычно имеет
размерность дБ или В/мкВ. С ростом частоты пульсаций напряжения питания
коэффициент подавления нестабильности питания КиЛ1 уменьшается, поэтому
для ослабления паразитных каналов прохождения помех по цепям питания
между каждым из выводов питания ОУ и общей точкой обязательно включают
пару блокирующих конденсаторов. Типичное значение емкостей для
маломощных ОУ общего назначения: оксидный конденсатор емкостью 2.2 мкФ и
керамический конденсатор — 0.1 мкФ. Керамический блокирующий конденсатор
должен быть подключен как можно ближе к выводам питания ОУ.
Шумы операционных усилителей, накладываясь на полезный сигнал,
обуславливают аддитивную погрешность в измерительных системах и помехи в аудио- и
видеоустройствах. Необходимо различать шумы, пришедшие в усилитель с
входными сигналами (внешние шумы) и собственные шумы усилителей
(внутренние шумы). С первыми можно бороться схемотехническими и
конструктивными средствами, например усреднением и другими видами фильтрации,
экранированием, рациональным расположением элементов на плате и созданием
связей, компенсирующих паразитные емкостные и индуктивные связи.
Внутренние шумы уменьшают преимущественно путем использования малошумя-
щих усилителей.
Обычно под термином «внутренний шум» подразумевают мешающий
сигнал, порождаемый теми или иными физическими явлениями
(чаще всего тепловыми) в компонентах электронного устройства. Шум
характеризуется своим частотным спектром, распределением
амплитуд и источником происхождения.
Основные виды шума в электронных схемах: тепловой, дробовый и флик-
кер-шум. Рассмотрим их подробнее.
Тепловой шум. Такой шум генерирует на своих выводах любой резистор. Теп-
42 ловой шум имеет нормальное распределение и равномерный частотный спектр,
1.7. Параметры операционных усилителей
т. е. он является гауссовым «белым» шумом. Действующее
(среднеквадратичное) напряжение теплового шума в незамкнутой цепи, порожденное
сопротивлением R, находящимся при температуре Т, выражается формулой
A.33)
где е — заряд электрона A.6-10 19 Кл), 1^ — постоянная составляющая (среднее
или установившееся значение) тока, a Af— ширина полосы измерения.
Например, постоянный ток силой в 1 мкА в полосе частот 10 кГц имеет
среднеквадратичные флуктуации, составляющие 0.006%, т. е. —85 дБ, а при постоянном токе
1 пА флуктуации тока будут уже составлять 5.6%. Как и тепловой шум, это гаус-
совский белый шум.
Приведенная выше формула для дробового шума выведена в
предположении, что создающие ток носители заряда действуют независимо друг от друга.
Это справедливо, когда заряды преодолевают некоторый барьер, например,
/?-я-переход, где заряды перемещаются за счет диффузии, но это не так, если
ток распространяется в металлическом проводнике, где между зарядами
существует тесная связь. Поэтому ток в простой резистивной схеме имеет намного
меньшую шумовую составляющую, чем это предсказывает формула A.33).
Фликкер-шум (шум 1/f). Этот шум,
называемый также мерцающим, имеет
частотный спектр, примерно описываемый
зависимостью \/f (постоянная мощность
на декаду частоты). Иногда шум с таким
спектром называют розовым шумом (в
отличии от белого шума с равномерным
спектром). В ОУ этот шум вызывается
флюктуирующим захватом зарядов
ловушками, образуемыми неоднородностя-
ми структуры полупроводника. Наиболее
важное значение имеет фликкер-шум в
области низких частот, где его
амплитудный спектр может значительно
превосходить спектр шумов иной природы. На
Рис. 1.28. График амплитудного спектра
напряжения шума ОУ AD707
A.32)
где к— постоянная Больцмана, Т— абсолютная температура, А/— полоса
частот в герцах. При комнатной B0°С) температуре спектральная плотность шума
Например, резистор сопротивлением ЮкОм при комнатной температуре
генерирует в полосе частот 10 кГц тепловой шум с действующим напряжением
1.27 мкВ.
Дробовый шум. Электрический ток представляет собой движение
дискретных зарядов. Число зарядов, проходящих через некоторое сечение проводящей
среды в единицу времени (т. е. ток), колеблется (флуктуирует) вокруг
некоторого среднего значения и носит статистический характер. Действующее значение
флуктуирующего тока определяется формулой
43
Глава 1. ОПЕРАЦИОННЫЕ УСИЛИТЕЛИ
Рис. 1.28 приведен график амплитудного спектра напряжения шума
прецизионного ОУ AD707, приведенного к его входу.
На графике видно, что в области низких частот преобладает фликкер-шум.
Частоту перехода от зависимости eN ~ 1//к eN = const называют частотой со-
пряжения/С0Пр.
Для усилителей с периодической компенсацией дрейфа характерно
отсутствие шумовой составляющей вида \/f. Как следствие, в области очень
низкихчастот ОУ этого типа (в целом более шумные) генерируют меньший
шум, чем малошумящие прецизионные ОУ без компенсации дрейфа.
Например, ОУ AD707 имеет в полосе частот 0.1... 10 Гц напряжение шума от
пика до пика 0.24 мкВ (п-п), а ОУ AD8571 с периодической компенсацией
дрейфа в той же полосе — 1.04 мкВ (п-п). Но уже в полосе 0.0001...0.01 Гц
напряжение шума ОУ AD8571 составляет всего 33 нВ (п-п) по сравнению с
118HB(n-n)yAD707.
В конечном счете все эти шумовые компоненты обусловливают
определенное напряжение шума на выходе ОУ. Спектральная плотность этого
напряжения, приведенного ко входу, определяется формулой
A.34)
44
Как правило, в технических характеристиках (спецификации) усилителей
приводят следующие шумовые параметры: спектральную плотность входного
напряжения шума eN, спектральную плотность входного тока шума /N и размах
входного напряжения шума от пика до пика isN п.п в полосе частот 0.1...10 Гц,
т. е. там, где наиболее сильно проявляется фликкер-шум.
К малошумящим, как правило, относят
усилители, у которых eN не превышает
10 нВ/Гц1/2. Для малошумящих усилителей
на биполярных транзисторах характерны
значительные входные токи и токи
потребления. Например, один из лучших в своем
классе ОУ AD797 при типичных
eN = 0.9 нВ/Гц1/2, /N = 2 пА/Гц1/2 на частоте
1 кГц, 2?м_п-п = 50 нВ в полосе частот
0.1... 10 Гц, имеет входной ток 250 нА, а ток
потребления — 8.5 мА. В то же время
микромощные усилители, потребляющие от
источника ток менее 10 мкА, как правило,
сильно шумят (TLC1078, типичное
значение eN = 68 нВ/Гц1/2). На Рис. 1.29
приведена осциллограмма входного шума
усилителя AD797 в полосе 0.1... 10 Гц.
Полевые транзисторы имеют значительно меньшие уровни шумов, чем
биполярные, прежде всего из-за малого уровня входной токовой шумовой
составляющей /N [1.1]. Для полевых транзисторов характерны несколько физических
механизмов генерации шума. Прежде всего, в выходной цепи полевого
транзистора, выведенного в область насыщения тока стока, действует тепловой шум.
Источником шума в этом случае является сопротивление канала транзистора.
Рис 1.29. Осциллограмма входного
шума ОУ AD797 в полосе 0.1...10 Гц
1.7. Параметры операционных усилителей
где RT = 0.7/S— эквивалентное сопротивление шумов, У = 5/A + Srs) —
эквивалентная крутизна переходной характеристики с учетом влияния внутреннего
сопротивления истоковой области.
Флуктуации тока в канале при прохождении носителями заряда
потенциального барьера управляющего /?-я-перехода порождают дробовые шумы.
Дробовая составляющая входного шумового тока
определяется током утечки затвора 1зуг
В полевых приборах, как и в
биполярных, генерируется фликкер-шум вида \/f.
Этот вид шумов вызывается
возмущениями потока носителей вблизи раздела
поверхностей полупроводника и изолятора.
Уровень шумов вида 1//*для транзисторов с
управляющим /?-я-переходом значительно
меньше, чем для МОП-приборов. В
частности, малошумящий ОУ AD745 с
полевыми транзисторами, управляемыми р-п-пе-
реходом, на входе, обладая типичными
eN = 2.9 нВ/Гц1/2 на частоте 10 кГц,
/N = 6.9 фА/Гц1/2 на частоте 1 кГц,
eN п_п = 380 нВ в полосе частот 0.1... 10 Гц,
имеет входной ток 150 пА, а ток
потребления — 8 мА.
Операционные усилители с полевыми
транзисторами на входе имеют чаще всего
большие шумовые напряжения, но меньшие шумовые токи, чем биполярные
ОУ того же класса. Это дает им преимущество при усилении сигналов
источников с высоким внутренним сопротивлением. На Рис. 1.30 представлены
графики зависимости общей спектральной плотности шума eN общ на частоте 1 кГц от
сопротивления источника сигнала R$ для биполярного ОР37 и полевого AD745
ОУ, рассчитанные по формуле A.34).
Шумовые свойства усилителей часто характеризуются нормированными
эквивалентными величинами, в число которых входят:
• коэффициент шума F;
• логарифмический коэффициент шума NF,
• эквивалентное шумовое сопротивление RN экв.
Коэффициент шума F показывает во сколько раз отношение
мощности шума к мощности сигнала на выходе усилителя увеличивается по
сравнению с аналогичным отношением на его входе.
45
Рис. 1.30. Графики зависимости
спектральной плотности шума на частоте
1 кГц от сопротивления источника
сигнала для биполярного (ОР37) и
полевого (AD745) ОУ
Тепловой ток шума пропорционален крутизне S переходной характеристики
прибора
Глава 1. ОПЕРАЦИОННЫЕ УСИЛИТЕЛИ
1.7.2. Динамические параметры ОУ
Параметры, характеризующие быстродействие ОУ, можно разделить на две
группы: параметры для малого и большого сигналов. К первой группе
динамических параметров относятся: полоса пропускания/п, частота единичного
усиления /г и время установления tycr Эти параметры называются
малосигнальными, т. к. они измеряются в линейном режиме работы всех каскадов ОУ
(AKqut^ 1 В). Ко второй группе относятся скорость нарастания выходного
напряжения р и мощностная полоса пропускания/р. Эти параметры измеряются
46 при большом дифференциальном входном сигнале ОУ (более 50 мВ). Некото-
Выражение для коэффициента шума можно представить в виде
где FN IN общ — общее напряжение шума на входе усилителя, определяемое его
шумовыми свойствами, KN 1N s — напряжение шума, генерируемого
внутренним сопротивлением источника сигнала /?s; /JN экв — эквивалентное шумовое
сопротивление, EN_изм — измеренная ЭДС шума (среднеквадратичное
значение).
Наиболее удобен и чаще всего применяется
логарифмический коэффициент шума NF (noise
factor)
где^ и/н — соответственно верхняя и нижняя граничные частоты фильтра.
Здесь W(Jf) — передаточная функция усилителя, нормированная относительно
К^. В простейшем случае при постоянной eN оит и АЧХ усилителя, такой, как у
полосового фильтра второго порядка
где KN = 1 + R2/R1 — коэффициент усиления шума, равный коэффициенту
усиления неинвертирующего усилителя, ет, eN2 — спектральные плотности шумов
источников входных напряжений соответственно Vx и К2.
Среднеквадратичное значение шумового напряжения на выходе усилителя
определится по формуле
Для расчета напряжения шума на выходе
усилителя удобно использовать шумовую модель ОУ,
изображенную на Рис. 1.31.
Согласно этой схеме спектральная плотность
выходного напряжения шума определяется
соотношением
Рис. 1.31. Шумовая модель ОУ
1.7. Параметры операционных усилителей
рые из этих параметров рассмотрены выше. Время установления tyCT отсчитыва-
ется по переходной характеристике от момента подачи на вход ОУ ступеньки
входного напряжения до момента, когда в последний раз станет справедливым
равенство
где 5 — допустимое отклонение (ошибка) выходного сигнала от
установившегося значения (Рис. L32).
Мощностная полоса пропускания ОУ
определяется по виду амплитудно-частотной
характеристики, снятой при максимально
возможной амплитуде неискаженного
выходного сигнала. Методика ее определения
заключается в следующем: вначале на
низких частотах устанавливают такую
амплитуду сигнала от генератора гармонических
колебаний, чтобы амплитуда выходного
сигнала Коит_МАХ немного не доходила до
уровня ограничения (границы насыщения
усилителя). Затем увеличивают частоту
входного сигнала. Мощностная полоса
пропускания соответствует значению частоты /р, на которой КОит станет
равным 0.707 от первоначального значения. Величина мощностной полосы
пропускания непосредственно связана со скоростью нарастания и поэтому
снижается при увеличении емкости корректирующего конденсатора.
Рис. 1.32. Переходная характеристика ОУ
1.7.3. Параметры, характеризующие усиление
сигналов переменного тока
Эти характеристики имеют особое значение для усилителей низкой частоты
(аудиоусилителей) и скоростных ОУ, применяемых чаще всего в системах связи.
Отношение сигнал/шум (SNR) — это отношение среднеквадратичного
значения входного сигнала к среднеквадратичному значению шума, который
определяется как сумма всех остальных спектральных компонент, включая
гармоники, но исключая постоянную составляющую. Измеряется для уровня входного
сигнала (-1 дБ) от полной шкалы.
Отношение сигнал/(шум + искажения) (SINAD) по смыслу мало отличается
от рассмотренного выше отношения сигнал/шум (SNR) но учитывает
дополнительные аддитивные искажения различного характера и происхождения,
имеющие большое значение при конструировании устройств аудио- и
радиотехники. Здесь сигнал — это среднеквадратичное значение основной
гармоники, а (шум + искажения) — это среднеквадратичное значение суммы всех
остальных компонент сигнала, кроме основной гармоники и постоянной
составляющей сигнала.
47
Глава 1. ОПЕРАЦИОННЫЕ УСИЛИТЕЛИ
где V\ — среднеквадратичное значение основной гармоники, аК2...^-
среднеквадратичные значения гармоник от второй до /. Обычно / = 6 или 9.
Динамический диапазон, свободный от паразитных составляющих (SFDR),—
это выраженная в дБ разность между среднеквадратичными значениями
основной составляющей входного сигнала и максимальной паразитной
составляющей (максимальной гармоникой или шумовой компонентой).
Интермодуляционные искажения (IMD). Когда на вход усилителя подается
сигнал, представляющий собой сумму двух синусоид с разными частотами, fa и
fb, то вследствие нелинейности переходной характеристики ОУ, в выходном
сигнале будут присутствовать составляющие с суммарными и разностными
частотами mfa ± nfb, где т, п = 0, 1, 2, 3... Интермодуляционными членами
называются те, для которых ни т, ни п не равны нулю. Например, члены второго
порядка это (fa +fb) и (fa -fb), а члены третьего порядка — это Bfa +fb), Bfa -fb),
(fa + Vb) и (fa~ Vb)- Если ОУ тестируется с использованием международного
стандарта CC1F, то на его вход подаются две синусоиды с частотами вблизи
верхней граничной частоты входного сигнала. В этом случае частоты членов
2-го и 3-го порядка имеют различное значение. Члены 2-го порядка обычно
значительно отстоят по частоте от входных синусоид, тогда как частоты членов
3-го порядка обычно близки к входным частотам. Вследствие этого члены 2-го
и 3-го порядка в спецификациях указываются отдельно. Наиболее важны
члены третьего порядка. IMD вычисляется аналогично TND и равно выраженному
в дБ отношению суммы среднеквадратичных значений отдельных
составляющих интермодуляционных искажений к среднеквадратичному значению
основной гармоники.
Коэффициент подавления двухтональных интермодуляционных искажений.
Это отношение мощности одного из двух входных сигналов к мощности
максимальной интермодуляционной компоненты 3-го порядка.
1.7.4. Эксплуатационные параметры ОУ
Эксплуатационные параметры ОУ определяют допустимые режимы
работы его входных и выходных цепей и требования к источникам питания, а
также температурный диапазон работы усилителя. Ограничения
эксплуатационных параметров обусловлены конечными значениями пробивных
напряжений и допустимыми токами через транзисторы ОУ. К основным
эксплуатационным параметрам относятся: номинальное значение
питающего напряжения Vcc; допустимый диапазон питающих напряжений; ток,
потребляемый от источника питания /s; максимальный выходной ток /Оит мах»
максимальные значения выходного напряжения при номинальном питании;
максимально допустимые значения синфазных и дифференциальных вход-
48 ных напряжений.
Суммарный коэффициент гармоник (THD) — это выраженное в дБ
отношение среднеквадратичного значения суммы гармоник к среднеквадратичному
значению основной гармоники. Определяется по формуле
1.8. Типы операционных усилителей
1.8. Типы операционных усилителей
В настоящее время в мире изготавливаются сотни наименований
интегральных ОУ. Все это многообразие можно разделить на группы, объединенные
общей технологией и схемотехникой, точностными, динамическими или
эксплуатационными характеристиками, причем эти группы могут пересекаться,
т. е. включать общие элементы.
С точки зрения внутренней схемотехники операционные усилители можно
разделить на биполярные, биполярно-полевые и КМОП (на комплементарных
полевых транзисторах с изолированным затвором). В биполярно-полевых ОУ
полевые транзисторы с управляющим /?-я-переходом или МОП-транзисторы
обычно используются в качестве входных в дифференциальном входном
каскаде. За счет этого достигается высокое входное сопротивление и малые входные
токи.
Большая часть номенклатуры ОУ относится к усилителям общего назначения.
Это дешевые усилители среднего быстродействия, невысокой точности и малой
выходной мощности. Обычные параметры: Ку = 20000... 200000;
КОРР = 0.1...20мВ;/т = 0.1...10МГц. Типичные представители: 140УД6, 140УД8,
153УД6, LF411.
Быстродействующие усилители при средних точностных параметрах имеют
высокие динамические характеристики (fT = 20... 1000 МГц, р = 10... 1000 В/мкс).
Быстродействие ОУ ограничивают два обстоятельства. Одно из них имеет место в
биполярных ОУ с /ья-/ьтранзисторами во входном дифференциальном
каскаде. Эти транзисторы обладают худшими частотными свойствами из-за меньшей
подвижности дырок по сравнению со свободными электронами. Второе
ограничение связано с конечной скоростью нарастания заряда корректирующего
конденсатора Ск(см. п. 1.6.4). Влияние первого фактора устраняют, используя
во входном каскаде более быстродействующие /?-канальные полевые
транзисторы. Чтобы повысить скорость заряда Ск можно либо увеличить ток
дифференциального каскада, либо уменьшить емкость Ск. В первом случае
увеличивается ток потребления ОУ, а во втором ухудшается устойчивость. Повысить
устойчивость можно, вводя дополнительные фазоопережающие звенья в схему
усилителя или вне его. Выше, в п. 1.6.1, описан ОУ LM118 как пример
применения фазоопережающей коррекции. Со времени создания этого усилителя
существенно снижены размеры элементов схем ОУ. Как следствие, это привело к
уменьшению межэлектродных емкостей и улучшению частотных свойств
транзисторов. Типичные представители высокочастотных ОУ обычного типа (с
сигналом обратной связи в виде напряжения): 574УДЗ, 154УД4, AD825, AD8042,
LM6165. Заметное повышение скорости нарастания выходного напряжения
дает применение в ОУ обратной связи по току (см. п. 3.1).
Некоторые модели высокоскоростных усилителей лишь с натяжкой можно
назвать операционными — они имеют всего один каскад усиления напряжения
и, как следствие, довольно низкий коэффициент усиления (менее 10000). Зато
практически нет проблем с устойчивостью, и не требуется коррекция. Эти
усилители применяют, в основном, для усиления видеосигналов, в качестве
буферов для высокоскоростных АЦП, драйверов для высокочастотных линий пере-
49
Глава 1. ОПЕРАЦИОННЫЕ УСИЛИТЕЛИ
дачи и т. п. Примеры: AD9632, ОРА680. Более детально усилители этого типа
будут рассмотрены в главе 3.
Прецизионные усилители имеют высокий дифференциальный коэффициент
усиления по напряжению, малые напряжения смещения нуля, малые входные
токи и, как правило, низкое быстродействие. Увеличение Ку возможно путем
усложнения каскадов усиления по напряжению или применением трехкаскад-
ной схемы (например, 551УД1), что усложняет частотную коррекцию.
Радикально уменьшить смещение нуля позволяет применение
модуляции-демодуляции (в настоящее время практически не применяется) либо периодическая
компенсация дрейфа (прерывание). Типичные примеры прецизионных
усилителей: AD707, 140УД26, МАХ400М (без прерывания), 140УД24, МАХ430,
AD8571 (с прерыванием).
Микромощные усилители используются в приборах, получающих питание от
гальванических или аккумуляторных батарей. Эти усилители потребляют очень
малый ток от источников питания (например, ОУ МАХ406 потребляет ток не
более 1.2 мкА). Все другие параметры (особенно быстродействие) у них обычно
невысокие. Появился целый класс микросхем (так называемых наноампер-
ных), работающих при напряжении питания 3 В и потребляющих при этом ток
менее 1 мкА. Примерами ОУ с наноамперным потреблением могут служить
TLV2401 (880 нА) и сдвоенный LMC6442 (950 нА на усилитель). Такие
устройства могут работать непрерывно десятки лет от одной литиевой батарейки!
Для того чтобы дать возможность разработчику самому найти компромисс
между малым потреблением и низким быстродействием, некоторые модели
микромощных ОУ выполняют программируемыми. Программируемый ОУ имеет
специальный вывод, который через внешний резистор соединяется с общей
точкой или источником питания определенной полярности. Сопротивление
резистора задает ток системы токовых зеркал усилителя, которые выполняют
функции генераторов стабильного тока и динамической нагрузки каскадов
усилителя. Уменьшение этого резистора приводит к увеличению быстродействия
ОУ и увеличению потребляемого тока. Увеличение — к обратному результату.
Типичные примеры: 140УД12, 1407УД2. Обычная величина тока потребления
для микромощных и программируемых ОУ— десятки микроампер.
Микромощные ОУ, как правило, допускают питание от весьма низких напряжений.
Например, ОУ типа МАХ480 допускает работу от источников с напряжением
±0.8...±18 В при токе потребления 15 мкА.
Если источник сигнала — однополярный (например, фотодиод),
целесообразно использовать операционный усилитель с однополярным питанием. Это
позволит питать усилитель от одной батареи или даже элемента, например от
литиевого элемента напряжением 3 В. Характерная особенность ОУ с
однополярным питанием состоит в том, что если диапазон входных синфазных сигналов
выходит за рамки верхнего и нижнего уровней напряжения питания, то
диапазон выходных сигналов должен обязательно лежать в этих пределах. При этом
один из этих уровней (в зависимости от полярности напряжения питания)
привязан к потенциалу земли. Выпускаются усилители, диапазоны входных и
выходных напряжений которых простираются от нижнего до верхнего значений
питающих напряжений, так называемые усилители rail-to-rail (от уровня до
уровня). Типичный пример: МАХ495, потребляющий от однополярного источ-
50 ника ток 150 мкА.
1.8. Типы операционных усилителей
Многие типы ОУ, особенно ранние модели, не допускают синфазных
напряжений, близких к напряжению питания, т. к. в этом случае возможен триг-
герный эффект («защелкивание» усилителя) или переворот фазы, когда
полярности входов меняются на противоположные. В усилителях с питанием от од-
нополярных источников такие явления исключены.
Многие фирмы выпускают
многоканальные усилители. Это микросхемы, имеющие
на одном кристалле два, три или четыре
однотипных ОУ. Например, ИМС типа
140УД20 имеет в своем составе два ОУ
140УД7. Микромощные ИМС
МАХ406/407/409 включают соответственно
один, два и четыре однотипных усилителя.
При построении схем многоканальных ОУ
возникает необходимость в снижении
уровня перекрестных связей между усилителями,
которые могут достигать 100% на высоких
частотах. Так, например, гармонический
сигнал частотой 10 МГц проходит с входа
одного усилителя двухканальной ИМС
THS4052 на выход другого усилителя практически без ослабления. Включение
блокирующих конденсаторов по питанию позволяет существенно ослабить эти
связи. На Рис. 1.33 приведена АЧХ коэффициента перекрестной связи между
каналами ОУ AD822 с подключенными к выводам питания типовыми
блокирующими конденсаторами. Каждый из усилителей нагружен на резистор 5 кОм.
Мощные и высоковольтные операционные усилители. Большинство типов ОУ
общего применения рассчитаны на напряжение питания ±15 В, некоторые
допускают питание от источников вплоть до ±22 В. Однако этого совершенно
недостаточно для управления, например, пьезоэлектрическими
преобразователями, которые применяются в ряде физических и биологических исследований.
Для этих целей промышленность производит высоковольтные ОУ, допускающие
более высокие питающие и выходные напряжения. К высоковольтным относят
операционные усилители, имеющие разность положительного и
отрицательного питающих напряжений свыше 50 В. Проблема повышения напряжений в
интегральных полупроводниковых (монолитных) ОУ связана с трудностью
создания интегральных высоковольтных транзисторов и прочной изоляции между
элементами в кристалле. Поэтому большинство ОУ с напряжением питания
свыше 100 В изготавливаются в виде гибридных ИМС. В то же время, фирма
Apex microtechnology (США) производит полупроводниковый интегральный
ОУ РА41 с номинальным напряжением питания ±175 В, выходным
напряжением ±165 В и выходным током до 60 мА. Одна из наиболее высоковольтных
моделей этой фирмы — гибридный РА89 с напряжением питания до ±600 В и
выходным током до 75 мА. Он может обеспечить на нагрузке размах напряжения
до ±570 В, а при включении двух усилителей РА89 по мостовой схеме (см.
Рис. 1.42) до ±1140 В!
Операционные усилители общего применения обычно допускают выходной
ток до 5 мА. Для управления мощной нагрузкой применяются мощные ОУ. К
мощным обычно относят усилители, допускающие выходной ток свыше 100 мА.
Рис. 1.33. АЧХ коэффициента
перекрестной связи между каналами
OYAD822
Глава 1. ОПЕРАЦИОННЫЕ УСИЛИТЕЛИ
Примером полупроводникового интегрального мощного ОУ может служить
LM12 с выходным током до 10 А и рассеиваемой мощностью до 90 Вт. Фирма
«Apex microtechnology» некоторое время выпускала сверхмощный гибридный ОУ
РА30, допускающий выходной ток до 100 А и способный отдать в нагрузку
мощность до 2000 Вт при жидкостном охлаждении. В настоящее время наиболее
мощный усилитель, выпускаемый этой фирмой, гибридный РА03 с выходным
током до 30 А и максимальной рассеиваемой мощностью до 500 Вт. Большой
интерес представляет монолитный сдвоенный РА29 с напряжением питания до
±20 В и выходным током до 2.5 А, оптимизированный для мостового включения.
В Табл. 1.1 приведены основные параметры некоторых моделей ОУ.
Таблица 1. L Основные параметры ОУ различных типов
52
140УД6
140УД7
140УД8
LF441
AD820
574УДЗ
154УД4
LM118
SL2541B
ОР37
LM6165
140УД21
МАХ400
ICL7652
ОР177
LMC6001
AD797
МАХ438
МАХ480
Операционные усилители общего применения
Быстродействующие операционные усилители
Прецизионные операционные усилители
Микромощные операционные усилители
ОУ с ПТ на входе
ОУ с ПТ на входе
ОУ с ПТ на входе
ОУ с ПТ на входе
Промстандарт
Устойчив при К > 25
ОУ с прерыванием
ОУ с прерыванием
Развитие линии —
ОР07, ОР77
Сверхвысокое Rw
Сверхмалый шум:
1.2нВ/л/Гц
Может работать с
одним источником
питания
1.9. Улучшение параметров операционных усилителей
Продолжение таблицы 1.1
МАХ406
Один источник
140УД12
/у= 15 мкА
/у = 1.5 мкА
Программируемый
TLV2401
Сверхмалый ток
потребления
1408УД1
157УД1
LM12
Простой в
применении мощный ОУ
РАОЗ
РАЗО
Гибридная ИМС.
Отдает в нагрузку до
2 кВт при
жидкостном охлаждении
РА89А
Гибридная ИМС
ОРА544Т
Тепловая защита
1.9. Улучшение параметров операционных
усилителей
Как правило, ОУ, обладающий высокими характеристиками одного типа,
например быстродействием, проигрывает в других отношениях. В результате
разработчик электронных схем оказывается в ситуации Агафьи Тихоновны из
гоголевской «Женитьбы»: «Если бы губы Никанора Ивановича да приставить к
носу Ивана Кузьмича, да взять сколько-нибудь развязности, какая у Балтазара
Балтазарыча, да пожалуй, прибавить к этому еще дородности Ивана
Павловича...». Все же положение инженера лучше, поскольку он может скомбинировать
из нескольких усилителей один, но с очень хорошими свойствами.
1.9.1. Снижение напряжения смещения нуля
Усилители с периодической компенсацией дрейфа отличаются низким
значением напряжения смещения нуля при сравнительно невысокой стоимости.
Вместе с тем их быстродействие и шумовые параметры оставляют желать
лучшего. Соединив два усилителя по схеме, представленной на Рис. 1.34, получим
инвертирующий усилитель, совмещающий достоинства своих частей.
53
Глава 1. ОПЕРАЦИОННЫЕ УСИЛИТЕЛИ
54
где ^offi — напряжение смещения нуля У^ Следовательно, напряжение на
инвертирующем входе усилителя У2 (основного) равно напряжению смещения
нуля усилителя Уг. Фильтр ЛфСф предназначен для сглаживания шума на
выходе У].
Схема образует замкнутый контур: интегратор на У! — фильтр ЯфСф —
усилитель У2 — делитель R\R2- Этот контур имеет высокое усиление и, как
минимум, три полюса передаточной функции. Для обеспечения устойчивости
следует выбирать RC и ЯфСф достаточно большими и, кроме того, выполнить условие
RC» ЛфСф. Повышенная инерционность контура балансировки нуля не
сказывается на качестве схемы, поскольку температурный и временной дрейфы
ОУ развиваются очень медленно.
Многие электронные схемы (в
частности, измерительные) работают в
кратковременном или повторно-кратковременном
режиме, когда короткий интервал приема и
обработки входного сигнала сменяет
продолжительная пауза, в течение которой
выходной сигнал схемы игнорируется
оконечным устройством (например,
микроконтроллером). В этом случае основной
усилитель может сам компенсировать свой дрейф. Схема с автокомпенсацией
нуля приведена на Рис. 1.35.
Автоматическая коррекция дрейфа выполняется путем запоминания
напряжения смещения V0F на конденсаторе в нерабочем интервале и последующего
вычитания запомненного напряжения из входного напряжения усилителя в
интервале усиления.
В паузе ключи S\ и S2 замкнуты, и усилитель оказывается включенным в
режиме неинвертирующего повторителя, коэффициент которого равен
Kw/(Ky + 1), т. е. весьма близок к единице. На выходе ОУ и, следовательно, на
конденсаторе С устанавливается напряжение, равное KOff- Длительность паузы
должна быть не меньше времени завершения переходных процессов с
необходимой точностью. В режиме приема входного сигнала ключи S\ и S2
размыкаются, и запомненное на конденсаторе напряжение компенсирует напряжение
смещения усилителя.
Поскольку в режиме паузы усилитель охвачен отрицательной обратной
связью, добавляющей полюс в передаточную функцию контура обратной связи
Рис. 1.35. Схема ОУ с
самоустановкой нуля
Идея схемы очень проста. Усилитель У!
(усилитель автоматической балансировки)
имеет низкое смещение нуля, высокий
коэффициент усиления по постоянному току и
пренебрежимо малый входной ток (как раз
этими достоинствами отличаются усилители
с периодической компенсацией дрейфа). В
установившемся режиме ток через
конденсатор С интегратора не течет (/R = 0). Пусть
KIN = 0. В таком случае
Рис. 1.34. Схема составного ОУ
1.9. Улучшение параметров операционных усилителей
(емкостная нагрузка!), необходимо принять меры для обеспечения
устойчивости. С этой целью последовательно с ключом S2 и конденсатором могут быть
включены резисторы.
Максимальная длительность интервала приема сигнала ограничена
скоростью заряда конденсатора током утечки ключа S2 и входным током усилителя.
1.9.2. Повышение устойчивости ОУ
Часто разработчик электронной аппаратуры попадает в ситуацию, когда
вроде бы правильно спроектированная схема с ОУ и, даже больше того, схема,
нормально работавшая на макетной плате, будучи перенесена на
окончательную печатную плату, начинает возбуждаться. Скорее всего, здесь дело в
неудачной топологии печатной платы, создающей повышенную входную емкость ОУ.
При единичном производстве перепроектировать и изготовить заново
печатную плату слишком накладно. Кроме гого, нельзя поручиться, что после
переделки ситуация улучшится. Какие же меры можно предпринять в этом случае?
Самый простой метод заключается в уменьшении петлевого усиления. (Рис. 1.36)
С уменьшением /?3 уменьшается и Кп, поэтому всегда можно настолько
уменьшить петлевое усиление, что схема станет устойчивой. В то же время
коэффициент передачи входного сигнала не меняется
Что же ухудшится при этом? Возрастет погрешность, обусловленная
конечным значением коэффициента усиления усилителя, причем на всех частотах.
Согласно A.20) эта погрешность, приведенная к входу усилителя, составит
Рис. 1.36. Повышение устойчивости операционных усилителей путем снижения петлевого усиление
а — с помощью дополнительного резистора, б — с помощью последовательной /?С-цепочки
Например, в схеме инвертирующего усилителя между инвертирующим
входом ОУ и землей подключают резистор (Рис. 1.36а). Тогда коэффициент
петлевого усиления
55
Глава 1. ОПЕРАЦИОННЫЕ УСИЛИТЕЛИ
Можно уменьшить эту погрешность хотя бы в области низких частот,
включив последовательно с резистором Л3 конденсатор (Рис. 1.366). Тогда при
правильном выборе емкости этого конденсатора петлевое усиление будет снижено
только в области частоты среза. Тем не менее полоса пропускания схемы
заметно ухудшится, так как она прямо связана с коэффициентом передачи по цепи
обратной связи (см. п. 1.6.2).
Поскольку входы ОУ, как правило, располагаются рядом на корпусе ИМС,
можно, используя SMD-компоненты (бескорпусные ЧИП-резисторы и
конденсаторы, предназначенные для поверхностного монтажа),
подкорректировать устойчивость усилителя.
Аналогичные результаты дает подключение параллельно выходу усилителя
дополнительного резистора или последовательной RC-цепи (см. подраздел 1.6.5
и Рис. 1.22.6).
1.9.3. Снижение токов утечки
Во многих случаях (в интеграторах, усилителях сигналов пьезодатчиков и
др.) требуются усилители с малыми входными токами. Для этого выпускается
длинный ряд моделей ОУ с входными каскадами на супербета- и полевых
транзисторах, входные токи которых составляют доли нА, а для некоторых типов —
доли пА. Для успешного применения таких ОУ следует решить проблемы,
связанные с утечкой токов по поверхности печатной платы.
Если не принять никаких мер, то токи утечки могут легко стать больше
входных токов ОУ, что вызовет дополнительное смещение входного
напряжения. Для уменьшения возможности возникновения такого смещения
необходимо тщательно очистить печатную плату после монтажа и покрыть ее
эпоксидным или иным компаундом с целью предотвращения влияния влаги и
дальнейшего ее загрязнения.
Однако даже чистая печатная плата не обладает бесконечным
сопротивлением. При температуре 125°С сопротивление между двумя
параллельными проводниками длиной 20 мм и расстоянием между ними 1 мм составляет
около 1011 Ом. Если один из них — шина питания +15 В, а другой —
инвертирующий вход с нулевым потенциалом, то нетрудно рассчитать, что при
этом в суммирующую точку усилителя будет втекать ток 0.15 нА, не
предусмотренный схемой, что намного больше входных токов многих типов ОУ.
Это приведет к значительному смещению нуля усилителя. Проблема
решается путем создания вокруг входных выводов ОУ проводящего, охранного,
кольца, подключаемого к некоторой точке схемы с низким сопротивлением,
находящимся практически под тем же потенциалом, что и входы ОУ Это
эффективно препятствует протеканию тока по плате к входам усилителя.
Охранные кольца должны полностью окружать входы ОУ и выводы
резисторов, конденсаторов, диодов и других элементов схемы, подключенных к
входам ОУ. Для достижения максимального эффекта при монтаже в
отверстия, охранные кольца должны быть помещены как с верхней, так и с
нижней стороны печатной платы. На Рис. 1.37 показаны печатная плата с
охранным кольцом (экраном), а также способы ее подключения в типовых схемах
56 включения ОУ.
1.9. Улучшение параметров операционных усилителей
Рис. 1.37. Охранное кольцо:
а — топология, б... г — способы его подключения
Имеется и другой способ борьбы с утечками, который дает даже лучшие
результаты, чем защитные кольца на печатной плате. Он заключается в том, что
выводы входов ОУ вообще не впаиваются в печатную плату и соединяются со
всеми присоединяемыми к ним элементами в воздухе. Для большей жесткости
вывод ОУ и точку соединения можно опереть на фторопластовую стойку
(Рис. 1.38).
Рис. 1.38. Способ подключения внешних цепей непосредственно к
входному выводу ОУ для снижения токов утечки
Другой потенциальный источник утечки, который может остаться
незамеченным, — это корпус микросхемы. Дополнительные токи утечки могут
протекать по пленке соли или жира, оставленной на поверхности корпуса после
прикосновения к нему руками.
1.9.4. Защита операционных усилителей
В спецификациях на ОУ изготовители указывают предельно допустимые
величины напряжений на выводах ИМС, а также токов через эти выводы и
значения максимальной рассеиваемой мощности. Эти параметры обычно входят в
группу эксплуатационных. ОУ необходимо защищать от многих видов
перегрузок: короткого замыкания выхода, повышенных синфазного и дифференциаль- 5 j
Глава 1. ОПЕРАЦИОННЫЕ УСИЛИТЕЛИ
ного входных напряжений, от защелкивания (перехода в триггерный режим), от
электростатического воздействия и др. Классический jjA709 не имел никаких
внутренних цепей защиты и выходил из строя при каждом удобном случае.
Выпускаемые сегодня модели ОУ имеют внутренние цепи защиты, что сильно
облегчает жизнь разработчиков и оберегает их от нервных стрессов. Однако
защитные цепи, повышая безопасность, зачастую снижают некоторые важные
характеристики ОУ, такие, как быстродействие, диапазон дифференциальных
входных сигналов, размах выходного напряжения. Поэтому часть моделей
усилителей может не иметь внутренней защиты от тех или иных неблагоприятных
факторов, и в этих случаях разработчику необходимо самому принимать
соответствующие меры.
Защита от чрезмерного дифференциального напряжения
на входе
Чаще всего обеспечивается встречно параллельным включением диодов
между входами ОУ (Рис. 1.39а). При значениях дифференциального напряжения,
соответствующих линейному режиму работы усилителя (обычно это доли
милливольт), сопротивление диодов, даже прямое, составляет несколько мегаом.
Потому диоды практически не проводят ток и не влияют на режимы цепи с ОУ.
Однако большие входные сигналы переводят диоды в проводящее состояние.
При этом дифференциальные напряжения будут ограничены на уровне
нескольких сотен милливольт (прямое падение напряжения на /?-я-переходе). В
некоторых ОУ эти диоды встраиваются прямо на кристалл, например, 140 УД 14
или ОР291, причем последний содержит также входные резисторы по 5 кОм,
так как на максимально допустимые токи через встроенные диоды
накладываются очевидные ограничения. Продается недорогая диодная сборка BAV99,
оптимизированная для целей защиты. Она состоит из двух диодов, включенных
последовательно, с выводом от средней точки. Ее можно применять в схемах,
представленных на Рис. 1.39.
58
Рис. 1.39 Схемы защиты ОУ:
а — схема диодной сборки BAV99, б — защита от КЗ на выходе, в — защита от
синфазного перенапряжения, г — защита от перенапряжения на выходе
1.9. Улучшение параметров операционных усилителей
Защита от короткого замыкания на выходе
Многие ОУ имеют встроенную защиту от короткого замыкания, допускающую
работу усилителя в этом режиме неограниченное время. Многие, но не все. Так,
например, прекрасный во многих отношениях ОР162 для достижения широкой
полосы единичного усиления (она у него составляет 15 МГц) не имеет такой
защиты. В приложениях, где эта защита необходима, можно включить
последовательно с выходом ОУ резистор (Рис. 1.396). Резистор обязательно должен быть
включен в контур обратной связи, тогда динамическое выходное
сопротивление усилителя останется достаточно низким. Сопротивление резистора должно
быть по возможности минимальным. Так, для того же ОР162, максимально
допустимый ток которого составляет 30 мА, при однополярном питании 5 В
изготовитель рекомендует применить резистор сопротивлением 169 Ом.
Подключение последовательного резистора к выходу ОУ сужает
диапазон выходных напряжений усилителя при его работе под нагрузкой
Защита от синфазного перенапряжения
Схема неинвертирующего усилителя с защитой приведена на Рис. 1.39в.
Если входное напряжение выходит за границы питающих напряжений, то один из
диодов открывается и напряжение на неинвертирующем входе ОУ фиксируется
на уровне соответствующего напряжения питания. Здесь только надо иметь в
виду, что при этом входной ток начинает течь в источник питания. Если
источник входного сигнала — мощный, то может случиться, что входной ток
окажется больше, чем ток всех потребителей данного источника питания. Если к тому
же источником питания является последовательный стабилизатор напряжения,
то его регулирующий транзистор перейдет в режим насыщения, и начнется
неконтролируемый подъем напряжения на нагрузке, что может вывести ее из
строя. Поэтому следует позаботиться об ограничении этого напряжения,
например, включив в цепь питания стабилитрон (Рис. 1.39г).
Защита от перенапряжения на выходе
Если нагрузка ОУ имеет индуктивный характер, то при больших скоростях
нарастания выходного тока усилителя возможны перенапряжения на выходе. В
этом случае выход ОУ соединяют через диоды с выводами питания (Рис. 1.39д).
1.9.5. Повышение выходного тока ОУ
Максимальный выходной ток ОУ общего применения обычно находится в
пределах 5...20 мА. Иногда этого может оказаться недостаточно. В то же время
мощные ОУ сравнительно дороги. Альтернативой их применению в некоторых
случаях может быть усиление выходного тока маломощных ОУ. Можно легко
увеличить выходной ток ОУ примерно в 100 раз. Для этого достаточно
использовать двухтактные эмиттерные повторители на комплементарных
транзисторах в режиме класса В. Однако из-за низкого быстродействия операционных 59
Глава 1. ОПЕРАЦИОННЫЕ УСИЛИТЕЛИ
усилителей общего назначения даже при наличии обратной связи возникают
ощутимые переходные искажения. Их можно ослабить, введя в схему резистор
R} (Рис. 1.40).
Рис. 1.40. Увеличение выходного тока ОУ
с помощью эмиттерного повторителя
на комплементарных
транзисторах
Рис. 1.41. Схема, в которой внешние
умощняющие транзисторы образуют с
транзисторами выходного каскада ОУ
комплементарные схемы Дарлингтона
При малых выходных токах, допустимых для данного ОУ, транзисторы
закрыты и нагрузка питается только от усилителя. При увеличении выходного
тока напряжение база—эмиттер соответствующего транзистора также
увеличивается, транзистор открывается и начинает отдавать ток в нагрузку. В этом
режиме транзистор внешнего эмиттерного повторителя образует с транзистором
выходного каскада ОУ того же типа проводимости известную схему
Дарлингтона. Например, при использовании в этой схеме низкочастотного ОУ 140УД7 и
резистора R\ = 68 Ом можно получить при нагрузке 5 Ом выходную мощность в
полосе частот 1 кГц.
Другая простейшая схема умощнения выхода ОУ приведена на Рис. 1.41.
60
1.9.6. Повышение выходного напряжения ОУ
Если необходимо повысить
выходное напряжение на изолированной
нагрузке не более чем в 2 раза без
увеличения выходного тока, то наиболее
просто эта задача решается
включением выходных каскадов ОУ по
мостовой схеме (Рис. 1.42).
Усилитель У! — ведущий, а
усилитель У2, на котором выполнен
инвертирующий повторитель, — ведомый.
Выходное напряжение У2 относительно общей точки равно по абсолютной
величине выходному напряжению Уь но имеет противоположную полярность.
Как следствие, размах напряжения на нагрузке RL вдвое больше размаха
одиночного ОУ тою же типа и при том же питании.
Если удвоения напряжения недостаточно, или нагрузка обязательно должна
одним полюсом соединяться с общей точкой, а также в случае, когда требуется
одновременно увеличить и напряжение, и ток, можно применить схему,
показанную на Рис. 1.43 и представляющую собой развитие схемы на Рис. 1.41.
Рис. 1.42. Мостовое подключение пары ОУ
к изолированной нагрузке
1.9. Улучшение параметров операционных усилителей
Рис. 1.43. ОУ с внешним каскадом
для одновременного усиления
выходного тока и напряжения
Здесь ОУ питается от эмиттерных
повторителей на транзисторах VTX и VT2 для
ограничения напряжений питания в безопасных
пределах. Величины этих напряжений (обычно
номинальные для данного типа ОУ) устанавливаются
делителями на резисторах /?з, Я\. Токи
коллекторов транзисторов VTX и VT2 практически
совпадают с токами их эмиттеров, поэтому оконечные
транзисторы VT3 и КГ4, как и в прототипе,
управляются токами, потребляемыми ОУ.
Резистор /?6 сопротивлением в несколько десятков
Ом, обеспечивают нужную зависимость этих
токов от выходного тока ОУ. Резисторы R5
выбираются из условия, чтобы в режиме покоя (при
нулевом сигнале на входе) токи в цепях питания
ОУ создавали на них падения напряжения,
достаточные для установления начальных токов транзисторов КГ3 и РТ4,
обеспечивающих отсутствие нелинейных искажений в области нулевых выходных
сигналов. Конденсатор С предназначен для коррекции частотной характеристики
усилителя. Он обеспечивает снижение коэффициента усиления оконечного
каскада на высоких частотах до единицы. Напряжения питания схемы ±FS
могут превосходить номинальные напряжения питания ОУ в два и более раз.
Рекомендуется дополнить эту схему цепями защиты от короткого замыкания и
перенапряжений.
Фирма Apex Microtechnology специально
для умощнения операционных усилителей
выпускает гибридные буферные усилители,
например РВ58, рассчитанный на напряжение
питания ±30...±150 В и ток нагрузки до 2 А.
Схема включения этого буфера, охваченного
совместно с ОУ общей обратной связью,
приведена на Рис. 1.44.
Усилитель РВ58 имеет простой входной
каскад на биполярном транзисторе по схеме с
ОЭ (как следствие, начальное смещение нуля
усилителя достигает 1.5 В!), каскад усиления
напряжения на МОП транзисторе с общим
истоком и выходной каскад на двух МОП транзисторах, стоки которых
подключены к выходу ОУ. Коэффициент усиления РВ58 без обратной связи достигает
6000, но для обеспечения устойчивости и снижения нелинейных искажений его
ограничивают с помощью внутренней отрицательной обратной связи по
напряжению. Изготовитель рекомендует устанавливать усиление в пределах 3...25
внешним резистором RY. Резистор RT3 предназначен для токовой защиты, а
конденсаторы Q и Ск — для коррекции частотной характеристики.
Рис. 1.44. Умощнение выхода ОУ с
помощью буфера
Глава 1. ОПЕРАЦИОННЫЕ УСИЛИТЕЛИ
1.9.7. Повышение быстродействия ОУ
Один из простейших способов расширения полосы пропускания ОУ общего
применения был предложен Р. Видларом еще в 1969 году [1.7]. Этот способ
состоит в охвате одной из половин входного дифференциального каскада ОУ
гибкой положительной обратной связью, обеспечивающей опережение по фазе в
области высоких частот (как уже отмечалось, в литературе этот способ
называют иногда способом подачи сигнала вперед). Схема ОУ LM101A с фазоопере-
жающей связью представлена на Рис. 1.45л, а на Рис. 1.456— соответствующие
частотные характеристики.
62
Рис. 1.45. Фазоопережающая коррекция частотных характеристик ОУ
общего назначения:
а — схема ОУ LM101A с фазоопережающей связью,
б — частотные характеристики
Корректирующий конденсатор С\ включен между инвертирующим входом
ОУ и одним из выводов, предназначенным для подключения стандартного
корректирующего конденсатора, который в данном случае не используется. На
схеме Рис. 1.11 этому соответствует включение конденсатора Q между базами
транзисторов VTX и VT5. Диод VD включен дополнительно для улучшения
реакции усилителя при быстром нарастании входного напряжения.
Как видно из Рис. 1.456, применение фазоопережающей связи увеличивает
частоту единичного усиления ОУ примерно в 10 раз. Скорость нарастания при
этом повышается с 0.5 до 10 В/мкс (благодаря исключению стандартного
корректирующего конденсатора).
Увеличить скорость нарастания выходного напряжения усилителя можно
также путем небольшой модификации схемы, показанной на Рис. 1.41. В
исходной схеме оконечный каскад усиления на внешних транзисторах охвачен
100% отрицательной обратной связью по напряжению, поэтому он не
усиливает выходное напряжение ОУ. Если включить в цепь обратной связи между
выходом схемы и выходом ОУ делитель на резисторах R4 и R5 (Рис. 1.46), то
выходной каскад на внешних транзисторах будет усиливать напряжение с
коэффициентом к « (Ri + R5)/R5.
Тогда максимальное выходное напряжение схемы РЬит будет достигаться за
время, необходимое для изменения выходного напряжения ОУ на величину
*оитА- Следовательно, скорость нарастания на нагрузке увеличивается в к раз.
При этом, к сожалению, обострится проблема устойчивости, т. к. даже если
1.9. Улучшение параметров операционных усилителей
Рис. 1.46. ОУ с внешним каскадом
усиления напряжения
Рис. 1.47. ЛАЧХ ОУ с внешним
каскадом усиления напряжения
взять высокочастотные внешние транзисторы, частота среза из-за увеличения
петлевого усиления скорее всего окажется выше частоты, соответствующей
второму полюсу передаточной функции ОУ (Рис. 1.47).
Однако, если величина, обратная коэффициенту передачи звена общей
обратной связи (т. е. 1/Р) окажется больше или равной к, то схема будет устойчива.
В противном случае следует включить корректирующий конденсатор С. ЛАЧХ,
приведенные на Рис. 1.47, показывают, что при р < 1 малосигнальная полоса
ОУ заметно увеличивается.
Допустим, что нам нужно получить широкую полосу пропускания
усилителя при высоком коэффициенте усиления. С увеличением коэффициента
усиления ОУ частота среза петли обратной связи, а следовательно и полоса
пропускания уменьшаются (см. Рис. 1.14 и Рис. 1.20). Простейший путь заключается в
каскадном соединении двух однотипных усилителей (Рис. 1.48а).
Рис. 1.48. Каскадное соединение ОУ:
а — схема, б — асимптотическая ЛАЧХ каскадно соединенных ОУ
На Рис. 1.48б штриховой линией представлена асимптотическая ЛАЧХ этих
ОУ, обозначенная Ку. Если, например, требуется усиливать входной сигнал в
100 раз, то полоса пропускания усилителя на одном ОУ составит fx
(соответствующая ЛАЧХ обозначена К\^). Соединение двух усилителей, каждый из
которых усиливает сигнал в 10 раз, позволит получить при том же необходимом
усилении полосу пропускания на уровне 3 дБ, примерно в 7 раз больше (f2). ЛАЧХ
для этого случая обозначена Кхо2. Смещение нуля всей схемы определяет Уь а
скорость нарастания выходного напряжения — У2. Следовательно, правильное
каскадное соединение двух разнотипных усилителей позволяет соединить дос-
, тоинства обоих ОУ. Заметим, однако, что такая схема включения пары ОУ обра-
63
Глава 1. ОПЕРАЦИОННЫЕ УСИЛИТЕЛИ
Рис. 1.49. Широкополосный
составной усилитель
зует НЧ-фильтр второго порядка с двукратным полюсом на частоте/2 и создает
на этой частоте фазовый сдвиг 90° между входным и выходным сигналами.
Еще лучше — охватить оба усилителя общей обратной связью, как это
показано на Рис. 1.49.
В этом составном усилителе следует
использовать в качестве У\ — прецизионный ОУ,
а в качестве У2 — скоростной. Преимущество
этой схемы перед предыдущей заключается в
том, что разброс сопротивлений резисторов /J3
и Л4, а также величина коэффициента усиления
ОУ У2 практически не сказываются на
точности установки общего коэффициента усиления
схемы, который задается отношением
сопротивлений резисторов R2 и Rh Общая
отрицательная обратная связь обеспечивает схеме прецизионные точностные
параметры, соответствующие усилителю У]. Данная структура требует особо
тщательного подхода с точки зрения обеспечения устойчивости при замыкании общей
петли обратной связи и накладывает определенные условия на соотношение
коэффициентов усиления и граничных частот обоих усилителей. В Табл. 1.2
представлены параметры составного усилителя на основе прецизионных
ОРА627/637 и широкополосного ОРА603 с токовой обратной связью,
имеющего частоту единичного усиления 160 МГц и скорость нарастания 1000 В/мкс.
Для такой широкополосной схемы требуется особенно тщательно выполнить
монтаж. В частности, необходимо обеспечить минимальную емкость монтажа
точки соединения резисторов с инвертирующим входом ОРА603 и
использовать для питания усилителей раздельные цепи с отдельными блокирующими
конденсаторами.
Таблица 1.2. Параметры составного усилителя с токовой обратной связью
64
1.9.7. Снижение шума ОУ
Все основные виды шума в электронных схемах являются
центрированными (т. е. имеющими нулевое математическое ожидание), с нормальным
распределением. Поэтому снижение уровня (среднеквадратического значения) шума
производят путем временного или пространственного усреднения. Временное
усреднение осуществляется путем ограничения полосы пропускания канала
усиления сигнала с помощью фильтра нижних частот или полосового фильтра.
Как следует из формулы A.32), уменьшение полосы пропускания в 4 раза
вызывает снижение среднеквадратического значения шума в 2 раза и т. д. Это,
вообще говоря, справедливо лишь для шума с равномерным частотным спектром
(белого), поэтому для низкочастотной области (<О.1...1О кГц — для разных
моделей ОУ эта граница различна), где существенную часть составляет шум типа
l/f, соотношение будет иным.
ОРА627
ОРА637
Скорость нарастания [В/мкс]
1.9. Улучшение параметров операционных усилителей
В случае если ограничение полосы недопустимо (снижается
быстродействие), можно прибегнуть к пространственному усреднению. Для этого N
однотипных усилителей включаются параллельно (Рис. 1.50).
Рис. 1.50. Параллельное соединение ОУ для снижения шума
Выходное напряжение схемы равно среднему арифметическому от
выходных напряжений усилителей Уь У2, У3,...У^. Шумы усилителей, подключенных
к источнику входного сигнала, некоррелированы. Считая среднеквадратиче-
ские значения шума на входах однотипных усилителей равными, найдем
действующее значение напряжения шума на выходе схемы
Это означает, что, включив параллельно, например 4 ОУ, мы снизим
напряжение входного шума вдвое.
1.9.8. Экспериментальное определение
параметров ОУ
Как правило, фирмы-изготовители предоставляют потребителю достаточно
полную информацию о своих изделиях. Тем не менее часто возникает
необходимость в экспериментальном определении основных параметров ОУ. Это
особенно важно в случаях, когда к входам или выходам усилителей подключают
внешние цепи (например, цепи защиты или умощнения), способные внести
дополнительные фазовые сдвиги и тем самым повлиять на устойчивость и
качество переходных процессов. Высокие и сверхвысокие значения параметров ОУ
(особенно прецизионных) затрудняют исследование усилителей обычными
методами. При определении малосигнальных параметров ОУ необходимо
обращать внимание на то, чтобы усилитель не выходил за пределы линейного
участка усиления. Из-за высокого коэффициента усиления это условие можно
выполнить практически только тогда, когда ОУ охвачен отрицательной обратной
связью. Необходимые собственные параметры можно вычислить косвенным
путем, используя данные измерений ОУ, охваченного обратной связью. Ниже
рассмотрены некоторые специальные приемы определения собственных
параметров и характеристик ОУ.
65
Глава 1. ОПЕРАЦИОННЫЕ УСИЛИТЕЛИ
Определение дифференциального коэффициента усиления ОУ
На Рис. 1.51 приведена схема для определения
дифференциального коэффициента усиления Ку.
За счет делителя на входе ОУ напряжение V\
составляет
Рис. 1.51. Определение
коэффициента усиления ОУ
и потому его значительно проще измерить.
Коэффициент усиления ОУ при этом подсчитывается по
формуле:
Изменяя частоту сигнала можно таким способом снять АЧХ ОУ без
обратной связи Ky{f). При этом целесообразно подключить к выходу ОУ
осциллограф, чтобы с его помощью контролировать, не выходит ли усилитель из
линейной области усиления. Одновременно при помощи фазометра можно
определить и фазочастотную характеристику ОУ.
Рис. 1.52. Схема
определения напряжения
смещения нуля ОУ
Измерение напряжения смещения
Напряжение смещения ОУ K0FF находят,
используя схему инвертирующего либо неинвертирующего
включения с заземленным входом (Рис. 1.52).
В зависимости от ожидаемой величины V0?F
отношение R2/R1 устанавливают равным 100, 1000
или 10000. Измеряют выходное напряжение и
рассчитывают смещение нуля по формуле
66
Измерение входных токов ОУ
Прямое измерение входного тока
микроамперметром возможно только для ранних моделей ОУ и
сверхскоростных усилителей, имеющих входные
токи свыше 1 мкА. Большие возможности имеет
схема, представленная на Рис. 1.53, где благодаря
100%-й обратной связи напряжения на входе и
выходе ОУ практически совпадают.
В момент начала измерения размыкается ключ 5. Конденсатор С заряжается
входным током усилителя при отсутствии входного сигнала; при этом
напряжение на нем будет нарастать по линейному закону
Рис. 1.53. Схема определения
входного тока ОУ
1.10. Однополярное питание операционных усилителей
Изменение во времени напряжения на конденсаторе можно измерить на
выходе ОУ. Благодаря наличию на входе операционного усилителя
конденсатора, наводимые напряжения помех сглаживаются. Емкость конденсатора
выбирается из условия удобства измерения временного интервала, в течение
которого напряжение изменяется на несколько сотен милливольт. Для входного тока,
например силой 30 пА, при емкости конденсатора С = 1.5 нФ изменение
напряжения на 200 мВ происходит за 10 с.
Чтобы ошибка измерения, вызванная токами утечки, оставалась достаточно
малой, напряжение на конденсаторе С не должно подниматься до больших
величин. Кроме того, во избежание влияния токов утечки следует использовать
конденсаторы с высококачественным диэлектриком— фторопластовые или
металлостеклянные и по возможности защищать конденсаторы от воздействия
ионизирующих излучений. Для измерений входных токов ОУ менее 1 пА
целесообразно применять вакуумные конденсаторы и принимать дополнительные
меры для снижения токов утечки, обусловленных другими факторами
(например, внешними условиями).
1.10. Однополярное питание операционных
усилителей
1.10.1. Общие сведения
Мобильные электронные системы с питанием от батарей получают все
большее распространение. Обычно в них используется Однополярное питание
напряжением 5 В и меньше. Схемы с однополярным питанием позволяют
уменьшить сложность источника питания и зачастую повысить экономичность
устройств.
Операционные усилители преимущественно используются в схемах с двух-
полярным питанием, поскольку входные и выходные сигналы ОУ чаще всего
могут иметь как положительную, так и отрицательную полярность
относительно общей шины схемы. В этом случае, если неинвертирующий вход ОУ
соединен с общей шиной, синфазное входное напряжение, вызывающее
погрешность преобразования сигнала схемой на ОУ, отсутствует (Рис. 1.5а). Тогда
выходное напряжение ОУ
A.35)
Если источник входного сигнала не соединен с общей шиной (Рис. 1.54а),
то разность потенциалов КСОм между общей шиной и выводом источника
входного сигнала влияет на выходное напряжение
67
Глава 1. ОПЕРАЦИОННЫЕ УСИЛИТЕЛИ
Рис. 1.54. Неинвертирующее (а) и дифференциальное
(б) включение ОУ с биполярным питанием
Иногда это допустимо, но
чаще выходное напряжение
усилителя должно обязательно
определяться только входным
сигналом KIN. В таком случае ОУ
используется в
дифференциальном включении, причем на
второй вход подается смещение, в
точности равное Усом
(Рис. 1.546). Напряжение VC0M
существует в обеих входных
цепях, следовательно, является
синфазным входным сигналом.
Схема инвертирующего
включения ОУ с однополярным
питанием приведена на Рис. 1.55. Здесь входное напряжение привязано не к
средней точке источников питания, как это обычно делается в случае
двухполярного питания ОУ, а к отрицательному полюсу источника питания. Эта схема
не работает, если входное напряжение положительно, поскольку выходное
напряжение должно в этом случае становиться отрицательным, а отрицательного
источника питания здесь нет. Для нормальной работы с отрицательными
входными сигналами в этой схеме следует использовать ОУ, допускающие
соединение входов с шинами питания. Непременное требование соединения входов с
общей шиной или другим опорным напряжением затрудняет построение схем
на ОУ с однополярным питанием.
Рис. 1.55. Инвертирующее включение
ОУ с однополярным питанием
Рис. 1.56. Схема включения ОУ с фотодиодом,
работающим в режиме фотоэлемента
Наиболее естественно использовать Однополярное питание операционных
усилителей тогда, когда источник входного сигнала однополярный (например,
фотодиод на Рис. 1.56). В других случаях могут использоваться различные
способы смещения входных и выходных напряжений ОУ.
68
1.10.2. Смещение ОУ с однополярным питанием
На Рис. 1.57 представлены три основные схемы подключения источника
смещения при однополярном питании ОУ. Схема на Рис. 1.57а представляет
собой инвертирующий сумматор, на Рис. 1.575 — дифференциальный усилитель,
и на Рис. 1.57в — неинвертирующий сумматор.
В общем случае связь между входными и выходными напряжениями в этих
схемах можно представить уравнением
A.36)
1.10. Однополярное питание операционных усилителей
Уравнению A.36) соответствует график
статической переходной характеристики
схемы с ОУ в виде прямой линии (Рис. 1.58).
В Табл. 1.3 приведены значения
постоянных к и b для уравнения A.36),
соответствующих разным схемам на Рис. 1.57. Если в
схеме на Рис. 1.575 поменять местами
источники KIN и ^oFF, то такому включению
соответствует нижняя строка в графе
«Рис. 1.575» Табл. 1.3.
Рис. 1.58. График статической
переходной характеристики схемы с ОУ
Таблица 1.3. Расчет коэффициентов для определения КоитA.36)
Схемы и значения постоянных к и Ъ выбираются так, чтобы при любых
возможных значениях входного напряжения KlN выполнялось условие
A.37)
Обычно к определяется необходимым
усилением схемы, поэтому разработчик может
выбрать только конфигурацию схемы и
постоянную Ь.
Типовая схема включения ОУ для
усиления сигналов переменного тока с питанием от
однополярного источника приведена на
Рис. 1.59. Здесь напряжение смещения равно
половине напряжения питания. Резисторы
делителя цепи смещения могут быть выбраны достаточно высокоомными,
чтобы не нагружать источники питания и входного сигнала. 69
Рис. 1.59. Схема включения ОУ для
усиления сигналов переменного тока
Рис. 1.57. Схемы подключения источника смещения к ОУ
Рис. 1.57д
Рис. 1.570
Рис. 1.57*
Глава 1. ОПЕРАЦИОННЫЕ УСИЛИТЕЛИ
Рис. 1.60. Схема инвертирующего
усилителя с однополярным
питанием и искусственной нулевой точкой
70
1.10.3. Введение искусственной нулевой точки
От использования цепей смещения можно
отказаться, если ввести искусственную
нулевую (среднюю) точку, т.е. точку схемы,
потенциал которой располагается приблизительно
посередине между потенциалами
положительного и отрицательного полюсов однополярно-
го источника питания. Для того, чтобы схема
могла усиливать биполярные сигналы,
источник входного сигнала включается между
входом инвертирующего усилителя и
искусственной нулевой точкой (Рис, 1.60). При этом, чтобы избежать смещения
выходного напряжения, нагрузку RL включают между выходом усилителя и
искусственной нулевой точкой. Это усложняет построение цепей,
формирующих нулевую точку.
На Рис. 1.61 представлены
примеры схем формирования
потенциала нулевой точки.
Наиболее простым является
резистивный делитель
напряжения, средняя точка которого
соединена с искусственной
нулевой точкой 0 (Рис. 1.61а).
Однако, при наличии нагрузки
RL ток нагрузки /L протекает
через один из резисторов
этого делителя, создавая
несимметрию напряжений между
полюсами источника питания
и точкой 0, причем степень
этой несимметрии зависит от
силы тока нагрузки.
Уменьшение сопротивлений делителя
снижает несимметрию этих
напряжений, но увеличивает
потери энергии в делителе.
Схема со стабилитроном
(Рис. 1.615) обеспечивает
хорошую стабилизацию
потенциала искусственной нулевой
точки относительно
отрицательного полюса источника
питания. В качестве
стабилитрона в этой схеме
целесообразно применение двухвыводного источника опорного напряжения (или
регулируемого трехвыводного, такого как, например, TL431). Эта схема хорошо работает
при вытекающем выходном токе ОУ, но для сохранения стабильности потенци-
Рис. 1.61. Схемы формирования потенциала
искусственной нулевой точки
1.10. Однополярное питание операционных усилителей
ала точки 0 при значительном втекающем выходном токе требуется резистор R с
низким сопротивлением, что опять-таки обуславливает повышенные потери.
Аналогичные проблемы возникают при использовании для формирования
искусственной нулевой точки стабилизатора напряжения с последовательным
регулирующим элементом.
Лучшие характеристики имеет схема с операционным усилителем,
подключенным по схеме неинвертирующего повторителя к средней точке резистивно-
го делителя напряжения (Рис. 1.61в). В данной схеме делитель может быть вы-
сокоомным, т.к. он нагружен только входным током покоя операционного
усилителя. ОУ сравнивает потенциал на выходе схемы с потенциалом в средней
точке делителя и поддерживает напряжение на своем выходе таким, чтобы
разность сравниваемых потенциалов была равна нулю. Этот эффект достигается
благодаря действию отрицательной обратной связи. При малых токах покоя,
потребляемых этой схемой (менее 1 мА), такой активный делитель имеет
выходное сопротивление не более 1 Ом.
Еще эффективнее применение специальных микросхем для формирования
искусственной нулевой точки (Рис. 1.61г). Фирма Texas Instruments (США)
выпускает ИМС типа TLE2425. Эта ИМС изготавливается в малогабаритном трех-
выводном корпусе ТО-92 и обеспечивает ток через искусственную среднюю
точку до 20 мА в любом направлении при токе собственного потребления не
более 0.25 мА и динамическом выходном сопротивлении не более 0.22 Ом.
В том случае, если нагрузка может быть не связана с общей точкой схемы,
или с какой-либо из шин питания, можно использовать простейший вариант
формирования искусственной нулевой точки на резистивном делителе
(Рис. 1.61а), но с мостовой усилительной схемой (Рис. 1.61д). В этой схеме
инвертирующий повторитель на ОУ2 создает на нижнем полюсе нагрузки RL
потенциал, противофазный по отношению к потенциалу верхнего ее полюса.
Здесь в искусственную нулевую точку втекает ток, равный V\^/R\, поэтому
сопротивление резистора R{ следует взять по возможности большим, иначе
возможна несимметрия нулевой точки. Дополнительные достоинства этой схемы:
увеличение максимальной амплитуды напряжения на нагрузке в два раза при
том же напряжении питания и заметное повышение КПД при полном размахе
выходного напряжения.
1.10.4. Расширение динамического диапазона
Понижение напряжения питания ОУ от обычных ±15 В до однополярного
5 В значительно уменьшает амплитудный диапазон входного и выходного
напряжений. Амплитудный диапазон в данном случае можно определить как
разность между максимально- и минимально-возможными входными
(выходными) напряжениями. Применение усилителей, рассчитанных на двухполярное
питание, возможно и с однополярным питанием, но, во-первых, при низкой
разности потенциалов между выводами питания далеко не все типы таких ОУ
имеют приемлемые характеристики (например, коэффициент усиления), а во-
вторых, амплитудный диапазон их выходных напряжений сравнительно мал
из-за довольно больших напряжений насыщения транзисторов выходного
каскада. Размах выходного напряжения обычных усилителей общего применения
Глава 1. ОПЕРАЦИОННЫЕ УСИЛИТЕЛИ
не доходит до верхнего и нижнего потенциалов источника питания на 1...2 В
при номинальной нагрузке. При питании такого усилителя от однополярного
источника напряжением 5 В, амплитудный диапазон выхода составит 1...3В.
Это означает серьезное снижение соотношения сигнал/шум и уменьшение
разрешающей способности схемы.
В настоящее время для работы от низковольтных источников питания, в том
числе и однополярных, разработано большое количество моделей ОУ с полным
размахом выхода («rail-to-rail»). Выходное напряжение таких усилителей при
работе на холостом ходу может изменяться практически от потенциала
отрицательного полюса источника питания до потенциала положительного полюса.
Схемотехника выходных каскадов усилителей с полным размахом выхода и
обычных ОУ различна. Выходной каскад обычных ОУ строится по схеме с
общим коллектором на комплементарных транзисторах (Рис. 1.62а). При
использовании такого схемного решения минимальное падение напряжения на
выходном транзисторе принципиально не может быть снижено. Как следует из
схемы на Рис. 1.62а, источник тока /должен обеспечивать ток коллектора
транзистора каскада усиления напряжения КГ3 и базовый ток выходного
транзистора УТ\. Для нормальной работы схемы источника тока необходимо падение
напряжения на нем не менее 1 В. Остальная часть общего падения напряжения
приходится на выходной транзистор.
Рис. 1.62. Схемы выходных каскадов ОУ
Рис. 1.63. Графики зависимости
напряжения насыщения выходных
транзисторов усилителя AD823 от тока нагрузки
72
Можно уменьшить минимальное падение на транзисторах выходного
каскада, включив в выходном каскаде транзисторы по схеме с общим эмиттером
(Рис. 1.626). По этой схеме построен выходной каскад, например, ОУ AD823
фирмы Analog Devices. На Рис. 1.63 представлены графики зависимости
напряжения насыщения KSAT выходных транзисторов этого усилителя от тока
нагрузки /L для максимального (Fs - F0H) и минимального (V0L) выходных
напряжений. Видно, что при работе усилителя на холостом ходу максимальное
выходное напряжение почти достигает напряжения питания, а минимальное — мало
отличается от нуля. Еще лучшие характеристики на холостом ходу
обеспечивают усилители, у которых выходной каскад построен на комплементарных
МОП-транзисторах (Рис. 1.62в). Сопротивления полностью открытого канала
1.10. Однополярное питание операционных усилителей
верхнего и нижнего МОП-транзисторов выходного каскада ОУ типа TLC2272
фирмы Texas Instruments составляют, соответственно, 500 и 200 Ом при питании
усилителя от однополярного источника 5 В. Если нагрузка RL включена между
выходом ОУ и общей точкой схемы, так как, например, на Рис. 1.56, то при
низких выходных напряжениях выходной ток также мал, и напряжение на
открытом нижнем транзисторе усилителя весьма близко к нулю (доли милливольта).
Если ток нагрузки велик и нагрузка соединена другим выводом с плюсом
источника питания или искусственной нулевой точкой, напряжение на
полностью открытом выходном транзисторе может достигать значений более 1 В.
В некоторых применениях
требуется не только полный размах
выхода ОУ, но и полный размах (rail-to-
rail) допустимых значений входного
синфазного напряжения VC0M (вход
с полным размахом). Это нужно,
например, в схеме неинвертирующего
повторителя, согласующего датчик
сигнала с аналого-цифровым
преобразователем. Для некоторых
приложений необходимо, чтобы диапазон
входных сигналов простирался ниже
потенциала общей шины на
0.2...0.3 В. Это требуется при одно-
полярном питании инвертирующего
усилителя, где на вход должно
подаваться отрицательное напряжение
(Рис. 1.55), например, в схеме
фотометра (Рис. 1.56), где полярность
напряжения на инвертирующем входе
ОУ несколько ниже, чем на
неинвертирующем. ОУ, имеющие вход с
полным размахом, схемотехнически
сложнее, чем обычные. Поэтому их
следует применять только там, где
действительно требуется полный
размах входа.
На Рис. 1.64а приведена схема дифференциального входного каскада
обычного ОУ. Он состоит из двух согласованных структур. Для того, чтобы входной
сигнал мог достигать потенциала общей шины используются /?я/?-транзисторы.
Такое построение позволяет подавать на вход потенциал общей шины без
нарушения работы входного каскада. При более низком синфазном входном
напряжении поведение входного каскада становится непредсказуемым. Часто
наблюдается инверсия входов, при которой меняется знак обратной связи и
происходит переход ОУ в триггерный режим (так называемое «защелкивание»).
Поскольку напряжение на источнике тока Vc в схеме на Рис. 1.64а должно быть
не менее 0.4 В (иначе он просто не будет работать), а напряжение база-эмиттер
транзисторов КВЕ в активном режиме составляет приближенно 0.6 В, то
входной синфазный сигнал должен быть по крайней мере на 1 В меньше V$.
Рис. 1.64. Схемы входных каскадов ОУ
73
Глава 1. ОПЕРАЦИОННЫЕ УСИЛИТЕЛИ
На Рис. 1.646 представлен дифференциальный каскад на я-канальных
полевых транзисторах с управляющим /?л-переходом (JFET-транзисторах).
Поскольку пороговое напряжение исток-затвор таких транзисторов составляет
— 2...—3 В, то можно легко обеспечить нормальную работу входного каскада ОУ
при небольших отрицательных синфазных входных напряжениях. Именно так
построен входной каскад ОУ с полным размахом выхода AD823. Этот усилитель
нормально работает при — 1В < Усом < ^ — 1В.
Если обязательно требуется работа ОУ с полным размахом входного
напряжения, то применяют двойной комплементарный дифференциальный каскад
(Рис. 1.64в). Биполярный вариант, показанный на Рис. 1.64в, используется в ОУ
типа TLV245x и ОР196, КМОП вариант этой схемы - в TLV247x и AD853x. Из
схемы ясно, что оба дифференциальных усилителя входного каскада
управляются одновременно. Дифференциальный усилитель (ДУ) с /?и/ьтранзисторами
работает до максимального уровня входных сигналов на 1 В ниже напряжения
питания. Для нормальной работы я/?я-усилителя требуется синфазный сигнал
не менее 1 В. Таким образом, в зоне 1В < VCOM < Js — 1В работают оба ДУ, а в
зонах VC0M > Vs — IB и ^сом < IB, только один. Это обстоятельство вызывает
значительное изменение входных токов и напряжения смещения нуля (до 3 нА
и 70 мкВ у TLV245x) при переходе через границы этих зон, что может вызвать
искажения усиливаемого сигнала. Уменьшить эти искажения можно, включив
последовательно с неинвертирующим входом резистор Rq (Рис. 1.55). Его
сопротивление определяется по формуле: Rq — R\R2/(R\ + Ri).
В Табл. 1.4 представлены основные параметры (типичные значения)
некоторых типов ОУ, предназначенных для работы с однополярным питанием.
Таблица 1.4. Основные параметры ОУ с однополярным питанием
Примечание
Двухканальный. Полный
размах выхода. Скоростной
ОР196
Полный размах входа и
выхода
AD8571
Полный размах входа и
выхода. Стабилизация нуля
прерыванием
TLC2272
Двухканальный. Полный
размах выхода
TLV2462
Полный размах входа и
выхода
74
МАХ480
Диапазон входа и выхода
при однополярном
питании включает
потенциал общей шины
1.10. Однополярное питание операционных усилителей
Выводы
1. Операционные усилители, предназначенные для работы с биполярным
питанием, могут работать в схемах с одним источником, однако
амплитудный диапазон их входных и выходных сигналов может
оказаться слишком узким.
2. Операционные усилители, предназначенные для работы с одним
источником питания, могут работать и в схемах с биполярным
питанием. Необходимо только, чтобы разность потенциалов
положительного и отрицательного источников не превышала предельно
допустимого напряжения питания для данного типа усилителя.
3. Если требуется усиливать сигналы переменного тока, то при
однополярном питании целесообразно использовать цепи смещения и
разделительные конденсаторы (Рис. 1.59).
4. Если входной сигнал постоянного тока биполярный, то можно
использовать цепи смещения, однако более удобно введение в схему
искусственной нулевой точки.
5. Если при однополярном питании предполагается работа с входными
сигналами, потенциал которых ниже потенциала общей шины, следует в
необходимых случаях предусмотреть меры для защиты входов
усилителя.
Вопросы и задачи
1. Перечислите основные характеристики идеального операционного усилителя.
2. В чем состоит преимущество применения дифференциального
усилительного каскада в качестве входного каскада ОУ?
3. Что такое дифференциальный входной сигнал ОУ?
4. Что такое синфазный входной сигнал ОУ?
5. Как определяется КОСС?
6. Нарисуйте примерные графики статической передаточной
характеристики Коит=ДКш) для инвертирующего и неинвертирующем)
включений ОУ с учетом смещения нуля и насыщения усилителя.
7. Объясните, почему большая величина эмиттерного резистора не
приводит к существенному уменьшению величины коэффициента усиления
каскада.
8. Какое из входных сопротивлений ОУ (синфазное или
дифференциальное) больше и почему?
9. В чем заключается преимущество нескорректированного ОУ перед
аналогичным ОУ с полной внутренней коррекцией?
10. Как повысить быстродействие ОУ?
11. Укажите, чем определяются величины резисторов (и их соотношение)
на неинвертирующем входе ОУ в дифференциальном включении?
12. Определите входное сопротивление для дифференциального сигнала
схемы на Рис. 1.4.
13. Почему резистор, компенсирующий смещение нуля, обусловленное
входными токами ОУ, не применяют в усилителях с полевыми
транзисторами?
14. Усилитель 140УД6 включен по схеме неинвертирующего усилителя
(Рис. 1.6), причем Я{ — 3 кОм, a R2= 100кОм. Определите выходное
сопротивление схемы.
75
Глава 1. ОПЕРАЦИОННЫЕ УСИЛИТЕЛИ
15. Усилитель 140УД7 включен по схеме неинвертирующего повторителя,
причем внутреннее сопротивление источника сигнала— ЮкОм. Нарисуйте
схему и определите: как уменьшить смещение нуля, обусловленное
входными токами усилителя? Решите эту же задачу для усилителя 140УД8.
16. Усилитель 15ЗУД6 включен по схеме инвертирующего усилителя
(Рис. 1.5), причем R{ = R2. Этот усилитель имеет выводы для
подключения внешнего корректирующего конденсатора, причем по паспортным
данным емкость корректирующего конденсатора определяется по
формуле: Ск = 30/А', где К— коэффициент усиления усилителя в
неинвертирующем включении. Найдите емкость корректирующего конденсатора.
17. Усилитель 153УД6 включен по схеме инвертирующего усилителя
(Рис. 1.5) и питается от источников напряжением ±15 В. Укажите
наименьшее значение сопротивления Ль если источником входного
сигнала является такой же ОУ.
18. 18. Можно ли в схеме с двухполярным питанием применить ОУ,
предназначенный для использования в схемах с однополярным питанием?
19. 19. Можно ли в схеме с однополярным питанием применить ОУ,
предназначенный для использования в схемах с двухполярным питанием? Если
можно, то при каких ограничениях?
20. Увеличение сопротивлений резисторов в цепях обратной связи ОУ
уменьшает нагрузку усилителя и снижает потребление энергии. Кроме
того, это позволяет уменьшить емкость конденсаторов в
частотно-зависимых обратных связях. Почему же эти сопротивления не выбирают
очень большими? Чем определяется максимальная величина резистора
обратной связи?
21. Как повлияет уменьшение резистора R\ в схеме инвертирующего
усилителя (Рис. 1.5) на выходное сопротивление схемы?
Литература к главе 1
1.1. Шило В.Л. Линейные интегральные схемы в радиоэлектронной аппаратуре. —
М.: Советское радио, 1979. — 368 с.
1.2. Widlar RJ. A unique circuits design for a high performance operational amplifier
especially suited to monolithic construction//Proc. NEC, 1965. V. 21. P. 85-89.
1.3. Widlar RJ. Future trends in integrated operational amplifiers//EDN, 1968. V.13. N$ 6.
1.4. Widlar RJ. 1С Op Amp Beats FETs on Input Current. National Semiconductor, 1969,
AN-29. December. — 18 pp.
1.5. Dobkin R.C. LM118 Op Amp Slews 70 V/usec. National Semiconductor, 1971, Linear
Brief 17. September. — 2 pp.
1.6. Полонников Д.Е. Операционные усилители: Принципы построения, теория,
схемотехника. — М: Энергоатомиздат, 1983. — 216 с.
1.7. Widlar RJ. Feedforward compensation speeds op-amp. National Semiconductor, 1969,
Linear Brief 2, March. — 4 pp.
1.8. ТитцеУ., ШенкК. Полупроводниковая схемотехника: Справочное руководство.
-М.:Мир, 1982.-512 с.
1.9. Хоров и ц П., Хилл У. Искусство схемотехники: В трех томах. T.I— M.: Мир,
1993.-413 с.
1.10. ПейтонА.Дж., Волш В. Аналоговая электроника на операционных усилителях.
- М.: БИНОМ, 1994. - 352 с.
1.11. Завадский В.А. Компьютерная электроника. — Киев: ТОО ВЕК, 1996. — 368 с.
1.12. РутковскиДж. Интегральные операционные усилители: Справочное
руководство. — М.: Мир, 1978. — 323 с.
1.13. Hayes T.C., Horowitz P. Student Manual for the Art of Electronics. — Cambridge:
Cambridge university press. — 2001. — 614 pp.
Глава 2
ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА
НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
2.1. Линейные аналоговые
вычислительные схемы на ОУ
Современные цифровые вычислительные машины позволяют с высокой
точностью выполнять широкий круг математических операций с числами.
Однако в измерительных и управляющих системах величины, подлежащие
обработке, как правило, представляют собой непрерывные сигналы, например
изменяющиеся значения электрического напряжения или тока. В этих случаях
приходится применять аналого-цифровые и цифроаналоговые
преобразователи. Такой подход оправдывает себя только тогда, когда конечной целью
преобразования является получение информации в числовом виде либо когда
требования к точности вычислений настолько высоки, что не могут быть обеспечены
с помощью аналоговых вычислителей. Существующие аналоговые
вычислители позволяют получить точность не свыше 0.1%. Тем не менее, во многих
случаях (например, в простейших управляющих устройствах, таких, как системы
управления импульсными преобразователями параметров электромагнитной
энергии) вполне можно обойтись аналоговыми схемами преобразования. Ниже
рассмотрены наиболее важные аналоговые вычислительные схемы на ОУ. Как
правило, мы будем полагать операционные усилители идеальными. Однако при
высоких требованиях к точности выполнения математических операций
необходимо учитывать также свойства реальных усилителей.
2.1.1. Схема масштабирования
Для пропорционального изменения сигнала, или масштабирования, или,
что то же, умножения на постоянный коэффициент, могут быть применены ОУ
как в инвертирующем (см. Рис. 1.5), так и в неинвертирующем включении (см.
Рис. 1.6), представленные в главе 1. Инвертирующее включение
предпочтительнее по следующим причинам:
• простая реализация коэффициентов передачи как больше, так и меньше
единицы;
• отсутствует синфазный сигнал;
• легко обеспечить защиту входов ОУ от перегрузки;
• операция масштабирования может быть совмещена с операцией
суммирования (см. п. 2.1.2).
77
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
Для облегчения построения
масштабирующих усилителей фирма National Semiconductor
выпускает микросхемы ОУ в инвертирующем
включении LMV101/02/05/10/11, имеющие
коэффициенты передачи -1, -2, -5 и -10, с
встроенными резисторами обратных связей на
кристалле. Кроме того, они имеют вывод от
инвертирующего входа ОУ, что дает
возможность внешними резисторами установить любой
коэффициент усиления, обеспечить
суммирование нескольких входных сигналов и др. Схема
этих ИМС приведена на Рис. 2.1.
Аналогичные изделия выпускает фирма Maxim под маркой GainAmps™.
Это комплектные масштабирующие усилители: микромощные «тихоходные»
(fr = 200 кГц) одиночный/сдвоенный МАХ4074/75 и более скоростные, с
частотой единичного усиления 17 МГц, МАХ4174/4274. Все они в зависимости от
сопротивления резистора, подключенного к инвертирующему входу,
обеспечивают коэффициент передачи 1.25...101 в неинвертирующем и —0.25...—100 в
инвертирующем включениях.
Сравнение масштабирующих усилителей:
Инвертирующий
Выходной сигнал в противофазе
относительно входного.
Отсутствует синфазный сигнал.
Низкое входное сопротивление.
Коэффициент передачи может
быть как больше, так и меньше
единицы.
Масштабирование может быть
совмещено с суммированием
(см. п. 2.1.2).
Неинвертирующий
Выходной сигнал в фазе со
входным.
Есть синфазный сигнал.
Высокое входное сопротивление.
Коэффициент передачи не меньше
единицы.
Рис. 2.2. Схема
инвертирующего сумматора
78
2.1.2. Схема суммирования
Для суммирования нескольких напряжений
можно применить операционный усилитель в
инвертирующем включении. Входные напряжения
через добавочные резисторы подаются на
инвертирующий вход усилителя (Рис. 2.2).
Поскольку эта точка является виртуальным
нулем, то на основании 1-го закона Кирхгофа и
свойства в) идеального ОУ (п. 1.2) получим следующее
соотношение для выходного напряжения схемы:
Рис. 2.1. Схема ИМС
LMV101/02/05/10/11
2.1. Линейные аналоговые вычислительные схемы на ОУ
Следует иметь в виду, что в многовходовых сумматорах имеет место сужение
полосы пропускания схемы в связи с уменьшением петлевого усиления за счет
параллельного включения входных сопротивлений каналов. При этом
коэффициенты масштабирования (передачи) по всем входам задаются независимо друг
от друга. Так, в случае равномасштабного суммирования п входных сигналов в
схеме сумматора на полностью скорректированном ОУ полоса пропускания
сузится в п раз по сравнению с обычным одновходовым инвертором с тем же
коэффициентом передачи (масштабирования)
2.1.3. Схема интегрирования
Важное место в аналоговой вычислительной технике имеет применение
операционных усилителей для реализации операций интегрирования. Как
правило, для этого используют инвертирующее включение ОУ (Рис. 2.3).
По первому закону Кирхгофа с учетом свойств а) и в) идеального ОУ для
мгновенных значений следует: ix = -ic. Поскольку i{ = V\/R\ , а выходное
напряжение схемы равно напряжению на конденсаторе:
то выходное напряжение определяется выражением:
Постоянный член vOtjt@) определяет начальное условие интегрирования.
С помощью схемы включения, показанной на Рис. 2.4, можно реализовать
необходимые начальные условия.
Рис. 2.3. Варианты схем инвертирующего интегратора:
а — на ОУ с полной частотной коррекцией, б — на ОУ
без внутренней частотной коррекции
Рис. 2.4. Интегратор с цепью
задания начальных условий
Когда ключ Sx замкнут, a S2 разомкнут, эта схема работает так же, как цепь,
изображенная на Рис. 2.3а. Если же ключ S{ разомкнуть, то зарядный ток при
идеальном ОУ будет равен нулю, а выходное напряжение сохранит значение,
соответствующее моменту выключения. Для задания начальных условий
следует при разомкнутом ключе S\ замкнуть ключ S2. В этом режиме схема
моделирует инерционное звено первого порядка и после окончания переходного процес-
79
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
После замыкания ключа S\ и размыкания ключа S2 интегратор начинает
интегрировать напряжение Уь начиная со значения B.1). Фирма Burr-Brown
выпускает микросхему ASF2101 двухканального интегратора, содержащую два ОУ
с входными токами 0.1 пА, ключи сброса и хранения и два интегрирующих
конденсатора по 100 пФ.
Используя формулу A.8) и учитывая, что в схеме на Рис. 2.3 R\ = R, а вместо
R2 включен конденсатор с операторным сопротивлением Z2(s) = l/(sQ, можно
найти передаточную функцию интегратора
B.2)
Устойчивость интегратора можно оценить по частотным характеристикам
петли обратной связи, причем в этом случае коэффициент передачи звена
обратной связи будет комплексным:
B.3)
Для высоких частот 0 -» 1 и его фазовый сдвиг будет нулевым. В этой
частотной области к схеме предъявляются те же требования, что и к усилителю с
единичной обратной связью (см п. 1.6). Поэтому здесь также следует ввести
коррекцию частотной характеристики. Чаще для построения интегратора
используют усилитель с внутренней коррекцией. Типичная ЛАЧХ схемы
интегрирования на ОУ приведена на Рис. 2.5.
Постоянная интегрирования
т = RC принята равной 100 мкс.
Из Рис. 2.5 видно, что при этом
максимальное петлевое
усиление по контуру обратной связи
составит \Кп\ = |pJSTv|~600, т. е.
будет обеспечена погрешность
интегрирования менее 0.2%,
причем в отличие от
инвертирующего усилителя эта точность
снижается не только на высоких,
но и на низких частотах.
Для повышения точности
интегрирования в области низких частот следует выбирать ОУ с большим
дифференциальным коэффициентом усиления по напряжению Ку. Действительно,
80
Рис. 2.5. Частотная характеристика интегратора
са, длительность которого определяется постоянной времени R^C, на выходе
интегратора установится напряжение
B.1)
где т — постоянная времени интегратора. Подставив в B.2) s =yco, получим
частотную характеристику интегратора:
2.1. Линейные аналоговые вычислительные схемы на ОУ
подставив B.3) в A.1), получим частотную характеристику интегратора с учетом
конечного значения Kw:
is
K(j<0) " l+yco/?C(l+tfv)'
т. е., строго говоря, интегратор на идеальном ОУ с бесконечной полосой
пропускания представляет собой фильтр низких частот первого порядка с
коэффициентом усиления Ку и постоянной времени A + Ky)RC. В случае же реального,
полностью скорректированного ОУ с частотой среза/^ интегратор представляет
собой НЧ-фильтр второго порядка, что требует определенного внимания к
вопросам обеспечения устойчивости при замыкании петли обратной связи.
Так, если для повышения точности интегрирования в области средних и
высоких частот использовать более быстродействующие ОУ, проблема
устойчивости может выйти даже на первый план.
Пример 2.1. Операционный усилитель ОРА627 с полной внутренней частотной
коррекцией почти идеально подходит для применения в схеме интегратора —
типичные значения его параметров: Ку = 106, /IN = 5 пА, VOFF = 100 мкВ, частота
единичного усиления fT= 16 МГц. Еще большим быстродействием обладает его
нескорректированный вариант ОРА637. При тех же статических параметрах его
частота среза^ = 80 МГц. Однако он обладает достаточными запасами
устойчивости лишь при К = 5. Поскольку в области высоких частот звено обратной связи
интегратора обеспечивает 100%-ную обратную связь, ОРА637 нельзя включать по
схеме Рис. 2.3а. Но его можно включить по схеме Рис. 236, если выбрать Ск = АС.
Частотная характеристика звена обратной связи интегратора с учетом
конденсатора Ск имеет вид
На Рис. 2.5 штриховыми линиями обозначены ЛАЧХ нескорректированного
усилителя \к*у\ 0 и 1/|р'|.Частота перегиба асимптотической ЛАЧХ равна 1/2ят^при-
чем т'= R(C + Ск). Видно, что при этом максимальное петлевое усиление по
контуру обратной связи составит |#'п| = Ip'A^vl ~ 5000, т. е. будет обеспечена точность
интегрирования в области средних частот до 0.02%.
В заключение отметим, что к операционным усилителям, работающим в
схемах интеграторов, предъявляются особенно высокие требования не только в
отношении дифференциального коэффициента усиления по напряжению Ку>
но и входного тока, а также напряжения смещения нуля. Большие входной ток
и смещение нуля могут вызвать существенный дрейф выходного напряжения
при отсутствии сигнала на входе.
2.1.4. Схема дифференцирования
Поменяв местами резистор и конденсатор в
схеме интегратора на Рис. 2.3я, получим
дифференциатор (Рис. 2.6).
Применение первого закона Кирхгофа для
инвертирующего входа ОУ в этом случае дает
следующее соотношение:
Рис. 2.6. Схема
дифферен циатора
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
пропорционален частоте.
Практическая реализация дифференцирующей схемы, показанной на
Рис. 2.6, сопряжена со значительными трудностями по следующим причинам:
• схема имеет чисто емкостное входное сопротивление, поскольку один из
выводов входного конденсатора привязан к виртуальной земле. В случае, если
источником входного сигнала является другой операционный усилитель, это
может вызвать его неустойчивость;
• дифференцирование в области высоких частот в соответствии с выражением
B.5) приводит к значительному усилению высокочастотных составляющих,
что, как правило, ухудшает отношение сигнал/шум;
• в этой схеме в петле обратной связи ОУ оказывается включенным
инерционное звено первого порядка, создающее в области высоких частот
запаздывание по фазе до 90°:
82
оно суммируется с фазовым запаздыванием операционного усилителя, которое
может составлять или даже превышать 90° (см. Рис. 1.16), в результате чего
схема становится неустойчивой.
Устранить эти недостатки
позволяет включение последо-,
вательно с конденсатором
дополнительного резистора R\ (на
Рис. 2.6 показан пунктиром).
Следует отметить, что
введение такой коррекции
практически не уменьшает диапазона
рабочих частот схемы
дифференцирования, т. к. на высоких
частотах из-за снижения
коэффициента усиления ОУ она все
равно работает
неудовлетворительно. Величину R\C (и, следовательно, полюс передаточной функции ЛС-це-
пи) целесообразно выбирать так, чтобы на частоте/i усиление петли обратной
связи было бы единичным (т. е. |AV| = |1/Р|> Рис* 2.7).
B.5)
модуль которой
где т — постоянная времени дифференциатора. Подставив в B.4) s =усо ,
получим частотную характеристику дифференциатора:
B.4)
Используя формулу A.8) и учитывая, что в схеме на Рис. 2.6 вместо R{ -»1/sC, a
R2 = R, найдем передаточную функцию дифференциатора
или
Рис. 2.7. ЛАЧХ схемы дифференцирования на ОУ
2.2. Схемы линейного преобразования сигналов
2.2. Схемы линейного преобразования
сигналов
При построении линейных электрических схем кроме пассивных элементов
используются идеализированные активные элементы в виде управляемых
источников тока и напряжения. Кроме того, применяются идеализированные
преобразующие Ьсемы, например преобразователи отрицательного
сопротивления. Ниже рассмотрены основные принципы их реализации.
2.2.1. Источники напряжения, управляемые током
Для точных измерений слабых токов, в цифроаналоговых преобразователях
и в некоторых других устройствах требуется получение напряжения,
пропорционального току. При этом во многих случаях необходимо, чтобы источник
напряжения, управляемого током, называемый также преобразователем ток-
напряжение, имел по возможности минимальные входное и выходное
сопротивления
Входное и выходное сопротивления идеального преобразователя
ток—напряжение равны нулю
Схема источника напряжения, управляемого током, приведена на Рис. 2.8.
Если усилитель идеальный, то Кд = 0 и Коит = -RIW. Если коэффициент
усиления ОУ Ку конечен, то
B.6)
B.7)
где R$ — сопротивление источника входного сигнала.
Схема, изображенная на Рис. 2.8, пригодна для преобразования в
напряжение относительно слабых токов, втекающих в общую точку. Для измерения
больших токов в линии, находящейся под относительно высоким потенциалом,
может быть использована схема, приведенная на Рис. 2.9.
Рис. 2.8. Источник напряжения,
управляемый током
Рис. 2.9. Схема для измерения тока
83
Пренебрегая током базы транзистора, найдем выходное напряжение схемы
Именно по этой схеме выполнен преобразователь ток—напряжение фирмы
Burr-Brown INA168 (границы микросхемы показаны на Рис. 2.9 штриховой
линией). Он допускает синфазное напряжение на входах до 60 В и коэффициент
усиления напряжения, падающего на шунте, до 100. Ток, потребляемый
микросхемой, всего 50 мкА. Для иллюстрации приведем несколько примеров
микросхем этого класса, различных по характеристикам и внутренней структуре. Так,
микросхема LT1787 построена симметрично, т. к. имеет в своем составе
усилитель с дифференциальными входами и выходами и нагрузку в виде токового
зеркала. Допустимое синфазное напряжение также 60 В. Динамический
диапазон — 12 разрядов G2 дБ). Микросхема МАХ471 имеет встроенный шунтовой
резистор, рассчитанный на ток до 3 А. В микросхеме МАХ4372 такого резистора
нет, но зато ее погрешность преобразования не превышает 0.18%.
2.2.2. Источники тока, управляемые напряжением
Источники тока, управляемые напряжением (преобразователи
напряжение—ток), предназначены для обеспечения нагрузки током, который не
зависит от выходного напряжения ОУ и регулируется только входным напряжением
схемы. Такие источники применяются в измерительных схемах, например, при
измерении сопротивления, в электроприводе, если требуется стабилизировать
вращающий момент электродвигателя и др.
Идеальный преобразователь напряжение—ток имеет бесконечно
большие входное и выходное сопротивления.
Источники тока с незаземленной нагрузкой
В инвертирующем и неинвертирующем усилителях по резистору
отрицательной обратной связи протекает ток /2 = Vi/R\ (см. п. 1.3). Таким образом,
этот ток не зависит от падения напряжения на резисторе R2. Следовательно, оба
этих усилителя можно использовать в качестве источников тока, в которых
вместо резистора обратной связи включена нагрузка (Рис. 2.10).
Поскольку дифференциальный коэффициент усиления ОУ Ку имеет конеч-
84 ное значение, входное дифференциальное напряжение Рц остается отличным
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
Ток, протекающий в нагрузку, создает напряжение KIN на шунте /?ш,
который играет здесь роль датчика тока. Полагаем ОУ идеальным. Тогда через
инвертирующий вход усилителя ток не течет и, поскольку напряжение между
дифференциальными входами усилителя равно нулю, напряжение KIN
приложено к левому резистору R. Ток через резистор R и коллектор транзистора VT
2.2. Схемы линейного преобразования сигналов
Рис. 2.10. Варианты источников тока с нагрузкой в цепи
обратной связи
от нуля. Для определения выходного сопротивления источника тока на
Рис. 2.10а запишем:
Оно пропорционально дифференциальному коэффициенту усиления ОУ.
Выходное сопротивление схемы на Рис. 2.105 может быть рассчитано аналогично.
Схема на Рис. 2.105 интересна тем, что при
использовании ОУ с большим выходным током (например,
LM12 или какого-либо из усилителей фирмы Apex),
она позволяет управлять мощной нагрузкой, например:
электродвигателем, отклоняющей системой
электроннолучевой трубки или соленоидом. Применение
источника тока позволяет в этом случае точно дозировать
вращающий момент двигателя, угол отклонения
электронного луча или напряженность магнитного поля
соленоида. Все указанные виды нагрузок имеют
активно-индуктивный характер и создают дополнительные
полюса и нули в передаточной функции схемы и как
следствие приходится принимать дополнительные меры по обеспечению ее
устойчивости. Эквивалентная схема источника тока, работающего на
активно-индуктивную нагрузку, приведена на Рис. 2.11.
Несложно убедиться, что передаточная функция звена обратной связи
Рис. 2.11. Эквивалентная
схема источника тока,
работающего на
активно-индуктивную
нагрузку
где xL = L]J{Rl + R\) — постоянная времени цепи нагрузки. Как видно, в
передаточной функции петли обратной связи добавляется полюс, который вносит
дополнительное запаздывание по фазе вплоть до 90°. Компенсировать это
запаздывание можно с помощью форсирующей цепочки RkCk, показанной на
85
Отсюда получим следующее соотношение:
Таким образом, выходное сопротивление источника тока будет равно
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
Рис. 2.11 пунктиром. Точный расчет этой цепочки здесь не приводится из-за его
громоздкости. Легче всего ее параметры можно подобрать с помощью
какой-либо моделирующей программы, например Electronics Workbench. При этом
нужно добиваться минимального фазового запаздывания четырехполюсника
обратной связи в области частоты среза усилителя.
Рассмотренные источники тока обладают весьма существенным
недостатком. Ни к одному из зажимов нагрузки этих источников тока не может быть
приложен постоянный потенциал (в том числе и нулевой), поскольку в этом
случае либо выход, либо инвертирующий вход операционного усилителя будет
закорочен на землю. В приведенных далее схемах этот недостаток устранен.
Источники тока с заземленной нагрузкой
Схемы источников тока этого типа приведены на Рис. 2.12.
Рис. 2.12. Источник тока, управляемый напряжением, для заземленной нагрузки
(схема Хоуленда):
а — типовая конфигурация, б — с буферным повторителем
Приравняв нулю коэффициент при V2, найдем условие независимости
выходного тока от напряжения на нагрузке:
B.8)
86
Из этих уравнений с учетом того, что в идеале Vn = Kp, получим:
На Рис. 2.12а изображена так называемая схема Хоуленда в типовой
конфигурации. Принцип ее действия состоит в том, что выходной ток измеряется
по падению напряжения на резисторе i?5- Выходное напряжение ОУ
устанавливается таким, что падение напряжения на резисторе R5 оказывается
пропорциональным величине входного напряжения. Для определения выходного тока
источника запишем уравнения по первому закону Кирхгофа для п- и /^-входов и
выхода операционного усилителя:
2.2. Схемы линейного преобразования сигналов
Если выбрать R{ = i?3, a R2 = R4, то выражение для выходного тока источника
будет иметь вид:
Недостаток схем, приведенных на Рис. 2.12, состоит в том, что внутреннее
сопротивление /Js управляющего источника напряжения V{ входит в
выражения B.8), B.9) (оно добавляется к сопротивлению резистора /?3> подключенного
к входу схемы). К тому же ток управляющего источника напряжения зависит от
сопротивления нагрузки. В резульгате полная балансировка источника тока
невозможна, если /?s, как, например, у стабилитронов, зависит от тока.
Этого недостатка лишена
схема, приведенная на Рис. 2.13.
Здесь входной резистор
присоединен к виртуальному нулю.
Другое достоинство этой схемы
состоит в отсутствии синфазного
сигнала. Для расчета выходного
тока в этой схеме используем
следующее соотношение:
Рис. 2.13. Источник тока на цепочке ОУ в
инвертирующем включении
Запишем уравнение по первому закону Кирхгофа для выхода схемы
87
Выполняя тонкую подстройку, например посредством регулировки Л3>
можно добиться весьма точного выполнения условия B.8), т. е. практически
бесконечного выходного сопротивления источника тока на низких частотах при
реальных характеристиках операционного усилителя.
Можно усовершенствовать схему Хоуленда, включив между выходом схемы
и резистором Л4 буферный повторитель (см. Рис. 2.125) [2.3]. При этом условие
независимости выходного тока от напряжения на нагрузке заметно упростится
B.9)
и появится возможность регулировать коэффициент передачи схемы
изменением сопротивления резистора /?5- Связь между входным напряжением и
выходным током с учетом B.9) выражается формулой
Исключив потенциал К4, получим выражение:
из которого следует, что выходной ток не будет зависеть от выходного
напряжения, если выполняется условие
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
Еще лучшие характеристики имеет схема преобразователя напряжение-
ток, построенная в соответствии с теми же принципами, что и схема на
Рис. 2.120, но на основе измерительного усилителя. Подробнее об этом см.
п. 2.4.4.
В заключение заметим, что рассмотренные выше источники тока с
заземленной нагрузкой представляют собой системы с регулированием по
возмущению (системы с компенсирующими связями). В отличие от систем с
регулированием по отклонению (систем с отрицательными обратными связями)
системы с регулированием по возмущению требуют точной настройки
параметров связей, как это и следует из последней формулы и выражения B.8). Схемы
источников тока с незаземленной нагрузкой — это системы с регулированием
по отклонению. Они не требуют точной настройки связей, а лишь по
возможности большего значения дифференциального коэффициента усиления ОУ.
Если дополнить любую из схем источников тока, приведенных на
Рис. 2.11...2.13, еще одним усилителем, можно получить мостовой источник
тока. Это целесообразно в мощных схемах, особенно при питании от батарей, где
не всегда можно вывести нулевую (среднюю) точку. На Рис. 2.14 представлена
схема токового контура системы управления двигателем постоянного тока.
На базе управляемого
источника тока можно легко
реализовать так называемую схему
подчиненного регулирования
тока электропривода, которая
отличается высокими
регулировочными и динамическими
характеристиками. Токовый
контур является внутренним
(подчиненным) контуром, входящим в общий контур регулирования скорости
вращения электродвигателя.
На усилителе Ух выполнена схема источника тока Хоуленда, а на У2 —
инвертирующий повторитель. Источник тока пропускает через якорную обмотку
двигателя ток, пропорциональный входному напряжению Vw. Повторитель
следит за напряжением на левом выводе якоря и поддерживает напряжение на
правом выводе якоря равным по величине, но обратной полярности
относительно общей точки. Таким образом, здесь можно использовать полный размах
питающего напряжения. Как и в схеме на Рис. 2.11, здесь должна быть
включена корректирующая цепочка ЯкСк.
Рис. 2.14. Схема токового контура системы
управления двигателем постоянного тока
88
Источники тока для нагрузки,
один из полюсов которой имеет постоянный потенциал,
отличный от потенциала общей точки
Если можно соединить один из полюсов нагрузки с положительным или
отрицательным полюсами источника питания, то схема источника тока
значительно упрощается (Рис. 2.15).
Эти схемы подобны известным схемам источников тока на транзисторах,
но для исключения влияния собственных параметров последних в в них введе-
2.2. Схемы линейного преобразования сигналов
т. е. для нормальной работы схемы входное напряжение должно быть
отрицательным. Здесь также целесообразно использование составного биполярного
или полевого транзисторов. Недостаток этой схемы: через источник входного
сигнала протекает почти тот же ток, что и через нагрузку. Очевидно, что при
больших токах нагрузки применять ее нецелесообразно.
Схема на Рис. 2.16 лишена этого недостатка.
Рис. 2.15. Источники тока с биполярными силовыми транзисторами:
а — с неинвертирующим включением ОУ,
б — с инвертирующим включением ОУ
Рис. 2.16. Схема источника
тока с делителем в цепи
обратной связи
С другой стороны, поскольку входной ток усилителя равен нулю, имеет
место равенство
B.11)
89
Потенциал инвертирующего входа ОУ равен нулю, поэтому напряжение Vx
связано с током эмиттера транзистора следующим соотношением:
На Рис. 2.155 приведена аналогичная схема источника тока с
инвертирующим включением операционного усилителя. Здесь выходной ток определяется
соотношением
В это соотношение входит статический коэффициент усиления тока
транзистора В. Это вызвано тем, что часть тока, протекающего через резистор R\
(т. е. эмиттерного тока транзистора), ответвляется в базу. Влияние конечного
усиления по току может быть уменьшено, если использовать составной
биполярный транзистор, и практически исключено, если заменить биполярный
транзистор полевым, ток затвора которого пренебрежимо мал. В этом случае
ны операционные усилители. Рассмотрим схему с неинвертирующим
включением ОУ (Рис. 2.15а).
Выходное напряжение ОУ устанавливается таким, что напряжение на
резисторе R\ равно V\. (Это, естественно, выполняется при положительном
напряжении, когда транзистор не заперт). При этом ток через резистор R\ будет равен
Vi/Ri. Выходной ток источника определится соотношением
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
Подставив V\ из B.10) в B.11) получим
В схемах на Рис. 2.15, Рис. 2.16 можно соединить нагрузку с отрицательным
источником питания, заменив л-/ьл-транзистор на комплементарный. При
этом изменится и полярность управляющего напряжения. Дополнительным
достоинством рассмотренных источников тока является то, что диапазон
изменений токов и напряжений нагрузки здесь ограничивается только областью
безопасной работы транзистора и не зависит от свойств ОУ.
2.2.3. Инверторы сопротивления
Иногда возникает необходимость использования
отрицательного сопротивления, например, для
компенсации потерь и повышения добротности колебательных
контуров. Для обычного двухполюсника направление
тока и напряжения совпадают и его сопротивление
положительное: R = V/L Если же в двухполюснике
направления протекающего тока и приложенного
напряжения не совпадают, отношение V/I будет
отрицательным. Говорят, что такой двухполюсник
обладает отрицательным сопротивлением. Физически это
означает, что этот двухполюсник не рассеивает, а отдает
энергию во внешнюю цепь. Поэтому отрицательные сопротивления могут быть
получены только с применением активных схем, которые называют
инверторами сопротивления. Схема инвертора сопротивления на операционном
усилителе приведена на Рис. 2.17.
Выходное напряжение идеального ОУ определяется как
Рис. 2.17. Схема
инвертора
сопротивления
90
На входах идеального операционного усилителя напряжения равны, т. е.
Vx = V2, поэтому /2 = —1г. Отсюда следует, что VJIX = -R2.
При выводе этих соотношений предполагалось, что схема находится в
устойчивом состоянии. Однако, поскольку операционный усилитель охвачен
одновременно положительной и отрицательной обратными связями, следует
принять меры, чтобы выполнялись условия устойчивости. Физический смысл
условий устойчивости для схемы инвертора сопротивления с идеальным ОУ
при резистивных обратных связях заключается в том, что глубина
положительной обратной связи должна быть меньше, чем отрицательной. Для схемы на
Рис. 2.17 это означает, что сопротивление источника входного сигнала R$
должно быть меньше R2.
Входной ток усилителя равен
2.2. Схемы линейного преобразования сигналов
Примером практического
применения инвертора
сопротивления является схема
неинвертирующем) интегратора (Рис. 2.18).
На Рис. 2.18а приведена
эквивалентная схема интегратора в
виде интегрирующей ЛС-цепочки,
содержащей резистор с
отрицательным сопротивлением.
Операторная передаточная функция
этой цепи, определяемая как
отношение изображений по Лапласу выходного и входного напряжений
приводится к виду:
Рис. 2.18. Неинвертирующий интегратор:
а — эквивалентная схема, б — схема
неинвертирующего интегратора на ОУ
т. е. с точностью до знака совпадает с передаточной функцией интегратора B.2).
Роль резистора с отрицательным сопротивлением выполняет инвертор
сопротивления (Рис. 2.185). С учетом коэффициента передачи неинвертирующего
усилителя для этой схемы имеем:
2.2.4. Гираторы
Для физического или полунатурного моделирования может понадобиться
катушка с индуктивностью в несколько сотен генри. Это очень громоздкое и
дорогое сооружение. В этом случае может помочь гиратор (Рис. 2.19).
Рис. 2.19. Гиратор:
а — эквивалентный четырехполюсник, б — схема гиратора на двух ОУ
Гиратором называют четырехполюсник, полное входное
сопротивление которого (ZBX) является обратным по отношению к полному
сопротивлению нагрузки (ZH), т. е. имеет место соотношение ZBXZH = к2,
где к некоторая постоянная. В частности, гиратор может
преобразовать индуктивное сопротивление в емкостное, и наоборот
91
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
Так, например, используя высококачественный конденсатор умеренной
емкости и операционные усилители, можно собрать схему, которая по отношению
к остальной части цепи будет проявлять себя как катушка большой
индуктивности (так называемая электронная индуктивность).
Эквивалентная схема четырехполюсника приведена на Рис. 2.19а.
Уравнения идеального гиратора в системе У-параметров имеют вид:
Ix = 0Vx + (l/R)V2, B.12)
I2 = (l/R)Vx + 0V2. B13)
Отсюда следует, что входной ток гиратора пропорционален его выходному
напряжению, и наоборот.
Гиратор можно реализовать на двух инверторах сопротивления (Рис. 2.190).
Считая ОУ идеальными, запишем уравнения по первому закону Кирхгофа для
их входов
(К3-К1)/Л-К1/Л + /1 = 0,
(V,-Vx)/R + (V2-Vx)/R = 09
(V4-V2)/R + (Vx-V2)/R-I2 = 0,
(V4-V2)/R-V2/R = 0.
Исключив из этих уравнений F3 и V4 получим
Ix = V2/Rn Vx/R, B.14)
что соответствует уравнениям гиратора B.12) и B.13).
Рассмотрим несколько примеров практического применения гираторов.
1. Подключим к правым выводам гиратора резистор с сопротивлением R2.
Тогда I2 = VilR2. Подставим это соотношение в уравнения B.14). В результате
получим
Vx = I2R = V2R/R2 и Ix = V2/R.
Отсюда следует, что левое входное сопротивление Rх гиратора равно
Rx = Vx/Ix = R2/R2.
Таким образом, действительно входное сопротивление гиратора обратно
пропорционально сопротивлению его нагрузки. При этом в данном случае
к2 = R2 Как уже было сказано, это справедливо и для полных операторных
сопротивлений:
Zx(s) = R2/Z2(s). B.15)
2. На соотношении B.15) основано очень важное применение гиратора.
Подключив к его выходу конденсатор емкостью С2, получим на его стороне
полное сопротивление со стороны входа
92 Zx(s) = R2sC2,
2.2. Схемы линейного преобразования сигналов
3. Важнейшее применение гираторов — получение физических моделей ин-
дуктивностей без потерь. При Ci = 1 мкФ и R = 10 кОм эквивалентная
индуктивность составит 100 Гн. Подключив параллельно входу гиратора конденсатор
С{ с высококачественным диэлектриком, можно получить колебательный
контур с высокой добротностью. Если по условиям эксперимента требуется
пропускать по эквиваленту индуктивности большой ток, то можно взять в схеме на
Рис. 2.190 в качестве Ух мощный ОУ, а два левых резистора выбрать с малыми
равными сопротивлениями.
«Классическая» схема гиратора на Рис. 2.195 требует применения семи
резисторов, согласованных с высокой точностью. Ниже на Рис. 2.20 вниманию
читателя представлены две остроумные схемы гираторов, не требующие
согласования параметров элементов.
Рис. 2.20. Схемы гираторов, некритичные к параметрам элементов:
а — на двух ОУ, б — на одном ОУ
B.18)
B.19)
Разрешив эту систему относительно дроби V/I, найдем входное сопротивление
схемы
B.20)
Если в качестве ZL включить конденсатор С (как показано на схеме Рис. 2.19а),
то операторное входное сопротивление
B.21)
т. е. гиратор моделирует катушку с индуктивностью L = CR&Ri/IU- Частотный
диапазон такой индуктивности и максимально допустимый ток через нее, как и
93
которое представляет собой не что иное, как полное операторное
сопротивление индуктивности
B.16)
Электрическое равновесие схемы на Рис. 2.20а [2.1] описывается системой
уравнений
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
схемы на Рис. 2.190, ограничиваются быстродействием и мощностью
применяемых усилителей.
Поменяв местами в схеме на рис. 2.20а конденсатор С и резистор R4,
получим схему умножения емкости. Действительно, несложно убедиться, что в этом
случае входное сопротивление схемы
Разрешив эту систему относительно входного импеданса, получим
операторный входной импеданс
B.27)
B.28)
94
Это означает, что схема на Рис. 2.200 моделирует катушку с индуктивностью
L = CR2R\ и сопротивлением постоянному току, равным R2.
Пример 2.2. Возьмем Rx = 10 МОм, R2 = 20 Ом, С = 1 мкФ. Тогда схема на
Рис. 2.20^ моделирует катушку с сопротивлением 20 Ом и индуктивностью 200 Гн.
B.22)
B.23)
B.24)
B.25)
B.26)
Выбрав RiRt, « R2R4, можно получить эквивалент емкости, многократно
превосходящей емкость конденсатора С.
И уж совсем простая схема эквивалента индуктивности на основе неинвер-
тирующего повторителя, приведена на Рис. 2.200. Основные уравнения
равновесия этой схемы в операторной форме
Соответствующее комплексное сопротивление
Для того чтобы схема на Рис. 2.19 могла моделировать индуктивность в
широкой полосе частот, необходимо выполнить условие R2 « R\. В таком случае
от постоянного тока до достаточно высоких частот выполняется условие
соС7?2 << Ь откуда приближенно получаем
B.29)
2.3. Активные электрические фильтры на ОУ
Частота, ниже которой начинает преобладать активное сопротивление схемы
/L = 0.016 Гц. Верхняя граничная частота, до которой выполняется условие
соСД2<1,/н = 8кГц.
2.3. Активные электрические фильтры на ОУ
2.3.1. Основные понятия
В электрических, радиотехнических, телекоммуникационных и
телеметрических системах и устройствах, работающих на принципах частотного
разделения сигналов, часто решается задача: из смеси сигналов, занимающих в
совокупности широкую полосу частот, выделить те или иные узкополосные
составляющие или их определенные комбинации. Сигналы заданной частоты
или заданной полосы частот выделяют при помощи частотных электрических
фильтров.
К частотным электрическим фильтрам предъявляются два основных
требования. В одной области частот, которая называется полосой пропускания (или
полосой прозрачности), составляющие частотного спектра выделяемого сигнала не
должны ослабляться, а в другой, называемой полосой задерживания
(заграждения, подавления, режекции), их ослабление (затухание) должно быть не
меньше определенного значения. Фильтр считают идеальным, если в полосе
пропускания ослабление отсутствует и фазово-частотная характеристика линейна
(при этом условии нет искажения формы сигналов), а вне полосы пропускания
все частотные составляющие полностью подавляются, т. е. идеальные фильтры
должны иметь прямоугольные амплитудно-частотные характеристики (АЧХ),
как на Рис. 2.21. Однако идеальные фильтры физически нереализуемы.
Рис. 2.21. АЧХ идеальных частотных фильтров
Фильтры можно классифицировать различным образом. Главный принцип
классификации — диапазоны частот пропускания и подавления. В зависимости
от пропускаемого спектра частот различают низкочастотные (фильтры нижних
частот — ФНЧ), высокочастотные (фильтры верхних частот — ФВЧ), полосовые
(ПФ), полосно-подавляющие (ППФ) избирательные (селективные — СФ) и
заграждающие (режекторные — РФ) фильтры. Свойства линейных фильтров могут
быть описаны передаточной функцией, которая равна отношению
изображений по Лапласу выходного и входного сигналов фильтра.
95
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
2.3.2. Фильтры нижних частот
Схема простейшего фильтра нижних частот
приведена на Рис. 2.22.
Передаточная функция этого фильтра
определяется выражением W(s) =1/A + sRQ. Заменив s наусо,
получим частотную характеристику фильтра. Для
реализации общего подхода целесообразно нормировать
комплексную переменную s. Положим S = s/cdc, где
шс — круговая частота среза фильтра. В частотной области этому соответствует
Порядок фильтра определяет крутизну спада его АЧХ за полосой
пропускания: чем выше порядок — тем круче спад.
где с15с2, ... усп — положительные действительные коэффициенты, Ко — коэф-
96 фициент усиления фильтра на нулевой частоте. Порядок фильтра определяется
Рис. 2.22. Простейший
фильтр нижних частот
первого порядка
Частота среза шс фильтра на Рис. 2.22 равна X/RC. Отсюда получим S = sRC и
B.30)
Используя передаточную функцию для оценки зависимости амплитуды
выходного сигнала от частоты, запишем
При Q » 1, т. е. для случая, когда частота входного сигнала Q » юс,
|ff(/Q)| = 1/Q. Это соответствует снижению коэффициента передачи фильтра с
ростом частоты на 20 дБ/ декада.
Если необходимо получить более быстрое уменьшение коэффициента
передачи, можно включить п фильтров нижних частот последовательно.
Передаточная функция такой системы имеет вид:
B.31)
где ар а2, ... ,осЛ — действительные положительные коэффициенты. Из этой
формулы следует, что |W(/Q)| ~ 1/Qn при Q » 1. Полюса передаточной функции
B.31) вещественные отрицательные. Таким свойством обладают пассивные
iJC-фильтры я-го порядка. Соединив последовательно фильтры с одинаковой
частотой среза, получим
Этот случай соответствует критическому затуханию.
Передаточная функция фильтра нижних частот (ФНЧ) в общем виде может
быть записана как
B.32)
2.3. Активные электрические фильтры на ОУ
максимальной степенью переменной S. Для реализации фильтра необходимо
разложить полином знаменателя на множители. Если среди нулей полинома
есть комплексные, то рассмотренное ранее представление полинома B.31) не
может быть использовано. В этом случае следует записать его в виде
произведения квадратных трехчленов:
Отсюда вывод: любой полиномиальный фильтр (т. е. такой, что его
передаточная функция представляет собой отношение полиномов)
может быть образован соединением фильтров 2-го порядка.
Для полиномов нечетных порядков коэффициент b\ равен нулю.
Реализация комплексных нулей полинома в выражении B.33) на пассивных ЛС-цепях
невозможна. Применение же катушек индуктивности в низкочастотной
области нежелательно из-за больших габаритов и сложности их изготовления, а
также из-за появления паразитных индуктивных связей. Схемы с операционными
усилителями позволяют обеспечить комплексные нули в вышеприведенном
полиноме без применения катушек индуктивности. Такие схемы называют
активными фильтрами. Рассмотрим различные способы задания характеристик
ФНЧ. Широкое применение нашли фильтры Бесселя, Баттерворта, Чебышева
и эллиптические (Кауэра), названные так по виду полиномов передаточных
функций, в разной степени аппроксимирующих АЧХ идеальных фильтров и
отличающиеся друг от друга крутизной наклона амплитудно-частотной
характеристики в начале полосы задерживания и степенью колебательности
переходного процесса при ступенчатом входном воздействии. АЧХ фильтров
четвертого порядка всех вышеперечисленных типов приведены на Рис. 2. 23.
Амплитудно-частотная характеристика фильтра Баттерворта имеет
наиболее длинный горизонтальный участок и резко спадает за частотой среза.
Переходная характеристика такого фильтра при ступенчатом входном сигнале имеет
колебательный характер. С увеличением порядка фильтра колебания
усиливаются. АЧХ фильтра Баттерворта в случае я-го порядка определяется
следующим образом
гдел = 1, 2, 3...
Фильтр с такой АЧХ физически нереализуем, поэтому приходится
приближать ее полиномами.
Амплитудно-частотная характеристика фильтра Чебышева спадает более
круто за частотой среза. В полосе пропускания она, однако, не монотонна, а
имеет волнообразный характер с постоянной амплитудой, которая
характеризуется неравномерностью д{. При заданном порядке фильтра более резкому м
где аг и bt — положительные действительные коэффициенты.
B.33)
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
Рис. 2.23. Амплитудно-частотные характеристики
фильтров четвертого порядка:
/ — фильтр с критическим затуханием; 2 — фильтр Бесселя; 3 — фильтр
Баттерворта; 4 — фильтр Чебышева с неравномерностью 3 дБ; 5 —
эллиптический фильтр с неравномерностью в полосе пропускания 2 дБ
и максимумами всплесков в полосе заграждения —50 дБ
98
спаду амплитудно-частотной характеристики за частотой среза соответствует
большая неравномерность в полосе пропускания. Колебания переходного
процесса при ступенчатом входном воздействии сильнее, чем у фильтра
Баттерворта. АЧХ фильтра Чебышева имеет вид
при х < 1.
Эллиптический фильтр, называемый также фильтром Кауэра,
характеризуется определенной неравномерностью АЧХ как в полосе пропускания, так и в
полосе заграждения. Минимумы АЧХ в полосе пропускания обозначены -^,а
максимумы в полосе заграждения — q2. Спад АЧХ этого фильтра за полосой
пропускания наиболее крутой по сравнению с фильтрами других типов.
Передаточная функция эллиптического фильтра нижних частот имеет нули в
числителе:
гдел = 1,2,3...
Параметры е и К— постоянные числа, а Сп является полиномом Чебышева
первого рода степени п и имеет вид
2.3. Активные электрические фильтры на ОУ
Фильтр Бесселя обладает оптимальной переходной характеристикой
(минимальное время переходного процесса по сравнению с другими типами
линейных фильтров). Причиной этого является пропорциональность фазового сдвига
выходного сигнала фильтра частоте входного сигнала. Благодаря этому фильтр
Бесселя воспроизводит сигналы, частотный спектр которых лежит в полосе
пропускания фильтра, с наименьшими искажениями. Однако при равном
порядке спад амплитудно-частотной характеристики фильтра Бесселя за полосой
пропускания оказывается более пологим по сравнению с фильтрами Чебышева,
Кауэра и Баттерворта. Передаточная функция фильтра Бесселя структурно
имеет вид B.32).
Тот или иной вид фильтра при заданном его порядке определяется
коэффициентами полинома передаточной функции B.33) фильтра. В Табл. 2.1 даны эти
коэффициенты для некоторых фильтров 2-го, 4-го и 6-го порядка. Более
подробно теория этих фильтров изложена в книге [2.2].
Таблица 2.1. Коэффициенты полинома передаточной функции для фильтров 2,4 и 6 порядка
2.3.3. Фильтры верхних частот
Используя логарифмическое представление, можно перейти от нижних
частот к верхним, зеркально отобразив амплитудно-частотную характеристику
коэффициента передачи относительно частоты среза, т. е. заменив О. на 1/Q или S
на 1/5. При этом частота среза остается без изменения, а Ко переходит в К^. Из
выражения B.33) при этом получим передаточную функцию фильтра верхних
частот
B.34)
99
Вид фильтра
Порядок фильтра
Номер звена
Фильтр Баттерворта
Фильтр Чебышева,
?,=0.5дБ
Фильтр Чебышева,
q\ = 3 дБ
Фильтр Бесселя
Эллиптический
фильтр, qx = 0.5 дБ,
<72 = -40дБ
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
2.3.4. Полосовые фильтры
Аналогично, путем замены переменных, можно преобразовать
амплитудно-частотную характеристику фильтра нижних частот в амплитудно-частотную
характеристику полосового фильтра. Для этого в передаточной функции
фильтра нижних частот необходимо произвести следующую замену переменных:
B.35)
В результате такого преобразования АЧХ фильтра нижних частот, лежащая в
диапазоне 0 < Q < 1, переходит в правую часть полосы пропускания
полосового фильтра( 1 < о,< QMAK)- Левая часть полосы пропускания является
зеркальным отражением (в логарифмическом масштабе) правой части относительно
средней частоты полосового фильтра Q = 1. При этом nMIN = 1/Qmax- Рис. 2.24
иллюстрирует такое преобразование.
Рис. 2.24. Преобразование нижних частот в полосу частот
100
Нормированная ширина полосы пропускания фильтра AQ = Qmax ~ ^min
может выбираться произвольно. Из Рис. 2.24 видно, что полосовой фильтр на
частотах QMax и ^min обладает таким же коэффициентом передачи, что и ФНЧ
при Q = 1. Если параметры ФНЧ нормированы относительно частоты среза, на
которой его коэффициент передачи уменьшается на 3 дБ, то значение AQ также
будет нормированной шириной полосы пропускания. Учитывая, что
получим выражение для вычисления нормированных частот среза полосового
фильтра, на которых его коэффициент передачи уменьшается на 3 дБ:
Избирательный (селективный) фильтр предназначен для выделения из
сложного сигнала монохромной составляющей и, по сути, является
узкополосным полосовым фильтром. Фильтры этого типа имеют АЧХ, подобные
амплитудно-частотным характеристикам колебательных ZC-контуров. Характерным для
этих фильтров является пик АЧХ в области резонансной частоты/р. Характери-
2.3. Активные электрические фильтры на ОУ
Передаточную функцию простейшего полосового фильтра можно получить,
применив преобразование B.35) к передаточной функции ФНЧ первого
порядка B.30). В результате получим:
Подставив вместо S в выражение B.40)уД получим частотную характеристику
полосно-подавляющего фильтра.
Для выборочного подавления составляющих определенных частот
необходим фильтр, коэффициент передачи которого на резонансной частоте равен
нулю, а для нижних и верхних частот имеет постоянное значение. Такой фильтр
называется заграждающим или режекторным. Оценка избирательности
характеризуется добротностью подавления сигнала Q = /П/А/ , где А/ — полоса час- Ю1
стикой избирательности фильтра является добротность Q, определяемая как от-
нпшр.нир прчпнянг.нпй чяг.тпткт кг гтпттпг.е пппт/г.1^яния т е.
B.36)
B.37)
Подставив выражение для добротности B.36) в соотношение B.37) и изменив
обозначение Kq на Кр получим передаточную функцию полосового фильтра
B.38)
Это выражение дает возможность определить основные параметры полосового
фильтра второго порядка непосредственно из его передаточной функции.
2.3.5. Полосно-подавляющие фильтры
Передаточную функцию полосно-подавляющего фильтра можно получить
из передаточной функции ФНЧ с помощью преобразования в частотной
области заменой:
B.39)
Здесь AQ = 1/Q, как и ранее, нормированная полоса частот. В результате такого
преобразования АЧХ фильтра нижних частот из области 0< Q < 1 переходит в
область пропускаемых частот 0< ft< Qj полосно-подавляющего фильтра.
Кроме того, она зеркально отображается в логарифмическом масштабе
относительно резонансной частоты. Для резонансной частоты Q = 1 значение
передаточной функции равно нулю. Как и в случае полосовых фильтров, при
преобразовании порядок фильтра удваивается.
Применив преобразование B.39) к передаточной функции ФНЧ первого
B.40)
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
тот, на краях которой коэффициент передачи падает на 3 дБ. Чем больше
добротность фильтра, тем быстрее возрастает коэффициент передачи при удалении
от резонансной частоты.
2.3.6. Реализация фильтров на операционных
усилителях
С ростом порядка фильтра его
фильтрующие свойства улучшаются. На одном ОУ
достаточно просто реализуется фильтр второго
порядка. Для реализации фильтров нижних
частот, верхних частот и полосовых широкое
применение нашла схема фильтра второго
порядка Саллена-Ки. На рис, 2.25 приведен ее
вариант для ФНЧ.
Отрицательная обратная связь,
сформированная с помощью делителя напряжения
/?з, (ос — 1)/?з> обеспечивает коэффициент усиления, равный а. Положительная
обратная связь обусловлена наличием конденсатора С2. Передаточная функция
фильтра имеет вид:
B.41)
Рис.2.25. Активный ФНЧ второго
порядка Саллена-Ки
Для расчета фильтра можно задать значения резисторов R\ и /?3 и по
приведенным формулам вычислить значения R2, C\ и С2. Однако, в связи с тем, что
конденсаторы, как правило, приходится выбирать из ряда Е12, где отношение
соседних емкостей составляет 1.21, или даже из ряда Е6, где отношение
соседних емкостей составляет 1.47, удобнее задаваться значениями емкостей
конденсаторов и вычислять необходимые значения сопротивлений резисторов. Расчет
следует начинать с выбора емкостей Q, С2. Для того чтобы получить
приемлемые сопротивления резисторов, рекомендуется взять С\ = 10//*с (мкФ). Считая,
что емкости конденсаторов Сх и С2 выбраны, получим для заданных значений а{
и*! [см. B.33)]:
102
Расчет схемы существенно упрощается, если с самого начала задать некоторые
дополнительные условия. Можно выбрать коэффициент усиления а = 1. Тогда
(а — 1O?з = 0, и резистивный делитель напряжения в цепи отрицательной
обратной связи можно исключить. ОУ оказывается включенным по схеме неин-
вертирующего повторителя. В простейшем случае он может быть даже заменен
эмиттерным повторителем на составном транзисторе. При а = 1 передаточная
функция фильтра принимает вид:
2.3. Активные электрические фильтры на ОУ
Из последнего соотношения видно, что
коэффициент а определяет добротность полюсов и
не влияет на частоту среза. Величина а в этом
случае определяет тип фильтра.
На Рис. 2.26 приведена схема ФНЧ
второго порядка с многопетлевой отрицательной обратной связью (фильтр Рауха).
Здесь ОУ используется в инвертирующем включении. Передаточная
функция этого фильтра
B.42)
Ь{ = со CR3R2C{C2.
Для определения сопротивлений резисторов при выбранных емкостях
конденсаторов решим уравнения B.42) относительно сопротивлений
Для того чтобы значение сопротивления R2 было вещественным, должно
выполняться условие
B.43)
103
Чтобы значения R\ и R2 были действительными, должно выполняться условие
Расчеты можно упростить, положив R{ = R2 = R и С\ = С2 = С. В этом случае для
реализации фильтров различного типа необходимо изменять значение
коэффициента а. Передаточная функция фильтра будет иметь вид
Отсюда с учетом формулы B.33) получим
Рис. 2.26. Схема ФНЧ второго порядка
с многопетлевой отрицательной
обратной связью (фильтр Рауха)
1
Приравняв коэффициенты этой передаточной функции к коэффициентам
выражения B.33), получим
Из-за необходимости большого количества конденсаторов эта схема применя-
104 ется сРавнит^льно редко.
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
При его выполнении в процессе расчета фильтра не следует выбирать
отношение С2/С{ много большим величины, стоящей справа. Характеристики
фильтра мало зависят от точности подбора номиналов его элементов, поэтому
рассмотренная схема может быть рекомендована для реализации фильтров с
высокой добротностью.
При приеме слабых сигналов смещение нуля операционных усилителей,
входящих в состав фильтров на Рис. 2.25, 2.26, накладываясь на входной
сигнал, порождает ошибку, поэтому очень интересна схема ФНЧ,
нечувствительная к смещению нуля ОУ. Эта схема приведена на Рис. 2.27.
Передаточная функция фильтра при условии, что он работает на холостом
ходу, имеет вид:
B.44)
Выбрав емкости конденсаторов С\ и С2, найдем сопротивления резисторов
Поменяв местами сопротивления и конденсаторы в схеме на Рис. 2. 25
получим фильтр верхних частот (Рис. 2.28).
Рис. 2.27. Схема активного ФНЧ второго
порядка, нечувствительная к смещению нуля ОУ
Рис. 2.28. Активный ФВЧ второго
порядка
Его передаточная функция имеет вид:
Для упрощения расчетов положим а = 1 и С\ = С2 = С. При этом получим
следующие формулы:
Поменяв местами конденсаторы и резисторы в схеме на Рис. 2.26 получим
фильтр верхних частот с многопетлевой обратной связью (Рис. 2.29),
передаточная функция которого
2.3. Активные электрические фильтры на ОУ
Если спад АЧХ фильтра второго порядка
оказывается недостаточно крутым, следует
применять фильтр более высокого порядка.
Для этого последовательно соединяют
звенья, представляющие собой фильтры
первого и второго порядка. В этом случае АЧХ
звеньев фильтра перемножаются (в
логарифмическом масштабе — складываются).
Рис. 2.29. Фильтр верхних частот
второго порядка с многопетлевой
обратной связью
Следует иметь в виду, что последовательное соединение, например,
двух одинаковых фильтров Баттерворта второго порядка (как и
фильтров любого другого типа) не приведет к получению фильтра
Баттерворта четвертого порядка. Результирующий фильтр будет
иметь другую частоту среза и другую частотную характеристику.
Поэтому необходимо задавать такие
коэффициенты звеньев фильтра из таблиц типа
вышеприведенной Табл. 2.1, чтобы результат
перемножения их частотных характеристик
соответствовал желаемому результату.
Полосовой фильтр второго порядка можно
реализовать на основе схемы Саллена-Ки, как
это показано на Рис. 2.30.
Передаточная функция фильтра имеет вид:
Рис. 2.30. Схема активного
полосового фильтра второго порядка
B.45)
Приравнивая коэффициенты этого выражения к коэффициентам
передаточной функции B.38), получим формулы для расчета параметров фильтра:
Недостаток схемы состоит в том, что
коэффициент усиления на резонансной частоте Кр
и добротность Q не являются независимыми
друг от друга. Достоинство схемы — ее
добротность зависит от параметра а, тогда как
резонансная частота от этого параметра не зависит.
При а = 3 коэффициент усиления
становится бесконечно большим и возникает
генерация. Чем ближе а к трем, тем критичнее
точность его установки.
Многопетлевую отрицательную обратную связь можно использовать и для
построения полосовых фильтров. Соответствующая схема приведена на
Рис. 2.31. Ее передаточная функция имеет вид
Рис. 2.31. Активный полосовой
фильтр с многопетлевой обратной
связью
105
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
Из сравнения этого выражения с передаточной функцией B.38) следует,
что коэффициент при S2 должен быть равен 1. Отсюда находим резонансную
частоту
B.46)
Подставив это выражение для резонансной частоты в передаточную
функцию и приравняв соответствующие коэффициенты к коэффициентам
передаточной функции B.38), получим формулы для вычисления остальных
характеристик фильтра:
106
B.47)
B.48)
Рассмотренная схема обладает тем преимуществом, что она не склонна к
самовозбуждению на резонансной частоте при небольших отклонениях величин
элементов от расчетных значений.
Добавив в схеме на Рис. 2.31 резистивный
делитель между входом схемы и
неинвертирующим входом ОУ, получим
полосно-подавляющий фильтр с многопетлевой
отрицательной обратной связью (Рис. 2.32).
Передаточная функция этого фильтра может
быть найдена следующим образом. Поскольку
схема на Рис. 2.31 имеет передаточную
функцию вида B.38), с учетом инвертирования
фазы можно записать
Рис. 2.32. Активный полосно-подав-
ляющий фильтр с многопетлевой
отрицательной обратной связью
B.49)
где а = Rs/{Ra + Rs) — коэффициент передачи делителя, постоянные Кр, Q и Шр
определяются из формул B.46)...B.48).
После преобразований получим:
B.50)
из которых видно, что коэффициент передачи, добротность и резонансная
частота рассматриваемого полосового фильтра могут выбираться произвольно.
Схема останется работоспособной, если исключить резистор Л3, при этом,
однако, ее добротность будет напрямую связана с коэффициентом передачи Kv.
Это следует из выражения B.48) при Д3 -> <*>
2.3. Активные электрические фильтры на ОУ
откуда следует с учетом B.47) условие полного подавления сигнала на
резонансной частоте
B.51)
В результате передаточная функция фильтра принимает вид B.40), причем вне
полосы подавления коэффициент передачи равен Я$/(Я\+ Л5).
Таким образом, из B.46), B.48) и B.51) видно, что резонансная частота,
добротность и коэффициент передачи а < 1 полосно-подавляющего фильтра с
многопетлевой отрицательной обратной связью могут быть выбраны
произвольно.
Активный заграждающий фильтр может
быть также реализован на основе двойного
Т-образного моста. Хотя двойной
Т-образный мост сам по себе является
заграждающим фильтром, его добротность составляет
только 0.25. Ее можно повысить, если мост
включить в цепь обратной связи ОУ. Один из
вариантов такой схемы приведен на
Рис. 2. 33.
Сигналы высоких и низких частот
проходят через двойной Т-образный мост без
изменения. Для них выходное напряжение фильтра равно aFIN. На резонансной
частоте выходное напряжение равно нулю. Передаточная функция схемы на
Рис. 2.33 имеет вид:
Рис. 2.33. Активный заграждающий
фильтр с двойным Т-образным
мостом
или, учитывая, что
B.52)
С помощью этого выражения можно непосредственно определять
требуемые параметры фильтра. Задав коэффициент усиления неинвертирующего
усилителя равным 1, получим Q = 0.5. При увеличении коэффициента усиления
добротность растет и стремится к бесконечности, если а —> 2.
Таким образом, добротность и коэффициент передачи заграждающего
фильтра на основе двойного Т-образного моста непосредственно связаны и не
могут быть выбраны произвольно в отличие от предыдущей схемы. Другой
недостаток схемы на Рис. 2.33 — три, а не два, как в предыдущей схеме, времяза-
дающих конденсатора, что усложняет изготовление перестраиваемого фильтра.
Полосовые и полосно-подавляющие фильтры высоких порядков могут быть
построены путем каскадного соединения соответствующих фильтров второго
107
Сопоставив последнее соотношение с B.40), найдем
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
порядка, однако удобнее их строить, комбинируя соответствующим образом
фильтры нижних и верхних частот (Рис. 2.34).
в) г)
Рис. 2.34. Структурные схемы и АЧХ фильтров на основе комбинаций ФНЧ и ФВЧ:
а — полосовой фильтр, б — АЧХ полосового фильтра,
в — полосно-подавляющий фильтр, г — АЧХ полосно-подавляющего фильтра
В частности, полосовой фильтр образуется при каскадном соединении
ФНЧ и ФВЧ (Рис. 2.34а). Нижняя частота среза ПФ совпадает с частотой среза
ФВЧ/В (Рис. 2.345), а верхняя частота среза ПФ — с частотой среза ФНЧ/Н.
Полосно-подавляющий фильтр можно построить путем
параллельно-последовательного соединения ФНЧ и ФВЧ (Рис. 2.34в). Его АЧХ приведена на Рис. 2.34г
108
2.3.7. Реализация активных фильтров на основе
метода переменных состояния
В схемах фильтров, рассмотренных выше, используется минимальное число
активных элементов (один операционный усилитель на два полюса
передаточной функции). Эти схемы, однако, чувствительны к изменениям параметров
элементов (особенно при высокой добротности) и непригодны для построения
универсальных программируемых фильтров. Поэтому в составе ИМС активных
фильтров используются схемы, построенные на основе метода переменных
состояния. В таких схемах реализуется решение дифференциальных уравнений,
описывающих процессы в фильтрах. Схема двухполюсного фильтра,
построенного на основе метода переменных состояния, приведена на Рис. 2.35.
Эта схема сложнее рассмотренных в п. 2.3.6, но она широко применяется
благодаря повышенной устойчивости и легкости регулировки. Схема состоит
из двух интеграторов и двух сумматоров. Напряжение на выходе второго
сумматора
2.3. Активные электрические фильтры на ОУ
B.53)
B.54)
причем Q = R]/Rq, Kq = R]/R^- Таким образом, на Рис. 2.35 приведена схема
полосового фильтра, параметры которого могут регулироваться независимо друг
от друга. Найдем передаточные функции этой схемы относительно выходов Кь
V2 и К3. Из B.54) с учетом B.53) получим:
т. е. схема на Рис 2.35 в зависимости от того, к какой точке схемы подключен
выход, может служить также фильтром нижних частот, фильтром верхних
частот и заграждающим фильтром.
Биквадратные фильтры. Наиболее близко по идее построения к фильтру на
основе метода переменных состояния примыкает так называемый
биквадратный фильтр, схема которого приведена на Рис. 2.36.
Рис. 2.36. Схема биквадратного фильтра
109
Рис. 2.35. Схема фильтра второго порядка, построенного на
основе метода переменных состояния
Поскольку
(причем S = sRjQ, передаточная функция фильтра имеет вид:
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
Для него можно найти
B.55)
B.56)
Если принять Л^з = /?2^7> то в соответствии с B.55) Vx можно использовать
как выходное напряжение звена эллиптического фильтра. Если же Л7 = °° и
R% = оо, то, как следует из B.56), выходное напряжение V2 соответствует звену
2-го порядка полиномиальных фильтров: Баттерворта, Чебышева и Бесселя.
Так же как и фильтр, построенный на основе метода переменных состояний,
биквадратный фильтр мало чувствителен к неточности элементов и прост в
настройке.
Параметры схемы, реализующей какой-либо из фильтров Баттерворта,
Чебышева и Бесселя, выходным сигналом для которых является напряжение V2
при условиях R7 = oo и i?8 = оо, определяют следующим образом. Выбирают
требуемое значение емкости Q, базируясь на полосе пропускания (как в п. 2.3.6), а
затем находят значения остальных элементов по формулам:
Биквадратное звено эллиптического фильтра (выходной сигнал —
напряжение Vi) рассчитывают, пользуясь соотношениями:
С2 и Лз выбирают так, чтобы уменьшить разброс получаемых в результате
расчета сопротивлений. Для большинства случаев можно принимать С2 = Q и
Л3=1/B1йС,).
Передаточные функции фильтров верхних частот, как и ранее, можно
получить, если в B.55) и B.56) вместо S подставить 1/5. При этом для
эллиптического фильтра структура передаточной функции сохранится, изменяются только ее
коэффициенты. Это значит, что эллиптические фильтры верхних частот
реализуются с помощью точно таких же биквадратных схем, что и фильтры нижних
частот, но при других сопротивлениях и емкостях.
Активные фильтры выпускаются в виде ИМС многими фирмами,
например, AF100/150 (National Semiconductor), LTC1562 (Linear Technology),
MAX270/271 или МАХ274/275 (Maxim). Они имеют перестраиваемую частоту
среза до нескольких сотен килогерц, порядок вплоть до восьмого и зачастую
программируемый тип фильтра.
2.3. Активные электрические фильтры на ОУ
Например, ИМС активного фильтра МАХ270 содержит две секции ФНЧ
Чебышева 2-го порядка по схеме Саллена-Ки (Рис. 2.37).
Рис. 2.37. Функциональная схема ИМС активного фильтра
МАХ270
Частота среза каждой секции может быть независимо установлена в пределах
от 1 до 25 кГц параллельным 7-разрядным кодом. ИМС МАХ274 включает
четыре секции фильтра, построенные на основе метода переменного состояния.
Частота среза, добротность и коэффициент усиления секций устанавливаются
внешними резисторами. Секции могут использоваться для построения ФНЧ и ПФ
вплоть до 8-го порядка. Подобную структуру имеет и ИМС фильтра LTC1562.
Недостатком этих схем является необходимость в большом количестве
внешних высокоточных элементов, и, как следствие, сложность настройки и
перестройки частоты. От этого недостатка свободны фильтры на
коммутируемых конденсаторах, которые будут рассмотрены ниже в п. 7.8. В настоящее
время наибольшее число моделей ИМС активных фильтров строятся именно на
схемах с коммутируемыми конденсаторами.
2.3.8. Фазовые фильтры
В описанных ранее фильтрах коэффициент передачи и фазовый сдвиг
зависели от частоты входного сигнала. Ниже рассмотрены схемы, коэффициент
передачи которых не зависит от частоты, а фазовый сдвиг с частотой меняется.
Такие схемы относят к классу неминимальнофазовых и называют фазовыми
фильтрами. Фазовые фильтры применяются для коррекции фазовых сдвигов,
управления фазой сигналов и их временной задержкой.
Передаточная функция фазового фильтра представляет собой
дробно-рациональное выражение, числитель которого является
комплексно-сопряженным по отношению к знаменателю
B.57)
111
112
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
Выражение B.57) в общем случае можно представить в виде
Частотная характеристика фазового фильтра
B.58)
B.59)
B.60)
где
Особый интерес представляет применение фазовых фильтров для задержки
сигнала в аудиотехнике и в автоматике. В первом случае — для создания
различных акустических эффектов, а во втором — для моделирования систем с чистым
запаздыванием. При этом на первый план выдвигается требование отсутствия
искажений при передаче сигналов. Первое условие неискаженной передачи —
независимость коэффициента передачи фильтра от частоты. Как видно из
B.59), это требование выполняется. Другое условие состоит в том, чтобы
групповое время задержки схемы для рассматриваемого частотного спектра было
постоянным.
Групповое время задержки — это время, на которое входной сигнал,
представляющий собой группу колебаний, близких по частоте,
задерживается фазовым фильтром.
Нормированное групповое время задержки Т^ определяют следующим
образом:
Здесь т — время задержки.
B.61)
B.62)
Подбор коэффициентов ah bt проводится так, чтобы обеспечить вид ФЧХ
наиболее близкий к линейному в возможно большей полосе частот. Другой путь
состоит в приближении передаточной функции звена чистого запаздывания
рядом Паде. Первый член ряда Паде имеет вид
2.3. Активные электрические фильтры на ОУ
Для низких частот групповое время задержки не
превысит значения 2RC, как это следует из B.62).
Расчеты показывают, что при условии практического отсутствия фазовых
искажений групповое время задержки для сигнала со спектром в полосе 0...3 кГц не
превысит 60 мкс, что совершенно недостаточно для многих приложений. Но
зато эта схема с успехом может быть применена в качестве широкополосного
фазовращателя. Изменяя сопротивление резистора Л, можно установить
необходимую величину фазового сдвига в диапазоне 0 ... - 180°, не меняя амплитуду
выходного сигнала. Величину фазового сдвига можно определить по формуле
Рис. 2.38. Схема фазового
фильтра первого порядка
Схема фазового фильтра первого порядка
приведена на Рис. 2. 38.
Передаточная функция этого фильтра имеет
вид
Фазовый фильтр второго порядка может быть реализован с помощью схемы
полосно-подавляющего фильтра с многопетлевой обратной связью
(см. Рис. 2.32), нужно только исключить из схемы резистор Л3- Посмотрев
внимательно на передаточную функцию этого фильтра B.50), можно увидеть, что
при выполнении условия
B.63)
числитель и знаменатель соответствующей ей частотной характеристики
окажутся комплексно-сопряженными. Из уравнения B.63) с учетом B.47) следует
необходимость выполнения условия
Иначе говоря, для того, чтобы схема на Рис. 2.32 была фазовым фильтром 2-го
порядка требуется соблюдение равенства
Включив фазовый фильтр каскадно с ФНЧ Баттерворта можно выбрать его
параметры так, что в пределах полосы пропускания фазо-частотная
характеристика этого комбинированного фильтра будет линейна, т. е. сигналы будут
передаваться без искажения. В то же время АЧХ не изменится, оставаясь
по-прежнему наиболее плоской в полосе пропускания по сравнению с
фильтрами иного типа.
Реализация на непрерывных фазовых фильтрах значительных задержек
широкополосных сигналов требует построения сложных схем. В частности, в [2.4]
приведен пример, показывающий, что для задержки без искажений сигнала
полосой 0... 1 кГц на время всего в 2 мс необходимо использовать фазовый фильтр
7-го порядка. В то же время для создания, скажем, эффекта двухголосного
звучания в акустике требуется задержка сигнала в полосе хотя бы до 5 кГц пример-
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
но на 5 мс. Поэтому сегодня такое устройство целесообразно строить по схеме:
АЦП-ОЗУ обратного магазинного типа (FIFO)-Il,An.
Завершая тему активных фильтров, следует отметить, что в настоящее время
активные фильтры высокого порядка на ОУ с ЛС-цепями в обратных связях
интенсивно вытесняются фильтрами на коммутируемых конденсаторах и схемами
со структурой «АЦП-цифровой фильтр-ЦАП». Однако все эти фильтры,
производящие дискретные выборки входного сигнала, имеют очень существенный
недостаток: они допускают сквозное прохождение тактового сигнала, а
сигналы, спектры которых расположены вблизи частоты тактового сигнала,
преобразуют в побочные низкочастотные. Поэтому при высоких требованиях к
качеству сглаживания необходимо включать непрерывные фильтры хотя бы 1-го или
2-го порядка на входе и выходе дискретизирующего фильтра. Например, ИМС
фильтра 8-го порядка на коммутируемых конденсаторах МАХ291 содержит
свободный (неподключенный) ОУ, на котором можно собрать входной или
выходной непрерывный ФНЧ.
114
2.4. Измерительные усилители
Во многих измерительных схемах необходимо измерять разность
потенциалов между двумя точками электрической цепи, каждая из которых
имеет ненулевой потенциал относительно общей точки измерительной
схемы. Для этой цели используются измерительные усилители (в
переводной литературе часто называемые инструментальными), которые
представляют собой устройства с дифференциальным входом, построенные так, что
они усиливают только разность напряжений, поданных на их входы, и не
реагируют на синфазное напряжение. Типичные примеры применения
измерительных усилителей (ИУ) приведены на Рис 2.39.
Схема на Рис. 2.39а обычна
для тензометрии, измерения
давления и др. В одно или два плеча
мостовой схемы включены тензо-
резисторы. Синфазное
напряжение на входах дифференциального
усилителя (ДУ) составляет в этой
схеме обычно 1.5... 2.5 В, причем,
хотя это напряжение, как правило,
стабилизируется, все же возможны
его изменения в пределах порядка
10 мВ. В то же время часто
требуется обеспечить чувствительность к
небалансу моста на уровне 1 мкВ.
Эта задача требует, чтобы дифференциальный усилитель имел КОСС более 80
дБ. Схема на Рис. 2.39^ применяется при измерении тока в проводе, потенциал
которого может многократно превосходить напряжение питания усилителя.
Это также требует большого КОСС, а также высоких допустимых значений
синфазного напряжения.
Рис. 2.39. Типичные примеры применения
измерительных усилителей:
а — с мостовым датчиком, б — с резистивным шунтом
2.4. Измерительные усилители
2.4.1. Измерительный усилитель на одном ОУ
В простейшем случае в качестве
измерительного усилителя может быть использован ОУ в
дифференциальном включении (Рис. 2.40).
В фирменной документации подобные схемы
так и называются — дифференциальные усилители
(ДУ). При выполнении условия R]/R2 = R?/R\
усиление дифференциального сигнала намного
больше усиления синфазного сигнала и коэффициент
ослабления синфазного сигнала (КОСС) будет
максимальным.
Дифференциальный коэффициент усиления при выполнении указанного
выше условия
Рис. 2.40. Схема простейшего
измерительного усилителя
(дифференциаьный усилитель)
К
сф2
Здесь КОСС выражается отношением, а не в децибелах.
Коэффициент ослабления синфазного сигнала всей схемы:
Дифференциальное входное сопротивление:
B.65)
B.66)
Поскольку, как это следует из B.64), КСф\ может принимать отрицательные
значения и зависит от сопротивлений резисторов схемы, подстройкой
резистора /?3 может быть достигнуто любое сколь угодно большое значение Косс в
соответствии с выражением B.66).
Пример 2.3. Пусть в схеме на Рис. 2.40 R{ = /?3 = 2 кОм, R4 = 200 кОм.
Сопротивление резистора R2 отличается от номинального значения 200 кОм на 1% и
составляет 198 кОм. Тогда дифференциальный коэффициент усиления схемы равен 100, а
, что во многих применениях недостаточно.
Эта простейшая схема имеет низкое входное сопротивление. Поэтому
выходное сопротивление источника сигнала влияет на величину
дифференциального коэффициента усиления и на коэффициент ослабления синфазного
сигнала, что почти всегда требует точной настройки параметров схемы. Для 115
Коэффициент усиления синфазного сигнала, обусловленный
рассогласованием резисторов, равен
B.64)
Коэффициент усиления синфазного сигнала, обусловленный конечным
значением КОСС операционного усилителя, равен
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
изменения коэффициента усиления нужно одновременно менять
сопротивления двух резисторов. Тем не менее эта простая схема выпускается многими
фирмами в виде ИМС. Например, схема ДУ — INA133 и INA143 (Burr-Brown).
На кристалле наряду с ОУ имеются 4 согласованных резистора, первые выводы
которых соединены попарно с входами ОУ, а другие соединены с выводами
ИМС, причем у INA133 резисторы имеют одинаковое сопротивление, а у
INA143 Rx и Л3 меньше, чем Я2 и R4 (см. Рис. 2.40) в 10 раз. Поэтому
коэффициент передачи дифференциального сигнала у INA133 единица, а у INA143 в
зависимости от схемы подключения резисторов может принимать значения 0.1 или
10. КОСС у INA133 составляет 80 дБ, а у INA143 - 86 дБ.
На рис. 2.41 представлены упрощенные схемы промышленных
интегральных ДУ, рассчитанных на работу при больших синфазных напряжениях.
При номиналах резисторов, указанных на схеме, дифференциальный
коэффициент усиления составляет 1. Рабочий диапазон синфазных напряжений для
INA117 составляет ±200 В, а для AD629 составляет ±270 В, причем последний
имеет встроенную защиту от синфазного и дифференциального напряжений до
±500 В! Коэффициент ослабления синфазной составляющей INA117 и AD629
превышает 86 дБ.
116
Схема ДУ с делителем в обратной связи
Дифференциальная схема с подогнанными резисторами может обеспечить
требуемые характеристики лишь в том случае, если сопротивление источника
сигнала равно нулю или, по крайней мере, очень мало. Для измерений в
мостовых схемах это условие трудно выполнить.
Рис. 2.41. Схемы промышленных ИМС дифференциальных усилителей:
а — с одним резистором в цепи обратной связи, б — с Т-образным делителем в
цепи обратной связи
На Рис. 2Ala приведена схема, по которой выполнен ДУ INA117 и его
модификация AD629 (Analog Devices). Здесь цепь обратной связи замыкается
одним резистором /?2> а Для получения большого диапазона синфазных
напряжений использован резистивный делитель напряжения 20:1 для того, чтобы
привести входной сигнал ±200 В к допустимому для ОУ диапазону ±10 В. Связь
между величинами сигналов этой схемы устанавливается уравнением
2.4. Измерительные усилители
Пример 2.4. Обратимся к схеме на Рис. 2.39а. Сопротивления тензорезисторов
обычно имеют величины 50...200 Ом. Даже если оба полумоста R1-R2 и R3-R4 —
активные, т. е. в каждом из них включен тензорезистор равного сопротивления, то
при использовании дифференциального усилителя с параметрами, взятыми из
примера 2.1, погрешность дифференциального коэффициента усиления составит,
как минимум, 1.25%. С другой стороны, если один из полумостов, скажем, R3-R4
— пассивный, т. е. не содержит тензорезистора, то с точки зрения экономичности
при батарейном питании лучше взять сопротивления этих резисторов несколько
больше, например по 1 кОм. В этом случае, даже если сам ОУ идеален, из-за
разности сопротивлений источников сигналов подключенных к дифференциальным
входам КОСС согласно формулам B.64), B.66) составит всего 27 дБ, что
совершенно недостаточно.
Снизить влияние параметров источников сигнала на А!д и КОСС можно,
увеличив входное сопротивление ДУ. Для сохранения высокого значения К%
можно применить Т-образную цепь для резисторов обратной связи,
показанную на Рис. 2.410. Если взять R^= R\, г R4= R2+ RsWRe, то дифференциальный
коэффициент усиления составит
B.67)
По этой схеме выполнена ИМС INA148. Ее входные резисторы имеют довольно
высокое сопротивление A МОм), КА= 1, а КОСС = 90 дБ. Диапазон
допустимых синфазных напряжений составляет ±200 В. Другой путь заключается в
применении дополнительного выходного усилителя, обеспечивающего
повышение коэффициента усиления. Так устроена микросхема INA146 (Рис. 2.42).
Рис. 2.42. Схема дифференциального усилителя
INA146
Входной ДУ имеет коэффициент передачи всего 0.1, но за счет этого он
допускает входное синфазное напряжение до ±100 В при сопротивлениях
входных резисторов по 100 кОм. Коэффициент усиления выходного неинвертирую-
щего усилителя У2 устанавливается внешним делителем R\Ri в пределах 1... 1000,
так что К% всей схемы может быть установлен в пределах 0.1... 100. КОСС этого
усилителя не менее 80 дБ.
117
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
2.4.2. Измерительный усилитель на двух ОУ
Несмотря на ухищрения разработчиков,
описанные выше, дифференциальный
усилитель пригоден только для усиления сигналов
источников с низким выходным
сопротивлением, таких, например, как измерительный
шунт (см. Рис. 2.396). Для приема и усиления
сигналов источников с относительно
большим выходным сопротивлением, например
мостовых схем, требуются усилители с
входным сопротивлением совершенно иного,
гораздо более высокого порядка. Как ранее
отмечалось, значительно большим входным сопротивлением обладают ОУ в
неинвертирующем включении. Схема простейшего измерительного усилителя
с неинвертирующим включением входных ОУ приведена на Рис. 2.43.
При соблюдении условия R2/R3= Rs/^л выходное напряжение можно найти
по формуле
Рис. 2.43. Измерительный усилитель
на двух ОУ
B.68)
В частном случае, когда R2 = R^ = ^4 = Rs> соотношение B.68) принимает вид
По схеме на Рис. 2.43 изготавливается ИУ с полевыми транзисторами на
входах INA155. Внешним резистором устанавливается дифференциальный
коэффициент усиления в пределах 10...50. Усилитель имеет КОСС = 92 дБ.
Входной ток — 1 пА.
118
2.4.3. Измерительный усилитель на трех ОУ
Улучшить характеристики схемы
дифференциального усилителя можно, включив
между источником сигнала и каждым из входов
неинвертирующий повторитель (см.
Рис. 2.40). Эти повторители будут служить
буферами, в результате чего входное
сопротивление измерительного усилителя повысится,
и влияние выходного сопротивления
источников сигнала на дифференциальный
коэффициент усиления и КОСС практически
будет устранено. Недостатком такого решения
является то, что здесь потребуется большой
КОСС и в повторителях и в выходном ОУ. Лучшими характеристиками
обладает схема, приведенная на Рис. 2.44 и принятая в качестве стандартной схемы
измерительного усилителя.
Рис. 2.44. Схема измерительного
усилителя на трех ОУ
2.4. Измерительные усилители
B.71)
Общий КОСС измерительного усилителя определяется соотношением B.66).
Пример 2.5. Пусть в схеме на Рис. 2.44 Rp = 1 кОм, R2 = Ri — 50 кОм,
R3 = R5= R6=\0 Ом. Сопротивление резистора R4 отличается от номинального
значения 10 кОм на 1% и составляет 9.9 кОм. Тогда дифференциальный
коэффициент усиления схемы равен 101, а КОСС — 20200, что выше, чем в примере 2.2.
Измерительные усилители на трех ОУ имеют КОСС выше, чем схемы на
двух ОУ. Они выпускаются в виде ИМС с внутренними согласованными
резисторами (AD620, LM363, ICL7605 и др.). Обычно эти ИМС имеют выводы для
подключения внешнего резистора Лр, которым задается дифференциальный
коэффициент усиления, а также вход опорного напряжения «REF», который
используется во многих приложениях. Например, ИУ INA118 фирмы
Burr-Brown имеет низкое смещение нуля V0F?= 50 мкВ, широкий диапазон
напряжений питания (±1.35... ±18 В) и входных напряжений (до ±40 В), малый
потребляемый ток — 0.35 мА и широкий диапазон коэффициентов усиления
A...104), устанавливаемых одним внешним резистором.
Шумовые характеристики промышленных моделей измерительных
усилителей на трех ОУ имеют некоторые особенности. Дело в том, что низким
внутренним шумом обладают только входные усилители. Шум выходного ОУ
значительно больше. Поэтому ИУ с большим коэффициентом усиления имеет шум,
приведенный к входу, значительно меньший, чем тот же ИУ с единичным
усилением. То же самое можно сказать и о смещении нуля.
Интересно, что фирма Maxim выпускает ИМС скоростного
дифференциального приемника линии МАХ4146, построенного на трех ОУ. По
динамическим характеристикам он оставляет обычные ИУ далеко позади — его полоса
119
Полагаем, в начале, что KREF = 0. Как видно из Рис. 2.44, напряжение на
резисторе Rp составляет Vx - V2. Отсюда следует, что
Эта разность преобразуется дифференциальным усилителем на трех ОУ в
напряжение Коит относительно общей точки (земли). Обычно выбирается
R2 = R\ и /?з = Ra ~ Rs = ^6- В таком случае дифференциальный коэффициент
усиления
При VREF ф 0 выходное напряжение смещается на эту величину
B.69)
Коэффициент усиления синфазного сигнала из-за разбаланса резисторов:
B.70)
Коэффициент усиления синфазного сигнала из-за конечного значения
КОСС схемы на трех ОУ (ОУ-3):
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
пропускания составляет 70 МГц при А" = 10, а скорость нарастания достигает
800 В/мкс. Усилитель имеет прекрасные шумовые характеристики —
3.5 нВ/Гц1/2 (К= 100), но довольно большие входные токи — 10 мкА (Табл. 2.2).
Таблица 2.2. Основные параметры дифференциальных и измерительных усилителей
Примечание
1 ОУ с переключаемыми
выводами резисторов
МАХ4199
1ОУ
INA146
2 ОУ. Допустимые
синфазное и
дифференциальное напряжения
±100 В
INA118
3 ОУ. Допустимые
синфазное и
дифференциальное напряжения
±40 В
INA116
3 ОУ. Допустимые
синфазное и
дифференциальное напряжения
±40 В
PGA204
Программируемый
коэффициент усиления
AD623
3 ОУ. Очень дешевый.
Может работать с одним
источником питания
AD625
3 ОУ.
Широкополосный
LT1167
3 ОУ. Допустимые
синфазное и
дифференциальное напряжения —
±100 В
МАХ4197
3 ОУ. Фиксированный
коэффициент усиления
120
В заключение отметим следующие преимущества измерительных
усилителей на одном и трех ОУ.
На одном ОУ
На трех ОУ
• КОСС может быть подстроен • Высокий КОСС без подстройки.
внешним резистором до очень
больших значений.
• Могут быть достигнуты высокие
рабочие значения синфазных и
дифференциальных входных
напряжений.
• Низкая стоимость.
• Высокое входное сопротивление.
• Коэффициент усиления
устанавливается одним резистором.
INA143
2.4. Измерительные усилители
2.4.4. Применение измерительных усилителей
Однокристальные ИУ могут использоваться для тех же целей, что и
отдельные операционные усилители. Отличаясь от последних более простой схемой
включения, высоким КОСС, симметрией входов, измерительные усилители
позволяют получить более высокое качество схем, чем обычные ОУ, при
соизмеримой стоимости.
С двумя схемами применения измерительных усилителей — для усиления
сигналов диагонали измерительного моста и измерительного шунта читатель
уже познакомился (см. Рис. 2. 39). Рассмотрим еще несколько схем.
Источник тока, управляемый напряжением
Как мы уже знаем, схема преобразователя
напряжение—ток Хоуленда (см. Рис. 2.12)
весьма критична к соотношению
сопротивлений резисторов. Необходимость согласования
большого количества резисторов делает эту
схему персоной «нон грата» в серийном
производстве. Применение высокоточных
резисторов приводит к существенному ее
удорожанию. А вот на измерительном усилителе
получается очень изящное решение задачи
(Рис. 2.45).
Рис. 2.45. Преобразователь
напряжение—ток на измерительном
усилителе
Полагая входной ток операционного усилителя равным нулю, получим
Усилитель переменного напряжения
Симметричный относительно земли вход измерительного усилителя
позволяет снизить долю синфазной помехи (от внешних электрических полей) в его
выходном напряжении. Это делает привлекательным применение ИУ, в
частности, в звукотехнике в качестве предусилителей микрофонов. Фирма Burr-Brown
выпускает ИМС измерительного усилителя на трех ОУ INA163,
оптимизированную для аудиоприложений. Этот усилитель имеет сверхнизкий уровень
шума: 1 нВ/Гц1/2, широкий диапазон усиления A...104), низкую нелинейность
переходной характеристики (не более 0.004%), но довольно значительное
смещение нуля @.5 мВ). Поскольку в звукотехнике не требуется усиливать
медленно меняющиеся составляющие сигналов, нужно преобразовать ИУ в
усилитель напряжения переменного тока. Это можно сделать по схеме, приведенной
на Рис. 2.46а.
121
Принцип действия этой схемы очень прост. Согласно B.69)
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
Рис. 2.46. Усилитель напряжения переменного тока на ИУ:
а — схема, б — ЛАЧХ
Отрицательная обратная связь через интегратор подавляет сигналы низких
частот. Из уравнения B.69) следует
B.72)
где ти = RC — постоянная времени интегратора. Отсюда передаточная функция
схемы
ЛАЧХ, соответствующая этой передаточной функции, приведена на Рис. 2.466.
Прием слабых сигналов
При приеме слабых сигналов от удаленных датчиков необходимо
принимать серьезные меры для снижения влияния внешних помех.
Особенно трудноустранимыми являются синфазные помехи промышленной
частоты 50 Гц. Подавление этих помех фильтрами приводит к
искажениям полезных сигналов. Экранирование проводов с заземлением экрана
малоэффективно. Хорошие результаты дает создание на экране
потенциала, совпадающего с синфазной составляющей напряжения входного
сигнала. Схема соединения приведена на Рис. 2. 47.
Резистор, которым
устанавливают коэффициент усиления
ИУ, заменяется двумя
последовательно включенными
резисторами половинного сопротивления,
и их общая точка через буферный
повторитель соединяется с
экраном. Буфер нужен для устранения
прохождения сигнала от экрана к
ИУ. Резистор R] сопротивлением
несколько сот ом включают,
чтобы уменьшить емкостную составляющую нагрузки буфера. Эта схема широко
122 применяется в тензометрии и электрокардиографии.
Рис. 2.47. Подключение экрана к источнику
синфазного напряжения
2.5. Схемы нелинейного преобразования сигналов на ОУ
Цепи протекания входного тока
Источник входного сигнала может быть изолирован от общей точки
измерительного усилителя. В этом случае проектировщику необходимо
предусмотреть цепи протекания (возврата) входных токов ИУ. В противном случае эти
токи, как бы малы они ни были, за счет заряда паразитных входных емкостей или
протекания по загрязнениям на поверхности печатной платы создадут
значительные синфазные входные напряжения, и усилитель может выйти из
линейного режима. Некоторые варианты организации цепей возврата входных токов
приведены на Рис. 2.48.
Рис. 2.48. Цепи возврата входных токов ИУ:
а — резистивная, б — трансформаторная
2.5. Схемы нелинейного преобразования
сигналов на ОУ
Часто возникает необходимость сформировать такое напряжение К2,
которое было бы нелинейной функцией напряжения Кь т. е. V2 = Л^)> например,
V2 = Valog(Vi/Vb) или V2 = |Kj|. Для реализации таких зависимостей существует
два возможных способа. Можно применять либо физические эффекты,
которые позволяют реализовать заданные зависимости, либо аппроксимировать их
полиномиальными или степенными рядами.
2.5.1. Логарифмирующие и экспоненциальные
преобразователи
В логарифмирующих и экспоненциальных преобразователях для получения
требуемой функциональной характеристики используются свойства /?-я-пере-
хода диода или биполярного транзистора, смещенного в прямом направлении.
Такие преобразователи входят в качестве отдельных узлов в различные
устройства, выполняющие математические операции. Логарифмирующие
преобразователи применяются также для компрессии сигналов, имеющих большой
динамический диапазон, например звуковых сигналов, причем некоторые из них
перекрывают динамический диапазон в 140 дБ или 7 декад.
123
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
Логарифмирующие преобразователи
На Рис. 2.49 приведена схема простейшего
логарифмирующего преобразователя.
Эта схема очень проста, но имеет много
недостатков, в частности, большие отклонения от
идеальной логарифмической зависимости и
дрейф выходного напряжения при изменениях
температуры.
Ток диода приближенно описывается выражением:
B.73)
где V— напряжение на диоде, q — заряд электрона, к — постоянная Больцмана,
/0 — обратный ток диода, Т— температура в градусах Кельвина.
Тогда для вышеприведенной схемы получим:
следовательно
Для кремниевого диода /0 = 1 нА, а значение кТ/д = 25 мВ при комнатной
температуре.
Простейший логарифмирующий преобразователь применяется редко из-за
двух серьезных ограничений.
а) как следует из B.74), он очень чувствителен к температуре;
б) диоды не обеспечивают высокой точности преобразования, т. е.
зависимость между их прямым напряжением и током не совсем логарифмическая.
Поэтому удовлетворительная точность в этой схеме может быть получена при
изменении входного напряжения в пределах только двух декад.
Лучшие характеристики имеет логарифмирующий преобразователь на
биполярном транзисторе, включенном в цепь обратной связи инвертирующего
усилителя. При этом возможно два вида включения транзистора — с
заземленной базой (Рис. 2.50а) и диодное (Рис. 2.506).
Зависимость тока коллектора транзистора от напряжения база—эмиттер
при нулевом напряжении коллектор-база имеет вид:
124
Рис. 2.49. Основная схема
логарифмирующего преобразователя
B.74)
Для получения логарифмической зависимости необходимо, чтобы
2.5. Схемы нелинейного преобразования сигналов на ОУ
B.75)
Поскольку /со транзистора существенно меньше, чем /0 диода,
приближенное равенство B.75) значительно точнее, чем B.74). Это обеспечивает рабочий
динамический диапазон схемы на Рис. 2.50а до 7 декад A40 дБ).
Примечание 2.1. Для такого широкого диапазона входные токи ОУ должны быть не
более 1 пА.
Схема на Рис. 2.500 менее точна (динамический диапазон до 4 декад — 80
дБ) из-за того, что здесь ток коллектора транзистора отличается от входного
тока схемы на величину тока базы. Однако эта схема менее склонна к
самовозбуждению и имеет более высокое быстродействие.
Для изменения полярности входного напряжения в схеме на Рис 2.505
достаточно просто «перевернуть» транзистор. В схеме на Рис. 2.50а для
отрицательных входных напряжений необходимо использовать /?-л-р-транзистор.
Входные сигналы обратной полярности могут вывести из строя транзистор
в схеме на Рис. 2.50я, т. к. операционный усилитель при этом входит в
насыщение, и на переход база—эмиттер подается обратное напряжение, практически
равное напряжению питания. Поэтому необходимо принять меры для защиты
транзистора. С этой целью в схему включают дополнительные диоды.
Как уже отмечалось выше, схема с заземленной базой транзистора склонна
к самовозбуждению. Это вызвано тем, что в цепи обратной связи усилителя есть
элемент, вносящий дополнительное усиление напряжения (транзистор,
включенный по схеме с общей базой), поэтому общий коэффициент передачи петли
обратной связи повышается и, кроме того, появляется дополнительный полюс
передаточной функции петли регулирования. Как видно из ранее
рассмотренного Рис 1.16, даже усилитель с полной внутренней коррекцией может потерять
устойчивость при увеличении контурного усиления. На диаграмме Боде этому
случаю соответствует перемещение ЛАЧХ вверх относительно оси частот, что
вызывает рост частоты среза и резкое сокращение запаса устойчивости по фазе.
Для обеспечения устойчивости схемы можно применить такую же частотную
коррекцию, что и при работе ОУ на емкостную нагрузку (см. Рис. 1.22а). Схема
скорректированного логарифмирующего преобразователя приведена на
Рис. 2.51.
125
где /со — обратный ток насыщения транзистора. Его значение для маломощных
транзисторов составляет около 0.1 нА при комнатной температуре. Выходное
напряжение этих схем определяется выражением:
Рис. 2.50. Схемы логарифмирования на транзисторе:
а — с включением по схеме ОБ, б — в диодном включении
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
Рис. 2.51. Схема скорректированного
логарифмирующего преобразователя
Рис. 2.52. Схема экспоненциального
преобразователя
Методика расчета параметров корректирующей цепи подробно изложена в
книге А.Дж. Пейтона и В. Волша [2.5].
В экспоненциальных преобразователях обычно применяется показанное на
Рис. 2.52 включение транзистора с заземленной базой.
Выходное напряжение этой схемы определяется выражением:
при
B.76)
Ряд фирм выпускает несколько видов ИМС логарифмирующих и
экспоненциальных преобразователей, например: ICL8048 и 1CL8049. Некоторые из них
предназначены для выполнения только одной функции, другие, такие, как
SSM-2100, могут осуществлять обе функции.
Выпускаются также ИМС радиочастотных логарифмических усилителей,
выходное напряжение которых пропорционально логарифму действующего
значения входного напряжения. Преобразование осуществляется методом,
близким к кусочно-линейной аппроксимации. Примерами могут служить
AD606 с диапазоном 80 дБ и полосой пропускания 50 МГц или AD8307 с
диапазоном 90 дБ и полосой пропускания 500 МГц.
2.5.2. Прецизионные выпрямители на ОУ
Во многих устройствах обработки аналоговых сигналов, например в
измерительных схемах, необходимо выделение либо составляющих только одной
полярности (однополупериодное выпрямление), либо определение
абсолютного значения сигнала (двухполупериодное выпрямление). Эти операции могут
быть реализованы на пассивных диодно-резистивных цепях, но относительно
большое прямое падение напряжения на диодах @.5... 1 В) и нелинейность его
вольт-амперной характеристики вносят в этом случае значительные
погрешности, особенно при обработке слабых сигналов. Применение ОУ позволяет в
значительной степени ослабить влияние реальных характеристик диодов.
126
2.5. Схемы нелинейного преобразования сигналов на ОУ
Однополупериодные выпрямители
Схемы однополупериодных выпрямителей, приведенные на Рис. 2.53,
отличаются друг от друга передаваемой полуволной входного сигнала
(положительной или отрицательной) и знаком коэффициента передачи (инвертирующие и
неинвертирующие).
Рис. 2.53. Четыре варианта схем однополупериодных выпрямителей
Неинвертирующие однополупериодные выпрямители имеют более
высокое входное сопротивление, чем инвертирующие. В инвертирующем
выпрямителе диод VDX открывается на соответствующей полуволне сигнала,
обеспечивая его передачу на выход с коэффициентом, определяемым отношением
резисторов Rx и R2. Диод VD2 смещен при этом в обратном направлении.
Неинвертирующий выпрямитель при передаче пропускаемой полуволны работает
примерно так же, однако в режиме отсечки он функционирует существенно
иным образом.
Как в инвертирующем, так и в неинвертирующем выпрямителях диод VD2
введен для повышения их быстродействия. Если исключить этот диод, то в
режиме отсечки ОУ будет входить в состояние насыщения (ограничения).
В этом случае при переходе б режим пропускания ОУ сначала должен будет
выйти из насыщения, а затем его выходное напряжение будет в течение
определенного времени нарастать до уровня открывания диода VD\. Введение диода
VD2 предотвращает насыщение ОУ и ограничивает перепад его выходного
напряжения при смене полярности входного сигнала. В неинвертирующей схеме
диод VD2 обеспечивает ограничение выходного напряжения ОУ путем
замыкания его выхода на землю, поэтому для этой схемы следует выбирать модель ОУ,
допускающую короткое замыкание на выходе в течение неограниченного
времени. Кроме того, в неинвертирующей схеме операционный усилитель должен
иметь большое допустимое дифференциальное входное напряжение и малое
время восстановления из режима ограничения выходного тока.
Существенным недостатком представленных выше схем является их
высокое выходное сопротивление, имеющее к тому же нелинейный характер.
127
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
Двухполупериодные выпрямители
Наиболее просто реализуются прецизионные
двухполупериодные выпрямители с незаземленной
нагрузкой, например со стрелочным
миллиамперметром. Схема такого устройства приведена на
Рис. 2.54.
Здесь операционный усилитель служит в
качестве управляемого по напряжению источника
тока, который был рассмотрен в п. 2.2.2.
Поэтому выходной ток не зависит от падения
напряжения на диодах и сопротивления нагрузки RL.
Мостовая схема выпрямляет обе полуволны входного сигнала, при этом
выпрямленный ток протекает через нагрузку:
Рис. 2.54. Двухполупериодный
выпрямитель с незаземленной
нагрузкой
128
Рис. 2.55. Двухполупериодный выпрямитель
с заземленным диодом:
а — простая схема и
б — схема повышенной точности
Простейшая из них (Рис. 2.55а) работает следующим образом.
Положительная полуволна входного напряжения запирает диод, в результате чего схема
работает в режиме неинвертирующего усилителя с коэффициентом передачи,
равным единице и Vom = KIN. Отрицательная полуволна открывает диод. Если
бы прямое падение напряжение на диоде было равно нулю, то схема работала
бы в режиме инвертирующего усилителя с единичным коэффициентом и
Vom= — KIN. Схема очень проста, но из-за конечного значения прямого
напряжения на диоде последнее равенство выполняется с большой погрешностью.
Точность можно повысить, если в схеме на Рис. 2.55а заменить диод VDb
моделью идеального диода на ОУ2 (Рис. 2.556). Здесь при положительной
полуволне входного сигнала выходное напряжение ОУ2 будет отрицательным, в
результате чего диод VDi закроется, a VD2 откроется. Выход усилителя ОУ2 будет
соединен с общей точкой практически накоротко и цепь обратной связи
усилителя разомкнута. Усилитель ОУ! работает в режиме неинвертирующего повто-
Эта схема не требует согласования резисторов и имеет высокое входное
сопротивление.
Схемы двухполупериодного выпрямителя с заземленной нагрузкой на ОУ в
дифференциальном включении приведены на Рис. 2.55.
2.5. Схемы нелинейного преобразования сигналов на ОУ
Рис. 2.56. Улучшенная схема
двухполупериодного выпрямителя
рителя. При отрицательной полуволне входного сигнала диод VD\ открыт, а
диод VD2 закрыт. Цепь обратной связи ОУ2 замкнута через открытый диод VDb
поэтому напряжение между входами ОУ2, а стало быть, и на неинвертирующем
входе OYi близко к нулю. Тогда усилитель ОУ! работает в режиме
инвертирующего повторителя.
Схема на Рис. 2.556 тоже довольно проста,
но имеет разное входное сопротивление для
положительных и отрицательных сигналов и
требует согласования резисторов Л1в Усилитель
ОУ2 должен допускать короткое замыкание
выхода и большое дифференциальное
напряжение.
Лучшие характеристики имеет схема,
приведенная на Рис. 2.56, в которой применено
инвертирующее включение операционных
усилителей и обеспечивается одинаковое входное сопротивление для обеих
полуволн входного напряжения.
Схема включает сумматор на ОУ2 и однополупериодный выпрямитель на
ОУ1 (см. левую нижнюю схему на Рис. 2.53).
Прежде всего рассмотрим режимы работы ОУ1. При положительном
входном напряжении он работает как инвертирующий усилитель. В этом случае
напряжение V2 отрицательно, т. е. диод VD\ проводит, a VD2 закрыт, поэтому
У\ = -Ум- При отрицательном входном напряжении V2 положительно, т. е. диод
VD\ закрыт, a VD2 проводит и замыкает цепь отрицательной обратной связи
усилителя, которая препятствует насыщению усилителя ОУ1. Поэтому точка
суммирования остается под нулевым потенциалом. Поскольку диод VD\ закрыт,
напряжение Vx также равно нулю. Справедливы соотношения:
B.77)
Подключение сумматора на ОУ2 обеспечивает двухполупериодное
выпрямление. Сумматор формирует напряжение
Это и есть искомая функция двухполупериодного выпрямителя
Достоинством рассмотренной схемы является равное входное
сопротивление для разных полярностей входного сигнала и отсутствие синфазного
напряжения на входах усилителей. Недостаток — необходимость согласовывать
большее число резисторов E шт.), по сравнению со схемой на Рис. 2.555.
129
Учитывая формулу B.77), получаем:
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
Достоинства двух последних устройств
объединяет прецизионный выпрямитель,
схема которого приведена на Рис. 2.57.
Рассмотрим работу схемы при Rx = R2,
полагая ОУ идеальными.
При K1N < 0 диод VDX открыт, а диод VD2
закрыт. Как следствие потенциалы входов
усилителя ОУ2 равны нулю, а напряжение на
инвертирующем входе OYj совпадает с
входным. В таком случае усилитель ОУ2 работает
как инвертирующий повторитель и ^оит= —
FIN, т. е. положительно. Если KIN > 0, то диод VD\ закрыт, а диод VD2 открыт.
Ток через резистор R\, а следовательно, и через R2 равен нулю, поэтому
выходное напряжение схемы Vom совпадает с потенциалом инвертирующего входа
ОУ! и, стало быть, равно входному напряжению. Аналитически это можно
представить в виде
Рис. 2.57. Прецизионный
выпрямитель с общей обратной
связью
130
Поскольку при KIN > 0 усилители соединяются каскадно в петле обратной
связи, причем ОУ1 не имеет собственной ОС, необходимо принять меры для
обеспечения устойчивости. С этой целью включают конденсатор Ск емкостью
несколько десятков пФ. Особые требования предъявляются к диоду VD2 в
отношении минимума обратных токов. Действительно, типовое значение обратного
тока у обычных кремниевых импульсных диодов составляет величину порядка
1 мкА. Такой ток создает на резисторе Л3 сопротивлением 2 кОм (меньше брать
не следует, чтобы не перегружать Oyt) напряжение 2 мВ, что очень много для
прецизионной схемы. Выпускаются специальные диоды с пониженным
обратным током (например, 1D101 фирмы Intersil имеет /ОбР= Ю пА). В качестве
диода VD2 можно также использовать переход затвор—канал полевых транзисторов
с управляющим ^-«-переходом, для которых ток утечки обычно менее 1 нА.
Замечательная по своей простоте схема
двухполупериодного прецизионного
выпрямителя представлена на Рис. 2. 58.
Она вообще не содержит диодов. Однако
в этой схеме могут применяться только ОУ с
полным размахом входных и выходных
напряжений (rail-to-rail). Усилители питаются
обязательно от однополярного источника.
Если K1N > 0, то усилитель ОУ! работает
как неинвертирующий повторитель. В этом
случае усилитель ОУ2 работает в
дифференциальном включении и Коит= Кш. При KIN < 0 усилитель ОУ1 переходит в
отрицательное насыщение, напряжение на его выходе становится равным нулю
(питание Однополярное!). Тогда усилитель ОУ2 переходит в режим
инвертирующего повторителя, поэтому
Рис. 2.58. Прецизионный бездиодный
выпрямитель на ОУ с однополярным
питанием
2.6. Генераторы сигналов на ОУ
Усилитель ОУ2 всегда работает в линейном режиме, а напряжение на
неинвертирующем входе ОУ\ при KIN < 0 становится меньше, чем напряжение
отрицательного источника питания. Не все операционные усилители это допускают.
Но, например, двухканальный ОУ ОР291 как нельзя лучше подходит для этой
схемы. Его входы защищены от дифференциального перенапряжения
встречно-параллельно включенными диодами, причем в цепи баз входных
транзисторов включены резисторы сопротивлением 5 кОм. Это позволяет усилителю
выдерживать при однополярном питании входные напряжения до —15 В. В этом
случае резистор R{ можно не включать. Иное дело двухканальный усилитель
ОР296. Он не имеет защитных резисторов и при его применении в этой схеме
необходимо включать резистор R{ = 2 кОм. Изготовитель рекомендует для этой
схемы при напряжении питания 5 В диапазон входных сигналов ±1 В. Из-за
того что усилитель ОУ1 долго выходит из насыщения, частотный диапазон схемы
оказывается довольно узким — для ОУ ОР291 он составляет всего 0...2 кГц.
2.6. Генераторы сигналов на ОУ
Генераторы сигналов являются неотъемлемым элементом значительной
части радиотехнических систем и устройств. Это могут быть синусоидальные
генераторы несущей частоты передатчиков или гетеродинов приемников,
импульсные тактовые генераторы цифровых устройств, генераторы частот
повторения различного рода периодических процессов в радиолокационных или
телеметрических системах, наконец, генераторы сигналов специальной формы
для различного рода измерительных и индикаторных устройств. В зависимости
от конкретного применения к генераторам предъявляются самые
разнообразные требования. Так, для генераторов синусоидальных сигналов — это
точность, монохромность и стабильность заданной частоты; для импульсных
генераторов — это точность и стабильность заданного периода повторения и
длительности импульсов; для генераторов сигналов специальной формы — это
стабильность и точность воспроизведения заданного вида колебания. Во
многих случаях в генераторах должна быть предусмотрена возможность внешнего
управления параметрами выходного сигнала (частотой, фазой, временными
параметрами и, наконец, формой колебаний). Схемотехнически электронный
генератор представляет собой усилитель, охваченный положительной обратной
связью. Усилители могут быть построены на дискретных транзисторах, на базе,
цифровых ИМС, на интегральных таймерах, а также на операционных
усилителях. Использование ОУ позволяет построить стабильные генераторы с весьма
точным воспроизведением заданной формы выходного сигнала.
2.6.1. Релаксационные генераторы
Релаксационными называют генераторы, у которых усилитель работает в
переключательном (релейном) режиме. К ним относят автоколебательный и
ждущий мультивибраторы, генераторы пилообразных и треугольных
колебаний. Основой релаксационных генераторов на ОУ является обычно
регенеративный компаратор, называемый также триггером Шмитта. Регенеративный 131
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
компаратор может быть выполнен на операционном усилителе с резистивной
положительной обратной связью (Рис. 2.59).
Рис. 2.59. Триггер Шмитта
(регенеративный компаратор с гистерезисом):
а — неинвертирующий, б — инвертирующий
Переходная характеристика компаратора имеет гистерезис, ширина
которого равна удвоенному пороговому напряжению 2FTH, причем для схемы на
Рис .2.59д
а для схемы на Рис. 2.595
B.78)
B.79)
где VM — максимальное выходное напряжение усилителя (напряжение
ограничения или насыщения).
Автоколебательный мультивибратор
Схема и временная диаграмма работы автоколебательного мультивибратора
приведены на Рис. 2.60.
Рис. 2.60. Автоколебательный мультивибратор:
а — схема, б — временная диаграмма работы
2.6. Генераторы сигналов на ОУ
Мультивибратор состоит из инвертирующего триггера Шмитта,
охваченного отрицательной обратной связью с помощью интегрирующей ЛС-цепочки
(Рис. 2.60а).
Когда напряжение на конденсаторе Vc достигает одного из порогов
срабатывания, схема переключается и ее выходное напряжение скачком принимает
противоположное значение. При этом конденсатор начинает перезаряжаться в
противоположном направлении, пока его напряжение не достигнет другого
порога срабатывания. В этот момент схема переключается в первоначальное
состояние (Рис. 2.605).
Анализ схемы мультивибратора позволяет записать дифференциальное
уравнение:
B.80)
Как видно из последней формулы, период колебаний мультивибратора не
зависит от напряжения Км, которое, в свою очередь, определяется
напряжением питания V$. Поэтому частота колебаний мультивибратора на ОУ мало
зависит от питающего напряжения.
Ждущий мультивибратор (одновибратор)
Обычное назначение ждущего мультивибратора — получение одиночного
импульса заданной длительности. Отсчет длительности импульса начинается от
фронта (или уровня) специального запускающего импульса. Для того чтобы
перейти от схемы автоколебательного к схеме ждущего мультивибратора,
необходимо ввести дополнительно цепь запуска и цепь «торможения». Схема одно-
вибратора и временные диаграммы, поясняющие его работу, приведены на
Рис. 2.61.
Рис. 2.61. Ждущий мультивибратор:
а — схема, б — временные диаграммы
133
При начальных условиях Vc@) = -Ктн решение этого уравнения имеет вид:
Значение напряжения, равное порогу срабатывания триггера Шмитта
(условие Vc(f) = Ктн), будет достигнуто спустя время
Период колебаний мультивибратора, таким образом, равен
B.81)
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
Если выходное напряжение ОУ отрицательное максимальное, то диод VD{
открыт, и напряжение на времязадающем конденсаторе Vc (равное падению
напряжения на открытом диоде) составляет примерно —0.5 В. При правильном
выборе параметров схемы, напряжение на неинвертирующем входе ОУ
поэтому при отсутствии запускающего импульса КЗАП схема находится в
устойчивом состоянии. При поступлении положительного запускающего импульса
достаточной амплитуды (| КЗАП I > I Vp \ - \ V% |) и длительности (/и должно
превышать время запирания диода VD\) операционный усилитель за счет
положительной обратной связи переключается в состояние, при котором его выходное
напряжение равно + КМ. Диод VD2 закрывается, и на/ьвходе ОУ
устанавливается напряжение Ктн, определяемое выражением B.79). К времязадающей цепи
RC теперь приложено напряжение +КМ, под действием которого закрывается
диод VD\ и начинается заряд конденсатора С. Когда, спустя время /ь
напряжение Vc достигнет порога Ктн, операционный усилитель переключится и
вернется в первоначальное состояние. Конденсатор С начнет разряжаться и спустя
промежуток времени tp, называемый временем релаксации, напряжение Vc
вновь станет отрицательным, диод VDX откроется и цикл закончится.
Процессы в схеме описываются тем же уравнением B.80), что и для
автоколебательного мультивибратора, но начальное условие иное, и его решение для
одновибратора имеет вид:
где VR — падение напряжения на открытом диоде VD\. Отсюда по условию
Vc(t\) = Fnop найдем длительность импульса одновибратора:
Из последнего выражения видно, что длительность импульса одновибратора
зависит от напряжения насыщения ОУ, которое, в свою очередь, определяется
напряжением питания. Другим недостатком рассмотренной схемы является
значительное время релаксации, в течение которого на одновибратор нельзя
подавать запускающий импульс (иначе из-за изменения начальных условий
будет сокращена длительность выходного импульса). Эти недостатки отсутствуют
у одновибраторов, выполненных на компараторе или аналоговом таймере,
которые мы рассмотрим в пп. 4.4.3,4.6.2.
Генератор колебаний прямоугольной и треугольной форм
Как видно из диаграммы на Рис. 2.605, в схеме мультивибратора
формируется напряжение не только прямоугольной формы, но и формы, близкой к
треугольной (на конденсаторе). Времязадающая ЛС-цепь мультивибратора
выполняет приближенное интегрирование выходных прямоугольных колебаний.
Заменив эту цепь интегратором на ОУ, получим генератор, на одном из выходов
которого формируются колебания прямоугольной формы, а на другом —
треугольные колебания (Рис. 2.62).
134
2.6. Генераторы сигналов на ОУ
Рис. 2.62. Схема генератора колебаний
прямоугольной и треугольной форм
Здесь на усилителе OYi выполнен
неинвертирующий триггер Шмитта, а на ОУ2
— интегратор. Он интегрирует постоянное
напряжение, имеющееся на выходе
триггера Шмитта. Когда выходное напряжение
интегратора достигает порога срабатывания
триггера, напряжение на его выходе Vx
скачком меняет свой знак. Вследствие
этого напряжение на выходе интегратора
начинает изменяться в противоположную
сторону, пока не достигнет другого порога
срабатывания триггера. Изменяя постоянную интегрирования ЛС, можно
перестраивать частоту формируемого напряжения в широком диапазоне. Амплитуда
треугольного напряжения V2 зависит только от установки уровня срабатывания
триггера Шмитта Ктн, который для данной схемы включения триггера
составляет VUR{/R2 (Км — по-прежнему напряжение насыщения ОУ).
Период колебаний генератора равен удвоенному времени, которое
необходимо интегратору, чтобы его выходное напряжение изменилось от
-Ктн до +КТН. Отсюда следует, что
2.6.2. Генераторы синусоидальных колебаний
Условия возбуждения
На Рис. 2.63 показана блок-схема генератора.
Усилитель усиливает входной сигнал в К\ раз. При этом между выходным
Кот и входным Kin напряжениями усилителя возникает фазовый сдвиг. К
выходу усилителя подключена схема частотно-зависимой обратной связи, которая
может представлять собой, например, колебательный контур. При этом
напряжение обратной связи составляет рКоит- Обозначим аргумент комплексного
коэффициента передачи звена обратной связи (J символом V|/.
Условием генерации стационарных
колебаний замкнутой схемой является равенство
выходного напряжения схемы обратной
связи и входного напряжения усилителя. Это
условие записывается следующим образом:
Рис. 2.63. Блок-схема
электронного генератора
синусоидальных колебаний
135
Таким образом, частота формируемого напряжения не зависит от величины
напряжения насыщения операционного усилителя.
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
Коэффициент петлевого усиления должен, таким образом, равняться
/?С-генератор синусоидальных колебаний
Простейшая схема ЛС-генератора синусоидальных колебаний на
операционном усилителе и частотная характеристика цепи его обратной связи
приведены на Рис. 2.64.
Рис. 2.64. RC-генератор синусоидальных колебаний:
а — схема, б — частотная и фазовая характеристики цепи обратной связи
В качестве звена обратной связи использован полосовой ЛС-фильтр,
частотные характеристики которого приведены на Рис. 2.645. Здесь по оси абсцисс
отложена нормированная частота Q = (oRC, поэтому средняя частота полосы
прпопускания равна единице. Фазовый сдвиг на средней частоте \|/A) = 0.
Следовательно, для выполнения условия баланса фаз выход звена обратной связи
должен быть подключен к неинвертирующему входу ОУ. Коэффициент
усиления полосового фильтра на средней частоте |Р A)| = 1/3. Для выполнения
условия баланса амплитуд ОУ по неинвертирующему входу должен иметь
коэффициент усиления К=3. Поэтому
B.85)
В целом цепь, подключенная к ОУ (полосовой фильтр и делитель R1R2),
называется мостом Вина-Робинсона.
При строгом выполнении условия B.85) и идеальном ОУ в схеме на
136 Рис. 2.64а будут существовать незатухающие колебания с частотой/= \/2nRC.
Из последнего комплексного соотношения вытекают два вещественных
B.82)
B.83)
2.6. Генераторы сигналов на ОУ
Однако амплитуда этих колебаний не будет определена. Кроме того, даже самое
незначительное уменьшение R\ по сравнению с B.85) вызовет затухание
колебаний. Напротив, увеличение R{ по сравнению с B.85) приведет к нарастанию
амплитуды колебаний вплоть до уровней ограничения выходного напряжения
усилителя и как следствие к появлению заметных нелинейных искажений
формы генерируемого колебания. Эти обстоятельства требуют использования в
составе генератора системы автоматического регулирования амплитуды. В
простейшем случае для этого вместо резистора R2 используют нелинейный
элемент, например микромощную лампу накаливания, динамическое
сопротивление которой с ростом амплитуды тока увеличивается.
Низкочастотные синусоидальные колебания могут быть также получены
путем моделирования дифференциального уравнения синусоидальных
колебаний с помощью операционных усилителей. Схема, реализующая этот метод,
подобна схеме фильтра второго порядка, построенного на основе метода
переменного состояния, приведенной на Рис. 2.35. Эта схема, как и предыдущая,
требует применения системы автоматического регулирования амплитуды коле-
оаний.
Сложность обеспечения высокой стабильности амплитуды колебаний при
минимальных искажениях выходной синусоиды существенно усложняет
построение генераторов синусоидальных колебаний и управление ими. Лучшие
результаты во многих случаях, особенно на низких и инфранизких частотах,
дает применение так называемых функциональных генераторов.
Рис. 2.65. Блок-схема функционального генератора
Функциональные генераторы
Блок-схема простейшего
функционального генератора приведена
на Рис 2.65.
Он включает генератор
прямоугольного и треугольного
напряжения и блок формирования
синусоидального сигнала. Как
показано на Рис. 2.62, генератор
прямоугольного и треугольного
напряжения состоит из триггера Шмитта и интегратора, образующих
замкнутый контур. Блок формирования синусоидального сигнала обычно
представляет собой нелинейный функциональный преобразователь, например на основе
аналогового перемножителя. Если частота генератора постоянна, то в качестве
блока формирования синусоидального сигнала можно использовать также
фильтр нижних частот с верхней граничной частотой полосы пропускания,
лежащей несколько выше частоты треугольного колебания. Задача фильтра
пропустить только первую гармонику спектра сигнала треугольной формы.
Функциональные генераторы производятся некоторыми фирмами в виде
интегральных микросхем. Например, микросхема МАХ038 генерирует
синусоидальные, треугольные, прямоугольные и импульсные сигналы в области
частот 0.1 Гц...20 МГц, причем синусоидальные сигналы имеют коэффициент
гармоник не более 0.75%.
137
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
2.7. Аналоговые перемножители
Перемножители являются одними из самых распространенных
функциональных узлов современных аналоговых устройств и, помимо перемножения
двух сигналов, позволяют также возводить входной сигнал в квадрат, извлекать
квадратный корень, выполнять операцию деления одного сигнала на другой.
На перемножителях выполняются схемы, управляемые напряжением,
например фильтры, генераторы сигналов и т. д. По принципу действия схемы
перемножителей можно разделить на следующие группы:
• перемножители с управляемым сопротивлением канала полевого
транзистора;
• перемножители на основе управляемого источника тока;
• логарифмирующие-антилогарифмирующие перемножители;
• импульсные перемножители (метод временного разделения);
• перемножители на основе цифроаналогового преобразователя.
2.7.1. Перемножитель с управляемым
сопротивлением канала полевого транзистора
Схема на Рис. 2.66 служит только
иллюстрацией рассматриваемого принципа.
При напряжениях сток-исток, лежащих ниже
напряжения точки перегиба выходной
характеристики, т.е не превышающих 0.5 В, полевой
транзистор ведет себя как управляемый резистор,
сопротивление которого приблизительно обратно
пропорционально напряжению затвор-исток.
Следовательно, схему можно рассматривать как
усилитель с входным напряжением Кх,
коэффициент передачи которого приближенно пропорционален VY\ в результате
происходит перемножение напряжений Vx и VY. Схема имеет много недостатков,
например, очень плохую линейность, т. к. отношение Кх к J^UT нелинейно
зависит от VY. Кроме того, характеристики полевого транзистора сильно зависят
от температуры, что вызывает значительные погрешности при ее изменениях.
Наконец, диапазон входных напряжений Vx и VY ограничен: 0.5 В < Vx < +0.5 В
и —0.5 В < VY< 0 В. Даже при тщательном проектировании погрешность таких
перемножителей составляет несколько процентов.
2.7.2. Перемножители на основе управляемых
источников тока
Упрощенная схема перемножителя, реализующего этот метод представлена
на Рис. 2.67.
Операция умножения реализуется за счет изменения коэффициента
передачи дифференциального усилительного каскада (согласованные транзисторы
138 VT{ и VT2) при изменении его рабочего тока 1Х. В данном случае ток I{« VY/Rb
Рис. 2.66. Перемножитель на
основе полевого транзистора с
управляемым сопротивлением
канала
2.7. Аналоговые перемножители
Отсюда следует, что
Приведенная схема имеет ограниченное практическое применение из-за
свойственных ей серьезных недостатков. Во-первых, для того, чтобы
искажения не превышали 1% необходимо соблюдать условие \VX\ < 9 мВ. Во-вторых,
коэффициент передачи перемножителя зависит от температуры. В-третьих, для
того, чтобы схема работала правильно, напряжение VY должно быть только
положительным, в то время как Vx может иметь любой знак. Такой
перемножитель называется двухквадрантным. Выпускаемые промышленностью четырех-
квадрантные перемножители на основе управляемых источников тока имеют
значительно более сложную внутреннюю структуру. Примерами могут служить:
классический AD534 фирмы Analog Devices, имеющий погрешность
перемножения не более 0.1% в диапазоне входных сигналов ±10 В и частотном
диапазоне до 10 МГц, и MPY632A фирмы Burr-Brown (отечественный аналог —
525ПСЗ), имеющие погрешность перемножения не более 1% при диапазоне
139
Рис. 2.67. Схемэ перемножителя на основе
управляемого источника тока
благодаря применению токового зеркала (согласованные транзисторы КГ3 и
КГ4) и источника тока на транзисторе VT5.
Операционный усилитель формирует напряжение, прямо
пропорциональное разности коллекторных токов транзисторов VTX и VT2:
причем разность коллекторных токов определяется отношением входного
напряжения дифференциального каскада к динамическому сопротивлению
эмиттера гЕ транзисторов VT\ и VT2:
В свою очередь, динамическое сопротивление эмиттера обратно
пропорционально току Iy.
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
140
входных сигналов ±10 В и частотном диапазоне до 1 МГц. Блок-схема этих
перемножителей приведена на Рис. 2.68.
Рис. 2.68. Блок-схема перемножителя
(Рмасш — масштабирующее напряжение)
Связь между входными и выходным сигналами этих микросхем
устанавливается соотношением:
B.87)
Микросхемы можно использовать и как умножитель (Рис. 2.69а), и как
делитель (Рис. 2.696).
1
Рис. 2.69. Варианты включения перемножителей:
а — аналоговый умножитель; б — аналоговый делитель
При включении микросхемы умножителем (Рис. 2.69а) справедливы
следующие соотношения:
или
откуда получим при
2.8. Измерительные схемы на ОУ
Последнее соотношение обеспечивает отрицательный знак обратной связи в
перемножителе.
Аналоговые перемножители могут использоваться и для выполнения иных
математических операций над сигналами, таких, как возведение в квадрат,
извлечение квадратного корня и др. [2.5]. Очень удобна для этих целей четырехка-
нальная ИМС фирмы Analog Devices MLT04, имеющая типичную погрешность
линейности 0.2% в полосе частот 8 МГц.
2.8. Измерительные схемы на ОУ
В этом параграфе рассматриваются несколько схем, обеспечивающих
преобразование в напряжение постоянного тока некоторых электрических
величин, которые не могут быть непосредственно измерены с помощью обычных
стрелочных измерительных приборов или преобразованы в цифровой код
стандартным аналого-цифровым преобразователем.
2.8.1. Измерение заряда
Схема измерения заряда формирует выходное напряжение,
пропорциональное изменениям заряда, находящегося на исследуемом приборе.
Например, в пьезодатчиках ускорения возникает заряд, изменяющийся в
соответствии с действующим на элемент механическим усилием. Датчики с
изменяющейся емкостью, например конденсаторные микрофоны, включаются
последовательно с источником постоянного напряжения, поэтому давление
воздуха или иные воздействия вызывают изменения заряда на электродах
датчика. Во всех задачах, связанных с измерением заряда, основные трудности
связаны с высоким сопротивлением источника исследуемого сигнала.
Аналогичные проблемы имеют место при приеме сигналов с датчиков,
имеющих большое внутреннее сопротивление, особенно если спектр этих
сигналов занимает широкую полосу частот. Такими датчиками, например,
являются микроэлектроды, используемые в биологии и медицине. Их сопротивление
составляет сотни мегаом. Ну и что же, — скажет просвещенный читатель, —
существует много моделей ОУ с входным сопротивлением порядка нескольких
тераом. С этим можно было бы согласиться, если бы сигналы датчиков
менялись очень медленно. Действительно, при конструировании измерителя ки- 1
При включении делителем (Рис. 2.696) можно записать:
откуда
при
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
слотности (рН-метра) особенных проблем не возникает, нужно лишь взять ОУ с
достаточно малыми входными токами (например, LMC6001A с входным током
25 фА при 25°С). С источниками быстро меняющихся сигналов дело обстоит
сложнее.
Линия, соединяющая источник и приемник с такими высокими
сопротивлениями, крайне чувствительна к электрическим помехам, поэтому ее
обязательно экранируют. Это приводит к большой емкостной нагрузке источника
относительно общей точки схемы (порядка 50 пФ/м). При внутреннем
сопротивлении источника сигнала, например 1 ГОм, и емкости кабеля 50 пФ,
граничная частота измеряемого сигнала составит всего лишь 3.1 Гц.
Другая проблема — изменения величины этой емкости во времени,
вызванные, например, механическими перемещениями. Это приводит к
возникновению очень большого шумового напряжения. Если на проводник подано
напряжение 10 В, то из-за колебаний емкости на 1% колебания входного напряжения
усилителя достигают 100 мВ.
Для снижения влияния экрана на качество приема сигнала от датчика ОУ с
малым входным током включают по схеме неинвертирующего повторителя
(Рис. 2.70), причем экран соединяют с выходом усилителя заряда с одинарным
экраном, как показано на Рис. 2.70а.
142
Рис.2.70.Схема усилителя заряда:
а — с одинарным экраном; б — с двойным экраном
В этом случае динамическая входная емкость схемы CIN оказывается
существенно меньше емкости Сэ между центральным проводом и экраном.
Используя соотношения для вывода входного сопротивления ОУ в неинвертирующем
включении (п. 1.5), можно показать, что
Физически это объясняется тем, что в этой схеме при подаче входного
сигнала разность потенциалов между проводом и экраном практически не
меняется, оставаясь равной входному дифференциальному напряжению ОУ. Если
входные сигналы слабые, то для уменьшения синфазной помехи следует
использовать двойной экран, причем внешнюю оболочку нужно заземлить. Для
предотвращения самовозбуждения, обусловленного влиянием межэкранной
емкости, следует включить между выходом ОУ и внутренним экраном резистор
сопротивлением несколько сот Ом (Рис. 2.706).
Усилитель, построенный по такой схеме, практически не нагружает
источник сигнала, поэтому его целесообразно применять для усиления сигналов пье-
зодатчиков, т. к. механические свойства и резонансные частоты последних в
этом случае остаются неизменными.
Другой путь измерения заряда состоит в применении инвертирующей
схемы (Рис. 2.71).
2.8. Измерительные схемы на ОУ
Рис. 2.71. Усилитель заряда с ОУ в инвертирующем включении:
а — схема включения, б — ЛАЧХ усилителя
Здесь С\ — емкостный датчик. Эта схема работает как интегратор, в котором
конденсатор С2 в цепи обратной связи ОУ интегрирует входной ток 1Х.
Благодаря низкому входному сопротивлению схема имеет хорошую частотную
характеристику. Емкость соединительного кабеля мало влияет на его работу.
Конденсатор С2 можно при необходимости разряжать, замыкая ключ S. Если не требуется
усиливать постоянную составляющую сигнала, то параллельно конденсатору С2
подключают резистор R2. Для повышения устойчивости схемы целесообразно
включить резистор R\. В этом случае передаточная функция схемы будет иметь
вид
Логарифмическая амплитудно-частотная характеристика схемы приведена
на Рис. 2.710. Нижняя частота полосы пропускания/н = 1/2пЯ2С2 (Гц). Верхняя
частота (в зависимости от того, что меньше) либо совпадает с полосой
пропускания ОУ, либо равна/в = \/2nRiC\ (Гц). В полосе пропускания коэффициент
передачи схемы равен —Сх/С2.
Данная схема практически закорачивает датчик, так что ее целесообразно
использовать совместно с емкостными датчиками сигналов, например
конденсаторными микрофонами, пьезоэлектрическими акселерометрами и др.
2.8.2. Измерители амплитуды (пиковые детекторы)
Пиковые детекторы предназначены для измерения максимального за
некоторый отрезок времени значения сигнала. Работу пикового детектора можно
пояснить на примере простой схемы, состоящей из идеального диода и
конденсатора (Рис. 2.72).
Рис. 2.72. Простейший пиковый детектор:
а — схема, б — эпюра выходного напряжения
143
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
Пиковые детекторы могут работать в двух различных режимах — слежения и
хранения. В режиме слежения входной сигнал больше напряжения на
конденсаторе, диод открыт и выходное напряжение детектора соответствует входному
до тех пор, пока входное напряжение не начнет снижаться. В этот момент
устройство переходит в режим хранения (Рис. 2.126), в котором будет оставаться до
тех пор, пока входное напряжение вновь не превысит ранее достигнутого
уровня. Для возврата схемы к первоначальному состоянию используется ключ S.
Схема на Рис. 2.72а имеет много недостатков. Во-первых, зафиксированное
выходное напряжение постепенно уменьшается из-за разряда конденсатора.
Во-вторых, из-за падения напряжения на диоде выходное напряжение
несколько отличается от входного в режиме слежения. И наконец, время заряда
конденсатора довольно значительно, а это ограничивает быстродействие схемы,
минимальную длительность обнаруживаемого импульса и максимальную
скорость нарастания выходного напряжения. При выборе емкости конденсатора
приходится учитывать два противоречивых требования: уменьшение скорости
спада и повышение скорости нарастания. Большая емкость конденсатора
гарантирует меньшую скорость спада, поскольку напряжение на конденсаторе
будет изменяться относительно медленно. Однако по этой же причине
снизится скорость нарастания и уменьшится точность обработки коротких импульсов.
На Рис. 2.73 приведена
усовершенствованная схема
пикового детектора.
Падение напряжения на
диоде компенсировано
включением его в цепь
отрицательной обратной связи неинвер-
тирующего повторителя. В результате при открытом диоде разность KIN — V\
равна напряжению смещения нуля усилителя У^ Благодаря этому конденсатор
С заряжается практически до максимального значения входного напряжения.
Повторитель напряжения на У2 весьма незначительно нагружает конденсатор,
так что пиковое значение запоминается на очень долгое время. С помощью
ключа S конденсатор разряжается перед новым измерением.
Усилитель У! в этой схеме работает на емкостную нагрузку, поэтому
возможно его самовозбуждение. Этот эффект может быть устранен включением
резистора R. Это приведет, однако, к увеличению времени нарастания за счет
асимптотического приближения напряжения на конденсаторе к
стационарному значению. Другим недостатком этой схемы является то, что У1 переходит в
режим ограничения при FIN < Vx. Эти факторы обуславливают надлежащую
работу этой схемы только в области низких частот.
Лучшими характеристиками
обладает пиковый детектор,
схема которого приведена на
Рис. 2.74.
Здесь ОУ У1 использован в
инвертирующем включении.
Если VlN>-Vc(Rl/R2),
напряжение V{ становится
отрицательным и диод VD\ проводит
Рис. 2.74. Усовершенствованная схема пикового
^ДД детектора
Рис. 2.73. Схема пикового детектора на двух
операционных усилителях
2.8. Измерительные схемы на ОУ
ток. Благодаря отрицательной обратной связи, охватывающей оба усилителя,
FOut = ~^in(^2/^i)- При этом исключается влияние падения напряжения на
диоде VDU а также напряжения смещения усилителя У2. Если входное
напряжение начинает снижаться, то Vx нарастает. Диод VDX закрывается, а диод VD2
открывается, замыкая внутреннюю обратную связь усилителя У! и не давая ему
заходить в область насыщения. Пиковое напряжение, инвертированное и
масштабированное в (R2/R1) раз запоминается на конденсаторе. Различные
варианты схем инвертирующих и неинвертирующих пиковых детекторов приведены
в книге [4.5].
2.8.3. Фотоэлектрические измерения
Фотоэлектрические измерения приходится проводить в очень многих
областях науки и техники. Это оптика (измерение освещенности,
автофокусировка, управление вспышкой в фотоаппаратах), медицина (анализ крови),
телекоммуникации (приемники оптоволоконной связи), промышленность
(датчики положения, лазерные принтеры). Один из наиболее
распространенных фотодатчиков — фотодиод. Он обладает высоким быстродействием и
линейной зависимостью тока короткого замыкания от освещенности. Например,
фотодиод SD-020-12-001, предназначенный для точных измерений, обладает
следующими характеристиками:
• чувствительность— 100нА/лк;
• линейная шкала выходного тока — 0 мкА;
• площадь светочувствительной поверхности — 0.2 мм2;
• емкость — 50 пФ при 10 В обратного напряжения;
• внутреннее сопротивление при коротком замыкании — 1000 Мом;
• время отклика — 12 не.
Как правило, фотодиоды
работают в одном из двух режимов: фо-
товольтаическом (Рис. 2.15а) или
фотодиодном (Рис. 2.755).
В первом случае фотодиод
работает в режиме короткого
замыкания, во втором — при обратном
смещении. Ниже приведены
сравнительные характеристики обоих
режимов.
Рис. 2.75. Схемы включения фотодиодов
в режимах:
а — фотовольтаическом, б — фотодиодном
Фотовольтаический режим
• Нулевое смещение.
• Нет темнового тока.
• Нелинейный.
• Низкий уровень шума (Джонсона).
• Прецизионные схемы.
Режим фотодиода
• Обратное смещение.
• Есть темновой ток.
• Линейный.
• Повышенный шум (Джонсона +
дробовой).
• Скоростные схемы.
145
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
146
В фотовольтаическом режиме фотодиод
может быть представлен источником тока с
внутренним сопротивлением в виде параллельной
цепочки RD CD (Рис. 2.76) [2.6].
В этом случае ОУ работает в режиме
преобразователя тока в напряжение. При медленных
изменениях светового потока влиянием емкости CD
можно пренебречь. Поскольку на
инвертирующем входе ОУ поддерживается практически
нулевой потенциал (виртуальная земля), ток через
сопротивление RD равен нулю. Если считать, что входной ток ОУ близок к
нулю, то весь фототок будет протекать через резистор R\ и
Рис. 2.76. Расчетная схема
фотодиода в фотовольтаическом
режиме
При изменении освещенности от 0.003 лк (ясная безлунная ночь) до 3000 лк
(прямой солнечный свет) фототок диода изменяется в пределах 30 пА...30 мкА.
Это соответствует динамическому диапазону 120 дБ. Для того чтобы влияние
входного тока ОУ было несущественным, он должен быть менее 3 пА. Если
требуется измерение освещенности в широких пределах, то сопротивление
резистора обратной связи должно быть не слишком большим (в пределах 10 МОм).
Тогда на нижней границе диапазона освещенности выходное напряжение
составит
что требует применения ОУ с напряжением смещения нуля не более 100 мкВ.
Поскольку фотодиод обладает заметной емкостью, в цепи обратной связи
ОУ образуются инерционные звенья со значительными постоянными времени.
Например, при включении SD-020-12-001 совместно с резистором
R{ = 100 МОм постоянная времени R\CD составит 4 мс. Это заметно
увеличивает фазовое запаздывание в петле обратной связи ОУ в области средних и
высоких частот и ведет к неустойчивости схемы. Для компенсации следует включить
параллельно резистору R\ корректирующий конденсатор Q.
Асимптотическая ЛАЧХ скорректированной схемы приведена на Рис. 2.77.
Постоянные времени xt = R\\\Rd(Ci + CD), т2 = R\C{ *.
* Как видно из рисунка, если выбрать емкость С\ из условия 1 + R\/R\> = 1 + CD/C\,
или, что то же, R\C\ = /?dQ> коэффициент передачи цепи обратной связи становится час-
тотнонезависимым и полоса пропускания всей схемы оказывается максимально широкой.
Рис. 2.77. Асимптотическая ЛАЧХ схемы на Рис. 2.76
2.8. Измерительные схемы на ОУ
2.8.4. Мостовые измерительные схемы
Резистивные элементы широко используются в датчиках различного
свойства и назначения. Это обусловлено их низкой ценой и простотой связи со
схемами преобразования электрических сигналов. Резистивные элементы могут
быть чувствительны к температуре, механическим деформациям, свету,
магнитному полю и другим физическим воздействиям. С помощью резистивных
датчиков измеряют вес, давление, влажность, скорость истечения газов и др.
Резистивные датчики изготавливаются в зависимости от назначения и типа с
сопротивлениями 50 Ом...10 МОм. Например, характерное сопротивление тен-
зодатчиков составляет 100, 200 Ом, термисторов — 3500 Ом и т. д.
Поскольку сопротивление этих датчиков зависит от
физических величин, к которым они чувствительны, необходимо
измерять их сопротивление и на основании характеристики
преобразования определять значение соответствующей физической
величины. Простейший способ измерения сопротивления
состоит в пропускании через резистор стабильного тока / и
измерении падения напряжения К В этом случае
V+AV= I(R + AR).
Точность измерения зависит от точности поддержания тока
источника и точности измерения напряжения. Любые
изменения тока могут быть восприняты как изменение сопротивления.
К тому же температурные дрейфы, например тензорезистора, также будут
интерпретированы как изменение контролируемой деформации.
Применение мостовых схем позволяет во многом снизить остроту этих
проблем. Основная схема моста Уинстона (фактически разработанного С. Кристи в
1833 году) показана на Рис. 2.78.
Основное уравнение моста имеет вид
Оно не зависит от способа его возбуждения (от источника тока или источника
напряжения, переменным или постоянным током), амплитуды возбуждения,
сопротивления индикатора баланса.
Можно измерить сопротивление (например, R\) в плече моста
компенсационным методом. Если, скажем, выбрать R2 = R$, то, включив в качестве
резистора /?4 магазин сопротивлений, добиваются баланса моста. Тогда R{ = /?4.
Компенсационный метод очень точен, но требует громоздкого прецизионного
оборудования и плохо поддается автоматизации. Прямое измерение небаланса
моста значительно проще. На Рис. 2.79 представлены мостовые схемы с
различным включением датчиков (они показаны переменными резисторами) при пи- 147
Рис. 2.78.
Мостовая
измерительная
схема (мост
Уинстона)
B.88)
B.89)
Условие баланса моста, то есть когда Vq\jt= 0, следующее:
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
тании постоянным напряжением (Ка= const), а в Табл. 2.3 приведены
функциональные зависимости для этих схем [2.7].
Рис. 2.79. Мостовые измерительные схемы с питанием от источника
постоянного напряжения
Таблица 2.3. Зависимость параметров мостовых схем с питанием от источника постоянного
напряжения
Как видно, чаще всего используемая схема с одним датчиком обладает
заметной погрешностью линейности. Лучшими в смысле линейности свойствами
обладают мостовые схемы с питанием неизменным постоянным током,
приведенные на Рис. 2.80, а в Табл. 2.4 представлены характеристики этих схем.
148
Таблица 2.4. Зависимость параметров мостовых схем с питанием от источника постоянного
тока
Погрешность линейности
Рис. 2.80. Мостовые схемы с питанием от источника постоянного тока
Погрешность
линейности
2.8. Измерительные схемы на ОУ
Стабильным током удобно питать удаленные мостовые схемы, т. к. падение
напряжения на питающих проводах не сказывается на точности
преобразования. Недостатком мостовых схем с токовым возбуждением является
невозможность подключения нескольких мостов к одному источнику.
Приведенные в Табл. 2.3 и Табл. 2.4 соотношения
показывают, что точность отсчета данных с резистив-
ных датчиков напрямую связана с точностью
поддержания величины тока или напряжения возбуждения.
Отсюда вытекают высокие требования к точности и
стабильности соответствующих источников.
Нелинейность функциональных зависимостей
также нежелательна, поэтому представляют
большой практический интерес схемы, устраняющие
нелинейность. Одна из таких корректирующих схем
приведена на Рис. 2.81.
Напряжения на входах ОУ совпадают и равны половине напряжения
возбуждения. Выходное напряжение ОУ:
Рис.2.81. Схема, устраняющая
нелинейность
функциональной характеристики тензомоста
Эта схема не только линеаризует зависимость выходного напряжения от
приращения сопротивления резистивного датчика, но и имеет в 2 раза большую
чувствительность, чем схема с пассивным мостом. К тому же выходной сигнал этой схемы
не содержит синфазной составляющей. Современные миниатюрные ОУ
(например, в корпусах SOT-23 или SC70-5) могут быть установлены непосредственно в
месте размещения датчика. В этом случае передача сигнала по кабелю от такого
низкоимпедансного источника, как ОУ, позволит уменьшить уровень помех.
Еще одна линеаризующая схема, на этот
раз на двух ОУ, показана на Рис. 2.82.
Уравнения ее равновесия имеют вид:
Рис. 2.82. Линеаризующая схема на
двух ОУ
Решение этой системы дает
Выходной сигнал этой схемы не имеет синфазной составляющей, что
позволяет непосредственно подавать его на недифференциальный вход
приемника. Схема позволяет существенно усилить входной сигнал прямо на месте
расположения датчика.
149
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
2.8.5. Измерение температуры
Промышленность выпускает большое количество типов и моделей датчиков
температуры, имеющих самые различные характеристики. Параметры
основных типов датчиков представлены в Табл. 2.5 [2.8]
Таблица 2.5. Параметры основных видов датчиков температуры
Тип датчика
Температурный диапазон
Точностные
характеристики
Требования к схеме
включения
Особенности
Термопары
-180°С...+2300°С
Высокая точность и
повторяемость
Нужна компенсация
холодного спая
Низковольтный
выход
Резистивные
датчики
-200°С...+850°С
Высокая
линейность
Требует
питания
Низкая
стоимость
Термисторы
0оС...+100вС
Низкая
линейность
Требует
питания
Высокая
чувствительность
Полупроводниковые датчики
-55вС...+150°С
Линейность: ГС
Точность: ГС
Требует
питания
Типичная
чувствительность:
10 мВ/К; 20 мВ/К
Рис. 2.83. Типовая схема включения термопары
150
Термопары. Если соединить между
собой два проводника из различных
металлов, то при разных температурах
спая и концов между последними
возникнет разность потенциалов,
зависящая от перепада температур и
вида металлов спая. Чувствительность
термопар характеризуется
температурным коэффициентом ЭДС и
принимает значения от 7.7 мкВ/К для
термопар платина/родий до 76 мкВ/К для термопар хромель/константан.
Типовая схема включения термопары представлена на Рис. 2.83.
Пара металлов А и Б подобрана, исходя из требуемого температурного
диапазона и максимальной чувствительности при приемлемой линейности.
Наиболее распространены пары: железо-константан (тип У), хромель-алюмель (тип
К), платина-платина/родий (типы S, К). Каждая пара изготавливается путем
сварки (спайки) разных металлов. Рабочий спай помещается в зону измеряемой
температуры, а опорный — в изотермальный блок, температура которого
известна (в идеале равна 0°С). Напряжение выхода схемы зависит (почти
пропорционально) от разности температур рабочего и опорного спаев. Обеспечить тер-
мостатирование опорного спая сравнительно сложно, поэтому чаще
применяют схемы компенсации температуры опорного спая. Одна из таких
схем приведена на Рис. 2.84.
Основная идея заключается в использовании полупроводникового датчика
(на схеме ТМП-35), воспринимающего температуру опорного спая, и схемы,
формирующей поправку к напряжению, т. е. компенсирующей разность между
фактической температурой опорного спая и стандартной @°С). Датчик
ТМП-35, установленный на основании, изотермическом с опорным спаем, дает
на выходе напряжение, пропорциональное температуре A0 мВ/°С). Это
напряжение через делитель R{, Я2 компенсирует изменение термоЭДС опорного спая
(—41 мкВ/°С). Резистор R2 обеспечивает установку начального смещения
шкалы. Выходное напряжение схемы пропорционально температуре рабочего спая
2.8. Измерительные схемы на ОУ
Рис. 2.84. Схема термокомпенсации опорного спая
A0 мВ/°С). Подробно интегральные полупроводниковые датчики температуры
рассмотрены в п. 10.1.
Фирма Analog Devices выпускает микросхемы AD594/5/6/7,
представляющие собой объединенные на одном кристалле измерительный усилитель и
компенсатор температуры опорного спая. Опорные спаи формируются при
припайке выводов термопары к расположенным в непосредственной близости друг
от друга выводам микросхемы.
Резистивные термодатчики
(РТД) меняют свое сопротивление
при изменении температуры. Они
представляют собой помещенные
в корпус катушечки с обмоткой из
меди или иного металла или сплава
с положительным температурным
коэффициентом сопротивления
(ТКС). РТД имеют более высокую
точность и линейность, чем
термопары из тех же материалов.
Особенно хороши, хотя и дороги,
платиновые РТД. Они обладают
прекрасной временной
стабильностью. Рис. 2.85 иллюстрирует
зависимость ТКС платинового РТД на
100 Ом и температурный коэффи-
Рис. 2.85. Зависимость чувствительности
платинового РТД и платино-платино/родиевой S
термопары от температуры
циент ЭДС (ТКЭ)
платино-платино/родиевой S-термопары.
Можно видеть, что ТКС РТД меняется относительно меньше, чем ТКЭ
термопары, и это изменение линейно, что значительно облегчает его
термокомпенсацию. Низкий ТКС платиновых РТД требует практически такого
же усиления сигнала, что и от термопары. Резистивные термодатчики с
большим сопротивлением имеют более высокую чувствительность, но, к
сожалению, и большую инерционность.
151
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
Рис. 2.86. Схемы включения
резистивного термодатчика:
а — 2-проводная, б — 4-проводная
В отличие от термопар,
генерирующих термоЭДС, для съема информации
с РТД через него требуется пропускать
стабильный постоянный ток
(Рис .2.86).
Сопротивление РТД является
функцией абсолютной температуры,
поэтому здесь нет необходимости в
стабилизации опорного спая. Постоянный ток
возбуждения через РТД должен быть не
слишком большим, иначе возможен
саморазогрев датчика, вносящий
погрешность в измерение температуры. С
другой стороны, именно явление
самопрогрева с успехом используется в
датчиках скорости воздушного потока.
Значительную погрешность в
измерение температуры вносят провода,
соединяющие РТД с приемником сигнала
(Рис. 2.86а). Их суммарное
сопротивление 2RR складывается с сопротивлением
датчика, за счет чего появляется
методическая погрешность. Для
исключения этой погрешности РТД следует
включать по 4-проводной схеме (Рис. 2.866). Фирма Analog Devices выпускает
микросхему ADT70, представляющую собой законченный формирователь
сигнала от РТД. Упрощенная функциональная схема этой ИМС приведена на
Рис. 2.87 [2.8].
Микросхема включает два согласованных источника тока, которыми
управляет встроенный источник опорного напряжения (ИОН). В цепь,
параллельную с РТД, включен опорный резистор /?reF с низким ТКС, сопротивление
которого совпадает с сопротивлением РТД при f = 0°С. Благодаря такой схеме,
выходной сигнал ИМС пропорционален температуре в °С: V0^T— 5 мВ/°С.
Рис. 2.87. Функциональная схема ИМС
ADT70
152
2.8.6. Измерение действующего значения
Важнейшим параметром переменного тока и переменного напряжения
является их действующее (эффективное) значение, характеризующее
энергетическое действие этих физических величин. В распространенных
комбинированных и электронных измерительных приборах для измерения переменного тока
или напряжения синусоидальной формы их вначале выпрямляют, а затем
измеряют среднее значение результата. Поскольку для синусоидального
переменного тока действующее значение превосходит средневыпрямленное в 1.11 раз, эти
приборы градуируют с соответствующим масштабом. Измерение же
несинусоидальных токов и напряжений такими приборами дает большую
погрешность. В Табл. 2.6 приведено сравнение действующих и средневыпрямленных
значений для различных форм колебаний.
2.8. Измерительные схемы на ОУ
Таблица 2.6. Сравнение действующих и средневыпрямленных значений напряжений
различной формы
Тип формы кривой
с амплитудой 1 В
Неискаженная синусоида
Симметричные
прямоугольные колебания
Неискаженные
треугольные колебания
Гауссовский шум (98%
амплитуд менее 1 В)
Последовательность
прямоугольных импульсов
Кривая напряжения
управляемого выпрямителя:
угол регулирования 90°
угол регулирования 135°
Коэффициент
амплитуды
VwjJV
1.414
1
1.73
3
2
10
2
4.7
Истинное
действующее
значение
0.707 В
1В
0.577 В
0.333 В
0.5 В
0.1В
0.495 В
0.212 В
Показание измерителя сред-
невыпрямленного значения,
откалиброванного по
действующему значению синусоиды
0.707 В
1.11В
0.555 В
0.295 В
0.278 В
0.011В
0.354 В
0.15 В
Погрешность
измерения [%]
0
+11
-3.8
-11.4
-44
-89
-28
-30
Погрешность в таблице определялась по формуле
B.90)
Во всех этих формулах v(t) представляет текущее значение напряжения. Для
измерения действующего значения можно использовать формулу B.90) либо
воспользоваться измерением мощности. Точное следование формуле B.90)
(прямое измерение) приведет к малому динамическому диапазону.
Действительно, если для возведения сигнала в квадрат применить микросхему
перемножителя с выходом 10 В, например AD734, то при входном напряжении 10 мВ
получим выходное напряжение 10 мкВ, что соизмеримо с шумами микросхемы.
Фактически преобразование сигнала с динамическим диапазоном в 60 дБ
требует внутренних схем измерителя действующего значения с динамическим
диапазоном 120 дБ.
Лучшие результаты дает
косвенный метод, при котором операция
извлечения корня на выходе
заменяется делением на входе. Для этого
используется один
множитель/делитель (например, тот же AD734) и
фильтр нижних частот (Рис. 2.88).
Рис, 2.88. Схема преобразования
действующего значения в постоянный ток ^ 53
причем среднее значение определялось по формуле
действующее значение по формуле
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
Считая, что ФНЧ выполняет операцию усреднения, т. е. идеально
сглаживает пульсации напряжения на выходе множителя/делителя, запишем
Но в соответствии со схемой
B.91)
B.92)
Подставив B.92) в B.91), получим
Откуда следует соотношение, совпадающее с B.90)
Рис. 2.89. Функциональная схема
HMCAD636
Промышленность выпускает
однокристальные преобразователи действующего
значения с ФНЧ, например, AD636, AD637
и ряд других. Функциональная схема ИМС
AD636 приведена на Рис. 2.89.
Применение на входе двухполупериод-
ного прецизионного выпрямителя
позволяет упростить схему квадратора/делителя (он
выполнен одноквадрантным). Токовое
зеркало принимает выходной ток
квадратора/делителя и возвращает его
квадратору/делителю сглаженным с помощью
конденсатора CAV. Преобразователь имеет
погрешность не более 0.5% в полосе частот
до 1 МГц при коэффициенте формы
входного сигнала до 2. Коэффициент формы,
равный 6, дает дополнительную погрешность
преобразования 0.5%.
154
Вопросы и задачи
1. Включите резистор, уменьшающий влияние входного тока ОУ на
смещение нуля сумматора (Рис. 2.2), и определите его сопротивление.
2. Инвертирующий сумматор на два входа выполнен на ОУ 140УД7 (см.
Табл. 1.1). Сопротивления резисторов R{ = R2 = R^ = 10 кОм. Определить
выходное сопротивление сумматора. Как влияет увеличение числа
входов сумматора на его выходное сопротивление?
2.8. Измерительные схемы на ОУ
3. ОУ МАХ439 устойчиво работает в схеме неинвертирующего усилителя
при коэффициенте усиления схемы не менее 5. Будет ли он устойчиво
работать в схеме инвертирующего интегратора? Если нет, то почему?
Каким образом можно было бы обеспечить его устойчивость?
4. Какой характер имеет выходное сопротивление интегратора в области
низких частот? Высоких частот?
5. В каком диапазоне частот инвертирующий интегратор на ОУ 140УД8
интегрирует входной сигнал, если постоянная интегрирования
ЛС=0.1с?
6. Интегратор с цепью задания начальных условий (Рис. 2.4) переведен в
режим установления начального условия. За какое время произойдет
установление начальных условий с погрешностью не более 0.1%, если
R2 — /?з =10 кОм, а С = 0.1 мкФ? Какова будет величина выходного
напряжения интегратора после установления начальных условий, если
V2 = 5 В?
7. Если на вход ОУ, включенного по схеме интегратора, подается
напряжение симметричной прямоугольной формы (меандр), то сигнал какой
формы можно ожидать на выходе?
8. По каким причинам в схеме дифференциатора (Рис. 2.6)
последовательно с конденсатором включают резистор R{?
9. Операционный усилитель 140УД6 включен по схеме дифференциатора.
Постоянная времени дифференцирования RC = 0.1 с. В какой полосе
частот будет осуществляться дифференцирование входного сигнала
этой схемой?
10. Для условий задачи 9 определите необходимое сопротивление резистора
R{ (Рис. 2.6).
11. Если на вход ОУ, включенного по схеме дифференциатора, подается
напряжение симметричной треугольной формы, то сигнал какой формы
можно ожидать на выходе?
12. Пусть в схеме источника напряжения, управляемого током, (Рис. 2.8)
ОУ работает в режиме холостого хода. Покажите, по какой цепи в этом
случае будет замыкаться ток /IN.
13. Как в схеме источника напряжения, управляемого током (Рис. 2.8),
снизить смещение нуля, обусловленное входным током ОУ?
14. Напряжение на входе источника тока, управляемого напряжением,
(Рис. 2.10) изменяется в пределах ±5 В. Сопротивление резистора R\
равно 2 кОм. В каких пределах может изменяться сопротивление
нагрузки RL в схемах Рис. 2.10а и Рис. 2.10#, чтобы схемы работали в
режиме источника тока?
15. На вход источника тока, управляемого напряжением (Рис. 2.10а),
выполненного на ОУ 140УД8, смещение нуля которого составляет 20
мВ, подано напряжение 0.5 В. Сопротивление резистора составляет 3
кОм. Определить ток в нагрузке.
16. Определить входное сопротивление схемы на Рис. 2.12а источника тока,
управляемого напряжением, полагая, что ОУ идеальный.
17. Найти выражение для выходного тока источника на Рис. 2.12а, если входное
напряжение V{ приложено между левым выводом резистора i?3 и общей
точкой, а левый вьюод левого резистора R2 соединен с общей точкой. ^ 55
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
18. Схема источника тока на Рис, 2.15а требует положительного входного
напряжения. Как видоизменить эту схему, чтобы она требовала
отрицательного входного напряжения, причем входной ток был бы много
меньше тока нагрузки? Обоснуйте свое решение.
19. Какому условию должно удовлетворять сопротивление источника
входного сигнала преобразователя отрицательного сопротивления
(Рис. 2.17), чтобы схема была устойчивой?
20. Каков будет характер входного сопротивления схемы преобразователя
отрицательного сопротивления (Рис. 2.17), если вместо резистора R2
включить конденсатор?
21. Перечислите преимущества активных частотных фильтров перед
пассивными.
22. Можно ли любую передаточную функцию ФНЧ вида B.32) заменить
передаточной функцией B.31)?
23. Дайте качественное сравнение фильтров Баттерворта и Бесселя.
24. В чем преимущество фильтра более высокого порядка по сравнению с
фильтром более низкого порядка, имеющим ту же полосу пропускания?
25. Дана передаточная функция ФНЧ определенного типа и порядка с
заданной частотой среза. Как получить передаточную функцию ФВЧ
того же типа и порядка, с той же частотой среза?
26. Как, имея передаточную функцию ФНЧ определенного порядка с
заданной частотой среза, получить передаточную функцию полосового
фильтра того же порядка со средней частотой, равной частоте среза
ФНЧ, и заданной полосой пропускания?
27. Можно ли реализовать ФНЧ второго порядка с комплексными
полюсами по схеме на рис. 2.25 при включении ОУ неинвертирующим
повторителем?
28. Какому условию должны удовлетворять сопротивления резисторов
ФНЧ по схеме на Рис. 2.25, чтобы смещение нуля, обусловленное
входными токами ОУ, было минимальным?
29. Найдите выражение для комплексного входного сопротивления ФНЧ
по схеме на Рис. 2.25, полагая ОУ идеальным.
30. Какому условию должен удовлетворять коэффициент в схеме на
Рис. 2.25, чтобы схема была устойчива? ОУ полагаем идеальным.
31. Пусть вход ФВЧ, схема которого приведена на Рис. 2.28, подключен к
выходу неинвертирующего повторителя на ОУ. Представляет ли его
входное емкостное сопротивление угрозу для устойчивости
повторителя? Обоснуйте свой ответ.
32. Найдите выражение для комплексного входного сопротивления ФВЧ по
схеме на Рис. 2.28, полагая ОУ идеальным.
33. Имеем три каскадно включенных фильтра Бесселя второго порядка. Будет
ли это устройство представлять собой фильтр Бесселя шестого порядка?
34. Какому условию должен удовлетворять коэффициент в схеме
заграждающего фильтра на Рис. 2.33, чтобы схема была устойчива? ОУ
полагаем идеальным.
35. Перечислите преимущества активных фильтров, построенных на основе
лcz метода переменных состояния.
2.8. Измерительные схемы на ОУ
36. Измерительный усилитель выполнен по схеме Рис. 2.40 на ОУ 140УД6.
Параметры резисторов выбраны так, чтобы коэффициент усиления
входного дифференциального сигнала составил 2000. Найдите
погрешность, обусловленную конечным коэффициентом усиления ОУ.
37. Пусть в схеме измерительного усилителя на трех ОУ (Рис. 2.44) R2^ Ry
Как это повлияет на коэффициент ослабления синфазного сигнала?
38. Выведите формулу для определения коэффициента усиления
дифференциального сигнала измерительного усилителя на трех ОУ с учетом
конечного значения коэффициентов усиления ОУ! и ОУ2, полагая их
одинаковыми, и при условии R$ = R5 = R6 = R7.
39. Чем определяется динамический диапазон логарифмирующего
преобразователя?
40. Обоснуйте преимущество схемы логарифмирующего преобразователя с
биполярным транзистором по сравнению со схемой с диодом.
41. Почему в схеме логарифмирующего преобразователя на транзисторе с
заземленной базой (Рис. 2.50а) может возбудиться даже операционный
усилитель с полной внутренней коррекцией?
42. Чем объясняется нежелательность применения пассивных
выпрямителей на диодах в измерительных схемах?
43. Чему равно выходное сопротивление инвертирующих измерительных
однополупериодных выпрямителей в режиме, когда диод VD\ закрыт, а
VD2 открыт (Рис. 2.53)?
44. Чему равно выходное сопротивление неинвертирующих измерительных
однополупериодных выпрямителей в режиме, когда диод VD\ закрыт, а
VD2 открыт (Рис. 2.53)?
45. В чем состоит преимущество инвертирующих измерительных
однополупериодных выпрямителей перед неинвертирующими?
46. Чему равно входное сопротивление инвертирующих измерительных
однополупериодных выпрямителей (Рис. 2.53)?
47. Начертите график переходной характеристики идеального 2-полупери-
одного выпрямителя.
48. Чему равно выходное сопротивление 2-полупериодного выпрямителя,
выполненного по схеме на Рис. 2.54?
49. Укажите недостатки простейшей схемы 2-полупериодного выпрямителя
на ОУ с заземленным диодом (Рис. 2.55л).
50. Начертите примерный график переходной характеристики
2-полупериодного выпрямителя на ОУ с заземленным диодом (Рис. 2.55а).
51. Начертите схему и обоснуйте вольтамперную характеристику модели
идеального диода.
52. Чему равно входное сопротивление 2-полупериодного выпрямителя на
ОУ с заземленным диодом (Рис. 2.55) для положительной и
отрицательной полярности входного сигнала?
53. Как изменить полярность выходного напряжения 2-полупериодного
выпрямителя, схема которого приведена на Рис. 2.56?
54. Зависит ли выходное сопротивление 2-полупериодного выпрямителя,
схема которого приведена на Рис. 2.56, от полярности входного
напряжения? ^57
Глава 2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
55. Чему равно входное сопротивление триггера Шмитта, выполненного по
схеме Рис. 2.59а? По схеме Рис. 2.596?
56. Предложите способы реализации переходной характеристики триггера
Шмитта, несимметричной относительно оси ординат.
57. Чему равна амплитуда колебаний на инвертирующем входе ОУ
автоколебательного мультивибратора (Рис. 2.60)?
58. Как влияет изменение питающих напряжений на частоту выходных
импульсов автоколебательного мультивибратора (Рис. 2.60)?
59. Предложите способы обеспечения несимметрии выходных импульсов
автоколебательного мультивибратора.
60. Как влияет изменение питающих напряжений на длительность
выходных импульсов одновибратора (Рис. 2.61)?
61. Как изменится длительность выходного импульса одновибратора, если
подать запускающий импульс спустя tx/2 после окончания предыдущего
импульса?
62. Изменится ли длительность выходного импульса одновибратора, если
подать короткий запускающий импульс во время генерации текущего
импульса? Если изменится, то как?
63. По каким причинам в схеме одновибратора (Рис. 2.61) в цепь запуска
включают диод?
64. Какие изменения следует внести в схему на Рис. 2.62 для того, чтобы
генератор прямоугольного и треугольного напряжений создавал
сигналы, близкие к пилообразным?
65. Генератор синусоидальных колебаний с мостом Вина-Робинсона
(Рис. 2.64) генерирует колебания определенной амплитуды. Как
изменится амплитуда колебаний при увеличении сопротивления резистора R{?
66. Какие изменения следует внести в схему фильтра, построенного на
основе метода переменных состояния (Рис. 2.35), чтобы он мог
генерировать синусоидальные сигналы? Чем будут в этом случае отличаться
напряжения Роиъ У\ и ^2?
67. Укажите преимущества функционального генератора (Рис. 2.65) по
сравнению с генератором синусоидальных колебаний с мостом
Вина-Робинсона (Рис. 2.64).
68. Какова может быть полярность напряжений Vx и KY, прикладываемых ко
входу перемножителя на полевом транзисторе, схема которого
приведена на Рис. 2.66?
69. Какова может быть полярность напряжений Vx и KY, прикладываемых ко
входу перемножителя на основе управляемого источника тока (Рис. 2.67)?
70. Разработайте схему блока возведения в квадрат на основе идеального
перемножителя.
71. Предложите схему блока извлечения квадратного корня на основе
идеального перемножителя и ОУ. Определите допустимую полярность
входного сигнала такого блока? Объясните, почему при другой полярности
входного сигнала схема работать не будет.
72. Начертите схему блока определения действующего значения
периодически изменяющегося напряжения с использованием аналоговых пере-
лсо множителей.
2.8. Измерительные схемы на ОУ
Литература к главе 2
2.1. Op Amp Circuit Collection. — National Semiconductor. Application Note 31, 1978.
February. 24 pp.
2.2. Джонсон Д., Джонсон Дж., Мур Г. Справочник по активным фильтрам. М.: Энер-
гоатомиздат, 1983. — 128 с.
2.3. Wong]. A Collection of Amp Applications//Analog Devices Inc. — Appl. Note. 1997.
-17pp
2.4. Титце У., Шенк К. Полупроводниковая схемотехника: Справочное руководство.
-М.: Мир, 1982. -512 с.
2.5. Лейтон АДж., Волш В. Аналоговая электроника на операционных усилителях.
- М.: БИНОМ, 1994. - 352 с.
2.6. Kester W., WurcerS., Kitchin С. High Impedance Sensors// Practical design techniques
for sensor signal conditioning. — Analog Devices Inc., 1999. — Pp. 5.1—5.40.
2.7. Kester W. Bridge Circuits//Practical design techniques for sensor signal conditioning.
— Analog Devices Inc., 1999. — Pp. 2.1—2.19.
2.8. Kester W., Bryant J., Jung W. Temperature Sensors// Practical design techniques for
sensor signal conditioning. — Analog Devices Inc., 1999. — P. 7.1 - 7.39.
2.9. Гутников B.C. Интегральная электроника в измерительных устройствах. — Л.:
Энергоатомиздат, 1986. — 304 с.
Глава 3
СПЕЦИАЛИЗИРОВАННЫЕ УСИЛИТЕЛИ
НА БАЗЕ ИНТЕГРАЛЬНЫХ ОУ
3.1. Широкополосные усилители
Широкополосные интегральные ОУ находят применение в аппаратуре,
предназначенной для усиления или преобразования аналоговых и цифровых
сигналов, спектры которых занимают очень широкую полосу частот. Это может
быть аппаратура многоканальных телекоммуникационных систем (например,
систем многоканальной связи или многоканальной телеметрии), аппаратура
систем обработки и передачи изображений (например, телевизионных и
радиолокационных). Как правило, спектры сигналов в подобных системах либо
занимают полосу от нулевых частот до десятков мегагерц (импульсные и
видеосигналы), или группируются в виде боковых полос вокруг несущей частоты в
десятки и сотни мегагерц (например, сигналы с модуляцией амплитуды,
частоты или фазы несущей).
В отличие от обычных ОУ, где важнейшими показателями качества
являются высокий коэффициент усиления, малые входные токи и малое напряжение
смещения, к широкополосным усилителям предъявляются повышенные
требования в отношении верхней граничной частоты усиления, частоты среза и
скорости нарастания выходного напряжения. Дополнительные требования к ОУ
этого класса обусловлены характером нагрузки, на которую они в большинстве
случаев работают. Как правило, это проводные линии связи с низкоомным
(порядка 50 Ом) волновым сопротивлением, несогласованные отрезки ВЧ-кабе-
лей, электростатические отклоняющие системы широкополосных
осциллографов, устройства сканирования и видеоусилители плоскопанельных мониторов
высокого разрешения и т. д. Во всех подобных применениях от усилителя
требуется большой выходной ток (до долей или единиц ампер) и устойчивая работа
на значительную емкостную нагрузку. Кроме того, поскольку, как это и следует
из их названия, усилители этого типа усиливают сигналы в широкой полосе
частот, в них должны быть приняты меры по минимизации спектральной
плотности шума. В самом деле, расширение полосы пропускания усилителя в
100 раз приводит при равномерной спектральной плотности шума к
увеличению действующего значения шума в 10 раз. Поэтому обычные значения
спектральной плотности напряжения шума для широкополосных ОУ составляют
единицы нВ/Гц°5. Например, ОУ LM6265 имеет eN = 5 нВ/Гц°5, а ОУ CLC426 —
ен=1.6нВ/Гц05.
Важное значение для схем с широкополосными ОУ, особенно при работе на
160 длинную линию, имеют также следующие параметры:
3.1. Широкополосные усилители
• коэффициент стоячей волны напряжения (КСВН) — отношение максимального
действующего значения напряжения в линии связи к минимальному.
Показывает, какая часть мощности, поступающей от источника сигнала,
отражается от нагрузки. В идеале КСВН должен быть равен единице;
• развязка между входом и выходом — малосигнальная характеристика
переменного тока, показывающая какая часть выходного сигнала усилителя, вернется
в его входную цепь через паразитные связи.
3.1.1. Работа транзисторного усилительного
каскада на высоких частотах
Прохождение широкополосных сигналов по электрическим цепям
обусловлено целым рядом факторов, к числу которых в первую очередь можно отнести
влияние паразитных параметров (таких, как паразитные емкости и
индуктивности элементов, паразитные емкостные и индуктивные связи между
участками электрической цепи), а также особенности распространения сигналов по
линиям связи, когда их длина соизмерима с длиной волны.
Как известно, из трех основных схем включения транзистора наибольшим
коэффициентом усиления по мощности обладает схема с общим эмиттером
(ОЭ) (Рис. 3.1л).
Рис. 3.1. Каскад с общим эмиттером:
а — принципиальная схема, б — ВЧ-модель, в — схема с индуктивной коррекцией
Однако эта схема имеет и наихудшие частотные свойства. Всему виной
эффект Миллера (см. п. 1.4.2), обусловленный емкостью между коллектором и
базой транзистора Сев» из-за чего схема с ОЭ ведет себя на высоких частотах как
интегрирующее звено. В этом случае источник сигнала оказывается
нагруженным на ЛС-цепь с эквивалентной постоянной времени т, которая согласно
упрощенной ВЧ-модели каскада с общим эмиттером, приведенной на Рис. ЗЛб,
определяется выражением
161
C.1)
где Ку — коэффициент усиления каскада на средних частотах, Rs — внутреннее
сопротивление источника сигнала, гв — сопротивление базы транзистора.
Проще всего можно расширить полосу пропускания каскада с ОЭ, включив
последовательно с коллекторной нагрузкой индуктивность в несколько микрогенри
(Рис. 3.1*), которая скорректирует спад усиления на высоких частотах. Именно
так строятся ИМС широкополосных усилителей ERA-xSM фирмы
Mini-Circuits с усилением до 20дБ в полосе О...8ГТц и TSH690 фирмы
ST Microelectronics с усилением 20 дБ в полосе 40...900 МГц.
Глава 3. СПЕЦИАЛИЗИРОВАННЫЕ УСИЛИТЕЛИ НА БАЗЕ ИНТЕГРАЛЬНЫХ ОУ
162
Принципиальная схема усилителя ERA-3SM и типовая схема его
включения приведены на Рис. 3.2.
Рис. 3.2. Усилитель ERA-3SM.
а — принципиальная схема, б — типовая схема включения
ИМС выполнена на основе арсенида галлия и помещена в миниатюрный
корпус диаметром около 2.2 мм и высотой 1.5 мм с четырьмя полосковыми
выводами.
В схеме с ОБ эффект Миллера отсутствует, но в силу малого входного и
высокого выходного сопротивления каскада усиление мощности здесь возможно
только при работе с низкоомным источником сигнала и высокоомной
нагрузкой, что не всегда возможно реализовать на практике. Каскад с ОК
(Эмиттерный повторитель) также обеспечивает широкую полосу пропускания, но не
усиливает сигнал по напряжению. По этим причинам для построения
широкополосных усилителей часто применяют более сложные составные схемы
включения транзисторов, представленные на Рис. 3.3 (цепи смещения не показаны).
Первая из них, схема ОБ-ОК
(Рис. З.Зя) обладает малым
входным (каскад с ОБ) и малым
выходным (каскад с ОК)
сопротивлением и может быть использована для
построения магистральных
усилителей (драйверов линий) для
проводных линий связи с волновым
сопротивлением 50 Ом, а также в
приемниках ультразвуковых
сигналов. Высокоомная нагрузка,
необходимая для усиления сигнала по
напряжению во входном каскаде с
ОБ (VTi), обеспечивается
подключением к его выходу эмиттерного
повторителя (VT2) с большим
входным сопротивлением.
Рис.З.З.Схемывысокочастот„ыхкаскадовна В ^СКОДНОЙ схеме ОЭ-ОБ
составных транзисторах (Рис. 3.30) эффект Миллера
практически устранен фиксацией
потенциалов коллектора транзистора VT{ и базы транзистора VT2. По такой схеме
построены однокаскадные дифференциальные усилители: LM6361, имеющий
AV=3000, /г =50 МГц и скорость нарастания 300 В/мкс, и THS4001
(AV = 10000,/т = 270 МГц и 400 В/мкс).
3.1. Широкополосные усилители
Схема ОК-ОБ (Рис. З.Зв) широко используется во входных каскадах ОУ.
Здесь эффект Миллера также устраняется фиксацией потенциалов коллектора
транзистора VTX и базы транзистора VT2.
В схеме ОК-ОЭ (Рис. З.Зг) низкое выходное сопротивление эмиттерного
повторителя на транзисторе VT\ позволяет заметно снизить постоянную
времени звена обратной связи усилительного каскада с ОЭ на транзисторе VT2, и тем
самым, как это следует из C.1), повысить частоту среза усилителя. Эта схема
часто применяется в каскадах усиления напряжения ОУ.
3.1.2. Применение операционных усилителей
для усиления радиочастотных сигналов
С появлением ОУ с частотой единичного усиления свыше 300 МГц у
разработчиков появилась возможность использовать эти интегральные устройства
для усиления и преобразования сигналов радиочастотного диапазона. ОУ
такого класса по ряду критериев имеют определенные преимущества перед
обычными ВЧ-усилителями, что хорошо видно из сравнения их свойств, приведенных
в Табл. 3.1 [3.1].
Таблица 3.1. Сравнение параметров ВЧ-усилителя и широкополосного ОУ
Параметр
Усиление
Полоса
пропускания
Коэффициент
стоячей волны
напряжения
входа/выхода
Развязка между
входом и
выходом
Коэффициент
шума
Коэффициент
подавления
двухтональных
интермодуляционных
искажений
Амплитудные
искажения
Ток питания
ВЧ-усилитель
Почти всегда фиксировано
Ограничена снизу емкостью
разделительных
конденсаторов. Может достигать очень
высоких частот (выше 100 ГГц).
Обычно составляет две декады
Типичное значение 1.5
20...30 дБ считается хорошим
показателем.
Слабо зависит от частоты
Может быть очень низким.
Типичные значения 2...5 дБ
Средние уровни.
Мало зависят от частоты
Малый уровень при питании от
стабильных источников
напряжения.
Слабо зависят от частоты
Обычно Однополярное питание.
Большие токи покоя
Широкополосный операционный усилитель
Легко настраивается в очень широком диапазоне
Начинается от постоянного тока. Удовлетворяет
требованиям к равномерности АЧХ, принятым
для ВЧ-усилителей в диапазоне до сотен
мегагерц
Может быть настроен намного лучше для
конкретной частоты, чем ВЧ-усилитель
Возможна намного более высокая развязка.
Ухудшается на высоких частотах. Выше при
неинвертирующем включении, чем при
инвертирующем
Зависит от усиления. При больших усилениях
лучше, но не менее 12 дБ для типичных ОУ.
Схемотехнически может быть снижен до <5 дБ
Очень хорошее подавление при
стабилизированном питании. Сильно
ухудшается с ростом частоты. Искажения могут быть
существенно снижены на низких частотах
Требуются большие диапазоны напряжений
питания для той же выходной мощности, что у
ВЧ-усилителей. Быстро увеличиваются с ростом
частоты из-за ограниченной скорости
нарастания выходного напряжения
Как правило, биполярное питание, однако почти
всегда возможно Однополярное питание.
Сравнительно малые токи покоя
163
Глава 3. СПЕЦИАЛИЗИРОВАННЫЕ УСИЛИТЕЛИ НА БАЗЕ ИНТЕГРАЛЬНЫХ ОУ
Типовые схемы включения ОУ в качестве ВЧ-усилителей представлены на
Рис. 3.4.
Рис. 3.4. Типовые схемы включения ОУ в качестве ВЧ-усилителей:
а — неивертирующая, б— инвертирующая
Неинвертирующее включение (Рис. 3.4а) отличается от стандартного
наличием резисторов Rq и Rom на входе и выходе усилителя. Эти резисторы
обеспечивают согласование входа и выхода усилителя со стандартным коаксиальным
кабелем с волновым сопротивлением 50 Ом. Поскольку выходное
сопротивление ОУ растет с увеличением частоты, параллельно 7?оит следует включить
компенсирующий конденсатор Ск емкостью 5...20 пФ. Такая мера позволяет
расширить на 30...40% область частот до сотен мегагерц с приемлемым КСВН.
На Рис. ЪЛб представлена схема инвертирующего включения ОУ.
Поскольку входное сопротивление схемы должно быть согласовано с источником
сигнала, необходимо чтобы Rc\\Ri = 50 Ом.
Если полоса частот усиливаемых сигналов начинается не от нуля, то можно
применить схемы с однополярным питанием (Рис. 3.5).
Рис. 3.5. Схемы ВЧ-усилителей на ОУ с однополярным питанием:
а — неинвертирующая, б — инвертирующая
Здесь входное согласующее сопротивление Rq неинвертирующей схемы
(Рис. 3.5а) должно рассчитываться из условия /?с||(/?/2) = 50 Ом, а
инвертирующей (Рис. 3.56) — из условия Rc\\R\ = 50 Ом.
3.1.3. Широкополосные ОУ
с обратной связью по току
Как указано в Табл. 3.1, быстродействующие ОУ проигрывают обычным
ВЧ-усилителям по уровню амплитудных искажений. Это объясняется сравни-
164 тельно малыми значениями предельной скорости нарастания выходного на-
3.1. Широкополосные усилители
пряжения ОУ, что обусловлено медленным перезарядом внутренних емкостей
усилителя малыми токами входных каскадов (см. п. 1.6.4). В последние годы
многие фирмы предлагают ОУ с токовым (низкоомным) входом для сигнала
обратной связи, так называемые ОУ с обратной связью по току (ОСТ-усилители),
которые обеспечивают исключительно высокие скорости нарастания.
Основное отличие этих усилителей от обычных ОУ с высокоомными входами,
которые можно назвать усилителями с обратной связью по напряжению (ОСН-уси-
лители), заключается в схемотехнике входного каскада. На Рис. 3.6 изображены
упрощенные типичные схемы входных каскадов усилителей ОСН (а) и ОСТ (б).
Рис. 3.6. Схемы входных каскадов:
а — усилителя ОСН, б — усилителя ОСТ
Вполне очевидно, что усилители ОСН имеют лучшие точностные
характеристики, чем усилители ОСТ, поскольку им свойственны:
• низкое входное напряжение смещения;
• согласованные по величине и весьма малые входные токи;
• большое значение коэффициента подавления нестабильности питания Кп п;
• высокий коэффициент ослабления синфазного сигнала (КОСС).
Характерными чертами входного каскада усилителя ОСТ являются его
следующие параметры:
• ненулевое смещение входного напряжения;
• несогласованные входные токи;
• существенное различие входных сопротивлений инвертирующего и неинвер-
тирующего входов.
Входной каскад типичного усилителя ОСТ представляет собой двухтактный
биполярный повторитель напряжения, каждое плечо которого выполнено на
паре комплементарных транзисторов, включенных по схеме ОК-ОК. Для того
чтобы напряжение смещения на выходе каскада было равно нулю, необходимо,
чтобы напряжение база—эмиттер n-p-п- и/?-я-/?-транзисторов были бы
равными. Так как транзисторы разного типа проводимости создаются на различных
стадиях изготовления ИМС, такое согласование трудно обеспечить. Входные
токи п- и /ьвходов в усилителе ОСТ принципиально различны. В то время как
входной ток неинвертирующего входа (р-входа) равен разности базовых токов,
входной ток инвертирующего входа («-входа) — это разность эмиттерных то-
165
Глава 3. СПЕЦИАЛИЗИРОВАННЫЕ УСИЛИТЕЛИ НА БАЗЕ ИНТЕГРАЛЬНЫХ ОУ
166
ков, которые в десятки раз больше базовых. Как следствие при неточном
согласовании характеристик комплементарных транзисторов входной ток «-входа
может существенно превышать входной ток /ьвхода. Например, в микросхеме
AD813 C-канальный ОСТ-усилитель видеосигналов RGB) типичные входные
токи составляют 0.5 мкА для /ьвхода и 5 мкА для «-входа. Для выравнивания
входных токов покоя во многих моделях ОСТ-усилителей базы входных
транзисторов /ьвхода соединяют с их коллекторами (Рис* 3.7).
Это также облегчает согласование
транзисторов о целью уменьшения напряжения
смещения нуля. При такой схеме включения,
входные токи покоя для, например, ОУ типа
THS3001 оказываются достаточно близкими
и составляют 1 и 2 мкА. В то же время
динамические входные сопротивления этого
усилителя равны: 1.5 МОм по/ьвходу и 15 Ом —
по п-входу.
Одно из основных преимуществ
ОСТ-усилителей состоит в том, что они
требуют меньшего количества каскадов усиления
по напряжению, чем усилители с ОСН. Часто
ОУ с ОСТ состоит просто из входного
буферного повторителя, одного каскада усиления
напряжения и выходного буферного
повторителя. Меньшее число каскадов усиления
напряжения означает меньшее запаздывание по
фазе в разомкнутой системе. Базовая ОСТ-структура — однокаскадный
усилитель напряжения (см. Рис. 3.7). Единственный высокоимпедансный узел в
схеме — это точка подключения входа выходного буфера. В отличие от
ОСТ-усилителей усилители с ОСН требуют двух или даже большего количества
каскадов усиления по напряжению. Это увеличивает порядок системы и
ухудшает ее устойчивость, для обеспечения которой зачастую приходится идти на
сужение полосы пропускания усилителя.
Искажения сигнала в операционных усилителях обусловлены
нелинейностью переходной характеристики и максимальной скоростью нарастания
выходного напряжения. Благодаря высокой симметрии схемы входного каскада
ОСТ-усилители отличаются весьма малой нелинейностью переходной
характеристики. Для ОСТ-усилителей характерна также более высокая скорость
нарастания выходного напряжения. Из Рис 3.7 видно, что скорость нарастания
определяется токами, которыми транзисторы КГ3 и VT4 могут заряжать
конденсаторы коррекции Ск. В отличие от ОСН-усилителей этот ток не
ограничен каким-либо фиксированным значением. В первом приближении можно
даже считать, что в ОСТ-усилителе нет предела скорости нарастания. Например,
в упоминавшемся выше THS3001 скорость нарастания выходного напряжения
достигает 6500 В/мкс. Некоторые ОСН-усилители, например LM7171, имеют
входной каскад, выполненный по ОСТ-схеме, но сигнал поступает на
инвертирующий вход через буферный усилитель. Это расширяет возможные схемы
построения цепей обратной связи таких усилителей с сохранением высоких
динамических характеристик.
Рис. 3.7. Упрощенная схема
ОСТ-усилителя
3.1. Широкополосные усилители
Рассмотрим характеристики ОСТ-усилителя в различных вариантах
включения (Рис. 3.8).
Рис. 3.8. Схемы ОСТ-усилителей
а — неинвертирующее включение, б — схема замещения передаточной проводимости
ОСТ-усилителя, в — эквивалентная схема неинвертирующего ОСТ-усилителя для малого сигнала
На Рис. 3.8я представлена эквивалентная малосигнальная схема такого
усилителя в неинвертирующем включении. Будем полагать входные
характеристики усилителя идеальными. Для ОСТ-усилителя это означает Rm неинв = ©о5
^in инв= 0> ^off= 0- Найдем передаточную функцию этой схемы, для которой
справедливы уравнения [3.2]
C.2)
vom ~ Jin ДО > C.3)
где Z(s) — передаточный импеданс — основной усилительный параметр
ОСТ-усилителя. Для постоянного тока типичные значения передаточного
импеданса ОСТ-усилителей лежат в пределах от сотен кОм до сотен МОм.
Подставив C.3) в C.2), после преобразований найдем
C.4)
C.5)
что соответствует реальным частотным характеристикам ОСТ-усилителя.
Подставив C.5) и C.6) в C.4) и учитывая, что#Л2«1, окончательно получим
C.7)
167
Обозначим
Передаточный импеданс моделируется схемой замещения на Рис. 3.86, где
Ск — емкость корректирующего конденсатора при полной частотной
коррекции усилителя. Тогда
Глава 3. СПЕЦИАЛИЗИРОВАННЫЕ УСИЛИТЕЛИ НА БАЗЕ ИНТЕГРАЛЬНЫХ ОУ
Выражение C.7) позволяет сделать важный вывод:
Полоса пропускания и усиление ОСТ-усилителя могут быть
установлены независимо друг от друга.
К
C.8)
ОСН-усилители
Более низкий шум.
Лучшее преобразование сигналов
постоянного тока.
Большая свобода выбора цепей
обратной связи.
ОСТ-усилители
Большие скорости нарастания.
Меньшие искажения.
Возможность независимой
регулировки усиления и полосы
пропускания как в инвертирующем, так и в
неинвертирующем включении.
Анализ устойчивости ОСТ-усилителей. При первом взгляде на передаточные
функции ОСТ-усилителя C.7), C.8) может показаться, что, поскольку они
имеют первый порядок, устойчивость обеспечивается при любых резистивных
обратных связях. На самом деле это не так. Входной и выходной буферные
каскады хотя не усиливают и не ослабляют сигналы по напряжению, однако на очень
высоких частотах создают заметные отрицательные фазовые сдвиги,
уменьшающие запасы устойчивости. Типичные ЛАЧХ и ЛФЧХ ОСТ-усилителя
приведены на Рис. 3.9.
168 ^^ 3#9ф Типичные лчх ОСТ-усилителя
Рис. 3.10. Уточненная схема замещения
Действительно, при регулировке коэффициента усиления изменением
сопротивления резистора R\ верхняя граничная частота/в = \/2kR2C^ не меняется.
Для инвертирующего включения аналогичным способом можно получить
а это означает возможность независимой регулировки усиления и полосы
пропускания ОСТ-усилителя и при инвертирующем включении. Следует отметить,
что в схеме инвертирующего ОСН-усилителя также возможна независимая
регулировка полосы пропускания и усиления при подключении дополнительного
резистора между инвертирующим входом (виртуальным нулем) и землей. При
этом усиление входного сигнала не изменится, а полоса пропускания сузится за
счет уменьшения коэффициента передачи цепи обратной связи.
Подводя итог изложенному, можно констатировать следующие
преимущества усилителей каждого типа:
3.1. Широкополосные усилители
Для анализа устойчивости используем уточненную схему замещения,
показанную на Рис. ЗЛО.
Для этой схемы можно записать следующую систему уравнений [3.4]:
/ш «/,-/„ C-9)
(ЗЛО)
C.11)
C.12)
Преобразовав эту систему, найдем передаточную функцию усилителя,
охваченного обратной связью
Здесь К— 1 + RilR\ ~~ коэффициент усиления схемы. Типичные значения Rw
для ОСТ-усилителей находятся в пределах 8...500 Ом, a Rom — 5...25 Ом.
Величина
C.14)
является статическим коэффициентом передачи и, следовательно, аналогом
коэффициента 1/Р, используемого для анализа устойчивости ОСН-усилителей
(см. п. 1.6). Как видно из выражений C.4)—C.7), значение RT определяет
полосу пропускания усилителя.
Пример 3.1. Пусть ОСТ-усилитель AD8001 включен по неинвертирующей схеме
(Рис. 3.10) сК=2. Оценим его запасы устойчивости. Логарифмические частотные
характеристики переходного импеданса этого усилителя приведены на Рис. 3.9.
Параметры усилителя Rw = 50 Ом, /?оит = 15 Ом. Полагаем модуль а2 в
рассматриваемой полосе частот равным единице. Выберем R{ = R2 = 300 Ом. По формуле
C.15) найдем RT = 417 Ом. Как видно, вклад Ri в RT и, следовательно, в ширину
полосы пропускания — определяющий. Напротив, значение R{ ни на
устойчивость, ни на полосу пропускания практически не влияет. Из C.14) следует, что
20 \g\W(j(o)\ = 20 lg|cc2Z(/co)| - 20 \gRT.
Из частотных характеристик видно, что схема обладает достаточным
запасом устойчивости по фазе (> 60°) при полосе пропускания 450 МГц. 169
представляет собой передаточную функцию разомкнутой петли обратной
связи, а ее знаменатель, который мы обозначим Лт
C.15)
Глава 3. СПЕЦИАЛИЗИРОВАННЫЕ УСИЛИТЕЛИ НА БАЗЕ ИНТЕГРАЛЬНЫХ ОУ
3.1.4. Усилители дифференциальных линий
Линии передачи высокочастотных сигналов имеют существенные отличия
от линий связи, используемых в низкочастотных приборах. Эти отличия
обусловлены соизмеримостью длины высокочастотных линий с длиной волны
передаваемых сигналов, а также необходимостью защиты от проникновения
помех в очень широкой полосе частот. В низкочастотных устройствах, как
правило, стараются обеспечить минимальный выходной импеданс источников
сигналов и максимальный входной импеданс приемников. Это обеспечивает
максимальное усиление сигнала по напряжению. При передаче
радиочастотных сигналов требование совершенно иное: полные входные и выходные
сопротивления источников и приемников сигналов должны быть равны
волновому сопротивлению линии связи, или, как говорят, линия должна быть
согласована на обоих концах. Только при этом условии отсутствуют отражения
сигналов от концов линии и, следовательно, обеспечивается передача
максимальной мощности сигнала в направлении от источника к приемнику.
В качестве линий передачи высокочастотных сигналов обычно
используются коаксиальные кабели и экранированные или неэкранированные витые пары
проводов. Коаксиальные кабели с несимметричным подключением
передатчика и приемника представляют собой несимметричную систему связи, в которой
синфазные помехи оказывают на экран и центральный проводник разное
воздействие, что снижает помехозащищенность передачи. Намного более высокую
помехоустойчивость при передаче сигналов можно получить, используя
дифференциальные системы связи, которые формируют из исходного
несимметричного сигнала vc(t) пару противофазных напряжений +vc@ и — vc(/), и передают
их по витой паре проводов, симметричной относительно «заземления». В конце
линии их принимает дифференциальный приемник, который при
необходимости вновь преобразует симметричный сигнал в несимметричный.
Таким образом, оборудование дифференциальной линии связи в общем
случае включает помимо собственно линий в виде витых пар,
дифференциальные передатчики, или драйверы линий (ДЛ), магистральные (промежуточные)
усилители (МУ) (компенсирующие затухание сигнала в линии) и
дифференциальные приемники (ДП) (Рис. 3.11).
Рис. 3.12. Схема простейшего
драйвера дифференциальной линии
170
Схема простейшего драйвера дифференциальной линии приведена на
Рис. 3.12.
Здесь усилители сконфигурированы как неинвертирующий (У{) и
инвертирующий (У2) повторители. Резистор, включенный между входами Уь
обеспечивает одинаковый коэффициент петлевого усиления усилителей У\ и У2, равный
двум, что желательно с точки зрения равенства запасов устойчивости усилите -
Рис. 3.11. Дифференциальная линия связи
3.1. Широкополосные усилители
лей и характеристик переходных процессов. Амплитуда выходного
дифференциального напряжения в два раза превосходит амплитуду входного
несимметричного сигнала. Недостатком этой схемы является низкое входное
сопротивление. Фирма National Semiconductor выпускает ИМС двухканального
буферного усилителя CLC5612 со встроенными резисторами обратных связей
сопротивлением по 1 кОм, на основе которой схема на Рис. 3.12 может быть
построена практически без дополнительных внешних элементов. Два других типа
преобразователей несимметричного входного сигнала в симметричный
дифференциальный сигнал имеют высокое входное сопротивление. Первый из них
показан на Рис. 3.13.
Рис. 3.13. Драйвер линии с высоким
входным сопротивлением
Рис. 3.14. Усовершенствованная схема
дифференциального драйвера линии
На неинвертирующий вход усилителя У{ подается входной сигнал, в то время
как такой же вход У2 соединен с общей точкой схемы. Таким образом,
инвертирующий вход У2 является виртуальной землей. Поэтому при указанных на схеме
параметрах У{ усиливает без инвертирования входной сигнал в пять раз —
A + R[/RK)- Сигналы на входах усилителя У{ равны, поэтому напряжение на
верхнем выводе резистора RK равно KIN. Следовательно, усилитель У2 усиливает
входное напряжение в пять раз с инвертированием (—R2/RK). Таким образом,
напряжения на выходах У{ и У2 изменяются в противоположных направлениях с
одинаковой амплитудой и создают симметричный дифференциальный сигнал.
Эта схема может работать с различным усилением при надлежащем выборе
сопротивлений резисторов. Однако чтобы изменить усиление схемы, в ней
нужно поменять сопротивления двух резисторов. Кроме того, коэффициенты
петлевого усиления в этой схеме различны, а раз так, то полосы пропускания
усилителей (если даже последние одинаковы) не будут согласованы.
Вторая схема, не имеющая ни одного из недостатков, присущих
предыдущей схеме, может быть выполнена на двухканальном ОСТ-усилителе
(Рис. 3.14).
Эта схема, построенная, например, на ИМС AD815, может быть
использована как мощный дифференциальный драйвер, отдающий в линию ток до 0.5 А
при размахе выходного сигнала до 40 В.
Для этой схемы справедливы уравнения
C.16)
171
Глава 3. СПЕЦИАЛИЗИРОВАННЫЕ УСИЛИТЕЛИ НА БАЗЕ ИНТЕГРАЛЬНЫХ ОУ
172
C.17)
C.18)
Учитывая, что К,= Vn, из системы C.16) — C.18) найдем при условии Л3 = Л»
C.19)
C.20)
Как видно, коэффициент передачи драйвера может быть установлен
выбором сопротивления одного резистора. Коэффициенты петлевого усиления
обоих усилителей также оказываются согласованными.
Схема магистрального усилителя приведена на Рис. 3.15.
Рис. 3.15. Схема магистрального усилителя
Рис. 3.16. Схема магистрального приемника
Он имеет по два симметричных входа и выхода. Коэффициент передачи
усилителя равен
Включение трансформатора на выходе усилителя упрощает согласование
усилителя с линией. Фирма Maxim производит однокристальный
магистральный усилитель МАХ4147 с Киу= 2. Полоса пропускания усилителя — 350 МГц,
а скорость нарастания — 3600 В/мкс. Фирма Analog Devices выпускает
аналогичный усилитель AD8132, оптимизированный для согласования источников
дифференциальных сигналов со скоростными АЦП, имеющими
дифференциальные входы. Его полоса пропускания составляет 350 МГц, а максимальная
скорость нарастания — 1200 В/мкс. Интересны ИМС AD8322 и AD8323 этой
фирмы: они представляют собой магистральные усилители для
видеоприложений с входным и выходным сопротивлениями по 75 Ом и программно
управляемым (по последовательному интерфейсу) усилением (в частности, у
AD8322-2...100).
В качестве дифференциального магистрального приемника обычно
применяется скоростной дифференциальный усилитель, построенный по трехусили-
тельной схеме (Рис. 3.16).
Типичным примером является приемник МАХ4144. Его коэффициент
усиления составляет 2, полоса пропускания — 130 МГц, а скорость нарастания —
3.1. Широкополосные усилители
ЮООВ/мкс. Еще одна микросхема, специально спроектированная как
приемник дифференциальной линии — AD830. Она также имеет три ОУ в корпусе
ИМС, но каждый из двух входных усилителей представляет собой
дифференциальный усилитель, а напряжение на выходе ИМС пропорционально разности
выходных токов этих усилителей. Благодаря такому построению AD830 может
быть сконфигурирован различными способами для многих применений, в
частности, для суммирования или вычитания сигналов без дополнительных
внешних резисторов. Полоса пропускания этого усилителя — 85 МГц, а
скорость нарастания — 360 В/мкс. Сравнительные характеристики некоторых
типов широкополосных интегральных усилителей приведены в Табл. 3.2.
Таблица 3.2. Параметры модулей широкополосных ОУ
AD8055
AD825
AD8063
LM6165
LM7171
THS4001
THS4031
ОРА687
МАХ4100
Есть сдвоенный и
счетверенный вариан-
Малые входные токи
Функция отключения
К>25
Токовый, с входным
буфером
Малошумящий:
еш=1.6нВ/Гц05
Малошумящий:
еш=0.95нВ/Гц0-5
AD8009
AD846
CLC449
CLC5665
THS3001
МАХ4112
МАХ4147
ОРА681
Сверхскоростной
Прецизионный
Сверхскоростной
Функция отключения
Сверхскоростной
Есть сдвоенный
вариант
Драйвер линии
Есть сдвоенный и
строенный варианты
173
ОСН-усилители
ОСТ-усилители
Глава 3. СПЕЦИАЛИЗИРОВАННЫЕ УСИЛИТЕЛИ НА БАЗЕ ИНТЕГРАЛЬНЫХ ОУ
3.2. Изолирующие усилители
Изолирующие усилители предназначены для гальванической развязки
цепей, непосредственно подключенных к источнику (датчику) сигнала и цепей,
осуществляющих его обработку и/или передачу запоминающему или
индицирующему устройству. Такая изоляция нужна, например, в медицинских
приборах для защиты пациента от поражения электрическим током. При измерении
параметров электрической энергии в высоковольтных цепях также необходимо
изолировать основную часть аппаратуры от исследуемой цепи. Наконец, при
значительных синфазных напряжениях целесообразно использовать
гальваническое разделение сигналов для снижения погрешности передачи информации.
Для решения этих задач измерительную схему разбивают на две
изолированные части. Передающая часть работает под потенциалом измерителя
(датчика), а приемная— под нулевым потенциалом. Для реализации подобного
устройства необходимо, чтобы передающая часть имела отдельный,
изолированный от приемной схемы, так называемый «плавающий» источник
электрической энергии, общая точка которого соединяется чаще всего с одним из
дифференциальных входов передатчика. Этот вход усилителя играет роль
«плавающей земли» (Рис. 3.17).
Использование
трансформатора для передачи энергии в
плавающий источник питания
передатчика устраняет
электрическую связь между входом и
выходом схемы на постоянном
токе и в области низких частот,
но остается связь на высоких
частотах из-за наличия
паразитных межобмоточных
емкостей (СС2 и Ссз) питающего
трансформатора. Нельзя
полностью устранить также
емкостную связь в тракте передачи
сигнала (СС1).
Изолирующие усилители
должны обеспечивать высокий
уровень электрической изоляции между входными и выходными цепями. Для
решения этой задачи в тракте передачи сигнала используются
преимущественно три вида связи: оптическая, емкостная и трансформаторная.
Оптическая связь наиболее просто реализуется с помощью оптронов.
Нелинейность передаточной характеристики /out=^(An) оптрона в значительной
мере уменьшается введением в схему усилителя компенсирующей обратной
связи. Схема изолирующего усилителя с непрерывной оптической связью
представлена на Рис. 3.18.
Для нее справедливы уравнения
Рис. 3.17. Блок-схема изолирующего усилителя
174
C.21)
3.2. Изолирующие усилители
C.22)
C.23)
C.24)
Рис. 3.18. Схема изолирующего усилителя с оптической связью
Решение этой системы уравнений при условии, что оптроны хорошо
согласованы и, следовательно, F\(Iu) = FiUt>) имеет вид
Промышленность выпускает согласованные (дифференциальные)
оптроны, которые могут быть использованы для этой цели. В частности,
отечественный дифференциальный диодный оптрон ЗОД301А по паспорту имеет очень
хорошие характеристики. Однако длительные поиски автором некоторое время
назад этого оптрона оказались тщетными. Впрочем, неплохие результаты дало
применение несогласованного 3-канального диодного оптрона отечественного
производства АОД109.
Изолирующий усилитель ISO100 фирмы Burr-Brown, построенный по
рассмотренной схеме, обладает хорошими характеристиками при сравнительно
невысокой цене.
Нелинейность коэффициента передачи для варианта этой схемы ISO100CP
не превосходит 0.07%. Типичная полоса пропускания составляет 60 кГц.
Входным сигналом для этой микросхемы является ток, поэтому источник сигнала
должен обладать довольно высоким сопротивлением. При этом шум,
спектральная плотность которого на частоте 1 кГц составляет 0.65 пА/Гц°5, может
достигать достаточно высокого уровня. Конденсатор Ск обеспечивает
частотную коррекцию, создавая фазоопережение в цепи обратной связи усилителя У{
(см. Рис. 3.18). Это необходимо, так как оптрон, обладая значительной
инерционностью, вносит в контур обратной связи существенное запаздывание по
фазе. Емкость этого конденсатора должна составлять десятки или сотни пФ.
При использовании изоляции за счет емкостной связи, передача сигнала
через изолирующий барьер осуществляется высокочастотными колебаниями,
модулированными тем или иным способом входным сигналом.
Рассмотрим, например, принципы построения и работу изолирующего
повторителя ISO124 (Рис. 3.19).
175
Глава 3. СПЕЦИАЛИЗИРОВАННЫЕ УСИЛИТЕЛИ НА БАЗЕ ИНТЕГРАЛЬНЫХ ОУ
176
Рис. 3.19. Изолирующий усилитель с емкостной связью
Здесь передача входного сигнала осуществляется через согласованные
конденсаторы емкостью 1 пФ с помощью модулированных по ширине импульсов с
частотой повторения 500 кГц. Входной каскад, представляющий собой
Широтно-импульсный модулятор (ШИМ), включает интегратор на усилителе У1 и два
компаратора напряжения КН1 и КН2, причем последний играет роль
порогового элемента. Выходной каскад содержит согласованные с входным каскадом
пороговый элемент на компараторе КНЗ и интегратор на У2. Ключи S\ и 52>
управляющие направлением интегрирования интеграторов, переключаются
синхронно и синфазно, что обеспечивает точную передачу ширины импульсов
через изолирующий барьер. Выходной каскад представляет собой демодулятор,
причем для уменьшения пульсаций выходного напряжения (сопутствующих
процессу демодуляции) при условии сохранения полосы пропускания на
приемлемом уровне здесь используется синхронный фильтр на двух устройствах
выборки-хранения (УВХ). В результате выходное напряжение содержит
пульсации частотой 500 кГц с амплитудой не выше 20 мВ. Для дальнейшего
снижения уровня пульсаций изготовитель рекомендует включать на выходе схемы
ФНЧ второго порядка с полосой пропускания 100 кГц. Микросхема имеет
токовый вход, поэтому для расширения амплитудного диапазона входного сигнала
(при известной полной шкале выходного напряжения усилителя У1)
достаточно включить последовательно с входом дополнительный резистор. Полоса
пропускания изолирующего повторителя ISO 124 составляет 50 кГц при
нелинейности коэффициента передачи не более 0.01%.
Как и для любой системы с импульсной модуляцией, необходимо, чтобы
сигнал на входе ISO 124 не содержал составляющих с частотой выше 250 кГц. В
противном случае в результате наложения спектров при модуляции и
демодуляции возможно появление дополнительных помех. Другим источником помех
может быть прохождение высокочастотного (или имеющего высокую скорость
нарастания) синфазного сигнала через изолирующие конденсаторы,
вызывающее ложное срабатывание порогового элемента КНЗ выходного каскада.
Изолирующий повторитель сильно «шумит» (до 4 мкВ/Гц05), поэтому, если
требуется передать слабый сигнал, например от термопары, его следует вначале
усилить по напряжению с помощью дополнительного усилителя либо
применить ИМС ISO175, содержащую во входном каскаде измерительный усилитель
на трех ОУ.
3.2. Изолирующие усилители
Схема изолирующего усилителя с трансформаторной связью AD215
представлена на Рис. 3.20.
Рис. 3.20. Схема изолирующего усилителя с трансформаторной связью
Здесь для передачи входного сигнала через изолирующий барьер
используется балансная амплитудная модуляция несущей частоты 430 кГц. Внутренний
синхрогенератор управляет демодулятором и передает часть энергии через
трансформатор VT2 для питания изолированной части и управления
модулятором. Встроенный изолированный выпрямитель с фильтром обеспечивает
питание изолированной части схемы постоянным током силой до 10 мА при
напряжении ±15 В.
Пульсации напряжения на выходе демодулятора подавляются ФНЧ Бесселя
с полосой пропускания 150 кГц. В результате амплитуда пульсаций выходного
напряжения усилителя не превышает 5 мВ. Полоса пропускания схемы
0... 120 кГц. При ограничении полосы пропускания до 50 кГц дополнительным
выходным фильтром амплитуда пульсаций выходного напряжения снизится до
1.2 мВ. Нелинейность коэффициента передачи схемы при К= 1 не превышает
0.015%. С помощью входного усилителя сигнал может быть усилен в 10 раз, а
при снижении требований к линейности — даже в 100 раз.
Ниже в Табл. 3.3 приведены характеристики изолирующих усилителей.
Таблица 3.3. Важнейшие параметры изолирующих усилителей
Модель
Тип развязки
ISO100
Оптическая
ISO124
Емкостная
ISO175
Емкостная
AD215
Трансформаторная
AD210
Трансформаторная
177
Глава 3. СПЕЦИАЛИЗИРОВАННЫЕ УСИЛИТЕЛИ НА БАЗЕ ИНТЕГРАЛЬНЫХ ОУ
3.3. Усилители класса D
3.3.1. Общие сведения
Рассмотренные ранее усилители относятся к так называемым устройствам
преобразования непрерывного сигнала. В них управление током нагрузки
осуществляется транзисторами, работающими в активной области выходных
характеристик, в режимах класса А, В или АВ. Известно, что даже теоретически
при максимальной амплитуде синусоидального выходного сигнала
коэффициент полезного действия (КПД) усилителя класса А с емкостной или
непосредственной связями не превышает 25%, а класса В — 78.5%. Реально, в особенности
при неоптимальных нагрузках, КПД этих усилителей оказывается еще ниже.
Как следствие такие усилители интенсивно выделяют тепло и для их
нормальной работы требуются громоздкие радиаторы или специальные системы
принудительного охлаждения.
Значительно более высоким КПД (теоретически почти до 100%) обладают
усилители класса D, у которых транзисторы, регулируя ток через нагрузку,
принимают только два состояния: «включено» — падение напряжения на
транзисторе близко к нулю и «выключено» — ток через транзистор практически равен
нулю. Переход из одного состояния в другое происходит очень быстро,
практически мгновенно. Непрерывное и плавное регулирование тока или напряжения
нагрузки в широких пределах осуществляется тем или иным видом времяим-
пульсной модуляции (обычно частотно-импульсной модуляцией (ЧИМ) или
широтно-импульсной модуляцией (ШИМ)).
ЧИМ широко применяется в импульсных стабилизаторах напряжения, где
выходное напряжение меняется мало. В усилителях же, которые должны
усиливать по мощности биполярные сигналы, изменяющиеся в широком
динамическом диапазоне, обычно используют ШИМ. Это объясняется тем, что в
последнем случае частота модулированных импульсов выходного напряжения
постоянна при любом изменении входного сигнала усилителя, а это
обстоятельство позволяет сравнительно легко сгладить высокочастотные пульсации.
3.3.2. Виды широтно-импульсной модуляции
Как уже упоминалось, широтно-импульсная модуляция состоит в
изменении ширины (длительности) импульсов, следующих друг за другом с
постоянной частотой (Рис. 3.21).
Рис. 3.21. Последовательность импульсов, модулированных по ширине
Основным регулирующим фактором выступает относительная длитель-
178 ность импульсов или коэффициент заполнения у= tJT, где Т— период следо-
3.3. Усилители класса D
Наименьший положительный корень этого уравнения определяет
относительную длительность импульса. Блок-схема широтно-импульсного
модулятора приведена на Рис. 3.22.
Здесь обозначено: ГОН — генератор опорного
напряжения, КН — компаратор напряжения. Опорное
напряжение изменяется, как правило, по линейному
закону. В зависимости от вида опорного напряжения
различают одностороннюю и двухстороннюю
ШИМ-Н. При односторонней ШИМ опорное
напряжение KREF@ представляет собой периодические
пилообразные колебания (Рис. 3.23д)
Рис. 3.22. Блок-схема
широтно-импульсного
модулятора
Рис. 3.23. Виды ШИМ:
а — односторонняя, б — двухсторонняя
где KREF — амплитуда опорного напряжения. Если K1N@ меняется медленно, то
приближенно можно записать
C.27)
Для двухсторонней ШИМ требуется треугольное (желательно
равностороннее) опорное напряжение (Рис. 3.236). Двухсторонняя ШИМ обладает более
высоким быстродействием, чем односторонняя, поэтому ее применяют чаще.
179
В этом случае модуляция осуществляется изменением положения только
одного фронта импульса. Уравнение C.25) при линейном опорном напряжении
примет вид
C.26)
вания импульсов. Различают широтно-импульсную модуляцию первого рода
(ШИМ-1) и широтно-импульсную модуляцию второго рода (ШИМ-Н). При
ШИМ-1 длительность импульса определяется по значению входного сигнала на
начало периода. ШИМ-1 применяется в основном в цифроаналоговых
системах. В усилителях класса D используется ШИМ-П. В этом случае положение
регулируемого фронта импульса определяется текущим значением входного
сигнала. Уравнение модуляции при ШИМ-Н имеет вид
C.35)
Глава 3. СПЕЦИАЛИЗИРОВАННЫЕ УСИЛИТЕЛИ НА БАЗЕ ИНТЕГРАЛЬНЫХ ОУ
Рис. 3.24. Временные диаграммы при
передаче биполярного сигнала:
а — вид входного сигнала, б — разнопо-
лярная ШИМ, в — однополярная ШИМ
Если входной сигнал — биполярный, то
должны меняться полярность и среднее
значение выходного напряжения усилителя
класса D. При этом возможны два типа
модуляции: разнополярная ШИМ (Рис. 3.246)
и однополярная ШИМ (Рис. 3.24#).
Разнополярной ШИМ из-за
удвоенного перепада амплитуд импульсов присущи
более интенсивный обмен реактивной
энергии и более высокий уровень
пульсаций, поэтому однополярная ШИМ
предпочтительнее. Однако однополярная
ШИМ в полной мере реализуется только
при мостовой схеме выходного каскада
усилителя.
3.3.3. Схемотехника выходных каскадов
усилителей класса D
На практике нашли применение две схемы выходных каскадов:
полумостовая и мостовая. Полумостовая схема на полевых транзисторах с изолированным
затвором представлена на Рис. 3.25.
Рис. 3.25. Полумостовой
выходной каскад
усилителя класса D
Рис. 3.26. Эпюры выходного напряжения
и токов в элементах выходного каскада,
выполненного по полумостовой схеме
180
Диоды VD{ и VD2 обеспечивают обмен реактивной энергией между
источниками питания и нагрузкой. На Рис. 3.26 приведены эпюры выходного
напряжения и токов в элементах выходного каскада, выполненного по схеме
Рис. 3.25 при чисто индуктивной нагрузке (основная гармоника тока /L отстает
от основной гармоники напряжения Vquj на 90°) и двухполярной ШИМ.
Видно, что при достаточно большой индуктивности нагрузки ток /L
поочередно протекает через открытый транзистор соответствующего плеча
полумоста и через диод противоположного плеча. Когда ток нагрузки протекает
3.3. Усилители класса D
через транзистор, происходит потребление энергии от источника, а когда
через диод— возврат энергии в источник (рекуперация). Поскольку выходное
напряжение каскада принимает значения ±Еп, пульсации тока весьма
значительны. Очевидно, что реализовать однополярную ШИМ в этой схеме можно
только в случае, если параллельно нагрузке включить дополнительный
двунаправленный ключ, который будет открываться при запирании транзистора
полумоста.
На Рис. 3.27 приведена мостовая схема оконечного каскада усилителя
класса D, а на Рис 3.28 — эпюры, поясняющие электрические процессы в нем при
работе с однополярной ШИМ на индуктивную нагрузку.
Рис. 3.27. Мостовая схема оконечного
каскада усилителя класса D
Рис. 3.28. Эпюры, поясняющие
электрические процессы в мостовой схеме
Для реализации однополярной ШИМ можно предложить следующий
алгоритм. Транзисторы одного из полумостов, например, VT\ и VT2
открываются поочередно в зависимости от полярности входного напряжения (см.
Рис. 3.24), т. е. они как бы задают знак выходного напряжения. Два других
транзистора УТЪ и VT4, также поочередно переключаясь, но с большей
частотой, осуществляют собственно широтно-импульсную модуляцию. На
Рис. 3.28 представлены эпюры для случая, когда Кш > 0. При этом постоянно
открыт транзистор VTU а УТЪ модулирует питающее напряжение Vs. Пока ток
нагрузки /L отрицателен, он протекает постоянно через диод VDX. Когда
транзистор УТг открыт, ток нагрузки протекает через него. При этом нагрузка
оказывается замкнутой почти накоротко открытыми диодом VD\ и транзистором
VTy Напряжение на нагрузке практически равно нулю, и ток меняется очень
мало. При закрытом VT^ открывается диод VD4 и к нагрузке подключается
напряжение Vs отрицательной полярности. В результате ток /L начинает быстро
снижаться по абсолютной величине.
Когда ток нагрузки /^меняет направление, он начинает протекать через
открытый на протяжении всего полупериода входного сигнала транзистор
VT\. При открытом транзисторе КГ4ток течет через него, а когда он закрыт —
через диод VD4, который вместе с транзистором VTX замыкает нагрузку
практически накоротко. Из диаграмм видно, что при однополярной модуляции
пульсации тока нагрузки заметно меньше, чем при разнополярной.
181
Глава 3. СПЕЦИАЛИЗИРОВАННЫЕ УСИЛИТЕЛИ НА БАЗЕ ИНТЕГРАЛЬНЫХ ОУ
3.3.4. Промышленные типы усилителей класса D
Усилители класса D выпускаются несколькими фирмами в виде
монолитных и гибридных ИМС. Ведущее положение занимает, по-видимому, «Apex
Microtechnology» (США), которая производит 15 моделей гибридных
ШИМ-усилителей с мостовым и полумостовым выходом, рассчитанных на
питающие напряжения 40...500 В, с выходной мощностью 200 Вт... 10 кВт. К
новинкам этой фирмы относятся усилители большой мощности промышленного
назначения, имеющие частоту переключения 22 кГц. Выходные каскады этих
усилителей выполнены на IGBT-транзисторах, обладающих большой
перегрузочной способностью. Примером может служить усилитель SA08,
предназначенный для построения электропривода постоянного тока. Типовая схема
включения этого усилителя приведена на Рис. 3.29.
Рис. 3.29. Типовая схема включения ШИМ-усилителя SA08
182
Эта схема представляет собой контур регулирования тока якоря двигателя
постоянного тока, которая может быть непосредственно использована в
качестве внутреннего контура в системе подчиненного регулирования скоростного
или позиционного электропривода. Схема включает помимо собственно
ШИМ-усилителя еще и два линейных ОУ, первый из которых (ОУ\) выполняет
функцию интегрального регулятора тока, а второй (ОУ2) формирует сигнал
обратной связи по току якоря. Усилитель SA08 развивает мощность в нагрузке до
10 кВт при напряжении 500 В и КПД до 98%. Он выполнен в малогабаритном
герметичном 12-выводном корпусе МО-127, внешний вид которого
представлен на Рис. 3.30.
3.3. Усилители класса D
Рис. 3.30. Внешний
вид усилителя SA08
Усилитель SA07 предназначен в основном для аудио-
приложений. Его мостовой выходной каскад выполнен на
МОП транзисторах, переключающихся с частотой 500 кГц.
Этот усилитель способен отдать в нагрузку до 200 Вт при
КПД до 94%. В состав микросхемы входит линейный ОУ,
принимающий входной сигнал и сигнал обратной связи.
Фирма Texas Instruments производит около десятка
моделей монолитных моно- и стереоусилителей класса D на
мощности 1..Л0 Вт. Это, например, стереоусилитель TPA2001D2 с мостовым
выходом, развивающий на нагрузке 8 Ом мощность до 1 Вт, при напряжении
питания 5 В и КПД до 85%. Частота переключения 200...300 кГц. Модуляция —
однополярная. Усилитель размещен в миниатюрном 24-выводном корпусе
TSSOP с размерами 4.5x8x1.2 мм. Другой пример— стереоусилитель
TPA032D04 мощностью 2x10 Вт, также с мостовым выходом, работающий на
частотах переключения 100...500 кГц. Усилитель выпускается в 48-выводном
корпусе TSSOP с размерами 6x12x1.2 мм. В состав микросхемы входит также
2-канальный аналоговый усилитель для головных телефонов.
Фирма National Semiconductor предлагает усилитель класса D на двух ИМС:
LM4651, содержащей все основные узлы ШИМ-усилителя, в том числе и
драйверы выходного каскада, и LM4652, включающей мостовой выходной каскад на
МОП-транзисторах и датчик температуры. Усилитель развивает мощность
170 Вт с КПД = 85% при напряжении питания ±20 В и частоте коммутации
125...145кГц.
В Табл. 3.4 приведены основные параметры некоторых моделей
промышленных усилителей класса D.
Таблица 3.4
Модель
SA08
SA07
TPA2001D2
TPA032D02
LM4651/2
TDA7482
Параметры i
10000
200
2x1
2x10
2x170
25
Ку
[ДБ]
22
100
8...23.5
25
115
30
моделей промышленных усилителей класса Д
А
16...500
5...40
4.S...5.5
8...14
±10...±22
±10...±25
20
5
0.4
3.5
10
3
fes
80
90
10
-
125
40
[кШ]
22.5
500
300
500
125
120
кпд
[%]
98
94
85
85
85
87
Особенности
Мост на IG ВТ-транзисторах
Мост на МОП-транзисторах
Аудио стерео усилитель с однополяр-
ной ШИМ-модуляцией
Стерео усилитель с мостовым выходом
Выходной каскад на отдельной ИМС
Полумостовой выход
3.3.5. Помехи, порождаемые усилителями
класса D и борьба с ними
Как видно из временных диаграмм (см. Рис. 3.26 и Рис. 3.28), работа
ШИМ-усилителей сопровождается высокими значениями dv/dt и di/dt. Это
порождает интенсивные помехи на выходе усилителя, а также в других
электронных устройствах, куда помехи попадают по кондуктивным связям через общие
шины питания, а также за счет наводок от электромагнитных полей,
создаваемых в окружающем пространстве при работе этих устройств. Таким образом,
при применении усилителей класса D приходится решать непростую проблему
183
Глава 3. СПЕЦИАЛИЗИРОВАННЫЕ УСИЛИТЕЛИ НА БАЗЕ ИНТЕГРАЛЬНЫХ ОУ
электромагнитной совместимости — обеспечить низкий уровень пульсаций
тока, потребляемого усилителем от источников питания, малые значения dv/dt и
di/dt в проводах, соединяющих усилитель с нагрузкой, особенно если эта
нагрузка удаленная и линии связи имеют большую длину.
Для снижения уровня помех в цепях питания изготовитель рекомендует
[3.5] подключение в непосредственной близости от выводов питания усилителя
пары блокирующих конденсаторов (Рис. 3.31).
Конденсаторы Q — керамические, емкостью 0.1...1мкФ. Конденсаторы
С2 — оксидные, желательно танталовые, с емкостью из расчета по 10 мкФ на
каждый 1 А потребляемого тока. Конденсаторы С\ должны располагаться как
можно ближе к выводам питания усилителя, а С2 — не далее 50 мм от этих выводов.
Чтобы уменьшить пульсации выходных напряжений и токов применяют
ФНЧ на Z/C-цепях. Для полумостового выхода обычно применяют
несимметричную схему (Рис. 3.32а), а для мостового — симметричную (Рис. 3.326).
В работе [3.6] приведен анализ влияния выходных фильтров на искажения
сигнала и уровень электромагнитных помех, создаваемых усилителем при его
работе на нагрузку типа громкоговорителя. Показано, что при работе усилителя
на нагрузку, имеющую выраженный индуктивный характер, несимметричный
фильтр (Рис. 3.32а) снижает только кондуктивные помехи, поставляемые
усилителем в питающую сеть. Уровень электромагнитных помех, создаваемых
усилителем с таким фильтром, даже выше, чем у усилителя вообще без фильтра. То
же самое справедливо и для искажений сигнала, поступающего в нагрузку.
Симметричный фильтр (Рис. 3.326) существенно снижает
электромагнитные помехи. В качестве примера на Рис. 3.33 представлены осциллограммы
регистрации напряженности электрического поля на расстоянии 12.5 мм от
кабеля, соединяющего громкоговоритель с выходным фильтром усилителя.
Частота импульсов ШИМ 250 кГц. Влияние фильтров на нелинейные
искажения сигнала незначительно, а на интермодуляционные — отрицательно.
Несколько слов об устойчивости усилителей с ШИМ. Если частота среза (fcp)
разомкнутого контура регулирования усилителя подчиняется условию
Рис. 3.31. Схема подключения
блокирующих конденсаторов
Рис. 3.32. Выходные фильтры усилителей класса D:
а — несимметричный, б — симметричный
C.28)
C.29)
где^ — частота импульсов ШИМ, то устойчивость усилителя может быть
исследована обычными методами. Широтно-импульсный модулятор и выходной
каскад в этом случае заменяются звеном с передаточной функцией
184
3.3. Усилители класса D
Рис. 3.33. Осциллограммы напряженности электрического поля
вокруг проводов, соединяющих громкоговоритель с усилителем
В ином случае исследование устойчивости усилителя сильно усложняется,
поскольку призер >/s/20 в полной мере проявляется дискретный, нелинейный
характер широтно-импульсной модуляции. Читателю, желающему
досконально разобраться в этом вопросе, можно рекомендовать книгу [3.7].
Вопросы и задачи
1. Перечислите важнейшие требования, предъявляемые к
широкополосным усилителям.
2. Укажите простейшие способы расширения полосы пропускания
усилительных каскадов.
3. Начертите схему усилительного каскада переменного тока по схеме
Рис. 3.3а с одним источником питания.
4. Начертите схему каскодного усилительного каскада переменного тока с
одним источником питания.
5. Чем отличается включение ОУ в качестве ВЧ-усилителей от обычного
включения в качестве усилителя постоянного тока?
6. Какой недостаток обычных ОУ вызвал появление ОУ с обратной связью
по току?
7. Назовите основной усилительный параметр ОСТ-усилителя и поясните
его физический смысл.
8. Покажите возможность независимого регулирования усиления и
полосы пропускания ОСТ-усилителей.
9. Почему дифференциальные линии передачи сигналов обладают
наивысшей помехозащищенностью?
10. Какие типы усилителей включает дифференциальная линия передачи
сигналов?
11. Какие основные требования предъявляются к драйверу
дифференциальной линии?
185
Глава 3. СПЕЦИАЛИЗИРОВАННЫЕ УСИЛИТЕЛИ НА БАЗЕ ИНТЕГРАЛЬНЫХ ОУ
12. Какие основные требования предъявляются к магистральному
усилителю дифференциальной линии?
13. Какие основные требования предъявляются к приемнику
дифференциальной линии?
14. В каких случаях следует применять изолирующие усилители (нельзя
обойтись измерительными усилителями)?
15. Какие факторы ограничивают КПД усилителя класса D?
16. Какой тип модуляции применяется в усилителях класса D?
17. Укажите преимущества и недостатки мостовой схемы выходного
каскада усилителя класса D по сравнению с полумостовой.
Литература к главе 3
3.1. A tutorial on applying op amples to RF applications //Application note OA-11.
National Semiconductor. — September 1993. — 22 pp.
3.2. Brandenburg D. Current vs. Voltage Feedback Amplifiers//Application note OA-30.
National Semiconductor. — January 1998. — 6 pp.
3.3. Potson D. Current Feedback Op Amp Applications Circuit Guide// Application Note
OA-07. National Semiconductor. — May 1988. — 8 pp.
3.4. Schmid R. Stability Analysis of Current Feedback Amplifiers//Application Note OA-25.
National Semiconductor. — May 1995. — 6 pp.
3.5. General operating considerations//Application note 1. Apex Microtech-nology
Corporation. — February 2001. — 11 pp.
3.6. Score M. Reducing and Eliminating the Class-D Output Filter//Application Report.
Texas Instruments. — August 1999. — 33 pp.
3.7. Воловин Г.И. Динамика вентильных источников вторичного электропитания
постоянного тока. М.: Энергоатомиздат, 1991. — 192 с.
Глава 4
АНАЛОГОВЫЕ КОМПАРАТОРЫ
И ТАЙМЕРЫ
4.1. Общие сведения о компараторах
Компаратор — это устройство сравнения. Аналоговый компаратор
предназначен для сравнения величин двух аналоговых сигналов. Если обозначить
входной анализируемый сигнал KIN, а опорный сигнал (или уровень сравнения)
KREB то выходной сигнал компаратора Vom — (представляющий собой
логический сигнал, содержащий I бит информации) будет определяться по правилу
Выходной сигнал компаратора в большинстве случаев подается на входы
логических устройств и потому согласуется по уровню и мощности с их
входами. Таким образом, компаратор — это элемент перехода от аналоговых к
цифровым сигналам, и по сути дела является одноразрядным аналого-цифровым
преобразователем.
Неопределенность состояния выхода компаратора при разности входных
сигналов | KIN - VREF I ~ 0 нет необходимости уточнять, так как реальный
компаратор всегда имеет либо конечный коэффициент усиления (Рис. 4.1а), либо
петлю гистерезиса (Рис. 4.16).
Рис. 4.1. Характеристики компараторов (при VREF = 0):
а — с конечным коэффициентом усиления, б — с гистерезисом (VG — ширина петли гистерезиса)
Чтобы выходной сигнал компаратора изменился на конечную величину
1^!оит- ^°оит1 ПРИ бесконечно малом изменении входного сигнала,
компаратор должен был бы иметь бесконечно большой коэффициент усиления
(Рис. 4.26-1) и работать при полном отсутствии шумов.
К такой характеристике можно приблизится двумя способами: либо
использовать усилитель с очень большим коэффициентом усиления, либо ввести
187
Глава 4. АНАЛОГОВЫЕ КОМПАРАТОРЫ И ТАЙМЕРЫ
188
положительную обратную связь. В первом случае при | KIN — KREF|« 0
характеристика компаратора будет иметь вид Рис. 4Ла. Это приводит к двум неприятным
последствиям. Прежде всего, при очень медленном изменении KJN выходной
сигнал также будет изменяться замедленно (Рис. 4.26-2), что может вызвать
нечеткое срабатывание последующих логических схем. Еще хуже то, что при
таком медленном изменении V[N около KREF может появиться так называемый
«дребезг», при котором выход компаратора многократно с большой частотой
меняет свое состояние под действием помех или шумов (Рис. 4.26-3). Для
устранения этого явления обычно вводят положительную обратную связь, которая
обеспечивает переходной характеристике компаратора гистерезис (Рис. 4.15).
Наличие гистерезиса хотя и вызывает некоторую задержку в переключении
компаратора (Рис. 4.26-4), но существенно уменьшает или даже полностью
устраняет «дребезг» Vquj.
В качестве компаратора может быть
использован и обычный операционный
усилитель (ОУ), как это показано на Рис. 4.3.
Усилитель включен по схеме
инвертирующего сумматора, однако вместо резистора в
цепи обратной связи включены
параллельно стабилитрон VDX и диод VD2.
Пусть R{ = R2. Если (KIN- KREF) > 0, то
диод VD2 открыт и выходное напряжение
схемы равно падению напряжения на
открытом диоде и не превышает 0.5...0.7 В.
При (Vw - KREF) < 0 на стабилитроне
установится напряжение, равное его
напряжению стабилизации Vcv Это напряжение
должно соответствовать единичному
логическому уровню цифровых интегральных
микросхем, входы которых подключены к
выходу компаратора. Таким образом,
выход ОУ принимает два состояния,
причем в обоих усилитель работает в
линейном режиме. Многие типы ОУ не
допускают сколько-нибудь существенное
входное дифференциальное напряжение.
ОУ, включенный по схеме, приведенной на
Рис. 4.3, работает в режиме компаратора
практически с нулевыми
дифференциальными и синфазными входными
напряжениями. Недостатком данной схемы
является относительно низкое быстродействие,
обусловленное необходимостью частотной
коррекции, так как ОУ работает в
линейном режиме со 100% отрицательной
обратной связью. Поэтому в компараторах на
обычных ОУ трудно получить время
переключения менее 1 мкс.
Рис. 4.2. Временные диаграммы
переключения компараторов:
а — входные напряжения, б — выходные
напряжения компараторов с
бесконечным усилением (/), с конечным
усилениемB), при наличии внутреннего
или входного шума C), с гистерезисом D)
Рис. 4.3. Схема компаратора на ОУ
4.2. Аналоговый интегральный компаратор
4.2. Аналоговый интегральный компаратор
4.2.1. Принципы построения интегральных
компараторов
Итак, компаратор — это быстродействующий дифференциальный
усилитель постоянного тока с большим усилением, малым дрейфом, малым
смещением нуля и логическим выходом. Его входной каскад должен обладать
большим коэффициентом ослабления синфазного сигнала (КОСС) и способностью
выдерживать большие синфазные и дифференциальные напряжения на входах,
не попадая в режим насыщения, приводящий к значительному снижению
быстродействия. Для повышения помехозащищенности желательно снабдить
компаратор стробирующим логическим входом, разрешающим сравнение и
переключение компаратора только в задаваемые внешним (тактовым) сигналом
моменты времени.
Схема первого
промышленного интегрального компаратора
дА710 (отечественный аналог —
521СА2), разработанного Р. Вид-
ларом в 1965 г. [4.1], приведена на
Рис. 4.4.
Она представляет собой
дифференциальный усилитель на
транзисторах VTb VT2,
нагруженный на каскады ОЭ на VT5 и VT6.
Каскад на УТ5 через транзистор
VTA управляет коллекторным
режимом входного каскада и через
транзистор в диодном включении
VT7 фиксирует потенциал базы
транзистора РТ8, делая его
независимым от изменений положительного напряжения питания. Каскад на КГ6
представляет собой второй каскад усиления напряжения. Эмиттерные выводы
транзисторов VT5 и УТв подключены к стабилитрону VD{ с напряжением
стабилизации 6.2 В, поэтому (с учетом падения напряжения на переходах база-
эмиттер) потенциалы баз указанных транзисторов соответствуют « 6.9 В.
Следовательно, допустимое напряжение на входах компаратора относительно
общей точки может достигать 7 В. На транзисторе VT% выполнен Эмиттерный
повторитель, передающий сигнал с коллектора УТв на выход. Постоянный
уровень выходного сигнала смещается к нулю стабилитроном VD2.
Если дифференциальное входное напряжение превышает+5...+10 мВ, то
транзистор VT6 закрыт, a VT5 близок к насыщению. Выходной сигнал
компаратора при этом не может превысить +4 В, так как при более положительных
сигналах открывается диод, выполненный на транзисторе УТ7 в диодном
включении, не допуская излишнего роста выходного напряжения и насыщения УТ5.
При обратном знаке входного напряжения VT6 насыщается, потенциал его кол-
Рис. 4.4. Схема компаратора цА710
189
Глава 4. АНАЛОГОВЫЕ КОМПАРАТОРЫ И ТАЙМЕРЫ
Рис. 4.5. Варианты включения выходного каскада
компаратора 521 САЗ:
а — по схеме с ОЭ, б — по схеме эмиттерного повторителя
190
лектора оказывается близок к напряжению стабилизации стабилитронов VD\ и
VD2, а поэтому потенциал выхода близок к нулю. Транзистор VT9 — источник
тока 3 мА для начального смещения VT% и VD2. Часть этого тока (до 1.6 мА)
может ответвляться в нагрузку с вытекающим (отрицательным) входным током
(например, при подключении одного входа ИМС ТТЛ серии 155 или 133).
В дальнейшем схема этого компаратора развивалась и
совершенствовалась. Схемы многих современных компараторов имеют стробирующий вход
для синхронизации, а некоторые модификации снабжены на выходе
триггерами-защелками, фиксирующими состояние выхода компаратора в
момент прихода синхроимпульса.
Выходные каскады
компараторов обычно обладают
большей гибкостью, чем
выходные каскады
операционных усилителей. В обычном
ОУ используют
двухтактный выходной каскад,
который обеспечивает размах
напряжения в интервале
между уровнями напряжения
питания (например, ±13 В
для ОУ типа 140УД7,
работающего от источников
±15 В). В выходном каскаде
компаратора эмиттер, как правило, заземлен, а выходной сигнал снимается с
«открытого» коллектора. Выходные транзисторы некоторых типов
компараторов, например, 521САЗ или LM311, имеют открытые (т. е. неподключенные) не
только коллектор, но и эмиттер. Две основные схемы включения компараторов
такого типа приведены на Рис. 4.5 [4.2].
На Рис. 4.5а выходной транзистор компаратора включен по схеме с общим
эмиттером (ОЭ). При потенциале на верхнем выводе резистора, равном +5 В к
выходу можно подключать входы ТТЛ, «МОП- и КМОП-логику с
напряжением питания 5 В. Для управления КМОП-логикой с более высоким
напряжением питания следует верхний вывод резистора подключить к источнику питания
используемой цифровой микросхемы.
Если требуется изменение выходного напряжения компаратора в пределах
от +KS до — Ks, выходной каскад включается по схеме эмиттерного повторителя
(ЭП) (Рис. 4.56). При этом заметно снижается быстродействие компаратора и,
кроме того, в отличие от схемы на Рис. 4.5а выходной сигнал компаратора
инвертируется относительно входного.
Некоторые модели интегральных компараторов (например, AD790,
МАХ907) имеют внутреннюю неглубокую положительную обратную связь,
обеспечивающую их переходной характеристике гистерезис с шириной петли,
соизмеримой с напряжением смещения нуля.
На Рис. 4.6а приведена схема включения компаратора с открытым
коллектором на выходе, переходная характеристика которого имеет гистерезис
(Рис. 4.66).
4.2. Аналоговый интегральный компаратор
Рис. 4.6. Компаратор с положительной обратной связью:
а — схема включения, б — переходная характеристика с гистерезисом
Пороговые напряжения этой схемы определяются по формулам
4.2.2. Компараторы с однополярным питанием
Компараторы с однополярным питанием удобны для использования в
носимой аппаратуре, имеющей батарейное питание, легко сопрягаются с КМОП
и ТТЛ цифровыми схемами, поэтому они получили широкое распространение.
Одна из первых моделей LM139/239/339 (отечественный аналог— 1401СА1),
была создана Р. Видларом в начале 70-х годов прошлого века и оказалась
настолько удачной, что и поныне выпускается несколькими фирмами в больших
количествах и многих модификациях (LM3302, LM393, TL331 и др.). ИМС
LM139 представляет собой маломощный счетверенный компаратор среднего
быстродействия с выходом в виде биполярного транзистора с открытым
коллектором.
Схема входного каскада одного их четырех
компараторов LM139 приведена на Рис. 4.7 [4.3].
Транзисторы VT{...VT4, включенные
попарно по схеме Дарлингтона, составляют
^-«-/^-дифференциальный входной каскад с
нагрузкой в виде токового зеркала на транзисторах
VT5 и К7б. Это позволяет преобразовать
дифференциальный входной сигнал в
несимметричный выходной без потери усиления. Такое
включение позволяет оперировать с синфазными
входными сигналами, сниженными вплоть до
Рис. 4.7. Схема входного
усилительного каскада компаратора LM139 ЛОЛ
Из-за асимметрии выходных напряжений компаратора петля гистерезиса
оказывается несимметричной относительно опорного напряжения. Обычно
выбирают Rc « /?2» так чт0
D.1)
Глава 4. АНАЛОГОВЫЕ КОМПАРАТОРЫ И ТАЙМЕРЫ
потенциала общей шины (земли). Если оба входа имеют потенциал общей
шины, то напряжения эмиттеров транзисторов VTX и VT4 относительно общей
шины равны КВЕ, а эмиттеров транзисторов VT2 и КГ3 — 2FBE. Для переключения
компаратора достаточно, чтобы потенциалы коллекторов транзисторов VT5 и
VT6 токового зеркала были бы выше потенциала общей шины на величину КВЕ.
Поскольку транзисторы VT2 и КГ3 могут работать с нулевыми напряжениями
коллектор—база, то компаратор нормально работает при KIN > -0.3 В. Однако
при переходе через эту границу, может произойти отпирание диода подложки,
что приведет к непредсказуемому состоянию выхода или даже к повреждению
компаратора, если входные токи не ограничены.
На Рис. 4.8 показана
упрощенная схема
компаратора LM139 с выходным
каскадом.
В каскадах с общим
эмиттером на
транзисторах VT-] и VT%
осуществляется дополнительное
усиление разностного сигнала.
Коллектор транзистора КГ8
оставлен открытым, чтобы
обеспечить более гибкое
применение компаратора.
Включение нагрузочного, так называемого «подтягивающего» (pull-up),
резистора между коллектором VT% и Fs или любым другим источником питания с
напряжением вплоть до +36 В позволяет управлять сравнительно мощной
нагрузкой, например, индикаторами или реле. Несколько выходов могут быть
соединены вместе, для того, чтобы обеспечить логическую операцию «проводное
(монтажное) И/ИЛИ». Транзистор КГ8 в полностью открытом состоянии
обеспечивает ток коллектора (нагрузки) до 15 мА. При этом его напряжение
коллектор—эмиттер не превышает 1 В. При коллекторном токе 4 мА типичное
значение этого напряжения составляет 0.25 В.
Источники тока /3 и /4 по 3.5 мкА каждый используются для ускорения
перезаряда паразитных емкостей эмиттеров транзисторов VT{ и VT4, что
увеличивает скорость нарастания входного каскада. Диоды VDX и VD2 установлены для
защиты от пробоя перехода база—эмиттер транзисторов VT\ и VT4 при больших
колебаниях входного напряжения.
Рис. 4.8. Упрощенная схема компаратора LM139
192
4.2.3. Скоростные компараторы
Быстродействие универсальных компараторов типа цА710, LM111 и LM139
не всегда достаточно. Для цифровых ИМС типа ТТЛШ или ЭСЛ достижимо
быстродействие на уровне 1...10 не, поэтому желательно обеспечить такую
скорость и для аналогового компаратора.
Быстродействие компараторов, работающих без обратной связи с
большими входными токами, можно увеличить за счет совершенствования
схемотехники и интегральных структур. Один из основных принципов проектирования:
4.2. Аналоговый интегральный компаратор
биполярные транзисторы, входящие в состав компаратора, ни при каких
допустимых режимах не должны входить в состояние насыщения. В компараторах
этого труднее избежать, чем в ОУ, поскольку:
• на входах компаратора в нормальном режиме работы могут быть большие
дифференциальные и синфазные напряжения;
• выходные каскады компараторов представляют собой логические элементы,
работающие в ключевом режиме.
Один из путей устранения
насыщения транзисторов заключается в
шунтировании перехода
база—коллектор диодом Шоттки. На Рис. 4.9
приведены упрощенные схемы
транзисторных ключей с указанием
разностей потенциалов между выводами в
открытом состоянии.
Ключ без диода Шоттки
(Рис. 4.9а) находится в глубоком
насыщении. При его переводе в режим
отсечки требуется значительное
время на рассасывание избыточных
зарядов в базе. Включение диода Шоттки (Рис. 4.95), имеющего низкое прямое
падение напряжения и малое время восстановления, позволяет исключить
переход транзистора в режим насыщения. При этом избыточный входной ток ключа
/D ответвляется через диод в цепь коллектора, что устраняет накопление
неосновных носителей в базовой области транзистора происходящее в режиме
насыщения. Тем самым обеспечивается наименьшее время выхода транзистора из
открытого состояния. Применение этого принципа при построении
скоростного компаратора SE527 (отечественный аналог— 521СА4) позволило снизить
время переключения до 15 не. Диоды Шоттки использованы также в выходном
каскаде скоростного компаратора TL714C, имеющего время переключения
6 не. Дальнейшее повышение быстродействия достигается построением всех
каскадов компаратора на дифференциальных парах, которые всегда работают в
линейном режиме. Это наиболее удобно в случае, когда компаратор
предназначен для работы с ЭСЛ-логикой, основой схемотехники которой также являются
дифференциальные пары транзисторов. Примером такого компаратора может
служить МАХ9692, типичное время переключения которого составляет 1.2 не.
Для повышения скорости нарастания выходного напряжения входные
каскады скоростных компараторов выполняют по схеме, аналогичной схеме ОУ с
токовой обратной связью (см. Рис. 3.7 в главе 3). Именно так построен входной
каскад компаратора TL714C.
В заключение перечислим некоторые особенности компараторов по
сравнению с ОУ:
• несмотря на то что компараторы очень похожи на операционные усилители, в
них почти никогда не используют отрицательную обратную связь, так как в
этом случае весьма вероятно (а при наличии внутреннего гистерезиса —
гарантировано) самовозбуждение;
• в связи с тем что в схеме нет отрицательной обратной связи, напряжения на
входах компаратора неодинаковы; 193
Рис. 4.9. Упрощенные схемы ключей
на биполярных транзисторах:
а — без диода Шоттки, б — с диодом Шоттки,
шунтирующим переход база-коллектор ключа
Глава 4. АНАЛОГОВЫЕ КОМПАРАТОРЫ И ТАЙМЕРЫ
• из-за отсутствия отрицательной обратной связи входное сопротивление
компаратора относительно невелико и может меняться при изменении входных
сигналов;
• выходное сопротивление компараторов значительно и различно для разной
полярности выходного напряжения.
4.3. Применение компараторов
4.3.1. Двухпороговый компаратор
Двухпороговый компаратор, или компаратор «с окном», фиксирует,
находится ли входное напряжение между двумя заданными пороговыми
напряжениями или вне этого диапазона (Рис. 4.10).
194
Рис. 4.10. Двухпороговый компаратор:
а — схема включения, б — временные диаграммы
Для реализации такой функции выходные сигналы двух компараторов
необходимо подвергнуть операции логического умножения (Рис. 4.10а). Как
показано на Рис. 4.106, на выходе логического элемента единичный уровень
сигнала будет иметь место тогда, когда выполняется условие
V{<Vm<V2, D.2)
так как в этом случае на выходах обоих компараторов будут единичные
логические уровни.
Такой компаратор выпускается в виде отдельной
ИМС |iA711 (отечественный аналог — 521СА1).
Пример реализации двухпорогового компаратора
на двух компараторах 4-канальной микросхемы
1401СА1 представлен на Рис. 4.11.
Компараторы имеют выходы с открытым
коллектором. Подключение двух или несколько выходов
с открытым коллектором к общему нагрузочному
резистору, подключенному к напряжению питания,
реализует (если логической единице соответствует
высокий уровень напряжения) операцию
логического умножения — «проводное (монтажное) И». Если
входное напряжение меньше Vx и больше К2, то
выходные транзисторы обоих компараторов заперты. А
Рис. 4.11. Схема
двухпорогового компаратора
на аналоговых компараторах
с открытым коллектором
4.3. Применение компараторов
так как выход схемы соединяется с напряжением питания через нагрузочный
резистор Rq> to выходное напряжение имеет высокий уровень. В противном
случае какой-либо из транзисторов остается открытым, и на выходе
устанавливается низкий уровень напряжения. Значения пороговых напряжений
определяются выбором резисторов Ru R2, /?з-
4.3.2. Детектор пересечения нуля
Компаратор можно использовать для
преобразования гармонических колебаний в
симметричные прямоугольные. Такое
преобразование может выполнить схема, называемая
нуль-органом, или детектором пересечения
нуля. На Рис. 4.12 представлена схема
нуль-органа на компараторе с однополярным
питанием и выходом с открытым коллектором.
Делитель напряжения &i, ^5 устанавливает
опорное напряжение V{ на неинвертирующем
входе. Если выбрать R{ + R2 = Rs (при Л3 = &д> то условие переключения
компаратора V{ = V2 будет удовлетворено при FIN = 0. Сопротивление резистора
положительной обратной связи R6 выбирается очень большим по сравнению с R5
(Лб = 2000Д5)> Для того, чтобы гистерезис переходной характеристики
компаратора был малым, обычно AFi < 10 мВ. В то же время наличие даже столь малого
гистерезиса заметно ускоряет переключение компаратора. Диод VD включен
для того, чтобы потенциал инвертирующего входа компаратора никогда не
опускался ниже -0.1 В. При отрицательном напряжении на входе диод
смещается в прямом направлении. Тогда напряжение в точке соединения резисторов
R\ и R2 приблизительно будет равно -0.7 В.
Рис. 4.12. Схема нуль-органа
4.3.3. Сравнение напряжений противоположной
полярности
Схема компаратора, приведенная на Рис. 4.13, сравнивает абсолютные
величины двух напряжений, имеющих противоположные полярности.
Рис. 4.13. Схема сравнения абсолютных величин
напряжений, имеющих противоположные полярности
что при R{ = R2 дает Vn = (Vim + КШ2)/2.
395
Результирующее напряжение Vn на инвертирующем входе компаратора
определяется соотношением
D.3)
Глава 4. АНАЛОГОВЫЕ КОМПАРАТОРЫ И ТАЙМЕРЫ
Транзистор VT в диодном включении защищает вход компаратора от
отрицательных перенапряжений, что требуется в случае, если компаратор имеет
Однополярное питание. Если необходимо, небольшой гистерезис переходной
характеристики компаратора может быть получен методами, рассмотренными
выше. Выходное напряжение схемы принимает высокий уровень (Коит= Ks) в
том случае, если положительное напряжение по абсолютной величине меньше
отрицательного.
4.3.4. Мультивибраторы
Автоколебательный мультивибратор
На Рис. 4.14а представлена схема генератора прямоугольных сигналов
(мультивибратора) на компараторе с однополярным питанием и выходом с
открытым коллектором, использующая минимум компонентов.
196
Рис. 4.14. Простейший автоколебательный мультивибратор.
а — схема, б — временные диаграммы
Выходная частота определяется постоянной времени Л/С„а ширина петли
гистерезиса устанавливается отношением сопротивлений резисторов Rb R2 и
Л3- Считаем, что Rq « R$. Максимальная частота ограничена только задержкой
переключения компаратора и емкостью нагрузки, которая снижает скорость
нарастания выходного напряжения.
При анализе этой схемы предположим, что в первый момент после
включения напряжения питания Vs, конденсатор Q разряжен, а выходное напряжение
имеет высокий уровень (напомним, что для этого необходимо, чтобы
напряжение на инвертирующем входе было бы равно или меньше, чем на
неинвертирующем). Напряжение на неинвертирующем входе Vp в таком случае равно
Если R{ = R2 = /?з> тогда
D.4)
D.5)
4.3. Применение компараторов
D.6)
D.8)
Генератор импульсов с переменной скважностью
Основная схема автоколебательного мультивибратора, приведенная на
Рис, 4.14, может быть изменена, с тем чтобы получить генератор импульсов с
регулируемой скважностью. Схема такого генератора представлена на Рис. 4.15.
Рис. 4.15. Схема генератора импульсов с регулируемой
скважностью
Для раздельного, независимого регулирования длительности импульса и
паузы последовательно с времязадающим конденсатором С, включены две
параллельные цепочки R4VD1 и R$VD2.
Цепочка R^D{ формирует ток заряда конденсатора, тем самым, определяя
ширину импульса (tx), а цепь R5D2 задает время паузы (t2). При изменении
сопротивления любого из этих резисторов меняется частота следования
импульсов генератора. При условии Ri = R2 = R$» Rc время нарастания напряжения
на конденсаторе с учетом соотношений D.5), D.6) определится из уравнения
D.9)
197
Когда конденсатор С, зарядится через резистор Rt до напряжения, равного
Vb выход компаратора переключится. При Коит= 0 значение Кр уменьшится до
величины
Конденсатор Ct теперь начнет разряжаться. Когда напряжение на
конденсаторе уменьшится до значения, равного К2, напряжения на выходе компаратора
и на неинвертирующем входе вернутся к прежним значениям
(^оит= V$\ Vp = V\) и весь цикл повторится снова. Для приведенной схемы при
условии R{ = R2 = /?3 и учитывая, что времена заряда и разряда Ct в
установившемся режиме примерно равны (t\ ~t2- 0.57), можно найти период колебаний
Г из уравнения
D.7)
Решение этого уравнения относительно Г с учетом того, что Vx = 2K2, имеет
вид
Глава 4. АНАЛОГОВЫЕ КОМПАРАТОРЫ И ТАЙМЕРЫ
где VD — прямое падение на диоде, а время спада
D.10)
Скорость заряда и разряда конденсатора в данном случае будет меньше, чем
в предыдущей схеме, из-за падения напряжения на диодах. Решение уравнений
D.9) и D.10) с учетом того, что Vx = 2V2, имеет вид
D.11)
D.12)
Мультивибратор с кварцевым резонатором
Рис. 4.16. Схема
генератора импульсов с
кварцевым резонатором
Простой высокостабильный генератор импульсов
на базе компаратора может быть построен, если в цепь
обратной связи включить кварцевый резонатор
(Рис. 4.16).
Сопротивления резисторов R\ и R2 выбраны
равными с тем, чтобы порог переключения компаратора
составлял половину напряжения питания. Постоянная
времени цепочки /?3Q устанавливается в несколько раз
больше периода генерируемых колебаний. Это
обеспечивает коэффициент заполнения у =0.5, поскольку
напряжение на инвертирующем входе будет практически
постоянным, равным И$/2.
198
4.3.5. Применение компаратора в качестве ОУ
Компараторы, не имеющие внутреннего гистерезиса, в принципе могут
использоваться в качестве операционных усилителей в низкочастотных схемах.
Это удобно при применении многоканальных компараторов, таких, как LM139,
в тех случаях, когда схема содержит несколько компараторов и один усилитель
(см. п. 4.4.5). Можно также использовать один из компараторов микросхемы в
качестве ОУ для реализации источника опорного напряжения.
Применение компараторов в качестве ОУ ограничено в основном двумя
обстоятельствами: сложностью обеспечения устойчивости при наличии
отрицательной обратной связи и асимметрией выхода. Для устойчивой работы
приходится ограничивать полосу пропускания компаратора (с помощью внешних
корректирующих цепей) несколькими килогерцами, что чрезвычайно снижает
скорость нарастания выходного напряжения.
Компараторы не имеют внутренней частотной коррекции или выводов для
подключения внешних корректирующих элементов, хотя часто содержат три
каскада усиления напряжения (а это сильно ухудшает условия устойчивости,
см. п. 1.6). Поэтому частотная коррекция должна осуществляться внешними
цепями. На Рис. 4.17 показана наиболее простая схема коррекции для
компаратора LM139, при которой параллельно выходу компаратора включается
конденсатор довольно большой емкости.
4.3. Применение компараторов
Такое включение создает доминирующий низкочастотный полюс
передаточной функции разомкнутой петли обратной связи. Постоянная времени,
соответствующая этому полюсу, практически равна RqCx, поскольку
динамическое сопротивление коллектора выходного транзистора компаратора,
работающего в активном режиме, составляет сотни килоом. При указанных на схеме
параметрах этот полюс соответствует частоте в 100 Гц.
На Рис. 4.18 приведена зависимость амплитуды выходного напряжения
усилителя на компараторе с коррекцией по Рис. 4.17 от частоты в режиме
большого сигнала.
Рис. 4.17. Схема
усилителя на
компараторе LM139
Рис. 4.18. Частотные
характеристики усилителей на
основе компаратора LM139
Рис. 4.19. Усилитель на
интегральном компараторе с
внешним умощняющим транзистором
и фазоопережающей коррекцией
Видно, что полоса пропускания усилителя ограничена частотой 100 Гц.
Цепь обратной связи R\ и R2 определяет коэффициент усиления, равный 101.
Схема имеет малую нагрузочную способность из-за большого сопротивления
резистора Rq. Выход может быть умощнен внешним транзистором VT,
включенным по схеме с общим коллектором. Полоса пропускания усилителя,
выполненного по этой схеме, может быть расширена до 20 кГц применением
более сложной схемы коррекции с фазоопережением (Рис. 4.19).
4.3.6. Генератор, управляемый напряжением
Простой, но очень стабильный генератор, управляемый напряжением
(ГУН), использующий минимум внешних элементов, может быть реализован
на трех компараторах. Удобно для этой цели применить четырехканальный
компаратор 1401СА1, у которого каждый из выходных каскадов выполнен на
биполярном транзисторе с открытым коллектором. Схемное решение
представлено на Рис. 4.20.
Схема имеет заметное сходство со схемой генератора прямоугольных и
треугольных колебаний (см. Рис. 2.62). Компаратор KHt работает в линейном
режиме, поскольку выполняет функцию интегратора. Для этого он охвачен
отрицательной обратной связью через конденсатор С\. Компаратор КН2 преобразует
треугольные колебания, вырабатываемые интегратором, в прямоугольные.
Компаратор КН3 играет роль ключа, управляющего интегратором. Для анализа
работы схемы предположим, что на выходе КН2 имеет место высокий уровень
(F0UT = Ks). Тогда выходной транзистор КН3 заперт, поэтому ток через резистор
R2 не течет. Приложенное к входу схемы управляющее напряжение KCTR вызы-
199
Глава 4. АНАЛОГОВЫЕ КОМПАРАТОРЫ И ТАЙМЕРЫ
200
D.13)
D.14)
Приращение напряжения AVX равно максимальному изменению
напряжения на конденсаторе Сь которое определяется разностью напряжений порогов
переключения компаратора КН2. Эти пороги, в свою очередь, устанавливаются
отношением R^/R^ Как следует из D.1) при R4» /?с2, пороговые напряжения
для компаратора КН2 могут быть приблизительно определены по формулам
а их разность
D.15)
D.16)
D.17)
При 7?4= 100кОм и ЯЪ—5Л кОм эта разность составит примерно 1.5 В при
Vs = 30 В.
По мере разряда конденсатора С\ выходное напряжение КН] уменьшается
до тех пор, пока не достигнет нижнего порога переключения компаратора КН2,
после чего выходное напряжение этого компаратора Коит станет близким к
нулю. Компаратор КН3 в свою очередь переходит в низкое состояние на выходе,
при котором выходной транзистор насыщен. Теперь ток /2 потечет через
резистор R2 в общую шину. Величина этого тока определяется соотношением
Если
D.18)
D.19)
Рис. 4.20. Схема генератора, управляемого напряжением
вает протекание тока /ь разряжающего конденсатор С\. Величина этого тока
при условии /?5 = Лб находится по формуле
Время разряда определяется соотношением
4.3. Применение компараторов
Если построить эту схему на ИМС 1401СА1, то при параметрах, указанных
на Рис. 4.17, а также при Сх = 510 пФ и V$ = 30 В диапазон выходных частот
составит 670 Гц..Л15 кГц при изменении управляющего напряжения в пределах
0.25 В...50 В. Для более низких частот следует выбрать емкость Сх значительно
большей, с тем, чтобы зарядные токи 1Х и /2 намного превышали входные токи
компаратора. Конденсатор С2, а также ЛС-цепочка, включенная параллельно
входам компаратора КНЬ обеспечивают его устойчивость в линейном режиме.
4.3.7. Логические элементы
Многие компараторы представляют собой логические схемы с широким
диапазоном легко настраиваемых уровней. Это позволяет обеспечить более
высокую помехоустойчивость по сравнению с обычными логическими
элементами. Кроме того, разработчик может оказаться в ситуации, когда в корпусе
многоканальной ИМС может остаться неиспользуемый компаратор, который
можно включить как логический элемент с тем, чтобы не вводить дополнительную
логическую микросхему.
Элемент И/И-НЕ
Трехвходовая схема И представлена на Рис. 4.21.
Рис. 4.21. Схема И(ИЛИ) на компараторе
Делитель на резисторах Rx и R2 устанавливает опорное напряжение на
инвертирующем входе компаратора
D.20)
то ток Ii окажется в 2 раза больше тока 1\. Это приведет к тому, что теперь
конденсатор С\ будет заряжаться током 1Х — /2, равным току разряда этого
конденсатора в первом такте, но противоположным по направлению. Следовательно,
напряжение на выходе KHt станет нарастать с той же скоростью, с какой в
первом такте снижалось. При достижении этим напряжением верхнего порога
переключения компаратора КН] схема вернется в первоначальное состояние и
цикл повторится. Таким образом, на выходе схемы формируются
симметричные прямоугольные колебания с коэффициентом заполнения 0.5. Частота этих
колебаний может быть определена на основании соотношений D.13), D.14) и
D.17) при условии D.19) по формуле
На неинвертирующий вход поступает сумма напряжений на логических
входах Хь Х2, Х3, поделенная делителями напряжения на резисторах /?3, R4, R5 и ^ '
D.21)
Глава 4. АНАЛОГОВЫЕ КОМПАРАТОРЫ И ТАЙМЕРЫ
D.26)
Инверсия выхода для реализации операции ИЛИ-НЕ опять-таки может
быть произведена простым взаимным переключением входов компаратора.
Стробирование выхода
Многие модели компараторов имеют выводы для
подачи стробирующих сигналов. В случае если выходной
каскад компаратора представляет собой транзистор с
открытым коллектором или стоком, стробирование
выхода может быть организовано очень просто (Рис. 4.22).
Выход компаратора может быть блокирован
включением параллельно с ним транзистора VT. При подаче по-
/?б- При равенстве сопротивлений входных резисторов R$ = Л4 = R5= R
напряжение на неинвертирующем входе КР равно
D.22)
Если высокий уровень входных сигналов совпадает с напряжением питания
схемы Vs, а низкий — с нулем, то (при наличии на входе двух сигналов высокого
уровня из трех) необходимая величина опорного напряжения определяется
неравенством
D.23)
D.24)
Если требуются равные запасы помехозащищенности «сверху» и «снизу», то
из D.23) с учетом D.21) получим
С увеличением числа входов помехозащищенность схемы уменьшается,
поэтому вместо резистивной входной цепи лучше включить обычную диодную
схему И. В таком случае следует установить опорное напряжение равным
половине Ks. Для преобразования этой схемы в И-НЕ достаточно поменять местами
подключение входов компаратора. Для ускорения переключения можно ввести
небольшой гистерезис.
Элемент ИЛИ/ИЛИ-НЕ
Трехвходовая схема ИЛИ может быть получена из схемы И на Рис. 4.21
простым уменьшением опорного напряжения, например за счет увеличения R{.
Если выполняется условие
D.25)
то подача хотя бы на один из входов сигнала высокого уровня приведет к
переключению компаратора. Практически следует выбирать параметры схемы,
исходя из условия
Рис. 4.22. Компаратор
со стробированием
202
4.3. Применение компараторов
ложительного напряжения на базу этого транзистора на выходе схемы
устанавливается низкий уровень независимо от входных сигналов компаратора. Если
компаратор используется в цифровой системе, его выход может стробироваться
с помощью любого логического элемента, имеющего выход с открытым
коллектором.
RS-триггер
На Рис. 4.23 представлена схема
компаратора, используемого как триггер с раздельным
запуском (RS-триггер).
Пороговое напряжение задается на
инвертирующем входе делителем напряжения на
резисторах R2 и /?з- Импульс амплитудой,
равной напряжению питания, приложенный к
входу Set (S), переключит выход компаратора
в состояние высокого уровня. Теперь делитель
напряжения на резисторах Ru Л*, и Rq задает
на неинвертирующем входе напряжение
большее, чем пороговое, поэтому после окончания импульса на S-входе компаратор
не вернется в первоначальное состояние. Импульс, приложенный к входу Reset
(R), вернет схему в первоначальное состояние.
Рис. 4.23. Схема RS-триггера на
компараторе
4.3.8. Одновибраторы
Простой одновибратор (генератор одиночных импульсов) может быть
реализован на одном компараторе, как это показано на Рис. 4.24.
Рис. 4.24. Простой одновибратор:
а — электрическая схема, б — временные диаграммы
Здесь также применен компаратор, имеющий выход с открытым
коллектором. Ширина выходного импульса устанавливается выбором значений С2 и Л3
(/?з> Ю/?с, чтобы не загружать выход компаратора). Необходимая амплитуда
входного запускающего импульса определяется параметрами делителя,
состоящего из резисторов Ri и R2.
В устойчивом состоянии схемы напряжение на инвертирующем входе
составляет Fs/2. Разделительный конденсатор заряжен до напряжения K!N — Ks/2.
203
Глава 4. АНАЛОГОВЫЕ КОМПАРАТОРЫ И ТАЙМЕРЫ
Выходное напряжение компаратора имеет низкий уровень @). Напряжения на
конденсаторе С2 и неинвертирующем входе компаратора равны нулю. Запуск
производится кратковременным снижением напряжения на запускающем
входе (Рис. 4.246). При этом напряжение на инвертирующем входе компаратора
становится меньше нуля, и компаратор переключается в состояние высокого
напряжения на выходе. Напряжение на неинвертирующем входе скачком
увеличивается почти до Ks, и компаратор фиксируется в этом состоянии, поэтому
при возврате входного напряжения к первоначальному уровню компаратор не
переключается в исходное состояние.
Конденсатор С2 начинает заряжаться от источника Vs через резисторы Л3 и
Rq. В результате напряжение на неинвертирующем входе компаратора
уменьшается. Как только оно достигает величины напряжения на инвертирующем
входе (равного Ks/2), компаратор возвращается в исходное состояние.
Конденсатор С2 разряжается от напряжения V$/2 до нуля через выходной транзистор
компаратора и диод VD2, поэтому разряд происходит быстро и время
релаксации незначительно. Кроме того, диод VD2 предотвращает появление большого
отрицательного напряжения на неинвертирующем входе.
а) б)
Рис. 4.25. Усовершенствованный одновибратор:
a — схема, б — временные диаграммы
Температурная стабильность может быть достигнута за счет баланса
температурных коэффициентов (ТК) С2 и Л3 или применения компонентов с низким
ТК. Длительность выходного импульса слабо зависит от величины питающего
напряжения: она изменяется менее чем на 2% при изменении Ks на 5 В.
Одновибратор, схема которого представлена на Рис. 4.25, имеет ряд
преимуществ перед предыдущей схемой.
Во-первых, здесь ширина импульса не зависит от величины напряжения
источника питания Ks, поскольку и зарядное напряжение, и напряжение
переключения составляют фиксированный процент от V$. Кроме того, время
релаксации этого одновибратора не превышает 1% от длительности импульса. И,
наконец, схема имеет входную блокировку, препятствующую повторному запуску
одновибратора до окончания генерации выходного импульса.
В рассматриваемой схеме, как и в предыдущей, используются компараторы
с открытым коллектором на выходе. В устойчивом состоянии схемы (Коит = 0)
и при Vw = 0 напряжение на инвертирующем входе компаратора KHj равно
D.27)
204
4.3. Применение компараторов
Когда напряжение на конденсаторе Vc превысит величину Ктн (см.
Рис. 4.250) компаратор КН2 переключается в состояние лог. О (быстрейшему
переключению содействует небольшой гистерезис переходной характеристики,
обусловленный резистором Л8), и восстанавливается первоначальное
состояние схемы за исключением того, что напряжение Vc еще долго будет нарастать
до установившегося значения Vs. Это, однако, не увеличивает время
релаксации, поскольку заряд времязадающего конденсатора при генерации выходного
импульса в любом случае начинается от нуля, поэтому запускающий импульс
может быть подан на вход схемы практически сразу же после окончания
выходного импульса.
Стабильной работе схемы при использовании компараторов ИМС LM139
способствует их замечательное свойство: при нулевом выходном токе (т. е. ко- 205
а напряжение на его неинвертирующем входе
D.28)
Для обеспечения устойчивого состояния одновибратора выбором
сопротивлений резисторов должно гарантироваться условие
VA<VB. D.29)
Конденсатор С{ заряжен через резистор R5 до напряжения питания. Емкость
этого конденсатора должна быть выбрана небольшой, с тем чтобы он мог
быстро полностью разрядиться через выходной транзистор компаратора KHi до
восстановления запертого состояния этого транзистора, вызываемого
переключением выхода компаратора КН2 в состояние высокого уровня (лог. 1). В
исходном устойчивом состоянии напряжение на выходе компаратора КН2 равно
нулю.
При подаче запускающего импульса на вход VlN напряжение VA становится
на время импульса больше, чем Кв. На выходе KHj возникает напряжение
низкого уровня (лог. 0). Конденсатор С\ быстро разряжается через открытый
выходной транзистор компаратора КНЬ и, как только напряжение Кс станет
меньше, чем пороговое напряжение компаратора КН2 KD, выход КН2
переключится в состояние лог 1. В этом состоянии схемы напряжение
Ув = ^s- D.30)
KHj вернется в первоначальное состояние, при котором его выходной
транзистор заперт, поэтому конденсатор начнет снова заряжаться напряжением Ks
через резистор R5 по экспоненциальному закону. Пока выполняется условие
D.29), т. е. до окончания выходного импульса, схема не будет реагировать на
запускающие импульсы.
Длительность выходного импульса определяется временем заряда
конденсатора от нуля до порогового напряжения компаратора КН2, которое в этом его
состоянии определяется формулой
D.31)
Глава 4. АНАЛОГОВЫЕ КОМПАРАТОРЫ И ТАЙМЕРЫ
гда конденсатор полностью разряжен) напряжение коллектор—эмиттер
открытого выходного транзистора не превышает 1 мВ, а выходная характеристика
компаратора в этом состоянии остается линейной при увеличении втекающего
тока вплоть до 16 мА.
4.3.9. Генератор временных задержек
Схема, представленная на Рис. 4.26, может применяться в тех случаях, когда
требуется задавать несколько временных интервалов, отстоящих от начала
отсчета на разное время.
Рис. 4.26. Генератор временных задержек:
а — схема, б — временные диаграммы
Для анализа схемы вначале положим FIN = 0 и рассмотрим исходное
статическое состояние, при котором выходное напряжение компаратора КН4 равно
нулю. Как следствие, конденсатор С полностью разряжен. Это обеспечивает
нулевые напряжения на выходах остальных компараторов. Последовательная
цепочка резисторов R3 — R$ формирует из напряжения питания Vs опорные
напряжения VA, VB и Vc соответственно для компараторов КНЬ КН2, и КН3.
При подаче на вход запускающего импульса компаратор КН4
переключается и его выходной транзистор запирается. Начинается заряд конденсатора
напряжением Fs через резистор Rt (Рис. 4.266). Напряжение на конденсаторе
изменяется по закону
D.32)
При поочередном достижении напряжением V4 уровней КА, VB и Кс,
происходит последовательное переключение соответствующих компараторов. По
окончание входного сигнала все компараторы переключаются в исходное со-
206 стояние. Небольшой гистерезис, создаваемый резисторами положительной об-
4.3. Применение компараторов
ратной связи у компараторов КНЬ КН2, и КН3 способствует их быстрому
переключению. При необходимости выходной сигнал любого из этих компараторов
может быть инвертирован простым переключением их входов.
4.3.10. Широтно-импульсный модулятор
На Рис. 4.27 показана простейшая схема широтно-импульсного модулятора
(ШИМ)
Рис. 4.27. Широтно-импульсный
модулятор
По существу, это тот же автоколебательный мультивибратор, схема
которого приведена на Рис. 4.14, с добавлением управляющего входа.
Длительности импульса и паузы (см. Рис. 4.146) находятся из уравнений
1
D.33)
D.34)
D.35)
D.36)
D.37)
не зависит от управляющего напряжения. Совместное решение уравнений
D.33) — D.36) позволяет найти зависимость от KCtr частоты выходных
импульсов
Разность пороговых напряжений
207
причем пороговые напряжения при
D.38)
и относительной длительности импульсов (основного параметра
регулирования ШИМ)
Глава 4. АНАЛОГОВЫЕ КОМПАРАТОРЫ И ТАЙМЕРЫ
Графики зависимостей этих величин от управляющего напряжения,
отнесенного к напряжению питания, при R = 107?cTR представлены на Рис. 4.28.
Рис. 4.28. Графики зависимости параметров ШИМ от относительной
величины управляющего напряжения:
а — частота выходных импульсов, б — относительная длительность
импульсов
Видно, что зависимость у почти линейна (это хорошо!), но при изменении
управляющего напряжения меняется и частота импульсов (это плохо), правда, в
не очень широких пределах. При уменьшении Bctr чувствительность схемы
снижается, и наоборот. Максимальная частота следования импульсов
ограничена динамическими параметрами компаратора.
4.3.11. Двухполупериодный выпрямитель
Рис. 4.29. Прецизионный
выпрямитель с компаратором
208
Множество схем прецизионных
выпрямителей, рассмотренных в п. 2.5.2, можно дополнить
простой схемой с компаратором,
представленной на Рис. 4.29.
Схема работает аналогично приведенной на
Рис. 2.545, за тем исключением, что вместо
модели идеального неуправляемого диода на ОУ
здесь используется активный выпрямитель на
компараторе КН и аналоговом ключе S. Если
KIN > 0, то выход компаратора находится в
состоянии лог. 0, и ключ разомкнут. Тогда ОУ
работает в дифференциальном включении и его выходное напряжение КОит = ^in-
При KIN < 0 компаратор переходит в состояние лог. I, ключ замыкается и ОУ
превращается в инвертирующий повторитель. В этом случае ^out=-^in-
Изменение полярности выходного напряжения может быть произведено простой
переменой входов компаратора.
Если компаратор на схеме Рис. 4.29 имеет Однополярное питание, то он
должен допускать значительные отрицательные напряжения на входах. Здесь
можно применить, например, компаратор LM139, включив его по схеме
детектора пересечения нуля (Рис. 4.12).
4.4. Параметры компараторов
4.4. Параметры компараторов
Параметры, характеризующие качество компараторов, можно разделить на
три группы: точностные, динамические и эксплуатационные.
Компаратор характеризуется теми же точностными параметрами, что и ОУ
(см. п. 1.7.1).
Основным динамическим параметром
компаратора является время переключения
/п. Это промежуток времени от начала
сравнения до момента, когда выходное
напряжение компаратора достигает
противоположного логического уровня. Время
переключения измеряется при постоянном
опорном напряжении, подаваемом на один
из входов компаратора, и скачке входного
напряжения KIN, подаваемого на другой
вход. Это время зависит от величины
превышения KIN над опорным напряжением.
На Рис. 4.30 приведены переходные
характеристики компаратора цА710 для
различных значений дифференциального входно-
Рис. 4.30. Переходная характеристика
компаратора цА710 при различных
превышениях дифференциального
напряжения ^диф над опорным.
1 — на 2 мВ, 2 — на 5 мВ, 3 — на 10 мВ,
4— на20мВ
го напряжения Идиф пРи общем скачке
входного напряжения в 100 мВ.
Время переключения компаратора tn
можно разбить на две составляющие: время
задержки t3 и время нарастания (или спада)
до порога срабатывания логической схемы /н (или tc) В справочниках обычно
приводится время переключения для значения дифференциального входного
напряжения, равного 5 мВ после подачи скачка входного напряжения.
Эксплуатационные параметры компараторов определяют допустимые
режимы работы их входных и выходных цепей, требования к источникам
питания и температурный диапазон работы. Важными эксплуатационными
параметрами являются уровни выходных сигналов, а также способы
подключения нагрузки к выходу компаратора. Ограничения эксплуатационных
параметров обусловлены конечными значениями пробивных напряжений и
допустимыми токами через транзисторы компаратора. Поскольку
компараторы, в отличие от ОУ, могут работать со значительными
дифференциальными входными напряжениями, важными характеристиками компаратора
являются максимально допустимые величины дифференциального и
синфазного входных напряжений.
В настоящее время в мире изготавливаются сотни наименований
интегральных компараторов. Эти ИМС можно условно разделить на следующие
группы: универсальные (или общего применения), быстродействующие,
прецизионные, микромощные.
В Табл. 4.1 приведены основные параметры некоторых моделей
компараторов различных типов.
209
Глава 4. АНАЛОГОВЫЕ КОМПАРАТОРЫ И ТАЙМЕРЫ
Таблица 4.1. Основные параметры компараторов
Универсальные компараторы
521СА2
Аналог
цА710
SE521
Открытый
коллектор
LM139
A401СА1)
4-х
канальный.
Открытый
коллектор
521САЗ
Открытый
коллектор и
эмиттер
AD790
Открытый
коллектор
597САЗ
Сдвоенный
597СА1
Триггер-защелка
SE9685
Парафаз-
ный выход
МАХ9692
Триггер-защелка
TL714C
Частота
переключения-
до 50 МГц
МАХ922
Сдвоенный
МАХ919
Симметричный выход
TLC339
Счетверенный.
Открытый сток
LMC7215
4.5. Аналоговые таймеры
4.5.1. Таймер NE555
Таймерами называются устройства для точного задания временных
интервалов. Таймеры могут быть цифровыми и аналоговыми. В относительно простых
210 электронных устройствах применяются аналоговые таймеры.
Прецизионные компараторы
Быстродействующие компараторы
Микромощные компараторы
4.5. Аналоговые таймеры
Простую в эксплуатации ИМС, предназначенную для формирования
точных интервалов времени, многие фирмы пытались спроектировать еще в
начале 60-х годов. Тогда использовались всевозможные варианты классической
транзисторной мультивибраторной схемы, точность работы которой невелика.
Мультивибраторы на ОУ и компараторах оказались непрактичными, поскольку
частота сигналов (или длительность отмеряемых интервалов времени) в таких
схемах заметно зависит от напряжения питания.
Прорывом в этом направлении явилось изобретение нескольких видов
интегральных таймеров. Первый интегральный таймер NE555 был разработан в
1972 г. фирмой Signetix (США). В настоящее время эта схема считается
классической. Функциональная схема таймера NE555 (отечественный аналог —
1006ВИ1) приведена на Рис. 4.31.
Рис. 4.31. Функциональная схема таймера NE555 (типовое включение в
ждущем режиме)
Здесь таймер представлен в типовом включении для ждущего режима.
Схема собственно таймера выделена заливкой. Основой таймера является
Двухпороговый компаратор, включающий два компаратора (KHj и КН2) и RS-триггер,
фиксирующий состояние выхода. Один из входов каждого компаратора
подключен к делителю напряжения, образованному резисторами R,
согласованными по величине с точностью не менее 2%. Напряжения на плечах делителя
составляют 2Ks/3 и Ks/3 соответственно. Триггер управляет двухтактным,
симметричным выходным каскадом на транзисторах VTb VT2, обеспечивающим
выходной ток до 250 мА. Кроме того, инверсный выход триггера управляет
разрядным ключом на транзисторе КГ3. Триггер имеет вход разрешения Е, при
подаче на который сигнала низкого уровня на выходе таймера также
устанавливается низкий уровень независимо от уровня сигнала на входе FIN.
На неинвертирующий вход компаратора КН! (вывод 5), соединенный с
верхней ступенью делителя, при необходимости может быть подано опорное
напряжение от внешнего источника. Обычно между этим выводом и общей
шиной включается конденсатор, сглаживающий помехи, приходящие по цепи
источника питания Ks.
211
Глава 4. АНАЛОГОВЫЕ КОМПАРАТОРЫ И ТАЙМЕРЫ
4.5.2. Основные схемы включения таймера
Ждущий режим
Обратимся к Рис. 4.31. В режиме ожидания входной
сигнал FIN на выводе 2 «Пуск» имеет высокий уровень
(по крайней мере, больше, чем К$/3). При этом
выходное напряжение компаратора соответствует лог. 1. Для
инверсного входа S триггера этот уровень является
неактивным. Напряжение Vc на времязадающем
конденсаторе С, близко к нулю, и выходное напряжение
компаратора КНЬ приложенное к инверсному входу R
триггера, также имеет уровень лог. 1. Триггер находится
в режиме хранения в состоянии Q = О, Q = 1.
Транзистор VT\ закрыт, a VT2 — открыт. На выходе таймера —
низкий уровень. Ключ КГ3 замкнут и поддерживает
конденсатор С, в разряженном состоянии.
При отрицательном кратковременном перепаде входного сигнала FjN < Vs/3
(Рис. 4.32) на выходе компаратора КН2 на время перепада установится
логический нуль (активный уровень для S-входа триггера) и триггер переключится в
состояние Q = 1, Q = 0.
Ключ УТЪ при этом размыкается, и конденсатор С, начинает заряжаться
через резистор Rt от источника питания. Уравнение заряда конденсатора имеет
вид
Рис. 4.32. Временные
диаграммы работы
ждущего
мультивибратора на
таймере
Решение этого уравнения при нулевых начальных условиях
D.40)
Импульс заканчивается по достижении напряжения vc величины опорного
напряжения KREF При этом компаратор KHj переключится и переведет триггер
в первоначальное состояние. Ключ КГ3 замкнется и разрядит конденсатор.
Длительность импульса определится из уравнения:
D.41)
212
из которого следует, что
D.42)
Если в течение этого времени на вход придет еще один запускающий импульс,
то триггер останется в единичном состоянии, т. е. повторный запуск во время
заряда конденсатора С, игнорируется. Разряд времязадающего конденсатора
происходит очень быстро, хотя и не мгновенно. Если следующий запускающий
импульс придет во время разряда конденсатора, то длительность импульса тай-
4.5. Аналоговые таймеры
мера сократится. Это время, называемое временем релаксации, во всяком случае,
значительно меньше аналогичного времени ждущего мультивибратора на ОУ
(см. п. 2.6.1) и соизмеримо со временем релаксации одновибратора на
компараторе (см. Рис. 3.24).
Автоколебательный режим
Схема простейшего автоколебательного мультивибратора на таймере
1006ВИ1 приведена на Рис. 4.33а.
Рис. 4.33. Автоколебательный мультивибратор на таймере:
а — схема, б — временные диаграммы
Когда потенциал на конденсаторе С, достигнет нижнего порога
срабатывания таймера, на входе S триггера установится низкий (активный) уровень.
Триггер переключится в состояние лог. 1 и ключ VT3 разомкнётся. При этом начнется
заряд конденсатора через два последовательно включенных резистора Л, и R{.
Напряжение на конденсаторе достигнет верхнего порога срабатывания за время
D.43)
Временные диаграммы работы автоколебательного мультивибратора
представлены на Рис. 4.330. При подаче сигнала низкого уровня на вход «Вкл.»
(вывод 4) генерацию можно остановить.
Некоторым недостатком схемы на Рис. 4.33а является разность
длительностей импульса и паузы, которая в данной схеме не может быть устранена.
Действительно, коэффициент заполнения у этой схемы определяется соотношением
213
При этом компаратор KHj переключится, на входе R триггера установится
низкий (активный) уровень, триггер переключится в состояние Q = О, Q = 1
и ключ КГз откроется. Конденсатор будет разряжаться через резистор Rt до тех
пор, пока напряжение на нем не достигнет нижнего порога срабатывания тай-
мепа. Это пооизойлет за воемя
Затем все процессы будут повторяться. Частота выходного напряжения
мультивибратора составит
Л Л А Л
D.44)
Глава 4. АНАЛОГОВЫЕ КОМПАРАТОРЫ И ТАЙМЕРЫ
Рис. 4.34. Схема автоколебательного
мультивибратора с независимой установкой
длительности и частоты импульсов
Эта величина составит 0.5 только в случае,
если /?! = 0. Это недопустимо, так как
приведет к короткому замыканию источника
при открытом ключе КГ3.
На Рис. 4.34 приведена схема, которая
способна обеспечить генерацию
импульсов с 0 < у < 1.
Для этого параллельно резистору Rt
включен диод VD\. Конденсатор С, в такой
схеме заряжается через резистор R\ и
открытый диод VDb а разряжается, как и в
базовой схеме, через Rt. Чтобы уменьшить
влияние диода VDX на точность формирования временных интервалов,
последовательно с резистором Rt включен диод VD2, согласованный по параметрам с
диодом VDX. При этом за счет падения напряжения на диодах временные
интервалы tx и t2 будут несколько больше, чем у базовой схемы (Рис. 4.33а).
Относительная длительность импульсов этой схемы определится
соотношением
D.45)
214
Для обеспечения высокой точности отсчета интервала времени следует
обеспечивать /с MIN > 50/lN, где /IN — входной ток таймера. Для таймера NE555
максимальная величина сопротивления резистора Rt при Ks=l5B составит
Мультивибратор, генерирующий импульсы с у=0.5, можно построить и
другим путем: используя выходные транзисторы таймера для заряда и разряда
времязадающего конденсатора.
4.5.3. Типы интегральных таймеров
Массовое применение таймеров в аппаратуре, разнообразие решаемых ими
задач и, следовательно, многообразие требований, предъявляемых к их
параметрам в зависимости от типа аппаратуры и выполняемых функций,
обусловило создание обширного семейства интегральных таймеров.
Интегральные таймеры классифицируются по следующим признакам:
• внутренняя схемотехника и технология — биполярные и КМОЛ;
• число тактов мультивибратора на формируемом интервале времени —
Однотактные и Многотактные.
Рассмотренный выше таймер NE555 выполнен по биполярной технологии.
Он потребляет от источника сравнительно большой ток A0 мА). Входные токи
его также сравнительно велики @.5 мкА). Последнее обстоятельство
существенно затрудняет построение таймеров, способных формировать большие
задержки времени. Ток заряда времязадающего конденсатора /с (Рис. 4.31)
зависит от номинала резистора Rt и напряжения питания Ks. Минимальная
величина этого тока достигается в конце формируемого интервала времени и
составляет
4.5. Аналоговые таймеры
200 кОм. При емкости времязадающего конденсатора Ct= 1 мкФ максимальная
длительность импульса согласно D.42) не превысит 0.22 с.
В конце 70-х годов фирма Intersil разработала ИМС ICM7555,
представляющую собой КМОП-вариант таймера NE555. Этот таймер, сохранив почти
полностью функциональную схему и даже назначение выводов своего биполярного
прототипа, потребляет от источника питания всего 0.12 мА (при V$= 15B).
Входные токи этой микросхемы не превышают 50 пА. Это дает возможность в
условиях, рассмотренных выше для таймера NE555, получить максимальную
длительность импульса 2200 с (~ 37 мин) при сопротивлении времязадающего
резистора Rt = 2 ГОм. Недостатком КМОП-варианта является меньшая
нагрузочная способность.
Многотактные таймеры применяются,
если требуется обеспечить длительность
импульса, измеряемую часами. В принципе
большую длительность можно получить,
используя с однотактным таймером времяза-
дающий конденсатор большой емкости
(десятки или сотни мкФ). Однако конденсатор
такой емкости с высококачественным
диэлектриком занимает много места и дорого
стоит. Блок-схема многотактного таймера
приведена на Рис. 4.35.
Многотактный таймер умножает
постоянную времени У?гСгцепи на коэффициент
пересчета счетчика. Семейство многотактных таймеров делится на две группы.
К первой группе относятся программируемые таймеры, в которых
формируемый интервал времени задается программно, установкой соответствующих
перемычек на выводах счетчика, либо цифровым кодом от ЭВМ. Ко второй
группе относятся специализированные таймеры со встроенными счетчиками, у
которых однозначно задан коэффициент пересчета.
В Табл. 4.2 приведены основные характеристики нескольких моделей
аналоговых таймеров.
Таблица 4.2. Основные параметры аналоговых таймеров
Рис. 4.35. Блок-схема многотактного
таймера
Однотактные таймеры
NE555
XR320
ICM7555
Аналог 1006ВИ1. Имеются
сдвоенный и счетверенный варианты
Открытый коллектор
КМОП-вариант NE555
Многотактные таймеры
ICL8240
ICM7250
Открытый коллектор
Программирование перемычками
215
Глава 4. АНАЛОГОВЫЕ КОМПАРАТОРЫ И ТАЙМЕРЫ
Вопросы и задачи
1. Нужна ли частотная коррекция операционному усилителю,
включенному по схеме компаратора на Рис. 4.3?
2. Укажите преимущества интегрального компаратора по сравнению со
схемой компаратора на операционном усилителе.
3. В каких случаях применение ОУ в качестве компаратора может быть
предпочтительно?
4. Можно ли использовать компаратор 521СА2 (Рис. 4.4) в качестве
усилителя сигналов? Если да, то как? Если нет, то почему?
5. Определите выходное напряжение высокого уровня компаратора на
Рис. 4.6. Входное сопротивление компаратора считать бесконечным.
6. Объясните влияние величины дифференциального входного
напряжения компаратора на время переключения (Рис. 4.30).
7. Определите входное сопротивление схемы на Рис. 4.6 по входу опорного
напряжения. Входное сопротивление компаратора считать
бесконечным.
8. Нарисуйте схему автоколебательного мультивибратора на компараторе
521 САЗ и выведите формулу для вычисления частоты его колебаний.
9. Нарисуйте схему ждущего мультивибратора на компараторе 521 САЗ и
выведите формулу для вычисления длительности его импульса.
10. Укажите преимущества генераторов импульсов на аналоговых таймерах
по сравнению со схемами аналогичного назначения на ОУ и
компараторах.
11. Для чего между выводом 5 таймера 1006ВИ1 и общей точкой схемы
обычно включают конденсатор?
12. На основе схемы на Рис. 4.34 спроектируйте автоколебательный
мультивибратор, длительность импульсов которого можно регулировать одним
подстроечным резистором без изменения частоты.
13. Как изменится частота автоколебательного мультивибратора по схеме
на Рис. 4.33, если сопротивление среднего из резисторов R делителя
напряжения таймера NE555 (см. Рис. 4.31) уменьшить вдвое?
14. Спроектируйте схему программируемого от ЭВМ многотактного
таймера на основе однотактного таймера NE555 и двоичного вычитающего
счетчика с предустановом.
15. Объясните необходимость диода VD2 на схеме Рис. 4.34.
16. Спроектируйте схему автоколебательного мультивибратора с у=0.5на
таймере NE555, используя транзисторы выходного каскада таймера в
качестве заряжающего и разряжающего ключей.
Литература к главе 4
4.1. Widlar RJ. The Operation and Use of a Fast Integrated Circuit Comparator//
App-116. — Fairchild Semiconductor. — February 1966.
4.2. Widlar RJ. Precision 1С Comparator Runs from +5V Logic Supply// Application Note
41. — National Semiconductor. — October 1970. — 6 pp.
4.3. LM139/LM239/LM339 A Quad of Independently Functioning Comparators//
Application Note 74. — National Semiconductor. — January 1973. — 20 pp.
4.4. Шило В.Л. Функциональные аналоговые интегральные микросхемы. — М.: Ра-
216 дио и связь, 1982. — 128 с.
Глава 5
ЛИНЕЙНЫЕ СТАБИЛИЗАТОРЫ
НАПРЯЖЕНИЯ
5.1. Общие сведения
Для питания любой активной электронной схемы необходимо иметь один
или несколько источников стабильного напряжения постоянного тока.
Простые нерегулируемые источники питания, выполненные по схеме
«трансформатор — неуправляемый выпрямитель — сглаживающий фильтр», во
многих случаях оказываются непригодными, так как их выходное напряжение
зависит от тока нагрузки и напряжения в сети. Однако с помощью все той же
отрицательной обратной связи, легко построить источник стабильного
питания, используя для компенсации влияния нагрузки и нестабильности сети
регулирующий сигнал, полученный в результате сравнения выходного напряжения
источника с некоторым постоянным эталонным (опорным) напряжением.
Такие стабилизированные источники питания относятся к классу
компенсационных. Они достаточно универсальны и могут быть изготовлены в виде
интегральных микросхем стабилизаторов напряжения.
Как правило, регулирующим элементом ИМС стабилизаторов напряжения
является биполярный либо полевой транзистор. Если этот транзистор все время
работает в активном режиме, то схему называют линейным (непрерывным)
стабилизатором напряжения (JICH), а если регулирующий транзистор работает в
ключевом режиме — импульсным (ИСН).
5.2. Схемотехника линейных
стабилизаторов напряжения
Микросхемы ЛСН включают помимо силовых регуляторов более или менее
сложную маломощную схему управления. Принципиальная трудность создания
интегральных стабилизаторов заключается в том, что силовые транзисторы
рассеивают значительную мощность, вызывая локальный нагрев кристалла с
существенным градиентом температур. Это резко ухудшает стабильность
параметров схемы управления, в состав которой входит источник опорного
напряжения, дифференциальный усилитель ошибки, цепи защиты от
перегрузок по току и короткого замыкания нагрузки, от перегрева кристалла и других
аварийных или нештатных режимов.
Монолитный линейный интегральный стабилизатор напряжения был
впервые разработан Р. Видларом в 1967 году. Эта микросхема (|iA723) содержит регу- 217
Глава 5. ЛИНЕЙНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
лирующий транзистор, включенный последовательно между источником не-
стабилизированного напряжения и нагрузкой, усилитель ошибки и
термокомпенсированный источник опорного напряжения. Схема оказалась
настолько удачной, что в начале 70-х годов выпуск ее доходил до 2 млн штук в
месяц! По массовости применения ЛСН стоят на втором месте после
операционных усилителей.
5.2.1. Базовая схема
линейного стабилизатора напряжения
В упрощенном виде схема линейного
стабилизатора напряжения приведена на Рис. 5.1.
Схема состоит из операционного усилителя в
неинвертирующем включении с отрицательной
обратной связью по напряжению, источника
опорного напряжения KREF и регулирующего
транзистора VT\, включенного последовательно с
нагрузкой.
Выходное напряжение КОит контролируется с
помощью цепи отрицательной обратной связи,
выполненной на резистивном делителе R\R2- ОУ
играет роль усилителя ошибки, в качестве которой
здесь выступает разность между опорным
напряжением FREB задаваемым источником опорного напряжения (ИОН), и
выходным напряжением делителя R{R2
Рис. 5.1. Базовая схема
линейного стабилизатора
напряжения
Схема работает следующим образом. Пусть по тем или иным причинам
(например, из-за уменьшения сопротивления нагрузки или входного
нерегулируемого напряжения) выходное напряжение стабилизатора КОит уменьшилось.
При этом на входе ОУ появится ошибка AV> 0. Выходное напряжение
усилителя возрастет, что приведет к увеличению тока базы, а, следовательно, и тока
эмиттера регулирующего транзистора до значения, при котором выходное
напряжение возрастет практически до первоначального уровня.
В случае идеального операционного усилителя установившееся значение
ошибки, совпадающее с дифференциальным входным напряжением ОУ,
близко к нулю. Отсюда следует, что
218
Питание операционного усилителя осуществляется от входного
нерегулируемого однополярного напряжения, в данном случае положительного
(при регулирующем транзисторе р-п-р-тнпа. все напряжения в схеме должны
быть отрицательными). Это накладывает ограничения на допустимый
диапазон входных и выходных сигналов, которые в этих условиях должны быть
только положительными.
5.2. Схемотехника линейных стабилизаторов напряжения
Для схем источников питания такое ограничение не играет роли, поэтому от
использования напряжения другой полярности для питания ОУ можно
отказаться. Еще одно преимущество подобной схемы состоит в том, что напряжение
питания операционного усилителя можно удвоить, не опасаясь превысить его
предельно допустимые параметры. Таким образом, стандартные операционные
усилители можно использовать в схемах стабилизаторов с входным
напряжением до 30 В. Хотя операционный усилитель питается от нестабилизированного
входного напряжения KIN, благодаря глубокой отрицательной обратной связи
влияние этого фактора на стабильность выходного напряжения невелико.
5.2.2. Интегральный линейный
стабилизатор напряжения
Представленная на Рис. 5.1 схема стабилизатора может быть выполнена в
виде интегральной схемы. Такие схемы выпускаются промышленностью
(например, серии |iA78xx, LM310,142Енхх, TPS77xxx и др.) на несколько
фиксированных значений стандартных выходных напряжений: 1.2...27 В. В таком
исполнении схема может иметь только три внешних вывода: вход, выход и общий
вывод (Рис. 5.2).
Рис. 5.2. Типовая упрощенная схема интегрального
стабилизатора напряжения
Характерной особенностью этого стабилизатора является включение
регулирующего л-/ья-транзистора по схеме с общим коллектором (эмиттерным
повторителем).
В зарубежной литературе такое устройство часто называют п-р-п-стабилиза-
тором. Требования, предъявляемые к усилителю ошибки, не очень высоки и он,
как правило, выполняется по простейшей схеме дифференциального
усилителя. Опорное напряжение может быть получено самыми различными
способами. На Рис. 5.2 в качестве источника опорного напряжения символически
показан стабилитрон VD\. Реально в низковольтных стабилизаторах используется
так называемый ИОН на ширине запрещенной зоны. Впервые его применил Р.
Видлар в одном из первых трехвыводных стабилизаторов LM109 [5.1]. За счет
отрицательной обратной связи, образуемой делителем напряжения R{ — R2,
выходное напряжение стабилизатора установится равным
219
Глава 5. ЛИНЕЙНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
220
Интегральный стабилизатор напряжения имеет встроенную схему
ограничения выходного тока, состоящую в данном случае из резистора 7?3 и
транзистора VT2. Если падение напряжения на Л3 превысит величину, равную
приближенно 0.6 В, транзистор УТ2 откроется и предотвратит дальнейшее увеличение
базового тока транзистора УТи поэтому величина выходного тока
стабилизатора ограничена уровнем
/оит_МАХ~0.6В/Д3.
При этом максимальная мощность, рассеиваемая на выходном
регулирующем транзисторе УТЬ будет равна
Лг = A)ut_max(^in~ ^оит)' E.1)
В случае короткого замыкания нагрузки (режим КЗ) эта мощность может
значительно превысить предельную мощность для регулирующего транзистора,
т. к. при этом выходное напряжение упадет от номинальной величины до нуля.
Чтобы снизить мощность, рассеиваемую транзистором в режиме КЗ,
одновременно с уменьшением выходного напряжения (точнее, с увеличением разности
потенциалов «вход—выход») нужно уменьшать уровень ограничения тока. При
таком способе ограничения тока выходная характеристика стабилизатора имеет
неустойчивый участок (Z-характеристика). Она изображена на Рис. 5.3.
С увеличением напряжения на
регулирующем транзисторе (например, из-за
нестабильности входного напряжения) происходит
быстрый рост мощности, рассеиваемой на его
коллекторном переходе.
Это обусловлено тем, что соответственно
возрастает разность напряжений (У\^— Уо\л)>
которая входит в выражение для мощности
E.1). Защита выходного транзистора от
перегрева в этом случае достигается тем, что
уровень ограничения тока /qut max делают
зависимым от разности напряжений (KIN— Vom). В
схеме на Рис. 5.2 для этой цели служат резистор R5 и стабилитрон VD2.
Если разность напряжений (Vm — Коит) остается меньшей, чем напряжение
стабилизации стабилитрона VD2, через резистор R5 ток не течет. В этом случае
уровень ограничения тока остается равным 0.6 B/R3. Если же эта разность
превысит величину напряжения стабилизации стабилитрона, замыкается цепь
делителя напряжения на резисторах R5, R4 и к эмиттерному переходу транзистора
VT2 прикладывается дополнительное положительное напряжение. В результате
транзистор VT2 будет открываться при меньших токах через регулирующий
транзистор VT\.
В последних моделях ИМС стабилизаторов напряжения все шире
применяется тепловая защита от перегрузок. Так, например, стабилизатор ADP3303
снабжен схемой, которая резко снижает выходной ток при нагреве кристалла до
температуры 165°С.
Конденсатор Ск осуществляет необходимую частотную коррекцию схемы. В
качестве дополнительной меры по предотвращению самовозбуждения следует
включать на входе и выходе стабилизаторов конденсаторы емкостью
0.1...10 мкФ. В последнее время на рынке появились стабилизаторы, так назы-
Рис. 5.3. Выходная характеристика
стабилизатора напряжения с
защитой от короткого замыкания
нагрузки (Z-характеристика)
5.2. Схемотехника линейных стабилизаторов напряжения
ваемые Cap-free, которые не требуют подключения внешних конденсаторов
параллельно выходу. Примером может служить REG 103 фирмы Burr-Brown.
Кроме стабилизаторов с фиксированным выходным напряжением
выпускаются также регулируемые стабилизаторы напряжения (например, 142ЕНЗ или
1168ЕН1). В схемах таких стабилизаторов отсутствует делитель напряжения
R\R2, а база транзистора VT4 подключена к выводу микросхемы для соединения
с внешним делителем напряжения. Значительная часть ИМС регулируемых
стабилизаторов (|iA78G, 142EH4 и др.) имеет, как минимум, 4 вывода,
поскольку ток собственного потребления микросхемы составляет единицы миллиампер
и зависит от нагрузки. Поэтому его нельзя замкнуть через цепь внешнего
делителя напряжения, поскольку это вызовет изменение напряжения на делителе
при изменении тока нагрузки. Усовершенствование схемотехники ИМС
стабилизаторов позволило снизить этот ток до десятков микроампер и избавиться от
четвертого вывода (LM317, LT1085 и др.).
В то же время наличие специального вывода для подключения цепи
обратной связи по напряжению позволяет обеспечить высокую стабильность
напряжения на удаленной нагрузке (сделать его независимым от падения
напряжения на соединительных проводах). Поэтому наряду с трехвыводными
выпускаются ИМС стабилизаторов с числом выводов больше 3 (например,
ADP3331, TPS70151 и др.), которые помимо входов обратной связи имеют
также дополнительные входы для управления цепями защиты от КЗ, от перегрузки
по току и других подобных режимов.
5.2.3. Стабилизация отрицательных напряжений
Вышеописанные стабилизаторы предназначены в основном для
стабилизации положительных напряжений относительно общей точки (земли) схемы.
Однако те же самые схемы можно применять и для стабилизации
отрицательных напряжений, если использовать гальванически изолированное от общей
точки входное напряжение. В этом случае выходной вывод стабилизатора
соединяется с общей точкой, а минусовым выводом схемы является точка
соединения минусового вывода источника входного напряжения и общей точки
стабилизатора (вывод 3 на хеме Рис. 5.2).
Значительно более удобным оказывается применение специальных схем
стабилизаторов для отрицательной полярности напряжения, например, jiA79xx
или 1168ЕНхх. Для случаев, когда требуется два симметричных относительно
общей точки стабилизированных напряжения (например, ±15 В для питания
операционных усилителей) выпускаются ИМС, содержащие два
стабилизатора— на положительное и отрицательное напряжение, например
NE5554 (отечественный аналог — КР142ЕН6). Упрощенная схема внутренней
структуры такого стабилизатора приведена на Рис. 5.4а, а типовая схема его
включения — на Рис. 5Л6.
Канал стабилизации отрицательного напряжения является независимым.
Дифференциальный усилитель ДУ2 управляет регулирующим транзистором VT2
так, чтобы выполнялось соотношение
221
Глава 5. ЛИНЕЙНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
222
Рис. 5.4. Стабилизатор двух разнополярных напряжений,
симметричных относительно общей точки:
а — принципиальная схема, б — типовая схема включения
Усилитель ДУ! с помощью транзистора VT\ стремится поддержать
потенциал точки соединения резисторов Я2 и R4 нулевым, что при выполнении условия
/?2 = 7?4 обеспечивает равенство положительного и отрицательного выходных
напряжений. Подключая дополнительные резисторы между соответствующими
выходами микросхемы, можно независимо подстроить баланс выходных
напряжений и их величину.
5.2.4. Уменьшение потерь в стабилизаторах
Минимальное падение напряжения на интегральном стабилизаторе,
необходимое для его нормальной работы, обычно составляет около 3 В. Однако для
схем, питающихся от химических источников тока (гальванических элементов
и аккумуляторов), это очень много. При использовании схемного решения,
показанного на Рис. 5.2, эта величина принципиально не может быть снижена.
Как следует из этой схемы, источник тока 1\ должен обеспечивать ток
коллектора транзистора дифференциального каскада VT4 и базовый ток выходного
составного транзистора УТЪ VT\. Для нормальной работы схемы источника тока
падение напряжения на нем должно составлять не менее 1.5 В. Остальная часть
общего падения напряжения приходится на составной регулирующий
транзистор; эта величина также составляет около 1.5 В. Заметим, что величина
падения напряжения на стабилизаторе определяет и его КПД — чем оно больше,
тем меньше КПД, особенно при малых выходных напряжениях, обычных для
питания интегральных схем C...15 В).
Одна из основных причин столь большого падения напряжения на
стабилизаторе заключается в том, что в рассматриваемом случае регулирующий
транзистор включен по схеме с общим коллектором. Существенного снижения
минимально допустимого напряжения можно достичь включением регулирующего
транзистора по схеме с общим эмиттером. Для стабилизатора положительного
напряжения это означает применение ^-«-/^-транзистора в качестве выходного.
В этом случае коллекторный ток транзистора дифференциального каскада мо-
5.2. Схемотехника линейных стабилизаторов напряжения
жет непосредственно использоваться в качестве базового тока выходного
транзистора; при этом отпадает необходимость в источнике тока 1\. Схема такого
стабилизатора приведена на Рис. 5.5.
Поскольку составной транзистор выходного каскада включен здесь по
схеме с общим эмиттером, то приходится учитывать дополнительное
инвертирование фазы управляющего сигнала. Поэтому сигнал управления регулирующим
транзистором снимается в усилителе ошибки не с транзистора VT4, как в
предыдущей схеме, а с транзистора КГ3. Минимальное падение напряжения на
стабилизаторе равно напряжению насыщения коллектор—эмиттер транзистора
VT\ и не превышает 1 В. Для стабилизации отрицательных напряжений все
транзисторы этой схемы должны быть заменены транзисторами с
противоположным типом проводимости. По подобной схеме построены, например, трех-
выводные стабилизаторы напряжения малой мощности типа ШОЕНхх,
работающие при минимальном напряжении между входом и выходом 0.6 В. Они
выпускаются в корпусах ТО-92 на фиксированные выходные напряжения 5, 6,
8, 9, 12 В при токе нагрузки до 100 мА и собственном потреблении не более
1.2 мА. Такие устройства в зарубежной литературе называют стабилизаторами
типа LDO (low drop output — выход с малым перепадом). Мы в дальнейшем
будем называть такие устройства МПН-стабилизаторами (стабилизаторами с
малым падением напряжения).
Дальнейшее уменьшение минимально допустимого падения напряжения на
стабилизаторе может быть достигнуто применением в качестве силового
регулятора МОП-транзистора, включенного по схеме с общим истоком.
Упрощенная схема стабилизатора с регулирующим МОП-транзистором
приведена на Рис. 5.6. Для стабилизации положительных напряжений
используется транзистор с/?-каналом, работающий в режиме обогащения. Схема
работает следующим образом.
Рис. 5.5. Интегральный стабилизатор с малым
падением напряжения вход—выход
Рис. 5.6. Стабилизатор напряжения с
регулирующим МОП-транзистором
При уменьшении сопротивления нагрузки выходное напряжение также
уменьшается, и на входе усилителя появится ошибка AV< 0. Выходное
напряжение усилителя будет снижаться, уменьшая напряжение на затворе
регулирующего МОП-транзистора. Поскольку это/э-канальный транзистор, то
уменьшение напряжения на его затворе вызовет увеличение тока стока и выходное
напряжение увеличится до прежнего значения.
Большое достоинство стабилизаторов с регулирующим МОП-транзистором
— независимость тока потребления (тока общего вывода) от тока нагрузки. Это
связано с тем, что МОП-транзистор управляется напряжением, а ток его затво-
223
Глава 5. ЛИНЕЙНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
pa (a следовательно, и выходной ток усилителя) совершенно ничтожен по
сравнению с током нагрузки. На Рис. 5.7 представлены примерные зависимости
тока собственного потребления /s от тока нагрузки /L стабилизаторов с
регулирующими транзисторами различного типа.
Другое достоинство — падение
напряжения на регулирующем элементе может
быть снижено до очень малых величин,
недостижимых для биполярных
транзисторов. Например, двухканальный
стабилизатор напряжения МАХ8865 имеет
минимально допустимое падение
напряжения 55 мВ при токе нагрузки 50 мА и
всего 1 мВ при токе нагрузки 1 мА.
Расширение номенклатуры устройств
с батарейным питанием требует
дальнейшего повышения их экономичности. Многие узлы измерительных приборов,
устройств связи и др. должны обеспечиваться питанием лишь время от
времени. В этом случае на нерабочих интервалах напряжение их питания следует
снижать до нуля. Для этого некоторые модели ИМС стабилизаторов снабжены
выводами Shutdown (отключение), подача активных логических уровней, на
которые вызывает принудительное запирание регулирующего транзистора. Это,
например, семейство LT176x фирмы Linear Technology с номинальными токами
0.1...3 А и минимальным напряжением «вход — выход» 0.3 В, а также семейство
ADP333x фирмы Analog Devices с минимальным напряжением «вход — выход»
0.17 В при токе 0.2 А.
Рис. 5.7. Сравнительные графики
зависимостей тока потребления стабилизаторов с
регулирующими транзисторами различного типа
5.3. Устойчивость линейных стабилизаторов
напряжения
224
5.3.1. Устойчивость я-р-л-стабилизаторов
Обычный я-/?-я-стабилизатор может быть представлен блок-схемой на
Рис. 5.8. Показанный на блок-схеме усилитель ошибки будем считать
безынерционным.
Рис. 5.8. Блок-схема я-р-л-стабилизатора
Рис. 5.9. Схема замещения л-/?-я-стабилизатора
Схема замещения стабилизатора без корректирующего конденсатора
приведена на Рис. 5.9. Внутри области, ограниченной штриховой линией, изображена
эквивалентная схема регулирующего транзистора, включенного по схеме ОК.
5.3. Устойчивость линейных стабилизаторов напряжения
Полюс s\ этой передаточной функции — доминирующий. Он определяется
емкостью корректирующего конденсатора усилителя Ск. Полюса s2 и s3
начинают влиять на частотную характеристику стабилизатора на значительно более
высоких частотах, за частотой среза системы. Полюс s2 обусловлен емкостью
коллектор—база регулирующего транзистора Свс'
где р — коэффициент усиления тока базы (р » 1), гЕ — дифференциальное
сопротивление эмиттера. Полюс s$ определяется емкостью нагрузки CL
E.3)
Типичные ЛЧХ я-/?-«-стабилизатора приведены на Рис. 5Л0 [5.2].
Корректирующий конденсатор
создает полюс S\ передаточной
функции разомкнутой петли,
соответствующий частоте 100 Гц.
От этого полюса ЛАЧХ падает со
скоростью 20 дБ/дек до второго
полюса 52, соответствующего частоте
3 МГц, который располагается за
частотой среза, равной 1 МГц. Если
первый полюс создает на частоте среза
фазовое запаздывание —90°, то второй
полюс на этой же частоте вносит сдвиг
всего лишь—18°. В результате запас
устойчивости по фазе составит 72°, что
является очень хорошим показателем.
Таким образом,
п-^-«-стабилизаторы обладают хорошей
устойчивостью и, как правило, не предъявляют
никаких специальных требований к нагрузке. Серьезно ухудшить устойчивость
может только подключение параллельно выходу стабилизатора конденсатора
большой емкости (десятки мкФ) с очень низким эквивалентным
последовательным сопротивлением, например, бумажного или керамического.
5.3.2. Устойчивость МПН-стабилизаторов
К сожалению, с устойчивостью МПН-стабилизаторов дело обстоит не так
просто. Здесь регулирующий транзистор включен по схеме с общим эмиттером
и, следовательно, осуществляет усиление и по току, и по напряжению. Поэтому, 225
Рис. 5.10. Типичные логарифмические
частотные характеристики я-/ья-стабилизатора
Усилитель преобразует ошибку регулирования АКв ток базы регулирующего
транзистора. Представим передаточную функцию разомкнутого контура
регулирования системы в виде
E.2)
Глава 5. ЛИНЕЙНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
во-первых, его выходное сопротивление гораздо выше, чем у транзисторного
каскада с общим коллектором, что уменьшает частоту полюса s$ передаточной
функции разомкнутого контура регулирования, обусловленного емкостью
нагрузки (для я-/?-л-стабилизатора см. E.3)), и делает его доминирующим, а
во-вторых, частота, соответствующая полюсу s2, связанному с частотными
свойствами регулирующего транзистора, заметно снижается за счет эффекта
Миллера. Частота перегиба ЛАЧХ МПН-стабилизатора, соответствующая
полюсу 53
E.4)
Рис. 5.11. Упрощенная схема
М ПН-стабилизатора
226
где гс — дифференциальное сопротивление коллектора регулирующего
транзистора, которое, как правило, очень велико по сравнению с нагрузкой.
На Рис. 5.11 представлена
упрощенная схема, а на Рис. 5.12 — типичные
ЛЧХ МПН-стабилизатора на 5 В, 50 мА.
Частота перегиба /3,
соответствующая полюсу st, при номинальной нагрузке
/?l=100Om и емкости выходного
конденсатора Cl=10mkO, равна 160 Гц. В
целях расширения полосы пропускания
усилителя конденсатор коррекции либо
вообще отсутствует, либо имеет малую
емкость, но даже при этих условиях
частота, соответствующая полюсу sb
оказывается не очень большой и в данном
случае равна 1000 Гц.
Очевидно, что система
регулирования с такими параметрами неустойчива:
каждый из двух полюсов s\ и s$ создает
фазовый сдвиг-90° так что на частоте
среза (которая в этом примере
составляет примерно 40 кГц) суммарный сдвиг
по фазе достигает -180°. Обеспечить
необходимый запас устойчивости по фазе
при таком типе ЛЧХ можно двумя
способами:
• многократно уменьшить полюс S\
включением корректирующего конденсатора
большой емкости, чтобы вывести полюс
53 за частоту среза. Но это в данном
случае приведет к катастрофическому сужению общей полосы пропускания
стабилизатора и, следовательно, к ухудшению его быстродействия (под которым
понимается длительность малосигнального переходного процесса при
скачкообразном изменении входного напряжения или тока нагрузки);
создать фазоопережение в окрестности частоты среза, для чего ввести
дополнительный нуль в передаточную функцию разомкнутого контура [5.2].
Рис. 5.12. Типичные ЛЧХ
МПН-стабилизатора
5.3. Устойчивость линейных стабилизаторов напряжения
Наиболее просто этот нуль создается включением
параллельно нагрузке оксидного конденсатора
значительной емкости, имеющего существенное эквивалентное
последовательное сопротивление. Эквивалентное
последовательное сопротивление (ЭПС) — параметр,
присущий любому конденсатору. Оно характеризует
потери энергии, связанные с переполяризацией
диэлектрика в переменном электрическом поле. Конденсаторы с
оксидным диэлектриком (алюминиевые, танталовые,
ниобиевые) обладают наиболее существенным значением ЭПС, приходящимся
на единицу номинальной реактивной мощности. Схема замещения
конденсатора с учетом ЭПС Яэп представлена на Рис. 5.13.
При включении оксидного конденсатора параллельно нагрузке
передаточная функция разомкнутого контура системы примет вид
Рис. 5.13. Схема
замещения конденсатора с
учетом эквивалентного
последовательного
сопротивления
E.5)
причем
Если, например, в схеме включения на Рис. 5.11 выходной конденсатор CL
имеет емкость 10 мкФ и Яэп = 1 Ом, то излом частотной характеристики в
сторону уменьшения крутизны отрицательного наклона произойдет на частоте
16 кГц. Рис. 5.14 показывает, что добавление соответствующего нуля в
передаточную функцию сделает систему устойчивой, причем частота среза контура
регулирования возрастет с 30 кГц до 100 кГц, что положительно скажется на
быстродействии стабилизатора.
Рис. 5.14. ЛЧХ МПН-стабилизатора с
передаточной функцией E.5)
Рис. 5.15. Области устойчивости
стабилизатора TPS76350
Большинство из выпускаемых ныне МПН-стабилизаторов требуют для
устойчивой работы, чтобы ЭПС выходного конденсатора находилось в пределах,
определенных изготовителем. Для выбора необходимого значения ЭПС
изготовители приводят в фирменной документации на ИМС стабилизаторов
диаграммы, подобные той, что представлена на Рис. 5.15 для стабилизатора TPS76350.
227
Глава 5. ЛИНЕЙНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
Американцы называют эту диаграмму «туннель смерти». Из диаграммы
следует, что для устойчивости стабилизатора при CL= 4.7 мкФ достаточно, чтобы
R3n находилось в пределах 0.2...7 Ом.
Так как выходной конденсатор — средство для обеспечения устойчивой
работы МПН-стабилизатора, то правильный его выбор очень важен.
Большинство случаев самовозбуждения стабилизаторов этого типа в той или иной мере
связано с неправильным выбором типа конденсатора.
Для рассмотренного примера с TPS76350 наилучшим является танталовый
конденсатор, который при емкости 4.7 мкФ имеет ЭПС, равное 1.3 0м при
25°С, что соответствует примерно середине области устойчивости. Очень
важным обстоятельством является то, что значение ЭПС конденсаторов этого типа
в температурном диапазоне—40°С...+125°С меняется меньше, чем 2:1. Для
алюминиевых электролитических конденсаторов характерно экспоненциальное
увеличение ЭПС с понижением температуры, поэтому они не годятся для
использования в промышленной и военной аппаратуре. Керамические
конденсаторы большой емкости имеют, как правило, очень низкое ЭПС (<0.02 Ом) и
могут вызвать самовозбуждение М ПН-стабилизаторов.
5.4. Основные параметры линейных
стабилизаторов напряжения
Параметры, описывающие качество линейных стабилизаторов напряжения,
можно разделить на три группы: точностные, динамические и эксплуатационные.
5.4.1. Точностные параметры
Основное назначение стабилизаторов — поддерживать выходное
напряжение неизменным, равным номинальному значению в условиях изменяющегося
входного напряжения, токов нагрузки, температуры окружающей среды и
старения элементов.
К точностным параметрам относятся: точность установки выходного
напряжения, коэффициент стабилизации, выходное сопротивление,
температурный коэффициент напряжения, временная нестабильность (временной дрейф),
шум выходного напряжения.
Точность установки выходного напряжения обычно указывается для
стабилизаторов с фиксированным выходным напряжением. Она зависит в основном
от технологических факторов. Отклонения выходного напряжения от
номинального значения вызваны разбросом элементов, входящих в состав
стабилизатора. Точность установки повышают путем лазерной подгонки
сопротивлений делителя обратной связи.
Коэффициент стабилизации определяется как отношение приращения
входного напряжения к вызываемому им приращению выходного напряжения
стабилизатора:
КСТ = AKIN/AKOUT.
Часто вместо этой величины в справочниках приводится так называемая
228 «нестабильность по напряжению», под которой понимают относительное изме-
5.4. Основные параметры линейных стабилизаторов напряжения
нение выходного напряжения в процентах при изменении входного
напряжения в заданных пределах. Иногда также приводится нестабильность по
напряжению как абсолютное изменение выходного напряжения в мВ при изменении
входного напряжения в заданных пределах. Повышение коэффициента
стабилизации достигается увеличением коэффициента усиления усилителя ошибки.
Выходное сопротивление характеризует нестабильность выходного
напряжения стабилизатора при изменении тока нагрузки
Rom = AK0UT/A/L.
В справочниках вместо выходного сопротивления иногда приводится так
называемая «нестабильность по току», под которой понимают относительное
изменение выходного напряжения при изменении тока нагрузки в заданных
пределах, в процентах от номинальной величины выходного напряжения для
стабилизаторов с фиксированным выходом и в милливольтах — для
регулируемых стабилизаторов.
Температурный коэффициент напряжения характеризует нестабильность
выходного напряжения стабилизатора при изменении температуры окружающей
среды:
ТКН = АКоит/АГ.
В справочниках часто приводится так называемая «температурная
стабильность», под которой понимают относительное изменение выходного
напряжения в процентах от номинальной величины при изменении температуры
окружающей среды в допустимых для данной ИМС пределах. Используется также
термин «температурный дрейф выходного напряжения», определяемый
отношением AK0UT/(K0UT nom^0) и измеряемый в мВ/(°СхВ).
Долговременная нестабильность определяет относительное изменение
выходного напряжения в процентах от номинального значения за 1000 часов
работы при температуре окружающей среды, соответствующей верхней границе
рабочего диапазона.
5.4.2. Динамические параметры
К основным динамическим параметрам линейных стабилизаторов
напряжения относятся коэффициент подавления пульсаций входного напряжения и
полное выходное сопротивление.
Коэффициент подавления пульсаций Кип определяется как отношение (в дБ)
амплитуд основной гармоники пульсаций напряжений на выходе и входе
стабилизатора при его питании от однофазного двухполупериодного
выпрямителя. Для зарубежных ЛСН обычно приводится для частоты 120 Гц, равной
удвоенной частоте промышленной сети США. Значение этого коэффициента в
области низких частот определяется частотной характеристикой контура
регулирования стабилизатора, в частности коэффициентом усиления петли и
частотой среза, а в области высоких частот — емкостью и частотными свойствами
выходного конденсатора. На Рис. 5.16 представлены графики зависимости от
частоты коэффициентов подавления пульсаций для обычного л-/?-я-стабилиза-
тора LM340LA-5.0 на 5 В, 100 мА (а) и МПН-стабилизатора LP2950CZ-5.0 на те
же параметры (б). 229
Глава 5. ЛИНЕЙНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
Рис 5.16. Графики зависимости от частоты коэффициентов подавления пульсаций
и-/ь/7-стабилизатора LM340LA-5.0 {а) и МПН-стабилизатора LP2950CZ-5 0 (б)
Полное выходное сопротивление ZOut характеризует способность
стабилизатора напряжения компенсировать изменение напряжения при быстрых
изменениях тока нагрузки. Задается либо в виде графика в функции от частоты
изменения тока нагрузки, либо в виде значений в Омах на частотах 10 Гц и 10 кГц.
Так же как и Кпп, в области низких частот Zom определяется усилительными
свойствами контура регулирования, а в области высоких частот полным
сопротивлением выходного конденсатора. На Рис. 5.17 представлены графики
зависимости от частоты модуля полного выходного сопротивления для обычного
л-/?-я-стабилизатора LM340LA-5.0 на 5 В, 100 мА (а) и МПН-стабилизатора
LP2950CZ-5.0 с теми же параметрами (б).
230
Рис 5.17. Графики зависимости от частоты модуля полного выходного сопротивления
л-/?-л-стабилизатора LM340LA-5.0 (а) и МПН-стабилизатора LP2950CZ-5.0 (б)
В фирменных описаниях микросхем линейных стабилизаторов часто
приводятся графики переходных характеристик — зависимости от времени
выходного напряжения при скачкообразном изменении входного напряжения или
тока нагрузки, по которым можно судить о быстродействии стабилизатора —
времени установления выходного напряжения с заданной погрешностью.
5.4. Основные параметры линейных стабилизаторов напряжения
5.4.3. Эксплуатационные параметры
К важнейшим эксплуатационным параметрам относятся (Табл. 5.1):
• диапазон допустимых входных напряжений;
• номинальное выходное напряжение для стабилизатора с фиксированным
выходным напряжением, либо диапазон выходных напряжений для
регулируемого стабилизатора;
• максимально допустимый ток нагрузки;
• максимально допустимая рассеиваемая мощность;
• минимально допустимое падение напряжения между входом и выходом
стабилизатора при максимальном или дополнительно оговоренном токе нагрузки;
• ток, потребляемый стабилизатором в режиме холостого хода;
• допустимый диапазон температур окружающей среды.
Таблица 5.1. Параметры линейных стабилизаторов напряжения
Многовыводные регулируемые стабилизаторы напряжения
1156ЕН4Б
Low drop*
МАХ603
Микромощный
142ЕН10
Аналог MA79G
ADP3367
Контроль
разряда батарей
Трехвыводные регулируемые стабилизаторы напряжения
1151ЕН1А
Аналог LM196
1157ЕН1
Аналог LM317L
142ЕН22 + 1.2...+34 -
Аналог LT1085
Трехвыводные стабилизаторы фиксированного напряжения
142ЕН5А
Аналог |iA7805
1170ЕНЗ
Low drop*
1158ЕН9А
Low drop*
LP2950
Микромощный
Двухполярные стабилизаторы фиксированного напряжения
142ЕН6
142ЕН15
Многоканальные стабилизаторы
ADP3302
Тепловая защита
МАХ8862 2.8; 3.2; 4.9
Двухканальный
* Стабилизатор с низким падением напряжения.
231
Глава 5. ЛИНЕЙНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
5.5. Схемы включения линейных
стабилизаторов напряжения
5.5.1. Типовое включение
На Рис. 5.18 приведены типовые схемы включения стабилизаторов
напряжения с фиксированным (а) и регулируемым (б) выходным напряжением.
Конденсаторы С\ и С^ включают для повышения устойчивости стабилизаторов.
Рис. 5.18. Типовые схемы включения линейных стабилизаторов напряжения
5.5.2. Увеличение выходного напряжения
В стабилизаторах с фиксированным значением выходного напряжения
имеется возможность изменения последнего в некоторых пределах. Для этого в
цепь общего вывода включают стабилитрон, как показано на Рис. 5.19. Это
повышает выходное напряжение на величину Кст.
Рис. 5.19. Повышение выходного
напряжения интегрального стабилизатора с
фиксированным напряжением стабилизации
Рис. 5.20. Регулируемый стабилизатор на
основе ИМС с фиксированным выходом
Можно повысить выходное напряжение этого стабилизатора или сделать
его регулируемым, если на общий вывод ИМС подать напряжение с делителя
через неинвертирующий повторитель на ОУ (Рис. 5.20). Благодаря низкому вы-
232 ходному сопротивлению повторителя, влияние тока /s будет несущественным.
Включение по той же схеме ИМС, показанной на Рис. 5.185, возможно, но
нежелательно, т. к. через резистор R2 будет течь ток /s, потребляемый цепями
управления стабилизатора, который зависит от тока нагрузки. Это приведет к
увеличению выходного сопротивления стабилизатора.Выходное напряжение
стабилизатора в этом случае определяется по формуле
5.5. Схемы включения линейных стабилизаторов напряжения
5.5.3. Повышение максимального выходного тока
Повысить максимальный выходной ток стабилизатора можно, включив
дополнительный мощный транзистор, как показано на Рис. 5.21.
Рис. 5.21. Схемы повышения максимального выходного тока с включением
дополнительного мощного транзистора:
а — по схеме ОЭ, б — по схеме ОК
Вместе с внутренним регулирующим транзистором интегрального
стабилизатора он образует комплементарный (Рис. 5.21а) или обычный (Рис. 5.216)
составной транзистор. Недостаток такого способа состоит в том, что встроенные
схемы ограничения тока и защиты выходного транзистора самого
стабилизатора не зависят от тока нагрузки и фактически не используется по прямому
назначению.
Некоторые фирмы выпускают микросхемы, содержащие, по существу,
только цепи управления стабилизатором напряжения и предназначенные для
подключения к мощному транзистору по схеме, сходной с приведенной на
Рис. 5.21. Так, например, фирма Maxim Integrated Products производит ИМС
типа МАХ687, к которой подключается /ья-/ьтранзистор с малым
напряжением насыщения коллектор—эмиттер. При фиксированном выходном
напряжении 3.3 В этот стабилизатор допускает при токе нагрузки 1 А минимальную
разность входного и выходного напряжений 0.14 В. Фирма Analog Devices
выпускает в миниатюрном корпусе SO-8 микросхему регулятора ADP3310,
которая совместно с мощным полевым транзистором способна отдать в нагрузку
ток до 10 А. Минимальная разность напряжений вход—выход составляет в этом
случае порядка 0.5 В (существенно зависит от параметров регулирующего
МОП-транзистора). Для токовой защиты включается внешний резистор.
За счет небольшого усложнения можно обеспечить защитой от КЗ и схему
со стандартным стабилизатором (Рис. 5.22).
Рис. 5.22. Стабилизатор с повышенным выходным током и
защитой от КЗ
233
Глава 5. ЛИНЕЙНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
При чрезмерном токе через основной регулирующий транзистор VTX
открывается транзистор УТ2 и перехватывает часть тока базы VT{. Сопротивления
схемы рассчитываются по формулам
где /кз — максимально допустимый ток короткого замыкания, р — коэффициент
усиления тока в схеме ОЭ транзистора VTX, /с мах—максимальный выходной ток
ИМС стабилизатора, /Оит мах — максимальный выходной ток всей схемы, а КВЕ1
обычно принимается равным 0.7...0.8.
5.5.4. Стабилизация тока
Схема источника стабильного тока на ИМС стабилизатора напряжений
приведена на Рис. 5.23.
Сопротивление резистора R определяется выражением
234
При использовании в этой схеме ИСН с
фиксированным выходным напряжением на
резисторе R падает напряжение, равное
номинальному выходному напряжению
стабилизатора. Это составляет, например, для КР142ЕН5
около 5 В, что приводит к большим потерям
энергии в резисторе. Поэтому в такой схеме
целесообразно использовать ИМС регулируемого стабилизатора, например
КР142ЕН12, у которого при такой схеме включения, это напряжение можно
установить равным 1.2 В.
5.5.5. Источник двухполярного напряжения
Номенклатура двухполярных стабилизаторов напряжения сравнительно
бедна, поэтому для построения стабилизатора с выходным напряжением,
например, ±5 В можно использовать схему, приведенную на Рис. 5.24.
Поскольку потенциал неинвертирующего
входа OYi нулевой, то и потенциал
инвертирующего входа этого усилителя также должен
быть равен нулю.
При работе ОУ в линейном режиме и
равенстве сопротивлений резисторов в делителе
это может быть только в случае равенства по
абсолютной величине разнополярных
напряжений на выходе схемы. В простейшем случае,
если ток выхода отрицательной полярности не
превосходит допустимого выходного тока ОУ,
транзистор VT\ может быть исключен из
схемы, а выход ОУ должен быть непосредственно соединен с отрицательным
выходом стабилизатора.
Рис. 5.24. Схема двухполярного
стабилизатора
5.5. Схемы включения линейных стабилизаторов напряжения
5.5.6. Стабилизатор переменного напряжения
Стабилизация переменного синусоидального напряжения с сохранением
низкого коэффициента гармоник представляет собой сложную техническую
задачу. Непрерывную стабилизацию величины выходного напряжения
практически без искажений можно осуществить с помощью автотрансформатора с
автоматическим электроприводом. Худшие, хотя и неплохие результаты, дает
применение в качестве регулирующих элементов дросселей насыщения,
управляемых электронными схемами. Все это сложные дорогие системы,
применение которых в дешевых маломощных устройствах не оправдано. В то же время,
если не требуется обеспечивать низкий уровень гармонических искажений,
можно легко стабилизировать действующее значение переменного напряжения
с помощью двух линейных стабилизаторов. На Рис. 5.25 представлена схема та-
кор стабилизатора на ИМС LM317.
Рис. 5.25. Схема простого стабилизатора переменного напряжения
По сути, он представляет собой симметричный двухполярный ограничитель
напряжения. Уровень ограничения Vo установлен резисторами в примере на
схеме Рис. 5.25 равным 6 В. Выходное напряжение определяется условием
График зависимости действующего
значения выходного напряжения Коит от
амплитудного значения входного напряжения
(Km IN) приведен на Рис. 5.26.
Коэффициент стабилизации,
определяемый как
в окрестностях значений Vm_IN= 12B равен
7.36 и с ростом амплитуды входного
напряжения возрастает.
Рис. 5.26. График зависимости
действующего значения выходного
напряжения от амплитудного
значения входного для схемы на Рис. 5.25
235
Глава 5. ЛИНЕЙНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
5.5.7. Эмиттерный повторитель с максимальной
передачей тока в нагрузку
Как известно, коэффициент передачи эмиттерного повторителя по
напряжению достаточно точно определяется формулой
E.6)
где гЕ — собственное сопротивление эмиттера транзистора, RE —
сопротивление резистора, включенного в цепь эмитттера для задания начального режима
транзистора по току, RE — сопротивление нагрузки. При этом ток нагрузки
будет равен /L= VWKW/RL.
Очевидно, что для того, чтобы ток,
отдаваемый в нагрузку, был максимальным, нужно
выбирать RE как можно больше. Чтобы
обеспечить необходимый режим транзистора по
току покоя при максимальной передаче тока в
нагрузку, целесообразно вместо RE включить
источник тока на ИМС линейного
стабилизатора, как это показано на Рис. 5.27. Полоса
пропускания этой схемы будет определяться
частотными свойствами линейного
стабилизатора, которые, как правило, невысоки.
Рис. 5.27. Эмиттерный
повторитель с максимальной
передачей тока в нагрузку
5.5.8. Получение искусственной общей точки
Часто при питании электронных устройств от батарей возникает
необходимость получения из одного гальванически изолированного напряжения
аккумуляторной батареи двух разнополярных напряжений, симметричных
относительно нулевой (общей) точки. Это, в частности, нужно для питания
операционных усилителей, которые в большинстве случаев должны усиливать
входные сигналы обеих полярностей. В принципе для этих целей мог бы
подойти резистивный делитель напряжения, средняя точка которого соединена с
нулевой точкой (Рис. 5.28л).
Коэффициент деления
напряжения такой схемы тем более
стабилен, чем более низкоомными
выбираются резисторы делителя. При
этом, однако, возрастают потери в
236
делителе, и падает общий КПД
схемы.
Лучшие характеристики имеет
схема с операционным усилителем,
подключенным по схеме неинвер-
тирующего повторителя к средней
точке резистивного делителя напряжения (Рис. 5.280). В данной схеме делитель
может быть высокоомным, т. к. он нагружен только входным током покоя
операционного усилителя. ОУ сравнивает потенциал на выходе схемы с потенциа-
Рис. 5.28. Схемы формирования искусственной
нулевой точки:
а — с помощью резистивного делителя,
б — с дополнительным повторителем на ОУ
5.6. Источники опорного напряжения
лом в средней точке делителя и поддерживает напряжение на своем выходе
таким, чтобы разность сравниваемых потенциалов была равна нулю. Этот эффект
достигается благодаря действию отрицательной обратной связи. При малых (в
пределах 1 мА) токах покоя, потребляемых этой схемой, такой активный
делитель имеет выходное сопротивление менее 1 Ом. Фирма Texas Instruments
(США) выпускает специальную ИМС типа TLE2425 для формирования
искусственной средней точки. Эта ИМС изготавливается в малогабаритном трехвы-
водном корпусе ТО-92 и обеспечивает ток через искусственную нулевую точку
до 20 мА в любом направлении при токе собственного потребления не более
0.25 мА и динамическом выходном сопротивлении не более 0.22 Ом.
5.6. Источники опорного напряжения
В любой схеме стабилизатора компенсационного типа требуется опорное
напряжение, с которым сравнивается величина выходного напряжения.
Стабильность выходного напряжения стабилизатора не может быть выше
стабильности его источника опорного напряжения. Источники опорного напряжения
(ИОН) широко применяются также в качестве эталонной меры в
аналого-цифровых и цифроаналоговых преобразователях, а также в разного рода пороговых
устройствах.
Основное назначение ИОН — создавать образцовое напряжение,
которое могло бы быть использовано электронными устройствами
преобразования информации в качестве меры, эталона.
5.6.1. ИОН на стабилитронах
Простейший метод получения опорного напряжения состоит в том, что не-
стабилизированное входное напряжение прикладывают через токоограничи-
вающий резистор к стабилитрону, который играет роль так называемого
параметрического стабилизатора, чей основной параметр — напряжение пробоя
обратносмещенного/ьл-перехода (Рис. 5.29а).
Полупроводниковый стабилитрон, представляющий собой разновидность
диода обладает характерной вольтамперной характеристикой (Рис. 5.30).
а) б)
Рис. 5.29. Схемы ИОН на стабилитронах:
a — параметрический ИОН,
б — ИОН компенсационного типа
Рис. 5.30. Вольтамперная
характеристика
стабилитрона
237
Глава 5. ЛИНЕЙНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
и составляет обычно от 10 до 100. Здесь гст — дифференциальное
(динамическое) сопротивление стабилитрона. Оно приблизительно обратно
пропорционально току, протекающему через стабилитрон, поэтому при заданном
входном напряжении увеличением сопротивления резистора R невозможно
добиться повышения коэффициента стабилизации. Важным фактором для
выбора стабилитрона является величина шумовой составляющей
напряжения стабилизации, которая сильно возрастает при малых величинах тока.
Недостатком схемы на Рис. 5.29а является относительно высокое выходное
сопротивление (десятки Ом), которое также возрастает при уменьшении тока
через стабилитрон. Другим недостатком является большой разброс
напряжений стабилизации, который даже для прецизионных стабилитронов
достигает 5% от номинального значения.
Существенного повышения коэффициента
стабилизации можно достичь, если токоограничивающий резистор
заменить источником стабильного тока, например на полевом
транзисторе (Рис. 5.31).
В этом случае К^ может превысить 1000.
Можно заметно улучшить характеристики источника
опорного напряжения, если использовать в его составе
операционный усилитель (Рис. 5.296), т. е. выполнить ИОН по
схеме стабилизатора напряжения компенсационного типа.
Коэффициент стабилизации в такой схеме определяется
главным образом коэффициентом подавления
нестабильности питания А'пп в используемом ОУ и может достигать
величины порядка 10000. Выходное сопротивление этой схемы составляет десятые
доли Ом. Поскольку напряжения на входах ОУ практически равны, выходное
напряжение ИОН
который называется коэффициентом стабилизации. Для схемы на Рис. 5.29а
коэффициент стабилизации
При определенном обратном напряжении происходит пробой/?-л-перехода,
причем вследствие конструктивных и технологических особенностей этот
пробой не приводит к выходу прибора из строя. Участок вольтамперной
характеристики, соответствующий режиму пробоя, расположен почти вертикально, так
что при изменении тока через стабилитрон напряжение на нем меняется мало.
Качество стабилизации оценивается коэффициентом
Рис. 5.31.
Источник опорного
напряжения с
полевым транзистором
В схеме на Рис. 5.29о выходное напряжение ИОН не может быть меньше
напряжения стабилизации стабилитрона. Если требуется более низкое
напряжение, то между стабилитроном и неинвертирующим входом усилителя
включается резистивный делитель. Так устроен, например, источник опорного
напряжения AD586. Применение ОУ позволяет также путем подгонки
соотношения сопротивлений резисторов R^Rx достичь высокой точности установки
опорного напряжения.
238
5.6. Источники опорного напряжения
Для большинства стабилитронов он находится в пределах +/—1-10 3К К
Для малых напряжений стабилизации он отрицателен, для больших —
положителен. Это вызвано тем, что в стабилитронах имеют место два механизма
пробоя: туннельный, проявляющийся на низких напряжениях (его напряжение
имеет отрицательный ТКН), и вторичный (зенеровский), для которого
характерен положительный ТКН, существенный на больших напряжениях. Минимума
по абсолютной величине этот коэффициент достигает при напряжениях
стабилизации около 6 В, причем напряжение, соответствующее нулевому ТКН,
зависит от тока через стабилитрон. Стабилитроны, имеющие ТКН в пределах
±110~5 К, называют опорными диодами и обычно используют в схемах ИОН
на напряжения, превышающие 7.5 В. Примером такого источника опорного
напряжения может служить ИМС МАХ671С, обеспечивающая выходное
напряжение 10 В с точностью 0.01% при Кст= 20000, ТКН = 310~6 К и токе
потребления 9 мА. Другой пример — AD586 (отечественный аналог — 1009ЕН2)
создает выходное напряжение 5 В с точностью 0.05% при А^ст = 10000,
ТКН = 2-10 К и токе потребления 3 мА.
Рекордными характеристиками для этого класса ИОН обладает 5-вольтовая
ИМС VRE3O5O производства фирмы «Thaler Corporation» — ТКН = 0.6-10 К,
точность 0.01%, выходное сопротивление 0.025 Ом.
Для повышения температурной стабильности в некоторые ИМС
источников опорного напряжения (например, LM199/299/399, отечественный аналог —
2С483) встраивают термостаты с нагревательным элементом. Обе части схемы
(нагреватель и ИОН) изготавливаются на одном кристалле, который
помещается в теплоизолированном корпусе. Это позволяет достичь ТКН < НО К в
диапазоне температур— 25°С...+85°С, причем время, требуемое для
установления рабочего режима после включения, составляет всего 3 с. Недостаток такого
решения — довольно большая мощность, потребляемая этим источником
опорного напряжения (около 400 мВт при 25°С).
5.6.2. ИОН на напряжении запрещенной зоны
Современная тенденция повышения экономичности электронных
устройств требует снижения питающих напряжений. Многие типы аналоговых и
цифровых микросхем в настоящее время питаются напряжениями 5 В, 3 В и
менее. Для работы с такими схемами требуются источники опорного
напряжения на 2.5 В и ниже, потребляющие ток менее 1 мА.
В принципе напряжение база—эмиттер транзистора можно использовать в
качестве опорного. Но его температурный коэффициент напряжения (ТКН)
239
В итоге, колебания выходного напряжения ИОН, выполненного по схеме
на Рис. 5.29?, при реальных изменениях входного напряжения и нагрузки не
превышают 1 мВ. Существенно бблешие значения имеют температурные
колебания опорного напряжения. Температурный коэффициент напряжения
стабилизации стабилитрона (ТКН) определяется как отношение относительного
приращения напряжения стабилизации к приращению температуры
Глава 5. ЛИНЕЙНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
Рис. 5.32. Упрощенная схема ИОН
на ширине запрещенной зоны
Рис. 5.33. Источник опорного
напряжения на биполярных транзисторах
составляет —310 3К !, что соответствует примерно —2.1 мВ/К, т. е. достаточно
велик. Он может быть уменьшен, если это напряжение суммировать с другим
напряжением, имеющим положительный температурный коэффициент.
Практически такое напряжение получают как разность напряжений база—эмиттер
двух транзисторов, которые работают при различных токах коллектора. Схема,
поясняющая принцип действия такого ИОН, представлена на Рис. 5.32.
Выходное напряжение схемы
E.9)
где VgQ — напряжение запрещенной зоны полупроводника при абсолютном
нуле температуры, То и Т — базовое и текущее значения абсолютных температур
полупроводника, m — коэффициент, определяемый конструкцией и
технологией производства транзистора. КВЕ 0 — напряжение база—эмиттер при базовой
температуре, к — постоянная Больцмана, е — заряд электрона, /к0 и /к — токи
коллектора при базовой и текущей температурах. Напряжение Кь равное
разности напряжений база—эмиттер транзисторов VTX и VT2, с учетом E.8)
E.10)
Опорное напряжение KREF складывается из напряжения КВЕ транзистора
240 УТЪ и напряжения V2 = n2AVBEi поэтому с учетом того, что два последних слагае-
E.7)
Чтобы температурный коэффициент выходного напряжения был равен
нулю, необходимо (но не достаточно), чтобы температурные коэффициенты
напряжений FBE1 и КВЕ2были различны. Для этого транзисторы VTX и УТ2
питаются различными токами от источников стабильного тока 1Х и /2, так что
E.8)
Схема источника опорного напряжения на биполярных транзисторах,
разработанная Р. Видларом в 1968 году [5.3], приведена на Рис. 5.33.
Она в упрощенном виде реализует уравнение E.7).
При анализе схемы будем полагать, что все транзисторы идеально
согласованы по параметрам и имеют очень высокий коэффициент усиления тока базы.
Напряжение база—эмиттер транзистора определяется следующим уравнением
[5.4]:
5.6. Источники опорного напряжения
т. е. для того чтобы ТКН равнялся нулю, опорное напряжение должно быть
равно напряжению запрещенной зоны полупроводника при абсолютном нуле
температуры. Для кремния это составляет 1.205 В. Именно поэтому такие
источники называются ИОН на ширине запрещенной зоны. Выполнение условия E.15)
достигается выбором коэффициентов пх и п2.
Источники опорного напряжения, построенные по схеме Рис, 5.33 и
подобным ей, выпускаются многими фирмами в двухвыводных корпусах (без
последовательного источника тока, показанного на Рис. 5.33). Одним из первых был
LM113. Это двухвыводной ИОН на номинальное напряжение стабилизации
1.22 В. Типичное отклонение опорного напряжения при изменении
температуры —55°С...-И25°С и изменении выходного тока 0.5мА...20мА не
превышает 5 мВ. Другой пример: микросхема AD589 обеспечивает опорное
напряжение 1.23 В с точностью 2% при ТКН = 1-10~5К~1 и обладает выходным
сопротивлением 0.6 Ом при токе потребления 50 мкА.
Если требуется опорное напряжение выше 1.2 В, то применяется вариант
этой схемы с ОУ (Рис. 5.34).
При работе ОУ в линейном режиме его дифференциальное входное
напряжение практически равно нулю.
Поэтому, как и в предыдущей схеме, выполняется условие E.8). Разность
напряжений база—эмиттер транзисторов VTX и VT2 Vx = I^R/nj падает на
резисторе R/n2. Напряжение
Уг = (/kl + 42)[*/(l+"i)] E.16) 241
Сравнив E.13) и E.14), найдем
Опорное напряжение при базовой температуре найдем из E.11) при Т= То
E.14)
E.15)
Из последнего выражения следует, что, для того чтобы температурный
коэффициент опорного напряжения был равен нулю, достаточно выполнения
условия
E.13)
Температурный коэффициент опорного напряжения
E.12)
E.11)
мых в правой части уравнения E.9) весьма малы и в первом приближении ими
можно пренебречь, запишем
Глава 5. ЛИНЕЙНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
с учетом E.8) в п2 раз больше V{. Опорное напряжение в соответствии с
вышеизложенным составляет
E.17)
Если подобрать коэффициент п2\пп\ таким, чтобы ККЕр(Г0)= 1.205 В, то
ТКН, как это следует из уравнений E.12)—E.15) будет равен нулю. Выходное
напряжение источника опорного напряжения можно варьировать путем
изменения коэффициента деления делителя R{, R2. Именно по такой схеме
построены ИОН LM4041-1.2, AD780 и др.
В схеме на Рис. 5.34 регулирующим элементом выступает верхний
транзистор оконечного каскада усилителя, показаный пунктиром. Этот транзистор
включен последовательно с нагрузкой, поэтому такой ИОН называют
последовательным. Характерным примером последовательных источников опорного
напряжения является семейство AD1582/3/4/5.
Источники опорного напряжения, построенные по схеме Рис. 5.34,
выпускаются многими фирмами в трехвыводных корпусах и в корпусах других типов.
Например, микросхема AD780 обеспечивает опорное напряжение 2.5 или 3 В с
точностью 0.04% при Кст= 100000, ТКН = З-Ю^К и обладает выходным
сопротивлением 0.04 Ом при токе потребления 1 мА. Микромощный ИОН
МАХ872 создает опорное напряжение величиной 2.5 В с точностью 0.2% при
Кст= 50000, ТКН = 410~5 К. Его выходное сопротивление равно 0.6 Ом, а ток
потребления — 10 мкА. Обе микросхемы имеют вывод датчика температуры.
Рис. 5.34. ИОН на биполярных транзисторах с ОУ и последовательным
регулирующим элементом
Схема источника опорного напряжения, основанного на схеме Рис. 5.34, с
регулирующим элементом, включаемым параллельно нагрузке (так
называемый параллельный ИОН), приведена на Рис. 5.35.
По аналогии со стабилитроном принято называть плюсовой вывод схемы
катодом, а минусовой — анодом.
Здесь усилитель управляет транзистором КГ3, который поддерживает
разность потенциалов коллектор— эмиттер равной
242
5.6. Источники опорного напряжения
Эта схема, так же как и схема на Рис. 5.33, представляет собой двухвывод-
ной опорный элемент. Ее основное достоинство — схемотехническая простота
генерации опорного напряжения как положительной, так и отрицательной
полярности. Недостатком параллельного регулятора является повышенное
потребление энергии в случае изменения входного напряжения опорного
источника в широких пределах. На Рис. 5.36 для сравнения приведены графики
зависимостей тока потребления /s от входного напряжения KIN для
последовательного ИОН AD1582 и параллельного AD1586.
Широко применяемая недорогая ИМС параллельного источника опорного
напряжения TL431 (отечественный аналог — 142ЕН19) выпускается в трехвы-
водном корпусе ТО92, причем наружу выведен верхний вывод резистора R2
(Рис. 5.35) — вывод управления ref. На Рис. 5.35 справа приведено условное
обозначение такого трехвыводного параллельного ИОН. При внешнем
подключении вывода управления re/к выводу, соединенному с коллектором
транзистора РТ3, ИОН имеет выходное напряжение 2.5 В. Если требуется более
высокое опорное напряжение, то коллектор транзистора УТЪ соединяется с
выводом управления через внешний резистивный делитель. Такая схема
оказалась очень удобной в применении, и в настоящее время различные варианты и
аналоги этой ИМС выпускаются несколькими фирмами (это LM431, LMV431,
LM4121-ADJ,TLV431 и др.).
Трехвыводные параллельные ИОН в настоящее время имеют одну из двух
основных конфигураций: опорное напряжение в линейном режиме равно
напряжению между анодом и выводом управления (Рис. 5.37а) и опорное напряжение в
линейном режиме равно напряжению между катодом и выводом управления
(Рис. 5.376). Типичный пример первой конфигурации — TL431, второй — LM385.
а) б)
Рис. 5.37. Основные конфигурации трехвыводных параллельных ИОН
В настоящее время источники опорного напряжения на ширине
запрещенной зоны — наиболее распространенный тип ИОН.
243
Рис. 5.35. ИОН с параллельным регулирующим
элементом
Рис. 5.36. Графики зависимостей тока
потребления от входного напряжения для
последовательного и параллельного ИОН
Глава 5. ЛИНЕЙНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
5.6.3. ИОН на полевых транзисторах
Сравнительно недавно на рынке электронных компонентов появилось
новое поколение источников опорного напряжения — XFET-источники (eXtra
Field Effect Transistor). Новая схемотехника обеспечивает источнику опорного
напряжения низкий шум, малый ток потребления и очень низкий ТКН.
Ядро XFET-источника состоит из двух полевых транзисторов с
управляющим /?-л-переходом (Рис. 5.38), один из которых (VT2) имеет дополнительный
встроенный канал, за счет чего его напряжение отсечки увеличено по
сравнению с напряжением отсечки транзистора УТ{.
Рис. 5.38. ИОН на полевых транзисторах (XFET)
Токи истоков транзисторов одинаковы (J{ = /2); за счет действия
операционного усилителя разность потенциалов истоков транзисторов равна нулю. В
результате за счет неравенства напряжений отсечки образуется
высокостабильная разность потенциалов между затворами транзисторов FREB которая может
быть усилена и использована для формирования весьма стабильного опорного
напряжения.
Для этих источников опорного напряжения характерна величина
Pref~ 0-5 В с отрицательным ТКН = —60 мкВ/К, что примерно в 30 раз меньше,
чем у ИОН на ширине запрещенной зоны. Такая малая температурная
нестабильность может быть легко скомпенсирована практически таким же
способом, что и у источника опорного напряжения на ширине запрещенной зоны. В
схеме на Рис. 5.38 эта компенсация осуществляется источником тока /тк с
положительным ТКН.
Меньшая величина ТКН опорного элемента на полевых транзисторах и как
следствие меньший компенсационный ток /тк обуславливают значительно
меньший, чем у источников опорного напряжения на ширине запрещенной
зоны, шум выходного напряжения, так как большая часть шума ИОН на ширине
запрещенной зоны обусловлена схемой температурной компенсации.
Уравнение электрического равновесия схемы на Рис. 5.38 имеет вид
Характерными представителями источников опорного напряжения на
полевых транзисторах является семейство ADR29x, из которого, например, ИОН
244 ADR291E на 2.5 В имеет типичное значение ТКН = ЗхЮ~6 1/К, уровень шума
5.6. Источники опорного напряжения
8 мкВ от пика до пика в полосе 0.1... 10 Гц, типовой ток потребления 9 мкА и
рекордную долговременную стабильность — 0.2x10~6/ 1000 ч против 6х10~6/Ю00 ч
у суперпрецизионного VRE3050.
5.6.4. Устойчивость ИОН
Поскольку большинство типов ИОН представляют собой схемы со
значительным усилением и обратными связями, то неизбежно встает вопрос об их ус/-
тойчивости. Разработчики принимают меры по обеспечению необходимых
запасов устойчивости этих схем, включая в них корректирующие конденсаторы.
Однако этого может оказаться недостаточно, особенно в тех случаях, когда
ИОН работает на емкостную нагрузку при малых выходных токах.
Обычно для нормальной работы ИОН не требуется подключение
конденсатора параллельно выходу. Однако, если входное напряжение ИОН содержит
высокочастотные помехи, или ток нагрузки может изменяться с большой
скоростью, либо требуется снизить шум, генерируемый самим ИОН, включение
такого конденсатора целесообразно. Как уже указывалось выше в п. 5.3, это
добавляет полюс передаточной функции разомкнутого контура регулирования и,
как следствие, увеличивает фазовое запаздывание.
В принципе для последовательных ИОН задача обеспечения устойчивости
аналогична таковой для линейных стабилизаторов. Здесь многое зависит от
принципа построения усилительной части ИОН. Как и у линейных
стабилизаторов, регулирующий транзистор может быть включен по схеме, как с общим
коллектором, так и с общим эмиттером.
Схемы с пониженным минимально
допустимым падением напряжения вход—выход
(аналогичные МПН-стабилизаторам)
обладают худшей устойчивостью и требуют
подключения к выходу оксидных конденсаторов с
определенным значением эквивалентного
последовательного сопротивления (ЭПС).
Например, для ИМС LM4140 ЭПС определяется
из диаграммы, приведенной на Рис. 5.39,
которая подобна «туннелю смерти» для МПН-ста-
билизаторов (см. Рис. 5.15).
Задача обеспечения устойчивости ИОН
при его работе на емкостную нагрузку может
решаться и другими способами. В частности,
AD780 имеет специальный вывод для
подключения корректирующего конденсатора. Этот
конденсатор включается между эмиттером
транзистора УТ\ и общей точкой (Рис. 5.35). В
технической документации на эту ИМС приведен график для определения
емкости корректирующего конденсатора по выбранному значению емкости
выходного конденсатора. Увеличение емкости выходного конденсатора не
ухудшает основных динамических характеристик ИОН, а только увеличивает время
его выхода на режим при включении. Микросхема МАХ872 также предусматри-
Рис. 5.39. Диаграмма областей
устойчивости ИОН LM4140
245
Глава 5. ЛИНЕЙНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
246
вает подключение внешнего корректирующего конденсатора в том случае, если
CL> 1нФ.
Устойчивость ИОН, имеющих регулирующий транзистор, включенный по
схеме эмиттерного повторителя, обеспечить значительно проще. Поэтому
источники такого типа допускают подключение к выходу конденсаторов значительной
емкости. В частности, REF195 — 1...100 мкФ, МАХ6061 — 0...1 мкФ.
Прецизионный МАХ6225 устойчив при любой емкости выходного конденсатора.
Параллельные ИОН с высокими
точностными характеристиками содержат усилители
с высоким усилением и потому довольно
критичны к емкости выходного
конденсатора. Возможности для коррекции двухвывод-
ных параллельных ИОН крайне ограничены,
поэтому важно следовать рекомендациям
изготовителя. Трехвыводные параллельные
ИОН, такие, как TL431 и другие аналогичные
ИМС, имеющие вывод, через который
можно подключиться к контуру обратной связи,
дают возможность разработчику попытаться
обеспечить устойчивость внешними /?С-це-
пями. Изменение опорного напряжения
трехвыводных параллельных ИОН
осуществляется включением в цепь обратной связи ре-
зистивного делителя напряжения, поэтому увеличение KREF означает снижение
контурного коэффициента усиления и, стало быть, повышение запасов
устойчивости. Кроме того, включение конденсатора между катодом и выводом
управления приводит к появлению нуля в передаточной функции разомкнутого
контура с соответствующим фазоопережением, а включив конденсатор
соответствующей емкости между выводом управления и анодом, мы можем создать
доминирующий полюс. В качестве примера рассмотрим характеристики
популярного трехвыводного параллельного ИОН типа TL431 (отечественный аналог
— 142ЕН19). На Рис. 5.40 представлена ЛАЧХ его разомкнутого контура
регулирования при токе катода /к = 10 мА.
Рис. 5.40. ЛАЧХ разомкнутого контура
регулирования ИМС TL431
Рис. 5.41. Области устойчивости ИМС
TL431
Рис. 5.42. Коррекция схемы
с ИОН
5.6. Источники опорного напряжения
Видно, что ниже частоты среза ЛАЧХ спадает с наклоном не более
25 дБ/дек., что соответствует фазовому запаздыванию порядка 120°, т. е.
система имеет достаточные запасы устойчивости. Подключение параллельно ИОН
конденсатора создает дополнительный полюс, который в принципе может
привести к неустойчивости. На Рис. 5.41 приведены области устойчивости ИОН в
координатах: ток катода — емкость нагрузки при различных значениях
опорного напряжения.
Видно, что увеличение опорного напряжения путем ослабления сигнала
обратной связи расширяет область устойчивости. Для повышения устойчивости можно
сформировать форсирующую цепь обратной связи, показанную на Рис. 5.42.
Это решение подобно форсирующей цепи, вводимой в схему включения ОУ
для компенсации влияния емкости нагрузки (см. п. 1.6.5).
5.6.5. Параметры источников опорного
напряжения
Точностные параметры
Основное назначение ИОН — создавать образцовое напряжение, которое
могло бы быть использовано электронными устройствами преобразования
информации в качестве меры, эталона. Поэтому главное требование к ИОН —
поддерживать выходное напряжение неизменным, равным номинальному
значению в условиях изменяющегося входного напряжения, токов нагрузки,
температуры окружающей среды и старения элементов.
К точностным параметрам ИОН относятся: начальная точность установки
выходного напряжения в нормальных условиях, коэффициент стабилизации по
входному напряжению, коэффициент стабилизации по току нагрузки,
температурный коэффициент напряжения, тепловой гистерезис, временная
нестабильность, шум выходного напряжения.
Начальная точность установки выходного напряжения зависит в основном от
технологических факторов. Отклонения выходного напряжения от
номинального значения вызваны разбросом элементов, входящих в состав ИОН.
Точность установки повышают путем лазерной подгонки сопротивлений
резисторов схемы.
Коэффициент стабилизации по входному напряжению определяется как
отношение приращения входного напряжения к вызываемому им приращению
выходного напряжения ИОН:
Иногда в справочниках приводится нестабильность по напряжению как
абсолютное изменение выходного напряжения в мВ, процентах или миллионных
долях (ррт) при изменении входного напряжения в заданных пределах.
Повышение коэффициента стабилизации достигается увеличением коэффициента
усиления контура регулирования.
Коэффициент стабилизации по току нагрузки характеризует стабильность
выходного напряжения стабилизатора при изменении тока нагрузки. Обычно под 247
Глава 5. ЛИНЕЙНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
Температурный коэффициент выходного напряжения характеризует
нестабильность выходного напряжения ИОН при изменении температуры
окружающей среды. Это вторая по важности после точности установки выходного
напряжения (а в некоторых случаях даже первая) точностная характеристика. Для
многих изготовителей измерительных приборов ТКН менее 10~6/°С позволяет
избавиться от системной температурной калибровки — медленного и
дорогостоящего процесса. Существует несколько методов определения ТКН. Один из
них состоит в определении ТКН как тангенса угла наклона касательной к
графику зависимости опорного напряжения от температуры:
ТНК = AFREF/Ar\
E.18)
248
Однако в силу того, что эта зависимость не только не линейна, но даже и не
монотонна, ТКН, определенный по формуле E.18), сам очень сильно зависит
от температуры. Обычно применяется метод поля, при котором задается поле
допуска на отклонения опорного напряжения от номинального значения в
заданном температурном диапазоне.
На Рис. 5.43 представлен график
зависимости опорного напряжения от
температуры для прецизионного ИОН
AD588.
Эта зависимость (ее называют S-об-
разной) характерна для ИОН на основе
стабилитронов с так называемым
«захороненным» слоем (или скрытым Зене-
ровским переходом). Очевидно, что
ТКН, вычисленный по формуле E.18),
ни в какой мере не определяет
действительные границы, в которых должно ос-
Рис. 5.43. График зависимости опорного
напряжения прецизионного ИОН AD588 от
температуры
этим коэффициентом понимают относительное изменение выходного
напряжения при изменении тока нагрузки в заданных пределах в процентах или
миллионных долях от номинальной величины. Используются также термины
«нестабильность по току нагрузки» и «выходное дифференциальное сопротивление»:
которое измеряется в Ом. Этот параметр также существенно зависит от
коэффициента усиления контура регулирования. Для уменьшения влияния
выходного тока при работе ИОН на удаленную нагрузку широко используется кель-
виновское (т. е. четырехпроводное) подключение (при этом напряжение
обратной связи снимается непосредственно с входных зажимов питания
устройства-потребителя). Для этого некоторые модели прецизионных ИОН,
например AD588, имеют специальные выводы.
Выходное сопротивление для трехвыводных параллельных ИОН зависит от
коэффициента передачи Р внешнего делителя в цепи обратной связи. Если
Rout — выходное сопротивление при отсутствии внешнего делителя, то при
включении делителя оно увеличивается
5.6. Источники опорного напряжения
таваться опорное напряжение при изменении температуры в рабочем
диапазоне. Поэтому обычно ТКН вычисляют по формуле
E.19)
Например, для AD588 формула E.19) дает ТКН = 0.95 • 10/°С.
Определенный таким образом ТКН равен тангенсу угла наклона диагонали
прямоугольника, построенного на Рис. 5.43.
На вид зависимости опорного напряжения от температуры
существенно влияет величина его начального значения.
Рис. 5.44. Графики зависимостей
опорного напряжения трех образцов
ИОН TL431 от температуры
Это вызвано тем, что, в свою очередь,
величина опорного напряжения конкретного
ИОН связана с точностью компенсации
ТКН его базового опорного элемента (см.
п. 5.6.2). Недокомпенсация ведет к
снижению FREB а перекомпенсация наоборот, к
его увеличению. На Рис. 5.44 приведены
графики зависимости опорного напряжения от
температуры для трех образцов ИОН типа
TL431.
Видно, что при недокомпенсации в
диапазоне температур преобладает
отрицательный ТКН (если его определять по формуле
E.18)), а при перекомпенсации —
положительный.
В справочниках часто приводится так
называемая «температурная стабильность»,
под которой понимают относительное изменение выходного напряжения в
процентах от номинальной величины при изменении температуры
окружающей среды в допустимых для данной ИМС пределах. Используется также
термин «температурный дрейф выходного напряжения», определяемый
отношением AKREF/(KREF NOMr°) и измеряемый в мВ/(°С * В).
Тепловой гистерезис — неоднозначность изменения опорного напряжения в
результате изменения температуры. Он проявляется в том, что при нагреве
ИОН и последующем возврате к исходной температуре, его опорное
напряжение не всегда принимает первоначальное значение. Тепловой гистерезис трудно
компенсировать, и зачастую он является главным источником погрешности
при температурных колебаниях с амплитудой 25°С и больше. Изготовители
ИОН сравнительно недавно начали включать данные о тепловом гистерезисе
своих изделий в техническую документацию. Например, для ИОН на ширине
запрещенной зоны МАХ6250 тепловой гистерезис при изменении температуры
в последовательности 25°С -> 50°С -> 25°С равен 20 мкВ, что сопоставимо с
отклонением опорного напряжения при изменении температуры на 7°С.
249
Глава 5. ЛИНЕЙНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
Рис. 5.45. График спектральной
плотности шума для прецизионного
HOHAD588
Рис. 5.46. Влияние шунтирующего
конденсатора на спектральную
плотность шума
250
Рис. 5.47. График зависимости
действующего значения шума
опорного напряжения ИОН от
частоты среза выходного фильтра
Долговременная нестабильность
(временной дрейф) определяет относительное
изменение выходного напряжения в процентах от
номинального значения за 1000 часов работы
при температуре окружающей среды,
соответствующей верхней границе рабочего
диапазона. Для ИОН на стабилитронах
типичное значение временного дрейфа составляет
610~6за 1000 часов и уменьшается по
затухающей экспоненте. Дополнительная
термотренировка улучшает временную
стабильность ИОН на стабилитроне. XFET
источники опорного напряжения имеют
превосходную долговременную стабильность
— 0.2-10 за 1000 часов.
Шум опорного напряжения характерен для
ИОН, так же как и для ОУ, но интенсивность
шума ИОН значительно превосходит
таковую для ОУ. Шум опорного напряжения
вносит ошибку в измерения. В опорном
напряжении преобладают два типа шума:
фликкер-шум A//) и тепловой (белый).
График спектральной плотности шума опорного
напряжения для прецизионного AD588
представлен на Рис. 5.45.
Широкополосный тепловой шум может
быть заметно сглажен путем подключения
параллельно выходу ИОН конденсатора. На
Рис. 5.46 можно видеть степень влияния на
спектральную плотность шума ИМС
МАХ6225 конденсатора емкостью 1 мкФ,
подключенного параллельно выходу ИМС.
Однако не все модели ИОН допускают
непосредственное подключение
конденсатора без потери устойчивости (см. п. 5.6.4).
Решением здесь может быть подключение
нагрузки к ИОН через ЯС-фильтр первого
порядка. На Рис. 5.47 приведен график
зависимости действующего значения
напряжения шума на выходе /?С-фильтра,
подключенного к ИОН типа LT1004-2.5ot его
частоты среза.
Поскольку в отличие от ОУ выходное
напряжение ИОН меняться не должно, можно
использовать фильтр с большой постоянной
времени.
К сожалению, применение ЛС-фильтра
приводит к увеличению выходного сопро-
5.6. Источники опорного напряжения
тивления ИОН на низких частотах. Это нежелательно, если входное
сопротивление приемника сигнала от ИОН низкое, особенно если оно меняется, как,
например у цифроаналогового преобразования с инверсной резистивной
матрицей. Поэтому сопротивление резистора фильтра выбирают порядка 20 Ом.
В стабилитронных ИОН конденсатор для снижения шума может быть
подключен непосредственно параллельно стабилитрону либо параллельно неин-
вертирующему входу усилителя, входящего в состав ИОН (см. Рис. 5.296), как
это, например, предусмотрено у прецизионного AD587. При этом условия
устойчивости ИОН не ухудшаются, поскольку конденсатор не входит в контур
обратной связи.
К основным динамическим параметрам источников опорного напряжения
относятся коэффициент подавления пульсаций, полное выходное
сопротивление и время установления после включения.
Коэффициент подавления пульсаций КцП определяется как отношение (в дБ)
амплитуд основной гармоники пульсаций напряжения на выходе и входе ИОН
при его питании от пульсирующею напряжения (например, выходным
напряжением двухполупериодного выпрямителя без фильтра). Обычно приводится в
технической документации в виде частотной характеристики. Значение этого
коэффициента в области низких частот определяется частотной
характеристикой контура регулирования ИОН, в частности коэффициентом усиления петли
и частотой среза, а в области высоких частот — емкостью и частотными
свойствами выходного конденсатора, если он есть. На Рис. 5.48 представлен график
зависимости коэффициента подавления пульсаций от частоты для AD291.
Рис. 5.48. График зависимости
коэффициента подавления пульсаций
от частоты для ИМС AD291
Рис. 5.49. Графики зависимости от
частоты модуля полного выходного
сопротивления ИМС МАХ6225
Полное выходное сопротивление Z0UT характеризует способность источника
опорного напряжения компенсировать изменение выходного напряжения при
изменении тока нагрузки. Задается, как правило, в виде графика в функции от
частоты изменения тока нагрузки. Так же, как и Кпп в области низких частот
определяется усилительными свойствами контура регулирования, а в области
высоких частот полным сопротивлением выходного конденсатора. На Рис. 5.49
представлены графики зависимости от частоты модуля полного выходного со-
251
Глава 5. ЛИНЕЙНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
противления ИМС МАХ6225 для втекающего /етек. и вытекающего /ВЫтек.
выходных токов силой 5 мА.
В фирменных описаниях микросхем ИОН часто приводятся графики
переходных характеристик — зависимости от времени опорного напряжения при
скачкообразном изменении входного напряжения или тока нагрузки.
Время установления после включения — время, в течение которого опорное
напряжение устанавливается с заданной точностью после подачи питания. У
большинства ИОН опорное напряжение устанавливается до 0.1% за время
менее 10 мкс. Этот параметр важен для систем с батарейным питанием, поскольку
в этом случае целесообразно подавать питание на узлы системы только на
короткое время их работы.
К важнейшим эксплуатационным параметрам ИОН относятся:
• диапазон допустимых входных напряжений;
• максимально допустимый ток нагрузки;
• максимально допустимая рассеиваемая мощность;
• минимально допустимое напряжение между входом и выходом ИОН при
максимальном или дополнительно оговоренном токе нагрузки;
• ток, потребляемый ИОН в режиме холостого хода (часто называемый током
утечки);
• допустимый диапазон температур окружающей среды.
В Табл. 5.2 приведены параметры некоторых моделей источников опорного
напряжения.
Таблица 5.2. Основные параметры ИС источников опорного напряжения
Источники опорного напряжения на стабилитронах
AD688
Два симметричных выхода
LM399
REF-08G
МАХ671С
Кельвиновское подключение к
удаленной нагрузке
Источники опорного напряжения на ширине запрещенной зоны
TL431
LM385
AD1582B
Отечественный аналог — 142ЕН19
Трехвыводной параллельный
Последовательный
252
AD1586B
Параллельный
AD589M
Параллельный
REF195E
Последовательный
МАХ676А
Есть выход датчика температуры
ADR291E
XFET-источник
5.6. Источники опорного напряжения
5.6.6. Применение ИОН
Помимо основного назначения — эталонная мера электрического
напряжения — ИОН могут быть применены во многих узлах электронной аппаратуры.
Особенно много возможностей в этом смысле предоставляют трехвыводные
последовательные ИОН. Ниже рассматривается построение некоторых
электронных схем на базе ИОН.
Типовое включение параллельного ИОН
На Рис. 5.50 приведены типовые схемы включения и схема замещения
параллельного ИОН.
Рис. 5.50. Параллельный ИОН:
а — типовая схема включения, б — схема замещения, в — схема включения с
источником тока
На резисторе R падает разность входного и опорного напряжений.
Коэффициент стабилизации по входному напряжению для этой схемы можно
определить на основе схемы замещения (Рис. 5.506)
E.20)
Из последнего выражения следует, что чем больше сопротивление
резистора R, тем выше Kcv Это, однако, справедливо только в том случае, если ток,
проходящий через ИОН, не изменяет его сопротивление.Поскольку
сопротивление R определяет ток через ИОН и нагрузку, оно не может быть больше
некоторого максимального значения, определяемого из следующего уравнения:
E.12)
где /MjN — минимально допустимый входной ток, /L MAX — максимально
возможный ток нагрузки, /к_MIN — минимально допустимый ток катода источника
опорного напряжения, KIN_MIN — минимально возможное входное напряжение.
Пример 5.1. Возьмем современную модель параллельного ИОН AD1586,
обладающую следующими параметрами: KREF N0M = 2.5 В; /к MIN = 0.05 мА;
Rom = 0-5 Ом. Пусть KIN = 5± I В, /L max = Ю мА. Тогда на основании E.21)
находим R = 150 Ом. По формуле E.20) найдем АГСТ = 301. При возможном отклонении
входного напряжения изменение опорного напряжения составит
Несложно убедиться (см. Табл. 5.2), что такое изменение FREF
эквивалентно его дрейфу при изменении температуры на 27°С. 253
Глава 5. ЛИНЕЙНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
Уменьшить влияние входного напряжения можно, если в качестве входного
использовать стабилизированное напряжение, либо заменив резистор
источником стабильного тока, например на полевом транзисторе (Рис. 5.50в).
Пороговый детектор с однополярным питанием
Рис. 5.51. Схема порогового
детектора с однополярным
питанием
В состав схем параллельных трехвыводных
ИОН на ширине запрещенной зоны входят:
собственно ИОН и усилитель (см. Рис. 5.37).
Это позволяет использовать такие ИОН в
качестве термокомпенсированных пороговых
детекторов. Схема устройства представлена на
Рис. 5.51.
Обратная связь разомкнута. В таком случае
усилитель превращается в компаратор.
Выходное напряжение схемы при использовании
ИМС типа TL431 и подобных ей (Рис. 5.37я)
E.22)
где Кнас — напряжение насыщения ИОН (около 2 В для TL431),
Р = /?2/(/?i + /у — коэффициент передачи делителя напряжения.
Реле времени
Сочетание в схеме параллельного трехвывод-
ного ИОН усилителя и опорного источника
позволяет использовать его для построения простого
реле времени (Рис. 5.52). Запуск реле осуществляется
кратковременным закорачиванием времязадающе-
го конденсатора С контактами кнопки «Пуск», в
результате чего конденсатор разряжается.
После размыкания контактов начинается заряд
конденсатора через резистор R. Пока Vc < KREB ток
катода ИОН менее 1 мкА. Когда напряжение на
конденсаторе Vc превысит KREB напряжение катод—анод ИОН становится
равным Кнас и через светодиод начинает течь ток, величина которого определяется
по формуле
Рис. 5.52. Реле времени
где Уд — прямое напряжение на диоде. Длительность задержки
В этой схеме хорошие результаты дает применение микромощных ИОН, та-
254 ких, как TLV431 и подобных им.
5.6. Источники опорного напряжения
Мощный параллельный стабилизатор
При включении по типовой схеме в
качестве параллельного стабилизатора
напряжения мощность ИОН может оказаться
недостаточной. В этом случае можно умощнить схему
дополнительным транзистором (Рис. 5.53).
Дополнительный транзистор VT и
выходной транзистор ИОН включены здесь по
квазикомплементарной схеме Дарлингтона.
Выходное напряжение схемы
Рис. 5.53. Схема мощного
параллельного стабилизатора
E.23)
Прецизионный последовательный стабилизатор напряжения
Параллельный ИОН можно использовать,
как схему управления регулирующим
транзистором в последовательном стабилизаторе
напряжения (Рис. 5.54). Поскольку
регулирующий транзистор включен по схеме с общим
коллектором, проблем с устойчивостью не
возникает, если только не подключать параллельно
выходу конденсатор большой емкости.
В случае же неустойчивости можно
попробовать включить конденсатор емкостью
несколько десятков нанофарад между катодом и
выводом управления ИОН. Выходное
напряжение определяется по формуле E.23).
Рис. 5.54. Схема последовательного
стабилизатора напряжения на
параллельном ИОН
Регулируемый линейный стабилизатор
Ранее (см. Рис. 5.19) была представлена
схема включения нерегулируемого трехвыводного
стабилизатора напряжения, обеспечивающая
повышение его выходного напряжения.
Использование в этой схеме вместо стабилитрона
параллельного трехвыводного ИОН позволяет
сделать этот источник регулируемым и
повысить его качество. Схема такого стабилизатора
приведена на Рис. 5.55.
Линейный стабилизатор поддерживает
разность потенциалов между своими выходным и
общим выводами равной его номинальному
выходному напряжению ^out_nom (для 142ЕН5А — 5 В). Только в этом случае
регулирующий транзистор стабилизатора будет работать в активном режиме. За
Рис. 5.55. Схема регулирования
выходного напряжения
трехвыводного стабилизатора
255
Глава 5. ЛИНЕЙНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
счет своей внутренней отрицательной обратной связи по выходному
напряжению ИОН поддерживает напряжение между анодом и управляющим выводом,
равным KREF При этом выходное напряжение всей схемы
Уоит нельзя устанавливать меньше, чем Vom N0M + KREB уменьшая
сопротивление резистора R{, поскольку тогда ИОН скачком перейдет в режим
насыщения и обратная связь разомкнётся.
Источники стабильного тока
Наиболее просто строятся источники стабильного тока на основе
последовательных ИОН. Схема включения не отличается принципиально от подобной
на основе ИМС линейного стабилизатора (Рис. 5.23). Схемы источников тока
на основе параллельных ИОН несколько сложнее (Рис. 5.56). На Рис. 5.56а и б
изображены схемы источников соответственно втекающего и вытекающего
токов на основе трехвыводных регулируемых ИОН.
Простое умощнение выхода
Представим себе ситуацию: выбран ИОН с максимально-допустимым
током нагрузки, близким к реальному току, потребляемому нагрузкой. После
256 монтажа оказалось, что ток нагрузки несколько больше, чем предполагалось
Рис. 5.56. Схемы источников тока на основе параллельных ИОН
В схеме на Рис. 5.56а используется ИОН, опорное напряжение которого
равно напряжению между анодом и выводом управления (TL431 и др.). На
Рис. 5.560 применен ИОН, опорное напряжение которого равно напряжению
между выводом управления и катодом (LM385 и др.). Для обеих схем выходной
ток равен
E.24)
Некоторую погрешность вносит конечный коэффициент усиления тока
базы транзистора, поэтому желательно, чтобы он был как можно больше.
На Рис. 5.56в и г приведены соответственно схемы источников втекающего
и вытекающего токов на основе двухвыводных параллельных ИОН и
операционных усилителей с однополярным питанием. Выходной ток этих схем
определяется по той же формуле E.24).
5.6. Источники опорного напряжения
вначале. Что делать? Предельно простой путь состоит в подключении между
выводами входа и выхода резистора R (Рис. 5.57), через который и будет
протекать «лишняя» часть тока нагрузки.
Поскольку обычно ИОН питается от
стабилизированного источника питания, через этот
резистор может ответвляться до 80% тока
нагрузки. Однако следует иметь в виду, что при
отключении нагрузки, или значительном повышении
ее сопротивления выходное напряжение ИОН в
этой схеме может превысить номинальное
значение или даже увеличиться до входного.
Рис. 5.57. Простой способ умощ-
нения последовательного ИОН
Получение отрицательного опорного напряжения
Номенклатура ИОН, специально предназначенных для получения
отрицательного (относительно общей точки) опорного напряжения, довольно бедна.
В то же время есть немало устройств, например, некоторые типы
цифроаналоговых преобразователей, где требуется именно отрицательное опорное
напряжение. Конечно, можно легко получить KREF < 0 с помощью соответствующим
образом соединенных резистора и параллельного ИОН, но последовательные
ИОН обладают более высокой точностью, особенно если речь идет о
KREF= 10 В. Другой путь состоит в изменении знака опорного напряжения с
помощью инвертирующего повторителя, но это требует применения
прецизионных резисторов.
Самый простой путь получения отрицательного опорного напряжения с
помощью источника положительного опорного напряжения иллюстрируется
схемой на Рис. 5.58а [5.7]. Единственный дополнительный компонент здесь —
резистор, соединенный с источником отрицательного питающего напряжения.
Эта схема имеет ограничения, обычные для параллельных ИОН, в первую
очередь ограничение допустимого диапазона тока нагрузки.
Рис. 5.58. Получение отрицательного опорного напряжения
Для расширения диапазона токов нагрузки нужно уменьшать
сопротивление /?, а это ведет к увеличению тока через ИОН и к его нагреву.
Схема, показанная на Рис. 5.585, устраняет эти проблемы. Как и в
предыдущем случае, здесь нет надобности в точных резисторах. Дополнительная
ошибка при применении прецизионных ОУ незначительна. Конденсатор С
способствует уменьшению шума. Понять, как работает схема, легко, если заменить
257
Глава 5. ЛИНЕЙНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
258
ИОН в цепи обратной связи ОУ источником ЭДС. Поскольку потенциалы
входов ОУ равны между собой, а значит, практически равны нулю, напряжение на
выходе ОУ равно— Vref- Поскольку выходной ток ИОН, равный входному
току ОУ, близок к нулю, здесь не действует фактор влияния тока нагрузки ИОН
на опорное напряжение. Важно, чтобы разность потенциалов между входным и
общим зажимами не превышала предельно допустимого для ИОН значения.
Вопросы и задачи
1. Предложите вариант схемы стабилизатора положительного напряжения
(Рис. 5.1) с использованием регулирующего/?-я-/ьтранзистора.
2. Какие изменения нужно внести в схему на Рис. 5.1, чтобы получить
выходное напряжение больше опорного?
3. Чем объясняется большое значение минимально допустимого
напряжения между входом и выходом в схеме на Рис. 5.2?
4. Какова должна быть последовательность регулировки двухполярного
стабилизатора напряжения по схеме на Рис. 5.4д?
5. Изменяется ли при регулировке баланса отрицательное выходное
напряжение двухполярного стабилизатора напряжения по схеме на
Рис. 5.4д?
6. Как в схеме на Рис. 5.5 должен быть подключен корректирующий
конденсатор?
7. От каких факторов зависит коэффициент стабилизации линейного
стабилизатора напряжения?
8. Чем определяется выходное сопротивление линейного стабилизатора
напряжения?
9. Какой фактор оказывает наиболее существенное влияние на
температурную стабильность линейного стабилизатора напряжения?
10. Определите входное сопротивление линейного стабилизатора
напряжения на ИМС КР142ЕН5 при нагрузке, соответствующей максимальному
выходному току (током, потребляемым цепями управления
стабилизатора, можно пренебречь).
11. Как и на сколько изменится минимально допустимое напряжение
между входом и выходом линейного интегрального стабилизатора
напряжения, если включить его по схеме, приведенной на Рис. 5.21, для
увеличения максимального выходного тока?
12. Как понизить выходное напряжение линейного интегрального
стабилизатора напряжения с фиксированным выходным напряжением?
Начертите схему включения.
13. Определить выходное сопротивление источника тока на ИМС
КР142ЕН5 (Рис. 5.23), если R = 5 Ом.
14. Будет ли работать схема на Рис. 5.24, если вместо VT{ включить
п-р-п-транзистор эмиттером к входу схемы и поменять местами входы
ОУг?
15. Как изменится коэффициент стабилизации источника опорного
напряжения по схеме Рис. 5.29а, если сопротивление резистора R увеличить в
два раза?
5.6. Источники опорного напряжения
16. Будет ли работать схема источника опорного напряжения на Рис. 5.296,
если верхний вывод резистора R переключить к входу схемы?
17. Можно ли изменением сопротивления резистора R подстроить
выходное напряжение источника опорного напряжения по схеме на
Рис. 5.296?
18. Как изменится температурный коэффициент напряжения источника
опорного напряжения, схема которого приведена на Рис. 5.33, если
увеличить сопротивление резистора R в цепи коллектора транзистора VT{t
19. Как изменится температурный коэффициент напряжения источника
опорного напряжения с ОУ, схема которого приведена на Рис. 5.34, если
увеличить сопротивление резистора R/ni B цепи эмиттера транзистора
VT21
Литература к главе 5
5.1. Wldlar RJ. 1С Provides On-Card Regulation for Logic Circuits //Application Note 42.
— National Semiconductor, February 1971. — 6 pp.
5.2. Simpson Ch. Linear Regulators: Theory of Operation and Compensation //Application
Note 1148. — National Semiconductor, May 2000. — 8 pp.
5.3. 1.2V Reference//Application Note 56. — National Semiconductor, December 1971. —
4 pp.
5.4. Brugler J.S. Silicon Transistor Biasing for Linear Collector Current Temperature
Dependence //IEEE Journal of Solid State Circuits, June, 1967. — 57...58 pp.
5.5. Miller P., Moore D. Precision voltage references //Texas Instruments Incorporated.
Analog Applications Journal. — November 1999. — 1...4pp.
5.6. Микросхемы для линейных источников питания и их применение. М.: Додэка.
- 1996 г. - 288 с.
5.7. Stitt M. Make a precision -10v reference //Burr-Brown Corporation. Application
Bulletin AB-004. - 1990. - 2 pp.
Глава 6
ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ
НАПРЯЖЕНИЯ
6.1. Общие сведения
Принцип действия непрерывных (линейных) стабилизаторов напряжения с
последовательным регулирующим элементом, рассмотренных в пятой главе,
состоит в том, что при изменении входного напряжения и/или тока нагрузки
выходное напряжение стабилизатора (напряжение на нагрузке)
поддерживается постоянным за счет изменения падения напряжения на регулирующем
элементе. Разность между входным и выходным напряжениями падает на мощном
регулирующем транзисторе и в зависимости от схемы его включения и
диапазона изменения входного напряжения может достигать нескольких вольт. Как
следствие при протекании тока нагрузки на этом транзисторе рассеивается
довольно большая мощность. Это предопределяет относительно невысокий
коэффициент полезного действия (КПД) линейного стабилизатора, который в
случае низких напряжениях стабилизации может падать даже ниже 50%.
Существенно больших значений КПД можно достичь, если вместо
непрерывного регулирующего элемента между входным напряжением и нагрузкой
включить импульсный коммутатор (ключ), который циклически (с
определенным периодом повторения 7) переключается из разомкнутого (закрытого)
состояния в замкнутое (открытое) и обратно. В этом случае среднее значение
выходного напряжения на нагрузке будет определяться отношением
длительности /open его открытого состояния к периоду повторения. Таким образом,
меняя относительную длительность открытого состояния ключа, можно в
широких пределах регулировать среднее значение напряжения на нагрузке. Если
между коммутатором и нагрузкой включить соответствующий фильтр нижних
частот, можно сгладить пульсации напряжения на нагрузке до необходимой
величины.
Вполне очевидно, что при малом сопротивлении ключа в открытом
состоянии (в идеале оно может быть очень близко к нулевому), потери мощности на
таком регулирующем элементе весьма малы, и на практике КПД здесь может
достигать 95% и более.
Источники питания с коммутаторами называют импульсными
источниками питания, а если они осуществляют стабилизацию выходного напряжения, то
импульсными стабилизаторами напряжения. По сравнению с непрерывными
стабилизаторами напряжения импульсные источники обладают не только су-
щественно более высоким КПД, но дополнительно позволяют получить:
260 • выходное напряжение больше входного;
6.1. Общие сведения
выходное напряжение обратной полярности по отношению к входному;
выходное напряжение, гальванически не связанное с входным;
стабилизацию выходного напряжения при широком (более 50%) диапазоне
изменения входного;
при выходной мощности в десятки и более ватт — существенно меньшие
массу и габариты.
Недостатками ИМС импульсных источников являются:
импульсный характер напряжений и токов в схеме, что обуславливает порой
весьма интенсивные помехи в нагрузке, в первичном источнике питания и в
окружающем пространстве и требует применения сложных сглаживающих
фильтров, тщательного экранирования и детальной проработки
конструкции;
определенные сложности с обеспечением устойчивости импульсных
устройств с обратной связью;
относительно большая (но сравнению с непрерывными устройствами)
длительность переходных процессов;
наличие внешних компонентов.
Классификация импульсных источников питания приведена на Рис. 6.1.
Рис. 6.1. Классификация импульсных источникоп питания
Импульсные источники питания отличаются большим
многообразием принципов построения \л схемных решений. Ниже мы рассмотрим
наиболее распространенные типы микросхем импульсных источников
питания с промежуточными накопителями энергии и без промежуточного
накопления энергии.
Для импульсных источников питания с промежуточными накопителями
характерна работа в два такта, в одном из которых происходит накопление
энергии в индуктивной катушке (дросселе) или конденсаторе, а во втором —
передача энергии в нагрузку. Изготовить индуктивную катушку или
конденсатор сравнительно большой емкости методами интегральной технологии не
удается, поэтому практически все импульсные интегральные источники питания
имеют внешние компоненты.
261
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
6.2. Понижающий импульсный стабилизатор
6.2.1. Схема понижающего импульсного
стабилизатора напряжения
На Рис. 6.2 показана схема понижающего импульсного стабилизатора
напряжения (ИСН).
Транзистор КГ переключается из полностью открытого в полностью
закрытое состояние с частотой в десятки, сотни килогерц или даже единицы
мегагерц. Когда транзистор открыт, ток от первичного источника энергии через
дроссель поступает в нагрузку. При этом ток /L растет и как следствие
происходит накопление энергии в дросселе. Когда транзистор закрыт, ток /L протекает
через диод VD, продолжая питать нагрузку. При этом ток катушки уменьшается
и энергия, накопленная в дросселе в предыдущем такте, расходуется на
поддержание напряжения на нагрузке V0{JT. Соотношение открытого и закрытогогсо-
стояний ключа определяет величину напряжения J'out
На Рис. 6.3 представлена блок-схема устройства управления
стабилизатором напряжения.
Рис. 6.2. Схема понижающего
импульсного стабилизатора напряжения
Рис. 6.3. Блок-схема устройства управления
262
При увеличении (уменьшении) Vom от номинального значения модулятор
уменьшает (увеличивает) значение у. В отечественной литературе этот параметр
называют также коэффициентом заполнения, а в английском обозначают
термином duty cycle (относительный рабочий интервал).
Принцип действия модулятора определяется законом модуляции. В
импульсных стабилизаторах наиболее часто применяют широтно-импульсную
или частотно-импульсную модуляции. Если регулируется время открытого
состояния, т. е. ширина импульсов, при постоянной частоте следования импуль-
сов/== 1/Т, то имеет место широтно-импульсная модуляция (ШИМ). Если
относительная длительность импульса у регулируется путем изменения частоты
следования импульсов, то такая модуляция называется частотно-импульсной
модуляцией (ЧИМ).
Устройство управления осуществляет сравнение выходного напряжения с
опорным; если выходное напряжение уменьшается по сравнению с опорным,
то модулятор устройства управления увеличивает отношение времени
открытого состояния транзистора fopEN к периоду импульсов стабилизатора Т,
называемое относительной длительностью импульса
6.2. Понижающий импульсный стабилизатор
Наиболее просто модулятор реализуется в
виде релейного регулятора на основе
компаратора с гистерезисом. Схема понижающего
стабилизатора с релейным регулятором
приведена на Рис. 6.4.
Частота импульсов в этом случае
определяется свойствами элементов, входящих в
контур регулирования, и может быть найдена
по формуле
Рис. 6.4. Стабилизатор напряжения с
релейным регулятором
где /?эп ~~ эквивалентное последовательное
сопротивление конденсатора, VG — ширина петли гистерезиса компаратора.
Таким образом, частота переключения может быть задана выбором величины
гистерезиса. Ширина петли гистерезиса определяет также и амплитуду пульсаций
выходного напряжения.
Сильная зависимость частоты коммутации ключа от входного напряжения,
ограничивает применение релейных регуляторов в промышленных
контроллерах импульсных стабилизаторов. Тем не менее некоторые фирмы выпускают
такие регуляторы. Так, например, Texas Instruments производит ИМС
контроллеров понижающих стабилизаторов TPS5210 и TPS5211, содержащие релейные
регуляторы, ширина петли гистерезиса, в которых может быть установлена
пользователем. Эти стабилизаторы предназначены для питания старших
поколений процессоров типа Pentium-Ill. Их входное напряжение стабилизировано
на уровне 12 В, поэтому частота коммутации меняется мало и устанавливается
около 200 кГц.
Драйвер представляет собой устройство, согласующее выход устройства
управления с цепью управления силовым ключом. Схемотехнику драйверов мы
рассмотрим ниже в п. 6.10.
6.2.2. Электромагнитные процессы
в понижающем ИСН
Для расчета электромагнитных процессов в импульсном стабилизаторе
выясним, как зависит от времени ток, протекающий через дроссель. При этом
вначале будем исходить из того, что емкость конденсатора бесконечно велика,
и поэтому пульсации выходного напряжения равны нулю. Кроме того, будем
полагать, что активное сопротивление обмотки дросселя пренебрежимо мало.
Согласно закону электромагнитной индукции
F.1)
В течение времени, когда коммутирующий транзистор заперт, с точностью
до прямого падения напряжения на диоде
263
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
Ток дросселя, таким образом, снижается линейно во времени
Рис. 6.5. Временные диаграммы напряжений и токов в
понижающем импульсном стабилизаторе напряжения
Согласно формулам F.2) и F.3) в установившемся режиме (см. Рис. 6.5)
Из этого соотношения следует
F.4)
F.5)
Выражение F.5) представляет собой регулировочную характеристику
понижающего преобразователя, график которой приведен на Рис. 6.6.
Формула F.5) справедлива, если ток через дроссель нигде на периоде
не обращается в нуль (так называемый режим непрерывного тока,
или, что более точно, режим непрерывного магнитного потока).
Этот режим имеет место при значительных токах нагрузки. В противном
случае (при малых токах нагрузки), когда ток через дроссель часть периода
равен нулю, выходное напряжение будет больше, чем рассчитанное по формуле
264 F.5). Поскольку относительная длительность импульсов у < 1, выходное напря-
F.2)
На интервале, когда коммутирующий транзистор открыт, с точностью до
прямого падения напряжения на транзисторе
В это время ток в дросселе возрастает также линейно во времени
График зависимости тока дросселя от времени изображен на Рис. 6.5.
F.3)
6.2. Понижающий импульсный стабилизатор
жение всегда меньше входного. Именно поэтому импульсный преобразователь
с последовательными ключом и дросселем называется понижающим.
Если ток через дроссель в течение цикла
коммутации обращается в нуль на сколь угодно малом
интервале, то говорят, что имеет место режим
прерывистого тока. В этом случае формула F.5) занижает
выходное напряжение ИСН.
Таким образом, выходное напряжение
импульсного стабилизатора прямо пропорционально
относительной длительности импульсов и мало зависит от
выходного тока, пока ток в дросселе в течение цикла
коммутации не спадает до нуля.
Ток через открытый коммутирующий транзистор
равен сумме выходного тока и тока заряда конденсатора. Отношение
1 Y
Рис. 6.6. График
регулировочной характеристики
понижающего стабилизатора
F.6)
где RL= КОит/Л)ит — сопротивление нагрузки.
При конечной величине емкости конденсатора на выходе стабилизатора
будут иметь место пульсации напряжения. Ток заряда конденсатора составляет
Периоды заряда и разряда конденсатора соответствуют на Рис. 6.5
заштрихованным областям на графике тока /L. Для величины амплитуды пульсаций
выходного напряжения справедливо следующее соотношение:
где AQ — амплитуда изменения заряда на конденсаторе в течение одного
периода коммутации.
Подставив соответствующие выражения из формул F.4) и F.5), получим
F.7)
Поскольку здесь не учитывается полное сопротивление конденсатора
на частоте импульсов источника питания, то фактически измеренная
величина напряжения пульсаций окажется заметно больше
расчетной.
265
будет тем больше, чем меньше величина индуктивности дросселя L. Величину а
следует ограничивать значением 1.2, с тем, чтобы не завышать требования к
параметрам транзистора коммутатора. Для определения величины L рассмотрим
соотношение, очевидное из Рис. 6.5,
Подставив соответствующие выражения из формул F.4), F.5), получим
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
Это обстоятельство особенно существенно для оксидных
(электролитических) конденсаторов.
В отличие от непрерывного последовательного стабилизатора напряжения
средний ток /in а\* протекающий через коммутирующий транзистор
импульсного стабилизатора, получается меньшим, чем выходной ток. Пренебрегая
потерями, можно записать следующее соотношение баланса мощности:
F.8)
Отсюда следует, что
т. е. не превышает допустимую. Масса, габариты и стоимость такой батареи
конденсаторов, однако выше, чем оксидного конденсатора на 6800 мкФ.
Интересно, что динамическое входное сопротивление стабилизированного
импульсного преобразователя отрицательно. Действительно, при неизменном
сопротивлении нагрузки у стабилизированного источника Коит и /Оит ~
постоянны. Следовательно, ^оит^оит = const. Поэтому динамическое входное
сопротивление с учетом F.8)
Если импульсный стабилизатор питается от другого стабилизированного
источника соизмеримой мощности, то указанное обстоятельство может
привести к возбуждению автоколебаний в системе. Подробнее об этом можно про-
266 читать в [6.4].
Пример 6.1. Требуется обеспечить стабилизированное напряжение 5 В при токе 5А
и амплитуде пульсаций не более 30 мВ. Нестабилизированное входное
напряжение равно 10 В. Частота коммутации ключа импульсного стабилизатора
составляет 100 кГц. Выберем а = 1.1. При этих параметрах из формулы F.6) получим
величину индуктивности дросселя 25 мкГн, а из формулы F.7) найдем, что
минимально необходимая величина емкости конденсатора составит 330 мкФ.
Оксидный (электролитический) конденсатор (например, типа К50-38) емкостью
470 мкФ на напряжение 6.3 В (что удовлетворяет условиям примера 6.1) имеет
весьма малые массу и габариты. Однако допустимый уровень пульсаций
напряжения на указанной частоте для него составляет всего 10 мВ. В то же время согласно
паспортным данным полное сопротивление такого конденсатора на частоте
100 кГц z = 0.7 Ом (см. примечание 6.2). Поэтому, как показывает расчет,
действительная амплитуда пульсаций напряжения на оксидном конденсаторе превышает
200 мВ. Необходимая емкость оксидного конденсатора в таком случае составит не
менее 6800 мкФ.
Возьмем керамический конденсатор (например, батарею из 22 конденсаторов
типа К10-47 на 15 мкФ, 16В). Реактивная мощность каждого из конденсаторов
батареи, по паспортным данным, не должна превышать 0.025 вар. В условиях данного
примера реактивная мощность на каждом конденсаторе:
6.2. Понижающий импульсный стабилизатор
Ток, потребляемый понижающим стабилизатором от первичного источника
постоянного тока, имеет выраженный импульсный характер с большими
скоростями нарастания и спада. Это может заметно влиять на работу других
потребителей, питаемых от этого же источника. Поэтому на входе импульсного
стабилизатора обычно включают Гобразный LC-фильтр.
Примером понижающего импульсного стабилизатора с ШИМ может
служить ИМС МАХ758А фирмы Maxim, преобразующая нестабильное
напряжение постоянного тока 6...16 В в постоянное напряжение 5 В при токе нагрузки
до 750 мА. Кристалл размером 3.3 х 3 мм в 8-выводном корпусе содержит не
только устройство управления, но и коммутирующий МОП-транзистор,
имеющий типичное сопротивление открытого канала 0.5 Ом. Диод, дроссель и
конденсатор — внешние. КПД устройства при токе нагрузки в ЮОмА составляет
91%. Ток, потребляемый на холостом ходу, не более 1.7 мА. Способ
регулирования — ШИМ на частоте около 160 кГц. Устройство управления ограничивает
выходной ток и контролирует напряжение первичного источника тока.
Более мощным стабилизатором является микросхема МАХ787, которая
преобразует входное постоянное напряжение от 6 до 60 В в стабилизированное
напряжение 5 В при токе нагрузки до 5 А. Способ регулирования — ШИМ на
частоте 100 кГц.
Для построения стабилизаторов напряжения еще больших мощностей
выпускаются микросхемы устройств управления (контроллеров),
предназначенные для управления мошными МОП-ключами. Например, ИМС МАХ796
управляет импульсным стабилизатором на напряжение 5 В при токе нагрузки
до 10 А. Способ регулирования — ШИМ на частоте 150 или 300 кГц.
6.2.3. Понижающие ИСН с синхронными
выпрямителями
В последние годы имеет место устойчивая тенденция к снижению
напряжения питания микросхем. Одновременно появляются модели ИМС,
потребляющие ток все большей силы. Например, процессор фирмы AMD Athlon
потребляет ток до 40 А при напряжении 1.6 В. В этом случае традиционное
решение — последовательный ключ на МОП-транзисторе и диод Шоттки
параллельно выходу — оказывается неэффективным, так как, хотя прямое
напряжение на диоде Шоттки составляет примерно 0.4 В, что значительно
ниже, чем на обычном кремниевом диоде, все же мощность потерь в нем
достигнет 10 Вт, что потребует принудительного обдува либо радиатора
больших размеров.
Лучшие результаты в импульсных стабилизаторах низкого напряжения
дает применение синхронных выпрямителей, в которых диод заменяется или
шунтируется параллельным ключом на МОП-транзисторе (Рис. 6.7).
Контроллер управляет транзисторами VTX и VT2 противофазно, т. е.
если первый транзистор открыт, то второй закрыт и наоборот. Когда
открыт VTb нагрузка преобразователя через дроссель подключена к входу
схемы и наряду с питанием происходит накопление энергии в дросселе.
Когда открыт VT2, дроссель включен параллельно нагрузке и отдает ей
часть своей энергии. 267
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
Потери мощности в МОП-транзисторе
пропорциональны сопротивлению
открытого канала. Выбрав транзистор с достаточно
малым сопротивлением открытого канала
или включив параллельно несколько
МОП-транзисторов, можно снизить потери
мощности до весьма малых величин.
Промышленность выпускает ряд ИМС
преобразователей с синхронными выпрямителями,
как с внутренними МОП-ключами (МАХ887
на ток до 0.6А, МАХ1623 на ток до ЗА), так и для управления внешними
МОП-транзисторами (МАХ798, TPS2830, двухканальный LTC1702 и др.). КПД
некоторых из этих преобразователей при питании нагрузки напряжением 1.6 В
достигает 96%. Фирма International rectifier выпускает МОП-транзисторы,
оптимизированные для применения в схемах низковольтных синхронных
выпрямителей. Например, транзистор IRF7456 на ток 13 А и допустимое напряжение
сток—исток 20 В в открытом состоянии имеет сопротивление канала не более
6.5 мОм, располагается в миниатюрном корпусе SO-8 и не требует радиатора
для охлаждения. Сборка IRF7901D1, предназначенная для построения
синхронных выпрямителей на ток до 5 А, содержит два МОП-транзистора,
включенных последовательно, причем транзистор, предназначенный для включения
параллельно выходу, зашунтирован диодом Шоттки. Сопротивление открытого
канала этого транзистора не превышает 0.023 Ом. Сборка также выполнена в
корпусе SO-8. Применение синхронного выпрямителя позволяет наряду с
повышением КПД устранить также режим прерывистого тока даже при малых
нагрузках, что улучшает регулировочные свойства преобразователей. Это
достигается за счет того, что при малых токах дросселя ток, достигнув нуля, не
прекращается, как в схеме с диодом, а меняет направление. При этом он
протекает по цепи сток—исток транзистора VT2 (см. Рис. 6.7).
Для питания высокопроизводительных процессоров типа Pentium-III и
аналогичных ему по классу некоторые фирмы выпускают ИСН с цифровым
управлением. Например, National Semiconductor производит семейство понижающих
стабилизаторов LM2636/7/8 с синхронными выпрямителями, выходное
напряжение которых устанавливается с помощью 5-разрядного ЦАП. Стабилизатор
управляется от процессора, который в зависимости от своей загрузки может
изменять напряжение питания вычислительного ядра от 1.3 до 3.5 В.
6.2.4. Многофазные ИСН
Для увеличения допустимого выходного тока понижающего импульсного
преобразователя транзисторы, служащие силовыми ключами, можно соединять
параллельно. Однако при таких соединениях возможности каждого из
элементов будут использоваться в недостаточной степени, поскольку точного деления
тока через них добиться практически нельзя. Лучшие результаты дает
применение многофазных преобразователей. Многофазный преобразователь
представляет собой группу одинаковых преобразователей с широтно-импульсной модуля-
268 цией, параллельно подключенных к нагрузке, причем силовые ключи этих
Рис. 6.7. Понижающий
преобразователь с синхронным
выпрямителем
Контроллер
6.2. Понижающий импульсный стабилизатор
преобразователей переключаются с взаимным временным сдвигом T/N, где
Т— период следования импульсов, N — число преобразователей. Это
обеспечивает снижение уровня и повышение частоты пульсаций напряжения на
нагрузке до величины N/T. Тем самым облегчается сглаживание пульсаций.
Упрощенная схема многофазного понижающего преобразователя и временные
диаграммы его работы приведены на Рис. 6.8.
Рис. 6.8. Многофазный понижающий преобразователь:
а — упрощенная схема, б — временные диаграммы работы @ и у — выраженные
в угловой мере длительности открытого состояния тактовых ключей и
межтактового сдвига соответственно)
Как видно из временных диаграмм работы преобразователя (Рис. 6.86),
несмотря на большие пульсации тока через каждый из дросселей в отдельности,
пульсация общего тока невелика. Более того, при прерывистом характере тока в
каждой из ячеек преобразователя общий ток течет непрерывно. Это упрощает
управление понижающим преобразователем и позволяет уменьшить
индуктивность дросселей.
Амплитуда пульсаций выходного тока многофазного преобразователя
зависит от числа фаз, входного напряжения, индуктивности дросселей, частоты
следования импульсов и от относительной длительности импульсов у. На
Рис. 6.9 приведены графики зависимостей нормализованных пульсаций тока
(двойная амплитуда) A/norm ot Y [6.1]
где /м — амплитуда пульсаций выходного тока,/— частота, Коит — среднее
значение выходного напряжения.
При построении многофазных преобразователей постоянного напряжения
разработчику приходится решать вопрос об установке на их входе
дополнительных конденсаторов, которые исключают влияние на характеристики
проектируемых преобразователей индуктивности питающей сети. Входные
конденсаторы работают в весьма тяжелых электрических режимах, так как через них
протекает значительный переменный ток, который будет уменьшаться по мере
увеличения числа используемых базовых ячеек (фаз). Выбор установленной
мощности входных конденсаторов можно производить по относительному зна-
269
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
чению протекающего через них тока /с, которое может быть вычислено с
помощью формулы [6.2]
F.9)
где к — максимальное число силовых ключей, открытых в течение одного
периода пульсаций TR, /L — среднее значение тока через нагрузку. Расчетные
графики, полученные с помощью формулы F.9), приведены на Рис. 6.10.
Рис. 6.9. Зависимости амплитуды
пульсаций выходного тока
многофазного понижающего
преобразователя от относительной
длительности импульсов
Рис. 6.10. Зависимости
относительного значения пульсаций входного
тока многофазного понижающего
преобразователя от относительной
длительности импульсов
В Табл. 6.1 приведены сравнительные параметры 100-амперного
понижающего преобразователя постоянного напряжения 12 В в 3.3 В при различном
числе фаз. Частота коммутации/= 200 кГц, индуктивность дросселей //=1.3
мкГн [6.3].
Таблица 6.1. Сравнительные параметры понижающего преобразователя постоянного
напряжения
Число фаз
Пульсации входного тока [А] (действующее значение)
Пульсации выходного тока [AJ (от пика до пика)
1
46.1
57.1
2
25.1
19.0
3
14.6
6.3
6
8.5
2.1
270
Как видно, применение многофазных преобразователей дает значительный
выигрыш в уровне пульсаций тока.
Микросхемы контроллеров для построения многофазных импульсных
преобразователей производят многие фирмы. Это Linear technology, National
Semiconductor, Semtech и др. Так, например, Linear technology выпускает ИМС
двухфазного контроллера LT1929, способного управлять двумя синхронными
выпрямителями, работающими в противофазе на частоте до 300 кГц. В
микросхеме предусмотрен мягкий запуск, перевод в дежурный режим обоих каналов
при коротком замыкании. Фирма Semtech изготавливает ИМС двух-, трех-, че-
тырехфазного контроллера SC1144 со встроенным 5-разрядным цифро-анало-
6.3. Повышающий импульсный стабилизатор
говым преобразователем, позволяющим программно регулировать число фаз и
выходное напряжение в пределах 1.3...3.5 В с шагом 50 мВ. National
Semiconductor предлагает четырехфазный контроллер LM2639 с контролем
входного тока. Каждый из выходов этой ИМС рассчитан на управление одним
ключом преобразователями с нулевым диодом, но при использовании
микросхем драйверов SC1405 возможно построение 4-фазного преобразователя на
базе синхронных выпрямителей с низким выходным напряжением. Большой
интерес представляет ИМС контроллера двухфазного преобразователя LT1629.
Этот контроллер содержит цепи синхронизации, позволяющие наращивать
число фаз преобразователя вплоть до 12. По данным фирмы-изготовителя
12-фазный преобразователь под управлением шести синхронизированных
ИМС LT1629 способен отдать в нагрузку при 3.3 В выходного и 12 В входного
напряжения до 200 А с КПД = 90%.
6.3. Повышающий импульсный
стабилизатор
В рассмотренной выше на Рис. 6.2 схеме стабилизатора выходное
напряжение всегда ниже входного. Изменив расположение элементов в схеме, можно,
используя свойство самоиндукции, получить выходное напряжение большее,
чем входное (Рис. 6.11).
Когда транзистор VTоткрыт, к дросселю L приложено входное напряжение
FIN. В этом случае согласно закону электромагнитной индукции
К диоду VD будет приложено запирающее напряжение, и ток нагрузки будет
поддерживаться за счет разряда конденсатора С. После запирания транзистора
потенциал на его коллекторе поднимается до величины, превышающей
выходное напряжение, за счет ЭДС самоиндукции дросселя. Диод откроется. Ток в
дросселе при этом будет убывать, и его энергия, запасенная в первом такте,
вместе с энергией, поступающей от первичного источника, будет питать
нагрузку и заряжать конденсатор. Скорость изменения тока на этом такте опреде-
271
Рис. 6.11. Схема повышающего
импульсного стабилизатора
Рис. 6.12. Временная диаграмма
напряжений и токов в повышающем
импульсном стабилизаторе напряжения
и ток в дросселе будет расти, увеличивая запасаемую в нем энергию (Рис. 6.12).
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
272
ляется соотношением F.3). Приращение тока в первом такте равно убыли тока
во втором:
F.11)
F.12)
Откуда следует
Выражение F.12) представляет собой регулировочную характеристику
повышающего преобразователя, график которой приведен на Рис. 6.13.
Формула F.12) справедлива, если только в течение периода
коммутации ток дросселя нигде не достигает нуля. В противном случае
выходное напряжение будет больше, чем величина, рассчитанная по этой
формуле. При работе нерегулируемого импульсного преобразователя
данного типа на холостом ходу его напряжение может возрасти до
опасных значений!
Примером ИМС повышающего
импульсного стабилизатора может служить
микросхема МАХ856 фирмы Maxim, преобразующая
постоянное нестабилизированное
напряжение от 0.8 до 6 В в постоянное напряжение 5 В
при токе нагрузки до 100 мА. Кристалл
размером 2.1 х 1.5 мм в восьмивыводном корпусе
содержит устройство управления и
коммутирующий МОП-транзистор. Диод, дроссель и
конденсатор — внешние. КПД устройства при
токе нагрузки в 40 мА достигает 85%. Ток,
потребляемый самой микросхемой, составляет
не более 25мкА. Способ регулирования —
ЧИМ, при частоте до 500 кГц. Устройство
управления ограничивает входной ток
величиной 0.5 А и контролирует напряжение
первичного источника тока.
Для повышения КПД при преобразовании
низких напряжений в этой схеме вместо диода
также можно использовать синхронный
выпрямитель на МОП-транзисторе. На Рис. 6.14
приведена схема повышающего
преобразователя с синхронным выпрямителем.
МОП-транзисторы — я-канальный VTX и
^-канальный VT2 — переключаются в проти-
вофазе. Прямое падение напряжения на
открытом транзисторе VT2 значительно меньше,
чем на диоде, даже если это диод Шоттки.
Другое достоинство этой схемы — ток через дроссель не прерывается. В фазе,
когда транзистор VT2 открыт, ток дросселя, снизившись до нуля, затем меняет
Рис. 6.13. График регулировочной
характеристики повышающего
импульсного стабилизатора
напряжения
6.4. Инвертирующий импульсный стабилизатор
свое направление и начинает течь от нагрузки к источнику. Часть энергии от
нагрузки возвращается источнику, т. е. имеет место реактивный обмен или
рекуперация энергии. Формула F.12) в этом случае справедлива для любого тока
нагрузки, и перенапряжения на холостом ходу не происходит.
Реактивный обмен не всегда желателен, поэтому некоторые ИМС
контроллеров для управления импульсными стабилизаторами напряжения содержат
цепи контроля, которые при снижении тока дросселя до установленного
порогового уровня обеспечивают запирание транзистора VT2.
Примером повышающего преобразователя с синхронным выпрямителем
может служить микросхема МАХ 1703, которая содержит на кристалле помимо
устройства управления и коммутирующего л-канального МОП-транзистора
также и синхронный выпрямитель на/^-канальном МОП-транзисторе,
выполняющий функцию диода. Поэтому внешние компоненты — только дроссель и
конденсатор. Эта ИМС работает при входном напряжении 0.7...5.5 В и
обеспечивает напряжение на нагрузке 5 В ± 4% при токе до 1.5 А.
6.4. Инвертирующий импульсный
стабилизатор
Схемы понижающего и повышающего преобразователей, рассмотренные
выше в пп. 6.2 и 6.3, считаются базовыми [6.5]. Они являются тем
фундаментом, на котором можно построить более сложные схемы преобразователей
постоянного напряжения. Простейшая составная схема, представляющая собой
комбинацию двух указанных преобразователей, представлена на Рис. 6.15.
Здесь регулирующий транзистор включен
последовательно с первичным источником, как
в схеме понижающего преобразователя, а диод,
через который протекает ток при запертом
транзисторе, — последовательно с нагрузкой,
как у повышающего преобразователя.
Когда транзистор VT открыт, диод VD
закрыт, и к дросселю L приложено входное
напряжение KjN. В этом случае согласно закону
электромагнитной индукции в соответствии с
формулой F.10) ток в дросселе будет расти, увеличивая в нем энергию.
Нагрузка питается за счет разряда конденсатора С. Во втором такте, после запирания
транзистора, ток продолжает течь через дроссель и через открывшийся диод
заряжает конденсатор в направлении, противоположном полярности входного
напряжения. Скорость уменьшения тока определяется в этом случае формулой
F.2). Приращение тока в первом такте равно убыли тока во втором:
Рис. 6.15. Схема инвертирующего
импульсного стабилизатора
напряжения
Откуда следует
F.13)
273
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
Выражение F.5) представляет собой регулировочную характеристику
инвертирующего преобразователя, график которой приведен на Рис. 6.16.
Формула F.13) справедлива только для режима непрерывного тока
дросселя.
Таким образом, на выходе инвертирующего импульсного стабилизатора
напряжение не только имеет полярность, обратную полярности входного
напряжения, но в зависимости от относительной длительности импульса может быть
как больше, так и меньше входного. Последнее обстоятельство заметно
расширяет область применения инвертирующего преобразователя.
Примером ИМС инвертирующего
импульсного стабилизатора может служить
микросхема МАХ764 фирмы Maxim,
преобразующая постоянное нестабильное
напряжение 3... 16 В в постоянное
напряжение —5 В при токе нагрузки до 250 мА.
Кристалл размером 3.7 х 2 мм в восьмивывод-
ном корпусе содержит устройство
управления и коммутирующий
МОП-транзистор. Диод, дроссель и конденсатор —
внешние. КПД устройства при токе
нагрузки в 200 мА достигает 80%. Ток,
потребляемый самой микросхемой, составляет не
более 90 мкА. Способ регулирования — ЧИМ,
при частоте импульсов до 300 кГц.
Устройство управления ограничивает входной ток
величиной 0.75 А.
Фирма National Semiconductor производит ИМС LM2524D, которая может
быть включена по схеме повышающего, понижающего или инвертирующего
стабилизаторов напряжения. Максимально допустимый ток силовых ключей
невелик (80 мА), поэтому для умощнения следует подключить внешние
транзисторы. Упрощенная схема ИМС представлена на Рис. 6.17.
Рис. 6.16. График регулировочной
характеристики инвертирующего
преобразователя
274
Рис. 6.17. Упрощенная схема ИМС LM2524D
6.5. Составные схемы ИСН
Микросхема содержит усилитель ошибки У, источник опорного
напряжения ИОН, управляющую логику, силовые ключи VTX и VT2, а также
Широтно-импульсный модулятор, включающий генератор пилообразного
напряжения, компаратор КН и ЛУ-триггер Тг^
Триггер Тг2 обеспечивает поочередное открывание ключей, причем
относительная длительность открытого состояния каждого ключа у < 0.5.
Это позволяет использовать эту ИМС для построения как двухтактных
(инвертирующих), так и однотактных схем. В последнем случае
транзисторы VT\ и VT2 включаются параллельно. При этом общая относительная
длительность открытого состояния такого составного ключа может
приближаться к единице.
6.5. Составные схемы ИСН
6.5.1. Схема Кука
Исходные схемы понижающего,
повышающего и инвертирующего
преобразователей, представленные
соответственно на Рис. 6.2, Рис. 6.11 и
Рис. 6.15, обычно дополняют
входными и выходными фильтрами,
служащими для уменьшения
электромагнитных помех, обусловленных
коммутацией силовых ключей. Схемы
преобразователей, оснащенных поме-
хозащищающими фильтрами,
приведены на Рис. 6.18.
Как видно, инвертирующему
преобразователю требуется на одну
индуктивную катушку и на один
конденсатор больше, чем
преобразователям других типов.
На Рис. 6.19 представлена
лишенная этого недостатка схема
составного инвертирующего
преобразователя, известная как схема
Кука [6.6].
Эта схема представляет собой, по
существу, каскадное соединение
повышающего и понижающего
преобразователей.
Преобразователь Кука работает
следующим образом (Рис. 6.20)
Рис. 6.18. Импульсные
преобразователи с входными и
выходными фильтрами:
а — понижающий, б — повышающий,
в — инвертирующий
Рис. 6.19. Схема преобразователя
Кука
275
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
276
В первой части коммутационного
цикла (в первом такте) длительностью уТ
ключ S замкнут (Рис. 6.20а). Индуктивная
катушка Lx включена параллельно
первичному источнику и запасает энергию. Ток в
катушке линейно нарастает. Конденсатор
Сь играющий роль промежуточного
накопителя энергии, через замкнутый ключ S
включен параллельно входу фильтра L2C2
и отдает энергию в нагрузку. Диод VD
смещен в обратном направлении и не
проводит ток. Во второй части цикла (во втором
такте) длительностью A — у)Т ключ
разомкнут, а диод открыт (Рис. 6.206).
Конденсатор С\ заряжается от первичного
источника и катушки L\. Энергия в нагрузку поступает из запасенной в
фильтре L2C2.
При выводе регулировочной характеристики этой схемы будем полагать,
что напряжение на конденсаторе VC] не меняется в течение всего цикла
коммутации (реально оно меняется менее чем на 1%). Пренебрегая сопротивлением
обмотки катушки и падениями напряжений на замкнутом ключе и открытом
диоде, запишем соотношение, связывающее приращение тока на первом такте
A/L1, с относительным временем открытого состояния ключа у ((оно следует из
уравнения F.10))
б)
Рис. 6.20. Работа ключей в
преобразователе Кука в цикле
коммутации:
а — в первом такте, б — во втором
такте
На втором такте согласно второму закону Кирхгофа
F.14)
F.15)
С другой стороны, вход выходного фильтра L2C2 в первом такте подключен
к конденсатору С\, а во втором такте закорочен через открытый диод. Поэтому
среднее за период импульсов выходное напряжение схемы
F.16)
Совместное решение уравнений F.14)—F.16), с учетом того, что
А/и1=А/и2,дает
F.17)
т. е. регулировочные характеристики схемы Кука и инвертирующего
преобразователя имеют одинаковый вид.
Фирма Linear Technology выпускает микросхему LT1611, которая может
быть использована для построения преобразователя Кука. Схема ее включения
приведена на Рис. 6.21.
6.5. Составные схемы ИСН
Рис. 6.21. Схема включения ИМС LT1611 в составе
преобразователя Кука
ИМС допускает частоту переключения до 1.4 МГц. Встроенный силовой
МОП-ключ допускает входное напряжение до 36 В. Его сопротивление в
открытом состоянии составляет всего 0.1 Ом.
6.5.2. Несимметричный преобразователь
первичной индуктивности
Рис. 6.22. Схема несимметричного
преобразователя первичной
индуктивности
(SEPIC-преобразователь)
На Рис. 6.22 представлена схема
каскадного соединения повышающего и
инвертирующего преобразователей, которую в
американской литературе называют преобразователем
типа SEPIC — Single Ended Primary Inductance
Converter (несимметричный преобразователь
первичной индуктивности).
Данная схема также может как повышать,
так и понижать преобразуемое напряжение, но
в отличие от схемы Кука здесь полярности
входного и выходного напряжений совпадают.
Принцип действия SEPIC-преобразователя во многом подобен
работе схемы Кука (Рис. 6.23).
В первом такте, когда ключ S замкнут, а
диод VD заперт (Рис. 6.23а) индуктивная
катушка Lx подключена параллельно входному
источнику и запасает энергию. Катушка L2
также накапливает энергию, получая ее от
конденсатора С]. Ток в нагрузке
поддерживается за счет разряда конденсатора С2. Во
втором такте, когда ключ S заперт, а диод VD
открыт (Рис. 6.236), катушка Lx включена
последовательно с входным источником и
конденсатором Сь а катушка L2 подключена
параллельно нагрузке. Происходит заряд
конденсатора С\ током /L1 и питание
нагрузки с одновременным подзарядом
конденсатора С2 токами обеих катушек.
Рис. 6.23. Работа ключей в
SEPIC-преобразователе в цикле
коммутации:
а — в первом такте,
б — во втором такте
277
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
Совместное решение уравнений F.18) и F.19) с учетом того, что
F.18)
Примем те же допущения, что и в п. 6.5.1. Тогда справедливы уравнения,
связывающие приращения токов в первом такте Д/що и A/l2(i> с
относительным временем открытого состояния ключа у (по аналогии с F.14))
Во втором такте
F.19)
Интересным свойством этой схемы является то, что ЭДС самоиндукции
обеих катушек(?и, EL2), с точностью до пульсаций выходного напряжения
всегда одинаковы. Действительно, поделив правое уравнение F.18) на правое
уравнение F.19), с учетом A/L2(i) = — A/L2B) получим
Из сопоставления F.20) и F.21) следует, что
F.21)
F.22)
С учетом F.22) найдем из уравнений F.18), что в первом такте
Из уравнений F.19) следует, что во втором такте
Равенство ЭДС позволяет располагать обе катушки на одном магнитопро-
воде. При этом, естественно, число витков катушек должно быть одинаково, а
направления намагничивающих сил согласованы.
Другое ценное свойство этой схемы (впрочем, так же, как и схемы Кука)
заключается в том, что входная цепь отделена по постоянному току от нагрузки
конденсатором С{. Это защищает наг^зку от перенапряжения в случае выхода
из строя силового ключа или схемы управления. Действительно, при пробое
силового ключа понижающего преобразователя (Рис. 6.2) или фиксации его
ключа в открытом состоянии в результате выхода из строя контроллера к нагрузке
оказывается постоянно приложенным входное напряжение, обычно
значительно большее, чем номинальное выходное. В схеме SEPIC-преобразователя этого
не случится.
Промышленность производит микросхемы, которые могут быть
использованы в качестве контроллеров для управления ключом SEPIC-преобразователя.
Это LT1619, МАХ618 и др. На Рис. 6.24 представлена схема преобразователя на
ИМС LM3478. Численные значения параметров даны для частоты
преобразования 1 МГц.
278
6.5. Составные схемы ИСН
Рис. 6.24. Схема SEPIC-преобразователя на ИМС LM3478
В Табл. 6.2. приведены основные параметры некоторых моделей
однокристальных ИСН.
Таблица 6.2. Микросхемы простейших импульсных источников питания
Модель
AD1110
AD3000
1155ЕУ2
1156ЕУ5
МАХ 1703
МАХ1672
LMx578A
LM2650
ML4890
LT1576
VC2577
TPS6734
CS-5171
Особенности
Биполярный, ШИМ
Биполярный, ЧИМ
Мощный,
синхронизируемый
Ограничение тока
Синхронный
выпрямляющий,
ШИМ
Повышающий,
с линейным
стабилизатором
Универсальный
импульсный
стабилизатор
Понижающий ИСН
с синхронным
выпрямлением
Синхронный
выпрямляющий,
ШИМ, линейный
стабилизатор
Дополнительная ОС
потоку
Дополнительная ОС
потоку
Источник питания для
флэш-памяти
Дополнительная ОС
по току,
положительное и отрицательное
выходное напряжение
ПН
+
+
+
+
-
+
+
+
-
+
-
-
+
пв
+
+
-
+
+
+
+
-
+
-
+
+
+
пи
-
+
-
+
-
+
+
-
-
-
+
-
-
V,N [В]
1...30
2...30
9...46
3...40
0.7...5.5
1.8...11
2...40
4.5...18
1...6
6...25
3...40
5...12
2.4...30
1оит
[А]
0.04
0.18
4
1.5
1.5
0.3
0.75
3
0.035
1.5
3
0.22
1.5
V0UT[B]
3.3/5
3.3/5/12/рег.
5.1...40
0...40
5
per
per
1.5...16
3/3.3/5
per
per
12
per
Isup
[mA]
0.3
0.5
85
4
0.14
0.085
14
7
0.08
1.3
10
1.2
-
fs [кГц]
70
400
200
100
400
60
100
300
—
200
52
170
260
кпд
[%]
80
-
80
-
95
90
-
95
85
-
80
86
-
279
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
6.6. Инверторные схемы
280
6.6.1. Общие сведения
Рассмотренные в разделах 6.2...6.4 однокаскадные (несоставные)
преобразователи постоянного напряжения имеют ряд ограничений при практическом
использовании. В частности, наличие в них гальванической связи между
входом и выходом не позволяет применять такие преобразователи в тех случаях,
когда такая связь не допускается. Другим ограничением является то, что при
заданном диапазоне изменения входного напряжения питания возможный
диапазон изменения выходного напряжения имеет вполне определенные пределы.
То есть нецелесообразно пытаться получить с помощью рассмотренных выше
схем напряжения в сотни вольт из напряжений в единицы вольт, и наоборот.
Указанные недостатки преобразователей постоянного напряжения можно
устранить, если дополнить их неким устройством, играющим роль
трансформатора постоянного напряжения vTFIH).
Идеальный ТПН должен обеспечивать передачу постоянного напряжения с
постоянным коэффициентом трансформации, высокую степень изоляции
между первичной и вторичной цепями, передачу энергии в любом из двух
направлений и, наконец, возможность построения системы преобразования энергии с
несколькими входами или выходами. Очевидно, что все перечисленные
свойства идеального ТПН в реальном ТПН реализованы быть не могут, но этого и не
требуется для практических целей.
На Рис, 6.25 представлена
функциональная схема
наиболее широко применяемого
ТПН.
Функции отдельных
звеньев ТПН вполне очевидны.
Инвертор преобразует входное
постоянное напряжение в переменное напряжение прямоугольной формы
высокой частоты. Трансформатор Тр обеспечивает повышение или понижение
переменного напряжения и гальваническое разделение первичной и вторичной
цепей. Выпрямитель вновь преобразует переменное напряжение в постоянное.
Отметим, во-первых, что при необходимости инвертор может быть
использован для регулирования средневыпрямленного значения выходного
напряжения, а во-вторых, что при использовании в данном ТПН неуправляемого
выпрямителя на диодах обратная передача энергии от вторичной цепи к
первичной невозможна. Как правило, между выпрямителем и нагрузкой
включается LC-фильтр, который обеспечивает не только сглаживание пульсаций, но
и ограничение скорости нарастания тока через силовые ключи инвертора.
Самым сложным узлом ТПН, во многом определяющим его свойства,
является инвертор, изучением которого мы сейчас и займемся.
Инверторами называют преобразователи постоянного тока в переменный.
Вообще семейство инверторов довольно обширно и включает устройства
различного назначения, рассчитанные на передачу мощности от долей ватта до
многих мегаватт (точнее, мегавольтампер). Далее будет рассмотрено несколько
Рис. 6.25. Функциональная схема ТПН
6.6. Инверторные схемы
простых схем высокочастотных инверторов малой мощности на основе
различного типа транзисторов, наиболее широко применяемых в составе источников
питания для электронной аппаратуры.
6.6.2. Нерегулируемые инверторы
Нерегулируемый инвертор представляет собой наиболее простой тип
инвертора. Это устройство преобразует постоянное напряжение в колебания
прямоугольной формы. Чаще используются так называемые двухтактные
инверторы, формирующие симметричные колебания, в идеале с нулевым средним
значением. Эти инверторы состоят из двух симметричных частей. Их
достоинством является наиболее полное использование выходного трансформатора за
счет симметричного намагничивания его сердечника. В преобразователях
малой мощности находят применение также Однотактные инверторы. Они проще
устроены, но эффективность использования выходного трансформатора в них
значительно ниже.
Нерегулируемые инверторы подразделяются по способу возбуждения
колебаний iia две группы: инверторы с независимым (внешним) возбуждением и
инверторы с самовозбуждением. Инверторы с самовозбуждением (генераторы
Роера и Енсена) прежде довольно широко применялись для построения
импульсных источников питания мощностью до десятков ватт. Однако для этих
схем характерны сложности с обеспечением устойчивости самовозбуждения и
низкий КПД. Их достоинство — схемотехническая простота — с развитием
интегральной схемотехники потеряло свое з*учение для разработчиков, поэтому в
настоящее время в новых разработках применяются почти исключительно
инверторы с внешним возбуждением.
Прежде чем начать изучение ИМС контроллеров нерегулируемых
двухтактных инверторов, рассмотрим схемы их силовых частей. На Рис. 6.26 приведены
основные схемы силовых частей инверторов.
Рис. 6.26. Основные схемы силовых частей инверторов:
а — нулевая, б— полумостовая, в — мостовая
Наименьшее количество элементов содержит так называемая нулевая схема,
в которой один из выводов входного источника питания соединен с отводом от
средней — нулевой — точки первичной обмотки трансформатора (Рис. 6.26а).
Ключи S\ и S2 поочередно замыкаются и размыкаются. При этом к
соответствующим первичным полуобмоткам трансформатора прикладывается входное
напряжение. Намагничивающие силы полуобмоток направлены в магнитопро-
281
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
воде в противоположные стороны, поэтому постоянное подмагничивание в
идеале отсутствует. Трансформатор объединяет полуволны одного цикла
коммутации и повышает или понижает их амплитуду в соответствии со своим
коэффициентом трансформации. Недостатком этой схемы является повышенное
напряжение на закрытом ключе. Действительно, за счет включения
полуобмоток с отводом от средней точки к закрытому ключу прикладывается
напряжение, равное 2FIN. Поэтому такую схему, как правило, применяют для
преобразования относительно низких напряжений. Другой недостаток — менее
эффективное, чем у двух других схем, использование трансформатора.
Полумостовая схема (Рис. 6.266) широко применяетсядля построения сетевых
источников питания небольшой мощности (до сотен ватт). Входное напряжение
делится пополам с помощью конденсаторов. Ключи также переключаются пооче -
редно. При замыкании одного из ключей к первичной обмотке трансформатора
прикладывается напряжение, равное K1N/2, поэтому для передачи той же
мощности, что и в предыдущей схеме, через ключи должен протекать вдвое больший ток.
Напряжение на закрытых ключах не превышает входное напряжение.
Мостовая схема (Рис. 6.26в) применяется для источников мощностью от
сотен ватт и выше. Ключи циклически меняют состояние: Sb S4 — замкнуты,
S2, S$ — разомкнуты, и наоборот. К первичной обмотке трансформатора всегда
прикладывается полное входное напряжение. Напряжение на закрытых ключах
также не превышает входное напряжение.
Примером ИМС нерегулируемого нулевого инвертора может служить
МАХ845. Эта микросхема содержит задающий генератор, счетный триггер и два
я-канальных МОП-транзистора (Рис. 6.27).
282
Рис. 6.27. Схема включения ИМС нерегулируемого инвертора МАХ845
Генератор в зависимости от состояния входа выбора частоты FS
вырабатывает счетные импульсы частотой 400 или 700 кГц.
Счетный триггер ТТделит эту частоту пополам и распределяет импульсы по
затворам МОП-транзисторов. Допустимое напряжение сток—исток
транзисторов всего 12 В, поэтому номинальное напряжение питания составляет 5 В.
Выходная мощность микросхемы не более 0.75 Вт. Ток собственного потребления
не превышает 5 мА. Микросхема изготавливается в миниатюрных корпусах
SO-8 и jiMAX размером 3x5 мм.
Другой пример — отечественная ИМС контроллера электронных пускоре-
гулирующих аппаратов компактных люминесцентных ламп 1211ЕУ1 [6.7]. По-
6.6. Инверторные схемы
мимо своего основного назначения, микросхема может использоваться в
качестве нестабилизированного источника постоянного напряжения,
гальванически не связанного с источником входного напряжения.
Эта ИМС выполнена по КМОП-технологии и содержит высокочастотный
генератор тактовых импульсов, управляемый делитель частоты, формирователь
импульсов, необходимых для управления, два выходных драйвера и
вспомогательную логику (Рис. 6.28).
Рис. 6.28. ИМС нерегулируемого инвертора 1211ЕУ1
Частота генератора устанавливается выбором параметров цепи /?sCs-
Делитель частоты в зависимости от уровня управляющего сигнала делит частоту
сигнала генератора на 14 или 18, что необходимо для управления режимом при
пуске люминесцентной лампы. Формирователь вырабатывает импульсы,
управляющие выходными драйверами, причем в отличие от схемы МАХ845
здесь формируется нулевая пауза («мертвое» время) между началом запирания
предыдущего ключа и отпиранием следующего. Это позволяет устранить
сквозные токи и уменьшить динамические потери.
Выходные драйверы представляют собой симметричные комплементарные
каскады усиления мощности. Такое построение позволяет быстро зарядить или
разрядить входные емкости МОП-ключей, что необходимо для уменьшения
динамических потерь. Это же дает возможность подключать первичную
обмотку трансформатора непосредственно к выходам драйверов (Рис. 6.29).
Рис. 6.29. Схема включения ИМС 1211ЕУ1
283
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
При этом выходные транзисторы ИМС образуют мостовую схему.
Преобразователь без внешних транзисторов может питать нагрузку мощностью до
1.5 Вт. Собственный ток потребления (без учета тока нагрузки) зависит от
частоты. Например, при/5= 10 кГц он составляет всего 30 мкА, а при/§= 1 МГц —
2.5 мА.
6.6.3. Регулируемые инверторы
Регулирование выходного напряжения инверторов, применяемых в схемах
преобразователей постоянного напряжения, осуществляется в основном путем
модуляции ширины выходных импульсов при постоянной частоте коммутации.
Схемы управления регулируемых преобразователей значительно сложнее, чем
нерегулируемых, поэтому именно такие схемы в первую очередь начали
выпускаться в интегральном исполнении.
Пионером в этой области микроэлектроники выступила фирма Silicon
General (США), выпустившая в 1976 г. семейство SG1524/2524/3524
(отечественный аналог — 1114ЕУ1), разработанное Р. Маммансом. Двухтактный
ШИМ-контроллер SG1524 помимо генератора тактовых импульсов, счетного
триггера и выходных драйверов, присущих ИМС нерегулируемых инверторов,
содержит также источник опорного напряжения (ИОН), компаратор,
усилитель ошибки и схему ограничения тока. Таким образом, эта ИМС представляет
собой законченное устройство для управления ключами регулируемого
инвертора.
Менее чем через год после начала производства ИМС SG1524 фирма Texas
Instruments начала продавать микросхемы семейства TL493/494/495
(отечественные аналоги — 1114ЕУЗ/4/5), разработанные Б. Холлондом. По сравнению с
SG1524 этот контроллер дополнен схемой формирования «мертвого» времени.
Кроме того, схема ограничения тока заменена схемой стабилизации тока. Эта
ИМС и в настоящее время пользуется популярностью у разработчиков. Она
выпускается многими фирмами. Функциональная схема TL494 приведена на
Рис. 6.30.
Встроенный генератор пилообразного напряжения требует для установки
частоты только двух внешних компонентов R$ и Cs. Частота генератора
определяется по формуле
Изготовитель рекомендует выбирать э \у частоту в диапазоне 1 ...300 кГц.
Модуляция шири: » выходных импульсов достигается сравнением
положительного пилообразного развертывающего напряжения КРАЗ, получаемого на
конденсаторе Cs, с двумя управляющими сигналами: сигналом обратной связи
FFB, формируемым усилителем Уь и сигналом установки «мертвого» времени
FDTC, подаваемым на вход DTC (Dead Time Control — управление «мертвым»
временем). При равенстве напряжения V?A3 и наибольшего из указанных
сигналов формируется передний фронт одного из чередующихся импульсов
(Рис. 6.31).
284
6.6. Инверторные схемы
Рис. 6.30. Функциональная схема ИМС TL494
Рис. 6.31. Временные диаграммы работы инвертора на ИМС TL494
где ГР — период следования импульсов, tD — «мертвое» время. Как видно из
графиков на Рис. 6.31, максимальная длительность импульсов не зависит от
величины напряжения обратной связи KFlj.
Увеличение напряжения на входе DTC вызывает увеличение «мертвого»
времени. Компаратор регулировки «мертвого» времени KHj имеет постоянное
смещение 0.1 В, когорое ограничивает минимальную длительность этой паузы
величиной порядка 5%.
285
Этим обеспечивается максимальная длительность импульсов, поступающих
на базы выходных транзисторов, определяемая формулой
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
На Рис. 6.32 представлена типовая схема включения ИМС TL494 в качестве
контроллера регулируемого двухтактного инвертора. Выходные транзисторы
микросхемы образуют с внешними/?-л-/ьтранзисторами комплементарные
схемы Дарлингтона.
Рис. 6.32. Типовая схема включения ИМС TL494
Следует обратить внимание читателя на то, что в инверторах,
работающих на двухполупериодные схемы выпрямления, могут не
использоваться диоды, включаемые встречно-параллельно
силовым ключам (см. Рис. 3.25, Рис. 3.27) для обеспечения
реактивного обмена. Энергия, накапливаемая в магнитопроводе во время
замкнутого состояния тех или иных ключей, сбрасывается в
нагрузку через соответствующий диод схемы выпрямления, когда
эти ключи разомкнуты.
286
Для обеспечения мягкого, т. е. монотонного, без перерегулирования,
пуска используется цепь, состоящая из конденсатора емкостью ЮмкФ,
включенного между выводами 4 (DTC) и 14 (J^ref)? и резистора на 10 кОм,
включенного между выводом 4 и общей точкой схемы. При подаче
питания на выводе DTC первоначально устанавливается напряжение, равное
опорному (+5 В), которому соответствует максимальное «мертвое» время,
т. е. минимальная длительность импульсов на выходе схемы выпрямления
и соответственно минимальное выходное напряжение преобразователя.
По мере заряда конденсатора напряжение на выводе DTC убывает,
«мертвое» время уменьшается, пока не достигает установившегося значения.
При этом преобразователь переходит в режим стабилизации выходного
напряжения. При указанных на схеме параметрах этот процесс занимает
примерно 0.3 с.
Для стабилизации используются отрицательные обратные связи по
напряжению и по току. Схема на Рис. 6.33 поясняет работу этих связей.
6.6. Инверторные схемы
Усилитель ошибки по току У2 включен
по схеме инвертирующего интегратора.
Если ток нагрузки /L находится в допустимых
пределах, то напряжение на
инвертирующем входе усилителя У2 положительно, а
выходное напряжение этого усилителя К2,
находящегося в насыщении, — низкое. В
этом случае напряжение К, на выходе
усилителя ошибки У\ больше, чем К2, и диод
VDX будет открыт, a VD2 — закрыт. При этом
обратная связь по току будет разомкнута, а
по напряжению — замкнута, и схема
находится в режиме стабилизации выходного
напряжения.
Если ток нагрузки 1^ превзойдет
некоторое предельное значение /LIM, то
напряжение на инвертирующем входе усилителя
У2 станет отрицательным, а выходное напряжение V2 этого усилителя по
мере заряда интегрирующего конденсатора С\ будет нарастать. Когда это
напряжение превысит Кь диод VDX закроется, a VD2 — откроется.
Обратная связь по напряжению разомкнётся, а по току — замкнется. Схема
перейдет в режим стабилизации тока.
Используемый метод регулирования
называют параллельным. Ему соответствует
внешняя характеристика стабилизатора,
приведенная на Рис. 6.34.
Параметры цепей обратных связей
находят из соотношений для установившихся
режимов стабилизации
Рис. 6.33. Организация обратных
связей в контроллере TL494
Рис. 6.34. Внешняя
характеристика ИСН с параллельным
регулированием напряжения и тока
F.23)
F.24)
Параметры остальных элементов определяются требованиями к
быстродействию и устойчивости. Этот вопрос будет рассмотрен в разделе 6.11.
В заключение заметим, что контроллер TL494 и подобные ему могут
применяться для управления понижающими бестрансформаторными
преобразователями. Для этого выходные транзисторы ИМС соединяются
параллельно.
В числе последних моделей контроллеров для управления двухтактными
инверторами — ИМС VCC3808A. Она изготавливается в миниатюрном
8-выводном корпусе TSSOP размером 3x7 мм и содержит почти все те же
узлы, что и TL494. Исключение составляют выходные драйверы — они
представляют собой симметричные комплементарные каскады усиления
мощности (так называемые пушпульные), оптимизированные для управления
внешними МОП-ключами инвертора. Кроме того, вместо канала парал-
287
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
дельного регулирования тока контроллер содержит схему для введения
дополнительной обратной связи по току дросселя (ДОСТД) (о ней подробнее
в Разделе 6.6.4). Максимальная тактовая частота этой ИМС —1 МГц.
6.6.4. Однотактные инверторы
Однотактные инверторы схемотехнически проще двухтактных. В
простейшем варианте такие инверторы содержат только один силовой ключ. Однако
эффективность использования силового трансформатора в них гораздо ниже.
Поэтому они применяются в основном в маломощных импульсных источниках
питания. На самом деле цикл коммутации однотактных инверторов также
состоит из двух частей (тактов), но в отличие от двухтактных схем, рассмотренных
выше, передача энергии через трансформатор здесь происходит только в одном
такте.
Прямоходовые преобразователи
Схема и диаграммы цикла коммутации одного из вариантов однотактных
преобразователей, так называемого прямоходового, приведена на Рис. 6.35.
Рис. 6.35. Прямоходовый однотактный преобразователь:
а — схема, б — эпюры напряжений и токов, в — ncjля намагничивания
трансформатора
При анализе ее работы будем пренебрегать сопротивлениями обмоток
трансформатора и дросселя, а также падениями напряжения на открытых
ключевых элементах (транзисторе VTh диодах VD{...VD3). В зависимости от напря-
288 жения затвор—исток МОП-транзистор либо открыт (первый такт, интервал /ь
6.6. Инверторные схемы
где и>! и w2 — число витков первичной и вторичной обмоток трансформатора.
Диод VD2 открывается и к дросселю L оказывается приложенным
напряжение, равное разности Е2 — Vom. Поэтому ток дросселя /L возрастает. Ток стока
транзистора /D, определяемый в начале такта начальным током дросселя, также
нарастает за счет роста тока намагничивания обмотки wx и тока дросселя.
При запирании ключа во втором такте (интервал t2) ток стока прекращается.
Поток в сердечнике начинает быстро убывать. В обмотке w3 трансформатора
индуктируется значительная ЭДС, которая превосходит входное напряжение
преобразователя. Диод VD{ открывается и через него в первичный источник
течет ток, сбрасывая туда энергию, накопленную в сердечнике в первом такте.
Пока этот диод открыт, к стоку транзистора приложено напряжение, равное
удвоенному входному напряжению FjN. После сброса энергии диод VD\
закрывается. Оставшуюся часть второго такта напряжение сток—исток транзистора
FDS = KIN. Во втором такте диод VD2 закрыт, a FZ>3 — открыт. Ток дросселя
замыкается через этот диод и убывает. Таким образом, передача энергии во
вторичную цепь трансформатора происходит в первом такте, когда открыт транзистор.
Поэтому такой преобразователь называют прямоходовым.
Один из важнейших недостатков прямоходового преобразователя —
неэффективное использование трансформатора. Действительно, если в двухтактном
инверторе индукция в сердечнике в течение такта изменяется от —
#мах Д° +#мах> то в прямоходовом приращение индукции составляет
Рис. 6.356), либо закрыт (второй такт, интервал t2). В первом такте к основной
(силовой) полуобмотке W\ первичной обмотки трансформатора Тр приложено
входное напряжение, и магнитный поток в сердечнике нарастает, индуктируя
во вторичной обмотке ЭДС, пропорциональную входному напряжению
что значительно меньше (см. Рис. 6.35в). Поэтому для индуктирования той же
ЭДС при той же длительности такта потребуется магнитопровод со значительно
большим поперечным сечением, чтобы получить то же самое изменение
магнитного потока, что и в двухтактной схеме. Как следует из Рис. 6.35в, для
трансформатора желательно применение феррита с большой магнитной
проницаемостью и малой остаточной индукцией. Использование ферритов с
прямоугольной петлей гистерезиса требует применения сложных схем
размагничивания сердечника, рассмотренных в [6.5].
В принципе для управления однотактным преобразователем может быть
применена ИМС контроллера типа TL494 или аналогичная ей. Однако
применение специализированных микросхем предпочтительнее, т. к. они позволяют
ввести дополнительную обратную связь по току дросселя (ДОСТД),
улучшающую устойчивость и быстродействие преобразователя [6.8].
Для управления однотактными преобразователями выпускается много
типов микросхем. Первым контроллером с ДОСТД стала ИМС UC1846,
выпущенная фирмой Unitrode в 1983 г. Ее выпуск послужил толчком к бурному росту
числа новых приборов и усовершенствованных модификаций. При регулирова-
289
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
нии с ДОСТД для прямого управления амплитудой тока дросселя по
отклонению от заданного значения используется внутренний (дополнительный,
подчиненный) контур регулирования, в то время как основной (внешний) контур
служит для стабилизации выходного напряжения (Рис. 6.36).
290
Рис. 6.36. Функциональная схема однотактного
преобразователя с дополнительной обратной связью по току
дросселя
Режим с ДОСТД обеспечивает параметрическую компенсацию отклонений
входного напряжения, поцикловое (т. е. в каждом цикле коммутации)
ограничение тока, а также устраняет возможность насыщения магнитопровода
дросселя в прямоходовом преобразователе. Кроме того, происходит перенос в область
более высоких частот одного из двух полюсов передаточной функции контура
регулирования, порождаемых выходным ZC-фильтром. Это чрезвычайно
благоприятно сказывается на устойчивости преобразователя. Параметрическая
компенсация отклонений входного напряжения позволяет мгновенно
корректировать (практически без изменения напряжения усилителя сигнала ошибки V^
режим работы преобразователя при произвольных изменениях входного
напряжения. Это утверждение иллюстрируется эпюрами на Рис. 6.37.
При увеличении входного напряжения
пропорционально увеличивается скорость
нарастания тока через ключ. Как следствие длительность
открытого состояния ключа уменьшается, однако
энергия, передаваемая на каждом рабочем такте в
нагрузку, остается практически неизменной.
Одной из наиболее популярных серий
контроллеров с ДОСТД является UC1842/3/4/5
(отечественные аналоги соответственно —
1033ЕУ10/1/2/3), разработанная Л. Уофордом в
1984 г. В настоящее время ИМС этой серии
выпускают несколько фирм. Микросхемы, цифровое
обозначение которых после букв UC начинается с
цифры 1, предназначены для работы в отвечающем военным стандартам
диапазоне температур (-55...+125°С), с цифры 2 — в индустриальном (-4О...+85°С), с
цифры 3 — в коммерческом (О...+7О°С).
ИМС UC3842/3/4/5 — это дешевые приборы, размещенные либо в корпусах
DIP и SOIC с 8 выводами, либо в корпусе SO-14. Помимо элементов,
указанных на Рис. 6.36, они содержат также схему блокировки при пониженном на-
Рис. 6.37. Эпюры, поясняющие
работу преобразователя с
дополнительной обратной
связью по току дросселя
6.6. Инверторные схемы
пряжении питания (undervoltage lockout, UVLO), встроенный стабилитрон для
ограничения напряжения питания микросхемы и пушпульный выходной
драйвер, обеспечивающий выходной ток в импульсе до 1 А, что необходимо для
ускоренной перезарядки входной емкости силового МОП-транзистора.
ИМС UC3842 и UC3843 предназначены для схем, работающих с
коэффициентом у вплоть до 1, a UC3844 и UC3845 - для схем с у до 0.5. ИМС UC3842 и
UC3844 оптимизированы для работы в сетевых источниках и имеют пороги
включения/отключения схемы UVLO соответственно 16 и 10 В. ИМС UC3843 и
UC3845 предназначены в основном для работы в низковольтных
преобразователях постоянного тока, их схемы блокировки UVLO срабатывают при
напряжениях питания 8.5 и 7.9 В соответственно. При включении совместно с
микросхемой драйвера UC3706 контроллеры UC3844 и UC3845 можно применить для
управления силовыми ключами двухтактных преобразователей.
Для того чтобы уменьшить
Рис. 6.38. Двухтранзисторная схема однотактного
преобразователя
максимальное напряжение на
стоке (коллекторе) силового
транзистора используется
двухтранзисторная схема
однотактного преобразователя (Рис. 6.38).
В этой схеме силовые
транзисторные ключи замыкаются и
размыкаются одновременно.
При замкнутых ключах
первичная обмотка
трансформатора соединяется с источником
входного напряжения и энергия из источника поступает в цепь вторичной
обмотки, питая нагрузку и накапливаясь в дросселе. Когда ключи размыкаются,
энергия, запасенная в сердечнике, сбрасывается через открывающиеся диоды
VDb VD2 в источник. При этом напряжение сток—исток закрытых ключей
равно входному. Первичная обмотка трансформатора подключается к источнику
входного напряжения противоположной полярностью. После сброса энергии
сердечника диоды VDb VD2 закрываются и обмотка отключается от источника.
На Рис. 6.39 приведен вариант схемы подключения цепей управления
транзисторами преобразователя описанного типа к выходу контроллера.
Рис. 6.39. Схема подключения цепей управления транзисторами
двухтранзисторного однотактного преобразователя к выходу
однотактного контроллера
291
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
Относительная сложность цепи управления верхним транзистором VT\
связана со значительной входной емкостью МОП-транзистора. Совместно с
индуктивностью рассеяния трансформатора эта емкость может образовывать
резонансные контуры, сильно искажающие управляющие сигналы [6.9]. Более
удобно в этом случае применить ИМС специальных драйверов, которые будут
рассмотрены позднее в п. 6.10.
Обратноходовые преобразователи
Обратноходовые преобразователи схемотехнически очень похожи на пря-
моходовые. Существенным отличием является то, что в магнитопроводе
трансформатора (точнее говоря, двухобмоточного дросселя) происходит
промежуточное накопление энергии. Схема однотранзисторного обратноходового
преобразователя представлена на Рис. 6.40.
Здесь в первом такте, когда транзистор открыт, происходит накопление
энергии в магнитопроводе дросселя Др за счет увеличения тока 1\ в его
первичной обмотке L\. В это время диод VD заперт, и нагрузка питается за счет
разряда конденсатора С. После запирания транзистора энергия, накопленная
в первом такте, передается в нагрузку через вторичную обмотку дросселя Li.
Благодаря возникающей на вторичной обмотке ЭДС самоиндукции диод
открывается и спадающий ток дросселя /2 заряжает конденсатор и питает
нагрузку. Двухобмоточный дроссель выполняется либо на замкнутом
магнитопроводе со сравнительно низкой относительной магнитной проницаемостью
E0...250), либо на магнитопроводе с зазором. При анализе электромагнитных
процессов в этой схеме будем полагать сопротивления обмоток, а также
падения напряжения на открытых ключевых элементах равными нулю. При этих
допущениях в первом такте, когда открыт транзистор, к первичной обмотке
дросселя прикладывается входное напряжение FIN. Ток в первичной обмотке
в соответствии с уравнением
На вторичной обмотке дросселя под действием нарастающего тока
намагничивания наводится ЭДС Е2. При указанном на схеме подключении
вторичной обмотки дросселя к цепи нагрузки это напряжение оказывается
запирающим для диода VD.
После запирания транзистора энергия, запасенная в магнитном поле
дросселя, переходит в цепь вторичной обмотки. Поскольку согласно закону комму-
292 тации магнитный поток мгновенно измениться не может, то и сумма намагни-
нарастает по линейному закону в общем случае от некоторого начального
значения /10 (Рис. 6.41).
Энергия, полученная от источника в первом такте и запасенная в
сердечнике,
F.26)
F.27)
6.6. Инверторные схемы
Рис. 6.40. Схема обратноходового
преобразователя
Рис. 6.41. Эпюры, поясняющие
работу обратноходового
преобразователя
чивающих сил, порождающих этот поток, также не может мгновенно
измениться. Следовательно
F.28)
Ток вторичной обмотки откроет диод VD. ЭДС Е2 ограничивается
напряжением на конденсаторе С, т. е. Е2 = *Ьит Поэтому ток вторичной обмотки
убывает в соответствии с уравнением
F.29)
F.30)
причем в первый момент после запирания транзистора на его коллекторе
может возникать чрезвычайно опасное для силового ключа дополнительное
перенапряжение (см. Рис. 6.41), обусловленное индуктивностью рассеяния
первичной обмотки дросселя, которая задерживает процесс подключения цепи
нагрузки к вторичной обмотке дросселя.
При изготовлении дросселя необходимо принять все возможные
меры для усиления индуктивной связи между его обмотками
(увеличения коэффициента связи)!
Для снижения этого выброса параллельно первичной обмотке дросселя, а
зачастую и параллельно силовому ключу включают демпфирующие /J-C- KD-це- 293
ЭДС Ех пропорциональна Е2. При этом во втором такте
Напряжение коллектор—эмиттер закрытого транзистора
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
почки либо специализированные быстродействующие полупроводниковые
схемы ограничителей напряжения.
На Рис. 6.42 представлена схема низковольтного обратноходового
преобразователя с использованием трехвыводной ИМС контроллера МС33463Н-ЗЗКТ.
Рис. 6.42. Схема обратноходового преобразователя с использованием ИМС
контроллера МС33463Н-ЗЗКТ
294
Это очень простой регулятор, использующий частотно-импульсный
модулятор и компаратор вместо усилителя ошибки. Слежение за выходным
напряжением осуществляется по нижнему порогу. Как только напряжение на выходе
делителя становится ниже напряжения ИОН, силовой транзистор отпирается
на фиксированный временной интервал, запасается энергия в магнитопроводе
дросселя и затем при запирании транзистора она передается в нагрузку.
Для мощных высоковольтных обратноходовых преобразователей также
может использоваться двухтранзисторная схема (см. Рис. 6.38), но цепь вторичной
обмотки должна иметь ту же конфигурацию, что и на Рис. 6.40.
Сравнение прямоходовых и обратноходовых преобразователей показывает,
что прямоходовые имеют в своем составе два обязательных моточных изделия
(трансформатор и дроссель), а обратноходовый — только одно. Но зато в пря-
моходовом преобразователе эффективнее используется силовой транзистор.
Поэтому обычно обратноходовая схема применяется в импульсных источниках
на мощности от единиц до 100 Вт, а прямоходовая — на мощности примерно
50...200 Вт.
6.6. Инверторные схемы
6.6.5. Резонансные инверторы
Может показаться, что ключевой метод регулирования напряжения,
например на основе ШИМ, является идеальным в смысле минимума потерь
энергии. Это действительно так, если сравнивать широтно-импульсные
регуляторы с непрерывными (линейными), где стабилизация осуществляется за
счет рассеяния энергии на регулирующем элементе. Реально же потери в
ключевых регулирующих элементах пренебрежимо малы лишь на
относительно низких частотах переключения в пределах 20...40 кГц. Разработчики
стремятся повысить частоту переключения, поскольку это позволяет
уменьшить размеры, вес и стоимость магнитных элементов и фильтровых
конденсаторов, однако с ростом частоты увеличиваются динамические потери
(потери на переключение). Развитие МОП-транзисторов и появление новых
моделей ИМС контроллеров позволило несколько отодвинуть эту границу в
сторону высоких частот, но не радикально.
Потери на переключение вызваны тем,
что переход от включенного состояния
транзистора к выключенному и обратно
происходит не мгновенно, а в течение
определенного, пусть даже и малого времени.
Во время переключения рабочая точка
транзистора находится в активной области
выходных характеристик (Рис. 6.43).
В идеале переключение транзистора
следовало бы проводить по траектории 1.
Например, для перевода транзистора из
выключенного состояния (точка В) во
включенное (точка А), следует сначала при
нулевом токе уменьшить напряжение
сток—исток FDS транзистора до нуля
(точка 0), а затем увеличить ток до установившегося значения. Практически же,
если не приняты специальные меры, из-за наличия паразитных емкостей и ин-
дуктивностей переключение будет происходить по траектории 2. При этом на
транзисторе выделяется значительная электрическая мощность,
преобразующаяся в тепло.
Таким образом, для уменьшения потерь на переключение следует
открывать транзистор, когда напряжение на нем равно нулю, а закрывать при
нулевом токе. Эти условия можно обеспечить за счет использования
резонансных колебаний в цепях с ключевыми элементами.
Упрощенная схема
резонансного преобразователя,
работающего при нулевом токе
переключения (так называемый
ПНТ-преобразователь), показана
на Рис. 6.44.
Эта схема является
резонансным вариантом прямоходовой
схемы. Здесь простой ключ заме-
Рис. 6.43. Траектории переключения
МОП-транзистора
Рис. 6.44. Схема резонансного преобразователя,
работающего при нулевом токе
переключения
295
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
нен резонансным ключом, состоящим из компонентов VT, LR, CR. В принципе в
качестве резонансной индуктивности может использоваться индуктивность
рассеяния трансформатора.
Пусть первоначально транзистор закрыт. Выходной ток течет за счет
энергии, запасенной в дросселе выходного фильтра LF, через диод VD$ в нагрузку. В
некоторый момент времени, определяемый схемой управления, ключ VT
открывается. Колебательный контур, образованный катушкой LR и
конденсатором CR, начинает получать энергию. Заряд конденсатора CR и последующий его
разряд будут происходить по закону, близкому к синусоидальному, с частотой,
равной резонансной частоте контура LrCr. Одновременно ток в катушке LR
также будет изменяться по синусоидальному закону — вначале увеличиваться,
затем уменьшаться. Когда этот ток уменьшится до нуля, нужно закрыть ключ.
При этом диод VD\ предотвращает обратный ток через паразитный диод
МОП-транзистора, который мог бы быть вызван продолжающимся
резонансным процессом.
Когда ток в катушке LR становится равным нулю, выходной ток течет через
дроссель LF, диод VD2 и конденсатор CR, который быстро разряжается. Как
только он разряжается до нуля, открывается диод FZK. На этом один
резонансный цикл заканчивается, и с открывания транзистора VT начинается
следующий цикл. Так как транзистор открывается и закрывается при нулевом токе,
потери на переключения будут минимальны. В связи с тем, что переход тока с
диода VD2 к диоду KD3 и обратно замедлен присутствием индуктивности LF и
емкости CR, потери энергии будут также снижены и в диодах. Уменьшаются
также скорости нарастания токов и напряжений, что способствует снижению
уровней электромагнитных помех и перенапряжений на элементах схемы.
В рассмотренной схеме переключение силового транзистора происходит
при нулевом токе через него. Существуют также схемы, в которых транзистор
переключается при нулевом напряжении (ПНН-преобразователи). Схемы
первого типа (переключение при нулевом токе — ПНТ) лучше подходят для
сетевых источников питания с повышенным питающим напряжением; схемы
второго типа — для преобразователей постоянного тока с более низким
напряжением питания. Схема простейшего ПНН-преобразователя и
временные диаграммы его работы представлены на Рис. 6.45.
^CTRL
Вкл /выклГ
296
Рис. 6.45. Преобразователь с переключением при нулевом
напряжении:
а — схема, б — эпюры напряжений и токов
Как видно, это простой понижающий преобразователь. В конце интервала
открытого состояния ключа (МОП-транзистор VT) конденсатор резонансного
6.6. Инверторные схемы
решение которого представляет собой синусоиду. При этом начальная фаза
напряжения на конденсаторе VCR (оно же — напряжение сток—исток
транзистора) равна нулю (Рис. 6.456), и соответственно фаза тока в катушке — 90°(т. е. ток
в катушке равен своему амплитудному значению). По прошествии времени,
равного половине периода собственных колебаний резонансного контура LRCR,
напряжение на ключе вновь достигает нуля. В этот момент следует подать
отпирающий сигнал на затвор транзистора. Таким образом, выключение и
включение ключа происходит при нулевом напряжении на нем. Примечательно, что
при отпирании ключа последний не сразу перехватывает весь ток у диода. Этот
процесс благодаря наличию в цепи катушки LR имеет заметную длительность
что снижает потери в диоде и электромагнитные помехи, порождаемые
электрической схемой (Рис. 6.45а) [6.10].
Методика переключения при нулевом напряжении применима ко всем
основным способам импульсного преобразования электрического тока: к
понижающим, повышающим и инвертирующим преобразователям, а также прямо-
ходовым, обратноходовым, полумостовым и мостовым инверторам.
Достоинства ПНН:
• токи в цепях схемы не превышают значений соответствующих токов
обычного преобразователя;
• пониженная мощность управления ключом (нет эффекта Миллера).
Недостатки ПНН:
• повышенное значение максимального напряжения на закрытом одиночном
ключе;
• частота преобразования обратно пропорциональна току нагрузки.
Прямоходовый ПНН-преобразователь
Однотранзисторный прямоходовый преобразователь (Рис. 6.46)может быть
легко сконфигурирован для ПНН-управления добавлением параллельно ключу
резонансного конденсатора (Рис. 6.46а).
Так же как и в предыдущей схеме, напряжение на силовом транзисторе
увеличено из-за резонансных процессов. Трансформатор может быть специально
изготовлен так, чтобы индуктивность намагничивания первичной обмотки
равнялась бы необходимой резонансной индуктивности. Эпюры напряжений и
токов схемы во времени представлены на Рис. 6.466. 297
контура CR разряжен, а ток индуктивной катушки резонансного контура LR
равен выходному току (полагаем выходной ток постоянным). При запирании
ключа открывается диод VD и начинается колебательный переходный процесс
заряда конденсатора CR током катушки LR, причем если пренебречь потерями,
то можно считать, что этому процессу отвечает дифференциальное уравнение
F.31)
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
Рис. 6.46. Прямоходовый ПНН-преобразователь:
а — схема, б — эпюры напряжений и токов
298
ПНН-конфигурация с фиксацией напряжения — полумостовая и мостовая
топология. Переключение при нулевом напряжении может быть распространено
на преобразователи более высокой мощности с полумостовой и мостовой
конфигурацией силовой части схемы. Работа этих схем на интервалах передачи
энергии (ключи замкнуты) подобна работе однотранзисторных ПНН-схем. Но
на резонансных интервалах имеются отличия. В то время как для
однотранзисторных схем (t\ < t< t2, см. Рис. 6.466) характерно высокое значение
напряжения на закрытом ключе, в мостовых схемах это напряжение фиксируется на
уровне входного напряжения. Тем самым достигается ограничение выброса
напряжения сток—исток силовых транзисторов. Это обстоятельство сокращает
резонансный интервал по сравнению с однотактной схемой, так как
противоположный ключ должен быть открыт намного раньше окончания полупериода
резонансного колебания.
ПНН-полумост Схема и временная диаграмма работы полумостового
резонансного ПНН-преобразователя представлена на Рис. 6.47.
Резонансные процессы здесь обеспечивают катушка LR и конденсаторы
емкостью Cr/2, включенные параллельно силовым транзисторам (Рис. 6.47а).
Рассмотрим электромагнитные процессы в этой схеме.
Анализ начнем с момента /о, когда запирается транзистор VTA. Транзистор
VTB пока также закрыт. В последовательном резонансном контуре
возбуждаются колебания, описываемые уравнением F.31). Верхний конденсатор Cr/2
заряжается, а нижний — разряжается. Когда напряжение сток—исток
транзистора VTA достигнет величины KIN (t=t2), откроется диод VDB и резонансный
процесс закончится (Рис. 6.476). Напряжение KDSA будет зафиксировано на
уровне FIN, a KDSB станет равным нулю. Если на интервале t2<t<t$ транзистор
VTB не откроется, то энергия, запасенная в катушке LR, за счет которой диод
VDB поддерживается в открытом состоянии, будет исчерпана и резонансный
процесс возобновится. При этом напряжение KDS_B будет увеличиваться и
отпирание транзистора VTB произойдет при ненулевом напряжении сток—исток.
6.6. Инверторные схемы
Рис. 6.47. Полумостовой резонансный ПНН-преобразователь:
а — схема, б — эпюры напряжений и токов
Таким образом, включение очередного транзистора должно происходить на
интервале t2< t< ty Столь жесткие требования к соблюдению временных
соотношений — характерная особенность резонансных инверторов, где частота
коммутации определяется реактивными элементами самой схемы. Как
следствие, в устройствах этого типа накладываются существенные ограничения на
диапазон стабилизации по входному напряжению и на допустимые изменения
тока в первичной обмотке трансформатора (а стало быть, и выходного тока
преобразователя). Это препятствует широкому использованию полумостовых схем
резонансных инверторов с фиксацией напряжения на закрытом ключе в
импульсных источниках постоянного тока.
ПНН-мост. При синхронном управлении
парами транзисторов VTA, VTD и VTB, VTC
(Рис. 6.48) электромагнитные процессы в
мостовом резонансном преобразователе
аналогичны процессам в полумостовой схеме, за
тем исключением, что к первичной обмотке
трансформатора при открытых ключах
прикладывается вдвое большее напряжение. В то
же время мостовая схема предоставляет боль-
шие возможности для регулирования выход- ^ 6Ж Мостовой резонансный
ного напряжения, так как допускает незави- пнн-преобразователь
симое управление четырьмя ключами.
Интересно, что в схеме мостового резонансного инвертора, как впрочем, и
других резонансных схемах, в качестве резонансных могут использоваться па-
299
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
разитные элементы. Так, вместо резонансных конденсаторов — выходные
емкости силовых транзисторов, составляющие порядка 1000 пФ, вместо обратных
диодов — паразитный диод подложки МОП-транзистора, вместо индуктивной
катушки — индуктивность рассеяния силового трансформатора.
ИМС контроллеров для резонансных преобразователей
Хотя известно более 40 способов резонансного регулирования, наиболее
широко используются квазирезонансные режимы с переменной частотой и
постоянным временем включенного состояния ключа (для ПНТ-схем), а также
квазирезонансные режимы с переменной частотой и постоянным временем
выключенного состояния ключа (для ПНН-схем).
В резонансных преобразователях обоих типов используются аналогичные
контуры регулирования. При этом генератор с управляемой частотой подает
запускающие импульсы на одновибратор, управляющий ключом, с частотой,
определяемой выходным сигналом усилителя ошибки. Ширина импульса на
выходе одновибратора может быть либо фиксированной, либо она зависит от
постоянной времени резонансного контура и (или) транзистор может
включаться при достижении током или напряжением нулевого значения.
Характерным представителем множества резонансных контроллеров
является семейство ИМС фирмы Unitrode (ныне подразделение Texas
Instruments) UCx861 — UCx868. Отличительные черты этих контроллеров
указаны в Табл. 6.3.
Таблица 6.3. Параметры UVLO* для ИС семейства UCx86x
Модель
Схема
Коммутация
Пороги
UVLO*
UCx861
Мост,
полумост
ПНН
16.5/10.5
UCx862
Однотакт-
ная
ПНН
16.5/10.5
UCx863
Мост,
полумост
ПНН
8/7
UCx864
Однотакт-
ная
ПНН
8/7
UCx865
Мост,
полумост
ПНТ
16.5/10.5
UCx866
Однотакт-
ная
ПНТ
16.5/10.5
UCx867
Мост,
полумост
ПНТ
8/7
UCx868
Одно-
тактная
ПНТ
8/7
* UVLO (Under Voltage Lock Out) — защита от пониженного напряжения.
300
Блок-схема ИМС семейства UCx86x представлена на Рис. 6.49.
Контроллер включает усилитель ошибки, необходимая передаточная
функция которого формируется внешними цепями обратной связи.
Выходной сигнал усилителя поступает на вход генератора, управляемого
напряжением (ГУН), который играет роль частотного модулятора. Максимальная
и минимальная частоты этого генератора ограничены. Запускаемый от ГУН
одновибратор генерирует импульсы запрограммированной максимальной
длительности, которая может регулироваться нуль-компаратором КН. Эта схема
упрощает получение «истинного» нулевого значения напряжения или тока для
повышения точности установления необходимого момента коммутации ключа
при изменении входного напряжения, нагрузки и температуры, а также
позволяет приспособиться к начальному разбросу параметров резонансных
элементов генератора.
Все микросхемы семейства допускают работу с частотой 10 кГц...1 МГц.
Выходной ток драйверов в импульсе может достигать 1 А.
6.6. Инверторные схемы
Рис. 6.49. Блок-схема микросхем семейства UCx86x
Схема прямоходового резонансного ПНН-преобразователя с контроллером
типа UCx864 приведена на Рис. 6.50.
Рис. 6.50. Схема прямоходового резонансного ПНН-преобразователя
с контроллером типа UCx864
Силовой МОП-транзистор отпирается, когда напряжение на его стоке
снижается до 10 В. Схема предназначена для преобразования сравнительно низких
напряжений.
На Рис. 6.51 представлена схема полумостового резонансного ПНТ-преоб-
разователя с контроллером типа UCx865. 301
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
Рис. 6.51. Схема полумостового резонансного ПНТ-преобразователя
с контроллером типа UCx865
302
Сигнал, отмечающий момент снижения тока до нуля, формируется с
помощью трансформатора тока Тр!. Резонансный конденсатор включен параллельно
первичной обмотке силового трансформатора. Последовательно с силовыми
МОП-транзисторами включены отсекающие диоды. Схема предназначена в
основном для построения сетевых источников питания.
Еще одно семейство той же фирмы — UCx875/6/7/8 — предназначено для
управления мощным мостовым каскадом путем сдвига по фазе момента
переключения одной половины моста относительно другой, т. е., по существу, путем
широтно-импульсной модуляции. ИМС содержат блоки управляемых
временных задержек. Эти задержки резервируют время для работы в резонансном
режиме и управляются независимо для каждой пары ключей (А-В, C-D, см.
Рис. 6.48). Генератор тактовых сигналов способен работать с частотой до 2 МГц.
Выходные драйверы допускают импульсный ток до 3 А. Детально работа этих
контроллеров рассмотрена в [6.11 ].
В заключение приведем характеристики резонансных преобразователей в
сравнении с обычными импульсными преобразователями на ту же мощность,
работающими с той же частотой переключения.
6.7. Сетевые источники питания
Преимущества резонансных преобразователей:
• значительно меньшие потери на переключение, в частности, в режиме ПНН
потери, связанные с разрядом выходной емкости транзистора через его
открытый канал при отпирании;
• примерно 5-кратное снижение уровня электромагнитных помех;
• более низкие требования к элементам, особенно в отношении
максимально-допустимых скоростей нарастания напряжений и токов;
• для организации резонансных процессов переключения могут
использоваться паразитные реактивности схемы.
Недостатки резонансных преобразователей:
• более сложная схема силовой части;
• узкий диапазон регулирования;
• в общем случае переменная частота переключения;
• более сложные для понимания электромагнитные процессы, затрудняющие
применение резонансных преобразователей широким кругом
разработчиков;
• как правило, для выдерживания жестких временных соотношений требуются
весьма сложные схемы управления.
6.7. Сетевые источники питания
6.7.1. Общие сведения
Импульсные источники питания, получающие первичное напряжение от
промышленной сети, обладают значительно лучшими массогабаритными
параметрами, чем обычные сетевые источники питания той же мощности с
низкочастотными силовыми трансформаторами. Этим объясняется их широкое
применение в блоках питания телевизоров, компьютеров и даже в малогабаритных
сварочных аппаратах. В то же время импульсные сетевые источники (ИСИ),
как правило, дороже, менее надежны, создают в первичной сети, в нагрузке и в
окружающем пространстве более интенсивные помехи и требуют от
разработчика гораздо более высокой квалификации.
При проектировании ИСИ решаются следующие задачи:
• выбор силовой схемы, обеспечивающей наилучшее использование
трансформатора и силового ключа при наименьшей их сложности и стоимости;
• защита силовых элементов от перегрузок;
• надежный плавный пуск преобразователя без перерегулирования по
выходному напряжению;
• минимизация потерь и повышение коэффициента полезного действия по
мощности;
• организация обратной связи по напряжению с гальванической развязкой
входной и выходной цепей.
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
6.7.2. Импульсные сетевые источники
на базе обратноходового преобразователя
Наиболее часто в качестве силовой схемы ИСИ мощностью до 100 Вт
используется обратноходовый преобразователь. Промышленность производит
десятки типов ИМС контроллеров для управления такими преобразователями.
Это семейства TDA4605, AS2208, LT1241, AN802x, TEA1504 и др.
Рассмотрим подробно работу типовой схемы обратноходового
преобразователя с питанием от сетевого напряжения. В качестве контроллера используется
уже упоминавшаяся ИМС UC3844, обеспечивающая управление
МОП-транзистором с обратными связями по выходному напряжению и по току дросселя.
Внутренняя структура этой ИМС представлена на Рис. 6.52.
304
Рис. 6.52. Внутренняя структура ИМС UC3844
Микросхема содержит помимо основных узлов, уже представленных на
Рис. 6.36, еще и дополнительные элементы: цепь защиты контроллера от
перенапряжения (встроенный стабилитрон на 34 В) и компаратор для схемы UVLO,
которая выключает контроллер при спаде напряжения питания ниже
допустимого уровня. Типовая схема включения этой ИМС в составе обратноходового
сетевого преобразователя представлена на Рис. 6.53.
Разберем подробнее работу этой схемы.
При включении источника в сеть конденсатор С8, играющий роль фильтра,
сглаживающего пульсации выпрямленного сетевого напряжения, заряжается
через выпрямительный мост. Резистор Rn необходим для ограничения тока
через диоды моста в момент включения источника. Через резистор R$ начинает
течь ток /ь заряжая конденсатор С^ Как только напряжение на выводе 7
микросхемы достигнет верхнего порога схемы UVLO, составляющего 16 В,
контроллер начинает генерировать импульсы, поступающие на затвор
МОП-транзистора. Для того чтобы контроллер запустился, достаточно, чтобы через резистор R$
протекал ток не более 1 мА. Благодаря этому, сопротивление резистора R5
можно выбрать достаточно большим, с тем, чтобы уменьшить рассеиваемую на нем
6.7. Сетевые источники питания
Рис. 6.53. Типовая схема включения ИМС UC3844
мощность. В то же время в рабочем режиме микросхема потребляет
значительно больший ток — до 17 мА. Поэтому после запуска контроллер питается в
основном от дополнительной обмотки WD.
Поскольку этот контроллер может работать с дополнительной обратной
связью по току дросселя (ДОСТД), сигнал этой связи снимается с резистора Яц,
включенного в цепь истока силового транзистора. Для подавления короткой
импульсной помехи, возникающей при отпирании транзистора за счет разряда
его выходной емкости и межвитковой емкости обмотки дросселя, в цепь
ДОСТД включается малоинерционный фильтр R9C7. Цепочка RbC$VD2
защищает силовой транзистор от перенапряжения в момент его запирания.
Сигнал обратной связи по напряжению снимается в этой схеме с обмотки
WD. Это позволяет практически устранить возмущения, возникающие при
изменении напряжения питающей сети. Изменение тока нагрузки может вызвать
заметные изменения выходного напряжения за счет падения на сопротивлении
вторичной обмотки трансформатора, активном сопротивлении обмотки
дросселя L\ и диоде VD5, поэтому лучше снимать сигнал обратной связи
непосредственно с нагрузки. Для этого в большинстве приложений желательно обеспечить
гальваническую развязку в канале обратной связи.
Таким образом, ИМС семейства UCx84x весьма универсальны. В перечень
их применений входят: Однотактные понижающий, прямоходовый и обратно-
ходовый стабилизаторы, а если их дополнить микросхемой двухканального
драйвера UC3706, то и двухтактные схемы. Платой за такую универсальность
является относительно сложная схема включения, содержащая много навесных
элементов. Более просто сетевой источник можно выполнить на основе
специализированных ИМС, содержащих на кристалле силовой ключ и другие
элементы, упрощающие построение сетевого обратноходового источника. Одним
из наиболее интересных в этом классе микросхем является семейство трехвы-
водных преобразователей TOPS witch фирмы Power Integrations, содержащее
модели PWR-TOP200/1/2/3/4 и другие. Эти ИМС, изготавливаемые в корпусе
305
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
ТО-220, могут служить основой для построения сетевых источников питания с
входным переменным напряжением 100...230 В на мощности до 100 Вт.
Блок-схема внутренней структуры преобразователя PWR-TOP20x представлена
на Рис. 6.54.
Рис. 6.54. Блок-схема внутренней структуры ИМС обратноходового
преобразователя PWR-TOP20x
306
Микросхема представляет собой линейный преобразователь входного тока
в коэффициент заполнения у с автономным питанием и высоковольтным (до
700 В) МОП-транзистором с открытым стоком на выходе. ИМС имеет
внутренний ИОН, ШИМ-контроллер с встроенным генератором 100 кГц,
высоковольтные пусковые цепи питания, параллельный стабилизатор (он же — усилитель
ошибки) и схемы защиты.
Внутренние цепи защиты осуществляют поцикловое ограничение тока
ключа, отключение его при перегреве, при перенапряжении на выходе, при
пониженном напряжении сети. В качестве датчика для поциклового ограничения
тока силового ключа используется сам ключ, имеющий практически линейное
сопротивление канала в открытом состоянии. Для повторного запуска
преобразователя после временного понижения питающего напряжения в состав
микросхемы входят цепи автоматического перезапуска, которые переводят
преобразователь в режим генерации коротких пачек импульсов с примерно в 20 раз
более длительной паузой (режим «икоты»).
6.7. Сетевые источники питания
Одна из типовых схем включения PWR-TOP20x приведена на Рис. 6.55.
Дополнительная сигнальная обмотка, имеющая 35 витков, обеспечивает питание
схеме управления и, кроме того, служит источником сигнала обратной связи по
напряжению.
Рис. 6.55. Типовая схема включения ИМС PWR-TOP20x
Для увеличения коэффициента усиления в контуре обратной связи число
витков этой обмотки выбрано большим, чем это необходимо для обеспечения
достаточного тока через управляющий вывод С, — примерно 3...5 мА. Большая
часть напряжения этой обмотки падает на стабилитроне. Конденсаторы в цепи
обратной связи сглаживают пульсации и обеспечивают необходимую
частотную коррекцию. В этой схеме для ограничения выбросов перенапряжения на
первичной обмотке дросселя при запирании ключа используется стабилитрон с
напряжением стабилизации 100 В. Более подробно о работе этих микросхем
можно прочитать в [6.12].
Семейство TOPSwitch-II (TOP22x) второго поколения отличается лучшим
соотношением цена/качество и имеет ряд улучшений по сравнению с
семейством первого поколения. В частности, максимальная мощность увеличена до
150 Вт. Часть моделей семейства мощностью до 30 Вт изготавливается в
миниатюрных корпусах SMD-8, предназначенных для монтажа на поверхность.
Еще более мощные однокристальные сетевые источники, предназначенные
для работы в квазирезонансном режиме, производит фирма Sanken. В
частности, модель STR-F6656 развивает мощность до 300 Вт.
В настоящее время однокристальные сетевые источники выпускаются
многими фирмами. Очень интересную микросхему МС33363А разработали
инженеры фирмы ON Semiconductor (подразделение фирмы Motorola). Эта
ИМС включает полноценный усилитель ошибки с высоким коэффициентом
усиления, чувствительный к напряжению, а не к току, как у предыдущей
схемы. ИМС имеет защиту от перенапряжения на выходе и от перегрева.
Встроенный ключевой МОП-транзистор допускает напряжение на стоке до 700 В и
ток стока до 1.5 А. Микросхема изготавливается в 16-выводных DIP и
SOP корпусах.
В Табл. 6.4 приведены основные параметры некоторых моделей
однокристальных сетевых источников.
307
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
Таблица 6.4. Основные параметры однокристальных сетевых источников
Модель
TOP204I
TOP210P/G
МС33363А
STR-F6656
Особенности
Система запуска, защита от перегрузки
по току и перегрева.
КПД до 90%
Система запуска, защита от перегрузки
по току и перегрева.
КПД до 80%
Система запуска, защита от перегрузки
по току, усилитель ошибки
Квазирезонансный режим работы.
Защита от перенапряжения и перегрузки
потоку
VDS[B]
700
700
700
650
Роит [Вт]
(приУш[В])
60... 100 B30)
0...8 B30)
14(92...265)
300 B20)
fs№]
100
100
300
-
Корпус
ТО-220
SO-8
S0P-16
SIP-5
6.7.3. Организация обратной связи
по выходному напряжению в сетевых источниках
При изменении нагрузки
сетевого источника в широких
пределах простая цепь обратной
связи по напряжению,
показанная на Рис. 6.53 и Рис. 6.55,
обеспечивает стабильность
выходного напряжения не лучше
5%. Это обусловлено тем, что
сигнал обратной связи прямо
пропорционален ЭДС
первичной обмотки дросселя
обратноходового преобразователя на
втором такте, когда ключ заперт.
В этом случае не учитывается
падение напряжения на
сопротивлении вторичной обмотки
дросселя и открытом диоде.
Если требуется более высокая стабильность, то сигнал обратной связи следует
снимать непосредственно с выхода источника. Тогда возникает
необходимость включения гальванической развязки в цепь обратной связи. Чтобы
уменьшить влияние нелинейных искажений и помех в изолирующих цепях,
следует сформировать сигнал ошибки и усилить его еще на стороне выхода
источника. Для этого цепь обратной связи должна быть построена так, как
это показано на Рис. 6.56.
На вход блока развязки поступает сигнал, равный
^(^ref~ *Wr)-
В этом случае источник опорного напряжения и усилитель ошибки,
встроенные в микросхему контроллера, не используются, и сигнал с выхода блока
308 развязки подается прямо на модулятор контроллера.
Рис. 6.56. Функциональная схема организации
обратной связи по напряжению в сетевых
источниках
6.7. Сетевые источники питания
Один из наиболее простых вариантов
реализации блока формирования сигнала
обратной связи представлен на Рис. 6.57.
Здесь трехвыводной параллельный ИОН
типа TL431 используется в качестве
источника опорного напряжения и усилителя
ошибки.
Если ток катода ИОН не менее 1 мА, то
напряжение на резисторе R3 за счет обратной
связи через оптрон, контроллер и преобразователь
поддерживается равным 2.5 В, а это означает,
что выходное напряжение источника
Рис. 6.57. Изолирующая обратная
связь на микросхеме TL431
Коэффициент передачи такого канала обратной связи
F.32)
где A/s — приращение тока транзистора оптрона, КОРТ — коэффициент
передачи оптрона по току, GREF — передаточная проводимость источника опорного
напряжения, составляющая в области низких частот для TL431 приблизительно
1.7 См (Сименс). Схема на Рис. 6.57 получила широкое распространение в
импульсных сетевых источниках. Многие фирмы, выпускающие контроллеры для
импульсных сетевых источников, приводят в типовых схемах включения своих
изделий именно такую обратную связь. Фирма Texas Instruments изготавливает
микросхему TPS5904, содержащую на кристалле ИОН TL431 и транзисторный
оптрон, применение которой упрощает построение цепи обратной связи.
Более сложные специализированные микросхемы могут обеспечить более
высокую точность стабилизации и более широкие функциональные
возможности при формировании сигнала обратной связи. По типу электрической
развязки эти ИМС делятся на схемы для оптической и для трансформаторной связи.
Типичная ИМС для передачи сигнала обратной связи через оптический
канал - это UC3965 (Рис. 6.58).
Для нее характерен широкий диапазон напряжений питания D.3...20 В),
позволяющий питать микросхему непосредственно от выходных шин источника.
UC3965 включает прецизионный источник опорного напряжения на 2.5 В,
имеющий начальную точность установки не хуже 0.4% и нестабильность при
изменении нагрузки, входного напряжения и температуры не более 1%,
усилитель ошибки и выходной буфер. Усилитель ошибки имеет типичное усиление
100 дБ и произведение усиления на полосу — 6 МГц.
Для оптической передачи сигнала обратной связи сетевого источника могут
быть применены и регулируемые параллельные стабилизаторы напряжения с
открытым коллектором выходного транзистора, такие, как UC39431, UC3833 и
аналогичные им, причем микросхема UC39431 может работать в диапазоне
напряжений питания 2.2...36 В.
Недостаток оптического разделения входной и выходной цепей
импульсного источника состоит в том, что обычные дешевые оптроны обладают значи-
309
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
Рис. 6.58. Внутренняя структура и основная схема включения ИМС UC3965
тельной инерционностью и вносят дополнительный полюс на частоте
50...100 кГц в передаточную функцию разомкнутого контура регулирования.
Это ухудшает динамические характеристики источника. В этом отношении
лучшие результаты позволяет получить трансформаторная или конденсаторная
связь. Для трансформаторной или конденсаторной передачи сигнала обратной
связи через изолирующий барьер может быть использована микросхема
обратной связи UC3901 (Рис. 6.59).
К конт- Трасформатор
роллеру связи
310
Рис. 6.59. Внутренняя структура и типовая схема включения
микросхемы обратной связи UC3901
6.7. Сетевые источники питания
Передача сигнала осуществляется путем амплитудной модуляции. ИМС
содержит встроенный генератор, частота колебаний которого
устанавливается внешними конденсатором С$ ирезистором R$ вплоть до 5 М Гц, что позволяет
использовать миниатюрный радиочастотный трансформатор связи. В состав
микросхемы, кроме того, входит источник опорного напряжения, усилитель
ошибкиикомпаратор,предназначенныйдлявыявленияотклонениявыходно-
го напряжения импульсного источника от номинального значения более чем
на 10%. В этом случае на выводе STATUS появляется логическая единица.
Емкостный фильтр выпрямителя на вторичной стороне трансформатора связи
вносит полюс в передаточную функцию контура регулирования, но на более
высокой частоте, чем обычный оптрон.
В Табл. 6.5 приведены параметры некоторых моделей контроллеров ИСН.
Таблица 6.5. Микросхемы контроллеров для импульсных стабилизаторов напряжения
Модель
Особенности
ПН
пв
пи
vIN[gcc)
fs[Klb]
Контроллеры для однотактных схем
LM2636
LM2641
LT1929
МАХ669
UCCx882
UCCx813-5
ЬтССх810
Контроллер с цифровым
управлением
Сдвоенный контроллер со
скип-режимом
Двухфазный синхронный
Повышающий с ОС по
пиковому току
Синхронный с ОС по
среднему току, и цифровым
заданием выходного напряжения
Модифицированный UCx84x
с малым стартовым током
@.1 мА)
Два синхронизированных
канала
+
+
+
+
+
+
+
-
-
-
+
-
+
+
-
-
-
-
-
+
+
4.5...5.5
5.5...30
4...36
1.8...28
A0.8...13.2)
C.6...12)
(8.3...15)
-
-
-
1
1.5
1
1
Per.
2.2...6
-
Per.
1.3...3.5
Per.
Per
4
-
-
0.22
12
0.5
2
1000
300
300
500
700
1000
1000
Контроллеры для двухтактных схем
TL494
UCCx806
UCx827-2
ОС только по напряжению
ОС по пиковому току
ОС по среднему току
+
+
+
-
-
-
-
-
-
G...40)
A0...15)
(9.5...20)
0.2
1
1
Per.
Per.
Per.
7.5
1.4
32
300
1000
500
6.7.4. ИМС микромощных бестрансформаторных
сетевых источников
Выше мы рассмотрели импульсные сетевые источники на основе
импульсных преобразователей с высокочастотными импульсными трансформаторами
или двухобмоточными дросселями. Основными их достоинствами являются:
высокий КПД и электрическое разделение первичной и вторичной цепей.
Однако наличие в их составе моточных изделий (трансформаторов и дросселей)
существенно увеличивает их цену, массу и габариты. При питании от сети
микромощных потребителей, мощность рассеяния которых составляет единицы
ватт или даже доли ватта, потери энергии в источнике часто не являются
определяющей характеристикой при выборе его типа.
311
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
Промышленностью выпускаются несколько разновидностей ИМС
источников постоянного тока, питаемых от сети переменного тока, не нуждающихся
в применении трансформаторов и других моточных изделий. Основное их
достоинство — простота включения при низкой цене. Основные недостатки —
низкий КПД и гальваническая связь с сетью. Последнее обстоятельство делает
опасным применение подобных устройств с точки зрения поражения человека
электрическим током!! Низковольтный вывод схемы может оказаться напрямую
соединенным с фазным проводом сети. Тем не менее в тех случаях, когда
соединение с корпусом этого вывода или касание им человека при правильной
эксплуатации абсолютно исключено, применение таких источников может
оказаться целесообразным.
Микросхема HV-2405E фирмы Harris Semiconductor (отечественный аналог
— 1182ЕМ1) — это однокристальный источник питания, который может
выдавать напряжение 5...24 В при выходном токе до 50 мА, работая от сети
переменного тока напряжением 120...240 В. Для получения компактного, легкого,
дешевого и эффективного источника питания необходимы только несколько
внешних компонентов. Микросхема заменяет собой трансформатор,
выпрямитель и стабилизатор напряжения. Типовая схема включения ИМС приведена
на Рис. 6,60.
Рис. 6.60. Схема включения ИМС HV-2405E
312
Однокристальный источник преобразует напряжение сети переменного
тока в стабилизированное постоянное. Устройство состоит из выпрямительного
диода, предварительного импульсного стабилизатора и линейного
стабилизатора с последовательным регулирующим элементом, выполненных на одном
кристалле.
Предварительный импульсный стабилизатор
заряжает конденсатор большой емкости С3 до тех пор,
пока напряжение на нем не превысит заданное
выходное напряжение на 6 В. Тогда предварительный
стабилизатор переходит в режим блокирования и
находится в этом режиме, пока не начнется
следующий период сетевого напряжения (Рис. 6.61).
Конденсатор С$ питает энергией линейный
последовательный стабилизатор, который
обеспечивает схему пользователя напряжением постоянного
тока. Скорость разряда конденсатора С3 зависит от
тока нагрузки. Конденсатор подзаряжается в начале
каждого периода сетевого напряжения.
Рис. 6.61. Временные
диаграммы работы ИМС
HV-2405E
6.8. Импульсные источники на коммутируемых конденсаторах
Более просто устроены микросхемы микромощных сетевых источников без
гальванической развязки типа МАХ610/12. Внутренняя структура этих ИМС
представлена на Рис. 6.62а, а типовая схема включения — на Рис. 6.626.
Рис. 6.62. Микромощный сетевой источник МАХ610/12:
а — внутренняя структура, б — типовая схема включения
Микросхемы содержат мостовую схему выпрямления, ограничительный
стабилитрон и линейный стабилизатор напряжения. Допустимое значение
входного переменного тока составляет в непрерывном режиме 180 мА, а в
импульсном — до 5 А. Для ограничения входного тока между сетью и входом
микросхемы включается конденсатор и резисторы, один из которых (R{)
предназначен для ограничения тока заряда конденсаторов С\ и С2, а другой — для
разряда конденсатора С\ при выключении питания. Выходное напряжение 5 В
может быть установлено простым подключением вывода KSET к общей точке
схемы. Другие значения выходного напряжения в пределах 1.3...9 В можно
задать, подключая внешний резистивный делитель R2Ri между выходом и KSET,
как это показано на Рис. 6.626. Сопротивления резисторов рассчитываются из
условия
Для микросхемы МАХ612 диапазон выходных напряжений составляет
3...15В.
Чтобы ограничить выходной ток, между выводом ^оит и нагрузкой следует
включить резистор /?sens> сопротивление которого определяется по формуле
6.8. Импульсные источники
на коммутируемых конденсаторах
Дроссель импульсного стабилизаторанапряженияявляетсяисточникомпере-
напряжений и электромагнитных помех, поэтому во многих случаях желательно
обойтись без него. Тогда следует использовать источники на коммутируемых
конденсаторах. Базовые схемы таких источников приведены на Рис. 6.63. 313
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
314
Рис. 6.63. Схемы источников питания на коммутируемых
конденсаторах:
а — инвертор, б — удвоитель напряжения
Эти схемы реализованы, в частности, в ИМС ICL7660 американской фирмы
Intersil (отечественный аналог — 1168ЕП1).
Микросхема включает четыре двунаправленных ключа S\—S4 на
МОП-транзисторах, генератор тактовых импульсов и схему управления
ключами. К микросхеме также подключены два конденсатора. Конденсатор С\
переносит заряд от входной цепи к выходной, а С2 поддерживает напряжение на
нагрузке во время заряда Сх. Электрическую цепь из четырех ключей Sx—54 и
конденсатора С\ (в такой конфигурации, как на Рис. 6.63) можно назвать
секцией переноса заряда.
Рассмотрим работу инвертора (Рис. 6.63а). Цикл состоит из двух тактов. В
первом такте замкнуты ключи S\ и 53. Конденсатор С\ подключен к входу и
заряжается от первичного источника до напряжения FIN. Во втором такте
замкнуты ключи S2 и S4. Конденсатор С\ отключается от входа и подключается в
перевернутом состоянии к выходу устройства. Так он передает свой заряд на С2 (и в
нагрузку), обеспечивая на выходе напряжение, равное примерно -Vw.
При работе в режиме удвоителя напряжения (Рис. 6.636) в первом такте
конденсатор также заряжается до напряжения KIN, но теперь уже через ключи S2 и 54.
Во втором такте конденсатор Q через ключи S\ и 53 включается последовательно и
согласно с FIN. При этом напряжение на конденсаторе С2 устанавливается «2 KIN.
Такой способ преобразования напряжений прост и эффективен. Для его
реализации достаточно трех компонентов: ИМС и двух конденсаторов. Однако
выходное напряжение схемы не стабилизировано и определяется величиной
входного напряжения. Другой недостаток таких преобразователей — «мягкие»
внешние характеристики: эквивалентное выходное сопротивление
преобразователя ICL7660 составляет величину порядка 150 Ом. Тем не менее, простейшие
преобразователи на коммутируемых конденсаторах при определенных
обстоятельствах очень удобны, например, для того, чтобы обеспечить биполярное
питание ОУ. Фирма Maxim выпускает несколько микросхем (МАХ200 — МАХ211 и
др.) интерфейсных приемопередатчиков RC-232 с питанием от одного источника
напряжением 5 В, которые содержат удвоитель и инвертор на коммутируемых
конденсаторах, вырабатывающие питание ±10 В для схем передатчиков.
Существуют еще много интересных микросхем ИМС с коммутируемыми
конденсаторами. Например, модернизация ICL7660 — микросхема МАХ660,
имеющая выходное сопротивление всего 6.5 Ом и работающая на частоте до
6.8. Импульсные источники на коммутируемых конденсаторах
80 кГц. Ее выходной ток — до 100 мА. Микросхема МАХ864 — это сдвоенный
источник, который вырабатывает ±10 В (до 20 мА) от +5 В при частоте
коммутации около 200 кГц. На кристалле размещены ключи для двух переносчиков
заряда, один из которых удваивает входное напряжение, а другой —
инвертирует положительное выходное напряжение.
В носимой аппаратуре, получающей питание от батарей, бывает очень
важно иметь стабилизированное питание при высоком КПД, низком уровне
электромагнитных помех в условиях существенного изменения напряжения
источника (например, никель-кадмиевых аккумуляторов) при малых габаритах. Для
этого почти идеально подходит ИМС МАХ619. Она содержит удвоитель и ут-
роитель напряжения на коммутируемых конденсаторах. Система управления
контролирует выходное напряжение и производит подключение и отключение
секции утроения. Поскольку частота коммутации составляет 500 кГц,
пульсации выходного напряжения не превышают 100 мВ при емкости выходного
конденсатора 10 мкФ. Коэффициент стабилизации KUne = 75, выходное
сопротивление Лоит= 2 Ом. Диапазон входного напряжения 2...3.6 В (два аккумулятора
или гальванических элемента во всем диапазоне разряда). Выходное
напряжение составляет 5 В при токе нагрузки до 50 мА. КПД при 3 В входного
напряжения достигает 80%. Преобразователь включает 4 внешних конденсатора и
занимает с ними на плате площадь всего 0.6 см2.
Сравнительно недавно фирма Texas Instruments начала выпускать семейство
стабилизированных преобразователей на коммутируемых конденсаторах
TPS601xx, имеющих пониженный уровень пульсаций выходного напряжения.
Каждый из этих преобразователей имеет две секции переноса заряда (Рис. 6.64).
Рис. 6.64. Схема преобразователей на коммутируемых конденсаторах
TPS601xx
315
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
316
Эти секции в основном работают как удвоители напряжения с
регулируемым выходным напряжением.
В зависимости от подключения управляющих выводов ИМС может
работать в нескольких режимах.
Режим с пропуском импульсов. В этом режиме (вывод Skip имеет высокий
уровень) усилитель ошибки блокирует переключение силовых каскадов в
случае, если выходное напряжение выше номинального значения C.3 В для
TPS601 Ох и 5 В для TPS6011х). До тех пор пока напряжение не уменьшится
ниже этой величины, коммутация прекращается, т. е., по существу, реализуется
релейное регулирование. Уровень пульсаций выходного напряжения
значительно (примерно в 5 раз) выше, чем при работе с постоянной частотой. Зато
при этом режиме ток, потребляемый самой схемой, уменьшается примерно
в 50 раз, поэтому данный режим целесообразно использовать при малых
нагрузках.
Режим работы с постоянной частотой. Когда вывод Skip имеет низкий
уровень, оба переносчика заряда работают непрерывно, переключаясь с частотой
генератора. Схема управления в соответствии с сигналом ошибки управляет
зарядом конденсаторов силовых секций. Когда выходное напряжение
уменьшается, заряд, переносимый коммутируемыми конденсаторами, увеличивается и
парирует возмущение. Этот способ управления обеспечивает минимальные
пульсации выходного напряжения, особенно в противофазном режиме.
Однако при режиме работы с постоянной частотой при малых нагрузках
коэффициент полезного действия микросхемы ниже, чем при работе с пропуском
импульсов.
Противофазный режим. В этом режиме (на вывод Com подан сигнал низкого
уровня) силовые секции работают со 180-градусным фазовым сдвигом, т. е.
когда конденсатор одной секции заряжается от первичного источника,
конденсатор второй разряжается на выходную емкость. За счет этого заметно
уменьшаются пульсации выходного напряжения.
Синфазный режим. Когда на выводе Com установлен высокий уровень, обе
секции переноса заряда работают синфазно, т. е. они одновременно заряжают
коммутируемые конденсаторы и одновременно разряжают их на выходную емкость.
Поэтому в синфазном режиме необходим только один коммутируемый конденсатор,
что снижает стоимость устройства и экономит место на печатной плате.
На Рис. 6.65 представлены типовые схемы включения ИМС TPS60111 в
противофазном режиме с постоянной частотой (а) и в синфазном режиме с
пропуском импульсов (б).
Вид пульсаций выходного напряжения этого преобразователя, работающего
в противофазном режиме, при изменении сигнала на Skip-выводе в
последовательности 0—1—0 (меньшие пульсации соответствуют работе с постоянной
частотой) представлен на Рис. 6.66.
Пульсации выходного напряжения FRIP преобразователей TPS6011x не
превышают 10 мВ (от пика до пика) в противофазном режиме работы с
постоянной частотой при емкости выходного конденсатора 15 мкФ и токе нагрузки
150 мА в диапазоне входных напряжений 2.7...5.4 В и выходном
напряжении 5 В. Коэффициент стабилизации ^LINE = 50, выходное
сопротивление Лоит = 01 0м* КПД при 2.7 В входного напряжения достигает 90%.
6.8. Импульсные источники на коммутируемых конденсаторах
Рис. 6.65. Типовые схемы включения ИМС TPS60111:
а — в противофазном режиме с постоянной частотой, б — в синфазном режиме с пропуском
импульсов
*WB1
Очень интересная микросхема с
коммутируемыми конденсаторами LM3352
производится фирмой National Semiconductor.
Она стабилизирует выходное напряжение с
точностью ±3% в условиях, когда входное
напряжение как больше, так и меньше
выходного. В частности, она выдает в нагрузку
3.3 В при изменении входного напряжения
от 2.5 до 5.5 В и токе нагрузки до 200 мА.
ИМС имеет три секции переноса заряда,
управляемые цифровым вычислительным
блоком, который получает информацию об
уровне выходного напряжения от
3-разрядного АЦП..
Рекордно малым шумом обладает
инвертирующий преобразователь LM2687:
типичный размах пульсаций КМР типично не
более 1 мВ (от пика до пика) при
стабильном выходном напряжении из ряда —2.5/—
3/—3.3 В и изменении входного напряжения в пределах 2.7...5.5 В. Такие чудеса
объясняются очень просто: на выходе собственно преобразователя
разработчики микросхемы включили линейный МПН-стабилизатор.
В Табл. 6.6 приведены основные параметры некоторых моделей ИСН на
коммутируемых конденсаторах.
-200 -100 0 100 200 300 400 500 600 700
Цмкс]
Рис. 6.66. Пульсации выходного
напряжения преобразователя
TPS60111, работающего в
противофазном режиме
317
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
Таблица 6.6. Параметры ИСН на коммутируемых конденсаторах
Модель
TPS60110
ADP3604
REG711
МАХ680
МАХ 1759
LM3352
LM2687
Особенности
Малошумящий, стабилизированный,
с двумя секциями переноса заряда
Стабилизированный инвертор
коит=-зв
Стабилизатор положительного
напряжения с тепловой защитой
Нестабилизированный К)ит= ±2KIN
Стабилизированный
повышающий/понижающий
Стабилизированный
повышающий/понижающий
Стабилизированный, малошумящий
инвертор
V,N[B]
2J...5.4
4.5...6
1.8...5.5
2...6
1.6...5.5
2.5...5.5
2J...5.5
1оит[мА]
300
120
50
10
100
200
10
УмрИ-п
[мВ]
10
55
-
-
20
75
1
Iq[mA]
0.06
3
-
0.5
0.05
0.5
0.5
fs№]
300
120
1000
8
1500
1000
110
6.9. Корректоры коэффициента мощности
318
6.9.1. Общие положения
Сетевые импульсные источники питания с бестрансформаторным входом
потребляют ток от сети в виде относительно коротких импульсов большой
амплитуды, обеспечивающих подзаряд конденсатора сглаживающего фильтра,
включенного на выходе выпрямительного моста (Рис. 6.67).
Рис. 6.67. Выпрямитель с емкостным фильтром:
а — схема, б — эпюры напряжений и токов
Это плохо, по крайней мере, по двум причинам. Во-первых, действующее
значение потребляемого тока значительно превосходит его средневыпрямлен-
ное значение, определяющее энергию, потребляемую нагрузкой, а это
приводит к дополнительным потерям энергии в соединительных проводах и их
перегреву. Во-вторых, это порождает интенсивные высшие гармоники
потребляемого тока, что ведет к искажению формы питающего напряжения,
создает кондуктивные и электромагнитные помехи. Влияние первого фактора
6.9. Корректоры коэффициента мощности
где S = KIN/IN — полная мощность импульсного источника, причем FIN и /IN —
действующие значения соответственно входных напряжения и тока
(Рис. 6.67а); Р — активная мощность, потребляемая источником, которая
вычисляется по формуле
F.34)
где /i(av) — среднее значение входного тока преобразователя. Сокращение
длительности импульсов тока, потребляемого от сети, приводит к возрастанию
действующего значения при том же среднем значении тока импульсного
источника и, следовательно, к снижению коэффициента мощности, который в этом
случае может составлять величину порядка 0.5...0.7. Стандарт МЭК IEC
1000-3-2 предъявляет жесткие требования к потребителям энергии по
коэффициенту мощности и гармоническому составу потребляемого тока. Несмотря на
то что в России пока нет закона об обязательном использовании корректоров
коэффициента мощности (ККМ), их применение позволяет обеспечить
электромагнитную совместимость импульсных источников питания с сетью,
улучшить условия отбора мощности от стандартных однофазных сетей (меньший
перегрев проводов и соединений).
6.9.2. Алгоритмы формирования
кривой входного тока
В идеале при входном синусоидальном напряжении ток также должен быть
синусоидальным, причем напряжение и ток должны быть синфазны. Так будет
в случае, если нагрузкой источника переменного тока служит резистор.
Следовательно, идеальный ККМ должен моделировать по входным зажимам
импульсного источника резистивную нагрузку. Наряду с этим желательно, чтобы
выходное напряжение ККМ было бы постоянным. Из простейших схем
импульсных преобразователей в качестве силового каскада ККМ лучше всего под-
F.33)
характеризуется коэффициентом мощности %, который определяется
соотношением
причем vIN@ и /ш@ — мгновенные значения соответствующих напряжения и
тока, Т — период напряжения сети. Для линейных приемников энергии
коэффициент мощности зависит только от взаимного сдвига фаз напряжения и тока,
но для таких устройств, как схем^ выпрямления с емкостным фильтром,
значение % определяется в первую очередь их нелинейными свойствами.
Если пренебречь потерями энергии в схеме выпрямления и пульсациями
напряжения на сглаживающем конденсаторе, которые малы, то
F.35)
319
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
ходит повышающий преобразователь (см. Рис. 6.11), который может
использоваться в режимах как непрерывного, так и прерывистого тока дросселя, с
фиксированной или переменной частотой переключения. Вообще
фиксированная частота и непрерывный ток дросселя предпочтительны для мощных
преобразователей, поскольку позволяют уменьшить пиковое значение тока.
При мощности ниже примерно 500 Вт целесообразно использовать режим
прерывистого тока, т. к. он дает возможность уменьшить индуктивность дросселя и
снизить потери на переключение силовых транзистора и диода. Для
формирования кривой входного тока могут быть использованы различные алгоритмы.
Наиболее простой из них — управление с постоянным временем открытого
состояния ключа [6.12]. При этом используется только информация о токе
дросселя и выходном напряжении. Упрощенная блок-схема ККМ с таким
алгоритмом работы приведена на Рис. 6.68.
*J б)
Рис. 6.68. ККМ, работающий с постоянным временем открытого состояния ключа:
а — блок-схема, б — эпюры напряжений и токов
Основные принципы управления с постоянным временем открытого
состояния ключа состоят в следующем. Время открытого состояния /Open ключа
ККМ управляется выходным напряжением усилителя ошибки, которое
сравнивается с линейно изменяющимся опорным напряжением. Это время не должно
меняться в течение полупериода сетевого напряжения. При открытом ключе к
дросселю приложено выпрямленное напряжение сети. Мгновенное значение
тока через дроссель связано с этим напряжением следующим соотношением:
F.36)
Полагая, что частота коммутации ключа в тысячи раз выше частоты сети,
будем считать, что на протяжении нарастания или спада тока дросселя входное
напряжение не меняется. В таком случае ток нарастает по линейному закону и
приращение тока от нулевого значения за время открытого состояния ключа
составит
320
F.37)
6.9. Корректоры коэффициента мощности
Таким образом, огибающая амплитуд импульсов входного тока повторяют
форму входного напряжения. Средние значения тока за периоды циклов
коммутации ключа, которые пропорциональны площади треугольников импульсов
тока и, следовательно, равны половинам амплитуд этих импульсов, также будут
повторять форму входного напряжения (Рис. 6.686). После окончания
интервала fopEN ключ запирается и ток в катушке убывает также практически по
линейному закону. Когда он становится близок нулю, по сигналу от датчика тока
контроллер вновь открывает ключ и цикл повторяется.
В соответствии с указанным алгоритмом работает ИМС контроллера ККМ
UC3852, упрощенная внутренняя структура и типовая схема включения
которого приведены на Рис. 6.69.
Рис. 6.69. Внутренняя структура и типовая схема включения ИМС UC3852
Благодаря отрицательной обратной связи через усилитель ошибки Е/А
время /open изменяется с изменением входного напряжения или тока, но
достаточно медленно, так чтобы оставаться практически постоянным на протяжении
полупериода напряжения сети.
Для этого частота единичного усиления усилителя ошибки выбирается
меньшей, чем частота сети. Параметры линейно нарастающего опорного
напряжения задаются резистором и конденсатором, подключенным к выводам
ISET и RAMP. Один из компараторов (/= 0) следит за снижением тока
индуктивной катушки до нуля, а другой (/мах) — защищает схему от перегрузки по
току. Микросхема включает схему защиты от пониженного напряжения
питания UVLO
При подключении устройства к сети первоначальное питание ИМС
получает через резистор Л^ Пусковой ток не превышает 1 мА, поэтому мощность,
рассеиваемая на резисторе, невелика. После запуска ККМ микросхема питается от
обмотки, индуктивно связанной с обмоткой дросселя. Контроллер UC3852 из-
321
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
готавливается в 8-выводном корпусе и обеспечивает повышение коэффициента
мощности до 0.99.
Рассмотренный алгоритм управления ККМ с постоянным временем
открытого состояния ключа реализуется просто, но дает хорошие результаты толька
при очень высокой частоте коммутации ключа, поскольку требует выполнения
условия практической неизменности входного напряжения за цикл
коммутации. А что, если нам потребовался источник на 5 кВт с питанием от
однофазной сети? Ну, например, мы решили сделать портативный источник тока для
электродуговой сварки. В этом случае нам без ККМ просто не обойтись. В
корректорах такой мощности наиболее целесообразно применение в качестве
силовых ключей IGBT-транзисторов, отличающихся очень высокими
значениями предельных токов и напряжений, но работающих при более низких по
сравнению с МОП-транзисторами частотах переключения.
При невысоких частотах переключения лучшие характеристики имеют
ККМ с программным формированием входного тока [6.15]. При этом возможен
режим формирования амплитудных значений импульсов токов, огибающей
которых является синусоида, синфазная с входным напряжением, и режим
формирования средних значений импульсов тока, соответствующих текущему
значению синусоиды, синфазной с сетевым напряжением.
Второй способ предпочтительнее, поскольку дает гораздо более точные
результаты при формировании входного тока при непрерывном токе дросселя. А
в мощных источниках, как правило, используется именно режим непрерывного
тока дросселя ККМ, поскольку это позволяет снизить пиковые значения тока
через ключ и уменьшить уровень электромагнитных помех.
Блок-схема ККМ с контроллером, использующим метод средних значений
импульсов тока, приведена на Рис. 6.70.
Рис. 6.70. Блок-схема ККМ с контроллером, использующим метод
средних значений импульсов тока
322
Силовая схема корректора, как и ранее — повышающий преобразователь.
Выход преобразователя — постоянное напряжение, а входной ток —
выпрямленная синусоида. ККМ должен управлять и формой тока на входе, и
напряжением на выходе. Токовый контур управления программируется
выпрямленным сетевым напряжением так, чтобы входное сопротивление схемы
представлялось чисто резистивным. Выходное напряжение управляется путем
изменения средней амплитуды программно-управляемого входного тока. Ана-
6.9. Корректоры коэффициента мощности
лотовый перемножитель, входящий в состав управляющей схемы, создает
сигнал, программирующий входной ток путем широтно-импульсной модуляции.
Он умножает выпрямленное входное напряжение ККМ на выходной сигнал
усилителя ошибки для того, чтобы сигнал программирования тока имел форму
входного напряжения и такое среднее значение, которое при данной нагрузке
необходимо для обеспечения требуемого выходного напряжения. Таким
образом, здесь перемножитель выступает в качестве передаточного звена с
коэффициентом усиления, пропорциональным ошибке регулирования выходного
напряжения. Указанный принцип управления реализован в ИМС контроллера
ККМ LX1562 фирмы Linfinity Microelectronics, MC34261 фирмы Motorola,
ML4812 фирмы Micro Linear (отечественные аналоги — 1033ЕУ4/8), и др.
Большой интерес представляет модификация последней микросхемы — ML4819
(отечественный аналог — 1033ЕУ6), содержащая помимо полного контроллера
ККМ еще и схему ШИМ-контроллера для однотактного сетевого источника.
6.9.3. Контроллеры ККМ для сетей с широким
диапазоном напряжений
В не такие уж давние времена приборы, питаемые от сети, имели
ступенчатые переключатели величины сетевого напряжения, причем нередко на
несколько позиций, скажем, 110/127/220/240 В. При неверной установке этого
переключателя в лучшем случае выгорал предохранитель, в худшем мог загореться
весь прибор. В настоящее время большая часть сетевых импульсных источников
питания выполняется с так называемым универсальным сетевым входом,
рассчитанным на диапазон входных напряжений 85...265 В. В источниках без ККМ
такой широкий диапазон обычно обеспечивается за счет преобразования
мостовой схемы выпрямления на низких сетевых напряжениях в схему удвоителя
напряжения. В источниках с ККМ это невозможно, поскольку удвоитель
содержит конденсаторы большой емкости. С точки зрения повышения
коэффициента мощности включение ККМ после них абсолютно бессмысленно.
С другой стороны, поскольку силовой каскад ККМ представляет собой
повышающий преобразователь напряжения, довольно легко можно обеспечить
более или менее стабильное напряжение на входе основного преобразователя
при изменении напряжения первичной сети в широких пределах. Следует
отметить, однако, что не всякий контроллер ККМ с программным
формированием входного тока пригоден в этом случае. Например, рассмотренные выше
ИМС, такие, как ML4812 и подобные ей, в алгоритме которых предусмотрено
простое перемножение выпрямленного входного напряжения ККМ на
выходной сигнал усилителя ошибки, применять здесь нецелесообразно. При
изменении входного напряжения коэффициент усиления в контуре регулирования
выходного напряжения в этих схемах меняется в широких пределах, что
неприемлемо по нескольким причинам.
Сигнал, программирующий форму входного тока, должен обеспечить,
чтобы последний как можно точнее повторял форму входного выпрямленного
напряжения для максимизации коэффициента мощности. Если сделать ширину
полосы пропускания контура регулирования выходного напряжения большой,
то модуляция входного тока будет производиться так, чтобы сохранить посто- 323
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
янство выходного напряжения с высокой точностью. При этом регулятор будет
стремиться сделать среднее значение тока в каждом импульсе также
постоянным, а это приведет к сильному искажению формы входного тока и к
значительному уменьшению коэффициента мощности. Поэтому, как это уже
указывалось выше, частота среза петли регулирования выходного напряжения
должна быть не больше частоты сети.
С другой стороны, для улучшения быстродействия при отработке
возмущений по току нагрузки эта полоса должна быть по возможности широкой.
Отсюда вытекает компромиссное требование: полоса пропускания контура
регулирования выходного напряжения должна быть постоянна и приближенно
равна частоте сети. Необходимым условием постоянства полосы пропускания
является постоянство коэффициента усиления петли регулирования.
Выполнению этого условия мешают два обстоятельства.
Во-первых, в рассмотренной выше схеме, как видно из Рис. 6.70,
коэффициент усиления петли регулирования пропорционален входному напряжению.
Во-вторых, как следует из уравнения баланса мощности, для
стабилизированного импульсного преобразователя с малыми потерями и коэффициентом
мощности, равным единице, при постоянной нагрузке с ростом входного
напряжения, входной ток должен пропорционально уменьшаться
F.38)
По этим причинам для сохранения коэффициента усиления петли
регулирования выходного напряжения неизменным при изменении входного
напряжения следует изменять этот коэффициент обратно пропорционально квадрату
входного напряжения. Чтобы при этом не искажалась форма входного тока,
следует перед возведением в квадрат формировать сигнал, пропорциональный
среднему значению входного напряжения.
На Рис. 6.71 приведена упрощенная функциональная схема ККМ с таким
контроллером.
Рис. 6.71. Функциональная схема ККМ для широкого диапазона
входных напряжений
Выходной сигнал усилителя ошибки делится на квадрат среднего значения
324 выпрямленного входного напряжения, формируемого фильтром нижних частот
6.10. Драйверы
ФНЧ. Сигнал, пропорциональный частному от этого деления, умножается на
мгновенное значение выпрямленного входного напряжения. Сигнал,
пропорциональный произведению, управляет широтно-импульсным модулятором,
формирующим входной ток. Подобным образом устроены микросхемы
контроллера ККМ UC3854, UCC3857, ML4822 и др. В [6.15] приведен пример
расчета ККМ на ИМС UC3854 мощностью до 250 Вт на входное напряжение
80...270В.
В Табл. 6.7 приведены параметры некоторых моделей контроллеров
корректоров коэффициента мощности.
Таблица 6.7. Основные параметры ИМС контроллеров ККМ
Модель
Особенности
UCx852
Постоянное время открытого состояния ключа
UCx854A
Умножитель/делитель в цепи входного напря-
Ucx858
Умножитель/делитель в цепи входного
напряжения. Улучшен, эффективность на малой
нагрузке
ML4812
Умножитель с токовым входом
ML4819
Комбинированный ККМ/Ш ИМ-контроллер
LX1562
Умножитель с токовым входом. Режим
непрерывного тока. Корпус S0P-8
LTC1248
Умножитель с токовым входом
МС33368
Умножитель. Маскирование переднего фронта
токового импульса
6.10. Драйверы
6.10.1. Общие сведения
Драйвер представляет собой усилитель мощности и предназначен для
непосредственного управления силовым ключом преобразователя. Схема
драйвера определяется типом ключевого транзистора (биполярный или
полевой, р-п-р-, ^-канальный или п-р-п-, «-канальный), а также
расположением транзистора в схеме коммутатора («верхний», когда оба силовых
вывода ключа в открытом состоянии имеют высокий потенциал, или
«нижний», когда оба силовых вывода ключа в открытом состоянии имеют
нулевой потенциал). Драйвер должен усилить управляющий сигнал по
мощности и напряжению и в случае необходимости обеспечить его
потенциальный сдвиг.
325
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
6.10.2. Схемы драйверов биполярных
транзисторов
Биполярный транзистор управляется током базы. Он открывается
полностью (переходит в состояние насыщения), когда ток базы /в
F.39)
где В — статический коэффициент усиления тока базы, Iq — ток коллектора.
Закрывается биполярный транзистор простым уменьшением тока базы до нуля.
Чтобы ускорить процесс переключения, целесообразно на интервале
открывания кратковременно подавать увеличенный по сравнению с F.39) ток, а на
интервале закрывания также кратковременно прикладывать к эмиттерному
переходу обратное напряжение. Для этого обычно используют форсируюшие
Ж?-цепи.
На Рис. 6.72 представлены схемы простейших драйверов для биполярных
транзисторов (собственно драйверы выделены штриховым контуром).
326
Рис. 6.72. Схемы простейших драйверов для биполярных транзисторов:
а — на п-р -п -транзисторе, б— на МОП-транзисторе с/^-каналом,
в — на эмиттерном повторителе
Если ключ понижающего или инвертирующего преобразователей выполнен
на биполярном р-п-р транзисторе, то простейшая схема драйвера получается,
если его транзистор имеет я-/?-я-структуру (Рис. 6.72а). Если транзистор VT2
открыт, то ток, вытекающий из базы силового транзистора, поддерживает его в
состоянии насыщения. При запирании транзистора VT2 через резистор Rx
протекает обратный ток коллекторного перехода транзистора VTX. При этом
обеспечивается запертое состояние этого транзистора. Так, например, выполнен
драйвер понижающего импульсного преобразователя HA78S40.
Если силовой транзистор понижающего преобразователя имеет структуру
п-р-п, то для питания драйвера требуется напряжение, превосходящее входное,
что неудобно, т. к. требуется дополнительный источник. В противном случае
силовой транзистор не будет насыщен в открытом состоянии, что вызовет
дополнительные потери. Остроту проблемы несколько снижает применение
драйвера на МОП-транзисторе с/>-каналом (Рис. 6.726). При высоком уровне
управляющего напряжения KCTRL МОП-транзистор закрыт и закрыт силовой
транзистор, у которого база соединена только с его же эмиттером через
резистор R\. При низком уровне Pctrl МОП-транзистор открыт и база силового
6.10. Драйверы
транзистора соединена с его коллектором через низкое сопротивление
открытого канала МОП-транзистора, так что потенциалы базы и коллектора
практически совпадают. Силовой транзистор при этом, правда, не насыщен, но близок
к этому состоянию. Как следствие, увеличивается быстродействие, но и потери
тоже. Эта схема используется, например, в ИМС понижающего
преобразователя MIC4576 производства фирмы Micrel.
Для повышающего преобразователя удобнее всего в качестве драйвера
использовать Эмиттерный повторитель (Рис. 6.72в). Эта схема применяется очень
широко. Примером может служить МС34063А.
6.10.3. Драйверы МОП- и IGBT-транзисторов
МОП- и IGBT-транзисторы — это приборы с потенциальным
управлением. Как нагрузка драйверов эти транзисторы в их мощном исполнении
представляют собой конденсаторы с емкостью в тысячи или даже десятки
тысяч пикофарад. При открывании транзистора необходимо его входную
емкость зарядить, а при закрывании — разрядить. Транзисторы начинают
открываться, когда напряжение на их затворе относительно истока превышает
пороговое значение. Пороговое напряжение затвор—исток ^oS(th)
МОП-транзисторов, используемых в качестве силовых ключей, обычно
составляет 2...4 В. Поэтому для минимизации сопротивления канала
открытого МОП-транзистора /JDS(on) следует подавать на затвор 10..Л5 В, а для
гарантированного запирания транзистора достаточно, чтобы KGS = 0, хотя для
ускорения запирания лучше подать напряжение-5...-15 В. Превосходство
скорости запирания транзистора над скоростью отпирания очень важно,
поскольку это позволяет устранить сквозные токи в двухтактных схемах,
вызывающие большие потери и перегрев транзисторов. На практике обычно
бывает наоборот, поэтому приходится вводить «мертвое» время между
запиранием предыдущего транзистора и отпиранием последующего. Для
запирания транзисторов отрицательным напряжением необходим
дополнительный источник питания, что усложняет схему, поэтому
МОП-транзисторы чаще запирают нулевым напряжением.
На Рис. 6.73 представлены типовые схемы драйверов, применяемых для
управления МОП- и ЮВТ-транзисторами.
При использовании биполярных транзисторов одного типа проводимости
(Рис. 6.73а) эти транзисторы управляются противофазными напряжениями
(например, UC3842). Если же драйвер построен на комплементарной паре
МОП-транзисторов (Рис. 6.736), то транзисторы драйвера могут управляться
одним и тем же входным напряжением (например, МС33368, RS5RM и др.).
Условное обозначение драйверов такого типа (в переводной литературе их
называют тотемными, или пушпульными) представлено на Рис. 6.73в.
Такие драйверы могут быть применены для управления силовым
транзистором в схеме повышающего или сетевого однотактного преобразователя, а также
для управления нижним л-МОП-транзистором в схеме синхронного
выпрямителя (например, CS-5155). Кроме того, эта схема широко используется для
переключения /?-МОП-транзистора в схеме понижающего преобразователя
(TL1454, UCC3582 и др.). 327
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
328
Рис. 6.73. Драйверы для управления МОП- и ЮВТ-транзисторами
а — на биполярных транзисторах одного типа проводимости, б — на
комплементарной паре МОП-транзисторов, в — условное обозначение
пушпульных драйверов
Для отпирания силового л-МОП-транзистора понижающего
преобразователя требуется, чтобы потенциал затвора был бы выше потенциала истока, по
меньшей мере, на 5 В. В то же время потенциал истока этого ключа в открытом
состоянии почти равен входному напряжению преобразователя. Поэтому для
питания драйвера требуется напряжение, превосходящее входное на 5...15 В.
Здесь может быть два решения:
Питать драйвер от дополнительного источника более высокого
напряжения, чем входное, так как это делается, например, в типовых схемах включения
ИМС LX1681/2 или SC1101, где при входном напряжении импульсного
стабилизатора, составляющем 5 В, драйвер питается от добавочного источника
напряжением 12 В. *
Формировать дополнительное напряжение питания драйвера при помощи
схемы вольтодобавки (в англоязычной литературе — bootstrap).
Рассмотрим последний способ подробнее.
Нижний (низкопотенциальный) вывод питания
драйвера соединен с общей точкой транзистора
VT, диода VD и дросселя L понижающего
преобразователя напряжения (Рис. 6.74).
Когда транзистор закрыт, а диод VD (или
нижний транзистор в синхронном
выпрямителе) — открыт, конденсатор Св вольтодобавки
подзаряжается через диод VDB вольтодобавки до
напряжения входа KIN.
При отпирании транзистора потенциал его
истока, нижней обкладки конденсатора Св и
нижнего вывода питания драйвера становится
почти равным входному напряжению, диод VDB
закрывается и к затвору транзистора
относительно истока прикладывается напряжение, равное KIN. Отсюда ясно, что
входное напряжение должно лежать в интервале 5... 15 В. В противном случае
драйвер необходимо питать от дополнительного источника с указанным
напряжением либо применять специальные МОП-транзисторы с пониженным
Рис. 6.74. Схема вольтодобавки для
питания буфера «верхнего»
транзистора
6.10. Драйверы
пороговым напряжением затвор—исток, такие, например, как сдвоенный
«-канальный IRF7107, обладающий пороговым напряжением 1...3 В. Поскольку
емкость конденсатора Св выбирается намного больше входной емкости
МОП-транзистора (обычно Св принимают равной 0.1 мкФ), то ее разряд на
такте отпирания ключа незначителен.
Вольтодобавка для микросхемы контроллера понижающего
преобразователя с синхронным выпрямителем LM2630 питается от внутреннего
линейного МПН-стабилизатора с выходным напряжением 5.5 В. Диод вольтодобавки
расположен внутри микросхемы, а конденсатор — внешний. Аналогично
устроено питание драйверов верхних транзисторов ИМС двухфазного
синхронного понижающего преобразователя LTC1929 за тем исключением, что диоды
вольтодобавок тоже внешние.
6.10.4. Микросхемы драйверов
МОП- и IGBT-транзисторов
Драйверы для управления сложными преобразовательными схемами —
однофазными и трехфазными, содержат большое количество элементов, поэтому
неудивительно, что их выпускают в виде ИМС несколько фирм: International
Rectifier, Intersil, Unitrode и др. Эти микросхемы, помимо собственно
драйверов, содержат также цепи преобразования уровня, вспомогательную логику,
цепи задержки для формирования «мертвого» времени и т. д. Рассмотрим
схемотехнику развитого семейства драйверов IR21xx.
Драйвер нижнего ключа мостовой схемы IR2121 представлен на Рис. 6.75.
Рис. 6.75. Драйвер нижнего ключа IR2121
Он содержит буферный КМОП-усилитель Б, схему защиты от пониженного
напряжения питания UVLO, блок задания времени отключения при ошибке
ERROR, три компаратора напряжения KHj — KH3, усилитель обратной связи
по току У, логический элемент, аналоговый коммутатор S и три источника
опорного напряжения. Типовая схема включения драйвера IR2121 показана
на Рис. 6.76.
329
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
330
Если напряжение питания микросхемы Vcc
не менее 12 В и перегрузка по току истока
силового транзистора отсутствует, то транзистор
переключается синфазно с сигналом на входе IN.
Логический порог переключения компаратора
KHj составляет 1.8 В, поэтому вход IN
совместим по уровням с ТТЛ и КМОП логикой. При
понижении питающего напряжения схема
UVLO блокирует прохождение управляющих
импульсов.
Микросхема оснащена довольно сложной
схемой защиты силового транзистора от
перегрузки по току. Если напряжение на выходе
датчика тока (на Рис. 6.76 это резистор RT) превысит 0.23 В, компаратор КНз
переключается и пересоединяет вход буфера Б к выходу усилителя У. При этом
драйвер переходит в режим стабилизации тока на уровне
Рис. 6.76. Типовая схема
включения драйвера IR2121
F.40)
Одновременно запускается схема формирования задержки времени
выключения в блоке ERROR и компараторе КН2. Длительность этой задержки
определяется временем заряда конденсатора СЕ от 0 до 1.8 В и рассчитывается по формуле
F.41)
где /err= 0.1 мА — ток, заряжающий конденсатор С^. По истечении времени
задержки силовой транзистор на этом цикле коммутации запирается. В следующем
цикле все повторяется, так что в результате формируются короткие импульсы
тока, амплитуда которых определяется формулой F.40), а длительность — F.41).
Микросхема IR2121 может быть использована для управления как
«нижним» транзистором мостовой схемы, так и силовым транзистором
повышающего однотактного преобразователя или однотранзисторного сетевого прямоходо-
вого или обратноходового преобразователя.
Схема драйвера верхнего ключа мостовой схемы IR2118 приведена на
Рис. 6.77. Существенное отличие этой схемы от предыдущей состоит в наличии
схемы высоковольтного сдвига уровня напряжения на транзисторах VT\ и VT2.
Рис. 6.77. Схема драйвера верхнего ключа мостовой схемы IR2118
6.10. Драйверы
Рис. 6.78. Типовая схема включения
драйвера IR2118
При Усс > 10 В переход входного сигнала из 0 в 1 и наоборот вызывает
импульс на соответствующем выходе генератора импульсов ГИ. Эти
импульсы после сдвига по уровню вверх и фильтрации (селекции) по
длительности поступают на соответствующие входы Л?-триггера, который, в
свою очередь, управляет выходным буфером Б. Фильтр предназначен для
повышения помехоустойчивости. Он подавляет импульсы длительностью
менее 50 не. Типовая схема включения драйвера IR2118 представлена на
Рис. 6.78.
Здесь на диоде и конденсаторе Св выполнена
цепь вольтодобавки, обеспечивающая
напряжение на затворе открытого силового
транзистора, равное Vcc. Этот драйвер может быть
использован для управления не только
«верхним» транзистором мостовой схемы, но и
транзистором высоковольтного понижающего
преобразователя. Для последней цели еще
лучше подходит ИМС драйвера IR2125,
содержащая цепи защиты от перегрузки силового
транзистора по току, аналогичные цепям того
же назначения в ИМС IR2121.
Драйвер верхнего и нижнего ключей IR2110 содержит на одном
кристалле как схему драйвера верхнего ключа, подобную IR2118, так и схему
драйвера нижнего ключа, подобную IR2121, за исключением цепей
токовой защиты, которых здесь нет. Управление обоими ключами независимо.
Имеется схема формирования «мертвого» времени для нижнего ключа.
Есть вход SD для отключения обоих драйверов. Напряжение питания
управляющей логики может быть смещено относительно напряжения
питания вольтодобавки. Импульсный выходной ток буферов может
достигать 2 А, что обеспечивает высокую скорость переключения управляемых
транзисторов. Максимально допустимое напряжение питания силовой
части для этой микросхемы составляет 500 В. Данную микросхему
целесообразно использовать для управления ключами инвертора с ШИМ-регу-
лированием выходного напряжения.
Если же требуется частотное управление
полумостовым инвертором, то лучше всего
использовать 8-выводную ИМС IR2111, которая
имеет только один управляющий вход
(Рис. 6.79).
Здесь обозначено: НО (high output) —
выход для управления верхним
транзистором, LO (low output) — выход для
управления нижним транзистором. Для
предотвращения сквозных токов, которые могут
возникнуть при коммутации транзисторов,
между запиранием одного транзистора и
отпиранием другого при помощи цепей задержки вводится «мертвое»
время длительностью 0.7 мкс.
Рис. 6.79. Драйвер для управления
полумостовым инвертором IR2111
331
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
Наконец, для нерегулируемого полумостового инвертора
выпускаются драйверы семейства IR215x, которые содержат на кристалле (помимо
того, что имеет ИМС IR2111) еще и схему автогенератора, аналогичную
схеме таймера NE555, а также стабилитрон на напряжение 15 В,
ограничивающий напряжение, питающее логику и выходные буферы. Эта ИМС
позволяет построить исключительно простой сетевой импульсный нестаби-
лизированный источник. Типовая схема включения ИМС IR215х
приведена на Рис. 6.80.
Рис. 6.80. Типовая схема включения ИМС IR215x
332
Управляющие цепи питаются от высокого напряжения через
балластный резистор /?!.Поскольку ток потребления микросхемы не превышает
5 мА, мощность, рассеиваемая на этом резисторе при питании схемы от
сети переменного тока 220 В через выпрямитель, оказывается немногим
больше 1 Вт. Еще более простой и малогабаритный источник можно
сделать на одной из недорогих гибридных микросхем семейства IR51HDxxx,
которые в одном корпусе помимо драйвера IR215x содержат еще и пару
высоковольтных силовых МОП-транзисторов, а также диод вольтодобав-
ки. Например, ИМС IR51HD420 включает драйвер IR2151 и два л-каналь-
ных транзистора IRFC420. Максимально допустимое входное напряжение
составляет 500 В, максимально допустимый ток через транзисторы —
0.7 А. Внешний вид этой микросхемы представлен на Рис. 6.81.
Микросхемы семейства IR215x широко
применяются в схемах электронного
балласта для люминесцентных ламп [6.16].
Из других ИМС драйверов можно
отметить HIP4080 (Intersil) для управления
однофазной мостовой схемой с напряжением до
80 В и IR2233 для управления трехфазным
мостом с напряжением до 1200 В. Фирма
Unitrode выпускает семейство драйверов
UC370x, которые могут быть использованы
для управления затвором
МОП-транзистора через трансформатор.
Рис. 6.81. Внешний вид
микросхемы IR51HD420
IR51HD420
6.11. Устойчивость импульсных стабилизаторов напряжения
6.11. Устойчивость импульсных
стабилизаторов напряжения
6.11.1. Общие сведения
Так же как и линейные стабилизаторы, импульсные стабилизаторы
напряжения (ИСН) имеют отрицательные обратные связи по напряжению с высоким
петлевым коэффициентом усиления. Поэтому необходимо принимать меры
для обеспечения их устойчивости. Проблема устойчивости импульсных
стабилизаторов является даже более острой, чем линейных, по крайней мере по трем
причинам:
1. Дискретный во времени характер управления ИСН, вносящий
определенную специфику (в частности, дополнительное фазовое запаздывание) в
процессы управления.
2. Наличие в составе ИСН многозвенных LC-фильтров, выходных и
входных, необходимых для подавления помех, обусловленных импульсным
характером регулирования.
3. Существенно нелинейный характер широтно- и частотно-импульсной
модуляции, затрудняющий исследование динамики ИСН, в особенности в
режимах глубоких возмущений. У повышающего и инвертирующего ИСН
нелинейны даже статические характеристики (см. Рис. 6.13 и Рис. 6.16).
По этим причинам исследование устойчивости импульсных стабилизаторов
представляет собой сложную задачу [3.7, 6.7], В этой книге, рассчитанной на
широкий круг читателей, исследование устойчивости будет рассмотрено только
в линейном приближении. Специалисты по теории автоматического
управления называют такой подход рассмотрением «в малом».
6.11.2. Устойчивость импульсных стабилизаторов
с обратной связью по напряжению
Анализ устойчивости импульсных стабилизаторов напряжения может быть
существенно упрощен, если воспользоваться методом средних значений. Этот
метод базируется на гипотезе, что частота единичного усиления контура
регулирования напряжения ИСН (частота среза) существенно (по крайней мере, в
десятки раз) меньше частоты коммутации силовых ключей. В этом случае
быстро меняющиеся мгновенные значения напряжений и токов заменяются их
средними значениями за период коммутации Т. Например, среднее за период
напряжение в цепи может быть найдено по формуле
F.42)
Ниже приведены результаты, опубликованные в работе [6.17], которая в
настоящее время считается классической, судя по количеству ссылок на нее.
Для понижающего (см. Рис. 6.2), повышающего (см. Рис. 6.11) и
инвертирующего (см. Рис. 6.15) преобразователей разомкнутый контур регулирования
333
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
334
напряжения в режиме непрерывного тока дросселя может быть представлен в
виде упрощенной структурной схемы, приведенной на Рис. 6.82.
Рис. 6.82. Упрощенная структурная схема разомкнутого
контура регулирования ИСН
На этой схеме обозначено:
Wv(s) — передаточная функция регулятора;
— передаточная функция функционально необходимой части (ФНЧ) ИСН.
В Табл. 6.8 представлены формулы для вычисления параметров
передаточных функций Kq(s) и W?(s) основных схем простейших однотактных ИСН.
Здесь, помимо уже поясненных параметров, обозначены: Re — эквивалентное
последовательное сопротивление конденсатора; Ri — активное сопротивление
обмотки дросселя; R — сопротивление нагрузки; у— коэффициент заполнения;
6=1-у.
Таблица 6.8. Формулы для вычисления параметров однотактных ИСН
Параметр Понижающий ИСН Повышающий ИСН Инвертирующий ИСН
— эквивалентная передаточная функция силовой схемы ИСН;
6.11. Устойчивость импульсных стабилизаторов напряжения
Как видно из Табл. 6.3, математические модели ИСН получаются
непростыми. Особенно неприятно то, что характерный для повышающего и
инвертирующего ИСН нуль 1/соа находится в правой комплексной полуплоскости. Это
обстоятельство серьезно осложняет задачу обеспечения устойчивости. Система
оказывается неминимально фазовой, т. е. для ее устойчивости недостаточно,
чтобы ЛАЧХ пересекала ось частот с наклоном по абсолютной величине менее
40 дБ/дек. Кроме того, этот нуль зависит от коэффициента у, т. е. от
регулирующего параметра стабилизатора. Для примера, на Рис. 6.83 приведены теорети-
Рис. 6.83. Теоретические ЛЧХ повышающего преобразователя
ческие логарифмические частотные характеристики (ЛЧХ) разомкнутого
контура регулирования повышающего ИСН, выполненного по схеме Рис. 6.11
[6.17], для различных значений коэффициента заполнения у.
Этот ИСН имеет следующие параметры: Т= 0.1 мс; R = 60 Ом; L = 6 мГн;
С= 41.7 мкФ; RL = 3 Ом; RC = 1 Ом; KIN= 60 В.
Из ЛЧХ видно, что уже при у > 0.25, даже при единичном усилении контура
обратной связи на нулевой частоте, запасы устойчивости по фазе совершенно
недостаточны, а при дальнейшем увеличении коэффициента заполнения
замкнутая система вообще становится неустойчивой.
Из анализа Табл. 6.8 можно сделать следующие выводы.
Устойчивость понижающего ИСН с
обратной связью по напряжению (относящихся к
классу минимально фазовых) может быть
обеспечена с помощью традиционных
последовательных корректирующих устройств.
Целесообразно для повышения точности стабилизации
использовать пропорционально-интегральный
(ПИ) регулятор. В области высоких частот (в
окрестности частоты среза) для повышения
запасов устойчивости можно ввести фазоопереже-
ние. На Рис. 6.84 приведена схема усилителя с обратными связями,
реализующая упомянутые решения.
Рис. 6.84. Схема усилителя с
корректирующими связями
335
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
Цепочка /JFCp обеспечивает фазоопережение, a Rp\C?i —
пропорционально-интегральное регулирование. Методику расчета подобных
последовательных корректирующих цепей можно найти в любом учебнике по теории
автоматического управления, например в [6.18]. Подобное корректирующее
устройство может быть реализовано на усилителе сигнала ошибки, входящего в
состав большинства ИМС контроллеров с регулированием по напряжению,
таких, какТЬ494, LT1576, 1114ЕУ1 и др. В частности, аналогичные цепи
используются в типовой схеме включения контроллера для управления понижающим
HCHTL5001.
Повышать устойчивость повышающего и инвертирующего ИСН
(неминимально фазовых) путем последовательной коррекции вряд ли целесообразно, т.
к. фазовое запаздывание контура регулирования этих преобразователей очень
велико. К тому же вид как амплитудно-частотных, так и фазо-частотных
характеристик этих преобразователей сильно зависит от величины регулирующего
параметра у. Тем не менее в некоторых простейших моделях ИСН, например
МС33466, используются форсирующие цепи для компенсации фазового
запаздывания. Другой путь обеспечения приемлемых характеристик ИСН
повышающего типа — использование релейного способа регулирования. В этом
случае вместо усилителя сигнала ошибки применяется компаратор. Известно (см.,
например, [6.18]), что релейные системы, имеющие переходную
характеристику без зоны нечувствительности, всегда работают в режиме автоколебаний. При
этом среднее значение выходного напряжения будет стабилизироваться, но
частота колебаний может быть относительно низкой (особенно в условиях,
когда входное напряжение или нагрузка ИСН меняется), а пульсации
соответственно большими. Чтобы повысить частоту переключения силового транзистора
в автоколебательном режиме, используют внутренний синхрогенератор. Так
построен регулятор, например, в ИМС повышающего ИСН МС33463. Это
обеспечивает стабильность выходного напряжения в пределах 2.5% от
номинального значения. Значительно лучшие характеристики обеспечивает
применение наряду с обратной связью по напряжению еще и дополнительной
обратной связи по току дросселя ДОСТД (см. подраздел 6.6.4).
6.11.3. Устойчивость импульсных стабилизаторов
с дополнительной обратной связью
по току дросселя
По сути дела любой ИСН с индуктивными элементами можно представить
в виде сочетания импульсного источника тока, состоящего из силового ключа и
дросселя, и питаемого этим источником выходного конденсатора большой
емкости, включаемого параллельно нагрузке. В импульсных источниках,
снабженных только обратной связью по выходному напряжению, дроссель и
конденсатор образуют колебательный контур с неплохой добротностью, в
результате чего полюса передаточной функции ФНЧ оказываются
комплексно-сопряженными, и запаздывание по фазе в контуре регулирования в области
336 частоты свободных колебаний этого контура нарастает с частотой очень быст-
6.11. Устойчивость импульсных стабилизаторов напряжения
ро. Идея метода введения дополнительной обратной связи по току состоит в
том, чтобы за счет местной обратной связи разъединить конденсатор с
дросселем по динамике и существенно повысить быстродействие источника тока, т. е.
перенести один из полюсов передаточной функции ФНЧ в область высоких
частот за частоту среза разомкнутого контура регулирования напряжения.
Подобный подход уже давно используется в электроприводе. Это так
называемые «системы подчиненного регулирования». Система управления ИСН,
построенная в соответствии с принципом подчиненного регулирования,
включает два контура управления: внутренний — токовый и внешний — контур
регулирования напряжения (в электроприводе — скорости). При этом контур
регулирования напряжения выступает по отношению к токовому контуру как
задатчик тока, отдаваемого в нагрузку. Для управления ИСН принцип
подчиненного регулирования начали использовать значительно позже, в конце 70-х
годов прошлого века, одновременно с бурным развитием интегральной
схемотехники ИСН. На Рис. 6.85 представлена функциональная схема подчиненного
регулирования ИСН.
Рис. 6.85. Функциональная схема подчиненного регулирования
ИСН
Здесь Zlq — нагрузка источника тока преобразователя, представляющая
собой включенные параллельно выходной сглаживающий конденсатор и
сопротивление собственно нагрузки. В зависимости от того, какое значение тока
используется при определении момента формирования регулируемого фронта
импульса ИСН (определении текущего значения у), различают два типа
регуляторов тока: регуляторы с управлением по пиковому значению тока и
регуляторы с управлением по среднему току. Оба этих типа регуляторов применяются в
системах с ШИМ, работающих на фиксированной частоте.
Регуляторы с управлением по пиковому току
Регулирование по пиковому значению тока начали использовать раньше и в
настоящее время оно применяется в большинстве моделей контроллеров ИСН.
Это LM2630, UCC3813, семейства UCx84x, LT107x и др. Метод управления
током дросселя путем сравнения нарастающего тока дросселя (или силового
ключа) с максимальным уровнем, устанавливаемым внешним контуром
управления, иллюстрируется Рис. 6.86 на примере понижающего ИСН.
Компаратор напряжения КН выключает силовой ключ, когда напряженке
Vc, пропорциональное мгновенному значению тока, достигает заданного
уровня VAVf устанавливаемого усилителем напряжения УН (Рис. 6.87а). Включение
силового ключа осуществляется подачей на 5-вход ЛУ-триггера импульса от
генератора тактовых импульсов ГТИ. 337
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
Рис. 6.86. Функциональная схема понижающего ИСН с дополнительной
обратной связью по пиковому току дросселя
Рис. 6.87. Диаграммы, поясняющие метод
управления по пиковому току дросселя:
а — при отсутствии коммутационных помех,
б — при наличие коммутационных помех
338
Методу управления по пиковому значению тока дросселя присущи
следующие недостатки:
• амплитуда колебаний тока дросселя довольно мала, в результате чего этот
метод чувствителен к помехам. Если, например, считывается ток не дросселя, а
силового ключа, что очень удобно в повышающих, прямоходовых и обратно-
ходовых ИСН, то в момент включения ключа за счет рассасывания зарядов в
силовом диоде и заряда межвитковой емкости трансформатора формируется
короткий импульс тока, передаваемый на вход компаратора (Рис. 6.876). Этот
импульс нарушает работу регулятора — он заставит силовой ключ
выключиться немедленно, поэтому в цепь измерения тока включают
интегрирующую ЛС-цепочку с небольшой постоянной времени. В ИМС ШИМ-контрол-
лера UCCx813 имеется встроенный узел маскирования переднего фронта
токового импульса — ей такая цепочка не нужна. Важными мероприятиями
для снижения чувствительности регулятора пикового тока к помехам
являются правильная трассировка печатной платы и применение блокирующих
конденсаторов по цепям питания;
• меньшая точность регулирования тока, чем при использовании метода
управления по среднему току. Ведь выходным параметром источника являет-
6.11. Устойчивость импульсных стабилизаторов напряжения
ся именно средний ток, а при больших пульсациях тока его пиковое значение
при изменении у непропорционально среднему значению;
• для метода управления по пиковому току характерны субгармонические
автоколебания при у > 0.5 [6.19]. Субгармонические колебания — это такие
колебания, частота которых в целое число раз меньше тактовой частоты. В
замкнутых системах, описываемых разностными уравнениями первого порядка, к
которым относится контур регулирования тока дросселя в ИСН, возможны
колебания только на основной субгармонике, т. е. на частоте/s/2, где/5 —
частота коммутации силового ключа.
Рассмотрим вопрос о субгармонической неустойчивости контура тока
поподробнее, применительно к схеме на Рис. 6.86. На Рис. 6.88а представлена
форма тока дросселя IL преобразователя с токовым управлением.
Рис. 6.88. Диаграммы, поясняющие возникновение субгармонических колебаний
в токовом контуре ИСН
Величина тока задается сигналом усилителя ошибки Кед. При изменении тока
на величину А/, можно видеть, что А/со временем уменьшится при у < 0.5 и
увеличится при у > 0.5 (Рис. 6.886). Математически это может быть выражено так:
F.43)
где т\ и т2 — скорости изменения тока дросселя на участках заряда и разряда.
Для сохранения устойчивости при у > 0.5 можно вычесть из задающего
сигнала пилообразное напряжение с наклоном т (см. Рис. 6.88в). Это дает:
При у -> 1, т{ -> 0, а \AI\\ -» |А/0|. Тогда из F.44) следует, что для того, чтобы
|А/,| < |Д/0| при любых значениях у, необходимо выполнение условия
F.45)
339
F.44)
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
поэтому, для того чтобы гарантировать устойчивость токового контура при всех
значениях у, наклон пилообразного корректирующего сигнала должен быть
больше, чем половина наклона токового сигнала. Для понижающего ИСН
F.46)
Если выбрать т = т2, то, как видно из Рис. 6.88г, при отклонении тока
дросселя от установившегося процесса, переходный процесс будет
заканчиваться за один такт, т. е. будет обеспечено оптимальное быстродействие
контура тока. К сожалению, при постоянной настройке параметров это
возможно только для узкого интервала значений у.
В ранних моделях ИМС
преобразователей и контроллеров с
управлением по пиковому
значению тока введение
корректирующего пилообразного напряжения
осуществляется путем внешнего
подключения входа токовой
обратной связи к одному из выводов
генератора тактовых сигналов,
либо через резистор, либо, как ре-
Рис. 6.89. Введение корректирующего пилообразного
напряжения
комендует изготовитель для
UC3842, через Эмиттерный
повторитель (Рис. 6.89).
Более современные ИМС,
такие, как, например,
однокристальный преобразователь LM2587 или контроллер LM2630, содержат на
кристалле узел суммирования сигнала, пропорционального току дросселя, с
корректирующим пилообразным сигналом, причем у LM2630 амплитуда пилы
устанавливается внешним резистором. У LM2630 имеется также
дифференциальный усилитель сигнала, снимаемого с датчика тока, что упрощает измерение
тока дросселя понижающего ИСН.
340
Регуляторы с управлением по среднему току
Регулирование по среднему значению тока дросселя позволяет устранить
основные недостатки регуляторов по пиковому току за счет введения в контур
регулирования тока интегрирующего усилителя. Схема понижающего ИСН с
регулятором по среднему току приведена на Рис. 6.90.
поэтому амплитуда напряжения пилообразного корректирующего сигнала А
должна быть
6.11. Устойчивость импульсных стабилизаторов напряжения
Выходной сигнал усилителя напряжения УН (усилителя ошибки) VEA задает
требуемое значение тока. Напряжение на токочувствительном резисторе R$
пропорционально текущему значение тока дросселя. Ошибка по току
усиливается пропорционально-интегральным (ПИ) регулятором на усилителе тока УТ
и сравнивается с пилообразным сигналом большой амплитуды на входах
компаратора напряжения КН. Этот сигнал вырабатывается генератором
пилообразного напряжения ГПН. Частота среза токового контура может быть
установлена выбором параметров цепи обратной связи УТ. Эта частота может быть не
меньше, чем аналогичная частота среза регулятора пикового тока, но на низких
частотах усиление в рассматриваемом случае может быть намного выше.
Преимущества управления по среднему току [6.20]:
• зависимости среднего тока от времени воспроизводятся с более высокой
точностью. Это особенно важно в корректорах коэффициента мощности. Режим
управления по среднему току особенно предпочтителен, если при низких
значениях входного тока ККМ имеет место переход в режим прерывистого тока.
Внешний контур регулирования напряжения практически не ощущает этого
перехода;
• коррекция скорости нарастания тока пилообразным сигналом не требуется,
однако при чрезмерном усилении контура регулирования тока возможна
потеря устойчивости;
• регулятор имеет высокую помехоустойчивость. Одновременно с
открыванием силового ключа пилообразный опорный сигнал снижается до самого
низкого уровня и первоначальный импульс тока через ключ не может
переключить компаратор;
• метод управления по среднему току может использоваться для управления
током в любой ветви силовой схемы импульсного преобразователя. Это
может быть управление входным током в понижающем и инвертирующем
преобразователях, а также управление выходным током повышающего и
инвертирующего преобразователей.
Для организации управления по среднему току предназначены микросхемы
контроллеров: UCx827, UCCx880, UCx886 и др.
Пример 6.2. Рассмотрим выбор цепей обратной связи токового усилителя в
токовом контуре понижающего ИСН на Рис. 6.90 [6.20]. Параметры ИСН: частота
коммутации ключа/8 = 100 кГц, FIN = 15...30 В, Коит = 12 В, /оит = 5 A, AIL = 1.2 А
(при FjN = 30 В), Rs = 0.1 Ом. Нуль R^cm значительно ниже частоты
переключения. Полоса пропускания УТ много больше/8. Токовый контур имеет один полюс
(обусловлен дросселем). Сигнал датчика тока дросселя с пульсациями треуголь-
341
Рис. 6.90. Схема понижающего ИСН с регулятором среднего тока
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
ной формы усилен, инвертирован в УТ и подан на вход компаратора. Напряжение
Pea убывает при замкнутом силовом ключе и нарастает при разомкнутом
(Рис. 6.91).
Рис. 6.91. Диаграммы,
поясняющие работу регулятора с
управлением по среднему току
342
Как следует из изложенного выше, чтобы не было субгармонических
колебаний, крутизна наклона Кед при разомкнутом ключе не должна быть больше
крутизны наклона пилообразного опорного напряжения Framp Скорость спада
тока при разомкнутом ключе
Крутизна наклона пилообразного опорного напряжения
F.47)
F.48)
где А — амплитуда пилообразного напряжения. Усиление УТ,
максимально-допустимое на частоте/s, определяется из равенства
и, следовательно,
F.49)
F.50)
Для данных примера 6.2. максимально допустимое значение КСА = 25. Этот
коэффициент устанавливается отношением RR\/R[. Малосигнальное усиление
разомкнутого контура регулирования тока ИСН от выхода УТ до напряжения
на токочувствительном резисторе R$ равно при KIN = 30 В
F.51)
Полное усиление разомкнутого контура регулирования тока найдем,
умножив F.50) на F.51). Приравняв результат единице, определим частоту среза
контура тока^сО) соответствующую максимально допустимому значению КСА:
6.11. Устойчивость импульсных стабилизаторов напряжения
откуда
F.52)
В данном примере частота среза /to = 20 кГц при FIN=15B (у =0.8) и
/со = 40 кГц при KIN = 30 В (у = 0.4).
Если вместо ПИ-регулятора на усилителе УТ
использовать просто усилитель, то запас по фазе
токового контура будет 90° — гораздо больше, чем
необходимо, зато усиление на низких частотах
будет не намного лучше, чем с регулятором пикового
тока. Включение конденсатора СР1, создающего
нуль RnCn на частоте 10 кГц, ниже минимально
возможной частоты среза, уменьшает запас по фазе
до 63° и значительно увеличивает низкочастотное
усиление, повышая точность регулирования тока.
Полюс передаточной функции усилителя
i?Ri(CRI||CF) целесообразно установить равным
частоте переключения/s, т. е. 100 кГц. Его назначение
— сглаживание узких импульсов, возникающих в
момент коммутации силового ключа. На Рис. 6.92
представлена асимптотическая ЛАЧХ контура регулирования тока,
построенная без учета дискретных свойств широтно-импульсного модулятора.
Рис. 6.92. Асимптотическая
ЛАЧХ контура регулирования
тока
Режим прерывистого тока
Когда ток нагрузки становится малым, ток через дроссель в цикле
коммутации может достигать нуля. Значение тока нагрузки, соответствующее границе
между режимами непрерывного и прерывистого тока, определяется формулой
F.53)
Наибольшее значение граничный ток имеет при максимальном входном
напряжении и соответственно минимальном у. В рассмотренном выше примере
граница режима соответствует 0.2 А, когда KIN = 15 В и 0.6 А, если FIN = 30 В. В
режиме прерывистого тока для такого же изменения выходного тока требуется
большее изменение коэффициента заполнения у, чем в режиме непрерывного
тока. Поэтому усиление контура тока падает. Кроме того, исчезает полюс с
90-градусным запаздыванием по фазе, так что усиление контура становится
независимым от частоты. Токовый контур становится более устойчивым, но
значительно менее чувствительным.
При режиме управления по пиковому току ошибка, обусловленная
непропорциональностью пикового и среднего значения тока, становится
недопустимо большой, но при управлении по среднему току высокое усиление УТ легко
обеспечивает работу схемы при больших значениях Ау, поддерживая таким
образом хорошее регулирование тока.
343
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
В таком случае внешний контур, гораздо более инерционный, имеет
обычно только один полюс в области частот ниже частоты среза и может быть легко
стабилизирован. На Рис. 6.93 приведена структурная схема понижающего ИСН
с обратной связью по току, построенная для малых отклонений средних
значений переменных.
Рис. 6.93. Структурная схема понижающего ИСН с обратной связью по току
Здесь обозначено: YL(s) = RL + sL — операторная проводимость цепи
дросселя, Zix)(s) — операторное сопротивление нагрузки преобразователя,
определяемое формулой
344
W?n(s) — передаточная функция регулятора напряжения, Wyi{s) —
передаточная функция регулятора тока, Ку и К\ — коэффициенты передачи датчиков
обратной связи соответственно напряжения и тока. Кц — коэффициент
передачи преобразователя, величина которого зависит от способа регулирования тока.
6.11.4. Особенности анализа устойчивости ИСН
с силовыми трансформаторами
Приведенный выше обзор методов анализа устойчивости касался
импульсных стабилизаторов с гальваническими связями между первичным источником
и нагрузкой. Анализ устойчивости преобразователей с силовыми
трансформаторами имеет некоторые особенности, связанные с электромагнитным
преобразованием энергии в трансформаторах. Как обычно в таких случаях, заменим
трансформатор его схемой замещения, причем будем полагать, что
трансформатор идеален, т. е. сопротивления и индуктивности рассеяния обмоток равны
нулю (с точки зрения анализа устойчивости это не имеет существенного значения,
т. к. частоты свободных колебаний, обусловленных этими параметрами,
многократно превосходят частоту среза контура регулирования). С учетом такой
замены эквивалентная схема прямоходового стабилизатора (Рис. 6.35) и
стабилизаторов на основе инверторов (Рис. 6.26) будет иметь вид как у понижающего
Регулятор тока с замкнутой обратной связью на частотах ниже частоты среза
ведет себя как преобразователь напряжение—ток с соответствующей
передаточной проводимостью
6.11. Устойчивость импульсных стабилизаторов напряжения
преобразователя (Рис. 6.94а), а эквивалентная схема обратноходового
стабилизатора (Рис. 6.40) — как у инвертирующего преобразователя (Рис. 6.946).
Рис. 6.94. Эквивалентные схемы трансформаторных преобразователей:
а — понижающего преобразователя, б — инвертирующего преобразователя
Параметры входных цепей в данном случае удобнее привести к выходным
цепям. Значения приведенных параметров для различных инверторных схем
можно найти в Табл. 6.9.
Таблица 6.9. Соотношения между исходными и приведенными параметрами
Схема инвертора
Нулевая
Полумостовая
Мостовая
Прямоходовая
\/к*
2/к
\/к
\/к
/s//s
2
2
2
1
* к = w{/w2 — коэффициент трансформации трансформатора.
Вопросы и задачи
1. Перечислите преимущества импульсных стабилизаторов напряжения
перед линейными.
2. Как влияет на амплитуду пульсаций выходного напряжения увеличение
частоты коммутации ключа импульсного стабилизатора напряжения?
3. Для чего в схему понижающего импульсного стабилизатора (см.
Рис. 6.2) напряжения включают диод VD?
4. Что дает применение синхронного выпрямителя в схеме понижающего
импульсного стабилизатора вместо диода?
5. Каковы преимущества и недостатки отсутствия режима прерывистых
токов в схеме с синхронным выпрямителем?
6. Перечислите достоинства применения многофазных преобразователей
по сравнению с однофазными той же мощности.
7. Чем определяется максимальное обратное напряжение на диоде VD
повышающего импульсного стабилизатора напряжения (см. Рис. 6.11)?
8. К выходу повышающего импульсного стабилизатора напряжения
(Рис. 6.11) подключена нагрузка RL= 1 Ом. Входное напряжение
стабилизатора FIN=2.5B, у=0.5, С=200мкФ, частота коммутации ключа
/= 100 кГц. Определите амплитуду пульсаций напряжения на нагрузке,
полагая конденсатор идеальным.
345
Для обратноходового трансформаторного преобразователя
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
346
9. Начертите диаграмму напряжений на дросселе инвертирующего
импульсного стабилизатора напряжения (см. Рис. 6.15) при у = 0.25.
10. Укажите преимущества схемы Кука (Рис. 6.19) перед инвертирующим
преобразователем.
11. Определите максимальное напряжение на транзисторе SEPIC-преобра-
зователя при известных входном и выходном напряжениях.
12. Почему в нулевой инверторной схеме (см. Рис. 6.26а) хуже
использование трансформатора, чем в мостовой? Ведь хотя в нулевой схеме при
прочих равных условиях число витков первичной обмотки вдвое
больше, чем в мостовой, сечение провода этой обмотки можно взять
меньшим, так как ток через каждую полуобмотку течет только половину
периода.
13. Для чего в нерегулируемых инверторах вводится «мертвое» время между
запиранием одних ключей и отпиранием других?
14. Для чего предназначены в прямоходовом преобразователе (см.
Рис. 6.35а) обмотка w3 с диодом VD{?
15. Почему в прямоходовом преобразователе с дополнительной обратной
связью по току дросселя при изменении входного напряжения энергия,
поступающая в нагрузку, не меняется?
16. Что будет происходить в обратноходовом импульсном стабилизаторе
напряжения с двухобмоточным дросселем (см. Рис. 6.40) при
уменьшении коэффициента связи между обмотками?
17. В чем состоят достоинства и недостатки режимов непрерывного и
прерывистого тока в обратноходовом преобразователе?
18. Как уменьшить максимальное напряжение на закрытом силовом
транзисторе обратноходового преобразователя, изменяя соотношение чисел
витков обмоток его дросселя?
19. Нарисуйте примерный вид внешней характеристики обратноходового
преобразователя, работающего с постоянными частотой и
относительной длительностью импульсов у.
20. В чем преимущество двухтранзисторных однотактных преобразователей
перед однотранзисторными?
21. Какому условию должно удовлетворять соотношение чисел витков
обмоток дросселя двухтранзисторного обратноходового
преобразователя, чтобы на втором такте не было возврата энергии в сеть?
22. Как изменится максимальная энергия, которую может накопить
дроссель обратноходового преобразователя в первом такте, если уменьшить
число витков его первичной обмотки?
23. Как изменится максимальная энергия, которую может накопить
дроссель обратноходового преобразователя в первом такте, если уменьшить
магнитную проницаемость материала его магнитопровода при
неизменных прочих параметрах?
24. Почему в прямоходовом преобразователе лучше использование
силового транзистора, чем в обратноходовом?
25. Нарисуйте траектории переключения силового транзистора в
однотактных резонансных ПНН- и ПНТ-преобразователей в плоскости их
выходных характеристик.
6.11. Устойчивость импульсных стабилизаторов напряжения
26. Считая все параметры элементов схемы резонансного преобразователя
на Рис. 6.45 известными и пренебрегая потерями энергии, определите в
общем виде амплитуду напряжения сток—исток транзистора.
27. Почему эффект Миллера не проявляется при переключении силовых
транзисторов в резонансных ПНН-преобразователях?
28. Повлияет ли паразитный диод подложки силового транзистора на
работу резонансного прямоходового преобразователя, схема которого
приведена на Рис. 6.46а?
29. Почему у микросхемы контроллера для сетевых источников питания
UCx861 (см. Табл. 6.3) разница между порогами срабатывания схемы
UVLO значительно больше, чем у идентичной UCx863,
предназначенной для построения низковольтных преобразователей постоянного
тока?
30. Укажите, хотя бы приблизительно, минимальное значение выходного
напряжения в схеме на Рис. 6.57, при котором эта схема может
нормально работать.
31. Постройте диаграммы напряжений на конденсаторах в функции
времени схем инвертора и удвоителя напряжения на Рис. 6.63 при
номинальной нагрузке.
32. Определите выходное эквивалентное сопротивление дУот/д1от
удвоителя напряжения на коммутируемых конденсаторах при С\ = 0Л мкФ,
С2= 1 мкФ, KIN= 10 В, /= 50 кГц, RL= 500 Ом. Ключи считать
идеальными.
33. Как изменится коэффициент мощности выпрямителя с емкостным
фильтром (см. Рис. 6.67) при уменьшении емкости конденсатора
фильтра?
34. В чем состоит преимущество повышающего преобразователя в качестве
силового каскада ККМ перед понижающим?
35. Как связана длительность закрытого состояния ключа ККМ,
работающего с постоянным временем открытого состояния ключа (см. Рис. 6.68)
с величиной входного напряжения?
36. Можно ли обеспечить работу в режиме непрерывного тока ККМ,
работающего с постоянным временем открытого состояния ключа?
37. Почему не стремятся расширить полосу пропускания контура
стабилизации выходного напряжения ККМ?
38. Нарисуйте схему драйвера для управления МОП-транзисторами на
комплементарной паре биполярных транзисторов.
39. Какие элементы в схеме драйвера IR2118 (см. Рис. 6.77) должны иметь
высокое допустимое напряжение?
40. Каким максимально допустимым обратным напряжением должен
обладать диод вольтодобавки VDB драйвера IR2118, если напряжение стока
силового транзистора составляет 600 В? Какое максимальное
напряжение прикладывается к конденсатору вольтодобавки Св в этом случае?
41. Нарисуйте примерный вид внешней характеристики понижающего
ИСНсДОСТД.
347
Глава 6. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
Литература к главе 6
6.1. Моин B.C. Стабилизированные транзисторные преобразователи. — М: Энерго-
атомиздат, 1986. — 376 с.
6.2. Высокочастотные транзисторные преобразователи /Э.М. Ромаш, Ю.И. Драбо-
вич, Н.И. Юрченко и др. — М.: Радио и связь, 1988. — 288 с.
6.3. Bindra A. New-Generation Power Controllers take Multiphase Route //Electronic
Design. - 1999, vol. 47, № 22, pp. 77 - 84.
6.4. Злакоманов В.В., Яковлев Б.С. Взаимодействие динамических систем с
источниками энергии. М.: Энергия, 1980. — 208 с.
6.5. Северне Р., Блум Г. Импульсные преобразователи постоянного напряжения для
систем вторичного электропитания. — М.: Энергоатомиздат, 1988. — 294 с.
6.6. Cuk S. General Topological Properties of Switching Structures //Power Electronics
Specialists Conference Record, June 1979, pp. 109 — 130.
6.7. Микросхемы для импульсных источников питания и их применение. Издание
2-е. - М.: ДОДЭКА, 2000. - 608 с.
6.8. Гудинаф Ф. Интегральные микросхемы управления импульсными источниками
питания //Электроника, № 3. — 1989. — С. 62 — 74.
6.9. Magdziak R. Effective MOS Transistors Drive Circuits for Bridge Converters
//Electronic Design. — 2000, vol. 48, № 4, pp. 122 — 124.
6.10. Andreycak W. Zero Voltage Switching Resonant Power Conversion //Application
Note V-138. — Unitrode Corp., April 1999. — 28 pp.
6.11. Andreycak W. Phase Shifted, Zero Voltage Transition Design Considerations and the
VC3875 PWM Controller//Application Note V-136A. — Unitrode Corp., April 2000. — 15 pp.
6.12. Перспективные изделия. Выпуск 3. M.: Додэка, 1997. — 96 с.
6.13. Когтапп В. TPS6010x/TPS601 lx Charge Pump //Application Report SLUA070. —
Texas Instruments, August 1999. — 53 pp.
6.14. Andreycak W. Power Factor Correction using the UC3852 Controlled On-Time Zero
Current Switching Technique//Application Note V-132. — Texas Instruments Incorporated,
1999.-17 pp.
6.15. Todd P.C. UC3854 Controlled Power Factor Correction Circuit Design//Application
Note V-134. — Texas Instruments Incorporated. — 1999, 21 pp.
6.16. Electronic Ballasts using the Cost-Saving IR215X Drivers //Application Note
AN-995A. — Control Integrated Circuit Designers' Manual. — International Rectifier. — 1998.
- Pp. 59-68.
6.17. Wester G. W., Middlebrook R. D. Low-Frequency Characterization of Switched
DC-DC Converters//IEEE Transactions on Aerospace and Electronic Systems, Vol. AES-9,
May 1973. - PP. 376 - 385.
6.18. Солодовников В.В., Плотников В.Н., Яковлев А.В. Основы теории и элементы
систем автоматического регулирования. Учебное пособие для вузов. — М.:
Машиностроение, 1985. — 556 с.
6.19. Modelling, Analysis and Compensation of the Current-Mode Converter// Application
Note V-97. — Texas Instruments Incorporated. — 1999, 7 pp.
6.20. Dixon L. Average Current Mode Control of Switching Power Supplies// Application
Note V-140. — Texas Instruments Incorporated, 1999—15 pp.
348
Глава 7
АНАЛОГОВЫЕ КОММУТАТОРЫ
7.1. Общие сведения
Аналоговый коммутатор служит для переключения непрерывно
изменяющихся электрических сигналов. Если коммутатор находится в состоянии
«включено», его выходное напряжение должно по возможности точно
равняться входному; если же коммутатор находится в состоянии «выключено»,
выходное напряжение должно быть как можно ближе к нулю.
Существуют различные схемные решения коммутаторов, удовлетворяющие
указанным условиям. Их принцип действия показан на Рис. 7.1 на примере
механических (контактных) переключателей.
Рис. 7.1. Схемы механических коммутаторов:
а — последовательный, б — параллельный, в —
последовательно-параллельный
На Рис. 7.1а представлен последовательный коммутатор. Пока контакт
замкнут, Vqjjj = FIN. Когда контакт размыкается, выходное напряжение
становится равным нулю. Все это справедливо, если источник сигнала имеет нулевое
выходное сопротивление и емкость нагрузки равна нулю. При значительном
выходном сопротивлении источника сигнала напряжение Vom делится между
этим сопротивлением и резистором R. Поэтому эту схему не следует применять
в случае, если источником сигнала является источник тока, например
фотодиод. При существенной емкости нагрузки во время разряда этой емкости при
размыкании ключа S выходное напряжение коммутатора падает до нуля не
мгновенно.
В схеме параллельного коммутатора (Рис. 7.16) Vom= Уш при разомкнутом
ключе, если входное сопротивление нагрузки коммутатора бесконечно велико.
Если же оно соизмеримо с сопротивлением резистора R, то на резисторе будет
падать часть выходного напряжения источника сигнала. При наличии
емкостной нагрузки будет относительно медленно устанавливаться выходное
напряжение после размыкания ключа. 349
Глава 7. АНАЛОГОВЫЕ КОММУТАТОРЫ
Последовательно-параллельный коммутатор, показанный на Рис. 1Лв,
объединяет достоинства двух предыдущих схем. В положении 1 он имеет выходное
сопротивление, равное выходному сопротивлению источника сигнала, и при
его малой величине коммутатор обладает коэффициентом передачи близким к
1 и малым временем установления выходного напряжения при заметной
емкости нагрузки. В положении 2 его выходное напряжение и выходное
сопротивление равны нулю, что обеспечивает практически мгновенный разряд емкости
нагрузки.
7.2. Электронные коммутаторы
Разновидности аналоговых коммутаторов, показанные на Рис. 7.1, могут
быть реализованы на электронных элементах с управляемым сопротивлением,
имеющим малое минимальное и высокое максимальное значения. Для этих
целей могут использоваться диодные мосты, биполярные и полевые транзисторы.
Вследствие неидеальности они вносят ряд статических и динамических
погрешностей в коммутируемые сигналы. В числе основных источников
погрешностей электронных аналоговых коммутаторов можно назвать следующие:
• проходное сопротивление электронного ключа не равно нулю во включенном
состоянии и, конечно, в выключенном;
• наличие не равного нулю остаточного напряжения на замкнутом ключе при
нулевом коммутируемом сигнале;
• нелинейная зависимость сопротивления ключа от напряжения (тока) как на
сигнальном, так и на управляющем входах;
• взаимовлияние управляющего и коммутируемого сигналов;
• наличие целого ряда паразитных емкостей, одни из которых приводят к
ослаблению высокочастотных составляющих коммутируемого сигнала при
замкнутом ключе, другие — к просачиванию коммутируемого сигнала на
выход при разомкнутом ключе, и, наконец, третьи обуславливают
дополнительные связи между каналами, а также между управляющими и сигнальными
цепями;
• ограниченный динамический диапазон коммутируемых токов и напряжений.
Ключи на биполярных транзисторах и в особенности на диодных мостах
потребляют значительную мощность по цепям управления и имеют сравнительно
большое остаточное напряжение, составляющее единицы мВ, что вносит
заметную погрешность при коммутации слабых сигналов (менее 100 мВ). Такие
ключи имеют высокое быстродействие (время переключения диодных ключей,
выполненных на диодах Шоттки, достигает 1 не) и применяются для
построения сверхскоростных коммутаторов. В менее быстродействующих
коммутаторах гораздо шире применяются ключи на полевых транзисторах.
7.3. Коммутаторы на полевых транзисторах
Как известно, полевой транзистор в области малых напряжений
сток—исток ведет себя как резистор, сопротивление которого может изменяться во мно-
350 го раз при изменении управляющего напряжения затвор—исток VGS. На
7.3. Коммутаторы на полевых транзисторах
Если напряжение *ctrl
установить большим, чем
максимально возможное входное
напряжение коммутатора, диод
VD закроется и напряжение
VGS будет, как это и требуется,
равно нулю. При достаточно
большом отрицательном
управляющем напряжении
диод будет открыт, а полевой
транзистор закрыт. В таком
режиме работы через резистор R\
течет ток от источника входного сигнала в цепь управляющего сигнала. Но это
не мешает нормальной работе схемы, так как выходное напряжение
коммутатора в этом режиме равно нулю. Однако если цепь входного сигнала содержит
разделительный конденсатор, последний при закрытом транзисторе
коммутатора зарядится до отрицательного уровня управляющего напряжения, что
приведет к полному нарушению работы схемы.
Проблемы подобного рода
не возникают, если в качестве
ключа использовать полевой
транзистор с изолированным
затвором (МОП-транзистор).
Его можно переводить в
открытое состояние, подавая
управляющее напряжение
большее, чем максимальное
входное положительное
напряжение, причем и в таком
режиме работы ток затвора
будет равен нулю. Таким
образом, в этой схеме коммутатора отпадает необходимость в диоде и
резисторе /?!. Схемы коммутаторов с ключами на МОП-транзисторах приведены
на Рис. 7.3. 351
Рис. 7.3. Последовательные коммутаторы с ключами на
МОП-транзисторах:
а — на л-канальном МОП-транзисторе, б—на.
КМОП-транзисторах
Рис. 7.2. Последовательный коммутатор на полевом
транзисторе с управляющим /ьл-переходом:
a — упрощенная схема, б — с ограничением
максимального управляющего напряжения цепью
VD-RX
Рис. 7.2а изображена упрощенная схема последовательного коммутатора на
полевом транзисторе с управляющим/?-л-переходом.
Если в этой схеме управляющее напряжение Jctrl установить меньшим,
чем минимально возможное входное напряжение, по крайней мере, на
величину порогового напряжения транзистора, транзистор закроется и выходное
напряжение станет равным нулю. Для того чтобы транзистор был открыт,
напряжение затвор—исток VG$ следует поддерживать равным нулю, что обеспечивает
минимальное сопротивление канала. Если же это напряжение станет больше
нуля, управляющий /ьл-переход откроется и выход коммутатора окажется
соединенным с цепью управления. В схеме Рис. 7.2л равенство нулю ^gs
обеспечить не так просто, поскольку потенциал истока меняется согласно изменению
входного сигнала. Наиболее простой путь преодоления этой трудности показан
на Рис. 1.26.
Глава 7. АНАЛОГОВЫЕ КОММУТАТОРЫ
352
На схеме Рис. 7.3а ключом является я-канальный МОП-транзистор
обогащенного типа, не проводящий ток при VGS < 0. В этом состоянии
сопротивление канала, как правило, достигает единиц или даже десятков ГОм, и сигнал не
проходит через ключ. Подача на затвор относительно истока значительного
положительного напряжения переводит канал в проводящее состояние, причем
для транзисторов, используемых в качестве аналоговых ключей, типичное
сопротивление открытого канала составляет от 1 до 300 Ом.
Эта схема будет работать при положительных входных сигналах, которые,
по крайней мере, на 5 В меньше, чем Рстяь ПРИ более высоком уровне сигнала
напряжение затвор—исток будет недостаточно, чтобы удержать транзистор в
открытом состоянии (сопротивление канала в открытом состоянии RqN начнет
расти); при заземленной подложке отрицательные входные сигналы вызовут
включение транзистора. Поэтому, если надо переключать сигналы обеих
полярностей (например, в диапазоне -10...+10 В), то можно использовать такую же
схему, соединив подложку с источником—15 В и подавая на затвор
напряжения +15 В (включено) и —15 В (выключено).
Лучшими характеристиками обладают
ключи на комплементарных
МОП-транзисторах (КМОП-ключи), Рис. 7.36. Здесь на
подложку транзистора F7\ подается
положительное питающее напряжение +KSi а на подложку
транзистора VT2 — отрицательное питающее
напряжение -Ks. При высоком уровне
управляющего сигнала напряжение на затворе л-ка-
нального транзистора VT2 практически
равно +KS. В этом случае транзистор VT2
проводит сигналы с уровнями от — Ks до величины
лишь на несколько вольт ниже +FS (при более
высоких уровнях сигнала Rq^ начинает резко
расти). В то же время напряжение на затворе
/ьканального транзистора VT\ практически
равно — Ks и он пропускает сигналы с
уровнями от + Fs до значения на несколько вольт
выше — Fs. Таким образом, все сигналы в
диапазоне от +FS до -Vs проходят через двухполюсник (параллельно включенные
VTX и VT2) с малым сопротивлением RqN (Рис. 7.4).
При переключении управляющего сигнала на низкий уровень напряжение
на затворе «-канального транзистора VT2 устанавливается близким k-Vs, а на
затворе/^-канального транзистора VT\ — близким к +^«
Тогда, при -Ks< FIN < +KS, оба транзистора заперты, и цепь коммутатора
разомкнута. В результате получается аналоговый переключатель для входных
сигналов в диапазоне от отрицательного до положительного напряжений питания
ключа. Эта схема одинаково работает в двух направлениях — ее сигнальные
зажимы S (source — исток) и D (drain — сток) могут служить как входом, так и
выходом. Она является основой практически для всех ИМС аналоговых
коммутаторов, выпускаемых в настоящее время.
Рис. 7.4. Зависимость сопротивления
каналов ключей на
КМОП-транзисторах от входного
напряжения
7.4. Промышленные аналоговые коммутаторы
Управление КМОП-ключами осуществляется с помощью логических схем,
причем наилучшие результаты обеспечивает КМОП-логика. Логические входы
аналоговых коммутаторов обычно проектируют таким образом, чтобы сделать
возможным управление ими как от КМОП-, так и от ТТЛ-логики. В ранних
моделях для питания входных логических элементов требовалось специальное
напряжение питания +5 В. В последних моделях этих ИМС обходятся без него.
Применение КМОП-логики для управления транзисторами ключей дает еще
один важный положительный эффект — в состоянии покоя эти микросхемы
практически не потребляют энергии.
7.4. Промышленные аналоговые
коммутаторы
7.4.1. Простейшие коммутаторы
Промышленность в настоящее время выпускает большое количество типов
микросхем, содержащих несколько отдельных, не связанных между собой
коммутируемых каналов (ключей). Основные производители аналоговых
коммутаторов — это фирмы Analog Devices и Maxim (в России — НПО «Светлана»). Для
низкочастотных применений обычный состав микросхемы — четыре ключа,
каждый из которых соединяет или разъединяет две цепи (single pole/single throw,
SPST — однополюсный переключатель на одно направление). Как правило,
при нулевом уровне на управляющих входах эти 4 ключа либо все нормально
замкнуты, либо все нормально разомкнуты, либо два из них нормально
замкнуты, а два других нормально разомкнуты. Пример — серия МАХ391/2/3/5:
МАХ391 — 4 нормально замкнутых (normally closed, NC) ключа, МАХ392 — 4
нормально разомкнутых (normally opened, NO) ключа, в составе МАХ393 два
нормально замкнутых и два нормально разомкнутых ключа, МАХ395 — 8
нормально разомкнутых (N0) ключей.
Другой вариант многоканального коммутатора — в одном корпусе
несколько переключателей, каждый из которых в зависимости от уровня управляющего
сигнала соединяет одну цепь с одной из двух других цепей (single pole/dual
throw, SPDT — однополюсный переключатель на два направления). Например,
ADG749 содержит на кристалле один переключатель с типичным Ron = 4 Ом, а
МАХ394 — четыре переключателя с типичным Ron = 17 Ом.
Применение аналоговых коммутаторов в составе микропроцессорной
системы делает желательным управление ими от системной шины. В этом
случае в состав микросхемы коммутатора должен входить регистр для приема
и хранения цифровой информации о состоянии ключей. При этом возможна
как параллельная, так и последовательная загрузка данных в регистр.
Примером коммутаторов с параллельной загрузкой могут служить 4-канальные
ADG222 или 590КН12. Эти коммутаторы содержат четыре нормально
разомкнутых ключа и 4-разрядный регистр хранения. По активному уровню сигнала
записи W 4-разрядное слово данных, управляющее ключами, загружается
в регистр.
353
Глава 7. АНАЛОГОВЫЕ КОММУТАТОРЫ
Увеличение числа ключей в одном корпусе
требует применения корпусов с большим числом
выводов для управляющих входов, усложняет
трассировку чипа и платы. В связи с этим
оказывается удобным применять коммутаторы с
управлением по последовательному интерфейсу. Это
позволяет существенно упростить подключение
коммутаторов к управляющему
микроконтроллеру. Типичные примеры таких устройств — 6-ка-
нальные МАХ4562/3 и 8-канальные ADG714/5.
Коммутаторы МАХ4562 и ADG715 из этих
семейств имеют двухпроводный цифровой
интерфейс A2С-совместимый), а МАХ4563 и ADG714
- трехпроводный (SPI/QSPI, MICROWIRE-co-
вместимый). На Рис. 7.5 представлена
функциональная схема коммутатора ADG715.
Он содержит восемь двунаправленных ключей
с типичными RqN= 2.5 Ом и токами утечки в закрытом состоянии 0.01 нА, а
также управляющую логику, в состав которой входит сдвиговый регистр.
Микросхема ADG715 управляется от двухпроводной последовательной
шины 12С как ведомое устройство. На вход SCL поступают тактовые импульсы, а
на SDA — 8-разрядное слово данных. ADG715 имеет 7-разрядный адрес. Пять
старших значащих разрядов (MSB) определяют номер коммутируемого канала,
а два младших разряда (LSB) — адрес микросхемы. Для установления адреса
микросхемы служат выводы А! и Ао, которые подключаются к шине питания
(тогда At = 1) или к общей шине (тогда А, = 0). Таким образом, по двум линиям
интерфейса можно адресовать четыре микросхемы, управляя состояниями
8 х 4 = 32 ключей.
Двухпроводный последовательный интерфейс шины по протоколу 12С
работает следующим образом (Рис 7.6):
Рис. 7.5. Схема 8-канального
коммутатора ADG715 с
последовательным управлением
по шине 12С
354
Рис. 7.6. Диаграммы управления коммутатором ADG715 по двухпроводной
последовательной шине 12С
Управляющее устройство (мастер) инициализирует передачу данных,
генерируя стартовый бит путем перевода линии SDA из 1 в 0 при высоком уровне
тактовой линии SCL. Далее передается адресный байт, который состоит из
7-разрядного адреса ведомого устройства, сопровождаемого R/W-битом (этот
бит определяет, будут ли данные читаться из ведомого устройства или будут
записываться в него). Ведомый, чей адрес соответствует переданному адресу,
отвечает, устанавливая на выводе SDA низкий уровень в течение девятого
синхронизирующего импульса (сигнал подтверждения, АСК). На этой стадии все
7.4. Промышленные аналоговые коммутаторы
другие устройства на шине остаются незанятыми, в то время как выбранное
устройство ждет данные, которые^будут записаны в или прочитаны из
последовательного регистра. Если бит R/W= 0, мастер осуществляет запись в ведомое
устройство (именно этот режим иллюстрируется Рис. 7.6), в противном случае
мастер считывает содержимое регистра.
Данные передаются по линии SDA в виде последовательности
синхронизируемых импульсов (8 информационных битов, сопровождаемых битом
подтверждения). При передаче данных изменения на линии SDA могут происходить
только при низком уровне сигнала SCL; в течение полупериода с высоким
уровнем сигнала SCL состояние линии SDA не меняется.
После передачи или чтения данных мастер останавливает процесс путем
перевода линии SDA из низкого в высокое состояние, в то время как сигнал SCL
имеет высокий уровень (команда «Стоп»).
Микросхема 8-канального коммутатора ADG715 обладает функцией
повторной записи, которая создает дополнительное удобство пользователю. Пусть
в некоторый момент времени требуется изменить состояния ключей только
одной из микросхем. Тогда, если не было команды «Стоп», при повторных
обращениях к этой микросхеме можно передавать только байт данных, который
снова изменит состояние ключей и так далее.
7.4.2. Аналоговые мультиплексоры
Хорошим применением ключей на полевых транзисторах являются
мультиплексоры — схемы, которые позволяют выбрать один из нескольких входов по
указанию управляющего цифрового сигнала. Такие устройства входят в состав
систем сбора данных микропроцессорных регуляторов промышленных и
транспортных объектов. На выход мультиплексора будет проходить аналоговый
сигнал с выбранного входа. На Рис. 7.7д в качестве примера показана
функциональная схема аналогового мультиплексора с четырех направлений в одно Dx1)
с параллельным управлением.
Каждый из ключей от Sq до 53 представляет собой аналоговый
КМОП-ключ. Дешифратор декодирует адрес, представленный в двоичном
коде, и включает только адресованный ключ, блокируя остальные. Вход
разрешения Е необходим для наращивания числа коммутируемых источников
сигналов; если на этот вход поступает сигнал низкого уровня, то независимо от
состояния адресных входов все ключи мультиплексора разомкнуты. Так как
аналоговые КМОП-ключи являются двунаправленными устройствами,
аналоговый мультиплексор является одновременно и демультиплексором, т. е.
сигнал может быть подан на выход мультиплексора и снят с избранного входа. На
Рис. 1Л6 приведено условное обозначение мультиплексора с параллельным
управлением, а на Рис. 1Лв — схема включения двух мультиплексоров 4x1,
обеспечивающая коммутацию восьми каналов в один.
Если требуется управление несколькими мультиплексорами по небольшому
количеству линий, то можно применить мультиплексоры с последовательным
интерфейсом. Примером могут служить ИМС МАХ349/50, первая из которых
содержит один мультиплексор 8x1, а вторая — два мультиплексора 4x1. Эта
последняя позволяет организовать дифференциальный мультиплексор 4x1. 355
Глава 7. АНАЛОГОВЫЕ КОММУТАТОРЫ
356
Рис. 7.7. Схемы аналогового мультиплексора 4x1:
а — функциональная, б — условное обозначение, в — схема включения двух
мультиплексоров в режиме 8x1
Управление ИМС МАХ349/50 осуществляется по последовательному трехпро-
водному интерфейсу, совместимому как с SPI/QSPI, так и с MICROWIRE.
На Рис. 7.8 приведена функциональная схема
мультиплексора МАХ349.
Блок логики содержит 8-разрядный регистр
сдвига, информационный вход которого
соединен с выводом DIN микросхемы, а выход
последнего разряда — с DOUT. Синхронизация
сдвига осуществляется последовательностью
импульсов, подаваемых на вывод SCL. Для
активизации входов на вывод CS (chip select — выбор
кристалла ) необходимо подать сигнал низкого
уровня. При этом регистр может принимать
данные, поступающие по входу DIN в моменты
времени, соответствующие передним фронтам
импульсов SCL (Рис. 7.9)
Входное слово имеет длину 8 бит, причем
каждый бит управляет одним из восьми ключей.
Таким образом, в отличие от мультиплексора с
дешифратором (см. Рис. 7.7), в данной схеме
Рис. 7.8. Схема мультиплексора
МАХ349 (8x1) с
последовательным управлением по
трехпроводному SPI/QSPI,
MICROWIRE-совместимому
интерфейсу
7.4. Промышленные аналоговые коммутаторы
Рис. 7.9. Диаграммы, поясняющие управление мультиплексором МАХ349
по трехпроводному (SPI/QSPI, MICROWIRE-совместимому) интерфейсу
ключи управляются независимыми разрядами, что удобно при использовании
МАХ349 в качестве демультиплексора, когда к одному источнику сигнала
можно подключить несколько приемников.
Данные на выводе DOUT представляют собой входные данные,
задержанные на восемь тактов сигнала SCL. При записи (сдвиге) данных в регистр
состояние ключей не меняется. Когда все 8 бит данных записаны в регистр,
сигнал CS переводится в состояние 1. В этот момент ключи устанавливаются в
состояние, соответствующее новому управляющему слову. Прием сигналов с
входа прекращается. В отличие от 2-проводного интерфейса 12С (управление
ADG715) здесь используется 3-проводный SPI/QSPI, MICROWlRE-совмести-
мый интерфейс и можно ввести через вход DIN (при низком уровне на входе
CS) любое количество бит информации. Однако в этом случае регистр сдвига
будет содержать только 8 бит, поступивших последними.
Для наращивания числа мультиплексоров, управляемых от одних и тех же
трех линий (DIN, SCL и CS), их можно включить гирляндой «с
последовательной загрузкой», как показано на Рис. 7.10.
Рис. 7.10. Схема управления несколькими мультиплексорами с
последовательной загрузкой
Выводы CS всех устройств связаны, и при низком уровне сигнала CS поток
данных перемещается через микросхемы последовательно. Когда сигнал CS
переводится в высокий уровень, все ключи, входящие в состав мультиплексоров,
устанавливаются в новое состояние одновременно. В отличие от интерфейса
12С, допускающего адресацию не более 128 устройств, здесь число управляемых
устройств не ограниченно.
357
Глава 7. АНАЛОГОВЫЕ КОММУТАТОРЫ
Другой вариант управления несколькими мультиплексорами —
последовательный интерфейс с параллельной адресацией (Рис. 7.11).
358
Рис. 7.11. Схема управления несколькими мультиплексорами по
последовательному интерфейсу с параллельной адресацией
В этом случае мультиплексоры адресуются процессором индивидуально.
Для выбора конкретного адресуемого устройства его адрес в виде параллельного
кода подается на дешифратор. При этом на одном из выходов дешифратора
устанавливается уровень НИЗКИЙ, делая доступным ввод данных DIN только в
мультиплексор, адресуемый этим выходом.
После загрузки данных адрес должен быть изменен для того, чтобы ключи
адресуемого мультиплексора были установлены в новое состояние. Выходы
данных DOUT в этой схеме не используются.
7.4.3. Матричные коммутаторы
Для сложных коммутаций аналоговых аудио- и видеосигналов
предназначены так называемые матричные коммутаторы (crosspoint switch). Их применяют в
тех случаях, когда требуется соединить в заданной конфигурации несколько
источников сигнала с несколькими приемниками, включая соединения, при
которых к одному источнику сигнала подключаются несколько приемников. Это
необходимо для видеосерверов, систем передачи видеосигналов, устройств
видеонаблюдения, видеоконференций, аудиоприложений и др.
Рис, 7.12 иллюстрирует идею, лежащую в основе построения матричных
коммутаторов, на примере коммутатора 6x6.
Входные шины IN и выходные OUT могут соединяться в любом их
пересечении, однако соединение одного приемника с несколькими источниками
сигналов должно быть исключено. На Рис. 7.12 приведен пример, когда к первому
входу подключены одновременно первый и третий выходы.
7.4. Промышленные аналоговые коммутаторы
В данном случае матрица
должна содержать 6 х 6 = 36
ключей. Эти ключи
организуются в 6 мультиплексоров
формата 6x1, входы каждого из
которых соединяются с входами
матричного коммутатора, а
выход — с соответствующим
выходом коммутатора.
Управляется каждый мультиплексор
дешифратором двоичного кода
в унитарный позиционный, т. е.
только один ключ каждого
мультиплексора может быть замкнут, так что возможность подключения одного
приемника сигнала к нескольким источникам исключена.
Рассмотрим организацию ИМС матричных коммутаторов более детально.
На Рис. 7.13 представлена блочно-функциональная схема микросхем
матричных коммутаторов 8x8 AD8108/09.
Рис. 7.12. Принцип соединения источников и
приемников сигналов в матричном коммутаторе
Рис. 7.13. Блочно-функциональная схема микросхем AD8108/09
359
Глава 7. АНАЛОГОВЫЕ КОММУТАТОРЫ
Поскольку здесь возможно подключение к источнику сигнала до восьми
приемников (а при соединении нескольких коммутаторов еще больше), для
уменьшения нагрузки на входы используются выходные буферные усилители.
Эти усилители в AD8108 имеют единичное усиление по напряжению, а в
AD8109 коэффициент усиления буферных усилителей равен двум.
Микросхемы AD8108/09 используют не совсем обычную для аналоговых
коммутаторов архитектуру, состоящую из матрицы с 64 входными каскадами,
организованными как восемь мультиплексоров 8x1. Каждый мультиплексор
представляет собой усилитель с высоким входным сопротивлением, обратной
связью по напряжению и восемью входными каскадами. В ИМС AD8108 выход
каждого мультиплексора соединен с инвертирующим входом каждого из
восьми выходных каскадов, а в AD8109 — через делитель напряжения 1:2. В
результате получаются матричные коммутаторы с малым потреблением, которые
способны непосредственно работать на стандартную 150-Ом видеонагрузку при
весьма низком уровне искажений сигналов (дифференциальные амплитудная и
фазовая погрешности не превышают 0.02% и 0.02° соответственно). Входы
обладают высоким сопротивлением A0 МОм) и малой емкостью B.5 пФ).
Выходы имеют низкое сопротивление @.2 Ом на постоянном токе), но могут быть
переведены в высокоимпедансное состояние (до 10 МОм у AD8108).
Коммутаторы AD8108/09 управляются двумя способами: последовательным
и параллельным вводом данных. В первом случае через последовательный вход
данных DATA IN вводится 32-разрядное управляющее слово, которое
полностью определяет конфигурацию коммутатора. Для изменения состояния одного
единственного ключа нужно полностью перепрограммировать матрицу
32-разрядным словом. При параллельном способе можно переключить один ключ,
подав на входы данных D линии) и адреса C линии) микросхемы 7-разрядное
слово в параллельном коде.
Фирма Analog Devices выпускает также матричные коммутаторы
размерностью 16x8 (AD8110/11) и 16x16 (AD8113/14/15/16). Микросхемы AD8113/14/15
управляются параллельной и последовательной загрузкой данных,
(изготавливаются в 100-выводных корпусах LQFP), a AD8116 допускает только
последовательную загрузку конфигурации (изготавливается в 128-выводном корпусе
LQFP размером 14x14 мм). При необходимости эти микросхемы можно
объединять для расширения числа входов или выходов.
7.4.4. Оптореле
К разновидности аналоговых коммутаторов можно отнести также
оптореле. Оптореле отличаются от коммутаторов, рассмотренных выше, прежде
всего отсутствием электрической связи между цепью управления и
коммутируемыми цепями, причем максимально-допустимое напряжение
электрической изоляции может достигать несколько киловольт. Это большое
преимущество, за которое приходится платить низким быстродействием.
Оптореле различаются, прежде всего, типами ключевых элементов, в
качестве которых применяются тиристоры, биполярные транзисторы и
МОП-транзисторы. Первые два вида ключей обладают плохими точностны-
360 ми характеристиками, поэтому соответствующие типы оптореле применя-
7.4. Промышленные аналоговые коммутаторы
ются исключительно для коммутации силовых цепей небольшой мощности.
Оптореле с МОП-транзисторами имеют неплохие точностные
характеристики (по крайней мере, на низких частотах), поэтому они могут
применяться в качестве коммутаторов аналоговых сигналов. На Рис. 7.14 приведена
схема оптореле на МОП-транзисторах.
Силовой ключ образуют два МОП-транзистора с каналом «-типа,
включенные встречно-последовательно. Это хотя и увеличивает вдвое сопротивление
открытого ключа, но позволяет получить высокое максимально допустимое
напряжение в закрытом состоянии. Управление состоянием обоих транзисторов
осуществляется несколькими фотодиодами, включенными последовательно.
Фотодиоды работают в данном случае как фотоэлементы в режиме холостого
хода. При освещении каждый из них вырабатывает напряжение около одного
вольта, поэтому при пропускании тока /ctrl через светодиод транзисторы
открываются. Динамическое сопротивление фотодиодов даже в режиме
холостого хода сравнительно велико, поэтому процессы отпирания и запирания ключа,
связанные с зарядом входной емкости МОП-транзисторов, протекают
довольно медленно.
Рис. 7.14. Схема оптореле
на МОП-транзисторах
Рис. 7.15. Вольтамперная характеристика
оптореле TLV422 в открытом состоянии
Типичным представителем этого класса приборов является 2-канальное
оптореле TLV422 производства фирмы International Rectifier. Это реле может
обеспечить коммутацию разнополярных сигналов с напряжением до 400 В, чего не
допускает ни один КМОП-коммутатор. Максимально допустимое напряжение
изоляции составляет 4 кВ. Сопротивление открытого канала не более 20 Ом
при входном токе управления 5 мА. Типичное время отпирания ключа при
коммутируемом токе 20 мА — 800 мкс, а выключения — 400 мкс. Ток утечки
закрытого ключа достигает 1 мкА (у аналоговых коммутаторов он меньше 1 нА). На
Рис. 7.15 представлена вольтамперная характеристика оптореле TLV422 в
открытом состоянии.
361
Глава 7. АНАЛОГОВЫЕ КОММУТАТОРЫ
7.5. Характеристики аналоговых
коммутаторов
7.5.1. Статические характеристики
Сопротивление в открытом (включенном) состоянии i?oN. Ключи КМОП,
работающие при относительно высоком напряжении питания V$ (например,
±15 В), будут иметь малые значения RqN во всем диапазоне значений входного
сигнала, так как всегда тот или другой проводящий транзистор имеет
достаточное прямое смещение затвора, равное, по крайней мере, половине напряжения
питания. Но при меньшем напряжении питания сопротивление ключа Rq^
будет расти, и при малых питающих напряжениях максимум /JqN имеет место при
среднем уровне сигнала между высоким и низким напряжениями питания.
На Рис. 7.16 приведены зависимости RqN ключа микросхемы коммутатора
МАХ312 от напряжения входного сигнала при однополярном питании.
362
Рис. 7.16. Зависимости RqN КМОП-ключа ИМС МАХ312 от
входного напряжения при однополярном питании для различных
значений питающего напряжения
При уменьшении V$ сопротивление полевого транзистора во включенном
состоянии значительно увеличивается (особенно вблизи точки KIN= Ks/2). Это
объясняется тем, что для полевого транзистора с индуцированным каналом,
работающего в режиме обогащения, пороговое напряжение составляет несколько
вольт, и для достижения малых значений Rq^ требуется напряжение затвор-
исток не меньше чем 5...10 В. Как видно из Рис 7.16, сопротивление открытого
7.5. Характеристики аналоговых коммутаторов
ключа при номинальном напряжении питания (Fs= 15B), близкое к 10 Ом,
при Vs = 2.7 В достигает 700 Ом.
Имеются различные приемы, позволяющие сохранить значение /?qN малым
и примерно постоянным во всем диапазоне изменения входного сигнала и тем
самым уменьшить нелинейные искажения последнего. Например, схему
управления ключом выполняют таким образом, чтобы напряжение «-подложки
«следило» за напряжением входного сигнала. Применение транзисторов с малым
напряжением отсечки и повышенной крутизной позволяет построить
коммутаторы с весьма малым /?qN при низком питающем напряжении. Так, например,
одноканальный ключ ADG701 при однополярном питании +5 В имеет
сопротивление /?on н^ более 2.5 Ом. На Рис. 7.17 приведены зависимости
сопротивления открытого ключа низковольтной микросхемы МАХ391 от напряжения
входного сигнала для различных питающих напряжений при однополярном и
двухполярном питании.
Рис. 7.17. Графики зависимостей RqN ключа ИМС МАХ391 от входного
напряжения для различных значений питающих напряжений:
а — при однополярном питании, б — при двухполярном питании
Сопротивление канала открытого транзистора существенно зависит от
температуры — при переходе от нижней к верхней границе диапазона температур
сопротивление увеличивается приблизительно в 2 раза.
Помимо собственно сопротивления канала открытого ключа изготовители
приводят в технических характеристиках коммутаторов значения
максимальной разности /?oN ключей многоканальных коммутаторов и мультиплексоров
(ARqN) и значения неравномерности сопротивления открытого канала
(^flat_on)> которая определяется как разность между максимальным и
минимальным значениями Rq^ одного канала, измеренными в указанном диапазоне
коммутируемого аналогового сигнала.
Ток утечки канала. В закрытом состоянии канал МОП-ключа обладает
очень высоким, но все же конечным динамическим сопротивлением (до сотен
гигом) при напряжении сток—исток более 0.1 В. Наличие конечного
сопротивления закрытого канала является причиной тока утечки /q. Направление
протекания тока утечки через закрытый КМОП-ключ определяется полярностью
363
Глава 7. АНАЛОГОВЫЕ КОММУТАТОРЫ
приложенного напряжения. Типичное значение /Q для широкой номенклатуры
аналоговых ключей и мультиплексоров составляет величину порядка 1 нА.
Однако выпускаются и ключи со значительно более низким током утечки.
Например, у 8-канального ADG715 типичный ток утечки при комнатной температуре
0.01 нА. При очень низких напряжениях на закрытом ключе сопротивление
канала уменьшается, но остается все-таки весьма высоким. Ток утечки очень
сильно зависит от температуры кристалла. Зависимость эта имеет сложный
характер, но, как правило, с ростом температуры ток утечки возрастает.
Например, для ADG511 изготовитель гарантирует при температуре +25°С значение
тока утечки в пределах 0.1 нА и не более 2.5 нА при изменении температуры в
диапазоне -4О...+85°С.
364
7.5.2. Динамические характеристики
Межэлектродные емкости. На работу МОП-ключей в динамическом
режиме оказывает наличие межэлектродных емкостей, в число которых входят
(Рис. 7.18): емкость между входом и выходом (CDS), емкости между каналом и
общей точкой схемы (CD, Cs), емкость между затвором и каналом (Со), а также
емкости между ключами различных каналов в пределах одного кристалла.
Как правило, наличие этих емкостей
ухудшает характеристики ключей.
Cds {емкость вход—выход). Наличие
этой емкости приводит к прохождению
сигнала через разомкнутый ключ, которое на
высоких частотах возрастает. На Рис. 7.19
показан этот эффект для микросхемы четы-
рехканального аналогового коммутатора
типа МАХ312.
Здесь кривая 1 представляет собой
амплитудно-частотную характеристику
последовательного ключа, нагруженного на
резистор 50 Ом в замкнутом состоянии. Кривая
2 — фазочастотная характеристика для
этого же случая. Кривая 3 представляет
амплитудно-частотную характеристику ключа в
разомкнутом состоянии при той же
нагрузке. Как видно, даже при нагрузке 50 Ом
сквозное прохождение сигнала на высоких
частотах становится весьма значительным.
С ростом сопротивления нагрузки ситуация
со сквозной передачей сигнала только
усугубляется. Для сравнения штриховой
линией 4 представлена АЧХ цепи, состоящей из
конденсатора емкостью 2.5 пФ и
сопротивления нагрузки 50 Ом.
В большинстве низкочастотных применений сквозное прохождение
сигнала через емкость разомкнутого ключа не создает проблем. Если они все же воз-
Рис. 7.19. Частотные характеристики
последовательного коммутатора на
ИМСМАХ312
7.5. Характеристики аналоговых коммутаторов
никают, хорошим решением является использование пары включенных каскад-
но ключей (Рис. 7.20а) или, что еще лучше, использование
последовательно-параллельного коммутатора (Рис. 7.206).
Рис. 7.20. Схемы соединения ключей, обеспечивающие улучшенные
характеристики коммутаторов в разомкнутом состоянии:
а — с последовательным соединением, б — с последовательно-параллельным
соединением, в — с Т-образным соединением
Последовательный каскад удваивает ослабление (в децибелах) за счет
дополнительного делителя напряжения, в то время как
последовательно-параллельная схема уменьшает прямое прохождение сигнала, когда
последовательный ключ разомкнут, а параллельный замкнут, снижая эффективное
сопротивление нагрузки до /?qN. Многие фирмы выпускают ИМС аналоговых
коммутаторов, содержащие по два нормально замкнутых (т. е. замкнутых при
низком уровне управляющего сигнала) и два нормально разомкнутых ключа.
Это, например, МАХ314, DG413, 590КН4 и др. Эти микросхемы позволяют
довольно просто построить последовательно-параллельные коммутаторы. Еще
удобнее использовать микросхемы с аналоговым переключателем, такие, как,
например, ADG749. И наконец, наименьшее прохождение сигнала через
закрытый коммутатор обеспечивает применение так называемых Т-образных
переключателей (Рис. 7.20в). ИМС такого переключателя ADG751 обеспечивает
сквозную изоляцию —75 дБ на частоте 100 МГц, в то время как МАХ312
пропускает сигнал на той же частоте с ослаблением всего—12дБ, т.е. работает в
1400 раз хуже!
CD, Cs (емкости относительно общего вывода). Шунтирующая на землю
емкость приводит к упомянутому ранее спаду частотной характеристики (кривые
1 и 2 на Рис. 7.19). Совместно с сопротивлением источника сигнала и
сопротивлением замкнутого ключа /JqN эти емкости образуют фильтр нижних частот.
Ситуация усугубляется при высокоомном источнике сигнала.
Емкость между ключами. Поскольку обычно на кристалле размещается
несколько ключей, то не следует удивляться появлению наводок между каналами.
Виновницей может быть емкость между каналами, составляющая величину
порядка 0.5 пФ. Эффект усиливается по мере роста частоты и увеличения
импеданса источника сигнала. Например, коэффициент ослабления связи между
каналами 4-канальной микросхемы МАХ391 на частоте 1 МГц составляет всего
85 дБ. Поэтому, если перекрестные связи нежелательны, следует применять
Одноканальные ключи, такие, как ADG741/2.
Динамические помехи. Во время перехода от включенного состояния к
выключенному и обратно в аналоговых ключах на полевых транзисторах могут
возникать неприятные эффекты. Скачок управляющего напряжения,
поданный на затвор, вызывает изменение заряда в цепи канала. Это наиболее сущест-
365
Глава 7. АНАЛОГОВЫЕ КОММУТАТОРЫ
Рис. 7.21. Форма выходного
напряжения при коммутации ключа
366
венно при уровнях управляющих сигналов, соответствующих разомкнутому
ключу. Подобные эффекты возникают и в мультиплексорах во время изменения
адреса канала.
Ввиду важности этой проблемы
рассмотрим ее более подробно. На Рис. 7.21
изображена форма выходного сигнала, которую можно
увидеть на выходе л-канального МОП-ключа,
схема которого показана на Рис. 7.3а при
нулевом уровне входного сигнала и нагрузке,
состоящей из резистора сопротивлением 10 кОм
и параллельного ему конденсатора емкостью
20 пФ.
Положительный и отрицательный
всплески, соответствующие фронтам
управляющего сигнала, вызваны переносом заряда в канал
через емкость CG (см. Рис. 7.18), имеющую величину порядка 5 пФ, при
изменении напряжения затвора. Это напряжение делает резкий скачок от одного
УРОВНЯ ПИТаНИЯ К ДРУГОМУ, ПереНОСЯ В Канал ЗарЯД q = ±CG(^GS_max ~ ^GS.min)-
Заметим, что величина переносимого заряда, называемого зарядом
переключения, зависит только от полного изменения напряжения затвора и не зависит
от времени, за которое это изменение происходит. Замедление изменения
сигнала на затворе вызывает меньшую по амплитуде, но более долгую
динамическую помеху (на Рис. 7.21 площадь, ограниченная всплесками ^сшъ
соответствующая заряду переключения, не меняется). Фильтрация выходного сигнала
ключа фильтром нижних частот дает тот же эффект. Такие меры могут помочь в
тех случаях, когда важно добиться малого пика амплитуды динамической
помехи, однако в смысле исключения пропускания управляющего напряжения с
затвора на выход они неэффективны. Можно попробовать частично
компенсировать заряд переключения путем добавки инвертированного сигнала затвора
через компенсирующий подстроечный конденсатор малой емкости Cq
(Рис. 7.22).
Емкость затвор—канал распределена по всей длине
канала, а это значит, что часть заряда переключения
(помехи) попадает на вход ключа, вызывая переходные
процессы на выходе источника сигнала. Эти процессы будут
минимальны, если источник сигнала обладает нулевым
выходным сопротивлением, т. е. является источником
ЭДС. Уменьшение полного сопротивления нагрузки
также приводит к снижению динамической помехи, но при
этом нагружается источник коммутируемого сигнала и вносятся
дополнительные статическая погрешность и нелинейность за счет конечного и нелинейного
iJoN- Уменьшение емкости затвор—канал за счет сокращения размеров
интегрального МОП-транзистора уменьшает переходные помехи при
переключении коммутатора, но за это приходится платить увеличением Rq^.
На Рис. 7.23 приведены кривые переноса заряда для ключа с управляющим
/ьл-переходом при различных сопротивлениях источника сигнала R$
(см. Рис. 7.2).
Рис. 7.22. Компенсация
заряда переключения
7.5. Характеристики аналоговых коммутаторов
Рис. 7.23. Зависимость заряда
переключения коммутатора на полевом
транзисторе с управляющим
^-«-переходом от входного напряжения
Рис. 7.24. Зависимость заряда
переключения КМОП-ключа
МАХ312 от входного напряжения
Как видно, для такого типа ключа существует сильная зависимость
величины динамической помехи от параметров источника сигнала, поскольку
напряжение на затворе пропорционально разности между уровнем входного сигнала
и уровнем отрицательного напряжения питания. Хорошо сбалансированные
КМОП-ключи имеют относительно малую динамическую помеху, поскольку
попадающие в канал заряды у комплементарных МОП-транзисторов стремятся
скомпенсировать друг друга (когда на одном затворе напряжение растет, на
другом — падает). На Рис. 7.24 приведены зависимости заряда переключения от
входного напряжения для интегрального КМОП-коммутатора МАХ312 при
двухполярном питании ±15 В (кривая А) и однополярном питании +12 В
(кривая В).
Чтобы дать представление о масштабе этих эффектов, скажем, что заряд
30 пКл создает скачок напряжения в 30 мВ на конденсаторе емкостью 1 нФ.
Для многих применений это очень существенная величина.
Быстродействие. Ключи на полевых транзисторах имеют сопротивление в
открытом состоянии /JqN от 10 Ом до сотен Ом. В комбинации с емкостью
подложки и паразитными емкостями это сопротивление образует фильтр нижних
частот, ограничивающий область частот пропускаемых сигналов значениями
порядка 10 МГц и даже ниже. Полевые транзисторы с меньшим RqN имеют
обычно большую емкость, так что выигрыша в скорости нарастания выходного
сигнала они не дают. Значительная доля в ограничении частотных свойств
обусловлена элементами защиты — последовательными токоограничивающими
резисторами и шунтирующими диодами, применяемыми почти во всех
КМОП-схемах. Специальные быстродействующие коммутаторы, например
ADG752 фирмы Analog Devices, имеют типичную полосу пропускания до
250 МГц и предназначены для передачи сигналов видеочастоты амплитудой
±1 В от низкоомных источников (обычно 75 Ом) на согласованную нагрузку.
Время переключения. Длительность переходного процесса включения и
выключения (/0N и /0FF) коммутатора на МОП-транзисторах определяется
временем перезаряда емкости затвор—канал. Уменьшение этой емкости приводит к
увеличению i?oN. Поэтому повышения скорости переключения добиваются
367
Глава 7. АНАЛОГОВЫЕ КОММУТАТОРЫ
снижением выходного сопротивления цепей, осуществляющих управление
напряжением на затворе коммутирующего МОП-транзистора. При этом
возрастает ток, потребляемый схемой от источника питания. Характерная величина
времени переключения для низкочастотных КМОП-коммутаторов составляет
около 0.2 мкс, а для быстродействующих, таких, как уже упоминавшиеся
ADG751/2, типичны время включения /On=8hc и время выключения
'off= 3 не при токе потребления в статическом режиме менее 1 мкА.
368
7.5.3. Эксплуатационные параметры
К эксплуатационным параметрам относятся:
• номинальные значения питающих напряжений;
• токи потребления;
• максимально допустимое значение тока через коммутатор;
• диапазон допустимых значений входного (выходного) напряжения;
• диапазон допустимых значений температуры окружающей среды;
• уровни напряжения управления (как правило, они согласованы с уровнями 0
и 1 ТТЛ и КМОП цифровых микросхем, для чего ИМС аналоговых
коммутаторов содержат порой довольно сложные схемы управления собственно
ключами).
В Табл. 7.1 приведены основные характеристики некоторых типов
аналоговых коммутаторов и мультиплексоров.
Таблица 7. /. Основные характеристики аналоговых коммутаторов и мультиплексоров
Особенности
Коммутаторы
DG411
МАХ391
HI-201HS
МАХ326
590КН13
ADG451
ADG701
ADG774
ADG715
Тоже
Счетверенный коммутатор
Быстродействующий
Минимальный заряд
переключения
Счетверенный коммутатор
Счетверенный коммутатор
Полоса пропускания
250 МГц
4-канальный
переключатель
8-канальный с
последовательным управлением по
12С-интерфейсу
7.6. Применение аналоговых коммутаторов
Продолжение таблицы 7. /
Особенности
Мультиплексоры
590КН6
8x1
591КНЗ
16x1
DG528
8x1; регистр-защелка
МАХ350
Сдвоенный 4x1;
последовательный интерфейс
ADG527A
Сдвоенный 8 х 1;
регистр-защелка
ADG509F
Сдвоенный 4x1; защита от
перенапряжения до ±35 В
ADG608
8x1; изоляция закрытого
ключа 85 дБ на 100 кГц
МАХ4617
8xl;THD = 0.015%npn
Rl = 600Om,Vcc = 5B,
VIN = 1 В (размах)
7.6. Применение аналоговых коммутаторов
7.6.1. Влияние нелинейности аналоговых
коммутаторов на искажения передаваемых
сигналов
Как уже отмечалось выше, сопротивление КМОП-ключа в открытом
состоянии Ron изменяется в зависимости от величины и полярности
коммутируемого напряжения. Графики этой зависимости имеют характерный двугорбый
вид, называемый иногда «короной». На Рис. 7.25 приведены графики
зависимости Rqn от напряжения VD на стоке (или Vs на истоке) для распространенных
мультиплексоров семейства ADG5xx для трех различных значений напряжений
двухполярного питания: положительного +KS и отрицательного—^; а на
Рис. 7.26 — изменения этих сопротивлений AiioN относительно минимальных
значений.
Эта зависимость сопротивления открытого канала от величины входного
сигнала известна как модуляция 7?qN и указывается в фирменной документации
на коммутаторы как неравномерность сопротивления открытого канала
/?flat_on- Очевидно, что чем больше неравномерность сопротивления
открытого канала коммутатора в диапазоне изменения входного сигнала, тем больше
нелинейные искажения сигнала на его выходе. Поэтому для уменьшения
искажений целесообразно увеличивать напряжение питания коммутатора и
снижать диапазон входного сигнала, коммутируемого ключом. Например, для
369
Глава 7. АНАЛОГОВЫЕ КОММУТАТОРЫ
W?on[Om]
Рис. 7.26. Графики зависимости
изменения /2qN от напряжения на стоке
Рис. 7.27. Мультиплексор,
нагруженный на резистор
Рис. 7.28. Номограмма для оценки искажения,
вносимого неравномерностью Rq^
370
мультиплексора из семейства ADG5xx, работающего при питании ±15 В, AHqn
не превышает 4 Ом в диапазоне входного сигнала ±3 В, увеличиваясь до 12 Ом в
диапазоне ±5 В и до 30 Ом в диапазоне +7 В [7.1]. Можно, конечно, соединить
ключ с виртуальной землей операционного усилителя. Это обеспечит низкое
напряжение на открытом ключе, что в свою очередь устранит проблемы
модуляции 7?oN, однако во многих случаях требуется коммутировать сигналы
относительно высоких напряжений.
Типичный вариант применения мультиплексора, нагруженного на резистор
RL, иллюстрируется на Рис. 7.27. Сопротивление /}Sk> показанное в каждом
канале мультиплексора — это выходное сопротивление к-го источника сигнала.
В диапазоне возможного изменения сигналов степень их искажения,
обусловленная модуляцией, может быть оценена по формуле [7.1]
Рис. 7.25. Графики зависимости lfoN
от напряжения на стоке
мультиплексора семейства ADG5xx
G.1)
7.6. Применение аналоговых коммутаторов
Как следует из формулы G.1), выбирая внешние сопротивления RL и Rs
достаточно большими, можно снизить искажение, вносимое каналом
коммутатора, до желаемого уровня, однако высокие значения сопротивлений резисторов
увеличивают шум в канале, требуют применения дополнительных усилителей.
В документации на некоторые модели коммутаторов и мультиплексоров
приводятся графики зависимости суммарного коэффициента гармоник (THD)
от частоты при RL = Rs = 600 Ом. Интересно, что обычно они приводятся для
режима максимально высоких напряжений питания и диапазона входных
напряжений 1 В/п-п (означает 1 В от пика до пика напряжения). При этом
получается очень красиво — THD не более 0.02% и не зависит от частоты. На
практике при увеличении диапазона входных напряжений до оговоренных
техническими условиями -V$< FIN < +FS THD резко возрастает.
На Рис. 7.28 приведена номограмма [7.1], которая позволяет быстро
оценить в первом приближении искажение, вносимое неравномерностью /?qN
мультиплексора, включенного по схеме на Рис. 7.27.
Левая шкала номограммы представляет полное сопротивление канала,
включая i?oN ключа при VD(VS) = 0 В, средняя шкала представляет THD, правая
шкала представляет A/?on B выбранном диапазоне изменения сигналов. Для
использования номограммы следует провести прямую линию между
соответствующими точками внешних шкал. Точка пересечения этой прямой со средней
шкалой определяет ожидаемый уровень THD.
Пример. 7.1. Мультиплексор семейства ADG5xx, характеристики RqN которого
приведены на Рис. 7.25 включен по схеме на Рис. 7.27. Питание ±15 В. При
KD(Fs) = 0B /*oN = 150Ом. В диапазоне KIN ±12В ARqN = 60Om. Если Rs = 0,
/?l=4k0m, то, как следует из номограммы, THD = 0.3% (—50 дБ) (прямая 1 на
Рис. 7.28). В случае 7?l=20kOm, характеристики улучшаются, и получаем
THD = 0.083% (-62 дБ) (прямая 2).
7.6.2. Защита коммутаторов от перенапряжений
Многие производители аналоговых
коммутаторов снабжают свои изделия диодными цепями
на входе и выходе с целью защиты последних от
перенапряжений (Рис. 7.29).
Если напряжение на входе или выходе ключа
становится выше напряжения +VS или ниже—Ks,
соответствующий диод открывается, и источник
входного сигнала замыкается на источник
питания. При этом важно, чтобы ток через этот диод не
превысил предельно допустимое значение,
которое обычно невелико. Некоторые модели
коммутаторов требуют определенной
последовательности включения источников питания. Например,
для МАХ391 изготовитель рекомендует подавать
сначала +KS, затем — Ks, и только после этого —
логические сигналы на управляющие входы. Если
это по какой-либо причине невозможно, то следу-
Рис. 7.29. Включение защитных
диодов в микросхемах
аналоговых коммутаторов
371
Глава 7. АНАЛОГОВЫЕ КОММУТАТОРЫ
ет включить последовательно с источниками питания диоды VD\ и VD2. При
этом, однако, защитная функция внутренних диодов будет утрачена, если не
принять никаких дополнительных мер.
7.7. Устройства выборки-хранения
7.7.1. Схемы устройств выборки-хранения
Одним из важнейших приложений высококачественных аналоговых
коммутаторов являются устройства выборки-хранения (УВХ). Это
обусловлено тем, что при сборе информации и ее последующем преобразовании
часто бывает необходимо зафиксировать значение аналогового сигнала в
некоторый момент времени. Некоторые типы АЦП, например последовательного
приближения, могут давать совершенно непредсказуемые ошибки, если их
входной сигнал не зафиксирован во время преобразования. При смене
входного кода цифроаналоговых преобразователей из-за неодновременности
установления разрядов наблюдаются выбросы выходного напряжения. Для
устранения этого явления на время установления также следует
зафиксировать выходной сигнал ЦАП. Устройства выборки—хранения
(слежения-хранения), выполняющие эту функцию, должны на интервале времени выборки
(слежения) повторять на выходе входной аналоговый сигнал, а при
переключении в режим хранения сохранять последнее значение выходного
напряжения до поступления следующего сигнала выборки, т. е., по сути, они
являются аналоговыми запоминающими устройствами. Схема простейшего УВХ
приведена на Рис. 7.30а. Когда ключ S замкнут, выходное напряжение схемы
повторяет входное, т. е. Коит= KIN (Рис. 7.306). При размыкании ключа V0UT
сохраняет значение, соответствующее моменту размыкания. Выходной
повторитель на ОУ препятствует разряду конденсатора хранения CL на нагрузку
схемы. Входное сопротивление повторителя должно быть как можно
больше, поэтому обычно применяют ОУ с полевыми транзисторами на входе. По
такой простой схеме построены многоканальные УВХ SMP04/08 фирмы
Analog Devices.
372
Рис. 7.30. Устройство выборки-хранения:
а — принципиальная схема, б — временные диаграммы
7.7. Устройства выборки-хранения
Простейшая схема УВХ имеет ряд недостатков [7.2]:
• При замкнутом ключе источник входного сигнала имеет значительную
емкостную нагрузку. Если источником является ОУ, это обычно приводит к его
самовозбуждению.
• Большое сопротивление источника сигнала увеличивает постоянную
времени заряда конденсатора хранения, и тем самым — время выборки.
• ОУ с полевыми транзисторами на входе, применяемые в качестве буферных
повторителей, обычно имеют значительное смещение нуля.
Первые два недостатка устраняются
применением наряду с выходным буферным
усилителем еще и входного буферного усилителя,
причем этот усилитель должен устойчиво
работать на емкостную нагрузку. Можно
использовать две архитектуры УВХ с двумя
буферными усилителями: разомкнутую и замкнутую,
различающиеся способами охвата их
обратными связями. В разомкнутой схеме (Рис. 7.31) входной и выходной буферные
усилители включены как повторители напряжения.
Преимущество этой схемы — быстродействие. Время выборки и время
установления малы, поскольку нет общей обратной связи между буферными
усилителями. Недостаток — худшая точность, поскольку ошибки по постоянному
току (в частности, смещения нулей усилителей) складываются. По разомкнутой
схеме построены сверхскоростные УВХ AD9100/1.
В моделях УВХ с более высокой статической точностью можно
использовать замкнутую схему с повторителем (Рис. 7.32) или интегратором (Рис. 7.33).
Рис. 7.31. УВХ без общей обратной
связи
Рис. 7.32. Замкнутая схема УВХ с
повторителем
Рис. 7.33. Замкнутая схема УВХ с
интегратором
Общая обратная связь значительно повышает статическую точность УВХ,
хотя несколько снижает быстродействие.
Типичным представителем замкнутых схем УВХ с повторителем является
ИМС LF398 — разработка инженеров фирмы National Semiconductor
(отечественный аналог — 1100СК2), которая в течение долгих лет была, по существу,
промышленным стандартом и выпускалась многими фирмами.
Функциональная схема этой ИМС приведена на Рис. 7.34. Здесь схема имеет общую
отрицательную обратную связь, охватывающую всю схему — с выхода усилителя У2 на
вход усилителя У1в
Когда коммутатор находится в замкнутом состоянии, потенциал выхода
операционного усилителя У{ вследствие действия общей отрицательной
обратной связи устанавливается таким, что V0UT отличается от KIN на величину
напряжения смещения усилителя У1# При этом смещение, возникающее из-за на-
373
Глава 7. АНАЛОГОВЫЕ КОММУТАТОРЫ
374
Рис. 7.34. Функциональная схема УВХ LF398
личия коммутатора и усилителя У2, сводится к нулю. Диоды VDb VD2 в этом
состоянии схемы заперты, так как падение напряжения на них, равное
указанному смещению, достаточно мало (< 20 мВ). При размыкании коммутатора
управляющим сигналом выходное напряжение остается неизменным. Резистор
Ri и диоды VD\, VDi предотвращают насыщение усилителя Уь которое могло
бы возникнуть из-за размыкания цепи общей отрицательной обратной связи в
этом режиме. Это снижает время переходного процесса при повторном
замыкании коммутатора. Усилитель У\ обеспечивает высокое входное сопротивление
УВХ. Он выполнен по схеме с биполярными транзисторами на входе, что легко
позволяет получить смещение нуля схемы в пределах 5 мВ. Резистор R2
ограничивает ток заряда конденсатора хранения.
И в разомкнутой, и в
замкнутой схеме с повторителем при
переходе УВХ в режим хранения за
счет инжекции заряда
переключения из цепи управления ключом
образуется ступенька выходного
напряжения, называемая
порогом переключения управления
(Sample/hold), причем высота этой
ступеньки зависит от входного
напряжения УВХ, поскольку заряд
переключения зависит от
входного напряжения ключа (см.
Рис. 7.24). Эта зависимость
обусловлена тем, что в упомянутых схемах ключ связан с входным сигналом через
входной буферный усилитель. В схеме с интегратором один из выводов ключа
соединен с виртуальной землей, имеющей постоянно нулевой потенциал. В
режиме выборки оба коммутируемых вывода ключа имеют практически нулевой
потенциал. Поэтому порог переключения не зависит от входного сигнала.
Примером УВХ с интегратором может служить микросхема SHC5320
фирмы Burr-Brown (ныне входящей в состав Texas Instruments). Схема включения ее
в режиме неинвертирующего повторителя приведена на Рис. 7.35.
Рис. 7.35. Типовая схема включения УВХ SHC5320
7.7. Устройства выборки-хранения
где FS— напряжение полной шкалы АЦП/(п-п), a N— его разрядность.
Например, микросхема LF398 считается 12-разрядным УВХ. Диапазон ее полной
шкалы составляет 23 В/(п-п). Тогда по формуле G.2) при S = 1: Vo$ < 2.8 мВ. В
то же время изготовитель гарантирует для нее KOs< 7 мВ. LF398 имеет
специальный вывод для подстройки смещения нуля, однако в настоящее время
ручная подстройка нуля считается крайне нежелательной. У микросхемы SHC5320
типичное смещение нуля составляет 0.5 мВ.
2. Погрешность коэффициента усиления — относительная разность
потенциалов между входом и выходом УВХ (исключая напряжение смещения), когда
УВХ находится в режиме выборки. Здесь мы предполагаем, что в идеале
усиление должно быть равно единице. При использовании совместно с АЦП
погрешность усиления должна быть меньше, чем SLSB, или
Для LF398 при N= 12 эта величина составляет не более 0.0122%. По
паспортным данным погрешность коэффициента усиления микросхемы не
превышает 0.01%, т. е. находится в допустимых пределах.
3. Погрешность линейности — максимальное отклонение статической
переходной характеристики УВХ от идеальной прямой, проведенной так, чтобы это
отклонение было минимальным. Гармонические искажения — следствие
погрешности линейности УВХ. 375
Микросхема SHC5320 содержит внутренний конденсатор хранения
емкостью 100 пФ, выполненный по МОП-технологии.
Если требуется меньший дрейф фиксируемого напряжения, то параллельно
основному может быть включен дополнительный конденсатор хранения Сн
между выводами 7 и 11. В этом случае полоса пропускания УВХ сузится, а для
дальнейшего уменьшения шума в выходном сигнале между выводом 8 и общей
точкой схемы целесообразно включить конденсатор емкостью 0.1 Сн.
7.7.2. Основные характеристики УВХ
Так как УВХ имеет два основных режима (режим выборки или слежения и
режим хранения) и два типа перехода между режимами (от выборки к хранению
и от хранения к выборке), обычно рассматривают группы технических
требований для этих четырех случаев.
Характеристики режима выборки (слежения)
{.Напряжение смещения нуля Vos — отклонение выходного напряжения от
нуля, когда входное напряжение равно нулю и УВХ находится в режиме
хранения. Чтобы обеспечить необходимую точность преобразования АЦП, у
включенного на его входе УВХ напряжение смещения нуля должно быть меньше
некоторой доли S единицы младшего разряда (LSB), или
G.2)
Глава 7. АНАЛОГОВЫЕ КОММУТАТОРЫ
где SR — скорость нарастания напряжения УВХ.
5. Полоса пропускания в режиме малого сигнала — частота, на которой
усиление по напряжению УВХ снижается на 3 дБ относительно усиления на
постоянном токе для амплитуды входного сигнала, намного меньшей полной шкалы
(по крайней мере, в 10 раз). Малосигнальная полоса в общем случае больше,
чем полоса по мощности. Этот параметр важен в тех случаях, когда не требуется
преобразования большой амплитуды сигналов высокой частоты.
6. Скорость нарастания — максимальная скорость изменения выходного
напряжения, когда УВХ находится в режиме выборки. Поскольку скорость
нарастания зависит от емкости конденсатора хранения, эта емкость должна быть
определена в технических условиях в том случае, если конденсатор внешний.
Скорость нарастания является важным динамическим параметром, потому что
это определяет полосу пропускания по мощности и время выборки.
Характеристики перехода из режима выборки в режим
хранения
\. Апертурное время /А, известное также какапертурная задержка,
определяется по-разному различными изготовителями. Строго говоря, апертурное время
— это интервал, в течение которого входной сигнал отключается от
конденсатора хранения после поступления команды хранения (Рис. 7.36). Более широко
распространенное определение — это интервал между поступлением команды
хранения и моментом полного отключения конденсатора хранения.
Второе определение включает цифровую задержку между поступлением
управляющей команды и началом процесса запирания ключа. В отличие от
апертурного дрожания апертурное время не является фактором,
ограничивающим максимальную частоту синусоидального сигнала, поскольку для
синусоидального сигнала ошибка, вызванная апертурной задержкой, проявляется как
изменение фазы, а не амплитуды.
2. Эффективное апертурное время задержки — время между подачей
команды хранения и моментом достижения входным напряжением значения, равного
выходному в момент перехода в режим хранения (см. Рис. 7.36). Если требуется
точная синхронизация, то команду хранения нужно подать на «эффективное
апертурное время задержки» раньше наступления необходимого момента фик-
376 сации.
4. Полоса пропускания по мощности ВЩр обычно определяется двумя
способами. Некоторые изготовители определяют ее как частоту, при которой
усиление по напряжению гармонического сигнала, имеющего амплитуду, равную
полной шкале входа УВХ, снижается на 3 дБ относительно усиления на
постоянном токе. Другие находят эту полосу по результатам измерения
максимальной скорости нарастания напряжения на выходе УВХ. Согласно этому
определению полоса пропускания по мощности равна частоте гармонического
сигнала, имеющего амплитуду в полную шкалу УВХ, максимальная скорость
изменения которого равна максимальной скорости нарастания напряжения
УВХ. Этому соответствует формула
7.7. Устройства выборки-хранения
Рис. 7.36. Апертурное время и эффективное апертурное время задержки
3. Апертурное дрожание tpj, известное также как апертурная
неопределенность, является неопределенностью апертурного времени. Апертурное
дрожание обусловлено шумом, который накладывается на управляющий сигнал.
Часто его определяют как среднеквадратическое отклонение апертурного времени.
Апертурное дрожание устанавливает верхний предел частоты
гармонического сигнала, который может быть преобразован в последовательность
выборок без потери точности. Чтобы не терять точность, следует придерживаться
эмпирического правила: входной сигнал не должен изменяться больше чем на
+SLSB в течение апертурного дрожания. Для синусоидального сигнала
V— AsinBnft); это дает
где А — половина максимального диапазона входного сигнала данного УВХ.
Учитывая, что SLSB = А/2™, находим
G.3)
В качестве примера использования этого критерия рассмотрим
12-разрядный АЦП, УВХ которого имеет апертурное дрожание 100 пс. В этом случае он
мог бы преобразовывать сигналы частотой вплоть до 388 кГц. Естественно, что
согласно теореме Котельникова (или Шеннона или критерию Найквиста)
частота преобразования этого АЦП должна быть более 766 кГц.
4. Инжекция заряда — количество электричества, перемещенного на
обкладки конденсатора хранения при размыкании ключа. Инжекция заряда
обусловлена емкостной связью между конденсатором хранения и затвором
ключевого транзистора. Из-за инжекции заряда имеет место шаг хранения на выходе
377
Глава 7. АНАЛОГОВЫЕ КОММУТАТОРЫ
378
УВХ. Для схем, у которых конденсатор хранения Сн связан с входным сигналом
через входной буферный усилитель (см. Рис. 7.31, 7.32) инжекция заряда —
функция входного напряжения, причем функция нелинейная, что ведет к
нелинейным искажениям.
5. Шаг хранения VSH, называемый также «пьедесталом», является
приращением выходного напряжения на переходе выборка-хранение (Рис. 7.37). Он
вызван инжекцией заряда в конденсатор хранения.
Рис. 7.37. Источники погрешности в режиме хранения и на переходе
«выборка-хранение»
Шаг хранения может быть определен по формуле
где q — величина инжекции заряда. Следовательно, шаг хранения может быть
уменьшен путем увеличения емкости конденсатора хранения. Это, однако,
приведет к увеличению времени выборки. Для аналого-цифрового
преобразования желательно, чтобы шаг хранения был независим от входного напряжения
и не превышал SLSB.
6. Время установления режима хранения fHs — минимальное время, по
прошествии которого с момента подачи команды хранения выходное напряжение
не выходит за границы определенной области. Эта область обычно составляет
не более 0.01% полной шкалы входного сигнала. Для АЦП требуется, чтобы
отклонения выходного напряжения от установившегося значения не превышали
SLSB до начала преобразования. Время установления режима хранения
является важным параметром при аналого-цифровом преобразовании, поскольку
сумма времени выборки /Aq, времени установления режима хранения /HS и
времени преобразования АЦП tc определяют максимальную частоту
дискретизации системы УВХ-АЦП.
7. Амплитуда переходного процесса выборка—хранение характеризует
максимальный выброс выходного напряжения при этом процессе. Если УВХ
используется для устранения выбросов выходного напряжения цифро-аналогового
преобразователя, эта амплитуда должна быть минимальна.
7.7. Устройства выборки-хранения
где N — разрядность АЦП.
Характеристики перехода из режима хранения к режиму
выборки
Время выборки tAQ определяет, как долго при самых неблагоприятных
условиях длится процесс заряда конденсатора хранения до величины входного
напряжения с заданным уровнем допуска. Перевод УВХ в режим хранения до
окончания интервала выборки чреват значительными ошибками. В паспортных
данных УВХ указывается время выборки при определенной емкости
конденсатора хранения. Можно уменьшить время выборки, выбрав конденсатор
хранения меньшей емкости, но это приведет к увеличению шага хранения и скорости
спада. 379
Характеристики режима хранения
1. Скорость спада в режиме хранения dVcu/dt — скорость, с которой
изменяется выходное напряжение из-за разряда конденсатора. Если УВХ имеет
внутренний конденсатор хранения, то эта величина указывается в паспортных
данных, однако если добавляется внешний конденсатор, то скорость спада зависит
от емкости конденсатора и определяется уравнением
где /Q — ток разряда конденсатора. Он складывается из токов утечки внешнего
конденсатора и коммутатора, а также из входного тока выходного буферного
усилителя УВХ.
Низкая скорость спада особенно важна для приложений, где выбранное
напряжение должно удерживаться в заданных границах в течение
продолжительного времени. При аналого-цифровом преобразовании недопустимо, чтобы
выходное напряжение изменилось за время преобразования на SLSB. В таком
случае скорость спада будет
При заданном токе утечки скорость спада можно уменьшить путем
увеличения емкости конденсатора Сн. Однако это увеличит время выборки.
2. Коэффициент проходного ослабления А? определяет часть входного сигнала,
которая появляется на выходе, в то время как УВХ находится в режиме
хранения. Коэффициент проходного ослабления приводится в паспортных данных
для сигналов постоянного тока и как значение для определенной частоты
сигнала. Для аналого-цифровых преобразований эта часть должна быть, по
крайней мере, меньше, чем SLSB для входного сигнала, соответствующего полной
шкале. Следовательно, коэффициент проходного ослабления AF должен быть,
по крайней мере
Глава 7. АНАЛОГОВЫЕ КОММУТАТОРЫ
В Табл. 7.2 приведены основные характеристики некоторых типов УВХ,
выпускаемых промышленностью.
Таблица 7.2. Основные характеристики УВХ
ЪшУВХ
1100СК2
SHC5320
AD9101
AD781
AD684
1103СКЗ
й
5
0.2
10
3
4
100
Скорость спада
[В/с]
0.21
0.084
180004
0.014
I4
10005
Время выборки
[мкс]
0.41'2
I4'3
7 нс
0.63
I3
0.042
Апертурная
задержка
[НС]
100
25
0.25
35
35
2
+15
±15
+5; -5.2
±12
±12
±9
4[мА]
4.5
13
70
4
25
75
Примечания
Промышленный
стандарт
Интегратор
Сверхскоростное
УВХ
-
Счетверенное
Скоростное:
'hs = 40hc
Примечания: 1 — Сн = 1000 пФ;
2 — с точностью до 0.1%;
3 — с точностью до 0.01%;
4 — встроенный конденсатор хранения;
5 - Сн = 200 пФ.
7.7.3. Применение УВХ
Основная область применения УВХ — дискретизация непрерывных
процессов с целью последующего их аналого-цифрового преобразования. При
таком применении УВХ включаются по типовой схеме, указанной их
изготовителями. Однако этим применение УВХ не исчерпываются. Ниже представлено
несколько схем, в которых УВХ используются в не совсем обычной роли. Эти
схемы взяты из технического описания ИМС LF398 [7.3].
380
Генератор пилообразного напряжения с управляемым
начальным уровнем
Схема генератора приведена на Рис. 7.38.
В режиме хранения, т. е. при разомкнутом ключе напряжение на
конденсаторе хранения Сн и, следовательно, на выходе схемы, для любого
te [n%(n + 1O] пропорционально интегралу тока /r2, протекающего через
резистор R2:
G.4)
где п = 0, 1, 2..., причем /ю = Fref/^2- При поступлении импульса на
управляющий вход ключ УВХ кратковременно замыкается, в результате чего напряжение
на конденсаторе хранения Сн становится равным входному (см. Рис. 7.39).
Отсюда следует
7.7. Устройства выборки-хранения
Рис. 7.38. Генератор пилообразного
напряжения на УВХ
Рис. 7.39. Заряд конденсатора
хранения
Устройство выборки с большим временем хранения
В некоторых случаях требуется запомнить амплитуду короткого (Юмкс)
входного сигнала, а затем длительное время A с) хранить его практически без
изменения исходного значения. Уменьшить скорость спада в режиме хранения
можно простым увеличением емкости конденсатора хранения. Однако при
этом пропорционально увеличится и время выборки. Чтобы убить сразу двух
этих зайцев можно воспользоваться схемой, состоящей из двух
последовательно включенных УВХ (Рис. 7.40). В первом УВХ благодаря небольшой емкости
CHi обеспечивается быстрая выборка входного напряжения KjN.
Рис. 7.40. Устройство выборки с большим временем хранения
Логический сигнал выборки V$ длительностью 10 мкс поступает
одновременно на первое УВХ и таймер, включенный по схеме одновибратора. На
выходе таймера формируется импульс выборки длительностью 12 мс, который
переводит в режим выборки второе УВХ. Такая длительность импульса выборки
необходима, чтобы обеспечить заряд конденсатора СН2 с большей емкостью.
Таким образом, осуществляется искусственное увеличение длительности
входного сигнала, необходимое для его запоминания вторым УВХ.
381
Глава 7. АНАЛОГОВЫЕ КОММУТАТОРЫ
Уменьшение статических погрешностей
Рис. 7.41. Схема подключения цепей
подстройки для снижения погрешностей УВХ
На Рис. 7.41 показана схема
УВХ, снабженная
дополнительными цепями подстройки
смещения нуля выборки и шага
хранения. Резистором Лн
подстраиваются величина и знак
компенсирующего заряда,
сообщаемого конденсатору хранения
при переводе УВХ в режим
хранения. Это дает возможность
скомпенсировать заряд
переключения коммутатора УВХ.
Резистор Rq позволяет подстроить
нуль в режиме выборки.
7.8. Устройства на переключаемых
конденсаторах
В последнее время наблюдается исключительно быстрый рост производства
и применения МОП-структур, имеющих много преимуществ перед
биполярными схемами. У МОП-структур большой входной импеданс, и они
управляются напряжением (в отличие от биполярных схем, управляемых током).
Комплементарные МОП-структуры практически не потребляют мощности в
статическом режиме. Технология МОП-структур обеспечивает большую
плотность упаковки, чем биполярных. Наконец, эта технология позволяет простым
способом реализовать в ИМС конденсаторы относительно большой емкости.
Такие МОП-конденсаторы в сочетании с МОП-ключами позволяют заменить
резисторы в некоторых типах ИМС и построить аналоговые вычислительные
схемы со значительно лучшими точностными и эксплуатационными
характеристиками. Замена резисторов конденсаторами, в частности, позволяет
повысить точность аналоговых и аналого-цифровых устройств и уменьшить
количество внешних элементов, подключаемых к микросхеме. В Табл. 7.3*
представлены сравнительные характеристики интегральных резисторов и
МОП-конденсаторов [7.4].
Таблица 7.3. Сравнение интегральных резисторов и МОП-конденсаторов
Элемент
Резистор
Конденсатор
Технология изготовления
Ионная имплантация с
шириной 40 мкм
МОП с толщиной
диэлектрика 0.1 мкм
Точность
изготовления [%]
±0.12
±0.06
Температурный
коэффициент
[10-ЧГ1]
400
26
Коэффициент влияния
напряжения
[10-6В!]
800
10
Высокая точность изготовления интегральных МОП-конденсаторов и их
стабильность способствовали тому, что в последние годы получили развитие
382 способы обработки сигналов, использующие явление дискретного переноса за-
7.8. Устройства на переключаемых конденсаторах
рядов. Один из путей реализации этих способов состоит в применении схем с
переключаемыми конденсаторами.
Рассмотрим реализацию аналогового интегратора с применением
переключаемого конденсатора. На Рис. 1Л1а приведена схема обычного аналогового
интегратора.
Рис. 7.42. Схемы интеграторов:
а — на ЛС-цепи, б — с переключаемым конденсатором
Передаточная функция этой схемы имеет вид
а частотная характеристика
G.5)
G.6)
На Рис. 7.425 показан интегратор, в котором резистор R{ имитируется с
помощью схемы с переключаемым конденсатором. Этот интегратор работает
следующим образом. Коммутатор периодически переключается из положения 1 в
положение 2 и обратно с периодом Т. В момент «Г конденсатор С\ заряжается
до напряжения Vw(nT), поэтому накопленный на нем заряд составляет
C\Vw(nT). После переключения коммутатора из положения 1 в положение 2 в
момент пТ+Т/2 конденсатор С{ разряжается на вход ОУ с конденсатором С2 в
обратной связи. Поскольку входное дифференциальное напряжение и входные
токи идеального ОУ равны нулю, конденсатор С\ разрядится полностью и его
заряд суммируется с зарядом, накопленным на конденсаторе С2. В результате в
момент (п + 1) Г справедливо следующее уравнение зарядов:
G.8)
G.9)
383
Здесь знак «—» обусловлен отрицательной обратной связью. Применив к обеим
частям уравнения G.7) ^-преобразование, получим уравнение
G.7)
Полученная из этого уравнения передаточная функция имеет вид
Глава 7. АНАЛОГОВЫЕ КОММУТАТОРЫ
Сравнивая выражения G.6) и G.11), находим, что в схеме на Рис. 7.425
коммутируемый конденсатор имитирует входной резистор схемы на Рис 7.42а с
сопротивлением, равным Т/С\. Поэтому, увеличивая частоту переключения
коммутатора, мы уменьшаем эквивалентную постоянную времени интегрирования
интегратора.
Применение интеграторов с переключаемыми конденсаторами в ИМС
фильтров вместо обычных интеграторов дает два существенных преимущества.
Во-первых, коэффициент передачи интегратора зависит только от
отношения двух конденсаторов, а не от их абсолютных величин. Вообще говоря,
можно достаточно просто создать на кремниевой подложке ИМС пару любых
однотипных согласованных элементов, в то время как получение разнотипных
элементов (резистора и конденсатора) с точными значениями и высокой
стабильностью весьма затруднительно (различия температурных коэффициентов
сопротивления (ТКС) и емкости (ТКЕ) могут быть значительными!). Поэтому
ИМС фильтров на переключаемых конденсаторах значительно дешевле.
Например, фильтр нижних частот (ФНЧ) 8-го порядка на ИМС МАХ291 (с
переключаемыми конденсаторами) стоит почти в 5 раз дешевле аналогичного
фильтра на двух ИМС МАХ270 (ЛС-интеграторы).
Второе преимущество фильтров на переключаемых конденсаторах состоит в
возможности настройки их характеристической частоты (т. е. центральной
частоты полосового фильтра или точки —3 дБ фильтра нижних частот) изменением
только тактовой частоты. Это объясняется тем, что характеристическая частота
фильтра, построенного на основе метода переменных состояния,
пропорциональна коэффициенту передачи интегратора (или, что тоже, обратно
пропорциональна постоянной времени интегрирования). Это позволяет выпускать
фильтры 8-го порядка в корпусе с восемью выводами без внешних времязадаю-
щих элементов (например, МАХ291), в то время как ИМС фильтров с ЛС-инте-
граторами имеют значительно больше выводов и требуют подключения
значительного количества точных резисторов (например, микросхема МАХ274 имеет
24 вывода; ее типовая схема включения содержит 15 внешних резисторов).
В заключение несколько слов о недостатках фильтров на переключаемых
конденсаторах. Такие фильтры имеют два неприятных свойства, которые
обусловлены присутствием периодического тактового сигнала. Первое — это
сквозное прохождение сигнала тактовой частоты, а именно, наличие некоторо-
384 го выходного сигнала (с напряжением приблизительно 10...25 мВ) с частотой
Представляет интерес сравнение свойств интеграторов, показанных на
Рис. 7.42. Подставляя в G.9) z — exp(/w7), получаем
G.10)
G.11)
При соТ —> 0 выражение в скобках в знаменателе правой части уравнения
G.10) неограниченно приближается KjcoT. Таким образом, для частот входного
сигнала низких относительно частоты переключения коммутатора/= 1/Г
можно приближенно записать
7.8. Устройства на переключаемых конденсаторах
тактового колебания, напряжение которого не зависит от прикладываемого
входного сигнала. Чаще всего это не имеет существенного значения, поскольку
этот сигнал значительно удален от полосы, занимаемой обрабатываемым
сигналом (обычно разработчики ИМС задают частоту коммутации в 100 раз (реже
в 50 раз) больше характеристической частоты фильтров). Если же такое
сквозное прохождение тактового сигнала нежелательно, то для его подавления
обычно используют простой непрерывный ФНЧ первого или второго порядка. В
состав ИМС фильтров на переключаемых конденсаторах обычно включают
неинвертирующий повторитель, на котором может быть построен такой
фильтр, например по схеме Саллена-Ки.
Вторая проблема более тонкого свойства связана с наложением спектров
входного сигнала. Любые компоненты входного сигнала, которые отличаются
от частоты тактового сигнала на величину, соответствующую ширине полосы
пропускания фильтра, не будут подавлены. Например, при использовании
ИМС МАХ291 в качестве ФНЧ с полосой 1 кГц и тактовой частотой 100 кГц все
спектральные компоненты входного сигнала, лежащие в диапазоне от 99 до
101 кГц, за счет биений с тактовой частотой будут перенесены в полосу частот
от постоянного тока до частоты 1 кГц. Поэтому в случае, если в спектре
входного сигнала есть заметные компоненты с частотами, близкими к тактовой
частоте, перед входом фильтра следует включить предварительный аналоговый
фильтр нижних частот.
Вопросы и задачи
1. Укажите преимущества МОП-ключей перед диодными и биполярными
ключами.
2. Почему нецелесообразно использовать схему последовательного
коммутатора (Рис. 1Ла) в случае, если источником сигнала является
фотодиод?
3. Укажите преимущества КМОП-ключей перед МОП-ключами с одним
типом проводимости.
4. Предложите схему замещения КМОП-ключа в статическом режиме.
5. Каковы должны быть уровни управляющих напряжений КМОП-ключа,
чтобы допустимые значения входного и выходного напряжений могли
достигать пределов питающих напряжений?
6. Объясните низкое быстродействие оптореле.
7. КМОП-ключ с CD= Cs= 0.5 пФ, RqN= 70 Ом подключен к источнику
сигнала с выходным сопротивлением 10 кОм. Сопротивление нагрузки
составляет 100 кОм. Определить входную частоту среза на уровне —3 дБ.
8. Рассчитайте сквозное прохождение сигнала в нагрузку 10 кОм через
закрытый ключ на частоте 1 МГц, приняв CDs= 1 пФ.
9. Выполнить то же самое, что в п. 7 для схемы на Рис. 7.205 при
разомкнутом ключе SY и замкнутом ключе 52, приняв CDS = 1 пФ, i?QN = 50 Ом.
10. Можно ли полностью скомпенсировать выбросы выходного
напряжения, связанные с переносом в нагрузку заряда переключения ключа,
используя схему на Рис. 7.22.
385
Глава 7. АНАЛОГОВЫЕ КОММУТАТОРЫ
11. Рассчитать изменение напряжения на конденсаторе УВХ (см. Рис. 7.30),
вызванное зарядом переключения ключа #=10пКл при запирании
ключа, если Сн = 1000 пФ.
12. Поясните, за счет чего смещение нуля УВХ на схеме Рис. 7.34 не зависит
от смещения нуля ОУ2.
13. Обоснуйте уравнение G.4).
Литература к главе 7
7.1. Wynne J. RqN Modulation in CMOS Switches and Multiplexers; What It Is and How
to Predict Its Effect on Signal Distortion //Application Note AN-251. — Analog Devices, 1997.
-2 pp.
7.2. Specifications and Architectures of Sample-and-Hold Amplifiers //Application Note
775 National Semiconductor. July 1992. — 6 pp.
7.3. LF198/LF298/LF398, LF198A/LF398A Monolithic Sample-and-Hold
Circuits//Datasheet National Semiconductor. May 1998. — 14 pp.
7.4. Мулявка Я. Схемы на операционных усилителях с переключаемыми
конденсаторами. М.: Мир, 1992. — 416 с.
Глава 8
ЦИФРОАНАЛОГОВЫЕ
ПРЕОБРАЗОВАТЕЛИ
8.1. Общие сведения
Цифроаналоговый преобразователь (ЦАП) предназначен для
преобразования числа, представленного, как правило, в виде двоичного кода, в напряжение
или ток, пропорциональные этому числу. Схемотехника цифроаналоговых
преобразователей весьма разнообразна. На Рис, 8.1 представлена общая
классификация ЦАП по способам преобразования входного кода и схемам
формирования выходного сигнала.
Дальнейшую классификацию ИМС цифроаналоговых преобразователей
можно провести по ряду специфических признаков, например:
• по роду выходного сигнала: преобразователи с токовым выходом или с
выходом по напряжению;
• по типу цифрового интерфейса: с последовательным вводом или с
параллельным вводом;
• по числу ЦАП на кристалле: Одноканальные и многоканальные;
• по быстродействию: низкого, среднего и высокого быстродействия;
• по разрядности. 387
Рис. 8.1. Обобщенная классификация ЦАП
Глава 8. ЦИФРОАНАЛОГОВЫЕ ПРЕОБРАЗОВАТЕЛИ
8.2. Параллельные ЦАП
8.2.1. ЦАП с суммированием весовых токов
ЦАП с формированием весовых токов резистивными цепями
Большинство схем параллельных ЦАП
основано на суммировании токов, сила каждого
из которых пропорциональна весу цифрового
двоичного разряда, причем должны
суммироваться только токи тех разрядов, значения
которых равны 1. Пусть, например, требуется
преобразовать двоичный четырехразрядный
код в аналоговый сигнал тока. У четвертого,
старшего значащего разряда (MSB), вес будет равен 23 = 8, у третьего разряда —
22 = 4, у второго — 21 = 2 и у младшего (LSB) — 2° = 1. Если вес LSB /LSB = 1 мА,
то Aisb = 8 мА, а максимальный выходной ток преобразователя /оит_тах = 15 мА
и соответствует коду 11112. Понятно, что, например, коду 10012 будет
соответствовать /Оит = 9 мА и т. д. Следовательно, требуется построить схему,
обеспечивающую генерацию и коммутацию по заданным законам точных весовых токов.
Простейшая схема, реализующая указанный принцип, приведена на Рис. 8.2.
Здесь весовые токи формируются с помощью резисторов в полном
соответствии с законом Ома. Сопротивления резисторов выбирают так, чтобы при
замкнутых ключах через них протекал ток, соответствующий весу разряда.
Ключ должен быть замкнут тогда, когда соответствующий ему бит входного
кода равен единице. Выходной ток определяется соотношением
где к — разрядность входного кода, d, принимает значение 0 или 1 в
зависимости от состояния /-го разряда входного кода, D — входной код (точнее,
суммарный вес входного кода). При высокой разрядности ЦАП токозадаюшие
резисторы должны быть согласованы с высокой точностью. Наиболее жесткие
требования по точности предъявляются к резисторам старших разрядов.
Поскольку разброс весовых токов не должен превышать доли тока младшего
(нулевого) разряда, то погрешность сопротивления в /-м разряде должна
удовлетворять условию
Рис. 8.2. Простейшая схема ЦАП с
суммированием весовых токов
(8.1)
Из этого условия следует, что относительная погрешность сопротивления
весовых резисторов должна снижаться по мере роста разрядности ЦАП.
Например, в четвертом разряде 4-разрядного ЦАП она не должна превышать 6%, а в
10-м разряде 10-разрядного — 0.1%. Это требование делает фактически
нереализуемым по указанному принципу ЦАП с разрядностью выше 12, особенно
для высокоскоростных схем. Поэтому в ЦАП высокой разрядности обычно
388
8.2. Параллельные ЦАП
применяют сегментацию цепей задания весовых токов старших разрядов,
которая будет описана немного позже.
Рассмотренная схема ЦАП с суммированием весовых токов при всей ее
простоте обладает рядом недостатков:
• при различных входных кодах ток, потребляемый от источника опорного
напряжения (ИОН), будет различным, а это может повлиять на величину
выходного напряжения ИОН;
• значения сопротивлений весовых резисторов могут различаться в тысячи раз,
что делает весьма затруднительной реализацию этих резисторов в
полупроводниковых ИМС. Кроме того, сопротивление резисторов старших разрядов
в многоразрядных ЦАП может быть соизмеримым с сопротивлением
замкнутых ключей, а это ведет к дополнительным погрешностям преобразования;
• в этой схеме к разомкнутым ключам прикладывается значительное
напряжение, что усложняет их построение.
Эти недостатки во многом устранены в схеме ЦАП AD7520 (отечественный
аналог — 572ПА1), разработанном инженерами фирмы Analog Devices в 1973 г.,
которая в настоящее время является, по существу, промышленным стандартом
(по ней выполнены многие серийные модели ЦАП). Указанная схема
представлена на Рис. 8.3. В качестве ключей здесь используются МОП-транзисторы.
Рис. 8.3. Схема ЦАП с переключателями и
матрицей постоянного импеданса
Рис. 8.4. Построение ступени резистив-
ной матрицы постоянного импеданса
В этой схеме задание весовых коэффициентов ступеней преобразователя
осуществляют посредством последовательного деления опорного напряжения с
помощью резистивной матрицы постоянного импеданса (так называемой
матрицы R—2R). Основной элемент такой матрицы представляет собой делитель
напряжения (Рис. 8.4), который должен удовлетворять следующему условию:
если он нагружен на сопротивление RL, то его входное сопротивление i?IN также
должно принимать значение i?L-
Коэффициент ослабления цепи ос= V2/V\ при этой нагрузке должен иметь
заданное значение. При выполнении этих условий получаем следующие
выражения для сопротивлений:
При двоичном кодировании а = 0.5. Если положить RL= 2R, то
(8.2)
(8.3)
в соответствии с Рис. 8.3.
389
Глава 8. ЦИФРОАНАЛОГОВЫЕ ПРЕОБРАЗОВАТЕЛИ
Предполагается, что благодаря малому или близкому к нулю входному
импедансу приемников токов /Оит и /'оит ПРИ любом положении переключателей
Sk нижние выводы резисторов находятся под потенциалом общей шины схемы.
Поэтому источник опорного напряжения всегда нагружен на постоянное
входное сопротивление Ящ = /J. Это гарантирует неизменность опорного
напряжения при любом входном коде ЦАП.
Согласно Рис. 8.3 выходные токи схемы определяются соотношениями
Поскольку, как уже отмечалось, нижние выводы резисторов 2R матрицы
при любом состоянии переключателей ^соединены с общей шиной через
низкое сопротивление замкнутых ключей, напряжения на ключах остаются всегда
небольшими и на практике не превышают нескольких милливольт. Это
упрощает построение ключей и схем управления ими и позволяет использовать
широкий диапазон опорных напряжений, в том числе и различной полярности.
Поскольку выходной ток ЦАП зависит от KreF линейно (8.4), преобразователи
такого типа можно использовать для умножения аналогового сигнала (подавая
его на вход опорного напряжения) на цифровой код. Такие ЦАП называют
перемножающими.
Точность этой схемы снижает то обстоятельство, что для ЦАП, имеющих
высокую разрядность, необходимо согласовывать сопротивления ключей в
открытом состоянии 7?oN с разрядными токами. Особенно это важно для ключей
старших разрядов. Например, в ЦАП AD7520 ключевые МОП-транзисторы
шести старших разрядов сделаны разными по площади и их сопротивление Rq#
нарастает согласно двоичному коду B0, 40, 80, ... 640 Ом). Таким способом
уравниваются (до 10 мВ) падения напряжения на ключах первых шести
разрядов, что обеспечивает монотонность и линейность переходной характеристики
ЦАП.
ЦАП на источниках тока
ЦАП на источниках тока обладают более высокой точностью. В отличие от
предыдущего варианта, в котором весовые токи формируются резисторами
сравнительно небольшого сопротивления и как следствие зависят от сопротив-
390 ления ключей и нагрузки, в данном случае весовые токи обеспечиваются тран-
(8.4)
(8.5)
(8.6)
а входной ток определяется соотношением
8.2. Параллельные ЦАП
зисторными источниками тока, имеющими высокое динамическое
сопротивление. Упрощенная схема ЦАП на источниках тока приведена на Рис. 8.5.
Рис. 8.5. Схема ЦАП на источниках тока
Весовые токи формируются источниками тока с помощью резистивной
матрицы. Потенциалы баз транзисторов одинаковы, а чтобы были равны и
потенциалы эмиттеров всех транзисторов, площади их эмиттеров делают
различными в соответствии с весовыми коэффициентами. Правый резистор матрицы
подключен не к общей шине, как на схеме Рис. 8.5, а к двум включенным
параллельно одинаковым транзисторам VT0 и VTU в результате чего ток через VT0
равен половине тока через VT{. Входное напряжение для резистивной матрицы
создается с помощью опорного транзистора f"TREF и операционного усилителя
ОУЬ выходное напряжение которого устанавливается таким, что коллекторный
ток транзистора VTREF принимает значение /REF = Fref/^ref Выходной ток для
TV-разрядного ЦАП
(8.7)
Типичными примерами ЦАП на источниках тока являются ИМС AD565,
594ПА1, П08ПА1.
В качестве переключателей тока Sk часто используются биполярные
дифференциальные каскады, в которых транзисторы работают в активном режиме. Это
позволяет сократить время установления выходного сигнала ЦАП до единиц
наносекунд. Схема переключателя тока на дифференциальных усилителях
приведена на Рис. 8.6.
Дифференциальные каскады VTi—VT3 и Vfy— Vf ъ образованы из
стандартных ЭСЛ-вентилей. Ток 1Ь протекающий через вывод коллектора выходного
эмиттерного повторителя, является выходным током ячейки.
Если на цифровой вход Dk подается напряжение высокого уровня, то
транзистор УТЪ открывается, а транзистор УТЪ закрывается. Выходной ток
определяется выражением
391
Точность весового тока значительно повышается, если резистор RE
заменить источником постоянного тока, как в схеме на Рис. 8.5. Благодаря
симметрии схемы существует возможность формирования двух выходных токов —
Глава 8. ЦИФРО А НАЛОГОВЫЕ ПРЕОБРАЗОВАТЕЛИ
Рис. 8.6. Переключатели тока на дифференциальных
усилителях
прямого и инверсного. Наиболее быстродействующие модели подобных ЦАП
имеют ЭСЛ-входы. Примером может служить 12-разрядный МАХ555,
имеющий время установления 4 не по уровню 0.1 % от полной шкалы. Другие
примеры: 10-разрядный ЦАП 1118ПА6 со временем установления 10 нс и
8-разрядный арсенид-галлиевый ЦАП 6100ПА1А со временем установления 1 не.
Поскольку выходные сигналы таких ЦАП захватывают радиочастотный
диапазон, они обычно имеют выходное сопротивление 50 или 75 Ом, которое должно
быть согласовано с волновым сопротивлением кабеля, подключаемого к
выходу преобразователя.
392
Высокоточные скоростные ЦАП
Современные системы связи требуют применения высокоскоростных ЦАП
большой разрядности, которые могли бы преобразовывать сигналы с малыми
искажениями. Фактически все современные высокоточные скоростные ЦАП
используют режим переключения источников тока с помощью ненасыщенных
ключей. Рассмотренные выше схемы ЦАП, у которых каждому разряду
соответствует отдельный переключаемый источник тока, обладают двумя
существенными недостатками:
1. Как уже было отмечено, в соответствии с формулой (8.1) технологически
очень сложно обеспечить необходимую точность изготовления весовых
источников тока высших разрядов.
2. При переходе от одной кодовой комбинации на входе ЦАП к другой на
выходе преобразователя наблюдаются выбросы, амплитуда которых зависит от
номера переключаемого разряда. Эти выбросы обусловлены
неодновременностью переключения источников тока. Например, если на входе 6-разрядного
ЦАП было число 3110 = 0111112, которое затем сменилось на 3210 = 1000002, то в
случае, когда источник тока старшего разряда подключился раньше, чем
отключились источники младших разрядов, на выходе ЦАП будет наблюдаться
кратковременный выброс напряжения, амплитуда которого составит половину
напряжения полной шкалы ЦАП.
Эти недостатки можно в значительной степени уменьшить, если применить
сегментирование или декодирование старших разрядов ЦАП. Принцип
сегментирования поясняет Рис. 8.7 [8.1].
8.2. Параллельные ЦАП
Здесь представлен 10-разрядный ЦАП с сегментированием. Пять старших
разрядов декодируются из двоичного в унитарный код, причем двоичному
числу на входе дешифратора соответствует численно равное количество единиц на
выходе.
Максимальное число, которое может быть отображено 5-разрядным
двоичным числом, равно 31, поэтому дешифратор имеет 5 входов и 31 выход. Второй
36-разрядный регистр-защелка необходим из-за задержки прохождения
сигналов через дешифратор. Дешифратор через регистр управляет 31 токовым
ключом, каждый из которых имеет один и тот же вес, соответствующий пятому
разряду (напомним, что младшим разрядом считается нулевой). Поэтому согласно
формуле (8.1) погрешность тока таких источников не должна превышать 3%,
что может быть сравнительно легко обеспечено (следует, однако, иметь в виду,
что эти источники должны быть согласованы друг с другом с гораздо более
высокой точностью, но интегральная технология позволяет этого добиться).
Кроме того, при любом изменении входного кода, выброс выходного сигнала,
вызванный неодновременной коммутацией ключей, не превысит 3.1% от полной
шкалы. Этот выброс не зависит от входного тока и может быть легко сглажен
фильтром. Все эти качества с лихвой окупают издержки, связанные с
увеличением числа источников тока и токовых ключей.
С точки зрения сокращения количества элементов без потери точности
целесообразно выполнение ЦАП младших разрядов на источниках тока, вес
которых задавался бы с помощью резистивной матрицы R-2R, как в схеме на
Рис. 8.5, однако такая схема требует применения тонкопленочных резисторов,
которые не могут быть созданы на основе дешевой КМОП-технологии. Один
из путей решения этой задачи — сегментация младших разрядов ЦАП. На
Рис. 8.8 приведена блок-схема 10-разрядного ЦАП AD9750 из нового семейства
ИМС фирмы Analog Devices, включающего также 12-разрядную (AD9752) и
14-разрядную (AD9754) версии.
Это семейство предназначено в основном для построения каналов передачи
базовых станций широкополосных систем связи, таких, как CDMA, VDSL и др.
ЦАП включает две основные секции сегментации. Старшие 5 бит
полностью декодированы и управляют 31 источником тока по 320 мкА каждый.
Следующие 4 бита декодированы в 15 линий, которые управляют 15 источниками
тока по 20 мкА. Наконец, младший бит управляет одиночным источником тока
393
Глава 8. ЦИФРОАНАЛОГОВЫЕ ПРЕОБРАЗОВАТЕЛИ
394
Рис. 8.8. Блок-схема 10-разрядного ЦАП AD9750
силой 10 мкА. Всего в схеме насчитывается 47 источников тока и 47 триггеров в
составе промежуточного регистра-защелки.
Базовая ячейка переключателя тока показана на Рис. 8.9.
Она построена на дифференциальной
паре /?МОП-транзисторов. Дифференциальные
пары управляются низкоуровневой логикой,
чтобы минимизировать переходный процесс
при переключении. Выходные сигналы ЦАП
представляют собой дополнительные по
отношению друг к другу дифференциальные токи,
что помогает уменьшить четные гармоники и
облегчает построение дифференциальных
линий передачи сигналов, улучшающих
помехозащищенность.
Развитие систем связи подвигло сразу
несколько фирм на создание и выпуск
скоростных 14-разрядных ЦАП, аналогичных по
характеристикам микросхеме AD9754. Это
микросхемы THS5671A Texas Instruments, DAC14135 National Semiconductor,
DAC904 Burr-Brown и др. Все эти ЦАП имеют время установления (с 0.1%-й
точностью) порядка 30 не и максимальную частоту обновления (частоту смены
входного кода) от 125 МГц (THS5671A) до 200 МГц (DAC904). Максимальная
площадь выброса у них не превышает 5 пВс. Насколько велик прогресс в этой
области, говорит тот факт, что 10 лет назад самым скоростным из 12-разрядных
ЦАП (о 14-разрядных скоростных ЦАП тогда не было и речи) был ЭСЛ-совмес-
тимый AD9712, допускавший максимальную частоту обновления 100 МГц.
Интегральная и дифференциальная нелинейность этого прибора составляла 4 LSB
при отсутствии гарантии монотонности, т. е. по сути дела он представлял собой
10-разрядный ЦАП. Максимальная площадь выброса составляла 100 пВс.
Оптовая цена — $30. Сейчас 14-разрядный ЦАП THS5671A с большим
быстродействием и с интегральной и дифференциальной нелинейностью не более
0.75 LSB стоит менее $10.
Особое место среди этих ЦАП занимает 16-разрядный LTC1668. Это на
сегодняшний день наиболее точный прибор из скоростных ЦАП. Его
максимальная частота обновления составляет 50 МГц, время установления с точностью до
Рис. 8.9. Базовая ячейка
переключателя тока
8.2. Параллельные ЦАП
0.1% от полной шкалы — 20 нс, динамический диапазон, свободный от
паразитных составляющих (SFDR), — 87 дБ при частоте выходного сигнала 1 МГц.
Типовая дифференциальная нелинейность не превышает 1 LSB, типовая
интегральная нелинейность — 3 LSB.
Высокоскоростные ЦАП с интерполяционными фильтрами
Рассмотрим систему связи, которая работает на частоте синхронизации
100 МГц и генерирует на выходе гармонический сигнал частотой 30 МГц
(Рис. 8.10).
Рис. 8.10. К пояснению метода передискретизации цифрового сигнала:
а — обоснование необходимости передискретизации, б — пример
8-кратной интерполяции
Первая боковая (разностная) частота составит 100 - 30 = 70 МГц.
Предположим, что мы хотим уменьшить с помощью ФНЧ составляющую первой
боковой частоты на 60 дБ, т. е. в 1000 раз. Тогда АЧХ фильтра в интервале от
граничной частоты 30 МГц до первой боковой частоты 70 МГц должна упасть на 60 дБ,
т. е. иметь наклон почти 60 дБ/октаву.
С учетом того, что полиномиальные ФНЧ типа фильтра Баттерворта в
полосе заграждения дают ослабление 6 дБ на октаву на каждый полюс передаточной
395
Глава 8. ЦИФРОАНАЛОГОВЫЕ ПРЕОБРАЗОВАТЕЛИ
функции, для решения этой задачи потребуется фильтр, как минимум, десятого
порядка.
Использование методов интерполяции для определения промежуточных
значений входных кодов позволяет увеличить эффективную частоту отсчетов,
тем самым повысить первую зеркальную частоту и снизить требования к ФНЧ.
Такое искусственное увеличение частоты отсчетов называют
передискретизацией (см. Рис. 8.105).
Передискретизация — это введение между входными выборками
сигнала равноотстоящих по времени промежуточных выборок, значение
которых рассчитывается по входным выборкам с помощью
тригонометрической интерполяции
Примером скоростного ЦАП с интерполяционными цифровыми
фильтрами может служить ИМС 14-разрядного ЦАП AD9774, упрощенная блок-схема
которого приведена на Рис. 8.11.
Рис. 8.11. Блок-схема ЦАП с интерполяционным фильтром
В этом преобразователе возможна 2- и 4-кратная передискретизация.
Микросхема содержит умножитель тактовой частоты на основе системы фазовой
автоподстройки частоты (ФАПЧ). Максимальная входная тактовая частота равна
32 МГц, максимальная частота выходных отсчетов — 128 МГц. Еще более
высоким быстродействием обладает 14-разрядный ЦАП AD9772. Его эффективная
частота обновления выхода достигает 400 МГц.
396
ЦАП с выходом по напряжению
Существует несколько способов формирования выходного напряжения для
ЦАП с суммированием весовых токов. Два из них показаны на Рис. 8.12.
На Рис. 8.12а приведена схема с преобразователем тока в напряжение на
операционном усилителе. Эта схема пригодна для всех ЦАП с токовым
выходом. Поскольку пленочные резисторы, определяющие весовые токи ЦАП
имеют значительный ТКС, резистор обратной связи RFB следует изготавливать на
кристалле ЦАП и в том же технологическом процессе, что обычно и делается.
Это позволяет снизить температурную нестабильность преобразователя в
300...400 раз.
8.2. Параллельные ЦАП
Рис. 8.12. Формирование напряжения по токовому выходу ЦАП:
а — с помощью ОУ, б — с помощью резистора
Для ЦАП с формированием весовых токов резистивными цепями с учетом
(8.4) выходное напряжение схемы на Рис. 8.12а
Обычно сопротивление резистора обратной связи RFB = R. В таком случае
(8.8)
Большинство моделей ЦАП имеют значительную выходную емкость.
Например, для ЦАП AD7520 с формированием весовых токов резистивными
цепями в зависимости от входного кода СОцтсоставляет величину 30... 120 пФ, для
ЦАП AD565A с источниками тока СОцт= 25 пФ. Эта емкость совместно с
выходным сопротивлением ЦАП и резистором RFB создает дополнительный
полюс частотной характеристики петли обратной связи ОУ, который может
вызвать неустойчивость в виде самовозбуждения. Особенно это опасно для
рассматриваемого ЦАП при нулевом входном коде. При RFB = ЮкОм частота
второго полюса составит около 100 кГц при 100%-й глубине обратной связи. В
таком случае усилитель, частота единичного усиления которого/г превышает
500 кГц, будет иметь явно недостаточные запасы устойчивости. Для
обеспечения устойчивости можно включить параллельно резистору RFB конденсатор Ск,
емкость которого в первом приближении можно взять равной СОит- Для более
точного выбора Ск необходимо провести полный анализ устойчивости схемы с
учетом свойств конкретного ОУ. Однако зачастую меры по повышению
устойчивости серьезно ухудшают быстродействие схемы. В результате возникает
парадоксальная ситуация: для поддержания высокого быстродействия даже
недорогого ЦАП может потребоваться относительно дорогой быстродействующий
(с малым временем установления) ОУ.
Ранние модели ЦАП с формированием весовых токов резистивными
цепями (типа AD7520, 572ПА1 и др.) допускают отрицательное напряжение на
ключах не свыше 0.7 В, поэтому для защиты ключей между выходами ЦАП следует
включать диод Шоттки, как это показано на Рис. 8.12а.
Для ЦАП на источниках тока преобразование выходного тока в напряжение
может быть осуществлено с помощью обычного резистора (Рис. 8.125). В этой
схеме невозможно самовозбуждение и сохранено быстродействие, однако ам-
397
Глава 8. ЦИФРОАНАЛОГОВЫЕ ПРЕОБРАЗОВАТЕЛИ
плитуда выходного напряжения не может быть большой (например, для
AD565A в биполярном режиме она лежит в пределах ±1 В). В противном случае
транзисторы источников тока могут выйти из линейного режима. Эти
требования могут быть удовлетворены при относительно низких значениях
сопротивления нагрузки: RL < 1 кОм. Для увеличения амплитуды выходного сигнала
ЦАП в этой схеме к ее выходу можно подключить неинвертирующий
усилитель, построенный на ОУ.
Высокоскоростные ЦАП с дифференциальными токовыми выходами
допускают несколько схемных конфигураций для получения выходного сигнала в
виде напряжения (Рис. 8.13а):
Рис. 8.13. Схемы преобразования выходных токов высокоскоростного ЦАП в напряжение:
а, б, в — симметричные, г — несимметричная
398
Здесь на примере микросхемы ДЕС166И, показано несколько схем
построения преобразователей ток—напряжение, в том числе:
• симметричная дифференциальная с помощью внешних нагрузочных
резисторов (Рис. 8.13а);
• симметричная однополюсная с использованием трансформатора (Рис. 8.136);
• симметричная однополюсная с подключением преобразователя
ток-напряжение на базе ОУ (Рис. 8.13*).
Если желателен
несимметричный режим, то используется только
один из выходов, предпочтительно
выход А (Рис. 8.13г).
Чтобы получить выходной
сигнал в виде напряжения для ЦАП с
формированием весовых токов ре-
зистивными цепями, можно
использовать инверсное включение ре-
зистивной матрицы (Рис. 8.14).
Рис. 8.14. ЦАП с инверсным включением
резистивной матрицы
8.2. Параллельные ЦАП
Выходное напряжение ЦАП найдем как общее напряжение на крайнем
правом узле, вызванное суммарным действием всех Vr При этом напряжения узлов
суммируются с весами, соответствующими коэффициентам деления резистив-
ной матрицы R-2R. Получим
Рис. 8.15. ЦАП с инверсным
включением резистивной матрицы
как эквивалентный генератор
Для определения выходного напряжения при произвольной нагрузке
воспользуемся теоремой об эквивалентном генераторе. Из эквивалентной схемы
ЦАП на Рис. 8.15 видно, что
Для расчета выходного напряжения этой схемы найдем связь между
напряжением Vt на ключе St и узловым напряжением V/.
Воспользуемся принципом суперпозиции. Будем считать равными нулю все
напряжения на ключах, кроме рассматриваемого напряжения Vi. При Rl=2Rk
каждому узлу подключены справа и слева нагрузки сопротивлением 2R.
Воспользовавшись методом двух узлов, получим
(8.9)
(8Л0)
(8.11)
Откуда э.д.с. эквивалентного генератора
Внутреннее сопротивление эквивалентного генератора RE совпадает с
входным сопротивлением матрицы R-2R, т. е. RE= R. При RL= 2R из (8.9) и (8.11)
получим
Подставив (8.12) в (8.10), для произвольной нагрузки найдем
(8.12)
399
Глава 8. ЦИФРОАНАЛОГОВЫЕ ПРЕОБРАЗОВАТЕЛИ
400
В частности, при RL = <*>
(8.13)
Недостатками этой схемы являются: большое падение напряжения на
ключах, изменяющаяся нагрузка источника опорного напряжения и значительное
выходное сопротивление. Вследствие первого недостатка по этой схеме нельзя
включать ЦАП типа 572ПА1 или 572ПА2, но можно 572ПА6 и 572ПА7. Из-за
второго недостатка источник опорного напряжения должен обладать низким
выходным сопротивлением, в противном случае возможна немонотонность
характеристики преобразования. Тем не менее инверсное включение резистив-
ной матрицы довольно широко применяется в ИМС ЦАП с выходом в виде
напряжения, например, в 12-разрядном ЦАП МАХ531, включающем также
встроенный ОУ в неинвертирующем включении в качестве буфера, или в
16-разрядном ЦАП МАХ542 без встроенного буфера.
8.2.2. Параллельный ЦАП на переключаемых
конденсаторах (ЦАП с суммированием зарядов)
Основой ЦАП этого типа является матрица конденсаторов, емкости
которых соотносятся как целые степени двух. Схема простого варианта такого
преобразователя приведена на Рис. 8.16.
Рис. 8.16. Параллельный ЦАП на коммутируемых конденсаторах
Емкость к-го конденсатора матрицы определяется соотношением
(8.14)
Цикл преобразования состоит из двух фаз. В первой фазе ключи Sq...SN_\
находятся в левой позиции. Ключ сброса SR замкнут. При этом все
конденсаторы разряжены. Во второй фазе ключ сброса SR размыкается. Если к-й бит
входного УУ-разрядного слова dk = 1, то соответствующий ключ Sk переключается в
правую позицию, подключая нижнюю обкладку конденсатора Ск к источнику
опорного напряжения, или остается в левой позиции, если dk = 0. Суммарный
заряд конденсаторов матрицы с учетом (8.14) составит
(8.15)
8.2. Параллельные ЦАП
Равный заряд получает и конденсатор С в обратной связи ОУ. При этом
выходное напряжение ОУ составит
Подставив (8.15) в (8.16), найдем окончательно
(8.16)
(8.17)
Для длительного хранения результата преобразования (т. е. постоянного
напряжения) в течение необходимого периода времени к выходу ЦАП этого типа
следует подключить устройство выборки-хранения, так как преобразователи на
коммутируемых конденсаторах не могут хранить выходное напряжение
неограниченное время из-за утечки заряда (как это могут делать ЦАП с
суммированием весовых токов, снабженные входным регистром-защелкой). Поэтому они
применяются в основном в составе аналого-цифровых преобразователей.
Другим недостатком является большая площадь кристалла ИМС, занимаемая
подобной схемой.
8.2.3. ЦАП с суммированием напряжений
Схема 8-разрядного ЦАП с суммированием напряжений, изготавливаемого
в виде ИМС, приведена на Рис. 8.17.
Основу преобразователя составляет
резистивная матрица из 256 резисторов
равного сопротивления, соединенных
последовательно.
Вывод Wчерез ключи Sq...S2ss может
подключаться к любой точке этой цепи в
зависимости от входного кода. Входной
двоичный код D преобразуется
дешифратором 8x256 в унитарный
позиционный код, непосредственно
управляющий ключами. Если приложить
напряжение Vp& между выводами Аи В,
то напряжение между выводами W и В
составит
Рис. 8.17. Блок-схема ЦАП с
суммированием напряжений
Достоинством данной схемы
является высокая линейность и
гарантированная монотонность переходной характеристики. ЦАП этого типа можно
использовать в качестве резистора, подстраиваемого цифровым кодом. Выпускается
несколько моделей таких ЦАП. Например, микросхема AD8403 содержит
четыре 8-разрядных ЦАП, выполненных по схеме на Рис. 8.17, с сопротивлением
между выводами Аи В \, 10, 50 либо 100 кОм в зависимости от модификации.
При подаче активного уровня на вход «Экономичный режим» происходит раз-
401
Глава 8. ЦИФРОАНАЛОГОВЫЕ ПРЕОБРАЗОВАТЕЛИ
402
мыкание ключа Sqff и замыкание ключа Sq. ИМС имеет вход сброса, которым
ЦАП можно установить на середину шкалы. Недостаток схемы —
необходимость изготавливать большое количество согласованных резисторов. То
обстоятельство, что в рассмотренной схеме, по существу, программируется
сопротивление между выводами, позволяет назвать этот тип ИМС программируемым,
или цифровым потенциометром.
Фирмы Analog Devices, Dallas
Semiconductor, Xicor и некоторые
другие выпускают модели
цифровых потенциометров, у которых
схема управления включает
энергонезависимое запоминающее
устройство, что особенно удобно
для построения схем с
автоматической подстройкой
(калибровкой). Например, 10-разрядный
цифровой потенциометр AD5231
содержит развитую цифровую
часть, включающую входные
регистры и три электрически
перепрограммируемых ПЗУ,
допускающих 100 тысяч циклов
перепрограммирования. Одно из
них может быть использовано для
хранения 28 байт любых констант,
необходимых пользователю.
Последовательный интерфейс может
быть сконфигурирован для
кнопочного управления типа
«инкремент-декремент».
Более простая модель цифрового потенциометра типа
«инкремент-декремент» AD5220 имеет только последовательный цифровой интерфейс для
кнопочного управления.
Блок-схема этой ИМС представлена на Рис. 8.18а, а типовая схема
включения — на Рис. 8.185. При каждом нажатии на кнопку «Изменить» содержимое
счетчика увеличивается или уменьшается на единицу в зависимости от
положения переключателя «+/—». Соответственно «движок» потенциометра
перемещается вверх или вниз на один шаг.
ЦАП с суммированием напряжений являются также основой для
построения многоразрядных ЦАП. Типичным примером может служить 16-разрядный
перемножающий ЦАП с выходом по напряжению AD569, схема аналоговой
части которого приведена на Рис. 8.19.
Основой ЦАП являются две цепочки по 256 согласованных резисторов.
Восемь старших разрядов входного слова выбирают один из резисторов (сегмент)
на левой цепочке. Через буферные усилители У^ и У2 напряжение на
выбранном сегменте прикладываются к правой цепочке. Напряжение на входе
выходного буферного усилителя У3 равно сумме напряжения на выходе делителя, об-
Рис. 8.18. Цифровой потенциометр типа
«инкремент-декремент» AD5220
а — блок-схема, б — типовая схема включения
8.3. Последовательные ЦАП
Рис. 8.19. Схема аналоговой части ЦАП AD569
разованного правой цепочкой резисторов и переключателем SL, и напряжения
между общей точкой и нижним выводом выбранного сегмента левой цепочки
(8.18)
где DL и DM — соответственно младший и старший байты входного слова D
преобразователя.
Такое построение позволяет добиться очень высокой дифференциальной
линейности. Дифференциальная нелинейность этого ЦАП не превышает jLSB
или 38 мкВ при Pref= 5 В, что, в свою очередь, гарантирует высокую
монотонность характеристики преобразования 16-разрядного устройства.
Примером комбинированной схемы, в которой четыре старших разряда
преобразуются с помощью последовательной резистивной цепи, а младшие — с
помощью ЦАП на основе матрицы R-2R, может служить 16-разрядный
преобразователь AD7849B. Он имеет более высокую точность и при этом стоит вдвое
дешевле, чем ЦАП AD569.
8.3. Последовательные ЦАП
8.3.1. ЦАП с широтно-импульсной модуляцией
Очень часто ЦАП входит в состав микропроцессорных систем. В этом
случае, если не требуется высокое быстродействие, цифроаналоговое
преобразование может быть очень просто осуществлено с помощью широтно-импульсной
модуляции (ШИМ). Схема ЦАП с ШИМ приведена на Рис. 8.20.
Наиболее просто организуется цифро-аналоговое преобразование
(Ц/А-преобразование) в том случае, если микроконтроллер имеет встроенную
функцию широтно-импульсного преобразования (например, микросхемы
AT90S8515 фирмы Atmel или 87C51GB фирмы Intel). Выход ШИМ управляет
ключом S. В зависимости от заданной разрядности преобразования (для кон-
403
Глава 8. ЦИФРОАНАЛОГОВЫЕ ПРЕОБРАЗОВАТЕЛИ
Рис. 8.20. ЦАП с широтно-импульсной модуляцией:
а — структурная схема, б — эпюры напряжений
троллера AT90S8515 возможны режимы 8, 9 и 10 разрядов) контроллер с
помощью своего таймера/счетчика формирует последовательность импульсов,
коэффициент заполнения которых y—tJT (Рис. 8.205) определяется
соотношением
(8.19)
где N— разрядность преобразования, a D — преобразуемый код. Фильтр
нижних частот сглаживает импульсы, выделяя среднее значение напряжения. В
результате выходное напряжение преобразователя
(8.20)
Рассмотренная схема обеспечивает почти идеальную линейность
преобразования, не содержит прецизионных элементов (за исключением источника
опорного напряжения). Основной ее недостаток — низкое быстродействие.
Это связано с тем, что описанная схема ЦАП с ШИМ преобразует
цифровой код во временной интервал с помощью двоичного счетчика квант за
квантом, поэтому для получения ^-разрядного преобразования необходимы 2N
временных квантов (тактов).
8.3.2. Последовательный ЦАП на переключаемых
конденсаторах
404
На Рис. 8.21 приведена схема
последовательного ЦАП, которая позволяет выполнить
Ц/А-преобразование за значительно меньшее
число тактов [8.1].
В этой схеме емкости конденсаторов С\ и С2
равны. Перед началом цикла преобразования
конденсатор С2 разряжается ключом 54.
Входное двоичное слово задается в виде
последовательного кода. Его преобразование
осуществляется последовательно, начиная с младшего разряда </0- Каждый такт
преобразования состоит из двух полутактов. В первом полутакте конденсатор Q
заряжается до опорного напряжения Fref при d0 = 1 посредством замыкания
Рис. 8.21. Схема последовательного
ЦАП на переключаемых
конденсаторах
8.3. Последовательные ЦАП
Если требуется сохранять результат преобразования продолжительное
время, к выходу схемы следует подключить УВХ. После окончания цикла
преобразования следует провести цикл выборки, перевести УВХ в режим хранения и
вновь начать преобразование.
Таким образом, представленная схема выполняет преобразование входного
кода за 2Nтактов, что значительно меньше, чем у ЦАП с ШИМ. Здесь требуется
только два согласованных конденсатора небольшой емкости. Конфигурация
аналоговой части схемы не зависит от разрядности преобразуемого кода.
Однако по быстродействию последовательный ЦАП значительно уступает
параллельным ЦАП, что ограничивает область его применения.
8.3.3. Сигма-дельта-ЦАП
Развитие цифровой звукозаписи (компакт-диски и магнитофоны)
предъявило новые требования к ЦАП. Высококачественная звукозапись имеет
динамический диапазон сигналов, превышающий 96 дБ, а это требует применения,
как минимум, 17-разрядных ЦАП. Первоначально в цифровых системах
звукозаписи получили распространение 18-разрядные параллельные ЦАП с
формированием весовых токов матрицей R-2R. При умеренной цене практически
невозможно было обеспечить монотонность их характеристик преобразования,
но с этим приходилось мириться. Другая проблема цифрового
звуковоспроизведения — избыточный шум и искажение сигналов, связанные с наложением
спектров, — потребовала применения на входе ЦАП цифровых
интерполирующих фильтров, аналогично тому, как это делается в интерполирующих
высокоскоростных ЦАП (Рис. 8.11). Все это приводит к усложнению и удорожанию
систем звуковоспроизведения.
Требования к цифровым системам звукозаписи, в которых запоминаются
выборки (отсчеты) непрерывно изменяющихся сигналов в дискретные
моменты времени, вытекают из теоремы Котельникова—Найквиста. 405
(8.23)
Точно так же выполняется преобразование для остальных разрядов слова. В
результате для TV-разрядного ЦАП выходное напряжение будет равно
Пока на конденсаторе С2 сохраняется заряд, процедура заряда конденсатора
С\ должна быть повторена для следующего разряда d\ входного слова. После
нового цикла перезарядки напряжение на конденсаторах будет
(8.22)
ключа S\ или разряжается до нуля при d0 = 0 путем замыкания ключа S2. Во
втором полутакте при разомкнутых ключах S\, S2 и S* замыкается ключ 5з, что
вызывает деление заряда пополам между Сх и С2. В результате получаем
(8.21)
Глава 8. ЦИФРОАНАЛОГОВЫЕ ПРЕОБРАЗОВАТЕЛИ
Теорема Котельникова—Найквиста
Сигнал может быть воспроизведен без искажений из
последовательности его равноотстоящих по времени выборок в том случае, если
верхняя граничная частота спектра этого сигнала меньше половины
частоты выборок.
Для ЦАП это означает, что частота выборок (отсчетов) должна быть больше
удвоенного значения самой высокой частоты сигнала, предназначенного для
воспроизведения. Два примера выбора частоты отсчетов приведены на
Рис. 8.22. Так, Рис. 8.22а иллюстрирует правильный выбор частоты отсчетов/s>
которая, как видно из рисунка, более чем вдвое превышает значение самой
высокой частоты fA существенной части спектра сигнала. На Рис. 8.226 показан
частотный спектр восстановленного сигнала в противоположном случае, когда
/s < 2/д. При этом имеет место наложение спектров восстанавливаемого и
зеркального сигнала, что, в частности, приводит к искажениям звука при
воспроизведении.
Рис. 8.22. К выбору частоты отсчетов
а — правильно (наложение спектров отсутствует),
б — неправильно (наложение спектров имеет место)
406
В цифровой звукозаписи используется частота выборок 44.1 кГц, которая
более чем вдвое превышает общепринятый верхний предел слышимых
человеком звуковых частот 20 кГц.
В аудио-ЦАП с матрицей R-2R, таких, как РСМ1700 или AD1865, данные,
считываемые с носителя записи в последовательном коде, преобразуются с
помощью сдвигового регистра в параллельный код. Эта архитектура имеет
теоретический шумовой предел, равный шуму квантования, содержащемуся в
данных цифровой звукозаписи. Шум квантования, как правило, превышает
уровень шума, создаваемого аналоговыми шумовыми источниками, такими,
как резисторы (тепловой шум) и фликкер-эффект A//), которые в сумме не
превышают -100 дБ. ЦАП этого типа не содержат никаких внутренних
фильтров или преобразователей спектра шума.
Выходной сигнал подобных ЦАП фильтруют с помощью аналогового
фильтра. Этот фильтр должен устранять наложение спектров, подавляя все
сигналы, частота которых превышаетД, как это показано на Рис. 8.23.
На практике эти фильтры несколько ослабляют сигналы также и звукового
диапазона, однако это почти не ухудшает качество воспроизведения.
8.3. Последовательные ЦАП
Рис. 8.23. Ограничение полосы сигнала
фильтром нижних частот
Как видно из Рис. 8.23, для идеального
воспроизведения цифрового сигнала
необходимо, чтобы АЧХ ФНЧ в полосе от
20 кГц до 44.1 - 20 = 24.1 кГц снижалась,
по крайней мере, на 60 дБ. Такую крутизну
наклона АЧХ на аналоговых фильтрах
трудно реализовать. Поэтому перед ау-
дио-ЦАП с матрицей R-2R включают
цифровые интерполирующие фильтры, такие,
как, например, YM3434 фирмы Yamaha или
CXD1244S фирмы Sony, обеспечивающие
передискретизацию входных кодов.
Цифровой фильтр для аудио-ЦАП интерполирует входные данные, а затем
сглаживает их фильтром с конечной импульсной характеристикой (КИХ-фильтр).
Уровень ослабления исходных зеркальных компонент в полосе заграждения
определяется порядком этого фильтра. Как показано на Рис. 8.24,
передискретизация уменьшает требования к выходному аналоговому фильтру. Для
наглядности здесь показаны спектральные характеристики сигналов при двукратной
интерполяции. На практике применяется 4- или 8-кратная интерполяция.
Сигма-дельта-ЦАП использует иные
принципы для обеспечения широкого
динамического диапазона воспроизводимых
сигналов. Сигма-дельта модулятор
преобразует спектр шума квантования, перенося
основную часть энергии шума в
высокочастотную область, где он может быть легко
подавлен аналоговым фильтром
относительно низкого порядка. Блок-схема сигма-дельта-ЦАП представлена
на Рис. 8.25.
Интерполирующий
цифровой
фильтр
Сигма-дельта
модулятор
ЦАП
ФНЧ
Цифровой
входной сигнал
Аналоговый
выходной сигнал
Рис. 8.25. Блок-схема сигма-дельта-ЦАП
Входной цифровой интерполяционный фильтр изготавливается на одном
кристалле с сигма-дельта-ЦАП, что упрощает схему включения и снижает ее
стоимость.
Частотный спектр выходного сигнала типичного сигма-дельта модулятора с
входным интерполирующим фильтром показан на Рис. 8.26а [8.3].
Сигма-дельта модулятор ЦАП представляет собой чисто цифровое
устройство, которое преобразует последовательность многоразрядных слов на входе в
малоразрядные двоичные коды, управляющие ключами параллельных ЦАП
низкой разрядности, одновременно перенося энергию шума квантования в
область более высоких частот. Структурная схема алгоритма работы сигма-дельта
модулятора третьего порядка приведена на Рис. 8.27.
407
Рис. 8.24. Преобразование спектра
цифровым фильтром
Глава 8. ЦИФРОАНАЛОГОВЫЕ ПРЕОБРАЗОВАТЕЛИ
Рис. 8.26. Спектр выходного сигнала сигма-дельта-ЦАП:
а — спектр при 8-кратной передискретизации, б — спектр шума
408
Рис. 8.27. Структурная схема алгоритма работы сигма-дельта модулятора
третьего порядка
Здесь оператор z~l обозначает задержку на один такт.
В качестве оконечного преобразователя код-аналог наиболее просто можно
использовать одноразрядные ЦАП, представляющие собой аналоговый комму-
8.3. Последовательные ЦАП
татор, как это, например, сделано в ИМС семейства 2-канальных 18-разрядных
сигма-дельта-ЦАП CS433x фирмы Crystal Semiconductor. В этих ЦАП
обеспечивается 128-кратная передискретизация. Блок-схема одного канала ЦАП CS4330
приведена на Рис. 8.28. Уровень шума здесь может достигать —81 дБ, что
многовато для высококачественных звуковых приложений. Микросхема помещается
в миниатюрном 8-выводном корпусе SOIC.
Интерполирующий
цифровой
фильтр х 128
Сигма-дельта
модулятор
3-го порядка
1-разрядный
ЦАП
ФНЧ
Рис. 8.28. Блок-схема одного канала ЦАП CS433x
В более совершенных моделях сигма-дельта модулятор генерирует
2-разрядные (например, семейство РСМ17хх) или даже 4-разрядные (например,
семейство AD185x) коды, поэтому на выходе ЦАП формируется многоуровневое
ступенчато изменяющееся напряжение, спектр которого содержит вне
звуковой полосы частот шумовые составляющие значительно более низкого уровня,
чем преобразователи с одноразрядным ЦАП. Это ослабляет требования к
выходному аналоговому фильтру в смысле крутизны спада АЧХ за полосой
пропускания, что, в свою очередь, приводит к снижению фазовых искажений. Как
следствие уровень шума микросхемы РСМ1710 не превышает —88 дБ, что
значительно меньше, чем у одноразрядного ЦАП CS4330. Частотный спектр шума
на выходе сигма-дельта модулятора ЦАП РСМ1710 показан на Рис. 8.265.
Таким образом, остроумные инженерные решения на базе глубокой
теоретической проработки позволили получить более высокое качество
преобразования цифровых аудиоданных в аналоговые сигналы при меньшей стоимости.
Например, оптовая цена лучшего по характеристикам стерео-ЦАП AD1865K с
матрицей R-2R, (фирма Analog Devices) равна $25.5, не считая стоимости
необходимого для него входного цифрового интерполирующего фильтра, а цена
обладающего более высокими характеристиками сигма-дельта стерео-ЦАП
AD1853 (той же фирмы) с встроенным интерполирующим фильтром составляет
всего $9!
Несмотря на принципиальную монотонность при невысокой стоимости,
сигма-дельта-ЦАПы долго не находили применения в системах
промышленного назначения. Первой ласточкой явилась 20-разрядная модель DAC1220
фирмы Burr-Brown, блок-схема которой изображена на Рис. 8.29.
Аналоговая часть этой микросхемы очень проста. Она включает
одноразрядный преобразователь код-аналог, ФНЧ первого порядка на коммутируемых
конденсаторах и аналоговый ФНЧ второго порядка.
Зато цифровая часть хорошо развита — в нее входят микроконтроллер,
необходимый, в частности, для выполнения операций самокалибровки,
последовательный интерфейс и сигма-дельта модулятор второго порядка. Хотя
разрешающая способность DAC1220 составляет одну миллионную от полной шкалы,
разработчики сумели обеспечить точность, соответствующую только
16 разрядам. Учитывая это, наиболее целесообразно запрограммировать ЦАП
для работы в 16-разрядном режиме. При этом у него возрастет быстродействие, 409
Глава 8. ЦИФРОАНАЛОГОВЫЕ ПРЕОБРАЗОВАТЕЛИ
Рис. 8.29. Блок-схема сигма-дельта-ЦАП DAC1220
а погрешности линейности и смещения нуля после самокалибровки не
превышают 1 LSR. ЦАП имеет низкий уровень шума: в полосе 0.1...10 Гц его
действующее значение не превышает 1 мкВ. Следствием применения 1-разрядного
ЦАП явилось низкое быстродействие: время установления в 16-разрядном
режиме составляет 2 мс, а в 20-разрядном — 15 мс. Точность ЦАП во многом
определяется точностью внешнего источника опорного напряжения, поэтому
требования к ИОН очень высоки. К недостаткам ЦАП этого типа можно
отнести довольно большую чувствительность к изменению напряжения питания —
коэффициент ослабления влияния питающего напряжения составляет всего
60 дБ, поэтому микросхема должна питаться от высококачественного
стабилизированного источника.
8.4. Интерфейсы цифроаналоговых
преобразователей
410
Важную часть цифроаналогового преобразователя составляет цифровой
интерфейс, т. е. схемы, обеспечивающие связь управляющих входов ключей с
источниками цифровых сигналов. Структура цифрового интерфейса определяет
способ подключения ЦАП к источнику входного кода, например,
микропроцессору или микроконтроллеру. Свойства цифрового интерфейса
непосредственно влияют и на форму сигнала на выходе ЦАП. Так, в случае параллельного
интерфейса неодновременность поступления битов входного слова на
управляющие входы ключей преобразователя приводит к появлению узких выбросов,
«иголок», в выходном сигнале при смене кода.
При управлении ЦАП от цифровых устройств с жесткой логикой
управляющие входы ключей ЦАП могут быть непосредственно подключены к выходам
цифровых устройств, поэтому во многих моделях ИМС ЦАП, особенно ранних
8.4. Интерфейсы цифроаналоговых преобразователей
E72ПА1, 594ПА1,1108ПА1, AD565 и др.), развитая цифровая часть отсутствует.
Если же ЦАП входит в состав микропроцессорной системы и получает входной
код от шины данных, то он должен быть снабжен цепями, позволяющими
адресовать ЦАП, принимать входное слово от шины данных, коммутировать в
соответствии с этим словом ключи ЦАП и хранить его до получения следующего
слова. Для управления процессом загрузки входного слова ЦАП должен иметь
соответствующие управляющие входы и схему управления. В зависимости от
способа загрузки входного слова в ЦАП различают преобразователи с
последовательным и параллельным интерфейсами входных данных.
8.4.1. ЦАП с последовательным интерфейсом
Такой преобразователь помимо собственно ЦАП содержит на кристалле
дополнительно последовательный регистр загрузки, параллельный регистр
хранения (буферный регистр) и управляющую логику (Рис. 8.30).
Рис. 8.30. ЦАП с последовательным интерфейсом:
а — функциональная схема, б — временная диаграмма
При активном уровне сигнала CS (в данном случае нулевом) входное слово
длины N (равной разрядности ЦАП) загружается по линии D\ в регистр сдвига
под управлением тактовой последовательности CLK. После окончания
загрузки, выставив активный уровень на линию LD, входное слово записывают в
регистр хранения, выходы которого непосредственно управляют ключами ЦАП.
Для того чтобы иметь возможность передавать по одной линии данных входные
коды в несколько ЦАП, последний разряд регистра сдвига соединяется с
выводом DO ИМС. Этот вывод подключается к входу D\ следующего ЦАП и т. д.
Коды входных слов передаются начиная с кода самого последнего
преобразователя в этой цепочке.
В качестве примера на Рис. 8.305 представлена временная диаграмма,
отражающая процесс загрузки входного слова в ЦАП AD7233. Минимально
допустимые значения обозначенных на эпюрах интервалов времени указываются в
технической документации на ИМС. Для данной ИМС все они близки к 50 не.
411
Глава 8. ЦИФРОАНАЛОГОВЫЕ ПРЕОБРАЗОВАТЕЛИ
Рис. 8.31.
Подключение ЦАП
с последовательным
интерфейсом
к микроконтроллеру
семейства MCS51
На Рис. 8.31 приведен вариант схемы подключения
преобразователя с последовательным интерфейсом к
микроконтроллеру (МК) типа МС551.
На время загрузки входного слова в ЦАП через
последовательный порт микроконтроллера, к которому
могут быть также подключены и другие приемники, на вход
CS (выбор кристалла) подается активный уровень с
одной из линий ввода-вывода МК. После окончания
загрузки МК меняет уровень на входе CS, как это показано
на Рис. 8.305, и, выставив активный уровень на входе LD
ЦАП, обеспечивает пересылку входного кода из регистра
сдвига ЦАП в регистр хранения. Время загрузки зависит
от тактовой частоты МК и обычно составляет единицы
микросекунд. В случае если колебания выходного
сигнала ЦАП во время загрузки допустимы, вход LD можно соединить с общей
точкой схемы.
В зависимости от состава схемы управления ЦАП возможна организация
двухпроводного последовательного интерфейса (совместимого с интерфейсом
12С) с последовательной передачей данных при каскадно-соединенных линиях
данных ЦАП, а также трехпроводного SPI/QSPI, MICROWIRE-совместимого
интерфейса с адресацией кристалла так, как это показано на Рис. 7.10, 7.11.
8.4.2. ЦАП с параллельным интерфейсом
Наиболее часто здесь используются два варианта. В первом случае, когда
разрядность входного кода совпадает с разрядностью ЦАП, на его входы
подается все входное слово целиком (Рис. 8.32).
Рис. 8.32. ЦАП с параллельным интерфейсом
а — функциональная схема, б — временная диаграмма
Интерфейс такого ЦАП включает два регистра хранения и схему
управления (Рис. 8.32а). Два регистра хранения нужны, если пересылка входного кода в
ЦАП и установка выходного аналогового сигнала, соответствующего этому ко-
412 цу9 должны быть разделены во времени. Подача на вход асинхронного сброса
8.4. Интерфейсы цифроаналоговых преобразователей
CLR сигнала низкого уровня приводит к обнулению первого регистра и
соответственно выходного напряжения ЦАП.
На Рис. 8.33 показан другой пример подключения ЦАП по этому варианту.
Рис. 8.33. Подключение ЦАП с параллельным интерфейсом
к микропроцессору Intel 8086
Здесь 12-разрядный ЦАП МАХ507 подключен к 16-разрядному
микропроцессору (МП). Процессор посылает входной код в ЦАП, как в ячейку памяти
данных. Вначале с шины адрес/данные поступает 16-разрядный адрес ЦАП,
который фиксируется регистром по команде с выхода ALE микропроцессора и
после дешифрации активизирует вход CS ЦАП. Вслед за этим МП подает на шину
адрес/данные 12-разрядный входной код данных, и затем сигнал записи на вход
WR (см. Рис. 8.320).
Для подключения многоразрядных ЦАП к 8-разрядным микропроцессорам
и микроконтроллерам используется второй вариант параллельного интерфейса.
Он предусматривает наличие двух параллельных загрузочных регистров для
приема младшего байта входного слова МБ и старшего байта — СБ (Рис. 8.34).
Рис. 8.34. Подключение ЦАП с параллельным интерфейсом второго типа
к восьмиразрядному микропроцессору
Пересылка байтов входного слова в загрузочные регистры может
происходить в любой последовательности. 413
Глава 8. ЦИФРОАНАЛОГОВЫЕ ПРЕОБРАЗОВАТЕЛИ
8.5. Применение ЦАП
Схемы применения цифроаналоговых преобразователей относятся не
только к области преобразования код—аналог. Пользуясь их свойствами, можно
выполнять целый ряд преобразований аналоговых сигналов, в том числе их
перемножение и деление, строить аналоговые звенья, управляемые от
микроконтроллеров, такие, как аттенюаторы, интеграторы. Важной областью
применения ЦАП являются также генераторы сигналов, в том числе
генераторы сигналов произвольной формы. Ниже рассмотрены некоторые схемы
преобразования сигналов, включающие ЦАП.
8.5.1. Обработка чисел со знаком
До сих пор при описании ЦАП входная цифровая информация
представлялась в виде чисел натурального ряда (униполярных). Обработка целых чисел
(биполярных) имеет определенные особенности. Обычно двоичные целые
числа представляются с использованием дополнительного кода. Таким путем с
помощью восьми двоичных разрядов можно представить числа в диапазоне от -
128 до +127. При вводе чисел в ЦАП этот диапазон чисел сдвигают до 0...255
путем прибавления 128. Числа, большие 128, при этом считаются
положительными, а числа, меньшие 128, — отрицательными. Среднее число 128 соответствует
нулю. Такое представление чисел со знаком называется смещенным кодом.
Прибавление числа, составляющего половину полной шкалы данной
разрядности (в нашем примере это 128), можно легко выполнить путем инверсии
старшего (знакового) разряда. Соответствие рассмотренных кодов иллюстрируется
Табл. 8.1.
Таблица 8.1. Соответствие кодов
Десятичный код
Дополнительный код
Смещенный код
Аналог ///(max)
414
Чтобы получить выходной сигнал с правильным знаком, необходимо
осуществить обратный сдвиг путем вычитания тока или напряжения,
составляющего половину шкалы преобразования. Для различных типов ЦАП это можно
сделать разными способами. (Рис. 8.35)
Например, в ЦАП на источниках тока, где диапазон изменения опорного
напряжения ограничен, а выходное напряжение имеет полярность, обратную
полярности опорного напряжения, биполярный режим наиболее просто
реализуется включением дополнительного резистора смещения /?off между выходом
ЦАП и входом опорного напряжения (Рис. 8.35я). Резистор /?off
изготавливается на кристалле ИМС. Его сопротивление выбрано таким, чтобы tok7off
составлял половину максимального значения выходного тока ЦАП (т. е. был бы
равен току старшего разряда).
8.5. Применение ЦАП
Рис. 8.35. Схемы биполярного включения ЦАП:
а — с резистором смещения /fair» б —с дополнительным внешним
инвертирующим ОУ, в — с буферным (встроенным) ОУ
В принципе аналогично можно решить задачу смещения выходного тока и
для ЦАП с формированием весовых токов резистивными цепями. Для этого нужно
проинвертировать опорное напряжение, а затем сформировать из-КЯЕР ток
смещения, который следует вычесть из выходного тока ЦАП. Однако для
сохранения температурной стабильности лучше обеспечить формирование тока
смещения непосредственно в ЦАП. Для этого, например, в схему ЦАП с рези-
стивной матрицей R-2R (Рис. 8.3), кроме ОУ, показанного на Рис. 8.35а, вводят
дополнительный операционный усилитель, к входу которого подключают
второй выход ЦАП с током /'оит (Рис. 8.350).
Второй выходной ток ЦАП согласно (8.6),
На входе У\ ток /'оит суммируется с током /LSB, соответствующим единице
младшего разряда входного кода. Суммарный ток инвертируется. Ток,
протекающий через резистор обратной связи i?FB усилителя У2, составляет
(8.24)
или с учетом (8.4)
(8.25)
415
Глава 8. ЦИФРО АН АЛОГО ВЫЕ ПРЕОБРАЗОВАТЕЛИ
формула (8.27) дает результат, который с точностью до множителя 2 совпадает с
данными, приведенными в последней графе Табл. 8.1.
Если резисторы R2 хорошо согласованы по сопротивлению и ТКС, то ток
смещения на входе выходного усилителя У2 будет равен входному току
дополнительного усилителя Уь и абсолютное изменение величин этих
сопротивлений при колебаниях температуры не будет влиять на выходное напряжение
преобразователя.
У цифроаналоговых преобразователей с выходным сигналом по напряжению,
построенных на инверсной резистивной матрице (см. Рис. 8.14), можно более
просто реализовать биполярный режим (Рис. 8.35в). Как правило, такие ЦАП
содержат на кристалле выходной буферный усилитель. Для работы ЦАП в
униполярном включении свободный вывод нижнего по схеме резистора R не
подключают вовсе, либо подключают к общей точке схемы для удвоения
выходного напряжения. Для работы в биполярном включении свободный вывод этого
резистора соединяют с входом опорного напряжения ЦАП. ОУ в этом случае
работает в дифференциальном включении и его выходное напряжение
(8.26)
(8.27)
В случае N= 8 и с учетом того, что для преобразователя с формированием
весовых токов резистивными цепями максимальный выходной ток
(8.28)
выходное напряжение собственно ЦАП согласно (8.13).
8.5.2. Перемножители и делители аналоговых
сигналов
Как уже указывалось выше, ЦА-преобразователи с формированием весовых
токов резистивными цепями допускают изменение опорного напряжения в
широких пределах, в том числе и смену полярности. Из формул (8.4) и {8.9)
следует, что выходное напряжение ЦАП пропорционально произведению
опорного напряжения на входной цифровой код. Это обстоятельство позволяет
непосредственно использовать такие ЦАП для перемножения аналогового сигнала
на цифровой код.
При униполярном включении ЦАП выходной сигнал пропорционален
произведению двухполярного аналогового сигнала на однополярный цифровой
код. Такой перемножитель называют двухквадрантным. При биполярном
включении ЦАП (Рис. 8.350 и 8.35в) выходной сигнал пропорционален произведе-
416
8.5. Применение ЦАП
нию двухполярного аналогового сигнала на двухполярный цифровой код. Эта
схема может работать как четырехквадрантный перемножитель.
Деление входного напряжения на цифровой масштаб MD = D/2N
выполняется с помощью схемы двухквадрантного делителя (Рис. 8.36).
Рис. 8.36. Схемы двухквадрантных делителей:
а — с токовым выходом, б — с выходом по напряжению
В схеме на Рис. 8.36а преобразователь с формированием весовых токов ре-
зистивными цепями с токовым выходом работает как преобразователь
«напряжение—ток», управляемый кодом D и включенный в цепь обратной связи ОУ.
Входное напряжение подается на свободный вывод резистора обратной связи
ЦАП, размещенного на кристалле ИМС. В этой схеме выходной ток ЦАП
что при выполнении условия ЛРВ = R дает
Следует отметить, что при коде «все нули» обратная связь размыкается.
Предотвратить этот режим можно, либо запретив такой код программно, либо
включив между выходом и инвертирующим входом ОУ резистор с
сопротивлением, равным /J-2N + {.
Схема делителя на основе ЦАП с выходом по напряжению, построенном на
инверсной резистивной матрице и включающем буферный ОУ, приведена на
Рис. 8.360. Выходное и входное напряжения этой схемы связаны уравнением
(8.29)
Отсюда следует
В данной схеме усилитель охвачен как положительной, так и отрицательной
обратными связями. Для преобладания отрицательной обратной связи (иначе
ОУ превратится в компаратор) необходимо выполнение условия D< 2N "l или
MD < 1/2. Это ограничивает значение входного кода нижней половиной шкалы.
417
Глава 8. ЦИФРОАНАЛОГОВЫЕ ПРЕОБРАЗОВАТЕЛИ
8.5.3. Аттенюаторы и интеграторы на ЦАП
Аттенюаторы, т. е. регуляторы уровня сигнала с цифровым управлением
гораздо более надежны и долговечны, чем традиционные аттенюаторы на основе
переменных резисторов. Их целесообразно использовать в измерительных
приборах и других устройствах, требующих подстройки параметров, особенно
автоматической. Такие аттенюаторы можно наиболее просто построить на основе
перемножающего ЦАП с инверсной резистивной матрицей и буферным
усилителем. В принципе для этой цели подойдет любой ЦАП этого типа, но
некоторыми фирмами выпускаются преобразователи, оптимизированные для
выполнения указанной функции. На Рис. 8.37а приведена схема аттенюатора на
переменном резисторе, а на Рис. 8.370 — аналогичная схема на
перемножающем ЦАП.
Рис. 8.37. Схемы аттенюаторов:
а — на переменном резисторе, б — на перемножающем ЦАП
418
Если входной сигнал — однополярный, целесообразно использовать ЦАП с
однополярным питанием, но буферный ОУ должен иметь выход «rail-to-rail»,
т. е. его выходное напряжение должно лежать в диапазоне от нуля до
напряжения питания. Если ЦАП — многоканальный, то у каждого преобразователя
микросхемы должен быть индивидуальный вход опорного напряжения. Этим
требованиям в разной степени удовлетворяют такие ИМС ЦАП, как 2-каналь-
ный 12-разрядный МАХ532, 4-канальный 8-разрядный МАХ509, 8-канальный
8-разрядный AD8441, 16-канальный 8-разрядный AD8600 и др. Фирма Analog
Devices выпускает микросхемы регуляторов громкости 4- и 6-канальные
SSM2160/SSM2161 оптимизированные для аудиоприложений,
представляющие собой многоканальные усилители с коэффициентом усиления,
регулируемым через ЦАП.
Для построения интегратора с цифровой установкой постоянной времени
интегрирования можно использовать базовую схему интегратора, а в качестве
входного резистора включить цифровые потенциометры (см. Рис. 8.17). На базе
такой схемы можно построить фильтры, в том числе фильтры на основе метода
переменных состояния, перестраиваемые генераторы импульсов и т. д. При
этом необходимо отметить, что в принципе сопротивления резисторов
цифрового потенциометра (в отличие от обычных ЦАП) могут значительно
отличаться от номинального значения (до 25%), но соответствующие сопротивления ре-
зистивных матриц многоканальных цифровых потенциометров должны быть
хорошо согласованы.
8.5. Применение ЦАП
8.5.4. Системы прямого синтеза сигналов
Важной областью применения ЦАП является синтез аналоговых сигналов
необходимой формы. Здесь приходится решать, по меньшей мере, две задачи.
Первая из них — это генерирование так называемых сигналов специальной
формы — синусоидальной, треугольной и прямоугольной. Обычные
аналоговые генераторы таких сигналов на операционных усилителях имеют низкую
точность и стабильность, не могут управляться от ЭВМ.
Другая задача — синтез гармонических сигналов множественных частот с
высокой точностью и стабильностью из одной или большего количества
опорных частот. Для этого до недавнего времени использовалось переключение и
смешивание выходных сигналов группы кварцевых генераторов, а также
программируемые умножители частоты на основе систем фазовой автоподстройки
частоты (ФАПЧ). Блок-схема умножителя частоты на основе ФАПЧ
представлена на Рис. 8.38.
Рис. 8.38. Блок-схема умножителя частоты на основе ФАПЧ
Опорное напряжение с фиксированной частотой/с поступает на один вход
фазового детектора (ФД), в качестве которого может использоваться
логический элемент «Исключающее ИЛИ».
Другой вход ФД управляется от программируемого счетчика-делителя на М,
на вход которого в свою очередь поступает сигнал от генератора, управляемого
напряжением (ГУН). Среднее значение напряжения на выходе ФД
определяется сдвигом фаз между сигналами на его входах. Частота выходного сигнала ГУН
пропорциональна этому напряжению. Таким образом, в схеме имеет место
отрицательная обратная связь, которая обеспечивает равенство
откуда следует
(8.30)
Из-за наличия обратной связи при проектировании ФАПЧ приходится
принимать компромиссные решения, связанные с фазовым шумом,
быстродействием, разрешающей способностью по частоте и т. д.
В связи с широким распространением цифровых методов в
контрольно-измерительной аппаратуре и системах связи получил развитие так
называемый прямой цифровой синтез (ПЦС) сигналов. Системы прямого
цифрового синтеза обеспечивают высокую точность задания частоты и
начальной фазы сигналов, а также высокую верность воспроизведения их
419
Глава 8. ЦИФРОАНАЛОГОВЫЕ ПРЕОБРАЗОВАТЕЛИ
420
формы. Более того, эти системы позволяют генерировать сигналы большого
многообразия форм, в том числе и форм, задаваемых пользователем. В
принципе системы прямого цифрового синтеза просты. Теория и основные
способы построения таких систем известны уже около 30 лет. Правда,
только недавно появились ЦАП и специализированные аналого-цифровые
ИМС, подходящие для синтеза сигналов в широкой полосе частот.
Упрощенная блок-схема генератора с ПЦС приведена на Рис. 8.39.
Схема прямого цифрового синтеза содержит
три основных блока: генератор фазового угла,
память и ЦАП. Генератор фазового угла в типичном
случае представляет собой накапливающий
сумматор с регистром. Работает он просто как
регистр фазы, содержимое которого получает
приращение на некоторый фазовый угол через
заданные интервалы времени. Необходимое
приращение фазы Аф в виде цифрового кода
загружается последовательно или побайтно во входные
регистры. Память играет роль таблицы функций.
Усеченный снизу до т бит (где т — разрядность
адресной шины памяти), код текущей фазы
поступает на ее адресные входы, а с выхода данных
на вход ЦА-преобразователя поступает
TV-разрядный код, соответствующий текущему значению
заданной функции. ЦАП в свою очередь
формирует аналоговый сигнал. Усечение выходного
слова генератора фазового угла не влияет на
разрешающую способность системы по частоте, а
только сокращает число выборок (ступенек) в
периоде воспроизводимой кривой.
Выходной регистр содержит текущую фазу
выходного сигнала в виде доли периода.
Увеличение разрядности регистра и сумматора повышает только разрешающую
способность этой доли. Частота выходного сигнала равна произведению тактовой
частоты/с на приращение фазы на каждом такте. При использовании я-разрядного
сумматора частота выходного сигнала будет равна [8.1]
Рис. 8.39. Блок-схема
генератора с ПЦС
(8.31)
Если, например, генератор фазового угла имеет разрядность 32, то при
Аф = 1 LSB потребуется 232, т. е. более 4 млрд тактов для возврата генератора в
первоначальное состояние.
Дискретность установки частоты (разрешение по частоте) Л/оит зависит от
величины относительного приращения фазы при изменении этого приращения
на 1 бит. Ее можно вычислить по формуле
(8.32)
8.5. Применение ЦАП
На Рис. 8.40 приведен график зависимости Л/оит от
частоты/оит Д^я системы ПЦС с 40-разрядным
генератором фазы при/с = 80 МГц.
Спектральная чистота выходного аналогового
сигнала, прежде всего, определяется свойствами ЦАП, а
фазовый шум — фазовым шумом сигнала генератора
опорной частоты/с.
Система прямого цифрового синтеза имеет по
сравнению с умножителем частоты на основе ФАПЧ ряд
особенностей. Поскольку ПЦС-система — это в
определенном смысле система выборки данных, здесь
приходится рассматривать все проблемы, связанные с
дискретизацией: шум квантования, наложение спектров,
фильтрация и т. д. Например, комбинационные
составляющие, обусловленные высшими гармониками
выходного сигнала ЦАП, попадают в полосу Найквиста
@... /с/2) и практически не могут быть
отфильтрованы, в то время как в ФАПЧ-системах комбинационные составляющие
отсутствуют, а высшие гармоники сигнала легко фильтруются. Зато ПЦС может
обеспечить разрешение по частоте, недоступное системам с ФАПЧ. На Рис. 8.41
показан выходной спектр системы ПЦС с 12-битным ЦАП и памятью на 217
слов при воспроизведении синусоидального сигнала частотой 39.1 МГц при
тактовой частоте 300 МГц.
Рис. 8.41. Спектр выходного сигнала системы прямого
цифрового синтеза
Системы прямого цифрового синтеза чрезвычайно гибки. Частота
выходного сигнала может быть изменена практически мгновенно без разрыва фазы
простым изменением содержимого входных регистров. Для систем прямого
цифрового синтеза разработаны ЦАП повышенной разрядности и быстродействия,
421
Рис. 8.40. График
зависимости
дискретности установки
частоты от частоты
выходного сигнала
генератора с ПЦС
Глава 8. ЦИФРОАНАЛОГОВЫЕ ПРЕОБРАЗОВАТЕЛИ
некоторые модели которых описаны в подразделе 8.2.1 в разделе
«Высокоточные скоростные ЦАП».
Существенное ограничение диапазона выходных частот, который может
обеспечить система ПЦС, вытекающее из теоремы Найквиста, состоит в том,
что тактовая частота должна, по крайней мере, в два раза превышать частоту
выходного сигнала. Практические соображения ограничивают верхнюю
выходную частоту значением/с/3. Рис. 8.42 демонстрирует спектр выходного сигнала
ПЦС-системы в случае, когда/оит = 30 МГц, а/с = 100 МГц.
Рис. 8.42. Наложение спектров в ПЦС-системе
После ЦАП должен быть включен сглаживающий ФНЧ для того, чтобы
подавить в первую очередь самую низкую боковую частоту A00 — 30 = 70 МГц).
Амплитудный спектр выходного напряжения ЦАП (до фильтрации)
подчиняется закону
422
Такая зависимость обусловлена ступенчатым характером изменения
напряжения на выходе ЦАП. Сглаживающий фильтр должен иметь относительно
плоскую АЧХ до максимальной выходной частоты ЦАП (обычно/с/3).
Другое важное обстоятельство состоит в том, что в отличие от системы с
ФАПЧ здесь в полосу частот ниже /Оит попадают комбинационные частоты,
обусловленные высшими гармониками выходного сигнала. Эти составляющие
не могут быть удалены сглаживающим фильтром. Например, если тактовая
частота Ус = 100 МГц, а выходная частота /out = 30 МГц, то вторая гармоника
составит 60 МГц. В результате в спектре выходного сигнала появится
комбинационная (разностная) составляющая 100 —60 = 40 МГц. Точно так же третья
гармоника (90 МГц) дает из-за наложения спектров составляющую 100 —
90 = 10 МГц, а четвертая — 120 - 100 = 20 МГц. Все эти комбинационные
частоты находятся в полосе пропускания выходного фильтра. Расположение
комбинационных частот, возникающих за счет первых четырех высших гармоник
дискретизируемого сигнала, показано на Рис. 8.42.
Во многих применениях ПЦС-систем, таких, например, как генераторы
сигналов, спектральная чистота выходного сигнала ЦАП имеет первостепенное
8.6. Параметры ЦАП
значение. Однако измерение, анализ и улучшение этой характеристики
усложнены рядом факторов. Даже идеальный многоразрядный ЦАП создает
побочные комбинационные составляющие в ПЦС-системе. Амплитуда этих
составляющих сильно зависит от соотношения выходной и тактовой частот. Это
вызвано тем, что спектральный состав шума квантования меняется с
изменением этого отношения. Среднеквадратическое значение шума практически не
зависит от соотношения частот, однако если частота выхода ЦАП кратна
тактовой, то шум квантования будет сосредоточен на частотах, кратных выходной
частоте. Если же слегка сместить выходную частоту, шум квантования станет
псевдослучайным, обеспечивая, таким образом, более высокое значение SFDR.
Для достижения этого эффекта можно включить в состав ПЦС-системы
генератор псевдослучайных чисел, который будет добавлять к выходному слову
генератора фазы цифровой шум с амплитудой, равной SLSB.
Генераторы прямого синтеза выпускаются в виде ИМС. В частности,
микросхема AD9850, упрощенная структура которой представлена на Рис. 8.39,
содержит 32-разрядный генератор фазового угла и 10-разрядный ЦАП. Загрузка
приращения фазы осуществляется по 8-разрядной шине данных побайтно в
четыре входных регистра. Память содержит таблицу синусов. Максимально
допустимая тактовая частота составляет 125 МГц. При этом разрешение по
частоте составляет 0.0291 Гц. Быстрый интерфейс позволяет менять частоту
выходного сигнала до 23 млн раз в секунду. Недавно появились новые модели
интегральных ПЦС-систем AD9852/4, содержащие 48-разрядный генератор
фазового угла и по два 12-разрядных ЦАП. Тактовая частота этих микросхем
может быть установлена вплоть до 300 МГц. Два выходных сигнала AD9854
сдвинуты относительно друг друга на 90°. Период выходных сигналов состоит
из 217 выборок, что обеспечивает высокое значение SFDR. Имеется
возможность амплитудной, фазовой или частотной модуляции обоих сигналов. Это
позволяет непосредственно использовать эти микросхемы в системах связи с
различными видами модуляции, в частности с квадратурной амплитудной
модуляцией (QAM).
8.6. Параметры ЦАП
При последовательном возрастании
значений входного цифрового сигнала D(f) от
0 до 2N- 1 через единицу младшего разряда
(LSB) выходной сигнал Коит@ образует
ступенчатую кривую. Такую зависимость
называют обычно характеристикой
преобразования ЦАП. В отсутствие аппаратных
погрешностей средние точки ступенек
расположены на идеальной прямой 1 (Рис. 8.43),
которой соответствует идеальная
характеристика преобразования.
Реальная характеристика
преобразования может существенно отличаться от иде-
Рис. 8.43. Характеристика
преобразования ЦАП 423
Глава 8. ЦИФРОАНАЛОГОВЫЕ ПРЕОБРАЗОВАТЕЛИ
альной размерами и формой ступенек, а также расположением на плоскости
координат. Для количественного описания этих различий существует целый
ряд параметров.
8.6.1. Статические параметры
Разрешающая способность — приращение Роит при преобразовании
смежных значений Dp т. е. отличающихся на один LSB. Это приращение является
шагом квантования. Для двоичных кодов преобразования номинальное
значение шага квантования h = V?S/BN- 1), где V?S — номинальное максимальное
выходное напряжение ЦАП (напряжение полной шкалы), N — разрядность
ЦАП. Чем больше разрядность преобразователя, тем выше его разрешающая
способность.
Погрешность полной шкалы eFS — разность между реальным и идеальным
значениями предела шкалы преобразования при отсутствии смещения нуля.
Обычно указывается в процентах от полной шкалы преобразования:
Эта погрешность является мультипликативной составляющей полной
погрешности. Иногда выражается соответствующим числом единиц LSB.
Погрешность смещения нуля ?Off ~ значение Уоиъ когда входной код ЦАП
равен нулю. Является аддитивной составляющей полной погрешности. Обычно
указывается в милливольтах или в процентах от полной шкалы:
Нелинейность (интегральная нелинейность) ?, — максимальное отклонение
реальной характеристики преобразования Vojjj(D) от оптимальной (линия 2 на
Рис. 8.43). Оптимальная характеристика находится эмпирически так, чтобы
минимизировать значение погрешности линейности. Нелинейность обычно
определяется в относительных единицах, но в справочных данных приводится
также и в единицах LSB. Для характеристики, приведенной на Рис. 8.43,
Для ЦАП с матрицей R-2R, построенных без сегментации старших
разрядов, характерен большой скачок на половине полной шкалы в графике
зависимости интегральной нелинейности от входного кода.
Дифференциальная нелинейность — максимальное изменение (с учетом
знака) отклонения реальной характеристики преобразования Vo\jj(D) от
оптимальной при переходе от одного значения входного кода к другому, смежному
значению. Обычно определяется в относительных единицах или в единицах
LSB. Для характеристики, приведенной на Рис. 8.43,
424
8.6. Параметры ЦАП
Монотонность характеристики преобразования — возрастание
(уменьшение) выходного напряжения ЦАП Коит при возрастании (уменьшении)
входного кода D. Цифроаналоговых* преобразователь монотонен, если выходной
сигнал или увеличивается, или остается постоянным при увеличении цифрового
кода. Если дифференциальная нелинейность больше относительного шага
квантования /*/KFS, то характеристика преобразователя немонотонна (см.
Рис. 8.43).
Температурная нестабильность ЦАП характеризуется температурными
коэффициентами погрешности полной шкалы, нелинейности и погрешности
смещения нуля. Температурный коэффициент погрешности полной шкалы и
смещения нуля обычно указывается в миллионных долях (ррт) полной шкалы на
°С. Температурный коэффициент опорного напряжения указывается в
миллионных долях (ррт) номинальной величины на °С.
Температурный коэффициент
сопротивления (ТКС) резисторов, на основе которых
построены цифровые потенциометры (ЦП),
достаточно большое значение. Это обычно
поликристаллические кремниевые резисторы,
имеющие положительный ТКС. Абсолютное
значение ТКС имеет величину порядка
300...800ррт/°С. Если применять ЦП в
качестве переменного резистора, например, для
перестройки частоты активного фильтра, то
такой же будет и зависимость частоты от
температуры. Поэтому в условиях широкого
изменения температуры окружающего воздуха
лучше использовать ЦП в потенциометриче-
ском включении (делитель напряжения).
Коэффициент передачи делителя имеет
значительно меньший температурный
коэффициент (обычно не более 20ррт/°С). Однако вблизи крайнего положения он
значительно больше (Рис. 8.44 [8.4]), так как здесь большое влияние оказывает
сопротивление канала МОП-ключа, имеющее значительный ТКС.
Некоторые ЦП имеют пониженный ТКС (например, у МАХ5413/14/15он
около 35 ррт/°С, а температурный дрейф коэффициента передачи при потен-
циометрическом включении для этих микросхем менее 5 ррш/°С).
8.6.2. Точность воспроизведения сигналов
переменного тока
Скоростные ЦАП, часто применяемые для генерации радиочастотных
сигналов, а также аудио-ЦАП, используемые в системах цифрового
звуковоспроизведения, должны удовлетворять требованиям к точности воспроизведения
быстро меняющихся сигналов
Динамический диапазон, свободный от паразитных составляющих (SFDR) —
это выраженное в дБ соотношение между среднеквадратическими значениями
425
Рис. 8.44. Температурная
зависимость коэффициента
передачи цифрового потенциометра
от входного кода
Глава 8. ЦИФРОАНАЛОГОВЫЕ ПРЕОБРАЗОВАТЕЛИ
где Vx — среднеквадратическое значение основной гармоники, а К2...^ — сред-
неквадратические значения гармоник от второй до /-й. Обычно / = 6 или 9.
Отношение сигнал/шум (SNR) — это отношение среднеквадратического
значения входного сигнала к среднеквадратическому значению шума (который
определяется как сумма всех остальных спектральных компонент, включая
гармоники, но исключая постоянную составляющую) для входного сигнала на
уровне -1 дБ от полной шкалы.
426
8.6.3. Динамические параметры
Динамические параметры ЦАП определяются по изменению выходного
сигнала при скачкообразном изменении входного кода, обычно от величины
«все нули» до «все единицы» (Рис. 8.45).
Время установления — интервал времени от
момента изменения входного кода (на Рис. 8.45 —
/ = 0) до момента, когда в последний раз
выполняется равенство
^оит~ ^fs = "/2,
причем обычно d = 1 LSB.
Частота обновления — максимальная частота,
с которой может происходить смена содержимого
входных регистров ЦАП.
Скорость нарастания — максимальная
скорость изменения VO}Jj(t) во время переходного
процесса. Определяется как отношение
приращения AVquj ко времени А/, за которое произошло это приращение (см. Рис. 8.45).
Обычно указывается в технических характеристиках ЦАП с выходом по
напряжению. У ЦАП с выходом по току этот параметр в большой степени зависит от
типа выходного ОУ.
Для перемножающих ЦАП с выходом по напряжению, как правило,
указываются частота единичного усиления и мощностная полоса пропускания,
которые в основном определяются свойствами выходного усилителя.
Групповое время задержки. Число входных тактов синхронизации между
цифровым импульсом, приложенным к входу устройства и токовым импульсом
на выходе ЦАП.
Полоса пропускания (для перемножающих ЦАП и цифровых аттенюаторов).
Диапазон частот, в котором любой сигнал, приложенный к аналоговому входу,
проходит на выход ЦАП без ослабления.
Рис. 8.45. Переходный процесс
при скачкообразном изменении
входного кода ЦАП
основной составляющей входного сигнала и максимальной паразитной
составляющей (максимальной гармоникой, или шумовой компонентой).
Суммарный коэффициент гармоник (THD) — это отношение
среднеквадратического значения суммы гармоник к среднеквадратическому значению
основной гармоники, выраженное в децибелах. Определяется по формуле
8.6. Параметры ЦАП
8.6.4. Шумы ЦАП
Шум на выходе ЦАП может появляться по различным причинам,
вызываемым физическими процессами, происходящими в полупроводниковых
устройствах. Для оценки качества ЦАП с высокой разрешающей способностью
принято использовать понятие максимальной амплитуды шума в определенной
полосе частот. Для оценки шумовых свойств ЦАП среднего качества принято
использовать понятие среднеквадратического значения шума, которое обычно
измеряют в нВ/ТГц в заданной полосе частот.
Выбросы (импульсные помехи) — крутые короткие всплески или провалы в
выходном напряжении, возникающие во время смены значений выходного
кода за счет неодновременности размыкания и замыкания аналоговых ключей в
разных разрядах ЦАП. Например, если при переходе от значения кода
011...111 к значению 100...000 ключ самого старшего разряда ЦА-преобразова-
теля с суммированием весовых токов откроется позже, чем закроются ключи
младших разрядов, то на выходе ЦАП некоторое время будет существовать
сигнал, соответствующий коду 000...000.
Выбросы характерны для быстродействующих ЦАП, где сведены к
минимуму емкости, которые могли бы их сгладить. Радикальным способом подавления
выбросов является использование устройств выборки-хранения. Выбросы
оцениваются по их площади (в пВс).
В Табл. 8.2 приведены важнейшие характеристики некоторых моделей
цифроаналоговых преобразователей.
Таблица 8.2. Основные параметры ЦАП
Примечание
ЦАП широкого применения
572ПА1
МАХ504
594ПА1
МАХ527
DAC8512
Перемножающий
С инверсной резистивной матрицей
На токовых ключах
Загрузка входных слов по 8-ми
выводной шине
Микромощные ЦАП
МАХ515
МАХ530
МАХ550В
AD7390
Перемножающий, в 8-ми выводном
корпусе
Перемножающий, потребление
0.2 мВт в экономичном режиме
Потребление 5 мкВт в экономичном
режиме
Перемножающий, потребление
0.2 мВт в экономичном режиме
Прецизионные ЦАП
AD7846 16 I 1 I К| 9 Парад. Нет ±15 100 IИнтегральная нелинейность< 2 LSB
427
Глава 8. ЦИФРОАНАЛОГОВЫЕ ПРЕОБРАЗОВАТЕЛИ
Продолжение таблицы 8.2
ЦАП
Примечание
AD7244
Интегральная нелинейность < 2 LSB
AD760
Интегральная нелинейность < 1 LSB
МАХ541
Интегральная
нелинейность < 1 LSB. 8-ми выв.
корпус. Самокалибровка
Быстродействующие ЦАП
AD9720
Площадь выбросов < 1.5 пВс
МАХ555
Перемножающий. Площадь
выбросов < 5.6 пВс. Rom = 50 Ом
AD768
Интегральная нелинейность < 4 LSB
LTC1668
83 дБ SFDR на 1 МГц
1118ПА6
По входам совместим с ЭСЛ
THS5671A
Частота обновления (max) 125 МГц
TQ6112M
Аналог 6100ПА1
Цифровые потенциометры
AD8403
Полоса пропускания 600 кГц
AD5231
Энергонезависимая память
МАХ5413
Низкий ТКС - 35 ррт/°С
DS1807
— Логарифмический 1 д Б/шаг
Сигма-дельта ЦАП
CS4330
1-битный аудио-ЦАП.
Динамический диапазон 94 дБ
AD1859
4-битный аудио-ЦАП. Аналоговые
аттенюаторы
DAC1220
Промышленный ЦАП. 20-битная
монотонность. Самокалибровка
Вопросы и задачи
428
1. Выходная частота импульсов ЦАП с широтно-импульсной модуляцией
составляет 1 кГц. Какова должна быть полоса пропускания ФНЧ
первого порядка на выходе ЦАП, если его разрешающая способность 0.1%
от полной шкалы? Подсказка: амплитуда основной гармоники
пульсаций выходного напряжения достигает максимума при относительной
длительности импульсов у = 0.5.
2. Для чего на входе аудио-ЦАП, а также скоростных ЦАП,
предназначенных для работы в системах связи, включают интерполирующие
фильтры? Ведь, казалось бы, для разнесения верхней частоты спектра
воспроизводимого сигнала и частоты выборки достаточно просто
увеличить частоту подачи данных на вход ЦАП.
8.6. Параметры ЦАП
3. Как повлияет на характеристики последовательного ЦАП на
коммутируемых конденсаторах (см. Рис. 8.21) различие сопротивлений ключей в
открытом состоянии Rq?
4. Оцените влияние на линейность характеристики преобразования
последовательного ЦАП на коммутируемых конденсаторах (см. Рис. 8.21)
различие в емкости конденсаторов Сх и С2 на 10%.
5. Определите зависимость Rw ЦАП по схеме на Рис. 8.2 по входу
опорного напряжения в функции от входного кода.
6. В чем состоит преимущество ЦАП на резистивной матрице постоянного
импеданса (см. Рис. 8.3) по сравнению с простейшей схемой (см.
Рис. 8.2)?
7. В чем выигрывает схема на Рис. 8.3 у инверсной схемы на Рис. 8.14, и в
чем она проигрывает ей?
8. Определите зависимость Rw ЦАП по схеме на Рис. 8.14 по входу
опорного напряжения в функции от входного кода.
9. Укажите преимущества ЦАП на источниках тока по сравнению со
схемой ЦАП с формированием весовых токов резистивными цепями.
10. Почему ЦАП с суммированием напряжений (см. Рис. 8.17) имеют
гарантированную монотонность характеристики преобразования?
11. Укажите недостатки ЦАП с суммированием напряжений по сравнению
с ЦАП с суммированием весовых токов.
12. Спроектируйте на базе цифрового потенциометра и трехвыводного
параллельного ИОН (такого, как, например, TL431) источник опорного
напряжения с цифровым управлением, предназначенный для работы на
нагрузку 10 кОм.
13. Почему для ЦАП с формированием весовых токов резистивными
цепями нельзя использовать схему на Рис. 8.125 для формирования
напряжения по токовому выходу ЦАП?
14. Укажите причины возникновения выбросов выходного напряжения
ЦАП, возникающих при смене входного кода.
15. Для чего ЦАП с параллельным интерфейсом включает два регистра
хранения?
16. Нарисуйте эпюры загрузки входного слова в ЦАП с параллельным
интерфейсом второго типа (см. Рис. 8.34).
17. Укажите назначение резистора R\ в схеме ЦАП с биполярным выходом
на Рис. S.356 и выведите формулу для его расчета.
18. Почему ЦАП с формированием весовых токов резистивными цепями
нельзя так же просто переключить на биполярный режим, как ЦАП на
источниках тока (см. Рис. 8.35а)?
19. Обоснуйте уравнение (8.29) для делителя в ЦАП с инверсной
резистивной матрицей.
20. Какими причинами может быть обусловлена немонотонность
характеристики преобразования ЦАП с суммированием весовых токов?
21. При каком значении дифференциальной нелинейности возможна
немонотонность характеристики преобразования ЦАП?
429
Глава 8. ЦИФРОАНАЛОГОВЫЕ ПРЕОБРАЗОВАТЕЛИ
22. Почему при производстве сигма-дельта ЦАП легче обеспечить
монотонность характеристики преобразования, чем для ЦАП с матрицей R-2R
равной разрядности?
23. Чем может быть обусловлено смещение нуля ЦАП на источниках тока в
униполярном режиме (см. Рис. 8.125) и в биполярном режиме (см.
Рис. 8.35а)?
Литература к главе 8
%A.Kester W. High Speed DACs and DDS Systems //The Analog Devices Guide for
Designing with DACs and DDS. Section 6. Analog Devices. 2000. — 20 pp.
8.2. Beliczinski В., Jaworski /., Orzilowski M., Swiderski T. Przetworniki cyfrowe signalow
elektricznych. — Warszawa: WNT. 1978.
%3.Gaddy L., Kawai H. Dynamic Performance Testing of Digital Audio D/A
Converters//Application Bulletin AB-104. — Burr-Brown Corporation. 1998. — 8 pp.
8.4. Ридико Л. Цифровые потенциометры//Компоненты и технология. 2001. № 5. —
С. 50-55.
Глава 9
АНАЛОГО-ЦИФРОВЫЕ
ПРЕОБРАЗОВАТЕЛИ
9.1. Общие сведения
Аналого-цифровые преобразователи (АЦП) — устройства, которые
принимают входные аналоговые сигналы и генерируют соответствующие им
цифровые коды, пригодные для обработки микропроцессорами и другими
цифровыми устройствами.
Принципиально не исключена возможность непосредственного
преобразования различных физических величин в цифровую форму, однако эту задачу
удается решить лишь в редких случаях из-за сложности таких
преобразователей. Поэтому в настоящее время наиболее рациональным признается способ
преобразования различных по физической природе величин сначала в
аналоговые электрические сигналы в виде тока или напряжения с амплитудой,
пропорциональной измеряемой величине, а затем уже с помощью АЦП их переводят в
цифровую форму.
9.1.1. Процедура аналого-цифрового
преобразования
Процедура преобразования аналоговых сигналов, которую реализуют с
помощью АЦП, представляет собой преобразование непрерывной функции
времени К@, описывающей исходный сигнал в последовательность цифровых
кодов чисел {V*(tj)}, у = 0, 1, 2..., отнесенных к некоторым фиксированным
моментам времени и соответствующих значению непрерывной функции в эти
моменты. Эту процедуру можно разделить на две самостоятельные операции
[9.1, 9.2]. Первая из них называется дискретизацией во времени и состоит в
преобразовании непрерывной функции времени V{t) в непрерывную
последовательность отсчетов или выборок {V(tJ)} (замеров значения функции. V(t) в
моменты времени /,). Вторая называется квантованием по уровню и состоит в
преобразовании последовательности отсчетов в последовательность {V*(tj)}
цифровых кодов, соответствующих значениям отсчетов V(tJ).
В основе дискретизации непрерывных сигналов лежит принципиальная
возможность представления их в виде взвешенных сумм
(9-1) 431
Глава 9. АНАЛОГО-ЦИФРОВЫЕ ПРЕОБРАЗОВАТЕЛИ
Для сигналов со строго ограниченным спектром это выражение является
тождеством. Однако спектры реальных сигналов стремятся к нулю лишь
асимптотически. Применение равномерной дискретизации к таким сигналам
приводит к возникновению в системах обработки информации специфических
высокочастотных искажений, связанных с наложением спектра, обусловленного
выборкой. Для уменьшения этих искажений необходимо либо увеличивать
частоту дискретизации, либо использовать перед АЦП дополнительный фильтр
нижних частот, ограничивающий спектр исходного сигнала перед его
аналого-цифровым преобразованием.
В общем случае выбор частоты дискретизации будет зависеть также от
используемого в (9.1) вида функции fj{t) и допустимого уровня погрешностей,
возникающих при восстановлении исходного сигнала по его отсчетам. Все это
следует принимать во внимание при выборе частоты дискретизации, которая
определяет требуемое быстродействие АЦП. Часто этот параметр задают
разработчику АЦП.
Рассмотрим более подробно место АЦП при выполнении операции
дискретизации. Для достаточно узкополосных сигналов операцию дискретизации
можно выполнять с помощью самих АЦП и совмещать ее с операцией
квантования. Основной закономерностью такой дискретизации является то, что за
счет конечного времени одного преобразования и неопределенности момента
его окончания, зависящего в общем случае от параметров входного сигнала, не
удается получить однозначного соответствия между значениями отсчетов и
моментами времени, к которым их следует отнести. В результате при работе с
изменяющимися во времени сигналами возникают специфические погрешности;
динамические по своей природе, для оценки которых вводят понятие апертур-
ной неопределенности, характеризующейся обычно апертурным временем.
9.1.2. Апертурная погрешность
Апертурным временем /д называют время, в течение которого сохраняется
неопределенность между значением выборки и временем, к которому она отно-
432 сится. Эффект апертурной неопределенности проявляется либо как погреш-
где cij — некоторые коэффициенты или отсчеты, характеризующие исходный
сигнал в дискретные моменты времени; fj(t) — набор элементарных функций,
используемых при восстановлении сигнала по его отсчетам.
Наиболее распространенной формой дискретизации является равномерная,
в основе которой лежит теорема отсчетов. Согласно этой теореме в качестве
коэффициентов dj следует использовать мгновенные значения сигнала V(tJ) в
дискретные моменты времени tj =jAt, а период дискретизации выбирать из условия
(9,2)
где Fm — максимальная частота спектра преобразуемого сигнала. При этом
выражение (9.1) переходит в известное выражение теоремы отсчетов
9.1. Общие сведения
ность мгновенного значения сигнала при заданных моментах измерения, либо
как погрешность момента времени, в который производится измерение при
заданном мгновенном значении сигнала. При равномерной дискретизации
следствием апертурной неопределенности является возникновение амплитудных
погрешностей, которые называются апертурными и численно равны
приращению сигнала в течение апертурного времени [9.3].
Если использовать другую интерпретацию эффекта апертурной
неопределенности, то ее наличие приводит к «дрожанию» истинных моментов времени,
в которые берутся отсчеты сигнала, по отношению к равноотстоящим на оси
времени моментам. В результате вместо равномерной дискретизации со строго
постоянным периодом осуществляется дискретизация с флюктуирующим
периодом повторения, что приводит к нарушению условий теоремы отсчетов и
появлению уже рассмотренных апертурных погрешностей в системах цифровой
обработки информации.
Такое значение апертурной погрешности можно определить, разложив
выражение для исходного сигнала в ряд Тейлора в окрестностях точек отсчета,
которое дляу-й точки имеет вид
(9.3)
(9.4)
где tA — апертурное время, которое для рассматриваемого случая является в
первом приближении временем преобразования АЦП.
Обычно для оценки апертурных
погрешностей используют синусоидальный
испытательный сигнал V(t) — Kmsinco/, для
которого максимальное относительное значение
апертурной погрешности
AVA/Vm = ю/А.
Если принять, что для TV-разрядного
АЦП с разрешением 2-лгапертурная
погрешность не должна превышать шага
квантования (Рис. 9.1), то между частотой сигнала щ
апертурным временем /А и относительной
апертурной погрешностью имеет место
соотношение
Рис. 9.1. Образование апертурной
погрешности для случая, когда она
равна шагу квантования
Для обеспечения дискретизации синусоидального сигнала частотой 100 кГц
с погрешностью 1% время преобразования АЦП должно быть равно 25 не. В то
же время с помощью такого быстродействующего АЦП принципиально можно
дискретизировать сигналы, имеющие ширину спектра порядка 20 МГц. Таким
образом, дискретизация с помощью самого АЦП приводит к существенному
расхождению требований между быстродействием АЦП и периодом
дискретизации. Это расхождение достигает 2...3 порядков и сильно усложняет и удоро-
433
Глава 9. АНАЛОГО-ЦИФРОВЫЕ ПРЕОБРАЗОВАТЕЛИ
жает процесс дискретизации, так как даже для сравнительно узкополосных
сигналов требует весьма быстродействующих АЦП. Для достаточно широкого
класса быстроизменяющихся сигналов эту проблему решают с помощью
устройств выборки-хранения, имеющих малое апертурное время.
9.1.3. Шум квантования
Реальные процессы в окружающем нас мире характеризуются непрерывно
изменяющимися величинами с бесконечным числом возможных состояний.
Цифровое же представление этих величин всегда дискретно, и число его
возможных состояний определяется разрешающей способностью устройства. В
результате близкие по величине, но все же различные значения входного
аналогового сигнала представляются одним и тем же цифровым кодом на выходе АЦП.
При этом часть информации теряется. Эта потеря представляет собой ошибку
(шум) квантования (Рис. 9.2).
434
Рис. 9.2. Возникновение шума квантования
Если считать входной сигнал случайной величиной, то при идеальной
характеристике преобразования АЦП разность между непрерывно
изменяющимся входным сигналом и его цифровым представлением имеет равномерное
распределение. Она может принимать значения в диапазоне ±1/2 LSB или +И/2,
где А — ширина одного кванта [9.4].
Ошибка на/-м шаге (см. Рис. 9.2)
и дисперсия шума квантования при равномерной дискретизации по уровню
(9.5)
Мощность синусоидального входного сигнала V{t) = Vm sinotf, рассеиваемая
на резисторе сопротивлением 1 Ом,
(9.6)
Среднеквадратическая ошибка на j-u шаге
9.1. Общие сведения
Поскольку при двойной амплитуде входного сигнала, соответствующей
полной шкале АЦП,
где Л^-разрядность АЦП, то отношение сигнал/шум в децибелах
(9.7)
(9.8)
или с учетом (9.7)
(9.9)
Формула (9.9) дает идеальное теоретическое значение для N-разрядного
АЦП. Она показывает, что увеличение разрядности АЦП на единицу
увеличивает соотношение сигнал/шум примерно на 6 дБ. Практически же погрешности
линейности характеристики преобразования и шумы элементов схемы
понижают эту величину.
9.1.4. Классификация АЦП
В настоящее время известно большое число методов преобразования
напряжение—код. Эти методы существенно отличаются друг от друга
потенциальной точностью, скоростью преобразования и сложностью аппаратной
реализации. На Рис. 9.3 представлена классификация АЦП по методам
преобразования.
Рис. 9.3. Классификация АЦП
В основу классификации АЦП положен признак, указывающий на то, как
во времени разворачивается процесс преобразования аналоговой величины в
цифровую. В основе преобразования выборочных значений сигнала в цифро- 435
Глава 9. АНАЛОГО-ЦИФРОВЫЕ ПРЕОБРАЗОВАТЕЛИ
вые эквиваленты лежат операции квантования и кодирования. Они могут
осуществляться с помощью либо последовательной, либо параллельной, либо
последовательно-параллельной процедур приближения цифрового эквивалента к
преобразуемой величине.
9.2. Параллельные АЦП
АЦП этого типа осуществляют квантование сигнала единовременно с
помощью набора компараторов, включенных параллельно источнику входного
сигнала. На Рис. 9.4 показана реализация параллельного метода
аналого-цифрового преобразования (А/Ц-преобразования) для 3-разрядного числа.
Рис. 9.4. Схема параллельного АЦП
436
С помощью трех двоичных разрядов можно представить восемь различных
чисел, включая нуль. Необходимо, следовательно, семь компараторов. Семь
соответствующих эквидистантных опорных напряжений образуются с помощью
резистивного делителя.
Если приложенное входное напряжение не выходит за пределы диапазона
от 5/2h до 7/2h, где h = FreF/7 — квант входного напряжения, соответствующий
единице младшего разряда АЦП, то компараторы с 1-го по 3-й устанавливаются
в состояние 1, а компараторы с 4-го по 7-й — в состояние 0. Преобразование
этой группы кодов в трехзначное двоичное число выполняет логическое
устройство, называемое приоритетным шифратором, диаграмма состояний
которого приведена в Табл. 9.1.
9.2. Параллельные АЦП
Таблица 9.1. Диаграмма состояний приоритетного шифратора
Входное напряжение
Km/A
0
1
2
3
4
5
6
7
Состояние компараторов
К-] ЛE К$ Кд Лз Л2 Л j
0000000
0000001
0000011
0000111
0001111
0011111
0111111
1111111
Выходы
QiQiQo
000
001
010
011
100
101
110
111
Подключение приоритетного шифратора непосредственно к выходу АЦП
может привести к ошибочному результату при считывании выходного кода.
Рассмотрим, например, переход от трех к четырем, или в двоичном коде от
0112 к 1002. Если старший разряд вследствие меньшего времени задержки
изменит свое состояние раньше других разрядов, то временно на выходе возникнет
число 1112, т. е. семь. Величина ошибки в этом случае составит половину
измеряемого диапазона. Так как результаты А/Ц-преобразования записываются, как
правило, в запоминающее устройство, существует вероятность получить
полностью неверную величину. Решить эту проблему можно, например, с помощью
устройства выборки-хранения. Некоторые ИМС параллельных АЦП, например
МАХ100, снабжаются сверхскоростными УВХ, имеющими время выборки
порядка 0.1 не. Другой путь состоит в использовании кода Грея, характерной
особенностью которого является изменение только одной кодовой позиции при
переходе от одного кодового значения к другому. Наконец, в некоторых АЦП
(например, МАХ1151) для снижения вероятности сбоев при параллельном
А/Ц-преобразовании используется двухтактный цикл, когда сначала состояния
выходов компараторов фиксируются, а затем, после установления состояния
приоритетного шифратора, подачей активного фронта на синхровход
выходного регистра в него записывают выходное слово АЦП.
Как видно из Табл. 9.1, при увеличении входного сигнала компараторы
устанавливаются в состояние 1 по очереди — снизу вверх. Такая очередность не
гарантируется при быстром нарастании входного сигнала, так как из-за
различия во временах задержки компараторы могут переключаться в другом порядке.
Приоритетное кодирование позволяет избежать ошибки, возможной из-за
этого обстоятельства, поскольку единицы в младших разрядах не принимаются во
внимание шифратором.
Благодаря одновременной работе компараторов параллельный АЦП
является самым быстрым. Например, восьмиразрядный преобразователь типа
МАХ 108 позволяет получить 1.5 млрд отсчетов в секунду при времени задержки
прохождения сигнала не более 2.2 не. Недостатком этой схемы является
высокая сложность. Действительно, N-разрядный параллельный АЦП содержит
2^—1 компараторов и 2N согласованных резисторов. Следствием этого
является высокая стоимость (сотни долларов США) и значительная потребляемая
мощность. Тот же МАХ108, например, потребляет свыше 5 Вт.
Интересная разновидность параллельного АЦП — 10-разрядный AD9060
содержит 512 компараторов, выполняющих преобразование для 9 старших
разрядов. Значение младшего значащего разряда определяется специальной
схемой интерполяции между смежными компараторами.
437
Глава 9. АНАЛОГО-ЦИФРОВЫЕ ПРЕОБРАЗОВАТЕЛИ
9.3. Последовательно-параллельные АЦП
Последовательно-параллельные АЦП являются компромиссом между
стремлением получить высокое быстродействие и желанием сделать это по
возможности меньшей ценой. Последовательно-параллельные АЦП занимают
промежуточное положение по разрешающей способности и быстродействию
между параллельными АЦП и АЦП последовательного приближения.
Последовательно-параллельные АЦП подразделяют на многоступенчатые,
конвейерные и Многотактные.
9.3.1. Многоступенчатые АЦП
В многоступенчатом АЦП процесс преобразования входного сигнала
разделен в пространстве. В качестве примера на Рис. 9.5 представлена схема
двухступенчатого 8-разрядного АЦП.
Верхний по схеме АЦП
осуществляет грубое преобразование
сигнала в четыре старших разряда
выходного кода.
Цифровые сигналы с выхода
АЦП поступают на выходной
регистр и одновременно на вход
4-разрядного
быстродействующего ЦАП. Во многих ИМС
многоступенчатых АЦП (AD9042,
AD9070 и др.) этот ЦАП выполнен
по схеме суммирования токов на
Рис. 9.5. Структурная схема двухступенчатого АЦП
438
дифференциальных
переключателях, но некоторые (AD775, AD9040A и др.) содержат ЦАП с суммированием
напряжений. Остаток от вычитания выходного напряжения ЦАП из входного
напряжения схемы поступает на вход АЦП2, опорное напряжение которого в
16 раз меньше, чем у АЦЩ. Как следствие квант АЦП2 в 16 раз меньше кванта
АЦПЬ Этот остаток, преобразованный АЦП2 в цифровую форму, представляет
собой четыре младших разряда выходного кода. Различие между АЦП! и АЦП2
заключается, прежде всего, в требовании к точности: у АЦП! и у ЦАП точность
должна быть такой же, как у 8-разрядного преобразователя, в то время как
АЦП2 может иметь точность 4-разрядного преобразователя.
Оценочная и точная величины должны, естественно, соответствовать
одному и тому же входному напряжению KIN(/y). Из-за наличия задержки сигнала в
первой ступени возникает, однако, временное запаздывание. Поэтому при
использовании этого способа входное напряжение необходимо поддерживать
постоянным с помощью устройства выборки-хранения до тех пор, пока не будет
получено все число.
Проблема обеспечения необходимой точности преобразования может
решаться двумя способами. Первый способ заключается в индивидуальной
подгонке параметров на открытом кристалле с помощью лазера, что обходится
довольно дорого. Другой способ состоит в использовании АЦП и ЦАП
9.3. Последовательно-параллельные АЦП
избыточной разрядности. Преобразователь оснащается однократно
программируемым ПЗУ, которое, по существу, представляет собой преобразователь
двоичного кода. При тестировании изготовленной микросхемы фиксируются
значения исходного выходного кода, соответствующие определенным уровням
аналогового входного сигнала, задаваемым внешним прецизионным ЦАП.
Этим кодам, имеющим избыточную разрядность, сопоставляются значения
конечного выходного кода, зашиваемого в ПЗУ по адресам, совпадающим с
исходным выходным кодом. Несмотря на усложнение АЦП за счет введения
дополнительных аналоговых и цифровых узлов, этот способ применяется очень
широко. Например, 12-разрядный 4-ступенчатый AD9224 содержит 4 АЦП:
один — 5-разрядный, один — 4-разрядный и два — 3-разрядных, т. е. общее
число разрядов входного квантователя равно 15.
9.3.2. Конвейерные АЦП
Быстродействие многоступенчатого АЦП можно повысить, применив
конвейерный принцип многоступенчатой обработки входного сигнала. В
обыкновенном многоступенчатом АЦП (Рис. 9.5) вначале происходит формирование
старших разрядов выходного слова преобразователем АЦПЬ а затем идет
период установления выходного сигнала ЦАП. На этом интервале АЦП2
простаивает. На втором этапе во время преобразования остатка преобразователем АЦП2
простаивает АЦП^ Введя элементы задержки аналогового и цифрового
сигналов между ступенями преобразователя, получим конвейерный АЦП, схема
8-разрядного варианта которого приведена на Рис. 9.6.
Рис. 9.6. Структурная схема конвейерного АЦП
Роль аналогового элемента задержки выполняет устройство
выборки-хранения УВХ2, а цифрового — четыре /)-триггера. Триггеры задерживают
передачу старшего полубайта в выходной регистр на один период тактового сигнала
CLK.
Сигналы выборки, формируемые из тактового сигнала, поступают на УВХ!
и УВХ2 в разные моменты времени (Рис. 9.7).
УВХ2 переводится в режим хранения позже, чем УВХЬ на время, равное
суммарной задержке распространения сигнала по АЦП! и ЦАП.
439
Глава 9. АНАЛОГО-ЦИФРОВЫЕ ПРЕОБРАЗОВАТЕЛИ
440
Задний фронт тактового сигнала управляет записью кодов в D-триггеры и
выходной регистр. Полная обработка входного сигнала занимает около двух
периодов CLK, но частота появления новых значений выходного кода равна
частоте тактового сигнала.
Таким образом, конвейерная архитектура позволяет существенно (в
несколько раз) повысить максимальную частоту выборок многоступенчатого
АЦП. То, что при этом сохраняется суммарная задержка прохождения сигнала,
соответствующая обычному многоступенчатому АЦП с равным числом
ступеней, не имеет существенного значения, так как время последующей цифровой
обработки этих сигналов все равно многократно превосходит эту задержку. За
счет этого можно без проигрыша в быстродействии увеличить число ступеней
АЦП, понизив разрядность каждой ступени. В свою очередь, увеличение числа
ступеней преобразования уменьшает сложность АЦП. Действительно,
например, для построения 12-разрядного АЦП из четырех 3-разрядных необходимо
28 компараторов, тогда как его реализация из двух 6-разрядных потребует 126
компараторов.
Поскольку производительность конвейерного АЦП практически не зависит
от числа ступеней, логично с целью упрощения и удешевления использовать в
его схеме одноразрядные АЦП и ЦАП. Примером такого АЦП может служить
12-разрядный ADC12181 фирмы National Semiconductor. Преобразовательное
ядро этого АЦП имеет 15 каскадно-соединенных одноразрядных ступеней,
каждая из которых включает компаратор КН в качестве одноразрядного АЦП,
аналоговый ключ S в качестве одноразрядного ЦАП, дифференциальный
усилитель с коэффициентом усиления 2 и УВХ (Рис. 9.8).
На вход усилителя поступает либо входное напряжение ступени Vw(k), если
Vm(k) < Freb или разность VlN(k) - KreB если Vw(k) > FREF
Выходной уровень компаратора представляет собой значение к-то разряда
выходного кода. Выходное напряжение ступени Уоит(к) является входным на-
Рис. 9.7. Диаграммы работы конвейерного АЦП
9.3. Последовательно-параллельные АЦП
пряжением к + 1 ступени. Биты соответствующих разрядов поступают в
цифровую часть преобразователя, где производится коррекция ошибок и
формируется 12-разрядный выходной код. Преобразователь содержит модуль
автокалибровки, который активизируется при включении питания. В процессе
калибровки преобразовательное ядро переводится в специальный режим
работы, чтобы выявить неустранимые систематические погрешности (например,
ошибки подгонки уровней квантования, смещения нуля и т. п.) и определить
поправочные коэффициенты. Эти коэффициенты помещаются в ОЗУ.
Конвейерную архитектуру
VqutW
Рис. 9.8. Схема ступени конвейерного АЦП
имеет большое количество
выпускаемых в настоящее время
многоступенчатых АЦП. В
частности, 2-ступенчатый
10-разрядный АЦП ADC10030,
выполняющий до 30 миллионов
преобразований в секунду
(МПс), 4-ступенчатый
12-разрядный АЦП CLC5958 G0 МПс), 3-ступенчатый 14-разрядный АЦП AD6644
(80 МПс) и др. При выборе конвейерного АЦП следует иметь в виду, что многие
из них не допускают работу с низкой частотой выборок. Например,
изготовитель не рекомендует работу ИМС AD9040A с частотой преобразований менее
10 МПс, 3-ступенчатого 12-разрядного AD9022 с частотой менее 2 МПс и т. д.
Это вызвано тем, что внутренние УВХ имеют довольно высокую скорость
разряда конденсаторов хранения, поэтому работа с большим тактовым периодом
приводит к значительному изменению преобразуемого сигнала в ходе
преобразования и, как следствие, к ошибкам преобразования. Если управление
процессом преобразования организовано таким образом, что по приходу тактового
импульса формируется серия синхроимпульсов, управляющих
последовательностью полного конвейерного преобразования отдельной выборки, то в таком
случае частота выборок конвейерного АЦП может быть сколь угодно низкой.
Таков, например, 12-разрядный AD9034.
9.3.3. Многотактные
последовательно-параллельные АЦП
Рассмотрим пример 8-разрядного
последовательно-параллельного АЦП,
относящегося к типу многотактных (Рис. 9.9).
Здесь процесс преобразования разделен
во времени.
Преобразователь состоит из 4-разрядного
параллельного АЦП, квант h которого
определяется величиной опорного напряжения,
4-разрядного ЦАП и устройства управления.
Если максимальный входной сигнал равен
2.56 В, то в первом такте преобразователь
работает с шагом квантования hx = 0.16 В. В это
Рис. 9.9. Структурная схема
двухтактного АЦП
441
Глава 9. АНАЛОГО-ЦИФРОВЫЕ ПРЕОБРАЗОВАТЕЛИ
время входной код ЦАП равен нулю. Устройство управления пересылает слово,
полученное от АЦП в первом такте, в четыре старших разряда выходного
регистра, подает это слово на вход ЦАП и уменьшает в 16 раз опорное
напряжение АЦП. Таким образом, во втором такте шаг квантования /i2 = 0.01 В, и
остаток, образовавшийся при вычитании из входного напряжения схемы
выходного напряжения ЦАП, будет преобразован в младший полубайт
выходного слова.
Очевидно, что используемые в этой схеме 4-разрядные АЦП и ЦАП должны
обладать 8-разрядной точностью, в противном случае возможен пропуск кодов,
т. е. при монотонном нарастании входного напряжения выходной код АЦП не
будет принимать некоторые значения из своей шкалы. Во избежание этого так
же, как и в предыдущем преобразователе, входное напряжение многотактного
АЦП во время преобразования должно оставаться неизменным, для чего между
его входом и источником входного сигнала следует включить устройство
выборки-хранения.
Быстродействие рассмотренного многотактного АЦП определяется полным
временем преобразования 4-разрядного АЦП, временем срабатывания
цифровых схем управления, временем установления ЦАП с погрешностью, не
превышающей 0.2...0.3 кванта 8-разрядного АЦП, причем время преобразования
АЦП входит в общее время преобразования дважды. В результате при прочих
равных условиях преобразователь такого типа оказывается медленнее
двухступенчатого преобразователя, рассмотренного выше. Однако он проще и
дешевле. По быстродействию Многотактные АЦП занимают промежуточное
положение между многоступенчатыми АЦП и АЦП последовательного приближения.
Примерами многотактных АЦП являются 3-тактный 12-разрядный AD7886 со
временем преобразования 1 мкс или 3-тактный 16-разрядный AD1382 со
временем преобразования 2 мкс.
9.4. Последовательные АЦП
9.4.1. АЦП последовательного счета
Этот преобразователь является типичным примером последовательных
АЦП с единичными приближениями и состоит из компаратора, счетчика и
цифроаналогового преобразователя (ЦАП) (Рис. 9.10а).
На один вход компаратора поступает входной сигнал, а на другой — сигнал
обратной связи с ЦАП. В исходном состоянии выход компаратора равен ЛОГ.1.
Работа АЦП начинается с прихода импульса запуска, который включает
счетчик, суммирующий число импульсов, поступающих от генератора тактовых
импульсов ГТИ. Выходной код счетчика подается на ЦАП, осуществляющий его
преобразование в напряжение обратной связи VFB. Процесс преобразования
продолжается до тех пор, пока в некоторый момент времени /COn напряжение
обратной связи не сравняется с входным напряжением (Рис. 9.106), компаратор
переключится, в состояние лог.О и запретит поступление тактовых импульсов
на счетчик. Интервал от момента запуска до момента tCoN называется временем
442 преобразования.
9.4. Последовательные АЦП
Рис. 9.10. АЦП последовательного счета:
а — структурная схема, б — временная диаграмма процесса
преобразования
Переход выхода компаратора из 1 в 0 означает завершение процесса
преобразования. Выходной код, пропорциональный входному напряжению по
окончании преобразования, считывается с выхода счетчика.
Время преобразования последовательного АЦП является переменным и
определяется входным напряжением. Его максимальное значение соответствует
максимальному входному напряжению и при разрядности двоичного счетчика
N и частоте тактовых импульсов/с равно
(9.10)
Например, при N = 10 к /q=\ МГц ?соьг_тах= Ю23 мкс, что обеспечивает
максимальную частоту выборок порядка 1 кГц.
Статическая погрешность преобразования определяется суммарной
статической погрешностью используемых ЦАП и компаратора. Частоту счетных
импульсов необходимо выбирать с учетом завершения переходных процессов в
этих устройствах.
При работе без УВХ на входе апертурное время совпадает со временем
преобразования. Как следствие результат преобразования чрезвычайно сильно
зависит от величины изменения или пульсаций входного напряжения в течение
времени преобразования. При наличии высокочастотных пульсаций среднее
значение выходного кода нелинейно зависит от среднего значения входного
напряжения. Это означает, что АЦП данного типа без УВХ на входе будут
пригодны лишь для работы с постоянными или медленно изменяющимися
напряжениями, которые за время преобразования изменяются не более чем на один
шаг квантования.
Таким образом, особенностью АЦП последовательного счета является
небольшая частота дискретизации, достигающая всего лишь нескольких кГц.
Достоинством АЦП данного класса является сравнительная простота построения,
определяемая последовательным характером выполнения процесса
преобразования. В настоящее время такие АЦП не изготавливаются в виде отдельных
интегральных микросхем, однако входят в состав микросхем для управления
электродвигателями, например ADMC330.
443
Глава 9. АНАЛОГО-ЦИФРОВЫЕ ПРЕОБРАЗОВАТЕЛИ
9.4.2. АЦП последовательного приближения
Преобразователь последовательного приближения, называемый в
литературе также АЦП с поразрядным уравновешиванием, в настоящее время является
наиболее распространенным вариантом последовательных АЦП. Он был
изобретен Б. Гордоном (США) более 40 лет назад. Среди наиболее интересных
приборов этого типа следует отметить 12-разрядный AD574, разработанный в
1978 г. П. Холлоуэем. Этот АЦП, имеющий время преобразования 35 мкс и
бывший долгое время, по существу, промышленным стандартом, и сегодня
фигурирует в каталоге фирмы Analog Devices.
В основе работы этого класса преобразователей лежит принцип дихотомии,
т. е. последовательного сравнения измеряемой величины с 1/2, 1/4, 1/8 и т. д. от
ее полной шкалы. Это позволяет для ТУ-разрядного АЦП последовательного
приближения выполнить весь процесс преобразования за N последовательных
шагов (итераций) вместо 2N —\ при использовании последовательного счета и
получить существенный выигрыш в быстродействии. Так, уже при N= 10 этот
выигрыш достигает 100 раз и позволяет получить с помощью таких АЦП до
1О5...1О6 преобразований в секунду. В то же время статическая погрешность
этого типа преобразователей, определяемая в основном используемым в нем ЦАП,
может быть очень малой, что позволяет реализовать разрешающую способность
до 18 двоичных разрядов при частоте выборок до 200 кГц (например, DSP101
фирмы Burr-Brown).
Рассмотрим принципы построения и работы АЦП последовательного
приближения на примере классической структуры 4-разрядного АЦП (Рис. 9.11).
Рис. 9.11. АЦП последовательного приближения:
а — структурная схема; б — временные диаграммы
Он состоит из трех основных узлов (Рис. 9.11а): компаратора, регистра
последовательного приближения (РПП) и ЦАП. После подачи команды «Пуск» с
приходом первого тактового импульса РПП принудительно задает на вход ЦАП
код, равный половине его шкалы (для 4-разрядного ЦАП это 10002= 8ю)«
Благодаря этому, напряжение KFB на выходе ЦАП (Рис. 9.115)
444
9.4. Последовательные АЦП
таким же образом сравнивается с ближайшим младшим разрядом и т. д.
После четырех подобных выравнивающих шагов в регистре последовательного
приближения оказывается двоичное число, из которого после цифроаналогово-
го преобразования получается напряжение, соответствующее KIN с точностью
до 1 LSB. Выходное число может быть считано с РПП в виде параллельного
двоичного кода по N линиям. Кроме того, в процессе преобразования на
выходе компаратора, как это видно из Рис. 9,116, формируется выходное число в
виде последовательного кода старшими разрядами вперед.
Точность АЦП последовательного приближения определяется точностью
источника опорного напряжения, компаратора и, главным образом, точностью
ЦАП. В современных АЦП используются параллельные ЦАП на
коммутируемых конденсаторах (с суммированием заряда). Обеспечить монотонность их
характеристик преобразования очень непросто. Как следствие АЦП высокого
разрешения могут иметь пропуски кодов. Например, 2-канальный
18-разрядный аудио-АЦП РСМ1750 не обеспечивает даже 16-разрядного разрешения без
пропуска кодов.
Быстродействие АЦП данного типа определяется суммой времени
установления /as ЦАП до стационарного значения с погрешностью, не превышающей
0.5 LSB, времени переключения компаратора /СОм и задержки распространения
сигнала в регистре последовательного приближения tD. Сумма /СОм + 'd
является величиной постоянной, а /^ уменьшается с уменьшением веса разряда.
Следовательно, для определения младших разрядов может быть использована
более высокая тактовая частота. При поразрядной вариации /с возможно
уменьшение времени преобразования /COn на 40%. Для этого в состав АЦП
может быть включен специальный контроллер.
При работе без УВХ на входе апертурное время равно времени между
началом и фактическим окончанием преобразования, которое так же, как и у АЦП
последовательного счета, по сути, зависит от входного сигнала, т. е. является
переменным. Возникающие при этом апертурные погрешности носят также
нелинейный характер. Поэтому для эффективного использования АЦП
последовательного приближения, между его входом и источником преобразуемого
сигнала следует обязательно включать УВХ. Большинство выпускаемых в
настоящее время ИМС АЦП последовательного приближения (например,
12-разрядный МАХ191, 16-разрядный AD7882 и др.) имеют встроенные или
следящие УВХ (track-hold), управляемые сигналом запуска АЦП. Следящее
УВХ отличается тем, что постоянно находится в режиме выборки, переходя в
режим хранения только на время преобразования сигнала.
Данный класс АЦП занимает промежуточное положение по
быстродействию, стоимости и разрешающей способности между последовательно-парал- 445
где h — квант выходного напряжения ЦАП, соответствующий единице
младшего разряда (LSB). Эта величина составляет половину возможного диапазона
преобразуемых сигналов. Если входное напряжение больше, чем эта величина,
то на выходе компаратора устанавливается 1, если меньше, то 0. В последнем
случае схема управления должна переключить старший разряд ёъ обратно в
состояние нуля. Непосредственно вслед за этим остаток
Глава 9. АНАЛОГО-ЦИФРОВЫЕ ПРЕОБРАЗОВАТЕЛИ
дельными и интегрирующими АЦП и находит широкое применение в системах
управления, контроля и цифровой обработки сигналов. Промышленность
изготавливает сотни моделей АЦП последовательного приближения
разрядностью от 8 до 18 и с быстродействием до 500 кПс.
9.5. Интегрирующие АЦП
Недостатком рассмотренных выше последовательных АЦП является низкая
помехоустойчивость результатов преобразования. Действительно, выборка
мгновенного значения входного напряжения, обычно включает слагаемое в
виде мгновенного значения помехи. В дальнейшем при цифровой обработке
последовательности выборок эта составляющая может быть подавлена, однако на
это требуется время и дополнительные вычислительные ресурсы. В АЦП,
рассмотренных ниже, входной сигнал интегрируется либо непрерывно, либо на
определенном временном интервале, длительность которого обычно
выбирается кратной периоду помехи. Это позволяет во многих случаях подавить помеху
еще на этапе преобразования. Платой за это является пониженное
быстродействие интегрирующих АЦП.
9.5.1. АЦП многотактного интегрирования
АЦП многотактного интегрирования были изобретены более 40 лет назад и
сразу же стали основой для цифровых вольтметров высокой точности.
Прорывом в этой области техники стала разработка в середине 70-х годов прошлого
века JI. Эвансом и Д. Бингемом (США) АЦП двухтактного интегрирования
ICL7106 (отечественный аналог — 572ПВ2), который и сегодня выпускается
многими фирмами. Варианты этого АЦП являются «мозгом» современных
цифровых мультиметров.
Упрощенная схема АЦП, работающего в два основных такта (АЦП
двухтактного интегрирования), приведена на Рис. 9.12.
Рис. 9.12. Упрощенная схема АЦП двухтактного интегрирования
Преобразование проходит две стадии: стадию интегрирования и стадию
счета.
В начале первой стадии ключ S{ замкнут, а ключ S2 разомкнут. Интегратор И
446 интегрирует входное напряжение FIN. Время интегрирования входного напря-
9.5. Интегрирующие АЦП
жения t\ постоянно; в качестве таймера используется счетчик с коэффициентом
пересчета Ксч, так что
(9.11)
К моменту окончания интегрирования выходное напряжение интегратора
составляет
(9.12)
где KIN(av) — среднее за время tx входное
напряжение. После окончания стадии
интегрирования ключ S\ размыкается, а
ключ S2 замыкается и на вход
интегратора поступает опорное напряжение Fref-
При этом опорное напряжение,
выбирается противоположным по знаку
входному напряжению. На стадии счета
выходное напряжение интегратора линейно
уменьшается по абсолютной величине,
как показано на Рис. 9.13.
Стадия счета заканчивается, когда
выходное напряжение интегратора
переходит через нуль. При этом компаратор
К переключается и счет останавливается.
Интервал времени, в котором проходит
стадия счета, определяется уравнением
Рис. 9.13. Временные диаграммы работы
АЦП двухтактного интегрирования
(9.13)
Подставив значение Fjft) из (9.12) в (9.13) с учетом того, что
(9.14)
где п2 — содержимое счетчика после окончания стадии счета, получим
результат
(9.15)
Из этой формулы следует, что отличительной особенностью метода
многотактного интегрирования является то, что ни тактовая частота, ни постоянная
интегрирования RC не влияют на результат. Необходимо только потребовать,
чтобы тактовая частота в течение времени tx + t2 оставалась постоянной. Это
можно обеспечить при использовании простого тактового генератора, посколь-
447
Глава 9. АНАЛОГО-ЦИФРОВЫЕ ПРЕОБРАЗОВАТЕЛИ
ку существенные временные или температурные дрейфы частоты происходят за
время несопоставимо большее, чем время преобразования.
Как видно из выражений (9.11)...(9.15), в окончательный результат входят
не мгновенные значения преобразуемого напряжения, а только значения,
усредненные за время t\. Поэтому переменные составляющие входного
напряжения (пульсации и помехи) ослабляются тем сильнее, чем выше их частота.
Определим коэффициент передачи помехи К# для АЦП двухтактного
интегрирования. Пусть на вход интегратора поступает гармонический сигнал
единичной амплитуды с частотой/и произвольной начальной фазой ф. Среднее
значение этого сигнала за время интегрирования t\ равно
(9.16)
Эта величина достигает максимума по модулю при ф = ±nk, k = 0, 1, 2... В
этом случае
(9.17)
Рис. 9.14. Амплитудно-частотная
характеристика коэффициента подавления
помех АЦП двухтактного интегрирования
Из (9.17) следует, что переменное
напряжение, период которого в целое
число раз меньше tb подавляется
полностью (Рис. 9.14).
Поэтому целесообразно выбрать
тактовую частоту такой, чтобы
произведение Ксч/с было бы равным или
кратным периоду напряжения
промышленной сети (наиболее частый
источник помех).
448
Автоматическая коррекция нуля.
Преобразование биполярных входных сигналов
Как следует из (9.15), статическая точность АЦП многотактного
интегрирования определяется только точностью источника опорного напряжения и
смещением нуля интегратора и компаратора, которые суммируются с опорным
напряжением. Смещение нуля можно устранить автоматической компенсацией.
Для этого в цикл преобразования вводят дополнительную стадию установки
нуля (см. Рис. 9.13), во время которой интегратор отключается от источников
сигналов и совместно с компаратором охватывается глубокой отрицательной
обратной связью, как это показано на Рис 9.15.
Здесь в качестве компаратора используется ОУ. Между интегратором и
входом АЦП включен неинвертирующий повторитель в качестве буферного
усилителя Б.
В фазе автоматической компенсации нуля ключи Sb S3, S5 разомкнуты, а
ключи 52, S4, S6, S7 — замкнуты. Поэтому интегратор, компаратор и буферный
9.5. Интегрирующие АЦП
Рис. 9.15. АЦП двухтактного интегрирования с автоматической
компенсацией смещения нуля
усилитель образуют повторитель напряжения, выходное напряжение которого
КСОм подается на конденсатор автоматической компенсации С{. Входное
напряжение буферного усилителя равно нулю, а выходное — его смещению нуля
Kqffb- После окончания переходных процессов на конденсаторе С\ установится
напряжение, равное KOffb + *offi > гДе *offi — смещение нуля интегратора.
Одновременно конденсатор Cref заряжается от источника опорного напряжения.
На стадии интегрирования входного напряжения ключи S4 и S7
размыкаются, a S\ — замыкается. Так как на это время напряжение на конденсаторе С\
запоминается, смещение нуля в течение фазы интегрирования компенсируется.
При этом дрейф нуля определяется только кратковременной нестабильностью,
которая очень мала. То же самое сохраняется на стадии счета.
Поскольку в контуре компенсации смещения нуля последовательно
включены два усилителя (И и К), то легко могут возникнуть автоколебания. Для
обеспечения устойчивости схемы последовательно с ключом S1 следует
включить резистор.
После окончания фазы интегрирования схема управления анализирует
выходное напряжение компаратора. Если среднее значение входного напряжения
положительно, то на выходе компаратора устанавливается напряжение
высокого уровня. В этом случае одновременно с размыканием ключа S\ замыкаются
ключи 54 и ^5> подключая к входу буферного усилителя конденсатор CREp с
сохраненным на нем опорным напряжением, причем так, что это напряжение
имеет полярность, противоположную полярности источника опорного
напряжения. Если среднее значение входного напряжения отрицательно, то на
выходе компаратора устанавливается напряжение низкого уровня. Тогда
замыкаются ключи 53 и 5б, подключая к входу буферного усилителя опорный
конденсатор другими полюсами. Таким образом, в обоих случаях в стадии счета
происходит изменение напряжения интегратора V\(t) в направлении,
противоположном тому, которое имело место в стадии интегрирования. Одновременно
схема управления формирует код знака. Таким образом, в простейшем случае
выходной код АЦП представляет собой прямой код со знаком.
Интегральные АЦП многотактного интегрирования изготавливаются в виде
полупроводниковых ИМС. Среди них можно различить две главные группы:
449
Глава 9. АНАЛОГО-ЦИФРОВЫЕ ПРЕОБРАЗОВАТЕЛИ
• схемы с параллельным или последовательным выходом для сопряжения с
микропроцессорами (например, ICL7109, выходное слово которого включает 12
разрядов плюс знак в параллельном 14-ти или 8 разрядном коде, или
18-разрядный МАХ 132 с дополнительным знаковым разрядом и последовательным
интерфейсом);
• схемы с двоично-десятичными счетчиками и дешифраторами для управления
семисегментными индикаторами, в том числе мультиплексированными.
Такие АЦП применяются в качестве основы для цифровых вольтметров.
Примерами могут служить ICL7106 с диапазоном ±2000 отсчетов или ICL7135
(отечественный аналог — 572ПВ6) с диапазоном ±40000 отсчетов.
9.5.2. Сигма-дельта АЦП
АЦП многотактного интегрирования имеют ряд недостатков. Во-первых,
нелинейность переходной статической характеристики операционного
усилителя, на котором выполняют интегратор, заметным образом сказывается на
интегральной нелинейности характеристики преобразования АЦП высокого
разрешения. Для уменьшения влияния этого фактора АЦП изготавливают
многотактными. Например, 13-разрядный AD7550 выполняет преобразование
в четыре такта. Другим недостатком этих АЦП является то обстоятельство, что
интегрирование входного сигнала занимает в цикле преобразования только
приблизительно третью часть. Две трети цикла преобразователь не принимает
входной сигнал. Это ухудшает помехоподавляющие свойства интегрирующего
АЦП. В-третьих, АЦП многотактного интегрирования должен быть снабжен
довольно большим количеством внешних резисторов и конденсаторов с
высококачественным диэлектриком, что значительно увеличивает место,
занимаемое преобразователем на плате и как следствие усиливает влияние помех и
увеличивает стоимость изделия.
Эти недостатки во многом устранены в конструкции сигма-дельта АЦП (в
ранней литературе эти преобразователи назывались АЦП с уравновешиванием
или балансом зарядов). Своим названием эти преобразователи обязаны
наличию в них двух блоков: сумматора (обозначение операции — 2) и интегратора
(обозначение операции — А). Один из принципов, заложенных в такого рода
преобразователях, позволяющий уменьшить погрешность, вносимую шумами,
а, следовательно, увеличить разрешающую способность — это усреднение
результатов измерения на большом интервале времени.
Сигма-дельта АЦП известны более 30 лет, но только сравнительно недавно
освоена цифровая технология высокой плотности VLSI, позволяющая
изготавливать и аналоговую и цифровую части на одном кристалле и тем самым
заметно снизить стоимость производства ИМС. Эти преобразователи используются
ныне во многих приложениях, где требуются дешевые экономичные АЦП
низкого и умеренного быстродействия с высоким разрешением.
В настоящее время изготавливаются две группы сигма-дельта АЦП:
• низкочастотные АЦП высокого разрешения с числом разрядов 16...24 для
измерительной техники промышленного назначения;
• широкополосные АЦП умеренного и высокого разрешения с числом разря-
450 дов 12...24 для аудиоприложений и систем цифровой обработки сигналов.
9.5. Интегрирующие АЦП
Основные узлы АЦП — это сигма-дельта модулятор и цифровой фильтр.
Схема я-разрядного сигма-дельта модулятора первого порядка приведена на
Рис. 9.16.
Работа этой схемы основана на
вычитании из входного сигнала Vw(t) выходного
сигнала ЦАП, выработанного на предыдущем
такте работы схемы. Полученная разность
интегрируется, а затем преобразуется в код
параллельным АЦП невысокой разрядности.
Последовательность кодов, следующих с
тактовой частотой, поступает на цифровой
фильтр нижних частот.
Порядок модулятора определяется числом
интеграторов и сумматоров в его схеме.
Сигма-дельта модуляторы второго порядка содержат два сумматора и два
интегратора и обеспечивают лучшее соотношение сигнал/шум, чем модуляторы
первого порядка.
Для уяснения работы сигма-дельта АЦП необходимо знакомство с такими
понятиями, как передискретизация, шум квантования, цифровая фильтрация и
децимация. О передискретизации уже шла речь в п. 8.3.3. Идеальный дискрети-
зирующий N-разрядный АЦП создает шум квантования, частотный спектр
которого равномерно распределен от 0 ло/$/2 (Рис. 9.17а).
Рис. 9.16. Структурная схема
сигма-дельта модулятора первого
порядка
Рис. 9.17. Спектры шумов квантования в АЦП различной
структуры:
а — простой АЦП, б — АЦП с передискретизацией
и цифровым фильтром, в — сигма-дельта АЦП
с передискретизацией и цифровым фильтром
Как уже указывалось в подразделе 9.1.3, среднеквадратическое значение
этого шума равно h2/l2, где А —шаг квантования или значение младшего
разряда. Поэтому отношение сигнал/шум SNR при преобразовании синусоиды с
размахом, равным полной шкале АЦП, составит F.02N+ 1.76) дБ. При
неидеальном АЦП и шуме, превышающем теоретический, разрешающая
способность будет меньше той, что определяется числом разрядов N. Фактическая раз-
451
Глава 9. АНАЛОГО-ЦИФРОВЫЕ ПРЕОБРАЗОВАТЕЛИ
решающая способность, часто называемая эффективной разрядностью (ENOB)
определяется по формуле [9.5]
(9.18)
Если выбрать намного более высокую частоту дискретизации, например, kf$
(см. Рис. 9.176), шум квантования оказывается распределенным (при той же
суммарной мощности) по более широкой полосе частот (от 0 до kfs/2). Если на
выходе модулятора включить цифровой ФНЧ, то можно удалить значительную
часть шума квантования, не затрагивая полезный сигнал, т. е. эффективная
разрядность увеличится. В результате мы можем выполнить аналого-цифровое
преобразование с высоким разрешением посредством АЦП, имеющего низкую
разрядность. Коэффициент к в данном случае характеризует кратность
передискретизации.
Так как ширина полосы пропускания АЦП сужена выходным цифровым
ФНЧ, то частота поступления выходных данных может быть более низкой, чем
первоначальная частота передискретизации A:/s, но, тем не менее, она должна
удовлетворять условиям теоремы отсчетов (теоремы Котельникова). Частоту
передачи выходных данных снижают, пропуская на выход каждый Af-й по
порядку следования результат цифрового фильтра и отбрасывая остальные. Этот
процесс известен как прореживание или децимация. М может быть любым
целым числом при условии, что частота выходных данных более чем вдвое
превышает максимальную частоту спектра входного сигнала АЦП. В таком случае
прореживание не приводит к потере информации (см. Рис. 9Л7в).
Если использовать передискретизацию для повышения эффективной
разрядности простого JV-разрядного АЦП, то необходимо взять коэффициент
передискретизации к = 22N. Сигма-дельта АЦП не нуждаются в таком большом
коэффициенте передискретизации, поскольку в них не только ограничивается
полоса пропускания сигнала, но и спектр шума квантования формируется
таким образом, что большая часть энергии шума выходит за пределы полосы
пропускания сигнала, как это показано на Рис. 9.17*.
452
Принцип действия сигма-дельта АЦП
Разберем очень упрощенно работу сигма-дельта АЦП на примере
преобразователя с одноразрядным модулятором первого порядка, схема которого
приведена на Рис. 9.18.
Рис. 9.18. Сигма-дельта АЦП с модулятором первого
порядка
9.5. Интегрирующие АЦП
Пусть входной сигнал VM представляет собой постоянное напряжение.
В этом случае напряжение на выходе интегратора V\ колеблется по
треугольному закону вокруг нулевого уровня, который задается подключением
инвертирующего входа компаратора к общей точке схемы. Выход компаратора
управляет 1-разрядным ЦАП, роль которого играет комбинация D-триггера и
переключателя полярности опорного напряжения. Выходное напряжение ЦАП
(+*/ref™h-Kref) в качестве напряжения отрицательной обратной связи
поступает на вход сумматора. Эта обратная связь обеспечивает равенство среднего
значения напряжения на выходе ЦАП KDAC(av) входному напряжению KIN.
В самом деле, среднее напряжение ЦАП определяется плотностью
«единиц» в потоке однобитных данных, поступающем с выхода компаратора. Если
входной сигнал приближается к + Fref в потоке бит увеличивается количество
«единиц» и уменьшается число «нулей». Аналогично при приближении
входного сигнала к — Kref число «единиц» уменьшается, а число «нулей» возрастает.
Сказанное поясняется в Табл. 9.2 на примере преобразования входного
сигнала, равного 0.6 В, при FREF= 1 В [9.6]. Пусть постоянная времени
интегрирования интегратора численно равна периоду тактовых импульсов. В нулевом
периоде выходное напряжение интегратора сбрасывается в нуль. На выходе ЦАП
также устанавливается нулевое напряжение. Затем схема проходит через
показанную в Табл. 9.2 последовательность состояний.
Таблица 9.2. Преобразование постоянного напряжения сигма-дельта модулятором
В тактовые периоды 2 и 7 состояния системы идентичны, так как при
неизменном входном сигнале KIN = 0.6 В цикл работы занимает пять тактовых
периодов. Усреднение выходного сигнала ЦАП за цикл действительно дает
величину напряжения 0.6 В: A - 1 + 1 + 1 + 1)/5 = 0.6.
453
Глава 9. АНАЛОГО-ЦИФРОВЫЕ ПРЕОБРАЗОВАТЕЛИ
Из этого соотношения следует, что по мере приближения частоты сигнала к
нулю влияние шумовой компоненты на выходной сигнал снижается, а входной
переменной — увеличивается. В области высоких частот наоборот: сигнальная
компонента ослабляется, а шумовая — возрастает. Таким образом, сигма-дельта
модулятор формирует спектр шума, перенося большую часть его энергии в
высокочастотную область. Для большего ослабления сигнала за полосой
пропускания обычно используют фильтры более высокого порядка. То же самое, с
некоторыми оговорками, справедливо и для сигма-дельта модуляторов.
Используя в сигма-дельта модуляторе несколько интеграторов и суммато-
454 ров, можно достичь более высокой степени подавления шума квантования в
Для формирования выходного кода такого преобразователя необходимо
каким-либо образом преобразовать последовательность бит на выходе
компаратора в виде унитарного кода в последовательный или параллельный двоичный
позиционный код. В простейшем случае это можно сделать с помощью
двоичного счетчика. Возьмем в нашем примере 4-разрядный счетчик. Подсчет бит на
выходе компаратора за 16-тактный цикл дает число 13. Несложно увидеть, что
при FIN = 1 В на выходе компаратора всегда будет единица, что дает за цикл
число 16, т. е. переполнение счетчика. Напротив, при FIN= —1 В на выходе
компаратора всегда будет нуль, что дает равное нулю содержимое счетчика в конце
цикла. В случае если KIN= Ото, как это видно из Табл. 9.2, результат счета за
цикл составит 8ю или 10002. Это значит, что выходное число АЦП
представляется в смещенном коде. В рассмотренном примере верхняя граница полной
шкалы составит 11112, или +710, а нижняя — 00002, или -810. При FIN = 0.6 В, как
это видно из левой половины Табл. 9.2, содержимое счетчика составит 131Ов
смещенном коде, что соответствует +5. Учитывая, что +810 соответствует
FIN = 1 В, найдем 5-1/8 = 0.625 * 0.6 В.
При использовании двоичного счетчика в качестве преобразователя потока
битов, поступающих с выхода компаратора, необходимо выделять
фиксированный цикл преобразования, длительность которого равна произведению KC4-fc.
После его окончания должно производиться считывание результата,
(например, с помощью регистра-защелки) и обнуление счетчика. В этом случае с
точки зрения помехоподавляющих свойств сигма-дельта АЦП близки к АЦП
многотактного интегрирования. Более эффективно с этой точки зрения
применение в сигма-дельта АЦП цифровых фильтров с конечной импульсной
характеристикой (КИХ-фильтров).
Формирование спектра шума
Принцип формирования спектра шума квантования проще всего
поясняется на линейной непрерывной модели одноразрядного сигма-дельта модулятора
первого порядка (Рис. 9.19), структурная схема которого была показана на
Рис. 9.18.
Связь между изображениями относительных величин переменных этой
модели устанавливается уравнением [9.5]
9.5. Интегрирующие АЦП
полосе входного сигнала и большую эффективную разрядность для данного
коэффициента передискретизации, чем это обеспечивает сигма-дельта модулятор
первого порядка, как это видно из Рис. 9.20.
Рис. 9.19. Линейная непрерывная модель
сигма-дельта модулятора первого порядка
Рис. 9.20. Формирование спектра
шума сигма-дельта модуляторами
Блок-схема модулятора второго порядка показана на Рис. 9.21.
На Рис. 9.22 показана зависимость между порядком сигма-дельта
модулятора и коэффициентом передискретизации к, необходимыми для достижения
определенного отношения сигнал/шум SNR при преобразовании сигналов,
спектр которых лежит в звуковой области частот.
Рис. 9.21. Блок-схема сигма-дельта АЦП с
одноразрядным модулятором второго порядка
Рис. 9.22. Зависимость отношения
сигнал/шум SNR от коэффициента
передискретизации
Например, если к = 64, то идеальный сигма-дельта модулятор второго
порядка способен обеспечить SNR = 80 дБ. Это дает эффективную разрядность
приблизительно 13 бит. В этом случае никакая фильтрация не даст увеличения
полезной информации. Все дополнительные биты будут скрыты шумом
квантования независимо от методов последующей фильтрации.
Таким образом, для достижения широкого динамического диапазона при
широкой полосе частот и умеренном коэффициенте передискретизации
необходимы сигма-дельта модуляторы порядка выше второго. Модуляторы третьего
и более высокого порядка могут быть неустойчивы при некоторых значениях
входного сигнала, однако, принимая определенные схемотехнические меры,
удается в значительной мере снизить вероятность возникновения
неустойчивости. Кроме того, цифровой процессор сигналов (ЦПС), входящий в состав
цифрового фильтра АЦП, распознает начинающуюся неустойчивость и
предотвращает ее.
Примерами простейших сигма-дельта аудио-АЦП могут служить модели
CS5330A/31A фирмы Crystal Semiconductor. Эти двухканальные 18-разрядные
АЦП, выпускаемые в 8-выводном корпусе, снабжены однобитным модулято-
455
Глава 9. АНАЛОГО-ЦИФРОВЫЕ ПРЕОБРАЗОВАТЕЛИ
456
ром первого порядка и работают с коэффициентом передискретизации 128.
Отношение сигнал/шум у этих преобразователей составляет 80 дБ, поэтому
эффективная разрядность составляет только 13 бит, что явно недостаточно для
систем высококачественной звукозаписи. Гораздо лучшими характеристиками
обладает ИМС той же фирмы CS5396. Это 24-разрядный стереоАЦП с
трехуровневыми сигма-дельта модуляторами 7-го порядка. При работе этой схемы
типичное соотношение сигнал/шум SNR= 105 дБ, что по эффективной
разрядности соответствует работе 18-разрядного идеального АЦП. Подавление
сигнала цифровым фильтром за полосой пропускания составляет 120 дБ.
Смещение нуля отсутствует, т. к. цифровой фильтр обеспечивает эффективное
подавление сигналов с частотами ниже 1.8 Гц.
Другой пример: 20-разрядный стерео-АЦП РСМ1800 фирмы Burr-Brown с
одноразрядными модуляторами пятого порядка. Он работает с к = 64 и
обеспечивает соотношение сигнал/шум SNR = 95 дБ. Подавление сигнала за полосой
пропускания составляет всего 65 дБ. Более совершенная модель этой
фирмы РСМ1804 обеспечивает SNR = 110 дБ и подавление за полосой
пропускания 120 дБ.
Фирма Analog Devices выпускает 18-разрядный стерео-АЦП AD1879 с
одноразрядным модулятором 5-го порядка, работающий с к = 64 и обеспечивающий
SNR= 104 дБ. Эффективный цифровой фильтр подавляет сигнал за полосой
пропускания на 118 дБ. На Рис. 9.23 приведены зависимость спектральной
плотности шума от частоты на выходе модулятора этого АЦП (а) и АЧХ
цифрового фильтра (б).
Рис. 9.23. Частотные характеристики АЦП AD1879:
а — спектральная плотность шума на выходе модулятора АЦП,
б — АЧХ цифрового фильтра
Повышение быстродействия сигма-дельта модуляторов и увеличение
вычислительной мощности цифровых процессоров сигналов, входящих в состав
АЦП, расширяют области их применения. Например, 16-разрядный АЦП
AD7725 содержит сигма-дельта модулятор седьмого порядка, работающий с
тактовой частотой до 19.2 МГц, и цифровой процессор сигналов, способный
производить до 130 млн умножений с накоплением в секунду. Процессор
полностью программируется пользователем и может обеспечить реализацию ФНЧ,
ФВЧ, полосового и полосноподавляющего фильтров. Программируются также
9.5. Интегрирующие АЦП
коэффициенты передискретизации, децимации и формат выходных слов.
Микросхема может обеспечить полосу пропускания до 500 кГц при частоте выдачи
данных до 1.2 МГц. Этот АЦП может решать широкий круг задач, связанных с
обработкой сигналов.
Низкочастотные сигма-дельта АЦП высокого разрешения
для средств измерения
От этих АЦП, как правило, не требуется высокого быстродействия. Они
используются для точных измерений физических величин, медленно
изменяющихся в широком диапазоне, в том числе, для измерений в условиях
интенсивных промышленных помех. Типичными представителями этой группы
являются 16-разрядные AD7705/6/7, МАХ1400/1/2/3 и 24-разрядные
AD7710/14/30/31, ADC1216/18/40/41, LTC240x. Все они не имеют пропуска
кодов в рамках заявленной разрядности. Эффективное разрешение этих АЦП
ограничивается шумами и может быть увеличено путем увеличения периода
обновления данных, сужения полосы пропускания и др. Подобные АЦП
снабжаются 1-разрядными модуляторами первого или более высокого порядка.
В сигма-дельта АЦП, предназначенных для измерений, обычно
применяются цифровые фильтры с амплитудно-частотной характеристикой (АЧХ) вида
(siruc/xK. Передаточная функция такого фильтра в ^-области определяется
выражением
где М— целое число, которое задается программно и равно отношению
тактовой частоты модулятора к частоте отсчетов фильтра. (Частота отсчетов — это
частота, с которой обновляются данные.) Например, для АЦП AD7714 это
число может принимать значения 19...4000. В частотной области модуль
передаточной функции фильтра
(9.19)
На Рис. 9.24 приведен график
амплитудно-частотной характеристики цифрового
фильтра, построенной согласно выражению
(9.19) при/с= 38.4кГц и М= 192, что дает
значение частоты отсчетов, совпадающей с
первой частотой режекции фильтра АЦП,
Л=50Гц.
Сравнение этой АЧХ с АЧХ
коэффициента подавления помех в АЦП с двукратным
интегрированием (см. Рис. 9.14) показывает
значительно лучшие помехоподавляющие
свойства сигма-дельта АЦП.
В то же время применение цифрового
фильтра нижних частот в составе сиг-
Рис. 9.24. График
амплитудно-частотной характеристики
цифрового фильтра сигма-дельта АЦП
457
Глава 9. АНАЛОГО-ЦИФРОВЫЕ ПРЕОБРАЗОВАТЕЛИ
ма-дельта АЦП вместо счетчика вызывает переходные процессы при
изменении входного напряжения. Время установления цифровых фильтров с
конечной импульсной характеристикой, как следует из их названия, конечно, и
составляет для фильтра вида (sinx/xK четыре периода частоты отсчетов, а при
начальном обнулении фильтра — три периода.
Сравнение сигма-дельта АЦП с АЦП многотактного интегрирования
показывает значительные преимущества первых. Прежде всего, линейность
характеристики преобразования сигма-дельта АЦП выше, чем у АЦП многотактного
интегрирования равной стоимости. Это объясняется тем, что интегратор
сигма-дельта АЦП работает в значительно более узком динамическом диапазоне, и
нелинейность переходной характеристики усилителя, на котором построен
интегратор, сказывается значительно меньше. Емкость конденсатора интегратора
у сигма-дельта АЦП значительно меньше (десятки пФ), так что этот
конденсатор может быть изготовлен прямо на кристалле ИМС. Как следствие
сигма-дельта АЦП практически не имеет внешних элементов, что существенно
сокращает площадь, занимаемую им на плате, и снижает уровень внешних
шумов. В результате, например, 24-разрядный сигма-дельта АЦП LTC2400
изготавливается в виде однокристальной ИМС в 8-выводном корпусе, потребляет
1 мВт мощности и стоит примерно 7 $ США (дешевле микросхемы АЦП
CS5322 той же разрядности выпуска 1991 года примерно в 40 раз [9.7]), а
18-разрядный АЦП восьмитактного интегрирования HI-7159 потребляет 75 мВт и
стоит около 30 $. К тому же сигма-дельта АЦП начинает давать правильный
результат через 3 или 4 отсчета после скачкообразного изменения входного
сигнала, что при величине первой частоты режекции, равной 50 Гц, и 20-разрядном
разрешении составляет 6О...8Омс, а минимальное время преобразования АЦП
HI-7159 для 18-разрядного разрешения и той же частоты режекции составляет
140 мс. В настоящее время ряд ведущих в области аналого-цифровых ИМС
фирм, таких, как Analog Devices и Burr-Brown, прекратили производство АЦП
многотактного интегрирования, полностью перейдя в области
аналого-цифрового преобразования высокого разрешения на сигма-дельта АЦП.
Сигма-дельта АЦП высокого разрешения имеют развитую цифровую часть, включающую
микроконтроллер. Это позволяет реализовать режимы автоматической
установки нуля и самокалибровки полной шкалы, хранить калибровочные
коэффициенты и передавать их по запросу внешнего процессора.
9.5.3. Преобразователи напряжение — частота
На базе преобразователей напряжение — частота (ПНЧ) могут быть
построены интегрирующие АЦП, обеспечивающие относительно высокую
точность преобразования при низкой стоимости. Существует несколько видов
ПНЧ. Наибольшее применение нашли ПНЧ с заданной длительностью
выходного импульса. Структурная схема такого ПНЧ приведена на Рис. 9.25. По этой
схеме построена ИМС VFC-32 (отечественный аналог — 1108ПП1).
Работает ПНЧ следующим образом. Под действием положительного
входного сигнала KIN напряжение Vx на выходе интегратора И уменьшается. При
этом ключ S разомкнут. Когда напряжение Ки уменьшится до нуля, компаратор
458 КН переключается, запуская тем самым одновибратор. Одновибратор форми-
9.5. Интегрирующие АЦП
Рис. 9.25. Структурная схема ПНЧ с заданной
длительностью выходного импульса
Рис. 9.26. Схема
интегрирующего АЦП на базе ПНЧ
рует импульс стабильной длительности Тъ который управляет ключом.
Последовательность этих импульсов является выходным сигналом ПНЧ. На время
импульса ключ замыкается, и ток /REF в течение ГР поступает на вход
интегратора, вызывая увеличение выходного напряжения интегратора. Далее
описанный процесс снова повторяется.
Импульсы тока /REF уравновешивают ток, вызываемый входным
напряжением KIN. В установившемся режиме
Отсюда следует
(9.20)
где KIN(av) — среднее значение входного напряжения за период Т. Выражение
(9.20) показывает, что точность преобразования входного напряжения в период
(или в частоту) повторения импульсов одновибратора определяется точностью
установки опорного тока /REP точностью выдержки длительности импульса
одновибратора Гв а также точностью резистора R. Емкость конденсатора
интегратора не оказывает влияния на частоту ПНЧ.
Таким образом, по существу, ПНЧ преобразует входное напряжение в
унитарный код. Для его преобразования в двоичный позиционный можно
использовать счетчик. Схема интегрирующего АЦП на базе преобразователя ПНЧ
приведена на Рис. 9.26.
Двоичный счетчик подсчитывает число импульсов, поступивших от ПНЧ за
период Т$ = l//*s, задаваемый отсчетными импульсами, которыми содержимое
счетчика заносится в выходной регистр-защелку.
Вслед за этим происходит обнуление счетчика. Число импульсов п,
подсчитанных счетчиком за время Г8,
459
Здесь VjN(av) — среднее значение входного напряжения за весь период rs.
Можно заметно повысить точность ПНЧ, если вместо одновибратора
включить тактируемый импульсами стабильной частоты D-триггер. Несложно
убедиться (см. Рис. 9.18), что в этом случае ПНЧ превращается в одноразрядный
сигма-дельта модулятор.
Глава 9. АНАЛОГО-ЦИФРОВЫЕ ПРЕОБРАЗОВАТЕЛИ
9.6. Интерфейсы АЦП
9.6.1. Общие сведения
Важную часть аналого-цифрового преобразователя составляет цифровой
интерфейс, т. е. схемы, обеспечивающие связь АЦП с приемниками цифровых
сигналов и правила (протокол) обмена данными. Структура цифрового
интерфейса определяет способ подключения АЦП к приемнику выходного кода,
например, микропроцессору, микроконтроллеру или цифровому процессору
сигналов. Свойства цифрового интерфейса непосредственно влияют на уровень
верхней границы частоты преобразования АЦП.
Наиболее часто применяют способ связи АЦП с процессором, при котором
АЦП является для процессора как бы одной из ячеек памяти. При этом АЦП
имеет необходимое число адресных входов, дешифратор адреса и подключается
непосредственно к адресной шине и шине данных процессора. Для этого он
обязательно должен иметь выходные каскады с тремя состояниями.
Другое требование совместной работы АЦП с микропроцессорами,
называемое программным сопряжением, является общим для любых систем, в
которые входят ЭВМ и АЦП. Имеется несколько способов программного
сопряжения АЦП с процессорами. Рассмотрим основные из них.
Проверка сигнала преобразования. Этот способ состоит в том, что команда
начала преобразования «Пуск» периодически подается на АЦП от таймера.
Процессор находится в цикле ожидания от АЦП сигнала окончания
преобразования «Готов», после которого выходит из цикла, считывает данные с АЦП и в
соответствии с ними приступает либо к следующему преобразованию, либо к
выполнению основной программы, а затем вновь входит в цикл ожидания.
Здесь АЦП выступает в роли ведущего устройства (master), а процессор —
ведомого устройства (slave). Этот способ почти не требует дополнительной
аппаратуры, но пригоден только в системах, где процессор не слишком загружен, т. е.
длительность обработки данных от АЦП значительно меньше времени
преобразования АЦП. Указанный способ позволяет максимально использовать
производительность АЦП.
Если длительность обработки данных от АЦП заметно превышает время
преобразования АЦП, можно использовать вариант этого способа,
отличающийся тем, что сигнал «Пуск» поступает от процессора. Процессор выполняет
основную программу обработки данных, а затем считывает данные с АЦП и
вновь запускает его. В этом случае процессор выступает в роли ведущего
устройства, а АЦП — ведомого.
Простое прерывание. Выдав команду «Пуск», процессор продолжает работу
по основной программе. После окончания преобразования формируется
сигнал прерывания, который прерывает вычисления в процессоре и включает
процедуру поиска периферийного прибора, пославшего сигнал прерывания. Эта
процедура состоит в переборе всех периферийных устройств до тех пор, пока не
будет найден нужный. Преимущество этого способа по сравнению с
предыдущим проявляется в большем числе преобразований за одно и то же время, если
460 используемый АЦП работает медленно. Если же АЦП быстродействующий, то
9.6. Интерфейсы АЦП
этот способ работы может оказаться даже медленнее предыдущего, так как на
обработку прерывания требуется значительное время.
Векторное прерывание. Способ векторного прерывания отличается от
предыдущего тем, что вместе с сигналом прерывания посылается и адрес
программы обращения к данному АЦП. Следовательно, не нужно перебирать все
периферийные приборы.
Прямой доступ к памяти. Здесь также используется прерывание, но в
отличие от предыдущих двух способов, управление по системе прерывания
передается на специальный интерфейс, который и производит перезапись данных
преобразования в память, минуя регистры процессора. Это позволяет сократить
длительность прерывания до одного такта. Номера ячеек памяти хранятся в
адресном регистре интерфейса. Для этой цели выпускаются ИМС контроллеров
прямого доступа к памяти.
В зависимости от способа пересылки выходного слова из АЦП в цифровой
приемник различают преобразователи с последовательным и параллельным
интерфейсами выходных данных. Последовательный интерфейс медленнее
параллельного, однако, он позволяет осуществить связь с цифровым приемником
значительно меньшим количеством линий и в несколько раз сократить число
выводов ИМС. Поэтому обычно параллельный интерфейс используется в
параллельных и последовательно-параллельных АЦП, а последовательный — в
интегрирующих. В АЦП последовательного приближения применяются как
параллельный (например, 1108ПВ2), так и последовательный (например,
AD7893) интерфейсы. Некоторые АЦП последовательного приближения
(например, AD7892) имеют интерфейс обоих типов.
9.6.2. АЦП с параллельным интерфейсом
выходных данных
В простейших случаях, характерных для параллельных АЦП и
преобразователей ранних моделей, интерфейс осуществляется с помощью jV-разрядного
регистра хранения, имеющего три состояния выхода. Здесь N — разрядность
АЦП. На Рис. 9.27 представлена функциональная схема такого АЦП (а) и
временные диаграммы работы интерфейса (б).
Рис. 9.27. АЦП с параллельным интерфейсом:
а — функциональная схема, б — временные диаграммы
работы интерфейса
461
Глава 9. АНАЛОГО-ЦИФРОВЫЕ ПРЕОБРАЗОВАТЕЛИ
На нарастающем фронте сигнала «Пуск» УВХ преобразователя переходит в
режим хранения и инициируется процесс преобразования. Когда
преобразование завершено, на выходную линию «Готов» выводится импульс, что указывает
на то, что в выходном регистре АЦП находится новый результат. Сигналы «CS»
(Выбор кристалла) и «RD» (Чтение) управляют выводом данных для передачи
приемнику
Для того чтобы упростить связь многоразрядного (N> 8) АЦП с
8-разрядным микропроцессором или микроконтроллером, в некоторых ИМС
(например, МАХ167) реализована побайтовая выдача выходного слова. Если сигнал
«HBEN», управляющий режимом вывода, имеет низкий уровень, то старшие
биты выходного слова поступают на соответствующие им выводы (для
12-разрядного АЦП на выводы D08...D011). В противном случае они подаются на
выводы, соответствующие младшему байту (для 12-разрядного АЦП на выводы
DO0...DO3).
9.6.3. АЦП с последовательным интерфейсом
выходных данных
В АЦП последовательного приближения, оснащенных простейшей
цифровой частью, таких, как 12-разрядный МАХ 176 или 14-разрядный МАХ121,
выходная величина может быть считана в виде последовательного кода прямо с
компаратора или регистра последовательного приближения (РПП), как это
указано в п. 9.4.2. На Рис. 9.28 представлена функциональная схема такого
интерфейса и временные диаграммы его работы.
462
Рис. 9.28. Простейший последовательный SPI-интерфейс
а — функциональная схема интерфейса, б — временные
диаграммы работы
Здесь приведена схема, реализующая SPI-интерфейс. Процессор является
ведущим (master). Он инициирует начало процесса преобразования задним
положительным фронтом (срезом) сигнала на входе «Пуск» АЦП. С тактового
выхода процессора на синхровход АЦП поступает последовательность
тактовых импульсов. Начиная со второго такта после пуска на выходе данных
АЦП формируется последовательный код выходного слова старшими битами
вперед. Этот сигнал поступает на MISO (master—input, slave—output) вход
процессора.
Простейший интерфейс обеспечивает наименьшее время цикла
«преобразование—передача данных». Однако он обладает двумя существенными
недостатками. Во-первых, переключение выходных каскадов АЦП во время преобра-
9.6. Интерфейсы АЦП
зования привносит импульсную помеху в аналоговую часть преобразователя,
что вызывает ухудшение отношения сигнал/шум (например, для АЦП AD7893
среднеквадратическое значение шума при передаче данных во время
преобразования почти в три раза больше, чем при считывании данных после
преобразования). Во-вторых, если АЦП имеет большое время преобразования, то
процессор будет занят приемом информации от него существенную часть
вычислительного цикла. По этим причинам современные модели АЦП с
последовательной передачей выходных данных оснащаются выходным сдвиговым
регистром, в который загружается результат преобразования из РПП.
Временные диаграммы такого интерфейса приведены на Рис. 9.29.
Рис. 9.29. Временные диаграммы последовательного
интерфейса с передачей данных по окончании преобразования
По переднему фронту сигнала «Пуск» УВХ переходит в режим хранения и
начинается преобразование. При этом на соответствующем выводе АЦП
выставляется сигнал «Занят». По окончании преобразования начинается
передача данных. Процессор подает на синхровход АЦП последовательность
синхроимпульсов CLK. Если 8<ЛГ<6, то число синхроимпульсов обычно
составляет 16. При iV< 16 вначале вместо отсутствующих старших битов
передаются нули, а затем выходное слово старшими битами вперед. До и после
передачи данных выходная линия АЦП* находится в высокоимпедансном
(третьем) состоянии.
Увеличение длительности цикла «преобразование—передача данных» по
сравнению с простейшим интерфейсом обычно несущественно, так как
синхроимпульсы могут иметь большую частоту. Например, для 12-разрядного АЦП
последовательного приближения AD7896 минимальный интервал между
отсчетами составляет 10 мкс. Из них последовательное чтение данных занимает
только 1.6 мкс при частоте синхросигнала 10 МГц.
9.6.4. Последовательный интерфейс
сигма-дельта АЦП с процессорами
Последовательный интерфейс сигма-дельта АЦП с процессорами аппарат-
но реализуется очень просто. Например, для связи 24-разрядного трехканаль-
ного АЦП AD7714 с микроконтроллером 80С51 в простейшем случае требуется
всего две линии интерфейса 12С (Рис. 9.30). 463
Глава 9. АНАЛОГО-ЦИФРОВЫЕ ПРЕОБРАЗОВАТЕЛИ
Рис. 9.30. Подключение
сигма-дельта АЦП к
микроконтроллеру
семейства MCS51 через шину I2C
АЦП управляется при помощи нескольких
внутренних регистров. Это — регистр обмена, регистр
режима, два регистра фильтра, три регистра
калибровки нуля шкалы, три регистра калибровки полной
шкалы и регистр данных. Данные в эти регистры
записываются через последовательный интерфейс;
этот же интерфейс позволяет также считывать
данные из указанных регистров. Любое обращение к
любому регистру должно начинаться с операции записи
в регистр обмена. После включения питания или
сброса АЦП ожидает записи в регистр обмена.
Данные, записываемые в этот регистр, определяют тип следующей операции
(чтение или запись), а также к какому регистру будет идти обращение. Программа
взаимодействия микроконтроллера с АЦП включает следующую
последовательность операций:
• запись в регистр обмена: задается входной канал;
• запись в верхний регистр фильтра: устанавливаются 4 старших бита слова
фильтра, а также устанавливается биполярный/униполярный режим и длина
выходного слова;
• запись в нижний регистр фильтра: устанавливаются 8 младших битов слова
фильтра;
• запись в регистр режима: устанавливается коэффициент усиления,
инициируется автокалибровка;
• опрашивается сигнал, указывающий на наличие в регистре данных нового
результата преобразования;
• чтение результата из регистра данных;
• циклический повтор действий 5 и 6, пока не будет считано заданное число
отсчетов.
464
9.7. Параметры АЦП
При последовательном
возрастании значений входного
аналогового сигнала Vw(t) от 0
до величины, соответствующей
полной шкале АЦП FFS,
выходной цифровой сигнал D{t)
образует ступенчатую
кусочно-постоянную линию. Такую
зависимость по аналогии с ЦАП
называют обычно
характеристикой преобразования АЦП. В
отсутствие аппаратных
погрешностей средние точки ступенек
расположены на идеальной
прямой 1 (Рис. 9.31), которой соответствует идеальная характеристика
преобразования. Реальная характеристика преобразования может существенно отличать-
Рис. 9.31. Характеристика преобразования АЦП
9.7. Параметры АЦП
ся от идеальной размерами и формой ступенек, а также расположением на
плоскости координат. Для количественного описания этих различий
существует целый ряд параметров.
9.7.1. Статические параметры
Разрешающая способность — величина, обратная максимальному числу
кодовых комбинаций на выходе АЦП. Разрешающая способность выражается в
процентах, разрядах или децибелах и характеризует потенциальные
возможности АЦП с точки зрения достижимой точности преобразования непрерывной
величины в цифровой код. Например, 12-разрядный АЦП имеет разрешающую
способность 1/4096, или 0.0245% от полной шкалы, или —72.2 дБ.
Разрешающей способности соответствует приращение входного
напряжения АЦП KIN при изменении Dj на 1 LSB. Это приращение является шагом
квантования. Для двоичных кодов преобразования номинальное значение шага
квантования h— Vfs/(^N~ 1)> гДе ^fs ~~ номинальное максимальное входное
напряжение АЦП (напряжение полной шкалы), соответствующее
максимальному значению выходного кода, N — разрядность АЦП. Чем больше
разрядность преобразователя, тем выше его разрешающая способность.
Погрешность полной шкалы — относительная разность между реальным и
идеальным значениями предела шкалы преобразования при отсутствии
смещения нуля:
Эта погрешность является мультипликативной составляющей полной
погрешности. Иногда выражается соответствующим числом LSB.
Погрешность смещения нуля — значение FIN, когда входной код ЦАП равен
нулю. Является аддитивной составляющей полной погрешности. Обычно
определяется по формуле
где KjN 01 — значение входного напряжения, при котором происходит переход
выходного кода из лог. 0 в лог. 1. Часто указывается в милливольтах или в
процентах от полной шкалы:
Погрешности полной шкалы и смещения нуля АЦП могут быть уменьшены
либо подстройкой аналоговой части схемы, либо коррекцией вычислительного
алгоритма цифровой части устройства.
Погрешности линейности характеристики преобразования не могут быть
устранены такими простыми средствами, поэтому они являются важнейшими
метрологическими характеристиками АЦП.
465
Глава 9. АНАЛОГО-ЦИФРОВЫЕ ПРЕОБРАЗОВАТЕЛИ
Нелинейность — максимальное отклонение реальной характеристики
преобразования /)(KIN) от оптимальной (линия 2 на Рис. 9.31). Оптимальная
характеристика представляет собой прямую линию и находится эмпирически так,
чтобы минимизировать значение погрешности линейности. Нелинейность
Рис. 9.32. Характеристика преобразования АЦП
с пропаданием кодов
обычно определяется в относительных единицах, но в справочных данных
приводится также и в единицах LSB. Для характеристики, приведенной на Рис. 9.32
466
Погрешность дифференциальной линейности определяет два важных
свойства АЦП: непропадание кодов и монотонность характеристики
преобразования. Непропадание кодов — свойство АЦП выдавать все возможные выходные
коды при изменении входного напряжения от начальной до конечной точки
диапазона преобразования. Пример пропадания кода / +1 приведен на
Рис. 9.32.
При нормировании непропадания кодов указывается эквивалентная
разрядность АЦП — максимальное количество разрядов АЦП, для которых не
пропадают соответствующие им кодовые комбинации.
Монотонность характеристики преобразования — это неизменность знака
приращения выходного кода D при монотонном изменении входного преобра-
Дифференциааьной нелинейностью АЦП в данной точке к характеристики
преобразования называется разность между значением кванта преобразования
hk и средним значением кванта преобразования А. В спецификациях на
конкретные АЦП значения дифференциальной нелинейности выражаются в долях
LSB или процентах от полной шкалы. Для характеристики, приведенной на
Рис. 9.32,
9.7. Параметры АЦП
зуемого сигнала. Монотонность не гарантирует малых значений
дифференциальной нелинейности и непропадания кодов.
Температурная нестабильность АЦП характеризуется температурными
коэффициентами погрешности полной шкалы и погрешности смещения нуля.
9.7.2. Динамические параметры
Возникновение динамических погрешностей связано с дискретизацией
сигналов, изменяющихся во времени. Можно выделить следующие параметры
АЦП, определяющие его динамическую точность.
Максимальная частота дискретизации (преобразования) — это наибольшая
частота, с которой происходит образование выборочных значений сигнала, при
которой выбранный параметр АЦП не выходит за заданные пределы.
Измеряется числом выборок в секунду. Выбранным параметром может быть,
например, монотонность характеристики преобразования или погрешность
линейности.
Время преобразования (tc) — это время, отсчитываемое от начала импульса
дискретизации или начала преобразования до появления на выходе
устойчивого кода, соответствующего данной выборке. Для одних АЦП, например,
последовательного счета или многотактного интегрирования, эта величина является
переменной, зависящей от значения входного сигнала, для других, таких, как
параллельные или последовательно-параллельные АЦП, а также АЦП
последовательного приближения, примерно постоянной. При работе АЦП без УВХ
время преобразования является апертурным временем.
Время выборки (стробирования) — время, в течение которого происходит
образование одного выборочного значения. При работе без УВХ равно времени
преобразования АЦП.
9.7.3. Шумы АЦП
В идеале повторяющиеся преобразования фиксированного постоянного
входного сигнала должны давать один и тот же выходной код. Однако
вследствие неизбежного шума в схемах АЦП существует некоторый диапазон
выходных кодов для заданного входного напряжения.
Если подать на вход АЦП постоянный
сигнал и записать большое число
преобразований, то в результате получится
некоторое распределение кодов. Если подогнать
гауссовское распределение к полученной
гистограмме, то стандартное отклонение
будет примерно эквивалентно среднеквад-
ратическому значению входного шума
АЦП. В качестве примера на Рис. 9.33
приведена гистограмма результатов 5000
преобразований постоянного входного сигнала,
выполненных 16-разрядным двухтактным
последовательно-параллельным АЦП AD7884.
(х-2) (х-1) (х) (х+1) (х + 2) (х + 3)Код
Рис. 9.33. Гистограмма результатов
преобразования АЦП AD7884
467
Глава 9. АНАЛОГО-ЦИФРОВЫЕ ПРЕОБРАЗОВАТЕЛИ
Входное напряжение из диапазона ±5 В было установлено по возможности
ближе к центру кода. Как видно из гистограммы, все результаты
преобразований распределены на шесть кодов. Среднеквадратическое значение шума,
соответствующее этой гистограмме, равно 120 мкВ. Этот шум в АЦП генерируется
резисторами (тепловой шум) и ключами. Кроме того, имеется остаточный шум
квантования, который не удален цифровым фильтром. Распределение шума
обычно гауссово, поэтому может быть определена величина среднеквадратиче-
ского отклонения шума.
Для характеристики уровня шума используется понятие эффективной
разрешающей способности, иногда называемой эффективной разрядностью (ENOB).
Примечательно, что, как правило, ENOB используется для характеристики
динамической эффективности высокоскоростных АЦП при преобразовании ими
сигналов переменного тока и гораздо реже в отношении низкочастотных
сигма-дельта АЦП.
Эффективная разрешающая способность высокоскоростных АЦП
определена следующим уравнением
где VFS — входное напряжение полной шкалы АЦП, KN —
среднеквадратическое отклонение шума.
Эффективная разрешающая способность АЦП высокой разрядности может
быть много ниже номинальной. Так, у 24-битного сигма-дельта АЦП AD7714
при частоте выходных отсчетов 50 Гц и максимальном усилении входного
сигнала входным усилителем эффективная разрешающая способность составляет
только 15.5 бит.
9.7.4. Параметры, характеризующие
качество преобразования сигналов
переменного тока
Эти характеристики имеют особое значение для скоростных АЦП,
применяемых чаще всего в системах телекоммуникации, а также для аудио-АЦП.
Отношение сигнал/шум (SNR) — это отношение среднеквадратического
значения входного сигнала к среднеквадратическому значению шума, который
определяется как сумма всех остальных спектральных компонент, исключая
постоянную составляющую и высшие гармоники, для входного сигнала,
имеющего уровень — 1 дБ от полной шкалы. Для идеального АЦП справедлива
формула: SNR= F.02АГ + 1.76) дБ, где N — разрядность АЦП. Например, для
идеального 12-разрядного АЦП получаем SNR = 74 дБ.
Отношение сигнал/(шум + искажения) (SINAD) по смыслу мало отличается
от рассмотренного выше отношения сигнал/шум (SNR) за исключением
добавленных искажений — важных при конструировании аудио- и радиотехники.
Сигнал — это среднеквадратическое значение основной гармоники.
468 (Шум + искажения) — это среднеквадратическое значение суммы всех осталь-
9.7. Параметры АЦП
где Vj — среднеквадратическое значение основной гармоники, a V2...Vt —
среднеквадратические значения гармоник от второй до /-й. Обычно / = 6 или 9.
Динамический диапазон, свободный от паразитных составляющих (SFDR), —
это выраженная в дБ разность между среднеквадратическими значениями
основной составляющей входного сигнала и максимальной паразитной
составляющей (максимальной гармоникой или шумовой компонентой).
Интермодуляционные искажения (IMD). Когда на вход АЦП подается
сигнал, представляющий собой сумму двух синусоид с разными частотами,/, и/ь,
то вследствие нелинейности характеристики преобразования, в выходном коде
будут присутствовать составляющие с суммарными и разностными частотами
mfa + nfbi где аи, я = О, 1, 2, 3... Интермодуляционными членами называются те,
для которых ни т, ни п не равны нулю. Например, члены второго порядка это
(fa +Л) и (fa -fi), а члены третьего порядка — это B/в +fb), Bfa -fb), (fa + 2fb) и
(fa - 2Л). Если АЦП тестируется с использованием международного стандарта
CCIF, то на его вход подаются две синусоиды с частотами вблизи верхней
граничной частоты входного сигнала. В этом случае частоты членов 2-го и 3-го
порядка имеют существенно различные значения. Члены 2-го порядка обычно
значительно отстоят по частоте от входных синусоид, тогда как частоты членов
3-го порядка обычно близки к входным частотам. Вследствие этого члены 2-го
и 3-го порядка в спецификациях указываются отдельно. IMD вычисляется
аналогично TND и равно отношению среднеквадратических значений суммы
отдельных интермодуляционных искажений к среднеквадратическому значению
основной гармоники, выраженному в дБ.
В Табл. 9.3 приведены важнейшие характеристики некоторых типов
аналого-цифровых преобразователей и систем сбора данных. 469
ных составляющих вплоть до 1/2 частоты дискретизации, кроме основной
гармоники и постоянной составляющей. Отношение зависит от числа уровней
квантования в процессе преобразования: чем больше уровней, тем меньше шум
квантования. Теоретически отношение S/(N + D) для идеального АЦП можно
оценить по формуле, аналогичной SNR.
Количество эффективных разрядов (ENOB). Если основным источником
погрешности являются только собственные шумы АЦП, то количество
эффективных разрядов ЛГ определяется формулой (9.18). При преобразовании
высокочастотных сигналов правильнее воспользоваться выражением
где SINAD — это реальное значение отношения сигнал/(шум + искажения) для
конкретного АЦП. Необходимо заметить, что большое влияние на этот
параметр оказывают динамические характеристики АЦП (максимальная скорость
нарастания, время выборки УВХ и т. п.), которые делают ENOB сильно
зависимым от частоты входного сигнала, т. к. с ростом частоты входного сигнала
увеличиваются искажения.
Суммарный коэффициент гармоник (THD) — это отношение
среднеквадратическое) значения суммы гармоник к среднеквадратическому значению
основной гармоники, выраженное в децибелах. Определяется по формуле
Глава 9. АНАЛОГО-ЦИФРОВЫЕ ПРЕОБРАЗОВАТЕЛИ
Таблица 9.3. Основные параметры аналого-цифровых преобразователей
Примечание
АЦП широкого применения
572ПВ1
12
Нет
110
Парал.
Нет
+5...15
120
Требуются внешние ОУ
1108ПВ2
12
Нет
Парал.
Есть
5;-6
1300
Последовательного
приближения (ПП)
МАХ114
Есть
0.66
Парал.
Нет
+5
40
Двухступенчатый. Дежур.
режим — 5 мкВт
AD7893
12
Есть
Поел.
Нет
+5
30
8-выводной корпус. ПП
AD7882
16
Есть
2.5
Парал.
Есть
±5
200
Автокалибровка, дежур. режим
-1мВт
МАХ186
12
Есть
7.5
Поел. Есть 5; ±5 7.5
ПП. Дежур. режим — 10 мкВт
Микромощные АЦП
572ПВЗ
Нет
7.5
Парал.
Нет
20
МАХ1110
Есть
16
Поел.
Есть
2J...5
0.7
ПП. Дежур. режим — 5 мкВт
AD7888
12
Есть
Поел.
Есть
2.7...5
ПП. Дежур. режим — 3 мкВт
МАХ195
16
Есть
9.4
Поел.
Нет
±5
80
Автокалибровка, дежур. режим
-0.1мВт
МАХ1299
12
Есть
1000 Поел. Есть 2.7...3.6 0.7
Встроен, темпер, датчик
Быстродействующие АЦП
1107ПВ4
Нет
0.03
A00)*
Парал.
Нет
+5, -5.2
3500
Параллельный
AD9054
Есть
B00)*
Парал.
Есть
500
Параллельный, ТТЛ уровни вы
хода
МАХ108
Есть
A500)*
Парал.
Нет
±5
4200
Параллельный, ЭСЛ уровни
выхода
AD9070
10
Есть
A00)*
Парал.
Есть
-5
700
Двухступенчатый, ЭСЛ уровни
выхода
AD9224
12
Есть
D0)*
Парал.
Есть
390
Четырехступенчатый
AD6644
14
Есть
F5)*
Парал. Есть
1300
Конвейерный
Интегрирующие АЦП
572ПВ5
3.5„
A2)
Парал.
Есть
15
Управление семисегментными
ЖКИ
TLC7135
4.5,,
C)
BCD
Нет
±5
Мультиплексированный
BCD-выход. Вх. ток 1 пА
МАХ132
18
A00)
Поел.
Нет
0.6
Многотактного
интегрирования
AD7715
16
B0...500)
Поел.
Нет
3 или 5
Сигма-дельта, автокалибровка
AD7714
24
A0... 1000)
Поел.
Нет
3 или 5
Сигма-дельта, автокалибровка
AD9260
16
Нет
B.5)
Поел.
Есть
2J...5.5
375
Многобитный сигма-дельта.
470
LTC2400
24
E0)
Поел.
Нет
2.7...5.5
В корпусе SO-8. Внутренний
тактовый генератор
9.8. Применение АЦП
Продолжение таблицы 9.3
Примечание
Системы сбора данных
572ПВ4 8 8 Нет
25
Парал.
Нет
15
FIFO 8x8 бит
AD1B60
16
E...100)
Поел.
Есть
±5
300
ПНЧ с микропроцессором,
ЭСППЗУ команд
LM12458
13
Есть
@.09)*
Парал.
Есть
30
FIFO 32x16 бит,
автокалибровка
ADS7870
12
Нет
@.05)*
Поел.
Есть
2.7...5.5
8.5
Проф. К =1,2, 4, 5, 8, 10,20
МАХ180
12
Есть
8.33
Парал.
Есть
+5;-12
155
TLV2548
12
Есть
@.2)*
Поел.
Есть
2J...5.5
4.5
FIFO 8x12 бит
ADuC812
12
Есть
Поел.
Парал.
Есть
3 или 5
36
MCS-51 контроллер, два
12-разрядных ЦАП
15 х 106 преобразований в секунду.
9.8. Применение АЦП
9.8.1. Системы сбора данных
Постепенное усложнение АЦП, появление многоканальных АЦП, АЦП со
встроенным устройством выборки—хранения, АЦП со сложной цифровой
частью привело к тому, что сейчас имеются законченные однокристальные
системы сбора данных, обеспечивающие преобразование в цифровой код сигналов,
поступающих от многих датчиков и передачу их на микроЭВМ. Структурная
схема развитой системы сбора данных приведена на Рис. 9.34. Основу системы
составляет АЦП, обычно АЦП последовательного приближения.
Рис. 9.34. Структурная схема системы сбора данных
(УПК — усилитель с программируемым коэффициентом усиления,
УВХ — устройство выборки-хранения, ИОН — источник опорного
напряжения, ШД — шина данных)
471
Глава 9. АНАЛОГО-ЦИФРОВЫЕ ПРЕОБРАЗОВАТЕЛИ
Чтобы уменьшить число корпусов ИМС, необходимых для создания
системы сбора данных, в схему встроены УВХ и источник опорного напряжения. Для
подключения к нескольким источникам входных аналоговых сигналов
используется аналоговый мультиплексор. Чтобы сократить частоту прерываний
главного процессора некоторые системы сбора данных снабжаются оперативным
запоминающим устройством типа FIFO (first input — first output, первый вошел
— первый вышел). Измерительный усилитель с программируемым
коэффициентом усиления УПК, входящий в систему, меняет свой коэффициент усиления
по команде от схемы управления. Это позволяет выровнять диапазоны
аналоговых сигналов с различных входов.
Схема управления может включать оперативное запоминающее устройство
(ОЗУ), в которое загружается от главного процессора блок рабочих команд.
Эти команды содержат сведения о том, какие операционные режимы
использовать, какие из входных каналов должны быть однопроводными
(несимметричными), а какие объединяться с образованием дифференциальных пар,
насколько часто и в каком порядке следует производить выборку для каждого канала.
Встроенный в систему сбора данных цифровой таймер определяет темп
преобразования АЦП.
Характерным примером системы сбора данных является микросхема
AD7581 (отечественный аналог — 572ПВ4), содержащая 8-входовый
аналоговый мультиплексор, 8-разрядный АЦП последовательного приближения, и
запоминающее устройство FIFO с организацией 8x8 бит. Другой пример —
микросхема AD1B60, включающая 8-входовый аналоговый мультиплексор,
измерительный усилитель с программируемым коэффициентом усиления от
1 до 128, 16-разрядный АЦП на основе интегрирующего ПНЧ, ИОН,
микропроцессор, ОЗУ режима и ПЗУ конфигурации. Одной из наиболее развитых
является система сбора данных LM12458, которая содержит 8-входовый
аналоговый мультиплексор, УВХ, 13-разрядный АЦП последовательного
приближения, память типа FIFO с организацией 32x16 бит, ОЗУ команд и
16-битный цифровой таймер.
В 1999 году фирма Analog Devices начала производство новой
разновидности однокристальных систем сбора данных под зарегистрированной торговой
маркой MicroConverter™. Эти системы включают многоканальный АЦП, один
или два ЦАП и микроконтроллер с флэш-памятью. Отличие их от обычных
миьфоконтроллеров, снабженных внутренними АЦП и ЦАП, имеющими, как
правило, низкие характеристики, состоит в том, что за счет приоритета,
отданного при проектировании микросхемы АЦП и ЦАП, и снижения влияния
цифровой части на работу аналоговых схем, разработчикам удалось добиться
сочетания высоких точностных характеристик преобразователей с возможностью
непосредственной обработки получаемой информации [9.8]. Первой
микросхемой семейства, запущенной в серийное производство, является ADuC812.
Архитектура ее представлена на Рис. 9.35.
Микросхема состоит из двух частей: цифровой и аналоговой.
Рассмотрим структуру аналоговой части. Восемь аналоговых входов
соединены с мультиплексором. На выходе мультиплексора включено УВХ,
фиксирующее значение аналогового сигнала на выбранном входе на время
преобразования АЦП последовательного приближения. В аналоговую часть также входят
472 два 12-разрядных ЦАП с выходными буферными усилителями, ИОН на 2.5 В
9.8. Применение АЦП
Рис. 9.35. Блок-схема микроконвертора ADuC812
и датчик температуры, позволяющий, хоти и косвенно, следить за температурой
окружающей среды, например, для того, чтобы ввести компенсацию
температуры холодного спая термопары, которая может быть подключена к одному из
аналоговых входов.
Интерфейсом между аналоговой и цифровой частями служат регистры
управления и калибровки. Цифровая часть состоит из ядра микроконтроллера,
полностью совместимого по системе команд с микроконтроллерами семейства
MCS-51, блока памяти и набора дополнительных периферийных устройств.
АЦП последовательного приближения может работать в режимах как
единичных, так и непрерывных преобразований, с максимальной скоростью
200 кПс. Для сохранения результатов преобразований используется либо режим
прерываний, либо режим прямого доступа к памяти, позволяющий сохранять
результаты преобразования во внешнем ОЗУ с адресуемым пространством 16
Мбайт. Все режимы работы АЦП определяются тремя регистрами управления,
находящимися во внутренней памяти микроконтроллера. Результаты
преобразования считываются из двух регистров, один из которых показывает номер
канала мультиплексора и 4 старших бита результата, а второй — 8 младших бит
результата.
ЦАП обслуживаются одним регистром управления и четырьмя регистрами
данных. Обновление информации на выходе ЦАП может происходить отдельно
для каждого из них либо одновременно. Время установления не превышает
4 мкс.
Контроллер микросхемы имеет дополнительные последовательные порты,
позволяющие просто организовать последовательный интерфейс RS-232 и
3-проводный последовательный интерфейс SPI.
Более поздняя модель семейства ADuC824 оптимизирована для
использования в составе интеллектуальных датчиков и содержит вместо 8-канального
473
Глава 9. АНАЛОГО-ЦИФРОВЫЕ ПРЕОБРАЗОВАТЕЛИ
12-разрядного АЦП два сигма-дельта АЦП, один из которых имеет
24-разрядное, а другой 16-разрядное разрешение. Этот микроконвертор содержит один
12-разрядный прецизионный ЦАП с выходом по напряжению.
Параметры некоторых моделей систем сбора данных приведены в Табл. 9.3.
9.8.2. Кодеки
Современные средства обработки и передачи аналоговых сигналов, такие,
как системы обработки речи, беспроводная и проводная связь должны
содержать в своем составе аналого-цифровые и цифроаналоговые преобразователи,
цифровые процессоры сигналов и фильтры. При современном развитии
микросхемотехники естественно разместить если не все, то хотя бы часть
перечисленных устройств, на одном кристалле. Устройства, в состав которых входят
АЦП и ЦАП, а также схемы аналогового и цифрового интерфейса называют
кодеками (КОдер/ДЕКодер).
Одним из важнейших применений кодеков является телефонная связь.
Любая автоматическая телефонная станция (АТС) соединяется с пользователями
(абонентами) с помощью телефонных линий связи (чаще всего проводных).
Исторически сложилось так, что большинство имеющегося абонентского
телефонного оборудования выдает в линию аналоговый сигнал. Но по
соображениям стоимости, надежности и качества сегодня нецелесообразно коммутировать
внутри АТС и передавать между АТС аналоговые сигналы. Поэтому аналоговый
сигнал передается только до входных клемм абонентской линии АТС, а далее он
преобразуется в цифровую форму с помощью так называемого абонентского
комплекта, в который входят интерфейс телефонной линии и речевой
кодек-фильтр. Назначение интерфейса телефонной линии — питание, защита,
подача вызывного напряжения и тестирование линии и системы. Кодек
предназначен для осуществления импульсно-кодовой модуляции (ИКМ) сигналов.
В число важнейших функций кодека входят:
• кодирование и декодирование, т. е. аналого-цифровое и цифро-аналоговое
преобразование;
• понижение уровня шумов квантования;
• коррекция частотной характеристики;
• программирование коэффициентов передачи;
• интерфейс с ИКМ-линиями.
В простейшем случае кодек включает входной и выходной усилители,
полосовые фильтры, ЦАП и АЦП, схемы цифрового интерфейса и управления
(Рис. 9.36).
474 Рис» 9.36. Блок-схема кодека
9.8. Применение АЦП
В кодеках, предназначенных для телефонии, при аналого-цифровом
преобразовании производится компандирование (сжатие/расширение
динамического диапазона), позволяющее повысить качество передачи речевого сигнала
8-битным кодом. Например, кодек М5156 фирмы Mostek преобразует
8-разрядные коды в аналоговые сигналы с 13-разрядным разрешением. Большими
возможностями обладают так называемые речевые процессоры (аудиопроцессо-
ры), которые содержат дополнительно цифровые процессоры сигналов. Фирма
Texas Instruments выпускает несколько моделей микросхем аудиопроцессоров, в
том числе TWL1103, кодирующий аналоговый сигнал с частотой выборок 8 кГц
со сжатием и способный преобразовывать 8-битный код в аналоговый сигнал с
15-битным разрешением.
9.8.3. Измерение энергии
Электромеханические счетчики электроэнергии, популярные более 50 лет, в
настоящее время вытесняются электронными счетчиками, которые имеют
более высокую точность и гибкость. Электронные счетчики позволяют
оплачивать энергию по многотарифной системе, дистанционно контролировать
расход электроэнергии. Современная технология позволяет изготавливать
однокристальные счетчики энергии, сочетающие высокую надежность с
низкой стоимостью.
Рассмотрим основные принципы измерения электрической энергии
(активной мощности). Активная мощность, потребляемая нагрузкой переменного
тока, определяется как среднее за период значение мгновенной мощности,
представляющей, в свою очередь, произведение мгновенных значений
напряжения на нагрузке и тока через нее:
При синусоидальных напряжении и токе
(9.21)
(9.22)
формула (9.21) дает
причем coscp — коэффициент мощности, определяемый свойствами нагрузки.
Энергия, потребляемая нагрузкой за время /, вычисляется как интеграл от
мгновенной мощности, взятый в пределах от нуля до V.
475
Глава 9. АНАЛОГО-ЦИФРОВЫЕ ПРЕОБРАЗОВАТЕЛИ
Один из первых интегральных счетчиков энергии AD7750 осуществляет
аналого-цифровое преобразование мгновенных значений тока и напряжения и
вычисление текущего значения активной мощности
Блок-схема этой ИМС приведена на Рис. 9.37.
476
Рис. 9.37. Блок-схема внутренней структуры ИМС измерителя активной
мощности AD7750
Устройство имеет два входа. Дифференциальное напряжение между
выводами VI + и VI-пропорционально мгновенному значению тока. Оно обычно
снимается с вторичной обмотки измерительного трансформатора тока,
первичная обмотка которого включена последовательно с нагрузкой. AD7750
использует архитектуру с коммутируемыми конденсаторами, что позволяет принимать
и преобразовывать биполярные сигналы при однополярном (+5 В) питании
микросхемы. Входное напряжение проходит через усилитель с
программируемым коэффициентом усиления (УПК), который может быть установлен
равным 1 или 16. С выхода УПК сигнал подается на 16-разрядный сигма-дельта
модулятор второго порядка с частотой выборки 900 кГц. Последовательный
поток данных пропускают через цифровой ФВЧ, чтобы удалить постоянную
составляющую сигнала. Этот фильтр вносит опережение по фазе 2.58° на частоте
50 Гц. Поэтому после него включается элемент задержки для компенсации
этого сдвига.
Дифференциальное напряжение, приложенное между входами V2+ и V2-,
пропорционально мгновенному значению напряжения на нагрузке (в
соответствующем масштабе). Этот сигнал пропускают через усилитель с
коэффициентом 2 и второй сигма-дельта модулятор. Мгновенные значения тока и
напряжения перемножаются в цифровой форме, в результате чего получается
мгновенная мощность. Текущее значение активной мощности получаем,
фильтруя мгновенную мощность цифровым фильтром нижних частот.
9.8. Применение АЦП
Преобразователи код-частота (ПКЧ) преобразуют текущее значение кода в
относительно низкую частоту противофазных импульсов на выходах F1 и F2.
Низкая частота определяет длительное время накопления информации между
импульсами, поэтому выходная частота пропорциональна средней активной
мощности. Эта информация о средней активной мощности, в свою очередь,
может быть накоплена (проинтегрирована) с помощью электромеханического
счетчика или шагового двигателя. В результате показания счетчика
оказываются пропорциональными потребленной энергии. Ширина выходных импульсов
ПКЧ составляет 275 мс, а диапазон частот — 0...1.8 Гц. Выходы могут быть
конфигурированы для представления среднего результата перемножения
напряжения и тока в четырех квадрантах (знак и величина) или в двух (только
величина). В последнем случае для сигнализации отрицательной мощности
используется выход указателя полярности (REVP). Сигнал на выходе FOUT
генерируется другим ПКЧ, имеющим значительно больший коэффициент
преобразования и, следовательно, частоту выходных импульсов, поэтому этот выход
удобно использовать для градуировки счетчика при постоянной нагрузке.
Микросхема имеет высокую точность: погрешность в измерении активной
мощности менее 0.2% при динамическом диапазоне 500:1 и меньше, чем 0.4%
при диапазоне 1000:1.
Фирма Analog Devices выпускает также однофазные измерители активной
мощности AD7756, которые наряду с преобразователями код-частота снабжены
последовательным интерфейсом, через который они могут передавать текущее
значение активной мощности микропроцессору. Кроме того, недавно эта
фирма начала производить ИМС AD7754 измерителя активной мощности и
энергии в трехфазных цепях. Прибор подключается к измеряемой цепи по схеме
трех ваттметров. Он имеет на кристалле цифровой процессор сигналов,
который производит необходимые вычисления и коррекцию ошибок в режиме
реального времени. Для преобразования информации об активной мощности в
энергию ИМС снабжена ватт-часовым накапливающим сумматором. Вывод
данных может быть организован по SPI-интерфейсу или через встроенный
преобразователь код-частота, такой же, как у AD7750.
9.8.4. Управление двигателями переменного тока
Высококачественные электроприводы должны иметь широкий диапазон
регулирования скорости вплоть до нулевой, обеспечивать полное управление
вращающим моментом, интенсивное ускорение и торможение. В прошлом в
широкодиапазонных электроприводах преобладали коллекторные двигатели
постоянного тока из-за их лучших регулировочных характеристик. Однако эти
двигатели имеют малую надежность и небольшой ресурс, требуют трудоемкого
обслуживания, порождают мощные радиопомехи. В последнее время более
широкое распространение в регулируемом приводе получили трехфазные
двигатели переменного тока, такие, как асинхронные (АД) и синхронные (СД) с
магнитным или электромагнитным возбуждением, а также синхронные
реактивные двигатели (РД). Это двигатели значительно надежнее, почти не
требуют обслуживания, имеют более высокую удельную мощность, особенно при
высоких частотах вращения. 477
Глава 9. АНАЛОГО-ЦИФРОВЫЕ ПРЕОБРАЗОВАТЕЛИ
До недавнего времени управление двигателями переменного тока
осуществлялось довольно примитивным образом, путем изменения частоты тока,
питающего статорные обмотки в зависимости от величины и знака ошибки по
скорости. Это ограничивало их применение низкодинамичными приводами со
сравнительно узким диапазоном регулирования. Сейчас все шире
используются более передовые способы регулирования, направленные на создание в
машине магнитных полей, интенсивность и положение которых являются
оптимальными при данном положении ротора двигателя. Эти способы базируются
на решении уравнений Парка—Горева и, по сути, сводятся к позиционному
управлению вектором магнитного поля машины. Такое управление часто
называют векторным. Векторное управление требует большого объема вычислений,
которые совсем недавно не могли быть выполнены в реальном времени за
приемлемую цену.
Сейчас ситуация изменилась. Появились недорогие однокристальные
цифровые процессоры сигналов (ЦПС) с высокой производительностью, которые
позволили обеспечить полосу пропускания контура регулирования до 4 кГц при
выполнении этими процессорами векторных преобразований сигналов,
пропорциональных токам и напряжениям двигателя. Эти преобразования
включают вычисления в реальном времени синуса и косинуса угла поворота ротора,
плюс операции «умножение—накопление» [9.9].
Для управления высококачественным сервоприводом переменного тока
требуется дискретизирующее АЦ-преобразование сигналов,
пропорциональных токам статора. Номинальный режим работы двигателя характеризуется
мощностью на валу, которую двигатель может развивать не перегреваясь в
течение продолжительного времени. Кратковременно двигатель может развить
мощность, превосходящую номинальную в несколько раз (некоторые типы
двигателей — шестикратно). В широкодиапазонных следящих и
программно-управляемых приводах двигатель работает значительную часть времени с
пониженными нагрузками, но кратковременно — со значительными
перегрузками. Еще 25 лет назад международная электротехническая комиссия (МЭК)
рекомендовала для привода станков с программным управлением диапазоны
регулирования скорости вплоть до 30000:1. Все это требует для систем
векторного управления приводами применения АЦП высокой разрядности (до
12... 14 бит). Второе требование, предъявляемое к АЦП: одновременное
осуществление выборки, по крайней мере, по двум каналам. В этом случае, зная
мгновенное значение тока в двух фазах при обычно трехпроводном включении
двигателя, мы можем рассчитать ток в третьей фазе. Любая задержка между
считываниями приведет к значительной погрешности определения тока.
Несколько фирм выпускают системы сбора данных, ориентированные на
применение в системах векторного управления двигателями переменного тока.
Например, микросхемы семейства AD7862/3/4 (Рис. 9.38) включают по два
АЦП (каждый со своим УВХ) и по два входных аналоговых мультиплексора
мих.
С помощью входных делителей можно в некоторых пределах изменять
полную шкалу входных сигналов. AD7862/4 имеют 12-разрядные АЦП, a AD7863 —
14-разрядные.
Впоследствии разработчики резонно посчитали, что для систем, не требую-
478 щих очень высокого быстродействия, достаточно использовать один АЦП, но с
9.8. Применение АЦП
Рис. 9.38. Система сбора данных AD7862
четырьмя УВХ на входах 4-х канального мультиплексора. Так появился более
дешевый 14-разрядный AD7865.
Типовое включение систем сбора данных этого семейства показано на
Рис. 9.39.
Рис. 9.39. Типовое включение ИМС системы сбора данных AD7862
Недостатком этой схемы является отсутствие информации о текущем
положении ротора, которая необходима для более точного управления двигателем. 479
Глава 9. АНАЛОГО-ЦИФРОВЫЕ ПРЕОБРАЗОВАТЕЛИ
В приводах на основе синхронных двигателей такая информация абсолютно
необходима для обеспечения оптимального угла выбега ротора. Поэтому
обычно двигатели снабжаются магнитными датчиками положения ротора на
эффекте Холла. Для недорогих приводов применение датчиков положения ротора
может оказаться накладным, тогда применяют метод оценивания угла поворота
ротора по Калману, основываясь на значениях токов и напряжений двигателя.
Это, однако, требует большей вычислительной мощности ЦПС и не
обеспечивает необходимой точности при низких скоростях привода.
Фирма Burr-Brown выпускает систему сбора данных ADS7864,
ориентированную на применение в системах векторного управления двигателями
переменного тока с датчиками положения ротора. Блок-схема этой системы
приведена на Рис. 9.40.
480
Рис. 9.40. Блок-схема системы сбора данных ADS7864
Микросхема ADS7864 содержит два 12-разрядных АЦП последовательного
приближения с максимальной частотой преобразований 500 кГц и шесть УВХ,
которые могут одновременно производить выборку шести дифференциальных
сигналов.
Два дифференциальных мультиплексора 3x1 подключают поочередно
выходы УВХ к входам АЦП, также дифференциальным. Такое построение
аналоговой части позволяет обеспечить подавление синфазного сигнала на 80 дБ
вплоть до частоты 50 кГц. Для упрощения передачи данных процессору в состав
микросхемы входит память типа FIFO (first input — first output) емкостью шесть
16-битных слов (адрес и данные).
Сравнительно недавно фирма Analog Devices начала выпуск
однокристальных контроллеров семейства АОМСЗхх для векторного управления
трехфазными электродвигателями. Упрощенная блок-схема системы управления
двигателем показана на Рис 9.41.
На входы регулятора поступают сигналы, зависящие от токов двигателя, а
также от положения и скорости вращения его ротора. Первичным датчиком
положения здесь является синусно-косинусный вращающийся трансформатор
(СКВТ). Цифровой процессор сигналов используется для векторных
вычислений в реальном времени, необходимых для генерации сигналов управления
ключами трехфазного мостового инвертора. ИМС ADMC300 располагает 5-ка-
нальным 16-разрядным сигма-дельта АЦП и трехфазным цифровым
ШИМ-контроллером с разрешением 12 бит на период, а также имеет гибкий
интерфейс кодера датчика положения ротора. Микросхемы ADMC330/1
содержат 7-канальные АЦП последовательного счета с 12-битным разрешением и
9.8. Применение АЦП
Рис. 9.41. Блок-схема системы управления двигателем на базе
ADMC3xx
программируемый 3-фазный 16-разрядный ШИМ-генератор. В качестве
процессорного ядра всех этих микросхем используется 16-разрядный ЦП С с
фиксированной точкой фирмы Analog Devices ADSP-2171, имеющий
быстродействие 20 MIPS (млн команд в с).
Для улучшения формы токов, питающих обмотки двигателя, контроллер с
помощью широтной модуляции импульсов, управляющих ключами
инверторов, формирует синусоидальные (в среднем) напряжения на выходе силового
инвертора. Частота управляющих импульсов, модулированных по ширине,
регулируется в пределах до 20 кГц. Это позволяет инвертору генерировать
квазисинусоидальное трехфазное напряжение в диапазоне частот 0...250 Гц. В
микросхемах ADMC3xx обеспечивается разрешающая способность по времени
ШИМ-контроллерадо 38 не.
Из-за невысокого быстродействия АЦП этих микросхем невозможно
отслеживать мгновенные значения токов двигателя, что снижает возможности
контроля над формой токов и оценивания положения ротора по информации о
токах. В этом отношении лучшими характеристиками обладает ADMC401. Эта
микросхема включает 8-канальный 12-разрядный конвейерный АЦП,
имеющий время преобразования менее 2мкс. В отличие от ADMC3xx в состав
ADMC401 входит встроенный интерфейс кодера положения.
Вопросы и задачи
1. Поясните, за счет чего включение УВХ между источником
преобразуемого сигнала и АЦП позволяет существенно повысить частоту выборок
без увеличения погрешности.
2. АЦП какого типа обладают наибольшим быстродействием?
3. Измените схему включения параллельного АЦП (см. Рис. 9.4) для
преобразования биполярного сигнала. В каком коде в этом случае будут
представлены выходные данные?
4. Сравните число компараторов в схемах 8-разрядных АЦП:
параллельного и двухступенчатого.
481
Глава 9. АНАЛОГО-ЦИФРОВЫЕ ПРЕОБРАЗОВАТЕЛИ
5. Сколько АЦП и сколько ЦАП должен содержать 4-ступенчатый АЦП?
6. Поясните, почему 4-разрядные АЦП и ЦАП в схеме двухтактного АЦП
должны обладать 8-разрядной точностью.
7. За счет чего конвейерный АЦП имеет большее быстродействие, чем
соответствующий ему многоступенчатый?
8. У каких последовательных АЦП время преобразования зависит от
амплитуды входного сигнала?
9. Спроектируйте схему управления для АЦП последовательного счета.
10. Сравните по быстродействию 12-разрядные АЦП последовательного
счета и последовательного приближения, выполненные на одинаковой
элементной базе.
11. В каких пределах (в процентах от полной шкалы) может меняться
входной сигнал 16-разрядного АЦП последовательного приближения во
время преобразования без потери точности преобразования?
12. К чему приведет уменьшение опорного напряжения по сравнению с
номинальным значением для АЦП любого типа?
13. Первые цифровые вольтметры изготавливались на основе АЦП
последовательного счета. Почему в настоящее время они изготавливаются
почти исключительно на основе АЦП двухтактного интегрирования?
14. Чем определяется статическая точность АЦП двухтактного
интегрирования?
15. Спроектируйте схему управления АЦП двухтактного интегрирования.
16. Почему в состав АЦП двухтактного интегрирования не включают УВХ?
17. Перечислите преимущества сигма-дельта АЦП по сравнению с АЦП
многотактного интегрирования.
18. Чем определяется статическая точность сигма-дельта АЦП?
19. Какую крутизну в логарифмическом масштабе имеет огибающая АЧХ
цифрового фильтра вида (sinx/xK, используемого в составе сигма-дельта
АЦП? Сравните с крутизной огибающей АЧХ АЦП двухтактного
интегрирования.
20. Чем определяется точность ПНЧ на Рис. 9.25?
21. Спроектируйте на базе ПНЧ 16-разрядный сигма-дельта АЦП.
22. Какой способ программного сопряжения АЦП с процессором
обеспечивает наибольшую производительность АЦП?
23. В чем преимущество последовательного интерфейса АЦП перед
параллельным?
Литература к главе 9
9.1. МаркюсЖ. Дискретизация и квантование. — М.: Энергия, 1969. — 144 с.
9.2. Бахтиаров Г.Д., Малинин В.В., Школин В.П. Аналого-цифровые
преобразователи. — М.: Советское радио, 1980. — 280 с.
9.3. Barr P. Influence of aperture time and conversion rate on the sampling accuracy of
analog-digital converters //Data System Eng. 1964. — V. 19, № 5. — Pp 30—34.
9.4. Understanding data converters //Texas Instruments Corp. — Application Report
SLAA013. - 1995 Mixed-Signal Products. 1995. - 23 p.
9.5. Bryan J.M. Sigma-delta measurement ADCs //Practical design techniques for sensor
signal conditioning. — Analog Devices Inc., 1999. — P. 8.16 — 8.34.
9.8. Применение АЦП
9.6. Интегральные микросхемы: Микросхемы для аналого-цифрового
преобразования и средств мультимедиа. Выпуск 1. — М.: Додэка, 1996. — 384 с.
9.7. Goodenough F. High-resolution ADCs up dynamic range in more applications//
Electronic Design. — 1991, №7. — Pp 65—79.
9.8. Соловьев Л. Однокристальные системы сбора данных семейства ADuC8xx//Kom-
поненты и технология. — 2000, №3. — 36 — 37 с.
9.9. Moynihan F. Fundamentals of DSP-based control for AC machines //Analog Dialoque.
- 2000, V. 34. - Pp 3-6.
Глава 10
ИНТЕГРАЛЬНЫЕ ДАТЧИКИ
где к — постоянная Больцмана, Т — абсолютная температура, q — заряд
электрона, /s — тепловой ток коллекторного перехода.
Если взять N +1 совершенно одинаковых
транзисторов и все, кроме одного, соединить
параллельно (Рис. 10.1), то токи коллекторов Л^тран-
зисторов, включенных параллельно, будут равны.
При равенстве токов, втекающих в
коллектор одиночного транзистора и в коллекторы N
параллельно соединенных транзисторов,
разность напряжений база—эмиттер
A0.2)
Таким образом, разность этих напряжений оказывается пропорциональной
484 абсолютной температуре.
A0.1)
10.1. Датчики температуры
Температурные датчики, рассмотренные в п. 2.8.5, неудобны для
применения, особенно в диапазоне температур — 5О...+15О°С. Термопары требуют
большого усиления сигналов и компенсации холодного спая. Характеристики их,
также как и характеристики терморезисторов, нелинейны. Лучшими
свойствами обладают полупроводниковые датчики.
10.1.1. Интегральные датчики температуры
на биполярных транзисторах
Современные интегральные датчики температуры (ДТ) обеспечивают
высокие точность и линейность в диапазоне примерно -55°С...+150°С. Встроенные
в датчики усилители позволяют привести масштаб преобразования
температуры в напряжение к удобной нормированной величине (например, 10 мВ/°С).
Большинство полупроводниковых датчиков температуры используют
соотношение между напряжением база—эмиттер биполярного транзистора и током
его коллектора:
10.1. Датчики температуры
Схемы ячеек датчиков температуры
Схема, представленная на Рис. 10.2,
реализует уравнение A0.2) и известна как ячейка
Брокау[10.1].
Транзистор VT2 представляет собой N
включенных параллельно транзисторов, таких
же, как VT\. Разность потенциалов эмиттеров
транзисторов приложена к резистору R2. Ток
эмиттера транзистора VT2 поэтому равен
Рис. 10.2. Схема «классического»
датчика температуры на ширине
запрещенной зоны
За счет отрицательной обратной связи
через ОУ коллекторные токи транзисторов
равны. Их сумма проходит через резистор Л1#
В результате напряжение, падающее на резисторе R\, пропорционально
абсолютной температуре. Действительно, с учетом A0.2) получаем
A0.3)
При надлежащем выборе отношения R\/R2 и N напряжение на базе
транзистора VT\ и, следовательно, на выходе операционного усилителя станет равным
ширине запрещенной зоны кремния 1.205 В. Это напряжение не зависит от
температуры. Схема на Рис. 10.2 — основной полупроводниковый датчик
температуры и широко используется в промышленности.
Таким образом, ячейка датчика
температуры может использоваться одновременно и в
качестве источника опорного напряжения.
Сравните схему на Рис. 10.2 со схемой ИОН
на ширине запрещенной зоны (см. Рис. 5.34)
и вы убедитесь, что они практически
идентичны. Поэтому ряд моделей ИОН,
например, МАХ872, AD780 и др., имеет выводы
датчика температуры.
Другой вариант ячейки ДТ приведен на
Рис. 10.3 [10.2].
Схема имеет АКВЕ приблизительно
@.2 мВ/°К)-37 Усилитель обеспечивает
равенство токов через транзисторы, причем
плотность токов через их коллекторы соотносится
как 1:10. Поскольку напряжение АКВЕ
приложено к резистору R, то общее падение
напряжения на цепочке, включающей резисторы Л,
26R и 23R, составит A0 мВ/°К)-7Г Резистор, обозначенный 100Л, используется
для подстройки смещения.
Рис. 10.3. Ячейка токового датчика
температуры
4в5
Глава 10. ИНТЕГРАЛЬНЫЕ ДАТЧИКИ
Схемы ДТ, приведенные на Рис. 10.2 и Рис. 10.3, очень
популярны, но они, по сути, являются датчиками
абсолютной температуры и как следствие имеют смещение шкалы
выходного напряжения в 2.73 В относительно более
привычной шкалы температур в градусах Цельсия. Дж. Мейджер
разработал схему ячейки ДТ [10.3], которая легко калибрует-
ся в градусах Цельсия (Рис. 10.4).
Схема работает следующим образом: ток /ртлъ
пропорциональный абсолютной температуре, генерируется
источником тока.
Выходной ток /0 равен разности этого тока и тока,
пропорционального напряжению VBE транзистора КГ4, и имеет
температурный коэффициент 1 мА/°С. Ток через этот
транзистор задается токовым зеркалом на/?-я-/ьтранзисторах VTX
и VT2 и транзистором РТ3, который играет роль усилителя с
обратной связью. Градуировка этой схемы может быть
выполнена для любой температурной шкалы. Изменением
резистора /?4 можно корректировать чувствительность схемы
Ыо/дТ, а подстраивая резистор в источнике тока /ртат> можно установить
начальную температуру для нулевого тока.
Рис. 10.4. Ячейка
датчика
температуры
Мейджера
ДТ с токовым выходом
486
Концепции, изложенные
выше, служат основой для
построения многих
разновидностей интегральных схем
датчиков температуры (ДТ). В
зависимости от выходной величины
различают датчики с выходом
по току и датчики с выходом по
напряжению. Примером ДТ с
токовым выходом может
служить AD592, имеющий
коэффициент преобразования 1 мкА/°С
(Рис. 10.5). Типовая схема
включения этого ДТ приведена на
Рис. 0.5а, а график
характеристики преобразования — на
Рис. 10.56.
Датчик изготавливается в трехвыводном корпусе ТО-92 и практически не
требует внешней калибровки.
При температуре +25°С датчик модели AD592CN имеет наименьшую
абсолютную погрешность измерения температуры AT— не более ±0.5°С. В
диапазоне рабочих температур — 25°С...+125°С абсолютная погрешность не превышает
+ ГС. Для более точной настройки может быть использован подстроечный ре-
Рис. 10.5. Типовая схема включения датчика
температуры AD592 (а) и характеристика
преобразования (б)
10.1. Датчики температуры
зистор (R2 на схеме Рис. 10.5а). Этот ДТ может работать в широком диапазоне
питающих напряжений — 4...30 В, однако точностные характеристики
определены для напряжения 5 В, а его изменение влияет на точность измерения:
коэффициент влияния нестабильности напряжения питания KSR составляет от
0.5°С/В при низких напряжениях и до О.ГС/В при высоких, поэтому
напряжение питания желательно поддерживать постоянным.
Другим примером токового ДТ может служить недорогой LM234. Это 3-вы-
водной подстраиваемый источник тока с коэффициентом трансформации
рабочего тока 10000:1 и простым регулированием тока, который устанавливается
сопротивлением одного резистора. Микросхема работает в широком диапазоне
питающего напряжения: 1...40 В. Модели LM234-3 и LM234-6 предназначены
для преобразования температуры в ток. Начальная погрешность измерения
температуры не превышает ±3°С для LM234-3. Температурная
чувствительность ИМС составляет +0.33%/°С. Токовые датчики идеальны для измерения
температуры удаленных объектов, поскольку для их подключения требуется
только два провода. Кроме того, сопротивление проводов, включенных
последовательно с датчиком, не вносит заметной погрешности, так как крайне мало
по сравнению с динамическим сопротивлением датчика, которое, например,
при токе 100 мкА составляет 100 МОм.
То, что токовые ДТ имеют всего лишь два вывода, обеспечивая большую
гибкость их применения. На Рис. 10.6 представлены три схемы с
использованием токовых ДТ на AD592.
Рис. 10.6. Различные схемы включения токовых ДТ для определения:
а — среднего значения температуры в трех точках пространства,
б — точки с минимальной температурой из трех контролируемых,
в — разности температур в двух точках
487
Глава 10. ИНТЕГРАЛЬНЫЕ ДАТЧИКИ
Если требуется определить среднее значение температуры в трех точках
пространства можно применить схему на Рис. 10.6а. Здесь через резистор
протекает сумма токов всех трех датчиков. Сопротивление резистора выбрано в три
раза меньше, чем в типовой схеме с тем, чтобы обеспечить общую
чувствительность по напряжению 1 мВ/°С.
На Рис. 10.60 представлена схема определения минимальной из температур
в трех точках. Только тот из датчиков, температура которого наименьшая, будет
работать в активном режиме. Два других перейдут в насыщенное состояние,
поэтому их динамические сопротивления (а следовательно и падения напряжения
на них) резко уменьшатся.
Наконец, на Рис. 10.бв приведена схема для определения разности
температур в двух точках. Точка соединения двух ДТ соединена с инвертирующим
входом операционного усилителя, имеющим нулевой потенциал. Ток /DiB равный
разности токов датчиков, создает на резисторе падение напряжения /dif^2>
пропорциональное разности температур. Резистор Rx включен для
компенсации начального разброса токов ДТ.
ДТ с выходом по напряжению
ADT45/ADT50 — трехвыводные температурные датчики с выходом по
напряжению, помещенные в миниатюрный корпус SOT-23. Они работают в
диапазоне питающих напряжений от 2.7 В и в диапазоне температур -4О...+125°С.
Чувствительность обоих устройств составляет 10 мВ/°С. Типичная погрешность
преобразования + ГС при температуре +25°С и ±2°С в диапазоне — 4О...+125°С.
ADT45 обеспечивает выходное напряжение 250 мВ при +25°С и предназначен
для измерения температуры 0°...+100°С. ADT50 обеспечивает выходное
напряжение 750 мВ при +25°С и предназначен для измерения температуры в
диапазоне —4О...+125°С. Погрешность преобразования температуры при изменении
питающего напряжения может достигать 0.15°С/В. Недостатком датчиков
является довольно значительное выходное сопротивление (до 200 Ом).
Если датчики ADT45/ADT50 имеют надежный тепловой контакт с
объектом и теплоизолированы от окружающей среды, то их температура будет
отличаться от температуры поверхности объекта не более чем на 0.0 ГС. Правильное
закрепление датчика на поверхности объекта имеет большое значение,
поскольку любая связь датчика с окружающей средой проявляет себя как
паразитный тепловой канал, привнося ошибки в измерения. Вывод для подключения
питания этих микросхем должен быть блокирован по переменному
напряжению относительно общей точки керамическим конденсатором емкостью 0.1
мкФ. Желательно применение безвыводных конденсаторов с тем, чтобы
снизить влияние электромагнитных помех.
Другим примером 3-выводного ДТ с выходом по напряжению является
LM45. При низкой цене ($0.4 при продаже партиями по 1000 шт.) этот датчик
обеспечивает точность не хуже ±3°С в диапазоне -2О...+1ОО°С. Низкий
потребляемый ток A20 мкА) гарантирует саморазогрев не более 0.2°С. Переход от
шкалы абсолютных температур Кельвина к шкале Цельсия осуществляется
488 подключением одного внешнего резистора.
10.1. Датчики температуры
Одним из характерных применений рассмотренных ДТ, помимо
непосредственного измерения температуры, является компенсация температуры
холодного спая термопары (см. главу 2 — п. 2.8.5).
Интересно семейство датчиков температуры
LM135/235/335 (Рис. 10.7).
Все они имеют выход по напряжению, а их
типовая схема включения подобна схеме
включения стабилитрона (см. Рис. 10.7а). При этом
«напряжение пробоя» меняется пропорционально
абсолютной температуре со скоростью
+ 10мВ/°К. Датчик нормально работает при
токах 0.4...5 мА. При калибровке с помощью
внешнего резистора (Рис. 10.76) при температуре
+25°С, LM135 имеет типичную погрешность
менее + ГС в диапазоне шириной 100°С. Низкое
динамическое сопротивление (типовое значение
Рис. 10.7. Типовые схемы
включения датчиков температуры LM135:
а — без калибровки, б — с
калибровкой с помощью внешнего
резистора
0.5 Ом) упрощает подключение датчика к приемникам сигнала и уменьшает
погрешность при изменении питающего напряжения. LM135 работает в
диапазоне температур -50...+150°С, LM235 — в диапазоне -4О...+125°С, а очень
недорогой LM335 — в диапазоне -40...+100°С.
Так же как и двухвыводные токовые ДТ, LM335 имеет широкий круг
применений, некоторые из которых приведены на Рис. 10.8. Так, на Рис. 10.8л
представлена схема определения минимальной из трех контролируемых температур.
Только тот из ДТ, температура которого минимальна, будет находиться в
активном режиме, остальные будут оставаться в состоянии отсечки.
Рис. 10.8. Простейшие схемы применения ДТ LM335 для измерения:
а — минимальной из трех контролируемых температур,
б — среднего значения температуры грех контролируемых точек,
в — разности температур двух точек
При помощи схемы на Рис. 10.85 можно измерять среднее значение
температур трех точек. Выходное напряжение равно сумме напряжений, падающих
на датчиках. При этом чувствительность схемы также возрастает в три раза.
Для измерения разности температур может быть использована простая
схема, приведенная на Рис. 10.8в. Подстроечным резистором обеспечивается
нулевой ток через измерительный прибор при равенстве температур датчиков.
Несложный, но довольно точный термостат можно построить по схеме,
показанной на Рис. 10.9 [10.2].
489
Глава 10. ИНТЕГРАЛЬНЫЕ ДАТЧИКИ
Рис. 10.9. Схема простого термостата
Здесь напряжение 6.9 В прецизионного ИОН LM329C, поделенное рези-
стивным делителем, сравнивается с напряжением датчика температуры LM335
с помощью прецизионного компаратора LM311. В зависимости от знака
рассогласования компаратор включает или выключает составной транзистор с
внутренней защитой LM395, который в свою очередь включает или отключает
нагревательный элемент. Большой коэффициент усиления компаратора (до
200000) обеспечивает высокую точность стабилизации температуры.
На Рис. 10.10 представлена схема датчика
скорости течения газа.
Верхний по схеме ДТ установлен в потоке
газа, а нижний датчик — в неподвижном газе этой
же температуры.
Верхний датчик подогревается протекающим
через него относительно большим током,
задаваемым резистором 1.2 кОм. Ток через нижний
датчик приблизительно в 20 раз меньше, поэтому
нижний ДТ имеет температуру окружающего газа.
При обтекании верхнего ДТ потоком газа
температуры меньшей, чем датчик, последний
охлаждается, что приводит к увеличению выходного напряжения ОУ. Подстроечным
резистором устанавливается нуль усилителя при нулевой скорости течения газа.
Рис. 10.10. Схема датчика
скорости течения газа
Логометрические ДТ
490
В некоторых случаях желательно, чтобы выходной сигнал датчика был
пропорционален его напряжению питания. Это полезно, например, при питании
от батарей самого датчика и АЦП, преобразующего его сигнал в код.
Упрощенная схема ИМС логометрического датчика температуры AD22103 и схема
преобразования температура/код приведена на Рис. 10.11.
Как видно из схемы на Рис. 10.11а, через терморезистор Яъ включенный в
плечо моста, от источника тока I(V) протекает ток, пропорциональный напря-
10.1. Датчики температуры
Рис. 10.11. Логометрический датчик температуры:
а — структурная схема, б — схема преобразования температура/код,
не зависящая от напряжения питания
жению питания. Дифференциальный усилитель преобразует разбаланс моста в
выходной сигнал, определяемый формулой
A0.4)
На схеме, представленной на Рис. 10.115, источник питания ИМС AD22103
является также источником опорного напряжения для АЦП.
Тем самым устраняется потребность в двух точных ИОН, поскольку
выходной код АЦП (Д)ит) пропорционален отношению входного напряжения (в
нашем случае это выходное напряжение датчика ^оит) к опорному (в нашем
случае это напряжение питания схемы Vs):
(Ю.5)
Подставив A0.4) в A0.5) найдем
A0.6)
Из A0.6) следует, что конечный результат преобразования не зависит от
напряжения питания. Такие измерительные схемы называются логометрическими.
Датчик AD22103 предназначен для работы в диапазоне О...1ОО°С и обеспечивает
погрешность менее +2.5°С при линейности не хуже 0.5°С. В этой схеме удобно
применить 12-разрядный АЦП AD7896, который использует питающее
напряжение в качестве опорного.
10.1.2. Датчики температуры с цифровым выходом
Датчики температуры, имеющие цифровые выходные сигналы, обладают
рядом преимуществ по сравнению с чисто аналоговыми датчиками, особенно в
случае, если требуется контролировать температуру в удалении от
информационно-управляющей системы. Датчики с цифровым выходом позволяют легко
обеспечить гальваническую развязку между удаленным датчиком и системой с
помощью оптронов. Различают три типа таких датчиков: с выходным
преобразователем напряжение/частота, с широтно-импульсной модуляцией и с
последовательным цифровым интерфейсом.
491
Глава 10. ИНТЕГРАЛЬНЫЕ ДАТЧИКИ
ДТ с преобразователем напряжение/частота
Датчики температуры этого типа обеспечивают связь с микроконтроллером
8051 по однопроводной линии. Примером может служить семейство
МАХ6576/7. Датчик МАХ6576 преобразует температуру окружающего воздуха в
последовательность прямоугольных импульсов с коэффициентом заполнения
(относительной длительностью импульсов) у = 0.5 и периодом повторения,
пропорциональным абсолютной температуре. Чувствительность датчика может
регулироваться до 1:64 подключением выводов TS1, TS0 к напряжению
питания или к «земле». Датчик МАХ6577 отличается только тем, что температуре
пропорциональна частота его выходных импульсов. Обе микросхемы
изготавливаются в миниатюрных 6-выводных корпусах SOT-23.
492
Цифровые ДТ с широтно-импульсной модуляцией
Датчики с широтно-импульсной модуляцией (ШИМ) обычно содержат,
помимо собственно ДТ, аналого-цифровой преобразователь и ШИМ-модулятор.
Например, микросхемы семейства ТМРОЗ/04 фирмы Analog Devices
отличаются только схемотехникой выходных каскадов: ТМР03 имеет на выходе
транзистор с открытым коллектором, а ТМР04 — симметричный КМОП-каскад. Они
включают в себя: ДТ, ИОН, тактовый генератор, сигма-дельта АЦП с
одноразрядным модулятором и цифровой фильтр (Рис. 10.12).
АЦП имеет эффективную разрядность 12
бит. Данные в ШИМ-модуляторе
преобразуются в скважность импульсов,
пропорциональную входному коду.
Выходной цифровой фильтр подавляет
шумовые составляющие. «Очищенная» от
шумов последовательность импульсов (Рис.
10.13) с выхода Dq\jT (вывод 1) может быть
подана на последовательный вход
какого-либо из наиболее распространенных
микроконтроллеров, например, 80С51 или
68НС11.
Они имеют встроенные таймеры и легко
декодируют скважность импульсов ДТ,
преобразуя ее в цифровое значение температуры
по любой требуемой шкале.
В частности, для вычисления температуры по Цельсию должна быть
использована формула
Рис. 10.13. OopNfa выходных сигналов
датчиков температуры ТМР03/04
В отличие от преобразования температуры в частоту или период здесь
отсутствует ошибка, связанная с нестабильностью тактовой частоты. Номинальная
частота импульсов при +25°С составляет 35 Гц. Длительность импульса
фиксирована и равна 10 мс.
10.1. Датчики температуры
ДТ с последовательным цифровым интерфейсом
Применение последовательного цифрового кода для передачи информации
о температуре позволяет упростить программирование микроконтроллера и
снизить его загрузку. Типичным примером ДТ с последовательным цифровым
интерфейсом является микросхема LM74. Эта микросхема помимо
температурного датчика на основе биполярного транзистора включает также сигма-дельта
АЦП, интерфейс которого совместим с интерфейсами SPI и MICROWIRE
(Рис. 10.14).
Тринадцатиразрядный АЦП
обеспечивает разрешение 0.0625°С в
диапазоне температур от -55 до +150°С.
Датчик допускает перевод в режим
молчания с пониженным
энергопотреблением (shutdown mode), при
котором потребляемый ток уменьшается
до 10 мкА. Датчик изготавливается в
корпусе SO-8 и в миниатюрном 5-вы-
водном microSMD-корпусе размером
1.5x1.5 мм.
Другой пример — цифровой
8-разрядный датчик температуры
МАХ1617, обеспечивающий разрешение ГС в диапазоне -4О...+125°С.
Погрешность измерения температуры в этом диапазоне не превышает ±3°С. Связь
датчика с микропроцессором обеспечивается двухпроводным
последовательным интерфейсом SMBus в двоичном дополнительном коде. Помимо
встроенного в ИМС датчика температуры, к микропроцессору может быть подключен
дистанционный датчик в виде биполярного транзистора (например, MTS102
фирмы Motorola). Этот датчик потребляет от источника напряжением 3...5.5 В
ток силой 70 мкА в активном режиме и всего 3 мкА — в режиме молчания.
Микросхемы AD7816/17/18 фирмы Analog Devices представляют собой
скорее АЦП со встроенными датчиками температуры. Все они, кроме AD7816,
имеют аналоговые входы. ИМС содержат 10-разрядный АЦП
последовательного приближения со временем преобразования 9 мкс. Микросхемы по
интерфейсу совместимы с интерфейсами SPI, QSPI и MICROWIRE. Программно
может быть установлен температурный порог, при превышении которого, на
выходе OTI микросхем появляется активный уровень.
Прекрасные характеристики имеют цифровые датчики температуры
производства фирмы Dallas Semiconductor. В частности, цифровой термометр DS
18В20 позволяет считывать температуру с разрешением от 9 до 12 двоичных
разрядов (настраивается пользователем).
Информация передается в/из DS 18B20 по однопроводному интерфейсу.
Напряжение питания для выполнения преобразования, чтения и записи
данных может быть получено или по шине данных, или от отдельного внешнего
источника питания C...5.5 В).
Поскольку каждый датчик содержит уникальный серийный номер,
записанный лазером в процессе производства, большое количество DS 18B20 может
быть подключено на одну шину. Это позволяет разместить множество датчиков
493
Рис. 10.14. Блок-схема цифрового ДТ LM74
Глава 10. ИНТЕГРАЛЬНЫЕ ДАТЧИКИ
в различных местах и собирать информацию по простому двухпроводному
кабелю (прямой и обратный провод). На структурной схеме (Рис. 10.15) показаны
основные узлы DS 18B20 [10.9].
Рис. 10.15. Структурная схема цифрового датчика температуры DS 18B20
494
Микросхема включает следующие узлы:
• 64-разрядное ПЗУ, запрограммированное лазером;
• температурный датчик;
• энергонезависимые температурные регистры хранения кодов высшей Гн
(RH) и низшей TL (RL) температуры;
• регистр конфигурации.
Функциональным ядром DS 18B20 является температурный датчик прямого
преобразования температуры в цифровой код. Эта схема использует два
генератора частоты с разными температурными коэффициентами, настроенными на
одну температурную точку (обычно —55°С). Разность между данными,
выработанными генераторами импульсов за единицу времени, является исходным
значением для определения соответствия цифрового кода и измеряемой
температуры. Накапливающий сумматор, входящий в функциональное ядро, позволяет
скорректировать нелинейность во всем диапазоне температур. Поэтому
дополнительной подстройки или использования АЦП не требуется. После того как
датчик выполнил температурное преобразование, значение температуры
сравнивается со значениями Тн и Тъ старшие разряды которых хранятся в
8-разрядных регистрах RH и RL. Если результат измерения выше, чем Гн, или ниже,
чем Гь, в приборе устанавливается сигнальный флажок, который
корректируется с каждым температурным измерением. Пока флажок установлен, DS 18B20
на каждый запрос отвечает сообщением о наличии аварийного режима.
Связь с DS 18B20 осуществляется через однопроводный порт. Пока
протокол функции ПЗУ не будет установлен, память и функции управления
прибором будут недоступны. Контроллер, управляющий шиной, сначала должен
выдать одну из следующих пяти команд на установку функции ПЗУ:
• чтение ПЗУ;
• совпадение ПЗУ;
• поиск ПЗУ;
• пропуск ПЗУ;
• сигнальный аварийный поиск ПЗУ.
10.1. Датчики температуры
С помощью этих команд выделяется нужный из множества приборов,
подключенных к однопроводной шине. После успешного выполнения
функциональной команды ПЗУ память и управление микросхемой доступны и
контроллер может обеспечить выполнение любой из команд управления. На Рис. 10.15
показана схема, в которой для питания ИМС используется энергия сигнала,
поступающего по шине данных. При этом происходит подзарядка внутреннего
конденсатора питания.
10.1.3. Температурные компараторы
Датчики температуры, используемые совместно с аналоговыми
компараторами, могут работать как сигнализаторы перехода температуры через
определенный порог или выхода температуры из заданной зоны. Типичным
представителем этого класса ДТ является ADT05 (Рис. 10.16).
Порог переключения устанавливается
резистором /?set с точностью 2°С в диапазоне —
4О...+15О°С. Выходной транзистор с открытым
коллектором открывается, когда температура
окружающего воздуха превышает
запрограммированную пользователем температуру
переключения. Переходная характеристика ИМС
ADT05 имеет гистерезис приблизительно 4°С,
который предотвращает слишком частое
переключение. Микросхема имеет малое
потребление (всего 0.2 мВт при Vs = 3.3 В), что
уменьшает самонагрев до пренебрежимо
малых величин. Встроенный в ИМС так назы-
Рис. 10.16. Температурный
компаратор ADT05
ваемый подтягивающий (pull up) резистор (подключается к точке с
повышенным потенциалом) может быть использован при управлении нагрузкой типа
входов КМОП-логики. ИМС изготавливается в миниатюрном 5-выводном
корпусе SOT-23.
Другим примером температурного компаратора может служить семейство
МАХ6501/2/3/4. Эти температурные переключатели также меняют логическое
состояние выхода, когда температура их кристалла пересекает
запрограммированный порог. ИМС работают при питании +2.7...+5.5 В и потребляют ток 35
мкА. На кристалле изготовлены компаратор и два источника опорного
напряжения, один из которых имеет отрицательный ТКН, а другой —
положительный. Приборы предлагаются с температурными порогами, задаваемыми
изготовителем через 10°С в диапазоне -45°С...+115°С с типовой точностью +0.5°С
(максимально +6°С). Они не имеют внешних радиокомпонентов. Величина
гистерезиса переходной характеристики 2°С или 10°С устанавливается
постоянным уровнем на выводе HYST-микросхемы. МАХ6501/МАХ6503 имеют выход с
открытым стоком, а МАХ6502/МАХ6504 — пушпульный выход. Микросхемы
изготавливаются в миниатюрном 5-выводном корпусе SOT-23.
Более развитая микросхема ТМР01 представляет собой температурный
контроллер с двумя порогами, который также генерирует и напряжение,
пропорциональное температуре (Рис. 10.17).
495
Глава 10. ИНТЕГРАЛЬНЫЕ ДАТЧИКИ
Состояние выходов с
открытым коллектором «OVER» или
«UNDER» меняется при переходе
температуры датчика через
соответствующий порог. Уровни
порогов, а также ширина гистерезиса
переходной характеристики
задаются выбором резисторов Rb R2,
Л3. Микросхема содержит ИОН
на ширине запрещенной зоны и
пару согласованных
компараторов. ИОН обеспечивает
термостабильное опорное напряжение
2.5 В и температурно-зависимое
выходное напряжение с чувствительностью 5 мВ/°К.
При изготовлении этих микросхем используется лазерная подгонка, что
обеспечивает типовую точность измерения температуры ±ГС в номинальном
температурном диапазоне -55...+125°С. Открытые коллекторы допускают
втекающий ток до 20 мА, что позволяет непосредственно управлять реле. При
питании от источника +5 В потребляемый ток не превышает 0.5 мА.
Рис. 10.17. Блок-схема температурного
компаратора ТМР01
10.1.4. Точность датчиков температуры
На точность преобразования температуры в напряжение помимо
технологических и схемотехнических причин влияют еще и тепловые свойства среды, в
которой работает датчик. Этот фактор вносит статическую погрешность,
обусловленную саморазогревом, и динамическую, связанную со значительной
инерционностью процесса теплопередачи. На Рис. 10.18 представлена тепловая
модель ДТ в виде эквивалентной электрической цепи, которая полезна для
понимания этих процессов.
Источник тепла /fo производит в секунду
количество теплоты в джоулях, равное
произведению напряжения питания датчика на ток,
потребляемый им от источника. Тепловое
сопротивление «кристалл—корпус» Rjjc,
например, для корпуса SOT-23, равно 180°С/Вт.
Тепловое сопротивление «корпус—окружающая
среда» Лтса является разностью между RjjA и
/?Tjc и определяется характеристиками
теплового контакта с окружающей средой.
Перегрев кристалла относительно температуры окружающего воздуха
определяется уравнением
Рис. 10.18. Тепловая модель датчика
температуры
A0.7)
где 7} и ТА — температуры соответственно кристалла и окружающей среды. В
496 частности, для ИМС ADT45, установленной в контактную панельку и питаемой
10.1. Датчики температуры
от источника напряжением 5 В, перегрев кристалла вследствие саморазогрева
при температуре воздуха, равной 25°С, составляет менее 0.04°С.
Переходный процесс установления
выходного сигнала ДТ при скачкообразном
изменении температуры определяется
тепловыми сопротивлениями и теплоемкостя-
ми кристалла Ссн и корпуса Сс.
Теплоемкость корпуса зависит от условий
измерения, так как она включает все, что
контактирует с корпусом. На практике
определяющим фактором ограничения
скорости реакции датчика на изменение
температуры является теплоемкость корпуса
микросхемы. Поэтому переходный процесс
теплопередачи может быть смоделирован
апериодическим звеном первого порядка с
постоянной времени т.
Рис. 10.19 иллюстрирует переходный процесс ДТ ADT45/50 при
скачкообразном изменении температуры окружающего неподвижного воздуха.
Тепловая постоянная времени х численно равна времени, необходимому
для достижения выходным сигналом 63.2% разности между первоначальным и
установившимся значениями.
В Табл. 10.1 приведены основные характеристики некоторых типов
интегральных датчиков температуры.
Таблица 10.1. Датчики температуры
Рис. 10.19. График изменения
выходного сигнала ДТ при скачкообразном
изменении температуры
Наименование
ТМР36
ADT45
AD592
LM234-3
LM135
МАХ6576
ТМР03
LM74
DS 18B20
ADT05
Диапазон
[°С]
-40...+ 125
0...+ 100
-55...+150
-40...+125
-50...+150
-40...+125
-55...+ 150
-55...+150
-55...+ 125
-40...+125
Чувствительность
[мВ/°С]
10
10
1 мкА/°С
0.33%/°С
10
10 мкс/°С
—
16бит/'С
—
Точность
га
±2...±3
±1...±2
±0.5...±1
±3
±1
±1...±3
±2
±1.25...±3
+2
±2
Напряжение
питания [В]
2J...5.5
2.7...12
4...30
1...40
2J...5.5
4.5..J
2.65...5.5
3...5.5
2J...7
Ток
потребления
[мА]
0.05
0.06
A)UT
0.4...5
0.14
1
0.5
1.5
0.06
Примечание
Корпус SOT-23
Трехвыводной датчик
Двухвыводной датчик
с токовым выходом
Трехвыводной источник
тока
Двухвыводной датчик
с выходом по
напряжению
Преобразователь
температура- период
Цифровой датчик
сШИМ
13-разргядный
сигма-дельта АЦП
Однопроводный
цифровой 12-разрядный
интерфейс
Температурный
компаратор
497
Глава 10. ИНТЕГРАЛЬНЫЕ ДАТЧИКИ
10.2. Датчики ускорения (акселерометры)
10.2.1. Общие сведения
Акселерометры представляют собой датчики линейного ускорения и в этом
качестве широко используются для измерения углов наклона тел, сил инерции,
ударных нагрузок и вибрации. Они находят широкое применение на
транспорте, в медицине, в промышленных системах измерения и управления, в инерци-
альных системах навигации. Промышленность изготавливает много
разновидностей акселерометров, имеющих различные принципы действия, диапазоны
измерения ускорений, массогабаритные характеристики и цены. Сравнение
основных типов акселерометров дано в Табл. 10.2.
Таблица 10.2. Сравнительные характеристики акселерометров
Тип
Пьезопленочные
Электромеханические
(струнные, маятниковые)
Пьезоэлектрические
Пьезорезистивные
Интегральные объемной
конструкции
Интегральные
поверхностной конструкции
Точность
Низкая
Очень
высокая
Высокая
Средняя
Средняя
Средняя
Цена
Самая
низкая
Очень
высокая
Высокая
Высокая
Средняя
Низкая
Область применения
Вибрации, удары
Инерциальная
навигация
Вибрации, удары
Наклон, вибрации,
инерциальные силы
Наклон,вибрации,
инерциальные силы
Наклон, вибрации,
инерциальные силы
Особенности
Только переменные
ускорения. Чувствительны к
температуре и давлению
Низкие частоты.
Чувствительны к перегрузкам
Только переменные
ускорения
Сложная настройка, низкая
термостабильность
Низкий шум, сложная
настройка
Малые габариты,
законченность конструкции
На Рис. 10.20 показаны области, занимаемые акселерометрами различного
типа на диаграмме «Качество—цена».
Современные технологии микрообработки позволяют изготовить
интегральные акселерометры, имеющие малые габариты и низкую цену. В
настоящее время изготавливаются ИМС акселерометров трех типов: пьезопленочные,
498 объемные и поверхностные.
Рис. 10.20. Диаграмма «Качество—цена» для различных
акселерометров
10.2. Датчики ускорения (акселерометры)
10.2.2. Пленочные пьезоэлектрические
акселерометры
Пленочные пьезоэлектрические датчики ускорения выполняются на основе
многослойной пьезоэлектрической полимерной пленки. Многослойная пленка
закреплена на подложке из окиси алюминия и к ней присоединена
инерционная масса из окиси металла. При изменении скорости движения датчика в
результате действия инерционных сил происходит деформация пленки.
Благодаря пьезоэффекту возникает разность потенциалов на границах слоев пленки,
зависящая от ускорения. Чувствительный элемент датчика обладает
чрезвычайно высоким выходным сопротивлением, поэтому на подложке датчика АСН-01
фирмы Atochem Sensors имеется также полевой транзистор с малым током
затвора, который представляет собой усилитель напряжения. Это позволяет
измерять переменные ускорения со сравнительно низкой частотой. Датчики этого
типа имеют плохую повторяемость характеристик в серийном производстве,
высокую чувствительность к изменению температуры и давления. Они не могут
контролировать постоянные ускорения и гравитационные силы. Основная
область применения — схемы управления надувными подушками безопасности.
10.2.3. Объемные интегральные акселерометры
Примером объемного датчика ускорения может служить NAC-201/3 фирмы
Lucas Nova Sensor [10.4], предназначенный для применения в системах
управления надувными подушками безопасности автомобилей. Этот датчик состоит из
двух пластин кремния 1 и 2, которые сплавлены друг с другом (Рис. 10.21).
Тремя тонкими кремниевыми
балками с, d и е, имеющимися в
пластине 1, инерционная масса «а»
соединена с кремниевой рамкой «Ь»
на пластине 2. Эта масса
соединяется с кремниевой рамкой
механически с одного края (точки f, f, f на
Рис. 10.21).
Каждая из коротких внешних
(изгибных) балок содержит пару
имплантированных пьезорезисто-
ров, образующих полумост. Два
полумоста соединяются в мостовую
схему. Когда происходит столкновение автомобиля с препятствием, масса
движется вниз, изгибая балки с, d, e и вызывая деформацию пьезорезисторов.
Таким образом, при деформации пьезорезисторов, включенных по схеме моста
Уитстона, датчик вместе с расположенной вне кристалла электронной схемой
вырабатывают выходной сигнал напряжением 50... 100 мВ полной шкалы.
Поскольку к надежности системы управления надувными подушками
безопасности предъявляются чрезвычайно высокие требования (представьте себе
последствия ложного срабатывания подушки безопасности на оживленной
автостраде при скорости 120 км/ч), датчик ускорения снабжен специальной сис-
Рис. 10.21. Интегральный акселерометр
объемной конструкции
499
Глава 10. ИНТЕГРАЛЬНЫЕ ДАТЧИКИ
темой самоконтроля. Ключевую роль в системе самоконтроля играет
резистор-возбудитель, который нагревается пропусканием через него импульса тока
50 мА при напряжении 9 В и длительностью 50 мс. Когда балка, расположенная
в средней части пластины 1, нагревается, происходит ее удлинение, поскольку
температурный коэффициент расширения кремния положителен. А так как
концы ее закреплены, она прогибается, отклоняет инерционную массу, а также
изгибает балку, содержащую пьезорезисторы. Эта балка смещается примерно
на 3 мкм в том же направлении, что и инерционная масса при столкновении
автомобиля с препятствием.
Микросхема датчика не содержит схемы обработки сигнала измерительного
моста. Варианты датчика отличаются тем, что микросхема NAC-203 содержит
встроенные толстопленочные схемы, позволяющие произвести лазерную
подстройку чувствительности и температурной коррекции в процессе
производства, а в микросхеме NAC-201 реализация этих функций предоставляется
пользователю. Входное и выходное сопротивления измерительного моста модели
NAC-201 равны 2000 Ом. Полоса пропускания по уровню 3 дБ составляет 500
Гц. Резонансная частота приборов, смонтированных в полном соответствии с
рекомендациями изготовителя, — не менее 10 кГц.
К недостаткам интегральных датчиков ускорения объемной конструкции
можно отнести то, что они сложны в производстве, поскольку операции
формирования объемных структур не очень просто совмещаются со стандартными
поверхностными интегральными технологиями. Кроме того, в датчике
объемной конструкции только на размещение чувствительного элемента требуется
6.5...16 мм2 площади кристалла. Размещение на кристалле схем формирования
сигнала может увеличить эту площадь еще в два раза. Это положение вступает в
противоречие с желанием разработчиков иметь датчик минимально возможных
размеров на схемном кристалле также минимально возможных размеров, так
как уменьшение размеров кристалла дает повышение его механической
прочности и снижение стоимости.
Поэтому, в частности, один из датчиков ускорения фирмы Motorola имеет
двухкристальную конструкцию [10.5]. На одном кристалле выполнен объемный
чувствительный элемент, а на другом — схема обработки сигнала.
10.2.4. Поверхностные интегральные
акселерометры
Фирма Analog Devices изготавливает семейство акселерометров ADXLxxx
поверхностной конструкции. Первым в этом семействе идет ADXL50,
серийный выпуск которого был начат в 1991 г. [10.6].
Весь кристалл акселерометра размером 3.05x3.05 мм занят главным образом
схемами формирования электрического сигнала, которые окружают
миниатюрный датчик ускорения размером 1x1 мм, расположенный в его центре.
Датчик представляет собой дифференциальную конденсаторную структуру с
воздушным диэлектриком, обкладки которого вырезаны (вытравлены) из
плоского куска поликремниевой пленки толщиной 2 мкм. Неподвижные об-
500 кладки этого конденсатора представляют собой простые консольные стержни,
10.2. Датчики ускорения (акселерометры)
Рис. 10.22. Основной конструктивный блок
элементарной ячейки датчика ускорения
расположенные на высоте 1 мкм от поверхности кристалла на поликремниевых
cTOR^wKux-uWY&pax, щ>\\ъъреннъ\х к кристаллу.
На Рис. 10.22 показан основной
конструктивный блок элементарной
ячейки датчика.
Фактически датчик имеет 54
элементарных ячейки для измерения
ускорения, но для простоты на рисунке
показана только одна из них.
Инерционная масса датчика
ускорения при изменении скорости
перемещения кристалла смещается
относительно остальной части кристалла. Ее
пальцеобразные выступы образуют
подвижную обкладку конденсатора
переменной емкости. С каждого конца эта
структура опирается на
столбики-анкеры, аналогичные по конструкции
держателям неподвижных обкладок. Растяжки по концам инерционной массы,
удерживающие ее на весу, являются как бы механическими пружинами
постоянной упругости, ограничивающими перемещение инерционной
массы-пробника и ее возврат в исходное положение. Говоря другими словами, сила
инерции при воздействии ускорения
F = та
уравновешивается силой упругости пружины
F= кх,
где т — масса, а — ускорение, к — жесткость пружины, х — перемещение
инерционной массы относительно исходного состояния. Отсюда следует, что
а = х(к/т),
где к/т — конструктивный параметр датчика.
Поскольку перемещение инерционной массы должно происходить в
плоскости поликремниевой пленки, ось чувствительности датчика лежит в этой
плоскости, и, следовательно, она параллельна плоскости печатной платы, к
которой припаивается датчик.
Каждый из наборов неподвижных обкладок конденсатора {Yw Z)
электрически соединен параллельно внутри схемного кристалла. В результате
получается пара независимых конденсаторов А"-У и X-Z, подвижная обкладка которых
образована всей совокупностью пальцеобразных выступов инерционной
массы. Внутри кристалла эти три обкладки подключены к встроенным схемам
формирования сигнала акселерометра.
В спокойном состоянии (движение с постоянной скоростью) все «пальцы»
подвижной обкладки ^благодаря растяжкам находятся на одинаковом
расстоянии от пар пальцев неподвижных обкладок. При каком-либо ускорении
датчика подвижные пальцы приближаются к одному из наборов неподвижных
пальцев и удаляются от другого набора. В результате этого относительного
501
Глава 10. ИНТЕГРАЛЬНЫЕ ДАТЧИКИ
перемещения соответствующие расстояния становятся неодинаковыми и
емкости между подвижной обкладкой и каждой из неподвижных обкладок
конденсатора изменяются.
Хотя в ИМС акселерометра ADXL50 датчик и схема формирования сигнала
фактически представляют собой замкнутый контур с обратной связью и
уравновешиванием сил, опишем вначале работу устройства при разомкнутой
обратной связи. Противофазные сигналы прямоугольной формы частотой 1 МГц
одинаковой амплитуды подаются от генератора соответственно на верхнюю и
нижнюю обкладки YnZ(Рис. 10.23).
502
Рис. 10.23. Структурная схема ИМС акселерометра ADXL50
При отсутствии ускорения емкости CS\ и CS2 между неподвижными и
подвижной обкладками одинаковы, поэтому на подвижную обкладку передаются
сигналы одинаковой амплитуды.
Разностный сигнал, поступающий на вход повторителя, равен нулю. При
ускорении датчика разностный сигнал не равен нулю, причем его амплитуда
зависит от величины смещения подвижной обкладки, а фаза определяется
знаком ускорения. Фазочувствительный демодулятор преобразует этот сигнал в
низкочастотный (полосой 0...1000 Гц), характеризующий величину и знак
ускорения. Это напряжение поступает на предусилитель, с выхода которого сигнал
подается на внешний вывод ИМС.
Чтобы уменьшить влияние температуры окружающей среды, временные
изменения параметров, снизить нелинейность переходной характеристики
акселерометра, разработчики ввели отрицательную обратную связь по положению
инерционной массы. Для этого напряжение с выхода предусилителя через
резистор 3 МОм подается на подвижные обкладки датчика. Это напряжение создает
электростатические силы между подвижной и неподвижной обкладками,
которые стремятся установить инерционную массу в исходное состояние.
Поскольку мы имеем в этом случае следящую систему с высокой добротностью,
инерционная масса никогда не будет отклоняться от своего исходного положения
10.2. Датчики ускорения (акселерометры)
более чем на 0.01 мкм. В отсутствии ускорения выходное напряжение предуси-
лителя равно Vo = 1.8 В, при ускорении полной шкалы ±50 g J>o = 1.8 ± 1.5 В.
В более поздних моделях интегральных акселерометров инженеры фирмы
Analog Devices отказались от обратной связи по положению инерционной
массы. С одной стороны, это позволило почти в два раза уменьшить площадь
кристалла датчика, повысить его экономичность, увеличить размах выходного
напряжения, практически исключить внешние компоненты, снизить стоимость
ИМС. Однако при этом увеличилось смещение инерционной массы, что
привело к некоторому реальному ухудшению линейности датчика.
Акселерометры семейства ADXL снабжены также системой
самотестирования. В ADXL50 тестовый сигнал в виде последовательности прямоугольных
импульсов низкой частоты подается на подвижную обкладку. Это вызывает
колебания инерционной массы, аналогичные тем, которые вызываются
воздействием инерционных сил. В результате выходное напряжение
исправного датчика будет изменяться с той же частотой.
В моделях без обратной связи по положению только 42 ячейки датчика
используются в схеме измерения ускорения. Остальные 12 входят в схему
самотестирования. Самотестирование осуществляется подачей ВЫСОКОГО
логического уровня на вывод SELF-TEST микросхемы. При этом на подвижную
часть датчика действует электростатическая сила, соответствующая
приблизительно 20% ускорения полной шкалы. Выходное напряжение ИМС
исправного датчика пропорционально уменьшается. Таким образом проверяется
работоспособность полной механической структуры и электрической схемы
акселерометра.
Для того чтобы снизить требования к стабильности источника питания и
сделать возможным питание акселерометров от батарей, выходное напряжение
датчиков делают пропорциональным произведению ускорения на напряжение
питания. В таком случае его следует включать по логометрической схеме, как
это показано на Рис. 10.11 для датчика температуры.
В настоящее время фирма Analog Devices выпускает несколько моделей
интегральных акселерометров: одноосные ADXL105, ADXL150, ADXL190 на
максимальное ускорение ±5, ±50, ±100 g соответственно и двухосные ADXL202,
ADXL210 и ADXL250 на максимальное ускорение по обеим осям ±2, ±10, ±50
g, соответственно. Датчики изготавливаются в основном в плоских
керамических корпусах QC-14 с планарными выводами, причем оси, по которым
измеряется ускорение, направлены параллельно плоскости выводов (т. е.
параллельно плоскости печатной платы). Вариант ADXL202E выпускается в
миниатюрном безвыводном кристаллоносителе LCC-8 размером 5x5x2 мм. Для
удобства сопряжения с микроконтроллерами выходные сигналы ИМС
ADXL202 и ADXL210 представляют собой прямоугольные импульсы
постоянной частоты. Информация об ускорении передается коэффициентом
заполнения у ^и/Т).
Интересное применение акселерометров с малым значением
максимального измеряемого ускорения (и соответственно высокой чувствительностью) —
определение угла наклона относительно горизонта . Это можно использовать в
охранных системах автомобилей, в устройствах определения местоположения
бура при бурении наклонных скважин и для других подобных целей.
503
Глава 10. ИНТЕГРАЛЬНЫЕ ДАТЧИКИ
Выходное напряжение акселерометра пропорционально синусу угла
наклона оси его чувствительности относительно горизонта. Для того чтобы
определить этот угол однозначно, необходимо использовать двухосный акселерометр.
Для этой цели почти идеально подходит ADXL202. Зависимости выходных
сигналов этого датчика (приведенных к 1 g) от угла его наклона а представлены
на Рис. 10.24.
Рис. 10.24. Использование двухосного акселерометра для измерения наклона:
а — механическая схема, б — выходные сигналы в зависимости от угла наклона
На Рис. 10.25л показывает упрощенную блок-схему двухосного
акселерометра ADXL202 и эпюры напряжений в одном из его каналов.
504
б)
Рис. 10.25. Двухосный акселерометр ADXL202:
а — блок-схема, б — эпюра выходного напряжения одного канала датчика
10.2. Датчики ускорения (акселерометры)
Обратите внимание, что коэффициент заполнения у = 0.5 соответствует
нулевому ускорению. Период импульсов Т2 не нужно измерять на каждом
импульсе. Его нужно уточнять только при изменении температуры. Так как
частота выходных импульсов одинакова для обоих каналов, период Т2 достаточно
измерить только на одном канале. Эта величина устанавливается в пределе
0.5... 10 мс внешним резистором Rset- Недостатком акселерометров с
ШИМ-выходом является необходимость применения весьма
быстродействующих микроконтроллеров для получения высокой разрешающей способности
при широкой полосе пропускания.
Завершая описание акселерометров фирмы Analog Devices приведем
несколько интересных цифр, характеризующих конструкцию и уровень
технологии производства этих микросхем [10.7]:
• масса инерционного грузика — 0.1 мкг;
• емкость каждой части дифференциального конденсатора — 0.1 пФ;
• минимальное обнаруживаемое отклонение емкости — 10~6 пФ;
• изменение емкости, соответствующее ускорению полной шкалы, — 0.01 пФ;
• расстояние между обкладками конденсатора — 1.3 мкм;
• минимальное обнаруживаемое отклонение подвижных обкладок
конденсатора — 0.2 ангстрем Bх10~8 мм или пятая часть диаметра атома!).
Акселерометры семейства ХММА фирмы Motorola состоят из планарной
емкостной ячейки датчика ускорения и КМОП-схемы нормализации сигнала,
выполненных в отличие от ранних моделей [10.5] на одном кристалле.
Чувствительный элемент (ЧЭ или G-ячей-
ка) занимает большую часть кристалла. Он
сформирован из поликристаллического
кремния, посредством поверхностной
микрообработки. ЧЭ состоит из двух неподвижных
пластин, между которыми расположена третья
(центральная) пластина, закрепленная на
упругом подвесе и способная перемещаться под
действием инерционных сил (Рис. 10.26).
Когда центральная пластина отклоняется
от среднего положения в результате ускорения, расстояние от нее до одной из
неподвижных пластин увеличится на ту же самую величину, на которую
расстояние до другой пластины уменьшится. Изменение расстояний характеризует
ускорение. Ось чувствительности к ускорению направлена перпендикулярно
поверхности основного кристалла (чипа), поэтому датчики, изготавливаемые в 505
Его выходными сигналами является периодическая последовательность
импульсов, коэффициент заполнения в которой пропорционален ускорению.
Такой тип выхода обеспечивает повышенную помехоустойчивость, передачу
сигнала по одной линии и прием его любым микроконтроллером, имеющим
таймер (АЦП не нужен!). Сигнал на выходе каждого канала датчика имеет
форму, показанную на Рис. 10.250, причем ускорение в единицах g рассчитывается
по формуле:
Рис. 10.26. Упрощенная
конструкция датчика ускорения
микросхемы семейства ХМ МА
Глава 10. ИНТЕГРАЛЬНЫЕ ДАТЧИКИ
DIP-корпусе, измеряют ускорение, направленное нормально к печатной плате.
Для того чтобы сделать возможным измерение ускорений, направленных
параллельно печатной плате, фирма выпускает эти датчики также и в корпусах
SIP, в которых чип расположен перпендикулярно печатной плате.
Пластины G-ячейки образуют два противовключенных конденсатора. При
движении датчика с ускорением, направленным перпендикулярно плоскости
пластин, подвижная пластина отклонится в направлении, противоположном
ускорению, и произойдет перераспределение расстояний между пластинами.
Емкости обоих конденсаторов изменятся в соответствии с формулой
С = Se/x, A0.8)
где S — площадь пластин, е — диэлектрическая
постоянная и х — расстояние между пластинами. Как видно,
эта зависимость нелинейна. На Рис. 10.27 приведен
график зависимости разности емкостей этих
конденсаторов (Q — С2) от перемещения подвижной пластины.
Схемы определения рассогласования емкостей
конденсаторов G-ячейки измеряют изменение напряжения
на подвижной пластине (MMAS40G, MMAS250G,
MMAS500G) или заряда на ней (ХММА1000,
ХММА2000). Напряжение измеряется
электрометрическим усилителем, а заряд — усилителем заряда. Судя по
техническим описаниям этих микросхем,
представленным фирмой-изготовителем, постоянное ускорение
они не воспринимают. На Рис. 10.28 приведена блок-схема акселерометра
XMMAS500G, имеющего диапазон измеряемых ускорений ±500 g.
0 Ах
Рис. 10.27. График
зависимости разности
емкостей конденсаторов
ячейки датчика ускорения от
перемещения подвижной
пластины
Рис. 10.28. Блок-схема акселерометра MMAS500G
Сигнал с выхода электрометрического усилителя поступает на фильтр
нижних частот 4-го порядка, а с него — на схему температурной компенсации.
Акселерометры фирмы Motorola также могут быть использованы в логометриче-
506 ском включении.
10.2. Датчики ускорения (акселерометры)
10.2.5. Точность интегральных акселерометров
Статическая точность. Точность преобразования ускорения в
электрический сигнал акселерометрами, так же как и точность датчиков другого
типа, определяется величинами смещения нуля, погрешностью полной шкалы
(или чувствительности), а также температурным и временным дрейфом этих
параметров. Важными составляющими погрешности являются также
погрешности линейности (нелинейность) и поперечная чувствительность.
Смещение нуля и чувствительность акселерометров при нормальных
условиях корректируются при изготовлении. Остаточная погрешность может быть
уменьшена путем калибровки и запоминания калибровочных констант в
памяти микроконтроллера. Калибровка акселерометра возможна двумя
способами: на вибростенде с образцовым датчиком ускорения и с использованием
силы тяжести.
Использование вибростенда имеет свои достоинства и недостатки. К числу
достоинств можно отнести:
• возможность калибровки, в том числе и датчиков, восприимчивых только к
переменному ускорению;
• возможность калибровки датчиков с ускорениями, многократно
превышающими g.
• Из недостатков этого варианта назовем следующие:
• требуется дорогостоящий вибростенд;
• закрепление датчика при калибровке на высоких g представляет
определенную проблему.
• Преимущества применения для калибровки силы тяжести:
• не требуется дорогостоящее оборудование;
• метод мало чувствителен к погрешности установки датчика.
К недостаткам метода можно отнести:
• метод применим только для датчиков, восприимчивых к постоянному
ускорению;
• практически невозможно откалибровать полную шкалу датчиков, способных
преобразовывать большие ускорения.
Температурный дрейф смещения нуля и чувствительности также может
быть скомпенсирован. Для этой цели некоторые модели (например,
ХММА1000, ADXL105) снабжаются встроенными датчиками температуры.
Одной из причин нелинейности характеристики преобразования
интегральных акселерометров с датчиками емкостного типа является нелинейная
зависимость емкости конденсатора от расстояния между обкладками (см.
Рис. 10.27). При использовании усилителя заряда, как в ХММА1000, потенциал
подвижной пластины постоянен и равен половине напряжения питания,
которое мы будем считать равным 2 К (см. Рис. 10.26). В этом случае из формулы
q = CVc учетом A0.8) следует, что приращение заряда подвижной обкладки при
ее перемещении на расстояние Ах составит
A0.9)
507
Глава 10. ИНТЕГРАЛЬНЫЕ ДАТЧИКИ
из A0.10) получим
Таким образом, зависимость напряжения на подвижных пластинах датчика
от перемещения получается линейной. Акселерометры семейства ADXL имеют
типовую погрешность линейности 0.2%.
В [10.7] в качестве еще одного источника погрешности указывается
гистерезис (т. е. неполная восстанавливаемость) при вибрациях и ударах. В фирменном
описании микросхем никаких сведений о гистерезисе нет, но эксперименты по
использованию интегральных акселерометров семейства ADXL для
определения скоростей и перемещений, проведенные автором совместно с А.Г. Волови-
чем, показали, что при наличии вибраций большой амплитуды погрешность,
обусловленная, по всей видимости, гистерезисом, может достигать совершенно
недопустимых значений. По мнению автора, этот гистерезис вызван тем, что
при значительных ускорениях деформация растяжек, играющих роль пружин,
может быть неупругой и при уменьшении ускорения инерционная масса либо
очень медленно возвращается в исходное состояние (вязкая неупругость), либо
не возвращается совсем. На Рис. 10.29 приведены графики зависимости
ускорения и скорости от времени для акселерометра ADXL150, закрепленного на
одном из концов стального стержня длиной 1.5 м, который перемещается с
большими ускорениями на расстояние 0.5 м.
Вследствие упругости стержня это перемещение сопровождается вибрацией
довольно большой амплитуды с частотой приблизительно 300 Гц.
График ускорения получен непосредственным считыванием сигнала аксе-
508 лерометра 12-разрядным АЦП с частотой выборки 80 кГц. График скорости яв-
Как видно, зависимость приращения заряда от изменения расстояния
между пластинами нелинейна. Если в акселерометре применяется усилитель
напряжения (электрометрический), то заряд конденсаторов датчика меняться не
будет. Тогда приращение напряжения на подвижной пластине будет линейно
зависеть от изменения расстояния между пластинами:
По указанным причинам акселерометр ХММАЮОО (усилитель заряда)
имеет типичную погрешность линейности 1% от полной шкалы против 0.5% у
MMAS40G (усилитель напряжения).
Акселерометры семейства ADXL имеют емкостный датчик
дифференциального типа, неподвижные пластины которого питаются равными, но
противофазными напряжениями возбуждения V\ и Vj частотой 1 МГц. Поэтому
комплексное действующее значение напряжения на средней пластине согласно
методу двух узлов определится формулой:
A0.10)
A0.11)
где со — круговая частота возбуждения. С учетом того, что
10.2. Датчики ускорения (акселерометры)
Рис. 10.29. К пояснению работы интегрального акселерометра ADXL150 в условиях
сильных продольных вибраций:
а — график ускорения, б — график скорости
ляется результатом численного интегрирования этих данных методом
трапеций. В начале и в конце интервала наблюдения 0...2.25 с скорость датчика равна
нулю. На графике скорости (Рис. 10.296), точки которого рассчитаны по
данным акселерометра, погрешность конечного значения скорости составила
примерно 1.25 м/с при максимальной скорости 3.5 м/с.
На Рис. 10.30 приведены графики ускорения и скорости того же датчика
при близких параметрах движения, но закрепленного на более жесткой
конструкции.
Рис. 10.30. К пояснению работы интегрального акселерометра ADXL150 в условиях
пониженной продольной вибрации:
а — график ускорения, б — график скорости
Движение сопровождалось значительно меньшей продольной вибрацией.
Как видно, погрешность определения скорости уменьшилась во много раз.
Поперечная чувствительность характеризует способность датчика
преобразовывать в электрический сигнал ускорение, направленное под углом 90° к оси
чувствительности датчика (поперечное). У идеального акселерометра
поперечная чувствительность равна нулю. В паспортных данных датчика указывается
часть (в процентах) поперечного ускорения, которая проходит на выход.
Шум акселерометров. Шум, содержащийся в выходном сигнале
акселерометра, определяет разрешающую способность устройства, важную при
определении малых ускорений. Предельное разрешение в основном определяется
уровнем шума измерения, который включает внешний фоновый шум и шум
собственно датчика. Уровень шума непосредственно связан с шириной полосы
пропускания датчика. Уменьшение полосы пропускания путем включения
509
Глава 10. ИНТЕГРАЛЬНЫЕ ДАТЧИКИ
ФНЧ на выходе датчика приводит к снижению уровня шума. Это улучшает
отношение сигнал/шум и увеличивает разрешающую способность, однако вносит
амплитудные и фазовые частотные искажения. Некоторые модели
акселерометров содержат на кристалле ФНЧ (семейство ХММА — 4-го порядка,
ADXL190 — 2-го). Двухосные датчики ADXL202/210 имеют выводы для
подключения двух внешних конденсаторов, образующих с двумя внутренними
резисторами по 32 кОм два ФНЧ первого порядка.
Пример 10.1. Микросхема ADXL150 имеет типичное значение спектральной
плотности шума gxlO~3/VrU в полосе 10... 1000 Гц. При включении ФНЧ с частотой
среза 100 Гц действующее значение шума на выходе фильтра составит 0.01 g, а
амплитудное, с вероятностью 0.997, — в пределах 0.03 g. Поскольку полная шкала этого
датчика составляет ±50 g, динамический диапазон равен 20 lg E0/0.03) = 64.4 дБ.
Это неплохо, но по этому показателю интегральные акселерометры сильно
уступают пьезоэлектрическим. Например, пьезоэлектрический акселерометр типа
4371 фирмы Bruel & Kjaer имеет динамический диапазон 140 дБ [10.8]. .
Основной динамической характеристикой акселерометров является полоса
пропускания по уровню —3 дБ. В Табл. 10.3 приведены основные
характеристики некоторых типов интегральных датчиков ускорения.
Таблица 10.3. Датчики ускорения
Наименование
Примечание
ADXL150
Малошумящий: 0.001 g/Vfu
ADXL250
Двухосный, малошумящий
ADXL105
Малошумящий: 0.175 Mg/Vfu
ADXL190
Встроенный ФНЧ 2-го порядка
ADXL202
Двухосный с ШИМ-выходом
ХММА1000
Встроенный ФНЧ 4-го порядка
MMAS250
Встроенный ФНЧ 4-го порядка
MMAS500
Встроенный ФНЧ 4-го порядка
10.3. Датчики давления
510
10.3.1. Устройство датчиков давления
Давление в жидкостях и газах преобразуют в электрический сигнал с
помощью датчиков давления. Измерение давления осуществляется чаще всего путем
контроля геометрии диафрагм, мембран, капсул, манометрических трубок и др.
с помощью тензорезисторов (тонкопленочных элементов электрической цепи,
сопротивление которых является функцией механического напряжения).
10.3. Датчики давления
В основе большинства
интегральных датчиков давления, несмотря на
их внешние различия, лежит один и
тот же базовый элемент,
изображенный на Рис. 10.31.
Он изготавливается посредством
вытравливания полости в
кремниевой пластине практически на всю ее
глубину, в результате чего остается
лишь тонкая A0 мкм) кремниевая
мембрана, выполняющая функцию
диафрагмы датчика давления. В
мембране методом диффузии
формируются один или несколько кремниевых тензорезисторов (иногда называемых в
литературе пьезорезисторами), сопротивление которых зависит от
деформации; помимо этого на периферийной части подложки выполняются
дополнительные диффузионные резисторы. Все эти резисторы соединяются по схеме
моста Уитстона, образуя тензодатчик. Расположение тензорезисторов может
быть таким, что при изменении давления на мембрану два из них сжимаются,
уменьшая свое сопротивление, а два других — растягиваются, увеличивая его
[10.10].
Рис. 10.31. Конструкция базового элемента
интегрального датчика давления
Рис. 10.32. Датчики абсолютного (а) и относительного (б) давления
В датчике, предназначенном для измерения абсолютного давления,
внутренняя полость, отделенная диафрагмой, герметично запаивается (Рис. 10.32я).
В датчиках относительного и дифференциального давлений через отверстие Р2
диафрагма испытывает давление и с другой стороны корпуса (Рис. 10.325).
В этом случае на дифференциальный элемент
воздействует разность давлений Р{ — Р2. Выходной
сигнал, таким образом, пропорционален этой разности.
Следует учитывать, однако, что такой элемент
рассчитан на эксплуатацию только при перепаде давления
рх>р2.
Тензорезисторы могут быть соединены как по
мостовой, так и по полумостовой схеме. Изменение
сопротивлений резисторов при деформации
диафрагмы показано на Рис. 10.33 приращениями R ± AR, где
R — сопротивление резистора на недеформированной Рис*10*33 Схема соеди-
^ нения тензорезисторов
диафрагме. датчика давления
511
Глава 10. ИНТЕГРАЛЬНЫЕ ДАТЧИКИ
Выходное напряжение моста КОит пропорционально напряжению его
питания и величине давления, определяющей деформацию тензорезисторов:
AR
A0.12)
A0.13)
Датчики давления с тензорезисторами, соединенными в мостовую схему,
производят фирма Honeywell и ее подразделение Data Instruments. Внешний
вид некоторых моделей датчиков приведен на Рис. 10.34.
Рис. 10.34. Внешний вид некоторых моделей датчиков фирмы Honeywell
Простейшие из этих моделей, такие, как 22РС, 24РС, содержат только тензо-
резисторы. Модель 26РС снабжена также цепями температурной компенсации,
а модели 40РС и 240РС — дифференциальными усилителями,
смонтированными в корпусе датчика на отдельной печатной плате. Поскольку чувствительность
датчиков пропорциональна питающему напряжению A0.13), целесообразно
подключение их к АЦП по логометрической схеме (аналогично Рис. 10.11).
Фирма Motorola, одна из ведущих в мире
по производству интегральных датчиков
давления, выпускает ИМС семейства МРХ,
предназначенных для измерения
абсолютного, относительного и дифференциального
давления. В качестве чувствительного
элемента в них используется запатентованный
фирмой Motorola кремниевый тензорези-
стор, именуемый X-ducer™ [10.11, 10.12].
Это название соответствует форме
чувствительного элемента. Эквивалентная
электрическая схема (а) и условное обозначение (б) датчика приведены на Рис. 10.35.
Как следует из эквивалентной схемы, выходное напряжение датчика
определяется формулой
Рис. 10.35. Датчик давления X-ducer™:
а — эквивалентная схема,
б — условное обозначение
512
A0.14)
Таким образом, чувствительность датчика
10.3. Датчики давления
где Д/?т — приращение сопротивления тензорезистора Rj, вызванное
деформацией тензорезистора. Зависимость Pqut (Д^т) нелинейна, однако эта
нелинейность относительно невелика, так как изменение напряжения во всем
диапазоне измерения давления обычно не превышает 0.3% величины питающего
напряжения Ks. Чувствительность датчика типа X-ducer
A0.15)
пропорциональна Fs, поэтому здесь также целесообразно применить логомет-
рическую схему включения.
Преимущества датчиков фирмы Motorola перед традиционными
мостовыми схемами характеризуются следующим:
• используется одиночный чувствительный элемент — не требуется
согласования параметров элементов;
• низкие значения нелинейности и гистерезиса;
• более простая температурная компенсация.
Рис. 10.36. Внешний вид корпусов интегральных датчиков давления фирмы
Motorola
В зависимости от типа датчика, его функционального назначения и
внутренней структуры используются корпуса с четырьмя, шестью и восемью
выводами, самые распространенные из которых представлены на Рис. 10.36.
Рис. 10.37. Функциональные схемы датчиков давления фирмы Motorola:
а - серии МРХ2ххх, б - серий МРХ4ххх/5ххх
Датчики МРХ10...МРХ200 содержат чувствительный резистивный элемент
без температурной компенсации (см. Рис. 10.356). На Рис. 10.37 приведены
функциональные датчиков серии МРХ2ххх и МРХ4ххх/5ххх. Датчик серии
513
Глава 10. ИНТЕГРАЛЬНЫЕ ДАТЧИКИ
МРХ2ххх включает интегральную схему, осуществляющую как температурную
компенсацию, так и нормализацию выходного сигнала по уровню. Благодаря
этому выходное дифференциальное напряжение О В соответствует давлению
О кПа (Рис. 10.37д). Датчики серий МРХ4ххх и МРХ5ххх дополнительно
содержат на кристалле встроенную схему усиления и преобразования выходного
сигнала в Однополярное напряжение 0...4.7 В (Рис. 10.375), что позволяет подавать
его непосредственно на вход АЦП.
Наконец, серия МРХ7ххх во всем подобна серии МРХ2ххх, но ее
чувствительный элемент имеет значительно более высокое входное сопротивление A0
кОм против 2.5 кОм у МРХ2ххх), что делает предпочтительным применение
этих датчиков в системах с автономным питанием.
10.3.2. Точность датчиков давления
При определении полной погрешности датчика давления необходимо
учесть весь комплекс погрешностей, порождаемых как недостатками
конструкции и технологии производства, так и влиянием внешних условий. Основными
источниками погрешности датчиков давления являются следующие.
Смещение нуля — численно равно выходному напряжению или току в
условиях, когда давления с обеих сторон диафрагмы датчика равны.
Погрешность полной шкалы AFS — отклонение значения выходного
напряжения, соответствующего крайним значениям диапазона измеряемого
давления от паспортных характеристик.
Температурный дрейф нуля dVO?/dT— изменение смещения нуля, вызванное
изменением температуры. В мостовых датчиках направление этого изменения
не может быть предсказано заранее. В датчиках типа X-ducer направление
смещения нуля определяется знаком изменения температуры
Температурный дрейф чувствительности dS/dT— изменение
чувствительности, вызванное изменением температуры. На Рис. 10.38 приведены примеры
изменения чувствительности для датчиков различного типа (чувствительность
определяется наклоном статических характеристик преобразования).
514
Рис. 10.38. Графики изменения (дрейфа) статических характеристик преобразования датчиков
давления:
а — для мостового датчика, б — для датчика X-ducer
10.3. Датчики давления
Как видно из Рис. 10.38а направление этого изменения у мостового датчика
давления заранее не может быть предсказано. Напротив, в датчиках типа
X-ducer направление изменения чувствительности известно точно (см.
Рис. 10.386).
Погрешность линейности — отклонение статической характеристики
преобразования датчика от идеальной прямой линии в заданном диапазоне давлений.
Способы определения погрешности показаны на Рис. 10.39. Один из них
состоит в использовании метода наименьших квадратов, который математически
обеспечивает получение прямой линии наилучшего приближения к реальной
характеристике преобразования [10.10] (Рис. 10.39а).
Рис. 10.39. Способы определения погрешности линейности датчика давления:
а — по методу наименьших квадратов, б — по максимальному расстоянию
между характеристикой преобразования и стягивающей ее хордой
Другой метод состоит в том, что проводится прямая линия (хорда) между
начальной и конечной точками статической характеристики преобразования
(Lx на Рис. 10.395). Затем находят максимальную длину нормали между прямой
и реальной характеристикой (стрелку прогиба). Длина этого отрезка и
представляет предельную основную погрешность линейности.
Гистерезис характеристики преобразования представляет собой
совокупность механического и термического гистерезиса. Механический гистерезис,
как и у акселерометров, связан с выходом диафрагмы за зону упругой
деформации. Температурный гистерезис проявляется в несовпадении показаний при
нагреве датчика с последующим охлаждением до первоначальной температуры.
Погрешность логометричности. Логометричность датчика подразумевает,
что выходной сигнал датчика пропорционален питающему напряжению при
постоянных других условиях. Погрешность логометричности — отклонение от
этой зависимости, которая выражается в процентах от полной шкалы.
Позиционная чувствительность. Земное тяготение вызывает деформацию
диафрагмы датчиков давления повышенной чувствительности, которая
обусловливает заметную погрешность измерения давления. Эта деформация
наиболее велика в том случае, если плоскость диафрагмы перпендикулярна вектору
гравитации. Измеряется в мВ/g. Например, датчики семейства DCAL4xx
фирмы Data Instruments имеют позиционную чувствительность ±5 мВ/g.
Время отклика /R является основным динамическим параметром датчиков
давления. Оно определяется как время изменения выходного сигнала от 10% до
90% установившегося значения его приращения при скачкообразном измене-
515
Глава 10. ИНТЕГРАЛЬНЫЕ ДАТЧИКИ
нии давления. Например, для микросхем серии МРХ2ххх время отклика
составляет 1 мс.
В Табл. 10.4 приведены основные характеристики некоторых типов
интегральных датчиков давления.
Таблица 10.4. Датчики давления
Наименование
Примечание
DUXL01D
Мостовая схема высокой чувствительности
141PC01G
Датчик со встроенным усилителем
МРХ10
X-ducer без усилителя
МРХ2012
Термокомпенсация
4040PC015G4D
Датчик со встроенным усилителем
Рис. 10.40. Конструкция датчика
относительной влажности HIH-3602
516
10.4. Датчики влажности (гигрометры)
Для построения датчиков относительной
влажности абсорбционного типа фирма
Honeywell использует трехслойную
конструкцию на основе термореактивного полимера
промышленного назначения с платиновыми
электродами (Рис. 10.40).
Водяные пары, содержащиеся в воздухе,
окружающем датчик, проникают через
верхний слой полимера, задерживающий
загрязнения, и далее через слой пористой платины
во второй слой полимера.
Это приводит к изменению емкости
конденсатора, образованного слоями платины.
Низкотемпературные датчики оснащены схемами преобразования емкость-
напряжение и температурной компенсации, выполненными на отдельном
кристалле. На Рис. 10.41 приведен внешний вид датчика фирмы Honeywell в
корпусе и без крышки корпуса.
В высокотемпературных датчиках на керамической подложке
устанавливается килоомный платиновый резистивный датчик температуры.
Выходной параметр датчиков влажности зависит не только от
относительной влажности воздуха RH%, но в значительной степени и от температуры.
Поэтому в датчиках высокой точности или рассчитанных на широкий
температурный диапазон используется температурная компенсация.
Выходное напряжение датчика влажности есть функция напряжения
питания, RH% и температуры, т. е. V0UT=f(VS9 RH%, T). Выход датчика логометри-
ческий, т. е. выходной сигнал пропорционален питающему напряжению Ks.
10.4. Датчики влажности (гигрометры)
Рис. 10.41. Внешний вид датчика HIH-3602
Поверхность действительного значения относительной влажности RH% при
постоянном напряжении питания над плоскостью показаний датчика RH$% и
температуры Г в диапазоне температур О...85°С представлена на Рис. 10.42. Эта
поверхность относительной влажности RH% довольно хорошо
аппроксимируется комбинацией двух уравнений:
A0.16)
A0.17)
Уравнение A0.16) представляет графически линию наилучшего
приближения для температуры +25°С (полужирная линия на Рис. 10.42).
Второе из этих уравнений преобразует показания датчика в значение
влажности с учетом температуры. Эти уравнения позволяют определить
относительную влажность с погрешностью не более:
• ±1%дляТ>20°С;
• ±2%дляЮ°С<Т<20°С;
• ±5%дляТ<10°С.
При снижении температуры активной области датчика ниже точки росы
окружающего газа происходит конденсация влаги на датчике. Пока влага не
испарится, выходной сигнал датчика будет соответствовать 100%-й влажности неза-
517
Глава 10. ИНТЕГРАЛЬНЫЕ ДАТЧИКИ
Рис. 10.42. Поверхность действительного значения
относительной влажности
висимо от действительного значения RH окружающего воздуха. Поэтому, если
датчик должен работать на уровнях влажности 90% и выше, необходимо
принять меры против конденсации. Некоторые способы борьбы с конденсацией:
• периодическое перемешивание воздуха с тем, чтобы избежать локальных
температурных флуктуации;
• защита датчика от попадания брызг;
• подогрев датчика с тем, чтобы температура активной области была выше
точки росы. Это можно сделать как внешним нагревателем, так и за счет самона-
грева кристалла при использовании повышенного напряжения питания.
Основным динамическим параметром датчиков относительной влажности
является время отклика, которое, например, для датчика HIH-3602 составляет
50 с при медленном перемещении окружающего воздуха с температурой 25°С.
10.5. Датчики магнитного поля
518
10.5.1. Принцип действия датчика Холла
Интегральные датчики магнитного поля в своем большинстве используют
эффект Холла, открытый американским физиком Эдвином Холлом (E.Hall) в
1879 г. Эффект Холла состоит в следующем.
Если проводник с током помещен в
магнитное поле, то в нем возникает ЭДС,
направленная перпендикулярно и току, и полю. Эффект
Холла иллюстрируется на Рис. 10.43.
По тонкой пластине полупроводникового
материала протекает ток /. При наличии
магнитного поля на движущиеся носители заряда
(электроны) действует сила Лоренца.
Эта сила искривляет траекторию движения
электронов, что приводит к перераспределению
Рис. 10.43. Иллюстрация эффекта
Холла
10.5. Датчики магнитного поля
где d — ширина пластины, q — заряд частицы-носителя, п — концентрация
носителей. При снижении концентрации носителей ЭДС Холла возрастает,
поэтому в качестве материала для датчиков Холла предпочтительно
использование полупроводников, таких, как кремний, арсенид галлия и др. Для
прямоугольной пластины с однородными по сечению током и магнитным
полем, направленными как показано на Рис. 10.43, эта ЭДС равна
A0.18)
где кп — постоянная Холла, Vs — напряжение, создаваемое на токоподводящих
выводах датчика Холла. Для кремния кн составляет величину порядка
70 мВДВТл), поэтому, как правило, ЭДС датчика Холла требуется усиливать.
Кремний обладает тензорезистивным эффектом, заключающимся в
изменении сопротивления при механических напряжениях. Желательно уменьшить
это влияние в датчике Холла. Это достигается соответствующей ориентацией
элемента Холла на интегральной схеме и использованием нескольких
элементов на кристалле.
На Рис. 10.44 показаны два элемента Холла, расположенные рядом на
кристалле ИМС.
Рис. 10.44. Расположение двух элементов Холла на ИМС, компенсирующее
ошибку, вызванную механической деформацией кристалла
Они позиционированы так, что испытывают практически одинаковое
механическое напряжение, вызывающее изменение АЯ,
К левому на рисунке элементу приложено напряжение возбуждения Fs,
направленное по вертикальной оси, а к правому — по горизонтальной. При
сложении сигналов этих двух датчиков ошибка, вызванная деформацией
кристалла, компенсируется.
519
объемных зарядов в полупроводниковой пластине. Как следствие между
краями пластины, параллельными направлению протекания тока возникает ЭДС,
называемая ЭДС Холла. Эта ЭДС пропорциональна векторному произведению
индукции В на плотность тока j
Глава 10. ИНТЕГРАЛЬНЫЕ ДАТЧИКИ
10.5.2. Интегральные датчики Холла
Датчики Холла являются основой интегральных измерителей самых
различных физических величин, в том числе линейного или углового перемещения,
магнитного поля, тока, расхода и др. Удобство бесконтактного срабатывания
(полное отсутствие механического износа), низкая стоимость, простота
использования делают их незаменимыми в приборостроении, автомобильной,
авиационной и других отраслях промышленности.
Интегральные датчики Холла производят многие фирмы, такие, как
Honeywell, Melexis, Allegro Microsystems, Micronas Intermetall, Siemens, Analog
Devices и др.
Первая группа интегральных датчиков Холла — это линейьйае устройства,
применяющиеся в измерителях напряженности магнитного поля. Как правило,
эти устройства содержат схемы усиления сигнала датчика. Необходимая
предварительная обработка сигнала обычно заключается в усилении и
температурной компенсации. Может понадобиться также стабилизация питающего
напряжения. Полярность и величина выходного напряжения датчика зависят
соответственно от направления и значения напряженности магнитного поля.
При отсутствии магнитного поля выходное напряжение датчика должно быть
равно нулю. Таким образом, для съема сигнала с датчика Холла требуется
дифференциальный усилитель (Рис. 10.45).
520
Рис. 10.45. Внутренняя схема ИМС линейного датчика
Холла (а) и график его характеристики преобразования (б)
Вторая группа включает в себя микросхемы компараторного типа с
цифровыми уровнями напряжения на выходе. Эта группа более многочисленна в силу
большего числа возможных применений. Микросхемы с цифровым выходом
(Рис. 10.46) делятся на две подгруппы: переключатели и триггеры.
Униполярный переключатель (см. Рис. 10.466) срабатывает только при
наличии магнитного поля одной полярности и гарантирует выключенное
состояние в отсутствии магнитного поля; магнитное поле противоположной полярно-
10.5. Датчики магнитного поля
Рис. 10.46. Цифровой датчик Холла:
а— блок-схема, б — петля гистерезиса униполярного датчика магнитного поля, в — петля
гистерезиса биполярного датчика магнитного поля
сти не оказывает на него никакого влияния. Биполярный триггер, напротив,
реагирует на обе полярности: включается при приближении северного или
южного полюсов магнита и выключается только в том случае, если поле с
противоположным знаком достигнет определенного уровня. Термин «биполярный
переключатель» обычно применяется к триггерам, реагирующим на пропадание
поля. Такие переключатели переходят во включенное состояние при наличии
магнитного поля, а выключаются при снижении уровня той же полярности,
отсутствии поля или в присутствии поля с противоположным знаком (см. Рис.
10.46«). Наличие ступени гистерезиса, которая является разностью между
величинами магнитного поля в точках включения и выключения повышает
помехозащищенность устройства.
Цифровой двухвыводной датчик Холла HAL556 производит фирма Micronas
Intermetall. Эта микросхема (Рис. 10.47) потребляет большой ток при
приближении положительного полюса магнита к маркированной стороне корпуса и
малый ток при удалении.
Рис. 10.47. Двухвыводной цифровой датчик HAL556 обеспечивает изменение
протекающего через него тока при изменении индукции магнитного поля
521
Глава 10. ИНТЕГРАЛЬНЫЕ ДАТЧИКИ
522
Цифровой двухвыводной датчик HAL566 реализует обратные функции.
Микросхема имеет встроенную систему, увеличивающую напряжение,
приложенное непосредственно к кристаллу датчика Холла, с тем, чтобы сделать
возможным применение недорогих постоянных магнитов, имеющих сравнительно
малую коэрцитивную силу [10.15].
10.5.3. Применение датчиков Холла
Ниже рассматриваются некоторые наиболее популярные применения
интегральных датчиков Холла. Перечень возможных применений этих датчиков
далеко не исчерпывается примерами, предложенными вниманию читателя.
Наиболее часто эти датчики используются для решения следующих технических
задач [10.14].
Линейные датчики Холла
• Датчики тока.
• Приводы переменной частоты вращения.
• Схемы управления и защиты электродвигателей.
• Датчики положения.
• Датчики расхода.
• Бесколлекторные двигатели постоянного тока.
• Бесконтактные потенциометры.
• Датчики угла поворота.
• Детекторы ферромагнитных тел.
• Датчики вибрации.
• Тахометры.
Цифровые датчики Холла
• Датчики частоты вращения.
• Устройства синхронизации.
• Датчики систем зажигания автомобилей.
• Датчики положения (обнаруживают перемещение менее 0.5 мм).
• Счетчики импульсов (принтеры, электроприводы).
• Датчики положения клапанов.
• Блокировка дверей.
• Бесколлекторные двигатели постоянного тока.
• Измерители расхода.
• Бесконтактные реле.
• Детекторы приближения.
• Считыватели магнитных карточек или ключей.
• Датчики бумаги (в принтерах).
10.5. Датчики магнитного поля
Датчики тока
Линейные датчики Холла могут быть использованы в составе измерителей
силы тока в пределах от 250 мА до тысяч ампер. Важнейшим достоинством
таких датчиков является полное отсутствие электрической связи с измеряемой
цепью. Линейные датчики позволяют измерять постоянные и переменные
токи, в том числе токи довольно высокой частоты.
Если линейный датчик Холла распо -
ложен вблизи проводника с током, то
выходное напряжение датчика
пропорционально индукции магнитного поля,
окружающего проводник. Величина
индукции, в свою очередь,
пропорциональна току. Два варианта конструкции
измерителей тока с датчиками Холла
показаны на Рис. 10.48.
В простейшем случае
бесконтактный измеритель тока представляет со-
Рис. 10.48. Конструкции датчиков тока:
а — с установкой около провода,
б — с установкой в прорезь магнитопровода
бой конструкцию, в которой датчик
Холла устанавливается около провода,
по которому течет измеряемый ток
(Рис. 10.48а). Такие датчики используются для измерения больших токов,
особенно в линиях электропередач. Индукция В определяется в мкТл по формуле
Линейный датчик обратной связи по положению
Линейные датчики Холла могут быть использованы во многих видах
позиционных приводов. Это иллюстрируется Рис. 10.49, где положение
перемещаемой части, на которой закреплен магнит, устанавливается автоматически таким
образом, чтобы разность между сигналом регулировки положения и сигналом
датчика равнялась нулю.
Рис. 10.49. Позиционный
привод с датчиком Холла
в обратной связи по
положению
523
где г — расстояние от центра чувствительной области датчика до оси
симметрии проводника в метрах.
Чувствительность датчика тока может быть значительно увеличена путем
использования концентратора магнитного потока в виде кольцевого
магнитопровода с прорезью, в которую помещается линейный датчик Холла
(Рис. 10.480). В этом случае индукция магнитного потока через датчик в мкТл
определяется по формуле
Глава 10. ИНТЕГРАЛЬНЫЕ ДАТЧИКИ
Бесколлекторные двигатели постоянного тока
Бесколлекторные двигатели
постоянного тока отличаются от обычных двигателей
постоянного тока, имеющих коллектор-
но-щеточный узел, прежде всего тем, что
коммутация секций якорной обмотки
осуществляется электронной схемой, а не
механическими скользящими контактами.
Поэтому такие двигатели имеют гораздо
большие надежностьи ресурс, требуютмень-
ше обслуживания, почти не создают
электромагнитных помех и могут использоваться
при пониженном атмосферном давлении.
Рис. 10.50 показывает, как может быть
получена информация о положении ротора для
управления электронным коммутатором с помощью трех датчиков Холла.
Работа двигателя этого типа, представляющего собой, по существу,
синхронный двигатель, основана на принципе самосинхронизации. Необходимую
для работы датчиков Холла конфигурацию магнитного поля создают
постоянные магниты, установленные на валу ротора. Датчики считывают угловую
позицию вала и передают эту информацию схеме управления, которая
обеспечивает своевременное отпирание и запирание силовых ключей электронного
коммутатора обмоток статора.
Подобные датчики положения ротора используются и в системах
векторного управления двигателями переменного тока (см. п. 9.8.4).
Рис. 10.50. Датчики положения ротора
бесколлекторного двигателя постоянного тока
524
Расходомер
Существуют различные методы измерения расхода с использованием
цифровых датчиков Холла, но принцип у них, как правило, общий: каждое
изменение магнитного потока через датчик соответствует некоторой порции жидкости
или газа, прошедшей через трубопровод. В примере, показанном на Рис. 10.51,
магнитное поле создается постоянными магнитами, установленными на
лопастях рабочего колеса.
Рис. 10.51. Датчик расхода
10.5. Датчики магнитного поля
Рабочее колесо вращается потоком воды. Датчик выдает два импульса за
оборот колеса.
10.5.4. Основные характеристики датчиков Холла
Линейные датчики Холла
Полная шкала выхода соответствует диапазону выходных напряжений, в
котором нелинейность не выходит из заданных пределов. Определяется в долях
(процентах) от напряжения питания.
Диапазон измеряемой индукции, устанавливаемый изготовителем в гауссах
или миллитеслах.
Чувствительность, определяемая как крутизна характеристики
преобразования в мВ/гс или мВ/мТл.
Погрешность линейности характеристики преобразования, определяемая так
же, как и в п. Ю.3.2. Указывается в процентах от полной шкалы.
Напряжение нуля магнитного поля — значение выходного напряжения,
соответствующее отсутствию магнитного поля.
Температурный дрейф нуля — изменение напряжения нуля, вызванное
изменением температуры. Указывается в %/°С от напряжения нуля,
соответствующего 25°С.
Температурный дрейф чувствительности — изменение чувствительности,
вызванное изменением температуры. Указывается в %/°С от напряжения
полной шкалы, соответствующего 25°С.
Время отклика, определяется как время изменения выходного сигнала от
10% до 90% установившегося значения его приращения при скачкообразном
изменении магнитного поля. Например, для ИМС серии SS94 типичное время
отклика составляет 3 мкс.
Полоса пропускания /s определяется по уровню снижения чувствительности
на 3 дБ в режиме малого сигнала.
Цифровые датчики Холла
Индукция включения — значение индукции, при которой происходит
переход выходного напряжения датчика от низкого к высокому уровню.
Индукция выключения — значение индукции, при которой происходит
переход выходного напряжения датчика от высокого к низкому уровню.
Время переключения — определяется как время изменения выходного
сигнала от 10% до 90% его установившегося значения при скачкообразном
изменении индукции. Сертифицируется отдельно для нарастания и спада магнитного
поля.
В Табл. 10.5 приведены основные характеристики некоторых типов
интегральных датчиков магнитного поля на эффекте Холла.
Глава 10. ИНТЕГРАЛЬНЫЕ ДАТЧИКИ
Таблица 10.5. Датчики магнитного поля
Линейные датчики
Наименование
Примечание
SS94A1
Линейный датчик
SS495A
Линейный миниатюрный 4x3x1.8 мм
AD22151
Термокомпенсированный
Цифровые датчики
Наименование
Примечание
SS111A
Биполярный магнитный ключ
SS141A
Униполярный магнитный ключ
1GT101DC
Датчик поворота зубчатого колеса
с встроенным магнитом смещения
2SS52M
Магниторезистивный датчик
Вопросы и задачи
526
1. Сравните характеристики полупроводниковых датчиков температуры с
резистивными датчиками температуры и термопарами. Определите
области применения всех этих датчиков.
2. Запишите уравнения, справедливые для схемы на Рис. 10.3, и найдите
чувствительность датчика.
3. Определите внутреннее динамическое сопротивление датчика
температуры AD592 (см. Рис. 10.5) при низких питающих напряжениях с учетом
того, что его чувствительность (коэффициент преобразования)
составляет 1 мкА/°С, а коэффициент подавления влияния напряжения
питания KSR= 0.5°C/B.
4. Какой из типов датчиков температуры предпочтителен для измерения
на удаленных объектах — с выходом по току или по напряжению и
почему?
5. Определите коэффициент подавления влияния напряжения питания
A'sr датчика температуры LM335 (см. Рис. 10.7) при питании от
источника напряжением 5 В через резистор сопротивлением 3 кОм.
6. Каким знаком температурного коэффициента сопротивления должен
обладать терморезисторчв ИМС AD22103 (см. Рис. 10.11), чтобы
выполнялось соотношение A0.4)?
Частота пе-
рекл. 100 кГц
10.5. Датчики магнитного поля
7. Почему ИМС цифровых датчиков температуры изготавливают почти
исключительно с последовательным интерфейсом?
8. Как влияет на статическую и динамическую ошибки измерения
температуры плохой тепловой контакт датчика с контролируемым объектом?
9. Нарисуйте схему логометрического включения датчика ускорения.
10. Определите максимальную разрешающую способность акселерометра
ADXL202 при его работе на микроконтроллер семейства MCS-51 с
тактовой частотой 24 МГц.
11. Почему с помощью датчиков ускорения фирмы Motorola нельзя
измерять наклон объектов относительно линии горизонта?
12. В чем состоит преимущество применения в акселерометрах с
емкостным датчиком усилителя напряжения перед усилителем заряда?
13. Определите динамический диапазон акселерометра ADXL105 (см. Табл.
10.3) при включении на его выходе ФНЧ с полосой пропускания 300 Гц.
14. Нужно ли удалять воздух из герметично запаиваемой полости датчика
абсолютного давления?
15. Укажите источник температурного дрейфа нуля датчика давления типа
X-ducer.
16. Как влияет на показания интегрального датчика абсолютной влажности
повышение температуры окружающего воздуха?
17. Укажите причины температурного дрейфа параметров датчика Холла.
18. Может ли датчик Холла по схеме на Рис. 10.45 использоваться в лого-
метрической схеме включения?
19. Для чего переходная характеристика цифровых датчиков Холла имеет
гистерезис?
20. Какие требования следует предъявлять к датчикам Холла, используемым
в измерителях малых токов?
Литература к главе 10
10.1. Brokaw P. A simple three-terminal 1С bandgap voltage reference //IEEE Journal of
Solid State Circuits. V. SC-9, December, 1974.
10.2. LM34/LM35 Precision Monolithic Temperature Sensors //National Semiconductor.
— Application Note AN-460. October 1986. — 10 p.
10.3. MeijerG. C. An 1С Temperature Sensor with an Intrinsic Reference// IEEE Journal of
Solid State Circuits, V SC-15, June, 1980. - Pp. 370-373.
10.4. Гудинаф Ф. Интегральный акселерометр на ±50 G с самоконтролем,
реализованным на нагреваемом возбудителе //Электроника, № 7-8, 1993. — С. 54—57.
10.5. Гудинаф Ф. Емкостный датчик ускорения, выполненный на основе сочетания
объемной и поверхностной микроструктур//Электроника, № 11—12, 1993. — С. 86—87.
10.6. Гудинаф Ф. Интегральный датчик ускорения для автомобильных надувных
подушек безопасности//Электроника, № 16, 1991. — С. 7—14.
10.7. DoscherJ. Accelerometer Design and Applications//Analog Devices. — 1998. — 61 p.
10.8. Серридж М., Лихт Т.Р. Справочник по пьезоэлектрическим акселерометрам и
предусилителям //Брюль и Къер. — Март 1987. — 187 с.
10.9. Шитиков А. Цифровые датчики температуры от Dallas
Semiconductor//Компоненты и технологии, № 3, 2001. — С. 116—120.
10.10. Pressure and Force Sensors. Piezoresistive Technology //Reference And Application
Data. — Honeywell MICRO SWITCH Sensing and Control, 1999. — 3 p.
527
Глава 10. ИНТЕГРАЛЬНЫЕ ДАТЧИКИ
10.11. Sense the Possibilities. Pressure Sensor Distributor Handbook //Motorola Corp.
1996.-31 p.
10.12. Волков В. Применение датчиков давления фирмы Motorola// Компоненты и
технологии, 2000, № 6. — С. 58—60.
10.13. Humidity Sensor Theory and Behavior// Reference and Application Data. —
Honeywell MICRO SWITCH Sensing and Control. 1999. — 2 p.
10.14. Hall Effect Sensing and Application Book. — Honeywell MICRO SWITCH Sensing
and Control. 1999. — 117 p.
10.15. Трэвис Б. Интегральные датчики Холла //Инженерная микроэлектроника,
июль 1998 (№ 1). - С. 39-44.
СХЕМОТЕХНИКА
АНАЛОГОВЫХ
И
АНАЛОГО-ЦИФРОВЫХ
ЭЛЕКТРОННЫХ УСТРОЙСТВ
Предлагаемая читателю книга освещает принципы построения,
свойства и особенности применения аналоговых и аналого-
цифровых интегральных микросхем: операционных усилителей,
компараторов, таймеров, фильтров, линейных и импульсных
стабилизаторов напряжения, коммутаторов, АЦП и ЦАП, различных
датчиков.
В книге нашли отражение последние достижения в элементной
базе, при этом основное внимание уделено схемотехнической
реализации различных функций электронных устройств.
Рассмотрены схемы линейного и нелинейного преобразования
сигналов, измерительные и вычислительные схемы, активные
электрические фильтры, генераторы и перемножители сигналов,
специализированные усилители (широкополосные, изолирующие,
измерительные и др.), источники опорного напряжения, различного
типа цифроаналоговые и аналого-цифровые преобразователи,
схемы датчиков температуры, ускорения, давления, влажности,
магнитного поля.
Издательский дом «Додэка-XXI»
ТОРГОВЛЯ ТЕХНИЧЕСКОЙ ЛИТЕРАТУРОЙ
ОТ 30 издательств
БОЛЕЕ 1000 наименований
Заказать книги можно:
• на сайте: www.dodeca.ru
• по e-mail: books@dodeca.ru
• по почте: 105318, Москва, а/я 70
• по тел./факсу: @95) 366-8145,
366-2429, 366-0922, 366-0456
Всю литературу и бесплатный аннотированный каталог можно
получить по почте наложенным платежом на территории РФ
ISBN 5-94120-074-9
9785941 200740
Книга полезна
специалистам в области
электроники, автоматики,
вычислительной техники,
а также аспирантам и
студентам
соответствующего профиля.