/









































Текст
БЮРО НАУЧНОЙ ИНФОРМАЦИИ
’Т СП CD О СО
— 04 04 СП СО
Ракетоплан .Дайна-Сор*....................... 1
Антиснаряд Уэстерн Электрик Дуглас .Нина Зевс" 4
Противолодочный снаряд .Асрок*.............. 11
Автоматическая астронавигация ..............
Топливо и безопасность полета ..............
Электрогидравлические сервоклапаны .........
Инерционные выключатели.....................
Хроника.....................................
БЮРО НАУЧНОЙ ИНФОРМАЦИИ
ЕХНИЧЕСКАЯ
имсрсуиишщя
(по материалам иностранной авиационной печати)
N 5 (931)
Март 1961 г.
XXII год издания
РАКЕТОПЛАН „ДАИНА-СОР“
Идея создания аппарата, достигающего с
помощью стартового двигателя большой высо-
ты, а затем планирующего в верхних слоях
атмосферы, не нова. Первые серьезные иссле-
дования в этой области были проведены в
Германии более 20 лет тому назад. Преду-
сматривалось создание пилотируемого ракет-
ного самолета, взлетающего с рельсового пути
длиною 3 км. К моменту выгорания топлива
самолет должен был достигать гиперзвуковой
скорости и входить в атмосферу по волно-
образной траектории, переходя в конце на
планирование со сверхзвуковой скоростью. Та-
ким образом, предполагалось достигнуть
дальности полета более 16000 км.
В немецком ракетном центре Пеенемюнде
еще в 1942 г. начали разрабатывать крылатый
аппарат, снабженный боевой частью ракеты
V-2; аппарат должен был устанавливаться
на последней ступени мощной ракеты-носи-
теля.
После окончания второй мировой войны
проектированием беспилотных планирующих
боевых аппаратов в США занимались фирмы
Конвэр и Джеиерал Электрик. Однако эти
работы были быстро прекращены, когда тех-
нические достижения в области ракетострое-
ния позволили создать баллистические ракеты
с межконтинентальными дальностями, боль-
шими скоростями и высотами полета, могущие
нести ядерные заряды уменьшенного веса.
Когда пришло время запяться полетами че-
ловека в космос, первый орбитальный пилоти-
руемый аппарат в США был спроектирован нс
крылатым, а баллистическим, напоминающим
головную часть МБС. Речь идет об известном
проекте «Меркурий». Предпочтение, отданное
баллистическому аппарату, основано на сле-
дующих соображениях.
Во-первых, имевшаяся в наличии ракета-
носитель не обеспечивала вывод на орбиту
нагрузки весом более 1 т. Во-вторых, в связи
с успехами в разработке головных частей
ракет и тепловой защиты разработка балли-
стического аппарата потребовала меньше вре-
мени. Наконец, в-третьих, крылатый аппарат
имеет более сложную конструкцию и опыта
его создания нет.
Тем не менее работы над крылатым аппа-
ратом начали фирма Белл (проекты «Робо» и
«Бомби») и фирма Гудъир (проект «Метеор»).
В этих работах принял участие NACA, ис-
следовавший аппараты как в форме полуко-
нуса, так и планирующие аппараты более
обычной формы. Технические отчеты Эймской
лаборатории на эту тему начали появляться в
печати в 1957 г. В них было показано, что пла-
нирующий аппарат с аэродинамическим ка-
чеством, близким к четырем и более, значи-
тельно превосходит баллистический аппарат с
точки зрения преобразования скорости в даль
кость. Хотя крылатый аппарат поглощает
больше тепла, этот недостаток компенсирует-
ся тем, что большая часть тепла может быть
рассеяна излучением.
В NASA пришли к заключению, что для
уменьшения местного нагрева крыло гиперзву-
кового планера должно иметь большую стре-
ловидность и затупленные передние кромки.
Если затупление фюзеляжа не обязательно ве-
дет к увеличению лобового сопротивления, то
затупление передней кромки крыла вызывает
рост сопротивления и уменьшение аэродина-
мического качества. Эту трудность можно пре-
одолеть увеличением стреловидности крыла.
Доля сопротивления вследствие затупления
передней кромки крыла уменьшается прибли-
зительно пропорционально кубу косинуса угла
его стреловидности при постоянном размахе.
Исходя из этого, а также учитывая необходи-
мость уменьшения веса, пришли к конфигура-
ции аппарата с треугольным крылом малого
удлинения без горизонтального оперения.
Исследования гиперзвукового полета нача-
лись в ВВС США, NACA и промышленности
в 1954 г. Уже тогда на начальной стадии ис-
следований стало ясно, что обычные аэроди-
намические и ударные трубы являются лими-
тирующим фактором. При более поздних
экспериментах потребовались очень высокие
температуры газа, и они могли создаваться в
течение нс более нескольких тысячных секун-
Сканирование и обработка
Deathdoor
ды. Эксперименты могли вестись только с
очень малыми моделями. Единственным выхо-
дом было перейти к дорогим и трудным экспе-
риментам в свободном полете с натурными
скоростями.
Несмотря на эти трудности, ВВС США в
ноябре 1957 г. выдали промышленности заказ
на эскизное проектирование ракетоплана
«Дайна-Cop». Согласно тактико-техническим
требованиям, аппарат должен совмещать ско-
рость баллистического снаряда со свойствами
пилотируемого самолета. Летчику должна
быть предоставлена возможность уменьшать
или увеличивать дальность полета на тысячи
километров, а также маневрировать и совер-
шать посадку в заданном месте. По заявле-
нию фирмы Боинг, ракетоплан при входе в
атмосферу может совершать маневр, обеспечи-
вающий выбор для посадки любого аэродрома
между м. Барроу на Аляске и Сан Диего в
Калифорнии.
К марту 1958 г. ведущие американские
фирмы представили свои предложения. В ию-
не того же года ВВС США приняли решение
выдать заказ на проектирование ракетоплана
Фиг. 1. Ракета-носитель «Ти-
тан» I с ракетопланом «Дайна-
Сор» (не в масштабе)
двум группам фирм. В первую группу, во гла-
ве с фирмой Боинг, входят фирмы Эрджет,
Чанс Воут, Норт Америкен, Рамо-Вулдридж,
Дженерал Электрик и Радио Корпорейшн оф
Америка. Во вторую группу, во главе с фир-
мой Мартин, входят Америкен Машин энд
Фаундри, Белл, Бендикс, Гудъир и Миннеапо-
лис-Ханиуэлл.
Группе фирм, возглавляемой фирмой Бо-
инг, был дан заказ на планер, компоновку раз-
личных его систем и установку на ракету-
носитель. На фирму Мартин возложена зада-
ча модификации МБС «Титан» в ракету-но-
ситель. Общее руководство работами осущест-
вляет Райтовский центр ВВС с помощью
NASA.
Фирма Боинг на основе конкурсов привле-
кает к проектированию и производству частей
и оборудования ракетоплана субподрядчиков.
Первой задачей является постройка и ис-
пытание планера ракетоплана. По заявлению
заместителя начальника штаба ВВС США,
первые полеты планеров начнутся не позже
чем через три года. Он заявил также, что на
более позднем этапе разработки предусматри-
вается постройка вариантов ракетоплана, ко-
торые будут выводиться на орбиты вокруг
Земли.
По заявлению фирмы Мартин, в первых
натурных испытаниях в качестве ракеты-носи-
теля будет использован МБС «Титан» I
(фиг. 1). Снаряд будет снабжен стабилизато-
рами и его прочность будет повышена, чтобы
обеспечить установку ракетоплана и «уникаль-
ной системы спасения экипажа». Последняя,
по-видимому, представляет собой связку ра-
кетных двигателей, предназначенных для от-
деления ракетоплана от верхней ступени
ракеты-носителя при аварии.
Возможные ракеты-носители ракетоплана
«Дайна-Сор» имеют следующие основные
данные:
«Титан* I «Титан* II
Длина |.«]....... 33,0 36.7
Диаметр корпуса |л«]3,05(1 ступень) 3.05 (I ступень)
2,44 (2 ступень) 3.05(2 ступень)
Стартовый вес (кг| 100 (XX) 122 (XX)
Силовая установка: первая ступень . 2X63 (XX) кг 2x77000 кг
вторая ступень . IX-36400 кг 1X38600 кг
Окислитель .... Жидкий n2o.
Горючее кислород Керосин RP-1 Смесь иесимме-
Скорость в момент выключения дви- гателя |к.к/час| . 27 500 тричного диме- тилгилразина и гидразина 29 600
Дальность [кл] . . 14 800 22 (XX)
Согласно опубликованному министерством
обороны рисунку (фиг. 2), ракетоплан «Дайна-
Сор» имеет фюзеляж арочного сечения, ниж-
няя плоская поверхность которого переходит
в треугольное крыло. Управление в нижних
слоях атмосферы осуществляется элевонами
и рулями направления, имеющимися на двух
килях, расположенных на концах крыла. Дли-
на ракетоплана превышает 10 м, размах кры-
ла около 6 м.
2
Конструкция ракетоплана на первый
взгляд очень проста. Между тем он летает в
чрезвычайно широком диапазоне скоростей от
Фиг. 2. Схема ракетоплана «Дайна-Сор»
соответствующей числу М- 25 до минималь-
ной дозвуковой скорости, с которой произво-
дится посадка. Посте полета ракетоплан дол-
жен использоваться повторно при минималь-
ной замене частей.
Наиболее трудная проблема связана с
аэродинамическими и тепловыми нагрузками
при входе аппарата в атмосферу. Поэтому
большое внимание уделяется выбору траекто-
рии входа в атмосферу (фнг. 3).
При снижении ракетоплана с малым коэф-
фициентом подъемной силы и минимальным
сопротивлением достигается сравнительно
большая дальность. Однако это связано с дли-
тельным полетом в диапазоне скоростей ме-
жду 19000 и 24 000 км/час и соответствующим
нагревом. Если ракетоплан входит в атмосфе-
ру под большим углом, он проходит этот
диапазон быстрее. Еще быстрее снижается
аппарат баллистического типа, типа «Мерку-
рий», хотя его скорость в начале входа
сравнима со скоростью ракетоплана.
В течение нескольких минут в процессе
входа ракетоплана в атмосферу выделяется
энергия порядка 35000000 ккал. Если бы все
это тепло было поглощено конструкцией, она
быстро бы испарилась. Однако большая часть
тепла затрачивается на нагревание атмосферы
и лишь небольшая доля поглощается аппара-
том. При входе в атмосферу весь аппарат об-
волакивается плазмой с температурой 11000—
14000°С. Чем больше затуплены формы аппа-
рата и чем больше угол атаки, тем больше
тепла передается в атмосферу. Крылатые
аппараты, имеющие большую поверхность и
меньшую затупленность по сравнению с бал-
листическими аппаратами, испытывают чрез-
мерные тепловые нагрузки, которые не могут
быть поглощены конструкцией. Одним из воз-
можных решений является применение охлаж-
дения путем излучения, но оно эффективно
только при нагреве не меньше, чем до 2000°С,
что связано с труднейшими металлургически-
ми и технологическими проблемами.
Наиболее нагретыми частями ракетоплана
«Дайна-Сор» являиггся носовая часть фюзе-
ляжа, передние кромки крыла и килей. Здесь
нельзя применить высокотемпературные спла-
вы, понадобятся обгорающие материалы или
такие материалы, как керамика и графит.
Относительно более холодные части, на-
гретые до красного каления, могут быть вы-
полнены в виде излучающей тепло конструк-
ции. В лабораториях NASA были проведены
большие работы, связанные с созданием та-
ких конструкций.
Излучающую обшивку нужно делать гоф-
рированной, чтобы обеспечить возможность ее
расширения при сильном нагревании. Сдвиг
панелей обшивки относительно друг друга
обеспечивается путем применения подвижных
соединений. Испытания показали, что такая
конструкция может обеспечить прочность и
жесткость, необходимые при входе ракетопла-
на в атмосферу.
Проблемой, однако, является подбор кон-
струкционных материалов.
Из конструкционных материалов представ-
ляют интерес молибден, ниобий, тантал и
вольфрам. Наиболее обещающим является мо-
либден, но если его поверхность надлежащим
образом не защищена, он быстро окисляется.
Важность теплозащитных покрытий молибде-
на выявилась в самом начале исследований.
После кратковременного воздействия высоких
температур на обшивке появились небольшие
участки с признаками окисления, что на пер-
вый взгляд не представляло опасности. Когда
покрытие было удалено, оказалось, что в об-
шивке образовались отверстия. Причиной их
появления является проникновение молекул
кислорода в металл через трещины в по-
крытии.
Остается нерешенным ряд технологических
вопросов. Высокотемпературные сплавы рань-
ше не изготовлялись в количествах, необходи-
мых для применения на самолетах. Необходи-
мо также научиться изготовлять заклепки,
болты и тонкие листы из этих сплавов. Осо-
бую трудность представляют проблемы свар-
ки, обработки резанием и давлением прочных
и часто хрупких материалов.
Программа исследований, связанных с со-
зданием ракетоплана, включает получение
Фнг. 3. Траектории входа баллистических
и планирующих космических аппаратов в атмосферу
аэродинамических данных при очень боль-
ших скоростях и температурах. В результате
этих исследований будут уточняться формы
ракетоплана и его органы управления. Но да-
3
же малейшее изменение какого-либо радиуса
или угла потребует повторной проверки в ряде
аэродинамических труб во всем диапазоне
скоростей полета. Для каждого испытания
нужно строить сложную, надлежащим обра-
зом оборудованную модель.
В качестве примера других сложных про-
блем, которые должны быть решены, можно
указать систему кондиционирования воздуха
внутри нагретого до красного каления самоле-
та, вспомогательной силовой установки для
получения электроэнергии и питания гидро-
систем, а также радиосистем, обеспечивающих
связь ракетоплана с землей, когда при входе
в атмосферу он окутан горячей плазмой.
Согласно сообщениям, «Дайна-Cop» будет
снабжен электротурбогенератором, работаю-
щим на водороде и кислороде. Часть водорода
будет расходоваться на охлаждение кабины и
электронного оборудования, а газы после вы-
хода из турбины будут использоваться для
управления положением ракетоплана в про-
странстве.
Важнейшей частью экспериментальных ис-
следований будут испытания моделей ракето-
плана. Запланировано девять запусков с по-
мощью ракеты HETS-609A «Блю Скаут». Для
этих испытании ВВС США заказали две аэро-
динамические модели (лаборатории Флайт
Сайенсиз в Буффало) и три конструкционные
модели с использованием намеченных к при-
менению на ракетоплане материалов (фирме
Мак Доннелл). Первые запуски моделей ожи-
даются в ближайшие месяцы.
Первый полномасштабный планер ракето-
плана будет поднят в воздух на самолете-мат-
ке В-52. Предполагают, что полет состоится
до 1962 г. Это позволит исследовать устойчи-
вость и управляемость ракетоплана при ма-
лых скоростях полета. Возможно, что исследо-
вания будут продвинуты в диапазон малых
сверхзвуковых скоростей при установке на
планерах небольших двигателей.
В 1963 г., вероятно, состоятся первые поле-
ты беспилотных ракетопланов, запускаемых с
помощью модифицированной ракеты «Титан»
Будет выяснена прочность комбинации раке-
топлана и ракеты-носителя и оценена система
спасения. Будут также исследованы устойчи-
вость и управляемость при больших сверхзву-
ковых скоростях и отделение ступеней ракеты
и ракетоплана при постепенном увеличении
скорости. После удовлетворительного заверше-
ния этой стадии испытаний будут произведе-
ны запуски ракетоплана с летчиком.
Первые посадки ракетоплана будут произ-
водиться на одном из островов Атлантическо-
го ракетного полигона, вероятно, на острове
Вознесения, а затем при суборбитальных и
орбитальных полетах—на авиабазе ВВС США
Эдвардс в Калифорнии. Для таких полетов
потребуется более мощная ракета-носитель,
чем «Титан».
Согласно существующим планам, наме-
чается построить 18 ракетопланов: 7 беспилот-
ных и 11 пилотируемых. Их общая стоимость
около 500 млн. долларов.
ВВС США рассматривают создание раке-
топлана «Дайна-Cop» как начало разработки
пилотируемой орбитальной боевой системы.
Ракетоплан открывает новые пути для воен-
ного оперативного искусства.
Объединяя большую скорость баллисти-
ческого снаряда с «управляемым полетом пи-
лотируемого самолета», ракетоплан «Дайна-
Сор» будет отличаться от других космических
аппаратов управляемым входом в атмосферу
«в заданное время с маневренностью, необхо-
димой для посадки на выбранный летчиком
аэродром». Таковы, по крайней мере, цели
разработки ракетоплана. Если они будут до-
стигнуты, станет возможна постройка боевых
ракетопланов для дальней разведки, бомбар-
дировки небольших целей путем сбрасывания
боевой нагрузки на планировании с гиперзву-
ковой скоростью, опознавание или уничтоже-
ние спутников, проведение спасательных опе-
раций в космосе; транспортных перевозок
между Землей и космическими станциями.
Применение ракетопланов, таким образом,
мыслится в широком масштабе. Это заставля-
ет обратить внимание на экономическую сто-
рону вопроса. Можно использовать сверхзву-
ковой бомбардировщик В-70 «Валькирия» в
качестве первой ступени ракеты-носителя. По
официальным данным, с самолета В-70 воз-
можно сбрасывание груза весом до 6800 кг
при скорости 3200 км!чис на высоте около
21000 .и. Предполагая, что самолет В-70 мо-
жет нести нагрузку более 10% взлетного веса,
можно ожидать, что с В-70 удастся запускать
ракетоплан весом 4,5 т с ракетой-носителем
весом 18 т, двигатель которой работает на
высококалорийном топливе. Использование
такой техники запуска ракетопланов заслужи-
вает внимания.
Aeroplane А6 2568.
АНТИСНАРЯД УЭСТЕРН ЭЛЕКТРИК/ДУГЛАС ,НИКА-ЗЕВС“
Антиснаряд «Ника-Зевс» предназначается
для обороны от межконтинентальных балли-
стических снарядов и баллистических снаря-
дов средней дальности путем перехвата их
боевых головок на нисходящей ветви траекто-
рии непосредственно перед входом или во
время входа их в атмосферу.
Предварительные изыскания по проекту
системы «Ника-Зевс» проводились в 1955—
1956 гг. Контракт на исследования и опытные
работы был заключен в конце 1956 г., а рабо-
ты по этому контракту начались в 1957 г.
Разработка системы «Ника-Зевс» ведется
фирмами Уэстерн Электрик, Дуглас и Белл
4
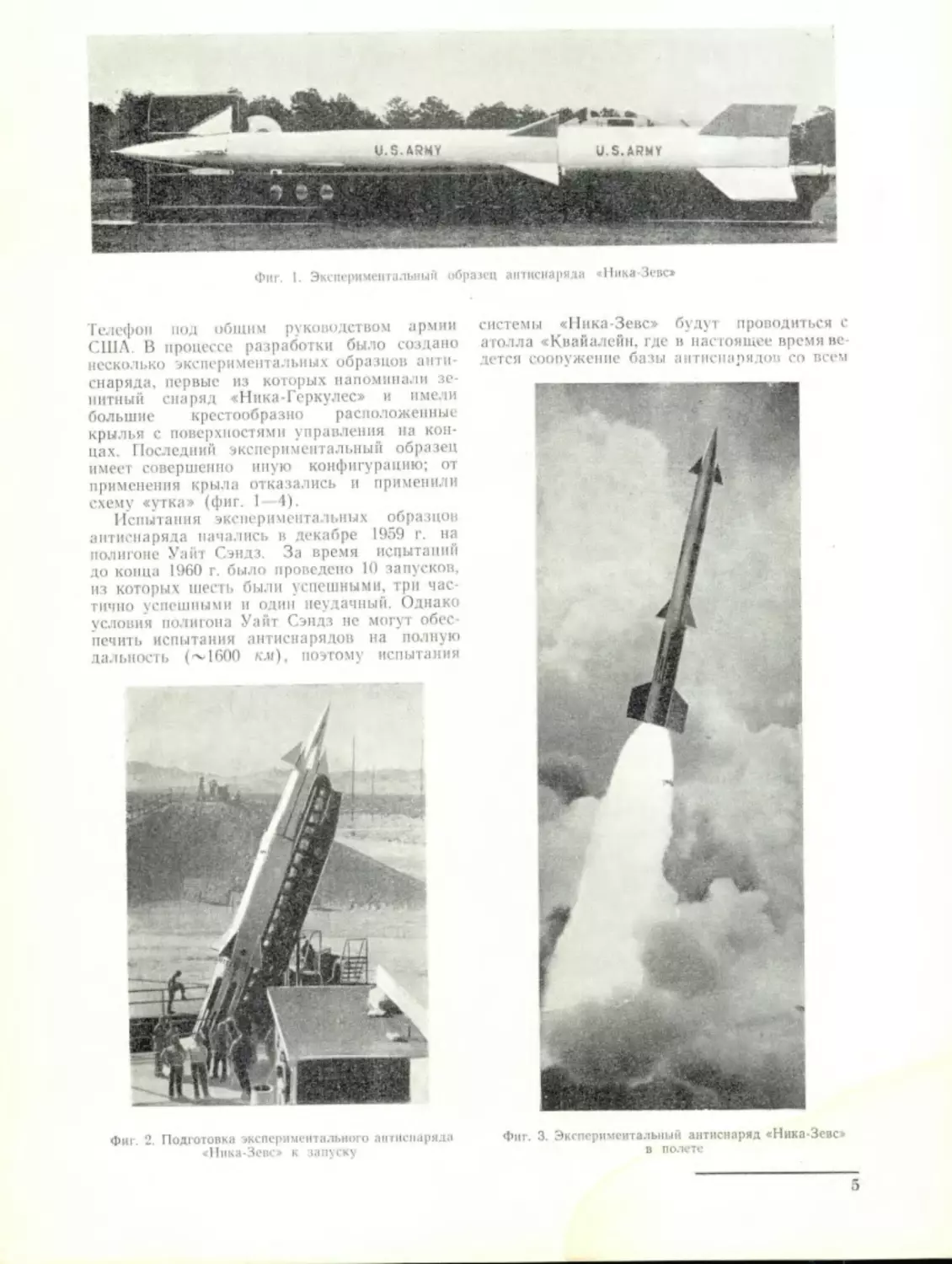
Фиг. I. Экспериментальный образец антненаряда «Ника-Зевс»
Телефон под общим руководством армии
США. В процессе разработки было создано
несколько экспериментальных образцов анти-
снаряда, первые из которых напоминали зе-
нитный снаряд «Ника-Геркулес» и имели
большие крестообразно расположенные
крылья с поверхностями управления на кон-
цах. Последний экспериментальный образец
имеет совершенно иную конфигурацию; от
применения крыла отказались и применили
схему «утка» (фиг. 1 I).
Испытания экспериментальных образцов
антненаряда начались в декабре 1959 г. на
полигоне Уайт Сэндз. За время испытаний
до конца 1960 г. было проведено 10 запусков,
из которых шесть были успешными, три час-
тично успешными и один неудачный. Однако
условия полигона Уайт Сэндз нс могут обес-
печить испытания антиснарядов на полную
дальность (М600 к,м), поэтому испытания
Фиг. 2. Подготовка экспериментального антненаряда
«Ника-Зевс» к запуску
системы «Ника-Зевс» будут проводиться с
атолла «Квайалейн, где в настоящее время ве-
дется сооружение базы антиснарядов со всем
Фиг. 3. Экспериментальный антиснаряд «Ника-Зевс»
в полете
Фнг, 4 Три снаряда семейства «Ника» (слева направо):
«Ника-Аякс», «Ника-Геркулес», «Ника-Зевс»
оборудованием (фнг. 5). С этой базы антисна-
ряды будут запускаться против МБС «Атлас»,
причем испытания будут вести с созданием
ложных целей.
Система «Ника-Зевс» будет, по-видимому,
запущена в производство лишь после испыта-
ний против МБС «Атлас», хотя контракты на
разработку технологии, производственной
оснастки и испытательного оборудования уже
заключены с тем, чтобы начать производство
немедленно после получения разрешения.
Стоимость программы исследований и
опытных работ, включая запланированные
ассигнования на 1962 бюджетный год. превы-
сила 1 млрд, долларов.
Если система будет принята на вооруже-
ние, то на производство системы и строитель-
ство баз потребуется еще 8 млрд, долларов.
Большие затраты на исследования и опыт-
ные работы объясняются тем, что создание
системы связано с решением новых мало изу-
ченных проблем. При решении этих проблем
были достигнуты определенные успехи, в част-
ности, в области разработки новейших радио-
локационных средств и создания мощных
РДТТ.
Система должна выполнять в короткое
время очень много функций, так как совре-
менные радиолокационные средства дальнего
обнаружения могут обнаруживать атакующий
баллистический снаряд лишь за 15—20 мин.
до поражения им цели. В функции системы
«Ника-Зевс» входят обнаружение и захват
цели, выделение ее среди возможных ложных
целей, слежение за целью и запуск антисна-
ряда с таким расчетом, чтобы боевая головка
атакующего снаряда была перехвачена на до-
статочно больших высотах, чтобы выпадение
радиоактивных осадков не приносило ущерба
наземным объектам. Естественно, что выпол-
нение этих функций за короткое время может
быть осуществлено лишь полностью автома-
тической системой.
Система «Ника-Зевс» связана с системой
раннего обнаружения BMEWS, обнаружи-
вающей и определяющей траекторию атакую-
щего снаряда и посылающей сигнал о приве-
дении в боевую готовность соответствующей
базы антиснарядов.
В систему «Ника-Зевс» входят четыре типа
радиолокаторов, система вычислителей, анти-
снаряд и связанное с ним вспомогательное
оборудование.
Основными частями системы являются ра-
диолокаторы, дальность действия которых, а
также их мощность и точность значительно
превышают подобные характеристики обыч-
ных радиолокаторов.
Обнаружение и захват боевых головок бал-
листических снарядов, летящих со скоростью
8000 м!сек, представляли собой довольно
сложную проблему. Мощный радиолокатор
обнаружения получает данные о приближаю-
щейся боевой головке от системы BMF.WS,
обнаруживает и захватывает се, а также вы-
дает данные для предварительного вычисле-
ния траектории. На все эти операции затрачи-
вается приблизительно 20 сек.
Вследствие необходимости наличия огром-
ных выходных мощностей передающая и при-
емная антенны радиолокатора обнаружения
отстоят друг от друга на расстоянии 300 м.
Передающая антенна треугольной формы
состоит из трех решеток, каждая из которых
имеет длину окаю 24 м (фиг. 6). Антенна вра-
щается на 360° по азимуту и установлена на
крыше полуподземного здания передатчика.
Выходная мощность этой установки неизвест-
на, но она находится в диапазоне многих ме-
гаватт. Корнельская авиационная лаборато-
рия недавно построила микроволновый радио-
локатор мощностью 50 мгвт, предназначенный
для исследования проблем обнаружения и
слежения за МБС.
Приемная антенна радиолокатора обнару-
жения (фиг. 7) представляет собой линзу Луне-
берга диаметром 24 м, выполненную из пено-
пласта с легкими металлическими полосками.
Металлические полоски расположены в пено-
пласте в определенном порядке с тем, чтобы
точно изменять диэлектрическую постоянную.
Действие этой линзы сводится к концентрации
отраженных радиолокационных импульсов на
приемных рупорах, находящихся внутри обте
кателя диаметром 33,5 .и. На основе получае-
мых данных определяются дальность, угол
места и азимут приближающейся боевой го-
ловки.
В приемнике используется молекулярный
усилитель, охлаждаемый примерно до 4°абс,
обеспечивающий системе чрезвычайно низкий
уровень шума.
атмосферу тел, хранящимися в запоминающем
устройстве вычислителя, на основе чего дей-
ствительная цель выделяется на фоне ложных
целей и помех.
Стартовая плои/адка
для запуска метеора
логически* ракет
Приборы и оборуЗадание
слежения
Сддоенные Зыити
с приборами
ПуСнобме -
уетанодки
Приборное я-'
оборудобание
Злектростануия
/ батареи
Радиолокаторы
I бдминистратиб-
L ное ода кие
\ \ г Здание
\ \ Г управления
\ \ I полигоном
ч ; Здание
асп/очнин питания
радиолокатора
обнаружения
Приемная антенна
радиолокатора
обнаружения /
/Хилая
зона
’Камера
слежения
Радиолокатор
СР- 56
Радиолокатор
ан/РРЗ-Ы для
обнаружения
азтормоб
Передающая антенна
радиолокатора
обнаружения
Склад горючего
и смазочных
материалод
<|>ш 5. Схема
испытательного комплекса на атолле
Квайалейн
Опорный подшипник приемной антенны,
весящей около 1000 т, является одним из са-
мых больших и имеет диаметр 9,1 л. Подшип-
ник изготовлен с точностью 0,013 лм(.
Трудную проблему представлял радиоло-
катор выделения цели. Проблема выделения
цели среди ложных целей в настоящее время
решена неполностью и потребует больших ис-
следований в будущем. Армия и ВВС США
ведут большие совместные работы по исследо-
ванию и определению характеристик входя-
щих в атмосферу тел, включая носовые конусы
баллистических снарядов, ложные цели и т. п.
Данные радиолокатора выделения цели за-
секречены. В передатчике используется мощ-
ная клистронная усилительная лампа, специ-
ально разработанная для системы «Зевс».
Многочастотный коротко-импульсный ра-
диолокатор принимает сигналы, отраженные
от целей. Эти сигналы сравниваются со всеми
известными характеристиками входящих в
Как только цель захватывается радиолока-
тором обнаружения, автоматически посылает-
ся сигнал на радиолокатор слежения за целью.
Этот радиолокатор имеет очень тонкий луч и
выдает данные о точной траектории цели в
вычислитель для определения точки пере-
хвата.
Радиолокатор слежения за целью имеет
отражатель диаметром 7,6 заключенный в
обтекатель диаметром 12,2 м. Отличительной
чертой радиолокатора являются его дальность
действия, очень узкий луч и высокая точность.
Огромная антенна весит несколько десятков
тонн и является наиболее точной из всех ра-
нее созданных установок.
Радиолокаторы выделения цели и радиоло-
катор слежения за целью имеют одинаковые
подшипниковые узлы. Подшипниковый узел
несет нагрузки, возникающие между вращаю- -
щейся н неподвижной частями антенны. Этот
Фиг. 7. Сборка приемной антенны радиолокатора
обнаружения на атолле Квайалейн
Фиг. 6. Передающая антенна радиолокатора
обнаружения, врашаюшаяся со скоростью 10 аб!мин
7
узел состоит из подшипника и кольцевой шес-
терни для получения данных о положении ан-
тенны. Общий диаметр всего узла около
1,42 м. Внутренний диаметр внешней дорож-
ки подшипника 1,14 .и. Кольцевая шестерня
имеет 1344 зуба, точность шага которых со-
ставляет по техническим условиям примерно
3,4".
Последний тип радиолокатора системы
«Ника-Зевс» представляет собой радиолока-
тор слежения за антнснарядом, который вы-
водит антиснаряд в точку перехвата цели и
подает команды о достижении этой точки.
Слежение осуществляется по радиомаяку,
установленному на третьей ступени антисна-
ряда. Этот радиолокатор разработан на осно-
ве радиолокатора слежения, входящего в сис-
тему зенитного снаряда «Ника-Геркулес».
Центром обработки принимаемых и пере-
даваемых данных является вычислительная
система. Система может решать задачи наве-
дения и управления для перехвата как оди-
ночной боевой головки, так и нескольких бое-
вых головок, окруженных ложными целями.
Вычислительная система представляет со-
бой скоростную цифровую систему обработ-
ки данных, расчетная надежность которой
0,01 на 1000 часов работы. Система на пере-
ключающихся транзисторах и угольных сопро-
тивлениях, изготовленных методом осаждения.
При испытании транзисторов на надежность
было проведено более 160 млн. часов испыта-
ний, в течение которых общее время неисправ-
ностей составляло всего 7 час.
Более 90% системы вычислителей состав-
ляется из одного стандартизированного элек-
тронного блока. Эти блоки, носящие обозначе-
ние «Модуль А» к имеющие размер пачки си-
гарет, собираются на горизонтальных рамах
(плоскости С), которые в свою очередь уста-
навливаются «стопкой» и соединяются в виде
выдвижных секций, называемых «Модуль D».
Все электрические соединения в системе
сделаны скручиванием с целью исключить пая-
ные соединения. В системе имеется более по-
лумиллиона блоков «А» и более 20 миллионов
соединений.
Вычислительная система способна произ-
водить 200000 арифметических операций в се-
кунду (примерно в 20 раз быстрее стандарт-
ного скоростного вычислителя).
В системе вычислителей имеется запоми-
нающее устройство, состоящее из элементов,
носящих название «твистор». Каждый такой
«твнетор» состоит из очень малого магнита и
очень тонких проводов, намотанных вместе с
металлической лентой для магнитной записи.
Производство этих новых блоков уже автома-
тизировано. На получение данных из запоми-
нающего устройства требуется всего 2,8 ми-
кросекунды.
После обнаружения и захвата цели радио-
локатором обнаружения его выходные данные
поступают в вычислитель обнаружения. База
готовится к бою, и первые данные подаются в
вычислитель перехвата цели. Вступает в дей-
ствие радиолокатор выделения цели, и начи-
нается процесс ее опознавания. Данные радио-
локатора выделения цели проходят через раз-
личные «экраны» вычислителя опознавания и
«сортируются» в соответствии с различными
параметрами.
Когда цель опознана, вычислитель по-
сылает сигнал в радиолокатор слежения за
целью и определяет антиснаряды, которые
должны быть запущены. В это время наибо-
лее важным фактором является период подго-
товки антиснаряда к запуску, так как такие
важные компоненты, как источники питания и
гироскопы, должны работать до сигнала к за-
пуску.
Данные от радиолокатора слежения за
целью анализируются в вычислителе для опре-
деления времени полета и начальной траекто-
рии антиснаряда, а также точки взрыва ядер-
ной боевой головки. После этого обработанные
данные подаются из вычислителя в радиоло-
катор слежения за антнснарядом.
Данные радиолокатора слежения за снаря-
дом и входные сигналы системы наведения
непрерывно обрабатываются. В заранее под-
считанное время вычислитель подает сигнал
запуска и включается двигатель первой сту-
пени антиснаряда.
Основные поправки на перехват цели вво-
дятся на антиснаряд за несколько секунд до
достижения им рассчитанной точки перехвата.
Взведение и взрыв ядерной боевой голов
ки антиснаряда происходят лишь в том случае,
если достигнуты требуемые высота, скорость
н т. п.
Наконец, вычислитель подаст команду
взрыва боевой головки.
Боевой частью системы «Пика-Зевс» яв-
ляется антиснаряд, основными задачами при
разработке которого было уменьшение веса и
размеров, а также уменьшение времени полета
к цели.
Последний экспериментальный образец
антисиаряда представляет собой трехступенча-
тый снаряд с РДТТ. Корпуса двигателей всех
ступеней имеют цилиндрическую форму с
плавным переходом от максимального диамет-
ра корпуса первой ступени к минимальному
диаметру корпуса третьей ступени.
Двигатель первой ступени развивает тягу
более 227 т в течение 5 сек., что обеспечивает
ускорение при старте не менее 20 g. Сопло
двигателя имеет диаметр 1.07 л и выполнено
из пластика. В хвостовой части корпуса пер-
вой ступени установлены четыре стреловидных
неподвижных стабилизатора из дуралюмина.
Вторая ступень представляет собой РДТТ
Гранд Сентрал с соплом из пластика. В хвос-
товой части второй ступени установлены четы-
ре изготовленных из дуралюмина треугольных
жестко закрепленных стабилизатора с обго-
рающим покрытием.
Корпуса двигателей обеих ступеней изго-
товлены из листов стали 1340. которые вначале
8
проверяются с помощью ультразвука, а затем
ла обычных валках свертываются в полуци-
линдры. Эти полуцилиндры правятся, соеди-
няются и свариваются дуговой сваркой в ней-
тральной атмосфере.
Днища корпусов выполняются методом
глубокой вытяжки и имеют отверстие для
установки втулки воспламенителя. Фирма
Дуглас проводит также исследования по воз-
можности прессования днищ и сферических
корпусов двигателей третьей ступени методом
взрыва.
Конуса для установки сопел делаются из
механически обработанных поковок.
Перед приваркой роликовой шовной свар-
кой днища и сопла корпусу с помощью ряда
сегментных оправок придается нужный
диаметр.
Втулка воспламенителя, выполняемая из
механически обработанной поковки, привари-
вается к днищу, после чего корпус подвергает-
ся термообработке в строго контролируемых
условиях.
Окончательная обработка мест установки
втулки воспламенителя и сопла ведется на
большом токарном станке, после чего болта-
ми крепятся переходные секции из алюминие-
вого сплава.
При испытаниях двигателей в стенках кор-
пуса создавались напряжения 167 кг! мм2. Два
корпуса прошли 100 циклов испытаний без
повреждений. Инженеры фирмы Дуглас наде-
ются, что если рабочее напряжение корпуса
будет 153 кг/мм?, то для корпусов можно бу-
дет применять более легкий и дешевый мате-
риал.
Сопла из пластика легче стальных сопел
приблизительно па 50%. Процесс изготовления
сопел засекречен, однако известно, что их про-
изводство предусматривает спиральную на-
мотку на сопло нитей из стекловолокна.
Третья ступень является основной и наибо-
лее сложной частью антиснаряда. Она состоит
из четырех секций из прессованных или меха-
нически обработанных детален, покрытых об-
шивкой из алюминиевого сплава 24ST, листы
которого сваривают в цилиндры.
В передней части корпуса третьей ступени
размещены крестообразно расположенные тре
угольные носовые поверхности управления,
плоскости установки которых смешены относи-
тельно плоскостей установки стабилизаторов
первой и второй ступеней на 45’. Поверхности
выполнены из дуралюмина с обгорающим по-
крытием. У основания ступени имеются не-
большие обтекатели антенн системы наве-
дения.
В основании третьей ступени расположено
оборудование системы наведения, над кото-
рым находится источник питания гидросисте-
мы — газогенератор твердого топлива. Выше
размещен сферический двигатель третьей сту-
пени (фиг. 8), обеспечивающий тягу и управ-
ление за пределами атмосферы. Этот двига-
тель применяется в основном для управления,
а не для увеличения скорости. Сопла двигате-
ля установлены в поверхностях управления.
Над двигателем располагается система управ-
ления носовыми рулями, а над пен — ядерный
боевой заряд.
Вся поверхность третьей ступени имеет за-
щитное покрытие, предотвращающее чрезмер-
ный нагрев.
Плоские листы или формованные детали
покрытия, выполненные из найлона, пропитан-
ного фенольной смолой, приклеиваются ко
всем поверхностям, установленным под не-
большими углами. Передние кромки и другие
места, подверженные сильному аэродинамиче-
скому нагреву и воспринимающие большие
усилия, покрыты материалом рефразил, про-
питанным фенольной смолой.
Фиг. 8. Сферический РДТТ третьей ступени антиснаряда
«Ника-Зевс»
Места соединения отдельных панелей по-
крытия, а также различные отверстия и неров-
ности па защитном покрытии заполняются спе-
циальным составом. Этот состав основан на
смоле 828, и его отвердение происходит вслед-
ствие введения диэтилентриамина. Состав об-
ладает высокой жаростойкостью, малой усад-
кой и хорошей адгезией с металлами и упроч-
ненными пластиками.
В полете защитное покрытие нагревается
до температуры его плавления.
Антиснаряд «Ника-Зевс» имеет систему на-
ведения по радиокомандам, отличительной чер-
той которой является относительно простое
бортовое оборудование. В число электронного
бортового оборудования, установленного на
третьей ступени, входят радиомаяк, приемник
команд, гиростабилизированная платформа,
система управления, источник питания, часо-
вые механизмы и связанные с этим оборудо-
ванием электроцепи.
Стабилизированная платформа представ-
ляет собой установленную на кардане систему
с тремя гироскопами, имеющими одну степень
свободы.
Источником питания для электронного обо-
рудования служит блок батарей.
2—.TH* № 5
9
Привод четырех носовых рулей осущест-
вляется посредством гидросистемы, работаю-
щей от вспомогательной силовой установки
(фиг. 9), представляющей собой газогенера-
тор, работающий на твердом топливе с осно-
вой из нитрата. Газогенератор работает на
всем протяжении полета антиснаряда, питая
газом турбину. Температура поступающих на
Народна Лрибса тахометра
передач (только на опытных
Фиг. 9. Вспомогательная силовая установка
антисиаряда
турбину газов 1100° С. Турбина вращается со
скоростью 78500 об/мин и рассчитана на пере-
грузку 50%. Турбинное колесо и лопатки пред-
ставляют собой единое целое. Вследствие на-
личия очень небольшого зазора между тонки-
ми лопатками турбины, при изготовлении это-
го узла оказалось невозможным применить ме-
ханическую обработку. После изучения раз-
личных методов был выбран метод электроэро-
знойной обработки. Применение этого метода
дало хорошие результаты.
Турбина приводит в действие насос. Ра-
счетный расход жидкости соответствует скоро-
сти вращения турбины 78500 об/мин при коэф
фициенте наполнения насоса 96%. Крутящий
момент турбины при расчетном расходе жид-
кости соответствует дифференциальному дав-
лению в насосе, превышающему 210 кг/см1.
Насос подает жидкость из резервуара низ-
кого давления в аккумулятор высокого давле-
ния. имеющий перед зарядкой избыточное дан
ление 155+7 кг/см-. Из аккумулятора жид-
кость поступает в гидросистему через регули-
ровочный клапан, поддерживающий в системе
давление на уровне 190—225 кг/см1.
Если расход жидкости падает до уровня,
компенсирующего только утечку из системы, то
ее повреждение в результате моментальной
чрезмерной производительности насоса предот-
вращается за счет применения гидравлическо-
го предохранительного клапана, включающего-
ся при давлении около 280 кг/см'. Жидкость
возвращается в резервуар низкого давления.
Резервуар низкого давления для рабочей
жидкости гидросистемы имеет достаточную
вместимость, чтобы обеспечить полную заряд-
ку аккумулятора. Он также обеспечивает со-
ответствующее теплопоглощение, ограничивая
рабочие температуры жидкости в конце цик-
ла 93° С.
Изменения в выходной мощности газогене-
ратора компенсируются устройством, регули-
рующим скорость горения топлива, что позво-
ляет уравновешивать входные и выходные кру-
тящие моменты. Этот прибор использует ос-
новные характеристики газогенератора; так,
если давление в камере сгорания повышается,
то скорость горения увеличивается, что, в свою
очередь, увеличивает подачу жидкости.
Гидросистема служит для привода носовых
рулей, которые в атмосфере являются аэроди-
намическими поверхностями управления,а при
полете за атмосферой отклоняют вектор тяги
двигателя третьей ступени, выхлопные сопла
которого установлены в рулях.
Поражение цели антиснаряд «Ника-Зевс»
осуществляет взрывом ядерного боевого заря-
да по команде с земли. Детали боевого заряда
антисиаряда секретны, однако можно предпо-
ложить, что метод поражения боевых головок
МБС относительно прост.
По некоторым данным, головка нагревает-
ся нейтронами, образующимися при взрыве,
что и приводит к ее повреждению. Если пред-
положить, что боевой заряд антисиаряда «Ни-
ка-Зевс» имеет тротиловый эквивалент 1 кг, то
есть основания считать, что влияние нагрева
нейтронами должно быть разрушающим для
головки в пределах 1,6 км от эпицентра
взрыва.
На основе расчетов утверждается, что при
взрыве боевой головки с тротиловым эквива-
лентом 1 кт создастся излучение в 500 рентген
на расстоянии около 5 км от эпицентра
взрыва.
Сообщается, что система «Ника-Зевс» мо-
жет захватывать и выделять цель на расстоя-
нии ~ 1600 км. после чего осуществлять со-
провождение цели до момента ее перехвата на
высоте 300—400 км.
Основные данные и характеристики антиснаряда
.Нина-Зевс*
Стартовый вес........... 9100 кг
Силовая установка:
1 ступен!................. РДТТ Тиокол
тяга .................. >227 т
время работы................ 5 сек.
2 ступен:.............РДТТ Гранд Сентрал
3 ступень............... сферический РДТТ
Гранд Сентрал
Длина общая............. 20.и
Диаметр (макс )......... 1.5 л/
Дальность...................... ~ 1600 км
Высота перехвата........ 320 -I0O км
Скорость в момент выгора-
ния топлива соответст-
вует числу М — 7
Боевой заряд . . .•..... ядерпый
Система наведения ..... раднокомандиая
Система «Ника-Зевс» при поступлении на
вооружение будет устанавливаться в так назы-
ваемых центрах обороны (фиг. 10). В каждый
10
центр обороны будет входить несколько бата-
рей антиснарядов. Для размещения одной ба-
тареи с 24 подземными пусковыми установка-
ми необходима площадь 50 га.
Несмотря на то, что система «Ника-Зевс»
является полностью автоматической, в центре
управления каждой батареей антиснарядов
будут находиться консоли и индикаторы, обе-
спечивающие контроль за подготовкой и дей-
ствием системы. Будет иметься на случаи не-
обходимости и ручное управление системой.
используется магнитная лента из материала
«Майлар».
В настоящее время армия США и фирмы-
изготовители стремятся начать производство
системы «Ника-Зевс», однако министерство
обороны США не уверено в совершенстве
системы и, вероятно, примет решение о ней
лишь после испытаний против МБС «Атлас».
Предполагается, что в случае успеха испы-
таний производство системы «Ника-Зевс» бу-
дет продолжаться в течение 6 7 лет, а постав-
Фиг. 10, Схема расположения системы «Ника-Зевс» в центре обороны
Кроме того, в центре управления батареей
будут иметься многочисленные панели провер-
ки системы, указывающие состояние подготов-
ки и обслуживания электронного оборудова-
ния, а также места повреждения и блоки, вы-
шедшие из строя. Система проверки полностью
на транзисторах, и для ее программирования
кн начнутся через четыре года после начала
серийного производства. Таким образом, систе-
ма «Ника-Зевс» может поступить на вооруже-
ние в лучшем случае в середине 1960-х годов.
Missiles and Rockets, 8/VIII I960, 30/1 1961;
Flight № 2671 и № 2695;
Aviation Week, 14/XI 19(4),
Interavia № 4544 и № 4695.
ПРОТИВОЛОДОЧНЫМ СНАРЯД ,ACPOK“
Закончена разработка противолодочного
снаряда «Асрок» (Antisubmarine rocket) для
флота США.
Разработка снаряда, являющегося разви-
тием снаряда «Рэт», началась в 1956 г. под ру-
ководством испытательской станнин флота
США и группы фирм, возглавлявшейся фир-
мой Минниаполис-Ханиуэлл.
Снарядами «/Хсрок» уже вооружены два
эсминца. К 1962 г. этими снарядами будет во-
оружено более 12 лидеров, несколько крейсе-
ров и большое число модернизируемых эсмин-
цев.
Полная стоимость программы около 270
млн. долларов—1,8 млн. долларов на корабль.
Снаряд стоит около 22000 долларов.
11
Фиг. 1. Снаряд «Асрок» перед загрузкой
в пусковую установку
Считается, что снаряды «Асрок» могут обе-
спечить эффективную оборону от быстроход-
ных атомных подводных лодок с большой глу-
биной погружения.
Максимальная дальность снаряда около
16,5 км, что позволяет кораблю держать под
обстрелом зону площадью 800 к.и2. Минималь-
ная дальность снаряда 180 м, однако при та-
кой дальности появляется опасность поврежде-
ния корабля-носителя, особенно если приме-
няется атомный боевой заряд.
Дальность снаряда может быть увеличена
с тем, чтобы соответствовать предполагаемому
увеличению эффективной дальности гидроаку-
стического локатора SQS-23 для обнаружения
подводных лодок. Эффективность снаряда мо-
жет быть значительно повышена путем увели-
чения боевой части.
Система снаряда состоит из четырех ос
новных частей: гидроакустического локатора
SQS-23, электронного цифрового вычислителя
системы управления огнем, пусковой установ-
ки и снарядов.
Гидроакустический локатор выполнен в ви-
де алюминиевого шара диаметром 7 л, опус-
каемого на 2,75 м ниже корпуса корабля. Ло-
катор работает на низкой частоте, благодаря
чему увеличивается дальность его действия,
поскольку при этом используется эффект мно-
гократного отражения эхо-сигналов от дна
океана и поверхности воды. Кроме того, длин-
ные волны меньше подвержены влиянию тем-
пературного градиента. Эхо-сигнал от подвод-
ной лодки выделяется из посторонних сигналов
и прочих шумов оператором гидроакустическо-
го локатора и подается на цифровой вычисли-
тель системы управления огнем Mk.lll для
определения курса, скорости и предполагаемо-
го местоположения подводной лодки. Кроме
того, в цифровой вычислитель поступает ин-
формация о направлении и скорости ветра,
плотности воздуха, температуре воды, скоро-
сти, курсе, крене и тангаже атакующего ко-
рабля. Эти данные используются для решения
задачи по поражению подводной лодки снаря-
дом. Выходные данные от вычислителя авто-
матически поступают на пусковую установку
Мк.112 и задают направление и дальность по-
лета снаряда. На планшете-индикаторе в руб-
ке управления дается изображение схемы ата-
ки, какой она выглядела бы при наблюдении
с воздуха.
Система управления огнем размещается в
рубке управления, где находятся два человека,
управляющие огнем, два оператора гидроаку-
стического локатора и один офицер. Они за-
пускают снаряды после того, как командир
корабля включает на мостике сигнал «открыть
огонь».
Для обслуживания системы запуска снаря-
дов требуются еще два человека — помощни-
ки наводчика, которые, находясь позади пус-
кового устройства, наблюдают за запусками,
ведущимися из рубки управления. Помощник
наводчика может запустить снаряд со своего
поста.
На пусковой установке имеется восемь яче-
ек для снарядов, расположенных в два ряда.
Каждая пара ячеек по вертикали объединена
в общий блок, который может изменять угол
установки независимо от других блоков. Вся
пусковая установка может поворачиваться по
азимуту в пределах 300°. Установка имеет ги-
дравлический привод. Каждая ячейка закры-
вается спереди небольшими створками. Створ-
ки открываются примерно за 30 сек. до запус-
ка. Хвостовая часть каждой ячейки защищает-
ся от дождя и морской воды диском с
покрытием из пластика, разрывающимся при
Фиг. 2. Рубка управления огнем системы
«Асрок»
12
выстреле. Внутри ячеек поддерживается по-
стоянная температура, для чего в трубопрово-
ды, проложенные в блоках, подается охлаж-
дающая жидкость или антифриз. Пусковая
установка может быть быстро перезаряжена.
Снаряды на больших кораблях могут хра-
ниться в легких алюминиевых контейнерах.
Для меньших судов пополнение снарядами мо-
жет осуществляться с транспортного судна.
Снаряд несет боевую часть в виде самона-
водящейся торпеды Mk. 11 или глубинной бом-
бы Мк. 17, которая может снабжаться атом-
ным зарядом Стартовый двигатель снаряда
работает на однокомпонентном твердом топ-
ливе. Боевая часть и стартовый двигатель свя-
заны корпусом. Корпус состоит из двух про-
дольных секций, охватываемых стальной лен-
той. Внутри корпуса расположены механизмы
управления, а снаружи — четыре киля.
Дальность полета снаряда зависит от мо-
мента отделения двигателя от боевой части.
Время отделения двигателя задастся реле вре-
мени, которое настраивается перед запуском по
сигналу от цифрового вычислителя. По сигналу
от реле времени небольшой взрывной болт раз-
рушает стальную ленту, связывающую секции
корпуса, двигатель вместе с корпусом отде-
ляется от торпеды и падает в воду.
Торпеда продолжает полет по баллистиче-
ской траектории.
Перед входом торпеды в воду се скорость
уменьшается с помощью парашюта диамет-
ром около 1,8
При входе в воду парашют и защитная
носовая часть отделяются от торпеды. Торпе-
да опускается на заданную глубину, затем вы-
равнивается. Электродвигатель торпеды начи-
нает получать питание от батареи с электро-
Фиг. 3. Пусковая установка снарядов «Асрок*
(вид сзади)
Фиг. 4 Торпеда Мк 41
дамп из хлористого серебра и магния, акти-
вируемых морской водой. Торпеда начинает
двигаться по кругу и производить поиск цели,
получая эхо-сигналы своего гидроакустическо-
го передатчика. Если цель не обнаружена,
торпеда начинает снижение по спирали в
поисках цели. По достижении заданной пре-
дельной глубины торпеда снова выравнивает-
ся и начинает подниматься по спирали до уста-
новленного потолка. Когда цель обнаружена,
торпеда движется к ней со скоростью 30 узлов
(5G км/час).
В носовой части торпеды установлены пре-
образователи эхо-сигналов в командные сиг
палы, которые подаются сервомеханизмам,
приводящим в действие систему управления
торпедой. В системе наведения торпеды ис-
пользуется 26 электронных ламп. Торпеда не
нуждается в гироскопических устройствах.
Устойчивость торпеды обеспечивается соответ-
ствующим расположением центра тяжести и
центра плавучести, а также точной установкой
килей и тщательной балансировкой гребных
винтов.
В течение разработки снаряда «Лерок» бы-
ло проведено более 200 опытных запусков.
Снаряды запускались с платформы, двигав-
шейся со скоростью 55 км/час.
Оценочные испытания флота проводились
со снарядами, несущими торпеду Мк.44. За-
планированы испытания со снарядами, несу-
щими глубинные бомбы.
Основные данные снаряда
Длина снаряда............................ 4575 мм
В том числе: длина торпеды Мк. 44 . . ~2'40 ,
длина корпуса........~1220 .
длина стартового двигателя-*- 610 ,
Диаметр снаряда .......................... 305 .
Наибольший диаметр ....................... 712 .
Вес снаряда........................ 454 кг
Тяга стартового двигателя ............ около
5000 кг
Missiles and Rockets, 27/VI 1960;
Aviation Week. 11 VI 1960; 27/VI 1960;
Electronics, 8 VII 1960;
Interavia Air Letter, X. 1960;
Interavia № 4543-
13
АВТОМАТИЧЕСКАЯ АСТРОНАВИГАЦИЯ
Задача навигации сводится к определению
местоположения наблюдателя относительно
некоторого заданного объекта. Эту задачу
можно рассматривать как приложение теоре-
мы проективной геометрии, определяющей по-
ложение одной неизвестной точки по отноше-
нию к четырем известным точкам, из которых
по крайней мере одна должна находиться на
конечном расстоянии. На практике оказыва-
ются достаточными три соответствующим об-
разом взятые точки, так как обычно имеется
другая информация, позволяющая сделать
выбор между несколькими решениями.
Навигацию принято подразделять на три
вида: пилотирование, счисление пути и астро-
номическую навигацию.
При пилотировании местоположение опре-
деляется по наземным ориентирам, находя-
щимся на конечном расстоянии. В своей про-
стейшей форме пилотирование используется
людьми с незапамятных времен. В более утон-
ченной форме оно применяется и в настоящее
время во всех видах транспорта. В авиации
сюда можно отнести различные радиомаяки и
гиперболические радионавигационные систе-
мы. Счисление пути почти столь же старо, как
пилотирование. При этом методе навигации
известной является исходная точка маршрута.
В процессе движения измеряется направление
движения от исходной точки (относительно
других точек) и вычисляется расстояние, прой-
денное в этом направлении. Точностьопределе.
ния двух этих параметров определяет и точ-
ность определения местоположения движуще-
гося объекта. Современные системы инерци-
альной навигации и допплеровские навигаци-
онные системы являются лишь наиболее со-
вершенными устройствами счисления пути.
Астрономическая навигация в том виде, как
она применяется на поверхности Земли, яв-
ляется наиболее абстрактной формой навига-
ции. Она использует лишь центр Земли в ка-
честве локальной точки и требует измерения
направлений на две другие, соответствующим
образом выбранные точки, рассматриваемые
как бесконечно удаленные. Такими точками
служат небесные светила. В частном случае
даже одна звезда, находящаяся в зените,
определяет положение наблюдателя на зем-
ной поверхности. За последнее десятилетие
принципы астронавигации нашли приложение
в автоматических системах наведения ракет и
самолетов.
Необходимость применения автоматичес-
кой астронавигации вытекает из следующих
соображений. Чисто инерциальные системы
навигации могут работать достаточно хорошо
только при наличии оборудования, обладаю-
щего требуемой устойчивостью. Все такие
системы основаны на применении гироскопи-
ческих стабилизирующих устройств. В настоя-
щее время невозможно изготовить гироскоп,
способный без постороннего влияния сохранять
точность, необходимую при инерциальной на-
вигации, в течение нескольких часов. Следова-
тельно, такая навигация при длительных поле-
тах нуждается в дополнительной информации
Применение обычных методов астронавига-
ции становится все менее надежным с возра-
станием скорости полета. Пусть, например,
самолет, летящий с небольшой сверхзвуковой
скоростью 500 м!сек, совершает разворот с
радиусом 25000 км. Тогда ошибка, вызывае-
мая такой скоростью разворота, будет равна
почти 6,4 км для астронавигационной системы,
в которой вертикаль определяется при помо-
щи обычного уровня с пузырьками или маят-
ника. Указанную скорость разворота (4°/час)
невозможно измерить без точных приборов.
Таким образом, для самолетов, обладающих
небольшими скоростями, и кораблей система
инерциальной навигации должна дополняться
другими средствами, обеспечивающими полу-
чение достаточной точности при дальних мар-
шрутах. При желании использовать астрона-
вигацию на скоростных самолетах требуется
более точное определение вертикали. Если
скорость полета не настолько велика, чтобы
время полета могло уложиться в период точ-
ной работы чисто инерциальной системы, то
следует пользоваться так называемой астро-
инерциальной системой.
При использовании небесных светил в ав-
томатической навигации можно, во-первых,
идти по пути механизации обычных средств
астронавигации и, во-вторых, использовать
астронавигацию для коррекции стабилизирую-
щих гироскопов инерциальной системы нави-
гации.
Обычный метод астронавигации заключает-
ся в решении так называемого астрономичес-
кого или параллактического треугольника
(фиг. I). Чаще всего при этом берется счисли-
мая точка (предполагаемое место наблюдате-
ля), координаты которой определяются счис-
лением пути или другими приближенными ме-
тодами, и по таблицам находятся высота и
азимут данной звезды в момент наблюдения.
Измерение действительной высоты звезды,
выполняемое с помощью секстанта, дает вели-
чину, обычно отличающуюся от вычисленной.
Разность между вычисленным и измеренным
значениями высоты принимают за ошибку, до-
пущенную при определении счислимой точки в
направлении азимутальной линии звезды. Сде-
лав два таких определения по звездам с раз-
личными азимутами, можно получить поправ-
ки для двух координат счислимой точки, т. е.
произвести астрономическое определение ме-
стоположения. Очевидно, чем ближе будет к
90° разность между азимутами двух наблюдае-
мых звезд, тем точнее будет определено место
наблюдателя. При отсутствии информации о
приближенных координатах места наблюдате-
14
ля определение по двум звездам дает указание
лишь на то, что наблюдатель находится в
одном из двух более или менее удаленных
друг от друга географических пунктов. В этом
случае наблюдение третьей звезды позволяет
установить правильное местоположение на-
блюдателя. Часто третья звезда используется
для проверки определения по двум звездам,
даже если счвеление пути дает достаточно точ-
ные результаты. Механизация этого метода
обычно строится на тех же принципах уста-
новления счислимой точки и наблюдения звезд
для внесения поправок в вычисленные значе-
ния координат. Вместо естественного горизон-
та или уровня с пузырьком применяется гиро-
стабилизированная платформа в сочетании с
обычным секстантом. Для счисления пути
обычно служит инерциальная система навига-
ции, работающая как автоштурман на участ-
ках маршрута между двумя пунктами, в кото-
рых производятся астрономические определе-
ния. ГТрн безоблачном небе астрономическую
информацию обычно можно получать почти
непрерывно. В большинстве же случаев нужно
учитывать периоды облачности, в течение ко-
торых инерциальная система должна обеспе-
чивать достаточную точность навигации. Инер-
циальная система, удовлетворяющая этим
требованиям, обеспечивает также наилучшую
в современных условиях вертикаль для астро-
номических наблюдений при воздействии на
летательный аппарат заметных, но неизвест-
ных ускорений.
Другой метод основан на использовании
данных астрономических наблюдений как ба-
зы инерциальной системы координат, относи-
тельно которой могут быть измерены и скор-
ректированы ошибки, связанные с уходом
стабилизирующих гироскопов. Ввиду того, что
уход гироскопов является одним из главных
источников ошибок навигационных автоматов
в продолжительных полетах, поправки, полу-
чаемые с помощью астрономических уст-
ройств, позволяют повысить точность навига-
ции и значительно увеличить дальность опе-
раций. Для полной коррекции работы гироско-
пов, очевидно, требуются наблюдения не ме-
нее чем двух звезд. Наблюдение только одной
звезды позволяет определить ошибки относи-
тельно любой оси под прямым углом к линии
визирования, но не дает никаких сведений по
ориентировке относительно этой линии. На-
блюдение второй звезды в другом направле-
нии дает необходимую дополнительную ин-
формацию для определения ошибок относи-
тельно линии визирования первой звезды.
При дальнем или продолжительном полете
нельзя наблюдать две одни и те же звезды
на протяжении всего маршрута. Следователь-
но, возникает проблема сохранения ориенти-
ровки при переходе от одной пары звезд к
другой. При использовании третьей звезды
информация для определения места наблюда-
теля или корректировки положения платфор-
мы становится избыточной. Однако эта избы-
точность информации позволяет полностью
сохранять ориентировку при переходе от од-
них звезд к другим.
Фиг. 1 Параллактический треугольник
В условиях земной навигации слежение за
планетами или другими небесными телами
солнечной системы является нежелательным.
Как правило, их можно наблюдать в довольно
узких пределах вблизи плоскости эклиптики,
что неизбежно связано с географическими
ограничениями. Движения планет более слож-
ны, чем движения звезд, так что при исполь-
зовании их в автоматических навигационных
системах требуется получать больше допол-
нительной информации. Кроме того, они на-
блюдаются как диски конечных размеров, а
не точечные источники света, что ухудшает
условия визирования. Солнце и Луна настоль-
ко велики и ярки, что при их наблюдении не-
обходимы специальные устройства для сниже-
ния уровня сигнала и установления центра
изображения.
Следует отметить, что оба указанных ме-
тода в конечном счете приводят к одним и тем
же результатам, так что различие между ними
заключается не столько в основных принци-
пах, сколько в техническом оформлении и
механизации. Так как инерциальная часть
оборудования, используемая при механизации
решения обычной задачи астронавигации,
должна быть настроена по принципу Шулера,
чтобы слу*жить в качестве вертикали или инер-
циального экстраполятора, то вся система в
целом с точки зрения образования ошибок
должна вести себя как маятник с периодом
колебания 84 минуты. Применение астроно-
мических ориентиров препятствует образова-
нию ошибки ухода. Чисто инерциальная систе-
ма также является в своей основе маятником
с периодом 84 минуты, но с накоплением
ошибки ухода. Астрономическая коррекция ги-
роскопов устраняет эту ошибку и сообщает
15
системе характеристики, идентичные характе-
ристикам механизированной астронавигацион-
ной системы. Вследствие потенциальной воз-
можности почти непрерывного наблюдения
звезд и в результате того, что при работающей
системе накопление ошибки в течение перио-
дов невидимости светил должно быть малым,
общее решение параллактического треуголь-
ника обычно не используется как метод на-
хождения места наблюдателя. Треугольник
решается, исходя из установления счислимой
точки и известных координат звезды, а следя-
щие телескопы служат лишь для обнаруже-
ния небольших угловых ошибок.
В практической конструкции системы с
астроориентировкой использование трех от-
дельных следящих телескопов обеспечивает
при достаточной видимости звезд полную
астрокоррекцию. Теоретически такая система
позволяет обойтись совсем без гироскопов.
Однако при нарушении видимости звезд (да-
же на очень короткий срок) наличие гироско-
пических устройств оказывается важным. Да-
же простейшие типы гироскопов могут
служить для ориентировки системы в период
перехода от одной звезды к другой, что позво-
ляет обойтись лишь двумя телескопами. Как
выяснилось, практически необходимо рассчи-
тывать на возможность сравнительно долгих
периодов невидимости звезд. Летательный
аппарат должен быть в состоянии взлететь
при сплошной облачности и подняться выше
облаков без ориентировки по звездам. К тому
же, если не предполагается полет на очень
больших высотах, то следует ожидать участ-
ков маршрута со сплошной облачностью. Ког-
да гироскопы станут достаточно совершенны-
ми, для ориентировки в условиях облачности
можно будет обходиться всего одним телеско-
пом, обеспечивающим попеременное наблюде-
ние двух звезд и переход (в случае необходи-
мости) от одной пары звезд к другой.
Использование одного телескопа затрудня-
ет отработку сигналов рассогласования по
сравнению с системами, имеющими несколь-
ко телескопов. Это обнаруживается из анали-
за возможных решений системы коррекции.
Положение телескопа можно охарактеризо-
вать с помощью прямоугольной системы коор-
динат т], £ с осью £ вдоль оптической оси
телескопа. Ориентация этой системы коорди-
нат относительно системы координат х, у, г,
связанной с гиростабилизированной платфор-
мой (ось z направлена в зенит), может быть
определена с помощью направляющих коси-
нусов, задаваемых матрицей:
Эти направляющие косинусы можно выра-
зить через углы визирования (углы наклона
и поворота установочной системы телескопа).
Ошибка при ориентации платформы должна
быть мала, так как иначе система вообще не
сможет работать. Эту ошибку можно предста-
вить вектором, направление которого задается
по правилу правого винта относительно дан-
ной оси и в соответствии с направлением от-
клонения от начального положения. Тогда
ошибка в будет
5 = -„1 „ ==• 1 к , (2)
где 1„и1,- единичные векторы в соответ-
ствующих системах координат.
Если известны все три составляющие е«,
то можно сразу получить
<, — v е Г
'•‘а — с-я '-//
(3)
Прилагая корректирующие моменты, про-
порциональные отрицательным значениям г„,
к соответствующим гироскопам, можно заста-
вить платформу прецессировать обратно к на-
чальному положению.
Телескоп не в состоянии обнаружить ошиб-
ку относительно своей оптической оси, так что
«г остается ненаблюдаемой. Поэтому прихо-
дится использовать вторую звезду. Если на-
блюдать две звезды одновременно, то четыре
наблюдаемые составляющие ошибок ееь ej2,
e«i, *ч 2 позволят решить уравнение (2) для «и.
Цифры 1 и 2 у координат соответствуют звез-
дам 1 и 2. Из уравнения (3) получаем:
е51 "» £e«eCeU ,
г'2 v“S"^a!'7’ (4)
— —д га 2-
Два любых из этих уравнений могут быть
решены совместно относительно г„ для полу-
чения уравнений, определяющих требуемые
корректирующие моменты. Пусть, например,
телескоп связан с платформой при помощи
подвеса, позволяющего вращать телескоп во-
круг двух осей (g, ч), как показано на схеме
сферы единичного радиуса (фиг. 2); тогда на-
правляющие косинусы могут быть представ-
лены в матричной форме (табл. 1).
Таблица /
Направляющие косинусы для углов
визирования телескопа
х
cos О
О
sin ?
У
sin в sin у
cos <р
— cos в sin »
sin 0 cos <f
sin у
cos 0 cos <f
Последняя пара уравнений (4) дает:
где а = х, у, z,
а = В, т), z.
в, i = cos + ez sin ®
«т, 2=8,. COS ?2 е, Sin «2,
16
откуда
_ S, I sin ?2 - s, г sin ?,
' sin (?,-?.)
_ Nacosy,-«, I cos ?,
sin'®. —?t) 7
и
, = 8;| 4. ЧаШе1 esitg°i (7}
'x cos^! sin (?,-?,) tg(?. - <?,)’
Очевидно, для получения конечного значе-
ния ошибки должно соблюдаться условие
?i * Vs-
Если предположить, что платформа уже
была скорректирована по направлению на звез-
ду 2, то еч»=0 и ею можно пренебречь при
механизации системы коррекции в момент на-
блюдения звезды 1. Считая, что в процессе
слежения не появляется никаких серьезных
ошибок и система механизации работает ис-
правно, можно наложить некоторые условия на
?2—?i и 02—0,, чтобы не допустить потери
звезд при их первом захвате и после периода
облачности. Очевидно, нужно, чтобы 62—0i
было существенно больше, чем ф2—ф(, так как
в противном случае допущение «г, 2=0 может
привести к увеличению ошибки при визирова-
нии второй звезды.
Физически эти ограничения не кажутся
серьезными, так как они имеют искусственный
характер. Очевидно, что точность регулирова-
ния будет зависеть от угла между линиями
визирования двух звезд, но не должна зави-
сеть от расположения этого угла относитель-
но платформы. Более того, оказалось, что ме-
ханизация системы коррекции приводит к ка-
чанию платформы вокруг оси х, если имеются
ошибки визирования относительно любой оси
подвеса телескопа. Это можно объяснить из
рассмотрения ошибок, получаемых при наблю-
дении второй звезды, после коррекции только
по одной звезде. Введя обозначения
А' 1 К = tgG|
1 ’ sin (?. -?,) • - tg(?, - ?,)’
уравнения (6) и (7) можно переписать в сле-
дующем виде:
е> = Л'| (e4isln<pt-Rasin'?,),
«, — A"i («г, 2 cos 1 cos ?,)
I
или приближенно, пренебрегая ошибкой
S ~ ------гГ — 8т. 1,
' COS 0| ’
г/ ~ ^1®-. 1 sin ?2>
®2 = ~ Кх ST, 1 COS?,.
(8)
(9)
После коррекции ошибки, определяемой
уравнениями (9), и считая, что никаких новых
ошибок не появилось, остаточные ошибки
установки платформы будут:
®ж = Og°l®4 2.
(Ю)
г* = - K|Sln?|ST,2,
«*=К, COS?j St, 2.
Фиг. 2. Схема сферы единичного радиуса
для углов визирования телескопа
В системе координат, связанной с телеско-
пом, после упрощения получается:
S* — Кх St 2 |tg 0] cos 02 —
— sin 6,cos (?2 — ?()|;
в* = sr J.
1 1
(11)
Легко заметить, что эта операция не изме-
нила ошибки установки телескопа относитель-
но оси ч2, но заменила начальную ошибку от-
носительно §2 ошибкой, зависящей от началь-
ного значения е,2. Ошибки при установке
платформы выразятся в неправильных значе-
ниях углов ? и 0. Анализ уравнения (И) по-
казывает, что такие ошибки могут вызвать
колебания вокруг оси х как в результате
прямых ошибок по углу ф, так и в результате
ошибок по углу 0, которые в другом случае
оказывали бы лишь слабое действие по осям
у и z. Такие колебания ведут к образованию
шумов в системе навигационного автомата и
поэтому являются нежелательными.
Другой метод решения проблемы коррек-
ции можно пояснить, рассматривая плоскость,
проходящую через две звезды (фиг. 3). Если
платформа выравнена по звезде 2, то«=1цц2.
Измеримые ошибки при наблюдении звезды
1 лежат в плоскости, перпендикулярной оси
Ci , т. е. должны быть направлены вдоль г.
3 ЛИ* № 5
17
Таким образом, измеримые ошибки могут
быть выражены как
еи = («и + е*2)'1 = Ч 2 Sin ф. (12)
Ненаблюдаемая ошибка должна быть
равна
в; 1 = е; jCOS'{», (13)
Из уравнений (12) и (13) получаем
(14)
Тогда уравнение (3) может быть перепи-
сано в таком виде:
ee — «r(cos0Ca5 4 sinpC„,j + ctg'bCa-.), (15)
где Р—фазовый угол измеренной ошибки в,
относительно осей £, т].
Знак последнего члена должен совпадать
со знаком Ccrj. Уравнение (15) давало бы
идеальное решение для поправок при точном
выравнивании по второй звезде. Однако полу-
ченное значение щ может быть совершенно
неправильным, если эти уравнения применить
к первой наблюдаемой звезде. Поэтому при
первом захвате звезд нужно предусматривать
специальные средства для устранения этого
члена.
Третий метод, устраняющий возможность
ошибочной установки платформы при захвате
звезды, заключается в коррекции путем ком-
бинации вращения вокруг линии визирования
на ненаблюдаемую звезду и вращения вокруг
общей нормали к двум звездам. Введя обо-
значение
Л-ЪХСЬХ ki). (16)
корректирующие моменты можно выразить
через
£=-/<(«;+вто. (17)
где &р — г— l:ie;j является наблюдаемой
составляющей угловой ошибки иод прямым
углом к линии визирования, а В опреде-
ляется таким образом, чтобы
£Л=0.
(18)
Отсюда
(^•l-BkOlcjXduX hi)-0 (19)
(*, + Bk.MWukt) -hi] “0. (20)
Следовательно,
ц = ~ 1 - 1 (1: । 1: а)
(kiW-l
Это эквивалентно выражению
д _ е„Ъ, 2 COS ф
81п’ф
Поэтому
7~ /z 1 к * cos *) г \
или в скалярной форме
М = — Кч 1,
(21)
(22)
(23)
(24)
Функции ф и направляющие косинусы мо-
гут быть выражены в явной форме через углы
визирования, а поправки могут быть преобра-
зованы для получения La. Результирующие
выражения очень сложны; но при использова-
нии для механизации моделирующих уст-
ройств выражения в явной форме не требу-
ются.
До сих пор ничего не было сказано о мето-
де наведения телескопа на звезду. Для изме-
нения углов визирования могут быть исполь-
зованы различные механические устройства,
однако выбор этих углов представляет специ-
альную задачу.
Матрицу направляющих косинусов (табл.
1), связывающих системы координат плат-
формы и телескопа, можно выразить в двух
формах: 1) через заданные углы визирования
(как в табл. 1) и 2) через астрономические
координаты звезды, координаты, определяю-
щие положение платформы относительно Зем-
ли, и звездное время. Таким путем можно вы-
разить углы визирования через другие величи-
ны. На практике обычно нет необходимости
выписывать полную матрицу в каждом слу-
чае. В частности, для приведенного выше при-
мера
fJ = arc sin ? = — arc tg . (25)
к С/
18
Отсюда видно, что для получения углов О
и ф нужно выразить через известные величины
лишь косинусы Саг. Такую операцию можно
выполнить для любого двухосного подвеса
телескопа. Единственным оправданием при-
менения подвеса с тремя или более осями яв-
ляется возможность определения осей, парал-
лельных географическим или астрономическим
осям координат. При этом упрощается опреде-
ление углов визирования, но зато усложняет-
ся конструкция с соответствующим осложне-
нием вопросов точности и надежности. Для
двухосного подвеса телескопа можно допус-
тить, что платформа (место наблюдения) рас-
положена под углами широты X и долготы Л,
измеряемыми в правой системе координат, так
что А считается положительной к востоку от
гринвичского меридиана в пределах 360°. По-
ложение звезды определяется прямым восхож-
дением р, склонением Л и гринвичским часо-
вым углом созвездия Овен у (фиг. 4). Углы
V. ₽ и Л относятся к одной и той же оси, так
что нужно учитывать лишь их алгебраическую
сумму
+ Л-р-|-9(Г. (26)
Направляющие косинусы выражаются че-
рез X, <т и ft следующим образом:
СЛ' = sin 8 cos X -]- cos 8 sin X cos s
CY\ = cos 8 sin a,
= sin 8 sin X -J- cos 8 cos X coss.
(27)
Подстановка этих значений в уравнения
(25) дает:
О =агс sin (sin 8 cos X-J-cos 8 sin X cos a),
/ cos 8 sin a
Ф ~ tire t£J ' -----------------------------
7 I sin 8 sinX-f- cos 8 cos X coss
Выбор других углов визирования или иной
ориентации осей координат может видоизме-
нить форму этих выражений, но при двухос-
ном подвесе телескопа нельзя рассчитывать
на какое-либо существенное упрощение их.
Скорее они могут стать более сложными.
При соответствующем выборе координат
можно формулировать уравнения, эквивалент-
ные уравнениям (28), таким образом, чтобы
для заданной траектории углы визирования
равнялись алгебраической сумме углов, опре-
деляющих географическое положение, и уг-
лов, являющихся функциями лишь времени и
постоянных параметров. В этом случае на
земле могут быть предварительно произведе-
ны точные вычисления, которые могут
быть записаны в форме, удобной для
воспроизведения их в полете временным
моделирующим устройством навигационного
автомата. Простейший результат для приве-
денного примера получается при полете по
чисто экваториальному курсу. В этом случае
ось х совпадает с осью X, так что угол <р
алгебраически складывается с другими угла-
ми. Из уравнений (28) получим
О - 8; ? = (р - 90° - 1) - Л. (29)
Вообще говоря, остаточные ошибки при ви-
зировании телескопа и отыскании положения
звезды вместе с ошибками ориентации плат-
формы являются по своей природе случайны-
ми. Поэтому их можно рассматривать как соб-
ственные шумы системы, приводящие к на-
коплению амплитудной ошибки, пропорцио-
нальной корню квадратному из времени. Если
в реальной системе эта ошибка приобретает
серьезное значение, то ее можно устранить пу-
тем демпфирования.
Применение средств астронавигации при
космических полетах отличается следующими
особенностями. Во-первых, в космическом про-
странстве летательный аппарат не подвержен
действию таких сильных случайных возмущаю
щнх факторов, как порывы ветра; находясь в
движении, аппарат сам может представлять
хорошую стабилизированную платформу. Воз-
можно, что в этих условиях вообще не будет
необходимости в применении гироскопов. Во-
вторых, при полетах в пределах солнечной
системы планеты становятся важными нави-
гационными светилами. На маршруте межпла-
нетного полета исходная планета и планета
назначения, вероятно, будут двумя наиболее
полезными объектами наблюдения. При срав-
нительной близости к одной из них можно бу-
дет использовать стадиометрический (теодо-
литный) метод для измерения расстояния до
Фиг. 4. Угловые соотношения между
географическими и астрономическими
координатами
этой планеты и скорости его изменения. При
дальнейшем сближении этот метод преобра-
зуется в метод сканирования горизонта, позво-
ляющий установить направление к центру
планеты и расстояние до него. Весьма вероят-
но, что при этом будет необходимо следить по
19
крайней мере еще за третьим объектом. Тре-
тий объект во всяком случае обязателен, если
требуется латное определение местоположе-
ния летательного аппарата на всех этапах
полета. Для этой цели может служить Солнце
или звезда. Использование Солнца сопряжено,
как упоминалось раньше, с ограничениями,
связанными с его конечными размерами и
большой яркостью.
Практические вопросы механизации астро-
навигационного оборудования в условиях кос-
мического полета следует рассмотреть с двух
точек зрения. Во-первых, это оборудование
должно функционировать в течение более про-
должительного времени, чем при земной на-
вигации. Во-вторых, важное значение приобре-
тает его устойчивость к излучениям с высоким
уровнем энергии. Космический аппарат не за-
щищен атмосферой от интенсивного солнечно-
го излучения. Кроме того, на нем, почти на-
верно, будет установлен тот или другой тип
ядерного реактора, от излучения которого по-
требуется защищать навигационное оборудо-
вание.
Автоматические системы слежения за звез-
дами, применяемые в астроинерциальной на-
вигационной аппаратуре, предназначенной для
полетов у поверхности Земли, должны удов-
летворять следующим требованиям:
1) работать как ночью, так и при дневном
освещении, ибо в противном случае резко сни-
зится их эксплуатационная гибкость;
2) иметь достаточную чувствительность
для надежного слежения за любой из группы
звезд, количество которых определяется, в
частности, ограниченностью угла зрения через
соответствующее окно в конструкции лета-
тельного аппарата. Исходя из требований оп-
тики и аэродинамики, такое окно обычно
плоское и ограничивает угол зрения величиной
90—100°. При этих условиях можно следить
приблизительно за сотней наиболее ярких
звезд. Иначе говоря, автоматический следя-
щий телескоп должен работать по звездам,
имеющим величину порядка 2,5. Эта величи-
на зависит от кривой спектральной чувстви-
тельности используемого фотоэлемента и не
всегда соответствует зрительной видимости
звезд;
3) обладать высокой степенью точности,
так как позиционные ошибки связаны с ошиб-
ками слежения в отношении приблизительно
30 м на 1 секунду дуги;
4) иметь сравнительно большой срок служ-
бы с учетом длительности операций по про-
верке и калибровке.
С точки зрения космонавтики требования
к автоматическим телескопам имеют несколь-
ко другой характер. Длительный срок службы
выдвигается на первое место, так как даже
при полетах в пределах солнечной системы им
придется непрерывно работать в течение полу-
тора—трех лет. С другой стороны, чувстви-
тельность становится менее важным факто-
ром. За исключением стартового периода меж-
планетный корабль будет находиться вне
пределов атмосферы, т. е. будет свободен от
аэродинамических ограничений. Следящий
телескоп сможет захватить целую полусферу
или более без ограничений со стороны окна.
Если следящая система будет находиться в
герметическом отсеке, то в нем может быть
сделано несколько окон под разными углами.
Выбор светил будет гораздо шире и, следова-
тельно, легче будет использовать наиболее
яркие звезды и планеты. Вероятно, снизятся и
требования к точности, поскольку задачи
навигации сведутся к ориентации на планету
назначения.
Большинство задач, связанных с разработ
кой следящего телескопа для полета вблизи
Земли, более трудные, чем при межпланетном
полете. Основную проблему в этом случае
представляет освещение фона при работе в
дневных условиях. Яркость дневного неба та-
кова, что участок ясного неба с площадью
I квадратная секунда излучает столько же
света, как некоторые слабые звезды, визируе-
мые автоматическим телескопом. В автомати-
ческом следящем телескопе приемлемых раз-
меров изображение звезды может занимать
окружность диаметром от 10 до 15 секунд
дуги. Таким образом, количество света, попа-
дающее на фотоэлемент от участка неба, раз-
меры которого достаточны для восприятия
максимального количества света звезды, будет
по крайней мере в сто раз интенсивнее света
этой звезды.
Другой проблемой является соотношение
между длиной фокусного расстояния телеско-
па и точностью пеленгации светила. Напри-
мер, при фокусном расстоянии 500 см ошиб-
ка 0,0025 см в определении положения
изображения звезды в фокальной плоскости
будет соответствовать ошибке пеленгации в
1 секунду дуги. При фокусном расстоянии
20 см та же ошибка 0,0025 см соответствует
уже ошибке пеленгации в 10 секунд дуги. Сле-
довательно, нужно найти некоторый компро-
мисс между длиной фокусного расстояния,
механической точностью наведения телескопа
и размерами фотоэлемента.
В автоматических астронавигационных сис-
темах световой сигнал, получаемый от звезды,
необходимо преобразовать в электрический
сигнал. Для этой цели можно испапьзовать
различные фотоэлектрические элементы, вклю-
чая элементы с внешним фотоэффектом (как
простые диодные, так и фотоумножители) и
элементы с внутренним фотоэффектом (фото-
сопротивления). Первыми были применены
селеновые фотоэлементы, затем были разра-
ботаны более чувствительные сернисто-свин-
цовые и другие типы фотоэлементов. Боль-
шинство из них имеет максимальную чувстви-
тельность в инфракрасной области спектра,
что неудобно для слежения за звездами.
К другим фотоэлектрическим устройствам от-
носятся полупроводниковые приборы типа
20
фототранзисторов и термисторов. Наконец,
имеются телевизионные передающие трубки,
например, ортикон с переносом изображения и
видекон. За исключением телевизионных тру-
бок только фотоумножитель оказался пригод-
ным для дневной пеленгации звезд. Однако
для целен космонавтики предпочтительнее мо-
гут быть фотосопротивлення и другие полу-
проводниковые приборы.
Из соотношения силы света звезды и неба
следует, что в полетах вблизи Земли требует-
ся модулировать приходящие световые сигна-
лы. Самым очевидным решением кажется
метод расщепления луча с использованием
большого количества фотоэлементов. Однако
этот метод неприменим, когда яркость фона
во много раз превышает яркость звезды.
Впрочем, он неудобен ив условиях космическо-
го полета из-за больших габаритов оборудова-
ния и изменения характеристик фотоэлементов
с течением времени. В простейшем из пред-
ложенных методов модуляции используется
так называемый диск Крона, одна половина
которого прозрачна, а другая непрозрачна.
Диск вращается вокруг оси, проходящей через
его центр. Ночью такая модуляция при сдвиге
звезды в сторону от центра дает сигнал, обла-
дающий приблизительно прямоугольной фор-
мой волны. По мере приближения изображе-
ния звезды к оси вращения диска амплитуда
прямоугольной волны уменьшается, становясь
равной нулю в момент их полного совпадения.
Простои диск Крона будет модулировать так-
же и свет, приходящий от неравномерного
фона. Поэтому днем такое развертывающее
устройство имеет тенденцию направлять сле-
дящий телескоп на Солнце, даже если в его
поле зрения находится сравнительно яркая
звезда. Для ослабления этого эффекта был
разработан компенсирующий диск Крона, в
котором прозрачная часть имеет форму полу-
кольца. Такой диск был использован при пер-
вых успешных испытаниях астроинерциальной
системы при дневном освещении.
В другом предложенном способе модуля-
ции применяется устройство в виде колеса со
спицами, расположенного в фокальной плос-
кости. При движении колеса или телескопа,
когда изображение звезды вращается по кру-
гу, диаметр которого равен половине диамет-
ра колеса, смещение звезды от центра вызы-
вает появление частотно-модулированного сиг-
нала. В этом случае круговой путь изображе-
ния звезды проходит у края колеса с одной
стороны и у втулки с другой стороны, в ре-
зультате чего частота изменяется один раз на
цикл нутации.
Третий метод уменьшения эффекта гради-
ента яркости неба на систему пеленгации
звезды заключается в прерывании сигналов
обычного диска Крона на более высокой час-
тоте.
Все рассмотренные выше способы модуля-
ции дают освещение фотоэлемента от участка
неба, сравнимого по величине со всем полем
обзора. В результате получается фон с отно-
сительно высоким уровнем шумов.
Было разработано несколько типов развер-
тывающих устройств с бегущим пятном, при
которых на фотоэлемент попадает гораздо
меньшее количество света и, следовательно,
снижается уровень шумов. В механических
устройствах этого типа использовалось свето-
вое пятно, перемещающееся по заданному
полю развертки заданным образом. Анало-
гичные результаты могут быть достигнуты
средствами электроники с телевизионной труб-
кой в качестве чувствительного элемента. Воз-
можными типами развертки являются растро-
вая или строчная развертка, обычно приме-
няемая в телевидении, плановая развертка,
применяемая в картографических радиолока-
торах, развертка Пальмера в форме удлинен-
ного эпициклоида и простая спиральная раз-
вертка.
Для крепления фотоследящего телескопа
могут применяться три типа установок. Пер-
вую из них можно назвать экваториальной.
Обычно она имеет три оси вращения, внутрен-
няя из которых соответствует оси склонения,
средняя — полярной оси и наружная — оси
широт. Такая установка удобна с точки зре-
ния простоты математических соотношений
при определении углов визирования. С другой
стороны, дополнительная ось является лиш-
ним потенциальным источником механических
ошибок в процессе пеленгации. Кроме того, в
практическом использовании на самолете эта
установка создает трудности в отношении
люфтов.
Второй тип установки — высотно-азиму-
тальная. В этой установке внешняя ось яв-
ляется вертикальной или азимутальной, а
внутренняя — горизонтальной или осью высот.
Математические вычисления требуемых углов
визирования получаются здесь довольно
сложными. Недостатком такой установки яв-
ляется также потеря азимутальной ориенти-
ровки при наблюдении звезды в зените, так
что ею нельзя пользоваться, если линия визи-
рования близка к вертикали. С другой сторо-
ны, высотно-азимутальная установка непо-
средственно соответствует широко принятой в
практике астронавигации системе координат.
Кроме того, такая установка позволяет поль-
зоваться плоским окном меньших размеров,
чем при других типах установок. Наконец,
следует отметить, что вращения по двум осям
должны происходить в сильно отличающихся
пределах. Азимутальный привод должен рабо-
тать в пределах 360°, в то время как высотный
привод обычно ограничивается углом лишь
45—50°.
Третьим типом установки является упоми-
навшаяся выше система, при которой телескоп
вращается относительно двух осей, перпен-
дикулярных его оптической оси. В этой систе-
ме устраняется проблема совмещения осей
при направлении телескопа в зенит, имевшая
место в высотно-азимутальной системе. В за-
21
висимости от типа оптической системы преде-
лы движения в двух координатных плоскостях
могут быть взяты в отношении 1 : 1 по 90—
100° в каждой плоскости или в отношении
2:1с меньшим пределом 45—50°.
Ночью сравнительно легко получить доста-
точный по величине сигнал от ряда звезд. При
космическом полете отношение сигнал—шум
также, вероятно, будет достаточно велико без
применения каких-либо специальных средств.
Однако при полетах вблизи Земли днем по-
мехи являются основным фактором, ограничи-
вающим возможность постройки практически
полезного звездного ориентатора. Помехи
возникают как за счет модуляции света фона,
так и за счет собственных шумов в электри-
ческих цепях и электронных приборах. При-
мером внешних помех может служить сигнал,
создаваемый неравномерной светимостью неба
при пользовании развертывающим диском
Крона. Такие помехи отсутствовали бы при
абсолютно равномерной светимости неба.
В обычных условиях уровень этих помех мо-
жет в несколько тысяч раз превышать уро-
вень сигнала от звезды при любом разверты-
вающем устройстве, в котором за один раз
просматривается большая часть поля наблю-
дения. Поэтому даже при компенсирующем
диске Крона потребовались дополнительные
устройства для компенсации остаточного мо-
дулированного сигнала неба, чтобы обеспе-
чить достаточно надежное слежение в первом
опытном образце астроориентатора. При раз-
вертке бегущим пятном неравномерный фон
неба создает более слабый сигнал, который
все же остается сравнимым по уровню с сиг-
налом звезды. Однако, как правило, помехи
этого типа будут обладать частотными харак-
теристиками, которые можно заранее предви-
деть. Тогда путем соответствующей конструк-
ции развертывающего устройства и фильтра-
ции можно обеспечить отделение полезного
сигнала от помех.
Внутренние шумы возникают в фотоэле-
ментах с внешним фотоэффектом в результа-
те дискретной природы фотоэлектрического
тока. В фотосопротивлениях возникают также
тепловые шумы вследствие движения электро-
нов. Оба вида шумов имеют хаотический ха-
рактер, так что их нельзя полностью исклю-
чить путем фильтрации. Первые из этих шумов
изменяются пропорционально корню квадрат-
ному из катодного тока, т. е. корню квадрат-
ному из полной освещенности фотокатода.
Поэтому их уровень можно уменьшить огра-
ничением площади неба, видимой в каждое
мгновение; в этом состоит преимущество раз-
вертки бегущим пятном. Тепловые шумы не
зависят от падающего света и изменяются
пропорционально корню квадратному из абсо-
лютной температуры элемента сопротивления,
в котором они возникают. Они также пропор-
циональны величине сопротивления. Но и сам
полезный сигнал пропорционален сопротивле-
нию, так что изменением величины сопротив-
ления нельзя улучшить отношения сигнал—
шум. Там, где тепловые шумы являются важ-
ным фактором, единственным средством улуч-
шения является охлаждение соответствующих
сопротивлений. Практикой установлено, что
фотоэлементы с внешним фотоэффектом и
связанные с ними схемы дают так мало тепло-
вых шумов, что при конструировании астро-
ориентатора последними можно полностью
пренебречь. Наоборот, фотосопротивления
обладают слишком высоким уровнем тепло-
вых шумов при отсутствии охлаждения. По-
этому почти во всех успешно работающих
астроориентаторах используются фотоэлемен-
ты с внешним фотоэффектом.
Задача выделения сигнала звезды из шу-
мов фона сводится в основном к устранению
шумов модуляции и отделению сигнала звез-
ды от остаточных шумов. Для фотоследящих
систем, размеры которых могут обеспечить
достаточную точность работы, шумы модуля-
ции могут быть снижены до ничтожной вели-
чины, если сделать диаметр сканирующего от-
верстия приблизительно равным размеру изо-
бражения звезды. Этот размер определяется
дифракцией и остаточными аберрациями в
оптической системе. Если затем время сгла-
живания в системе детектирования того же
порядка, что и длительность импульса сигнала
звезды, то можно получить оптимальное отде-
ление сигнала звезды от шумов, возникающих
вследствие дискретности тока. В этом случае
вероятность Р того, что импульс шума придет-
ся на один период сканирования, приближен-
но выражается следующей формулой:
где О —диаметр ноля обзора,
d — диаметр сканирующего отверстия
в тех же единицах измерения, что
и D,
Г—период сканирования,
р — давление окружающего воздуха,
А — эффективное отверстие объектива,
kt, k. — постоянные коэффициенты.
Эта формула получается за счет использо-
вания метода нелинейного детектирования с
фильтрацией узкой полосы частот, соответст-
вующей принятому времени сглаживания, и
последующей подрезкой импульсов, в резуль-
тате чего в выходном сигнале остаются лишь
наивысшие импульсы. Применение резонанс-
ного выхода или метода корреляции в послед-
ней ступени усиления эквивалентно по сво-
ему действию увеличению периода сканирова-
ния с соответствующим уменьшением шири-
ны полосы.
ARS Journal, XII, 1959.
22
ТОПЛИВО И БЕЗОПАСНОСТЬ ПОЛЕТА
Применение бензина для поршневых авиа-
ционных двигателей было необходимо, хотя и
являлось основной причиной пожаров, приво-
дивших к человеческим жертвам. Появление
газотурбинных двигателей позволило приме-
нять менее летучие топлива. Поэтому в после-
военные годы полагали, что применение керо-
сина на гражданских пассажирских самолетах
повысит безопасность полета. Однако вскоре
появился промежуточный тип топлива, в кото-
ром с целью увеличения выхода авиационного
топлива из сырой нефти сочетаются бензино-
вые и керосиновые фракции.
Новое топливо, получившее название JP.4
или широкофракционный бензин, несколько
лет тому назад начала применять одна между-
народная канадская авиалиния и, по крайней
мере иногда, оно применяется на двух между-
народных авиалиниях США и двух линиях в
Европе.
В какой мере безопасно это топливо? Для
ответа на этот вопрос необходимо сравнить
свойства обоих топлив.
Для воспламенения топлива необходимо
образование над его поверхностью топливо-
воздушной смеси должного состава. Слишком
богатая или слишком бедная смесь не будет
поддерживать горения, хотя при чрезмерном
обогащении воспламенение может произойти,
если топливо находится на открытом воздухе,
а не в баке, при расположении источника вос-
пламенения на определенном расстоянии от
поверхности топлива в области смеси с мень-
шим избытком топлива.
Температуры вспышки керосина и топлива
JP.4 значительно различаются, что объясняет-
ся различиями в летучести или упругости па-
ров топлива. Упругость паров керосина по
Рейду примерно 0,0088 ата, а топлива JP.4—
от 0,14 до 0,21 ата. Поэтому для образования
наиболее бедной смеси керосина с воздухом,
способной поддерживать горение у земли, тем-
пература керосина должна быть не менее 40°С,
что соответствует его точке вспышки, а это
может иметь место только при эксплуатации
в тропических условиях. С другой стороны,
температура вспышки топлива JP.4 может
снижаться до —22° С, т. е. это топливо может
воспламеняться практически всегда. Это зна-
чит, что при аварии воспламенение керосина
менее вероятно, чем топлива JP.4. Если, одна-
ко, пожар все же начинается, то распростра-
нение пламени керосина будет относительно
медленным, поскольку для этого нужно повы-
сить температуру керосина. В случае же топ-
лива JP.4 и, конечно, бензина распространение
пламени будет стремительным.
Следует отметить, что эти соображения не
относятся к топливному туману, который вос-
пламеняется при температурах, значительно
меньших температуры вспышки неподвижного
топлива. В NASA был проведен ряд опытов с
полномасштабной имитацией пожаров самоле-
тов с поршневыми и газотурбинными двигате-
лями. В этих опытах самолет разгонялся по
взлетной полосе до столкновения со специаль-
но воздвигнутым барьером, что приводило к
сносу' шасси, а также срыву обшивки носка
крыла. В результате топливо выбрасывалось
вперед с образованием топливного тумана в
больших объемах. Такой туман легко воспла
меняется независимо от рода топлива, хотя
керосин и при этом обладает небольшим пре-
имуществом, а последующее тепловыделение
оказывается столь большим, что величина тем-
пературы вспышки теряет свое значение.
В катастрофах такого типа шансы покинуть
самолет весьма невелики. Однако образование
топливного тумана, обволакивающего само-
лет, не обязательно сопровождает все аварии,
при которых топливо выбрасывается из само-
лета.
На фиг. 1 приведены температуры топлива,
при которых над уровнем топлива в баке
образуется воспламеняемая и потому взрыво-
опасная топливо-воздушная смесь. На фиг. 2
показаны зоны взрывоопасности для керосина
Фиг. 1. Взрывоопасные смеси
авиационного топлива (равновесные
условия)
1,76 ага в течение шестичасового крейсерско-
го полета самолета на высоте 12000 м. На этой
же фигуре нанесена кривая максимальной воз-
можной температуры топлива в баке-отсеке
этого же самолета при истинной скорости по-
лета 810 км/час, условиях по MCA и начальной
температуре топлива 15° С. Из фиг. 2 следует,
что в районах с более холодным климатом эта
температура находится в зоне взрывоопасно-
сти для топлива JP.4 в каждом продолжитель-
ном полете (и в большинстве коротких), но она
ниже границы зоны взрывоопасности для ке-
росина. Если представить себе, что кривая
23
температуры сместится в более теплом клима-
те вверх, то можно видеть, что хотя смесь с
топливом JP.4 будет слишком богатой для то-
го, чтобы быть взрывоопасной, большую часть
времени полета при снижении она часто будет
в зоне взрывоопасности. При эксплуатации в
тропических условиях и температура керосина
может соответствовать зоне взрывоопасности.
Фиг. 2 Зоны пзрывоопасности н температура
топлива в полете
На фиг. 2 не показаны соответствующие
кривые для бензина, но интересно отметить,
что хотя он иногда образует взрывоопасную
смесь в конце длительного полета, в течение
большей части полета самолета с поршневыми
двигателями смесь оказывается слишком бога-
той для взрыва.
Наличие взрывоопасной смеси в баках са-
молета не представляет особой опасности, если
отсутствует источник воспламенения, однако
таким источником может оказаться удар мол-
нии. Часто утверждают, что нет ни одного
случая уничтожения самолета в результате
попадания молнии, однако кажется, что это не
является справедливым, поскольку летом
1959 г. вблизи Милана произошел взрыв топ-
ливных баков самолета «Констеллейшн» в ре-
зультате попадания молнии. Кроме того, из-
вестны случаи взрыва баков с топливом
JP.4, расположенных на концах крыла, при
попадании молнии на ряде военных самоле-
тов. Основной мерой предотвращения таких
взрывов является тщательное проектирование
топливной системы самолета. Все без исклю-
чения топлива способны создавать в тех или
иных условиях взрывоопасную смесь, но оче-
видно, что в этом отношении топливо JP.4 об-
ладает худшими характеристиками.
Температурой воспламенения называется
температура нагретой поверхности, вызываю-
щая воспламенение топлива при отсутствии
других источников воспламенения вроде
искры или пламени. Эта температура с тру-
дом поддается измерению, поскольку она за-
висит от многих переменных, важнейшими из
которых являются локальная скорость венти-
ляции и период, в течение которого топливо
находится в контакте с поверхностью. Чем
больше скорость вентиляции и меньше время
контакта, тем выше температура самовоспла-
менения.
Опыты, проведенные одной из самолето-
строительных фирм, показали, что при неболь-
шом расходе вентилирующего воздуха воспла-
менение керосина происходит при температуре
поверхности 400° С, а воспламенение топлива
JP.4 — при температуре 500° С, т. е. это топ-
ливо обладает некоторым преимуществом в
данном отношении. Однако практически топ-
ливные системы двигателей расположены в
отсеке компрессора, где температуры поверх-
ностей значительно ниже указанных выше.
В качестве меры предосторожности у двига-
телей с высокой степенью сжатия горячий ко-
нец компрессорного отсека должен иметь
двойную экранировку. Обычно топливные ма-
гистрали не проходят через зоны, в которых
расположена камера сгорания, так что воз-
можность течи топлива на горячие поверхно-
сти двигателя исключается, если не считать
аварийных случаев. Кроме того, двигательные
отсеки самолета обычно хорошо вентилируют-
ся, что приводит к повышению температуры
самовоспламенения.
В настоящее время нет данных, свидетель-
ствующих о более частых случаях пожаров в
полете с каким-либо видом топлива.
Что касается случаев самовоспламенения
топлива при авариях, то следует иметь в ви-
ду, что часто оно происходит в результате
контакта топлива с горячими частями двига-
теля, как внутренними, так и, в меньшей мере,
внешними. Для ТРД особая опасность связа-
на с продолжающимся вращением ротора, в
результате которого происходит засасывание
топлива, так что его последующее воспламене-
ние вызывает появление факелов пламени с
обоих концов двигателя. Как было показано
опытами NASA, и керосин, и бензин, и топли-
во JP.4 легко воспламеняются при аварийной
посадке. Важным является распространение
пламени после аварии, и в этом отношении ке-
росин обладает преимуществом.
Под температурой замерзания понимается
температура, при которой начинают затверде-
вать некоторые составные части топлива.
24
К счастью, топлива не затвердевают полностью
при температуре замерзания и сохраняют те-
кучесть и способность к перекачке при темпе-
ратуре по крайней мере на 5° более низкой.
Температура замерзания керосина, применяю-
щегося в Англии, равна —50°, а топлива JP.4
—60° С, вследствие чего последнее обладает
теоретическим преимуществом, однако его ис-
пользование на практике невероятно. Наи-
меньшая температура топлива в конце дли-
тельного полета транспортного самолета с
ГТД. обладающего малой скоростью, будет
по крайней мере на 25° С больше окружающей
температуры, вследствие чего последняя долж-
на быть меньше —75° С для того, чтобы по-
влиять на замерзание керосина. Такая темпе-
ратура соответствует арктическому минимуму
на высоте 11300 м и является чрезвычайно
редкой. Чем больше скорость полета самолета,
тем сильнее защитное действие кинетического
нагрева. Что касается самолетов с ТВД, то
они эксплуатируются на меньших высотах в
условиях большей температуры окружающего
воздуха.
Наименьшая температура топлива в поле-
те (—47°С) была зарегистрирована на само-
лете «Комета». При керосине с температурой
замерзания —40° С в этом редком случае сле-
довало бы изменить график полета, чтобы из-
бежать такой температуры. Современный ке-
росин с температурой замерзания —50°С бу-
дет удовлетворять всем возможным в эксплу-
атации требованиям.
Все топлива содержат растворенную воду,
которая с понижением температуры выпадает
из раствора. Обычно эта вода, а также содер-
жащаяся в топливе свободная влага выделя-
ются в воздух над уровнем топлива. Если,
однако, в баках воздух влажный, то вода
останется в топливе и образует при отрица-
тельных температурах кристаллы льда. Лед,
поступая в топливные магистрали, осаждается
на фильтрах.
Эта проблема стала более важной с появ-
лением газотурбинных двигателей в связи с
более частым использованием микронных
фильтров, а также из-за увеличения эксплу-
атационных высот полета и применения топ-
ливных баков-отсеков, поскольку два послед-
них фактора привели к понижению температу-
ры топлива по сравнению с характерной в
прошлом. Существует также теория, что
усложнение указанной проблемы связано с
применением керосина, потому что в связи
с большей вязкостью он стремится удержать
выделившуюся из раствора воду во взвешен-
ном состоянии, тогда как в топливе с мень-
шей вязкостью вода осаждается под действием
силы тяжести. Различие в вязкости не может
существенно сказаться на проблеме обледене-
ния (топливо JP.4 может содержать несколь-
ко большее количество воды в растворе, чем
керосин), хотя некоторые специалисты придер-
живаются другого мнения. Один из таких спе-
циалистов настоял на удалении сетки 20 мош
бустерного насоса у некоторых английских
двигателей, хотя в эксплуатации не было слу-
чая обледенения сетки.
На практике обледенение фильтров проис-
ходит одинаково часто с керосином и топливом
JP.4, так что решением этой проблемы являет-
ся применение подогревателей топлива. Ве-
роятно, обледенение было причиной многих
необъясненных отказов поршневых двигателей
в прошлом.
Иногда высказываются предположения, что
повторный запуск двигателей в полете облег-
чается при использовании топлива JP.4 в связи
с его большей летучестью. Однако запуск в
полете мог быть проблемой для некоторых
старых газотурбинных двигателей, теперь же
с появлением систем зажигания большой энер-
гии и более совершенных топливных систем
такой запуск может быть обеспечен при лю-
бом типе применяемого топлива.
Таким образом, с точки зрения запуска в
полете, содержания воды, температуры замер-
зания и температуры самовоспламенения прак-
тически оба топлива одинаковы. В отношении
опасности взрыва в полете топливо JP.4 менее
предпочтительно, если иметь в виду эксплуата-
цию во всех районах земного шара. С точки
же зрения температуры вспышки и ее влия-
ния на опасность пожара при аварии керосин
явно превосходит топливо JP.4 в отношении
безопасности.
С целью подтверждения этого теоретиче-
ского преимущества на практике целесооб-
разно рассмотреть некоторые случаи ката-
строф самолетов, двигатели которых работали
на керосине. Конечно, не по всем приведен-
ным ниже случаям имеются официальные све-
дения, а также точные данные о течи топлива
и распространении пожара. Только в одном
случае достоверно известно, что причиной ка-
тастрофы была техническая неполадка.
В октябре 1952 г. в Римс самолет «Коме-
та» 1 не смог взлететь и остановился сильно
поврежденный, причем было пролито пример-
но 9000 л топлива без возникновения пожара.
В октябре 1954 г. в Австралии самолет
«Вайкаунт» перевернулся при тренировочном
взлете с неработающим двигателем после
столкновения с деревьями, был сильно по-
врежден, керосин, вылившийся из разрушен-
ных баков, загорелся, но пламя распространя-
лось столь медленно, что пять человек, нахо-
дившихся в кабине, смогли покинуть ее.
Самолет «Вайкаунт» в январе 1955 г. в
лондонском аэропорту столкнулся с препятст-
вием на взлетной полосе; все винты, редукто-
ры и два двигателя были оторваны, самолет
остановился в луже из более чем 4500 л керо-
сина, два небольших пожара двигателей были
погашены, все 40 пассажиров остались живы.
Самолет «Вайкаунт» в январе 1956 г.
в Блекбаше во время тренировочного взлета
с выключенным двигателем ударился о землю,
остановился после пробега на двух колесах и
носовой части фюзеляжа примерно через
4-.ТИ" № 5
25
200 л: и воспламенился. Пять членов экипажа
благополучно выбрались из самолета, после
чего он был почти полностью уничтожен
огнем.
Самолет «Вайкаунт» вблизи Бенгази в
августе 1958 г. ударился о холм и воспламе-
нился. Погибли 33 человека, но пожар распро-
странялся так медленно, что 18 пассажиров,
главным образом из задней части кабины,
смогли покинуть самолет.
Самолет «Дарт Геральд» в августе 1958 г.
вблизи Фарнборо загорелся в полете из-за
аварии двигателя; горящий двигатель отор-
вался, керосин вытекал из гондолы, самолет
совершил посадку и горел так медленно, что
пять членов экипажа смогли покинуть его.
Самолет «Британия» в декабре 1958 г.
вблизи Хорна во время испытательного поле-
та в тумане врезался в землю и воспламенил-
ся; три из 12 человек спаслись.
Самолет «Вайкаунт» в феврале 1959 г. вбли-
зи Гатвика задел за деревья при посадке,
упал и загорелся; 10 человек спаслись, 15 по-
гибло.
Самолет «Комета» в Ассунсионе (Параг-
вай) в августе 1959 г. упал на деревья при
ночной посадке в плохую погоду, погибло
двое, 63 человека спаслись из сильно повреж-
денного самолета. Пожара не было, хотя сле-
довало ожидать сильной течи топлива.
В декабре 1959 г. в Риме самолет «Комета»
совершил посадку с убранным шасси без воз-
никновения пожара, хотя следовало ожидать
течи топлива и искрения из-за трения о взлет-
ную полосу.
В феврале 1960 г. самолет «Комета» в Буэ-
нос-Айресе совершил в тренировочном полете
жесткую посадку, при которой оторвались
подвесные баки и начался пожар, сильно раз-
рушивший самолет, но все II человек выбра-
лись без повреждений.
Самолет «Комета» в марте 1960 г. в Мад-
риде ударился ночью в откос и при этом поте-
рял главные ноги шасси. При посадке оторва
лось одно пол у крыло, пожара не было, хотя
в таких обстоятельствах следовало ждать
сильной течи топлива и искрения.
Конечно, были случаи аварий при посадке
и самолетов с бензиновыми двигателями без
возникновения пожара или с медленным его
распространением, поэтому нельзя сказать, что
произошло бы, если бы в перечисленных слу-
чаях аварий вместо керосина было топливо
JP.4. Этот перечень просто указывает ряд слу-
чаев, когда при тяжелых авариях керосин
вытекал, но пожар не возникал или распро-
странялся настолько медленно, что люди мог-
ли спастись.
Имеются еще два важных фактора в вы-
боре топлива — его стоимость и наличие.
Однако при предъявлении компаниями авиа-
линий соответствующих требований к нефтя-
ной промышленности стоимость керосина не
будет существенно отличаться от стоимости
широкофракционного топлива.
Flight № 2674.
ЭЛЕКТРОГИДРАВЛИЧЕСКИЕ СЕРВОКЛАПАНЫ
У большинства автоматических устройств
мощность на выходе чувствительных элемен-
тов обычно бывает недостаточной для непо-
средственного управления исполнительными
органами. В таких случаях применяют различ-
ные системы непрямого действия, имеющие
Оймотна
управления
Рнорь
Постоянный
магнит
сечением
ff цилиндру
Слив
Заслонка
Фиг. I, Сервоклапан фирмы Даути
Фильтр тонной
очистки
с пос то-
какой-либо усилитель. Наилучшие результаты
дают системы с электрической — командной—
и гидравлической — исполнительной—цепями,
связанными между собой сервоклапаном типа
«сопло — заслонка»; клапаны этого типа до-
пускают весьма значительное усиление мощ-
ности.
Сервоклапаны «сопло—заслонка» широко
применяются в системах автоматической ста-
билизации и управления снарядов и самоле-
тов, механизмах отклонения камер ЖРД на
карданном подвесе, сканирующих устройствах
радиолокационных антенн. За последнее вре-
мя они также нашли применение в промыш-
ленности, например, для металлорежущих
станков с программным управлением.
Используемые в авиационной и ракетной
технике сервоклапаны обычно выполняются по
двухступенчатой схеме (фиг. 1). В первую
ступень входят управляющее электромагнит-
ное и сопло-заслоночное устройства, которые
приводят в действие вторую ступень, имею-
щую обычный четырехходовой золотниковый
распределитель; последний, пропуская боль-
шие объемы жидкости, непосредственно воз-
действует па исполнительный гидромеханизм.
26
Управляющее электромагнитное устрой-
ство (фиг. I) состоит из двух П-образных по-
стоянных магнитов, обмотки управления и
якоря, связанного с заслонкой, расположен-
ной между двумя симметричными соплами.
Якорь шарнирно закреплен в эластичной
опоре, герметически отделяющей электромаг-
нитную секцию клапана от гидравлической.
Наводимый магнитный поток проходит по
замкнутому контуру, образованному обоими
постоянными магнитами, четырьмя воздуш-
ными зазорами и концами якоря. При отклю-
ченной обмотке управления якорь занимает
устойчивое среднее положение, так как на
него действует восстанавливающий момент
магнитных сил, пропорциональный углу от-
клонения якоря.
Когда в обмотку управления поступает
командный сигнал, то возникает дополнитель-
ный магнитный поток, текущий вдоль якоря
и суммирующийся в воздушных зазорах с
основным магнитным потоком. При этом у
каждого конца якоря в одном из зазоров маг-
нитный поток уменьшается, а в другом уве-
личивается. В результате появляется момент,
отклоняющий якорь в сторону большего маг-
нитного потока.
Сопло и заслонка представляют собой
дроссель с переменным проходным сечением.
Через два канала в корпусе клапана к соплам
непрерывно подается из гидросистемы жид-
кость под давлением. Каждый канал имеет на
входе дроссель постоянного сечения и сооб-
щается с ближайшим концом цилиндрической
камеры, в которой находится распределитель-
ный золотник. Вытекающая из сопел жидкость
отводится в сливную линию гидросистемы.
При среднем положении заслонки расходы
жидкости через каждое сопло одинаковы.
Также одинаковым будет и падение давления
между дросселем и соплом каждого канала.
Поэтому под действием равных давлений в
концевых полостях камеры распределителя
золотник удерживается в нейтральном поло-
жении. закрывая доступ рабочей жидкости к
исполнительному механизму.
Когда якорь в зависимости от поданного
сигнала отклонится в ту или другую сторону,
заслонка соответственно приблизится к одному
соплу и удалится от другого. Благодаря смеще.
нию заслонки изменятся расходы жидкости че-
рез сопла, отчего возникает разность давлений
между их каналами, а следовательно, и меж-
ду концевыми полостями камеры распредели-
теля. В результате разности давлений золот-
ник начнет перемещаться, открывая впускные
и выпускные окна распределителя в соответ-
ствии с поданным сигналом. Движение золот-
ника прекратится, как только пружина обрат-
ной связи возвратит заслонку в среднее поло-
жение.
Английская фирма Даути изготовляет ма-
логабаритные сервоклапаны, соответствующие
схеме, приведенной на фиг. 1. двух серий,
имеющие обозначение 31 и 32. Клапаны пер-
Фиг. 2. Гидроусилитель с сервоклапаном
фирмы Мууг
вой серии, имеющие золотниковый распреде-
литель с уменьшенными размерами, обладают
высокой динамической чувствительностью;
клапаны второй серии рассчитаны на повы-
шенные расходы жидкости. Пропускные спо-
собности клапанов 26,5 и 53,1 л/мин, соответ-
ственно. Обе серии сервоклапанов предназна-
чены для систем с рабочими давлениями до
280 кг/см2.
Для облегчения монтажа и удобства экс-
плуатации сервоклапан устанавливают непо-
средственно на управляемом им исполнитель-
ном гидромеханизме; при этом исключаются
трубопроводы, соединяющие клапан и гидро-
механизм, что улучшает динамические харак-
теристики системы.
Такие комбинированные агрегаты выпу-
скает американская фирма Мууг. Агрегат
(фнг. 2), являясь мощным гидроусилителем,
состоит из сервоклапана, силового цилиндра
и позиционной обратной связи. Используемый
в агрегате сервоклапан имеет размеры 51X
Х63Х38 мм и весит около 0,45 кг; потребная
мощность входного сигнала порядка 50 мил-
ливатт. Размеры силового цилиндра подби-
раются по максимальному шарнирному мо-
менту и максимальному углу отклонения по-
верхности управления. Отношение мощности
входного сигнала к мощности, развиваемой
силовым цилиндром (коэффициент усилия),
может достигать 10000000. Диапазон рабочих
температур агрегата от —54 до 260° С.
Схема сервоклапана фирмы Мууг показана
на фиг. 3*. Управляющее электромагнитное
устройство клапана имеет два постоянных
прямых магнита, снабженных полюсными
башмаками, между которыми находится кон-
сольно закрепленный в эластичной опоре
якорь. Опора служит одновременно уплотне-
нием, разделяющим электромагнитную и гид-
равлическую секции клапана.
Другими конструктивными особенностями
сервоклапана фирмы Мууг являются: объеди-
нение заслонки и якоря в одну общую деталь;
применение пружин, центрирующих золотник
распределителя в нейтральном положении;
♦ Сервоклапаны этого типа производит по лицен-
зии английская фирма Даути.
27
Фиг. 3. Сервоклапан фирмы .Мууг
установка в каналах для подачи жидкости к
соплам миниатюрных фильтров, защищающих
отверстия сопел и дросселей от засорения;
наличие компенсационного устройства, улуч-
шающего динамические характеристики кла-
пана.
Сервоклапан функционирует следующим
образом. Когда под действием сигнала за-
слонка отклонится и в участках каналов меж-
ду дросселем и соплом возникнет разность
давлений, золотник начнет перемещаться, со-
ответственно открывая окна камеры распре-
делителя. Движение золотника прекратится,
как только разность давлений жидкости на
его торцы уравновесится суммарным усилием
пружин. При выравнивании давлений в участ-
ках каналов между дросселем и соплом золот-
ник вновь возвращается в нейтральное поло-
жение, прекращая доступ рабочей жидкости
к исполнительному силовому цилиндру.
Разность давлений на заслонку вытекаю-
щей из сопел жидкости обеспечивает обрат-
ную связь, уравновешивающую развиваемое
якорем усилие. Точная балансировка дей-
ствующих на заслонку сил происходит благо-
даря ослаблению влияния упругости эластич-
ной опоры отрицательным градиентом сило-
вого поля постоянных магнитов. Этим обеспе-
чивается прямая пропорциональность между
уровнем входного сигнала и положением зо-
лотника распределителя, а также достигается
такая стабилизация гидроусилителя, при ко-
торой коэффициент усиления не зависит от
колебаний давления жидкости в довольно
широких пределах.
На фиг. 4 приведены графики зависимости
расхода жидкости от противодавления нагруз
кн, выраженного в процентах от максималь-
ного давления гидросистемы, при различных
уровнях сигнала для сервоклапанов фирмы
Мууг. Расход жидкости относительный, при-
чем за 100% условно принята величина рас-
хода, соответствующая 2/3 предельной на-
грузки.
По сообщению фирмы Мууг, верхний пре-
дел рабочей температуры сервоклапана мож-
но значительно повысить, если управляющее
электромагнитное устройство должно реагиро-
вать нс на сложный сигнал, изменяющийся
по величине и знаку, а лишь па двухпозицион-
ный сигнал: «включить — выключить». При
таком простом сигнале уменьшается влияние
электрического гистерезиса, и поэтому в
управляющем устройстве становится возмож-
ным использование нелигированной холодно-
катанной стали, магнитные свойства которой
сохраняются при температурах 540—760е С.
Сервоклапаны этого типа можно применять в
системах включения и выключения ракетных
двигателей, а также для регулирования на-
правления вектора тяги двигателей с подвиж-
ными соплами.
Для гидросистем небольших управляемых
снарядов, питаемых от аккумулятора ограни-
ченной емкости, относительно малый, но
длящийся в течение всего полета непрерыв-
ный расход жидкости через сопла сервокла-
пана нежелателен. Чтобы уменьшить этот
расход до минимума, сервоклапаны фирмы
Кадиллак (США) выполняются только с одним
соплом.
Управляющее электромагнитное устрой-
ство сервоклапана фирмы Кадиллак FC2
(фиг. 5) находится в заполненной жидкостью
камере, сообщающейся со сливом гидросисте-
мы. Таким образом, опора якоря освобож-
дается от дополнительной функции уплотне-
ния, разделяющего электромагнитную и гид-
равлическую секции клапана, что повышает
его чувствительность. Якорь, шарнирно за-
крепленный между полюсными башмаками
160
160
Ito
но
100
во
60
to
20
о
100 % уровня сигнала
Постоянное дросселирование
Обычный сервоклапан
Сервоклапан с компе.чсаиионным
устройством
20 tO
Противодавление нагрузки
Обычный сервоклапан
Фиг. 4. Зависимость расхода жидкости
от противодавления нагрузки для сервоклапанов
фирмы Мууг
I
1
60% уровня I
сигнала
а
Постоянное дросселирование
„ Л 1
Сервоклапан с компенсационным
________устройством______ |
1% уровня сигнала
/ Обычный сервоклапан
28
Постоянного магнита, при воздействии сигна-
ла через связующее звено перемещает заслон-
ку. Изменяющееся при этом давление жидко-
сти в участке канала между входным дрос-
селем и соплом передается на левый торец
распределительного золотника; на его правый
торец постоянно действует полное давление ги-
дросистемы. Так как с правой стороны эффек-
тивная площадь по торцу золотника умень-
шена, то при возрастании давления в участке
между входным дросселем и соплом выше
определенной величины золотник будет пере-
мещаться вправо, а при падении давления —
влево. Нейтральное положение золотника,
соответствующее среднему положению заслон-
ки, устанавливается рычагом и пружиной об-
ратной связи, регулируемой центрирующим
винтом.
Сопло
Слив
Распредели
тельный
млотнии
Знойной
дроссель
Дроссель слаба
центрирующий
I винт у
Заслонка
/ Якорь «5
7 ' 'У
I
Роетоянныи \
магнит \
' Рыиаг
и , обратной
л цилиндру Нагнетание л цилиндру сояли
Фиг. 5. Сервоклапан фирмы Кадиллак
Работа сервоклапана типа «сопло—заслон-
ка» ухудшается с увеличением противодавле-
ния в полости для отвода вытекающей из
сопел жидкости в сливную линию гидросисте-
мы. Причинами этого увеличения противодав-
ления являются либо установка дросселя в
сливном канале клапана для стабилизации
его действия, либо повышенное гидравличе-
ское сопротивление сливной линии системы.
На фиг. 6 показано, как резко уменьшаются
протяженность и крутизна рабочей части ста-
тической характеристики сервоклапана FC10
фирмы Кадиллак с установкой дросселя в
сливном канале: клапан FCI0 выполнен по
той же схеме, что и клапан FC2 (фиг. 5).
Все рассмотренные выше сервоклапаны
имеют много общего по конструкции, однако
принцип «сопло—заслонка» может быть осу-
ществлен применением и иных конструктив-
ных форм. Например, в сервоклапане (фиг. 7)
английской фирмы Армстронг-Уитворт управ-
ляющее устройство состоит из двух соленоидов,
расположенных концеитрично вокруг сопел,
между которыми помещена диафрагма, вы-
полняющая роль заслонки. Вторая ступень
клапана представляет собой обычный четы-
рехходовой золотниковый распределитель.
Жидкость под давлением поступает к соплам
из гидросистемы через сужающиеся пазы в
концевых головках золотника. Эти пазы слу-
-7,3 ~3 -7J о г.З J 7,3
Сила тола сигнала [на]
Фиг. 6. Влияние дросселирования потока в линии
слива на статическую характеристику сервоклапана
фирмы Кадиллак
жат одновременно в качестве входных дрос-
селей и обратной связи между диафрагмой
и золотником.
Электрогидравлические клапаны выпуска-
ют также американские фирмы Виккерс Хайд-
роликс, Кирфот и английские—Фейрн, Митчел
Хайдроликс, Хобсон. В соответствии с тенден-
цией уменьшения габаритов и веса оборудова-
ния снарядов и самолетов миниатюризуются и
Фиг. 7. Схема сервоклапана фирмы
Армстронг-Уитворт
сервоклапаны. Сервоклапан «Спейсмастер»
фирмы Виккерс Хайдроликс имеет объем
около 70 смЛ и весит 227 г; при мощности сиг-
нала около 0,1 вт клапан обеспечивает управ-
ление исполнительным механизмом с выход-
ной мощностью до 5 л. с. Особенностью ми-
ниатюрного сервоклапана 6104 (фиг. 8) фир-
мы Кирфот является запатентованное гидро-
механическое устройство обратной связи меж-
ду первой и второй ступенями; этот клапан,
изготовленный из титана, имеет только две
подвижные летали.
29
Производство электрогидравлических сер-
воклапанов типа «сопло — заслонка» требует
прецизионного технологического оборудова-
ния, так как основные детали выполняются с
допусками, значительно меньше принятых
при изготовлении аналогичных деталей дру-
гих гидроагрегатов. Процесс сборки имеет ряд
особенностей, связанных с накладкой клапана;
в частности, для получения одинакового сило-
вого воздействия струй на заслонку необхо-
димы идентичные гидравлические характери-
стики обеих половин сопло-заслоночного
устройства. Поэтому чаще всего сборка вы-
полняется путем индивидуальной подгонки де-
талей для каждого сервоклапана.
Фиг. 8. Миниатюрный сервоклапан
фирмы Кнрфот
На заводе Даути, специализирующемся
длительное время на выпуске агрегатов для
самолетных гидросистем, изготовление серво-
клапанов выделено в обособленное производ-
ство. Специально построенные для этой цели
рабочие помещения с кондиционированием
воздуха и регулированием температуры со-
держатся в исключительной чистоте.
Перед сборкой детали поступают в кон-
трольное отделение, где с помощью пневмати-
ческих измерительных приборов проверяются
правильность формы, диаметральные зазоры и
перекрытия золотниковых пар. Здесь же в слу-
чае необходимости осуществляется доводка
деталей до нужных размеров с точностью до
0,0013—0,0018 л.ч. В смежном изолированном
помещении все детали, входящие в клапан,
подвергаются чистке ультразвуковым методом.
Сборочное отделение и испытательная ла-
боратория совмещены воедино, что облегчает
пооперационный контроль в процессе сборки.
Последняя выполняется в тщательно вычи-
щенных шкафах, облицованных изнутри пласт-
массой на бакелитовой основе. Передняя стен-
ка шкафа, изготовленная из прозрачного пла-
стика, снабжена отверстиями с вделанными в
них рукавами для рук сборщика. Небольшое
избыточное давление воздуха, поддерживае-
мое в шкафу, исключает попадание в него пы-
ли из окружающей среды.
Каждый собранный сервоклапан подвер-
гается испытаниям по определению порога
чувствительности, гистерезиса, линейности ха-
рактеристики и расхода жидкости. Кроме того,
проверяется влияние низких и высоких темпе-
ратур, а также механических вибраций, при
которых клапану сообщаются перегрузки в
горизонтальном направлении до 30 gn в вер-
тикальном направлении до 10 g; в заключение
определяется чувствительность к различным
частотам. При испытаниях клапаны крепятся
болтами на панели с точным воспроизведени-
ем условий их монтажа на летательном аппа-
рате. Испытание и регулировку производит
сборщик, собиравший клапан.
К сборочному отделению примыкает по-
мещение насосной станции, питающей гидрав-
лические испытательные установки. В целях
предупреждения загрязнения испытуемых сер-
воклапанов жидкость очищается путем непре-
рывной циркуляции ее через группу 5-мик-
ронных фильтров; прокачку жидкости через
фильтры начинают за 30 мин. до начала ра-
бочего дня.
Контроль чистоты жидкости осуществляет-
ся периодическим отбором проб по 50 см3
каждая. Жидкость считается пригодной, если
в указанном объеме ее количество твердых
частиц не превышает: 40000 частиц величиной
от I до 25 и по наибольшему измерению (из
их числа допускается не более 1000 металли-
ческих частиц величиной 10—25 и); 500 частиц
крупнее 25 ц по наибольшему измерению; 5
волосообразных частиц длиннее 500 р.
Частицы размером более 25 р легко задер-
живаются фильтрами, встроенными в серво-
клапаны.
Aeroplane № 2498;
Air Revue, I, 1960;
Compressed Air and Hydraulics, X, 1960;
Missiles and Rockets, 10 V111 1959, 18/1 1960;
SAE Journal, VI, 1959.
ИНЕРЦИОННЫЕ ВЫКЛЮЧАТЕЛИ
Инерционные выключатели используются
для выработки сигнала, соответствующего
определенной величине ускорения. Эти выклю-
чатели находят применение в различных лета-
тельных аппаратах; для срабатывания выклю-
чателей не требуется электрическая энергия,
они невосприимчивы к сигналам всех извест-
ных устройств для создания помех, не подают
радиосигналов или сигналов в инфракрасной
части спектра.
Выключатели применяются для включения
систем управления ракет, отделения ступеней
при достижении заранее установленных вели-
чин ускорения, скорости или пройденного рас-
стояния, для взведения боевых головок (на
заранее установленном расстоянии от пуско-
30
вой площадки или при снижении); для опре-
деления напряжений в конструкции от вибра-
ций, ударов или других нагрузок и регистра-
ции величины ударных нагрузок во время
испытаний при внешних условиях, аналогич-
ных рабочим.
В большинстве выключателей используется
система, состоящая из пружины и груза (с
различными демпфирующими устройствами)
и электрических контактов. Режим работы
выключателей описывается дифференциаль-
ным уравнением второго порядка:
DX КХ,
где F суммарная движущая сила,
Л1 — масса,
D — коэффициент демпфирования,
К жесткость пружины,
X — приложенное ускорение,
к — скорость массы и
X — смещение массы.
Реакция системы второго порядка на сту-
пенчатую функцию на входе выражается фор-
мулой:
где амплитуда реакции прибора,
О —амплитуда вынужденной функции,
/— частота вынужденных колебаний,
/п — частота собственных колебаний
прибора,
С —декремент затухания.
Частота собственных колебаний выражает-
ся формулой:
/п “ 2* |/ М •
Выключатели могут выдавать сигналы уско-
рения, скорости (интегрирование), пройден-
ного пути (двойное интегрирование) (фиг. 1).
Выключатель, выдающий ускорение, с оди-
нарной системой пружина — груз является
самым простым, дешевым и наиболее широко
используемым.
Выключатель, выдающий скорость, анало-
гичен предыдущему, но в него введено вре-
менное устройство (фиг. 2). Датчиком времени
может служить сильфон с мерной диафрагмой.
Груз действует на сильфон, и время его обжа-
тия под действием ускорения является инте-
гралом ускорения по времени. Полное обжа-
тие сильфона является критическим в этой
системе и поэтому диапазон регулирования
узкий.
Фирмой Магнавокс разработан выключа-
тель, выдающий скорость, в котором вместо
сильфона с газом используются стеклянные бу-
синки, пропускаемые через отверстие. Под
действием ускорения бусинки текут через это
отверстие. Система смещения позволяет уста-
навливать минимальный уровень восприни-
маемого выключателем ускорения, при превы-
шении которого выключатель срабатывает.
Ускорение
Замыкание
выключатели
Система
пружина-груз
выключатель
по ускорению
Ускорение
Механическое
временное
устройства
выключатель
по пройденному
пути
а — ускорение; I— гремя; fudt скорость; ffadt — путь
Фиг. 1. Схемы инерционных выключателей
Количество бусинок и размер отверстия изме-
няют в соответствии с продолжительностью
действия и величиной ускорения, на которое
рассчитан выключатель.
Силырон
77/777777777777777>У777/7777777Л
__ib \ ^<11- А внешней
AVJ-1 Чепи
Груз
К внешней
цепи
7777777777777777777777777777777
Фиг. 2. Выключатель по скорости. Под действием
ускорения груз перемещается вправо, сжимая
сильфон. Контакты А и А' соединены; при соеди-
нении с контактами Б и Б' цепь замыкается
В другом типе подобного выключателя
используются механическое временное устрой-
ство, акселерометр и фрикционный интегратор
в виде диска с шариком. Акселерометр приво-
дит каретку шарика, временное устройство
приводит диск, и результирующий сигнал про-
порционален интегралу ускорения по време-
ни. Основным недостатком этой системы яв-
ляется отсутствие точного временного устрой-
ства, отвечающего соответствующим техниче-
ским условиям: кроме того, прибор получается
больших размеров и дорогостоящий.
При подаче выходного сигнала скорости на
второй фрикционный интегратор (с таким же
31
временным устройством) получают выходной
сигнал пройденного пути. Эта конструкция
имеет те же недостатки, что и выключатель,
выдающий скорость, в еще большей степени.
Испытывались и другие методы двойного
интегрирования, но большинство из них имело
ограниченный диапазон или не удовлетворяло
соответствующим техническим условиям.
Системы с применением груза и пружины,
используемые для большинства выключателей,
могут быть разделены по конструкции на три
типа (фиг. 3):
Jajop
Щ////////Л7///////////
77777777777777777X777777
Лрумина
Фиг. 3. Системы из груза и
пружины, применяемые в инер-
ционных выключателях
I) системы, в которых груз с пружиной
монтируется на валу, опирающемся на раз-
личного вида подшипники;
2) системы, в которых груз укреплен на
плоской пружине;
3) системы, в которых груз укреплен на
механизме моментального действия, срабаты-
вающем, когда ускорение превысит установ-
ленную величину.
Преимущество первой системы заключает-
ся в том, что в ней легко осуществить пневма-
тическое, масляное или магнитное демпфиро-
вание. Однако необходимость установки под-
шипников (в которых будет создаваться тре-
ние) является недостатком этой системы. Мо-
жет быть также использован узел с плаваю-
щим грузом, подвешенный на стержнях, рабо-
тающих на кручение. Плавающий узел
обеспечивает высокую точность, но его стои-
мость приблизительно в 10 раз больше стои-
мости обычных типов выключателей.
Вторая система выключателей является са-
мой дешевой. Плоская пружина работает и
как подвеска, исключая применение подшип-
ников или стержней и дополнительных пру-
жин. Гистерезиса плоской пружины можно
избежать, применив для ее изготовления бе-
риллиевую бронзу. Недостатком этой системы
является изменение контактного сопротивле-
ния в зависимости от ускорения. Для демпфи-
рования используется только вязкая среда;
пневматическое или магнитное демпфирование
нс могут быть применены.
Стоимость выключателей моментального
действия почти такая же, как и выключателей
с плоской пружиной, но они имеют два недос-
татка: во-первых, присущий этим выключате-
лям гистерезис делает их менее точными при
малых ускорениях, чем выключатели с плоской
пружиной, и во-вторых, не может быть приме-
нено демпфирование. Однако при больших
ускорениях, для которых они лучше всего под-
ходят, предварительное нагружение предот-
вращает преждевременное срабатывание вы-
ключателя от вибрации и обеспечивает хоро-
ший контакт, что способствует их применению
при сильном токе.
В выключателях с пневматическим демп-
фированием груз в цилиндре монтируется
обычно по ходовой посадке. Диаметральный
зазор является диафрагмой, через которую газ
выдавливается при перемещении груза. По-
скольку демпфирование пропорционально
средней вязкости, а вязкость газа изменяет-
ся незначительно, пневматическое демпфиро-
вание может применяться в широком диапа-
зоне температур. Например, для азота при
изменении температуры от —50°С до 4-120сС
демпфирование изменяется лишь на 25%.
Если материалы корпуса демпфера и груза
выбраны с таким расчетом, что зазор умень-
шается при низких температурах и увеличи-
вается при высоких температурах, то будет
обеспечиваться почти постоянное падение дав-
ления при протекании газа через отверстие и,
следовательно, очень небольшое изменение
демпфирования.
В демпфирующей системе с сопротивлени-
ем, прямо пропорциональным скорости пере-
мещения, в выключателе с плоской пружиной
для демпфирования может быть использована
вязкая жидкость. Когда требуются большие
величины демпфирования, применяется систе-
ма, в которой используется сопротивление пе-
ретекающего масла, до некоторой степени
аналогичная системе с пневматическим демп-
фированием. Зазоры в такой системе больше,
так как вязкость жидкости значительно пре-
вышает вязкость газов. Изменения вязкости
жидкостей при изменении температуры в 8—
10 раз больше, чем у газов. Для регулирова-
ния вязкости могут быть применены электро-
обогреватель и термостат, но это усложняет
конструкцию.
Демпфирование может также изменяться с
помощью регулируемого мерного отверстия
(фиг. 4). Изменение демпфирования может
быть ограничено до 15% в диапазоне темпера-
32
тур от —45 до -И 15° С с помощью биметалли-
ческого элемента или мембранной коробки,
открывающих клапан при низких температу-
рах и закрывающих его при высоких темпера-
турах. Обычно стоимость конструкции с демп-
фированием жидкостью значительно больше,
чем конструкции с пневматическим демпфиро-
ванием.
Преимуществом магнитного демпфирова-
ния является независимость от изменений
температуры. Большие размеры магнитов и
жесткие допуски при изготовлении ограничи-
вают широкое использование этого метода
демпфирования. Новые открытия и материалы
могут устранить эти недостатки в ближайшем
будущем.
Электрические контакты выключателей мо-
гут быть почти любого типа. Основное внима-
ние при проектировании должно быть уделе-
но устранению размыкания контактов пол
действием вибраций и минимальному контакт-
ному сопротивлению.
Фирмой Инэшиа Свитч разработан очень
простой, надежный и недорогой выключатель,
состоящий из шарика и магнита. Шарик удер-
живается в одном положении до тех пор, пока
под действием ускорения не преодолевается
сила притяжении магнита. При отрыве шарика
может замыкаться или размыкаться электри-
ческая цепь, а второй магнит может быть ис-
пользован для запирания шарика.
Инерционные выключатели могут быть
использованы для включения счетчиков дости-
гаемой величины ускорения. Комплект выклю-
чателей, настроенных на различные ускорения,
биметаллический ялемент
Перепускная
трубка
77777777777777777777777777777777X777777777
Пружина
Фиг. 4. Выключатель с демпфированием
жидкостью и температурной компенсацией
объединенный в один корпус, может пополь-
зоваться, например, для определения пере-
грузок в различных зонах самолета. Такой
прибор может иметь до 18 каналов.
Space/Aeronautics, VII, 1960.
ХРОНИКА
Министерство авиации выдало заказ на производ-
ство серин опытных самолетов Виккерс-Армстронг/
/Инглиш Электрик TSR-2, которые предназначаются
для замены самолетов «Канберра». Предполагают, что
будет построено 12 самолетов. Первый полет опытного
самолета намечается на весну 1963 г., а поступление
на вооружение ВВС Англии — на 1965 г. Построен ма-
кет и начата постройка первого опытного самолета.
Проектирование и производство самолета ведутся сов-
местно фирмами Виккерс-Армстронг и Инглиш Элек-
трик.
Самолет TSR-2 сможет летать па малых высотах
со скоростью, соответствующей числу М=0,9, и на боль-
ших высотах со скоростью, превышающей соответст-
вующую числу М=2. В полете на малых высотах
самолет сможет достигать дальности, достаточной для
выполнения разведывательных заданий. Самолет будет
снабжен автоматической системой управления, обеспе-
чивающей в полете на малых высотах следование
рельефу местности.
Сообщается, что крыло самолета будет очеиь не-
большим, на основании чего можно предположить, что
удельная нагрузка на крыло будет большой. Это соот-
ветствует заявлению о том, что самолет обладает хоро-
шими характеристиками устойчивости при порывах
ветра, обеспечивающими благоприятные условия полета
на малых высотах.
Самолет будет иметь малые длины разбега и про-
бега, и его шасси спроектировано с учетом эксплуата-
ции с неподготовленных аэродромов.
Самолет может нести различные виды оружия с
зарядами обычного ВВ или атомными зарядами и в
том числе самолетные баллистические снаряды.
Aeroplane № 2556;
Flight К' 2962;
Interavla № 4588.
Фирма Белл Эрсистемз провела успешные испыта-
ния ЖРД, работающего па жидком фторе (окислитель)
и жидком водороде (горючее). При некоторых испыта-
ниях жидкий водород заменялся гидразином. Проведе-
но более 600 запусков двигателя, причем достигалась
тяга около 16 г. ЖРД, работающие на жидком фторе
и жидком водороде, приблизительно на 15% эффектив-
нее ЖРД, работающих на жидком кислороде и водоро-
де. Предполагают, что такие ЖРД будут применяться в
качестве последних ступеней ракет-носителей.
Aeroplane № 2555.
♦ *
*
Слоистые панели из нержавеющей стали с сотовым
заполнителем для бомбардировщика Норт Америкен
В-70 «Валькирия» подвергаются пайке, термической об-
работке и старению с помощью специальных приспособ-
лений. разработанных фирмой Авко. Применяются кера-
мические плиты, в которых имеются электрические на-
гревательные элементы н каналы для охлаждающего
воздуха. Керамические плиты механически обработаны
точно по контуру панели и служат формами. Панели
обшивки и сотовый заполнитель помещаются между ке-
рамическими плитами. Для обеспечения плотного приле-
гания обшивок к заполнителю во время пайки к форме
прикладывается давление, а внутри ее создается разре-
жение. Затем керамические плиты нагревают в течение
короткого времени до температуры пайкн. Быстрое
охлаждение осуществляется пропусканием по каналам
внутри плит холодного воздуха Затем керамические
плиты снова нагревают, чтобы подвергнуть панель ста-
рению для достижения максимальной прочности.
Пайка и термическая обработка панелей в одной
форме дают значительную экономию средств.
Aviation Week, 12/IX 1960.
5-.ТИ* № 5
33
На палубном истребителе Мак Доннелл F411-1
«Фантом» Н 25 сентября 1960 г. установлен новый ми-
ровой рекорд скорости полета по замкнутому маршруту
длиной 100 км — 2237,4 кж/час. Предыдущий рекорд
(1878,7 км/час) был установлен на истребителе бомбар
дировщике Рипаблик F-I05B.
Interavia № 4585.
• •
•
Фирма Чанс Воут построила макет спасательной
капсулы, представляющей собой отделяемую носовую
часть фюзеляжа с кабиной летчика. Капсула разраба
тывастся по заказу флота США. Для испытаний в
свободном полете будут использованы модели капсулы
длиной 0.9 м, устанавливаемые в носовых частях сверх-
звуковых ракет. После отработки конструкции капсулы
будут проводиться йены гания натурных капсул на
сверхзвуковых ракетных салазках для того, чтобы про
верить, обеспечиваются ли в капсуле безопасные усло-
вия для человека. Конечная фаза испытаний преду-
сматривает три отделения капсул в полете с
управляемых по радио самолетов Чанс Воут F8U
«Крузейдер» два раза с манекенами к один раз с
летчиком
Па фотографии показан макет спасательной капсу-
лы, соответствующей носовой части фюзеляжа истреби-
теля Чанс Воут F8U. Видны выдвинутые стабилизаторы.
Interavia № 4581.
* »
*
С базы Кэйн Канаверал в сентябре I960 г был за-
пушен МБС Мартин «Титан», который пролетел около
16000 км и упал в заданном районе в 1600 к.и к юго-
востоку от острова Мадагаскар. Отделившийся от сна-
ряда контейнер с приборами был подобран.
Interavia Ns 4582.
Вице-президент фирмы Рипаблик Картвели описал
проект пилотируемого самолета, обладающего ско-
ростью. соответствующей числу М 25. Предполагается,
что самолет будет иметь взлетный вес около 180 т,
запас топлива (жидкий водород) около 90 г и будет
совершать полет по орбите, удаленной от Земли на
60 к.и, со скоростью до 27000 км/час. Предполагаемая
длина самолета ~52 м. высота 10 размах крыла
30 м. Силовая установка самолета будет состоять из че-
тырех ТРД J-58 и четырех ПВРД. Предлагается воору-
жить самолет небольшим истребителем, который запус-
кался бы с носителя для выполнения локальных такти-
ческих заданий.
Картвели считает, что помимо этого самолета по-
требуется построить по меньшей мере три типа новых
пилотируемых самолетов, прежде чем авиационная
промышленность полностью переключится на постройку
спутников и космических летательных аппаратов.
В число этих самолетов входят:
1) Одноместный вертикально взлетающий истреби-
тель-бомбардировщик. обладающий скоростью, соответ
ствующей числу М=2,3 и могущий в любую погоду
производить прицельное бомбометание с высот от
22800 лг до уровня моря
2) Бомбардировщик с атомным ПВРД. обладаю
щнй скоростью, соответствующей числу М 4,25, даль-
ностью 1.3500 км и крейсерской высотой 26000 м.
3) Бомбардировщик с треугольным крылом с дву-
мя ТРД и двумя ПВРД, обладающий скоростью, соот-
ветствующей числу М—7. крейсерской высотой 36500 .и
и дальностью 8000 к.ч.
Space/Acronaullcs. IX. 1960.
* *
А
Бомбардировщик Конвэр В-58 «Хаслер» во время
трс.хчасового полета 78 минут летел со скоростью, со-
ответствующей числу .4=2. Сначала он летел с этой
скоростью 32 минуты, затем совершил заправку топли-
вом в полете и снова летел с этой скоростью 46 минут.
.Максимальная продолжительность непрерывного полета
си скоростью, соответствующей числу .М 2. была достиг
нута одним из самолетов «Хаслер» в 1959 г. во время
перелета из Сиэттла в Даллас, длившегося 58'/} мин.
Aeroplane № 2560.
«
Военная воздушная транспортная служба ВВС
СШ.А (MATS) предполагаег израсходовать в течение
последующих восьми лет на закупки военно-транспорт-
ных самолетов с ТРД д.га миллиарда долларов. Требо-
вания к новому военно-транспортному самолету изло-
жены в тактико-технических требованиях SOR-182.
Предполагается, что самолет поступит на вооружение
в 1964 г. MATS намерена закупить 376 таких самолетов
Самолет должен перевозить платную нагрузку ве-
сом 22,7 27,2 т на расстояние 7400 к.ч или около 9 г
на расстояние 10200 км. При этих нагрузках должна
обеспечиваться неограниченная эксплуатация самолета
с взлетно-посадочных дорожек длиной не более 1800
Взлетный вес самолета около 145 т и силовая установ-
ка. возможно, будет из четырех ТВРД с тягой по
9000 кг. Требуемая крейсерская скорость 834 км/час.
Выбор военно-транспортного самолета, соответст-
вующего ТТТ SOR-182, несомненно, окажет большое
влияние на перспективы развития гражданских само-
летов.
Поскольку в настоящее время замена некоторого
числа транспортных самолетов MATS стала неотложной
задачей. ВВС вынуждены заказать небольшое число
существующих самолетов или самолетов, поставки ко-
торых могут быть начаты в ближайшем будущем.
В первую очередь намечается закупить около 50 тран-
спортных самолетов Локхид С-130Н «Геркулес» с ТВД.
а в дальнейшем некоторое количество самолетов с ТРД,
которые также будут промежуточными. Такими само-
летами могут быть модифицированные самолеты Боинг
КС-1.35 или Боинг 707. Дуглас DC-8 или Конвэр 6Л0;
упоминается также самолет Кападэр CL-44.
Interavia № 4607.
* *
Опубликован рисунок управляемого снаряда флота
США класса воздух воздух Бендикс «Игл». Двигатель
снаряда работает на твердом топливе; вес снаряда око-
ло 900 кг, длина ~4,6 .«.
Interavia № 4582.
34
Командование ПВО североамериканского континен-
та сообщило, что I октября 1960 г. вступила в эксплу-
атацию первая станция системы раннего обнаружения
МБС в Туле (Гренландия). Строительство двух дру-
гих станций b Клире (Аляска) и Файлингсдейл Мур
(Англия) продолжается.
Interavia № 4585.
* *
ф
С полигона Кэйп Канаверал 4 октября I960 г. раке-
той «Тор-Эйбл Стар» был запущен связной спутник
«Курьер» 1В. Спутник предназначен для проверки воз-
можности создания системы связи в масштабе земного
шара с помощью спутников, регистрирующих сообщения
и передающих их по командам наземных станций.
Период обращения запущенного спутника 105 мин.,
перигей орбиты около 800 км, апогей около 1200 км.
На спутнике установлено 19152 солнечных элемента, а
также никель-кадмиевые батареи (12 ач. 28 в). Вес
спутника 227 кг; диаметр 1295 мм; средняя скорость на
орбите 23000 км/час. Информация регистрируется на
пять магнитных лент. Спутник может осуществлять
мгновенную ретрансляцию информации со скоростью
68000 слов в минуту. Связь со спутником поддерживает-
ся двумя наземными станциями — в Форт Монмауте
(шт. Йью Джерси) и на о. Пуэрто Рико.
На фотографии показана натурная модель спутника
«Курьер» IB
Interavia К 4585.
Армия США выдала шести группам фирм заказы
стоимостью 250 тыс. долларов на проведение исследо-
ваний системы обороны наземных войск в полевых
условиях от атак снарядов. Армия заявила, что она
нуждается «в системе, способной в полевых условиях
передвигаться вместе с войсками и оборонять их от
атак различных баллистических и управляемых снаря-
дов».
Interavia № 4591.
Ж ж
*
Атомная подводная лодка флота США «Джордж
Вашингтон», вооруженная 16 БССД «Поларис», 15 нояб-
ря 1960 г. вышла с базы флота США в Чарлстоуне с
тем, чтобы вести патрулирование «в районе Атланти-
ческого океана». Дальность снаряда около 1900 кж.
Предполагают, что всего на вооружении флота
США будет состоять 45 подводных лодок. Таким обра-
зом, по морям и океанам земного шара будет рассре-
доточено не менее 720 снарядов с термоядерными за-
рядами.
Aeroplane № 2561.
* *
*
Экспериментальный самолет Норт Америкен Х-15
15 ноября 1960 г. совершил первый полет с новым
ЖРД Тиокол-Риэкши Моторз XLR-99-RM-1. Во время
полета была достигнута максимальная скорость около
3200 км/час и максимальная высота около 24 к.и. ЖРД
на максимальной мощности не работал.
ЖРД XLR-99-RM-I с регулируемой тягой имеет
наименование «Пионер».
Харьктерисгина двигателя
Тяга ......................... ......... 26620 кг
Удельный импульс.................• . . . . 2X4 сек
Давление и камере сгорания при полной тяге ... 42 кг/см'
Вес сухого днигагеля .................. . . 410 кс
Диаметр...................•.............- - 1016 мм
Длина ..................................... 1X30 лглг
Interavia № 4615.
• *
ф
Для бомбардировщиков Конвэр В-58 «Хаслер» раз-
работана составная подвесная гондола. Новая гондола
будет применяться вместо применяемой в настоящее
время одной гондолы. В нижней сбрасываемой части
размещается топливо, а в верхней, имеющей меньшие
размеры.— бомбовая нагрузка. Для испытаний новой
гондолы модифицируются опытные самолеты «Хаслер»
№ 4 и 38.
Air Pictorial, XI, I960.
* »
»
В соответствии с решением правительства Англии
сохранить на вооружении армии управляемые снаряды
класса земля—воздух «Тандерберд», фирма Инглиш
Электрик сообщила, что она разрабатывает модифика-
цию снаряда Mk.II. На снаряде «Тандерберд» II будет
установлено оборудование для борьбы с. помехами, лет-
ные характеристики будут улучшены, и будет обеспе-
чена возможность его перевозки по воздуху. Возможно,
что будут разрабатываться и дальнейшие модификации
снаряда.
Предварительные испытания первой модификации
снаряда «Тандерберд» проходят успешно. Снарядами
вооружены два полка.
Interavia № 4611,
« *
ф
В ноябре 1960 г. закончено производство бомбар-
дировщиков Боинг B-52G и начата подготовка к произ-
водству обладающего более высокими характеристика-
ми бомбардировщика В-52Н, который предполагается
вооружать СБС Дуглас «Скайболт» .
Air Pictorial. XII, 1960.
♦ •
«
Второй раз военно-транспортным самолетом ВВС
США Фэрчайлд С-119 была затралена при снижении
капсула с приборами спутника «Днскаверер». После
того, как спутник «Днскаверер» XVII, запущенный
12 ноября 1960 г., совершил тридцать три оборота во-
круг Земли, 14 ноября капсула была снижена в центр
заданного района, недалеко от Гавайских островов. Де-
сять самолетов С-Н9, оборудованных радиокомпасами,
приняли участие в операции по тралению капсулы; де-
сять других самолетов были оборудованы тралами. В
время снижения капсулы на парашюте за ней наблюла
ли с четырех самолетов; капсула была затралена с пер-
вой попытки.
Перигей спутника «Днскаверер» XVII—189 к.«, апо-
гей—989 км. Согласно заявлению командующего отде-
лением баллистических снарядов ВВС США, в капсуле
были установлены приборы для регистрации изменений
солнечных пятен. Первое успешное траление в полете
капсулы с приборами, отделившейся от спутника «Днс-
каверер» XIV, было выполнено 19 августа 1960 г.
Interavia № 4614.
35
В США разработаны гильзы, полностью сгорающие
н стволе орудия при выстреле. Новый материал для
гильз (состав которого засекречен) разработан иссле-
довательским центром вооружения (Чикаго). Примене-
ние нового материала устраняет необходимость изготов-
ления дорогостоящих латунных гильз и дает экономию
веса снаряда.
При применении новых гильз нс только умень-
шается количество газов, но н полностью отсутствует
нагар в стволе.
Interavla № 4627.
* «
»
На истребителях ПВО Копвэр F-106 «Дельта Дарт»
устанавливаются разработанные фирмой Конвэр ката-
пультируемые сиденья, снабженные ракетным двигате-
лем. Сиденье поднимается над фонарем кабины и пово-
рачивается так. что летчик лежит на спине Затем с по-
мощью ракетного двигателя сиденье выбрасывается из
вого класса на самолете 68 пассажирских мест, а в
экономичном варианте—85 мест.
Характеристика самолета ю ТРД JT3D-1O)
Размеры
Длина самолета .............................33,35 .ч
Размах крыла ... ............ .......... . 38,58 .
Высота.....................................11.05 .
Плошать крыла ..... 185,8
Удлинение крыла.............................. 7
Веса
Вес конструкции..........................
Топлкпо ..............................
Экипаж....................................
Платили нагрузка.........................
Оощий в<*с нагрузки..................
Взлетный вес.............................
Максимальный посадочный пес..............
Удельная нагрузка на крыло...............
Удельная нагрузка на тагу ...............
Весовая отдача ..........................
Оок>сительная платная нагрузка...........
37790 *.•
19950 .
500 .
7М0 .
28И0 .
658П0 .
63500 .
355 «а.Гж*
3,28 «г,- «га отх.'.г
43%
11,5%
Летные характеристики
Крейсерская скорость:
на внес те 7600 м ............... 940 км час
на высоте 10700 .и .............. 900 .
Дальние1Ь полега .................... 3000 км
Flugwelt, X, I960
Опубликована фотография всепогодного истребите-
ля SAAB J35 «Дракон» с различными вариантами на-
грузки и вооружения, относящимися, главным образом,
к экспортной модификации самолета.
самолета, что позволяет производить катапультирование
при скорости полета 2400 км/час. Летчик приводит си-
стему катапультирования в действие с помощью D-об-
разного кольца, расположенного между ступнями его
ног.
Aviation Week, 19 IX I960.
♦ «
*
Опубликованы некоторые дополнительные сведения
о проекте самолета Конвэр 60. Внешне этот самолет
очень похож на самолет Конвэр 880. Силовая установка
может состоять из двух ТВРД Пратт.Уитни JT3D-10 с
общей тягой 18150 кг или двух ТВРД Дженерал Элект-
рик CJ805-41C1 с общей тягой 20000 кг. В варианте пер-
Слева направо: подкрыльный сбрасываемый топлив-
ный бак весом 400 кг; контейнер с семнадцатью не-
у1гравляемы.ми реактивными снарядами класса воздух—
воздух калибром 75 мм. управляемый снаряд класса
воздух—воздух «Сайдуиндер» (Rb. 324); бомба весом
500 кг; бомба весом 250 кг; шесть реактивных снарядов
класса воздух—земля калибром 135 .«.и; три освети-
тельные бомбы весом по 80 кг; автоматическая пушка
калибром 30 .«.я; контейнер с неуправляемыми реактив-
ными снарядами класса воздух—воздух; подкрыльный
сбрасываемый топливный бак; снаряд «Сайдуиндер» и
сбрасываемый подфюзеляжный бак.
Interavla № 4599.
И. о. отв. редактора Е. И. Сухоцкий
Подписано в печать H/V 1961 г. Объем 4>/2 печ. л., 45000 зн. в печ. л.
Типография ЦАГИ. Заказ № 323
Корректор И. И. Паскалов
Учетно-издательских листов 5,6
Издание подписное