



























































































































































































































































































































































































































































































































































































































































































































































































































































































































































Автор: Бабкин А.В. Велданов В.А.
Теги: оружие вооружение артиллерийско-техническое имущество бронированные машины и специальные средства транспорта стрелковое оружие личное оружие боеприпасы и боевые отравляющие вещества управляемые и неуправляемые ракеты и реактивные снаряды военная техника военное оборудование военное дело боеприпасы
ISBN: 978-5-7038-3171-7
Год: 2008



Средства поражения
боеприпасы
Издательство МГТУ
им. Н.Э. Баумана
УДК 623.45(075.8)
ББК 68.8
С752
Рецензенты: д-р техн, наук, проф. И.О. Артамонов;
д-р техн, наук, проф. В.Е. Смирнов;
д-р техн, наук, проф. А.Н. Чуков
Авторы: А.В. Бабкин, В.А. Велданов, Е.Ф. Грязнов, Н.А. Имховик,
И.Ф. Кобылкин, С.В. Ладов, Л.П. Орленко, В.Н. Охитин,
А.Г. Ришняк, В.В. Селиванов, В.С. Соловьев
Средства поражения и боеприпасы: Учебник / А.В. Бабкин,
С752 В.А. Велданов, Е.Ф. Грязнов и др.; Под общ. ред. В.В. Селиванова. -
М.: Изд-во МГТУ им. Н.Э. Баумана, 2008. - 984 с.: ил.
ISBN 978-5-7038-3171-7
В систематизированном виде изложена классификация средств поражения
и боеприпасов, приведены характеристики эффективности их действия. Опи-
саны осколочные, фугасные и кумулятивные боеприпасы, боеприпасы объем-
ного взрыва, средства поражения с использованием ударного ядра и устройства
динамической защиты, бетонобойные и бронебойные боеприпасы, а также бое-
припасы вспомогательного назначения. Подробно рассмотрены конструктивно-
схемные решения, процессы функционирования и параметры действия указан-
ных средств поражения и боеприпасов.
Приведены классификации устройств и принципы действия взрывателей
(взрывательных устройств) боеприпасов различного назначения, а также об-
щие сведения о средствах инициирования. Изложены основные понятия, прин-
ципы построения, применения и действия нетрадиционных средств временной
нейтрализации живой силы и техники, получивших наименование «оружие не-
легального действия».
Материалы учебника соответствуют курсу лекций, читаемых авторами сту-
дентам МГТУ им. Н.Э. Баумана.
Для студентов и аспирантов технических университетов и машинострои-
тельных вузов, курсантов военных училищ, слушателей и адъюнктов военных
академий.
УДК 623.45(075.8)
ББК 68.8
© Селиванов В.В., 2008
© Оформление. Изд-во МГТУ им. Н.Э. Баумана, 2008
ISBN 978-5-7038-3171-7
ПРЕДИСЛОВИЕ
В книге рассмотрены основные этапы развития средств поражения и
боеприпасов и их современное состояние, приведены характеристики наи-
более распространенных образцов (комплексов). Описание каждого вида
средств поражения и боеприпасов содержит общие краткие сведения и кон-
кретные параметры конструкций, наиболее полно характеризующие данное
средство поражения или боеприпасы. Все образцы проиллюстрированы схе-
мами, рисунками и (или) фотографиями. Числовые и другие данные, приве-
денные в книге, уточнены по новейшим (до 2008 г.) российским и зарубеж-
ным изданиям. Основные понятия, термины и определения соответствуют
принятым в военно-технической литературе справочного характера. В при-
ложении дан список сокращений, используемых не только в настоящем из-
дании, но и общепринятых в области вооружения и военной техники.
Учебник соответствует программам учебных дисциплин специальнос-
ти «Средства поражения и боеприпасы» по направлению подготовки «Ору-
жие и системы вооружения» и является первым опытом создания учебника
по данному направлению подготовки специалистов.
Издание предназначено студентам высших технических учебных за-
ведений, обучающихся по специальностям, которые связаны с вооруже-
нием и военной техникой, курсантам военных училищ и слушателям во-
енных академий, офицерам Вооруженных сил и читателям с соответствую-
щей технической подготовкой, интересующихся историей создания,
состоянием и развитием вооружения и военной техники, а также их ос-
новной составляющей - средствами поражения и боеприпасами. Главная
цель - в сжатой форме систематизировать и единообразно изложить кон-
структивное воплощение основных типов средств поражения и боеприпа-
сов, описать их функционирование и параметры действия.
Учебник подготовлен коллективом преподавателей кафедры СМ-4 МГТУ
им. Н.Э. Баумана, имеющих многолетний опыт исследований и разработок
в данной области вооружения и военной техники: введение и глава 12 -
В.В. Селивановым, подразделы 1.1 и 1.2 - В.В. Селивановым и В.С. Со-
ловьевым, подраздел 1.3 - В.В. Селивановым, глава 2 - А.Г. Ришняком, гла-
ва 3 - Е.Ф. Грязновым, главы 4 и 5 - В.Н. Охитиным, глава 6 - С.В. Ладо-
вым и Л.П. Орленке, глава 7 - А.В. Бабкиным, главы 8 и 9 В.А. Велдано-
вым, глава 10 - И.Ф. Кобылкиным, главы 11 и 13 - Н.А. Имховиком,
глава 14 - В.С. Соловьевым. Научно-методическое редактирование учебни-
ка осуществлено В.В. Селивановым.
ВВЕДЕНИЕ
Ушел в историю XX в. - век стремительного научно-технического про-
гресса и двух мировых войн. Пожалуй, невозможно сейчас найти какую-либо
область науки и техники, в которой не были совершены крупнейшие откры-
тия и технологические прорывы. Естественно, что многие из них интенсивно
используются в целях обеспечения безопасности государств, а именно, в
военно-технической области, в результате чего были созданы самые разнооб-
разные средства поражения (СП) и боеприпасы (БП) как для вооруженных
сил, так и для других силовых структур. И хотя последнее десятилетие XX в.
и начало XXI в. ознаменовались прекращением противостояния военно-по-
литических блоков, возглавляемых сверхдержавами, и изменением междуна-
родной обстановки, обычные СП и БП и в обозримом будущем останутся
основным фактором сдерживания и огневого воздействия в возможных меж-
региональных конфликтах и локальных войнах. Данный вывод наглядно под-
твердили результаты проведения операции «Буря в пустыне» группировкой
многонациональных сил против Ирака в 1991 г. Тогда в тактической полосе
обороны от артиллерийского огня иракские войска понесли более 50 % об-
щих потерь. Аналогичная ситуация имела место в Ираке и в 2003 г. при осу-
ществлении операции «Шок и трепет».
Обеспечение военной безопасности остается по-прежнему важной за-
дачей любого государства. Ее решение в современных условиях, когда бое-
способность вооруженных сил все больше зависит от научно-технического
уровня и качества вооружений, требует непрерывного совершенствования
военной техники, ведущего к необходимости кардинального повышения
уровня подготовки специалистов, занятых исследованиями, разработкой и
эксплуатацией вооружений. Последнее в значительной степени сдержива-
ется отсутствием современной учебной научно-технической литературы,
посвященной методически структурированному описанию взаимосвязан-
ных видов и типов вооружения и военной техники. Предлагаемая читате-
лям книга призвана отчасти восполнить этот пробел и является первой
попыткой дать целостную и систематизированную картину созданий СП и
БП, перспектив и тенденций их развития во всем многообразии связан-
ных с этим научно-технических, конструкторско-технологических и экс-
плуатационных проблем.
В книге не только изложены концепции и подходы к созданию СП и
БП, но и освещены история их появления и наиболее значимые этапы про-
веденных исследований и разработок, даны описания основных конструк-
тивно-схемных решений СП и БП, рассмотрены вопросы эффективности
их действия и оценены перспективы развития. Все это позволяет читателю
Введение
7
составить целостную картину истории создания и развития СП и БП в раз-
личных странах.
В целом история создания, текущее состояние и перспективы развития
СП и БП, их роль и место в обеспечении национальной безопасности стран,
ими обладающих, всегда привлекали и привлекают внимание исследовате-
лей, служащих вооруженных сил, конструкторов и всех тех, кто интересу-
ется развитием вооружения и военной техники, свидетельством чему слу-
жат многочисленные труды отечественных и зарубежных авторов на эту
тему. Вместе с тем во всем многообразии вызывающих интерес ценных
работ, посвященных разработке СП и БП. преобладает тенденция рассмот-
рения либо избранных событий, связанных с данным вопросом, либо конк-
ретных примеров создания отдельных образцов СП и БП.
В отличие от указанной тенденции в учебнике рассмотрен широкий
круг вопросов, включающих концепции развития многообразных СП и БП
в основных странах - производителях вооружения и военной техники (США,
России, Великобритании, Германии, Франции), - конструктивные решения,
которые положены в основу функционирования средств поражения и бое-
припасов, их главных систем и узлов. Приведены основные тактико-техни-
ческие характеристики и ключевые показатели эффективности действия
созданных средств поражения и боеприпасов, проанализированы возмож-
ные тенденции их дальнейшего развития. Конечно, в системе требований,
которые контролируют достигаемые в процессе проведения опытно-конст-
рукторских работ тактико-технические характеристики, как правило, отра-
жается опыт эксплуатации и боевого применения подобных систем воору-
жения, состояние экономики страны, ее науки и техники, а также возмож-
ный характер современных боевых действий.
Средства поражения и боеприпасы, предназначенные для выполнения
тех или иных боевых задач, обладают определенными свойствами, всесто-
ронне характеризующими их состояние и возможности. Совокупность этих
свойств, обусловливающих пригодность каждого конкретного изделия удов-
летворять необходимые потребности в соответствии с назначением, пред-
ставляет собой качество данного СП и БП. В общем случае средство пора-
жения как единица расходной части оружия включает в себя метательную и
метаемую (предназначенную для непосредственного выполнения боевой за-
дачи в соответствии с назначением средства поражения) части. Фундамен-
тальная основа для первой части (гильза или картуз с пороховым зарядом,
жидкое метательное вещество, реактивный двигатель) - это теория горе-
ния, для второй - теория детонационных, ударно-волновых и других быст-
ропротекающих процессов, сопровождающих явления взрыва и удара. Ис-
ходя из этого кардинального различия, а также учитывая, что в последние
годы издан ряд книг по твердотопливным реактивным двигателям, авторы
ограничились описанием конструкций и принципов действия метаемых
частей БП. Ввиду ограниченного объема книги не были рассмотрены неко-
торые БП основного действия (зажигательные, химические) и небоевые
взрывные устройства вспомогательного назначения (взрывные разделите-
ли, заряды-ликвидаторы и пр.).
8
Введение
Высокоточное оружие, рассматриваемое большинством развитых стран
как основной вид перспективного вооружения, которое необходимо для веде-
ния «бесконтактных» войн будущего, и теория управления должны служить
предметом отдельной монографии, поэтому в ряде подразделов учебника
данный вид обычных вооружений лишь проиллюстрирован характерными
примерами типичных образцов.
Учитывая что теория взрывчатых веществ и теория физических про-
цессов, протекающих при действии боеприпасов, в том числе детонацион-
ных и ударных волн, достаточно подробно изложены в двухтомной моно-
графии «Физика взрыва» (М., 2002), в настоящем учебнике приведены только
основные расчетные формулы, необходимые для практического проектиро-
вания СП и БП.
Следует отметить, что вопросы боевой эффективности систем оружия,
средств поражения и боеприпасов уже давно оформились в отдельную на-
учную дисциплину и актуально издание соответствующей монографии, в
данной книге подробно изложены только основные теоретические положе-
ния, необходимые для целостного восприятия всего материала.
Появление в последнее десятилетие потока открытой информации для
специалистов в области разработки, испытаний и эксплуатации вооруже-
ния и военной техники во многом способствовало подготовке и изданию
настоящего учебника.
Активное участие российских производителей в продаже вооружений
и военной техники десяткам стран мира активизировало показ отечествен-
ных образцов на многочисленных международных и российских выстав-
ках и выпуск высококачественных каталогов и рекламных буклетов, в ко-
торых описаны как конструкции предлагаемых на экспорт изделий воен-
но-технического назначения, так и их основные тактико-технические
характеристики.
В открытой печати появляются новые иллюстрированные справочники
и энциклопедии по вооружению и военной технике. Так, конструкции раз-
личных СП и БП анализируются в периодических журналах «Техника и
вооружение» и «Зарубежное военное обозрение». В 1990-х годах начал
выходить журнал «Военный парад», иллюстрирующий и рекламирующий
российскую продукцию военного назначения. Издательский дом «Военный
парад» выпустил каталог «Оружие России» в 7 томах и дополненный свод-
ный каталог «Оружие России 2004», в которых на русском и английском
языках приводится обширная информация о созданных ранее и новых, мо-
дернизированных образцах вооружения и военной техники. Издательский
дом «Оружие и технологии» начал выпуск энциклопедии «Оружие и техно-
логии России. XXI век» в 18 томах. В 2006 г. вышел один из томов этой
энциклопедии под названием «Боеприпасы и средства поражения», в кото-
ром приведены основные образцы боеприпасов сухопутных войск, авиации
и флота, специальные БП, пороха, взрывчатые вещества (ВВ), твердые топ-
лива, а также рассмотрены ключевые аспекты разработки, испытаний, хра-
нения, утилизации и уничтожения БП и ВВ. В том же томе дана информа-
ция о предприятиях, организациях и научно-исследовательских центрах
оборонно-промышленного комплекса России, связанных с разработкой и
Введение
9
производством боеприпасов, порохов и взрывчатых веществ. Издательство
«Машиностроение» совместно с Российской академией ракетных и артил-
лерийских наук начали выпуск многотомной справочной библиотеки раз-
работчика и исследователя «Вооружение и военная техника», рассчитан-
ной на широкую аудиторию читателей - научных работников, конструкто-
ров, технологов и испытателей вооружения и военной техники, а также
студентов, аспирантов и преподавателей высших технических учебных за-
ведений. Планируется издать отдельные книги по основам проектирова-
ния высокоточных ракетных комплексов, физическим основам теории взры-
ва, порохам и взрывчатым веществам, проектированию БП, испытанию и
эксплуатации вооружения и военной техники, технологии производства
БП и СП.
В течение последних лет были сняты ограничения на открытую публи-
кацию большого числа специальных учебных пособий, различных настав-
лений и руководств по эксплуатации СП и БП.
Подробная информация о средствах поражения и боеприпасах стала
размещаться на интернет-сайтах специализированных издательств, военно-
технических музеев, ведущих фирм по продаже оружия и организаций-
производителей различного вида вооружений и военной техники.
Все перечисленные информационные источники были использованы
авторами при подготовке учебника «Средства поражения и боеприпасы».
Кроме того, у авторов была возможность анализировать и применять при
отборе иллюстративного и текстового материала большое число доступ-
ных музейных образцов и макетов изделий, используемых в ходе учебно-
го процесса по направлению подготовки специалистов «Оружие и систе-
мы вооружения».
Таким образом, книга написана с привлечением многочисленных от-
крытых публикаций в отечественной и зарубежной печати, литературных
источников, на основе анализа музейных образцов изделий, открытых до-
кументов проектного и нормативно-технического характера, данных ин-
тернет-сайтов, а также на основе собственных знаний и опыта авторов,
которыми в соответствии с установленным порядком они сочли возмож-
ным поделиться с читателем.
Как одну из серьезных и актуальных задач авторы рассматривали уста-
новление единого методологического подхода при техническом анализе раз-
личных классов БП, включая использование единой терминологии, обозна-
чений, международной системы единиц, безразмерных характеристик, меж-
видовой унификации, единых параметрических рядов.
Авторы учебника - профессиональные ученые и преподаватели выс-
шей школы, многие из которых принимали непосредственное участие как в
создании средств поражения и боеприпасов, так и в их внедрении в произ-
водство. В связи с этим материалы и сведения, изложенные в книге, явля-
ются в высшей степени достоверными.
Книга включает предисловие, введение, 14 глав и список рекомендуе-
мой литературы к каждой главе.
Глава 1 «Классификация средств поражения и боеприпасов» - это
вводная глава, в которой даны основные понятия, термины и определения
10
Введение
оружия, комплекса вооружения, системы вооружения, боеприпасов и средств
поражения, приведена классификация СП и БП по ведомственной принад-
лежности, способу доставки, назначению и технико-конструктивным при-
знакам. Заключительный подраздел главы 1 систематизирует СП и БП по
их принадлежности к комплексам вооружения, начиная с БП (снарядов) к
малокалиберным автоматическим пушкам и заканчивая боевыми частями к
тактическим и оперативно-тактическим комплексам.
В главе 2 «Основные характеристики эффективности действия
средств поражения и боеприпасов» изложена система показателей эффек-
тивности действия СП и БП. На основе классификации целей и моделей их
уязвимости выполнен анализ методов оценки эффективности действия и
приведены основные показатели эффективности поражения одиночных,
групповых и площадных целей боеприпасами прямого попадания, зонного
и фугасного действия.
Введены элементы теории стрельбы, включающие основные факторы
и характеристики рассеивания в совокупности с методами их определения,
ошибки выстрела и законы распределения ошибок стрельбы, вероятность
попадания в заданную область, точность и кучность стрельбы, а также пути
их повышения.
Для БП прямого попадания описаны зависимость вероятности пораже-
ния от числа попаданий (условный закон поражения), особенности показа-
тельного закона поражения, среднее число попаданий, необходимое для
поражения цели, вероятность поражения элементарной цели одиночным вы-
стрелом и залпом, эффективность действия БП прямого попадания по груп-
повой цели и пути ее повышения.
Для БП зонного действия даны понятия поражающего действия оскол-
ков, пуассоновского поля поражения, координатного и условного законов
поражения, вероятности поражения одиночной цели, эффективности дей-
ствия по одиночным наземным, групповым и площадным, а также воздуш-
ным целям. Уделено внимание вопросу согласования поля разлета поража-
ющих элементов (ПЭ) с диаграммой направленности взрывателя и анализу
путей повышения эффективности действия осколочных БП.
Для БП фугасного действия введены понятия показателей эффективно-
сти при стрельбе снарядами фугасного действия и бомбометании по пло-
щадным целям, описаны аналитические методы оценки средней доли пора-
женной площади и расхода средств на поражение площадной цели, в том
числе при стрельбе с искусственным рассеиванием.
В заключительном подразделе главы 2 рассмотрены проблемы оптими-
зации систем оружия и задачи оптимизации многоцелевых БП по критерию
эффективности действия с учетом моделей боевых операций, а также со-
временные компьютерные методы оптимизации БП по комплексному кри-
терию эффективности.
В главе 3 «Боеприпасы осколочного действия» изложены материалы
учебно-методического, научно-технического и справочного характера, со-
держащие подробную классификацию и представление конкретных типов
СП и БП. Собственно глава 3 посвящена одному из наиболее широко распро-
страненных типов БП - осколочным боеприпасам (ОБП), которые различа-
Введение
11
ются по типу поражаемой цели, типу используемой системы оружия, кон-
фигурации осколочного поля, наличию системы управления осколочным
полем, способу формирования ПЭ и другим отдельным конструктивным при-
знакам. В соответствии с указанной классификацией рассмотрены конст-
рукции ОБП с круговыми, осевыми и радиально-направленными осколоч-
ными полями, ОБП с корпусами естественного и заданного дробления, а
также ОБП с готовыми поражающими элементами (ГПЭ).
Проанализированы основные характеристики осколочных полей различ-
ной пространственной ориентации, их преимущества и недостатки, методы
управления ими, описаны основные расчетные зависимости для оценки па-
раметров пространственно-массового распределения осколков, полуготовых
и готовых ПЭ, а также годографа скоростей осколочных полей разной фор-
мы и ориентации.
Для анализа процесса функционирования ОБП с корпусами естествен-
ного дробления изложены основы процесса разрушения осколочных оболо-
чек, определяющие роль различных механизмов трещинообразования и раз-
рушения в формировании осколочного спектра и пространственно-массо-
вого распределения осколков, основные соотношения для оценки числа и
формы образующихся осколков, баллистических коэффициентов и распре-
деления осколков по массе. Здесь же даны характеристики штатных и перс-
пективных высокоосколочных сталей.
Для ОБП с корпусами заданного дробления приведены основные мето-
ды получения осколков: механическое ослабление оболочки (подрезка), на-
несение структурных сеток, неравномерное приложение нагрузки со сторо-
ны заряда ВВ, схемы с кольцами и пружинами заданного дробления.
Описание ОБП с готовыми ПЭ, в том числе ОБП с осевыми потоками
ПЭ, включает в себя анализ как конструктивных схем таких БП, так и су-
ществующих форм ГПЭ (компактных и удлиненных).
В главе дано краткое описание основных характеристик осколочных
полей, а также основных зависимостей для расчета параметров действия
ОБП: начальной скорости разлета ПЭ и ее изменения в полете с учетом
собственной скорости БП, убойной скорости и убойного интервала, удель-
ной энергии и удельного импульса пробития стального эквивалента и др.
Все типы ОБП проиллюстрированы примерами их конструктивного воп-
лощения в виде моноблочных и кассетных снарядов, мин, боевых частей
различных управляемых и неуправляемых ракет, авиационных бомб, выст-
релов к гранатометам и ручных гранат.
Основная задача главы 4 «Фугасные боеприпасы» - познакомить чи-
тателя с особенностями конструкции, функционирования и действия фу-
гасных БП в воздухе, воде и грунте. Приведены эмпирические зависимос-
ти для вычисления основных параметров взрывных волн в указанных сре-
дах, размеров зоны разрушения в твердых средах. Рассмотрены вопросы
взаимодействия взрывных волн с поверхностью раздела сред и образования
воронки выброса, а также проблемы оценки могущества фугасных БП при
взрыве в грунте и сейсмического действия взрыва. Особое внимание уделе-
но ударному (проникающему) действию БП в твердых (грунт, бетон) сре-
дах, в воде, а также действию по металлическим преградам ограниченной
12
Введение
толщины, имеющему важное значение для выбора времени замедления сра-
батывания взрывателя, который обеспечивает наиболее выгодное, с точки
зрения фугасного действия, заглубление снаряда в преграду. На примерах
отечественных и зарубежных образцов описаны устройство и особеннос-
ти конструкций фугасных артиллерийских снарядов и мин, неуправляе-
мых и корректируемых авиационных бомб, реактивных снарядов, боевых
частей ракет и торпед, инженерных БП и морских мин.
В главе 5 «Боеприпасы объемного взрыва» приведены сведения об от-
носительно недавно появившихся фугасных БП, обеспечивающих пораже-
ние целей воздушной ударной волной и использующих в процессе взрыва в
качестве окислительного компонента кислород окружающей атмосферы.
Описаны особенности распространения реакции взрывчатого превращения
в больших объемах топливовоздушных смесей и приведены зависимости
для расчета параметров как внутри облака смеси, так и в окружающей ат-
мосфере при взрыве в режимах детонации и дефлаграции.
Рассмотрены история развития двухтактных БП объемного взрыва и
особенности их конструкций на примере отечественных и зарубежных
авиационных бомб и реактивных снарядов. Описаны основные режимы
функционирования однотактных БП объемного взрыва и конструкции тер-
мобарических БП на примере авиационной бомбы, реактивной огнеметной
системы, огнемета одноразового использования и выстрела к ручному гра-
натомету. В заключение представлены вопросы оценки эффективности дей-
ствия БП объемного взрыва. Приведены критерии поражающего действия
воздушной ударной волны и характеристики уязвимости различных целей.
Описаны показатели боевой эффективности фугасных БП при действии воз-
душной ударной волны.
Глава 6 «Кумулятивные средства поражения и боеприпасы» посвя-
щена классификации широкого перечня БП, использующих в качестве по-
ражающего фактора кумулятивный эффект взрыва, описанию конструкций
типичных образцов различных кумулятивных БП и характеристик их дей-
ствия по типовым целям.
В главе 6 даны краткие сведения об особенностях кумулятивного эф-
фекта взрыва и действия кумулятивных зарядов (КЗ), начиная с механизма
формирования кумулятивной струи (КС) и описания возможных режимов
кумуляции и заканчивая явлениями проникания КС в преграду и запреград-
ного действия КЗ.
Изложены принципы классификации кумулятивных БП:
- по типу оружия (артиллерийские кумулятивные снаряды и мины, ку-
мулятивные ручные и ружейные (винтовочные) гранаты и гранаты ручных
и станковых гранатометов, кумулятивные боевые части противотанковых
управляемых ракет (ПТУР), кумулятивные инженерные мины и заряды раз-
рушения, кумулятивные боевые элементы (БЭ) и противотанковые авиаци-
онные бомбы кассетного оружия, кумулятивно-осколочные боевые части
неуправляемых авиационных ракет, кумулятивно-фугасные боевые части
управляемых авиационных ракет, кумулятивно-фугасные боевые зарядные
отделения торпед и боевые части ракетно-бомбовых противолодочных комп-
лексов);
Введение
13
- по точности стрельбы (обычные, высокоточные);
- по типу попадания в цель (в горизонтальной плоскости во фронталь-
ную и боковую поверхности, в вертикальной плоскости в нижнюю и верх-
нюю поверхности, сверху на пролете и с пикирующей траектории);
- по конструкции (моноблоки осевой направленности действия, мо-
ноблоки с поперечным и угловым относительно оси БП расположением
КЗ, тандемные БП со стационарным, выдвижным и отстреливаемым пред-
зарядом).
Следующие разделы главы 6 посвящены описанию компоновочных схем,
конструктивных особенностей и специфике функционирования типичных
образцов широкого класса кумулятивных БП российского и зарубежного
производства:
- моноблочных и тандемных артиллерийских управляемых и неуправ-
ляемых кумулятивных снарядов и мин к гладкоствольным (невращающих-
ся оперенных) и нарезным (вращающихся, невращающихся с «плавающим»
ведущим пояском и с невращающимся КЗ) артиллерийским системам;
- кумулятивных моноблочных и тандемных противотанковых ручных
и винтовочных гранат ручных и станковых гранатометов одноразового и
многоразового действия;
- кумулятивных боевых частей ПТУР малой, средней и большой даль-
ности с ручным, полуавтоматическим и автономным управлением (теле-
метрическим, по радио, по волоконно-оптической линии связи и по лучу
лазера, с помощью инфракрасной (тепловизионной), телевизионной (ра-
диолокационной) головок самонаведения), находящихся в составе пере-
носных, самоходных, вертолетных и ствольных противотанковых ракет-
ных комплексов;
- кумулятивных инженерных противоднищевых и противобортовых мин
обычного и дистанционного минирования и кумулятивных зарядов разру-
шения (сосредоточенных, удлиненных, кольцевых);
- кумулятивных свободно (естественно) рассеивающихся, самонаводя-
щихся и самоприцеливающихся БЭ с моноблочным и тандемным КЗ, а так-
же кассетных противотанковых авиационных бомб с кумулятивно-осколоч-
ными БЭ;
- кумулятивно-осколочных боевых частей неуправляемых авиационных
ракет и кумулятивно-фугасных боевых частей управляемых авиационных
ракет класса воздух-поверхность, в том числе и противокорабельных,
- кумулятивно-фугасных боевых зарядных отделений торпед и боевых
частей ракетно-бомбовых противолодочных комплексов, в том числе кор-
ректируемых.
Для всех перечисленных кумулятивных БП приведены не только об-
щие тактико-технические характеристики, но и рассмотрены дальнейшие
перспективы развития каждого типа БП.
В заключительном подразделе главы 6 проанализированы возможные
методы расчета функционирования кумулятивных зарядов БП и изложена
инженерная методика расчета скорости и угла схлопывания кумулятивной
облицовки, скорости, массы и энергии КС, а также длины элемента струи с
учетом его растяжения, скорости проникания элемента КС в преграду, глу-
14
Введение
бины проникания и диаметра пробоины в преграде применительно к КЗ с
высокими коническими облицовками.
В главе 7 «Средства поражения с использованием ударного ядра»
основное внимание уделено боеприпасам типа SADARM (Sence and
Destroy Armor), техническое решение которых основано на следующих
составляющих: снарядоформирующий заряд - кумулятивный заряд, фор-
мирующий дальнобойный ПЭ; неконтактное взрывательное устройство -
координатор цели; поступательно-вращательное движение снарядоформи-
рующего заряда со сканированием местности координатором цели.
Приведена классификация SADARM-боеприпасов:
- по системам оружия (авиационное кассетное оружие, кассетные ар-
тиллерийские снаряды, кассетные боевые части реактивной системы зал-
пового огня (РСЗО), средства поражения цели на пролете сверху, инженер-
ные мины - противобортовые и крышебойные);
- по типу координатора цели (инфракрасный, радиолокационный, двух-
канальный);
- по виду формируемого взрывом ПЭ (компактный - ударное ядро,
удлиненный);
- по принципу наведения на цель (движение со сканированием местно-
сти, ждущий режим неподвижного БП, наведение на цель в составе управ-
ляемого летательного аппарата);
п о форме кумулятивной облицовки (сегментная, высокая коническая
облицовка);
- по материалу облицовки (медь, сталь, обедненный уран, тантал).
Изложены физические особенности и основные этапы функционирова-
ния снарядоформирущих зарядов (от формирования безградиентного ПЭ
до его проникания в преграду), приведены основные расчетные зависимос-
ти для оценки влияния параметров снарядоформирующего заряда (типа ВВ,
высоты заряда, профиля облицовки, материала облицовки) на скорость и
конфигурацию формируемого ПЭ.
В заключительном подразделе главы 7 подробно описаны зарубежные
и отечественные образцы кассетного авиационного оружия, кассетные ар-
тиллерийские противотанковые снаряды и боевые части РСЗО, противо-
бортовых и крышебойных инженерных мин, конструктивные схемы кото-
рых основаны на применении снарядоформирующих зарядов. Рассмотре-
на область применения таких БП, тактико-технические характеристики
указанных систем оружия, особенности конструкции системы оружия и
самоприцеливающихся БЭ, а также специфика их наведения на цель и
действия по цели. Кроме того, проанализированы перспективные конст-
рукции БП со снарядоформирующими зарядами.
Бронебойные БП кинетического действия являются весомой составля-
ющей практически любого боекомплекта. Их классификации и описанию
посвящена глава 8 «Кинетические бронебойные боеприпасы». Приведены
перечень основных целей, защищенных броней, и классификация броне-
бойных БП по типу оружия, калибру, отношению диаметра корпуса БП к
калибру артиллерийского орудия, по типу стабилизации в полете, удлине-
нию корпуса, типу ведущего устройства.
Введение
15
В качестве конкретных примеров всех существующих типов броне-
бойных БП даны конструктивные схемы и тактико-технические характе-
ристики:
- калиберных бронебойных БП (остроголовых и тупоголовых артилле-
рийских бронебойных снарядов с бронебойным наконечником);
- подкалиберных бронебойных БП, стабилизированных вращением с
неотделяемым и отделяемым ведущим устройством;
- подкалиберных бронебойных БП, стабилизированных оперением, с
ведущими устройствами тянущего типа и с катушечными ведущими уст-
ройствами, с прижимными, цанговыми металлическими и полимерными ве-
дущими устройствами;
- бронебойных БП, для увеличения эффективности действия которых
применяют обедненный уран, материалы высокой твердости и ударной вяз-
кости (волокна карбида вольфрама, гафния); увеличение удлинения корпу-
са БП в полете обеспечивается использованием выдвижных элементов или
телескопической конструкцией.
Рассмотрены пути увеличения скорости взаимодействия с преградой
бронебойных БП и их отдельных частей (сердечников, элементов корпуса)
с помощью пороховых и взрывных устройств, размещаемых в корпусе БП
для дополнительного разгона сердечников перед встречей с преградой.
В заключение даны основные расчетные зависимости оценки броне-
бойного действия, учитывающие особенности взаимодействия с броней уд-
линенных срабатывающихся корпусов и недеформируемых твердосплавных
сердечников, а также удлиненных срабатывающихся корпусов с твердосплав-
ными сердечниками в их головной или хвостовой части.
В главе 9 «Бетонобойные боеприпасы» описаны конструкция и прин-
цип действия основных типов бетонобойных БП. Приведены перечень ос-
новных целей, защищенных бетонным покрытием, и классификация бето-
нобойных БП по типу поражаемых целей, по типу оружия (артиллерийские
снаряды, неуправляемые и управляемые авиационные бомбы, разовые бом-
бовые кассеты, боевые части неуправляемых и управляемых ракет), по осо-
бенностям функционирования (кинетического действия и тандемные с пред-
зарядом).
В качестве конкретных примеров всех существующих типов бетоно-
бойных БП приведены конструктивные схемы и тактико-технические ха-
рактеристики:
- бетонобойных артиллерийских снарядов;
- неуправляемых бетонобойных и проникающих авиационных бомб (мо-
ноблочных с разгонным двигателем и без него, кассетных со ствольной раз-
гонной системой и разгонным реактивным двигателем);
- неуправляемых авиационных ракет с проникающими боевыми частями;
- бетонобойных БП и боевых частей комбинированного действия с ку-
мулятивным предзарядом;
- боевых частей управляемых авиационных бомб и управляемых авиа-
ционных ракет;
- перспективных конструкций бетонобойных и проникающих БП
(противобункерные авиационные бомбы с маломощным ядерным зарядом
16
Введение
и гиперзвуковые летательные аппараты с проникающими боевыми
частями).
Рассмотренные расчетные зависимости оценки функционирования бе-
тонобойных и проникающих БП позволяют определить основные парамет-
ры ударного (проникающего) действия (глубину проникания в грунт и тол-
щину пробиваемой бетонной преграды), откольные эффекты при проника-
нии, рикошет, а также характеристики фугасного действия в бетоне, радиус
зоны разрушения и суммарную толщину пробиваемой бетонной преграды с
учетом фугасного действия.
В главе 10 «Динамическая защита» дана оценка стойкости монолит-
ной бронезащиты к воздействию современных противотанковых СП, на
основании которой подтверждена необходимость динамической защиты
(ДЗ), а приведенные исторические сведения о разработке и применении
ДЗ позволяют проанализировать весь путь развития и создания указан-
ных средств защиты.
Прежде всего, рассмотрены ключевые принципы действия ДЗ, основ-
ные физические процессы, возникающие при функционировании ДЗ (про-
битие отверстий в тонких пластинах, инициирование детонации в тонких
слоях ВВ при интенсивных локальных воздействиях, метание пластин
ограниченных поперечных размеров, взаимодействие пластин с КС) и прин-
ципы построения методики расчета проникания КС в преграду, оснащен-
ную ДЗ. Предложена классификация устройств ДЗ (взрывная, невзрывная
и комбинированная, противокумулятивная навесная, встроенная универсаль-
ная, эшелонированная) с указанием области их применения и описанием
конструктивного построения типовых отечественных и зарубежных образ-
цов ДЗ. Проанализированы особенности взаимодействия ДЗ с бронебойны-
ми подкалиберными снарядами, а также перспективы использования не-
взрывной ДЗ.
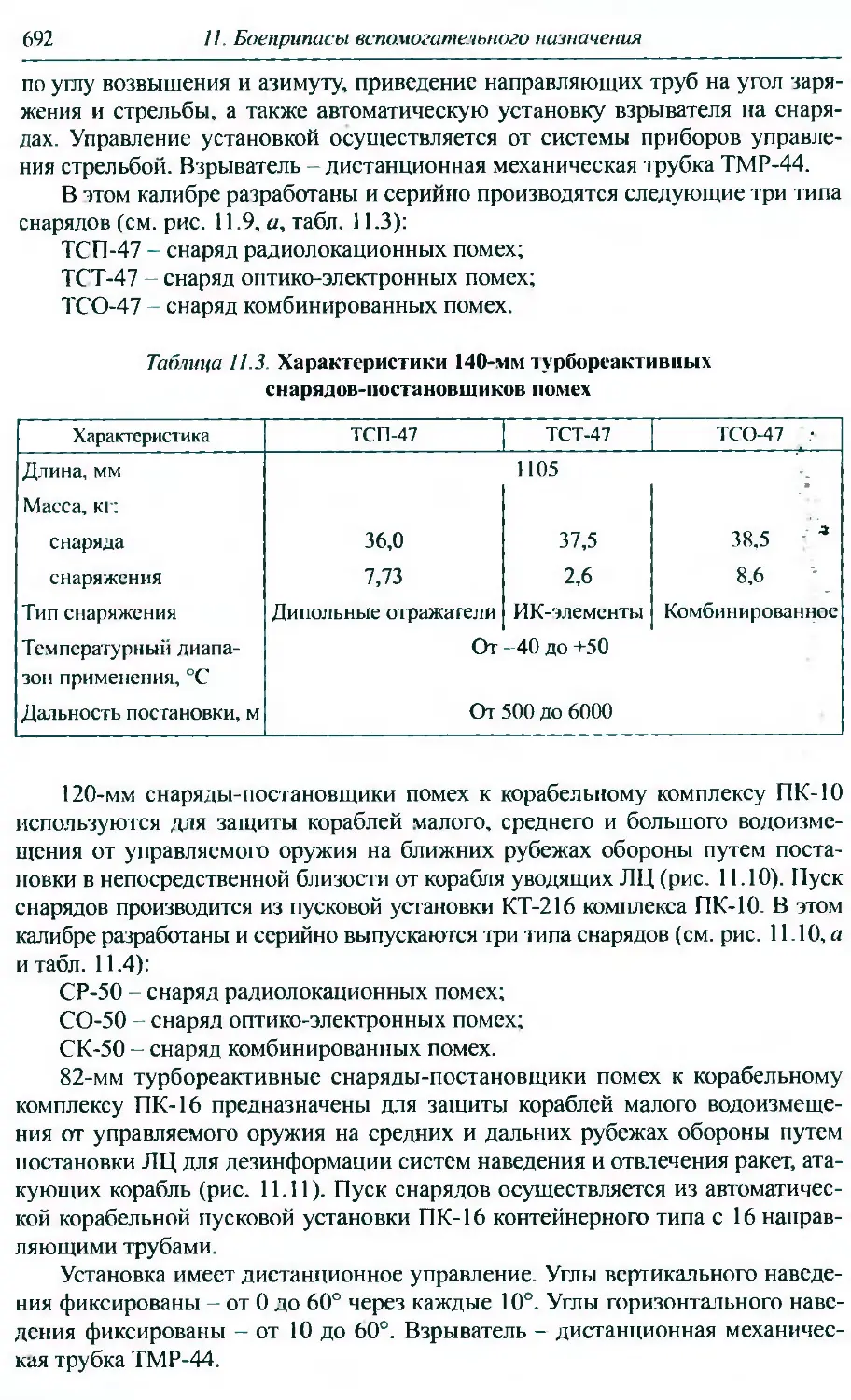
В главе 11 «Боеприпасы вспомогательного назначения» приведены
необходимые сведения о БП вспомогательного назначения, к которым от-
несены все БП, способствующие выполнению боевой задачи или препят-
ствующие действиям противника, а также используемые для проведения
учебно-практических задач и испытательных стрельб. Дана классифика-
ция БП вспомогательного назначения и рассмотрены предъявляемые к ним
общие и специфические требования. Описаны типовые образцы, основ-
ные технические характеристики и принципы действия помехосоздающих,
осветительных, дымовых, ориентирно-сигнальных, агитационных, прак-
тических и системопробных БП. Изложены основные расчетные зависи-
мости для выбора конструктивных параметров ключевых элементов БП и
соотношения, позволяющие оценить характеристики действия вспомога-
тельных БП различного типа.
Цель главы 12 «Оружие нелетального действия» - изложение основ-
ных понятий, принципов построения, применения и действия нетрадицион-
ных средств временной нейтрализации живой силы и техники, получивших
наименование «оружие нелетального действия» (ОНД). Проанализированы
основные предпосылки разработки ОНД и особенности, определяющие
Введение
17
необходимость его наличия в системе вооружений. Приведены генераль-
ный классификатор видов ОНД по принципам действия, объектам воздей-
ствия, эффективности и масштабу использования и классификатор крите-
риев применимости ОНД, сформулированы основные тактико-технические
требования к ОНД при их разработке и использовании.
Рассмотрены основные принципы функционирования ОНД, воздейству-
ющего на биообъекты, технику, а также окружающую среду.
Особое внимание уделено описанию основных медико-биологических
и международно-правовых аспектов разработки и применения ОНД, а так-
же проблеме превентивного контроля над распространением ОНД.
В качестве кинетических и механических, химических и физико-хими-
ческих, электрических и электромагнитных, акустических и ослепляющих,
а также комбинированных типов ОНД приведены зарубежные разработки
и образцы специальных средств нелетального действия, принятых к приме-
нению в системе МВД РФ.
В заключение рассмотрены возможные сценарии использования ОНД в
боевых, миротворческих и антитеррористических операциях, в операциях
по правопринуждению и для охраны объектов.
Глава 13 «Взрыватели» посвящена описанию устройства и действия
взрывателей и взрывательных устройств (ВУ) БП различного назначения.
Даны основные понятия, термины и определения, структурная схема и фи-
зические основы построения различных взрывателей и ВУ. Рассмотрены
общие требования, предъявляемые к взрывателям и ВУ, их основные харак-
теристики и принципы классификации.
Классификатор ВУ проиллюстрирован подробным описанием устрой-
ства и действия типовых конструкций:
- контактных механических ВУ осколочных, осколочно-фугасных, фу-
гасных, бронебойных, бетонобойных, кумулятивных, зенитных и авиаци-
онных БП ствольной артиллерии (с детализацией основных узлов и ме-
ханизмов функционально-структурных схем ВУ: ударных и предохрани-
тельных механизмов, механизмов изоляции капсюлей, установочных и
замедлительных устройств, блокирующих и накольно-воспламенительных
механизмов, механизмов дальнего взведения и самоликвидации);
- контактных механических взрывателей для ракет и реактивных сна-
рядов;
- контактных механических ВУ авиационных бомб и кассетных БЭ;
- контактных электромеханических ВУ (с указанием особенностей их
структурной схемы, включая источники питания, и сравнительной оценкой
по отношению к механическим ВУ);
- дистанционных взрывателей и дистанционных механизмов ВУ, пост-
роенных на различных принципах обеспечения дистанционного действия;
- неконтактных радиолокационных ВУ активного, полуактивного и пас-
сивного типа (с описанием устройства и принципа действия типовых об-
разцов доплеровских радиовзрывателей);
- неконтактных оптических ВУ (с описанием устройства и принципа
действия предохранительно-исполнительного механизма типовых некон-
тактных ВУ).
18 Введение
В главе 14 «Средства инициирования и передачи огневого и детона-
ционного импульса» приведены общие сведения о средствах инициирова-
ния, качестве элементов систем инициирования, структуре цепей иниции-
рования. Рассмотрены различные средства воспламенения (патронные удар-
ные, трубочные накольные, электрические) и средства детонирования
(лучевые, накольные, электрические).
К каждой главе прилагается список рекомендуемой литературы, в при-
ложении дан список сокращений средств поражения и боеприпасов в оте-
чественной и зарубежной литературе, который поможет читателю легче ори-
ентироваться в обширной и ежедневно обновляющейся информации по во-
оружению и военной технике как в текущей научно-технической литературе,
так и на интернет-сайтах.
1
КЛАССИФИКАЦИЯ
СРЕДСТВ ПОРАЖЕНИЯ И БОЕПРИПАСОВ
1.1. Основные понятия, термины и определения
Современные определения понятий «оружие», «комплекс вооружения» и
«система вооружения» сформировались в течение последних 50 лет. Эти опре-
деления с учетом опыта Второй мировой войны и последующих крупномасш-
табных военных конфликтов даны в Военном энциклопедическом словаре*.
Оружие - устройства и средства, применяемые для поражения противни-
ка в вооруженной борьбе. Обычно оружие состоит из средств поражения (СП)
и средств доставки их к цели. Оружие подразделяют по основным отличи-
тельным признакам следующим образом:
• характер поражающего действия - оружие массового поражения и обыч-
ные средства поражения;
• масштаб решаемых боевых задач - стратегическое, оперативно-такти-
ческое и тактическое;
• целевое назначение - одноцелевое и многоцелевое (универсальное);
• способ доставки к цели средств поражения (пули, снаряды, гранаты, бо-
евые части) - огнестрельное, ракетное (реактивное), доставляемое к цели с
помощью самолетов, кораблей, электрических или турбинных двигателей (тор-
педы), с комбинированной доставкой, ручное;
• степень маневренности - стационарное с неподвижной платформой
(шахтные ракетные комплексы, казематные орудия), стационарное с подвиж-
ной платформой (авиационное, танковое, корабельное и др.), самоходное, бук-
сируемое и возимое;
• количество обслуживающего персонала - индивидуальное и групповое;
• степень автоматизации процесса стрельбы - автоматическое, полуавто-
матическое и неавтоматическое;
• возможность изменения траектории при движении СП к цели - неуправ-
ляемое и управляемое.
Техническую систему принято называть комплексом вооружения (КВ), если
оружие включает в себя также приборы и устройства управления, обнару-
жения, наведения, взаимосвязанные как с самим оружием, так и с его плат-
формой.
Комплекс вооружения - совокупность образцов военной техники, функ-
ционально связанных и совместно используемых для решения боевых задач.
Обязательный элемент комплекса вооружения - оружие в совокупности со
* Военный энциклопедический словарь. М.: Воениздат, 1984.
20
/. Классификация средств поражения и боеприпасов
средствами поражения, непосредственно предназначенными для поражения
целей. К наиболее распространенным КВ относятся наземные ракетные комплек-
сы стратегического, оперативно-тактического и тактического назначения, авиаци-
онные ракетные комплексы, зенитные артиллерийские и ракетные комплексы, ко-
рабельные артиллерийские, торпедные и ракетные комплексы и др. Комплексами
вооружения считают также танк, боевую машину пехоты (БМП) и т. п.
В наиболее общем случае КВ включает в себя такие основные компонен-
ты, как платформу с системой защиты; огневую установку (оружие); систему
управления; расчет (экипаж); средства поражения (боеприпасы).
Первые четыре компонента КВ - постоянные составляющие, а пятый ком-
понент КВ - расходная составляющая, которая представляет собой техничес-
кие объекты одноразового действия.
Комплекс вооружения принято разделять на ударные (наступательные) и
оборонительные, типы оружия в составе комплекса также могут быть удар-
ными и оборонительными. Комплекс вооружения может содержать несколько
видов оружия и средств поражения. Как указывалось выше, в общем случае
КВ может быть размещен на нескольких платформах, поэтому различают авиа-
ционный ударный КВ, танковый КВ, КВ «боевая машина пехоты» (плаваю-
щая, вертолетотранспортабельная, парашютно-десантируемая), зенитные ра-
кетные артиллерийские КВ.
Система вооружения - совокупность КВ и другой военной техники, обес-
печивающая выполнение определенных боевых задач и предназначенная для
оснащения определенного рода войск, вида Вооруженных сил и Вооружен-
ных сил в целом (в Российской Федерации к видам Вооруженных сил отно-
сятся Сухопутные войска (СВ), Военно-воздушные силы (ВВС) и Военно-мор-
ской флот (ВМФ)).
Основная современная тенденция развития КВ и СП - постепенный пере-
ход от обычного вооружения к высокоточному. Эта тенденция проявляется во
всех классах оружия всех видов Вооруженных сил и отражает стремление
ведущих стран - производителей вооружения и военной техники - к «бескон-
тактным» методам ведения боевых операций, осуществляемым с минималь-
ным риском для собственных Вооруженных сил. Термин «высокоточное» был
вначале введен для обозначения управляемых СП (зенитный ракетный комп-
лекс ЗРК, противотанковый ракетный комплекс ПТРК, противокорабельная ра-
кета ПКР и др.), однако в настоящее время высокоточным оружием (ВТО)
принято называть любое оружие, обеспечивающее точное наведение снаряда
на цель, что приводит либо к прямому попаданию, либо к минимальному зна-
чению промаха. При этом системы наведения (управления полетом) разделя-
ются на автономные системы, системы телеуправления и самонаведения.
В соответствии с определением понятия КВ средства поражения (бое-
припасы) - расходная составляющая КВ, предназначенная для поражения живой
силы и техники, разрушения сооружений (укреплений) и выполнения специ-
альных задач (освещения, задымления, радиоэлектронного подавления и т. д.).
Понятия «средства поражения» и «боеприпасы» взаимосвязаны, а доста-
точно условно их можно подразделить с учетом определений, приведенных в
Военном энциклопедическом словаре и военно-технической литературе, сле-
дующим образом.
1.1. Основные понятия, термины и определения
21
Боеприпасы - технические устройства, преимущественно неуправляемые
и применяемые при выполнении боевой задачи во множественном количестве
(у термина «боеприпасы», как и понятия «ammunition» в английском языке,
нет единственного числа). В соответствии с этим определением к БП можно
отнести артиллерийские и минометные выстрелы, гранаты (ручные, ружей-
ные, к подствольным, автоматическим и противотанковым гранатометам), ре-
активные снаряды к РСЗО, неуправляемые авиационные ракеты, неуправляе-
мые авиационные и глубинные бомбы, авиационные кассеты, инженерные и
морские мины, инженерные взрывные устройства (заряды разминирования,
заряды для разрушения сооружений), патроны к стрелковому оружию. Бое-
припасы принято также различать по принадлежности к виду или роду войск
(артиллерийские, авиационные, морские, стрелковые, инженерные), по назна-
чению (основные - для поражения целей, вспомогательные (специальные) -
для освещения, задымления, целеуказания, а также агитационные, учебные,
практические, холостые, системопробные и т. д.), по характеру снаряжения
(обычные, ядерные, химические, биологические и др.).
Из приведенного определения следует, что боеприпасы основного назна-
чения являются средствами поражения. Кроме этого к СП условно относят
некоторые типы боеприпасов вспомогательного назначения, которые созда-
ют условия, косвенно способствующие поражению противника (например, по-
мехосоздающие, осветительные, дымовые, целеуказательные и др.)
Средства поражения (помимо БП основного назначения и части БП вспо-
могательного назначения) - технические устройства, являющиеся составной
частью более сложных, как правило, управляемых устройств, и используемые
для выполнения боевой задачи в единичных количествах. В соответствии с
этим определением к СП можно отнести боевые части (БЧ) управляемых ра-
кет всех видов (тактических, зенитных управляемых ракет (ЗУР), авиацион-
ных управляемых ракет (АУР), ПТУР, крылатых, в том числе противокора-
бельных), боевые зарядные отделения торпед и антиторпед, управляемые авиа-
ционные бомбы и т. п. В данном контексте основной признак СП - это его
однократное применение.
Из приведенных определений следует, что термин «средство поражения»
по отношению к понятию «боеприпасы» более общий, т. е. включает в себя
понятие «боеприпасы» как частный случай. В то же время необходимо отме-
тить, что существует ряд изделий, которые с одинаковым основанием могут
быть отнесены к обоим понятиям. Поэтому при дальнейшем описании клас-
сификации СП и БП в основном будет использоваться обобщающий термин
«средство поражения».
В общем случае средство поражения включает в себя метательную и ме-
таемую (доставляемую) части, хотя в некоторых видах СП метательная часть
отсутствует (авиационные бомбы, инженерные БП, устройства ДЗ, ручные гра-
наты и др.). Для ствольных СП основа метательной части - пороховой заряд,
помещенный в гильзе (металлической или сгораемой) или в матерчатых чехлах
(картузах) и снабженный средством воспламенения. После выстрела метательная
и метаемая части разделяются. Совокупность метательной и метаемой части (сна-
ряда) принято называть артиллерийским выстрелом. По способу заряжания вы-
деляют три типа выстрелов: унитарные, раздельно-гильзовые и картузные.
22
1. Классификация средств поражения и боеприпасов
В выстреле унитарного заряжения (для унитарного выстрела часто упот-
ребляется термин «патрон») гильза с пороховым зарядом и снаряд соединены
в неразъемное целое. Изменение массы порохового заряда при стрельбе не-
возможно. Преимуществами данного выстрела являются облегчение процесса
заряжания при автоматической стрельбе, герметичность метательного заряда,
исключение возможности некомплектной подачи боеприпасов.
Выстрел раздельно-гильзового заряжания состоит из двух частей: сна-
ряда со взрывателем и гильзы с метательным зарядом и средством воспла-
менения (капсюльной втулкой). Основное преимущество выстрелов этого
типа - возможность уменьшения массы метательного заряда при стрельбе
на небольшие дальности, что существенно увеличивает живучесть орудия.
Метательный заряд - это набор пакетов с порохом, уложенных в гильзе в
определенном порядке, уменьшение массы которого достигается удалением
части пакетов. Дополнительными преимуществами раздельно-гильзовых вы-
стрелов являются снижение физической нагрузки расчета как при подноске
БП, так и при заряжании, и уменьшение общей длины выстрела, что облег-
чает их размещение в боеукладке самоходных орудий и танков.
В унитарных (например, 120-мм выстрел танков Abrams (США) и Leopard
(ФРГ)) и раздельно-гильзовых (например, 125-мм выстрел отечественных тан-
ков Т-72, Т-80, Т-90) выстрелах может быть использована гильза со сгораю-
щим корпусом, выполненным из пироксилиново-целлюлозного полотна, кото-
рое пропитано тротилом и сопряжено с металлическим поддоном.
Выстрел картузного заряжания состоит из снаряда (мины), оболочки из
плотной ткани (шелковой, хлопчатобумажной, ацетатной и др.), внутри кото-
рой помещены метательный заряд и средство воспламенения.
Для реактивных СП с неотделяемым двигателем метательной частью яв-
ляется сгораемая масса пороха или твердого ракетного топлива, а корпус дви-
гателя входит в состав метаемой части.
Метаемая часть СП основного назначения включает в себя корпус, заряд
ВВ, взрыватель, а для некоторых видов СП - также металлический узел в
виде кумулятивной воронки, вогнутой пластины, блока ГПЭ и т. п., и в общем
случае систему управления. Существуют метаемые части, не содержащие за-
ряда ВВ (например, бронебойные подкалиберные снаряды).
В метаемую часть СП вспомогательного назначения входит корпус со снаря-
жением в виде осветительного состава, блока диполей, дымовой шашки и т. п.
В некоторых конструкциях, например, в активных реактивных снаря-
дах, компоненты метательной части могут располагаться в обеих основных
частях СП.
В качестве официального документа, трактующего разделение СП и БП
на определенные группы, приведем выдержки из Единого классификатора
предметов снабжения (ЕКПС) Вооруженных сил РФ. Классификатор по со-
ставу групп и кодам совместим с классификатором Федеральной системы ка-
талогизации США, принятой также в НАТО и в ряде других государств.
«Группа 13. Боеприпасы, боевые части ракет и взрывчатые вещества
(классы 1305-1398):
1305 - боеприпасы и артиллерийские выстрелы калибром до 30 мм вклю-
чительно;
1.2. Классификация СП и БП по ведомственной принадлежности 23
1310 - боеприпасы и артиллерийские выстрелы калибром от 30 до 75 мм
включительно;
1315 - боеприпасы и артиллерийские выстрелы калибром от 75 до 125 мм
включительно;
1320 - боеприпасы и артиллерийские выстрелы калибром свыше 125 мм;
1325 - авиационные бомбы;
1330- гранаты;
1336 - боевые части и взрывчатые компоненты управляемых ракет;
1340 - неуправляемые ракеты, их боевое оснащение и составные части;
1345 - инженерные мины;
1350 - морские мины (неснаряженные) и их составные части;
1351 - боевые зарядные отделения морских мин;
1355 - торпеды, антиторпеды, скоростные подводные ракеты (без боевого
зарядного отделения), их составные части;
1356 - боевые зарядные отделения торпед, антиторпед, подводных скоро-
стных ракет;
1360 - глубинные бомбы (неснаряженные) и их составные части;
1361 - боевое снаряжение глубинных бомб;
1365 - зажигательные и дымовые вещества;
1370 - пиротехнические средства;
1375 - подрывные устройства;
1376 - взрывчатые вещества и пороха;
1377 - пиропатроны, пороховые приводные устройства и их составные
части;
1385 - инструменты и оборудование для обезвреживания наземных бое-
припасов;
1386 - инструменты и оборудование для обезвреживания подводных бое-
припасов;
1390 - капсюли и взрыватели для боеприпасов и артиллерийских выстрелов;
1395 - прочие боеприпасы, не вошедшие в другие классы данной группы;
1398 - специальное оборудование для эксплуатации и технического об-
служивания боеприпасов».
Несмотря на то что название группы 13 классификатора ЕКПС не содер-
жит термина «средства поражения», из анализа структуры группы видно, что
она включает в себя средства поражения как единицы расходной части КВ,
содержащие (в общем случае) метательные и метаемые части, так как БП,
авиационные бомбы (АБ), гранаты, БЧ ракет, инженерные и морские мины,
боевые зарядные отделения торпед и антиторпед и подрывные устройства -
средства поражения по определению.
1.2. Классификация средств поражения и боеприпасов
по ведомственной принадлежности, способу доставки к цели,
назначению и технико-конструктивным признакам
Название данного раздела условно, так как рассмотрена классификация
не средств поражения и боеприпасов в целом, а их метаемых (доставляемых)
частей. При дальнейшем изложении классификационных признаков в основ-
24
1. Классификация средств поражения и боеприпасов
ном будет употребляться термин «средства поражения» как обобщающее по-
нятие расходной части КВ.
По ведомственной принадлежности СП подразделяют на три группы:
- СП Сухопутных войск (включая ПВО СВ);
- СП Военно-воздушных сил (включая ПВО страны);
- СП Военно-морского флота.
Обычно выделяют также виды СП, предназначенные для вооружения си-
ловых структур, не входящих в Вооруженные силы РФ (внутренние войска,
пограничные войска, специальные подразделения и др.).
По способу доставки к цели выделяются СП:
- ствольного метания;
- ракетного или реактивного метания;
- авиабомбовой доставки;
- стационарной установки (инженерные мины, динамическая и активная
защита танков и др.).
По назначению СП делят на основные и вспомогательные. Средства пора-
жения основного назначения предназначены для поражения живой силы, тех-
ники, сооружений и СП противника (БП динамической и активной защиты
танков, устройства взрывного разминирования и т. п.).
Средства поражения основного назначения классифицируются по физи-
ческой природе действия по цели на следующие основные виды: осколочные;
с направленными кинетическими потоками ГПЭ; фугасные; фугасно-зажига-
тельные; проникающе-фугасные; осколочно-фугасные; кумулятивные; с взры-
воформируемыми ПЭ («ударными ядрами»); кинетические бронебойные; бе-
тонобойные.
Средства поражения вспомогательного назначения предназначены для со-
здания условий, способствующих поражению противника или препятствую-
щих противнику в выполнении его боевой задачи (помехосоздающие, освети-
тельные, фотоосветительные, дымовые, аэрозольные, сигнально-ориентирован-
ные, целеуказательные, разведывательные, агитационные). К ним относят также
учебно-тренировочные, практические, лафетопробные и имитационные БП.
Отметим, что ранее некоторые из типов СП вспомогательного назначения от-
носили к БП специального назначения (более подробно это будет рассмотре-
но в гл. 11).
По принципу взаимодействия с целью можно выделить СП прямого попа-
дания и зонного действия (имеющие зону поражения). Действие СП прямого
попадания обеспечивается только при попадании СП в контур цели. К СП пря-
мого попадания относятся пули стрелкового оружия, все виды бронебойных и
бетонобойных боеприпасов. Средства поражения зонного действия обеспечива-
ют возможность поражения цели при подрыве снаряда в районе ее расположе-
ния за счет осколочного, фугасного или зажигательного действия. Деление СП
на указанные группы в определенной степени условно. Например, осколочный
снаряд зенитного орудия при комплектации его взрывателем контактного (удар-
ного) действия является СП прямого попадания, а при комплектации неконтак-
тным или дистанционным (временным) взрывателем - СП зонного действия.
Бронебойные кумулятивные и сплющивающиеся снаряды прямого попадания
создают также определенное зонное осколочное и фугасное действие.
1.2. Классификация СП и БП по ведомственной принадлежности
25
По наличию управления СП делят на неуправляемые и управляемые с воз-
можностью оснащения различными типами взрывателей (ВУ).
По легитимности применения можно выделить конвенционные и некон-
венционные СП. Последние в значительной мере условно подразделяют на
полностью запрещенные (химические, биологические и радиологические СП),
запрещенные отдельными конвенциями (противопехотные мины; мины-ловуш-
ки; пластмассовые ПЭ, не обнаруживаемые рентгеном, и др.) и официально
не запрещенные, но осуждаемые мировым сообществом (например, стрело-
видные противопехотные ПЭ).
По конструктивной схеме выделяют моноблоки, контейнеры и кассетные
СП. Моноблок - неразборная конструкция от момента выстрела или старта и
вплоть до момента подрыва или воздействия на цель. Необходимо отметить,
что особый тип условно моноблочной конструкции представляют собой бро-
небойные подкалиберные снаряды с отделяемыми ведущими секторами или
поддонами: при выстреле такой снаряд является моноблоком, после отделе-
ния секторов или поддона в полете его ПЭ (сердечник) остается моноблоком
вплоть до взаимодействия с целью.
Контейнер - это емкость, из которой на траектории проводится выброс
функционального моноблока, например, постановщика радиопомех средствам
связи, разведывательно-информационного, в том числе телевизионного, блока
подсветки целей, осветительного и др., или рассыпающегося блока компакт-
ных или стреловидных ПЭ (СП и БП типа шрапнелей), противолокационных
диполей, тепловых имитаторов целей и т. п.
Кассетные СП - это по существу разновидность контейнеров, содержа-
щих от двух до нескольких сотен однотипных кассетных боевых элементов
(КБЭ), которые выбрасываются на заданной высоте над поверхностью земли,
рассеиваются на местности и создают значительно более обширную зону по-
ражения по сравнению с боеприпасом-моноблоком. Кассетные конструкции в
настоящее время получили широкое распространение во всех видах СП (ар-
тиллерийские снаряды, головные части ракетных снарядов (или ракет) РСЗО
и тактических ракет, АБ) и во многих случаях благодаря их высокой эффек-
тивности вытесняют боеприпасы-моноблоки. По своему назначению кассет-
ные СП могут применяться как для поражения цели в момент обстрела, так и
для дистанционного минирования.
Кассетные боевые элементы можно разделить по наиболее важным клас-
сификационным признакам следующим образом:
• наличие системы управления - кассетные неуправляемые БЭ свободно-
го рассеивания (как правило, осколочные, кумулятивные, кумулятивно-оско-
лочные, бетонобойные, зажигательные и др.) и кассетные управляемые БЭ
(в основном БЭ для поражения бронированных целей, а именно, кумулятив-
ные - для самонаводящихся БЭ и с «ударными ядрами» - для самоприцелива-
ющихся БЭ);
• форма БЭ - осесимметричные (сферические и овальные тела, высокие и
низкие цилиндры) и асимметричные (секторной формы, «лепестки» и др.);
• способ ориентации БЭ в полете - боевые элементы с гироскопической
стабилизацией (раскручивание БЭ и установление его оси по направлению по-
лета проводится с помощью фигурных приливов на внешней поверхности эле-
мента) и боевые элементы с аэродинамической стабилизацией (используются
26
1. Классификация средств поражения и боеприпасов
раскрываемые перьевые стабилизаторы, гибкие ленточные, петлевые и лопас-
тные стабилизаторы, купольные парашюты и т. п.);
• способ выброса БЭ из кассетных СП одноразового действия - через сре-
заемый торец корпуса с сохранением целостности последнего (артиллерийс-
кие снаряды и толстостенные кассетные АБ) или в радиальном направлении с
разрушением (вскрытием) корпуса детонирующими удлиненными зарядами и
последующим разбросом БЭ с помощью центрального разрывного заряда (тон-
костенные авиационные бомбы и БЧ ракет);
• место разрыва боевых элементов - БЭ наземного разрыва (с контактным
взрывателем), БЭ с подбросом после удара о землю (с ударным воспламени-
телем заряда разделения и замедлителем) и БЭ с траекторным разрывом.
В целях достижения более равномерного распределения БЭ внутри пло-
щади накрытия в ряде конструкций кассетных СП используется двухэтапный
выброс БЭ с применением промежуточных блоков, когда из контейнера пер-
воначально выбрасывается несколько блоков, а затем происходит их раскры-
тие с выбросом боевых элементов из каждого блока.
Для некоторых типов кассетных СП по условиям функционирования не-
обходимо разведение БЭ вдоль траектории. В этом случае осуществляется пос-
ледовательный выброс боевых элементов с помощью автономных вышибных
зарядов. Разведение БЭ после выброса из корпуса по радиальным направле-
ниям может проводиться также с помощью односторонних скосов на лобовой
поверхности боевых элементов, асимметричных стабилизаторов, эксцентри-
ситета масс БЭ и другими способами.
По отношению к калибру ствола (пусковой трубы) выделяют подкали-
берные, калиберные и надкалиберные СП.
Подкалиберным является снаряд, калибр которого в полете меньше ка-
либра ствола, что достигается отделением ведущего поддона после вылета
снаряда из канала ствола. В то же время довольно часто термин «подкалибер-
ный снаряд» используется для обозначения бронебойных снарядов, представ-
ляющих совокупность подкалиберного сердечника с неотделяемым поддоном.
В этом случае более правильным было бы применение понятия «снаряд с под-
калиберным сердечником».
Надкалиберные СП - это главным образом гранаты ручных противотан-
ковых гранатометов и ружейные гранаты. Гранаты надеваются на дульную часть
ствола винтовки, имеющую специальные буртики, или на пламегаситель и
выстреливаются с помощью холостых патронов или при наличии на гранате
пулеуловителя - с помощью боевых патронов.
Понятие «надкалиберная боевая часть» часто используется применитель-
но к БЧ ракет, большей частью неуправляемых. В этом случае имеют в виду
отношение диаметра БЧ не к диаметру (калибру) ствола, а к диаметру дви-
гателя.
По способу стабилизации в полете выделяют аэродинамический и гиро-
скопический методы. При этом аэродинамическая стабилизация (центр дав-
ления располагается позади центра масс снаряда) применяется в основном
для невращающихся и слабовращающихся снарядов. По конструктивным при-
знакам различают жесткие стабилизаторы и раскрывающиеся в полете перье-
вые стабилизаторы, у которых оси перьев перпендикулярны оси снаряда; по-
луцилиндрические стабилизаторы, оси перьев которых параллельны оси сна-
1.3. Классификация СП и БП по принадлежности к комплексам вооружения 27
ряда; стабилизаторы в виде упругих перьев, согнутых и уложенных по поверх-
ности хвостовой части снаряда и раскрывающихся по принципу «капустного
листа». Раскрывающиеся в полете перьевые стабилизаторы используют для
ракет и реактивных снарядов, выстреливаемых из пусковых труб, а также для
снарядов танковых гладкоствольных пушек.
Как правило, аэродинамически стабилизируемым снарядам сообщается
небольшое вращение, предназначенное для компенсации эксцентриситета век-
тора тяги, неточности геометрии перьев и других факторов, вызывающих од-
ностороннее отклонение снаряда от расчетной траектории. Например, в бро-
небойных оперенных подкалиберных снарядах (БОПС) вращение («подкру-
чивание») снаряду придается с помощью косо поставленных отверстий в
секторах поддона и поддерживается на траектории с помощью односторон-
них скосов на передних кромках перьев стабилизатора.
Для управляемых СП применяют дополнительные классификации:
- по схеме БЧ (несущая, вкладная, пристыковываемая);
- по методу расположения в ракете БЧ;
- по виду связи БЧ с СП (неотделяемая, отделяемая);
- по аэродинамической схеме;
- по типу управления (наведения).
1.3. Классификация средств поражения и боеприпасов
по принадлежности к комплексам вооружения
В соответствии с принадлежностью СП и БП к комплексам вооружения
их можно классифицировать следующим образом:
1) БП (унитарные артиллерийские выстрелы - патроны) к малокалибер-
ным автоматическим пушкам (МКАП);
2) БП (артиллерийские выстрелы) к артиллерийским системам средних и
крупных калибров;
3) БП (выстрелы с минами) к минометам;
4) БП (выстрелы с гранатами) к подствольным и автоматическим гранато-
метам, а также винтовочные (ружейные) гранаты для стрельбы из специально
приспособленного для этого индивидуального стрелкового оружия (винтовка,
автомат);
5) ручные гранаты;
6) БП (выстрелы с противотанковой, осколочной или штурмовой грана-
той) к ручным противотанковым гранатометам (РПГ) и станковым противо-
танковым гранатометам (СПГ);
7) БЧ ПТУР к противотанковым ракетным комплексам;
8) БЧ ракет к зенитным ракетным комплексам;
9) БЧ к авиационным управляемым и неуправляемым (НАР) ракетам;
10) БЧ к крылатым ракетам;
11) авиационные бомбы и кассетные контейнеры;
12) инженерные БП;
13) морские мины;
14) БЧ (боевые зарядные отделения) к торпедам;
15) головные части снарядов к РСЗО;
16) БЧ к тактическим и оперативно-тактическим комплексам.
28
1. Классификация средств поражения и боеприпасов
Боеприпасами малого калибра условно принято считать выстрелы со сна-
рядами калибра менее 75 мм (20, 23, 25, 30, 35, 37,40, 45, 50 и 57 мм). Снаряды
калибра от 20 до 45 мм используются (или использовались) в составе боекомп-
лектов к МКАП, которые находятся (или находились) на вооружении СВ, ВВС
и ВМФ. По виду действия малокалиберные снаряды имеют широкую номенк-
латуру: бронебойно-подкалиберные, бронебойно-разрывные, бронебойно-трас-
сирующие, бронебойно-зажигательные, бронебойно-зажигательно-трассирую-
щие, осколочно-зажигательные, осколочно-трассирующие, фугасно-зажигатель-
ные, осколочно-зажигательно-трассирующие, осколочно-фугасно-зажигательные,
осколочно-фугасно-зажигательно-трассирующие, многоэлементные противора-
диолокационные, инфракрасных помех, практические. По способу стабилиза-
ции снаряда в полете МКАП относятся к нарезным артиллерийским системам.
Следует отметить, что в настоящее время основным калибром отечественных
МКАП (одноствольных, двуствольных и шестиствольных) для всех трех видов
Вооруженных сил стал калибр 30 мм. В то же время для вооружения легкой
бронированной техники разработаны МКАП и БП калибра 25 мм («Бушмас-
тер» - ФРГ) и 35 мм («Эрликон» - Швейцария), МКАП (L70B - Швеция,
CTWS - США, СТА - Франция) и БП калибра 40 мм (в том числе опытный
образец корректируемого снаряда), а в перспективе рассматривается возмож-
ность создания МКАП и БП калибра 50 мм. На вооружении ВМФ РФ нахо-
дятся также малокалиберные корабельные комплексы АК-725 для стрельбы
57-мм артиллерийскими боеприпасами.
Артиллерийские снаряды калибра 75... 155 мм (76, 85, 100, 105, 115, 120,
122, 125, 127, 130, 152, 155 мм) относятся к артиллерийским боеприпасам
среднего калибра, а снаряды калибра свыше 155 мм - к артиллерийским бое-
припасам крупного калибра. По виду действия снаряды среднего и крупного
калибра могут быть осколочными, осколочно-фугасными, фугасными, куму-
лятивными, бронебойными, бетонобойными, кассетными, помехосоздаюши-
ми, агитационными и т. д. По способу стабилизации снаряда в полете можно
выделить нарезные артиллерийские системы, обеспечивающие гироскопичес-
кую стабилизацию снаряда вращением последнего вокруг своей продольной
оси, и гладкоствольные артиллерийские системы, при выстреле из которых
происходит аэродинамическая стабилизация снаряда с помощью раскрываю-
щегося оперения.
По своей принадлежности БП среднего калибра предназначены как для
наземной ствольной артиллерии, которая включает в себя полевые (гаубицы,
гаубицы-пушки и пушки), танковые (гладкоствольные и нарезные), противо-
танковые и горные орудия, так и для ствольной артиллерии ВМФ, состоящей
из корабельных пушек для борьбы с надводными, береговыми и зенитными
целями. Основными корабельными артиллерийскими комплексами РФ сред-
него калибра являются АК-130 (калибр 130 мм), АК-100 (калибр 100 мм),
АК-176 и АК-726 (калибр 76 мм), которые используют унитарные выстрелы,
что необходимо для автоматической стрельбы, и имеют углы вертикального
наведения от -10 до +85°, а углы горизонтального наведения - ±180°. Орудия
береговой артиллерии (стационарные и самоходные типа 130-мм самоходного
комплекса А-222 «Берег») и БП к ним служат для защиты портов, прибреж-
ных сооружений и коммуникаций, а также для отражения высадки морского
десанта на побережье.
1.3. Классификация СП и БП по принадлежности к комплексам вооружения 29
Для поражения целей в обваловках, на обратных скатах, за сооружениями
и создания кругового осколочного поля на поверхности земли широко исполь-
зуются боеприпасы для минометов - мины (в основном осколочные и оско-
лочно-фугасные) с навесной траекторией и соответственно большим углом
падения. Основной метательный заряд мины каплевидной формы расположен
в картонной гильзе, снабженной капсюлем-воспламенителем и вставляемой в
перфорированную трубку стабилизатора. На поверхности трубки стабилиза-
тора могут размещаться дополнительные метательные кольцевые заряды. Для
доставки мины к цели применяют переносные и возимые минометы, основ-
ными компонентами которых являются гладкий ствол, минимальный угол вер-
тикальной наводки которого составляет не менее 45° и не допускает ведение
настильной стрельбы, и опорная плита, устанавливаемая на грунт и передаю-
щая ему отдачу от выстрела. Автоматические минометы (типа «Василек») об-
ладают возможностью стрельбы с меньшими углами возвышения. На воору-
жении Вооруженных сил РФ есть минометы и мины к ним 82, 120, 160 и
240 мм калибров. При этом минометы калибра 82 и 120 мм относятся к дуль-
нозарядным, заряжание которых проводится опусканием мины в ствол сверху
(мина скользит вниз по гладкому стволу, после чего капсюль-воспламенитель
взаимодействует с накольным устройством, расположенным в донной части
ствола миномета, и воспламеняет метательный пороховой заряд), а минометы
160 и 240 мм - к казнозарядным, заряжание которых осуществляется с казен-
ной части ствола (ствол отделяется от опорной плиты и переводится в гори-
зонтальное положение, после досылания мины в ствол и ее захвата стопор-
ным устройством он возвращается в первоначальное положение и вновь сцеп-
ляется с опорной плитой), а выстрел производится с помощью ударного
механизма. Минометы зарубежного производства и выстрелы с минами к ним
имеют калибры 60, 81, 82, 107 и 120 мм, причем основными являются калиб-
ры 81 и 120 мм.
Использовать для стрельбы как нарезные артиллерийские снаряды, так и
мины позволяют разработанные и принятые на вооружение универсальные ору-
дия'. самоходное, на гусеничном шасси, бронированное, плавающее и авиаде-
сантируемое орудие «Нона-С» (2С9); самоходное, на колесном шасси, брони-
рованное, плавающее орудие «Нона-СВК» (2С23); легкое буксируемое орудие
«Нона-К» (2Б16).
Боеприпасы для подствольных и автоматических гранатометов предназ-
начены для борьбы с живой силой, расположенной преимущественно на от-
крытой местности. Их применяют для стрельбы из подствольных ручных, ав-
томатических станковых и ружейных гранатометов, основные калибры кото-
рых составляют 30 и 40 мм. Типовые образцы гранатометов: отечественный
30-мм автоматический станковый гранатомет АСГ-17 «Пламя» с патронной лен-
той емкостью 29 выстрелов; 40-мм отечественные подствольные гранатометы
ГП-25 и ГП-30; 40-мм подствольный гранатомет М203 (США), подвешиваемый
под стволом 5,56-мм автоматической винтовки М16А1; 40-мм автоматический
гранатомет МК19 Mod3 (США) с укладываемой в коробку патронной лентой
емкостью 20 или 50 выстрелов.
Гранаты, которыми комплектуются выстрелы перечисленных гранатоме-
тов, в основном обеспечивают осколочное действие. Например, в качестве
30
1. Классификация средств поражения и боеприпасов
БП для ГП-25 и ГП-30 обычно применяют осколочную гранату ВОГ-25 и
«подпрыгивающую» ВОГ-25П (с подрывом на высоте 0,5... 1,5 м от поверхно-
сти грунта).
В качестве примера винтовочной (ружейной) гранаты можно привести раз-
работанную в США 140-мм штурмовую гранату RAW (Rifleman Assault
Weapon), которая выстреливается из пускового устройства, установленного на
винтовке Ml6. Граната RAW в форме сферы содержит заряд ВВ массой 1,36 кг
и снабжена реактивным двигателем, который обеспечивает ее полет без сни-
жения траектории на дальности не менее 200 м, после чего граната переходит
на баллистическую траекторию. В боекомплект пускового устройства входят
фугасные, кумулятивные, зажигательные и дымовые гранаты.
Что касается стрелкового оружия со встроенными гранатными стволами
калибра 20 мм и емкостью магазина от 6 до 10 осколочных гранат, то в насто-
ящее время оно находится в стадии опытных разработок.
Ручные гранаты предназначены для поражения главным образом живой
силы противника осколками, причем в большинстве из них предусмотрено
дробление корпуса на осколки заданной массы (путем нанесенйя на корпус
гранаты соответствующей подрезки) для усиления эффективности осколочно-
го действия.
Боеприпасы {гранаты) к РПГ и СПГ оснащены кумулятивными (в том
числе тандемными) зарядами и являются эффективными средствами пораже-
ния легкобронированной (ЛБТ) и бронированной техники (БТ). В последние
годы появились также гранаты к РПГ осколочного действия, предназначен-
ные для поражения живой силы противника. Следует отметить, что в настоя-
щее время боекомплект реактивных пехотных огнеметов, относящихся к классу
РПГ, содержит термобарический выстрел, обеспечивающий одновременное
фугасное, ослепляющее и зажигательное действие.
Боевые части противотанковых управляемых ракет к ПТРК так же, как
и боеприпасы к РПГ, снабжены в основном кумулятивными (в том числе тан-
демными) зарядами и служат для поражения ЛБТ и БТ. В настоящее время
разработаны и приняты на вооружение также и управляемые ракеты к ПТРК с
БЧ осколочного, фугасного, термобарического и зажигательного действия, пред-
назначенные для поражения других классов целей.
Боевые части ракет самоходных (СЗРК) и переносных (ПЗРК) зенитных
ракетных комплексов должны обеспечивать поражение воздушных целей. Как
правило, ракеты указанных СЗРК и ПЗРК состоят из осколочно-фугасных и
осколочных БЧ кругового или направленного действия, а также стержневых и
осколочно-стержневых БЧ. Современные СЗРК и ПЗРК осуществляют опоз-
навание целей и автоблокировку пуска ракеты по своему самолету, неконтакт-
ный подрыв БЧ на промахе и контактный подрыв при прямом попадании в
цель, подрыв вместе с БЧ невыработанного топлива маршевого двигателя ра-
кеты, послестартовый разворот ракеты на цель с помощью импульсных твер-
дотопливных двигателей, установленных в рулевом отсеке ракеты. Захват и
сопровождение цели проводится головками самонаведения различного типа
(инфракрасного, лазерного и др.).
Боевые части к авиационным управляемым и неуправляемым ракетам слу-
жат для поражения наземных, морских и воздушных целей, в соответствии с
чем их делят на три класса: воздух-земля, воздух-корабль и воздух-воздух.
1.3. Классификация СП и БП по принадлежности к комплексам вооружения 31
Авиационные управляемые ракеты и неуправляемые авиационные раке-
ты класса воздух-земля предназначены для поражения наземных (укрытия са-
молетов, железнодорожные и шоссейные мосты, командные пункты, пуско-
вые установки ЗУР и т. п.) одиночных и площадных целей, АУР и НАР класса
воздух-корабль - для поражения крупных надводных целей, а АУР класса
воздух-воздух - для эффективного поражения самолетов бомбардировочной
и истребительной авиации. В соответствии с разнообразием решаемых задач
боевые части АУР и НАР могут быть осколочного, осколочно-фугасного, ку-
мулятивно-осколочного, кумулятивно-фугасного, кумулятивно-фугасно-зажи-
гательного, кумулятивно-осколочно-зажигательного, осколочно-стержневого,
кумулятивного, бетонобойно-проникающего и фугасного (на основе объемно-
детонирующих систем) действия. Существуют также модификации АУР и НАР,
применяемых для запуска с кораблей и наземных установок и оснащенных
моноблочной БЧ проникающе-фугасного действия (в отдельных случаях ис-
пользуют и кассетные БЧ). Кроме этого, есть ряд НАР, которые обеспечивают
выполнение осветительных и помехосоздающих (радиолокационных, оптико-
электронных, комбинированных) функций.
В настоящее время разработаны АУР класса воздух-земля с кассетными
БЧ. Указанные кассетные БЧ можно снаряжать малогабаритными бетоно-
бойными бомбами; самоприцеливающимися противотанковыми БП и мина-
ми, действующими по принципу ударного ядра; осколочными БЭ с ГПЭ в
виде стальных шариков; самонаводящимися противотанковыми БЭ с куму-
лятивной БЧ.
Следует отметить, что в системе вооружения ВВС важную роль играют
также противорадиолокационные АУР, которые наводятся на излучение ра-
диолокационных станций зенитных ракетных комплексов и других радиоиз-
лучающих объектов в целях их последующего уничтожения.
Боевые части к крылатым ракетам предназначены для поражения на-
земных и морских хорошо защищенных целей и являются БЧ проникающе-
фугасного и осколочно-фугасного действия. Ранее под крылатыми ракетами
понимали только те из них, которые были выполнены по самолетной схеме
с плоским крылом, двигались с дозвуковой скоростью и на небольшой высоте
над поверхностью. В настоящее время к ним также относят сверхзвуковые
ПКР (типа «Москит», «Яхонт», «Клуб» и др.).
К авиационным бомбам и кассетным контейнерам принадлежат СП, не
имеющие метательной части и доставляемые к цели летательными аппарата-
ми (ЛА), причем бомбы могут размещаться как внутри фюзеляжа ЛА, так и
на внешней подвеске.
Авиационная бомба обычно состоит из корпуса, снаряжения (ВВ, зажига-
тельного, осветительного, дымового и др.) и стабилизатора, а перед боевым
применением комплектуется одним или несколькими взрывателями. Корпус,
как правило, удлиненной сигарообразной или цилиндрическо-конической фор-
мы сопряжен с калиберным или надкалиберным стабилизатором перистого,
перисто-цилиндрического или коробчатого типа в хвостовой части. Если бом-
ба размещается на внешней подвеске ЛА, то на средней части корпуса кре-
пятся ушки подвесной системы, расстояние между которыми называется ба-
зой подвески.
32 1. Классификация средств поражения и боеприпасов
Основная характеристика бомбы - ее номинальная масса, выраженная в
килограммах и называемая «калибром» бомбы. Калибр бомбы указывается пос-
ле сокращенного наименования бомбы (например, ОФАБ-ЮО - осколочно-
фугасная АБ массой 100 кг, БетАБ-1000 бетонобойная АБ массой 1000 кг).
Если фактическая масса существенно отличается от номинальной, она также
включается в наименование в виде второй цифры (например. ОФАБ-250-280).
В настоящее время в России существуют следующие калибры АБ: 0,5; 1; 2,5;
10; 25; 50; 100; 250; 500; 1500; 3000; 5000; 9000. Отметим, что бомбы калибра
до 100 кг обычно оснащены одним взрывателем и запальным стаканом, а бомбы
основного назначения калибра 100 кг и более - двумя взрывателями и запаль-
ными стаканами (головной и донный).
В США принят параметрический ряд калибров бомб в фунтовом исчис-
лении: МК82 (500 фунтов), МК7 (750 фунтов), МК83 (1000 фунтов), МК84
(2000 фунтов), МК8 (3000 фунтов). Все указанные типы бомб имеют неуп-
равляемые и управляемые модификации.
По виду действия АБ делятся на два больших класса: АБ основного на-
значения (фугасные, осколочные, осколочно-фугасные, противотанковые, бро-
небойные, бетонобойные, противолодочные, зажигательные, фуг-асно-зажига-
тельные, осколочно-фугасно-зажигательные, фугасно-бетонобойные, фугасные
с объемно-детонирующими смесями и др.), которые применяются для пора-
жения наземных и морских целей, и АБ вспомогательного назначения (осве-
тительные, дымовые, фотографические, имитационные, агитационные, ори-
ентирно-сигнальные, практические и др.), используемые для решения специ-
альных задач.
Кроме этого, данный вид СП принято подразделять на АБ свободного па-
дения и управляемые АБ; моноблочные и кассетные АБ; обычные и маловы-
сотные (штурмовые) АБ.
Управляемые авиационные бомбы (УАБ) различают двух классов: управ-
ляемые планирующие авиационные бомбы (УПАБ), траектория движения ко-
торых содержит явно выраженный участок планирования, и корректируемые
авиационные бомбы (КАБ), траектория движения которых формируется та-
ким образом, чтобы минимизировать величину их отклонения от баллисти-
ческой траектории, проходящей через цель.
Для поражения подводных лодок и других подводных объектов (якорных
и донных мин и др.) предназначен морской боеприпас, называемый или реак-
тивной глубинной бомбой (РГБ), если он выстреливается из реактивных бом-
бометов, или противолодочной АБ (ПЛАБ), если он сбрасывается из кормо-
вых бомбосбрасывателей.
Кассетные контейнеры многократного применения обычно имеют цилин-
дрический корпус с передним и задним обтекателями. Вдоль корпуса после-
довательно расположены несколько отсеков, а на нижней стороне корпуса есть
раздвижные пневматические створки. В отсеки устанавливаются и фиксиру-
ются электрическими замками контейнерные фронтовые блоки, которые с по-
мощью электросистемы могут сбрасываться одиночно или серией с различ-
ными интервалами времени. После удаления от самолета-носителя блок рас-
падается на две части, одновременно выбрасывая в воздух БЭ. На вооружении
ВВС РФ находится авиационный кассетный контейнер многоразового приме-
1.3. Классификация СП и БП по принадлежности к комплексам вооружения 33
нения КМГУ-2 (контейнер малогабаритных грузов универсальный). Сброс бло-
ков обеспечивается одиночно или серией с интервалами 0,05; 0,2; 1,0 и 1,5 с.
Блоки обычно снаряжены 12 осколочными авиационными бомбами АО-2.5РТ,
или 12 противотанковыми авиационными бомбами ПТАБ-2.5КО, или 12 про-
тивотанковыми минами ПТМ-1 массой 1,6 кг, или 156 противопехотными фу-
гасными минами ПФМ-1 массой 80 г каждая.
Примером кассетного контейнера с непосредственным выбросом БЭ из
контейнера (без промежуточных блоков) служит контейнер MW-1 (Германия),
предназначенный для подвески под фюзеляж истребителя Tornado. Метание
БЭ проводится с боковых поверхностей контейнера перпендикулярно оси са-
молета из 112 пусковых стволов диаметром 132 мм, в каждом из которых раз-
мещено шесть БЭ (всего 672 шт.).
Таким образом, кассетные контейнеры могут содержать неуправляемые и
самонаводящиеся БЭ осколочного, фугасного (в том числе на основе объем-
но-детонирующих или термобарических смесей), осколочно-фугасного, зажи-
гательного и кумулятивного действия.
Инженерные боеприпасы подразделяют на три основных класса:
- инженерные мины;
- заряды (удлиненные заряды разминирования, окопные заряды, кумуля-
тивные заряды разрушения, заряды для подрывных работ, в том числе под-
водных и др.);
- разовые минные кассеты.
Инженерные мины по типу поражаемых ими целей бывают противопе-
хотными, противотранспортными, противотанковыми, противообьектными,
противодесантными (береговыми), сплавными, специального назначения (ди-
версионные, сигнальные мины-ловушки).
В свою очередь противопехотные мины подразделяются на фугасные и
осколочные с круговыми и направленными полями ПЭ, а противотанковые
мины можно разделить на противогусеничные, противоднищевые, противо-
бортовые и противокрышевые.
Инженерные мины по способу установки минного поля бывают обычно-
го (ручного или механизированного) и дистанционного минирования, а по спо-
собу приведения в действие их можно разделить на мины:
- контактного действия, срабатывающие от контакта цели непосредствен-
но с миной (обычно нажимного действия) или от контакта с датчиком цели
(обычно натяжного или обрывного действия);
- неконтактного действия, срабатывающие от воздействия физического
поля цели (магнитного, сейсмического, акустического, инфракрасного и т. д.);
- командного действия, срабатывающие по сигналу, который передается
по проводной линии или по радио;
- временного действия, срабатывающие по истечении заданного времени
после установки.
Следует отметить появление нового класса минных комплексов с пуско-
выми установками (ПУ). При идентификации движущегося объекта в каче-
стве цели ПУ автоматически наводится в направлении цели и после того, как
цель оказывается в зоне поражения, выстреливается неуправляемая или уп-
равляемая БЧ.
34
I. Классификация средств поражения и боеприпасов
Морские мины (ММ) относятся к морским боеприпасам, устанавливае-
мым в воде для поражения подводных лодок и надводных кораблей противни-
ка, а также для затруднения их плавания. Общая компоновка любой морской
мины включает в себя корпус, заряд ВВ, взрыватель и устройство, обеспечи-
вающее установку и удержание мины под водой в определенном положении.
Морские мины обычно снабжены предохранительными противотральными уст-
ройствами и подразделяются по своему назначению, способу удержания на
месте постановки, степени подвижности, принципу действия взрывателя и уп-
равляемости после постановки. Установка ММ проводится с кораблей, под-
водных лодок и ЛА.
Классификатор морских мин довольно обширен и состоит из авиацион-
ных (донные, якорные и плавающие ММ, устанавливаемые с авиационных
носителей); противолодочных (ММ, предназначенные для поражения подвод-
ных лодок на различных глубинах погружения); донных (неконтактные мины,
устанавливаемые на дне водоема и имеющие отрицательную плавучесть); якор-
ных (мины с положительной плавучестью удерживаются на заданной глубине
под водой с помощью троса, соединяющего мину с лежащим на дне якорем);
дрейфующих (сорванные с якоря штормом или подсеченные тросом якорные
ММ, всплывшие на поверхность воды и перемещающиеся под'воздействием
ветра и течения водной среды); плавающих (безъякорные мины, плавающие
на заданной глубине с помощью гидростатических или других устройств и
перемещающиеся под воздействием глубинных подводных течений); реактив-
но-всплывающих (якорные ММ всплывают под действием реактивного двига-
теля, запускаемого при воздействии физических полей проходящего над ми-
ной корабля, и поражают корабль воздействием подводного взрыва); антен-
ных (якорные контактные мины, взрыватель которых срабатывает при
соприкосновении корпуса корабля с металлической тросовой антенной); кон-
тактных (мины с контактным взрывателем, включающемся при механическом
соприкосновении подводной части корабля с самим взрывателем или корпу-
сом мины); гальваноударных (контактные мины с гальваноударным взрывате-
лем, срабатывающим при ударе корабля по выступающему из корпуса мины
колпаку); неконтактных ММ (мины с неконтактными взрывателями, а имен-
но, магнитные, индукционные, акустические, гидродинамические и комбини-
рованные мины, инициируемые от воздействия физических полей корабля и
отличающиеся высокой противотральной стойкостью, для чего они оснаща-
ются приборами кратности и приборами срочности). В конце XIX в. применя-
ли также шестовые (контактные мины, крепившиеся на конце длинного шес-
та, который выдвигался вперед в носовой части минного катера перед минной
атакой) и самодвижущиеся ММ - так в России назывались первые торпеды, а
во время Первой мировой войны для поражения подводных лодок использо-
вали буксируемые ММ - контактные мины, у которых заряд ВВ и взрыватель
(В) размещались в корпусе обтекаемой формы, позволяющем обеспечить бук-
сировку мины кораблем на заданной глубине.
Боевые части к торпедам (так называемые боевые зарядные отделения)
предназначены для поражения надводных кораблей, подводных лодок и су-
дов, разрушения причалов, доков и других объектов, расположенных у уреза
воды. Торпеды находятся на вооружении подводных лодок, крейсеров, проти-
володочных кораблей, эсминцев, торпедных катеров, противолодочных само-
1.3. Классификация СП и БП по принадлежности к комплексам вооружения 35
летов и вертолетов. По виду действия БЧ торпед могут быть фугасными и
кумулятивно-фугасными.
Головные части снарядов реактивных систем залпового огня по виду дей-
ствия имеют широчайшую номенклатуру и предназначены для поражения (или
создания условий, способствующих выполнению боевой задачи) большого спек-
тра наземных, надводных и подводных целей на дальности от десятков метров
до сотен километров. Снаряды РСЗО основного назначения применяются для
поражения ЛБТ и БТ, пунктов управления, узлов связи артиллерийских диви-
зионов, подразделений противовоздушной и противоракетной обороны, взлет-
но-посадочных полос (ВПП), для противолодочной зашиты кораблей в ближ-
ней зоне, для уничтожения подводных лодок, торпед и подводных диверсан-
тов, атакующих корабль, для защиты входов в пункты базирования кораблей
ВМФ от сверхмалых подводных лодок и боевых пловцов. Снаряды РСЗО вспо-
могательного назначения используются для создания помех в КВ- и УКВ-диа-
пазонах длин волн, для постановки и поддержания маскирующих и ослепляю-
щих завес перед боевыми порядками противника в целях снижения эффектив-
ности огневого воздействия противника. Под РСЗО принято понимать комплекс
вооружения, включающий в себя многозарядную ПУ (пакет пусковых труб или
направляющих) и реактивные снаряды (неуправляемые и управляемые), кото-
рые выполняют огневую задачу за счет множественного (залпового) пуска.
Подразделение РСЗО в основном проводится по видам Вооруженных сил:
- наземные, к которым относятся российские 9М21 «Град» и «Прима»
(калибр 122 мм), 9К57 «Ураган» (калибр 220 мм), 9К58 «Смерч» (калибр
300 мм), ТОС-1 «Буратино», MLRS (США), LARS (ФРГ), RAFAL-145 (Фран-
ция), FIROS-30 (Италия) и др.;
- корабельные системы залпового огня (отечественные десятитрубная ре-
активная бомбометная установка РБУ-1200, шеститрубная РБУ-1000, двухтруб-
ная установка создания помех ЗИФ-121);
- подвешиваемые блоки с НАР (российские НАР типа С-5, С-8, С-13, С-25;
зарубежные НАР типа HYDRA (США) и др.).
Головные части реактивных снарядов РСЗО могут быть моноблочными
(фугасные, проникающе-фугасные, зажигательные, термобарические, осколоч-
но-фугасные с полуготовыми и готовыми ПЭ, осколочные с ГПЭ одной или
двух фракций) и кассетными, содержащими противопехотные или противо-
танковые мины для дистанционного минирования, БЭ осколочного действия,
кумулятивно-осколочные БЭ, самоприцеливающиеся БЭ типа SADARM для
поражения ЛБТ и БТ и др.
Боевые части к тактическим и оперативно-тактическим ракетным ком-
плексам по конструктивным признакам могут быть моноблочными и кассет-
ными, а по виду действия в основном являются осколочно-фугасными или
фугасными, хотя кассетные БЧ могут содержать боевые элементы любого типа.
Боевые части к тактическим ракетам служат также для радиоэлектронного
подавления и дистанционного минирования. Оперативно-тактические ракет-
ные комплексы (типа российского наземного «Искандер-Э») с управляемыми
(самонаводящимися) ракетами предназначены для поражения объектов про-
тивника различного назначения в оперативной глубине, а тактические комп-
лексы (типа российских наземных 9К52 - «Луна-М» и 9К79 - «Точка-У»)
36
/. Классификация средств поражения и боеприпасов
с неуправляемыми или управляемыми (самонаводящимися) ракетами, имею-
щими неотделяемые БЧ, - для поражения объектов противника в тактической
глубине. Указанные комплексы состоят на вооружении СВ, ВВС и ВМФ. Пуск
ракет осуществляется с наземных подвижных ПУ, самолетов, вертолетов, под-
водных лодок и надводных кораблей.
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ
Ардашев А Н. Огнеметно-зажигательное оружие: Иллюстрированный справоч-
ник. М.: ООО «Изд-во АСТ», 2001.
Военный энциклопедический словарь. М.: Воениздат, 1984.
Егоров С. Высокоточное бомбовое вооружение авиации // Военный парад. 1994.
№ 2. С. 76-78.
Забегаев С.К., Савченко Н.Н. Средства устройства и преодоления минно-взрыв-
ных заграждений. М.: Изд. ВИУ, 2002.
Инженерные боеприпасы. М.: Изд-во МО, 1976.
Латухин А.Н. Современная артиллерия. М.: Изд-во МО, 1970.
Миропольский Ф.П., Саркисян Р.С., Вишняков О.Л., Попов А.М. Авиационные бое-
припасы и их исследование. М.: Изд-во ВВИА им. Н.Е. Жуковского, 1996.
Морозов К.В. Минно-торпедное оружие. М.: Изд-во ДОСААФ, 1974.
Новейшая энциклопедия вооружения: В 2 т.: Пер. с пол.; Под ред. Р. Возняка.
Минск: ООО «Попурри», 2004.
Оружие России: Каталог. Т. I: Вооружение сухопутных войск. М.: АОЗТ «Воен-
ный парад», 1995.
Оружие России: Каталог. Т. II: Авиационная техника и вооружение Военно-воз-
душных сил. М.: АОЗТ «Военный парад», 1996.
Оружие России: Каталог. Т. III: Корабли и вооружение Военно-морского флота.
М.: АОЗТ «Военный парад», 1996.
Оружие России: Каталог. Т. VII: Высокоточное оружие и боеприпасы. М.: АОЗТ
«Военный парад», 1997.
Пехотное оружие России. М.: ФГУП «ГНПП «Базальт», 2001.
Противотанковые ракетные комплексы зарубежных стран: Обзорно-аналитичес-
кий справочник за 1986-1992 гг. Тула: КБП, 1993.
Прохоров Б.А. Боеприпасы артиллерии. М.: Машиностроение, 1973.
Пырьев Е.В., Резниченко С.Н. Бомбардировочное вооружение авиации России.
1912-1945 гг. / Под общей ред. Ю.П. Клишина. М.: Редакционно-издательский центр
Генштаба ВС РФ, 2001.
Родионов Б.И, Новичков Н.Н. Крылатые ракеты в морском бою. М.: Воениздат,
1987.
Справочник по минно-взрывным средствам армий капиталистических государств.
М.: Изд-во МО, 1996.
Сычев В.А. Корабельное оружие. М.: Изд-во ДОСААФ, 1984.
Третьяков ГМ. Боеприпасы артиллерии. М.: Изд-во МО, 1947.
Шунков В. Н. Ракетное оружие. Минск: ООО «Попурри», 2001.
Широкорад А.Б. Энциклопедия отечественного ракетного оружия 1817-2002 / Под
общ. ред. А.Е. Тараса. М.: ООО «Изд-во АСТ»; Минск: Харвест, 2003.
ОСНОВНЫЕ ХАРАКТЕРИСТИКИ
ЭФФЕКТИВНОСТИ ДЕЙСТВИЯ
СРЕДСТВ ПОРАЖЕНИЯ И БОЕПРИПАСОВ
2.1. Роль расчета эффективности действия
в проектировании систем
Начало жизненного цикла любого изделия, предназначенного для пора-
жения различных объектов, представляющих угрозу с точки зрения опериру-
ющей (принимающей решение) стороны, можно связать с понятием «цель»,
которое в данном контексте означает и поражаемые объекты, и желаемый ре-
зультат. Логика развития военной техники такова, что появление потенциаль-
ной угрозы в виде нового средства нападения вынуждает разрабатывать адек-
ватное средство поражения, способное эффективно нейтрализовать эти объекты
(цели). Требуемый уровень эффективности, при котором борьба с новой це-
лью (угрозой) может быть признана успешной, формулируется как цель (и ос-
новной критерий качества) разработки средств поражения.
Итак, появление новых целей-объектов и формулирование целей-крите-
риев непосредственно предшествуют созданию СП и определенным образом
влияют на логику принятия решения на всех этапах проектирования и, в ко-
нечном счете, на облик проектируемых изделий. Однако прямой связи между
характеристиками целей, критериями их поражения и проектируемыми по этим
критериям СП, конечно, нет. Эффективность выполнения боевых задач в ти-
повых ситуациях - это функция системы оружия, расходуемым элементом ко-
торой является СП. Когда принимается решение о необходимости разработки
нового изделия, эффективность системы оружия рассматривается в рамках во-
енной доктрины, и исходя из этого формулируется техническое задание (ТЗ)
на проектирование новых элементов системы оружия, в том числе и СП.
Системный подход к развитию вооружения проявляется, в частности, в том,
что вновь проектируемые изделия создаются как многоцелевые, способные эф-
фективно взаимодействовать с другими компонентами системы оружия при ре-
шении разнообразных боевых задач. Возможность системного анализа вариан-
тов проекта на уровне исполнения ТЗ ограничивается в рамках сформулирован-
ных целей и требований. Так, если объект проектирования - артиллерийская
система, то при поиске путей повышения эффективности действия могут рас-
сматриваться принципиально разные способы обеспечения основных боевых
свойств (маневренности, живучести, скорострельности, дальнобойности, куч-
ности и т. д.). Если проектируется только артиллерийский выстрел, границы
системной оптимизации сильно сокращаются, но также возможно оптимальное
согласование начальной скорости, аэродинамических характеристик, дополни-
тельных разгонных устройств, прочности при выстреле и т. п.
38
2. Основные характеристики эффективности действия СП и БП
Чем ниже в системной иерархии находится объект проектирования, тем
больше неуправляемых ограничений со стороны внешних подсистем и мень-
ше шансов для его структурной оптимизации - наиболее действенного спосо-
ба повышения эффективности проектируемых изделий. В этом нет большой
беды, если на всех этапах обоснования ТЗ на проектирование подсистем про-
водится оптимальное согласование основных параметров и распределяемых
ресурсов (массы, габаритных размеров) по критериям эффективности действия
и при выполнении ТЗ проект оптимизируется по тем же критериям.
Объектом оптимизации на предпроектной стадии могут служить обоб-
щенные модели функционирования подсистем. Обобщенная модель могуще-
ства действия БЧ определенного типа по данной цели может^быть представле-
на прогнозируемой зависимостью вероятности поражения G(r, Res) от прома-
ха г при оптимальном использовании выделенного ресурса Res. Для получения
этой зависимости можно применять, например, осредненный по лучшим про-
ектам удельный закон поражения при единичном ресурсе G[(r): G(r. Res) =
= G}(r)Res. Обобщенная модель ошибки наведения в виде плотности распре-
деления промаха f(r, Res) также параметрически зависит от выделенного ре-
сурса. Тогда, принимая в качестве критерия эффективности действия полную
вероятность поражения цели -
W(Res, Re si) = J G(r,Res) f (r,Resl)dr,
G>0
в результате оптимизации получаем обоснованное распределение ресурсов
(Res*, Resl*). На этапе проектирования необходимо обеспечить конструктив-
ную и технологическую реализуемость проекта в ограничениях, зависящих
от предоставленного ресурса Res* и от характеристик системы наведения, за-
данных с учетом /?е$Г. При этом альтернативами становятся варианты конст-
руктивной схемы и ее параметрические реализации, представленные значени-
ями вектора проектных параметров X. Главным критерием отбора альтерна-
тив остается эффективность действия
W(X,Res*) = j G(r,X,Res*)f(r)dr,
G>0
где закон поражения уже связан с параметрами конструкции. Адекватное
моделирование всех характеристик функционирования F,(20 на этапе про-
ектирования позволяет провести оптимизацию проектных параметров по
критерию эффективности действия с учетом всех ограничений, выделяю-
щих в пространстве проектных параметров допустимую область D(Res*) =
= {X: F: (X, Res*) > F^, V i}: max W(x), где индекс «тр» означает «требуемый».
D(Res")
Результат оптимального проектирования неявно зависит от распределе-
ния ресурсов X*(Res*, Resl*), как и результаты параллельно осуществляемого
проектирования других подсистем. Оценка эффективности системы по этим
результатам на уровне ее генерального конструктора может привести к пере-
распределению ресурсов с соответствующим уточнением ТЗ для повторного
цикла проектирования и т. д. При надлежащей организации отношений меж-
2.2. Классификация целей и СП, структура показателей эффективности 39
ду проектными подразделениями разных уровней итерационная процедура про-
ектирования сложных иерархических систем, состоящая из циклов обосно-
ванной декомпозиции и последующего синтеза по согласованным моделям фун-
кционирования, сходится намного быстрее и надежнее, чем традиционные про-
цедуры согласования, которые базируются на интуитивных волевых решениях.
Схема получения прогнозируемых fK(Res, Resl) и вычисляемых Res*)
критериев эффективности действия показывает, что надлежащая организация
кооперативного проектирования должна предусматривать:
- разработку обобщенных математических моделей подсистем и баз зна-
ний специалистами соответствующих уровней;
- интеграцию частных описаний в комплексную математическую модель
системы и базу знаний на уровне генерального конструктора;
- оптимальное распределение ресурсов проектируемой системы между
соисполнителями на основе комплексной модели и формирование обоснован-
ных частных ТЗ;
- оптимальное проектирование подсистем на основе рабочих математи-
ческих моделей;
- интеграцию комплексной модели функционирования системы на осно-
ве проектов подсистем и оптимизацию требований к ним.
Эти вопросы естественным образом решаются в рамках компьютериза-
ции проектирования, развития корпоративных сетей, разработки системной
методологии проектирования. Ориентация на объективно обоснованные ре-
шения на всех заинтересованных уровнях - это хорошая альтернатива состя-
зательным технологиям распределения ресурсов проектируемых систем, для
которых характерно сознательное занижение оценок потенциальных возмож-
ностей в целях гарантированной реализуемости заданий. Центральное место
в решении системных вопросов при проектировании объектов, предназначен-
ных для поражения целей, занимают модели СП, так как они определяют ос-
новной критерий оптимальности таких объектов - эффективности действия.
2.2. Классификация целей и средств поражения,
структура показателей эффективности действия
Типы целей и показатели эффективности действия
Элементарной целью (ЭЦ) называется отдельный объект, выполняющий
определенные функции и неделимый на составные части, каждая из которых
могла бы действовать самостоятельно. Существенно различаются методики
оценки эффективности наземных (танк, самоходная артиллерийская установ-
ка (САУ), радиолокационная станция (РЛС), отдельное сооружение и т. п.),
надводных, подводных и воздушных (самолет, вертолет, ПКР) целей. Для рас-
четов эффективности проектируемых изделий из всего многообразия целей
выделяют типовые ЭЦ, данные о которых вместе с необходимыми моделями
поражающего действия составляют единую информационную и методичес-
кую базу, позволяющую не только осуществлять расчеты, но и проводить срав-
нительный анализ альтернативных вариантов проекта по критерию эффектив-
ности действия.
40
2. Основные характеристики эффективности действия СП и БП
Прямыми расчетами определяются показатели физического ущерба, кото-
рый может быть нанесен ЭЦ попавшим в нее СП или ПЭ (например, глубина
и диаметр пробоины). Объектом таких расчетов становится не реальная типо-
вая ЭЦ, а ее модель уязвимости, в которой структурные элементы цели в ре-
зультате специальных исследований заменяют на так называемую эквивален-
тную преграду. Материал и толщину эквивалентной преграды подбирают так,
что ее пробитие равносильно выводу из строя соответствующего элемента цели.
Структурно простые ЭЦ в методиках оценки эффективности низшего уровня,
используемых обычно для предварительных расчетов на ранних этапах про-
ектирования, заменяются обобщенной моделью, которая характеризует уязви-
мость цели эквивалентной преградой, а для вычисления вероятности попада-
ния задается простая геометрическая форма (цилиндр, параллелепипед) с со-
ответствующими размерами. Неоднородность цели с точки зрения уязвимости
учитывается уязвимой площадью каждой из проекций (граней), меньшей, чем
геометрическая площадь.
Для описания сложных целей разрабатывается агрегатная модель, состо-
ящая из совокупности уязвимых агрегатов (УА), каждый из которых рассмат-
ривается как обобщенная модель. Пространственное расположение УА зада-
ется координатами их центров в целевой системе координат (ЦСК). Агрегат-
ная модель бронированной цели содержит также описание внешнего экрана
(брони) - ее упрошенную (кусочно-линейную) геометрию, характеристики уяз-
вимости (толщина, материал). Этой информации достаточно для решения воп-
роса о возможности поражения каждого отдельно взятого УА. Но нанесение
физического ущерба, даже приведшее к выводу из строя одного или несколь-
ких УА, не обязательно означает нарушение боевого функционирования цели,
т. е. частичную или полную потерю ею одного или совокупности боевых
свойств (способность вести прицельную стрельбу, подвижность, наличие де-
сантируемого состава и т. п.). Информация о возможных сочетаниях повреж-
денных УА, необходимых для поражения цели по заданному типу, находится
в функциональной схеме уязвимости (ФСУ). Понятие поражения и ФСУ по
тому или иному типу можно записать формулами поражения следующего вида:
А = А] + А^ + А3А4 + ...,
В = А + В^ + В2 В3 Вд + ...,
С = В + (7] С2 + ...,
где Л„ Bt, Cj - случайные события поражения i-ro УА в структуре агрегатной
модели, вывод которого из строя безусловно или в определенных сочетаниях
приводит к поражению по типу А, В или С. Тип поражения чаще всего опре-
деляется минимально необходимым временем нарушения боевого функцио-
нирования:
• тип А - немедленное уничтожение или вывод из строя на время не ме-
нее tA,
• тип В - уничтожение за время t после действия поражающего фактора
или вывод из строя на время не менее tB;
• тип С - повреждение, вызывающее отказ от выполнения боевой задачи
или вывод из строя на время не менее tc;
2.2. Классификация целей и СП, структура показателей эффективности 41
• тип D (для воздушных целей) - невозможность совершить безаварий-
ную посадку.
Необходимое время нарушения боевого функционирования для каждого
типа поражения назначается исходя из уровня типовой боевой задачи и места
СП в системе вооружения, важности и особенности цели.
Единственная объективнпя оценка возможности поражения ЭЦ - вероят-
ность этого события. Вероятность поражения по заданному типу принимают
в качестве показателя эффективности действия по цели, состоящей из одной
ЭЦ - одиночной цели. Как правило, вероятность поражения ЭЦ является про-
межуточным результатом в методиках оценки эффективности действия по со-
вокупности ЭЦ, представляемых моделями групповой или площадной цели.
Групповая цель (ГЦ) - это совокупность ЭЦ, выполняющих единую (кол-
лективную) задачу, причем расположение каждой из них вполне известно, так
что можно установить факт поражения каждой ЭЦ в соответствии с приня-
тым понятием поражения.
Однородная ГЦ состоит из N одинаковых ЭЦ (группа однотипных само-
летов, колонна танков). Ущерб, наносимый однородной ГЦ, измеряется чис-
лом U пораженных ЭЦ или относительным числом Umw = U/N пораженных
ЭЦ. Но U и Umil являются случайными величинами и не могут служить пока-
зателем эффективности действия по ГЦ. В качестве таковых может выступать
математическое ожидание М[О] или М= M\U/N~\. Так как в ГЦ можно
определить вероятность поражения каждой ЭЦ i = 1, 2,..., N, то математи-
ческое ожидание числа пораженных ЭЦ цолучим как сумму вероятностей ПО-
TV
ражения ЭЦ: М[С] = Критерием эффективности действия по ГЦ может
1=1
служить выполнение условия Р{U> (7гр) или P{Umn> и1?), где 6/три и7р уро-
вень нанесенного ей ущерба, выраженного абсолютным или относительным
количеством пораженных ЭЦ, при котором она не может выполнить коллек-
тивную функцию. Сложная {разнородная) ГЦ - это совокупность различных
объектов (танк в сопровождении пехоты, аэродром, завод). Основная труд-
ность оценки эффективности поражения разнородных ГЦ заключается в фор-
мировании критерия поражения, отражающего невозможность выполнения ею
коллективной задачи.
Рассредоточенной считается ГЦ, элементы которой настолько далеко рас-
положены друг от друга, что средства поражения, направленные на одну ЭЦ,
не могут поразить другую. Сосредоточенная {компактная) ГЦ - при стрельбе
по одной цели возможно поражение и других ЭЦ, т. е. в полный эллипс рассе-
ивания попадает более одной цели.
Группа объектов, расположенных на некоторой территории так, что их
расположение неизвестно, называется площадной целью (ПЦ). Даже если груп-
па ЭЦ имеет вполне определенное взаимное расположение, но оперирующая
сторона не обладает полной информацией об этом, цель должна рассматри-
ваться как площадная. Например, аэродром считают неоднородной площад-
ной целью, если при обстреле оперирующая сторона не владеет информацией
о координатах отдельных сооружений и, тем более, о расположении самоле-
тов в момент обстрела. Даже одиночную цель следует рассматривать как пло-
щадную, если известна лишь область ее расположения. Характерным для ПЦ
42
2. Основные характеристики эффективности действия СП и БП
является то, что стрельба ведется не по отдельным ЭЦ в пределах данной
площади, а по всей ПЦ как единому целому.
Модель ПЦ, как и обобщенная модель ЭЦ, содержит характеристики гео-
метрии и уязвимости. Геометрия ПЦ задается в форме прямоугольника или
круга с соответствующими размерами. Если площадная цель представляет со-
бой совокупность (скопление) ЭЦ, то ее уязвимость исчерпывающим образом
обусловлена соответствующими характеристиками ЭЦ. В этом случае модель
площадной цели дополняется сведениями о количестве ЭЦ и их распределе-
нии в указанной площади. В условиях неопределенности распределение при-
нимается равномерным, а его единственной характеристикой является плот-
ность - среднее число ЭЦ на единичной площади цели. Более общую модель
уязвимости ПЦ представляют критическим уровнем поражающих факторов
(например, критическим избыточным давлением на фронте УВ), достаточным
для возникновения необходимых разрушений.
Ущерб, наносимый ПЦ, измеряется площадью зоны поражения 5пор, на
которой есть разрушения. Площадь зоны возможных поражений Sn в окрест-
ности точки срабатывания БП определяется могуществом действия БП и уяз-
вимостью цели не случайным образом, но из-за рассеивания точки срабатыва-
ния она может лишь частично пересекаться с целью, поэтому 5пор - случайная
величина с возможными значениями в интервале [О, 5П]. Удобнее оценивать
ущерб относительной величиной, не зависящей от площади цели S[( - долей
пораженной площади U = Snop/Sn, возможные значения которой ограничены
максимальной долей пораженной площади ит = Sn/Su. Показателем эффектив-
ности действия по ПЦ является средняя доля пораженной площади Л/[Ц], а
критерием поражения ПЦ может служить вероятность события (U> икр) при
заданном уровне критической доли пораженной площади, с превышением ко-
торой цель перестает функционировать.
Выбор модели цели зависит не только от свойств самой цели, но и от
принципа действия СП, условий стрельбы, располагаемой информации о ко-
ординатах цели. Например, подводную лодку, о положении которой известен
лишь район акватории, следует рассматривать (и обстреливать) как площад-
ную цель. Средняя доля пораженной площади в этом случае равна вероятнос-
ти поражения цели*. Но как только координаты лодки будут определены точ-
но, бомбометание ведется уже как по одиночной цели.
Типы БП и характеристики их поражающего действия
При оценке эффективности действия БП учитываются все виды пора-
жающего действия: механическое (пробивное, режущее), фугасное, иниции-
рующее, зажигательное. В зависимости от характера поражающего действия
При равномерном распределении координат цели относительная площадь зоны поражения
(если лодка находится в ней, она поражена) - это условная вероятность поражения Р(А/и) = и.
Полная вероятность поражения по интегральной формуле полной вероятности с разрывной функ-
цией распределения
ит ит
Р(А)= J P(A/u)dF(u) + umP(U = ит) = J udF(u) + umP{U =ит)
О О
совпадает с математическим ожиданием доли пораженной площади.
2.2. Классификация целей и СП, структура показателей эффективности 43
по цели различаются БП осколочного, фугасного, кумулятивного, бронебой-
ного, бетонобойного и зажигательного действия. Большинство БП основного
назначения обладают комбинированным поражающим действием: осколочно-
фугасным, кумулятивно-осколочным, бронебойно-зажигательным, фугасно-за-
жигательным и др. Степень поражающего действия, его достаточность для
вывода цели из строя - это предмет физических исследований, которые про-
водятся в детерминированных условиях, насколько это возможно. При прове-
дении расчетов эффективности действия учитывается влияние случайных фак-
торов, разделяемых обычно по группам. Случайные факторы, которые прояв-
ляются на этапе непосредственного действия БП по цели, определяют
условную вероятность поражения при срабатывании его в фиксированной точке
с координатами (х,у, z) на поверхности цели или в ее окрестности Р(А | х,у, z).
Функция G(x,y, z) = P(A\x,y, z) называется координатным законом пораже-
ния (КЗП). Характеристики случайных факторов, влияющих на положение точ-
ки срабатывания (рассеивание траектории полета, ошибки наведения и управ-
ления, ошибки срабатывания неконтактного взрывателя), определяют плотность
распределения точки срабатывания f(x,y, е). Вероятность поражения цели од-
ним выстрелом вычисляется по интегральной формуле полной вероятности:
W] =JjG(x,y,z) f(x,y,z)dxdydz (2.1)
D
с интегрированием по максимальной области D срабатывания, в которой воз-
можно поражение цели, т. е. D= {x,y,z: G(x,y,z) >0}. Это общая схема вы-
числения основного показателя эффективности действия по ЭЦ. Ее реализа-
ция сильно зависит от характера области возможных поражений D. По этой
причине независимо от характера поражающего действия все БП с точки зре-
ния оценки эффективности подразделяются на ударные и дистанционные.
Ударными называют БП, которые могут поражать цель только при не-
посредственном попадании в нее (например, бронебойные и бетонобойные).
В этом случае область возможных поражений D сужается практически до ви-
димой поверхности цели. Если цель малоразмерная, КЗП на ее поверхности
усредняют (в различных ракурсах обстрела: спереди, сбоку, сверху), заменяя
вероятностью поражения данным БП при одном попадании в цель. В обозна-
чениях
G(x, у, z) =
П, (x,y,z)^Dn,
0, (x,y,z)£Dn;
Р\ = JJ Л*, У, z)dxdydz,
где £) - область, занимаемая целью;/(х, у, z) - плотность распределения то-
чек попадания, формула (2.1) принимает вид Wx =r]pi. Вероятность пораже-
ния одним выстрелом меньше вероятности попадания в цель, а она в случае
малоразмерной цели и неуправляемого БП невелика. Поэтому W। может слу-
жить промежуточным показателем эффективности БП ударного типа, но не
критерием эффективности стрельбы. Для обеспечения приемлемого уровня
вероятности поражения производится несколько выстрелов (очередь, залп).
Если п выстрелов независимы, а также независимы события поражения
44
2. Основные характеристики эффективности действия СП и БП
в каждом попадании, вероятность поражения цели определяется как вероят-
ность хотя бы одного поражающего попадания
W„=l-(l-r1P1)n. (2.2)
При обстреле технически сложных целей, высокая живучесть которых
обеспечивается многократным резервированием УА, события поражения в не-
скольких попаданиях нельзя считать независимыми. В результате очень тру-
доемких экспериментов находят зависимость вероятности поражения цели дан-
ным БП от числа попаданий Р(А\т). Функция G(m) = Р(А\т) называется ус-
ловным законом поражения (УЗП) цели и является основной характеристикой
действия ударных БП по ЭЦ. Если известен УЗП G(m) и можно вычислить
вероятности гипотез рт п (вероятность т попаданий в п выстрелах), то вероят-
ность поражения цели в п выстрелах рассчитывают по формуле полной веро-
ятности, которая применительно к данному случаю называется формулой Кол-
могорова:
И
К = Z (2.3)
/п=1
Таким образом, эффективность действия БП ударного типа определяется
его могуществом действия по отношению к данной цели, точностью стрель-
бы и числом выстрелов в очереди. Из формулы (2.2) следует, что повышение
любого из этих факторов приводит к увеличению вероятности поражения цели
за стрельбу. Например, имеют смысл как частная оптимизация в целях повы-
шения условной вероятности поражения без ухудшения точности стрельбы,
так и мероприятия по повышению вероятности попадания без снижения мо-
гущества действия (увеличение количества выстрелов в очереди).
Комплексная оптимизация по критерию вероятности поражения за стрель-
бу может дать намного больший прирост эффективности, но она затрагивает
все элементы системы оружия. Например, из формулы (2.2) можно получить
необходимое число выстрелов для поражения цели с требуемой вероятностью
igo-Pi)
Но реально количество выстрелов ограничено допустимой длиной очере-
ди, которая определяется условиями живучести ствола орудия, а этот показа-
тель связан со всем комплексом свойств орудия и снаряда, вплоть до конст-
рукции и характеристик материала ведущего пояска. Кроме этого, надо учи-
тывать и тактическое ограничение на продолжительность стрельбы из-за
противодействия противника, которое при данной скорострельности опреде-
ляет возможное число выстрелов.
Дистанционные БП могут поражать цель не только при прямом попадании
в нее, но и при разрыве на некотором расстоянии от цели. Различают два типа
дистанционных БП: непосредственного и осколочного действия.
Боеприпасы непосредственного действия создают в окрестности точки
разрыва сплошное поле распределения поражающего фактора (например, из-
быточного давления на фронте УВ), уровень которого снижается по мере уда-
2.2. Классификация целей и СП, структура показателей эффективности 45
ления от точки разрыва. Область, в которой уровень поражающего фактора
превышает критический для данной цели, называется зоной поражения. Цен-
трально-симметричное поле взрыва имеет сферическую зону поражения ра-
диусом /?п. Если в нее попадает ЭЦ или ее часть, обеспечивается достоверное
поражение. Это значит, что КЗП принимает вид ступенчатой функции, равной
единице в окрестности ЭЦ, содержащей точки, удаленные от ЭЦ не более,
чем на Rn. Область Do = {х,у, z: G(x,y, z) = 1} называется обобщенной целью,
попадание в нее равносильно поражению цели. Вероятность поражения цели
одним выстрелом в этом случае вычисляется как вероятность попадания в
обобщенную цель:
Ж] = ^G(x,y,z)f(x,y,z)dxdydz = f(x,y,z.)dxdydz. (2.4)
О Do
Конечно, распределение поражающего фактора на агрегатах структурно
сложной цели отличается от его распределения в свободной среде на том же
расстоянии от центра взрыва, оно зависит также от дополнительных условий
(ракурса цели, взаимного положения агрегатов), часть которых является нео-
пределенной при оценке эффективности. Поэтому поражение можно считать
достоверным только до тех расстояний от центра взрыва, где уровень поража-
ющего фактора превышает критическое значение с некоторым запасом, а даль-
ше вероятность поражения уменьшается до нуля при некоторой величине по-
ражающего фактора, меньшей критической. Но поскольку причины, опреде-
ляющие действие поражающих факторов, имеют не вероятностный, а
неопределенный характер, КЗП для БП непосредственного действия чаще всего
принимают вид ступенчатой функции.
Таким образом, эффективность БП непосредственного действия оценива-
ется так же, как эффективность БП ударного типа со ступенчатым УЗП при
6(1) = 1. Существенное отличие состоит в том, что могущество действия по
данной цели, измеряемое радиусом поражения Rn (или площадью поражения
Sn в общем случае несимметричных полей), влияет на вероятность попадания
в обобщенную цель. Из-за характерного для фугасного действия быстрого спада
поражающего фактора с увеличением расстояния от центра взрыва повыше-
ние могущества действия за счет выделения дополнительного ресурса (мас-
сы) может оказаться неэффективным. Из формулы (2.4) следует, что вероят-
ность поражения можно увеличить как за счет расширения обобщенной цели,
так и за счет уменьшения промахов, выделяя часть ресурса на систему кор-
рекции траектории. Комплексная оптимизация должна проводиться как опти-
мальное распределение ресурса на обеспечение могущества действия и на ме-
роприятия по повышению вероятности попадания за счет бортовых устройств
(высокоточные БП).
Боеприпасы осколочного типа поражают цель при срабатывании в окрест-
ности цели за счет создания поля ПЭ, попадание которых в уязвимый агрегат
цели может оказывать на него механическое разрушающее (пробитие), зажи-
гательное или инициирующее действия. В силу неоднородности УД и влия-
ния большого числа факторов на процесс пробития поражение носит случай-
ный характер, а его вероятность p(q, v) зависит от массы ПЭ и скорости встречи
46 2. Основные характеристики эффективности действия СП и БП
УА с целью. Методы вычисления вероятности поражения цели осколочным
полем основаны на двух допущениях: распределение ПЭ в поле подчиняет-
ся закону Пуассона; для поражения УА достаточно одного удачного попада-
ния в него. Можно считать, что цель малых размеров по сравнению с харак-
терными размерами поля накрывается однородным полем ПЭ с плотностью,
зависящей от координат точки подрыва в целевой системе координат П(х, у, z).
В любом случае поле считается однородным в пределах каждого УА, т. е.
П,(х, у, z) - постоянная плотность поля на i-м УА. Таким образом, в i-й УА с
площадью проекции на картинную плоскость 5, попадает в среднем
=ПДх, у,г)рД^,г)5; «поражающих» (или эффективных) элементов, а ве-
роятность поражения определяется как вероятность хотя бы одного «поража-
ющего» попадания: G, (х, у, z) = 1 - е~т'. Если для поражения цели, состоящей
из п УА, достаточно вывести из строя хотя бы один из них, КЗП цели вычис-
ляется по формуле
G(-^,y,z) = l-n[1-Gi(x>bz)] = l-exp ~^т* =
= 1-ехр -ХП,(х,у,г)р,(?,о)5,
(2.5)
В поле ПЭ с плотностью П(х, у, z), постоянной на проекции цели с сум-
марной площадью проекций всех УА цели 5Ц = У, S,, среднее число эффектив-
ен
ных попаданий в формуле (2.5) можно представить как произведение характе-
ристик поля (плотности), цели (площади) и действия ПЭ по данной цели (ве-
роятности ее поражения одним попавшим ПЭ):
w* = Ё т* = П(х, у, z)X Pi (?, v)St = П(х, у, z)SuP(q,v),
i=i e=i
где P(q, о) - полная вероятность поражения цели одним попавшим в нее ПЭ,
если считать вероятностью попадания в i-й УА его относительную площадь
Sj/Su, a Pj - условной вероятностью поражения цели при попадании ПЭ в i-й
УА. Величина
Sy (q, v) = StlP(q, г) = X Pi (<?. ®)5,-
(2.6)
является важнейшей характеристикой уязвимости данной цели к действию ПЭ
массой q и скоростью соударения v и называется функцией уязвимости цели.
В ориентировочных расчетах функция уязвимости полностью характеризует
уязвимость цели и дает возможность вычислить КЗП при известных характе-
ристиках поля ПЭ:
G(x,y,z) = l-e^w)^(9’r)
(2-7)
Полную вероятность поражения цели одним выстрелом можно получить
по формуле (2.1) при известном законе распределения точек срабатывания
2.3. Объектное представление исходных данных для расчетов
47
f(x,y,z). Если эффективность оценивается на промежуточных этапах проек-
тирования, когда параметры рассеивания еще неизвестны, пользуются показа-
телем могущества действия - интегралом КЗП по области опасных разрывов
Dop = {х,У : G(x,y) >0}. Чаще всего этот способ оценки могущества действия
применяется в случае рассеивания на плоскости:
5пр= JJ G(x,y)dxdy. (2.8)
G(x,y)>0
Величина 5пр с размерностью площади называется приведенной площа-
дью поражения. По этому показателю справедливо отдается предпочтение тому
варианту конструкции, который имеет доминирующие значение КЗП по срав-
нению со всеми альтернативными вариантами. Однако такая ситуация не ти-
пична, поскольку предполагает заведомо неравноценные варианты. Например,
можно увеличить плотность поля за счет увеличения количества ПЭ при со-
ответствующем уменьшении массы q. При этом среднее число попаданий эф-
фективных ПЭ (а значит, и вероятность поражения цели) может возрасти на
малых промахах, где энергии ПЭ еще достаточно, чтобы полная вероятность
P(q, v) снизилась несущественно. Но легкие ПЭ быстрее теряют скорость, по-
этому на больших промахах плотность эффективных попаданий уже меньше,
чем в первоначальном варианте. Сравнение по показателю 5пр в общем случае
может противоречить результату сравнения по критерию который учиты-
вает закон распределения промахов.
2.3. Объектное представление исходных данных
для расчетов эффективности действия
Преимущества объектного подхода
при оценке эффективности действия
Формулы вида (2.1) или (2.3) проясняют вероятностную природу показа-
телей эффективности действия, связывают их с промежуточными показателя-
ми, но не являются самодостаточными с точки зрения построения вычисли-
тельных процедур. Например, формула (2.5) лишь указывает на зависимость
вероятности поражения г-го УА от массы и скорости ПЭ, но как получить эту
зависимость в явном виде теория эффективности действия объясняет в общих
чертах, основываясь на физических закономерностях, характерных для раз-
личных поражающих факторов (механического, зажигательного, инициирую-
щего действия). На практике вычислению показателей эффективности дей-
ствия предшествуют трудоемкие исследования возможных последствий для
типовой цели от попадания в нее ПЭ в достаточно широком диапазоне скоро-
стей встречи. В результате этих исследований выделяются группы УА с иден-
тичными механизмами поражения, и для каждой группы вырабатываются эм-
пирические формулы, связывающие вероятность поражения с параметрами
ПЭ (масса, коэффициент формы, плотность материала и т. д.), характеристи-
ками уязвимости УА (толщина эквивалентной преграды, толщина экрана) и
условиями встречи (скорость, угол подхода).
48
2. Основные характеристики эффективности действия СП и БП
Таким образом, структура исходных данных об уязвимости цели состав-
ляет систему, на которую должны ориентироваться расчетные методики оцен-
ки эффективности действия. Большое разнообразие типовых целей вынужда-
ет разрабатывать соответствующие структуры исходных данных и алгоритмы,
учитывающие специфику целей. В рамках обычно используемой процедур-
ной технологии программирования невозможно обеспечить независимость вы-
числительных алгоритмов от структуры исходных данных, поэтому програм-
мы расчета эффективности не универсальны. Это приемлемо для прямых рас-
четов эффективности действия данного изделия по типовой цели, при наличии
развитого программного обеспечения проблема сводится просто к выбору под-
ходящей программы. Но при поиске оптимальных инженерных решений в ши-
роком смысле нужен универсальный аппарат количественной оценки эффек-
тивности, который приходится строить на основе общих зависимостей, пусть
даже с некоторыми упрощениями. К сожалению, в процедурном подходе к
построению расчетных моделей соображения замкнутости модели вынужден-
но превалируют над требованиями к ее адекватности, из-за чего полученный
результат часто становится заведомо непригодным для принятия решений. Ти-
пичный пример - некорректное использование функции уязвимости. Она оп-
ределена как промежуточный результат вычислений по формуле (2.6) вероят-
ности поражения цели по известным вероятностям поражения каждого УА., и
никаких других оснований для количественной оценки уязвимой площади не
существует. Тем не менее простота вычисления КЗП с использованием функ-
ции уязвимости по формуле (2.7) порождает соблазн искать аппроксимацию
этой функции уже вне связи с конкретной целью, что можно объяснить лишь
крайней необходимостью в безвыходной ситуации. Действительно, на уровне
экспресс-методик оценки эффективности осколочного действия трудно найти
альтернативный способ обобщенного моделирования уязвимости цели, если
искать его в традиционных рамках замкнутой системы уравнений. Именно в
этом «если» заключается и главный недостаток всех аналитических методик
оценки эффективности действия, и ключ к решению проблемы.
Не только простейшие аналитические модели, но и более гибкие алгорит-
мические модели эффективности действия находятся в принципиальном про-
тиворечии с системным характером боевых операций. Эффективность - это
функция системы. Вывод из строя сложной цели есть нарушение ее боевого
функционирования как системы. Возможность нанесения цели критических
для нее повреждений является результатом взаимодействия с целью системы
наведения, ВУ, БЧ, среды, причем каждое перечисленное техническое устрой-
ство в свою очередь следует рассматривать как систему. Системный характер
взаимодействий не позволяет повысить эффективность действия, совершен-
ствуя в отдельности БЧ, или ВУ, или систему наведения. Скорее всего, любой
отход от согласованного решения способен лишь ухудшить эффективность дей-
ствия. Из этого следует, что модель, положенная в основу расчетной методики
оценки эффективности, должна быть адекватна не только локальным свой-
ствам определяющих ее подсистем, но и взаимодействиям между ними. Необ-
ходимыми качествами обладает объектный подход, позволяющий моделиро-
вать классы объектов реального мира, их свойства, поведение, отношения на-
следования и вложенности. Технология объектно-ориентированного
2.3. Объектное представление исходных данных для расчетов
49
программирования позволяет отказаться от неприемлемых упрощений при раз-
работке сложных систем. Напротив, она предполагает тщательное изучение
соответствующей предметной области, выделение объектов, ситуаций, про-
цессов со сходными базовыми свойствами и объединение их в классы по су-
щественным признакам, разработку методов, реализующих адекватное пове-
дение объектов каждого класса, и механизмов взаимодействия объектов раз-
личных классов. Разумное выполнение этой работы (проектирование классов)
открывает уникальную возможность: разнообразные задачи в рамках компе-
тенции классов можно решать, задавая нужные свойства объектов в качестве
исходных данных и вызывая соответствующий метод; все промежуточные вы-
числения выполняются механизмом взаимодействия объектов.
Таким образом, переход к объектному моделированию кардинальным об-
разом меняет отношение между теорией и ее применением. Если алгоритми-
ческое моделирование выполняется на основании теории по формулировке
задачи, то объектная модель непосредственно может служить инструментом
решения задач. Это значит, что иерархия классов становится частью теории
так же, как таблицы функции Лапласа, распределения Пуассона и т. п. явля-
ются непременным приложением во всех учебных пособиях по теории бое-
вой эффективности. Впрочем, таблицы играют лишь вспомогательную роль в
вычислениях, потому они и помещаются в приложениях, а хорошо спроекти-
рованный класс - это работающая теория. Например, объекты класса нор-
мально распределенных случайных векторов, представляющие компоненты
ошибок стрельбы, взаимодействуя между собой, находят суммарное распре-
деление, а совместно с объектами, представляющими геометрию области, за-
нимаемой целью, вычисляют вероятность попадания наиболее рациональным
способом. И если формулы вида (2.1) лишь в символической форме отобра-
жают способ получения показателя эффективности действия, то объектная мо-
дель содержит в себе и соответствующие разделы теории вероятностей, и не-
обходимый математический аппарат. Приведение теории к работоспособному
виду - это одна из причин, по которой разделы объектного моделирования
включены в настоящую главу как продолжение традиционных содержатель-
ных разделов. Другие не менее важные мотивы станут очевидными в ходе
анализа решений с использованием объектных моделей.
Среда для программирования классов выбиралась из соображений макси-
мальной компактности и математической выразительности текстов программ,
чтобы второстепенные детали программирования не скрывали сущности дела.
Этому требованию полностью отвечает интерпретирующая система MATLAB
с матричным решателем, средствами реализации объектно-ориентированной
технологии и хорошо развитым математическим ядром. Открытость кода по-
зволяет читателю самостоятельно разобраться в деталях реализации и дей-
ствия классов. Необходимые сведения по языку и операционной среде
MATLAB можно найти в учебно-справочной литературе.
Первый шаг в объектном моделировании предметной области - выделе-
ние классов объектов, их свойств и поведения. Построение иерархической
структуры классов, представляющих уязвимость целей, основывается на клас-
сификации целей, но не выводится из нее. Решающее значение имеют сообра-
жения технологичности использования классов.
50 2. Основные характеристики эффективности действия СП и БП
Объектное моделирование уязвимости цели
Объектная модель уязвимости цели - это не альтернатива агрегатной мо-
дели цели, а наиболее подходящий способ ее реализации, избавляющий от
необходимости прибегать к замене агрегатной модели цели обобщенной для
упрощения расчетов. Иерархия классов (рис. 2.1) полностью соответствует
классификации целей. Уязвимость ЭЦ представляет собой класс «ЭЦ», в ко-
тором содержатся сведения о наборе УА, защитном экране и ФСУ. Производ-
ные классы «Наземная», «Воздушная» наследуют класс «ЭЦ», добавляя свой-
ства конкретных типов целей (например, скорость, высота полета для воздуш-
ных целей), а также соответствующие им методы вычисления КЗП. Вообще
говоря, для объектного подхода характерно, что особенности подлежащих ре-
шению задач учитываются производными классами пользовательского уров-
ня, выведенными простым или множественным наследованием из подготов-
ленных для этого базовых классов. Методы базовых классов выполняют прак-
тически всю вычислительную работу, а методы пользовательских классов
принимают условия задачи, устанавливают связь с объектами других классов
(СП, среда), формируют запросы к родительским классам, передавая им необ-
ходимые данные. Верхний уровень иерархии классов («Наземная», «Воздуш-
ная») показан как пример пользовательских классов. Основное внимание долж-
но уделяться тщательной проработке базовых классов.
Рис. 2.1. Иерархия классов для моделирования уязвимости целей:
• - данные класса; ° - рассчетные методы класса
2.3. Объектное представление исходных данных для расчетов
51
Все свойства «ЭЦ» (набор УА, ФСУ, экран) задаются объектами соответ-
ствующих классов. Набор УА - это массив объектов класса «УА». Для моде-
лирования защитных свойств внешней брони, задания ее геометрии также надо
разработать класс «Экран». Но в случае легкоуязвимых целей, когда пробитие
экрана - лишь вопрос снижения запаса пробития для находящихся за ним УА,
достаточно задать толщину экрана по направлениям, и тогда его можно пред-
ставить объектом класса «УА». ФСУ представляет собой набор выражений,
связывающих события поражения цели по типам А, В, С и т. д. с событиями
поражения УА, и, на первый взгляд, не нуждается в объектном представле-
нии. Но применение теорем сложения и умножения вероятностей сложных
событий при большом числе УА приводит к громоздким, а главное, не уни-
версальным алгоритмам вычислений. Целесообразно разработать класс «ФСУ»,
переопределить в нем операции сложения и умножения по теоремам теории
вероятностей с тем, чтобы объекты этого класса сами проводили вычисления
непосредственно по формулам поражения.
В классе «УА» содержатся сведения о форме и размерах УА и его уязви-
мости к различным поражающим факторам. Оба свойства представлены объек-
тами (экземплярами) соответствующих классов «Форма» и «Уязвимость».
В агрегатной модели цели геометрия УА задается одной из простых форм
(параллелепипед, цилиндр, шар) с соответствующими размерами. С точки зре
ния взаимодействия объектов особенности формы не имеют значения, поэто-
му объект «Форма» входит в класс «УА» как то, что имеет конкретную форму,
соответствующие размеры (массив соответствующей длины) и положение в
пространстве. Положение центросимметричной формы задается координата-
ми центра, но было бы неправильно просто включить их в класс «Форма»,
потому что тогда пришлось бы заниматься пересчетом координат при вычис-
лении КЗП, определять накрытие УА той или иной зоной разлета ПЭ и т. д.
В духе объектного подхода необходимо все методы, обслуживающие положе-
ние и перемещение точек, реализовать в классе «Точка» и сделать его базо-
вым для класса «Форма». Тогда потомки класса «Форма» (геометрические
объекты) смогут сами решать все вопросы, связанные с положением, опреде-
лением расстояний, принадлежностью к заданной области и т. д. Ближайши-
ми наследниками класса «Форма» должны быть классы, в которых моделиру-
ются индивидуальные свойства геометрических тел определенной формы, -
«Параллелепипед», «Цилиндр», «Шар». Они наследуют от своих предков и
координаты центра, и размеры. В этих классах нужно реализовать лишь мето-
ды вычисления площадей проекций.
Класс «Уязвимость» должен содержать характеристики уязвимости дан-
ного УА ко всем видам поражающего действия и уметь вычислять вероят-
ность поражения попавшим ПЭ с известными массой и скоростью, устанав-
ливать факт поражения ударной волной на данном расстоянии от центра взрыва
или вычислять радиус поражения. Неразумно требовать от одного класса вы-
полнения всех функций даже в рамках фиксированного разнообразия, поэто-
му создадим классы, специализирующиеся только на одном виде действия
(«Пробивное», «Зажигательное», «Инициирующее», «Фугасное»). В классе
«Уязвимость» при наличии полученных в классе-владельце «УА» характери-
стик уязвимости создается массив из объектов тех классов, к компетенции
52
2. Основные характеристики эффективности действия СП и БП
которых эти характеристики относятся. Например, если среди характеристик
уязвимости есть критическое избыточное давление, то формируется объект
класса «Фугасное», который получает данную величину в качестве своего свой-
ства. В дальнейшем этот объект не существует сам по себе, он является час-
тью объекта «Уязвимость», который, в свою очередь, принадлежит конкрет-
ному объекту класса «УА». Поэтому, когда объект «УА» получает сообщение
о воздействии тех или иных поражающих факторов, он передает его своему
подчиненному объекту «Уязвимость», где оно обрабатывается одним из спе-
циализированных объектов. В объекте, к компетенции которого относится дан-
ный вид поражающих факторов, вычисляется вероятность поражения от это-
го фактора и возвращается результат классу-владельцу, где собираются ре-
зультаты откликнувшихся на запрос подчиненных объектов и происходит их
сложение по правилу суммы вероятностей совместных событий.
Проследим взаимодействие объектов в процессе получения промежуточ-
ных результатов при вычислении КЗП по формуле (2.7). Информация о месте
взрыва и параметрах поля ПЭ передается объекту класса «ЭЦ» с верхнего
уровня, имеющего доступ к интерфейсам объекта «СП» (класс, моделирую-
щий СП, рассматривается ниже). Плотность поля ПЭ и скорость встречи ПЭ с
целью пересчитываются на положение каждого УА и передаются объектам
класса «УА» для вычисления вероятности поражения. Каждый объект класса
«УА» передает массу и скорость попавшего ПЭ своему объекту «Уязвимость»
и получает от него вероятность поражения, а от объекта класса «Форма» -
площадь проекции на картинную плоскость. При перемножении этих вели-
чин каждым «УА» и последующем суммировании классом-владельцем «ЭЦ»
можно вычислить уязвимую площадь УА согласно формуле (2.6). Процедура
настолько проста, что нет смысла придерживаться тех допущений, в рамках
которых получена формула (2.6). В объекте «УА» достаточно информации для
вычисления математического ожидания числа эффективных попаданий ПЭ раз-
личных фракций, прилетевших из различных статических зон поля разлета.
Для этого надо уязвимую площадь УА по отношению к каждой фракции ум-
ножить на плотность ПЭ данной фракции на данном УА. Согласно принципу
суперпозиции пуассоновских полей, математическое ожидание общего числа
эффективных попаданий ПЭ получается как сумма среднего числа попаданий
от разных фракций. После этого вероятность поражения данного УА вычисля-
ется как вероятность хотя бы одного эффективного попадания в него. Пропус-
кая массив вероятностей поражения всех УА через объект «ФСУ», объект «ЭЦ»
получает вероятность поражения цели в данных условиях, а это и есть значе-
ние КЗП в данной точке.
Итак, самый ответственный первый шаг в проектировании иерархии клас-
сов сделан. Теперь необходимо осуществить решающий второй шаг - про-
граммирование классов. После выполнения таких же действий в других час-
тях предметной области уже можно будет сделать и самый интересный тре-
тий шаг - установить взаимодействие между объектами верхних уровней,
представляющих разные иерархии (снаряд, среда и т. д.), получить количе-
ственные оценки. Возможно, для этого придется разработать дополнительные
методы в уже существующих классах. В системе MATLAB каждый класс объек-
тов располагается в отдельной папке, имя которой совпадает с именем класса
2.3. Объектное представление исходных данных для расчетов
53
с обязательным префиксом «@». В папку класса помещаются все методы дан-
ного класса, среди которых обязательно должен быть конструктор - метод,
создающий объекты этого класса. Имя конструктора должно совпадать с име-
нем класса.
Класс точек Point. Конструктор Point прост, как и сама точка:
function X=Point(c)
X=struct('Class','Point','C',[]);
X=class(X,'Point');
if nargin>0 X=setval(X,c); end
Он создает структуру, в которой предусмотрены поля для имени класса и
массива координат точки, затем - класс с этой структурой и, если конструктор
вызван с параметром, принимает его в качестве своего значения. Можно про-
сто присвоить Х.С=с, но метод Point/setval делает это лучше, так как га-
рантирует, что независимо от структуры входного вектора с в объекте он бу-
дет храниться в виде вектор-столбца:
function X=setval(X,с)
X.С=с (:);
Это очень важно, потому что базовая точка для некоторых объектов мо-
жет занимать одновременно несколько положений (например, моделируя рас-
сеивание точки в пространстве или устанавливая объект во все точки расчет-
ной сетки при численном интегрировании). При этом возможные положения
точки отражаются в различных строках с. Таким образом, единственный па-
раметр объекта Point может быть не только [1х«]-вектором для задания ко-
ординат одной точки в «-мерном пространстве, но и [тпх«]-матрицей для опи-
сания множества т «-мерных точек, которые относятся к единственному объек-
ту, наследующему Point. Конечно, можно объединить в массив несколько
объектов, наследующих Point (например, элементы ГЦ). Метод Point/
display выводит на экран координаты простой точки с одним комплектом
координат, а в остальных случаях - только размерность множественного объек-
та и матрицы координат:
function display(X)
if length(X)>l I size (X.C,2)>1
linel = sprintf('%s object: class (X) ) ;
line2 = sprintf('%d x %d %s', size (X) ) ;
,line3 = sprintf (' coord.: %d x %d', size (X (1) . C) ) ;
disp ([linel line2 line3]);
else
disp (['центр: ['%sprintf(' %0.1f ' ,X.C) ']'])
end
Класс Point будет использоваться в качестве базового для всех объектов,
имеющих свойства пространственного положения. У производных классов
в MATLAB нет непосредственного доступа к данным своих предков, а толь-
ко к их методам, поэтому кроме метода Point/setval присваивания дан-
ных объекту необходимо предусмотреть метод получения данных от него.
Метод Point/MyCenter позволяет получить выборочно координаты всех то-
чек, объединенных в объекте:
54 2. Основные характеристики эффективности действия СП и БП
function out=MyCenter(X,i,j)
for k=l:length(X)
switch nargin
case 1, out(к,:)=X(к).C;
case 2, out(k,:)=X(k),C(i);
case 3, out (к, :) =X (к) . C (i, j) ;
end
end
Очень важную роль в классе Point играет метод Point/move, который
перемещает точку, а значит, и связанный с ней объект в новое положение:
function Y=move(X,dl,d2)
Y=X;
if nargin==3
Ll=length(dl);L2=length(d2);
if ~(L1==L2)
if Ll==l
dl=ones(L2,1)*dl;
elseif L2==l
d2=ones(LI,1)*d2;
end
end
if length(dl)==length(d2)
for k=l:length(X)
Y=X(k) ;
for i=l:length(dl)
Y.C=X(k),C+[dl(i) d2 (i) ] ;
tmp(k,i)=Y;
end
end
Y=tmp;
else
error('??? - matrix dimensions must agree')
end
elseif nargin=2
Y=setval(X,Y.C+dl);
end
Классы форм. Базовым для всех форм является класс Shape, который, в
свою очередь, наследует класс Point в качестве центра, добавляя к наследуе-
мым методам обслуживание размеров в массиве Sz, хотя и не представляет,
размерами чего они являются:
function X=Shape(varargin)
X=struct('Class', 'Shape',' Sz', []);
X=class(X,'Shape',point);
X=setval(setval(X,zeros(2,1)),varargin{:});
Имея два элемента данных - наследованную точку и размеры, класс Shape
позволяет вводить их методом Shape/setval в произвольной последователь-
ности. Размеры вводятся вектор-строкой, точка (центр) - столбцом:
2.3. Объектное представление исходных данных для расчетов 55
function X=setval(X,varargin)
for i=l:nargin-l
x=varargin{i};
if size(x,l)==l X.Sz=x;
else X.point=setval(X.point,x); end
end
Конечно, класс Shape обязательно будет наследован каким-либо классом
конкретной формы, поэтому метод Shape/display показывает имя не своего
класса, а производного (прямоугольника, круга и т. п.). Координаты центра вы-
водятся методом базового класса, после чего остается лишь показать размеры:
function display(X)
for i=l:length(X)
disp([getfield(struct(X) ,'Class') ' ' inputname(1)] );
display(X(i).point)
disp ( [' размеры:' sprintf ('%6. If', X (i) . Sz') ] );
end
Своим потомкам класс shape предоставляет размеры массивом и выбо-
рочно с помощью метода получения данных Shape/MySize:
function out=MySize(X,i)
if nargin<2 out=X.Sz; else out=X.Sz(i); end
От Shape можно получить класс любой конкретной формы. Имеет смысл
выделить класс трехмерных форм, базовых для параллелепипедов, цилинд-
ров, шаров, т. е. всех возможных форм УА. Класс Shape 3 выступает именно в
этой роли, придавая созданному его конструктором объекту форму параллеле-
пипеда, цилиндра или шара в зависимости от количества заданных размеров:
function X=Shape3(varargin)
X=struct('Class','Shape31) ;
X=setval(class(X,'Shape3',Shape),zeros(3,1));
if -isempty(varargin)
X=Create(X,varargin{:});
end
Если размеры определены (массив varargin не пуст), метод Shape2/
Create создает подходящую форму и передает ей параметры:
function X=Create(X,varargin)
X=setval(X,varargin{:});
if -isempty(MySize(X))
x=CreateG(length(MySize(X)));
X=setval(x,MySize(X),MyCenter(X));
end
О/
/О
function out=CreateG(k)
switch(k)
case 1, out=BallShape;
case 2, out=CylShape;
case 3, out=ParaShape;
end
56 2. Основные характеристики эффективности действия СП и БП
Ниже показаны конструкторы классов параллелепипедов ParaShape, ци-
линдров Cyl Shape и шаров Ball Shape:
function X=ParaShape(varargin)
X=class(struct('Class','Параллелепипед'),'ParaShape',Shape3);
X=setval(X,varargin{:});
function X=CylShape(varargin)
X=class(struct('Class','Цилиндр'),'CylShape',Shape3);
X=setval(X,varargin{:});
function X=BallShape(varargin)
X=class(struct('Class','Шар'),'BallShape',Shape3);
X=setval(X,varargin{:});
Точно так же можно определить и другие классы трехмерных форм (призм,
конусов и т. д.). В папках @ParaShape, @CylShape и @BallShape кроме конст-
рукторов находятся также расчетные методы с одинаковыми именами, но раз-
ным содержанием, которые вызываются для объектов соответствующих ти-
пов. Так, в классе параллелепипедов площади граней вычисляются методом
ParaShape/Face
function out=Face(X)
S=MySize(X);
out=[S(2)*S(3) S(3)*S(1) S(2)*S(1)];
а площади торцов цилиндра и проекции его боковой поверхности на мериди-
ональную плоскость вычисляются одноименным методом из папки @CylShape:
function out=Face(X)
S=MySize(X);
out=[pi*S(1)Л2*Б(2)*0.25 S(2)*S (1)];
Конструктор Shape3 создает нужные объекты по структуре их размеров,
что демонстрирует следующий пример с вычислением площадей параллеле-
пипеда и цилиндра:
» Objl=Shape3([6;7],[2 3 5]),Obj2=Shape3([6;7],[2 3])
Параллелепипед Objl
центр: [6.07.0]
размеры: 2.0 3.0 5.0
Цилиндр Obj2
центр: [6.07.0]
размеры: 2.0 3.0
» sl=gSq(Objl),s2=gSq(Obj2)
si =1510 6
s2 =9.42486.0000
Классы характеристик уязвимости. Так же, как и для форм УА, набор
типов которых можно наращивать наследованием от Shape3, уязвимость УА
удобно представлять иерархией классов с единым вмещающим классом Vulner,
конструктор которого предоставляет пустой массив ячеек для размещения ин-
формации о всех поражающих факторах, опасных для данного УА:
function X=Vulner(varargin)
X=struct('Class','Vulner');
X.Factors={};
2.3. Объектное представление исходных данных для расчетов
57
X=class(X,'Vulner') ;
X=setval(X,varargin{:}) ;
Последний оператор конструктора передает входные параметры методу
Create, который создает в ячейках Factors объекты, представляющие уязви-
мость УА к определенным поражающим факторам. В данном примере реализо-
ваны объект Vulner h, характеризующий стальным эквивалентом уязвимость
к пробивному действию, и Vulner p, который содержит параметры Р*, 7*, К
обобщенного критерия поражающего действия УВ. В локальной функции Create
объекты первого класса идентифицируется строкой ' h', второго - ' PIK':
function out=setval(X,varargin)
i=l; while(i<nargin)
x=varargin{i};
if ischar(x)
Obj=Create(x,varargin{i+1}) ;
if -isempty(Obj)
X.Factors{WhatExist(X,Obj)}=Obj;
i=i+l;
end
end
i=i+l;
end
out=X;
%
function Out=Create(x,V)
Out=Vulner;
switch(x)
case 'h',Out=Vulner_h(V);
case 'PIK',Out=Vulner_p(V);
end
Метод WhatExist обеспечивает размещение созданного объекта в той
ячейке, где находится объект того же класса (заменяет его), или указывает на
свободную ячейку для вновь принимаемого объекта:
function out=WhatExist_(X,0)
out=length(X.Factors) +1;
for i=l:out-l
if isa( X.Factors{i},getfield(struct(0),'Class'));
out=i;break
end
end
Класс Vulner выполняет функции контейнера для рабочих классов, ха-
рактеризующих уязвимость УА. Например, их содержимое он показывает на
экране, даже не зная, что собой представляют выводимые объекты: он просто
предлагает каждому хранимому им объекту выполнить свой метод makestr:
function display(X)
s=[];
for i=l:length(X.Factors)
58 2. Основные характеристики эффективности действия СП и БП
s=strcat(s,makestr(X.Factors{i})) ;
end
disp(s)
Реализация метода makestr в каждом классе не составляет проблемы:
% класс Vulner_h
function out=makestr(X)
out= [' проб.: { экв. толщина: '
sprintf ('%0.5g' ,X.h_eq) ' }'];
% класс Vulner_p
function out=makestr(X)
out=[' фуг.: {']; s='PIk';
for i=l:length(X.pik)
out = strcat(out, [' ' s(i) ' = ' ...
sprintf ('%3.2g',X.pik(i) )]) ;
end
out(end+1)='}';
Конструкторы и методы setval обоих классов тривиальны:
function X=Vulner_h(varargin)
X=struct('Class','Vulner_h','h_eq',[]);
X=class(X,'Vulner_h');
X=setval(X,varargin{:});
function X=setval(X,v)
if nargin>l X.h_eq=v;end
function X=Vulner_p(varargin)
X=struct('Class','Vulner_p','pik',[]);
X=class(X,'Vulner_p');
X=setval(X,varargin{:});
function X=setval(X,v)
if nargin>l X.pik=v;end
Разработка аналогичных объектов, представляющих уязвимость УА к дру-
гим поражающим факторам (зажигательное, инициирующее, запреградное
действие), сводится к обычной процедуре оформления соответствующих
классов: выбрать имя и создать папку класса, представить структуру данных
класса одним массивом, как в Vulner p, создать по этой структуре конст-
руктор. Надо также создать по аналогии и вложить в папку нового класса
файлы setval и makestr. В существующих методах достаточно сделать лишь
одно изменение: в локальной функции Create файла Vulner/setval вста-
вить строку с новым оператором case, в которой будет вызываться конст-
руктор нового класса.
Классы уязвимых агрегатов. В соответствии с иерархией классов (см.
рис. 2.1) конструктор v unit класса «УА» должен включать форму (объект,
производный от Shape3) и контейнер объектов класса Vulner для описания
всех характеристик уязвимости:
2.3. Объектное представление исходных данных для расчетов 59
function X=V_Unit(varargin)
X.Class='V_Unit' ;
X.shape=Create(Shape3,varargin{:});
X. vulner=Vulner;
X=class(X,'V_Unit');
X=setval(X,varargin{:});
Метод V Unit/setval раздает параметры включенным объектам:
function X=setval(X,varargin)
r=l; while(icnargin)
x=varargin{i};
if isa(x,' Shape3')
X.shape=x;
elseif ischar(x)
X.vulner=setval(X.vulner,varargin{i:end});
break
else
X.shape=setval(X.shape,x);-
end
i=i+l;
end
а метод V Unit/display позволяет им показать свои свойства:
function display(X)
for i=l:length(X)
Xi=struct(X(i).shape);
disp(['yA' num2str(i, 3) ' ' Xi.Class
display(X(i).shape);
display(X(i).vulner);
end
Кроме указанных методов, в класс v unit должны быть добавлены мето-
ды расчета результатов воздействия на его объекты различных поражающих
факторов: вероятности поражения фрагментами, радиус поражения фугасным
действием и т. д. Они будут созданы в ходе разработки классов, представляю-
щих поражающие факторы.
Классы, представляющие ФСУ. Согласно определению (см. разд. 2.2)
ФСУ задается формулами поражения, которые представляют собой арифме-
тические выражения с операциями сложения и умножения событий пораже-
ния УА в комбинациях, приводящих к поражению цели по типам А, В, С, D.
Как правило, эти события совместны, что приводит к громоздким выражени-
ям для вероятности результирующего события при большом числе УА. Целе-
сообразно воспользоваться объектным представлением простых событий, что-
бы, переопределив в классе этих объектов арифметические операции в соот-
ветствии с теоремами сложения и умножения вероятностей, избежать
необходимости явного составления выражений для вероятностей сложных со-
бытий.
Определим класс независимых событий UndepEvents, который содержит
единственную характеристику события - вероятность р, умеет выводить ее
значение в строку, возвращает вероятность как вещественное число функцией
60
2. Основные характеристики эффективности действия СП и БП
Value и переопределяет базовые арифметические операции MATLAB сложе-
ния plus (+) и умножения mtimes (*):
function X=UndepEvents(Р)
X=struct('Class','UndepEvents','P', P);
X=class(X,'UndepEvents');
function display(X)
disp( [' P=' sprintf ('%5.5g', X. P) ]* );
function V=Value(X)
V=X.P;
function S=plus(X,Y)
S=UndepEvents(X.P+Y.P-X.P*Y.P);
function S=mtimes(X,Y)
S=UndepEvents(X.P*Y.P) ;
Результаты операций plus и mtimes преобразуются в объекты класса
UndepEvents, чем обеспечивается последовательное применение переопре-
деленных операций в вычислении сложных выражений. Например, операция
с объектами • ’
» UndepEvents(0.1)+UndepEvents(0.2)+UndepEvents(0.3)
Р=0.496
выполняется как следующая последовательность операций с числами:
» х=0.1+0.2-0.1*0.2; у=х+0.3-х*0.3
у = 0.4960
При создании класса FSU для обслуживания вычислений согласно ФСУ при-
мем во внимание, что содержащиеся в нем данные исчерпываются набором
формул поражения. Поскольку число определяемых типов поражения различ-
но, а структура объектов должна содержать постоянное число полей, в конст-
рукторе предусмотрено единственное поле т, как структура, в которой можно
установить необходимое число полей для размещения формул поражения:
function X=FSU(varargin)
X.Class='FSU';
X.T=struct('A00', " ,'A0', " ,'A', " ,'B', " ,'C' , " , ' D' , " );
X=setval(class(X,'FSU'),varargin{:});
Можно добавлять поля для обозначения какого-либо нового понятия по-
ражения, важно лишь то, чтобы они следовали в порядке ослабления призна-
ков поражения. Все остальные методы класса не зависят от конкретного набо-
ра полей. Например, метод display не показывает неиспользуемые поля:
function display(X)
M=fieldnames(Х.Т);
for i=l:length(М)
s=getfield(X.T,M{i});
if -isempty(s)
disp( [' Тип ' M{i}, ':' s] );
end
end
Строка, представляющая формулу поражения, должна начинаться с имени
типа и следующего за ним символа '=', причем число символов в имени типа
2.3. Объектное представление исходных данных для расчетов
61
может быть произвольным, если определяются типы с уточнением характера
поражения (Ао, Ат). Метод FSu/setval учитывает такую возможность:
function X=setval(X,varargin)
for i=l:nargin-l
x=varargin{i}; k=findstr(x,
X.T=setfield(X.T,x(l:k-l),x(k+l:end));
end
Сама формула поражения вида А = А । + Л2 + + • • •> т. е. ее правая часть,
для сокращения может быть заменена выражением из индексов 1+2+3*4+....
Это самая лаконичная форма записи, но перед вычислением индексы надо за-
менить соответствующими объектами. Первый шаг к этому - поэлементное пре-
вращение массива вероятностей событий в объекты класса UndepEvents: если
вероятности событий содержатся в массиве Р, то для всех его элементов надо
выполнить и (i) =UndepEvents (Р(i)). Теперь остается преобразовать запись
вида 1+2+3*4+... в выражение и(1)+и(2)+и(3)*и(4) +... и вычислить его. Пре-
образование выполняется локальной функцией MkStr в методе calcP, а вычис-
ление - с помощью встроенной функции .eval. Цикл вычислений по формулам
поражения заданных типов организован так, что понятие поражения по данно-
му типу включает и признаки поражения по более жестким требованиям. По-
этому окончательный результат представляется накопленной суммой cumsum:
function p=CalcP(X,P)
for i=l:length(P)
U(i)=Undep(P(i));
end
M=fieldnames(X.T);
p= [ ] ;
for i=l:length(M)
s=getfield(X.T,M{i}) ;
if -isempty(s)
p(end+1)=Value(eval(MkStr(s)));
end
end
p=cumsum(p) ;
%
function S=MkStr(s)
a=(s>='0' & s<='9');
b=diff( [0 a]);
beg=find(b==l); m=length (beg);
kon=find(b==-l);
beg(m+1)=length(s)+1;
i f length(kon)<m
kon(m)=length (b)+1;
end
S=s(l:beg(l)-1) ;
for i=l:m
S=strcat(S, ['U(' s (beg (i) : kon (i)-1) ')'...
s(kon(i):beg(i+1)-1)]);
end
62
2. Основные характеристики эффективности действия СП и БП
В следующем примере формулы поражения очень просты, чтобы можно
было легко проверить результаты:
» F=FSU('А=1+2','В=3+4*5')
Тип А:1+2
Тип В:3+4*5
» Р=[0.1 0.4 0.1 0.2 0.5];p=CalcP(F,Р)
р= 0.46000.6500
Проверка выполняется непосредственно по формулам сложения и умно-
жения вероятностей:
» р(1)=Р(1)+Р(2)-Р(1)*Р(2) ;р(2)=р(1)+Р(3)+Р(4) *Р(5)-
Р(3)*Р(4)*Р(5)
р= 0.46000.6500
Класс элементарных целей. Агрегатная модель уязвимости ЭЦ, если ис-
ключить из рассмотрения защитные свойства экрана, определяется набором
УА и ФСУ, что и зафиксировано в конструкторе и методе display класса ЭЦ
Target_E:
function X=Target_E(varargin)
X=struct('Class','Target_E','A',V_Unit,'fsu', FSU);
X=class(X,'Target_E');
X=class(X,'Target_E' );
if -isempty(varargin)X=setval(X,varargin{:}); end
function display(X)
display(X.A);
display(X.fsu);
Имея в виду все соглашения о форматах параметров метода setval базо-
вых классов, вошедших в класс Target E, а также то, что объем данных об
уязвимости цели может быть очень большим, желательно наличие промежу-
точной формы организации данных в виде массива ячеек. В каждой ячейке
описывается один УА, и в еще одной ячейке - ФСУ цели (или ее части):
С={
{ [1 2 3], [6;7;2],'PIK',[0.5 23 20],'h',10};
{ [3 2 1], [6;-7; 2],' h', 10,' PIK', [0.7 43 32]};
{ [12], [2;0;5],'h',10};
{ [1 1 0.4], [4;3;-5],'PIK',[0.4 23 18]};
{ [12], [-2;0;5],'h',10};
{'FSU' 'A=l+2' 'B=3+4*5'}
}
Метод Target E/setval может принять объект V_Unit в качестве обоб-
щенной модели цели. Агрегатная модель цели в виде массива ячеек содержит
в каждой строке описание либо УА, либо ФСУ, поэтому очень просто разоб-
раться, какому из двух базовых классов v unit или FSU предназначена оче-
редная ячейка:
function X=setval(X,С)
if iscell(С)
for i=l:length(С)
2.4. Основные элементы теории стрельбы
63
if isstr(C{i}{1})
X.fsu=FSU(C{i}{2:end});
else
X.A(i)=V_Unit(Create(Shape3,C{i}{1}),C{i}{2:end});
end
end
elseif isa(C, 'V_Unit')
X.A=C;
end
Ниже показано значение объекта т, созданного конструктором Target_E
по массиву ячеек С. В подготовке этого отчета принимают участие все объек-
ты построенной выше иерархии:
» T=Target_E(С)
УА1 Параллелепипед:
центр: 672; размеры: 123
фуг.: { Р = 0.5 I = 23 к = 20} проб.: { экв. толщина: 10 }
УА2 Параллелепипед:
центр: 6 -7 2; размеры: 321
проб.: { экв. толщина: 10 } фуг.: { Р =0.7 I =43 к =32}
УАЗ Цилиндр:
центр: 2 05; размеры: 1 2
проб.: { экв. толщина: 10 }
УА4 Параллелепипед:
центр: 43-5; размеры: 110.4
фуг.: } Р = 0.4 I = 23 к = 18}
УА5 Цилиндр:
центр:-205; размеры: 1 2
проб.: { экв. толщина: 10 }
Тип А:1+2
Тип В:3+4*5
Агрегатная модель цели в объектной форме не просто содержит все необ-
ходимые сведения о цели для расчета эффективности действия, но и активно
оперирует ими. Пока это проявляется в подготовке объектом отчета о себе. От
объектов агрегатной модели цели при расчетах эффективности действия мо-
жет понадобиться умение вычислять те или иные характеристики, например,
площади граней УА, уязвимую площадь цели и т. п. Создание соответствую-
щих методов и включение их в совместную работу объектов не вызывают
проблем, так как предусмотрены приведенной выше технологией. Дополни-
тельные методы для иерархии классов, представляющих уязвимость цели, бу-
дут включены в нее после разработки классов, моделирующих «СП».
2.4. Основные элементы теории стрельбы
Одним из важнейших факторов, определяющих случайный характер ущер-
ба, наносимого цели при ее обстреле, является рассеивание снарядов - слу-
чайное отклонение траектории полета от расчетной точки. При стрельбе по
наземной или морской цели «навесными» траекториями ошибки измеряются
64
2. Основные характеристики эффективности действия СП и БП
отклонением точки падения от центра цели. При стрельбе по воздушной цели
отклонения измеряются в плоскости, перпендикулярной расчетной траекто-
рии и содержащей центр цели - картинной плоскости.
Источников ошибок слишком много, чтобы их хотя бы перечислить, по-
этому они объединяются в группы по признакам, связанным с причинами воз-
никновения или физической природой ошибок. Наибольший удельный вес в
суммарном рассеивании имеют ошибки стрельбы, связанные с прицеливани-
ем и наведением снаряда на цель (или точку прицеливания). Их компонента-
ми являются:
• информационные ошибки от информационной системы, получающей и
обрабатывающей информацию о положении и параметрах движения цели;
• методическая ошибка, связанная с неучетом факторов, которые имеют
второстепенное влияние на точность стрельбы при вычислении координат уп-
режденной точки;
• ошибки наводки, допускаемые исполнительными органами (автоматичес-
кими приводами или наводчиком);
• ошибка стрельбы за счет маневра цели вследствие ошибочных гипотез
о законе движения цели за время полета снаряда или преднамеренных манев-
ров цели для уклонения от встречи.
Перечисленные ошибки возникают на этапе подготовки стрельбы, они оди-
наковы для всех выстрелов очереди или залпа. Следующую группу составля-
ют ошибки, различные и, как правило, независимые в каждом отдельном вы-
стреле:
баллистическая ошибка, вызванная отклонениями баллистических харак-
теристик (массы, формы, размеров, начальной скорости) от номинальных зна-
чений, а также турбулентностью атмосферы;
техническая ошибка, вызванная возмущениями при отделении снаряда от
орудия, колебательными процессами из-за отдачи и т. п.
Следует отметить, что каждая ошибка имеет две составляющие: неслу-
чайную систематическую и центрированную случайную. По теореме сложе-
ния математических ожиданий суммарная систематическая ошибка стрельбы
равна сумме систематических составляющих перечисленных компонент. По
теореме сложения дисперсий, считая все случайные факторы независимыми
вследствие их различной физической природы, дисперсия суммарной ошибки
равна сумме дисперсий ошибок прицеливания, технических и баллистичес-
ких ошибок. Закон распределения ошибок ввиду того, что среди большого
числа случайных факторов нет превалирующих, принимается нормальным с
математическими ожиданиями по координатам тх, mv и среднеквадратически-
ми отклонениями стх,
Между систематической и случайной ошибками есть принципиальная
разница: при большом числе выстрелов в одинаковых условиях системати-
ческие ошибки принимают одно и то же значение, в ряде случаев их мож-
но вычислить заранее, но только для фиксированных условий стрельбы.
Систематические ошибки резко снижают эффективность стрельбы, поэто-
му разработчики прицельных систем и конструкторы орудий стремятся све-
сти их к минимуму, хотя полностью устранить все же не удается. Практи-
чески можно считать допустимым т < 0,5с по каждой координате, иначе
2.4. Основные элементы теории стрельбы
добиться высокой эффективности стрельбы неуправляемыми снарядами за-
труднительно.
В теории стрельбы обычно вместо среднеквадратических отклонений ис-
пользуют срединные (вероятные) отклонения: Ех -р\2ах, Еу = р\2<зу, р =
= 0,477. Применяют также обозначения Вп = Ех, Вб = Еу для вероятных откло-
нений по дальности и по боку.
В общем случае, когда система координат повернута относительно глав-
ных осей рассеивания на некоторый угол а, ошибки по координатам зависи-
мы с коэффициентом корреляции
Одноименные координаты точек попадания (или ошибки выстрелов) не-
зависимы только в серии одиночных выстрелов.
Рассеивание при зависимых выстрелах
Выстрелы следует считать зависимыми, если в ошибках содержится об-
щая для всех выстрелов компонента (ошибка целеуказания, наведения, техни-
ческая и т. п.). Примеры зависимых выстрелов:
- стрельба залпом из нескольких орудий;
- стрельба серией залпов в течение некоторого промежутка времени, ко-
торый называется длиной серии’,
- серийное бомбометание, когда при одном заходе на цель сбрасывается
серия либо одиночных бомб, либо залпов из нескольких бомб, либо РБК с
заданным интервалом между сбрасываниями;
- стрельба очередью из автоматического орудия.
При стрельбе группой (серией или залпом) выстрелов случайные коорди-
наты точек попадания оказываются зависимыми между собой вследствие того,
что ошибки, связанные с прицеливанием и наводкой на цель, являются со-
ставной частью ошибки каждого выстрела.
При стрельбе очередью в течение некоторого промежутка времени прице-
ливание и наводка корректируются, вследствие чего ошибки прицеливания
изменяются от выстрела к выстрелу, но они оказываются связанными в той
или иной степени, которая зависит от удельного веса повторяющихся ошибок
в суммарном рассеивании.
В любой стрельбе из п выстрелов координаты точек попадания на картин-
ной плоскости YOZ составляют систему из 2п случайных величин (У), Z,,...,
Yn, Zn). Система подчиняется нормальному закону распределения, числовыми
характеристиками которого являются 2п математических ожиданий mzi, myi;
2п среднеквадратических отклонений oz„ Gyj; две нормированных матрицы ко-
эффициентов корреляции, характеризующих зависимость между выстрелами:
(z)
Пи
66 2. Основные характеристики эффективности действия СП и БП
где коэффициенты корреляции определяются через элементы корреляционной
матрицы Ку выражениями
r(y) = КТ =
СТУ'СТУ/ gyigyj
= 4?) = М[^-т^-т^)]
При стрельбе группой выстрелов в течение некоторого промежутка вре-
мени коэффициенты корреляции в матрицах обычно уменьшаются по мере
удаления от главной диагонали (зависимость для близких по времени выстре-
лов больше, чем для отдаленных).
Наиболее простой тип зависимости между выстрелами - при стрельбе
залпом, когда все случайные ошибки можно разделить на две независимые
категории: групповые, одинаковые для всех выстрелов, и индивидуальные ошиб-
ки, вызывающие независимые между собой отклонения каждого снаряда внут-
ри залпа. Групповыми являются все ошибки прицеливания и наводки, а инди-
видуальными - ошибки, связанные с техническим и баллистическим рассеи-
ванием снарядов. Такой тип зависимости между выстрелами называется
схемой двух групп ошибок. На основании теоремы о корреляционной матрице
суммы независимых случайных векторов суммарная дисперсия ошибок стрель-
бы равна сумме дисперсий групповых и индивидуальных ошибок:
_2 _ _2 , _2 . _2 _ 7. , 2
g> gyr + gyn ’ gzr gzH ’
(2.Ю)
а коэффициенты корреляции равны соответственно
г.(у) = г = gyr _ -2L _ г _ gZT = gZT .
ij У _2 , ^2 2 ’ ij z 2 , _2 _2
gyr + gJH g у gZT + gZH gz
Схема двух групп ошибок в чистом виде имеет место только при стрельбе
залпом. При стрельбе очередью в условиях непрерывного процесса прицели-
вания и наводки орудия коэффициенты корреляции между разными выстрела-
ми различны. Чтобы сохранить возможность применения аналитических и гра-
фоаналитических методов оценки эффективности, разработанных на основе
схемы двух групп ошибок, общий случай корреляционной зависимости ис-
кусственно заменяется схемой двух групп ошибок путем некоторого осредне-
ния коэффициентов корреляции. Удовлетворительные результаты получаются
по формулам, предложенным Е.С. Вентцелы
Ш')2
j>i___
п(п — 1) / 2
2.4. Основные элементы теории стрельбы
67
в которых квадрат среднего коэффициента корреляции определяется как сред-
нее арифметическое квадратов недиагональных элементов матрицы коэффи-
циентов корреляции.
В качестве коэффициента корреляции между выстрелами принимается
среднее геометрическое г = .
Определение характеристик рассеивания
Для нахождения характеристик рассеивания применяют различные мето-
ды: экспериментальные, аналитические, методы математического моделиро-
вания и комбинированные (полунатурные).
При использовании экспериментальных методов проводят N опытных
стрельб (одиночных пусков управляемых ракет (УР), залпов, очередей) при-
мерно в одинаковых условиях и на выбранной картинной плоскости YOZ (ре-
альной или воображаемой) фиксируются декартовы координаты точек попа-
дания yik, zik, где i - номер выстрела в очереди или снаряда в залпе; к - номер
опытной стрельбы. Можно предположить, что координатные оси параллель-
ны главным осям рассеивания. Обычно Ориентация главных осей рассеива-
ния определяется условиями стрельбы. Так, при стрельбе и бомбометании по
наземным целям направление одной из главных осей совпадает с направлени-
ем стрельбы или полета ЛА. Тогда координаты независимы и определение
характеристик рассеивания существенно упрощается.
При стрельбе одиночными выстрелами характеристиками рассеивания яв-
ляются координаты центра рассеивания ту, mz и среднеквадратические откло-
нения Оу, oz, которые могут быть вычислены по формулам
1 N 1 N
ту= — ^Ук> wz= —Xz*;
N k=i N k=i
1 7 1
A -1 Jt=i A -1 *=i
где суммирование ведется только по номерам стрельб, так как в одной стрель-
бе производится только один выстрел. Для оценки числовых характеристик
нормального рассеивания требуется статистический материал сравнительно
небольшого объема (несколько десятков наблюдений).
Экспериментальные методы определения характеристик рассеивания по-
зволяют наблюдать рассеивание таким, каким оно есть на самом деле, без
упрощений. Однако использование экспериментальных методов не всегда же-
лательно ввиду большой сложности проведения опытных стрельб в опреде-
ленных метеоусловиях и высокой стоимости натурных экспериментов. Для
вновь проектируемой системы вооружения экспериментальное изучение ха-
рактеристик рассеивания невозможно. В связи с этим на практике широко при-
меняют другие методы исследования рассеивания.
При использовании аналитических методов выявляются и изучаются от-
дельные причины отклонения снаряда от расчетной точки, в результате чего
68 2. Основные характеристики эффективности действия СП и БП
суммарную ошибку стрельбы представляют в виде суммы частных составля-
ющих. Затем исследуется зависимость каждой частной ошибки стрельбы от
вызывающих ее причин («первичных» ошибок), определяется аналитическая
зависимость между ними. Вероятностные характеристики первичных ошибок
обычно определяются экспериментально. Зная их, можно с помощью методов
теории вероятностей вычислить характеристики частных ошибок стрельбы, а
затем и суммарной ошибки.
Так как горизонтальная дальность есть функция начальной скорости v0,
угла бросания 0О и баллистического коэффициента с, т. е. £ = L(v0, 0О, с), в
силу малости случайных отклонений Stg, 80о, 8с по сравнению с номиналь-
ными значениями случайное отклонение дальности можно представить в виде
«.=^8Ч,+^гво4Л&,
Случайные отклонения 8г0, 80о, 8с независимы, так как вызываются раз-
личными факторами, поэтому вероятное отклонение по дальности BR опреде-
ляется согласно теореме о дисперсии линейной функции
где гг,о, гбо, гс - срединные отклонения начальной скорости (в %), угла броса-
ния (в тыс. дальности) и баллистического коэффициента (в %); Э£/Эо0- измене-
ние дальности, вызываемое изменением только начальной скорости на 1% от
v0, м; Э£/Э0о - изменение дальности, вызываемое изменением только утла бро-
сания на 0,001 тыс., м; ЪЬГдс = 3/4dL/dH - изменение дальности, вызываемое
изменением только баллистического коэффициента на 1% от г0, м; dL/dH - из-
менение дальности, вызываемое изменением давления воздуха на 10 мм, м.
Срединное отклонение по боку вычисляют по формуле
B6 = Z^O,lr2+(rztgOo)2,
где L - полная дальность стрельбы, м; гю, rz - срединные отклонения значений
угла наводки в горизонтальной плоскости и угла деривации.
Так как число факторов, определяющих частные составляющие ошибок,
велико и среди них отсутствуют превалирующие, закон распределения откло-
нений по дальности и направлению считается нормальным.
Величины Э/./Эг;0, Э£/Э0о, дБГдс вычисляются по известным формулам
внешней баллистики и их можно найти в баллистических таблицах и табли-
цах стрельбы.
Величины срединных отклонений гг,о, г6о, гс, ги, rz определяются опытным
путем по результатам полигонных стрельб, их значения также имеются в
таблицах стрельбы. Для снарядов и мин значения этих отклонений изменя-
ются в пределах: г = (О,2...О,4)^о, %; гс =(1...2)с, %;rw = 0,2...0,5 тыс.; г2 =
= 0,0003...0,0025; г6()= 0,5...0,7 тыс. для калибра до 76 мм, 0,4 тыс. для ка-
либра 76... 152 мм и 0,3 тыс. для калибра более 152 мм.
2.4. Основные элементы теории стрельбы
69
Хотя в случае применения аналитического метода также необходим экс-
перимент для нахождения вероятностных характеристик первичных ошибок,
трудоемкость и стоимость его на порядки ниже, чем при непосредственном
исследовании рассеивания в опытных стрельбах. К тому же результаты иссле-
дования некоторых первичных ошибок могут быть распространены на все си-
стемы, где встречаются такие же первичные ошибки. Существенные преиму-
щества аналитических методов - это возможность анализа причин, вызываю-
щих рассеивание и удобство для сравнительной оценки различных вариантов
системы вооружения на ранних этапах проектирования.
К недостаткам аналитических методов следует отнести различного рода
упрощения и схематизацию такого сложного явления, как процесс прицелива-
ния и стрельбы, при этом некоторые факторы, влияющие на рассеивание, мо-
гут оказаться неучтенными.
Имитационная модель стрельбы используется для накопления большого
числа «реализаций» стрельб на ЭВМ, затем характеристики рассеивания оп-
ределяются так же, как и после натурного эксперимента. Имитационная мо-
дель представляет собой полную систему уравнений, описывающих движе-
ние снаряда и цели, кинематическую связь между ними и метод наведения
снаряда на цель. В качестве случайных возмущений в эту систему уравнений
включаются источники первичных ошибок: ошибки измерения координат цели,
технологические неточности геометрии изделий, возмущения атмосферы, ди-
намика ствола и пр. Конкретные значения первичных ошибок моделируются
методом статистических испытаний (Монте-Карло) на основе известных за-
конов распределения этих ошибок. Экспериментальное исследование рассеи-
вания снарядов заменено экспериментами с его имитационной моделью.
Методы математического эксперимента позволяют более глубоко по
сравнению с аналитическими методами изучать рассеивание, однако и здесь
исследуются лишь модели стрельбы с априорными законами распределения
первичных ошибок.
Рассеивание сложных изделий, содержащих блоки наведения на цель, уп-
равления, коррекции и т. п., невозможно моделировать с помощью математи-
ческого эксперимента из-за отсутствия достаточной априорной информации о
влиянии этих аппаратных средств на рассеивание. Но такие изделия и слиш-
ком дороги, чтобы исследовать их рассеивание экспериментально.
Исследование влияния блоков аппаратуры совместно с макетами элемен-
тов системы вооружения и имитационными моделями среды проводится ком-
бинированными методами на специальных стендах полунатурного моделиро-
вания. В зависимости от степени совершенства стенда полунатурное модели-
рование более или менее приближено к экспериментальным методам.
Методы ведения стрельбы
Различают два вида стрельбы: сосредоточенную и разнесенную. При со-
средоточенной стрельбе все снаряды направляются в одну точку, обычно в
центр цели, а при разнесенной стрельбе стреляющая сторона преднамеренно
или вынужденно рассредоточивает расчетные точки попадания отдельных сна-
рядов относительно цели.
70
2. Основные характеристики эффективности действия СП и БП
В случае сосредоточенной стрельбы фактические точки попадания имеют
единый центр рассеивания, положение которого относительно центра цели
определяется систематической ошибкой, общей для всех выстрелов. При раз-
несенной стрельбе у фактической точки попадания каждого снаряда есть свой
центр рассеивания, который при отсутствии систематических ошибок совпа-
дает с расчетной точкой. При наличии систематической ошибки все центры
рассеивания смещаются как единое целое.
Разнесенная стрельба еще называется заградительной или стрельбой с
искусственным рассеиванием, поскольку в этом случае кроме естественного
рассеивания существует преднамеренное, организованное рассредоточение то-
чек попадания. При обстреле одиночной цели применяют оба вида стрельбы.
Сосредоточенная стрельба эффективнее в тех случаях, когда групповые ошибки
не слишком велики по сравнению с индивидуальным рассеиванием (коэффи-
циент корреляции между выстрелами невелик). В противном случае полный
эллипс индивидуального рассеивания не перекрывает групповую ошибку, по-
этому более эффективна стрельба с подходящим разнесением центров рассеи-
вания отдельных выстрелов очереди или залпа. а
Разнесенную стрельбу широко применяют при обстреле групповых целей.
Искусственное рассеивание позволяет равномерно подвергнуть обстрелу всю
область расположения ЭЦ и используется в тех случаях, когда точное положе-
ние цели неизвестно, а есть только сведения о ее нахождении в некотором райо-
не. Тогда точки прицеливания равномерно распределяются по всей области.
Вероятность попадания в некоторые виды областей
Плотность нормально распределенных случайных величин (Х},..., Хп) мож-
но представить корреляционной матрицей К и математическим ожиданием in:
1 —^-(х-т)тк ’(х-т)
/(х) = -=__е 2 . (2.11)
7(2л)'! det/С
Нормальное распределение координат точки (X, Y) на плоскости задает-
ся математическими ожиданиями тх = М[Х], ту = Л/[У] и корреляционной
матрицей
^Х &х Г^у
К*у Dy J о2
(2.12)
После подстановки определителя и обратной матрицы в формулу (2.12)
получим плотность двухмерного нормального распределения, заданного па-
раметрами тх, ту, <зх, о,,, г:
х 1
/(*, у)=---------7===ТХ
2лаЛсг.,л/1-г
Л У
Pvn « 1 (х-тЛ)2 (х-тх)(у-ту) (у-ту)2 . 1 24
слр ’ 2 2Г + 2 (2.13)
2(1-г2) а
2.4. Основные элементы теории стрельбы
71
Вероятность попадания случайной точки в произвольную область D вы-
числяют интегрированием плотности распределения по этой области, но в не-
которых частных случаях она может быть получена без интегрирования.
Вероятность попадания случайной точки в прямоугольник, стороны кото-
рого параллельны главным осям рассеивания, равна произведению вероятно-
стей попадания отдельных координат в соответствующие интервалы
Р(а < Х< р, у < У < т]) = Р(а < X < Р)Р(у < У < т|) (2.14)
и может быть вычислена с помощью таблиц функции Лапласа:
Р(А) = Ф
-Ф
а-т
<Sr
Г)-т
(2-15)
Ф
о
Вероятность попадания случайной , точки в «-мерный эллипсоид рассеи-
вания
п к.2
5.....
i=i а.
находят интегрированием по слоям равной плотности. После замены пере-
менных и, = /о,, где i =1,2,..., п, эллипсоид превращается в «-мерную сферу
радиуса /- = вероятность попадания в слой (г, dr) пропорциональна
„ I ,2/2
г е ' ° , а суммарная вероятность по всем слоям выражается интегралом
*
= с{е~ 2 г"-1 dr.
о
Постоянная С находится из условия, что вероятность попадания в бесконечно
большой эллипсоид равна единице.
Интегрируя данное выражение по частям при « = 3, получаем формулу
для вероятности попадания случайной точки в трехмерный эллипсоид рассеи-
вания:
= /2_ = _ IIke-k2/2 = 2ф* (Jt) _ 1 _ l^ke^2. (2.16)
у/2п/2 N п N к
При и = 2 имеем простую формулу для вероятности попадания случайной
точки в эллипс рассеивания с полуосями key, key:
Р((Х, У)еВк) = 1 - е’*2/2. (2.17)
Если рассеивание по всем направлениям одинаково Gj = G2 = ... = G„ = а
(круговое, шаровое рассеивание), можно говорить о распределении промаха -
расстоянйя от случайной точки до центра рассеивания. При круговом рассеи-
вании на плоскости промах подчиняется закону Рэлея:
72
2. Основные характеристики эффективности действия СП и БП
F(r) = P(R<r) = -
О,
,r>0,
г <0;
/(r) = _Le-r2A2a2>; r>0. (2.18)
G
При смещении центра кругового рассеивания от начала координат на ве-
личину d получим нецентральное распределение Рэлея:
r + d
2л
/л (г) = [ /к.Ф (г,Ф)<Ар=^- ехр
о °
Если область D сравнительно невелика (ее размеры по направлениям рас-
сеивания не больше срединных отклонений Lx < Еу, Ly < Еу или Lx < 0,7сЛ,
Lv< 0,1 с у), то приближенная вероятность попадания вычисляется согласно тео-
реме о среднем по формуле
Р((Х, К) 6 D) = || f(x, y)dxdy = /(xq, у0)|| dx dy =
D D
f exp|--^-costp Lftp. (2.19)
n I G 7
2доЛау 2g1 2g2
(2.20)
где x0, y0 - координаты центра области D в системе главных осей рассеива-
ния; SD - площадь области D. В частности, если центр области совпадает с
центром рассеивания (х0 = 0, у0 = 0), то
2
Р((Х,У)е D) = —^— = _Р_^
27tGrGv пЕгЕ.
Л у Л J
(2.21)
Объектное моделирование нормального рассеивания на плоскости
Опыт создания иерархии объектов в предыдущем разделе показал, что
объектное моделирование эффективно, если оно адекватно отражает взаимо-
связь реальных сущностей. Реализация формул (2.11)-(2.21) в классе двух-
мерного нормального распределения сделает проблему вычисления вероятно-
стей попадания в цель внутренним делом объекта этого класса, если ему
предъявить объект, представляющий геометрию цели. Это значит, что объект,
представляющий цель, должен включать или наследовать объект плоской фор-
мы (прямоугольник, круг, эллипс), а класс двухмерного нормального распре-
деления должен уметь вычислять вероятность попадания в эти фигуры.
Класс плоских форм. Носителями отличительных особенностей плос-
ких форм являются классы, производные от класса Shape, от которого уже
образован базовый класс трехмерных форм Shape3 для моделирования УА.
Классы наиболее часто употребляемых плоских форм выведем непосредствен-
но из класса Shape. Методы Shape/setval и Shape/display способны об-
служивать производные классы. Достаточно в производных классах кроме кон-
структоров реализовать лишь методы вычисления площадей фигур Area:
2.4. Основные элементы теории стрельбы
73
Класс прямоугольников
function X=RecShape(varargin)
X=class(struct('Class','Прямоугольник'),'RecShape',Shape);
X=setval(X,varargin{:});
function out=Area(X)
out=prod(MySize(X));
Класс кругов
function X=CirShape(varargin)
X=class(struct('Class','Круг'),'CirShape',Shape);
X=setval(X,varargin{:});
function out=Area(X)
out=pi*MySize(X)Л2;
Класс эллипсов
function X=EllShape(varargin)
X=class(struct('Class','Эллипс'),'EllShape',Shape);
X=setval(X,varargin{:});
function out=Area(X)
out=pi*prod(MySize(X));
В классе малоразмерных областей Ls Shape площадь вводится как един-
ственный размер, поэтому Ls Shape сам вообще ничего не вычисляет и не
добавляет данных:
function X=Ls_Shape(varargin)
X=class(struct('Class','Малоразмерник'),'Ls_Shape',Shape);
X=setval(X,varargin{:});
function out=Area(X)
out=MySize(X);
Класс двухмерного нормального распределения Norm2. Класс Norm2
наследует Point в качестве центра рассеивания. Конструктор Norm2 добавля-
ет в структуру класса корреляционную матрицу и избыточный, но удобный
для быстрой диагностики распределения коэффициент корреляции:
function X=Norm2(varargin)
X=struct('Class','Norm2'К',[1 0;0 l],'r',0);
X=class(X,'Norm21,point);
X=setval(X,varargin{:});
Все параметры, задаваемые методом setval, различаются по структуре.
Характеристики рассеивания можно задавать как корреляционной [2х2]-мат-
рицей, так и среднеквадратическими отклонениями в виде [1х2]-вектора (центр
рассеивания задается для Point вектор-столбцом). Несмотря на неоднознач-
ность способов задания объекта, его неправильное состояние исключено, так
как каждая процедура установления свойств объекта анализируется функцией
Correct, которая в случае противоречивости исходных данных проводит пе-
ресчет параметров для их согласования, а при обнаружении неустранимой
74 2. Основные характеристики эффективности действия СП и БП
ошибки отклоняет ввод данных с выдачей соответствующего сообщения. Пос-
леднее синтезируется локальной функцией message:
function X=setval(X,varargin)
for i=l:nargin-l
x=varargin{i};
if size(x) = [2 1]
X.point=setval(X.point,x');
else
switch prod(size(x))
case 1, X.r=x;X=Correct(X,1);
case 2, X.K([1 4])=x.A2;X=Correct(X,0);
case 4, X.K=x;X=Correct(X, 0);
end
end
end
%
function X=Correct(X, k)
DD=X.K(1)*X.K(4);
if DD<0 error(message(2)) ; end
if k
X.K(2:3)=X.r*sqrt(DD);
else
if abs(X.K(2) - X.K(3))>0.0001 error(message(1)); end
if Х.К(2)Л2 > DD error(message(2)); end
X.r=X.K(2)/sqrt(DD);
end
%
function s=message(n)
si = 'Корреляционная матрица должна быть ';
switch n
case 1, s=[sl 'симметричной'];
case 2, s=[sl 'положительной'];
end
Метод Norm2/display наглядно и компактно представляет свойства объекта:
function display(X)
name = sprintf ('%s', inputname(l));
disp(['Norm2' name])
disp([name sprintf ('.m = [%0.3f %0.3f] ', MyCenter(X))]);
linel = sprintff'.s - [%0.3f %0.3f]', sqrt(X.K([l 4])));
line2 = sprintf ('.r = %0.3f ',X.r);
disp([name linel name line2]);
disp ([name sprintf ('.К = [%0.3f %0.3f; %0.3f %0.3f]' ,X.K) ]) ;
В расчетах понадобятся распределения координат случайной точки. Как
известно, проекции нормально распределенного вектора подчиняются нор-
мальному закону. Метод Norm2/Y12 создает массив из двух экземпляров
структуры, в поля m и s которой помещает параметры распределения каж-
дой координаты:
2.4. Основные элементы теории стрельбы
75
function out=Y12(X,i)
M=MyCenter(X);
S=sqrt(X.K([1 4] ) );
if nargin=l
for i=l:2 out(i).m=M(i);out(i).s=S(i); end
else
out. m=M (i) ; out. s=S (i) ;
end
Плотность двухмерного нормального распределения вычисляется по фор-
муле (2.13) файл-функцией f_Norm2. Первые два аргумента - нормированные
центрированные координаты точки, в которой нужно определить плотность,
третий аргумент - коэффициент корреляции. Функция векторизована по обе-
им координатам, что необходимо, поскольку в процедурах численного интег-
рирования аргументом f_Norm является, расчетная сетка:
function out=f_Norm2(xl,х2,г)
if nargin<3 r=0; end
a=(l-rA2);
t=(xl.л2-2*г*х1.*x2+x2.*2)./(2*a);
out=exp(-t)./(pi*2*sgrt (a));
Метод Norm2/f вычисляет аргументы для файл-функции f_Norm2 по за-
данным координатам точки и параметрам распределения в объекте класса
Norm2:
function f=f(X,xl,x2)
if nargin=2 x2=xl(2); xl=xl(l);end
x=Y12(X);
yl=(xl-x(l).m)/x(l).s;
y2=(x2-x (2) .m) /x (2) . s;
f=f_Norm2(yl,y2,X.r)/prod(x.s);
Если параметры распределения известны только для компонентов ошибок,
то суммарное распределение получают как функцию случайных аргументов.
Переопределение операции сложения Norm2/plus по правилам композиции слу-
чайных векторов позволяет находить суммарное распределение, естественным
образом складывая объекты. Переопределенный метод можно применять также
для суммирования (и вычитания посредством N о rm2/minus) объекта с констан-
той, что приводит к соответствующему смещению центра рассеивания:
function X=plus(X,a)
if isa(a,'Norm2')
X=setval(X,X.K+a.K,MyCenter(X)+MyCenter(a));
else
X=setval(X,MyCenter(X)+a);
end
function X=minus(X,a)
X=plus(X,-a);
Мультипликативные операции используются только с векторным операн-
дом к корреляционной матрице по правилам умножения ее на неслучайный
вектор:
76 2. Основные характеристики эффективности действия СП и БП
function X=mtimes(X,а)
if length(а)==1 a=ones(1,2)*а; else а=а(:); end
X=setval(X,Х.К.*kron(а,а'));
Вектор с одинаковыми компонентами может быть задан одним числом.
Результатом тензорного произведения kron(а,а') является матрица [а (1) Л2
а (1) *а (2); а (1) *а (2) а (2) Л2 ], перемножение которой с корреляционной мат-
рицей равносильно изменению среднеквадратического отклонения ;-й случай-
ной величины системы в а (;) раз (i = 1, 2).
Композицию нормально распределенных векторов можно применять, если
компоненты векторов заданы в одной системе координат. Однако различные
группы ошибок могут определяться по разным направлениям (например, ошиб-
ки целеуказания - по направлению наблюдения, а ошибки технического рас-
сеивания - по направлению стрельбы). Поворот осей координат осуществля-
ется методом Norm2/RotAxes, который подвергает ортогональному преобра-
зованию вектор математических ожиданий и корреляционую матрицу:
function Y=RotAxes(X,а)
a=a/180*pi;sina=sin(а);cosa=cos(а);
C=[cosa sina; -sina cosa];
Y=Norm2( MyCenter(X)*C, C*X.K*C' );
Вычисление угла поворота до совмещения с главными осями рассеивания
осуществляется методом Norm2/ToMainAxes согласно формуле (2.9):
function [out, a, A]=ToMainAxes(X)
out=X; а=0; А=0;
if Х.г-0;
a=2*X.r*sqrt (X.К(1)*Х.К(4))/(Х.К(1)-Х.К(4));
а=0.5*atan(а);
A=a*180/pi;
out=RotAxes(Х,А);
end
Метод вычисления вероятностей попадания Norm2/Ver работает как с еди-
ничными геометрическими объектами, так и с группами объектов. Объекты
разных типов могут быть объединены только в массив ячеек. Из единичных
объектов метод различает прямоугольники, круги, эллипсы и малоразмерные
фигуры произвольной формы:
function P=Ver(X,v)
if iscell(v)
for i=l:length(v)
P(i)=calcVer(X,v{i}) ;
end;
else
P=calcVer(X,v);
end
%
function P=calcVer(X,v)
if isa(v,' Shape')
for j=l:size(v,1)
2.4. Основные элементы теории стрельбы
77
for i=l:size (v,2)
P(j,i)=calcV(X,v(j,i));
end;
end;
else
error('object is not Shape!')
end
%
function P=calcV(X,R)
A=MySize(R);
C=MyCenter(R);
if isa(R,' RecShape')P*calcRec(X,C,A);
elseif isa(R,'CirShape')P=calcC(X,C,A);
elseif isa(R,'LS_Shape') .
for i=l:size(C,1) P(r)=A * f(X,C(i,:)); end
elseif isa(R,'EllShape')
P=calcC (setval (X, sqrt (X.К ( [1; 4] ) ) ./А' ) , С./А, 1) ;
end
Определив, что объект имеет прямоугольную форму, метод Norm2/Ver
переправляет данные своей локальной функции calcRec, которая для всего
множества положений объекта (центр с может быть не единственным) вычис-
ляет вероятность попадания. Если стороны прямоугольника параллельны глав-
ным осям рассеивания, вероятность вычисляется по формуле (2.14), а в об-
щем случае - численным интегрированием, которое в int_Norm2 заменено
суммированием:
function P=calcRec(X, С,А)
Ь=С+А*0.5; а=С-А*0.5;
for i=l:size(С,1)
if abs(X.г)<0.01
P(i)=Ver_G(X12(X,1),a(i, 1) ,b(i, 1))*. . .
Ver_G(X12(X,2),a(i,2), b(i,2));
else
P=int_Norm2(X, a(i,1),b(i,1), a(i,2), b(i,2));
end
end
%
function out=int_Norm2(X,a,b,c,d)
x=linspace(a,b,40);y=linspace(c,d,40);
for i=l:length(y)
p(i,:)=f(X,x,у(i));
end
out=[0 diff(y)]*p*[0 diff(x)]';
%
function P = Ver_G(X, a, b)
a0=a/X.s; a=a0-X.m/X.s;
x=linspace(a(1), a (2), 50);
P=defint(x,exp(-x.z2/2))/sqrt(2*pi);
78
2. Основные характеристики эффективности действия СП и БП
Вероятность попадания в круг и эллипс вычисляет локальная функция
calcCir (в случае эллипсов calcv предварительно масштабированием коор-
динат преобразует фигуру в круг единичного радиуса). При круговом рассеи-
вании или близком к нему применяется формула (2.17), а при ненулевом сме-
щении - интегрирование плотности нецентрального распределения Рэлея
(2.19). В общем случае двухмерное интегрирование по кругу проводится в
полярных координатах:
function P=calcCir(X,С,А)
Z=Y12(X);
s=mean(Z.s);
if abs(diff(Z.s)/s)<0.01
for i=l:size(C,1)
P=int_Rayl(A/s, sqrt(dot(C(i,:)-Z.m,C(i,:)-Z.m))/s);
end
else
for i=l:size(C,1) P=EvalCir(X,C(i,:),A); end
end
%
function P=EvalCir(X,C, R)
dr=R/30; r =[dr:dr:R]-dr/2;
dfi=pi/30; fi=[dfi:dfi:2*pi]-dfi/2;
for i=l:length(r)
t(i,:)=f(X,C(1)+r(i)*cos(fi),C(2)+r(i)*sin(fi)).*r(i);
end
P=[dr diff(r)]*t*[dfi diff(fi)]';
%
function out= int_Rayl(r, d)
if abs(d)<0.001
out=l-exp(-гЛ2/2) ;
else
dr=r/50; y=(dr:dr:r)-dr/2;
for i=l:length(y)
p(i)=RayTrans(y(i) ,d) ;
end
out=defint(y,p)/(2*pi) ;
end
%
function out= RayTrans(t,d)
T=t.A2+d.Л2;
dfi=pi/30; fi=[0:dfi:2*pi];
out=t.*exp(-T/2).*defint(fi,exp(-t.*d.*cos(fi)));
Для примера создадим несколько объектов: прямоугольник с размерами
4x5 и центром в начале координат, круг радиусом 3 с центром в точке (1, 2),
эллипс с полуосями 4 и 3 с центром в (2, -1) и произвольную форму с пло-
щадью 9, условный центр которой расположен в точке (-3; 2):
» A=RecShape([4 5]),C=CirShape([1;2],3),E=EllShape((4 3],
[2;-1]),S=Ls_Shape(9,[-3;2]);
2.4. Основные элементы теории стрельбы 79
прямоугольник А: центр = [0.00.0]размеры: 4.0 5.0
круг С:центр = [1.02.0]размеры: 3.0
эллипс S: центр = [2.0 -1.0]размеры: 4.0 3.0
Рассеивание определяется суммой двух ошибок х и Y
» X=Norm2([3 2]); Y=Norm2([2.5 2],0.3);
причем объект X задан в той же системе координат, в которой заданы геомет-
рические объекты, a Y - в повернутой относительно нее на 30°. Суммарный
закон распределения и вероятности попадания в данные объекты вычисляют-
ся следующей командой:
» P=Ver(X+RotAxes(Y,30),{A,C,E,S})
P = 0.2476 0.2675 0.0406 0.0771
С помощью таблиц функции Лапласа можно определить только вероят-
ность попадания в прямоугольник А случайного вектора х, так как стороны А
параллельны главным осям х. Сравним результаты вычислений, выполнен-
ных объектом х
» P=Ver(X,A)
Р = 0.3903
и по формуле (2.15)
Р(А) =
/2 5 А (-2 5 Y1 (
ф -ф =4Ф - |Ф(1,25) =
( 2 J I 2 JJ ( 3 J
= 4-0,2475 • 0,3944 = 0,3904.
Вероятность попадания в тот же прямоугольник точки с распределением
Y уже нельзя найти с помощью таблиц, так как главные оси рассеивания не
параллельны сторонам прямоугольника. Объектный метод в этой ситуации ра-
ботает. Правда, ему приходится переходить на численное интегрирование по
прямоугольнику, но об этом можно догадаться, лишь сопоставив время счета
(tic-toe):
» YY=RotAxes(Y, 30) ; tic, PY=Ver (YY, А), toe, tic, PX=Ver (X, А) , toe
PY = 0.4592
elapsed_time = 0.0160
PX = 0.3903
elapsed_time = 0
Впрочем, в системе координат, параллельной сторонам прямоугольника,
компоненты Y практически независимы, в чем легко убедиться по значению
преобразованного объекта YY:
» YY
Norm2 YY
YY.m = [0.000 0.000]
YY.s = [2.643 1.807]YY.r = -0.047
YY.K = [6.987 -0.224; -0.224 3.263]
Поэтому можно сравнить и PY с результатом вычисления с помощью функ-
ции Лапласа:
2Ф(2/2,643) 2Ф(2,5/1,807) = 4 0,2754 0,4167 = 0,4591.
80 2. Основные характеристики эффективности действия СП и БП
2.5. Эффективность средств поражения ударного действия
Согласно формуле (2.3), эффективность СП ударного типа определяется
характеристиками поражающего действия (УЗП) и рассеивания.
Основные свойства условного закона поражения
Условный закон поражения обладает следующими очевидными свойства-
ми: 6(0) = 0; 6(те2) - <t(wi) ПРИ т2 > mv> lim G(m) = 1. Конкретный вид функ-
ции G(w) зависит от мощности СП и степени защищенности цели. Если могу-
щество действия таково, что для поражения цели достаточно одного попада-
ния в любую точку проекции, то УЗП имеет ступенчатый вид: G(m) = 1 при
т > 1. Для поражения целей с накоплением ущерба необходимо и достаточно
некоторое критическое число т* попаданий, a G(m) имеет вид
. 1, если т > т*,
G(z”) = ln
0, еслит<т .
Для сложных целей, состоящих из агрегатов различной'уязвимости, безус-
ловно поражаемых при одном попадании (или поражаемых после критического
числа попаданий) и неуязвимых для данного СП, вид УЗП зависит от соотно-
шения площадей проекций указанных типов УА на картинную плоскость. Обо-
значим суммарную площадь проекции безусловно поражаемых агрегатов на кар-
тинную плоскость S), суммарную площадь агрегатов, поражаемых с накопле-
нием ущерба, - S2, площадь непоражаемой зоны - 50. Условную вероятность
попадания в одну из этих зон можно найти как геометрическую вероятность,
т. е. как отношение площади зоны к площади цели Уц = Уо + 5]+ S2.
При отсутствии в составе цели уязвимых комбинаций (S2 = 0) для ее по-
ражения достаточно хотя бы одного попадания в область S):
G(l) = r,=-S-.
а поскольку действие отдельных ПЭ можно считать независимым при отсут-
ствии накопления ущерба, УЗП примет вид показательной функции:
G(w) = 1 - [1 - G(l)]w = 1 - (1 - Г])'".
Если цель содержит уязвимые комбинации, поражение может наступить
либо при попадании в безусловно поражаемую зону хотя бы одного ПЭ, либо
не менее т* ПЭ в зону с накоплением ущерба
G(m) = ^
1 - (1 - q )w при т < т*,
i-O-rj)'” +AG(wi) прига>га*,
(2.22)
где AG(w) - это вероятность поражения цели при т попаданиях в зону So и S2.
Если известен закон накопления ущерба G2(m) - вероятность поражения цели
при т попаданиях в зону S2, то
2.5. Эффективность средств поражения ударного действия
81
т
&G(m) = У ст r2 ^~kG2(k), (2.23)
k=m*
где r0 = Sq/S^, r2 = S2ISn - геометрические вероятности попадания в непоражае-
мую зону и в область поражений с накоплением ущерба. На практике закон
накопления ущерба принимают ступенчатым: G2(m) - 1 при т > т*.
Среднее число попаданий, необходимых для поражения цели
Для оценки могущества действия данного СП по цели используется чис-
ловая характеристика УЗП - математическое ожидание числа попаданий, при
котором наступает поражение цели. По определению
(О=М[т]= У тР(т), (2.24)
т=1
где т - номер первого удачного попадания; Р(т) - вероятность первого пора-
жения в т-м попадании при условии, что в предыдущих попаданиях пораже-
ние не наступило. Очевидно, что Р(т) = G(m) - G(m -1). Подстановка этого
выражения в формулу (2.24) дает
со = М[т] = У, т [G(m) - G(m -1)].
Считая, что после некоторого числа попаданий М выполняется условие
G(m) =\,т>М, рассмотрим ограниченное число слагаемых и перегруппиру-
ем их:
М М-1
со = У. У, (m + l)G(m) =
т=1 т=0
М-1 М-1
= У mG(m) + MG(M)-G(0)- У (wi + l)G(w) =
т=1 т=1
М-1 М-1
= M-G(0)~ У mG(m) = У [l-G(m)J.
т=1 т~0
В пределе при М °° получим формулу
оо
со= у [l-G(zn)],
т~0
справедливую для любого закона поражения. Это значит, что среднее необхо-
димое число попаданий равно сумме дополнений ординат УЗП до единицы.
Применяя ее для ступенчатого УЗП, имеем
ю= У [l-G(/n)] = w*.
/и=0
82 2. Основные характеристики эффективности действия СП и БП
Для легко уязвимых целей, когда т* = 1, необходимое число попаданий -
неслучайная величина и со = 1. В случае УЗП показательного вида G(m) = 1-
-[i-адги
со= X [1-6(1)Г =-----------= —=-
mto 1-[1-G(1)] G(l) r}
При показательном законе поражения среднее необходимое число попа-
даний равно обратной величине вероятности поражения в одном попадании.
УЗП показательного вида можно выразить через со:
( 1 Y”
G(m) = l-| 1---.
\ 03 )
Вероятность поражения одиночной цели в п выстрелах
Вероятность поражения цели в п выстрелах зависит от числа попаданий,
а вероятность попадания определяется законом рассеивания. При стрельбе зал-
пом или очередью ошибки представляют собой сумму как минимум двух групп
ошибок: одинаковой для всех выстрелов (групповой) ошибки целеуказания и
независимых между собой ошибок индивидуального рассеивания.
Групповые ошибки подчиняются нормальному закону<и характеризуются
вероятными отклонениями Ехг, ЕуТ (при нулевых математических ожиданиях).
Индивидуальные ошибки имеют вероятные отклонения Ет, Е^, а центр инди-
видуальных ошибок находится в точке (хг, уг). Суммарная ошибка характери-
зуется вероятными отклонениями
Ех = у!е1 + Еы’ еу = \1Е2уг+Е^-
Вероятность попадания в цель, занимающую область D на плоскости
рассеивания, при одном выстреле можно получить интегрированием плотнос-
ти нормального распределения с параметрами тх= ту= О, Ех, Ev по области D
•dxdy
или в случае малоразмерной цели с площадью SD по формуле
=т^р.ехр1_р1 (if Jit
кЕхЕ 2 I Е I Е
Л У у Л / у Л
где х0, у0 - координаты центров области D.
Вероятность т попаданий в п выстрелах можно вычислить по биноми-
альной формуле только в случае независимых выстрелов. Согласно схеме двух
групп ошибок, коэффициент корреляции между выстрелами
2.5. Эффективность средств поражения ударного действия
83
4 = 4
г 2 । г 2 г 2
^уг + ^уи ^у
зависит от соотношения между групповыми и индивидуальными ошибками
рассеивания. Когда зависимостью между выстрелами можно пренебречь (г ~ 0),
распределение вероятностей ртп подчиняется биномиальному закону. Прини-
мая также G(tn) в форме показательного закона, для вероятности поражения
цели в п независимых выстрелах можно получить простую формулу
п
w„(0) = £ с- (1 - Р1 у~т [1 - а - л, г ]=
т=1
л п
= z сп РГ (1 - A )”"m - Е су Ру (I - Pl у-т (I - п г =
т=1 т=1
= (pl+l-piy-[p1(l-rl)+(l-p1)]n = l-(l-p1rl)n
или, учитывая, что Г] = 1/(0,
= (2.25)
V 03 )
Максимальная степень зависимости г = 1 в схеме двух групп ошибок на-
ступает при отсутствии индивидуальных ошибок. Тогда вероятность попада-
ния в одном выстреле обусловлена только характеристиками групповых оши-
бок Ех^Еут:
\2 ( V11
1 . У
,уг
р2
2
Так как ошибки у всех п выстрелов одинаковы (они попадают в одну и ту
же точку), вероятность т попаданий равна нулю при т < п, а рп п = р{, поэтому
И;<1> = р1/(7(п),
а если число выстрелов достаточно велико, так что G(n) ~ 1, то
Вероятность поражения при произвольном коэффициенте корреляции
О < г < 1 находится между предельно возможными значениями: W„(1) < <
< и может быть аппроксимирована зависимостью
= W„(1) + >/l-r2 ). (2.26)
Строго говоря, на вероятность поражения в п выстрелах влияет степень зави-
симости между событиями попадания в цель, а не между ошибками стрельбы.
84
2. Основные характеристики эффективности действия СП и БП
Зависимость между попаданиями существенно слабее, чем зависмость между
ошибками стрельбы г, поскольку разные ошибки допускают одинаковый ис-
ход (попадание в цель или промах).Так, Вентцель Е.С. использует аналогич-
ную (2.26) эмпирическую формулу
W„(r) = kW^ + (1 - k)W™,
где k - коэффициент, определяемый по специальной таблице с двумя входами
М=пр/(й и г, причем таблица составлена для диапазона значений г от 0,5 до 1.
Теоретически обоснованный метод точного вычисления оперирует
только лишь с параметрами рассеивания и легко реализуется в рамках объект-
ной модели рассеивания. Определим вначале условную вероятность пораже-
ния в п выстрелах при фиксированных групповых ошибках (л^., уг). Согласно
схеме двух групп ошибок, если групповые ошибки исключены из случайных
факторов, выстрелы становятся независимы, поэтому для вычисления услов-
ной вероятности подходит формула вида (2.25), в которой вероятность попа-
дания при одном выстреле следует рассчитывать по характеристикам индиви-
дуального рассеивания с центром в точке (jc,, уг):
W„(xr,yr) = l-[1-Р17%г’Уг)
со
(2.27)
где
РГ= Р JJexp-
^“хи^ук d
(
суи
•dxdy.
(2.28)
Теперь вероятность поражения цели в п выстрелах можно вычислить по
интегральной формуле полной вероятности осреднением Wn(xr, у,) по полно-
му эллипсу группового рассеивания б,:
Wn = jjwn(xr,yr)fT(xT,yr)dxrdyT, (2.29)
«г
где
/г(хг,уг)= Р ехр-
КЕхГ^уГ
(2.30)
Эффективность стрельбы по групповой цели
Согласно определению групповой цели положение каждой ЭЦ в ее соста-
ве известно. Следовательно, можно вычислить вероятность поражения каж-
дой цели как одиночной. Суммируя эти вероятности, получаем математичес-
кое ожидание числа пораженных целей.
Пусть ё^х^Уу) - вероятность поражения f-й цели при фиксированной груп-
повой ошибке (хг, уг), которую найдем по формуле (2.27)
2.5. Эффективность средств поражения ударного действия
85
^.(хг>Уг) = 1-Г1-А,(Хг>Уг)1 , (2.31)
(О
тде ру - вероятность попадания в Лю цель в одном выстреле при фиксиро-
ванной групповой ошибке (хг, уТ). Усредняя условное математическое ожида-
ние числа пораженных ЭЦ
w/(xT,yr) = X5/(Jtr. Jr) (2-32)
i
по всем групповым ошибкам, получаем математическое ожидание числа по-
раженных элементарных целей:
оо оо
Л/ц = j J т, (хг, уг )./г (хг, уг )</хг dyT. (2.33)
Объектное моделирование попадания в цель
При вычислении по формуле (2.29) необходимо дважды выполнить чис-
ленное интегрирование: сначала плотности индивидуального рассеивания по
проекции цели согласно формуле (2.28), а затем - вычисленной согласно (2.25)
условной вероятности поражения по полному эллипсу рассеивания группо-
вых ошибок. Эти расчеты легко выполняются как взаимодействие объектов,
реализующих нормальное распределение на плоскости и свойства геометри-
ческих фигур. Напомним, что класс двухмерного нормального распределения
Norm2 работает с объектами классов плоских фигур (RecShape, CirShape,
EllShape, Ls Shape) при вычислении вероятности попадания в область соот-
ветствующей формы, причем не только с отдельными геометрическими объек-
тами, но и с массивами таких объектов (ГЦ). Геометрические объекты тоже не
совсем просты: на уровне базового класса они могут перемещаться в заданную
точку, а если целевая точка не единственная, то они клонируются так, что каж-
дый клон размещает центр в своей точке, при этом свойства всех производных
классов остаются общими. Число геометрических объектов при таком размно-
жении остается прежним, просто их центры становятся множественными.
Именно отмеченные особенности класса Norm2 и иерархии классов от
класса Shape в их сочетании позволяют легко проводить двойное интегриро-
вание в формуле (2.29). Предназначенная для этого функция dblquad в
MATLAB вычисляет подынтегральное выражение для всего множества значе-
ний внутренней переменной при каждом значении внешней переменной на
расчетной сетке.
Предпримем сначала «лобовую атаку» на проблему вычисления вероят-
ности поражения по формуле (2.29). Оформим подынтегральную функцию
inFun согласно формулам (2.27)-(2.29) так, чтобы она имела только два аргу-
мента - переменные интегрирования. Объекты Xg, Xi, представляющие груп-
повое и индивидуальное рассеивание, а также внешнюю геометрию цели т,
вероятность поражения при одном попадании rl и число выстрелов п переда-
дим в глобальном списке. Вероятность попадания р”(хТ, уг) надо вычислять
для всех клонов цели на множестве положений групповой ошибки, заданном
86
2. Основные характеристики эффективности действия СП и БП
переменными х, у, первая из которых - векторная. Клонирование осуществля-
ет метод MoveTo, вызываемый для объекта т. Плотность распределения в точ-
ках сетки вычисляет метод Norm2/f, вызываемый для объекта распределения
групповых ошибок Хд. Расчет подынтегральной функции выполняется одной
строкой, которая в точности соответствует интегралу (2.29) с подстановкой в
него выражения (2.27) и заменой 1/со на rl:
function out=InFun(х,у)
global Xg Xi Т rl n
out=(1-(1-Ver(Xi,MoveTo(T,x,y))*rl).Лп).*f(Xg,x,y);
В рабочей области MATLAB объявим глобальный список для передачи
объектов и параметров в подынтегральную функцию:
» global Xg Xi Т rl n
» rl=0.3;n=20;
Создадим объекты групповых ошибок Xg с параметрами тхг- 1, /ик = О,
охг = 3, = 2, г = 0,4 и индивидуальных ошибок Xi с параметрами тхн =
- ~ 0, ~ 3» Gyn ~ 1 t — 0.
» Xg=Norm2([l; 0],[3 2],0.4);Xi=Norm2([3 1.5]);
Построим прямоугольник с центром в точке [1, 0], длиной 2, шириной 1,5
(в тех размерностях, в которых определены параметры объекта Norm2):
» T=RecShape([1;0] , [2 1.5]);
Теперь проведем интегрирование по возможным групповым ошибкам в
пределах mTi± 3cTi:
» tic,p=dblquad('InFun',-8, 10, -4.5, 4.5),toe
p= 0.1838
elapsed_time= 46.9840
Сформируем ГЦ, расположив девять объектов т вдоль одной из координат-
ных осей с шагом 5 м так, чтобы средний объект оказался в начале координат:
» for i=l:9 Gr(i)=move(T, i*5-25, 0); end
Теперь целью является объект Gr, значение которого нужно присвоить гло-
бальному объекту т. Соответственно, вместо одной вероятности поражения цели
при фиксированных групповых ошибках будет получен [1х9]-вектор:
» P=Ver(Xi,Gr)
Р= 0.0000 0.0000 0.0013 0.0428 0.0946 0.0144 0.0001
0.0000 0.0000
В результате векторных операций в подынтегральной функции InFun пер-
вый сомножитель (условная вероятность поражения) также будет иметь по
одной строке на каждую ЭЦ, поэтому перед почленным умножением на плот-
ность распределения его надо просуммировать по столбцам для получения
вектора условных математических ожиданий числа пораженных элементар-
ных целей (2.31), (2.33). После замены единственного оператора в функции
inFun на
out=sum(1-(1-Ver(Xi,move(T,x,y))*rl).Лп,1).*f(Xg,x,y);
ее результат автоматически соответствует структуре цели: для одиночных це-
лей результат по-прежнему можно считать вероятностью поражения, а если
2.5. Эффективность средств поражения ударного действия
87
т - группа целей, результатом является математическое ожидание числа пора-
женных целей:
» T=Gr; tic,p=dblquad('InFun',-8, 10, -5, 5),toe
M = 0.4856
elapsed—time = 143.5620
Таким образом, вычисление вероятности поражения ЭЦ и математическо-
го ожидания числа пораженных целей в составе ГЦ сводится к формирова-
нию функций для подынтегрального выражения и обращению к ним из биб-
лиотечной функции dblquad. Из-за того, что dblquad не принимает допол-
нительных переменных, приходится пользоваться глобальными переменными,
а это методическая слабость (источник возможных ошибок) и нарушение объект-
ной технологии. Пользуясь открытостью MATLAB, можно создать собствен-
ную версию dblquad, но еще лучше, учитывая достаточно плавное измене-
ние подынтегральной функции в формуле (2.29), вовсе отказаться от числен-
ного интегрирования, заменив его суммированием. Последний оператор в
функции Knock выполняет суммирование произведений подынтегрального
выражения на Ax,Ajz по всем индексам дискретизации области интегрирова-
ния. Функция Knock сама разбивает область полного рассеивания групповых
ошибок (по правилу «трех сигм») с помощью своей локальной функции Net,
в цикле вычисляет матрицу значений подынтегральной функции и в после-
днем операторе выполняет суммирование:
function out=Knock(Xg,Xi,R,rl,n)
x=Net(Xl(Xg),50);y=Net(X2(Xg),20);
for i=l:length(y)
g=l-(1-Ver(Xi,move(R,x,y(i)))*rl).Лп;
p(i,:)=sum(g,1).*f(Xg,x,y(i));
end
out=[0 diff(y)]*p*[0 diff(x)]';
о/
/О
function t=Net(X,k)
X=struct(X);
t=linspace(X.m-X.s*3,X.m+X.s*3,k);
Все исходные данные (групповые и индивидуальные ошибки, цель, веро-
ятность поражения в одном попадании и число выстрелов) функция Knock
получает через список формальных параметров. Сравним ее результаты с про-
веденным ранее численным интегрированием:
» tic,p=Knock(Xg,Xi,Gr,0.3, 20) , toe
p = 0.4857
elapsed_time = 3.1870
Практически тот же результат получен более технологичным способом,
и, к тому же, на три порядка быстрее - за 3 с. Это значит, что можно услож-
нять постановку задач оценки эффективности вплоть до оптимизационных.
Например, оптимизация параметра кругового нормального распределения ин-
дивидуальных ошибок, которая может быть связана с выбором высоты рас-
крытия кассеты с ПЭ ударного типа, основывается на следующем цикличес-
ком расчете:
88
2. Основные характеристики эффективности действия СП и БП
» р=[];for i=l:9
р(i)=Knock(X,setval(Y,[l,l]*i/2),Gr,0.3,100); end
p = 0.4108 0.7588 1.0302 1.2058 1.2874 1.3013 1.2745
1.2263 1.1687
Видно, что наилучший результат получается в шестом варианте при а =
= 6/2 = 3.
2.6. Эффективность поражения цели ударной волной в воздухе
Промежуточный показатель могущества фугасных БП при стрельбе по
наземным (надводным) целям - КЗП Р(А /х, у, z) = G(x, y,z)-B силу отмечен-
ных (см. разд. 2.1) особенностей принимает вид ступенчатой функции с еди-
ничным значением в пределах обобщенной цели Do, все точки которой распо-
ложены на расстоянии не больше критического /?п от поверхности реальной
цели Ц:
C(y v = P при (х’Ьг)еОо={х,у,г:</((х,у,ДЦ)<Ап},
|0 при {x y ^Do
Поэтому полная вероятность поражения цели вычисляется как -вероятность
попадания в обобщенную цель.
Малоразмерные цели. Если размеры цели малы по сравнению с разме-
рами поля (наибольший линейный размер цели £ц и радиус поражения нахо-
дятся в отношении £ц < 0,2/?п), то симметричное поле поражения сосредото-
чено в круге радиусом 7?п:
, П при г<Л„,
v 7 [0 при г>Яп.
В этом случае, конечно, 5пр = , причем, в отличие от величины, вы-
численной по формуле (2.8) при произвольной функции G(r), она представля-
ет собой истинную площадь зоны поражения, а не какую-то абстрактную ве-
личину с размерностью площади, именуемую приведенной площадью. Попа-
дание в круг радиусом Rn с центром в точечной цели совпадает в данном
случае с поражением цели, так что вероятность поражения определяется как
вероятность попадания в круг
W= Я f(x,y)dxdy,
x2+y2<R2
где f(x, у) - плотность распределения промахов.
Если рассеивание нормальное круговое, т. е. ол = Су = о , или близкое к
круговому при 0,5 < сл/Оу < 2, тогда о = (а +ал)/2, промах подчиняется закону
Рэлея и вероятность попадания в круг радиусом 7?п вычисляется по формуле
(2.18) или (2.20).
Протяженная цель. Элементарная цель считается пораженной, если ка-
кая-либо часть ее попадает в область поражения (находится не дальше Ru от
центра взрыва). Если цель занимает область D, поражение обеспечивается при
условии, что центр взрыва принадлежит обобщенной цели Do, граница кото-
рой эквидистантна границе области D с расстоянием, равным Rn.
2.6. Эффективность поражения цели ударной волной в воздухе
89
Если протяженность цели значительна только по координатам х, у, то об-
ласть D и обобщенная цель Do составляют часть плоскости XOY. Протяжен-
ность по высоте не существенна при наземном разрыве, так как минимальное
расстояние до выпуклой поверхности цели определяется ее проекцией на плос-
кость XOY.
Если протяженность цели по высоте соизмерима с горизонтальными раз-
мерами и взрыв может произойти на некоторой высоте Н, то полную вероят-
ность попадания в обобщенную цель следует вычислять по трехмерному КЗП
G(x,y, Н) и плотности распределения /(х, у, Н). Но в зависимости от способа
стрельбы плотность распределения может иметь особенности, использование
которых упрощает нахождение полной вероятности.
Дистанционный подрыв с установкой на высоту. При стрельбе снаря-
дами с дистанционным ВУ (ДВУ) по навесной траектории, когда ДВУ уста-
навливается на данную высоту подрыва HQ, ошибки на плоскости стрельбы и
ошибки по высоте срабатывания, очевидно, не зависят друг от друга, поэтому
f(x,y, Н) = /(х, у)<р(Н). Нормальная плотность распределения промахов f(x,y)
определяется характеристиками ошибок стрельбы, а закон распределения вы-
соты подрыва также принимается нормальным с параметрами М [Я] = Яо, о.
В этом случае имеет смысл рассмотреть горизонтальное сечение обобшенной
цели на высоте Н (обозначим его 5Я). Вероятность попадания центра взрыва
(х, у, Н) в обобщенную цель равна вероятности попадания эпицентра (х, у) в
проекцию сечения SH на плоскость XOYD0(H)
w(H)= jj f(x,y)dxdy.
DO(H)
Чтобы определить полную вероятность поражения цели, надо усреднить
полученную зависимость w(H) по высоте срабатывания
W = j w(H)<p(H)dH.
о
Дистанционный подрыв с установкой на дальность. При стрельбе сна-
рядами с ДВУ по настильной траектории ошибками ДВУ обусловлено уже
рассеивание дальности, т. е. координата х теперь распределена по нормально-
му закону <р(х) с параметрами, зависящими от установки и точности ДВУ. Рас-
сеивание траекторий определяется координатами точки пролета в картинной
плоскости - плоскости YOZ, перпендикулярной направлению стрельбы. Так
что f(x,y, Н) = f(y, //)<р(х). Значит, обобщенную цель надо рассекать плоско-
стями, параллельными картинной плоскости, строить в нескольких сечениях
£>0(х), вычислять условные вероятности поражения
w(x) = jj f(y,z)dydz,
DOW
а затем - полную вероятность поражения по формуле
W = j w(x)<p(x) dx.
90
2. Основные характеристики эффективности действия СП и БП
Стрельба снарядами с НВУ по объемной цели. При стрельбе снаряда-
ми с НВУ, реагирующими на цель, ошибка срабатывания по дальности за-
висит от промаха в картинной плоскости, причем условное распределение
ф(х/у, z) является нормальным с параметрами, также зависящими от у и z. Обыч-
но рассеивание в картинной плоскости нормальное круговое и задается зако-
ном распределения промахов Рэлея /(г). Предположим для упрощения, что
условное распределение <p(x/y, z) не зависит от стороны промаха, а зависит
только от промаха, и его можно представить более простой функцией ср(х/г).
Из геометрических построений при предположении об осевой симметрии обоб-
щенной цели в направлении оси х можно для каждого промаха определить
интервал [х((г), х2(г)], при подрыве в котором обеспечивается поражение цели,
т. е. часть траектории, находящейся в пределах обобщенной цели. Тогда ус-
ловную вероятность поражения при фиксированном промахе вычислим как
вероятность срабатывания НВУ в пределах интервала [х((г), х2(г)];
w(r) = ^ Ф
Х2(г)-х(г)
Ех(г)
-ф
xt(r)-x(r)
Ех(г)
после чего полную вероятность поражения можно рассчитать интегрировани-
ем по промахам:
гт
jw(r)(p(x/r)/(r)dr,
о
где гт - максимальный радиус действия НВУ.
Вероятность поражения цели при нескольких выстрелах. Вероятность
поражения цели при п независимых выстрелах после вычисления вероят-
ностей поражения в каждом г'-м выстреле Wt можно определить по формуле
w(n)=1-П(1-^),
1=1
или, если все ^одинаковы,
w(n)=i-(i-w;.)n.
Вычисление вероятности поражения при воздушном взрыве
Условием разрушения конструкции при квазистатическом нагружении
(длительность фазы сжатия УВ т+ много больше периода собственных коле-
баний конструкции Т) является превышение избыточного давления на фронте
УВ Ьрт над. критическим &р*т, приводящим к разрушению данного объекта
(2-34)
При воздействии У В с малым временем фазы сжатия, когда т+/Г « 1,
нагружение имеет импульсный характер, деформации конструкции пропорци-
ональны импульсу силы, и условие разрушения записывается неравенством
i+>i*+, (2.35)
2.6. Эффективность поражения цели ударной волной в воздухе
91
где /'* - критический импульс положительной фазы избыточного давления УВ,
приводящий к разрушению объекта.
С достаточной для практики точностью частный критерий (2.34) можно
использовать при х+/Т> 10, а критерий (2.35) - при т+/Т < 0,25. В остальных
случаях поражающее действие УВ зависит как от 2хрт, так и от i+, а условие
разрушения представляется обобщенным критерием поражающего действия УВ
(Дрт - Ьр*т)( i+ -1*) = К. (2.36)
Подробно обобщенный критерий (2.36) описан в гл. 5, а здесь в качестве
примера приведены лишь некоторые значения исходных данных для расчетов
эффективности действия УВ по типовой цели (табл. 2.1).
Таблица 2.1. Значения исходных данных
для расчета действия УВ по типовой цели
Тип поражения кгс/см2 г,, кгс-с/м2 К
А 0,5 45 23
В 0,4 » 35 22
С 0,3 25 21
Они позволяют построить область срабатывания БП, в которой обеспечи-
вается поражение цели по типу А, В или С {x,y,z: G(x,y,z) = 1} в соответ-
ствии с критерием (2.36) Для этого надо вычислить радиус поражения цели
Rn в поле взрыва данного БП, с помощью которого можно построить конфигу-
рацию обобщенной цели.
При взрыве в воздухе сферического заряда ТНТ массой тивв параметры
поражения определяются по эмпирическим формулам Садовского (подробнее
это рассмотрено в гл. 4):
Лрт =0,084^-§®- + 0,27
™вв
+ 0,7
у]твв
, МПа; (2.37)
т+ = 1,5 Vwbb мс>
зСу-
/+=2Ю™_, Па-с,
г
(2.38)
(2.39)
где г - расстояние от центра взрыва.
При взрыве зарядов из других ВВ согласно принципу энергетического
подобия следует подставлять в формулы (2.37)-(2.39) массу эквивалентного
тротилового заряда тэ - Q/Qim, где Q, бтнт ~ удельные теплоты взрыва ис-
пользуемого ВВ и ТНТ.
Зависимости (2.37)-(2.39) справедливы в диапазоне расстояний 1 < г/у]твв <
< 10 ([г] = м, [лгвв] = кг) при взрыве в безграничном пространстве. При взрыве
заряда на поверхности жесткой недеформируемой преграды вся выделяющая-
92
2. Основные характеристики эффективности действия СП и БП
ся энергия идет на формирование УВ в полупространстве, следовательно, ее
параметры будут такими же, как при взрыве в неограниченном пространстве
заряда удвоенной массы. Параметры УВ можно рассчитать в этом случае по
формулам (2.37)-(2.39) при массе 2znBB. Чтобы учесть сжимаемость прегра-
ды, необходимо в те же формулы подставить активную массу
ета=2тривв,
где Т] - коэффициент, учитывающий свойства преграды (Г| = 1 - при взрыве на
металлической или железобетонной плите, Т] = 0,6...0,8 - при взрыве на пр-
верхности земли и Т] = 0,55...0,6 - при взрыве на поверхности воды).
Исключив г из уравнений (2.37) и (2.39), построим кривую поля взрыва
Apm(i+). Сопоставляя ее с предельной диаграммой обобщенного критерия по-
ражения (2.36), получаем величину параметров УВ, которые обеспечивают по-
ражение цели по данному типу, а затем по формуле (2.37) найдем соответ-
ствующее расстояние от центра взрыва. Это и есть радиус поражения Rw
Если параметры предельной -^-диаграммы Др*т, i*+ и К соответствуют
поражению цели с некоторой заданной вероятностью Р, то найденное рассто-
яние от центра взрыва определяет не радиус поражения, а аргумент .коорди-
натного закона поражения G(r), при котором G(r) = Р.
Все вычисления от определения радиуса поражения до вероятности пора-
жения целей легко осуществляются в иерархии объектных моделей. Надо толь-
ко добавить необходимые методы в разработанные ранее классы, представля-
ющие уязвимость целей к действию фугасных поражающих факторов. Что
касается самого СП, то его фугасное действие будем определять известной
массой сферического заряда ТНТ в соответствии с зависимостями (2.37)-(2.39),
хотя для общих применений целесообразно разработать соответствующий
класс, который определял бы эту характеристику по свойствам ВВ и конст-
руктивным особенностям СП.
Для вычисления радиуса поражения составим вспомогательную функцию
margin, определяющую запас поражения на данном расстоянии г от центра
взрыва. Она сначала вычисляет по формуле Садовского избыточное давление
на расстоянии г, затем находит необходимое избыточное давление по обоб-
щенному критерию (2.36) при i+, вычисленном в этой же точке по формуле
(2.39). Запас поражения рассчитывается как превышение фактического избы-
точного давления над требуемым:
function P=margin(r,dP,I,K,m)
k=mA(1/3)./г;
Pl=[0.084 0.27 0.7]*[k; к.Л2; к.Л3];
P2=(К/(210*кЛ2*г-1)+dP);
P=P1-P2;
end
Предельное значение расстояния, при котором запас поражения обраща-
ется в нуль, теперь можно вычислить с помощью функции MATLAB fzero.
Ей надо передать имя функции, корень которой подлежит определению, гра-
ницы интервала или исходное приближение, а также дополнительные пара-
метры обрабатываемой функции. Этот расчет выполним в классе фугасных
поражающих факторов Vulner p, который содержит в массиве pik парамет-
2.6. Эффективность поражения цели ударной волной в воздухе 93
ры обобщенного критерия поражающего действия (2.36) именно в той после-
довательности, в которой они расположены в формуле: Лр*т, i*+, К. В качестве
исходного приближения выберем половину радиуса, на котором импульс фазы
сжатия равен г*. Метод Vulner_p/CalcR вызывается для объекта X класса
Vulner _р с параметром m (масса сферического заряда ТНТ), а возвращает
радиус поражения R и дополнительно остаточное значение функции:
function R=CalcR(X,m)
гтп=210*тЛ (2/3) /X.pik(2) ;
[R d] =fzero ('margin' ,rm/2, [] ,X.pik(l) ,X.pik(2) ,X.pik(3) ,m) ;
Впрочем, вычисленная таким образом величина R является радиусом по-
ражения только для точечной цели. Для объектов, знающих свою форму и
размеры, абстракция в виде точечной цели не дает особых преимуществ. Но
здесь для упрощения будем предполагать, что цель (точнее, ее проекция на
XOY) имеет «компактную форму», так что граница обобщенной цели мало
отличается от окружности радиусом /?ц + R, если /?ц определить по площади
проекции цели. Метод с тем же именем, что и предыдущий, но уже в классе
УА (v unit/CalcR) вычисляет сначала'йредельный радиус поражения для
фугасных факторов, затем определяет площадь своих поверхностей, далее по
площади проекции на горизонтальную плоскость находит радиус равновели-
кого круга, возвращает радиус поражения и радиус обобщенной цели:
function [г, R]=CalcR(X,m)
r=CalcR(X.vulner,m);
S=Area (Create (X. shape,MySiz’e (X. shape) ) );
R=R+sqrt(S(end)/pi);
Правда, объект v unit не может обратиться непосредственно к Vulner p/
CalcR, он даже не может быть уверен, что является уязвимым для фугасных
факторов. Он обращается к своему члену vulner, который представляет уяз-
вимость по всем факторам. Одноименный метод Vulner/CalcR просматри-
вает определенные в нем поражающие факторы, и если среди них обнаружи-
вает объект класса Vulner p, отправляет его методу CalcR параметр m и по-
лучает обратно предельный радиус поражения. Естественно, что в случае
отсутствия данных по запрашиваемому признаку поражения возвращается ну-
левой результат:
function R=CalcR(X,m)
R=0;
for i=l:length(X.Factors)
0=X.Factors(i);
if isa(0{:},'Vulner_p') R=CalcR(0{:},m); end
end
Итак, передавая вызов CalcR для вычисления радиуса поражения воз-
душной ударной волной по иерархии объектов с уровня цели (или УА) до
объекта, специализирующегося по данному виду поражения, система объек-
тов получает радиус зоны поражения вокруг цели. Для вычисления вероятнос-
ти поражения достаточно создать объект «круг» (класса CirShape) радиусом
зоны поражения и центром, совпадающим с центром цели, а затем передать
запрос на определение вероятности попадания в круг объекту, представляю-
94 2. Основные характеристики эффективности действия СП и БП
щему рассеивание точки взрыва. Допустим, нормальное рассеивание на плос-
кости имеет параметры тх = 3, ту=2, сх= 4,5, Су= 3, г = 0,4:
» X=Norm2([3;2],[4.5 3],0.4);
Обобщенная модель цели в форме параллелепипеда с длиной 3, шири-
ной 2 и высотой 1,5 характеризуется параметрами обобщенного критерия по-
ражающего действия УВ из первой строки табл. 2.1:
» A=V_Unit([3 2 1.5] , 'PIK' , [0.5 45 23])
УА1 параллелепипед:
центр: 0 0; размеры: 3 2 1.5
фуг.: { Р = 0.5 I =45 к =23}
Вычислим радиусы зоны поражения вокруг цели и вокруг точки взрыва
при эквивалентной массе заряда 10 кг:
» [R r]=CalcR(A,10)
R =4.1206
г =2.7386
Теперь найдем вероятность попадания в зону поражения цели: „
» p=Ver(X,CirShape(R,MyCenter(А)))
р =0.3717
Таким образом, рационально распределив данные и вычислительные про-
цедуры по соответствующим объектам, мы получим не просто средство опре-
деления одного из показателей эффективности действия, а удобный инстру-
мент анализа решений. Например, уменьшив рассеивание в 2 раза и «запла-
тив» за это уменьшением массы заряда также в 2 раза, оценим влияние этих
изменений на вероятность поражения. Для сравнения сначала определим ве-
роятность поражения при уменьшенном рассеивании, а затем при уменьше-
нии массы:
» p=Ver(Х*0.5,CirShape(R,MyCenter(А)))
р = 0.5461
» p=Ver(Х*0.5,CirShape(CalcR(A,10/2),MyCenter(А)))
р = 0.4352
Вероятность поражения при стрельбе в случае ступенчатого закона пора-
жения можно найти, как в случае СП ударного типа действия, полагая услов-
ную вероятность поражения равной единице:
» р=1-(1-Ver(Х*0.5,CirShape(CalcR(A,10/2),MyCenter(А))))Л5
р = 0.9425
2.7. Эффективность средств поражения осколочного действия
Общая характеристика эффективности СП осколочного типа
Характер изменения КЗП в окрестности цели определяется структурой
поля ПЭ, создаваемого данным СП, и вектором скорости носителя относи-
тельно цели в момент подрыва. Формула (2.5) показывает, как влияют на эф-
фективность действия плотность поля ПЭ, их масса и скорость встречи с
целью. Предельно высокое число эффективных попаданий в цель имело бы
2.7. Эффективность средств поражения осколочного действия 95
место при максимально возможной плотности поля П(х, у, z), полностью скон-
центрированного на проекции цели. Но только это маловероятно, потому что
техническая реализация направленного поля потребовала бы соответствую-
щих ресурсов на устройства определения координат цели и формирования ра-
ционального потока ПЭ. Хорошо, если оставшегося ресурса хватит хотя бы
на один эффективный ПЭ, но это уже другой тип СП. Если некоторая инфор-
мация о положении цели в момент подрыва уже есть (например, в системе
наведения ЗУР), имеет смысл увеличить плотность поля в сторону цели за
счет других направлений. На этапе проектирования оптимизация поля воз-
можна на основании априорных предположений о вероятном месте нахожде-
ния цели в момент подрыва. Например, при стрельбе по одиночной непод-
вижной цели с применением ДВУ в момент подрыва она находится в преде-
лах трубки промахов на небольшом расстоянии от снаряда по направлению
его движения. В этом случае целесообразно формирование поля с осевым раз-
летом внутри соосного снаряду конуса с небольшим углом раствора. Возмож-
ная плотность поля ПЭ в момент накрытия цели зависит от степени достовер-
ности априорной информации при данной точности стрельбы, установки ДВУ
и ошибок его срабатывания: чем больше ошибки, тем больший диаметр поля
нужно обеспечивать (за счет угла раствора или упреждения срабатывания) для
гарантированного накрытия цели. Эти условия особенно критичны для эф-
фективности полей с осевым разлетом ПЭ в связи с тем, что при осевом мета-
нии общее количество ПЭ определяется наиболее ограниченным ресурсом сна-
рядов - калибром.
Во многих случаях осколочные СП применяют для поражения групповых
и площадных целей, причем повышение плотности поля достигается не кон-
центрацией ПЭ в окрестности конкретной ЭЦ, а увеличением их количества в
области расположения всех ЭЦ. Эффективное поражение очередью одиноч-
ной малоразмерной легкоуязвимой цели (например, ракеты класса воздух-воз-
дух) также требует создания плотного осколочного поля. В таких ситуациях
безусловно предпочтительнее СП с радиальным разлетом ПЭ.
СП осколочного типа с радиальным разлетом ПЭ
Средства поражения с радиальным разлетом ПЭ формируют осесиммет-
ричный поток, плотность которого (предел отношения количества ПЭ, летя-
щих в элементарном телесном угле, к величине этого угла) зависит только от
меридионального угла (р в интервале 0 < <рх < (р < ф2 < Я- Исходная информа-
ция для расчета плотности потока содержится в функции распределения чис-
ла ПЭ по меридиональным углам разлета Нф), которая получается в стати-
ческих испытаниях как относительное число ПЭ с углом вылета в интервале
(фр ф). Распределение по углам разлета можно охарактеризовать также диф-
ференциальным законом /(ф) = С'(ф). Плотность поля ПЭ в произвольной
точке определяется как относительное число ПЭ на элементарной площадке,
перпендикулярной направлению разлета. Так как плотность потока зависит
только от угла ф, плотность поля постоянна на кольцевой части сферы произ-
вольного радиуса R с центром в начале разлета, вырезанной конусами с угла-
ми раствора 2ф и 2(ф + Дф):
96 2. Основные характеристики эффективности действия СП и БП
п/о \ A/V<P #ДГ(ф) N /(ф) „ л
П(/?, ф) =--=----------(2.40)
Д5 2л(/?8Шф)/?Дф 2л R2 sin ф
где ДЛ^ - среднее число осколков, разлетающихся в выделенной зоне; ДА -
площадь кольцевой части сферы радиусом R в выделенной зоне; N — общее
число осколков.
В момент срабатывания СП имеет некоторую скорость Vj, которая изме-
няет не только суммарную скорость разлета ПЭ, равную в статике v0, но и
угол вылета в неподвижной системе координат. Так, ПЭ, в статике вылетаю-
щий с начальной скоростью я0 под углом ф, получает суммарную скорость
гю =yll!o+v] ~ 2г0г1 cos ф (2.41)
и угол вылета
ф'= arctg I°Sinl|> (2.42)
Г] + го COS ф
Поэтому распределение по углам разлета в динамике отличается от стати-
ческого. Если скорость разлета ПЭ в статике одинакова по всем направлениям
разлета, то преобразование ф—>ф" однозначно, и перестройка функции рас-
Рис. 2.2. Пример неодно-
значного соответствия между
пределения ПЭ по углам разлета в статике ^(ф)
в функцию распределения по углам в динамике
/д(ф') не составляет проблемы: Fn(<p') = Е(ф), если
аргументы ф' и ф связаны формулой (2.42). При
переменном годографе скорости г?0(ф) Ф const за-
висимость ф'(ф) не однозначна. В зоне разлета,
примыкающей к углу ф', могут лететь ПЭ из не-
скольких статических зон (рис. 2.2). Формально
Е’д(ф') и плотность/д(ф') = F'д(ф/) получаются как
закон распределения немонотонной функции ф'(ф)
углами вылета в статике и
динамике
случайной величины с известным законом распре-
деления аргумента /(ф). На практике эта задача
чаще решается алгоритмически, так как статичес-
кое распределение задается дискретно относительным числом ПЭ в двугра-
дусных зонах. Построив закон распределения/д(ф'), вычислим плотность поля
ПЭ вокруг СП в неподвижной системе координат
П(/?,ф,) = -^^^- (2.43)
2л/?2 sin ф
Для расчета скорости соударения в функции уязвимости Sy(q, v) необхо-
димо знать скорость ПЭ при подлете к цели. Начальную скорость разлета в
неподвижной системе координат по направлению ф' (с учетом скорости носи-
теля ?.'j) можно определить по формуле
г01 = ц cos ф'+yjVQ - v2 sin2 ф', (2-44)
в которую нужно подставить собственную начальную скорость &0 в угле ста-
тического разлета ф, соответствующем динамическому углу ф'. Снижение
2.7. Эффективность средств поражения осколочного действия 97
скорости на небольших расстояниях R от точки вылета до встречи с целью
подчиняется экспоненциальной зависимости
v(R,(f>') = vOie~cnR, (2.45)
где сИ — обобщенная баллистическая характеристика ПЭ на высоте Н. При
беспорядочном вращении ПЭ на траектории она зависит не от площади миде-
лева сечения, а от среднего поперечного сечения S:
(2.46)
2?
Согласно лемме Коши среднее поперечное сечение выпуклого тела равно
одной четверти площади его поверхности
5=^-- (2.47)
4
Плотность воздуха ря на данной высоте Н вычисляют с учетом снижения
с помощью нормальной плотности р0 по высоте ря= р0 Н(Н). Табличную функ-
цию высоты Н(у) можно аппроксимировать, например, формулой Ветчинки-
на, применимой в диапазоне высот от 0 до 20 000 м:
20000-у (2.48)
2000Q+ У
Коэффициент лобового сопротивления сх при скоростях, характерных для
разлета ПЭ (г > 600 м/с), определяют по формуле
=0,865(1+—) (2-49)
V v)
При стрельбе по неподвижной цели скорость встречи ПЭ с целью - v(R, ср')-
Если масса всех ПЭ одинакова и известна функция уязвимости, среднее число
эффективных попаданий в проекцию цели можно вычислить непосредствен-
но как произведение плотности поля и уязвимой площади цели:
/п(А, ф') = N fa (Ф - 5 (q, v(R, ф')). (2.50)
2л/?2 sin ф 7
Вероятность поражения цели при условии, что это событие наступает на
расстоянии R от центра взрыва в направлении ф' от оси СП, определяется как
вероятность хотя бы одного эффективного попадания ПЭ в цель
Р ( А | R, ф') = G(R, ф') = 1 - . (2.51)
Вероятностный смысл функции G(R, ф') такой же, как и КЗП G(x, у, z).
Правда, в отличие от КЗП в системе координат цели, функция G(R, ф') не по-
зволяет найти вероятность поражения цели по интегральной формуле полной
вероятности (2.1). Но она является важной промежуточной характеристикой по-
ражающего действия по данной цели, поскольку не зависит от условий встречи
98
2. Основные характеристики эффективности действия СП и БП
СП с целью (направления и скорости движения снаряда относительно непод-
вижной цели). Эффективность действия в различных условиях встречи удоб-
но анализировать, выполняя в каждом случае пересчет координат (х, у, z) ЦСК
в координаты относительно снаряда (R, ср") и приравнивая G(x, у, z) в этой
точке вычисленным предварительно значениям G(R, ф').
Формулы (2.40)-(2.51) применяют для моделирования осесимметричных
поверхностных однофракционных осколочных полей. В других случаях они
могут служить лишь теоретической основой для разработки адекватной моде-
ли. Два основных допущения можно считать справедливыми для любых оско-
лочных полей: распределение числа попаданий в УА по закону Пуассона и
возможность поражения каждого УА одним удачно попавшим ПЭ. Из них вы-
текает формула (2.51), а универсальное свойство простейших пуассоновских
полей - устойчивость к сложению - позволяет распространить ее применение
на многокомпонентные поля, считая компонентами те части ПЭ, которые ока-
зывают одинаковое воздействие на цель. Из формулы (2.50) следует, что это
аргументы функции уязвимости: масса ПЭ и скорость соударения.
Так, если поле ПЭ состоит из нескольких массовых фракций и они неко-
торым образом распределены по угловым зонам разлета, можно вычислить
среднее число эффективных попаданий, приходящихся на каждую, фракцию,
а в формулу (2.51) подставить их сумму. Для сокращения исходных данных и
упрощения расчетов иногда принимается допущение о равномерном распре-
делении фракций по всем угловым зонам, т. е. в г-й массовой фракции со
средней массой ql находится AjV, ПЭ и все они примерно одинаково распреде-
лены по угловым зонам, так что плотность i-й фракции в каждой угловой зоне
составляет ДА, /N плотности всего поля. Среднее значение эффективных по-
паданий ПЭ fn(R, ф', qt) из каждой массовой фракции вычисляется по форму-
ле (2.51) с подстановкой в качестве аргумента функции уязвимости. Пола-
гая, что равномерное распределение фракций по статическим зонам разлета
остается таковым и в динамике, получаем:
ш(/?,ф')=1;-^-^2^5у(9,.,г(/?,ф')).
i 2nR^ вшф N у
Последнее предположение неверно в случае переменного годографа ско-
рости г.’0(ф), когда обратное преобразование ф(ф') неоднозначно. В формуле
(2.44) нужно подставлять не одно, а несколько значений v0 из тех статических
зон, которые соответствуют условию (2.42) с данным ф'. Поток ПЭ в направ-
лении ф' могут составлять элементы, вылетевшие из разных статических зон
с различными скоростями и соотношением массовых фракций. «Перемешива-
ние» направлений разлета еще больше усиливается относительно движущей-
ся цели вследствие того, что по мере торможения ПЭ с разными баллистичес-
кими характеристиками направление их движения относительно цели изменя-
ется по-разному. Если скорость цели соизмерима со скоростью ПЭ, поле разлета
в ЦСК изменяется принципиальным образом - оно перестает быть осесим-
метричным: при встрече СП с целью на пересекающихся курсах относитель-
ная скорость ПЭ и динамическая плотность поля зависят не только от мери-
дионального угла, но и от стороны промаха. Изменение плотности поля по
2.7. Эффективность средств поражения осколочного действия
99
экваториальным углам может вноситься и намеренно, чтобы увеличить плот-
ность поля в области цели при известной стороне промаха.
Методы алгоритмического моделирования процессов формирования поля
ПЭ, оперирующие динамической плотностью, не позволяют универсальным
образом учесть все особенности реального поля. Работоспособные расчетные
алгоритмы удается построить за счет «сглаживающих» допущений. Напри-
мер, принимают г’о(ср) = const, из произвольных условий встречи ракеты с воз-
душной целью выделяют стрельбу на параллельных курсах, что сохраняет осе-
вую симметрию КЗП и т. п. Разумеется, такой подход нельзя считать приемле-
мым для анализа эффективности действия в ситуациях, выходящих за рамки
принятых допущений. Есть важное применение методов оценки эффективно-
сти, целенаправленно создающее такие ситуации. Так, в оптимальном проек-
тировании необходимо исследовать всю область поиска оптимальных вариан-
тов по принятому критерию в пределах существенных ограничений, к како-
вым методические допущения, конечно, не относятся. Критерий оптимальности
формируется из показателей эффективности, его нечувствительность к принци-
пиальным изменениям пробных вариантов или неадекватное поведение лиша-
ют смысла всю процедуру поиска оптимального решения. Значит, нужна аль-
тернатива самой технологии получения ответственных критериальных оценок.
В предыдущем разделе объектное моделирование уязвимости цели позво-
лило организовать вычисление функции уязвимости взаимодействием объек-
тов, автоматически создаваемых непосредственно по исходным данным о цели.
Моделирование поля ПЭ связано с такой же проблемой: теоретически поле
разлета с осевой симметрией описывается динамической плотностью потока
ПЭ /ц(<р'), но на самом деле не эта функция определяет эволюцию поля, а
наоборот, движение дискретных элементов в соответствии с их начальными
скоростями и баллистическими свойствами определяет относительное коли-
чество элементов, попадающих в некоторую часть цели. Это означает, что адек-
ватное моделирование поля ПЭ при произвольных условиях встречи с целью
можно обеспечить, сосредоточив внимание на свойствах и поведении диск-
ретных элементов. Под дискретными элементами поля здесь понимаются не
сами ПЭ, а их совокупности, выделяемые исходными данными о поле разле-
та распределением по углам вылета, скоростям, массовым группам. В ре-
зультате должна получиться объектная модель поля ПЭ. Ее взаимодействие с
созданной ранее объектной моделью цели позволит анализировать эффектив-
ность действия в широком диапазоне условий, а значит, такой подход может
использоваться и в оптимальном проектировании.
Объектная модель поля ПЭ
Иерархия классов, моделирующих поле разлета ПЭ. Основой иерар-
хии является класс «ПЭ» (рис. 2.3). Его геометрические свойства содержатся в
базовом классе «Форма», конкретизированном классами «Шар», «Цилиндр» и
т. д. Собственное свойство «материал» вместе с унаследованными от класса
«Форма» свойствами и методами позволяют вычислять в этом классе все необ-
ходимые характеристики ПЭ. Свойства материала следует также представить
соответствующим классом, но он не интересен с точки зрения взаимодействия
100 2. Основные характеристики эффективности действия СП и БП
Рис. 2.3. Иерархия классов для моделирования поля ПЭ в динамике
с другими классами и поэтому здесь не определяется. Одинаковые ПЭ состав-
ляют фракцию, которая характеризуется количеством элементов и их распре-
делением в углах вылета. Создадим класс «Фракция» наследованием класса
«ПЭ», добавив два указанных свойства. Считая, что ПЭ всех фракций в одном
угле разлета имеют одинаковую начальную скорость (поле разлета в статике -
поверхностное), класс «Поле ПЭ в статике» произведем от класса «Фракция»
с добавлением свойства «начальная скорость разлета» - распределение на-
чальной скорости в двуградусных зонах. Все проблемы перестройки поля раз-
лета в динамике решаются в классе «Поле ПЭ в динамике», наследующем
«Поле ПЭ в статике» с добавлением к свойствам класса скорости носителя. В
этом классе реализуется и основной метод данной иерархии - расчет КЗП в
системе координат СП G(/?,(p').
Классы форм ПЭ. Классы трехмерных форм, разработанные для моде-
лирования УА, не содержат методов вычисления объема и средней площади
сечения, необходимых для определения массы и баллистического коэффици-
ента ПЭ. Чтобы восполнить этот пробел, достаточно добавить в папки
@ParaShape, @CylShape, @BallShape методы Volume и MyParameter:
function out=Volume(X)
out=prod(MySize(X));
function out=MyParameter(X)
out=sum(AreaG(X)) /2;
function out=Volume(X)
2.7. Эффективность средств поражения осколочного действия 101
S=MySize(X);
out=pi*S(l)A2*S(2)*0.5;
function out=MyParameter(X)
S=MySize(X);
out=(S(1)/2+S(2))*pi*S(1)/4;
Необходимо также разработать класс для моделирования свойств фраг-
ментов неправильной формы, возникающих при естественном дроблении. Кон-
структор этого класса такой же, как и конструкторы определенных форм:
function X=AnyShape(varargin)
s=struct('Class','Неправильный');
X=class(s,'AnyShape',Shape3);
X=setval(X,varargin{:});
Класс произвольной формы не может вычислять объем и параметр фор-
мы, но он может хранить их заданные значения, которые обслуживаются ба-
зовым классом как размеры. Удобнее задавать не объем, а массу ПЭ, но, что-
бы в остальном поведение не отличалось от других классов трехмерных форм,
класс AnyShape должен оперировать объемом. Он просто пересчитывает мас-
су в объем в момент принятия исходных данных:
function X=Correct(X)
out=MySize(X); out(1)=outfl)/7810е-6;
X=setval(X,out);
function out=Volume(X)
out=MySize(X,1);
function out=MyParameter(X)
out=MySize(X,2);
Класс поражающих элементов ShockE. ПЭ - трехмерное тело, поэто-
му его следует произвести от класса Shape3:
function X=ShockE(varargin)
X=class(struct('Class','ShockE'),'ShockE',shape3);
X=setval(X,varargin{:});
Метод ShockE/setval принимает уже готовую форму и может создать
одну из правильных форм по размерам:
function X=setval(X,varargin)
for i=l:nargin
x=varargin{i};
if isa(x,'shape31)
X.shape3=x;
elseif double(x)
X.shape3=Create(X.shape3,x);
end
end
Метод ShockE/display кроме характеристик формы показывает массу ПЭ:
function display(X)
s=getfield(struct(X.shape3),'Class');
sl=sprintf ('%5.1f',Mysize (X.shape3)');
102 2. Основные характеристики эффективности действия СП и БП
s2=sprintf('massa %5.3f',massa(X));
disp([s ' ' inputname (1) ' (' si ') ' s2] );
Масса вычисляется умножением объема на плотность стали с учетом
того, что объект х, для которого вызван метод, может содержать несколько
фракций ПЭ:
function out=massa(X)
for i=l:length(X)
out(i)=Volume(X(i).shape3)*7810e-6;
end
Аналогично векторизован и метод ShockE/MyParameter:
function out=MyParameter(X)
for i=l:length(X)
out(i)=MyParameter(X(i).shape3);
end
Баллистический коэффициент в первой строке метода s.hockE/bal вы-
числяется по формулам (2.46) без учета скорости движения и высоты, точнее,
при скорости около 973 м/с и нулевой высоте. Затем учитываются, если они
заданы, высота и фактическая скорость по формулам (2.48), (2.49):
function out=bal(X,V,h)
out=0.45*1.29e-3*MyParameter(X)./Massa(X);
if nargin>l & V>550 out=out*(1+50/V)/1.0514;end
if nargin>2 out=out* (20000-h)/(20000+h); end
Основной метод класса ShockE/decr определяет экспоненту затухания
скорости в выражении (2.45). Он принимает переменный список аргументов,
из которых только первый (расстояние) обязателен, а остальная часть списка
передается методу bal:
function d=decr(X, varargin)
R=varargin{1};
if length(X)>1
d=zeros(1,length(X));
for i=l:length(X)
d(i,:)=exp(-bal(X(i),varargin{2:end])*R);
end
else
d=zeros(1,length(R));
for i=l:length(R)
d(i)=exp(-bal(X,varargin{2:end)) *R(i) ) ;
end
end
Создадим несколько типов ПЭ:
» cube=ShockE([10 10 10]),cyl=ShockE([10 10]),ball=ShockE(10)
Параллелепипед brus( 10.0 10.0 10.0) масса 7.810
Цилиндр cyl( 10.0 10.0) масса 6.134
Шар ball(10.0) масса 4.089
» brus=ShockE([5 5 20]),osk=ShockE(AnyShape,[5 1.8])
2.7. Эффективность средств поражения осколочного действия
103
Параллелепипед brus ( 5.0 5.0 40.0) масса 7.810
Неправильный osk(640.2 1.8) масса 5.000
От каждого из них потребуем вычислить свой параметр формы
» MyParameter([cube cyl ball brus osk])
ans = 1.5000 1.3840 1.2090 2.1250 1.8000
и затухание скорости (до 30 м с аргументами по умолчанию) для шарика и
бруса при скорости 1500 м/с на нулевой высоте и на высоте 5000 м:
» х=[0:5:30],deer(osk,х)
х =0 5 10 15 20 25 30
ans = 1.0000 0.9443 0.8917 0.8421 0.7952 0.7509 0.7091
» deer(brus,х,1500)
ans = 1.0000 0.9452 0.8935 0.8446 0.7983 0.7546 0.7133
» deer(brus,x,1500,5000)
ans = 1.0000 0.9668 0.9347 0.9036 0.8736 0.8446 0.8165
Класс фракции FRACT. Фракцию составляют фрагменты одинаковой
массы, их общее количество N распределено в интервале значений углов вы-
лета [ф], <р2] так, что в каждой двуградусной зоне этого интервала находится
относительное количество f (в %). Целесообразно сделать класс fract на-
следником класса ShockE, добавив в его структуру дополнительные свойства -
общее число ПЭ в фракции N, границы углов вылета данной фракции f i, век-
тор f с массовым распределением ПЭ по зонам:
function X=FRACT(varargin) ,
X=struct('Class','FRACT','N',[],'fi',[],'f',[]);
X=class(X,'FRACT',ShockE);
X=setval(X,varargin{:});
Метод FRACT/setval различает числовые поля по структуре: в списке
его аргументов fi нужно задавать [2х1]-столбцом, f - строкой. Особенность
метода в том, что вектор f с процентным распределением по зонам автомати-
чески дополняется до 100 в том случае, если количество элементов входного
списка меньше числа двуградусных зон в интервале, заданном вектором fi.
Дополнение равномерно распределяется по оставшимся зонам:
function X=setval(X,varargin)
for i=l:nargin-l
x=varargin{i};
if isa(x,'shocke')X.shocke=x;
elseif length(x)==l X.N=x;
elseif size(x,l)==2 X.fi=x;
elseif size(x, 1)=1
Nzon=diff(X.fi)/2;LV=length(x);
X.f(1:LV)=x;
X.f(LV+1:Nzon)=(100-sum(x))/(Nzon-LV);
end
end
Метод fract/display предусматривает многофракционное поле. В каж-
дой фракции он показывает параметры ПЭ и числовые поля:
104 2. Основные характеристики эффективности действия СП и БП
function display(X)
for i=l:length(X)
display(X(i).shocke)
disp([' N = ' int2str(X(i).N)])
disp([' fi= ' int2str(X(i).fi)])
disp([' f = ' int2str(X(i).f)])
end
Следующая команда создает фракцию из 1000 ранее определенных фраг-
ментов brus, распределенных в интервале углов [72°, 110°] согласно вектору
f, дополненному двумя элементами:
» Fl=Fract (brus, 1000, [72; 110], [2 3324676799977654])
Параллелепипед( 12.0 10.0 8.0) масса 7.498
N=1000
fi= 72 110
f= 2332467679997765422
Из второго типа фрагментов cyl создадим еще одну фракцию:
» F2=Fract(cyl,2000,[80;110],[2 332467679997])
Цилиндр ( 10.0 10.0) масса 6.134
N= 2000
fi= 80 110
f= 2332467679997 13 13
Объекты Fl, F2 готовы для включения в объект более высокого уровня,
представляющий снаряд осколочного типа действия.
Класс радиального поля разлета в статике Pole_S. Поле ПЭ представ-
лено в этом классе как суперпозиция фракций, включенных в объект данного
класса наследованием. Предполагается, что фрагменты разных фракций в од-
ной угловой зоне вылетают с одинаковой скоростью, т. е. поле ПЭ изначально
не эшелонировано. В разных угловых зонах скорости могут быть различными
и должны задаваться в общем случае вектором V0 с числом элементов, рав-
ным числу угловых зон. Равномерный годограф задается одним значением
скорости:
function X=Pole_S(varargin)
x=struct('Class','Pole_S',' V', []);
X=class(x,'Pole_S',fract);
X=setval(X,varargin{:});
Метод Pole_S/setval принимает массив уже созданных объектов, пред-
ставляющих фракции, и годограф скорости:
function X=setval(X,varargin)
for i=l:nargin-l
x=varargin{i};
if isa(x, 'FRACT')
X.fract=setval(x,x);
else
X.V=x;
end
end
2.7. Эффективность средств поражения осколочного действия 105
Метод Pole S/display выводит информацию о каждой фракции и ско-
рости разлета в угловых зонах:
function display(X)
display(X.fract)
disp(['godograf: ' int2str(X.V)])
Метод Pole_s/Godograf возвращает вектор скорости разлета целиком
или один элемент, если он указан вторым необязательным аргументом:
function out=Godograf(X,i)
out=X.V;
if nargin>l out=X.V(i);end
Класс эшелонированного радиального поля разлета Distrib. Объекты
этого класса в массиве ячеек с содержат всю информацию о структуре дина-
мического поля разлета, а именно, для каждой динамической угловой зоны в
соответствующей ячейке массива С хранятся данные об относительном коли-
честве ПЭ, попавших в нее из статических угловых зон. Начальные скорости
разлета и углы разлета в динамике вычисляются в этом классе и хранятся в
массивах V и f i:
function X=Distrib(Y,n)
x=struct('Class','Distrib','V',[],'fi',[]);
x.C={};
X=class(x,'Distrib');
if nargin>0 X=setval(X,Y,n); end
Вычисление V, fi, С выполняет метод Distrib/setval, который вызы-
вается конструктором Distrib, получая при этом объект Y класса Pole D
(а значит, и все данные о статическом распределении и скорости БП), а также
кратность дополнительного разбиения статических угловых зон п:
function X=setval(X,Y,n)
[Fi Fid Vd]=sector(X, Y, n);
X.V=Vd.*cos(Fi*pi/180-Fid)+Velos(Y)*cos(Fid);
m=(length(Fi)-1)/n;
X.V=mean(reshape(X.V(2:end),n,m));
X.fi=linspace(min(Fid),max(Fid),m+1);
w=sort([Fid(1:end-1);Fid(2:end)]);
X.C=cell(m,1);
for i=l:m
a=ceil(find(X.fi(i)<=w(l,:) & X.fi(i+l)>w(l,:))/n);
k=[find(a(1:end-1)~= a(2:end)) length(a)];
X.C{i}=[a(k);diff([0 k])/n];
end
Сначала в методе Distrib/sector (описан ниже) вычисляются границы
статических угловых зон Fi, уменьшенных в п раз по сравнению с исходны-
ми, границы тех же зон в динамике Fid и статический годограф скоростей V.
Начальные скорости разлета в динамике (X. V) определяются по формуле (2.44)
как среднее арифметическое в п участках каждой статической угловой зоны.
Интервал между наименьшим и наибольшим углами вылета в динамике Fid
разбивается на m динамических зон разлета (x.fi). Хотя границы статичес-
106
2. Основные характеристики эффективности действия СП и БП
ких угловых зон упорядочены по возрастанию, в массиве соответствующих
им динамических углов этот порядок может быть нарушен из-за возможной
немонотонности <р'(ф)- Поэтому для построения поля в динамике выполняет-
ся еще одно вспомогательное действие: создается матрица со, состоящая из
двух строк, в k-м столбце которой находятся соседние динамические углы ф'(Фл)
и ф'(ф*+]), причем меньший из них всегда расположен в первой строке.
Важной характеристикой распределения в динамике является степень пред-
ставления статических угловых зон в динамических угловых зонах (рис. 2.4).
Например, если в некоторую динамическую зону попали два подынтервала из
z-й статической зоны и один из J-й зоны, то надо запомнить пары чисел (z, 2/п),
(j, 1/и) и то, что в этом направлении разлетаются А/^ф^^/л фрагментов к-п
Рис. 2.4. Дополнительная дискре-
тизация угловых зон при расчете
динамической плотности распреде-
ления ПЭ
фракции из z-й зоны и Nf/fyjj/n изу-й. Сум-
мировать эти числа на том основании, что
обе группы фрагментов попали в одну ди-
намическую угловую зону, нельзя из-за раз-
личия скоростей »д(ф,) и Гд(ф7). Число таких
групп в каждой динамической угловой зоне
различно, поэтому сохранить их в числовом
массиве нельзя. Универсальная структура
хранения для произвольных наборов данных
в MATLAB - массив ячеек. Созданием мас-
сива ячеек m заканчивается подготовитель-
ная работа к построению динамического
поля, а его заполнение осуществляется тре-
мя операторами в цикле. Первый оператор
выясняет принадлежность образов мелких
статических зон к той или иной динамической зоне. Признаком принадлежно-
сти считается вхождение в эту зону меньшего из двух граничных углов, т. е.
первой строки из сортированного по столбцам массива to. Номера отобранных
подынтервалов сначала приводятся к индексации двуградусных зон, затем в
следующем операторе подсчитывается число одинаковых номеров. Последним
оператором в z-й ячейке массива с запоминается матрица с двумя строками и
числом столбцов, равным числу статических зон, фрагменты из которых по-
пали в z-ю динамическую зону. В каждом столбце матрицы первый элемент -
номер статической угловой зоны, второй - относительное количество фраг-
ментов, попавших из нее в данную динамическую зону.
Пересчет углов вылета ф, в динамические ф' выполняется методом
Distrib/sector по формуле (2.42). Получаемый им объект Y наследует
Pole_S, а через него - fract, sectorf (Y) - это интерфейсный метод в клас-
се fract, который возвращает границы статического сектора разлета в двух
элементах вектора f i. Этот интервал разбивается на двуградусные элементы
или более мелкие в п раз, если задан третий необязательный аргумент, ре-
зультат разбиения Fi включен в список возвращаемых переменных. Массив
скоростей разлета, полученный интерфейсным методом Pole S/Godograf,
интерполируется в центры отрезков между узлами разбиения Fi и в таком
виде включается в выходной список. Наконец, сетка углов разлета в статике
по формуле (2.42) пересчитывается в сетку динамических углов разлета Fid:
2.7. Эффективность средств поражения осколочного действия 107
function [Fi,Fid,V]=sector(X, Y, n, Z)
if nargin<3 n=l; end
fi=sectorf(Y);
Fi=[fi(1):2/n:fi(end)];
V=Godograf(Y);
if length(V)>1
V=interpl(fi(1):2:fi(end),[V(l),V],Fi);
end
Xfi=Fi*pi/180;
Fid=atan (sin (Xfi) . / (velos (Y) . /V+cos (Xfi)) );
ind=find(Fid<0);
if ~isempty(ind) Fid(ind)=Fid(ind)+pi; end
Интерфейсный метод Distrib/velos возвращает динамический годограф
скорости:
function out=velos(X)
out=X.V;
Метод Distrib/display выводит pa экран динамические зоны разлета
и их структуру, выявленную методом Distrib/setval и представленную им
в массиве ячеек Z:
function display(X)
fi=X.fi*180/pi;
disp(['godograf dyn.: ' int2str(X.V)])
for 1=1:length(fi)-1
Z=X.C{I};
s=sprintf ('%3i)%5.if-%5. If:', I, fi (i) , fi (1+1) ) ;
for j=l:size(Z,2)
s= [s, sprintf ('%3i) (%4.2f)', Z(:,j))J;
end
disp (s);
end
Класс радиального поля разлета в динамике Pole D. Этот класс насле-
дует класс статического поля Pole s, добавляет к наследуемым свойствам
скорость носителя VI и объект D класса Distrib, который будет создавать и
хранить структуру поля в динамике:
function X=Pole_D(varargin)
x=struct('Class','Pole_D','VI',[]);
x.D=distrib;
X=class(x,'Pole_D',Pole_S);
X=setval(X,varargin{:});
Метод PoleD/di splay предоставляет базовому классу возможность по-
казать параметры статического поля, объекту D - структуру поля в динамике,
а сам показывает лишь скорость носителя:
function display(X)
display(X.pole_s)
disp(['Скорость носителя: ' int2str(X.VI)])
display(X.D)
108 2. Основные характеристики эффективности действия СП и БП
Интерфейсный метод Pole D/velos возвращает скорость носителя:
function out=velos(X)
out=X.Vl;
Метод Pole D/setval принимает уже сформированный объект базового
класса.Ро1е_Э, скорость носителя и необязательный параметр - число допол-
нительных разбиений угловых зон при пересчете статических распределений
поля в динамические (по умолчанию получает значение 4). Пересчет выпол-
няется в базовом классе Distrib:
function X=setval(X,varargin)
n=4;
for i=l:nargin-l
x=varargin{i} ;
if isa(x,'Pole_S')
X.pole_s=x;
else
X.Vl=x(l);
if length(x)==2 n=x(2); end
end
end
X.D=Distrib(X,n);
Этой информации достаточно, чтобы вычислить математическое ожида-
ние числа фрагментов на заданной площадке в точке с полярными координа-
тами (R, (р') относительно центра разлета по формуле (2.50) в отдельности для
каждой фракции и угловой зоны. По массе и скорости этой части фрагментов
можно определить вероятность поражения цели и математическое ожидание
числа эффективных попаданий. По принципу суперпозиции пуассоновских
полей суммированием этих величин получается общее число эффективных
попаданий в элемент цели на данном угле вылета (р", после чего вероятность
поражения цели можно найти по формуле (2.51) как вероятность хотя бы од-
ного эффективного попадания. Именно так организована работа метода
Pole_D/CalcG:
function W=CalcG(X,R,fi,Т)
global q;
q=massa(X. F);
fi=fi/180*pi;
W=zeros(length(R),length(fi)) ;
for i=l:length(R)
for j=l:length(fi)
W(i,j)=Calc(X,fi(j) ,R(i) ,T) ;
end
end
function W=Calc(X,R,fi, T)
global q;
W=0;
y=find(fi>X.fid );
if -isempty(y) & length(y)<length(X.fid) 1
2.7. Эффективность средств поражения осколочного действия
109
Z=X.C{y(end)};
V=decr(X.F,R)'*X.Vd(Z(l, :) ) ;
M=sum(Nij(X.F,Z(1,:)).*Sy(T,q,V));
G=l-exp(-M*Z(2,:)'/(2*pi*sin(fi)*R'2));
end
Его аргументами кроме объекта х класса Role_D, представляющего все
необходимые данные о поле разлета в динамике, являются полярные коорди-
наты R, f i, а также объект т класса Target E, который содержит сведения о
цели. Еще один необязательный параметр задает тип поражения (по умолча-
нию ' А'). Так как КЗП используется в интегральной формуле полной вероят-
ности, аргументы R и f i могут быть векторными. Векторизация метода CalcG
осуществляется двойным циклом по элементам R и fi, в котором каждому
элементу предварительно созданной матрицы W присваивается значение веро-
ятности поражения, вычисленное для каждой пары скалярных R и f i локаль-
ной функцией Calc. Предварительно CalcG получает от базового класса fract
массы фрагментов каждой фракции (вектор q).
При наличии объектных связей функции Calc остается лишь организо-
вать вычисление одной точки КЗП. Сначала она определяет, к какой динами-
ческой зоне принадлежит заданный угол f i. При успешном выделении зоны
из соответствующей ячейки массива с извлекается информация о степени пред-
ставления в этой зоне исходных двуградусных зон, полученная ранее методом
Distrib/setval. По номерам этих зон в первой строке массива z выбирают-
ся начальные скорости разлета в динамике из массива X. Vd, которые затем
умножаются матрично на экспоненты затухания, определенные для каждой
фракции методом deer. В результате получается [тхп]-матрица скоростей, где
т - число фракций, п - число зон. Такой же формат имеет матрица чисел
фрагментов каждой фракции в выделенных зонах, которая формируется мето-
дом Ni j класса fract (его нужно добавить в папку @FRACT):
function out=Nij(X,j)
for i=l:length(X)
out(i,:)=X(i),f(j)*X(i).N/100;
end
Метод получает массив номеров выделенных зон j, умножает относитель-
ное число фрагментов каждой i-й фракции в заданных зонах X(i) . f (j) /100
на их общее число х (i) . N, а результат (с тем же числом элементов, что и в
аргументе j) присваивается в качестве i-й строки возвращаемой матрице out.
Поэлементное умножение матриц числа элементов и уязвимых площа-
дей, возвращаемых методами Ni j и Sy, дает с точностью до скалярного мно-
жителя такую же по форме матрицу математических ожиданий числа эффек-
тивных попаданий в цель. Элементы этой матрицы суммируются по столбцам
(фракциям), так что массив м содержит математическое ожидание числа эф-
фективных попаданий из всех учитываемых зон. Степень участия двуградус-
ных зон в данной динамической зоне представлена второй строкой массива z
той же длины, что и м, поэтому их скалярное произведение с учетом скаляр-
ного множителя дает суммарное математическое ожидание числа эффектив-
ных попаданий, по которому вычисляется вероятность поражения в данных
условиях.
110 2. Основные характеристики эффективности действия СП и БП
Выполним команды, формирующие объекты ПЭ cube, cyl, и фракции из
них Fl, F2:
» cube=ShockE([10 10 10]);cyl=ShockE([8 12]);
» Fl=Fract (cube, 1000, [72; ПО], [2 3324676799977654]);
» F2=Fract(cyl,2000,[80;110],[2 3 3 2 4 12 19 6 7 9 9 9 7 ]);
Создадим поле ПЭ в статике ps из фракций Fl, F2 с годографом в виде
части синусоиды, а также поле ПЭ в динамике pd при скорости носителя
600 м/с:
» z=linspace(pi/6,5/6*pi,19);v0=ceil(1500*sin(z) ) ;
» ps=pole_s([Fl F2],v0); pd=pole_d(ps,[600,4])
Параллелепипед ( 10.0 10.0 10.0) roassa 7.810
N = 1000
fi= 72 110
Цилиндр ( 8.0 12.0) massa 4.711
N = 2000
fi= 72 110
Фракция 1: 2 Фракция 2: 0 godograf: 750 33246767 00023324 9 9 9 7 7 6 5 12 19 6 7 9 9 4 2 2 9 7 4 4 1460 -1490
896 1030 1150 1254 1341 1410
1500 1490 1460 1410 1341 1254 1150 1030 896 750
Скорость носителя: 600
godograf dyn: 1089 1200 1303 1394 1472 1534 1579 1606
1615 1605 1576 1528 1463 1380 1282 1171 1049 921 794 _
1) 38.4-40.2 : 1 ( 0.50 )
2) 40.2-42.1 : 1 ( 0.25 )
3) 42.1-44.0 : 1 ( 0.25 ) 2 ( 0.25 )
4) 44.0-45.8 : 2 ( 0.25 )
5) 45.8-47.7 : 2 ( 0.50 )
6) 47.7-49.5 : 3 ( 0.50 )
7) 49.5-51.4 : 3 ( 0.50 )
8) 51.4-53.3 : 4 ( 0.50 )
9) 53.3-55.1 : 4 ( 0.50 )
Ю) 55.1-57.0 : 4 ( 0.50 )
П) 57.0-58.8 : 5 ( 0.50 ) 6 ( 0.25 )
12) 58.8-60.7 : 6 ( 0.50 ) 19 ( 0.25 )
13) 60.7-62.6 : 6 ( 0.25 ) 7 ( 0.50) 19 ( 0 .25 )
14) 62.6-64.4 : 7 ( 0.50 ) 8 ( 0.25 ) 19 ( 0.25 )
15) 64.4-66.3 : 8 ( 0.75 ) 9 ( 0.25 ) 18 ( 0.25 ) 19 ( 0.25 )
16) 66.3-68.1 : 9 ( 0.75 ) 18 ( 0.25 )
17) 68.1-70.0 : 10 ( 1.00 ) 11 ( 0.25 ) 18 (0.50 )
18) 70.0-71.8 : 11 ( 0.75 ) 12 ( 0.50 ) 17 ( 0.75 )
19) 71.8-73.7 : 12 ( 0.50 ) 13 ( 1.00 ) 14 ( 1.00 ) 15 ( 1.00 )
16 ( 1.00 ) 17 ( 0.25 )
Последние 19 строк подтверждают качественный анализ возникновения
эшелонов в динамических зонах разлета (см. рис. 2.4). Например, в 18-ю ди-
намическую зону, ограниченную углами 70 и 71,8°, попала половина ПЭ из
2.7. Эффективность средств поражения осколочного действия 111
12-й статической двуградусной зоны в диапазоне от 94 = 72 + 11 - 2 до 96°,
а также по 3/4 % ПЭ из двуградусных зон 11 и 17. Скорости разлета этих ПЭ
находятся в соответствующих элементах 11, 12 и 17 динамического годографа
(1576, 1528, 1049). Фракционный состав динамической зоны также можно взять
из соответствующих элементов массивов, представляющих распределение
фракций в статике, но только в той части, где двуградусные зоны представлены
в данной динамической зоне. Например, в 18-ю динамическую зону из 11-й
двуградусной зоны попадают 9 • 3/4 % ПЭ первой фракции и 19 • 3/4 % - вто-
рой. Графически можно показать распределение суммарного числа осколков
(обеих фракций) в динамических зонах разлета при различных скоростях но-
сителя (рис. 2.5, а), а также минимальные и максимальные скорости разлета в
тех же зонах при скорости носителе = 600 м/с (рис. 2.5, б).
Рис. 2.5. Структура поля разлета ПЭ с учетом скорости носителя.
а - число ПЭ в динамических зонах разлета; б - наибольшая и наименьшая скорости ПЭ в тех же
зонах; 1 - vt = 0 м/с; 2 — vt = 200 м/с; 3 — »(= 400 м/с
Информация, которую содержит объект pd класса Pole D, вместе с агре-
гатной моделью цели позволяет построить КЗР вокруг снаряда. Построим рав-
номерную сетку динамических углов разлета гр' в интервале от 40 до 74° и
логарифмическую сетку расстояний до цели R, используя сформированный в
разд. 2.3 массив ячеек с, который представляет собой агрегатную модель цели
для создания объекта т класса Target E, после чего вероятность поражения
G(R, ф') по типу А получим как результат взаимодействия объектов pd и т при
выполнении метода Pole_D/CalcG:
» T=Target_E(СС);
» fi=40:74; R=logspace(0.2,1.4,50);
» G=CalcG(pd,R,fi,T,'A');
В двухмерном массиве G содержится информация о КЗП вокруг снаряда.
Построим графики зависимостей G(R) на трех направлениях ф' = 40, 49, 59° и
Сг(ф') на трех дальностях R ~ 2, 8, 25 м (рис. 2.6):
» subplot (2,1,1), plot(R,G(:,[1 10 20])), grid, fil23 =
fi([l 10 20])
112
2. Основные характеристики эффективности действия СП и БП
fil23 = 40 49 59
» subplot(2,1,2), plot(fi,G([10 30 50],:)), grid, R123 =
R([5 30 50])
R123 = 1.9859 8.1321 25.1189
Графики зависимости G(R) иллюстрируют снижение вероятности пора-
жения цели по мере удаления от центра взрыва из-за уменьшения плотности
Рис. 2.6. Зависимость вероятности поражения цели от расстояния при различных
углах разлета (а) и от углов разлета на различных расстояниях (6)
поля и скорости фрагментов, но это снижение, как показывают графики зави-
симости б(ф'), менее интенсивно в задней части сектора разлета, что согласу-
ется с уплотнением поля в этой части при тех условиях формирования дина-
мического поля, которые отражены в свойствах объекта pd (см. рис. 2.5).
Эффективность осколочного действия по наземным целям
Координатный закон поражения одиночной наземной цели строится в ЦСК:
начало располагается в центре ЭЦ, ось ОХ направляется вдоль ее большего
горизонтального габаритного размера или по направлению возможного дви-
жения, ось OZ - вертикально вверх, вторая горизонтальная ось OY - так, что-
бы получилась правая система координат. Значение координаты z точки под-
рыва зависит от типа ВУ. При установке ВУ на мгновенное действие за высо-
ту подрыва принимают аппликату центра масс СП в момент удара (точнее, в
момент касания его вершиной плоскости расположения целей). На самом деле,
того мгновения, которое проходит от момента касания до начала разлета ПЭ,
достаточно для некоторого заглубления, зависящего от свойств грунта, голов-
ной части, что заметно снижает эффективность действия. Отрицательный эф-
фект оказывают и неровности рельефа местности.
Подобные эффекты исследуются при анализе путей повышения эффек-
тивности осколочного действия, но ее оценка проводится при допущениях,
что цели расположены на плоской поверхности и все осколки разлетаются
из центра масс снаряда в положении касания к плоскости расположения це-
лей при наземном подрыве. По известному КЗП в полярных координатах
G(R, ф') можно вычислить значение КЗП в целевой системе координат, а
именно, G(x, у,Н)= G(R, ф'), если(х, у, R) и (R, ф') связаны геометрическим
условием встречи СП с целью в момент подрыва при угле сближения 0С
(рис. 2.7):
2.7. Эффективность средств поражения осколочного действия 113
Рис. 2.7. Положение снаряда отно-
сительно цели в момент подрыва
U x
cos o' =—sin 0,,-cos 0,,.
R R
Это значит, что можно построить КЗП
в окрестности наземной цели с помощью
метода CalcG. Для учета особенности дей-
ствия по наземным целям нужно из базо-
вого для всех целей класса Target E вы-
вести новые классы. Вместо этого мы про-
сто добавим в класс Target_E метод
вычисления КЗП:
function Z=CalcG(Т,Q,X,Y,teta,Н)
if nargin<6 Н=0; end
teta=teta*pi/180;
n=length(X);
m=length(Y);
Z=zeros(n,m);
for j=l:m
[R Fi]=RFtoXY(X(i),Y(j) ,teta,H) ;
Z(i,j)=CalcG(Q, R,Fi*180/pi,T);
end
end
function [R, fi]=RFtoXY(x, y, teta, H)
R=sqrt (xz‘2+yz'2+Hz'2) ;
fi=acos((H*sin(teta)-x*cos(teta))/R);
В его списке аргументов, в отличие от метода Pole D/CalcG, на первом
месте обязательно должен быть объект Target_E, а объект класса Pole D
задан вторым аргументом Q. Остальные аргументы задают также декартовы
координаты х, Y в точке срабатывания, угол конечной скорости с плоскостью
расположения целей tetac и высоту срабатывания н. В методе Pole D/CalcG
просто пересчитываются декартовы координаты в полярные с помощью ло-
кальной функции RFtoXY и вызывается уже опробованный метод Pole D/
CalcG для объекта Q.
В качестве примера использования этого метода построим двухмерные
графики КЗП G(x, у) при Н - 1 м, 0С= 60 и 85° с помощью следующего скрипт-
файла:
х= -10:0.5:16; у= -30:1:30;
Z=zeros(length(х),length(у));
for i=l:length(у)
Z (:,i)=CalcG(T,Q,x,у(i) ,60,1);
end
[X Y]=meshgrid(x,у);
surf(X,Y,Z')
114
2. Основные характеристики эффективности действия СП и БП
Причина низкой эффективности действия поля с исходными данными из
предыдущего раздела: слишком узкое поле разлета концентрирует зону опас-
ных разрывов в сравнительно небольшой окрестности цели (рис. 2.8, а). При
Н— 1 м, 0С= 85° нормализованная траектория наиболее благоприятна для эф-
фективности действия по наземной цели (рис. 2.8, б).
а
-20
б
Рис. 2.8. КЗП на плоскости расположения целей:
а - угол подхода к цели 60°; б - ось снаряда почти вертикальна
Вероятность поражения ЭЦ в одном выстреле после построения КЗП
G(x,y, Н) вычисляется по общей формуле (2.1). Полагая, что рассеивание вы-
соты срабатывания не зависит от ошибок в горизонтальной плоскости
f(x,y, z) = f(x,y)fH(z), интегрирование проведем в два этапа:
2.7. Эффективность средств поражения осколочного действия
115
w, (Я) = JJ G(x, у, H)f(x, y)dxdy, (2.52)
^о.р
нт
Wl= j W1(H)fH(z)dz. (2.53)
о
Если подрыв осуществляется над плоскостью расположения цели, слу-
чайная высота срабатывания распределена по нормальному закону fH(z) с ма-
тематическим ожиданием Но (расчетная высота срабатывания) и вероятным
отклонением Ен. Тогда - полная, вероятность поражения цели в одном выс-
треле. При наземном подрыве вероятность поражения в одном выстреле =
= M'1(/cosGc). ,
Вычисления по формулам (2.52) и (2.53) с помощью метода CalcG удоб-
но провести, заменяя интегрирование суммированием. При угле падения 60°
(см. рис. 2.8, а) и срабатывании у поверхности расположения цели зона опас-
ных разрывов заключена в прямоугольнике -30 < х < 30, -40 <у < 40. Сумми-
руя подынтегральное выражение в этих пределах без учета плотности распре-
деления, получаем приведенную площадь поражения (суммирование осуще-
ствляется умножением матрицы КЗП на вектор приращений х слева и на
транспонированный вектор приращений у справа):
» х= -30:0.5:30; у= -40:0.5:40; z=calcG (Т, Q, х, у, 60,0.3);
[0 diff (x)]*z*[0 diff(у)]' •'
ans = 60.2254
При 0C = 60° и H = 0,3 м имеем 5пр = 60 м2. Проверим правильность выбора
интервала, увеличивая и уменьшая его:
» х= -40:0.5:40; у= -50:0.5:50;z=calcG(Т,Q,х,у,60,0.3);
[0 diff(x)]*z*[0 diff(у)]'
ans = 60.2254
» х= -15:0.5:30; у= -20 : 0.5: 40; z=calcG (Т, Q, х, у, 60, 0.3) ;
[0 diff(х)]*z*[0 diff(у)]'
ans =37.3557
ans =54.9981
» х= -30:0.5:30; у= -40:0.5:40;z=calcG(Т,pd,х,у,60,0.3);
[0 diff(х)]*z*[0 diff(у)]'
ans =43.3579
Увеличение области интегрирования по сравнению с первоначальной не
приводит к изменению результата. Так же непосредственной проверкой мож-
но убедиться в том, что дискретная сетка достаточно мелкая.
Плотности нормального распределения на прямой и плоскости будем вы-
числять с помощью файл-функций fNorm и fNorm2:
%Плотность нормального распределения
function f=fNorm(x,X)
t=(x-X.m)/X.s;
f=exp (-t. л2/2) / (sqrt (2*pi) *X. s) ;
116 2. Основные характеристики эффективности действия СП и БП
%Штотность 2-мерного нормального распределения
function f=fNorm2(X,Y,XY)
X=(X-XY.mx)/XY.sx;
Y=(Y-XY.my)/XY.sy;
out=zeros(length(X),length(Y));
for i=l:length(Y)
out(:,i)=Calc(X,Y(i) ,XY.r) ;
end
out=out/(2*pi*XY.sx*XY.sy*sqrt(l-XY.rA2));
%
function f=Calc(x,y,r)
f=exp(-(x.Л2-2*г*х.*у+ул2)/(2*(1-гл2))) ';
Одномерная функция fNorm векторизована и в качестве второго парамет-
ра имеет структуру со значениями математического ожидания и среднеквад-
ратического отклонения. Функция fNorm2 векторизована по первому аргументу
и в структуре XY получает пять параметров распределения. Определим эту
структуру и вычислим вероятность поражения при фиксированной высоте под-
рыва Н= 0,3 м: «
» XY.mx=0; XY.my=0; XY.sx=4; XY.sy=3; XY.r=0;
» x=-3*XY.sx:0.5:3*XY.sx; y=-3*XY. sy: 0.5: 3*XY .‘sy;
» z=calcG(T,Q,x,y,60,0.3).*Gauss2(x,y,XY);
WH=[0 diff(x)]*z* [0 diff(y)]'
WH =0.1121
Теперь можно построить зависимость W(H) и найти полную вероятность
поражения по формуле (2.53). Необходимые для этого команды сведены в сле-
дующий скрипт-файл:
Н=[0.01,0.2:0.2:8];WH=[];
for i=l:length(Н)
z=calcG(T,Q,к,у,60,Н(i)).*Gauss2(х,у,XY);
WH(i)=[0 diff(х)]*z*[0 diff(y)]';
end
XH.m=3;XH.s=1.5;
W=WH.*fNorm(H,XH)*[0 diff(H)]'
plot(H,W), grid on, xLabel('H'), yLabel('W')
Последняя команда строит график W(H), подтверждающий, что дискрет-
ность поля ПЭ обладает характерной для эффективности осколочного дей-
ствия многоэкстремальностью.
Эффективность действия по однородной групповой цели оценивается ма-
тематическим ожиданием числа пораженных ЭЦ в ее составе. Целевая систе-
ма координат строится с началом в центре одной из ЭЦ. Если срабатывание
СП произошло в точке (х, у), то по отношению к i-й ЭЦ, собственные коорди-
наты которой в ЦСК обозначим парой (^, тц), координаты точки срабатывания
составляют х= - х, у; = Т|; - у. Сумма условных вероятностей поражения всех
ЭЦ представляет собой условное математическое ожидание числа поражен-
ных целей:
w
т(х, у, Н) = £ G(x ). (2.54)
i=i
2.7. Эффективность средств поражения осколочного действия
117
Усредняя по всем возможным координатам, получаем зависимость мате-
матического ожидания числа пораженных целей от высоты срабатывания:
JJ m(x,y,H)f(x,y)dxdy. (2.55)
^ор
При наземном подрыве Л//0) представляет собой показатель эффективно-
сти действия СП по групповой цели - математическое ожидание числа пора-
женных целей. При воздушном подрыве с нормальным законом распределения
ошибок по высоте срабатывания с параметрами /70, ЕИ математическое ожида-
ние числа пораженных целей получается осреднением МфН) по высоте:
Нт
М}= j Mx(H)fH(z)dz. (2.56)
о
Вероятность поражения одиночной цели при п независимых выстрелах
без накопления ущерба определяется как вероятность суммы независимых слу-
чайных событий - поражение цели в i-м выстреле И7,:
п
1=1
а если выстрелы проводятся в одинаковых условиях и все W, одинаковы и
равны W}, то
^=1-(1-^)п.
Математическое ожидание числа пораженных целей при стрельбе п СП
по ГЦ приближенно можно оценить по формуле
Мп = пМ{,
пренебрегая возможностью перекрытия зон опасных разрывов отдельных СП.
Вероятность поражения одиночной цели зависит как от КЗП, характери-
зующего могущество действия СП по данной цели в определенных условиях,
так и от характеристик рассеивания СП. Величина
5пр= Я G(x,y)dxdy,
So.p
имеющая размерность площади, учитывает только могущество действия СП
и называется приведенной площадью поражения. Она может интерпретиро-
ваться как площадь окрестности цели, при попадании в которую цель безус-
ловно поражается. Если поле поражения симметрично относительно центра
цели (при углах подхода, близких к 90°), т. е. КЗП представлен функцией про-
маха R = -Jx2 + у2, то приведенная площадь
Луб
5Iip = j G(R)2nRdR
о
118 2. Основные характеристики эффективности действия СП и ПП
интерпретируется как площадь круга радиусом Rnp = ^рпр/л, где Лпр - при-
веденный радиус поражения, а /?уб - убойный радиус.
Если площадная цель представляет собой скопление ЭЦ, характеризую-
щееся плотностью По элементарных целей на 1 м2, то величина dN = 2nRdR -
это число ЭЦ в соответствующей кольцевой области, G(R)dN - математичес-
кое ожидание числа пораженных целей в этом кольце, а
Ry6
Mj = J 6(/?)П02л/МЯ = П05пр (2.57)
о
в этом случае имеет смысл математического ожидания числа пораженных це-
лей в одном выстреле.
В качестве примера зададим координаты семи элементарных целей слу-
чайным образом в прямоугольнике 20х 15 м и вычислим среднее число по-
раженных целей. Центр рассеивания совпадает с четвертой целью, сх = 3 м,
о^ = 4 м, бс= 70°. Следующий скрипт-файл выполняет вычисления по форму-
лам (2.54)-(2.56): генерирует семь пар случайных точек, пересчитывает их
на заданный прямоугольник, переносит начало координат в четвертую точ-
ку, задает параметры рассеивания и строит расчетную сетку, а затем во внут-
реннем цикле суммирует КЗП по формуле (2.54) для высоты, заданной во
внешнем цикле. Последний оператор внешнего цикла находит условное ма-
тематическое ожидание числа пораженных целей при срабатывании на дан-
ной высоте, что соответствует формуле (2.55). Последний оператор файла
для заданных параметров распределения высоты срабатывания определяет
осредненное математическое ожидание числа пораженных целей согласно
формуле (2.56):
А=[rand(1,7)* 2 0;rand(1,7)*15] ;
А=А-[ones(1,7)*А(1,4);ones(1,7)*А(2,4)];
XY.mx=0;XY.my=0;XY.sx=3;XY.sy=4;XY.r=0;
XH.m=3;XH.s=1.5;
x= -3*XY.sx:0.5:3*XY.sx;
y— -3*XY.sy:0.5:3*XY.sy;
H=[0.01,0.2:0.2:8];MH=[];
for j=l:length(H)
npzeros(length(x),length(y)) ;
for i=l:length(A(1,:))
m=ni+calcG (T, Q, x-A (1, i) , y-A(2, i) , 70,H (j) ) ;
end
MH(j)=meanP2(XY,x,y,m);
end
M=meanP(XH, H,MH) ;
Запуск скрипт-файла дает при координатах целей
А=-10.0020 -3.3258 -2.5217 0 -1.5047 -11.0441 -5.9831
2.4311 -5.6297 5.0341 0 0.9388 -5.0219 -0.3064
окончательный результат
М=1.0576
2.7. Эффективность средств поражения осколочного действия
119
т. е. только одна цель из семи в среднем будет поражена при одном выстреле в
данных условиях (напомним, что характеристики снаряда и цели содержатся
в объектах Q и т). На оптимальной высоте срабатывания, равной 3 м,
» [Мтах I]=тах(МН);Мтах,Нтах=Н(I)
Мтах = 1.2367
Нтах = 3.0000
максимальное значение принятого показателя эффективности чуть больше еди-
ницы. Приближенная оценка этого показателя по формуле (2.57), если приве-
денную площадь поражения вычислять при Н= 2,
» х— -10:0.5:10;
» у= -7.5:0.5:7.5;S=defint2(х,у,calcG(Т,Q,х,у,70,0.2));
M1=S*7/(20*15)
М1=0.9534
дает близкий км = 1.0576 результат.
Эффективность осколочного действия по воздушным целям
Сложность оценки эффективности осколочного действия по воздушным
целям определяется следующими особенностями.
1. Собственная скорость воздушных целей, как правило, соизмерима со
скоростью ПЭ, поэтому за время полета ПЭ к точке встречи цель смещается
на расстояние, которым нельзя пренебречь. Это осложняет использование КЗП
G(R, ср') для вычисления вероятности поражения: R и ф' нужно пересчитывать
не на координаты цели, а на координаты упрежденной точки встречи ПЭ с
целью.
2. Относительная скорость ПЭ и цели в момент соударения зависит не
только от величины, но и от стороны промаха, т. е. возникает асимметрия
поля поражения относительно цели.
3. Характерные размеры поля поражения при стрельбе по воздушным це-
лям, как правило, соизмеримы с размерами цели, которую нельзя считать ма-
лоразмерной, а поле - однородным на проекции цели, т. е. приходится учиты-
вать пространственное расположение (разнесенность) УА.
В этих условиях переход от координат х, у, z в ЦСК к полярным коорди-
натам вокруг цели, который успешно предпринимается в случае наземных
(практически неподвижных) целей, не столь эффективен, так как параметры
поля зависят не только от R и ф' в меридиональной плоскости, но и от эквато-
риального угла. В методиках, предназначенных для экспресс-анализа эффек-
тивности действия, приходится делать существенные упрощения. Самое прин-
ципиальное из них ограничивает условия встречи с целью сближением на па-
раллельных курсах, что сохраняет осевую симметрию поля ПЭ в целевой
системе координат. В некоторых случаях это соответствует условиям стрель-
бы, например, при стрельбе по ПКР в ближней зоне обороны корабля. В стрель-
бе на встречных курсах более эффективным может оказаться не радиальный
разлет ПЭ, а осевое метание, но установить это можно только с помощью
адекватных методик, и не простым расчетом сравниваемых конструктивных
схем, а сравнением их оптимальных вариантов. С точки зрения применимос-
ти в оптимизации модель эффективности на параллельных курсах, конечно,
120
2. Основные характеристики эффективности действия СП и БП
предпочтительнее универсальной методики по продолжительности расчета од-
ного варианта, но не годится для оценки эффективности действия по той же
цели зенитной ракетой на курсах перехвата, так как в этом случае вероят-
ность поражения существенно зависит от стороны промаха и угла перехвата
(между вектором скорости ракеты и отрицательным вектором скорости цели).
Замена цели обобщенной моделью - цилиндром, ориентированным в про-
дольном измерении цели, в экспресс-оценках, разумеется, необходима и не
является принципиальным ограничением методики. Ее применение для вы-
числения вероятности поражения УА в рамках объектного моделирования -
это только вопрос наличия соответствующих исходных данных и используе-
мых вычислительных ресурсов.
Упрощенное описание поля ПЭ (постоянство годографа скорости, равно-
мерная плотность распределения между передним и задним углами разлета)
имеет исключительно методическое значение для выяснения совместного вли-
яния элементов боевого снаряжения на эффективность действия. Равномер-
ное распределение ПЭ по углам вылета позволяет получить КЗП в осесим-
метричном поле поражения как функцию только от промаха G(r) в пределах
зоны опасных разрывов. Так как зона опасных разрывов при параллельных
курсах ограничена двумя круговыми конусами, образуемыми передним и зад-
ним динамическими углами разлета ПЭ, НВУ обеспечивает срабатывание в
этой зоне с некоторой вероятностью S(r), также не зависящей от стороны про-
маха. Интегрируя вероятность поражения на данном промахе G(r)S(r) в пре-
делах чувствительности НВУ гт с учетом плотности распределения промахов,
получаем полную вероятность поражения
гт
Wi = J G(r)S(r)f(r)dr,
о
которой можно оценивать совместное качество БЧ, НВУ и системы наве-
дения.
Расчет эффективности по приближенной модели. Плотность поля в точ-
ке встречи с целью, скорость фрагментов при сделанных допущениях зависят
только от промаха. Действительно, при равномерном распределении N фраг-
ментов на воображаемой цилиндрической поверхности радиусом г (рис. 2.9) в
пределах между конусами с углами полураствора ср], ф'2, которые определя-
ются по формуле (2.42), плотность поля обратно пропорциональна квадрату
промаха:
П(г) =----5----*-------- (2.58)
2Ttr2(ctg(pj — ctg ср2)
Расстояние до точки встречи R, скорость фрагмента в этой точке vR, а
значит, и скорость встречи v зависят от параметров г и ср':
R = —; vR = г01е-а«Л; о = ч/гд +Гц ±2&дг cos ср', (2.59)
sin ср
где ан- баллистический коэффициент на высоте Н.
2.7. Эффективность средств поражения осколочного действия
121
Рис. 2.9. Условия попадания ПЭ в цель при сближении на параллельных курсах
Однако в принятой степени упрощения допускается использовать в качестве ско-
рости встречи величину, вычисленную для среднего угла вылета ф'= (ф{+ ф2)/2.
Тогда уязвимая площадь цели Sy(q, г), как и плотность поля, зависит только от
промаха, следовательно, функцией промаха является и математическое ожи-
дание числа эффективных попаданий:
йГ(г)=----- . (2.60)
2лг2 (ctg <pj - ctgcp2)
Здесь уместно вспомнить, что математическое ожидание числа эффектив-
ных попаданий равно произведению плотности поражающих ПЭ П(г)р(^, г) и
площади накрытой полем части цели S, которая только при полном накрытии
цели равна площади проекции цели 5Ц, и тогда
т (г) = П(г)р(9, vr )5Ц = П (r)Sy (q, vr),
что приводит к формуле (2.58). Но при малых промахах поле накрывает толь-
ко часть цели. В рассматриваемой ситуации, когда цель эффективной длиной
Ьэ ориентирована параллельно оси переднего и заднего конусов разлета, рас-
стояние между следами которых на цели составляет I < L3, площадь накрытой
части поля можно выразить как 5Ц//£Э, что приводит к более слабой зависимо-
сти in* от промаха:
, I с N . . I „ NS (q,vr)
щ1(г) = П(г)р(9,гг) — S =—— p(q,vr)—~ 5Ц = —?—----------I2-61)
L, 2тш L3 ZitrL^
Параллельность траекторий снаряда и цели в КЗП относительно снаряда
проявляется в том, что ракурс цели к направлению разлета ПЭ и скорость
встречи не зависят от стороны промаха, вследствие чего имеет место осевая
симметрия КЗП G(R, ф'), а дополнительное допущение позволило выразить
его через единственную переменную - величину промаха:
l-e~ra(r), г>г*
1 —e~,ni(r), г<г*
(2-62)
где г* =L,/(ctg ф^ - ctg ф'2)-
122 2. Основные характеристики эффективности действия СП и БП
В ЦСК при параллельных курсах сохранится симметрия КЗП:
G{x, у, z) | х2+уг=г2 = g(r, z)
В области опасных разрывов Do р, ограниченной предельным промахом гт,
до которого НВУ еще обнаруживает цель, передним и задним конусами разлета
(см. рис. 2.9) с образующими гфг), z2(r), КЗП вокруг цели зависит только от
промаха и эта зависимость выражается функцией G(r): g(r, z) = G(r), если
(r, z) g Do p. Закон распределения точек срабатывания f(x,y, z) также можно вы-
разить в координатах г, z как произведение плотности распределения промахов
на условную плотность ошибок срабатывания взрывателя f (г, z) = fR(r) f (z/f).
Интегрирование КЗП в области опасных разрывов Dop с учетом того, что КЗП
вокруг цели зависит только от промаха, дает
Гт
W=^G(x,y,z)f(x,y,z)dxdydz=\G(r)fR(r) J f(zJr)dzdr.
0 Z](r)
Условная вероятность срабатывания в области опасных разрывов на про-
махе г
z2(r)
S(r)= J f(zJr)dz
Z](r)
называется функцией согласования НВУ Согласованию подлежат, параметры
условного распределения f(z/r), которое обычно принимается нормальным.
Среднеквадратическое отклонение az/r = az, характеризующее точность взры-
вателя, желательно по возможности уменьшать, а линию регрессии mz/r = z0(r)
согласовывать с направлением разлета ПЭ так, чтобы вероятность накрытия
была максимально возможной. Вероятность попадания случайной величины с
симметричным распределением в заданный интервал максимальна, если ма-
тематическое ожидание находится в середине интервала. Значит, в данном слу-
чае линия регрессии z0(r) должна делить пополам зону опасных разрывов, т. е.
где
Zi(O = —y+rctg(₽2, z2(r) = y + rctg(p", (2.63)
а предельные углы сектора разлета в ЦСК пересчитываются по формуле вида
(2.42) с подстановкой относительной скорости:
„ г'о sin Ф
гр =arctg-----У---—----- (2.64)
±&ц + &0COS(p
Получается, что оптимальное согласование НВУ зависит от скорости цели,
которая не является управляемым параметром. Необходима оптимизация в не-
котором диапазоне значений скоростей встречи, причем максимизации подле-
жит не сама функция согласования, а вероятность поражения С7(г) = G(r)S(r) -
2.7. Эффективность средств поражения осколочного действия
123
условный закон поражения. В конечном итоге оптимизируется полная вероят-
ность поражения цели:
гт гт
w = J U(r)fR(r)dr = j G{r)S{r) fR(r) dr.
О о
Для проведения количественного анализа можно использовать разрабо-
танную систему классов. Если и потребуются какие-то изменения, то они вно-
сятся не в существующие классы, а в новые производные классы, наследую-
щие все свойства родительских классов. В данном случае особенности цели
заключаются в разнесенности УХ по длине и конфигурации зоны опасных
разрывов при параллельных курсах. Обе особенности учтем в новом классе
Target A, производном от класса Target E, в структуру которого конструк-
тор Target_A вводит скорость цели V:
function X=Target_A(varargin)
X=struct ('Class','Target_A'.,'V', []) ;
X=class(X,'Target_A',Target^E);
if -isempty(varargin)X=setval(X,varargin{:}); end
Метод Target A/setval присваивает только значение нового свойства,
а данные о модели уязвимости (агрегатной или обобщенной) передает базово-
му классу:
function X=setval(X,varargin)
for i=l:length(varargin)
x=varargin{i} ;
if iscell (x) | isa (x,' V__Unit')
X.target_e=setval(X.target_e,x);
else
X.V=x;
end
end
Метод Target_A/display к модели уязвимости, показанной базовым
классом, добавляет сообщение о скорости цели:
function display(X)
display(X.target_e);
disp (sprintf (' скорость%5. If',X. V) ) ;
Для иллюстрации работы упрощенной методики создадим объект с обоб-
щенной моделью уязвимости длиной 8 м, а также однофракционную БЧ wh с
равномерным годографом:
» T=Target_A(V_Unit([3 8],'h',[40 70]),700);
» cubic=ShockE([5 5 5]);
» F=Fract(cubic, 800,[72;110],[2 332467679997
7 6 5 4 ] ) ;
» Wh=pole_s(F,1000);
Поле ПЭ в динамике Pole Wh с учетом скорости носителя, а также поле
в ЦСК Ро1е_Т создадим конструктором Pole_D:
124
2. Основные характеристики эффективности действия СП и БП
» Pole_Wh=Pole_D(Wh,1100,4) ;
» Pole_T=Pole_D(Wh,1100,4,Т);
Составим метод Target A/CalcG для вычисления КЗП G(r) по форму-
лам (2.58)-(2.62). Ее аргументами, кроме объекта Target A, будут поле в ди-
намике и сетка промахов, например:
» r=logspace(0.05,1.4,20);
Сначала вычислим границы поля разлета в динамике f, а также медиану f i.
Для каждого значения промаха найдем расстояние до точки встречи R, чтобы
затем определить скорость ПЭ при подлете к цели VR и скорость соударения с
целью Vr. Коэффициент пропорциональности для вычисления длины поля на
данном промахе L равен разности котангенсов заднего и переднего углов раз-
лета, что в MATLAB можно выразить как L=-diff(l./tan(f)). Длина цели
запрашивается у объекта т методом Target A/MySize. Вместо определения
критического промаха из равенства r*L=LT, как рекомендует методика, удоб-
нее выделить множество индексов ind тех элементов массива г, для которых
длина поля меньше длины цели. Математическое ожидание числа эффектив-
ных попаданий сначала вычисляют по формуле (2.60) для всех^ промахов, а
затем проводят пересчет для малых промахов. Так что КЗП в последнем опе-
раторе вычисляется в полном соответствии с формулой (2.62):
function G=CalcG(Т,Pole_Wh,г)
f=[min(bnds(Pole_Wh)) max(bnds(Pole_Wh))];
fi=mean(f);
R=r/sin(fi);
VR=mean(Godog(Pole_Wh))*decr(Pole_Wh,R);
Vr=sqrt (VR. ''2+velos (T) ,'2+VR. * (2*velos (T) *cos (fi) ) ) ;
L=-diff(1./tan(f));
LT=MySize(T,2);
ind=find(r<LT/L);
m=Nij(Pole_Wh)./(2*pi*r.A2*L).*Syl(T,Pole_Wh,mean(Vr));
m(ind)=m(ind).*r(ind)*L./LT;
G=l-exp(-m);
Для вычисления функции согласования. УЗП и полной вероятности пора-
жения составим скрипт-файл и_ат:
LT=MySize(Т,2);
ft=[min(bnds(Pole_T)) max(bnds(Pole_T))];
zl=r. /tan (ft (1) ) +LT/2.;
z2=r./tan(ft(2))-LT/2;
X.m=(zl+z2)/2;X.s=4;
S=pNorm(X,z2,zl);
fr=raylpdf (r, 5) ;) ;%плотность распределения Рэлея
W=defint(r,fr.*S.*G);
Границы зоны опасных разрывов ft вычисляются по формулам (2.63),
предельные углы сектора разлета в ЦСК - по данным объекта Ро1е_т, кото-
рые соответствуют формуле (2.64). Согласование НВУ с направлением разле-
та ПЭ считаем пока идеальным, т. е. линия регрессии, на которой находятся
математические ожидания точки срабатывания х. т, делит пополам зону опас-
ных разрывов. Среднеквадратическое отклонение принято равным 3 м. Рас-
2.7. Эффективность средств поражения осколочного действия
125
пределение промахов подчиняется закону Рэлея с параметром 5. Процедура
интегрирования заменена суммированием.
Вычисление проведем сначала для заданной скорости цели 500 м/с, ско-
рости 1000 м/с (также на встречном курсе) и 500 м/с с наведением вдогон.
Результаты представим в виде графиков G(r), S(r), U(r). После формирования
объектов вся работа выполняется командой
» for V=[1000 500 -500];W_at;
plot(r, G,r,S,',r,S.*G,,hold on,end
Чем больше относительная скорость отличается от расчетной (500 м/с),
при которой построена поверхность срабатывания взрывателя, тем сильнее
снижается функция согласования и, соответственно, УЗП (рис. 2.10). Относи-
тельное положение границ зоны разлета и образующей поверхности срабаты-
вания при скорости цели 500 м/с (рис. 2.11) дает представление о причинах
этого снижения. Графики получены при выполнении команды
» hold off,for V=[1000 500 -500];
W_at;plot(zl,r,z2,r,X.m,r),hold on,end
Рис. 2.10. КЗП, УЗП и функция согласования при различных относительных скоростях:
------------------------------С.--------S,------U
Рис. 2.11. Границы зоны опасных разрывов при различных значениях относительной
скорости и условная плотность положений срабатывания НВ
126
2. Основные характеристики эффективности действия СП и БП
Приведем на том же графике условные законы распределения точек сра-
батывания при минимальном и большом промахах (с увеличением ординат в
50 раз):
» Ь=-10:50;Z.m=X.т(1);Z.s=X.s;
plot(b,г(1)+fnorm(Z,b)*50);
» Z.m=X.m(18);hold on,plot(b,r(18)+fnorm(Z,b)*50);
Ясно, что в область вероятного срабатывания взрывателя попадает лишь
часть сектора разлета (чем больше отличие скорости от расчетной и промах,
тем меньше часть сектора разлета).
Построим в диапазоне от -1000 до 1000 м/с зависимость полной вероят-
ности поражения от промаха
» WW=[ ]; W=-1000 : 50 :1000; for V=W;W_at;
WW(end+l)=W;end, plot(W,WW)
Вероятность поражения сильно снижается при нерасчетных относитель-
ных скоростях (рис. 2.12, сплошная линия), поэтому необходима адаптация к
условиям встречи. Одна из возможностей адаптации - изменение направле-
ния разлета (например, выбором точки инициирования). Изменим в скрипт-
файле data_AT диапазон углов разлета с 70... 110° на 55.. .95°, выполним его, а затем
Рис. 2.12. Зависимость вероятности поражения от скорости цели:
1 - 85... 125°; 2- 55...95°; 3 - 70... 110°; 4 - 70... 110° с оптимальным временем задержки
повторим предыдущую команду (изменив стиль линии). Сделаем то же самое
для диапазона 85... 125°. Соответствующие графики (см. рис. 2.12) подтверж-
дают возможность адаптации к условиям встречи за счет дискретного управ-
ления полем разлета. Наилучший результат (штрихпунктирная кривая) полу-
чен непрерывной адаптацией.
Согласование взрывателя с направлением разлета ПЭ. Непрерывную
адаптацию к условиям встречи можно осуществлять изменением угла направ-
ленности взрывателя, чтобы он среагировал на цель в самый подходящий мо-
мент при данной относительной скорости. Но это техническая проблема, на-
ходящаяся вне компетенции проектировщика СП. Самый простой способ уп-
равления моментом срабатывания - задержка инициирования с момента
реагирования на цель в зависимости от имеющихся данных об условиях встре-
чи. В частном случае сближения на параллельных курсах оптимальный мо-
мент срабатывания определяется относительной скоростью и промахом. При
2.7. Эффективность средств поражения осколочного действия
127
встрече с произвольными углами перехвата к определяющим факторам добав-
ляются углы встречи и фаза промаха. В технологии реализации оптимальной
задержки срабатывания принципиальное значение имеют как определяющие,
так и контролируемые данные. Например, относительная скорость сближения
может быть известна бортовой системе, а величина промаха - нет. В результа-
те предварительной оптимизации момента срабатывания по критерию полной
вероятности поражения в широком диапазоне условий встречи выявляется ста-
тистическая связь с условиями встречи, которые предполагаются известными
на борту. Уравнение регрессии используется бортовым вычислителем для оп-
ределения задержки срабатывания.
Чтобы получить уравнение регрессии, подготовим статистику, для чего
разыграем достаточно большое число N реализаций скорости цели, равномер-
но распределенных в диапазоне 100... 1000 м/с, и промахов, распределенных
по закону Рэлея с параметром 3:
N=1000;
V0=rand(N,l)*900+100;
R0=random('rayl',5,N,1);
С помощью имитационной модели взрывателя необходимо для каждого
промаха получить момент реагирования на цель и, соответственно, координа-
ту центра БЧ в этот момент в ЦСК. Роль имитационной модели выполняет
команда, которая вычисляет координату антенны в момент касания цели сред-
ней линией диаграммы направленности (угол полураствора диаграммы направ-
ленности pi/4.5, случайная ошибка координаты срабатывания подчиняется
нормальному закону без систематической ошибки и о = 3, смещение центра
разлета от антенны не учитывается):
Z=R0/tan(pi/4.5)+Ts.L/2+normrnd(0,3,N,1);
Теперь в каждой реализации нужно найти оптимальное положение точки
срабатывания по критерию вероятности поражения и определить необходи-
мое смещение от точки реагирования (соответствующего элемента вектора z).
В упрощенной модели поля разлета оптимизация не нужна, так как оптималь-
ной является середина зоны опасных разрывов при данной относительной ско-
рости:
for i=l:N
T=setval(Т,' V', V0 (i)) ;
WH2=struct(Trans(Wh,4,T));
[zl z2]=zona(T,R0(i),WH2.fid([1 end]));
Z(i)=Z(i)-(zl+z2)/2;
end
После выполнения этого цикла вектор Z содержит смещения точек сраба-
тывания. Чтобы вычислить время задержки, его надо поделить на относитель-
ную скорость, но отрицательное время задержки допускать нельзя:
ind=find(М<0); if ~isempty(ind) M(ind)=0; end
Vr=V0+WH2.VI;
Tau=Z./Vr;
Самое сложное в регрессионном анализе - выбор адекватного уравне-
ния регрессии, но в данном случае этот вопрос решается просто, так как
128
2 Основные характеристики эффективности действия СП и БП
при известных промахе г и относительной скорости на данном промахе vr
зависимость времени задержки т(г, vr) должна иметь вид т = ajvr + a2rlvr +
+ а3г. Коэффициенты регрессии после выполнения всех предыдущих команд
можно найти с помощью функции regress из папки toolbox\stats системы
MATLAB:
» [a,al]=regress(Таи,[1./Vr,RO./Vr,RO])
a = 3.0700 1.2327 -0.0008
alnt =
2.8364 3.3037
1.1068 1.3587
-0.0009 -0.0007
Коэффициенты регрессии выводятся в первой строке результата, а дове-
рительные интервалы для них находятся в строках двухмерного массива. Не-
трудно догадаться, что первый коэффициент - это как раз половина длины
цели т.ь=6. Непосредственной проверкой можно убедиться, что второй коэф-
фициент приблизительно равен ctg ф0- ctg фср = ctg (л/4,5) - ctg (л/2) = 1,19,
где фо - угол полураствора диаграммы направленности взрывателя, фср - ме-
дианный угол разлета ПЭ в статике, третий коэффициент l/(t'osin фср) =
= 1/1500 = 0,0007. Именно закон смысл коэффициентов в зависимости т(г, гг)
определяет оптимальную задержку срабатывания в стрельбе на параллельных
курсах.
Для оценки выигрыша от применения задержки срабатывания в скрипт-
файл Wat перед вычислением функции согласования вставим следующие две
строки:
» Vr=velos(Т)+velos(Wh);
» X.m=r./tan(pi/4)+Ts.L/2-max(0,a(1)+a(2)*r+a(3)*r*Vr);
Теперь выполнение той же команды, с помощью которой построены гра-
фики (см. рис. 2.12), дает штрихпунктирную кривую:
» WW=[ ]; W=-1000 : 50 :1000; for V=W;W_at;WW (end+1) =W;end,
plot (W,WW)
При неполной информации об условиях встречи (например, когда вели-
чина промаха неизвестна) качество уравнения регрессии снижается:
» [a,al]=regress(Таи,1./Vr)
а =3.8351
al =3.6577 4.0125
В данном случае, когда из двух переменных регрессии осталась одна, ни-
каких преимуществ получить нельзя, но в произвольных условиях встречи
даже при неполной информации уравнение регрессии получается достаточно
гибким, и применение задержки срабатывания эффективно.
Расчет эффективности действия по точной модели. Анализ совместно-
го влияния могущества действия БЧ, согласования взрывателя и точности на-
ведения на эффективность действия проведено, как это часто делается, с су-
щественными упрощениями. Но в вычислительном аспекте в рамках объект-
ной методологии упрощения не нужны. Схема вычислений такая же, как и в
методе Target_E/CalcG класса наземных целей: координаты в ЦСК пере-
считывают в полярные координаты меридиональной плоскости (R, ф'), после
2.7. Эффективность средств поражения осколочного действия
129
чего вызывают метод Pole D/CalcG. Но если в случае наземных целей ин-
тегрирование КЗП проводят в плоскости расположения целей, то в окрестнос-
ти воздушной цели КЗП удобнее интегрировать по трубке промаха, а затем
осреднять по промахам.
Следует также отказаться от чрезмерного упрощения цели (представле-
ние ее одним обобщенным УА). Вместо этого объекты, характеризующие класс
УА и содержащие сведения об уязвимости, их положении в ЦСК, необходимо
включить в объект класса воздушных целей так же, как объекты fract вклю-
чены в объект Pole s. Взаимодействие объектов организуется следующим
образом. Для текущего значения промаха г определяется интервал [z,, z2], при-
надлежащий зоне опасных разрывов, как минимальное и максимальное значе-
ние координаты z, при которых центр разлета виден хотя бы из одного УА под
одним из углов разлета ПЭ в ЦСК. Далее гиге [zf, z2] пересчитываются при
данной относительной скорости в (А, ф') и вычисляют в методе CalcG класса
БЧ вероятности поражения всех УА gj(r, z). КЗП G(r, z) вычисляется с учетом
функциональной схемы уязвимости или в простейшем случае по формуле
G(r, z) = 1 - П gi (г, z). Полная вероятность-поражения W и УЗП U(r) определя-
i
ют так же, как и в приближенной модели: •-
Следующий необходимый шаг в развитии классов - обобщение на произ-
вольные условия встречи. Класс Distrib, в котором происходит пересчет ско-
рости и плотности осесимметричного поля в структуру данных о поле разле-
та в динамике (массив ячеек С), представляет все распределения в меридио-
нальной плоскости, что справедливо только для сближения на параллельных
курсах. В произвольных условиях встречи, когда вектор относительной ско-
рости составляет некоторый угол с осью симметрии БЧ, поле становится не-
симметричным, поэтому массив ячеек нужно сделать двухмерным, чтобы учи-
тывать в нем и распределение по экваториальным углам. Дополнительное раз-
биение статических элементарных зон перед преобразованием в ЦСК, сбор
дискретных данных в массив ячеек, упорядоченный по динамическим расчет-
ным зонам, выполняются так же, как и в методе Distrib/setval. Отличие
только в том, что присутствие дробных интервалов из определенных стати-
ческих зон индексируется двумя номерами: меридиональных угловых зон и
экваториальных интервалов.
Эффективность осколочного действия СП с осевым метанием ПЭ
Отличительная особенность дистанционного метода подрыва состоит в
том, что команда на срабатывание подается в некоторой расчетной точке на
траектории, независимо от величины промаха (за счет временной задержки от
момента старта, по информации от дальномера и т. п.). Поле ПЭ в этом случае
должно быть таким, чтобы обеспечивать накрытие при пролете на разных про-
махах, а именно: все ПЭ в относительном движении должны находиться внутри
конуса с осью, совпадающей с вектором относительной скорости &1ц (рис. 2.13).
В ЦСК при сближении на параллельных курсах направление ПЭ, имею-
щего максимальную скорость г”, составляет угол ф^ =arctg(?Ql/? k() с осью
изделия, а остальные ПЭ разлетаются в конусе с углом раствора 2ф'т.
130
2. Основные характеристики эффективности действия СП и БП
Допустим, что срабатывание произошло в зоне опасных разрывов на рас-
стоянии z от картинной плоскости. Дисковое поле в дальнейшем расширяет-
Рис. 2.13. Зона опасных разрывов для
осевого поля ПЭ
ся со скоростью V™. К моменту проле-
та цели, т. е. через промежуток време-
ни t - zlvXn, круговое поле будет иметь
радиус
m Vq1
rm=v0t = Z---=
^1ц
Если поле равномерно и N - об-
щее количество ПЭ, то плотность поля
П(2) =
•jtf 2
к'т
,N
TU2tg2 <р^
Считая, что скорость встречи ПЭ с целью - (скоростью сопротивле-
ния воздуха и собственной скоростью разлета можно пренебречь), опреде-
ляем уязвимую площадь как постоянную величину в зоне опасных разрывов
S = S*(q, ц1ц). Таким образом, среднее число поражающих фрагментов зави-
сит только от координаты z:
m(z) = n(z)S*(g,rlu) =
NS*
nz2tg2 <?'т
Соответственно КЗП в зоне опасных разрывов представляется функци-
ей от z:
G(z) = l-e-m*
= 1-ехр -
NS*
Л?2*ё2 <Pm
Вероятность того, что срабатывание произойдет в зоне опасных разры-
вов, также зависит от расстояния z:
гт
P(r<rm) = J f(r)dr,
о
так как гт зависит от z. При нормальном круговом рассеивании промахов со
среднеквадратическим отклонением о
Г” (
P(r<r„,) = 5(z)= J/(rWr = l-exp
о <
z2tg2 <Р'т
2g2
Вероятность поражения
Wz(г) = G(z)S(z) = (1 -e-₽/z2)(1 -е~а^ ),
2.7. Эффективность средств поражения осколочного действия 131
где Р = —№ а = -- Как произведение монотонно убывающей G(z)
rctg2 <pm 2а2
и монотонно возрастающей S(z) функций, вероятность поражения Wz(z) имеет
максимальное значение при
Na tg<p^N 2л
которое находится из условия dWx/dz = 0. Это значит, что ДВУ перед стрель-
бой должен быть установлен так, чтобы срабатывание произошло при недоле-
те до цели на дистанцию z*. Из-за Ошибок определения дальности, установки
и срабатывания взрывателя случайная дистанция подчиняется нормальному
закону fz(z) с параметрами mz, ог. Вероятность поражения одним выстрелом
следует осреднить по возможным значениям z:
Wl=jwl(z)fz(z)dz.
Очевидно, что максимальное значение полной вероятности поражения W\
будет получено при математическом ожидании дистанции срабатывания, близ-
ком к оптимальной дистанции mz=z*. Ошибка наведения (промах) уже учтена
среднеквадратическим отклонением кругового рассеивания о. Этот параметр
также влияет на оптимальную дистанцию и вероятность поражения. Исследо-
вание влияния ошибок стрельбы и срабатывания ДВУ удобно провести в
MATLAB с помощью функции w_Ax, в которой интегрирование заменено сум-
мированием произведений условных вероятностей M^fZj) на элементы вероят-
ностей fz(z^dz-
function W=W_Ax(sr,sz)
t=tan(pi/12)Л2;
b=100*0.5/ (pi*t);
a=t/(2*згЛ2) ;
mz=(Ь/а)Л0.25;
z0=max(mz-3*sz, 0.1);
zl=mz+3*sz;
dz=0.1;
z=[zO:dz:zl];
f=exp(-((z-mz). Л2) / (2*szA2)) ./(sqrt(2*pi)*sz);
Wz=(1-exp(-a*z.A2)).*(1-exp(-b./z.A2));
W=sum(Wz*f')*dz;
Первый параметр sr - среднеквадратическое отклонение кругового рас-
сеивания о, второй sz - Gz. Постоянными величинами заданы угол полура-
створа конуса разлета в ЦСК <р'т = л/12, число ПЭ N = 100, уязвимая площадь
цели S* = 0,5.
Чтобы построить графики зависимости вероятности поражения от дис-
танции Wz(z) при нескольких значениях G = 1, 2, 3, 4 и oz= 3, в функцию w_Ax
в качестве последнего оператора добавим следующую строку:
plot( z,Wz), hold on, grid on, xLabel('z'), yLabel('W');
132 2. Основные характеристики эффективности действия СП и БП
а затем выполним команду
» Sr=[l:4];for i=l:4 W_Ax(Sr(i),3); end
Графики (рис. 2.14) показывают, что эффективность осколочного действия
СП аксиального типа существенно зависит от дистанции срабатывания при
высокой точности стрельбы, а снижение точности стрельбы приводит к паде-
нию вероятности поражения и сдвигу более пологого экстремума в область
больших дистанций.
Рис. 2.14. Зависимость вероятности поражения от дистанции срабатывания:
7-0 = 1,2-0 = 2; 3-0 = 3; 4-0-4
Чтобы выявить совместное влияние ошибок стрельбы и срабатывания ДВУ,
можно построить трехмерные графики с помощью скрипт-файла W AxSrSz:
Sr=[1:0.2:4];
Sz=[3:0.6:12];
[X, Y]=meshgrid(Sr, Sz) ;
Z=zeros(length(Sz),length(Sr));
for j=l:length(Sz)
sz = Y(j) ;
for i=l:length(Sr)
sr = X(j,i);
Z (j,i)=W_Ax(sr, sz) ;
end
end
С помощью функции meshgrid он строит сетку для о от 1 до 4 с шагом
0,2 и для oz от 1 до 4 с шагом 0,6. Значения полной вероятности поражения в
узлах вычисляются вызовом функции w Ах (в ней нужно убрать команду по-
строения графика plot (z,wz)) и запоминаются в массиве Z. Теперь можно
строить график командой
» W AxSrSz, surf(X,Y,Z)
Построим еще такой же график, но при наличии систематической ошиб-
ки дистанции срабатывания, для чего уменьшим оптимальную дистанцию
2.7. Эффективность средств поражения осколочного действия
133
в 2 раза (откроем строку mz=mz*0.5 в файле w_Ax). Чтобы построить эту
поверхность на прежнем графике, применим команду hold on:
» W_AxSrSz, hold on, surf(X,Y,Z),xLabel('sz'),
yLabel('sr'),zLabel('W')
Среднеквадратическое отклонение промахов снижает вероятность пора-
жения сильнее, чем среднеквадратическое отклонение дистанции срабатыва-
ния (рис. 2.15). Наличие систематической ошибки в сторону уменьшения (за-
паздывание срабатывания) не позволяет обеспечить высокую вероятность по-
ражения даже при хорошей точности стрельбы.
Рис. 2.15. Зависимость вероятности поражения осевым потоком ПЭ от ошибок
срабатывания и наведения
Можно анализировать влияние и других параметров, принятых в функ-
ции w_Ax постоянными величинами: угла полураствора конуса разлета, чис-
ла ПЭ, уязвимой площади цели. Но простая модель накрытия цели полем
ПЭ, реализованная в функции w_Ax, не учитывает других важных факторов,
которые могут поставить под сомнение целесообразность выбора такой кон-
структивной схемы. В частности, на эффективность действия СП с осевым
метанием отрицательно влияет отклонение оси снаряда от направления дви-
жения в момент срабатывания (при низкой скорости цели). В рамках приня-
той модели можно получить верхнюю оценку степени влияния этого факто-
ра, учитывая отклонение оси на угол 0 изменением промаха на величину
U= z sin 0. Считая 0 случайной величиной, равномерно распределенной в ин-
тервале [0, 0“““], дисперсию величины U оценим значением (zsin 0max)2/12 (при
малых 0тах дисперсия закона синуса не сильно отличается от равномерного
в сторону уменьшения). Проекция U на одну из координатных осей в кар-
тинной плоскости (7cos £1 при равномерном распределении £1 в интервале
[О, я] как произведение независимых центрированных случайных величин
имеет дисперсию
134 2. Основные характеристики эффективности действия СП и БП
,,г,, rxi пггчп. m Usin0max)2n
£>[t/cos £1] = D\I/] £>[cos £1] =----.
12 2
Прибавив ее к дисперсии нормального рассеивания по этому же направ-
лению и2, будем считать распределение промахов прежним (по закону Рэлея)
Г\ (zsin 0max)2 д
с параметром Ju -I-----—----—, так как нормальная компонента в сум-
марном промахе является превалирующей. Теперь внесем соответствующие
изменения в функцию W Ах. Увеличим список аргументов
function W=W__Ax (sr, sz, tetamax, stl),
чтобы можно было при желании задавать (необязательные) параметры tetamax -
величину 0max, stl - свойство линии на графике. В тело функции после вы-
числения вектора z вставим блок
if nargin>2
ssr=sr/42+ (z*sin(tetamax)).Л2/12 * pi/2;
a=t./(2*ssr);
end J
if nargin<4 stl='b'; end
Интерпретатор MATLAB знает число фактических аргументов nargin, и
если задан третий параметр tetamax, пересчитывается переменная а, завися-
щая от среднеквадратического отклонения промаха, и становится, как и z,
вектором. Выполнив команды
» hold off
» Sr=[l:4];for i=l:4 W_Ax(Sr(i) , 3) ; end
» Sr=[l:4];for i=l:4 W_Ax(Sr(i),3,0.4*pi/12,'k:'); end
» Sr=[l:4];for i=l:4 W_Ax(Sr(i),3,pi/10,'k—'); end,
получим график (рис. 2.16), на котором сплошными линиями показана зави-
симость Wz(z) при и = 1, 2, 3, 4 и uz = 3 (см. рис. 2.14), пунктирными линия-
ми - небольшие отклонения (до 6°) оси конуса разлета от вектора относитель-
ной скорости, штриховыми линиями - отклонения до 18°.
Рис. 2.16. Зависимость вероятности поражения от дистанции срабатывания
при отклонении оси снаряда от вектора скорости
2.8. Особенности оценки эффективности СП непосредственного действия 135
2.8. Особенности оценки эффективности средств поражения
непосредственного действия
Ущерб, нанесенный площадной цели, характеризуют величиной поражен-
ной площади Sn, на которой имеются повреждения не менее заданных, или
относительной долей пораженной площади U = Sn/Su, где 5Ц - площадь цели.
Если площадная цель представляет собой совокупность элементарных целей,
распределенных на площади с постоянной плотностью X, то характеристи-
кой действия может служить доля пораженных объектов, которая также сво-
дится к отношению площади зоны поражения Sn (в которой находится в сред-
нем Уп - Х5П ЭЦ) к площади расположения ЭЦ с общим количеством Уц =
= Л5ц,т.е.Уп/Уц = 5п/5ц=Ц.
Зону возможных поражений вокруг точки срабатывания СП, которая за-
дается распределением поражающих факторов и уязвимостью цели, можно
считать детерминированной с площадью 5ВП. Площадь пораженной части
цели Sn, вообще говоря, меньше зоны возможных поражений за счет того,
что она может частично или полностью дыходить за пределы цели. Возмож-
ные значения доли пораженной площади U принадлежат интервалу [0, ит],
где ит= Ss n/Sn. Доля поражения U не может служить показателем эффектив-
ности, так как является случайной величиной. В качестве показателя эффек-
тивности может быть принята либо вероятность события (U > мтр) при неко-
тором заданном требуемом уровне этой характеристики мтр, либо математи-
ческое ожидание M[U] - средняя доля поражения.
Конфигурация области поражения мбжет быть сложной. В расчетах, тем
более в проектных, когда нет конкретных данных об условиях накрытия цели
и эти условия целесообразно усреднить, форма области поражения принима-
ется круговой или прямоугольной со сторонами, параллельными главным осям
рассеивания (2/хх21у). Прямоугольная форма и ориентация осей вдоль главных
осей распределения могут быть оправданы тем, что зона поражения образует-
ся совокупным действием нескольких БП, рассеянных при одном заходе но-
сителя, или кассетных элементов, выброшенных из одной кассеты.
Площадь характерной цели задают также прямоугольником со сторонами
2£х, 2Ly, ориентированным вдоль главных осей рассеивания (рис. 2.17). Об-
ласть возможного поражения цели не обязательно полностью попадает в об-
ласть цели и может вовсе не пересекаться с ней. Максимально возможная
доля пораженной площади ит = $ВП/5Ц (ит = 1, если 5В П > 5Ц), а область значе-
ний случайной величины U - интервал [0, мт].
Для вычисления математического ожидания случайной величины U или ве-
роятности достаточного уровня доли поражения необходимо иметь функцию
распределения F(u), называемую функцией ущерба. Характерная особенность
функции ущерба - наличие двух разрывных точек, соответствующих конеч-
ным значениям вероятности нулевого значения доли пораженияр0 - P(U= 0)
и максимального значения рт = P(U = ит). Поэтому средняя доля ущерба вы-
числяется как математическое ожидание дискретно-непрерывной случайной
величины:
«т «т
Ми = j udF + ^xiPi = J udF + pmum.
0 ' 0
136 2. Основные характеристики эффективности действия СП и БП
Рис. 2.17. Определение ущерба площадной цели
При отсутствии функции ущерба грубую оценку Ми можно получить, по-
лагая dF= (1 -р0 -р„)/ит, тогда
Ми =^^-Р0-Рт) + итРт =П^У + Рт ~ Ро)-
Если геометрическая модель накрытия площадей цели использует прямо-
угольные формы цели и области поражения (см. рис. 2.17), то функцию ущер-
ба можно построить на основе взаимодействия объектов класса прямоуголь-
ников RecShape и двухмерного нормального распределения Norm2. Но для
этого прямоугольники нужно сделать более «сообразительными», чтобы они
могли сами определять пересечения между собой. Такой класс Rect создадим
на основе класса RecShape, добавив в него метод Sect, который строит пере-
сечение двух прямоугольников и возвращает его как объект того же класса:
function X=Rect(varargin)
X=class(struct('Class','Умный прямоугольник'), 'Rect',
RecShape);
X=setval(X, varargin{:});
function Z=Sect(X,Y)
sX=MyCenter(X)*[1 1]+MySize(X)'/2*[-1 1];
sY=MyCenter(Y)*[1 1]+MySize(Y)'/2*[-1 1];
Rl=Cut(sX(l,:),sY(l,:));
R2=Cut(sX(2,:),sY(2,:));
Z=Rect([0 0]);
if Sorted(Rl)&Sorted(R2)
Z=setval(Z,[mean(Rl);mean(R2)],[dif f(Rl),diff(R2)]); end
%
2.8. Особенности оценки эффективности СП непосредственного действия 137
function R=Cut(А,В)
A=sort(А); B=sort(В);
R=[max([a(l) B(D] min([A(2) В(2)1) ];
%
function out=Sorted(А)
out=A(l)<A(2);
Создадим два экземпляра прямоугольников А, в со сторонами 30x20 (цель)
и 6x4 (область поражения), а также внутренний А1 и внешний АО прямоуголь-
ники (см. рис. 2.17):
» A=Rect(30,20); B=Rect(6,4); SA=Area(А); Um=Area(В)/SA
» A0=Rect (MySize (A) +MySize'(B)) ; Al=Rect (MySize (A) -MySize (B) ) ;
» Show(A,0),Show(AO,1),Show(Al,1)
Нормальное распределение центра области поражения зададим объектом
класса No г m2 с параметрами 10 и 5 - среднеквадратическими отклонениями
вдоль длинной и короткой сторон прямоугольника-цели соответственно (сис-
тематические отклонения по умолчанию— нулевые). Сгенерируем 30 случай-
ных точек согласно заданному распределению методом Norm2/GenSet, кото-
рый использует датчик случайных чисел randn, корректируя их параметрами
Рис. 2.18. Случайное распределение области поражения относительно цели (а) и функ-
ция распределения ущерба для закрашенной области прямоугольника (б)
данного объекта. В каждую из этих точек перенесем центр прямоугольника в
и покажем его, выделив цветным фоном пересечение с прямоугольником-це-
лью А (рис. 2.18, а):
» Y=Norm2([10 5]); N=30; X=GenSet(Y,N);Show(А,0),
Show(АО,1), Show(Al,1)
» for i=l:N Z=MoveTo(В,X (:,i)) ;
T=Sect(A,Z);show(Z,1,[],' r'); show(T,1,[],'c',1); end
Теперь в 2000 случайных положениях прямоугольника в вычислим пло-
щадь его пересечения с А, построим гистограмму этой случайной величины и
эмпирическую функцию распределения ущерба (рис. 2.18, б):
» N=2000; X=GenSet(Y,N);
» S=[];for i=l:N S(i)=Area(Sect(A,MoveTo(B,X(:,i))))/SA; end
138
2. Основные характеристики эффективности действия СП и БП
» f=[sum(S=O)hist (S (S>0 & S<Um*O . 999) , 20)
sum(S>Um*0.999)]/N;
» F=cumsum(f); x=[-0.01 0 0 linspace(0,Um,20) Um Um*l.l];
plot(x,[0 0 F l],'r') grid
Нетрудно проверить, что разрывы функции ущерба в концах интервала
возможных значений практически совпадают с вероятностями нулевого и мак-
симального пересечения при попадании центра в соответственно вне прямоу-
гольника АО и внутрь А1:
» pO=l-Ver(Y,A0), pl=Ver(Y,Al)
р0=0.0877 pl=0.6850
Математическое ожидание ущерба вычислим для сравнения как грубое
приближение, по эмпирической функции распределения, а также как среднее
выборочное:
» m=Um/2*(1+pl-pO), M=dot(linspace(0,Um,20),
diff(F(l:end-l)))+Umxpl, Ms=mean(S)
M=0.0319 M=0.0328 Ms=0.0325
В случае независимых ошибок по направлениям х, у математическое ожи-
дание площади перекрытия равно произведению средних линейных перекры-
тий Л/[[7] = M[CJX] М[Пу]. В обозначениях а = Lx- lx, h = L х+ lx, d = 2ГХзависи-
мость их(х) величины линейного перекрытия зоной возможных поражений пря-
моугольника цели от координаты х можно записать следующим образом:
0,
6-Н’
d,
|х| >Ь,
а < |х| < Ь,
а <|х|.
В интервалах а < |х | < b зависимость возможных значений их случайной
величины Ux выражается функцией ф(х) вида
ф(х) =
ф] (х) = b + х,
ф2 (х) = b - х,
- а > х > -Ь,
а <х<Ь,
а ее функция распределения
0, их < О,
F(ux) = lFx (Vi (их)) + [1 — Fx (ф2 (их))],
0<ux<d,
1, ux>d,
где ф;(х) - обратные функции к функции фг(х):
*1 =Vi(y) = y-k ф{(у) = 1;
х2=ф2(у) = 6-у, V2(y) = -1-
Внутри интервала (0, d) эту функцию распределения можно выразить че-
рез стандартную функцию нормального распределения:
Г(у) = С(у) = Ф*
у-Ь-т
+ 1-Ф*
Ь-у-т.
0<y<d. (2.65)
2.8. Особенности оценки эффективности СП непосредственного действия 139
На концах интервала F(0) = 0, F(d) = G(d), причем F(0+) = 6(0), F((F) = 1.
Значит, в этих точках функция распределения имеет разрывы первого рода.
Составим программу вычисления средней доли ущерба как произведения
средних линейных перекрытий, используя векторизованную файл-функцию
F_LaplasV для реализации формулы (2.65) и файл-функцию Trap для чис-
ленного интегрирования методом трапеций. Программа MeanDamage получа-
ет объект двухмерного нормального распределения Y и два прямоугольника -
цели А и области поражения в, а возвращает математическое ожидание отно-
сительно ущерба:
function M=MeanDamage(Y,А,В)
for direct=l:2
X=Y12(Y,direct);
LA=MySize(A,direct); LB=MySize(B,direct);
B= (LA+LB) /2; y=linspace('o, LB, 50) ;
F=l+F_LaplasV((y-b-X.m)/X.s)- F_LaplasV((b-y-X.m)/X.s);
Um=LB/LA; if Um>l Um=l; end
M(direct)=Trap(y,F)/LA+(l^F(end))*Um;
end
M=prod(m);
Используя в качестве исходных данных объекты Y, А, в, с которыми про-
водились статистические испытания, получаем:
» M=MeanDamage(Y,А,В)
М=0.0326
Результат практически совпадает с оценкой среднего значения 0,0328, по-
лученной по эмпирической функции распределения. Теперь сравним расчет
по программе MeanDamage с обычно используемым графоаналитическим ме-
тодом определения среднего линейного перекрытия Мх = M[UX] на основе се-
мейства кривых, отражающих зависимость Мх от относительных размеров пря-
моугольников цели и области поражения по одному из направлений 2LX/EX,
21JEX. Математическое ожидание доли площади цели с размерами 2000x1000 м,
накрытой прямоугольной зоной поражения с размерами 1000x800 м, получе-
но равным 0,37 при значениях вероятных отклонений центра области пораже-
ния от центра цели Ех = 200 м, Еу = 100 м. Точность графоаналитического
метода ограничена погрешностями интерполяции и снятия данных с кривых,
тогда как численный расчет дает гораздо меньшую погрешность, связанную
только с дискретизацией вещественных чисел. Методически объектный под-
ход, безусловно, предпочтительнее:
» Z=Norm2([200 100]/0.675); A=Rect(2000, 1000) ;
B=Rect(1000,800);
» M=MeanDamage(Z, А, В)
M=0.3604
Хотя графики M^LJE^ 2lx/Ex) построены для центрального рассеивания,
с помощью дополнительных манипуляций (существенно снижающих точность
результата) можно учесть систематические отклонения центра рассеивания от
центра цели. При тх = 400 м, mY = 500 м графоаналитическим методом полу-
чено Мх = 0,215, тогда как точное значение существенно меньше:
140
2. Основные характеристики эффективности действия СП и БП
» Zl=setval(Z,[400;500]); Ml=MeanDamage(Z1,А,В)
М1=0.1866
Эффективное поражение площадной цели можно обеспечить мощной БЧ,
создающей достаточно большую область поражения, или за счет достаточно
большого числа выстрелов обычными БП с относительно малой областью по-
ражения. Средняя доля ущерба в п выстрелах из-за перекрытия областей по-
ражения возрастает не пропорционально числу выстрелов, а несколько сла-
бее: Мп < пМх. Для уменьшения перекрытий применяют разнесенную стрель-
бу или искусственное рассеивание. Существуют приближенные формулы для
оценки средней доли ущерба при некотором «оптимальном» распределении
точек прицеливания, но они не позволяют найти такое распределение, так как
не учитывают явным образом координаты центров рассеивания. Статистичес-
кие испытания на основе объектного моделирования, проведенные для пост-
роения функции ущерба при одном выстреле, можно распространить на се-
рийную стрельбу. Нужно только научить «умные» прямоугольники учитывать
не только попарные пересечения, что имеет место при одном выстреле, но и
пересечения всех областей поражения от нескольких выстрелов,Как с целью,
так и между собой. Для этого создан класс «Множество прямоугольников»
SetOfRect, в котором метод Area вычисляет суммарную площадь всех эле-
ментов с учетом всевозможных пересечений (за счет рекурсивного создания
множеств пересечений исходных элементов, пересечения их пересечений и т. д.
с последующим знакопеременным вычетом суммарной площади каждого уров-
ня из площади предыдущего уровня):
function X=SetOfRect(level)
x=struct('Class','SetOfRect','T',Rect,'CS',Rect,'N',0,
'CN',0,'level',1);
X=class(x,'SetOfRect') ;
if nargin>0 X.level=level; end
function S=Area(X,B)
S=0; for i=l:X.N S=S+Area(X.T(i)); end
if X.CN~=0
W= SetOfRect(X.level+1);
W=setval(W,X.CS);
S=S-Area(W);
end
Статистические испытания организуем с помощью файл-функции
ArT Distrib, которая получает объект двухмерного нормального распреде-
ления z, прямоугольники цели А и области поражения в, множество точек
прицеливания [2хт]-матрица т, число выстрелов п и число испытаний N:
function S= Ari Distrib(Z,A,B,T,n,N)
if isempty(T) T=[0;0]; end
m=size(T,2);
for 1=1:N
R=SetOfRect;
X= [ ] ;
for i=l;n Z=setval(Z,T(:,i)); X=[X,GenSet (Z,m) ] ; end
2.8. Особенности оценки эффективности СП непосредственного действия 141
for i=l:n
R=Add(R,Sect(A,MoveTo(B,X(:,i)) ) ) ;
end;
S (I) =Area (R) /Area (A) ;
end
Сначала проведем 28 выстрелов на одной установке прицела (по умолча-
нию - в центр цели) с уменьшенными по сравнению с предыдущим примером
областью поражения и вероятными отклонениями:
» A=Rect(2000, 1000); B=Rect(100,80);
Z=Norm2([150 75]/0.675); n=28; N=1000;
» S= ArT_Distrib(Z,A,B,[],N,n);
Случайное расположение областей поражения в одном испытании пока-
зывает (рис. 2.19, а), что области поражения недостаточно рассредоточены
Длина, м
в
Рис. 2.19. Функция ущерба при нескольких выстрелах и различных характеристиках
рассеивания снаряда:
а - результат п = 28 выстрелов на одной установке прицела по центру прямоугольника 2000x1000 м
с вероятными отклонениями Ех = 120 м, Еу = 60 м; б - то же при Ех = 300 м, Еу = 150 м; в -
разнесенная стрельба с точками прицеливания (-400, 200), (400, 200), (-400, -200), (400, -200)
при Ех = 120 м, Еу = 60 м
142
2. Основные характеристики эффективности действия СП и БП
по прямоугольнику цели, из-за чего доля накрытой площади цели существен-
но меньше максимально возможной ит = nSB/SA = 0,112. Средняя доля пораже-
ний площади в этом варианте Л/28 = 0,0761, как и эмпирическая функция рас-
пределения (см. рис. 2.19, а), получена теми же командами, что применялись
для обработки одиночных стрельб. Удвоим вероятные отклонения, чтобы рас-
средоточить области поражения:
» Z=Norm2([300 150]/0.675); S= ArT_Distrib(Z,А,В,[],N,п);
Теперь области поражения равномерно распределены по прямоугольнику
цели, но часть из них из-за большого рассеивания попала за пределы цели
(рис. 2.19, б). Как показывает график функции ущерба, вероятность макси-
мального накрытия в этом варианте pt= 0,05. Но отсутствие перекрытий по-
вышает среднюю долю ущерба M2i = 0,1047. Теперь снова уменьшим вероят-
ные отклонения, но определим четыре точки прицеливания и произведем по
семь выстрелов на каждом прицеле:
Z=Norm2([150 75]/0.675); Т=[-4 4 -4 4; -2 -2 2 2]*Ю0;
S= ArT_Distrib (Z, А, В, Т, N, 7) ;
Все области поражения попали в цель и почти равномерно распредели-
лись на ней (рис. 2.19, в). В результате получена максимально возможная сред-
няя доля ущерба Л/28 = 0,1120.
Таким образом, объектное моделирование позволило не только получить
оценку показателя эффективности действия по площадной цели, но и анали-
зировать влияние условий стрельбы на этот показатель, в результате чего мо-
жет быть найдена оптимальная тактика обстрела. '
2.9. Прогнозирование эффективности действия
в боевых ситуациях
Показатели эффективности действия, вычисленные в заданных условиях,
используют для сравнительной оценки вариантов проекта, но они не в полной
мере представляют эффективность боевого применения спроектированного из-
делия. Основные причины несоответствия следующие:
условия встречи с целью могут существенно отличаться от принятых в
расчете; более того, в реальных боевых ситуациях эффективность действия
снижают не только условия поля боя, отличающиеся от полигонных, факторы
опасности, огневое противодействие противника, но и выбор противником стра-
тегии поведения, при которой создаются наихудшие условия встречи с целью
с точки зрения эффективности действия;
показатели эффективности действия по одиночной или групповой цели,
одним выстрелом, залпом или очередью адекватно отражают влияние контро-
лируемых факторов на результат стрельбы, но не отвечают на главный воп-
рос: приведет ли рациональное применение данного СП к выигрышу боя в
заданной ситуации.
Условия применения можно учесть значениями параметров в соответству-
ющих законах распределения. Огневое противодействие, как и надежность,
снижает эффективность действия: показатель эффективности, вычисленный
без учета противодействия, умножается на вероятность того, что противодей-
2.9. Прогнозирование эффективности действия в боевых ситуациях
143
ствие будет безуспешным. Другой подход требуется для выработки оптималь-
ной стратегии проектирования и использования собственных СП с учетом воз-
можных стратегий поведения разумного противника, как и для опенки влия-
ния на исход боя в заданных ситуациях.
Оценка эффективности действия в конфликтных ситуациях
Когда две стороны с противоположными интересами имеют несколько ва-
риантов поведения (стратегий) и могут объективно оценить все возможные
пары встречных стратегий выигрышем (или проигрышем) каждой из сторон,
эта ситуация квалифицируется как конечная игра двух лиц с нулевой суммой
(выигрыш одной стороны в точности равен проигрышу другой). В теории игр
для этого класса задач разработаны методы, позволяющие рекомендовать каж-
дому игроку оптимальную стратегию, выбрав которую, он будет получать в
среднем (при многократном повторении игры) наибольший выигрыш (или наи-
меньший проигрыш) независимо от того, какой стратегии следует другой иг-
рок. Игровые методы широко применяются в подготовке принятия решений.
Имеет смысл использовать их и для оптимизации проектных решений по эф-
фективности действия в широком диапазоне условий встречи с целью, стре-
мящейся уменьшить свой ущерб. Выделив основные стратегии поведения цели
(тип цели, высота полета, скорость, маневр ухода и т. п.), наметив возможные
проектные решения (собственные стратегии), вычислив показатель эффектив-
ности действия каждого варианта проекта в условиях, создаваемых всеми воз-
можными сочетаниями стратегий, можно сформулировать игровую задачу и
из ее решения получить гарантированный результат.
Антагонистическая игра двух лиц, в которой игрок А имеет п стратегий
А],..., Ап, а игрок В - т стратегий В{, ..., Вт, полностью описывается [лхт]-
матрицей, элементы которой а1} представляют выигрыш игрока А при исполь-
зовании им z-й стратегии в сочетании с у-й стратегией другой стороны. Эта мат-
рица называется матрицей платежей. Второй игрок также может иметь выиг-
рыш by, но антагонизм ситуации как раз в том, что atJ + by = 0, т. е. by = - а у
не является независимой величиной, ее называют проигрышем (даже если
ау < 0). Рекомендации теории игр по выбору оптимальной стратегии для игро-
ка А основаны на естественном предположении о том, что другой игрок ведет
себя разумно в том смысле, что берет больше, если дают больше. Поэтому
каждая стратегия стороны А должна оцениваться минимальным выигрышем
а, = min atJ, а игра в целом - максимальным гарантированным выигрышем
j 7
а = max аг = max min ay, доставляемым оптимальной чистой стратегией с
i i j
номером i*. Игрок В оценивает игру с противоположной позиции, а именно,
как минимальный гарантированный проигрыш Р = min Р7 = min max ау при
J j i
оптимальной чистой стратегии Bj*. Очевидно, что а < Р, поэтому а и Р назы-
ваются соответственно нижней и верхней ценой игры. Равенство а = Р = v
формально означает, что матрица платежей имеет седловую точку, образован-
ную чистыми стратегиями. В этом случае каждый игрок может рассчитывать
не более чем на цену игры и должен придерживаться своей оптимальной чис-
той стратегии.
144
2. Основные характеристики эффективности действия СП и БП
При отсутствии седловой точки игроки могут добиться в среднем лучшего
результата, чем гарантируют их цены игры, если будут руководствоваться неко-
торой схемой, реализующей случайный выбор стратегии в целях маскировки
своих намерений. Речь идет о том, чтобы чистые стратегии выбирались в со-
ответствии с некоторым законом распределения вероятностей SA = рп)
для игрока А и SB = (q}, qm) для В. Распределения SA и SB называются сме-
шанными стратегиями, так как они определяют не только линию поведения каж-
дого игрока, но и математическое ожидание выигрыша (проигрыша для В):
п т
M{SA,SB)=YYPi^ij4j- (2.66)
i=lj=i
Основная теорема теории игр утверждает, что для данной матрицы плате-
жей существуют оптимальные смешанные стратегии S*A> SB такие, что
M(SA, SB) < M(SA, SB) < M(SA, SB). Седловая точка (S^, SB) определяет цену игры
v = M(SA, SB) в смешанных стратегиях.
Задача поиска оптимальных смешанных стратегий сводится к задаче ли-
нейного программирования. Действительно, оптимальная смешанная страте-
гия 5^ при каждой чистой стратегии игрока В согласно основной теореме дает
средний выигрыш, не меньший, чем цена игры v:
XayA>v, j = \,...,n,
i=i
причем максимизировать надо цену игры. Выполняя замену переменных pj
v = хг с учетом того, что надо минимизировать =1 и 1/v =Х] +...+ хп,
сформулируем задачу оптимизации: '
п
min £хг;
1=1
п
Y, ^ijXj > 1, j = 1,..., nr, (2.67)
i=i
х( >0, z = l,п.
Таким образом, минимаксная задача сводится к чистой задаче минимиза-
ции, которая легко решается, например, симплекс-методом линейного програм-
мирования. Из ее решения получаются равновесная цена игры v = 1/(Х] +...+ хл)
и оптимальная смешанная стратегия стороны A: pt= vx(, i = 1, п. Опти-
мальная смешанная стратегия другой стороны может быть найдена аналогич-
но из двойственной задачи линейного программирования.
Основное условие эффективности смешанной стратегии - скрытность вы-
бора чистой стратегии - выполнимо при решении тактических задач, когда
изменить свою чистую стратегию, разгадав намерение противника по его дей-
ствиям, уже невозможно. Результатом проектирования являются те или иные,
но в конечном итоге вполне определенные тактико-технические характерис-
тики, что равносильно преждевременному объявлению чистой стратегии. Из
этого следует, что объективная оценка эффективности вариантов проекта дол-
жна проводиться не в каких-то типичных, а в наихудших условиях примене-
2.9. Прогнозирование эффективности действия в боевых ситуациях
145
ния, которые будет выбирать противник из набора своих стратегий. Если ЗРК
оптимизирован по критерию эффективности поражения низколетящих целей,
самолеты будут преодолевать зону его действия на большой высоте, и прогно-
зируемая эффективность действия не будет достигнута. Но оптимизировать
комплекс, предназначенный для борьбы с низколетящими целями, по эффек-
тивности действия на большой высоте бессмысленно, так как это приведет к
ухудшению самой стратегии, после чего самолеты противника будут летать,
где захотят. Единственный выход - в сохранении равновесного состояния, оп-
ределяющего приемлемый уровень цены игры v вплоть до последних этапов
принятия решений. Как следует из основной теоремы теории игр, равновесная
ситуация может быть достигнута в седловой точке смешанных стратегий. Это
значит, что при планировании вооружений нужно обеспечить несколько актив-
ных стратегий, не теряющих актуальности в оперативной обстановке, а на эта-
пе проектирования - искать оптимальныё решения не только в рамках чистых
стратегий, но и проводить максиминную оптимизацию в целях повышения рав-
новесной цены игры (эффективности в широком диапазоне условий).
Пример формирования боекомплекта. Если принять решение в пользу
какого-то определенного типа СП для боекомплекта танковой или авиационной
пушки, его реальная эффективность будет снижена тактическими приемами про-
тивника. Так, если оставить в боекомплекте танка только снаряды ударного типа,
для него станут опасными малоразмерные цели, другой чистой стратегии - сна-
ряды дистанционного типа действия - противник противопоставит брониро-
ванные боевые единицы и снова выигрывает. Равновесная ситуация, когда у
каждой стороны отсутствует стимул для перемены используемой стратегии, если
другая сторона не изменяет своей стратегии, как следует из основной теоремы
теории игр, может быть достигнута в седловой точке смешанных стратегий.
Для этого на этапе проектирования боекомплекта надо провести оценку эф-
фективности действия снарядов различных видов по типовым танкоопасным
целям, заполнив этими оценками матрицу платежей, в которой стратегии А -
возможные компоненты боекомплекта, стратегии В - типовые цели. Получен-
ную из решения максиминной задачи стратегию 5^ следует рассматривать как
рациональную пропорцию снарядов соответствующих типов в боекомплекте.
Смешанная стратегия, полученная таким образом на этапе проектирования,
доводится до этапа применения в виде физической смеси стратегий.
Пусть рассматриваются п = 3 составляющие боекомплекта (стратегии А)
против т = 4 типовых целей (стратегии В) и вероятности поражения в каждом
сочетании (табл. 2.2). Чтобы найти оптимальную пропорцию каждой состав-
ляющей боекомплекта как оптимальную смешанную стратегию, составим про-
грамму для решения задач вида (2.67).
Таблица 2.2. Матрица платежей из показателей эффективности
трех типов снарядов по четырем типовым целям
Вероятность поражения В> 52 в3 вЛ
А1 0,8 0,7 0,2 0,4
0,6 0,75 0,5 0,4
0,4 0,4 0,9 0,8
146 2. Основные характеристики эффективности действия СП и БП
Сначала сформируем матрицу и определим нижнюю и верхнюю цену игры:
» a= [ 0. 8 0.7 0 .2 0.4; 0.6 0.75 0.5 0.4; 0.4 0.4 0.9 0.8]
a =
0.8000 0.7000 0.2000 0.4000
0.6000 0.7500 0.5000 0.4000
0.4000 0.4000 0.9000 0.8000
» nu_min=max(min(а,[ ],2)),nu_max=min(max(а))
numir. =0.4000
nu_max =0.7500
Нижняя и верхняя цены игры не совпадают, равновесную цену игры бу-
дем искать решением задачи линейного программирования (2.67). В качестве
решателя используем МЕХ-функцию e04mbf ( Ы, bu, х, cvec, М, ...)
из библиотеки MATLAB, с помощью которой решаются задачи линейного про-
граммирования достаточно общего вида:
min £с,х,,
i=i .
i=l
at < x, < bt, z = l,..., n.
Нам понадобятся первые пять аргументов функции e04mbf: Ы - вектор
нижних границ [«,, ..., ап, 1{, lm]; bu - вектор верхних границ [бь ...,
Ьп, щ,ит]; х - исходное значение вектора переменных; cvec - вектор ко-
эффициентов целевой функции [q,...»си]; М- [техп]-матрица, формирующая
линейные ограничения. Собственно, антагонистическая игра с нулевой сум-
мой полностью определяется матрицей платежей, так что последний аргумент
содержит всю необходимую информацию о задаче, но программа e04mbf не
может ее извлечь. Составим файл-функцию igra_2x2 (а), которая по предъяв-
ленной ей матрице платежей подготовит все данные для решателя, получит от
него результат и преобразует его в решение игры - равновесную цену игры
пи, оптимальные смешанные стратегии обеих сторон рА, рв:
function [nu, рА, pB]=igra_2x2(а);
[n m]=size(а);
Z=min(min(а));
a=a-Z;
% оптимальная смешанная стратегия А
bl=[zeros(1,n), ones(l,m)];
bu=ones(l,n+m)*le+21;
cvec=ones(1, n);
x = e04mbf(bl,bu,cvec,cvec, a);
nu=l/sum(x);
pA=x*nu;
nu=nu+Z;
% оптимальная смешанная стратегия В
bl=[zeros(l,m), -ones(l,n)*le+21];
bu=[ones(l,m)*le+21, ones(l,n)];
2 9 Прогнозирование эффективности действия в боевых ситуациях
147
cvec=ones(1,ш);
х = e04mbf(bl,bu,cvec,-cvec,a);
рВ=х/sum (x);
Сначала по размерам матрицы платежей определяются числа стратегий
сторон п и т. В прямой задаче (2.67) п - это число переменных, m - число
ограничений. Среди элементов матрицы платежей могут быть отрицательные,
поэтому из нее вычитается минимальный элемент, что не влияет на оптималь-
ные значения переменных. Изменится лишь цена игры, что легко компенси-
ровать.
Переменные оптимизации в (2.67) ограничены снизу нулями, а сверху не
ограничены, поэтому первые п элементов вектора нижних границ Ы нули, а
соответствующие элементы в векторе верхних границ bu - очень большие
числа 1е+21. Линейные ограничения в прямой задаче (2.67) имеют только
нижние границы, так что последние m элементов в bl - единицы, а все n+m
элементов bu следует заполнить большими числами 1е+21. Все п коэффици-
ентов целевой функции - единицы, поэтому cvec сформирован как и-мерный
единичный вектор. Его можно передать решателю e04mbf не только четвер-
тым, но и третьим аргументом в качестве исходного приближения, по крайней
мере ограничениям неотрицательности он удовлетворяет. Матрицу платежей,
как следует из (2.67), нужно передавать в Транспонированном виде.
Первым в выходном списке решателя e04mbf стоит вектор оптимизиро-
ванных переменных - это все что нужно для того, чтобы сформировать реше-
ние задачи. Обратная величина суммы элементов вектора х и есть равновес-
ная цена игры, «увеличенная» на величину z (возможно, отрицательную), но
произведение x*nu не нуждается в поправке - это оптимальная смешанная
стратегия стороны А. Исправленная цена игры пи и оптимальная смешанная
стратегия рА включены в выходной список.
Оптимальная смешанная стратегия стороны В является результатом двой-
ственной задачи к (2.67), в которой сторона В минимизирует цену игры в огра-
ничений^ сверху:
т
7=1
Двойственность задачи отражается в подготовке данных для решателя.
Линейные ограничения и целевая функция формируются противоположно пре-
дыдущей задаче: единицы теперь попали в верхние границы, а нижние откры-
ты, целевая функция (обратная к цене игры) должна максимизироваться, но
так как e04mbf занимается исключительно минимизацией, в целевой функ-
ции нужно изменить знак на противоположный. Переменные оптимизации
ограничены так же, как и в прямой задаче, они неотрицательны. Естественно,
двойственная задача дает ту же равновесную цену игры, из ее решения выби-
раем только рв - оптимальную смешанную стратегию стороны В.
Получено универсальное средство решения игровых задач с нулевой сум-
мой. Воспользуемся им для нахождения оптимальной физической смеси стра-
тегий с определенной по табл. 2.2 матрицей платежей:
» [nu, рА, рВ]=igra_2x2(а)
пи= 0.5778
148
2. Основные характеристики эффективности действия СП и БП
рА= 0.3333 0.2222 0.4444
рВ= 0.1778 0.3911 0.0533 0.3778
Непосредственным вычислением по формуле (2.66) можно убедиться в том,
что средний выигрыш в точности равен цене игры, если обе стороны будут
строго придерживаться своих оптимальных смешанных стратегий рА и рв:
» Nu=pA*a*pB'
Nu= 0.5778
Равновесие сохраняется даже тогда, когда одна из сторон отходит от сво-
ей оптимальной стратегии:
» Nu=[0.60.40.0]*а*рВ'
Nu= 0.5778
В условиях данной задачи это означает, что мы исключили из боекомп-
лекта один из типов снарядов, а эффективность боевых операций в среднем
осталась той же. Однако наше решение будет оставаться безнаказанным лишь
до тех пор, пока противник не узнает, что мы отошли от своей оптимальной
смешанной стратегии. Проанализировав еще раз матрицу платежей, разум-
ный противник решит, что в отсутствие опасной для него стратегии А3 ему
выгодно применять свою третью чистую стратегию, и будет прав:
» Nu=[0.6 0.4 0]*а*[ 0010]'
Nu= 0.3200
В азартных играх в сложившейся ситуации рассматривался бы велико-
лепный ход - неожиданный для противника возврат к стратегии, А3 с макси-
мальным выигрышем:
» Nu=i|0 0 1] *а* [0010]'
Nu= 0.9000
Однако теоретико-игровые методы принятия решений дают лишь объек-
тивно устойчивые рекомендации. Это тем более важно в тех случаях, когда
оптимальная стратегия реализуется технически. Так, если пропорции боеком-
плекта соответствуют оптимальной стратегии рА, то никакие изменения про-
тивника в выборе своих стратегий не смогут снизить средней эффективности
боевых операций:
» Nu=pA*a*[ 0 0 1 0]'
Nu= 0.5778
Следует обратить внимание на то, что теория игр гарантирует не резуль-
тат игры, а средний результат при многократном ее повторении. Это согласу-
ется с характером оценок эффективности, но насколько большие отклонения
от среднего результата могут быть при небольшом числе повторений, если
придерживаться рекомендаций теории игр? Чтобы ответить на этот вопрос,
составим статистическую модель применения смешанных стратегий. Приве-
денный ниже скрипт-файл igra_stat случайным образом выбирает чистую
стратегию, разыгрывая это случайное событие в соответствии с вероятностя-
ми стратегий с помощью датчика случайных чисел. Эта процедура выполня-
ется за обе стороны N раз, каждый раз определяется выигрыш по матрице
платежей и накапливается суммарный выигрыш. В последнем операторе вы-
числяется среднее значение выигрыша:
2.9. Прогнозирование эффективности действия в боевых ситуациях
149
М=0;
PA=cumsum(рА);
PB=cumsum(рВ) ;
for 1=1:N
A=rand;
for i=l:n
if A<PA(i) break
end
end
B=rand;
for j=l:m
if B<PB(j) break
end
end
M=M+a(i,j);
end
nu_stat=M/N; .
Зададим небольшое число N=10 и повторим серии по N розыгрышей 8 раз
с помощью igra stat, определяя в каждой серии средний выигрыш:
» R=[ ];N=ltyfor i=l:8 igraJ_stat;R(end+1) =nu_stat; end, R
R= 0.6000 0.5700 0.6100 0.6400 0.5800 0.5700 0.4800 0.5400
Очевидно, что результаты не сильно, отличаются от цены игры, а при
N=10 000 отклонение от цены игры будет совсем незначительным:
» R=[ ];N=100000;for i=l:8 igr_stat;R(end+1)=nu_stat;
end, R
R= 0.5791 0.5789 0.5779 0.5785 0.5766 0.5758 0.5789
0.5806
Последний результат подтверждает совпадение результатов теории и экс-
перимента, но интересно, каковы будут результаты в случае, когда одна из
сторон отходит от своей оптимальной стратегии при небольшом числе повто-
рений:
» рВ=[0 О 1 0];R=[ ];N=10000;for i=l:8
igr_stat;R(end+1)=nu_stat; end, R
R= .0.7500 0.5700 0.4000 0.7200 0.5100 0.7000 0.4400
0.4900
Результат выглядит менее предсказуемым, чем в первом эксперименте,
выполненном в строгом соответствии с оптимальными стратегиями, хотя и в
этом случае в среднем ни одна из сторон не получает преимущества (по срав-
нению с ценой игры пи=0.5778) из-за того, что одна сторона придерживает-
ся оптимальной стратегии:
» mean(R)
ans= 0.5725
Совсем плохим может оказаться результат, если обе стороны пренебрега-
ют рекомендациями теории игр:
150
2. Основные характеристики эффективности действия СП и БП
» рА=[0.4 0.6 0];рВ=[0 0 1 0];R=[ ];N=10;for i=l:8
igr_stat;R(end+l)=nu_stat; end, R
R= 0.3800 0.3500 0.3800 0.3500 0.3500 0.4100 0.3200
0.4400
» mean(R)
ans= 0.3725
В данном случае результат оказался плохим для стороны А, но в проигры-
ше может оказаться и сторона В, даже если она придерживается предыдущей
успешной стратегии:
» рА=[0.3 0 0.7];рВ=[0 0 1 0];R=[ ];N=10;for i=l:8
igr_stat;R(end+1)=nu_stat; end, R
R= 0.6900 0.6200 0.5500 0.6900 0.6900 0.6900 0.7600
0.6900 "
Равновесие может быть нарушено появлением новой стратегии у одной
из сторон, что вынудит и другую сторону менять уже не смешанные, а чистые
стратегии. Например, добавление новой стратегии В5 = [а, [0,5; 0,3;. 0,4]] (но-
вого типа цели) к прежней матрице платежей
» а=[а,[0.5;0.3;0.4]]
а=
0.8000 0.7000 0.2000 0.4000 0.5000
0.6000 0.7500 0.5000 0.4000 0.3000
0.4000 0.4000 0.9000 0.8000 0.4000
должно снизить верхнюю цену игры, а вместе с ней и равновесную цену игры:
» nu__min=max (min (а, [ ], 2) ) , nu_max=min (max (а) )
nu_min =0.4000
nu_max =0.5000
» [nu, pA, pB]=igra_2x2(a)
nu= 0.4625
pA= 0.6250 0 0.3750
pB= 0 0 0.1250 0 0.8750
Следует отметить, что добавленная стратегия является доминирующей над
стратегиями В} и В2, т. е. безусловно лучше их с точки зрения стороны В.
Доминируемые стратегии могут исключаться из матрицы платежей для упро-
щения. Но в данном случае это не понадобилось, так как они исключены ре-
шателем, как и стратегия В4, которая дает чуть меньший проигрыш стороне В
только в сочетании с А{. Из решения видно также, что сторона А должна как-
то изменить ставшую неэффективной стратегию А}. В данном примере речь
может идти о модернизации второго элемента боекомплекта. Если бы уда-
лось, например, повысить в два раза вероятность поражения новой цели при
сохранении или небольшом увеличении эффективности действия по прежним
целям, то равновесие было бы восстановлено на прежнем уровне:
» а(2,:)=[0.6 0.75 0.6 0.55 0.6]; [nu, рА, pB]=igra_2x2(а);
пи= 0.5778
рА= 0 0.8889 0.1111
рВ= 0.1778 0 0 0.4444 0.3778
2.9. Прогнозирование эффективности действия в боевых ситуациях
151
Теперь выявлена относительная слабость двух остальных элементов бое-
комплекта, что тоже, конечно, может послужить стимулом к планированию
соответствующих проектных мероприятий, однако возможности рассмотрен-
ной модели конечных антагонистических игр не следует преувеличивать. Ана-
лиз эффективности системы оружия с учетом закономерностей эволюции стра-
тегий, ограниченных ресурсов сторон, наличия более чем двух заинтересо-
ванных сторон конфликта проводится на основе более сложных моделей
конфликтных ситуаций (дифференциальные игры, кооперативные игры и т. д.).
Но во всех случаях процедуры решения основываются на математических ус-
ловиях равновесия.
Модели динамики боя
Основные показатели эффективности действия СП не учитывают некото-
рых факторов, важных с точки зрения ведения боя: скорострельность орудий,
соотношение разнородных боевых единиц в распоряжении оперирующей сто-
роны и у противника, дистанция стрельбу по разным позициям и т. д. Они и
не должны принимать во внимание такого рода факторы, потому что эффек-
тивность ведения боя - это функция системы оружия при его целесообразном
тактическом применении. Но проектируемое СП необходимо оценить как эле-
мент системы оружия по критерию выигрыша боя. Для этого проводят его
испытание в боевой обстановке, точнее, не самого СП, а его показатели эф-
фективности действия, и не в реальном бою, а в модели боя.
Простейшая модель боя называется дуэльной, потому что сражаются две
группы однородных боевых единиц в статических позициях, и целью являет-
ся не оттеснение противника, а его уничтожение. Модель строится на основе
следующих допущений.
1. Каждая боевая единица любой стороны, пока она не поражена, произ-
водит простейший пуассоновский поток выстрелов со средней скорострель-
ностью X и ведет прицельный огонь по вполне определенной боевой единице
противника, мгновенно перенося огонь с пораженной цели на другую.
2. Средняя скорострельность всей группы однородных боевых единиц про-
порциональна не самому числу сохранившихся боевых единиц, а его матема-
тическому ожиданию.
Обозначим /И], X],/?] соответственно среднюю численность, скорострель-
ность и вероятность поражения выбранной цели для боевых единиц одной
стороны и т2, Л,2, р2 - такие же параметры другой стороны. За малый проме-
жуток времени AZ сторона 1 произведет X,Az выстрелов, из которых только
/?]X]Az будут эффективными, именно на такую величину уменьшится количе-
ство боевых единиц другой стороны: Д/и2 = -p^At. Переходя к пределу, по-
лучим для т2 и аналогично для т} систему дифференциальных уравнений ди-
намики боя, которые называются уравнениями Ланчестера:
dm, .
-?- = -Р2^2"г2>
at
dm2 .
—— = -plklm1.
at
(2.68)
152
2. Основные характеристики эффективности действия СП и БП
Эти уравнения можно интегрировать с начальными условиями t = О,
= Nb т2 = N2 до истощения сил одной из сторон, свидетельствующего о пре-
имуществе другой стороны. Соотношение сил определяется не только скорос-
тью убывания боевых единиц (правыми частями уравнений Ланчестера), но и
их первоначальными количествами. Переход к относительным количествам
боевых единиц р, = mxIN}, ц2 = m2/N2 обнаруживает условие превосходства
Р2^2^2 1 м2 т *г2
сил как отношение параметров —— и ———-: если p2A-2N2 > Р]Л|У,,
М ^2
побеждает вторая сторона, и наоборот. То, что преимущество пропорциональ-
но эффективной скорострельности и в еще большей степени зависит от чис-
ленности, называют законом Ланчестера, но ценность этого вывода невели-
ка, как и в целом модель динамики боя однородных совокупностей боевых
единиц с каждой стороны. Закономерность убывания боевых единиц в моде-
ли (2.68) также не единственна. Она предполагает, что стрельба ведется ис-
ключительно по действующим боевым единицам противника, т. е. мгновенно
переносится с пораженной единицы на активные. Это идеальные условия в
наблюдаемой стрельбе. Другой крайний случай: стрельба ведемся по всем бо-
евым единицам, начавшим бой. В этом случае вероятность поражения цели
должна быть уменьшена умножением на вероятность того, что попадание про-
изошло в еще действующую цель:
dm, . те.
—Т- = -М2"г2ТГ’
dt
dm2 - п У
dt N2
(2.69)
Главный недостаток модели (2.68) - она не учитывает взаимодействие раз-
нородных боевых единиц с учетом их пространственного расположения, ко-
торое ввело бы в рассмотрение баланса сил такую важную характеристику
оружия, как дальнобойность. Включение в модель боя динамики перемещения
боевых единиц ввело бы еще одну важную характеристику - подвижность.
Позиционная модель также объединяет в одной позиции группу однород-
ных боевых единиц; с каждой стороны можно задействовать несколько таких
позиций с разными боевыми единицами. Позиция может быть подвижной в
направлении сближения с противником и характеризуется расстоянием от ли-
нии разделения х, количеством боевых единицу-го рода, их скорострельностью,
вероятностью поражения боевой единицы на s-й позиции противника, а также
скоростью передвижения. Ущерб, наносимый каждой позиции одной стороны,
выражается так же, как и в дуэльной модели, относительным изменением чис-
ленности боевых единиц на этой позиции в единицу времени, но он складыва-
ется из эффективных выстрелов со стороны нацеленных на нее позиций про-
тивника:
dm^
dt
dm™
dt
= - £ Р™(х(г1) + xj2) )ЧПтгЬ > j e J (2) •
(2.70)
2.9. Прогнозирование эффективности действия в боевых ситуациях 153
Распределение целей для каждой позиции задается вектором 8. сумма эле-
ментов которого равна единице (в простейшем случае единице равен лишь
элемент с индексом одной обстреливаемой позиции). Вероятность поражения
цели на i-й позиции расположения с А-й позиции стрельбы pki зависит от рас-
стояния между ними, поэтому уравнения динамики ущерба необходимо ин-
тегрировать совместно с кинематическими соотношениями
ie •/<’),
' ^2) <2-71)
jeJ™
L dt J
Вряд ли целесообразно рекомендовать какую-то стандартную систему
уравнений динамики боя, чтобы составить программу ее численного интегри-
рования в целях последующего параметрического анализа решений. Структу-
ру уравнений определяют количество позиций с каждой стороны и схема це-
лераспределения, которые тоже подлежат изменениям в ходе анализа. В среде
оптимального проектирования формирование модели боя выполняется визу-
ально с помощью специального интерфейса, полученная в текстовом виде си-
стема уравнений интегрируется решателем, отчет предоставляется в удобной
форме постановщику задачи. Решателем можно анализировать и дуэльные мно-
гокомпонентные модели. Позиционная модель, оставляя математическое опи-
сание в рамках обыкновенных дифференциальных уравнений, позволяет учи-
тывать дальнобойность и подвижность. Однако, представляя показатели эф-
фективности в виде вероятностей поражения, позиционная модель не
принимает во внимание пространственных факторов, таких как возможность
поражения нескольких ЭЦ при стрельбе по площадной или сосредоточенной
групповой цели СП дистанционного типа.
Континуальная модель в качестве фазовых переменных использует плот-
ности боевых единиц i-го рода р;(г) в точке с радиус-вектором г (или на рас-
стоянии х от линии контакта в одномерной постановке) для обеих сторон, т. е.
р,(1)(г), i - 1, ..., 7V(1), p7(2)(r),y = 1, ..., где М2) - количество видов
боевых единиц каждой стороны. Параметрами модели являются скорострель-
ность, характеристики рассеивания, обобщенные характеристики поражающего
действия (например, приведенный радиус поражения). Замыкают модель фун-
кции целераспределения и скорости боевых единиц. Изменение плотности бо-
евых единиц i-ro рода одной стороны выражается уравнением
дп(1)
^- + divpI<1M1) + Y1)=0,
dt ‘ 1
где у-1) - удельный ущерб боевых единиц i-ro рода.
Численное моделирование динамики боя
Рассчитывать на аналитическое решение уравнений динамики боя - это
значит ограничиться рассмотрением только самых простых моделей, не по-
зволяющих вовлечь в анализ существенные характеристики системы ору-
154
2. Основные характеристики эффективности действия СП и БП
жия. Несравнимо больше возможностей у численных методов, но они также
нужны не столько для получения количественных результатов, а как инстру-
менты анализа. Составим модель динамики боя для решателя систем обыкно-
венных дифференциальных уравнений, имеющегося в библиотеке MATLAB.
В показанной ниже файл-функции lanch система (2.68) моделируется локаль-
ной функцией dydt, а остальные функции нужны исключительно для управ-
ления решателем. Основная функция lanch только переключает режимы ра-
боты; функция init вызывется в начале работы для установления начального
значения и условия окончания процесса интегрирования, а также включает
опцию Events, чтобы решатель остановился при достижении нулевого значе-
ния одной из переменных, функция events сообщает решателю, что нужно
останавливаться при обращении в нуль любой из переменных. В основном
режиме функция dydt вызывется с ключом key, который определяет, каким
из двух способов вычислять скорость убывания боевых единиц: цри key = 1 -
как правые части в системе (2.68), при key = 2 - в системе (2.69):
function varargout = lanch(t,у,flag,varargin)
switch flag
case ''
varargout{l} = dydt(t,y,varargin{:}) ;
case 'init'
[varargout{l:3}] = init(varargin{:});
case 'events'
[varargout{l:3}] = events(t,y);
otherwise г
error (['Unknown flag "' flag
end
function out = dydt(t,y,varargin)
xx=y.*varargin{2}' .*varargin{3}' ;
out=-xx(end:-1:1) ;
if nargin>3 & varargin{4}==2
out = out.*y./varargin{l}';
end
function [tspan,yO,options] = init(varargin)
tspan=100; if nargin>4 tspan = varargin{5];end
yO = varargin{l};
options = odeset('Events','on');
function [value,isterminal,direction] = events(t,y)
value = y;
isterminal = [1; In-
direction = [0; 0];
Режимы расчета задаются в вызывающей функции Lan, она же обращает-
ся к решателю ode45, который реализует метод Рунге - Кутта четвертого по-
рядка. Окончательный результат формируется из следующих переменных tO -
продолжительность боя, у-оставшееся количество боевых единиц у побе-
2.9. Прогнозирование эффективности действия в боевых ситуациях
155
дившей стороны, Y - массив из двух столбцов с динамикой изменения ресур-
сов сторон в моменты времени т:
function [tO, у, Y,T]=lan(varargin)
[Т,Y,tO,YY] = ode45('lanch',[],[],[],varargin{:});
if isempty(tO)
YY=Y(end,:); tO=T(end);
end
у = max(YY);
Зададим первоначальные количества боевых единиц каждой из сторон,
вероятности поражения и скорострельность векторами N, р, lambda, а затем
вызовем файл-функцию Lan:
» N=[50 25];р=[0.56 0.5];lambda=[0.25 0.5];
» [t,yk,Yl,Т1]=lan(N,p,lambda); t, yk, [Y1 Tl]
t =4.3159
yk = 37.2026
ans =
50.0000 25.0000 0
48.9066 23.7579 0.1794 ' '
47.8683 22.5426 0.3588
37.2026 0.0128 4.3135
37.2026 -0.0000 4.3159
Точное аналитическое решение этого примера* дало такие же результа-
ты: продолжительность боя 4,28 мин, потери победившей стороны приблизи-
тельно 12 единиц. Повторим расчет с теми же данными в режиме без перено-
са огня:
» [t,yk,YY1,ТТ1]=lan(N,p,lambda,2,10);t,yk
t=10
yk= 30.5757
При том же соотношении сил вторая сторона должна очень существенно
повысить эффективность своего оружия, чтобы добиться перевеса:
» [t,yk,Y2,T2]=lan(N, [0.56 0.9], [0.5 1.5]);t,yk, [Y2 Т2]
t =2.4925
yk = 10.3194
ans =
50.0000 25.0000 0
47.5396 23.9838 0.0744
45.1787 23.0179 0.1489
3.0712 10.4131 2.2726
-0.0000 10.3194 2.4925
В режиме без переноса огня конфликт развивается более вяло, поэтому
ограничим его продолжительность до 10 мин:
» [t,yk,YY2,TT2]=lan(N,[0.56 0.9],[0.5 1.5],2,10);
t,YY2(end,:)
Вентцель Е.С. Введение в исследование операций. М.: Сов. радио, 1964. 387 с.
156
2. Основные характеристики эффективности действия СП и БП
t =10
ans =3.65995.7774
Для наглядности построим графики соотношения сил (рис. 2.20, а) и убы-
вания боевых единиц от времени (рис. 2.20, б):
» plot (Y1 (:, 1) , Y1 (:, 2) , ' k-' , YY1 (:, 1) , YY1 (:, 2) , ' к- .' ,
Y2(:, 1),Y2 (:,2), 'b-o', YY2 (:, 1) , YY2 (:, 2) ,'Ь-')
» legend('Y1','YY11,'Y21,'YY21)
» plot (Tl, Y1 (:, 1) , ' к-', Tl, Y1 (:, 2) ,' к-.', Т2 (:, 1) , Y2 (:, 1) ,
'b-' ,T2(:,1) ,Y2 (:,2), 'b-o' )
» legend('Yl_l','Yl_2’,'Y2_l’,'Y2_2’)
Признак поражения одной из сторон - не обязательно полное истребление
ее боевых единиц. Можно назначить предельные значения численностей до-
полнительным шестым векторным аргументом. В следующем примере вектор
начальных численностей имеет прежнее значение (N = [50, 25]), а шестой аргу-
мент [10, 7] задает предельную численность боевых единиц каждой стороны:
Рис. 2.20. Убывание боевых единиц в дуэльной модели боя:
а - относительное (7 - Y2; 2 - YY2; 3 - УУ1; 4 - У1); б-в зависимости от продолжительности
боя (1 - У22; 2 - Yl2; 3 - Y2t; 4-Ylt)
2.9. Прогнозирование эффективности действия в боевых ситуациях 157
» [t,yk,Yl,Tl]=lan(N,p,lambda,1,12,[10 7]); [Y1 Tl]
ans =
50.0000 25.0000 0
48.9066 23.7579 0.1794
38.3592 7.0000 2.9855
Локальная функция events перед тем, как передать решателю текущие
значения переменных для сравнения с нулем, уменьшает их на вектор lim,
который берется функцией in it из переменного списка аргументов, если за-
дан его шестой элемент. Поэтому процесс остановился при достижении вто-
рой переменной своего предельного значения 7.
Отлаженную технологию можно применить и для реализации позицион-
ной модели (2.70). В файл-функции lanch подлежит замене только локальная
функция dydt, вычисляющая правые части уравнений. В новую функцию
dydt nm поступают массивы исходных данных через список глобальных па-
раметров: pl - вероятности поражения каждым типом боевых единиц первой
стороны каждого типа целей второй стороны, р2 - аналогичные данные для
боевых единиц другой стороны, lambdal, lambda2, nl, n2 - скорострель-
ность и численность боевых единиц каждого типа с первой и второй стороны.
В списке глобальных параметров передаются также Xl, Х2 - удаленность
позиций каждой стороны от линии фронта, Dl, D2 - дальнобойность боевых
единиц на каждой позиции, vi, V2 - скорости перемещения боевых единиц
относительно линии фронта, kl, k2 - коэффициенты потерь, показывающие
предельное количество боевых единиц, при котором позиция еще бое-
способна:
function out=dydt_nm(t,у)
global pl р2 lambdal lambda2 nl n2 select
global Xl X2 Dl D2 Vl V2 kl k2
ml=length(nl);m2=length(n2);
11=1:ml;12=(1:m2)+ml;
Kl=find(y(Il)>nl(II)*kl);
K2=find(y(12)>n2(l:m2)*k2);
dy = zeros(ml+m2,1);
for ii=l:length(Kl)
i=Kl(ii);
X=X2+X1 (i);
S=I2(find(Dl(i)>X(I2-ml)));
k=SelTarget(S,y,i);
if k>0
dy(k)=dy(k)-y(i)*pl(i,k-ml)*lambdal(i);
end
end
for ii=l:length(K2)
i=K2 (ii);
X=X1+X2(i);
S=I1(find(D2(i)>X(I1)));
k=SelTarget(S,y,i);
158
2. Основные характеристики эффективности действия СП и БП
if к>0
dy(k) = dy(k) - y(i+ml) * р2(i,к)*lambda2(i);
end
end
out=dy;
Первое отличие позиционной модели боя от модели противоборства од-
нородных средств заключается в том, что полное истребление боевых единиц
на одной позиции не является обязательной причиной остановки процесса.
Чтобы количество единиц на таких позициях не уменьшалось в область отри-
цательных значений, даже если по ним ведется стрельба, на каждом времен-
ном шаге из множеств индексов позиций II, 12 выбираются подмножества
Kl, К2 индексов боеспособных позиций.
Второе принципиальное отличие позиционной модели - выбор цели каж-
дой позицией нетривиален. Поэтому на каждом временном шаге каждой по-
зиции предоставляется возможность по одному разу выбрать цель из числа
позиций противника, находящихся в пределах досягаемости. Для Этого даль-
нобойность боевых средств данной позиции сравнивается с удаленностями от
нее позиций противника. Соответствующее подмножество индексов выбира-
ется из номеров всех позиций противника независимо от их боеспособности.
Окончательный выбор из достижимых целей осуществляет локальная функ-
ция SelTarget. В ней реализованы три способа выбора: случайный выбор из
всех целей, вступивших в бой; случайный выбор из активных целей на теку-
щий момент; выбор наиболее уязвимых целей к данному типу боевых средств.
Способ задается значением 1, 2 или 3 глобальной переменной select:
function out = SelTarget(m2,у,i,I)
global pl p2 lambdal lambda2 nl n2 select
out=0;
switch select
case 1,
out=m2(fix(rand*length(m2))+1);
if y(out)<=0 out=0; end
case 2
ind=find(y(m2)>0); X=m2(ind);
if -isempty(ind)
out=X(fix(rand*length(ind))+1) ;
end
case 3
ind=find(y(m2)>0) ;
if -isempty(ind)
X=m2(ind) ;
p=pl; i0=length(nl);
if m2(end)clength(nl)+1 p=p2;i0=0;end
P=p(i, :);
[max Imax]=max(P(ind)'.*y(ind+iO));
out=X(Imax);
end
end
2.9. Прогнозирование эффективности действия в боевых ситуациях
159
В качестве исходных данных определим три позиции с одной стороны и
четыре - с другой, для чего выполним следующий скрипт-файл:
global pl р2 lambdal lambda2 nl n2 select
global XI X2 Dl D2 VI V2
nl=[10; 10; 12];
n2=[10; 10; 10; 10];
pl=[0.4 0.3 0.4 0.45;0.3 0.25 0.35 0.4;0.3 0.3 0.25 0.35];
p2=[0.6 0.5 0.4;0.3 0.25 0.35;0.2 0.15 0.25;0.3 0.2 0.35];
lambdal=[1.5 1.0 0.5];
lambda2=[1.5 1.0 0.5 0.5];
XI = [500 1000 4000]; 20000
X2 = [500 1000 4000 8000];
Dl = [2000 7000 12000];
D2 = [2000 7000 10000 25000']';
kl=0.3; k2=0.4;
Создадим вызывающую функцию, чтобы упростить обращение к решате-
лю. Для файл-функции 1ап2 достаточно задать продолжительность боя и спо-
соб выбора цели, например:
» Y=lan2 (3,2) ;disp(Y (1:2, :)) ,disp ('...') ,disp(Y (end-1:end, :))
70.0000 20.0000 40.0000 60-.0000 25.0000 12.0000 30.0000
69.9271 19.9142 39.9938 59.9123 24.9516 11.9903 30.0000
-0.0000 -0.0000 31.0777 27.3254 -0.0000 9.0492 30.0000
-0.0000 -0.0000 31.0725 27.3242 -0.0000 9.0484 30.0000
В команде заданы продолжительность боя 2 мин и второй способ выбора
цели (случайным образом из еще непораженных) с получением в массиве Y
текущих численностей всех боевых единиц на всех временных шагах. На пе-
чать выведены результаты только на первых и последних двух шагах. По ко-
нечному результату видно, что первая сторона разгромлена, существенные по-
тери понесла ее третья позиция, а передовые - полностью уничтожены. Вто-
рая сторона также потеряла одну позицию, но оставшиеся силы (4-, 6- и 7-й
столбцы) празднуют победу. Предметом анализа может быть следующий воп-
рос: как повысить эффективность действия боевых единиц третьей позиции,
чтобы, по крайней мере, уравнять шансы?
Прежде, всего, нужно обеспечить эффективное применение имеющихся
средств. Даже в рамках нашей модели можно найти лучший способ ведения
боя с применением третьего способа выбора цели, который максимизирует
среднее число пораженных целей (произведение вероятности поражения на
число оставшихся боевых единиц) на множестве досягаемых позиций:
» [Y,T]=lan_m(3,3);
Вместо того, чтобы выводить на экран большой массив результатов, мы
получили массивы численностей боевых единиц Y и моментов времени т. По-
строим график зависимости текущих численностей от времени:
» plot (Т, Y (:, 1) , ' :' , Т, Y (:, 2) , ' :' , Т, Y (:, 3) , ' :' , Т, Y (:, 4)
T,Y(:,5) ,T,Y(:,6) ,T,Y(:,7) )
160
2. Основные характеристики эффективности действия СП и БП
Графики (рис. 2.21, а) построены по первому варианту расчета, когда цели
выбирались случайным образом, а графики (рис. 2.21, б) - по второму вариан-
ту. Кривые численностей первой стороны - пунктирные, а то, каким позици-
ям они соответствуют, легко понять по начальным значениям на оси ординат.
Рис. 2.21. Динамика боя разнородных групп боевых единиц
Видно, что при разумном выборе целей первая сторона хоть и проигрыва-
ет, но держится дольше, поэтому дальнейший анализ будем проводить с ис-
пользованием третьего способа выбора целей. Если доступны все способы
повышения эффективности боевых единиц на третьей позиции, то прежде всего
надо существенно увеличить дальность стрельбы и за счет этого вывести тре-
тью позицию из-под огня:
» D1(3)=30000;Х1(3)=16000; [Y,T]=lan_m(3,2);
Графики (рис. 2.21, в) показывают, что цель наполовину достигнута. Третья
позиция не несет потерь, но две другие погибли одновременно на второй мину-
те, и это понятно: так как третья позиция недосягаема для противника, вся ог-
невая мощь сосредоточена на остальных. Невредимая третья позиция не смогла
предотвратить гибель прикрываемых ею позиций из-за низкой эффективности
поражения целей, которая представлена третьей строкой массива pl:
2.10. Оптимизация средств поражения по эффективности действия
161
» pl(3,:)
ans =0.2000 0.1500 0.1000 0.3000
Следовательно, новое орудие нужно укомплектовать более эффективны-
ми снарядами. Допустим, в результате проектных мероприятий нам удалось
повысить эффективность действия по данным типовым целям в 2-3 раза. Вве-
дем новые данные и увеличим количество боевых единиц нашей ударной по-
зиции, переведя тем самым техническое превосходство в тактическое, а затем
повторим расчет с увеличенной (до 5 мин) продолжительностью боя:
» р1(3,:)=[0.4 0.5 0.35 0.45]; nl(3)=60;[Y,T]=lan_m(5,3);
Графики (рис. 2.21, г) подтверждают целесообразность совместного по-
вышения дальнобойности и эффективности действия в данной ситуации. Ди-
намика боя изменилась так, что при начальном численном превосходстве в
затянувшемся примерно в 2 раза дольше сражении вторая сторона уже не в
состоянии претендовать на победу.
Конечно, описанная модель боя может служить лишь иллюстрацией воз-
можностей математического моделирования в разработке системы оружия. Она
не принимает во внимание многие факторы, способные оказать решающее
влияние на исход реального боя. Например, задымленность поля боя - это
фактор, снижающий реальную эффективность стрельбы по сравнению с рас-
четной. Возможность учета таких факторов - это не проблема моделирования
боя, а проблема моделирования самих факторов, их стохастических свойств,
влияния на вероятность попадания в цель, скорострельность и другие обоб-
щенные показатели, которые учитываются в модели боя. Речь может идти об
уточнении тех или иных деталей. Например, можно добавить другие способы
выбора целей (наносящих наибольший ущерб данной стороне в целом, дан-
ной позиции), предусмотреть возможность индивидуального ключа select для
каждой позиции и т. д. Нужно ввести в программу и несколько операторов,
обрабатывающих скорости перемещения позиций vl, V2, если они содержат
ненулевые элементы. Приобщить систему (2.71) к системе (2.70) очень просто:
достаточно в локальной функции init заменить формирование вектора началь-
ных значений и добавить формирование исходных значений приращений:
Y0=[nl;n2;Xl;X2];
dyO = [zeros(ml+m2,1), -VI, -V2];
а в функции dydt вместо обнуления dy присваивать ему dyO (его надо вклю-
чить в глобальный список). Вместо вектора начальных положений позиций
XI, Х2 теперь нужно использовать соответствующие фрагменты вектора теку-
щих значений переменных
xl=y(11+12(end)); x2=y(I2+Il(end)+I2(end));
2.10. Оптимизация средств поражения по эффективности действия
Оптимальное проектирование
Эффективность действия СП на этапе проектирования оценивается наря-
ду с другими характеристиками функционирования (прочность при выстреле,
максимальная дальность полета, кучность и т. п.) для проверки соответствия
162 2. Основные характеристики эффективности действия СП и БП
рассматриваемого варианта проекта всем тактико-техническим требованиям
и техническому заданию. Но если прочность должна быть достаточной, даль-
ность, кучность и другие характеристики - удовлетворять требованиям ТЗ, то
эффективность действия желательно увеличивать до максимально возможной
величины. Для этого выполняют многовариантный анализ конструкции в це-
лях отыскания рационального сочетания изменяемых размеров - проектных
параметров. Вариант, удовлетворяющий всем обязательным требованиям, т. е.
полностью работоспособный, можно назвать допустимым. Если принцип дей-
ствия, конструктивная схема выбраны удачно в свете требований данного ТЗ,
то допустимые варианты существуют и составляют некоторую область в мно-
гомерном пространстве проектных параметров - допустимую область. Из нее
надо выбрать единственный вариант, обладающий наиболее высокой эффек-
тивностью действия. Регулярные процедуры, гарантирующие отыскание до-
пустимых вариантов или диагностику отсутствия таковых, а также выбор наи-
лучшего варианта по принятому критерию из всей допустимой области стро-
ятся на основе численных методов оптимизации.
Математический аппарат и программные средства оптимизации в^настоя-
щее время достаточно хорошо разработаны. Однако оптимизация в проекти-
ровании сопряжена с рядом принципиальных трудностей из-за того, что объект
оптимизации изначально имеет не математическую природу, а представляет
собой функционально сложную техническую систему. Изменениям в ходе по-
иска оптимального решения подлежат не просто компоненты вектора, а раз-
меры конструкции, и любые изменения сказываются не только на целевой
функции и учитываемых ограничениях, но, прежде всего, на функционирова-
нии изделия в целом. Следовательно, оптимизация в проектировании должна
строиться на основе параметризованной геометрической модели проектируе-
мого объекта, его поведение необходимо описывать исчерпывающим образом
комплексной моделью функционирования, ассоциированной с геометричес-
кой моделью, а формулировка задачи оптимизации должна стать основным
инструментом проектировщика, с помощью которого он может исключить из
допустимой области все варианты, не удовлетворяющие ТЗ. Перечисленные
вопросы выходят за рамки аппарата оптимизации. Функция оптимального про-
ектирования обеспечивается развитыми системами автоматизации проекти-
рования (САПР), которые располагают средствами параметризованного моде-
лирования геометрии объекта проектирования, организации комплексного мо-
делирования его поведения, а также предоставляют проектировщику в качестве
удобного инструмента диалоговую систему оптимизации. Для изучения воз-
можностей оптимального проектирования СП в МГТУ им. Н.Э. Баумана раз-
работана исследовательская САПР «ИНЖЕНЕР М4», на примере которой рас-
смотрим основные этапы проектных мероприятий, направленных на повыше-
ние эффективности действия проектируемых изделий.
Параметризация объекта оптимального проектирования
Большинство СП по условиям функционирования - осесимметричные тела,
составленные из тел вращения и плоских тел. Поверхности этих классов мо-
гут быть представлены кинематическим методом: плоской ломаной линией и
2.10. Оптимизация средств поражения по эффективности действия 163
законом ее движения (вращением образующей, параллельным перемещением
контура). Как правило, образующие состоят из прямолинейных отрезков и дуг
окружностей, а в исключительных случаях аппроксимируются отрезками этих
двух типов. Ломаная, в свою очередь, представляется координатами точек из-
ломов, характером отрезков (признаком принадлежности к одному из двух ти-
пов), дополнительными параметрами дуг. Множество характерных точек ло-
маной, упорядоченное согласно последовательности их расположения, одно-
значно описывается двумя рядами координат. Для тел вращения в качестве
одной координаты целесообразно выбирать удаление вдоль оси вращения от
некоторой поперечной плоскости, принятой за базу, а другой координаты -
диаметр соответствующей окружности. Формирование таблицы координат ло-
маной по определенным правилам позволяет однозначно представить поверх-
ность детали или ее элемента.
Соединение деталей (элементов) в осесимметричной сборке описывается
указанием основной (корпусной) детали и положением каждой присоединяе-
мой детали: осевым смещением ее начала координат относительно базовой
плоскости основной детали, радиальным смещением и углом поворота от оси
основной детали. При наличии радиального смешения следует указать также
количество деталей в данном слое. Таким образом, описание соединений, как
и координат, имеет табличную форму.
Если таблицы заполнены числовыми Значениями, то они представляют
вполне определенную конструкцию, т. е. составляют ее числовую геометри-
ческую модель (ЧГМ). По ЧГМ можно вычислить, например, массомомент-
ные характеристики конструкции и ее элементов, но в нее трудно вносить
изменения размеров, а значит, нельзя организовать оптимизацию. Заменяя ос-
новные размеры именованными переменными (геометрическими параметра-
ми объекта проектирования) или арифметическими выражениями с участием
параметров, получим параметризованную геометрическую модель (ПГМ). Рас-
смотрим часть образующей и соответствующий фрагмент ПГМ (рис. 2.22), в
который попали описания трех точек изломов, разде-
ленных символом ';'. К координатам первой точки
добавлен радиус дуги R. Эта точка снабжена также
меткой labell, по совмещению которой с одноимен-
ной меткой другой детали вычисляется их относитель-
ное смещение. Символ заменяет значение одно-
именной координаты предыдущей точки, что позво-
ляет использовать приращения в координатной форме
описания линий. Это важно для обеспечения целост-
ности геометрической модели при изменениях значе-
ний параметров, так как приращения - более устой-
чивые свойства конструкции. Так, цилиндрическая и
оживальная части контура (см. рис. 2.22) сохранят
свою форму при любых корректных изменениях па-
раметров d, г, Н, D, h.
ПГМ
...; label 1: 0, d, Arc(R = r);
И, D; #+h, #;...
Рис. 2.22. Фрагмент па-
раметризованного описа-
ния контура детали
Подстановка значений параметров в ПГМ порождает соответствующую
ЧГМ, по которой вычисляются масса, центр масс и моменты инерции, как
функции параметров. Из числа геометрических параметров можно выбрать
164 2. Основные характеристики эффективности действия СП и БП
оптимизируемые, так что оптимизацию конструкции можно проводить по ПГМ,
проводя расчеты каждого пробного варианта по обновленной ЧГМ. Конечно,
каждый вариант геометрии конструкции необходимо оценивать не только по мас-
се и моментам инерции, но и по другим характеристикам функционирования,
для чего ПГМ должна быть ассоциирована со всеми проектными расчетами.
Организация комплексных проектных расчетов
Большинство проектных расчетов выполняются по так называемым ин-
женерным методикам, общее свойство которых - прямой путь вычислений: от
конструкции к ее характеристикам поведения. Так как проектирование реша-
ет как раз обратную задачу - найти конструкцию с заданными характеристи-
ками, приходится прибегать к многовариантному анализу каждой рассмат-
риваемой конструктивной схемы, чтобы методом проб и ошибок подобрать
наиболее рациональное сочетание всех ее параметров. Необходимость много-
кратного повторения расчетов вынуждает минимизировать трудоемкость ин-
женерных методик, что обычно достигается учетом специфики конструктив-
ной схемы в построении расчетной модели, привлечением выявленных зако-
номерностей в виде аналитических зависимостей с полуэмпирическими
коэффициентами или регрессионных моделей, и т. п.
Метод проб и ошибок реализуют и процедуры численной оптимизации,
только последовательность пробных вариантов они выстраивают наиболее ра-
циональным образом. Ограничение на трудоемкость вычислений остается в
силе, поэтому в оптимальном проектировании для оценки вариантов'.исполь-
зуются те же прикладные программы. Их совместная работа (определенная
последовательность исполнения, обмен данными) обеспечивается в рамках еди-
ной программной системы, называемой пакетом прикладных программ (1ШП).
Разработка ППП - это очень трудоемкая работа для квалифицированных про-
граммистов. Необходимо согласовать с разрабатываемой конструктивной схе-
мой и между собой множество программ различного происхождения, обеспе-
чить функциональную полноту, чтобы в рамках пакета были определены все
промежуточные данные, необходимые для обеспечения замкнутой цепочки
вычислений от масс и моментов инерции до эффективности действия, создать
диалоговые интерфейсы для конечного пользователя. Эта работа может по-
требовать несколько месяцев. Парадокс заключается в том, что готовый к ис-
пользованию ППП возникает тогда, когда необходимость в нем уже отпадает:
этап эскизного проектирования сменяется этапом разработки рабочего проек-
та, на котором нужен не многовариантный анализ, а окончательный и по воз-
можности точный расчет характеристик принятого варианта конструкции.
Применение готового ППП к проектированию аналогичных изделий ограни-
чено его привязкой к определенной конструктивной схеме, а модификация свя-
зана с радикальными переделками на уровне программирования.
Интеллектуальный пакет прикладных программ
В САПР «ИНЖЕНЕР М4» реализована совершенно иная технология со-
здания ППП, позволяющая осуществлять как сборку пакета, так и его моди-
фикацию при изменениях конструктивной схемы самому проектировщику
2.10. Оптимизация средств поражения по эффективности действия
165
с помощью диалоговых средств. В этой технологии функции системного про-
граммиста выполняются встроенными компонентами САПР как на этапе фор-
мирования пакета, так и в ходе его эксплуатации, например, для координации
работы прикладных и оптимизирующих программ при решении различных
оптимизационных задач, сформулированных пользователем в текстовом виде.
Эффект постоянного участия внимательного и исполнительного программис-
та в решении задач, поставленных конечным пользователем, отличает интел-
лектуальный ППП (ИППП).
Работа ИППП основана на структуре глобальных данных и межмодуль-
ных связей, формируемой автоматически при включении новых прикладных
программ в пакет. Необходимая для этого информация содержится в тексто-
вых файлах, которые прилагаются в качестве паспорта к каждой прикладной
программе. В паспорте описаны возможности программы, ее входные и вы-
ходные данные, допустимые интервалы входных данных, физические размер-
ности. Сами прикладные программы могут оформляться в виде DLL или СОМ-
объектов.
В контексте структуры данных ИППП интерпретируются формулировки
всех задач, поступающих от пользователя, планируется последовательность
вызова прикладных и встроенных компонент для ее решения, осуществляется
постоянный контроль за сохранением целостности (внутренней непротиворе-
чивости) данных. Специальный диспетчер организует выполнение всех моду-
лей в соответствии с построенной планировщиком очередью. С точки зрения
пользователя есть только постановка задачи и отчет о ее решении, но лишь
после того, как ИППП укомплектован всеми необходимыми программными
модулями. Интеллектуальный ППП предоставляет пользователю разнообраз-
ные средства для достижения такого состояния.
Интерпретатор арифметических выражений с участием глобальных па-
раметров позволяет оперативно проводить промежуточные расчеты для кор-
ректировки межмодульных функциональных связей или временного замеще-
ния модулей. Например, на ранних этапах проектирования снаряда для штат-
ного орудия предельное значение начальной скорости может быть оценено
ограничением на начальный импульс, причем выражение V0=720*4 3.56/m
вычисляется при вводе по текущему значению массы, а замена в нем знака
присваивания операцией связывания ' :=' приведет к запоминанию выраже-
ния и вычислению его в дальнейшем при каждом обращении к значению на-
чальной скорости V0. Переменные в правой части также могут быть связаны
с выражениями. Так могут образовываться достаточно нетривиальные цепоч-
ки вычислений.
Интерпретируемые выражения можно применить и для вычисления внут-
ри прикладной программы без ее перекомпиляции, что позволяет произвес-
ти функциональную настройку программы в данных условиях применения.
Выход в среду ИППП осуществляется функциями передачи значений аргу-
ментов (Put) и получения результата (Get). Например, для оперативного оп-
ределения вычислений по формуле т0 = kDyfy нужно передать из програм-
мы текущие значения аргументов D, beta в среду ИППП и потребовать
результат V0:
166
2. Основные характеристики эффективности действия СП и БП
Put (D, ' D' ) ;
Put (beta,'beta');
Get(VO,'VO');
При подготовке значения запрашиваемой переменной V0 она будет вы-
числена по VO: = k*D*sqrt (beta) или по другому подходящему выражению,
предварительно введенному пользователем.
Параметрическая настройка выполняется для согласования содержащихся
в программе полуэмпирических коэффициентов с имеющимися опытными дан-
ными. Так, при наличии инженерной модели вида Y = F(X,K), содержащей
набор коэффициентов К, и таблицы опытных данных (У,-, ХД i = 1, ..., N,
можно оценить отклонение результатов вычисления от опытных данных по
подходящей норме
0>(/0 = £[y;-F(Xz,/0] , Ф1(/Г) = тах|у;.-Г(Х,.,/Г)| и т.п.’,
г=1 1
а затем минимизировать норму для получения оптимального значения коэф-
фициентов К: *
min Ф(К) => К*.
к
В среде ИППП алгоритмизация подобных действий основана на возмож-
ностях встроенных компонент. Работу с таблицами выполняет объект типа
tab, функции которого поддерживаются встроенным табличным процессором.
В приведенном ниже фрагменте макропрограммы используется функция
GetRecord (), присваивающая значения переменных очередной строки одно-
именным переменным в структуре данных ИППП:
tab T(V0, D, beta);
float S=0;
while( T.GetRecord() )
S+=(V0-K*D*sqrt(beta))A2;
Макропрограмма вычисляет суммарное среднеквадратическое отклонение
результатов расчетов по формуле с экспериментальными данными при опре-
деленном значении коэффициента К. Она включается в состав пакета в каче-
стве модуля и автоматически участвует в оптимизации нормы отклонения по
команде min S(K) штатными средствами среды. В данном случае оптимизиру-
ется значение коэффициента в формуле', но аналогично настраиваются и при-
кладные программы. Функциональная и параметрическая настройка приклад-
ных программ позволяет расширить область их адекватного применения.
Интеллектуальный ППП создает благоприятные условия для восстанов-
ления отсутствующей математической модели непосредственно по табли-
цам статистики. Уравнение регрессии для метода наименьших квадратов
может задаваться произвольно, поскольку оно распознается интерпретатором
в контексте предъявленной таблицы. Качество уравнения регрессии оценива-
ется как по формальному признаку (дисперсии ошибки), так и визуально по
графикам. Метод прямого восстановления модели по таблице статистики пе-
рекладывает на компьютер решение всех трудных вопросов регрессионного
2.10. Оптимизация средств поражения по эффективности действия
167
анализа: и выбор существенных переменных в уравнении регрессии, и поиск
оптимальной структуры уравнения, и оптимизацию коэффициентов в этом
уравнении.
Интеллектуальные ППП содержат средства декларативного моделирова-
ния, позволяющие получать решение задач непосредственно по их математи-
ческой формулировке в виде систем алгебраических или обыкновенных диф-
ференциальных уравнений, минуя стадию программирования. Это дает воз-
можность оперативно создавать недостающие модули конечному пользователю.
Например, в случае сложного движения снаряда по траектории с различным
чередованием участков разгона, торможения, разделения элементов програм-
ма расчета внешней баллистики может оказаться полностью непригодной.
Пользователь ИППП может составить систему уравнений по всем участкам и
решить ее с помощью решателя, который предоставляет удобный интерфейс
для выбора метода численного интегрирования и его настройки. Отлаженный
текст уравнений движения вместе с выбранным методом решения и его на-
стройкой принимается в состав пакета й обслуживается в дальнейшем точно
так же, как и паспортизованные прикладное программы.
Оперативное формирование расчетных модулей из интерпретируемых тек-
стов и встроенных решателей не только заменяет неадекватные объекту про-
ектирования прикладные программы, но часто оказывается единственно при-
емлемой формой моделирования. Например, позиционная модель динамики
боя (разд. 2.7) также приводится к системе обыкновенных дифференциаль-
ных уравнений, причем она имеет исключительно ситуационный характер,
так что нет смысла выделять какую-то стандартную формулировку для созда-
ния соответствующей программы. Средствами ИППП эта задача решается про-
сто: с помощью визуального интерфейса постановщик задачи устанавливает
позиции, задает количества и свойства боевых единиц на каждой из них, по
этим данным автоматически формируется текст задачи, которая в дальнейшем
обрабатывается решателем. Так можно оперативно оценивать достаточность
эффективности действия в заданной боевой ситуации по критерию выигрыша
боя и выявлять неблагоприятные ситуации для данного СП с тем, чтобы скор-
ректировать комплексный критерий эффективности действия.
Разнообразные средства моделирования в среде ИППП не являются ис-
ключающей альтернативой обычным компилируемым программам, основу для
комплектования интеллектуальных пакетов составляют те же библиотеки при-
кладных программ, что и для пакетов с программируемыми межмодульными
связями. Принципиальная разница в том, что интеграция на основе общей
структуры данных, в отличие от технологий программирования, доступна са-
мому проектировщику и осуществляется динамически непосредственно в ходе
проектирования в соответствии с содержанием задач. Дополнительные сред-
ства моделирования позволяют максимально приспособить используемые при-
кладные программы к особенностям моделируемого объекта, оперативно со-
здать недостающие функциональные связи, что является непременным усло-
вием для оптимизации объекта проектирования по комплексному критерию
качества, такому как эффективность действия. Включение самого объекта про-
ектирования в проектные расчеты осуществляется по тем же механизмам: гео-
метрическая модель снабжается паспортом, в котором описаны все параметры
168
2. Основные характеристики эффективности действия СП и БП
конструктивной схемы в качестве входных данных, а в качестве результатов
обработки модуля геометрии - переменные, связанные с массомоментными
характеристиками. В выходные данные модуля геометрии могут быть вклю-
чены также параметры, непосредственно вычисляемые по размерам конструк-
ции (толщины стенок в опасных сечениях, фокусное расстояние кумулятив-
ного заряда и т. п.).
В ИППП общие переменные разных модулей (например, дульная скорость
в программе расчета внутренней баллистики и начальная скорость в програм-
ме расчета внешней баллистики) имеют одинаковые имена, по которым со-
гласно их вхождению в списки входных или выходных данных модулей авто-
матически строится схема межмодульных связей. Она используется плани-
ровщиком ИППП для динамического построения очередей вызовов модулей и
определения затребованных переменных или проведения необходимых пере-
счетов в связи с изменением каких-либо из глобальных переменных. Те вели-
чины из структуры данных, которые не вычисляются ни одним из модулей,
например, параметры геометрической модели, составляют совокупность неза-
висимых проектных параметров. Она обозначается в дальнейшем вектором X.
Любую из вычисляемых величин можно рассматривать как функцию проект-
ных параметров F(X), которая реализуется неявным образом при изменении
аргументов. В ИППП есть возможность разрешать функциональные зависи-
мости и в обратном порядке: по заданному значению какой-либо зависимой
величины F вычислять значение указанного аргумента. Допустим, в пакет
включена программа расчета внешней баллистики с именем Polet, вводны-
ми данными (V0, с, tetaO - начальная скорость, баллистический коэффици-
ент, угол бросания) и выходными результатами (Ys - высота траектории, Хс,
Vc, tetac - дальность полета, скорость и угол подхода в конце траектории).
Добиться заданной дальности 23 000 м за счет выбора начальной скорости
при прочих равных условиях - значит, решить задачу оптимизации:
min abs (У - 23 000).
varu0
Если формулировка задачи понятна читателю в контексте глобальных пе-
ременных, она также понятна и интерпретатору ИППП, что в какой-то мере
оправдывает эпитет «интеллектуальный». Но в отличие от понятливого чита-
теля эта и более сложные задачи оптимизации после интерпретации их содер-
жания довольно быстро решаются встроенными средствами интеллектуаль-
ной среды.
Универсальная оптимизация в интеллектуальной среде
Наиболее подходящими для решения оптимизационных задач с алгорит-
мически заданными функциями являются методы нулевого порядка, не требу-
ющие вычисления производных. Так или иначе, они выполняют следующие
три стандартных действия: генерируют пробную точку, обращаются к вычис-
лению в этой точке целевой функции и функций-ограничений, проводят оцен-
ку результата. В интеллектуальной САПР у модулей оптимизации нет про-
граммной связи с прикладными модулями, но есть прямой доступ к общей
2.10 Оптимизация средств поражения по эффективности действия
169
структуре данных. Именно это дает возможность не программировать опти-
мизацию, а выполнять ее по формулировке пользователя.
В результате интерпретации текста постановки задачи формируется спи-
сок переменных, вычисляемых функций и необходимая для их определения
цепочка вызовов прикладных модулей. Выясняется также тип задачи: количе-
ство переменных, наличие ограничений и т. п. Эти признаки передаются всем
имеющимся в системе модулям оптимизации, и каждый из них решает, может
ли он включиться в решение данной задачи. Список «добровольцев» предъяв-
ляется пользователю в качестве подходящих методов оптимизации. Выбран-
ный метод показывает в окне диалога свои настроечные параметры (длина
пробного шага, коэффициент растяжения и т. п.) и их рекомендованные значе-
ния. Пользователь может установить параметры поиска и признаки остановки
процесса оптимизации (точность, число итераций, длительность оптимизации)
по своему усмотрению, после чего запускает процедуру оптимизации.
Модули оптимизации выполнены по -известным алгоритмам (методы зо-
лотого сечения, Хука - Дживса, Нелдера - Мида), но имеют одну важную осо-
бенность. В каждой итерации они выполняют действие текущего состояния:
получают значения нужных величин из структуры данных ИППП, изменяют
значения переменных оптимизации на величину пробного или рабочего шага,
возвращают их в структуру данных, запоминают следующее состояние и воз-
вращают управление диспетчеру для выполнения циклической цепочки при-
кладных модулей в новой точке. В каждой рабочей точке модуль оптимизации
проверяет также условия остановки процесса, в случае их выполнения гене-
рирует отчет и прекращает итерации. Оценив отчет, пользователь может про-
должить оптимизацию в той же постановке, тем же или другим методом оп-
тимизации. Можно, конечно, изменить и постановку задачи оптимизации, но
тогда все начинается с интерпретации новой задачи.
Таким образом, оптимизация в интеллектуальной среде полностью соот-
ветствует своему назначению: она организуется не программистом, а пользо-
вателем и является инструментом подготовки принятия решений. Действи-
тельно, как и любой инструмент, оптимизация в проектировании имеет смысл
только в контексте действий проектировщика. Например, обратная задача вы-
числения необходимой начальной скорости «при прочих равных условиях»
предполагает, что результат не выйдет за разумные пределы. Вернее, предпо-
лагает это проектировщик, в цепи рассуждений которого, видимо, предусмот-
рены и дальнейшие действия в зависимости от полученного результата, на-
пример, добавление ограничения на начальную скорость по условиям проч-
ности откатных частей.
Часть своих предположений относительно условий оптимизации пользо-
ватель может перенести в интеллектуальную среду. Например, следующая за-
дача оптимизации массы по условию максимальной дальности полета
max Хс
varm
имеет смысл при анализе внешней баллистики, если определена зависимость
между массой и входными данными программы Polet. Влияние массы на бал-
листический коэффициент можно учесть зависимостью с:=0.5*43.56/т (если
170 2. Основные характеристики эффективности действия СП и БП
у прототипа такой формы при массе 43,56 кг баллистический коэффициент
равен 0,5). Масса снаряда влияет также на величину начальной скорости, но
пользователь может на данном этапе отказаться от проработки внутренней
баллистики и временно ввести зависимость начальной скорости от массы по
предельной дульной энергии или импульсу: V0: =7 2 0 * 4 3.5 6 /т.
Имеет смысл также максимизация дальности за счет угла бросания (max Хс,
var tetaO), а добавление ограничения на высоту траектории Ys<Ht превра-
щает эту оптимизацию в вычисление дальности прямого выстрела. Оформив
списки входных (invar) и выходных (outvar) данных в тексте постановки за-
дачи, получим новый тип модуля обратных вычислений, который ведет себя как
обычный модуль с входными/выходными данными и именно так рассматрива-
ется планировщиком вычислений, но реализуется как оптимизация:
max Хс
var tetaO
bounds Ys<Ht
invar VO, c, Ht?=2
outvar Xd=Xc >
Этот текст подлежит обработке интерпретатором, поэтому он некоторым
образом формализован. Понятно, что переменные V0, с передаются модулю
Polet, новая переменная Ht (высота цели) по умолчанию принимается рав-
ной 2 м, переменная xd (дальность прямого выстрела) получает значение даль-
ности из модуля Polet. Модуль обратных вычислений - более удобный и
естественный для пользователя инструмент проектирования по сравнению с
прямыми методами.
Приведенные примеры показывают, что даже в контексте лишь одной ча-
стной модели функционирования - внешней баллистики - возникает множе-
ство оптимизационных задач, последовательное решение которых позволяет
принять правильное решение о выборе важнейших параметров конструкции.
В рамках одной лишь параметризованной геометрической модели также мож-
но решать задачи оптимизации некоторых размеров в разумных пределах в
целях помещения центра масс в нужную точку, выполнения ограничения на
отношение моментов инерции и т. д. Для решения более содержательных за-
дач оптимизации необходимо просто расширить комплексную модель объекта
проектирования вплоть до оценки эффективности действия, воспользовавшись
интеграционными возможностями ИППП. Формально полномасштабная за-
дача оптимизации по критерию эффективности действия ничем не отличается
от рассмотренных частных задач. Но оптимизация по эффективности действия
нуждается в субъективной трактовке цели оптимизации по одной очень суще-
ственной причине: задачи оптимального проектирования многокритериальны.
Оптимизация по векторному критерию
На первый взгляд, есть только один критерий полезности СП - эффектив-
ность действия, поскольку изделия этого класса ни для чего другого не нуж-
ны. На самом деле, критерий эффективности представляет несколько, как пра-
вило, противоречащих друг другу показателей, каждый из которых выражает
степень достижения одной определенной цели (вероятность поражения типо-
2.10. Оптимизация средств поражения по эффективности действия
171
вой ЭЦ на большой дальности, на дальности прямого выстрела, на малом и
большом промахе, то же самое для других типовых ЭЦ). Показателями эф-
фективности действия могут выступать средний расход снарядов на пораже-
ние ЭЦ с заданной вероятностью, математическое ожидание числа поражен-
ных целей в составе групповой и площадной, среднее время, необходимое
для поражения ЭЦ, и т. д. Кроме того, есть еще экономические показатели:
стоимость выстрела, стоимость операции.
Критерий эффективности действия отражает всю совокупность целей про-
ектирования, формально являясь функцией показателей 1F(1F|, ..., IVS). Поэто-
му оптимизация по нескольким показателям называется многокритериальной,
а правильнее называть такие задачи оптимизацией по векторному критерию.
Например, оптимизация СП осколочного типа по легкоуязвимым и легкобро-
нированным целям в отдельности приводит к разным значениям оптимальной
массы ПЭ. Действительно, в выражении для математического ожидания чис-
ла эффективных попаданий (2.5) П*(х, у, г) = П(х, у, z)P(q,v) плотность ПЭ
является убывающей функцией массы ТГЭ (при неизменной суммарной мас-
се), а вероятность поражения попавшим^ ПЭ - возрастающей (до единицы).
Произведение таких функций имеет максимум, причем экстремальное значе-
ние сдвигается в область большей массы при оптимизации по более защи-
щенным целям. Если масса ПЭ оптимизирована по легкоуязвимой цели, эф-
фективность действия по легкобронированной цели может оказаться недопус-
тимо низкой. Промежуточное решение, реализованное в одном проекте,
ухудшает оба частных показателя. Формально в этой ситуации можно приме-
нить метод матричной игры, но максиминйый подход дает оптимум с позиций
крайнего пессимизма, также неэффективный ни по одной цели.
Формальные методы не решают проблему многокритериальной оптими-
зации. Рациональный компромисс между отдельными показателями может быть
обоснован в системе предпочтений опытного специалиста, который в таких
случаях выступает как лицо, принимающее решение (ЛПР). Но ЛПР не может
выразить свои предпочтения априорно, например, решить, что компромисс-
ным является вариант, уступающий максимальной эффективности по легко-
бронированной цели на 10 %. Ему нужны количественные оценки возможных
вариантов решения. Диалоговая система оптимизации как нельзя лучше под-
ходит для решения многокритериальных задач.
Методы векторной оптимизации
Методы свертки. Самые простые методы сводят оптимизацию по век-
торному критерию к другой задаче со скалярным критерием, полагая без осо-
бых оснований, что решения этих совершенно разных задач эквивалентны.
В случае однородных показателей имеет смысл взвешенная сумма показате-
s
лей с весовыми коэффициентами р(: 1Г(20 = £Р(ИДХ). Так как 1Т(Х) - ска-
лярная функция, задача
s
max £р,И<(Х)=>Х*
i=l
172
2. Основные характеристики эффективности действия СП и БП
решается обычными методами оптимизации. Если, например, р, - частота воз-
никновения ситуации, в которой актуален i-й показатель, результат свертки
можно интерпретировать как среднюю оценку эффективности при многократ-
ном применении СП. Величины р, могут также выражать степень угрозы опе-
рирующей стороне в случае, если i-я цель применения СП не будет достигну-
та. В этой интерпретации очевидно, имеют смысл вероятностей недо-
стижения i-й цели.
В случае неоднородных показателей иногда применяется мультипликатив-
ная свертка в виде дроби с произведением показателей, которые желательно
увеличивать (эффективность), в числителе, а тех, что нужно уменьшать (сто-
имость), - в знаменателе. Критерий «эффективность-стоимость» выражает сба-
лансированные признаки целесообразности проектного решения, но его нельзя
использовать для сравнения принципиально разных вариантов (например,
обычные и высокоточные СП). Иначе можно прийти к выводу о «целесооб-
разности проигрыша войны с минимальными затратами».
Практическое применение методов свертки в диалоговой системе опти-
мизации не требует никаких дополнительных средств, т. е. просто составляет-
ся соответствующее выражение в качестве целевой функции. Но, по суще-
ству, эти методы лишь маскируют произвольный выбор, который переносится
с частных показателей на весовые коэффициенты.
Методы оптимальных решений по Парето. Суть этих методов заклю-
чается в выделении множества альтернатив, среди которых нет ни явно пред-
почтительных по всем показателям, ни уступающих, т. е. замена одйой аль-
тернативы на любую другую из этого же множества улучшает некоторые из
показателей, но хотя бы один показатель при этом ухудшается. Формально ни
один из вариантов решения нельзя признать лучшим, так как выбор может
быть обоснован только с привлечением дополнительной информации об от-
носительной важности показателей качества или с помощью других призна-
ков, не вошедших в систему показателей (как правило, из-за сложностей фор-
мализации), но хорошо различаемых постановщиком задачи. Так как любой
выбор в этих условиях является компромиссным, множество всех вариантов,
претендующих на оптимальность согласно приведенной выше формулировке,
называется множеством компромиссов, или множеством эффективных ре-
шений по Парето.
В рамках этого подхода существует много методов установления компро-
мисса, которые можно разделить на две группы: априорные методы, устанав-
ливающие формулу компромисса до начала процедуры решения, и апостери-
орные методы, в которых для сравнительной оценки вариантов используются
данные, получаемые уже в ходе решения задачи. Среди них есть и простые, и
сложные. Но простые - методы пропорционального предпочтения (рис. 2.23, а)
и утопической точки (рис. 2.23, б) - не позволяют адекватно структурировать
предпочтения на множестве целей (в этом они мало отличаются от методов
свертки). Сложные методы предъявляют слишком высокие требования к ЛПР
не столько в его профессиональной области, сколько в средствах математи-
ческого выражения априорных предпочтений, или задают слишком трудные
вопросы в диалоговых апостериорных процедурах.
2.10. Оптимизация средств поражения по эффективности действия
173
Рис. 2.23. Варианты компромиссных решений в области Парето:
а - методом пропорционального предпочтения; б — методом утопической точки
Следующие два прагматичных метода соответствуют уровню сложности
многокритериальной оптимизации в проектировании СП и их применение
вполне доступно проектировщику.
Метод последовательных уступок. Предполагается, что все частные кри-
терии упорядочены по степени важности: Wx - самый важный, W2 - самый
важный из всех остальных и т. д. впло!ъ до Ws. Вначале решается частная
задача оптимизации по самому важному критерию:
max WJXj^X*1.
Xe/J,
Полученный результат X*1 дает абсолютно наилучшее значение ^(Х*1).
Ясно, что последующая оптимизация по остальным критериям ухудшит это
значение. Идея последовательных уступок состоит в том, чтобы определить
допустимое снижение важного показателя и провести оптимизацию по следу-
ющему критерию в той области, где это условие выполняется:
max W2(X)=>X*2-,
XeDj
И,1(Х)>И,1(Х*1)-А1Ц.
Этот процесс повторяется по всем частным критериям вплоть до самого
последнего:
max W5(X)=>X*S;
XeDj
B/(X)>W/(X*')-AW;, i = l,..„5-1.
Реализация этого метода в диалоговой системе оптимизации технически
очень проста: в диалоговом окне оптимизации ЛПР должен присвоить поряд-
ковые индексы каждой цели, решить обычным способом задачу оптимизации
по первому показателю, внести допустимую уступку, перейти к оптимизации
по второму показателю (ограничение по первому показателю в соответствии с
уступкой добавляется автоматически) и т. д. Для ЛПР метод последовательных
уступок хорош тем, что все решения принимаются в абсолютных, понятных
174
2. Основные характеристики эффективности действия СП и БП
ему величинах. Он может сопоставить, например, уступку в вероятности по-
ражения на 0,05 одной цели с полученным выигрышем в вероятности пораже-
ния другой цели, скорректировать свое решение, т. е. оперировать с понятны-
ми ему и на самом деле важными величинами.
Метод «просеивания» критериальных таблиц. Этот метод так же прост
в реализации, как и метод последовательных уступок, но предпочтительнее
тем, что в момент установления компромисса между показателями известны
значения показателей всех сравниваемых вариантов. Метод основан на на-
коплении допустимых вариантов в области поиска, удовлетворяющих всем
ограничениям, с последующим вычеркиванием относительно худших по по-
следовательно повышаемым пороговым уровням важных показателей. Проб-
ные варианты выбираются так, чтобы область поиска была покрыта рав-
номерно, для чего используется генератор ЕРх-последовательностей , или
ЬРт-поиск.
В каждой пробной точке сначала проверяется выполнение ограничений.
Недопустимые варианты отбрасываются, а для прошедших проверку вычис-
ляются все показатели и заносятся в очередную строку специальной таблицы
вместе с номером варианта (чтобы потом можно было восстановить его’ пара-
метры). После получения достаточного количества допустимых вариантов по-
становщик задачи просматривает таблицу, вычеркивает доминируемые варш
анты, по сравнению с которыми есть хотя бы один вариант, лучший по всем
показателям. Оставшиеся точки находятся в области компромиссов и, так как
все они уже оценены показателями, выбор наилучшего варианта можно осу-
ществить явным сравнением всех кандидатов по строкам таблицы. Но так мож-
но сравнить две-три строки. Сокращение числа строк проводится наложени-
ем пороговых ограничений на показатели, в результате из таблицы удаляется
часть строк. Повторяя последовательно процедуру ужесточения критериаль-
ных ограничений, постановщик задачи добивается того, что в таблице оста-
ются лишь несколько строк, из которых он уже может выбрать наилучший
вариант.
Для накопления вариантов и «просеивания» таблицы в интеллектуальной
среде используется табличный процессор, а пороговые ограничения вводятся
строкой соответствующих неравенств.
Безытерационная оптимизация и постоптимальный анализ
Оптимизация в проектировании всегда содержит параметры, значения ко-
торых нужно выбирать и обосновывать, но они не могут быть объявлены оп-
тимизируемыми переменными из-за отсутствия соответствующих моделей,
прогнозирующих последствия их изменения. Например, изменением физико-
механических характеристик можно выполнить ограничение по прочности тон-
костенного корпуса снаряда, создающего эффективное осколочное поле, но с
другой стороны, характеристики материала влияют на осколкообразование, тех-
нологию изготовления и т. д. Формально учесть все последствия изменения
материала принципиально возможно, но для этого требуется существенно рас-
* Их еще называют последовательностями Соболя. Программу генерации таких последо-
вательностей можно найти в библиотеке программ Sobseq численных методов
2.10. Оптимизация средств поражения по эффективности действия
175
ширить функциональную модель в области материаловедения, механики раз-
рушения, технологии, т. е. за рамки компетенции проектировщика. Он может
оценить оптимальное решение и, основываясь на своем опыте, скорректиро-
вать сделанные ранее назначения. Проблема заключается именно в корректи-
ровке назначений, так как она касается не одного-двух, а многих параметров.
Если в постановке задачи обозначить оптимизируемые переменные X, а
выбираемые пользователем существенно влияющие на результат параметры Y
(их можно назвать внешними параметрами, чтобы подчеркнуть неучастие в
процедуре оптимизации), то задача выглядела бы следующим образом:
max W(X,Y)
tyX.YjiF?, i = 1,..., т.
Тогда процесс взаимного согласования обеих групп проектных параметров
(X и К) можно представить следующей итерационной процедурой: произве-
дя априорный выбор значений внешних параметров У(|), получить оптималь-
ное решение А^УУ^), оценив эффективность в оптимальном решении
У(1)), скорректировать внешние параметры У(2), получить следующее
решение X*(2\Y^) и т. д. Каждая итерация - это полномасштабное решение
оптимизационной задачи, которое не выявляет закономерности, а просто дает
возможность реализовать процедуру «цроб и ошибок» для выбора внешних
параметров, неэффективную при большом числе параметров. При этом опти-
мальное решение Х*(к} каждый раз теряется, так как нужно лишь для того,
чтобы оценить максимальное значение целевой функции W*(Y) при данном
У(А\ Если получить каким-то образом зависимость JV*(Y) в аналитическом виде,
рациональный выбор внешних параметров стал бы целенаправленным, а оп-
тимизация - более полной: по приемлемому уровню целевой функции W* мож-
но непосредственно выбрать подходящее сочетание внешних параметров У* и
только после этого найти полностью согласованное оптимальное решение X*.
Процедура согласования параметров, влияющих на оптимальное решение,
по результатам оптимизации называется постоптимальным анализом. Безус-
ловно, такой инструмент был бы очень полезен в проектировании, но как по-
лучить в аналитическом виде оптимизирующее соотношение 1У*(У), если фун-
кциональные характеристики в целевой функции и ограничениях заданы ал-
горитмически, т. е. вычисляются «черными ящиками» - программными
модулями, о которых известны только входы и выходы? Это хороший вопрос,
потому что ответ на него можно найти только на основе системного подхода.
Основное препятствие можно устранить аппроксимацией алгоритмически
заданных функций F(X) математическими функциями F(X) определенного
класса так, чтобы в любой заданной точке пространства проектных пара-
метров Хо совпадали не только функции, но и их первые производные:
F(X0) = F(Xq), F'(Xq) = F'(X0). Класс аппроксимирующих функций необходимо
выбрать так, чтобы они позволили применение эффективных аналитических
методов оптимизации. Тогда в случае существенной погрешности аппрокси-
мации в оптимальной точке | F(X*) - F(X*)\ аппроксимацию можно повторить
уже в этой точке и так далее до приемлемого совпадения. Технически аппрок-
симация осуществляется средствами ИППП с участием модулей, вычисляющих
176 2. Основные характеристики эффективности действия СП и БП
точные значения характеристик функционирования F(X), что и обеспечивает
совпадение функций и производных в опорной точке. Таким образом, целесо-
образную форму аппроксимации следует выбирать из соображений быстрой
оптимизации, которая, в свою очередь, позволяет уточнить аппроксимацию, -
все это выполняется средствами интеллектуальной среды. Успешное решение
проблемы обусловлено также тем, что оптимизация рассматривается в кон-
тексте выбора внешних параметров, следовательно, аргументом аппроксима-
ции является ограниченный набор варьируемых переменных, наиболее силь-
но связанный с внешними параметрами в оптимальном решении. В соответ-
ствии с системным подходом следует выделять группы внешних параметров с
тем, чтобы за счет декомпозиции задачи оптимизации (движение на траекто-
рии определяется аэродинамическими свойствами и условиями баллистики,
прочность при выстреле - толщиной стенок и характеристиками материала
корпуса) еще более сузить список аргументов аппроксимации. Ни один из пе-
речисленных вопросов не решается в отдельности, а их системное решение
открывает принципиально новую возможность в оптимальном проектирова-
нии - постоптимальный анализ.
При совместном решении вопросов выбора метода оптимизаций и класса
аппроксимирующих функций следует исходить из того, что целью оптимиза-
ции, допускающей постоптимальный анализ, является нахождение оптимизи-
рующего соотношения. Поэтому нужно сосредоточить внимание не на поиске
оптимального сочетания варьируемых переменных, а на условиях, определя-
ющих точную верхнюю грань максимизируемой функции. В связи с этим зас-
луживают внимания методы оптимизации, базирующиеся на фундаменталь-
ных неравенствах. В частности, на свойствах геометрического неравенства
основан метод геометрического программирования.
Метод геометрического программирования
В качестве класса функций, достаточно гибких с точки зрения возможно-
стей аппроксимации и обладающих полезными свойствами для составления
оптимизирующих соотношений, целесообразно выбрать полиномы с положи-
тельными коэффициентами (такие полиномы еще называются позиномами):
т
g(xl,...,xn)^^cix^il -...-х^,
1=1
гдел’;> 0, Cj> 0, 7?1, i = 1, ..., n;j = 1, ..., т.
Позиномы обладают важным свойством экстремальности - они выпуклы
и ограничены снизу, а значит, имеют точную нижнюю грань, формальный при-
знак которой может служить искомым оптимизирующим соотношением. Дей-
ствительно, сумма положительных чисел пг =С1х“'1 где i = 1, ..., п,
ограничена снизу положительной величиной, которую можно найти, исполь-
зуя геометрическое неравенство:
т т
1=1 1=1
2 10. Оптимизация средств поражения по эффективности действия 177
где 8( - произвольные положительные веса, удовлетворяющие условиям нор-
мализации 5j + ... + &т= 1. Геометрическое неравенство обращается в равен-
ство при а} = а2=... = ат. Заменой переменных и, = аДполучим неравенство
которое означает, что сумма любых положительных чисел ограничена снизу и
и1 и2 ит с
определяет точную нижнюю грань при —- = — = ... = —Если эти числа -
51 б2
слагаемые позинома с аргументами х = (х15 ..., х„), то правая часть неравен-
ства примет вид:
т т
£(*)=!>, >П т* Vм -хп=' =v(8,x).
«=1 б/
(2.72)
Можно доказать, что функция Е(8, х) вогнута и имеет максимальное зна-
чение по х в той же точке, что и минимум прямой функции g(x), причем мак-
симум прямой и минимум двойственной функций совпадают. На этом основа-
на идея двойственных оптимизационных задач. Далеко не очевидно, однако,
что максимизация функции Е(8, х) проще, чем минимизация прямой функ-
ции. Но можно упростить ее, воспользовавшись тем, что двойственные пере-
менные произвольны в ограничениях неотрицательности и нормализации, а
это оставляет возможность такого выбора переменных 6, чтобы показатели
степеней при х( в выражении (2.72) обратились в нуль (дополнительные огра-
ничения ортогональности). Полученная таким образом двойственная функ-
ция зависит только от переменных 8:
т f О V*1
п^,..., 5т) = П Ь-
<=i\ ,
8, >0 , i = l, ..., т;
(2.73)
(2.74)
£б,=1; (2.75)
1=1
т
i=i
(2.76)
Найдя максимум двойственной функции (2.73) по переменным 8 в линей-
ных ограничениях нормализации (2.75) и ортогональности (2.76), тем самым
определяем и минимум прямой функции
g(x*) = г(6*).
(2.77)
178
2. Основные характеристики эффективности действия СП и БП
В случае, когда число слагаемых позинома на единицу больше числа пе-
ременных, т. е. при т = п + 1, линейные ограничения определяют единствен-
ное допустимое решение двойственной задачи и искать максимум двойствен-
ной функции не приходится. Это значит, что 8 *, а с ним и минимум позинома
зависят только от показателей степеней atJ и не зависят от коэффициентов С{.
Это именно то, что нужно для постоптимального анализа. Внешние парамет-
ры могут входить только в коэффициенты С), потому что вид зависимостей
определяется самой физикой процесса. Так, если характеристика поражающе-
го действия ПЭ обусловлена его кинетической энергией, то масса ПЭ войдет
в модель поражения в первой степени, а скорость - во второй (свойства мате-
риала ПЭ входят в виде коэффициентов). Значения коэффициентов можно ме-
нять в оптимальном решении - правой части выражения (2.73), обеспечивая
приемлемое значение минимума целевой функции прямой задачи.
После того, как желаемое значение целевой функции найдено, можно вы-
числить оптимальные значения переменных прямой задачи. Для этого нужно
воспользоваться условием обращения геометрического неравенства в равен-
ство =р, i = 1, ..., т, причем отношение р не произвольно, а равно уже
найденному максимуму двойственной функции г(8*):
ТП ТП ТП —
г(8*) = g(x*)=X и,- = X Р5‘ = PZ 5* = Р '
1=1 i=i i=i
с учетом условия нормализации. Переменные в оптимальном решении пря-
мой задачи можно найти из системы отношений и= 8^(8*):
Qx”'1 •••х“'" = 5*г(8*), ie 1,..., m.
Общая задача геометрического программирования учитывает ограниче-
ния также в виде позиномов:
ming0(x)
gk(x)< \,k= 1,2, ...,р.
При сквозной нумерации слагаемых всех позиномов от 1 до тп обозначим
множество индексов слагаемых k-го позинома Jk,k = 0, 1, ...,р. Целевая функ-
ция общей задачи геометрического программирования ограничена снизу двой-
ственной функцией
m ( с А5, р 1
...5т) = П f П^‘.
1=1 (О, J к=1
которая отличается от двойственной функции для задачи без ограничений толь-
ко произведением множителей , где кк - сумма двойственных перемен-
ных, соответствующих слагаемым к-го ограничения: Хк = X к = 1, ...,р.
i^jk
Условие нормализации учитывает только двойственные переменные от целе-
вой функции: £ 5,• = 1. Переменные в оптимальном решении прямой задачи
,еЛ)
находятся из системы отношений:
2.10. Оптимизация средств поражения по эффективности действия
179
Задача. Найти оптимальную массу ПЭ, максимизирующую условную ве-
роятность поражения цели на максимальном промахе (г = 25 м) при фиксиро-
ванной массе (т = 5 кг) БЧ радиального разлета с готовыми ПЭ. Уязвимость
цели такова, что она достоверно поражается при попадании ПЭ с минималь-
ной кинетической энергией !FKp = 300 Дж, уязвимая площадь составляет
5у = 5 м2. Скорости носителя и цели пренебрежимо малы по сравнению со
скоростью метания ПЭ. Баллистические свойства ПЭ заданы параметром
В = 0,04. Распределение числа ПЭ по углам разлета подчиняется закону сину-
са: f (<р) = A sin (ф). Направление разлета ПЭ идеально согласовано с диаграм-
мой направленности неконтактного взрывателя (НВ), т. е. накрытие цели полем
ПЭ при данных условиях встречи гарантировано. Передний и задний углы раз-
лета в меридиональной плоскости равны соответственно ф! =40° и ф2 = 100°.
Бризантность ВВ характеризуется скоростью детонации D = 1 000 м/с. Выяс-
нить степень зависимости оптимального решения от параметров задачи.
Решение. Необходимо провести частную оптимизацию при уже согла-
сованных параметрах разлета. При подрыве на заданном промахе г и идеаль-
ном согласовании НВ с направлением разлета ПЭ цель находится под углом
Фер = (Ф1 + Фг У2 к оси симметрии БЧ на расстоянии R = rtsm фср от центра
разлета. Следовательно, нужно оптимизировать КЗП (2.51) в данной точке.
По условию задачи можно не различать динамические и статические углы
разлета в выражении для среднего числа эффективных попаданий (2.50). Ве-
роятность поражения попавшим ПЭ равна единице при выполнении ограни-
чения на кинетическую энергию. Плотность поля ПЭ согласно формуле (2.43)
при заданном законе распределения по углам вылета постоянна на сфере ра-
диуса R и пропорциональна общему числу ПЭ: П(Я) = NA/(2nR2). Коэффици-
ент А однозначно определяется по общему свойству закона распределения
Ч>2
J Л8Щфб/ф=1,
Ф1
откуда следует, что А = l/(cos ф1 - cos ф2). Общее число ПЭ при дроблении
оболочки массой М на фрагменты одинаковой массы q равно M/q, причем
масса оболочки и масса разрывного заряда /ивв должны находиться в опреде-
ленном отношении (коэффициент нагрузки Р = швв/Л/), которое определяет на-
чальную скорость разлета г0. Если полную массу БЧ составляют только обо-
лочка и ВВ т = швв + М, то М = т/(\ + Р). Пороговое условие поражения цели
попавшим ПЭ означает, что существует ограничение на начальную скорость
разлета v0, при выполнении которого кинетическая энергия соударения ПЭ с
целью будет достаточной для поражения. Так как скорость цели по условию
задачи мала по сравнению с собственной скоростью ПЭ, определяющей в этом
ограничении является скорость ПЭ с учетом торможения на заданном рассто-
янии до цели:
180 2. Основные характеристики эффективности действия СП и БП
2BR
qv^e Уч >2WKp.
При выполнении ограничения математическое ожидание числа эффектив-
ных попаданий равно произведению плотности поля и уязвимой площади цели:
fn(R) = n(R)S= --------------------. (2.78)
2л/?2 ?(1 + Р) 2л/?2 (cos <Pj -costp2)
Условная вероятность поражения растет вместе с т, но свободными пере-
менными в выражении (2.78) являются лишь q и 0. Их оптимальные значения
можно найти из решения задачи
min q + qfi,
_2br . .. (2.79)
qvfie w >2WKp.
Необходимо также проанализировать влияние на оптимальное решение
всех параметров в условии задачи. Ограничение в задаче (2.79) всегда актив-
но, потому что лишь оно и определяет минимальную массу ПЭ вместе с при-
ходящейся на него долей энергии взрыва, необходимой для поражения цели с
учетом торможения ПЭ на траектории. Целевая функция означает,-что нужно
минимизировать массу ПЭ вместе с приходящейся на него долей ВВ с тем,
чтобы максимально увеличить число ПЭ. Ограничение предотвращает пре-
вращение фрагментов в пыль (благодаря наличию q в экспоненте'.затухания
скорости), поэтому оно безусловно активно, т. е. должно выполняться в фор-
ме равенства. Это значит, что выбор q однозначно определяет 0 и значение
целевой функции. Мы можем установить характер изменения целевой функ-
ции от q непосредственным вычислением. Воспользовавшись формулой По-
кровского
<2-80)
составим инлайн-функцию:
F=inline (' 2000*W. / (q* (k*D) л2.* exp(-2*B./q.л (1/3) *R))',
' q' , ' W' , ' В' , ' k' , ' D' , ' R' )
F =Inline function:
F (q, W, B, 0.5, D, R) =2000*W. / (q*kD2 . *exp (-2*B. /q.74 (1/3) *R) )
Она разрешает ограничение относительно подкоренного выражения в фор-
муле для начальной скорости ПЭ по следующим аргументам: q - масса ПЭ, г,
w - критическая энергия, Дж, в - баллистический коэффициент ПЭ, к - коэф-
фициент потерь энергии при метании (к = 0,5 при отсутствии потерь), D - ско-
рость детонации, м/с, R - расстояние до цели, м. Подготовим исходные дан-
ные и вычислим значения функции F в диапазоне масс ПЭ 0,5...5 г:
» W=250;B=0.04;D=7000;R=20/sin(70/180*pi); q=[0.5:0.01:5];
» Y=F (q, W, В, 0.5, D, R) ;
2.10. Оптимизация средств поражения по эффективности действия
181
Результат Y - это массив значений подкоренного выражения в формуле
(2.80) для всех значений векторного аргумента q. Несложно пересчитать его
на коэффициент нагрузки и вычислить целевую функцию задачи (2.79) для
всех значений q:
» beta=Y*2./(1-Y); goal=q+beta.*q;
Следует иметь в виду, что адекватность вычислений по полуэмпиричес-
кой формуле можно обеспечить (выбором коэффициента к) в узком диапазо-
не. В оптимизации нельзя пользоваться локально адекватными моделями, по-
тому что, ориентируясь по искаженным тенденциям, поиск лучших решений
может выйти далеко за разумные пределы. Чтобы убедиться в этом, построим
графики зависимости достаточного коэффициента нагрузки и целевой функ-
ции от массы ПЭ (рис. 2.24):
» plot (q, beta,' b:' , q, goal,.' r:' )
Верхняя пунктирная кривая 3 показывает, что оптимум сдвинут в сторону
очень малых масс, а нижняя пунктирная кривая 1 - что он сдвинут в сторону
больших коэффициентов нагрузок. Никто не применяет формулу Покровского
Рис. 2.24. Зависимость коэффициента нагрузки и целевой функции от массы ПЭ:
1 - ₽(П; 2 - 0(2); 3 - q + 40(1); 4 q + <?0(2)
при Р близком к единице, но оптимизация не может остановиться при дости-
жении ожидаемого значении коэффициента нагрузки, потому что формально
скорость метания без учета потерь энергии взрыва продолжает расти и обес-
печивать необходимую кинетическую энергию очень легкими и потому более
многочисленными фрагментами. Обычно вводится поправка на потери с по-
мощью коэффициента к < 0,5 вместо его теоретического значения к = 1/2 в фор-
муле (2.80). Для оптимизации поправка должна быть адекватной в широком
диапазоне коэффициентов нагрузок, поэтому введем ее множителем (РФ])7
где Р] - достаточно малое значение коэффициента нагрузки, при котором по-
правка отсутствует; у < -1 определяет крутизну поправки. Чтобы излишне не
усложнять окончательную формулу, приведем и выражение (2.80) к степенно-
му виду. Обозначив/(Р) = р/(2 + Р), заменим эту функцию:
ЛР) = Л(Р) = /(Ро)
JL
Ро
182 2. Основные характеристики эффективности действия СП и БП
где
Ж)<Ф
. Ро 2
р-ft, /(Ро)(2 + Р„>2
Следует отметить, что Л(Р0) =/(Р0) и й'(0) = /'(Р) при 0 = Ро, поэтому апп-
роксимирующая функция й(0) имеет с точки зрения оптимизации методами
первого порядка те же локальные свойства, что и точная, а выбрав опорную
точку Ро в оптимальном решении Р*, всегда можно добиться совпадения
Л(0‘) = /(р*) несколькими итерациями. В общем виде пригодная для оптими-
зации формула вычисления начальной скорости ПЭ выглядит так:
I (|
(2-81)
Принимая Ро = 0,5, получаем/(0О) = 0,2 и а - 0,8. Примем также 0, = 0,2
и подлежащий экспериментальному обоснованию параметр, учитывающий по-
тери, у = - 0,1. В результате получим зависимость, которой можно пользовать-
ся в процессе оптимизации:
v0 =0,250Р°’3. (2.82)
Эта формула напоминает обычно рекомендуемую при 0 < 0,3 формулу т0 =
= D/3Р0’5, но, как показывает график (пунктирная линия на рис. 2.25}, показа-
тель степени 0,3 дает меньший рост начальной скорости с увеличением коэф-
фициента нагрузки по сравнению с теоретической формулой (2.80) (толстая
линия), тогда как зависимость с показателем степени 0,5 (штрихпунктирная
линия) более крутая и дает большое завышение при Р> 0,3. Кривая, показан-
ная сплошной тонкой линией, вычислена по аппроксимирующей формуле (2.81)
при Ро = 0,5, а - 0,8, у = 0 (без учета потерь) и практически совпадает с теоре-
тической зависимостью. Следовательно, формула (2.81) наилучшим образом
Рис. 2.25. Зависимость начальной скорости разлета ПЭ от коэффициента нагрузки
2.10. Оптимизация средств поражения по эффективности действия 183
подходит для предварительной оптимизации основных параметров конструк-
ции в качестве обобщенной модели, содержащей управляемые параметры, ко-
торые можно использовать для настройки этой зависимости по имеющимся
контрольным (экспериментальным) данным.
Будем считать, что настроечные параметры, принятые при выводе форму-
лы (2.82), подтверждены экспериментально, и используем ее для поиска опти-
мального решения задачи. Изменив инлайн-функцию согласно выражению
(2.82), получим еще одну пару графиков (см. рис. 2.24, линии 2, 4). Целевая
функция (кривая 4) имеет минимум при большей массе q = 1,63 (по сравне-
нию с 0,80) и этому минимуму соответствует меньшее значение коэффициен-
та нагрузки Р = 0,59. Анализируя полученные результаты, можно сделать вы-
вод о том, что для корректной оптимизации решающее значение имеет адек-
ватность модели, причем если речь идет о вычислении целевой функции, то
правильное отражение тенденций ее изменения важнее, чем количественное
соответствие. Значение переменной г/, при котором целевая функция мини-
мальна, и есть оптимальная масса ПЭ. Нетрудно вычислить по ней макси-
мальную вероятность поражения, но исследовать влияние параметров задачи
таким же способом, т. е. повторяя вычисления при других исходных данных,
нерационально. Методом проб невозможно выяснить полную картину влия-
ния параметров, позволяющую решить обратную задачу - по заданной веро-
ятности поражения подобрать параметры, при которых она обеспечивается в
оптимальном решении. С этой проблемой может справиться безытерационная
оптимизация.
Наличие экспоненты в ограничении не позволяет решать задачу (2.79) ме-
тодом геометрического программирования, но в данном случае от экспоненты
легко избавиться предельным переходом
z \Е
е“ = lim 11 + — I ,
е->~1 £ }
сначала заменив ограничение двумя эквивалентными неравенствами
2 2ВК
и
[Е КР
при достаточно большом е, чтобы последующая замена экспоненты была спра-
ведливой:
Так как t > 1, эквивалентное неравенство
2BR 1/3-^.
t -I----q 1 1 < 1
е
выражается через позином. Теперь задачу оптимизации можно представить в
каноническом виде задачи геометрического программирования с переменны-
ми q, Р и Z:
184
2. Основные характеристики эффективности действия СП и БП
min С// + С2<7Р;
С3д-,РЧ)’6ГЕ < 1;
С4г' +С5е-1^1/3/-1<1,
где С, =С2 = С4 = 1, С3 = 32 00(Жкр/П2, С5 = 2BR.
Двойственная задача примет вид
(2.83)
5j + 82 = 1;
3] +82 — 83 --8.
82-0,683=0;
е83 - 84 - 85 = 0;
8, > 0, 82 > 0, 83 > 0, 34 > О, 8Э > О.
Она содержит пять двойственных переменных и четыре линейных огра-
ничения. Это значит, что придется искать максимум двойственной функции,
но все двойственные переменные можно выразить через одну независимую:
8! =8:
82=1-8;
83=82/0,6;
85 = 3 - 383;
84 = е83 - 85
(2.84)
На первый взгляд кажется ненормальным, что размерные коэффициенты
возводятся в произвольные вещественные степени и решение зависит от не-
которой очень большой величины Е. Но Cj = С2 = С4 = 1, а коэффициенты С3,
С5 входят в двойственную функцию так, что в вещественную степень возво-
дится их безразмерная комбинация:
,83^,85 _^,83^-,3 З83 _ f3
3 с5 -с3 С5 -С5
С V3
С3
Cl
"32 000WKp f 3
D2 (2BR)3
Очень большая величина £ исключается из решения, вместо нее в реше-
ние возвращается экспонента от двойственной переменной 83, связанной как
раз с тем выражением, в котором мы вводили е:
2.10. Оптимизация средств поражения по эффективности действия 185
1 V*4 ( 1 V*5 ( 1 V*5
— — (б4+б5)84+55 =(£53-б5)65-е8з _L ege83 =
84J [е85 J 4 5 v 3 57 ^eg5j з
=fs1f'es5 =f£bf’.
e85 e85 [б5 [ 35 t
В ходе решения задачи обнаружена безразмерная комбинация
(2.85)
4000 WKD
D2 (ВК)3 ’
определяющая оптимальную массу ПЭ по вероятности поражения данной цели
на заданном промахе, что совсем не очевидно, если просто анализировать
структуру зависимостей. Это убедительно подтверждает высказанный в нача-
ле раздела тезис о том, что адекватная оптимизация является инструментом
поиска не числа, а истины.
Двойственную функцию
&(£) =
где 83 = (1 - 8)/0,6 и 85 = 3( 1 — 83), нужно максимизировать по 8 в интервале, в
котором выполняются условия неотрицательности двойственных переменных,
после чего решение прямой задачи можно найти из соотношений вида (2.77)
<7*=бЖ),
* 1 (2.86)
в =-V-i.
Безразмерный комплекс С можно рассматривать как единственную пере-
менную, от которой зависят оптимальные значения переменных двойствен-
ной задачи. Построив графики зависимостей оптимальных r(8 ), q* и [3* от С,
легко проанализировать влияние параметров безразмерного комплекса на оп-
тимальное решение.
Составим файл-функцию goal gp для вычисления двойственной функ-
ции, вернее, зависящей только от 8 и безразмерного комплекса С величины
f(8)/Cg. Вычисленное значение двойственной функции нужно возвращать с
отрицательным знаком, чтобы можно было использовать функцию fmin для
поиска максимума г(8):
function out=goal_gp(d,С)
d3=(l-d)/0.6;
d5=3-3*d3;
out=-C^'d3*dz' (-d) * (1-d) Л (d-1) * (d3*exp(l) /d5) z'd5;
Как следует из соотношений между двойственными переменными и пе-
ременной 8 (2.84), условия неотрицательности двойственных переменных
186
2. Основные характеристики эффективности действия СП и БП
выполняются, если 8 < 1 и 8 > 1 - 0,6. Вычислим коэффициенты по исходным
данным, найдем решение двойственной задачи оптимизации и по формулам
(2.86) получим решение прямой задачи:
» C5=2*B*R; С=32000*Ю/СЛ2/С5Л3
С=0.0203
» d=fmin('goal_gp',0.4,1,0,С); q_opt=-d*C5A3*goal_gp(d,С),
beta_opt = 1/d-l
q_opt = 1.6281
beta_opt = 0.5982
Это решение практически совпадает с результатами прямых расчетов при
построении графика (см. рис. 2.24, линии 2, 4). Условную вероятность пора-
жения цели получим как вероятность хотя бы одного попадания при среднем
числе попаданий, вычисленном по формуле (2.78):
M=5;S=4;fil=40;fi2=100;A=l/(cos(fil*pi/180)-cos(fi2*pi/180));
» G=l-exp(-M*1000*A*S/(q_opt*(l+beta_opt))/(2*pi*RA2));
G = 0.8411
Влияние параметров задачи на оптимальное решение можно оценить по-
средством безразмерного комплекса С. Для этого в некотором диапазоне его
значений построим графики зависимостей оптимальных г(8*), q* и от С
(рис. 2.26):
» СС=[C/10:С/10:С*4];d=[ ];V=[ ];
» for с=СС (d(end+l) y]=fmin('goal_gp',0.4,l,0,c);
V(end+1)=-С5Л3*у(8) ; end
» q = d.*V; beta = l./d-l;
» subplot(2,2,1),plot(CC,q,CC,beta,CC,V),
legend('q','beta','q+q*beta' )
To, что безразмерный комплекс С не является независимой переменной,
отобразим графиком его зависимости от критической энергии поражения цели
^кР (рис. 2.26, в):
» subplot(2,2,3),plot(СС,200:25:600)
Так как оба графика, выравненные по вертикали, имеют одинаковые абс-
циссы, хорошо видно, как могут измениться оптимальные масса ПЭ и коэф-
фициент нагрузки, полученные при PKKp = 300 Дж (С = 0,2), если оптимизиро-
вать их по цели с другой характеристикой уязвимости. Чтобы оценить влия-
ние оптимальных q , р на условную вероятность поражения, построим сначала
зависимость среднего числа попаданий ПЭ на данном промахе от величины
q* + g*P* (рис. 2.26, б), т. е. от результата оптимизации. Согласно формуле (2.78)
положение гиперболы определяется такими параметрами задачи, не вошед-
шими в оптимизацию, как масса БЧ, границы зоны разлета ПЭ, расстояние до
цели и уязвимая площадь цели. Изменение любого из этих параметров остав-
ляет в силе результат оптимизации, поэтому новая кривая для среднего числа
попаданий (пунктирная линия на рис. 2.26, б соответствует увеличенной в 1,2
раза массе БЧ) отражает оптимальный промежуточный результат при прочих
равных условиях:
» qb=-b(8)*C5'43;QB=linspace(qb*0.5,qb*l.5,30);
2.10. Оптимизация средств поражения по эффективности действия 187
» a=M*1000./QB*A/(2*р±*Кл2)*S;
» subplot(2,2,2),plot(a,QB,а*1.2,QB,'к:')
И наконец, построим график зависимости вероятности поражения от сред-
него числа попаданий (рис. 2.26, г), что даст возможность оценить влияние
всех параметров задачи на окончательный результат
» G=l-exp(-a); subplot(2,2,4), plot(a,G)
Действительно, последовательность стрелок, направленная от ординаты
И'кр = 300 Дж (см. рис. 2.26, б), отмечает оптимальное решение задачи q* = 1,6281,
Р* = 0,5982, п(3*) = <7*(1 + р*) = 2,6020 при С = 0,0203 (см. рис. 2.26, а) и ведет
Рис. 2.26. Зависимости оптимизирующих соотношений:
а - оптимальных »(8), q и р от безразмерного комплекса; б - среднего числа попаданий ПЭ от
промежуточного критерия q + др, в - »(6), q и р от критической энергии поражения цели
г - условной вероятности поражения G от среднего числа попаданий
к максимальной условной вероятности поражения, равной 0.8411 (см. рис. 2.26, г).
Естественным образом все параметры задачи в ходе решения разделились на
группы влияния. На первом этапе, определяющем значение безразмерного ком-
плекса, можно оценить влияние на окончательный оптимальный результат
таких параметров, как критическая энергия поражения и скорость детонации
ВВ. Баллистический параметр ПЭ и расстояние до цели входят в безразмер-
ный комплекс и влияют на оптимальный коэффициент нагрузки точно так же,
как и два предыдущих. Но эти же параметры входят еще и в размерный коэф-
188
2. Основные характеристики эффективности действия СП и БП
фициент С5, поэтому их изменение приведет к смещению не только графика
(см. рис. 2.26, г), но и линий q, beta (см. рис. 2.26, а). Остальные параметры
задачи влияют только на положение графика (см. рис. 2.26, б). Впрочем, гра-
фики лишь иллюстрируют возможные варианты постоптимального анализа.
Зависимость максимума двойственной функции от безразмерного комплекса
можно восстановить по вычисленным массивам СС, V интерполяционной про-
цедурой, а остальные отношения реализуются точными вычислениями.
Главное заключается в том, что во всех отношениях фигурируют макси-
мально возможные значения условной вероятности поражения при любом из-
менении параметров. Это значит, что так можно решить и обратную задачу -
подобрать значения параметров для достижения желаемого уровня условной
вероятности поражения, например, G = 0,9 (см. рис. 2.26, г). Сначала нужно
вычислить необходимое число ПЭ, при котором обеспечивается требуемая ве-
роятность поражения цели в данных условиях. Этому числу соответствует оп-
ределенный уровень целевой функции двойственной задачи q*{ 1 + р*) = m/N,
который по графику определяет значение безразмерного комплекса. Остается
подобрать подходящие значения размерных параметров в формуле (2.85), при
которых достигается нужное значение левой части. В данном случае в* каче-
стве управляемых параметров можно рассматривать скорость детонации D,
баллистический параметр В, расстояние до точки встречи R, кроме того,'мож-
но также анализировать влияние критической энергии поражения lTKp. •
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ
Вентцель Е.С. Исследование операций: задачи, принципы, методология. М.': Нау-
ка, 1980.
Даффин Р, Питерсон Э., Зенер К. Геометрическое программирование. М.: Мир,
1972.
Калабухова Е.П. Основы теории эффективности воздушной стрельбы и бомбоме-
тания. М.: Машиностроение, 1991.
Миропольский Ф.П., Саркисян PC., Вишняков О.Л., Попов А.М. Авиационные бое-
припасы и их исследование. М.: Изд-во ВВИА им. Н.Е. Жуковского, 1996.
Потемкин В.Г. MATLAB 6: среда проектирования инженерных приложений. М.:
ДИАЛОГ-МИФИ, 2003.
Ришняк А.Г., Овчинников А.Ф. Вероятностные расчеты эффективности действия.
М.: Изд-во МГТУ им. Н.Э. Баумана, 2006.
Саати Т.Л. Математические модели конфликтных ситуаций. М.: Сов. радио, 1977.
Тутарашвили В.Г., Овчинников А.Ф., Аверкин Е.В. Введение в теорию эффектив-
ности боеприпасов. М.: Машиностроение, 1986.
Фендриков Н.М., Яковлев В. И. Методы расчета боевой эффективности вооруже-
ния. М.: Воениздат, 1971.
Физика взрыва: В 2 т. / Под ред. Л.П. Орленко. М.: Физматлит, 2002.
3
БОЕПРИПАСЫ ОСКОЛОЧНОГО ДЕЙСТВИЯ
3.1. Основные понятия и общие сведения
Боеприпасы осколочного действия - один из старейших и наиболее рас-
пространенных типов боеприпасов основного назначения, к которому отно-
сят не только осколочные, но и все виды осколочно-фугасных БП, т. е. разде-
ление боеприпасов на осколочные и осколочно-фугасные в значительной мере
условно. •
Назначение ОБП - поражение практически всех типов целей за исключе-
нием бетонированных, подводных и тяжело бронированных. Осколочные бо-
еприпасы наносят повреждение главным образом высокоскоростным потоком
ПЭ, метаемых взрывом заряда бризантного взрывчатого вещества (БВВ). По-
ражающие элементы представляют собой либо осколки естественного или за-
данного дробления, либо являются ГПЭ. В меньшей степени поражение на-
носят продукты детонации заряда ВВ, в Связи с чем основные требования,
предъявляемые к ОБП, сводятся к получению максимального количества
убойных ПЭ при возможно большем радиусе поражения.
Большое разнообразие конструкций ОБП обусловлено многочисленнос-
тью выполняемых боевых задач и многообразием средств доставки ОБП к
цели. Законченной строгой общей классификации ОБП не существует. Тем не
менее их можно классифицировать:
- по виду средств доставки к цели;
- по типу поражаемой цели;
- по конфигурации осколочного поля;
- по способу формирования ПЭ.
В зависимости от вида средств доставки к цели осколочные и осколочно-
фугасные БП подразделяют следующим образом:
- артиллерийские снаряды и мины;
- авиационные бомбы;
- боевые части ракет и реактивных снарядов;
- инженерные боеприпасы (мины);
- гранаты к гранатометам;
- ручные гранаты.
По типу поражаемой цели различают многоцелевые (осколочно-фугасные
снаряды средних калибров, мины, АБ) и специализированные ОБП, предназ-
наченные для поражения определенных целей. К последним относятся проти-
вопехотные ОБП (для поражения открытых и слабо защищенных целей), про-
тивотранспортные (для поражения наземной и воздушной небронированной
190
3. Боеприпасы осколочного действия
Рис. 3.1. Конфигурации осколочных полей:
а - круговые; б - несимметричные радиально направленные; в — осевые; г - плоские низкоско-
ростные
техники) и противобронные (для поражения легкобронированных целей со
стальным эквивалентом до 20 мм).
По конфигурации осколочного поля выделяют следующие основные груп-
пы ОБП, формирующие:
- круговые осколочные поля (осколочно-фугасные снаряды, мины, АБ,
БЧ ракет и т. п. - рис. 3.1, а);
- несимметричные радиально направленные осколочные поля (БЧ с систе-
мами многоточечного инициирования, деформируемые БЧ и т. п. - рис. 3.1, б);
- осевые осколочные поля (аксиальные БЧ, осколочные шрапнельные сна-
ряды, инженерные мины и т. п. - рис. 3.1, в);
- плоские низкоскоростные осколочные поля (БЧ для поражения воздуш-
ных целей в нижних и верхних слоях атмосферы рис. 3.1, г).
По способу формирования ПЭ осколочные боеприпасы можно подраз-
делить на ОБП:
- естественного дробления;
- заданного дробления;
- с готовыми поражающими элементами.
3 1. Основные понятия и общие сведения
191
Осколочные боеприпасы с оболочками естественного дробления
Наиболее распространенный тип ОБП - боеприпасы естественного (не-
контролируемого) дробления (артиллерийские снаряды, мины, АБ и т. п.)- Ти-
повая конструкция таких БП представляет собой осесимметричный корпус,
выполненный из мало- или среднеуглеродистой стали и заполненный зарядом
ВВ. При воздушном подрыве ОБП естественного дробления образуется боль-
шое количество осколков массой 10-6 и более граммов (рис. 3.2).
Процесс дробления корпуса ОБП - достаточно сложный. Несмотря на то
что исследования в этой области как в нашей стране, так и за рубежом прово-
дились на протяжении многих десятилетий, задача разработки адекватной фи-
зико-математической модели процесса дробления до сих пор остается акту-
альной научной проблемой. Значительный вклад в изучение процессов взрыв-
ного метания и дробления оболочек внесли Дж. Тейлор, Д. Райнхарт,
Дж. Пирсон, М. Хелд, Р. Ллойд, К.П. Станюкович, Г.И. Покровский, В.А. Куз-
нецов, В.М. Кузнецов, В.А. Одинцов, В.В. Селиванов и другие.
Общее представление о процессе расширения и разрушения осколочной
оболочки под действием продуктов детонации (ПД) можно получить с помо-
щью высокочастотной оптической или рентгеноимпульсной регистрации про-
цесса. Регистрация процессов метания и дробления корпусов осколочно-фу-
гасных снарядов (ОФС) или их макетов (рис. 3.3 и 3.4) показала, что в про-
цессе метания цилиндрической оболочки происходит изменение ее формы,
при этом сквозные трещины в стальных оболочках, наблюдаемые по прорыву
ПД, образуются при увеличении радиуса оболочки в 1,4-1,6 раза. Основные
или, как их еще называют, магистральные трещины ориентированы вдоль об-
разующей оболочки, а их ветвление и слияние приводят к возникновению от-
дельных осколков.
В общем случае в осколочном спектре можно выделить две заметно раз-
личающиеся по морфологическим признакам группы осколков - крупные (или
основные) осколки типа А, образованные магистральными трещинами и со-
держащие обе поверхности цилиндрической оболочки, и сопутствующие мел-
кие осколки типа В (рис. 3.5). Механизмы разрушения оболочек, выполненных
из сталей с заметно различающимися физико-механическими свойствами, име-
ют существенные различия. Главный отличительный признак - ориентация внеш-
ней зоны фрагментообразующих трещин. Если в оболочках из относительно
хрупких (средне- и высокоуглеродистых) сталей внешняя зона оболочки раз-
рушается преимущественно за счет радиального отрыва (рис. 3.6, а), то для
оболочек из пластичных (малоуглеродистых и низколегированных) сталей ха-
рактерным признаком разрушения внешней зоны является сдвиговая (под уг-
лом примерно 45° к радиусу) ориентация трещин (рис. 3.6, б).
Продольное трещинообразование в цилиндрических оболочках неразрыв-
но связано с процессами зарождения и развития очагов разрушения в ради-
альном направлении. Как показали металлографические исследования, в по-
перечных шлифах осколков ОБП наблюдается заметное нарушение сплош-
ности материала - поврежденность в виде макро- и микропор, микротрещин
(рис. 3.7). Появление поврежденности в срединной зоне оболочки связано с
откольно-разрывными эффектами, являющимися следствием начального
Группы масс (г)
4...6
Рис. 3.2. Осколки, образующиеся при воздушном подрыве 100-мм ОФС
Группы масс (г)
50...75
75...100
100 и более
3. Боеприпасы осколочного действия
3.1. Основные понятия и общие сведения
193
Рис. 3.3. Высокоскоростная оптическая фоторегистрация процесса расширения обо-
лочки цилиндрического макета под действием ПД (сталь SAE 1015, ВВ - С-3, внут-
ренний диаметр оболочки - 114,3 мм, наружный диаметр - 127 мм, высота — 254 мм;
камера — Cordin, частота съемки - 500 000 кадр/с)
Рис. 3.5. Осколки основной (Л) и
сопутствующей (В) частей спект-
ра (поперечное сечение)
Рис. 3.4. Рентгеноимпульсная регист-
рация подрыва 35-мм ОБП при проби-
тии тонкой преграды (алюминиевый
лист толщиной 0,8 мм, скорость сна-
ряда - 1175 м/с, угол встречи - 30°)
Рис. 3.6. Ориентация фрагментообразующих трещин в оболочках из хрупких (а)
и пластичных (б) сталей
а б
Рис. 3.7. Зоны поврежденности осколков ОБП:
а - сталь 20, ТНТ; б - сталь С60, ТНТ
194
3. Боеприпасы осколочного действия
(ударно-волнового) этапа нагружения оболочки. Взаимодействие двух систем
волн разрежения, распространяющихся, с одной стороны, от внешней поверх-
ности оболочки после выхода на нее косой ударной волны (рис. 3.8) и, с дру-
гой стороны, от внутренней поверхности,
вследствие спада давления за счет расшире-
ния оболочки приводит к появлению в сре-
динной зоне оболочки областей с растягива-
ющими напряжениями, превышающими проч-
ность материала. В результате в данной зоне
образуется множество микропор и микротре-
щин, часть из которых развивается в процессе
дальнейшего расширения обблочки в макро-
Рис. 3.8. Схема взаимодействия
волн разрежения и образования
зоны поврежденности в стенке
оболочки:
D - скорость детонационного фрон-
та; 1 - волны разрежения; 2 - удар-
ная волна сжатия
трещины (рис. 3.9, а). На внешней поверхнос-
ти оболочки под действием тангенциальных
растягивающих напряжений, возникающих в
процессе ее расширения, зарождайся система
трещин, которые распространяются в глубь
стенки и взаимодействуют с трещинами от-
кольно-разрывной зоны (рис. 3.9, б). Внутрен-
няя зона оболочки в процессе ее разгона нахо-
дится в состоянии неравномерного объемного сжатия, что приводит к появле-
нию на внутренней поверхности оболочки системы неразвитых' сдвиговых
трещин, часть из которых на заключительном этапе разрушения оболочки ста-
новится очагами локализации пластической деформации и окончательного раз-
рушения по механизму сдвига (рис. 3.9, в).
Описанная выше картина процесса фрагментации оболочки, хотя и являет-
ся качественной, основана на обширном экспериментальном материале. Наря-
ду с экспериментальными исследованиями большое развитие получили и тео-
ретические подходы, которые базируются главным образом на использовании
Рис. 3.9. Стадии зарождения и развития
трещин в поперечном сечении оболочки:
а - микротрещины и микропоры; б - система
трещин; в - система неразвитых сдвиговых
трещин
методов механики сплошных сред.
Задачи о расширении оболочек под
действием ПД решаются методами
численного интегрирования в одно-,
двух- и трехмерной постановках и поз-
воляют не только проанализировать на-
пряженно-деформированное состояние
материала оболочки в процессе взрыв-
ного нагружения, но также, достаточ-
но точно оценить изменение1 геометрии
оболочки в процессе нагружения и рас-
считать ее кинематические параметры.
В нашей стране такие задачи решались
В.А. Одинцовым, А.В. Каширским,
В.В. Селивановым, А.Е. Колобановой,
В.И. Колпаковым, А.В. Герасимовым
и др. В качестве примера (рис. 3.10)
приведены результаты расчета про-
3.1. Основные понятия и общие сведения
195
цесса расширения оболочки 152-мм ОФС
(53-ОФ-540) по программе, разработанной в
МГТУ им. Н.Э. Баумана, которая позволяет оп-
ределить не только скорость разгона оболочки,
но и распределения скоростей и масс оболоч-
ки по углам разлета - г(ср) и Л/(<р).
Недостатком практически всех существу-
ющих расчетных программ является то, что в
них не рассматривается процесс фрагментации
или разрушения оболочки. Это обусловлено в
первую очередь отсутствием в современной ме-
ханике разрушения физико-математических
моделей, адекватно описывающих сложный
процесс множественного динамического разру-
шения, который происходит в условиях высо-
коскоростного деформирования материала обо-
лочек ОБП. В связи с этим количественное и
качественные характеристики фрагментации
оболочек ОБП естественного дробления уста-
Рис. 3.10. Процесс расширения
оболочки 152-мм ОФС (числен-
ное моделирование)
навливаются экспериментальными методами.
Боевая эффективность ОБП естественного дробления (см. гл. 2) во мно-
гом зависит от качества дробления корпуса, которое определяется рядом раз-
личных факторов: физико-механическими свойствами материала корпуса, де-
тонационными характеристиками заряда ВВ, конструктивными особенностя-
ми БП, условиями подрыва и др.
Одним из показателей качества дробления корпусов ОБП является общее
количество осколков массой, превышающей некоторый заданный уровень. Из-
вестна эмпирическая формула Юстрова для нахождения общего количества
осколков массой более 1 г:
2
= (3.1)
d ^в5 X -1
где Pq - коэффициент, зависящий от свойств ВВ (для тротила Ро = 46, для
аммотола Ро = 30); твв - масса ВВ, г; d - калибр снаряда, см; Gy - предел
упругости материала корпуса, МПа; ав - предел прочности материала корпу-
са, МПа; 5 - относительное удлинение материала корпуса, %; % - коэффици-
ент, зависящий от конструкции оболочки (для оболочек с коэффициентом на-
полнения а = 0,07; 0,1 и 0,15 коэффициент х = 1,8; 1,5 и 1,4 соответственно);
а = твв/(твв + М), где М - масса корпуса.
Современные стандарты предусматривают учет осколков массой более 0,5 г.
Для подсчета общего количества осколков со стандартным нижним пре-
делом 0,5 г В.А. Одинцовым предложена эмпирическая формула
N05 = K — d2D2, (3.2)
V
где К- коэффициент, зависящий от геометрических особенностей корпуса (для
осколочно-фугасных гранат К = 70... 100); а - коэффициент наполнения, %;
196
3. Боеприпасы осколочного действия
V - относительное сужение материала корпуса, %; d - внешний диаметр (ка-
либр), дм; D - скорость детонации заряда ВВ, км/с.
Похожие результаты оценки величины No 5 дает эмпирическая формула
И.В. Долинина для определения общего количества осколков осколочно-фу-
гасных гранат калибра 76... 152 мм с тротиловым снаряжением:
1.619+^
_ J 1000
(3.3)
где d - внешний диаметр (калибр), мм.
Используя рассчитанные по формулам (3.1)—(3.3) значения общего количе-
ства осколков, можно оценить среднюю (характеристическую) массу осколка
где Л/ - масса корпуса ОБП; N>m* - общее число осколков с массой, большей
нижней границы спектра ms (обычно принимают ms - 1,0 или О^г).
Характеристики N>m и ms долгое время использовались в качестве кри-
териев качества дробления ОБП. Так, экспериментальные исследования оско-
лочности, проведенные в годы Великой Отечественной войны, позволили вы-
работать следующий критерий качества фрагментации: если при подрыве ОФС
в его спектре содержалось 50...55 осколков с массой более 4 г, то такое дроб-
ление считалось близким к оптимальному. Поздние исследования процессов
дробления и развитие методов оценки боевой эффективности ОБП привели
к необходимости разработки более детальных показателей качества дробле-
ния. В настоящее время для этого применяются дифференциальные харак-
теристики осколочных спектров: числовое f (m) и массовое <р(т) распределе-
ния осколков по массовым группам - фракциям N^m) и М£т), которые опре-
деляют в результате обработки осколочных масс (спектров).
Осколочные спектры получают при проведении стандартных осколочных
испытаний в бронеяме (рис. 3.11), где осу-
ществляется мягкое торможение осколков в
специальной улавливающей среде (древес-
ных опилках, песке и т. п.). Собранные пос-
ле подрыва осколки взвешивают и сортиру-
ют по массе в определенных интервалах по
всей непрерывной шкале от минимального
ms до максимального znmax значений.
Следует отметить, что в соответствии с
требованиями стандарта на осколочные ис-
пытания общая масса собранных осколков
должна составлять не менее 95 % массы ис-
пытанного корпуса. После обработки оско-
лочной массы заполняется таблица исходных
данных по числам и суммарным мас-
сам М£т) осколков в массовых группах.
В качестве примера рассмотрим спектр ос-
Рис. 3.11. Бронеяма для мягкого
улавливания осколков:
1 - осколочная оболочка; 2 - воздуш-
ная полость; 3 - мягкая улавливающая
среда
3.1. Основные понятия и общие сведения
197
колков, полученных при подрыве стального цилиндрического макета с откры-
тыми торцами, выполненного из стали 20 и снаряженного ТНТ (цилиндр имел
внутренний диаметр 25 мм, внешний диаметр 37,5 мм, длину 100 мм и массу
485 г). Фракционный состав осколочных масс по результатам обработки дан-
ного спектра приведен ниже (суммарная масса осколков с массой более 0,5 г
равна Ms = 419,9 г, а их полное число Ns = 189):
т, г ... < 0,5 0,5-1,0 1-2 2-3 3-4 4-6 6-8 8-10
Л» — 81 38 17 16 26' 8 3
Л/,(/и), г ... .. 64,1 56,6 57,6 42,5 55,1 124,7 56,9 26,5
Числовые и массовые распределения осколков строятся в виде ненорми-
рованных или нормированных гистограмм распределения. В первом случае
по осям ординат откладываются относительные числа NjNs или MjMs, а во
втором - значения величин 7
,, . Ni 1 . Ч- 1
f(m) = —-------<p(m) = —---------.
Ns knif у* Ms
Ненормированные гистограммы более просты и наиболее часто применя-
емы на практике. Их недостаток - искажение вида распределения в группах с
большими интервалами масс Д/л,-. При'аппроксимации спектров аналитичес-
кими выражениями необходимо пользоваться только нормированными гисто-
граммами.
Результаты обработки данных фракционного состава для построения гис-
тограмм ненормированного распределения приведены ниже (рис. 3.12):
т,г ........... <0,5 0,5-1,0 1-2
Nj/Ns........ - 0,429 0,201
MJMS ......... 0,132 0,117 0,119
2-3 3-4 4-6 6-8 8-10
0,090 0,085 0,137 0,042 0,016
0,088 0,114 0,258 0,118 0,054
Рис. 3.12. Ненормированная гистограмма осколочного спектра стального цилиндри-
ческого макета
198
3. Боеприпасы осколочного действия
Нормированное распределение чисел и масс осколков по результатам об-
работки данных представлено ниже (рис. 3.13):
т,г......... <0,5 0,5-1,0 1-2
f(m), 1/г ... - 0,858 0,201
<р(/и), 1/г.. 0,264 0,234 0,119
2-3 3-4 4-6 6-8 8-10
0,090 0,085 0,069 0,021 0,008
0,088 0,114 0,129 0,059 0,027
Рис. 3.13. Нормированная гистограмма осколочного спектра стального цилиндриче-
ского макета
В качестве показателей качества дробления используются различные ха-
рактеристики распределений f(m) и ср(/и) осколочных масс. Так, В.А. Один-
цов предложил условно разбивать осколочный спектр на три фракции, содер-
жащие мелкие, средние и крупные осколки, и оценивать качество дробления
по относительному содержанию средних осколков в спектре. При этом выбор
границ основных фракций определяется геометрическими параметрами кор-
пуса ОБП. В качестве примера рассмотрим фракционные составы осколков
152-мм ОФС, снаряженных двумя типами ВВ - ТНТ (53-ОФ-540) и A-IX-2
(З-ОФ-25) (табл. 3.1 и 3.2).
Таблица 3.1. Распределение осколков по массовым группам
Снаряд Число осколков в массовых группах
0,5-1,0 1-2 2-3 3-4 4-6 6-8 8-10
53-ОФ-540 704 632 314 216 288 196 152
З-ОФ-25 1159 1045 560 371 491 329 235
Число осколков в массовых группах
10-15 15-20 20-30 30-50 50-75 75-100 >100
53-ОФ-540 268 176 199 192 87 32 21
З-ОФ-25 401 221 224 149 40 9 1
3.1. Основные понятия и общие сведения
199
Таблица 3.2. Фракционный состав осколочных масс
Снаряд ВВ Цм Рс Мк
53-ОФ-540 З-ОФ-25 Примечаь относительная к осколков крупно ТНТ A-IX-2 I и е. - относится «асса осколков сред! й фракции (т > 20 г' 0,17 0,19 ьная масса осколко гей фракции (4 < л 0,28 0,42 в мелкой фракции ( ч < 20 г); рк - отн 0,55 0,39 0 < т < 4 г); цс - осительная масса
При цс > 0,45 дробление считается высококачественным, при 0,4 < цс <
< 0,45 - качественным, при 0,3 < цс < 0,4 - удовлетворительным, при цс < 0,3 -
неудовлетворительным. Если придерживаться данной классификации, то дроб-
ление корпуса 152-мм ОФС, снаряженного A-IX-2, - качественное, а при сна-
ряжении ТНТ - неудовлетворительное..'> у
Достаточно большое распространение к настоящему времени получили
различные аналитические формы представления осколочных спектров. Зако-
ны распределения осколков по массе применяются как в числовой F(m),f(m),
так и в массовой Ф(/я), <р(/и) формах. При этом числовая форма ориентирова-
на на оценку эффективности действия, а'.массовая - более выпукло выявляет
ресурсы осколочной массы.
В числовой форме функция распределения случайной величины (интег-
рального закона распределения) вводите» в виде
Ни
где N(< т) - число осколков массой менее m;N0- полное число осколков.
Функция распределения имеет следующие общие свойства:
функция является неубывающей, т. е. при т2> т{ выполняется условие
F(m2)>F(mj);
на левой границе области определения F(m) = 0, а на правой границе об-
ласти определения F(m) = 1.
Число осколков с массами в интервале (тъ т2) (рис. 3.14) определяется
соотношением
^т1-т2 = N0 (™2 ) ~ ("»1 )]
Медианой массы т называют ее зна-
чение Ме, при котором F(Me) = 0,5.
Плотность распределения (диффе-
ренциальный закон распределения) име-
ет вид
dF(m) 1 dN(<m)
f(m) =------=----------.
dm Nq dm
Размерность плотности распределе-
ния f(m) 1/г, а функция распределения
Рис. 3.14. Интегральный закон рас-
пределения числа осколков по массо-
вым группам
200
3. Боеприпасы осколочного действия
является безразмерной величиной. Основные свойства плотности распределе-
ния можно сформулировать следующим образом:
f (т) - функция неотрицательная, т. c.f (m) > 0;
интеграл от плотности распределения в пределах границ области опреде-
ления равен единице, т. е.
^тах
J f(m)dm = l.
ms
Число осколков с массой в интервале хи2) находят по формуле
Рис. 3.15. Дифференциальный за-
кон распределения числа оскол-
ков по массовым группам
Nmx-m2 f(m)dm,
т. е., как площадь F под кривой плотности рас-
пределения (рис. 3.15).
Модой величины т называется такое ее
значение Л/, при котором значение ф(/п) мак-
симально. Математическое ожидание массы
осколка определяется выражением
ОО I
(хи) = J mf{m) dm.
о
Если М- масса корпуса, то (т) = M/N0.
В массовой форме функция распределения Ф(/и) и плотность распределе-
ния ф(/и) вводятся следующими соотношениями:
Ф(/и) =
Л/(< т)
~М '
, . с?Ф(хи) 1 с?М(</п)
<р (т) =-=----------------,
dm М dm
где М(<т) — суммарная масса фрагментов, масса каждого из которых менее т.
Между числовой и массовой плотностями распределений осколков суще-
ствует связь:
mN0
М
/04
<Р(™) =
Массу осколков, заключенную в интервале (mt, т2), находят как
т2
мт1-т2 =Л/[Ф(т2)-Ф(т1)] = М J <p(m)dm.
При анализе баланса массы осколков массовое распределение является
более информативным по сравнению с числовым, так как дает возможность
выявлять потери материала осколочной оболочки на образование малоэффек-
тивных осколков мелких и крупных фракций.
3.1. Основные понятия и общие сведения
201
Числовые и массовые законы распределения могут быть описаны различ-
ными аналитическими зависимостями. Наиболее широкое распространение
получило распределение Вейбулла, которое в дифференциальной форме запи-
сывается так:
у(х) = -(х~^—е~Ы , х>0, (3.4)
где 8, X, |1- параметры распределения.
При ц = 0 выражение (3.4) можно представить в интегральном виде:
° М
F(x) = l-e W , х>0. (3.5)
Двухпараметрическое распределение (3.5), использованное для аппрокси-
мации числовых и массовых распределений осколочных спектров, в зарубеж-
ной литературе получило название распределений Розина - Раммлера - Спер-
линга (RRS), Мотта и Хелда, которые соответственно имеют формы:
М(т) = М0Лт*) ,
f т
7V(m) = ./Voe , (3.6)
Л/(п) = Л/0(1-е“Вп>" ),
где Мо - полная масса всех осколков; М(т) - суммарная масса осколков с
массой больше т; М(п) - суммарная масса осколков с массой, превышающей
массу л-го осколка, начиная с самого крупного осколка; т - масса л-го оскол-
ка; Nq - полное число осколков; N{m) - суммарное число осколков с массой
больше т; п - суммарное число осколков, рассчитанное начиная с наиболее
крупного осколка; mR,mM, XR, \м, Хн, В - константы в распределениях RRS,
Мотта и Хелда соответственно.
Степень соответствия подобранного аналитического закона распределе-
ния реальному распределению осколков определяется обычно с применением
критерия согласия Пирсона х2 = min.
Распределение Мотта обычно упрощают до однопараметрического вида,
полагая Zw = 0,5. В этом случае
/ ч05
4—]
N(m)=NoeV"M ) ,
(т} = 2тм, Щ = Мй/2тм.
Для наглядности осколочные спектры, описываемые распределением Мот-
та, представляют в логарифмических координатах:
202
3. Боеприпасы осколочного действия
In N (т) = In Nq - .
В координатах In N(m)—т0'5 распределение Мотта отображается в виде
прямой с коэффициентом пропорциональности пересекающей ось ор-
динат в точке 1пА0. Для осколочных оболочек с одинаковыми массами Мо
спектры с более сильным дроблением изображаются прямыми с более кру-
тым наклоном.
Степень соответствия реального распределения осколков и распределе-
ния Мотта определяется по отклонению экспериментально полученных точек
от прямой.
Аналогично распределению Мотта достаточно наглядное представление
имеет и распределение Хелда. Если выражение (3.6) после несложных алгеб-
раических преобразований прологарифмировать, то получим
1п«о-м(»)=_вЛ у
м°
Повторное логарифмирование приводит к соотношению
1g
Л/о
In
М0-М(п)
= lgB + Xff Ign,
(3-7)
которое в координатах 1g In {М0 /[Мо - М (и)]} - 1g п графически изображается
в виде прямой. Характеристическую константу В находят при п = 1 (1g п = 0).
Другая характеристика распределения определяется тангенсом угла накло-
на прямой. Найденные таким образом величины В и \н позволяют вычислить
массу и-го осколка по формуле
т = dM(n) = щВ^нП^н-\гВп^ (з 8)
dn
В качестве примера рассмотрим закон распределения Хелда для 30-мм
осколочного снаряда (HUSPANO SUIZA 30 mmxl70 UIA). Экспериментально
были получены числовые и массовые характеристики спектра данного снаря-
да (табл. 3.3) (минимальная масса сбора ms = 0,065 г).
Графически результаты (см. табл. 3.3) обработаны в соответствии с зави-
симостями (3.7) и (3.8) (рис. 3.16). Высокое значение коэффициента корреля-
ции (0,9999) говорит о достаточно точном совпадении параметров реального
осколочного спектра и спектра, найденного в результате статистической обра-
ботки характеристик аналитической модели (В и Хя). Однако следует отме-
тить, что столь точное совпадение расчетных и экспериментальных результа-
тов достигнуто за счет значительного смещения нижней границы сбора оско-
лочной массы (до 0,065 г) и учета очень мелких осколков.
Законы распределения RRS, Мотта и Хелда наиболее просты, поэтому до-
вольно часто применяются на практике. Наряду с этими законами распределе-
ния известны и другие более сложные схемы аналитического представления
осколочных спектров, в частности, для описания бимодальных спектров ос-
3.1. Основные понятия и общие сведения
203
Таблица 3.3. Закон распределения для 30-мм осколочного снаряда
Массовые группы, г 6-12 5-6 4-5 3-4 2,5- 3,0 2,0- 2,5 1,5- 2,0 1,0- 1,5 0,5- 1,0 0-0,5
Число оскол- ков п 5 4 5 9 6 5 13 12 55 589
Масса оскол- ков в группе, г 43,3 21,3 21,3 30,7 16,3 10,8 22,4 38,0 39,2 45,4
Ь 5 9 14 23 29 34 47 79 134 723
1И(п), г 43,3 64 85,9 115,9 132,9 143,7 166,7 204,1 143,3 288,7
[пМ0-М(п) Мо 0,162 0,253 0,353 0,517 0,617 0,689 0,856 1,227 1,850 -
Г7'
колков. Общей чертой рассмотренных за&онов распределения независимо от
их вида является то, что они с достаточнее степенью точности могут описы-
вать экспериментально полученные спектры осколков.
Возможно ли с такой же точностью прогнозировать параметры осколоч-
ных спектров, используя полученные закойы распределения? Для решения та-
кой задачи необходимо достаточно точно установить зависимости констант в
соответствующих законах распределения от целого комплекса характеристик
ОБП (размеров, свойств металла, типа ВВ). Указанные зависимости в извест-
ных работах установлены, как правило, эмпирическим путем и ограничены
одним-двумя параметрами, в качестве крторых принимают либо геометри-
ческие размеры оболочки ^диаметр и толщина стенки), либо характеристики
материала корпуса (трещиностойкость и сопротивление ветвлению трещин),
Рис. 3.16. Массовое распределение:
а - lg-lg-диаграмма; б - зависимость средней массы л-го осколка от накапливающегося числа
осколков п
204
3 Боеприпасы осколочного действия
либо характеристики ВВ. Таким образом, в настоящее время возможности
использования полученных зависимостей и соответствующих законов рас-
пределения для прогнозирования параметров осколочных спектров весьма
ограничены.
Расширение класса применяемых сталей и типов ВВ при разработке но-
вых конструкций ОБП усложняет проблему прогнозирования параметров ос-
колочных спектров. Решение данной задачи требует проведения глубоких,
прежде всего экспериментальных, исследований с накоплением статистичес-
ких данных и их последующей обработкой.
В целях получения сопоставимых результатов такие эксперименты про-
водят с применением стандартных образцов - стандартных осколочных ма-
кетов (цилиндров), которые нашли широкое применение как в нашей стране,
так и за рубежом для исследования метательной способности ВВ и характери-
стик дробления материала,. В России при-
Рнс. 3.17. Закрытая (а) и открытая
(6) схемы стандартных осколочных
макетов:
/с - длина цилиндра
няты две основные схемы стандартных
цилиндров - закрытая (рис* 3.17, а) и от-
крытая (рис. 3.17, б). Для каждого типа ци-
линдра в зависимости от внутреннего диа-
метра предусмотрен ряд Модификаций
(da = 20, 25, 32, 40, 50, 63, .80, 1б0, 125,
160,200 мм), при этом в-качестве основно-
го варианта выбран цилиндр с внутренним
диаметром da - 40 мм.
Длина каморы основного Тдилиндра и,
соответственно, длина открытого цилиндра
составляет 160 мм, общая длина открытого
цилиндра 200 мм (табл. 3.4).
При исследованиях особенностей пла-
стического деформирования и механизма
разрушения оболочки более удобно с прак-
тической точки зрения использовать цилин-
дры малых размеров. И, наоборот, при изу-
чении метательных и дробящих свойств ВВ
с большим содержанием горючих добавок,
например, алюминия (термобарические,
Таблица 3.4. Характеристики стандартных цилиндрических макетов
Относительная толщина стенки 8d = 80/4 Внешний диаметр d, мм Закрытый цилиндр Открытый цилиндр
Идентифика- ционный номер Масса оболочки, г Идентифика- ционный номер Масса оболочки, г
1/12 48 9 1065 9-о 695
1/10 50 10 1305 Ю-о 890
1/8 53,33 11 1730 11-0 1225
1/6 60 12 2660 12-о 1975
Примечание. 60- толщина стенки цилиндра.
3.1. Основные понятия и общие сведения
205
пластизольные составы и т. п.), применяют макеты увеличенных размеров
(da > 60 мм), что обеспечивает полноту детонации ВВ.
Важным методическим вопросом при испытаниях унифицированных ци-
линдров является назначение нижней границы сбора - массы ms осколков.
Для стандартных цилиндров № 11 и 12 нижняя граница сбора принята равной
0,25 г. В исследованиях, проводимых за рубежом, значение ms обычно снижа-
ется до 1 грана (0,0648 г).
Границы трех основных фракций осколочных спектров (мелкой, сред-
ней и крупной) при испытаниях стандартных макетов № 11 и 12 определены
следующим образом: мелкие осколки массой 0 < т < 1 г и относительным
содержанием цм; средние осколки с массой 1 < т < 4 г и относительным
содержанием Цс; крупные осколки°с массой т > 4 г и относительным содер-
жанием |ЛК.
Методическим заключением исследований при использовании стандар-
тных осколочных цилиндров являетс^оценка качества дробления. Для маке-
та № 12 при различных сочетаниях ВВ-металл принята следующая класси-
фикация:
No 25 S 2000 и цс > 0,45 - высококачественное дробление;
TV0’25 > 1500 и цс > 0,4 - качественное дробление;
Nq,25 Ю00 и цс > 0,3 - удовлетворительное дробление;
Л'0'25 < Ю00 и цс < 0,3 - неудовлетворительное дробление.
Максимально прогнозируемое число Aq25 для стандартного цилиндра № 12
составляет 3000. Число осколков Ло,25, полученное при испытаниях стандарт-
ного цилиндра № 12, может быть пересчитано на прогнозируемое число ос-
колков No 5 для некоторой конкретной осколочной оболочки диаметром d (при-
мерно с той же относительной толщиной стенки и при том же сочетании ВВ-
металл) по соотношению
М),5 =2М),25^2’
где d - внешний диаметр оболочки, дм.
Параметры формы осколков. Помимо числовых и массовых характери-
стик важным параметром, определяющим качество дробления, является фор-
ма осколков. Основная характеристика формы осколков - параметр формы
Ф=^3’ (39)
где S - средний мидель осколка; Г- объем осколка.
Средний мидель S - математическое ожидание площади проекции оскол-
ка на плоскость, перпендикулярную направлению полета. Для выпуклых тел,
которыми являются практически все осколки естественного дробления, сред-
ний мидель определяется выражением S = /4, где Sz - полная площадь по-
верхностей осколка. Принимая форму произвольного осколка в виде прямо-
угольного параллелепипеда со сторонами axbxc, получаем
S =±(ab + bc+ac).
206
3. Боеприпасы осколочного действия
Значения а, b и с, а также массу осколка находят при обработке оско-
лочной массы после проведения осколочных испытаний, при этом обмерам
подвергаются до 50 осколков каждой массовой группы. Реальный диапазон
значений параметра формы осколков естественного дробления составляет
Ф= 1,8...2,2.
Помимо среднего миделя при проведении осколочных испытаний вычис-
ляют и другие характеристики формы осколка - поперечную нагрузку q = mlS,
а также относительную поперечную нагрузку = qlm11 .
Величины S , Ф, q и используются в основном для расчетов эффектив-
ности ОБП. Наряду с этим, учитывая, что осколки естественного дробления
представляют собой удлиненные тела, естественной характеристикой формы
может служить относительное удлинение осколка Xq = l/ffriie. Inf- длина и
ширина осколка соответственно. Осколки с большим удлинением малоэффек-
тивны, но вместе с тем «отбирают» заметную часть массы осколочного спектра.
При плохом дроблении в спектрах встречаются осколки с,удлинением
до 15. Длинными можно считать осколки с > 8. Наличие в"спектре длин-
ных и особенно сверхдлинных (Xq> 15) осколков указывает нр неудовлетво-
рительное качество дробления.
Осколочные стали боеприпасов естественного дробления. Осколочные
БП естественного дробления относятся к изделиям массового Производства,
масштабы которого резко возрастают в военное время. В связи с этим при
выборе материала корпуса к основным требованиям по обеспечению заданно-
го уровня боевой эффективности добавляются технико-экономические пока-
затели, к которым в первую очередь относятся прочность ОБП'в условиях
боевого применения, технологичность и низкая себестоимость.
Основной материал при изготовлении корпусов ОБП естественного дроб-
ления - мало- и среднеуглеродистые стали. Малоуглеродистые стали приме-
няются чаще всего с добавлением легирующих элементов. В среднеуглероди-
стых снарядных сталях легирующие добавки либо вообще отсутствуют, либо
их содержание невелико. Химический состав и механические свойства ста-
лей, используемых в производстве ОБП, можно найти в специальных спра-
вочниках, однако в целом их свойства соответствуют свойствам типовых уг-
леродистых сталей.
Содержание углерода - это основной фактор, влияющий не только на проч-
ностные свойства стали, но и на качество дробления. Увеличение содержания
углерода приводит, как правило, к улучшению числовых и балансово-массо-
вых характеристик осколочного спектра, а также формы осколков. Наихуд-
шим качеством дробления обладают малоуглеродистые стали (стали 10 и 20).
Малоуглеродистые стали, используемые в производстве малокалиберных ос-
колочных снарядов, применяются в сочетании с упрочняющими технология-
ми (холодное выдавливание и т. п.), что наряду с повышением прочностных
характеристик изделия приводит и к улучшению качества дробления.
Основными сталями, применяемыми для производства корпусов ОФС
средних и крупных калибров, в течение уже нескольких десятилетий остают-
ся среднеуглеродистая сталь С60 и хромистая сталь 45X1. Несомненное дос-
тоинство данных сталей - они не требуют упрочняющей термообработки на
стадии изготовления корпуса. Зарубежные осколочные и осколочно-фугасные
3.1. Основные понятия и общие сведения
207
снаряды изготовляются из сталей, в которых содержание углерода, как прави-
ло, не превышает 0,4 %, что, очевидно, требует применения при производстве
упрочняющих технологических приемов.
В связи с повышением требований к качеству дробления ОБП естествен-
ного дробления как в нашей стране, так и за рубежом ведутся исследования
по созданию новых осколочных сталей. Одной из наиболее перспективных
сталей является кремнистая сталь 60С2, которая относится к классу пружин-
но-рессорных сталей и содержит около 2 % относительно недорого легирую-
щего элемента - кремния, повышающего хрупкость. В США запатентована
снарядная сталь аналогичного состава AISI-9260. Сталь 60С2 обеспечивает
стабильное, хотя и не очень высокое преимущество перед сталью С60. Суще-
ственно более высоким уровнем дробимости обладают стали с высоким со-
держанием углерода. Примером такой стали может служить сталь HF-1 (США),
запатентованная в качестве осколочнор-в, 1970 г. Она является заэвтектоидной
и относится к классу высокоуглеродидтых кремнемарганцовых сталей. Суще-
ственный недостаток HF-1 и аналогичных ей сталей - низкая пластичность и
трещиностойкость, что при определенных условиях может привести к недо-
пустимому растрескиванию корпуса при*выстреле и ударе о преграду. Отече-
ственный аналог HF-1 - сталь 110Г2С, обладающая такими же преимуще-
ствами и недостатками, что и HF-1. Как'показал и исследования, с помощью
специального вида термообработки (изотермической закалки с отпуском), уро-
вень пластичности и трещиностойкости стали 110Г2С можно довести до тре-
буемого. Однако трудности, связанные с применением такой термообработки
в условиях массового производства, делают перспективы использования вы-
сокоуглеродистых сталей в качестве осколочных незначительными.
Недостатков, присущих высокоуглеродистым сталям типа HF-1, в значи-
тельной мере лишены эвтектоидные стали, в частности сталь 80Г2С. Однако
для широкого применения таких сталей в качестве осколочных необходимо
преодолеть трудности прежде всего технологического плана.
Качество дробления ОБП из рассмотренных сталей можно оценить по ре-
зультатам испытаний стандартного цилиндра № 12 (табл. 3.5).
Таблица 3.5. Результаты испытаний осколочных цилиндров № 12
Сталь ВВ Ао.25 М).5 Им Вс Вк Ф
ТНТ 547 423 0,06 0,10 0,84 2,16
A-IX-2 670 490 0,12 0,12 0,76 2,07
ТНТ 796 604 0,18 0,20 0,62 —
A-IX-2 934 718 0,20 0,26 0,52 1,98
САП ТНТ 885 684 0,15 0,26 0,59 2,04
сии A-IX-2 1131 867 0,18 0,35 0,47 1,9£
АПС9 ТНТ 1039 814 0,16 0,32 0,52 1,91
A-IX-2 1358 1020 0,25 0,42 0,34 1,84
80Г2С A-IX-2 1590 1223 0,30 0,46 0,24 1,83
11ПГ9С ТНТ 1932 1295 0,40 0,51 0,09 —
A-IX-2 2103 1324 0,53 0,42 0,05 1,83
208
3. Боеприпасы осколочного действия
Осколочные боеприпасы с оболочками заданного дробления
Заметное улучшение характеристик осколочных спектров достигается в ОБП
заданного (контролируемого) дробления. Попытки регулировать разрушение
корпуса снаряда или БЧ на осколки заданной массы и формы делались еще в
70-80-е годы XIX в., однако вследствие громоздкости и сложности такие конст-
руктивные решения в то время не нашли практического применения. Приемле-
мые решения задачи о дроблении оболочек ОБП на осколки заданной формы и
массы появились позднее. К настоящему времени реализован ряд методов орга-
низации заданного дробления, основными из которых являются (рис. 3.18):
- механическое ослабление корпуса (подрезка с внешней или внутренней
стороны); „
- неравномерное приложение нагрузки со стороны ВВ;
а б в г
I
Рис. 3.18. Основные методы заданного дробления: * ,
а - внешняя подрезка корпуса; б - внутренняя подрезка корпуса; в - кумулятивные выемки
заряда ВВ; г - структурная сетка
f
Рис. 3.19. Формы пазов при механическом ослаблении корпуса
Механическое ослабление оболочки (подрезка, рифление) - наиболее рас-
пространенный метод реализации заданного дробления. Форма паза, ослабля-
ющего корпус, может быть прямоугольной, трапециевидной, треугольной
(рис. 3.19). Пазы выполняются чаще всего в виде сетки с прямоугольными,
ромбическими, шестиугольными ячейками со стороны внешней или внутрен-
ней поверхностей различными технологическими способами (резанием, обра-
боткой давлением, литьем). Оболочки заданного дробления могут быть одно-
слойными и многослойными.
Основными геометрическими характеристиками подрезки являются отно-
сительные величины: глубина паза z = z/50 и шаг подрезки / = //50 (рис. 3.19).
Многочисленными экспериментами установлено, что в диапазоне 1 < f ^3 ста-
бильное разрушение оболочки обеспечивается при условии 7 = 1 - 0,25/.
3.1. Основные понятия и общие сведения
209
Форма и масса осколков при заданном дроблении оболочки определяются
как параметрами сетки подрезки, так и формой пазов. Так, при симметричной
форме треугольного паза в оболочках из пластичных сталей реализуются два
типа осколков - А и В, формируемых трещинами, исходящими из вершины
подреза который выполняет роль концентратора напряжений, и ориентиро-
ванными по линиям максимальных касательных напряжений (рис. 3.20, а).
При несимметричной форме треугольного паза разрушение происходит чаще
всего по одной из поверхностей максимальных касательных напряжений
(рис. 3.20, б). При оптимальной глубине пазов такая картина образования ос-
колков наблюдается при любой ориентации пазов по отношению к оси обо-
лочки. Сочетание пазов различной формы позволяет получать одновременно
три и более групп осколков заданной массы и формы (рис. 3.21).
При достаточной глубине подрезки осколки формируются путем радиаль-
£ис. 3.21. Формирование сдвиговых тре-
щин и образование осколков разной фор-
мы при сочетании формы пазов внутрен-
ней подрезки
Рис. 3.20. Формирование сдви-
говых трещин при внутренней
симметричной (а) и несиммет-
ричной (б) треугольной подрезке
Рис. 3.22. Разрушение отрывом при
оптимальной глубине подрезки
Рис. 3.23. Продольно-поперечная (а)
и наклонная (б) ориентация подре-
зов заданного дробления
Сетка как наружной, так и внутренней подрезок может выполняться с
различной ориентацией пазов: в продольном или поперечном направлениях к
оси оболочки или под некоторым углом к ней (рис. 3.23), при этом относи-
тельная глубина паза z поперечной подрезки должна быть больше, чем глу-
бина z продольных пазов. При нанесении сетки подрезки под углом к оси
210
3. Боеприпасы осколочного действия
оболочки оптимальным является наклон пазов под углом 45° к образующей
(рис. 3.24). Высокую эффективность действия такой системы подрезки можно
проиллюстрировать фоторегистра-
цией, полученной в процессе высо-
коскоростной оптической съемки
процесса взрывного нагружения
оболочки с сеткой наклонных пазов
(рис. 3.25). Для сравнения на этом
же рисунке дана аналогичная фото-
регистрация для такой же оболочки
естественного дробления.
Рис. 3.24. Осколочная о.болочка БЧ
с подрезами на внешней и внутренней
поверхностях
б
Рис. 3.25. Высокоскоростная оптическая регистрация процесса расширения оболочек
естественного (а) и заданного (б) дробления
Достаточно широко среди ОБП заданного дробления распространены кон-
струкции с кольцами, имеющими внутреннюю подрезку и собранными в блок
на тонкостенной несущей оболочке (рис. 3.26). Разновидность такого рода
ОБП - конструкции, получаемые навивкой прутка квадратного или круглого
сечения на несущую оболочку (рис. 3.27).
Неравномерное приложение нагрузки со стороны ВВ осуществляется сле-
дующими методами (рис. 3.28):
- с помощью системы кумулятивных выемок на заряде ВВ;
- за счет использования перфорированных прокладок из инертного мате-
риала или листового ВВ.
3.1. Основные понятия и общие сведения
211
3
Рис. 3.26. ОБП с кольцами заданного дробления:
1 - ВВ; 2 - кольца; 3 - несущая оболочка
Рис. 3.27. ОБП с навитым прутком (цружиной) заданного дробления:
1 - заряд ВВ; 2 - несущая оболочка; 3 - пружина
а
Рис. 3.28. Схемы неравномерного приложения нагрузки со стороны заряда ВВ:
а - кумулятивные выемки на заряде ВВ; б - перфорированные прокладки
б
В обоих случаях ослабление оболочки происходит за счет образования
кратеров на ее внутренней поверхности газовыми кумулятивными струями.
Возникшие кратеры - концентраторы напряжений, которые обеспечивают пос-
ледующее разрушение оболочки на осколки заданной массы и формы подоб-
но механической подрезке. Формирование кумулятивных выемок на поверх-
ности заряда ВВ производится при снаряжении заливкой с применением про-
филированных прокладок из пластмассы, устанавливаемых на внутренней
поверхности оболочки. Оптимальное значение угла раствора клиновидной вы-
емки составляет 70...90°, высота выемки должна быть не менее О,6бо.
Система кумулятивных выемок и перфорированных прокладок на повер-
хности заряда ВВ имеет различную конфигурацию подобно сеткам механи-
ческих подрезов, и при обеспечении оптимальных параметров выемок - дос-
таточно эффективное средство получения осколков заданной массы и формы.
212
3. Боеприпасы осколочного действия
Рис. 3.29. Заданное дробление стальной оболочки за счет кумулятивных выемок
на заряде ВВ (слева внизу - алюминиевая плита толщиной 8 мм, пробитая осколками
оболочки)
Осколки при дроблении стальной оболочки толщиндй 3 мм являются ком-
пактными и образуют достаточно регулярное осколочное поле при срабаты-
вании системы кумулятивных выемок, расположенных в шахматном поряд-
ке (рис. 3.29).
Структурные сетки для заданного дробления оболочек ОБП стали приме-
няться сравнительно недавно. Под структурной сеткой следует понимать на-
несенную на оболочку систему охрупченных зон, по которым происходит раз-
деление оболочки на отдельные осколки. Охрупченные зоны образуют следу-
ющими методами:
- локальной термической обработкой стали (например, токами высокой
частоты);
- химико-термической обработкой (например, науглероживанием, азоти-
рованием и т. п.);
- электронно-лучевой или лазерной обработкой.
Среди перечисленных методов нанесения структурных сеток наиболь-
шее развитие получили лучевые методы. При электронно-лучевой обработ-
ке воздействие высокоскоростного пучка электронов вызывает интенсивный
нагрев достаточно узкой зоны материала. Последующее быстрое охлажде-
ние данной зоны через металл оболочки вследствие его высокой теплопро-
водности приводит к закалке материала в зоне нагрева, повышению твердо-
сти и снижению трещиностойкости, т. е. к охрупчиванию. Аналогичное воз-
3.1. Основные понятия и общие сведения
213
действие на материал оболочки оказывает и ла-
зерная обработка. Основное различие электрон-
но-лучевой и лазерной обработок заключается в
технологических условиях: если первая проводит-
ся в специальных вакуумных камерах, то вторая
может применяться при наличии атмосферы.
Закалочные зоны при лучевой обработке мо-
гут наноситься с различной глубиной (рис. 3.30).
С увеличением глубины зоны уменьшается общая
масса мелких сопутствующих осколков и, наобо-
рот, увеличивается выход осколков заданной мас-
сы и формы.
Практическое применение методы заданного
дробления находят в ОБП, относителфзб малона-
груженных в условиях боевого применения (авиа-
ционных бомбах, БЧ ракет; РСЗО и т. в мень-
шей степени - в артиллерийских минах).-'»
VH7/
Рис. 3.30. Форма осколков
в зависимости от глубины
закалочной зоны при луче-
вой обработке корпуса
Осколочные боеприпасы с готовыми поражающими элементами
Готовые поражающие элементы применяются в ОБП, к которым предъяв-
ляются повышенные требования по вероятности поражения целей. Преиму-
щества ОБП с ГПЭ: стабильная масса ПЭ,-их хорошая аэродинамическая фор-
ма, возможность реализации широкого диапазона масс ПЭ, включая малые
(до 0,1 г).
В зависимости от условий боевого применения оболочки с ГПЭ выполня-
ются в двух вариантах: с несущей металлической оболочкой (рис. 3.31, а) или
без нее (рис. 3.31, б). Несущая оболочка обеспечивает требуемый уровень проч-
ности при действии ствольных и ударных нагрузок. При дроблении несущих
оболочек, как правило, образуются осколки с заметно худшими параметрами
по сравнению с ГПЭ, что является недостатком таких конструктивных схем.
Системы с ГПЭ и несущей оболочкой получили широкое распространение в
ОБП различных классов.
Рис. 3.31. Осколочные оболочки с ГПЭ:
а - с несущей оболочкой; б - без несущей оболочки
214
3 Боеприпасы осколочного действия
В конструкциях БП, применяемых в условиях незначительных стартовых
и ствольных перегрузок, используются оболочки с ГПЭ, у которых нет несу-
щих силовых элементов (рис. 3.31, б). Готовые ПЭ здесь собираются в еди-
ный блок с помощью связующего вещества (эпоксидного клея или других кле-
ящих составов). Такие технические решения встречаются в конструкциях раз-
личных гранат, инженерных осколочных мин, сборно-клеевых осколочных БЧ
зенитных управляемых ракет.
Применение легкого связующего вещества при однослойной укладке ГПЭ
и отсутствии несущей оболочки приводит при взрыве заряда ВВ к достаточно
быстрому «выдуванию» связующего материала ПД, прорыву продуктов дето-
нации в зазоры между ГПЭ (рис. 3.32) и, как следствие, к снижению скорости
метания ГПЭ. Для подавления эффекта «выдувания» блоки с ГПЭ защищают
со стороны ВВ тонкими (не несущими) оболочками - лайнерами, сдерживаю-
щими прорыв ПД, а также используют более плотную укладку ГПЭ, умень-
шая зазоры между поражающими элементами за счет применения, например,
вместо сферических поражающих элементов ГПЭ в виде прямоугольных или
шестигранных призм (рис. 3.33). ,''»
Рис. 3.32. Метание ГПЭ при от-
сутствии несущей оболочки
Рис. 3.33. Осколочная оболочка
с ГПЭ в виде шестигранных призм
По типу ГПЭ известные схемы ОБП можно условно разделить на конст-
рукции:
- с компактными ГПЭ;
- со стержневыми ПЭ;
- с ГПЭ улучшенной аэродинамической формы.
Компактные ГПЭ чаще всего выполняются в виде шара, куба, короткого
цилиндра (ролика) и изготавливаются из стали (реже из тяжелых сплавов на
основе вольфрама). Такие ГПЭ обладают хорошими аэробаллистическими па-
3.1. Основные понятия и'общие сведения
215
раметрами и стабильными параметрами поражающего действия и применя-
ются во всех типах ОБП с ГПЭ.
Стержневые БЧ, применяемые в ЗУР, предназначены для поражения воз-
душных целей и выполнены в виде стальных стержней квадратного или круг-
лого сечения, уложенных на поверхности заряда ВВ, как правило, под неболь-
шим углом к его образующей. Стержни могут быть прочно соединены (сваре-
ны) попеременно верхними и нижними концами. В этом случае при метании
системы стержней образуется сплошное кольцо - единый ПЭ больших разме-
ров (рис. 3.34). Если стержни не соединены между собой, то образуется поле
с множеством длинных ПЭ. Для предотвращения разрушения стержни отде-
лены от заряда ВВ демпфером. Поражающее действие таких стержневых ПЭ
заключается" в нанесении сплошных разрезов в обшивке и силовом наборе
цели, что приводит к разрушению конструкции планера, т. е. к практически
мгновенному поражению цели. £ *’
Рис. 3.34. Стержневая БЧ и схема ее действия:
1 - демпфер; 2 - заряд ВВ; 3 - крышки БЧ;,4 - стержни
На фоторегистрации (рис. 3.35), полученной при полигонных испытаниях
стержневой БЧ, зафиксирован , момент пробития левой половины мишенной
обстановки ПЭ в виде сформировавшегося кольца; правая половина мише-
ней, установленная на большем расстоянии от эпицентра, еще не поражена.
На нижнем снимке показан характер поражающего действия стержней: верх-
ний неровный край листов представляет собой линию сплошного реза, нане-
сенного кольцевым ПЭ.
Готовые ПЭ улучшенной аэродинамической формы применяются в ОБП
сравнительно редко. К данным ГПЭ можно отнести, во-первых, удлиненные
ПЭ стреловидной формы (рис. 3.36, а), а во-вторых, несимметричные плоские
ПЭ (рис. 3.36, б). Отличает такие ПЭ то, что они обладают стабилизацией в
полете: в первом случае - за счет оперения, во втором - за счет вращения в
плоскости ПЭ, возникающего при взрывном метании несимметричного тела.
Естественно, такой тип ГПЭ отличает высокий уровень поперечной нагрузки
и соответственно высокий уровень поражающего действия.
Основной недостаток данного типа ПЭ - сложность их сохранного ме-
тания. Взрывное метание стреловидных ПЭ приводит к значительным по-
вреждениям как оперения, так и самих элементов, при этом теряются их
216
3 Боеприпасы осколочного действия
Рис. 3.35. Полигонные испытания стержневой БЧ
Рис. 3.36. Стреловидный (а) и плоский ГПЭ (б)
улучшенной аэродинамической формы
Рис. 3.37. Оболочки мультиэле-
ментных ОБП
3.1. Основные понятия и общие сведения
217
положительные свойства. В связи с этим оперенные ПЭ применяются в таких
ОБП, где их сохранный выброс из корпуса осуществляется пороховыми заря-
дами при скорости метания до 200 м/с, а итоговая достаточно высокая ско-
рость ПЭ обеспечивается за счет скорости самого снаряда. Пластинчатые ГПЭ
также требуют тщательной отработки устройств, предохраняющих ПЭ от по-
вреждений при метании, например, демпферов различной конструкции.
Промежуточное положение в ряду ОБП с заданным дроблением и с ГПЭ
занимают так называемые менисковые или мультиэлементные ОБП. Сталь-
ные оболочки таких ОБП профилируются обработкой давлением с образова-
нием неглубоких выемок в виде менисков или конусов с большими углами
раствора (рис. 3.37). При взрывном нагружении из материала выемок форми-
руются компактные ПЭ типа «ударное ядро», обладающие заданной массой
(равной массе металла выемки) и метаемые со скоростями 1800...2200 м/с
(рис. 3.38). Такие элементы пробивают стальные преграды толщиной (0,5...1,0)JM
(здесь с/м - диаметр мениска (см. рис. 3.37)) на расстояниях до нескольких
десятков метров. Высокая эффективность-мультиэлементных ОБП подтверж-
дается при их испытаниях на действие по металлическим преградам (рис. 3.39).
Преграда устанавливалась на расстоянии 5.м от мультиэлементной осколочной
оболочки. Вид пробоин свидетельствует о формировании примерно одинако-
вых компактных высокоскоростных элементов, стабилизированных в полете.
Рис. 3.38. Формирование ПЭ типа «ударное ядро»:
а — пустотелое «ударное ядро»; б - «ударное ядро» стержневой формы
Рис. 3.39. Вид мишени после подрыва мультиэлементной осколочной оболочки
(мишень - плита дюралюминия толщиной 8 мм, дистанция — 5 м)
218
3. Боеприпасы осколочного действия
Если вместо менисковой формы выемкам придать вид полусфер или умень-
шить угол раствора конических выемок до 70...90°, то вместо компактных
ПЭ типа «ударное ядро» при подрыве заряда ВВ формируются кумулятивные
струи. Такие БП получили название мультикумулятивных.
3.2. Метание осколков
Одна из важнейших характеристик действия ОБП - начальная скорость
осколков, которая определяется как теоретически на стадии отработки конст-
рукции БП с применением известных соотношений, так и экспериментально
при проведении полигонных испытаний.
Теоретические оценки начальной скорости осколков сводятся к опреде-
лению максимальной скорости оболочки ОБП, разгоняемой ПД. При этом в
зависимости от геометрии конструкции ОБП рассматриваются три геомет-
рически возможные схемы метания, а именно, метание сферических и ци-
линдрических оболочек, а также пластин или плоских блоков ПЭ. Решению
этих задач посвящено достаточно большое количество работ, наиболее изве-
стные из которых выполнены Г.И. Покровским, К.П. Станюковичем?Дж. Тей-
лором, Р. Гарни.
В общем случае для закрытых сферических и цилиндрических; оболочек
максимальная скорость метания может быть найдена с использованием зако-
на сохранения энергии:
2
2 +£кг + £вг +£ф +£ср = тВВ<2’ (3.10)
где М - масса оболочки; v - скорость оболочки; ЕКТ - кинетическая энергия
газообразных ПД; ЕВГ - внутренняя энергия ПД; Еф - энергия формоизмене-
ния материала оболочки; Еср - энергия, передаваемая окружающей среде;
тевв _ масса ВВ; Q - удельная теплота взрывчатого превращения.
Величины Евг, Еф и Еср пренебрежимо малы в сравнении с кинетической
энергией оболочки и ПД. Полагая Екг =fynBBVQ, где г>0 - максимальная ско-
рость оболочки, из формулы (3.10) получаем
. 2В<9
Htw <ЗП)
где Р = твв/М - коэффициент нагрузки.
Для определения величины £ необходимо учитывать радиальное распре-
деление параметров ПД. Кинетическая энергия ПД может быть задана соот-
ношением
о
где и - скорость движения частиц ПД; dmBB = 2nrpt/r - для цилиндрической
схемы метания; dmBB = 4nr2pt/r - для сферической схемы метания; р - плот-
ность ПД; г - радиальная координата.
3.2. Метание осколков
219
Если принять линейный закон распределения скорости движения час-
тиц ПД
z/ = v0 —•
^об
где гоб - радиус внутренней поверхности оболочки, то значения величины
получаются равными 1/4 и 3/10 для цилиндрической и сферической схем со-
ответственно. При этом соотношения для максимальной скорости метания при-
обретают вид
г0 =
л/2ё
20
2 + 0’
(3.12)
с0 =
(3.13)
Соотношения (3.12) и (3.13) носят название формул Гарни. Более удоб-
ный для практического использования вид эти соотношения приобретают, если
удельную теплоту взрыва Q выразить через скорость детонации В В следую-
щим образом:
D2
2U2-!)’
(3.14)
где D - скорость детонации ВВ; к - показатель политропы ПД.
В этом случае, например, для цилиндрической оболочки соотношение
(3.12) приводится к виду
I 21Г
vo = D —Г-------‘
^(Р-1)(2 + ₽)
(3.15)
Для ряда конденсированных ВВ, в частности для ТНТ, значение величи-
ны к ~ 3. Подставляя его в формулу (3.14), получаем соотношение
_Е> Г0~
?’° 2\2 + 0’
(3.16)
которое обычно называют формулой Покровского. Достаточно широко извес-
тна также формула Станюковича, полученная также из выражения (3.10), но
для параболического закона распределения скорости движения частиц ПД, и
при к - 3 в случае цилиндрической оболочки принимающая вид
= 0,3540 А-.
° \з+Р
(3-17)
Формула (3.17) дает более высокие значения скоростей по сравнению с
соотношением (3.16). Однако в наиболее интересном с практической точки
5 + 0
Q =
220
3. Боеприпасы осколочного действия
зрения диапазоне значений Р < 1 разница в вычислениях по формулам (3.16) и
(3.17) не превышает 5 %.
Рассмотренные выше соотношения (3.12)—(3.17) имеют простой вид и весь-
ма широко применяются для предварительной оценки скорости п0. Однако
результаты, получаемые по этим формулам, являются приближенными, так
как при выводе указанных формул исключен ряд физических факторов, учет
которых значительно усложняет решение задачи о метании оболочки ПД.
Одним из таких (наиболее существенных) факторов является сопротив-
ление материала оболочки. В наиболее простой форме учет прочности обо-
лочки сводится к введению в формуле (3.10) слагаемого Еф - энергии фор-
моизменения:
2
^2- + £шВв»0п + £ф = тВВ<2
откуда
&0п=%1-------
V ™bb<2
где &Оп - скорость оболочки с учетом прочности; - скорость оболочки без
учета прочности, определяемая по формуле (3.11); - коэффициент, учиты-
вающий снижение конечной скорости оболочки за счет сил прочности.
Энергия формоизменения Еф может быть выражена как
£Ф ~ =
Рм
где Ем - объем материала оболочки; А - удельная работа формоизменения;
М - масса оболочки; рм - плотность материала оболочки.
С учетом выражения (3.14) выражение для КП преобразуется к виду
(3.18)
или при к = 3
Удельная работа формоизменения материала оболочки определяется со-
отношением
е;
А = J о, t/e, = оте,, (3.19)
о
где о, и е, - интенсивности напряжений и деформаций соответственно; <гт -
предел текучести материала.
3.2. Метание осколков
221
Интенсивность деформаций для тонкой несжимаемой жесткопластичес-
кой цилиндрической оболочки в случае плоской деформации выражается как
(3.20)
Рис. 3.40. Типовая схе-
ма осколочной оболоч-
ки небольшой длины
2 г
е =—;=1п—,
V3 ГО
где го и г - начальный и конечный радиусы оболочки соответственно.
Следует отметить, что влияние прочности на величину становится за-
метным при относительно небольших скоростях метания. Так, для цилиндри-
ческих оболочек, выполненных из среднеуглеродистых сталей с пределом те-
кучести от = 500... 1000 МПа и метаемых со скоростями г0= 800... 1800 м/с
(что соответствует значениям (3 = 0,1...0,5), величина коэффициента Кп, рас-
считанная по формуле (3.18) с учетом соотношений (3.19) и (3.20), равна со-
ответственно Кп = 0,962...0,992 (при от = 500 МПа) и Кп = 0,923...0,985 (при
(Ут= 1000 МПа). Таким образом, при нагрузках и ско-
ростях метания, характерных для большинства конст-
рукций ОБП, снижение скорости v0 за счет сопротивле-
ния материала оболочки незначительно. Поэтому усло-
вие Еф ~ 0, использованное при выводе соотношений
(3.12), (3.13) и (3.15) (3.17), вполне оправдано. Однако
при скорости метания < 800 м/с влияние прочности
оболочки становится существенным и усиливается по
мере снижения »0.
Рассмотренные зависимости для определения мак-
симальной скорости метания цилиндрических оболочек
справедливы в случае их бесконечной длины, так как в
модели Гарни - Покровского не учитывается истечение
ПД в осевом направлении. Данный фактор достаточно
существенен для БП и взрывных устройств с относительно небольшой длиной
корпуса, где осевое истечение ПД приводит к заметному снижению скорости
осколков. Для таких БП с использованием подхода Гарни найдена зависимость
^°=х/2ё L 2Р----------,
1 1 + -А_ (2 + Р)
Ц ЛБЧ )
где d3 - диаметр заряда ВВ (рис. 3.40); /Бч - длина оболочки (БЧ).
Подставив в формулу (3.21) соотношение (3.14), можно определить
(3.21)
&0 = Е>
2Р
;з (2+Р)
БЧ )
или при к = 3
D
"о-7
2'бч )
222
3. Боеприпасы осколочного действия
В конструкциях БП, содержащих ГПЭ, происходит истечение ПД через
зазоры между метаемыми элементами (рис. 3.41), что, по мнению многих
исследователей, также приводит к снижению скорости ГПЭ по сравнению со
скоростью метания сплошной оболочки - при этом снижение скорости со-
ставляет приблизительно 10 %.
Рис. 3.41. Схема метания ГПЭ:
1 ГПЭ; 2 — лайнер; 3 - заряд ВВ; 4 - про-
дукты детонации
Рис. 3.42. Оболочка ОБП с плоским
блоком ГПЭ:
1 - плоский блок ГПЭ; 2 - заряд ВВ; 3 -
точка инициирования
В ряде ОБП применяются плоские блоки ГПЭ (рис. 3.42) или металли-
ческие пластины (рис. 3.43). Для оценки скорости метания плоских тел ис-
пользуются следующие зависимости:
Рис. 3.43. ОБП с металличе-
скими пластинами где 0 - коэффициент нагрузки; D - скорость де-
тонации; к - показатель политропы ПД. Зависи-
мость (3.22) получена с использованием импульсного подхода.
Важным моментом при оценке скорости осколков БП с короткой боевой
частью цилиндрической формы является то, что осколки естественного дроб-
ления или ГПЭ приобретают различные скорости. Например, если при цент-
ральном инициировании заряда ВВ некоторой БЧ (рис. 3.44) поражающие эле-
менты центральной зоны приобретают скорость то ПЭ из торцевых зон
имеют скорость на 25...30 % ниже ц0.
(3.22)
3.3. Баллистика осколков
223
Рис. 3.44. Распределение скоростей мета-
ния ПЭ вдоль оси БЧ при центральном
инициировании
Рис. 3.45. Схема расширения цилинд-
рической оболочки под действием ПД
при торцевом инициировании заряда ВВ
Рис. 3.46. Склонение вектора скорости при расширении цилиндрической (а) и кони-
ческой (б) оболочек
Во многих конструкциях ОБП узел инициирования расположен в одном
из торцов корпуса. В этом случае по заряду ВВ распространяется скользящий
детонационный фронт, а оболочка приобретает скорость v0, направленную под
некоторым углом ср к оси симметрии (рис. 3.45), что приводит к так называе-
мому склонению осколочного поля. В общем случае величина этого угла оп-
ределяется следующими соотношениями:
0 • I г’о • е
ф = —= arcsin ——sint
2 I 2D
и (p = 0o+arcsin
г,0
---со
2D
где 0 - угол отклонения образующей оболочки; D - скорость детонации; £, -
угол падения детонационного фронта; 0О - половина угла раствора коничес-
кой оболочки (рис. 3.46).
3.3. Баллистика осколков
Подрыв ОБП осуществляется, как правило, на некотором расстоянии от
поражаемых объектов. Дистанция, на которой осколки сохраняют способность
поражать цели, может достигать ста и более метров. Полет осколков прохо-
224
5. Боеприпасы осколочного действия
дит в воздушной среде, создающей сопротивление движению, что приводит
к падению их скорости на траектории. Для оценки эффективности действия
ОБП важным является определение, во-первых, закона снижения скорости в
полете г(х), а во-вторых, убойного интервала, т. е. расстояния, на котором оскол-
ки сохраняют способность поражать заданный тип цели.
Задача о движении осколка в воздушной среде решается при следующих
допущениях: плотность воздуха вдоль траектории постоянна, влияние силы
тяжести пренебрежимо мало. С учетом этих допущений уравнение движения
осколка запишется в виде
mdvРв(5)слг2
dt 2
(3.23)
где т - масса осколка; v - текущая скорость осколка; рв - плотность воздуха;
(S) - текущая площадь миделя осколка; сх - коэффициент лобового сопро-
тивления.
Коэффициент сх существенным образом зависит от скорости V. Для ПЭ
сферической формы функция сд.(г) имеет вид
0,865 1 + —
\ г )
1,49 + 0,51 sin (860°-3501g?)'
0.5
при v>550 м/с;
при 150 < v <550 м/с;
при v <150 м/с. '
(3.24)
Рис. 3.47. Зависимость
коэффициента сх от ско-
рости для ПЭ сфериче-
ской формы
Как ясно из графика сЛ(?) (рис. 3.47), резкое изменение величины сх на-
блюдается в области значений скорости, близких к скорости звука с.
Относительно слабая зависимость коэффициен-
та сх от скорости при значениях г < с и v > с позво-
ляет аппроксимировать (3.24) функцией ступенчато-
го вида
прис<ц<г0,
* сх/2 при v < с.
Расчетные и экспериментальные проверки пока-
зывают, что данная аппроксимация не вносит боль-
ших погрешностей и может использоваться при ре-
шении многих задач баллистики осколков.
Как отмечалось выше, зависимости cx(v) в виде
(3.24) или (3.25) получены для ПЭ сферической фор-
мы. Для компактных ПЭ несферической формы (куб, короткий цилиндр), а
также для осколков естественного дробления величина сх несколько возраста-
ет. Для компактных ПЭ коэффициент сх во всем диапазоне скоростей увели-
чивается примерно на 10 %, а для осколков естественного дробления - при-
мерно на 20 %.
Величина текущей площади миделя (5), входящая в уравнение (3.23),
для практических приложений обычно заменяется на его среднее значение 5.
3.3. Баллистика осколков
225
При решении уравнения (3.23) ряд параметров в его правой части обычно
заменяется на комплекс, называемый баллистическим коэффициентом осколка:
А = РвСл Ф
2/3™|/3 ’
2рм т
где рм - плотность материала осколка; Ф - параметр формы осколка, опреде-
ляемый соотношением (3.9). Параметр формы осколка зависит от его геомет-
рических характеристик (табл. 3.6) и плотности материала. Для осколочного
спектра естественного дробления осколки мелких фракций имеют параметр
формы Ф = 1,8...2,2.
Таблица 3.6. Значения параметра Ф для тел правильной геометрической формы
Форма ПЭ и его относительные размеры Значения Ф Форма ПЭ и его относительные размеры Значения Ф
Шар 1,31 Куб 1,50
Цилиндр: Параллелепипед:
^пэ/^пэ = 1 1,38 1x1x2 1,58
^пэ/^пэ = 2 1,45 .1x1x8 2,13
Тетраэдр 1,80 1x2x2 1,59
Октаэдр 1,43 1x4x4 1,89
Если принять сх= const, то уравнение (3.23) можно свести к виду
и найти аналитическое решение для зависимости г(х), представляющей прак-
тический интерес. Используя замену
dv dv dx dv
— =-------= v—,
dt dx dt dx
записываем уравнение движения в виде
dr .
— = -Av.
dx
Интегрируя это уравнение и применяя начальное условие v(x) = v0, получаем
In — = -Ах,
vo
откуда
v = v0~Ax. (3.26)
Выражение (3.26) - это закон затухания скорости осколка на траектории.
В качестве примера показана зависимость г(х) для стальных сферических ПЭ
различной массы (рис. 3.48).
Рис. 3.48. Затухание скорости сферических ПЭ разной массы в зависимости от рас-
стояния (т>0= 1500 м/с)
Вводя понятие убойной скорости губ осколка как скорости, необходимой
для поражения заданной цели, из выражения (3.26) можно получить значение
убойного интервала
-_Lin^0_.
уб - . 1П
А йуб
3.4. Характеристики осколочных полей
Основные характеристики осколочного поля или потока ПЭ - направле-
ние, скорость движения, а также его плотность (число ПЭ, приходящихся на
единицу пересекаемой площади). В общем случае поражаемая цель может
находиться под произвольным углом по отношению к оси ОБП, поэтому при
решении задачи определения вероятности попадания осколков в цель необхо-
димо знать, сколько ПЭ летит в данном направлении. Рассмотрим типовую
картину осколочных потоков, образующихся при статических подрывах ОФС
(рис. 3.49): в круговое поле, формируемое осколками стенок, уходит до 70 %
массы корпуса, в головном направлении разлетается около 20 % и назад -
около 10 % осколков. В динамических условиях, т. е. при подрыве в заданной
точке траектории, боковой поток осколков получает некоторое склонение в
направлении вектора скорости снаряда vc (рис. 3.50). В случае наземного под-
рыва при установке взрывателя на мгновенное действие образуется зона по-
ражения наземных целей в виде эллипса, размеры которого ограничены убой-
ным интервалом, при этом выделяются секторы разлета осколков боковой,
головной и донной частей корпуса (рис. 3.51).
Отношение размеров £г/£ш (глубины и ширины) зоны поражения возрас-
тает с увеличением угла встречи 0С и для большинства ОФС составляет
0,15...0,50. При больших углах встречи, близких к 90° (это характерно для
ОБП типа ОАБ, ОФАБ, артиллерийских мин и т. п.), зона поражения по фор-
ме приближается к круговой.
3.4. Характеристики осколочных полей
227
Рис. 3.49. Направления потоков оскол-
ков при статическом подрыве ОФС
Рис. 3.50. Схема осколочных потоков
при подрыве ОФС на траектории
Рис. 3.51. Зона поражения наземных целей осколками ОФС
Конфигурация и размеры зоны поражения учитываются при оценке бое-
вой эффективности ОБП, в частности при расчете площади приведенной зоны
поражения 5пр. Основной этап решения этой задачи связан с нахождением
характеристик осколочного ноля для статических условий. Наиболее точно
228
3. Боеприпасы осколочного действия
Рис. 3.52. Схема щитовой мишенной обстановки:
/ - ОБП; 2 - щит; 3 скоростные кинокамеры
эти характеристики определяются экспериментально при проведении стандар-
тных полигонных испытаний путем подрыва неподвижного ОБП в щитовой
мишенной обстановке (рис. 3.52). В качестве щитов используются дюралю-
миниевые или чаще стальные листы, на одной из сторон которых наносится
координатная сетка (рис. 3.53). При пробитии щитов потоком осколков возни-
кают достаточно яркие вспышки, которые фиксируются скоростными кинока-
мерами. Обработка план-карт щитов (рис. 3.54) и материалов оптической съем-
ки позволяет определить угловые распределения чисел осколков /(гр) и ско-
рость ?'o = g(tp) в пятиградусном или двуградусном секторах зоны разлета,
при этом результаты испытаний пересчитываются на сферу. Скорость разлета
осколков в угловых зонах вычисляется по измеренному с помощью оптичес-
кой съемки времени пролета осколком расстояния от места подрыва до щита.
Наряду с распределениями /(гр) и г 0(<р) при проведении щитовых испыта-
ний находят границы сектора разлета осколков (рис. 3.55, а): передний <pj и
задний гр2 углы поля, а также величину Дгр = гр2 - (рР На практике за угол Дгр
принимают угол разлета 80, 90 или 100 % осколков.
Используя векторное сложение скорости осколков г0 и собственной ско-
рости ОБП vc, можно найти значения угловых границ осколочного поля у при
3.4. Характеристики осколочных полей
229
Рис. 3.53. Щитовая мишенная обстановка с координатной сеткой
Рис. 3.54. План-карта щита мишенной обстановки
Рис. 3.55. Границы сектора разлета ПЭ при подрыве ОБП в статических условиях (а)
и изменение положения этих границ при подрыве на траектории (б)
230
3. Боеприпасы осколочного действия
подрыве на траектории (рис. 3.55, б) и результирующую (динамическую) ско-
рость осколков сд по соотношениям (2.42) и (2.43) (см. гл. 2).
Используя формулы (2.42) и (2.43), можно определить передние и задние
динамические утлы поля Yi и у2 и соответствующие скорости од1 и гд2» а так"
же динамическую плотность поля Пд на различных расстояниях от точки под-
рыва по соотношению (2.43).
Границы секторов зоны поражения на местности при наземном подрыве
(рис. 3.56) представляют собой следы пересечения конических поверхностей
с плоскостью поверхности земли. Угловые границы сектора на местности оп-
ределяются следующими выражениями:
„ COSV1 „ cosy?
с. =arccos---—, с7 =arccos------—
cos0c cos0c
В радиальном направлении секторы зоны поражения ограничены дугами
окружности радиусом, равным убойному интервалу /уб.
Рис. 3.56. Секторы зоны поражения на
местности при наземном подрыве ОФС
3.4. Характеристики осколочных полей
231
При известных конфигурации и размерах зоны поражения можно вычис-
лить площадь приведенной зоны поражения 5пр, которая является характери-
стикой поражающего действия ОБП, зависящей от параметров уязвимости
целей.
На практике эффективность осколочного действия БП по тому или иному
виду целей характеризуется размерами (или площадью) зон сплошного и дей-
ствительного поражения. Границей зоны сплошного поражения считают рас-
стояние, на котором вероятность поражения данного типа целей равна 0,63, а
границы зоны действительного поражения определяются уровнем вероятнос-
ти поражения, равным 0,5.
Важный момент при оценке боевой эффективности - учет вероятност-
ного характера положения точки подрыва ОБП по отношению к цели, что
обусловлено прежде всего траекторным рассеиванием. При наземных под-
рывах траекторный разброс выражается в виде эллипса рассеивания, а при
воздушных - величиной и направлением промаха. Для повышения вероят-
ности поражения необходимо согласовать положения зон поражения и рас-
сеивания. В частности, проблема такого согласования достаточно остро сто-
ит при настильной стрельбе, т. е. при маЛых углах встречи 0С, когда эллипс
рассеивания сильно вытянут в направлении стрельбы (отношение длин про-
дольной и поперечной осей эллипса достигает 40...50), а секторы зоны по-
ражения расположены перпендикулярно направлению стрельбы. В этом слу-
чае эллипс рассеивания и приведенная зона поражения имеют незначитель-
ную общую площадь, в пределах которой вероятность поражения цели не
равна нулю. Таким образом, при малых углах встречи 0с важна не столько
площадь приведенной зоны поражения, сколько конфигурация поля пораже-
ния и его положение относительно эл-
липса рассеивания. Именно это обсто-
ятельство обусловливает высокую эф-
фективность ОБП с осевыми потоками
ПЭ, к которым прежде всего относится
шрапнель.
По форме зоны поражения ОБП с
осевыми потоками ПЭ заметно отли-
чаются от зон поражения ОБП с кру-
говыми осколочными полями. Подрыв
шрапнельных ОБП (рис. 3.57) произ-
водится на некоторой высоте Н над
поверхностью земли, а метаемые ПЭ
образуют осколочное поле в форме
конуса с углом при вершине 2(р. На
Рис. 3.57. Зона поражения наземных
целей шрапнельным снарядом
поверхности земли зона поражения
имеет вид эллипса с осями £ш и £г,
определяющими ширину и глубину
зоны поражения. Например, для
76-мм шрапнельного снаряда при стрельбе на средние дальности и при
подрыве на оптимальной высоте значение LT составляет 150...200 м, а -
= 20...25 м.
232
3. Боеприпасы осколочного действия
Рис. 3.58. Зона поражения наземных це-
лей снарядом типа «взрывная шрапнель»:
/ - зона поражения осколками корпуса; 2 -
зона поражения передним блоком ГПЭ; 3 -
эллипс рассеивания
Скорости ПЭ в осевом потоке находят в виде суммы скорости метания и
собственной скорости снаряда: vR = vc + г'о. Так как скорость метания ПЭ в
шрапнелях обычно невелика (100...200 м/с), то результирующая скорость ПЭ
vR определяется в основном скоростью самого снаряда. Угол разлета 2<р для
таких ОБП обычно составляет 10...20°.
Для метания ПЭ в шрапнелях применяют пороховые вышибные заряды,
при этом корпус снаряда остается не разрушенным. При замене пороховых
шашек на БВВ получают не только прирост скорости метания ПЭ т0, но и
обеспечивают дробление корпуса на ос-
колки. Зона поражения наземных целей
при этом будет комбинацией кругового
поля осколков корпуса и осевого пото-
ка ПЭ (рис. 3.58), а согласование рас-
положения зон поражения и эллипса
рассеивания может привести к суще-
ственному повышению вероятности по-
ражения целей.
Помимо шрапнелей существуют и
другие типы ОБП, создающих осевые
или направленные потоки ПЭ (аксиаль-
ные БЧ, инженерные мины и т. п.), в ко-
торых применяются высокобризантные
ВВ, обеспечивающие высокие скорости
метания ПЭ (1000 м/с и более).'
Параметры осевых потоков ПЭ (на-
правление, скорость метания, плотность
поля) зависят как от характеристик нагружения, так и конструктивных осо-
бенностей ОБП. При подрыве аксиальной БЧ с квадратным в плане блоком
ГПЭ (рис. 3.59) поток ПЭ образует пирамиду с поперечным сечением в форме
квадрата: вид поля пробоин на стальном щите, установленном на пути потока
Рис. 3.59. Схема аксиальной БЧ с квадратным блоком ГПЭ:
1 - блок ГПЭ; 2 - корпус; 3 - заряд ВВ; 4 - детонатор
3.4. Характеристики осколочных полей
233
ПЭ (рис. 3.60, а), говорит о том, что поперечная конфигурация осколочного
поля в целом повторяет форму блока ГПЭ. Распределение ПЭ в продольном
направлении разлета удается определить с помощью рентгеноимпульсной съем-
ки потока в полете (рис. 3.60, б): из представленной рентгенограммы видно,
что уже на небольшом расстоянии осколочный поток становится эшелониро-
ванным, т. е. ПЭ центральной зоны блока имеют более высокие скорости по
сравнению с периферийными ПЭ, причем разница в скоростях составляет
15...20 %.
Рис. 3.60. Распределение ПЭ в потоке после подрыва аксиальной БЧ:
а - действие ПЭ по стальному щиту-мишени; б рентгеноимпульсная съемка потока ПЭ (вид сбоку)
Конструктивные особенности ОБП позволяют управлять характеристика-
ми осколочных полей в достаточно широких пределах. Так, в конструкциях
ОБП с осевым метанием ПЭ при плоском торцевом инициировании заряда
ВВ (например, с помощью системы многоточечного инициирования) образу-
ется узконаправленный поток ПЭ с углом 2ср (рис. 3.61, а), не превышающим
10°. При одноточечном инициировании заряда ВВ на оси (рис. 3.61, б) угол
раствора потока увеличивается до 15°. При смешении точки инициирования
(рис. 3.61, в) весь поток ПЭ отклоняется от осевого направления, при этом
угол склонения достигает 10°.
234
3. Боеприпасы осколочного действия
в
Рис. 3.61. Управление углом разлета ПЭ с помощью системы инициирования:
а - многоточечное (плоское) торцевое инициирование: б - одноточечное центральное торцевое
инициирование; в - одноточечное торцевое инициирование со смешением; 1 - заряд ВВ;
2 - блок ГПЭ; 3 - точка инициирования
Аналогичная картина наблюдается и для осесимметричных ОБП с круго-
выми полями поражения. Вид функции распределения чисел осколков в угло-
вых зонах /(ф) меняется в зависимости от положения точки инициирования
Рис. 3.62. Вид функции распреде-
ления числа осколков /(<р) в угло-
вых зонах в зависимости от поло-
жения точки инициирования;
1 - со стороны левого торца; 2 - в цент-
ре заряда; 3 - со стороны правого торца
на оси симметрии (рис. 3.62): максимальное
значение угла разлета Аф = Ф2 - ф] достига-
ется при центральном инициирований, а при
инициировании с торцов происходит смеше-
ние потока осколков в сторону, противопо-
ложную точке инициирования.
В значительной степени управлять уг-
лами разлета и плотностью потока ПЭ мож-
но изменением формы осколочной оболоч-
ки или блока ПЭ: придавая блоку ПЭ вы-
пуклую или вогнутую форму, получают
широкие или узкие сходящиеся потоки при
осевом метании ПЭ (рис. 3.63) Аналогич-
ных результатов достигают и для осесим-
метричных ОБП с круговыми осколочны-
ми полями (рис. 3.64).
Помимо рассмотренных способов на
практике реализуются и более сложные си-
стемы управления характеристиками оско-
лочных полей, учитывающие особенности
боевого применения ОБП. Например, в ряде
конструкций осколочных БЧ (ОБЧ) зенитных
управляемых ракет, срабатывающих при некотором промахе по отношению к
цели, применяются системы многоточечного инициирования, при этом взры-
ватели приводят в действие тот узел или группу узлов инициирования, кото-
рые обеспечивают метание потока ПЭ в направлении цели. В схеме одного из
3.4. Характеристики осколочных полей
235
Рис. 3.63. Влияние формы блока ГПЭ аксиальной БЧ на угол разлета ПЭ:
а - блок ГПЭ выпуклой формы; б - блок ГПЭ вогнутой формы
Рис. 3.64. Влияние формы осесимметричной оболочки ОБП на угол разлета ПЭ:
1 - выпуклая оболочка: 2 - цилиндрическая оболочка; 3 - вогнутая оболочка
вариантов ОБЧ избирательно направленного действия ГПЭ размещены в цен-
тральной зоне БЧ, а блоки ВВ - по ее поверхности (рис. 3.65). Срабатывание
определенного узла инициирования вызывает подрыв только той части заряда
ВВ, которая метает ПЭ в нужном направлении, оставшаяся же часть заряда
ВВ не подрывается. Также показано (см. рис. 3.65) влияние размеров зоны
продетонировавшего ВВ на параметры осколочного поля: при срабатывании
третьей части заряда ВВ ПЭ разлетаются в секторе с углом 45...60°, а при
детонации половины заряда поле сужается до 20...40°, что, естественно, при-
водит к повышению плотности осколочного поля и увеличению скорости
метания ПЭ.
Рассмотренные типы и соответствующие характеристики осколочных по-
лей относятся к ОБП, получившим достаточно широкое практическое приме-
нение. Наряду с этим в последнее время разрабатываются ОБП, создающие
осколочные поля, несколько отличающиеся по своей конфигурации и характе-
ристикам от привычных аналогов. Для поражения целей в верхних слоях ат-
мосферы или за ее пределами используются ОБП, образующие круговые дос-
236
3. Боеприпасы осколочного действия
Рис. 3.65. Схема действия ОБЧ направленного действия с периферийными блоками ВВ
Цель
Начало формирования
плоского поля ПЭ
Сформированное
/ плоское поЛе ПЭ
Рис. 3.66. Плоское поле низкоскоростных ПЭ
таточно узкие низкоскоростные (относительно точки подрыва) осколочные
поля, плоскость которых ориентирована перпендикулярно направлению под-
лета цели (рис. 3.66). Характерная особенность таких осколочных полей-
это сплошное заполнение поля ПЭ с плотностью, достаточной для обеспечения
заданного уровня вероятности поражения цели. Эффективное поражающее
действие низкоскоростных осколочных полей обусловлено высокой скоро-
стью самой цели. Своеобразный предельный случай таких осколочных по-
лей - неподвижные плоские или объемные поля связанных между собой ПЭ
(рис. 3.67, а), которые в зарубежной литературе получили название кластер-
ных. В качестве ПЭ здесь используются либо компактные удлиненные высоко-
3.5. Поражающее действие осколков
237
Рис. 3.67. Схема полей ПЭ с гибкими связями (а) и полей, размещенных на упру-
гих элементах (б)
плотные инертные тела (шары, стержни), либо активные осколочные элементы,
содержащие заключенный в оболочку разрывной заряд ВВ, который срабатыва-
ет при взаимодействии с целью. . Формирование таких полей поражения осуще-
ствляется или с помощью упругих механических систем (рис. 3.67, б), или с
применением пиротехнических средств.
3.5. Поражающее действие осколков
В зависимости от характеристик уязвимости целей рассматривают раз-
личные виды поражений, связанных с проникающим, зажигательным и ини-
циирующим действием ПЭ.
Проникающее действие осколков
Основной критерий проникающего действия - толщина пробиваемой пре-
грады, которая зависит от ряда параметров: скорости, массы, формы осколка,
условий встречи с преградой, физико-механических характеристик материа-
лов осколка и преграды.
Оценка проникающей способности ПЭ проводится по действию либо на
полубесконечную преграду, либо на стальную или дюралевую преграды за-
данной толщины. Стальные эквиваленты целей (мм) приведены ниже:
Незащищенная живая сила ...... 1
Небронированная техника....... 5
Легкобронированная техника ...15
Для оценки действия по живой силе используются неметаллические эк-
вивалентные преграды, в том числе сухая сосновая доска толщиной 1 дюйм
(25,4 мм), стандартная пластилиновая модель НАТО толщиной 180 мм и т. п.
238
3. Боеприпасы осколочного действия
Наибольшей проникающей способностью обладают удлиненные ПЭ, од-
нако их преимущество реализуется только в случае осевого удара, когда ось
симметрии ПЭ ориентирована вдоль вектора скорости. При ударе под углом
/пэ L
Рис. 3.68. Схемы взаимодей-
ствия удлиненных ПЭ с пре-
градой
или боковой поверхностью глубина проникания
значительно уменьшается (рис. 3.68). При осе-
вом ударе процесс внедрения ПЭ в преграду по
существу такой же, что и при действии БОПС
(более подробно рассмотрено в гл. 8). В первом
приближении нижнюю оценку глубины прони-
кания при скорости удара более 1500 м/с можно
провести, используя соотношение
^-^пэ
Рпэ
Рп
где I - глубина каверны кратера; /пэ - длина ПЭ;
Рпэ и Рп - плотности материала ПЭ и преграды
соответственно.
Более точно глубину проникания удлинен-
ных ПЭ в полубесконечную преграду, а также
предельную скорость пробития преграды задан-
ной толщины можно определить с помощью по-
луэмпирических соотношений, рассмотренных
в гл. 8.
Важен с практической точки зрения такой параметр действия осколка, как
предельная толщина пробиваемой конечной преграды 6прел, которую можно
связать с глубиной внедрения в полубесконечную преграду соотношением
^пред
где к > 1 — коэффициент конечности преграды (учитывает вспомогательное
действие тыльных эффектов (откола) при пробитии).
При компактной форме ПЭ в зависимости от скорости соударения и па-
раметров ПЭ и преграды проявляются различные механизмы их взаимодей-
ствия. Так, при внедрении стальных ПЭ в низкоплотные преграды (жидко-
сти, пластмассы, древесина, твердое топливо, модельные среды типа плас-
тилина и т. п.) со скоростями до
а б в
Рис. 3.69. Аэродинамическая (я), переход-
ная (б) и кратерная (в) схемы взаимодей-
ствия компактных ПЭ с преградой
1500 м/с, а также в преграды из
алюминиевых сплавов со скоростя-
ми до 800 м/с реализуется так на-
зываемая аэродинамическая схема
внедрения (рис. 3.69, а). В этом слу-
чае задачу определения величин L
и /’пред можно свести к решению
уравнения движения жесткого неде-
формируемого ударника, которое с
учетом инерционных и прочност-
ных свойств среды имеет вид
3.5. Поражающее действие осколков 239
2
т^ = _Р^ SCx_SHo, (3.27)
at 2
где т - масса осколка (ПЭ); рп - плотность материала преграды; S - плошадь
миделя ПЭ; сх - коэффициент лобового сопротивления; Но - удельное прочно-
стное сопротивление преграды.
Уравнение (3.27) можно представить в виде
™=-A'v2-C',
dt
Где д'=РА; с' = ^--
2т т
После замены
dv dv dx dv
— =-------= v —
dt dx dt dx
и интегрирования в пределах от 0 до L* и от до 0 получают соотношения
для глубины внедрения в полупространство
и соответственно предельной толщины пробития
к ( А 2
^пред — э д' П "*"77^0
I С/
Из этого решения находят также выражение для предельной скорости про-
бития (ПСП) преграды заданной толщины Ь\
rncn -
(3.28)
Высокоскоростное внедрение компактных ПЭ в плотные и прочные пре-
грады сопровождается деформированием ударников, при этом реализуются
так называемые кратерный (рис. 3.69, в) или переходный (рис. 3.69, б) меха-
низмы внедрения.
При увеличении скорости удара изменяется форма каверны (кратера) и, как
следствие, увеличиваются глубина и объем кратера (рис. 3.70). О смене харак-
тера взаимодействия ударников с преградой свидетельствуют и эксперименталь-
ные данные о глубине кратеров, образованных стальными ударниками в сталь-
ных преградах с различной твердостью материала (1700, 3000 и 4400 НВ для
кривых 1,2 и 3 соответственно, рис. 3.71). Немонотонный характер зависимос-
тей L(v) (см. рис. 3.71) объясняется сменой механизма взаимодействия.
Кратерный механизм взаимодействия характерен для высокоскоростного
соударения (скорость более 3000 м/с). При таком ударе образуется кратер, объем
которого значительно превышает объем ударника.
240
3. Боеприпасы осколочного действия
г
е
Рис. 3.70. Сечение кратеров в свинцовой преграде при различных скоростях удара, км/с:
а - 0,6; б - 0,7; в - 1,3; г - 3,1 ;д - 4,4; е - 5,5
Рис. 3.71. Зависимости глубины кратеров от скорости удара в переходном диапазоне
скоростей для преград различной твердости, НВ:
1 - 1700; 2 - 3000; 3 - 4400
При оценке глубины пробития высокоскоростными компактными ударни-
ками преград с изотропными пластическими свойствами обычно принимают
форму кратера близкой к полусферической. В первом приближении допускают,
что объем кратера пропорционален начальной кинетической энергии ударника
£0. Считая, что кинетическая энергия расходуется на работу расширения по-
3.5. Поражающее действие осколков
241
лусферической полости в преграде с постоянным противодавлением/>0 = zgtii
при изменении радиуса каверны г от 0 до конечного значения R, получаем
откуда глубина каверны
« 3
£0 = 2лр0 j г2 dr = - тср0г3,
о
\ 2тиотп
а относительная предельная толщина пробиваемой преграды -
^прел _ kL
из-- 1/з
т т
( 2 А1/3
= £ •
^тп ,
(3.29)
где отп - предел текучести материала преграды; К - обобщенный коэффици-
ент конечности преграды; z - коэффициент, учитывающий прочностные свой-
ства преграды.
Для наиболее распространенных преград, изготовленных из сталей и спла-
вов алюминия (дюралюминия) среднего качества, найдены приближенные со-
отношения:
для стали -
^пред - _s 2/3
—^-5,25/70 ,
т
для дюралюминия -
^пред
1/3
т
где Лпрсд измеряется в мм, а г'о - в км/с.
Диапазон значений г() встречи ПЭ с преградами в настоящее время про-
стирается до 10 км/с и более. Столь высокий уровень скоростей соударения
обусловлен тем, что в число целей включены ле-
тательные аппараты, поражаемые на баллисти-
ческих участках траектории в высоких слоях ат-
мосферы или же в космическом пространстве на
орбитах искусственных спутников. Для прогно-
зирования размеров кратеров в таких условиях
можно воспользоваться результатами эксперимен-
тов, в которых происходит удар стальных шаров
по преградам из различных конструкционных ма-
териалов (рис. 3.72). Из них следует, что силь-
Рис. 3.72. Зависимость отно-
сительной глубины кратеров
от скорости удара:
/ Д16; 2 сталь 10
ное влияние на конечные параметры кратера ока-
зывают прочностные характеристики материала
преграды, величины которых на поздних стади-
ях процесса сравнимы с инерционными силами.
Учесть влияние динамического характера нагру-
242
3 Боеприпасы осколочного действия
жения на параметры кратерообразования можно через зависимость предела
текучести от скорости деформирования. Если скорость деформации выразить
как ё = г0/с/Пэ» то в экспериментах - 106 < ё < 3 107 с-1 (рис. 3.73). Для расче-
та динамического предела текучести отпд в столь высокоскоростном диапазо-
не деформирования воспользуемся соотношением
<\пд=л"ё₽,
полученным и обоснованным в теории динамического деформирования ме-
таллов Постоянные А" и Р для ряда материалов преграды даны ниже:
Материал .... ... Х18Н10Т Ml Д16Т АМГ-6 АД1-М
А" 5,06 2,24 1,58 1,43 0,63
Р 0,42 0,38 0,136 0.183 0.2
Большое влияние на толщину пробиваемой преграды при кратерном ме-
ханизме внедрения оказывают тыльные эффекты, проявляющиеся в основ-
ном в виде откола. При действии ПЭ на преграды из алюминиевых сплавов
Рис. 3.73. Рентгеноимпульсная съемка про-
цесса пробития компактным ПЭ тонкой
стальной преграды
откольные явления выражены слабо,
а начало сквозного разрушения свя-
зано с радиальным трещинообразо-
ванием при пластическом течении
«донной» части материала околокра-
терной зоны. Наоборот, при ударе
стальных ПЭ по стальным прегра-
дам предельная толщина во многом
определяется откольными эффекта-
ми, при этом остающаяся часть ма-
териала преграды между кратером и
зоной откола разрушается по типу
выбивания пробки. Обобщенный ко-
эффициент конечности преграды К
в соотношении (3.29) составляет для
преград из алюминиевых сплавов ве-
личину 1,4...1,5. Тыльные эффекты
приводят к увеличению предельной
пробиваемой толщины /?пред. Для
стальных преград К в соотношении
(3.29) достигает значений 2 и более.
Действие компактных ПЭ по на-
земным целям сопровождается соуда-
рением при относительно умеренных скоростях, при этом в зависимости от
свойств материалов ударника и мишени в диапазоне от нескольких сотен м/с
до 2,5 км/с внедрение происходит по переходному механизму. В этих услови-
ях наблюдается заметная деформация ударника, степень которой при задан-
ных физико-механических характеристиках материалов ударника и преграды
зависит от скорости удара и толщины мишени. Толщина пробиваемой прегра-
ды при переходном механизме внедрения пропорциональна импульсу ударни-
(3.30)
(3.31)
3.5. Поражающее действие осколков 243
ка, в связи с чем для оценки Лпред используется критерий удельного импульса,
который линейно зависит от толщины преграды
/ = ^>i
S кр'
При соударении пары сталь-сталь
^пред _ Рр . _ 155/?^тФ
щ1/3 ~ 155Ф ’ ПСП“
а сталь дюраль -
^пред _ Ур _ 66&дФ
т1/3 “ббФ’ ^СП“ ’
где Ф - параметр формы ПЭ; ЬЭСТ стальной и дюралевый эквиваленты
целей; гпсп _ предельная скорость пробития.
Помимо приведенных соотношений (Э.30)-(3.32) для определения предель-
ной толщины пробиваемой преграды при реализации переходного механизма
внедрения получены различные эмпирические формулы, в частности, для пары
сталь-сталь известно соотношение НИИ.«Геодезия»
611ред=2,19(1 + 6,5^),
где 7>прсд - в мм> го _ в км/с, q - в г/см2.
Рассмотренные выше механизмы внедрения и соотношения, характеризу-
ющие критические условия пробития, относятся к одиночным преградам. В
то же время многие реальные цели (в частности, воздушные) состоят из набо-
ра разнесенных преград. В этом случае при ударе со скоростью, превышаю-
щей некоторое критическое значение г0 > гкр, после пробития первой прегра-
ды происходит разрушение ПЭ, что подтверждается характером повреждения
разнесенных преград (рис. 3.74) и рентгеноимпульсной съемкой процесса про-
бития преграды (см. рис. 3.73). При этом за счет разрушения как ПЭ, так и
преграды образуется поток мелких осколков, приобретающих радиальные ско-
рости, а скорость разлета этих осколков в направлении удара существенно
уменьшается по сравнению с первоначальной скоростью удара г0. И несмотря
на то что общий импульс и энергия потока за первой преградой уменьшаются
незначительно, происходит их перераспределение на большую площадь, что
резко снижает пробивное действие потока по следующим преградам. Так, в
рассмотренном опыте (см. рис. 3.73) предельная толщина пробития для оди-
ночной преграды составляет Лпред = 21 мм, а при действии по разнесенным
преградам суммарная толщина пробитых стальных листов равна приблизи-
тельно 10 мм.
Приведенные выше соотношения по определению предельных значений
являются в известной степени приближенными. Более точные оценки величи-
ны /?пред могут быть получены при численном моделировании процессов про-
бития в двухмерной (при нормальном ударе) или трехмерной (при ударе под
углом) постановках.
244
3. Боеприпасы осколочного действия
Рис. 3.74. Пробитие разнесенных преград компактным ПЭ (преграды -* 3-мм сталь-
ные листы, установленные с шагом 100 мм; ПЭ — стальной цилиндр массой 13 г; ско-
рость удара - 1900 м/с)
Действие плотного потока ПЭ
В большинстве случаев поражающее действие осколков связано с воз-
действием на цели отдельных ПЭ. Наряду с этим в осколочных потоках вы-
сокой плотности реализуется ситуация коллективного действия ПЭ по цели,
при которой проявляются дополнительные факторы поражения: механичес-
кое ослабление или разрушение уязвимых элементов конструкции цели; аэро-
удар в закрытых объемах цели; гидроудар в топливных баках. В качестве
примера рассмотрим механическое воздействие высокоплотного потока ПЭ
на разнесенные преграды из алюминиевого сплава (рис. 3.75). Действие та-
кого потока ПЭ привело не только к образованию множества сквозных про-
боин, но и проломов в преградах. Аэроудар - ударное повышение давления
в закрытых объемах цели (для воздушной цели фюзеляжа, киля, крыла),
которое при определенных условиях может привести к разрушению. Прони-
кающее действие осколочного потока по топливным бакам (гидроудар) вы-
зывает ударное повышение давления в них и соответственно деформирова-
ние и разрушение стенок баков.
Плотным считается поток, содержащий несколько десятков ПЭ на 1 м2
поперечного сечения потока и попадающий в цель с малой разновременнос-
тью. Основная характеристика плотного потока его удельная энергия Е. Для
готовых ПЭ Е = Ппп 2/2, где П плотность потока ПЭ, 1/м2. Условие пораже-
ния цели плотным потоком очевидно: Е > Екр.
Инициирующее действие осколков
Попадание высокоскоростных осколков в боевые заряды ВВ, находящие-
ся в составе цели (АБ на самолете, БЧ ракет и т. п.), может вызвать реакцию
3.5. Поражающее действие осколков
245
а
6
Рис. 3.75. Действие плотного потока ПЭ по разнесенным преградам:
а рентгеноимпульсная съемка плотного потока ПЭ; б - вид преград после воздействия
плотного потока ПЭ (слева - передний щит, справа - задний, расстояние между
щитами 100 мм)
взрывчатого превращения ВВ и привести соответственно к частичному или
полному поражению цели.
В работах, посвященных исследованию взаимодействия осколков с заря-
дами ВВ, отмечается, что ответные реакции ВВ на удар осколков или компак-
тных ПЭ, могут протекать в режимах детонации, взрыва (недетонационного
превращения ВВ ударно-волновой природы), локального взрыва или горения.
Предельным и наиболее эффективным режимом с точки зрения поражения
цели является детонация. Критические условия возбуждения детонации при
ударе осколка зависят от ряда таких факторов, как скорость, масса, размеры и
форма контактной поверхности ПЭ, наличие и параметры экранирующей обо-
лочки заряда ВВ и, естественно, характеристик чувствительности ВВ.
Анализ результатов экспериментальных исследований показывает, что
для каждого конкретного поражаемого БП существуют верхний и нижний
пороговые уровни воздействия ПЭ, характеризуемые обычно скоростью и
диаметром ПЭ. Детонация в заряде ВВ возбуждается при превышении верх-
него порогового уровня, а нижний пороговый уровень определяет границу
246
3. Боеприпасы осколочного действия
характеристик воздействия, при которых в заряде ВВ начинает проявляться
заметная химическая реакция. Между верхним и нижним пороговыми уров-
нями лежит область промежуточных ответных реакций ВВ - от горения до
взрыва.
При определении верхнего порогового уровня воздействия ПЭ использу-
ется подход, учитывающий ударно-волновой механизм возбуждения детона-
ции в заряде ВВ, при этом в качестве критерия принимается критическое зна-
чение плотности энергии. Условие возбуждения детонации при локализован-
ном воздействии ПЭ записывается в виде
G>GKp, (3.33)
G = kE = v2dn3, (3.34)
где GKp - критериальная величина (табл. 3.7); к - коэффициент пропорцио-
нальности, комплексно учитывающий время действия импульса сжатия в УВ,
а также плотность и сжимаемость материалов ПЭ и ВВ; Е - поверхностная
плотность энергии, подводимая к заряду ВВ ударной волной,^возникающей
при ударе ПЭ; v - скорость удара; г/пэ диаметр ПЭ.
Таблица 3.7. Значения величины <7.р для различных ВВ
при действии ПЭ по открьп ым зарядам ВВ
ВВ Плотность ВВ, рвв-10 3 кг/м3 Размеры и форма ПЭ, мм Скр, мм3/мкс2
ТГ 40/60 1,61-1,7 6-12 мм 16,5
РВХ-9404 1,84 Со сферическим торцом, с?пэ = 2-4 мм 16,0
РВХ-9404 1,84 С плоским торцом, </пэ = 2—4 мм 4,0
Используя известную для данного ВВ величину GKp, а также зависимость
(3.34), можно найти пороговое значение скорости удара ПЭ, при которой в
заряде В В возбуждается детонация.
Рис. 3.76. Схема взаимо-
действия ПЭ с зарядом ВВ
при ударе под углом
При ударе под углом (рис. 3.76) зависимости
(3.33), (3.34) записываются в виде
г2с/пэ sin a^G^.
Анализ экспериментальных данных по возбуж-
дению детонации ПЭ показывает, что существен-
ную роль здесь играет форма головной части удар-
ника. Для сферических ПЭ значения GKp заметно
выше, чем для ПЭ с плоскими торцами, что объяс-
няется более быстрой разгрузкой нагружаемого
объема ВВ в случае сферического ударника по срав-
нению с ударником, имеющим плоский торец.
При наличии экрана (оболочки) на заряде ВВ
плотность энергии, вводимой в заряд ВВ на началь-
ном этапе ударно-волнового взаимодействия с ПЭ,
3.5. Поражающее действие осколков
247
уменьшается, что, естественно, отражается на критических значениях харак-
теристики G и скорости удара. В этом случае критериальная величина может
быть записана в следующем виде:
G - г2^пэ
( 8, Г гп + zv„
>GK_ l + m-И --------------
кр1 d z
\ “ J у 4уд
?п ^вв
2zn
(3.35)
где т - коэффициент, определяемый свойствами взаимодействующих матери-
алов и формой головной части ПЭ и учитывающий увеличение диаметра об-
ласти взаимодействия (для широкого диапазона ВВ и металлических экранов
(сталь, медь) значение т близко к отношению плотностей материалов экрана
и ПЭ); 8| - толщина экрана (оболочки) на заряде ВВ; zn, гуд, zBB - импедансы
материалов преграды, ударника и ВВ.
Форма головной части ударника учитывается величиной (1 + к)2, на кото-
рую умножается правая часть выражения (3.35), при этом к = 0 для ударников
с плоским торцом и к - 1 для ударников, ср сферическим торцом.
Определение характеристик нижнего порогового уровня воздействия ПЭ
на заряды ВВ сводится к нахождению такого значения скорости ПЭ, при пре-
вышении которого в заряде ВВ возбуждается реакция взрывного типа, не пе-
реходящая в детонацию, но приводящая к разрушению экранирующей обо-
лочки и самого заряда ВВ.
Пробитие ПЭ оболочки боеприпаса с зарядом ВВ сопровождается выби-
ванием пробки и снижением скорости ударника. Возбуждение взрыва проис-
ходит при некотором пороговом значении остаточной скорости ПЭ гпор, полу-
чаемой экспериментально. По величине гпор можно найти критическое значе-
ние скорости подхода ПЭ к поражаемому объекту, при котором произойдет
взрыв заряда ВВ:
I 2
V -< рпсп +
2
г’пор ’
где г’псп _ предельная скорость пробития экрана (оболочки); 8уд - высота уцар-
ника; 8| - толщина экрана (оболочки).
Величину г’псп можно определить, например, по соотношению (3.28), при
этом необходимо иметь в виду, что наличие ВВ за экраном (оболочкой) при-
водит к увеличению ?’псп- Так, в экспериментах по пробитию сферическим
ПЭ оболочек, снаряженных составом ТГ40/60, установлено, что величина г’псп
возрастает на 10... 15 %. В тех же экспериментах, но с цилиндрическими ПЭ
в виде роликов определено значение пороговой скорости гпор, которое для
ТГ40/60 равно 100 м/с.
В качестве примера (рис. 3.77) приведены результаты экспериментально-
го определения пороговых уровней воздействия стальных ПЭ (шарики диа-
метром 12,7 мм) на стальные цилиндрические оболочки, снаряженные соста-
вом ТГ40/60 (диаметр и высота заряда ВВ равны 60 мм). Удар ПЭ проводился
по донной части оболочек. При уменьшении толщины экрана (дна) с 5 до
4 мм наблюдается скачкообразный переход от взрыва к локальному взрыву,
248
3. Боеприпасы осколочного действия
обусловленный резким сбросом давления вследствие отрыва дна, отчего на-
чавшаяся реакция взрыва затухает. При гидроударе оболочка разрушается без
заметного разложения ВВ.
Следует отметить, что в экспериментах, проведенных по такой же схеме с
ВВ аналогичного состава (состав «В»), но с ПЭ в форме цилиндров-роликов
(диаметром 13,2 и высотой 12,2 мм), установлена возможность возбуждения
взрыва без сквозного пробития экрана (дна оболочки), что подтверждает от-
меченное выше преимущество ПЭ с плоскими ударяющими поверхностями
по сравнению со сферическими ПЭ.
Из рассмотренного примера видно, что задача нахождения границ поро-
говых уровней воздействия ПЭ на боевые заряды ВВ достаточно сложна даже
для одного типа ВВ, а учитывая большую номенклатуру ВВ и значительное
разнообразие условий взаимодействия ПЭ с поражаемым объектами, ее реше-
ние становится еще и весьма трудоемким. В связи с этим наиболее рациональ-
ными с точки зрения практического использования являются эмпирические со-
отношения, определяющие условия инициирования по верхнему пороговому
уровню, т. е. по режиму детонации, при котором происходит безусловное пора-
жение цели. Одно из таких соотношений - формула Якобса - Росланда, по-
зволяющая получить критическую скорость ПЭ:
r = (A, +В1)(1 + А:)| 1 + С—
V б/пэ
где v - критическая скорость ПЭ, км/с; Ах и Вх - коэффициенты, определен-
ные в экспериментах с плоской ударяющей поверхностью осколка (для флег-
матизированного октогена Ах = 2,05 и Вх = 0); к - коэффициент формы (для
1
sin а
Рис. 3.77. Границы пороговых
уровней воздействия ПЭ на ВВ
в зависимости от толщины пре-
грады (оболочки):
I - детонация; [1 - взрыв; III - ло-
кальный взрыв; IV - гидрсудар; V -
отсутствие пробития и химической
реакции
Рис. 3.78. Зависимость критической скорос-
ти инициирования детонации от диаметра ПЭ:
1 - флегматизированный октоген (открытый заряд,
плоский торец ПЭ); 2 - флегматизированный ок-
тоген (открытый заряд, сферический торец ПЭ);
3 — флегматизированный гексоген, 4 - флегмати-
зированный октоген (экран - 6 мм тантал, плос-
кий торец ПЭ); 5 - флегматизированный октоген
(экран - 6 мм тантал, сферический торец ПЭ)
3.5. Поражающее действие осколков
249
ПЭ со сферическим торцом k = 1, с плоским - к = 0); С - коэффициент, учи-
тывающий влияние экрана (оболочки) (для танталового экрана С - 1,86, а для
композиции алюминий-полиуретан-поликарбонат - С = 2,96); Ь - толщина эк-
рана, мм; с?пэ _ диаметр ПЭ, мм; а - угол встречи ПЭ (см. рис. 3.76).
Из экспериментальной зависимости критической скорости ПЭ (по верх-
нему пороговому уровню) от диаметра ПЭ (рис. 3.78) видно, что с увеличени-
ем размера пороговый уровень воздействия ПЭ снижается.
В последние десятилетия разрабатываются новые составы ВВ, отличаю-
щиеся повышенной устойчивостью к воздействию осколков, однако для по-
давляющего большинства современных поражаемых БП с зарядами ВВ, ини-
циирующее действие осколков остается одним из основных факторов пора-
жения.
Зажигательное действие осколков
Зажигательное действие ПЭ - один из существенных факторов пораже-
ния целей. При попадании в уязвимые зоны цели, содержащие горючие ком-
поненты (топливные баки, ракетные твердотопливные двигатели и т. п.), ПЭ,
имея достаточные скорости и массы, могут вызвать их воспламенение и, как
следствие, вывод цели из строя. Особо важную роль зажигательное действие
играет при действии осколочных потоков по воздушным целям, у которых
площадь топливных баков составляет 30...60 % уязвимой площади цели.
Процесс воспламенения топлива осколком - вероятностный и зависит от
ряда факторов, основными из которых являются физические свойства и со-
стояние горючего в баках, конструктивные особенности баков и экранирую-
щей обшивки ЛА, а также скорость и масса ПЭ.
С физической точки зрения процесс инициирования горения топлива весь-
ма сложен и до настоящего времени не поддается полному теоретическому
описанию. В связи с этим задача оценки инициирующей способности оскол-
ков решается в основном экспериментально. Так,
с помощью экспериментов показано, что в качестве
основного критерия, определяющего зажигательную
способность осколка, может быть принят его удель-
ный импульс
. _mv _ m'l3v
Ф ’
а вероятность воспламенения ръ топлива находят
в зависимости от удельного импульса.
Характер кривой/?в(г) (рис. 3.79) зависит от ряда
факторов, одним из которых является наличие эк-
ранировки топливных баков. На ЛА, в частности на самолетах, экран - это
обшивка, выполненная из сплавов на основе алюминия (например, дюралю-
миния). Пробитие таких экранов стальными ПЭ сопровождается горением
алюминия и образованием запреградного потока мелких раскаленных час-
тиц в виде факела, способного воспламенить топливо. Таким образом, нали-
гпйп Gnax
Рис. 3.79. Вероятность
воспламенения топлива
в зависимости от удель-
ного импульса ПЭ
250
3. Боеприпасы осколочного действия
чие экранов из сплавов на основе алюминия повышает вероятность воспла-
менения топлива.
Другой фактор, влияющий на вероятность воспламенения, - это состоя-
ние топлива. Воспламенение паров топлива в неполных баках существенно
вероятнее, чем воспламенение топлива, находящегося только в жидкой фазе.
Вероятность воспламенения зависит также от условий, при которых про-
исходит взаимодействие с целью, в частности от высоты полета цели. С уве-
личением высоты понижаются давление и температура атмосферы, в связи с
чем уменьшается парциальное давление паров горючего, концентрации паров
горючего и кислорода в парогазовой смеси, что также снижает вероятность
воспламенения (на высоте около 16 км вероятность воспламенения практи-
чески равна нулю).
Наряду с топливными системами уязвимыми по опасности воспламене-
ния являются метательные пороховые заряды БП, содержащиеся в составе
целей - носителей артиллерийского или реактивного вооружения, отсеки твер-
дотопливных ракетных двигателей и т. п. Оценки зажигательного действия по
таким целям достаточно сложны и для их упрощения проводятся по крити-
ческим значениям параметров, например, скорости ПЭ. В этом* случае для
каждого конкретного типа уязвимых агрегатов экспериментально находят та-
кие значения скорости ПЭ и0, v05, v{, при которых вероятности йоспламене-
ния равны 0; 0,5 и 1 соответственно. Вероятность воспламенения при других
скоростях может быть найдена путем аналитической аппроксимации зависи-
мости рв(и) по трем известным точкам.
3.6. Артиллерийские осколочные и осколочно-фугасные снаряды
Конструкции артиллерийских осколочных снарядов на протяжении не-
скольких столетий, начиная с момента их появления, состоят из трех основ-
ных элементов - металлического корпуса, разрывного заряда и устройства ини-
циирования заряда. Первые артиллерийские БП осколочного действия появи-
лись во второй половине XVI в. и представляли собой толстостенные чугунные
шары - ядра с внутренней полостью и очком под трубку (рис. 3.80). В каче-
стве разрывного заряда использовали дымный порох. Трубка конической фор-
мы изготавливалась из дерева и имела сквозное отверстие, в которое запрес-
совывали заряд дымного пороха. Трубка приводила в действие разрывной за-
ряд; пороховой заряд трубки поджигали либо отдельно, либо от метательного
порохового заряда пушки. Такое взрывное приспособление было, по суще-
ству, первой дистанционной трубкой.
Осколочные снаряды-ядра находились на вооружении армий разных стран
около трехсот лет. Опыт их применения показал, что при полном заряде поро-
ха чугунное ядро дробится с образованием излишне большого числа мелких
неубойных осколков, а при известном ограничении массы разрывного заряда
число убойных осколков возрастает. По этой причине во второй половине
XVIII в. одинаковые корпуса стали снаряжать полными зарядами дымного по-
роха для действия по сооружениям и уменьшенными зарядами - для действия
по живой силе. Таким образом, фактически возникло разделение разрывных
снарядов на фугасные и осколочные.
lepuiicKiie осколочные и осколочно-фугасные снаряды
251
Рис. 3.81. Бомба
для мортиры
Рис. 3.82. Сферическая
шрапнель
Рис. 3.80. Чугунное ядро -
первый осколочный снаряд
Рис. 3.83. Корпус
осколочного сна-
ряда второй поло-
вины XIX в.
В зависимости от массы первые ОБП получили название гранат (при мас-
се менее 1 пуда - 16,4 кг) или бомб (при массе более 1 пуда). Следует отме-
тить, что бомбы гладкоствольной артиллерии несколько отличались от гранат
наличием ушек для облегчения заряжания орудия (рис. 3.81). В России пер-
вые гранаты и трубки появились в конце XVII - начале XVIII в. и просуще-
ствовали до середины XIX в. Наименовайие гранат и бомб за осколочными и
фугасными снарядами сохранялось и в период развития нарезной артиллерии
вплоть до 20-х годов XX в.
Стремление повысить эффективность осколочного действия привело к по-
явлению в конструкциях осколочных гранат ГПЭ. В начале XIX в. англича-
нин Шрапнель разработал первый осколочный снаряд с ГПЭ, который с тех
пор во всех видоизменениях называют по имени изобретателя. Первые шрап-
нели представляли собой обычные ядра, заполненные ружейными свинцовы-
ми пулями и порохом (рис. 3.82), а длину порохового заряда трубки подбира-
ли из расчета разрыва снаряда в воздухе перед целью.
Появление нарезной артиллерии в середине XIX в. при-
вело к существенному повышению дальности стрельбы, куч-
ности боя и могущества действия ОБП. Повышение могу-
щества связано в первую очередь с изменением облика сна-
рядов - переходом от сферической к удлиненной форме,
свойственной для современных снарядов. Корпус типового
осколочного снаряда второй половины XIX в. вытянутой
формы (рис. 3.83) снабжен медным ведущим пояском (для
придания снаряду вращательного движения, стабилизиру-
ющего его полет, и обтюрации - предотвращения прорыва
пороховых газов в предснарядное пространство в канале
ствола) и центрирующим утолщением (для центровки и пра-
вильного ведения снаряда по каналу ствола пушки); в го-
ловной части корпуса предусмотрено очко для снаряжения
разрывным зарядом и установки устройства для его иници-
ирования - ударной (срабатывающей без замедления) или
дистанционной (срабатывающей с заданной временной за-
держкой) трубок.
Переход к удлиненной форме осколочных гранат выз-
вал развитие шрапнелей (рис. 3.84) и появление первых
252 3. Боеприпасы осколочного действия
конструкций с регулируемым дроблением корпусов. Снаряд, получивший в
русской артиллерии название двухстенной осколочной гранаты (рис. 3.85), был
разработан в 1870-1880 гг. Граната содержала набор чугунных зубчатых ко-
лец 1, составлявших внутреннюю стенку корпуса, и наружный чугунный кор-
пус 2. Она снаряжалась зарядом дымного пороха. Осколочный спектр такой
гранаты состоял из достаточно большого количества убойных осколков.
До 70-х годов XIX в. для снаряжения осколочных гранат нарезной артил-
лерии использовали исключительно дымный порох. Качественно новый этап
в развитии ОБП связан с появлением БВВ. В 80-х годах XIX в. во Франции,
Англии и, несколько позднее, в Японии для снаряжения гранат стали приме-
нять пикриновую кислоту (мелинит), в России - влажный пироксилин. К на-
чалу Первой мировой войны ОФС снаряжали тротилом. При снаряжении чу-
гунных осколочных гранат мощными БВВ практически весь осколочный спектр
смещался в область мелких неубойных осколков, что явилось одной из при-
чин замены чугуна на сталь. Другой причиной такой замены стал возросший
уровень требований к прочности корпусов вследствие увеличения перегрузок
на снаряд при выстреле и уцаре о преграду. #
Рис. 3.84. Шрапнель второй
половины XIX в.
Рис. 3.85. Двухстенная осколочная
граната:
1 чугунные зубчатые кольца; 2 —
наружный корпус
3.6. Артиллерийские осколочные и осколочно-фугасные снаряды 253
Переход от чугунных ядер к стальным осколочным снарядам нарезной
артиллерии сопровождался также развитием узлов инициирования: на смену
столбчатым трубкам пришли дистанционные и ударные трубки, которые, в
свою очередь, с появлением БВВ сменились на взрыватели ударного и дис-
танционного действия.
Современный облик артиллерийские осколочные, осколочно-фугасные и
фугасные снаряды приобрели к концу 20-х годов XX в., заняв центральное
место в ряду БП артиллерии, практически полностью вытеснив традицион-
ные для того времени шрапнели. Дальнейшее развитие конструкций осколоч-
ных и осколочно-фугасных снарядов вот уже на протяжении многих десяти-
летий связано с улучшением их аэродинамических характеристик, повышени-
ем параметров осколочного и фугасного действия.
В настоящее время на вооружении артиллерии армий различных стран на-
ходятся ОФС различных калибров. В наземной артиллерии в зависимости от
калибра их подразделяют на снаряды малого (до 75 мм), среднего (75... 155 мм)
и крупного (более 155 мм) калибров.
Конструкции современных ОФС достаточно просты и в самом общем
случае содержат три основных элемента: корпус с внутренней полостью (ка-
мора), заряд ВВ, размещаемый в каморе, и взрыватель. При этом на корпу-
сах выполняются центрующие утолщений'и устанавливаются ведущие пояс-
ки. Верхнюю часть снаряда (от верхнего центрирующего утолщения до вер-
шины взрывателя) принято называть головной, среднюю часть (от верхнего
центрирующего утолщения до ведущего пояска) - цилиндрической, а ниж-
нюю (от ведущего пояска до донного
среза) - запоясковой.
Оболочки ОФС выполняют цельно-
корпусными (рис. 3.86, а), характерны-
ми для ОФС малых, средних и реже -
крупных калибров, с привинтной голов-
кой (рис. 3.86, б), применяемой в ОФС
средних калибров, шрапнелях, реже - в
ОФС малых и крупных калибров, с
ввинтным дном (рис. 3.86, в) - для ОФС
средних и крупных калибров.
Головная часть ОФС имеет ожи-
вальную форму, запоясковая - коничес-
кую. Полная длина современных ОФС
в зависимости от калибра и типа сна-
ряда составляет /с = 4,0...5,5 клб. Пара-
метры внешней формы ОФС определя-
ются в первую очередь требованиями по
дальности стрельбы и, следовательно,
начальной скоростью снаряда. Основ-
ные тенденции изменения формы сна-
ряда в зависимости от его начальной
скорости следующие (рис. 3.87): с рос-
том начальной скорости длина головной
Рис. 3.86. Оболочки ОФС:
а — цельнокорпусная; б - с привинтной
головкой; в - с ввинтным дном
254
3. Боеприпасы осколочного действия
части увеличивается, а цилиндрической и запоясковой - уменьшается. Тол-
щину стенок корпуса ОФС находят из условий обеспечения прочности при
выстреле и встречи с преградой.
Снаряды, предназначенные для стрельбы из гаубиц со сравнительно не-
большими начальными скоростями, выполняют с меньшей полной длиной
/с, небольшой высотой оживальной части и минимальной толщиной стенки
корпуса по сравнению с аналогичными параметрами снарядов для пушек
(табл. 3.8).
Рассмотрим некоторые типовые конструкции современных осколочных и
осколочно-фугасных снарядов более подробно.
30-мм осколочно-трассирующий снаряд (рис. 3.88) входит в состав патро-
на, имеющего гильзу с метательным пороховым зарядом, и предназначен для
стрельбы из автоматических пушек 2А38, 2А42, 2А72 по наземным и воздуш-
ным целям. Наличие трассера позволяет создать видимую в дневное и ночное
время трассу полета снаряда. Снаряд состоит из стального корпуса с двумя
каморами - передней, в которой размещается разрывной снаряд (A-IX-2), и
задней, в которой помещен трассер; медного ведущего пояска и взрывателя.
Таблица 3.8. Конструктивные характеристики осколочных
и осколочно-фугасных снарядов
Снаряд Общая длина /с, клб Высота голов- ной части (ГЧ) /j-ц, клб Коэффициент наполнения а, % Толщина стенки 6, клб
К зенитным пушкам 37-57 мм 4,42-3,90 2,40-1,88 5,0-5,5 0,18-0,20
К пушкам 76-100 мм 4,5—4,6 2,3 7,8-10,0 0,20-0,24
К пушкам 122-152 мм 4.4-5,2 2,2-3,0 10-14 0,13-0,24
К гаубицам 122- 152 мм 4,2—4,6 2,0 14,5-16,2 0,12-0,13
К гаубицам США 105-155 мм 4,5-4,7 2,3-2,4 13,7-15,9 0,10-0,22
Примечание. а = твв/(твв + М), где твв - масса ВВ, М- масса корпуса. Размеры /с, /Гч и 6 заданы в клб (другими словами - по отношению к калибру снаряда).
3.6 Артиллерийские осколочные и осколочно-фугасные снаряды 255
Рис. 3.88. 30-мм оско-
лочно-трассирующий
снаряд:
I - взрыватель; 2 - корпус;
3 - заряд ВВ; 4 - трассер;
5 - ведущий поясок
Корпус снаряда выполнен с двумя центрирующими
утолщениями и снабжен цилиндрической запоясковой
частью с двумя кольцевыми патронными канавками,
предназначенными для обжима дульца гильзы при
сборке патрона. В снаряде применен взрыватель за-
медленного действия (А-670М), взведение которого
начинается в канале ствола и заканчивается на рас-
стоянии примерно 100 м от дульного среза ствола
пушки. Замедление срабатывания взрывателя при уда-
ре о преграду создает условия для подрыва снаряда
за преградой, что обеспечивает максимальный уровень
поражения цели. Взрыватель оснащен устройством са-
моликвидации, которое приводит к подрыву снаряда
при промахе в течение 5...9 с после выстрела.
Корпус снаряда обладает следующими конст-
руктивными характеристиками: полная длина /с =
= 4,86 клб; высота головной части /гч = 2,3>3 клб; мак-
симальная толщина стенки 8 = 0,167 клб; масса сна-
ряда - 0,37 кг; масса ВВ - 11,5 г; коэффициент на-
полнения а = 3,1 %.
Оценка скорости осколков по соотношению (3.16)
дает для данного снаряда значения ~ 1100... 1200 м/с.
При дроблении корпусов осколочных снарядов ма-
лых калибров образуются несколько десятков оскол-
ков с массой от 1 до 10 г. Наличие достаточно боль-
шого чиста убойных осколков при высокой скорости
их метания делает ОБП малых калибров, в том числе
и рассматриваемый снаряд, высокоэффективным по-
ражающим средством при условии подрыва в запрег-
радном пространстве.
122-мм ОФС повышенного могущества (3-ОФ-24Ж)
к гаубицам Д-30, Б-30, 2С1 (рис. 3.89) универсален и
предназначен для вывода из строя живой силы, ар-
тиллерии, минометов и пехотных огневых средств
противника, а также для разрушения сооружений по-
левого типа и проволочных заграждений.
Снаряд состоит из корпуса 3 с ведущим пояском 5, разрывного заряда 4 и
взрывателя 1. Стальной корпус имеет привинтную головку 2 и выполнен с
двумя центрирующими утолщениями. Металлокерамический ведущий поясок
5 запрессован в канавку корпуса 3. Основная часть каморы снаряда заполнена
составом A-IX-20 методом порционного прессования. В зоне привинтной го-
ловки в камору помещена шашка прессованного заряда A-IX-20. Снаряд ком-
плектуют ударным взрывателем с установками на мгновенное или замедлен-
ное действие (РГМ-2Э РГМ-2М и т. п.). Конструктивные характеристики сна-
ряда: полная длина снаряда /с = 4,55 клб; высота головной части /гч = 2,25 клб;
максимальная толщина стенки в цилиндрической части 8 = 0,14 клб; масса
снаряда - 21,6 кг; масса ВВ - 3,93 кг; коэффициент наполнения а = 18,1 %.
256
3. Боеприпасы осколочного действия
Рис. 3.89. 122-мм ОФС 3-ОФ-24Ж:
1 - взрыватель; 2 - привинтная голов-
ка; 3 - корпус; 4 - заряд ВВ; 5 - веду-
щий поясок
Рис. 3.90. 152-мм ОФС ОФ-45:
1 взрыватель; 2 - переходная втулка; 3 -
корпус; 4 — заряд ВВ; 5 - ведущий поясок;
б - конус
Начальная скорость осколков г0, оцененная по формуле (3.16), составляет
1300... 1450 м/с. Повышенное могущество действия данного снаряда реализу-
ется за счет применения мощного БВВ A-IX-20, что в сочетании с высоким
коэффициентом наполнения обеспечивает не только качественное дробление
корпуса, но и повышенные скорости метания осколков. Помимо улучшения
характеристик осколочности данный снаряд обладает также высокими уров-
нями фугасного и термического действия.
152-мм ОФС ОФ-45 (рис. 3.90) к гаубицам 2А65 и 2С19 имеет улучшен-
ную аэродинамическую (дальнобойную) форму, универсален и предназначен
для вывода из строя живой силы, средств вооружения, небронированной и
легкобронированной техники противника, разрушения сооружений полевого
типа и проволочных заграждений.
3.6 Артиллерийские осколочные и осколочно-фугасные снаряды 257
Снаряд состоит из корпуса 3 с медным ведущим пояском 5, переходной
втулки 2, конуса 6, разрывного заряда 4 и взрывателя 1. Стальной корпус 3
выполнен с двумя центрирующими утолщениями и имеет в головной части
очко под переходную втулку 2, в которую устанавливают взрыватель 7. Сталь-
ной конус б крепится на резьбе к хвостовой части корпуса для улучшения
аэродинамических характеристик снаряда.
Камора корпуса заполнена составом A-IX-2 методом порционного прес-
сования. В каморе переходной втулки 2 размещены шашки прессованного
A-IX-2. Для подрыва разрывного заряда 4 применен ударный взрыватель РГМ-2
(РГМ-2М) с установками на мгновенное или замедленное действие.
Улучшенные аэродинамические характеристики снаряда обусловлены
увеличением полной длины снаряда за счет удлинения головной части и вве-
дения в конструкцию дополнительной детали - заднего конуса. Полная дли-
на снаряда составляет 1С = 5,65 клб; высота головной (оживальной) части
равна /гч = 3,1 клб; максимальная толщина стенки в цилиндрической части
8 = 0,125 клб; масса снаряда - 43,56 кг; масса ВВ - 7,65 кг; коэффициент на-
полнения а = 17,6 %.
Начальная скорость осколков снаряда, рассчитанная по формуле (3.16),
равна 1200... 1350 м/с. Качественное дробление корпуса в сочетании с высо-
кой скоростью осколков обеспечивает достаточно высокий уровень осколоч-
ного действия снаряда. За счет применения состава A-IX-2 данный снаряд
является высокоэффективным по параметрам как фугасного, так и термичес-
кого действия по целям.
Рассмотренные снаряды - типичные образцы современных артиллерийс-
ких ОБП, в конструкциях которых видны основные тенденции их развития:
повышение могущества и улучшение аэродинамических характеристик. По-
вышенное могущество осколочного действия создают увеличением коэффи-
циента наполнения и применением мощных БВВ, что приводит к увеличению
скорости осколков, достаточно качественному дроблению, а в снарядах сред-
них и крупных калибров - еще и заметному повышению уровня фугасного
действия. Значительно меньше в реально существующих ОФС используют
ресурсы, заложенные в новых марках осколочных сталей.
Доминирующая тенденция развития современных артиллерийских сис-
тем увеличение дальности стрельбы. Так для нового поколения 155-мм ору-
дий НАТО требуемый уровень дальности составляет 40...50 км. Наряду с со-
вершенствованием самих артиллерийских систем существуют методы повы-
шения дальнобойности, связанные непосредственно с конструкцией снаряда.
Улучшение аэродинамических характеристик снарядов - это один из таких
методов. Среди других технических решений, направленных на увеличение
дальности стрельбы, следует выделить прежде всего использование активно-
реактивных снарядов, подкалиберных снарядов и снарядов с уменьшенным
аэродинамическим сопротивлением.
Активно-реактивные снаряды (АРС) состоят из двух основных частей
(рис. 3.91) - боевой части и реактивного двигателя с пороховым зарядом, со-
пловым блоком и замедлительно-воспламенительным устройством, обеспечи-
вающим работу двигателя через определенное время после вылета снаряда из
ствола. Изменение массогабаритных характеристик АРС проводится в преде-
258
3. Боеприпасы осколочного действия
лах, обусловленных характеристиками орудия, в связи с чем введение в со-
став снаряда реактивного двигателя неизбежно уменьшает массу разрывного
заряда, что несколько снижает могущество действия. По внешним очертани-
ям и функционированию при выстреле АРС не отличается от обычных снаря-
дов. Боевые части АРС снаряжают мощным БВВ, а в реактивных двигателях
используют высококалорийные пороха.
Активно-реактивные снаряды распространены достаточно широко и вхо-
дят в боекомплект орудий различных калибров. Так, в США разработаны АРС
калибром от 40 до 200 мм. Применение АРС приводит к увеличению дально-
сти стрельбы на 25... 100 %. Интересно отметить, что стоимость БП при этом
возрастает всего лишь на 10... 15 %. Современные разработки АРС направле-
ны на замену реактивных пороховых зарядов высокопрочными шашками твер-
дого топлива с более высоким удельным импульсом и минимальным дымооб-
разованием. • •
Подкалиберные ОФС можно отнести к сверхдальнобойным. Большую
дальность стрельбы здесь достигают за счет высокой начальной скорости сна-
ряда, что обусловлено уменьшением массы снаряда при сохранении дульной
энергии орудия. Подкалиберные ОФС включают в себя собственно снаряд 2,
называемый активным (рис. 3.92), и поддон 7, необходимый для ведения сна-
ряда в канале ствола и отделяемый от активного снаряда на начальном учас-
тке траектории. Высокие начальные скорости относительно легких подкали-
берных ОФС (1500... 1600 м/с) обеспечиваются использованием усиленных
пороховых зарядов, при этом дальность стрельбы может достигать 100 км и
более.
Рис. 3.91. Активно-реактивные ОФС:
1 разрывной заряд; 2 - пороховой заряд, 3 - со-
пловой блок с воспламенительным устройством
Рис. 3.92. Подкалиберный ОФС:
1 поддон; 2 - активный снаряд
3.6. Артиллерийские осколочные и осколочно-фугасные снаряды 259
Рис. 3.93. 155-мм
полнооживальный
ОФС с донным
газогенератором
ERFB/BB:
1 — взрыватель; 2 -
корпус; 3 - выступы
(пилоны); 4 - дон-
ный газогенератор
Осколочно-фугасные снаряды с уменьшенным аэродинамическим сопро-
тивлением имеют корпус так называемой полнооживальной формы, в дон-
ной части которого размещен газогенератор. В полете за плоским донным
срезом позади снаряда образуется область разрежения, являющаяся одним из
составляющих силовых факторов аэродинамического сопротивления. Назна-
чение донного газогенератора и заключается в снижении влияния данного фак-
тора. Характерными особенностями конструкции 155-мм полнооживального
ОФС с донным газогенератором ERFB/BB (рис. 3.93) является полное отсут-
ствие стандартной цилиндрической части, при этом центровку снаряда в ка-
нале ствола осуществляют специальными выступами на корпусе. Максималь-
ная дальность стрельбы для этого снаряда составляет 38...40 км.
Среди современных ОФС можно выделить снаряды к гладкоствольным
танковым пушкам, появившимся во второй половине XX в. и имеющим опре-
деленные преимущества перед нарезными танковыми артиллерийскими сис-
темами при метании высокоэффективных БОПС. Основное
отличие таких типов ОФС от обычных снарядов к нарез-
ным артиллерийским системам заключается в наличии
оперения, необходимого для стабилизации полета снаря-
да. В остальном как устройство, так и функционирование
БЧ соответствуют аналогам для нарезных систем. 125-мм
ОФС к танковой пушке Д-81 (рис. 3.94) универсален и пред-
назначен для вывода из строя различных типов целей.
Стальной корпус снаряда 2 оживальной формы выполнен
с тремя центрирующими утолщениями и снабжен двумя
медными ведущими поясками 4. Стабилизатор снаряда со-
стоит из корпуса 5, изготовленного из алюминиевого спла-
ва и четырех стальных лопастей 6, которые закреплены в
пазах корпуса на осях. В условиях служебного обращения
лопасти удерживаются в сложенном положении специаль-
ными стопорами, раскрытие оперения происходит после
вылета снаряда из канала ствола. Для повышения кучнос-
ти стрельбы снаряду придают некоторое вращение, для чего
на передних гранях каждой лопасти выполняют трапецие-
видные скосы
Камора корпуса заполнена тротилом, при снаряжении
использован метод шнекования, масса разрывного заряда 3
равна 3,15 кг. Снаряд укомплектован взрывателем 1 дальне-
го взведения В-429Е с установками на мгновенное (реак-
ционное). инерционное и замедленное действие. Общая
длина снаряда составляет /с = 5,4 клб, высота головной части
/гч = 2,1 клб, относительная толщина стенки корпуса 8 =
= 0,14 клб, полная масса снаряда - 23 кг, начальная скорость
осколков снаряда, рассчитанная по формуле (3.16), равна
950... 1100 м/с.
В заключение краткого обзора особенностей конструк-
ций осколочных и осколочно-фугасных артиллерийских сна-
рядов, а также основных тенденций их развития следует
260
3. Боеприпасы осколочного действия
отметить, что наряду с совершенствованием универсальных ОФС во второй
половине XX в. наметилась тенденция разработок специализированных сна-
рядов осколочного действия, а именно шрапнелей, исчезнувших из боекомп-
лектов артиллерийских орудий в конце 1920-х годов. Так, в 1960-х годах в
США разработан снаряд со стреловидными ПЭ к 105-мм гаубице. Боевое при-
менение данного снаряда войска США начали в 1967 г. во время войны во
Вьетнаме. Стальные стреловидные ПЭ (см. рис. 3.36) собраны в компактный
блок 3 и размещены в корпусе снаряда (рис. 3.95). Блок ПЭ, рассчитанных на
поражение живой силы, содержит 1500...2000 элементов. В головной части
снаряда на внутренней поверхности корпуса закреплены шнуровые заряды
ВВ 2, в донной части находится вышибной пороховой заряд 4. Снаряд снаб-
жен дистанционным взрывателем /, срабатывающим либо сразу после вылета
из канала ствола, либо на любой заданной дистанции, что обеспечивает воз-
можность применения снаряда как в ближнем бою, так и при обстреле целей
на различных дальностях. При срабатывании взрывателя происходит иниции-
рование шнуровых зарядов ВВ, подрыв которых приводит к раскрытию го-
ловной части корпуса. Одновременно осуществляется воспламенение вышиб-
ного заряда, под действием которого блок ПЭ выбрасывается из корпуса. Вра-
щение снаряда обеспечивает расхождение ПЭ в радиальном направлении.
Таким образом, снаряд создает поток высокоскоростных ПЭ с большой пло-
щадью накрытия. Опыт боевого применения показал высокую боевую эффек-
тивность шрапнели со стреловидными ПЭ.
Рис. 3.94. 125-мм ОФС З-ОФ-19:
1 взрыватель; 2 корпус; 3 разрывной
заряд; 4 - ведущий поясок; 5 - корпус ста-
билизатора; 6 - лопасть стабилизатора
Рис. 3.95. 105-мм снаряд со стреловидны-
ми ПЭ (США):
/ - взрыватель; 2 -- шнуровые заряды ВВ; 3 -
блок стреловидных ПЭ, 4 - вышибной заряд
3.7. Осколочные и осколочно-фугасные мины к ствольным минометам
261
3.7. Осколочные и осколочно-фугасные мины
к ствольным минометам
Основное назначение минометов - навесная стрельба, позволяющая по-
ражать как открыто расположенные цели, так и цели, укрытые в окопах, на
обратных скатах высот, а также разрушать горизонтальные перекрытия со-
оружений. Минометы имеют относительно тонкостенные гладкие или на-
резные стволы, из которых осуществляется метание мин с небольшими по
сравнению с артиллерийскими снарядами скорос-
тями - до 300 м/с. Максимальное давление поро-
ховых газов у минометов не превышает 108 Па
(1000 атм.). Минометы - это орудия ближнего боя,
диапазон дальности стрельбы которых находится
в пределах от нескольких сотен метров до несколь-
ких километров.
Минометные орудия в современном понимании
этого названия появились около ста лет назад и вско-
ре в ходе Первой мировой войны заняЛЙ прочное
место в ряду средств вооружения армий многих
стран. Диапазон калибров минометов, применявших-
ся в разные годы в армиях различных стран, доста-
точно широк (от 47 до 240 мм), однако во второй
половине XX в. наметилась тенденция к уменьше-
нию номенклатуры калибров минометов. В нашей
стране на вооружении находятся 82-, 120-, 160- и
240-мм минометы. При калибре 120 мм и менее ми-
нометы, как правило, заряжают со стороны дула, при
калибре более 120 мм - со стороны казенной части.
Осколочные и осколочно-фугасные мины - ос-
новные БП в боекомплектах минометов. Конструк-
тивные особенности мин определяются условиями
их боевого применения. Мины к гладкоствольным
минометам имеют каплеобразную форму и состоят
из следующих основных частей (рис. 3.96): корпу-
са; снаряжения; взрывателя; стабилизатора; основ-
ного патрона и дополнительных зарядов. В конст-
рукции мины выделяют головную, цилиндрическую,
хвостовую части и стабилизатор.
Корпус мины выполняют цельным или с при-
винтной головкой, реже - с привинтной хвостовой
частью. Детали корпуса изготавливают либо из вы-
сокопрочного (сталистого) чугуна методом литья,
либо из стали методом горячей штамповки с после-
дующей механической обработкой.
Головная часть мины имеет высоту, зависящую
от калибра и равную 0,4...2,0 клб. На цилиндричес-
кой части есть одно или два центрирующих утолще-
Рис. 3.96. Каплеобразная
осколочно-фугасная мина:
/ - воспламенительный за-
ряд; 2 - перо; 3 - дополни-
тельные заряды; 4- корпус
стабилизатора; 5 заряд ВВ;
6 - корпус; 7 - запальный
стакан с дополнительным де-
тонатором; 8 - привинтная
головка, 9 - взрыватель
262
3. Боеприпасы осколочного действия
ния, которые играют в минах ту же роль, что и в снарядах. Диаметр мины по
центрирующим утолщениям всегда меньше калибра миномета на 0,6...0,7 мм
для обеспечения свободного опускания мины в канал ствола миномета под дей-
ствием силы тяжести при его заряжании. Для уменьшения прорыва пороховых
газов в зазор между миной и стенками ствола на центрирующем утолщении
протачивают кольцевые канавки треугольного, прямоугольного, полукруглого
или трапециевидного профиля. Уменьшение прорыва пороховых газов проис-
ходит вследствие падения скорости газов при многократном расширении и за-
вихрении их в кольцевых канавках. Длина цилиндрической части колеблется в
зависимости от калибра мины в широких пределах: наименьшая длина свой-
ственна осколочным минам каплеобразной формы, наибольшая - минам боль-
шой емкости.
Хвостовую часть мины выполняют криволинейной, реже - конической.
Длина хвостовой части заключена в диапазоне 1,0...2,5 клб. Со стороны ниж-
него основания хвостовая часть имеет узел соединения со стабилизатором.
Стабилизатор мины состоит из трубки и перьев и предназначен для обес-
печения устойчивости полета мины и размещения элементов боевого^заряда.
Наличие стабилизатора приводит к перенесению центра давления ниже цент-
ра тяжести в область хвостовой части, создавая тем самым стабилизирующий
момент. Перья стабилизатора, количество которых в различных типах мин ко-
леблется от 4 до 24, обеспечивают также центровку мины в канале ствола.
В трубке стабилизатора есть камора для установки в ней основного заряда в
гильзе (основного хвостового патрона) и соединительные отверстия для вы-
хода пороховых газов основного заряда из трубки стабилизатора при выстре-
ле. Отверстия обычно располагаются на трубке в шахматном порядке между
перьями стабилизатора либо над ними в зависимости от места установки до-
полнительных зарядов: наличие отверстий обеспечивает надежное и быстрое
воспламенение дополнительных зарядов газами основного заряда.
Помимо рассмотренной мины каплеобразной формы с относительно не-
большой цилиндрической частью, мины могут иметь увеличенную длину ци-
линдрической части (рис. 3.97). Такая мина отличается повышенным коэффи-
циентом наполнения и, соответственно, могуществом действия.
Мины к нарезным минометам (рис. 3.98) близки по внешнему виду и уст-
ройству к гаубичным снарядам. Такие мины имеют либо авторегулируемый
ведущий поясок, либо поясок с готовыми нарезами. Метательные заряды здесь
расположены на специальном хвостовике. Особенностью нарезных миноме-
тов является то, что при необходимости они позволяют вести стрельбу не толь-
ко специальными минами, но и минами к гладкоствольным минометам, т. е.
оперенными минами каплеобразной формы.
Мины калибром менее 100 мм принято считать осколочными, 100... 120 мм -
осколочно-фугасными, а свыше 120 мм - фугасными. Для снаряжения оско-
лочных мин обычно используют тротил, а для осколочно-фугасных и фугас-
ных мин более мощные БВВ. Осколочные мины комплектуют взрывателями
мгновенного действия.
Осколочные мины считаются одним из наиболее высокоэффективных ти-
пов ОБП, что обусловлено, с одной стороны, условиями боевого применения
3.7. Осколочные и осколочно-фугасные мины к ствольным минометам
263
мин, а с другой - их конструктивными особенностями. Вследствие больших
углов падения и низких скоростей подхода к поверхности земли при подрыве
мин образуются круговые осколочные поля с большей по сравнению со сна-
рядами глубиной поражения. Конструктивные особенности, отвечающие за
высокую эффективность осколочного действия, заключаются прежде всего в
удачном сочетании свойств материала корпуса и ВВ: применение сталистых
чугунов обеспечивает высококачественное дробление корпусов мин при под-
рыве тротилового снаряжения, скорости метания осколков при этом тоже дос-
таточно высоки - v0- 800... 1200 м/с.
Типичные представители осколочных мин: 82-мм мина 0-832 (рис. 3.99, а)
или ее модификация 0-832Д (рис. 3.99, б), отличающиеся между собой коли-
чеством перьев стабилизатора. Они предназначены для стрельбы из всех ти-
пов 82-мм минометов, в том числе образца 1941 и 1943 гг., а также современ-
ных минометов 2Б9 и 2Б9М «Василек»..
Корпус мины изготавливают из высокопрочного чугуна методом литья,
снаряжается мина тротилом. В годы Великой Отечественной войны корпуса
таких мин отливали из обычного (серого) чугуна, а для снаряжения использо-
вались суррогатные (пониженной бризантности) ВВ на основе тротила.
Рис. 3.97. Осколоч-
но-фугасная мина
цилиндрической
формы
Рис. 3.98. Осколоч-
но-фугасная мина,
стабилизируемая
вращением
Рис. 3.99. 82-мм осколочные мины
0-832 (а) и О-832Д (б)
264
3. Боеприпасы осколочного действия
Масса? мины в зависимости от модификации составляет 3,1...3,3 кг при
массе разрывного заряда 0,4 кг.
Мины 0-832 и О-832Д укомплектованы взрывателями мгновенного дей-
ствия М-1, М-4 или МП-82 (табл. 3.9).
Таблица 3 9 Конструктивные характеристики 82-мм осколочных
и 120-мм осколочно-фугасных мин
Калибр Материал корпуса Высота ГОЛОВНОЙ части, клб Длина, клб Толщина стенки 8. клб Коэффи- циент наполне- ния а, %
полная цилинд- рической части хвосто- вой части стабили- затора
82 мм: 0-832 Чугун 1,08 3,9 0,29 1,54 0,99 0,11 13,6
О-832Д Высоко- прочный чугун 0,92 3,8 0,38 1.51 0,99 0,10 14.6
120 мм: О-843Б То же 1,60-1,64 5,40-5,49 0,36 2,16-2,20 1,64-1,72 0,17 8,75
0-843 Сталь 1,54 1,56 5,96 6,00 0,34 2,38 1,3 0.1.0- 0,12 18,75
Осколочно-фугасные мины к 120-мм минометам состоят из тех же основ-
ных частей, что и 82-мм осколочные мины. При этом их основная отличи-
тельная особенность - увеличенная длина как всего корпуса, так и его отдель-
ных частей (рис. 3.100) В разные периоды корпуса мин изготавливали из се-
рого (мина ОФ-843А) и высокопрочного (сталистого) (ОФ-843Б) чугунов, а
также из стали (ОФ-843).
Кроме мин основной серии (ОФ-843), была разработана осколочно-фу-
гасная мина 30Ф-34 с увеличенным коэффициентом наполнения, имеющая
стальной корпус.
Масса полностью снаряженных мин составляет 15,9...16,1 кг, а масса раз-
рывного заряда (тротила) - 1,40...3,43 кг. 120-мм осколочно-фугасные мины
комплектуют взрывателями с установками на мгновенное или замедленное
действие (табл. 3.10)
Осколочно-фугасные мины серии ОФ-843 применяют для стрельбы из всех
типов 120-мм гладкоствольных, а также нарезных минометов, в том числе из
120-мм универсального орудия 2А51 («Нона»).
Высокая эффективность осколочного действия мин подтверждена как по-
лигонными испытаниями, так и опытом их боевого применения. Размеры зон
действительного поражения открыто расположенной живой силы для 82-мм
мин составляют по фронту 25...30 м, по глубине - 20...25 м. Таким образом,
накрываемая площадь при стрельбе 82-мм минами равна 250...450 м2, а 120-мм
минами - 1000... 1500 м2 при вероятности поражения 0,5.
Модернизация осколочных и осколочно-фугасных мин может проводить-
ся либо в связи с переходом на более мощные новые составы ВВ, либо
3.7. Осколочные и осколочно-фугасные мины к ствольным минометам
265
с появлением новых минометных систем. Однако в обоих
случаях модернизация мин не вносит принципиальных из-
менений в их конструкцию.
В боекомплект современного автоматического 82-мм
миномета 2Б9 (2Б9М) «Василек» входит осколочная мина
О-832ДУ, корпус которой изготовлен из высокопрочного
(сталистого) чугуна. Масса полностью снаряженной
мины составляет 3,1 кг, и при начальной скорости мины
v0 = 272 м/с диапазон дальностей стрельбы лежит в пре-
делах 800...4300 м. При подрыве заряда тротила корпус
дробится, образуя от 400 до 600 убойных осколков мас-
сой более 1 г, при этом радиус зоны действительного по-
ражения составляет около 18 м
В 1980-1990 гг. на вооружение нашей армии поступи-
ли универсальные нарезные 120-мм орудия 2А51 и 2А60,
устанавливаемые на буксируемом орудии «Нона-К», а так-
же на самоходных установках «Нона-С^ и «Нона-СВК».
Эти орудийные системы обладают баллистическими харак-
теристиками, свойственными минометам, и, по существу,
являются минометами нового поколения. Отличительная
особенность орудий 2А51 и 2А60 - стрельба как вращаю-
щимися снарядами, так и всеми типами 120-мм мин к глад-
коствольным минометам (ОФ-843Б, 3-ОФ-34 и т. п.).
При обстреле оперенными минами дальность стрель-
бы составляет 430...7200 м, начальная скорость мин -
120...330 м/с. Вращающиеся снаряды к орудиям 2А51 и
2А60 во многом похожи на гаубичные снаряды, но в отли-
чие от них имеюз нарезы на ведущем пояске (рис. 3.101).
Рис. 3.100. 120-мм
осколочно-фугас-
ная мина ОФ-843
В боекомплекты орудий семейства «Нона» входят осколоч-
но-фугасные вращающиеся снаряды ОФ-49 и ОФ-51 Кор-
пус снаряда ОФ-51 изготовлен из высокопрочного чугуна,
а корпус ОФ-49 - из стали. Для снаряжения этих ОФС ис-
пользуют мощный бризантный состав А-1Х-2, при этом в снаряде ОФ-51 мас-
са разрывного заряда составляет 3,8 кг, а в ОФ-49 - 4,9 кг. Дальность стрель-
бы такими снарядами достигает 850...8850 м при начальных скоростях от 110
до 370 м/с.
Таблица 3.10. Типы взрывателей и массовые характеристики
120-мм осколочно-фугасных мин
Тип Масса, кг
МИНЫ взрывателя мины с взрывателем разрывного заряда
ОФ-843А ГВМ, ГВМЗ, ГВМЗ-1, М-4 15,9 1.6-2,0
ОФ-843Б М-12, ГВМЗ-7 16,0 1,4
ОФ-843 ГВМ, ГВМЗ, ГВМЗ-1. М-4 16,0 2,6
3-ОФ-34 М-12 16,1 3,43
266
3. Боеприпасы осколочного действия
Рис. 3.101. 120-мм осколочно-фугасный
снаряд ОФ-49:
а - снаряд; б - метательный заряд
Рис. 3.102. Активно-реактивные
осколочно-фугасные мины
Увеличение дальности стрельбы - одна из актуальных проблем миномет-
ного вооружения. Так же, как и в артиллерии, для этого разработаны конструк-
ции мин с реактивными двигателями - активно-реактивные мины (рис. 3.102).
По своим внешним очертаниям и функционированию у цели активно-реак-
тивные мины не отличаются от обычных мин. Введение в конструкцию мин
реактивного двигателя приводит к уменьшению массы разрывного заряда, что
снижает уровень осколочного и фугасного действия. В целях компенсации по-
тери массы ВВ в активно-реактивных минах применяют мощные БВВ, а при
изготовлении корпусов мин используют методы заданного дробления.
Примером активно-реактивной мины может служить мина РЕРА к легко-
му 120-мм миномету МО-120-60 (Франция), которая позволяет производить
обстрел целей на дальности до 6550 м, в то время как при стрельбе обычной
миной дальность не превышает 3600 м. В боекомплект орудий семейства
«Нона» входит активно-реактивный ОФС ОФ-50 с реактивным двигателем,
включающимся через 10... 13 с после вылета из канала ствола. Дальность
стрельбы снарядом ОФ-50 достигает 13 км.
3.8. Боеприпасы осколочного и осколочно-фугасного действия
реактивной артиллерии
Реактивными (или ракетными) снарядами называют снаряды, метание ко-
торых осуществляется с помощью реактивных двигателей. Для запуска реак-
тивных снарядов используют специальные ПУ, которые с учетом конструкции
3.8 Боеприпасы осколочного и осколочно-фугасного действия
267
можно разделить на одно- и многоснарядные, с направляющими (рельс, стер-
жень, труба) и без направляющих (пусковые столы, кронштейны для подвес-
ки), стационарные и мобильные (переносимые, возимые, самоходные и т. п.).
Во второй половине XX в. широкое распространение получили самоходные
многоствольные реактивные системы залпового огня (РСЗО), различные ва-
рианты которых находятся на вооружении армий многих стран.
Реактивный снаряд состоит из двух основных частей - боевой и ракет-
ной. Ракетная часть или двигатель снабжены устройствами, обеспечивающи-
ми движение снаряда по направляющим при пуске и устойчивое поступатель-
ное движение на траектории. Стабилизацию полета реактивных снарядов осу-
ществляют либо с помощью стабилизатора-оперения, либо за счет придания
снаряду вращательного движения (рис, 3.103). В последнем случае снаряды
называют турбореактивными (ТРС).
У турбореактивных снарядов (рис. 3.104) нет стабилизатора, а их ракет-
ная часть содержит блок с соплами, которые расположены по окружности и
имеют некоторый наклон (около 20°) к оси снаряда. Реактивная сила при этом
вызывает не только поступательное, но и вращательное движение снаряда,
обеспечивая устойчивость его полета и повышая кучность стрельбы.
Максимальная угловая скорость вращения ТРС 15 000. .18 000 об/мин до-
стигается на конечном участке траектории. Для повышения кучности боя опе-
ренным реактивным снарядам также придают вращательное движение, но со
значительно меньшей угловой скоростью по сравнению с ТРС.
Рис. 3.103. Схема реактивного снаряда с оперением:
/ - боевая часть; 2 - ракетная часть; 3 - стабилизатор; 4 - сопло; 5 - пороховой заряд
Рис. 3.104. Схема турбореактивного снаряда;
/ - разрывной заряд; 2 - пороховой заряд; 3 - направление выхода газов
268
3. Боеприпасы осколочного действия
Боевые части реактивных снарядов не имеют принципиальных отличий
от корпусов артиллерийских снарядов. Однако учитывая сравнительно неболь-
шие перегрузки, возникающие на участке разгона реактивного снаряда, его
корпус выполняют с меныпей, чем у артиллерийских снарядов, толщиной стен-
ки, что увеличивает массу разрывного заряда и соответственно коэффициент
наполнения, а следовательно, поднимает уровень фугасного действия и повы-
шает скорость осколков.
Реактивные снаряды или, как их называли, боевые ракеты, применялись
задолго до появления артиллерийского и ручного огнестрельного оружия и
представляли собой зажигательные ракеты с горючей смесью. После дли-
тельного перерыва интерес к боевым ракетам был проявлен в конце XVIII -
начале XIX в. В это время были разработаны образцы боевых ракет с БЧ
осколочного действия (рис. 3 105), которые поступили на вооружение боль-
шинства европейских армий и, частично, флотов. Каждая ракета состояла из
корпуса 1 снаряда с разрывным зарядом 2, гранатной трубки 3, гильзы 4 с
реактивным зарядом 5 и отверстиями (соплами) 6 для истечения пороховых
газов и стабилизирующего устройства. Корпус снаряда чаще всего изготов-
ляли из чугуна, разрывной и реактивный заряды - из дымного пороха. Ста-
билизацию ракет в полете осуществляли при помощи хвостовика 7 (для
не вращающихся ракет) или турбины с наклонными соплами 8 для истече-
ния пороховых газов, сообщающих ракете вращательное движение (по су-
ществу - прообраз ТРС).
В России первые боевые ракеты появились в начале XIX в., разработчи-
ком которых был А.Д. Засядко. В конструкции ракет Засядко содержались
Рис. 3.105. Боевые ракеты XIX в.:
/ корпус; 2 - разрывной заряд; 3 - i-ранатная трубка; 4 - гильза (реактивная камера); 5 -
реактивный заряд; 6 - сопла; 7- хвостовик; 8 - наклонные сопла
3.8. Боеприпасы осколочного и осколочно-фугасного действия
269
те же основные элементы, что и в
европейских ракетах. Для запуска та-
ких ракет применяли специальный
станок (рис. 3.106) с направляющим
брусом. Среди ракет, разработанных
Засядко, были ракеты с осколочны-
ми гранатами (рис. 3.107) различных
калибров. При запуске четырехдюй-
мовых ракет максимальная дальность
полета достигала 2700 м, у ракет мел-
ких калибров дальность не превыша-
ла 1600 м.
В середине XIX в. на вооруже-
ние русской армии поступили боевые
ракеты, разработанные К.И. Констан-
тиновым, который после проведения
исследовательских работ установил
Рис. 3.106. Станок с направляющим бру-
сом для запуска боевых ракет
оптимальное сочетание массогабаритных характеристик боевой и ракетной
частей. На вооружение были приняты 2-, 2,5- и 4-дюймовые ракеты с БЧ ос-
колочного действия гранатами. В большинстве вариантов гранаты были удли-
ненной формы (рис. 3.108).
Четырехдюймовая ракета, снаряженная гранатой массой 4,1 кг, имела мак-
симальную дальность полета 4150 м, что в 2-2,5 раза выше, чем
у снарядов к артиллерийским орудиям соответствующих калибров того вре-
мени. В ПУ ракет системы К.И. Константинова использовали трубчатые на-
правляющие.
Боевые ракеты широко применяли в разных военных кампаниях первой
половины XIX в., включая Крымскую войну 1853-1856 гг. Однако во второй
половине XIX в. с приходом нарезной артиллерии использование боевых ра-
кет стало быстро сокращаться, и к началу XX в. ни одна армия уже не имела в
своем составе ракетных частей. Вновь широкое применение боевые ракеты
под наименованием реактивных (ракетных) снарядов и мин получили во Вто-
Рис. 3.107. Боевая ракета конструкции Засядко
Рис. 3.108. Боевая ракета конструкции Константинова
270
3. Боеприпасы осколочного действия
рую мировую войну, когда их стали активно использовать для вооружения
авиации, флота, а также сухопутных войск. Наиболее эффективно поражаю-
щее действие реактивных снарядов проявилось в РСЗО, в частности, установ-
ленных на боевых машинах БМ-13, вошедших в историю под названием «Ка-
тюша».
Прицельная стрельба реактивными снарядами затруднена ввиду достаточно
низкой кучности стрельбы. Так, при стрельбе с ПУ машины БМ-13 132-мм
реактивными снарядами М-13 на дальность 3000 м отклонения по дальности
достигают 250 м, по боку - 50 м. Пусковая установка машины БМ-13 имеет 8
рельсовых направляющих, на которые попарно устанавливают 16 снарядов.
Пуск 16 снарядов в течение нескольких секунд приводит к накрытию доста-
точно большой площади и поражению расположенных на этой площади це-
лей. Одним залпом боевая машина БМ-13 накрывает площадь в несколько
гектаров.
Одним из основных реактивных снарядов, принятых на вооружение Со-
ветской армии в годы Великой Отечественной войны, стали реактивные неуп-
равляемые снаряды - 82-мм снаряд РС-82 и 132-мм снаряд PC-13 2,^которые в
исполнении под боевые машины получили индексы М-8 (рис. 3.109) и М-13
(рис. 3.110) соответственно.
Стальной корпус БЧ снаряда М-8 (рис. 3.111) оживальной формы соеди-
няется с двигательным блоком с помощью резьбы, также на резьбе' к корпусу
двигателя крепится и стабилизатор с сопловым блоком. Корпус двигателя вы-
полнен из стали, а оперение стабилизатора - из листовой стали. Корпус снаря-
да М-13 имеет аналогичную конструкцию. В пороховых двигателях снарядов
М-8 и М-13 применяли шашки из нитроглицериновых порохов (НМ-4), кото-
рые в некоторых модификациях снарядов заменяли на пироксилиновые.
Боевые части снарядов М-8 и М-13 снаряжали тротилом либо суррогат-
ным ВВ на основе тротила. Для надежности инициирования разрывных заря-
дов в конструкции предусмотрены дополнительные детонаторы в виде шашек
из ВВ с высокой чувствительностью. В реактивных снарядах использовали
взрыватели с установкой на мгновенное и замедленное действие. В снаряде
М-13 применяли взрыватель ГВМЗ.
Для повышения кучности боя в конструкцию снаряда М-13 вносились
изменения, приводящие к провороту на траектории. Так, в одной из модифи-
каций в стенке корпуса в зоне центрального утолщения снаряда выполнялись
12 тангенциально ориентированных отверстий для истечения пороховых га-
зов двигателя, что приводило к появлению касательной реактивной силы, обес-
печивающей проворот снаряда. В другой модификации проворот реализовали
за счет косо установленного оперения стабилизатора. Обе модификации сна-
ряда с улучшенной кучностью получили индекс М-13УК.
Для увеличения дальности стрельбы снаряда М-13 его двигатель сделали
двухкамерным - с двумя одновременно рабо тающими камерами сгорания. Об-
щая длина снаряда заметно увеличилась, снаряд получил индекс М-13ДД
(рис. 3.112, табл. 3.11).
В системах РСЗО применяли также турбореактивные снаряды. Для бое-
вой машины БМ-14, имевшей 16 ствольных направляющих, был разработан
турбореактивный 140-мм осколочно-фугасный снаряд М-14-ОФ (ОФ-949) со
3.8. Боеприпасы осколочного и осколочно-фугасного действия 271
Рис. 3.109. Реактивный
снаряд М-8
Рис. 3.110. Реактивный снаряд М-13:
1 - взрыватель; 2 - корпус БЧ; 3, 6 направляющие штифты;
4 - пирозапалы; 5 - пороховой двигатель; 7 - стабилизатор;
8 - пороховые шашки; 9 - воспламенитель; 10 - дно БЧ
081
Рис. 3.111. Корпус реактивного снаряда М-8:
1 - боевая часть; 2 - камера сгорания; 3 - сопло; 4 — обтекатель; 5 - стабилизатор
272
3. Боеприпасы осколочного действия
3
Рис. 3.112. Реактивный снаряд М-13ДД
Таблица 3.11. Характеристики реактивных снарядов М-8 и М-13
Характеристика М-8 • (0-931) М-13 (ОФ-941) М-13УК (ОФ-942) М-13ДД (ОФ-947)
Полная длина, мм Масса, кг: 675 1415 1415 2229
снаряда 7,92 42,5 42,5 62,8
порохового заряда 1,18 7,1 7,1 -
разрывного заряда Скорость, м/с: 0,6 4,9 4,9 4,9
дульная 70 70 70 -
максимальная 315 355 335 - 520
Максимальная дальность, м 5515 8470 7900 • 11800
Отклонения, м:
по дальности 105 135 84 120
боковое 220 300 107 180
Радиус зоны поражения, м:
СПЛОШНОГО 3-4 8-10 —
действительного 12-15 25-30 - -
следующими конструктивными характеристиками: полная длина снаряда -
1086 мм, полная масса - 39,6 кг, масса разрывного заряда - 4,2 кг, масса поро-
хового заряда - 7,65 кг. Снаряд комплектовался взрывателем В-25. Дульная
скорость снаряда составляла 27...40 м/с, скорость в конце активного участ-
ка- 400 м/с, максимальная частота вращения - 22 000 об/мин, максимальная
дальность стрельбы - 9800 м, минимальная - 1000 м. Для повышения кучнос-
ти стрельбы на головку снаряда перед пуском устанавливали тормозные коль-
ца (рис. 3.113).
В 60-70 годах XX в. на смену устаревшим РСЗО пришли новые высоко-
эффективные «Град», «Ураган», «Смерч».
Боевая машина БМ-21 системы «Град» снабжена 40-ствольной пусковой
установкой с калибром ствола 122 мм и обеспечивает поражение площадных
целей на дальностях от 5 до 20,5 км. В боекомплект машины БМ-21 входит
реактивный снаряд 9 М-21 (М-21-ОФ) с осколочно-фугасной БЧ (рис. 3.114).
Снаряд М-21-ОФ имеет полную длину 2870 мм, массу - 66 кг, массу порохо-
вого заряда двигателя - 20,45 кг, массу БЧ снаряда - 18,4 кг при массе разрыв-
ного заряда 6,4 кг. Снаряд М-21-ОФ укомплектован головным взрывателем
МРВ (9Э210) ударного действия с дальним взведением и установками на мгно-
3.8. Боеприпасы осколочного и осколочно-фугасного действия
273
Рис. 3.113. Турбореактивный снаряд М-14-ОФ:
1 - реактивная камера; 2 — пороховой заряд; 3 - корпус головной части; 4 - разрывной заряд;
5 дополнительный детонатор; 6 взрыватель; 7 - тормозное кольцо
Рис. 3.114. 122-мм реактивный снаряд М-21-ОФ:
/ - взрыватель; 2 - боевая часть; 3 - ракетная часть; 4 - тормозное кольцо; 5 — корпус;
6 - дополнительный детонатор; 7 разрывной заряд
венное и замедленное действие. Скорость схода снаряда с направляющих -
около 50 м/с, максимальная скорость на траектории - 690 м/с.
Стабилизацию снаряда на траектории осуществляют за счет оперения, при
этом хвостовой перьевой стабилизатор выполнен складывающимся - раскры-
тие перьев происходит сразу после вылета снаряда из ствола ПУ. В сложенном
состоянии перья стабилизатора удерживаются специальным кольцом и не вы-
ходят за габариты снаряда. Для устранения эксцентриситета силы тяги двигате-
ля и эффекта рыскания на траектории снаряду сообщают вращательное движе-
274
3. Боеприпасы осколочного действия
ние (несколько десятков оборотов в секунду), которое возникает за счет дей-
ствия перьевого стабилизатора (плоскость перьев стабилизатора для этого уста-
навливается под небольшим углом около 1 ° к оси снаряда).
При стрельбе на максимальную дальность отклонение по дальности со-
ставляет 160 м, а боковое - 100 м. Для улучшения кучности стрельбы на го-
ловку снаряда перед пуском устанавливают тормозные кольца: малое - при
стрельбе на дальность более 12 км и большое - при стрельбе на дальность
менее 12 км.
Стальной корпус БЧ снаряда М-21-ОФ имеет оживальную форму. В це-
лях улучшения качества дробления его цилиндрическая часть выполняется
трехслойной, при этом средняя оболочка снабжена двухсторонней подрезкой,
обеспечивающей заданное дробление. Оживальную часть корпуса снаряда из-
готавливают из стального листа методом раскатки.
По уровню осколочного действия БЧ снаряда М-21-ОФ в два раза эффек-
тивнее М-140-Ф.
В последнее десятилетие произошла модернизация РСЗО «Град». Для но-
вой системы разработан реактивный снаряд 9М521 с дальностью стрельбы до
35 км. Для этого снаряда создана осколочная БЧ повышенного фугасного дей-
ствия, содержащая блок ГПЭ. Эффективность поражения целей этим снаря-
дом повышена в среднем в два раза по сравнению со снарядом М-21-ОФ. Для
новой РСЗО «Град» разработан также снаряд 9М522 с отделяемой осколочно-
фугасной БЧ и оснащенный дистанционным и контактным взрывателями. Сра-
батывание дистанционного взрывателя обеспечивает отделение БЧ, после чего
происходит раскрытие парашюта. Боевая часть подходит к земле практически
вертикально. При встрече с поверхностью срабатывает контактный взрыва-
тель и БЧ подрывается с образованием практически кругового осколочного
поля. В этом случае площадь поражения увеличивается примерно в шесть раз
по сравнению со снарядом М-21-ОФ.
Реактивные снаряды РСЗО «Град» используются также в кассетном вари-
анте, в частности, для минирования местности противопехотными минами.
В корпусе снаряда 9М21 размещается пять противопехотных мин ПОМ-2, выб-
расываемых на дальность до 13,5 км. Залпом из 20 снарядов минируется око-
ло 1 км фронта.
В кассетном варианте реактивного снаряда 9М218 к модернизированной
РСЗО «Град» корпус БЧ содержит 45 противопехотных мин. Такой снаряд по-
зволяет осуществлять минирование на дальности до 33 км.
Кассетный вариант ОБП реализован также в РСЗО «Ураган» и «Смерч».
Боевая машина 9П140 «Ураган» оснащена пусковой установкой с 16-ю 220-мм
ствольными направляющими. Она является дальнобойной и позволяет пора-
жать цели на дальности более 30 км. Ракета 9М27 РСЗО «Ураган» имеет пол-
ную длину 4830 мм и массу 280 кг. Стабилизацию полета ракеты осуществля-
ют за счет раскрывающегося оперения, при этом ракете сообщают вращатель-
ное движение с небольшой угловой скоростью. Первоначальная раскрутка
снаряда происходит при движении снаряда по трубчатым направляющим с
винтовым П-образным пазом, по которому скользит штифт снаряда. На траек-
тории вращение снаряда поддерживается с помощью лопастей стабилизатора,
установленных под определенным углом к оси снаряда.
3.8. Боеприпасы осколочного и осколочно-фугасного действия
275
Кассетный вариант БЧ ракеты 9М27 используется для дистанционного ми-
нирования осколочными противопехотными минами, а также для непосредствен-
ного поражения целей осколочными БЭ. В кассетной БЧ ракеты РСЗО «Ура-
ган» размешены кассетные БЭ (рис. 3.115). Боевой элемент осколочного дей-
ствия (рис. 3.116) состоит из корпуса 2 с готовыми ПЭ, разрывного заряда 3,
взрывателя / и стабилизатора 4. Готовые ПЭ находятся между тонкостенными
оболочками. Лопасти стабилизатора, раскрывающиеся после выброса БЭ из
корпуса боевой части, обеспечивают стабилизированный полет БЭ и тормо-
жение на конечном участке траектории, создавая условия для их практически
вертикальной ориентации в момент подрыва и образования кругового оско-
лочного поля. Масса БЭ равна 1,85 кг, масса разрывного заряда 0,3 кг.
Рис. 3.115. Кассетная БЧ ракеты 9М27ГСЗО «Ураган» с осколочными
боевыми элементами
Рис. 3.116. Боевой кассетный элемент ракеты 9М27 РСЗО «Ураган»:
1 взрыватель; 2 блок ГПЭ; 3 разрывной заряд; 4 - стабилизатор
В кассетной боевой части 9М27К размещают 30 БЭ. Взведение взрывате-
лей БЭ осуществляют в заданной точке траектории от срабатывания дистан-
ционной трубки, воспламеняющей специальный заряд. Под действием давле-
ния продуктов сгорания этого заряда происходит не только взведение взрыва-
телей БЭ, но и сброс обтекателя БЧ. Вращательное движение снаряда
обеспечивает рассеивание БЭ на достаточно большой площади.
Управляемые 300-мм реактивные снаряды или ракеты РСЗО «Смерч» за-
метно превосходят по дальности стрельбы все известные аналоги. Данными
снарядами поражаются цели, расположенные на расстоянии до 70 км. Боевая
машина РСЗО «Смерч» БМ9К58 имеет 12 ствольных направляющих. Полная
длина ракеты РСЗО «Смерч» - 7600 мм, масса - 800 кг, при этом масса БЧ
276
3. Боеприпасы осколочного действия
составляет 280 кг. Система стабилизации ракеты в полете такая же, что и у
ракет РСЗО «Ураган». Для коррекции на траектории в состав ракеты введен
блок управления, а корректировка траекторных координат осуществляется с
помощью газодинамических рулей, приводимых в движение давлением газов
бортового газогенератора.
По кучности стрельбы РСЗО «Смерч» в 2 3 раза превосходит зарубеж-
ные аналоги и при стрельбе на максимальные дальности приближается к ар-
тиллерийским системам.
Для ракет РСЗО «Смерч» разработаны два типа БЧ с осколочным дей-
ствием, один из которых представляет собой моноблочную осколочно-фугас-
ную БЧ 9М55Ф с разрывным зарядом массой 92,5 кг. Второй тип - кассетная
БЧ 9М55К, содержащая 72 кассетных осколочных БЭ, причем отсек с БЭ раз-
мещен за головным отсеком блока управления (рис. 3.117). Ракеты системы
РСЗО «Смерч» запускаются либо поодиночке, либо залпом. При залповой
стрельбе накрывается площадь от 40 до 67 га.
Рис. 3.117. Кассетная БЧ 9М55К ракеты РСЗО «Смерч»
В настоящее время реактивные снаряды и системы РСЗО стоят на воору-
жении армий многих стран. Семейство современных РСЗО отличает разнооб-
разие калибров, количества стволов, баллистических характеристик и т. д. Сре-
ди них можно отметить 70-мм 114-ствольную РСЗО Slammer-б (США), даль-
нобойную 240-мм 12-ствольную РСЗО MLRS и 240-мм РСЗО HIMARS (США)
с дальностью стрельбы до 40 км, 145-мм 30-ствольную РСЗО RAFAL (Фран-
ция) с дальностью стрельбы до 32 км. В боекомплекты практически всех ком-
плексов РСЗО входят реактивные снаряды с БЧ осколочного действия.
Как уже отмечалось выше, в ходе Второй мировой войны реактивные сна-
ряды стали применяться для вооружения самолетов и кораблей ВМФ По сво-
ему устройству авиационные и корабельные снаряды незначительно отлича-
лись от снарядов, применяемых в сухопутных войсках. Советские 132-мм авиа-
ционные реактивные снаряды РС-132 (рис. 3.118) и 82-мм РС-82 широко
использовались в ходе Великой Отечественной войны. Основные техничес-
кие характеристики снарядов РС-82 и РС-132 приведены ниже:
РС-82 РС-132
Полная длина, мм ........................... 600 845
Масса, кг:
снаряда...................................... 6,8 23,0
порохового заряда......................... 1,1 3,8
разрывного заряда (ВВ) ................... 0,36 0,9
3.9. Авиационные бомбы осколочного и осколочно-фугасного действия
277
Максимальная скорость, м/с
(без учета скорости носителя) ........... 340 350
Максимальная дальность, км............... 6,2 7,1
Рассеивание при стрельбе
по наземным целям, м..................... 87-100 100-114
Радиус зоны осколочного поражения, м .... 6-7 9—10
Боевая часть осколочного варианта снаряда PC-132 выполнялась с ГПЭ и
имела дистанционный или неконтактный взрыватель.
864
Рис. 3.118. 132-мм авиационный реактивный снаряд PC-132
Реактивные снаряды РС-82 и PC-132 послужили прототипом при даль-
нейших разработках семейства авиационных неуправляемых и управляемых
реактивных снарядов классов воздух-земля и воздух- воздух, в частности, не-
управляемых 57-мм снарядов С-5, 80-мм С-8 и 122-мм С-13. Для всех пере-
численных ракет разработаны БЧ осколочного действия, принципиально не
отличающиеся от осколочных БЧ рассмотренных выше типов реактивных сна-
рядов.
3.9. Авиационные бомбы осколочного
и осколочно-фугасного действия
Авиационные бомбы представляют собой оперенные снаряды, сбрасыва-
емые с самолетов и предназначенные для поражения наземных, надводных и
подводных целей. Осколочные АБ (ОАБ) и осколочно-фугасные (ОФАБ) - наи-
более распространенные типы АБ.
В условиях служебного обращения и в процессе боевого применения АБ
испытывают относительно низкие перегрузки, что накладывает отпечаток на
их конструктивные особенности.
Типовая АБ (рис. 3.119) содержит следующие основные элементы: кор-
пус /, разрывной заряд 2, стабилизатор 4, подвесную систему (ушки) 3, взры-
вательное устройство - запальный стакан с дополнительным детонатором 5 и
баллистическое кольцо 6.
Корпус - это каркас АБ, состоящий из головной, средней и хвостовой
частей, соединяемых между собой при помощи сварки. Головная часть чаще
278
3. Боеприпасы осколочного действия
Рис. 3.119. Устройство ОФАБ:
/ - корпус; 2 - разрывной заряд; 3 - подвесные ушки; 4 стабилизатор; 5 - запальный стакан
и дополнительный детонатор; 6 - баллистическое кольцо
всего выполняется оживапьной или в виде усеченного конуса. От формы го-
ловной части в большой степени зависят аэродинамические характеристики
АБ. Средняя часть корпуса АБ обычно имеет форму цилиндра, на наружной
поверхности которого крепятся ушки подвесной системы. Малокалиберные
осколочные АБ выполняются цельнокорпусными и без подвесной системы.
Хвостовая часть для улучшения условий обтекания АБ имеет, как правило,
коническую форму и служит для размещения стабилизатора.
Стабилизатор АБ выполняется в виде пластин (перьев), соединяемых меж-
ду собой с помощью колец или пластинок. Он обеспечивает необходимую
устойчивость полета АБ после сбрасывания ее с самолета. Наличие стабили-
затора приводит к смещению центра давления аэродинамических сил в сторо-
ну хвостовой части относительно центра масс, создавая тем самым стабили-
зирующий момент. Стабилизатор изготавливается из листовой стали и кре-
пится к корпусу с помощью сварки.
Баллистические кольца, привариваемые к головной части некоторых ти-
пов АБ, служат для повышения устойчивости движения АБ на траектории за
счет стабилизации процесса возникновения скачков уплотнения при движе-
нии АБ со скоростями, приближающимися к местной скорости звука. Стаби-
лизация полета обеспечивает углы подхода к поверхности земли в диапазоне
40...80° в зависимости от скорости самолета в момент сбрасывания АБ и вы-
соты сброса. В случае применения специальных тормозных устройств (лопас-
тей, лент, парашютов) АБ может подходить к поверхности практически вер-
тикально, что приводит к максимальной площади кругового осколочного поля
поражения.
Разрывные заряды в ОАБ представляют собой мощные БВВ - тротил, раз-
личные составы ТГ или составы на основе гексогена. В осколочно-фугасных
АБ применяются ВВ с усиленным фугасным эффектом - ТГА, ТГАФ. а в не-
которых современных ОФАБ - термобарические составы. Подрыв разрывно-
го заряда осуществляется взрывателями или ВУ. Взрывательные устройства
обычно размещают в головной или хвостовой части АБ при ее сборке на заво-
де-изготовителе. Взрыватели чаще всего устанавливаются в АБ непосредствен-
но перед применением. Для установки взрывателей АБ имеют один или не-
сколько патрубков с резьбовым соединением - запальных стаканов. Запаль-
3.9. Авиационные бомбы осколочного и осколочно-фугасного действия
279
ные стаканы некоторых ЛБ снабжены дополнительными детонаторами, повы-
шающими надежность инициирования разрывного заряда. С этой же целью в
АБ крупных калибров устанавливается несколько взрывателей.
Одна из основных конструктивных характеристик АБ - калибр, при этом
за калибр АБ принимается ее номинальная масса, выраженная в килограммах.
Как для отечественных, так и для зарубежных АБ установлены стандартные
шкалы калибров, при этом калибр А Б указывается в ее индексе: например,
осколочные - ОАБ-10, ОАБ-25, осколочно-фугасные - ОФЛБ-100, ОФАБ-250
и т. д. Следует отметить, что фактическая масса АБ может отличаться от но-
минальной.
Начало широкому применению АБ осколочного действия положила Пер-
вая мировая война Практически все воевавшие страны, имевшие на вооруже-
нии самолеты, разрабатывали и использовали в боевых действиях ОАБ. Сре-
ди первых отечественных ОАБ этого времени следует выделить бомбы конст-
рукций Орановского и Гронова, которые- выпускались в калибрах от 10 фунтов
до 2 пудов (4,1...32,8 кг) и имели примерно одинаковое устройство БЧ. Для
своих ОАБ В.В. Орановский использовав корпуса уже применявшихся фу-
гасных АБ (рис. 3.120). При снаряжении в корпус вставлялась коническая
решетка, в пространство между решеткой.и корпусом засыпались ГПЭ - же-
лезные или стальные осколки (обрезки железных и стальных листов, прутков,
гайки и прочие металлические предметы небольших размеров), внутрь корпу-
са заливался расплавленный тротил, который, проникая через решетку, запол-
нял пустоты между ГПЭ и фиксировал их.
Рис. 3.120. Осколочная авиационная бомба конструкции Орановского
Авиационные бомбы конструкции Е.Г. Гронова во многом повторяют бом-
бы В.В. Орановского (рис. 3.121). Вместо решетки в корпус АБ Гронова встав-
лена жестяная труба, а пространство между трубой и корпусом, заполнен-
ное предварительно аналогичными ГПЭ, заливалось парафином или кани-
фолью для фиксации ГПЭ. Такие АБ снаряжались динамитом или мелинитом.
В авиационных бомбах Орановского и Гронова применялись донные
взрыватели ударного типа. Для усиления осколочного действия в АБ конст-
рукции Гронова использовалось устройство, обеспечивающее подрыв на не-
которой высоте над поверхностью земли. Оно представляло собой упорный
штырь, на конце которого закреплялась круглая вогнутая пластина с отвер-
стиями, препятствующая углублению бомбы в грунт. Это устройство (упре-
дитель) используется и в ряде современных ОФАБ, а также НАР.
Рис. 3.121. Осколочная авиационная бомба конструкции Гронова с упредителем
Осколочные АБ конструкций Орановского и Гронова обладали высоким
уровнем осколочного действия. Так, 10-фунтовые ОАБ с массой ВВ, равной
2,46 кг, и общей массой ГПЭ, также равной 2,46 кг, создавали осколочное поле
радиусом зоны действительного поражения до 75 м. Двухпудовые ОАБ при
массе ВВ 12,3 кг и массе ГПЭ 16,4 кг создавали осколочное поле радиусом
зоны действительного поражения 150 м.
Осколочные АБ времен Первой мировой войны послужили прототипом
для разработки в последующие годы более современных и эффективных бомб
осколочного действия. В 30 40 годах XX в. производство ОАБ стало массо-
вым, в связи с чем особенно острой стала проблема снижения себестоимос-
ти их производства. Интересным техническим решением, направленным од-
Рис. 3.122. ОАБ с корпусами артиллерийских снарядов и мин:
а - АО-8м6 с корпусом 76,2 мм артиллерийского снаряда; б - АО-2.5-3 с корпусом 82-мм мины;
в- АО-25м13 с корпусом БЧ реактивного снаряда М-13
3.9 Авиационные бомбы осколочного и осколочно-фугасного действия
281
повременно на снижение себестоимости и сохранение достаточно высокого
уровня эффективности осколочного действия ОЛБ, явилось использование
корпусов осколочных артиллерийских снарядов и мин, а также осколочных
БЧ реактивных снарядов, непригодных к использованию по прямому назна-
чению, в частности, забракованных на стадии производства. Переделка го-
товых осколочных БП в авиационные бомбы не требовала больших затрат и
заключалась в том, что к корпусу снаряда или мины со стороны дна с помо-
щью сварки крепили конусный обтекатель с перьевым стабилизатором, а на
цилиндрической части корпуса приваривали при необходимости подвесную
систему (рис. 3.122).
Основное направление развития ОАБ, как и ОБП других типов, связано с
поиском оптимального сочетания свойств материала корпуса и ВВ. Высоко-
эффективное дробление в отечественных ОАБ периода 40-50-х годов XX в.
обеспечивалось за счет использования для изготовления корпусов сталей и
сталистых чугунов в ОАБ как малых, так и больших (100 кг) калибров. Кор-
пуса ОАБ изготавливали в основном методом литья, при использовании ста-
лей иногда применялась штамповка (рис. J. 123).
Для снаряжения ОАБ применяли тротил и аммотол (40/60 и 50/50). В ряде
ОАБ крупных калибров иногда использовали аммотол 80/20, а в ОАБ средних
Рис. 3.123. Штатные ОАБ:
а АО-Юсч образца 1941 г.; б АО-50-ЮОсч образца 1943 г.; в - ОФАБ-100 образца 1945 г.
282
3. Боеприпасы осколочного действия
калибров - смесевое ВВ К2. Снаряжение тротилом осуществляли методом
заливки, а при использовании смесевых ВВ - методом шнекования на гори-
зонтальных шнек-аппаратах. ОАБ малых калибров снаряжали также раздель-
но-шашечным методом с использованием прессованных шашек из смесевых
ВВ (табл. 3.12).
Основные тенденции совершенствования конструкции моноблочных ОАБ
в послевоенный период вплоть до настоящего времени связаны с использо-
ванием различных методов заданного дробления, ГПЭ, а также более мощ-
ных ВВ. При этом следует отметить появление крупнокалиберных осколоч-
ных или, точнее, осколочно-фугасных АБ. Так, среди отечественных АБ, раз-
работанных в 1960-1990 гг., можно отметить ОФАБ-250-270, ОФАБ 250-шн,
ОФАБ-500У.
Некоторые современные АБ осколочного действия, при применении кото-
рых предусмотрено бомбометание с малых высот, оснащены тормозными па-
рашютами, основным назначением которых является обеспечение безопасно-
сти самолета-носителя от поражающего действия осколков, образующихся при
подрыве сбрасываемой бомбы. Кроме того, наличие парашютной системы при-
водит к увеличению углов встречи АБ с поверхностью и, соответственно, к
росту размеров и площади зоны поражения осколками.
Таблица 3.12. Технические характеристики отечественных ОАБ
периода Великой Отечественной войны
Калибр АБ, индекс Общая длина (без взры- вателя), мм Диаметр корпуса, мм Размах оперения, мм Масса, кг Тип взрывателя
АБ (без взрывателя) ВВ
2,5 кг АО-2.5сч 1940 г. 375-378 52 60 2,87 0,1 АМ-А, АМ-1
10 кг АО-Юсч 1941 г. 476 482 90 по 9,50 0,84 АГМ-1 к/д АВ-4 А-ВШ-2 АМ-А
25 кг АО-25сч 1942 г. 932-940 120 150 25,57 2,99 АГМ-1 к/д АВ-4 А-ВШ-2 АМ-А
50 кг АО-50-ЮОсч 1943 г. 960-985 203 280 95,35 10,86 А-ВШ-2 АМ-А
100 кг ОФАБ-100 1945 г. 1006-1023 280 308 114,40 32,6 АПУВ АПУВ-М АПУВ-1 А-ВШ-2 АМ-А
3.9. Авиационные бомбы осколочного и осколочно-фугасного действия
283
Для увеличения эффективности осколочного действия по наземным це-
лям в современных ОАБ используются различные методы организации под-
рыва на некоторой оптимальной высоте над поверхностью земли. Воздушный
подрыв обеспечивают либо применением дистанционных или неконтактных
взрывателей, либо упредителей, которые выполняют в виде выдвижных што-
ков или гибких тросовых устройств с массивными выбрасываемыми элемен-
тами-лидерами Выброс лидера из АБ осуществляется при раскрытии пара-
шюта за счет инерционных сил (рис. 3.124.) После разматывания троса его
натяжение возникает за счет разности ускорений торможения бомбы и лиде-
ра, создаваемых силами аэродинамического сопротивления.
Помимо перечисленных выше, к способам организации воздушного под-
рыва, применяемым в ОАБ, можно отнести также подброс ОБП после удара
Рис. 3.124. Воздушный подрыв ОАБ с лидером
284
3. Боеприпасы осколочного действия
о преграду, который реализован в ОАЬ малых калибров или в суббоеприпасах
кассетных АБ, в частности в осколочно-кумулятивной АБ АРАМ (США), ис-
пользуемой в составе бомбовых кассет. Взрыватель такой бомбы снабжен уст-
ройством, различающим тип преграды (грунт или металл). При ударе о грунт
боевая часть АБ с оболочкой заданного дробления отстреливается назад за
счет срабатывания порохового вышибного заряда (рис. 3.125), после чего про-
исходит подрыв. При встрече с металлической преградой АБ срабатывает как
кумулятивный БП.
Рис. 3.125. Отстрел БЧ осколочно-кумулятивной АБ АРАМ (США) при ударе о грунт
Рассмотрим технические характеристики современных крупнокалиберных
отечественных АБ осколочного действия. ОФАБ-250-270 (рис. 3.126) имеет
длину около 1450 мм и диаметр корпуса 325 мм. Масса разрывного заряда
составляет 94 кг. Максимальный радиус поражения небронированной техни-
ки осколками данной АБ достигает 155 м, легкобронированной - 80 м.
Длина ОФАБ-500У - 2300 мм, диаметр корпуса - 400 мм, полная масса
бомбы - 515 кг, масса разрывного заряда - 159 кг. Максимальный радиус по-
ражения небронированной техники достигает 210 м, легкобронированной -
90 м. ОФАБ-500У с парашютом и упредителем обеспечивает надповерхност-
ное мгновенно-контактное, малозамедленное и замедленное действие. Тормоз-
ная система позволяет применять ОФАБ-500У с малых высот (от 50 м).
Среди современных авиационных бомб можно также выделить ОФЗАБ-500
(рис. 3.127) - осколочно-фугасную зажигательную АБ, обладающую высоким
уровнем фугасного, термического и осколочного действия по разным типам
целей. ОФЗАБ-500 имеет полную длину 2500 мм, диаметр корпуса - 450 мм,
полную массу бомбы - 500 кг, массу разрывного заряда - 250 кг. Максималь-
ный радиус поражения небронированной техники достигает 120...280 м, лег-
кобронированной - 90 м.
Наиболее высокий уровень размеров зоны поражения осколками при дей-
ствии по различным типам целей реализуется в АБ кассетного типа. Прототип
современных кассетных АБ - это ротативно-рассеивающие АБ (РРАБ) периода
30-40 годов XX в. В ходе военных действий применялись отечественные РРАБ
трех калибров - 1000 кг (РРАБ-1), 500 кг (РРАБ-2) и 250 кг (РРАБ-3), имев-
шие примерно одинаковую конструкцию (рис. 3.128). Головной и хвостовой
обтекатели РРАБ выполнялись из тонколистовой стали (толщиной 1 мм),
3.9. Авиационные бомбы осколочного и осколочно-фугасного действия
285
Рис. 3.126. ОФАБ-250-270
Рис. 3.127. ОФЗАБ-500
Рис. 3.128. Ротативно-рассеиваютцая авиабомба РРАБ-2
а цилиндрическая часть представляла собой четыре створки из гофрирован-
ной стали (толщиной 1,25 мм), изогнутые по дуге окружности с диаметром,
равным диаметру бомбы. Для обеспечения прочности и несущей способно-
сти применялись продольные и поперечные силовые элементы. Рабочий
объем внутри бомбы разделяли с помощью фанерных перегородок на не-
сколько отсеков, в которые укладывали бомбы малых калибров - суббое-
припасы (АО-10, АО-25 и т. п.). Каждый отсек снаряженной РРАБ стягивал-
ся 2-4 разрывными кольцами - тросами с ослабленным сечением. После
сброса на траектории бомба начинала вращаться с большой частотой за счет
установки хвостового оперения под углом к продольной оси (около 45°).
Когда угловая скорость вращения бомбы достигала некоторого критического
значения, происходило разрушение стягивающих разрывных колец под дей-
ствием инерционных сил, и боевое снаряжение рассеивалось на большой
площади.
286
3. Боеприпасы осколочного действия
Одна из рассмотренных АБ (РРАБ-2) обладает следующими технически-
ми характеристиками: общая длина - 3245.. .3285 мм, диаметр корпуса 600 мм,
масса в снаряженном состоянии 500...650 кг. При снаряжении РРАБ-2 оско-
лочными АБ малых калибров в ее корпусе размещалось 260 бомб АО-2.5,
78 бомб АО-8, 66 бомб АО-10, 25 бомб АО-20.
Эффективность осколочного действия РРАБ была достаточно высокой.
В зависимости от типа снаряжения при сбрасывании РРАБ-1 с высоты до
3000 м площадь поражения достигала 225...940 м2, с высот 3000...5000 м -
255...1200 м2. Для РРАБ-2 эти показатели составляли 280...1300 м2, 315...
...1700 м2, а для РРАБ-3 - 220...850 м2 и 480... 1100 м2 соответственно.
Современный вариант отечественных АБ кассетного типа принято назы-
вать разовыми бомбовыми кассетами (РБК), выполненными в габаритах фу-
гасных АБ с калибром от 100 до 500 кг и имеющими тонкостенный корпус, в
секциях которого размещаются суббоеприпасы - бомбы малых калибров.
В головной части РБК устанавливаются вышибной пороховой заряд и взры-
ватель дистанционного действия, срабатывающий через заданное время пос-
ле сбрасывания бомбы и воспламеняющий вышибной заряд. Под давлением
пороховых газов происходит разделение корпуса на две части и выталкивание
суббоеприпасов, которые под действием аэродинамических сил сопротивле-
ния рассеиваются на некоторой площади - площади накрытия. Площадь на-
крытия зависит как от высоты, на которой происходит раскрытие кассеты, так
и от скорости РБК в момент раскрытия.
Приведем отдельные технические характеристики нескольких типовых
РБК. РБК-250 АО-1 имеет полную длину 2120 мм, диаметр корпуса - 325 мм
и полную массу - 273 кг. В кассете размещается 150 осколочных боевых эле-
ментов АО-1, масса каждого из которых равна 1 кг. Максимальная площадь
поражения данной РБК составляет 4800 м2.
Полная длина РБК-500 ШОАБ-0.5 - 1500 мм, диаметр корпуса - 450 мм
и полная масса - 334 кг. Она вмещает 565
Рис. 3.129. Кассетный осколочный
боевой элемент ШОАБ-0.5:
/ - корпус с ГПЭ; 2 разрывной заряд;
3 - взрыватель; 4 - дополнительный де-
тонатор; 5 - приливы; б - соединитель-
ный элемент
осколочных боевых элементов ШОАБ-0.5
сферической формы (рис. 3.129). Корпус 1
элемента, выполненный из алюминиевого
сплава, содержит стальные ГПЭ. Косые
приливы 5 на корпусе обеспечивают зак-
ручивание БЭ на траектории, стабилизируя
его полет и ориентацию при ударе о по-
верхность, необходимую для надежного
срабатывания взрывателя 3. Боевые эле-
менты ШОАБ-0.5 особенно эффективны
при действии по живой силе. Площадь по-
ражения наземных целей одной РБК-500
ШОАБ-0.5 достигает 50 000 м2.
РБК-500 АО-2.5РТМ (рис. 3.130) при-
меняется с высот 300...25 000 м при ско-
ростях самолета-носителя от 500 до
2300 км/ч. Полная длина корпуса этой РБК
составляет 2500 мм, диаметр - 450 мм, пол-
3.9. Авиационные бомбы осколочного и осколочно-фугасного действия 287
ная масса - 504 кг, масса БЭ - 270 кг. РБК-500-АО-2.5РТМ вмещает 108
боевых осколочных элементов АО-2.5РТМ. Боевой элемент АО-2.5 РТМ со-
стоит из двух соединенных между собой суббоеприпасов (рис. 3.131), каждый
из которых имеет плоское основание, стальной корпус заданного дробления,
разрывной заряд и взрыватель.
Рис. 3.130. РБК-500 АО-2.5РТМ
Рис. 3.131. Кассетный осколочный боевой элемент АО-2.5РТМ
Суббоеприпасы пристыкованы друг к другу плоскими основаниями и
соединены наружным бандажом - кольцом с лопастями, обеспечивающими
вращательное движение относительно продольной оси БЭ и горизонталь-
ную ориентацию продольной оси при подходе к поверхности земли. Между
основаниями суббоеприпасов размещена шашка порохового заряда. При уда-
ре о землю и небольшом заглублении в грунт происходит воспламенение по-
рохового заряда, а под действием пороховых газов - разделение суббоеприпа-
сов и их метание с некоторой относительной скоростью. Далее под действием
результирующей силы сопротивления грунта суббоеприпасы выбрасываются
в воздух, и уже в воздухе инициируется разрывной заряд. Таким образом, «под-
скок» обеспечивает надземный подрыв суббоеприпасов, при котором достига-
ется максимальная эффективность осколочного действия.
Масса одного боевого элемента АО-2.5РТМ составляет 2,5 кг, его длина -
150 мм, а диаметр - 90 мм, а радиус поражения небронированной техники
одним элементом достигает 30 м
Помимо разовых бомбовых кассет к кассетному типу авиационных БП
можно отнести и контейнеры малогабаритных грузов (КМГУ), предназна-
ченные для боевого применения АБ и мин малых калибров, без подвесной
системы. Бомбы и мины предварительно размещаются в специальных бло-
ках - БКФ (блок контейнерный для фронтовой авиации), которые затем уста-
навливаются в отсеки контейнера. Контейнер КМГУ содержит восемь блоков
288 3. Боеприпасы осколочного действия
БКФ с авиационными бомбами или БЭ различного назначения, в том числе
и осколочными. В частности, в одном из вариантов блок БКФ комплектуется
12 боевыми элементами АО-2.5РТ калибра 2,5 кг (рис. 3.132). Выброс БЭ из
КМГУ осуществляется поблочно с дальнейшим разделением элементов на
траектории.
В заключение краткого обзора конструкций АБ осколочного действия сле-
дует отметить несколько необычное устройство - авиационную гранату АГ-2,
применявшуюся в годы Великой Отечественной войны для защиты самоле-
тов-штурмовиков в воздухе от нападения истребителей противника со сторо-
ны нижней части задней полусферы. Гранаты размещались в специальных
кассетах, вмещавших по пять или десять гранат.
Рис. 3.132. Контейнерный блок БКФ
с боевыми элементами АО-2.5РТ
Рис. 3.133. Авиационная осколочная гра-
ната АГ-2
Граната АГ-2 (рис. 3.133) со сферическим корпусом из сталистого чугу-
на, снаряженным смесью К2, оснащалась тормозным парашютом и взрыва-
телем. Парашют укладывался в цилиндрическую коробку, жестко закреплен-
ную на соединительной втулке взрывателя. В качестве взрывателя использо-
вали запал ручной гранаты УЗРГ с уменьшенным временем замедления (до
3,2...4,0 вместо 6 с) штатного запала. Легкая жестяная крышка парашютной
коробки принудительно открывалась при сбрасывании гранаты, обеспечи-
вая гарантированное раскрытие парашюта. При сбросе крышки выдергива-
лась чека запала. Под действием парашютов гранаты быстро отставали от
самолета-носителя на расстояние, безопасное по действию осколков. При
подрыве корпус гранаты дробился на 100... 130 осколков. Размеры зоны
сплошного поражения при этом достигали 8... 10 м, убойный интервал от-
дельных осколков достигал 40...50 м. В горизонтальном полете самолета при
скорости 270 км/ч гранаты подрывались на дистанции 220...280 м позади и
на 40...55 м ниже точки положения самолетов-носителей, в качестве кото-
рых использовались самолеты Пе-2, Ил-2 и Ил-10.
3.10. Инженерные мины осколочного действия
289
3.10. Инженерные мины осколочного действия
Данные мины относятся к классу инженерных БП, предназначенных для
устройства минно-взрывных заграждений в целях поражения различных объек-
тов противника. При постановке минно-взрывных заграждений используются
те или иные виды маскировки мин.
Мина, как правило, содержит заряд ВВ, конструктивно связанный со сред-
ствами взрывания. В зависимости от вида поражаемых целей различают про-
тивотанковые, противопехотные, противодесантные, противотранспортные и
объектные инженерные мины. Осколочные мины относятся к группе проти-
вопехотных мин и могут применяться как в автономном, так и в управляемом
вариантах. В первом случае мины взрываются при срабатывании взрывателя
с контактным (натяжным или обрывным) или неконтактным (сейсмическим)
датчиком цели.
Осколочные мины подразделяются по виду осколочного поля на мины с
круговыми и направленными полями поражения. Мины с круговыми полями
поражения подрываются либо непосредственно в месте их установки, либо
на некоторой высоте после выброса с места установки вышибным зарядом.
В последнем случае мины называют выпрыгивающими.
Противопехотные осколочные мины могут устанавливаться в грунт, на по-
верхность грунта, в снег или на некоторой высоте над поверхностью грунта
(снега), при этом место установки определяется условиями боевой обстанов-
ки, особенностями местности, а также конструктивными особенностями мин.
Противопехотные осколочные мины с круговыми полями поражения одни
из первых широко распространенных типов инженерных мин, принятых на
вооружение армиями многих стран. Такие мины отличаются простотой как
самой конструкции, так и способов их боевого применения. Типичный пред-
ставитель этого семейства мин - отечественная противопехотная осколочная
мина ПОМЗ-2М (ПОМЗ-2), разработанная в 30-х годах XX в. и широко приме-
нявшаяся в ходе Великой Отечественной войны. Мина ПОМЗ-2М (ПОМЗ-2)
(рис. 3.134) имеет чугунный корпус 1 заданного дробления с подрезами со сто-
роны наружной поверхности, внутри которого размещается заряд ВВ 2 (троти-
ловая шашка массой 75 г). На верхнем торце корпуса выполнено отверстие для
установки взрывателя 3 (у мины ПОМЗ-2М это отверстие имеет резьбу). Ниж-
ней частью корпус насажен на установочный колышек 7, забиваемый в грунт.
Для инициирования заряда ВВ в минах применяются взрыватели мгновенного
действия МУВ-2, МУВ-3 или МУВ, которые снабжаются Р-образной чекой 4 и
запалами МД-5М (в мине ПОМЗ-2М), МД-2, МД-5М (в мине ПОМЗ-2).
При установке мины ПОМЗ-2М (ПОМЗ-2) на местности с растительным
покровом (травой, мелким кустарником), чтобы обеспечить ее достаточную
маскировку (рис. 3.135), проволочная растяжка 6 крепится к установочному
колышку, забиваемому в 4...5 м от мины. Комплектация мины ПОМЗ-2М
(ПОМЗ-2) предусматривает возможность установки к одной мине двух ветвей
растяжек.
Подрыв мины ПОМЗ-2М (ПОМЗ-2) происходит при натяжении проволоч-
ной растяжки - при этом выдергивается боевая чека взрывателя, что приводит
к срабатыванию запала и инициированию заряда ВВ. При дроблении корпуса
290
3. Боеприпасы осколочного действия
Рис. 3.134. Противопехотные мины ПОМЗ-2М (а) и ПОМЗ-2 (6):
I - корпус; 2 - разрывной заряд; 3 - взрыватель; 4 - боевая чека; 5 - карабин с отрезком
проволоки; б - проволочная растяжка; 7 - колышек; 8 - запал
До 5 м
Рис. 3.135. Установка мины ПОМЗ-2М с одной ветвью проволочной растяжки
образуется круговое осколочное поле радиусом зоны сплошного поражения
около 4 м.
Технические характеристики мины ПОМЗ-2М (ПОМЗ-2) следующие: мас-
са корпуса равна 1,2 кг (1,5 кг), диаметр корпуса - 60 мм, высота корпуса -
107 мм (130 мм).
Среди зарубежных аналогов мин ПОМЗ-2М можно выделить мины ПМР-1,
ПМР-2А (АС) и ПМР-3 (Югославия), М-36 (Венгрия).
3.10. Инженерные мины осколочного действия
291
Типичная выпрыгивающая мина с круговым осколочным полем - отече-
ственная мина ОЗМ-72 (осколочная заградительная мина) (рис. 3.136). Основ-
ные элементы конструкции: направляющий стакан, корпус с ГПЭ, заряд ВВ,
вышибной заряд и ударный механизм.
Направляющий стакан 3 выполнен из стали и имеет на дне камеру 19, в
которой уложен и закреплен одним концом натяжной трос 16. Корпус 9 пред-
ставляет собой цилиндрическую обойму ГПЭ, залитых полиэтиленом.
В ОЗМ-72 применяются ГПЭ в виде стальных цилиндров диаметром 5 мм и
массой 0,75 г. Заряд ВВ 8 выполнен из литого тротила и имеет массу 0,66 кг.
Дополнительный детонатор 10 - тетриловая шашка массой 23 г - установлен
в верхней части полости центральной трубки (втулки 11), при этом в допол-
нительном детонаторе есть гнездо для установки капсюля-детонатора (КД
№ 8-А). Вышибной заряд 1 из дымного пороха массой 7,5 г в тканевом ме-
шочке помещен в боковом канале. Ударный механизм размещен в нижней ча-
сти центральной втулки и состоит из втулки 11, предохранительного кол-
пачка 18, ударника 13 с боевой пружиной 14, пятки ударника с клиновидным
Рис. 3.136. Противопехотная мина ОЗМ-72:
1 - вышибной заряд; 2 - трубка; 3 - направляющий стакан; 4 - втулка с капсюлем-воспламени-
телем и шариком; 5 - колпачок; 6 - пробка, 7 крышка; 8 - заряд ВВ; 9 - корпус с блоком ГПЭ;
10 дополнительный детонатор; // втулка; 12 - втулка с капсюлем-воспламенителем 13 -
ударник; 14 - боевая пружина; 15 крышка; 16 - натяжной трос; 17 - клиновидный замок; 18 -
предохранительный колпачок; 19 камера
292 3. Боеприпасы осколочного действия
замком 17 и втулки с капсюлем-воспламенителем (КВ) 12. К пятке ударника
прикреплен второй конец натяжного троса.
Для приведения в действие мина ОЗМ-72 комплектуется взрывателями
мгновенного действия МУВ-2, МВЭ-72 или МУВ-4, которые устанавливают-
ся на втулку с КВ и шариком 4 после удаления колпачка 5.
Установка мины ОЗМ-72 проводится углублением в грунт летом, в снег -
зимой, при этом боевая чека взрывателя через натяжной трос соединяется с
двумя проволочными растяжками длиной по 15 м каждая, прикрепленными к
колышкам. Место установки мины маскируется.
При срабатывании мины от натяжения проволочной растяжки выдергива-
ется боевая чека, и взрыватель инициирует КВ, форс огня которого воспламе-
няет вышибной заряд /. Под действием давления пороховых газов шарик втул-
ки 4 перекрывает отверстие в верхней части втулки, запирая пороховые газы в
полости вышибного заряда. Пороховые газы, проникая в камеру /9, выбрасы-
вают мину из направляющего стакана, при этом растягивается натяжной трос.
При полном натяжении троса происходят срыв предохранительного колпачка
18 и вытягивание пятки ударника 13, сжимающего боевую пружину /Д. При
выходе клиновидного замка из втулки ударник освобождается и под действи-
ем боевой пружины накалывает КВ, установленный во втулке 12, который в
свою очередь инициирует капсюль-детонатор КД № 8-А. Срабатывание КД
№ 8-А вызывает подрыв дополнительного детонатора и основного заряда ВВ.
Подрыв мины осуществляется на высоте 0,6...0,9 м над поверхностью
грунта. Радиус зоны сплошного поражения мины ОЗМ-72 составляет 25 м,
при этом убойный интервал ГПЭ равен 50 м.
Основные технические характеристики мины ОЗМ-72: полная масса
мины - 5 кг, диаметр мины - 108 мм, высота - 172 мм, количество ГПЭ -
2400 шт.
Предшествующие аналоги ОЗМ-72 - выпрыгивающие отечественные мины
ОЗМ-З и ОЗМ-4, имеющие примерно одинаковые конструкции (рис. 3.137,
3.138). В отличие от ОЗМ-72 корпус в минах ОЗМ-З и ОЗМ-4 выполнен в
виде чугунной оболочки естественного дробления. Особенностью конструк-
ции мины ОЗМ-З является дополнительное оснащение электрокапсюлем-вос-
пламснителем для приведения мины в действие электрическим способом по
проводам.
Основные технические характеристики мин ОЗМ-З и ОЗМ-4 даны ниже:
ОЗМ-З ОЗМ-4
Масса, кг:
полная ..................................... 3,2 5,4
ВВ (тротил) ............................ 0,075 0,17
вышибного заряда (порох)................ 0,006 0.015
Диаметр корпуса, мм......................... 76 90
Высота корпуса, мм......................... 130 170
Взрыватель............................... МУВ-2, МУВ-2,
МУВ-3 МУВ-3
Высота подрыва мин ОЗМ-З и ОЗМ-4 равна 0,4... 1,4 м, и 0,6...0,8 м, а ра-
диус зоны сплошного поражения - 9 и 13м соответственно.
3.10. Инженерные мины осколочного действия
293
3
Рис. 3.137. Противопехотная мина ОЗМ-З:
1 - корпус; 2 - заряд ВВ; 3 проволочная растяжка;
4 взрыватель; 5 - вышибной заряд; 6 капсюль
детонатор КД № 8-А
Рис. 3.138. Противопехотная мина
ОЗМ-4;
/ - корпус; 2 заряд ВВ; 3 - запал; 4
вышибной заряд; 5 взрыватель; б -
проволочная растяжка
Типовой образец зарубежных выпрыгивающих осколочных мин -
Mi.AP.MB.Mie 51/55 (Франция) (рис. 3.139), которая имеет корпус с ГПЭ, все
основные узлы, характерные для выпрыгивающих осколочных мин, и снабже-
на самоликвидатором. Срабатывание мины происходит от натяжения датчика
цели, подрыв осуществляется на высоте 0,8 м. В случае отказа через 4...5 с
после выброса мины и сгорания порохового замедлителя самоликвидатора,
воспламеняющегося от огня вышибного заряда, происходит ее самоликвида-
ция. Убойный интервал ГПЭ данной мины составляет 45 м.
Противопехотная мина AUS-50/5 (Италия) (рис. 3.140) также является вып-
рыгивающей. Ее корпус выполнен в виде конуса, усиленного ребрами жестко-
сти - коническая форма нижней части корпуса и наличие наконечника облег-
чают установку мины в грунт. Сверху на корпус навинчивается крышка, при
этом резьбовое соединение снабжено герметизирующей прокладкой. Взрыва-
тель устанавливается в резьбовое гнездо в центре крышки. В полости мины
размещены заряд ВВ и блок ГПЭ, в качестве которых использованы стальные
шарики диаметром 9,5 мм и массой 3,5 г, зафиксированные в блоке с помо-
щью цементного раствора. В нижней части корпуса установлен вышибной
294
3. Боеприпасы осколочного действия
Рис. 3.139. Противопехотная мина
Mi.AP.MB.Mie 51/55 (Франция):
/ - трубка; 2 - пробка; 3 -} блок ГПЭ; 4 - са-
моликвидатор; 5 - заряд ВВ; 6 - ударник; 7 -
боевая пружина; 8 - пороховой замедлитель;
9 - тросик
Рис. 3.140. Противопехотная мина AUS-50/5 (Италия):
1 - предохранительная скоба; 2 - взрыватель; 3 - боевая чека; 4 - боевая пружина; 5 - ударник;
6 - крышка; 7 - заряд ВВ; 8 - ГПЭ; 9 - КД; 10- корпус; 11 - КВ; 12 - пороховые замедлители;
13 - вышибной заряд; 14 - наконечник
3.10 Инженерные мины осколочного действия 295
заряд (дымный порох). Заряд ВВ выполнен из тротила или состава «В», при
этом ему придана форма, обеспечивающая кумулятивный эффект при взрыве.
В мине есть два пороховых замедлителя (из дымного пороха), один из кото-
рых расположен между КВ и вышибным зарядом, а другой - между вышиб-
ным зарядом и капсюлем-детонатором (КД). При срабатывании взрывателя
воспламеняется первый пороховой замедлитель, и от него - вышибной заряд.
Под действием пороховых газов вышибного заряда мина без наконечника выб-
расывается вверх, при этом воспламеняется второй пороховой замедлитель,
инициируя КД. В результате подрыва заряда ВВ образуется плоский поток
поражающих элементов, состоящих из ГПЭ и осколков корпуса мины, при
этом радиус зоны сплошного поражения составляет 15 м.
Основные технические характеристики мины AUS-50/5: полная масса -
1,7 кг, масса заряда ВВ - 0,15 кг, диаметр корпуса - 125 мм, высота мины -
140 мм. .-'ч
Среди зарубежных выпрыгивающих осколочных заградительных мин мож-
но отметить также мины S.ML35, S.Ml.44, DM31 (Германия), SPM75 (Авст-
рия), в которых используются блоки ГПЭ. Корпус заданного дробления имеет
мина ПРОМ-1 (Югославия), а чугунные оболочки естественного дробления
применяются в минах МК-2 (Англия), М16, М16А1 М16А2 (США).
К новому поколению противопехотных заградительных мин осколочного
действия можно отнести мину VS-ER-83 (Италия) (рис. 3.141). При срабаты-
вании мины осуществляется надповерхностный подрыв с образованием кру-
гового осколочного поля. В отличие от рассмотренных выше заградитель-
Рис. 3.141. Противопехотная мина VS-ER-83 (Италия):
1 - корпус; 2 - заряд ВВ; 3 - блок ГПЭ; 4 - боевая чека; 5 -
КВ; 6 - реактивный заряд; 7 - детонатор; 8 - ударник с
боевой пружиной; 9 - установочный колышек; 10 — ось-экс-
центрик; 11 — дополнительный детонатор
296
3. Боеприпасы осколочного действия
ных осколочных мин выпрыгивающего типа, эта мина является поднимаю-
щейся.
Мина VS-ER-83 состоит из корпуса с зарядом ВВ и блоком ГПЭ, внут-
реннего взрывателя, установочного колышка и внешнего механического взры-
вателя с реактивным двигателем. Блок ГПЭ содержит 1600 стальных шари-
ков. При установке мина VS-ER-83 занимает горизонтальное положение. Сра-
батывание мины происходит от механического воздействия на растяжку либо
по управляющей команде оператора, при этом воспламеняется заряд реактив-
ного двигателя. Под действием реактивной силы мина поворачивается, зани-
мая вертикальное положение, переход в которое заканчивается взведением и
срабатыванием внутреннего взрывателя, инициирующего дополнительный де-
тонатор и от него заряд ВВ.
Основные технические характеристики мины VS-ER-83 следующие: пол-
ная масса мины - 4,7 кг, масса заряда ВВ (состав «В») - 0,7 кг; диаметр -
113 мм, высота - 345 мм. Радиус зоны сплошного поражения мины составля-
ет 25 м, при этом убойный интервал достигает 50 м.
К осколочным минам, устанавливаемым с применением систем дистан-
ционного минирования, относится отечественная мина ПОМ-2 (рис. 3.142).
При дистанционном минировании мины ПОМ-2 размещаются в блоках и
кассетных головных частях снарядов РСЗО «Ураган». Для данной мины
Рис. 3.142. Общий вид противопехотной мины дистанционного минирования ПОМ-2
при выбросе из кассеты (а); после отстрела из стакана (б) и в боевом положении (в):
/ - стакан; 2 - колпачок; 3 - крышка; 4 - лапки; 5 - упорный шток; 6 - фиксатор; 7 - датчик
цели; 8 крестовина; 9- втулка; 10- осколочный корпус; 11 - нити; 12 - якорь
3.10. Инженерные мины осколочного действия
297
предусмотрен также вариант ручной установки с применением комплектов
ручного минирования КРМ-П (в этом случае мина имеет индекс ПОМ-2Р).
Мина снабжена механическим взрывателем с натяжным датчиком цели, пиро-
техническим механизмом дальнего взведения и механизмом самоликвидации.
Основными частями ПОМ-2 являются боевой элемент, стакан, выбрасываю-
щее устройство и блок стабилизатора.
Боевой элемент мины ПОМ-2 (рис. 3.143) включает в себя осколочный
корпус с зарядом ВВ, устройство установки и взрыватель. Осколочный кор-
пус 13 представляет собой стальную цилиндрическую оболочку естественно-
го дробления, в которой размещен заряд ВВ 4 и взрыватель 3. Устройство
Рис. 3.143. Противопехотная мина ПОМ-2:
/ - стакан; 2, 15, 20 - пиротехнические замедлители; 3 - взрыватель; 4 заряд ВВ; 5 корпус
стабилизатора со стержнем; б лопасть стабилизатора; 7 - пружина; 8 - капроновая лента; 9
колпачок; 10 - втулка; 11 - крестовина; 12 - подпружиненные лапки; 13 - осколочный корпус;
14, 16, 18 - вышибные заряды; 17 - крышка; 19 - пиротехнический датчик; 21 - блок
датчиков цели
298
3. Боеприпасы осколочного действия
установки обеспечивает ориентированное (вертикальное) положение мины на
поверхности и выполнено в виде шести подпружиненных лапок 12, закреп-
ленных одним концом на крестовине 11, поджатой с помощью втулки 10 к
осколочному корпусу 13.
Взрыватель ВП-09С состоит из блока датчиков цели 21, предохранитель-
но-исполнительного механизма и предохранительно-детонирующего узла, раз-
мещенных в корпусе взрывателя. В блоке датчиков цели установлен жесткий
предохранитель. Датчики цели выполнены из четырех синтетических нитей
длиной по 10 м каждая, одним концом закрепленных в блоке датчиков цели.
Жесткий предохранитель снабжен пиротехническими замедлителями и вы-
шибными зарядами, которые осуществляют установку мины и переводят ее
в боевое положение после отстрела БЭ из стакана. В предохранительно-ис-
полнительном механизме предусмотрены устройства, обеспечивающие сра-
батывание мины при воздействии на датчик цели или от механизма само-
ликвидации.
Выбрасывающее устройство предназначено для отстрела элемента из ста-
кана / после падения мины на грунт и включает в себя вышибной заряд 18,
снабженный пиротехническим датчиком /9 с замедлителем 20.
Блок стабилизатора размещен в верхней части стакана / и служит для
стабилизации полета мины и снижения ее скорости до требуемого уровня (не
более 60 м/с). Стабилизирующие элементы мины три пары капроновых лент
длиной по 440 мм каждая, собранных вместе с другими элементами стабили-
затора в корпусе 5 и закрытых колпачком 9.
При выбросе мины из кассеты приводятся в действие пиротехнические
датчики и замедлители выбрасывающих устройств, одновременно с помощью
пружины 7 сбрасываются колпачки стабилизатора, и под действием набегаю-
щего потока воздуха разматываются капроновые ленты стабилизатора. После
падения мины на грунт по истечении времени горения пиротехнических за-
медлителей выбрасывающего устройства (около 50 с) происходят отстрел БЭ,
сброс стабилизаторов и воспламенение пороховых замедлителей вышибных
зарядов БЭ, под действием которых через 3...4 с после отстрела освобожда-
ются подпружиненные лапки, а БЭ устанавливаются в заданное положение.
Сразу после установки мины в заданное положение срабатываю! вышибные
заряды блоков датчиков цели и происходит отстрел блоков на высоту около
0,5 м, где под действием пружин осуществляется разброс четырех нитяных
датчиков с якорями на расстояние до 10 м. Одновременно с отстрелом блоков
датчиков цели предохранительно-исполнительный механизм взрывателя пе-
реводится в боевое положение.
Подрыв мины осуществляется от механического воздействия на нитяные
датчики цели. Механизм самоликвидации начинает работать после отстрела бло-
ка датчиков цели, при этом самоликвидация мины происходит через 4...50 ч.
Основные технические характеристики мины ПОМ-2: полная масса мины
1,6 кг, масса БЭ - 1,06 кг, масса заряда ВВ (тротил) - 140 г, диаметр мины -
63 мм, высота - 180 мм. Радиус зоны сплошного поражения мины ПОМ-2
равен 16 м.
Противопехотные осколочные мины направленного действия образуют ос-
колочные поля с углом разлета ПЭ от нескольких градусов до нескольких де-
3.10. Инженерные мины осколочного действия
299
сятков градусов. Типовой для данного семейства противопехотных мин явля-
ется конструкция отечественной мины МОН-50 (рис. 3.144), предназначенной
не только для вывода из строя живой силы противника, но и для поражения
небронированной техники.
Рис. 3.144. Противопехотная мина МОН-50:
1 - корпус; 2 пробка; 3 - прицельная щель; 4 - заряд ВВ; 5 - запальное гнездо; 6 дополни-
тельный детонатор; 7 - ножка; 8 - фланец; 9 - крышка; 10 блок ГПЭ
Мина МОН-50 состоит из корпуса 1, внутри которого размещены заряд
ВВ 4 и блок ГПЭ 10. Пластмассовый корпус мины в верхней части имеет два
запальных гнезда 5, в которые при установке мины вставляются электродето-
наторы ЭДП-р (или запал МД-5м). В условиях служебного обращения гнез-
да 5 закрыты пробками 2. В верхней части корпуса сделана прицельная щель
3, необходимая для более точной установки мины на местности. Снизу к кор-
пусу прикреплены складывающиеся ножки, используемые при установке мины
на грунт, и фланец 8 с резьбой для крепления мины к местным предметам с
помощью струбцины.
Заряд ВВ выполнен из пластичного ВВ - ПВВ-5А и снабжен двумя до-
полнительными детонаторами в виде шашек из A-IX-1, запрессованных в за-
пальные гнезда. Масса заряда ВВ равна 0,7 кг.
Однослойный блок ГПЭ прилегает к выпуклой стороне корпуса и содер-
жит стальные ПЭ в виде либо цилиндров диаметром 6 мм, высотой 7 мм и
массой 1,5 г, либо стальных шариков диаметром 6.35 мм и массой 1 г, залитых
эпоксидным компаундом. Общее количество ГПЭ в блоке для цилиндров со-
ставляет 485 шт. или для шариков - 540 шт.
Для подрыва мины применяются взрыватели МВЭ-72, МУВ-2, МУВ-3,
МУВ-4, МВЭ-НС, срабатывающие от растяжек, а также взрыватели замедлен-
ного действия ВЗД-бч, ВЗД-Зм. При необходимости мина может подрываться
в управляемом варианте - при этом используются электродетонаторы ЭДП-р
или ЭДП, приводимые в действие по проводной электрической цепи от под-
рывной машинки или других источников тока.
300
3. Боеприпасы осколочного действия
Рис. 3.145. Противопехотная мина
М18А1(США):
/ - корпус; 2 - установочные ножки; 3 -
блок ГПЭ; 4 - заряд ВВ; 5 - прицельное
приспособление; 6 гнездо детонатора; 7 -
пробка
Полная масса мины МОН-50 равна 2,0 кг, габариты 226x155x66 мм.
При подрыве мины образуется осколочное поле с углом разлета в горизон-
тальной плоскости 54°, при этом радиус зоны сплошного поражения живой
силы достигает 50...58 м при ширине зоны 45...54 м, а убойный интервал
равен 80...85 м.
Аналоги мины МОН-50 - зарубежные мины МРУД (Югославия), М18А1
(США), а также отечественная МОН-90. Мина М18А1 (рис. 3.145) имеет сле-
дующие технические характеристики: полная масса мины - 1,6 кг, габариты -
216x83x36 мм, масса ВВ - 0,68 кг, ко-
личество ГПЭ - 700 шт. Угол сектора
разлета ПЭ в горизонтальной плоскости
равен 60°, радиус зоны сплошного пора-
жения достигает 50 м при ширине зоны
50 м, высота потока осколков на дально-
сти 50 м не превышает 4 м, максималь-
ная дальность разлета отдельных оскол-
ков составляет 200 м. . Л
Особенностью конструкции мины
М18А1 является то, что ее взрыватель,
срабатывающий от натяжного датчика,
устанавливается отдельно на некотором
расстоянии (35...40 м) от мины, а дето-
национный импульс на заряд ВВ мины
от взрывателя передается с помощью де-
тонационного шнура.
Существенно более узкий по срав-
нению с минами МОН-50 или М18А1
поток ПЭ образуют отечественные мины
МОН-100 и МОН-200 примерно одина-
ковой конструкции, но различающиеся
по массе и габаритам. Мина МОН-100
(рис. 3.146) имеет осесимметричный
корпус в виде конуса с большим углом
раствора, при этом блок ГПЭ размещен на внутренней поверхности конуса.
Корпус мины выполнен из штампованной листовой стали, а его внутренняя
полость заполнена зарядом ВВ из литого тротила, усиленного дополнитель-
ным детонатором шашкой прессованного тротила.
Блок ГПЭ содержит 400 ПЭ в виде цилиндров с диаметром и высотой по
10 мм, которые зафиксированы либо поджимающей упругой прокладкой, либо
с помощью заливки мастикой. Мина снабжена электродетонатором ЭДП-р, при
этом подрыв мины осуществляется только в управляемом варианте с приме-
нением электрической проводной цепи.
Полная масса мины МОН-100 равна 5 кг, ее диаметр - 236 мм (у мины
МОН-200 эти параметры соответственно 25 кг и 434 мм). Во время подрыва
МОН-100 образуется узкое осколочное поле, при этом ширина зоны сплошно-
го поражения на расстоянии 100 м составляет 6,5...9,5 м (рис. 3.147), а угол
сектора разлета ГПЭ в зоне сплошного поражения равен 5,5°. Убойный
3.11. Осколочные ручные гранаты
301
Рис. 3.146. Противопехотная мина МОН-100:
а - разрез; б вид спереди; 1 - скоба; 2 - болт; 3 - трубка; 4 гайка; 5 костыль; 6 - заряд ВВ;
7 - дополнительный детонатор; 8 - корпус; 9 - перегородка; 10 — блок ГПЭ; II - электродето-
натор ЭДП-р; 12 - накладка; 13 - винт; 14 гайка
интервал ГПЭ мины достигает 160 м. Ввиду острой направленности осколоч-
ного потока мины МОН-100 при ее ручной установке используется специаль-
ное прицельное приспособление.
3.11. Осколочные ручные гранаты
Ручные гранаты - средства ближнего боя, а их метание осуществляется
ручным способом. Осколочные ручные гранаты предназначены для борьбы с
пехотой противника и подразделяются на наступательные и оборонительные.
Гранаты первого типа применяются, как правило, в наступательном бою и име-
ют относительно небольшие размеры зоны поражения осколками (до 5...10 м),
заметно уступающие средней дальности броска. Для наступательных гранат
характерна небольшая толщина стенок корпуса и более высокое, по сравне-
302
3. Боеприпасы осколочного действия
нию с оборонительными, значение коэффициента наполнения. Оборонитель-
ные гранаты обычно используются из укрытий, что позволяет существенно
повысить величину убойного интервала осколков по сравнению с наступа-
тельными гранатами.
Помимо наступательных или оборонительных гранат существуют и уни-
версальные наступательно-оборонительные гранаты, представляющие собой
наступательную гранату, снабженную дополнительным осколочным чехлом,
который в случае необходимости надевается сверху на корпус, вследствие чего
граната становится оборонительной.
Ручные гранаты по принципу срабатывания делят на ударные, дистанци-
онные и ударно-дистанционные. Ударные гранаты срабатывают при встрече с
преградой, а дистанционные - с замедлением после выгорания дистанцион-
ного состава. Ударно-дистанционные гранаты имеют два независимых уст-
ройства инициирования - ударного и дистанционного типа.
Как и в других типах ОБП, в современных осколочных ручных гранатах
используются оболочки как естественного, так и заданного дробления, а так-
же ГПЭ.
Ручные гранаты начали применять в Средние века. Первое упоминание о
них датируется 1483 г. и связано с Италией. С появлением стрелкового ору-
жия использование гранат в боевых действиях заметно сократилось, однако в
начале XX в. ручные гранаты, и прежде всего осколочные, вновь занялй проч-
ное место среди средств вооружения пехоты.
Первые гранаты имели глиняный корпус с зарядом пороха, и по совре-
менной классификации их скорее следует считать фугасными. Осколочными
такие гранаты стали после того, как их корпуса начали изготавливать из чугу-
на или латуни. Такие гранаты снабжались запалом - деревянной трубкой с
пороховой мякотью (дистанционной трубкой), поджигаемой перед броском.
В конце XVII в. запал был усовершенствован - в деревянную трубку вставили
деревянный стержень, при этом трубка и стержень имели неровности (зазуб-
рины), покрытые бертолетовой солью. Перед броском стержень за кольцо вы-
дергивали из трубки, воспламеняя ее пороховую мякоть. Подобные гранаты
длительное время применяли в армиях многих стран. В конце XIX в. деревян-
ные трубки были заменены на латунные. Гранаты с такой терочной трубкой
стояли на вооружении русской армии, при этом для автоматического выдерги-
вания терочного стержня из трубки при броске к кольцу стержня при помощи
карабина присоединяли кожаный ремень, надеваемый на руку перед броском
(рис. 3.148).
Ударные осколочные гранаты появились в начале XX в. Первая русская
граната ударного действия была сконструирована Яншиным (рис. 3.149). Гра-
ната была снабжена деревянной ручкой, позволявшей увеличить дальность
броска и служившей одновременно стабилизатором. Граната после броска
ударялась головной частью о грунт, и жало, закрепленное с внутренней сто-
роны колпачка гранаты, накалывало КВ, от которого срабатывал КД. Колпа-
чок с жалом надевался на гранату непосредственно перед броском, а в усло-
виях служебного обращения вместо него граната была закрыта предохрани-
тельным колпачком. Осколочное действие гранаты обеспечивалось за счет
дробления свинцового пояса с насечками (оболочкой заданного дробления),
3.11. Осколочные ручные гранаты
303
закрепленного на внешней поверхности корпуса. Гранаты Лишина снаряжа-
ли БВВ.
Граната Зелинского (рис. 3.150) - также одна из первых отечественных
ударных осколочных ручных гранат. Ее корпус изготовлялся из чугуна, на внеш-
ней стороне оболочки выполнялись подрезы, обеспечивающие заданное дроб-
ление. Снаряжалась граната дымным (черным) порохом, для инициирования
которого применяли запал, похожий на запал гранаты Лишина. Для стабили-
зации гранаты в полете в нижнее отверстие корпуса вставляли деревянный
штырь.
Рис. 3.148. Ручная осколочная гра- Рис. 3.149. Ручная
ната русской армии конца XIX в. граната Лишина
Рис. 3.150. Ручная
граната Зелинского
Осколочные ручные гранаты периода Первой мировой войны, использо-
вавшиеся в армиях разных стран, отличались разнообразием конструкций, при
этом можно отметить достаточно сложные по устройству запалы дистанцион-
ных гранат Рдултовского и Новицкого - Федорова, но наиболее известной стала
осколочная граната F-1, разработанная во Франции в 1915 г. (рис. 3.151) и
находившаяся на вооружении не только французской, но и армий некоторых
других стран, в том числе и России.
Корпус гранаты F-1 выполнялся из чугуна и имел подрезы с внешней сто-
роны, а сама граната снабжалась рукояткой, в которой размещался запал дис-
танционного действия. Перед броском ее ударяли о твердый предмет высту-
пающей деталью запала, при этом происходил накол КВ и воспламенение ди-
станционного порохового заряда. После удара гранату метали в сторону цели,
подрыв заряда ВВ происходил после выгорания дистанционного заряда.
В более поздних модификациях граната F-1 выполнялась без рукоятки с
более надежным запалом с предохранительной скобой. Отечественный вариант
304
3. Боеприпасы осколочного действия
Рис. 3.151. Ручная грана-
та F-1 (Франция, 1915 г.)
Рис. 3.152. Ручная оборо-
нительная граната Ф-1:
1 - корпус; 2 - заряд ВВ;
3 - запал
гранаты F-1 с запалом конструкции Ковешникова под
индексом Ф-1 был принят на вооружение в 1926 г.
Позднее запал Ковешникова гранаты Ф-1 заменили
на УЗРГМ. Современный вариант оборонительной
ручной осколочной гранаты дистанционного действия
Ф-1 (рис. 3.152) состоит из корпуса 7, заряда ВВ 2
(тротил) и запала УЗРГМ 3.
Корпус гранаты изготовлен из серого чугуна
СЧ00 методом литья, при этом с внешней стороны
он имеет продольные и поперечные «подрезы», по-
добно оболочкам заданного дробления, однако при
дроблении чугунного корпуса образуются осколки,
большая часть которых массой менее 1 г, что значи-
тельно ниже уровня, определяемого геометрией
«подрезов». Снаряжается граната тротилом методом
шнекования. Подрыв заряда ВВ гранаты осуществ-
ляется от КД, входящего в состав запала УЗРГМ,
через 3,2...4,2 с после броска.
Основные технические характеристики гранаты
Ф-1: масса - 0,6 кг, диаметр - 55 мм, высота корпу-
са - 86 мм ( высота гранаты с запалом - 117 мм),
масса заряда ВВ - 60...90 г. Начальная скорость ос-
колков гранаты Ф-1 составляет 730 м/с, убойный ин-
тервал наиболее крупных осколков достигает 200 м.
Приведенная площадь поражения при действии по
открытой живой силе равна 75...82 м2.
Аналогами гранаты F-1 являются не только оте-
чественная Ф-1, но и ряд осколочных гранат других
стран. Так, начиная с Первой мировой войны и прак-
тически в течение всего XX в. в различных войнах
широко применялась ручная осколочная граната
конструкции Миллса (Англия) или граната № 5
(рис. 3.153) с чугунным корпусом.
Металлический корпус с «подрезами» заданного
дробления был также у оборонительных гранат Вго
Mena (Испания) (рис. 3.154), 0-23 (Польша)
(рис. 3.155), Мк-2 (США) (рис. 3.156) и японской гра-
наты образца 1937 г. (рис. 3.157) (табл. 3.13).
Как отмечалось выше, при дроблении чугунных
корпусов ОБП, в том числе и ручных гранат, под дей-
ствием ПД мощных БВВ (например, тротила) подав-
ляющая часть осколочного спектра содержит оскол-
ки, масса которых не превышает 0,1...0,3 г, и, соот-
ветственно, радиус зоны поражения не выходит за
пределы нескольких метров. Для повышения уровня
боевой эффективности в современных конструкциях
осколочных оборонительных гранат осуществляется
3.11. Осколочные ручные гранаты
305
переход от чугунных к стальным оболочкам заданного дробления или к обо-
лочкам с блоками ГПЭ.
Современный вариант осколочной оборонительной гранаты представляет
собой отечественная граната РГО (рис 3.158). Двухслойный корпус фанаты
имеет четыре стальные полусферы с подрезами заданного дробления, причем
подрезы на нижней внешней полусфере выполнены с наружной стороны, что
позволяет отличать по внешнему виду гранату РГО от наступательной грана-
ты РГН.
Рис. 3.153. Ручная осколочная граната Миллса (Англия)
Рис. 3.154. Ручная оборонительная
граната Bro Mena (Испания)
Рис. 3.155. Ручная оборонительная
граната 0-23 (Польша)
306
3. Боеприпасы осколочного действия
Рис. 3.156. Ручная оборонительная
граната Мк-2 (США)
Рис. 3.157. Ручная оборонительная
граната образца 1937 г. (Япония)
Помимо применения стального корпуса заданного дробления в гранате
РГО реализованы и другие современные тенденции развития данного типа
ОБП. Во-первых, вместо тротила граната РГО снаряжена более мощным БВВ.
обеспечивающим не только качественное дробление на осколки заданной мас-
сы, но и высокую начальную скорость осколков: при подрыве РГО образуют-
ся 670...700 компактных осколков массой 0,46 г каждый, метаемых со скорос-
тью около 1200 м/с. Во-вторых, в гранате РГО применен запал УДЗ с повы-
шенным уровнем безопасности и надежности в условиях боевого применения.
Запал УДЗ снабжен самоликвидатором и двумя цепями срабатывания: ударно-
дистанционной и дистанционной (самоликвидатор), которые дублируют друг
Таблица 3.13. Характеристика ручных осколочных гранат
Характеристики Ручная граната образца 1937 г. Граната Миллса Bro Mena 0-23 Мк-2
Диаметр, мм 50 61 — 58 57
Высота, мм Масса, кг: 102 100 — ПО 114
гранаты 0,450 0,77 0,5 0,61 0,59
заряда ВВ 0,05 0,07 0,1 0,045 0,06
Тип ВВ Тротил (пикриновая кислота) Тротил Тротил Тротил Тротил
Время замедления, с 4-5 5,0 3^1 4,50 5,06 3,5-4,0
3.И. Осколочные ручные гранаты
307
Рис. 3.158. Ручная оборонительная граната РГО:
1 - заряд ВВ; 2 - верхняя внешняя полусфера; 3 - пробка; 4 - запальный стакан; 5 - верхняя
внутренняя полусфера; 6 — дополнительный детонатор; 7 - нижняя внутренняя полусфера; 8 -
нижняя внешняя полусфера
друга. Взрыв гранаты происходит или от удара о преграду по истечении вре-
мени дальнего взведения (1,0... 1,8 с), или (при отсутствии удара или недоста-
точно сильном ударе) по истечении времени самоликвидации (3,3...4,3 с).
Технические характеристики гранаты РГО следующие: масса гранаты -
0,53 кг, масса заряда ВВ - 90 г, диаметр корпуса - 60 мм, высота корпуса -
63 мм, высота гранаты с взрывателем - 114 мм.
По уровню эффективности граната РГО заметно превосходит гранату Ф-1.
Так, приведенная площадь поражения при действии гранаты Ф-1 составляет
75...82 м2, а у РГО этот показатель равен 210 м2 (при достаточно высокой
плотности осколочного поля в зоне поражения). Отсутствие в осколочном спек-
тре РГО ПЭ большой массы приводит к заметному снижению максимального
значения убойного интервала. Так у гранаты Ф-1 убойный интервал наиболее
тяжелых осколков достигает 200 м, а у РГО максимальный убойный интер-
вал - менее 100 м, что повышает безопасность обороняющихся подразделе-
ний от действия собственных гранат.
Высокая плотность осколочного поля в зоне поражения и относительно
небольшой убойный интервал, незначительно превышающий размеры действи-
тельной зоны поражения, характерны и для современных оборонительных гра-
нат с ГПЭ. Ручная оборонительная граната M-DN21 (ФРГ) (рис. 3.159) имеет
пластмассовый корпус с продольно-поперечными ребрами жесткости на внеш-
ней поверхности. Готовые ПЭ в виде стальных шариков диаметром 2,0.. .2,3 мм
залиты в корпус, при этом общее количество ГПЭ в гранате составляет 2200 шт.
Граната снаряжена флегматизированным тэном, а масса заряда ВВ равна 45 г.
Общая масса гранаты составляет 0,225 кг.
308
3. Боеприпасы осколочного действия
Рис. 3.159. Ручная оборонительная
граната M-DN21 (ФРГ)
К наступательным ручным осколоч-
ным гранатам предъявляются более жест-
кие требования по безопасности от дей-
ствия осколков своих гранат по сравнению
с оборонительными: максимальное значе-
ние убойного интервала осколков наступа-
тельных гранат должно быть заметно мень-
ше средней дальности броска (30...40 м).
В связи с этим осколочные спектры насту-
пательных гранат содержат осколки с ми-
нимальной массой и одновременно с мак-
симально возможным значением баллисти-
ческого коэффициента. В конструкциях
наступательных гранат данные требования
удовлетворяются за счет применения тон-
костенных корпусов или выполнения ос-
колочных оболочек из легких материалов
(алюминия, пластмасс и т. п.).
Интересным техническим решением
по разработке осколочных наступательных
гранат стала конструкция отечественной
гранаты РГ-42 (рис. 3.160), принятой на
вооружение в 1942 г. Многослойный кор-
пус гранаты РГ-42 выполнен из несколь-
ких витков рифленой стальной ленты.
Рифление (подрезы) обеспечивает задан-
ное дробление каждого из слоев ленты.
Осколки ленты имеют форму тонких пла-
стин, что приводит к высоким значениям
баллистического коэффициента и, следо-
вательно, к резкому падению скорости на
траектории. Технические характеристики
гранаты РГ-42 следующие: масса грана-
ты - 0,40 кг, диаметр корпуса - 54 мм, вы-
сота корпуса (с запалом) - 121 мм. Снаря-
жается граната тротилом (масса заряда
ВВ - 110... 120 г). В качестве взрывателя в
РГ-42 используется запал УЗРГМ (УЗРГ),
осуществляющий дистанционное срабаты-
вание гранаты с временем замедления
3,2...4,2 с. Расчетные значения началь-
ной скорости разлета осколков составляют
Рис. 3.160. Ручная наступательная граната
РГ-42:
1 - корпус гранаты; 2 - запал; 3 заряд ВВ; 4 -
трубка; 5 - лента
3.11. Осколочные ручные гранаты
309
1100 м/с, при этом убойный интервал наиболее крупных осколков не превы-
шает 15...20 м, а радиус зоны сплошного поражения равен 5 м.
Среди зарубежных осколочных наступательных гранат с тонкостенным
корпусом можно отметить гранату Eihandgranaten 39 (Германия), применяв-
шуюся в период Второй мировой войны (рис. 3.161), и Z-23 (Польша)
(рис. 3.162). Гранаты внешне незначительно отличаются друг от друга, но
снабжены запалами разного принципа дистанционного действия. В гранате
Eihandgranaten 39 применен запал терочного типа, а в Z-23 - запал системы
Роллана ударного действия, срабатывающий после снятия боевой чеки и по-
следующего броска гранаты.
Рис. 3.162. Ручная наступательная
граната Z-23 (Польша)
Рис. 3.161. Ручная наступательная
граната Eihandgranaten 39 (Германия)
Обе гранаты снаряжены тротилом и обладают примерно одинаковыми тех-
ническими характеристиками, приведенными ниже:
Eihandgranaten 39 Z-23
Масса, кг:
гранаты ................................... 0,24 0,31
заряда ВВ............................... 0,11 0,12
Диаметр, мм................................. 60 56
Высота, мм ................................ 100 98
Время замедления, с ..................... 4,5 4,5-5,0
Радиус зоны сплошного поражения обеих гранат - около 5 м, а дальность
разлета отдельных осколков не превышает 15 м.
Типовой конструкцией наступательной гранаты с тонкостенным корпу-
сом является отечественная РГД-5 (рис. 3.163) - ручная осколочная граната
310
3. Боеприпасы осколочного действия
Рис. 3.163. Ручная наступательная граната РГД-5:
1 - верхний внешний колпак корпуса; 2 - верхний внутренний колпак корпуса; 3 - внутренняя
трубка; 4 - запал; 5 — заряд ВВ; 6 - нижний внешний колпак корпуса; 7 - нижний внутренний
колпак корпуса; 8 - соединительный узел и.
дистанционного действия. Корпус гранаты состоит из двух половин - двух-
слойных колпаков, соединенных между собой. Граната снаряжена тротилом и
снабжена запалом УЗРГМ. Технические характеристики РГД-5: масса грана-
ты - 0,31 кг, диаметр корпуса - 58 мм, высота корпуса - 76 мм, высота грана-
ты с запалом - 117 мм, масса заряда ВВ - ПО г, время замедления - 3,2...4,2 с.
Коэффициент наполнения РГД-5 (равен 0,35) выше, чем у оборонитель-
ных гранат, что характерно для всех наступательных гранат. Расчетное значе-
ние начальной скорости осколков гранаты РГД-5 составляет 2000 м/с, т. е.
является достаточно высоким, однако убойный интервал отдельных осколков
не превышает 15...20 м.
Ручная осколочная наступательная граната РГД-5 долго находилась на во-
оружении Советской армии. В настоящее время ее сменила более современ-
ная граната РГН, которая по внешнему виду отличается от оборонительной
гранаты РГО отсутствием подрезов на наружной поверхности нижней полу-
сферы корпуса (рис. 3.164).
Корпус гранаты РГН выполнен в виде двух полусфер, изготовленных из
алюминиевого сплава и имеющих на внутренней поверхности подрезы для
организации заданного дробления. В верхнюю полусферу корпуса завальцо-
ван стакан с резьбой для установки запала. Для снаряжения гранаты РГН при-
меняется A-IX-1, а ее взрывателем служит запал УДЗ. Так же, как и в гранате
РГО, запал в РГН срабатывает от удара о преграду по истечении времени
дальнего взведения (1,0... 1,8 с) либо после выгорания пороховой шашки за-
медлителя самоликвидатора через 3,3...4,3 с.
Технические параметры гранаты РГН следующие: масса гранаты - 0,31 кг,
масса ВВ - 114 г (коэффициент наполнения - 0,37), диаметр корпуса - 61 мм,
высота корпуса - 63 мм, высота гранаты с запалом - 114 мм.
3.11 Осколочные ручные гранаты
311
Рис. 3.164. Ручная наступательная граната РГН;
1 заряд ВВ; 2 - верхняя полусфера корпуса; 3 - запальный стакан; 4 - пробка; 5 дополни-
тельный детонатор; 6 нижняя полусфера корпуса
Несмотря на высокую скорость метания осколков (более 2000 м/с), ради-
ус зоны сплошного поражения не превышает 5...6 м при площади этой зоны
около 100 м2. Расстояние безопасного удаления для метающего гранату со-
ставляет 24 м.
Применение легких сплавов на основе алюминия для изготовления кор-
пусов можно отметить и в ряде конструкций зарубежных осколочных насту-
пательных гранат, в частности гранат О.Т.О.
и М35 (Италия) системы Бреда.
По-видимому, предельным случаем об-
легчения корпуса наступательной гранаты и,
соответственно, уменьшения радиуса разле-
та осколков является использование пласт-
массовых корпусов. Ручная осколочная гра-
ната PRB NR446 (Бельгия) (рис. 3.165) с
пластмассовым корпусом состоит из двух ча-
стей - нижней и верхней, скрепленных меж-
ду собой. На наружной поверхности корпу-
са выполнены ребра жесткости, придающие
дополнительную прочность стенкам корпу-
са. Граната снаряжается взрывчатым соста-
вом «В» и комплектуется запалом ударно-
предохранительного типа с временем замед-
ления 4 с. Граната довольно легкая, ее масса
равна 0,115 кг, при этом масса заряда ВВ со-
ставляет 85 г (коэффициент наполнения -
0,74). Диаметр гранаты равен 50 мм, а высо-
та-82 мм.
Рис. 3.165. Ручная наступательная
граната PRB NR 446 (Бельгия)
312
3. Боеприпасы осколочного действия
При подрыве гранаты PRB NR 446 практически отсутствуют убойные ос-
колки, а основным поражающим фактором является воздушная ударная вол-
на, при этом радиус зоны поражения не превышает 5 м.
Как среди ранних, так и среди современных конструкций осколочных гра-
нат можно выделить универсальные наступательно-оборонительные гранаты.
Одно из направлений разработки наступательно-оборонительных гранат свя-
зано с применением съемных осколочных оболочек-чехлов: в случае исполь-
зования без осколочного чехла граната является наступательной, а с чехлом -
оборонительной. Данное техническое решение реализовано в отечественной
ручной гранате образца 1914/1930 г., а позднее в гранате РГД-33, применяв-
шейся в годы Великой Отечественной войны.
Основные части гранаты дистанционного действия РГД-33 (рис. 3.166):
корпус с размещенным в нем зарядом ВВ, рукоятка, в которой были установ-
Рис. 3.166. Ручная универсальная граната РГД-33:
1 - лента; 2 — корпус; 3 — предохранитель; 4 - центральная трубка; 5 - осколочный чехол;
6 - заряд ВВ; 7 - боевая пружина; 8 - ударник
3.11. Осколочные ручные гранаты
313
лены узлы предохранительно-спускового механизма, и запал. Тонкостенный
корпус гранаты выполняли из жести, при этом на внутренней поверхности
корпуса закреплялась дополнительная многослойная осколочная оболочка из
навитой стальной ленты с рифлением (подрезами) заданного дробления. Сна-
ряжалась граната тротилом. Запал, устанавливаемый перед броском, имел
пороховой замедлитель, КВ, детонатор и дополнительный детонатор. Время
замедления срабатывания гранаты составляло 3,2...3,8 с. Безопасное обра-
щение с гранатой после установки запала обеспечивалось предохранитель-
ным движком (с предохранителя граната снималась непосредственно перед
броском).
Осколочный чехол надевали при необходимости на корпус, фиксировали
с помощью специального шпенька, и граната становилась оборонительной.
К гранате РГД-33 было разработано два типа чехлов: тяжелый массой 250 г и
легкий массой 125 г, при этом на наружной поверхности каждого из них была
сделана сетка подрезов заданного дробления, ориентированных под углом око-
ло 30° к образующей.
При использовании гранаты РГД-33 ц качестве наступательной осколки
имели пластинчатую форму и разлетались на расстояние, не превышающее
25 м, при этом радиус зоны сплошного поражения равнялся 5 м. Расчетное
значение начальной скорости осколков составляло 1100 м/с. При наличии тя-
желого осколочного чехла начальная скорость осколков снижалась до
700...850 м/с, однако дальность разлета отдельных осколков увеличивалась
до 200 м, а радиус зоны сплошного поражения - до 25 м.
Осколочные чехлы, превращающие наступательные гранаты в оборони-
тельные, применяют и в некоторых современных универсальных ручных гра-
натах, в частности в гранатах М (MD) (Франция) и DM51 (ФРГ). В наступа-
тельном варианте граната М имеет пластмассовый корпус, масса заряда ВВ
равна 87 г при полной массе гранаты 0,26 кг, при этом поражающим фак-
тором является воздушная ударная волна. В оборонительном варианте на
корпус гранаты М навинчивается осколочный чехол с подрезами заданного
дробления массой 140 г, который при подрыве образует 280 осколков массой
0,4 г каждый. Площадь зоны сплошного поражения гранаты М составляет
100 м2.
Ручная универсальная граната дистанционного действия DM51 по конст-
рукции аналогична гранате М (MD). В наступательном варианте DM51 имеет
пластмассовый шестигранный корпус (рис. 3.167) с зарядом ВВ (флегматизи-
рованный тэн) массой 85 г. Осколочный чехол DM51 выполнен в виде пласт-
массового кожуха с залитыми в нем стальными шариками (6500 шт.) диамет-
ром 2,0...2,3 мм. В собранном виде осколочный чехол фиксируется на корпу-
се гранаты с помощью донной шайбы, навинчиваемой на цилиндрический
выступ корпуса. Полная масса гранаты с осколочным чехлом равна 0,45 кг
(коэффициент наполнения - 0,2), ее диаметр - 57 мм, высота - 107 мм, время
замедления -4 с.
Наряду с применением осколочных чехлов при разработке современных
ручных универсальных гранат реализуется и другой подход, основанный на
оптимизации параметров конструкции гранаты, в целях придания ее коорди-
натному закону поражения формы, близкой к ступенчатой. В этом случае ПЭ
314
3. Боеприпасы осколочного действия
Рис. 3.167. Ручная универсальная граната DM51 (ФРГ):
а - с осколочным чехлом; б - без осколочного чехла; в - устройство
с оптимальными параметрами, выходя за пределы зоны поражения, резко те-
ряют скорость и, следовательно, убойную силу. Размеры зоны поражения та-
ких универсальных гранат больше, чем у наступательных гранат, но меньше,
чем у оборонительных.
В конструкциях осколочных гранат с готовыми или полуготовыми ПЭ дан-
ный подход осуществляется за счет уменьшения массы ГПЭ до оптимального
Рис. 3.168. Ручная универсаль-
ная граната М26А1 (США)
уровня. Анализ конструкций современных руч-
ных гранат и характеристик их боевой эффек-
тивности показывает, что для образования оско-
лочных полей радиусом зоны сплошного пора-
жения не более 5 м (в наступательных гранатах)
ГПЭ в виде стальных шариков должны иметь ди-
аметр около 1,5 мм и массу около 0,015 г. При
увеличении размеров ГПЭ и их начальной ско-
рости размеры зоны поражения возрастают, и
граната становится либо универсальной, либо
только оборонительной. Характерный образец
оборонительной ручной гранаты такого типа -
рассмотренная выше граната M-DN21 (ФРГ).
Примером универсальной гранаты служит
ручная осколочная граната М26А1 (США), кото-
рая может применяться и как наступательная, и
как оборонительная. Граната М26А1 (рис. 3.168)
имеет тонкостенный корпус, состоящий из верх-
ней и нижней частей, соединенных между со-
бой. На внутренней поверхности корпуса разме-
щена осколочная рубашка из навитой стальной
3.12. Осколочные гранаты к гранатометам
315
проволоки с подрезами заданного дробления. Граната снаряжается составом
«В» с массой заряда ВВ 165 г. Полная масса гранаты равна 0,45 кг. а коэффи-
циент наполнения - 0,37.
При подрыве осколочная рубашка дробится на 1200 осколков, образую-
щих осколочное поле радиусом зоны сплошного поражения около 9 м, при
этом убойный интервал отдельных осколков не превышает 15...20 м.
3.12. Осколочные гранаты к гранатометам
Гранатометы значительно расширяют возможности ведения боевых дей-
ствий пехоты как в оборонительном, так и в наступательном бою. Прицельная
дальность метания гранат из гранатометов значительно превосходит среднюю
дальность броска ручной гранаты, что не только повышает эффективность
применения гранат, но и уровень безопасности от осколочного действия сво-
их гранат.
Наиболее ранние гранатометные устройства были предназначены для ме-
тания обычных ручных гранат, при этом в качестве гранатометов применяли
либо стволы винтовок, либо специальные, мортирки. Примером такой универ-
сальной осколочной гранаты, которую можно было использовать как ручную,
так и гранатометную, является граната Миллса (см. рис. 3.153) самая извес-
тная граната Первой мировой войны. В нижней пробке гранаты выполнено
глухое отверстие, куда при необходимости ввинчива-
ли шомпол, который вставлялся в ствол винтовки. Ме-
тание гранаты осуществляли выстрелом холостого пат-
рона. Позднее появилась модификация гранаты Мил-
лса, позволявшая метать гранату из специальной
наствольной мортирки. К донной части гранаты кре-
пился специальный диск, служивший обтюратором при
стрельбе.
Другой пример использования ручной осколочной
гранаты для метания из гранатомета - японская уни-
версальная граната образца 1931 г. (тип 91) (рис. 3.169).
Для метания из гранатомета она снабжалась донным
цилиндром с пороховым зарядом. Гранату можно было
применять и как наствольную, для чего на донный ци-
линдр надевали специальную трубку - стабилизатор.
В остальном конструкция данной гранаты типична для
ручных осколочных гранат. Корпус гранаты - чугунный
с подрезами заданного дробления. Снаряжение - тро-
тил или пикриновая кислота. Запал - дистанционный
ударного действия с временем замедления 7,5...7,8 с.
Полная масса гранаты равна 0,52 кг, масса заряда ВВ -
40 г, длина - 125 мм, диаметр - 50 мм.
В ходе Второй мировой войны появились специ-
альные осколочные гранаты для гранатометов, кото-
рые, по существу, представляли собой малокалибер-
ные снаряды. Одной из первых осколочных гранат
Рис. 3.169. Ручная уни-
версальная граната об-
разца 1931 г. (Япония)
316
3. Боеприпасы осколочного действия
такого типа была универсальная 30-мм осколочно-фугасная граната G.Sprgr.
(Германия) (рис. 3.170), которая применялась и как ружейная, и как ручная.
При использовании гранаты в ружейном (или наствольном) варианте ее мета-
ние производилось из мортирки, надетой на ствол карабина. Граната снабжа-
лась двумя взрывателями - головным непредохранительного типа и ударного
действия (срабатывающим только при ружейном использовании) и донным
дистанционного действия с пороховым замедлителем и спиральным тероч-
ным устройством. При применении гранаты в качестве ручной донный взры-
ватель был основным, а при использовании в ружейном варианте - работал
как самоликвидатор при отказе головного взрывателя. Время замедления со-
ставляло около 7 с. Корпус донного взрывателя одновременно служил веду-
щим пояском, для чего на его внешней поверхности выполнялись готовые
нарезы. Корпус гранаты изготавливали из стали и снаряжали шашкой флег-
матизированного тэна. Общая масса гранаты равнялась 0,26...0,28 кг,-масса
заряда ВВ - 32 г, длина гранаты составляла 142 мм. Для ее метания из мор-
тирки применяли вышибной патрон с навеской пороха 1 г. При использова-
нии гранаты в ручном варианте непосредственно перед броском необходимо
было отвинтить и выдернуть донный взрыватель, при этом приводились в
действие терочное устройство и пороховой замедлитель.
В годы Второй мировой войны в Германии разработали пистолетную ос-
колочную гранату ударного действия (рис. 3.171), которая стала готовым выс-
Рис. 3.170. Универсальная 30-мм осколочно-
фугасная граната G.Sprgr.:
а - гильза с пороховым зарядом; б - граната
Рис. 3.171. Пистолетная
• осколочная граната
3.12. Осколочные гранаты к гранатометам
317
трелом к сигнальному пистолету четвертого калибра (26 мм). Основные части
гранаты: баллистический наконечник с неподвижно закрепленным в нем жа-
лом, предохранительная пружина, корпус гранаты, хвостовое оперение, со-
единительная втулка, стакан-ударник с зарядом ВВ, КД, чашка предохраните-
ля, предохранительные шарики и чека, гильза с вышибным зарядом, пыжом и
КВ. Вышибной заряд представлял собой навеску бездымного одноканального
пороха массой 0,5 г. В качестве ВВ использовали состав ТГ массой 12 г. Пол-
ная масса гранаты составляла 0,138 кг, длина — 132 мм.
В момент выстрела пороховые газы выбрасывали гранату вместе с пы-
жом, гильза экстрагировалась из пистолета обычным способом. В полете пре-
дохранительная чека, помещавшаяся в центральном канале хвостового опере-
ния, отделялась от гранаты, после чего предохранительные шарики провали-
вались внутрь центрального углубления и освобождали стакан-ударник. При
ударе о преграду стакан-ударник вследствие инерции продвигался вперед, сжи-
мая предохранительную пружину; при наколе жалом КД происходил мгно-
венный подрыв заряда ВВ.
Корпус баллистического наконечника* пистолетной гранаты изготавлива-
ли из стали, а корпус гранаты и хвостовое оперение из алюминиевого спла-
ва, при этом центр масс гранаты смещался в сторону головной части, обеспе-
чивая при наличии хвостового оперения.стабилизацию полета гранаты. Гра-
ната в полете двигалась обычно по навесной траектории, поэтому при подрыве
на поверхности земли тяжелые осколки баллистического наконечника входи-
ли в грунт, а поле поражения создавалось легкими осколками корпуса. В свя-
зи с этим площадь зоны сплошного поражения была незначительной (около
3...4 м2), что требовало от гранатометчика повышенной точности стрельбы.
Применение гранатометов в различных военных конфлик-
тах второй половины XX в. подтвердило высокую боевую эф-
фективность данного вида оружия, многие гранатометы при-
няты на вооружение армиями разных с гран, при этом в бое-
комплекты практически всех гранатометов входят осколочные
гранаты.
По типу гранатометных систем современные осколочные
гранаты можно условно разделить на наствольные или ружей-
ные, гранаты к подствольным, однозарядным, многозарядным
и автоматическим гранатометам.
Для большинства иностранных винтовок предусмотрено
их использование в качестве ружейных гранатометов, грана-
ты при этом надевают на дульную часть ствола и выстрелива-
ют с помощью либо холостых, либо, при наличии на гранате
пулеуловителя, боевых патронов. Примером современной ру-
жейной осколочной гранаты может служить граната PRB 404
(Бельгия) (рис. 3.172) с пластмассовым корпусом, на внешней
Рис. 3.172. Противопехотная ружейная граната PRB 404 (Бельгия):
1 - пружина с подрезами заданного дробления; 2 - заряд ВВ; 3 - корпус;
4 - стабилизатор
318
3. Боеприпасы осколочного действия
поверхности которого крепят легкосъемную оболочку из навитой стальной
проволоки с насечками на внутренней стороне.
Для снаряжения гранаты использован состав «В», при этом заряд ВВ снаб-
жен дополнительным детонатором, который приводит в действие донный взры-
ватель инерционного типа. Полная масса гранаты равна 0,52 кг, масса сталь-
ной осколочной рубашки - 0,3 кг, масса заряда ВВ - 100 г. Диаметр гранаты с
пружиной составляет 45 мм, длина со стабилизатором - 250 мм. Гранату вы-
стреливают со скоростью около 70 м/с, при этом максимальная дальность
стрельбы достигает 440 м. При необходимости граната PRB 404 может ис-
пользоваться как ручная оборонительная граната - для этого перед броском с
нее снимают стабилизатор.
Многие современные виды стрелкового вооружения оснащены подстволь-
ными гранатометами. Известны 40-мм подствольный гранатомет М203 к
5,56-мм автоматической винтовке М16А-1 (США), 40-мм подствольный гра-
натомет НК-69 (ФРГ), отечественные 40-мм подствольные гранатометы
ГП-25 и ГП-30 (к 7,62- и 5,45-мм автоматам Калашникова). Осколочные гра-
наты к гранатометам такого типа входят в состав выстрелов. *
Выстрел к гранатомету НК-69 (ФРГ) (рис. 3.173) имеет массогабаритные
характеристики, позволяющие применять его и в 40-мм гранатометах США, в
частности в М203. Полная масса выстрела составляет 0,230 кг, масса осколоч-
ной гранаты - 0,180 кг, масса заряда ВВ - 31 г. В гранате используются ГПЭ в
виде стальных шариков; сферическая форма донной части гранаты обеспечи-
вает широкое поле поражения практически при любых углах встречи с пре-
градой.
Сферическую форму имеет также осколочная граната к 40-мм выстрелу
М381 (США) гранатомета М203. Сферический осколочный корпус изготавли-
вают из стальной проволоки квадратного сечения (2,5x2,5 мм) методом на-
вивки. При этом на проволоке нанесены подрезы заданного дробления с ша-
гом 3 мм, что позволяет получать при подрыве около 500 осколков массой
0,15 г каждый. Проволочный каркас оболочки загерметизирован припоем. Сна-
ряжена граната составом «В». Полная масса выстрела составляет 227 г, дли-
на - 99 мм, начальная скорость гранаты - 76 м/с, дальность стрельбы достига-
ет 500 м, при этом прицельная дальность по точечным целям не превышает
150 м. При подрыве гранаты осколки получают скорость 1500 м/с, радиус дей-
ствительной зоны поражения равен 4,5 м.
Все 40-мм выстрелы с осколочной гранатой HE/FRAG 92 (рис. 3.174) и
осколочно-кумулятивной гранатой HE/DP 92 (рис. 3.175) фирмы Arges (Авст-
рия) разработаны с максимальной унификацией: большинство деталей и уз-
лов конструкций обоих выстрелов выполнены совершенно одинаковыми, раз-
личие заключается лишь в наличии кумулятивного узла в гранате HE/DP 92.
В обеих гранатах содержится блок ГПЭ из 1000 стальных шариков диаметром
2 мм. Полная масса обоих выстрелов составляет по 0,265 кг, при этом масса
гранат - по 0,165 кг. Гранаты снаряжены циклонитом, масса заряда ВВ в грана-
те HE/FRAG 92 равна 28 г, а в гранате HE/DP 92 - 20 г. По эффективности
осколочною действия граната HE/DP 92 несколько уступает гранате HE/FRAG 92,
однако может применяться для поражения бронированной техники - при уда-
ре в нормаль граната пробивает стальную плиту толщиной до 25 мм.
3.12. Осколочные гранаты к гранатометам
319
Рис. 3.173. Выстрел с
осколочной гранатой
к 40-мм гранатомету
НК-69 (ФРГ)
Рис. 3.175. 40-мм вы-
стрел с осколочно-ку-
мулятивной гранатой
HE/DP 92 (Австрия)
Рис. 3.174. 40-мм выст-
рел с осколочной грана-
той HE/FRAG 92 (Авст-
рия)
Общими чертами конструкций подствольных гранат, в том числе и рас-
смотренных выше, являются наличие самоликвидатора и использование прак-
тически одинаковой схемы метания гранат.
Для отечественных подствольных гранатометов ГП-25 и ГП-30 разрабо-
таны два выстрела с осколочными гранатами ВОГ-25 и ВОГ-25П. В отличие
от ВОГ-25 граната выстрела ВОГ-25П является выпрыгивающей - она снаб-
жена дополнительным вышибным зарядом, срабатывающим при ударе о
грунт, и ее подрыв осуществляется на высоте 0,5... 1,5 м. Обе гранаты име-
ют осколочный корпус с кольцевыми канавками на внешней поверхности,
обеспечивающими заданное дробление. Гранаты оснащены взрывателями
ударного действия с устройствами дальнего взведения (на дистанции
10...40 м) и самоликвидации (время срабатывания самоликвидатора 14...19 с).
Основные технические характеристики гранат приведены ниже:
ВОГ-25 ВОГ-25П
Масса, кг:
выстрела ..................................... 0,250 0,278
заряда ВВ.................................. 0,048 0,037
Коэффициент наполнения........................ 0,19 0,13
Длина выстрела, мм............................ 102 122
320 3. Боеприпасы осколочного действия
Начальная скорость гранаты, м/с............. 76,5 75
Максимальная прицельная дальность, м....... 400 400
Радиус зоны сплошного поражения обеих гранат примерно одинаков -
около 6 м.
Значительное увеличение дальности прицельной стрельбы осколочными
гранатами и, соответственно, эффективности их боевого применения достига-
ется в противотанковых и автоматических гранатометах. Так, прицельная даль-
ность стрельбы 40-мм автоматического гранатомета МК 19 (США) составляет
2000 м при начальной скорости метания гранаты 240 м/с. У отечественного
30-мм автоматического гранатомета АТС-17 прицельная дальность равна 1700 м
при начальной скорости метания гранат 185 м/с. Из гранатомета АТС-17 мож-
но вести стрельбу очередями, при этом практическая скорострельность со-
ставляет 65 выстрелов в минуту.
Осколочная граната ВОГ-17М выстрела к гранатомету АГС-17 (рис. 3.176) -
это снаряд, стабилизируемый вращением на траектории, имеющий тонкостен-
ный корпус, на внутренней стороне которого размещен блок металлических
колец с подрезкой заданного дробления. Полная масса выстрела равна 0,35 кг,
масса осколочной гранаты - 0,28 кг, масса заряда ВВ - 40 г (коэффициент
наполнения 0,145), радиус зоны сплошного поражения -7 м.
Пример современной осколочной гранаты к противотанковым гранатоме-
там калиберная граната, входящая в состав выстрела ОГ-7В к 40-мм грана-
тометам РПГ-7В1 и РПГ-7В2. Головная часть гранаты имеет жезлообразную
форму (рис. 3.177). Граната стабилизируется на траектории с помощью рас-
крывающегося хвостового оперения. Стабилизатор в сложенном состоянии раз-
мещается в блоке стартового (метательного) заряда, который перед стрельбой
соединяют (свинчивают) с головной частью. Прицельная дальность стрельбы
выстрелом ОГ-7В из гранатомета РПГ-7В1 составляет 350 м, а из РПГ-7В2
(с универсальным прицелом) - 700 м, полная длина выстрела 716 мм, пол-
ная масса - 2,0 кг, начальная скорость метания гранаты - 140 м/с. Граната
снабжена головным взрывателем ГО-2 ударного действия с дальним взве-
дением. На внешней поверхности корпуса гранаты выполнены кольцевые
Рис. 3.176. Выстрел с осколочной гранатой ВОГ-17М:
1 - взрыватель; 2 - корпус; 3 - кольца заданного дробления; 4 заряд ВВ; 5 - ведущий поясок;
6 - гильза; 7 - метательный заряд; 8 КВ
3.12. Осколочные гранаты к гранатометам
321
б
Рис. 3.177. Осколочная граната (а) и выстрел ОГ-7В (б) к 40-мм гранатомету
РПГ-7В1
канавки, обеспечивающие заданное дробление, близкое к оптимальному. За
счет осколочного действия граната ОГ-7В- поражает различные виды целей:
живую силу (в том числе в бронежилетах), расположенную как на открытой
местности, так и в укрытиях полевого типа, а также небронированную техни-
ку и точечные цели, находящиеся в укрытиях городского типа. Площадь зоны
поражения открыто расположенной живой силы в бронежилетах 150 м2.
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ
Балаганский И.А., Мержиевский Л.А. Действие средств поражения и боеприпа-
сов. Новосибирск: Изд-во НГТУ, 2004
Взрывчатые вещества: Учеб, пособие. В 3 т / Под общей ред. РИ. Илькаева.
Т. 1: Поведение взрывчатых веществ при механических нагрузках / Под ред. С.А. Но-
викова. Саров, РФЯЦ-ВНИИЭФ, 2001.
Елисеев К.В., Марков В.А., Мовчанюк В.В., Прибылое Б.В. Инженерные боепри-
пасы (конструкции, принцип действия и техническое обеспечение взрывотехника).
Ч. 1.1. Противопехотные мины и взрыватели к ним. М.: ГУ НПО «Специальная тех-
ника и связь» МВД России, 2005.
Ермаков Г.В., Орлов В.Г Устройство и действие боеприпасов артиллерии: Учеб,
пособие. Пенза ПВАИУ, 1968.
Инженерные боеприпасы. М.: Изд-во МО, 1976
Миропольский Ф.П., Саркисян Р.С., Вишняков О.Л., Попов А. М. Авиационные бое-
припасы и их исследование. М.: Изд-во ВВИА им. Н.Е. Жуковского, 1996.
Одинцов В.А. Действие средств поражения и боеприпасов: Учеб, пособие. М.:
Изд-во МГТУ им. Н.Э. Баумана, 2005.
Одинцов В.А. Конструкции осколочных боеприпасов: Учеб, пособие В 3 ч. М.:
Изд-во МГТУ им. Н.Э. Баумана, 2002.
Одинцов В А. Метание и разрушение оболочек продуктами детонации Обзор.
М.: ЦНИИНТИ. 1976.
Прибылое Б.В. Ручные гранаты: Справочник. М.: «Арктика 4Д», 2004.
Прохоров Б.А. Боеприпасы артиллерии. М.: Машиностроение, 1973.
Пырьев Е.В., Резниченко С.Н. Бомбардировочное вооружение авиации России
1912-1945 гг. М.: Ред.-изд. центр Генштаба ВС РФ, 2001.
322 3. Боеприпасы осколочного действия
Справочник по патронам, ручным и специальным гранатам иностранных армий. -
М.: Воениздат, 1946.
Третьяков Г.М. Боеприпасы артиллерии. М.: Изд-во МО, 1947.
Физика взрыва: В 2 т. / Под ред. Л.П. Орленко. М.: Физматлит. 2002.
Широкорад А. Б. Отечественные минометы и реактивная артиллерия / Под общ.
ред. А.Е. Тараса. Минск: Харвест; М.: ООО «Изд-во АСТ», 2000.
R.M. Lloyd. Conventional Warhead Systems Physics and Engineering Design / Progress
in astronautics and aeronautics. - Vol. 179: Raytheon Systems Company Tewksbury,
Massachusetts - Charles Stark Draper Laboratory, Inc. Cambridge, Massachusetts, Publ. by
the American Institute of Aeronautics and Astronautics, Inc., 1801 Alexander Bell Drive,
Reston, Verginia 10191-4344, 1998.
Tactical Missile Warhead / Edited by J.Carleone / Progress in astronautics and aeronau-
tics. - Vol. 155: Aerojet General Corporation Azusa, California - University of Colorado at
Boulder. Boulder, Colorado - Publ. by the American Institute of Aeronautics and Astronautics,
Inc., 370 L’Euf-ant Promenade, SW, Washington, DC 20024-2518, 1993.
4
ФУГАСНЫЕ БОЕПРИПАСЫ
4.1. Основные понятия и общие сведения
К фугасным боеприпасам относятся БП, поражающее действие которых
обусловлено фугасным действием взрыва. Под фугасным действием взрыва
понимается разрушающее воздействие на окружающую среду и объекты (цели)
разлетающихся продуктов взрыва (ПВ) и формирующейся при этом ударной
волны (УВ). Фугасное действие можно разделить на контактное действие взры-
ва (заряд ВВ находится в непосредственном контакте с разрушаемым объек-
том), на близкое неконтактное действие (нагрузки на объектах связаны с тор-
можением разлетающихся ПВ) и на действие У В. Иногда первые два вида
действия называют местным действием взрыва, а действие УВ - общим фу-
гасным действием.
Таким образом, очевидно, что все БП, снаряженные взрывчатыми веще-
ствами, в той или иной мере обладают фугасным действием. Поэтому обычно
под фугасными боеприпасами понимают БП крупного калибра, содержащие
значительное количество ВВ, либо устройства с тонкостенными или неметал-
лическими корпусами, для которых фугасное действие является основным.
Рассмотрим качественную картину формирования УВ в окружающей сре-
де с давлением р0 при взрыве сферического заряда ВВ радиусом г0, иниции-
руемого в центре симметрии (рис. 4.1). В момент времени tn выхода детонаци-
онной волны на поверхность заряда происходит распад разрыва и давление на
фронте волны от значения Чепмена - Жуге р2 скачком изменяется до значения
начального давления УВ в среде рп. В зависимости от сжимаемости окружаю-
щей среды давление рп может быть как больше, так и меньше значения р2,
т. е. в ПВ могут формироваться как отраженная УВ, так и волна разрежения.
Рис. 4.1. Формирование ударной волны при взрыве сферического заряда ВВ
324
4. Фугасные боеприпасы
На начальном этапе после распада разрыва в продуктах детонации (ПД) воз-
никает сложная волновая картина, однако уже при расширении ПД до несколь-
ких начальных радиусов (в момент времени с большой точностью можно
считать, что давление в них выравнивается, уменьшаясь с увеличением ради-
уса газовой полости со скоростью и (кривая 7 на рис. 4.1). Фронт УВ, распро-
страняясь со скоростью D, постепенно отходит от контактной поверхности ПД,
образуя слой сильно сжатой среды, и давление на нем также уменьшается (кри-
вая 2 на рис. 4.1). При расширении ПД до 10... 12 радиусов заряда (в момент
времени t2) давление в них становится равным атмосферному, при этом в УВ
формируется зона сжатия (р > р0) некоторой начальной протяженности /0 с
положительным избыточным давлением. Величина /0 зависит от свойств окру-
жающей среды и составляет (1...2)г0 при взрыве в воздухе, порядка 100го -
при взрыве в воде и может достигать 1ОООго и более при взрыве в грунтах.
За счет инерции среды ПД продолжают расширяться, и давление в них па-
дает ниже атмосферного. При этом в окрестности ПД образуется область разре-
жения (р < /?0), а в окружающую среду начинает распространяться Зона сжа-
тия УВ. В этом случае говорят, что волна «отрывается» от ПВ. В результате
сопротивления среды граница газового пузыря тормозится и, в конце концов,
останавливается, достигнув некоторого максимального радиуса гт (в момент
времени г3). Величина гт зависит от инерционных и прочностных свойств ок-
ружающей среды и составляет порядка (15...18)г0 при взрыве в воздухе,
(ЗО...35)го - при взрыве в воде и водонасыщенных грунтах, (7...9)г0 - при
взрыве в грунтах средней плотности и (З...4)го - при взрыве в прочных скаль-
ных породах.
После достижения максимального радиуса под действием отрицательно-
го перепада давления газовый пузырь ПВ схлопывается, совершая несколько
колебаний в окрестности радиуса, соответствующего равновесному состоя-
нию продуктов: в воздухе можно наблюдать 3-4 таких колебания, в воде - до
10-12. В прочных средах радиус пузыря может и не уменьшаться. Кроме это-
го, в воде пузырь ПВ всплывает, образуя султан в момент выхода на свобод-
ную поверхность.
После формирования области сжатия УВ характер движения газового
пузыря ПВ практически не влияет на ее параметры. По мере удаления вол-
ны от заряда протяженность зоны сжатия I возрастает, параметры на ее фрон-
те продолжают уменьшаться, и, в конце концов, она вырождается в звуко-
вую волну.
Параметры взрывных волн
Если на некотором расстоянии от заряда (см. рис. 4.1) установить датчик,
регистрирующий давление в среде, то в процессе прохождения УВ он запи-
шет эпюру давления (рис. 4.2).
В момент прихода фронта волны (t = 0) давление от начального значения р0
скачком изменяется до максимального рт. За фронтом, по мере распростране-
ния волны, давление уменьшается и в некоторый момент времени т+ стано-
вится равным атмосферному. В дальнейшем его уровень становится ниже
атмосферного, достигая минимума, а затем постепенно возрастает до значе-
ния р0.
4 1. Основные понятия и общие сведения
325
Рис. 4.2. Эпюра давления взрывной волны
Основные параметры взрывных волн, определяющие их разрушительное
действие, следующие: максимальное избыточное давление на фронте (Арт =
=рт - Ро), удельный импульс положительной фазы избыточного давления
т+
(1+ ~ j(P~Po)^) и длительность фазы сжатия (т+). При ядерных взрывах
о
рассматривают также удельный импульс отрицательной фазы избыточного дав-
ления и ее длительность, однако при детонации зарядов ВВ эти параметры не
оказывают существенного влияния на воздействие взрыва.
Экспериментальные исследования взрывных волн, проведенные в различ-
ных странах, позволили получить достаточно простые эмпирические форму-
лы для расчета их параметров. При этом на выбор аналитических зависимос-
тей накладываются определенные ограничения, вытекающие из теории подо-
бия. Начиная с некоторого удаления от заряда, когда течение в ПД перестает
оказывать влияние на УВ, все безразмерные параметры одномерных течений
за фронтом УВ зависят лишь от двух безразмерных переменных
Z г
(£о/Ро )1/(v+1)/ л/ро/Ро (£о/Ро )1/(v + °
где Ео - энергия, выделяющаяся при взрыве; р0 - плотность окружающей сре-
ды; v = 0. 1,2- параметр симметрии соответственно для плоского, цилиндри-
ческого и сферического случаев.
Отсюда следует, что масштабами измерения времени и длины при взрыве
являются величины
_(Eo/Po)1/(v+1).
'м ~ /- ’
УРо/Ро
(4.1)
Таким образом, для безразмерных параметров одномерных взрывных волн
должны выполняться функциональные зависимости:
Ро ) Ро гм v'm ) гм Vм
326
4. Фугасные боеприпасы
Так как Ео = m^Q, где wBB - масса заряда ВВ; Q - удельная теплота
взрыва ВВ, то, рассматривая взрывы выбранного ВВ в одной среде (р0 = const)
и при одинаковых внешних условиях (р0 — const), для величин (4.1) получаем
гм ~ твв+'^; гм ~ "1вв +1')- Следовательно, для размерных параметров взрыв-
ных волн можно записать:
&Рт ~ <Р1
V+x/raBB ,
Р ~ V+x/raBB(P2
™вв J
т+ ~ V+x/"2BB(P3
V'^WIBB J
Анализ экспериментальных и теоретических данных показывает, что фун-
кции ф], ф2, Фз, как правило, хорошо аппроксимируются степенными зависи-
мостями.
Для сферического заряда ТНТ массой швв (кг) основные параметры УВ
на расстоянии г (м) рассчитывают по эмпирическим формулам, приведенным
ниже.
При взрыве в воздухе:
0,84^& + 2,7р&
г г
\
Па;
,; = 2iofc[Sa
Г
\
Па с;
(4.2)
Положительная фаза эпюры избыточного давления воздушной УВ (ВУВ)
хорошо описывается зависимостью Ар = Д/>т(1-г/т+)е~ш/т+ , где а - коэф-
фициент, определяемый по известному импульсу избыточного давления
Зависимости (4.2), называемые формулами Садовского, справедливы в диа-
пазоне значений 1 г/д/твв ^10-
4.1. Основные понятия и общие сведения
327
При взрыве в воде:
ДоП1 = 533
41.13
•105;
г+=588О^/пг^в
< Г
(4.3)
___(
6 = 0,13/^
<
\0.24
где 0 - постоянная спада давления за фронтом УВ, с.
Как отмечалось выше, при взрыве ввбде протяженность фазы сжатия УВ
достигает большой величины, поэтому длительность ее не является показа-
тельной характеристикой эпюры давления, которая на начальном участке хо-
рошо описывается экспоненциальной зависимостью Др = Др,п е"^е. Констан-
та 0 характеризует изменение избыточного давления в окрестности фронта
волны. Соотношения (4.3) предложены Р. Коулом и носят его имя. Они спра-
ведливы в диапазоне значений 1,05 < г/\]твв <12,8, а первое из них для опре-
деления Лрт можно использовать, начиная со значения г/3jmBB — 0,635, что
соответствует примерно 12 радиусам заряда.
При взрыве в грунте:
&Рт = Ki
(4.4)
где Kh (1; - константы для некоторых типов неводонасыщенных грунтов естест-
венного сложения (табл. 4.1).
В грунтах вблизи места взрыва волны являются ударными, но по мере
удаления от центра взрыва УВ преобразуются в волны сжатия с постепенным
подъемом давления за фронтом волны до максимального значения и последу-
ющим его спадом. Формула (4.4) для Лрт относится к оценке максимального
избыточного давления, величина которого может соответствовать не только
фронту волны. Диапазон использования формул (4.4) ограничен величиной
Д/?т > 105 Па.
328
4. Фугасные боеприпасы
Таблица 4.1. Значения констант для определения параметров
взрывных волн в грунте
Грунт К, Pi *2 М2 К4
Песчаный 7,5 3 4000 1,5 4 16
Суглинистый 8 3 4000 1,5 10 10
Лёссовидный 4,5 2,8 5000 1,65 14 14
Сравнивая выражения (4.2)-(4.4), можно сделать следующий вывод: если в
воздухе давление &рт плавно изменяется от стадии сильного взрыва к акусти-
ческой, то УВ в воде быстро переходит в акустическую (Др,„ ~ 1/г), а в неводо-
насыщенных грунтах (вплоть до достаточно низких давлений) затухает по-
добно сильной УВ (Дрт ~ 1/г3). Последнее обстоятельство связано с пористой
структурой грунта и наличием защемленного в грунте воздуха.
При определении параметров взрыва зарядов других ВВ пользуютсялрин-
ципом энергетического подобия, из которого следует, что параметры УВ не
изменяются, если остается постоянной выделяющаяся энергия. Таким обра-
зом, в формулы (4.2)- (4.4) следует подставлять массу тротилового эквивален-
тного заряда ВВ, которую находят из условия
^эбтнт ~ тввв’
откуда тиэ = 'Пвв&бтнъ ГДе Q, Стнт ~ удельные теплоты взрыва используемо-
го ВВ и ТНТ.
М.А. Садовский рекомендовал зависимости (4.2) для зарядов массой бо-
лее 100 кг, так как при меньшей массе заряда заметное влияние оказывают
потери энергии в результате разбрасывания поверхностного слоя не прореа-
гировавшего ВВ (слоя Харитона). Эти химические потери учитывают подста-
новкой в выражение (4.2) значения массы прореагировавшего ВВ (активной
массы), определяемой соотношением
( d^P V
ma=mBB ’
I 2го )
где JKp - критический диаметр детонации ВВ.
При взрыве в конденсированных средах химическими потерями для заря-
дов любой массы можно пренебречь.
Оболочка заряда неоднозначно влияет на параметры взрыва. С одной сто-
роны, она заметно снижает начальные параметры УВ и отбирает энергию на
деформацию, разрушение корпуса и разгон осколков, с другой - уменьшает
химические и энтропийные потери при взрыве и возвращает часть энергии в
УВ при торможении осколков в окружающей среде. Эксперименты показыва-
ют, что при значении коэффициента наполнения, большем 0,4, влиянием обо-
лочки на параметры воздушных взрывных волн можно пренебречь. При взры-
ве в плотных средах, где осколки практически сразу тормозятся, влияние обо-
лочки еще менее заметно.
4.1. Основные понятия и общие сведения
329
Строго говоря, формулы (4.2) (4.4) справедливы для сферических заря-
дов при центральном инициировании, однако в указанных диапазонах ими
можно пользоваться также и для оценки параметров взрыва компактных за-
рядов любой формы (с отношением характерных размеров порядка едини-
цы) и при произвольной точке инициирования, так как уже на расстояниях
порядка нескольких длин заряда в конденсированных средах и 10-15 длин
заряда в воздухе указанные факторы практически перестают влиять на пара-
метры УВ.
Зона разрушения при взрыве в твердых средах
При взрыве в твердых средах типа грунтов или горных пород под дей-
ствием высокого давления ПД слои породы, непосредственно примыкающие
к заряду, раздавливаются (изменяют внутреннюю структуру), сильно сжима-
ются и, переходя в пластическое состояние, перемещаются в радиальном на-
правлении. В результате чего порода полностью вытесняется ПВ, образуя по-
лость, которую называют зоной вытеснения, или камуфлетной полостью.
К зоне вытеснения примыкает зона’сильно деформированной и уплот-
ненной породы. Для нее, особенно в однородных горных породах, характерно
наличие системы спиральных поверхностей скольжения, касательные к кото-
рым образуют углы около 45° к радиальным направлениям, исходящим из цен-
тра заряда.
По мере удаления от места взрыва в движение вовлекается все увеличи-
вающаяся масса среды, вследствие чего плотность энергии, сообщенной еди-
нице объема среды, уменьшается, а напряжения сжатия убывают. На некото-
ром расстоянии они становятся меньше предела прочности материала. Начи-
ная с этого расстояния, структура среды остается в основном такой же, какой
она была до взрыва: отсутствуют поверхности скольжения и ничтожно мало
уплотнение материала. Однако в этой зоне еще значительны радиальные сме-
щения частиц среды, вызывающие такие растягивающие напряжения, кото-
рые приводят к разрыву породы и образованию системы радиальных трещин.
Зону, в которой наблюдаются радиальные трещины, называют зоной разрыва
среды.
Зоны вытеснения, раздавливания и разрыва можно объединить в единую
зону разрушения, так как твердая среда в этой области претерпевает разруше-
ние в той или иной форме. За зоной разрушения породы следует зона пласти-
ческих, а затем упругих деформаций, не вызывающих нарушение сплошнос-
ти среды, которая называется зоной сотрясения. Находящиеся в этой зоне
объекты подвергаются так называемому сейсмическому действию взрыва, вы-
званному распространением по породе волны сжатия.
При взрыве сосредоточенного заряда радиус зоны разрушения /?р (м) мож-
но вычислить по эмпирической зависимости
Rp = Kp^, (4.5)
где Кр - коэффициент, зависящий от свойств твердой среды, м/кг,/3; тэ -
масса эквивалентного тротилового заряда ВВ, кг. Значения коэффициента Кр,
м/кг1/3; для некоторых сред приведены ниже:
330
4. Фугасные боеприпасы
Суглинок .............................. 1,15-1,20
Известняк ............................. 0,95-1,10
Песчаник................................ 0,85 0,90
Гранит ................................. 0,80-0,85
Кирпичная кладка ...................... 0.95-1,10
Бетон .................................. 0,82-0,90
Железобетон ............................ 0,50-0,60
Радиус камуфлетной полости пропорционален радиусу зоны разрушения
(4.5) и примерно равен гк = 0,36/?р.
Рассмотренный случай взрыва в неограниченном пространстве на прак-
тике встречается достаточно редко. Как правило, взрыв заряда происходит либо
вблизи, либо непосредственно на поверхности раздела различных сред.
Взрыв на границе раздела сред
При взрыве заряда на поверхности жесткой недеформируемой преграды
вся выделяющаяся энергия затрачивается на формирование УВ в полупрост-
ранстве, следовательно, параметры ее будут такими же, как при взрыве в не-
ограниченном пространстве заряда удвоенной массы, и могут быть рассчита-
ны по формулам (4.2)-(4.4) при подстановке в них величины 2w/BB. Если пре-
града сжимаема, то часть энергии затрачивается на ее деформирование, поэтому
активную массу заряда, определяющую интенсивность УВ в среде, вычисля-
ют из соотношения
wa = 2т]ливв, (4.6)
где Т] - коэффициент, учитывающий свойства преграды (V) = 1 — для абсолют-
но жесткой преграды, т] = 0,5 - для ограничивающего полупространства, со-
впадающего по динамической сжимаемости со средой, в которой рассматри-
вается УВ). Значения Г] для некоторых типов преград при расчете параметров
воздушных взрывных волн приведены ниже:
Плита:
стальная ..................................... 1
железобетонная......................... 0,95-1,00
Бетон, скальный грунт..................... 0,85-0,95
Плотные суглинки и глина ................. 0,70-0,80
Грунты средней плотности ................. 0,60-0,65
Вода...................................... 0,55-0,60
При взрыве заряда на дне водоема величина Г] для водной волны может
быть принята: 0,85...0,90 - для скального дна; 0,65...0,70 - для глинистого
дна; 0,55...0,60 для песчаного дна.
Взрыв заряда на поверхности воды и грунта приводит также к формиро-
ванию УВ и в этих средах, однако в этом случае значение коэффициента Г|
меньше 0,5 и равно: 0,10...0,15 - для плотного суглинка; 0,20...0,25 - для грун-
тов средней плотности; 0,30...0,35 - для воды. При этом за счет влияния вол-
ны разгрузки, распространяющейся со свободной поверхности, параметры УВ
4.1. Основные понятия и общие сведения
331
зависят не только от расстояния до места взрыва, но и от выбранного направ-
ления. Поэтому зависимости (4.3) и (4.4) с учетом выражения (4.6) и указан-
ных значений T] используют лишь при определении параметров в направле-
нии нормали к свободной поверхности. Параметры вдоль оси, наклоненной
под углом ф < 30...40° к нормали, в первом приближении можно описать за-
коном косинусов, т. е. представить в следующем виде:
Ьрт (ф) = &Рт (O)cos ф; i+ (ф) = i+ (O)cos ф;
т+ (ф) = т+ (0)со8ф; 0(ф) = 0(0)cosф.
Взаимодействие взрывных волн с поверхностью раздела сред
При воздушном взрыве на некоторой высоте Н (рис. 4.3, а) УВ будет от-
ражаться от поверхности грунта или водоема. Так как избыточное давление в
ВУВ очень быстро падает (на расстоянии г = 15г0 оно составляет порядка
20 • 105 Па), то в большинстве практических приложений как воду, так и грунт
можно считать жесткими недеформируёмыми преградами.
В эпицентре взрыва (точка О на рис. 4.3, а) происходит нормальное отра-
жение УВ. До некоторого радиуса RKp на поверхности, пока угол падения вол-
ны меньше критического (ф < фкр), наблюдается косое регулярное отражение,
а при R > RKp отражение переходит в нерегулярный режим, образуется головная
волна, а траектория тройной точки (штрихпунктирная линия на рис. 4.3, а) уда-
ляется от поверхности. В отличие от случая отражения стационарных волн,
при переходе от регулярного к нерегулярному отражению взрывной волны
резкого возрастания давления не наблюдается. Можно отметить лишь локаль-
ную немонотонность его изменения в окрестности значений фкр (кривая 1 на
рис. 4.3, б). На больших удалениях отраженная и падающая волны сливаются,
образуя полусферическую волну с центром в эпицентре взрыва, параметры
которой эквивалентны параметрам взрыва заряда непосредственно на жест-
кой поверхности.
Рис. 4.3. Схема процесса отражения сферической взрывной волны от жесткой поверх-
ности (а) и изменение давления отражения при удалении от эпицентра взрыва (б)
Решение задачи о нормальном отражении УВ от жесткой поверхности в
совершенном газе с показателем адиабаты к приводит к следующей зависимо-
сти для избыточного давления в момент отражения:
332
4 Фугасные боеприпасы
ДРот ^"^Рт
_^+wL_
(£-1)Дрт+2Ар0
(4.7)
Эта формула, называемая формулой Власова - Измайлова (впервые указан-
ная задача решена в 1935 г.), с помощью соотношений динамической совмест-
ности на фронте УВ может быть представлена в виде
л -> * +1 2
&Рт ~ 2 Ртит’’
где к - 1,4 - для воздуха при Дрт < 20р0; р„„ ит - плотность и массовая
скорость на фронте падающей взрывной волны.
Если считать, что при падении волны под углом у рост давления связан с
торможением нормальной составляющей скоростного напора, то последняя
зависимость запишется в виде
к +1 о 2
ДРот = 2ДА« + ^PACOS V’
или, аналогично формуле (4.7),
^Рот &Рт
(k + l'jkp 2
2 +---------—-----cos ы
(к-\)Дрт+2крц
(4-8)
Зависимость (4.8) хорошо описывает экспериментальные данные при значе-
ниях угла падения волны I/ до 60...65°. В дальнейшем при —э 90° (RIH —э <*>)
ДдО1 —> Дрт (кривая 2 на рис. 4.3, б), в то время как в связи с переходом волны
в полусферическую должно выполняться условие Дрт —> у/2Дрт. Поэтому
для вычисления избыточного давления отражения взрывной волны при боль-
ших углах падения можно воспользоваться соотношением (4.2) для случая
размещения заряда в эпицентре взрыва на жесткой поверхности (кривая 3 на
рис. 4.3, б), начиная с точки пересечения кривых 2 и 3 (см. уравнения (4.2) и
(4.8) соответственно).
Длительность фазы сжатия при отражении волны возрастает незначительно
(примерно в 1,10-1,15 раза), поэтому в первом приближении можно принять
т0Т = (У2т+. Этим соотношением можно пользоваться при определении тот на
любом удалении от эпицентра взрыва, так как оно удовлетворяет предельно-
му переходу волны в полусферическую.
Возрастание импульса избыточного давления при отражении волны свя-
зано как с торможением скоростного напора, так и с увеличением длительно-
сти фазы сжатия, поэтому запишем
i =^1
ОТ v
*2 2 +------------cos2 у
(/с-1)Д^+2^0
(4.9)
Так же, как и в случае оценки избыточного давления, при вычислении по
зависимости (4.9) получают завышенные результаты при больших углах паде-
ния, когда волну можно считать полусферической и воспользоваться уравне-
нием (4.2) для заряда массой 2/ивв, размещенного в. эпицентре взрыва.
4.1. Основные понятия и общие сведения
333
При взрыве в воде УВ отражается как от свободной поверхности, так и от
дна водоема (рис. 4.4, а}. Динамическая жесткость воды на 3 4 порядка боль-
ше динамической жесткости воздуха, поэтому влиянием последнего в процес-
се отражения можно пренебречь, считая, что на свободной поверхности избы-
точное давление всегда равно нулю. Кроме того, как отмечалось ранее, про-
цесс распространения УВ в воде быстро переходит в акустическую стадию,
т/е. его можно рассматривать в акустическом приближении, при котором отра-
жение волны от свободной поверхности эквивалентно взаимодействию двух
волн: от заряда и отрицательного источника такой же интенсивности, располо-
женного симметрично относительно свободной поверхности (см. рис. 4.4, а).
В рассматриваемую точку А, расположенную на глубине h и удаленную от
заряда и отрицательного мнимого источника на расстояния г и R, обе волны
придут с задержкой та, которую определяют из очевидного геометрического
соотношения
R-r г
=-----= —
с0 с0
где с0 - скорость звука в воде; Н - глубина размещения заряда. Графики изме-
нения давления в точке А от заряда (кривая 1 на рис. 4.4, б) и мнимого отрица-
тельного источника (кривая 2 на рис. 4.4, б) строят по одним зависимостям
(4.3) (с учетом знака и удаления от источников), а их сумма дает полную эпю-
ру (заштрихована на рис. 4.4, б). Вода не выдерживает отрицательных давле-
ний и после прихода волны разрежения кавитирует (разрывается), а избыточ-
ное давление в ней становится равным нулю. Поэтому удельный импульс вол-
ны можно определить, интегрируя эпюру давления до момента прихода волны
разрежения от свободной поверхности.
L ,1
1 + 4—-1 ,
(4.10)
Рис. 4.4. Схема процесса (а) отражения водной УВ от свободной поверхности (точ-
ка Л) и дна водоема (точка В) и эпюры давления в этих точках (б).
1 - кривая изменения давления от заряда; 2 - кривая изменения давления от мнимого источника
334
4. Фугасные боеприпасы
Характер отражения водной УВ от дна водоема существенно зависит от
свойств грунта дна. В случае абсолютно жесткого дна процесс отражения эк-
вивалентен взаимодействию двух акустических волн от положительных ис-
точников одинаковой интенсивности, расположенных симметрично относи-
тельно плоскости дна (см. рис. 4.4, а). В произвольной точке В давление до
момента прихода отраженной волны изменяется как при взрыве в безгранич-
ной жидкости, а затем становится равным сумме давлений падающей и отра-
женной волн (см. рис. 4.4, б). Время прихода та отраженной волны находят по
формуле (4.10) с учетом расположения заряда и рассматриваемой точки отно-
сительно дна водоема.
При снижении жесткости дна интенсивность отраженной волны падает.
Приближенно учесть этот эффект можно уменьшением интенсивности (мас-
сы заряда) мнимого источника, т. е. считая, что отраженная волна формирует-
ся зарядом, массу которого находят из соотношения та = Т)/мвв, где т] - коэф-
фициент, зависящий от свойств грунта дна водоема (т) ~ 0,75 - для скального
дна, Т] = 0,3 - для глинистого дна, ц = 0,15 - для песчаного дна).
При взрыве в грунте вблизи свободной поверхности возникает очень слож-
ная волновая картина, связанная с появлением поперечной и поверхностной
волн. В первом приближении при оценке параметров взрыва вблизи поверх-
ности грунта можно воспользоваться таким же подходом, что и для воды. При
этом следует учитывать, что в грунтах, обладающих достаточной прочностью
(например, скальных породах), в волне разгрузки могут существовать значи-
тельные растягивающие напряжения.
Воронка выброса
При взрыве сосредоточенного заряда на большой глубине, когда свобод-
ная поверхность грунта не оказывает влияния на процесс разрушения твердой
среды, форма камуфлетной полости близка к сферической (рис. 4.5, а). Умень-
шение глубины заложения заряда приводит к вытягиванию камуфлетной по-
лости в направлении свободной поверхности и появлению на ней остаточного
холмика (рис. 4.5, б). При дальнейшем приближении заряда к свободной по-
верхности размеры холмика увеличиваются, а толщина его свода уменьшает-
ся, в результате чего уже после взрыва под действием силы тяжести он может
обвалиться в камуфлетную полость. Образуется так называемая провальная
воронка (рис. 4.5, в), что характерно для крупномасштабных взрывов (напри-
мер, ядерных). Наконец, при глубинах, меньших некоторой критической ве-
личины, ПВ на стадии расширения прорываются в атмосферу и формируется
воронка выброса (рис. 4.5, г). Характерная особенность воронок выброса -
наличие видимой глубины Ав, которая может заметно отличаться от глубины
заложения заряда h и глубины зоны вытеснения грунта. Кроме того, по краям
воронки образуется насыпной валик (гребень). Связано это с частичным осы-
панием склонов воронки и падением на дно части грунта, выбрасываемого
вверх. Форму воронки выброса принято характеризовать показателем действия
взрыва (показателем выброса) п, равным отношению радиуса воронки гв к глу-
бине заложения заряда h (п = rB/h).
4.1. Основные понятия и общие сведения
335
а
Рис. 4.5. Образование воронки при взрыве в грунте
а - камуфлетная полость; б - полость, образующаяся в результате влияния свободной поверх-
ности; в - провальная, воронка; г - воронка выброса
Общий вид формулы, связывающей массу эквивалентного тротилового за-
ряда с размерами воронки при не очень большой глубине заложения заряда
(А < 25 м), может быть получен с помощью теории подобия и размерностей:
m3 = Kf(n)h3 = K^-r3, (4.11)
п
где К - коэффициент (зависит от свойств твердой среды), называемый удель-
ным расходом ВВ при взрыве на выброс и связанный с коэффициентом Кр в
формуле (4.5) соотношением К = 1,68/К3- функция показателя действия
взрыва.
Если п = 1,/(л) = 1, то такой заряд называют зарядом нормального выбро-
са, при п > > 1 - зарядами усиленного выброса, а заряды с показателя-
ми п < !,/(«) < 1 - зарядами уменьшенного выброса.
Известно более десятка видов записи функции Дп) в формуле (4.11). Пер-
вый вид Ди) = [(и2 + 1)/2]2 3 предложен Белидором в 1731 г., наиболее часто
используется функция /(и) = 0,4 + 0,6и3 (М.М. Боресков, 1871 г.), а теорети-
чески выражение f(n) = [(и2 + 1 )/2]9/4 и связь между коэффициентами К и
были получены Л.Е. Власовым в 1946 г. Эти формулы обладают разной степе-
нью достоверности и справедливы в ограниченных диапазонах изменения п.
Наиболее общее выражение функции Ди) = 2(3и2 + 4)2/(и + 97) для диапазона
0 < п < °® было предложено Т.М. Саламахиным на основе обработки опытных
данных.
Глубина воронки Ав в связанных грунтах может быть определена по соот-
ношению
йв = kBrB,
где кв - коэффициент, зависящий от свойств грунта (кв — 0,4...0,5 для сухого
песка, кв = 0,45...0,55 для влажного песка, супеси и суглинка, кв = 0,5...0,7
для глины).
336
4. Фугасные боеприпасы
В скальных породах при п = 1,75...2,0 глубина воронки примерно равна
глубине заложения заряда (Лв = h), а при п = 2,5...3,0 превышает ее, но не
более чем на 10...20 %.
4.2. Артиллерийские снаряды и мины
Основное отличие фугасных снарядов и мин от осколочных заключается
в наличии у них значительно большего количества ВВ, что позволяет приме-
нять их для разрушения прочных огневых сооружений, командных пунктов,
узлов связи, имеющих деревоземляные, деревокаменно-земляные и легкие же-
лезобетонные защитные покрытия.
Артиллерийские снаряды
Фугасные снаряды используют для поражения самоходных установок,
стартовых площадок тактических и оперативно-тактических ракет, аэродро-
мов, морских судов, береговых укреплений, разрушения проволочных, мин-
ных и других заграждений. При необходимости фугасные снаряды могут при-
менять против открыто расположенной живой силы и танков противника.
Фугасные снаряды используют в наземной и морской артиллерии круп-
ного калибра, отдельные образцы специальных фугасных снарядов малого и
среднего калибра находят применение в зенитных, морских и авиационных
пушках.
По элементам внешнего очертания пушечные фугасные снаряды имеют
дальнобойную форму, снаряды к гаубицам и мортирам - недальнобойную фор-
му (рис. 4.6). Снаряды снабжены привинтной головкой, а в отдельных случа-
ях - ввинтным дном. Для обеспечения должной прочности при ударе и про-
никании в различные преграды корпуса изготовляют из стали, иногда со спе-
циальными легирующими присадками для повышения прочностных
характеристик материала.
Снаряды снаряжают тротилом или его сплавом с более мощными ВВ (гек-
согеном) и снабжают дополнительным детонатором в разрывном заряде, кото-
рый помещают в запальный стакан.
Фугасные снаряды в сравнении с осколочными и осколочно-фугасными
снарядами имеют значительно больший коэффициент наполнения. Для снаря-
дов к гаубицам и мортирам он может составлять более 20 %, для снарядов к
пушкам - около 15 %. Фугасные снаряды к гаубицам и особенно к мортирам
обладают высоким могуществом действия, в том числе и осколочным. После-
днее обеспечивается за счет высокого коэффициента наполнения ВВ. Корпус
при разрыве дробится на большое количество осколков, которым сообщается
большая скорость, чем у осколочных и осколочно-фугасных снарядов, что по-
зволяет им сохранять свои убойные свойства на значительном расстоянии от
места взрыва.
Фугасные снаряды снабжают головными, донными или, для повышения
безотказности действия, одновременно обоими ударными взрывателями. Го-
ловные взрыватели имеют установки на реакционное (мгновенное), инерци-
онное и замедленное действие. Донные взрыватели обычно имеют установки
4.2. Артиллерийские снаряды и мины
337
Рис. 4.6. Фугасные 203-мм недальнобойный снаряд Ф-625 (а), 203-мм дальнобойный
снаряд Ф-625Д (б), 210-мм снаряд Ф-643 (в).
1 - ведущий поясок; 2 - разрывной заряд; 3 - корпус снаряда; 4 - привинтная головка;
5 - запальный стакан; 6 - головной взрыватель; 7- шашки дополнительного детонатора
на инерционное и одну или две установки на замедленное действие. В насто-
ящее время фугасные снаряды полевой артиллерии входят в боекомплект ору-
дий калибра 180 мм и выше (табл. 4.2).
Снаряды Ф-572, Ф-625Д, Ф-644, Ф-643 имеют дальнобойную форму, а
снаряд Ф-625 - недальнобойную (см. рис. 4.6). Корпуса фугасных снарядов
Ф-572, Ф-625Д, Ф-644, Ф-643 снабжены привинтными головками, а снаряд
Ф-625, кроме этого, - запальным стаканом. Корпуса снарядов изготовляют из
хромистых сталей марок 45Х и 45X2, а привинтные головки из хромистой
или углеродистой снарядной стали. На корпусе крепят один-три ведущих по-
яска. Снаряды снаряжены тротилом методом заливки в камору.
Таблица 4.2. Конструктивные характеристики фугасных снарядов
Орудие, для которого предназначен снаряд Индекс снаряда Полная длина, клб Масса, кг Толщина стенки, клб Коэффициент наполнения ВВ а, %
снаряда разрывного заряда
180-мм пушка С-23 Ф-572 5.38 88 10,7 0,15 12,1
203-мм гаубица Б-4 Ф-625 4,63 100 23,4 0,08 23,4
То же Ф-625Д 4,65 100 15,8 0,13 15,8
210-мм пушка БР-17 Ф-643 5,19 133 18,8 0,13 14,4
210-мм пушка В-3 Ф-644 5,20 133 15.6 0,16 11,7
338
4. Фугасные боеприпасы
Артиллерийские мины
Фугасные артиллерийские мины предназначены для навесной стрельбы
из минометов, что приводит к повышению эффективности поражающего дей-
ствия по целям, размещенным на обратных скатах местности. Фугасные мины -
Рис. 4.7. Фугасные мины калибров
240 (а) и 160 мм (б):
1 - корпус; 2 - разрывной заряд; 3 - допол-
нительный детонатор из тетриловых шашек;
4 - прокладки; 5 - детонатор из тетриловых
шашек; 6 запальный стакан; 7 - предохра-
нительный большой колпак; 8 - взрыватель;
9 - предохранительный малый колпак; 10 -
стабилизатор; 11 - перья стабилизатора;
12 - пробка; Ц, И - верхнее и нижнее цент-
рирующие утолщения
мощные средства разрушения оборони-
тельной полосы противника с заранее
сооруженными укреплениями и огневы-
ми точками.
Фугасные мины имеют калибр свы-
ше 120 мм. Корпуса фугасных мин из-
готавливают из стали и сталистого чу-
гуна, снаряжают тротилом и реже сур-
рогатными ВВ, а также снабжают
ударными головными взрывателями с
установками на реакционное (осколоч-
ное), инерционное (фугасное) и замед-
ленное действие. Для предохранения
разрушения взрывателя и головной ча-
сти мины при ударе по прочностным
преградам их снабжают специальными
предохранительными колпаками, вы-
полненными из высокопрочной стали.
Для обеспечения надежной детона-
ции большого разрывного заряда в фу-
гасных минах применяются два допол-
нительных детонатора, один из которых
размещают в запальном стакане, а вто-
рой - в разрывном заряде. Запальный
стакан обеспечивает надежную герме-
тизацию снаряжения, полноту разрыва
и повышает мощность взрыва.
В настоящее время отечественные
фугасные мины имеют калибры 160 и
240 мм и используются для стрельбы
из 240-мм миномета М-240 (на даль-
ность от 800 до 9700 м), 160-мм мино-
мета М-160 (на дальность от 750 до
8040 м) и 160-мм миномета образца
1943 г. (на дальность от 620 до 5100 м)
(табл. 4.3).
Мина Ф-864 (рис. 4.7, а) снабжена
большим и малым предохранительными
колпаками, корпус ее цилиндрической
формы и изготовлен из стали 45Х или
45X12. Корпуса мин калибра 160 мм
(рис. 4.7, б) каплеобразной формы вы-
4.2. Артиллерийские снаряды имины
339
Таблица 4 3 Конструктивные характеристики фугасных мин
Наименование мины Индекс мины Длина с взры- вателем, клб Масса, кг Толщина оболочки, клб Коэффициент наполнения а, %
мины ВВ
Стальные:
240-мм к М-240 Ф-864 6,40 130,70 31,95 0,062 23,3
160-мм к М-160 Ф-853С 7,00 41,14 9,00 — 21,8
То же Ф-853У 7,05 41,14 9,00 0,094 21,8
Из сталистого чугуна:
160-мм к М-160 Ф-853А 7,00 41,14 7,72 0,103 18,8
То же Ф-853АУ 7,15 41,14 7,72 0,103 18,8
» Ф-853 6,85 40,87 7,45 — 18,2
160-мм к миномету образца 1943 г. Ф-852 6,85 40,87 7,45 — 18,2
полнены из стали или сталистого чугуна. В головной части корпуса есть очко
под запальный стакан. Камору стальных мин снаряжают тротилом, а мин из
сталистого чугуна - амматолом А-80. Для обеспечения надежной детонации
разрывного заряда в его гнезде размещают шашки из прессованного тетрила.
В качестве примера корректируемых фугасных мин, предназначенных для
поражения малоразмерных целей, можно отметить мину ЗФ5 («Смельчак»),
предназначенную для стрельбы из 240-мм буксируемого миномета М-240 или
самоходного миномета 2С4. Мина массой 134 кг, длиной 1635 мм снаряжена
мощным взрывчатым составом в тротиловом эквиваленте 32 кг и оснащена
лазерной полуактивной системой самонаведения с импульсными двигателями
коррекции, обеспечивающей на дальности стрельбы от 3,5 до 9,2 км круговое
срединное отклонение 0,8... 1,4 м и поражение малоразмерных прочных це-
лей одним-тремя выстрелами.
Оценка могущества фугасных снарядов и мин
Артиллерийские фугасные снаряды и мины, как отмечалось ранее, пред-
назначены для действия по сооружениям противника, однако воронки, обра-
зуемые при взрыве снарядов в грунте, позволяют оценивать их могущество
независимо от характера и прочности цели. Фугасное действие снарядов и
мин измеряется абсолютным или отнесенным к массе разрывного заряда объе-
мом воронки.
Вследствие неоднородности грунта и несимметричности размещения сна-
ряда относительно свободной поверхности воронки обычно имеют довольно
неправильную форму. В полигонной практике форму воронки принимают в
виде простого усеченного конуса с большим основанием, лежащим на повер-
хности грунта, и малым основанием радиусом, равным половине радиуса во-
ронки. При этом глубина воронки оказывается равной глубине взрыва заряда
h. Очевидно, что объем воронки V может быть выражен через глубину h и
показатель действия взрыва (показатель выброса) п\
V =—лйгв2 = 1,83и2Л3.
12 в
340
4. Фугасные боеприпасы
Наиболее характерны для фугасного действия артиллерийских снарядов
и мин воронки нормального (« = I) и усиленного (п > 1) выброса. Наивыгод-
нейшее фугасное действие соответствует такому заглублению снаряда в пре-
граду, когда один килограмм ВВ выбрасывает наибольшее количество грунта,
достигающее 2,2.. .2,5 м3.
Влияние разнообразных, трудно поддающихся точному учету факторов
на величину фугасного действия чрезвычайно затрудняет подбор оптималь-
ного замедления срабатывания взрывателей и вынуждает останавливаться
на некоторых средних значениях. При слишком большом замедлении взры-
вателя происходит подземный взрыв снаряда с образованием камуфлетной
полости. Стрельбу на камуфлетах используют для разрушения подземных
сооружений.
Разрушение подземных объектов наступает тогда, когда они оказываются
в пределах радиуса зоны разрушения Rp (см. (4.5)). Для расчета поражающего
действия используют метод эквивалентных слоев. Слой материала объекта раз-
рушения толщиной b заменяют эквивалентным по сопротивляемости слоем
грунта by.
b, _ h
V
где Кр, Kpi - коэффициенты, определяющие размеры зон разрушения в грунте
и материале объекта соответственно. Отсюда радиус зоны разрушения может
быть найден по формуле
Массу эквивалентного тротилового заряда ВВ, необходимого для разру-
шения объекта на расстоянии Rp, вычисляют следующим образом:
Ч+_С
л+к^,
4.3. Авиационные бомбы
Авиационными бомбами называют БП, сбрасываемые с самолетов или
других ЛА и отделяющиеся от держателей под действием силы тяжести или
с небольшой скоростью принудительного отделения. Различают управляе-
мые (корректируемые) и неуправляемые АБ. Управляемые АБ имеют раз-
личные системы наведения, которые обеспечивают высокую точность попа-
дания бомбы в цель. Неуправляемые АБ обычно называют просто авиацион-
ными бомбами.
Фугасные АБ (ФАБ) - наиболее универсальный и распространенный тип
авиационных бомб, применяемых для разрушения и уничтожения различных
по своей уязвимости целей. Коэффициент наполнения ФАБ - 0,40...0,55. Из-
4.3. Авиационные бомбы
341
вестны также ФАБ с меньшим коэффициентом наполнения (толстостенные
АБ). Фугасные АБ используются с ударными взрывателями мгновенного (по
целям, расположенным на поверхности земли) и замедленного действия (по
объектам, поражаемым взрывом АБ внутри объекта, и по заглубленным це-
лям). В последнем случае поражение целей осуществляется также сейсмичес-
ким действием взрыва. Фугасные АБ, укомплектованные взрывателями дли-
тельного замедления, метут применяться для минирования местности. В этом
случае взрыватели снабжают вибрационными устройствами и противосъем-
ными механизмами («ловушками»), вызывающими взрыв АБ при сотрясении
грунта перемещающимися вблизи целями (поезд, танк и др.) или при попытке
обезвредить АБ.
Типовая ФАБ (рис. 4.8) включает в себя корпус 1, снаряжение 2, подвес-
ную систему 3, стабилизатор 4, запальный стакан 5, дополнительный детона-
тор 6 и баллистическое кольцо 7. Корпус предназначен для соединения всех
элементов АБ в единое целое и размещения в нем снаряжения. Обычно кор-
пус АБ конструктивно состоит из головной, средней и хвостовой частей, со-
единенных между собой сваркой. Головнук5 часть выполняют в виде оживала,
сочетания двух усеченных конусов или полусферы. Форма и размеры голов-
ной части оказывают существенное влияние на аэродинамику АБ. Авиацион-
ные бомбы, используемые для пробивания прочных преград и проникания в
них, имеют массивную и весьма прочную головную часть.
Рис. 4.8. Фугасная авиационная бомба:
1 - корпус; 2 - снаряжение; 3 - подвесная система (ушки); 4 - стабилизатор;
5- запальный стакан; б - дополнительный детонатор; 7- баллистическое кольцо
Приведение в действие боевого снаряжения осуществляется взрывате-
лями или ВУ. Взрывательные устройства, как правило, являются встроенны-
ми и устанавливаются в головной или хвостовой части корпуса АБ при ее
сборке на заводе-изготовителе. Взрыватели же чаще всего снаряжаются в
АБ перед ее применением путем установки в один или несколько патрубков
с резьбовыми соединениями, которые называются запальными стаканами. У
некоторых АБ в заводских условиях в запальные стаканы помещаются до-
полнительные детонаторы, которые поджимаются пробкой с помощью кар-
тонного вкладыша.
В послевоенные годы на вооружение Советской армии было принято
несколько типов ФАБ калибров 100, 250, 1500, 3000, 5000 и 9000 кг. Фугас-
342
4. Фугасные боеприпасы
ные АБ, принятые на вооружение в конце 1940-х - начале 1950-х годов, в
основном предназначались для действия по крупным морским кораблям.
Лишь ФАБ-1500 и бомбы большего калибра считались приемлемыми для
ударов по промышленным объектам, плотинам и подземным сооружениям
(рис. 4.9, табл. 4.4).
з
Рис. 4.9. ФАБ-100 (а), ФАБ-250 (б, в), ФАБ-250 (г), ФАБ-500( д, е, ж) и ФАБ-5000 (з)
Таблица 4.4. Характеристики ФАБ свободного падения 1940-1950-х годов
Индекс Масса, кг Длина, мм Диаметр, мм
бомбы БЧ ВВ
ФАБ-100 100 70 — 964 267
ФАБ-250 250 230 99 1589 285
ФАБ-500 500 450 213 2142 392
ФАБ-1500 1400 1200 675 3000 580
ФАБ-5000 4900 4200 2207 3107 642
Обычная бомба ФАБ-1500 имеет стенки толщиной 18 мм и массу ВВ
675 кг. ФАБ-3000М-46 и ФАБ-3000М-54 содержат по 1400 и 1387 кг тротила,
а ФАБ-9000М-54 - 4297 кг тротила.
Стремительный научно-технический прогресс в XX в. позволил перейти
к разработке нового типа авиационного вооружения - управляемым (коррек-
тируемым) АБ, которые создавались в течение двух периодов: первый охваты-
вает 1940-1950-е годы, второй - с конца 1960-х годов по настоящее время.
4.3. Авиационные бомбы
343
Первый период разработки был связан в основном с решением принци-
пиальных вопросов выбора конструктивно-аэродинамических компоновок из-
делий, с построением систем наведения и управления, энергопитания и отра-
ботки тактики применения образцов УАБ. Однако он быстро завершился, так
как интерес к УАБ к концу 1950-х годов был утрачен.
Возобновление работ по созданию УАБ (второй период) диктовалось тре-
бованиями существенного повышения эффективности боевого применения
бомбового вооружения в условиях высоких скоростей самолетов-носителей и
увеличения дальности применения, что было вызвано созданием эффектив-
ных систем ПВО. Второй период работ проходил в условиях интенсивного
внедрения новых достижений и современных технологий в науке и технике,
особенно с появлением персональных компьютеров и элементной базы.
Современные отечественные и зарубежные УАБ по сравнению с неуправ-
ляемыми позволяют в сотни раз повысить точность бомбометания, в десятки
раз усилить поражающую способность, до десяти и более раз сократить чис-
ло самолетовылетов и до десятка раз снизить затраты на поражение цели и
расход АБ. .
Отечественные корректируемые авиационные бомбы КАБ-1500Л-Ф и
КАБ-1500Л-Пр (рис. 4.10) имеют одинаковые массогабаритные характеристи-
ки (полную массу - 1525 кг; длину - 4580 мм; диаметр корпуса - 580 мм;
размах оперения - 850 мм (в сложенном положении), 1300 мм (в раскрытом))
и снабжены полуактивной лазерной системой наведения с флюгерной го-
ловкой самонаведения, обеспечивающей точность наведения на цель (сред-
неквадратичное отклонение) в пределах 4...7 м. Взрыватели КАБ - контакт-
ные с тремя видами замедления. Бомбы применяются в составе комплексов
вооружения самолетов фронтовой авиации с высот 1...15 км при скорости
550... 1700 км/ч.
Боевая часть КАБ-1500Л-Ф - фугасная с общей массой 1170 кг и массой
ВВ 440 кг - предназначена для поражения наземных и надводных малораз-
мерных целей типа железнодорожных и шоссейных мостов, военно-промыш-
ленных объектов, кораблей и транспортных узлов, складов боеприпасов, же-
лезнодорожных узлов.
Рис. 4.10. Корректируемые авиационные бомбы КАБ-1500Л-Ф (а) и КАБ-1500Л-Пр (б)
344
4 Фугасные боеприпасы
Боевая часть КАБ-1500Л-Пр - фугасно-проникающая, подкалиберная,
вкладного типа с общей массой 1100 кг и массой ВВ 210 кг, обеспечивает
проникание в грунт на глубину 10...20 м или пробитие железобетонного пе-
рекрытия толщиной до 2 м и поражает неподвижные малоразмерные особо
прочные и заглубленные цели типа железобетонных укреплений усиленного
типа, командных пунктов, складов ядерного оружия.
Разрушающее действие ФАБ
Радиусы зон повреждений при установке взрывателей ФАБ на мгновен-
ное действие приведены в табл. 4.5.
В качестве примера приведены опытные данные для размеров воронок,
образовавшихся при бомбометании с высот 1200.. .3500 м авиационными бом-
бами различных калибров при установке замедления взрывателя. 0.2 с
(табл. 4.6).
Таблица 4.5. Радиусы зон повреждений
Значение, м
Наименование АБ Зона сильных повреждений Зона средних повреждений Зона легких повреждений
ФАБ-50 12 25 50
ФАБ-100 18 35 70
ФАБ-250 28 56 112
ФАБ-500 40 80 160
ФАБ-1500 56 112 224
Примечание. Под зоной сильных повреждений следует понимать повреждения кир-
личной кладки, под зоной средних повреждений - повреждения деревянных стен и частей
зданий, под зоной легких повреждений - разбитие стекол, смещение черепиц и т. п.
Таблица 4.6. Размеры воронок
Тип АБ Грунт Значение, м
диаметр глубина
ФАБ-100 Известняк 1,5-2,0 0,7-1,0
ФАБ-250 » 4,5-5,5 1,2-1,5
ФАБ-500 » 6,0-8,0 1.5-2,0
ФАБ-500 Суглинок 11,0-12,0 4,1—4,5
После выхода УВ на поверхность грунта (при установке взрывателя на
замедленное действие) от эпицентра взрыва начинает распространяться по-
верхностная сейсмическая волна (волна Рэлея), являющаяся следствием со-
вместного воздействия продольных и поперечных колебаний частиц грунта
вблизи свободной поверхности. Сейсмическая волна вызывает колебания ча-
стиц грунта за пределами радиуса разрушения в зоне упругих деформаций.
Запись горизонтальных смещений частиц грунта под действием сейсмичес-
ких волн позволяет получить так называемую сейсмограмму взрыва
4.3. Авиационные бомбы
345
(рис. 4.11). Вначале фиксируются вынужден-
ные упругие колебания грунта под воздей-
ствием У В с периодом колебаний 0,005...
...0,05 с. Эта фаза колебаний называется
вступлением. Через 1...10 с после начала
фазы вступления наступает главная фаза
свободных колебаний грунта, представляю-
Вступление Главная фаза
Рис. 4.11. Сейсмограмма взрыва
тая собой сейсмическую волну.
Сейсмическое действие взрыва было исследовано М.А. Садовским. Пери-
од колебаний частиц грунта в главной фазе можно оценить по формуле
Тс - тс 1g г, с,
(4.12)
где тс - коэффициент, зависящий от свойств грунта; г - расстояние от точки
взрыва, м. Значения коэффициента тс приведены ниже:
Грунт:
водонасыщенный (торфяники, плывуны)........ 0,11-0,13
наносный средней прочности. ч............ 0,06-0,09
скальный ................................ 0,01-0,03
Величина максимальной скорости колебаний грунта для произвольного
показателя действия взрыва п может быть определена по формуле, получен-
ной с помощью теории подобия:
(4.13)
где f(n) - функция показателя действия взрыва (см. формулу (4.11)); т3 - мас-
са эквивалентного тротилового заряда ВВ, кг.
Полагая, что колебания частиц грунта являются синусоидальными, у =
= y,„sin (2лг/7'с), можно, зная ит и Тс, определить амплитуду ут и максималь-
ное ускорение колебаний ат:
Ут
и,пТс .
ат
4л2
Т2 Ут-
Подставляя сюда выражения для ит (4 13) и Гс (4.12), получаем
_ 0,32тс 1g г '
[ r J
/ а/--\1.5
1,28
тс 1g rllf(n) г
где пт - am/g - максимальная перегрузка.
Оценку сейсмического действия взрыва проводят путем сопоставления
величин ит, ут или пт с их критическими значениями, которые определяются
динамическими свойствами рассматриваемого сооружения. Если воспользо-
ваться шкалой разрушений, составленной для землетрясений, то катастрофи-
ческим разрушениям соответствует значение перегрузки пт = 0,3...0,4, силь-
ным - пт = 0,05...0,10, слабым - пт = 0,02...0,05.
346
4. Фугасные боеприпасы
4.4. Ударное действие фугасных боеприпасов
В зависимости от характера преграды ударное (проникающее) действие
снаряда может выражаться либо в пробивании преграды (стенки или пере-
крытия блиндажа), либо в проникании в преграды на определенную глубину.
В первом случае ударное действие будет измеряться толщиной пробиваемой
преграды, а во втором - наибольшей величиной углубления снаряда в преграду.
Углубление снаряда в преграду (рис. 4.12) можно измерять по касатель-
ной к траектории L либо по нормали к преграде h = L sin а, где а - угол
Рис. 4.12. Траектория снаряда в пре-
граде
подлета снаряда к поверхности прегра-
ды. Первая величина определяет путь
снаряда в преграде, а вторая — глубину
проникания в преграду. Эти характерис-
тики ударного действия имеют важней-
шее значение для подбора времени за-
медления взрывателя, обеспечивающего
необходимое для наивыгоднейшего фу-
гасного действия углубление снаряда в
преграду.
Конструкции фугасных и фугасно-
проникающих БП проектируют таким
образом, чтобы деформации корпуса сна-
ряда в процессе проникания были минимальными. Поэтому при оценке удар-
ного действия таких снарядов их можно рассматривать как жесткие недефор-
мируемые ударники.
Весь процесс проникания в преграды, в частности по нормали к свобод-
ной поверхности, можно условно разбить на три этапа.
Первый этап соответствует внедрению ударника на глубину, равную вы-
соте головной части. Он характеризуется изменением площади контакта удар-
ника со средой, возрастанием силы сопротивления преграды до максимума и
Рис. 4.13. Взаимодействие недефор-
мируемого ударника с преградой:
1 - входная воронка; 2 - канал; 3 - вол-
на сжатия; 4 - волна разгрузки; 5 - от-
кол; 6 - выходная воронка
сопровождается некоторым снижением ско-
рости внедрения (как правило, незначитель-
ным). На лицевой поверхности преграды за
счет выброса среды образуется входная во-
ронка (кратер), окруженная валиком наплы-
вов (рис. 4.13).
На втором этапе проникания площадь
контакта ударника со средой остается по-
стоянной, однако скорость непрерывно
уменьшается, поэтому сила сопротивления
преграды также непрерывно снижается. За
проникающим ударником образуется канал
(каверна), который в средах, не обладаю-
щих прочностью, например в воде, захло-
пывается.
Для преград конечной толщины, если скорость ударника достаточно ве-
лика, следует рассматривать и третий этап - сквозное пробивание. Образую-
4.4. Ударное действие фугасных боеприпасов 347
щаяся при соударении УВ сжатия, достигнув тыльной поверхности преграды,
может вызвать откол среды, который способствует образованию сквозного от-
верстия. Вытеснение ударником материала преграды в направлении тыльной
поверхности и откол образуют выходную воронку при пробитии (см. рис. 4.13).
Для силы сопротивления, действующей на ударник на втором этапе про-
никания, который, по существу, определяет все основные закономерности про-
цесса внедрения, в самом общем случае можно записать
F=S(Av2 + Bvc + C), (4.14)
где 5 - площадь поперечного сечения ударника; vc - скорость ударника (сна-
ряда); первый член в скобке - сила динамического сопротивления, вызванная
инерцией частиц среды, приводимых в движение при проникании ударника,
второй - сила вязкого сопротивления, возникающая в результате преодоления
трения между частицами среды, а третий - сила статического сопротивления,
величина которой характеризуется прочностью среды; А, В, С - коэффициен-
ты, зависящие от формы головной части,ударника и свойств среды.
Зависимость (4.14) для силы сопротивления в виде трехчленного закона
была предложена Г.И. Покровским и вклтбчает в себя как частные случаи из-
вестные ранее формулы Эйлера, Понселе, Вуича, Забудского и др.
Уравнение прямолинейного движения недеформирующегося ударника в
плотной среде (в пренебрежении силой тяжести) записывается в виде
= (4.15)
dt
где т - масса ударника.
Проникание в твердые среды
Наиболее простой вид решение уравнения (4.15) принимает в случае уче-
та для силы сопротивления лишь вязкой составляющей (второй член в форму-
ле (4.14)). Тогда, приняв во внимание, что dvjdt = dvjdx х dx/dt = vcdvc/dx,
из уравнения (4.15) имеем
откуда с помощью интегрирования от скорости соударения v до vc = 0 для
полного пути проникания ударника L получим
Учитывая, что 5 = ltd2/Л, где d- калибр ударника, и обозначив К} = 4/лВ,
окончательно найдем
L = (4.16)
fl-
где Кг - коэффициент, характеризующий свойства среды (табл. 4.7).
348
4. Фугасные боеприпасы
Таблица 4.7. Значения эмпирических коэффициентов для определения
глубины проникания недеформирующегося ударника
Среда Ki 10* Лг10 6
Свеженасыпанная земля 13-15 4,52 60
Грунт;
средней плотности 11-13 4,26 20
ГЛИНИСТЫЙ 10 10,2 35
Дерево (сосна, ель) 6 11,4 10
Кирпичная кладка 2,5 31 15
Бетон средней прочности 1,2 — —
Формула (4.16) - это эмпирическая формула, полученная по результатам
стрельб, проведенных в 1912 г. на острове Березань (около г. Очакова) (так
называемая Березанская формула).
Для определения времени проникания ударника в преграду, аналогично
Вуичу, можно допустить, что он движется в преграде равнозамедленно, вслед-
ствие чего . *
Т = —.
v
Березанская формула (4.16) не учитывает форму головной части ударника
и базируется на законе сопротивления, исключающем инерционные и прочно-
стные свойства среды, в силу чего она применима для сравнительно неболь-
шого диапазона скоростей и дает невысокую точность.
Эксперименты показывают, что для плотных сред типа грунтов сила со-
противления в основном определяется инерционным и прочностным члена-
ми. Тогда, положив В = 0, из выражения (4.14) получим
F=F2X5(1 + b}vc), (4.17)
где К2, Ь\ - коэффициенты, характеризующие свойства преграды; X - коэффи-
циент, зависящий от формы головной части ударника.
Такая форма записи силы сопротивления впервые была предложена
Н.А. Забудским. Подставляя выражение (4.17) в уравнение (4.15) и интегри-
руя, для определения полного пути L и времени Т проникания нетрудно полу-
чить соотношения:
L = Lq In (1 + Z?]T>);
Т = 2у[ь^1^ arctg (yfav), (4.18)
где Lo = m/2 K2 b^kS; K2, ht - экспериментальные коэффициенты (см. табл. 4.7),
X - коэффициент, зависящий от относительной высоты головной части удар-
ника lVvJd (табл. 4.8).
Закон сопротивления для бетона (железобетона) записывается обычно в виде
F = S(o0+крг>2), (4.19)
где <т() - так называемая безынерционная прочность бетона в условиях дина-
мического проникания, Па; к - коэффициент формы ударника (см. табл. 4.8);
р - плотность бетона.
4.4. Ударное действие фугасных боеприпасов 349
Таблица 4.8 Значения коэффициентов А. и к в формулах Забудского
/Гч/ d X к lrn/d X К
0-0,5 1,1 0,85 1,0 1,5 0,9 0,5
0,5-1,0 1.0 0,65 1,5 2,0 0,8 0,4
Из сравнения уравнений (4.19) и (4.17) видно, что отличие закона сопро-
тивления для бетона от закона для грунта состоит лишь в форме записи коэф-
фициентов для силы сопротивления. Следовательно, расчеты для бетона мож-
но вести по формулам Забудского (4.18), имея в виду, что
К2=^Ь.=^
Z q 1
Л О0
где к коэффициент формы ударника (см. табл. 4.8).
Как показывают эксперименты, величина о0 зависит не только от прочно-
стных свойств бетона, но и от диаметра ударника. По результатам испытаний
ударников калибром до 0,3 м для бетона средней прочности величина о0 мо-
жет быть определена из соотношения
о0= 4 + 36 lgf-j
I d
•107.
Так как при пробитии бетонных преград обычно возникает откол, то тол-
щина пробиваемой по нормали плиты на 30...40 % превышает глубину про-
никания ударника в бетон.
Проникание в воду
Характерная особенность проникания в воду - появление замкнутой воз-
душной полости, сопровождающей ударник при высоких скоростях соударе-
ния на достаточно большое расстояние (кавитационный режим обтекания).
Так как вода не обладает прочностью и заметной вязкостью, то формула для
определения силы сопротивления внедрению будет содержать только гидро-
динамический член, который записывается в виде
2
F = cxS^, (4.20)
х 2
где сх - коэффициент лобового сопротивления, зависящий от формы головной
части; р - плотность воды.
При скоростях соударения менее 1000 м/с воду можно считать несжимае-
мой жидкостью, поэтому в момент удара во всем ее объеме возникнет некото-
рое поле скоростей, а начальная скорость движения ударника п0 будет меньше
скорости соударения о. Величину ?>0 определяют по методу Н.Е. Жуковского.
Закон сохранения количества движения для момента соударения можно запи-
сать в виде
то = (т + т0)о0, (4.21)
где т0 - так называемая присоединенная масса, т. е. некоторая фиктивная масса
воды, которая, присоединяясь к движущемуся ударнику, заменяет собой инер-
цию массы воды, приведенной в движение проникающим телом.
350
4. Фугасные боеприпасы
Величину присоединенной массы находят интегрированием по объему
жидкости полного количества движения, приобретаемого в момент удара,
«о = ЦоР^
где р0 - коэффициент присоединенной массы; V - объем ударника. Тогда из
формулы (4.21) получим выражение для определения начальной скорости вне-
дрения
W Рср
где рср = m/V - средняя плотность ударника.
Значения коэффициента |10 для эллипсоида с отношением полуосей alb,
которым в первом приближении можно аппроксимировать удлиненные удар-
ники, приведены ниже:
а!Ь ... 1,0 1,5 2,0 3,0 4,0 5,0 6,0
Ро • • • 0,5 0,305 0,209 0,122 0,082 0,060 0,045
После удара в движении будут участвовать масса ударника и присоеди-
ненная масса воды. Кроме силы гидродинамического сопротивления (4.20) на
тело действуют также сила тяжести и сила Архимеда. Таким образом, уравне-
ние вертикального движения ударника в воде принимает вид
, \dvc iz Р^с с
(от + то = mg - pgV - сх — S,
или, вводя обозначения
I—z------Г
т + т0 = Рср _ 12 (mg - pg V)
wg-pgV j__P_ ’ ПреД V
Рср
2gV( Рср
[ р
получаем
(4.23)
где г’ПрСд - предельная стационарная скорость погружения ударника, когда силы
гидродинамического сопротивления, тяжести и Архимеда уравновешивают
друг друга (из формулы (4.23) следует, что при vc —> &пред dvc/dt —> 0).
Интегрируя выражение (4.23) по времени от начальной скорости г?0 (4.22)
до текущей vc, а затем по координате (с учетом того, что dvjdt = vcdic/dx),
нетрудно записать закон движения ударника в параметрической форме:
4.4. Ударное действие фугасных боеприпасов
351
^3^'пред jn г’пред + ®пред f,0
2 ^пред — ^прсд '*'^0 ?
v 2 /2 2 \
'^3^'пред in ’'пред ^0
г пред ~ &c )
(4.24)
Задаваясь рядом значений гс (г0 > vc > опред), из уравнения (4.24) опреде-
ляются соответствующие им значения t и х, по которым может быть построе-
на зависимость x(f).
Пробивание металлических преград
При внедрении недеформируемых ударников в металлические преграды
сила сопротивления в основном характеризуется статической составляющей
закона (4.15). При этом в случае сквозного пробития ее среднее значение зави-
сит не только от прочностных свойств металла, но и от отношения толщины
плиты b к калибру d и по данным экспериментов может быть записано в виде
F=CS(±T,
И )
где С - некоторая константа.
Интегрируя уравнение прямолинейного движения (4.15), получаем
1 /2 2) r-cf b Y
— т (о - I = CS — х,
откуда, полагая х = b и vc = 0 и учитывая S = лх/2/4, нетрудно найти выражение
для определения предельной скорости пробития (ПСП) плиты по нормали:
> (l+n)/2 j(2-n)/2
гпсп= кь [72 ’ (4-25)
т
где Кь = у/пС/2.
Опытным путем было установлено, что наилучшее совпадение расчет-
ных и экспериментальных данных наблюдается для величины п = 0,5, если
при этом уменьшить показатель степени h от 0,75 до 0,7. Тогда выражение
(4.25) запишется в виде
^°’75ь0-7
г’псп - кь 53 • (4.26)
т ’
Формула (4.26) называется формулой Жакоб де Марра.
Числовые значения коэффициента Кь в формуле (4.26) зависят от свойств
металла, особенностей конструкции ударника и лежат в пределах от
(45...55) • 103 для гомогенной (однородной) брони и до (55...85) 103 для гете-
рогенной брони (в размерностях системы СИ).
352
4. Фугасные боеприпасы
Влияние углов встречи с преградой сказывается самым решающим обра-
зом на характере ударного действия снарядов и тем сильнее, чем меньше угол
встречи. Как показывает опыт, при малых углах встречи глубина проникания
снарядов в преграду становится близкой к нулю вследствие рикошетирования
снарядов. Рикошет представляет собой движение снаряда в твердой или жид-
кой преграде, сопровождающийся обратным выходом снаряда из этой прегра-
ды. При наличии этого явления снаряд, едва успев углубиться в преграду, вы-
ходит из нее и продолжает движение в воздухе. При очень малых углах встре-
чи углубление снаряда в преграду бывает настолько ничтожным, что на земле
в месте рикошетирования остается след в виде открытой борозды.
Помимо угла встречи на число рикошетов, получаемое при стрельбе, вли-
яет характер преграды в точке падения снаряда. Чем ровнее и тверже грунт,
тем больше число рикошетов будет получено при прочих равных условиях.
Вследствие этого предельными углами встречи, при которых наблюдается не
менее 80 % рикошетов, являются углы 15... 18° при мягком и среднем грунте
и 18...22° при твердом грунте. При стрельбе по воде условия рикошета в
60...100 % случаев обеспечивают углы встречи до 10. ..12°.
Способность снарядов рикошетировать при известных условиях стрель-
бы используют для получения воздушных разрывов фугасных, осколочных и
осколочно-фугасных снарядов без применения дистанционных взрывателей.
Стрельбой на рикошет обеспечивается значительное повышение осколочного
действия по открытым живым целям, материальной части и живым целям в
открытых окопах по сравнению со стрельбой при установке взрывателя на
мгновенное (осколочное) действие. При такой стрельбе получают наилучший
эффект действия по минным заграждениям, так как под влиянием взрывной
волны и осколков снарядов в минах срабатывают нажимные и натяжные взры-
ватели. Для получения разрывов снарядов после рикошета взрыватель должен
устанавливаться на замедленное действие.
Таким образом, при расчете глубины проникания снарядов в преграды по
приведенным ранее формулам необходимо учитывать, что явление рикошета
исключает их использование при малых углах встречи, а незакономерный ха-
рактер поведения снаряда в грунтах при углах 20...40° предопределяет значи-
тельную разницу между результатами расчета и данными практики. Тем не
менее рассмотренные формулы достаточно полно обобщают накопленный
опытный материал и позволяют судить об ожидаемом проникании снарядов в
преграды различной прочности.
4.5. Реактивные снаряды, боевые части ракет и торпед
В реактивных снарядах, ракетах и торпедах средства поражения, в том
числе и фугасные БЧ, доставляются к цели с помощью двигательных устано-
вок, размещенных внутри корпуса снаряда и создающих силу тяги с исполь-
зованием реактивного принципа или гребных винтов (в торпедах).
Реактивные снаряды
Реактивные снаряды (PC) предназначены для ведения залпового огня из
многоствольных ПУ и особенно эффективны при отражении массированных
4.5. Реактивные снаряды, боевые части ракет и торпед
353
атак и огневых налетах по крупным сосредоточениям войск и техники про-
тивника. По способу стабилизации в полете PC подразделяются на невраща-
ющиеся (оперенные) и вращающиеся (турбореактивные).
Оперенный PC (рис. 4.14) состоит из боевой части 2 с взрывателем /,
порохового реактивного двигателя 5 и стабилизатора 6. Реактивный двигатель
включает в себя реактивную камеру, сопло, пороховой за-
ряд и воспламенитель. Реактивная камера соединяется с БЧ
с помощью резьбы или другим способом. Чтобы предохра-
нить пороховой заряд от продольного перемещения при
транспортировке снарядов и удержать пороховые шашки в
камере при их горении, применяют колосниковые решетки
или диафрагмы, которые размещают над соплом. Воспла-
менители порохового заряда из дымного пороха зажигают-
ся электрозапалами или пиросвечами (пиропатронами) 4.
Если реактивный снаряд выстреливается не из ствола,
а с направляющей рельсового, каркасного или другого типа,
то на наружной поверхности каморы двигателя закрепля-
ют два направляющих штифта 3, которые удерживают PC
на направляющей ПУ до стрельбы и служат для ведения
снаряда по направляющей при выстреле.
Для повышения кучности стрельбы оперенным PC со-
общается вращательное движение в полете (проворот), на-
пример, с помощью тангенциальных отверстий в камере
реактивного двигателя, выполненных вблизи центра масс
снаряда.
Турбореактивные PC не имеют оперения и стабилизи-
руются на траектории, как и артиллерийские снаряды, вра-
щением вокруг оси симметрии, создаваемым с помощью
4
5
Рис. 4.14. Оперен-
ный реактивный
снаряд
I - взрыватель; 2 -
БЧ; J - направляю-
щие штифты; 4 пи-
росвечи; 5 - поро-
ховой реактивный
двигатель; 6 - стаби-
лизатор
наклонно поставленных сопел.
Боевая часть PC, как средство поражения противника,
не имеет принципиальных отличий от БЧ артиллерийского
снаряда, поэтому на нее полностью распространяются тре-
бования, предъявляемые к последнему. Малые перегрузки,
испытываемые PC при выстреле, дают возможность выпол-
нять его фугасную БЧ со значительно более высоким коэф-
фициентом наполнения, т. е. при одном и том же калибре
PC обладает более высоким могуществом действия по срав-
нению с артиллерийским фугасным снарядом.
Для повышения могущества действия фугасные бое-
вые части PC делают надкалиберными по отношению к корпусу самого сна-
ряда (снаряды М-30, М-31, М-31 УК, М-28).
Снаряд М-30, впервые примененный Красной армией в июле 1942 г.,
предназначался для подавления и уничтожения укрытых огневых средств и
живой силы, а также разрушения полевых оборонительных сооружений про-
тивника. Снаряд состоял из выполненной в виде эллипсоида калибром 300 мм
головной части, к которой был присоединен ракетный двигатель от снаряда
М-13 («Катюша»). Масса ВВ в головной части снаряда составляла 28,9 кг.
354
4. Фугасные боеприпасы
Такая конструкция снаряда позволила быстро освоить его выпуск, однако
вследствие большой массы головной части и неудовлетворительной баллис-
тической формы снаряда дальность его полета не превышала 2800 м.
Для запуска PC была разработана ПУ (станок) М-30, конструкция кото-
рой предусматривала запуск снарядов непосредственно из их транспортной
укупорки. В ней изготовленный на заводе PC транспортировали на огневую
Рис. 4.15. 300-мм реактив-
ный снаряд М-31:
1 - взрыватель; 2 - переход-
ная втулка под взрыватель
ГВМЗ-1; 3 - дополнительный
детонатор; 4 - разрывной за-
ряд; 5 - блок, камера, сопло;
б - воспламенитель; 7 - про-
вод от электрозапала; 8 — по-
роховая шашка; 9 - колосни-
ковая решетка 10 - крыло;
11 - направляющее кольцо;
12 обтекатель; 13 - тарели;
14 - дио; 75 - корпус головки
позицию, из нее же производился и пуск снаряда,
для чего на внутренней поверхности укупорки были
сделаны продольные деревянные бруски, обитые ме-
таллическими полосками, по которым скользили
снаряды при пуске. С переднего торца укупорка име-
ла съемное дно, что обеспечивало беспрепятствен-
ный выход снаряда при стрельбе.
Пусковая установка представляла собой изготов
ленную из стальных уголков наклонную раму, на ко-
торую укладывали в один ряд четыре укупорки с
PC. Для обеспечения устойчивости ПУ в ее нижней
части имелись сошники, а передняя часть рамы опи-
ралась на съемные стойки, с помощью которых раме
придавали необходимый угол возвышения. Стрель-
ба велась путем подачи импульса электрического
тока к снаряду по проводам от обычной саперной
подрывной машинки.
Уже при создании снаряда М-30 конструкторам
стало ясно, что дальность его полета не в полной мере
отвечает потребностям войск. Поэтому в конце 1942 г.
на вооружение Красной армии поступил новый
тяжелый фугасный PC М-31. Имея массу на 20 кг
больше, он превосходил М-30 по дальности полета в
1,5 раза.
Головная часть снаряда М-31 (рис. 4.15) была по-
хожа на М-30, но масса корпуса головной части сни-
жена с 23,5 до 10,8 кг за счет уменьшения толщины
стенок с 7 до 4 мм. При этом масса ВВ в головной
части не изменилась. При попадании в грунт сред-
ней твердости и установке взрывателя на замедление
создавалась воронка диаметром 7...8 м и глубиной
2,0...2 5 м. Снаряд мог пробить кирпичную стену
толщиной до 75 см.
Снаряды М-31 также запускались с ПУ М-30,
однако весной 1943 г. она была модернизирована, в
результате чего стала возможной двухрядная уклад-
ка снарядов на раму. Таким образом, с каждой та-
кой ПУ запускали восемь снарядов вместо четырех.
В 1943 г. был создан PC улучшенной кучности
М-31 УК, которую достигли за счет медленного про-
ворота снаряда, компенсировавшего эксцентриситет
4.5. Реактивные снаряды, боевые части ракет и торпед
355
силы тяги. Для вращения снарядов М-31 УК на его ракетной камере около
центра масс было ввернуто четыре штуцера с Г-образными каналами. Куч-
ность новых снарядов возросла в шесть раз по сравнению с кучностью снаря-
да М-31.
Фугасный ТРС М-28 (рис. 4.16) создали в начале 1942 г. на базе 28-см
фугасной мины (Германия) и тяжелого метательного прибора образца 1940 г.
Корпус БЧ снаряда М-28 штамповали из
листовой стали толщиной 2...3 мм, а за-
тем сваривали. В корпус заливали 45,4 кг
расплавленного тротила или амматола
40/60 и получали так называемый тяже-
лый снаряд массой 82 кг с дальностью
полета 1900 м. Если БЧ снаряжалась
Рис. 4.16. Фугасный ТРС М-28:
30 КГ амматола 80/20 путем ручной на- 1 - взрыватель; 2 - заряд тротила; 3 - кор-
бивки, ТО масса снаряда составляла пус; 4 - реактивная камера; 5 - запал
65 кг, а дальность полета - 3000 м.
В нарезное дно головной части ввинчивали реактивную часть, выполнен-
ную в виде тонкостенного цилиндра с навинтным днищем-соплом, в котором
имелось 26 сопловых отверстий, расположенных под углом к оси снаряда.
В корпусе реактивной части помещалась пороховая шашка-моноблок с семью
продольными каналами. Масса шашки составляла 6,9 кг.
Снаряды транспортировали по одному в упаковочных ящиках, из кото-
рых они и выстреливались. Для производства выстрела упаковочные ящики
со снарядами М-28 укладывались на деревянные или металлические пуско-
вые станки - рамы. В первом случае на раму укладывали два ящика, во вто-
ром - четыре. Рамы прикрепляли к земле с помощью сошников и растяжек.
Вертикальное наведение производили путем перемещения рамы вниз по под-
поркам, снабженным дополнительными отверстиями, в которые вставляли бол-
ты, связывающие подпорку с рамой.
Запуск снарядов М-28 (табл. 4.9) производился с помощью электроза-
палов от подрывной электрической машинки. Тяжелый снаряд М-28 с БЧ,
Таблица 4.9. Характеристики тяжелых фугасных PC
Характеристика М-28 М-30 М-31 М-31УК
Калибр, мм 280 300 300 300
Длина снаряда без взрывателя, мм 1250 1400 1760 1760
Размеры крыльев стабилизатора, мм — 300 300 300
Масса, кг:
снаряда с взрывателем 82,0 72,0 92,4 94,8
ВВ 45,4 28,9 28,9 28,9
порохового заряда 6,9 7,1 Н,2 11,2
Максимальная скорость снаряда, м/с — 195 255 245
Дальность табличная максимальная, м 1900 2800 4325 4000
Отклонение при максимальной дальности, м:
по дальности 47,5 90 105 55
боковое 38 140 255 75
356 4. Фугасные боеприпасы
снаряженной 45 кг амматола 40/60, при падении на грунт средней плотности
образовывал воронку диаметром около 7 м и глубиной около 2 м. Облегчен-
ный снаряд с 30 кг амматола 80/20 при взрыве в грунте создавал воронку
диаметром около 5 м и глубиной 1,5 м.
Качественно новым шагом в развитии РСЗО стала разработка РСЗО БМ-21
«Град», которая началась в СССР во второй половине 1950-х годов. В 1963 г.
работы завершили принятием системы на вооружение Советской армией. РСЗО
БМ-21 в течение длительного времени и в больших количествах производилась
оборонной промышленностью СССР. Выпуск этой системы и ее модификаций
был налажен также в Китае, Египте, Ираке, Иране, Румынии и ЮАР. В настоя-
щее время БМ-21 находится на вооружении армий более чем 30 стран мира.
122-мм неуправляемый PC М-21-ОФ (рис. 4.17) создали для РСЗО
БМ-21. Конструкция снаряда оказала революционное действие на развитие
послевоенной реактивной артиллерии. Корпус снаряда изготовляется не тра-
диционной обработкой резанием из стальной болванки, а высокопроизводи-
тельным методом раскатки и вытяжки из стального листа. Другая особенность
реактивного снаряда РСЗО БМ-21 - это складывающиеся плоскости стабили-
затора, которые в закрытом положении удерживаются специальным кольцом
и не выходят за габариты снаряда. Стабилизация снаряда в полете обеспечи-
вается как с помощью стабилизатора, так и за счет вращения снаряда вокруг
его продольной оси. Начальное вращение, полученное в результате взаимо-
действия ведущего штифта снаряда и винтового П-образного паза направляю-
щей, поддерживается в полете лопастями стабилизатора, которые расположе-
ны под углом 1° к продольной оси снаряда. Такая система стабилизации ока-
залась близкой к оптимальной и была принята для последующих систем
большего калибра «Ураган» и «Смерч».
Рис. 4.17. Снаряд М-21-ОФ для РСЗО БМ-21:
/ - взрыватель; 2 - головная часть; 3 головная труба; 4 - головная шашка; 5 - промежуточная
диафрагма; 6 воспламенитель; 7 - хвостовая труба; 8 - хвостовая шашка; 9 ведущий штифт;
10 - блок стабилизатора
Воспламенение порохового заряда производится пирозапалами, срабаты-
вающими под воздействием импульсов тока от токораспределителя системы
управления огнем.
Наиболее широко используемый тип реактивного снаряда РСЗО БМ-21 -
снаряд БМ-21-ОФ с осколочно-фугасной БЧ. Длина этого снаряда с взрывате-
лем МРВ-У составляет 2,87 м, масса с взрывателем - 66,4 кг, масса БЧ
19,18 кг, масса ВВ - 6,4 кг, коэффициент наполнения - около 0,35. Пороховой
заряд массой 20,45 кг обеспечивает наибольшую скорость полета снаряда
690 м/с. Взведение взрывателя производится после схода с направляющей на
расстояниях 150.. .450 м от боевой машины. От установки взрывателя зависит
4.5. Реактивные снаряды, боевые части ракет и торпед 357
характер действия снаряда у цели: при мгновенном срабатывании - преиму-
щественно осколочное, при замедленном - преимущественно фугасное. По
осколочному действию снаряд БМ-21-ОФ в 2 раза эффективнее снаряда
М-14-ОФ («Катюша»), а по фугасному - в 1,7 раза.
Максимальная дальность стрельбы снарядом БМ-21-ОФ составляет
20,75 км. Для стрельбы на меньшую дальность были предусмотрены ориги-
нальные приспособления - малые и большие тормозные кольца. Дальность
стрельбы с малыми тормозными кольцами - от 12 до 15,9 км, с большими -
менее 12 км. Минимальная дальность стрельбы - 1600 м. Залпом из 40 таких
снарядов обеспечивается поражение открыто расположенной живой силы на
площади 1046 м2, небронированной техники - на площади 840 м2.
Неуправляемые фугасные PC используют также для борьбы с подводны-
ми целями. Например, в 1957 г. на вооружение ВМФ была принята реактив-
ная противолодочная система «Бурун», которая предназначалась для залповой
Стрельбы глубинными реактивными кормовыми бомбами (РГБ) по подводной
лодке противника, находящейся в подводном положении за кормой атакующе-
го корабля. Система «Бурун» представляет собой шестиствольную ненаводя-
щуюся реактивную установку, размещаемую на корме противолодочного ко-
рабля для выстреливания РГБ за корму корабля. Шесть трубчатых направляю-
щих системы «Бурун» калибром 302 мм расположены вертикально в два ряда
и закреплены при помощи болтов за кронштейны к основанию пакета. В вер-
тикальной плоскости направляющие соединены между собой болтами. Даль-
ность стрельбы реактивной противолодочной системы «Бурун» составляла
90... 114 м.
Рис. 4.18. Реактивная бомба РГБ к системе «Бурун»:
1 - корпус; 2 - головная втулка; 3 — оболочка; 4 - тротиловая пробка; 5 — дно; б реактивная
камера; 7- пороховой заряд; 8 - стабилизатор; 9 - кольцо герметизации; 10 - сопловая крышка;
11 - диафрагма; /2 - пиропатрон; 13 - воспламени!ель; 14 - центрирующий поясок; 15 - ВВ;
16 взрыватель; 17 - тротиловая пробка
Реактивная бомба РГБ (рис. 4.18) имеет массу 180 кг, масса ВВ марки
ТГАГ-5 или МС-31 составляет 101 кг. В РГБ установлены контактно-дистан-
ционный взрыватель, обеспечивающий взрыв бомбы на глубинах до 335 м, и
акустический неконтактный взрыватель активного принципа действия ВБ-1М
радиусом реагирования 6 м. Скорость погружения РГБ в воде 11,4 м/с.
Боевые части ракет
Первая в мире баллистическая ракета класса земля-земля с фугасной БЧ
А-4 (ФАУ-2) была создана в Германии. Четвертый по счету и первый удачный
358
4. Фугасные боеприпасы
пуск А-4 состоялся 3 октября 1942 г. Первый боевой пуск (по Лондону) про-
изведен 7 сентября 1944 г.
Ракета А-4 (рис. 4.19) имела длину 13,9 м, максимальный диаметр 1,6 м и
стартовую массу 13 т. Фугасная БЧ ракеты содержала 980 кг ВВ. Ракету А-4
транспортировали без БЧ, которую присоединяли к ракете непосредственно
Рис. 4.19. Ракета А-4:
1 - БЧ; 2 - инерциальная си-
стема; 3 - бак с этанолом; 4 -
бак с жидким кислородом;
5 - топливный насос; 6 — вы-
пускной клапан пара из тур-
бины; 7 - главный вентиль
этанола; 8 - аэродинамичес-
кий руль; 9 - антенна; 10 - га-
зовый руль; // - камера сго-
перед стартом. Но при входе ракеты в плотные слои
атмосферы БЧ не отделялась. Максимальная даль-
ность полета ракеты составляла 250...300 км, а
среднеквадратичное отклонение - около 4 км. По-
этому ракета могла эффективно поражать только
крупные площадные цели.
Ракеты класса земля-земля с дальностью дей-
ствия до 1000 км подразделяются на ракеты такти-
ческого и оперативно-тактического назначения
только в советской, а ныне российской военной тер-
минологии. В армиях других стран это оружие от-
носится к тактическому. Оно предназначен^ для
действия по целям в глубине обороны противни-
ка: поражения средств ядерного нападения, круп-
ных сосредоточений войск, командных пунктов,
аэродромов, железнодорожных узлов и др. В связи
с тем, что для всех этих ракет разработаны ядерные
БЧ, они являются основным средством нанесения
противнику ядерного поражения. В то же время на-
личие на современных оперативно-тактических и
тактических ракетах совершенных систем управле-
ния с бортовыми цифровыми вычислительными
комплексами позволяет наносить этими ракетами,
содержащими различные БЧ (в том числе и фугас-
ные), точечные удары.
Ввиду большой массы заряда ВВ и для повы-
шения надежности срабатывания в фугасных БЧ
(рис. 4.20), как правило, используют два взрывате-
ля - головной 7 и донный 5. В случае применения
фугасных БЧ на тактических ракетах в целях защи-
ты боевого заряда от высоких температур, возника-
ранил ракетного двигателя
(модернизированный вари-
ант); 12 - главный вентиль
жидкого кислорода; 13 - па-
рообразующий агрегат турбо-
насоса; 14 - бак с перекисью
водорода
ющих в результате аэродинамического нагрева, кор-
пус с внутренней стороны может иметь слой тепло-
защитного материала 2. Для снижения нагрузок при
вхождении в плотные слои атмосферы на оператив-
но-тактических ракетах БЧ может выполняться от-
деляющейся.
Наибольший эффект разрушения ВУВ наземных
сооружений достигают в случае наземного или на некоторой оптимальной вы-
соте взрыва заряда ВВ, в связи с чем фугасные БЧ оснащают контактными
мгновенного действия или неконтактными взрывателями. При этом корпус БЧ
можно делать достаточно тонким, так как он не испытывает больших пере-
4 5. Реактивные снаряды, боевые части ракет и торпед
359
Рис. 4.20. Схема фугасной БЧ:
1 - корпус; 2 — теплоизоляция; 3 - боевой заряд; 4 - днище; 5 донный взрыватель, 6 допол-
нительные детонаторы; 7 - головной взрыватель
грузок во время полета ракеты, а коэффициент наполнения БЧ может дости-
гать 0,8 и более.
Для поражения подземных целей используют фугасные БЧ проникающе-
го типа, испытывающие большие нагрузки при ударе о грунт и в процессе
движения в нем. Это приводит к необходимости упрочнения корпуса БЧ и
увеличению его массы, что влечет за собой уменьшение коэффициента напол-
нения и относительное снижение могущества фугасного действия. Основной
способ увеличения глубины проникания БЧ - повышение скорости удара. Для
этого Управление перспективных исследовательских проектов министерства
обороны США планирует использовать списанные баллистические ракеты
«Трайдент». Ядерный боезаряд предлагают заменить специальной боеголов-
кой заглубляющегося типа. На конечном участке траектории полета ракеты
такая боеголовка отделяется и с помощью собственного ракетного двигателя
разгоняется до скорости, равной трем скоростям звука в момент соударения с
землей, при этом глубина проникания в грунт может достигать 70 м.
Недостатками фугасных БЧ класса земля-земля, снаряжаемых обычными
ВВ, являются быстрый спад давления во фронте ВУВ и быстрое ее затухание
в грунте, что приводит к невозможности значительного увеличения зоны по-
ражающего действия. Учитывая высокую стоимость управляемых тактических
ракет, военные специалисты считают, что использование в них фугасных БЧ
экономически нецелесообразно, за исключением случаев стрельбы по малораз-
мерным целям ракетами с очень точно работающей системой управления.
Для поражения надводных целей на ракетах часто устанавливают фугас-
ные проникающие БЧ. В качестве примера можно указать корабельный ракет-
ный комплекс «Уран» с противокорабельной крылатой ракетой Х-35, который
предназначен для поражения надводных кораблей, ракетных, торпедных и ар-
тиллерийских катеров, а также транспортов из состава конвоя и десантных
отрядов противника.
Ракета Х-35 (рис. 4.21) имеет стартовую массу 603 кг и содержит твердо-
топливный ракетный ускоритель и маршевый двухконтурный турбореактив-
ный двигатель. Скорость полета ракеты составляет 280...300 м/с, максималь-
ная дальность действия - 130 км, минимальная - 5 км. Управление ракетой в
полете, ее стабилизацию на заданной траектории и вывод в район нахождения
цели обеспечивает инерциальная система наведения, а наведение на цель на
конечном участке осуществляется с помощью помехозащищенной активной
радиолокационной головки самонаведения.
360
4. Фугасные боеприпасы
Рис. 4.21. Противокорабельная ракета Х-35:
1 - активная радиолокационная головка самонаведения; 2 - проникающая БЧ,' 3 - автономная
система самоликвидации; 4 - инерциальная навигационная система; 5 - радиовысотомер;
6 - воздухозаборник; 7 - блоки топливной системы; 8 - двухконтурный турбореактивный дви-
гатель; 9 сервопривод; 10 - твердотопливный ракетный ускоритель
Для повышения скрытности и внезапности ракетной атаки, а также ус-
тойчивости ракеты от средств огневого противодействия атакуемых кораблей
Х-35 имеет малые эффективную поверхность рассеивания и высоту полета:
10... 15 м на траектории и 3... 5 м на конечном участке. . ч
Вкладная БЧ ракеты массой около 100 кг имеет толстостенную обтекае-
мую форму с коэффициентом наполнения порядка 0,5. Поражение цели про-
исходит за счет подрыва БЧ после проникания ее внутрь корабля при прямом
попадании или за счет осколочно-фугасного действия при пролете ракеты над
целью.
Торпеды
Первая в мире самодвижущаяся мина (торпеда) была создана в России
талантливым русским изобретателем И.Ф. Александровским, который в 1865 г.
предложил морскому министерству проект торпеды. В 1866 г. проект само-
движущегося подводного снаряда разработал англичанин Р. Уайтхед, который
и предложил его назвать «Торпедо». С 70-х годов XIX в. торпеды его конст-
рукции стали поступать на вооружение надводных кораблей, а в начале XX в.
торпедами усовершенствованной конструкции начали оснащаться подводные
лодки. Честь первого в истории успешного применения торпед принадлежит
русским морякам во главе с известным флотоводцем, будущим ученым и вице-
адмиралом С.О. Макаровым, которые в 1878 г. во время русско-турецкой вой-
ны, выпустив с двух паровых катеров до одной торпеде, потопили неприя-
тельское сторожевое судно «Интибах».
Современные торпеды предназначены в основном для поражения подвод-
ных лодок и надводных кораблей, но могут применяться также для разруше-
ния гидротехнических и портовых сооружений. Особое значение приобрели
противолодочные торпеды, используемые для активной борьбы с подводными
лодками, которые обладают большими скоростями, значительными глубина-
ми погружения и коротким временем пребывания в надводном положении.
Торпеды состоят на вооружении надводных кораблей, подводных лодок и са-
молетов (вертолетов) и используются как БЧ противолодочных ракет (ракет-
торпед), а также могут входить как составные части в противолодочные мины
(мины-торпеды).
4.5. Реактивные снаряды, боевые части ракет и торпед
361
Конструктивное исполнение современных торпед в принципе однотипно.
Корпус цилиндрической формы имеет закругленные носовые обводы и кону-
сообразные кормовую и хвостовую части. В головной части корпуса (боевом
зарядном отделении) размещены заряд ВВ и взрыватели. В переднем отсеке
головной части самонаводящихся торпед находится аппаратура самонаведе-
ния. В средней и кормовой частях расположены источники энергии, двигатель
и приборы системы управления движением. Хвостовая часть оканчивается дви-
жителем: гребными винтами или ракетным соплом. Корпуса торпед изготов-
ляют из стали или алюминиевых сплавов. В некоторых образцах иностран-
ных торпед корпус выполнен из стеклопластика.
Диаметр (калибр) торпед, как правило, лежит в пределах 324...550 мм.
Наиболее распространены торпеды диаметром 324, 482 и 533 мм. Длина ино-
странных торпед 2,3...6,5 м, отечественных до 8 м и более, масса 1500 кг и
более. Современные торпеды несут мощные заряды БВВ (такие заряды назы-
вают обычными), некоторые образцы имеют ядерный заряд. Бризантные ВВ,
используемые в торпедах как боевой заряд, представляют собой смеси или
сплавы ВВ на основе тротила. Наиболее распространены сплавы тротила с
гексогеном. В США и Великобритании в торпедах в качестве заряда применя-
ют сплавы Н-6 (тротиловый эквивалент 1,5} и ТОРПЕКС (тротиловый эквива-
лент 1,7). Для повышения мощности взрыва, в частности фугасного действия,
в состав смеси вводят металлический порошок (например, алюминий). В за-
рядное отделение, как правило, ВВ заливают в расплавленном виде. Масса
боевого заряда современных торпед достигает 300 кг и более.
В зависимости от вида энергосиловой установки торпеды подразделяют
на тепловые (парогазовые), электрические и реактивные. По принципу управ-
ления движением торпеды различают автономно управляемые, телеуправляе-
мые и самонаводящиеся. Большинство торпед управляется по проводам и снаб-
жено акустической активно-пассивной головкой самонаведения. Торпедные
энергосиловые установки и системы управления движением включаются пос-
ле входа торпед в воду. Скорость торпед в воде достигает 60...70 узлов, а
дальность хода - до 20 км и более. При прохождении торпед на определенном
расстоянии от цели срабатывают неконтактные взрыватели, при ударе торпе-
ды в цель - взрыватели ударного действия (контактные).
В качестве примера рассмотрим отечественную самонаводящуюся элект-
рическую торпеду СЭТ-65МКЭ.
Торпеда СЭТ-65МКЭ (рис. 4.22) имеет калибр 533,4 мм, длину 7,8 м, массу
1738 кг, массу заряда ВВ 205 кг. Торпеда предназначена для поражения под-
Рис. 4.22. Самонаводящаяся электрическая торпеда СЭТ-65МКЭ:
1 - система наведения; 2 - неконтактный взрывателе 3 — контактные взрыватели; 4 заряд ВВ;
5 — аккумуляторная батарея; 6 - приборы управления; 7 - электродвигатель
362
4. Фугасные боеприпасы
водных лодок и может быть использована с надводных кораблей и подвод-
ных лодок. Она оснащена гидроакустической активно-пассивной системой
самонаведения на маневрирующую цель независимо от уровня ее ходовых
шумов.
Система управления движением по курсу, глубине и крену позволяет осу-
ществлять двухплоскостное маневрирование торпеды и вывод ее в зону сра-
батывания акустического неконтактного взрывателя либо прямое попадание в
цель, при этом подрыв заряда производится двумя взрывателями.
Энергосиловая установка торпеды включает в себя одноразовую электри-
ческую батарею, биротативный двигатель и обеспечивает бесследность дви-
жения, постоянство скорости и дальность хода торпеды независимо от глуби-
ны хода.
Парогазовые торпеды приводятся в движение поршневой машиной, вра-
щающей гребные винты и работающей на смеси водяного пара с продуктами
сгорания некоторой горючей смеси, а реактивные - реактивными двигателя-
ми на твердом топливе.
Использование в качестве энергосиловой установки ракетного двипцеля
позволило отечественным разработчикам создать принципиально новую ско-
ростную торпеду «Шквал» (ВА-111), которая была принята на вооружение
ВМФ СССР в 1977 г. Несмотря на столь почтенный возраст, до сих пор это
оружие не имеет аналогов за рубежом. Уникальность суперторпеды - в скорос-
ти, которая примерно в три раза выше, чем у обычных торпед и может дости-
гать 200 узлов - абсолютный рекорд для подводного объекта.
Торпеда «Шквал» (рис. 4.23) имеет калибр 533,4 мм, длину 8,2 м и стар-
товую массу 2700 кг; масса снаряжения БЧ составляет 250 кг, дальность стрель-
бы 10 км, маршевая скорость 370 км/ч (100 м/с), время разгона до маршевой
скорости 4 с.
Для разгона и поддержания столь большой скорости торпеде требуется
огромная тяга, которую нельзя получить от обычных двигателей и реализо-
Рис. 4.23. Торпеда «Шквал»:
1 - сопла маршевого двигателя; 2 — сопла стартового ускорителя; 3 - срабатываемый твердо-
топливный стартовый ускоритель; 4 - маршевый гидрореактивный двигатель; 5 - боеголовка;
6- система управления и стабилизации; 7 - управляемый по наклону кавитатор с отверстиями
водозабора для маршевого двигателя; 8 - генератор «поддува» каверны; 9 - дюзы «поддува»
каверны; 10- выдвижные управляемые рули; 11 - контактный разъем для программирования
системы управления
4.5. Реактивные снаряды, боевые части ракет и торпед
363
вать с помощью гребных винтов. Поэтому в качестве движителей в торпеде
«Шквал» используются ракетные ускорители. Стартовый ускоритель - твер-
дотопливный, с тягой в несколько десятков тонн - разгоняет торпеду до крей-
серской скорости за 4 с, а затем отстреливается. Далее начинает работать мар-
шевый двигатель, который является реактивным двигателем на гидрореагиру-
ющем топливе, содержащем алюминий, магний, литий, а в качестве окислителя
используется забортная вода.
Однако даже реактивным двигателям не под силу постоянно преодоле-
вать сопротивление водной среды на такой огромной скорости. Особенность
торпеды «Шквал» состоит в использовании эффекта суперкавитации - она не
плывет, а летит в газовом пузыре (каверне), которую сама и создает. Для этого
в носовой части торпеды «Шквал» установлена специальная деталь - кавита-
тор. Это эллиптической формы в сечении толстая пластина с острыми кром-
ками. Кавитатор немного наклонен' к оси торпеды (во фронтальной проекции
он круглый) для создания подъемной силы на носу (на корме подъемная сила
создается рулями). При достижении определенной скорости (около 80 м/с)
вблизи края пластины кавитация достигает такой интенсивности, что образу-
ется газовый пузырь, обволакивающий торпеду.
Но одного лишь кавитатора недостаточно, чтобы получить каверну нуж-
ного размера. Поэтому в торпеде «Шквал» используется специальный «под-
дув»: сразу за кавитатором в носовой части расположены отверстия-дюзы, че-
рез которые каверна «поддувается» от огдельного газогенератора. Это позво-
ляет увеличить каверну и охватить весь корпус торпеды от носа до кормы.
Революционные принципы, положенные в основу конструкции торпеды
«Шквал», имеют и свою оборотную сторону. Одна из них - невозможность
обратной связи, а стало быть, и отсутствие системы самонаведения: излуче-
ние гидролокаторов не может «пробить» стенки газового пузыря. Вместо это-
го торпеду программируют до запуска, вводя в систему управления координа-
ты цели с учетом упреждения. «Шквал» не может поворачиваться. Она дви-
жется строго по прямой линии к заранее рассчитанной точке встречи с целью.
Система стабилизации постоянно отслеживает положение торпеды и ее курс
и вносит коррективы с помощью выдвижных рулей, едва касающихся стенок
«пузыря», а также за счет наклона кавитатора. Однако неточное отклонение
грозит не только потерей курса, но и разрушением каверны.
Замаскировать запуск торпеды «Шквал» невозможно: она издает сильный
шум, а газовые пузыри всплывают на поверхность, образуя отлично видимый
след. В США «Шквал» иногда называют «убийцей авианосцев», так как одна
из задач торпеды - выведение из строя авианосца или даже всей авианосной
группы (боеголовка торпеды может быть ядерной). Несмотря на отсутствие
скрытности и «прямолинейность» движения, уйти или защититься от атаки
торпеды «Шквал» (а тем более от залпа двух таких торпед) практически не-
возможно: за 100 с подводного «полета» к цели крупное судно или подводная
лодка не успеют ни изменить курс (или хотя бы погасить набранную ско-
рость), ни принять какие-либо контрмеры. В результате погрешность попада-
ния торпеды «Шквал» не превышает 12...20 м, что практически гарантирует
поражение крупной цели.
364
4. Фугасные боеприпасы
4.6. Инженерные боеприпасы и морские мины
Инженерные боеприпасы - это средства промышленного изготовления во-
енного назначения, содержащие ВВ и пиротехнические составы. В соответ-
ствии с общей квалификацией средств инженерного вооружения они включа-
ют в себя следующие типы: заряды (для ведения взрывных работ и размини-
рования), мины и разовые минные кассеты.
Заряды
Заряды ВВ предназначены для производства взрывных работ и изготав-
ливаются в виде тротиловых шашек, брикетов из пластита-4 и сосредоточен-
ных или удлиненных зарядов.
Тротиловые шашки бывают трех типов:
- массой ВВ 400 г, размером 50x50x100 мм;
- массой ВВ 200 г, размером 25x50x100 мм;
- массой ВВ 75 г, диаметром 30 мм, длиной 70 мм.
Тротиловые шашки изготавливают прессованием. Для защиты от внешних
воздействий они покрыты слоем парафина и обернуты бумагой, пропитанной
парафином. В шашках предусмотрено запальное гнездо под КД № 8. Место
запального гнезда обозначено на бумажной обертке кружком черного’ цвета.
400- и 75-граммовые шашки могут оснащаться запальным гнездом с резьбой.
Из 400- и 200-граммовых тротиловых шашек при взрывных работах составля-
ются заряды необходимой массы (по расчету) и формы. 75-граммовые шашки
применяют в основном для взрывных работ в мерзлых и твердых грунтах и
скальных породах на открытых разработках. Ящики с 400- и 200-граммовыми
шашками могут использоваться как заряды ВВ массой 25 кг без снятия крыш-
ки, для чего в ней есть отверстие, закрытое съемной планкой. Из ящиков с
тротиловыми шашками могут составляться заряды большей массы.
Брикеты из пластита-4 имеют размеры 70x70x145 мм, массу 1 кг и бу-
мажную обертку. Пластит-4 представляет собой однородную массу светло-кре-
мового цвета, сохраняет свои пластические свойства при температуре от -30 до
+50 °C, негигроскопичен, нерастворим в воде и легко деформируется усилием
рук, что позволяет изготовлять из него заряды различной формы в зависимос-
ти от назначения. Пластит-4 не обладает свойствами липкого вещества (легко
крошится), поэтому заряды из него необходимо делать в оболочках (из ткани,
пленки и т. п.) и крепить к подрываемым объектам. Заряды из пластита-4
взрываются от КД № 8, заглубленного в него на глубину не менее 10 мм.
Сосредоточенные и удлиненные заряды имеют оболочки (сосредото-
ченные - металлическую, удлиненные - тканевую), гнезда для средств взры-
вания, приспособления и устройства для переноски и закрепления на подры-
ваемых объектах (табл. 4.10).
В качестве примера рассмотрим удлиненный гибкий заряд СЗ-4П.
Заряд СЗ-4П (рис. 4.24) снаряжен пластичным ВВ ПВВ-5А. Оболочка 1
заряда ВВ 2 состоит из двух слоев: нижнего - из полиэтиленовой ленты и
верхнего - из капроновой ткани. На концах заряда привязаны ленты 4 для
крепления на подрываемом объекте, а также для связывания зарядов в цепоч-
ку по длине или нескольких зарядов по толщине. Внутри заряда по всей дли-
не проходят технологические нити 3.
4.6. Инженерные боеприпасы и морские мины
365
Таблица 4.10. Основные характеристики зарядов
Тип заряда Масса, кг Габариты, ММ
общая ВВ
СЗ-1 1,4 1,0 65x116x126
сз-з 3,7 3,0 65x171x337
СЗ-За* 3,7 2,8 98x142x200
СЗ-6* 7,3 5,9 98x142x395
СЗ-бм* 6,9 6,0 Диаметр 82, длина 1200
СЗ-4П 4,2 4,0 Диаметр 45, длина 2000
СЗ-1П 1,5 1,1 Диаметр 45, длина 600
* Заряды СЗ-За, СЗ-6 и СЗ-бм могут применяться для взрывных работ под водой на
глубинах до 10 м.
Каждые шесть зарядов (один ящик) комплектуют двумя шаблонами для
образования запальных гнезд, отрезком ленты длиной 20 м и инструкцией по
установке в заряд средств взрывания. При изготовлении зарядов требуемой
формы и массы из зарядов СЗ-4П необходимо учитывать, что каждые 10 см
длины заряда содержат 0,2 кг ВВ. Сосредоточенные заряды делают путем пе-
регибания заряда СЗ-4П несколько раз и связывания его лентой. Удлиненные
заряды длиной более 2 м изготавливают соединением зарядов по длине путем
связывания их концов внакладку (на 10... 15 см) с помощью ленты. Соедине-
ние зарядов по толщине в несколько нитей проводится связыванием их лен-
той так, чтобы заряды плотно прилегали один к другому по всей длине. При
изготовлении зарядов массой менее 4 кг заряды СЗ-4П могут разрезаться ост-
рым стальным ножом на деревянной подкладке.
Для обеспечения надежного перебивания элементов конструкций необхо-
димо обеспечивать плотное прилегание заряда к поверхности подрываемого
объекта. Заряд при этом перегибается по форме поперечного сечения переби-
ваемого элемента, привязывается лентой и при необходимости поджимается к
нему деревянными подкладками и распорками (табл. 4.11).
Заряд СЗ-4П взрывается от КД № 8, установленного в массу ВВ на глуби-
ну не менее 10 мм. В месте установки КД в массе ВВ шаблоном выпрессовы-
вают запальное гнездо. При отсутствии шаблона на заряде ножом делают ко-
сой надрез, в который устанавливают КД.
Рис. 4.24. Заряд СЗ-4П:
а - общий вид; б - разрез; 1 - оболочка; 2 - заряд ВВ; 3 - капроновая нить; 4 - ленты
366
4. Фугасные боеприпасы
Таблица 4.11. Требуемое количество нитей заряда СЗ-4П
для разрушения конструкций
Стальная конструкция Железобетонная конструкция
Толщина элементов, см Количество нитей заряда, шт. Толщина элементов, см Количество нитей заряда, шт.
для выбивания бетона с частичным перебива- нием арматуры
До 1,5 1 До 15 1 1
1,5 2,5 2 20 1 2
2,5-3,5 3 25 1 3
3,5-4,0 4 30 2 4
4,0-4,5 5 40 2 8
4,5-5,0 6 50 3 12
Заряды СЗ-4П можно взрывать детонирующим шнуром, для чего конец
детонирующего шнура с тремя узлами на нем помещают в массу ВВ заряда
или обертывают вокруг заряда тремя-четырьмя витками, плотно прилегающи-
ми один к другому и к заряду. Вставленный в заряд КД (конец детонирующе-
го шнура) привязывается к заряду лентой.
Заряды разминирования предназначены для проделывания проходов в
минных полях взрывным способом, в частности заряд ЗРП-2 - для проделы-
вания проходов-троп в противопехотных минных полях.
Заряд разминирования ЗРП-2 представляет собой удлиненный однониточ-
ный заряд из детонирующего кабеля ДКР-150 А длиной 60 м и массой заряда
ВВ (A-IX-1) на 1 м - 0,15 кг. Комплект обшей массой в ранце для переноски
34 кг обеспечивает подачу заряда на минное поле по воздуху реактивным дви-
гателем на дальность 140... 160 м и образование прохода в минном поле из
мин типа ПМД-6 и ПМН длиной не менее 54 м и шириной не менее 0,4 м.
Заряд разминирования ЗРП-2 (рис. 4.25) состоит из детонирующего кабе-
ля 5, реактивного двигателя 3, соединительного каната 4, взрывателя 7, тор-
мозного шнура 9 в футляре 8, пускового станка 2, пускового устройства 10,
анкера I и ранца 6 для переноски. Канат предназначен для соединения двига-
теля с детонирующим кабелем и представляет собой стальной канат с соеди-
нительными втулками на концах.
Взрыватель служит для подрыва заряда после подачи его на минное поле.
Взрыватель инерционного действия с усилием срабатывания 343...833 Н со-
держит инерционный груз, ударник с пружиной, КВ, пиротехнический замед-
литель, КД и детонатор (шашки из прессованного тетрила массой 9 г). При
пуске заряда инерционный груз освобождает ударник, который под действием
пружины накалывает КВ, в результате чего загорается пиротехнический
замедлитель и после его сгорания (через 13...22 с) форс пламени передается
на КД, срабатывание которого вызывает взрыв детонатора и детонирующего
кабеля.
Тормозной шнур предназначен для торможения заряда в воздухе на завер-
шающем участке полета в целях прямолинейной раскладки заряда на грунте
и подтягивания заряда назад для перекрытия им всей глубины минного поля.
Тормозной шнур выполнен из капрона длиной 100 м, диаметром 4,1 мм и
4.6. Инженерные боеприпасы и морские мины
367
Рис. 4.25. Заряд разминирования:
1 — анкер; 2 — пусковой станок; 3 реактивный двигатель; 4 - соединительный канат; 5 - заряд
(детонирующий кабель); 6 - ранец; 7 - взрыватель; 8 футляр с тормозным шнуром; 9 - тор-
мозной шнур; 10 — пусковое устройство
специальной петлевой укладкой в металлический футляр. На концах шнура име-
ются петли, одной из которых он соединяется с взрывателем, а другой - с анке-
ром. Футляр состоит из двух алюминиевых крышек, вставляемых одна в дру-
гую и имеющих ребра жесткости и центральные отверстия для выхода шнура.
Пусковой станок служит для придания направления полета реактивному
двигателю. Корпус станка выполнен из полистирола. С помощью откидной
крышки и дна станок устанавливается под углом возвышения, необходимым
для пуска заряда. Пусковой станок служит одновременно упаковкой реактив-
ного двигателя, взрывателя, анкера, соединительного каната и футляра с ПУ,
для каждого из которых в нем имеются соответствующие гнезда.
Пусковое устройство 10 УП-60 предназначено для пуска ракетного двига-
теля и состоит из отрезка огнепроводного шнура и закрепленных на его кон-
цах терочного воспламенителя и воспламенительного заряда. Сердцевина ог-
непроводного шнура состоит из медленно горящего состава. Длина отрезка
шнура20 см, время горения 50...80 с.
Анкер используется для удержания тормозного шнура, ранец — для уклад-
ки и переноски заряда разминирования. Ранец изготовлен из брезентовой па-
русины и имеет два плечевых ремня с наплечниками, служащими для пере-
носки заряда за спиной.
368
4. Фугасные боеприпасы
Принцип действия заряда разминирования ЗРП-2 следующий Форс пла-
мени от воспламенительного устройства УП-60 поджигает пороховой заряд
двигателя. Пороховые газы, выходя из сопел, создают реактивную тягу, и дви-
гатель выходит из станка. При движении двигатель через соединительный ка-
нат выбирает из ранца детонирующий кабель. После полной выборки детони-
рующего кабеля в результате удара инерционного груза приводится в действие
взрыватель, в котором загорается пиротехнический замедлитель. Заряд, про-
должая полет, вытягивает из футляра тормозной шнур, при этом происходят
плавное торможение заряда в воздухе, его выпрямление и ограничение даль-
ности подачи. Заряд падает на грунт и через 13...22 с от момента полного
выхода заряда из ранца форс пламени от пиротехнического замедлителя взры-
вателя воздействует на КД, который, срабатывая, вызывает взрыв детонатора
и детонирующего кабеля. От взрыва детонирующего кабеля противопехотные
мины срабатывают и в минном поле проделывается проход-тропа, осью кото-
рого является образованный взрывом заряда ровик.
В принципе, аналогично устроены заряды разминирования для проделы-
вания проходов в противотанковых минных полях, например заряд УЗ-67, ис-
пользующийся на установке разминирования УР-67. Заряд - двуХциточный,
каждая нить содержит по восемь секций детонирующего кабеля ДКР-4 дли-
ной 10,4 м, диаметром 70 мм и погонной массой ВВ 4 кг/м. На минное поле
заряд УЗ-67 подается по воздуху реактивным двигателем на дальность 200
или 350 м и после срабатывания обеспечивает создание прохода длиной 80 м
и шириной не менее 6 м.
Инженерные мины
Инженерные мины представляют собой заряд ВВ, конструктивно объеди-
ненный со средством для его взрывания (взрывателем). Они предназначены
для устройства минно-взрывных заграждений в целях поражения живой силы,
боевой и транспортной техники противника, разрушения дорог, различных со-
оружений и взрываются либо от воздействия объекта (цели) на их взрыватель,
либо по команде оператора. Инженерные мины бывают противотанковыми, про-
тивопехотными, противодесантными, противотранспортными и объектными.
Противотанковые мины (ПТМ) используются для минирования мест-
ности в целях поражения танков и другой бронированной техники. Фугасные
ПТМ бывают только противогусеничными, т. е. предназначены для разруше-
ния гусениц (колес) и срабатывают при наезде на них гусеницей танка (коле-
сом БТР). Типичные представители фугасных противогусеничных мин - мины
серии ТМ-62.
Мина ТМ-62М (рис. 4.26) состоит из корпуса, снаряженного зарядом, и
взрывателя. Стальной корпус 1 имеет центральный стакан с резьбой в верх-
ней части. В нижней части стакана с помощью гайки закреплен дополнитель-
ный детонатор 6 из прессованного тротила в металлической оболочке. Для
герметизации места сочленения мины с взрывателем служит резиновая про-
кладка 3. Дно 5 соединено с корпусом закаткой. В зависимости от технологии
снаряжения дно может иметь заливочные горловины, закрытые крышками,
или быть без горловин. К дну приварены проушины 7 для крепления съемной
ручки из капроновой тесьмы. Заряд 4 заполняет весь объем внутри корпуса.
4.6. Инженерные боеприпасы и морские мины
369
Рис. 4.26. Мвда ТМ-62М:
а - общий вид мины с взрывателем МВЧ-62 в транспортном положении; б разрез мины с
пробкой: / - корпус; 2 - пробка; 3 - прокладка; 4 - заряд; 5 - дно; 6 дополнительный детона-
тор; 7 проушина для крепления ручки
В неокончательно снаряженном виде при хранении очко под взрыватель зак-
рывают пластмассовой или полиэтиленовой пробкой 2.
Мина ТМ-62М имеет диаметр 320 Мм, высоту (с взрывателем МВЧ-62)
128 мм, полную массу 9,5 кг и массу заряда ВВ (тротил) 7 кг. Мины серии
ТМ-62 могут выполняться в пластмассовом (ТМ-62П) и в тканевом корпусах
(ТМ-62Т), а также без корпуса (ТМ-62Б). Все они имеют примерно одинако-
вые массогабаритные характеристики.
Мина ТМ-62Д (рис. 4.27) с деревянным корпусом несколько отличается
по устройству и геометрии. Сбоку в прорезях корпуса 1 закреплена ручка 7.
В центре корпуса установлен пластмассовый стакан 2, в котором размещен
дополнительный детонатор 3. В верхней части стакана имеется внутренняя
резьба для ввинчивания взрывателя 4. Для герметизации соединения взрыва-
теля применяют резиновую прокладку. При снаряжении заливкой заряд 5 мо-
жет полностью или частично заполнять внутренний объем корпуса. При час-
тичном заполнении в свободный объем устанавливают вкладыш б из фанер-
ного щитка и деревянных реек.
Рис. 4.27. Мина ТМ-62Д:
/ - корпус; 2 - стакан; 3 - дополнительный детонатор; 4 - взрыватель; 5 заряд ВВ;
6 - вкладыш; 7 - ручка
370
4. Фугасные боеприпасы
Мина ТМ-62Д имеет размеры в плане 340x290 мм, высоту (с взрывателем
МВ-62) - 178 мм, полную массу - от 11,3 до 13,0 кг. При снаряжении троти-
лом масса заряда ВВ равна 6,5 или 10,3 кг.
Мины серии ТМ-62 могут устанавливаться минными заградителями, со
специально оборудованных вертолетов и вручную. При установке вручную
мины укладывают взрывателем кверху в специально отрытую лунку и маски-
руют слоем грунта (снега). Нажимное усилие срабатывания мины зависит от
типа взрывателя и для МВЧ-62 составляет 1500...5500 Н, а для взрывателя
МВ-62 - 1750...6500 Н.
Мина ПТМ-1 (рис. 4.28) - фугасная противогусеничная нажимного дей-
ствия - предназначена для минирования местности против танков, самоход-
ных ракетных и артиллерийских установок, БТР и автомобилей. Мина состо-
ит из корпуса, заряда ВВ и взрывателя. Корпус мины пластмассовый, удли-
ненной формы. Жесткость мины на изгиб повышают выполнением продольных
канавок прокаткой на боковой поверхности корпуса. В поперечном сечении
корпус имеет форму, близкую к сектору с углом при вершине 45°, вырезанно-
му из круга с внешним диаметром 210 мм и внутренним диаметром 70 ^м.
Рис. 4.28. Мина ПТМ-1
Заряд мины выполнен из пластичного взрывчатого вещества ПВВ-12с, за-
полняющего весь свободный внутренний объем корпуса. Взрыватель гидрав-
лического типа установлен на горловине одного из торцов корпуса с помо-
щью обжимного кольца и соединен с эластичной трубкой, заполненной спе-
циальной жидкостью. Трубка размещена в картонном пенале, который
находится внутри заряда ВВ.
Мина ПТМ-1 имеет общую массу 1,6 кг, массу заряда ВВ - 1,1 кг, длину -
337 мм, ширину - 70 мм, высоту - 69 мм. При наезде гусеницей (колесом) на
мину пластмассовый корпус и пластичное ВВ деформируются, обжимая кар-
тонный пенал и эластичную трубку. Возникающее давление жидкости вызы-
4.6. Инженерные боеприпасы и морские мины
371
Л
Рис. 4.29. Головная часть ре-
активного снаряда 9М27К2
вает срабатывание взрывателя и взрыв заряда мины, что приводит к разруше-
нию гусеницы танка (колеса БТР).
Минами ПТМ-1 снаряжается головная часть реактивного снаряда 9М27К2
к 220-мм РСЗО 9К57 «Ураган», предназначенного для дистанционной установ-
ки минных полей как перед подразделениями боевой техники противника, на-
ходящегося на рубеже атаки, так и в районах их сосредоточения. В головной
части снаряда (рис. 4.29) мины ПТМ-1 размещены
в три яруса, в каждом из которых вплотную по бо-
ковым поверхностям установлено восемь мин, об-
разующих трубу с центральным каналом, через ко-
торый проходит шток поршня. После срабатывания
дистанционного взрывателя реактивного снаряда
воспламеняется вышибной заряд, в результате чего
под давлением пороховых газов поршень через
шток отделяет головную часть и выталкивает мины
в набегающий воздушный поток. Под действием
центробежных и аэродинамических сил мцны рас-
сеиваются на местности. Если на мину не был со-
вершен наезд, то она самоликвидируется через
3...40 ч. Мина ПТМ-1 может также устанавливать-
ся вручную.
Противопехотные мины (ППМ) предназначе-
ны для минирования местности в целях поражения
живой силы противника. Фугасные ППМ поража-
ют живую силу действием продуктов взрыва и удар-
ной волны, являются контактными и взрываются
при воздействии на их нажимной датчик цели. Они
поражают, как правило, одного человека, нанося
травматическое действие нижним конечностям.
Одна из старейших фугасных ППМ - мина
ПМД-6, принятая на вооружение Красной армии
в 1930-х годах и эффективно применявшаяся во вре-
мя Великой Отечественной войны. Мины анало-
гичной конструкции состоят на вооружении неко-
торых армий иностранных государств (Т/78 в пла-
стмассовом корпусе - Египет, 43Т - Финляндия,
Tret-Mi43 - Швейцария, № 4 в пластмассовом кор-
пусе и типа 86 в металлическом - Израиль). Особенности мины ПМД-6 -
простота конструкции и возможность изготовления в кустарных условиях.
Мина ПМД-6М (модернизация ПМД-6) состоит из корпуса, заряда ВВ (тро-
тиловая шашка массой 200 г), взрывателя МУВ или МУВ-2 с Т-образной бое-
вой чекой и запалом МД-2 или МД-5М. Деревянный корпус 5 мины (рис. 4.30)
имеет откидную крышку 1. В передней стенке корпуса есть отверстие для
взрывателя 3, а в передней стенке крышки паз, в который при закрывании
крышки входит шток взрывателя МУВ или втулка взрывателя МУВ-2. Снизу
к крышке прикреплена металлическая пластинка 2, которая в снаряженной
мине опирается на корпус взрывателя и повышает усилие срабатывания мины.
372
4. Фугасные боеприпасы
Рис. 4.30. Противопехотная мина
ПМД-6М:
1 - крышка; 2 металлическая пластин-
ка; 3 - взрыватель МУВ-2 с Т-образной
боевой чекой и запалом МД-5М; 4 за-
ряд ВВ; 5 корпус
В боевом положении мины передняя
стенка крышки нижней гранью опирается
на заплечики Т-образной чеки взрывателя.
При нажатии на крышку мины она опуска-
ется и передней стенкой вытаскивает бое-
вую чеку взрывателя, приводя к его сраба-
тыванию и взрыву мины. Мина ПМД-6М
имеет полную массу 490 г, длину - 200 мм,
ширину - 90 мм и высоту - 50 мм. Усилие
срабатывания составляет 60...280 Н. Уста-
навливается мина вручную с соответству-
ющим заглублением в грунт или снежный
покров и последующей маскировкой.
У мины ПМД-6 в отличие от ПМД-6М нет металлической пластинки, что
снижает полную массу до 460 г и усилие срабатывания до 10... 120 Н.
Мина ПМН принята на вооружение Советской армии в 1950 г. Ойа экс-
портировалась в различные страны мира и широко применялась в вооружен-
ных конфликтах. За причиняемые человеку при взрыве тяжелые ранения, прак-
тически не оставляющие ему шансов остаться в живых, на Западе подучила
название «Черная вдова». С 1963 г производилась в Китае под индексом «мина
типа 58».
Мина ПМН (рис. 4.31) состоит из корпуса, заряда ВВ, нажимного устрой-
ства, запала МД-9, спускового и ударного механизмов (УМ). Пластмассовый
корпус мины 1 имеет внутри два канала: вертикальный и горизонтальный.
Заряд ВВ представляет собой специальную тротиловую шашку массой 200 г,
установленную в корпусе на лаке. Нажимное устройство (крышка) мины вклю-
чает в себя резиновый колпак 3, закрепленный на корпусе металлической лен-
той 7, и пластмассовый щиток 4.
21 20 19 18 17 16 15 14 13 12 11
б
Рис. 4.31. Противопехотная мина
ПМН;
а - общий вид, б - разрез; / корпус;
2 заряд ВВ; 3 - резиновый колпак; 4 -
щиток; 5 - разрезное кольцо; 6 - шток;
7 - металлическая лента, 8 - резиновая
прокладка; 9 - колпачок; 10 - резак;
// - металлоэлемент № 2; 12 - кольцо;
13 - предохранительная чека; 14 - втул-
ка; 15 - боевая пружина: 16 - удариик;
17 - пружина штока; 18 - боевой выс-
туп; 19 - КД М-1; 20 - тетриловая шаш-
ка; 21 - пластмассовая гильза; 22 - проб-
ка; 23 - резиновая прокладка
4.6. Инженерные боеприпасы и морские мины
373
Спусковой механизм смонтирован в вертикальном канале корпуса и со-
стоит из пластмассового штока 6, пружины 17 и разрезного кольца 5. В штоке
есть окно с боевым выступом 18, в которое проходит ударник при срабатыва-
нии мины. Боевой выступ удерживает ударник на боевом взводе после пере-
резания металлоэлемента. В собранной мине шток поджат пружиной вверх к
разрезному кольцу.
Ударный механизм размещен в горизонтальном канале корпуса, собран в
отдельный узел и имеет временной предохранитель. Ударный механизм со-
стоит из втулки 14, ударника 16 с резаком 10 в виде петли из стальной стру-
ны, закрепленной с помощью вкладыша, боевой пружины 15, металлоэлемен-
та № 2 11, предохранительной чеки 13 с кольцом 12, колпачка 9 с резиновой
прокладкой 8, герметизирующих место соединения УМ с корпусом мины.
В собранном УМ боевая пружина сжата, шток ударника проходит через втул-
ку и удерживается в ней предохранительной чекой. Металлоэлемент № 2 по-
мещается в пазу втулки в петле резака.
Запал МД-9 находится в горизонтальном канале корпуса со стороны, про-
тивоположной УМ. Он включает в себя пластмассовую гильзу 21, тетриловую
шашку 20 массой 6,5 г и КД накольного действия М-1 19, установленный в
гнезде шашки на лаке. Тетриловая шашка выполняет роль передаточного за-
ряда. Запал МД-9 закрепляется в мине пробкой 22 с резиновой прокладкой 23.
После выдергивания предохранительной чеки срабатывает временной предо-
хранитель - под действием боевой пружины перерезается металлоэлемент № 2.
Через некоторое время (в зависимости от температуры окружающей среды -
от нескольких минут до нескольких десятков часов) мина переходит в боевое
положение - ударник упирается в боевой выступ штока. При нажатии на мину
крышка и шток опускаются, боевой выступ штока выходит из зацепления с
ударником. Ударник освобождается, под действием боевой пружины прохо-
дит через окно в штоке и накалывает КД М-1, который взрывается, вызывая
последующий взрыв тетриловой шашки и заряда ВВ мины.
Мина ПМН имеет полную массу 550 г, диаметр - 110 мм и высоту - 53 мм.
Усилие срабатывания составляет от 80 до 250 Н. Мина устанавливается вруч-
ную с соответствующим заглублением в грунт (или снежный покров) и после-
дующей маскировкой.
Мина ПФМ-1С принята на вооружение Советской армии в 1981 г. и явля-
ется аналогом мины BLU-43/B Dragon Tooth (США). Мины хранят и транс-
портируют в. кассетах КСФ-1С, которые используют для установки минных
полей заградителями У М3, вертолетными системами минирования ВСМ-1, пе-
реносными комплексами минирования ПКМ, в авиационных блоках БКФ-
ПФМ-1С, применяемых в авиационных контейнерах КМГУ, в реактивных сна-
рядах РСЗО «Град» и «Ураган». Мину применяли во многих вооруженных
конфликтах.
Мина ПФМ- 1С (рис. 4.32) включает в себя корпус, заряд жидкого ВВ и
взрыватель. Корпус мины представляет собой полиэтиленовый баллон со ста-
билизирующим крылом, обеспечивающим устойчивость полета мины после
выброса из кассеты. Заряд жидкого ВВ массой 40 г заполняет свободный объем
внутри баллона и одновременно является рабочим телом, приводящим взры-
ватель в действие при воздействии нагрузки на мину. Взрыватель закреплен
374
4. Фугасные боеприпасы
в корпусе мины кольцом и состоит из механизма дальнего взведения (МДВ),
системы предохранения, предохранительно-детонирующего устройства, меха-
низма самоликвидации, корпуса и вспомогательных деталей.
Второй ступенью предохранения является МДВ, который служит для пе-
ревода взрывателя мины в боевое положение после падения ее на грунт. В МДВ
входит шток 6 с поршнем, размещенным в камере 7 с жидким каучуком, и
пружина. Система предохранения обеспечивает безопасность при хранении и
транспортировании мин в кассетах. Она состоит из чеки 10 (одна на две мины),
вставленной в пазы корпуса 4 и крышки 8, удерживающей шток 6 МДВ от
перемещения под действием пружины 9 (первая ступень предохранения).
Предохранительно-детонирующее устройство предназначено для обеспе-
чения разрыва огневой цепи взрывателя в транспортном положении и вклю-
чает в себя УМ с втулкой 12, ударником 11, шариком 22 и боевой пружиной
23, КД 21, размещенный в движке 14, детонатор 15 и резиновый колпачок 16.
В транспортном положении все подвижные элементы взрывателя удержива-
Рис. 4.32. Мина ПФМ-1С:
1 - корпус; 2 - заряд ВВ; 3 - кольцо; 4 - корпус МДВ; 5, 9 и 19 пружины; б и /7 - штоки с
поршнями; 7 и 18 - камеры с жидким каучуком; 8 - крышка; 10 - чека; 11 - ударник; 12 -
втулка; 13 - стабилизирующее крыло; 14 - движок; 15 - детонатор; 16 колпачок; 20 - отвер-
стие; 21 КД; 22 - шарик; 23 - боевая пружина
4.6. Инженерные боеприпасы и морские мины
375
ются чекой 10 через крышку 8 и шток б МДВ. Разрыв огневой цепи взрывате-
ля обеспечивается смещением КД 21 относительно детонатора за счет скоса
на торце втулки 12 УМ и конфигурации движка 14. Движок находится в не-
закрепленном состоянии, фиксация его в транспортном положении обеспечи-
вается упором детонатора в движок.
Механизм самоликвидации мины предназначен для ее уничтожения через
1...40 ч (в зависимости от температуры окружающей среды). Он состоит из
штока / 7 с поршнем, размещенным в камере 18 с жидким каучуком, и пружи-
ны 19. Шток механизма самоликвидации через колпачок 16 упирается в дето-
натор 15 и удерживается им от перемещения под действием пружины 19.
Корпус взрывателя служит для размещения в нем всех механизмов и уз-
лов. В нем имеется отверстие, через которое жидкое ВВ поступает в полость
между резиновым колпачком и механизмом самоликвидации.
При размещении мин в кассете онй собираются в блоки и соединяются
попарно одной чекой 10, удерживающей крышки 8 их взрывателей. При выб-
росе мин из кассет и раскрытии блоков мины за счет упругости предохрани-
тельной чеки попарно разворачиваются одна относительно другой, чека выхо-
дит из пазов корпуса 4 обеих мин и освобождает крышки 8, удерживающие
штоки 6 МДВ. Крышки под действием пружин 5 отделяются от мин, а штоки
под действием пружин 9 начинают перемещаться в массе жидкого каучука,
освобождая полость для перемещения УМ. После падения мин на грунт и
перемещения поршней в крайнее верхнее положение взрыватели переводятся
в боевое положение. При воздействии на мину нагрузки жидкое В В через
отверстие 20 в корпусе взрывателя давит на колпачок 16, вызывая перемеще-
ние вверх детонатора 15. При перемещении детонатора на 2,5...3,5 мм проис-
ходит поворот движка 14 с КД, после чего вместе с детонатором и движком
начинает двигаться втулка УМ. При ее перемещении шарик 22 освобождает-
ся, а ударник 11 под действием пружины накалывает КД 21, который взрыва-
ется и вызывает срабатывание детонатора и заряда мины. В случае отсутствия
воздействующей на мину нагрузки через определенное время срабатывает ме-
ханизм самоликвидации, который начинает работать одновременно с МДВ.
Под действием пружины 19 поршень перемещается в массе жидкого каучука,
одновременно его шток 17 через колпачок 16 давит на детонатор, перемещая
его вверх до тех пор, пока не произойдет освобождение шарика 22 и срабаты-
вание УМ.
Мина ПФМ-1С имеет массу 80 г, диаметр (двух мин в кассете) 119 мм,
высоту 64 мм, толщину 18 мм, время взведения от 60 до 600 с, а усилие сра-
батывания 50...250 Н.
Противодесантные мины (ПДМ) предназначены для минирования при-
брежной зоны морей рек и озер в целях поражения десантных средств, бое-
вых и транспортных машин, преодолевающих водную преграду. Противоде-
сантные мины подразделяются на донные, якорные, сплавные и бывают толь-
ко фугасными. Донные мины устанавливаются на дно водоема, а якорные
мины - при помощи якорного устройства с определенным заглублением. Сплав-
ные мины сплавляются по течению рек.
При действии взрыва заряда ВВ донной или якорной мины в воде в подвод-
ной части десантного плавсредства (плавающего танка, бронетранспортера)
376
4. Фугасные боеприпасы
образуется пробоина. Сплавные мины предназначены для вывода из строя на-
плавных мостов противника и его десантных переправочных средств.
Донная противодесантная мина ПДМ-1М (рис. 4.33) состоит из корпуса,
снаряженного ВВ, взрывателя ВПДМ-1М с запалом МД-10, штанги и баллас-
Рис. 4.33. Противодесантная
мина ПДМ-1М:
1 - корпус мины с зарядом ВВ;
2 штанга; 3 - взрыватель ВПДМ-1М;
4 балластная плита
Рис. 4.34. Противодесантная
мина ПДМ-1М (разрез):
1 - корпус; 2 взрыватель ВПДМ-1М;
3 - чека, препятствующая отвинчи-
ванию штанги; 4 - штанга; 5 - запал
МД-10; 6 дополнительный детона-
тор; 7 заряд ВВ; 8 - пробка; 9 -
дно; 10 балластная плита; II - болт
тной плиты. Стальной, полусферической фор-
мы корпус 1 мины (рис. 4.34) оснащен цент-
ральным очком для взрывателя и горловиной
(сбоку) для заливки заряда ВВ. Горловина и
очко для взрывателя неокончательно снаря-
женной мины закрываются пробками 8.
В корпусе закреплен стакан с дополнитель-
ным детонатором 6 из прессованного троти-
ла (масса 150 г) с запальным гнездом под за-
пал МД-10 5. На корпусе имёются две руч-
ки. Дно 9 к корпусу прикреплено сваркой,
имеет форму квадрата размером 35x35 см с
отверстиями по углам. В дву%. отверстиях
вставлены болты с барашковыми гайками 11,
служащие для закрепления корпуса на бал-
ластной плите 10. Корпус полностью запол-
нен литым тротилом 7 (10 кг).
Механический контактный взрыватель 2
ВПДМ-1М с временным предохранителем
состоит из стального толстостенного корпуса,
в котором размещены ударный (с запалом
МД-10) и предохранительный механизмы. На
нижней части корпуса выполнена резьба для
ввинчивания взрывателя в мину и установле-
на кожаная прокладка, обеспечивающая гер-
метичность соединения. Штанга 4 служит ры-
чагом для передачи усилия от плавающего
средства головке взрывателя. На нижнем
утолщенном конце штанги закреплена втул-
ка, в которой имеется канал с резьбой для на-
винчивания на головку взрывателя, а сбоку -
сквозное отверстие для чеки 3, препятствую-
щей отвинчиванию штанги.
Чугунная балластная плита 4 (см. рис. 4.33)
служит для придания мине устойчивого поло-
жения на грунте при волнении моря и воздей-
ствии плавсредства на штангу взрывателя. Для
обеспечения лучшего сцепления с грунтом на
плите снизу предусмотрены шипы. Для зак-
репления корпуса мины в плите имеются от-
верстия с гнездами для головок болтов. Перед
установкой мины в воду снимается резиновый
с барашковой гайкой
колпачок с крышки предохранительного ме-
4.6. Инженерные боеприпасы и морские мины
377
ханизма взрывателя. После установки мины вода через отверстия в крышке
проникает к сахарной таблетке, постепенно растворяя ее. Время растворе-
ния таблетки зависит от температуры воды и составляет 8 мин при +30 °C,
2,5 ч при 0 °C. После растворения сахарной таблетки мина переходит в бое-
вое положение.
При воздействии плавсредства на штангу она наклоняется вместе с го-
ловкой взрывателя. При наклоне головки на 10... 15° освобождается ударник,
который под действием боевой пружины накалывает запал МД-10, взрываю-
щийся и вызывающий взрыв дополнительного детонатора и заряда ВВ мины.
Мина ПМД-1М имеет массу с балластной плитой 55...60 кг, без балласт-
ной плиты - 21 кг, диаметр мины с балластной плитой - 0,8 м, высоту с взры-
вателем и штангой -1м, усилие срабатывания при приложении нагрузки к
концу штанги - 180...260 Н, глубину установки мины - 1,1...2,0 м, заглубле-
ние от поверхности воды до штанги -0,1...0,9 м, взрывоустойчивость от со-
седней мины - не менее 6 м. Мина ПМД-1М может устанавливаться с плава-
ющих средств, вертолетов и вручную.
Якорная речная мина ЯРМ состоит из корпуса с зарядом ВВ, взрывателя
ВРМ с крестовиной и якоря с механизмом автоматической установки на за-
данное заглубление. В нижней части внутри металлического сварного корпу-
са 3 (рис. 4.35) приварен конус, заполненный зарядом ВВ (3 кг тротила). Сво-
бодный объем внутри корпуса служит камерой плавучести. Сверху на корпу-
се имеется очко под взрыватель 7, которое при хранении и транспортировке
закрыто пробкой. В нижней части корпуса предусмотрена горловина для за-
ливки ВВ, закрытая заглушкой с ушком для крепления конца минрепа 7 (тро-
са), который соединяет корпус мины с якорем. К горловине прикреплены две
стойки, служащие для соединения корпуса мины с якорем в транспортном
положении.
Якорь 5 служит для автоматической установки мины на заданное заглуб-
ление и удержания ее на месте установки. Он выполнен в форме цилиндра с
дном и перегородкой сверху, на которую в транспортном положении опирает-
ся корпус мины. Снаружи на якоре имеется ручка для переноски мины. Внут-
ри якоря к дну прикреплены стойки 8, между которыми установлен на оси
барабан 9 с намотанным на нем минрепом (стальным тросом) длиной 12 м.
Верхний конец минрепа проходит через отверстие в перегородке и с помо-
щью вертлюга 6 соединяется с корпусом мины. На щеках барабана есть два
фигурных выреза, в которые входит подпружиненный стопор 10. К дну якоря
сверху прикреплен дополнительный груз 11 в виде кольца. В углублении дна
якоря снизу помещен груз 13 массой 2 кг в форме кольца. На грузе имеется
подпружиненная поворотная скоба, которая при установке мины поворачива-
ется перпендикулярно плоскости груза и увеличивает сцепление груза с дном
водоема. Груз соединен тросом 14 со штоком 16 стопора 10. Свободная длина
троса определяет заглубление мины на 0.1...0,3 м. Для регулировки заглубле-
ния часть троса закреплена на грузе четырьмя винтами. При последовательном
вывинчивании каждого винта (в порядке номеров, указанных на рис. 4.35, б)
увеличиваются свободная длина троса (на 10 см) и соответственно заглубление.
Если вывернуть все четыре винта, то заглубление мины будет 0,5...0,7 м. При
установке мины в водоемах с илистым дном для обеспечения заглубления мины
378
4 Фугасные боеприпасы
а
Рис. 4.35. Якорная речная мина ЯРМ:
а - разрез мины; б - вид со стороны дна - расположение винтов для регулирования
заглубления мины; № 1, 2, 3 и 4 - последовательность вывинчивания винтов;
1 - взрыватель; 2 - крестовина, 3 - корпус; 4 - заряд ВВ; 5 - якорь; б - вертлюг; 7 -
минреп; 8 - стойка, 9 - барабан с минрепом (тросом); 10 - стопор; 11 - дополнитель-
ный груз; 12 - днище; 13 - груз; 14 - трос; 15 - донная чека; 16 - шток стопора; 17 -
концы стоек, соединяющих корпус мины с якорем
на 0,1...0,3 м необходимо вывинтить винт № 1. В транспортном положении
мины груз удерживается в выемке дна днищем 12 и донной чекой 15. Донная
чека проходит в отверстие в закраинах якоря и нижних концах стоек 17, за-
крепленных верхними концами в горловине корпуса мины, и через прорезь
винта, ввинченного во втулку днища. Винт упирается в шток стопора. Этим
обеспечивается в транспортном положении соединение корпуса мины с яко-
рем и фиксация стопора барабана в верхнем положении.
Взрыватель речной мины ВРМ - механический с предохранителем. При
хранении взрыватель закрыт сверху резиновым колпачком. Снизу взрывателя
закреплен стакан с детонатором (27 г тетрила) и КД М-1. Взрыватель посту-
пает в войска с металлическим вкладышем, установленным на место сахарно-
го предохранителя. На корпусе взрывателя предусмотрена наружная резьба
для ввинчивания в очко мины и отверстие, закрытое пробкой. Крестовина слу-
жит для передачи усилия от плавсредства взрывателю. Стойка крестовины на-
девается на головку взрывателя и фиксируется пружинной защелкой.
4.6. Инженерные боеприпасы и морские мины
379
Перед сбрасыванием мины в воду выдергивают предохранительную чеку
из взрывателя и донную чеку из якоря. При сбрасывании мины в воду
(рис. 4.36) от якоря отделяется днище, груз выпадает из выемки дна якоря и,
повисая на тросе (положение I), оттягивает стопор, который выходит из за-
цепления со щеками барабана. Барабан получает возможность свободно вра-
щаться. Минреп сматывается с барабана, а якорь погружается в воду (положе-
ние II); корпус мины при этом плавает на поверхности воды. Когда груз дос-
тигает дна водоема (положение III), натяжение грузового троса уменьшается,
стопор под действием пружины входит в фигурные вырезы на щеках бараба-
на и сматывание минрепа прекращается. Якорь, продолжая погружаться до
дна водоема, увлекает под воду корпус мины на заглубление, заданное длиной
троса (положение IV).
Рис. 4.36. Схема установки мины ЯРМ:
I—IV положения мины после ее сбрасывания в воду; 1 - корпус мины с взрывателем и кресто-
виной; 2 минреп; 3 якорь; 4 - трос; 5 - груз; 6 - поворотная скоба груза; 7 днище
После погружения взрывателя мины в воду сахарный предохранитель ра-
створяется и мина переходит в боевое положение (время растворения сахар-
ного предохранителя от 10 мин при температуре воды +20 °C до 40 мин при
температуре воды около 0 °C). При воздействии плавсредства на крестовину
головка взрывателя наклоняется и освобождает ударник, который под действи-
ем боевой пружины накалывает КД М-1, вызывая его взрыв. От КД взрывает-
ся детонатор, а от него - заряд ВВ мины.
Мина ЯРМ имеет массу 13 кг, массу ВВ 3 кг, высоту 510 мм, диаметр
275 мм, глубину установки 1...12 м, усилие срабатывания (при приложении
нагрузки к крестовине) 6...9 Н. Мина удерживается якорем при скорости те-
чения до 1 м/с. Взрывоустойчивость от срабатывания соседней мины - не
менее 12 м. Установка ЯРМ происходит с плавсредств.
380
4 Фугасные боеприпасы
В качестве примера сплавных противодесантных мин рассмотрим устрой-
ство французской 12-кг речной мины.
12-кг речная сплавная мина (Mine Fluviale Derivante а 12 kg de Charge)
(рис. 4.37) состоит из корпуса с зарядом ВВ, взрывателя, предохранительного
механизма и самоликвидатора. В нижней части металлического корпуса 19
мины укреплены опорное кольцо 16 (для придания мине устойчивости на земле
и как успокоитель на воде) и балластная камера 15 с дробью (для придания
остойчивости). В средней части корпуса расположены два опорных крюка /2,
которыми мина опирается на наклонные направляющие балки при спуске ее
на воду. В верхней части корпуса размешены приводы взрывателя 6 и 23,
Рис. 4.37. 12-кг речная мина:
1 штырь; 2 - коромысло; 3 самоликвидатор; 4 - ручка предохранительной чеки; 5 - влагопог-
лотитель; 6 - дополнительный рычаг; 7 - пружина предохранительного механизма; 8 - ручка;
9 - ударник; 10 пенопласт; 11 - направляющий цилиндр; 12 - опорный крюк; 13 - промежуточ-
ный детонатор; 14 - заряд ВВ; 15 - балластная камера; 16 - опорное кольцо; 17 - клапан запаль-
ного гнезда; 18 - перегородка; 19 - корпус; 20 - КД; 21 - втулка; 22 - корпус взрывателя; 23 -
рычаг; 24 - растворимый элемент; 25 - колодка; 26 - упорная пружина; 27 поплавок; 28 - шток
4 6. Инженерные боеприпасы и морские мины
381
самоликвидатор 3 и две ручки 8 для переноски Нижняя часть корпуса запол-
нена ВВ 14 (12 кг амматола 85/15), а верхняя - пенопластом 10, благодаря
чему мина не затапливается (запас плавучести 30 г).
Взрыватель включает в себя привод и ударник 9 с боевой пружиной, зак-
люченной в корпусе 22, который заканчивается втулкой 21с КД 20. Привод
выполнен в виде штока 28, проволочного кольца, опоясывающего корпус мины
и укрепленного с помощью рычагов 23 на колодке 25, которая соединена крюч-
ком с хвостовиком ударника 9 взрывателя и зафиксирована упорной пружи-
ной 26. В колодку ввинчен вертикальный шток, на который навинчивается
штырь. Кроме того, имеется дополнительный рычаг 6, оканчивающийся коро-
мыслом 2, которое упирается в колодку. У основания штыря свободно поме-
щен цилиндрический поплавок 27, не позволяющий штоку отклоняться от вер-
тикального положения при перевозке мины.
Предохранительный механизм служит для перевода мины в боевое поло-
жение через некоторое время после ее установки. Он состоит из пружины 7 и
растворимого элемента 24. При хранении мины и ее установке пружина сжата
и удерживается в таком положении растворимым элементом. При этом корпус
с ударником и боевой пружиной взрывателя-’расположен так, что КД 20 отде-
лен от гнезда промежуточного детонатора 13. При нахождении мины в воде
растворимый элемент через определенное время освобождает пружину пре-
дохранительного механизма, которая, разжимаясь, посылает корпус ударника
вперед и КД через клапан 17 вводится в гнездо промежуточного детонатора
(30-граммовая шашка тетрила).
Кроме предохранительного механизма в мине предусмотрена предохра-
нительная чека, пропущенная через отверстие в хвостовике ударника и окан-
чивающаяся рукояткой 4, расположенной в верхней части корпуса мины. Пре-
дохранительная чека не допускает наклона рычагов взрывателя при транспор-
тировке и установке мины.
Самоликвидатор 3 установлен в верхней части корпуса мины, содержит
растворимый элемент и срабатывает по истечении определенного срока, если
мина во время движения не встретится с какой-либо преградой. Срок сраба-
тывания самоликвидатора зависит от типа растворимого в воде вещества.
При установке мины необходимо удалить предохранительную чеку. По-
плавок оказавшейся в воде мины всплывает, освобождая штырь, и начинает
разрушаться растворимый элемент предохранительного механизма. Через оп-
ределенное время (20 мин) взрыватель приводится в боевое положение.
Срабатывание мины происходит при отклонении штыря от вертикального
положения или ударе о преграду кольцом или рычагом. При этом колодка
взрывателя, преодолевая сопротивление упорной пружины, наклоняется и
освобождает хвостовик ударника.
12-кг речная сплавная мина имеет общую массу 26 кг, диаметр 480 мм и
высоту 510 мм (без штыря, длина штыря 1350 мм). Время срабатывания само-
ликвидатора может устанавливаться на 4, 12, 24 и 48 ч.
Противотранспортные мины предназначены для минирования дорог в
целях их разрушения и поражения транспортных средств. Отдельные виды
противотранспортных мин используются для минирования аэродромов в це-
лях поражения самолетов и вертолетов. Противотранспортные мины подраз-
деляются на автодорожные, железнодорожные и универсальные.
382
4. Фугасные боеприпасы
Объектные мины применяют для минирования сооружений в целях их
разрушения в заданный момент времени. Объектные мины взрываются по ис-
течении заданного срока замедления.
Все противотранспортные и объектные мины являются фугасными и снаб-
жены устройствами неизвлекаемости и самоликвидации, а также могут быть
установлены в управляемом варианте (по радио или проводной линии). Кон-
структивно противотранспортные и объектные мины представляют собой за-
ряд ВВ в корпусе, к которому подсоединяется ВУ. Отличительные особеннос-
ти этих мин связаны с устройством взрывателей, которые могут обеспечить
подрыв заряда ВВ с замедлением до нескольких сотен суток или после проез-
да заранее задаваемого числа транспортных средств. Устанавливают противо-
транспортные и объектные мины только вручную.
Разовые минные кассеты предназначены для размещения, транспорти-
рования, хранения мин и выброса их над минируемым участком местности
или акватории. В качестве примера рассмотрим устройство кассеты КСФ-1С
для фугасных противопехотных мин ПМФ-1.
Кассета КСФ-1С (рис. 4.38) состоит из стакана / и ввернутой в него элек-
трокапсюльной втулки ЭКВ-ЗОМ 2. Внутри размещены вышибной пороховой
заряд 3, поршень 4, четыре закрытых блока с минами, газовод 5, диски 11, 13
и разделительный заряд 7. Стакан закрыт крышкой 9, зафиксированной в нем
завальцовкой лапок 10. Конструкция кассеты герметична. Для исключения про-
4.6. Инженерные боеприпасы и морские мины
383
рыва газов от вышибного заряда в объем кассеты, заполненный минами, пор-
шень имеет уплотнительную прокладку 14.
Каждый закрытый блок включает в себя две опоры, между которыми уло-
жены 16 мин ПФМ-1С 6. Опоры с одной стороны соединяются Z-образным
замком, а с другой - крышкой с завальцованными на ней лапками опор, в
крышке закрытого блока установлены пиротехнический замедлитель 8 и за-
ряд У ЗВ.
При подаче импульса электрического тока электрокапсюльная втулка
ЭКВ-ЗОМ срабатывает и воспламеняет вышибной заряд 3. Давление порохо-
вых газов через поршень 4 подается на блоки и крышку 9. Лапки 10 стакана 1
разгибаются и блоки выбрасываются из него. Одновременно при срабатыва-
нии вышибного заряда воспламеняются пиротехнические замедлители 8 бли-
жайших к поршню блоков и через газовод 5 - разделительный заряд 7. При
выходе блоков из стакана срабатывает разделительный заряд 7, воспламеняя
пиротехнические замедлители 8 двух других блоков и разделяя их. Срабатыва-
ние разделительного заряда сообщает дополнительную скорость одним блокам
и уменьшает скорость других, что позволяет получить вытянутое минное поле
с достаточным расходом мин. По истечении времени горения (0,3 ...1,1 с) пи-
ротехнических замедлителей 8 срабатывают заряды УЗВ, крышки блоков сбра-
сываются и раскрываются, освобождая уложенные в них мины, которые рас-
сеиваются в свободном падении и, приземляясь, образуют минное поле.
Кассета КСФ-1С имеет массу 9,2 кг, длину 480 мм, диаметр 140 мм и
предназначена для размещения 64 противопехотных фугасных мин ПФМ-1С.
Морские мины
Морские мины (ММ) предназначены для минирования акваторий и при-
брежных зон морей и океанов против надводных кораблей, подводных лодок
и плавающих десантных средств противника. По конструктивной схеме ММ
принципиально не отличаются от инженерных противодесантных мин и так
же, как и последние, бывают якорными, донными и плавающими (на поверх-
ности или дрейфующими на заданной глубине). Однако, учитывая важность
задач, решаемых ММ, сами их конструкции и ВУ к ним могут быть достаточ-
но сложными и, в частности, содержать отделяющиеся самодвижущиеся и
самонаводящиеся элементы с боевыми зарядами.
Минное оружие появилось в 1847 г., когда русский академик Б.С. Якоби
создал гальванические и гальваноударные мины. Благодаря работе И.И. Фиц-
тума, П.Я. Шиллинга, Б.С. Якоби и других отечественных ученых русский
флот получил достаточно совершенные в то время мины с пороховыми заря-
дами, устанавливаемые с помощью грузов на заранее измеренной глубине.
Начало массовому использованию первых серийных образцов якорных мин
положила Крымская война 1853-1856 гг. К Первой мировой войне были усо-
вершенствованы корпусно-механические части мин, взрыватели, устройства
автоматической постановки с носителей и установки на заданное заглубление,
увеличились заряды и глубины использования мин. В 1916 г. русский моряк
капитан I ранга И.А. Ковалевский предложил устанавливать мины с самолетов,
при этом существенно повысилась быстрота доставки мин на большие рас-
384
4. Фугасные боеприпасы
стояния и возможность проникновения в недоступные для других видов носи-
телей минного оружия места. В период, предшествовавший Второй мировой
войне, началась подготовка к массовому применению неконтактных ММ.
Большинство современных ММ имеют неконтактные взрыватели, кото-
рые срабатывают при прохождении корабля или судна на определенном рас-
стоянии от мины при воздействии одного либо нескольких физических полей
(акустического, магнитного, гидродинамического и др.). По этому принципу
неконтактные ММ подразделяют на акустические, магнитные, индукционные,
гидродинамические. Контактные ММ бывают ударными (срабатывающими при
ударе о корпус корабля) и антенными (они снабжены взрывателем электро-
контактного типа с чувствительным элементом в виде антенны).
Пример классической якорной контактной ударной ММ - мина ПДМ-ЗЯ,
предназначенная для минирования прибрежной полосы на глубине до 10 м.
Мина ПДМ-ЗЯ (рис. 4.39 и 4.40) состоит из корпуса 6, снаряженного за-
рядом ВВ, трех штыревых контактных замыкателей, закрытых предохрани-
тельными колпаками /, электродетонатора ЭДП-р 7, источника тока 8, сахар-
ной рвушки 9, предохранительного прибора 2, осушителя 3, .самоликвидато-
ра 4 взрывателя ЭХВ-7 и якоря 5.
Корпус 6 имеет форму шара диаметром 500 мм, сваренного -из двух полу-
шарий. В верхнем полушарии сделаны четыре очка. Центральное очко пред-
Рис. 4.39. Мина ПДМ-ЗЯ:
1 - контактный замыкатель, закрытый предохранительным колпаком; 2 - предохранительный
прибор; 3 - осушитель; 4 - самоликвидатор взрывателя ЭХВ-7; 5 - плита якоря; 6 - корпус
мины; 7 - электродетонатор ЭДП-р; 8 - источник тока (батарея БАТ-ЗЯ)
4.6. Инженерные боеприпасы и морские мины
385
Рис. 4.40. Мина ПДМ-ЗЯ (вид сверху):
1 - контактный замыкатель, закрытый предохранительным колпаком; 2 - предохранительный
прибор; 6 - корпус мины; 9 - сахарная рвушка; 10 - талреп; II - стропка
назначено для установки предохранительного прибора 2. Через это очко при
снаряжении мины в корпус устанавливаются электродетонатор 7, источник
тока 8, самоликвидатор 4 и осушитель 3. Остальные три очка служат для ввин-
чивания в них контактных замыкателей. На верхнем полушарии приварены
две скобы (см. рис. 4.40) для переноски корпуса и крепления его к якорю
стропками 11 с талрепами 10. На нижнем полушарии предусмотрено очко для
заливки заряда ВВ, а внизу приварена скоба для крепления верхнего конца
минрепа.
Внутренняя сферическая перегородка образует камеру для заряда ВВ (15 кг
тротила). В центре перегородки есть стакан с дополнительным детонатором и
резьбовым запальным гнездом для детонатора ЭДП-р 7. На перегородке при-
варены скобы с зажимами для крепления самоликвидатора взрывателя ЭХВ-7 4
и штырь для навинчивания осушителя 3. Пространство внутри корпуса над
перегородкой служит камерой плавучести.
Штыревые контактные замыкатели закрыты подпружиненными предо-
хранительными колпаками 1, закрепленными на корпусе замыкателей с помо-
щью пластинчатых предохранительных чек и удерживаемыми сахарной рвуш-
кой 9 с замком, содержащим сахарную шашку и чеку (см. рис. 4.40).
Предохранительный прибор 2 служит для создания разрыва в электричес-
кой цепи мины в целях обеспечения безопасности обращения с ней при снаря-
жении и установке, а также для автоматического замыкания электрической цепи
мины после ее установки. Он содержит сахарную шашку и предохранительную
386
4. Фугасные (юеприпасы
чеку. Отверстия в крышке предохранительного прибора, обеспечивающие дос-
туп воды к сахарной шашке, закрыты жестяной лентой, припаянной к крышке.
Осушитель 3 (см. рис. 4.39) поглощает влагу из воздуха внутри корпуса
мины и представляет собой металлическую коробку, закрытую крышкой с от-
верстиями. Внутри коробки помешен марлевый мешочек с окисью кальция.
По оси коробки проходит втулка с резьбой для крепления на резьбовом шты-
ре внутри корпуса мины.
Самоликвидатор 4 электрохимическского взрывателя ЭХВ-7 (см. рис. 4.39)
предназначен для взрывания мины или перевода ее в безопасное положение
по истечении заданного срока замедления.
Якорь используется для автоматической установки мины на заданное заг-
лубление и удержания ее на месте установки. Он выполнен в виде двухосной
тележки, которая служит для перемещения мины в процессе сборки и уста-
новки. Якорь состоит из основания и вьюшки с минрепом. Основание якоря
представляет собой плиту 5 (см. рис. 4.39) с откидным щитом, который в транс-
портном положении крепится к вьюшке строчкой с сахарным разъедините-
лем. Для лучшего сцепления якоря с грунтом на плите и щите предусмотрены
зацепы и перо. Щит автоматически откидывается после растворения сахарной
шашки в разъединителе и фиксируется в откинутом положении стопором. На
плите якоря 5 есть две деревянные или пластмассовые подушки, на которые
опирается корпус мины, и четыре скобы, использующиеся для крепления кор-
пуса на якоре стропками 11 с талрепами 10.
Вьюшка с минрепом (см. рис. 4.40) зафиксирована на плите основания бол-
тами. Она имеет раму, в которой на оси закреплен барабан с наматываемым на
него минрепом, и подпружиненную щеколду для стопорения барабана после
разматывания минрепа на необходимую длину. Минреп капроновый канат ди-
аметром 15 мм и длиной 10 м- намотан на барабан. Один конец минрепа зак-
реплен на барабане, а на другом установлена скоба, служащая для присоедине-
ния этого конца минрепа к скобе, приваренной на корпусе мины снизу.
Штерт-груз (см. рис. 4.39) каплеобразной формы служит для оттягивания
щеколды вьюшки вниз во время разматывания минрепа с барабана при погру-
жении якоря до момента достижения грузом дна водоема. При сборке мины
штерт-груз закрепляется на откидном щите якоря на кронштейне чекой. Груз
массой 7 кг соединен со щеколдой стальным штертом (тросом) длиной 1,5 м,
часть которого намотана на груз. Свободная длина троса определяет заглубле-
ние мины и регулируется установкой специальной серьги на тот или иной
виток.
Установка мины ПДМ-ЗЯ аналогична установке противодесантоной мины
ЯРМ (см. рис. 4.36). Перед сбрасыванием мины в воду выдергиваются пре-
дохранительные чеки из трех контактных замыкателей, предохранительного
прибора, сахарной рвушки, разъединителя и штерт-груза, а также срываются
металлическая лента, закрывающая отверстия в крышке сахарника на предох-
ранительном приборе, и пластинка на крышке разъединителя. Мина сталкива-
ется в воду. При падении мины в воду штерт-груз погружается, опережая якорь,
разматывает штерт на свободную длину (до серьги) и оттягивает щеколду вниз,
освобождая барабан. Корпус мины, имея положительную плавучесть, отделя-
ется от якоря и всплывает на поверхность воды, а якорь погружается вниз.
4.6. Инженерные боеприпасы и морские мины
387
Минреп при этом сматывается с барабана. Когда штерт-груз достигает дна во-
доема, натяжение штерта прекращается. Щеколда под действием пружины под-
нимается вверх и застопоривает барабан. Разматывание минрепа останавлива-
ется, и якорь, погружаясь, утапливает корпус мины на заданное заглубление.
Через 1...20 мин после сбрасывания мины в воду растворяются сахарные шаш-
ки в сахарной рвушке и разъединителе откидного щита. Замок сахарной рвуш-
ки раскрывается и она сбрасывается. Освобожденные предохранительные кол-
паки контактных замыкателей под действием пружины сбрасываются, а щит
якоря откидывается в горизонтальное положение. Через 15...30 мин сахарная
шашка в предохранительном приборе растворяется и происходит замыкание кон-
тактов элекгровзрывной цепи - мина переходит в боевое положение.
При воздействии плавсредства на штырь любого из замыкателей с усили-
ем 120... 160 Н происходит замыкание электровзрывной цепи, что вызывает
взрыв элекгродетонатора и заряда ВВ мины. Если в электрическую цепь мины
включен взрыватель ЭХВ-7, то по истечении заданного срока в зависимости
от схемы включения взрыватель замыкает электровзрывную цепь, вызывая
взрыв мины, или закорачивает источник тока, в результате чего он разряжает-
ся и мина становится безопасной.
Мина ПДМ-ЗЯ имеет массу 175 кг, длину 900 мм, ширину 650 мм и высо-
ту 730 мм. Заглубление мины от поверхности воды до контактных замыкате-
лей может изменяться в пределах 0,3... 1,1 м. Взрывоустойчивость от сосед-
ней мины составляет не менее 15 м, а штормоустойчивость - до шести бал-
лов. Мину ПДМ-ЗЯ устанавливают с надводных кораблей, оборудованных
минными путями и скатами.
Примером современной якорной ММ может служить неконтактная про-
тиволодочная мина-ракета ПМР-2.
Мина-ракета ПМР-2 предназначена для борьбы как с современными, так
и с перспективными подводными лодками, находящимися в подводном поло-
жении. Мина ставится в прибрежных, морских и океанских районах на глуби-
не от 200 до 400 м (рис. 4.41). Она включает в себя стартовый контейнер,
Рис. 4.41. Якорная морская мина ПМР-2
388
4. Фугасные боеприпасы
ракету и якорь. Стартовый контейнер служит для размещения ракеты, систем
обнаружения и целеуказания, источника питания, функциональных и предох-
ранительных приборов. К контейнеру крепится система автоматической уста-
новки на заданное углубление.
В ракете размещены заряд ВВ (тротил массой 300 кг), реактивный двига-
тель, блок приборов управления ее движением, комбинированное ВУ, состоя-
щее из неконтактного, временного и контактного взрывателей. Неконтактная
акустическая аппаратура ПМР-2 позволяет обнаружить любую подводную лод-
ку независимо от уровня ее шумности и скорости хода.
Движение ракеты к цели начинается после срабатывания систем обнару-
жения и целеуказания, вызванного воздействием акустического поля цели.
Опасная зона мины представляет собой область досягаемости самодвижущейся
БЧ ракеты и составляет сотни метров. Высокая скорость ракеты и малое вре-
мя атаки цели (не более 7 с) исключают возможность использования средств
противодействия и проведения маневра уклонения.
Мина ПМР-2 имеет диаметр 533 мм, длину 7830 мм, полную массу 1850 кг
и может находиться на боевой позиции после установки до одного года.
Донные морские мины могут устанавливаться с надводных кораблей,
подводных лодок и самолетами морской, корабельной и военно-транспортной
авиации (подвеска мин аналогична подвеске авиабомб).
Авиационная донная мина МДМ-3 (рис. 4.42) предназначена для борьбы с
надводными кораблями всех классов и подводными лодками. Мину можно уста-
Рис.4.42. Авиационная донная мина МДМ-3
4.6. Инженерные боеприпасы и морские мины
389
навливать в морских и океанских районах, а также в шельфовой и пришельфо-
вой зоне на глубинах не менее 15 м. Мина состоит из корпуса и парашютной
системы торможения и стабилизации полета. В корпусе мины размещены: ис-
точник питания, комплект предохранительных и функциональных приборов
(срочности, кратности, ликвидации), трехканальный неконтактный взрыватель,
имеющий акустический, электромагнитный и гидродинамический каналы, а так-
же заряд ВВ (массой 300 кг). Опасная зона мины определяется чувствительнос-
тью неконтактной аппаратуры к воздействию физических полей корабля и со-
ставляет около 50 м. Подрыв мины происходит после того, как корабль или
подводная лодка подойдут на расстояние, при котором интенсивность создавае-
мых ими физических полей будет достаточна для активирования аппаратуры.
Принцип действия мины с неконтактным взрывателем в сочетании с ис-
пользованием приборов срочности и кратности защищает ее от вытраливания
современными тралами и обеспечивает требуемую помехозащищенность при
сроке боевой службы до одного года. При постановке мины с самолетов и
попадании ее на сушу или мелководье она самоликвидируется взрывом. Кон-
струкционное исполнение мины обеспечивает малое характеристическое вре-
мя нахождения на воздушной траектории*, высокую точность минометания и
повышенную ударостойкость.
Мина МДМ-3 имеет длину 1580 мм, диаметр 450 мм, массу 525 кг, макси-
мальную глубину установки 35 м. Мину МДМ-3 можно также устанавливать
с надводных кораблей с минными путями и кормовыми скатами. При этом в
конструкции мины отсутствует тормозной парашютный блок и несколько из-
менены массогабаритные характеристики.
Самотранспортируюшаяся морская донная мина СМДМ (рис. 4.43) пред-
назначена для борьбы с надводными кораблями и подводными лодками в не-
доступных для минирования районах с развитой системой противолодочной
обороны. Допускает постановку в морских и океанских районах, а также в
шельфовой и пришельфовой зоне на глубинах не менее 8 м. Мина состоит из
боевого зарядного отделения, приборного отсека и носителя, в качестве кото-
рого используется серийная торпеда, состоящая на вооружении ВМФ России.
В боевом зарядном отделении размещен заряд ВВ (тротил массой 480 кг).
Постановка мины на позицию происходит путем ее выстреливания из тор-
педного аппарата подводной лодки, после чего она продолжает самостоятель-
но двигаться к месту укладки с помощью торпеды-носителя. В конце прохож-
дения дистанции торпеда ложится на грунт в заданном районе на требуемой
глубине и функционирует далее как обычная донная мина.
Мина создана на базе серийных торпед калибра 533 и 650 мм. Она мало-
заметна после постановки как для гидроакустических станций миноискателя
подводных лодок и надводных кораблей, так и для средств обнаружения, ко-
торыми оснащены подводные аппараты. Подрыв мины происходит после того,
как цель подойдет на расстояние, при котором интенсивность создаваемых сю
физических полей будет достаточна для активирования неконтактной аппара-
туры. Опасная зона мины определяется чувствительностью неконтактной ап-
паратуры к воздействию физических полей корабля.
Мина СМДМ имеет диаметр 533 или 650 мм, длину 7900 или 11 000 мм,
массу 1980 или 5500 кг, максимальную глубину постановки 100...120 м, а
срок боевой службы на позиции - до одного года.
390
4. Фугасные боеприпасы
Рис. 4.43. Самотранспортирующаяся морская донная мина СМДМ
Морская шельфовая мина МШМ (рис. 4.44) предназначена для борьбы
как с подводными лодками, так и с надводными кораблями в прибрежных
районах Мирового океана. Она представляет собой комбинацию донной мины
с подводной самонаводящейся ракетой и устанавливается на грунт в верти-
кальном положении. Неконтактная акустическая аппаратура мины позволяет
обнаруживать современные и перспективные подводные лодки и надводные
корабли (транспорты, десантные и другие корабли ВМФ).
Подводная ракета, стартующая из корпуса МШМ, оснащена неконтакт-
ным акустическим взрывателем, позволяющим ей высокоэффективно пора-
жать цели. Небольшое время атаки на обнаруженную цель (не более 25 с)
практически исключает возможность использования средств противодействия
и проведения маневра уклонения.
Рис. 4.44. Морская шельфовая мина МШМ
4.6. Инженерные боеприпасы и морские мины
391
На грунте МШМ малозаметна как для гид-
роакустических станций подводных лодок и над-
водных кораблей, так и для средств обнаруже-
ния, которыми оснащены противоминные под-
водные аппараты. Мины могут устанавливаться
с надводных кораблей с рельсовыми путями и
кормовыми скатами, подводных лодок с 533 мм
торпедными аппаратами и с помощью авиации.
Мина имеет диаметр 533 мм, длину 4000 мм,
полную массу 820 кг и массу заряда ВВ 250 кг
(в тротиловом эквиваленте). МШМ может уста-
навливаться на глубину от 60 до 300 м и нести
боевую службу на позиции сроком до одного года.
Плавающие морские мины могут’исполь-
зоваться для борьбы как с надводными .корабля-
ми, так и с подводными лодками. Схема одной
из противолодочных автоматически плавающих
мин (США) (рис. 4.45) имеет прибор плавания,
основу которого составляет электродвигатель 5,
вращающий в воде гребной винт 6, расположен-
ный в нижней части мины. Работой электродви-
гателя управляет гидростат 4, который реагиру-
ет на внешнее давление воды и периодически
подключает аккумуляторную батарею 3 к элект-
Рис. 4.45. Автоматическая
плавающая мина
1 - взрыватель; 2 - заряд ВВ; 3 -
аккумуляторная батарея; 4 - гид-
ростат управления электродвига-
телем; 5 электродвигатель; 6 -
гребной винт прибора плавания
родвигателю.
Если мина опускается на глубину больше
той, которая установлена на приборе плавания,
то гидростат включает электродвигатель, который
вращает гребной винт и заставляет мину всплы-
вать до заданного заглубления. После этого гид-
ростат выключает питание двигателя. Если же
мина будет продолжать всплывать, то гидростат вновь включает электродви-
гатель, но в этом случае гребной винт будет вращаться в обратную сторону и
заставит мину углубиться. Считается, что точность удержания такой мины на
заданном углублении может быть достигнута ±1 м.
Контактный ударный взрыватель / мины срабатывает при приложении не-
которого усилия на чувствительные элементы, появляющегося в результате
контакта с судном, вызывая последующий взрыв заряда ВВ 2 мины.
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ
Андреев С.Г, Овчинников А.Ф, Охитин В.Н. Основы конструкции и действия
боеприпасов. Ч. I: Теория и расчет. М.: Изд-во ЦНИИИНТИ, 1989.
Егоров С. Высокоточное бомбовое вооружение авиации // Военный парад. 1994.
№ 2. С. 76- 78.
Забегаев С.К., Савченко Н.Н. Средства устройства и преодоления минно-взрыв-
ных заграждений. М.: Изд-во ВИУ, 2002.
Инженерные боеприпасы. М.: Изд-во МО, 1976.
392
4. Фугасные боеприпасы
Коул Р. Подводные взрывы. М.: Изд-во ИЛ, 1950.
Латухин А.Н. Современная артиллерия. М.: Изд-во МО, 1970.
Ляхов ГМ. Основы динамики взрыва в грунтах и горных породах. М.: Недра,
1974.
Мирополъский Ф П., Саркисян PC., Вишняков О.Л., Попов А.М. Авиационные бое-
припасы и их исследование М.: Изд-во ВВИА им. Н.Е. Жуковского, 1996.
Морозов К.В. Минно-торпедное оружие. М.: Изд-во ДОСААФ, 1974.
Оружие России: Каталог. Т. I: Вооружение сухопутных войск. М.: АОЗТ «Воен-
ный парад», 1995.
Оружие России: Каталог. Т. II: Авиационная техника и вооружение Военно-воз-
душных сил. М.: АОЗТ «Военный парад», 1996.
Оружие России: Каталог. Т. III: Корабли и вооружение Военно-морского флота.
М.: АОЗТ «Военный парад», 1996.
Оружие России: Каталог. Т. VII: Высокоточное оружие и боеприпасы. М.: АОЗТ
«Военный парад», 1997.
Прохоров Б.А. Боеприпасы артиллерии. М.: Машиностроение, 1973.
Садовский М.А. Геофизика и физика взрыва: Избранные труды. М.: Наука. 1999.
Саламахин Т.М. Физические основы механического действия взрыва и методы
определения взрывных нагрузок. М.: Изд-во ВИА им. В.В. Куйбышева, 1974;
Справочник по минно-взрывным средствам армий капиталистических госу-
дарств. М.: Изд-во МО, 1996.
Третъяков ГМ. Боеприпасы артиллерии. М.: Изд-во МО. 1947.
Физика взрыва: В 2 т. / Под ред. Л.П. Орленко. М.: Физматлит, 2002.
Широкорад А.Б. Энциклопедия отечественного ракетною оружия 1817-2002 ' Под.
общ. ред. А.Е. Тараса. М.: ООО «Изд-во АСТ»; Минск: Харвест, 2003.
Шунков В.Н. Ракетное оружие. Минск: ООО «Попурри», 2001.
5
БОЕПРИПАСЫ ОБЪЕМНОГО ВЗРЫВА
5.1. Основные понятия и общие сведения
Объемный взрыв - это процесс распространения реакции взрывчатого пре-
вращения в той или иной форме в больших объемах топливовоздушных сме-
сей (ТВС), сопровождающийся формированием в окружающем воздухе взрыв-
ных волн. К боеприпасам объемного взрыва (БОВ) относят фугасные БП, при
функционировании которых проявляются эффекты объемного взрыва, т. е. фор-
мируется ТВС и в ней возбуждается реакция взрывчатого превращения. Ос-
новное преимущество БОВ заключается р-’гом. что к поражаемому объекту
можно доставлять одно лишь горючее, а.в качестве окислителя в реакции
взрывчатого превращения использовать кислород окружающего воздуха. Если
при этом учесть, что теплота сгорания типичных углеводородных горючих
более чем на порядок превосходит удельную теплоту взрыва тротила, то мож-
но ожидать соответствующего повышения фугасного поражающего действия.
В связи с этим некоторые иностранные специалисты рассматривают БОВ как
промежуточное звено между фугасными БП с обычным снаряжением и ядер-
ными БП малой мощности.
В отечественной литературе БОВ также называют боеприпасами объем-
но-детонируюших систем (ОДС). За рубежом они получили название FAE (Fuel
Air Explosive). В последнее время у нас в стране такие БП стали иногда назы-
вать боеприпасами компрессионного действия (от англ, compression - сжатие,
давление), что не отражает сути явления. Дело в том, что фугасное действие
УВ в любой среде связано с возникающей областью избыточного давления, а
при взрыве в воздухе и с давлением торможения скоростного потока, при этом
разрушение объектов в подавляющем большинстве случаев происходит не в
результате всестороннего сжатия, а под воздействием суммарной силовой на-
грузки, возникающей в процессе обтекания УВ и направленной в сторону рас-
пространения фронта.
Рассматривая принцип действия БОВ, можно провести аналогию со слу-
чайными взрывами на предприятиях химической промышленности, на скла-
дах легковоспламеняющихся летучих веществ, в жилых домах при утечке бы-
тового газа. В подобных случаях взрыв имеет одинаковый характер - образо-
вание ТВС, которая затем воспламеняется от случайного источника. При
определенных условиях в таких смесях могут развиваться высокоскоростные
режимы распространения пламени, вплоть до детонационного, приводящие к
большим разрушениям и человеческим жертвам.
Поскольку ТВС способны проникать в негерметичные объемы и форми-
роваться по профилю рельефа местности, то при создании условий для дето-
нации от поражающего действия не защищают ни складки местности, ни
394
5. Боеприпасы объемного взрыва
полевые оборонительные сооружения. Кроме того, попадая в замкнутые объе-
мы через вентиляционные входы фортификационных сооружений или откры-
тые окна зданий, ТВС оказываются в более благоприятных условиях для раз-
вития детонации и разрушают несущие конструкции изнутри. Подобные свой-
ства БОВ позволяют рассматривать их в качестве СП неукрытой и слабо
защищенной живой силы, боевой техники на открытой местности, фортифи-
кационных и оборонительных сооружений, проделывания проходов в минных
заграждениях, расчистки и подготовки временных площадок для десантиро-
вания и посадки вертолетов, разрушения зданий и т. п.
Топливовоздушные смеси по своей структуре могут быть газовыми (го-
могенными) или гетерогенными. В первом случае они представляют собой
смеси с воздухом горючих газов либо паров горючего, а во втором - аэровзве-
си мелких жидких капель или твердых частиц горючих материалов.
Известно, что газовые ТВС могут воспламеняться и устойчиво гореть при
определенных условиях. В теории горения существуют понятия так называе-
мых нижнего и верхнего концентрационных пределов воспламенения (НКПВ
и ВКПВ соответственно). При концентрации горючего газа или napoj в смеси
с воздухом ниже НКПВ или выше ВКПВ реакции с последующим развитием
горения не происходит. Таким образом, одно из условий возникновения хими-
ческой реакции горючего - его перемешивание с воздухом в определенном
соотношении.
Другое условие возникновения горения ТВС - это наличие источника вос-
пламенения в объеме реакционноспособной среды. Следует отметить, что энер-
гии искры, возникающей на контактах электрического звонка, выключателя
освещения, реле времени холодильника и других электробытовых приборов в
момент их включения или выключения, как правило, достаточно для воспла-
менения подготовленной газовой ТВС. Именно этим объясняется большое ко-
личество аварийных происшествий при взрывах бытового газа в помещениях.
Воспламенение ТВС в локальной области приводит к развитию процес-
са горения, начальная скорость распространения которого не превышает
0,3...0,4 м/с, при этом температура в области фронта горения может прини-
мать значения, близкие к 2000 °C. Сгорание относительно небольшого объема
ТВС (до нескольких кубических метров) в свободном воздушном простран-
стве способно оказать лишь некоторое термическое действие на объекты, рас-
положенные в непосредственной близости, а волны сжатия, возникающие при
этом, сравнимы с порывами ветра.
Другая картина возникает при воспламенении ТВС внутри замкнутого
объема. Это связано с изменением физико-химических процессов, происходя-
щих в ТВС при указанных условиях. В результате химического превращения
при горении объем нагретых продуктов реакции в несколько раз превышает
объем исходной газовой смеси, что приводит к образованию волн сжатия, рас-
пространяющихся со скоростью звука. Волны сжатия отражаются от поверх-
ностей, ограничивающих объем ТВС, что в свою очередь вызывает повыше-
ние давления всей газовой среды. Кинетика химических реакций такова, что
повышение давления приводит к интенсивному ускорению распространения
фронта горения, скорость которого для углеводородных смесей может дости-
гать десятков и даже сотен метров в секунду. При этом вся реакционность
5.1. Основные понятия и общие сведения 395
собная смесь срабатывает с эффектом взрыва независимо от объема ТВС и
реализуется другая форма химического превращения - взрывное (дефлагра-
ционное) горение с образованием сильных волн сжатия, а в некоторых случа-
ях - УВ с избыточным давлением на фронте до нескольких атмосфер.
Дефлаграционное горение может развиться и при воспламенении газовых
ТВС в свободном (незамкнутом) объеме, однако при этом линейные размеры
топливовоздушного облака должны составлять не менее нескольких десятков
и даже сотен метров, а объем - от десятков до сотен тысяч кубических мет-
ров. Скорость распространения фронта пламени существенно возрастает при
обтекании различных препятствий за счет турбулентного перемешивания не-
сгоревшей ТВС с горячими продуктами сгорания.
Другая форма взрывчатого превращения ТВС - детонация, которая яв-
ляется основной формой взрывчатого превращения при срабатывании БОВ.
Главное отличительное условие возникновения этого процесса - наличие ис-
точника, способного генерировать УВ с определенными параметрами в под-
готовленной смеси. Такими источниками могут быть взрыв заряда конден-
сированного ВВ или мощный искровой разряд При этом минимальная энер-
гия источника возбуждения детонации во много раз превышает минимальную
энергию, необходимую для возникновения горения. Если минимальное значе-
ние энергии воспламенения газовых ТВС обычно порядка миллиджоуля, то
значение минимальной массы заряда тротила, взрыв которого способен выз-
вать детонацию в ТВС, находится в диапазоне от (есятков граммов до не-
скольких килограммов.
В больших объемах газовых ТВС детонационный режим взрыва может
быть достигнут в результате постепенного возрастания скорости распростра-
нения фронта горения (особенно при различных препятствиях). В свободных
объемах гетерогенных ТВС выйти на режим детонации таким образом не уда-
ется.
Значения параметров на фронте детонационной волны в ТВС существен-
но превышают параметры на фронте горения Так. скорость детонации в сме-
сях на основе углеводородов составляет 1500... 1800 м/с, давление
1,5...2,0 МПа, а массовая скорость газового потока, направленного в сторону
движения волны, - 600...800 м/с. Детонационная волна с указанными пара-
метрами приводит к последующему распространению ВУВ вне облака ТВС.
Этим и обусловлено значительное поражающее фугасное действие таких взры-
вов не только внутри объема смеси, но и на существенных расстояниях за его
пределами. Именно эти особенности стали причиной разработки и принятия
на вооружение многими странами высокоэффективных БП на основе топли-
вовоздушных детонирующих смесей.
Как при воспламенении, так и при детонации существуют нижний и верх-
ний концентрационные пределы (табл. 5.1), внутри которых смесь способна
устойчиво детонировать.
Независимо от формы превращения наибольшая энергия химической ре-
акции выделяется при таком соотношении горючего и окислителя, когда все
атомы углерода и водорода способны полностью окислиться до СО2 и Н2О,
при этом кислорода в смеси не остается. Такие ТВС называются стехиомет-
рическими.
396
5. Боеприпасы объемного взрыва
Таблица 5.1. Концентрационные пределы детонации
и воспламенения ТВС, % (об.)
Горючий компонент Детонация Воспламенение
в неограниченном пространстве в замкнутом объеме
Нижний Верхний Нижний Верхний Нижний Верхний
Ацетон С3Н6О - - - - 2.2 13,0
Ацетилен С2Н2 — — 4,2 50,0 2,0 81,0
Бензин С7 i7H140 - - -5,6 -9,4 0,79 5,16
Бутан С4Н10 2,5 5,2 1,98 6,18 1,9 9,1
Водород Н2 - - 18,3 58,9 4,0 75,0
Пропан С3Н8 3,0 7,0 2,57 7,37 2,1 ’ 9,5
Пропилен С3Н6 3,5 8,5 3,55 10,40 2,4 ; 11,0
Этан С2Н6 4,0 9,2 2,87 12,20 2,9 15,0
Этилен С2Н4 - - 3,32 14,70 2,7 36.0
Бензол С6Н6 - - 1,6 5,55 1,3 7.9
Ксилол С6Н10 - - — - 1,1 6,4
Циклогексан С6Н12 - - - - 0,57 7,8
Метан СН4 - - — - 5.0 15,0
Аммиак NH3 - — - — 15,5 27,0
Оксид углерода СО - - - - 12,5 74,2
Сероводород H2S - - - - 4,3 45,5
Примечание. Концентрационные пределы детонации ТВС, как правило, уже, чем кон- центрационные пределы воспламенения.
Условная формула воздуха, представленного в виде смеси кислорода и
азота в объемном соотношении 21:79 с молярной массой рв = 29, имеет вид
O043N] 58. Тогда химическую реакцию превращения стехиометрической сме-
си углеводородов с воздухом можно записать в виде
CflН/; + d O0i43N158 = аСО2 + 0,5Ь Н2О + 0,79 J N2, (5.1)
где а и b - число атомов углерода и водорода в молекуле горючего (либо в
условной химической формуле смеси углеводородов) соответственно; d - ко-
эффициент, d - (2а + 0,5Ь)/0,43.
Согласно формуле (5.1) относительная массовая концентрация углеводо-
родного горючего в стехиометрической газовой смеси с воздухом равна
8ст =-----—-----
(5.2)
где р, - молярная масса углеводородного горючего либо смеси углеводородов,
|lr = 12а + Ь.
5.1. Основные понятия и общие сведения 397
Объемная концентрация горючего в ТВС связана с массовой соотношением
. (5.3)
Sc +(1-8стЛг
Ев
Расчетные значения рт, 8СТ и Q, для некоторых горючих газов и паров
представлены в табл. 5.2. Формулы (5.1)-(5.3) могут быть использованы для
проведения расчетов любых углеводородных горючих или их смесей.
Таблица 5.2. Значения параметров некоторых горючих и их смесей
Горючее Молярная масса цг, г /моль Относительная массовая стехиометрическая концентрация 5СТ, % Удельная теплота сгорания Q, 10 3, ккал/кг
Метан СН4 16 - 5,60 11,94
Этан С2Н6 30 5,97 11,36
Пропан C3HR 44 6,12 11,09
Бутан С4Н10 58 6.20 10,94
Ацетилен С2Н2 26 7,16 11,53
Бензин С7 17Н14 0 100 6,50 10,37
Ацетон С3Н6О 58 9,71 7,37
Если горючее представляет собой смесь нескольких газов, то необходимо
в первую очередь определить его условную химическую формулу, т. е. рас-
считать коэффициенты а и Ь, входящие в выражение (5.1) по соотношениям
N
a = '^aiai-, b = '£aibi,
i=i i=i
(5.4)
где N - количество компонентов в смеси; а,, Ь, - число атомов углерода и
водорода в молекуле /-го компонента соответственно; а, - мольная концентра-
ция /-го компонента в смеси горючего.
Как правило, массовые концентрации отдельных компонентов в исходной
горючей смеси известны. Определить мольные концентрации, необходимые
для расчета коэффициентов а и Ь, можно по формуле
а, =
5,
N 8- ’
цг,- X
1=1 Г*Г|
(5.5)
где и 8( - молярная масса и массовая концентрация г-го горючего компо-
нента соответственно.
398 5. Боеприпасы объемного взрыва___________________
Следует отметить, что сумма мольных (так же, как и массовых) концент-
раций компонентов смеси всегда равна единице.
После вычислений по зависимостям (5.4) и (5.5) можно рассчитать массо-
вые и объемные стехиометрические соотношения смеси горючих с воздухом
по формулам (5.1)—(5.3).
Параметры взрыва ТВС в режиме детонации
Параметры детонации ТВС. Параметры на фронте детонационной волны
в ТВС полностью определяются удельной теплотой взрыва смеси (9СМ (Дж/кг),
показателем адиабаты продуктов взрыва Лпв, начальным давлением р0 (Па) и
плотностью смеси рсм (кг/м3):
£>=72(^nB-i)eCM;
2
A Pr> = Pd ~ Ро = г = 2(^пв _0РсмСсм; .-* (5-6)
Апв + 1
_ D О
U[) ~ 7- Л ’ Cd ~ пв 7 Л ’
*пв+1 Лв + 1
где D - скорость распространения фронта детонационной волны (скорость дето-
нации), м/с; ^pD - избыточное давление на фронте детонационной волны, Па;
pD, uD, cD - давление (Па), массовая скорость (м/с) и скорость звука (м/с)
в ПД непосредственно за фронтом детонационной волны.
Формулы (5.6) получены для сильной детонационной волны и справедли-
вы с погрешностью не более 5 % при давлении на фронте pD > 10 /?0.
Плотность смеси связана с плотностью окружающего воздуха рв соотно-
шением
1-8 1-Ив
Здесь 8 - относительная массовая концентрация горючего,
8 = mv/(mB + тг),
где тв, тг - массы воздуха и горючего в смеси соответственно.
Принимая для гетерогенных ТВС в формуле (5.7) ц, получаем
р =-^5-
Рсм
Удельная теплота взрыва £>см зависит от состава смеси и может быть рас-
считана по удельной теплоте взрыва на единицу массы горючего Qr, если вер-
но предположение, что в обедненных ТВС реагирует вся масса топлива, а в
5.1. Основные понятия и общие сведения 399
обогащенных - лишь часть, соответствующая наличию кислорода в смеси. В
этом случае нетрудно получить
бсм
5(2, при <5 < 6СТ;
8gr J при 5>5СТ.
J Ост 1
(5.8)
Удельная теплота взрыва на единицу массы горючего определяется с по-
мощью термодинамических расчетов. В первом приближении за величину Qr
можно принять стандартную теплоту сгорания горючего (см. табл. 5.2).
При известных теплоте взрыва и скорости детонации ТВС показатель ади-
абаты ПВ рассчитывается по формуле, являющейся следствием первого соот-
ношения из выражения для D (5.6),
^'пв
1 + 0,5—.
Сем
(5.9)
Согласно анализу термодинамических расчетов, показатель адиабаты ПВ
принимает минимальное значение Лст при детонации ТВС стехиометрическо-
го состава и в первом приближении в области концентрационных пределов
взрываемости смеси может быть описан линейной зависимостью
"Р"
(5.10)
Лст + (кг - кСТ)——при 5 > 5СТ,
]-9С1
где кв - показатель адиабаты воздуха, кв - 1,4; кг - расчетная константа.
Для углеводородных газообразных и жидких топлив значения Аст и кг ме-
няются незначительно (Аст =1,23... 1,25, kv = 1,5... 1,7) и могут быть приняты
равными средним значениям, kCJ = 1,24, кг = 1,6.
Параметры детонационного взрыва внутри облака ТВС. Анализ ре-
зультатов математического моделирования сферического взрыва газовых и ге-
терогенных ТВС показывает, что существуют две характерные области: внут-
ри и вне смеси, параметры в которых зависят от соответствующих характери-
стик и изменяются различным образом. При этом особое значение приобретают
параметры на границе облака, связывающие поле взрыва обеих областей.
Начальное избыточное давление ВУВ Д/?„ может быть найдено из реше-
ния задачи о распаде произвольного разрыва. Учитывая относительно низкую
интенсивность детонационной волны в ТВС, нетрудно получить приближен-
ное аналитическое решение:
Др„ а1,025ДРозО—(5.11)
V ^ПВ +1 Рем
Для стехиометрических углеводородных ТВС (Апв = 1,24) значение рсм
мало отличается от рв, поэтому соотношение (5.11) примет вид Д рп = 0,78 Д pD.
400 5. Боеприпасы объемного взрыва
Для удельного импульса избыточного давления на границе облака ТВС
можно записать выражение
to
‘о = J&pdt ~ торп,
о
где т0 - длительность фазы сжатия в волне, которая для сферической симмет-
рии приблизительно равна 3,3 r0/D (г0- радиус облака).
По данным анализа численных результатов получено
i0 = 0,1472т0А рп = 0,486г0 . (5.12)
Для стехиометрических углеводородных ТВС формула (5.12) принимает
вид z0 = О,38го Арр/£>.
Максимальное избыточное давление Арт внутри облака ТВС совпадает с
избыточным давлением на фронте детонационной волны Ард и расЦчитыва-
ется по соответствующему соотношению из формул (5.6).
Учитывая автомодельность решения для сферической детонационной
волны, можно получить функциональную зависимость от радиуса г ддя удель-
ного импульса избыточного давления в окрестности места инициирования:
о ( <i>)
где а,Ь- константы, которые по результатам численных расчетов равны 0,96
и 0,47 соответственно. Следовательно,
Д =^£-(о,96-0,47 — 1 (5.13)
D ( го ,
В окрестности границы облака за счет быстрого прихода волны разреже-
ния удельный импульс фазы сжатия может заметно отклоняться от значения,
полученного по (5.13). Обобщая эту формулу для всей области внутри ТВС,
с учетом численных результатов можно записать
»+('')+[«о
где /+(г) и <+(г0) - значения импульса, вычисленные по формуле (5.13) для
рассматриваемой точки и границы облака г0.
С помощью выражений (5.12) и (5.13) последнее соотношение приводит-
ся к виду
/+=-^^(о,96-О,47 —]+fo,486^^-O,49^^1(—"l . (5.14)
D ( г() Д D D Дг0 J
5.1. Основные понятия и общие сведения
401
В случае применения стехиометрических углеводородных ТВС формула
(5.14) упрощается и записывается в виде
•+ = гоАРв о,96-О,47—-0,11Г—1
D го И ))
Параметры ВУВ при детонации ТВС. В качестве основных парамет-
ров, определяющих распространение ВУВ, как правило, принимают энергию
взрыва Е, а также давление р0 и плотность рв окружающего воздуха. Однако
физически более обоснован выбор не энергии взрыва, а энергии ударной вол-
ны Еув (эта энергия равна работе расширяющихся ПВ над окружающим воз-
духом). При взрыве зарядов конденсированных ВВ энергия УВ достигает
величины порядка 0,9Е и слабо изменяется при переходе от одного ВВ к
другому.
При детонации ТВС работа расширяющихся ПВ над окружающим воз-
духом составляет примерно половину от выделившейся энергии Е и может
заметно изменяться в зависимости от состава смеси и параметров воздуха.
Поэтому в качестве основного определяющего параметра У В при детона-
ции ТВС выбрана энергия ударной волны Еув, которую рассчитывают по
формуле
£УВ=Пд£’о’ (5.15)
где Т] - КПД взрыва (отношение энергии УВ к энергии взрыва); с, - коэффи-
циент полноты реакции горючего; Ео - полная энергия, которая выделяется
при реагировании всей массы горючего тТ, Ео = mrQT.
В случае идеальной детонации, т. е. при выделении всей энергии во фронте
волны, в соответствии с формулой (5.8) коэффициент полноты реакции горю-
чего для ТВС с постоянной по объему концентрацией равен
G =
1 при 5 < 5СТ;
1/5-1 s s
Pg-тт при s *s"
*7 СТ
(5.16)
Для типичных углеводородных ТВС на верхнем концентрационном пре-
деле взрываемости коэффициент полноты реакции горючего составляет при-
мерно 0,25; в плохо перемешанных смесях с областями концентрации горю-
чего, выходящей за пределы взрываемости, 0,02... 0,10.
Коэффициент полезного действия детонационного взрыва ТВС достаточ-
но точно можно рассчитать по формуле
"_Ро
\(^пв _ ОАпв
(5.17)
которая получена из модели равновесного расширения ПВ от детонационного
давления до давления окружающего воздуха.
402
5. Боеприпасы объемного взрыва
Для стехиометрических углеводородных ТВС с давлением на фронте де-
тонационной волны pD = (T5...2O)/jo значение КПД взрыва изменяется в диа-
пазоне Г| = 0,41 ...0,44.
Максимальное избыточное давление в точке, удаленной на расстояние г
от центра детонационного взрыва сферического облака ТВС, соответствует
давлению на фронте УВ в воздухе и может быть определено по аппроксима-
ционной зависимости
&Рт = Ро °’249
\Мув/ Ро
+ 0,393
\2
+ Дехр
г ~ 'о
0,15г0
(5.18)
х/^ув Ро
где А - константа, определяемая из выражения (5.18) по известному началь-
ному давлению УВ (5.11) при условии, что г - г0.
Третье слагаемое в квадратной скобке формулы (5.18) описывает очень
резкий спад давления на фронте ВУВ вблизи облака ТВС и заметно влияет на
результаты расчетов лишь при г < 1,5г0. На больших расстояниях дм можно
пренебречь. ? *
Удельный импульс избыточного давления (+ фазы сжатия УВ на удалении г
от центра взрыва находят по формуле
г+ = 0,058 зКв Мв/Ро I JZb f +1
V Ро r V г ) I ' )
Па с. (5.19)
Выражение в квадратной скобке формулы (5.19) описывает немонотонное
изменение величины i+ в окрестности облака ТВС и при г > 5г0 значение /+
становится практически равным единице. Константу В вычисляют по извест-
ному значению удельного импульса на границе облака ТВС (5.12) из выраже-
ния (5.19) при г =г0. Для углеводородных ТВС на любых расстояниях (г > г())
значение выражения в квадратных скобках отличается от единицы не более
чем на 10 %. Поэтому с указанной погрешностью для оценки удельного им-
пульса ВУВ можно пользоваться зависимостью
i+ «0,058^ Ж fes/Po , па е.
V Ро г
(5.20)
Запись выражений для определения максимального избыточного давле-
ния и удельного импульса (5.18)-(5.20) с использованием позволяет учесть
влияние давления окружающего воздуха (при взрывах на различной высоте
над уровнем моря), а введение рв в формулы для расчета удельного импуль-
са - температуру и влажность воздуха.
В случае формирования облака ТВС непосредственно у поверхности зем-
ли в первом приближении его можно представить в виде полусферического
объема. При этом в зависимостях (5.18)—(5.20) следует подставлять удвоен-
ную энергию УВ, рассчитанную по соотношению (5.15), а радиус облака г0
вычислять, как для полусферы.
403
5.1. Основные понятия и общие сведения
Параметры взрыва ТВС в режиме дефлаграции
При дефлаграционном взрыве ТВС доля энергии, уходящая в ВУВ, зави-
сит не только от состава смеси, но и от скорости распространения фронта
горения U, изменяется в очень широком диапазоне (от нуля до предельного
значения) и, как правило, не может быть рассчитана заранее. Поэтому пара-
метры ВУВ связывают с эффективным энергозапасом горючей смеси Е, опре-
деляемым по соотношению
/ЛгСг
при
при
5<8СТ;
5>5СТ,
(5.21)
где Qr — стандартная теплота сгорания горючего.
При расчете параметров взрыва облака ТВС, лежащего на поверхности
земли, величина Е удваивается.
При видимой скорости распространения фронта горения, U> 500... 600 м/с,
параметры дефлаграционного взрыва как внутри облака ТВС, так и в воздухе
близки к детонационному режиму и, в первом приближении, могут быть оце-
нены по соответствующим зависимостям (5.6)-(5.20).
При меньшей скорости распространения фронта горения на параметры
ВУВ кроме эффективного энергозапаса смеси (5.21) также оказывает влияние
степень расширения с продуктов сгорания. Для газовых смесей типичных уг-
леродов о = 7, а для гетерогенных - о = 4. При этом смесь считается гетеро-
генной, если более 50 % горючего содержится в облаке в виде капель.
Максимальное избыточное давление Арт и удельный импульс фазы сжа-
тия i+ в волне на расстоянии г от центра облака ТВС рассчитывают по зависи-
мостям:
&Рт = Ро
I2 <3-1
со ) °
0,83^£//?о -0,14
г
U
"х/^0
_Ро
X
X 0,06^. +0,01
\2
-0,0025
Г
г
... ~ 0-1(7
где с0 - скорость звука в воздухе; W - расчетный параметр, W =-.
_____° со
Формулы (5.22) и (5.23) справедливы для значений г/^/Е/ р0 > 0,34. При
выходе за указанный диапазон Дрт и /+ принимают значения, соответствую-
щие аргументу г/%]Е/ р() =0,34. Так же, как и формулами (5.18), (5.20), за-
404
5. Боеприпасы объемного взрыва
висимостями (5.22) и (5.23) можно пользоваться при определении парамет-
ров дефлаграционного взрыва, произошедшего на любой высоте над уров-
нем моря, при разных значениях температуры и влажности воздуха
5.2. Двухтактные боеприпасы объемного взрыва
Принцип действия двухтактных БОВ сводится к распылению в воздухе
жидкого горючего снаряжения с образованием облака ТВС, которое через не-
которое время подрывается одним или несколькими вгоричными инициатора-
ми. Название таких БОВ связано с двухэтапностыо схемы их функциониро-
вания: первый этап включает в себя взрыв диспергирующего заряда в кон-
тейнере с горючим снаряжением и формирование взрывоспособного облака
ТВС, а второй - срабатывание вторичных инициаторов, возбуждение в ТВС
самоподдерживающейся реакции взрывчатого превращения и формирование
в окружающем воздухе УВ. Часто их называют боеприпасами объемного
взрыва.
Первый подрыв макета БОВ был осуществлен военно-морскими силами
США в 1960 г. и показал перспективность разработки таких БП. Работы по
созданию БОВ в США начались в 1966 г., а впервые их использовали в 1967 г.
во Вьетнаме для проделывания проходов в минных полях и расчистки взлет-
но-посадочных площадок для вертолетов. В 1969 1970 гг. проводились бое-
вые испытания (Вьетнам) первой кассетной бомбы CBU-55/B, которая была
принята на вооружение ВВС США в 1971 г. К настоящему времени в США
разработано уже несколько поколений БОВ, различия между которыми сво-
Рис. 5.1. Кассета CBU-55/B, подвешенная на держателе вертолета UH-1,
подготавливаемого к вылету на боевое задание
5.2. Двухтактные боеприпасы объемного взрыва
405
дятся в основном к использованию более скоростных носителей, поиску но-
вых горючих энергоемких составов и совершенствованию техники формиро-
вания аэрозоля, что влечет за собой конструктивные изменения и повышение
боевой эффективности БП.
Авиационная бомбовая кассета CBU-55/B (рис. 5.1) калибра 500 фунтов -
типичный образец первых БОВ (в западной прессе ее относят к БП первого
поколения), которая применялась с легких дозвуковых самолетов А-37 и
OV-10 и вертолетов UH-1 при высоте полета около 600 м и скорости 120 км/ч.
Кассета содержит три бомбы BLU-73 со следующими характеристиками: об-
щая масса - 235 кг, масса снаряжения (жидкого оксида этилена) в каждой
бомбе - 32,6 кг, масса одной бомбы - 45 кг, длина кассеты - 2285 мм, диаметр
корпуса - 356 мм, размах хвостового стабилизатора - 712 мм, база подвески
356 мм.
Вдоль борта корпуса кассеты от очка головного взрывателя до донной
крышки проложен детонирующий шнур, который при подрыве обеспечивает
раскрытие кассеты в воздухе. Каждая из трех бомб пред-
ставляет собой цилиндрическую канистру 2 (рис. 5.2) дли-
ной 530 мм и диаметром 345 мм, снабженную индивиду-
альным парашютом 6 и взрывателем ударного действия 1
с выдвижным щупом. На цилиндрической стенке бомбы,
выполненной из тонкой листовой стали, через каждые 15°
нанесены продольные насечки (концентраторы напряже-
ний), обеспечивающие регулярность дробления корпуса.
Вдоль оси цилиндрического корпуса размещен разрыв-
ной (диспергирующий) заряд 3, масса которого состав-
ляет примерно 2 % массы снаряжения.
После сбрасывания кассеты с самолета или вертоле-
та через некоторое время происходит ее раскрытие и раз-
деление бомб. Затем выдвигаются щупы взрывателей и
раскрываются индивидуальные парашюты каждой из
бомб, которые уменьшают скорость снижения у земной
поверхности до 33 м/с. При касании щупом поверхности
земли (рис. 5.3) срабатывает ударный взрыватель, под-
рывающий центральный разрывной заряд, который раз-
рушает корпус и разбрасывает снаряжение в окружаю-
щую атмосферу. В результате образуется топливовоздуш-
ное облако диаметром 15... 17 м и высотой 2,5...3,0 м.
Подрыв облака ТВС производится детонаторами (вторич-
ными инициаторами), выбрасываемыми в облако при
взрыве центрального разрывного заряда, спустя 125 мс
на высоте примерно 1 м.
Избыточное давление на фронте детонационной вол-
ны, формирующейся в ТВС, составляет порядка 2 МПа и
может возрасти до 5 МПа при отражении от поверхнос-
ти земли и различных объектов. После выхода волны из
ТВС параметры ее быстро уменьшаются и на расстоянии
трех-четырех радиусов облака избыточное давление на
Рис. 5.2. Схема БОВ
BLU-73:
1 — взрыватель; 2 - ци-
линдрический корпус
(канистра); 3 - цент-
ральный разрывной за-
ряд; 4 - жидкое горю-
чее; 5 - устройство
инициирования ТВС;
6 тормозной парашют
406
5. Боеприпасы объемного взрыва
Рис. 5.3. Схема действия БОВ:
1 тормозной парашют; 2 - облако ТВС; 3 детонатор; 4 выдвижной туп
: •»
фронте ВУВ становится менее 0,1 МПа. Однако даже при таком давлении
наносятся значительные повреждения различным объектам. Например, са-
молеты становятся полностью непригодными к использованию после воз-
действия на них ВУВ с избыточным давлением 0,028...0,042 МПа. Диапазон
давлений 0,07...0,09 МПа считается критическим для надводных кораблей
всех типов, так как при этих значениях они получают тяжелые повреждения
либо теряют плавучесть. Избыточное давление 0,042 МПа приводит к по-
вреждениям средней тяжести, под которыми понимается полный вывод из
строя навигационного оборудования и большинства механизмов, влекущий
за собой необходимость восстановления трубопроводов и устройств для креп-
ления оборудования, расположенного как снаружи, так и внутри корабля.
В то же время специалисты полагают, чго при выводе из строя только одно-
го электронного оборудования современный корабль практически полностью
лишается боеспособности.
Согласно приводимым в зарубежной печати данным, при нормальной орга-
низации детонационного процесса каждая из бомб кассеты CBU-55/B полно-
стью уничтожает даже густую растительность на площади диаметром 30 м.
При этом на поверхности земли воронка не образуется, что позволяет исполь-
зовать площадку для посадки вертолетов.
В 1971 г. была создана модификация этой кассеты, получившая обозначе-
ние CBU-72. Ее можно применять со скоростных самолетов А-4 Skyhawk, А-7
Corsair и F-4 Phantom. Кассета оснащена дополнительным тормозным пара-
шютом, замедляющим ее снижение до скорости, при которой возможно рас-
крытие и дальнейшее самостоятельное падение бомб BLU-73.
В конце 1960-х годов предприняли попытку создать АБ объемного взры-
ва большого калибра (2500 фунтов). Однако испытания, проведенные в США,
показали, что ее конструкция не обеспечивает расчетной эффективности даже
при нормальных погодных условиях. В связи с этим специалисты ВВС США
временно отказались от идеи крупнокалиберных БП и разработали малокали-
5.2. Двухтактные боеприпасы объемного взрыва 407
берные бомбы объемного взрыва BLU-72 и BLU-76, снаряжаемые в кассеты
и предназначенные для использования с дозвуковых и сверхзвуковых само-
летов соответственно. Боевым снаряжением в них является оксид этилена
(33,5 кг), время задержки подрыва после распыления горючего и образова-
ния единого топливовоздушного облака может достигать более 4 с.
Для авиации морской пехоты создана система MADFAE (до 12 бомб объем-
ного взрыва, подвешиваемых на вертолетах CH-46, СН-53 и UH-I), которая
предназначена для проделывания проходов в минных заграждениях. Каждая
бомба снаряжается 62 кг оксида этилена или пропилена. Сброс бомб может
производиться одновременно, одиночно или поочередно. Максимальная дли-
на прохода в минном заграждении составляет около 300 м.
В качестве горючего для бомб объемного взрыва первого поколения были
испытаны и признаны пригодными для использования углеводородные топ-
лива, находящиеся при нормальном или'повышенном давлении в жидком со-
стоянии, в том числе оксиды этилена или пропилена, метан, пропилнитрат,
МАРР (смесь метила, ацетилена, пропадиена и пропана).
Опыт боевого применения и результаты многочисленных испытаний по-
зволили оценить эффективность бомб объемного взрыва первого поколения
и выявить их недостатки. В частности, одним из наиболее серьезных недо-
статков специалисты из США считают существенную зависимость эффек-
тивности АБ от соблюдения методики бомбометания и метеорологических
условий, которые непосредственно влияют на образование топливовоздуш-
ного облака. В бомбах BLU-73 выявили конструктивный недостаток, огра-
ничивающий их применение в условиях отрицательных температур. В част-
ности, установили, что при температуре ниже -7 °C за счет объемного сжа-
тия оксида этилена происходят образование пустот внутри контейнера и
оголение диспергирующего заряда. В результате формируется облако с не-
оптимальной концентрацией и возможно воспламенение ТВС до момента
срабатывания вторичных инициаторов.
Учитывая накопленный опыт, в США в первой половине 1970-х годов
был развернут широкий фронт работ по теоретическим исследованиям и про-
ектированию БОВ второго поколения. Эти работы велись по двум основным
направлениям: создание теоретических основ процесса оптимального форми-
рования топливовоздушного облака и механизма его подрыва с уменьшением
зависимости от метеорологических факторов и обеспечением максимальной
боевой эффективности; поиск новых, более энергоемких топлив и проектиро-
вание мощных БОВ, способных развивать повышенное избыточное давление
во фронте ВУВ (до 10 МПа). В результате проведения исследовательских и
конструкторских работ в США создали АБ объемного взрыва второго поколе-
ния BLU-95 (калибр 500 фунтов) и BLU-96 (калибр 2000 фунтов), предназна-
ченные для применения со скоростных самолетов и снаряжаемые оксидом про-
пилена (136 и 635 кг соответственно). Один из вариантов BLU-96 разрабаты-
вался для использования в качестве БЧ в управляемых авиационных бомбах
GBU-15. Второе поколение БОВ с метановым снаряжением калибра 1000 кг,
по расчетам иностранных специалистов, позволяет получать избыточное дав-
ление на фронте ВУВ 0,09 МПа на удалении 65 м от границы зоны детонации,
а 0,042 МПа - на 120 м.
408 5 Боеприпасы объемного взрыва
Одним из перспективных углеводородных топлив для БОВ второго поко-
ления считается жидкий гептан (С7Н]6), химическая активность которого уве-
личивается при введении в него дополнительно до 20 % пропилнитрата или
бутилнитрата, что повышает его детонационные характеристики. Эксперимен-
тально замеренная средняя скорость детонации гептано-воздушного облака
диаметром 7 м (с добавлением 20 % пропилнитрата) достигает 1600 м/с. По
сравнению с оксидом пропилена в таком объеме расходуется на 27 % больше
атмосферного кислорода, что увеличивает параметры детонации, а следова-
тельно, и боевую эффективность БОВ. Отмечается также, что при уменьше-
нии диаметра капель гептана в ТВС детонационный процесс значительно уси-
ливается. К БОВ второго поколения специалисты из США относят и назем-
ную систему разминирования SLU-FAE (Surface Launched Unit FAE).
Система SLU-FAE (рис. 5.4) представляет собой 30-ствольную реактив-
ную установку залпового огня для стрельбы 127-мм неуправляемыми реак-
тивными снарядами Zuni класса воздух-воздух, смонтированную, на базе
5-тонного гусеничного артиллерийского тягача М548. Снаряд массой 87 кг
состоит из надкалиберной БЧ диаметром 346 мм, порохового двигателя, зак-
люченного в трубу, кольцевого стабилизатора и крестообразного тормозного
парашюта. Сама БЧ снаряжена 38 кг оксида пропилена и содержит централь-
ный разрывной заряд, два вторичных детонатора, электронный и механичес-
кий взрыватели. Дальность стрельбы ПУ от 300 до 1000 м.
Рис. 5.4. Схематическое изображение пуска снарядов из системы разминирования
SLU-FAE (США)
Электронный взрыватель оснащен устройством, предохраняющим БЧ от
преждевременного срабатывания при встрече с посторонними местными пред-
метами, например, листвой деревьев, а также имеет выдвигающийся в полете
штырь датчика взрывного механизма длиной 1,8 м. В состав механического
5.2. Двухтактные боеприпасы объемного взрыва
409
взрывателя входит временной механизм управления тормозным парашютом.
У всех снарядов он работает в течение 12 с, однако за счет использования
интервалометра, регулирующего длительность задержки снарядов в направ-
ляющих, полетное время их различно. Так, пуск снаряда на максимальную
дальность 1000 м задерживается на 2,8 с, а его полетное время (до раскрытия
парашюта) составляет 9,2 с; для снаряда, выстреливаемого на дальность 300 м,
это время равно 11 и 1 с соответственно. Таким образом, достигается равно-
мерное распределение снарядов по дальности. При ударе датчика взрывате-
ля о поверхность земли срабатывает центральный разрывной заряд и обра-
зуется облако ТВС диаметром 14 м и высотой 4 м, которое подрывается
вторичными детонаторами с задержкой до 4 с. Образующееся при взрыве
давление вызывает срабатывание мин, находящихся на поверхности земли и
в грунте. Общее время на проделывание прохода в минном поле составляет
3...5 мин (один залп).
На вооружении Российской армии рмеется ряд БОВ. На международной
выставке вооружения, военной техники и боеприпасов Russian Expo Arms 2002
были представлены два новых образца БОВ: авиационная бомба ОДАБ-500ПМ
и 300-мм реактивный снаряд 9М55С для РСЗО «Смерч».
Авиационная бомба ОДАБ-500ПМ (рис. 5.5) калибра 500 кг предназна-
чена для поражения легкоуязвимой техники, живой силы, разминирования
противопехотных и противотанковых минных полей. Бомба имеет диаметр
500 мм, длину 2380 мм, размах стабилизатора 685 мм,
массу 525 кг и снаряжена жидкой горючей рецептурой
ЖВВ-14 (193 кг). Применяется с самолетов с высоты
200... 1000 м при скорости 500... 1100 км/ч и вертолетов
с высоты не менее 1200 м при скорости более 50 км/ч.
После отделения от носителя на высоте 30...50 м рас-
крывается тормозной парашют, расположенный в хвос-
товой части бомбы, и включается в работу радиовысото-
мер. На высоте 7...9 м происходит взрыв центрального
диспергирующего заряда из обычного ВВ, что приводит
к разрушению тонкостенного корпуса бомбы и разбра-
сыванию жидкого горючего. Через 100... 140 мс взрыва-
ется вторичный инициатор, находящийся в капсуле, ко-
торая прикреплена к парашюту, и происходит взрыв об-
лака ТВС.
Реактивный снаряд 9М55С для РСЗО «Смерч» ка-
либром 300 мм имеет полную длину 7600 мм и массу
800 кг, массу БЧ 280 кг, минимальную дальность стрель-
бы 20 км, максимальную - 70 км. Конструктивно снаряд
состоит из головной части с системой управления поле-
том, БЧ и двигательной установки с твердотопливным
ракетным двигателем. Хотя РСЗО «Смерч» позволяет
Рис. 5.5. Объем-
но-детонирующая
авиационная бомба
ОДАБ-500ПМ
выпустить весь боекомплект (12 снарядов) за 20 с, стрель-
ба снарядами с БЧ объемного взрыва производится оди-
ночными выстрелами или через интервалы времени,
410
5. Боеприпасы объемного взрыва
Рис. 5.6. Хвостовая часть
БЧ 300-мм реактивного
снаряда 9М55С
обеспечивающие взрыв предыдущего снаряда до
того, как к зоне взрыва приближается следующий
снаряд. При подлете к цели на нисходящей части
траектории происходит разделение снаряда на три
части головную часть, боевую часть и двигатель-
ную установку. На высоте 60...70 м раскрывается
тормозной парашют, уложенный в хвостовой части
БЧ снаряда (рис. 5.6), и включается в работу ра-
диовысотомер. Далее все происходит так же, как и
у бомбы ОДАБ-500ПМ.
Неоднократно БОВ применяли в различных во-
енных конфликтах 1980-1990-х годов. Например,
ВВС Израиля в войне против Ливана использова-
ли бомбы объемного взрыва BLU-95 и BLU-96
(США). 6 августа 1982 г. израильский самолет
сбросил бомбу BLU-96 на восьмиэтажный жилой
дом в Бейруте. В результате взрыва^произошед-
шего в непосредственной близости от здания на
уровне 1-2-го этажа, погибли около Д 00 человек
(в основном не в здании, а находящихся поблизо-
сти от места взрыва). Панельное здание было пол-
ностью разрушено, сложилось как карточный до-
мик, и создалось впечатление, что оно было «за-
сосано» внутрь вакуумной полости под действием
отрицательного перепада давления. После этого в
прессе появилось название «вакуумная бомба», ко-
торое достаточно часто используется журналистами. На самом деле при взры-
ве БОВ вакуум не образуется, хотя, как и при взрыве обычных ВВ, в удар-
ной волне формируется достаточно продолжительная фаза разрежения. Ха-
рактер же разрушения здания связан с особенностями действия объемных
зарядов, не обладающих бризантностью, но приводящих к возникновению
относительно невысокого избыточного давления на очень больших площа-
дях, что вызывает смещение несущих элементов конструкции и обрушение
здания в целом.
В августе 1999 г. на дагестанский аул Тандо, где скопилось значительное
число чеченских боевиков, со штурмовика Су-25 была сброшена крупнокали-
берная бомба объемного взрыва типа ОДАБ-500. Захватчики понесли огром-
ные потери. В последующие дни одно только появление одиночного (именно
одиночного) штурмовика Су-25 над каким-либо населенным пунктом застав-
ляло боевиков спешно его покидать.
Современные БОВ двухтактной схемы функционирования по параметрам
ВУВ имеют тротиловый эквивалент порядка 5...7, что существенно повыша-
ет эффективность фугасного действия по сравнению с БП, снаряженными обыч-
ными ВВ. Однако БОВ не могут обеспечить поражение сильно укрепленных
целей, таких как танки, подземные сооружения, пусковые шахты баллисти-
ческих ракет и т. п.
5.3. Однотактные боеприпасы объемного взрыва
5.3. Однотактные боеприпасы объемного взрыва
411
Двухтактные БОВ явились качественным шагом в развитии фугасных БП,
однако они не лишены ряда недостатков. Схема их функционирования доста-
точно сложна, что приводит к снижению надежности применения нередки
случаи отказов или нештатных режимов (например, выгорание облака ТВС
вместо детонации). На работу БОВ большое влияние оказывают погодные ус-
ловия - при сильном ветре, проливном дожде топливовоздушное облако или
не формируется, или же сильно рассеивается. Невозможно или нецелесооб-
разно создание двухтактных БОВ малых калибров (бомбы менее 50 кг и сна-
ряды менее 220 мм). Кроме того, двухтактные БОВ имеют ограничения по
скорости подлета и ориентации к поверхности земли, что требует использова-
ния различных тормозных систем. Существуют еще некоторые недостатки,
которые не свойственны обычным фугасным БП.
Все это привело к созданию БОВ однотактной схемы функционирования
(в США их относят к БОВ третьего поколения), принципиальным отличием
которых является существование единого процесса образования ТВС, возбуж-
дения и протекания в ней реакции взрывчатого превращения, т. е. применение
только одного диспергирующе-инициирующего заряда ВВ и исключение не-
обходимости использования вторичных детонаторов.
Анализ всех известных конструктивных схем однотактных БОВ позволя-
ет выделить четыре основных режима их функционирования.
Режим сгорания твердых частиц за фронтом ВУВ. Суть режима состо-
ит в том, что ВУВ создается высокоскоростным потоком твердых частиц, ко-
торые воспламеняются и горят за фронтом ВУВ, «подпитывая» его параметры
выделяющейся в результате протекания реакции энергией. Этот режим реали-
зуется в схеме заряда с активной оболочкой (рис. 5.7), которая включает в
себя цилиндрический заряд мощного БВВ 1, активную оболочку 2 на боковой
поверхности заряда и КД Активная оболочка выполнена из спрессованного
мелкодисперсного порошка горючего металла (алюминия, магния, бора и т. п.),
пропитанного горючим связующим (каучуком, парафином, целлулоидом и т. п.).
Рис. 5.7. Схема заряда с активной оболочкой:
1 - заряд ВВ; 2 - активная оболочка; 3 - КД
412 5. Боеприпасы объемного взрыва
При взрыве заряда БВВ активная оболочка разрушается на отдельные ча-
стицы металла и метается, формируя перед собой ВУВ. Металлические час-
тицы, попадая в разогретый ВУВ до высокой температуры воздух (104 К и
более), быстро прогреваются и воспламеняются, продолжая лететь эшелоном
за фронтом ВУВ. Энергия от сгорания частиц выделяется в области, непос-
редственно прилегающей к фронту, создавая оптимальные условия для «под-
питки» его параметров.
Заряды с активными оболочками были известны еще до появления двух-
тактных БОВ, однако анализ процессов, протекающих при их срабатывании,
позволяет отнести их к классу однотактных БОВ.
Режим дефлаграционного горения заключается в том, что реакция взрыв-
чатого превращения распространяется по облаку ТВС в виде фронта горения
(узкой зоны, в которой исходная смесь превращается в продукты сгорания) со
скоростью, меньшей скорости звука в продуктах сгорания. Предельный слу-
чай дефлаграционного горения - детонация, когда скорость распространения
фронта горения становится равной скорости звука в продуктах сгорания. Ре-
жим дефлаграционного горения характерен для БОВ имплозивной схемы
(рис. 5.8), содержащей контейнер с жидким горючим снаряжением /, заряд
БВВ 2, выполненный в виде тонкого слоя и размещенный на боковой поверх-
ности контейнера, малопрочный цилиндрический пенал, который запол-
нен пирозехническим составом 3 и установлен на оси симметрии контейне-
ра, и КД 4.
При детонации заряда БВВ в жидком горючем снаряжении формируется
сходящаяся цилиндрическая ВУВ, значения параметров которой при схлопы-
вании на оси симметрии сильно возрастают, при этом температура достаточна
для воспламенения пиротехнического состава. После отражения от оси сим-
метрии ВУВ возвращается к боковой поверхности контейнера, распадается, и
в жидкость уходит волна разрежения, в которой горючее снаряжение дробит-
Рис. 5.8. БОВ имплозивной схемы:
1 - жидкое горючее снаряжение; 2 - заряд ВВ; 3 - пиротехнический состав; 4 - КД;
ПС - продукты сгорания
5.3. Однотактные боеприпасы объемного взрыва 413
ся на мелкие капли и разбрасывается в окружающий воздух, образуя облако
ТВС. При отражении волны разрежения от оси симметрии происходят разру-
шение малопрочного пенала и метание горящих частиц пиросостава вслед за
каплями горючего снаряжения. Обладая более высокой плотностью и мень-
шим коэффициентом сопротивления, горящие частицы пиросостава внедря-
ются в образовавшуюся ТВС и вызывают ее воспламенение. В результате по
облаку со скоростью разлета пирочастиц начинает распространяться фронт
горения, перед которым формируется область сжатой, но непрореагировав-
шей ТВС, ограниченная фронтом ВУВ, распространяющимся со скоростью D,
превосходящей скорость распространения фронта горения U, а за ним - про-
дукты сгорания.
Скорость распространения фронта горения U в имплозивной схеме одно-
тактных БОВ может достигать нескольких сотен метров в секунду, при этом
избыточное давление внутри облака ТВС- остается ниже детонационного, од-
нако при достижении нескольких радиусов объемного заряда параметры ВУВ
будут совпадать с параметрами взрыва в режиме детонации.
Режим выгорания ТВС ио объему облака заключается в возбуждении
реакции взрывчатого превращения в форме горения в большом количестве
точек, рассредоточенных по объему облака ТВС. При очень большом числе
точек возбуждения реакции, равномерно распределенных по объему ТВС, этот
режим приближается к предельному случаю мгновенной детонации объемно-
го заряда.
Указанный режим может быть реализован в БОВ с химическим иниции-
рованием (рис. 5.9). В одном из вариантов такого БОВ заряд БВВ 2 выпол-
няется в виде звезды в сечении и устанавливается вдоль оси симметрии ци-
линдрического корпуса 1. В желобообразных выемках диспергирующего за-
ряда размещены капсулы с химическим инициатором 3, в качестве которого
предлагается использовать неустойчивые межгаллоидные соединения (C1F3,
BrF3). Свободный объем корпуса заполнен жидким горючим снаряжением 4
(гептаном), при этом участки корпуса в направлении выемок диспергирую-
щего заряда выполнены ослабленными (уменьшенной толщины).
Рис. 5.9. Цилиндрический макет БОВ с химическим инициированием (в разрезе):
1 корпус; 2 - заряд БВВ; 3 - химический инициатор; 4 - жидкое горючее
414 5. Боеприпасы объемного взрыва
При взрыве диспергирующего заряда ослабленные участки корпуса раз-
рушаются и из желобообразных выемок выбрасывается горючее снаряжение
с химическим инициатором, которые перемешиваются, дробятся и, вовлекая
воздух из межструйного пространства, образуют облако ТВС. При достиже-
нии определенной концентрации облако ТВС воспламеняется в большом ко-
личестве точек практически одновременно.
Режим турбулентного догорания связан с окислением кислородом окру-
жающего воздуха горючих компонентов, не прореагировавших в процессе пер-
воначального взрыва снаряжения БОВ. Этот режим характерен для так назы-
ваемых термобарических БП, принципиальная конструктивная схема которых
предельно проста (рис. 5.10). Она включает в себя контейнер с термобаричес-
кой смесью (ТБС) 1. промежуточный детонатор 2 и КД 3.
Рис. 5.10. Принципиальная схема термобарических БОВ:
1 - ТБС; 2 - промежуточный детонатор; 3 - КД; ТД - турбулентная диффузия
Появление термобарических БП связано с разработкой специальных со-
ставов - термобарических смесей. Как правило, ТБС представляют собой па-
стообразные смеси, созданные на основе жидкого топлива с большим отрица-
тельным кислородным балансом (например, изопропилнитрата C3H7NO3), в
которое вводят порошок высокобризантного ВВ (например, гексогена) и мел-
кодисперсную пудру горючего металла (например, алюминия). Такие смеси
обладают детонационной способностью, т. е. в них можно возбудить само-
поддерживающийся детонационный режим распространения реакции взрыв-
чатого превращения, однако для этого требуется достаточно мощный проме-
жуточный детонатор, а сами параметры детонации относительно невелики
(скорость детонации порядка 5000...6000 м/с). В результате протекания реак-
ции взрывчатого превращения за фронтом детонационной волны образуются
газообразные продукты, содержащие непрореагировавшие горючие компонен-
ты, а частицы металла прогреваются и начинают вступать в реакцию с окис-
лительными компонентами ПД (СО2, Н2О).
После выхода детонации на поверхность ТБС и разрушения корпуса кон-
тейнера газообразные продукты начинают расширяться в воздух, при этом ин-
тенсивно затормаживаясь. Горящие металлические частицы, обладая большей
инерцией, обгоняют газообразные продукты и попадают в воздух, где интен-
сивность их сгорания существенно возрастает. Выделяющаяся при этом энер-
5.3. Однотактные боеприпасы объемного взрыва
415
гия идет на «подпитку» параметров фронта ВУВ и формирование протяжен-
ной высокотемпературной области, обладающей повышенным термическим
воздействием (см. рис. 5.10). На более поздней стадии за счет развития турбу-
лентной диффузии происходит перемешивание ПД с воздухом и догорание
непрореагировавших горючих компонентов. В этом случае энергия выделяет-
ся в «хвосте» фазы сжатия ВУВ и приводит к увеличению ее длительности.
Название однотактных БОВ, функционирующих в режиме турбулентного
догорания, связано с повышением параметров термического воздействия и по-
ложительной фазы избыточного давления в ВУВ по сравнению с фугасными
БП, снаряженными обычными ВВ.
Так как ТБС, по существу, являются конденсированными ВВ, то они об-
ладают достаточно высоким бризантным и метательным действием, поэтому
термобарические БП с взрывателями контактного действия применяют и для
поражения легкобронированных целей (БМП, БТР и т. п.), а при их срабаты-
вании из корпуса формируется высокоскоростное осколочное поле, которое
можно использовать в качестве дополнительного поражающего фактора.
Наибольшее развитие среди однотат^гуых БОВ у нас в стране и за рубе-
жом получили термобарические БП.
Корректируемая авиационная бомба КАБ-500Кр-ОД (рис. 5.11), состоя-
щая на вооружении Российской армии, предназначена для поражения живой
силы и наземных целей типа огневых точек, укрытых в складках горной мест-
ности. Боевая часть бомбы снаряжена ТБС. Бомба применяется в составе ком-
плекса вооружений самолетов фронтовой авиации с высот 0,5...5,0 км при
скорости 550... 1100 км/ч. Она имеет массу 370 кг (масса БЧ 250 кг), длину
3050 мм, диаметр корпуса 350 мм, размах стабилизатора 750 мм. Бомба снаб-
жена телевизионной корреляционной головкой самонаведения, которая обес-
печивает точность наведения на цель до 4 м.
Рис. 5.11. Корректируемая авиационная бомба КАБ-500Кр-ОД
416
5. Боеприпасы объемного взрыва
Реактивная 30-ствольная огнеметная установка залпового огня, смонти-
рованная на шасси танка Т-72 (рис. 5.12), также состоит на вооружении Рос-
сийской армии. Такой комплекс, включающий боевую машину - ПУ, неуправ-
ляемые реактивные снаряды (НУРС) и транспортно-заряжающую машину, по-
лучил название ТОС-1 «Буратино» (тяжелая огнеметная система). ТОС-1
предназначена для поражения вооружения и военной техники, оборонитель-
ных объектов и живой силы противника (в том числе находящейся в защит-
ных сооружениях), а также для создания очагов пожаров на местности. Пора-
жение противнику наносится за счет комплексного воздействия избыточного
давления и высоких температур при взрыве ТБС, доставляемой НУРС к цели.
Рис. 5.12. Реактивная огнеметная установка ТОС-1 «Буратино»
Неуправляемые PC калибром 220 мм состоят из головной части с напол-
нителем, взрывателя и твердотопливного двигателя. Максимальная дальность
стрельбы достигает 3500 м, а минимальная - 400...600 м. Пусковая установка
оснащена поворотной платформой с качающейся частью - пакетом из 30 труб-
чатых направляющих, а также силовыми следящими приводами наведения ра-
кет в вертикальной и горизонтальной плоскостях и системой управления ог-
нем. В связи с тем что ТОС-1 предназначена для использования в боевых
порядках войск, направляющие снабжены броневой защитой, а все операции
по наведению ПУ на цель расчет проводит, находясь внутри боевой машины,
обладающей мощной броней.
Боевая машина имеет совершенную систему управления огнем, в состав
которой входят оптический прицел, лазерный дальномер с точностью опреде-
ления расстояния до цели 10 м, электронный баллистический вычислитель и
датчик крена. Стрельба может вестись как с открытых, так и закрытых огневых
позиций. Несмотря на относительно большую массу боевой машины ТОС-1
(42 т), она обладает высокой маневренностью и хорошей проходимостью на
5.3. Однотактные боеприпасы объемного взрыва
417
пересеченной местности. Реактивная система ТОС-1 показала высокую бое-
вую эффективность в боевых действиях в Афганистане и Чечне.
Огнемет одноразового использования РПО-А «Шмель» (рис. 5.13) - реак-
тивное пехотное оружие одноразового применения с термобарической БЧ. Функ-
цию ПУ выполняет транспортно-пусковой контейнер, на котором смонтирова-
ны ударно-пусковой механизм с пистолетной рукояткой, дополнительно отки-
дывающаяся рукоятка и прицельные приспособления. РПО-А «Шмель» в
заводских условиях снаряжен огнеметным выстрелом, состоящим из капсулы с
ТБС и твердотопливного реактивного двигателя. Для стабилизации огнеметно-
го выстрела в полете используется так называемый репер, который снабжен
раскрывающимися лопастями, расположенными под некоторым углом к про-
дольной оси выстрела и вызывающими вращение относительно этой оси. Пос-
ле выстрела транспортно-пусковой контейнер выбрасывается. РПО-А «Шмель»
предназначен для борьбы с живой силой противника в условиях городской за-
стройки и в горах, выводит из строя фортификационные сооружения, транспорт-
ные средства, легкобронированную технику. Длина огнемета 920 мм, калибр
93 мм, масса в боевом положении 11 кг, масса капсулы с ТБС 2,1 кг, прицельная
дальность 600 м, максимальная дальность стрельбы 1000 м.
а
б
Рис. 5.13. Огнемет одноразового использования РПО-А «Шмель»:
а - огнеметный выстрел, б - основные части выстрела
Выстрел ТБГ-7В к гранатомету РПГ-7В1 (рис. 5.14) с термобарической
БЧ калибра 105 мм имеет полностью заимствованную от выстрела ПГ-7ВР
сборку реактивного двигателя с метательным зарядом. Масса выстрела ТБГ-7В
4,5 кг, прицельная дальность стрельбы 200 м.
При встрече с преградой срабатывает донный инерционный взрыватель,
подрывающий сначала воспламенительно-разрывной, а затем и основной за-
ряд ТБС. Граната ТБГ-7В предназначена для поражения живой силы в окопах,
бункерах, укрытиях полевого типа, других помещениях при попадании внутрь
и при разрыве БЧ на расстоянии до 2 м от окна или амбразуры. По могуще-
ству действия эта граната сравнима с артиллерийским снарядом или миной
калибра 120 мм. Кроме живой силы, выстрел ТБГ-7В может также поражать
небронированную или легкобронированную технику.
418
5. Боеприпасы объемного взрыва
Рис. 5.14. Общий вид и разрез выстрела ТБГ-7В
Термобарические смеси, по существу, не имеют ограничения по массе
средств поражения, что позволяет создавать малокалиберные БОВ (например,
гранаты к подствольным гранатометам ГП-25, ГП-30), в которых масса снаря-
жения составляет всего несколько десятков граммов.
Среди зарубежных аналогов однотактных БОВ, функционирующих в ре-
жиме турбулентного догорания, можно выделить бомбу BLU-82/B (США) мас-
сой 6810 кг. Бомба снаряжена смесью нитрата аммония, алюминиевого по-
рошка и полистирольного связующего геля общей массой 5715 кг. В ходе опе-
рации «Буря в пустыне» ВВС США использовали 11 бомб BLU-82/B. Основной
целью применения было создание проходов в развитой системе минных по-
лей. По оценкам экспертов Пентагона, круговое вероятное отклонение бомбы
составило 30 м. Такой высокий результат был достигнут за счет весьма совер-
шенной навигационной и прицельной аппаратуры самолета специального на-
значения МС-130. В некоторых случаях прицеливание и сбрасывание бомб
осуществлялись с помощью наземных РЛС. Эксперты отмечают, что исполь-
зование BLU-82/B оказывало высокий деморализующий эффект на личный
состав иракской армии.
ВВС США применяли BLU-82/B в антиталибской операции в Афганистане.
Как и советские объемно-детонирующие АБ в 1980-х годах, BLU-82/B оказалась
весьма эффективной для уничтожения живой силы противника в горных ущель-
ях и пещерах, где поражающее действие осколочно-фугасных БП невелико из-за
экранирования УВ и потока осколков местными преградами.
Конструкция BLU-82/B достаточно проста: стальной тонкостенный ци-
линдр с коническим обтекателем. На траектории полета бомба стабилизиру-
ется парашютом и лишена управляющих аэродинамических поверхностей. Сра-
батывает бомба от контактного взрывателя (штанга в носовой части длиной
1,24 м), что позволяет производить подрыв до того момента, как бомба прони-
кает в грунт. По оценкам западных специалистов, BLU-82/B уничтожает все
живое на открытой местности в радиусе 100 м.
11 марта 2003 г. ВВС США провели первое испытание новой авиационной
бомбы, которая стала самым мощным неядерным БП из всех, состоящих ныне
на вооружении. Она была представлена под названием МОАВ (Massive Ordnance
Air Blast). Достаточно точно ему соответствует перевод «тяжелый боеприпас
объемного взрыва». Журналистами аббревиатура МОАВ была интерпретирова-
на по-своему: Mother of All Bombs (мать всех бомб).
5.4. Оценка эффективности боеприпасов объемного взрыва
419
В ходе первого испытания бомба была сброшена с самолета сил специ-
альных операций США МС-130 (модификация военно-транспортного Herkules).
Бомба размещалась в грузовом отсеке на специальной тележке, которую при
сбросе вытягивал из самолета парашют. Затем МОАВ отделялась от тележки
и, совершая относительно небольшие маневры в воздухе, начинала свой по-
лет к цели. По данным Пентагона, масса бомбы составляет 21 500 фунтов
(9761 кг). Размеры МОАВ не сообщаются, однако для нее характерны доволь-
но большое удлинение, обтекаемая аэродинамическая форма (рис. 5.15) и крыло
небольшого размаха, позволяющее маневрировать по дальности. В хвостовой
части установлен блок из четырех складываемых решетчатых стабилизаторов
и рулей, что подтверждает сообщение о снабжении бомбы системой наведе-
ния, использующей сигналы космической радионавигационной системы
(КРНС) NAVSTAR. Масса ТБС (желеобразной смеси GSX на основе селитры,
алюминиевой пудры и синтетического мыла) составляет 18 тыс. фунтов. Ана-
лиз доступной информации позволяет сделать вывод, что в США сделан су-
щественный шаг вперед по сравнению с аналогичными БП предыдущего по-
коления, прежде всего, с авиационной бомбой BLU-82/B.
Рис. 5.15. Авиационная бомба МОАВ
Однотактные БОВ по простоте конструкции и надежности функциониро-
вания имеют неоспоримые преимущества по сравнению с двухтактными БОВ,
однако, поскольку в однотактных БОВ процессы формирования, инициирова-
ния и взрыва ТВС происходят автоматически, не удается реализовать все энер-
гетические возможности снаряжения. Кроме того, все однотактные БОВ со-
держат окислительные элементы, поэтому по параметрам ВУВ они примерно
в 2 раза уступают двухтактным БОВ, т. е. относительный тротиловый эквива-
лент при их срабатывании не превосходит 2,5-3,5 единиц.
5.4. Оценка эффективности боеприпасов объемного взрыва
Критерии поражающего действия ударных волн
Результаты воздействия взрывных волн на различные объекты определя-
ются в основном максимальным избыточным давлением &.рт и удельным им-
пульсом фазы сжатия избыточного давления i+ в волне. В случае УВ, длина
зоны сжатия которой намного больше характерных размеров объекта пораже-
ния, нагружение носит «квазистатический» характер (мгновенное приложе-
ние постоянного давления), а деформация и смещение объектов определяют-
ся максимальным избыточным давлением. При очень короткой волне реакция
420___________________5. Боеприпасы объемного взрыва___________________
объектов на нагружение определяется удельным импульсом фазы сжатия (им-
пульсное нагружение).
Выбор характера нагружения при оценке поражающего действия взрыв-
ных волн связан с соотношением длительности фазы сжатия в волне т+ и
периода собственных колебаний объекта Т. Если длительность фазы сжатия
т+ < 0,257, то нагрузку можно считать импульсной, а условие разрушения объек-
та запишется в виде критерия по удельному импульсу:
i+>i*+. (5.24)
При т+ > 107 нагружение становится квази статическим, а критерий разруше-
ния выражают через избыточное давление
ДР». ДА„- (5-25)
Соотношения (5.24) и (5.25) называют частными критериями поражения
в результате фугасного действия взрывных волн, a i+, Дрт - критическими
значениями удельного импульса и максимального избыточного давления в
волне. . •*
В области 0,257 < т+ < 107 на поведение объекта оказывают влияние как
максимальное избыточное давление, так и удельный импульс в волне. При
Рис. 5.16. Геометрическое пред-
ставление критерия разрушения
цели фугасным действием УВ
в фазовой плоскости Дрт - i+
этом, как показывают эксперименты и теоре-
тические решения модельных задач, их совме-
стное воздействие может быть учтено с по-
мощью обобщенного критерия поражения:
(д рт - )('+ ~ С ) = (5-26)
где К - некоторая константа.
Функция (5.26) в плоскости Xpm-i+ име-
ет форму гиперболы с двумя асимптотами, ко-
торые соответствуют критическим значениям
максимального избыточного давления и удель-
ного импульса фазы сжатия в волне, обеспечи-
вающими нанесение объекту определенного
вида поражения (рис. 5.16). Если параметры
взрывной волны Дрт и i+ соответствуют точке, лежащей выше кривой обоб-
щенного критерия (5.26), то объекту будет нанесен заданный вид поражения.
Из обобщенного критерия нетрудно получить частные критерии фугасно-
го действия взрывных волн. Так, при Др*т —> «> из формулы (5.26) следует
критерий по удельному импульсу (5.24), а при /* —> °° - по максимальному
избыточному давлению (5.25). Критические параметры и константа К в фор-
муле (5.26), как правило, определяются экспериментально для каждого объек-
та и вида его поражения.
Характеристики уязвимости целей к фугасному действию
Параметры разрушения зданий и других объектов. В зданиях при наи-
меньших взрывных нагрузках разрушаются окна. Стекло представляет собой
5.4. Оценка эффективности боеприпасов объемного взрыва 421
хрупкий материал, который рассыпается, как только напряжение в нем дости-
гает предела упругости. Окна обычно имеют небольшие горизонтальные раз-
меры между опорами и поэтому первыми подвергаются взрывным нагруз-
кам, а следовательно, при воздействии взрывных волн чаще всего разруша-
ются в режиме квазистатического нагружения. Для таких случаев вполне
оправдано применение частного критерия по максимальному избыточному
давлению.
Критическое избыточное давление, при котором начинает разрушагься
остекление зданий, связано с площадью поверхности оконного стекла 5 (м2),
его толщиной h (мм) и отношением максимального и минимального размеров
LIB следующей зависимостью:
ДЛ„ = 1/5.10О.П5Л+0.-0634£/В-0.1939, кПа (5,27)
При скольжении УВ вдоль поверхности стекла значение, вычисленное по
формуле (5.27), сравнивается с избыточным давлением Ь.рт, а при нормаль-
ном падении волны - с избыточным давлением нормального отражения Дрт.
Для зданий и других сооружений различают четыре степени разруше-
ния: полное, сильное, среднее и слабое. При полном разрушении обрушива-
ется большая часть стен, колонн и перекрытий. Сильное разрушение харак-
теризуется частичным повреждением стен, колонн и перекрытий; легкие эле-
менты (двери, перегородки, крыши) разрушаются полностью или частично.
При среднем разрушении деформируются (прогибаются) основные ограж-
дающие и несущие конструкции, а разрушаются в основном второстепен-
ные конструкции. Слабое разрушение характеризуется повреждением или
серьезными деформациями отдельных легких элементов ограждения (окна,
двери, крыши).
Проведение расчетов на прочность и оценка уровня поражения цели оп-
ределяются такой важнейшей характеристикой, как период собственных коле-
баний Т цели. В литературе имеются обширные данные об испытаниях соору-
жений на воздействие вынужденных или свободных колебаний с малыми амп-
литудами, целью которых является определение первых нескольких форм
собственных колебаний и соответствующих коэффициентов затухания. Перио-
ды собственных колебаний Т зданий с жесткой конструктивной схемой, как
правило, находятся в диапазоне 0,1... 1,0 с и могут быть оценены по эмпири-
ческим формулам:
Т = ап; Г = 0.017/7; Т = 0.0905—= ; Т = 0,3/7jSg,
ФВ
где а - коэффициент, зависящий от конструкции здания и вида основания
(для грунта средней плотности а = 0,04...0,09); п - число этажей; Н - высота
здания, м; В - ширина или длина здания, м; g - ускорение свободного паде-
ния, g= 9,81 м/с2.
Значения Т для различных типов сооружений получены опытным путем
(табл. 5.3).
При длительности взрывной волны т+ > ЮГ, т. е. при взрыве крупномас-
штабных облаков ТВС, степень разрушения объектов можно оценить по кри-
тическому избыточному давлению (табл 5.4).
422 5. Боеприпасы объемного взрыва
Таблица 5.3. Периоды собственных колебаний зданий и сооружений
Здание Число этажей Период колебаний Т, с
поперечных продольных
Жилое:
с несущими каменными стенами 3 0,15 0,16
5 0,26 0,22
6 0,37-0,39 -
крупнопанельное 4 0,16 0,15
5 0,30 0,22
6 0,36 -
сборное каркасно-панельное 14 0,86 0,76
16 1,20 0,76
с нижним каркасным и верхними крупно- 4 0,28 0,30
панельными этажами 10 0,64 0,44
Школьное с несущими кирпичными стенами 3 0,22 * 0,21
4 0,30 - 0,27
Административное каркасное с кирпичным
заполнением:
с железобетонным каркасом 12 0,69-0,96 0,62-0,89
каркасное 22 1,10 1,16
Таблица 5.4. Значения избыточного давления УВ (Арт, кПа),
характеризующие степени разрушения при наземном взрыве зданий,
сооружений, техники и оборудования
Категория объекта Разрушение
сильное среднее слабое
Промышленные здания: с тяжелым металлическим или железобетонным 40-50 30-40 20-30
каркасом с легким металлическим каркасом и бескаркасной 35^4-5 25-35 10-20
конструкции многоэтажные железобетонные с большой пло- 40-90 20-40 8-20
щадью остекления атомные и гидроэлектростанции 200-300 150-200 25-35
Промышленные сооружения и оборудование: технологические трубопроводы и вспомогатель- 60-70 40-60 30-40
ные сооружения на промышленных объектах железобетонные эстакады с пролетом до 20 м 120-150 110-120 100-110
силовые трансформаторы, открыто расположенные 50-60 30-50 10-30
вышки на нефтяных промыслах - 60-100 40-60
5.4. Оценка эффективности боеприпасов объемного взрыва 423
Окончание табл. 5.4
Категория объекта Разрушение
сильное среднее слабое
Трубопроводы сетей коммунального хозяйства:
подземные стальные на сварке диаметром до 350 мм 1500-2000 1000-1500 600-1000
подземные чугунные и керамические на рас- трубах, асбоцементные на муфтах 1000-2000 600-1000 200-600
стальные, заглубленные на 20 см Линии электрических сетей: — 250-350 —
кабельные подземные 1000-1500 700-1000 500-700
воздушные высокого напряжения 80-120 50-70 30-50
воздушные низкого напряжения на деревянных опорах Средства связи: . '•» 60-100 40-60 20-40
автомобильные радиостанции 45-55 20-30 15-20
телефонно-телеграфная аппаратура - 60-90 -
радиорелейные линии связи Металлические мосты с длиной пролета, м: — 50-70
30-45 200-300 100-200 50- 100
45-100 150-200 80-120 40-80
более 100 100-200 60- 100 40-60
Железобетонные мосты и путепроводы с пролетами длиной 20 м 130-200 110-130 50-80
Наземные сооружения аэропортов 35—45 25-35 15-25
Взлетно-посадочные полосы с бетонным покры- тием 1500-2000 400-1500 300-400
Железнодорожное полотно Средства транспорта, инженерные машины: 400-700 150-400 100-150
подвижной железнодорожный состав 70-90 40-70 20-40
тепловозы и электровозы 100-150 70-100 50-70
грузовые автомобили и автоцистерны 50-60 40-50 20-40
легковые автомобили и автобусы 30-50 20-30 15-20
гусеничные тягачи, тракторы, бронетранспортеры 70-80 50-70 30-40
транспортные суда Защитные сооружения: 80-100 60-80 30-60
подвалы в одноэтажных деревянных домах 70-100 40-70 20-40
в промышленных зданиях 80-110 60-80 35-60
подземные сооружения типа метрополитена мел- кого заложения — 400 —
424 5. Боеприпасы объемного взрыва
Для оценки совместного воздействия избыточного давления и удельного
импульса взрывной волны на типовые здания и промышленные сооружения
можно воспользоваться данными о разрушении от бомбардировок во Второй
мировой войне, полученными в Великобритании, которые для кирпичных зда-
ний аппроксимируются уравнением
к ,и0-33
(5.28)
где г - расстояние от места взрыва, м; тэ — масса эквивалентного тротилового
заряда ВВ, кг: Kt - коэффициент (3,8 - полное разрушение зданий; 5,6 - зда-
ния разрушены наполовину; 9,6 - здания непригодны для обитания; 28,0 -
умеренные разрушения, повреждения внутренних малопрочных перегородок;
56,0 - зданиям нанесен небольшой ущерб, разбито ~ 10 % стекол).
С помощью формулы (5.28) для каждого вида разрушений можн^ постро-
ить предельные диаграммы в плоскости Др,„ - i+ с характерным гиперболи-
ческим видом и двумя асимптотами Д/^, и Г, значения которых вместе с кон-
стантой К в обобщенном критерии (5.26) для зданий и промышленных соору-
жений приведены ниже:
Kt 3,8 5,6 9,6 28,0 56.0
Бр*„„ кПа 77,5 38,1 16,4 4,21 1,96
г +, Па с 743 504 294 101 50,4
К, кПа -Па-с 921 346 106 11,5 3
Характеристики уязвимости элементарных наземных целей при действии
ВУВ даны в табл. 5.5.
Таблица 5.5. Характеристики уязвимости элементарных наземных целей
при действии ВУВ
Цель &р*т, МПа 1+, Па • с К, МПа • Па - с
ПУ с ракетами:
РК Lans 0,06 280 35
ЗРК Patriot и Hawk 0,07 500 42
РЛС:
AN/MPQ-33 и AN/MPQ-39 0,05 450 23
AN/MPQ-3 0,04 340 21
Самолет А-10А 0,06 350 40
Вертолет AH-1G 0,02 250 20
Спецмашина фургонного типа 0,04 340 21
БТРМ113А1 0,17 1200 220
5.4. Оценка эффективности боеприпасов объемного взрыва 425
Параметры поражения человека. Поражение человека связано с трав-
мированием различных частей тела. При этом отдельные органы могут по-
разному реагировать на воздействие УВ. Например, барабанные перепонки
имеют очень маленький период собственных колебаний, поэтому при любых
размерах взрывающегося облака ТВС их реакцию на воздействие УВ можно
оценивать по критерию максимального избыточного давления в волне.
Связь между максимальным избыточным давлением в волне Арт и веро-
ятностью повреждения барабанных перепонок человека £2 описывается зави-
симостью
Q = 0.881g А—1,323. (5.29)
Умножив вероятность (5.29) на 100, получим процент повреждения бара-
банных перепонок в группе людей, одинаково удаленных от места взрыва.
Граница временной потери слуха соответствует давлению Арт = 1,5...2,0 кПа,
нижний порог повреждения барабанных перепонок - 34...35 кПа, а 50 % ве-
роятности разрыва перепонок примерно 100 кПа.
При взрывах крупномасштабных облаков ТВС человека можно рассмат-
ривать как единый объект и в качестве критерия поражения использовать кри-
тическое давление в У В А/?*„, значения которого в зависимости от вероятнос-
ти летального исхода приведены ниже:
Вероятность летального исхода .... 0,99 0,75 0,50 0,25 0,10
Ар*„ кПа.................... 500 370 320 280 250
Наиболее чувствительны к поражающему действию УВ органы человека
с большим различием в плотностях соседних тканей, в первую очередь - это
легкие. При этом существенное влияние оказывает ориентация человека от-
носительно падающей волны и окружающих объектов. Наибольшие повреж-
дения при минимальных значениях давления и импульса приходящей УВ по-
лучает человек, который стоит или лежит вблизи плоской отражающей повер-
хности, по нормали к которой набегает взрывная волна. Однако учет формы и
типа отражающей поверхности, расстояния от нее человека, а также угла под-
хода взрывной волны представляет значительные трудности.
В США получены предельные диаграммы (Ар*„ - г’+) для различных сте-
пеней поражения органов дыхания человека в положении «стоя» с расположе-
нием тела вдоль фронта подходящей УВ. Проведенные исследования показа-
ли, что результаты воздействия УВ зависят от начального окружающего дав-
ления р0, а при импульсном нагружении - и от массы человека М. При этом
критические параметры УВ, входящие в обобщенный критерий (5.26), могут
быть найдены из соотношений
Др», = Ро^р ; i+= Ро М I .
Значения приведенных критических параметров Ар , i для различных
степеней поражения органов дыхания следующие:
Вероятность летального исхода .. . .. 0,01 0,10 0.50 0,90 0,99
ДР* . . 1,78 2,01 2,42 2,83 3,40
/*, Па0,5 с/кг0,33 .. 0,251 0,306 0,373 0,472 0,575
426 5. Боеприпасы объемного взрыва
Константа К в обобщенном критерии (5.26) вычисляется по соотношению
К = 1,2р£5Л/а33Др* i , Па2 - с.
При воздействии взрывной волны на человека, находящегося в положе-
нии «стоя», происходит перенос тела как целого с последующим тормозящим
ударом при падении. При этом возникают травмы, степень тяжести которых
зависит от таких факторов, как скорость при ударе, время торможения, тип
поверхности, площадь соударения и т. д. При тормозящем ударе голова наи-
более уязвима для механических повреждений. Категории поражения челове-
ка при ударе головой о твердую поверхность в зависимости от относительной
скорости удара приведены ниже:
Практически безопасно .................................... 3,05
Нижняя граница, или порог допустимого повреждения......... 3,96
50%-ная вероятность летального исхода .................... 5,49
Удар другими частями тела более безопасен для человека, однако и он
может привести к различным травмам. Категории поражения человека при
ударе различными частями тела в зависимости от относительной скорости уда-
ра представлены ниже:
Практически безопасно .................................... 3,05
Нижняя граница, или порог допустимого повреждения......... 6,40
50%-ная вероятность летального исхода ................... 16,46
Интересно, что уровни практически безопасной скорости удара как голо-
вой, так и иными частями тела совпадают. Используя указанные данные, У. Бей-
кер (США) рассчитал избыточное давление Лрт и удельный импульс !+ при-
ходящей УВ, которые обеспечивают перенос тела человека с критическими
скоростями. Полученные результаты можно представить в виде приближен-
ных зависимостей:
при ударе головой
ДРт77^ = Л; (530)
при ударе другими частями тела
ЛРт^=В’ (53П
где М - масса тела человека, кг; значения параметров удара человека о жест-
кую поверхность А и В, в зависимости от приобретаемой скорости, приведе-
ны ниже:
Скорость удара, м/с .... 3,05 3,96 5,49 6,40 7,01 16,46 42,06
А 10 5, Па2-с/кг0-33 ......... 400 546 748 - 964 -
В • 10 5, Па2 с/кг0-33 ....... 392 - - 801 - 2043 5383
<i 5.4. Оценка эффективности боеприпасов объемного взрыва 427
о
j значению максимального избыточного давления Лр„, и удельного им-
пульса i+ в У В в месте нахождения стоящего человека, а также по его массе М
вычисляются значения параметров А (5.30) и В (5.31), по которым с учетом
критериев поражения человека при ударе определяются скорость метания и
степень поражения.
Показатели боевой эффективности БОВ
Задача стрельбы (применения) БОВ состоит в общем случае в нанесении
противнику ущерба, снижающего его боевые возможности. Эффективность
стрельбы есть мера соответствия результата стрельбы поставленной боевой
задаче. Оценивают ее определенными количественными показателями, чис-
ленное значение которых должно характеризовать ущерб, нанесенный про-
тивнику.
Тротиловый эквивалент часто используется в качестве показателя эффек-
тивности фугасных БП. Под тротиловым эквивалентом понимается масса за-
ряда тротила, обеспечивающего на заданном расстоянии такие же параметры
УВ, что и при взрыве самого СП. С точки»зрения поражения целей под троти-
ловым эквивалентом следует понимать массу заряда тротила, обеспечиваю-
щего поражение цели на том же удалении от места взрыва, что и при срабаты-
вании самого устройства. Используется также относительный тротиловый эк-
вивалент, который равен отношению массы тротилового эквивалента к массе
снаряжения фугасного БП.
Для традиционных фугасных БП, снаряженных обычными конденсиро-
ванными ВВ, справедлив энергетический закон подобия, в соответствии с ко-
торым, начиная с некоторого расстояния, все параметры УВ определяются лишь
энергией, выделяющейся при взрыве. В этом случае формулы Садовского для
произвольного ВВ можно переписать в виде
где А, В, С, D - некоторые числовые коэффициенты; Q - удельная теплота
взрыва рассматриваемого ВВ.
Из зависимостей (5.32) и (5.33) следует, что при равенстве произведения
mwQ Для тротилового заряда и заряда произвольного ВВ все параметры, оп-
ределяющие поражающее действие ВУВ, на любом расстоянии будут совпа-
дать, т. е. радиус поражения рассматриваемой цели в обоих случаях будет
один и тот же. Отсюда следует, что тротиловый эквивалент фугасного БП мо-
жет быть рассчитан по зависимости
шэ =швв
Q
Qtht
где (2тнт “ удельная теплота взрыва тротила.
428 5. Боеприпасы объемного взрыва
В случае применения БОВ, даже если параметры ВУВ на отдельных уча-
стках можно описать функциональными зависимостями (5.32) и (5.33), чис-
ленные значения коэффициентов А, В, С, D будут отличаться от значений,
полученных из формул Садовского. Поэтому тротиловый эквивалент БОВ бу-
дет изменяться с расстоянием и иметь различное значение при определении
по избыточному давлению Ар„, и импульсу фазы сжатия /+, т. е. терять свою
универсальность. В этом случае в качестве показателя эффективности фугас-
ного действия БП по типовым элементарным целям удобно принять приве-
денную площадь поражения.
Приведенная площадь поражения 5пр определяется по зависимости
Snp = ру]б(х,у)Дх, (5.34)
о о
где х, у - координаты в плоскости размещения цели; G(x, у) - координатный
закон поражения цели (вероятность поражения цели, размещенной в точке
(х, у) при взрыве фугасного БП в центре системы координат х = 0, у * Т). По
сути, формула (5.34) определяет ожидаемую площадь безусловного пораже-
ния определенной цели рассматриваемым устройством.
Для фугасных БП без явно выраженной направленности действия соотно-
шение (5.34) можно переписать в полярной системе координат:
G(r) =
5пр = G(r)rdr. (5.35)
о
где г - удаление рассматриваемой точки от центра взрыва.
Для фугасного действия БОВ характерно, что область недостоверных по-
ражений, как правило, мала по сравнению с областью достоверных пораже-
ний и ею можно пренебречь. В этом случае КЗП принимает ступенчатый вид:
1 при г < 7?п;
О при г < Rn,
где Rn - радиус поражения цели.
Тогда формула (5.35) для приведенной площади поражения становится
предельно простой:
5п=л/?п2.
Для определения радиуса поражения Rn находят точку пересечения кри-
вой функции Ау>„;(/+) поля взрыва рассматриваемого БП с предельной диаг-
раммой &pm-i+ обобщенного критерия поражения фугасного действия вы-
бранной цели. Для этого (рис. 5.17) во втором и третьем квадрантах декартовой
системы координат сгроят зависимости от расстояния г максимального избы-
точного давления А/?„, и импульса фазы сжатия /+ в волне, образованной при
срабатывании БП, и по ним в первом квадранте воспроизводят кривую А/>,„(Д).
В этом же квадранте строится предельная диаграмма А;>„, -Д обобщенного
критерия поражения рассматриваемой цели. Точка пересечения этих кривых
5.4. Оценка эффективности боеприпасов объемного взрыва
429
Рис. 5.17. Диаграмма Дрт - г+-для определения радиуса поражения
Рис. 5.18. Диаграмма Дрт - /+ для построения КЗП G(r):
1-G - 0,2: 2 - G = 0,5; 3 - G = 0,8; 4- G = 0,9
определяет значение параметров У В (Дд„, и i+), обеспечивающих поражение
цели, а по ним (например, по Ддт) и радиус поражения Дп.
Если параметры ВУВ, формирующейся при срабатывании фугасного БП,
могут быть описаны функциональными зависимостями типа (5.32) и (5.33), то
графические построения можно не проводить, так как, выражая аргумент
430 5. Боеприпасы объемного взрыва
г/^/твв из формулы (5.33) и подставляя его в выражение (5.32), сразу полу-
чаем функцию Д/?„,(1():
txpm = Л-. + + Д
d^^bQ
+с
< D^BbQ
Если известны предельные диаграммы Дрт - i+ обобщенного критерия
поражения цели с заданной вероятностью (например, органов дыхания чело-
века), то не представляет труда построить КЗП G(r) (рис. 5.18). При этом при-
веденная площадь поражения цели вычисляется с помощью формулы (5.35).
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ
Ардашев А.Н. Огнеметно-зажигательное оружие: Иллюстрированный справочник.
М.: ООО «Издательство АСТ», 2001.
Бейкер У, Кокс П, Уэстайн П и др. Взрывные явления и последствия. В 2 кн.
М.: Мир, 1986.
Веремеев Ю. Боеприпасы объемного взрыва (термобарические) // armotjciev.ua7
army/hist/obomvzryv.shtml.
Дмитриев В. Боеприпасы объемного взрыва // Зарубежное военное обозрение.
1983. №9.
Зарубин В.Н., Мартынов В.В., Охитин В.Н. и др. Методика определения пара-
метров взрывного устройства по разрушениям окружающей обстановки, типовых стро-
ительных конструкций и повреждениям биообъектов на месте происшествия. М.: Изд-
во МВД РФ, 2002.
Ильин Б. Боеприпасы объемного взрыва // Техника и вооружение. 1986. № 8.
Имховик Н.А., Соловьев В.С. Термодинамическое моделирование особенностей
влияния добавок алюминия на детонационные и энергетические характеристики бри-
зантных ВВ, ВВ-окислителей и смесевых взрывчатых составов на основе изопропил-
нитрата// Оборонная техника. 1999. № 1/2.
Кокшаров В.В., Колегов Л.Е., Лашков В.Н. и др. Параметры взрыва в замкнутом
объеме зарядов ВВ с оболочкой из ультрадисперсного алюминия // III Харитоновские
тематические научные чтения «Экстремальные состояния вещества. Детонация Удар-
ные волны»: Тезисы докладов. Саров, 2001.
Котляковский А.В., Виноградов А.В., Еремин С.В. и др. Аварии и катастрофы.
Предупреждение и ликвидация последствий. В 2 кн. М.: Изд-во АСВ, 1996.
Лебедев Ф Американская система разминирования // Зарубежное военное обо-
зрение. 1979. № 2.
Нетлетон М. Детонация в газах. М.: Мир, 1989.
Оружие России: Каталог. Т. II: Авиационная техника и вооружение Военно-воз-
душных сил М.: АОЗТ «Военный парад», 1996.
Оружие России: Каталог. Т. VII: Высокоточное оружие и боеприпасы. М.: АОЗТ
«Военнный парад», 1997.
Патент 3570401 США, МКИ F 42 В25/14. Опубл. 24.08.1967, НКИ 102/6.
Пехотное оружие России. М. ФГУП «ГНПП «Базальт», 2001.
Робинсон К. Разработка в США боеприпасов объемного взрыва И Зарубежное
военное обозрение. 1973. № 12.
Сборник методик №1. Госгортехнадзор России. М.: НТЦ «Промышленная без-
опасность», 1999.
Физика взрыва. В 2 т. / Под. ред. Л.П. Орленко. М.: Физматлит, 2002.
Шунков В.Н. Ракетное оружие. Минск: ООО «Попурри», 2001.
КУМУЛЯТИВНЫЕ СРЕДСТВА ПОРАЖЕНИЯ И БОЕПРИПАСЫ
6.1. Кумулятивный эффект взрыва
и действие кумулятивных зарядов
Средства поражения и боеприпасы кумулятивного действия используют
прежде всего для поражения бронированных и легкобронированных целей,
таких как танки. САУ, БМП и БТР, самолеты и вертолеты, подводные лодки и
надводные корабли, долговременные железобетонные сооружения, а также для
разрушения грунтовых, ледяных, кирпичных и других типов комбинирован-
ных преград значительной толщины.
Действие кумулятивных СП и БП по таким преградам основано на ис-
пользовании явления кумуляции. Термин «кумуляция» (от лат. cumulatio -
скопление или cumulo - накапливаю) дословно означает увеличение или уси-
ление какого-либо эффекта за счет сложения или накопления нескольких од-
нородных с ним эффектов. Применительно к кумулятивным СП и БП явление
кумуляции заключается в сосредоточении энергии взрыва в заданном направ-
лении, что приводит к локальному увеличению разрушительного действия.
Поражение цели осуществляется кумулятивной струей, которая формируется
при обжатии кумулятивной облицовки (КО) продуктами взрыва заряда ВВ.
При детонации заряда ВВ без кумулятивной выемки наблюдается неглу-
бокая вмятина в материале преграды (рис. 6.1, а), а при незначительном уда-
лении заряда от преграды эффект воздействия на преграду резко снижается
(рис. 6.1, б). Наличие кумулятивной выемки в заряде приводит к концентра-
ции плотности энергии, что проявляется в увеличении глубины вмятины в
материале преграды (рис. 6.1, в). С удалением рассматриваемого кумулятив-
ного заряда (КЗ) от преграды эффект взрывного воздействия также резко
Рис. 6.1. Схематичное изображение результатов взрывного воздействия обычных (а, б)
и кумулятивных (в, г, д, е) зарядов на преграду из мягкой стали
432
6. Кумулятивные средства поражения и боеприпасы
снижается (рис. 6.1, г). Применение металлической облицовки в КЗ способ-
ствует сильному увеличению пробивного действия, при этом глубина прони-
кания КС существенно зависит и от расстояния КЗ от преграды (рис. 6.1, д, е).
Структурная характеристика КЗ обусловлена особенностями их конструк-
тивного оформления и функциональным назначением. Различают сосредото-
ченные (осесимметричные) и удлиненные (плоские) КЗ (рис. 6.2).
Рис. 6.2. Сосредоточенный (а) и удлиненный (б) КЗ:
1 — заряд ВВ с кумулятивной выемкой; 2 - облицовка кумулятивной выемки; 3 - корпус КЗ;
4 - средство инициирования . 4
Наибольшее значение для практики имеет направленная осевая кумуля-
ция, которая может быть реализована при подрыве осесимметричных зарядов
(см. рис. 6.2, а) с выемкой конической или полусферической формы. Такие КЗ
на оптимальном расстоянии Fm~ (l,5...6,0)do способны пробивать насквозь
стальные преграды или создавать в них каверны глубиной L = (5.. .6)<7О и бо-
лее, со средним диаметром отверстия d0TB= (0,1...0.3)do, где d0 внутренний
диаметр основания КО (см. рис. 6.1, е).
Удлиненные КЗ с плоской симметрией (см. рис. 6.2, б) имеют кумулятив-
ную выемку, поперечное сечение которой может быть в форме угла (клино-
видные облицовки) или полуокружности (полуцилиндрические облицовки).
При взрыве они формируют пелену или кумулятивный «нож», который и раз-
резает преграду. При функционировании удлиненных КЗ глубина реза сталь-
ных преград на оптимальном фокусном расстоянии Fm = (0,5... !,())<:/составля-
ет £ = (0,8... 1,0)<£ где d- внешний диаметр корпуса (трубки с полуцилиндри-
ческой медной облицовкой).
Наиболее подробно механизм формирования кумулятивной струи (КС) изу-
чен на осесимметричных зарядах с конической и полусферической облицовка-
ми выемок. В ходе этих исследований установили, что металлическая облицов-
ка под воздействием ПВ обжимается, в результате чего ее элементы последова-
тельно захлопываются с образованием компактной монолитной массы (песта) и
формированием тонкой металлической струи, скорость которой может в несколь-
ко раз превышать скорость обжатия металлической облицовки. Общая картина
процесса деформирования металлической облицовки и образования КС показа-
на на двух сериях рентгеновских снимков для конической и полусферической
облицовок (рис. 6.3). Снимки фиксируют начальный момент процесса обжатия
облицовки и движения струи во времени. При этом давление ПД на облицовку
составляет 20...60 ГПа (в зависимости от материала облицовки, угла подхода
фронта детонационной волны к поверхности облицовки и характеристик ВВ),
а скорость метаемой тонкой металлической облицовки 1 ...3 км/с.
6.1. Кумулятивный эффект взрыва и действие кумулятивных зарядов
433
Картина формирования КС при обжатии металлической конической об-
лицовки осесимметричного КЗ показана схематично на рис. 6.4, также
условно сопоставлены зоны КО и зоны образуемых из ее частей КС и песта
(рис. 6.5).
Рис. 6.3. Рентгенограммы начальной стадии, формирования КС зарядами с кониче-
ской (а) и полусферической (б) облицовками
Рис. 6.4. Формирование КС при обжа-
тии металлической конической облицов-
ки осесимметричного КЗ:
1 - средство инициирования; 2 ВВ; 3 — КО;
4 - фронт детонационной волны; 5 - пест;
6 КС
Рис. 6.5. Зоны КО и образуемых из ее
частей КС и песта:
/ - верхняя внутренняя часть: 2 нижняя
внутренняя часть; 3 - нижняя внешняя часть;
4 - верхняя внешняя часть
434
6. Кумулятивные средства поражения и боеприпасы
в
Рис. 6.6. Основные стадии формирова-
ния и движения КС:
а - образование струи при обжатии обли-
цовки; б - растяжение струи вследствие на-
личия градиента скорости; в — фрагмента-
ция (разрыв) струи на отдельные элементы
в свободном полете
Результаты обработки рентгенограмм (см. рис. 6.3) показывают, что в слу-
чае использования конических медных облицовок в струю переходит в сред-
нем 10...20 % массы облицовки, при этом скорость головных участков струи
составляет 9... 10 км/с, а хвостовых - 2,0.. .2,5 км/с. Скорость струи от полусфе-
рической облицовки приблизительно в 2 раза меньше, но масса ее в 3-4 раза
больше, так что общая энергия струи от полусферической облицовки сравни-
ма с энергией струи от конуса такой же массы.
Из рентгенограмм ясно, что в течение некоторого времени пест и струя
образуют единое целое, однако их движение осуществляется с различными
скоростями (рис. 6.6, а). Пест движется сравнительно медленно (со скорос-
тью 0,5... 1,0 км/с), а струя, наоборот, об-
ладает весьма большой скоростью по-
ступательного движения. В свою очередь
головная часть струи имеет наибольшую
скорость, а скорость хвостовой части
близка к скорости песта. Различие в
скоростях движения элементов струи мо-
жет достигать 5...6 км/с и более*значе-
ния начальных градиентов скорости -
104... 105 с~’, что приводит к удлинению
(растяжению) (рис. 6.6, б) струи при ее
движении в свободном пространстве, а
затем и к ее распаду на конечное число
отдельных фрагментов (рис. 6.6, в), в
дальнейшем не изменяющих своей дли-
ны. При этом элементы фрагментирован-
ной КС в процессе движения под воздей-
ствием внешних возмущений и с учетом
технологических факторов могут откло-
няться от оси в пределах некоторого те-
лесного угла разлета, изменяющегося в
зависимости от точности изготовления КЗ
в пределах 0,5... 1,5°. Картина фрагмен-
тированной КС (рис. 6.7, а) при функци-
онировании модельного КЗ с коничес-
кой облицовкой из меди представлена на
ортогональном синхробаллистическом снимке. Результат обработки этого сним-
ка позволил получить увеличенные теневые изображения типичных фрагмен-
тов КС (рис. 6.7, б), образуемых после разрыва.
Условия формирования КС определяются микроструктурой металла об-
лицовки и способностью его структурных составляющих к пластической де-
формации. Тяжелые пластичные металлы, в частности с кубической гране-
центрированной решеткой группы меди и некоторые сплавы, образуют сплош-
ные струи, плотность которых не более чем на 10 % ниже плотности материала
облицовки и которые при большом удлинении (примерно в 10 раз по сравне-
нию с исходной длиной образующей облицовки) не разрываются и сохраняют
высокую плотность. Другие металлы, такие, например, как железо и цинк, на
6.1. Кумулятивный эффект взрыва и действие кумулятивных зарядов 435
начальных стадиях формируют сплошные струи, которые, в отличие от опи-
санных выше, при растяжении разрываются значительно раньше. Хрупкие ме-
таллы, такие как вольфрам, титан, а также металлы с высокой пористостью,
получаемые спеканием, не образуют сплошных струй, а формируют дискрет-
ные потоки, состоящие из отдельных твердых частиц. Поражающая способ-
ность таких струй по сравнению со сплошными значительно ниже.
Рис. 6.7. Фотохронограмма движения фрагментированной КС (я) и теневые изобра-
жения типичных фрагментов КС (б):
1 - фрагмент № 4 (гкс = 2,13 км/с, /кс/^кс = 5,6); 2 - фрагмент № 17 (гкс = 3.1 км/с. /кс^кс =
= 6,12); 3 - фрагмент № 29 (г>кс = 4,03 км/с, l\«JdKC = 5,9), где скс, ZKC, dKC - осевая скорость,
длина и диаметр фрагмента КС соответственно
Нормальный процесс струеобразования приводит к формированию клас-
сической сплошной монолитной высокоградиентной КС, обладающей наиболь-
шей пробивной способностью. Однако могут существовать условия, при ко-
торых струя либо вообще не образуется, либо формируется в виде дисперги-
рованного потока частиц или компактного ПЭ (ударного ядра).
Различные режимы кумуляции связаны с изменением угла конической и
профиля полусферической облицовок. В зарядах с высокими конусами (углы
раствора 20...90°) реализуется режим классической кумуляции (см. рис. 6.4),
приводящий к возникновению высокоскоростной и высокоградиентной КС (вы-
ход металла в струю - до 30 %, скорости головных элементов - 9... 10 км/с, хвос-
товых - 2,0...2,5 км/с, пробитие стальной преграды - до (8...10)г/о). В зарядах
с пологими конусами с углом раствора порядка 150... 160° и сегментными
436
6. Кумулятивные средства поражения и боеприпасы
облицовками высотой до (0,1.. . 0,2 )с/0 реализуется режим обратной кумуляции,
который формирует компактный ПЭ с практически 100%-ным выходом мате-
риала облицовки в ударное ядро, скоростью порядка 2,2...2,8 км/с и пробити-
ем стальной преграды толщиной (0,5.. .0,8)t/o (подробнее рассмотрено в гл. 7).
Возможен также комбинированный (промежуточный) режим кумуляции, ха-
рактерный для конических облицовок с углами раствора 100... 140° и полу-
сферических облицовок и приводящий к образованию массивной малогради-
ентной струи (выход металла облицовки в струю - 50...60 %, скорости голов-
ных элементов - 4,5...5 км/с, хвостовых - порядка 1,5...2,0 км/с, пробитие
стальной преграды - до (4...5)г/о). Приведенные выше количественные дан-
ные зависят также от толщины КО. характеристик заряда ВВ и относятся к
медным КС и ударным ядрам.
При попадании классической сплошной КС в преграду в результате воз-
никающего очень высокого давления на границе между материалом струи и
преграды струя тормозится, разворачивается и «срабатывается», ее материал
растекается в направлении, обратном скорости ее движения, а материал пре-
грады за счет пластического деформирования перемещается в радиальном на-
правлении. Таким образом, образуется кратер, диаметр которого существенно
превышает диаметр КС. При этом глубина полученного кратера зависит от
размеров и формы КЗ; формы, геометрии и материала КО; качества, энергосо-
держания, плотности и скорости детонации ВВ; расстояния F от заряда до
преграды; степени вращения КЗ; точности изготовления различных деталей
КЗ и точности их сборки; плотности и прочности материала преграды.
Согласно гидродинамической теории кумуляции, глубина проникания
(внедрения) КС в полубесконечную гомогенную преграду может быть опреде-
лена как
L - бсс
г’пр
^кс-%
где /кс - длина КС; г?кс - скорость КС; гпр - скорость проникания КС в пре-
граду. Для случая, когда материалы КС и преграды являются идеальными не-
сжимаемыми жидкостями (данное условие характерно для относительно боль-
ших скоростей струи > 4 км/с), приведенное выражение преобразуется в
известную формулу Лаврентьева - Тейлора:
L-ZKC
Ркс
Рп
где ркс - плотность материала КС; рп - плотность материала преграды. По
этой формуле глубина проникания зависит только от длины КС, плотности
КС и преграды и не зависит от скорости струи, сжимаемостей материалов
струи и преграды, их прочности и ряда приведенных выше факторов. При
необходимости все это может быть учтено в соответствующих методиках рас-
чета (подробнее в подразд. 6.10).
Диаметр кратера dmBl в полубесконечной преграде на заданной глубине
проникания Lt (для i-й части КС) может быть определен по приближенной
зависимости:
6.1. Кумулятивный эффект взрыва и действие кумулятивных зарядов
437
d = А
“ОТВ! ’
где Л - коэффициент удельной работы вытеснения единицы объема материала
преграды, определяемый экспериментально; ЕКС( - кинетическая энергия со-
ответствующей части КС (отдельного z-го фрагмента КС). По данной зависимо-
сти может быть построен профиль образуемого в преграде кратера (пробоины).
Для не слишком малых зарядов справедлив закон подобия: размеры кра-
тера увеличиваются в той же степени, что и размеры заряда. Таким образом,
поражающая способность зарядов данного типа определяется отношением глу-
бины проникания КС к диаметру заряда d3 или к внутреннему диаметру осно-
вания КО do.
Большое значение для образования Кратера (пробоины) в преграде име-
ет так называемое фокусное расстояние, ассоциируемое с минимальным рас-
стоянием заряда от преграды, при котором КС обладает максимальной про-
бивной способностью. Из зависимости поражающей способности одного из
стандартных зарядов от относительного расстояния F/d0 между зарядом и
стальной преградой (рис 6.8) ясно, что достигаемая при этом относительная
Шубина проникания Ljd0 по мере увеличения расстояния между зарядом и
преградой вначале возрастает, а затем убывает. В этом случае глубина прони-
кания достигает максимального значения при подрыве КЗ на оптимальном
(фокусном) расстоянии Fm от преграды, которое изменяется в зависимости от
конструкции заряда, материала облицовки, точности изготовления и характе-
ристик пробиваемой преграды.
Экспериментально полученные значения относительной глубины прони-
кания КС в преграды из материалов различной плотности и прочности приме-
нительно к взрыву стандартного заряда приведены в табл. 6.1, где глубина
каверны в мягкой стали Ls принята за единицу.
Рис. 6.8. Зависимость относительной глубины проникания КС от относительного рас-
стояния КЗ с медной конической облицовкой до прочной стальной преграды (3200 НВ):
1 - КЗ обычной технологии изготовления; 2 - прецизионный КЗ; 3 - идеальный КЗ;
4 - идеальная КС в воздухе
438
6. Кумулятивные средства поражения и боеприпасы
Таблица б. 1. Значения относительной глубины проникания КС
в преграды разной плотности
Материал преграды рп -10 3, кг/м3 L/Ls
Сталь:
мягкая (эталон) 7,8 1,0
броневая средней плотности 7,8 0,8
Свинец 11,3 1,3
Бетон 2,3 3,5
Плексиглас 1,2 2,8
Полиэтилен 0,92 5,0
Парафин 0.9 7,2 '
Резина 1,1 6,4
Значения глубины проникания КС в преграды разной твердости приведе-
ны ниже:
Сталь ..........
Алюминиевый сплав
НВ L, мм
100/350 111/80
50/200 327/256
Влияние разной прочности (твердости) на глубину проникания КС конк-
ретных КЗ в преграду с одинаковой начальной плотностью объясняется более
быстрым «срабатыванием» КС в прочной преграде. При этом чем прочнее
преграда, тем хуже происходит пластическое течение материала преграды и
меньше глубина проникания.
В целом объем кратера можно считать зависящим от энергии КС и проч-
ности материала преграды. Существенным образом на форму кратера влияет
геометрия преграды. Это ясно из того, что расширение кратера в значитель-
ной степени происходит благодаря вытеснению материала преграды в ради-
альном направлении. Поэтому чем меньше энергии требуется для пластичес-
кого течения материала преграды, тем больше диаметр кратера.
При пробитии КС преграды конечной толщины в запреградное простран-
ство проникают, помимо оставшейся части самой струи, вторичные осколки,
образующиеся в результате взаимодействия струи с тыльной частью прегра-
ды, продукты детонации и возникают баллистические УВ (рис. 6.9). В резуль-
тате взрыва КЗ 2, инициируемого детонатором 1, образуется КС 12, ПД 3 и
падающая на преграду взрывная УВ 5. После пробития такой преграды 6 в
запреградное пространство проникают элементы КС 8 и поток осколков 7 от
преграды, впереди которых распространяется ударная волна (проходящая
взрывная 11 и баллистические 9,10 от потока осколков и элементов КС). С на-
ружной поверхности преграды распространяется отраженная взрывная УВ 4.
Указанное явление необходимо учитывать при оценке эффективности действия
КЗ по преградам конечной толщины, особенно в случае защиты ими объектов
с замкнутым воздушным пространством.
Приведенные выше особенности действия КС по преградам относятся в
основном к металлическим гомогенным преградам. При переходе на такие
6.1. Кумулятивный эффект взрыва и действие кумулятивных зарядов 439
Рис. 6.9. Рентгенограмма (а) и схема пробития (б) КС стальной преграды конечной
толщины:
1 - средство инициирования; 2 КЗ; 3 - продукты детонации; 4 - осаженная взрывная УВ;
5 - падающая взрывная УВ; 6 — преграда; 7 - запр'еградный поток осколков, 8 - запрсградный
элемент КС; 9, 10 - фронт баллистической УВ от потока осколков и элементов КС;
11 проходящая взрывная УВ; 12 - КС
нетрадиционные материалы преград, как скальные породы, бетон, лед, мерз-
лый грунт, вода, стеклопластик, керамика, пористые материалы и т. п., к кото-
рым в последнее время проявляют определенный интерес в связи с возможно-
стью расширения области использования КЗ, появляются принципиально
новые факторы, которые необходимо учитывать при оценке пробивной спо-
собности КЗ. Как правило, такие материалы имеют небольшую плотность по
отношению к стали (при этом возможна существенно большая их прочность),
некоторые из них характеризуются инерционным движением среды и хруп-
ким разрушением; помимо срабатывающихся элементов КС, существенный
вклад в глубину их пробития может вносить пест, проникающий как жесткое
тело. Рассмотрение процесса проникания КС еще более усложняется при ее
действии по комбинированной преграде, состоящей из набора гомогенных пре-
град из самых разных, в том числе и активных, материалов (ячеистые прегра-
ды, ДЗ и т. п.).
Область использования кумулятивного эффекта определяется конструк-
тивными особенностями и функциональным назначением КЗ. Сосредоточен-
ные осесимметричные КЗ используются в военной технике для пробития силь-
нозащищенных и бронированных целей; в кумулятивных перфораторах - для
пробивания обсадных труб нефтяных, газовых, нагнетательных и водозабор-
ных скважин; для образования шпуров под заряды ВВ в массивах материа-
лов, негабаритах горных пород и металлических скрапах; для прошивки от-
верстий в плитах из различных материалов и т. п. Удлиненные КЗ применя-
ются в зарядах разрушения для перерубания рельсов, балок, свай, кабелей,
тросов, для взрывной резки материалов и конструкций, разделения ступе-
ней ракет и т. п.
440
6. Кумулятивные средства поражения и боеприпасы
6.2. Классификация кумулятивных средств поражения
и боеприпасов
Кумулятивный эффект был открыт еще в конце XVIII в., впервые реально
использован при строительстве фортификационных сооружений в скальных
породах и прочных грунтах в середине XIX в., однако непосредственно куму-
лятивные СП и БП нашли широкое применение лишь во время Второй миро-
вой войны. За прошедшие годы их конструкции претерпели значительные из-
менения. В настоящее время на вооружении всех армий имеются кумулятив-
ные СП и БП, обладающие высокой эффективностью действия, способные
пробивать гомогенную броню толщиной свыше 1000 мм
По типу оружия различают следующие кумулятивные СП и БП:
артиллерийские кумулятивные снаряды и мины;
- кумулятивные гранаты (ручные, реактивные, винтовочные);
- кумулятивные боевые части ПТУР;
- кумулятивные инженерные мины и заряды разрушения;
противотанковые авиационные бомбы (ПТАБ) и кумулятивно-осколоч-
ные боевые элементы (КОБЭ) кассетного оружия;
- кумулятивно-осколочные БЧ неуправляемых авиационных ракет;'
- кумулятивно-фугасные БЧ управляемых авиационных ракет и управляе-
мых авиационных бомб;
- кумулятивно-фугасные боевые зарядные отделения (БЗО) торпед, мин и
БЧ ракетно-бомбовых противолодочных комплексов.
В перечисленных типах СП и БП первичным и основным действием, как
правило, является кумулятивное действие (пробитие преграды КС). Часто ос-
новному кумулятивному действию сопутствуют дополнительные осколочный
или фугасный типы действия, реализуемые за счет конструкции корпуса СП и
БП или достаточно большой массы заряда ВВ. Это отражено в приведенной
выше классификации. Кроме того, известны СП и БП, осуществляющие одно-
временно кумулятивный, ударно-проникающий (кинетический) и фугасный
типы действия. В качестве примера можно привести БЧ проникающего типа
MEPHISTO (Германия) для УАР класса воздух- земля или УАБ с лазерным
наведением, состоящую из КЗ, расположенного перед основной боевой час-
тью. Подрыв КЗ осуществляется на оптимальном расстоянии от цели по сиг-
налам от электрооптического неконтактного ВУ. В образовавшееся в результа-
те взаимодействия КС и материала преграды свободное пространство со ско-
ростью до 250 м/с входит основная БЧ, которая после поражения оставшейся
части преграды взрывается внутри объекта. Аналогичным образом построена
и схема известного отечественного окопного заряда ОЗ-l (см. в подразд. 6.6).
Малокалиберная бетонобойная бомба STABO (Германия) комбинирован-
ного действия (рис. 6.10) имеет в передней части корпуса 1 КЗ 3 и взрыва-
тель 4, а в задней части корпуса - снаряд 2 проникающего типа с зарядом ВВ и
взрывателем, снабженным замедлителем. При встрече с бетонной преградой КЗ
пробивает в ней пробоину, через которую проходит проникающий снаряд.
По точности стрельбы кумулятивные СП и БП могут быть классифици-
рованы на обычные и высокоточные. Такое разделение характерно прежде все-
го для артиллерийских снарядов и мин, а также БЭ кассетного оружия. Сре-
6.2. Классификация кумулятивных средств поражения и боеприпасов
441
Рис. 6.10. Малокалиберная бетонобойная бомба STABO комбинированного действия:
1 - корпус; 2 - подкалиберный проникающий фугасный снаряд (проникатель); 5 кумулятив-
ный предзаряд; 4 - взрыватель
ди высокоточных артиллерийских снарядов следует отметить 155-мм управ-
ляемые кумулятивные снаряды М712 Copperhead (США) с лазерной голов-
кой самонаведения (ГСН), ADC (Франция) и BOSS (Швеция) с радиолока-
ционной (РЛ) ГСН миллиметрового диапазона, которые обеспечивают про-
битие 500...600 мм брони. Среди высокоточных артиллерийских мин следует
отметить 81-мм противотанковую мину Merlin (Великобритания) с радиоло-
кационной ГСН миллиметрового диапазона, а также 120-мм управляемые
кумулятивные мины Strix (Швеция) с пассивной двухдиапазонной инфра-
красной (НК) ГСН и Griffin (Великобритания, Италия, Швейцария) с радио-
локационной ГСН миллиметрового диапазона, которые пробивают от 500 мм
(в обычном варианте) до 700 мм (в тандемном варианте) брони. Помимо
КОБЭ кассетного оружия свободного (естественного) рассеивания, в после-
днее время широкое применение находят самонаводящиеся и самоприцели-
вающиеся БЭ, также относящиеся к классу ВТО. Из выделенных выше ти-
пов высокоточным оружием уже по своему определению являются ПТУР,
УАР, УАБ и торпеды. При этом основная часть артиллерийских снарядов и
мин, кумулятивные гранаты ручных и станковых гранатометов, широкая но-
менклатура инженерных БП, НАР относятся к классу обычного оружия.
По типу попадания в цель (способу атаки) кумулятивные СП и БП могут
быть классифицированы следующим образом: в горизонтальной плоскости -
во фронтальную (лобовую) и боковые поверхности; в вертикальной плоско-
сти - в нижнюю и верхнюю поверхности; при пролете над целью и с пикиру-
ющей траектории (рис. 6.11).
Как известно, бронетанковая техника максимально защищена со сторо-
ны фронтальной поверхности от большинства артиллерийских снарядов, дей-
ствующих на дальности прямого выстрела, ПТУР, ручные и станковые гра-
натометы. Толщина лобовой брони корпуса и башни современных танков
достигает 700... 1000 мм, к тому же она может быть многослойной и допол-
нительно укреплена динамической защитой (по классификации НАТО - ре-
активная броня ERA). В этом случае соответствующие кумулятивные СП и
БП должны обладать максимальной пробивной способностью не менее
(6...8)d0 в калибрах 120... 150 мм и не менее (8...10)с/о в калибрах 100...
...120 мм, где d0 - внутренний диаметр основания КО. Реально такое бро-
непробитие обеспечивают лишь самые современные тандемные кумулятив-
ные ПТУР и кумулятивные гранаты относительно больших калибров.
442
6. Кумулятивные средства поражения и боеприпасы
а
в
г
Рис. 6.11. Типовые схемы взаимодействия кумулятивных СП и БП с бронецелью
(танком):
а — попадание во фронтальную поверхность; б - взаимодействие при пролете над целью;
в - действие снизу; г - действие сверху; 1 - лобовая атака; 2 - атака при пикировании на
конечном участке траектории; 3 - действие БЧ с поперечным расположением КЗ; 4 - действие
БЧ с угловым расположением КЗ
6.2. Классификация кумулятивных средств поражения и боеприпасов
443
При попадании кумулятивных СП и БП в бортовую поверхность броне-
цели требования по пробивной способности существенно снижаются. Од-
новременно расширяется номенклатура кумулятивных СП и БП, обеспечи-
вающих бронепробитие с данного направления. В этом случае помимо ПТУР
и кумулятивных гранат надежно поразить цель в горизонтальной плоскости
можно артиллерийскими снарядами и противобортовыми инженерными ми-
нами.
Менее защищенными являются также верхняя и нижняя поверхности бро-
нецели, для поражения которых используются кумулятивные БЭ и ПТАБ кас-
сетного оружия, близкие к ним по типу действия НАР, противокрышевые и
противоднищевые противотанковые инженерные мины. С навесной траекто-
рии поражают цель артиллерийские (ствольные) мины. В этих случаях при
пробитии преград относительно небольшой толщины весьма вероятно допол-
нительное поражающее действие КЗ за счет запреградного эффекта (см.
рис. 6.9).
Использование ВТО позволяет не только существенно повысить вероят-
ность попадания кумулятивных СП и БП в цель, но и увеличить эффектив-
ность их действия за счет «грамотного» выбора места попадания и угла взаи-
модействия с преградой. В этом плане весьма перспективны варианты пора-
жения цели при пролете над ней (ПТУР Bill (Швеция), ПТУР Predator и Tow-2B
(США), высокоточный танковый 120-мм снаряд ХМ943 STAFF (США)) или
при пикировании на конечном участке траектории (ПТУР ATGW-3/LR Trigat
(Германия, Франция, Великобритания), ПТУР Javelin (США)). При этом важ-
ное значение имеет сочетание указанных способов поражения цели с соответ-
ствующими компоновочными схемами кумулятивных СП и БП.
По конструктивному исполнению кумулятивные СП и БП можно подраз-
делить следующим образом:
- моноблоки осевой направленности действия;
- моноблоки с поперечным или угловым относительно оси СП и БП рас-
положением КЗ (БЧ бокового боя);
- тандемные кумулятивные СП и БП осевой направленности действия с
неподвижным, выдвижным или отстреливаемым (выбрасываемым) предза-
рядом.
Основная конструктивная особенность классической схемы моноблочно-
го кумулятивного СП с одним КЗ осевого действия (рис 6.12, а) - обеспече-
ние необходимого свободного воздушного пространства перед КО для нор-
мального формирования КС и оптимального (фокусного) расстояния от торца
КЗ до пробиваемой преграды. Если при этом перед КЗ не располагаются эле-
менты бортовой аппаратуры, маршевый двигатель или другие составные час-
ти СП, то необходимое фокусное расстояние обеспечивается длиной обтека-
теля головной части или специальным выдвинутым штырем (иглой) в случае
контактного подрыва, или моментом срабатывания неконтактного ВУ в слу-
чае предконтактного подрыва. При другом варианте в блоке аппаратуры или
маршевом двигателе необходимо предусматривать цилиндрический канал
(трубку) для прохождения КС, а непосредственно перед КО - свободный объем
в форме обратного конуса для обеспечения нормального схлопывания нижней
части КО.
444
б. Кумулятивные средства поражения и боеприпасы
Рис. 6.12. ПТУР с одним КЗ осевого действия (а) и БЧ с попе-
речным расположением КЗ (б)
Схема с поперечным относительно оси СП расположением кумулятив-
ных зарядов (рис. 6.12, б) использована в ПТУР Tow-2B (США). Такая двух-
элементная БЧ срабатывает при пролете над целью, образуя в результате под-
рыва два бронебойных самоформирующихся элемента, каждый из которых
направлен в крышу танка - наиболее уязвимую часть его корпуса с более
тонкой броней.
Помимо поперечного расположения, КЗ могут находиться под некоторым
углом относительно оси СП, например, в конструкции ПТУР Bill (Швеция) за-
ряд повернут под углом 30° относительно продольной оси. В устройстве такой
ПТУР (рис. 6.13) используют так называемую БЧ бокового боя. В конструкции
усовершенствованной ПТУР Bill-2 применяют два КЗ, один из которых распо-
ложен поперечно, а другой - под некоторым углом относительно оси.
Наибольшее распространение получила классическая схема компоновки
тандемного кумулятивного СП осевой направленности действия. Рассмотрим
Рис. 6.13. ПТУР Bill с БЧ бокового боя:
I - взрыватель; 2 - маршевый двигатель; 3 - кумулятивная БЧ; 4 - батарея; 5 - гироскоп;
6 - стабилизатор; 7 - кагушка с проводом; 8 - руль
6.2. Классификация кумулятивных средств поражения и боеприпасов
445
ее на примере ПТУР большой дальности ATGW-3/LR (рис. 6.14). В ней перед
основным КЗ 2 располагается лидирующий КЗ 1 (предзаряд), который должен
сработать первым, обеспечивая пробитие элементов бортовой аппаратуры (глав-
ным образом ГСН 5) и взведение ДЗ (реактивной брони ERA), дополнительно
защищающей основную броню танка. При этом основной КЗ должен быть
защищен от действия взрыва предзаряда и иметь определенную задержку в
инициировании по отношению к моменту подрыва предзаряда.
Подобная схема взаимодействия классического тандемного СП с динами-
ческой защитой основного броневого корпуса танка показана на примере ПТУР
Hellfire (США) (рис. 6.15). Кумулятивная струя предзаряда 7 проходит в кана-
ле 6, пробивает ГСН 5 и инициирует ВВ 2 в элементе ДЗ. За счет временной
задержки подрыва основного КЗ 8 его КС должна подойти к основной бро-
не 1 танка в момент, когда метаемый слоем ВВ 2 через воздушный зазор 3 со
скоростью смэ металлический экран 4.уже не будет находиться на пути ее
движения.
Другая схема компоновки тандемного кумулятивного СП осевой направ-
ленности действия реализована в ПТУР ближнего боя Егух (Франция)
(рис. 6.16). В ней основной КЗ 4 отделен*от лидирующего КЗ 1 (предзаряда)
маршевым двигателем 2, в котором предусмотрен специальный цилиндричес-
кий канал для прохождения КС основного заряда и который обеспечивает за-
щиту основного заряда от действия взрыва предзаряда и оптимальное фокус-
ное расстояние до преграды.
Рис. 6.14. Схема компоновки ПТУР ATGW-3/LR с тандемной БЧ:
1 - лидирующий КЗ; 2 - основной КЗ; 3 - привод управления; 4 двухрежимный старто-
маршевый двигатель; 5 - инфракрасная ГСН
Рис. 6.15. Взаимодействие ПТУР Hellfire с динамической защитой танка:
1 - основная броня; 2 - пластичное ВВ; 3 - воздушный зазор; 4 - метаемый экран; 5 - ГСН;
6 - канал для прохождения КС предзаряда; 7 - предзаряд; 8 - основной КЗ
446
6. Кумулятивные средства поражения и боеприпасы
Рис. 6.16. ПТУР Егух:
I лидирующий КЗ; 2 маршевый двигатель; 3 сопло; 4 - основной КЗ; 5 - корпус контей-
нера; 6 - плечевой упор; 7 узел фиксирования; 8 - электрическое соединение; 9 батарея
Схема кумулятивной БЧ тандемного типа с выдвижным предзарядом ис-
пользована в ПТУР Tow-2A (рис. 6.17). В этой схеме лидирующий КЗ диамет-
ром 38 мм, предназначенный для предварительного инициирования^З, уста-
навливается в специальной телескопической игле /, передняя часть которой
имеет диаметр примерно 50 мм. Для инициирования ВУ 6 основного ц допол-
нительного КЗ используется механически сминаемый замыкатель, а перед де-
тонацией основного заряда 4 реализуется небольшая задержка. При этом «ли-
дер» добавляет к массе ракеты Tow-2 моноблочного варианта с выдвигаю-
щейся иглой всего 300...400 г, что не оказывает значительного влияния на ее
дальность и продолжительность полета.
В схеме ПТУР Hot-З (Франция, Германия) (рис. 6.18, а) взрыватель снаб-
жен оптическим неконтактным датчиком цели, который после ее обнаруже-
ния в заданном диапазоне расстояний перед ракетой выдает сигнал на сраба-
тывание управляющего устройства (рис. 6.18, б). Пороховой заряд массой не-
сколько десятков граммов осуществляет плавное разделение головного отсека
с КЗ-лидером от основного корпуса ракеты (рис. 6.18, в). Такая конструкция
позволяет установить оптимальную временную задержку между подрывами
КЗ-лидера и основного заряда, обеспечивающую уход с траектории КС ос-
новного заряда метаемого металлического экрана ДЗ (рис. 6.18, г) и подлет
основного заряда к «оголенной» броне танка (рис. 6.18, д). Подобная компо-
новочная схема дает возможность в случае изменения параметров ДЗ срав-
нительно легко модернизировать конструкцию БЧ посредством корректировки
Рис. 6.17. Кумулятивная БЧ ПТУР Tow-2A с выдвижным предзарядом:
I - выдвигающаяся телескопическая игла с лидирующим КЗ; 2 - корпус основного КЗ;
3 - кумулятивная воронка основного КЗ; 4 - заряд ВВ; 5 - линза; 6 ВУ
6.3. Артиллерийские кумулятивные снаряды имины
447
б
Рис. 6.18. ПТУР Hot-З с отстреливаемым предзарядом:
а - компоновочная схема; б - обнаружение цели датчиком; в - отделение КЗ-лидера от ракеты;
г - срабатывание КЗ-лидера по ДЗ; д - срабатывание с задержкой по времени основного КЗ
по броне
расстояния (на котором осуществляется отстрел предзаряда) и временной
задержки срабатывания основного заряда. Кроме того, при наличии на тан-
ке помимо динамической еще и активной защиты ПТУР с отстреливаемым
предзарядом можно решить проблему одновременного преодоления двух этих
защит.
6.3. Артиллерийские кумулятивные снаряды и мины
Кумулятивный снаряд - это составная часть артиллерийского выстрела,
в который входит также гильза с пороховым зарядом. В качестве примера
приведем отечественный 115-мм выстрел с кумулятивным снарядом ЗБК4М
(рис. 6.19), в котором крепление гильзы из стали ПЮА (применяется также
латунь) осуществляется обжатием ее дульца к запоясковой части снаряда.
Аналогичный выстрел с кумулятивным снарядом ЗБК8М имеет гильзу со
сгорающим корпусом, который запрессовывается в поддон на клее БФ-4.
Далее рассматриваются только кумулятивные снаряды, основные элементы
448
6. Кумулятивные средства поражения и боеприпасы
Рис. 6.19. 115-мм
выстрел с кумуля-
тивным снарядом
ЗБК4М:
1 - кумулятивный
снаряд; 2 - гильза;
3 - пороховой заряд
которых и особенности конструкции будут отмечены на
приведенных ниже схемах
Артиллерийские кумулятивные снаряды могут вы-
стреливаться из орудий с нарезными стволами и гладко-
ствольных орудий, а мины - из безоткатных орудий и ми-
нометов. По способу стабилизации на траектории снаря-
ды подразделяют на вращающиеся и оперенные, при этом
последние могут иметь как калиберное оперение (жесткий
стабилизатор), характерное для артиллерийских мин, так
и раскрывающееся в полете надкалиберное оперение (опе-
ренный стабилизатор).
Как правило, в кумулятивных снарядах применяют го-
ловные взрыватели мгновенного действия с изоляцией КД
от детонатора, с дальним взведением типа ГПВ-2, ГПВ-3
или головодонные пьезоэлектрические взрыватели типа
В-15 (для отечественных выстрелов). При встрече кумуля-
тивного снаряда с целью срабатывает ВУ, импульс от взры-
ва детонатора которого передается КД снаряда, располо-
женному в нижней части разрывного заряда у вершины
КО. Взрыв КД вызывает детонацию промежуточного де-
тонатора и разрывного заряда. Детонационный фронт дви-
жется в направлении КО и образующиеся в результате
взрыва ПД под большим давлением обжимают КО к оси
симметрии заряда, образуя КС (см. подразд. 6.1).
Кумулятивные вращающиеся снаряды
к нарезным орудиям
Впервые кумулятивные снаряды были применены нем-
цами во время войны в Испании 1936 -1939 гг., но наибо-
лее широкое распространение они получили во Второй ми-
ровой войне на советско-германском фронте военных дей-
ствий в 1941-1942 гг. Такие снаряды выстреливались из
нарезных орудий и стабилизировались в полете вращением, снабжались вы-
сокочувствительными взрывателями ударного действия, имели медные или же-
лезокерамические ведущие пояски и трассеры, а также привинтную головку
оживальной или конической формы. Корпуса первых отечественных снарядов
изготовлялись из снарядной стали С60 или сталистого чугуна и имели толщи-
ной, примерно равную 0,1 клб снаряда. Длина снарядов составляла 3...4 клб,
а максимальные скорости вращения - 8000... 15 000 об/мин. Форма КО выби-
ралась полусферической, конической или рупорообразной, а сама облицовка
изготовлялась преимущественно из стали. Для передачи инициирующего им-
пульса от КД взрывателя к нижнему капсюлю-детонатору в КЗ предусмагри-
валась центральная полая трубка. Первые отечественные снаряды наполня-
лись сплавом ТГ в разных пропорциях, однако постепенно был осуществлен
переход на более мощное ВВ - А-1Х-1.
6.3. Артиллерийские кумулятивные снаряды имины
449
Рис. 6.20. Кумулятивно-трассирующий снаряд-(д), 76-мм вращающийся снаряд
БП-353А (б), 152-мм вращающийся снаряд БП-540 (в):
1 - взрыватель; 2 - привинтная головка; 3 - корпус; 4 - КО; 5 - заряд ВВ; 6 - ведущий поясок;
7 центральная трубка; 8 - детонатор, 9 - трассер
Один из первых таких снарядов - вращающийся кумулятивно-трассиру-
ющий снаряд (Германия) к 149-мм тяжелому пехотному орудию (рис. 6.20, а),
один из первых отечественных - вращающийся 76-мм кумулятивный снаряд
БП-353А (рис. 6.20, б) и один из последних (хронологически) - отечествен-
ный 152-мм кумулятивный снаряд БП-540 (рис. 6.20, в) (табл. 6.2).
Таблица 6.2. Конструктивные характеристики кумулятивных
вращающихся снарядов
Снаряд Толщина корпуса, клб Кумулятивная облицовка Тип ВВ Скорость вращения, об/мин
Индекс Калибр, мм Длина, мм d0, мм 6,/4о hjdo Форма
БП-460А 122 3,03 0,12 95 0,026 1,10 Конус ТГ50 8400
БП-463 122 3,70 0,07 86,8 0,043 1,73 Рупор A-IX-1 14 200
БП-1 122 3,60 0,10 82 0,067 0,71 Конус A-IX-1 14 600
БП-540 152 3,64 0,08 100 0,063 0,71 » Тротил, А-1Х-1 10 800
Примечание.^ - внутренний диаметр КО; ho - высота КО; 6О - толщина КО.
Основные недостатки таких снарядов - малые бронепробиваемость (не
превышает 1,0... 1,5 клб) и начальная скорость снаряда (300...500 м/с). При
этом главный фактор, снижающий бронепробиваемость, - наличие вращения,
при котором возникающие центробежные силы приводят к расстройству КС,
450 6. Кумулятивные средства поражения и боеприпасы
вследствие чего падает глубина пробития. Кроме того, к моменту появления
таких снарядов не был накоплен достаточный опыт по конструированию ку-
мулятивных снарядов, оптимизации формы и толщины КО, в силу объектив-
ных причин сдерживалось использование в качестве материала КО дорогос-
тоящей и дефицитной меди, а в качестве ВВ - мощных гексогеносодержащих
составов.
В дальнейшем усилия научной и конструкторской мысли были направле-
ны на создание снарядов, обладающих более высокой бронспробиваемостью.
Кумулятивные оперенные снаряды с проворачивающимся пояском
к нарезным орудиям
Одним из решений было создание снарядов, вращающихся с небольшой
угловой скоростью. Некоторое вращение снарядам (до 1500 об/мин), сообща-
ется для осреднения эксцентриситетов центра масс. Такие снаряды получили
название кумулятивных оперенных снарядов к орудиям с нарезными ствола-
ми. Снаряды отличаются от вращающихся устройством ведущей части и на-
личием раскрывающегося надкалиберного стабилизатора. Несмотря на конст-
руктивные и эксплутационные преимущества, калиберный стабилизатор не
получил практического применения вследствие неудовлетворительного дей-
ствия при сверхзвуковых скоростях снаряда.
В качестве стабилизирующего устройства выбрали раскрывающееся пос-
ле вылета снаряда из ствола надкалиберное оперение с четырьмя-шестью пе-
рьями (лопастями), закрепленными в корпусе стабилизатора (рис. 6.21). Ста-
Рис. 6.21. Стабилизатор с перьями, открывающимися с помощью газовой камеры
и плунжера:
1 - донная часть снаряда; 2 обтюрирующий поясок на проворачивающемся кольце; 3 - ось
пера (лопасти); 4 - перо (лопасть)
6.3. Артиллерийские кумулятивные снаряды и мины 451
билизатор с помощью имеющейся в верхней части его корпуса резьбы ввин-
чивается в резьбовое очко дна 1 снаряда. Перья 4 стабилизатора, установлен-
ные в его пазах, закрепляются с помощью осей 3, проходящих через отвер-
стия в перьях. Раскрытие лопастей может осуществляться с помощью распо-
ложенных в корпусе стабилизатора газовой камеры и плунжера или под
действием газов, находящихся под лопастями, центробежных сил и силы со-
противления воздуха. Длина и количество лопастей определяются исходя из
условий обеспечения стабилизации снаряда в полете. Необходимое вращение
обеспечивается наличием на лопастях специальных скосов, воздействуя на ко-
торые воздушный поток вовлекает снаряд во вращение.
Для фиксации положения снаряда при заряжании и обтюрации порохо-
вых газов снаряд снабжен обтюрирующим пояском 2. Для того чтобы при
врезании обтюрирующего пояска в поле нарезов снаряд не получал враще-
ния, его размещают на стальном проворачивающемся («плавающем») кольце,
названном так за возможность свободного проворота относительно корпуса
снаряда. Во время выстрела поясок, двигаясь по нарезам, поворачивается на
снаряде вместе с кольцом. Для обеспечения более свободного вращения меж-
ду трущимися поверхностями кольца и снаряда наносится графитовая смазка.
Кольцо фиксируется на хвостовике корпуса кольцевым
утолщением корпуса стабилизатора или муфтой. На на-
ружной поверхности кольца есть проточка в форме «ла-
сточкина хвоста», в которую запрессовывается желе-
зокерамический, медный или медно-никелевый обтю-
рирующий поясок. Кольцо с пояском на хвостовике
вращается свободно и благодаря этому снаряд при дви-
жении в канале орудия получает лишь небольшую ско-
рость вращения вокруг своей продольной оси (до 10 %
от угловой скорости вращения проворачивающегося
кольца). До выстрела кольцо закреплено от проворота
на корпусе фиксатором. Небольшая скорость вращения
способствует раскрытию оперения после вылета снаря-
да из канала ствола и не влияет на могущество дей-
ствия снаряда по броне.
Отечественный 122-мм оперенный кумулятивный
снаряд ЗБК9 со ступенчатой формой головной части
(рис. 6.22) стабилизируется в полете раскрывающимся
оперением и имеет проворачивающееся
Рис. 6.22. 122-мм кумулятивный оперенный снаряд ЗБК9
с проворачивающимся пояском к нарезному орудию:
1 - пьезогенератор ВУ; 2 - гайка; 3 - контакт; 4 головка; 5 - кон-
тактный конус; 6 - переходное кольцо; 7 - вкладыш; 8 - манжета;
9 - корпус снаряда; 10 шашка ВВ; 11 - кумулятивная воронка;
12 контакт; 13 - линза; 14 - шашка ВВ; 15 - вкладыш; 16 -
проворачивающееся кольцо с обтюрирующим пояском; 17 - пре-
дохранительно-детонирующий механизм ВУ; 18 - прокладка; 19 -
лопасть стабилизатора; 20 - трассер; 21 ось; 22 - гайка трассера
452
б Кумулятивные средства поражения и боеприпасы
кольцо с обтюрирующим пояском. Снаряды данного типа имеют большую,
чем у вращающихся снарядов, общую длину (до 5.. .7 клб) и улучшенные аэро-
динамические качества формы головной части. Такая длина необходима для
увеличения расстояния между центром масс и центром давления воздуха,
а ступенчатая форма головной части оказывает положительное влияние на
устойчивость оперенного снаряда на траектории. Усовершенствованный ку-
мулятивный узел включает в себя высокую коническую облицовку (угол ра-
створа конуса составляет 20.. .30°) толщиной 5(, = (0,025...0,035)<7О, изготовля-
емую из стали 10 или меди марок Ml, М2 (в этом случае отечественные сна-
ряды имеют индекс ЗБК6М, ЗБК9М и г. д.). В качестве ВВ наиболее часто
применяются гексогеносодержащие составы (для отечественных снарядов со-
ставы A-IX-1, A-IX-10 и т. п.), спрессованные в шашки или запрессованные в
корпус на облицовку (табл. 6.3). Корпус снаряда, корпус стабилизатора и его
лопасти, проворачивающееся кольцо и другие элементы производят из специ-
альных сталей (например, в снаряде ЗБК9 используют стали 45X1, 50ХГ, 50Л,
С60, 11ЮА). Во многих снарядах в КЗ применяется «линза» - узел управле-
ния детонационным фронтом, выполненный из различных инертных материа-
лов (например, пресс-материала К-214).
Таблица 6.3. Конструктивные характеристики кумулятивных оперенных
снарядов с конической кумулятивной облицовкой
Снаряд Толщина корпуса, клб Кумулятивная облицовка Тип ВВ ^л^з
Индекс Калибр, мм Длина, клб do, мм hjdo
Снаряды к орудиям с нарезными стволами
ЗБК5М 100 6,37 0,08 76 0,035 1,91 A-IX-1 0,50
ЗБК6М 122 5,83 0,10 89 0,033 1,88 A-IX-1 —
ЗБК9М 122 5,26 0,08 91.5 0,034 1,75 A-IX-1 0,37
Снаряды к гладкоствольным орудиям
ЗБКЗМ 100 6,40 0,07 76 0,035 1,91 A-IX-1 0,50
ЗБК4М 115 5,55 0,05/0,08 88 0,033 1,77 A-IX-1 0,39
ЗБК8М 115 5,54 0,05/0,07 88 0,034 1.78 A-IX-1 0,40
ЗБК14М 125 5,40 0.10 93,5 0,037 1,70 Окфол 0,65
Примечание dn - диаметр линзы; <7., - диаметр заряда ВВ
В результате рассмотренных технических решений удалось повысить бро-
непробиваемость почти в 3 раза и достичь 3...4 клб, при этом начальная
скорость снарядов возросла до 1000 м/с. Однако при достаточно высокой
бронепробиваемости и хорошей кучности боя на дальностях прямого вы-
стрела недостатками таких снарядов стали усложнение устройства веде-
ния снаряда по каналу ствола и некоторое ухудшение внешнебаллисти-
ческих характеристик за счет большой парусности и увеличения общей дли-
ны снаряда.
6.3. Артиллерийские кумулятивные снаряды имины
453
Кумулятивные снаряды с проворачивающимся снаряжением
к нарезным орудиям
Высокая бронепробиваемость невращающихся снарядов достигается тем,
что снаряжение (заряд ВВ) не вовлекается во вращение. При этом предотвра-
щение вращения КЗ может быть достигнуто обеспечением возможности про-
ворачивания корпуса относительно снаряжения снаряда. В этом случае ста-
билизация в полете кумулятивного снаряда осуществляется с помощью вра-
щения, а имеющее возможность свободного проворота в своем корпусе
снаряжение, стремясь сохранить в силу своей инерции состояние покоя, не
будет вовлекаться во вращение. Положительные свойства таких снарядов сле-
дующие: простота устройства стабилизации в полете; меньшая общая длина,
чем у невращающихся снарядов; лучшие внешнебаллистические характерис-
тики; меньшая парусность. Вместе с тем Такие снаряды сложны в устройстве
и вмещают в себя меньшее количество снаряжения (массы ВВ).
Конструктивная схема 105-мм кумулятивного снаряда ОСС 105 F-1 (Фран-
ция) (рис. 6.23) снабжена невращающимся* КЗ, проворачивающимся на под-
шипниках относительно корпуса снаряда. Кумулятивный заряд в корпусе 5
размещается внутри корпуса снаряда 4 на двух подшипниках (верхнем 3 и
нижнем 10) для предотвращения передачи момента от корпуса снаряда на за-
ряд ВВ 6 с кумулятивной воронкой 7 в момент выстре-
ла. При этом корпус КЗ как бы «вывешивается» с помо-
щью порохового газа, поступающего в момент выстрела
в газовый подпятник 9. Передача электрического импуль-
са на подрыв от взрывателя / к донному детонатору 8
осуществляется с помощью скользящего контакта 2. Та-
кой снаряд при начальной скорости выстрела 1100 м/с
пробивает по нормали до 400 мм брони, т. е. его бро-
непробиваемость находится в диапазоне 3,5...3,8 клб.
Кумулятивные оперенные снаряды
к гладкоствольным орудиям
По своим конструктивным характеристикам такие
снаряды практически не отличаются от оперенных ку-
мулятивных снарядов к нарезным орудиям. По сравне-
нию с последними в них отсутствует за ненадобностью
проворачивающееся («плавающее») кольцо, несколько
изменена конструкция корпуса, используются более со-
временные материалы корпусных деталей и деталей
Рис. 6.23. 105-мм кумулятивный вращающийся снаряд
ОССЮ5 F-1 с проворачивающимся снаряжением к нарезному
орудию:
1 контактный взрыватель; 2 - скользящий контакт; 3 - верхний
подшипник; 4 - корпус снаряда; 5 - корпус проворачивающегося КЗ;
6 - заряд ВВ; 7 - кумулятивная воронка; 8 - донный детонатор;
9- газовый подпятник; 10- нижний подшипник
454 6. Кумулятивные средства поражения и боеприпасы
стабилизатора, кроме того, они снаряжены более мощными современными БВВ
и имеют оптимальные формы головной части и КО (см. табл. 6.3).
В России такие снаряды используются в танковых пушках и полевых про-
тивотанковых орудиях калибров 100, 115 (см. рис. 6.19) и 125 мм. Корпуса та-
ких снарядов изготовляются из стали 45X12 или 45X3, хорошие механические
характеристики которых позволили выполнять корпуса с тонкими стенками. При-
дание конусной формы внутренней и наружной поверхностям корпуса снаряда
ЗБКЗМ еще больше снизило массу снаряда и увеличило значение начальной
скорости. На наружной поверхности корпуса есть два кольцевых выступа для
соединения снаряда с гильзой и ведения снаряда по каналу ствола. Кроме того,
в проточке верхнего выступа крепится медный обтюрирующий поясок. В кор-
пусе стабилизатора 100-мм снаряда ЗБКЗМ (рис. 6.24, а) имеется несколько
радиальных отверстий, которые обеспечивают свободный доступ пороховым
газам в полость корпуса и обратно, предохраняя его от деформации.
Рис. 6.24. 100-мм кумулятивный
снаряд ЗБКЗМ (а) и 125-мм куму-
лятивный снаряд ЗБК14М (б) к глад-
коствольным орудиям:
1 - взрыватель ГПВ-2 (а) или пьезоге-
нератор ВУ (6); 2 - головка; 3 - предо-
хранительный (а) или контактный (б) ко-
нус; 4 прокладка; 5 - корпус; б - шаш-
ка ВВ; 7 - кумулятивная воронка; 8 -
обтюрирующий поясок; 9 - шашка ВВ;
10 - прокладка; 11 - втулка из пресс-ма-
териала; 12 — донный КД; 13 - вкладыш
из пресс-материала; 14 - проволочный
фиксатор; 15 - шпилька; 16 - лопасть
стабилизатора; 17 - корпус стабилиза-
тора; 18 - трассер; 19 - ось лопасти;
20 - гайка трассера; 21 - манжета; 22 -
ПДМ ВУ В-15; 23 - кольцо стабилиза-
тора с лапками А
6.3. Артиллерийские кумулятивные снаряды имины
455
Снаряд ЗБК14М (рис. 6.24, б) по конструкции аналогичен снаряду ЗБК9.
Камора его снаряжена окфолом. Лопасти стабилизатора в условиях обраще-
ния удерживаются в закрытом положении кольцом, которое входит в пазы ло-
пастей и крепится на корпусе стабилизатора отгибом лопаток. При выстреле
под действием осевых перегрузок кольцо опускается вниз, освобождая лопас-
ти, и садится на цилиндрическую проточку корпуса стабилизатора.
Подобные кумулятивные снаряды обладают максимальной бронепроби-
ваемостью в классе артиллерийских снарядов. Так, снаряд ЗБКЗМ с началь-
ной скоростью выстрела 975 м/с пробивает по нормали 350 мм брони; снаряд
ЗБК4М при начальной скорости 950 м/с - 400 мм брони; снаряд ЗБК14М при
начальной скорости 905 м/с - 500 мм брони. Последние модификации отече-
ственных 125-мм кумулятивных оперенных снарядов обеспечивают пробитие
по нормали не менее 550 мм брони. Для
сравнения: аналогичный 120-мм кумуля-
тивный снаряд DM 1206 (Германия) к тан-
ковой пушке с начальной скоростью вы-
стрела 1140 м/с пробивает по нормали до
450 мм брони. Таким образом, кумулятив-
ные оперенные снаряды имеют бронепро-
биваемость порядка 3,5...4,5 клб снаряда.
Повышение эффективности действия
артиллерийских кумулятивных оперенных
снарядов может быть достигнуто увеличе-
нием их калибра (в разумных пределах),
использованием тандемных схем (действие
сдвоенных зарядов для обеспечения сум-
мирования их пробития), применением бо-
лее тяжелых и пластичных материалов (по
сравнению с медью) при изготовлении КО,
переходом на более мощные (по сравнению
с окфолом) БВВ.
В качестве примера показан внешний
вид опытного кумулятивного снаряда
(рис. 6.25), который предназначен для пора-
жения бронетанковой техники, оснащенной
встроенными и навесными блоками ДЗ.
Снаряд совместим с гладкоствольными тан-
ковыми пушками калибра 125 мм. Основ-
ная особенность снаряда - тандемное рас-
положение двух основных КЗ при наличии
предзаряда, что увеличивает бронепробитие
при последовательном действии КС по нор-
мали до 700...800 мм гомогенной брони.
При этом бронепробитие под углом 60° от
нормали составляет по гомогенной броне
350...400 мм, по броне, усиленной встро-
енной ДЗ, - 300...330 мм, по броне, уси-
ленной навесной ДЗ, - 320...350 мм.
Рис. 6.25. Опытный 125-мм кумуля-
тивный оперенный снаряд с тандем-
ным расположением двух основных
КЗ и предзарядом.
1 - предзаряд; 2 - первый основной КЗ;
3 - второй основной КЗ
456 6. Кумулятивные средства поражения и боеприпасы
Кумулятивные снаряды и мины к безоткатным орудиям и минометам
Первые отечественные безоткатные динамореактивные орудия были при-
няты на вооружение сухопутных войск, авиации и ВМФ в конце 30-х годов
XX в., тогда как в иностранных армиях они появились лишь во время Второй
мировой войны (орудия 75- и 105-мм калибров (Германия)). Особенно интен-
сивно началась их разработка с появлением первых кумулятивных снарядов.
Отечественные безоткатные орудия Б-10 и Б-11 калибра 82 и 107 мм соответ-
ственно обеспечивают при выстрелах кумулятивными снарядами и минами
бронепробиваемость по нормали до 400 мм, дальность прямого выстрела
400...800 м, дальность эффективной стрельбы 1000... 1500 м.
Боеприпасы к безоткатным орудиям могут быть гильзового (для стрельбы
снарядами) и безгильзового (для стрельбы минами) заряжания Гильза обыч-
но снабжена отверстием в корпусе и поддоне, йто способ-
ствует уменьшению выброса пороховых частиц через сопло
и повышению коэффициента использования заряда. При без-
гильзовом заряжании пороховой заряд размещается в длин-
ной трубке стабилизатора мины. По сравнению со снаряда-
ми к полевым и танковым пушкам длина мин достаточно
велика и составляет 6...8 клб. Сама мина по своему устрой-
ству и действию не имеет принципиальных отличий от рас-
смотренных выше кумулятивных снарядов.
Кумулятивный выстрел МК-10 предназначен для стрель-
бы прямой наводкой по движущимся и неподвижным бро-
нированным целям, а также по вертикальным стенкам обо-
ронительных сооружений. Масса 82-мм кумулятивного вы-
стрела МК-10 отечественного безоткатного орудия Б-10
составляет 4,9 кг, масса кумулятивной мины 3,89 кг, началь-
ная скорость мины 322 м/с, дальность прямого выстрела
400 м (рис. 6.26). Выстрел состоит из кумулятивной мины,
воспламенительного заряда 17, дополнительного пучка по-
роха 16 в амиантиново-перкалевом картузе 15, взрывателя /
типа ГК-2 и диска 20. Кумулятивная мина включает в себя
корпус 4, головку 2 и стабилизатор.
В корпусе 4 между кумулятивной воронкой 5, наруж-
ной трубкой 7 и внутренней трубкой 8 помещены три прес-
сованные шашки ВВ 6. В донной части корпуса в стака-
не 11 помещен детонатор 12 с КД 73; сверху стакан закрыт
прокладкой 10 и крышкой 9, в которой имеется девять
Рис. 6.26. 82-мм кумулятивный выстрел МК-10 к безоткатному
орудию Б-10:
1 - взрыватель; 2 - головка; 3 конус предохранительный; 4 корпус;
5 - кумулятивная воронка; 6 - шашки заряда ВВ; 7 - трубка наружная;
8 трубка внутренняя; 9 - крышка; 10 - прокладка; 11 - стакан; 12 - дето-
натор; 13 - КД; 14 - трубка; 15 — картуз; 16 - пучок пороха; 17 заряд
воспламенительный; 18 — крыло; 19 - кольцо; 20 диск; 21 - гайка
6 3. Артиллерийские кумулятивные снаряды и мины
457
отверстий. Кумулятивная воронка 5 в своей расширенной части изолирована
от стенок корпуса 4 картонной прокладкой. В хвостовой части корпуса 4 есть
резьбовое гнездо для трубки 14 стабилизатора, а в передней части - резьбо-
вое отверстие для головки 2, в которую ввинчен взрыватель ГК-2. В передней
части корпуса 4 есть центрирующее утолщение, служащее для центрирования
мины во время ее движения по каналу ствола. Стабилизатор обеспечивает
устойчивость мины в полете. Он включает в себя трубку 14 с приваренными к
ней крыльями 18, к которым приварено кольцо 19, предназначенное для уве-
личения устойчивости мины в полете, а также ведения стабилизатора по на-
правляющим полозкам каморы и по каналу ствола орудия. Гайка 21, закреп-
ляющая диск 20, предотвращает выбрасывание гильзы воспламенительного
заряда 17 в камору орудия при выстреле. На трубке стабилизатора предусмот-
рены 20 огнепередаточных отверстий, через которые осуществляется воспла-
менение пороха 16 дополнительного пучка.
80-мм безоткатное орудие Folgore (Италия) используется главным образом
для уничтожения бронированных боевых машин. Само орудие является неавто-
матическим и включает в себя комбинированную (безоткат-
но-ракетную) метательную систему. Эффект безоткатности
во время выстрела получен применением открытой казен-
ной части ствола (в форме сопла), позволяющей части по-
роховых газов выходить в направлении, противоположном
движению снаряда.
Используемый для стрельбы бронебойный кумулятив-
ный снаряд с перфорированной гильзой (рис. 6.27) со-
стоит из кумулятивной БЧ, ракетного двигателя 6 и ста-
билизатора с шестью крылышками 9. Боевая часть с мед-
ной конической КО 3 снабжена донным электрическим
взрывателем 5 с двумя контактами (один из них - балли-
стический наконечник 1), который взводится в боевое по-
ложение во время выстрела под влиянием осевой силы
инерции.
Ракетный двигатель 6 снаряда предназначен для уве-
личения скорости движения снаряда во время его полета
по траектории. В его состав входят камера сгорания, со-
пло, запас топлива и замедлитель воспламенения 8, приво-
дящий в движение двигатель на безопасном расстоянии от
ствола орудия. На сопле двигателя установлен стабилиза-
тор, крылышки 9 которого раскрываются под влиянием пру-
жины после вылета снаряда из ствола.
Рис. 6.27. Кумулятивный снаряд к 80-мм безоткатному орудию
Folgore:
1 - баллистический наконечник; 2 - контакт взрывателя; 3 — КО; 4 -
заряд ВВ; 5 - взрыватель; 6 ракетный двигатель; 7 - муфта, раскрыва-
ющая крылышки; 8 - замедлитель воспламенения; 9 - крылышко ста-
билизатора
458
6. Кумулятивные средства поражения и боеприпасы
Масса выстрела орудия Folgore составляет 5,2 кг, масса снаряда 3 кг, ско-
рость снаряда от 385 м/с (начальная) до 500 м/с (максимальная), дальность
выстрела 700... 1 000 м.
На современном этапе развития военной техники широкое распростра-
нение получили управляемые ствольные мины, относящиеся к классу высо-
коточных БП и выстреливаемые из минометов. Такие мины могут поражать
с настильной траектории не только неподвижные сильнозащищенные цели,
но и подвижную бронетанковую технику. Считается, что минометы с бое-
комплектами высокоточных ствольных мин вследствие их мобильности и
авиатранспортабельности (в особенности вертолетотранспортабельности)
могут сыграть весьма важную роль в борьбе с танками на дальностях до
6...8 км.
120-мм управляемая кумулятивно-осколочная мина Strix (рис. 6.28.) со-
стоит из зарядного оборудования, включающего в себя метательный заряд и
управляемый снаряд (типа «выстрелил- забыл», самонаводящийся в конечной
фазе полета к бронированной цели). Для нормального формирования КС пе-
ред КЗ предусмотрен специальный «тоннель» (воздушная цилиндроконйЗес-
кая полость), вокруг которого располагаются различные элементы бортовой
аппаратуры управления. После вылета мины из ствола раскрываются крылыш-
ки стабилизатора (в результате действия пружин), а на расстоянии примерно
20 м от дульного среза ствола отбрасывается пиротехническое зарядное обо-
рудование и одновременно включается дополнительный реактивный двига-
тель. Импульсное воздействие тяги двигателей позволяет корректировать тра-
екторию полета мины и точно наводить мину (методом пропорциональной
навигации) до момента ее попадания в цель, которую атакует со стороны верх-
ней полусферы. Бронепробиваемость такой мины по нормали составляет
550 мм, максимальная дальность полета до 7500 м, скорость от 180 (момент
вылета из ствола) до 320 м/с (максимальная).
Аналогичная 120-мм высокоточная ствольная танковая мина Griffin имеет
тандемный вариант БЧ, что обеспечивает бронепробиваемость по нормали не
менее 700 мм гомогенной брони (тип R.HA).
Рис. 6.28. 120-мм управляемая кумулятивно-осколочная мина Strix:
1 - КЗ; 2 - сопло двигателя управления; 3 - импульсный двигатель управления; 4 - батареи
питания; 5 - линза; 6 - детектор ИК-излучения; 7 - электронная система управления
6.4. Кумулятивные ручные, реактивные и винтовочные гранаты
459
6.4. Кумулятивные ручные, реактивные и винтовочные гранаты
Практически одновременно с артиллерийскими кумулятивными снаряда-
ми, поражающими бронетехнику на расстояниях больше 1 км, появились про-
стейшие и очень эффективные средства борьбы пехоты с танками в ближнем
бою-ручные противотанковые гранаты и противотанковые ружья.
Отечественная ручная противотанковая кумулятивная граната РПГ-43
(рис. 6.29, а) с взрывателем ударного действия имеет стабилизатор, обеспечи-
вающий соответствующее положение гранаты при ударе в цель, и деревян-
ную рукоятку, облегчающую ее метание..
Цилиндрический корпус 6 гранаты, изготовленный из листового железа,
сверху и снизу закрывается крышками. В нижней крышке 12 есть гнездо, в
котором располагается накольник 10 с пружиной 11 и в которое входит за-
пал 3. Под верхней крышкой 9 расположена стальная кумулятивная воронка 8
конической формы, а внутри корпуса находится заряд ВВ, состоящий из двух
шашек: основного заряда 7 и дополнительного детонатора 5. Стабилизирую-
щее устройство включает в себя колпак 15, пружину 16 и две матерчатые
ленты 2, прикрепленные одним концом к металлической втулке, а другим -
Рис. 6.29. Ручная противотанковая граната РПГ-43 (а) и принцип ее стабилизации
в полете (б):
1 предохранительная скоба; 2 — ленты-стабилизаторы; 3 - запал; 4 - КВ заряда; 5 - дополни-
тельный детонатор; 6 - корпус; 7 - заряд ВВ; 8 — кумулятивная воронка; 9 верхняя крышка
корпуса; 10 накольник; 11 - контрпредохранительная пружина; 12 - нижняя крышка корпуса;
/3-штуцер; 14-предохранительная чека; /5-колпак; 16 пружина колпака; /7-рукоятка
460
6. Кумулятивные средства поражения и боеприпасы
к колпаку. Пружина надевается на рукоятку 17 и упирается одним концом в
тарельчатую пружину, закрепленную на втулке, а другим - в дно колпака.
Перед метанием граната берется в руку так, чтобы откидная планка была
плотно прижата к рукоятке. Затем за кольцо удаляется предохранительный
шплинт и граната метается в цель. Во время полета предохранительная скоба /
отделяется от рукоятки 17 корпуса 6 и освобождает колпак 15 стабилизатора,
который под действием пружины 16 сползает с рукоятки и вытягивает ленты 2,
обеспечивая устойчивый полет гранаты (рис. 6.29, б). При перемещении колпа-
ка вдоль втулки чека 14 под собственным весом выпадает из отверстий втулки
и штуцера 13 и освобождает штуцер 13 с запалом 3. Теперь штуцер с запалом
удерживается только при помощи контрпредохранительной пружины 11. При
ударе о преграду штуцер с запалом преодолевает сопротивление контрпредо-
хранительной пружины и перемещается вперед, пока запал 3 не натыкается кап-
сюлем-воспламенителем 4 на жало, что приводит к взрыву.
Калибр (диаметр) гранаты составляет 95 мм, длина 299 мм, масса грана-
ты 1,2 кг, масса заряда ВВ из тротила 0.65 кг, граната пробивает до’ 75 мм
брони. 4
Похожую конструкцию и принцип действия имеют также ручные проти-
вотанковые кумулятивные гранаты РПГ-6 (диаметр 96 мм, длина 136 мм, мас-
са гранаты 1,13 кг, масса ВВ типа ТГ40 0,6 кг, пробитие брони до 100 мм) и
РКГ-3 (диаметр 72 мм, длина 362 мм, масса гранаты 1,07 кг, масса ВВ типа
ТГ40 0,6 кг), причем в более поздних образцах ручных ку-
мулятивных гранат РКГ-ЗЕ и РКГ-ЗЕМ кумулятивная во-
ронка выполнена из меди.
Однако с учетом невысокой пробивной способности
брони (от 60 до 150 мм) и малого расстояния броска (от 15
до 20 м), а также из-за большой массы (от 1,2 до 3,0 кг)
ручные противотанковые гранаты не получили широкого
распространения и потеряли свое первоначальное значение
в вооружении современных армий, а их функции стали вы-
полнять ручные противотанковые гранатометы.
Примером другого типа оружия может служить 88-мм
реактивное противотанковое ружье Offenror (Германия),
представляющее собой простую трубу, свернутую из лис-
тового железа, с деревянным упором для плеча и магнито-
электрическим стреляющим приспособлением. Стрельба по
танкам из такого ружья велась реактивными снарядами (ми-
нами) кумулятивного действия на дальность до 150 м.
Активная часть реактивного кумулятивного снаряда к
ружью Offenror (рис. 6.30) состоит из оболочки 4, изготов-
Рис. 6.30. Реактивный кумулятивный снаряд (мина) к противо-
танковому ружью Offenror:
1 — взрыватель; 2 - заряд ВВ; 3 - КО; 4 - оболочка (корпус); 5 - цент-
ральная трубка; 6 - детонатор с КД; 7 - воспламенитель; 8 - реактивная
камора; 9 - реактивный заряд; 10 - средство воспламенения; 11 - опере-
ние; 12- сопло
6.4. Кумулятивные ручные, реактивные и винтовочные гранаты
461
ленной из листового железа, взрывателя мгновенного действия 7, разрывного
заряда 2 с кумулятивной выемкой фигурного очертания, накрытой облицов-
кой 3, центральной трубки 5 и детонатора 6 с КД. Эта часть снаряда при
помощи хвостовика с нарезкой прикреплена к реактивной каморе 8, содержа-
щей реактивный заряд 9 с воспламенителем 7. К нижней части реактивной
каморы прикреплено сопло 12 с электрическим средством воспламенения 10.
Устойчивость мины в полете обеспечивается хвостовым оперением 11. Такой
снаряд пробивает броню толщиной до 90 мм при угле от нормали к преграде
60° и до 160 мм при подходе снаряда по нормали к броне.
Новым пехотным средством ближнего боя, пришедшим на смену проти-
вотанковым ружьям и получившим распространение в самом конце Второй
мировой войны, стало реактивное неуправляемое противотанковое оружие типа
«фаустпатрон» (Германия), «базука» (США), «пиат» (Англия) с кумулятивны-
ми гранатами. Ствол при выстреле не имел отдачи и оставался в руках стрел-
ка. Эффективная дальность стрельбы по танкам достигала 30... 100 м. Новое
оружие состояло из двух основных частей кумулятивной гранаты с хвосто-
вым оперением и трубы-ствола с пороховым метательным зарядом и стреля-
ющим механизмом. «Фаустпатрон» имел полную массу 3,25 кг (второй обра-
зец), дальность стрельбы до 30 м, оставлял сноп огня сзади длиной до 4 м.
88,9-мм ракета «базука» на дальности 150...200 м поражала броневую пре-
граду толщиной до 280 мм.
В 1944 г. был разработан отечественный ручной противотанковый грана-
томет РПГ-1, который в 1945 г. успешно прошел весь цикл оценочных испы-
таний. В 1942 г. началось создание станковых противотанковых гранатометов
реактивного действия СГ-82 (поступил в войска в 1945 г.) с 82-мм кумулятив-
ной гранатой ПГ-82, имеющей оперенный стабилизатор (масса гранатомета
4 кг, масса В В 0,6 кг, скорость полета гранаты 160... 170 м/с, дальность прямо-
го выстрела до 200 м). В результате действия пробивалась броня толщиной до
150 мм под углом встречи от нормали к преграде 30°, а по нормали глубина
бронепробития достигала 210.. .220 мм.
В первые послевоенные годы наблюдалось широкое внедрение в конст-
рукции образцов противотанкового вооружения реактивных двигателей, ку-
мулятивных СП и БП и новейших средств радиоэлектроники. К традицион-
ным противотанковым средствам - противотанковой артиллерии, ружьям и
ручным гранатам - добавились новые: противотанковые управляемые ракеты
и противотанковые гранатометы реактивного и динамореактивного действия.
Современные противотанковые гранатометы - одно из самых мощных ог-
невых средств пехоты для борьбы с танками в ближнем бою. Стрельба из
гранатометов ведется оперенными противотанковыми гранатами с надкали-
берной или калиберной головной частью кумулятивного действия (по суще-
ству, это гладкоствольная безоткатная система с активно-реактивным выстре-
лом). Граната выстреливается из гранатомета с помощью стартового порохо-
вого заряда. На начальном участке траектории включается реактивный
двигатель, который увеличивает скорость гранаты. Безоткатность гранатомета
при выстреле обеспечивается тем, что часть пороховых газов отводится назад
через сопло и раструб патрубка. При этом образуется реактивная сила, на-
правленная вперед, которая уравновешивает силу отдачи.
462
6. Кумулятивные средства поражения и боеприпасы
Гранатометы подразделяют на ручные (для стрельбы с плеча) и станко-
вые (для стрельбы с треноги или колесного станка). Кроме того, в соответ-
ствии с конструкцией корпуса они могут быть как многоразового, так и одно-
разового применения. В гранатометах многоразового действия (до 300 выст-
релов и более) используют, как правило, надкалиберные гранаты, а в
гранатометах одноразового действия - калиберные (диаметры ствола гранато-
мета и гранаты совпадают).
В основу конструкции РПГ может быть положен один из следующих че-
тырех принципов: ракетный (гранатомет LAW М-72), принцип безоткатной
пушки (гранатомет Carl Gustav), принцип пушки Девиса (гранатомет Zanze) и
принцип Armbrust (одноименный гранатомет).
Наиболее распространенный в настоящее время ракетный принцип имеет
следующее преимущество: пусковая труба испытывает при выстреле очень
небольшое внутреннее давление и поэтому может быть очень легкой и про-
стой по конструкции и изготовляться из дешевого материала, что очень важно
для оружия одноразового применения. Соотношение между массой оружия и
калибром БЧ является оптимальным, так как отсутствие отдачи обусловлено
принципом действия. Подготовка к стрельбе занимает очень мало времени.
Недостаток такого гранатомета - невозможность скрытной стрельбы, так как
при выстреле возникают громкий звук, вспышка, дым и клубы пыли.
В случае реализации принципа безоткатной пушки при выстреле в стволе
возникает высокое внутреннее давление. Устранение отдачи обеспечивается ис-
течением газов в направлении, противоположном направлению стрельбы. Та-
кой гранатомет имеет большую массу, дорог в изготовлении и поэтому неприго-
ден для одноразового применения. Звук и вспышка при выстреле - значитель-
ны. Ствол, как правило, на всем протяжении должен иметь тот же калибр, что и
БЧ. Таким образом, при использовании крупнокалиберной БЧ гранатомет будет
крайне громоздким, а при уменьшении калибра - неэффективным.
При реализации принципа пушки Девиса безоткатность обеспечивается
применением противомассы, вылетающей в момент выстрела в противопо-
ложном направлении. Недостаток этого принципа - существенное увеличе-
ние массы оружия не только за счет противомассы, но и за счет утолщения
ствола, подвергающегося высокому внутреннему давлению. Однако у такого
гранатомета есть и свои достоинства: калибр БЧ может быть больше калибра
ствола, что позволяет в дальнейшем увеличивать калибр БП; метательный за-
ряд может быть небольшим.
Принцип, реализованный в гранатомете Armbrust (Германия, Бельгия),
представляет собой модификацию принципа пушки Девиса. В гранатомете ис-
пользуются два дополнительных поршня, выталкивающие из пусковой трубы
гранату и противомассу и задерживающие выход газов, что резко уменьшает
звук выстрела и вспышку. Такое оружие может стрелять как калиберными,
так и надкалиберными гранатами. Этот принцип оптимален для стрельбы из
закрытых помещений, хотя необходимость торможения поршней усложняет и
удорожает конструкцию оружия, а надкалиберная БЧ увеличивает его массу.
Рассмотрим более подробно принцип действия, основные составные час-
ти и конструкцию выстрела на примере отечественного ручного противотан-
кового гранатомета многоразового применения РПГ-7, поступившего в войска
6.4. Кумулятивные ручные, реактивные и винтовочные гранаты 463
в 1961 г. Гранатомет включает в себя следующие основные части и механиз-
мы: ствол с механическим (открытым) прицелом; ударно-спусковой механизм
с предохранителем; бойковый механизм; оптический прицел. Ствол гранато-
мета предназначен для направления полета гранаты и отвода пороховых газов
при выстреле. Канал ствола - гладкий, открытый с обоих концов. Диаметр
канала ствола называется калибром: у гранатомета РПГ-7 он равен 40 мм.
Ствол состоит из длинного цилиндрического участка (трубы) и патрубка, со-
единенных между собой с помощью резьбы. Труба в задней (казенной) части
имеет уширение, образующее зарядную камору. В передней части патрубка
сделано сопло, в задней части - раструб, оканчивающийся предохранитель-
ной тарелью. Обычно стволы гранатометов изготовляются из высококачествен-
ных сталей, что позволяет обеспечить их минимальную массу при высокой
прочности конструкции и многоразовое использование.
Ударно-спусковой механизм служит для спуска курка с боевого взвода,
нанесения удара по бойку и для постановки гранатомета на предохранитель.
Он состоит из корпуса, курка, предохранителя, спускового крючка, шептала и
стержня с боевой пружиной. Прицельные приспособления используют для на-
водки гранатомета при стрельбе по целям на различные расстояния. Прицель-
ные приспособления гранатомета РПГ-7 содержат оптический ПГО-7В (с от-
корректированными углами прицеливания) и механический (открытый) при-
целы, обеспечивающие наводку гранатомета РПГ-7 в цель при стрельбе как
выстрелами ПГ-7В, так и ПГ-7ВМ, ПГ-7ВС, ПГ-7ВЛ.
Выстрел ПГ-7В (рис. 6.31) активно-реактивного типа (стартовый заряд сго-
рает в канале гранатомета, а заряд реактивного двигателя - на траектории) вклю-
чает в себя противотанковую гранату калибра 85 мм и пороховой заряд. Калибр
гранаты выстрела ПГ-7ВМ составляет 70 мм, ПГ-7ВС - 72 мм, а ПГ-7ВЛ -
93 мм. В противотанковую гранату входят головная часть, взрыватель ВП-7М,
реактивный двигатель и стабилизатор (размещенный в пороховом заряде).
Головная часть гранаты состоит из корпуса 5, обтекателя 3, токопроводя-
щего контактного конуса 2, конической медной воронки 4 и разрывного заря-
да 6. Корпус выполнен из алюминиевого сплава с толщиной стенки от 1,0 до
1,8 мм, обтекатель - из алюминиевого сплава с толщиной стенки от 0,5 до
0,8 мм. Во втулку обтекателя ввинчивается головная часть 1 пьезоэлектричес-
кого взрывателя, а его донная часть 19 размещается в предохранительно-дето-
нирующем механизме.
Рис. 6.31. Выстрел ПГ-7В к ручному противотанковому гранатомету РПГ-7:
1 - головная часть взрывателя; 2 - токопроводящий конус; 3 - обтекатель; 4 - воронка; 5 -
корпус; б - разрывной заряд; 7 - сопловой блок; 8 - труба; 9 - пороховой заряд реактивного
двигателя; 10 - дно; 11 - перо стабилизатора; 12 - ленточный нитроглицериновый порох; 13 -
турбинка; 14 - пыж из пенопласта; 15 - трассер; 16 - гильза из бумаги; 17 - КВ; 18 - сопловое
отверст ие; 19 - донная часть взрывателя; 20 - проводник
464
6. Кумулятивные средства поражения и боеприпасы
Кумулятивный узел включает в себя шашку 6 ВВ в обертке, медную во-
ронку 4 для кумулятивной выемки с латунным проводником (трубкой) 20 и
экран (инертная линза из поделочного текстолита). В качестве ВВ применяет-
ся состав A-IX-1 массой 0,388 кг. Медная воронка имеет угол раствора 60° и
постоянную толщину стенки. Кумулятивный узел вставляется в корпус 5 на сплав
парафина и опирается на изолятор из пресс-материала АГ-4С. В более позднем
по разработке выстреле ПГ-7ВЛ помимо увеличенного диаметра гранаты в ка-
честве ВВ используется окфол массой 0,73 кг, а медная воронка имеет «про-
грессивную» толщину (утоненную у вершины и утолщенную у основания).
Взрыватель ВП-7М (пьезоэлектрический) служит для обеспечения раз-
рыва гранаты при встрече ее с целью (преградой). Он содержит головную и
донную части. У головной части взрывателя есть пьезоэлемент, который при
ударе гранаты о преграду вырабатывает электрический ток. Донная часть
взрывателя снабжена электродетонатором, который при подаче на.цего элек-
трического тока от пьезоэлемента взрывается и вызывает разрыв головной
части гранаты. Электрическая связь обеих частей взрывателя осуществляется
через внешнюю и внутреннюю цепи, которые образуются металлическими
частями гранаты (внешняя цепь: обтекатель 3 - корпус 5; внутренняя цепь:
токопроводящий конус 2 из алюминиевого листа толщиной 0,6 мм — кумуля-
тивная воронка 4 - проводник 20). В донной части взрывателя помещается
самоликвидатор.
Реактивный двигатель необходим для увеличения скорости полета гра-
наты. Он состоит из трубы 8, соплового блока 7, фиксатора с шайбой, упора,
диафрагмы и дна 10. В трубе помещаются пороховой заряд 9, воспламени-
тель и пирозамедлитель, который служит для воспламенения порохового за-
ряда реактивного двигателя. В сопловом блоке предусмотрено шесть закры-
тых герметизаторами сопловых отверстий 18, через которые после выстрела
истекают пороховые газы из реактивного двигателя. Фиксатор при заряжа-
нии входит в вырез на дульной части ствола гранатомета и обеспечивает
расположение КВ 17 гранаты против бойка. Дно 10 имеет радиальный и
осевой каналы, заполненные дымным порохом. В радиальном канале поме-
щен КВ 17, а в осевом - колпачок, предохраняющий порох от влаги и высы-
пания. Дно, кроме этого, имеет выступ с резьбой для навинчивания порохо-
вого заряда.
Стартовый заряд предназначен для сообщения гранате начальной скорос-
ти. Он конструктивно объединен со стабилизатором, состоит из ленточного
нитроглицеринового пороха /2 и размещен в гильзе 16 из патронной бумаги.
Стабилизатор, обеспечивающий устойчивый полет гранаты, расположен внутри
порохового заряда и включает в себя крестовину, четыре лопасти 11 (свобод-
но вращающихся на осях), цоколь и турбинку 13. Цоколь выполняет роль об-
тюратора, препятствующего прорыву пороховых газов к реактивному двига-
телю. На крестовине предусмотрена резьба для навинчивания порохового за-
ряда на выступ дна реактивного двигателя. В гнезде турбинки, служащей для
придания гранате вращения (плоскости лопастей турбинки составляют с про-
дольной осью гранаты угол, равный 33°), помещен трассер 15.
При выстреле из гранатомета от удара бойка по КВ гранаты воспламеня-
ется порох в стартовом заряде. Газы, образующиеся от сгорания порохового
6.4. Кумулятивные ручные, реактивные и винтовочные гранаты
465
заряда, придают гранате вращательное движение (с помощью турбинки) и выб-
расывают ее из канала ствола со скоростью 120... 140 м/с. При этом обеспечи-
вается вращение гранаты с угловой скоростью 350...370 об/мин.
После вылета гранаты из канала ствола открываются лопасти стабилиза-
тора, происходит взведение взрывателя и на расстоянии, обеспечивающем без-
опасность стреляющего (горение замедлительного состава), воспламеняется
пороховой заряд реактивного двигателя. При горении порохового заряда реак-
тивного двигателя вследствие истечения пороховых газов через сопловые от-
верстия образуется реактивная сила и скорость полета гранаты увеличивает-
ся, достигая в конце полного сгорания заряда 300...350 м/с. В дальнейшем
граната движется по инерции.
При встрече гранаты с преградой (целью) пьезоэлемент взрывателя сжи-
мается, в результате чего вырабатывается электрический ток, под действием
которого срабатывает электродетонатор- взрывателя, а затем разрывной заряд
гранаты. При взрыве гранаты образуется КС, которая пробивает броню (пре-
граду), поражает живую силу, разрушает.Цроружение и оборудование, а также
воспламеняет горючее.
Станковые гранатометы включают в себя ствол, щит и станок с колесами.
Примером может служить гранатомет СПГ-9, принятый на вооружение в 1963 г.
в двух вариантах: на треноге и на станке с колесами (десантный вариант). Их
можно передвигать на колесах и переносить на руках. Ствол - это гладко-
ствольная труба, открытая с обоих концов и состоящая из двух разъемных
частей (дульной и казенной), соединенных между собой муфтой. К дульной
части ствола прикреплены газоулавливатель, передняя и задняя мушки, при-
цел, передняя рукоятка, соединительная муфта. В казенной части ствола есть
приспособления для крепления щита и колесного хода, плечевой упор, спус-
ковая тяга, задняя рукоятка, подушка для щеки наводчика, стреляющий и спус-
ковой механизмы, защелка для удержания гранаты от выпадения назад из ка-
нала ствола. Передняя и задняя рукоятки служат для передвижения и пере-
носки гранатомета.
Устройство выстрела ПГ-9В к станковому гранатомету СПГ-9 аналогично
рассмотренному выше выстрелу ПГ-7В для ручного гранатомета РПГ-7. Про-
тивотанковые гранаты к станковым гранатометам, как правило, имеют тот же
калибр, что и ствол (в данном случае калибр равен 73 мм). Гранаты вылетают
из ствола со скоростью 435 м/с, скорость гранаты в конце работы реактивного
двигателя составляет 700 м/с, частота ее вращения на траектории находится в
диапазоне 1300... 1600 об/мин.
Рассмотренные образцы отечественных гранатометов до настоящего вре-
мени находятся на вооружении армий ряда стран. Особая судьба выпала на
долю гранатомета РПГ-7 с выстрелом ПГ-7В, непревзойденные качества ко-
торого получили широкое международное признание. Этот образец находится
на вооружении более 40 стран мира, а по популярности сравним с автоматом
Калашникова. Оригинальная конструкция оружия позволила провести ряд мо-
дернизаций, обеспечивших постоянное улучшение его характеристик.
В результате последней модернизации, завершенной в 1985 г., созданы
105-мм противотанковый выстрел с тандемной головной частью ПГ-7ВР и мо-
дернизированный гранатомет РПГ-7В1 (штатный с доработкой прицельного
466
6. Кумулятивные средства поражения и боеприпасы
оснащения). Последний образец предназначен для поражения всех современ-
ных танков с комбинированной и разнесенной бронезащитой и навесной ДЗ.
Гранатомет РПГ-7В1 состоит из ствола, выполненного из высокопрочной
стали, с поднутрением и соплом в казенной части. На стволе закреплены: меха-
нический прицел, оптический прицел, ударно-спусковой механизм, рукоятка и
упорная откидная сошка. Модернизированный гранатомет РПГ-7В1 позволяет
вести прицельную стрельбу и всеми ранее разработанными выстрелами.
Выстрел ПГ-7ВР (рис. 6.32) содержит тандемную БЧ (КЗ 2 и 3) с ВУ 1 и
двигательную установку 4. В походном положении двигательная установка
находится в специальном водонепроницаемом футляре. При приведении в бо-
евое положение она извлекается из футляра и свинчивается с тандемной БЧ,
образуя выстрел. Тандемная БЧ с двумя соосно расположенными КЗ обеспе-
чивает ликвидацию ДЗ при срабатывании первого заряда (предзаряда) и про-
битие после этого бронепреграды за ДЗ при инициировании второго (основ-
ного) заряда. Калибр основного КЗ 3 равен 105 мм, заряд из окфола имеет
массу 1,2 кг и медную КО переменной толщины с углом раствора'конуса 60°.
Предзаряд 2 имеет калибр примерно 60 мм, массу заряда из окфола*- 0,12 кг
и алюминиевую КО. Время задержки инициирования основного КЗ по отно-
шению к инициированию предзаряда составляет примерно 200 мкс"; В резуль-
тате функционирования БЧ обеспечивается пробитие по нормали гомогенной
брони толщиной не менее 600 мм за навесной ДЗ, а при отсутствии или не-
инициировании последней - 700...800 мм брони (за счет сложения действия
кумулятивных струй двух зарядов).
Рис. 6.32. Выстрел ПГ-7ВР с тандемной БЧ к ручному противотанковому гранатомету
РПГ-7В1:
1 - пьезоэлектрическое ВУ; 2 - лидирующий КЗ (предзаряд); 3 - основной КЗ; 4 - двигатель-
ная установка
В конце 1980-х годов разработан и принят на вооружение ручной проти-
вотанковый гранатомет РПГ-29 с выстрелом ПГ-29В. Оружие, несмотря на
существенно возросшие по сравнению с РПГ-7 массогабаритные характерис-
тики, просто и удобно в эксплуатации, надежно и безотказно в любых клима-
тических условиях. Гранатомет разделен на две части. В походном положении
обе части помещаются в специальный вьюк для переноски одним человеком.
При приведении в боевое положение они соединяются посредством специ-
ального разъема. На гранатомете крепятся ударно-спусковой механизм с руко-
яткой, упорная откидная сошка и механический прицел. Выстрел ПГ-29В вклю-
чает в себя тандемную БЧ (унифицирована с ПГ-7ВР) и реактивный двига-
тель. Пороховой заряд реактивного двигателя полностью сгорает в пределах
длины гранатомета.
6.4. Кумулятивные ручные, реактивные и винтовочные гранаты
461
Помимо гранатометов многоразового применения широкое распростране-
ние получили реактивные противотанковые гранаты с гранатометами однора-
зового применения, относящиеся к классу индивидуального внештатного ору-
жия. Устройство кумулятивных узлов выстрелов таких гранатометов практи-
чески не отличается от рассмотренных выше выстрелов для гранатометов
многоразового применения.
Первая отечественная граната РПГ-18 калибра 64 мм к гранатомету одно-
разового применения была принята на вооружение в 1972 г. Реактивная про-
тивотанковая граната РПГ-18 - индивидуальное оружие, состоящее из ПУ од-
норазового применения в виде гладкоствольной трубы телескопического типа
и собственно гранаты, размещенной в ПУ. Пусковое устройство, служащее
для направления полета гранаты, состоит из наружной (изготовленной из стек-
лопластика) и внутренней (изготовленной из алюминиевого сплава) труб. Гра-
ната - калиберная, кумулятивного действия. По аналогии с рассмотренными
выше гранатометными выстрелами она включает в себя головную часть и ре-
активный двигатель.
Основные тактико-технические характеристики РПГ-18: калибр 64 мм;
длина в походном положении 705 мм; Длина в боевом положении 1050 мм;
масса 2,6 кг; начальная скорость полета гранаты 114 м/с; дальность прямого
выстрела до цели высотой 2 м 135 м; прицельная дальность стрельбы 200 м;
время перевода ПУ из походного положенйя в боевое 8... 10 с.
В середине 1980-х годов на вооружение принята граната РПГ-26. В этом
образце в наиболее сконцентрированном виде реализованы все достоинства
данного вида оружия. РПГ-26 состоит из пластмассовой ПУ (гранатомета од-
норазового применения), на которой закреплены механический прицел, удар-
но-спусковой механизм и резиновые крышки, закрывающие канал ствола. Гра-
натомет одновременно является контейнером для хранения и переноски гра-
наты. Реактивная граната удерживается в ПУ специальным узлом, который
разрушается при выстреле и выбрасывается из ствола. Выстрел из оружия
производится без снятия передней и задней крышек гранатомета.
В реактивную гранату калибра 72,5 мм входят кумулятивная БЧ с ВУ и
реактивный двигатель. Взрывательное устройство обеспечивает безотказное
срабатывание БЧ при углах встречи с преградой до 75° от нормали к ней.
Пороховой заряд реактивного двигателя полностью сгорает в пределах длины
гранатомета. Масса гранаты составляет 2,9 кг; при снаряжении окфолом обес-
печивается пробитие по нормали к преграде не менее 500 мм гомогенной бро-
ни и 400 мм брони за ДЗ.
Дальнейшим развитием этого вида оружия стала 105-мм реактивная
противотанковая граната РПГ-27 (рис. 6.33) с тандемной БЧ и двигательной
Рис. 6.33. Реактивная противотанковая граната РПГ-27
468
6 Кумулятивные средства поражения и боеприпасы
установкой, размещенных в ПУ одноразового применения. Это индивидуаль-
ное оружие, способное поражать современные танки. Боевая часть реактив-
ной гранаты унифицирована с БЧ гранаты ПГ-7ВР. Существенно возросшие
массогабаритные, а следовательно, и энергетические характеристики потре-
бовали разработки ряда оригинальных конструктивных решений, обеспечи-
вающих требуемый уровень эргонометрических характеристик. Благодаря
этому в образце сохранены практически все эксплутационные достоинства
РПГ-26 при многократно возросшей эффективности.
Еще большей эффективностью действия обладает 125-мм реактивная про-
тивотанковая граната РПГ-28 с гранатометом одноразового применения и ку-
мулятивной БЧ тандемного типа. Длина гранаты составляет 1200 мм, масса
13,5 кг, дальность прицельной стрельбы 300 м.
Все перечисленные выше образцы по комплексу характеристик находятся
на уровне лучших зарубежных аналогов (табл. 6.4).
В качестве примера для сравнения рассмотрим гранатомет Panzerfaust-3
(Германия) (рис. 6.34), который представляет собой образец оружия одноразо-
вого использования, оснащенного безоткатно-ракетной метательной системой.
Он состоит из пусковой трубы 9 с внутренним диаметром 60 мм, гранаты 14
с взрывателем, дополнительным двигателем и стабилизатором, метательного
заряда 4 с воспламенителем, противомассы, спускового механизма с писто-
летной рукояткой, плечевым упором и передней рукояткой, оптического при-
цела /. Пусковая труба одноразового использования выполнена из пластмас-
сы, усиленной стекловолокном, и имеет лейнер из алюминия. В ней помеща-
ются граната, метательный заряд с воспламенителем и противомасса.
К пусковой трубе крепятся спусковой механизм и прицел, которые можно ис-
пользовать многократно. Такая конструкция значительно снижает стоимость
оружия при сохранении требуемой надежности и точности стрельбы.
Для уменьшения массы оружия, а также силы звука и вспышки при выст-
реле потребовалось снизить начальную скорость гранаты до 165 м/с. Требуе-
мая дальность стрельбы и малое время полета гранаты обеспечиваются до-
полнительным двигателем, который включается после того, как граната про-
летит около 10 м. Скорость гранаты на траектории достигает 250 м/с.
1 2 3 4 5
14 13 12 11 10 9 8 7 6
Рис. 6.34. Гранатомет Panzerfaust-3:
/ - оптический прицел; 2 - кожух прицела; 3 - рукоятка для переноски; 4 - пороховой мета-
тельный заряд; 5 - упор для щеки; 6 - задний обтюратор; 7 - задний амортизатор; 8 - ремень
для переноски; 9 пусковая установка (труба); 10 капсюль; 11 - модуль многоразового при-
менения; 12 - передний амортизатор; 13 - передний обтюратор; 14 - граната (БЧ)
6.4 Кумулятивные ручные, реактивные и винтовочные гранаты
469
Таблица 6.4. Характеристики противотанковых выстрелов к гранатометам
многоразового применения, реактивных гранат к гранатометам одноразового
применения и кумулятивных винтовочных гранат
Выстрел (граната) Прицельная даль- ность стрельбы, м Начальная скорость, м/с Пробитие преграды, мм
броневой кирпичной > 1 S о X S 2 D О D £ деревоземляной
Индекс Калибр, мм Масса, кг
ПГ-7В 85 2,2 500 120 260 1000 600 1500
ПГ-7ВМ 70,5 2.0 500 .120 300 1000 700 1800
ПГ-7ВС 72 2,0 500 120 400 1500 1000 2000
ПГ-7ВЛ 93 2,6 300 '120 500 1700 1200 2400
ПГ-7ВР 105* 4,5 200 130 750 2000 1500 3700
ПГ-9ВС 73 4,4 1300 435 400 1500 1000 2000
ПГ-29В 105* 6,7 500 130 750 2000 1500 3700
РПГ-18 64 2,6 200 114 250 1000 700 1500
РПГ-22 72,5 2,7 250 133 400 1200 1000 2000
РПГ-26 72,5 2,9 250 135 500 1500 1000 2400
РПГ-27 105’ 8,3 200 135 750 2000 1500 3700
Armbrust (Бельгия, 67 1,0 300 210 300 - - -
Германия) Panzerfaust-З (Гер- мания) ПО 3,8 300 165 700 - - -
Carl Gustav М3 84 3,0 700 260 600 - - -
(Швеция) LAW80 (Великобри- тания) 94 4,6 350 330 700 - - -
Apilas (Франция) 112 4,3 330 293 700 - 2000 -
Folgore (Италия) 80 6,2 500 380 600 - - -
М260 (Бельгия) 40 0,35 300 70 140 - - -
М31 (США) 66 0,70 250 53 260 - - -
Energa (Бельгия) 75 0,72 275 54 275 - - -
М433 (США) 40 0,23 350 76 50 - - -
HE/DP 92 (Австрия) 40 0,265 350 76 60 - - -
S401B (Сингапур) 40 0,22 350 75 63 — - —
* Основной КЗ тандемной БЧ.
470
6. Кумулятивные средства поражения и боеприпасы
Стабилизация ее в полете осуществляется откидными плоскостями. Для по-
вышения кумулятивного действия БЧ снабжена выдвижным сердечником.
Вместе с гранатометом был разработан широкий ассортимент гранат к
нему, в том числе и кумулятивных, калибра 90, 110 и 125 мм. Но самое широ-
кое применение нашла 110-мм граната с кумулятивной БЧ и пьезоэлектричес-
ким взрывателем (рис. 6.35, а). Для уменьшения длины оружия в походном
положении граната имеет баллистический наконечник с выдвижным телеско-
пическим стержнем (граната со сложенным стержнем может использоваться
при стрельбе по небронированным целям, при этом она характеризуется бо-
лее мощным фугасным действием, нежели когда стержень выдвинут). В 1998 г.
принят на вооружение вариант гранатомета Panzerfaust-ЗТ с кумулятивной го-
ловной частью тандемного типа, в которой лидирующий КЗ (предзаряд) раз-
мещается в телескопическом выдвижном стержне баллистического наконеч-
ника (рис. 6.35, б). Следует также отметить, что на базе различных вариантов
гранатомета Panzerfaust-З было создано несколько типов дистанционно уп-
равляемых мин, предназначенных для уничтожения бронированных целей на
расстояниях 15...65 м.
Зарубежные гранатометы и реактивные гранаты, как правило, одноразо-
вого применения, основные достоинства которых - низкая стоимость, высо-
кая вероятность поражения цели и простота обращения. Устройство кумуля-
тивной БЧ в них принципиально не отличается от устройства аналогичных
БЧ отечественных гранат. Например, в гранатомете Carl Gustav М3 (Швеция)
помимо основного варианта с калибром гранаты 84 мм и бронепробитием по
нормали до 600 мм гомогенной брони (используется активно-реактивный вы-
стрел с прицельной дальностью стрельбы до 700 м) разработана надкалибер-
ная БЧ диаметром 135 мм в варианте моноблока и в варианте тандемной БЧ,
что обеспечивает пробитие не менее 900 мм брони и преодоление динамичес-
кой защиты.
В настоящее время противотанковые гранатометы - одни из эффектив-
ных и перспективных видов оружия. Идет постоянное их совершенствование
в направлении увеличения бронепробиваемости (до 700...900 мм комбиниро-
ванной преграды) и эффективной дальности стрельбы (по движущимся целям
до 300...400 м и неподвижным целям до 500...600 м). При этом необходимо
стремиться к сокращению полетного времени гранаты на эффективной даль-
ности стрельбы до 2,2... 1,2 с и снижению массы гранатометов.
Отдельно следует отметить использование кумулятивных гранат в каче-
стве насадок к различным видам обычного стрелкового оружия (автоматам,
винтовкам и т. п.). Еще в период Второй мировой войны для метания ружей-
ных гранат стали применять винтовку М1 (США), на срез ствола которой на-
девалась узкая продолговатая насадка. В телах стабилизаторов гранат были
выполнены отверстия, диаметр и длина которых немного больше, чем разме-
ры насадки. Они надевались на насадку и выстреливались с помощью мета-
тельного патрона. После 1945 г. чаще всего применялись бронебойные и ку-
мулятивные винтовочные (ружейные) гранаты, БЧ которых имели большую
массу и размеры, позволявшие пробивать броню толщиной от 200 до 300 мм.
Так как толщина брони современных танков постоянно увеличивается, винто-
вочные гранаты (они значительно меньше и легче предыдущих, пробивают
6.4. Кумулятивные ручные, реактивные и винтовочные гранаты
471
Рис. 6.35. Устройство кумуля-
тивных гранат РПГ Panzer-
faust-3 (а) и Panzerfaust-ЗТ (б):
I - выдвижная часть наконечни-
ка; 2 - баллистический наконеч-
ник; 3 - кумулятивная воронка; 4 -
заряд ВВ. 5 - заслонка; 6 - обтю-
ратор; 7 - взрыватель, 8 - мета-
тельный заряд; 9 - сопло реактив-
ного двигателя; 10 - крылышко
стабилизатора; 11 - взрыватель
предзаряда; 12 - заряд ВВ пред-
заряда; 13 - кумулятивная ворон-
ка предзаряда; 14 — выдвижной
наконечник с предзарядом
броню толщиной примерно 100 мм) используются главным образом для унич-
тожения БТР и других боевых машин.
К достоинствам винтовочных гранат относятся простота обращения и бо-
евого применения, возможность метания мощных стандартных гранат на даль-
ности, недосягаемые для броска рукой (до 100 м, а с активно-реактивными
гранатами и на дальности 200 м и более). Для метания таких гранат широко
используются стандартные винтовки (автоматы), на дульную часть которых
или на пламегаситель надевается трубка стабилизатора гранаты для выстре-
ливания с помощью холостых патронов. В последнее время ликвидируется
472
6. Кумулятивные средства поражения и боеприпасы
такой недостаток винтовочного применения грана!, как необходимость стре-
лять специальным холостым патроном для метания гранат. Современные вин-
товочные гранаты имеют «ловушку для пуль», как, например, в ВТ/АТ52 (Из-
раиль), или отверстие для свободного прохода пули, как, например, в Bullet-
Thru (Бельгия). Такие современные винтовочные гранаты выстреливаются с
помощью боевых патронов, имеют мощность, недоступную для гранат под-
ствольных гранатометов, и дальность выстрела до 400 м.
В Бельгии в 1956 г. была принята на вооружение кумулятивная 75-мм
граната HEAT-RFL-75N Energa (индекс «N» обозначает выстреливание холос-
тым патроном). Граната имеет тонкостенный оживальный корпус и трубку с
кольцевым стабилизатором, выстреливается с пламегасителя винтовки или с
22-мм дульной насадки. Головной пьезоэлектрический взрыватель при транс-
портировке прикрывается пластиковым колпачком. К каждой гранате прила-
гаются 7,62-мм патрон и складной пластмассовый рамочный прицел с отмет-
ками для стрельбы на 25, 50, 75 и 100 м.
В 1957 г. армия США приняла на вооружение 66-мм противотанковую
гранату М31, стальной корпус которой вмещает заряд из состава «В» с куму-
лятивной воронкой и соединяется с трубкой четырехлопастного стабилизато-
ра из алюминиевого сплава. Пьезоэлектрический головной взрыватель сраба-
тывает при угле встречи до 25°. В начале 1960-х годов на вооружение армии
США под индексом М28 поступила граната Energa (рис. 6.36, а) к винтовке
Ml4. Необходимость специальных дульных насадок и холостого патрона ог-
раничивала использование этих гранат.
Следующим этапом в развитии винтовочных гранат стало введение в на-
чале 1970-х годов «пулеулавливателей» или «пульных ловушек», позволив-
ших метать гранаты боевым патроном с обыкновенной пулей. Типовой пуле-
улавливатель - это вставляемый в трубку стабилизатора стальной цилиндр с
пятью перегородками: пуля пробивает три-четыре перегородки и застревает
в последней, передавая через нее свою энергию гранате, а пороховые газы
действуют на пулеулавливатель, как на поршень. Среди первых производи-
телей новых гранат была фирма Mekar (Бельгия), разработавшая в самом
конце 1960-х годов серию 40-мм оперенных гранат, имеющих стандартный
стабилизатор с восьмилопастным оперением. Базовой стала кумулятивная гра-
Рис. 6.36. Кумулятивные винтовочные гранаты 75-мм Energa (а) и 40-мм М260 (б)
(Бельгия)
6.4. Кумулятивные ручные, реактивные и винтовочные гранаты
473
ната APR-RFL (М260) (рис. 6.36, б). При стрельбе 7,62-мм патроном макси-
мальная дальность составляла 300 м, а 5,56-мм патроном - 275 м Прицел
имел отметки на 50, 100, 150 и 200 м Такие 40-мм оперенные винтовочные
гранаты фирмы Mckar приняли на вооружение армии более чем 35 стран, вклю-
чая страны НАТО.
В качестве современной противотанковой гранаты следует отметить ку-
мулятивную винтовочную гранату Olin (США) с тянущим пороховым реак-
тивным двигателем в головной части (впереди БЧ) и четырехлопастным ста-
билизатором в хвостовой части. Стрельба гранатой ведется со специальной
пластиковой насадки, накрывающей дульную часть ствола. Насадка имеет два
наружных винтовых паза: при сходе гранаты с насадки она получает враще-
ние, стабилизирующее ее полет. В обтекаемом корпусе гранаты помещена тан-
демная кумулятивная БЧ (для поражения экранированной брони и объектов с
динамической защитой) с головодонным взрывателем. Замыкатель взрывате-
ля установлен на головном штыре, обеспечивающем оптимальное расстояние
для формирования и действия КС. За счет‘установки в трубке стабилизатора
пулеулавливателя выстрел может производиться боевым патроном. При массе
гранаты 1,65 кг энергии выстрела хватает для ее движения только на даль-
ность безопасного для стрелка запуска реактивного двигателя. Такой старт
позволяет запускать гранату из тесных закрытых помещений, кроме того, сни-
жает демаскирующие признаки. Длина гранаты 564 мм, начальная скорость
70 м/с, дальность стрельбы от 10 до 250 м, бронепробиваемость 400 мм.
В последнее время в США разработано так называемое ударное оружие
пехотинца (УОП), представляющее собой кронштейн с короткой направляю-
щей трубкой, закрепляемый на стандартной винтовке типа М16 или любого
другого стрелкового оружия типа винтовки или автомата. Такая ружейная штур-
мовая граната RAW представляет собой сферу диаметром 140 мм, вставляе-
мую своим соплом в направляющую трубку кронштейна. I раната может бол-
таться на кронштейне или на поясе солдата сколь угодно долго. Масса всей
системы составляет 2,72 кг. Перед выстрелом гранатой солдат выдергивает
предохранительную чеку, а затем стреляет из винтовки любым патроном (или
очередью). Пороховые газы выстрела приводят в действие ударник гранаты,
который инициирует КВ гранаты, после чего включается ее реактивный дви-
гатель. Поток реактивных газов специальным образом отводится в стороны,
причем часть газов закручивает гранату для стабилизации ее в полете вра-
щением. Ударное оружие пехотинца имеет различные боеголовки (сминае-
мая фугасная из пластита, кумулятивная, с готовыми осколками в виде воль-
фрамовых шариков, зажигательная, химическая, дымовая). Противотанковая
кумулятивная боеголовка пробивает до 450 мм брони, при этом подрыв бое-
головки на фокусном расстоянии от брони достигается оптическим опреде-
лителем расстояния до цели, расположенным внутри боеголовки. Тяга реак-
тивного двигателя гранаты рассчитана так, чтобы обеспечить гранате траек-
торию без ее снижения на дальности 200 м, после чего она летит уже по
баллистической траектории. Скорость гранаты первые 200 м составляет
173 м/с, время полета на эту дальность - 1,9 с. Основным достоинством гра-
наты считают стабилизацию вращением, что увеличивает кучность стрельбы.
Сила отдачи при выстреле очень слаба, практически отсутствуют демаскиру-
474
6. Кумулятивные средства поражения и боеприпасы
ющие признаки, возможна стрельба с закрытых позиций и помещений из
табельного оружия.
Помимо чисто винтовочных (ружейных) гранат широкое распростране-
ние получили кумулятивно-осколочные гранаты к подствольным гранатоме-
там, закрепляемым (подвешиваемым) на штурмовых винтовках и автоматах.
Наибольшую известность получили 40-мм подствольные однозарядные гра-
натометы М203 (США), МК40 (ЮАР), 40GL (Сингапур), Pallad (Польша),
ГП-25 и ГП-30 (Россия) и др. Из многозарядных гранатометов можно отме-
тить ручной шестиствольный гранатомет РГ-6 (Россия). Все однозарядные гра-
натометы имеют примерную массу без снаряжения до 2 кг, длину 300.. .350 мм
и высокую скорострельность на дистанции стрельбы 350...400 м. Ствол гра-
натомета, как правило, снабжен правосторонним нарезным каналом и вы-
полнен из легкого сплава. Заряжание гранатомета выстрелом осуществляет-
ся с дульной части ствола. Выстрел, вложенный в ствол, удерживаетбя спе-
циальным фиксатором. Номенклатура используемых гранат достаточно
широка: кумулятивно-осколочные, осколочные, термобарические, сигналь-
ные, светозвуковые, дымозажигательные, осветительные, различного^целе-
тального действия и т. п.
6.5. Кумулятивные боевые части
противотанковых управляемых ракет
Противотанковые управляемые ракеты - одни из основных средств борь-
бы с танками, бронемашинами, малоразмерными наземными объектами (ДОТ,
ДЗОТ) и низколстящими малоскоростными воздушными целями. Они способ-
ны поражать сильнозащищенные цели как на относительно близких дистан-
циях от 30 до 500 м, так и на расстояниях до 3000...8000 м. Создание ПТУР
стало принципиальным скачком в развитии противотанкового оружия. В от-
личие от артиллерийских снарядов и противотанковых гранат ПТУР поража-
ют цели на дистанциях более 2 км, а перспективные ПТУР - до 10 км с веро-
ятностью попадания в цель до Р = 0,8...0,9. При этом обеспечиваются высо-
кая скорострельность и малая уязвимость противотанковых ракетных
комплексов за счет меньшего времени на подготовку выстрела, смены огне-
вой позиции, полета ракеты до цели, возможности стрельбы с закрытых по-
зиций. Малые масса и габариты облегчают маневрирование и маскировку
на поле боя. Современные кумулятивные БЧ ПТУР способны пробить гомо-
генную броню (RHA) толщиной более 1 м, преодолевая при этом дополни-
тельную ДЗ (ERA).
Классификация ПТУР. Общие сведения
В настоящее время в странах НАТО определились три основных направ-
ления развития ПТРК, различающихся используемыми конструктивно-схем-
ными решениями и системами наведения. Эти направления обусловлены тре-
мя основными способами боевого применения (штатной принадлежности): в
качестве носимого пехотного оружия (переносные); при перевозке на автомо-
биле или установке на БТР, БМП (возимые или самоходные); при размещении
6.5. Кумулятивные боевые части противотанковых управляемых ракет 475
ПУ на вертолетах (вертолетные) или самолетах (самолетные). По этим же на-
правлениям идет развитие отечественных ПТРК. В России помимо прочего на
вооружение приняты так называемые ствольные ПТУР в составе комплексов
управляемого вооружения (КУВ) танков, малых кораблей и артиллерийских
систем, реализующие запуск ракеты через ствол гладкоствольного и даже на-
резного орудий.
Наиболее обширна классификация ПТРК по используемым системам уп-
равления (наведения) ПТУР. Она связана с развитием ПТУР разных поколе-
ний и в какой-то мере с историей их создания от реализации принципа «вижу
стреляю» (ручная и полуавтоматическая системы наведения) до постепенного
перехода к принципу «выстрелил-забыл» (автономная система наведения). При
этом различают ПТУР с проводной линией связи (ПЛС), по которой может
осуществляться передача обычного электрического сигнала, радиокоманд или
использоваться волоконно-оптический кабель (ВОК) связи (в перспективе), и
беспроводные ПТУР. Последние могут иметь разные типы ГСН: лазерно-лу-
чевую, тепловизионную (с ИК-излучением), с применением радиоканала в мил-
лиметровом диапазоне волн, телевизионную а также комбинированную из пе-
речисленных способов передачи команд и приема сигналов.
Возможны и другие виды классификации: по аэродинамической схеме
(нормальная самолетная, «утка», «бесхвостка»); по массе (легкие - от 5 до
15 кг, средние - от 15 до 40 кг, тяжелые - свыше 40 кг); по скорости полета
(дозвуковые и сверхзвуковые); по конструктивным схемам размещения основ-
ных элементов ракеты и типам БЧ.
Как правило, ПТУР стабилизируются в полете крыльевыми стабилизато-
рами. Вращение же ракеты в полете, происходящее за счет сопел двигателей,
наклоненных к оси ракеты, косых стабилизаторов и вращающего момента,
возникающего при сматывании катушки с проводом, осуществляется с малой
угловой скоростью и не может стабилизировать ракету (в отличие, например,
от реактивного снаряда), но зато успешно компенсирует отклонение вектора
силы тяги от оси ракеты, а также асимметрию корпуса ракеты.
Все ПТУР снабжены кумулятивной БЧ. В ракетах первого поколения КО
(воронка) располагалась в головной части ракеты, а во многих ракетах второ-
го и третьего поколений она размещена за приборным отсеком. Часть ракет
второго и третьего поколений снабжена тандемной кумулятивной БЧ, т. е. фак-
тически двумя кумулятивными БЧ, расположенными одна за другой. Первая
кумулятивная БЧ преодолевает действие реактивной брони (ERA) или выне-
сенного броневого экрана, а вторая пробивает основную броню танка. Мно-
гие современные ПТУР комплектуются так называемыми БЧ бокового боя, а
также фугасными и осколочными БЧ, что делает ПТРК многоцелевыми.
Считается, что приоритет в разработке ПТУР принадлежит Германии, где
в 1944 г. создали первый в мире противотанковый управляемый реактивный
снаряд Х-7 Rotkappchen («Красная шапочка»). Управление Х-7 осуществля-
лось по проводам. Изменение направления полета ракеты проводилось с по-
мощью интерцепторов (колеблющихся пластин, прерывающих поток возду-
ха). Ракета была сделана по аэродинамической схеме «бесхвостка». Стабили-
зация происходила с помощью крыльевого стабилизатора. Дальность стрельбы
такой ракетой не превышала 2400 м, маршевая скорость составляла 98,3 м/с,
476
6. Кумулятивные средства поражения и боеприпасы
а бронепробиваемость 140-мм ракеты по нормали к преграде - 200 мм. Для
использования Х-7 в пехотном варианте была разработана ПУ, носимая во
вьюке пехотинца.
Таким образом, в Германии создали классическую ПТУР первого поколе-
ния, принятую на вооружение разных армий в середине 50-х - начале 60-х го-
дов XX в. В таких ПТУР была заложена ручная система наведения, при ко-
торой управляющие сигналы формируются в наземном пульте управления, а
сами сигналы передаются чаще всего по электрической ПЛС или радио. Для
создания управляющей силы используются интерцепторы, аэродинамичес-
кие или газовые рули. У ПТУР первого поколения скорости полета не превы-
шали 200м/с, минимальная дальность составляла 300...800 м, а максималь-
ная - 1500...4000 м. При этом обеспечивалась вероятность попадания в цель
Р = 0,8.. .0,9 на дальностях 1.. .2 км и Р - 0,7.. .0,8 на дальности до 3 км. Куму-
лятивные боевые части ПТУР первого поколения пробивали гомогенную бро-
ню толщиной не более 400.. .500 мм (по нормали к преграде) (табл. 6.5),
Таблица 6.5. Характеристики ПТУР первого поколения
Индекс Страна- разработчик Дальность min/max, м Средняя скорость, м/с Калибр, мм Бронепробитие по нормали, мм
Ручная система управления по проводам
SS-10 Франция 300/1600 80 164 500
SS-11 Франция 500/3500 190 164 600
Cobra-810 Германия 400/1600 85 100 500
Dart США -/4500 275 220 450
9М14М «Малютка» СССР 500/3000 115 125 400
ЗМ6 «Шмель» СССР 700/2000 100 135 380
Ручная система управления по радио
ЗМ11 «Фаланга» СССР 600/2500 140 140 500
Недостатками ПТУР первого поколения были небольшая скорость и боль-
шое время полета (20...25 с), наличие непоражаемой зоны перед огневой по-
зицией в 300...800 м из-за необходимости придавать ПУ угол возвышения
при ручной наводке, сложность управления и требуемая в связи с этим высо-
кая квалификация оператора. Появление в 1960-е годы бронетанковой техни-
ки нового поколения выдвинуло повышенные требования и по таким пара-
метрам, как дальность стрельбы и бронепробиваемость.
Противотанковые управляемые ракеты второго поколения, принятые на
вооружение в 1960-1970-е годы, проектировали с таким расчетом, чтобы лик-
видировать недостатки ПТУР первого поколения. Ручное управление ПТУР
было заменено на полуавтоматическое, при котором оператор удерживает пе-
рекрестие оптического прицела на цели до момента попадания в нее, а ракета
при этом управляется автоматически. Отсутствие оператора в контуре управ-
ления ракетой позволило повысить скорострельность и точность стрельбы.
Максимальная дальность полета ПТУР второго поколения составляет 3.. .4 км,
6.5. Кумулятивные боевые части противотанковых управляемых ракет 477
а минимальная фактически определяется дальностью взведения взрывателя и
достигает 25...300 м. В таких ПТУР используются в основном оптические
каналы визирования, а для передачи команд управления широко применяются
электрические ПЛС и радио. ПТУР второго поколения позволили увеличить
скорость ракет до 200...300 м/с, уменьшить время полета ракеты на макси-
мальной дистанции до 10... 15 с и сократить мертвую зону у огневых пози-
ций. Такие ПТУР были особенно эффективны на открытой местности (без
кустов, строений, холмов и т. п.), а их кумулятивные БЧ обеспечивали проби-
тие гомогенной брони толщиной 500...700 мм. Ко второму поколению отно-
сятся такие известные ПТРК, как Dragon и Tow (США), Milan и Hot (Фран-
ция, Германия), Swingfire (Великобритания), отечественные «Фагот», «Кон-
курс», «Метис», «Штурм» и их модификации - модернизированные «Малютка-П»
и «Фаланга-П» (табл. 6.6).
Таблица 6.6. ХарактеристикиПТРК второго поколения
Наименование Индекс ракеты Дальность min/max, м - Средняя скорость, м/с Калибр ракеты, мм Бронепробитие по нормали, мм
Полуавтоматическая система управления по проводам
«Малютка-П» 9М14П 400/3000 ‘115 125 500
«Фагот» 9М111 75/2000 ' 180 120 400
«Фактория» 9М111М 75/2500 180 120 500
«Конкурс» 9М113 75/4000 210 135 600
«Конкурс-М» 9М113М 75/4000 210 135 800
«Метис» 9М116 40/1000 180 93 460
«Метис-М» 9М131 80/1500 180 127 800
Полуавтоматическая система управления по радио
«Фаланга-П» 9М17П 450/4000 170 142 600
«Штурм-С» 9М114 400/5000 350-400 130 600
«Атака» 9М120 400/6000 350—400 130 900
Постоянная модернизация бронетанковой техники и появление в начале
1980-х годов танков нового поколения, оснащенных комбинированной броней
и навесной или встроенной ДЗ, средствами постановки пассивных и актив-
ных оптических и радиоэлектронных помех, прицелами ночного видения, а
также увеличение дальности прицельной стрельбы танковых пушек постави-
ли перед разработчиками ПТРК задачи их совершенствования путем сокра-
щения времени обнаружения цели, момента открытия огня, увеличения даль-
ности и получения высокой точности стрельбы, повышения могущества БЧ,
помехозащищенности, возможности стрельбы с закрытых позиций, обеспече-
ния круглосуточного и всепогодного применения.
Противотанковые управляемые ракеты третьего поколения (табл. 6.7) нача-
ли поступать на вооружение уже в конце 1970-х годов и были полностью вне-
дрены в 1980-е годы, а в начале 90-х годов XX в. стали интенсивно модернизи-
роваться. У таких ПТУР оператор исключается не только из контура управле-
ния ракетой, как у ПТУР второго поколения, но и из контура слежения за целью.
Таблица 6.7. Характеристики ПТРК препъего поколения
Наименование ПТРК Дальность min/max, м Система управления Средняя скорость, м/с Калибр ракеты, мм Бронепробитие по нормали, мм/ способ атаки
Dragon 2 (США) 65/1000 Полуавтоматическая по проводам 100 127 800/Лобовая
Tow-2 (США) 65/3750 То же 250 152 1000/»
Hellfaire (США) 600/7000 Полуавтоматическая по лучу лазера 230 178 1200/»
Milan-2 (Франция, Германия) 25/2000 Полуавтоматическая по проводам 200 115 850/»
Hot 2 (Франция, Германия) 75/4000 То же 240 150 1200/»
«Малютка-2» (СССР) 400/3000 » 130 125 800/»
«Корнет-Э» (Россия) 100/5500 Полуавтоматическая по лучу лазера 200 152 1000/»
Егух (Франция) 50/600 Полуавтоматическая по проводам 250- 280 137 900/»
Predator (США) 17/600 Инерционная лазерная 300 150 150-200/На пролете
Javelin (США) 65/2500 Автоматическая с инфракрасной ГСН 300 142(127) 900 (750)/Пикирование
ATGW-3/LR Trigat (Германия, Франция, Великобритания) 500/5000 (до 8000) То же Сверх- звуковая 160 1200/»
Longbow Hellfaire (США) 500/9000 То же + радиолокационная ГСН » 178 1200/»
Brimstone (Великобритания) -/8000 Автоматическая с радиолокационной ГСН » 178 1200/»
«Хризантема-С» (Россия) -/6000 То же » 152 1100/Лобовая
«Вихрь» (Россия) 500/10000 Автоматическая по лучу лазера >>. • 135 900/»
6.5. Кумулятивные боевые части противотанковых управляемых ракет 479
Приведенные ПТУР оснащены ГСН, работающими в полуактивном или
пассивном режимах. В полуактивном режиме наведение проводится по отра-
женному от цели лазерному или инфракрасному лучу, а в пассивном режиме
для наведения используются характерные физические признаки цели. Таким
образом, оператору нужно только выбрать цель, навести ПУ и осуществить
запуск ракеты. Максимальная дальность полета ПТУР третьего поколения до-
стигает 8... 10 км, средняя скорость полета - 200 ..300 м/с (но может быть и
сверхзвуковой), время полета на средней дальности не превышает 10 с, а на
максимальной - 15...20 с. Бронепробиваемость таких ПТУР, имеющих, как
правило, тандемные кумулятивные БЧ, составляет по нормали 700... 1000 мм
гомогенной брони с учетом преодоления ДЗ.
На современном этапе развития систем вооружения рассматривается воз-
можность совершенствования ПТУР третьего поколения путем перехода на
полностью автономные системы наведения, действующие не по принципу
«вижу стреляю», как ручные и полуавтоматические, а по принципу «выстре-
лил забыл». При этом используются самые различные ГСН: инфракрасная с
матричным приемником излучения, инерциальная лазерная, телевизионная, ра-
диокомандная в миллиметровом диапазоне волн, а также их комбинации. В пла-
не совершенствования ПТРК с полуавтоматической системой управления весь-
ма перспективно использование ВОК, что существенно увеличивает дальность
и помехозащищенность ПТУР. Ракеты будут иметь модульные конструкции
со взаимозаменяемыми блоками, что обеспечит большой набор их сочетаний,
а также как минимум двойную систему наведения, например, по радиокоман-
дам и командам инфракрасной ГСН и т. д. По-видимому, именно эти направ-
ления определят облик и принцип управления ПТУР в начале XXI в. В буду-
щем на вооружение поступят ПТРК четвертого поколения, главными досто-
инствами которых станут всепогодность и всесуточность действия, большая
дальность и высокая надежность. Тандемная кумулятивная БЧ с предконтакт-
ным подрывом должна будет обеспечивать преодоление ДЗ (ERA) и пробитие
за ней гомогенной брони (RHA) толщиной до 1200... 1400 мм.
Особенности устройства и функционирования ПТУР
Рассмотрим более подробно устройство и принцип действия ПТУР раз-
ных поколений на примере отечественных образцов этого класса СП и БП.
Первые отечественные ПТУР «Шмель» (передача по проводам электри-
ческого сигнала), «Фаланга» (передача команд по радио) и наиболее извест-
ная ракета «Малютка» были ручного управления (см. табл. 6.5). По масшта-
бам изготовления «Малютка» сопоставима с такими видами оружия, как авто-
мат Калашникова и гранатомет РПГ-7. В настоящее время комплекс «Малютка»
находится на вооружении армий десятков стран мира и имеет несколько мо-
дификаций.
Впервые в мире при создании ПТУР «Малютка» (рис. 6.37) в конструк-
ции корпуса широко применили пластмассы. Так, корпус крыльевого отсека и
корпус головной части, в котором разместили КЗ с медной воронкой, были
сделаны из пластика. У ракеты отсутствовал бортовой источник электропита-
ния, а имелась только одна рулевая машинка типа «да-нет» и простейший
480
6. Кумулятивные средства поражения и боеприпасы
Рис. 6.37. Ракета 9М14М комплекса «Малютка»:
1 - баллистический наконечник; 2 — пьезоэлектрический элемент; 3 - кумулятивная воронка;
4 - заряд ВВ, 5 - замок БЧ; 6 - линза; 7 - взрыватель; 8 - стартовый двигатель; 9 - маршевый
двигатель; 10 - катушка с проводом; 11 стабилизатор; 12 - бортовая аппаратура; 1.3‘ - система
управления; 14 - гироскоп
гироскоп с механической раскруткой. Команды на борт передавались во мик-
рокабелю с тремя медными эмалированными жилами диаметром 0,12 мм
каждая в тканевой обертке. Аэродинамическая схема ракеты - «бесхвостка».
Управление осуществлялось за счет изменения вектора тяги маршевого дви-
гателя. Для компенсации эксцентриситета тяги маршевого двигателя предус-
матривалось вращение ракеты вокруг своей оси со скоростью около 8,5 об/с.
Боевая часть ракеты имела заряд ВВ из состава A-IX-1 и головодонный пье-
зоэлектрический взрыватель 9Э219.
Позднее ПТУР «Малютка» установили на БМП-1, серийно выпускавшу-
юся с 1966 г. Попытки поместить ПТУР «Малютка» на башне танка и на вер-
толете не увенчались успехом. В 1973 г. в ходе арабо-израильской войны ра-
кетами «Малютка» было поражено свыше 800 израильских танков.
Первой отечественной ПТУР второго поколения с полуавтоматической си-
стемой наведения стала ракета 9М111 ПТРК «Фагот» (индекс комплекса -
9К111). Нестандартным конструкторским решением явилось размещение бло-
ка рулевого привода в головной части в пределах фокусного расстояния КЗ
так, что в момент удара ракеты о броню происходил сдвиг рулевого привода
относительно оси ракеты. Это не только упростило конструкцию, но и дало
возможность уменьшить длину ракеты за счет частичного заполнения обычно
свободного пространства перед БЧ. Впервые была использована аэродинами-
ческая схема «утка», позволившая существенно снизить мощность привода,
так как воздушные рули располагались сравнительно далеко от центра тяжес-
ти ракеты. Для получения требуемой скорости полета ракеты на траектории
применялся разгонно-маршевый двигатель однокамерного типа. В комплексе
«Фагот» успешно решили задачу автоматизации пуска ракеты: оператор лишь
нажимал на спусковой крючок, а последующие операции - выход аппаратуры
на режим, открытие крышки контейнера, старт ракеты - происходили автома-
тически без его участия.
Комплекс «Фагот» принят на вооружение в 1970 г. Пусковая установка
комплекса «Фагот» состоит из станка (тренога, вертлюг, подъемный и пово-
6.5. Кумулятивные боевые части противотанковых управляемых ракет 481
ротный механизмы), аппаратного блока и механизма пуска. Контейнер выпол-
нен в виде трубы из стекловолокна со съемными задней и передней крышка-
ми. С артиллерийской точки зрения ПУ 9П135 представляет собой безоткат-
ную пушку, созданную по схеме «свободная труба» и стреляющую активно-
реактивным снарядом.
Следующим шагом в разработке отечественных ПТУР второго поколения
было создание комплексов «Конкурс», «Штурм», «Метис» и модернизация ком-
плексов первого поколения - «Малютка-П», «Фаланга-П» (см. табл. 6.6).
По сравнению с ракетой комплекса «Фагот» ракета 9М113 ПТРК «Кон-
курс» (рис. 6.38, а) стала больше, тяжелее, увеличились бронепробиваемость
и дальность стрельбы, при этом маршевая скорость полета осталась практи-
чески без изменения. Как ПТУР «Конкурс», так и «Фагот» вращались в по-
лете для компенсации эксцентриситета двигателя с частотой 5... 10 об/с. Ра-
кета 9М113 «Конкурс» скомпонована по аэродинамической схеме «утка», т. е.
аэродинамические рули 1 размещены впереди центра тяжести ракеты. Управ-
ляющая сила, обеспечивающая маневр paxefti, создается за счет поворота аэро-
Рис. 6.38. Ракеты 9М113 ПТРК «Конкурс» (а) и 9М113М ПТРК «Конкурс-М» (б):
1 - аэродинамический руль; 2 корпус; 3 - кумулятивная БЧ; 4 предохранительно-детониру-
ющий механизм; 5 - твердотопливный двигатель; 6 - камера; 7 - электровоспламенитель; 8 -
лопасть (крыло); 9 - корпус; 10 блок системы управления; И ~ предзаряд тандемной БЧ; 12 -
воздухозаборник; 13 - гироскопический блок; 14 - электрическая батарея; 15 - катушка
с проводом; 16 - источник излучения
482
6. Кумулятивные средства поражения и боеприпасы
динамических рулей. В целях стабилизации на траектории ракета в полете
вращается с помощью лопастей 8 и сопел, установленных под углами 2 и 9°
соответственно к продольной оси ракеты. Система управления ракетой в по-
лете - полуавтоматическая с передачей команд по проводам. Лампа-фара, рас-
положенная в аппаратурном отсеке 10 в каркасе катушки ПЛС, является элек-
трическим источником ИК-излучения и предназначена для определения поло-
жения ракеты относительно линии визирования.
Для ПТРК «Конкурс» на базе БРДМ-2 создали боевую машину 9П148, на
ПУ которой находились пять контейнеров с ракетами 9М113. Всего же вози-
мый боекомплект составлял 20 ракет 9М113 или 9М111. После пуска отстре-
лянный контейнер автоматически сбрасывался. В комплектацию машины вхо-
дила выносная ПУ типа 9П135, которая вместе с боекомплектом могла выно-
ситься из боевой машины и использоваться независимо от нее.
В 1975 г. на вооружение был принят ПТРК «Конкурс-М». Габариты раке-
ты 9М113М и пусковое устройство не изменились. Модернизаций подверг-
лась лишь передней части ракеты, где был установлен предзаряд 11 тандем-
ной БЧ (рис. 6.38, б). Кроме этого, ракета была снабжена новым воздушным
динамическим приводом полуоткрытого типа с лобовым воздухозаборником 12.
Масса ракеты в контейнере несколько увеличилась, а максимальная и мини-
мальная дальности стрельбы остались без изменения. Бронепробиваемость по
нормали к преграде возросла с 600 до 800 мм. С 1979 г. ПТУР «Конкурс-М»
начали устанавливать на БМП-1 взамен ПТУР «Малютка».
Разработка комплекса 9К113 «Штурм» с ракетой 9М114 (рис. 6.39) велась
в двух вариантах: самоходном «Штурм-С» (на вооружении с 1972 г.) и верто-
летном «Штурм-В» (на вооружении с 1975 г.). Ракета 9М114 выполнена по
аэродинамической схеме «утка» и конструктивно состоит из БЧ, двигательной
установки, рулевого и приборного отсеков. Для создания необходимой подъем-
ной силы используют четыре дугообразных пера, а для создания управляю-
щей аэродинамической силы - отклонение рулей. Для обеспечения запуска из
пусковой трубы-контейнера ракета не имеет выступающих частей, рули и пе-
рья сложены и раскрываются после ее вылета из пусковой трубы-контейнера.
Ракета 9М114 обеспечивает сверхзвуковую скорость полета на дальность
до 5000 м и оснащена кумулятивной БЧ с бронепробиваемостью 560...600 мм
по нормали к преграде. Кумулятивный заряд такой БЧ состоит из двух ша-
шек - передней (ВВ типа окфол) и задней (ВВ типа A-IX-10). В заднюю шаш-
ку впрессована пластмассовая линза, предназначенная для формирования фрон-
Рис. 6.39. Ракета 9М114 ПТРК «Штурм»:
/ - обтекатель; 2 - кумулятивная БЧ; 3 - аэродинамический руль; 4 - рулевая машина; 5 -
твердотопливный двигатель; 6 - аппаратура системы управления; 7 - радиоантенна; 8 - источ-
ник ИК-излучения
6.5. Кумулятивные боевые части противотанковых управляемых ракет 483
та детонационной волны, которая распространяется по заряду от места ини-
циирования. Кумулятивный заряд имеет цилиндроконическую форму, а БЧ ос-
нащена головодонным пьезоэлектрическим взрывателем 9Э243 мгновенного
действия с самоликвидатором.
За БЧ ракеты 9М114 расположены рулевой отсек и пороховой аккумуля-
тор давления, предназначенный для питания пороховыми газами рулевой ма-
шины и турбогенераторного источника питания при полете ракеты. В цент-
ральной части ракеты размещена двигательная установка, представляющая со-
бой однокамерный двухрежимный двигатель с двумя боковыми наклонными
раструбами. За двигательной установкой расположен приборный отсек, в ко-
тором находятся блок бортовой радиоаппаратуры и блок ответчика. На корпу-
се приборного отсека размещены четыре дугообразных пера. Антенна блока
бортовой радиоаппаратуры расположена в хвостовой части ракеты.
Пусковая труба-контейнер служит как направляющее устройство при вы-
стрелах с вертолета или боевой машины 9П.149 и представляет собой стекло-
пластиковую гладкую трубу с расположейными на ней передней и задней
цапфами.
На современном этапе вместо ракеты 9М114 ПТРК «Штурм» для верто-
летов типа Ми-24 и боевых машин 9П149 создали более эффективную ракету
9М120 «Атака». В какой-то мере «Атаку» можно назвать и модернизацией
ракеты 9М114, поскольку ее система управления и конструктивно-компоно-
вочное решение близки к «Штурму». Калибр ракеты «Атака» - 130 мм, даль-
ность стрельбы при пуске с вертолета - до 6 км, а с боевой машины - до
5,5 км. Помимо тандемной кумулятивной БЧ, способной пробивать броню тол-
щиной до 900 мм по нормали, для ракеты 9М120 были разработаны фугасная
(точнее - термобарическая, объемно-детонирующая) и осколочная БЧ, снаб-
женная ГПЭ (стержнями).
В 1980 г. на вооружение приняли легкий противотанковый комплекс «Ме-
тис», предназначенный для вооружения мотострелковых рот. Система управ-
ления - полуавтоматическая с передачей команд по проводам и упрощенной
аппаратурой на борту. Ракета комплекса «Метис» выполнена по аэродинами-
ческой схеме «утка» с воздушными рулями в головной части. Впервые в кон-
струкцию ПТУР был введен воздушно-динамический рулевой привод откры-
того типа, использующий давление воздуха набегающего воздушного потока
для перемещения коробчатых аэродинамических рулей. Ракета 9М116 поме-
щена в контейнер. Выстрел (индекс 9М115) состоит из контейнера и ракеты,
помещенных на легком треножном лафете 9П151.
Основные составные части ракеты следующие: блок рулевого управле-
ния, кумулятивная БЧ, ракетный пороховой двигатель, катушка с проводом и
трассер. Блок рулевого управления осуществляет отклонение рулей в соответ-
ствии с командами, поступающими по проводам, которые тянутся за летящей
ракетой. Ракетный пороховой двигатель обеспечивает старт ракеты и необхо-
димую скорость ее полета. Он состоит из стартовой и разгонно-маршевой ка-
мер и имеет три режима работы: стартовый, разгонный и маршевый. Для обес-
печения вращения ракеты вокруг продольной оси с частотой 7... 12 об/с сопла
разгонно-маршевой камеры, а также плоскости стабилизаторов повернуты
на углы 8°30' и 2° 18' соответственно. На одной из плоскостей стабилизатора
484
6. Кумулятивные средства поражения и боеприпасы
закреплен трассер. Когда ракета находится в контейнере, плоскости стабили-
затора сложены. Катушка с проводом установлена в хвостовой части ракеты
на стартовой камере двигателя. Проводная линия связи, начало которой вы-
полнено в виде троса с вилкой на конце, представляет собой двухжильный
провод.
При пуске ракеты сначала воспламеняется стартовый пороховой заряд, а
затем пиротехнический состав трассера. Когда ракета вылетает из контейне-
ра, плоскости стабилизатора раскрываются, включаются предохранительно-
исполнительный механизм БЧ и разгонно-маршевый двигатель (на расстоя-
нии более 4 м). Линия визирования наземной аппаратуры управления удержи-
вается на цели оператором с помощью ИК-излучения от трассера, что позволяет
автоматически определять координаты снаряда, его угол крена и посылать ко-
манды на движущуюся ракету.
Рассмотрим устройство и принцип действия БЧ ракеты, состоящей из КЗ,
корпуса, контактного устройства и ПИМ (рис. 6.40). Кумулятивный заряд вклю-
чает в себя шашку ВВ (окфол) 9, медную кумулятивную воронку 8 и линзу 10
из фенопласта. Корпус БЧ содержит стакан 7, переходное кольцо 4 для» соеди-
нения БЧ и блока рулевого привода, поджимное кольцо 6 для крепления к
торцу воронки контактного устройства, в которое входят два конуса-(верх-
ний 1 и нижний 3) и изоляционное кольцо 2 между ними. Предохранительно-
исполнительный механизм обеспечивает срабатывание БЧ.
При пуске ракеты за счет продольного ускорения накалывается КВ, кото-
рый зажигает пиротехнические составы механизма дальнего взведения и са-
моликвидатора ракеты, срабатывающего через 10 с. При встрече ракеты с пре-
градой контактный конус головной части и верхний конус 1 БЧ (см. рис. 6.40)
соприкасаются и замыкают электрическую цепь, по которой конденсаторы раз-
ряжаются на электродетонатор, а последний через передаточный заряд дето-
нирует шашку ВВ 9 кумулятивного заряда.
В середине 1990-х годов был создан комплекс «Метис-М» с выстрелом
9М131. Калибр ракеты увеличился с 93 до 127 мм, а воздушно-динамический
рулевой привод полуоткрытого типа сменил ранее применявшийся открытый.
Увеличение калибра ракеты позволило заменить коробчатые аэродинамичес-
кие рули на монопланные, расположенные в одной плоскости. Дальность
Рис. 6.40. Боевая часть 9Н135 ракеты 9М116 ПТРК «Метис»:
/ - конус верхний; 2 - кольцо изоляционное; 3 — конус нижний; 4 - кольцо переходное; 5 -
винт; 6 - кольцо поджимное; 7 - стакан; 8 - воронка; 9 - шашка; К) - линза; 11 - предохрани-
тельно-исполнительный механизм; 12 прокладка; 13 - гайка поджимная; 14 - провод
6.5. Кумулятивные боевые части противотанковых управляемых ракет 485
стрельбы возросла с 1 000 до 1500 м, а бронепробиваемость - с 460 до 800 мм.
Ракета «Метис-М» с тандемной кумулятивной БЧ имеет компоновочную схе-
му, в которой двигательная установка защищает основной КЗ от взрывного
воздействия предзаряда.
На этапе модернизации ПТУР второго поколения и разработки ПТУР тре-
тьего поколения был создан ракетный комплекс «Корнет-Э», который может
устанавливаться как на боевой машине ПТРК (самоходный вариант), так и
использоваться с выносной ПУ. Управление ракетой 9М133 комплекса «Кор-
нет-Э» осуществляется в полуавтоматическом режиме по лучу лазера. Функ-
ции оператора сводятся к обнаружению цели через оптический или телевизи-
онный прицел, взятию ее на сопровождение, произведению выстрела и удер-
жанию перекрестия прицела на цели вплоть до ее поражения. Вывод ракеты
после пуска на линию визирования (ось лазерного луча) и дальнейшее удер-
жание ее на оси происходят автоматически. Ракета выполнена в двух вариан-
тах: 9М133 с тандемной кумулятивной БЧ и 9М133Ф с БЧ термобарического
(фугасно-зажигательного) действия.
Рис. 6.41. Ракета 9М133 ПТРК «Корнет-Э»:
1 - предзаряд тандемной БЧ; 2 - воздухозаборник; 3 аэродинамический руль; 4 твердотоп-
ливный двигатель; 5 - основной КЗ; 6 - крыло; 7 - аппаратура приема лазерного излучения
В ракете 9М133 ПТРК «Корнет-Э» (рис. 6.41), как и в ракете 9М131 ПТРК
«Метис-М», твердотопливный двигатель 4 находится между основным КЗ 5 и
предзарядом 7, тем самым защищая основной КЗ от взрывного воздействия
предзаряда. Длина ракеты диаметром 152 мм составляет 1200 мм, масса раке-
ты-11 кг, а заряда ВВ - 4,6 кг.
Танковые ствольные ПТУР
В послевоенные годы ПТУР появились во многих странах мира. Для уве-
личения мобильности их начали устанавливать на автомобилях и бронирован-
ных колесных машинах, в связи с чем возник вопрос о вооружении танков
такими ракетами. Впервые за рубежом танковые управляемые ракеты (ТУР)
486
6. Кумулятивные средства поражения и боеприпасы
установили на легких танках АМХ-51 (Франция) в 1959-1960 гг., которые были
вооружены ТУР SS-U в двух вариантах: по две ПУ на крыше башни или по
четыре ПУ на передней стенке башни. Противотанковые ракеты первого по-
коления имели ручное управление по проводам, низкую точность наведения и
большое полетное время, что исключало стрельбу с хода, а открытое располо-
жение ПУ балочного типа на броне танка делало невозможным ее перезаря-
жение под огнем противника. Сами же ракеты подвергались воздействию пуль
и осколков, не говоря уже о действии ядерного взрыва.
В начале 1970-х годов в США на вооружение приняли ТУР нового поко-
ления Shillelagh, наводившиеся полуавтоматически по ИК-лучу. Запуск
Shillelagh производился из 152-мм танковой пушки, которая, кроме ракеты,
стреляла и обычными осколочно-фугасными и кумулятивными снарядами.
В боекомплект легких танков М551 Sheridan входило 10 ТУР и 20 обычных
снарядов, а в боекомплект средних танков М60А2 - 13 ТУР и 33 обычных
снаряда. Однако в середине 1970-х годов производство танков с ТУР Shillelagh
было прекращено вследствие высокой стоимости и недостаточной эффектив-
ности ТУР, а также более слабого действия ракет из 152-мм короткой пушки
по сравнению со 105- и 120-мм танковыми пушками. Попытки зарубежных
конструкторов создать ТУР для 105- и 120-мм штатных танковых пушек ока-
зались неудачными. Опытные образцы подобных ТУР имели слабое кумуля-
тивное действие и ряд других недостатков.
Таким образом, в странах НАТО единственным орудием танка по-пре-
жнему остается танковая пушка, хотя еще в начале 1980-х годов зарубежные
специалисты признали, что на дистанции свыше 2,0...2,5 км действие обыч-
ных снарядов танковых пушек менее эффективно, чем действие ПТУР. Со-
всем по-другому шло развитие отечественного танкового ракетного вооруже-
ния. В конце 1950-х годов в СССР развернулись опытно-конструкторские ра-
боты (ОКР) по применению в бронетанковой технике управляемого ракетного
вооружения, которые велись по трем основным направлениям:
- использование пехотных ПТУР в качестве дополнительного вооруже-
ния танков;
- создание специализированных танков - истребителей танков с примене-
нием в качестве основного вооружения управляемых и неуправляемых ракет;
- разработка специализированных КУВ для танков и других боевых бро-
нированных машин.
В начале 1960-х годов была предпринята неудачная попытка разместить
ПУ с ракетой ЗМ6 «Шмель» в кормовой части танка Т-55. В 1963 г. некоторое
количество танков Т-55, Т-62 и ПТ-76Б дополнительно оборудовали ПТУР
комплекса «Малютка». В 1968 г. на вооружение приняли комплекс «Дракон»,
оснащенный ТУР с полуавтоматической системой наведения и передачей ко-
манд по радио, который установили на специальном истребителе танков -
ИТ-1. Танк не имел пушки и был вооружен только ПУ «Дракон» (боекомп-
лект из 15 ракет ЗМ7 помещался под броней танка). Однако ряд конструктив-
ных недостатков и отсутствие пушки на танке послужили причиной снятия
ИТ-1 с производства.
К концу 1960-х годов в СССР, США и других странах инженеры и воен-
ные отказались от идеи создания специального ракетного танка, т. е. машины,
6.5 Кумулятивные боевые части противотанковых управляемых ракет 487
основным оружием которой стали бы управляемые ракеты. Вместо этого ре-
шено было разрабатывать ТУР, выстреливаемые через ствол штатных танко-
вых орудий, что не снижало боевых возможностей танков. Следует отметить,
что свыше 20 лет СССР являлся монополистом в области ТУР, а аналогичные
системы в США и других странах НАТО не созданы и в настоящее время.
В СССР в 1970 1990 гг. на вооружении танков состояли старые 100-мм
нарезные пушки семейства Д-10Т, 115-мм гладкоствольные пушки У5-ТС и
125-мм гладкоствольные пушки Д-81. У 125-мм пушки было раздельно-гиль-
зовое заряжание, а у остальных - унитарное. Соответственно для пушки ТУР
являлись активно-реактивными снарядами раздельного или унитарного заря-
жания.
Проектирование первого КУ В «Кобра» под 125-мм танковую пушку Д-81
началось в середине 1968 г. В 1976 г. на вооружение приняли танк Т-64Б с ТУР
9М112. Аппаратура управления каналом-т-. радиоимпульсная, двухканальная.
Ракета снабжена четырьмя серповидными крыльями, создающими подъемную
силу и придающими ей в полете вращательное движение. Средняя скорость
полета ракеты - 350...400 м/с. Исполнительным управляющим органом в по-
лете являются рули ракеты, которая состоит из собственно противотанковой
ракеты и метательного устройства (вышибного заряда), т. е. из артиллерий-
ского выстрела раздельно-гильзового заряжания. Боевая часть ракеты кумуля-
тивного действия имеет взрыватель 9Э239 и с помощью резьбы соединяется
с крышкой маршевого двигателя (рис. 6.42, табл. 6.8).
В 1980-х годах была предпринята модернизация КУ В «Кобра» под 125-
мм гладкоствольную пушку 2А46М1 танка Т-80Б. Модернизированные вари-
анты получили названия «Кобра-М» с ракетой 9М128 и «Агона» с ракетой
9М124, способными пробить по нормали броню толщиной 600...700 мм.
Для увеличения боевой мощи старых танков Т-55 и Т-62 в 1983 1985 гг.
на вооружение принимаются комплексы «Бастион» и «Шексна» (см. табл. 6.8).
Оба комплекса оснагцены унифицированной ракетой 9М117 и почти одинако-
выми полуавтоматическими системами наведения, в которых передача команд
осуществляется по лазерному лучу. Основные изменения в конструкции выс-
трелов по сравнению с КУВ «Кобра» коснулись гильз с метательным зарядом,
которые были спроектированы под каморы 100- и 115-мм пушек этих танков.
При использовании в КУВ «Шексна» ракета 9М117 оснащалась опорными
поясками для обеспечения движения по стволу большего калибра. Выстрелы
Рис. 6.42. ТУР 9М112 КУВ «Кобра».
1 - кумулятивная БЧ; 2 - маршевый двигатель; 3 - метательное устройство; 4 - поддон; 5 -
хвостовой отсек; 6 - аппаратурный отсек; 7 - головной отсек
488
6. Кумулятивные средства поражения и боеприпасы
Таблица 6.8. Характеристики ТУР и КУ В
Наименование ТУР и КУВ Индекс выстрела Тип/калибр пушки, мм Дальность min/max, м Бронепробитие по нормали, мм
Полуавтоматическая система управления по радио
9М112 «Кобра» Гладкоствольная/125 100/4000 500
Полуавтоматическая система управления по лучу лазера
9М117 «Кастет» ЗУБК10 Гладкоствольная/100 100/4000 600
9М117 «Бастион» ЗУБК10-1 Нарезная/100 100/4000 600
9М117 «Шексна» ЗУБК10-2 Гладкоствольная/ 115 100/4000 600
9М117 «Басня» ЗУ БК 10-3 Нарезная/100 100/4000 600
9М119 «Рефлекс» ЗУБК14 Гладкоствольная/125 100/5000 700
9М119 «Свирь» ЗУБК14 Гладкоствольная/125 100/4000 700
ЗУБК10-1 и ЗУБК10-2 представляют собой ракету с кумулятивной БЧ, заваль-
цованную в штатных гильзах танковых выстрелов так, что сама ракета и ее
метательное устройство (вышибной заряд) образуют вместе унитарный выст-
рел. Средняя скорость ракеты составляет 300 м/с, а бронепробиваембсть по
нормали - не менее 600 мм.
Следует отметить также, что ракета 9М117 используется для стрельбы из
100-мм гладкоствольной противотанковой пушки МТ-12 (комплекс «Кастет») и
100-мм нарезной пушки к БМП-3 (комплекс «Басня»). Модернизированные ра-
кеты 9М117М «Кан» и 9М117М1 «Аркан» с дальностью стрельбы 100... 5500 м
и средней скоростью полета ракеты 300...375 м/с имеют тандемные кумуля-
тивные БЧ, обеспечивающие пробитие 700...800 мм брони.
В 1985 г. на вооружение принимается танк Т-72Б, оснащенный 125-мм
гладкоствольной танковой пушкой 2А46М, которая стреляла ракетой 9М119
(рис. 6.43) комплекса «Свирь». Принципиальным отличием КУВ «Свирь» от
КУВ «Кобра» стала помехозащищенная полуавтоматическая система управле-
ния ракетой по лучу лазера. Почти одновременно на вооружение танка Т-80У
поступает КУВ «Рефлекс», имеющий ту же, что и КУВ «Свирь», раке ту 9М119.
Рис. 6.43. Ракета 9М119 КУВ «Свирь»:
1 - выдвижной секторный воздухозаборник; 2 - аэродинамический руль; 3 - элемент воздуш-
но-динамического привода; 4 - твердотопливный двигатель; 5 - кумулятивная БЧ; 6 - крыло;
7 аппаратура приема лазерного излучения
6.6. Кумулятивные инженерные мины и заряды разрушения 489
Различия состоят только в комплексе системы управления и в новой схеме
выстрела ЗУБК-14 с раздельным заряжанием, который разделен на две части:
ракету 9М119 и метательное устройство 9X949. По габаритам он соответству-
ет штатному 125-мм осколочно-фугасному выстрелу типа ЗВОФ26.
Ракета 9М119 имеет твердотопливный двигатель с передним расположе-
нием двух косонаправленных сопел, который размещен в центральной части.
Кумулятивная БЧ расположена в задней части ракеты, рулевые приводы с аэро-
динамическими рулями - в передней, а основная часть аппаратуры управле-
ния - в хвостовой. Ракета оснащена пятиугольными серповидными складны-
ми крыльями, установленными в хвосте ракеты.
Кроме танков Т-72Б, Т-80У и Т-90С ракета 9М119 применяется в комп-
лексе для 125-мм буксируемых противотанковых пушек 2А45М «Спрут-Б».
Модернизированный выстрел ЗУБК-20 с ракетой 9М119М «Инвар» имеет тан-
демную кумулятивную БЧ с бронепробитйем 800...900 мм.
Для поражения танков, оснащенных.ДЗ, в 1980 1990 гг. модернизацию
прошли практически все ТУР (замена обычной БЧ с одним КЗ на тандем-
ную). Новая БЧ состоит из лидирующего^ располагаемого в отсеке управле-
ния, и основного зарядов. Лидирующий КЗ предназначен для пробития ДЗ
танка, а основной КЗ - для пробития брони.
6.6. Кумулятивные инженерные мины и заряды разрушения
Кумулятивный эффект взрыва используется также в противотанковых ми-
нах, предназначенных для минирования местности прочив танков и другой
подвижной наземной техники (самоходных ракетных и артиллерийских уста-
новок, БТР и грузовых автомобилей). Такие мины устанавливаются в грунт с
маскировкой слоем грунта или непосредственно на поверхность грунта сред-
ствами механизации минирования или вручную. В последнее время широкое
распространение получило дистанционное минирование с применением авиа-
ционных средств и РСЗО.
Требования к такому типу мин существенно отличаются от требований к
рассмотренным выше артиллерийским снарядам, кумулятивным гранатам и
ПТУР. В связи с тем что броня со стороны днища и борта значительно тонь-
ше, чем в передней части танка, бронепробивное действие инженерных куму-
лятивных мин может быть меньше, но при этом должно обеспечиваться высо-
кое поражающее действие в заброневом пространстве танка. Кроме того, мас-
совое производство инженерных мин обусловливает использование недорогих
и недефицитных материалов.
В таких случаях применяют конструкции КЗ, формирующих нетрадици-
онные массивные малоградиентные КС, направленный сходящийся поток вы-
сокоскоростных элементов или компактных ПЭ (ударные ядра). В кумулятив-
ных узлах используют пологие конические, полусферические, сегментные или
кольцевые с клиновидными желобами облицовки, изготовленные, как прави-
ло, из стали или алюминия. В качестве ВВ чаще всего применяют литьевые
смеси ТГ в разных пропорциях.
К инженерным минам относятся также кумулятивные заряды разруше-
ния, используемые для пробивания защитных толщ броневых и железобетон-
490
6. Кумулятивные средства поражения и боеприпасы
ных сооружений, образования скважин в мерзлых грунтах, перерезания ме-
таллических листов, стержней, тросов и т. и.
Противотанковые кумулятивные мины
Противотанковые мины подразделяются на противогусеничные, противо-
днищевые, противобортовые и противокрышевые мины. В последних трех ти-
пах инженерных мин используется кумулятивный эффект взрыва.
Противоднищевые мины. По сравнению с противогусеничными такие
мины обладают значительно большей эффективностью поражающего действия.
Взрываясь под днищем танка и пробивая его, мины поражают экипаж и выво-
дят из строя вооружение и оборудование машины. Взрыв такой мины под гу-
сеницей танка выводит ее из строя. Противоднищевые мины оснащаются КЗ
или зарядом типа ударного ядра. Первые противоднищевые мины имели ме-
ханические взрыватели штыревого типа, а большинство современных проти-
воднищевых мин оснащены неконтактными взрывателями с магнитными дат-
чиками, которые улавливают изменения магнитного поля при прохождении
танка над миной. f •*
Отечественная противотанковая кумулятивная мина ТМК-2 (рис. 6.44), при-
нятая на вооружение еще в 1958 г., состоит из корпуса, заряда ВВ, взрывателя
МВК-2 с удлинителем и запалом, детонирующего устройства ДУМ-2. Метал-
лический корпус 7 мины в форме усеченного конуса имеет сбоку горловину
для заливки заряда ВВ 8, закрытую крышкой, и запальное гнездо с резьбой
Рис. 6.44. Противотанковая кумулятивная мина ТМК-2:
а - внешний вид; б - разрез;
1 удлинитель; 2 - винт для крепления удлинителя; 3 - взрыватель МВК-2; 4 запал МД-7М;
5 - колпак; б - КО; 7 - корпус; 8 - заряд ВВ; 9 линза; 10 - дополнительный детонатор; 11 -
дно; 12 - детонирующее устройство ДУМ-2; 13 - лапки; 14 - кронштейн; 15 - стакан
6.6. Кумулятивные инженерные мины и заряды разрушения
491
для ввинчивания наконечника детонирующего устройства ДУМ-2 12. Выше
запального гнезда с помощью болта закреплен кронштейн 14 со стаканом 15,
в который сверху ввинчивается взрыватель МВК-2 3, а снизу наконечник де-
тонирующего устройства ДУМ-2. При хранении мины отверстия в стакане 15
закрыты пробками. Вместе с кронштейном к корпусу мины прикреплены лап-
ки 13, которыми закрепляется средняя часть детонирующего устройства. Сбо-
ку на корпусе находится ручка для переноски мины, сверху - колпак 5 в виде
усеченного конуса, образующий пространство над зарядом ВВ, необходимое
для формирования КС. В заряде ВВ 8 предусмотрена кумулятивная полость в
форме неполной полусферы со стальной облицовкой 6. В нижней части заря-
да размещена деревянная линза 9, улучшающая формирование КС, под кото-
рой расположен тетриловый дополнительный детонатор 10, закрытый дном 11.
Взрыватель МВК-2 - механический, штыревой, без предохранителя - со-
стоит из корпуса, ударного механизма,/штыря с удлинителем и запала. Дето-
нирующее устройство ДУМ-2 служит для передачи детонации от запала до-
полнительному детонатору мины и включает в себя отрезок детонирующего
шнура (ДШ-В) длиной около 20 см, на концах которого надеты наконечники,
снаряженные тэном. На наконечниках закреплены резьбовые втулки: на од-
ном - металлическая для ввинчивания в запальное гнездо мины, на другом
пластмассовая для ввинчивания в стакан взрывателя.
Противоднищевая мина ТМК-2 имеет общую массу 12 кг, массу ВВ при
снаряжении смесью ТГ50 - 6,5 кг, диаметр - 307 мм, высоту без взрывателя -
265 мм, а с взрывателем МВК-2 - ИЗО мм. Мина устанавливается в грунт
вручную и при действии на клиренсе танка пробивает броню толщиной 110 мм
(при снаряжении тротилом - 60 мм).
При наезде танка (автомобиля) на мину удлинитель 1 наклоняется и труб-
ка изгибается. Катушки при изгибе трубки поворачиваются относительно друг
друга и воздействуют на тягу, которая поднимается вверх и своим нижним
концом вытягивает колпачок из втулки. Шарики выпадают из отверстий кол-
пачка и освобождают ударник, который под действием боевой пружины нака-
лывает КВ. От него загорается замедлитель и через 0,30...0,45 с от луча огня
взрывается капсюль-детонатор ТАТ-1-Т, вызывая взрыв детонатора запала. От
запала по детонирующему устройству ДУМ-2 детонация передается дополни-
тельному детонатору и заряду ВВ мины. Замедление 0,30...0,45 с обеспечива-
ет взрыв мины под средней частью танка (автомобиля).
Аналогичная противоднищевая кумулятивная мина М21 (США) (рис. 6.45),
принятая на вооружение в 1959 г., имеет мощный КЗ 1 с массой ВВ 4,7 кг и
штыревой взрыватель 6 с вскрышным зарядом 5, расположенным соосно с
КО 3 (диаметр мины - 230 мм, высота с взрывателем -815 мм). При наезде
танка на штырь срабатывает ударный механизм (УМ) взрывателя, в результа-
те чего воспламеняются порох вскрышного заряда 5 и пиротехнический за-
медлитель 8 детонатора 7 мины. Давлением пороховых газов крышка 4 вмес-
те с взрывателем и маскировочным слоем грунта к моменту взрыва мины от-
брасывается от кумулятивной выемки, что обеспечивает нормальные условия
для формирования массивного ПЭ и его действия по днищу танка.
Дальнейшее развитие противоднищевых мин пошло по пути значительно-
го повышения их тактико-технических характеристик за счет использования
492
6. Кумулятивные средства поражения и боеприпасы
Рис. 6.45. Противотанковая кумулятивная мина М21:
/ - заряд ВВ; 2 - корпус; 3 - КО; 4 - крышка; 5 - пороховой вскрышной заряд;
6 - штыревой взрыватель; 7 - детонатор; 8 - пиротехнический замедлитель
неконтактных ВУ и разработки КЗ, специально предназначенных для пораже-
ния танка со стороны днища и отличающихся повышенным заброневым дей-
ствием, т. е. при пробитии днища обеспечивается занесение в заброневое про-
странство танка потока откольных осколков с большой кинетической энерги-
ей (табл. 6.9).
Масса отечественной неконтактной противоднищевой мины ТМ-72
(рис. 6.46) с КО в виде кольцевого желоба составляет 6 кг, а масса заряда ВВ
из литьевой смеси ТГ40 - 2,5 кг, диаметр мины - 250 мм, высота мины с
Рис. 6.46. Неконтактная противоднищевая мина ТМ-72:
/ - корпус; 2 - КО; 3 - стакан; 4 - прокладка; 5 - кольцо; б - крышка; 7 - обойма: 8 - заряд ВВ;
9 - дно; 10 шайба; 11 - втулка, 12 - колпачок; 13 - дополнительный детонатор; 14 - стакан;
15- прокладка; 16 - диафрагма
6.6. Кумулятивные инженерные мины и заряды разрушения
493
Таблица 6.9. Основные характеристики противоднищевых кумулятивных мин
Индекс Масса, кг Размеры, мм Материал корпуса
общая заряда ВВ Диаметр (длинахширина) Высота
М70, М73 (США) 2,2 0,7 127 76 Сталь
АТ-2 (Германия) 2,0 0,7 100 130 »
HPD (Франция) 6,0 2,0 280x185 105 Пластмасса
SB-MV/T (Италия) 5,0 2,6 235 100 »
FFV-028 (Швеция) 5,0 3,5 250 ПО Сталь
ТМ-72 (Россия) 6,0 2,5 250 128 »
ТМ-89 (Россия) П,5 6,7 320 131 »
ПТМ-3 (Россия) 4,9 1,8 330x84 84 »
ПТМ-4 (Россия) 3.25 1,4 350x110 55 »
взрывателем МНВ-72 (реагирует на магнйтное поле танка и другой техни-
ки)- 128 мм. В мине ТМ-72 может использоваться и штыревой взрыватель
МВШ-62 с удлиненным штырем (тогда высота мины с взрывателем - почти
1 м). Мина может устанавливаться как на грунт, так и в грунт, в снег, под воду
(только вручную); раскладка мин на минном поле осуществляется минным
заградителем ПМЗ-4. С расстояния 0,25...0,50 м мина пробивает броню тол-
щиной до 100 мм при действии по нормали к преграде, образуя отверстие
диаметром 50...60 мм и оказывая запреградное действие в заброневом про-
странстве (см. рис. 6.9, б и 6.11, в).
Противоднищевая мина HPD (Франция) оснащена взрывателем с магнит-
ным и сейсмическим датчиками и взрывается при их одновременном сраба-
тывании. Бронепробиваемость мины с расстояния 0,5 м (примерный клиренс
ганка) составляет 70 мм. Для сбрасывания крышки корпуса и маскировочного
слоя грунта в HPD применен дополнительный (вскрышной) заряд. Минирова-
ние этими минами осуществляется с помощью минного заградителя.
Противотанковая кумулятивно-фугасная мина ТМ-89 (рис. 6.47) устанав-
ливается на грунт или в грунт с маскировочным слоем на глубину до 100 мм.
Масса мины составляет 11,5 кг, а заряда ВВ из литьевой смеси ТГ40 - 6,7 кг,
диаметр мины - 320 мм, высота по крышке дистанционного или пускового
механизмов взрывателя - 132 мм. Мина состоит из заряда ВВ 1 со стальной
КО 8 сегментной формы, размещенного в тонкостенном стальном корпусе 7,
взрывателя 2, вышибного заряда 3, предохранительно-исполнительного меха-
низма 10 и детонатора 9. Взрыватель предназначен для воспламенения пороха
вышибного заряда и запуска предохранительно-исполнительного механизма
мины в момент прохождения над ней цели. Вышибной заряд служит для уда-
ления взрывателя и маскировочного слоя грунта из зоны формирования КС
перед взрывом мины. Давление пороховых газов вышибного заряда в полости
КО приводит к перемещению вверх на 25...30 мм конической части корпуса
мины с взрывателем без прорыва пороховых газов, что обеспечивает разгон
взрывателя и маскировочного слоя грунта над миной и их удаление из зоны
формирования КС. Передаточный заряд предохранительно-исполнительного
494
6. Кумулятивные средства поражения и боеприпасы
Рис. 6.47. Противотанковая кумулятивно-фугасная мина ТМ-89:
1 - заряд ВВ; 2 - взрыватель; 3 - вышибной заряд; 4 - прокладка; 5 кольцо; 6 - крышка;
7 - корпус; 8 - КО; 9 - детонатор; 10- предохранительно-исполнительный механйзм
механизма инициирует детонатор мины с некоторым замедлением, вызывая
взрыв основного заряда ВВ.
Образующаяся в результате обжатия КО продуктами взрыва КС пробива-
ет днище танка и поражает его внутреннее оборудование и экипаж. При сра-
батывании мины под гусеницей танка выбрасывания взрывателя и образова-
ния КС не происходит. Разрушение элементов ходовой части танка в этом
случае производится за счет бризантного и фугасного действия при взрыве
заряда ВВ мины.
В последнее время большое внимание уделяется разработке противодни-
щевых мин для систем дистанционного минирования. В США, например, со-
зданы противоднищевые мины, разбрасываемые с помощью артиллерийских
и авиационных систем минирования (М70, М73). Эти мины отличаются не-
большими габаритами (масса мины - 2,2 кг) и оснащены неконтактными взры-
вателями с магнитными датчиками и элементами неизвлекаемости. Мины М70
и М73 являются компонентами артиллерийской противотанковой системы ми-
нирования RAAMS (для 155-мм гаубиц). В кассетных снарядах М718 и М741
этой системы содержится девять мин М70 или М73, которые имеют КЗ, на-
правленные в противоположные стороны, что не требует специального ори-
ентирования на поверхности грунта. По конструкции эти мины одинаковы и
различаются только сроком самоликвидации. Батарея из шести 155-мм гаубиц
двумя залпами устанавливает противотанковое минное поле размером
300x250 м.
Противоднищевая мина АТ-2 (Германия) предназначена для устройства
противотанковых заграждений с использованием наземной, ракетной (систе-
ма Lars) и авиационной систем минирования. Мина имеет кумулятивную БЧ,
построенную на принципе ударного ядра.
Отечественная противотанковая мина ПТМ-3 для дистанционного мини-
рования используется в кассете КПТМ-3 и считается кассетной кумулятивной
миной комбинированного действия. Масса мины составляет 4,9 кг, масса за-
6.6. Кумулятивные инженерные мины и заряды разрушения
495
ряда ВВ (литьевая смесь ТГ40) - 1,8 кг, габариты мины - 330x84x84 мм, ма-
териал корпуса - сталь. Мина оснашена неконтактным взрывателем магнит-
ного принципа действия.
Мина ПТМ-3 (рис. 6.48) состоит из стального штампованного корпуса 1 с
зарядом ВВ 3 и взрывателя 2. Корпус мины имеет форму прямой четырех-
гранной призмы с выемками, выпрессованными на четырех боковых (в форме
корытообразного желоба) и одной торцевой (в форме сегмента) гранях. Выем-
ки выполняют роль КО 8 заряда. Взрыватель ВТ-06 крепится в корпусе мины
лапками и включает в себя корпус, пиротехнический замедлитель (механизм
дальнего взведения), электронный блок с индукционной катушкой, предохра-
нительно-исполнительный механизм и элементы огневой цепи. В заряде 3 мины
есть полость, образованная полиэтиленовой оболочкой 4. В ней размещено
детонирующее устройство, состоящее из двух отрезков детонирующего шну-
ра 5 и двух дополнительных детонаторов 7, которые расположены в противо-
положных концах заряда мины. Детонирующее устройство служит для пере-
дачи детонации от взрывателя 2 основному заряду 3 мины в двух точках через
дополнительные детонаторы 7, что обеспечивает формирование ПЭ из КО 8.
Между отрезками детонирующего шнура находится стальная пластина 12,
предназначенная для обеспечения их последовательного срабатывания. Де-
тонирующее устройство заключено в нижний 10 и верхний 11 металличес-
кие кожухи, предотвращающие передачу детонации заряду 3 ВВ от отрезков
Рис. 6.48. Противотанковая кумулятивная мина дистанционного минирования ПТМ-3:
1 - корпус; 2 - взрыватель, 3 - заряд ВВ; 4 - оболочка; 5 - детонирующие шнуры; 6 - гильза;
7- дополнительные детонаторы; 8 - облицовка; 9 колпачок; 10 - кожух нижний; 11 - кожух
верхний; 12 - пластина; 13 - гильза; 14 приемная шашка; 75 мембрана; 16- заглушка; 17 -
крышка; 18 трос (стальной канатик); 19- датчик; 20- накладка; 21 чека
496
6. Кумулятивные средства поражения и боеприпасы
детонирующего шнура 5. Мембрана /5 необходима для предотвращения дето-
нации основного заряда мины непосредственно от взрывателя.
Кассета КПТМ-3 (рис. 6.49) применяется в вертолетных системах мини-
рования ВСМ-1, универсальных минных заградителях (УМЗ) и переносных
комплексах минирования (ПКМ). Масса кассеты с одной миной ПТМ-3 со-
ставляет 8,5 кг, диаметр кассеты - 140 мм, длина кассеты - 480 мм. Кассета
КПТМ-3 состоит из стакана 3 с отверстиями для установки источника тока 14,
корпусных деталей электрокапсюльной втулки /, вышибного заряда 20 (масса
заряда из черного пороха - 0,009 кг), втулок 2, вкладыша 4, диска 9, крышек 5
и //. На втулку 2 надета петля канатика 19 (см. рис. 6.48, поз. 18), который
другим концом прикреплен к чеке (см. рис. 6.48, поз. 21) взрывателя мины.
Стакан 3 обжат в четырех точках на поршень 6, в котором есть отверстие,
обеспечивающее доступ пороховых газов к тепловому датчику мины и про-
хождение канатика. Диск и поршень имеют выемки для фиксации мины. Все
детали в стакане плотно поджаты крышкой через прокладки обжатыми на нее
лапками стакана. Для установки или смены источника тока в мине кассеты
комплектуются ключом, укладываемым вместе с ними в упаковку.
Рассмотрим принцип действия кассеты КПТМ-3. При подаче импульса
электрического тока срабатывает электрокапсюльная втулка ЭКВ-30М, вос-
пламеняя вышибной заряд 20. Под действием давления и температуры' поро-
ховых газов включается тепловой датчик мины. Усилие от давления порохо-
вых газов через детали кассеты и мину передается на лапки стакана, которые
разгибаются, что приводит к выбрасыванию мины из стакана. При выходе
мины из стакана (примерно наполовину) канатик 19 натягивается, выдергивая
чеку, в результате чего происходит снятие механической ступени предохране-
ние. 6.49. Кассета КПТМ-3:
1 - электрокапсюльная втулка ЭКВ-30М; 2 - втулка; 3 - стакан; 4 - вкладыш; 5 и 11 - крышки;
6 - поршень; 7.10 и 17 - прокладки; 8 - мина; 9 - диск; 12 - заглушка; 13 - лента; 14 -
источник тока РЦ-534; 15 - ключ; 16 - валик; 18 - взрыватель; 19 - трос (стальной канатик);
20 - чашка с вышибным зарядом; 21 - стакан
6.6. Кумулятивные инженерные мины и заряды разрушения
497
ния мины. Через 60 с после приземления мины с момента срабатывания теп-
лового датчика она переводится в боевое положение. Одновременно включа-
ется электронный механизм самоликвидации.
При наезде на мину танка (БТР, БМП) и воздействия магнитного поля взры-
ватель срабатывает, вызывая взрыв детонирующего устройства и заряда мины.
Образовавшийся при взрыве ПЭ, действующий в направлении днища, пробива-
ет его, поражая экипаж танка и выводя из строя его оборудование. При сраба-
тывании мины под ходовой частью боевой техники поражение ее происходит за
счет фугасного действия взрыва (перебивается гусеница, разрушаются колеса).
Дальнейшим развитием этого вида оружия стала малогабаритная проти-
вотанковая мина дистанционной установки ПТМ-4, используемая в кассете
КПТМ-4 и поражающая современные танки со стороны днища под всей по-
верхностью. Масса кассеты с двумя минами ПТМ-4 составляет 9,6 кг, диа-
метр кассеты - 140 (по буртику 148) мм, длина кассеты - 480 мм, масса поро-
ха вышибного заряда - 0,0105 кг. Сама мина ПТМ-4 считается кассетной ми-
ной кумулятивно-фугасного действия. Масса мины составляет 3,25 кг, масса
заряда ВВ (литьевая смесь ТГ40) - 1,4 кг, длина мины - 350 мм, ширина -
ПО мм, высота - 55 мм; материал корпуса - сталь. Мина имеет неконтактный
магнитный взрыватель с программируемым самоликвидатором.
Форма мины и наличие раскрывающегося ориентирующего устройства
(сбрасываемого после падения мины на грунт) обеспечивают ей плотную ком-
поновку во всех системах минирования, надежную ориентированную уста-
новку мины на грунте, минимальный демаскирующий силуэт и максимальное
бризантное действие заряда ВВ по гусенице танка. Наличие одной большой
стальной облицовки в форме корытообразного желоба, выпрессованной на бо-
ковой грани, и двухточечное инициирование заряда ВВ позволяют мине пора-
жать через днище все современные и перспективные танки. При этом в дни-
ще образуется сквозное отверстие со средним диаметром не менее 30 мм с
возникновением откола и заброневого потока осколков.
Противобортовые мины. Такие мины предназначены для поражения тан-
ков и бронемашин на расстоянии нескольких десятков метров, а также эффек-
тивно используются для перекрытия дорог и установки заграждений в лесах
и населенных пунктах. Поражающий элемент у противобортовых мин (рас-
смотрены в гл. 7) - это ударное ядро или кумулятивная противотанковая гра-
ната, выстреливаемая из трубы-направляющей.
Действие кумулятивных противотанковых гранат и их типовые компоно-
вочные схемы подробно рассмотрены в разд. 6.4. Типичные представители
противобортовых мин подобного класса («летающих»): отечественная ТМ-73
(создана на базе реактивной гранаты РПГ-18, см. табл. 6.4), PARM-DM12 (вы-
стреливается из гранатомета Panzerfaust-З, см. габл. 6.4), ARGES (создана на
базе 120-мм кумулятивной гранаты с тандемным зарядом), APAJAX (выстрели-
вается из гранатомета Apilas, см. табл. 6.4), М24 (выстреливается из противо-
танкового ружья М29) и др. В отечественной противобортовой мине ТМ-73
(рис. 6.50) вылет кумулятивной гранаты 2 осуществляется из пусковой тру-
бы 3 реактивной гранаты РПГ-18 после срабатывания пускового устройства 5,
замкнутого на взрыватель обрывного действия 4 и петлевой датчик цели 1
(обрывной провод).
498
6. Кумулятивные средства поражения и боеприпасы
Рис. 6.50. Схема установки и принцип действия отечественной противобортовой
мины ТМ-73:
1 - петлевой датчик цели; 2 - кумулятивная реактивная граната; 3 - пусковая труба; 4 - взры-
ватель обрывного действия; 5 - пусковое устройство
Полуавтоматическая противотанковая управляемая мина PARM-DM12
(Германия) предназначена для постановки минных заграждений на любой
местности и при любых атмосферных условиях. Она может использоваться в
двух вариантах: базовом (с оптоволоконным датчиком и дальностью действия
до 40 м) и развернутом (с системой ARES, оснащенной ИК-детектором актив-
ного типа, и дальностью действия до 120 м). В базовом варианте комдлекс
состоит из следующих узлов: ПУ, хвостового блока, световодного датчика и
бронебойной головной БЧ кумулятивного действия. Пусковая установка вы-
полнена в виде складной стойки на треноге с вращающейся платформой и
блокирующим механизмом. Такое техническое решение позволяет наводить
головную БЧ в любом направлении (без перестановки стойки) с возможнос-
тью изменения угла как в горизонтальной, так и вертикальной плоскостях.
Короткая трубчатая направляющая ПУ, расположенная на стойке, включает в
себя пороховой метательный заряд и предохранительный механизм. В хвосто-
вом блоке находятся электронное устройство, воспламеняющее метательный
заряд, разъем для подключения системы ARES, механизм активации мины,
оптический индикатор режима работы мины, блок питания и контейнер со
световодом.
Подготовка мины к применению заключается в раскладывании стойки (или
прикреплении ее к дереву, столбу и т. п.), наведении головной части в выбран-
ном направлении, блокировании механизма, задающего ее положение, разма-
тывании световода и включении часового механизма активации. Полная акти-
вация мины происходит через пять минут, о чем сигнализирует оптический
индикатор. В момент деформации световода (например, проезжающей колес-
ной или гусеничной машиной) преобразователь сигнала регистрирует обрыв
и приводит к немедленному выстреливанию головной части.
Для атаки с большей дистанции необходима установка системы ARES
(рис. 6.51), которая содержит датчики предупреждения и пуска, преобразова-
тель сигналов и систему управления. Датчик предупреждения состоит из двух
независимых датчиков пассивного типа: акустического и инфракрасного. Пер-
вый - сигнализирует о приближающейся цели, а второй - идентифицирует
цель на строго определенном расстоянии. Датчик предупреждения также слу-
жит для перевода системы из режима ожидания в активный режим, в котором
можно произвести выстрел. Датчик пуска объединяет в себе передатчик и при-
емник ИК-излучения. Комплекс PARM-DM12 с системой ARES позволяет
уничтожать цели, двигающиеся со скоростью от 3 до 80 км/ч.
6.6. Кумулятивные инженерные мины и заряды разрушения
499
Рис. 6.51. Принцип действия мины PARM-DM12 с системой ARES:
/ - активация системы одним из датчиков предупреждения; 2 - перехват цели оптической сис-
темой и выработка основных данных (расстояние до цели, скорость движения цели, вектор
движения, длина цели); 3 — точка попадания мины в цель; 4 - зона действия датчика предуп-
реждения; 5 - направление стрельбы; Ц - цель; М - мина
Полная масса мины составляет 10 кг, масса КЗ - 1,5 кг, диаметр голов-
ной БЧ - 128 мм, высота мины на боевой позиции - 390 мм, углы наведения
в вертикальной плоскости - от -30 до + 45°. Пробивная способность мины
PARM-DM12 по гомогенной броне составляет 600 мм (при действии по нор-
мали к преграде).
Противобортовая мина М24 (США) состоит из 88,9-мм гранаты, трубы-
направляющей, взрывателя с контактным датчиком, выполненным в виде лен-
ты, источника питания и соединительных проводов. Общая масса мины -
10,8 кг; масса заряда ВВ - 0.9 кг; длина мины - 609 мм; материал корпуса -
сталь. Труба-направляющая выполняет роль контейнера, в котором хранится
и транспортируется мина. Размещают установку на расстоянии около 30 м от
дороги или прохода. При наезде гусеницей танка на контактную ленту цепь
взрывателя замыкается и противотанковая граната выстреливается. Разрабо-
тан усовершенствованный образец этой мины - М66, отличающейся от М24
тем, что вместо контактного датчика используются инфракрасный и сейсми-
ческий датчики. В боевое положение мина переводится после того, как сраба-
тывает сейсмический датчик. Он же включает ИК-датчик цели. Граната выст-
реливается как только бронецель пересечет линию излучатель-приемник.
Противотанковая противобортовая мина ARGES (Франция, Германия, Ве-
ликобритания) имеет неконтактный взрыватель с акустическим и инфракрас-
ным датчиками цели, а также приемно-излучающее устройство для управле-
ния по радио состоянием мины (боевое-безопасное). Общая масса мины
12 кг, масса кумулятивной 120-мм гранаты - 4,3 кг, заряда ВВ - 1,5 кг, высота
в боевом положении - 650 мм, толщина пробиваемой брони - 700 мм на уда-
лении 2... 150 м, дальность обнаружения цели - 200 м.
Противотанковая противобортовая мина увеличенной дальности действия
APAJAX (Франция, Великобритания) состоит из реактивного противотанково-
500 6. Кумулятивные средства поражения и боеприпасы
го гранатомета Apilas и взрывательного устройства. Кумулятивная 112-мм гра-
ната с раскрывающимся в полете стабилизатором способна пробить гомо-
генную горячекатаную броню толщиной 700 мм на дальности 2... 100 м. Не-
контактное ВУ снабжено сейсмическим, акустическим и инфракрасным дат-
чиками, дискриминатором направления движения цели, прибором кратности
и микропроцессором. Сейсмический и акустический датчики обнаруживают
движущуюся цель на дальности 100 м, а ИК-датчик обеспечивает срабатыва-
ние мины. Общая масса мины 14 кг, масса гранаты 2,4 кг, заряда ВВ 1,5 кг,
высота в боевом положении 650 мм.
Примеры противокрышевых мин, формирующих дальнобойные ПЭ для
поражения бронецелей сверху, подробнее рассмотрены в гл. 7, а принцип их
действия (см. рис. 6.11, г) показан на примере противотанковой мины обшир-
ной зоны поражения М93 Hornet (США), относящейся к классу «интеллекту-
альных мин», осуществляющих поиск цели с помощью ИК-датчика и ее пора-
жение со стороны верхней поверхности ударным ядром.
Кумулятивные заряды разрушения
; *
Инженерные кумулятивные заряды разрушения подразделяют на сосре-
доточенные, удлиненные и кольцевые. Рассмотрим их устройство, и специфи-
ку действия на примере отечественных КЗ подобного класса (табл. 6.10). Раз-
рушительное действие этих зарядов достигается за счет использования энер-
гии кумулятивной струи, а наибольшее пробивное действие КЗ - при установке
их на определенном (фокусном) расстоянии от преграды.
Сосредоточенные кумулятивные заряды КЗ-2 (КЗ-1), КЗ-4, КЗ-5, КЗ-6 и
КЗ-7 предназначены для пробивания броневых и железобетонных толщ раз-
личных сооружений, разрушения твердого покрытия дорог и аэродромов, под-
земных трубопроводов (КЗ-4 и КЗ-5), пробивания шпуров в бетоне, железобе-
тоне (КЗ-7) и в мерзлом грунте, повреждения военной и промышленной тех-
ники и уничтожения боеприпасов (КЗ-6 и КЗ-7).
Заряд КЗ-2 (рис. 6.52) имеет металлический корпус /, снаряженный ВВ 2
типа ТГ50 с полусферической кумулятивной полостью и стальной металли-
ческой облицовкой 3. К корпусу снизу шарнирно прикреплены выдвижные
ножки 7, а сбоку - ручка 6 для переноски. В верхней части корпуса установ-
лен стакан с дополнительным детонатором 4 и запальным гнездом с резь-
бой, закрытым пробкой 5. Средствами взрывания являются электродетона-
тор ЭДП-р, присоединенный к проводной сети, зажигательная трубка ЗТП
или взрыватель замедленного действия с запалом МД-5М. Для подготовки
заряда к взрыву необходимо вывинтить пробку из запального гнезда, рас-
крыть ножки, установить (прицелить) заряд и ввинтить в запальное гнездо
зажигательную трубку (ЭДП-р или взрыватель).
Максимальная пробивная способность достигается при удалении заряда
от пробиваемой преграды на 350 мм (при установке на выдвижных ножках).
При уменьшении расстояния она резко снижается, а при увеличении на
50... 100 мм существенно не изменяется. Заряды, выпущенные до 1955 г., имеют
шифр КЗ-1 и запальное гнездо без резьбы (оно заклеено бумажным кружком).
По аналогичной конструктивной схеме построены и другие сосредото-
ченные КЗ (см. табл. 6.10). В самом крупном заряде КЗ-4 также используется
Таблица 6.10 Основные характеристики отечественных
кумулятивных зарядов разрушения
Индекс заряда Масса, кг Тип ВВ Размеры, мм Материал корпуса Пробивное д<
'И СУгвие (толщина/отверстие). мм
общая заряда ВВ Диаметр (длинахширина) Высота (длина без ножек) Сталь
Железобетон Мерзлый грунт (каменная кладка)
Сталь 300/10 15 х_
КЗ-2 14,7 9,0 ТГ50 350 240 1300/40-70 2000/80- 100
КЗ-4 63,0 49,0 ТГ50 410 440 » 500/80 2000/300 —
КЗ-5 12,5 8,5 ТГ50 215 280 » 450/25 1400/45 2000/180
КЗ-6 3,0 1,8 ТГ40 112 292 » 215/20 — 800/50
КЗ-7 6,5 4,0 ТГ40 162 272 ’ 280/35 700/40 1100/140
КЗУ 18,0 12,0 ТГ50 500x225 195 » 120 1000 1500
КЗУ-2 0.9 0,32 ТГ40 150x105 85 Алюминий 36 30 —
ЛКЗ-80 2,5 1,5 ТГ40 200x120 115 Сталь 80 50 —
КЗК 1,0 0,4 ТГ50 200x160 52 » 70 —
502
6. Кумулятивные средства поражения и боеприпасы
4 5
Рис. 6.52. Кумулятивный заряд КЗ-2:
1 — металлический корпус; 2 - заряд ВВ; 3 —
металлическая облицовка; 4 дополнительный
детонатор; 5 - пробка; 6 - ручка для переноски;
7 выдвижные ножки
полусферическая КО, а внутри заря-
да ВВ есть деревянная линза, улуч-
шающая пробивное действие. Заряд
в упаковке можно буксировать вруч-
ную, за танком или БТР. Заряд КЗ-5
с конической КО и линзой из пено-
пласта может разрушать подземные
трубопроводы на глубинах до 1,5 м.
При диаметре до 800 мм трубопровод
пробивается насквозь (обе стенки) с
образованием отверстий диаметром
50...250 мм. Заряд КЗ-7 с полусфери-
ческой КО и линзой устанавливается
и действует аналогично заряйу КЗ-5.
Удлиненные кумулятивные заряды
КЗУ, КЗУ-2, ЛКЗ-80 и УМКЗ предназ-
начены для перебивания элементов же-
лезобетонных и металлических конст-
рукций (мостов, опор, балок, плит, пус-
ковых установок ракет, трубопроводов
и др.).
Кумулятивный заряд КЗУ
(рис. 6.53) имеет металлический кор-
пус 7, снаряженный ВВ 2 типа ТГ50,
с полуцилиндрической кумулятивной
полостью и стальной облицовкой 4. В одном из торцов корпуса и сверху зак-
реплены стаканы с дополнительными детонаторами 5 и запальными гнездами
с резьбой, закрытыми пробками 6. Ручка 3 служит для переноски, а четыре
проушины 8 - для крепления заряда на подрываемом объекте и их связывания
с помощью отрезка ленты длиной 3 м. Снизу к корпусу прикреплены две де-
ревянные рейки 7, обеспечивающие установку заряда на наиболее выгодном
(фокусном) расстоянии от перебиваемого элемента. Средства взрывания стан-
Рис. 6.53. Кумулятивный заряд КЗУ:
/ - корпус; 2 - заряд ВВ; 3 - ручка; 4 - стальная облицовка; 5 - дополнительные детонаторы;
б - пробки; 7 — деревянные рейки; 8 — проушины
6.6. Кумулятивные инженерные мины и заряды разрушения
503
дартные: электродетонатор ЭДП-р, зажигательная трубка ЗТП или взрыватель
с запалом МД-5М.
При перебивании элементов большой ширины заряды устанавливаются
вплотную торцами один к другому для перекрывания сечения перебиваемого
стального или железобетонного элемента по всей ширине. При перебивании
железобетонных элементов со слабой арматурой, а также элементов из бетона
и каменной кладки цепочка из зарядов может перекрывать ширину перебива-
емого элемента не полностью (не доходит до края элемента на расстояние до
0,5 м). При перебивании бетонных элементов и каменной кладки толщиной
до 750 мм КЗУ могут устанавливаться с интервалами 0,5 м и соединяться
детонирующим шнуром.
Кумулятивный заряд КЗУ-2 состоит из дюралевого корпуса, заряда ВВ
(сплав ТГ40), съемных магнитов, дополнительного детонатора (две шашки из
сос тава A-IX-1 в стакане) и пенопластового вкладыша. Заряд ВВ имеет полу-
цилиндрическую кумулятивную полость со стальной облицовкой. Магниты
обеспечивают быстрое крепление заряда на элементах стальных конструкций.
Заряды КЗУ-2 и ЛКЗ-80 могут применяться в «оде, однако при этом их эффек-
тивность снижается на 20.. .30 %.
Кольцевой кумулятивный заряд КЗК предназначен для перебивания сталь-
ных стержней, тросов и других металлических связей. Он включает в себя
два полукольцевых заряда, соединенных с помощью петель со шплинтом, и
замок с пружинной защелкой. Полукольцевой заряд (рис. 6.54) состоит из ме-
таллического корпуса 1, снаряженного ВВ 2 типа ТГ50, с полукольцевой ку-
мулятивной полостью и стальной облицовкой 5. Для формирования КС в воде
в полость устанавливают объемный пенопластовый вкладыш //, который кре-
пится прижимом б.
Дополнительный детонатор 3 помещен в металлический стакан и закреп-
лен на корпусе с помощью рамки и пружинной защелки 4. При хранении резь-
бовое запальное гнездо в дополнительном детонаторе закрывается пробкой.
Дополнительный детонатор может сниматься, что обеспечивает возможность
Рис. 6.54. Полукольцевой заряд КЗК:
/ корпус; 2 - заряд ВВ, 3 дополнительный детонатор: 4 - защелка; 5 стальная облицовка;
6 - прижим; 7 - пружина; X - скоба для регулировки натяжения пружины, 9 планка; 10 -
шплинт, 11 пенопластовый вкладыш
504
б. Кумулятивные средства поражения и боеприпасы
ввинчивания в него взрывателей с запалом МД-5М. Каждый полукольцевой
заряд снабжен двумя пружинами 7, заключенными в пластиковые трубки. Пру-
жины обеспечивают крепление и центрирование заряда при установке его на
перебиваемом элементе. Натяжение пружин может быть изменено передвиже-
нием скобы 8 с продольной прорезью, что позволяет крепить заряд на элемен-
тах диаметром более 60 мм. Для крепления на перебиваемом элементе каж-
дый полукольцевой заряд комплектуется планкой 9 и шплинтом 10. На заряде
с защелкой предусмотрена планка с крючком, а на заряде с крючком - планка
с защелкой.
Кольцевые заряды применяют для перебивания стальных стержней диа-
метром от 30 до 70 мм и тросов диаметром до 65 мм. Для перебивания эле-
ментов диаметром до 30 мм используют полукольцевой вариант заряда КЗК.
Глубина установки заряда в воде достигает 10 м. При перебивании элементов,
находящихся на суше, пенопластовый вкладыш с заряда снимается перёд ус-
тановкой заряда на объект. Наличие вкладыша снижает эффективность дей-
ствия заряда (до 15 %).
К удлиненным КЗ можно отнести также шнуровые кумулятивные заряды
(ШКЗ), представляющие собой заряды из эластичного ВВ на основе гексогена
в виде шнуров различного диаметра с продольной кумулятивной выемкой,
которая облицована гибкой металлизированной лентой. Шнуровые КЗ не со-
стоят на вооружении инженерных войск, однако широко применяются в ходе
ликвидаций последствий аварий и катастроф для перебивания металлических
конструкций. Подразделения МВД и ФСБ используют ШКЗ в ходе специаль-
ных операций. Такие заряды применяются на открытом воздухе для резки
трубопроводов, крупногабаритных металлических сооружений, металлокон-
струкций различного профиля, не содержащих или очищенных от остатков
нефти, нефтепродуктов, горючих парогазовых смесей и смесей нефтепро-
дуктов с воздухом.
Шнуровые КЗ выпускаются шести типоразмеров (табл. 6.11) в виде бухт
длиной от 1 до 30 м. Упаковка ШКЗ проводится в комбинированные ящики
или в ящики из древесно-волокнистой плиты. Инициирование ШКЗ осуще-
ствляется с помощью КД № 8-А, электродетонаторов типа ЭДП или любых
других с равной или большей инициирующей способностью, которые устанав-
ливаются торцом по нормали к наружной поверхности ШКЗ или стыкуются
Таблица 6.11. Основные технические характеристики ШКЗ
Марка Диаметр, мм Погонная масса ВВ в заряде, г/м Максимальная толщина разре- заемой преграды (СтЗ), мм Минимальный радиус перегиба, мм
ШКЗ-1 9,0±1,5 65±15 4,0 5,0
ШКЗ-2 13,О±1,5 130=120 7,0 10,0
ШКЗ-З 17,0±1,5 240±25 11,0 15,0
ШКЗ-4 21,0±2,0 340±30 15,0 15,0
ШКЗ-5 26,0±2,0 520*35 19,0 20,0
ШКЗ-6 32,0±2,5 730±40 25,0 25,0
6.6. Кумулятивные инженерные мины и заряды разрушения
505
с торцом заряда. Монтаж ШКЗ на преграде проводится вплотную без зазора
кумулятивной выемкой к поверхности преграды. Допускается применение
ШКЗ на расстоянии от края кумулятивной выемки до поверхности преграды,
не превышающем половины диаметра заряда. Шнуровые КЗ рекомендуют кре-
пить с помощью липкой ленты, пластилина, бечевок или др.
Максимальную толщину разрезаемой преграды из различных материалов
можно рассчитать по формуле
^тах — К ^СтЗ’
где femax - максимальная толщина преграды из материала, мм; 6Ст3 - макси-
мальная толщина преграды из СтЗ, мм (см. табл. 6.11); К - безразмерный
коэффициент (К ~ 1,0 - для СтЗ; К = 0,8 - для корозионно-стойкой стали;
К= 1,6... 1,8- для дюралюминия; К = 3,5...4,0 - для органического стекла;
К = 1,4... 1,5 - для стеклопластика).
Оригинальный представитель инженерных КЗ разрушения - отечествен-
ный окопный заряд 03-1, который предназначен для устройства взрывным
способом одиночного стрелкового окопа (ячейки) в мерзлых и твердых грун-
тах. Заряды ОЗ-1 могут применяться для рыхления мерзлого и твердого грун-
тов при устройстве групповых стрелковых окопов на два-три человека, от-
рывке окопов для танков, боевых машин, а также укрытий для личного соста-
ва и транспортных машин.
Окопный заряд ОЗ-1 (рис. 6.55, а) состоит из четырех узлов, собираемых
в одно целое перед применением кумулятивного заряда IV с подставкой; фу-
гасного заряда II с реактивным двигателем; взрывателя III; пускового устрой-
ства У П-60 I. Каждый заряд 03-1 комплектуется сумкой для переноски.
Кумулятивный заряд IV (рис. 6.55, б) включает в себя пластмассовый кор-
пус 1, заряд ВВ 4 из состава A-IX-1 или гекфола-5 с конической КО 5. Внутри
заряда имеется инертная линза 3 из пластмассы. Сверху заряда предусмотре-
но резьбовое очко для взрывателя. Кумулятивная полость закрыта колпаком 8,
выполняющим роль подставки, на котором закреплено приспособление 9 для
установки заряда, состоящее из кольца и прикрепленных к нему восьми опор-
ных стальных гибких перьев. В транспортном положении пластины согнуты
вокруг заряда и удерживаются капроновой тесьмой (лентой) 6 с чекой 7. При
удалении чеки перья подставки резко выпрямляются (см. рис. 6.55, а), благо-
даря чему увеличивается опорная площадь заряда и улучшается его устойчи-
вость при установке на поверхности грунта.
Фугасный заряд (рис. 6.55, в) имеет корпус 18 в виде трубы, в среднюю
часть которой помешен разрывной заряд ВВ 17, состоящий из пяти цилинд-
рических шашек (A-IX-2). В нижнем конце трубы закреплена втулка 20 с до-
полнительным детонатором 19 из состава A-IX-10 и резьбовым очком под взры-
ватель, закрытым пробкой 21. В верхнем конце трубы размещен реактивный
двигатель, включающий в себя стальной корпус 12, сопловую крышку 11, по-
роховой заряд 13, пиротехнический замедлитель 15 в корпусе и вышибной
пороховой заряд 16. В сопловой крышке для ввинчивания пускового устрой-
ства предусмотрено резьбовое гнездо. Вышибной заряд с замедлителем пред-
назначен для выбрасывания корпуса отработавшего реактивного двигателя пе-
ред взрывом фугасного заряда, что уменьшает осколочное действие взрыва.
506
6. Кумулятивные средства поражения и боеприпасы
Рис. 6.55. Окопный заряд 03-1:
а - общий вид; б - кумулятивный заряд; в - фугасный заряд с реактивным двигателем;
I - пусковое устройство УП-60; II - фугасный заряд с реактивным двигателем; III - взрыватель;
IV - кумулятивный заряд;
1 - корпус КЗ; 2 - пробка; 3 - линза; 4 - заряд ВВ; 5 - КО; б - лента; 7 - чека; 8 - колпак; 9 -
приспособление для установки; 10 - пробка; П - сопловая крышка; 12 - корпус реактивного
двигателя; 13 - пороховой заряд; 14 - реактивная камера; 15 - пиротехнический замедлитель;
16 - вышибной пороховой заряд; 17 - фугасный заряд ВВ; 18 - корпус; 19 - дополнительный
детонатор; 20 втулка; 21. 22 - пробки; 23 - переходная втулка
Механический взрыватель заряда 03-1 снабжен двумя накольно-воспла-
менительными детонирующими устройствами: нижнее служит для приведе-
ния в действие КЗ, верхнее - для приведения в действие фугасного заряда.
Пусковое устройство УП-60 состоит из отрезка огнепроводного шнура и
закрепленных на его концах терочного воспламенителя и ниппеля с воспла-
менительным зарядом. Сердцевина огнепроводного шнура сделана из медлен-
ногорящего состава, длина отрезка шнура - 20 см, время замедления - 50.. .83 с.
Воспламенительный состав помещен в гильзе, обжатой на конце огнепровод-
ного шнура.
Рассмотрим принцип действия заряда 03-1 (рис. 6.56). Заряд устанавли-
вается на поверхности грунта в вертикальном положении. Перед приведением
в действие из взрывателя вывинчивается предохранительная чека, при удале-
нии которой шарик выталкивается подпружиненным стаканом из канала в кор-
пусе взрывателя и скатывается в коническое углубление на ударнике. Стакан
перемещается вниз и закрывает канал.
После выдергивания терки пускового устройства через 50...83 с воспла-
меняется пороховой заряд в реактивном двигателе. Образовавшиеся газы
б в
Рис. 6.56. Принцип действия окопного заряда 03-1:
а - пробитие шпура КЗ и движение вниз фугасного заряда под действием реактивной тяги; б - взрыв фугасного заряда
в глубине грунта; в - готовый окоп после ручного дооборудования лопатой
508 б. Кумулятивные средства поражения и боеприпасы
выходят через сопловые отверстия и толкают вниз фугасный заряд. От поро-
хового заряда воспламеняется пиротехнический замедлитель в расширитель-
ной камере. Фугасный заряд вместе с корпусом взрывателя перемещается
вниз, срезая при этом четыре чеки, соединяющие корпус взрывателя с втул-
кой. При движении корпуса вниз происходит накол КВ ударником, располо-
женным в канале корпуса. От луча огня загорается пиротехнический замедли-
тель в верхней втулке и взрывается КД, а от него - детонатор и затем КЗ.
Кумулятивная струя пробивает в грунте шпур, куда попадает фугасный заряд,
продолжая движение вниз под действием реактивной тяги. После сгорания
пиротехнического замедлителя в расширительной камере (0,5...0,9 с) воспла-
меняется вышибной пороховой заряд. Образовавшимися газами корпус реак-
тивного двигателя отбрасывается от фугасного заряда на расстояние 1 ...3 м.
После сгорания пиротехнического замедлителя в верхней втулке взрыва-
теля (1...2 с) от луча огня взрывается КД взрывателя. От него детонация пере-
дается дополнительному детонатору фугасного заряда и к самому фугасному
заряду. Взрывом фугасного заряда в грунте образуется воронка, которая вруч-
ную (лопатой) дооборудывается под стрелковый окоп (ячейку). 4
Масса собранного заряда 03-1 составляет 3,5 кг, масса ВВ фугасного за-
ряда - 0,65 кг, масса ВВ кумулятивного заряда 0,45 кг, общая длина заряда
920 мм, диаметр КЗ 90 мм. В результате взрыва в суглинистом, супесчаном и
мерзлом (толщина промерзания до 0,4 м) грунтах образуется воронка диамет-
ром 1,2. ..1,9 м и глубиной 1,1...1,5 м.
Принцип действия заряда ОЗ-1 сохранен и в более мощном кумулятивно-
фугасном заряде КФЗ-1, предназначенном для создания воронок на ВПП аэро-
дромов и дорогах, разрушения различных объектов, отрывки взрывным спо-
собом укрытий для бронетанковой техники, окопов, траншей, а также различ-
ных инженерно-взрывных работ.
Заряд КФЗ-1 поставляется в транспортно-пусковом контейнере размера-
ми 1560x382x335 мм, имеет общую массу 76 кг, массу заряда ВВ - 25 кг, а в
качестве КЗ использует заряд разрушения КЗ-5 (см. табл. 6.10). Толщина раз-
рушаемых этим зарядом сезоннопромерзающих грунтов достигает 2 м, а раз-
меры образуемой при взрыве заглубленного фугасного заряда воронки состав-
ляют по диаметру 4,5...6,0 м, по глубине 1,8...2,5 м.
6.7. Противотанковые авиационные бомбы
и кумулятивно-осколочные боевые элементы кассетного оружия
Противотанковые АБ предназначены для поражения бронированных це-
лей (танков, БМП, БТР и др.). Калибр ПТАБ находится в пределах от 0,5 до
10 кг. Бомба (рис. 6.57) включает в себя заряд ВВ 2 с кумулятивной выемкой,
закрытой тонкой металлической оболочкой (облицовкой) 3. Основным пора-
жающим фактором ПТАБ является КС, которая образуется при резком обжа-
тии продукгами взрыва металлической облицовки кумулятивной выемки за-
ряда. При пробитии брони в последней образуется пробоина, а находящиеся за
броней уязвимые агрегаты цели поражаются пробивным, зажигательным и ини-
циирующим действием остатков струи и осколков брони. Кроме того, осколка-
ми корпуса ПТАБ могут поражаться живая сила и легкоуязвимая техника.
6.7. Противотанковые АБ и КОБЭ кассетного оружия
509
Рис. 6.57. Противотанковые авиационные бомбы:
а - общий вид; б - штатная противотанковая авиабомба ПТАБ-2,5-1,5 образца 1943 г.; в - опыт-
ная противотанковая авиабомба ПТАБ-10-2,5 образца 1944 г.;
1 головка; 2 - заряд ВВ; 3 - КО
Максимальное бронепробивное действие ПТАБ достигается при усло-
вии, что в момент взрыва КЗ бомба находится на определенном (фокусном)
расстоянии от брони. Взрыв КЗ ПТАБ на фокусном расстоянии обеспечивает-
ся соответствующими размерами головки 1 бомбы (см. рис. 6.57, а).
Для комплектации ПТАБ применяются головные и донные контактные
взрыватели мгновенного действия. Время действия головных взрывателей мень-
ше, чем донных, благодаря чему при их использовании обеспечивается взрыв
заряда на фокусном расстоянии, т. е. раньше, чем произойдет возможный ри-
кошет бомбы или разрушится ее головная часть.
Противотанковые бомбы сбрасывают в разовых бомбовых кассетах или
из контейнеров многоразового применения (типа КМГУ), которые, в свою оче-
редь, могут комплектоваться блоками одноразового действия (типа БКФ - блок
контейнерный фронтовой).
Разовые бомбовые кассеты (РБК) представляют собой тонкостенные АБ,
предназначенные для снаряжения мелкими осколочными, противотанковы-
ми, противолодочными, зажигательными бомбами или авиационными про-
тивопехотными и противотанковыми минами. Кассеты имеют габариты ФАБ
калибра 100...500 кг и обозначаются шифром, в котором отмечены сокра-
щенное название кассеты, ее калибр и тип снаряжения (например, РБК-500
ПТАБ-1М). Разные типы РБК отличаются способом разбрасывания мелких
бомб.
510
6. Кумулятивные средства поражения и боеприпасы
Приоритет в разработке мелких авиационных бомб кумулятивного дей-
ствия принадлежит отечественным ученым и конструкторам. В середине 1942 г.
известный конструктор взрывателей И.А. Ларионов предложил схему лег-
кой ПТАБ кумулятивного действия, выполненную в габаритах калибра 10 кг.
С учетом того, что штурмовики Ил-2 были оснащены четырьмя кассетами для
мелких бомб, комиссия рекомендовала проектировщику уменьшить габариты
БП до калибра 2,5 кг, что позволило бы увеличить боезапас машин почти в
4 раза и существенно повысить вероятность поражения цели. В кратчайшие
сроки - с декабря 1942 г. по апрель 1943 г. - ПТАБ калибром 2,5 кг не только
спроектировали и создали, но и испытали. Так появилась «бомба Ларионова»,
ставшая прототипом большого семейства ПТАБ. Боевое крещение ПТАБ по-
лучили 5 июля 1943 г. в ходе битвы под Курском во время Великой Отече-
ственной войны, когда советским летчикам за день удалось уничтожить 30 тан-
ков противника.
Штатная противотанковая авиационная бомба ПТАБ-2,5-1,5 образца 1943 г.
(рис. 6.57, б) имела общую длину 355...361 мм, диаметр корпуса -"66 мм,
размах оперения - 85 мм, массу (без взрывателя) - 1,37 кг, массу ВВ - /0,62 кг.
Характеристики бомбы ПТАБ-10-2,5 образца 1944 г. (рис. 6.57, в) следующие:
общая длина - 395...400 мм, диаметр корпуса - 90 мм, размах оперения -
120 мм, масса (без взрывателя) - 2,38 кг, масса ВВ - 1,12 кг.
У первых ПТАБ-2,5-1,5 (см. рис. 6.57, б) корпуса и клепаные стабилизато-
ры перисто-цилиндрической формы изготовляли из листовой стали толщиной
0,6 мм. Для увеличения осколочного действия на цилиндрическую часть АБ
дополнительно надевали стальную 1,5-мм рубашку. Сферическая головная часть
корпуса БП выполнялась радиусом, строго соответствовавшим оптимальному
расстоянию для наиболее эффективного действия КЗ. Стабилизатор АБ крепи-
ли с помощью специальной штампованной скобы к корпусу донного взрывате-
ля (при транспортировке его функции выполняла пробка). Боевой заряд ПТАБ
состоял из смесевого ВВ типа ТГА, снаряженного через донное очко. Кроме
того, в гнездо под взрывателем устанавливали дополнительный промежуточ-
ный детонатор в виде.прессованной тетриловой шашки. Для предохранения
крыльчатки взрывателя АД-А от самопроизвольного свертывания на стабилиза-
тор бомбы надевали специальный предохранитель из жестяной пластины квад-
ратной формы с закрепленной на ней вилкой из двух проволочных усов, прохо-
дящих между лопастями. После сбрасывания ПТАБ с самолета его срывало с
бомбы встречным потоком воздуха. Бомба ПТАБ-2,5-1,5 пробивала броню тол-
щиной до 50 мм при углах встречи с преградой от 30 до 90°.
Противотанковая бомба ПТАБ-10-2,5 (см. рис. 6.57, в) разрабатывалась в
габаритах 10-кг авиационного БП, но массой 2,5 кг, и пробивала броню тол-
щиной до 160 мм (по нормали). По принципу действия и назначению основ-
ных узлов и элементов ПТАБ-10-2,5 была аналогична штатной ПТАБ-2,5-1,5
и отличалась от нее только формой и габаритами. Так, корпус АБ из листовой
стали толщиной 0,5 мм выполняли коническим для того, чтобы не превысить
заданных ограничений по массе окончательно снаряженного боеприпаса. Чтобы
ПТАБ обладала требуемой бронепробиваемостью, диаметр кумулятивной во-
ронки должен был быть не менее 85 мм. Головная часть корпуса, отштампо-
ванная из листовой стали толщиной 1 мм, имела сферическую форму, радиус
6.7. Противотанковые АБ и КОБЭ кассетного оружия
511
которой определяло фокусное расстояние. Для усиления кумулятивного эф-
фекта и возможности поражения живой силы на корпус АБ была надета и
приварена в одной точке «осколочная рубашка» из стали толщиной 2 мм. Пе-
ристо-цилиндрический сварной стабилизатор, состоящий из четырех одина-
ковых секторов, отштампованных с зигой на цилиндрической части, крепился
к корпусу бомбы посредством взрывателя. На бомбе был установлен новый
авиационный центробежный донный взрыватель АДЦ, устранивший ряд не-
достатков конструкции.
В настоящее время на вооружении ВВС РФ находятся ПТАБ калибров 1 и
2,5 кг, применяемые из РБК-250, РБК-500 и КМГУ(БКФ). К числу противо-
танковых авиационных бомб относятся ПТАБ-1М, ПТАБ-2,5 КО, ПТАБ-2,5, а
также самоприцеливающиеся боевые элементы (СПБЭ), применяемые для сна-
ряжения РБК и имеющие инфракрасный координатор цели, парашютную сис-
тему и БЧ, формирующую ударное ядро, которая поражает бронированные
цели с верхней проекции при наличии тепаового контраста (более подробно
рассмотрено в гл. 7).
Кумулятивный противотанковый элемент ПТАБ-1М (рис. 6.58, а) имеет
диаметр 42 мм, длину - 260 мм и массу - 944 г. Инициирующий импульс от
головного взрывателя передается донному детонатору через канал, который
проходит вдоль оси КЗ. Данный элемент пробивает гомогенную броню тол-
щиной 200 мм (по нормали) при скорости встречи с преградой 100...200 м/с.
Под элемент ПТАБ-1М разработана кассета РБК-500 ПТАБ-1М, которая мо-
жет применяться с высот 300...25 000 м при скорости носителя 500...2300 км/ч.
Диаметр кассеты - 450 мм, длина - 1955 мм, масса - 427 кг, количество АБ в
кассете - 268 шт.
Под ПТАБ-1М разработан также КМГУ с восемью блоками типа БКФ.
Блоки используются с высот 50... 1000 м при скорости носителя 700. ..1100 км/ч,
имеют габариты 257x338x372 мм, массу 49 кг и вмещают 31 элемент ПТАБ-1М.
Рис. 6.58. Кумулятивные противотанковые ПТАБ-1М (а) и противолодочные
ПЛАБ-10К (б) элементы
512
6. Кумулятивные средства поражения и боеприпасы
Таким образом, в контейнере калибра 500 кг, длиной 3700 мм и массой 470 кг
размещаются 248 элементов ПТАБ-1М.
Блок одноразового действия с более крупной противотанковой кумулятив-
но-осколочной АБ калибра 2,5 кг БКФ ПТАБ-2,5 (рис. 6.59) доставляется в стан-
дартном контейнере КМГУ калибра 500 кг, имеет габариты 346x256x373 мм,
массу 41 кг и вмещает 12 авиационных бомб. В контейнер входят восемь бло-
ков и, следовательно, всего 96 боевых элементов. Высота применения состав-
ляет 30... 1000 м при скорости носителя 700... 1100 км/ч. Бронепробиваемость
такой ПТАБ достигает 250 мм при действии по нормали к преграде.
Аналогичные малокалиберные кумулятивные авиационные бомбы есть на
вооружении многих армий зарубежных стран. В Германии малокалиберная
кумулятивная бомба Кв44 снаряжается в кассету MW-1 (несбрасываемую мно-
гоцелевого применения) связками по три группы из семи штук с каждой сто-
роны трубчатой направляющей. Время отстрела бомб может составлять 0,6 с.
При этом точность бомбометания с малых высот (30...300 м) при скорости до
1100 км/ч достигает 30 м. Самолет Tornado с кассетой MW-1 при одном захо-
де на групповую цель из 10 танков способен уничтожить бомбами Кв44 не
менее четырех машин.
В качестве малокалиберной АБ в США используются противотанковые
элементы BLU-99ACM, которые в количестве 50 шт. размещаются fe кассете
Рис. 6.59. Блок одноразового действия БКФ ПТАБ-2,5 с противотанковой кумулятив-
но-осколочной авиационной бомбой калибра 2,5 кг
514
6. Кумулятивные средства поражения и боеприпасы
Первый класс включает в себя снаряды калибра 105...203 мм с КОБЭ.
В терминологии НАТО эти снаряды обозначаются как DPICM (Double Purpose
ICM - улучшенные конвенционные БП двойного назначения). Наиболее изве-
стный 155-мм кассетный снаряд М483А1 (США), ставший базовой конструк-
цией для других снарядов, успешно применялся во время войны в Персидс-
ком заливе в 1991 г. Снаряд (рис. 6.60, а) имеет массу 46,5 кг, длину - 899 мм
(5,8 клб) и содержит 88 КОБЭ типа М42 или М46. Характеристики боевого
элемента М42 (рис. 6.60, б) следующие: диаметр - 38,9 мм, длина - 62,5 мм,
масса - 182 г, масса заряда ВВ - 30,5 г, суммарная масса всех БЭ - 16 кг, т. е.
0,344 полной массы снаряда. Один из наиболее рационально спроектирован-
ных снарядов - RB63 (Германия) с относительным содержанием БЭ 0,452.
RB63 обладает следующими характеристиками: 63 БЭ массой 330 г и суммар-
ной массой 20,8 кг при массе снаряда 46 кг (табл. 6.12).
Рис. 6.60. 155-мм кассетный снаряд М483А1 (а) и кумулятивно-осколочный боевой
элемент М42 (б):
/ - дистанционный взрыватель; 2 вышибной пороховой заряд; 3 - диафрагма; 4 корпус
снаряда; 5 - кумулятивно-осколочный боевой элемент М42, 6 - срезаемое дно; 7 - петлевой
стабилизатор; 8 ударный инерционный взрыватель; 9 - кумулятивная воронка; 10 осколоч-
ная оболочка
6.7. Противотанковые АБ и КОБЭ кассетного оружия
515
Таблица 6.12. Характеристики 155-мм кассетных снарядов
с КОБЭ свободного рассеивания
Индекс Боевой элемент Бронепробитие по нормали, мм
снаряда БЭ Количество Диаметр, мм Масса, г
М483А1 (США) М42 (М46) 88 38,9 208(213) 70
М684 (США) М42 (М46) 72 38,9 208(213) 70
RH49 (1 ермания) DM1388 49 43 330 100
RB63(Германия) — 63 43 330 100
ORGE G1 (Франция) - 63 .. 40 244 90
CL31O3 (Израиль) 3022-52 49 ' 42 300 100
: •»
Как правило, КОБЭ свободного рассеивания состоит из боевого заряда,
стабилизатора траектории (в виде раскладываемых крылышек, ленты или па-
рашюта) и взрывателя ударного действия. В современных образцах использу-
ется также самоликвидатор БЭ. Боевые элементы имеют стальной корпус, а
их КЗ в состоянии пробить броню толщиной от 60 до 150 мм. поражая одно-
временно живую силу в радиусе 6 м.
Перед заряжанием орудия кассетным снарядом
проводится установка взрывателя, задающая момент
разделения снаряда на траектории его полета (в
среднем на высоте от 300 до 500 м над целью). При
срабатывании взрывателя выбрасывающий заряд
воспламеняется. Образовавшиеся в результате сго-
рания газы давят на пластину выбрасывателя и при-
водят к отрыву дна снаряда и выбросу его содер-
жимого. Боевые элементы падают на поверхность
земли и относительно равномерно покрывают оп-
ределенную площадь. Их детонация происходит при
ударе о цель или на высоте 2 м над поверхностью
земли (благодаря подбрасывающему заряду).
В корпусе 6 типового КОБЭ (диаметр - 43 мм,
длина 117 мм) к кассетным БЧ емкостью от 28 до
646 шт. (рис. 6.61) смонтированы кумулятивная во-
ронка 5, заряд ВВ 4 и донный инерционный взры-
ватель 2. На головной части корпуса 6 закреплена
цилиндрическая втулка 7 из алюминиевого сплава,
длина которой (41 мм) обусловлена фокусным
расстоянием кумулятивной воронки 5. На цилинд-
Рис. 6.61. Типовой КОБЭ к кассетным БЧ:
/ - зигзаг; 2 - взрыватель; 3 - скоба; 4 - заряд ВВ; 5 - кумуля-
тивная воронка; 6 - корпус; 7 - втулка; 8 - кольцевые выступы;
9 - поперечная ось корпуса; 10 - положение скобы; 11 - лента
516
6. Кумулятивные средства поражения и боеприпасы
рической части корпуса 6 выполнены кольцевые выступы 8, обеспечиваю-
щие заданное его дробление. Донная часть корпуса 6 конической формы со-
пряжена меньшим диаметром с взрывателем 2, на поперечной оси 9 корпуса
которого уложена лента 11 длиной 1,0±0,1 м и шириной 25 мм, служащая
аэродинамическим стабилизатором в автономном полете КОБЭ. С осью 9
лента 11 связана посредством изогнутой скобы 3 сопрягаемой формы с про-
филем взрывателя 2. Лента 11 складывается зигзагом 1 (его ширина равна
длине периметра поперечного сечения взрывателя 2) таким образом, чтобы ее
свободный конец был размещен между последними витками зигзага.
При автономном движении к цели КОБЭ под действием набегающего по-
тока лента 11 раскрывается из зигзага /, образуя аэродинамический стабили-
затор. Скоба 3 разгибается, демпфируя усилие торможения при раскрытии лен-
ты 11, и занимает осевое относительно корпуса 6 положение 10, обеспечивая
смещение центра давления к хвостовой части КОБЭ, что стабилизирует его
продольную устойчивость на траектории автономного ориентированного па-
дения. В этом случае встреча КОБЭ с преградой происходит практически в
нормаль, что обусловливает надежное срабатывание инерционного взрывате-
ля и повышает эффективность действия КС.
Одно из важных направлений совершенствования КОБЭ - надежная ста-
билизация БЭ в полете. В принципе, возможна гироскопическая стабилиза-
ция БЭ, так как последний совершает за один оборот снаряда оборот вокруг
своей собственной оси, т. е. вращается с частотой, равной частоте вращения
снаряда (примерно 300 1/с). Однако в большинстве конструкций наряду с
гироскопической используется аэродинамическая стабилизация. В патент-
ной литературе описаны различные типы стабилизаторов, в том числе пет-
левые, с гибкими лопастями из нейлона и др. Лопасть из нейлона может
быть установлена на валу генератора, питающего электрическую схему взры-
вателя.
Помимо БЭ свободного рассеивания, современные кассетные БП могут
комплектоваться самонаводящимися и самоприцеливающимися БЭ.
Для системы оружия MLRS/TGW (табл. 6.13) разработан БЭ типа TGSM,
предназначенный для снаряжения кассетной боевой части, которая содержит
три самонаводящихся БЭ. Каждый БЭ оснащен КЗ тандемного типа, радиоло-
кационной ГСН, работающей в миллиметровом диапазоне длин волн, и меха-
низмом управления.
Для головной части крылатой ракеты MGM-137 (США) создана кассет-
ная головная часть, снаряженная БЭ ВАТ, который построен по нормальной
аэродинамической схеме. Он имеет корпус цилиндрической формы с капле-
видным утолщением в носовой части и развитые аэродинамические поверх-
ности: четыре прямоугольных складывающихся крыла в центральной части
корпуса и хвостовой четырехэлементный складывающийся (закругляемый вок-
руг корпуса) стабилизатор. Крылья и стабилизатор раскрываются после раз-
ведения БЭ из кассетной головной части и обеспечивают его планирование и
медленное проворачивание вокруг продольной оси. Для эффективного пора-
жения перспективных танков в самонаводящемся БЭ ВАТ используют КЗ тан-
демного типа.
б. 7. Противотанковые АБ и КОБЭ кассетного оружия
517
Таблица 6.13. Тактико-технические характеристики БП с самонаводящимися БЭ
Характеристика Наименование системы оружия
Art-Striks (Швеция) MLRS/TGW (Велико- британия, Франция) ВАТ (США)
Боеприпасы
Тип носителя Кассетный артиллерийский снаряд Кассетная боевая часть НУР Кассетная головная часть ВАТ и Block-2 мод. 2
Максимальная даль- ность стрельбы, км 26 (с донным генератором) 40 500; 150; 40
Калибр снаряда, мм 155 240 -
Масса снаряда, кг 43 258 -
Количество БЭ в носи- 1 18; 12; 3
телях Самонаводящиеся боевые элементы
Диаметр, мм 120 •»110 140
Длина, мм 830 , 914 914
Масса, кг 18,6 18,1 20
Тин БЧ Кумулятивная Кумулятивная тандемная Кумулятивная тандемная
Бронепробиваемость по нормали, мм 756 630 за ERA 600 за ERA
Тип ГСН Инфракрасная двухдиапазонная РЛ (мм диапазона длин волн) Акустическая и инфракрасная двухдиапазонная
После разведения элементов ВАТ над районом расположения цели он функ-
ционирует автономно, осуществляя поиск, распознавание, самонаведение и
поражение цели. Боевой элемент ВАТ оснащается комбинированной ГСН в
составе ультразвукового и ПК-датчиков цели. Двухдиапазонный ИК-датчик
цели располагается в носовой части летательного аппарата, а микрофоны аку-
стического канала - в тонких штырях, установленных на концах крыльев и
сильно выступающих вперед. На цилиндрической части корпуса БЭ (между
крыльями) размещен датчик системы измерения параметров воздушного по-
тока, знание которых позволяет решить проблему шумоподавления.
Боевой элемент ВАТ принят в США в качестве основного для снаряжения
не только ракеты MGM-137, но и кассетных головных частей Block-2 мод. 2 и
кассетных БЧ TGW (для РСЗО MLRS).
Аналогичные конструктивные решения реализованы и в отечественных
кассетных БП для РСЗО. Так, 122-мм реактивный снаряд для РСЗО 9К51
«Град» с дальностью стрельбы 30 км может комплектоваться КОБЭ свободно-
го рассеивания (45 шт.) или самоприцеливающимися БЭ (2 шт.), а 300-мм
реактивный снаряд для РСЗО 9К58 «Смерч» с дальностью стрельбы 70
и 90 км - кассетной головной частью с самоприцеливающимися БЭ (5 шт.),
518
6. Кумулятивные средства поражения и боеприпасы
кассетной головной частью с противотанковыми минами (25 шт.) и кассетной
головной частью с КОБЭ свободного рассеивания (616 шт.).
6.8. Кумулятивно-осколочные боевые части
неуправляемых авиационных ракет
Неуправляемые авиационные ракеты (НАР) относятся к классу воздух
земля и предназначены для поражения наземных целей различного типа (от
живой силы до бронетанковой техники) с самолетов и вертолетов. Пуск ракет
производится из подвешиваемых на носителе специальных блоков орудий. Це-
левое назначение НАР определяется видом поражающего действия ее БЧ, ка-
ковым может быть, в частности, кумулятивно-осколочное действие. Калиб-
ром НАР называется максимальный диаметр ее двигателя в мм.
Рассмотрим устройство НАР с кумулятивно-осколочными БЧ на примере
отечественных образцов данного класса боеприпасов. На вооружении ВВС
РФ состоят НАР калибра 57, 80, 122, 240 и 266 мм, имеющие соответствую-
щие наименования: С-5, С-8, С-13, С-24 и С-25. После условного наименова-
ния ракет обычно приводятся сведения о типах БЧ в виде соответствующих
индексов (например, С-8КО - НАР калибра 80 мм с БЧ кумулятивно-осколоч-
ного действия).
Семейство современных НАР калибра 57 мм ведет свое начало от первой
ракеты С-5 (первоначально называлась АРС-57), разработанной в ОКБ-16 (глав-
ный конструктор А.Э. Нудельман) и принятой на вооружение в 1955 г. Приме-
чательным отличием ракет С-5 от предшествующих советских НАР было склад-
ное оперение, обеспечившее компактное размещение ракет в направляющих
трубах, которые были собраны в один блок. Идею позаимствовали у ракет
R4/M и Schlange, выпускавшихся в годы Второй мировой войны в Германии.
Такой подход давал возможность простым способом увеличить количество
запускаемых ракет путем наращивания числа труб в блоке.
Неуправляемая авиационная ракета С-5 состоит из твердотопливного дви-
гателя с топливной шашкой, размещенной в точеном стальном корпусе, к пе-
редней части которого крепится БЧ с взрывателем, а к задней - сопло с узла-
ми навески оперения. Лепестки стабилизатора шарнирно складываются по на-
правлению полета, охватывая в сложенном виде сопло. Заточка передних
кромок «под нож» придала им своеобразный аэродинамический профиль, обес-
печивающий раскрутку ракеты в полете до 1500 об/мин и дополнительную
стабилизацию вращением.
Для быстрого разгона ракеты и достижения достаточных оборотов сразу
после выхода из трубы (частота вращения зависит от скорости полета) твердо-
топливный двигатель снабжен звездообразным каналом, дающим наибольшую
площадь горения и тягу. Время работы двигателя всего 1,1 с (за это время С-5
пролетает около 300 м), и после выгорания топлива ракета продолжает баллис-
тический полет подобно пушечному снаряду. Табличная дальность стрельбы
ракет С-5 составляет 2000 м, а баллистическая - свыше 4000 м.
Ракета С-5 оснащалась взрывателем ударного действия В-5М или В-5М1
с самоликвидатором. Стрельба производилась из однозарядных орудий (с от-
6.8. Кумулятивно-осколочные БЧ неуправляемых авиационных ракет 519
крытой казенной частью), размещенных на самолете в блоках УБ-16-57, или
из орудий (с закрытой казенной частью) с самолетов в блоках ОРО-57КМ.
На базе ракеты С-5 было создано несколько модификаций. Специально
для борьбы с бронеобъектами разработали кумулятивные снаряды КАРС-57
с механическим взрывателем В-586. Длина снаряда КАРС-57 со сложенным
оперением составляет 830 мм, без оперения - 738 мм, размах оперения -
232 мм, масса снаряда с взрывателем - 3,65 кг, масса БЧ - 1,13 кг, масса заря-
да ВВ - 0,287 кг, масса реактивного топлива - 0,89 кг, максимальная скорость,
развиваемая снарядом, - 594 м/с (при дульной скорости всего 78 м/с). Дистан-
цию 1000 м снаряд преодолевает за 2,3 с. В 1960 г. ракету КАРС-57 приняли
на вооружение под индексом С-5К.
В 1971 г. поступила на вооружение многоцелевая ракета С-5КО с БЧ
комбинированного кумулятивно-осколочного действия. Масса ракеты -
4,45 кг, масса БЧ - 1,6 кг, максимальная скорость - 540 м/с. Боевая часть
имеет десять колец с надрезами, образующих при разрыве 220 осколков мас-
сой 2 г каждый.
Ракеты С-5КП и С-5КПБ вместо ударных механических оснащены высо-
кочувствительными пьезоэлектрическими взрывателями. Для образования ос-
колков на корпус БЧ навита стальная проволока. Подрыв БЧ в этих ракетах
проводится контактным взрывателем, срабатывающим при попадании в цель.
Временной самоликвидатор подрывает БЧ при промахе и пролете мимо цели,
уничтожая ракету.
Стрельба современными НАР семейства С-5 осуществляется из 16- и
32-ствольных блоков орудий УБ-16, УБ-32, УБ-32М. Блоки УБ-32М обеспе-
чивают применение ракет с высокоскоростных самолетов без ограничения ре-
жимов полета. Наибольшая эффективность прицельного огня достигается при
пуске ракет с дальности 1600... 1800 м при пикировании носителя под углом
25...30°.
Ракета С-5К (рис. 6.62) состоит из головной части (А) и порохового реак-
тивного двигателя (Б) со стабилизирующим оперением.
Головная часть кумулятивного типа предназначена для непосредствен-
ного поражения бронецелей и включает в себя корпус 5 с обтекателем 2,
соединительную втулку 12, кумулятивный узел и взрыватель В-5К 1. Корпус
изготавливается из стали в виде цилиндра с наружными резьбами на обоих
концах. Обтекатель сделан из дюралюминия. Соединительная втулка пред-
назначена для соединения головной части с реактивным двигателем и пред-
ставляет собой стальной стакан с внутренней перемычкой и резьбами с обоих
концов. Наружная поверхность соединительной втулки служит передней цен-
трирующей поверхностью ракеты.
Кумулятивный узел состоит из двух шашек ВВ 7, воронки 6, детонато-
ра 9, инертной линзы 8 с капсюлем-детонатором К-1-Т, предохранительно-
го конуса 3 и прокладки К). Шашки ВВ прессуются из ВВ типа A-IX-1, а
детонатор - из тетрила. Воронка является металлической облицовкой ку-
мулятивной выемки в передней шашке, изготовляется из меди, имеет ру-
порообразную форму и постоянную толщину стенок. Линза сделана из пла-
стмассы. Предохранительный конус изготовлен из стали и предохраняет
520
6. Кумулятивные средства поражения и боеприпасы
воронку от повреждений осколками, образующимися при срабатывании
взрывателя.
Взрыватель В-5К - головной, механический, контактный взрыватель мгно-
венного и инерционного действия - снабжен огневой цепью непредохрани-
тельного типа и МДВ.
Пороховой реактивный двигатель служит для сообщения ракете поступа-
тельного движения. Он состоит из корпуса двигателя 13, порохового заряда 14,
диафрагмы 15 с войлочной прокладкой, воспламенителя ГВ-5М 11 с двумя
Б
электровоспламенителями, сопла 18 со стабили-
зирующими лопастями 17, пластмассового дна 19
с контактной вилкой и транспортировочного фут-
ляра 16.
Транспортировочный футляр 16 удерживает
лопасти стабилизатора от раскрывания,.Предохра-
няет стабилизатор и дно ракеты с вилкой от меха-
нических повреждений в условиях служебного
обращения, а также облегчает заряжание^орудия.
Футляр представляет собой картонный стакан, ок-
леенный коленкором. На дне футляра закреплен
стальной поддон.
Действие ракеты происходит следующим об-
разом. При нажатии кнопки «Огонь» срабатыва-
ют электровоспламенители воспламенителя, а от
них - воспламенитель и пороховой заряд двига-
теля. Давлением пороховых газов, образующих-
ся при горении порохового заряда, разрушается
пластмассовое дно ракеты, пороховые газы, ис-
текая через сопло, создают тягу. Ракета начина-
ет двигаться по каналу ствола, отгибая бурт ко-
ронки К. При вылете ракеты из канала ствола под
действием пружин и набегающего воздушного по-
тока лопасти стабилизатора раскрываются и ста-
билизируют полет ракеты на траектории. Вслед-
ствие расположения лопастей под углом 1°40'
относительно направления воздушного потока ра-
кета начинает вращаться относительно своей
Рис. 6.62. Ракета С-5К:
А - головная часть; Б - пороховой реактивный двигатель со
стабилизатором; 1 - взрыватель В-5К; 2 - обтекатель; 3 —
предохранительный конус; 4 - прокладка; 5 - корпус; 6 -
кумулятивная воронка; 7- шашки ВВ; 8 - инертная линза с
капсюлем-детонатором К-1-Т; 9 - детонатор; 10 - проклад-
ка; 11 - воспламенитель ГВ-5М с двумя электровоспламе-
нителями; 12 - втулка соединительная, 13 - корпус двига-
теля, 14 — пороховой заряд, 15 - диафрагма; 16 - футляр
транспортировочный; 17 - лопасть стабилизатора; 18 -
сопло; 19-дно с вилкой; К-коронка
6.9. Кумулятивно-фугасные БЧ управляемых ракет, бомб и торпед 521
продольной оси с максимальной частотой порядка 1500 об/мин. В начале пас-
сивного участка траектории (не ближе 183 м от точки пуска) взводится взры-
ватель, который при встрече с преградой вызывает срабатывание БЧ ракеты.
Масса окончательно снаряженной ракеты (с взрывателем) составляет
3,64 кг, масса шашек ВВ 0,092 кг, масса порохового заряда 0,88 кг, размах
стабилизатора при раскрытых лопастях 224...239 мм, максимальная скорость
полета 514...549 м/с (из открытого орудия) и 563...620 м/с (из закрытого ору-
дия), толщина пробиваемой брони при встрече ракеты с броней под углом 30°
от нормали - 100... 150 мм.
В связи с незначительной поражающей способностью ракет типа С-5 в
калибре 57 мм разработаны более крупные ракеты семейства С-8 калибра
80 мм. Ракета С-8 сохранила принципиальную схему и компоновку ракеты
С-5. Для улучшения точностных характеристик шесть перьев стабилизатора
при выходе ракеты из трубы принудительно раскрываются газовым поршнем
под действием отбираемых из камеры сгорания твердотопливного двигателя
пороховых газов. Для быстрого разгона и'раскрутки более тяжелой ракеты
С-8 тяга твердотопливного двигателя по сравнению с двигателем ракеты С-5
увеличена, а время его работы сокращено, до 0,69 с. Максимальная скорость
ракеты - 680 м/с.
На основе базовой конструкции С-8 с универсальной кумулятивно-ос-
колочной БЧ было разработано несколько модификаций ракеты - С-8М и
С-8КОМ с модернизированной БЧ усиленного осколочного действия и твер-
дотопливным двигателем с увеличенным временем работы. Кумулятивно-ос-
колочная БЧ массой 3,6 кг содержит 0,9 кг ВВ, полная длина ракеты С-8КОМ
составляет 1570 мм, стартовая масса ракеты 11,3 кг, бронепробитие по норма-
ли 300...400 мм, дальность пуска ракет 1300...4000 м, диапазон скорости са-
молета-носителя при боевом применении ракет С-8 всех типов 166.. .330 м/с. По-
мимо БЧ моноблочного типа, для ракет данного семейства разработана тан-
демная кумулятивная БЧ (индекс ракеты С-8Т) с несколько увеличенной общей
массой (13 кг) и повышенным бронепробивным действием.
Пуск ракет С-8 осуществляется из специальных ПУ (блоков) Б-8М1 и
Б-8В20А. Оба блока снабжены 20 пусковыми трубами, открытыми с казенной
части. Длина блока Б-8М1 (Б-8В20А) - 2760 мм (1700 мм), диаметр блока -
520 мм, масса пустого блока - 160 кг (123 кг). Позднее были разработаны ПУ
типа Б-8В7, имеющие семь открытых пусковых труб (диаметр блока - 332 мм,
длина - 1780 мм). Носители ракет С-8: истребители Су-17, Су-24, Су-25, Су-27,
МиГ-23 и МиГ-27, а также вертолеты Ми-8, Ми-24, Ми-28, Ка-25 и Ка-50.
6.9. Кумулятивно-фугасные боевые части
управляемых ракет, бомб и торпед
Первые образцы управляемых крылатых ракет появились еще в годы Вто-
рой мировой войны. От всех предшествующих традиционных боевых средств
они отличаются способностью доставлять большие заряды ВВ на дальние
расстояния за счет тяги реактивного двигателя и подъемной силы крыла.
Такие ракеты предназначены для поражения одиночных стационарных или
522
б. Кумулятивные средства поражения и боеприпасы
подвижных сильнозащищенных наземных и надводных целей. В зависимости
от места старта управляемые крылатые ракеты могут быть авиационного (раз-
мещаются на самолетах и вертолетах) и морского (размещаются на кораблях
и подводных лодках) базирования.
В зависимости от взаимного расположения несущих и управляющих
поверхностей по длине корпуса аэродинамические схемы ракет можно под-
разделить на нормальную самолетную, с поворотными консолями крыла,
«бесхвостку» и «утку». Тип системы наведения ракет определяется основ-
ными информационными признаками цели, в число которых входит контра-
стность цели в различных физических полях: магнитном поле Земли; поле
электромагнитных излучений в РЛ, ИК и видимой областях спектра; акусти-
ческом и гидроакустическом полях. Различают автономные и радиокоманд-
ные системы наведения ракет. Широко используются активные, полуактив-
ные и пассивные ГСН.
Представителями управляемых ракет, предназначенных для поражения тан-
ков и другой бронетехники, являются ПТУР с кумулятивными БЧ (см. разд. 6.2
и 6.5). Как правило, ПТУР имеют относительно небольшие диаметрьщне пре-
вышающие 200 мм, и обеспечивают поражение бронецелей на дистанциях до
5... 10 км за счет пробивного действия КС. Из-за небольшой массы заряда БЧ
и действия ракеты при контактном подрыве с фокусного расстояния до пре-
грады фугасное действие взрыва практически не оказывает влияния на разру-
шение пробиваемой конструкции.
Совершенно иные требования предъявляют к БЧ противокорабельных кры-
латых ракет (ПКР), рассматриваемых в данном подразделе в качестве наибо-
лее ярких образцов управляемых ракет для поражения сильнозащищенных
точечных целей. Для поражения крупных надводных целей (авианосцев, крей-
серов, эсминцев и др.) такие ПКР оснащаются кумулятивно-фугасными, ку-
мулятивно-осколочно-фугасными или кумулятивно-фугасно-зажигательными
БЧ, которые должны «выдерживать» также возможное проникание ракеты в
«глубину» цели до момента подрыва. Увеличенные размеры фюзеляжей кры-
латых ПКР позволяют разместить в них достаточно большой по массе заряд
ВВ в обычном снаряжении, который при необходимости может быть заме-
нен на специальный (ядерный). Эффективность действия такой ракеты по
сильнозащищенной цели, имеющей, как правило, большую протяженность
в глубину с набором относительно тонких разнесенных преград, будет опре-
деляться не только чисто кумулятивным пробивным действием, но и мощ-
ным дополнительным действием, прежде всего фугасным от взрыва заряда
ВВ. При этом зачастую фугасное действие выходит на первое место, и тогда
такие БЧ называют фугасно-кумулятивными. Эффективность действия БЧ
может еще более усилиться за счет кинетического проникания ракеты в глубь
преграды до момента подрыва и взрыва неизрасходованного ракетного
топлива.
Современные ПКР снабжены головным отсеком с аппаратурой самонаве-
дения, оснащенной самыми различными ГСН и работающей чаще всего в ав-
тономном режиме по принципу «выстрелил-забыл», отсеком с БЧ двигате-
лем (жидкостным или твердотопливным), системой электрооборудования, ру-
левыми управляющими приводами (рис. 6.63).
6.9. Кумулятивно-фугасные БЧ управляемых ракет, бомб и торпед 523
Рис. 6.63. ПКРХ-15С:
I - радиолокационная ГСН; 2 - навигационная система; 3 - система электрооборудования;
4 - управляющий привод; 5 - твердотопливный двигатель; 6 - кумулятивно-фугасная БЧ
Кумулятивно-фугасные БЧ управляемых крылатых ракет комплектуются
чаще всего стальными полусферическими облицовками. Такие БЧ, располо-
женные за головным и приборным отсеками, обеспечивают требуемый уро-
вень бронепробития даже при ее подрыве ga внешней поверхности корабля.
Они достаточно эффективны при действии по отсекам корабля и в широком
диапазоне углов встреч обеспечивают пробитие корпуса корабля, кроме того,
сравнительно просты в изготовлении. Из всех возможных вариантов размеще-
ния кумулятивной (или фугасно-кумулятивной) БЧ в составе ПКР наиболее
часто используются две характерные схемы БЧ с полусферическими облицов-
ками для случаев осевого расположения облицовки (рис. 6.64, а) и под неко-
торым углом р к оси ракеты (рис. 6.64, б). В случае проникающей БЧ с сило-
выми элементами и кумулятивной выемкой (рис. 6.65) переднее днище /, КО 2,
силовые элементы 4 и заднее днище 5 образуют единый силовой каркас, пре-
пятствующий получению значительных деформаций тонкой обечайки 3 при
нагружении в процессе пробития корабельной преграды. При подрыве та-
кой БЧ в замкнутом объеме корабля силовые элементы выполняют роль ре-
жущих стержней, обеспечивая пробитие или ослабление переборок и палуб
корабля.
В 1968 г. на вооружение фронтовой авиации поступила первая отечествен-
ная тактическая ракета класса воздух-земля Х-66 (табл. 6.14). Траектория ее
полета при пикировании истребителя МиГ-21 была почти прямой - ракета
как бы «соскальзывала» на цель по направленному лучу РЛС. Для обеспе-
а б
Рис. 6.64. Схемы БЧ с осевым (о) и наклонным (б) расположением КО
524
6. Кумулятивные средства поражения и боеприпасы
Рис. 6.65. Схема кумулятивно-фугасной БЧ проникающего типа: '
1 переднее днище; 2 КО; 3 - обечайка; 4 - силовые элементы; 5 - заднее днище
J
чения возможности поражения различных целей (бронетехники, укрытий,
сооружений, живой силы противника) БЧ массой 103 кг, содержащая 51 кг
ВВ, имела комбинированную конструкцию: кумулятивную головку и основ-
ной фугасный заряд, заключенный в осколочную рубашку. Боевая часть осна-
щалась контактным взрывателем. При пуске ракеты двигатель сначала разго-
нял ее до скорости 440 м/с, а затем переходил на маршевый режим. Время
управляемого полета ракеты составляло 20 с.
На основе конструкции ракеты Х-66 в дальнейшем была спроектирована
ракета Х-23, получившая название «Гром» и принятая на вооружение в 1974 г.
Новая ракета, предназначенная для поражения наземных целей и небольших
кораблей, сохранила схему и компоновку основных узлов ракеты Х-66, но была
снабжена радиокомандной системой управления (в хвостовом отсеке разме-
щалась аппаратура приема и дешифровки кодируемых управляемых радио-
сигналов). Пуск ракеты проводился с истребителя-бомбардировщика, летя-
щего со скоростью от 600 до 1000 км/ч на высоте от 80 до 500 м. Угол пуска
по отношению к цели составлял от 2 до 40°, дальность пуска не превышала
3... 10 км, а время управляемого полета достигало 20 с.
Ракета Х-23 имеет аэродинамическую схему «утка». При старте масса ра-
кеты составляет 287 кг, а в конце активного участка полета - 225 кг. Кумуля-
тивно-осколочно-фугасная БЧ массой 108 кг (масса заряда ВВ из смеси ТГ40
составляет 75 кг) со стальной конической кумулятивной воронкой обеспечи-
вала уничтожение защищенных объектов с толщиной брони до 250 мм и сплош-
ное поражение небронированных целей в радиусе до 40 м. Последнее обеспе-
чивалось осколочными элементами в виде кубиков с 10-мм гранью, которые
наклеивались на БЧ в секторах вдоль ее корпуса таким образом, что при под-
рыве разлетались вбок. При встрече ракеты с преградой срабатывали находя-
щиеся в рулевом отсеке контактные датчики, от которых сигнал шел на ПИМ.
вызывающий подрыв БЧ. Ракетами вооружены самолеты МиГ-23, МиГ-27,
Су-17 и др.
Таблица 6.14. Тактико-технические характеристики некоторых УАР
класса воздух-поверхность
Индекс Масса, кг Диаметр, мм Длина, м Размах опере- ния. мм ТипБЧ Дальность, км Скорость полета, м/с или в М
ракеты БЧ
УАР воздух-земля (Россия)
Х-66 278 103 275 3,63 811 КОФ 8-10 -
Х-15С 1200 150 455 4,8 920 КФ 60-150 5М
Х-22М 5780 930 1810 11,65 3000 ФК 300—400 ЗМ
Х-23 (Х-23М) 287 108(111) 275 3,59 785 КОФ 3-10 600-750
Х-59 (Х-59М) 760 (920) 148 (320) 380 5,37 (5,69) 13.00 ФК (ПОФ) 40(115) 250-300 (280)
Семейство УАР Maverick (США)
AGM-65A.B 210 57-59 305 2,46 720 К 3-15 2М
AGM-65C 210 57-59 305 2,46 720 К 15 2М
AGM-65D 210 57-59 305 2,46 720 К 20-25 2М
Примечание. КОФ - кумулятивно-осколочно-фугасная БЧ; КФ - кумулятивно-фугасная кающая осколочно-фугасная БЧ; К - кумулятивная БЧ. БЧ. ФК - фугасно-кумулятивная БЧ; ПОФ - прони-
526
6. Кумулятивные средства поражения и боеприпасы
Модернизированный вариант ракеты Х-23М при сохранении практически
всех тактико-технических характеристик ракеты Х-23 оснащался более совер-
шенной системой радиоуправления и трассером повышенной светосилы, об-
легчавшим визуальное сопровождение, при этом были несколько изменены
аэродинамика ракеты и форма оперения.
Основной недостаток первых отечественных УАР класса воздух-земля -
командное наведение ракеты, поэтому следующим этапом развития стало со-
здание автономных ГСН, которые могли бы с высокой степенью самостоя-
тельности вести поиск, распознавание и наведение на цель. Наиболее эффек-
тивными оказались лазерные и телевизионные комплексы целеуказания и са-
монаведения.
Высокоточный комплекс авиационного вооружения Х-59 «Овод», пред-
назначенный для поражения точечных наземных целей и малых кораблей,
приняли на вооружение в 1980 г. в составе истребителя-бомбардировщика
Су-17М, контейнера управления и двух ракет. Ракета Х-59, построенная по
схеме «бесхвостка» с развитым крылом и дестабилизаторами, была снабже-
на двумя РДТТ: стартовым в сбрасываемом блоке и двухсопловым .марше-
вым. Скорость полета - 285 м/с. Первоначально на ракете устанавливали БЧ
фугасно-кумулятивного действия. Но в 1984 г. на вооружение поступила мо-
дернизированная ракета Х-59М для использования на фронтовых бомбарди-
ровщиках Су-24М. Данная ракета может запускаться с малых высот (до 100 м)
и выполнять низковысотный полет к цели на заданной высоте (от 50 до 1000 м
в зависимости от рельефа местности на суше и от 7 м и выше над морем).
Точность стрельбы такой ракетой на предельную дальность 115 км сопоста-
вима с точностью стрельбы ракеты Х-59 на дальность 40 км и составляет
2...3 м. Новый РДТТ позволил высвободить компоновочные объемы и разме-
стить вдвое большую по массе БЧ. Основным вариантом стала проникающая
осколочно-фугасная БЧ массой 320 кг (при этом масса заряда ВВ из смеси
ТГА составляет 116 кг), однако предусмотрен также вариант кассетной БЧ
массой 280 кг с отдельными поражающими элементами осколочного и куму-
лятивного действия.
Особо следует сказать о разработке специальных ПКР класса воздух-по-
верхность, в которых принимались попытки использования кумулятивно-фу-
гасных, фугасно-кумулятивных и кумулятивно-фугасно-зажигательных БЧ.
Самая крупная из рассматриваемых ПКР Х-22М, принятая на вооруже-
ние в 1974 г., предназначена для эффективной борьбы с авианосцами. Раке-
та оснащена фугасно-кумулятивной БЧ массой 930 кг (масса заряда ВВ -
около 600 кг). При подрыве ось КЗ направлена вниз (под углом к оси раке-
ты) в сторону преграды (см. рис. 6.64, б). Попадание одной такой ракеты в
борт корабля-мишени приводит к образованию пробоины площадью более
20 м2 и пробитию кумулятивной струей внутренних отсеков на глубину до
12 м. Основной носитель ракеты Х-22М - стратегический бомбардиров-
щик Ту-95К
В середине 1980-х годов на базе известной ракеты Х-15 (которая была
ответом на ракету SRAM (США), размещаемую на стратегических бомбарди-
ровщиках В-52) создали ПКР Х-15С (см. рис. 6.63), оснащенную радиолока-
6 9. Кумулятивно-фугасные БЧ управляемых ракет, бомб и торпед 527
ционной ГСН. Стрельба такой ракетой производится по принципу «выстре-
лил-забыл», при этом на большей части траектории движения ракеты Х-15С
управление осуществляется инерциальной системой наведения, а на конеч-
ном участке включается активная радиолокационная ГСН. Ракета Х-15С снаб-
жена кумулятивно-фугасной БЧ массой 150 кг. Дальность пуска ракеты Х-15С
до цели типа «крейсер» - 150 км, до цели типа «эсминец» - 100 км, до цели
типа «катер» - 60 км. Твердотопливный двигатель позволяет развивать ско-
рость до 5М. Ракета запускается как с роторных установок МКУ-6-1, так и с
ординарных балочных установок носителей: самолетов Ту-95МС, Ту-22МЗ,
Ту-160, Су-27К и Су-27ИБ. Ракета Х-15С прошла полный цикл испытаний, но
данных о ее принятии на вооружение нет.
За рубежом яркий представитель управляемых ракет класса воздух-по-
верхность - семейство ракет типа AGM-65 Maverick (США), предназначен-
ных как для поражения малоразмерных прочных целей (танк, БТР, полевое
укрепление и др.), так и для борьбы с объектами на поверхности воды. Раке-
ты этого семейства отличаются друг от ;ipyfa системами управления и БЧ.
Всего было создано шесть вариантов ракет- Maverick с различными ГСН, в
том числе AGM-65A, AGM-65B с телевизионными ГСН, AGM-65C с лазер-
ной ГСН, AGM-65D с тепловизионной ГСН, которые оснащены кумулятив-
ными БЧ (см. табл. 6.14). Все ракеты построены по нормальной самолетной
аэродинамической схеме и имеют цилиндрический корпус с затупленной но-
совой частью, состоящий из трех отсеков: системы наведения, боевой части и
твердотопливного двигателя, системы управления. Ракеты входят в состав во-
оружения самолетов F-4, F-5E, F-15E, F-16, F-111, А-7 и др.
Наиболее известные зарубежные ПКР Garpoon и Tomahawk (США), Exocet
(Франция), Kormoran (Германия), Gabriel (Израиль) снабжены фугасными или
осколочно-фугасными проникающими БЧ. Вместе с тем имеются данные о
размещении на некоторых ракетах проникающих полубронебойных БЧ, на-
пример, на норвежской ракете Penguin. В 1980-х годах подобные ПКР, в ко-
торых отказались от идеи использования кумулятивных зарядов в пользу про-
никающих осколочно-фугасных или полубронебойных БЧ, были созданы и
отечественными конструкторами для вооружения кораблей и самолетов, на-
пример, ракеты Х-35 (аналог ракеты Garpoon) и Х-31А (аналог ракеты Exocet).
Помимо ракет авиационного базирования, фугасно-кумулятивными БЧ
были оснащены также отечественные ПКР морского базирования (табл. 6.15).
Ракеты П-6 имеют надводный старт с дизельных и атомных подводных лодок
(ПЛ), а ракеты П-35 - с надводных кораблей. Крылатая ПКР П-500 «Базальт»
аналогична по компоновке ракетам П-6 и П-35, но имеет более мощную фу-
гасно-кумулятивную БЧ и большую дальность действия. Принятая на воору-
жение атомных ПЛ в 1975 г. и авианесущих крейсеров в 1977 г., ракета П-500
«Базальт» стала последней лодочной ракетой надводного старта. Ракета П-70
«Аметист» - первая отечественная твердотопливная ПКР с подводным («мок-
рым») стартом, а ракета П-120 «Малахит» - последняя лодочная ракета на
твердом топливе.
Для поражения ПЛ используется ракетно-торпедное, минно-торпедное
и бомбовое оружие. Подводная лодка представляет собой сильнозащищен-
528
6. Кумулятивные средства поражения и боеприпасы
Таблица 6.15. Тактико-технические характеристики некоторых отечественных
ПКР морского базирования с фугасно-кумулятивной БЧ
Индекс Масса, кг Длина, м Дальность, км Высота полета, м Скорость полета, км/ч Старт
ракеты БЧ
П-6 6000 930 10,2 500 100-7000 1250 Надводный
П-35 6000 500 11,0 300 400-7500 400 »
П-500 «Базальт» 6000 500 11,7 550 50 5000 3000 »
П-70 «Аметист» 3700 1000 7,0 80 60 1160 Подводный
П-120 «Малахит» 3200 1000 9,0 120 60 1100 »
ную одиночную цель, имеющую однокорпусную или двухкорпусную кон-
струкцию. Для того чтобы разрушить прочный корпус и поразит! внутрен-
ние объекты двухкорпусной ПЛ, необходимо пробить внешний акустичес-
кий слой (резина) и металлический легкий корпус, слой балластной воды,
достигающий по толщине 1,5... 1,8 м, и корпус из высокопрочной судо-
строительной стали (не уступающей по прочности броневой стали) тол-
щиной до 60...75 мм. Для эффективного поражения таких двухкорпусных
ПЛ традиционные фугасные БЧ противолодочных торпед, ПЛАБ и реак-
тивных глубинных бомб (РГБ) должны иметь массу заряда ВВ не менее
100 кг. что возможно реализовать лишь в крупногабаритных образцах дан-
ных боеприпасов. В этой связи для повышения эффективности действия
малогабаритного торпедного и бомбового оружия используется направлен-
ный взрыв кумулятивно-фугасных БЧ
В качестве примера управляемого реактивно-бомбового оружия можно
привести отечественную корректируемую авиационную противолодочную бом-
бу СЗВ, предназначенную для поражения ПЛ на глубине до 600 м, а также в
надводном, перископном положениях и лежащих на грунте. Такая бомба при-
меняется с противолодочных самолетов и вертолетов Ту-142, Ми-14, Ка-28.
Корректируемая авиационная противолодочная бомба с активной гидроакус-
тической пеленгацией отличается высокой эффективностью по сравнению с
неуправляемой ПЛАБ с традиционной фугасной БЧ. Вероятность поражения
цели по сравнению с фугасной авиабомбой типа ПЛАБ выше в 1,2-1,5 раза в
условиях мелкого моря (до 200 м) и в 4 8 раз - на глубинах до 600 м. Масса
бомбы при калибре 211 мм и длине 1300 мм составляет 94 кг, а масса кумуля-
тивно-фугасного заряда ВВ с комбинированной (конус - полусфера) кумуля-
тивной облицовкой - 19 кг, скорость погружения - 16,2 м/с, угол планирова-
ния от вертикали - до 60°, система траекторной коррекции - активная гидро-
акустическая. Движение на подводном участке траектории происходит под
действием сил гравитации.
На вооружение ВМФ РФ принят противолодочный комплекс РПК-8 «За-
пад», предназначенный для поражения ПЛ, торпед и подводных диверсантов.
Ракета комплекса «Запад» по габаритам практически совпадает с неуправляе-
мой реактивной глубинной бомбой РГБ-60 противолодочного комплекса
6.9. Кумулятивно-фугасные БЧ управляемых ракет, бомб и торпед 529
«Смерч-2», однако отделяемый в воде гравитационный подводный снаряд ос-
нащен системой коррекции. При ударе о корпус ПЛ происходит подрыв БЧ
направленного действия. Калибр ракеты составляет 212 мм, ее длина - 1830 мм,
масса ракеты - 112,5 кг, масса гравитационного снаряда - 67 кг, а масса заря-
да ВВ - 19 кг.
Использование кумулятивного эффекта взрыва - одно из направлений по-
вышения эффективности поражающего действия противолодочных малогаба-
ритных торпед. В настоящее время такие торпеды поступают на вооружение
армий многих зарубежных стран. Так, в США активно проходит модерниза-
ция существующей малогабаритной торпеды Мк46 мод. 5А и создание мало-
габаритной противолодочной торпеды Мк54. В ракете Мк46 мод. 5А исполь-
зуется стандартное БЗО Мк103 мод. I, содержащее ВВ типа PBXN-105 мас-
сой около 44,6 кг Для достижения наибольшего пЬражающего эффекта заряда
направленного действия на конечном участке наведения (атаки) обеспечива-
ется сближение торпеды по нормали (или близко к перпендикулярному на-
правлению) к поверхности корпуса цели.
В Великобритании создана усовершенствованная модификация малога-
баритной противолодочной торпеды Stringray мод. 1, одной из отличитель-
ных особенностей которой является применение в БЗО кумулятивного заря-
да ВВ массой около 45 кг. В целях обеспечения требуемого уровня боевой
эффективности и. прежде всего, возможности гарантированного поражения
современных двухкорпусных ПЛ, в том числе с корпусом из титановых спла-
вов, система наведения обеспечивает вывод торпеды к цели таким образом,
чтобы на момент подрыва ВВ она двигалась по нормали (или достаточно
близко к перпендикулярному направлению) к поверхности корпуса атакуе-
мой подводной лодки.
В Италии разработана малогабаритная противолодочная торпеда А-200,
при создании которой реализован принцип «выстрелил-забыл». Предусмат-
ривается несколько вариантов ее компоновки в зависимости от носителя, ос-
нащенного или стабилизатором (авиационный), или стартовым ускорителем
(пороховые шашки) и ВОК (только корабельный вариант). Базовая модифика-
ция выполнена в габаритах РГБ (длина - 0,88 м, калибр - 0,12 м, масса -
12 кг), вто время как авиационная имеет длину 0,91 м и массу 12,5 кг. Кора-
бельный вариант предполагает две модификации: собственно противолодоч-
ную (длина - 2,04 м, масса - 32,7 кг) и противоминную (длина - 1,25 м, мас-
са- около 13 кг), которые могут при использовании стартового ускорителя
выстреливаться из установки пуска 130-мм НУРС пассивных помех. Приме-
нение в авиационном варианте кумулятивного (масса - 2,5 кг), а в корабель-
ном - тандемного (кумулятивно-фугасного) заряда ВВ позволяет поразить со-
временную двухкорпусную подводную лодку.
С 1997 г. осуществляется серийное производство малогабаритной проти-
володочной торпеды MU-90 Umpact (Франция, Италия) (корабельный и авиа-
ционный варианты). Применение в БЗО торпеды MU-90 (рис. 6.66) кумуля-
тивного заряда В В массой около 59 кг дает возможность разрушить струей
направленного действия два корпуса ПЛ (прочный и легкий), отстоящих друг
от друга на расстоянии до 1,2 м.
6.7. Противотанковые АБ и КОБЭ кассетного оружия 513
SUU-65. После раскрытия кассеты каждый боевой элемент в форме призмы
с четырьмя полусферическими выемками опускается на надувном парашюте,
при этом из него выдвигается телескопический шток с взрывателем. При па-
дении на грунт взрыватель срабатывает и инициирует заряд БЧ, в результате
чего образуются четыре ударных ядра, одно из которых направлено вниз, а
остальные - в разные стороны в горизонтальной плоскости.
В Великобритании сбрасываемая авиационная кассета BL.755, имеющая
массу в снаряженном состоянии около 280 кг, диаметр корпуса - 400 мм и
длину - 2500 мм, комплектуется 147 малокалиберными кумулятивно-осколоч-
ными бомбами массой около 1 кг каждая. Кассета раскрывается с помощью
пиротехнических зарядов, а бомбы выталкиваются с определенными интерва-
лами из ее цилиндрических отсеков пневматическим механизмом. Эллипти-
ческая площадь поражения одной такой кассетой составляет 50...200 м2 (в за-
висимости от высоты сбрасывания и программы работы интервалометра).
Для снаряжения известной авиационной бомбовой кассеты BLG-66 Belyga
(Франция) (масса заряженной кассеты - 29$ кг, длина - 3300 мм, диаметр -
360 мм) разработаны бомбы трех типов, в том числе и противотанковые куму-
лятивные с бронепробиваемостью до 300 мм (по нормали к преграде).
Определенный интерес представляет использование комбинированных
схем БП, о которых уже шла речь выше, в малокалиберных АБ. Так, для вы-
вода из строя ВПП и рулевых дорожек аэродромов в Германии была создана
бетонобойная бомба STABO, в состав которой входят кумулятивный и фугас-
ный заряды (см. рис. 6.10). Аналогичная бомба с кумулятивным и осколочно-
фугасным зарядами позволяет выводить из строя укрытия и уничтожать нахо-
дящиеся в них самолеты.
По аналогии с ПТАБ, применяемыми против бронетанковой техники и за-
щитных сооружений, разработаны противолодочные авиационные бомбы
(ПЛАБ), которые используются против подводных целей. Идеология примене-
ния ПЛАБ и принцип их конструирования практически не отличаются от ПТАБ,
при этом малогабаритные ПЛАБ комплектуются кумулятивно-фугасными заря-
дами и сбрасываются в разовых бомбовых кассетах. Так, для поражения под-
водных лодок (в том числе и двухкорпусных) используется РБК калибра 100 кг
в снаряжении малокалиберными противолодочными боевыми элементами
РБК-100 ПЛАБ-ЮК (см. рис. 6.58, б). Данная кассета может применяться с вы-
сот 250...2000 м при скоростях носителя 300...900 км/ч. Диаметр кассеты -
240 мм, длина - 1585 мм, масса - 125 кг, количество АБ в кассете - 6 шт.
В связи с низкой вероятностью попадания таких элементов в подводную
цель, особенно одиночную, разработаны более эффективные управляемые (кор-
ректируемые) ПЛАБ с кумулятивно-фугасной БЧ (рассмотрены в подразд. 6.9).
Одним из перспективных направлений борьбы со скоплениями бронецелей
и живой силы на больших удалениях, не требующих, с одной стороны, исполь-
зования сложных электронных систем управления, а с другой, не подвержен-
ных информационному и огневому противодействию противника, является при-
менение кассетных снарядов с БЭ свободного рассеивания. Это развивающееся
направление представлено наибольшим числом образцов, принятых на воору-
жение и подразделяемых по назначению на два класса кассетных снарядов: для
поражения в момент обстрела и для дистанционного минирования.
530
6. Кумулятивные средства поражения и боеприпасы
Рис. 6.66. Малогабаритная противолодочная торпеда MU-90 Umpact с кумулятив-
но-фугасной БЧ
Рис. 6.67. Авиационная тепловая самонаводящаяся 324-мм торпеда ТТ-4:
1 - носовой отсек; 2 кумулятивно-фугасная БЧ; 3 - приборный отсек; 4 - отсек' силовой
установки; 5 - кормовой отсек; б - система торможения и стабилизации
На уровне лучших мировых образцов малогабаритных противолодочных
торпед находится отечественная авиационная тепловая самонаводящаяся тор-
педа ТТ-4 (рис. 6.67) калибром 324 мм, предназначенная для уничтожения
современных ПЛ любых типов во всем диапазоне глубин их хода и работаю-
щая в автономном режиме (по принципу «выстрелил-забыл»). Носителями
торпеды ТТ-4 могут быть самолеты и вертолеты, а также надводные корабли
с торпедными аппаратами. Кроме того, торпеда может использоваться в каче-
стве БЧ ракетных противолодочных комплексов. Торпеда может быть оснаще-
на БЧ направленного действия, аналогичной по конструкции БЧ авиационной
противолодочной бомбы СЗВ и самонаводящегося гравитационного снаряда
ракеты комплекса «Запад».
6.10. Методика расчета параметров функционирования
кумулятивных зарядов
Существуют два метода расчетного определения параметров функциони-
рования КЗ. Первый из них заключается в численном интегрировании систе-
мы дифференциальных уравнений, описывающих поведение составных эле-
ментов КЗ на разных стадиях кумулятивного действия: обжатия (схлопыва-
ния) КО под действием ПД, образования КС или формирования ПЭ, растяжения
и разрыва КС, проникания КС или ПЭ в преграду. Такой метод расчета требу-
ет обычно составления нескольких взаимосвязанных программ, использова-
ния современных ЭВМ, знания свойств ВВ и материалов КО, корпуса, линзы
и других составных элементов заряда.
Второй метод, получивший название метода инженерного расчета, осно-
ван на гидродинамической теории кумуляции, а также ряде приближенных
соотношений по определению активной массы заряда, скорости метания
облицовки, угла схлопывания отдельных элементов облицовки и экспери-
6.10. Методика расчета параметров функционирования КЗ
531
ментальных данных. В силу широкого использования экспериментальных
данных для тарировки или определения отдельных параметров функцио-
нирования КЗ этот класс методов иногда называют расчетно-эксперимен-
тальным.
Рассмотрим инженерный метод, предназначенный для оперативного расче-
та основных параметров КЗ с коническими облицовками высокого прогиба, обес-
печивающих формирование классических КС. Именно такие КЗ характерны для
большинства из рассмотренных выше кумулятивных СП и БП.
Кумулятивная струя формируется последовательно, начиная с элемен-
тов, лежащих у вершины КО. Процессы схлопывания облицовки и форми-
рования КС могут быть рассчитаны приближенно, для чего вводят систему
координат, исходящую из точки О, расположенной на некотором удалении
от геометрической вершины КО (рис. 6.68). Далее разбиваем КО по высоте h
на п в общем случае неравных сечений плоскостями, перпендикулярными оси
Рис. 6.68. Схема расчета параметров функционирования КЗ:
1 - корпус; 2 - КО; 3 - ПД; 4 - точка инициирования; 5 - фронт детонационной волны; б - ВВ;
7 предала
532 6. Кумулятивные средства поражения и боеприпасы
симметрии заряда, и рассматриваем последовательность расчета произволь-
ного /-го элемента облицовки высотой Az-.
Среднюю скорость схлопывания /-го элемента КО можно определить по
формуле
тко. ~—>
KOi Л' \ р,• + 2
где D - скорость детонации; Р, = - коэффициент нагрузки, wa, и
MKO j - активная масса заряда и метаемая масса КО в /-м сечении. Коэффици-
ент учитывает отклонение принятой модели метания от реально происходя-
щего процесса схлопывания. В первом приближении х,- = 1 для показателя
изоэнтропы ПД Л = 3 и %, = 1,2 для к = 2,55.
Активная масса m,d t вычисляется по формуле
wBB,f.
mai=------ 1-1---------------,
2 MKOi +Mi + mBBi ?
где >nBB, и Mj - массы заряда и его наружной оболочки в рассчитываемом
сечении.
Скорость, масса и энергия элемента КС определяются по формулам гид-
родинамической теории кумуляции:
»кс, = »ко/ ctg(y J
MKCi = ^KOisir|2
р MKCivKCi
£кс(-=----~,
где аг - угол схлопывания /-го элемента КО (см. треугольник АВС на
рис. 6.68, R).
К моменту начала формирования /-го элемента струи значение тангенса
угла а, составит (см. рис. 6.68, R):
tg (а.) = 5+1 _ Д|-1 ~ &KOi+l < ri !vKOi - btj )
где г’ко( =(£’ко/-1 +г;ко;)/2 определяет скорость перемещения верхней гра-
ницы, а Гко/+1 =(г’ксн + &ко/+1)/2 _ скорость нижней границы /-го элемента.
Для расчета угла схлопывания первого и последнего элементов приближенно
принимают »ко1~&коь ^KOn+i“&KOn или используют экстраполяционные
зависимости вида
Г’КО1 -
4г’ко1 3»КО2 +&коз
2
6 10. Методика расчета параметров функционирования КЗ 533
_ _ - Зг'кОп-1 + г,КОп-2
г’коп+1 _ 2 ’
Начальная длина элемента струи lOl равна длине образующей элемента
КО (см. рис. 6.68). За время полета элемент удлиняется на А/, под действием
сил, вызванных наличием значительных градиентов осевых составляющих
скоростей, причем на расстоянии F, = z( - z0(- - /0, от места образования удли-
нение элемента КС можно определить следующей зависимостью:
F
М = loi ——grad rKC, =l0,(ti -/o,)ezo„ С6-1)
?’КО
где grad тКС/ = ё,0, = 0,5(&КС;_1 -£'kc7+i)^0i ~ начальный градиент осевой ско-
рости; t, — текущее время, отсчитываемое от момента подхода фронта детона-
ционной волны к началу выбранной системы координат (точка О на рис. 6.68);
/0( - момент образования /-го элемента струи: /с, = + /;7FKO(- + /0//?’kC/- Тог-
да полная текущая длина элемента КС равна
li =lOi+^i -
где nbi- коэффициент предельного удлинения элемента КС. Данный параметр
может быть определен на основе экспериментальных исследований по следу-
ющей зависимости:
пЫ = А + ^KCOr^zOi ’ (6.2)
где А и В - коэффициенты, определяемые экспериментально для конкретного
материала облицовки (табл. 6.16); /?ксо, и ё,0,- - начальные значения радиуса
и градиента скорости вдоль КС, 7?КС0( = ^/Л7КС;/(л/0, ркс).
Таблица 6.16. Экспериментальные значения для расчета коэффициентов
предельного удлинения пь некоторых материалов
Материал 4 В, мкс'мм Материал А В, мкс/мм
Алюминий 1,5 12,2 Сталь 20 1,6 8,0
Медь 1,8 15,2 Тантал 2,2 18,0
Никель 1,8 14,0 Цирконий 1,5 25,9
Ниобий 2,4 17,7
Максимально возможная длина элемента струи lmi находится по соотно-
шению /„„ = nbi lOi. Это условие определяет время tmi и осевую координату zmi
разрыва /-го элемента (отмечена крестиком на рис. 6.68):
. , ^mi , 2/q(- («/,, — 1)
'mi - ‘Oi +---------------- 'О/ +------------’
гКС/-1 -1’кС(+1 г”кС/-1 г’КС/+1
Zmi ~ z0i + ^mi ~ {0i )г’КС/
534
6. Кумулятивные средства поражения и боеприпасы
Очевидно, что если zmi - zOi - lOi < Ft (см. рис. 6.68), то текущий элемент
КС разрывается до начала момента проникания, в противном случае он вне-
дряется в преграду в неразорванном состоянии. Следует отметить, что для
расчета значений градиента осевой составляющей скорости вдоль КС, входя-
щего в формулы (6.1) и (6.2), для первого и последнего элементов необходимо
приближенно принять г’ксо = ?’ксь ^кси-ч = гкс« или воспользоваться экстра-
поляционными зависимостями вида
г”ксо = З^'кс! “ ЗгКС2 + гксз,
гкс„+1 - З^ксп - ЗгКСп_| + гКСп_2.
Согласно гидродинамической теории кумуляции, глубина и скорость
проникания (пробития) гпр;- z-ro элемента в преграду определяются следую-
щим образом:
A=₽U
/Ркс.
V Рп ’
(6.3)
Г, - „ х/Ркс/Рп
'пр/ 'КС/ I---;- ’
VPKC/Pn+I
где Р = pBBD2/(pBBD2)0 - коэффициент, учитывающий влияние ВВ; (pBBZ>2)o -
характеристика опорного состава ВВ (рвв = 1,65 г/см3, D = 8,1 км/с); =
= (?!КС/_ v ксУ?’ кс»— экспериментальный коэффициент, учитывающий влияние
скорости на глубину пробития; скс - критическая скорость пробития
(табл. 6.17), причем = 0 при гКС( < с*кс, а при гКС( > 4 км/с = 1.
Итоговая глубина пробития КЗ гомогенной преграды на фокусном рас-
стоянии F определяется по формуле
п
L = YLi-
/=1
Диаметр пробоины в преграде рассчитывают по приближенной зависимо-
сти, полученной в предположении пропорциональности кинетической энер-
гии элемента КС EKCj работе деформирования, необходимой для образования
цилиндрической каверны диаметром dmBi и длиной
^отв/
4£kci
^уд.в/^ А
(6.4)
где Ауд В1 - удельная работа вытеснения единицы объема материала преграды,
определяемая по экспериментальным данным.
На удельную работу вытеснения единицы объема материала влияют не
только свойства материала преграды, но и конкретная конструкция КЗ, а так-
же расстояние от рассчитываемого сечения каверны до свободной поверхно-
6.10. Методика расчета параметров функционирования КЗ
535
Таблица 6.17. Значения критической скорости пробития КС
в зависимости от материалов преграды и КО
Материал преграды Материал КО v кс.м/с
Сталь:
закаленная, 50 HRC Сталь 2200
125 НВ Сталь/дюралюминий 2050/3300
Дюралюминий, 115 НВ Дюралюминий 2900
Бетон Медь/сталь 1500/1900
Мрамор Медь 1600
Известняк » 1500
Песчаник » 1300
Лед » 1800
Грунт мерзлый Сталь 1000
сти преграды (вблизи поверхности значение Аудв не постоянно, что и опреде-
ляет резкое расширение отверстия и образование характерной полости). Как
правило, значение Ауд в находят экспериментальным путем.
В интервале 0 < А(/«7КС( < 10 значение Аудв может быть оценено следую-
щей ступенчатой функцией:
^уд.в< ^уд.вО
aKCi
где К - коэффициент; dKCi - диаметр z-го элемента КС. В случае пробития
прочной стальной преграды КЗ с медной конической облицовкой можно
принять Ауд в0 = 0,3 101()Дж/м3, К = 0,3 • 109 Дж/м3. При отношении LjldKCi> 10
для тех же условий значение Луд в будет постоянным и может составлять Аулв ~
= 0,6 1010 Дж/м3.
Для оценки значения удельной работы вытеснения объема материала в
глубинных слоях преграды, где ее можно считать постоянной, используют так-
же зависимость Ауд в~ Нд + НВ, где Нд, НВ - динамическая и статическая (по
Бринеллю) твердости материала преграды соответственно.
Зависимость (6.4) после ряда преобразований можно использовать и в виде
^отв I А
где А- коэффициент удельной работы вытеснения единицы объема материала
преграды (табл. 6.18); dKCl и пКС|- - диаметр и скорость /-го элемента КС; ркс
и рп - плотности материалов КС и преграды.
Расчет диаметра отверстия в преградах конечной толщины ведется, как
правило, по полуэмпирическим зависимостям, в основу вывода которых по-
ложен закон сохранения энергии.
536
6. Кумулятивные средства поражения и боеприпасы
Таблица 6.18. Значение коэффициента А для различных материалов
Материал преграды рп, г/см3 мм3'2 А' Дж1'2 Материал преграды Рп, г/см3 мм3'2 Л Дж1й
Конструкционная 7,80-7,82 0,5-0,6 Медь 8,9 0,9
сталь Свинец и,з 2,2
Алюминиевый 2,7 0,6-0,8 Лед 0.95 2,7
сплав Бетон 2,2 2,6 0,8
Титан 4,5 0,44 Тяжелый суглинок 1,75 4,0
Изложенная методика напрямую не учитывает влияния технологических
факторов, обусловленных структурными особенностями состава ВВ и мате-
риала КО, точностью изготовления составных элементов и сборки изделия в
целом, на характеристики действия КЗ. Однако косвенным образом это влия-
ние учтено экспериментальными коэффициентами, например, параметрами А
и В в формуле (6.2); критической скоростью пробития гкс, входящей посред-
ством коэффициента в выражение (6.3); значением Лудв удельной работы
вытеснения единицы объема материала преграды.
Данная методика принимает во внимание также сжимаемость, прочност-
ные свойства и неоднородность физико-механических параметров реальной
преграды, которые при необходимости можно учесть введением поправочных
коэффициентов в исходные формулы. Так, формулу (6.3) для определения глу-
бины пробития с учетом ряда неучтенных факторов можно записать в следу-
ющем виде:
L^^k^k^k^k.,
\ Рп
где kQ - коэффициент, учитывающий прочность преграды, к-^ - сжимаемость
струи и преграды, кш - вращение КЗ, kF - расстояние от КЗ до преграды, кЛ -
уровень технологии изготовления КЗ.
Диапазон числовых значений этих коэффициентов по результатам экс-
периментальных исследований может составлять: ко = 1,00 ..0,75 (от низко-
углеродистой до высокопрочной сталей); к-, = 1...2 (от проникания медной
или стальной КС в сталь или в воду); кы = 1,0...0,5 (при вращении КЗ со
скоростями от 0 до 20 000 об/мин); kF = 1 при установке КЗ на фокусном
расстоянии (уменьшается при изменении этого расстояния); кТ = 1...2 (от
использования традиционной технологии изготовления КЗ до прецизионной
технологии).
Существуют и другие инженерные методики расчета КЗ, формирующих
классические высокоскоростные и высокоградиентные кумулятивные струи.
В случае использования КЗ с полусферическими и сегментными обли-
цовками, а также пологими коническими облицовками, формирующими ма-
Список рекомендуемой литературы
537
лоградиентные массивные КС или ПЭ, необходимо вносить коррективы в рас-
четные методы и применять другие или модифицированные методики. Ос-
новные зависимости для оценки действия компактных ПЭ (ударных ядер) при-
ведены в гл. 7.
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ
Ангельский Р Отечественные ПТРК // Техника и вооружение. 2001. № 2, 3, 4.
Анненков В. Основные направления развития системы противоторпедной защиты
кораблей ВМС стран НАТО // Зарубежное военное обозрение. 2002. № 8.
Базилевич В.М. Противотанковое гранатометное вооружение // Военный парад.
1995. № 2.
Балаганский И.А., Мержиевский Л.А. Действие средств поражения и боеприпа-
сов. Новосибирск: Изд-во НГТУ, 2004.
Боевая авиационная техника: Авиационное вооружение / Под ред. Д.И. Гладкова.
М: Воениздат, 1987.
Вооружение и военно-морская техника России. М.: ООО «Военный парад»,
2003.
Воротилин М.А., Дорофеев С.В., Князева Л.Н., Чуков А.Н. Вопросы моделирова-
ния и конструирования кумулятивных зарядов: Учеб, пособие. Тула: ТулГУ, 1999.
Воротилин М.А., Князева Л.Н., Чуков А.Н., Шмараков Л.Н. Современные сред-
ства поражения бронетанковой техники: Учеб, пособие. Тула: ТулГУ, 2005.
Гуров СВ. Реактивные системы залпового огня: Обзор / Под общ. ред. Н.А. Мака-
ровца. Тула: Издательский дом «Пересвет», 2006.
Дерябин П.Н., Ганин А.А., Горобец А.А. Проектирование средств поражения и
боеприпасов : Учеб, пособие. Пенза: ПАИИ, 2004.
Дудка В.Д., Чуков А.Н., Шмараков Л.Н. Высокоточные боеприпасы различного
целевого назначения: Учеб, пособие. Тула: ТулГУ, 2002.
Забегаев С.К, Савченко Н.Н. Средства устройства и преодоление минно-взрыв-
ных заграждений. М.: Изд-во ВИУ, 2002.
Забнев А.Ф Торпедное оружие. М.. Воениздат, 1984.
Инженерные боеприпасы. Руководство по материальной части и применению.
Кн. 1. М.: Военное изд-во МО СССР, 1976.
Калугина Е.А., Костылев В. К. Состояние и перспективы развития «интеллекту-
альных» минных заграждений в странах НАТО // Известия Российской академии ра-
кетных и артиллерийских наук. 2006. № 1 (46).
Карпенко А. Отечественные ручные гранаты. М.: ООО Изд-во «Цейхгауз», 2006.
Карпенко А. Ракетные танки // Танкомастер: Спецвыпуск. М.: ООО «Восточный
горизонт», 2002.
Кислов Ф. Основные тенденции развития торпедного оружия ВМС НАТО // Зару-
бежное военное обозрение. 2002. № 7.
Костылев В.К., Батурин Л.С., Метасов В.Ф. и др. Новая противотанковая мина
дистанционной установки // Известия Российской академии ракетных и артиллерий-
ских наук. 2006. № 1 (46).
Лаврентьев М.А. Кумулятивный заряд и принципы его работы // Успехи матема-
тических наук. 1957. Т. 12, вып. 4 (76).
538
6. Кумулятивные средства поражения и боеприпасы
Лови А.А., Кореньков В.В., Базилевич В.М., Кораблин В.В. Отечественные проти-
вотанковые гранатометные комплексы И Пехотное оружие России: Спецвыпуск. М.:
ООО «Восточный горизонт», 2001.
Марковский В., Перов К. Советские авиационные ракеты воздух земля. М.: ООО
Издательский центр «Экспринт», 2005.
Миропольский Ф.П., Саркисян Р.С., Вишняков О.Л., Попов А.М. Авиационные бое-
припасы и их исследование. М.: Изд-во ВВИА им. Н.Е. Жуковского, 1996.
Морозов В. П., Обухович В.А., Сидоренко С.И., Широкорад А.Б. Энциклопедия со-
временной военной авиации. М.: ООО «Изд-во АСТ»; Минск: Харвест, 2001.
Наставление по стрелковому делу. Ручной противотанковый гранатомет (РПГ-7
и РПГ-7Д). М.: Воениздат, 1972.
Новейшая энциклопедия вооружения; В 2 т. / Пер. с пол.; Под ред. Р. Возняка.
Минск: ООО «Попурри», 2004.
Одинцов В.А. Основные направления развития боеприпасов полевой артиллерии
и проблемы перехода на калибр 155 мм // Оборонная техника. 1996. № 8-9.
Оружие и технологии России. Энциклопедия. XXI век. Т 2. Ракетно-артиллерий-
ское вооружение сухопутных войск. М.: Издательский дом «Оружие и технологии»,
2000. ‘ *
Оружие и технологии России. Энциклопедия. XXI век. Т. 3. Вооружение Воен-
но-морского Флота. М.: Издательский дом «Оружие и технологии», 2001.
Оружие и технологии России. Энциклопедия. XXI век. Т. 10. Авиационное воо-
ружение и авионика. М.: Издательский дом «Оружие и технологии», 2004.
Оружие и технологии России. Энциклопедия. XXI век. Т. 12. Боеприпасы и сред-
ства поражения. М.: Издательский дом «Оружие и технологии», 2006.
Оружие России: Каталог. Т. I: Вооружение сухопутных войск. М.: АОЗТ «Воен-
ный парад», 1995.
Оружие России: Каталог. Т. II: Авиационная техника и вооружение Военно-воз-
душных сил. М.: АОЗТ «Военный парад», 1996.
Оружие России: Каталог. Т. III: Корабли и вооружение Военно-морского флота.
М.: АОЗТ «Военный парад», 1996.
Оружие России: Каталог. Т. VII: Высокоточное оружие и боеприпасы. М.: АОЗТ
«Военный парад», 1997.
Оружие России: Энциклопедический справочник. М.; ООО «Дом Славянской кни-
ги», 2007.
Партала С.В., Алчинов В.И., Бурлов В.В. и др. Конструкция средств поражения,
боеприпасов, взрывателей и систем управления средствами поражения. Конструкция
и функционирование ПТУР: Учеб, пособие. Пенза: ПАИИ, 2004.
Прибылое Б.В., Кравченко Н.Е. Ручные и ружейные гранаты. М.: «Арктика 4Д»,
2008.
Прибылое Б.В. Ручные гранаты: Справочник. М.: «Арктика 4Д», 2004.
Противотанковые ракетные комплексы зарубежных стран / Обзорно-аналити-
ческий справочник за 1986-1992 гг. Тула: КБП, 1993.
Прохоров Б.А. Боеприпасы артиллерии. М.: Машиностроение, 1973.
Пырьев Е.В., Резниченко С.Н. Бомбардировочное вооружение авиации России.
1912-1945 гг. / Под общ. ред. Ю.П. Клишина. М.: Редакционно-издательский центр
Генштаба ВС РФ, 2001.
Ракетно-артиллерийское вооружение. М.: ООО «Военный парад», 2004.
Список рекомендуемой литературы 539
Растопшин М. О поражающем действии перспективного вооружения И Техника
и вооружение. 1998. № 2.
Растотиин М. Инженерные боеприпасы // Техника и вооружение. 1998. № 10.
Растопшин М. Эффективность противотанкового самоходного ракетного комп-
лекса «Корнет» // Техника и вооружение. 1999. № 1.
Растотиин М. Артиллерийские высокоточные боеприпасы И Техника и вооруже-
ние. 1999. № 8.
Растотиин М., Солопов А. Особенности развития отечественных противотанко-
вых ракетных комплексов И Техника и вооружение. 2000. № 10.
Распюпшин М. Особенности развития зарубежных ПТРК // Техника и вооруже-
ние. 2002. № 1.
Растопшин М. Пути повышения параметров защиты танков и эффективности
противотанковых средств И Техника и вооружение. 2002. № 9.
Резниченко С.И. Реактивное вооружение советских ВВС 1930-1945 гг. М.: Бед-
ретдинов и К°, 2007. /
Родионов Б.И., Новичков Н.Н. Крылатые ракеты в морском бою. М.: Воениздат,
1987.
Руководство службы по станковому гранатомету СПГ-9 и выстрелу ПГ-9В. М.:
Воениздат, 1965.
Сафронов Л.К. Авиационные боевые комплексы XXI века. США - Россия. Лож-
ные цели. М.: Полиграф-сервис, 2007.
Свирский О.В. Тенденции развития кумулятивных средств поражения БТТ по дан-
ным открытых зарубежных источников // Известия Российской академии ракетных и
артиллерийских наук. 2006. № 3 (48).
Слуцкий В. Тенденции развития противотанковых средств И Зарубежное военное
обозрение. 1995. № 9.
Справочник артиллерийских боеприпасов, подлежащих утилизации и уничтоже-
нию / Под общ. ред. А.А. Каллистова. М.: СП «Нова», 1992.
Справочник по патронам, ручным и специальным гранатам иностранных армий.
М.: Воениздат, 1946.
Средства воздушного нападения зарубежных стран: программы развития высо-
коточного оружия / Под ред. Б.Ф. Чельцова. С.В. Ягольникова. Тверь: 2 ЦНИИ МО
РФ, 2003.
Стрелковое оружие и средства ближнего боя. М.: ООО «Военный парад», 2005.
Сычев В.А. Корабельное оружие. М.: Изд-во ДОСААФ СССР, 1984.
Третьяков Г.М Боеприпасы артиллерии. М.: Воениздат, 1947.
Тришин Ю.А. Физика кумулятивных процессов: Монография. Новосибирск:
Изд-во ИГ им. М.А. Лаврентьева СО РАН, 2005.
Федосеев С.Л. Оружие современной пехоты: Иллюстрированный справочник. М.:
ООО Изд-во «Астрель», 2002.
Физика быстропротекающих процессов: В 3 т. Т. 2. / Под ред. Н.А. Златина. М.:
Мир, 1971.
Физика взрыва; В 2 т. / Под ред. Л.П. Орленко. М.: Физматлит, 2004.
Частные вопросы конечной баллистики / Под ред. В.А. Григоряна. М.: Изд-во
МГТУ им. Н.Э. Баумана, 2006.
Шипунов А., Дудка В., Захаров Л., Парфенов Ю. Концепция ПТРК третьего поко-
ления И Военный парад. 1999. № 1.
540 6. Кумулятивные средства поражения и боеприпасы
Широкорад А.Б. Вооружение советской авиации 1941-1945 / Под общ. ред.
А.Е. Тараса. Минск: Харвест, 2004.
Широкорад А.Б. ПТУР первого поколения // Техника и вооружение. 2000. № 9.
Широкорад А.Б. ПТУР второго поколения // Техника и вооружение. 2000. № 10.
Широкорад А.Б. Энциклопедия отечественной артиллерии / Под общ. ред.
А.Е. Тараса. Минск: Харвест, 2000.
Широкорад А.Б. Энциклопедия отечественного ракетного оружия. 1817-2002 /
Под общ. ред. А.Е. Тараса. М.: ООО «Изд-во АСТ»; Минск: Харвест, 2003.
Шунков В.Н. Вооружение пехоты. Минск: ООО «Попурри», 2001.
Шунков В.Н. Ракетное оружие. Минск: ООО «Попурри», 2001.
Шунков В.Н. Энциклопедия новейшего стрелкового оружия. М.: ООО «Изд-во
АСТ»; Минск: Харвест, 2006.
Шунков В.Н. Энциклопедия реактивной артиллерии. Минск: ОАО «Полиграф-
комбинат им. Я. Коласа», 2004.
7
СРЕДСТВА ПОРАЖЕНИЯ
С ИСПОЛЬЗОВАНИЕМ УДАРНОГО ЯДРА
7.1. Принцип действия и классификация
боеприпасов с ударным ядром
Средства поражения с использованием ударного ядра - это разновидность
кумулятивных СП. В целом для СП и БП данного класса еще не существует
устойчивого и исчерпывающе точного общепринятого названия. Иногда их
называют боеприпасами со взрывоформируемым снарядом EFP (Explosively
Formed Projectile), боеприпасами со снарядоформирующим зарядом (СФЗ), бое-
припасами с самоформирующимся снарядам SFP (Self Formatting Projectile).
Наиболее точно, хотя и несколько громоздко, было бы называть эти БП куму-
лятивными боеприпасами точного прицеливания, формирующими дальнобой-
ные ПЭ. Наиболее часто употребляемым (хотя и не вполне ясным на первый
взгляд) является название, близкое к вынесенному в заголовок данного под-
раздела, - боеприпасы с использованием ударного ядра.
Начало интенсивного развития БП с ударным ядром относится к концу
1970-х годов. Именно тогда наметился качественный скачок в повышении эф-
фективности противотанкового кассетного оружия в связи с выдвижением идеи
создания кассетных суббоеприпасов особого рода - самоприцеливающихся
боевых элементов (СПБЭ) дистанционного кумулятивного действия. После-
дующие интенсивные исследования привели к разработке и принятию на во-
оружение армий стран мира большого количества образцов противотанковых
БП с ударным ядром.
Наиболее точно и образно сущность технического решения СПБЭ выра-
жается аббревиатурой SAD ARM (Sense And Destroy Armor - обнаружь и унич-
тожь бронецель). Высокую боевую эффективность СПБЭ типа SADARM обес-
печивают три ключевых технических решения, органично сочетающихся в од-
ном устройстве. Они касаются формы выполнения кумулятивного узла
(кумулятивный СФЗ - кумулятивный заряд, формирующий дальнобойный ПЭ),
типа ВУ (неконтактное с узкой диаграммой направленности), а также харак-
тера ориентации и движения БЭ при его автономном полете к поверхности
земли после выброса из кассеты (поступательно-вращательный при угловом
расположении продольной оси элемента относительно вертикали).
В качестве КО в разрывном заряде ВВ боевого элемента типа SADARM
применяются низкие конические (угол раствора конуса 150... 160°) или сег-
ментные (высота прогиба основания облицовки йо ~ (0,1.. ,0,3)J3, где d3 - диа-
метр заряда) облицовки. Кумулятивные заряды с такими облицовками при
взрыве формируют не высокоградиентную растягивающуюся КС, а безгради-
542 7. Средства поражения с использованием ударного ядра
ентный ПЭ (ударное ядро) со скоростью гпэ = 2,0...2,5 км/с и большей массой
(около 90% массы облицовки). При калибре заряда 100...200 мм формирую-
щиеся ПЭ по скорости и кинетической энергии сопоставимы с артиллерийс-
ким бронебойным снарядом, поэтому такие заряды часто называют снарядо-
формирующими. Они обеспечивают бронепробитие на уровне (0,5 ...1,1 }dv что
существенно меньше бронепробития кумулятивных БП с высокими коничес-
кими облицовками, достигаемого на оптимальном (фокусном) расстоянии от
преграды (рис. 7.1). Однако отличительная особенность СФЗ - это сохране-
ние указанного уровня бронепробития при действии по цели с расстояний в
несколько сотен (до тысячи) калибров, когда кумулятивные БП с высокими
коническими облицовками не способны поразить даже легкобронированную
технику (см. рис. 7.1). При действии СФЗ по наименее защищенной верхней
части танка необходимый уровень пробития достигается в разумных калиб-
рах БЭ (-100 мм), при этом возникает мощный запреградный эффект (УВ,
осколочный поток, зажигательное действие), существенно превышающий
обеспечиваемый обычными кумулятивными БП. Принципиальным t точки
зрения использования СФЗ для поражения относительно малоразмерйцх це-
лей с больших расстояний является также и то, что при существующем тех-
нологическом уровне изготовления КЗ вполне реально обеспечить высокую
вероятность попадания ПЭ, сформированного предварительно нацеленным
СФЗ, в верхнюю проекцию бронецели.
Рис. 7.1. Характер зависимости бронепробития L от расстояния F заряда до преграды:
1 - с высокой КО; 2 СФЗ
Основа неконтактного взрывательного устройства в СПБЭ типа SAD ARM -
это так называемый координатор цели (КЦ), который представляет собой при-
борное устройство (пассивного или активного типа) с узкой диаграммой на-
правленности. Его устанавливают с обеспечением параллельности осей сим-
метрии СФЗ и оси диаграммы направленности. По существу ось диаграммы
направленности «смотрит» в точку прицеливания СФЗ. При малой ширине
диаграммы направленности (например, для СПБЭ отечественной РБК-500 угол
поля зрения КЦ составляет 0,75°) попадание в поле зрения КЦ бронеобъекта
соответствует прицеливанию СФЗ на этот объект. При этом идентификация
объекта на фоне подстилающей поверхности может осуществляться, напри-
мер, по тепловому контрасту или радиометрическим путем. Главная задача
КЦ - выдача команды на дистанционный подрыв СФЗ в момент его прицели-
вания на бронеобъект, что обеспечивает последующее его поражение форми-
руемым ПЭ (ударным ядром).
7.1. Принцип действия и классификация боеприпасов с ударным ядром 543
Если ограничиться двумя приведенными выше техническими решениями
БЭ кассетного оружия, то уже только это повысит вероятность поражения бро-
нецели одним БЭ по сравнению с традиционным кассетным элементом кон-
тактного действия (например, типа ПТАБ-2,5). Ведь по мере движения к по-
верхности земли КЦ просматривал бы значительный участок поверхности.
Однако в кассетных СПБЭ типа SADARM реализовано еще одно простое и
замечательно остроумное решение, выводящее такие БП на качественно бо-
лее высокий уровень. За счет ориентации параллельных осей СФЗ и КЦ под
некоторым углом к вертикали и одновременного вращательного движения сни-
жающегося БЭ вокруг вертикальной оси обеспечивается сканирование коор-
динатором цели местности по спирали с уменьшающимся по мере снижения
радиусом. Таким образом, задача наведения БП на бронецель решается отно-
сительно простыми «механическими» средствами - по мере движения БП про-
исходит как бы его «самоприцеливание» (отсюда и укоренившееся название
подобных суббоеприпасов - БЭ различных систем оружия). За КЦ закрепля-
ются лишь функции обнаружения этой цели и выдачи команды на подрыв
дальнобойного КЗ. /
Схему и принцип действия кассетного противотанкового БП с СПБЭ типа
SADARM рассмотрим на примере кассетного артиллерийского снаряда (рис. 7.2
и 7.3) (за рубежом это снаряды к 203,2-мм или 155-мм гаубицам). Он состоит
из корпуса 3, тонкостенного головного обтекателя 7, вкладного дна 1 с веду-
щим пояском 2, двух или трех СПБЭ, неконтактного взрывателя б, вышибного
заряда 5, нажимного поршня 4. Каждый боевой элемент снабжен тормозным
устройством для гашения вращательного движения, вращающимся парашю-
том, разрывным кумулятивным СФЗ, неконтактным ВУ (КЦ, микропроцес-
сор и блок питания). Снаряд выстреливается из артиллерийской системы в
направлении скопления танков. На заданных дальности и высоте происхо-
дит раскрытие корпуса снаряда с отделением вкладного дна и выбрасывани-
ем БЭ. Осуществляется значительное снижение скорости вращения БЭ, ко-
торые затем спускаются на парашютах со скоростью до 15 м/с (здесь и ниже
конкретные значения приведены для существующих СПБЭ). При этом про-
дольная ось элементов отклонена на угол |3 = 25...35° от вертикали, а сами
элементы продолжают вращательное движение относительно оси подвеса
Рис. 7.2. Кассетный артиллерийский снаряд с СПБЭ типа SADARM:
1 - вкладное дно; 2 - ведущий поясок; 3 - корпус; 4 - нажимной поршень; 5 - вышибной заряд;
б неконтактный взрыватель; 7 головной обтекатель
544
7. Средства поражения с использованием ударного ядра
Рис. 7.3. Схема действия СПБЭ типа SADARM
парашюта с частотой п ~ 6...8 об/с. На высоте// = 150...200 м КЦ приводится
в боевое состояние. Угловое положение БЭ в пространстве и одновременное
его вращение относительно оси подвеса обеспечивают КЦ сканирование по
сходящейся спирали района местонахождения танков. После обнаружения
танка КЦ бортовой микропроцессор определяет положение его центра и за-
дает оптимальное время подрыва разрывного заряда. Формируемый ПЭ (удар-
ное ядро) движется к цели с расстояния S = Я,/cos р - высота подрыва
СФЗ) и поражает танк сверху. Максимальный полетный путь ударного ядра
Smax = Я/cos Р « 200 м.
Обеспечиваемый параметрами движения СПБЭ шаг спирали сканирова-
ния местности Дх = vtgP/n = 1...Ц5 м/об в несколько раз меньше характерных
размеров бронецелей axb = 3x6 м, что исключает «пропуск» объекта КЦ. Цель
будет обнаружена и поражена, если она находится в пределах площади круга
радиусом R = HtgP ~ 100 м с центром на линии спуска СПБЭ, где Н - высота
перевода СПБЭ в боевой режим поиска цели. Оригинальные технические ре-
шения, реализованные в СПБЭ типа SADARM, по существу приводят как бы
к «увеличению» уязвимой площади цели по сравнению со случаем действия
по цели неуправляемыми БЭ контактного действия. Действительно, относи-
тельно системы отсчета, связанной с СПБЭ, цель «перемещается» в пределах
круга площадью S = л/?2, неизбежно «подставляясь» под линию прицеливания
СПБЭ. Вероятность попадания в цель одним кассетным СПБЭ типа SADARM
возрастает примерно в N= Slab ~ 103 раз по сравнению с обычным БЭ контак-
тного действия.
Боеприпасы с ударным ядром можно классифицировать по нескольким
признакам. Ниже приведены примеры классификации для БП различных стран,
как состоящих на вооружении, так и находящихся на разных стадиях разра-
ботки.
7. /. Принцип действия и классификация боеприпасов с ударным ядром 545
С точки зрения систем оружия БП с ударным ядром в подавляющем боль-
шинстве случаев выступают как суббоеприпасы кассетного оружия - его са-
моприцеливающиеся БЭ. Такие суббоеприпасы используются в неуправляе-
мых кассетных артиллерийских снарядах (155-мм SMArt-155 (Германия),
ХМ898 SADARM (США), BONUS (Швеция), 203,2-мм Double (Япония)), в
кассетных авиационных системах оружия (РБК-500 СПБЭ (Россия), управляе-
мых авиабомбах GBU-15 (США)), в головных частях оперативно-тактических
ракет (ATACMS (США) - Army Tactical Missile System), в УАР (AGM-130
(США)), в кассетных БЧ реактивных снарядов систем залпового огня (240-мм
MLRS (США), 9М217 для 122-мм РСЗО «Град» и 9М55К1 для 300-мм
«Смерч»). Самоприцеливающиеся БЭ планируется применять в корректируе-
мых кассетных артиллерийских снарядах (155-мм ХМ982 (США)). Отдель-
ную группу БП с ударным ядром составляют инженерные мины - противо-
бортовые (отечественная ТМ-83) и прогийокрышевые (WAM (США) с от-
стреливаемым самоприцеливающимся суббоеприпасом). Также несколько
обособленно стоят крышебойные БП с ударным ядром для поражения целей
на пролете сверху (снаряд ХМ943 STAFF, П^УР Tow-2B и управляемый бес-
пилотный ЛА LOCAAS).
По принципу наведения на цель БП с ударным ядром подразделяют на три
группы. Первую и самую крупную группу составляют рассмотренные выше
СПБЭ кассетного оружия или отстреливаемые суббоеприпасы противокры-
шевых мин. Наведение таких БП на цель осуществляется сканированием бое-
припасом (линией его прицеливания) поверхности земли с расположенными
на ней целями. В сущности, такие БП даже не наводятся на цель (понятие
наведения на цель движущегося снаряда связано с изменением траектории
его движения), а просто «натыкаются» на нее, и именно в этот момент време-
ни КЦ выдает команду на подрыв заряда ВВ, формирующего ударное ядро.
В принципе у данных снарядов система наведения как таковая отсутствует,
что определило их относительную дешевизну (СПБЭ кассетного оружия при-
мерно в 3-5 раз дешевле самонаводящихся БЭ) и в сочетании с достаточно
высокой эффективностью привело к широкому использованию в различных
системах оружия. Вторую группу составляют противобортовые мины с удар-
ным ядром. В момент боевого применения эти БП неподвижны и с точки зре-
ния определения момента подрыва СФЗ работают в ждущем режиме: движу-
щаяся цель «натыкается» на линию прицеливания БП и попадает под удар
формируемого компактного ПЭ. Третья группа - это крышебойные БП, пора-
жающие цель на пролете сверху. При боевом применении и поиске цели та-
кие БП движутся преимущественно поступательно и параллельно земной по-
верхности, КЦ просматривает поверхность под БП, своевременно «натыкает-
ся» на цель и инициирует СФЗ. В таких БП система наведения может
отсутствовать (ХМ943 STAFF) или же находиться в составе ЛА для вывода тра-
ектории его движения в одну вертикальную плоскость с целью (ПТУР Tow-2B,
LOCAAS).
Боеприпасы с ударным ядром различают по типу и принципу работы КЦ
(могут быть оснащены одно-, двух- или даже трехканальными КЦ, использу-
ющими инфракрасный или радиометрический принципы работы). По призна-
кам, характеризующим разрывной СФЗ, выделяют боеприпасы с медными,
546
7. Средства поражения с использованием ударного ядра
стальными, танталовыми КО, а также с облицовками из обедненного урана.
Кумулятивная облицовка может быть конической (низкий конус) или сегмент-
ной. По виду формируемого ПЭ боеприпасы подразделяют на формирующие
компактные или удлиненные поражающие элементы.
7.2. Физические принципы действия
снарядоформирующих зарядов и основные расчетные соотношения
Рассмотрим более подробно физические основы функционирования СФЗ -
основного конструктивного узла БП с ударным ядром.
Как уже было сказано, снарядоформирующие заряды - это разновидность
КЗ, имеющих с ними общие основные признаки, такие как кумулятивная вы-
емка в разрывном заряде ВВ, облицованная тонкостенной металлической обо-
лочкой, и др. В то же время конструктивные параметры СФЗ таковы/ что фор-
мируемые ими при взрыве ПЭ принципиально отличаются от КС, .создавае-
мых классическими КЗ.
Классические КЗ формируют при взрыве высокоградиентные КС^состав-
ляющие 10...20 % массы облицовки, которые на расстоянии 4...6 клб от заря-
да распадаются на несколько десятков отдельных элементов. Образовавшие-
ся отдельные элементы с относительным удлинением (отношение длины к
диаметру) около 3...4 движутся как недеформируемые тела. В силу техноло-
гического несовершенства реальных КЗ эти элементы перемещаются не стро-
го по оси КЗ, а в некотором телесном угле, составляющем несколько граду-
сов. Кроме того, вследствие разворота не обладающих запасом аэродинами-
ческой устойчивости элементов КС вокруг поперечной оси происходит потеря
их ориентации. Два этих обстоятельства в конечном итоге приводят к тому,
что классические кумулятивные БП не способны поразить даже легкоброни-
рованную технику, если цель удалена от места их подрыва на расстояние не
только в несколько сотен (до тысячи), но даже и в несколько десятков ка-
либров.
Для обеспечения требуемого уровня действия на больших расстояниях
необходимо создание ПЭ (компактных или удлиненных), сохраняющих свою
сплошность на траектории и обладающих запасом аэродинамической устой-
чивости. Один из основных способов формирования дальнобойного ПЭ, по-
лучившего название «ударное ядро», использование в1 КЗ облицовок мало-
го прогиба, конических или сегментных (чашеобразных), ограниченных сфе-
рическими поверхностями с радиусом кривизны, существенно превышающим
калибр заряда. Такие КЗ и образуют ПЭ, масса которого может составлять
до 90 % от массы облицовки, скорость достигает 2,5 км/с, а кинетическая
энергия сопоставима с кинетической энергией артиллерийских бронебой-
ных снарядов.
Физические особенности формирования ПЭ при взрыве СФЗ поясняются
с помощью рис. 7.4-7.9.
При торцевом метании пластины ее элементы приобретают скорость, име-
ющую осевую и радиальную составляющие, при этом радиальная составляю-
щая направлена от оси симметрии заряда. Характер распределения скорости
7.2. Физические принципы действия снарядоформирующих зарядов
547
Рис. 7.5. Стадии процесса деформиро-
вания стальных пластин и облицовок
малого прогиба при взрыве заряда ВВ:
a t = 20 мкс; б / = 50 мкс; в -1 = 120 мкс;
1 - пластина: 2 2а = 160°; 3 - 2а = 150°;
4-2а= 140°
Рис. 7.4. Стадии процесса деформирова-
ния медных пластин и облицовок малого
прогиба при взрыве заряда ВВ:
а - t = 20 мкс; б - t =50 мкс; в - I = 120 мкс;
1 - пластина; 2 - 2а = 160°; 3 - 2а = 150°;
4 2а =140°
по элементам таков, что пластина при метании выгибается, испытывая де-
формированное состояние всестороннего растяжения, и под действием возни-
кающих растягивающих напряжений разрушается (позиции 1 на рис. 7.4, 7.5).
Характер распределения скорости по элементам метаемой взрывом КО с
углом раствора 2а = 160... 140° принципиально другой (позиции 2-4 на рис. 7.4,
7.5). Элементы облицовки также приобретают осевую и радиальную состав-
ляющие скорости, однако в этом случае радиальная составляющая направле-
на к оси симметрии. Слабовогнутая облицовка выворачивается вдоль оси, од-
новременно наблюдается уменьшение ее диаметра и натекание материала об-
лицовки на ось. В результате формируется центральный стержень, в котором
выделяются головная (проявление эффекта «прямой» кумуляции - аналог клас-
сической КС) и хвостовая (проявление эффекта «обратной» кумуляции - ана-
лог песта в классическом КЗ) части. При этом на начальных стадиях образо-
вания ПЭ осевая скорость головной части центрального стержня превышает
скорость его хвостовой части, подобно тому, как для классического кумуля-
тивного заряда скорость КС превышает скорость песта (рис. 7.6).
548 7. Средства поражения с использованием ударного ядра
Рис. 7.6. Зависимость скорости голов-
ной части КС 1 и песта 2 от угла ра-
створа конической медной облицовки
ного движения. Формирование
Для КО с углом раствора 2а = 160°
(позиция 2 на рис. 7.4 и 7.5) приобретен-
ная при взрыве радиальная составляю-
щая скорости движения относительно не-
велика. В связи с этим эффект натекания
материала на ось проявляется слабо и на
определенной стадии формирования ПЭ
парируется внутренними силами, дей-
ствующими в материале облицовки из-
за наличия у него упругопластических и,
по некоторым представлениям, вязких
свойств. Эти же внутренние силы по
мере деформирования элемента приво-
дят к уменьшению осевой скорости го-
ловной части центрального стержня, к
увеличению скорости его хвостовой ча-
сти (рис. 7.7) и в целом способствуют вы-
равниванию осевых скоростей, различ-
ных частей ПЭ и исчезновению радиаль-
ПЭ заканчивается, когда прекращается
относительное перемещение его частиц. В итоге образуется безградиентный
компактный ПЭ, состоящий из центрального стержня и периферийной «юбоч-
ной» части. Характерные размеры ПЭ, полученного, например, из медной КО
с углом раствора 2а = 160° (позиция 2 на рис. 7.4), составляют: длина /пэ =
= (0,4...0,6)(/3, диаметр </пэ = (0,5...0,6)б73. В дальнейшем образовавшийся ПЭ
движется по траектории как жесткое целое. Расстояние, на котором формиру-
ется компактный ПЭ, достигает (8...15)Д3.
С увеличением прогиба облицовки и уменьшением угла раствора до
2а = 150° (позиция 3 на рис. 7.4, 7.5) возрастает радиальная составляющая
скорости метания ее элементов. Это приводит к росту количества натекаю-
щего материала, к увеличению диаметра и длины центрального стержня и
Рис. 7.7. Характер изменения распределений скорости между головной / и хвосто-
вой 2 частями ПЭ, формирующегося из сегментной стальной облицовки
7.2. Физические принципы действия снарядоформирующих зарядов
549
к соответствующему уменьшению периферийной «юбочной» части ПЭ. Уве-
личивается и перепад осевой скорости между головной и хвостовой частями
центрального стержня (см. рис. 7.6). Образующийся в итоге компактный ПЭ
имеет длину большую, а диаметр меньший, чем в случае облицовки из того же
материала с большим утлом раствора, 2а = 160°. Так, диаметр медного ПЭ со-
ставляет с?пэ = (О,З...О,4)с?3, а длина - /пэ - (0,7...0,9)с?3. Поражающий же эле-
мент, сформированный из более прочной стальной облицовки, характеризует-
ся меньшим относительным удлинением (/пэ = (0,4... 0,5)т/3, т/пэ = (0,6...0,7)d3),
что объясняется более высоким уровнем действующих в материале ПЭ внут-
ренних сил, обеспечивающих выравнивание скорости движения частиц ПЭ и
диссипацию их «избыточной» по отношению друг к другу кинетической энер-
гии на меньших деформациях.
При превышении некоторого критического значения прогиба, зависящего
от свойств материала облицовки, вся ее масса переходит в центральный стер-
жень (позиция 4 на рис. 7.4, 7.5). Перепад в скоростях движения головной
и хвостовой частей сформировавшегося стержня составляет около 1,5 км/с
(см. рис. 7.6), т. е. такой ПЭ представляет со^бой массивную низкоградиент-
ную КС. Столь существенный перепад осевой скорости не может быть пари-
рован внутренними прочностными и вязкими силами, в результате чего стер-
жень разрушается аналогично КС на несколько отдельных элементов.
Таким образом, есть узкий диапазон значений углов раствора или проги-
бов облицовки, в пределах которого ПЭ не разрушается. Для меди этот диапа-
зон составляет 145...160°, для стали - 150...160°. Наличие верхней и нижней
границ области формирования неразрушаемых компактных ПЭ обусловлено
существованием двух следующих процессов: разрушение пластин и разрыв
на элементы, характерный для КС.
Для сохранения облицовки в процессе метания от разрушения (по типу
разрушения пластин) необходимо, чтобы радиальная составляющая скорос-
ти в направлении оси не превышала некоторого значения во избежание ин-
тенсивного натекания на ось и образования разрушающейся КС. По экспе-
риментальным данным значение радиальной составляющей скорости, при
котором происходит образование неразрушающегося компактного ПЭ по ука-
занному выше механизму (см. рис. 7.4 и 7.5), для зарядов с медной облицовкой
составляет 0,1...0,35 км/с при угле раствора конуса 2а = 160° и 0,2...0,5 км/с
при 2а = 150°. Так же путем исследований установлены предельно допусти-
мые для получения неразрушающегося ПЭ перепады осевой скорости между
головной и хвостовой частями элемента, не превышающие 1,0... 1,5 км/с.
Формирование дальнобойных ПЭ - достаточно сложный процесс. Меха-
низм формирования и параметры образуемых ПЭ зависят от формы, толщины
и материала облицовки, типа и массы ВВ, конфигурации фронта детонацион-
ной волны, геометрии заряда, наличия корпуса и его толщины.
Среди многообразия механизмов формирования ПЭ можно выделить три
основных: выворачивания (рис. 7.8, а), сворачивания (рис. 7.8, б) и натекания
(рис. 7.8, в). Механизмы выворачивания и сворачивания чисто деформаци-
онные (при их реализации нет присущих КЗ гидродинамических эффектов
образования прямой и обратной КС). Механизму же натекания, напротив, свой-
ственно проявление этих эффектов.
550
7. Средства поражения с использованием ударного ядра
а
50 100 150 200 250 300 мкс
б
в
Рис. 7.8. Основные механизмы формирования ПЭ снарядоформирующим зарядом
(время отсчитывается от момента подрыва заряда):
а выворачивание; б - сворачивание; в - натекание
В зависимости от конструктивных параметров СФЗ при формировании
ПЭ может реализовываться один из указанных основных механизмов. Однако
чаще всего режимы формирования сочетают в себе три основных механизма.
Так, процесс формирования компактного ПЭ из медных и стальных коничес-
ких облицовок малого прогиба (см. рис. 7.4 и 7.5) реализуется через механиз-
мы выворачивания (при больших углах) и натекания (при меньших углах).
Компактный элемент (см. рис. 7.7) также образуется посредством выворачи-
вания и натекания, но уже при доминировании процесса натекания, а процесс
формирования компактного ПЭ из комбинированной сегментной облицовки
(рис. 7.9) в соответствии с результатами численного моделирования проходит
посредством чисто деформационных механизмов - выворачивания на началь-
ной стадии и сворачивания на завершающей. Следует отметить, что образова-
ние представляющих наибольший интерес с точки зрения повышения бро-
непробития удлиненных ПЭ с относительным удлинением /цэ/^пэ > 4 осуще-
ствляется, как правило, с помощью чисто деформационных механизмов
Рис. 7.9. Стадии процесса формирования компактного ПЭ из комбинированной
сегментной облицовки
7.2. Физические принципы действия снарядоформирующих зарядов 551
выворачивания или сворачивания. При этом в основном используют сегмент-
ные облицовки малого прогиба, приосевая часть которых перпендикулярна
оси, что позволяет при взрывном нагружении сообщать ей лишь осевую со-
ставляющую скорости и исключать проявление эффектов натекания и после-
дующего формирования центрального стержня (см. рис. 7.4 и 7.7).
Существенный фактор обеспечения высокой эффективности действия
СФЗ - достижение хороших аэродинамических и баллистических характерис-
тик формируемых ПЭ. Форма элемента должна обеспечивать минимальные
потери скорости и ориентированное, устойчивое движение по траектории. Пос-
леднее особенно актуально по отношению к удлиненным ПЭ. Аэродинами-
ческая устойчивость ПЭ обеспечивается при расположении центра масс эле-
мента впереди его центра давления. Это требование наиболее просто удовлет-
воряется за счет расширения хвостовой части формируемого элемента.
О необходимости обеспечения достаточного запаса аэродинамической устой-
чивости удлиненного ПЭ можно судить цо результатам модельных испытаний
ПЭ с удлинением /пэМлэ ~ 4 (Рис- 7.10). Влияние, оказываемое формой хвос-
товой части на устойчивость ПЭ в полете,-*велико. Наличие асимметрии фор-
мы ПЭ или формирование недостаточно развитой хвостовой части могут при-
вести к неориентированному движению элемента и взаимодействию с прегра-
дой и даже к уводу ПЭ с траектории движения и непопаданию в удаленную
на несколько сотен калибров цель. Вместе с тем требуемое для стабилизации
расширение хвостовой части удлиненного элемента приводит к некоторому
повышению коэффициента лобового сопротивления и увеличению потерь ско-
рости в полете. Это негативное последствие можно минимизировать форми-
рованием «крылатой» хвостовой части, где в качестве «крыльев» выступают
продольные гофры, образующиеся в некоторых случаях естественным обра-
зом в количестве трех-четырех на деформирующейся в режиме выворачива-
ния облицовке.
Рис. 7.10. Возможный характер движе-
ния по траектории удлиненного ПЭ
с хвостовой частью:
а — цилиндрической; б - асимметричной;
в - расширенной с недостаточным запасом
аэродинамической устойчивости; г - расши-
ренной с достаточным запасом аэроди-
намической устойчивости
552
7. Средства поражения с использованием ударного ядра
Эффективность ударного действия сформированных взрывом поражаю-
щих элементов определяется их массой и скоростью (для компактных ПЭ),
а также длиной (для удлиненных ПЭ). Глубина бронепробития в преграде
большой толщины (полубесконечная преграда) компактным ПЭ, движущимся
со скоростью 2 км/с, на дальностях в несколько сотен калибров составляет
L - (0,4...0,6)d3. При этом диаметр образуемого в преграде отверстия t/OTB =
= (0,7...1,0)d3, что примерно в 5-6 раз превышает диаметр пробоины от куму-
лятивной струи классического КЗ. Взаимодействие компактных ПЭ с больши-
ми поперечными размерами и бронепреграды имеет как бы объемный харак-
тер в отличие от локального характера, присущего сильно удлиненным от-
носительно тонким КС (в момент проникания в преграду <7КС ~ 0,05с/3)
(рис. 7.11). Этим же обстоятельством объясняется и мощный запреградный
эффект, реализуемый при действии ПЭ по бронепреградам конечной толщи-
ны. Снарядоформирующие заряды с компактными ПЭ обеспечивают йа даль-
ностях в несколько сотен калибров сквозное пробитие бронепреград толщи-
ной Апрсч = (0,5...0,8)б/3, при этом суммарная масса образующихся осколков
преграды в несколько раз (до семи) превышает массу самого элемента. За-
преградный осколочный поток характеризуется большим углом разлеФа и зна-
чительной поражающей способностью.
Именно эти особенности действия сформированных взрывом ПЭ и опре-
делили выбор СФЗ в качестве основы конструкции БП, реализующих дистан-
ционное действие по бронецелям в рамках концепции атаки сверху или сбоку.
Толщина брони наиболее уязвимой верхней проекции самых защищенных бро-
нецелей танков - составляет не более 50...70 мм. Снарядоформирующие за-
ряды калибром более 100 мм обеспечивают сквозное пробитие таких преград
и мощный запреградный эффект даже при подходе под углом от нормали к
преграде. Калибры самоприцеливающихся суббоеприпасов кассетного оружия,
Рис. 7.11. Характер действия по бронепреграде конечной толщины классического
КЗ (а) и СФЗ (б)
7.2. Физические принципы действия снарядоформирующих зарядов 553
состоящих на вооружении различных стран мира, выбраны несколько боль-
шими с учетом возможной дополнительной динамической или экранной за-
щиты верхней проекции бронеобъектов.
Как следует из изложенного выше, функционирование СФЗ - весьма слож-
ный процесс, в котором выделяют четыре характерных этапа. Первым этапом
является взрывное нагружение КО и ее ускорение под действием продуктов
детонации заряда ВВ. Второй этап - это инерционное деформирование обли-
цовки, сопровождающееся диссипацией энергии за счет работы деформации
и приводяхцее к образованию безградиентного компактного, удлиненного или
же фрагментированного ПЭ. Третий этап связан с движением сформирован-
ного ПЭ по траектории. Заключительный четвертый этап - взаимодействие
ПЭ с преградой, сопровождающееся интенсивным деформированием и разру-
шением как самого элемента, так и преграды при вовлечении в эти процессы
массы преграды, в несколько раз превышающей массу ПЭ.
Сложность процессов динамического деформирования элементов СФЗ, эк-
стремальность условий, в которых происходят формирование ПЭ и его взаи-
модействие с преградой, отсутствие достоверной информации о физико-меха-
ническом поведении металлов в этих условиях (особенно это касается спо-
собности к деформированию без разрушения и критериев разрушения) - все
это объективно обусловливает то обстоятельство, что в настоящее время не
существует надежных методов расчета функционирования СФЗ. Даже имея
полное представление об облике СФЗ (размеры КО и заряда ВВ, тип ВВ, ха-
рактер инициирования заряда), априорно невозможно надежно и достоверно
предсказать для изменяющихся в широком диапазоне конструктивных пара-
метров СФЗ не только результат действия по бронепреграде, но даже форму и
тип формируемого ПЭ (компактный, удлиненный или фрагментированный).
Поэтому основным методом при разработке новых конструкций СФЗ на сегод-
ня остается метод экспериментального исследования - проведение лаборатор-
ных и натурных испытаний с использованием импульсной рентгенографии.
Тем не менее существуют и методы расчета функционирования СФЗ. Среди
них можно выделить две основные группы, различающиеся глубиной исполь-
зуемых физико-математических моделей, а также уровнем привлекаемого ма-
тематического аппарата: расчеты с помощью конечно-разностных методов вы-
числительной математики при подходе к построению моделей с позиций ме-
ханики сплошных сред и инженерные методики расчета.
Численное моделирование позволяет получить подробную информацию
о характере взрывного нагружения КО и ее последующем инерционном де-
формировании и формировании ПЭ. В качестве примера рассмотрен расчет
(см. рис. 7.9) для нагружаемой взрывной нагрузкой комбинированной сегмен-
тной облицовки, из которой формируется компактный ПЭ посредством слож-
ного механизма (выворачивания на начальной стадии, сворачивания - на зак-
лючительной). Для получения необходимого соответствия с эксперименталь-
ными данными по форме и скорости ПЭ в качестве модели материала облицовки
используется сжимаемая упругопластическая среда в рамках теории пластичес-
кого течения или даже более сложная модель упруговязкопластической среды.
Численные расчеты дают практически достоверную информацию для слу-
чаев формирования целостных ПЭ (изменяющиеся во времени поля скоростей,
554 7. Средства поражения с использованием ударного ядра
перемещений, деформаций, напряжений, температуры и т. п.). Однако точно
ответить на главный вопрос - будет ли сформирован сплошной элемент или же
он разрушится на несколько отдельных элементов определенных размеров -
невозможно в силу недостаточной изученности вопроса о разрушении материа-
лов в сложнейших условиях формирования ПЭ. При ответе на этот вопрос при-
ходится ориентироваться на определенные экспериментами предельно допус-
тимые значения радиальных составляющих скоростей метания КО (0,1...0,5 км/с)
и перепадов осевой скорости между головной и хвостовой частями формируе-
мого ПЭ (1,0... 1,4 км/с). Недостаток информации для построения адекватной
физико-математической модели в рамках механики деформируемого твердого
тела препятствует и получению достоверных расчетных данных о пробитии ПЭ
преград конечной толщины и параметрах запреградного осколочного потока.
Приближенная оценка параметров формируемого СФЗ поражающего эле-
мента и его действия по бронепреграде может быть проведена с помощью
инженерных методов расчета.
Определение начальных скоростей метания КО осуществляется по зави-
симости, известной из физики взрыва, следующего вида: j .
v7 (г) = 0,354£> (7 п
г Уз + р(т) ' '
где v_(r) - осевая составляющая скорости метания облицовки для ее элемента,
расположенного на расстоянии г от оси z СФЗ (рис. 7.12); D - скорость дето-
нации заряда ВВ; Р(г) - коэффициент нагрузки, Р(г) = /?а(г)Рвв/^о(г)РпЭ’ ^а(г) “
высота активной части заряда на расстоянии г от оси; 5о(г) - толщина обли-
цовки; рвв и рпэ - плотности ВВ и ПЭ (облицовки) соответственно. Высота
активной части заряда ha не превышает 4/9 высоты заряда и ограничена
боковой конической поверхностью с углом конусности у = arctg 0,5 = 26,6°.
Первое ограничение вытекает из особенностей одномерного осевого разлета
ПД при распространении детонационной волны по заряду ВВ. Второе учитыва-
ет влияние на разлет ПД волны разрежения, распространяющейся со скоростью
D/2 с боковой поверхности и обеспечивающей разлет части ПД в радиальном
Рис. 7.12. К расчету скорости
метания облицовки СФЗ
направлении.
Вследствие влияния боковой волны разре-
жения и формы облицовки формируемое при
взрывном нагружении поле скоростей неодно-
родно и характеризуется распределением по ра-
диальной координате осевой составляющей ско-
рости движения v_(r). Скорость же образуемого
в итоге ПЭ (для случая целостного ПЭ) можно
определить с использованием формулы (7.1) в
предположении малого влияния ПД на этапе
инерционного деформирования и выполнения за-
кона сохранения импульса:
vro =---- vz(Иdm(r),
тпэ;
7.2. Физические принципы действия снарядоформирующих зарядов 555
где юпэ - масса ПЭ (в первом приближении ее можно считать равной массе
всей облицовки).
Бронепробивное действие сформированного взрывом ПЭ приближенно
рассчитывается по законам пробития преград компактными ударниками. Глу-
бина пробиваемого кратера в полубесконечной преграде находится из усло-
вия равенства кинетической энергии ПЭ энергии вытеснения материала в объе-
ме кратера:
/ \1/3
где /Д - динамическая твердость, принимаемая в качестве удельной энергии
вытеснения материала (для брони средней твердости На = 4,0...4,4 ГПа), к$ -
экспериментальный коэффициент, определяющий форму кратера и равный
отношению его диаметра t/OTB к глубине L, к$ = dmjJL — 1,6...1,7. В связи с
объемным характером взаимодействия ПЭ с преградой и мощным проявлением
откольных эффектов толщина пробиваемо^ насквозь преграды конечной тол-
щины несколько больше, чем глубина кратера в полубесконечной преграде. С до-
статочной для практики точностью зависимость толщины пробиваемой брони
от скорости тпэ и массы тпэ можно оценить по эмпирической формуле
Ьпред = (1 + 0Д5тпэ)£, (7.3)
где гпэ - в км/с. Приведенные выше формулы (7.2) и (7.3) могут использо-
ваться для решения обратной задачи - задачи проектирования СФЗ, обеспечи-
вающего сквозное пробитие бронепреграды заданной толщины Ьпред. В этом
случае формулы дополняются еще одним соотношением, обобщающим опыт
разработки дальнобойных СФЗ и устанавливающим взаимосвязь диаметра
заряда dv плотности материала КО рпэ и массы ПЭ тпэ:
шпэ=(0,03...0,04)^рпэ. (7.4)
Эта оценочная формула получена в предположении, что масса формируе-
мого из облицовки малого прогиба ПЭ близка к массе самой облицовки, а
последняя - к массе круглой пластины с диаметром t/3 и толщиной 80 =
= (0,03...0,04)(/3, характерной для облицовок СФЗ.
При решении задачи определения рациональных параметров СФЗ, фор-
мирующих компактные ПЭ, задавшись скоростью ПЭ (в диапазоне гпэ =
= 1,8...2,5 км/с), по формулам (7.2) и (7.3) определяют массу элемента тпэ и
далее по выражению (7.4) оценивают необходимый для решения поставлен-
ной задачи диаметр заряда d.}. Для образования неразрушающегося ПЭ необ-
ходим правильный выбор геометрических параметров облицовки и заряда ВВ.
Опытным путем установлены критерии, обеспечивающие целостность мета-
емых элементов для ряда частных случаев. Например, медные компактные
поражающие элементы формируются СФЗ со следующими параметрами: тол-
щина облицовки 8О = (0,03...0,04)</3, прогиб Ао = 0,lt/3, угол раствора конуса
2а= 150...160°, высота заряда А3 = (0,6... 1,5)J3, скорость ПЭ порядка 0,25...0,35
556
7. Средства поражения с использованием ударного ядра
от скорости детонации заряда ВВ, масса до 70...90 % от массы облицовки,
диаметр = (0,3...0,6)(/.( и длина /пэ = (0,9...0,4)t/3. Расстояние, на котором
завершается формирование поражающего элемента, составляет (10...15)<7.г
Самоформирующиеся заряды с приведенными выше параметрами не опти-
мальны с точки зрения решения поставленной задачи, а представляют собой
скорее опорное техническое решение - первое приближение в итерационном
процессе последовательного уточнения оптимальных значений параметров кон-
струкции. Оптимальные параметры СФЗ, обеспечивающие максимальное бро-
непробивное и запреградное действие на заданной дальности в данном ка-
либре БП или, напротив, заданный уровень бронепробивного и запреградного
действия при минимальном калибре и массе заряда, на сегодняшний день мо-
гут быть определены только с помощью дополнительных экспериментальных
исследований с привлечением численного моделирования для выяснения тон-
ких особенностей, характера взрывного нагружения и инерционцоТо дефор-
мирования облицовки СФЗ.
Результаты экспериментов говорят о сложной зависимости параметров ПЭ,
формируемых взрывом, от параметров СФЗ (табл. 7.1). ; 4
Таблица 7.1. Значения скорости и относительного удлинения ПЭ
с сегментной облицовкой из армко-железа в зависимости от типа ВВ
Тип ВВ /пэ/'/пэ гпэ, м/с
Тротил 0,84 1650
Состав «В» 1,65 1950
Октол 75/25 2,4 2130
Октоген 2,65 2160
Так, из приведенной таблицы следует, что увеличение мощности ВВ при
неизменных прочих параметрах СФЗ способствует повышению скорости гпэ
и степени удлинения элемента. Значительное влияние на формируемый ПЭ
оказывает и высота заряда (рис. 7.13). Из рисунка ясно, как с ростом только
одной высоты заряда уменьшается диаметр периферийной «юбочной» части,
увеличиваются центральная стержневая часть ПЭ и относительное удлинение
элемента, а также создаются условия для начала его фрагментации.
Представление о сложном характере влияния на вид и параметры ПЭ про-
филя облицовки СФЗ дают результаты испытаний зарядов с медной сегмент-
ной облицовкой (рис. 7.14). В них варьировался лишь радиус кривизны сво-
бодной поверхности облицовки при неизменных значениях радиуса кривизны
граничащей с ВВ поверхности и толщины облицовки на оси симметрии. Кри-
вые 1 и 2 - это зависимости результирующих значений скоростей соответ-
ственно головной и хвостовой частей ПЭ от относительной массы облицовки
(ПЭ) т = шпэ/рпэ t/3. Область 3 на графике соответствует облицовкам про-
грессивной формы и большей массы (толщина на периферии больше, чем в
центре), а область 4 - облицовкам дегрессивной формы и меньшей массы
(толщина на периферии меньше толщины в центре). Целостные безградиент-
7.2. Физические принципы действия снарядоформирующих зарядов 557
Рис. 7.14. Влияние профиля мед-
ной сегментной облицовки на па-
раметры и вид формируемого ПЭ
Рис. 7.13. Влияние высоты заряда ВВ на фор-
му ПЭ, сформированного из стальной коничес- .
кой облицовки с углом раствора 2а = 140°:
a-ht = Q,7d^, 6-h3 = 0.85d3; в — = d,; г - h.t = 1,2d, л
ные ПЭ формируются только в определенных диапазонах изменения парамет-
ров облицовки, показанных на рисунке цифрами 5 и 6 (скорости головной и
хвостовой частей совпадают). При сильном уменьшении толщины облицовки
к периферии в диапазоне 5 получаются ПЭ с формой близкой к шарообразной
за счет выворачивания периферийной части вперед (см. рис. 7.9). При почти
постоянной толщине облицовки (диапазон 6) за счет выворачивания образует-
ся удлиненный ПЭ (см. рис. 7.8, а). Вне диапазонов 5 и 6 формируются фраг-
ментированные ПЭ.
Проводимые в последние 10... 15 лет исследования СФЗ ориентировались
на создание поражающих элементов с бронепробиваемостью свыше /’пре;[ > d3
на дальности до тысячи калибров заряда. В качестве основных направлений
решения этой задачи рассматривалось формирование как можно более удли-
ненных сплошных и высокоплотных ПЭ с высокой начальной скоростью. Обя-
зательным условием являлось достижение хороших аэродинамических и бал-
листических характеристик, обеспечивающих ориентированное движение ПЭ
по траектории с малыми потерями скорости.
К настоящему времени достигнуты определенные успехи в части созда-
ния ПЭ, приближающихся к указанным требованиям. Разработаны СФЗ, фор-
мирующие ПЭ с относительным удлинением до /пэ^пэ = 5 и начальной ско-
ростью до 2500 м/с. Создаваемая расширенная хвостовая часть обеспечивает
устойчивое движение по траектории с потерей скорости не более 200 м/с на
дальности до тысячи калибров.
Определенные надежды с точки зрения повышения бронепробивного дей-
ствия СФЗ связывались с использованием не только традиционных медных
или стальных облицовок, но и облицовок из тяжелых металлов (тантала, обед-
ненного урана) и формированием более массивных ПЭ. По оценкам, в этом
случае бронепробиваемость СФЗ должна повышаться до /’пред = 1,3(73. Опыт
отработки СФЗ в разных странах во многом подтвердил эти прогнозы. К на-
558
7. Средства поражения с использованием ударного ядра
стоящему времени облицовки из тяжелых металлов уже нашли применение в
новейших образцах боеприпасов с СФЗ (например, суббоеприпас SMArt-155 к
одноименному 155-мм кассетному артиллерийскому снаряду имеет тантало-
вую облицовку и обеспечивает бронепробитие /’пред ~ l,lt/3, в суббоеприпасе
SAD ARM использована облицовка из обедненного урана). В связи с большей,
чем у традиционных меди и мягкой стали, склонности тяжелых металлов к
разрушению при взрывном нагружении прорабатываются идеи применения
комбинированных облицовок (см. рис. 7.9). Поражающие элементы, форми-
руемые из таких облицовок, содержат центральное ядро из тяжелого металла
в оболочке из более пластичного материала, которая препятствует фрагмента-
ции ПЭ и обеспечивает его целостность.
Рассмотрим более детально особенности устройства и действия БП с удар-
ным ядром на примерах образцов различных систем оружия.
7.3. Кассетные средства поражения
с самоприцеливаюшимися боевыми элементами*
Одним из состоящих на вооружении образцов кассетного авиационного
оружия является разовая бомбовая кассета РБК-500 СПБЭ (Россия) с само-
прицеливающимися боевыми элементами, формирующими ударное ядро при
атаке бронетехники сверху. Кассета предназначена для поражения танков, БТР,
БМП и других объектов бронированной техники с положительным тепловым
контрастом относительно подстилающей поверхности. Она обеспечивает бое-
вое применение на высотах от 600 до 5000 м при скоростях полета самолета
500... 1900 км/ч (в зависимости от высоты) как при горизонтальном полете,
так и при пикировании и кабрировании до углов 20...30°.
Основные массогабаритные характеристики кассеты: масса - 478 кг, диа-
метр - 450 мм, длина - 2505 мм, размах стабилизатора - 570 мм. Кассета
включает в себя 14 СПБЭ и один командный элемент.
Кассета (рис. 7.15) содержит головку 7 с центральным отверстием, жест-
ко скрепленную с тонкостенным цилиндрическим корпусом 17. К заднему тор-
цу корпуса разъемно присоединена хвостовая конусная часть 13 со стабилиза-
тором 14. Головной обтекатель 1 крепится к головке через приваренные к ней
крюки 19 посредством механизма расцепления 2 через командный прибор 3.
В центральном отверстии головки установлена на резьбе втулка б, в которую
введен полый хвостовик центральной трубы 16. Втулка и центральная труба
соединены с помощью пробки-штифта, размещенной в радиальных соосных
отверстиях, которые выполнены в стенках втулки и полого хвостовика трубы.
Хвостовая конусная часть поджата к корпусу гайкой 15. Обтюратор 8 уста-
новлен в контакте с головкой 7, внутренней поверхностью корпуса (через вой-
лочное кольцо) и наружной поверхностью центральной трубы. Самоприцели-
вающиеся боевые элементы 9 и командный элемент размещены в пяти секци-
ях между обтюратором, промежуточными дисками 10, замыкающим диском 11
и зафиксированы от осевых перемещений с помощью поджимающей гайки
12. На дисках и обтюраторе в местах контакта с БЭ сделаны соответствую-
щие выемки. В полости центральной втулки и полого хвостовика централь-
ной трубы расположен механизм распаковки кассеты 18, а в резьбовое очко
Рис. 7.15. Разовая бомбовая кассета РБК-500 СПБЭ:
1 головной обтекатель; 2 - механизм расцепления; 3 - командный прибор; 4 - взрыватель;
5 - жгут; 6 - втулка; 7 - головка; 8 - обтюратор; 9 - БЭ; 10 - промежуточный диск;
II - замыкающий диск; 12 - поджимающая гайка; 13.- хвостовая конусная часть; 14 - стабили-
затор; 75 - гайка; 16 - центральная труба; 17 - корпус; 18 - механизм распаковки кассеты;
19 - крюки.
втулки ввернут взрыватель 4. Командный прибор и взрыватель соединены жгу-
том 5 с механизмом подачи импульса самолета.
Основные характеристики СПБЭ следующие: масса - 16 кг, диаметр кор-
пуса БЧ - 186 мм, высота - 270 мм, поперечный размер с учетом КЦ - 290 мм,
масса ВВ снаряжения (типа ТГ 40/60) - 4,5 кг.
Противотанковый СПБЭ кассеты РБК-500 (рис. 7.16) состоит из БЧ, пара-
шютной системы (вспомогательный и основной парашюты), механизмов от-
стрела вспомогательного парашюта и вращения, КЦ и предохранительно-ис-
полнительного механизма (ПИМ).
В БЧ входят корпус 2 с размещенными в нем зарядом ВВ 3 и медной
сегментной КО 1. На верхнем торце корпуса 2 БЧ установлен ПИМ 10. Пара-
шютная система и механизм отстрела вспомогательного парашюта располо-
жены в корпусе 4, соединенном с корпусом БЧ. Корпус закрыт крышкой 8, на
боковой поверхности которой шарнирно установлены подпружиненные пе-
рья, ориентированные при сборке кассеты вдоль корпуса СПБЭ. Крышка свя-
зана с чехлом вспомогательного парашюта 14 и обеспечивает ввод его в дей-
ствие. Коуш вспомогательного парашюта соединен со штоком 6, размещен-
ным в корпусе 9 механизма отстрела и зафиксированным перемещаемым
фиксатором 5. Каналы корпуса сообщаются с полостью, в которой установлен
пиропатрон, обеспечивающий отстрел штока вместе со вспомогательным па-
рашютом. Задействование пиропатрона осуществляется подачей электричес-
кого импульса от приемника радиокомандной линии (РКЛ), приемная антен-
на /5 которой прикреплена к стропе вспомогательного парашюта. Вспомога-
тельный парашют связан расчековочным звеном 13 с чекой запуска бортового
источника питания КЦ. Отстреливаемый шток 6 посредством вытяжного зве-
на 18 связан с чехлом основного парашюта. В свою очередь, основной пара-
шют при помощи расчековочного звена соединен с чекой освобождения сто-
порного механизма ПИМ 10.
18 17
Рис. 7.16. СПБЭ кассеты РБК-500:
/ - сегментная кумулятивная облицовка; 2 - корпус БЧ; 3 - заряд ВВ; 4 - корпус; 5 фиксатор;
6 - шток; 7 - скоба; 8 - крышка; 9 - корпус механизма отстрела вспомогательного парашюта;
10 - ПИМ; 11 - вертлюг; 12 - КЦ; 13 - расчековочное звено; 14 чехол вспомогательного
парашюта; 15 -- приемная антенна; 16 - основной парашют; 17 - лопасть; 18 - вытяжное звено
Механизм вращения СПБЭ включает в себя вертлюг 11, соединенный с
коушем основного парашюта 16, а также две подпружиненные раскрывающие-
ся лопасти 17. В сложенном состоянии лопасти уложены вокруг корпуса 4 и
зафиксированы скобой 7, связанной с отстреливаемым штоком.
Одноканальный координатор цели 12 СПБЭ представляет собой пассив-
ный оптико электронный прибор, принимающий излучение в ИК-диапазоне и
обеспечивающий угол поля зрения 0,75°.
Один из вкладных элементов кассеты является командным. У командного
элемента (КЭ) массогабаритные характеристики и площади куполов парашю-
тов такие же, как у СПБЭ, что и обеспечивает одинаковые параметры движе-
7.3. Кассетные СП с самоприцеливающимися боевыми элементами
561
ния после выброса из кассеты. Командный элемент не имеет БЧ. Его основ-
ная часть - радиометрический датчик, предназначенный для измерения теку-
щего значения высоты при снижении КЭ вместе с СПБЭ на вспомогательных
парашютах и передачи по РКЛ команды на раскрытие основных парашютов
СПБЭ при достижении КЭ заданной высоты.
При сбрасывании кассеты в момент ее отделения от механизма подачи
импульса самолета на командный прибор 3 (см. рис. 7.15) и взрыватель 4
подается электрический импульс. Через 0,9 с после отделения кассеты от
самолета срабатывает пиропатрон командного прибора. В корпусе механиз-
ма расцепления 2 создается давление пороховых газов, под действием кото-
рых элементы механизма выходят из зацепления, а головной обтекатель 1
освобождается от связи с головкой 7 и отделяется от кассеты.
По истечении установленного и зависящего от высоты сброса времени
замедления срабатывает взрыватель 4 и воспламеняет пороховой заряд меха-
низма распаковки 18. Под действием образующихся пороховых газов пробка-
штифт выталкивается из соосных отверстии втулки 6 и хвостовика трубы 16,
освобождая центральную трубу от связи с головкой 7. Одновременно порохо-
вые газы заполняют объем между головкой иЪбтюратором 8, при этом обтю-
ратор вместе с механизмом распаковки 18, центральной трубой 16, блоком
боевых элементов и хвостовой частью 13 перемешается назад, обеспечивая
расстыковку хвостовой части с корпусом 17 кассеты. Увеличивающийся объем
между головкой и обтюратором подпитывается пороховыми газами горяще-
го порохового заряда механизма распаковки (при этом обтюратор предохра-
няет оптические системы СПБЭ 9 от их воздействия). При полном сгорании
порохового заряда блок БЭ приобретает скорость, достаточную для полного
выхода из кассеты. В этот момент обтюратор отделяется от блока элементов
канатами, соединенными с головкой. Под действием набегающего потока воз-
духа БЭ 9 отсоединяются от промежуточных 10 и замыкающего 11 дисков,
получают боковые импульсы рассеивания и начинают автономное движение
к земле.
Расположенные на боковых поверхностях крышек 8 (см. рис. 7.16) БЭ
подпружиненные перья раскрываются и под действием набегающего потока
воздуха сдергивают крышки с элементов, вытягивая из корпусов чехлы со вспо-
могательными парашютами 14. При дальнейшем снижении КЭ и СПБЭ вспо-
могательные парашюты выходят из чехлов и раскрываются, в результате чего
происходит срывание чек и запуск бортовых источников питания КЦ 72 и
датчика высоты КЭ. Датчик высоты начинает излучать высокочастотный сиг-
нал и принимать сигнал, который отражен от земной поверхности, обеспечи-
вая измерение текущего значения высоты, а приемная антенна 15 и приемное
устройство СПБЭ подготавливаются к приему команды на отстрел вспомога-
тельных парашютов.
Команда на отстрел вспомогательных парашютов всех выбрасываемых из
кассеты СПБЭ выдается командным элементом при достижении им высоты
/7= 170 м, после чего приемники РКЛ СПБЭ формируют сигнал на подрыв
пиропатрона механизма отстрела вспомогательного парашюта. При срабаты-
вании пиропатрона пороховые газы действуют на торец фиксатора 5, который
перемещается, освобождая шток ,6 и обеспечивая его отстрел вместе со вспо-
562
7. Средства поражения с использованием ударного ядра
могательным парашютом 14. Отстреливаемый шток 6 с помощью вытяжного
звена 18 вводит в действие основной парашют и с помощью расчековочного
звена перестает держать стопорный механизм ПИМ 10, который переводится
в боевое положение. Вместе со штоком 6 отстреливается и соединенная с
ним скоба 7, освобождая подпружиненные лопасти 17, которые раскрывают-
ся и придают СПБЭ вращательное движение при его дальнейшем снижении
на основном парашюте. Установившаяся скорость снижения СПБЭ кассеты
РБК-500 на основном парашюте составляет v = 15 м/с, а частота вращения
равна п = 6...8 об/с.
За счет расположения продольной оси СПБЭ и оптической оси поля зре-
ния КЦ под углом Р = 30° к линии подвески и за счет вращательного движе-
ния СПБЭ при спуске на основном парашюте происходит сканирование
КЦ земной поверхности по сходящейся спирали с шагом Ах = vtgP/и =
= 1,0... 1,5 м/об. Тепловое излучение от осматриваемой поверхности попадает
в пироприемник КЦ 12. При попадании цели в поле зрения КЦ он выдает
сигнал на срабатывание ПИМ 10, который обеспечивает подрыв заряда ВВ 3
и последующее формирование ударного ядра - компактного ПЭ (рис, 7.17),
отстреливаемого в сторону цели и поражающего ее.
Один из принятых на вооружение кассетных артиллерийских снарядов с
СПБЭ - 155-мм снаряд SMArt-155 (Германия), который входит в боекомплект
самоходных и буксируемых гаубиц FH70. M109G3 и PzH-2000. В полете на
траектории снаряд стабилизируется вращением. Максимальная дальность
стрельбы из самоходной гаубицы PzH-2000 составляет 28 км.
Длина снаряда SMArt-155 - 899 мм, масса снаряда 46,5 кг. Снаряд име-
ет два СПБЭ калибра 140 мм, длиной 200 мм и массой 12 кг. Снарядоформи-
рующий заряд БЭ имеет танталовую кумулятивную облицовку. Для уменьше-
ния вращательного движения БЭ после его выброса из снаряда использовано
раскрывающееся оперение, установленное с охватом корпуса БЭ. Координа-
тор цели в боевом элементе SMArt-155 - трехканальный. Миниатюрный ло-
катор работает на принципах как пассивной, так и активной локации в милли-
метровом диапазоне длин волн на частоте 94 ГГц. Координатор цели также
снабжен пассивным ИК-детектором.
Выброс суббоеприпасов из кассетного снаряда происходит на высоте около
500 м на нисходящем участке траектории снаряда. Раскрывающееся оперение
значительно снижает угловую скорость вращения БЭ, а купольный парашют
Рис. 7.17. Форма ударного ядра, создаваемого РБК-500 СПБЭ
7.3. Кассетные СП с самоприцеливающимися боевыми элементами
563
обеспечивает снижение со скоростью порядка 10 м/с. При сканировании по-
верхности датчики КЦ функционируют одновременно, а на выходе измери-
тельной системы формируется обобщенный образ цели. Основное (тепловое)
изображение Цели синтезируется на базе сигнала ИК-датчика. Радиолокаци-
онные активный и пассивный датчики образуют альтернативный канал само-
прицеливания, чувствительный к обшивке боевых бронированных машин, а
также к железобетонным перекрытиям инженерных сооружений. Для надеж-
ности сигналы, снимаемые с датчиков, обрабатываются бортовым микропро-
цессором с помощью двух специальных алгоритмов сканирования, что позво-
ляет не реагировать на ложные цели. Захват цели может происходить с высо-
ты 100... 150 м, радиус зоны обзора - 75 м (этому соответствует угол между
линией прицеливания и вертикалью Р = 30°). При обнаружении цели и после-
дующем взрыве СФЗ SMArt-155 образуется танталовый удлиненный ПЭ с от-
носительным удлинением /цэ^пэ ~ 5 (рис. 7.18). Скорость ПЭ - 2100 м/с.
Формируемый элемент обладает развитой хвостовой частью, обеспечивающей
его аэродинамическую устойчивость при движении по траектории к цели. Бро-
непробитие поражающего элемента с расстояния около 1000 калибров состав-
ляет 150 мм, т. е. примерно 1,1 d3.
Кассетный артиллерийский снаряд SMArt-155 обладает высокой боевой
эффективностью. По опубликованным данным на предшествующих крупно-
серийному производству полигонных испытаниях удалось достичь очень вы-
соких показателей. В одной серии испытаний 15 снарядами (30 СПБЭ) было
поражено 20 целей, в другой - пять выстрелов на максимальную дальность
(10 суббоеприпасов) привели к уничтожению девяти целей. В целом по окон-
чании стрельбовых испытаний нескольких сотен снарядов получен результат
более одного поражения на снаряд.
В настоящее время SMArt-155 и одноименный кассетный артиллерийский
снаряд - наиболее модернизированные среди зарубежных образцов БП этого
вида. Ближайшими конкурентами являются 155-мм кассетные артиллерийские
снаряды ХМ898 SADARM (США) с одноименным суббоеприпасом и BONUS
(Швеция).
В США работы по созданию СПБЭ и кассетных артиллерийских снаря-
дов проводятся с начала 1980-х годов. На первых порах они осуществлялись в
рамках программы создания 203,2-мм кассетного снаряда ХМ836, позднее ос-
новные усилия переключились на 155-мм кассетный снаряд ХМ898 SADARM.
Снаряд ХМ898 предназначен для стрельбы из артиллерийских систем М109А5,
М198. В полете он стабилизируется вращением, а дальность стрельбы состав-
ляет 22 км.
Рис. 7.18. Удлиненный ПЭ самоприцеливающегося суббоеприпаса SMArt-155
с
564
7. Средства поражения с использованием ударного ядра
Основные технические характеристики снаряда ХМ898 близки к характе-
ристикам снаряда SMArt-155: длина - 899 мм, масса - 46,6 кг. Снаряд содер-
жит два СПБЭ SADARM диаметром 147,3 мм, длиной 200 мм и массой 12.25 кг.
В СФЗ суббоеприпаса SADARM использована КО из обедненного урана.
Скорость формируемого ПЭ составляет 2440 м/с (несколько выше, чем для
SMArt-155). Однако его бронепробиваемость ниже, чем у SMArt-155, и дос-
тигает 100 мм (примерно 0,ld3 - по этому признаку можно предположить, что
формируемый ПЭ ближе к компактному, чем к удлиненному). Так же, как и
SMArt-155, суббоеприпас SADARM имеет трехканальный КЦ, включающий
в себя инфракрасный пассивный и радиолокационный пассивно-активный ка-
налы. Последний работает в миллиметровом диапазоне длин волн на частоте
35 ГГц и используется также как высотомер.
Выброс суббоеприпасов из корпуса снаряда происходит на высоте около
750 м. С помощью тормозного устройства гасится угловая скорость вращения
БЭ, созданная вращением снаряда, после чего раскрывается ленточный пара-
шют. Парашютная система обеспечивает спуск элемента со скоростью дЪ 15 м/с
с наклоном линии прицеливания в 25...30° от вертикали. Снижающийсявра-
щающийся суббоеприпас сканирует местность. На высоте 150...200 м приво-
дится в боевое состояние КЦ. После попадании цели в поле зрения КЦ с по-
мощью микропроцессора определяется ее положение и осуществляется под-
рыв СФЗ. Площадь сканирования местности при начальной высоте 150 м
составляет около 18 000 м2. По оценкам, вероятность поражения танка одним
СПБЭ SADARM равна 0,25.
К концу XX в. SADARM рассматривался специалистами из США в каче-
стве одного из наиболее перспективных средств поражения бронецелей. Его
выбрали как основной и планировали использовать в кассетных БЧ различ-
ных носителей без существенных доработок. Обсуждались возможности его
применения в оперативно-тактической ракете ATACMS, в УАБ GBU-15 с кас-
сетной БЧ, в УАР AGM-130 и в перспективных управляемых авиационных
кассетах. Однако полностью разработанный кассетный артиллерийский сна-
ряд ХМ898 SADARM к 2002 г. так и не был принят на вооружение сухопут-
ных войск США. В ходе испытаний выявили неспособность его надежного
срабатывания, что было связано с меньшей разрешающей способностью радио-
локационного канала КЦ, работающего на частоте примерно в 3 раза меньшей,
чем у SMArt-155. Возможно, именно по этой причине США пока отказались от
принятия на вооружение ХМ898 SADARM, и, пользуясь военно-техническим
сотрудничеством с другими странами, заменили его высокоэффективным сна-
рядом SMArt-155 (Германия).
155-мм артиллерийский кассетный снаряд BONUS (Швеция) с одноимен-
ными суббоеприпасами предназначен для использования в артиллерийских
системах Ml 14/39, Ml98 и FH-77A. Снаряд снабжен донным газогенерато-
ром, который позволяет обеспечить дальность стрельбы до 28 км на умень-
шенном метательном заряде. Последнее обстоятельство обусловлено необ-
ходимостью снижения перегрузок, действующих на электронный узел СПБЭ.
BONUS имеет массу 42,5 кг, содержит два суббоеприпаса диаметром 120 мм
и массой 12 кг каждый. Скорость формируемого ударного ядра - 2000 км/с,
а его бронепробиваемость - 120 мм (1,0с/3). В отличие от SMArt-155 и
7.3. Кассетные СП с самоприцеливающимися боевыми элементами
565
SADARM в суббоеприпасе BONUS использован одноканальный КЦ двух-
диапазонный ИК-датчик цели. В целом данный КЦ суббоеприпаса BONUS
более уязвим к сложным метеоусловиям, чем КЦ у суббоеприпасов SMArt-155
и SADARM.
Для перевода выбрасываемых из корпуса кассетного снаряда суббоепри-
пасов BONUS в режим авторотации и плавного снижения используются два
малых выдвижных «крыла», аэродинамика которых обеспечивает угловую ори-
ентацию суббоеприпаса под углом в 30...35° к вертикали. Перевод бортовой
электронной аппаратуры в поисковый режим осуществляется на высоте до
175 м. При снижении со скоростью до 45 м/с суббоеприпас сканирует пло-
щадь до 30 тыс. м2 (по этому показателю BONUS более чем в 1,5 раза превос-
ходит свои аналоги).
Рассмотренные выше кассетные артиллерийские снаряды SMArt-155.
ХМ898 SADARM и BONUS относятся к активным неуправляемым артилле-
рийским снарядам. Их высокая боевая эффективность реализуется за счет ис-
пользования высокоточных самоприцеливающихся суббоеприпасов. Однако в
последние несколько лет в области создания кассетных артиллерийских сна-
рядов обозначилась тенденция, которая, судя по всему, в самом ближайшем
будущем приведет к еще одному качественному скачку в повышении эффек-
тивности борьбы с бронетехникой. Эту тенденцию коротко можно сформули-
ровать как «сверхвысокоточное дальнобойное оружие», т. е. сочетание качеств
самоприцеливающихся суббоеприпасов и высокоточного дальнобойного кас-
сетного снаряда, который является их носителем. Образцом такого снаряда
станет разрабатываемый в США 155-мм снаряд повышенной дальности
ХМ982, который относится к классу снарядов с корректируемой траекторией.
Увеличение дальности стрельбы будет достигнуто не за счет газогенератора
или маршевого двигателя, а использованием хвостового оперения и аэроди-
намических поверхностей (рулей), корректирующих траекторию движения
снаряда. Команды управления изменением траектории движения формируют-
ся по сигналам КРНС NAVSTAR, которая определяет реальные координаты
снаряда и сравнивает их с вычисленными перед выстрелом параметрами тра-
ектории. Процессор обработки сигналов может размещаться на БП или вы-
полняться в наземном варианте. Принципиальная схема снаряда ХМ982
(рис. 7.19) включает в себя головной обтекатель 7, антенну приема сигналов
КРНС NAVSTAR 2, вышибной заряд 3, обтюратор 4, стабилизатор 5, полез-
ную нагрузку 6 (в частности, СПБЭ), рули управления 7, систему наведения 8.
Очевидно, что управляемый 155-мм артиллерийский снаряд ХМ982 в снаря-
жении самоприцеливающимися суббоеприпасами, - это кассетный снаряд сле-
дующего поколения. Возможно, именно он займет место так и не принятого
на вооружение неуправляемого снаряда ХМ898 SADARM.
Еще одним перспективным образцом кассетного артиллерийского 155-мм
снаряда нового поколения является активно-реактивный корректируемый
снаряд «Пеликан» (Франция). В одном из вариантов этого снаряда преду-
смотрено снаряжение самоприцеливающимися суббоеприпасами BONUS
(5 шт.). При максимальной дальности стрельбы 80 км радиус рассеивания
составляет 15 м. Для достижения максимальной дальности стрельбы пред-
полагается использовать маршевый двигатель, который включается при
566
7. Средства поражения с использованием ударного ядра
снаряда -
Рис. 7.19. Кассетный снаряд ХМ982 (США) повышенной дальности с корректируе-
мой траекторией:
1 - головной обтекатель; 2 - антенна приема сигналов КРНС NAVSTAR; 3 - вышибной заряд;
4 - обтюратор; 5 - стабилизатор; 6 — полезная нагрузка; 7 - рули управления; 8 система
наведения
выходе снаряда из канала ствола. При этом одновременно разворачиваются
стабилизаторы и управляющие поверхности, получающие команды управ-
ления от КРНС NAVSTAR и бортового процессора. Общая масса
54 кг, а его длина - 1350 мм.
В настоящее время кассетные БЧ с самоприцеливающимися суббоепри-
пасами достаточно широко применяют в неуправляемых реактивных снаря-
дах - боеприпасах систем залпового огня. Это реактивный 240-мм снаряд к
системе MLRS (США) с кассетной БЧ в снаряжении боевыми элементами
SADARM, отечественные реактивные снаряды к РСЗО «Град» и «Смерч».
122-мм неуправляемый PC 9М217 с СПБЭ входит в боекомплект боевой
машины БМ-21 системы «Град». Дальность стрельбы составляет от 8 до 30 км,
длина реактивного снаряда 3037 мм, масса 70 кг, масса БЧ 25 кг. Боевая часть
содержит два СПБЭ, обеспечивающих при действии ударного ядра с расстоя-
ния 100 м бронепробиваемость по гомогенной броне под углом 30° от норма-
ли на уровне 60...70 мм. В боекомплект 300-мм РСЗО «Смерч» входит реак-
тивный снаряд 9М55К1, предназначенный для поражения сверху группиро-
вок бронированной военной техники, ПУ тактических и зенитных управляемых
ракет. Это дальнобойный снаряд имеет дальность стрельбы от 25 до 70 км,
длину снаряда 7600 мм, массу 800 кг. Кассетная БЧ массой 243 кг содержит
пять СПБЭ «Мотив-ЗМ», высота БЭ 255 мм, диаметр корпуса 186 мм, попе-
речный размер с учетом КЦ 284 мм, масса БЭ 15 кг, масса ВВ снарядоформи-
рующего заряда 4,5 кг. Элемент снабжен инфракрасным двух диапазонным КЦ.
При действии с расстояния 150 м формируемое ударное ядро (компактный
ПЭ) пробивает не менее 70 мм гомогенной брони под углом 30° от нормали.
Таким образом, основной (но не единственной) областью наиболее мас-
сового использования БП с ударным ядром является кассетное оружие - авиа-
ционное и артиллерийское (ствольной и реактивной Артиллерии).
7.4. Инженерные боеприпасы с ударным ядром
Вторая крупная область применения БП с ударным ядром - область ин-
женерных боеприпасов (противокрышевые и противобортовые мины). В ин-
женерных противокрышевых минах в качестве принципа поражения броне-
7.4. Инженерные боеприпасы с ударным ядром
567
цели использован принцип СПБЭ типа SADARM. Образцом такой мины ста-
ла недавно созданная в США противотанковая мина WAM (Wide Area Mine) с
большим радиусом действия. Мины WAM могут разбрасываться в невзведен-
ном положении и оставаться в нем в течение необходимого времени, после
чего взводиться по специальному сигналу. Мина снабжена акустическим и
сейсмическим датчиками для обнаружения цели. По сигналу этих датчиков с
помощью порохового двигателя отстреливается на определенную высоту СПБЭ
мины, который в дальнейшем функционирует подобно самоприцеливающим-
ся суббоеприпасам кассетного оружия. При снижении СПБЭ мины WAM по-
следовательно происходят сканирование местности КЦ и «самоприцеливание»
БП, обнаружение цели, дистанционный подрыв СФЗ, формирование ударного
ядра и поражение бронецели в наиболее уязвимую верхнюю проекцию. Ради-
ус поражения цели СПБЭ мины WAM составляет 100 м, общая масса мины -
15,9 кг, диаметр - 188 мм, высота - 343 мм. В.разрабатываемых ранее анало-
гах противокрышевой мины WAM предполагалось применять СПБЭ Skeet с
инфракрасным двухдиапазонным КЦ. При диаметре 140 мм и высоте 170 мм
данный БЭ обеспечивает бронепробитие 120 мй.
Одним из образцов противотанковых противобортовых мин является со-
стоящая на вооружении отечественная мина ТМ-83, предназначенная для ми-
нирования дорог с твердым покрытием, лесных и горных дорог против тан-
ков, БТР и грузовых автомобилей. Мина поражает цель со стороны борта пу-
тем пробития бронезащиты, повреждения в заброневом пространстве агрегатов
и вывода из строя экипажа. Мина ТМ-83 допускает установку в управляемом
и неуправляемом (автономном) вариантах.
В состав мины ТМ-83 (рис. 7.20) входят СФЗ / взрывчатого вещества ТГ
40/60, размещенный в тонкостенном стальном корпусе 7 с закатанной медной
облицовкой 2. С противоположной облицовке стороны заряд закрыт крыш-
кой 8, в которой предусмотрено резьбовое отверстие под запал 9. Под крыш-
кой расположен детонатор. Двухканальное взрывательное устройство (КЦ) ав-
тономно функционирующей мины включает в себя оптический датчик цели б,
сейсмический датчик цели 11, ПИМ 10, запал и элементы питания. Мина так-
же снабжена скобой 3, штырем и визиром для установки мины на местности
и ее нацеливания. Для крепления заряда на скобе используются рукоятки 4,
размещенные на двух приваренных к корпусу заряда цапфах 5 с резьбовыми
окончаниями. Визир представляет собой металлический стержень с прорезью,
мушкой и пружиной. На корпусе заряда есть устройство для установки опти-
ческого датчика цели или визира параллельно лийии прицеливания СФЗ. Сбор-
ка мины осуществляется непосредственно на месте установки.
Технические характеристики мины ТМ-83: общая масса мины в неуправля-
емом варианте - 20,4 кг, из них масса ВУ - 2,7 кг, масса ВВ - 9,6 кг, диаметр
заряда ВВ - 250 мм, высота заряда - 200 мм, максимальная высота по мушке
оптического датчика цели при установке мины на крышку ящика 440 мм.
В автономном режиме мина работает следующим образом. В режиме ожи-
дания цели оптический датчик 6 выключен, задействован лишь сейсмический
датчик 11. При обнаружении цели сейсмическим датчиком оптический датчик
включается. При пересечении целью линии прицеливания мины с оптическо-
568
7. Средства поражения с использованием ударного ядра
Рис. 7.20. Противотанковая противобортовая мина ТМ-83:
1 - СФЗ; 2 медная облицовка; 3 - скоба; 4 - рукоятка; 5 - цапфа; 6 - оптический датчик цели;
7 - корпус; 8 - крышка; 9 - запал; 10 - ПИМ; 11 - сейсмический датчик цели
го датчика передается электрический сигнал на срабатывание ПИМ 10 и запа-
ла, который инициирует детонатор и подрывает СФЗ. Формируемый компакт-
ный ПЭ поражает цель. При взрыве на расстоянии от 5 до 50 м при угле
встречи с преградой не более 30° от нормали обеспечивается пробитие брони
толщиной 100 мм. Мина сохраняет работоспособность в интервале темпера-
тур от -30 до +50 °C без замены источников питания в течение 30 суток.
7.5. Средства поражения с ударным ядром,
поражающие цель на пролете сверху
Третья крупная область применения и разработки БП с ударным ядром -
это крышебойные боеприпасы, поражающие цель на пролете сверху (артил-
лерийские снаряды, боевые части ПТУР и автономных беспилотных ЛА).
Так, в США ведутся НИОКР по созданию высокоточного снаряда ХМ943
STAFF к танковой 120-мм гладкоствольной пушке М256 (рис. 7.21). Снаряд
предназначается для поражения сверху бронированной техники, а также бое-
вых вертолетов на малых и сверхмалых высотах в наименее защищенную часть
в момент пролета над целью (в том числе и когда цель находится за укрыти-
ем). Это обеспечивается оснащением снаряда радиолокационным датчиком,
работающим в миллиметровом диапазоне и определяющим момент подрыва
СФЗ при прохождении боеприпаса над целью. Заряд, формирующий ударное
ядро, располагается поперечно продольной оси снаряда. Предполагается, что
разрабатываемый БП будет намного эффективнее БПС на предельных дальне-
7.5. СП с ударным ядром, поражающие цель на пролете сверху
569
Рис. 7.21. Высокоточный 120-мм танковый снаряд ХМ943 STAFF
стах стрельбы прямой наводкой и даст принципиальную возможность сред-
ствами танкового вооружения бороться с бронетехникой за складками мест-
ности или за укрытиями. Подробной информации по снаряду STAFF в опуб-
ликованных материалах нет. Однако, судя по его общему виду (см. рис. 7.21),
в данном снаряде отсутствуют средства обеспечения стабилизации движения
по крену, а при движении по траектории та^ой снаряд должен вращаться. При
поперечном расположении оси СФЗ это приводит к повышенным требовани-
ям к взрывательному устройству и необходимости «тройной синхронизации»:
момент подрыва заряда определяется моментом совпадения нахождения цели
под БП и направления линии прицеливания СФЗ на цель. Не исключено, что
КО снарядоформирующего заряда выполнена заодно с корпусом снаряда как
профилированная его часть.
Концепция поражения бронеобъекта на пролете сверху реализуется в бое-
вой части ПТУР Tow-2B (США). Противотанковый ракетный комплекс Tow
находится на вооружении с 1969 г. и очень широко распространен. К 2000 г.
он использовался более чем в 40 странах мира, а всего было выпущено около
600 тыс. ракет разных модификаций. По мере роста защищенности бронетех-
ники ПТРК Tow непрерывно модернизировался: начиная от 127-мм моноблоч-
ной кумулятивной БЧ Tow через 152-мм тандемную кумулятивную БЧ Tow-2A
к БЧ Tow-2B с двумя зарядами, формирующими ударное ядро и поражающи-
ми цель сверху. ПТУР Tow-2B относится к второму поколению рассматривае-
мого типа СП и наводится на цель полуавтоматически с передачей команд
управления по проводам. Диаметр корпуса БЧ - 152,4 мм. Каждый из двух
СФЗ имеет диаметр 127 мм (5 дюймов), линии прицеливания зарядов ориен-
тированы поперечно оси ракеты и направлены вертикально вниз. В полете
ракета стабилизирована по крену, система наведения обеспечивает ее движе-
ние над линией прицеливания по настильной траектории с последующим про-
летом над целью. Одновременный подрыв обоих СФЗ реализуется в момент
пролета над наиболее уязвимой частью бронецели с помощью неконтактно-
го ВУ - координатора цели. Двухканальный КЦ включает в себя оптический
(лазерный дальномер) и магнитометрический датчики. ПТУР Tow-2B посту-
пила на вооружение в 1991 г. и показала высокую эффективность в боевых
действиях в зоне Персидского залива. К настоящему времени создана ее мо-
дификация Tow-2N, у которой команды полуавтоматического наведения пере-
даются по радиолучу.
В США в рамках одной из программ развития высокоточного оружия раз-
рабатывается еще один БП с ударным ядром, поражающий цель на пролете
сверху. Это суббоеприпас LOCAAS, предназначенный для поражения танков,
570
7. Средства поражения с использованием ударного ядра
бронированных транспортных средств, позиций зенитных ракетных комплек-
сов и установок мобильных баллистических ракет (от англ, low cost anti-armour
submunition - дешевый бронебойный суббоеприпас).
В качестве основных носителей суббоеприпасов LOCAAS в настоящее
время рассматриваются самолеты, оснащенные специальными кассетными ус-
тановками. Планируется, что бомбардировщики В-1 и В-2 будут способны
нести до 14 LOCAAS, а современные и перспективные истребители F-16,
F-22 и JSF - до 16 таких суббоеприпасов. Ожидается, что носителями систем
LOCAAS могут быть авиационные управляемые ракеты (например, AGM-130),
реактивные снаряды систем залпового огня MLRS, оперативно-тактические
ракеты ATACMS.
В основе технического решения суббоеприпаса LOCAAS по-прежнему
лежит кумулятивный дальнобойный СФЗ. Однако в дополнение к этой уже
ставшей традиционной идее в данном БП планируется использовать идеи
адаптивности БЧ к типу цели и индивидуального активного наведения на
цель вместо «самоприцеливания», носящего все же пассивный характер.
Суббоеприпас LOCAAS представляет собой небольшую крылатую рэкету
(рис. 7.22) и выполнен по нормальной аэродинамической схеме с несущим кор-
пусом I. Боеприпас снабжен раскрывающимся после пуска из носителя верхне-
расположенным крылом 6 и управляемым хвостовым оперением 5, обеспечива-
ющим в ходе наведения на цель изменение траектории полета по принципу
крен- поворот. Длина суббоеприпаса - 0,79 м, ширина фюзеляжа - 0,25 м, высо-
та - 0,18 м, размах крыла -1,18м. Предусматривается создание суббоеприпаса
в двух вариантах - с двигателем и без него. Вариант с двигателем будет иметь
стартовую массу 38...43 кг и дальность действия около 170 км. Вариант без
двигателя значительно легче - масса 22 кг, дальность при сбрасывании суббое-
припаса с больших высот - 60...70 км. Планируемая крейсерская скорость -
370 км/ч, рабочая высота полета - 230 м, площадь поиска цели - 137 км2.
Суббоеприпас LOCAAS намечается оснастить инерциальной навигаци-
онной системой и лазерной локационной станцией 3, позволяющей получать
Рис. 7.22. Суббоеприпас LOCAAS:
1 - несущий корпус; 2 - ЭВМ; 5 - лазерная локационная станция; 4 - БЧ; 5 - управляемое
хвостовое оперение; б - верхнерасположенное крыло
7.5. СП с ударным ядром, поражающие цель на пролете сверху
571
трехмерные изображения обнаруженных объектов. Лазерная станция сопряга-
ется с системой автоматического распознавания целей по заложенным в па-
мять бортовой ЭВМ 2 цифровым образам. По замыслам разработчиков в ре-
жиме поиска цели лазерная станция будет осуществлять сканирование земной
поверхности в полосе шириной 750 м по курсу полета, а в режиме распозна-
вания в полосе до 100 м. При одновременном обнаружении нескольких це-
лей алгоритм обработки изображений обеспечит возможность атаки наиболее
приоритетной из них. Для варианта с двигателем в состав суббоеприпаса пла-
нируется Также включить приемники КРНС NAVSTAR. В перспективе
LOCAAS возможно оснастят системой передачи данных, обеспечивающей
связь суббоеприпасов с самолетом запуска и между собой. Это позволит ис-
пользовать их по методу «волчьей стаи», когда после обнаружения цели од-
ним из суббоеприпасов другие будут получать соответствующие координаты
и автоматически перенацеливаться непосредственно в полете.
В суббоеприпасе LOCAAS будет применена мультирежимная дальнобой-
ная кумулятивная БЧ 4 массой 7,7 кг с диаметром практически на всю шири-
ну фюзеляжа (250 мм) и с медной КО, ориентированной вертикально вниз.
Принципиальная техническая новизна БЧ - ее мультирежимность, придаю-
щая БП способность адаптироваться к типу цели. В зависимости от степени
защищенности цели подрыв заряда БЧ при пролете боеприпаса над целью
будет осуществляться с обеспечением формирования ударного стержня (удли-
ненного ПЭ типа формируемого самоприцеливающимся суббоеприпасом
SMArt-155, см. рис. 7.18) или ударного ядра (типа компактного ПЭ, образуе-
мого самоприцеливающимся боевым элементом РБК-500 СПБЭ (см. рис. 7.17),
или же нескольких ударных ядер. Первый режим работы БЧ суббоеприпаса
LOCAAS будет реализовываться для поражения танков и других сильноза-
щищенных целей, второй - для уничтожения легкобронированной техники,
третий для вывода из строя практически незащищенных целей типа ПУ
ракет и радиолокационных станций. В опубликованных материалах отсут-
ствует информация по реализации мультирежимности БЧ суббоеприпаса
LOCAAS. Возможно, мультирежимность БЧ будет осуществлена через ме-
ханизм многоточечного инициирования СФЗ, которое приводит к формиро-
ванию детонационного фронта различной конфигурации, различному харак-
теру нагружения КО и, как следствие, к формированию различающихся ПЭ.
Таким образом, в разрабатываемом крышебойном суббоеприпасе LOCAAS
будут применены самые передовые технические решения в области создания
высокоточных БП. Очевидно, в случае достижения целей, поставленных пе-
ред программой LOCAAS, БП с ударным ядром пополнятся новым сверхвы-
сокоэффективным образцом.
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ
Анисимов В. Боеприпасы с высокоточными боевыми элементами // Зарубежное
военное обозрение. 1994. № 11. С. 23- 29.
Боевые части с формирующимися взрывом поражающими элементами // Эксп-
ресс-информация «Новости машиностроения». Сер. «Наука и техника». 1987.
Вып. 22(275). С. 3-9.
572 7. Средства поражения с использованием ударного ядра
Вопросы разработки и применения самоприцеливающихся и управляемых бое-
припасов // Экспресс-информация «Новости машиностроения». Сер. «Наука и техни-
ка». 1987. Вып. 8(261). С. 3-7.
Григорьев А. Американский авиационный боеприпас LOCAAS // Зарубежное во-
енное обозрение. 1997. № 5. С. 40-41.
Дмитриев В. Перспективы развития ПТРК средней дальности за рубежом // За-
рубежное военное обозрение. 2001. № 10. С. 24-28.
Дудка В.Д., Чуков А.Н., Шмараков Л.Н. Высокоточные боеприпасы различного
целевого назначения: Учеб, пособие. Тула: ТулГУ, 2002.
Жуков Н. Новые противотанковые мины // Зарубежное военное обозрение. 1992.
№ 1. С. 24 -32.
Неуправляемый реактивный снаряд 9М217 с самоприцеливающимися боевыми
элементами // Рекламный проспект ФГУП «Сплав», 2003.
Оружие России: Каталог. Т. VII. Высокоточное оружие и боеприпасы- М.: АОЗТ
«Военный парад», 1997.
Разовая бомбовая кассета РБК-500 СПБЭ: Техническое описание и* инструкция
по эксплуатации. М.: Изд-во МО РФ, 1989. *-
Растопшин М. Артиллерийские высокоточные боеприпасы // Техника и вооруже-
ние. 1999. № 8. С. 4-8.
Растопшин М. Особенности развития зарубежных ПТРК И Техника и вооруже-
ние. 2002. № 1.С. 29-33.
Растопшин М. Пути повышения параметров защиты танков и эффективности
противотанковых средств // Техника и вооружение. 2002. № 9. С. 18-21.
Реактивный снаряд 9М55К1 с самоприцеливающимися боевыми элементами //
Рекламный проспект ФГУП «Сплав», 2003.
Русинов В. Состояние и перспективы развития 155-мм боеприпасов полевой ар-
тиллерии за рубежом // Зарубежное военное обозрение. 2002. № 3. С. 24-29.
Средства воздушного нападения зарубежных стран: Программы развития высо-
коточного оружия / Под ред. Б.Ф. Чельцова, С.В. Ягольникова. М.: ЦНИИ МО РФ,
2003.
Строев В. Кассетные боеприпасы с самоприцеливающимися боевыми элемента-
ми // Зарубежное военное обозрение. 2000. № 8. С. 20-25.
Суров О. Совершенствование боеприпасов полевой артиллерии // Зарубежное во-
енное обозрение. 1983. № 12. С. 36-41.
Танковые боеприпасы зарубежных стран // Зарубежное военное обозрение. 1997.
№5. С. 21-25.
Физика взрыва: В 2 т. / Под. ред. Л.П. Орленко. М.:Физматлит, 2002.
Фомич Н. Противотанковые средства сухопутных войск капиталистических стран //
Зарубежное военное обозрение. 1987. № 5. С. 24-33.
Military Technology. Special Supplement. 1986. Vol. 10. № 9. P. 19-20.
8
КИНЕТИЧЕСКИЕ БРОНЕБОЙНЫЕ БОЕПРИПАСЫ
8.1. Классификация бронебойных боеприпасов
Действие кинетических бронебойных боеприпасов (БрБП) основано на
использовании кинетической энергии удара. Они предназначены для пораже-
ния подвижных и неподвижных объектов военного назначения, основным за-
щитным конструктивным элементом которых является набор металлических,
стекловолоконных и керамических плит. К числу подвижных бронированных
объектов военного назначения относятся танки, БМД, боевые машины десан-
та (БМД), БТР, самоходные артиллерийские установки (САУ), отдельные типы
ЛА и кораблей ВМФ. Среди неподвижных объектов военного назначения с
элементами бронирования известны долговременные огневые точки, крышки
шахтных пусковых установок (ШПУ) ракет стратегического назначения и др.
Конструкция пассивной защиты всех этих объектов предусматривает ис-
пользование плит из специальной броневой легированной стали с оптималь-
ным сочетанием прочности и вязкости, исключающей возникновение сквоз-
ных трещин, расколов, проломов и отколов с тыльной стороны плит после
локального приложения к ним динамической нагрузки. Такие свойства у бро-
невых плит получают соответствующей термообработкой и упрочнением при
прокатке, ковке и штамповке броневых деталей сложной формы, которые мо-
гут быть изготовлены и литьем. Физико-механические свойства таких плит и
деталей бываю! одинаковыми (гомогенная броня) или различающимися (гете-
рогенная броня) по толщине. Различают броню низкой (2170...2550 НВ), сред-
ней (2850...3410 НВ) и высокой (3630...4150 НВ) твердости. Известна также
высокопрочная (5000...6000 НВ) тонколистовая броня.
Броню высокой твердости с гетерогенными и гомогенными свойствами
(толщиной до 30 мм), широко применяемую в конструкциях БМП, САУ, само-
летов штурмовой авиации, вертолетов, бронекатеров и т. д., называют проти-
вопупьной. Такую же броню (толщиной от 30 мм), называемую противосна-
рядной, используют для дифференцированного по толщине и углам наклона
бронирования танков, САУ, кораблей и различных оборонительных сооруже-
ний. Чем толще броневые листы, тем сложнее их изготовить, обеспечив при
этом высокую твердость и одинаковые свойства по толщине.
Среди вариантов бронирования объектов, кроме использования монолит-
ных плит, встречаются варианты разнесенного бронирования плитами с воз-
душными зазорами между ними, многослойного бронирования из плотного
набора плит различной толщины и свойств (сталь, керамика, стеклопластики)
и комбинированного бронирования из разнесенных и многослойных наборов
плит. В сочетании с углами наклона динамической и активной защиты такое
574
8. Кинетические бронебойные боеприпасы
бронирование объектов позволяет существенно повысить их стойкость по от-
ношению к воздействию не только бронебойных, но и кумулятивных и фугас-
ных БП, а также средств массового поражения.
Основные цели кинетических БрБП танки, которые имеют защищаю-
щие толщины брони носовой части, борта и кормы корпуса в примерном со-
отношении 2,5:1,0:0,5. Объем боевого отделения в корпусе и башне, достига-
ющий 6...7 м3, составляет 50...60 % общего забронированного объема танка,
масса бронирования - 50 % от обшей его массы. Корпуса и башни с кормовой
нишей, предназначенной для размещения боеукладки, у большинства тан-
ков сварные. В передней их части предусмотрено применение многослойной
брони. Для повышения защищенности танков используют различные конст-
руктивные приемы: увеличение углов наклона брони до 80...83° (рис. 8.1):
установка на некотором расстоянии от брони дополнительных экранов (фальш-
бортов); применение разнесенной (двух- и многопреградной) й комбиниро-
ванной брони с наполнителями из низкоплотных (стеклотекстолит), высоко-
плотных (обедненный уран), а также высокопрочных хрупких (керамика) ма-
териалов; использование динамической и активной защиты, обеспечивающей
полное или частичное разрушение боеприпаса до или во время взаимодей-
ствия с танком. С учетом больших углов наклона брони и конструктивных
приемов для повышения защищенности танков (рис. 8.2) горизонтальная тол-
щина эквивалентной монолитной стальной брони, необходимая для пробития
бронебойными снарядами, у современных танков (М1А1, М1А2 - США,
Leopard-2 - Германия, Leclerc - Франция) составляет 700...800 мм, а у перс-
пективных - 1000 мм.
Для ЛА характерно дифференцированное бронирование, преимуществен-
но со стороны нижней полусферы. У кораблей ВМФ толщина палубной и
бортовой брони составляет 5... 10 мм (бронекатера, малые артиллерийские и
сторожевые корабли), 50 мм (крейсера), 65... 100 мм (авианосцы). Для защиты
жизненно важных частей кораблей (цитаделей, башен главного калибра, бое-
вой рубки) применяется противоснарядное бронирование с толщиной брони
до 100... 175 мм.
Рис. 8.1. Компоновочная схема танка Ml:
МТО — моторно-трансмисснонное отделение
8.1. Классификация бронебойных боеприпасов
575
Рис. 8.2. Многофункциональная комбиниро-
ванная броня:
/ - маскировочное покрытие; 2 - сталь с аморф-
ным лицевым слоем; 3 - керамические элементы
с ВВ; 4. 6- сталь; 5 - стекло с волокнами углерода;
7 противонейтронная и противоосколочная защи-
та (подбой)
По типу оружия БрБП подразделяются на:
• бронебойные снаряды (БС) сухопутной и морской артиллерии, танко-
вых, противотанковых и авиационных пушек;
• авиационные бомбы;
• боевые части ракет.
По калибру выделяются БрБП:
• малого (23...57 мм);
• среднего (57... 152 мм);
• большого (более 152 мм) калибра.
По отношению к калибру артиллерийского орудия БС делят на калибер-
ные и подкалиберные.
Калиберные БС, стабилизирующиеся вращением, можно классифициро-
вать следующим образом:
• наличие разрывного заряда - камерные (с каморой под разрывной за-
ряд) и сплошные (без разрывного заряда);
• форма головной части - остроголовые и с притупленной головной частью.
При этом калиберные БС могут быть оснащены бронебойными наконеч-
никами для увеличения бронепробиваемости и баллистическими наконечни-
ками для уменьшения падения скорости снаряда на траектории.
Подкалиберные БС по типу стабилизации подразделяются на:
• стабилизированные вращением;
• стабилизированные оперением (бронебойные оперенные подкалиберные
снаряды БОПС).
Стабилизированные вращением бронебойные подкалиберные снаряды (БПС)
по типу отделяемости ведущего устройства (поддона) в полете могут быть с
неотделяемым (катушечной и обтекаемой формы) и отделяемым поддонами.
Стабилизированные оперением БОПС выполняются с отделяемыми в по-
лете ведущими устройствами, которые можно разделить следующим образом:
• количество центрующих поверхностей (ЦП) - одна (роль второй ЦП
выполняет в этом случае калиберное оперение) и две ЦП (в этом случае опе-
рение имеет размах менее калибра орудия);
576
8. Кинетические бронебойные боеприпасы
• тип ведущего устройства - тянущий, толкающий и комбинированный;
• удлинение корпуса - малое (менее 10 диаметров корпуса), среднее (10.. .20
диаметров корпуса) и большое (более 20 диаметров корпуса);
• наличие дополнительного сердечника — без сердечника (цельнокор-
пусные) и с сердечником (в головной, в донной частях или по всей длине
корпуса).
8.2. Калиберные бронебойные снаряды
Первые БС служили для поражения бронированных судов, бронебашен
и бронекуполов полевых и береговых укреплений. В настоящее время их
основное назначение - поражение танков и САУ. Броневая защита кораблей
и танков изначально представляла гомогенную (с постоянными по толщине
Рис. 8.3. Калиберный
бронебойный остро-
головый снаряд:
1 - корпус; 2 - ведущие
пояски; 3 - разрывной
заряд; 4 - взрыватель;
5 - трассер; 6 - подре-
зы-локализаторы
прочностными свойствами) броню низкой твердости,
для поражения которой применялись остроголовые ка-
либерные снаряды, имевшие для усиления -заире град-
ного действия камору с ВВ (рис. 8.3). У калиберных БС
на наружной поверхности может быть одна*или две
кольцевые канавки треугольного сечения, называемые
подрезами-локализаторами. При ударе снаряда о броню
подрезы-локализаторы предотвращают распространение
трещин вдоль корпуса и в глубь него, что снижает веро-
ятность разрушения каморы, снаряженной ВВ, при про-
никании снаряда в броню. Головные части остроголо-
вых снарядов выполняются, как правило, в форме ожи-
вала радиусом 1,0... 1,8 клб, с высотой бронебойного
свода (расстояния от вершины корпуса до каморы с ВВ)
1,0...3,0 клб, с толщиной стенок каморы 0,2...0,4 клб и с
коэффициентом наполнения ВВ, не превышающим 2 %
(в снарядах без каморы, т. е. со сплошными корпусами,
ВВ вообще отсутствует) (табл. 8.1). Для уменьшения на-
пряжений в ВВ при ударе о броню в верхнюю часть
каморы иногда помещают деревянные или пластмассо-
вые вкладыши. Корпуса остроголовых снарядов изго-
товляют из легированных сталей 50Х, ХЗНМ, 35ХГС,
35ХГСА. Каморные снаряды снабжают донными взры-
вателями непредохранительного типа с постоянным за-
медлением.
Появление гетерогенной брони предъявило более высокие требования к
снарядам по прочности. В целях предотвращения разрушения снарядов и
вскрытия каморы при взаимодействии с броней толщина стенок их корпу-
сов была увеличена, а сами снаряды оснащены бронебойным наконечником
(предложен адмиралом С.О. Макаровым), изготовляемым из менее прочных,
чем корпус снаряда, сталей (рис. 8.4). При встрече с преградой бронебой-
ный наконечник повреждает более твердый лицевой слой гетерогенной бро-
ни, деформируется и разрушается сам, создавая при этом в головной части
корпуса объемное сжатие и предохраняя последнюю от разрушения. Нако-
8.2. Калиберные бронебойные снаряды
577
Таблица 8.1. Значения основных характеристик калиберных
бронебойных остроголовых снарядов
d, мм L, клб т, кг а, % 8, клб /, клб
37 4,27 0,76 — — —
57 3,97 3,14 0,60 0,32 2,35
85 3,15 9,34 0,60 0,35 1,91
100 3,09 15,88 0,40 0,33 2,06
122 2,91 25,00 0,60 0,30 2,00
152 2,90 48,78 1,35 0,30 1,56
Примечание, d калибр; L - удлинение корпуса; т масса снаряда; а наполнения; 8 толщина стенок каморы; t - высота бронебойного свода. - коэффициент
нечник благодаря своей притупленной форме уменьшает тенденцию снаря-
дов к рикошету. а -
Коэффициент наполнения у снарядов с бронебой-
ными наконечниками (табл. 8.2) составляет 0,37.. .0,55 %,
высота их бронебойного свода корпусов - 1,20...
...1,56 клб, что меньше высоты бронебойного свода ос-
троголовых снарядов. Для изготовления корпусов при-
меняют стали 60ХНМ, 60Х2М, 60Х2Н2М со сложной
термообработкой: закалка всего корпуса, высокий от-
пуск, подкалка головной части, отпуск донной части,
низкотемпературный отпуск всего корпуса.
Бронебойный наконечник (рис. 8.5) крепится на
головной части корпуса с помощью специального при-
поя типа 4 ПОС 61, в состав которого входят олово,
свинец, сурьма, мышьяк. Материал наконечника -
сталь 35ХГСА, 46X30, 48X3. Бронебойный наконечник
охватывает 0,65...0,80 высоты головной части корпу-
са. Толщина свода у современных бронебойных на-
конечников находится в диапазоне 0,35...0,40 клб, а
высота h приблизительно равна одному калибру. Пе-
ред пайкой наконечник индивидуально подбирается
или подгоняется к корпусу. При этом соприкоснове-
ние сопрягаемых поверхностей должно обеспечиваться
как минимум в трех зонах (в верхней, средней и ниж-
ней частях наконечника) и в трех точках в каждой зоне,
расположенных не менее чем на двух третях окруж-
ности.
Для улучшения баллистической формы снаряда к
бронебойному наконечнику с помощью закатки кре-
пится баллистический наконечник из тонколистовой
декапированной стали или тонколистовой качествен-
ной стали марок 08кп, 10кп.
Рис. 8.4. Калиберный
бронебойный остроголо-
вый снаряд с бронебой-
ным наконечником:
1 - баллистический нако-
нечник; 2 - бронебойный
наконечник; 3 корпус; 4 -
разрывной заряд; 5 дон-
ный взрыватель; 6 - веду-
щий поясок; 7 - ввинтное
дно; 8 - трассер
578 8. Кинетические бронебойные боеприпасы
Таблица 8.2. Значения основных характеристик калиберных бронебойных
остроголовых снарядов с бронебойным наконечником
d, мм L, клб т, кг а, % 8, клб t, клб ц/h, клб
57 3.60 2,80 0,47 0,32 1,35 0,38/1,09
85 3,64 9,20 0,55 0,36 1,28 0,35/0,98
100 3,90 15,88 0,37 0,35 1,48 0,39/1,11
122 3,70 25,10 0,50 0,30 1,20 0,41/1,03
130 3,67 33,40 0,40 0,31 1,56 0,40/1,14
Калиберные остроголовые снаряды, как правило, рикошетируют от брони
при углах встречи от нормали к преграде более 45...50°, поэтому в настоящее
Рис. 8.5. Бронебойный
наконечник
время они применяются в основном для поражения
морских целей, при стрельбе по которым в большин-
стве случаев реализуются меньшие углы встречи.
При взаимодействии снарядов с танковой броней
углы встречи могуч превышать указанные выше значе-
ния. Лучшие результаты, особенно по гетерогенной
броне, показывают калиберные тупоголовые снаряды
с притупленной головной частью (рис. 8.6). При встрече
с броней под углом сначала внедряется кромка при-
тупления, что приводит к появлению нормализующего
момента сил сопротивления, поворачивающего снаряд
в направлении уменьшения угла
встречи (нормализация снаряда). Дальнейшее проникание
идет практически по нормали к преграде. При пробитии
брони такими снарядами из нее выбивается пробка, что
наряду с уменьшением пути снарядов в броне из-за нор-
мализации снаряда повышает их бронепробивное действие.
При взаимодействии с броней корпуса тупоголовых сна-
рядов частично разрушаются (срабатываются) до подрезов-
локализаторов, ограничивающих разрушение корпуса, бла-
годаря чему камора с зарядом ВВ не вскрывается.
Притупление головной части выполняется плоским,
сферическим, фигурным с площадкой или выступом в цен-
тре. Диаметр притупления головной части составляет
0,6...0,8 клб. На головной части путем закатки крепится
Рис. 8.6. Калиберный бронебойный снаряд с притупленной
головной частью:
/ - баллистический наконечник; 2 - корпус; 3 - подрезы-локализаторы;
4 - инертный вкладыш; 5 - разрывной заряд; 6 донный взрыватель;
7 - ведущий поясок; 8 - ввинтное дно; 9 - трассер
8.2. Калиберные бронебойные снаряды
579
Таблица 8.3. Значения основных характеристик калиберных бронебойных
тупоголовых снарядов
d, мм L, клб т, кг а, % 8, клб t, клб
45 4,55 1,44 1.20 0,25 1,70
57 4.34 3,14 - - -
57 4,10 3,19 0,45 0.32 3,24
76 4,07 6.50 0,65 0,33 1,66
85 4,30 9,20 1,78 0,25 1.52
100 3,69 15,88 . 0,41 0,37 1,84
122 3,40 25,00 • 0,62 0,30 1,90
152 3,40 48,96 0,98 0,30 1,60
баллистический наконечник из тонколистовой декапированной стали, кото-
рый улучшает баллистическую форму снаряда и сохраняет его скорость на
траектории.
Корпуса тупоголовых снарядов изготовляются из сталей 35ХГСА, ХЗНМ.
Термическая обработка корпусов обеспечивает высокую твердость голов-
ной части, а цилиндрическая (в области канавок под ведущие пояски) и
донная (с резьбой под дно) части или взрыватель характеризуются большей
вязкостью.
Снаряды с притупленной головной частью комплектуются донными взры-
вателями непредохранительного типа МД, а также взрывателями непредо-
хранительными типа ДБР с авторегулируемым замедлением (табл. 8.3).
Обтюрация каморы с ВВ по резьбовым соединениям ввинтного дна и дон-
ного взрывателя осуществляется с помощью свинцовых колец (рис. 8.7).
Рис. 8.7. Донный узел калиберного бронебойного снаряда:
1 - корпус снаряда; 2 - взрыватель; 3, 7 - наборы прокладок; 4 - свинцовые кольца;
5 - трассер; 6 - ввинтное дно; 8 - заряд ВВ
580
8. Кинетические бронебойные боеприпасы
8.3. Бронебойные подкалиберные снаряды,
стабилизируемые вращением
Увеличение толщины брони к концу Второй мировой войны потребовало
резкого повышения бронепробиваемости, что привело к появлению БПС. При
всем их многообразии изначально все они стабилизировались вращением и
пробивали броню толщиной, равной 2...3 клб снаряда, что примерно в два и
более раз превосходит бронепробиваемость калиберных снарядов.
Высокая бронепробиваемость БПС достигается, с одной стороны, увели-
чением их скорости до 1500 м/с (прежде всего за счет уменьшения массы
снаряда), а с другой - повышением концентрации энергии удара за счет
использования подкалиберных сердечников диаметром в 2,0 2,5 раза мень-
ше калибра орудия и изготовляемых из твердых металлокерамических спла-
вов типа карбида вольфрама с высокой твердостью (90 HRC) и плотностью
(14 100 кг/м3). Поддон снаряда служит для ведения снаряда по каналу ствола,
обтюрации пороховых газов, сообщения скорости сердечнику и его , защиты
от повреждений в служебном обращении. В БПС с неотделяемым поддоном
масса сердечника обычно не превышает 30 % массы снаряда т, а длина сер-
дечника равна 3...4 его диаметрам (табл. 8.4). Дополнительное преимущество
БПС перед калиберными - их более высокая (до 0,9) вероятность попадания в
цель, чему способствует меньшее время полета снаряда до цели и большая на-
стильность траектории. Вместе с тем малая масса БПС отрицательно сказыва-
ется на их внешних баллистических свойствах, приводя к резкому падению ско-
рости на траектории и снижению бронепробиваемости на дальностях свыше
1000 м. Первые БПС имели неотделяемый от сердечника поддон катушечной
формы (рис. 8.8) с кольцевым пазом в центральной части для сокращения мас-
сы снаряда. Некоторое уменьшение падения скорости БПС на траектории было
достигнуто выполнением поддона обтекаемой формы (рис. 8.9). Помимо этого
Таблица 8.4. Значения основных характеристик БПС
с неотделяемым поддоном
d, мм L, клб т, кг dc, мм IJd. 7ИС, КГ
45 2,66 Катушечная 0,85 ])орма поддона 20 3,55 0,260
57 2,86 1,79 25 3,64 0,525
76 3,02 2,30 28 3,75 0,630
85 3.22 4,99 28 3,22 0,648
100 3,45 8,51 42 3,10 2,130
57 3,84 Обтекаемая ( ' 2.40 рорма поддона 28 3,22 0,648
76 3,15 3,30 28 4,00 0,825
85 3,00 5,30 35 4,00 1,600
Пр и м еч а н и е. Здесь /с, с, !с и тс - длина, диаметр и масса сердечника соответственно.
8.3. Бронебойные подкалиберные снаряды, стабилизируемые вращением 581
Рис. 8.8. БПС с поддоном катушеч-
ной формы:
/ баллистический наконечник; 2 -
бронебойный сердечник; 3 - корпус
(поддон); 4 трассер
Рис. 8.9. БПС с поддоном обтекаемой формы:
1 баллистический наконечник: 2 - головка; 3 -
гайка; 4 - бронебойный сердечник; 5 - обтекатель;
6 — корпус; 7 - ведущие пояски; 8 - трассер;
9 - канавка для обжима дульца гильзы; 10 - цент-
рирующее утолщение
в таких снарядах используются сердечники большего удлинения, чем у снаря-
дов с катушечными поддонами, что обеспечивает дополнительное увеличение
бронепробиваемости.
Подкалиберные снаряды также применялись для орудий с цилиндрокони-
ческим стволом (рис. 8.10), в которых в процессе выстрела поддон обжимал-
ся, что улучшало внешние баллистические характеристики снаряда и умень-
шало падение скорости на траектории. Однако от таких орудий пришлось от-
казаться вследствие их низкой живучести.
Радикальное улучшение внешних баллистических свойств может быть по-
лучено только при использовании поддона, отделяемого от активного снаряда
(сердечника в защитной металлической оболочке). Разделение происходит пос-
ле вылета снаряда из орудия за счет различия в силах сопротивления воздуха
движению активного снаряда и поддона, а также под влиянием остаточного
давления пороховых газов, которые заполняют при выстреле камору, выпол-
ненную в донной части поддона, либо с помощью центробежной силы (для
поддона, состоящего из отдельных секторов).
Отечественные БПС с отделяющимися поддонами (рис. 8.11) имеют сер-
дечник из твердого сплава типа ВН-8 или ВН-10, который смонтирован в кор-
пусе с приваренной головкой. Такая сборка представляет собой активный сна-
ряд, закрепленный в поддоне с помощью стопорных винтов. В каморе 8 во
время выстрела накапливаются пороховые газы под высоким давлением, кото-
рые после вылета снаряда расширяются, срезают стопорные винты и разъеди-
582
8. Кинетические бронебойные боеприпасы
Рис. 8.10. БПС для орудий с цилинд-
роконическим стволом:
/ - баллистический наконечник; 2 - го-
ловка; 3 - бронебойный сердечник; 4 -
корпус; 5 трассер
Рис. 8.11. БПС с отделяющимся поддоном:
1 - головка; 2 бронебойный сердечник 3 - кор-
пус активного снаряда; 4 - поддон; 5- стопор-
ный винт; 6 - ведущий поясок; 7 трассер;
8 - камора
няют активный снаряд и поддон с помощью набегающего воздушного потока.
По такой схеме выполнены снаряды для отечественных нарезных пушек, в час-
тности, 122-мм БПС ЗБМ11 с сердечником из твердого сплава ВН-10 массой
2,81 кг и поддоном из стали 30ХГСА с четырьмя стопорными винтами.
Зарубежные БПС, стабилизируемые вращением, как правило, снабжены от-
деляющимися секторными поддонами (рис. 8.12). По классификации НАТО их
относят к снарядам типа APDS (Armour Piercing Discarding Sabot) - бронебой-
ным подкалиберным снарядам с отделяемым поддоном. Такой снаряд состоит
из активного снаряда и поддона. Активный снаряд содержит твердосплавный
сердечник, заключенный в стальную оболочку. Поддон включает в себя верх-
нюю часть, изготовленную из легкого сплава, на которой есть верхнее и нижнее
центрирующие утолщения, и стальное дно с ведущим пояском. Активный сна-
ряд скреплен с ведущим устройством посредством обжатия его верхней части,
на которой предусмотрены три продольных паза, расположенных под углом 120°.
В зоне верхнего центрирующего утолщения оставлены перемычки трапецие-
видного сечения, обеспечивающие конструктивную прочность детали в усло-
виях служебного обращения. В момент выстрела верхняя часть оседает вниз,
что приводит к разрыву перемычек. Разъединенные части поддона (сектора)
движутся в стволе вместе со стальным дном и активным снарядом. При вылете
за дульный срез под действием центробежной силы и силы сопротивления воз-
духа происходит отделение деталей ведущей части от активного снаряда.
В начале 1960-х годов широкое распространение в странах НАТО полу-
чили 105-мм нарезные пушки L7 (Великобритания) и их модификация М68
(США). В боекомплект этих пушек входили БПС типа APDS двух видов: сна-
ряд L28A1 с сердечником из карбида вольфрама обладал относительно высо-
8.3. Бронебойные подкалиберные снаряды, стабилизируемые вращением 583
Рис. 8.12. БПС с отделяющимся секторным,
поддоном:
1 - баллистический наконечник; 2 - головка;
3 - бронебойный сердечник; 4 - корпус активно-
го снаряда; 5 - поддон с секторами; 6 - трассер
* Рис. 8.13. БПС L52A1 с отделяю-
щимся секторным поддоном
кой бронепробивной способностью при небольших углах встречи; снаряд
L52A1 (рис. 8.13) (внешне похож на снаряд L28A1) с сердечником из плас-
тичного тяжелого вольфрамового сплава уступал сердечнику снаряда L28A1
при действии по броне при малых углах, но превосходил его при действии по
броне при больших углах встречи. Пробиваемая толщина стальной брони сред-
ней твердости при обстреле перечисленными снарядами на дальность 2 км
под углами 0...300 составляла 250...300 мм, а под углами 60...70° - ПО... 120 мм.
Большие углы наклона брони современных танков (до 82°), а также при-
менение защитных экранов отрицательно сказываются на бронепробиваемос-
ти БПС, стабилизируемых вращением. С ростом углов встречи существенно
возрастает их тенденция к рикошетированию, которая может быть несколько
снижена выполнением головной части сердечников в виде сочетания двух ко-
нусов или с выемкой в вершине головной части.
Однако в случае их отсутствия рикошета при встрече под углом пробития
может не произойти, так как возможно разрушение сердечников вследствие
возникающих в процессе взаимодействия с броней значительных изгибаю-
щих моментов и слабой сопротивляемости твердых металлокерамических спла-
вов изгибным и растягивающим усилиям. По этим же причинам часто проис-
ходит разрушение сердечников после пробития стальных защитных экранов,
так как в результате резкого снятия нагрузки в них возникают большие растя-
гивающие напряжения.
Рассмотренные БПС стабилизируются в полете вращением, что наклады-
вает определенные ограничения на длину снаряда, а следовательно, и на его
бронепробиваемость.
584
8. Кинетические бронебойные боеприпасы
8.4. Бронебойные оперенные подкалиберные снаряды
В начале 1960-х годов стало очевидно, что улучшение характеристик бро-
непробиваемости стабилизируемых вращением снарядов типа APDS не имеет
перспектив, так как их относительная длина (отношение длины снаряда к ка-
либру) уже достигла верхнего предела, равного приблизительно 5-7, и при
дальнейшем ее увеличении угловая скорость, которая может быть сообщена
снаряду в нарезном стволе, не будет обеспечивать устойчивости полета сна-
ряда на траектории. От этого недостатка практически избавлены БОПС, при-
меняемые для стрельбы из нарезных и гладкоствольных пушек. Такие снаря-
ды оснащены стабилизатором, который обеспечивает устойчивость полета сна-
ряда. По классификации НАТО их относят к снарядам типа APFSDS (Armour
Piercing Fin Stabilized Discarding Sabot) - бронебойным подкалиберным с от-
деляемым поддоном, стабилизируемым оперением. Такое конструктивное ис-
полнение снарядов позволяет сосредоточить большую кинетическую энергию
на малой площади контакта с броней, что определяет их высокую эффектив-
ность.
Сообщение скорости БОПС и обтюрация пороховых газов осуществляются
либо с помощью ведущего устройства тянущего типа (рис. 8.14, а), выполнен-
ного в виде нескольких закрепленных на корпусе секторов, либо с помощью
ведущего устройства толкающего типа (рис. 8.14, б), снабженного поддоном,
который расположен за стабилизатором. Возможно и их совместное использо-
Рис. 8.14. БОПС с ведущим устройством тянущего (а), толкающего (б) и комбиниро-
ванного (в) типов:
1 - активный снаряд; 2 - обтюрирующий поясок; 3 - отделяемый сектор; 4 - толкающий
поддон; 5 центрирующая втулка
8.4. Бронебойные оперенные подкалиберные снаряды
585
вание в виде ведущего устройства комбинированного типа (рис. 8.14, в). Высо-
кая бронепробиваемость таких снарядов объясняется большой относительной
длиной (до 10 и более диаметров корпуса), а их значительно лучшее действие
под большими углами по сравнению с БПС с твердосплавными сердечника-
ми - изготовлением корпусов из пластичных высокоплотных сплавов.
В России и за рубежом получили в основном распространение БОПС с
ведущими устройствами тянущего типа. При этом российские снаряды из-
начально выполнялись с ведущими устройствами в виде колец с одной ЦП
(рис. 8.15). Роль второй ЦП выполнял калиберный стабилизатор, размах лопа-
стей которого был равен диаметру артиллерийского ствола. Зарубежные кон-
структоры использовали тянущие ведущие устройства катушечного типа с дву-
мя ЦП (рис. 8.16), позволяющими выполнять у снарядов подкалиберные ста-
билизаторы (размах лопастей меньше диаметра ствола). Ведущее устройство
в виде колец имеет меньшую массу, чём ведущее устройство катушечного типа,
поэтому начальная скорость таких БОПС на 50... 150 м/с выше, чем у анало-
Рис. 8.15. БОПС с ведущим устройством в виде
колец без сердечника (а) и с сердечником (б):
1 - баллистический наконечник; 2 - бронебойный
наконечник (демпфер-локализатор); 3 - корпус;
4 - секторное ведущее кольцо; 5 - обтюрирующий
поясок; 6 стабилизатор; 7 - трассер; 8 - трассер-
ная гайка; 9 твердосплавный сердечник
Рис. 8.16. БОПС с ведущим устрой-
ством катушечного типа:
1 - баллистический наконечник; 2 - ци-
линдрические вкладыши; 3 - секторное
ведущее устройство; 4 - корпус; 5
кольцевой обтюратор; б - ленточный об-
тюратор; 7 - стабилизатор; 8 - трассер
586
8. Кинетические бронебойные боеприпасы
гичных снарядов с ведущими устройствами катушечного типа. Однако из-за
большого размера калиберного стабилизатора потеря скорости у таких снаря-
дов при полете на дальность 2 км больше (170... 180 м/с), чем у снарядов с
подкалиберным стабилизатором (70.. .95 м/с). С учетом этого фактора скорость
взаимодействия с броней на дальность более 2 км у снарядов с калиберным
стабилизатором на 50... 100 м/с ниже, чем у снарядов с подкалиберным стаби-
лизатором.
Бронебойные оперенные подкалиберные снаряды могут быть выполнены без
сердечника и с сердечниками из твердого или тяжелого сплавов (см. рис. 8.15).
Первые БОПС сделали цельнокорпусными, т. е. без сердечников, что суще-
ственно увеличило бронепробиваемость под большими углами по сравнению
с БПС, стабилизируемыми вращением. Несмотря на это, такие БОПС уступа-
ли в бронепробитии БПС, стабилизируемых вращением, при малых углах
встречи (взаимодействие с лобовой броней башни танка). Твердосплавные сер-
дечники, размещаемые в корпусе, обеспечили повышение эффективности
БОПС при таких условиях взаимодействия. В дальнейшем получили распрос-
транение сердечники из тяжелых сплавов на основе вольфрама и обедненного
урана. Для уменьшения вероятности рикошета сердечника при взаимодействии
под углом его располагают в хвостовой части корпуса.
Российские БОПС
В 60-е годы XX в. все вновь разрабатываемые отечественные танки были
оснащены гладкоствольными орудиями калибра 115 (танк Т-62) и 125 мм (танки
Т-64, Т-72, Т-80, Т-90), что позволило сократить потери при движении сна-
ряда в канале ствола и перейти к новой схеме стабилизации снаряда опере-
нием. Это в свою очередь способствовало, с одной стороны, повышению
бронепробиваемости БОПС за счет увеличения длины снаряда, а с другой -
увеличению бронепробиваемости кумулятивными снарядами путем исклю-
чения отрицательного влияния вращения снарядов на формирование КС.
Все элементы БОПС, кроме отделяемого при вылете из ствола ведущего
устройства, представляют собой активную часть снаряда, которая непосред-
ственно участвует в поражении цели. В нее входят корпус, баллистический и
бронебойный (демпфер-локализатор) наконечники, сердечник, стабилизатор и
трассер.
Корпус - основная поражающая часть снаряда, изготовляемая из легиро-
ванной стали. В его головной части есть оживальная или резьбовая часть для
крепления бронебойного наконечника, в хвостовой части - резьба для уста-
новки стабилизатора, а в средней части корпуса - кольцевые проточки или
резьба для крепления секторов ведущего кольца. Термообработкой достигает-
ся высокая твердость корпуса, которая уменьшается от головной к хвостовой
части снаряда. Корпус изготовляют из стали 60ХНМ или 35X3НМ (табл. 8.5).
Баллистический наконечник предназначен для улучшения баллистичес-
кой формы снаряда, изготовляется из тонколистовой качественной стали типа
08кп или стали 10 и крепится на бронебойном наконечнике закаткой.
Бронебойный наконечник (демпфер-локализатор) имеет то же назначение,
что и в калиберных БС. Кроме этого в некоторых снарядах в наконечнике раз-
мещается и крепится бронебойный сердечник. Бронебойный наконечник, изго-
Таблица 8 5 Основные характеристики российских БОПС
Индекс Год разра- ботки Скорость, м/с Диаметр, мм Длина полная / сердечника, мм Удлинение полное/ сердечника Масса активной части, кг Бронепро- битие на 2 км, мм/60° Бронепро- битие на 2 км. мм/0я Материал корпуса / демпфер-локализатора / сердечника
Калибр 115 мм, орудие У-5ТС
ЗБМ4 - 1650 42 571 /- 13,6/- 4,05 - — 60ХНМ / 35ХГСА / -
ЗБМ5 - 1650 44 554/- 12,6/- 3,89 - - 35X3HM/-/-
ЗБМ6 - 1680 39 523 /- 13,4/- 3,89 - - 35X3HM / 35ХГС / -
ЗБМ21 — 1600 45 -/- -/- 4,47 - — 35X3HM / ВНЖ-90 / -
ЗБМ28 - 1650 44 -/- 4,91 - 350 УЦН /-/-
Калибр 125 мм. орудие Д-81 2А46 -
ЗБМ9 1962 1800 42 519/410 12,4/10 3,62 ' МО 290 60ХНМ/-/-
ЗБМ12 1968 1800 42 545 /410 13,0/10 3,68 180 400 35ХЗНМ/30ХГСА/ВН-8
ЗБМ15 1968 1780 42 525 /450 12,5/11 3,92 180 400 35X3HM / 30ХГСА / ВН-8
ЗБМ22 1976 1760 44 560 / 450 12,8/10 4,50 220 470 35X3HM / ВНЖ-90 / ВН-8
ЗБМ26 1983 1700 - -/470 -/ 13 4,85 230 490 35ХЗНМ/-/ВНЦ
ЗБМ29 1982 1760 44 -/450 -/12 4,50 230 500 35ХЗНМ/-/УЦН
ЗБМ32 1984 1700 - -/470 -/ 13 4,70 250 560 УЦН/-/-
ЗБМ42 1986 1700 - -/520 -/ 16 4,85 230 520 Сталь 1-1 W-сплав
ЗБМ42М 1998 1750 - -/- -/22 - - 650 W-сплав моноблочный
588
8. Кинетические бронебойные боеприпасы
Рис. 8.17. БОПС ЗБМ32;
1 - корпус из уранового
сплава; 2 - секторное ве-
дущее устройство при-
жимного типа; 3 - поли-
амидный обтюрирующий
поясок; 4 - резиновый об-
тюратор; 5 - стабилизагор;
6 трассер
товляемый из стали ЗОХГСА или тяжелого вольфрамового сплава ВНЖ-90, кре-
пится к корпусу припоем или с помощью эпоксидного компаунда.
Бронебойный сердечник служит для увеличения поражающего действия
активного снаряда. Он делается из твердого (ВН-8) или тяжелого (ВНЖ-90)
сплава вольфрама или из сплава на основе обедненного урана УЦН (уран-
цинк-никель). Сердечники из ВН-8 имеют длину порядка двух-трех его диа-
метров, а применение ВНЖ-90 или урана позволяет выпускать сердечники
длиной до 10 и более диаметров.
Стабилизатор необходим для центрования снаряда в гильзе и при движе-
нии по каналу ствола, но главное его назначение - это обеспечение устойчи-
вости полета снаряда на траектории. Стабилизатор, изготовляемый из стали
40ХФА, крепится к корпусу с помощью резьбы. Внутри корпуса гайкой зак-
реплен трассер. На лопастях стабилизатора есть односторонние скосы, служа-
щие для поддержания вращения снаряда на траектории за счет воздействия
боковой составляющей силы сопротивления воздуха. Такое вращений с отно-
сительно небольшой угловой скоростью (15...20 об/с)
улучшает кучность.
Ведущее кольцо воспринимает давление пороговых
газов при выстреле и предназначено для центрования
снаряда в канале ствола. Оно состоит из трех секторов
с углом раствора 120° каждый. В канавке боковой по-
верхности секторов закреплен обтюрирующий поясок,
который кроме обтюрации пороховых газов при выст-
реле скрепляет сектора в кольцо. На внутренней по-
верхности сектора сделаны выступы в виде кольцевой
гребенки для соединения с корпусом. В секторах неко-
торых БОПС выполнены тангенциальные отверстия
диаметром 3...4 мм. Оси отверстий наклонены в тан-
генциальной плоскости под углом 50°, и при движении
снаряда по каналу ствола орудия пороховые газы, вы-
ходя через эти отверстия, создают силу, которая прида-
ет снаряду вращение в стволе. Материал ведущего коль-
ца - сталь 35X3HM или 40ХФА, но для уменьшения
износа ствола применяют и алюминиевые сплавы В95
и В96. Масса ведущего кольца у снарядов калибра
115 мм составляет 1,4... 1,7 кг, у снарядов калибра
125 мм - 2,0...2,1 кг. В связи с необходимостью увели-
чения удлинения корпусов до 20 их диаметров и более
возникает проблема обеспечения устойчивости корпу-
сов снарядов при метании, что требует увеличения базы
контакта ведущего устройства с корпусом. Это дости-
гается применением секторного ведущего устройства
прижимного типа с задней частью в виде обратного ко-
нуса большой длины (рис. 8.17), осуществляющего на-
дежный контакт ведущего устройства вдоль большой
длины корпуса за счет давления пороховых газов на сек-
тора в канале ствола. Такая схема ведущего устройства
позволяет выполнять гребенчатое зацепление с малым
8.4. Бронебойные оперенные подкалиберные снаряды
589
шагом (зубьями меньшей высоты), что в свою очередь повышает прочность
корпуса снаряда при метании и взаимодействии с преградой, а также уменьша-
ет аэродинамическое сопротивление в полете. Поскольку такие ведущие уст-
ройства можно выполнять двухбазовыми, появляется шанс использовать подка-
либерные стабилизаторы, что сократит потери скорости при полете снаряда.
Выполнение обтюрирующего пояска из полиамида снижает потери на трение в
канале ствола, увеличивает скорость метания и уменьшает износ ствола. Увели-
чение базы центрования корпуса в стволе и, как следствие, уменьшение возму-
щений снаряда при выстреле могут быть обеспечены применением ведущих
устройств с дополнительными опорными элементами, такими как пилоны (опоры
в виде призматических выступов). Использование дополнительной опоры по-
зволяет увеличить длину ведущего устройства и относительное удлинение ак-
тивной части снаряда.
При вылете снаряда из канала ствола под действием центробежной силы
и встречного потока воздуха сектора разрушают обтюрирующий поясок и на
расстоянии 4...5 м отделяются от корпуса снаряда. Они разлетаются под уг-
лом не более 4° от направления стрельбы и могут лететь на дальность до
700 м, представляя опасность не только Для живой силы, но и для легкобро-
нированной техники.
Наличие отделяющихся секторов позволило создать снаряды с массой ак-
тивной части, достигающей 80 % массы всего снаряда. Небольшая общая масса
обеспечивает снарядам при выстреле высокую (до 1800 м/с) начальную ско-
рость, что увеличивает дальность прямого выстрела (при которой высота тра-
ектории не превосходит высоты цели). Малое время полета и большая удель-
ная энергия снаряда обусловливают высокое поражающее действие таких сна-
рядов.
Зарубежные БОПС (APFSDS)
За рубежом БОПС появились почти на 20 лет позднее, чем в России, и
первоначально разрабатывались для танковых нарезных орудий калибра 105
мм. В настоящее время осуществляется переход танковых пушек на калибр
120 мм (танки М1А1, М1А2 - США; Leopard-1, Leopard-2 - Германия; Leclerc
- Франция; «90» - Япония). Причем почти во всех странах в танках применя-
ются гладкоствольные орудия (табл. 8.6). Исключение составляет Великобри-
тания: танки Chieftain и Challendger оснащены 120-мм нарезными пушками
L11A5 и L11A7 соответственно.
Для зарубежных БОПС характерно использование двухбазовых сектор-
ных ведущих устройств катушечного типа, что, как отмечено выше, позволяет
устанавливать в снарядах подкалиберные стабилизаторы, уменьшающие па-
дение скорости снаряда в полете. Передняя часть такого ведущего устройства
воспринимает давление пороховых газов, заполняющих полость между коль-
цами за счет наличия в нижней части кольца газодинамических отверстий,
через которые пороховые газы из заснарядного пространства истекают в эту
полость. Задняя (иногда и передняя) часть секторов скрепляется обтюрирую-
щим пояском. Для уменьшения нутационных колебаний снаряда при выстре-
ле необходимо плоскость, проходящую через центр масс ведущего устрой-
ства, совмещать с центром масс снаряда. Следует отметить, что отделение
Таблица 8.6. Основные характеристики зарубежных БОПС (APFSDS)
Индекс Орудие Год разра- ботки Скорость, м/с Диаметр, мм Длина, мм Удлине- ние Масса активной части, кг Бронепроби- ваемость на 2 км, мм/60° Бронепроби- ваемость на 2 км, мм/0° Материал корпуса
L64A4 (Великобрита- L7 1978 1490 Калиб1 28 о 105 .мм 476 17 з,з 170 340 Вольфрам
ния) Mill (Израиль) М68 — 1455 33 327 9,9 3.9 170 340 »
М774 (США)’ М68 1979 1508 26 346 13,3 3,4 180 360 Уран
М833 (США) М68 1983 1485 24 427 17,8 3,7 230 460 »
OFL120G1 (Франция) CN120 — 1650 Калиб 26 р 120 мм — 3,6 270-290 540-580 Вольфрам
DM23 (Германия) RhL44, RhL55 1985 1650 32 380 11,9 4,3 240 480 »
DM33F1 (Германия) RhL44. RhL55 1988 1650 28 532 19 - 275 550 »
DM43 (Германия) RhL44, RhL55 1995 1700 21 508 24,2 - 320-350 640-700 »
М827 (США) M256 1984 1650 38 - - - 250 500 »
М829 (США) M256 1986 1665 27 460 17 4,0 270 280 540-560 Уран
М829А1 (США) M256 1990 1700 24,2 - - - 350 700 »
М829А2 (США) M256 1992 1680 24,2 - - - 370 740 »
М829АЗ (США) M256 2003 - — - - - 400 800 »
ХМ946 (США) XM291 1997 1800 Калибр 140 мл 24 870 36,2- 450-500 900-1000 Уран
8.4. Бронебойные оперенные подкалиберные снаряды
591
Рис. 8.19. 105-мм БОПС М735 (США):
1 гайка трассера; 2 основание обтюратора; 3 наружное (проворачивающееся) кольцо об-
тюратора; 4 - сектор ведущего устройства (поддона); 5 - сердечник из обедненного урана;
6 - винт; 7 — малый баллистический наконечник; 8 — большой баллистический наконечник;
9 - направляющее кольцо поддона; 10 - корпус; 11 - внутреннее кольцо обтюратора; 12 - ста-
билизатор; 13 - трассер
секторов ведущего устройства (рис. 8.18) за дульным срезом орудия оказыва-
ет влияние на возмущение снаряда и отклонение его траектории от точки при-
целивания. Для обеспечения надежного одновременного отделения секторов
в их передней части выполняются воздухозаборники.
В остальном конструкции зарубежных БОПС во многом схожи с российс-
кими: применяются сердечники из тяжелых сплавов и урана (рис. 8.19), ис-
пользуется гребенчатое зацепление между ведущим устройством и корпусом
снаряда (рис. 8.20).
Увеличение бронепробиваемости таких снарядов достигается повышени-
ем скорости встречи снаряда с преградой, увеличением массы бронебойного
сердечника и совершенствованием его конструкции, изготовлением бронебой-
592
8. Кинетические бронебойные боеприпасы
Рис. 8.20. 105-мм БОПС М735 с сердечником (а), М774 (б) и М833 (США) с корпу-
сом из обедненного урана (в):
1 - малый баллистический наконечник; 2 - большой баллистический наконечник; 3 - сектор-
ное ведущее устройство (поддон); 4 - проворачивающееся кольцо обтюратора; 5 — стабилиза-
тор; 6 - трассер; 7 - корпус; 8 - сердечник
ного сердечника из специальных материалов с улучшенными физико-механи-
ческими свойствами. Основные усилия зарубежных конструкторов танковых
БП сосредоточены на поиске оптимальной конструкции БОПС и новых мате-
риалов для изготовления их бронебойных сердечников. В последние годы в
ряде зарубежных стран разработаны БОПС с повышенной бронепробиваемо-
стью, что достигнуто путем удлинения сердечников, а также путем использо-
вания в качестве материала бронебойного сердечника специальных сплавов с
применением обедненного урана (238U).
Повышенная эффективность БОПС с обедненным ураном по сравнению
с традиционными боеприпасами на основе вольфрамовых сплавов объясня-
ется физико-механическими свойствами материала сердечника (плотность -
19 030 кг/м3 и прочность на разрыв - 1600 МПа). Но не только эти свойства
определяют высокие бронебойные качества таких снарядов (плотность воль-
фрама больше плотности урана). Важное значение имеют физико-химичес-
8.4. Бронебойные оперенные подкалиберные снаряды 593
кие свойства урана и его химическая активность, благодаря которой взаимо-
действие с броней уранового сердечника сопровождается значительным эк-
зотермическим эффектом. Возможно это и обусловливает его особые броне-
бойные свойства. Урановый сердечник входит в реакцию с броней танка, в
результате чего выделяется тепловая энергия, обеспечивающая дополнитель-
ную бронепробиваемость. Есть и другие трактовки причин высокой бронеп-
робиваемости урановых снарядов (например, выделение энергии межатом-
ной связи урана). Существенная и весьма отрицательная особенность этих
снарядов - достаточно высокая радиоактивность обедненного урана, в ре-
зультате чего при разрушении сердечника в процессе пробития броневой
преграды происходит радиоактивное заражение местности и пораженной
цели осколками снаряда. Кроме того, высокая температура и давление при
взаимодействии сердечника и преграды в точке контакта приводят к образо-
ванию мелкодисперсных частиц различных радиоактивных соединений и,
как следствие, происходит дополнительное заражение местности.
Увеличение бронепробиваемости за счет удлинения снаряда обеспечива-
ется переходом от вкладных сердечников (см. рис. 8.19) из тяжелых сплавов и
обедненного урана к моноблочным корпусам (см. рис. 8.20, б, в) из этих мате-
риалов, что упрощает конструкцию снаряда и позволяет получить удлинение
снаряда до 20 и более его диаметров. В США для 120-мм пушки М256 разра-
ботаны БОПС М827 с корпусом из вольфрамового сплава (бронепробивае-
мость 250 мм под углом 60° от нормали) и М829 нескольких модификаций
с корпусом из сплава обедненного урана Stabilia (бронепробиваемость 270...
...370 мм под углом 60° от нормали, что соответствует пробиваемой толщине
540...740 мм брони по ходу движения снаряда). Бронебойные оперенные под-
Рис. 8.21. 120-мм БОПС М829 (США) (а) с корпусом из обедненного урана (б)
594
8. Кинетические бронебойные боеприпасы
калиберные снаряды из обедненного урана помимо высокой бронепробивае-
мости обеспечивают повышенное заброневое действие по сравнению с БОПС
из вольфрамовых сплавов. В боекомплект танка М1А2, который принят на
вооружение в 1992 г., входят БОПС М829А2 (рис. 8.21). Кроме того, в отли-
чие от М829А1 в их конструкции вместо алюминиевого применен поддон из
композиционного материала, что уменьшило массу снаряда на 30% и, как
следствие, увеличило бронепробиваемость. Бронебойные оперенные подка-
либерные снаряды, разработанные в Великобритании (CHARM3), Германии
(DM43), Франции (OFL120G1), совместно Германией и Францией (PROCIPC)
по своей эффективности близки к снарядам М829 (США), в том числе и позд-
них модификаций.
8.5. Пути увеличения эффективности действия
кинетических бронебойных боеприпасов
Необходимость совершенствования БОПС определяется тем, что и в На-
стоящее время и в перспективе они представляют для танка наибольшую уг-
розу. В последние годы БОПС в значительной степени вытеснили из боекомп-
лектов танков кумулятивно-осколочные снаряды. Из всего спектра средств по-
ражения танков реальную конкуренцию БОПС пока составляют вновь
разрабатываемые ПТУР с тандемными кумулятивными боевыми частями и
гиперзвуковые ПТУР (ГПТУР) с бронебойными сердечниками. Наметившая-
ся тенденция к переходу на новые калибры танковых пушек (140... 150 мм),
очевидно, обострит эту конкуренцию.
Основными особенностями функционирования современных БОПС, обус-
ловившими приоритетность их разработки, являются:
- относительно слабая чувствительность БОПС по сравнению с кумуля-
тивными БП к различного рода деструктивным воздействиям со стороны бро-
невой защиты за счет ее многослойности, разнесенности, наличия ДЗ (так,
снижение бронепробивной способности современных БОПС на многослой-
ных структурах защиты в 3-5 раз меньше, чем у кумулятивных БП);
- более мощное заброневое действие БОПС по сравнению с кумулятив-
ными снарядами;
- слабая зависимость бронепробивной способности срабатывающихся мо-
ноблочных сердечников от углов встречи с броней, вплоть до углов в 50°.
К достоинствам БОПС можно отнести и то, что длина их траектории в
броне при взаимодействии под углом (толщина брони по ходу снаряда) прак-
тически равна длине траектории при пробитии по нормали, а благодаря тому,
что в пробитую толщину входит и высота выбиваемой с тыльной стороны
преграды пробки, может на несколько десятков миллиметров превышать дли-
ну траектории по нормали. Этому способствует и нормализация (поворот в
сторону нормали к поверхности преграды) снаряда при прохождении тыль-
ных слоев преграды.
Совершенствование БОПС связано с реализацией концепции поражения
танков с первого выстрела на дальностях 2,5...3,0 км, а в перспективе - до
6 км. Для достижения этой перспективы необходимо уменьшить время полета
снаряда, свести к минимуму ошибки при подготовке к стрельбе и увеличить
8.5. Пути увеличения эффективности действия кинетических ББП
595
результативность действия по цели на предельной дальности эффективного
огня. Особое внимание следует уделить повышению поражающей способнос-
ти БОПС по многослойной броне с ДЗ.
Можно выделить следующие направления увеличения эффективности дей-
ствия кинетических бронебойных снарядов:
- повышение начальных скоростей метания снарядов;
- увеличение скорости взаимодействия снаряда с преградой за счет сни-
жения потери скорости полета снаряда на траектории или дополнительного
разгона снаряда (его элементов) до встречи с преградой;
- увеличение поперечной нагрузки (отношения массы активной части сна-
ряда к площади его поперечного сечения) активной части снаряда;
- конструктивные приемы.
Повышение начальных скоростей метания снарядов
Повышение скоростей метания осуществляется совершенствованием ме-
тательных зарядов и улучшением параметров, внутренней баллистики. Одна-
ко считается, что этот путь скоро достигнет? предела в рамках калибров
120...125 мм. Поэтому не исключен переход на более мощные пушки. В США,
Германии, Великобритании и Франции ведутся работы по созданию пушки
традиционной конструкции с универсальной зарядной каморой под заменяе-
мый ствол калибра 120 или 140 мм. Оценки показывают, что при калибре
140 мм возможно почти двухкратное по-
I
вышение дульной энергии и существен-
ное увеличение массы подкалиберного
снаряда. Скорость метания из 140-мм
орудия составляет 1800... 1900 м/с. К не-
достаткам таких орудий прежде всего
относится существенное уменьшение во-
зимого боекомплекта.
Другим вариантом повышения на-
чальной скорости метания снарядов при
одновременном достижении некоторых
компоновочных преимуществ является
использование жидких метательных ве-
'W777777/77777777%^^^
Окислитель
Топливо
Рис. 8.22. Пушка с двухкомпонензным
ЖМВ
ществ (ЖМВ) - одно- или двухкомпонен-
тных (рис. 8.22), в которых топливо и
окислитель размещены отдельно. Это мо-
жет привести к увеличению начальной
скорости снаряда до 2000 м/с и более (на демонстрационной установке для
30-мм пушки фирмы General Electric была получена скорость 3100 м/с). Приме-
нительно к танкам особенно важен фактор увеличения боекомплекта, так как
ЖМВ размещается более компактно, чем пороховой заряд в гильзе.
Электромагнитные пушки позволяют разгонять снаряды до скоростей в
несколько километров в секунду. Существуют два типа таких пушек: рельсо-
вые и катушечные (рис. 8.23). В рельсовых пушках электромагнитное поле,
разгоняющее снаряд, создается электрическим током, текущим по рельсам, а
в катушечном - по катушкам. Однако практическому применению таких
596
8. Кинетические бронебойные боеприпасы
Рис. 8.23. Рельсовая (а) и катушечная (б)
электромагнитные пушки:
/ - снаряд; 2 электрический ток; 3 рельс;
4 катушка
пушек на танках препятствует необхо-
димость решения многих технических
проблем: создание мощного малогаба-
ритного источника энергии с объемной
плотностью энергии 20...30 МДж/м3,
уменьшение износа и предотвращение
разрушения проводников и контактов,
защита экипажа и оборудования от элек-
тромагнитного импульса. Появление в
США танка, оснащенного 80-мм элект-
ромагнитной пушкой массой 2,7 т, пред-
полагается не ранее 2020 г. Такое ору-
дие будет метать снаряд массой 3 кг со
скоростью 2500...3000 м/с при дально-
сти прямого выстрела 4 км. Определён-
ный практический интерес представля-
ют разрабатываемые в США, Франции,
Германии и Израиле комбинированные
электротермические пушки, в которых
разгон снаряда осуществляется метательным зарядом и электрической энер-
гией. Несмотря на более низкую ожидаемую начальную скорость (не более
2500 м/с) по сравнению с электромагнитными пушками, они обладают рядом
преимуществ: большей надежностью и живучестью, меньшими габаритами и
стоимостью.
Легкогазовые пушки (рис. 8.24), как и электромагнитные, способны сооб-
щать снаряду скорости в несколько километров в секунду. В качестве рабоче-
го тела в них используются легкие газы (гелий, водород), имеющие высокую
скорость звука, в результате чего волнообмен при расширении объема газа в
стволе при метании снаряда происходит с более высокой скоростью, чем в
пороховых газах. Это способствует выравниванию давления внутри ствола и
увеличению скорости метания, которая, как и у электромагнитных пушек, силь-
Рис. 8.24. Легкогазовая пушка:
1 - камера сгорания пороха; 2 - поршень; 3 - ка-
мера с рабочим телом (легким газом); 4 - снаряд;
5 ствол; 6 продукты сгорания пороха
но зависит от массы снаряда. Пуш-
ка массой 2 т сообщает снаряду мас-
сой 1 кг скорость 2500...3000 м/с.
Основной, но не единственный, не-
достаток легкогазовой пушки - низ-
кая скорострельность из-за сложно-
сти процедуры ее перезаряжания.
Один из рациональных путей
повышения начальной скорости
метания активной части снаряда -
минимизация массы таких непос-
редственно не участвующих в про-
цессе бронепробития частей, как
ведущее устройство, хвостовое
оперение, баллистический наконеч-
ник и др., для чего используются
8.5. Пути увеличения эффективности действия кинетических ББП 597
новейшие достижения в области материаловедения и точных технологий. При-
менение новых легких высокопрочных материалов для ведущего устройства,
в том числе пластмасс типа нейлона и композиционных материалов, армиро-
ванных углеводородными волокнами, существенно снижает массу ведущего
устройства (снаряд М829А2, США).
Рис. 8.25. Бро-
небойный сна-
ряд трубчатой
формы:
1 - корпус; 2 тя-
нущее ведущее
устройство
Увеличение скорости взаимодействия снаряда с преградой
Минимизация потерь скорости активной части снаряда на траектории до-
стигается совершенствованием ведущего устройства снаряда и аэродина-
мических качеств его полетной части. Потеря дульной скорости современных
серийных БОПС (например, М829А1 к 120-мм пушке танка М1А1) не превы-
шает 73,6 м/с на дистанции 2 км (для сравнения: аналогичный показатель для
стабилизированных вращением БОПС rana.APDS к зарубежным 105-мм пуш-
кам составлял не менее 180 м/с, а первых поколений БОПС
типа APFSDS - 120... 130 м/с). Уменьшение диаметра актив-
ной части снаряда и размаха перьев стабилизатора, выпол-
нение стабилизатора подкалиберным (за сЛет применения
двухбазовых ведущих устройств), а также увеличение удли-
нения снаряда позволяют сократить потери скорости снаря-
да при полете к цели. Выполнение корпусов бронебойного
снаряда с головными насадками звездообразного сечения
снижает лобовое аэродинамическое сопротивление при по-
лете до 5... 10 %.
Уменьшить потери скорости снаряда и повысить устой-
чивость его движения на траектории можно путем выполне-
ния снаряда трубчатой формы (рис. 8.25) с осевым сквозным
отверстием (патенты ФРГ 3113070, Великобритании 1507057,
1541291, 2180691, США 4413565).
Увеличение скорости снарядов в полете может быть дос-
тигнуто применением в бронебойном снаряде твердотоплив-
ного (патенты США 3754507 (рис. 8.26, а), ФРГ 1428658) или
жидкостного реактивного двигателя (преимущественно для
БОПС). Другой способ повышения скорости бронебойного
сердечника снаряда его отстрел на траектории из корпуса снаряда (патенты
ФРГ 2948542, США 3842741) с помощью порохового заряда (рис. 8.26, б).
Такую схему могут использовать для поражения ДЗ: отстреливаемый сердеч-
ник взводит ДЗ, а корпус снаряда осуществляет пробитие основной брони.
Появление малогабаритных ракетных двигателей и высокоэнергетических
твердых топлив к ним позволило подойти к созданию нового типа противо-
танкового оружия - гиперзвуковых противотанковых управляемых ракет
(ГПТУР), применяемых как с авиационных носителей, так и с различных на-
земных установок (рис. 8.27, а). Отличительной особенностью ГПТУР стала
высокая скорость (порядка 1600... 1700 м/с) в конце активного участка траек-
тории на дальности 3...4 км и более, что дает возможность использовать бое-
вую часть кинетического действия, представляющую собой длинный боевой
элемент, аналогичный активной части БОПС.
598
8. Кинетические бронебойные боеприпасы
Рис. 8.26. БОПС с пороховым реактив-
ным двигателем (а) и пороховым мета-
тельным устройством (б)'.
I - корпус; 2 бронебойный сердечник; 3 -
метательный заряд; 4 — воспламенительное
устройство; 5 — сопло; б — секторное веду-
щее устройство; 7 - продольное отверстие
Боевые части перспективных
ГПТУР должны обладать следующими
характеристиками: масса - 5...6 кг; дли-
на - не менее 700 мм; удлинение кор-
пуса БЭ - 30 и более; бронепробивае-
мость - свыше 800...900 мм стальной
брони по ходу.
Преимущество ГПТУР по сравне-
нию с БОПС - при разгоне ракета ис-
пытывает существенно более низкие
перегрузки по сравнению с артиллерий-
ским снарядом, что снижает требования
по прочности к бронебойному элемен-
ту. Системы управления ГПТУР предус-
матривают работу нескольких каналов
наведения (радиолокационного, лазер-
ного, тепловизионного), обеспечивая
высокую точность попадания в подвиж-
ные и неподвижные бронецели. Наве-
дение ГПТУР на конечном участке тра-
ектории полета перед непосредствен-
ной атакой цели может осуществляться
с помощью ПК-датчиков. Недостатком
ГПТУР стало относительно низкое бро-
небойное действие на участке разгона
ракеты (на дальностях менее 1 км).
В США разрабатывается ГПТУР X-Rod
(рис. 8.27, б), которая при начальной
скорости около 1100 м/с будет разго-
няться до 1650 м/с. Проектированием
критических (базовых) технологий для боеприпаса X-Rod занимается фирма
S.G.Smith Associates, создавшая компоненты головки самонаведения милли-
метрового диапазона длин волн и интегральные схемы для бортовой элект-
ронной аппаратуры.
Применение трубчатых снарядов, снаряженных топливом (патенты ФРГ
2829591, 2856286, США 4523524) или использующих в качестве топлива ма-
териал корпуса снаряда (патент США 3561363), позволит наилучшим образом
объединить преимущества прямоточного воздушно-реактивного двигателя с
устойчивым движением на траектории трубчатых снарядов.
Представляет определенный интерес возможность увеличения скорости
взаимодействия бронебойных сердечников с преградой путем сообщения им
дополнительного импульса за счет взрыва БВВ в момент начального взаимо-
действия (патент ФРГ 2036897 (рис. 8.28, а), 3049623, Франции 2176988). При-
менение в таких снарядах дополнительного заряда ВВ повышает эффектив-
ность поражения брони, снабженной ДЗ (патент США 4648324 (рис. 8.28, б)).
После срабатывания переднего дополнительного заряда происходит взведе-
8.5. Пути увеличения эффективности действия кинетических ББП
599
Рис. 8.27. Гиперзвуковая противотанковая управляемая ракета (с) и разрабатываемая
в США ГПТУР X-Rod (б):
1 - сопловой блок; 2 - сопло; 3 задняя часть стойки; 4 корпус; 5 заряд твердого топлива;
6 - бронебойный стержень; 7 - продольные ребра; 8 ~ передняя часть стойки; 9 - руль;
10 - отсек управления; 11 - ГСН; 12 - крыло (стабилизатор)
Рис. 8.28. БПС с одним (о) и двумя (б) за-
рядами ВВ:
/ - баллистический наконечник; 2 - бронебой-
ный сердечник; 3 - корпус; 4 ~ метательный
заряд ВВ; 5 - взрыватель: 6 - передний допол-
нительный заряд
600
8. Кинетические бронебойные боеприпасы
ние (срабатывание) ячейки ДЗ, а затем и основного заднего заряда, сообщаю-
щего бронебойному стержню дополнительную скорость.
Увеличение поперечной нагрузки активной части снаряда
Увеличение поперечной нагрузки активной части снаряда - сегодня один
из самых надежных способов сосредоточения максимума кинетической энер-
гии на минимальной площади контакта бронебойного снаряда с преградой и,
как следствие, повышение бронепробиваемости. Такой способ может быть осу-
ществлен с помощью увеличения удлинения (отношения длины сердечника к
диаметру) или плотности материала активной части снаряда. Удлинение (от-
ношение длины активной части к ее диаметру) современных БОПС достигает
20...25, а у перспективных снарядов его значение составит 40. В качестве
высокоплотных материалов для изготовления корпусов БОПС используются
сплавы вольфрама и обедненного ура-
а б
Рис. 8.29. Бронебойные снаряды боль-
шого удлинения с ведущим устройством
из пластмассы (а) и раздвижным кор-
пусом (б):
/ баллистический наконечник; 2 - корпус,
3 - стабилизатор; 4 - пластмассовое веду-
щее устройство; 5 - ствол; б - выдвижной
бронебойный сердечник
на (плотность 19 000... 19 300 кг/м ).
Основная проблема в реализации-
указанного решения - обеспечить воз-
можность метания снаряда большого
удлинения без потери его устойчивос-
ти и прочности в стволе баллистичес-
кой установки. Эта проблема решает-
ся с помощью выполнения ведущего
устройства комбинированного толкаю-
ще-тянущего цангового типа (патенты
ФРГ 1262830, 2041877, 2212853; патент
Великобритании 1446142, патент США
3961580), что создает контакт с корпу-
сом удлиненного снаряда на большей
(до 80... 100 %) части его длины. При
этом для уменьшения массы снаряда и
сокращения потерь на трение при вы-
стреле ведущее устройство может вы-
полняться из пластических (патент
Франции 2506925, рис. 8.29, а) или
композиционных материалов (снаряд
М829А2).
Особый интерес представляет сна-
ряд с малоплотным ведущим устрой-
ством, изготовленным из прессованной
пороховой смеси, которая является од-
новременно частью порохового заряда
(патент ФРГ 2319705).
Удлинение снаряда может быть уве-
личено, если он снабжен выдвигаю-
щимся в полете относительно корпуса
стержнем (рис. 8.29, б). Возможный
8.5. Пути увеличения эффективности действия кинетических ББП
601
путь решения этой задачи - телескопическая форма корпуса, т. е. в виде не-
скольких раздвигающихся в полете втулок (патент Франции 2535450). При
этом длина снаряда может быть увеличена в 2 раза и более.
При увеличении удлинения снарядов толщина пробиваемой брони возрас-
тает пропорционально этому удлинению. В целом повышение эффективности
бронебойных снарядов за счет указанных решений может составить 10...30 %.
Конструктивные приемы
К ним в первую очередь относится использование для изготовления сна-
рядов прочных материалов, в качестве которых применяют монокристаллы
высокоплотных металлов. Максимальный эффект достигается при исполь-
зовании многослойных конструкций корпусов или сердечников снарядов. Вы-
сокоплотные элементы в оболочках могут быть соединены в единый корпус
(патент Великобритании 2128299, рис. 8.^0, а). Возможно выполнение кор-
пуса в виде концентрических оболочек из материалов, отличающихся по твер-
дости и ударной вязкости (патент США 4044679, рис. 8.30, б), прочных во-
локон карбида вольфрама, гафния (патент£ША Н343) или из прочной лен-
ты, намотанной на бронебойный сердечник (патент США 4256039). Такие
бронебойные элементы обеспечивают помимо увеличения бронепробивае-
мости их высокую прочность и ударостойкость при взаимодействии с бро-
ней под большими углами и с ДЗ танка. Представляется перспективным ис-
пользование для изготовления корпуса БС композиционных материалов и
углепластиков. Во-первых, обладая малой плотностью, такие БС способны
приобретать более высокие начальные скорости, чем стальные или тяжело-
Рис. 8.30. БПС из материалов с различными механическими свойствами в виде про-
дольных волокон (а) и концентрических оболочек (б):
1 - корпус; 2 - высокоплотные скрепленные стержневые элементы; 3 - защитные оболочки;
4 - концентрические оболочки из материалов с различной твердостью и ударной вязкостью
602
8. Кинетические бронебойные боеприпасы
сплавные снаряды. Во-вторых, имея высокую прочность, они прекратят сра-
батываться (разрушаться) при более высоких скоростях взаимодействия, что
приведет к увеличению бронепробиваемости, ожидаемый порядок которого
составит 10...20 %.
Технологические приемы
Придание сердечникам дифференцированных по длине свойств (большая
твердость в передней части) обеспечивает более рациональное расходование
массы сердечника на разных стадиях пробития броневых преград. Одна из
попыток оптимизировать процесс расходования энергии снаряда в процессе
пробития - сочетание в единой конструкции активной части БПС тяжелосплав-
ных (срабатывающихся) и твердосплавных (несрабатывающихся) элементов.
Термическая обработка позволяет получать материалы с заданными свойства-
ми по прочности. Так, при определенном сплаве с другими металлами и тер-
мической обработке (сплавление с 2 % Мо или 0,75 % Ti, быстрая закалка
разогретого до 850 °C сплава в воде или масле, дальнейшее выдерживание
при 450 °C в течение 5 ч) уран становится тверже и прочнее стали (прочность
на разрыв более 1600 МПа). В сочетании с большой плотностью это делает
уран чрезвычайно эффективным для пробивания брони, а именно, по орав-
Рис. 8.31. Двухсекционные снаряды для преодоления динамической и активной
защиты с предзарядом ВВ (а, б) и с лидером (в):
/ - корпус (проникающий модуль); 2 - кумулятивный предзаряд; 3 - ведущее устройство;
4 - осевое отверстие; 5 - лидирующий элемент
8.5. Пути увеличения эффективности действия кинетических ББП
603
нению с аналогичным по эффективности, намного более дорогим монокрис-
таллическим вольфрамом.
Выполнение корпусов БПС многосекционными позволяет повысить их эф-
фективность при поражении брони с динамической или активной защитой.
Один из вариантов такого технического решения - изготовление бронебой-
ных снарядов двухступенчатыми по функционированию. При этом сами сна-
ряды - двухсекционные (патенты ФРГ 2629280, 1811331, Франции 2537264,
США 4063512, 4102271), состоящие из кумулятивного предзаряда и проника-
ющего модуля Кумулятивный предзаряд может находиться как перед прони-
кающим модулем (рис. 8.31, а), так и позади него (рис. 8.31, б). Первая секция
может быть сделана в виде лидирующе-
го подкалиберного бронебойного эле-
мента, который выстреливается из об-
щего поддона (патент ЕПВ 0087502, .*
рис. 8.31, в). Эта схема имеет некоторое
преимущество перед рассмотренными •
выше, так как в ней исключено отрица-
тельное тормозящее и дестабилизирую-
щее действие первой секции на броне-
бойный элемент.
Возможны конструктивные реше-
ния, заключающиеся в перераспределе-
нии массы снаряда вдоль его корпуса
путем изменения его диаметра по дли-
не. Например, уменьшение диаметра го-
ловной части позволяет сократить часть
энергии снаряда, идущей на образова-
ние каверны, и тем самым повысить глу-
бину проникания.
Другой способ перераспределения
массы снаряда состоит в выполнении
его из отдельных элементов, распреде-
ленных вдоль оси снаряда. Эти элемен-
ты могут быть прочно соединены или
находиться в контакте - в таком случае
механические свойства материалов этих
частей должны значительно отличаться
(патент ФРГ 3242591) по вязкости, проч-
ности и хрупкости, что приводит к ло-
кализации зон разрушения корпуса при
Рис. 8.32. Снаряды в виде отдельных,
последовательно расположенных элемен-
тов - вплотную (а) и с промежутками (б):
1 баллистический наконечник; 2 - корпус;
3 - бронебойные элементы (сегменты); 4 -
бронебойный сердечник; 5 - вкладыши из
пластичного материала
взаимодействии с преградой и увеличе-
нию бронепробиваемости.
Корпус снаряда из отдельных пос-
ледовательно расположенных элемен-
тов, не скрепленных между собой (па-
тент Франции 2529320, ЕПВ 0088798,
рис. 8.32, а), повышает антирикошет-
604
8. Кинетические бронебойные боеприпасы
ные свойства снарядов, приводя к нормализации (повороту в сторону тыль-
ной поверхности снаряда) как отдельных элементов, так и корпуса снаряда
в целом.
В случае выполнения корпуса сегментированным - из отдельных эле-
ментов, разделенных вдоль оси снаряда воздушными промежутками или за-
полненными легкими пластичными материалами (патент США 4108072,
рис. 8.32, б), повышается эффективность снаряда как по разнесенной экрани-
рованной броне, так и по ДЗ, предохраняя основной бронебойный корпус от
волнового ударного нагружения.
Следует ожидать повышения эффективности действия таких снарядов и
по монолитной броне ввиду различного характера их взаимодействия с пре-
градой - квазистационарного у сплошных снарядов и неустановившегося у
сегментированных. При неустановившемся характере взаимодействия реали-
зуются более высокие давления в зоне контакта снаряда с преградой, что спо-
собствует более интенсивному ее разрушению.
Рис. 8.33. Проникание сегментированного снаряда с зазором между элементами, рав-
ным одному (а) и двум его диаметрам (б)
При взаимодействии отдельного сегмента и преграды в них формиру-
ются мощные УВ. Материалы преграды и элемента приобретают радиаль-
ную скорость, что приводит к образованию каверны. На следующем этапе
формируются волны разгрузки, разрушающие преграду и элемент снаряда и
выносящие разрушенный материал из каверны. Следующий элемент ударя-
ет по дну сформированной предыдущим элементом каверны. Эксперимен-
тально доказано, что для элементов длиной 0,5... 1,0 диаметра увеличение
глубины сегментированых снарядов по сравнению со сплошными может до-
стигать 40 %. Существенное влияние на окончательный результат должна
8.6. Основные расчетные зависимости для оценки бронебойного действия 605
оказывать величина зазора между отдельными элементами. Например, при
увеличении зазора между элементами от одного до двух диаметров прони-
кающего элемента (рис. 8.33) глубина каверны увеличивается на 17 %. При
большем зазоре предыдущий элемент успевает полностью сработаться и ос-
вободить пространство для следующего элемента снаряда.
Оптимальные размеры элементов и зазоров между ними должны опре-
деляться в зависимости от используемых материалов элементов и габаритов
снаряда.
8.6. Основные расчетные зависимости
для оценки бронебойного действия
На результаты действия по броне кинетических бронебойных снарядов
оказывают влияние различные факторы, среди которых наиболее важны ско-
рость и угол встречи с преградой. О влиянии этих факторов можно судить по
фазовым диаграммам (рис. 8.34), которые можно построить для конкретных
снарядов и преград. Кривая баллистического предела разделяет зоны проби-
тия и непробития преграды. На диаграмме показаны отдельные зоны, харак-
теризующие состояние снаряда после взаимодействия с преградой. В конст-
рукторских разработках используются и более сложные диаграммы, напри-
1400
800
600
400
1200
1000
200
После пробивания снаряд дробится
на мелкие осколки
0 20 40 60 80
Наклон к нормали, град
Рис. 8.34. Фазовая диаграмма, характеризующая соударение снаряда диаметром 6,35 мм
по мишени из алюминиевого сплава толщиной 6,35 мм
606
<S. Кинетические бронебойные боеприпасы
Рис. 8.35. Зависимость приведенной глубины проникания Um1 от скорости удара ?’о
компактного стального снаряда по свинцовой преграде
мер, показывающие прирост стойкости многопреградной брони в зависимос-
ти от толщины отдельных преград и расстояния между ними. При увеличении
скорости встречи не всегда возрастает глубина проникания или толщина про-
биваемой брони. В определенных условиях (сочетание физико-механических
характеристик материалов снаряда и преграды) при достижении предельных
скоростей может наблюдаться уменьшение глубины проникания, что является
следствием разрушения снаряда при взаимодействии с преградой и смены ме-
ханизма взаимодействия с преградой. Такой характер зависимости глубины
проникания от скорости наиболее ярко проявляется при проникании компакт-
ных снарядов (рис. 8.35).
Характер взаимодействия недеформируемых и деформируемых при ударе
снарядов имеет свои особенности. Взаимодействие с преградой недеформиру-
емых снарядов изучалось в ФТИ им. А.Ф. Иоффе. Обработка результатов экс-
периментальных и теоретических исследований позволила дать следующую
трактовку процесса силового нагружения снаряда при проникании.
Удельное нормальное сопротивление (давление) о,;, действующее на эле-
ментарной площадке dS в окрестности какой-либо точки на поверхности про-
никающего снаряда (рис. 8.36), является функцией физико-механических
свойств среды и vn - проекции скорости v рассматриваемой точки на вектор
нормали и к поверхности тела в этой точке. В общем виде эта функция для
большинства металлов записывается одинаково:
= + (8.1)
где А и С - коэффициенты, характеризующие свойство преграды оказывать
сопротивление прониканию. В зависимости от глубины нахождения рассмат-
риваемой точки поверхности дела в преграде и скорости взаимодействия сна-
рядов с преградой они определяются различными величинами (рис. 8.37). При
нахождении точки в поверхностных слоях (не более одного-двух диаметров сна-
ряда от лицевой или тыльной поверхности) при всех скоростях взаимодействия
Л = рп; С = НЛ, (8.2)
8.6. Основные расчетные зависимости для оценки бронебойного действия 607
Рис. 8.36. Удельное нормальное сопротивле-
ние на поверхности проникающего тела:
/ - поверхностные слои преграды; 2 - глубинные
слои преграды
Рис. 8.37. Зависимость <5п от нор-
мальной составляющей скорости v„:
1 - поверхностные слои преграды; 2 —
глубинные слои преграды
при нахождении в глубинных слоях при скоростях сп выше критических гз
коэффициенты рассчитываются по формуле (8.2), а при скоростях сп ниже
критических гикр коэффициенты равны:
Л = 0; С = Яудв,
где рп - плотность материала преграды; НД - динамическая твердость матери-
ала преграды; Л в - удельная работа вытеснения объема материала преграды
(табл. 8.7).
Критическая скорость гикр находится экспериментально как скорость, при
которой диаметр образуемой каверны начинает превышать диаметр снаряда
d, а через твердость НВ материала преграды она приближенно определяется
по зависимости
^икр
'НВ?’5
Таблица 8.7. Физико-механические характеристики материалов
Название рп, кг/м3 НВ, МПа Ог, МПа Отпд. МПа НД, МПа *^уд.в’ МПа гИКр, м/с
Алюминий 2700 300 -80 250 560 810 340
Дюралюминий 2800 1100 370 490 1400 2200 590
Медь 8900 450 НО 180 720 1200 220
Свинец 11340 50 16 40 80 100 70
Железо 7850 900 300 560 2000 2800 320
Сталь:
низкой твердости 7850 2400 700 -1300 -3900 -6300 -550
средней » 7850 3200 900 -1500 -4500 -7700 -640
высокой » 7850 3900 1400 -1700 -5000 -9900 -700
608
8. Кинетические бронебойные боеприпасы
Удельная работа вытеснения объема материала преграды Лудв определя-
ется экспериментально как отношение начальной кинетической энергии сна-
ряда к объему образуемой каверны, а приближенно может быть найдена в
виде суммы статической и динамической твердостей, Аул в = HR + НВ.
Силовые факторы, вызванные сопротивлением преграды, вычисляются ин-
тегрированием выражения (8.1) для удельного нормального сопротивления
прониканию по всей поверхности тела с учетом возможности отсутствия кон-
такта части его поверхности со средой. В случае прямолинейного проникания
снарядов с коническими головными частями максимальная сила Fmax сопро-
тивления и глубина проникания h снаряда по нормали к поверхности прегра-
ды могут быть определены по зависимостям:
F....... (/tonSin2X + C);
4
, 2т
л =------—
. Asin“X о
In 14------Vq cosar,
где - скорость встречи снаряда с преградой; <хг - угол встречи снаряда с
преградой от нормали; т - масса снаряда.
Для оценки параметров проникания снарядов с оживальной головной ча-
стью последнюю можно представить в форме конуса с углом X, рассчитан-
ным по формуле
k=arcsin
8(/?/</)-1
24(/?/Д)2
где R - радиус оживала.
Подход Алексеевского - Тейта, являющийся модификацией гидродинами-
ческой теории кумуляции и учитывающий прочностные характеристики ма-
териала преграды (динамическую твердость и удельную работу вытеснения
объема) и снаряда (динамический предел текучести), используется для опи-
сания взаимодействия с преградой деформируемых (срабатывающихся) сна-
рядов.
Вместе с тем для проведения оценочных расчетов иногда оказывается до-
статочным применение эмпирических зависимостей.
Эмпирические зависимости расчета проникания
Для оценки минимальной скорости снаряда, необходимой для пробития
брони заданной толщины и с заданными свойствами, широко используется
формула Жакоб де Марра'
d0 75^0.7
гпсп - кь ~’
т ’ cos
8.6. Основные расчетные зависимости для оценки бронебойного действия 609
где г'пс п _ минимальная скорость встречи, необходимая для пробития снаря-
дом бронеплиты (предел сквозного поражения - ПСП), м/с; Кь - эксперимен-
тальный коэффициент бронепробиваемости, учитывающий конструктивные
особенности снаряда и плиты, включая свойства их материалов, специфику
взаимодействия и вид поражения плиты; d - диаметр корпуса снаряда, взаи-
модействующего с бронеплитой, м; b - толщина бронеплиты, м; т - масса
снаряда, кг; аг, - начальный угол взаимодействия снаряда с плитой, измеряе-
мый от нормали к поверхности бронеплиты. Для гетерогенной брони Кь ра-
вен (55...85)-103, для гомогенной - (45.. .55)-103 для калиберных БС и
(55...85)-103 для оперенных подкалиберных снарядов со срабатывающимися
корпусами.
Для оценки глубины проникания срабатывающегося снаряда и минималь-
ной скорости пробития им стальной Плиты толщиной b при скорости встречи
1500... 1800 м/с и угле их взаимодействия аг, можно воспользоваться следую-
щими приближенными формулами:
л
A] d + Aq/c
кЧ1ред1
-1
cosar,
(8.3)
/
^ПСП ~ *- прс’д1 1 +
b-Ah . ,
---------A\d
cos <хг,
А21с
где h - глубина проникания по нормали в полубесконечную преграду, м; At,
А2 - эмпирические коэффициенты, зависящие от физико-механических свойств
материала снаряда (табл. 8.8); /с - длина снаряда, м; v0 - скорость встречи
снаряда с преградой, м/с; гпред1 - предельная скорость, при которой прекра-
щается срабатывание снаряда в преграде (см. табл. 8.8); г’псп ~ минимальная
скорость снаряда, необходимая для пробития бронеплиты, м/с; b - толщина
пробиваемой бронеплиты, м; Д/г - приращение глубины проникания снаряда
за счет разрушения им тыльных слоев плиты, Д/г = 0,5г/ + 0,08/с. м; d- диа-
метр корпуса снаряда, м.
Таблица 8.8. Значения эмпирических коэффициентов А ,, Аг, плотности
и скорости » для снарядов
Материал снаряда Плотность, кг/м3 ^1 Л2 ®предЬ м с
Сталь 7800 1,2 0,71 1150
Вольфрамовый сплав 17800 1,4 0,92 850
Предельную толщину пробиваемой бронеплиты с учетом формулы (8.3)
находят как сумму глубины проникания /г по нормали в полубесконечную пре-
граду и величины Д/г.
610 8. Кинетические бронебойные боеприпасы
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ
Алексеевский В.П. К вопросу о проникании стержня в преграду с большой скоро-
стью // Физика горения и взрыва. 1966. № 2.
Баллистические установки и их применение в экспериментальных исследовани-
ях / Под ред. Н.А. Златина и Г.И. Мишина. М.: Наука, 1974.
Брилев О. Танк на пороге XXI века (технический облик) // Военный парад. 1997.
№ 4 (22).
Ведерников Ю.А., Щепановский В.А Оптимизация реогазодинамических систем.
Новосибирск: Наука, 1975.
Водопьянов М.Я. Теория и расчет артиллерийских снарядов: Лабораторный прак-
тикум -СПб.: БГТУ, 2002.
Воропгилин М.С., Князева Л.Н., Чуков А.Н., Шмараков Л. Н. Современные сред-
ства поражения бронетанковой техники: Учеб, пособие. Тула: ТулГУ, 2005.
Высокоскоростные ударные явления. - М.: Мир, 1973.
Григорян В.А., Белобородъко А.Н., Терехин И.И. и др. Расчет и синтез структур
баллистической защиты танков: Учеб, пособие / Под ред. В.А. Григоряна. М.: МГТУ
им. Н.Э. Баумана, 2002. •*
Григорян В.А., Белобородько А.И, Дорохов НС и др. Частные вопросы конечной
баллистики / Под ред. В.А. Григоряна. М.: МГТУ им. Н.Э. Баумана, 2006.
Дудка В.Д., Чуков А.Н., Шмараков Л.Н. Высокоточные боеприпасы различного
целевого назначения: Учеб, пособие. Тула: ТулГУ, 2002.
Зукас Дж. А., Николас Т, Свифт X. Ф. и др. Динамика удара: Пер. с англ. М.:
Мир, 1985.
Ильин В. От Т-80 до «Черного орла» // Техника и вооружение. 2001. № 2.
Клайн С. Дж. Подобие и приближенные методы. М.: Мир, 1968.
Курков Б.А., Мураховский В.И., Сафонов Б.С. и др. Основные боевые танки / Под
ред. Б.С. Сафонова и В.Н. Мураховского. М.: Арсенал-Пресс, 1993.
Маликов В.Г. Шахтные пусковые установки. М.: Воениздат, 1975.
Мержиевский Л.А., Титов В.М. Высокоскоростной удар // Физика горения и взры-
ва. 1987. № 5.
Носков Б И. Малокалиберные выстрелы к автоматическим пушкам: Учеб, посо-
бие. М.: Изд-во «Вооружение. Политика. Конверсия», 1998.
Одинцов В. Танковое вооружение на пороге XXI века // Техника и вооружение.
1999. № 10.
Оружие России: Каталог. Т. VII: Высокоточное оружие и боеприпасы. М.: АОЗТ
«Военный парад», 1997.
Прохоров Б.А. Боеприпасы артиллерии. М.: Машиностроение, 1973.
Растотиин М. Броня выигрывает соревнование. Концепция создания бронебой-
ных подкалиберных снарядов нуждается в корректировке // Независимое военное обо-
зрение. 2000. № 36.
Сагомонян А.Я. Проникание. М : МГУ, 1974.
Справочник артиллерийских боеприпасов, подлежащих утилизации и уничтоже-
нию / Под ред. А.А. Каллистова. М.: СП «Нова», 1992.
Танки и танковые войска / Под общ ред. А.Х. Бабаджаняна. 2-е изд., доп. М.:
Воениздат, 1980.
Тейт А. Дальнейшие результаты в теории пенетрации длинных стержней / Меха-
ника: Сб. переводов. 1970. № 2.
Список рекомендуемой литературы 611
Третъяков ГМ. Боеприпасы артиллерии. М.: Воениздат, 1947.
Физика быстропротекающих процессов. Т. 2 / Пер. с англ. Н.А. Златина. М.: Мир,
1971.
Фомин В.М., Гулидов А.И., Сапожников Г.А. и др. Высокоскоростное взаимодей-
ствие тел. Новосибирск: Изд. СО РАН, 1999.
Широкорад А.Б. История авиационного вооружения. Минск: Харвест, 1999.
Щербаков Р. Программа создания гиперзвуковых управляемых ракет // Зарубеж-
ное военное обозрение. 2003. № 6.
9
БЕТОНОБОЙНЫЕ БОЕПРИПАСЫ
9.1. Классификация бетонобойных боеприпасов
Боеприпасы, действие которых основано на использовании энергии удара
с последующим внедрением в преграду и взрывом боевого заряда на задан-
ной глубине, образуют класс ударно-проникающих БП, к которым могут быть
отнесены проникающие и бетонобойные БП. Они предназначены для пораже-
ния глубоко расположенных в толще земли или хорошо защищенных слоями
стали и бетона объектов.
-
К объектам поражения относят следующие группы целей: фортификаци-
онные сооружения (огневые сооружения, наблюдательные и командные пунк-
ты, убежища), стартовые позиции ракет (ШПУ, пункты управления пуском),
аэродромные объекты (ангары для самолетов, горючесмазочных материалов,
ВПП), склады (обычных и ядерных БП), военно-промышленные предприятия
(производственные предприятия, энергетические сооружения) и политико-ад-
министративные объекты.
Эти объекты, как правило, являются стационарными. Их местоположение
часто хорошо известно неприятелю до начала военных действий. Вследствие
невозможности перемещения этих объектов обороняющаяся сторона ограни-
чена в своих действиях по их защите. Наиболее дешевый и часто самый эф-
фективный способ защиты таких целей их сильное укрепление. Для аэро-
дромов защитные мероприятия заключаются в утолщении ВПП и постройке
железобетонных укрытий (ЖБУ) для самолетов. Другие важные объекты мо-
гут находиться в подземных бункерах. Для повышения защищенности заглуб-
ленных объектов над ними может быть построено многоэтажное здание. Не-
которые объекты, такие как ШПУ, заводы по производству химического ору-
жия, могут располагаться глубоко в земле или внутри горных массивов и иметь
мощную естественную защиту.
Объекты поражения, как правило, представляют собой многослойные, раз-
несенные преграды сложной конструкции (табл. 9.1). Слои этих преград со-
стоят из таких материалов, как грунт, железобетон, сталь, керамика, асфальт
различной толщины (от нескольких миллиметров для стали и керамики до
нескольких метров для железобетона и десятков метров для грунта). Физико-
механические характеристики материалов преград изменяются в широком диа-
пазоне. Только для изготовления ШПУ применяется бетон марок 35-600. Марка
соответствует пределу прочности (в кгс/см2) при сжатии стандартного кубика
из бетона с длиной ребра 200 мм (прочность кубика Rz). В зависимости от
марки цемента и используемого заполнителя (гранит, базальт, стальные опил-
ки - стальбетон, полимерная пропитка - полимербетон) прочность бетона на
сжатие может достигать 80... 100 МПа.
Таблица 9.1. Общая классификация типов целей
Тип цели Тип защитной конструкции Эквивалентная толщина железобетона, м Вид цели
Объект системы боевого управления, связи и разведки Уплотненный грунт, железобетон 1,8 S Элек геь ——-—.—.—1 Оперативный пункт управления трическис Вычислить ераторы средст W1,8 м льные ва
Наземный объект системы боевого управления Уплотненный грунт (2,4 м), бетонная арка (1,8 м) 2,1 7 нН 1 Хранилище 1
1 Командный пункг^.
Вспомогательные i помещения
ЖБУ для самолетов Цементированный грунт (1,8 м), армированная арка (2,4 м), стальная облицовка (10 мм) 3,0 г. 20 м
15 м. 40 м
Командный пункт(один подземный уровень) Железобетон (3,7 м) 3,7 Бетон 3,7 м Z
/ " L 1 Подземный бункер
Окончание табл. 9.1.
Тип цели Тип защитной конструкции Эквивалентная толщина железобетона, м Вид цели
Укрытие на случай тревоги для ракет класса земля-земля Армированный грунт (6 м), железобетон (4 м) 4,6-5,8 2.0 м 2.0 м [ 1,1 " " ~ “I V । “1 ’.9 м 2,9 м
। z ~i. Л
ПУ
Многоэтажное наземное здание (подземный бункер) Шесть надземных этажей, один подвальный этаж (высота 2,4 м) 5,5-6,4 — 3.0 м
1.2 м
Железобетон
ШПУ Глубина расположения в грунте днища 26-50 м, железобетон 0,3-1,4 м, стальной стакан 7-10 мм 1,4-10
Г I И Г
ВПП Асфальт 1 35-50 мм, бетон 2 0,3-0,7 м, обработанный цементом грунт 3 0,2-0,3 м 0,5-1,0 • т С * с V Г 1 2 3 / / /
ШШШ,
п
9.2. Бетонобойные артиллерийские снаряды
615
По типу поражаемых целей (толщине пробиваемой преграды и глубине
проникания) зарубежные и отечественные проникающие БП можно отнести к
двум классам:
- проникающие БЧ ракет типа Maverick, AGM-130 (США), авиационных
бомб типа DURANDAL (Франция), GBU-15, GBU-24, GBU-27, GBU-28 (США),
ФАБ, БетАБ, КАБ (Россия) массой 100...2000 кг, предназначенные для пора-
жения как ВПП, железобетонных укрытий и защитных сооружений, так и глу-
бокорасположенных (до 30...50 м) объектов;
- кассетные бетонобойные БП типа STABO (Германия), BLU-106 (США),
SG357 (Великобритания), ВАР-100 (Франция), РБК-500 (Россия) массой, не
превышающей 40 кг, используемые в основном для поражения ВПП, промыш-
ленных объектов и фронтовых фортификационных сооружений.
Проникающие и бетонобойные БП по удлинению разбиваются на две группы:
- 4...6 диаметров (характерна криволинейность и непредсказуемость тра-
екторий, особенно в малопрочных грунтовых преградах);
- 7... 12 диаметров (свойственна прямолинейность траекторий в силу ста-
билизирующего воздействия, вызываемого контактом боковой поверхности с
инерционно движущейся преградой - стенками каверны).
По типу функционирования проникающие и бетонобойные БП разделя-
ются на:
- БП кинетического действия, обеспечивающие пробитие преграды за счет
своей кинетической энергии, которая определяется массой БП и его скорос-
тью; могущество таких БП достигается увеличением их массы и сообщением
дополнительной скорости с помощью реактивных двигателей;
- тандемные БП (БЧ двойного действия) с одним или несколькими куму-
лятивными предзарядами и расположенным за ними проникающим блоком,
использующиеся при наличии ограничений по массе и габаритам БП.
По типу оружия проникающие и бетонобойные БП можно подразделить:
- на артиллерийские снаряды;
- на неуправляемые и управляемые АБ и РБК;
- на БЧ неуправляемых и управляемых ракет.
Тип оружия придает существенные особенности проникающим и бетоно-
бойным БП. Средство их доставки к цели определяет облик и конструктив-
ные характеристики БП. Так, артиллерийская система предъявляет высокие
требования к прочности корпуса снаряда при метании, а также вносит огра-
ничения по его удлинению при стабилизации в полете вращением. Менее стро-
гие требования по прочности при доставке к цели предъявляют к БЧ неуправ-
ляемых и управляемых ракет и авиационных бомб. Однако при этом должны
быть учтены требования по стыковке с реактивным разгонным двигателем и
взаимодействие с отсеком управления полетом.
9.2. Бетонобойные артиллерийские снаряды
Первые образцы бетонобойных БП (артиллерийские снаряды) появились
на вооружении после Первой мировой войны, когда развитие фортификаци-
онной техники сделало возможным широкое применение железобетонных
сооружений в условиях не только позиционной, но и маневренной войны.
616
9. Бетонобойные боеприпасы
Стрельба по железобетонным сооружениям одними фугасными или броне-
бойными снарядами была неэффективной, так как первые разрушались при
ударе о прочную преграду, а вторые не обладали необходимым могуществом
фугасного действия. Это обстоятельство потребовало введения на вооруже-
ние артиллерии снарядов, обладающих прочностью, достаточной для дей-
ствия по железобетону, и по возможностям мало уступающих фугасным сна-
рядам по фугасному действию. Такие снаряды, получившие наименование
бетонобойных, приобрели конструктивные особенности, которые характе-
ризуют их как промежуточный тип между бронебойными и фугасными сна-
рядами. Основные требования, предъявляемые к бетонобойным снарядам,
следующие:
- мощное ударное и фугасное действие;
- достаточная прочность при ударе в железобетонную преграду;
- стойкость снаряжения при ударе;
- высокая кучность боя и дальнобойность.
Для обеспечения мощного ударного действия бетонобойный снаряд дол-
жен обладать возможно большей кинетической энергией при ударе в прегра-
ду, быть прочным и иметь заостренную головную часть. Высокое фугасное
действие обеспечивает содержание большого количества мощного и малочув-
ствительного к удару ВВ и наличие взрывателя, вызывающего подрыв заряда
в необходимый момент проникания. Требования по высокой кучности боя и
дальнобойности для бетонобойных снарядов не менее важны, чем все осталь-
ные. Это обусловлено относительно малыми размерами огневых сооружений
(долговременные огневые точки, деревоземляные огневые сооружения и т. д.),
наблюдательных и командных пунктов и необходимостью ведения огня по ним
на любых дальностях. Общее могущество действия современных бетонобой-
ных снарядов должно приводить к разрушению оборо-
нительных сооружений с толщиной железобетонных сте-
нок и перекрытий порядка 1,5.. .2,5 м при стрельбе на даль-
ность 14... 16 км.
Современные бетонобойные артиллерийские снаряды
(рис. 9.1) состоят из корпуса, ввинтного дна, донного взры-
вателя и заряда ВВ. Они выполняются калибрами 152 мм
(снаряд 53-Г-530Ш) и 203 мм (снаряды 53-Г-620Ш,
53-Г-620Т) с относительной массой Cq =11,5... 17,5 кг/дм3
и коэффициентом наполнения а = 7... 18 %, имеют дально-
бойную форму. Полная длина снаряда колеблется от 4 до
5 клб. Увеличение длины бстонобойного снаряда ограниче-
но условиями его устойчивости в полете, прочности при уда-
ре и обеспечения высокой кучности боя. Головная часть бе-
тонобойных снарядов оживально-копической формы (ради-
ус оживала - 8... 12 клб, высота конуса - 0,6...0,7 клб)
Рис. 9.1. Бетонобойный артиллерийский снаряд:
1 - корпус; 2 - заряд ВВ, 3 - ведущий поясок; 4 - донный взрыватель;
5 - ввинтное дно
9.3. Неуправляемые бетонобойные и проникающие авиационные бомбы 617
выполняется заостренной, длиной 2...3 клб, с малым углом у вершины
(20...25°).
Для упрощения производства, предотвращения возможных повреждений в
условиях служебного обращения и улучшения антирикошетных свойств вер-
шина снаряда притуплена, что не оказывает существенного влияния на баллис-
тику снаряда и его ударное действие. Ввиду большой длины головной части
цилиндрическая составляющая бетонобойных снарядов сравнительно корот-
кая (1.2... 1,75 клб). Наименьшая ее длина ограничивается условием правиль-
ности ведения снаряда по каналу ствола орудия.
Запоясковая часть бетонобойных снарядов представляет собой сочетание
весьма короткого цилиндра длиной от 0,10 до 0,15 клб и конуса длиной
0,5...0,6 клб. Толщина стенки оболочки определяется из условия прочности
корпуса снаряда при ударе в преграду, в результате чего толщина стенки убы-
вает от головной части к донной. Толщцйа головного свода и толщина стенок
цилиндрической части оболочки изменяются от 0,7 до 1,5 и от 0,1 до 0,2 клб
соответственно. Бетонобойные снаряды’снабжены верхним и нижним цент-
рирующими утолщениями и одним ведущем пояском. При изготовления кор-
пусов снарядов используют хромистые стали марок 46Х и 46Х12.
Для снаряжения бетонобойных снарядов, которое осуществляется залив-
кой, шнекованием или футлярным методом (за рубежом), применяется тротил.
Снаряды приводятся в действие у цели с помощью донных взрывателей
типа КТБ, ДБТ с двумя установками: «О» на фугасное (инерционное) дей-
ствие и «3» на замедленное действие, обеспечивающее подрыв снаряда после
пробития преграды или остановки в ней снаряда.
Для увеличения проникающей способности бетонобойные снаряды могут
выполняться подкалиберными. что приводит к существенному возрастанию
(в два и более раз) глубины проникания за счет повышения поперечной на-
грузки (отношения массы снаряда к площади его поперечного сечения). Од-
нако такие снаряды более сложны в изготовлении, так как оснащены веду-
щим устройством в виде отделяемых секторов и стабилизирующим оперени-
ем. Помимо этого они обладают заметно меньшим коэффициентом наполнения
по сравнению с калиберными снарядами, а следовательно, и небольшим фу-
гасным действием.
9.3. Неуправляемые бетонобойные
и проникающие авиационные бомбы
К неуправляемым авиационным бомбам, предназначенным для пораже-
ния объектов, защищенных грунтом и бетоном, относят толстостенные фугас-
ные бомбы, бетонобойные АБ и разовые бомбовые кассеты в снаряжении БЭ
бетонобойного действия. Головные части этих БП конструктивно мало отли-
чаются от бетонобойных снарядов: имеют аналогичную форму и похожие
основные относительные размеры. Коэффициент наполнения у АБ выше, чем
у снарядов, и составляет 15...25 %. Корпус АБ изготовляют из прочных ста-
лей типа 30ХГСА, 30ХГСН и снаряжают тротилом, ТА или ТГАФ. Поскольку
при наружной подвеске авиационные бомбы подвергаются длительному аэро-
динамическому нагреву, к ВВ предъявляют дополнительные требования по
618
9. Бетонобойные боеприпасы
термостойкости. Конструктивные особенности таких БП определяются схемой
их применения и заключаются в наличии узлов подвески к носителю и узлов
стабилизации (хвостовое оперение у БетАБ-500, парашют у БетАБ-500 ШП) и
разгона (двигатель у БетАБ-500 ШП).
Авиационные бомбы типа БетАБ-500 сбрасывают с высот 30...5000 м и
при пикировании со скоростью полета 600... 1200 км/ч. Они должны прони-
кать в усиленные железобетонные преграды толщиной порядка 1 м, укрытые
слоем грунта до 3 м (ВПП аэродромов, дамбы, сооружения полевого типа,
плотины, железобетонные мосты и др.). Аналогичные задачи возлагаются и
на толстостенные фугасные авиационные бомбы ФАБ-250тс и ФАБ-500тс.
Конструкции толстостенных фугасных авиационных бомб ФАБ-250тс и
ФАБ-500тс похожи на конструкцию бетонобойной авиационной бомбы
БетАБ-500 (рис. 9.2) - прочный корпус с массивной головной частью ожи-
вальной формы, донный взрыватель. Основное отличие состоит в величине
коэффициента наполнения: у БетАБ-500 он ниже (табл. 9.2).
Корпус БетАБ-500 состоит из головки, фланца, средней части и снабжен
двумя подвесными ушками для установки на бомбодержатель, расположен-
ными симметрично относительно центра масс АБ. На фланце закреплено дно
со стаканом для размещения детонатора и взрывателя. Размещение детонато-
ра и снаряжение АБ взрывателем осуществляются до подвески ее на бомбо-
Рис. 9.2. Бетонобойная авиационная бомба БетАБ-500:
1 - головка; 2 - заряд ВВ; 3 - подвесное ушко; 4 - центральная часть корпуса; 5 - стакан;
6 - детонатор; 7 - фланец; 8 - дно; 9 - взрыватель; 10 - жгут и удлинитель ЭПУ; 11 - бобышка;
12 - конус; 13 - крышка люка; 14 - тарелка; 15 - перо стабилизатора; 16- кольцо
Таблица 9.2. Основные характеристики толстостенных ФАБ, БетАБ и BLU-109/B
Характеристика ФАБ-250тс (Россия) ФАБ-500тс (Россия) БетАБ-500 (Россия) BLU-109/B (США, Франция)
Масса, кг:
БП 256 508 477 874 (без оперения) 1000 (с оперением)
ВВ 61,4 102,1 76 240
Коэффициент наполнения, % 23,6 20,1 15,9 24
Диаметр корпуса, мм 300 400 350 370
Длина, мм 1500 1500 2200 2400
9.3. Неуправляемые бетонобойные и проникающие авиационные бомбы 619
держатель через крышку люка стабилизатора, вскрываемую при подготовке
АБ к применению. Взрыватель снабжен жгутом электрического пускового ус-
тройства (ЭПУ) и удлинителем для подключения его к механизму подачи им-
пульсов (МПИ) бомбодержателя. Стабилизатор выполнен в виде сварного ко-
нуса с тарелкой для обеспечения жесткости и четырех надкалиберных перьев
с кольцом. Для крепления стабилизатора во фланце корпуса предусмотрены
бобышки с резьбовыми гнездами. При бомбометании электрический импульс
от МПИ передается на взрыватель, осуществляя его дальнее взведение. При
встрече с целью взрыватель инициирует ВВ с задержкой, необходимой для
проникания и пробития преграды.
Среди зарубежных неуправляемых бетонобойных (проникающих) АБ наи-
более известной стала BLU-109/B (рис. 9.3), которая схожа по конструкции и
компоновке с БетАБ-500. В связи с увеличением защитных свойств стационар-
ных военных сооружений командованием' ВВС США в середине 1980-х годов
было сформулировано требование к пронйкающим БП - обеспечить пораже-
ние самолетных ангаров, бункеров органов управления, складов вооружения
и т. п., расположенных на поверхности, в'цодземных сооружениях или имею-
щих природную защиту (в пещерах и утесах). Разработка проникающей АБ
базировалась на известной конструкции универсальной бомбы с небольшим ло-
бовым сопротивлением Мк 84. Хотя боеприпас BLU-109/В разрабатывался как
бомба свободного падения, был предусмотрен также вариант этого БП в каче-
стве боевой части УАБ или ракеты. Существует ряд ракет класса воздух-поверх-
ность и бомб, в которых применена боевая часть BLU-109/B: УАБ GBU-10,
GBU-15, GBU-24, GBU-27, GBU-31, ракета класса воздух земля AGM-130.
Проектируемая во Франции совместно с США бомба с БЧ BLU-109/B имеет
аналогичное наименование.
Бомба BLU-109/B с небольшим лобовым сопротивлением (см. табл. 9.2)
по форме и конструкции напоминает универсальную бомбу Мк 84 (США) мас-
сой 908 кг. В качестве заряда ВВ используются тритонал или менее чувствитель-
ное к температуре ВВ PBXN-109. Бомбы, применяемые ВМС США, снабжены
тепловым защитным покрытием. Взрыватели FMU-143/B или FMU-143 (D2)/B
устанавливаются в хвостовой части бомбы и используются совместно с дето-
натором FZU-32B/B, размещаемым на наружной поверхности бомбы. Пуск
БП BLU-109/B производится в диапазоне скоростей 560... 1200 км/ч. При под-
ходе к цели на малой высоте самолет осуществляет крутой набор высоты для
сброса бомбы на траекторию свободного полета. Чтобы достичь максималь-
ного эффекта проникания, бомбы свободного падения сбрасывают с самолета
Рис. 9.3. Бетонобойная авиационная бомба BLU-109/B:
1 - проникающая боевая часть; 2 - подвесное ушко; 3 - конус; 4 - перо стабилизатора
620
9. Бетонобойные боеприпасы
F-117А на крутом пикировании. В зависимости от угла встречи бомба проби-
вает железобетонное укрытие толщиной 1,8...2,4 м.
Сброс АБ типа БетАБ-500 ШП (табл. 9.3) проводят с низких высот (от
170 до 1000 м) при скорости носителей 700... 1100 км/ч. При поражении ВПП
они обеспечивают площадь повреждений бетонного покрытия до 150 м2. Низ-
кие высоты сброса этих АБ требуют надежного ее отставания от самолета
после отделения для гарантии безопасности самолета при встрече бомбы с
преградой, разворота АБ в сторону преграды в целях уменьшения вероятнос-
ти рикошета, а также увеличения скорости встречи с преградой для обеспече-
ния необходимой проникающей способности. Все это достигается в АБ с
помощью тормозного парашюта и разгонного реактивного двигателя.
Таблица 9.3 Основные характеристики бетонобойных авиационных бомб
с разгонным двигателем
Характеристика БетАБ-500 ШП (Россия) DURANDAL (Франция) ВАР-100 (Франция) ВЦЗ-106 (США)
Масса, кг: *
БП 380 185 37 19,5
ВВ 77 15 3,5 3,0
БЧ - 100 20 -
Коэффициент наполнения, % 20,3 8,1 9,4 15,4
Диаметр корпуса, мм 325 223 100 100
Длина, мм 2509 2490 1800 1105
БетАБ-500 ШП (рис. 9.4, а) включает в себя головную часть, двигатель,
контейнер с парашютом, исполнительные устройства (пиропатроны, устрой-
ство отделения парашюта), авиационное ВУ, состоящее из ЭПУ и взрывателя.
Корпус головной части содержит головку в виде притупленного оживала, цен-
тральную часть с подвесными ушками и дно, выполненных из прочной стали
и сваренных между собой. На дне закреплен стакан с взрывателем. Головная
часть бомбы снаряжена ВВ, имеющим компенсирующую полость. Реактив-
ный двигатель представляет собой корпус с блоком, в котором находятся кон-
центрично расположенные сопла. Для воспламенения топлива он снабжен пи-
ропатроном. В контейнер входит корпус, содержащий дно с осями для креп-
ления парашюта и перья стабилизатора. В контейнере размещены парашют и
устройство вскрытия парашюта, состоящее из крышки в его донной части с
пиропатроном отстрела, а также системы отделения парашюта. Авиационное
ВУ оснащено жгутом для обеспечения электрической связи с самолетом.
При отделении бомбы от самолета (рис. 9.4, б) запускаются все систе-
мы, необходимые для ее функционирования. С помощью пиропатрона про-
исходит отделение крышки контейнера и раскрытие парашюта, в результате
чего осуществляется интенсивное торможение бомбы и ее нормализация по
отношению к горизонтальной поверхности преграды, после чего срабатыва-
ет устройство отделения парашюта и запускается реактивный двигатель. Бом-
ба приобретает дополнительную скорость, что позволяет ей пробивать желе-
9.3. Неуправляемые бетонобойные и проникающие авиационные бомбы 621
зобетонную преграду толщиной до 1 м, укрытую слоем грунта, а также бро-
ню толщиной до 550 мм.
Среди зарубежных Л Б для бомбометания при горизонтальном полете на
малых высотах наиболее известной и состоящей на вооружении в 19 стра-
нах мира является DURANDAL (Франция) (см. табл. 9.3). Она создавалась в
соответствии с требованиями ВВС Франции к оружию, предназначенному
для вывода из строя аэродромов и бетонных укрытий и применения с малых
и сверхмалых высот. В рамках программы DURANDAL был разработан
Рис. 9.4. Конструкция (а) и схема функционирования (б) бетонобойной авиационной
бомбы БетАБ-500 ШП:
1 - головка; 2 - заряд ВВ; 3 - подвесное ушко; 4 - центральная часть корпуса; 5 - компенсиру-
ющая полость; 6 - стакан; 7 - дно; 8 - взрыватель; 9 - топливо; 10 - реактивный двигатель;
11 - сопло; 12 пиропатрон запуска реактивного двигателя; 13 - ЭПУ; 14 - устройство отделе-
ния парашюта; 15 - дно контейнера; 16 - ось; 17 - пиропатрон отстрела крышки контейнера;
18 - контейнер; 19 - парашют; 20 - перо стабилизатора; 21 - крышка контейнера
622
9. Бетонобойные боеприпасы
универсальный переходник, который позволяет использовать бомбу на всех
соответствующих стандарту НАТО 356-мм подвесных узлах-бомбодержате-
лях. Таким образом, носителем этой бомбы может стать любой самолет НАТО.
В США бомбе DURANDAL присвоили обозначение BLU-107/B.
Конструктивно DURANDAL включает в себя четыре основных отсека
(рис. 9.5, а). Боевая часть массой 100 кг, снабженная взрывателем, размещена
в носовой части. За БЧ расположены система зажигания и твердотопливный
разгонный двигатель. Двигатель и БЧ соединены с помощью узла соединения
в виде стальных колец. За двигателем находится отсек, закрепленный с помо-
щью сбрасываемого зажимного кольца и содержащий два парашюта (тормоз-
ной и основной).
Сброс бомбы осуществляется на высоте около 50...75 м при скорости
самолета-носителя 180...280 м/с, после чего выпускается первый тормозной
парашют, и бомба очень быстро затормаживается до скорости 25 м/с? На вы-
соте около 40 м раскрывается второй парашют. После достижения бомбой
угла пикирования в 30° парашютная система отделяется, срабатывает меха-
низм боевого взвода и запускается разгонный двигатель, работающий 5 тече-
ние 0,45 с. К моменту встречи с целью скорость бомбы DURANDAL состав-
ляет 250 м/с. При встрече с преградой срабатывает контактный взрыватель, и,
пробив бетонное перекрытие толщиной до 0,7 м, бомба взрывается. Взрыва-
тель также может быть настроен перед взлетом на подрыв БЧ через несколько
часов. Взрыв бомбы под покрытием ВПП приводит к образованию воронки
диаметром до 5 м и глубиной 2...3 м, окруженной разбросанными на площа-
ди около 200 м2 крупными обломками бетонного покрытия.
Авиационная бомба ВАР-100 (Франция) (ВАР - Bombe Acceleree de Pene-
fration) по конструкции и принципу действия (рис. 9.5, б) аналогична бомбе
DURANDAL, но отличается (см. табл. 9.3) меньшими массогабаритными ха-
рактеристиками (общая масса - 37 кг, диаметр - 100 мм, длина - 1800 мм), а
также способом подвески на самолет-носитель: связками в кассеты по две
Рис. 9.5. Бетонобойные авиационные бомбьг
а - DURANDAL (7 - тормозной и основной парашюты; 2 - перо стабилизатора; 3 - разгонный
двигатель; 4 - взрыватель; 5 - БЧ; 6 - противорикошетная головная часть); б - ВАР-100
(7 - контейнер с парашютами; 2 - разгонный двигатель; 3 - электронное устройство; 4 - узел
подвески; 5 - взрыватель; 6 - БЧ; 7 - пьезоэлектрический контактный датчик взрывателя)
9.3. Неуправляемые бетонобойные и проникающие авиационные бомбы 623
группы из шести-восьми или девяти бомб с помощью специальных переход-
ников. Сброс бомб ВАР-100 из такой кассеты происходит последовательно
через определенные интервалы времени на высотах полета самолета-носите-
ля вдоль ВПП до 50 м (оптимальной считается высота 80 м) и скоростях
600... 1000 км/ч. В результате взрыва на полосе образуются воронки на рас-
стоянии 15 м одна от другой. Каждая бомба способна пробивать бетонное
покрытие толщиной около 40 см, причем подрыв заряда ВВ после пробива-
ния покрытия может осуществляться практически мгновенно (через 5 мс) или
с различным временем замедления (до нескольких часов) в зависимости от
установки взрывателя. ВАР-100 могут применяться и в качестве обычных бомб:
в этом случае летчик в полете перед их сбрасыванием должен отключить сис-
тему воспламенения ракетного ускорителя.
Бетонобойная бомба BLU-106 (США) (условное наименование при созда-
нии ВКЕР - Boosted Kinetic Energy Penetrator), представляющая собой кассет-
ный БП, может использоваться как для вывода из строя ВПП, так и для унич-
тожения самолетов в ЖБУ. По конструкции эта бомба схожа с ВАР-100, но
обладает меньшей массой и длиной (общая масса - 19,5 кг, диаметр - 100 мм,
длина - 1105 мм). Она имеет цилиндрический корпус, в котором размещаются
БЧ, твердотопливный ракетный ускоритель, вытяжной и тормозной парашю-
ты. После отстрела из кассеты БП стабилизируется в полете с помощью
раскрывающегося хвостового оперения. Затем срабатывает парашютная си-
стема, которая тормозит его и ориентирует под углом около 65° относитель-
но земной поверхности. При достижении определенной высоты отстрелива-
ется парашют, включается в работу ускоритель и бомба разгоняется до ско-
рости, при которой бронебойный наконечник БЧ пробивает бетонное
покрытие цели, после чего с небольшой задержкой производится подрыв
заряда ВВ.
Для повышения эффективности поражения бетонных, объектов большой
протяженности, таких как ВПП, используются разовые бомбовые кассеты в
снаряжении бетонобойными БЭ. Ниже приведены основные характеристики
отечественных РБК:
РБК-500 БетАБ РБК-500У БетАБ-М
Масса, кг ............................... 525
Количество элементов в кассете........ 12
Диаметр корпуса, мм ..................... 450
Длина, мм .............................. 2500
480
10
450
2495
Разовая бомбовая кассета РБК-500 БетАБ (рис. 9.6, а) предназначена для
поражения ВПП, рулежных дорожек современных аэродромов и автострад.
В состав данной бомбовой кассеты входят 12 БЭ, каждый из которых должен
пробивать 400 мм бетонного покрытия и обеспечивать площадь повреждения
около 4 м2. Применяются такие БП при сбрасывании с высот 200... 10 000 м
при скорости носителей 500... 1000 км/ч.
Корпус РБК-500 БетАБ включает в себя обтекатель, жгут для электричес-
кой связи с МПИ самолета, головку, стабилизатор и подвесные ушки. Внутри
корпуса размещена арматура, с помощью которой в нем закреплены БЭ и ста-
билизатор. В арматуру входят механизм расцепления и вышибные заряды с
624
9. Бетонобойные боеприпасы
2 4 6 8 10 12 14 16
б
а
в
г
Рис. 9.6. Разовая бомбовая кассета калибра 500 кг (а) в снаряжении бетонобойными
боевыми элементами РБК-500 БетАБ (б), боевой элемент РБК-500У БетАБ-М (в)
и основные этапы его функционирования (г):
I - обтекатель; 2 - механизм расцепления с вышибными зарядами; 3 - головка; 4 - обтюратор;
5 жгут электрической связи с МПИ самолета; 6 - стакан; 7 - проникатель; 8 - ВВ; 9 - перо
стабилизатора; 10 - взрыватель; 11 - метательный заряд; 12 - воспламенитель; 13 - футляр с
парашютом; 14 - устройство распаковки парашюта; 15 - подвесное ушко; 16 - арматура;
17 - корпус; 18 - стабилизатор
9.4 Неуправляемые авиационные ракеты с проникающими БЧ 625
устройством их воспламенения, обтюратор для предотвращения прорыва
пороховых газов при отделении БЭ из корпуса. Боевые элементы (рис. 9.6, б)
состоят из проникателей с ВВ и взрывателем, установленных в стаканах, ко-
торые выполняют роль стволов для метания проникателей. Внутри стаканов
расположены метательные заряды с воспламенителями, снаружи - футляры с
парашютами и устройствами их распаковки.
После отделения от самолета по истечении определенного времени вклю-
чается механизм расцепления и воспламеняются вышибные заряды. При дей-
ствии пороховых газов на обтюратор происходит выброс БЭ из корпуса кассе-
ты и их разделение друг от друга и от арматуры. Затем срабатывают устрой-
ства распаковки парашютов БЭ. После раскрытия парашюта срабатывают
воспламенители и вышибные заряды каждого из БЭ. В процессе отстрела про-
никателей взводятся их взрыватели, а при внедрении проникателя в преграду
осуществляются срабатывание взрывателя и подрыв его заряда ВВ.
Разовая бомбовая кассета РБК-500У БётАБ-М по своему устройству и
функционированию в основном совпадает с РБК-500 БетАБ. Отличия состо-
ят в конструкции разгонного устройства проникателей (рис. 9.6, в). В кассе-
те РБК-500У БетАБ-M их разгон происходит с помощью реактивных двига-
телей, а также из-за наличия тормозных парашютов не только у БЭ, но и у
самой РБК, осуществляющих торможение и разворот корпуса РБК в сторо-
ну преграды еще до отделения БЭ (рис. 9.6, ?). Боевые элементы по уст-
ройству и функционированию схожи с бомбой BLU-106 (США). РБК-500У
БетАБ-M применяется для метания с высот 300...5000 м при скоростях са-
молета в диапазоне 500... 1200 км/ч для создания 10 очагов поражения.
9.4. Неуправляемые авиационные ракеты
с проникающими боевыми частями
Повышение проникающей способности бетонобойных БП связано с су-
щественным увеличением скорости их встречи с преградой, что применительно
к АБ не всегда может быть реализовано. Неуправляемые авиационные ракеты
(НАР), имеющие мощные разгонные двигатели, позволяют осуществить про-
никание со скоростями в 2 раза (и более) выше (гиперзвуковые ракеты) скоро-
стей АБ.
Неуправляемые авиационные ракеты предназначены для поражения оди-
ночных малоразмерных наземных (прочных, бронированных или легкоуяз-
вимых) и воздушных целей, живой силы противника, а также для вывода из
строя ВПП аэродромов. Неуправляемые авиационные ракеты снаряжаются
БЧ кумулятивно-осколочного, проникающего, осколочно-фугасного или
объемно-детонирующего действия, а также стреловидными ПЭ. Целевое на-
значение НАР определяется видом поражающего действия их боевых частей.
НАР С-8БМ (табл. 9.4) имеет бетонобойную БЧ проникающего действия, а
НАР С-13 (рис. 9.7, а) и C-I3T - проникающие БЧ. Эти ракеты предназначе-
ны для уничтожения самолетов в ЖБУ, а также объектов военной техники и
живой силы, находящихся в особо прочных укрытиях. НАР С-13Т помимо
проникающей БЧ снабжена дополнительной осколочно-фугасной БЧ и слу-
жит для уничтожения самолетов в усиленных укрытиях различного типа, а
626
9. Бетонобойные боеприпасы
Таблица 9.4. Основные характеристики отечественных НАР с бетонобойными БЧ
Характеристика С-8БМ С-13 С-13Т
Диаметр (НАР/БЧ), мм Длина, мм Масса, кг: ракеты БЧ ВВ Коэффициент наполне- ния БЧ, % Боевая эффективность Дальность пуска, м Скорость ракеты, м/с 80/68 1510 15,2 7,41 0,6 8,1 0.8 м железо- бетона 1200-2200 450 122/90 2540 57 21 1,82 8,7 3 м грунта + + 1,0 м железобетона 1100-3000 650 122/90 3100 75 21 + 16,3 1,8+ 2,7 8,7/16,6 6 м грунта + 1,0 м желе- зобетона (20 м2 ВПП) 1100-4000 500
Рис. 9.7. НАР С-13 (а), проника-
ющая боевая часть НАР С-13 (б)
и двухмодульная боевая часть
НАР С-13Т(в)
1 - корпус БЧ; 2 - обтекатель;
3 - дно, 4 - взрыватель 9-К-730;
5 - опора; б - разрывной заряд;
7 - корпус БЧ второго модуля; 8 -
стакан защитный; 9 - втулка
9.5. Бетонобойные БП и БЧ комбинированного действия 627
также командных пунктов и пунктов связи. НАР С-8 применяются для пуска
из 20-ствольных блоков Б-8М1 (самолеты) или Б-8В20А (вертолеты). Пуск
НАР С-13 производят из 5-ствольного пускового блока Б-13. Блоки и пуско-
вые устройства НАР подвешиваются на стандартные балочные держатели, ус-
танавливаемые на точки подвески под крыльями самолета.
Проникающие БЧ ракет С-8БМ, С-13 и С-13Т характеризуются следую-
щими общими особенностями:
- выполнены подкалиберными (диаметр БЧ меньше диаметра ракеты), что
позволяет увеличить поперечную нагрузку, а следовательно, и проникающую
способность;
- оснащены толстостенным корпусом с большим сводом головной части
(рис. 9.7, б);
- имеют притупленную головную часть для повышения антирикошетных
свойств и улучшения прочностных характеристик при взаимодействии с пре-
градой под большим (от нормали) углом; .
- снабжены донным взрывателем инерционного действия.
Функционируют НАР следующим образрм: после запуска ракетного дви-
гателя НАР движется в направлении к цели; при попадании в нее срабатывает
донный взрыватель и с некоторым замедлением осуществляется инициирова-
ние ВВ боевой части.
Ракета С-13Т (рис. 9.7, в) за счет применения двух разделяющихся авто-
номных БЧ, первая из которых является проникающей (аналог БЧ НАР С-13),
позволяет повысить количество ВВ, заносимого за преграду, а также обеспе-
чить разнесение зон подрыва БЧ за преградой, что резко увеличивает эффек-
тивность НАР С-13Т по сравнению с НАР С-13 при сохранении проникающей
способности. В основу разработки НАР С-13Т положен принцип модульности,
при котором можно либо исключить вторую БЧ (второй модуль) (в этом случае
НАР С-13Т превращается в С-13), либо заменить ее на БЧ другого назначения.
9.5. Бетонобойные боеприпасы и боевые части
комбинированного действия с кумулятивным предзарядом
В настоящее время существуют две концепции решения проблемы по-
ражения заглубленных целей: применение БП с высокой кинетической энер-
гией, имеющих большие массогабаритные характеристики и скорость всгречи
с преградой, и БП с тандемным размещением кумулятивного и фугасного
зарядов.
Поскольку на вооружении ВВС США находятся самолеты В-52 и F-111,
способные нести на борту весьма тяжелые СП, то в США уделяется большое
внимание разработке проникающего оружия с очень высокой кинетической
энергией: к такому оружию относятся АБ большой массы (1000. .2000 кг) с
проникающими БЧ BLU-109/B (массой порядка 900 кг) и BLU-113 A/В (мас-
сой 2000 кг). Также проведены испытания БЧ, оснащенных двигателями или
некоторыми другими средствами, позволяющими развить скорость к моменту
удара свыше 1200 м/с. Потенциальной областью использования указанных БП
может служить комплексный БП непосредственной атаки JDAM (Joint Direct
Attack Munition).
628
9. Бетонобойные боеприпасы
Стремясь получить такие же или более эффективные средства пораже-
ния, некоторые европейские страны, не располагающие тяжелыми бом-
бардировщиками или имеющие самолеты, способные нести боевое снаряже-
ние в пределах 1000 кг, направляют свои усилия на разработку других техно-
логий, которые позволяют минимизировать массу СП. Это привело к созданию
БЧ тандемного типа (рис. 9.8, а), когда один или несколько КЗ, установлен-
ных в носовой части БЧ перед основным проникающим модулем, осуществ-
ляют предварительную обработку цели так, что модуль проникающего типа
срабатывает более эффективно. Кумулятивный заряд в течение нескольких мил-
лисекунд приводит к значительному разрушению бетонных конструкций. Такое
предварительное воздействие максимизирует способность проникающего мо-
дуля разрушить цель за счет уменьшения толщины оставшегося защитного слоя
и создания канала по линии движения к цели, облегчающего ее поражение.
Рис. 9.8. Кинетические и тандемные БЧ:
а - функционирование (/ - кинетическая БЧ; 2 - тандемная БЧ; 3 - кумулятивный предзаряд;
4 - проникающая БЧ; 5 - дистанция подрыва БЧ; 6 - КС); б - область боевого применения в
зависимости от угла встречи (от нормали к поверхности преграды) и угла атаки (7 - граница
отказов кинетической БЧ; 2 расчетная граница отказов тандемной БЧ; 3 расчетная (раница
рикошета тандемной БЧ; 4 граница рикошета кинетической БЧ; 5 - область работоспособ-
ности кинетической БЧ)
9.5. Бетонобойные БП и БЧ комбинированного действия
629
Таблица 9.5. Характеристики бетонобойных БП с кумулятивным предзарядом
Характеристика STABO (Германия) LANCE (Велико- британия) BROACH, LANCER (Великобритания) MEPHISTO (Германия)
Диаметр, мм 132 160 - 240
Длина, мм Масса, кг: ~ 600 -300 — Проникающего блока - 2300
БП 16,8 — 450 500
кумулятивного блока / ВВ 0,6/- - -/91 -/45
проникающего блока / ВВ -/- -/5 -/55 -/56
Боевая эффективность ВПП Ж БУ 6,1 9,1 м грунта, 3,4-6,1 м желе- зобетона 6.1 9.1 м грунта. 3,4-6,1 м желе- зобетона
Потеря скорости проникающего модуля зависит от его массы и формы го-
ловной части проникающего снаряда, а также расстояния от КЗ и составля-
ет не более 10 %. Более одного КЗ может потребоваться в том случае, когда
необходимо поразить сильно заглубленные цели, а ограничения внешнего
диаметра не позволяют увеличить внешний калибр. В этом случае отдель-
ные заряды выполняют самостоятельные функции и их конструкции отли-
чаются друг от друга. Первый заряд проделывает отверстие в преграде, вто-
рой такой же заряд достигает максимальной глубины, прокладывая путь для
проникающей БЧ. Между двумя КЗ необходимо размещать взрывозащитный
демпфер. Преимущество тандемной БЧ - это ее антирикошетные свойства
(рис. 9.8, б) и способность эффективно воздействовать при более пологих
углах встречи (обычно около 60° от нормали по сравнению с 25...30° для
проникающих БЧ с высокой кинетической энергией кинетических БЧ). В то
же время такая БЧ более сложна в конструкции и ее труднее интегрировать
в корпус БП.
Одним из первых бетонобойных БП (табл. 9.5) с кумулятивным предзаря-
дом стала (рис. 9.9) малокалиберная бетонобойная бомба STABO (Starthbahn
Bombe), разработанная для бомбовой кассеты MW-1, в которой размещалось
до 200 шт. STABO.
Рис. 9.9. Малокалиберная бетонобойная бомба STABO:
1 - взрыватель; 2 - кумулятивный заряд; 3 проникающий фугасный заряд; 4 - парашют
630
9. Бетонобойные боеприпасы
В Великобритании созданы две тандемные бетонобойные БЧ (см. табл. 9.5):
BROACH (Bomb Royal Ordance Augment Charge) и LANCER (модификация
более мелкого варианта БЧ суббоеприпаса LANCE), предназначенные для по-
ражения ЖБУ. По своему принципу действия, устройству, массовым характе-
ристикам и боевой эффективности эти БП сходны между собой. Отличитель-
ная особенность БЧ BROACH - наличие программируемого взрывательного
устройства FMU-157/B HTSF (Hard Target Smart Fuze).
Боевая часть MEPHISTO (Multi-Effect Penetrator High Sophisticated and Target
Optimised), поражающая бетонные преграды (рис. 9.10, а), разработана по зака-
зу министерства обороны Германии для оснащения УАР KEPD-350 и KEPD-150
(Kinetic Energy Penetrator and Destroyer) класса воздух-земля (рис. 9.10, б).
В ней используется электромеханический ПИМ, входящий в состав взрывате-
ля PIMPF (Programmable Intelligent Multi-Purpose Fuze), который выполнен по
технологии SHAFT (Smart Hard target Attack Fuzing Technology). Отличитель-
ная черта этого устройства - способность распознавать большое количество
Рис. 9.10. Основные блоки и элементы бетонобойной БЧ с кумулятивным предзаря-
дом MEPHISTO (а) и бетонобойная БЧ с кумулятивным предзарядом MEPHISTO
в ракете KEPD-350 (б):
1 - неконтактный взрыватель; 2 — кумулятивный предзаряд; 3 ПИМ 4 проникающий блок;
5 - ВВ; 6 - взрыватель с тремя режимами подрыва ВВ проникающего блока
9.6. Боевые части УАБ и управляемых авиационных ракет 631
преград разных типов путем сравнения данных, заложенных в его электрон-
ную память, с информацией, которая поступает со встроенного акселеромет-
ра, измеряющего ударные ускорения. Это позволяет определить количество пре-
град с разной плотностью и твердостью, а также пройденное расстояние и пра-
вильно вычислить время подрыва основного заряда ВВ. Кумулятивный и
проникающий блоки заполняются нечувствительным к ударным нагрузкам ВВ.
Для подрыва КЗ на желаемом расстоянии от цели используется обычный элект-
ронно-оптический датчик. Корпус КЗ может быть выполнен с надрезами, фор-
мирующими осколки для поражения площадных легкоуязвимых целей. Подрыв
КЗ в этом случае осуществляется в воздухе при подлете к цели. Для подрыва
ВВ проникающего блока применяется взрыватель с тремя режимами подрыва:
в воздухе, при контакте с преградой и после проникания на заданную глубину.
9.6. Боевые части управляемых авиационных бомб
и управляемых авиационных ракет
Управляемые АБ - это один из основных видов ВТО, сочетающего в себе
высокую точность попадания, мощную БЧ и относительно низкую стоимость.
Важной характеристикой каждого боеприпаса считается отношение массы БЧ
к его общей массе. Так, у обычных неуправляемых АБ это отношение близко
к единице, у управляемых авиационных ракет класса воздух-поверхность оно
составляет 0,2. . 0,5, а для УАБ это отношение 0,7. . 0,9, т. е. при одинаковых
с УАР общей массе и дальности применения УАБ способна доставить к цели
почти вдвое большую БЧ, что более предпочтительно при поражении проч-
ных и заглубленных целей. В тех случаях, когда необходимо поразить цель
без захода самолета-носителя в зону действия ПВО (на дальности 100 км и
более), преимуществом обладают УАР.
Управляемая АБ снабжена системой управления (ГСН, автопилотом, орга-
нами управления), которая позволяет минимизировать промах относительно
точки прицеливания. Она может включать в себя следующие элементы:
- координатор или датчик цели;
- БЧ и ВУ;
- автопилот, контролирующий положение УАБ относительно центра мас-
сы, траектории полета и выполняющий функции системы стабилизации;
- органы управления (обычно аэродинамического типа);
- аэродинамический модуль;
- стартовый или маршевый двигатель (для увеличения дальности УАБ на
малых высотах);
- двигатель-ускоритель (для повышения проникающей способности при
контакте с целью).
В настоящее время окончательно сформировались два типа УАБ: коррек-
тируемые и планирующие.
Корректируемая АБ (КАБ) - управляемая АБ, траектория движения ко-
торой находится в пределах «трубки» рассеивания траекторий бомбы отно-
сительно баллистической траектории, проходящей через цель. Дальность ее
действия - 10... 15 км, точность наведения (круговое вероятное отклонение
(КВО))-3...13 м.
632
9. Бетонобойные боеприпасы
Управляемая планирующая АБ (УПАБ) - управляемая АБ, траектория дв!
жения которой содержит четко выраженный планирующий участок, а дальност
ее действия превышает баллистический относ УАБ и составляет 20...80 ю
КВО-3..,5 м.
Существующие и разрабатываемые в России и за рубежом УАБ в зависн
мости от типа системы наведения, дальности применения и точности наведе
ния можно классифицировать по четырем поколениям: /
- система наведения, в которой ГСН лазерная (флюгерная полуактивная
или телевизионная; дальность применения - 8... 10 км, КВО -10.. .30 м;
- система наведения с лазерной ГСН (флюгерная полуактивная модифи
цированная с кодирующим устройством) или телевизионная; дальность при
менения - 12 км, КВО -9 м; 1
- система наведения, в которой ГСН лазерная (лазерная гиростабилизи-
рованная, наведение - методом пропорциональной, йавигации), телевизион'
ная или тепловизионная; дальность применения - 8б.км, КВО - 3 м;
- система наведения радиометрическая, разностно-дальномерная, комп
лексированная инерциально-спутниковая; дальность применения - 90... 100 км
КВО- 1...5 м.
Разработанные в России УАБ (табл. 9.6) с бетонрбойными и проникаю
щими БЧ могут быть отнесены к второму и третьему поколениям (рис. 9.11)
Головка наведения (самонаведения) это, как правило, автономный опти-
ко-электронный прибор, имеющий механические и электрические функцио-
нальные связи с остальной частью ЛА. Он реагирует на физический признак
Таблица 9 6 Характеристики отечественных УАБ, способных поражать
защищенные грунтом и бетоном цели
Характеристика КАБ-1500Л-Пр КАБ-1500Л-Ф КАБ-500Кр
Масса, кг:
БП 1500 1560 520
БЧ 1100 1180 380
ВВ 210 450 100
ТипБЧ Подкалиберная фу- гасно-проникающая Фугасная Бетонобойная
Коэффициент наполнения, %:
УАБ 14 29 19
БЧ 19 38 26
Диаметр корпуса, мм 580 580 350
Длина, мм 4600 4600 3050
Размах оперения, мм:
сложенного 850 850 —
выпущенного 1300 1300 750
Тип системы наведения Полуактивная лазерная Полуактивная лазерная Телевизионная корреляцией ная
КВО, м 7 7 3
9.6. Боевые части УАБ и управляемых авиационных ракет
633
Рис. 9.11. Основные блоки отечественных УЛБ:
1 - ГСН. 2 - электрический соединитель с бортом самолета-носителя; 3 передний приборный
отсек; 4 элемент крепления к подвесным устройствам самолета; 5 - отсек с БЧ; 6 аэроди-
намическая поверхность; 7 задний приборный отсек; 8 - рулевой орган
поражаемого объекта, формирует и передает управляющие сигналы в систему
управления. В переднем приборном отсеке располагаются элементы бортовой
автоматики, датчики, приборы, бортовой соединитель для электрической свя-
зи УАБ с бортом самолета-носителя и т. И. Элементы крепления к подвесным
устройствам самолета-носителя представлены подвесными ушками, рым-бол-
тами, упорами и т. п. Отсек с БЧ является -определяющим весовым компонен-
том изделия и представляет собой нссуэДии корпус с элементами подвески.
В состав отсека входят исполнительные устройства, приводящие в рабочее со-
стояние БЧ. Аэродинамические поверхности и рулевые органы обеспечивают
управляемое движение на траектории автономного полета. Аэродинамичес-
кая схема УАБ - «бесхвостка», т. е. рули расположены сзади оперения. Руле-
вые органы снабжены пневматическим, гидравлическим или электрическим
приводом. В заднем приборном отсеке находятся приборы системы управления
и энергопитания.
Авиационные управляемые бомбы КАБ-1500Л-Пр и КАБ-1500Л-Ф
(рис. 9.12, а) схожи по устройству и отличаются только типом боевой части
(см. табл. 9.6), просты и надежны в эксплуатации, а также являются эффек-
тивным средством поражения различных целей.
Они оснащены лазерной полуактивной системой самонаведения, исполь-
зующей флюгерное устройство (рис. 9.12, 6) для ориентации оси чувствитель-
ности лазерного приемника ГСН по вектору скорости.
Аэродинамическая схема АБ - «бесхвостка». В кормовой части распо-
ложено крестообразное оперение, за которым находятся бипланные рули (см.
рис. 9.12, б), обеспечивающие высокие маневренные характеристики. Пере-
днее и заднее оперение выполнены складывающимися, что позволяет разме-
щать БП не только на внешней подвеске, но и в бомбоотсеках больших са-
молетов.
Мощная проникающая авиационная бомба КАБ-1500Л-Пр (рис. 9.12, в)
предназначена для поражения наземных (надводных) малоразмерных особо
прочных и заглубленных целей типа ЖБУ, складов ядерного оружия, командных
пунктов. Применяется в составе комплексов вооружения самолетов фронтовой
авиации Су-24М и Су-27ИБ с высот 1...15 км при скорости 550... 1700км/ч,
проникает в грунт на глубину 10...20 м и пробивает железобетонное перекры-
тие толщиной до 3 м.
Боевая часть - фугасно-проникающая подкалиберная (см. рис. 9.12, в),
обладающая высокой проникающей способностью.
634
9. Бетонобойные боеприпасы
Рис. 9.12. Управляемая АБ калибра 1500 кг с лазерной системой наведения (а), ее крес-
тообразное оперение с бипланными рулями и флюгерное устройство головки наведе-
ния (б), КАБ-1500Л-Пр с подкалиберной фугасно-проникающей БЧ (в), КАБ-1500Л-Ф
с фугасной БЧ (г):
1 флюгерное устройство; 2 - аэродинамическая поверхность; 3 - передний приборный отсек;
4 - электрический соединитель с бортом самолета-носителя, 5 - боевой отсек; 6 - подвесные
ушки; 7 - электротехническое пусковое устройство; 8 - хвостовой приборный отсек; 9 рас-
крывающееся хвостовое оперение; 10 - бипланный руль
9.6. Боевые части УАБ и управляемых авиационных ракет
635
Авиационная бомба КАБ-1500Л-Ф того же калибра снабжена фугасной
калиберной БЧ (рис. 9.12, г), выполненной на базе стандартной неуправляе-
мой АБ ФАБ-1500. Предназначена для поражения прочных целей типа воен-
но-промышленных объектов, железобетонных укрытий, обладает мощным фу-
гасным действием. При взрыве такого БП в грунте образуется воронка диамет-
ром до 20 м. Внешне эта АБ аналогична КАБ-1500Л-Пр.
При всех достоинствах лазерная система наведения УАБ имеет ряд недо-
статков. Будучи полуактивной, она требует непрерывной подсветки цели ла-
зерным лучом вплоть до момента попадания АБ. Кроме этого при больших
высотах бомбометания увеличивается диаметр лазерного пятна на поверхно-
сти земли, что снижает точность попадания. Эти недостатки отсутствуют у
телевизионной системы самонаведения.
Авиационная бомба КАБ-500Кр (рис. 9.13, а) калибра 500 кг предназна-
чена для поражения наземных (надводных) ‘Целей типа железнодорожных мо-
стов, ЖБУ, ВПП, фортификационных сооружений, узлов коммуникаций и др.
Применяется в составе комплексов вооружения самолетов фронтовой авиа-
ции с высот 0,5...5,0 км при скорости 550...44 00 км/ч.
Телевизионная система наведения корреляционного типа обеспечивает
возможность поражения замаскированных- целей. Головка самонаведения
КАБ-500Кр (рис. 9.13, б) фиксирует взаиморасположение различных оптически
контрастных объектов. При этом цель может и не выделяться на фоне местно-
сти, а БП будет наводиться на условную точку, заданную маркером. Аэроди-
намическая схема АБ - «бесхвостка» с крестообразным неподвижным опере-
нием, а ее боевая часть - бетонобойная, калиберная (рис. 9.13, в).
Основу арсенала российских УАБ составляют боеприпасы с проникаю-
щей БЧ. Концепция использования КАБ предусматривает поражение макси-
мально защищенных целей. Проникающая БЧ, находящаяся в толстостенном
корпусе, обладает еще и вторичным осколочным действием, а ее проникаю-
щая способность существенно зависит от поперечной нагрузки БЧ (отноше-
ния массы БЧ к площади ее поперечного сечения). Чем она выше, тем больше
глубина проникания, поэтому масса БЧ в большей степени, чем масса ВВ,
является определяющим показателем огневой мощи УАБ.
Зарубежные УАБ, прежде всего в США, выполняются с использованием
унифицированных БЧ, которые применяются в различных бомбах и в управ-
ляемых ракетах. Примером таких УАБ могут служить их конструкции
(рис. 9.14), разработанные и разрабатываемые в рамках программ PAVE WAY
по единым принципам на базе существующих обычных авиационных бомб.
Управляемые АБ, создаваемые по этим программам, практически одинаковы
по конструкции и компоновке: передний отсек оснащен лазерным КЦ (флю-
герным - второе поколение УАБ или гиростабилизированным - третье поко-
ление), блоками наведения и управления с источником питания, рулями и
приводом рулей; центральный отсек содержит БЧ штатной бомбы; хвостовой
отсек интегрирован с аэродинамическими поверхностями. Рули и хвостовые
аэродинамические поверхности, сопрягаемые с БЧ, отличаются друг от друга
размерами в зависимости от калибра. Все остальные элементы системы иден-
тичны. Выполнены УАБ по аэродинамической схеме «утка» и имеют общую с
обычными бомбами систему подвески на самолет-носитель. Совершенствова-
636
9. Бетонобойные боеприпасы
Рис. 9.13. Авиационная бомба КАБ-500Кр (а), ее крестообразное оперение с рулями
и телевизионно-корреляционная ГСН (б), бетонобойная БЧ КАБ-500Кр (в):
1 - телевизионно-корреляционная ГСН; 2 аэродинамическая поверхность; 3 - передний при-
борный отсек; 4 - электрический соединитель с бортом самолета-носителя; 5 - боевой отсек;
6 - подвесные ушки; 7 — электротехническое пусковое устройство; 8 - хвостовой приборный
отсек; 9 - хвостовое оперение; 10 - руль
ние таких АБ определяется в основном совершенствованием системы наведе-
ния. Наиболее полно идея использования идентичных элементов реализуется
в АБ модульной конструкции. В УАБ модульной конструкции применяются
шесть основных элементов: БЧ; комплект аэродинамических поверхностей (с
крестообразным или плоским раскрывающимся крылом для УПАБ); системы
наведения и управления; переходник и блок связи. С помощью переходников
на корпус БЧ устанавливают аэродинамические поверхности.
В зависимости от условий боевого применения и типа цели из модулей
может быть собран оптимальный вариант БП наибольшей эффективности.
Наиболее массовыми УАБ за рубежом стали АБ GBU-24 и GBU-27 (США),
которые при использовании в них проникающей боевой части BLU-109/B
получили наименование GBU-24A/B (рис. 9.15), GBU-24B/B, GBU-27/B
(табл. 9.7). Боевая часть BLU-109/B применяется в УАБ модульной конструк-
ции: GBU-10G, GBU-10H, GBU-10J; GBU-31 (V) 3/В, GBU-31 (V) 4/В. Эта БЧ
9.6. Боевые части УАБ и управляемых авиационных ракет
637
Рис. 9.14. Основные блоки зарубежных УАБ второю поколения:
1 - двухстепенной карданный подвес; 2 - блок электроники; 3 — электронный модуль; 4 - отсек
управления с механизмом энергопитания и вычислителем; 5 - взрыватель, 6 - механизм приво-
да взрывателя; 7 - крыльевой блок с механизмом раскрытия крыла (крыло убрано); 8 - крылье-
вой блок (крыло выпущено); 9 - хвостовой переходный элемент конструкции; 10 - БЧ;
11 - носовой переходный элемент конструкции; 12 - рулевой привод; 13 - управляющие аэро-
динамические поверхности; 14 - аэродинамический стабилизируемый координатор (флюгер-
ное устройство); 15 - приемник лазерного излучения
Рис. 9.15. УАБ GBU-24A/B:
1 - лазерная гиростабилизированная система наведения; 2 - БЧ; 3 - переходной элемент;
4 - крыльевой блок
Рис. 9.16. УАБ AGM-130:
1 - система наведения; 2 - БЧ; 3 — система управления; 4 - твердотопливный ракетный двигатель
638
9. Бетонобойные боеприпасы
Таблица 9.7. Основные характеристики УАБ (США) с проникающими БЧ
Характеристика GBU-24A/B; GBU-27/B GBU-28/B (GBU-37) J-250 SSB
Масса, кг:
БП 1065; 984 2130 113,2
БЧ 874 2004 95
ВВ 240 306 22,6
ТипБЧ BLU-109/B BLU-113A/B -
Коэффициент напол- нения, %:
УАБ 24 14 20
БЧ 27 15 24
Диаметр корпуса, мм 370 370 152
Длина, мм 4320; 4240 5840 1830 ,
Размах оперения, мм: «
сложенного 940; 720 720 — ,.
выпущенного 2000; 1680 1680
Тип системы Полуактивная Полуактивная Космическая нави-
наведения лазерная гироста- лазерная гироста- гация + лазерный
билизированная билизированная локатор
КВО, м 3 3 -
Боевая эффектив- 1,8-2,4 м железо- 6,0 м железобетона 1,8 м железобетона
ность бетона или 30,0 м грунта
также нашла использование и в управляемой ракете: AGM-130 (рис. 9.16) пред-
ставляет собой модульную УАБ GBU-10, которая снабжена твердотопливным
ракетным двигателем, отделяемым от ракеты после завершения его работы
(60 с). GBU-27 (рис. 9.17, а) имеет меньшие по сравнению GBU-24 габариты
корпуса и оперения, что позволяет размещать ее в небольшие бомбовые отсе-
ки малозаметного боевого самолета F-117A. Боевая часть этих бомб способна
пробивать до 2,4 м железобетона.
GBU-28/B (рис. 9.17, б) была разработана в короткие сроки (17 дней) во
время войны в Персидском заливе (1991 г.) при использовании существую-
щих системы наведения и взрывателя от боевой части BLU-109/B и изготов-
лении корпуса БЧ из отрезка пушечного ствола калибром 203 мм. Боевая часть
BLU-113/B такой УАБ позволяет поражать объекты, расположенные на глуби-
не до 30 м и пробивать бетонные преграды толщиной до 6 м.
Проникающую способность можно повысить различными средствами.
1. Увеличение поперечной нагрузки с помощью существенного увеличе-
ния массы БЧ путем:
- выполнения БЧ с удлинением (отношением длины к диаметру) до 10... 12 -
УАБ GBU-28/B (см. рис. 9.17, б), J-250 SSB (Small Smart Bomb) (рис. 9.18);
- использования более плотных, чем сталь, материалов, например вольф-
рама (БЧ JAST-1000, США) для AGM-158 (табл. 9.8) - ожидаемая эффектив-
ность этой БЧ массой 432 кг находится на уровне БЧ BLU-109/B массой 874 кг.
9.6. Боевые части УАБ и управляемых авиационных ракет
639
Рис. 9.18. УАБ J-250 SSB:
1 - ВВ; 2 - корпус бомбы; 3 - взрыватель; 4 - система наведения; 5 - система управления
(источник питания, рулевые поверхности)
Таблица 9.8. Основные характеристики УАР (США) с проникающими БЧ
Характеристика AGM-130C AGM-86D AGM-158 JASSM AGM-65F Maverick
Масса, кг: БП 1353 1750 1023 307
БЧ 874 545 432 136
ВВ 240 — 103 —
ТипБЧ BLU-109/B AUP-3M JAST-1000 —
Коэффициент напол- нения, %: УАР 18 10
БЧ 27 — 24 —
Диаметр корпуса, мм 370 693 450x550 305
Длина, мм 3950 БЧ-370 6320 БЧ - 295 4260 2490
БЧ - 2400 БЧ - 1820
640
9. Бетонобойные боеприпасы
Окончание табл. 9.8
Характеристика AGM-130C AGM-86D AGM-158 JASSM AGM-65F Maverick
Размах выпущенного оперения, мм 1500 3650 2700 720
Тип системы наведе- ния ИНС/GPS с телевизион- ной или тепло- визионной ГСН HHC/GPS HHC/GPS с тепловизи- онной ГСН Теплови- зионная
Дальность полета, км 45(160) 1200 500 25
Боевая эффективность 1,8 2,4 м желе- зобетона 6,0 м железо- бетона или 30,0 м грунта 1,2-2,1 м же- лезобетона в
Примечание. ИНС инерциальная система наведения; GPS спутниковая навигаци- онная система.
2. Обеспечение высокой скорости встречи за счет применения:
- разгонного реактивного двигателя для БЧ BLU-116B (AUP), представ-
ляющей собой корпус из высокопрочной стали с примесями никеля и кобаль-
та, который разгоняется реактивным ускорителем; при массе этой БЧ 750 кг
ожидается, что пробиваемость возрастет в 2 раза (около 4 м железобетона);
планируется замена существующей БЧ BLU-109/B на BLU-116В;
проникающих БЧ на гиперзвуковых и межконтинентальных ракетах
3. Выполнение БЧ по тандемной схеме с кумулятивным предзарядом (см.
табл. 9.5).
9.7. Перспективные бетонобойные и проникающие боеприпасы
Проблема поражения глубокорасположенных объектов может решаться с
помощью миниатюрных термоядерных бомб мощностью 0,01...0,1 кт. Разра-
ботка такого оружия невозможна без решения определенных технических, а
также юридических проблем, связанных с запретом испытаний ядерного ору-
жия. Технические проблемы, с одной стороны, состоят в возможности созда-
ния надежного взрыва малого заряда, обеспечения сохранности при проника-
нии в прочную преграду как корпуса АБ, так и самого заряда, а с другой
стороны, в надежном проникании АБ на значительную глубину (до 70 м для
заряда мощностью 0,1 кт), что необходимо для исключения выброса из-под
земли радиоактивных газов. Юридические проблемы заключаются в действу-
ющих запретах на испытания ядерных зарядов, а также в ограничениях на
исследования и разработку маломощного ядерного оружия в связи с опаснос-
тью его распространения в виде так называемых чемоданных бомб. В США
ранее была создана маломощная бомба В61-7. В настоящее время там разра-
ботали заглубляющийся ядерный боеприпас В61-11, установив ядерную на-
9.7. Перспективные бетонобойные и проникающие боеприпасы
641
чинку из предыдущей конструкции бомбы В61 в корпус из закаленной стали
с новым обтекателем для обеспечения способности ее заглубления в грунт.
Однако проблемы реализации ударостойкости заряда, прочности корпуса и дос-
тижения требуемой глубины проникания еще далеки от разрешения. Для обес-
печения необходимой прочности корпус АБ может быть выполнен из артилле-
рийского ствола (рис. 9.19), как это сделали у проникающей АБ GBU-28. Фор-
ма головной части и ее заострение должны быть оптимизированы из условия
достижения заданной глубины проникания. Для исключения пластических де-
формаций корпуса его можно укрепить, нанеся на него сверхпрочный матери-
ал, который изготовлен на основе углеродных нанотрубок. В качестве устрой-
ства запуска ядерной реакции допускается использовать какой-либо тип запа-
ла уже существующего термоядерного оружия, который в целях уменьшения
перегрузок при проникании можно поместить в амортизатор из пористого алю-
миния. Следует иметь в виду, что устойчивое движение боеголовки в грунте
может быть обеспечено только при подлете бомбы практически перпенди-
кулярно к поверхности внедрения. В связи с этим возможны сравнительно
простые методы защиты подземной цели^от проникающей бомбы. Напри-
мер, соответствующую площадь земной поверхности над защищаемым под-
земным сооружением можно покрыть бетонными пирамидами, что приведет
к рикошетированию или разрушению ядерного заряда, а его фрагменты могут
стать трофеем противника, т. е. должна быть предусмотрена система уничто-
жения бомбы в начальный момент рикошета.
Эффективность проникающих БЧ можно существенно повысить путем раз-
мещения их на гиперзвуковых ЛА, разработке и созданию которых во многих
странах уделяется большое внимание. Гиперзвуковой полет реализуется при
скорости ЛА порядка М = 4.. .5 с помощью воздушно-реактивных двигателей,
которые в 4-10 раз эффективнее классических ракетных двигателей.
Для приведения в действие гиперзвуковых прямоточных воздушно-реак-
тивных двигателей (ПВРД) требуется применение ускорителей. Но даже в этом
Рис. 9.19. Противобункерная АБ с маломощным ядерным зарядом:
1 - GPS и пусковой механизм; 2 прочная оболочка с углеродными нанотрубками. 3 - суще-
ствующий запал «пушечного» типа; 4 - твердотопливный ракетный двигатель; 5 - аэродинами-
ческая поверхность, управляемая GPS; 6 - амортизатор из пористого алюминия; 7 корпус из
артиллерийского ствола; 8 обедненный уран; 9 - заостренный наконечник головной части
642
9. Бетонобойные боеприпасы
случае (при скоростях полета порядка М = 4...7) двигатели не выходят на
полностью сверхзвуковой режим работы, и поток воздуха через гиперзвуко-
вой ПВРД остается частично дозвуковым. В результате этого большинство
гиперзвуковых ПВРД созданы для работы по принципу, допускающему дей-
ствия с дозвуковыми и сверхзвуковыми потоками воздуха в двигателе.
В отличие от обычных реактивных двигателей, где для сжатия воздушно-
го потока применяются вращающиеся компрессоры, гиперзвуковые ПВРД для
сжатия воздушного потока в двигателях используют форму своих ЛА и их
скорость движения. Так как гиперзвуковые ПВРД работают на кислороде воз-
духа и не требуют окислителей, они легче обычных ракетных силовых уста-
новок и могут обеспечить большую грузоподъемность. Один из вариантов со-
здаваемого в США гиперзвукового ЛА (рис. 9.20) имеет следующие характе-
ристики: дальность полета - 1100 км; скорость полета - 1340 м/с на высоте
30 км; масса ракеты - 1050. ..1135 кг; масса БЧ - 115... 140 кг. Двигатель кон-
структивно (расчетный удельный импульс - не менее 600 с, общая длина -
около 4,5 м, максимальный диаметр - до 0,5 м) будет включать в себя лобовой
многосегментный воздухозаборник, две камеры сгорания - дозвуковую и сверх-
звуковую, расположенные тандемно, и расширяющееся сопло.
В воздухозаборнике происходят первоначальное сжатие воздушного по-
тока и распределение его между камерами сгорания. Около 25 % воздуха под-
водится для первоначального сжигания топлива (керосина) в дозвуковой ка-
мере сгорания (газогенераторе), предназначенной для подготовки обогащен-
ной ТВС, разгона потока и для его подачи через четыре входных устройства в
сверхзвуковую камеру сгорания, где происходят впрыск и горение основного
топлива (максимальная температура газа в камере сгорания равна -2200 °C).
Высокие скорости встречи с преградой могут обеспечить сравнительно
небольшим боевым частям этих ЛА проникание на значительные глубины.
Так, исследования, проведенные в США, показали, что БЧ массой 30...75 кг
при скорости встречи 1200... 1350 м/с способны проникать в бетонную пре-
граду на глубину 6,0... 10,5 м. Это в 3^4 раза выше проникающей способно-
сти штатных БЧ по сравнению с BLU-109/B и почти в 2 раза - по сравнению с
BLU-113А/В. При таких скоростях взаимодействия с преградой существенное
Рис. 9.20. Двухрежимный ПВРД гиперзвукового ЛА:
/ - воздухозаборник сверхзвуковой камеры сгорания; 2 дозвуковая камера сгорания; 3 - сверх-
звуковая камера сгорания; 4 - воздухозаборник дозвуковой камеры сгорания
9.8. Основные расчетные зависимости оценки функционирования БП 643
значение приобретают вопросы сохранения прочности корпуса БЧ и стойкос-
ти снаряжения, а также устойчивости движения (отсутствие искривления тра-
ектории и разворота БЧ в преграде).
Работы, проведенные в МГТУ им. Н.Э. Баумана, показали, что пути по-
вышения эффективности ударного действия БП могут быть сведены к следу-
ющим двум направлениям.
Для первой группы БП (малого удлинения) обеспечивается управление тра-
екторией движения БП в преграде путем изменения начальных условий их
взаимодействия с преградой (углов атаки и угловых скоростей) как на этапе
полета, так и непосредственно в момент встречи с преградой в зависимости
от типа преграды и условий боевого применения. Это достигается либо с по-
мощью системы управления, либо с помощью специальных импульсных газо-
динамических устройств, срабатывающих в момент контакта с преградой в
направлении, вызывающем искривление траектории при проникании в глубь
преграды, существенно увеличивая глубину проникания, либо выполнением
корпуса боеприпаса асимметричным по форме (патенты США 4085678 и
4090446) или с эксцентриситетом массы. ,• л
Для второй группы БП (большого удлинения) обеспечивается управление
физико-механическими свойствами материалов преграды и корпуса БП, коэф-
фициентом трения корпуса БП о преграду путем введения в нее (патент США
3580178) в процессе проникания или нанесения на поверхность БП вещества,
уменьшающего трение. Возможно также управление инерционным расшире-
нием материала преграды за счет создания кавитаторов с конструктивными
параметрами, изменяющимися в зависимости от прочностных характеристик
преграды.
Проникание на значительные глубины может быть в основном достигну-
то применением БЧ проникающего типа большого удлинения.
9.8. Основные расчетные зависимости для оценки
функционирования бетонобойных и проникающих боеприпасов
Глубина поражения преграды проникающим БП складывается из глуби-
ны его проникания в результате кинетического воздействия (ударного действия)
и размера зоны разрушения, образуемой при взрыве заряда ВВ (фугасного
действия). Для проникающих БП основным является ударное действие.
Характер проникания БП в преграду во многом определяет условия встречи
БП с преградой, при которых угол встречи между вектором скорости и норма-
лью к поверхности преграды не равен нулю. При этом угол атаки (между век-
тором скорости и осью тела) обычно отличается от нуля и может не находить-
ся в плоскости полета тела. Эти условия приводят к тому, что сопротивление
среды в различных точках поверхности проникающего тела оказывается нео-
динаковым. В результате вектор результирующей силы сопротивления среды
не совпадает с осью симметрии тела, траектория его движения искривляется
и может представлять пространственную кривую.
При пространственном проникании движение тела с шестью степенями
свободы может быть описано уравнениями движения твердого тела в общем
644
9. Бетонобойные боеприпасы
случае. Уравнения его движения - это уравнения движения центра масс С
тела и вращательного движения вокруг него:
т
dt
= F,
(9.1)
= М, (9.2)
dt
где т масса тела; vc и Кс - скорость центра масс С тела и его кинетический
момент; F кМ - сила сопротивления среды и ее момент относительно центра
масс С тела.
Уравнения (9.1) и (9.2) образуют систему обыкновенных дифференциаль-
ных уравнений, которая может быть решена численным интегрированием, на-
пример методом Рунге - Кутта. При этом силовые факторы, вызванные со-
противлением грунта F и ее моментом Л/, определяются интегрированием вы-
ражений для нормального и касательного удельных сопротивлений
прониканию по всей поверхности тела с учетом возможности отсутствия кон-
такта части его поверхности со средой:
F= f (о„л + т„т)^.
М = J р(оли + Tnt)ds,
sK
где нит- единичные векторы нормали и касательной в рассматриваемой
точке поверхности тела, причем направление единичного вектора касатель-
ной т совпадает с направлением проекции
вектора v на плоскость, касательную к повер-
хности тела в рассматриваемой точке (рис.
9.21), ds - элементарная площадка в окрест-
ности рассматриваемой точки; 5К - поверх-
ность тела, находящаяся в контакте с грун-
том; р - радиус-вектор рассматриваемой точ-
ки поверхности тела относительно его центра
масс С.
Для определения силовых факторов не-
обходимо знать распределение нормального
о„ и касательного удельных сопротивле-
ний среды по поверхности проникающего
тела. Независимо от его формы удельные со-
Рис. 9.21. Силовые факлоры, дей-
ствующие на поверхности прони-
кающего БП
противления оч и т„ в какой-либо точке по-
верхности тела, находящейся в контакте с преградой, являются функциями
физико-механических свойств среды и vn - проекции скорости v рассматрива-
емой точки на вектор нормали к поверхности тела в этой точке. В общем виде
эти функции для большинства грунтов записываются одинаково:
9.8. Основные расчетные зависимости оценки функционирования БП 645
= Av?. + Bv.. + С;
" " ‘ (9.3)
где А, В, С - коэффициенты, характеризующие свойство среды оказывать со-
противление прониканию; ц - коэффициент трения материала преграды о кор-
пус тела.
Коэффициенты А, В, С в зависимостях (9.3) могут определяться раз-
личными способами. Возможен путь получения этих коэффициентов через
стандартные физико-механические характеристики (плотность, сжимае-
мость, угол внутреннего трения, сцепление, пористость, модуль сдвига) -
аналитическое или численное решение задач проникания с позиций меха-
ники сплошной среды. Возможно нахождение указанных коэффициентов
на основании обработки экспериментальных данных по прониканию тел в
преграды.
При проведении оценочных расчетов проникания в грунты и бетон мож-
но воспользоваться простыми зависимостями для определения коэффициен-
тов А, В, С через коэффициенты свойств преграды в известных эмпирических
формулах Забудского - Майевского и Березанской.
В связи с тем, что бетон имеет отличающиеся практически на порядок
пределы прочности при сжатии и растяжении, при пробитии телами бетон-
ной преграды в последней могут происходить разрушения в виде тыльного
и лицевого отколов. Образование откольных воронок существенно влияет
на силу сопротивления и кинематику проникания (особенно при движении
тела в лицевых и тыльных слоях преграды), так как физико-механические
характеристики разрушенного бетона в откольных воронках значительно от-
личаются от характеристик неразрушенного бетона. Поэтому одним из спо-
собов учета характерного разрушения бетонной преграды стало изменение
коэффициентов А, В и С для бетона в лицевых и тыльных слоях преграды на
коэффициенты Ad, Bd, Cd. На основании анализа результатов численного ре-
шения задачи механики сплошной среды и данных экспериментальных ис-
следований соотношения между коэффициентами могут быть представлены
в следующем виде:
^ = 0,7771; Bd = 0,42В; Q = 0,39C.
Замена коэффициентов происходит для час-
тиц материала преграды, находящихся в лицевых
и тыльных зонах разрушения, размеры которых
для преград толщиной более 3 4 диаметров БП
следующие:
Df D Н
-i = 4...5; — = 7...9; ^ = 2; -^- = 1,5,
d d d d
где Dj - диаметр зоны лицевого откола; d - диа-
метр проникающего тела; D, - диаметр зоны тыль-
ного откола; Нг £ толщина зоны тыльного откола;
Н/ - толщина зоны лицевого откола (рис. 9.22).
Рис. 9.22. Тыльная и лице-
вая откольные воронки при
проникании БП в бетон:
Ь - толщина преграды
646
9. Бетонобойные боеприпасы
Характеристики движения БП в процессе его проникания (координа-
ты, скорость, осевая и боковая силы) находятся из решения системы урав-
нений, которая включает в себя уравнения движения (9.1) и (9.2), записан-
ные в проекциях на оси подвижной и связанной с телом системах коорди-
нат, и кинематические уравнения, связывающие подвижную и неподвижную,
связанную с преградой, системы координат.
Эмпирические зависимости расчета проникания
Для оценки проникающего действия (в основном глубины проникания)
используются эмпирические зависимости, среди которых наиболее известны
формулы Забудского - Майевского и Березанской (после ее усовершенствова-
ния получила название формулы АНИИ). При определении глубины проника-
ния принимается допущение о прямолинейном движении БП в преграде.
Формула Забудского - Майевского имеет следующий вид:
, 2т 2\ *
п =-----— In (1 + b}v0 )cos аг,,
a^iui
где h - глубина проникания БП относительно лицевой поверхности преграды, м;
т - масса БП, кг; d - диаметр БП, м; с0 - скорость встречи БП с преградой, м/с;
аг) - угол встречи с преградой, отсчитываемый от нормали к поверхности пре-
грады; а\,Ь\~ коэффициенты свойств преграды (табл. 9.9).
Формула АНИИ:
, w cos (на )
= i——>
d y/cos at,
где К - коэффициент формы голрвной части снаряда {К = 1,3 - для снарядов
дальнобойной формы, К = 1,0 для снарядов недальнобойной формы); п -
коэффициент, характеризующий способность снаряда к изменению его траек-
тории в преграде (п = 1,82 для снарядов дальнобойной формы, п = 2,62 - для
снарядов недальнобойной формы); К} - коэффициент свойств преграды
(табл. 9.10).
Таблица 9.9. Значения коэффициентов свойств преграды
(формула Забудского - Майевского)
Преграда а, • 10 6 Ь\ 106 Р
Камень:
хорошего качества 5,52 15 0,35
среднего » 4,40 15 0,35
Кирпич 3,16 15 0,35
Свеженасыпанная земля 0,70 60 0,30
Земля:
насыпная (суглинок) 0,46 60 0,20
сырая 0,27 80 0,12
9 8 Основные расчетные зависи мости оценки функционирования Ы7
647
Таблица 9.10. Значения коэффициента свойств преграды (формуле АНИИ)
Преграда К, 106 Р
[рунт:
торфяно-болотист ый 16 0,10
средней плотности 11-13 0,20
ГЛИНИСТЫЙ 10 0,15
плотный 6,0 -8,5 0,23
Свсженасыпанная земля 13 15 0.20
Песчаная насыпь 9,0 0,38
Глина плотная 7,0 0,23
Песок слежавшийся . ' 4.5 О’,39
Кирпичная кладка 2,0-2,5 0,35
Булыжный камень -.2,5 0,38
Известняк, песчаник 2,0 0,30
Бетон: -
слабый R: = 20-30 МПа 1,2-1.5 0.15-0,33
средний R,= 30-60 МПа 0,75-1,20 0,15-0,33
прочный R. - 60-100 МПа 0,50-0,75 0,15-0,33
Глубина проникания снарядов определяется при условии, что снаряды при
ударе и проникании в преграды сохраняют прочное состояние (не разрушают-
ся и не деформируются).
Коэффициенты А, В, С в выражении (9.3) находят через коэффициенты
О|, (см. /абл. 9.9) в формуле Забудскою - Майевского с учетом коэффици-
ента трения ц преграды о БП по следующим зависимостям:
л= Wl; в=0; с = _^5_.
0,5 + - it 1 + — ц
8 2
Эти коэффициенты определяются через коэффициент К\ (см. табл. 9.10)
формулы АН ИИ как
1,5
А = 0; В----------; С = 0.
К) (0,59 + 1,4ц)
Полученные значения коэффициентов могут быть использованы нс толь-
ко при решении уравнений движения (9.1) и (9.2), но и самостоятельно для
определения характеристик прямолинейного проникания: максимальной силы
сопротивления и глубины проникания по нормали к поверхности преграды:
2
max =^-(l + MCtgX)(A?>oSin2X + C),
648
9. Бетонобойные боеприпасы
и
2т
h =-----2--------------~ 1n 1 +
And (1 + gctg X)sin“ X
Asin2X 2
v0 cos av
(9.4)
nd2
Fmax = —(l + HCtgX)(BrosinX),
h =-----у---------------r0cos av, (9.5)
Bnd~ (1 + gctg X)sin X
где - максимальная сила сопротивления, H; X = arctg (2/гч /d); /гч - длина
головной части (ГЧ), м. ' '
Следует иметь в виду, что при скоростях встречи менее 200...300 м/с воз-
можен рикошет (отскок) БП от преграды. При малых скоростях это может
происходить и при встрече с прочной преградой по нормали, но с углем атаки
порядка 5°.
При взрыве заряда ВВ, находящегося в корпусе БП, зона разрушения (глу-
бина проникания), образованная ударным воздействием, которое рассчитыва-
ется по формулам (9.4) и (9.5), будет увеличена на радиус зоны разрушения
Rp, сформированной при взрыве:
Rp ~^р\1тВИ’
где Кр - коэффициент податливости материала преграды взрыву; твв- масса
ВВ в корпусе БП, кг. Значения коэффициента Кр в зависимости от материала
преграды приведены ниже:
Рыхлая земля ................................. 1,40
Обыкновенный грунт (целина) ..................... 1,07
Песок........................................ 1,00-1,04
Глина с песком .................................. 0,96
Известняк и песчаник ............................ 0,92
Каменная кладка.................................. 0,84
Бетон ........................................... 0,77
Железобетон ................................... 0,60-0,70
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ
Велданов В.А. Закон сопротивления прониканию ударников в грунт // Оборонная
техника. 1995. № 4.
Велданов В.А., Исаев АЛ, Маринчев Д.В., Пушилин Ю.М. Программа расчета на
ПЭВМ параметров процесса взаимодействия ударника с преградой / Численные ме-
тоды решения задач теории упругости и пластичности. Новосибирск: ИТПМ СО РАН,
1992.
Список рекомендуемой литературы 649
Дудка В.Д., Чуков А.Н., Шмараков Л.Н. Высокоточные боеприпасы различного
целевого назначения: Учеб, пособие. Тула: ТулГУ, 2002.
Егоров К. Перспективные бетонобойные авиационные боеприпасы ведущих стран
НАТО // Зарубежное военное обозрение. 2001. № 2.
Егоров С. Высокоточное бомбовое вооружение авиации // Военный парад. 1994.
№2. I
Каренин И. Авиационное оружие для нанесения ударов по аэродромам // Зару-
бежное военное обозрение. 1984. № 12.
Клайн С. Дж. Подобие и приближенные методы. М.: Мир, 1968.
Маликов В.Г. Шахтные пусковые установки. М.: Воениздат, 1975.
Оружие России: Каталог. Т. VII: Высокоточное оружие и боеприпасы. М.: АОЗТ
«Военный парад», 1997.
Проблемы создания корректируемых и управляемых авиационных бомб / Под ред.
Е.С. Шахиджанова. М.: Инженер, 2003.
Прохоров Б.А. Боеприпасы артиллерии. М;: Машиностроение, 1973.
Сагомонян А.Я. Проникание. М.: МГУ, 1974.
Справочник артиллерийских боеприпасов, подлежащих утилизации и уничтоже-
нию / Под ред. А.А. Каллистова. М.: СП «Нова»,J992.
Средства воздушного нападения зарубежных стран: программы развития высо-
коточного оружия / Под ред. Б.Ф. Чельцова и С. В. Ягольникова. М.: 2 ЦНИИ МО,
2003.
Третьяков ГМ. Боеприпасы артиллерии. М2 Воениздат, 1947.
Уилсон Дж. Миниатюрные ядсрные бомбы // Популярная механика. 2002. № 12.
Шахиджанов Е. ГНПП «Регион»: высокоточное управляемое оружие И Военный
парад. 1999. № 3.
Широкорад А.Б. История авиационного вооружения. Минск: Харвест, 1999.
Щербаков Р. Программа создания гиперзвуковых управляемых ракет // Зарубеж-
ное военное обозрение. 2003. № 6.
Jane’s Intenational Defence Rewiew. 1996. № 7.
Jane’s Intenational Defence Rewiew. 1998. № 1.
10
ДИНАМИЧЕСКАЯ ЗАЩИТА
10.1. Динамическая защита и принцип ее действия
Оценка стойкости монолитной бронезащиты
к воздействию противотанковых средств поражения.
Необходимость динамической защиты
Согласно классическому определению, к БП относятся предметы воору-
жения, предназначенные для поражения, уничтожения и разрушения объек-
тов и целей противника. Однако не менее важная составляющая военного про-
тивоборства - защита своих войск и объектов от поражающего действия БП
противника. Динамическая защита (ДЗ) обеспечивает защиту от ударно-про-
никающего действия кумулятивных боеприпасов (КБП) и БП кинетического
действия: БПС и формируемых взрывом снарядов (ФВС). Можно сказать, что
динамическая защита обеспечивает поражение СП, поэтому ее рассмотрение
вполне уместно.
До недавнего времени основным способом защиты от действия КБП и
БПС было бронирование объектов защиты (в основном тяжелой бронетехни-
ки) однородной по составу стальной броней, обеспечивающей инерционное и
прочностное сопротивление прониканию КС и бронебойных сердечников. Про-
никающая способность обоих типов СП может быть оценена с помощью со-
отношения
VPn
где L - глубина проникания, т] - коэффициент эффективности, учитывающий
прочностные свойства взаимодействующих материалов и качество изготовле-
ния КБП или БПС; I - эффективная длина КС или БПС; р - плотность матери-
ала КС или БПС; рп - плотность материала преграды.
Бронебойные подкалиберные снаряды из обедненного урана или ВНЖ
плотностью рс ~ 18 г/см3 и длиной 600...900 мм при скорости 1700 м/с имеют
коэффициент эффективности Г] = 2/3. При воздействии на стальную броневую
преграду глубина проникания такого БПС составит
Д = |(600...900)^^, £ = 600...900 мм
Современные КБП способны формировать КС длиной 1250. .1500 мм и
более. Принимая для них T) = 0,9 и рс ~ 8,9 г/см3, получаем оценку глубины
проникания медной КС в стальную преграду:
10.1. Динамическая защита и принцип ее действия
651
£ = 0,9(1250—1500)
£=1200... 1440 мм.
Таким образом, для обеспечения зашиты от ударно-проникающего дей-
ствия существующих КБП и БПС необходимая толщина монолитной броне-
вой преграды должна быть более 1 000 мм. Даже если учесть увеличение тол-
щины преграды по ходу проникания СП вследствие наклона преграды (при
наклоне преграды на угол 0 = 60° £ = b/cos 0 = 2b, где b - толщина преграды),
все равно необходимая толщина преграды составит не менее 500 мм, что уже
поражает воображение.
Использование различных типов комбинированной брони, дифференци-
рование бронирования, увеличение углов наклона брони и другие конструк-
тивные мероприятия без существенного повышения массы брони не способ-
ны защитить объекты бронетехники от современных противотанковых СП.
Радикальным способом усиления бронёзащиты от действия ударно-про-
никающих БП без существенного увеличенйя-массы и толщины преграды стали
изобретение и применение взрывной ДЗ. J
Принцип действия динамической защиты. Исторические сведения
о ее разработке и применении
Высокая проникающая способность КС и БПС во многом определяется
их прямолинейной формой. Из опыта известно, что возмущение прямолиней-
ной формы КС и БПС приводит к резкому уменьшению глубины пробития.
Принцип действия ДЗ заключается в воздействии на боковую поверхность КС
или БПС движущихся под углом к средству поражения элементов преграды, в
качестве которых обычно выступают стальные пластины (рис. 10.1). Это воз-
действие приводит к отклонению (возмущению прямолинейной формы) КС
или БПС, разрушению или срабатыванию проникающего тела, вследствие
чего существенно уменьшается глубина пробития основной части преграды,
4
Рис. 10.1. Принцип действия взрывной ДЗ:
1 - кумулятивный заряд; 2 - элемент ДЗ; 3 поврежденная КС; 4 пластины; 5 - заряд ВВ;
U - скорость взрывного метания пластин
652
10 Динамическая защита
расположенной за устройством ДЗ. В зависимости от источника энергии,
приводящей в движение элементы преграды, различают взрывную и невзрыв-
ную ДЗ.
Основу взрывной ДЗ составляют ее боеприпасы - плоские элементы ДЗ
(ЭДЗ), состоящие из двух металлических пластин и заключенного между
ними слоя ВВ. Инициирование детонации в слое ВВ осуществляется при
воздействии средств поражения - КС, БПС или порождаемых при их прони-
кании ударных волн и осколочных потоков. Образующиеся при детонации
слоя ВВ продукты ускоряют пластины, которые при подходе к КС или БПС
воздействуют на их боковую поверхность. В зарубежной литературе взрыв-
ная ДЗ называется ERA (Explosive Reactive Armour - взрывная реактивная
броня).
В невзрывной ДЗ между пластинами вместо ВВ размещается слой инерт-
ного в химическом отношении сжимаемого материала (резины, оргстекла и
др ), называемого наполнителем. При проникании КС через такой ЭДЗ в на-
полнителе формируется расходящаяся УВ. Ускорение пластин осуществляет-
ся под действием давления за фронтом этой УВ. из-за сильного затухания
которой оно локализуется в области воздействия КС. Тем не менее возникшее
движение пластин (выпучивание) смещает на траекторию КС отдельные уча-
стки пластин, которые примыкают к области воздействия КС. Смещение еще
не пробитых участков пластины на траекторию КС повреждает последнюю и
приводит к потере проникающей способности КС в преграду, расположенную
за ДЗ (рис. 10.2). Источник энергии, необходимый для функционирования не-
взрывной ДЗ, - сама КС. Несмотря на то что вследствие локального ускоре-
ния пластин невзрывная ДЗ обладает меньшей эффективностью по сравне-
нию с взрывной, она представляет значительный практический интерес, по-
скольку не содержит в себе заряд ВВ. В зарубежной литературе невзрывная
ДЗ называется NERA (Non Explosive Reactive Armour - невзрывная реактив-
ная броня).
В настоящее время альтернативы использованию ДЗ в том или ином ва-
рианте для защиты бронетехники от ударно-проникающих БП нет. Важней-
шие достоинства ДЗ в отличие от других систем защиты: 1) высокая эффек-
Рис. 10.2. Принцип действия невзрывной ДЗ:
/ - кумулятивный заряд; 2 - элемент ДЗ; 3 поврежденная КС; 4 - пластины; 5 - инертный
наполнитель
10.1. Динамическая защита и принцип ее действия 653
тивность и надежность функционирования; 2) простота конструктивного ис-
полнения; 3) постоянная готовность к функционированию в автоматическом
режиме (слой ВВ - это не только источник энергии, но и своеобразное сен-
сорное средство обнаружения факта нападения). Несмотря на простоту конст-
рукции большинства устройств ДЗ, физика функционирования ДЗ весьма слож-
на и до настоящего времени не все процессы, определяющие ее защищаю-
щую способность, полностью изучены. Впрочем, последнее замечание
справедливо практически для всех типов БП.
Разрабатывать ДЗ начали независимо в разных странах после Второй ми-
ровой войны в обстановке строгой секретности. Поэтому говорить о приори-
тете разработок очень трудно. Что касается СССР, то уже в 1949 г. появились
две статьи советских авторов П.Т. Алексеева, И.А. Бытенского, Г.В. Миронова
и М.Д. Буланова, в которых предлагалось использовать энергию зарядов ВВ,
установленных на броню, для защиты от действия КБП. Современное (или
близкое к нему) оформление ДЗ получила несколько позднее, когда при МФТИ
в 1956 г. создали группу по изучению новых методов защиты бронетанковой
техники, руководителем которой стал М.А. Лаврентьев, а в состав вошли
Б.В. Войцеховский, В.Л. Истомин (МФТИ), А.Й. Платов (ВНИИ стали) и другие.
В 1960-х и 1970-х годах усилиями ВНИИ стали, ЦНИИХМ и других органи-
заций были разработаны ЭДЗ типа «рамка» дЛя установки на танк Т-64 и ЭДЗ
типа «крест» для танка Т-72. Однако практического использования ни та, ни
другая по разным причинам не нашли. Эти типы ДЗ будут рассмотрены далее.
Основной недостаток взрывной ДЗ - достаточно интенсивное взрывное
и ударное воздействие на защищаемый объект, что может уменьшить его
живучесть и повредить внешнее оборудование. Кроме того, образующиеся
при срабатывании ДЗ высокоскоростные фрагменты представляют опасность
для пехоты и легкобронированной техники, которые сопровождают танки.
Именно эти обстоятельства долгое время служили психологическим препят-
ствием для установки ДЗ на советские танки. Лишь только после того, как
ДЗ продемонстрировала свою высокую эффективность в боевых условиях
во время войны в Ливане 1982 г., началось широкое оснащение советских
танков динамической защитой. Имеющийся научный задел позволил за не-
сколько лет разработать и установить на основные боевые танки комплекс
навесной противокумулятивной ДЗ «Контакт», которая выполнена на осно-
ве плоского ЭДЗ, состоящего из двух штампованных стальных пластин тол-
щиной 2 мм и размещенного между ними слоя пластичного ВВ на основе
гексогена толщиной 6 мм. К этому времени относится интенсификация ра-
бот по созданию универсальной противокумулятивной и противоснарядной
ДЗ «Контакт-5».
Работы в области ДЗ за рубежом, судя по публикациям рассекреченных
патентов, начались в 1970-е годы. Первые основные патенты в ФРГ (М. Хелд,
фирма МВВ) датируются 1970-1972 гг. Работу в области ДЗ начиная с середи-
ны 1970-х годов также проводил Израиль, который и применил ее впервые в
боевых условиях в ходе войны в Ливане 1982 г. Для противодействия широко
распространенным в то время в Ливане противотанковым кумулятивным гра-
натам ПГ-9 на старые танки М48 АЗ, М60 и «Центурион» с уровнем бронеза-
щиты 140... 180 мм были установлены коробчатые конструкции с плоскими
10. Динамическая защита
654
ЭДЗ, обеспечивающими защиту не только от ПГ-9, но и от кумулятивных сна-
рядов БК-14М. Основой такой ДЗ, получившей название Blazer, стал плоский
ЭДЗ, который включал в себя две штампованные стальные пластины толщи-
ной 3 мм и размещенный между ними слой пластичного ВВ на основе гексо-
гена толщиной 4 мм.
После внедрения навесной ДЗ стало ясно, что весь арсенал имевшихся в
то время моноблочных КБП стал практически бесполезен. Начался следую-
щий этап развития тандемных КБП и совершенствования БПС, что в свою
очередь привело к разработке новых устройств ДЗ, обладающих противосна-
рядной стойкостью и способных противостоять тандемным КБП.
Классификация устройств динамической защиты
Поскольку терминология в области ДЗ еще не устоялась, трудно дать за-
вершенную классификацию устройств ДЗ. В предыдущем подразделе в зави-
симости от вида источника энергии ДЗ разделили на взрывную (ЭДЗ содер-
жит заряд ВВ) и невзрывную (у ЭДЗ нет заряда ВВ). При этом рассмотрена
только такая невзрывная ДЗ, которая функционирует вследсзвие поглощения’
кинетической энергии фрагмента КС, израсходованного при проникании че-
рез ЭДЗ. Эта энергия идет на деформирование и ускорение пластин - обкла-
док ЭДЗ. Наполнитель ЭДЗ - рабочее тело, преобразующее с помощью удар-
но-волновых процессов поглощенную энергию в кинетическую энергию ло-
кального движения пластин и работу их деформирования.
К невзрывной ДЗ следует отнести также магнитодинамическую защиту, в
которой ускорение пластин осуществляется электромагнитной энергией, за-
пасенной в плоских катушках индуктивности. Использование электромагнит-
ной энергии для защиты бронетехники не ограничивается магнитодинамиче-
ской защитой. Известны и другие методы противокумулятивной электроди-
Рис. 10.3. Комбинированный ЭДЗ:
1 - взрывной ЭДЗ; 2 - невзрывной ЭДЗ;
3 пластины; 4 - заряд ВВ; 5 - инертный
наполнитель
намическои защиты, основой которых
является непосредственное воздействие
на КС мощного электрического тока.
В литературе обсуждается комбини-
рованная ЭДЗ, содержащая как заряд ВВ,
так и инертный наполнитель (рис. 10.3).
Предполагается, что слой инертного на-
полнителя способствует как частично-
му поглощению лидера КС, пропускае-
мого взрывным ЭДЗ, так и снижению
проникающей способности хвостовых
элементов КС. Кроме того, наличие в
тыльной части комбинированного ЭДЗ
инертного сжимаемого наполнителя
смягчает удар стальных пластин по кор-
пусу защищаемого объекта. Динамичес-
кая загцита с комбинированными ЭДЗ
установлена на БТР Ml 13 (Израиль) и
на БМП Bradley (США).
10.1. Динамическая защита и принцип ее действия
655
По характеру расположения на защищаемом объекте различают навесную
ДЗ (additive ERA) и встроенную ДЗ (integrated ERA).
Навесная ДЗ предназначена для защиты объектов, которые были разрабо-
таны до появления ДЗ. Навесная ДЗ, представляющая собой контейнеры с
расположенными в них в один или два ряда ЭДЗ, закрепляется на поверхнос-
ти защищаемого объекта (рис. 10.4). Типичные примеры навесной ДЗ - «Кон-
такт» и Blazer. Контейнеры не только защищают ЭДЗ от эксплуатационных
нагрузок и частично от воздействия пуль и осколков, но и участвуют во взаи-
модействии с КС. Как правило, навесная ДЗ используется только для защиты
от действия КБП и содержит в себе ЭДЗ с относительно тонкими пластинами
толщиной 2...3 мм. Такие пластины не способны оказать существенное воз-
действие на БПС. Кроме того, ЭДЗ навесной ДЗ снаряжается относительно
малочувствительным пластичным ВВ типа ПВВ-5А, которое недостаточно на-
дежно инициируется при воздействии БПС.
Рис. 10.4. Схема навесной ДЗ:
1 контейнер; 2 ЭДЗ-1;3 ЭДЗ-2; 4 - основная броня
Для снижения эффективности действия не только КБП, но и БПС, выст-
реливаемых из танковых пушек, была разработана встроенная ДЗ (ВДЗ). Встра-
ивание ДЗ в конструкцию броневой защиты танка равносильно разделению
его брони на относительно тонкий внешний и толстый внутренний слои и
разнесение их на достаточно большое расстояние, позволяющее установить
между ними ДЗ того или иного типа (рис. 10.5). Такая компоновка бронеза-
щиты защищает ЭДЗ от воздействия пуль, осколков и малокалиберных снаря-
дов и позволяет использовать для снаряжения ЭДЗ более чувствительные
взрывчатые составы, детонирующие при попадании не только КС, но и БПС.
Воздействие на БПС осуществляется наружным экраном, толщина которого
значительно превосходит толщину пластин ЭДЗ.
Отечественная универсальная ДЗ «Контакт-5» (рис. 10.6) представляет со-
бой промежуточный переходный вариант от навесной ДЗ к встроенной. Воз-
действие на боковую поверхность БПС осуществляется достаточно толстой
крышкой блока ДЗ - 15...25 мм, которая разгоняется под действием удара
656
10. Динамическая защита
Рис. 10.5. Схема ВДЗ:
/ - экранирующая броневая плита; 2 - ЭДЗ; 3 - основная броня
Рис. 10.6. Схема универсальной ДЗ «Контакт-5»:
/ - крышка блока; 2 - ЭДЗ; 3 перегородка; 4 - основная броня; b - толщина плиты (крышки)
пластин ЭДЗ и давления расширяющихся продуктов детонации их зарядов.
Большие размеры крышки и ее относительно невысокая скорость значитель-
но увеличивают время функционирования ДЗ и тем самым обеспечивают за-
щиту от воздействия тандемных КБП с небольшим временем задержки сраба-
тывания основного заряда.
Для защиты от тандемных КБП можно использовать двухрядную или тан-
демную ДЗ (рис. 10.7), которая представляет собой дальнейшее развитие ВДЗ.
В принципе защита объектов бронетехники от различных противотанко-
вых средств поражения может быть обеспечена с помощью взрывной ДЗ. Ос-
новное препятствие на этом пути - все увеличивающая масса заряда ВВ в
устройствах защиты, необходимая для противодействия новым и перспектив-
ным СП. Взрыв заряда ВВ в одном блоке такого устройства может привести к
повреждению защищаемого объекта. Уменьшить массу одновременно взры-
10.1. Динамическая защита и принцип ее действия
657
Рис. 10.7. Схема тандемной ДЗ:
/ - первый эшелон ДЗ; 2 - второй эшелон ДЗ
вающегося ВВ можно путем использования взрывчатых составов, испытыва-
ющих при воздействии КС или БПС локальное детонационно-подобное пре-
вращение. Применение таких взрывчатых составов актуально также для за-
щиты легкобронированной техники (БМП, БТР) и тонкобронных проекций
танка (крыши башни и моторно-трансмиссионного отделения).
Уменьшить массу одновременно взрывающегося ВВ можно также путем
управления процессами инициирования и распространения детонации в заря-
де В В устройства ДЗ. В зарубежной литературе есть сведения о разработке
концепции адаптируемой или «умной» ДЗ (Smart Armour), схема которой ос-
нована на применении специальных датчиков и микропроцессоров. Датчики
находят местоположение и скорость КС или БПС, затем микропроцессоры оп-
ределяют оптимальное время срабатывания нужного блока ДЗ. Такая ДЗ дол-
жна содержать взрывательные устройства и по своей идеологии ближе к ак-
тивной защите.
В заключение настоящего раздела следует кратко рассказать о ячеистой
броне (рис. 10.8). Повышенная стойкость ячеистой брони к воздействию КС
объясняется следующим образом. Если в среде, в которую проникает КС, дей-
ствует давление, то возможно схлопывание каверны - среда как бы восстанав-
ливает свою сплошность и ее вновь нужно пробивать. Кроме того, схлопыва-
ние каверны может быть несимметричным относительно КС. Тогда воздей-
ствие движущегося по направлению к КС материала отклоняет или повреждает
КС, уменьшая тем самым ее проникающую способность. Условие схлопыва-
ния каверны - достаточно высокий уровень давления в среде по сравнению с
ее прочностью. Если в преграде содержится малопрочная сжимаемая среда,
то эффект захлопывающейся каверны может быть реализован как за счет
658
10. Динамическая защита
|икс
а
Рис. 10.8. Схема ячеистой брони:
а - ударно-волновые процессы в ячейке без ВВ (/ - баллистическая УВ в наполнителе ячейки;
2 - отраженная УВ; 3 - захлопывающаяся каверна); б - ударно-волновые процессы в ячейке
с зарядом ВВ (1 фронт баллистической УВ; 2 - фронт отраженной УВ; 3 ~ фронт УВ, образу-
ющийся при детонации заряда ВВ; 4 - схлопывание каверны; 5 - заряд ВВ)
отражения баллистической УВ (возникающей при проникании КС в эту сре-
ду) от ограничивающих малосжимаемых стенок или перегородок, так и со-
зданием в среде повышенного давления при взрыве небольшого заряда ВВ,
инициирование детонации в котором осуществляется КС. Стенки ячеек могут
иметь различную форму, в том числе быть плоскопараллельными.
10.2. Проникание кумулятивной струи через взрывную
динамическую защиту
Основные физические процессы, возникающие при проникании
кумулятивной струи через взрывную ДЗ
Импульсное рентгенографирование процесса взаимодействия КС с ЭДЗ
показывает, что прошедшая через ЭДЗ кумулятивная струя состоит в общем
случае из трех частей (рис. 10.9): 1) относительно короткой, практически не
поврежденной и маловозмущенной головной части КС (лидера); 2) значитель-
но поврежденной основной части КС; 3) неповрежденной хвостовой части
КС, проникающей через ЭДЗ без всякого взаимодействия с ее пластинами.
Увеличение эффективности ДЗ требует решения таких задач, как уменьшение
Рис. 10.9. Вид КС после прохождения через ЭДЗ:
А - головная часть КС (лидер); В - поврежденная часть КС; С - неповрежденная хвостовая
часть КС
10.2. Проникание кумулятивной струи через взрывную ДЗ 659
длины лидера, увеличение степени повреждения основной части КС и недо-
пущение прохождения через ДЗ хвостовой части КС без воздействия на нее
пластин ДЗ. При решении этих задач необходимо понимание физических про-
цессов, возникающих при проникании КС через ЭДЗ и определяющих эффек-
тивность защищающей способности ДЗ. К ним относят: 1) формирование
отверстий в пластинах ЭДЗ при их пробитии КС; 2) инициирование детона-
ции в заряде ВВ ЭДЗ; 3) взрывное метание пластин ограниченных попереч-
ных размеров; 4) взаимодействие движущихся пластин с КС. В настоящее
время достигнут достаточно высокий уровень понимания этих физических
процессов.
1. Формирование отверстия в пластине при пробитии ее КС. Один из
наиболее значимых факторов, определяющих длину лидера, - размер отвер-
стия t/OTB, образующегося в пластине ЭДЗ при пробитии ее головным элемен-
том КС. Известно, что при уменьшений толщины пластины размер отверстия
уменьшается из-за воздействия волн разгрузки, образующихся вследствие дви-
жения материала в сторону поверхностей, что существенно ослабляет стадию
радиального инерционного течения материала пластины. При ударе под уг-
лом размер отверстия в направлении удара увеличивается, а само отверстие
принимает эллиптическую форму.
Возможный подход к определению размеров отверстий в пластинах при
их пробитии КС - это использование зависимостей диаметров отверстий, об-
разующихся в полубесконечных преградах, от времени, но с ограничением
времени радиального течения материала. Естественно предположить, что вре-
мя формирования отверстия в пластине te пропорционально времени ее про-
бития:
v8
te =-------’
r>npcos е
где v - эмпирический коэффициент; 8 - толщина пластины; гпр - скорость
проникания КС; 0 - угол между КС и нормалью к пластине. Используя зави-
симость диаметра отверстия в полубесконечной преграде от времени, можно
получить следующие выражения:
(10.1)
где <7П1ах - максимальный диаметр отверстия в пластине, dOTB - диаметр отвер-
стия в полубесконечной преграде из материала пластины; dKQ, г’кс _ диаметр
и скорость КС; отд - динамический предел текучести материала пластины;
Ркси Рил ~ плотности материалов КС и пластины. Выражения (10.1) учитыва-
ют также и угол воздействия КС. Наилучшее согласие с результатами экспе-
риментов достигается при v =4,5.
660
10. Динамическая защита
2. Инициирование детонации в заряде ВВ ЭДЗ. Инициирование дето-
нации в заряде ВВ ЭДЗ - это важнейший процесс, определяющий работос-
пособность ДЗ. Характеристика инициирующей способности КС параметр
G = г'кс^кс- Поскольку заряд ВВ ЭДЗ представляет собой тонкий слой, огра-
ниченный с обеих сторон металлическими пластинами, инициирование в нем
детонации при интенсивном локализованном воздействии КС обладает ря-
дом особенностей. Основная характеристика процесса инициирования дето-
нации, которая определяет длину лидера, это время задержки возникнове-
ния детонации тд после достижения КС лицевой пластины или слоя взрыв-
чатого вещества ЭДЗ.
Асимптотический характер геометрии взаимодействия КС с тонким сло-
ем ВВ позволяет разделить процесс инициирования детонации на два этапа:
1) локальное инициирование детонации в области воздействия (создание де-
тонационного очага); 2) распространение детонации из детонационного очага
на окружающее ВВ.
Механизм инициирования детонации в области воздействия КС зависит
от толщины 8] лицевой пластины ЭДЗ. При взаимодействии КС сдущевой
пластиной образуется мощная ударная волна, которая с затуханием распрост-
раняется в пластине. Первоначально ВВ
нагружается именно этой УВ, переходя-
щей из пластины в заряд ВВ (рис, 10.10).
Если толщина пластины 8] не превосхо-
дит (3...5)tZKC и заряд ВВ обладает доста-
точно высокой чувствительностью, то ини-
циирование детонации осуществляется
этой УВ в течение ее первого пробега по
заряду ВВ или при отражении от тыльной
пластины. Критерий ударно-волнового
инициирования детонации при воздействии
КС под утлом записывается в виде нера-
венства
Рис. 10.10. Схема нагружения заря-
да ВВ ЭДЗ предшествующей удар-
ной волной:
<^6кр
\2
cos 1 0,
>
Л) - фронт предшествующей УВ; dQ -
диаметр области воздействия
где Скр - критическая ударно-волновая чув-
ствительность зарядов ВВ при интенсив-
ном локализованном воздействии; р - ко-
эффициент, равный отношению плотностей материалов пластины и КС; 0 -
угол между нормалью к поверхности пластины и КС. Для эластичных и плас-
тичных взрывчатых составов, применяемых для снаряжения ЭДЗ, G’Kp состав-
ляет 10...20 мм3/мкс2.
У высокочувствительных взрывчатых составов с малым значением кри-
тического диаметра детонации (dKp < 1 мм) возбуждение детонации в области
воздействия КС обеспечивает ее распространение в радиальном направлении
на окружающее ВВ. К таким взрывчатым составам можно отнести, например,
эластичные составы типа ЭВВ-34 или ХТХ-8003 на основе мелкодисперсного
1О 2. Проникание кумулятивной струи через взрывную ДЗ 661
тэна с JKp < 0,5 мм и с расстоянием не более 1 мм, на котором плоская УВ с
амплитудой порядка 10 ГПа переходит в детонационную. Характерное время
задержки возникновения детонации тд в заряде взрывчатого вещества ЭДЗ по
такому механизму определяется временем распространения предшествующей
ударной волны по слою ВВ:
h
где h - толщина слоя ВВ; Авв - средняя скорость ударной волны в заряде ВВ.
Величина тд ~ h/D, где D - скорость детонации заряда ВВ ЭДЗ.
Для инициирования детонации в тонких слоях менее чувствительных
ВВ (глубоко флегматизированных пластичных ВВ типа ПВВ-5А или С-4)
при воздействии КС, когда диаметр области воздействия сравним по вели-
чине с критическим диаметром детонации или меньше его, требуется не толь-
ко инициирование детонации в области воздействия, но и выполнение усло-
вия распространения детонации из локального детонационного очага на ок-
ружающее ВВ. Это условие описывается ’Неравенством, связывающим
диаметр области воздействия tZ0, толщину слоя ВВ /? и критическую толщи-
ну слоя ВВ /?кр:
Л>_А—
i_^pcosq)*
Угол наклона гр* стационарного детонационного фронта к поверхности
заряда ВВ для свободных зарядов ВВ составляет приблизительно 45°, а для
зарядов, ограниченных стальными пластинами, - примерно 80 ..85°; /гкр ~ с/кр/2;
d0~ (1,..2)ДКС. Характерное время задержки возникновения детонации по та-
кому механизму равно времени проникания КС через слой ВВ тд = А/?.’пр, где
г>пр - скорость проникания КС в заряд ВВ. В общем случае тд = а/г/г>пр, где
а = 0...1 - эмпирический коэффициент. Значение а = 0 соответствует иници-
ированию детонации после пробития КС лицевой пластины еще до ее входа в
слой ВВ; при а - 1 детонация возникает после проникания КС через слой ВВ
перед ее входом в тыльную пластину; а = 0,5 соответствует инициированию
детонации в момент достижения КС середины слоя ВВ. Для обоих механиз-
мов ударно-волнового инициирования детонации время задержки не превы-
шает 1 мкс.
При увеличении толщины лицевой пластины ЭДЗ сверх некоторой крити-
ческой 5|кр амплитуда предшествующей УВ становится недостаточной для
быстрого инициирования детонации. Последующее нагружение слоя ВВ осу-
ществляется волной сжатия, формирующейся в ВВ при приближении прони-
кающей в пластину КС к границе раздела пластина-ВВ (рис. 10.11). При тол-
щине лицевой пластины б j < (3...5)t/KC трудно разделить вклады предшеству-
ющей УВ и последующей волны сжатия в инициирование детонации. Можно
лишь отметить, что волна сжатия, образуемая движущейся границей раздела,
ускоряет переход предшествующей УВ в детонационную. При большей тол-
662
К). Динамическая защита
Рис. 10.11. Схема нагружения заряда ВВ ЭДЗ волной сжатия:
Nf — фронт предшествующей УВ; D — скорость детонации
щине экранирующих пластин 8, > 5с?кс основную роль в инициировании дето-
нации начинает играть волна сжатия. При инициировании детонации в заряде
взрывчатого вещества ЭДЗ волной сжатия время задержки инициирования де-
тонации возрастает и может достичь нескольких микросекунд. Большое время
задержки тд объясняется десенсибилизацией ВВ при его предварительном сжа-
тии предшествующей УВ.
К числу особенностей инициирования детонации в экранированных тон-
ких слоях ВВ, важных для разработки ДЗ, следует отнести также существова-
ние предельной толщины лицевой пластины 8|тах = (10... 12)<7КС, при превы-
шении которой инициирование детонации в ВВ не происходит даже при воз-
действии высокоскоростных головных элементов КС.
Как правило, проблем с инициированием детонации в зарядах взрывчато-
го вещества ЭДЗ при воздействии КС мощных кумулятивных зарядов не воз-
никает. Некоторые проблемы имеют место при воздействии на ЭДЗ малокали-
берных предзарядов тандемных КБП первого поколения.
3. Взрывное метание пластин ЭДЗ ограниченных поперечных разме-
ров. Как отмечалось выше, эффект ДЗ основан на взаимодействии средства
поражения с движущейся пластиной. Поэтому правильное определение ско-
рости метания пластин важно для расчета эффективности ДЗ.
Наиболее простой и распространенной моделью, позволяющей получить
конечные зависимости для скорости взрывного метания пластин ЭДЗ U, стала
одномерная энергетическая кинематическая модель, которую связывают с име-
нами Р. Гарни, К.П. Станюковича, ПИ. Покровского. Эта модель обычно при-
меняется для анализа плоского метания параллельных пластин толщиной 8] и
8 2, между которыми расположен заряд ВВ толщиной Л, или для метания ци-
линдрических или сферических оболочек, наполненных ВВ.
Формулы для расчета скорости метания пластин разной толщины 8, и 8 2
при линейном распределении скорости ПД (несимметричная схема) имеют
вид
10.2. Проникание кумулятивной струи через взрывную ДЗ
663
и = [w ___________3ft________
J3+₽l + B2 /'+v(₽l+2₽2+6)
Ч М₽г + 2)'
₽!₽2+2
(10.2)
где Q - теплота взрыва, отвечающая за метательное действие.
Коэффициенты нагрузки Р] и Р 2 определяются основными конструктив-
ными характеристиками ЭДЗ:
о _ Рвв^ . « _ Рвв^
Pi - Р2 “
Р пл 1°1 РпЛ2°2
где РплЬ Рпл2 _ плотности материалов метаемых пластин; рвв - плотность
метаемого заряда ВВ.
Если одна из метаемых пластин отсутствуй; то 1/р2 = 0, и из зависимос-
тей (10.2) получим следующие выражения для скорости пластины при одно-
стороннем ограничении слоя ВВ:
I— зр2
Ul=y/2Q.^-^------,
\ Р2 +5Р + 4
о_ Рв1??
РплД
(10.3)
При стремлении массы метаемой пластины к нулю (1/р —> 0) из послед-
ней зависимости можно найти скорость истечения (7тах продуктов мгновен-
ной детонации в вакуум. Совершая в (10.3) предельный переход при 1/р —> 0,
получаем
t/max=x/6G-
Если эту зависимость подставить во вторую формулу (10.2), то вместо зависи-
мостей (10.3) можно найти другое выражение для определения скорости ме-
тания пластины при одностороннем ограничении заряда ВВ:
Р /— Р
Ux = С„ах = J6Q
Р+2 Р+2
Трудности возникают и при определении величины Q. В большинстве оте-
чественных работ для этого используют приближенное соотношение, следую-
щее из политропного уравнения состояния ПД и соотношений теории детона-
ции,
где к - показатель политропы ПД (к ~ 3 - для высокоплотных ВВ).
664
/ 0. Динамическая защита
Для полноты изложения приведем формулу для расчета скорости метания
пластин в симметричной схеме, когда метаемые пластины одинаковы (распре-
деление скорости ПД - линейное):
D
зр
6 + P \]k2 -1 » 6 + Р
Рассмотренный подход дает неплохие результаты при расчете скорости
метания относительно тонких пластин достаточно больших поперечных раз-
меров. Если же толщина пластины возрастает до 15...20 мм и более, а толщи-
на слоя ВВ остается по порядку величины равной 10 мм, то скорости пластин
площадью примерно 0,1 м2, определенные с помощью приведенных выше со-
отношений, оказываются сильно завышенными. При малых коэффициентах
нагрузки (Р < 0,1) существенными становятся потери энергии вследствие бо-
кового истечения ПД. Анализ эффекта бокового истечения ПД с использова-
нием энергетического кинематического подхода в двухмерном приближении
позволяет предложить следующую методику расчета скоростей метаемых пла-
стин. Сначала с помощью зависимостей (10.2) находят скорости метания'пла-
стин Сп1ах, (z = 1, 2 - номер пластины) в одномерном приближении. После
этого рассчитывают толщины слоев ВВ и й2, разлетающихся в направлении
соответственно первой и второй пластин. При линейном распределении ско-
рости ПД метающего заряда ВВ
Л1
U п
max 2
^maxl
Л2 =h-h}.
= h 1 +
Далее вычисляют активные коэффициенты нагрузки Ра1 = Рвв^/РплД- ^че1
бокового истечения ПД из-под пластин проводят с помощью параметров вы-
дувания Wj, которые определяют, задавая распределения скоростей продуктов
детонации вдоль направления метания (z-направление) и в боковом направле-
нии (z-направление):
где Ф - параметр формы метаемых пластин; S,z, - параметры, характеризу-
ющие распределение скоростей ПД. Для пластин в виде прямоугольника с
размерами а и Ь параметр формы находят из соотношения Ф = (a +b) hn/(ab),
где п = 1, 2 - коэффициент, зависящий от отношения а/b. Скорости метания
пластин Ц с учетом бокового истечения ПД рассчитывают по формуле С/, =
= Стах,/и’,. Удовлетворительное согласие расчетных и экспериментальных ско-
ростей метания достигается при = 1/6, ^г= 1/12, /7=1,4.
Для анализа начальной стадии взаимодействия КС с ЭДЗ необходимо
учесть время разгона пластины тр. Особенно это важно для определения дли-
ны лидера КС, проникающего через ЭДЗ. При метании тонкой пластины сколь-
зящей детонационной волной, как это имеет место в ЭДЗ, время разгона плас-
тины можно оценить предполагая, что ускорение пластины постоянно, а дав-
10.2. Проникание кумулятивной струи через взрывную ДЗ 665
ление, действующее на пластину, равно некоторому среднему давлению р*.
Тогда при известной конечной скорости пластины получим следующее соот-
ношение для тр:
т =Рпл^/
Lp ’
р*
где рпл - плотность материала пластины; U - конечная скорость метания
пластины; р* = (0,5... 1,0)рн, где рн - нормальное давление детонации.
Ускорение рассматриваемого участка пластины начинается после того, как
его достигает детонационный фронт. Поэтому время начала движения участ-
ка пластины, отстоящего на расстояние х от места возникновения детонации в
заряде ВВ, включает в себя время достижения детонационной волной этого
участка x/D и т Ускоренная пластина поворачивается относительно первона-
„ о „ • . U
чального положения на угол, равный р = 2arcsin
4. Взаимодействие движущихся пластин с КС. Механизм взаимодей-
ствия КС с движущимися пластинами весьма сложен и характеризуется трех-
мерными нестационарными динамическими процессами срабатывания, откло-
нения и разрушения КС. Точка К пересечения КС с пластинами перемещается
вдоль КС со скоростью Uxi (ось х направлена вдоль КС). В системе координат,
связанной с этой точкой, взаимодействие КС с пластинами эквивалентно сли-
янию двух потоков, направленных вдоль КС и пластин (рис. 10.12). Скорости
этих потоков таковы:
?'КСТ = гкс ~ (_1)‘ '~Р ’
cos 0
^ти=^ё0.
Режим взаимодействия КС с пластинами определяется соотношением пото-
ков масс КС /икс, и пластины /лпл, в точке К. Для м кс ,• и /ипл, можно записать
следующие выражения:
itdic
тка - Рксг’ка’’
тпл( — ^/^КсРпл^пл/’
где к JKC - ширина реза в пластине; к - параметр, характеризующий ширину
реза в пластине (к > 1). С учетом выражений для скоростей сливающихся
потоков отношение потоков масс можно представить в виде
_ тко __ Ркс ^кс ( гкс _ О'
тпл, Рпл 4кб,[зде sine,
Экспериментальное исследование взаимодействия КС с ДЗ показывает,
что при Z, > 1 реализуется стационарное непрерывное взаимодействие КС с
пластиной, в результате которого КС, частично срабатываясь, уменьшаясь в
диаметре и отклоняясь по направлению, перерезает пластину. При этом изме-
666
10. Динамическая защита
Рис. 10.12. Кинематика взаимодействия КС с пластинами ЭДЗ в системе координат,
связанной с точкой К пересечения КС с пластинами
няется форма поперечного сечения — КС расширяется в боковом направлении.
Как правило, стационарный режим реализуется при взаимодействии высоко-
скоростных элементов КС как с лицевой, так и с тыльной пластинами ДЗ.
Низкоскоростные элементы КС в стационарном режиме взаимодействуют толь-
ко с достаточно тонкими лицевыми пластинами ДЗ, движущимися навстречу
КС. Анализ рентгенограмм показывает, что влияние лицевых пластин ДЗ на
КС приводит к ее преждевременному разрушению.
При Z, < 1 поток массы пластины в точке взаимодействия превосходит
поток массы КС и режим взаимодействия оказывается нестационарным: КС
периодически взаимодействует с пластиной и образует в ней отверстия - каж-
дое очередное взаимодействие реализуется при столкновении КС с краем
предыдущего отверстия в пластине, которое смещается на траекторию КС
вследствие ее движения. В результате часть КС расходуется на пробитие пла-
стины, а оставшаяся возмущенная часть проникает через пластину и воздей-
ствует на основную преграду. Нестационарный режим характерен для взаи-
модействия КС с тыльной пластиной, перемещающейся в направлении дви-
жения КС.
Пространственно-временная диаграмма процесса проникания КС с линей-
ным распределением скорости в преграду, оснащенную ДЗ, представлена на
рис. 10.13.
Для того чтобы продемонстрировать возможности ДЗ, был выполнен коли-
чественный анализ защищающей способности модельного ЭДЗ, состоящего из
двух стальных пластин толщиной 2 мм и слоя ВВ, которое обеспечивает ско-
рость их метания U = 1300 м/с. Расчеты проводились для медной КС с линей-
ным распределением скорости. Характеристики КС: = 2 мм; максимальная
скорость головного элемента г0 = 8000 м/с; минимальная скорость хвостового
элемента ?,'niin = 2000 м/с; поперечная скорость элементов КС vd = 8 м/с; время
разрушения КС tb = 100 мкс. Кумулятивная струя с такими характеристиками
обеспечивала пробитие стальной преграды на базовую глубину Сба.3 = = 500
мм при расстоянии установки кумулятивного заряда S - 500 мм. Длина плас-
тин ЭДЗ составляла 250 мм, расстояние их установки 5'1 = 300 мм.
10.2. Проникание кумулятивной струи через взрывную ДЗ
667
Рис. 10.13. Пространственно-временная диаграмма процесса проникания КС в пре-
граду, оснащенную ДЗ:
I - часть КС, израсходованная при пробитии ЭДЗ; II лидер (головной элемент КС, проникаю-
щий через ЭДЗ); III поврежденная часть КС; IV - неповрежденная часть КС; 1 - воздействие
лидера; 2 - воздействие поврежденной части КС; 3 - воздействие неповрежденной части КС
Из анализа вклада различных элементов КС в остаточное пробитие основ-
ной преграды для угла взаимодействия 0 = 65° и Ц = /2 = 125 мм (рис. 10.14, а)
следует, что хвостовые элементы КС полностью поглощаются ЭДЗ. Основны-
ми характеристиками защищающей способности ЭДЗ являются зависимость
глубины остаточного проникания LOC1 от угла взаимодействия 0 (рис. 10.14, б)
(минимальная величина Лост достигается при 0 = 65...75°) и зависимость Лост
от координаты точки попадания КС в ЭДЗ (рис. 10.14, в). Глубина оста-
точного проникания слабо зависит от 1} при попадании КС в нижнюю часть
ЭДЗ (Zj > 100 мм), когда основное воздействие на КС оказывает лицевая
пластина.
Если поток массы КС в точке пересечения с пластиной ЭДЗ не превосхо-
дит или сравним с потоком массы материала пластины (\ < 1), то в первом
приближении можно считать, что в процессе взаимодействия КС с пластиной
668
10. Динамическая защита
а
Рис. 10.14. Зависимости глубины остаточного проникания КС в преграду, оснащен-
ную ДЗ, от скорости элементов КС (а), от угла взаимодействия (б), от координаты
точки попадания КС в ЭДЗ (в)
происходит полное поглощение КС (срабатывание, рассеяние, отклонение на
большие углы) и фрагмент КС, взаимодействующий с пластинами ЭДЗ, не
принимает участия в пробитии основной преграды.
10.3. Особенности взаимодействия динамической зашиты
с бронебойными подкалиберными снарядами
На настоящем этапе развития противотанковых СП бронебойные оперен-
ные подкалиберные снаряды с отделяемыми поддонами (в англоязычной ли-
тературе - APFSDS) и тяжелосплавными сердечниками представляют серьез-
ную угрозу для танков. В ближайшей перспективе их бронепробиваемость
может достичь 800...900 мм. Один из эффективных способов существенного
снижения их проникающей способности - использование в составе броневой
защиты устройств ДЗ.
Возмущение траектории БПС путем придания ему угла атаки и угловой
скорости вращения, его деформирование и разрушение осуществляются при
воздействии движущейся пластины на боковую поверхность БПС (рис. 10.15).
Контактному взаимодействию пластины с БПС предшествуют инициирова-
ние детонации в заряде взрывчатого вещества ДЗ, ускорение пластин, выбор-
ка зазора между БПС и боковой поверхностью отверстия в плите, образован-
ного при его проникании.
Все это занимает некоторое время t3, за которое снаряд проникает за пла-
стину на расстояние
10.3. Особенности взаимодействия динамической защиты с БПС
669
где i - номер пластины (1 - лицевая
пластина, 2 - тыльная пластина).
Именно на расстоянии /0 от головной
части снаряда осуществляется перво-
начальное приложение нагрузки со
стороны движущейся пластины к бо-
ковой поверхности снаряда. После
выбора зазора снаряд нагружается
ударом. Верхний уровень амплитуды
ударной нагрузки Fyfl можно оценить
исходя из соотношения
„ _ d8 . п а
^уд а Рпл^пл^Л ’
7 COS0
РиС. 10.15. Схема взаимодействия движу-
; щейся пластины с БПС
. Мо — момент относительно точки О
где d - диаметр снаряда; б - толщина пластины; спл - скорость звука в
материале пластины. Длительность ударного импульса туд будет равна
8 8
т ~. Так как 0 ~ 60°, то т =-------------. Ударный импульс 1уа, действу-
2СПЛСО8 ® СПЛ
ющий на снаряд на расстоянии /0 от головной части снаряда,
^уд ^удтуд Рпл^ C/(tg0.
Вследствие перемещения снаряда относительно пластины в дальнейшем
снаряд подвергается скользящей боковой нагрузке. Зависимость координаты
точки приложения нагрузки от времени описывается соотношением
x = lo+ r-(-l)'—
COS0
Контактная сила взаимодействия определяется режимом взаимодействия. Если
взаимодействие сводится к перерезанию снарядом движущейся пластины, то
для поперечной силы Fn можно получить следующее выражение:
d8 ( 2 2 2 n
Л1 =---рТд+тРпл^(8Ш 0
cos 01 3
где <5ТД - динамический предел текучести материала движущейся пластины.
Торможением снаряда вследствие действия сил трения в зоне контактиро-
вания снаряда с пластиной в первом приближении можно пренебречь.
Дальнейший анализ движения снаряда определяется моделью материала
снаряда. Наиболее просто анализируется движение абсолютно жесткого неде-
формируемого снаряда, плоское движение которого под действием рассмот-
ренных выше сил описывается следующей системой дифференциальных урав-
нений:
670
10. Динамическая защита
dvv
m~r=F-
dl
где m - масса снаряда; 7 - момент инерции снаряда относительно его центра
масс; - поперечная скорость центра масс; (О - угловая скорость вращения
снаряда; /с - длина снаряда. Интегрирование этой системы уравнений
не представляет труда. В качестве начальных условий следует использовать
значение скорости rv0 = 7уд//и и начальное значение угловой скорости
«о = /удТуд(/с/2-/о)/7.
При воздействии на снаряд лицевой пластины, движущейся навстречу ему,
при х < /с/2 (точка приложения нагрузки находится между вершиной и цент-
ром масс снаряда) происходит увеличение угла атаки, т. е. денормализация
снаряда, при х > 7с/2, наоборот, - нормализация снаряда. Воздействие тыль-
ной пластины при тех же условиях приводит к противоположным эффектам.
В результате воздействия движущихся пластин динамической защиты БПС
деформируется и разрушается, а его отдельные части приобретают разные уг-
ловую скорость и углы атаки (рис. 10.16). Если при небольшом искривлении
БПС в основном сохраняет свою бронепробивную способность, то при разру-
шении БПС она резко уменьшается. Глубина проникания БПС в преграду сни-
жается и при увеличении угла атаки у (утла между осью снаряда и вектором
скорости) сверх некоторого критического, равного, примерно, 12... 15°. Ос-
новная причина этого состоит в том, что ударник начинает взаимодействовать
с преградой не только своей головной частью, но и боковой поверхностью.
Вследствие этого уменьшается эффективная длина ударника /эф. Формально
Рис. 10.16. Схема проникания БПС в преграду, оснащенную ДЗ
10.4. Невзрывная динамическая защита и перспективы ее применения 671
при небольших углах атаки /эф можно предположить, что длина /эф равна про-
екции ударника на направление проникания, /эф = I cos у. При больших углах
атаки правильней считать эффективную длину ударника пропорциональной
его диаметру:
где Л.], Х2 ~ эмпирические постоянные.
Экспериментальное и теоретическое изучение процесса проникания уд-
линенных ударников в сильно наклоненные стальные плиты показывает, что
можно выделить следующие стадии взаимодействия: 1) рикошет и дисперги-
рование головной части ударника; 2) пробитие преграды центральной частью
ударника; 3) проникание хвостовой части ударника.
Рикошет ударников от преграды при воздействии под большими угла-
ми резко снижает бронепробивное действие, поэтому явление рикошета
используется для повышения стойкостщбронезащиты к воздействию кине-
тических СП. *
Условия рикошета обычно определяются зависимостью угла рикоше-
тирования от скорости ударника для каждой конкретной пары ударник-
преграда. При воздействии удлиненных ударников из тяжелых сплавов со
скоростью 1500... 1700 м/с на броневые преграды угол рикошета достигает
80°, что практически исключает рикошетирование БПС, поскольку наклон
преграды в реальных конструкциях, как правило, не превышает 80°. Од-
ним из способов уменьшения угла рикошета является придание преграде
скорости, направленной от ударника, когда составляющая скорости пре-
грады вдоль линии воздействия направлена в ту же сторону, что и ско-
рость ударника. Именно такая ситуация возможна при взаимодействии БПС
с тыльной пластиной ДЗ.
10.4. Невзрывная динамическая защита
и перспективы ее применения
Один из перспективных путей снижения нагрузок от действия ДЗ на за-
щищаемый объект - использование невзрывной ДЗ, построенной на основе
плоских ЭДЗ с инертным наполнителем, в качестве которых применяют раз-
личные пластмассы, стекло, керамику, резину, парафин и смеси на его основе
и т. п. При проникании КС через такой ЭДЗ в наполнителе формируется рас-
ходящаяся ударная волна. Ускорение пластин осуществляется под действием
давления за фронтом УВ, из-за сильного затухания которой оно локализуется
в области воздействия КС (см. рис. 10.2). Тем не менее возникшее движение
перемещает на траекторию КС непробитые участки пластины, что приводит к
повреждению части КС и потере ее проникающей способности в преграду,
расположенную за ЭДЗ. Основной источник энергии для ускорения пластин -
это кинетическая энергия элемента КС, израсходованная на преодоление на-
полнителя. Подобный эффект локального «вспучивания» относительно тон-
ких пластин, размещенных за броневой преградой с прокладкой из сжимае-
672
10. Динамическая защита
мого материала, использовался ранее для увеличения противокумулятивной
стойкости преград.
Вследствие локального ускорения пластин невзрывная ДЗ обладает мень-
шей эффективностью по сравнению с взрывной ДЗ (полностью поглотить КС
с помощью однорядной невзрывной ДЗ невозможно). Однако отсутствие за-
ряда ВВ в ЭДЗ делает невзрывную ДЗ весьма привлекательной для защиты от
действия КБП объектов и сооружений, где нельзя использовать взрывную ДЗ
и можно применять многорядное расположение невзрывных ЭДЗ. К таким
объектам относятся, например, стационарные блок-посты и подобные им со-
оружения, различные транспортные контейнеры.
Неожиданное применение невзрывная ДЗ может получить для защиты от
действия КБП атомного и термоядерного оружия. Распространенность ручно-
го противотанкового гранатометного вооружения дает возможность использо-
вать его при террористических нападениях на объекты хранения и средства
транспортировки атомного и термоядерного оружия (АиТО). При достижении
КС блоков АиТО, содержащих одновременно делящиеся и взрывчатые веще-
ства, вполне реально возбуждение взрывных процессов в заряде ВВ, посколь-
ку КС характеризуются высокой инициирующей способностью. Конечно, ядер-
ный взрыв при таком воздействии произойти не может, но разрушение контей-
нера, диспергирование делящегося вещества и, как следствие, радиоактивное
загрязнение окружающей среды способны привести к аварии, сопоставимой
с чернобыльской.
Кумулятивные БЧ распространенных РПГ характеризуются достаточно
высокой эффективностью: толщина пробиваемой сплошной преграды из бро-
невой стали достигает 0,5...0,8 м (и это не предел). Получается, что для пре-
дотвращения воздействия КС на блоки АиТО транспортный контейнер по за-
щищающей способности должен походить на современный танк, причем со
стороны наиболее защищенной фронтальной проекции. Ситуация усугубляет-
ся тем, что использование взрывной противокумулятивной ДЗ, характеризую-
щейся высокой эффективностью, затруднено или даже невозможно. Где же
выход и есть ли он?
По мнению авторов, выход состоит в применении невзрывной противоку-
мулятивной ДЗ для поглощения высокоскоростной части КС и в допущении
возможности возбуждения в зарядах взрывчатого вещества АиТО недетона-
ционного низкопорядкового взрывного процесса (НПВП), при котором реаги-
рует небольшое количество ВВ вдоль траектории проникания КС при воздей-
ствии оставшейся низкоскоростной хвостовой части КС. Возможность воз-
буждения в зарядах ВВ НПВП обеспечивается замечательной особенностью
градиентных кумулятивных струй, заключающейся в том, что инициирующая
способность различных участков (элементов) КС изменяется в широких диа-
пазонах - от чрезвычайно высокой у головных высокоскоростных элементов
КС до относительно невысокой у низкоскоростных хвостовых элементов КС,
которые проникают через заряды некоторых ВВ без возбуждения детонации.
Сведение к минимуму количества прореагировавшего ВВ предотвращает раз-
рушение контейнера, обладающего в этом случае повышенной стойкостью к
действию внутреннего взрыва.
10.5. Характерные образцы динамической защиты
673
10.5. Характерные образцы динамической защиты
Объемные элементы динамической защиты
Основа большинства отечественных и зарубежных устройств ДЗ - плос-
кие ЭДЗ. Однако до принятия их на вооружение создавались также объемные
ЭДЗ коробчатого вида. В настоящее время эти разработки имеют скорее истори-
ческий интерес. Важное свойство ЭДЗ типа
«рамка» (рис. 10.17)- независимость их
противокумулятивной стойкости от угла
воздействия КС. Так, ЭДЗ кубической фор-
мы со стороной внутренней полости 60 мм,
толщиной внутренних стальных обкладок
3 мм, толщиной слоя ВВ (ТГ 40/60) 5 мм, с
наружным корпусом из стали толщиной 0,5
мм снижает бронепробитие КЗ диаметром
85 мм на 56 % при воздействии под углами
0 и 60° от нормали.
Дальнейшим развитием схем объемных
ЭДЗ стало создание ЭДЗ типа «крест» (рис. 10.18), снаряжение которых осу-
ществлялось пластичными или эластичными ВВ. Предполагалось, что воз-
действие на проникающую КС будет усиливаться за счет вставки во внутрен-
нюю полость облицованного металлическими пластинами крестообразного за-
ряда ВВ. Уровень снижения бронспробития этими ЭДЗ при воздействии на них
КБП, пробивающим около 400 мм сплошной преграды из броневой стали, со-
ставлял 35...44 %. На основе ЭДЗ «крест» разработали опытные конструкции
ДЗ навесного и встроенного типов для одного из отечественных танков.
Как показали экспериментальные исследования, основной вклад (~ 80 %)
в снижение бронспробития вносит наружная кольцевая часть ЭДЗ. Поэтому
оказалось целесообразным удаление крестообразного заряда ВВ из внутрен-
ней полости. Трубчатый ЭДЗ типа «кольцо» (рис. 10.19) имел наружный кор-
пус из алюминиевого сплава, трубчатый слой ВВ и внутреннюю облицовку из
алюминиевого сплава или стали. Примерно при той же эффективности, что и
у ЭДЗ типа «крест», ЭДЗ «кольцо» более технологичен в изготовлении, обла-
дает меньшей общей массой и содержит небольшое количество ВВ.
Рис. 10.18. ЭДЗ типа «крест»
Рис. 10.19. ЭДЗ типа «кольцо»
674
10. Динамическая защита
Динамическая защита с плоскими ЭДЗ
Плоские ЭДЗ представляют собой две металлические пластины, между
которыми размещен слой ВВ. Конструктивно их выполняют таким образом,
чтобы при эксплуатационных натрузках предотвратить истечение ВВ из-под
пластин, а также передачу детонации в поперечном направлении от одного
элемента к другому. Конструктивное оформление комплекса ДЗ зависит от
вида ДЗ. В комплексе навесной динамической защиты ЭДЗ на броне танка
устанавливают в специальных контейнерах, оснащенных узлами крепления к
основной броне. Контейнер - это штампованный полый корпус из листовой
стали толщиной несколько миллиметров. Внешняя стенка контейнера выпол-
няет роль взводящего экрана для КБП, вызывающего срабатывание взрывате-
ля. Для обеспечения воздействия на ЭДЗ именно КС предусматривается зазор
между ЭДЗ и внешней стенкой контейнера.
Комплекс навесной ДЗ «Контакт». В каждый контейнер навесной ДЗ
«Контакт» (рис. 10.20) устанавливается по два плоских ЭДЗ, располагаемых
относительно друг друга под небольшим углом, что обеспечивает практичес-
ки полное перекрытие расстояния между отдельными контейнерами и про-
хождение КС через два или три ЭДЗ в зависимости от точки ее Попадания.
Контейнеры крепятся на защищаемом участке брони таким образом, чтобы
угол между нормалью к поверхности контейнера и горизонтальной поверхно-
стью составлял 55... 85°.
Масса ВВ в одном ЭДЗ - 0,26 кг, масса ЭДЗ - 1,35 кг, масса контейнера -
5,5 кг. Полный комплект навесной ДЗ, устанавливаемой на танк Т-72, состоит
из 227 контейнеров общей массой (вместе с крепежом) примерно 1400 кг, сум-
марная масса ВВ - 118 кг. Установка ДЗ «Контакт» на танк по отношению к
действию КБП эквивалентна увеличению толщины брони вдоль траектории
проникания КС на 350...450 мм в зависимости от типа КБП. При этом дости-
гается многократный (10-20 раз) выигрыш по массе в сравнении со сплошной
броней.
К навесной ДЗ предъявляют достаточно жесткие требования. Взрывчатое
вещество, которым снаряжают ЭДЗ, должно обладать относительно невысо-
кой чувствительностью, в частности, не взрываться при ремонтных ударных
воздействиях, не детонировать при обстреле боеприпасами стрелкового ору-
жия, малокалиберными (23...30 мм) снарядами и при воздействии осколков.
Возникшее горение в ЭДЗ не должно переходить в детонацию, которая не
должна передаваться между соседними ЭДЗ, контактирующими по торце-
вой поверхности. В то же время при воздействии КС в заряде взрывчатого
вещества ЭДЗ необходима надежность инициирования детонации при тем-
пературе -50...+50 °C.
Комплекс навесной ДЗ «Контакт» может быть установлен не только на
танки российского производства, но и на танки других стран.
Комплекс навесной ДЗ Blazer. Толщина стальных пластин-обкладок плос-
кого ЭДЗ Blazer (рис. 10.21) составляет 3 мм, толщина слоя ВВ - 4 мм, рас-
четная скорость метания пластин - 900 м/с В качестве ВВ используют плас-
тичное ВВ на основе гексогена (типа С-4, состоящее из 91,5 % гексогена и
8,5 % пластичного наполнителя). На танки ЭДЗ устанавливают в контейнерах
10.5. Характерные образцы динамической защиты
675
Траектория
полета КС
ЭДЗ-1 ЭД 3-2
Рис. 10.20. Схема навесной ДЗ «Контакт»:
а - схема взаимодействия с контейнером; б - контейнер ДЗ; N — число сработавших ЭДЗ; А -
зона работы ЭДЗ-1; Б - зона работы ЭДЗ-1 и ЭДЗ-2; В зона работы ЭДЗ-2; 2, 3 - количество
сработавших ЭДЗ
Рис. 10.21. Схема ЭДЗ Blazer
10. Динамическая защита
676
с толщиной стенки 3 мм. В отличие от ДЗ «Контакт» в ДЗ Blazer ЭДЗ имеют
несколько типоразмеров, например, на танке М48АЗ применялись ЭДЗ сле-
дующих размеров: 260x200x10; 260x250x10; 300x200x10; 380x200x10. Ус-
тановка ДЗ Blazer на танки М48АЗ с уровнем бронирования 140... 180 мм
сделала практически неэффективными распространенные в то время моно-
блочные КБП, поскольку ДЗ уменьшала глубину проникания КС приблизи-
тельно на 450 мм при угле воздействия 65° и при размещении в контейнере
двух ЭДЗ.
Характеристики рассмотренных комплексов навесной ДЗ почти одинако-
вы. Можно отметить, что при близкой эффективности масса ДЗ «Контакт»
несколько меньше массы ДЗ Blazer. Кроме того, за счет большего количества
ВВ в ЭДЗ, «Контакт» обладает лучшей эффективностью по сравнению с ДЗ
Blazer.
В настоящее время ДЗ широко применяется многими странамй мира, ис-
пользующими технологии России и Израиля для повышения защищенности
бронетехники. Приведем некоторые примеры.
Фирмы Giat и SNPE (Франция) производят блоки ДЗ Brenus, кр^орые мо-
гут устанавливаться на всех типах средне- и тяжелобронированных машин.
Корпорация Norinco (Китай) выпускает ДЗ для танков Т-59 и Т-86/88. Осна-
щает свои танки ДЗ и Пакистан. Польша разработала ДЗ ERAWA для уста-
новки на танки Т-72. Эти контейнеры и ЭДЗ примерно в 2 раза короче ЭДЗ,
используемых в ДЗ «Контакт», что обусловливает их меньшую эффектив-
ность. Чехия также предлагает комплекты ДЗ для танка Т-72, устройства
которых содержат один плоский ЭДЗ по размерам больший, чем ЭДЗ произ-
водства России.
Фирма Royal Ordnance (Великобритания) предложила свои модули ДЗ
Ramor-A, которые использовались для дополнительной защиты танков
Challenger-1 во время войны в Персидском заливе в 1991 г. Италия закупила
такие модули для своей тяжелой колесной бронемашины Centauro.
Примеры применения ДЗ для усиления защиты бронетехники можно про-
должить. Принцип действия ДЗ хорошо известен, ЭДЗ просты по конструкции
и технологии изготовления, и любая страна с достаточно развитой промышлен-
ностью может самостоятельно разрабатывать и выпускать комплексы ДЗ.
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ
Войцеховский Б.В., Истомин В.Л. Динамическая антикумупятивная защита И Фи-
зика горения и взрыва. 2000. № 6.
Григорян В.А., Белобородько А.И., Дорохов Н.С. и др. Частные вопросы конечной
баллистики / Под ред. В.А. Григоряна. М.: Изд-во МГТУ им. Н.Э. Баумана, 2006.
Григорян В.А., Белобородько А.Н., Терехин И.И. и др. Расчет и синтез структур
баллистической защиты танков: Учеб, пособие. М.: Изд-во МГТУ им. Н.Э. Баумана,
2002.
Григорян В.А., Дорохов И.С., Кобылкин И.Ф. и др. Невзрывная противокумуля-
тивная динамическая защита // Оборонная техника. 2002. № 1-2.
Григорян В.А., Дорохов Н.С., Кобылкин И.Ф. и др. Невзрывная противокумуля-
тивная динамическая защита контейнеров для хранения и транспортировки устройств,
Список рекомендуемой литературы
677
содержащих делящиеся и взрывчатые вещества / Тр. V Всеросс. конф. «Актуальные
проблемы защиты и безопасности». СПб.: НПО СМ, 2002.
Григорян В.А., Дорохов Н.С., Кобылкин И.Ф., Рототаев Д.А. Проникание куму-
лятивных струй через взрывную динамическую защиту И Оборонная техника. 2002.
№ 11.
Дерибас А.А. Физика упрочнения и сварки взрывом. Новосибирск, 1980.
Иванов А.Г, Федоренко А.Г, Сырунин М.А. О возможности повышения безопас-
ности ядерного оружия // Физика горения и взрыва. 1995. Т. 31, № 2.
Кобылкин И.Ф., Шабанов В.М., Носенко Н.П. Исследование взрывного метания
пластин ограниченных размеров // Оборонная техника. 1996. № 8 9.
Орленко Л.П. Защита от удлиненных элементов И Оборонная техника. 1994. № 3.
Теория и конструкция танка: В Ют. / Под ред. П.П. Исакова; Т. 2: Комплексная
защита. М.: Машиностроение, 1990.
Федоров С.В., Бабкин А.В., Ладов С.В. й др. Выбор параметров электродинами-
ческой защиты против кумулятивных средств»поражения танков И Оборонная техни-
ка. 2002. № 1-2.
Физика взрыва: В 2 т. / Под ред. Л.П. Орленке. М.: Физматлит, 2002.
Barnea N., Sela N., Ravid М. An Analitical Model for Shaped-Charge Jet Interaction
with Reactive Armour and Residual Penetration /'The 14th Intern. Symp. on Ballistics.
Quebec, Canada. 1993.
Goldsmith W. Rewiew. Non-ideal projectile impact on targets H Int. J. of Impact
Engineering. 1999. Vol. 22, № 2-3.
Gov N., Kivity E, Yaziv D On the Interaction of a Shaped-Charge Jet with a Rubber
Filled Metallic Cassette / The 13th Intern. Symp. on Ballistics. Stocholm. 1992.
Held M. Armour // The 14th Intern. Symp. on Ballistic. Quebec, Canada. 1993.
Held M., Mayseless M., Rototaev D. Explosive Reactive Armor I The 17th Intern.
Symp. on Ballistics. Midrand, South Africa. 1998.
Mayseless M., Erlich E, Falcovitz E, Rosenberg G. Interaction of Shaped-Charge Jets
with Reactive Armour / The 8th Intern. Symp. on Ballistics. Orlando, USA. 1984.
Mayseless M., Marmor E., Gov IV., Kivity E, Falcovitz J. Interaction of Shaped-Charge
Jet with Reactive or Passive Cassettes / The 14th Intern. Symp. on Ballistics. Quebec,
Canada. 1993.
Naz P. Penetration and Perforation of a Steel Target by Copper Rods. Measurement of
Crater Diameter / The II th Intern. Symp. on Ballistic. Brussel. 1989.
Ogorkiewich R.M. JANE’s International Defense Review. 1997. № 5.
Ripley T, Biass E.H. Новые решения в области броневой защиты боевых машин //
Armada International. 2002. № 5.
Rosenberg G., Yeshurun Y, Mayseless M. On the ricochet of long rod projectiles / The
14th Intern. Symp. on Ballistics. Quebec, Canada. 1993.
Szendrei Th. Analytical Model for High-Velocity Impact Cratering with Material
Strengths: Extension and Validation // The 15th Intern. Symp. on Ballistics. Jerusalem,
Israel. 1995.
Thoma K., Vinckier D., Kiermeir J., Deisenroth U., Fucke W. Shaped-Charge Jet
Interaction with Highly Effective Passive Sandwich Systems - Experiments and Analysis //
Propellants, Explosives, Pyrotechnics. 1993. № 5. Vol. 18.
Yaziv D., Frilling S., Kivity Y. The Interaction of Inert Cassettes with Shaped-Charge
Jets//The 15th Intern. Symp. on Ballistics. Jerusalem, Israel. 1995.
11
БОЕПРИПАСЫ ВСПОМОГАТЕЛЬНОГО НАЗНАЧЕНИЯ
11.1. Классификация и общие сведения
о боеприпасах вспомогательного назначения
Настоящая глава посвящена особенностям конструкций, устройству и дей-
ствию БП вспомогательного назначения. Под этим обобщающим термином
будем понимать не только артиллерийские снаряды (и БП других систем ору-
жия), используемые для вьн юлнения учебно-практических задач и успытатель-
ных стрельб (учебные, практические, системопробные БП), но и все типы БП,
непосредственно не предназначенные для поражения цели, а лишь способ-
ствующие выполнению боевой задачи или же препятствующие действиям про-
тивника (противорадиолокационные, дымовые, осветительные, целеуказатель-
ные, агитационные и др.). Следует отметить, что в некоторых нормативных
документах, в частности, относящихся к артиллерийским выстрелам, такие
типы БП (помехосоздающие, осветительные,.пристрелочно-целеуказательные
и т. д.) классифицируются как выстрелы со снарядами специального назначе-
ния, в других, например, принадлежащих к. области авиационных БП, они оп-
ределяются двойным термином - авиационные бомбы вспомогательного (спе-
циального) назначения и неуправляемые авиационные ракеты вспомогатель-
ного (специального) назначения.
Например, современные АБ вспомогательного назначения применяются
для освещения местности при действии авиации в ночных условиях и при
ночном воздушном фотографировании, для прицельного бомбометания за счет
маркирования целей, для постановки дымовых завес, а также при обучении
летного состава прицельному бомбометанию, для доставки и распростране-
ния на территории противника агитационной литературы, для обеспечения
радиоэлектронного противодействия и решения ряда других задач, связанных
с тренировкой летного и инженерно-технического составов.
Ранее некоторые из вышеперечисленных типов АБ назывались также авиа-
ционными бомбами специального назначения, однако в современном, более уз-
ком понимании к специальным относят, как правило, лишь ядерные АБ, а зада-
чи, связанные с фоторазведкой, освещением, задымлением и т. п., решают при
помощи соответствующих типов АБ вспомогательного назначения.
Полная номенклатура современных АБ вспомогательного назначения вклю-
чает следующие типы бомб:
- осветительные (светящиеся) АБ (САБ);
- фотоосветительные АБ (ФОТАБ);
- дневные и ночные ориентирно-сигнальные АБ (ДОСАБ, НОСАБ);
- дымовые АБ (ДАБ);
11.1. Классификация и общие сведения о БП вспомогательного назначения 679
- практические АБ (ПАБ);
- агитационные АБ (Arm АБ) и агитационно-парашютная тара (АПТ).
Авиационные БП вспомогательного назначения есть также в классе НАР
типа С-8, номенклатура которых включает следующие типы ракет (калибр НАР
80 мм): С-8ОМ с осветительной БЧ, С-8П и С-8ПМ с БЧ, снаряженной ди-
польными отражателями, а также С-8Ц и С-8ЦМ (целсуказательные НАР).
Эти ракеты используются для освещения местности, для решения задач, свя-
занных с созданием пассивных помех наземным и самолетным РЛС, и для
целеуказания наземных целей.
В соответствии с классификацией, установленной нормативными доку-
ментами, выстрелы разделяются по назначению на боевые, холостые, практи-
ческие, учебные и системопробные. Боевые выстрелы используются для бое-
вой стрельбы - со снарядами основного и вспомогательного (специального)
назначения они составляют боекомплекты орудий. Холостые выстрелы (от-
сутствует снаряд) предназначены для звуковой- имитации стрельбы, а практи-
ческие - для учебно-боевой стрельбы. Учебные выстрелы - это макеты выст-
релов, служащие для изучения устройства, принципа действия, обучения пра-
вилам и приемам обращения с ними. Системопробные выстрелы применяют
для испытаний артиллерийских орудий.
К артиллерийским снарядам основного назначения относятся снаряды,
предназначенные для поражения различных целей: осколочные, осколочно-
фугасные, фугасные, бетонобойные, бронебойные, кумулятивные, зажигатель-
ные и др., рассмотренные выше (за исключением зажигательных) в соответ-
ствующих главах данной книги.
Перечислим номенклатуру снарядов, непосредственно не используемых
для поражения цели, а лишь способствующих выполнению боевой задачи или
же препятствующих действиям противника, которые (с учетом вышесказан-
ного) будем относить к снарядам вспомогательного назначения.
Противорадиолокационный снаряд - БП помехообразующего действия, со-
здающий помехи в работе радиолокационных систем. В общем случае под
помехообразующим действием понимается действие БП, при котором созда-
ются помехи применению противником средств наблюдения, обнаружения, на-
ведения, управления и разведки за счет образования точечных источников из-
лучения и физических полей (завес), отражающих или поглощающих тепло-
вые, акустические и электромагнитные волны.
Дымовой снаряд - снаряд помехообразующего действия, служащий для
постановки дымовых завес, пристрелки и сигнализации. Характеристики мо-
гущества действия дымовых снарядов: кроющая способность дымового обла-
ка, его стабильность, размеры (в м2) в момент разрыва снаряда и по истече-
нии заданного времени.
Пристрелочно-целеуказательный снаряд - это снаряд сигнального дей-
ствия, предназначенный для целеуказания и пристрелки, посредством которо-
го создают сигналы для ориентации, оповещения, управления и целеуказания.
Осветительный снаряд используется для освещения местности в районе
цели. Световой поток образуется при сгорании специального пиротехничес-
кого состава. Помимо рецептуры осветительного состава факторами, влияю-
щими на могущество действия осветительных БП, являются: конструкция
680
11. Боеприпасы вспомогательного назначения
снаряда, тип и параметры освещаемого объекта, прозрачность атмосферы, уда-
ление осветительного элемента от освещаемого объекта.
Агитационный снаряд применяется для переброски агитационной лите-
ратуры.
К артиллерийским снарядам вспомогательного назначения (в их изначаль-
ном понимании) относятся также снаряды, служащие для выполнения учеб-
но-практических задач и испытательных стрельб (учебные, практические, си-
стемопробные).
Учебный снаряд - макет артиллерийского снаряда, предназначенный для
изучения его устройства или обучения правилам и приемам обращения с ним.
Практический снаряд используется для учебно-боевых стрельб, а систе-
мопробный снаряд - для испытаний артиллерийского орудия на прочность и
функционирование противооткатных устройств.
Согласно требованиям к маркировке артиллерийских выстрелом их эле-
ментов, на снарядах вспомогательного назначения (дымовых, пристрелочно-
целеуказательных, осветительных, агитационных, практических и др.) допол-
нительно наносится отличительная окраска. На дымовых снарядах вместо шиф-
ра ВВ ставится шифр дымообразующего вещества, на агитационных - надпись
«АГИТ». На учебных снарядах над индексом снаряда наносится надпись
«УЧЕБНЫЙ», на системопробных снарядах после индекса снаряда через тире -
«СИСТЕМ», а на практических - «ПРАКТ».
Учитывая специфику и весьма широкую номенклатуру БП вспомогатель-
ного (специального) назначения, имеющихся на вооружении Сухопутных войск
РФ, ВВС, а также ВМФ, их классификация и дальнейшее более подробное
описание в настоящей главе будут построены не по принадлежности БП к
системам вооружения видов вооруженных сил и родов войск, а преимуще-
ственно по их назначению (типу) и принципу действия, аналогично описа-
нию СП и БП основного назначения в предыдущих главах книги.
11.2. Помехосоздающие боеприпасы
Боеприпасы радиолокационных и оптико-электронных помех
Все более широкое применение управляемых ракет (УР) с радиолокаци-
онными и инфракрасными ГСН привело к возрастанию значения активных
средств радиоэлектронной борьбы (РЭБ). К их числу от носятся и противора-
диолокационные (ПРЛ) и противоинфракрасные боеприпасы (снаряды опти-
ко-электронных помех), используемые для создания ложных целей (ЛЦ) и от-
влечения противника от действительных целей.
Ложная цель должна отвечать нескольким требованиям: во-первых, жела-
тельно, чтобы ее излучение превосходило по интенсивности излучение дей-
ствительной цели или хотя бы было равно ему; во-вторых, характеристики
излучения ложной и действительной целей должны быть сходными; в-треть-
их, необходимо нахождение ЛЦ в зоне поиска ГСН.
Эффективность действия ПРЛ- и противоинфракрасных боеприпасов в зна-
чительной мере обусловливается способностью обнаружения атакующих ра-
кет противника, т. е. быстротой реакции, дальностью действия БП, а также
условиями окружающей среды, например, наличием ветра и его скоростью.
11.2. Помехосоздающие боеприпасы
681
Боеприпасы данного типа применяются в основном в ближнем бою. ког-
да ГСН ракеты противника уже захватила цель. Если в это время в зоне поис-
ка ГСН создается ЛЦ, то ГСН направляет ракету на центр излучения обеих
целей (центроидный эффект), т. е. ракета не попадает в действительную цель.
При атаке низколетящих самолетов противника, когда время реакции так мало,
что опознавание самолетов и использование средств ПВО уже невозможно, в
первую очередь должны использоваться средства РЭБ, в том числе ПРЛ- и
противоинфракрасные боеприпасы.
Противорадиолокационные БП, предназначенные для борьбы с активными
радиолокационными ГСН, создают дипольное облако, отражающее радиолока-
ционные сигналы и, таким образом, имитирующее цель. Диполи изготовляют-
ся из металлизированного стекло- и нейлонового волокна и металлических
нитей различной длины, что позволяет отражать радиолокационное излуче-
ние в широком диапазоне длин волн. Кроме дипольных отражателей, исполь-
зуют уголковые от ражатели и линзы Люнеберга. Диполи могут разбрасываться
непрерывно во время полета снаряда или однократно при его разрыве.
Противоинфракрасные БП изготовляют ^ виде точечных трассеров и трас-
серов с решеткой. В точечном трассере при очень высокой температуре горит
пиротехнический состав, создавая точечную цель с интенсивным излучением.
Трассеры с решеткой образуют цель большой площади, по форме и характе-
ристикам близкую к действительной цели, что позволяет формировать ЛЦ для
УР второго и даже третьего поколения с инфракрасными ГСН.
Можно выделить три группы пиротехнических составов ИК-излучения.
Первая группа имеет характеристики ИК-излучения, близкие по своему спек-
тральному распределению к излучению струи выхлопных газов реактивного
двигателя. Подобное излучение могут 1 енерировать продукты термической де-
струкции органических соединений. Поэтому первая из трех наиболее рас-
пространенных групп пламенных пиротехнических составов ИК-излучения
содержит около 50 % органических горючих преимущественно ароматическо-
го ряда (нафталин, дифенил, антрацен и др.), способных к интенсивному са-
жеобразованию, а также металлическое горючее (магний, алюминиево-магни-
евый сплав) и окислитель, которые предназначены в первую очередь для уста-
новления необходимого температурного режима.
Вторая группа составов ИК-излучения содержит не кислородосодержа-
щий окислитель, а фторполимер (фторонласт-З, 4), который одновременно
является и поставщиком окисляющего агента (фтора) для горючего, и сажи,
необходимой для обеспечения высоких излучающих свойств пламени. Та-
кие составы несколько уступают по удельной световой энергии составам с
ароматическими добавками, но позволяю! изменять скорость горения от 2
до 30 мм/с. что реализует более высокую силу ИК-излучения.
Третья группа составов ИК-излучения низкотемпературных тлеющих ис-
точников на подложке представляет собой смеси на основе оксида железа,
карбида циркония, древесного угля и фторполимера в качестве связующего.
ИК-излучение таких составов в 5-8 раз ниже первых двух, но благодаря боль-
шому числу горящих элементов обеспечивается развитая низкотемпературная
поверхность горения с достаточной интенсивностью ИК-излучения и спект-
ральным распределением, близким к излучению реальных военных объектов.
682
11. Боеприпасы вспомогательного назначения
Составы на основе ароматических соединений и фторполимеров изготов-
ляют путем сухого смешивания; формование зарядов проводят глухим прес-
сованием в оболочку. Высокое содержание в составе органического горючего
и фторполимеров улучшает его технологические свойства. Низкотемператур-
ные тлеющие составы в жидком виде наносятся на инертную подложку (стек-
лоткань, углеткань и др.) тонким слоем толщиной 0,2...0,4 мм на специаль-
ных пропиточных машинах. Из сушильного элеватора машины удаляется ра-
створитель, и полотно поступает на разрезку. Горение такого источника
(модуля) излучения происходит по образующей квадратного или круглого эле-
мента со скоростью 1...3 мм/с, при этом инертная подложка разогревается до
температуры 300...400 °C и является дополнительным источником ИК-излу-
чения. Воспламенение смотанных в рулон или собранных в блок модулей осу-
ществляется со стороны одной из кромок, которую иногда покрывают воспла-
менительным эластичным составом.
Пропшворадиолокационные БП
Малокалиберные выстрелы к авиационным пушкам (разработчик -
ФГУП ФНПЦ «Прибор», Москва). На вооружении ВВС РФ имеются .23-, 30-
и 37-мм выстрелы (патроны) с ПРЛ-снарядами, снаряженными противорадио-
локационными дипольными отражателями, и 23-мм патроны со снарядами оп-
тико-электронных (ИК) помех.
Противорадиолокационные снаряды создаю! пассивные помехи самолет-
ным и наземным РЛС противника. Постановка помех осуществляется выбро-
сом отражателей (стекловолокна диаметром десятки микрометров с напыле-
нием из алюминия или цинка) из снаряда на траектории. В снаряд могут по-
мещаться отражатели одной или двух длин исходя из заданной длины
радиоволны.
Создавая дипольное облако, ПРЛ-снаряды (рис. 11.1) препятствуют точ-
ному срабатыванию радиовзрывателя ракеты на оптимальном расстоянии от
Дипольное
Рис. 11.1. Схема применения бомбардировщиком ПРЛ-средств:
Яюр расстояние (радиус области) оптимального срабатывания НВУ ракет класса воздух -воз-
дух; Явзр - расстояние срабатывания НВУ в условиях отражения радиоволн от дипольного
облака (Яюр > Лвзр>
11.2. Помехосоздающие боеприпасы 683
самолета. В зависимости от интенсивности облака это расстояние возрастает
в несколько раз, существенно снижая вероятность поражения бомбардиров-
щика ракетой противника. Помимо пассивных помех самолетным (рис. 11.2)
и наземным РЛС противника могут ставиться и активные помехи (рис. 11.3).
Рис. 11.2. Схема постановки пассивных
помех РЛС самолетов и ГСН ракет
f’HC. 11.3. Схема постановки актив-
ных помех наземной РЛС
На вооружение были приняты четыре модификации 23-мм ПРЛ-выстре-
лов к авиационным автоматическим пушкам АМ-23, ГШ-23, ГШ-6-23, НР-23
и НС-23 (рис. 11.4).
Для снаряжения снарядов специальным металлизированным волокном ис-
пользуется галетный способ. Сами снаряды несколько различаются конструк-
цией дна и укладкой галет с металлизированным волокном. Кроме того, су-
ществуют небольшие отличия в массогабаритных характеристиках патронов
и снарядов (табл. 11.1). Все выстрелы комплектуются латунной гильзой одно-
го типа (9-Г-056) длиной 115 мм и диаметром фланца 27 мм.
На вооружение были приняты девять модификаций 30-мм ПРЛ-выстре-
лов к авиационной автоматической пушке НР-30 (рис. 11.5). Способ снаряже-
ния аналогичен 23-мм снарядам, а разные модификации различаются массо-
габаритными характеристиками (табл. 11.2) и укладкой галет в каморе снаря-
да (см. рис. 11.5). Все 30-мм выстрелы комплектуются латунной гильзой одного
типа (9-Г-104) длиной 155 мм и диаметром фланца 41,5 мм.
23-мм и 30-мм ПРЛ-снаряды состоят из стального корпуса, внутренний
объем которого образует камору, ведущего пояска, дна, вышибного устрой-
ства, толкателя, полуцилиндров, галет с металлизированным волокном, шайб,
колпачка или набора картонных прокладок. На корпусе снаряда есть центри-
рующее утолщение, которое служит для центрирования и правильного веде-
ния снаряда по каналу ствола пушки. На цилиндрической запоясковой части
корпуса снаряда предусмотрены две кольцевые патронные канавки, предназ-
наченные для обжима дульца гильзы при сборке патрона. Ведущий поясок из
меди запрессован в кольцевую канавку на корпусе снаряда. В головную часть
корпуса снаряда вышибное устройство ввертывается на герметике и закреп-
ляется кернением в двух диаметрально противоположных точках.
684
П. Боеприпасы вспомогательного назначения
Рис. 11.4. 23-мм выстрелы 9-А-345 (а), 9-А-418 (б), 9-А-493 (в) и 9-А-548 (г) с ПРЛ-
снарядами к авиационным автоматическим пушкам
11.2. Помехосоздающие боеприпасы 685
Таблица 11.1. Массогабаритные характеристики 23-мм ПРЛ-выстрелов
Характеристика 9-А 345 9-А-418 9-А-493 9-А-548
Длина, мм:
патрона 198,4 200,5 198,9-200,7 198,3-200.5 198,9-200,7
снаряда 104,7-107,2 104,7 107,2 102,7- 104,9 105,5 106,9
Масса, кг:
патрона 0,336 0,339 0,325 0,339
снаряда 0,210 0.178 0,268 0,178
снаряжения 0,0147 0,0129 0.0130 0,0168
Таблица 11 2. Массогабаритные характеристики 30-мм ПРЛ-выстрелов
Характеристика 9-А-346 (а) 9-А-402 (б) 9-А-403 (в) 9-А-404 (.’) 9-А-452 (О) 9-А-453 (ж) 9-А-494 (з) 9-А-495 (е) 9-А-496 (и)
Длина, мм: патрона снаряда Масса, кг: патрона снаряда снаряжения 264,2-267,1 132,6-135,2 0,850 0,345 (а, в); 0,309 (б); 0,344 (г) 0,0236 (а); 0,0200 (б); 0,0226 (в); 0,0230 (г) г 264.1-267,8 135,3-137,8 0,847 0,385 0,0400 (б); 0,0460 (.ж) 264,1-267,8 135,3-137,8 0,844-0,848 0,382 (з); 0,384 (е); 0,386 (и) 0.0375 (з); 0,0468 (е); 0,0490 (и)
В каморе корпуса снаряда размещены галеты дипольных отражателей, раз-
деленные между собой стальными шайбами. На верхнюю галету установлен
толкатель, на который помещен колпачок или набор картонных прокладок для
плотного поджатия толкателя взрывателем Снизу камора снаряда закрыта
стальным дном, внешняя часть которого обжата в специальную канавку на
корпусе снаряда. Герметичность каморы снаряда обеспечивается установкой
колец из пластика под дно и в зарезьбовую канавку на вышибном устройстве.
Галета состоит из обернутых бумагой дипольных отражателей, представ-
ляющих собой металлизированные стеклянные нити (стекловолокно), диаметр
которых без покрытия составляет 35 мкм Галета вкладывается в два сталь-
ных полуцилиндра, которые вместе со стальными шайбами предохраняют ее
от разрушения при выстреле и в момент выброса из корпуса снаряда Количе-
ство галет, полуцилиндров и шайб зависит от вида снаряжения снаряда ди-
польными отражателями (от длин дипольных отражателей), вид которых ука-
зан в маркировке патрона.
После срабатывания вышибного устройства на траектории движения сна-
ряда образуются пороховые газы, под давлением которых толкатель действует
на полуцилиндры, выдавливающие дно и выбрасывающиеся из корпуса сна-
ряда вместе с дном и галетами дипольных отражателей. При этом происходит
686
11. Боеприпасы вспомогательного назначения
Рис. 11.5. ПРЛ-снаряды 30-мм выстрелов 9-А-346 (я), 9-А-402 (б), 9-А-4ОЗ (в),
отделение полуцилиндров от галет и разброс под действием центробежных
сил и встречного потока воздуха дипольных отражателей, образующих обла-
ко, которое создает помехи самолетным и наземным РЛС.
В качестве характерного примера ниже приведены основные технические
характеристики одного из 30-мм патронов с ПРЛ-снарядом:
Масса, кг:
патрона ................................................. 0.847
снаряда ................................................. 0.405
отражателей ............................................. 0,040
Количество отражателей ............................... Не менее 480 000
Начальная скорость, м/с...................................... 780
Время до срабатывания вышибного устройства, с ............... 6-8
Средняя эффективная площадь рассеивания дипольных
отражателей от одного снаряда, mz
через 7-9 с после вылета ................................ 7-9
через 10-15 с ......................................... 10-13
через 30 с ............................................ 14-19
11.2. Помехосоздающие боеприпасы
687
и
9-А-404 (г), 9-А-452 (<-)), 9-А-495 (е), 9-А-453 (ж), 9-А-494 (з), 9-А-496 (и)
Для авиационной автоматической пушки Н-37 также разработан 37-мм
ПРЛ-выстрел (рис. 11.6), укомплектованный латунной гильзой 6Т-361 длиной
155 мм и диаметром фланца 46 мм. ПРЛ-снаряд длиной 166,7... 168,5 мм,
массой 0,727 кг, снаряженный галетным способом металлизированным во-
локном массой 0,072 кг, отличается от аналогичных снарядов калибра 23 и
30 мм наличием баллистического наконечника, который при функцио-
нировании снаряда на траектории выталкивается вместе с полуцилинд-
рами, содержащими галеты дипольных отражателей, и конструкцией тол-
кателя.
23-мм патроны со снарядами ПК-помех предназначены для создания по-
мех оптическим неконтактным взрывателям и тепловым ГСН управляемых
ракет. Постановка помех осуществляется генерацией электромагнитного из-
лучения в ИК-диапазоне длин волн В конструкции патронов использовано
воспламенительное устройство всепогодного применения с несколькими сту-
пенями предохранения и фиксированным временем срабатывания. Основ-
ные технические характеристики 23-мм патрона со снарядом оптико-элект-
688
11. Боеприпасы вспомогательного назначения
Рис. 11.6. 37-мм выстрел с ПРЛ-снарядом
ронных (ПК) помех к авиационным автоматическим пушкам АМ-23, ГШ-23,
ГШ-6-23, НР-23 и НС-23 представлены ниже:
Масса, кг:
патрона .................................................. 0.329*
снаряда ............................................ 0.176
Начальная скорость, м/с...................................... 700
Время действия воспламенительного устройства, с............ 0.8-1,2
Общее время горения донного излучателя, с................ Не менее 3,8
ИК-диапазон излучения электромагнитных волн (создание
ИК-помех), мкм......................................... 1,8-6,0
В настоящее время на вооружении ВВС находятся две модификации выс-
трелов со снарядами ИК-помех, которые имеют индексы 9-А-546 (рис. 11.7, а)
и 9-А-547В (рис. 11.7, б). Их масса составляет 0,329 кг, адлина- 198,7...201,0 мм
и 198,6...200,6 мм соответственно. В корпус снаряда запрессовывается мало-
газовый пиротехнический состав ПЭ-64-28 массой 0,044 кг. Оба 23-мм выст-
рела комплектуются латунной гильзой одного типа (9-Г-056) длиной 115 мм и
диаметром фланца 27 мм.
Снаряд состоит из стального корпуса, внутренний объем которого обра-
зует две - головную и донную (см. рис. 11.7, а) — или одну (см. рис. 11.7, 6)
каморы, медного ведущего пояска, воспламенительного устройства, головно-
го и донного излучателей, а также картонных прокладок. Воспламенительное
устройство ввертывается в головную часть корпуса снаряда на герметике и
закрепляется кернением.
В головную камору устанавливается головной излучатель, включающий в
себя дюралюминиевую гильзу с запрессованными в нее излучающим, пере-
ходным и воспламенительным составами. На верхний торец головного излу-
чателя помещены картонные прокладки для обеспечения его плотного поджа-
тия воспламенительным устройством. Донная камора предназначена для зап-
рессовывания излучающего, переходного и воспламенительного составов
донного излучателя.
При выстреле в процессе движения снаряда по каналу ствола под дей-
ствием силы инерции от линейного ускорения срабатывает воспламенитель-
ное устройство и воспламеняется малогазовый пиротехническый состав, ко-
П.2. Помехосоздающие боеприпасы
689
торый через 0,8... 1,2 с вызывает инициирование вышибного заряда. При этом
происходят возгорание пиротехнических составов головного излучателя и от-
деление вышибного устройства от корпуса снаряда. Воспламенение пиротех-
нических составов донного излучателя осуществляется от пороховых газов в
процессе движении снаряда по каналу ствола при выстреле.
На вооружении ВВС РФ есть также противорадиолокационные НАР
С-8П и С-8ПМ (рис. 11.8), для пуска которых используются многозарядные
блоки типа Б-8, модернизированные Б-8М и Ml, а также Б-8-0 (с теплозащи-
той) и Б-8В20А (вертолетное исполнение). Ракеты С-8П и С-8ПМ (модифика-
ции отличаются усовершенствованным РДТТ, измененным составом топлива
Рис. 11.8. 80-мм противорадиолокационная НАР С-8ПМ
690
11. Боеприпасы вспомогательного назначения
и устройством узла стабилизации) предназначены для защиты самолетов и
вертолетов от обнаружения и сопровождения самолетными и наземными РЛС
противника путем создания пассивных радиолокационных помех. Боевые ча-
сти этих ракет снаряжают дипольными отражателями из металлизированного
стекловолокна, которые выбрасываются из БЧ вышибным зарядом при сраба-
тывании дистанционного взрывателя (время формирования дипольного обла-
ка - около 3 с). Основные технические характеристики противолокацион-
ных НАР С-8П и С-8ПМ приведены ниже:
Калибр, мм............................................... 80
Тип пускового блока (устройства) ...................... Б-8М-1
Количество ракет ........................................ 20
Максимальная скорость, м/с ........................... 610(565)
Тип БЧ .................................... Противорадиолокационная
Время полета на активном участке, с............... 0,96-1,96(0,5-1,3)
Дальность стрельбы, км........................ 1,2-6,0 ' .
Длина ракеты, мм....................................... 1650(1624) «
Масса, кг: ,
окончательно снаряженной ракеты...................... 12,3(12,1) *
БЧ ......................................... 4,5
Турбореактивные снаряды-постановщики пассивных помех (разработ-
чик Институт прикладной физики, Новосибирск). Они относятся к вспомо-
гательным боеприпасам ВМФ и предназначены для защиты кораблей мало-
го, среднего и большого водоизмещения от управляемого оружия с различ-
ными системами наведения (самонаведения) на ближних, средних и дальних
рубежах обороны. В настоящее время разработаны и состоят на вооружении
снаряды ТСП-47, ТСТ-47, ТСО-47; ТСП-60У, ТСТ-60У; СР-50, СО-50 и СК-50
для комплексов ПК-2, ПК-16, ПК-10, размещаемых на кораблях различного
класса.
Снаряды-постановщики созданы на основе банка данных о характеристи-
ках физических полей защищаемых объектов, алгоритмах работы и характе-
ристиках информационных каналов наведения ракет. Отработаны различные
виды снаряжения в составе боеприпасов для комплексов ПК-2, ПК-10, ПК-16,
обеспечивающих имитацию полей излучения и (или) рассеяния электромаг-
нитных волн кораблями различного класса.
Подбор комплектов снаряжения и конструкция БП позволяют распреде-
лять источники излучения в пространстве с учетом получения необходимых
значений эффективности поверхности рассеяния, интенсивности в спектраль-
ных диапазонах излучения, спектра пространственных частот. В результате
ложная цель не может быть селектирована системой наведения управляемого
оружия по признакам, присущим кораблю.
140-мм турбореактивные снаряды-постановщики помех к корабельному ком-
плексу ПК-2 предназначены для защиты кораблей среднего водоизмещения
от управляемого оружия на средних и дальних рубежах обороны путем по-
становки ложных целей для дезинформации систем наведения и отвлечения
ракет, атакующих корабль (рис. 11.9). Пуск снарядов производится из пуско-
вой установки ЗИФ-121 турельного типа с двумя открытыми направляющими
трубами. Установка обеспечивает автоматическое дистанционное наведение
11.2. Помехосоздающие Боеприпасы
691
а
б
Рис. 11.9. 140-мм турбореактивные снаряды-постановщики помех (а) и схема их
применения(б)
692
11. Боеприпасы вспомогательного назначения
по углу возвышения и азимуту, приведение направляющих труб на угол заря-
жения и стрельбы, а также автоматическую установку взрывателя на снаря-
дах. Управление установкой осуществляется от системы приборов управле-
ния стрельбой. Взрыватель - дистанционная механическая трубка ТМР-44.
В этом калибре разработаны и серийно производятся следующие три типа
снарядов (см. рис. 11.9, а, табл. 11.3):
ТСП-47 - снаряд радиолокационных помех;
ТСТ-47 снаряд оптико-электронных помех;
ТСО-47 - снаряд комбинированных помех.
Таблица 11.3. Характеристики 140-мм турбореактивных
снарядов-постановщиков помех
Характеристи ка ТСП-47 ТСТ-47 ТСО-47 •
Длина, мм 1105
Масса, кг:
снаряда 36,0 37,5 38,5 - *
снаряжения 7,73 2,6 8,6
Тип снаряжения Дипольные отражатели ИК-элементы Комбинированное
Температурный диапа- зон применения, °C От -40 до +50
Дальность постановки, м От 500 до 6000
120-мм снаряды-постановщики помех к корабельному комплексу ПК-10
используются дтя защиты кораблей малого, среднего и большого водоизме-
щения от управляемого оружия на ближних рубежах обороны путем поста-
новки в непосредственной близости от корабля уводящих ЛЦ (рис. 11.10). Пуск
снарядов производится из пусковой установки КТ-216 комплекса ПК-10. В этом
калибре разработаны и серийно выпускаются три типа снарядов (см. рис. 11.10, а
и табл. 11.4):
СР-50 - снаряд радиолокационных помех;
СО-50 - снаряд оптико-электронных помех;
СК-50 - снаряд комбинированных помех.
82-мм турбореактивные снаряды-постановщики помех к корабельному
комплексу ПК-16 предназначены для защиты кораблей малого водоизмеще-
ния от управляемого оружия на средних и дальних рубежах обороны путем
постановки ЛЦ для дезинформации систем наведения и отвлечения ракет, ата-
кующих корабль (рис. 11.11). Пуск снарядов осуществляется из автоматичес-
кой корабельной пусковой установки ПК-16 контейнерного типа с 16 направ-
ляющими трубами.
Установка имеет дистанционное управление. Углы вертикального наведе-
ния фиксированы - от 0 до 60° через каждые 10°. Углы горизонтального наве-
дения фиксированы - от 10 до 60°. Взрыватель - дистанционная механичес-
кая трубка ТМР-44.
11.2. Помехосоздающие боеприпасы
693
Рис. 11.10. 120-мм снаряды-постановщики помех (а) и схемы их применения для
постановки уводящих ЛЦ (б, в)
694
11. Боеприпасы вспомогательного назначения
1 1 *
я .. А
1 * ’ • 1
1
1 к, *
1—’
ГСП-60У ГСТ-60У
б
Рис. 11.11. 82-мм турбореактивные снаряды-постановщики радиолокационных и
оптико-электронных помех (а) и схема их применения (б)
11.2. Помехосоздающие боеприпасы
695
Таблица 11.4. Характеристики 120-мм турбореактивных
снарядов-постановщиков помех
Характеристика СР-50 СО-50 СК-50
Длина, мм 1226
Масса, кг:
снаряда 25,5 25,0 25,0
снаряжения 11,0 7,3 9.1
Тип снаряжения Дипольные ИК, лазерное Дипольные отражатели,
отражатели ИК, лазерное
Температурный диапазон От - 40 до +50
применения, °C
В этом калибре разработаны и серийно выпускаются два типа снарядов
(см. рис. 11.11. а): *
ТСП-60У - снаряд радиолокационных помех;
ТСТ-60У - снаряд оптико электронных помех.
Характеристики 82-мм турбореактивных снарядов-постановщиков помех
приведены ниже:
ТСП-60У ТСТ-60У
Длина, мм .............................. 653 653
Масса, кг:
снаряда .............................. 8,30 8,15
снаряжения............................ 1,85 0,53
Тип снаряжения ................ Дипольные отражатели ИК-элементы
Температурный диапазон примене-
ния, °C ................................... От - 40 до +50
Дальность постановки, м........ 500-1800 500-1700
Универсальный корабельный комплекс выстреливания помех ВМС
Германии MASS (Multi-Ammunition Softkill System) производит компания
Rheinmetall Waffe Munition (RWM). Он разработан отделением авиационных
и корабельных систем радиоэлектронного подавления (РЭП) фирмы RWM -
Buck Fronau (г. Фронау, Германия).
Комплекс MASS предназначен для постановки ложных отвлекающих и
уводящих целей (ЛОЦ и ЛУЦ), создающих физические поля, превосходящие
соответствующие сигнатуры защищающегося корабля, на которые реагирует
система самонаведения противокорабельных ракет (ПКР), что приводит к ее
подавлению или к перенацеливанию на ЛЦ на конечном участке их траекто-
рии полета. При постановке комплексом маскирующей завесы происходит срыв
наведения УР с полуавтоматической телевизионно-командной системой наве-
дения и лазерной полуактивной ГСН.
По мнению специалистов фирмы RWM, в настоящее время и на период
до 2030 г. наибольшую опасность для кораблей и судов будут представлять
УР, оснащенные ГСН, которые работают в следующих диапазонах-
696
11. Боеприпасы вспомогательного назначения
• телевизионные (ТВ) ГСН 0,4. ..1,0 мкм;
• инфракрасные и тепловизионные (ТПВ) ГСН - 3... 13 мкм;
• радиолокационные ГСН - 8... 18 ГГц;
• лазерные ГСН - 1,06 мкм (лазер на алюмоиттриевом гранате, легиро-
ванном неодимом Nd-YAG) и 10,6 мкм (СО2-лазер);
• ГСН с полуавтоматическим командным наведением по линии визирова-
ния (электронно-оптические (ЭО), ИК, ТПВ) - 0,4... 1,3 мкм;
• радиолокационные ГСН миллиметрового диапазона - 35.. .94 ГГц.
Кроме того, по кораблям, находящимся в своих пунктах базирования, мо-
гут применяться УР и АБ с корректируемой инерционной навигационной сис-
темой (ИНС), скоординированной с КРНС NAVSTAR, работающей на часто-
тах 1575,42 и 1227,6 МГц.
Исследования, проведенные специалистами фирмы RWM. показали, что
в ходе боевых действий в прибрежной зоне перспективные ИКР, маневрирую-
щие в условиях типичных для таких районов сильных местных помех, будут
оснащаться комбинированными ГСН (ИК/ЭО, РЛ/ИК), борьба с которыми с
помощью существующих корабельных средств РЭП значительно усложнится.
При этом следует ожидать применения по кораблям и катерам УР малой даль-
ности, в том числе ПТРК с командной системой наведения по линии визиро-
вания и лазерными полуактивными ГСН. К тому же в прибрежных районах
возможности маневрирования кораблей ограничиваются. На малых дистанци-
ях пуска УР сокращается подлетное время и соответственно сроки распозна-
вания типа УР и ее системы наведения. Поэтому, по оценке специалистов фир-
мы RWM, корабельным комплексом постановки ЛЦ должны использоваться
универсальные снаряды-постановщики помех, обеспечивающие радиоэлект-
ронное подавление ракет с различными системами наведения.
Комплекс выстреливания помех MASS включает в себя от одной до шес-
ти 32-зарядных поворотных ПУ реактивного типа (в зависимости от класса
корабля), центральный прибор управления (ЦПУ) постановкой помех и 81-мм
многоспектральные снаряды помех. Основные тактико-технические характе-
ристики ПУ: масса - 330 кг; высота - 1,1 м; скорость наведения - 100 град/с;
ускорение наведения - 360 град/с2; радиус разворота - 1,3 м. Ударное воздей-
ствие при стрельбе на палубу не превышает 2 кН (продолжительностью не
более 10 мс).
Многоспектральные снаряды-постановщики помех калибра 81 мм пред-
назначены для постановки радиолокационных, инфракрасных и оптических
помех в следующих диапазонах:
• ультрафиолетовый - 0,3...0,4 мкм (по спектральному составу и интен-
сивности эквивалентно солнечному излучению);
• электронно-оптический - 0,4.. .1,1 мкм;
• лазерный - 0,4... 1,5 мкм и 10,6 мкм;
• инфракрасный - 2... 14 мкм (двухцветный);
• радиолокационный - 8... 18 ГГц.
В настоящее время ведется разработка снаряда помех приемникам КРНС
NAVSTAR, устанавливаемым на УР и УАБ, а также снарядов помех с актив-
ными и пассивными радиолокационными ЛЦ в миллиметровом диапазоне.
11.2. Помехосоздающие боеприпасы
697
Каждый снаряд оснащается программируемым электронным взрывателем,
который позволяет осуществлять бесконтактную установку дальности поста-
новки ЛЦ (0... 100 м) непосредственно перед стрельбой. Ошибка в выставле-
нии помехи в трех измерениях составляет 10... 15 см. После выстреливания
активной радиолокационной ЛЦ на заданной высоте срабатывает парашют-
ная система, и ЛЦ опускается на парашюте, с которым она соединяется через
вращающийся блок подвески. Вращающийся блок может имитировать флук-
туацию РЛ-сигнала. Комбинированный снаряд используется для образования
одновременно пассивной РЛ и ИК ЛЦ. Он снаряжается дипольными отража-
телями и аэрозолем на основе микрокапсулированного красного фосфора.
Время образования маскирующей завесы инфракрасной ЛЦ составля-
ет 2...3 с. Продолжительность действия ЛЦ: активной РЛ - до нескольких
минут; комбинированной ИК/РЛ - не менее 30 с, маскирующей завесы -
20...30 мин. '
По заявлениям представителей фирмы. RWM комплекс MASS способен
эффективно бороться с ракетами, ГСН которых имеют строб сопровождения
не более 12 м. По расчетам специалистов для надежной защиты кораблей клас-
са «фрегат» необходимо устанавливать комплекс в составе двух ПУ При этом
для кораблей с эффективной площадью рассеивания не более 5000 м2 уровень
защиты с помощью комплекса MASS оценивается как «хороший», а с кораб-
лей с эффективной площадью рассеивания до 10, 15 и 20 тыс. м2 - как «при-
емлемый». «частичный» и «незначительный» соответственно. При постанов-
ке маскирующей завесы комплекс способен покрывать помехами площадь до
35 тыс. м2 и может эффективно использоваться для постановки ЛОЦ против
ПКР, оснащенных активными радиолокационными ГСН, а при постановке ЛУЦ
- против всех известных типов ПКР и УР.
Комплекс выстреливаемых помех MASS принят на вооружение ВМС Гер-
мании в 2002 г., а до 2010 г. планируется оснастить им большинство состоя-
щих на вооружении и вновь строящихся кораблей ВМС Германии, Польши,
Норвегии, Швеции и Финляндии.
При разработке комплекса MASS широко применялись методы математи-
ческого и полунатурного моделирования, которые в обязательном порядке под-
тверждались полномасштабными испытаниями в условиях обстановки, близ-
кой к реальной. Периодически ВМС стран НАТО проводят комплексные ис-
следовательские учения по РЭБ, в ходе которых проверяются возможности
комплексов постановки ЛЦ, находящихся на вооружении кораблей различных
классов стран НАТО, осуществляется подавление систем наведения УР са-
мых различных модификаций.
Так, в ходе учений, проведенных в 2003 г., на самолетах базовой патруль-
ной авиации Р-ЗС «Орион» на внешних узлах подвески устанавливались до
шести УР с разными типами ГСН. По заранее определенному маршруту са-
молет начинает облет кораблей на предельно малой высоте, а операторы (в со-
ставе экипажа) включают ГСН ракет в режиме эмуляции. При подлете само-
лета к цели корабли выставляют ЛЦ, а на его борту осуществляется аппарат-
но-программный контроль за работой ГСН УР. В одном из эпизодов учений
комплекс MASS установили на тральщике ВМС Германии, а на самолете
Р-ЗС подвесили шесть УР: по две с ИК и РЛ ГСН и по одной с ЭО и ТПВ.
698
11. Боеприпасы вспомогательного назначения
При этом радиолокационные ГСН работали в режиме перестройки несущей
частоты. По заявлениям представителей фирмы RWM комплекс MASS отстре-
лял 11 зарядов, обеспечив 100%-ное выполнение задачи.
Исследовательские учения по защите корабля от ПТРК (включая пере-
носные), ПЗРК, а также УР и УАБ с полуактивными лазерными ГСН проводи-
лись также в 2004 г. (район Балтийского побережья Германии). Подсветка цели
для последних осуществлялась как с помощью подвесного прицельно-навига-
ционного контейнера самолета, так и лазерными целеуказателями с берега.
Во всех случаях наведение было сорвано, в итоге и УР, и УАБ цель не порази-
ли. Как сообщали представители фирмы, при постановке маскирующей заве-
сы происходил срыв подсветки цели лазерными целеуказателями, в результа-
те чего и УР, и УАБ, потеряв управление, падали в воду, не долетев до цели.
Рис. 11.12. 152-мм артиллерийский выстрел ЗВРБ38 со снарядом ЗРБЗО для поста-
новки активных радиопомех
11.2. Помехосоздающие боеприпасы
699
Артиллерийские снаряды-постановщики активных помех. В боекомп-
лекте артиллерийских систем 2А65 и 2С19 «Мета», состоящих на вооружении
Сухопутных войск РФ, имеется 152-мм выстрел ЗВРБ38 со снарядом ЗРБЗО
(разработчик - ГП «НИМИ», Москва) для постановки активных радиопомех
тактическим средствам связи (в целях нарушения управления войсками) и
управляемому оружию (рис. 11.12). Основные технические характеристики
152-мм артиллерийского снаряда ЗРБЗО и его передатчика помех приведены ниже:
Масса снаряда, кг ..................................... 43,56
Максимальная дальность стрельбы, км ............... 22
Диапазон подавляемых частот, МГц.................... 1,5-120
Радиус действия передаточных помех, м .. .. 700
Продолжительность работы передатчика, мин .............. 60
Температурный диапазон применения, QG ,............ ±50
Реактивные снаряды-поста-
новщики помех к РСЗО (разра-
ботчик - ФГУП ГНПП «СПЛАВ»,
Тула). Аналогичное назначение име-
ет 122-мм реактивный снаряд РСЗО
«Град» 9М519-1-7 с передатчиком
помех Р-032, точнее комплект из
семи реактивных снарядов 9М519-1-7
с одинаковыми массогабаритными и
динамическими характеристиками.
Комплект предназначен для создания
помех в КВ- и УКВ-диапазонах ра-
диосвязи в целях дезорганизации си-
стемы управления противника в так-
тическом звене путем подавления ли-
ний радиосвязи, пунктов управления
войсками и оружием, наземных пун-
ктов обработки информации и т. п.,
создания помех тактическим сред-
ствам связи. Каждый из семи реак-
тивных снарядов, входящих в ком-
плект, оснащен головной частью
(рис. 11.13) с передатчиком помех оп-
ределенной литеры. Основные тех-
нические характеристики 122-мм ре-
активного снаряда 9М519-1-7 и его
передатчика помех Р-032 представ-
лены далее.
Рис. ПЛЗ. Головная часть 122-мм реактив-
ного снаряда РСЗО «Град» 9М519-1-7 (а)
и его передатчик помех Р-032 (б)
а
б
700
11. Боеприпасы вспомогательного назначения
Масса реактивного снаряда, кг ......................... 66
Длина, мм............................................. 3025
Дальность стрельбы, км............................. 4,4-18,5
Диапазон подавляемых частот, МГц..................... 1,5-120
Радиус действия передаточных помех, м....... 700
Время непрерывной работы передатчика, мин ... 60
Вид и тип помехи ...............................Заградительная, шумовая
11.3. Осветительные боеприпасы
Осветительные снаряды и мины
Разработка первых осветительных снарядов в России началась еще до Пер-
вой мировой войны. В 1911 г. создали первые образцы осветительных пара-
шютных снарядов для полевых орудий (гаубиц) и орудий ближнего боя (пер-
вых минометов или так называемых бомбометов). В Первую мировую войну
а б
Рис. 11.14. Осветительные парашютные снаряд (о) и мина (б):
1 - парашют; 2 - осветительная звездка; 3 вышибной заряд; 4 взрыватель
11.3. Осветительные боеприпасы
701
Рис. 11.15. Осветительный снаряд (я) и
принцип его действия (б):
1 — опорный цилиндр; 2 - дно; 3 - звездка;
4 - парашют
отработали осветительные снаряды к гаубицам калибра 122 и 152 мм приме-
нительно к корпусам шрапнелей с выбросом снаряжения через головное очко
корпуса. В 122-мм снаряде поместили два факела (в виде полуцилиндров) со
своими парашютами, а в 152-мм снаряде - четыре факела (в виде сегментов).
Основной недостаток данных конструкций снарядов - частые отказы в
действии. Кроме того, из-за непрочности внутренних деталей снаряды могли
применяться только для стрельбы на малых зарядах, из-за чего дальность
стрельбы не превышала 4...5 км.
После Первой мировой войны во всех странах, принимавших участие в
боевых действиях, продолжались работы над новыми осветительными снаря-
дами, у которых осветительный элемент выбрасывался с парашютом через
дно снаряда (рис. 11.14). В 122-мм осветительном парашютном двухфакель-
ном снаряде впервые был реализован принцип двухфазного выбрасывания сна-
ряжения на траектории. Вначале под действием большого вышибного заряда
происходит сброс стального цилиндра, содержащего два факела и два пара-
шюта; одновременно воспламеняется пороховой замедлитель, помещенный в
крышке цилиндра. После его сгорания начинает гореть второй (меньший) по-
роховой заряд, находящийся внутри цилиндра под факелами, который выбра-
сывает факелы с парашютами и воспламеняет осветительный состав в фа-
702 11. Боеприпасы вспомогательного назначения
келах (рис. 11.15). Двухфазное выбрасывание резко сокращает скорость поле-
та цилиндра к моменту сброса факела, вследствие чего уменьшается сила рыв-
ка, испытываемая парашютом в момент его раскрытия. Скорость снижения
системы парашют факел в этих снарядах уменьшалась до 4...5 м/с вместо
10... 15 м/с и более в снарядах других конструкций. Данный принцип послу-
жил основой для создания ряда образцов парашютных снарядов и мин.
Типовой 122-мм гаубичный осветительный снаряд (см. рис. 11.4, а) при
высоте разрыва около 500 м обеспечивает на местности освещение площадью
до 10 тыс. м2 в течение 50...55 с (сила света - до 500 тыс. кд). Для предотвра-
щения скручивания строп парашюта факел снабжен вертлюгом, вращающим-
ся на шари-коподшипниках. У осветительных мин (см. рис. 11.14, б) нет прин-
ципиальных конструктивных отличий от рассмотренных выше осветительных
снарядов. ?
Некоторые характеристики действия осветительных снарядов и л1ин
Освещенность предмета в направлении заданного угла от источника (?вс-
та определяется по формуле
где / - сила света источника, кд; D - расстояние от источника света до точки
освещаемой поверхности при угле ос.
Если в формуле (11.1) заменитьDmh(h- расстояние от источника света
до поверхности предмета по перпендикуляру), то она при условии, что D =
= /г/cos ос, примет следующий вид:
„ / cos3 ос
Еа=—Ъ------
п
Радиус освещения г будет равен величине h tg ос, т. е. при заданной силе
света источника радиус освещаемого района зависит от высоты, на которой
находится факел, и угла падения луча света.
Видимость и различимость местных предметов обусловлены такими фак-
торами, как:
- размер рассматриваемых целей;
- расстояние от цели до наблюдателя;
- контраст освещения между целью и фоном, на который она проектируется;
- острота зрения наблюдателя;
- освещенность цели;
- продолжительность наблюдения.
Первые четыре фактора не зависят от качества снаряда и определяются
условиями, при которых происходит наблюдение. От осветительных свойств
снаряда зависят только два последних фактора. На время освещения целей
большое влияние будет оказывать ветер: чем он сильнее, тем меньшее время
снаряд будет находиться в районе цели.
Наблюдения показывают, что скорость перемещения осветительных эле-
ментов на парашюте в горизонтальном направлении близка к скорости ветра.
Скорость перемещения осветительных элементов беспарашютных снарядов в
11.3. Осветительные боеприпасы
703
горизонтальной плоскости меньше зависит от скорости ветра и его направле-
ния, так как они всегда перемещаются в одну сторону (в направлении их по-
лета). Осветительные элементы после их выброса из снаряда падают вниз под
действием силы тяжести. По имеющимся данным скорость падения может
достигать 30 м/с. При снижении силу сопротивления воздуха движению осве-
тительного элемента парашютного снаряда можно рассчитать по формуле
Л = спрв5г2. (11.2)
где сп - коэффициент сопротивления парашюта; рв - плотность воздуха (при
расчетах принимается равной 1,25 кг/м3); 5- площадь парашюта, м2; v - ско-
рость снижения парашюта, м/с.
Обозначив через Q массу системы парашют факел и принимая R = Q,
получим снижение системы с постоянной скоростью. Значение сп для плот-
ной ткани может быть принято 0,5. Наиболее выгодная форма купола - сфе-
рический сегмент, в котором отношение высоты купола к его радиусу состав-
ляет 0,5. По формуле (11.2) при указанных Допущениях можно вычислить зна-
чения скорости снижения парашютного фавела и диаметра парашюта.
Для обеспечения равномерности освещения цели, а следовательно, и луч-
шего ее наблюдения необходимо, чтобы система парашют-факел снижалась с
минимально возможной скоростью (табл. Ц.5).
Основные технические характеристики современных отечественных осве-
тительных мин приведены ниже;
Калибр, мм................................
Масса, кг ................ ...............
Дальность стрельбы, м.....................
Время эффективного действия, с............
Сила света, млн кд .......................
82
3,6
1254000
35
0,3
120
16,8
1000 5300
45
1.5
Таблица 11.5. Характеристики действия осветительных снарядов и мин
периода Великой Отечественной войны
в; X К о X 5 св Начало горения факела Конец горения факела
Наименование О □5 о сх О 3 св 6 3 Л О> 3 Л
боеприпаса сх ь 3 s (D CQ О О X s о CQ с X
<D £ Ц о s 5 Ц х □5 * 2 св С О 2 X X <D а <D св о С £ 2 X X (D 3 о
о СХ сЗ о а сх и <D О S s 1 CQ S а §
и -е- и к и Р га Q- X О ч га с_ я О ч
122-мм осветительный снаряд 32,4 8,9 444 351 269 10,3 63 233 112,00
То же 48,5 7,8 400 373 195 10,4 19 155 110,50
82-мм осветительная мина 38,6 4,1 242 232 196 10,4 74 194 44,00
107-мм осветительная мина 43,5 4,8 325 281 222 10,4 73 217 61,14
704
11. Боеприпасы вспомогательного назначения
Следует отметить, что осветительные снаряды и мины в настоящее время
состоят на вооружении артиллерии армий почти всех государств. Так, на во-
оружении сухопутных войск стран НАТО имеются осветительные мины для
минометов с длительностью свечения 30...40 с и силой света 0,9... 1,3 млн кд,
а также осветительные снаряды для ствольной артиллерии калибров 105 и
155 мм с силой света 0,6... 1,6 млн кд. В ближнем бою для освещения местно-
сти поля боя могут использоваться боеприпасы FFV545, выстреливаемые из
84-мм реактивного гранатомета, сила света которых составляет 0,65 млн кд,
длительность свечения - 30 с, диаметр освещаемого пространства -
400...500 м.
Наряду с парашютными осветительными снарядами применение находят
и беспарашютные осветительные снаряды, которые содержат 20...24 освети-
тельных элемента, выбрасываемых обычно под действием вышибного заряда
через головную часть. Осветительные элементы располагаются в. снаряде в
несколько ярусов, по 4...6 шт. в ярусе. После выброса зажженные осветитель-
ные элементы снижаются и освещают местность.
К пиротехническим составам для осветительных БП предъявляюа' следу-
ющие общие требования:
- максимальный осветительный эффект (сила света, интенсивность излу-
чения в заданном диапазоне видимого спектра и т. д.) при минимальном рас-
ходовании состава (при этом плотность составов должна быть возможно вы-
сокой);
- достаточная механическая прочность, соответствующая требованиям экс-
плуатации;
- возможно низкая чувствительность к механическим воздействиям, без-
опасность при изготовлении и применении (минимальные взрывчатые свой-
ства и минимальный тротиловый эквивалент);
- химическая стойкость и физическая стабильность при длительном хра-
нении;
- устойчивость по отношению к внешним тепловым воздействиям (не-
воспламеняемость от попадания искры и т. д.);
- нечувствительность к прострелу пулей;
- простота технологического процесса изготовления;
- отсутствие компонентов, оказывающих токсическое действие на чело-
веческий организм при изготовлении;
- недефицитность исходных материалов, наличие достаточной сырьевой
базы и т. д.
К осветительным составам предъявляются особые требования в отно-
шении чувствительности к механическим воздействиям, вытекающие из ус-
ловий боевого применения. При использовании осветительных средств в со-
ставе артиллерийских снарядов (преимущественно для гаубиц среднего ка-
либра) необходимо ограничивать чувствительность составов к удару
допустимыми напряжениями при выстреле, установленными для ВВ. При-
менение осветительных и фотоосветительных АБ требует ограничения чув-
ствительности используемых в них составов к прострелу пулей, удару и про-
битию корпусов АБ осколками зенитных БП.
11.3. Осветительные боеприпасы
705
Эти обстоятельства исключали возможность применения хлоратных со-
ставов в названных осветительных БП, что привело к необходимости исполь-
зования менее чувствительных составов на основе нитрата бария. Его массо-
вое содержание в осветительных составах может достигать 50...80 %
(табл. 11.6). Кроме того, образующаяся при разложении нитрата бария оксид
бария дает сплошной спектр с преобладанием желто-зеленой части, к которой
человеческий глаз наиболее чувствителен. Соли натрия, распадающиеся при
горении с выделением атомов натрия, излучающих в желтом диапазоне види-
мого спектра, увеличивают силу света осветительных составов, которые со-
держат нитрат бария.
Таблица 11.6. Пиротехнические составы освет ительного действия
Компонентный состав •Содержание, %
Нитрат бария Магниевый порошок Алюминиевая пудра Алюминиевый порошок Порошок алюминиево- магниевого сплава Кремнефтористый натрий Олифа натуральная СмолаСФ-0112А Сера Индустриальное масло Идитол или щелак Пороховая мякоть 70 12 2 12 2 2 62 27 11 50 36 4 9 1 । *• 1 1 I .1 1 '.’J , f g 68 28 4 75 4 18 3 80 15 6 (свыше 100 %) 5
Для получения при горении осветительных составов наибольшей интен-
сивности излучения необходимо, во-первых, наличие компонентов, при сго-
рании которых образуются тугоплавкие вещества, находящиеся при темпера-
туре горения в твердом (или труднолетучем жидком) состоянии, а во-вторых,
высокая температура горения состава. Этим требованиям удовлетворяют со-
ставы, имеющие в качестве горючего алюминий, магний и их сплавы. Сгорая,
металлы образуют оксиды, находящиеся при температуре горения в твердом
или жидком состоянии, и выделяют большое количество теплоты, за счет чего
достигается высокая температура горения.
В качестве цементаторов, обеспечивающих осветительным составам тре-
буемую механическую прочность спрессованного изделия, применяют иди-
тол, бакелит, раствор канифоли в олифе, смолу СФ-0112А, серу. Цементаторы
снижают яркость пламени и замедляют горение, поэтому их содержание в со-
ставе ограничивают количеством 5...8 (до 10) %. Если при содержании це-
ментатора до 6 % скорость горения еще велика, то часть горючего вводят в
706
11. Боеприпасы вспомогательного назначения
виде крупнозернистого металлического порошка, что также задерживает го-
рение. Состав (см. последний столбец табл. 11.6) применялся в снарядах По-
гребнякова, причем пороховая мякоть в нем предназначалась для облегчения
воспламенения.
Давление прессования осветительных составов выбирают в зависимости
от свойств состава и потребной скорости горения. Обычно пиротехнические
средства прессуют в оболочку под давлением 50... 100 МПа, а осветительные
звездки - под давлением 200...300 МПа. Изделиям чаше всего придают фор-
му цилиндра, а с одного торца при прессовании добавляют воспламенитель-
ный состав с нитью стопина, служащей для зажигания.
Осветительные авиационные бомбы и ракеты
Наряду с осветительными снарядами и минами во время ВеЛИкой Отече-
ственной войны 1941-1945 гг. широкое применение получили и осветитель-
ные (светящие) АБ, в том числе благодаря большой концентрации их свето-
вой энергии в единице объема боевого заряда, компактности и простоте обра-
щения, а также возможности транспортировки на дальние расстояния. Эти
БП эффективно использовали в ночных операциях разведывательной и бом-
бардировочной авиации в ходе визуальной разведки и для освещения местно-
сти при прицельном бомбометании, в совместных действиях авиации с кораб-
лями ВМФ и авиации с артиллерией. Последний сценарий применения за-
ключался в корректировке артиллерийского огня с самолетов, наведении
кораблей и подводных лодок ночью на флот противника, бомбардировщиков -
на цели, а также в освещении местности при посадках самолетов вне аэро-
дромов. Иногда САБ использовали для подсветки целей при ночных стрель-
бах сухопутной и морской артиллерии.
Разработка САБ в нашей стране началась в 1930 г. на заводе № 67. К 1932 г.
там создали осветительную АБ массой 5 кг (ее рабочий вариант назывался
САБ-5), которую в том же году приняли на вооружение ВВС. Затем в те же
предвоенные годы были спроектированы и также поступили на вооружение
авиационные бомбы САБ-3, САБ-15 и САБ-25.
Интенсивное развитие авиации в предвоенный период, увеличение ско-
рости и высоты ее боевых действий поставили перед конструкторами и про-
мышленностью проблему создания новых мощных осветительных средств.
В связи с этим пришлось модернизировать САБ-15 и разработать новую -
САБ-100-55, по силе света (2,0...2,2 млн кд) практически не имевшую ана-
логов в мире.
К началу Великой Отечественной войны на вооружении ВВС, кроме
прошедших модернизацию САБ-15 и САБ-ЗМ, находились также посадоч-
ные осветительные ракеты ПР-8 и ПР-4, которые применялись для выбора
подходящей площадки при посадке самолета вне аэродрома, а также для
ориентировки на местности. Непосредственно для выполнения самой по-
садки в дополнение к фарам - основному средству обеспечения ночной
посадки на аэродром - использовались подкрыльные осветительные факе-
лы Хольта.
11.3. Осветительные боеприпасы
707
Следует отметить, что округленное значение силы света факелов САБ в
документации организационного характера всегда рассматривалось как сред-
ний показатель. Реально эту характеристику в каждой партии БП уточняли от-
дельно, и ее абсолютные значения сильно отличались. Кроме того, сила свече-
ния факела в самом начале его действия и в конце существенно различалась,
поэтому в характеристиках зачастую указывали также ее среднее значение.
На практике в ходе Великой Отечественной войны пилоты строевых час-
тей скорректировали и оптимизировали размеры освещаемых площадей, кото-
рые несколько отличались от опытных данных, полученных в ходе полигонных
и войсковых испытаний. Например, САБ-50-15 использовали на высотах 2000 м
для создания светового пятна радиусом 3000 м, САБ-25 - на высоте 1500 м для
образования пятна радиусом 3000 м, САБ-100-55 - на высоте 2000 м для фор-
мирования пятна радиусом 4000 м, а САБ-100-75 - на высоте 2500 м для созда-
ния пятна радиусом 2500 м. В пределах освещённой местности разведчики и
бомбардировщики могли работать без дополнительного расхода осветитель-
ных БП. Естественно, это определяло и высоту срабатывания взрывателей АБ,
а также строгое следование заданному высотйрму эшелону: с увеличением
высоты наблюдения радиус просматриваемой местности уменьшался.
Осветительные авиационные бомбы калибром 3 кг. Как и все освети-
тельные АБ, САБ-3 состояла из корпуса и размещенного внутри него факела с
парашютом (рис. 11.16). К цилиндрическому корпусу, изготовленному из лис-
товой стали, с помощью роликовой сварки приваривали штампованную го-
ловку с упором для факела и втулкой с резьбой под взрыватель. В хвостовой
части на корпус плотно надевали сферическую крышку. В оболочке факела,
выполненной из патронной бумаги, размещалось снаряжение из осветитель-
ного, переходного, зажигательного и воспламенительного составов. Переходной
состав факела включал основной осветительный и зажигательный составы в
равных пропорциях. Воспламенительный состав представлял собой густую
массу, приготовленную из пороховой мякоти на этиловом спирте. Купол пара-
шюта был сделан из хлопчатобумажной ткани.
Рис. 11.16. Осветительная авиационная бомба САБ-3 для ручного сброса:
1 - взрыватель; 2 - корпус; 3 - подвесное ушко; 4 — факел; 5 - парашют; общая длина
(с взрывателем АГДТ-Б) - 525,6.. .529,6 мм; диаметр корпуса - 96,5 мм; масса неокончательно
снаряженной (без взрывателя) бомбы - 3,05 кг; сила света - 60... 100 тыс. кд; время горения
факела - 2,18 мин; скорость снижения факела - 3,2 м/с
708 11. Боеприпасы вспомогательного назначения
САБ-3, снаряженную дистанционными трубками, сбрасывали как вручную,
так и с держателей самолетов. В соответствии с установленным временем
замедления трубка срабатывала, зажигая воспламенительный состав факе-
ла. При этом давлением продуктов горения факел выталкивался из корпу-
са АБ, сбрасывая сферическое дно. В потоке воздуха парашют раскрывал-
ся, и снижающийся на нем горящий факел освещал местность. Рецептура
и конструкция факела обеспечивали силу света около 90 тыс. кд. К 1937 г.
были разработаны новые составы снаряжения осветительных АБ с силой
света около 200 тыс. кд, что обеспечивало радиус освещения приблизи-
тельно 1000 м.
Развитие разведывательной авиации и появление на вооружении ВВС
скоростных бомбардировщиков выдвинули новые требования к осветитель-
ным АБ. Дело в том, что изделия САБ-3 уже не удовлетворяли как по силе
света и устойчивости, так и по возможности их применения исключительно
из кабины самолета. В результате модернизации в 1938 г. на вооружение
поступила осветительная АБ со стабилизатором САБ-ЗМ (силу света увели-
чили до 200...270 тыс. кд, были разработаны стабилизаторы, усовершен-
ствованы конструкции хвостовой части и парашюта). Только в период 1940
1945 гг. было произведено около 320 тыс. шт. САБ-3 и САБ-ЗМ (рис. 11.17)
(общее число осветительных АБ, выпушенных за годы Великой Отечествен-
ной войны, составило 600 тыс. шт.).
Рис. 11.17. Штатная осветительная авиационная бомба САБ-ЗМ образца 1944 г.:
общая длина (с взрывателем АГДТ-Б) - 574,6...590,6 мм; диаметр корпуса - 96,5 мм; размах
оперения - 110,5 мм; расстояние от центра тяжести до головного среза 177 мм; масса неокон-
чательно снаряженной (без взрывателя) бомбы - 4,05 кг; сила света — 200.. .270 тыс. кд; время
горения факела - 2,4 мин; скорость снижения факела - 4.5 м/с
Осветительные авиационные бомбы калибром 50 кг. Осветительная
АБ САБ-15 разработанная в 1936 г., при свечении позволяла посадить гид-
росамолет на море или совершить вынужденную посадку тяжелого самоле-
та на неподготовленную площадку, вести визуальную разведку на суше, ос-
вещать сухопутные цели и бомбить их, однако силы света САБ-15 для осве-
щения движущихся морских целей и бомбометания по ним было все же
недостаточно.
Конструктивно САБ-15 (рис. 11.18) была схожа со штатной САБ-3. Го-
ловные части корпусов штамповали из листового железа, вваривая в их верх-
11.3. Осветительные боеприпасы
709
Рис. 11.18. Опытная осветительная авиационная бомба САБ-15 образца 1936 г.:
общая длина (с взрывателем АГДТ-Б) - 1098 мм; диаметр корпуса - 160 мм; размах оперения -
234 мм; расстояние от центра тяжести до головного среза - 370 мм; масса неокончательно
снаряженной (без взрывателя) бомбы - 14,30 кг; сила света - 90... 130 тыс. кд; время горения
факела - 6,12 мин; скорость снижения факела - 2,4 м/с
нее основание втулку под взрыватель. Для воспламенения факела во втулке
устанавливали вышибной заряд, содержащий 15 г дымного ружейного поро-
ха. К цилиндрическому корпусу в виде трубы, свальцованной и сваренной
по шву с помощью роликовой сварки, приваривали четыре крыла стабили-
затора. Задняя крышка из листового железа, имела вид усеченного конуса,
переходящего в цилиндр. К ее конической части также приваривали четы-
рехперистый стабилизатор с тормозным диском. Цилиндр и задняя крышка
крепились между собой шплинтами. Все эти детали вальцевали и штампо-
вали из кровельного железа толщиной 0,50...0,75 мм. Оболочку факела,
изготовленную из машинопатронной бумаги, снаряжали осветительным, пе-
реходным, зажигательным и воспламенительным составами. Основной
осветительный состав состоял из трех слоев, различных по составу, коли-
честву и длине.
После разработки и внедрения в 1941-1944 гг. новых рецептур и техноло-
гий запрессовки пиротехнических составов в корпус факела САБ-15 (пере-
именованного в 1941 г. в САБ-50-15) (рис. 11.19) его сила света возросла до
400...600 тыс. кд при времени горения факела около 3,5 мин. В темную ночь
с высот 2000...3000 м благодаря функционированию САБ-15 были хорошо
видны предметы в радиусе 300...500 м, далее - только их очертания. Силы
света двух АБ было достаточно для разведки целей и бомбометания.
Рис. 11.19. Штатная осветительная авиационная бомба САБ-50-15 образца 1944 г.:
общая длина (с взрывателем АГДТ-Б) - 1090,6... 1106,6 мм; диаметр корпуса - 160 мм; размах
оперения - 234 мм; расстояние от центра тяжести до головного среза - 335 мм; масса неокон-
чательно снаряженной (без взрывателя) бомбы - 14,80 кг; сила света - 600 тыс. кд; время горе-
ния факела - 3,5 мин; скорость снижения факела 2,4 м/с
710
11. Боеприпасы вспомогательного назначения
В довоенный период одновременно с 15-килограммовой осветительной
АБ разработали 25-килограммовую бомбу САБ-25 (рис. 11.20), предназначен-
ную для освещения водной .поверхности и визуальной разведки бомбардиро-
вочной и разведывательной авиации, а также для освещения целей при ноч-
ном бомбометании.
Рис. 11.20. Штатная осветительная авиационная бомба САБ-25 образца 1938 г.:
общая длина (с взрывателем ТМ-4Б) - 1262... 1267 мм; диаметр корпуса - 190 мм;размах опе-
рения - 267 мм; расстояние от центра тяжести до головного среза - 351...355 мМ) масса не-
окончательно снаряженной (без взрывателя) бомбы - 23,00 кг; сила света - 700 тыщ .кд: время
горения факела - 2,5...3,0 мин; скорость снижения факела 3,0 м/с f
Назначение основных узлов и деталей САБ-25 было аналогично назначе-
нию основных узлов САБ-15, но существовала значительное различие в уст-
ройстве факела и его снаряжения. У САБ-25 он включал в себя цилиндричес-
кую картонную оболочку, внутреннюю гильзу, деревянный стержень, картон-
ную крышку с шестью отверстиями, тарельчатое дно, в центр которого
приваривали скобу с отверстием для болта и вырезом для вытяжного троса
парашюта. В картонной оболочке факела размещались осветительный, пере-
ходной, зажигательный и воспламенительный составы. На испытаниях в ста-
ционарных и летных условиях средняя сила света факелов САБ-25 составила
60...700 тыс. кд, а среднее время горения - 2,5...3,0 мин.
Современные САБ, так же как и их предшественницы, разработанные и
принятые на вооружение в годы Великой Отечественной войны, предназначе-
ны для освещения местности в ночных условиях при бомбометании и визу-
альной разведке, а также для обеспечения боевых действий других родов войск.
Типовые конструкции осветительных АБ можно рассмотреть на примере
САБ-250-200 и САБ-250Т (разработчик ФГУП «ГНПП «Базальт»), характери-
стики действия которых приведены ниже:
САБ-250-200 САБ-250Т
Калибр, кг ............................. 250 250
Масса, кг .............................. 200 215
Диаметр, мм............................. 325 325
Длина, мм.......................... 1500 2400
Количество факелов, шт. ................. 7 7
Сила света, млн кд ................... 9,7-10,2 8-10
Время горения факела, мин ............... 6 6,0-8,5
САБ-250-200 предназначена для освещения местности в целях обеспече-
ния прицельного бомбометания и визуальной разведки в ночных условиях с
высот 2500.. .20 000 м при скорости носителя 500... 1000 км/ч.
11.4. Фотоосветительные боеприпасы
711
Термостойкая светящая авиационная бомба САБ-250Т используется с вы-
сот 2500...25 000 м при скорости носителя 700...2500 км/ч.
НАР осветительного действия
В настоящее время на вооружении ВВС имеются также НАР осветитель-
ного действия С-8-О (С-8-ОМ), служащие для освещения местности в ноч-
ных условиях в целях визуальной разведки и обеспечения боевых действий
авиации и других родов войск. Основные характеристики НАР осветительно-
го действия С-8-О (С-8-ОМ) представлены ниже:
Калибр, мм.........................................
Тип пускового блока (устройства)/количество ракет . ..
Максимальная скорость, м/с ........... ..........
Тип БЧ ............................................
Время полета на активном участке, с ....;..........
Дальность стрельбы, км................,............
Длина ракеты, мм .......................*..........
Масса, кг:
окончательно снаряженной ракеты ..........
БЧ .............................................
С-8-0 (С-8-ОМ)
80
Б-8М-1/20
590 (545)
Осветительная
0,96-1,96 (0,5-1,2)
1,2-4,0
1660(1632)
12,5(11,9)
4,3
11.4. Фотоосветительные боеприпасы
Основные свойства фотоосветительных пиротехнических составов, исполь-
зуемых в соответствующих типах БП ( табл. 11.7), практически аналогичны
свойствам осветительных составов за исключением продолжительности дей-
ствия, составляющего десятые и сотые доли секунды. Для фотосмесей харак-
терна кратковременная вспышка с большой силой света. Так же, как и другие
пламенные составы, они включают в себя окислитель и металлическое горю-
чее, причем второй компонент имеется в избытке (наибольшую силу света
дают смеси с небольшим отрицательным кислородным балансом). При этом
металл окисляется не только газообразными продуктами горения окислителя,
но и воздухом, образуя оксиды и нитриды металлов. Массовая доля твердой
фазы в пламени фотоосветительных составов достигает 95 %, максимум из-
лучения лежит в ближней ИК-части спектра.
Таблица 11.7. Фотоосветительные составы
Компонентный состав Содержание, %
Нитрат бария 41 54 60
Магниевый порошок 52 40 40
Асфальтит 6 - -
Трикрезилфосфат 1 - -
Смола СФ-430А - 6 -
712 11. Боеприпасы вспомогательного назначения
Фотоосветительные АБ (ФОТАБ) предназначены для освещения мест-
ности и расположенных на ней объектов при воздушном фотографировании в
ночных условиях. Типовые конструкции ФОТАБ были разработаны ФГУП
«ГНПП «Базальт» (табл. 11.8).
Таблица 11.8. Характеристики ФОТАБ
Характеристика ФОТАБ-100-80 ФОТАБ-100-140 ФОТАБ-250Т
Калибр, кг 100 100 250
Масса, кг 80 140 275
Длина, мм 1500 1500 -
Диаметр, мм 240 240 -
Сила света, млн кд 2200 8000 4000
Продолжительность вспышки, с 0,15 0,06 , 0,25
ФОТАБ-100-80 предназначена для освещения местности при нодном воз-
душном фотографировании с высот 500... 10 000 м при скорости носителя
600... 1000 км/ч.
Термостойкая авиационная бомба ФОТАБ-100-140 предназначена для ос-
вещения местности при ночном воздушном фотографировании при скорости
носителя 500...2500 км/ч. Минимальная высота применения определяется ти-
пом используемой фоторегистрирующей аппаратуры, а максимальная высота
достигает 15 000 м.
11.5. Дымовые боеприпасы
Дымовые снаряды и мины
Дымовые боеприпасы служат для образования дымовых завес, маскиру-
ющих свои части и тыловые объекты, а также ослепления огневых позиций
батарей противника, огневых точек, наблюдательных и командных пунктов.
Кроме того, они могут обеспечивать целеуказание артиллерии и авиации, сиг-
нализацию и пристрелку. Наиболее эффективно дымовые БП используют для
задымления района расположения противника в целях его ослепления. Эф-
фективность стрельбы при задымлении самих стреляющих снижается в зна-
чительно меньшей мере, чем при задымлении цели. Стрельба по подвижным
целям, задымленным стреляющей стороной, становится неэффективной.
Дымовой снаряд (мина) состоит из корпуса, снаряжения (дымообразую-
щего вещества), запального стакана, содержащего разрывной заряд, взрывате-
ля или трубки (рис. 11.21). При встрече с целью взрыватель инициирует дето-
нацию разрывного заряда, который, разрушая корпус, выбрасывает дымообра-
зующее вещество. Дымокурящие снаряды (мины) отличаются от дымовых
снарядов тем, что имеют вышибной заряд из дымного черного пороха вместо
разрывного заряда и снабжаются дистанционной трубкой.
Через определенное время после выстрела под действием вышибного за-
ряда шашки с дымообразующим веществом выбрасываются из снаряда. На
11.5. Дымовые боеприпасы
713
а
о
Рис. 11.21. Дымовые снаряд и мина (aj и действие дымового БП (б):
1 - дымообразующий состав; 2 - запальный стакан с ВВ; 3 - взрыватель
земле в результате термической возгонки происходит дымообразование. В ка-
честве дымообразующего вещества применяют белый фосфор, триоксид серы
в твердом виде или в растворе (олеум), различные жидкие и твердые смеси. В
дымокурящихся снарядах используют различные твердые смеси, способные к
дымообразованию в результате термической возгонки.
Белые дымы лучше скрывают очертания предметов, чем черные. К веще-
ствам, формирующим белый дым, относятся белый фосфор, серный ангидрид
и хлорное олово При горении фосфора образуется фосфорный ангидрид, ко-
торый взаимодействует с влагой воздуха с образованием мета- и ортофосфор-
ной кислот, создающих белый дым (туман).
Серный ангидрид ~ весьма летучее вещество, которое легко переходит в
парообразное состояние и, взаимодействуя с влагой воздуха, образует серную
кислоту. Пары серной кислоты, обладающие при обычной температуре весь-
ма малой упругостью, пересыщают пространство. Одновременно влага возду-
ха, энергично взаимодействуя с серной кислотой, образует гидраты; при кон-
денсации отдельные молекулы, сцепляясь между собой, формируют коллоид-
ные частицы, составляющие дисперсную фазу, в результате чего возникает
белый туман.
Хлорное олово SnCl4 в тонкораспыленном состоянии реагирует с влагой
воздуха, образуя ортооловянную кислоту H2SnO3, которая вместе с хлорис-
тым водородом создает белый дым.
К дымообразующим относятся также составы Ершова (20 % КС1О3,
10 % угля, 50 % NH4C1, 20 % нафталина). При горении такого типа составов
происходит возгонка хлористого аммония и части нафталина, которые образу-
ют дым. Составы такого типа рассчитаны на неполноту сгорания, а продукты
их горения содержат много оксидов углерода, водорода, углеводородов и дру-
гих горючих веществ. Для устранения их воспламенения при смешении с воз-
714
11. Боеприпасы вспомогательного назначения
духом в дымовые составы вводят пламегасители (углекислые соли - сода, мел,
углекислый магний). На их разложение расходуется значительное количество
теплоты, вследствие чего понижается температура продуктов горения. Кроме
того, образующийся углекислый газ разбавляет продукты горения, повышая
температуру воспламенения последних. Роль пламегасителя выполняет и хло-
ристый аммоний.
Во время Второй мировой войны широко применяли дымовые составы
на основе гексахлорэтана С2С16 и цинковой пыли, образующие серый дым,
так как наряду с белыми частичками хлористого цинка ZnCl2 выделяются чер-
ные частицы углерода, для устранения которых в смесь вводили дополнитель-
ный окислитель (например, хлорат натрия). В результате реакции горения дан-
ной трехкомпонентной смеси образуется белый дым, не содержащий частиц
углерода.
В настоящее время широкое распространение получили наша'цлрно-ант-
раценовые и металлохлоридные смеси, а также смеси, содержащие 'органи-
ческие красители. В нащатырно-антраценовых составах за счет теплоты экзо-
термических реакций происходит возгонка части хлористого аммрймя, нео-
кисленного антрацена, карбазола, фенантрена и других летучих примесей
технического антрацена, а также летучих продуктов их взаимодействия, кото-
рые при соприкосновении с воздухом конденсируются, создавая дымовую за-
весу. Если закрыть выход дыму, могут возникнуть реакции взрывного разложе-
ния хлората калия. Скорость, равномерность и эффективность процесса дымо-
образования определяются соотношением и свойствами исходных компонентов,
технологией изготовления смеси и снаряжением изделий, а также их конструк-
тивными особенностями. Изменение соотношения компонентов в смеси в пре-
делах ±2 % значительно изменяет показатели дымообразования.
Дымообразующие вещества формируются в результате реакции горения
компонентов металлохлоридных смесей, состоящих из органических хлорсо-
держащих веществ и порошков металлов. При горении смеси выделяется теп-
лота, необходимая для образования пара хлорида металла. Хлориды весьма
гигроскопичны, поэтому, находясь во влажном воздухе, они реагируют с вла-
гой, что увеличивает концентрацию дыма. В качестве хлорсодержащих ве-
ществ используют гексахлорбензол, гексахлорэтан и др. Металлические го-
рючие выбирают из расчета их энергичного реагирования с хлорсодержащи-
ми компонентами при высокой температуре. Такими металлами являются
алюминий, магний и их сплавы.
Высокими маскирующими способностями обладает четыреххлористый
титан, поэтому вместо металлического горючего может использоваться тита-
номагниевая руда.
Ниже приведены примеры дымообразующих составов:
а) маскирующие дымы'.
антрацен - 44 %, хлорат калия - 32 %, хлористый аммоний (нашатырь) -
24 %;
титаномагниевая руда - 24 %, алюминиевая пудра - 6 %, гексахлорэтан -
65 %, сера - 5%;
хлористый аммоний - 43 %, хлорат калия - 43 %, антрацен техничес-
кий-14 %;
11.5. Дымовые боеприпасы
715
б) черные сигнальные дымы.
гексахлорэтан - 60 %, магниевый порошок - 22 %, антрацен техничес-
кий - 18 %;
хлорат калия - 60 %, антрацен технический - 40 %.
Маскирующее действие дымового облака во многом зависит от метеоро-
логических условий стрельбы и характера растительного покрова местности.
Ветер, дождь, снег и воздушные потоки отрицательно влияют на плотность и
стойкость дымовой завесы. Благоприятные условия для стрельбы дымовыми
снарядами: ветер со скоростью не более 5 м/с, направленный параллельно
фронту задымления; отсутствие восходящих потоков воздуха; твердый грунт;
густая растительность в районе цели (табл. 11.9).
Таблица 11.9. Характеристики действия (при благоприятных условиях)
дымовых снарядов периода Вели^ор Отечественной войны
Калибр снаряда, мм Размеры дымового облака (м) по истечении заданного времени от момента разрыва, с Время рассеивания дымово- го облака от момента раз- рыва (начало-конец), с
5 15 35 55 90 120 150 ; J80 210
Одиночная стрельба*
36-56
76
20 59 160
12 24 34
32 59 140
24 37 49
183
64
58-160
Групповая стрельба (5 выстрелов) с максимальной скорострельностью**
122
100 200 300
/О 200 300 500
122 90 150 200
230 350 570
250
600
60-97
300
600
330
720
370
770
112-212
В числителе - длина, в знаменателе - высота.
* В числителе - начальная длина, в знаменателе - конечная длина.
Состоящий на вооружении в настоящее время 120-мм минометный выст-
рел с дымокурящей миной предназначен для ослепления наблюдательных пунк-
тов и создания помех в работе оптико-электронной аппаратуры. Выстрел фор-
мирует дымовое облако, не просматриваемое в видимом и ближнем ИК-диапа-
зоне волн. Аналогичный 82-мм минометный выстрел с дымовой миной служит
для постановки дымовых завес и целеуказания. Основные технические харак-
теристики 82- и 120-мм минометных выстрелов с дымовой и дымокурящей ми-
нами (разработчик ФГПУ «ГНПП «Базальт») представлены ниже:
Калибр, мм..................................
Масса, кг ..................................
Дальность стрельбы, м.......................
Время эффективного действия (дымообразо-
вания), с...................................
Дымовая завеса, м:
высота .....................................
длина ...................................
82 120
3,5 16,7
125-4000 1000 6800
30 120
10 более 10
20 более 200
716
11. Боеприпасы вспомогательного назначения
Дымовая граната ГРД-40 к подствольному гранатомету ГП-25 предназна-
чена для дистанционной прицельной постановки дымовой маскирующей за-
весы мгновенного действия в целях защиты личного состава от стрелкового
оружия с оптическим и ночным прицелами в ближнем инфракрасном диапазо-
не длин волн. Тактико-технические характеристики дымовой гранаты ГРД-40
приведены ниже:
Калибр, мм............................................ 40
Масса, кг ........................................... 0,26
Длина, мм............................................. 150
Дальность постановки завесы, м................... 50, 100,200
Размер завесы, м, спустя:
1с................................................. 10X10X10
2 с........................................... 20x20x20
3 с.............................................. 25x25x2^'
Начальная скорость гранаты, м/с ..................... 70-75< -’
Время маскирующего действия дымового облака при
скорости ветра 3... 5 м/с, с ..................... Не менее (Ю*
t
Комплект 40-мм выстрелов специального (вспомогательного) назначения
для подствольных гранатометов ГП-25 и ГП-30 ?.
Как показывает опыт современных боевых операций, в том числе контр-
террористической направленности, пехотинцам приходится решать задачи
не только по огневому поражению противника. Довольно часто возникает
необходимость скрыть маневр подразделения, ослепить противника, осве-
тить местность или цель в ночных условиях, обозначить свое местоположе-
ние и т. д. Для этого приходится, кроме штатного оружия и боекомплекта к
нему, постоянно иметь при себе сигнальные, дымовые, осветительные и дру-
гие пиротехнические средства (шашки, патроны). Для приведения в действие
таких средств требуется дополнительное время, необходимое на снятие кры-
шек и предохранительных чек и т. д.
В целях устранения подобных недостатков и расширения возможностей
противопехотных гранатометов ФНПЦ «НИИ прикладной химии» (НИИПХ)
был разработан ряд специальных 40-мм выстрелов для подствольных грана-
тометов ГП-25 и ГП-30 (рис. 11.22). Такие выстрелы позволяют решать зада-
чи, возлагаемые обычно на БП вспомогательного назначения и специальные
пиротехнические средства, а также специфические задачи, присущие специ-
альным подразделениям правоохранительных органов (более подробно это рас-
смотрено в гл. 12).
В частности, для создания дымовых завес на открытой местности, перед
естественными и искусственными укрытиями, а также очагов возгорания на
местности, в помещениях и небронированной технике, содержащих горючие
и легковоспламеняемые материалы, был разработан 40-мм выстрел ВГ-40ДЗ
с дымозажигательной гранатой (см. рис. 11.22, в). Одна такая граната может
поставить сплошную дымовую завесу длиной до 5 м и высотой до 2,5 м. Кро-
ме того, от одной гранаты выстрела ВГ-40ДЗ возникает до десяти очагов воз-
горания. Дальность стрельбы гранатой - от 50 до 400 м. Стрельба из под-
11.5. Дымовые боеприпасы
717
Рис. 11.22. 40-мм выстрелы для подствольных гранатометов ГП-25 и ГП-30:
а сигнальный; б - светозвуковой; в - дымозажигательный; г - термобарический; д - освети-
тельный парашютный; е - сигнальный комбинированный; ж осветительный беспарашютный
ствольных гранатометов типа ГП-25 или ГП-30 возможна при установке его
на 5,45-мм автоматы АК-74, (АКС-74, АК-74М, АЕК-971, АН-94), 5,56-мм
автоматы АК-101 и АЕК-972, а также на 7,62-мм автоматы АКМ (АКМС, АК-
103, АЕК-973).
Часто при проведении контртеррористических операций, а также при ве-
дении боя в особых условиях (в городе, в лесу, в горах) или при попадании
под огонь противника, который ведется из засад, появляется необходимость
выиграть время для формирования боевого порядка подразделения или пере-
группировки, скрытного подхода с других направлений к позициям противни-
718
11. Боеприпасы вспомогательного назначения
ка и защиты личного состава от прицельного огня. Для решения таких задач в
НИИПХ разработан 40-мм выстрел ГДМ-40 с дымовой гранатой мгновенного
действия, которая обеспечивает образование сплошного аэрозольно-дымового
облака размерами до 10 м в длину и до 3 м в высоту в течение 1 ...2 с после
выстрела. Времени существования облака (20...30 с) вполне достаточно для
совершения маневра и выхода из-под огня противника. Дальность постановки
аэрозольно-дымового облака от стреляющего выстрелом ГДМ-40 не превы-
шает 50 м.
Помимо дымовых, в НИИПХ создан также ряд выстрелов к подствольно-
му гранатомету со специальными пиротехническими возможностями. Одним
из таких выстрелов стал комбинированный сигнальный патрон (см. рис. 11.22, е),
который предназначен для одновременной подачи цветового огневого и отра-
женного радиолокационного сигналов. После выстрела из подствольного гра-
натомета такого патрона на высоте 300 м загорается яркая звездочка красного
цвета, время горения которой составляет не менее 6 с. Кроме того, при сраба-
тывании патрона на этой же высоте образуется облако радиоотражающих ди-
полей площадью не менее 10... 12 м2, обеспечивающее прием осаженного
радиосигнала на дальности не менее 10... 12 км. Горение звездочки можно
увидеть невооруженным глазом в дневное время на расстоянии до 3 км, а в
ночное время - почти за 10 км.
Для подачи цветового сигнала с использованием только одного подстволь-
ного гранатомета в НИИПХ разработан специальный сигнальный патрон (см.
рис. 11.22, а), осуществляющий подачу цветового сигнала красного или зеле-
ного цвета на высоте не менее 200 м. Время горения звездочки составляет
около 20 с, а различить ее можно невооруженным глазом в дневное время на
расстоянии не менее 3 км, а в ночное время - не менее чем с 10 км.
Для обеспечения освещения местности и подсветки целей в ночное вре-
мя в НИИПХ созданы специальные осветительные патроны для подстволь-
ных гранатометов типа ГП-25 или ГП-30. Это осветительный беспарашютный
(см. рис. 11.22, ж) и осветительный парашютный патроны (см. рис. 11.22, д).
Их основное отличие заключается в продолжительности времени освещения
местности, дальности и высоте постановки факела. Оба типа осветительных
патронов, используемых для подствольных гранатометов, обеспечивают ради-
ус освещения местности до 250 м с уровнем освещенности не менее 1 лк.
Дальность постановки факела составляет 200 и 400 м для осветительного бес-
парашютного и осветительного парашютного патронов соответственно. Вре-
мя освещения местности, для беспарашютного патрона не менее 9 с, а пара-
шютного - не менее 20 с.
С применением вышеперечисленных пиротехнических средств и техно-
логий снаряжения выстрелов для подствольных гранатометов конструктора-
ми НИИПХ разработан также и комплект 60-мм ручных гранат, действие ко-
торых во многом идентично действию описанных выше 40-мм гранат специ-
ального (вспомогательного) назначения.
80-мм переносной комплекс «Пурга» предназначен для дистанционной
постановки маскирующей завесы в видимом и ИК-диапазонах длин волн, а
также защиты военных и гражданских объектов от управляемого оружия с
ИК-телевизионными, тепловизионными и лазерными системами наведения.
11.5. Дымовые боеприпасы
719
Комплекс «Пурга» состоит из ПУ, смонтированной на плите, пульта управле-
ния стрельбой, соединительного кабеля и комплекта БП (снарядов). Возмож-
но гибкое изменение кассетного снаряжения снаряда, а также количества ство-
лов ПУ. Основные технические характеристики 80-мм переносного комплекса
«Пурга», разработанного ГП «НИМИ», представлены ниже:
Масса, кг:
комплекса с одним снарядом ......................... 16
комплекса с четырьмя снарядами......................... 34
снаряда ................................................ 4
Калибр, мм................................................ 80
Дальность постановки, м................................. 50-1000
Длина снаряда, мм......................................... 500
Время, с:
формирования завесы .................. ............ 1,0-1,5
действия завесы .................................. 20-30
Геометрические размеры завесы от одного снаряда, м... 60x60x60
Температурный диапазон применения, °C . j............ ±50
Зарубежные боеприпасы для постановки дымовых завес
За рубежом БП для постановки дымовых завес применяются в настоящее
время во всех родах войск, в особенности в сухопутных войсках, с целью зат-
руднить противнику наблюдение и ориентировку. К числу современных дымо-
вых завес, ограничивающих видимость в оптическом диапазоне, относятся:
- жидкостная завеса, которая образуется путем рассеивания в воздухе
тетрахлорида титана, хлорсульфоновой кислоты и тетрахлорида кремния (во
всех случаях для возникновения реакции необходим влажный воздух), при-
чем рассеивание проводится с помощью артиллерийских снарядов и ракет;
- пиротехнические завесы, к которым, прежде всего, относятся завесы,
создаваемые с помощью гексахлорэтана и применяемые в составе гаубичных
БП, мин, а также в виде дымовых шашек и свеч;
- завесы из фосфорной кислоты, для которых используется как белый,
так и красный фосфор (первый - в минометных и гаубичных БП, а второй - в
БЧ ракет, снарядах и минах);
- масляные завесы применяются путем разбрызгивания масляных или во-
домасляных суспензий из газовыпускных систем бронемашин.
К дымовым завесам предъявляются такие требования, как:
- быстрое образование, позволяющее немедленно скрыть свои войска при
появлении противника;
- устойчивость в течение нескольких минут, дающая возможность сме-
нить позицию или замаскироваться.
В качестве примера дымовых БП для постановки завес можно привести
110-мм реактивный снаряд DM25 системы залпового огня LARS (табл. 11.10).
Этот снаряд с дистанционным взрывателем снаряжен дымовым зарядом, со-
стоящим из 336 таблеток прессованного красного фосфора. На высоте 400 м
над районом цели дымовой заряд выбрасывается, таблетки фосфора воспла-
меняются и падают на землю. Одна ПУ LARS залпом из 36 снарядов может
720
11. Боеприпасы вспомогательного назначения
Таблица 11.10. Боеприпасы для посгановки дымовых завес,
состоящие на вооружении сухопутных войск НАТО
Тип БР Снаряжение Дальность действия, м С трана-разработчик
155-мм гаубичные БП
DM45 Гексахлорэтан 24 000 ФРГ
DM 105 » 4000 24 000 ФРГ
М110 Белый фосфор 4000-24 000 США
М110А1 То же 4000-28 000 США
М110Л2 » 4000-28 000 США
BE Ml 16 Минометные БП ка- либра, мм: Гексахлорэтан 4000-18 000 США
120 Гексахлорэтан 1100 6000 t США
120 » 1)00-6000 ФРГ
81 Белый фосфор 500-3700 ; США
Тстрахлорид титана 600-2100 США
Красный фосфор 600-2100 * ФРГ
60 Белый фосфор 200-1600 . США
100,7 То же 5600 США
110-мм реактивный снаряд DM25 Боеприпасы танковых пушек (средство само- защиты): Красный фосфор 6000-14 000 ФРГ
DM 15 Гексахлорэтан ФРГ
DM35 Красный фосфор ~30 ФРГ
М239 То же Англия
Устройство ТЕСС Масло США
Стрелковые БП DM2 Гексахлорэтан 5 ФРГ
создать дымовую завесу шириной 300...400 м. глубиной до 80 м и высотой до
5... 10 м, сохраняющуюся в течение 15 мин
Для буксируемой гаубицы 70 (FN-155-1) специалисты фирмы Rheinmetall
разработали дымовой снаряд DM105 (см. табл. 11.10), снаряженный четырь-
мя дымовыми шашками. На высоте нескольких сот метров над районом цели
шашки выбрасываются и создают на местности дымовую завесу шириной
300. ..400 м, глубиной 15. ..20 м и высотой до 10 м, сохраняющуюся в течение
нескольких минут.
Дымовые мины, выстреливаемые с бронемашин, создают меньшие по раз-
мерам и длительности действия дымовые завесы, которые сохраняются около
двух минут.
Стойкость дымовых завес, разумеется, зависит и от погодных условий.
При очень низких температурах дым, возникающий при горении, может слиш-
ком быстро подниматься вверх. Ветер со скоростью 5... 10 м/с способствует
распространению дымовой завесы, а при больших скоростях, наоборот, рас-
11.6. Ориентирно-сигнальные боеприпасы
721
сеивает ее слишком быстро. Для создания некоторых видов дымовых завес
необходима достаточная влажность воздуха.
В цели постановки дымовых завес входит не только затруднение оптичес-
кой видимости для противника, но и все большее значение приобретает проб-
лема борьбы с его радиоэлектронной аппаратурой. Изучается также эффек-
тивность дымовых завес как средства защиты от светового излучения такти-
ческого ядерно! о оружия.
Развитие БП для постановки дымовых завес идет в следующих направ-
лениях:
- ускорение дымообразования (уже созданы скоростные дымовые снаря-
ды и шашки, образующие дымовую завесу менее чем за 2 с);
- возможность маскировки от тепловизионных, оптических и электрон-
но-оптических разведывательных приборов (БП в сочетании с инфракрасны-
ми и радиолокационными ЛЦ, см. разд. 11.2);
возможность постановки обширных дымовых завес (обеспечивается,
прежде всего, системами залпового огня, способными создавать дымовые за-
весы длиной в несколько километров). .
Дымовые авиационные бомбы
Дымовые БП имеются также и в классе авиационных бомб. Они предназ-
начены для постановки завес нейтрального дыма в целях маскировки боевых
действий своих войск, а также ослепления огневых точек, командных и на-
блюдательных пунктов противника. Типовые конструкции дымовых АБ раз-
работаны в ФГУП «ГНПП «Базальт». В частности, дымовую авиационную
бомбу калибра 500 кг ДАБ-500 используют для постановки дымовой завесы и
создания помех системам поиска целей и управления зенитными средствами
противника. Она применяется с высот 50... 15 000 м при скорости носителя
500... 1400 км/ч. Характеристики действия ДАБ-500 приведены ниже:
Диаметр, мм ................................................ 400
Длина, мм ................................................. 2490
Масса, кг:
бомбы .................................................. 435
дымообразующего устройства................................ 170
Время формирования аэрозольной завесы, с................... 60-90
Время существования дымовой завесы, мин............... Не менее 15
Размеры непрозрачной завесы в видимом и ИК-диапазонах, м
подлине .............................................. 1000-1500
по высоте .............................................. 10 100
11.6. Ориентирно-сигнальные боеприпасы
Дневные и ночные ориентирно-сигнальные авиационные бомбы (ДОСАБ
и НОСАБ) предназначены для создания на земле сигнальных точек, маркиру-
ющих цель или ориентиры на местности, места высадки (выброски) десан-
тов, а также обозначающих маршруты при полете одиночных самолетов но-
чью или днем. Типовые конструкции ориентирно-сигнальных АБ разработа-
ны в ФГУП «ГНПП «Базальт». Основные боевые характеристики ДОСАБ и
НОСАБ - дальность видимости и время действия сигнала.
722
11. Боеприпасы вспомогательного назначения
Термостойкая дневная ориентирно-сигнальная авиационная бомба
ДОСАБ-100Т предназначена для обозначения целей, мест высадки воздуш-
ных десантов и создания сигналов на земле в дневное время. Ее применение с
высот 200...20 000 м при скорости носителя 500...2500 км/ч обеспечивает даль-
ность видимости и различимость цвета огня факела (красный, черный, бе-
лый) до 20 км.
Термостойкая ночная ориентирно-сигнальная авиационная бомба
НОСАБ-ЮОТМ создает на земле в ночных условиях сигнальные точки, ори-
ентирующие экипажи ударных авиационных групп. Ее использование с высот
130.. .20 000 м при скорости носителя 500.. .2500 км/ч обеспечивает дальность
видимости и различимости цвета огня факела (зеленый, красный, желтый)
50...90 км. Основные характеристики 100-кг ориентирно-сигнальных авиаци-
онных бомб приведены ниже:
Масса, кг ДОСАБ-100Т 120 НОСАБ-ЮОТМ 115 .
Длина, мм 1560 1500'
Диаметр, мм 240 240 ,’ л
Дальность видимого сигнала, км ... До 20 50-90
Время, мин Не менее 10 Не менее 40
эффективного горения ’
дымообразования факела
Высота применения, м 200-20 000 130-20 000
Скорость применения, км/ч 500-2500 500-2500
Ориентирная морская авиационная бомба ОМАБ-25-12Д служит для об-
разования на водной поверхности в дневное время хорошо видимого ориен-
тира в виде пятна и используется с высот 200...8000 м при скорости носителя
до 550 км/ч. ОМАБ-25-8Н предназначена для создания на водной поверхности
в ночное время хорошо видимого ориентира в виде светового сигнала и приме-
няется с тех же высот и при таких же скоростях носителя, что и ОМАБ-25-12Д.
Характеристики действия ориентирно-сигнальных морских АБ представлены
ниже:
ОМАБ-25-12Д
Диаметр, мм.............................. 153
Длина, мм................................ 870
Масса, кг .............................. 12
Время, мин............................... 75
Дальность видимости ориентира, км ... До 26
ОМАБ-25-8Н
140
872
9,2
60 80
До 58
Целеуказательные НАР С-8Ц (С-8ЦМ) используются для создания на земле
сигнальных точек, маркирующих цель. Характеристики действия данных НАР
приведены ниже:
С-8Ц (С-8ЦМ)
Калибр, мм....................................... 80
Тип пускового блока (устройства)/количество ракет ... Б-8М-1/20
Максимальная скорость, м/с ...................... 650 (605)
Тип БЧ .......................................... Дымовой факел
Время полета на активном участке, с.............. 0,96-1,96 (0,5-1,2)
11.7. Агитационные боеприпасы
723
Дальность стрельбы, км.............................. 1,8- 2,2
Длина ракеты, мм ................................... 1570 (1600)
Масса, кг:
окончательно снаряженной ракеты .................... 11,3 (11,1)
БЧ ..................................................... 3,3 (3,5)
11.7. Агитационные боеприпасы
Агитационные снаряды и мины
Агитационные БП предназначены для заброса в район расположения про-
тивника агитационной литературы. Агитационный снаряд состоит из корпу-
са, в верхней части которого над диафрагмой помещается вышибной заряд из
дымного пороха (рис. 11.23). Под диафрагмой размещают листовки, сверну-
тые в один или несколько расположенных один над другим рулонов, которые
заключены в стальные полуцилиндры. У снаряда есть ввинтное дно и порохо-
вая дистанционная трубка. От луча огня дистанционной трубки воспламеня-
ется вышибной заряд, под действием которого стальные полуцилиндры с лис-
товками, срезая резьбу дна, выбрасываются (рис 11.24).
Рис. 11.23. Агитационные снаряд (а) и мина (б):
1 - агитационные листовки; 2 - вышибной заряд; 3 взрыватель
724
11. Боеприпасы вспомогательного назначения
Под действием центробежной силы и силы сопротивления воздуха
полуцилиндры распадаются и листовки разбрасываются. Масса вышибного
Рис. 11.24. Принцип действия
агитационного снаряда
заряда составляет 0,4...0,5 % массы снаряда, а
масса листовок - около 4 %.
При высоте разрыва около 300 м и скорос-
ти ветра до 3 м/с листовки рассеиваются на пло-
щади 2x4 км. Осадки в виде дождя и мокрого
снега, восходящие потоки воздуха, порывистый
сильный ветер отрицательно влияют на нормаль-
ное разлистование и рассеивание листовок. Что-
бы уменьшить процент непригодных для про-
чтения листовок, бумагу упрочняют. Однако при
плохой укладке листовки могут спресовывать-
ся, что приведет к падению их в пачках. Харак-
теристики действия 122-мм агитационного сна-
ряда приведены ниже:
4
Размер листовок, мм .......... 144x203
Количество выстрелов, шт....... 9 -
Количество листовок, шт.:
всего выброшенных .............. 3600
собранных...................... 3149
целых ....................... 1865
пригодных для чтения ........... 814
не пригодных для чтения...... 470
Доля листовок, %:
целых от числа собранных ....... 59,2
поврежденных, но пригодных
для чтения .................... 25,8
не пригодных для чтения, %..... 14,9
Агитационные авиационные бомбы
Агитационные АБ, блоки контейнерные фронтовые и парашютная тара
(АгитАБ, БКФ, АПТ) предназначены для доставки и разбрасывания агитаци-
онных листовок в районах расположения войск и в тылу противника с само-
летов. Агитационная авиационная бомба АгитАБ-250-85 применяется с высот
500. ..9000 м при скорости носителя 500...800 км/ч. Основные характеристи-
ки АгитАБ-250-85 представлены ниже:
Калибр, кг ................................
Диаметр, мм ...............................
Длина, мм .................................
Тип снаряжения ............................
Масса, кг
снаряда ...................................
снаряжения...............................
250
325
1500
Агитационные листовки
85-93
25-46
11.8. Практические и учебные боеприпасы
725
11.8. Практические и учебные боеприпасы
Практические артиллерийские БП
Практическими принято называть БП, используемые для тренировочных
(учебных) стрельб при обучении и тренировке личного состава. Применение
их обусловлено, прежде всего, экономическими соображениями - заменой до-
рогостоящих боевых снарядов и мин более дешевыми, изготовленными с ис-
пользованием менее дефицитных и дорогих материалов. Основные требова-
ния к этим изделиям сводятся к сохранению одинаковых с боевым снарядом
внешних габаритов и приемов заряжания, применению одних и тех же таблиц
стрельбы, прицелов. Практические бронебойные снаряды производят из про-
стых углеродистых сталей. У кумулятивных снарядов может отсутствовать
боевое снаряжение, а следовательно, и ряд необходимых при боевом снаряже-
нии внутренних деталей. Осколочно-фугасные снаряды и мины также могут
не иметь боевого снаряжения: камору заполняют инертным веществом полно-
стью или с наличием небольшой шашки ВВ в верхней части для обозначения
и имитации разрыва.
Конструкция и основные параметры практического снаряда и мины в каж-
дом конкретном случае определяются соответствующими требованиями к бо-
евому снаряду и мине. В морской артиллерии практические снаряды принято
называть ядрами.
Лафетопробные снаряды и мины используются для испытания на проч-
ность материальной части артиллерии, для подбора и отработки пороховых
метательных зарядов. Основное требование к таким изделиям состоит в обес-
печении одинаковых с боевым снарядом массы и конструктивного исполне-
ния ведущего устройства и запоясковой части корпуса снаряда. Для оценки
прочности брони и бетона (железобетона) могут применяться специально из-
готовляемые плитопробные и бетонопробные снаряды.
Гидроснаряды используют для испытания стрельбой отремонтированных
артиллерийских систем. Они состоят из деревянных пыжей-обтюраторов и
воды (для летних условий) или специальной жидкости с температурой за-
мерзания до -35 °C (для зимних условий).
Подбор гидроснарядов по массе проводится по результатам сравнения
характеристик работы противооткатных устройств и напряжений в деталях
лафета, возникающих при стрельбе штатными снарядами и гидроснаряда-
ми. При этом максимальное давление пороховых газов в стволе во время
стрельбы гидроснарядами обычно меньше, чем при стрельбе штатными сна-
рядами. Поэтому прочность ствола проверяется стрельбой лафетопробными
снарядами.
Стрельбу гидроснарядами из орудий, снабженных дульными тормозами
или эжекторами, необходимо осуществлять без дульных тормозов и кожухов
эжектора. У орудий с несъемным дульным тормозом (изготовлен заодно со
стволом) при стрельбе гидроснарядами он закрыт специальным кожухом.
Перед выстрелом пыж-обтюратор забивают ручным досыльником со сто-
роны каморы, предварительно смазав пушечной смазкой с торца меньшего
диаметра и по боковой поверхности (не менее половины его длины). Затем с
726
11. Боеприпасы вспомогательного назначения
Рис. 11.25. Учебно-
практический снаряд:
1 - баллистический на-
конечник; 2 - корпус;
3 - плунжер; 4 - пружи-
на; 5 - ведущий поясок;
6 - донная часть с отвер-
стием для извлечения
снаряда из ствола после
заряжания
дульной части заливают подобранную для каждой ар-
тиллерийской системы воду или специальную жидкость,
обеспечивающую при выстреле такие нагрузки на ору-
дие, как при стрельбе штатными снарядами. Стрельба
гидроснарядами проверяет работу противооткатных уст-
ройств, полуавтоматики всех механизмов орудия и де-
талей лафета.
Учебные снаряды и мины предназначены для изу-
чения орудийными расчетами, курсантами военных
учебных заведений устройства БП, приемов обращения
с ними у орудия (рис. 11.25). Для изучения устройства
снарядов и мин используют их разрезные макеты с ими-
тацией инертного вещества и элементов боевого снаря-
жения. Для обучения расчетов приемам заряжания в ка-
честве учебных применяют практические снаряды и
мины.
Зарубежные учебно-практические
и имитационные БП
Тенденция непрерывного возрастания стоимости
артиллерийских систем как в Российской армии, так и
армиях зарубежных стран приводит к все более широ-
кому использованию на учениях и маневрах вместо бо-
евых БП учебно-практических и имитационных БП, в
связи с чем баллистические характеристики последних
должны приближаться к характеристикам боевых БП.
Расширение их использования в последнее время объяс-
няется не только удорожанием боевых снарядов, но в
ряде случаев недостатком площадей на испытательных
полигонах, особенно в странах Западной Европы, а так-
же высокими требованиями к безопасности стрельбы.
Однако чем больше эти БП соответствуют боевым, тем они дороже и тем
большая зона безопасности для них требуется. Поэтому фирмы-разработчики
боеприпасов стремятся создать максимально простые практические БП с
уменьшенной дальностью стрельбы, которые в то же время приближаются к
боевым по наибольшему количеству параметров, особенно в отношении функ-
ций оружия.
Зарубежные учебно-практические и имитационные артиллерийские БП в
зависимости от их устройства и назначения разделяются на учебные, холос-
тые, с самоликвидацией, с малой (укороченной) дальностью, практические,
имитационные, подкалиберные (для артиллерийских тренажеров) и др.
Учебные боеприпасы предназначаются для тренировки в обращении с ору-
жием (в заряжании и разряжании). Они имеют те же параметры и по возмож-
ности ту же массу, что и боевые, и представляют собой обточенную алюми-
ниевую болванку. Центр тяжести в учебном снаряде должен быть расположен
так же, как и в боевом. Учебные БП отличаются от боевых рифленой гильзой,
11.8. Практические и учебные боеприпасы
727
а на месте капсюля в них может быть отверстие для того, чтобы не срабаты-
вался ударник.
Холостой выстрел (без снаряда) состоит из пластмассового патрона с дон-
ной частью, выполненной из меди (при больших калибрах - из стали), и слу-
жит лишь для звуковой, оптической и функциональной имитации выстрела.
С этой целью патрон частично наполнен порохом, который воспламеняется с
помощью капсюля. После разрыва насечки в передней части патрона порохо-
вые газы устремляются вперед, поэтому зона безопасности при стрельбе мо-
жет быть очень небольшой (около 3 м для стрелкового оружия и от 12 до 20 м
при калибре 20...30 мм). При этом ни «снаряд», ни какие-либо твердые эле-
менты выстрела или частицы не выстреливаются, а наружу вылетает только
пороховой нагар. При использовании усилителей отдачи, которые навинчива-
ются на оружие вместо дульного тормоза, возможна автоматическая стрельба
из скорострельного оружия.
Недостаток практических БП, выполненных на основе корпусов штатных
снарядов (в том числе, с охолощенным взрывателем и инертным наполнением
вместо боевого), - возможность их рикошет^рования от цели или преграды.
В частности, применение таких БП с низколетящего самолета может привес-
ти к его повреждению. Исследования, проведенные в Великобритании, пока-
зали, что из 490 000 практических снарядов, выпущенных из авиационных
пушек, 19 послужили причиной аварий самолетов, с которых велась стрельба.
Поэтому были разработаны самоликвидирующиеся практические снаряды для
27-мм авиационных пушек. Корпус этих снарядов покрыт продольными и по-
перечными насечками, а снаряжение состоит из прессованного металлическо-
го порошка. При встрече с целью или при падении на землю (в воду) под
любым углом такие снаряды рассыпаются на мелкие, не отлетающие далеко
осколки.
В другом варианте боеприпаса с самоликвидацией снаряд содержит плас-
тмассовый корпус, наполненный прессованным металлическим порошком. Не-
посредственно после вылета снаряда из ствола имеющиеся на его корпусе на-
сечки разрываются под действием центробежной силы, металлический поро-
шок высыпается, и снаряд падает на землю. Такие снаряды калибра 20...40 мм
используются преимущественно для учебно-имитационной стрельбы из зе-
нитных установок по воздушным целям. При стрельбе по наземным целям
зона безопасности для калибра 20 мм составляет около 50 м в направлении
стрельбы и 25 м - в поперечном направлении; для калибра 35 мм - 80 и 40 м
соответственно, для калибра 40 мм - 100 и 50 м.
Боеприпасы с уменьшенной дальностью стрельбы наиболее близки к
боевым и выполняются в различных вариантах. Например, корпус малока-
либерного снаряда снабжается баллистическим наконечником и механизмом
(взрывательным устройством), отбрасывающим наконечник через определен-
ное время по достижении учебной дальности. При этом из-за повышенного
сопротивления воздуха (а в некоторых конструкциях еще и из-за потери ги-
роскопической устойчивости) дальность полета снаряда резко сокращается.
Однако установка такого механизма (взрывательного устройства) возможна
только в снарядах калибра 30 мм и более.
728
11. Боеприпасы вспомогательного назначения
Боеприпасы с уменьшенной дальностью стрельбы имеют большое значе-
ние и при проведении учебных стрельб из танковых пушек, особенно БПС
типа ADPS-FS. В случае промаха или рикошета при стрельбе данным снаря-
дом он может улететь на достаточно большое расстояние (до 30.. .50 км). Вслед-
ствие этого при проведении тренировочных стрельб возникает проблема обес-
печения безопасности, в том числе для населения, на достаточно большой
окружающей полигон территории. Для ее решения фирмы-изготовители БП
разработали различные конструкции учебно-тренировочных снарядов типа
ADPS-FS, основанные на принципе ухудшения аэродинамических характери-
стик снарядов после 30...5000 м полета (с тем, чтобы рикошетирующие сна-
ряды не вылетали за пределы полигона).
В одном из вариантов стреловидный сердечник снаряда снабжается на-
сечками и через определенное время полета самоликвидируется с помо-
щью пиротехнических средств или малых подрывных зарядов (временной
самоликвидатор использует, в частности, фирма Diehl). Снаряд может так-
же иметь плавкий наконечник или другое запирающее устройство, скреп-
ляющее его части. Из-за трения о воздух в полете спустя определенное
время наконечник расплавляется (или размягчается), снаряд распадается и
его составные части падают на землю раньше, чем снаряд достигнет гра-
ниц полигона.
Фирма RWM разработала учебные бронебойные снаряды с уменьшенной
дальностью для 105- и 120-мм гладкоствольных танковых пушек, используя
детали существующих БС (рис. 11.26). При дальности до 2000 м они облада-
ют почти той же баллистикой, что и боевые БС (благодаря этому не требует-
ся вносить изменения в систему управления огнем танка), однако их макси-
мальная дальность стрельбы не превышает 7,5 км (при угле возвышения
10°), тогда как у боевых снарядов она составляет примерно 30 км. Уменьше-
ние дальности стрельбы обеспечивается хвостовым оперением с коаксиаль-
ными отверстиями. При скоростях, отвечающих числам Маха 2 < М < 5, воз-
дух проходит через отверстия, почти не оказывая сопротивления снаряду.
При критической величине скорости около М - 2 происходит аэродинами-
ческое закупоривание отверстий, а возникающая УВ резко повышает сопро-
тивление воздуха и донный подсос снаряда, снижая тем самым дальность
стрельбы.
Учебный 120-мм выстрел с трассером общей массой 18,4 кг состоит из
трех основных частей (см. рис. 11.16): сгорающей гильзы, трехсекционного
ведущего устройства массой 2,7 кг и снаряда массой 3,2 кг диаметром 38 мм.
Заряд из 8 кг нитроцеллюлозы, заключенный в гильзу, обеспечиваез снаряду
начальную скорость 1700 м/с. Снаряд снабжен коническим оперением диа-
метром 85 мм с девятью отверстиями, которые реализуют аэродинамическое
торможение. Ограничение дальности полета учебного снаряда (7,5 км вместо
30 км) при максимальной высоте 700 м и безопасной боковой зоне 2 км по-
зволяет значительно расширить программу тренировочных стрельб даже на
небольших полигонах при сохранении всех остальных боевых характеристик.
Поражение цели на расстоянии 2000 м происходит с той же точностью, что
при стрельбе 120-мм оперенным БПС с трассером и разностью времени поле-
та менее 0,5 с.
11.8. Практические и учебные боеприпасы
729
Рис. 11.26. 120-мм учебно-тренировочный снаряд М865, в конструкции которого
использованы технические решения фирмы RWM
Есть и другие варианты конструктивного исполнения артиллерийских
БП для учебных стрельб из танковых пушек и артиллерийских тренажеров,
а также практических БП, входящих в боекомплекты отечественных танков
(рис. 11.27) (разработчик - ГП «НИМИ», г. Москва).
Средства для обучения стрельбе из реактивных гранатометов
типа РПГ и РШГ
Условия боевого применения РПГ и их возможности определяют необхо-
димость стрельбы на небольшую дальность порядка 150...300 м, т. е. когда
противник может оказать реальное и значительное огневое воздействие на гра-
натометчика. Громкий звук выстрела, газопламенная струя или материал про-
тивомассы позади гранатомета также не повышают комфортности при стрельбе.
Обеспечение высокой вероятности попадания на прицельной дальности
возможно при обязательном учете всех условий стрельбы, но в первую оче-
редь - бокового ветра и флангового движения цели. Все это требует от грана-
тометчика умения правильно и быстро применять правила стрельбы в усло-
виях боевого стресса. Именно поэтому высокая эффективность использова-
730
11. Боеприпасы вспомогательного назначения
a
в
Рис. 11.27. Боекомплект выстрелов (а) отечественных 125-мм танковых и противотан-
ковых пушек с двумя практическими снарядами - кумулятивным ЗП11 (б) и подкали-
берным ЗПЗ1 (в)
11.8. Практические и учебные боеприпасы
731
ния реактивных гранатометов обеспечивается не только их достаточными бое-
выми свойствами, но в первую очередь высоким уровнем подготовки стреля-
ющих.
Для подготовки стрелков на завершающем этапе обучения все россий-
ские реактивные противотанковые гранаты выпускаются как в боевом снаря-
жении, так и с инертным снаряжением головной части. В инертном снаряже-
нии РПГ предназначены для учебно-практических стрельб, обозначаются над-
писью «И» (инертная) и окрашиваются в защитный цвет с широкой черной
полосой с двух сторон трубы в ее передней части. Граната в инертном снаря-
жении имеет черную окраску головной части и надпись «инерт.».
Помимо РПГ, в инертном снаряжении для начального обучения, а также
для совершенствования умения и поддержания необходимых навыков в стрель-
бе из гранатометов, особенно для обучения правильного учета условий стрель-
бы во всем их многообразии, в «ГНПП «Базальт» было создано практическое
учебное имущество (ПУИ) к отечественным гранатометным выстрелам ПГ-7В
(ПУИ-7В, рис. 11.28, а) и ТБГ-7В (ПУИ-7ТБГ, рис. 11.28, б), а также устрой-
ства ПУИ-26 (рис. 11.28, в) - для обучения стрельбе из РПГ-26 и ПУИ-Ш2 -
для обучения стрельбе из РШГ-2. Основные характеристики ПУИ-7В приве-
дены ниже:
Калибр, мм:
устройства .................................. 85
практической гранаты........................ 34,2
Масса, кг:
устройства ................................. 2,2
практической гранаты........................ 0,43
Давление в стволе гранатомета, кг/см2 ...... Не более 9,0
Начальная скорость гранаты, м/с ................ 120
Тип БЧ...................................... Инертная
Сопряжение траектории с ПГ-7ВЛ, м .......... От Одо 500
Назначенный ресурс, выстрелов................... 300
Основные характеристики ПУИ-7ТБГ следующие:
Калибр, мм:
устройства ................................. 105
практической гранаты................... 38
Масса, кг:
устройства ................................. 4,5
практической гранаты......................... 0,8
Тип БЧ ...................................... Инертная
Сопряжение траекторий с ТБГ-7В, м........... От 0 до 50
Назначенный ресурс, выстрелов................... 300
Основные тактико-технические характеристики устройств ПУИ-26 и ПУИ-Ш2
представлены ниже:
ПУИ-26
Калибр, мм:
устройства .......................... 72,5
практической гранаты........ 42
ПУИ-Ш2
72,5
42
732
11. Боеприпасы вспомогательного назначения
Длина, мм-
устройства ................... 770 770
практической гранагы........ 350 350
Масса, кг:
устройства ............................ 3,2 3,8
практической гранаты, кг 0,6 0,75
Тип БЧ ............................... Инертная Инертная
Сопряжение траектории, м ....... От 0 до 250 с РПГ-26 От 0 до 250 с РШГ-2
Назначенный ресурс, выстрелов . 300 300
Новые средства обучения представляют собой габаритные копии гранато-
метов РПГ-26 и РШГ-2. Внутрь устройств перед выстрелом помещают прак-
тические гранаты с инертным снаряжением БЧ меньшего диаметра, длины и
К
Рис. 11.28. ПУИ-7В к выстрелу ПГ-7В (а), ПУИ-7ТБГ к выстрелу ТБГ-7В (б) и ПУИ-26
к реактивной противотанковой гранате РПГ-26 (в)
11.8. Практические и учебные боеприпасы
733
массы, чем боевые гранаты. При этом обеспечивается полное сопряжение тра-
ектории практической гранаты с боевой на всех дальностях стрельбы. От-
носительно высокий уровень звука выстрела и наличие газопламенной струи
также позволяют проводить обучение в условиях, приближенных к реальным.
Устройства можно многократно применять, их ресурс - не менее 300 выстре-
лов. Наличие сегодня в системе подготовки стрелков средств обучения с не-
обходимыми возможностями и свойствами позволяет значительно снизить
затраты на обучение при одновременном повышении уровня их умений и
навыков.
Таким образом, рассмотренные выше ПУН, которые предназначены для
использования в учебно-практических целях и обучения приемам стрельбы в
реальных условиях, максимально имитируя боевой выстрел, обеспечивают мно-
гократное применение и заменяют инертный выстрел при значительном сни-
жении стоимости учебно-практического имущества и БП.
В заключение отметим, что большое количество разновидностей учебно-
практических БП имеется не только в Сухопутных войсках, но и в ВВС (авиа-
ционные бомбы, ракеты) и ВМФ (торпеды, мины). Приведем несколько при-
меров.
Практические АБ (ПАБ) предназначены для обучения летного состава
бомбометанию с больших и малых высот боевого применения. П-50-75 ка-
либра 50 кг используется с высот 250... 16000 м при скорости носителя
600... 1200 км/ч (табл. 11.11).
Термостойкая ПАБ П-50Т служит для обучения летного состава бомбоме-
танию в любое время суток. П-50Т имеет три сигнальных элемента и приме-
няется с высот 200...25 000 м при скорости носителя 500...2500 км/ч. Даль-
ность обнаружения видимого светового и дымового сигналов составляет не
менее 4 км.
П-50Ш предназначена для обучения летного состава бомбометанию штур-
мовыми авиационными бомбами и применяется с высот 30...500 м при скоро-
сти носителя до 1200 км/ч. Дальность наблюдения достигает 10 км.
Таблица 11.11. Основные характеристики ПАБ калибра 50 кг
Характеристика П-50-75 П-50Т П-50Ш
Масса, кг Диаметр, мм Длина, мм Способ обозначения точки падения: дневной заряд ночной заряд Время, с. видимости облака днем видимости огня ночью 75 203 1064 Оранжевое облако Яркая вспышка 22 3 50 203 1044 Оранжевое облако Яркая вспышка До 35 До 16 49 203 1097 Имитация взрыва 30 (время горения факела) 1 млн кд (сила света факела)
734
11. Боеприпасы вспомогательного назначения
Учебная противолодочная авиационная бомба УПЛАБ-50 используется для
обеспечения боевой подготовки подразделений противолодочной авиации в
торпедометании и бомбометании по подводным лодкам. Применяется с высот
150...2000 м при скорости носителя до 850 км/ч. Масса УПЛАБ-50 составля-
ет 45 кг, время горения светодымового факела - 8... 10 мин.
Учебные образцы АБ - это разновидность БП, совершенно не пригодных
для боевого использования. Они подразделяются на учебно-разрезные (для
изучения устройства боевых аналогов) и полноразмерные (для обучения пра-
вилам обращения с боевыми АБ). Учебные АБ специально изготавливают на
заводах из отбракованных на различных стадиях производства корпусов АБ.
Иногда на практике в качестве учебных образцов используют охолощенные
боевые образцы АБ.
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ
Вернидуб И.И. На передовой линии гыла. М.: ЦНИИНТИ КПК, 1993.
Горовой ГР, Бильдюкевич НА., Чулков ВП. Производство пиротехнических со-
ставов и средств. М.: Машиностроение, 1982.
Горст А.Г Пороха и взрывчатые вещества. М.: Оборонгиз, 1957.
Миропольский Ф.П., Саркисян Р.С., Вишняков О.Л., Попов А. М Авиационные бое-
припасы и их исследования. М.: Изд-во ВВИА им. Н.Е. Жуковского, 1996.
Носков Б.И Малокалиберные выстрелы к автоматическим пушкам: Учеб, посо-
бие. М : Вооружение. Политика. Конверсия, 1998.
Оружие России: Каталог. Т. VII: Высокоточное оружие и боеприпасы. М.: АОЗТ
«Военный парад», 1997.
Прохоров Б.А. Боеприпасы артиллерии. М.: Машиностроение, 1973.
Пырьев Е.В., Резниченко С. И. Бомбардировочное вооружение авиации России
1912-1945 гг / Под общ. ред. Ю.П. Клишина. М.: Редакционно-издательский центр
Генштаба ВС РФ, 2001.
12
ОРУЖИЕ НЕЛЕТАЛЬНОГО ДЕЙСТВИЯ
12.1. Основные понятия и принципы классификации ОНД
С приходом третьего тысячелетия, несмотря на уменьшение опасности
мировой войны, в мире по-прежнему сохраняется обстановка напряженности
и продолжающихся региональных и внутренних конфликтов, которые стали
основной проблемой мирового сообщества. Расширился спектр угроз, связан-
ных с терроризмом (внутренним и международным) и организованной пре-
ступностью вследствие масштабного, зачастую конфликтного, изменения форм
собственности, обострения борьбы за власть на основе групповых и этнона-
циональных интересов. Основная причина появления международного терро-
ризма как проблемы, представляющей угрозу не только национальной, но и
региональной, а также глобальной безопасности, - экстремизм. Его питатель-
ная среда - доведенные до крайности различия во взглядах и оценках тех или
иных аспектов жизнедеятельности, основными из которых можно назвать по-
литические, социальные, национальные и конфессиональные. В экстремаль-
ной форме различия во взглядах на происходящие события могут объединять
людей разных национальностей вне зависимости от их государственной при-
надлежности. Нарастает активность неправительственных религиозно-поли-
тических организаций, формы действий которых чрезвычайно разнообразны -
от массовых народных демонстраций до террористических акций и воору-
женных выступлений.
Сегодня в мире насчитывают 160 зон этнополитической напряженности,
половине из которых присущи все признаки неурегулированных конфликтов.
Только в последнем десятилетии произошло более 100 войн при участии 90 го-
сударств. Вооруженные конфликты и акты международного терроризма мо-
гут приобретать огромный пространственный размах с вовлечением широ-
кого круга гражданских лиц и отсутствием выраженных линий боевого про-
тивостояния и единого центра политического и военного управления.
Оценивая характер вооруженной борьбы, необходимо отметить, что терро-
ристы действуют, как правило, небольшими мобильными группами или в
одиночку. Однако, как показали события в Чечне, Косово, Македонии, Аф-
ганистане, Ираке, Испании, на Филиппинах, в Индонезии, в Колумбии и в
ряде других стран, террористы могут входить в состав и более крупных фор-
мирований, обладая практически всеми видами вооружения и военной тех-
ники, особенно ее мобильными составляющими. К особенностям тактики
действий террористических групп следует отнести их высокую мобильность,
что исключает наличие линии фронта, а также их укомплектованность таким
736
12. Оружие нелетального действия
составом людей и оружия, которые обеспечивают одновременное использо-
вание всего арсенала стрелкового вооружения для достижения высокой плот-
ности огня и скоротечности огневого воздействия на противника. Обращают
на себя внимание отличная профессиональная подготовка к ведению боевых
действий при любом соотношении техники и личного состава противника, а
также высокий моральный дух, основанный прежде всего на конфессиональ-
ной принадлежности. Нельзя не отметить использование террористами мир-
ного населения в качестве живого щита, что во многом затрудняет действия
военных и специальных формирований. В последнее время лидеры террорис-
тических группировок стали широко применять средства массовой информа-
ции (в том числе Интернет) для дезинформации мировой общественности об
истинных целях экстремистов, о реальных потерях среди мирного населения
и противостоящих им сил.
Один из важных элементов национального могущества любой .высоко-
развитой в военно-техническом отношении страны - использование воен-
ной силы для предотвращения и ликвидации кризисных ситуаций и воен-
ных конфликтов. При этом обычно либо угрожают применением силы (на-
ращивают свой потенциал путем переброски боевых сил и средств, в зону
кризиса), либо осуществляют ее непосредственное применение, что сопро-
вождается жертвами и разрушениями. Однако, как показывает мировой опыт,
оба варианта могут приводить к неадекватному реагированию на складыва-
ющуюся в зоне кризиса обстановку. Особенно большие проблемы с приме-
нением военной силы возникают при проведении антитеррористических и
миротворческих операций, а также операций по правопринуждению. Это свя-
зано с тем, что боевые действия против террористических формирований,
операции по принуждению к миру и по правопринуждению приходится вес-
ти, как правило, на территориях, где высока плотность гражданского насе-
ления. А поскольку современные средства вооруженной борьбы создавались
для ведения крупномасштабных боевых действий и обладают колоссальной
разрушительной силой, их использование всегда ведет к опасности нанесе-
ния непоправимого ущерба не только инфраструктуре среды обитания лю-
дей, но и к большим потерям среди мирного населения. Кроме того, при
наличии в районах боевых действий экологически опасных объектов всегда
существует угроза их повреждения и инициирования экологической катаст-
рофы не только в этих районах, но и в окружающих регионах. Подобные
обстоятельства требуют проектирования и применения принципиально иных
видов вооружения, исключающих многие негативные последствия, которые
возникают при использовании традиционных видов оружия. Наиболее веро-
ятно, что сегодня таким средством воздействия на живую силу и военную
технику может стать так называемое оружие нелетального действия (ОНД),
применение которого обеспечивает временный вывод из строя живой силы
противника, но исключает или минимизирует ущерб мирному населению,
гражданской инфраструктуре и окружающей среде. Хотя ОНД находится в
начале своего развития, мало сомнений в том, что в ближайшее время оно
будет востребовано в комплекте вооружения войск и сил специального на-
12.1. Основные понятия и принципы классификации ОНД 737
значения наряду с существующими средствами ведения вооруженной борь-
бы, что позволит эффективно вмешиваться в ход локальных конфликтов, при-
нимать участие в миротворческих миссиях, проводить полицейские опера-
ции и при этом, по возможности, избегать нанесения противнику заметных
потерь в живой силе и материального урона. Наличие таких средств дало
бы возможность вооруженным силам и силам специального назначения до-
биваться своих целей в случаях, когда использование обычного оружия не-
приемлемо по политическим и этическим соображениям.
Ограничение побочного ущерба во всем спектре угроз и кризисных ситу-
аций, включая и полномасштабные войны, - весьма важный фактор для пре-
одоления последствий и восстановления порядка в пострадавших регионах.
Кроме того, увеличение «асимметричности» угроз и разнообразие кризис-
ных ситуаций требуют придания вооруженным силам, специальным подраз-
делениям и силам по поддержанию внутреннего правопорядка способности
селективно реагировать на такие угрозы, осуществлять быстрые и эффек-
тивные меры по контролю за поведением населения или враждебных терро-
ристических группировок, предотвращать ^эскалацию потенциально взрыв-
ных ситуаций. Как полагают сегодня эксперты силовых ведомств многих стран,
принятие на вооружение систем ОНД позволит более эффективно выполнять
перечисленные выше задачи и значительно снижать потери в живой силе, а
также сокращать ущерб, наносимый гражданскому населению и окружающей
среде.
В отличие от экспертов в области вооружений законодательными орга-
нами ведущих стран - разработчиков ОНД еще не осознана весомая роль
ОНД в системе обеспечения национальной безопасности. Возрастание ин-
тенсивности дискуссий по проблемам разработки и применения ОНД на пар-
ламентском и общественном уровнях практически никак не отразилось на
соотношении затрат на развитие обычных вооружений и ОНД. Действитель-
но, во всем мире ежегодно на разработку ОНД выделяют лишь 50 млн долл.
США из бюджетных средств (это цена всего лишь 10 танков М-1 или 16 %
стоимости одного F-22), причем из этой суммы 44 млн затрачивают в США.
Весь военный бюджет США составляет 380 млрд долл., т. е. затраты на разра-
ботку ОНД не превышают 0,012 % суммы военного бюджета. Что касается
затрат США на исследования и разработки, то они достигаю! 16 млрд долл,
и только 0,3 % этой суммы используют на исследования в области техноло-
гий ОНД. Конечно, статистика соотношения затрат военного бюджета США -
это всего лишь яркий пример. В других странах ситуация еще более печаль-
на. Это означает, что политическое осознание необходимости некоторого
перераспределения военных бюджетов с учетом важности развития тех-
нологий ОНД ни в одной стране еще не переросло в решимость оказания
соответствующей финансовой поддержки данным исследованиям и раз-
работкам.
В директиве № 3000.3 министерства обороны США ОНД характеризует-
ся как «Оружие, прямо предназначенное и прежде всего применяемое для вы-
ведения из строя личного состава или техники, сводя к минимуму нанесение
738
12. Оружие нелеталъного действия
постоянных увечий живой силе и непреднамеренный ущерб имуществу и
окружающей среде». В более широком смысле под ОНД понимают средства
достижения военных или других целей, предполагающих ненанесение посто-
янного ущерба здоровью, жизни, имуществу и окружающей среде. В этом слу-
чае к категории ОНД можно также отнести технологии ведения информаци-
онной борьбы, различного рода пропагандистские и дипломатические акции,
экономические санкции и прочие нематериальные средства.
Системы ОНД представляют собой средства, вызывающие функциональ-
ное поражение при использовании разнообразных способов воздействия на
объекты. К ним относятся резиновые и деревянные пули, ослепляющие и ог-
лушающие гранаты, распылители аэрозолей с химическими агентами раздра-
жающего действия, электрический разряд, электромагнитное радиочастотное
и микроволновое излучение высокой мощности, акустические колебания раз-
личного диапазона частот, ударные волны, биологические и биотехнологичес-
кие средства и пр.
Для обозначения этого нового класса оружия в зарубежной и российской
литературе появилось большое число различных терминов, с помощь^ кото-
рых делались попытки отразить специфику применения и воздействия этого
оружия. В США наиболее часто употреблялись термины «нелегальное (не-
смертельное) оружие» (Non-Lethal Weapons), «менее, чем летальное» (Less Than
Lethal), а также «мягкое поражение» (Soft Kill). В России использовали тер-
мины «нелетальные виды оружия» (НЛВО), «оружие несмертельного действия»
(ОНД), «оружие с низким уровнем непреднамеренных потерь» (ОНУНП), «ору-
жие нелетального воздействия» (ОНЛВ) и др. Следует признать, что ни один
из них не является удачным. Наиболее часто употребляемый в США термин
«Non-Lethal Weapons», как выразился один из высокопоставленных чинов-
ников Министерства обороны США, звучит как «почти непристойный ок-
сюморон». Тем не менее этот термин политически весьма привлекателен.
Это подтверждает бывший руководитель программы по нелегальному ору-
жию лос-аламосской национальной лаборатории Дж. Александер: «США по-
лучат большие политические преимущества, будучи первым государством,
которое провозглашает политику проецирования силы, осуществляемую та-
кими средствами, которые не приводят к гибели людей». Из встречающихся
в литературе США терминов наиболее точно отражает назначение этого клас-
са оружия понятие «выводящее из строя» (Disabling) и близкое ему по зна-
чению Soft Kill, т. е. «мягкое», неразрушающее поражение боевой техники и
вывод из строя живой силы.
В последнее время из существующих терминов в качестве более предпоч-
тительного употребляется термин «оружие нелегального действия», характе-
ризующий целевое предназначение этого класса оружия, но оставляющий за
скобками последствия его применения, поскольку вероятность смертельного
поражения не исключена.
К настоящему времени в открытой литературе и средствах массовой ин-
формации появилось значительное число публикаций, посвященных описа-
нию возможных технологий ОНД и концепциям их применения. Большин-
12.1. Основные понятия и принципы классификации ОНД
739
ство из приведенных в этих источниках технологий - предмет тщательного
изучения и отбора для экспериментальной проверки возможности их практи-
ческого использования и соответствия тактико-техническим требованиям для
принятия на вооружение.
В основу классификации и оценки видов ОНД могут быть положены
различные признаки и свойства, причем наиболее рациональная классифи-
кация ОНД зависит от цели проводимого исследования. С военно-полити-
ческой точки зрения естественной является классификация по масштабу ис-
пользования (тактическое, оперативно-тактическое, стратегическое), а так-
же по принадлежности данного типа ОНД к основным военным технологиям.
При решении вопроса финансирования разработки и производства ОНД клю-
чевым становится признак завершенности разработки и наличия соответ-
ствующей технологической и промышленной базы, привязки его к основ-
ным научно-техническим направлениям базовых технологий. Для естествен-
ной классификации, позволяющей максимально четко разделить ОНД на
подвиды, основные признаки - это объект воздействия (человек, вооруже-
ние и военная техника, окружающая среда, объекты инфраструктуры, госу-
дарство), а также виды и механизмы воздействия (кинетическое, волновое,
физико-химическое, биологическое, информационное и др.). Такая класси-
фикация, включающая в себя основные характеристики различных видов
ОНД (вид, принцип действия (механизм воздействия), объект воздействия,
масштаб использования (оперативный, тактический, стратегический), эффек-
тивность воздействия), впервые была приведена в одном из докладов рос-
сийских ученых на 1-м Европейском симпозиуме по оружию нелетального
действия.
Оружие нелетального действия, воздействующее на людей, должно:
- эффективно пресекать массовые беспорядки путем рассеивания и бло-
кирования толпы;
- эффективно нейтрализовать индивидуальных участников противостоя-
ния, обеспечивая их захват, арест и пленение;
- предотвращать несанкционированный доступ к наземным, морским и
воздушным объектам;
- обеспечивать возможность очистки зданий, сооружений, объектов и тер-
ритории от противника и мирного населения без нанесения ущерба людям и
материальным ценностям.
При воздействии на военную технику, сооружения и материалы ОНД дол-
жно обеспечивать выполнение следующих функций:
- охранять территории, воздушное, морское и подводное пространства от
проникновения транспортных средств и боевой техники;
- повреждать узлы и конструкционные материалы военной техники и обо-
рудования, приводя их в неисправное состояние;
- воздействовать на топливные системы транспортных средств, лишая их
способности к передвижению вследствие отказа работы двигателей.
Основные характеристики различных видов ОНД, классифицированных
по механизмам и объектам воздействия, представлены в табл. 12.1.
Таблица 12.1. Характеристика видов ОНД
Вид Механизм воздействия (принцип действия) Объект воздей- ствия Масштаб использо- вания Эффектив- ность воздействия Состояние работ (по данным открытой печати)
Ослепляющее ОНД: когерентное (лазерное) высоко- и низкоэнергети- ческое излучение некогерентное (дето- нация, дефлат рация, горение мультифазных энергетических систем) излучение Opi аны зрения человека и оптико-электрон- ные устройства Органы зрения и психика человека, оптико- электронные устройства Человек, техника То же Тактичес- кий » В ряде слу- чаев эффек- тивно То же Разработано, частично оп- робовано в качестве ОНД. Может быть реализовано как оружие двойного на- значения То же
СВЧ-излучение (направ- ленное микроволновое): информационное - ма- лой мощности термическое, энергети- ческое - большой мощ- ности Эффекты радиослышимости, воздействие на центральную нервную систему и функ- циональное состояние анализаторов Кожные покровы и органы зрения человека, электрическое и электронное оборудование Человек Человек, техника Тактичес- кий » 4. Средняя Малая - воздействие на человека, средняя - воздействие на технику Исследования. Механизмы воздействия и возникаю- щие эффекты недостаточно изучены. Есть положитель- ные результаты Разработка Имеются поло- жительные результаты. Мо- жет быть реализовано так- же с помощью ядерных БП третьего поколения
Акустическое ОНД (ин- фразвуковое, ультразву- ковое, ударно-волновое): информационное энергетическое Дезориентация, нарушения психомоторных функций человека, чувство страха, паничес- кое состояние Органы слуха и внутренние органы челове- ка, резонансные элементы конструкций ин- женерных объектов Человек Человек, соору- жения Тактичес- кий » Средняя » Эксперименты по провер- ке концепции Есть сведе- ния о неудачном исходе ис- следований. Эффективно совместное применение с ослепляющими ОНД То же. Для генерации инф- развука требуются громоз- дкие установки Имеются экспериментальные сведе- ния о быстром привыкании биообъектов к моноакусти- ческому полю
Вихревое ОНД (vortex- генераторы) Органы слуха и внутренние органы человека Человек Тактичес- кий** Средняя Математическое и физи- ческое моделирование про- цесса генерации вихрей. Эксперименты, подтверж- дающие явления генерации и воздействия
Средства радиоэлектрон- ной борьбы Системы управления войсками и оружием (для обеспечения эффективного применения других типов ОНД или с целью принудить противника отказаться от сопротивления) Радио-и оптико- элект- ронные средства Тактичес- кий, оператив- ный, страте! и- ческий Высокая Необходимые средства со- зданы и успешно опробова- ны в локальных конфлик- тах. Для применения в ка- честве ОНД необходимо изменение концепции бое- вого применения
Продолжение табл. 12.1
Вид Принцип действия (механизм воздействия) Объект воздей- ствия Мас ни аб использова- ния Эффектив- ность воздействия Состояние работ (по данным открытой печати)
Средства информацион- ной борьбы: заранее внедренные блоки программного обес- печения (ПО) компьютерные вирусы вооружение и военная техника (ВВТ) с дистан- ционным санкциониро- ванием применения Активизация по специальному сигналу вне- дренных в ПО систем оружия специальных «закладок», вносящих в них неисправности и не допускающих эффективное использо- вание оружия Модификация ПО и баз данных систем уп- равления войсками и оружием. Внесение возможно агентурными методами и через ка- налы связи Введение в состав ВВТ средств, исклю- чающих их применение без предварительно- го санкционирующего сигнала. Эффективное средство контроля использования ВВТ (про- данного, захваченного и т. п.) ПО сис- тем ору- жия, системы управле- ния ПО систем управле- ния ВВТ Тактичес- кий, оператив- ный, стратеги- ческий То же Тактичес- кий, оператив- ный Очень высокая Высокая Низкая (в качестве ОНД) Разработаны » В разработке
Полицейские средства: безосколочные (пиро- технические) взрывные устройства (ослепляю- щие, оглушающие); кинетического дей- ствия (резиновые и пла- стиковые пули, мешочки с мягким наполнителем); Органы чувств (зрение, обоняние, осязание, слух) и дыхание - ударно-шоковое воздей- ствие. Рассеивание толпы и прекращение массовых беспорядков Человек Тактичес- кий (в ограни- ченном диапазоне условий) Высокая (для спе- циального примене- ния) Разработаны, имеются на вооружении. Применение отработано в условиях, когда противоположная сторона в основном не во- оружена
электрошоковые уст- ройства (стационарные, носимые и выстреливае- мые); липкие и жесткие пены, маркирующие составы. бло- кирующие сети; ирританты (слезоточи- вые, раздражающие и зло- вонные составы); водометы (возимые тя- желые и носимые легкие)
Высокоточное оружие нового поколения (ин- теллектуальные БП) Критические элементы боевой техники и военных объектов. ОНД выводит их из строя, но не влечет за собой гибель личного состава и значительное разрушение матери- альных объектов Боевая техника, военные объекты Тактичес- кий Высокая В разработке. Эффективны для доставки других видов ОНД
Метеорологическое, гео- физическое ОНД (аэро- зольные композиции, ге- нераторы вынужденных колебаний земной коры) Метеорологическая обстановка (иницииро- вание осадков, туманов, лавин) препятству- ет противнику использовать боевые сред- ства Окружа- ющая среда Тактичес- кий, опе- ративно- тактичес- кий Средняя Проведены отдельные экс- перименты
Биологическое оружие нового поколения - пси- хотропные средства (ток- сины, галлюциногены, возбудители, химические нейроингибиторы) Временное выведение человека из строя без значительных отрицательных послед- ствий для здоровья Человек Такгичес- кий, оператив- ный Высокая В разработке. Отдельные образцы (психотропные газы) находятся на воору- жении. Применение может противоречить нормам международного права
Продолжение табл. 12.1
Вид Принцип действия (механизм воздействия) Объект воздей- ствия Масштаб использо- вания Эффектив- ность воздействия Состояние работ (по данным открытой печати)
Биотехнологическое ОНД Использование микроорганизмов и продук- тов их жизнедеятельности для выведения из строя боевой техники, оборудования, мате- риалов Техни- ческие средства, топлива, смазка и т. п. Тактичес- кий, оператив- ный Может быть высокой Выработка концепции. Не- которые варианты воздей- ствия проработаны для других применений
Физико-химическое ОНД:
нелетального воздей- ствия (блокирующие лип- кие и быстроотвердеваю- щие пены, суперскользкие составы в форме порош- ков, суспензий, эмульсий) Временное выведение человека из строя без значительных отрицательных последствий для здоровья; блокирование движения транс- портных средств. Применение быстроотвер- девающих пен может вызвать асфиксию при попадании в голову Человек, техника Тактичес- кий Высокая Разработка и испытания
воздействующее на ве- щества и материалы (лип- кие и жесткие пены, супер- клеи, модификаторы го- рения, охрупчивающие составы, коррозионно-ак- тивные составы и т. д.) Снижение прочностных свойств базовых ма- териалов, порча резинотехнических изделий, остановка двигателей, блокирование движе- ния с помощью суперфрикционных и клея- щих составов и т. п. ВВТ, инфра- структу- ра Стратеги- ческий » То же
воздействующее на си- стемы электроснабжения (проводящие дисперсные материалы, углеволокно, металлизированное во- локно) Замыкание высоковольтных линий электро- передач, вывод из строя электростанций и подстанций Энерго- системы i » ‘ ' L О » Испытано в реальных бое- вых условиях
Электромагнитное ОНД: импульсное низкочас- тотное ядерное неядерное Мощные короткие импульсы электромагнит- ного излучения, в том числе для воздействия на электромагнитные устройства То же » Радио- электро- ника, электро- техника, транс- порт и ВВТ То же » Стратеги- ческий, оператив- ный, тактичес- кий Стратеги- ческий, оператив- ный Тактичес- кий Высокая » » Разработано и эксперимен- тально испытано (частич- но) Проведены испытания Подтверждение концепции
Невоенные методы воздействия: торговое эмбарго нарушение финансово- го механизма государства Блокада страны для принуждения ее руко- водства отказаться от проводимого курса и принять условия другой стороны без пере- растания конфликта в вооруженное проти- востояние Дезорганизация денежного обращения стра- ны (проникновение в компьютерные сети, выпуск поддельных денег и ценных бумаг и т. п.) Государ- ство Финан- совая система » ' 4# Стратеги- ческий » Низкая/ средняя То же Неоднократное использова- ние против стран, грубо на- рушающих нормы между- народного права Неоднократно опробовано в ходе тайных операций
Психологическая война Изменение политической ориентации насе- ления. давление на руководство страны, де- морализация войск противника Человек Стратеги- ческий Средняя/ высокая Методы отработаны и не- однократно применялись в войнах. Разработаны новые технические средства
Окончание табл. 12.1
Вид Принцип действия (механизм воздействия) Объект воздей- ствия Масштаб использо- вания Эффектив- ность воздействия Состояние работ (по данным открытой печати)
Психотронное ОНД (гип- ноз, кодирование) Использование группового (массового) вну- шения гипнотического типа Человек Тактичес- кий Оценка отсутствует Полного объяснения с по- зиций современной меди- цины нет
Парапсихологическое ОНД Применение телепатии, ясновидения, про- скопии, телекинеза и т. п. Человек Тактичес- кий, оператив- ный, стратеги- ческий Оценка отсутствует Явления не подтверждены научными исследовани- ями и не имеют рациональ- ного объяснения
12.2. Физические принципы функционирования ОНД
747
12.2. Физические принципы функционирования ОНД
Оружие нелетального действия должно обеспечивать адекватный ответ
на угрозу применения силы и оказывать эффективное воздействие на опера-
тивную ситуацию без использования оружия на поражение при минимиза-
ции сопутствующего ущерба. К его основным функциям относят обнаруже-
ние, предупреждение, упреждение, удержание, задержание, нейтрализацию
и ликвидацию угрозы при решении боевой задачи с помощью минимально
необходимой силы. Цель использования ОНД - операции по предотвраще-
нию массовых беспорядков, задержанию нарушителей, предупреждению не-
законных действий, охране объектов и предотвращению доступа к ним,
освобождению зданий, объектов, территорий и заложников, нейтрализации
имеющихся в распоряжении противника техники и инфраструктуры, а также
содействие проведению спецопераций в городских условиях и обеспечение
защиты персонала.
Средства воздейстепр на человека
Полицейские средства имеют давнюю историю и в силу особенностей
применения их выделяют в особую категорию. К настоящему времени разра-
ботан, испытан и широко используется большой набор таких средств, кото-
рые можно разделить на три группы: кинетическое оружие, обладающее оста-
навливающим действием шокогенного характера; электрошоковое оружие, ока-
зывающее локальное воздействие на различные органы человека; различные
химические средства (полицейские газы и аэрозоли) широкого спектра дей-
ствия на различные органы чувств и органы дыхания человека. Следует отме-
тить, что полицейские средства применимы лишь на коротких дистанциях.
Даже кинетическое оружие обладает низкой точностью стрельбы, что, есте-
ственно, ограничивает дистанцию его использования. Однако характеристики
точности кинетического ОНД можно повысить за счет использования специ-
альной геометрии нарезки ствола в сочетании с эластичным гибким стабили-
затором. В ряде случаев рационально применять эластичный поражающий эле-
мент, который вытягивает полезный груз (сеть, контейнер с активным веще-
ством и т. д.). Очевидно, что возможна модификация и других полицейских
средств, что может привести к их использованию в качестве ОНД для опера-
ций иного масштаба, нежели выполнение полицейских задач, причем такая
модификация вполне эффективна как с технической, так и с экономической
точки зрения.
К настоящему времени разработаны и приняты на вооружение разнооб-
разные перспективные системы кинетического действия, в первую очередь -
специальные патроны и выстрелы, снаряженные ударниками непроникаю-
щего и полупроникающего действия. Первые из них вызывают шок и вре-
менную боль, не проникая через кожный покров, а вторые наносят ранения,
но не проникают глубоко в тело человека и не повреждают внутренние орга-
ны. Многие из них применяют в операциях по правопринуждению, в анти-
террористических и миротворческих операциях как новые типы специаль-
ных средств.
748
12. Оружие пел стального действия
Наиболее характерные примеры систем нелетального кинетического дей-
ствия - непроникаюшие элементы в форме круглых или цилиндрических ПЭ
из резины, резиновой пены, пластика или дерева, в виде резиновой пули или
эластичного ударника (со стабилизаторами или без них), в форме мягкого удар-
ника (подушечки или продолговатого мешочка из ткани, силиконового эласто-
мера, наполненного металлическим порошком), разработанные и используе-
мые в ряде стран в операциях по правопринуждению. Дальность эффективно-
го действия перечисленных ударников, выстреливаемых из различных типов
гладкоствольных и нарезных ружей и подствольных гранатометов, находится
обычно в диапазоне 5...45 м.
К средствам непроникающего воздействия, имеющимся на вооружении
различных силовых подразделений многих стран, можно отнести:
- 23-мм патроны с резиновыми пулями, которые отстреливаются из кара-
бина КС-23 (Россия) и его модификаций, обладают эффективной дальностью
действия до 60...70 м и применяются для стрельбы по нижним конечностям
правонарушителей, находящихся на расстоянии не менее 40 м;
- пластиковые цилиндрические пули L5A7 (Англия) или их улучшенный
вариант L21А1 с повышенной устойчивостью на траектории и точностью по-
падания;
- резиновые пули калибра 5,56 мм к автоматической винтовке М16 (США);
- выстрел ударно-шокового действия (ЭГ-50) к специальному гранатомет-
ному комплексу РГС-50 (Россия) для травмобезопасного ударного воздействия
на правонарушителей, находящихся на расстоянии до 40 м, одиночными элас-
тичными сферическими ПЭ;
- 40-мм выстрелы 2QFY00 модульного типа с ударниками из резиновой
губчатой пены и гранаты ХМ 1006 с мягкой носовой частью из пенопласта к
подствольному гранатомету М203;
- модульные системы для рассеивания толпы и т. п.
Существуют две основные проблемы применения резиновых пуль: а) ма-
лая эффективная максимальная дальность их действия, не превышающая 40 м;
б) недостаточный (для эффективного воздействия на биообъект) импульс на
максимальной дальности и чрезмерно высокое значение импульса на близких
расстояниях, что может привести к высокой вероятности нанесения тяжких
телесных повреждений. Исследования, проведенные в США, показали, что
50 % Г1Э кинетического действия не могут попасть в цель диаметром 450 мм
на расстоянии 23 м. При этом физически развитый среднестатистический мо-
лодой человек может бросить 250-граммовый камень, бутылку с зажигатель-
ной смесью или иной опасный предмет на дальность примерно 60 м. Следова-
тельно, чтобы использовать резиновые пули, бойцам правоохранительных орга-
нов необходимо входить в зону возможного поражения, в связи с чем они
неохотно применяют резиновые пули для контроля над разбушевавшейся тол-
пой и подавления массовых беспорядков. Таким образом, недостаточный ради-
ус действия - главная проблема применения резиновых пуль. Еще одна пробле-
ма использования средств кинетического действия - их нештатное применение,
при котором возможны попадания в голову, шею, глаза, что может вызвать
серьезные травмы (официально зафиксировано несколько таких случаев) и даже
летальный исход.
12.2. Физические принципы функционирования ОНД
749
Согласно статистике применения резиновых пуль, в Северной Ирландии
с 1973 по 1994 г. в операциях по правопринуждению на 125 тыс. выстрелов
резиновыми пулями пришлось 17 летальных исходов. Анализ оперативного
использования кинетического ОНД в реальных операциях показал, что прак-
тическая вероятность гибели от резиновых пуль составила 0,014. Но уже пос-
ле 1994 г., когда на вооружение были приняты модернизированные карабины
и новые типы пуль непроникаюшего действия, не было зарегистрировано ни
одного летального исхода.
Характерный пример систем нелегального кинетического действия пат-
роны и непроникающие элементы в виде резиновой пули со стабилизатором
и мягким ударником (в форме подушечки), разработанные в США и приме-
няемые в ряде стран в операциях по правопринуждению (рис. 12.1). Кроме
того, для 40-мм гранатомета М203 созданы выстрелы 2QFY00 модульного
типа с пенопластовыми ударниками (рис. 12.2, а) и резиновыми шариками
(рис. 12.2. б), обеспечивающие рассеивание непроникающих элементов и
множественный импульс при разгоне толпы. К этому же гранатомету выпу-
щена граната ХМ 1006 с мягкой носовой частью из пенопласта (рис. 12.3).
Эффективная дальность действия перечисленных БП непроникающего дей-
ствия составляет десятки метров. Разработаны также опытные образцы мин
нелегального действия, например, мина направленного действия (рис. 12.4),
содержащая около 600 шариков непроникающего или полупроникающего
действия с начальной скоростью 60...70 м/с и эффективной дальностью дей-
ствия до 15 м.
Необходимо отметить новый подход в разработке кинетического ОНД -
комбинированное воздействие кинетического фактора и других факторов не-
легального воздействия. В частности, это могут быть пневматически выстре-
ливаемые сферы, заполненные ирритантами, малодорантами или маркирую-
а б
Рис. 12.1. Патрон со стабилизируемой резиновой пулей (а) и мягким плоским удар-
ником (б)
750
12. Оружие нелетального действия
Рис. 12.2. Выстрел 2QFY00 с пенопластовым наполнителем (а) и резиновыми шари-
ками (б) к гранатомету М203:
1 - черный порох; 2 - уплотнитель-герметизатор; 3 - верхняя пробка; 4 - пенопласт; 5 - ниж-
няя пробка; 6 - капсюль-воспламенитель; 7 - оболочка; 8 - резиновые шарики
Рис. 12.3. 40-мм граната
ХМ 1006 с мягким наконечни-
ком к гранатомету М203
Рис. 12.4. Мина направленного действия
12.2. Физические принципы функционирования ОНД
751
щими веществами. Предполагается, что комбини-
рованное воздействие нескольких факторов уве-
личивает суммарный эффект. Созданы и приме-
няются специальные гранаты для одновременно-
го кинетического и светозвукового воздействия,
существуют заряды для минометов, обеспечива-
ющие совокупное воздействие света, звука и раз-
летающихся эластичных сферических элементов.
В качестве примера можно привести упрощен-
ную схему эластичного шрапнельного элемента
(рис. 12.5), для снаряжения которого используют
различные светозвуковые (шумовые) составы, вы-
зывающие временную потерю дееспособности в
результате светоакустического эффекта. Шрапнель-
ный элемент состоит из корпуса 3, выполненного
из эластичного материала, внутри которого поме-
Рис. 12.5. Эластичный
шрапнельный элемент:
1 - пирозамедлитель-воспламе-
нитель; 2 - светозвуковой со-
став; 3 - корпус из эластично-
го материала
щен светозвуковой состав 2. Инициирование со-
става осуществляется тепловым импульсом, который подается от метательно-
го заряда БП через пирозамедлитель-воспламенитель 1. С наибольшей эффек-
тивностью такие шрапнельные элемента можно использовать в ручных
гранатометах малого калибра (40...50 мм) для временного вывода из строя
живой силы на расстояниях до 100 м.
Наиболее характерные примеры стрелкового оружия комбинированного
нелегального действия - полуавтоматическая пневматическая (рабочее тело -
сжатый воздух) винтовка (рис. 12.6, а) с емкостью магазина на 200 выстрелов
(единичных или очередями); полуавтоматический пневматический (рабочее
тело - сжатый углекислый газ) пистолет (рис. 12.6, б) с емкостью магазина на
8 выстрелов; полу- или полностью автоматическая пневматическая (рабочее
тело - сжатый воздух) винтовка (рис. 12.6, в) с емкостью магазина на 25 или
85 выстрелов и скорострельностью 12 выстрелов в секунду. Указанное оружие
комплектуется пулями либо в виде резиновых шариков непроникающего удар-
ного действия, либо в виде капсул с перцовым жидким спреем или полыми
резиновыми шариками комбинированного действия, содержащими перцовый по-
рошок-спрей (так называемый PepperBall). Эффективная дальность действия
пневматического оружия комбинированного действия составляет 2,5...4,0 м.
Предлагают также использовать четырехствольные мортиры калибра 66 мм
M6LVOSS для одновременного метания на расстояние от 50 до 100 м четырех
гранат, которые могут снаряжаться дымообразующими, раздражающими или
светошумовыми составами, а также сферическими элементами непроникающе-
го кинетического действия в количестве 450 шт., начальная скорость которых
достигает 50...60 м/с, а эффективный радиус действия - около 10 м (рис. 12.7).
Среди систем нелегального оружия кинетического действия особо можно
выделить дистанционные системы для ограничения подвижности - сеткоме-
ты, которые могут воздействовать на движущийся объект, не контактируя с
ним. Захват по принципу ловчей сети - один из наиболее нетравматических
способов задержания, позволяющий не только предотвратить бегство или на-
падение, но и избежать в последующем рукопашной схватки.
152.
12. Оружие нелеталъного действия
в
Рис. 12.6. Полуавтоматические пневматические винтовка (а) и пистолет (б), полу-
или полностью автоматическая пневматическая винтовка (в)
Тактически система обладает большой гибкостью, что позволяет исполь-
зовать ее также при сложных метеоусловиях, в условиях ограниченного про-
странства и массового скопления людей, а также других подобных обстоя-
тельствах. Применение сеткометов, в отличие от огнестрельного оружия, не
требует каждый раз глубокого правового обоснования и тем самым делает
необоснованными попытки предъявления обвинений в превышении должност-
ных полномочий или причинении ущерба. Существует возможность их пре-
12.2. Физические принципы функционирования ОНД
753
Рис. 12.7. Мортирный комплекс с гранатами нелегального действия
вентивного использования, предотвращающая неблагоприятное развитие со-
бытий.
В настоящее время во многих научных лабораториях и производствен-
ных фирмах ведут разработку подобного вида систем, причем от экспери-
ментальных моделей переходят к серийному выпуску таких систем вооруже-
ния. Так, в США создаются 40-мм артиллерийские БП типа Silver Shroud,
раскрывающие в полете покрывало шириной 8,5 м, которое накрывает цель,
лишая ее обзора местности. Ниже в качестве примера приведены две харак-
терные разработки фирм Diehl (Германия) и «АРМОЛАЙН-ВСТ» (Россия).
Системы различаются как по составу и компоновке основных модулей, так и
по своим тактико-техническим характеристикам. Кроме того, если зарубеж-
ная система может быть рассмотрена только в контексте применения специ-
альными формированиями на уровне государственных служб безопасности,
то отечественная разработка отличается мобильностью, компактностью и про-
стотой использования.
В качестве основы для реализации системы дистанционного ограниче-
ния подвижности разработчики фирмы Diehl выбрали штатное устройство
метания БЧ носимого типа - гранатомет (рис. 12.8, а), что расширило воз-
можности системы в целом. Ее общая масса не превышает 12 кг, а масса по-
лезной нагрузки составляет примерно 1,5 кг. Вместо метаемого модуля (рис.
12.8, б), содержащего сеть (рис. 12.9), возможна доставка любого другого по-
лезного груза (например, постановщика радиопомех, емкости с ирритантами,
различных пен) непосредственно в зону применения (рис. 12.10).
754 12. Оружие нелетального действия
Нелетальное действие система оказывает при помощи сетки с радиаль-
ными грузами, раскрытие которой происходит перед встречей с целью. Мета-
тельное устройство калибра 90 мм имеет минимальную массу, что снижает
риск нанесения ущерба. Гранатомет приводится в действие лазерным дально-
мером и беспроводной передачей информации снаряду, включая расчет по-
летного времени. Дальность действия составляет 30...300 м, скорость мета-
ния - 100 м/с. Безоткатность действия достигается за счет противовеса. Пус-
ковая установка выполнена на основе системы Panzerfaust-З (длина ствола -
1240 мм). Возможно многоразовое использование.
Рис. 12.8. Гранатомет (а) и метаемый модуль
с кевларовой сетью (б) системы фирмы
Diehl:
1 - лазерный дальномер для определения пуско-
вых параметров, 2 оптическая система, 3 кол-
пак; 4 - кевларовая сеть; 5 - хвостовая секция с
электронным блоком; 6 - пусковая труба со сна-
рядом и безоткатным устройством; 7- аппарату-
б ра управления огнем; 8 - рукоятка
Рис. 12.9. Блок воздействия на цель с устройством обездвиживания при помощи сети:
1 - датчик-дальномер; 2 - вышибной заряд, 3 - сеть; 4 - хвостовая часть; 5 - блок электроники;
б - баллистический колпак; 7 - растягивающие грузы
12.2. Физические принципы функционирования ОНД
755
Расстояние до 300 м
Ч
Рис. 12.10. Схема применения системы фирмы Diehl
<-•
Дистанционная система ограничения подвижности биообъекта «Стоп-сеть»
(Россия) имеет принципиальные отличия от системы фирмы Diehl, так как
выполнена в других габаритах и предназначена для других условий тактичес-
кого применения (рис. 12.11).
Конструктивно «Стоп-сеть» состоит из ПУ, картриджа с 16 направляю-
щими стволами и установленными в них 16 грузиками, каждый из которых
соединен стропами с краями сети. В качестве порохового источника энергии
используется строительный патрон. Сеть может быть выкроена в форме круга
или прямоугольника (по заказу). Картридж с сетью закрыт специальной за-
глушкой, которая способствует созданию соответствующего давления форси-
рования. Благодаря полученной кинетической энергии и заданным направле-
ниям вылета грузики в полете расправляют сеть и доставляют ее к цели. Встре-
чая на своем пути объект, сеть с грузиками охватывают его, перехлестываются
и запутываются на нем. Чем подвижнее объект или объекты ведут себя в сети,
тем плотнее затягивается сеть, и противодействие со стороны охваченных се-
тью объектов становится невозможным. Сеть выполнена из сверхпрочного ма-
териала «Русар», допускается многократное использование сети (до 30 раз) с
перезарядкой даже в полевых условиях.
Рис. 12.11. Система «Стоп-сеть»
756
12. Оружие нелетального действия
Время действия системы «Стоп-сеть» от начала срабатывания до потери
двигательной способности объекта - не более 0,5 с. Площадь рабочей поверх-
ности сети составляет 40 м2, масса изделия - 650 г, длина - 295 мм, диаметр -
32 (или 98) мм, дальность применения - 1,5... 10,0 м.
Натурные испытания системы «Стоп-сеть» проводили на различных
типах биообъектов в целях лишения последних двигательной активности
(рис. 12.12). Устройство продемонстрировало высокую эффективность в ус-
ловиях взаимодействия на небольших (до 5 м) расстояниях. Объект, лишен-
ный возможности двигаться, самостоятельно не способен нарушить сплош-
ность сети или произвести распутывание и дальнейшее освобождение. Малая
масса устройства дает возможность носить несколько единиц, что позволяет
воздействовать на объект многократно при промахе или необходимости обез-
движить несколько объектов.
Рассмотренные разработки представляют собой основные варианты ис-
пользования систем дистанционного обездвиживания биообъектов. Разработ-
ка фирмы Diehl обеспечивает значительную дальность воздействия (др 300 м),
но при этом необходимо применять дополнительные сложные системы для
метания рабочего модуля. Кроме того, такая дальность стрельбы требует на-
личия специальных устройств по наведению и измерению фактического рас-
стояния до объекта воздействия. Для этого в систему вводится лазерный даль-
номер, что значительно повышает ее стоимость, а массогабаритные характе-
ристики комплекса исключают возможность одновременного ношения данной
системы и обычного стрелкового вооружения, вследствие чего применяемость
системы ограничивается операциями по поддержанию мира. Для использо-
вания комплекса в совокупности с обычным стрелковым вооружением необ-
ходимо наличие транспортных средств для своевременной дислокации опе-
раторов непосредственно в область применения.
Система «Стоп-сеть» лишена указанных выше недостатков, однако ее мо-
бильность достигается значительным упрощением и исключением важных с
точки зрения эффективности действия модулей. Нацеливание системы прово-
дится вручную без каких-либо вспомогательных устройств, что значительно
Рис. 12.12. Применение системы «Стоп-сеть» для пресечения бегства
предполагаемого правонарушителя
12.2. Физические принципы функционирования ОНД 757
снижает точность попадания и, как следствие, эффективность действия систе-
мы. Данное устройство может быть рекомендовано только для проведения от-
дельных операций по правопринуждению, но его применение в миротворчес-
ких и антитеррористических операциях сомнительно.
В качестве ОНД, сочетающего механическое, химическое и электрошоко-
вое воздействие, предлагается также использовать дистанционно выстрелива-
емые сети, пропитанные ирритантом или имеющие возможность генериро-
вать электрические импульсы.
Особо можно выделить интенсивно разрабатываемые в последнее время
мобильные сборные и быстро разворачиваемые барьеры. Поводом для их со-
здания стало требование обеспечения жесткого контроля в критических ситуа-
циях и необходимость сокращения количества таких ситуаций во время:
- проведения миротворческих операций;
- спортивных, политических и экономических мероприятий;
- воспроизведения сценариев, схожих с гражданской войной.
При этом одна из самых важных проблем - проблема управления и разде-
ления враждебно настроенной толпы и блокирование доступа в запрещенную
зону. В соответствии со стратегической концепцией применения таких барье-
ров к их конструкции предъявляют следующие требования:
- исключение нанесения тяжелых травм;
- ограниченный по численности обслуживающий персонал;
- возможность сигнализации посредством оптических или акустических
эффектов;
- легкоприспосабливаемая сборочная конструкция;
- развертывание, осуществляемое за время менее 1 с;
- препятствование повреждению барьера подручными средствами;
- предотвращение контактов и нарушение видимости между оппонирую-
щими группами;
- чувствительность системы к приближающимся к ней объектам.
В соответствии с перечисленными требованиями конструкторы из Фра-
унховеровского института химических технологий (Германия) предложили
архитектуру системы, схема которой включает оператора, управляющий мо-
дуль, датчики, газогенератор и барьерные модули. В соответствии с приве-
денной архитектурой к разработке предлагаются два типа барьеров. Барье-
ры первого типа (рис. 12.13, а) состоят из стоек, изготовленных как поршни
с регулируемой высотой, занавеса (собственно барьера) из неподдающегося
воздействию текстиля (Aramyd, Zylon) с высоким сопротивлением механи-
ческому и тепловому воздействию, газогенератора, программируемого дат-
чика и системы управления, интегрированных в базу стойки. Барьеры вто-
рого типа (рис. 12.13, б) включают в себя стойку, изготовленную из спрессо-
ванной airbag-ткани, занавес (собственно барьер) из неподдающегося
воздействию текстиля (Aramyd, Zylon), усиленный сжатым газом, газогене-
ратор, программируемый датчик и систему управления, интегрированные в
базу стойки.
Требования к газогенератору могут быть сформулированы следующим об-
разом:
- различное в зависимости от способа применения газообразование;
758
12 Оружие нелетального действия
Рис. 12.13. Схемы барьерных модулей первого (а) и второго (б) типов
Р
- дружественные к окружающей среде компоненты энергоносителя и не-
токсичные продукты горения; ' -
- долговременная стабильность материала конструкции газогенератора.
В качестве датчиков могут применяться оптические, акустические (ульт-
развуковые) и механические датчики, а также видеосистемы (частота ампли-
тудно-импульсной модуляции экономичных видеосистем сегодня составляет
10...20 мс). При этом видеосерия импульсов передачи изображения должна
быть доступна для анализа в целях адекватной реакции на конкретный сцена-
рий угрозы. Кроме того, видеосерия импульсов передачи изображения перед
развертыванием барьера должна быть сохранена для идентификации личнос-
ти и последующей оптимизации алгоритма управления.
Предполагается, что разрабатываемые гибкие (легкоразворачиваемые и лег-
коприспосабливаемые) преграды станут оптимальными устройствами для за-
щиты зон ограниченного доступа, различных зданий и сооружений, для про-
ведения операций в условиях эскалации асимметричных конфликтов и при
противодействии массовым беспорядкам.
Во многих странах для пресечения массовых беспорядков и групповых
действий, нарушающих работу транспорта, связи и организаций, допускается
применение водометов, выполненных на тяжелом автомобильном шасси и обес-
печивающих выброс компактной струи воды на дистанцию до нескольких де-
сятков метров, которая оказывает ударное воздействие и создает дискомфорт-
ное состояние в результате намокания одежды. Разработаны также экспери-
ментальные образцы легконосимых водометов в виде короткого ствола, который
соединен с канистрой, наполненной водой и размещаемой в виде ранца на
спине оператора. Водяная струя может быть как сплошной (подача в сверх-
звуковом режиме), так и пульсирующей, причем возможно добавление в нее
инкапаситантов типа ОС, CN или CS, что обеспечивает одновременное кине-
тическое и раздражающее действие. Однако для того чтобы реализовать идею
легкого водомета в виде промышленного образца, требуются еще значитель-
ные усилия для достижения удовлетворительных тактико-технических харак-
теристик его функционирования.
К химическим нелетальным средствам раздражающего действия и иммо-
билизирующим средствам, в частности, можно отнести экстракт перца
12.2. Физические принципы функционирования ОНД
759
Oleoresin Capsicum (ОС) - полностью природное вещество (основная актив-
ная составляющая, вызывающая жжение и боль, - капсаицин), воздействие
которого на человеческий организм достаточно хорошо изучено, а также ком-
позиции типа CN (хлорцетофенон), CS (ортохлорбанзальмалононитрил) и CR
(дибенз-1,4-оксазепин). При этом CN более токсичен, чем CS, но для дости-
жения одинакового с CS эффекта необходимо большее количество CN, а диа-
пазон концентрации CN между летальной и нелетальной дозами весьма мал,
что создает проблемы его использования в качестве активной составляющей
химических видов ОНД. Несколько лет назад был синтезирован также состав
PAVA (Pelargonic Acid Vanillylamide) капсаициноид (полностью раститель-
ное вещество) менее едкий, нежели капсаицин, однако по предварительным
оценкам вполне пригодный для ОНД, хотя окончательного заключения о бе-
зопасности его применения еще нет.
В разных странах используется ряд аэрозольных спецсредств, в том числе
боеприпасы, газы и дымы. Для создание аэрозольного облака на открытой
местности могут применяться переносные системы, мины и даже специаль-
ные контейнеры, размещаемые на вертолетах.
Наиболее характерный пример конструктивного оформления химических
нелетальных средств - газовые баллончики, распространенные в различных
странах в качестве средств самозащиты, газовые пистолеты и револьверы. Ско-
рость струи выходящего газа для указанных средств самозащиты может изме-
няться в широких пределах (вплоть до сверхзвуковой), а частота составлять
5-40 выбросов газа в секунду. В полицейском исполнении баллончики и пат-
роны к газовым пистолетам и револьверам могут дополнительно к ирританту
содержать ультрафиолетовую краску для маркировки нападающего. Дальность
действия указанных средств - 0,5.. .4,0 м.
Необходимо отметить негативные последствия широкого распростране-
ния газового оружия самообороны, обладающего многофакторным поврежда-
ющим действием, среди гражданского населения. Например, по статистичес-
ким данным 3-й городской клинической больницы скорой помощи г. Самары
(Россия), уже в первые несколько лет после разрешения гражданским лицам
приобретать газовые пистолеты и револьверы число повреждений от этих
средств ежегодно в среднем составило около 30 % от общего числа огнестрель-
ных ранений. В связи с этим Государственным институтом усовершенствова-
ния врачей Министерства обороны РФ проведены экспериментальные иссле-
дования, целью которых стало изучение повреждающего действия газового
оружия с близкой дистанции выстрела. Было показано, что применение газо-
вых револьверов и пистолетов, особенно с расстояния менее 1,5 м, способно
причинить тяжелые механо- и термохимические ранения. Практические хи-
рурги отмечают, что заживление повреждений, нанесенных штатными хими-
ческими патронами газового оружия самообороны, не укладывается в «клас-
сическое» течение раневого процесса. На основании этих исследований сде-
лали вывод, что газовые револьверы и пистолеты по баллистическим и
тактико-техническим характеристикам, а также по патоморфологической кар-
тине создаваемых им повреждений следует отнести к огнестрельному гладко-
ствольному короткоствольному оружию. Поэтому было предложено запретить
распространение и применение газового ствольного оружия самообороны, спо-
760
12. Оружие нелетального действия
собного причинить тяжкие телесные повреждения человеку с близкой дис-
танции выстрела (упор и неплотный упор), и разрешить использование дан-
ного вида ОНД только сотрудникам подразделений МВД, которые несут слу-
жебную ответственность за штатное применение специальных средств не-
легального действия. Описанный негативный опыт свидетельствует о том,
что параллельно с исследованиями, направленными на создание новых ви-
дов газового оружия самообороны, должна быть разработана и закреплена
международными соглашениями правовая база, необходимая для контроля за
производством, распространением и использованием данного вида оружия.
Увеличение дальности действия достигается с помощью ручных аэрозоль-
ных гранат, которые рассеивают ирританты обычно пиротехническим спосо-
бом. Гранаты могут выполняться как в ручном варианте, так и входить в со-
став выстрелов к различным стрелковым средствам (ружьям, карабинам, гра-
натометам, передвижным многоствольным пусковым установкам). Например,
в России специальные подразделения используют ручную аэрозольную тра.-
нату «Дрейф», предназначенную для ручного забрасывания на дальность свы-
ше 10 м в целях мгновенного создания на открытой местности облака аэрозо-
ля раздражающего действия, причем расстояние от точки падения гранаты до
ближайшего человека не должно быть менее 0,6 м. Данный тип гранат приме-
няют только на открытой местности и запрещают к использованию в местах,
где происходит утечка газа, хранятся взрывчатые и легковоспламеняющиеся
вещества и материалы. Аналогичные гранаты для ручного метания на даль-
ность порядка 25...40 м широко используются в ряде европейских стран и в
США. Задержка инициирования обычно составляет 0,7...2,0 с, время распыле-
ния ирританта - от 3 до 40 с, причем его устанавливают на гранате до ее
применения. Срабатывание всех рассмотренных конструкций происходит од-
ним из двух способов: граната разрушается при ударе о поверхность, а ирри-
тант при этом попадает в атмосферу, или ирритант выходит из гранаты через
специальные щели в корпусе под действием давления, создаваемого газогене-
ратором, который находится в центре гранаты.
Конструкции выстрелов, содержащих в качестве активного вещества раз-
личные ирританты, с дальностью действия от 50 до 300 м разработаны и ис-
пользуются в России, США и ряде стран Европы. Метаемая часть одного из
таких выстрелов, созданных для увеличения дистанции действия и совмеща-
ющих кинетическое действие с доставкой ирританта, выполнена в форме лег-
кого резинового кольца (Ring Airfoil Projectile - RAP) с полостями для ирри-
танта, закрытыми мембраной. После выстрела из винтовки М16 со специаль-
ной насадкой и попадания в цель мембрана разрушается и формируется облако
ирританта. В настоящее время ведутся работы по созданию специального руч-
ного ПУ для RAP. Для повышения дальности действия применяют также тон-
костенные резиновые пули с ирритантом. Кроме того, разработан 40-мм по-
ристый картридж, изготовляемый из вспененной резины и содержащий CS,
ОС или CN.
Здесь необходимо отметить, что в отличие от негативного опыта нештат-
ного применения газовых пистолетов и револьверов в качестве оружия само-
обороны гражданскими лицами, случаи летальных исходов от применения ир-
ритантов сотрудниками правоохранительных служб неизвестны.
12.2. Физические принципы функционирования ОНД
761
Для использования всевозможных раздражающих химических составов
силовыми структурами в различных тактических ситуациях разрабатывают и
применяют более эффективные системы нелетального действия. Характерный
пример - 37...40-мм картриджи, содержащие аэрозоль и применяемые для
стрельбы из пулемета (рис. 12.14) в целях создания обширного облака раздра-
жающего вещества, которое обезвреживает людей, находящихся в зоне эф-
фективного действия системы. Другой пример - устройство для рассеивания
аэрозолей-ирритантов М2А1 (рис. 12.15), которое с помощью метательного
заряда ВВ распыляет химические вещества (ирританты) вблизи своего место-
нахождения и может быть использовано в качестве мины нелегального дей-
ствия. Еще один пример - портативный автономный рассеиватель аэрозоля
(рис. 12.16) с механизмом управления, который программируется для действия
устройства после выброса последнего в воду. Портативное устройство осна-
щено специальными средствами, обеспечивающими его плавучесть как на ре-
ках, так и на море. Устройство обладает высокой степенью безопасности (нет
взрыва, следовательно, нет осколочного и фугасного действия), имеет элект-
ронное управление временем и местоположением начала функционирования,
способностью совмещения различных реагентов нелегального действия (кас-
Рис. 12.14. Картриджи с аэрозолем;
а - пулеметная лента; б - принципиальная схема; 1 - разрушающийся диск; 2 - оболочка карт-
риджа; 3 - диффузионный лист; 4 метательное В В (швв 1,5 г); 5 - аэрозоль-ирритант
762
12. Оружие нелетального действия
Рис. 12.15. Общий вид (а) и схема установки (б) стационарного устройства для рас-
сеивания аэрозолей-ирритантов М2А1:
1 - место для управляющего устройства; 2 - контейнер М2А1 (т = 14,5 кг); 3 - электродетона-
тор; 4 - секция для метательного ВВ; 5 - диффузор; 6 - кассеты для полезной нагрузки;
7- разрушаемая диафрагма; 8 - верхняя плита
Рис. 12.16. Портативный автономный рассеиватель
аэрозоля;
1 - кассеты с аэрозолем; 2 - подушка (надутая) для удер-
жания устройства на поверхности воды
12.2. Физические принципы функционирования ОНД
763
сетная схема) и подходит для проведения различных операций: тактической
маскировки, противодействия снайперу, контроля над толпой, зачистки зда-
ний и сооружений.
В нейтрализации точечных целей (например снайперов, рассредоточен-
ных на местности или находящихся в зданиях) важную роль могут сыграть
малогабаритные БП средств ближнего боя (СББ) со слезоточивыми состава-
ми, в первую очередь, гранаты подствольных гранатометов и ручные грана-
ты. Граната (рис. 12.17) к подствольному гранатомету, снаряженная слезото-
чивым составом, в которой реализован взрывной способ перевода ирританта
в боевое состояние, состоит из корпуса 3, представляющего собой баллон с
расположенным в нем слезоточивым
составом 4 в виде жидкости или по-
рошка. Для уменьшения радиуса оско-
лочного поражения живой силы при
взрывном диспергировании состава
корпус БЧ выполняют из безосколоч-
ных материалов, например, из стекло-
пластика. Внутрь корпуса со стороны
головной части установлен стакан 2 с
диспергирующим зарядом 5 и взрыва-
телем /.
Боеприпас выстреливается в на-
Рис. 12.17. Конструктивная схема снаря-
женной ирритантом гранаты к подстволь-
ному гранатомету:
1 - взрыватель; 2 - стакан; 3 - корпус; 4 -
состав; 5 - диспергирующий заряд; 6 - мета-
тельный заряд
правлении цели из ручного гранатоме-
та на расстояние 50...500 м, являюще-
еся оптимальной прицельной дально-
стью стрельбы для большинства СП
данного класса. При этом попадание
БП внутрь здания не обязательно, до-
статочно обеспечить подрыв БЧ на на-
ружной стенке или вблизи него. Образующееся в результате подрыва БЧ аэро-
дисперсное облако слезоточивого вещества нейтрализует расположенную в зда-
нии живую силу за счет затекания активных сред внутрь через дверные и
оконные проемы. Проведенные исследования показали, что БЧ боеприпаса
массой 2.. .3 кг может обеспечить вывод из строя живой силы, расположенной
внутри двух-трехэтажного здания на период до 10...20 мин. Этого времени
достаточно для захвата здания штурмовой группой.
Кроме того, для исключения открытия внезапного прицельного огня по
наступающей штурмовой группе командир может принять решение обстре-
лять любые наиболее вероятные объекты размещения боевиков (отдельные
здания, развалины и т. д.) боеприпасами со слезоточивым составом.
Предлагаемые нелетальные БП можно также эффективно применять для
борьбы с засадами. При внезапном нападении на колонну, когда известно только
направление, откуда ведется стрельба из засады, неприцельный ответный огонь
из стрелкового оружия и традиционных СББ с относительно малыми площа-
дями поражения не позволяет за короткое время ликвидировать засаду. Расче-
ты показывают, что увеличение площади поражения (нейтрализации) живой
силы боеприпасами СББ примерно в 5-6 раз обеспечило бы эффективное ре-
764
12. Оружие нелетального действия
шенис задачи по борьбе с «садами. Применение боеприпасов СББ, снаря-
женных ирритантами и имеющих площадь нейтрализации живой силы поряд-
ка 800 м2, позволяет быстро подавить нападающих и вывести их из строя на
время, достаточное для ликвидации и пленения.
В настоящее время достигнут значительный прогресс в разработке но-
вых типов химических нейтрализующих веществ, хотя проблема индивиду-
альной дозировки в условиях воздействия на большую группу людей оста-
ется нерешенной. Например, в Центре химических исследований, разрабо-
ток и технологий сухопутных войск США создают психотропные вещества
(пикапаситанты), вызывающие временные психические расстройства, нару-
шение координации движений, временную слепоту, глухоту или тахигаст-
рию. Вещества класса фентанилов парализуют человека, а вещества класса
детомидина вызывают полную анестезию и сон. Для воздействия химичес-
ких агентов непосредственно через кожу человека используют их растворы
в диметилсульфоксиде. Однако до настоящего времени еще не создано иде-
ального транквилизирующего средства. Один из возможных путей к разра-
ботке безопасного химического состава - одновременное или последователь-
ное применение транквилизатора и антидота, что может снизить вероятность
необратимых потерь.
Стационарные и выстреливаемые электрошоковые устройства (ЭШУ) не-
однократно применялись в США при задержании нарушителей. Аналогичные
средства, обеспечивающие импульс напряжения до 30...90 кВ, и электричес-
кий разряд, пробивающий более 1 см одежды, разработаны также в России.
Рассмотрим основные современные технологии разработки и использова-
ния ЭШУ. По физическим принципам функционирования ЭШУ подразделя-
ются на два класса:
1) STUN-системы (от англ, stun - ошеломлять) мощностью 5... 15 Вт, со-
здающие помехи деятельности нервной системы биообъекта и временно по-
ражающие только ее сенсорную компоненту;
2) EMD-системы (EMD электромускульный пробой) мощностью 16...26 Вт;
подавляющие функции центральной нервной системы, получая прямое уп-
равление скелетными мышцами, и воздействующие на сенсорную и мотор-
ную компоненты нервной системы.
Если ЭШУ типа STUN действуют на цель, ошеломляя ее высоким уров-
нем электронной стимуляции и заставляя сенсорную систему вырабатывать
ошибочные сигналы, то ЭШУ типа EMD действуют непосредственно на мо-
торную систему и мышцы, заставляя последние непроизвольно сокращаться.
Поэтому для эффективного воздействия предпочтение отдается EMD-систе-
мам, для которых ключевой момент - генерируемая мощность.
По тактике применения конструкции ЭШУ могут быть контактного и ди-
станционного действия. Электрошоковые устройства контактного действия
широко используются как средства самозащиты, а дальность их действия оп-
ределяется суммой длин вытянутой руки и самого устройства (более подроб-
но рассмотрено в подразд. 12.6). Однако для оперативного применения ЭШУ
силовыми подразделениями и использования их в качестве средств охраны
различных объектов необходимо дистанционное воздействие. Для этого со-
зданы ЭШУ типа TASER, передающие электрический импульс с помощью
12.2. Физические принципы функционирования ОНД
765
проводов, выстреливаемых из специального картриджа, а также разрабатыва-
ется технология передачи электрического импульса с помощью формирова-
ния электропроводящих газодисперсных каналов. Принцип функционирова-
ния подобного ЭШУ был предложен еще в 1976 г. Дж. Ковером. Так как Ко-
вер был поклонником научно-фантастических романов Томаса Свифта, то он
назвал свое изобретение Thomas A. Swift Electronic Rifle (электронная винтов-
ка Томаса А. Свифта) или сокращенно TASER.
TASER (рис. 12.18) стреляет двумя заостренными металлическими стрел-
ками, к которым прикреплены проводники. При попадании в биообъект стрелки
впиваются в него и по проводникам передают импульсы высокого напряже-
ния. Электрические характеристики разработанных и применяемых в США
TASER типа Х26 и М26 следующие: напряжение в электроцепи - 50 000 В;
средняя сила тока - от 2,1 до 3,6 мА; энергия в импульсе от 0,36 до 1,76 Дж.
По мнению разработчиков, достоинства TASER-технологий следующие: воз-
можность дистанционного управления; немедленная ответная реакция биообъ-
екта как элемента электроцепи; многократно доказанный надежный и эффек-
тивный вывод цели из строя; применение не опарных для здоровья материалов;
рентабельность; отсутствие вероятности летального исхода; надежное функци-
онирование в неблагоприятных погодных условиях (дождь, снег). В настоя-
щее время уже созданы опытные образцы устройств, которые работают в
полуавтоматическом режиме, что допускает их многократное применение в
течение короткого промежутка времени по нескольким целям.
TASER может использоваться не только в виде носимого ручного оружия
нелетального действия (Х26 или М26), но и в виде элемента бронированной и
моторизованной фиксированной установки Sentinel, наводимой с помощью ви-
деокамеры (рис. 12.19). Кардановый подвес этого элемента позволяет опера-
Рис. 12.18. Схема ЭШУ TASER типа Х26
1 - игла; 2 - зонд с проводом, 3 - воздушный патрон; 4 - подсветка высокой интенсивности; 5 -
плата с серийным номером; 6 - переключатель подсветки; 7 - предохранитель; 8 - кнопка
разрядки цифрового магазина мощности; 9 - зоны усиленного сжатия; 10 - цифровой магазин
мощности; 11 - ударные платы; 12 — курок; 13 - подсветка низкой интенсивности; 14 - лазер-
ный прицел; 15 - заслонки
766
12. Оружие нелетального действия
тору, находящемуся в помещении охраны, поворачивать его как по азимуту,
так и по углу возвышения для прицеливания на биообъект в пределах 10 м от
устройства. Носимые ЭШУ типа TASER и стационарные ЭШУ типа Sentinel
могут применяться для контроля над толпой, запрета доступа в охраняемую
зону (рис. 12.20), защиты важных объектов - посольств, складов, пунктов уп-
равления, зданий правового принуждения, исправительных учреждений (рис.
12.21) и т. д, для контроля и дистанционного воздействия на зачинщиков бес-
порядков в исправительных учреждениях (рис. 12.22). При этом автоматичес-
кое срабатывание механизма прямого выстрела требует наличия в автомати-
ческой системе Sentinel бортового сенсора, который должен получить угол
возвышения и азимутальный угол цели в зависимости от скорости ее переме-
щения. В соответствии со значительной статистикой использования ЭШУ типа
М26 в США успех их применения в зависимости от расстояния составил: на
Рис. 12.19. Стационарное ЭШУ типа
Sentinel
Рис. 12.20. Применение ЭШУ для запре-
та доступа в охраняемую зону
Рис. 12.21. Применение ЭШУ для защи-
ты объектов
Рис. 12.22. Применение ЭШУ для дис-
танционного воздействия в исправитель-
ных учреждениях
12.2. Физические принципы функционирования ОНД
767
дистанции 0,3-•• 1,0 м - 93,7 %; на дистанции 1...2 м - 93,8 %; на дистанции
2,0...3,3 м - 94,1 %; на дистанции 3,3...4,5 м - 91,5 %; на дистанции
4,5...6,4 м - 87,3 %. Поэтому М26 и Х26 не используют на расстояниях более
7...8 м, а максимальная дальность их действия, заложенная в конструкцию
сменного картриджа с электропроводящими нитями, не превышает 9 м. Сле-
дует отметить, что каждая TASER содержит специальный чип, который фик-
сирует историю применения (дальность применения, частота воздействия
и т. д.) данного ЭШУ. Что касается опасности применения TASER, то, по дан-
ным независимой патолого-анатомической экспертизы США, в результате мно-
гих тысяч случаев действия TASER погибли только три человека, причем соб-
ственно TASER не является первопричиной смерти, а была лишь частью об-
щего негативного воздействия на организм других факторов. Отметим также,
что в последние 20-30 лет в США проводились интенсивные исследования
влияния TASER мощностью 5...7 Вт на работу сердца, в том числе при нали-
чии кардиостимулятора. Эти TASER были признаны безопасными, но сегодня
необходимо определить пригодна ли полученная информация для TASER мощ-
ностью 26 Вт. / Л
При кажущейся простоте TASER имеет некоторые ограничения и недо-
статки. На дистанции 3 м происходит расхождение стрелок между собой на
расстояние порядка 45 см, что предъявляет высокие требования к точности
начального прицеливания. Если один контакт не попадет в объект, то воз-
действия не будет. Если стрелка попадет в пуговицу или нечто подобное, то
она отскочит от объекта. Проникая в глаз или шею, стрелка, летящая со ско-
ростью приблизительно 70 м/с, может нанести серьезную травму объекту
воздействия. Поэтому разрабатывают альтернативный способ передачи вы-
соковольтных электрических импульсов на расстояние путем формирования
плазменных электропроводящих газодисперсных каналов (ГДК), обладаю-
щих площадным контактом с объектом и по этой причине не требующих
точного прицеливания. Помимо этого достоинства ГДК не травмируют объект,
а используемый материал безопасен для глаз и не может проникнуть через
кожу.
Газодисперсный канал формируется в результате диспергирования
скоростного аэрозольного заряда (рис. 12.23). При помощи пружины, сжато-
го воздуха или пиротехнического средства диспергируемому веществу сооб-
щается некоторая начальная скорость. В полете набегающий поток воздуха
сносит диспергирующие частицы с
поверхности заряда, в результате
чего вдоль траектории его полета об-
разуется ГДК, формируемый до пол-
ного исчезновения частиц. Под вли-
янием диффузионных процессов,
силы тяжести, ветра и других фак-
торов канал может деформировать-
ся. Механизм формирователя ГДК
следующий (рис. 12.24): после сра-
батывания пиротехнического заряда
образовавшиеся пороховые газы вы-
Рис. 12.23. Механизм формирования ГДК:
1 - заряд диспергирующего вещества
768
12. Оружие нечетального действия
Рис. 12.24. Принцип действия формирователя ГДК:
1 метательный заряд; 2 камера из диэлектрика; 3 ствол из диэлектрика; 4 ГДК
Рис. 12.25. Стадии формирования ГДК в течение времени Z, (а) и t2 (б)
ч
талкивают заряд диспергирующего вещества, разгоняя его в трубке (стволе
формирователя) до скорости 50...60 м/с. Далее, как уже говорилось, под дей-
ствием набегающего потока воздуха из частиц формируется ГДК (рис. 12.25).
Решение проблемы передачи электрических импульсов по ГДК зависит
от возможности практической реализации способа формирования ГДК и со-
здания в нем электрической проводимости. При решении первой задачи не-
обходимо ответить на два вопроса: 1) какова возможная максимальная дли-
на канала; 2) от каких параметров зависит длина канала и каким образом
можно изменять его геометрические характеристики. Для решения второй
задачи требуется: 1) определить критическую пробойную концентрацию дис-
пергирующего вещества, т. е. минимальное количество вещества в единице
объема, необходимое для возникновения электрического тока; 2) найти пара-
метры вещества, влияющие на значение критической концентрации; 3) оце-
нить электрическое сопротивление канала и значение протекающего по нему
тока.
Для решения указанных проблем сегодня проводят многочисленные экс-
периментальные исследования. Разработаны компактные упаковки дисперги-
рующего вещества (рис. 12.26) и модульные элементы для аэрозольных заря-
дов в совокупности с пиротехническим элементом инициирования (рис. 12.27).
Судя по опубликованным результатам исследований, сегодня экспериментально
достигнута длина газодисперсного электропроводящего канала длиной 13 м.
Главные задачи ближайшего будущего в указанном направлении проектирова-
12.2. Физические принципы функционирования ОНД
769
Рис. 12.26. Упаковки диспергирующего вещества:
а галета высотой 10 мм, диаметром 20 мм и массой 12 г; б упаковка из шести галет
Рис. 12.27. Оболочка, содержащая аэрозольный заряд и пиротехнический элемент ини-
циирования (фирма RMW)
ния нелетальных ЭШУ на основе ГДК - надежное введение электрического
импульса в ГДК и разработка картриджной системы, совместимой со стандарт -
ными 40-мм системами оружия. В случае успешного решения этих проблем
возможно применение ЭШУ на основе ГДК для создания систем запрета дос-
тупа в зону, систем для установки на мобильные платформы и 40-мм плаз-
менных ЭШУ к подствольным гранатометам.
Последние разработки в области ЭШУ связаны с исследованиями эффек-
тов передачи электрического импульса по тонкой струе воды, которая выстре-
ливается из специального водяного пистолета. Струя может быть сплошной и
передавать электрический импульс объекту при вторичном нажатии операто-
ром гашетки только после контакта струи воды с объектом воздействия. Дру-
гой вариант использования водяной струи связан с ее дискретизацией, когда
струя состоит из мелких отдельных капель, каждая из которых несет в себе
электрический заряд.
Компанией MDM Group (Австралия) предложены также конструкции
электрошоковых пуль (ЭШП), технология производства которых основана
на применении стандартных металлических или резиновых пуль, полнос-
тью совместимых с существующим огнестрельным оружием. Электрошоко-
вые пули основаны на открытом более 100 лет назад и хорошо изученном
пьезоэлектрическом эффекте для генерации высоковольтного заряда. Совре-
менные пьезоэлектрические материалы позволяют получать высокий уровень
электрических характеристик: напряжение порядка 50 000 В и энергию заря-
770
12. Оружие нелетального действия
да до 175 Дж. Достигается это, например, с помощью ЦТС-керамики (ЦТС -
цирконат-титанат свинца), мелкодисперсные элементы которой являются на-
полнителем эластичных пластмасс или эластомеров. При выстреле в резуль-
тате сжатия и перегрузок керамические элементы находятся в напряженном
состоянии, в результате чего при их столкновении с целью вырабатывается
электрический импульс. В отличие от ударно-шоковых пуль эффективность
действия ЭШП не зависит от высоких кинетических параметров, благодаря
чему существенно снижается возможность нанесения травм, что нередко про-
исходит при использовании резиновых пуль. По заявлению специалистов MDM
Group, ЭШП могут полностью обезвредить цель на расстоянии до 100 м, в то
время как дальность эффективного действия резиновых пуль ограничена рас-
стоянием в 40 м, а дальность действия TASER не превышает 12 м.
Разработаны также образцы липких электрошокеров (Sticky Shocker), со-
вмещающих кинетическое действие с воздействием электрического импульса.
Sticky Shocker представляет собой снаряд с электрическим проводником, выст-
реливаемый из газовой метательной установки, который прикрепляется в по-
мощью клейкой субстанции к объекту воздействия и генерирует электричес-
кие импульсы подобно TASER.
Ослепляющие и оглушающие средства нелегального действия при-
меняются как на открытой местности, так и в зданиях, поездах, кораблях, са-
молетах. Обычно такие системы являются пиротехническими. Кроме того, раз-
работаны системы кластерного типа с дальностью действия до 100 м для рас-
сеивания толпы.
Лазерные временно ослепляющие и временно освещающие системы
уже созданы, но требуют дальнейшего усовершенствования. Пока еще не
достигнут необходимый уровень яркости, поэтому эффективность этих сис-
тем ограничивается уровнем повреждения сетчатки глаз и трудностью при-
целивания лазерным лучом малого диаметра в глаза двигающейся цели. При-
менение оптической расфокусировки такого луча приводит к быстрому па-
дению уровня освещенности, а снижение ослепляющего эффекта обратно
пропорционально квадрату расстояния. По крайней мере, для ручного лег-
кого лазерного ослепителя с диодной накачкой (Lazer Dazzler), разработан-
ного по заказу Управления перспективных исследований и разработок мини-
стерства обороны США (DARPA), это еще не решенная проблема, хотя уже
предложены и сделаны некоторые практические шаги в данном направлении.
Например, для создания лазерного ослепителя в габаритах полицейского фо-
нарика, функционирующего на расстояниях от 10 до 300 м, главное требова-
ние - обеспечение плотности мощности излучения от 2,5 до 25,0 мВт/см2 на
требуемой дистанции. Дневная эксплуатационная эффективность лазерного
ручного ослепителя Dissuader (рис. 12.28), имеющего мощность излучения
68 мВт со спектральной частотой 650 нм и минимальную плотность мощно-
сти излучения около 2,55 мВт/см2, определяется порогом видимости поряд-
ка 25 м при ярком солнечном свете. Указанное устройство с изменяемым
фокусным расстоянием генерирует плотный ослепляющий сфокусированный
конус, обеспечивая минимальный эффект ослепляющих вспышек с частотой
8 Гц на расстоянии 50 м, а в случае несфокусированного положения реали-
зуется значительный, но менее плотный ослепляющий конус на расстояниях
12.2. Физические принципы функционирования ОНД 771
от 25 до 50 м. Лазерный ослепитель HALT с аналогичной оптикой (рис. 12^29, а)
оснащено универсальной крепежной направляющей для комплектации раз-
личных систем вооружения, в том числе ручного огнестрельного оружия
(рис. 12.29, б). Конструкция с двумя фиксированными фокусами (узким -
для сопровождения на длинных дистанциях и широким - для подавления
зрения и дезориентации на коротких дистанциях) снабжена переключателя-
ми режима на обеих сторонах устройства, которые приводятся в действие с
помощью одного пальца.
Рис. 12.28. Лазерный ручной ослепитель Dissuader
а
б
Рис. 12.29. Лазерный ослепитель HALT (а) и вариант его использования в комплекте
с ручным огнестрельным оружием (б)
772
12. Оружие нелеталъного действия
Итак, для описанных выше устройств в режиме поиска и обнаружения
цели необходимо использование маломощного расфокусированного луча с
большой площадью пятна. В оперативном (основном) режиме площадь пятна
должна уменьшаться, а поверхностная плотность излучения достигать поро-
гового уровня. Для того чтобы снять противоречивость требований к приме-
нению лазерного ослепителя в двух различных режимах функционирования,
было предложено вместо круглого пятна формировать излучение в виде узкой
полоски или эллипса, используя особенности образования светового потока
полупроводниковыми лазерными диодами. Тогда уже на дистанции 10 м дли-
на полосы излучения в несколько раз превысит расстояние между глазами, а
ее ширина будет составлять всего несколько сантиметров. Так как под воздей-
ствием яркого света человеческий глаз начинает рефлекторно моргать (пери-
од моргания составляет 0,10. ..0,25 с), то достаточно четверти секунды облу-
чения сетчатки глаза, чтобы вызвать необходимое ослепляющее воздействие.
Для обеспечения требуемого времени облучения предложен механизм реали-
зации поочередных взаимных перемещений (ПВП) эллиптического луча, при-
чем частота ПВП такова, что луч попадает в глаза за время 0,10...0,25*с. При
этом обнаружение цели и наведение луча происходят одновременно. Корпус
устройства, формирующего поочередно перемещающийся эллиптический луч
(рис. 12.30), может быть изготовлен из легкого материала (например, пласти-
ка) и иметь форму и габариты, сходные с обычным фонариком. Реализация
Рис. 12.30. Конструкция легкого лазерного ослепляющего фонарика с цилиндричес-
кой линзой, находящейся в начальном положении (п) и повернутой на 90° (б):
1 корпус; 2 последовательно включенный источник питания; 3 — светящееся тело; 4 - поло-
са света; 5 - цилиндрическая линза; 6 - линза; 7 - концевой излучатель; 8 - лазерный излуча-
тель; размеры пучка света
12.2 Физические принципы функционирования ОНД 1Т2
эллиптической формы пятна облучения и механизма ПВП, по мнению авто-
ров, приводит к значительному увеличению плотности энергии лазерного из-
лучения на сетчатке глаза и уменьшению времени обнаружения цели.
Когерентные ослепляющие средства (низкоэнергетическое лазерное ору-
жие) обладают такими преимуществами, как практически мгновенная достав-
ка поражающего фактора до цели с высокой точностью, высокая скорострель-
ность, многообразие поражающих факторов и значительная дальность воз-
действия. Уже к началу 1990-х годов в ряде стран были созданы образцы
лазерных комплексов для подавления оптико-электронных систем наблюдате-
лей-корректировщиков, снайперов, систем управления оружием, разведки и
связи, ослепляющего действия на органы зрения личного состава. Указанные
средства разрабатывались как в переносном варианте для снаряжения бойца
на поле боя, так и для подвижного носителя на базе автомобильных и гусе-
ничных платформ. Источники лазерного излучения - газовые, твердотельные
и химические лазеры различных диапазонов длин волн, выпуск которых ши-
роко освоен промышленностью для самых разных целей.
Одно из назначений этого вида ОЦЦ в антитеррористических и мирот-
ворческих операциях - временное ослепление противника и вывод из строя
оптической аппаратуры без поражения органов зрения человека, что возмож-
но при определенных параметрах лазерного излучения. При этом лазеры, из-
лучающие в красной части спектра, менее предпочтительны, чем лазеры, из-
лучающие в зеленой части спектра, так как глаз человека более чувствителен
к частотам зеленой части оптического излучения и достижение одного и того
же эффекта возможно при меньшей интенсивности излучения.
Новые типы устройств для временного ослепления (лазеры и газоразряд-
ные лампы) исследуются и разрабатываются в США и Европе, некоторые из
них являются товарной продукцией. Например, в США компанией Allied Signals
создан экспериментальный образец портативного ослепляющего твердотель-
ного лазера Dazer с массогабаритными характеристиками, аналогичными вин-
товке Ml6. Другой образец портативного лазерного оружия Cobra разработа-
ла компания McDonnell-Douglas. Лазерный ослепитель Sabre-203 лаборатории
им. Филлипса ВВС США устанавливается на гранатомет М203 и функциони-
рует в режиме непрерывного излучения, ослепляющего противника. По мне-
нию экспертов, в системе Sabre-203 можно также использовать встроенный
оптический генератор, действующий в режиме коротких вспышек и дезориен-
тирующий личный состав противника. Необходимо отметить, что существует
проблема наведения лазерных ослепителей, которые разрабатываются для руч-
ных устройств, так как обычно лазер генерирует луч, распространяющийся
на расстояние в несколько километров, и обычный оператор вряд ли сможет
справиться с наведением луча на столь больших расстояниях без специаль-
ных приспособлений.
В качестве основных путей совершенствования лазерных систем рассмат-
ривают возможности увеличения дальности их действия до 5...7 км и пути
создания многочастотных систем с широким частотным спектром (в красной,
синей, зеленой и ультрафиолетовой областях спектра), что делает трудновы-
полнимой задачу защиты от этого излучения с помощью узкополосных филь-
тров. Международными соглашениями использование лазеров для ослепле-
774
12. Оружие нелетального действия
ния запрещено. Однако эти ограничения не оговаривают запретов на времен-
ное ослепляющее действие лазерного ОНД, что создает некоторую правовую
основу для их разработки. Вместе с тем для надежной правовой основы раз-
работки и применения данного вида ОНД необходимо четко разграничить по-
нятия постоянного и временного ослепления. Именно поэтому необходимо
решение ряда медико-биологических аспектов, связанных с нахождением кри-
териальных уровней воздействия, которые обеспечивают обратимость воздей-
ствия излучения на органы зрения.
Некогерентные ослепляющие средства генерируют световое излучение,
сравнимое по интенсивности с лазерным. Направленное некогерентное излу-
чение для получения эффекта временного ослепления создают с помощью пор-
тативных высокоинтенсивных прожекторов, которые выполняются в носимом
портативном или возимом (монтируемом на транспорте) вариантах. Такие ус-
тройства с силой света от 0,75 до 6,0 млн кд хорошо освещают на дальность
до 2 км, но собственно эффект ослепления интенсивно уменьшается с рассто-
янием и практически осуществим на дистанциях, не превышающих 100 м.
При этом существует определенный риск постоянной потери зрения. Имею-
щиеся стробоскопические источники некогерентного излучения вызывают эф-
фект дезориентации, но могут привести и к инициированию эпилептического
припадка у лиц с определенной патологией.
Ненаправленное излучение образуется, как правило, в процессе детонации,
дефлаграции или горения высокоэнергетических составов (конденсированных
ВВ, пиротехнических составов, мультифазных энергетических систем), продук-
ты детонации или горения которых создают низкотемпературную газовую плаз-
му. Указанные средства можно доставлять к месту действия с помощью опти-
ческих БП (гранат, мин, артиллерийских снарядов, авиационных бомб и т. д.).
Типичные составы фотосмесей, используемых в ФОТАБ и фотопатронах,
следующие: состав № 1 - Mg/Al/KClO4 (34/26/40); состав № 2 - сплав Al-Mg
(50/50)/Ba(N03)2 (45,5/54,5); состав № 3 - сплав Al-Mg (50/50)/КСЮ4 (60/40);
состав № 4 - А1/КС1О4 (40/60). Из большого количества различных составов
фотосмесей наиболее эффективными и доступными для практического при-
менения оказались смеси КС1О4 с порошками алюминия или сплава Al-Mg
(обозначаемые аббревиатурой ПАМ). Вспышки с наибольшей силой света
дают фотосмеси с избытком горючего, которое сгорает за счет кислорода
воздуха. Суммарный тепловой эффект и размеры огненного шара при этом
увеличиваются. Средний размер частиц горючего - это важный параметр,
определяющий излучательную способность фотосмесей. Экспериментально
установлено, что для смеси А1/КС1О4 (40/60) оптимальный размер частиц А1
заключен в диапазоне (22 ± 8) 10 6 м. Светотехнические характеристики фо-
тосмесей, содержащих КС1О4 и металлические горючие А1 и Mg, приводятся
в стехиометрическом соотношении (Ст.) и с избытком горючего (Из.) в коли-
честве 14 % против стехиометрии (табл. 12.2).
Химический состав фотосмеси выбирают таким образом, чтобы удельная
теплота ее горения даже без учета догорания смеси в воздухе превосходила
8,4 МДж/кг, что соответствует температуре горения Гг > 3000 °C. Кроме того,
состав фотосмеси должен обеспечивать некоторое оптимальное соотношение
между количеством газообразных продуктов, которые достаточно сильно вли-
12.2. Физические принципы функционирования ОНД
775
Таблица 12.2. Светотехнические характеристики фотосмесей
Mg/KC1O4H AI/KC1O,
Горючее Состав Максимальная сила света /п1ах, Х106 кд Время достижения макси- мальной силы света, х10 3 с Полная продолжи- тельность вспышки, с
А1 Ст. 41 1,2 14
Из. 41 1,7 16
Мгг Ст. 18 1,2 24
Mg Из. 20 2,3 25
яют на размер огненного шара (а следовательно, и на силу света) и количе-
ством конденсированных (жидких и твердых) продуктов реакции, являющих-
ся основными излучателями. Для фотоосветительных составов оптимален
удельный объем газообразных продуктов в диапазоне 50... 100 л/кг. Для ВВ
этот показатель на порядок выше. Данное обстоятельство обеспечивает мини-
мальное фугасное действие, исключающее поражение людей ударными вол-
нами. Элементный состав фотосмеси влияет на .спектр излучаемой энергии,
например, натрий - сильный излучатель в видимой части спектра, тогда как
калий в этой части спектра излучает плохо.
В импульсных фотоосветителях металлопылевого типа используют мелко-
дисперсные алюминиевые и магниевые порошки (Al, Mg) и сплавы (Al -Mg),
расположенные вокруг ОЦРЗ. Алюминиевые порошки дают яркую вспышку
и требуют наличия довольно значительного по массе ОЦРЗ. При магниевых
порошках необходимо применение ОЦРЗ меньшей массы, но эти порошки
обладают менее яркой и более продолжительной вспышкой. Достаточно вы-
сокая детонационная способность фотосмесей (особенно в диспергирован-
ном состоянии) позволяет на их основе конструировать импульсные излуча-
тели с малой массой заряда фотосмеси. Например, при габаритах фотопат-
рона Ml 12 0 40x196 мм масса фотосмеси составляет 0,198 кг, а параметры
излучения имеют следующие значения: максимальная сила света - /тах =
= 110 106 кд , время достижения максимальной силы света - 3 • 10 3 с, про-
должительность вспышки - 30 мс, общая светосумма равна 1,4- 106 кд с. Са-
мый существенный недостаток фотосмесей - высокая чувствительность к
прострелу пулей или осколком. Стремление совместить положительные ка-
чества фотоосветительных составов обоих типов (высокую излучательную
способность фотосмесей и безопасность к прострелу пулей или осколком,
присущую порошкам металлов) привело к разработке импульсных излуча-
телей раздельного снаряжения, в которых ОЦРЗ, алюминиевый порошок и
окислитель (перхлорат калия) размещены раздельно в коаксиальных цилин-
драх. Слой окислителя в таких устройствах находится между ОЦРЗ и ме-
таллическим порошком.
Экспериментально установлено, что при взрыве ФОТАБ металлопылево-
го типа заметная доля частиц металла спекается в комки довольно больших
размеров (диаметром до 250 мкм и более) по механизму жидкофазного спека-
ния. Это приводит к снижению интенсивности вспышки и увеличению ее про-
должительности. Для компактирования алюминиевых и алюмомагниевых
776
12. Оружие нелетального действия
порошков достаточны давления на фронте УВ порядка 1 ГПа. При использо-
вании высокоплотных зарядов ВВ для изготовления ОЦРЗ в порошке дости-
гаются значительно большие давления. Для того чтобы предотвратить спека-
ние микрочастиц порошка, необходимо снизить давление в УВ, распростра-
няющейся в цилиндрическом слое порошка. Следовательно, в разрывном заряде
требуется применять низкоплотный взрывчатый состав (НПВС) с небольшой
нагружающей способностью. Один из наиболее технологичных НПВС для этих
целей - разработанный в МГТУ им. Н.Э. Баумана состав ТГАПС, представля-
ющий собой смесь ТНТ, гексогена (RDX), алюминия и низкоплотного каркас-
ного наполнителя (пенополистирола).
Проведенные исследования позволяют рекомендовать для ОЦРЗ импуль-
сных пиротехнических излучателей НПВС ТГАПС плотностью 0,4...0>5 г/см3
с содержанием алюминия до 25 %. Эти составы характеризуются высокой
работоспособностью и низкой нагружающей способностью, что позволяет эф-
фективно метать порошкообразные оболочки из металлических порошков и
окислителей без компактирования микрочастиц горючего. Алюминии в со-
ставе заряда ВВ дает возможность получать высокотемпературные медлен-
но охлаждающиеся ПД, обусловленные наличием в них конденсированной
фазы А1ЭО3, что приводит к дополнительному разогреву фотосмеси, ускоре-
нию возбуждения и протекания химической реакции между компонентами
фотосмеси.
В качестве примера рассмотрим конструктивную схему возможного вари-
анта гранаты ослепляющего действия калибра 40 мм (рис. 12.31), корпус ко-
торой выполнен из полиамида. Выстрел производится из 40-мм подствольно-
го гранатомета с начальной скоростью порядка 100 м/с. Масса гранаты со-
ставляет примерно 200 г, масса центрального заряда ВВ - 4 г, масса окислителя
(КСЮ4) - 56 г, а масса металлического горючего (А1) - 48 г. При подрыве
такой гранаты расчетный радиус огненного шара ROU1 достигает приблизи-
тельно 1 м. Минимальное безопасное расстояние для бойцов спецподразделе-
Рис. 12.31.40-мм граната ослепляющего некогерентного действия:
/ - корпус; 2 - ВВ; 3 - окислитель; 4 - металлическое горючее; 5 - стакан-прокладка;
6 шашка детонатора; 7 - ВУ; 8 - крышка-фиксатор; 9 - накольник; 10 - донная крышка,
11 - метательный заряд
12.2. Физические принципы функционирования ОНД
777
ний оценивается примерно в 15 м при условии защиты их органов зрения
штатными средствами. Гранаты должны выстреливаться по восходящей тра-
ектории с расстояния примерно 30 м от заслона и, пролетев минимальное рас-
стояние около 50 м, срабатывать на высоте 4...5 м от поверхности земли, что
осуществляется с помощью дистанционного взрывателя, который должен обес-
печить инициирование ОЦРЗ в заданной точке траектории.
Световые гранаты могут использоваться подразделениями по борьбе с тер-
роризмом при проведении операций по освобождению заложников или при
проведении полицейских и миротворческих операций для временной нейтра-
лизации больших скоплений людей. Созданы также комбинированные сред-
ства с оглушающим и ослепляющим эффектом, продолжительность воздей-
ствия которого на объект определяется удаленностью от эпицентра взрыва:
ослепление может быть обеспечено на время до 20...30 с, а потеря слуха - на
срок до 4...6 ч. В качестве источников некогерентного излучения могут при-
меняться также прожекторы и мощные лампы-вспышки.
В США разрабатывают ослепляющие БП всенаправленного некогерент-
ного излучения, в которых при взрыве происходит сжатие инертного газа, в
результате чего образуется плазма с яркостью выше яркости солнечного све-
та. Боеприпасы направленного излучения создают начальный световой поток
по тому же принципу, но в них имеется лазерный стержень, который излучает
часть энергии плазмы вдоль своей оси, обеспечивая большую интенсивность
излучения в заданном направлении и уменьшая вероятность ослепления опе-
ратора и собственных подразделений. Указанные мощные источники некоге-
рентного излучения, размещенные в корпусе 155-мм артиллерийского снаря-
да, могут временно выводить из строя как личный состав противника, так и
оптические датчики боевой техники.
СВЧ-излучение может приводить к нарушению деятельности организма
человека. В зависимости от частоты и мощности воздействия излучения на
человека наблюдают следующие эффекты: нарушение работы головного моз-
га и центральной нервной системы, поражение внутренних органов с опреде-
ленной вероятностью летального исхода. Информационное воздействие на че-
ловека СВЧ-излучения малой мощности практически не изучено. Хотя в 1970-х
годах сообщалось об открытии эффекта радиослышимости, но в дальнейшем
эти сообщения не подтверждались и не опровергались. В случае реального
существования указанного эффекта его можно было бы использовать в каче-
стве ОНД для психологической обработки личного состава и больших масс
населения.
В целом проблема применения микроволнового излучения как средства
воздействия на человека и охраны территорий обсуждается уже в течение
многих лет. Однако многочисленные исследования показали недостаточную
эффективность излучения сантиметрового диапазона, проявляющуюся, глав-
ным образом, в нагреве тела человека. Эксперименты последних лет доказа-
ли, что более действенно микроволновое излучение миллиметрового диапазо-
на. Все воздействия микроволнового излучения на биологические системы
можно разделить на две группы: термические, вызываемые относительно вы-
сокой мощностью излучения, и нетермические (информационные). Извест-
но, что порог термического воздействия для человека при микроволновом
778
12. Оружие неаеталъного действия
излучении с частотой 1 ГГц составляет 5... 10мВт/см2. Судя по результатам
опубликованных работ, низкоэнергетические поля микроволнового излучения
с плотностью мощности менее 10 мВт/см2 воздействуют на центральную не-
рвную систему, изменяя функциональное состояние зрительного и других ана-
лизаторов, а также различные параметры системы высшей нервной деятель-
ности. Микроволновое излучение, интенсивность которого превышает порог
термического воздействия, проникает лишь в верхние слои кожного покрова,
вызывая термически индуцируемую труднопереносимую боль и не повреж-
дая внутренние жизненно важные органы (рис. 12.32). Основными препятстви-
ями для развертывания систем с относительно высокой мощностью излуче-
ния пока являются их громоздкость и высокая стоимость, малая дальность
действия, а также необходимость тщательных дополнительных исследований
отдаленных последствий воздействия излучения на человеческий организм. В
то же время СВЧ-генераторы термического нелетального действия (частота
излучения 95 ГГц) уже могут использоваться в качестве стационарных актив-
ных систем запрета доступа в охраняемую зону.
а
б
Рис. 12.32. Мобильная (а) и стационарная (б) СВЧ-установки для систем запрета
доступа в охраняемую зону
12.2. Физические принципы функционирования ОНД
779
Акустические средства нелетального воздействия исследуют в разных
странах в течение последних десятилетий. За исключением пиротехничес-
ких светозвуковых гранат, а также сирен и свистков для рассеивания толпы
успехов в этой области не достигнуто, хотя работы продолжаются. Прежде
предполагалось, что акустическое ОНД позволит в перспективе добиться не-
медленной нейтрализации объекта без ущерба для здоровья. Однако оказа-
лось, что инфразвук не является очевидным эффективным нелетальным сред-
ством воздействия на человека. Например, согласно экспериментам, зафикси-
рованным документально в научной литературе, инфразвук не вызывает потерю
ориентации, тошноту, рвоту и неконтролируемую диарею вплоть до уровня
170 дБ (это максимальное значение, которое достигнуто в специальной инф-
развуковой частотной камере и которого невозможно достичь на некотором
расстоянии от устройства). Следует отметить, что в диапазоне звуковых час-
тот в пределах слышимости болезненные ощущения начинаются от уровня
звукового давления (УЗД) 140 дБ, причем рсновные эффекты - это боль в
ушах и временная потеря слуха вплоть до постоянной его потери при повы-
шении мощности. В диапазоне низких частот Непереносимость звукового дав-
ления достигалась генерацией звуковых колебаний интенсивностью около
150 дБ и частотой 50... 100 Гц. Этот уровень близок к звукам, издаваемым
реактивным двигателем самолета, при которых существует угроза безвозврат-
ной потери слуха. При этом даже простые средства весьма эффективны для
защиты от акустического воздействия. Поэтому пиротехнические источники
неожиданного громкого звука в этом смысле обладают очевидными преиму-
ществами. Наиболее эффективны постоянные источники громкого звука - си-
рены и свистки (табл. 12.3). Они работают под воздействием продуктов горе-
ния или сжатого воздуха и способны обеспечить акустическую мощность в
несколько киловатт. В акустической гранате нелетального оглушающего дей-
ствия (рис. 12.33) рабочим телом для получения акустических колебаний яв-
ляется сжатый газ, который может капсулироваться в процессе сборки или
образовываться при срабатывании пиротехнического генератора.
В США компания Scientific Application & Research Inc. провела экспери-
менты с узконаправленными пучками звуковых импульсов («акустические
пули»), излучаемых параболической антенной диаметром 1...2 м. Было
установлено, что акустические устройства, предназначенные для формирова-
ния направленного звукового пучка высокой мощности, должны иметь боль-
шие размеры, сравнимые с длиной излучаемой волны. Кроме того, направлен-
ный звук большой мощности быстро ослабевает из-за дифракции и поглоще-
ния в атмосфере. Поэтому создание акустических устройств, способных оказать
болевое воздействие на расстоянии порядка 100 м в полевых условиях, весь-
ма проблематично, в связи с чем подобные разработки в США практически
не финансируются уже с 1999 г. В то же время в условиях применения акус-
тических средств внутри зданий ситуация принципиально другая: источники
громкого звука способны доставить большие неудобства захватившим здание
нарушителям и сильно затруднить их связь и взаимодействие.
Как уже было сказано, акустическое оружие оказалось недостаточно эф-
фективным, однако не исключается возможность использования слышимых
780
12. Оружие нелетального действия
Таблица 12.3 Основные характеристики струйных излучателей звука
Схема и конструкция Наименование Частота, кГц Частота при максималь- ной мощнос- ти. кГц Расход на 1 Вт. л/с Коэффици- ент полез- ного дей- ствия, %
МШ. j Крутовой Кольцевой Клиновой Клиновой с резонатором Гальтона Гартмана Стержневой Втулочный 0,2-5,0 0,3-6,0 0,3-20 0.1-30 0.5-30 0,6-300 1,0-300 1,0-300 1 1 10 10 8 20 25 25 2.0 2,0 0,5 0,6 2,0 0,67 0,5 0,5 5 5 .. . 20 , * 25 5 15 20 20
А
♦ 1 1
*
►
1ППЕ5
ис//м
Tn
— ——
р к* Z 4
акустических колебаний как дополнения к эффектам другого рода для множе-
ственного воздействия на биообъект (так называемые комбинированные сред-
ства нелетального действия). Таким образом, возникла идея создания неле-
гального оружия на основе вихревых и вихреакустических устройств - раз-
личных генераторов вихревых структур (vortex-технологии). При соответствии
основным принципам создания ОНД и отсутствии многих проблем, характер-
ных для акустического оружия (например, распространение для рассматрива-
12.2. Физические принципы функционирования ОНД
781
емых устройств вполне решаемо), вихревые устройства,
по мнению его исследователей и разработчиков, обла-
дают рядом преимуществ, выгодно выделяющих их
среди других видов ОНД, хотя, разумеется, не исклю-
чается возникновение новых проблем.
В настоящее время рассматривают возможность со-
здания как стационарных, так и переносных конструк-
тивных вариантов генераторов вихрезвукового действия
и их применения рядовыми сотрудниками правоохра-
нительных органов и специальных подразделений без
длительного специального обучения.
В соответствии с предварительными аналитичес-
кими оценками действие вихрезвуковых устройств на
вегетативную нервную систему биообъекта должно
приводить к болевому синдрому, сильному раздраже-
нию органов чувств, а также судорогам-и кратковре-
менному шоку. Возможно применение вихревых ко-
лец для переноса различных химических^веществ (ир-
ритантов, маркирующих средств или психотропных
составов) к цели, причем не исключено, что именно
это направление использования эффектов, присущих
распространению вихревых колец, может стать основ-
ным. Исходя из этого можно выделить основные об-
ласти применения устройств такого рода: управление
вышедшей из-под контроля толпой на стадионах, мас-
совых митингах и манифестациях; решение широко-
масштабных задач борьбы с наркоторговлей; защита
правительственных зданий от угроз, возникающих при
массовых беспорядках. Актуально использование вих-
ревых технологий при проведении операций мирот-
Рис. 12.33. Внешний
вид компактной акус-
тической гранаты для
операций по захвату и
обезвреживанию пра-
вонарушителей:
/ - чека; 2 - регулятор ин-
тенсивности; 3 - регулятор
времени задержки; 4 зву-
ковые отверстия;5 - отде-
ляющаяся скоба: 6 - резер-
вуар для газа (диаметр
150 мм, длина 300 мм)
ворческого и антитеррористического характера.
К настоящему времени в Германии, США, Вели-
кобритании и Франции проведены исследования гене-
рации и распространения вихревых структур в атмосфере с дозвуковой и сверх-
звуковой скоростью, а также предложены различные устройства для их фор-
мирования. Результаты этих исследований могут привести к двум различным
направлениям. Первое - разработка эффективных генераторов тороидальных
вихревых волн (рис. 12.34), для чего необходимо изучить их распространение
и воздействие на человека. Второе - использование механизма vortex для ге-
нерации акустических волн большой амплитуды с помощью различных уст-
ройств вихрезвукового действия (рис. 12.35). Одно из них (см. рис. 12.35, а)
представляет собой акустический генератор, работающий по принципу пря-
моточной камеры сгорания и формирующий ударные акустические импульсы
в виде вихревых колец, которые содержат продукты сгорания. Другое устрой-
ство генерации вихревых колец (см. рис. 12.35, б) основано на явлении усиле-
ния потока при его отражении от дна полого цилиндра и последующем обра-
зовании вихревых колец с помощью центрированной круглой пластины, рас-
782
12. Оружие нелетального действия
Рис. 12.34. Формирование вихревого тороидального кольца (а) и схема его последова-
тельной визуализации с помощью метода «дождевой завесы» (б)
положенной с некоторым зазором относительно верхнего среза цилиндричес-
кого стакана. В структуру вихревых колец можно вводить различные инкапа-
ситанты, воздействующие на человека на значительном расстоянии (десятки
метров) от среза генератора.
Появились также сообщения о разработке новых видов акустического ору-
жия на основе фазированных акустических колебаний, получаемых с помо-
щью программируемого подрыва зарядов ВВ или мощных источников непре-
рывных акустических колебаний (например, авиадвигателей) и крупногаба-
ритных излучателей. По имеющимся оценкам такие средства могут создавать
на сравнительно больших расстояниях (до 1...2 км) звуковые давления, доста-
точные даже для разрушения зданий и сооружений.
Среди основных проблем, с которыми столкнулись разработчики акусти-
ческого оружия и которые они так и не смогли пока преодолеть, необходимо
упомянуть проблему оценки медико-биологического воздействия на объект.
Как и у других типов ОНД, у акустического оружия существуют проблемы
дозировки и восприимчивости, различные для разных биообъектов. По этой
причине сегодня нелетальные средства, основанные на волновых технологи-
ях, в Российской Федерации законодательно ограничены по частотным и амп-
литудным характеристикам. Для возможного применения разрешены техни-
12.2 Физические принципы функционирования ОНД 783
Рис. 12.35. Схемы вихрезвуковых генераторов импульсного (а) и компрессионного (б)
типа:
1 - свеча; 2 — воздух и ацетилен; 3 - кольцо; 4 ударная труба; 5 - камера сгорания; б - впрыск
топлива; 7 - труба компрессора
ческие средства, которые генерируют звуковые колебания только слышимого
диапазона (Федеральный закон об оружии от 13 декабря 1996 г.).
Физико-химические композиции. Приводят к различным вариантам вре-
менного вывода из строя личного состава.
Пенные составы известны многие десятилетия, они широко используют-
ся и в быту, и как средство пожаротушения. Многие пенные составы уже про-
шли медицинскую проверку и могут быть хорошей основой для перспектив-
ных видов ОНД. Для того чтобы обеспечить их функциями ОНД, необходимо
лишь применить специальные добавки (раздражающие, красящие, транкви-
лизирующие и т. п.). Например, рота морских пехотинцев при выводе войск
США из Сомали была оснащена системой, включающей в себя передвижную
цистерну объемом 1 000 л и носимый на плече пеномет, разбрасывающий мыль-
ную пену, смешанную со слезоточивым газом, которая покрывала площадь 60
м2 и могла образовывать барьер высотой около 1 м. Пенообразующие систе-
мы состоят из жидкой фазы, подлежащей вспениванию, газового носителя (пе-
нообразующего агента) и соответствующего оборудования для смешивания,
пенообразования и распыления. Изменяя физические свойства пены, в част-
ности ее вязкость, можно добиться стабильности пенного состава и даже воз-
можности формирования толстых пенных барьеров, которые станут пре-
градами для неуправляемой толпы.
Липкие и жесткие быстроотвердевающие пены испытывались в Сандийс-
кой национальной лаборатории (США) как для лишения подвижности зло-
784
12. Оружие нелетального действия
умышленников при защите ядерных объектов, так и по заказу Национального
института юстиции США для подавления крупных тюремных бунтов. В ре-
зультате исследований был выбран пеноматериал марки Stepan’s Steol СА-330
(35%-ный водный раствор аммонийной соли лауринсульфата, массовая кон-
центрация которого в воде для применения в качестве пенообразующего реа-
гента составляет от 2 до 6 %) - нетоксичное поверхностно-активное вещество
легкого раздражающего действия. Этот пеноматериал может быть носителем
различных ирритантов, обеспечивая комплексное останавливающее и раздра-
жающее действие. Другие сведения по характеристикам быстроотвердеваю-
щих акриловых, особенно цианакриловых адгезивных рецептур, ставших ос-
новой для разработки обволакивающих и липких быстроотвердевающих пен,
можно найти в информации фирмы NEPAC (США).
Психот ропные препараты, которые могут добавляться в пены в качестве
компонентов нелегального действия, приводят к усыплению или сильному раз-
дражению человека. В последнее время появились сообщения о принцип
альной возможности создания высокоэффективных психотропных препаратов
(обездвижителей) с особыми свойствами и обратимостью воздействия. / л
Основная проблема применения быстроотвердевающих пен в качестве
средства остановки и задержания людей заключается в том, ito ни один, из
известных трех десятков растворителей нс обладает способностью быстро и
безопасно очистить задержанного человека от пены. Вторая не менее важная
проблема - вероятность асфиксии дыхания при попадании пены в голову с
последующей блокадой органов дыхания.
Особо скользкие временные покрытия, лишающие людей возможности пе-
ремещаться в привычном темпе, предлагается создавать с помощью различ-
ных типов веществ, которые приводят к малому динамическому коэффициен-
ту скольжения. Американское национальное бюро стандартов (NBS) и Аме-
риканское общество по испытанию материалов (ASTM) приняли коэффициент
трения кТ, равный 0,5, как порог безопасности для нормального передвижения
по сухой поверхности. При этом человек может двигаться по поверхности и с
к^ < 0,4, если он знает об опасности. Однако сложность пересечения скольз-
кой поверхности характеризует не величина кТ, а локализованные пятна, бо-
лее скользкие, нежели остальная поверхность. Ограниченная скользкая по-
верхность (пятно) с kj < 0,2 гарантирует падение и невозможность передви-
жения человека, неосведомленного о наличии такого пятна. Критерии выбора
суперскользких веществ - толщина пленки не менее 3,2 мм; хорошая удержи-
васмость на поверхности; эффективность действия как при высоких, так и
при низких скоростях движения объекта по поверхности, а также при силь-
ных и слабых нагрузках на поверхность; фиксированная и постоянная толщи-
на пленки при действии сжимающих нагрузок. Такими веществами являются
нетоксичные односоставные, способные к длительному хранению, дисперс-
ные системы, тик отропные или реотропные жидкости, к которым относятся
водные растворы и дисперсии полимеров; полисахариды, акрилаты, акрила-
миды, частично растворенные с (или без) меньшими полимерами или микро-
сферами; неводные масла и жиры, содержащие нсудаляемые и несжимаемые
частицы; жидкие мыла, детергенты поверхностно-активные вещества с уп-
равляемой вязкостью; хлопья или нити полиэтилена полипропилена, тефлона
12.2. Физические принципы функционирования ОНД
785
и других пластиков в водной или неводной вязкой жидкости. Стандартный
вариант - жидкий детергент, уплотненный с помощью коллоидов или поли-
меров (для удержания на поверхности) и содержащий дисперсные гранулы
гидроксиэтилцеллюлозы, акриламидовых или полиакриламидовых кислот. Не
менее эффективным может оказаться применение тиксотропной или реот-
ропной жидкости или жировой пленки, содержащей полутвердые гранулы
полимеров или стеклянные (металлические) шарики, распределенные пример-
но по 2.. .4 шт. на каждые 5 см2 пленки.
Проблематичность использования суперскользких покрытий заключает-
ся в том, что не только задерживаемый объект лишается возможности пере-
движения, но и сотрудники правоохранительных органов не могут подойти
к нему.
Различные носители (артиллерийскйе БП, авиационные бомбы, боепри-
пасы СББ, ручные гранаты) могут содержать также зловонные составы (одо-
ранты), которые при определенной концентрации в воздухе понижают объем
дыхания и повышают его частоту, а та^се кожно-электрическую реакцию,
уменьшают амплитуду желудочного сигнала и рост его частоты (тахигастрия).
В США на добровольцах испытаны различные запахи, из которых наиболее
неприятными были признаны два состава. Один из них приводит к раздраже-
нию, неудобству и указанным выше ответным реакциям организма человека
при концентрации 0,1 %, а другой - при концентрации 0,01 %. Эти составы
могут применяться как в однокомпонентных средствах нелетального дей-
ствия (например, бомбы «зловонного действия»), так и в устройствах комп-
лексного действия (звуковой эффект, запах, вспышка), подобных ручным гра-
натам (см. рис. 12.31) с продолжительностью от 30 с до 5 мин в зависимос-
ти от емкости резервуара. В последнем случае необходима система защиты
оператора (ушные заглушки, специальные очки с поляризованными стекла-
ми и респираторы) для быстрого захвата правонарушителя во время дей-
ствия устройства.
Средства воздействия на вооружение и военную технику
Средства остановки транспорта. Широкое распространение получили
средства остановки транспорта - так называемые ежи, повреждающие покрыш-
ки. В последние годы появились новые средства остановки транспорта, ис-
пользующие электростатические, микроволновые, радиочастотные устройства,
а также широкополосный электромагнитный импульс для повреждения элект-
рических цепей и остановки двигателя. Многие из этих устройств уже произ-
водятся и продаются на рынке.
Фирма QinetiQ (Великобритания) разработала систему задержания транс-
порта X-Net, которая, как сообщается, располагает явными преимуществами
перед существующими системами. Система X-Net широко опробована и вы-
пущена опытная заводская партия для практической оценки в реальных усло-
виях оперативного применения. X-Net изготовлена из легкой и прочной поли-
этиленовой фибры Dyneema, которая способна к значительному растяжению
при поглощении кинетической энергии транспортного средства. Обычно раз-
меры сети 2,5x8 м, что соответствует ширине дороги (могут быть и другие
786
12. Оружие непетального действия
размеры), масса не более 10 кг и в упакованном виде имеет габариты
0,75x0,45x0,2 м (рис. 12.36, а). В развернутом состоянии система X-Net при-
обретает очень низкий профиль (рис. 12.36, б), который сложно обнаружить
до тех пор, пока транспортное средство не окажется в нескольких метрах от
устройства, что снижает вероятность маневра в целях уклонения от наезда на
сеть. Шипы (рис. 12.36, в), предназначенные для первоначального плотного
соединения сети с колесами движущегося транспортного средства, изготовле-
ны из высокоуглеродистой стали и защищены от обламывания (затупления)
пластиковыми кожухами, которые разрушаются при контакте с покрышкой
колеса транспортного средства (рис. 12.37). Система X-Net способна останав-
ливать транспортные средства вплоть до четырехтонных грузовиков, движу-
щихся со скоростью от 50 до 100 км/ч на дистанциях, сравнимых с аварийной
остановкой (от 25 до 75 м).
Рис. 12.36. Система X-Net в упакованном (а) и развернутом (б) виде; форма шипов
системы (в), расположенных вдоль передней кромки фибры
Рис. 12.37. Функционирование системы X-Net:
а - транспортное средство приближается к X-Net; б шипы входят в контакт с материалом
покрышки; в - сеть начинает наматываться на покрышки; г - сеть натягивается вплотную
к нижней поверхности кузова, останавливая вращение передних колес
12.2. Физические принципы функционирования ОНД
787
Другое компактное средство остановки транспорта «Лиана-6000», создан-
ное НПО «Специальные материалы» (Россия) в виде складной конструкции с
подвижными ромбическими ячейками, переносимое в пенале размерами
100x400x600 мм и имеющее ширину в рабочем состоянии 0,3 м, перекрывает
дорогу шириной 6 м. Высота преграждающих стержней, выполненных из труб-
чатого профиля с углом среза 45° и остающихся после наезда на них автомо-
биля внутри проколотой шины, составляет 70 мм.
Один из успешных коммерческих продуктов - компактное барьерное уст-
ройство для остановки транспорта PVAB (Portable Vehicle Arresting Barrier),
разработанное в США. Поднимаемая телескопическим устройством сеть по-
зволяет задерживать многотонные транспортные средства (рис. 12.38). Тор-
мозная коробка включает в себя дисковый тормозной механизм и катушку
тормозной нити из плетеного нейлона с высокой разрывной прочностью.
Подъемник выдвигается давлением сжатого воздуха, поступающего из присо-
единенного баллона со сжатым воздухом, который выпускается из него при
активации электромагнитного пневмоклапана, срабатывающего нажатием уп-
равляющего переключателя. Захватывающая .сеть с перекрывающимся по ди-
агонали плетением изготовлена из нейлоновой решетки толщиной 75 мм и
прочностью на разрыв 4104 Н. Выдвижные подъемники поднимают сеть на
высоту 1,2 м над поверхностью дороги менее чем за 2 с и возвращают обрат-
но в режим ожидания за 20 мин. Соединенные контактные секции системы
формируют расположенный поперек дороги гребень, который содержит и за-
щищает сеть и кабель управления, а в режиме ожидания не препятствует дви-
жению транспортных средств. Система имеет четыре анкерные плиты (по две
с каждой стороны дороги), заглубленные на 60 см, анкерные тросы соедине-
ны с тормозной коробкой для обеспечения неподвижности системы. Блок уп-
равления оснащен встроенными контрольными схемами для подтверждения
Рис. 12.38. Принципиальная схема компактного барьерного устройства для остановки
транспортных средств:
1 - сеть; 2 - подъемник; 3 - система управления; 4 - пульт; 5 - анкерная плита; 6 - гребень;
7 - направление движения; 8 - тормозная коробка
788
12. Оружие нелетального действия
готовности системы, а пульт управления может тестировать и запускать сис-
тему на расстоянии 90 м от нее. Система PVAB устанавливается из походного
в боевое положение двумя людьми за два часа и надежно останавливает транс-
портные средства массой до 3,4 т, движущиеся со скоростью до 72 км/ч, и
автомобили вдвое большей массы, перемещающиеся со скоростью до 35 км/ч.
При этом веревочные замки на сети сохраняют ее натянутой, а двери, забло-
кированные сетью, не дают возможности нарушителям, находящимся внутри
автомобиля, покинуть его.
В России НПО «Специальные материалы» разработано и успешно приме-
няется стационарное механическое средство остановки транспорта «Покат-3000»,
которое устанавливают либо непосредственно на проезжую часть дороги (при
этом высота пандуса составляет 0,125 м), либо на одном уровне с дорожным
покрытием (для этого необходимо выполнить углубление в 125 мм и проверти
дренирование почвы). «Покат-3000» выпускается как в левом, так и в правом
варианте, что позволяет перекрывать многополосные проезды с двухсторонним
движением. Перекрываемая ширина проезда одним комплектом составляет З.м,
а время подъема (опускания) защитной платформы на максимальную выечЛу
500 мм - 15 с, причем система оснащена звуковым и световым (строб-вспыш-
ка) сигналами, извещающими о подъеме платформы. Управление системой осу-
ществляется с многофункционального компактного пульта, рассчитанного на
управление двумя и более системами «Покат-3000» в различных режимах (па-
раллельно, последовательно, каскадом). Потребляемая мощность в стартовом
режиме - 250 Вт, а в режиме подъема (опускания) платформы - 180 Вт. Систе-
ма надежно останавливает транспортные средства массой до Ют.
Средства направленной энергии обладают очевидными преимуще-
ствами:
- практически мгновенная (невидимая и неслышимая) доставка поража-
ющего фактора к цели;
- высокая точность прицеливания и вследствие этого сведение к миниму-
му нежелательного ущерба гражданским лицам и объектам;
- возможность управления силой воздействия от уровня демонстрации
эффекта до его поражающего действия.
Тактическими компонентами систем направленной энергии, по мнению
компаний, занимающихся их разработкой, в частности, являются:
- перспективный авиационный тактический лазер (ATL);
- системы электронно-оптического распознавания цели и прицеливания;
- направленное микроволновое излучение большой мощности (СВЧ-сис-
темы).
Считается, что ATL будет способен с помощью точно направленного пе-
ремещаемого луча повреждать ключевые элементы вооружения, систем уп-
равления и наблюдения без поражения находящихся на близком расстоянии
заложников, гражданских лиц, транспортных средств и опасных объектов. Та-
ким образом, лазерное оружие предполагается использовать для вывода из
строя оптических систем, причем они могут применяться в стационарном (на-
земном), авиационном и корабельном вариантах. Объектами воздействия бу-
дут оптическая и оптико-электронная аппаратура разведки, связи, прицель-
ных систем и систем управления оружием различных типов.
12.2. Физические принципы функционирования ОНД
789
Ведутся также исследования возможности использования импульсных хи-
мических лазеров как средства нелетального воздействия Предполагают, что
высокоточные оптические средства наведения пучка не принесут ущерба окру-
жающим биообъектам и инфраструктуре. Изучается возможность примене-
ния импульсных химических лазеров, которые способны создавать ударную
нагрузку и механическое повреждение объектов. Эти лазеры формируют вы-
сокотемпературную плазму высокого давления перед целью. Воздействуя на
какую-либо поверхность, плазма вызывает частичное испарение материала,
а в самом материале при этом образуется УВ, которая, отражаясь от внутрен-
ней поверхности, может временно выводить из строя экипаж, находящийся
в боевой машине.
Оружие с электромагнитным излучением - ЭМИ-оружие предназначе-
но для вывода из строя электронной и электротехнической аппаратуры, стира-
ния информации в банках данных, а его эффективность подтверждена теоре-
тическими работами и экспериментальными исследованиями. С помощью вы-
сотных ядерных взрывов указанные повреждения могут охватить территории,
на которых полностью размещается страна,, противник или целая группа стран.
Хотя ядерные генераторы ЭМИ в качестве ОНД обладают очень высокой эф-
фективностью и почти не имеют вредных экологических последствий, однако
такие средства неприемлемы, как не соответствующие международным нор-
мативно-правовым актам, строго выполняемым странами - участниками «ядер-
ного клуба». Неядерные генераторы ЭМИ менее эффективны и требуют точ-
ной доставки в район поражаемой цели. Однако их воздействие более избира-
тельно и вполне приемлемо, причем современные достижения в этой области
позволяют сделать такие генераторы достаточно компактными для использо-
вания в составе обычных и высокоточных средств доставки.
Новые возможности для электромагнитных БП, воздействующих на элек-
тронные устройства и средства связи противника, появились сегодня благода-
ря развитию высокоточных систем доставки излучателя к мишени, что снима-
ет основную проблему недостаточного радиуса действия электромагнитного
импульса. В этом аспекте действие ЭМИ имеет военное значение, так как
может привести к необратимому повреждению широкого спектра электричес-
кого и электронного оборудования, особенно компьютеров и радио- или ра-
дарных приемников, не оказывая при этом фатального воздействия на людей.
В зависимости от стойкости электронного и электрического оборудования к
воздействию ЭМИ и интенсивности генерируемого электромагнитного поля
устройство может быть необратимо повреждено или, другими словами, его
электрическая система будет уничтожена.
Компьютерное оборудование (системы обработки данных, коммуникаци-
онные системы, системы отображения информации, системы промышленного
контроля, включая системы сигнализации автомобильных и железных дорог,
и компьютеры, встроенные в военное оборудование, а именно, сигнальные
процессоры, системы контроля полетов, цифровые системы контроля двига-
телей) особенно уязвимо к действию ЭМИ, так как оно в основном построено
на схемах высокой плотности, которые очень чувствительны к воздействию
высоковольтных переходных процессов, т. е. требуется очень немного энер-
гии для того, чтобы повредить или уничтожить их, а любое напряжение
790
12. Оружие нелетального действия
порядка десятков вольт может вызвать эффект, называемый пробоем затвора,
который эффективно уничтожает прибор. Даже если импульс не несет энер-
гии, достаточной для термического повреждения, источник питания обору-
дования сам добавит энергии для завершения процесса уничтожения. По-
врежденные приборы могут еще функционировать, но их надежность будет
серьезно ухудшена. Экранирование электроники при помощи корпусов обо-
рудования обеспечивает только ограниченную защиту, так как любые кабе
ли, входящие и выходящие из оборудования, будут вести себя подобно ан-
теннам, направляя высокое напряжение в него. Телекоммуникационное обо-
рудование может быть также весьма уязвимо к действию ЭМИ из-за наличия
длинных кабелей между приборами. Приемники всех типов особенно чув-
ствительны к ЭМИ, так как высокочувствительные высокочастотные тран-
зисторы и диоды в таком оборудовании легко уничтожаются при воздей-
ствии электрических импульсов высокого напряжения. Поэтому радарное и
электронное военное оборудование, спутниковое, микроволновое, УКВ-, КВ-
и низкочастотное коммуникационное оборудование, а также телевизионное
оборудование являются потенциально уязвимыми к воздействию ЭМИ. Су-
щественно, что современные платформы военного назначения плотно загру-
жены электронным оборудованием, и, несмотря на хорошую защищенность,
ЭМИ-устройства могут значительно снизить их функциональность или пе-
ревести их в разряд непригодных к использованию.
Технологическая база, которая может быть применена к разработке элект-
ромагнитного ОНД, разнообразна и вполне отработана во многих областях.
Ключевые технологии, существующие в области разработки ЭМИ-оружия: ге-
нераторы со сжатием потока при помощи энергии ВВ (explosively pumped Flux
Compression Generators - FCG), магнитогидродинамические генераторы
(explosive or propellant driven Magneto-Hydrodynamic (MHD) generators), ис-
пользующие энергию ВВ или порохового заряда, и целый набор микроволно-
вых устройств высокой мощности (НРМ Devices), из которых наиболее извес-
тен осциллятор с виртуальным катодом (Virtual Cathode Oscillator - Vircator).
В этих технологических областях был испытан широкий набор эксперимен-
тальных образцов и имеется значительное количество публикаций в открытой
литературе.
FCG являются наиболее исследованными устройствами применительно к
разработке ЭМИ-оружия и были впервые продемонстрированы К. Фоулером
(лос-аламосская национальная лаборатория) в конце 1950-х годов. С тех пор
создали и испытали множество конструкций FCG в разных странах мира.
FCG - это генератор в относительно компактной упаковке, способный произ-
водить электрическую энергию порядка десятков мегаджоулей за сотни мик-
росекунд с пиковой мощностью от единиц до десятков тсраватт. FCG могут
использоваться непосредственно как источники низкочастотного излучения для
воздействия на цель или в качестве источника коротких импульсов дзя мик-
роволновых генераторов. Основная идея конструкции FCG — применение вы-
сокоплотного заряда ВВ с высокой скоростью детонации для того, чтобы
быстро сжать магнитное поле, преобразовав энергию ВВ в энергию магнит-
ного поля. Начальное магнитное поле в таких генераторах (до инициирова-
ния заряда ВВ) вырабатывает стартовый ток, который обеспечивается вне-
}2.2. Физические принципы функционирования ОНД
791
шними источниками, такими как высоковольтный конденсатор, малые FCG-
или MHD-устройства. В принципе, подойдет любое оборудование, способ-
ное создать импульс электрического тока от десятков килоампер до единиц
мегаампер.
Несколько геометрических конфигураций FCG описаны в литературе. Как
правило, применяют коаксиальное расположение FCG, так как цилиндричес-
кая форма облегчает их «упаковку» в корпуса бомб и боевых частей В типич-
ном коаксиальном FCG цилиндрическая медная труба образует якорь и запол-
нена ВВ (рис. 12.39). Было использовано несколько типов ВВ - от компози-
ций В и С до обработанных на станках блоков РВХ-9501. Якорь окружен
спиралью (как правило, медной) и формирует статор FCG. Обмотка статора в
некоторых конструкциях расщеплена на сегменты с разветвлением проводов
на их границах для оптимизации электромагнитной индуктивности спирали
якоря. Интенсивные магнитные силы, возникающие во время работы FCG,
потенциально могут вызвать преждевременное разрушение генератора, если
не предпринять контрмеры, которые обычно заключаются в дополнении кон-
струкции оболочкой из немагнитного материала. В принципе, может быть ис-
пользован любой материал с соответствующими механическими и электри-
ческими свойствами, но там, где существенна масса конструкции (например,
в боеголовках крылатых ракет), наиболее подходят стекло или кевларовые эпок-
сидные композиты.
Как правило, ВВ инициируется при достижении стартовым током пико-
вого значения с помощью специального плосковолнового генератора, кото-
рый формирует в заряде ВВ плоский детонационный фронт Фронт детонации
распространяется по ВВ в якоре, деформируя его в конус (12... 14° дуги). Там,
где якорь расширяется до полного заполнения статора, происходит короткое
замыкание между концами статорной обмотки, которое обладаст эффектом
сжатия магнитного поля. Такой генератор производит импульс нарастающе-
го тока, пиковое значение которого достигается перед окончательным разру-
шением прибора. По опубликованным данным, время нарастания составля-
ет от десятков до сотен микросекунд и зависит от параметров устройства,
при токах на пике в десятки мегаампер и энергиях на пике в десятки мета-
джоулей.
Достигаемая сила тока (отношение выходного тока к стартовому) изменя-
ется в зависимости от типа конструкции, но уже в настоящее время составля-
ет 60 единиц. Если предъявляют жесткие требования к массе и габаритам
генератора, то желательно использование малогабаритных источников старто-
вого тока - каскадных FCG, где малый FCG применяют как источник старто-
вого тока для более крупного FCG. Основные технические проблемы исполь-
зования FCG для создания ОНД - приемлемый по характеристикам источник
стартового тока и упаковка FCG в корпус носителя.
Хотя FCG и являются потенциальной технологической базой для генера-
ции мощных электрических импульсов, их выход вследствие физики процес-
са ограничен полосой частот ниже 1 МГц. При таких частотах излучения мно-
гие цели будет трудно атаковать, даже с очень высоким уровнем энергии, бо-
лее того, фокусировка энергии от таких устройств довольно проблематична.
Микроволновой источник высокой мощности решает обе проблемы, так как
792
12. Оружие нелетального действия
б
Рис. 12.39. Схема FCG ЭМИ (а) и стадии его функционирования в течение времени t (5):
/ - и юлирующая трубка; 2 - обмотка статора; 3 - рубашка из диэлектрика; 4 — блок изоляции;
5 выходное кольцо статора; 6 - ВВ (РВХ-9501); 7 - входное кольцо статора; 8 - блок изоля-
ции; 9 - линза из ВВ (плосковолновой генератор)
его выходная мощность может быть хорошо сфокусирована, а микроволновое
излучение намного лучше поглощается многими типами целей. Существует
множество микроволновых устройств высокой мощности. Релятивистские кли-
строны, магнетроны, Slow Wave-устройства, рефлекс-триоды, Spark Gap-уст-
ройства и осцилляторы с виртуальным катодом (виркаторы - vircators) - это
все примеры имеющейся технологической базы. В практическом плане пре-
имущество сегодня имеют осцилляторы с виртуальным катодом, а в ближай-
шей перспективе - Spark Gap-источники. Виркаторы - это одноразовые, кон-
12.2. Физические принципы функционирования ОНД
793
структивно простые, небольшие по размерам, прочные приборы, способные
создавать очень мощный одиночный импульс энергии и работать в относи-
тельно широкой полосе частот микроволнового диапазона. Физика работы
виркаторов существенно более сложна, чем физика работы ранее рассмот-
ренных устройств. Фундаментальная идея, лежащая в основе виркатора, зак-
лючается в ускорении мощного потока электронов сетчатым анодом. Значи-
тельное число электронов пройдет анод, формируя за ним область простран-
ственного заряда, которая при определенных условиях будет осциллировать
с частотами микроволнового диапазона. Если область пространственного за-
ряда помещена в резонансную полость, настроенную соответствующим об-
разом, то можно достичь очень большой пиковой мощности. Чтобы вывести
энергию из резонансной полости, используют обычные микроволновые тех-
нологии. Поскольку частота осцилляции зависит от параметров электронно-
го пучка, виркаторы могут быть настроены по частоте, где микроволновая
полость поддерживает соответствующие-моды. Уровни мощности, достиг-
нутые в экспериментах с виркаторами, находятся в диапазоне от 170 кВт до
40 ГВт по мощности и в диапазоне длиН»волн от дециметрового до санти-
метрового.
Наиболее известны две конфигурации виркаторов: аксиальный (axial
vircator - AV) и поперечный (transverse vircator - TV). Аксиальный виркатор
(рис. 12.40) наиболее прост по конструкции и в экспериментах дает наиболь-
шую выходную мощность. Обычно он встраивается в цилиндрическую вол-
новодную структуру. Мощность выводится посредством перехода волновода
в коническую рупорную структуру, которая служит антенной. Аксиальные вир-
каторы обычно генерируют в поперечной магнитной моде. Поперечный вир-
катор инжектирует катодный ток со стороны полости и, как правило, генери-
рует в поперечной электрической моде. Технические вопросы, возникающие
при конструировании виркаторов, связаны с длительностью выходного им-
пульса, который составляет порядка микросекунды и лимитируется размером
ячеек анодной сетки, стабильностью частоты генерации, эффективностью пре-
образования и общей выходной мощностью. Эффективный отбор мощности
из виркаторной полости в режимах, подходящих для выбранного типа антен-
ны, может также быть проблемой при высоких уровнях энергии, так как по-
тенциально возможен пробой изоляторов.
Рис. 12.40. Схема аксиального виркатора:
1 катод; 2 изолятор; 3 - виртуальный катод; 4 окно из диэлектрика; 5 - анод
794
12. Оружие нелетального действия
При оценке количества энергии ЭМИ, поглощаемой целью, в литературе
рассматривают два принципиально разных режима:
- энергия проникает в цель через «парадную дверь», т. е. через антенну,
наличие которой характерно для радарного и связного оборудования;
- энергия попадает через «заднюю дверь», т. е. электромагнитное поле
от электромагнитного оружия генерирует большие переходные токи (выбро-
сы, если энергия генерируется низкочастотным устройством, или электри-
ческие стоячие волны, если энергия генерируется микроволновым устрой-
ством) на электрических проводниках или кабелях внутренних соединений,
обеспечивающих соединения с основным источником питания или телефон-
ной сетью.
В последнем случае оборудование, соединенное с облученными кабелями
или проводами, будет подвержено действию или высоковольтных выбросов,
или стоячих волн, которые могут повредить источники питания и коммуника-
ционные интерфейсы, если их электрическая стойкость не усилена. Боле&зого,
при проникании переходных токов в оборудование повреждения возникают и
внутри прибора.
Низкочастотное оружие хорошо воздействует на типичную проводную ин-
фраструктуру, такую, как большинство телефонных линий, сетевых кабелей и
силовых линий вдоль улиц, стояков зданий и коридоров. Во многих случаях
любая конкретная кабельная проводка включает в себя многократные линей-
ные сегменты, объединяемые при примерно прямых углах. Какой бы ни была
относительная ориентация оружейного поля, более чем один линейный сег-
мент кабельной проводки окажется ориентированным таким образом, что мож-
но достичь хорошей эффективности поглощения энергии.
С этой точки зрения оценивают пределы безопасности некоторых типич-
ных полупроводниковых приборов. По гарантиям производителей диапазон
напряжений пробоя для кремниевых высокочастотных приборов, широко ис-
пользуемых в связном оборудовании, как правило, составляет 15...65 В, для
арсенид-галиевых полевых транзисторов - 10 В. Микросхемы динамической
памяти с произвольным доступом (DRAM) имеют напряжение пробоя до 7 В
относительно земли, напряжение пробоя CMOS-логики - от 7 до 15 В, микро-
процессоры с номинальным напряжением 3,3...5,0 В находятся вблизи этого
диапазона. Несмотря на то что большинство современных приборов оборудо-
ваны дополнительными цепями защиты для стока электростатических заря-
дов, постоянное или повторяющееся приложение высокого напряжения будет
вызывать их повреждение.
Коммуникационные интерфейсы и источники питания должны, как пра-
вило, удовлетворять требованиям элекгробезопасности, заданным соответству-
ющими регулирующими документами. Такие интерфейсы обычно защищены
посредством изолирующих трансформаторов с номинальным напряжением от
сотен вольт до 2.. .3 кВ. Очевидно, что если при защите, обеспечиваемой транс-
форматором, выходя! из строя кабельный разрядник или экранировка, то на-
пряжения (даже такие низкие, как 50 В) могут существенно повредить компь-
ютерное или связное оборудование.
Микроволновое оружие высокой мощности, работающее в сантиметро-
вом и миллиметровом диапазонах, оснащено дополнительным механизмом про-
12.2. Физические принципы функционирования ОНД
795
никновения энергии, что дает возможность непосредственно проникать в обо-
рудование через вентиляционные отверстия, щели между панелями и плохо
экранированными интерфейсами. При таких условиях любое отверстие внут-
ри оборудования ведет себя как щель в микроволновой полости, позволяя
микроволновой радиации прямо возбуждать или проникать в полость. Мик-
роволновая радиация формирует пространственную стоячую волну внутри обо-
рудования. Компоненты, расположенные в противоположных узлах стоячей
волны, подвергаются действию сильного электромагнитного поля. Посколь-
ку микроволновая радиация легче попадает в оборудование, чем радиация
низкочастотного диапазона, и во многих случаях обходит защиту, разрабо-
танную для остановки проникновения низкочастотной энергии, микровол-
новое оружие потенциально имеет большее поражающее действие, чем низ-
кочастотное.
Разнообразие типов вероятных целей, неизвестные геометрическое рас-
положение и электрические характеристики проводной и кабельной инфра-
структуры, окружающей цель, делают точное предсказание поражающего дей-
ствия невозможным. Обычный подход (при проникновении энергии через про-
вода и кабели) заключается в определении^ровня напряжения для поражения
и затем использования его для нахождения напряженности поля, требуемой
для возникновения этого напряжения. Когда напряженность поля известна,
радиус поражения для данного типа оружия может быть рассчитан. Тривиаль-
ный пример: микроволновой генератор высокой мощности (10 ГВт, 5 ГГц)
облучает площадку диаметром 400...500 м, что приводит к напряженности
поля в несколько киловольт на метр и, в свою очередь, вызывает напряже-
ние от сотен вольт до нескольких киловольт на облученных проводах и ка-
белях. Следовательно, радиус эффективного воздействия составит порядка
сотен метров в зависимости от параметров оружия и электрической прочно-
сти мишени.
Чтобы максимизировать эффективное действие электромагнитного ОНД,
необходимо повысить мощность, поглощаемую мишенью. Первый шаг в мак-
симизации действия заключается в увеличении пиковой мощности и длитель-
ности излучения. При заданном размере носителя этого достигают примене-
нием наиболее мощного генератора (генератора со сжатием потока или вирка-
тора в случае микроволновых генераторов) и повышением эффективности
преобразования внутренней энергии порохового заряда или ВВ в электромаг-
нитную энергию. Энергия, которая не преобразуется, потеряна с точки зрения
эффективного действия. Второй шаг - это максимизация эффективности по-
глощения энергии мишенью. Хорошая стратегия при наличии сложного и раз-
нообразного набора мишеней заключается в максимальном использовании ча-
стотного диапазона электромагнитного оружия.
Низкочастотная бомба, созданная на базе FCG, требует большой антен-
ны для обеспечения эффективной доставки энергии от оружия к цели (ком-
пактная антенна не будет оптимальным решением). Одна из возможных
схем - это развертывание пяти линейных антенных элементов при достиже-
нии бомбой заданной высоты путем выбрасывания кабельной катушки с не-
сколькими сотнями метров кабеля. Четыре радиальных антенных элемента
формирую! виртуальную землю около бомбы, в то время как аксиальный
12. Оружие нелетального действия
796
элемент передает энергию от FCG. Длины элементов необходимо с особой
тщательностью согласовать с частотными характеристиками оружия. Импуль-
сный трансформатор высокой мощности согласует низкий импеданс FCG с
очень высоким импедансом антенны и гарантирует, что импульс тока не ис-
парит кабель раньше времени.
Возможны и другие подходы. Один из них заключается в том, чтобы на-
править бомбу как можно ближе (порядка нескольких метров) к цели и сори-
ентировать ее на ближнее поле, производимое обмоткой FCG, которая дей-
ствует как петлевая антенна с диаметром, намного меньшим длины волны.
Область, которая заслуживает дальнейших исследований в этом контексте, -
использование низкочастотных бомб для повреждения или уничтожения биб-
лиотек на магнитных лентах, так как ближние поля в непосредственной бли-
зости от генератора потока того же порядка, что и коэрцитивная сила боль-
шинства современных магнитных материалов. »'
Микроволновое ОНД обладает более широким диапазоном режимов «вне-
дрения» энергии. Его излучение имеет длину волны, малую по сравнению с
размерами носителя, и легко фокусируется на мишени при помощи комаакт-
ного антенного ансамбля (рис. 12.41). При этом можно предложить, по край-
ней мере, два механизма, которые могут быть применены для дальнейшей
максимизации действия ЭМИ. Первый - это использование поличастотного
излучения, что улучшает «внедрение» энергии по сравнению с моночастот-
ным излучением, так как дает возможность радиации проникнуть в апертуры
и резонансы в широком интервале частот. Второй механизм, который может
быть применен для улучшения «внедрения», - поляризация оружейного излу-
чения. Если предположить, что ориентация возможных апертур и резонансов
проникновения в наборах мишеней случайна относительно ориентации ору-
жейной антенны, то линейно поляризованная эмиссия использует только по-
ловину имеющихся возможностей, в то время как круговая поляризация - все
возможности «внедрения» энергии. Практическое ограничение заключается в
определенных трудностях при разработке и изготовлении мощной антенны с
круговой поляризацией, которая к тому же должна быть компактной и широ-
кополосной. Поэтому необходимо провести исследования конических спираль-
ных типов антенн, способных работать с высокими уровнями излучения, а
Рис. 12.41. Схема виркатора с компактным антенным ансамблем:
1 - конический носовой обтекатель; 2 - излучение с круговой поляризацией; 3 - антенна в виде
конической многозаходной спирали; 4 - отражатель обратного осевого излучения; 5 - осевой
виркатор
12.2. Физические принципы функционирования ОНД
797
также создать соответствующий интерфейс для виркатора с несколькими вы-
ходными портами.
Подводя итог вышесказанному, можно сделать вывод: действие ЭМИ мак-
симизируется путем увеличения выходной мощности и эффективности пере-
носа энергии от оружия к мишени. Микроволновое оружие дает возможность
сфокусировать почти всю выходную энергию в область поражения и приме-
нить широкий спектр мод «внедрения» энергии. Поэтому микроволновое ОНД
предпочтительнее н изкочастотного.
Известны решения по установке электромагнитных боеголовок в крыла-
тые ракеты, где размер первичного источника тока и его батареи накладывают
существенные ограничения на возможности оружия. Авиационные бомбы с
подлетным временем от десятков секунд до минут могут быть сконструирова-
ны так, чтобы использовать энергосистему самолета. В такой конструкции
бомбы банк конденсаторов можно заряжать по пути от взлета самолета до
цели. После сброса бомбы требуется уже-значительно меньший бортовой ис-
точник электропитания для сохранения Заряда в первичном источнике до его
инициирования.
Электромагнитные бомбы (рис. 12.42), доставляемые при помощи обыч-
ных самолетов, дают лучшее соотношение массы электромагнитного прибора
к общей массе бомбы, так как большая ее часть может быть отдана электро-
магнитному устройству. Из этого следует, что на данном технологическом этапе
электромагнитная бомба той же массы, что и крылатая ракета, имеет более
высокую эффективность действия в предположении одинаковой точности до-
ставки и технологического подобия конструкции электромагнитных приборов.
Кроме того, электромагнитные бомбы можно доставлять к цели при помощи
тактических самолетов с навигационной системой наведения, способных не-
сти GPS-управляемое вооружение. Ожидается, что GPS-управляемое воору-
жение будет стандартным вооружением военно-воздушных сил НАТО к кон-
цу первого десятилетия XXI в., и каждый самолет, способный нести стандар-
тное управляемое вооружение, также станет потенциальным носителем
электромагнитных бомб. Простота электромагнитных бомб по сравнению с
таким вооружением, как ракеты для подавления источников излучения, сдела-
ет эти бомбы дешевле в производстве и проще в обслуживании.
Рис. 12.42. Компоновка мощной микроволновой электромагнитной бомбы с исполь-
зованием виркатора и лвухстадийного процесса сжатия потока:
1 - блок питания; 2 - балласт; 3 - отсек формирования импульсов; 4 микроволновая антенна;
5 - носовой обтекатель; 6 - трубка виркатора; 7 - генератор сжатия потока (вторая ступень);
8 - генератор сжатия потока (первая ступень); 9 батарея конденсаторов; 10- аккумулятор
798
12. Оружие нелетального действия
Ограничение применимости электромагнитного оружия зависит от конк-
ретного исполнения и средств доставки. Тип исполнения оружия определяет
силу электромагнитного поля на данном радиусе от места инициации и его
спектральное распределение. Средства доставки ограничивают точность дос-
тавки оружия к намеченной цели.
Важный фактор в оценке эффективности действия электромагнитного ору-
жия - распространение генерируемого ЭМИ в атмосфере. Хотя соотношение
между силой электромагнитного поля и протяженностью свободного простран-
ства описывается законом обратных квадратов, ослабление действия ЭМИ с
увеличением расстояния в атмосфере будет также обусловлено эффектами по-
глощения атмосферных газов. Это, в частности, существенно на частотах выше
20 ГГц, где находятся значительные пики поглощения водяного пара и кис-
лорода, что ограничивает действие электромагнитного оружия микроволно-
вого диапазона более коротким радиусом, чем в идеале достигалось бы для
К- и L-частотных диапазонов. дУ
Средства доставки сужают поражающее действие электромагнитных бомб
введением ограничений на размеры оружия и точность его доставки? ^сли
ошибка доставки будет порядка радиуса эффективного действия при данной
высоте подрыва, то действие будет значительно ограничено. Это особенно важ-
но при оценке эффективности действия неуправляемых электромагнитных
бомб, так как ошибок доставки будут существенно больше, чем в случае при-
менения GPS-управляемых бомб. Поэтому точ-
Рис. 12.43. Постановщик помех
HRR32
ность доставки и радиус поражения должны
рассматриваться с учетом приемлемого неле-
гального повреждения выбранной цели.
Направленное микроволновое излучение,
получаемое с помощью стационарных СВЧ-ге-
нераторов, предполагается также использовать
в качестве активной системы охраны террито-
рий и объектов. Эти системы могут найти
практическое применение как интегрирован-
ные охранные лазерные (микроволновые)
сенсорные системы особо важных объектов
и территорий, таких как порты, военные базы,
посольства и т. п.
Интенсивно разрабатываются компактные
мобильные системы ЭМИ для защиты жизнен-
но важных объектов, нейтрализации систем
ПВО противника, подавления и отключения
электронных систем контроля и информаци-
онных коммуникаций, систем сигнализации и
обзора, защиты кораблей в порту и дорожных
конвоев, обезвреживания мин, остановки и за-
держания транспортных средств. В качестве
таких устройств фирмой Diehl предложены опытные образцы постановщика
помех для подавления радиокоммуникаций в диапазоне частот 10...800 МГц
(рис. 12.43) и компактный, переносной, автономный источник с круговым по-
12.2. Физические принципы функционирования ОНД 799
лем излучения с настройкой в мегагерцевом диапазоне частот. Устройство вы-
полнено в габаритах небольшого чемодана (рис. 12.44, а) и содержит генера-
тор Аркадьева - Маркса (рис. 12.44, б), состоящий из источника напряжения
и настраиваемой антенны.
а ' б
Рис. 12.44. Компактная автономная переносная система DS110В:
а внешний вид; б генератор Аркадьева Маркса
В последнее время во многих странах мира ведутся широкомасштабные
работы по созданию принципиально новой экипировки бойца, важнейшая со-
ставляющая часть которой - радиоэлектронные средства (РЭС): мобильная
связь, приборы ночного видения, вычислительные устройства, датчики тер-
морегулирования и др. Наличие мобильных средств связи у каждого бойца
повышает уровень управления в бою, что усиливает эффективность действий
малых подразделений в условиях ближнего контактного огневого боя. В связи
с этим перед средствами поражения и, в частности, перед СББ возникает но-
вая задача по выводу из строя РЭС экипировки живой силы.
Наиболее уязвимы к воздействию мощного СВЧ-излучения чувствитель-
ные элементы входных трактов приемных устройств РЭС, построенных на
основе твердотельных полупроводниковых структур. Причина невосстанав-
ливаемых отказов в большинстве случаев - тепловой пробой поражаемых по-
лупроводниковых структур при помощи мощных импульсов ЭМИ.
Реализацию электромагнитного импульса с указанными выше параметра-
ми можно осуществить с помощью так называемого взрывомагнитного гене-
ратора частоты (ВМГЧ). Принцип действия ВМГЧ аналогичен описанному
выше функционированию FCG и основан на быстром изменении магнитного
потока электрического устройства в результате взрывного воздействия. Сле-
дует отметить, что ВМГЧ в СББ предполагается применять в основном для
вывода мобильных средств связи, у которых нет и не будет эффективных
средств защиты от ЭМИ. Кроме того, в условиях ведения боя они всегда нахо-
дятся в активном (включенном) состоянии.
800
12. Оружие нелетального действия
Схема построения ВМГЧ для СББ (рис. 12.45) включает в себя корпус
БЧ 1, сердечники 2 и 3, заряды ВВ 4 и 9, вибратор 5, обмотку соленоида 6,
батарею 7, обмотку контура излучения 8. К соленоиду 6 с двух сторон подхо-
дят сердечники 2 и 3, выполненные из материала высокой магнитной прони-
цаемости. С внешней стороны сердечника размещены заряды ВВ 4 и 9. Соле-
ноид 6 запитывается от активной батареи 7 первичным током. На соленоид
накладывается обмотка контура излучения 8, один конец которой заземлен, а
другой связан с полуволновым вибратором 5. Конструктивно ВМГЧ располо-
жен в корпусе / боевой части БП, предназначенного, например, для гранато-
мета. При подрыве БП, а следовательно, и ВВ сердечники двигаются с боль-
шой скоростью внутрь соленоида. При этом изменяется магнитный поток и
возникает электродвижущая сила индукции, которая через витки обмотки кон-
тура излучения передается на вибратор и излучается в пространство в виде
мощных сверхкоротких импульсов ЭМИ. / V
Рис. 12.45. Принципиальная схема построения ВМГЧ для СББ:
1 - корпус БЧ; 2, 3 - сердечники; 4, 9 заряды ВВ; 5 - вибратор; 6 - обмотка соленоида;
7 - батарея; 8 - обмотка контура излучения
Расчеты показывают, что ВМГЧ, помещенное в БЧ боеприпаса калибром
105 мм и массой 3 кг, должно обеспечить излучение электромагнитного им-
пульса мощностью до 109 Вт. При таких параметрах излучателя мобильные
устройства связи, находящиеся в активном режиме, будут выведены из строя
в радиусе 30...40 м от места подрыва боеприпаса с ВМГЧ.
Аналогичные генераторы СВЧ-излучения могут рассматриваться в качестве
основы для создания электромагнитных БП артиллерии, так как они обладают
высокой удельной мощностью. Как показали оценки, если 122-мм ОФС надеж-
но поражает неконтактную мину, находящуюся в радиусе 4.. .5 м, то макет элек-
тромагнитного БП тех же габаритов поражает мины в радиусе 40.. .50 м.
ОНД на основе систем радиоэлектронной борьбы (РЭБ) предназначе-
ны для снижения обороноспособности противника. Многократно проверен-
ные на учениях и во время локальных конфликтов испытания показывают,
что с помощью массированных мероприятий РЭБ можно существенно изме-
12.2. Физические принципы функционирования ОНД
801
нить соотношение сил в свою пользу, дезорганизовать управление войсками
и оружием противника, лишить его достоверной информации об обстанов-
ке, заставить действовать заранее известным и выгодным для себя спосо-
бом. Эти возможности РЭБ предлагалось использовать также для создания
оптимальных условий по нанесению поражающих ударов по живой силе и
технике противника в целях ее уничтожения. Оружие нелетального действия
на основе систем РЭБ может применяться, во-первых, для решительной де-
монстрации прот ивнику готовности и способности нанесения ему ощутимого
ущерба при условии малых потерь, а во-вторых, для доставки без потерь
средств ОНД к целям и создания условий, обеспечивающих наиболее эффек-
тивное использование ОНД и снижение своих потерь при применении про-
тивником обычных видов вооружений.
Физико-химическое ОНД позволяет с помощью аэрозольных БП (бомб,
мин, реактивных снарядов и др.) распылять в районе расположения боевой
техники противника химические вещества, -приводящие к порче или останов-
ке двигателей самолетов, танков, грузовиков^ электрогенераторов за счет загу-
стения топлива, утрате смазочными материалами своих антифрикционных
свойств, замутнению стекол и выводу из строя оптических средств наблюде-
ния и прицеливания, разрушению резинотехнических изделий (покрышек ав-
томобилей, вкладышей металлорезиновых гурениц танков и т. д.).
Для принудительного прекращения сгорания топлива в двигателях внут-
реннего сгорания (поршневых и турбинных) необходимо подавить быстрое
окисление углеводородных горючих (бензина, керосина, дизельного топлива,
реактивного горючего) воздухом. С этой целью следует либо исключить взаи-
модействие кислорода воздуха с топливом (перекрыть доступ кислорода в зону
горения), либо затруднить процесс нормального сгорания топлива (устранить
доступ свободных радикалов, поддерживающих горение, в зону сгорания). Для
реализации указанных процессов возможно применение: веществ, вызываю-
щих засорение и выведение из строя фильтров; воды, отводящей теплоту из
зоны горения; химических ингибиторов горения. К настоящему времени уже
исследован широкий перечень химических ингибиторов горения (табл. 12.4).
Таблица 12.4. Относительная эффективность ингибиторов горения
углеводородных топлив
Ингибитор Значение Ингибитор Значение
со2 0,86 SnCl4 31
С12 1,8 РОС13 31
Si(CH3)4 3,9 РС13 39
СС14 4,2 РВг3 39
C2F4Br2 6,0 СгО2С12 244
SiCl4 10,5 Fe(CO)5 356
(СН3)3РО4 23,0 РЬ(С2Н5) 390
SbCl3 26,0 Fe(C5H5)2 1000
TiCl4 30,0
802
12. Оружие нелетального действия
Ингибиторами горения снаряжают специальные стабилизируемые пули к
патронам нелетального действия (рис. 12.46), которые срабатывают при взаи-
модействии с техническими объектами, выбрасывая концентрированный ин-
гибитор горения. Он засасывается вместе с воздухом в систему подготовки
ТВС двигателя и подавляет горение топлива.
Рис. 12.46. Патрон с пулей, снаряженной ингибитором горения углеводородных топлив
К составам, разлагающим резину, предъявляют специальные технические
требования. Во-первых, эти составы должны быть по своей сути катализато-
рами деполимеризации, во-вторых, не реагировать с дорожным покрытием,
в-третьих, обладать высокой скоростью разложения и способностью разла-
гать множество полимеров, в-четвертых, иметь возможность доставки в об-
ласть покрышки и инициирования процесса разложения резины, в-пятых, быть
пригодными для создания миниатюрных мин с временной задержкой сраба-
тывания. Хотя получены положительные результаты практических испытаний
по деполимеризации натуральной резины с помощью гексахлорида вольфра-
ма, тетраметила и хлорбензола, однако еще не отработаны способы доставки
деполимеризаторов к объектам воздействия и не продемонстрировано на прак-
тике их воздействие на реальные покрышки.
Перспективным является использование аэрозоля фтористого водорода,
суперкислот (хлорсульфоновой и фторсульфоновой) и пентафторида сурьмы
для повреждения оптических систем. При этом суперкислоты для безопасного
применения могут изготовляться в виде бинарных зарядов, состоящих из
двух (или более) раздельных безопасных компонентов, которые смешивают
непосредственно в ходе использования БП. Эти рецептуры способны также
эффективно разлагать резинотехнические изделия, асфальт, покрытия крыш
зданий и сооружений и применяются в виде жидкостей, аэрозолей, порош-
ков и гелей.
12.2. Физические принципы функционирования ОНД
803
Проводящие дисперсные материалы весьма эффективны в качестве
ОНД. Это металлизированные ленты и проводящие волокна, которые выво-
дят из строя трансформаторы электростанций и высоковольтных линий элек-
тропередач, а также нейтрализуют радарные системы (Electric Power Distri-
bution Munition - EPDM). Такие электропроводящие углеродные волокна уже
используются в войсках. Например, в мае 1999 г. ВВС США применили в
Югославии кассетные боевые элементы BLU-114/B, которыми были снаря-
жены тактические авиационные кассеты (Tactical Munitions Dispenser - TMD)
SUU-66/B, используемые в качестве контейнеров для авиационных бомб. Бое-
вые элементы содержали саморазворачивающиеся катушки с токопроводны-
ми нитями из композиционного материала на основе углерода, вышибной заряд
и тормозной парашют. Вся эта комбинация получила обозначение CBU-94.
На малой высоте створки TMD раскрываются, а суббоеприпасы (боевые кас-
сетные элементы) под действием центробежной силы разбрасываются по кру-
гу большого радиуса. При приближении суббоеприпаса к земле в нем сраба-
тывает вышибной заряд, выбрасывающий и раскручивающий катушки так,
чтобы в воздухе электропроводящие волокна образовывали паутину. При по-
падании нитей паутины на токонесущие элементы объектов электроснаб-
жения происходят короткие замыкания сети и вывод ее из строя, что на не-
сколько часов лишило снабжения электроэнергией около одного миллиона
человек.
Быстроотвердевакицие и суперфрикционные составы предназначены
для обездвиживания военной техники и транспорта. Клеящие составы спо-
собны фиксировать подвижные части военной техники, детали двигателей и
других механизмов, а быстродействующие адгезионные смеси блокируют ра-
боту механизмов. При нанесении суперфрикционных составов на дорожное
покрытие последнее приобретает столь малый коэффициент трения, что ис-
ключает передвижение автотранспорта. Поэтому пенные химические систе-
мы, содержащие суперфрикционные композиции, предполагается применять,
в частности, в качестве ультраскользких покрытий, препятствующих контакту
с поверхностью, который необходим для перемещения и торможения (распы-
ление ультраскользких составов над ВПП аэродромов, мостами и т. п.). Дей-
ствуя таким образом, можно на некоторое время блокировать передвижение
войск и других вооруженных формирований перед важными мостами и въез-
дами в город, препятствовать выходу техники с военных баз, взлету и посадке
самолетов на ВВП аэродромов. На данной стадии изучается вопрос: насколь-
ко имеющиеся системы и их тактико-технические характеристики удовлетво-
ряют требованиям боевого применения? Химические составы, являющиеся
потенциальными кандидатами для использования в качестве таких покрытий,
известны и описаны выше, лабораторные исследования их свойств в различ-
ных странах проведены.
Для затруднения движения военной техники рассматривались также воз-
можности создания суперклея, способного сковывать движущиеся части ме-
ханизмов и приклеивать объекты к месту их нахождения. Наиболее техноло-
гичны - двухкомпонентные суперклеи, компоненты которых смешиваются в
воздухе и образующийся конечный состав затем оседает на землю, технику и
сооружения.
804
12. Оружие нелетального действия
Следует также отметить возможность создания полимерных соединений,
образующих в водной среде волокна, которые могут наматываться на лопасти
турбин, винтов морских и речных судов и приводить к их остановке.
Средства информационной борьбы уже успешно применяют как в ком-
мерческих, так и в военных целях. Их появление обусловлено повсеместным
внедрением ЭВМ в оружие и военную технику, а также использованием ЭВМ
на всех этапах вооруженной борьбы. Можно условно выделить несколько ти-
пов специального воздействия на ЭВМ, эффективность которого, по оценкам
военных специалистов, может быть сравнима с применением оружия массо-
вого поражения:
- заблаговременное внесение в ПО систем оружия, управления и связи
соответствующих модификаций, которые активируются по истечении опреде-
ленного промежутка времени по специальному сигналу или иным путем и
выводят ЭВМ из строя, причем отказ может восприниматься в качестве есте-
ственного сбоя ПО или аппаратуры;
- внесение агентурным путем, по каналам связи или иными способами
компьютерных вирусов, разрушающих информацию в банках данных й*ПО;
- вхождение в каналы связи между ЭВМ и внесение в них ложной-инфор-
мации.
12.3. Медико-биологические аспекты разработки
и применения ОНД
С точки зрения медико-биологического воздействия на организм чело-
века ОНД - оружие, принцип действия которого основан на временном (от
нескольких секунд до нескольких часов) лишении противника боеспособно-
сти без серьезных остаточных патологических изменений в организме по-
страдавшего.
Первое направление создания ОНД, механически ограничивающих воз-
можность выполнения человеком координированных движений (сети, арка-
ны, ловушки и др.), имеет наиболее давнюю историю и опыт применения.
Второе направление развития ОНД, воздействующих на различные орга-
ны чувств человека, связано с тем, что человеческий организм может быть
представлен в виде сложной системы, адекватность реакций которой на вне-
шние раздражители обеспечивается центральной нервной системой (ЦНС).
Управление ЦНС осуществляется головным мозгом (ГМ) на основании ин-
формации о внешней среде, которую он получает через рецепторы и органы
чувств.
Итак, для лишения противника боеспособности достаточно:
-дезориентировать ГМ заведомо ложной информацией об окружающей
обстановке в пределах нормальной чувствт ельности рецепторов и органов
чувств;
привести ЦНС в шоковое состояние путем воздействия на рецепторы и
органы чувств сигналами, значительно превышающими нормальный уровень,
что способствует их запредельному раздражению, появлению болевого и су-
дорожного синдромов с расстройством вегетативной нервной системы.
12.3 Медико-биологические аспекты разработки и применения ОНД 805
Проводя параллели с оценкой повреждающего действия обычного стрел-
кового оружия, целесообразна разработка единой международной методики
испытаний воздействия различных видов ОНД на организм человека. При этом
с учетом согласованной классификации типов и уровней воздействия необхо-
димо установить пороговые уровни допустимого эффективного, но не опас-
ного для жизни пострадавшего воздействия ОНД. Важно также учитывать,
что чувствительность к влиянию различных видов ОНД, а следовательно, и
эффективность действия ОНД в значительной мере зависят от функциональ-
ного состояния организма и наличия острой или хронической патологии у
объекта воздействия.
Количественные данные, определяющие воздействие различных факто-
ров ОНД на биообъекгы, в том числе и на человека, в настоящее время весьма
невелики. Наибольшее количество экспериментальных данных опубликовано
по проблемам влияния на человека непроникающих элементов кинетического
действия, звуковых волн и оптического излучения.
Биомеханика удара резиновых, пластиковых, пенопластовых и других мяг-
ких пуль на тело человека должна ответ ить.на следующие вопросы: как тело
человека реагирует на сообщаемый ударный импульс; к каким травмам ведет
удар; как можно прогнозировать эти травмы; каков предельный уровень меха-
нического воздействия, который может быть стандартизован. В процессе ис-
следований проблемы влияния ОНД кинетического действия на человека спе-
циалисты Государственного университета Уэйна (США) предложили сокра-
щенную шкалу травм (AIS): 0 - отсутствие травмы; 1 - незначительная травма;
2 - умеренная травма; 3 - серьезная травма; 4 - тяжелая травма (вероятность
летального исхода - 33 %); 5 - критическая травма (вероятность летального
исхода - 58 %); 6 - максимальная травма (вероятность летального исхода -
99 %). Например, для грудной клетки эта шкала идентифицирует следующие
травмы: 1 - проникающая травма груди; 2 - перелом ребер или разрыв поверх-
ностных тканей груди; 3 - проникающая травма груди с потерей 20 % крови;
4 - тяжелая контузия с нарушением деятельности сердца и легких; 5 - рваная
рана легких с напряженным пневмотораксом; 6 - рваная рана легких с разры-
вом желудочка. Аналогичная идентификация травм в соответствии с указан-
ной шкалой предложена также для брюшной полости, головы, лица. В прин-
ципе механизм травмы грудной клетки можно описать четырехэлементной
моделью грудной клетки с сосредоточенными параметрами. Результаты ис-
пытаний свидетельствуют о том, что предельно допустимая энергия удара
при обстреле биообъекта резиновыми пулями калибра 24...36 мм составля-
ет примерно 85 Дж, а предельно допустимый прогиб, который определяет
серьезность травмы, не должен превышать 24 мм. При таком прогибе (РК =
= 24 мм = const) связь между массой т и скоростью v, взаимодействующей с
биообъектом резиновой пули, учитывается законом тиг4/3 = const.
Широкое распространение в ряде стран устройств электрошокового дей-
ствия также сопровождается интенсивными медико-биологическими иссле-
дованиями процесса и последствий воздействия этих устройств на биообъ-
екты. Анализ имеющейся литературы со всей очевидностью свидетельству-
ет о том, что действие ЭШУ на организм биообъекта носит сложный характер.
Эффективность ответной реакции организма находится в зависимости от
806
12. Оружие непетального действия
электрических параметров ЭШУ, продолжительности воздействия, функци-
онального состояния систем организма биообъекта и состояния окружаю-
щей среды. При этом эффект воздействия может быть совершенно различ-
ным (от легкого до смертельного) и характеризуется разной степенью тяже-
сти клинической картины.
Полученные данные показывают, что эффект воздействия стандартного
ЭШУ проявляется в снижении биологической активности коры головного мозга
и фазном изменении функции дыхания кратковременного (до 3 мин) характе-
ра. При этом наблюдается слабая стрессовая реакция со стороны циркуляции
периферической крови.
Увеличение энергии воздействия (тока и напряжения) приводит к более
выраженному снижению биологической активности ЦНС и угнетению функ-
ции дыхания. Однако эти изменения также носят кратковременный характер
и проявляются в течение первых трех минут после воздействия. ?'
Увеличение частоты следования импульсов и общей продолжительности
импульса интенсифицирует снижение активности ЦНС и угнетение функции
дыхания, а функциональное поражение обладает более продолжительном ха-
рактером (свыше 5 мин). При этом наблюдается резко выраженная стрессовая
реакция со стороны циркуляции периферической крови.
Таким образом, приведенные в литературных источниках результаты ис-
следований позволяют с определенной степенью достоверности считать, что
такие параметры ЭШУ, как энергия воздействия, частота следования импуль-
сов и их общая продолжительность могут в значительной мере характеризо-
вать эффект и степень нелетального воздействия. При этом наиболее критич-
ной является система дыхания, временное поражение которой может быть свя-
зано как с возбуждением, так и с угнетением функции дыхательного центра.
Достоверные количественные данные, определяющие воздействие акус-
тических колебаний на человека, в настоящее время достаточно обширны,
Рис. 12.47. Кривые выжива-
ния при поражении органов
дыхания человека
хотя зачастую весьма противоречивы. Согласно
экспериментальным данным по воздействию аку-
стических колебаний на человека в зависимости
от их интенсивности Л, частоты и времени т воз-
действия (рис. 12.47), область I соответствует ин-
формационному действию, область II - психо-
логическому воздействию и существенному вли-
янию на выполнение объектом операторской
деятельности, область III - возникновению об-
ратимых функциональных расстройств, области
IV и V - развитию необратимых функциональ-
ных расстройств и летальному исходу.
В целом физиологические реакции человека
очень селективны по отношению к частоте зву-
ка, что предполагает наличие механического ре-
зонанса эластичных структур внутри тела. Мож-
но выделить следующие области негативного
воздействия звука на человека: укачивание -
10 L.. 10 Гц; возникновение резонансных явлений
12.3. Медико-биологические аспекты разработки и применения ОНД
807
в организме - 10... 102 Гц; расстройство дыхания и речи - 10...103 Гц; поте-
ря остроты зрения - 10... 102 Гц; нарушение равновесия - 10'1...104 Гц; на-
рушение координации движения - 1О“1...1О2 Гц; негативное влияние на сер-
дечно-сосудистую систему - 10... 103 Гц; нагревание тканей и разрушение
клеток 103... 106 Гц. Степень опасности влияния избыточного давления су-
щественно возрастает, когда время воздействия ВУВ (или акустического воз-
действия) соизмеримо или превышает период собственных колебаний био-
объекта. Заслуживают также внимания данные, определяющие допустимые
уровни звука различной частоты и длительности воздействия (табл. 12.5).
Все испытания, как правило, ограничены УЗД 150 дБ, поскольку нельзя под-
вергать человека воздействию более высоких уровней звука независимо от
типа защитных приспособлений, так как указанный уровень шума может не
только оказать воздействие на органы слуха, но и повлиять на другие орга-
ны и системы человека.
Таблица 12.5. Допустимые значения уровня звука, дБ, в зависимости от частоты
и длительности воздействия
Длительность, ч - Частота, Гц
1 5 10 20
1 145 138 135 132
8 136 129 126 123
24 131 124 121 118
Суммируя результаты экспериментальных исследований на различных био-
объектах, а также отдельные результаты исследований на человеке, многие
авторы устанавливают три уровня интенсивности низкочастотного акустичес-
кого воздействия на человека при его длительности около 10 с: акустическое
воздействие с УЗД 170... 190 дБ приводит к летальному исходу, 130... 150 дБ -
к неконтролируемому поведению, состоянию испуга, тошноте, головной боли,
диарее и энурезу; менее 130 дБ к так называемому информационному воз-
действию.
Если говорить о российских нормативах акустического воздействия на
человека, то значения предельно допустимых уровней звука на рабочих мес-
тах производственных предприятий максимально занижены и не превыша-
ют 100 дБ, при работе на транспорте, в авиации и около судовых дизельных
установок не достигают 120 дБ, при работе систем оповещения, аварийной
сигнализации и полицейских сирен звуковое давление ограничено 130 дБ.
Отметим, что в соответствии с нормами, установленными еще Минздравом
СССР, уровень звукового воздействия интенсивностью 130 дБ считается мак-
симально допустимым уровнем болевого порога для органа слуха человека.
В связи с тем, что безопасные уровни акустического воздействия на чело-
века существенно занижены и объективно не подтверждены, различные ис-
следователи придерживаются двух точек зрения на максимально допустимый
уровень звукового давления. При всей противоречивости приведенных дан-
ных и неопределенности конкретных значений частоты звуковых колебаний
808
12. Оружие нелетального действия
главный вывод заключается в следующем: по мнению военных специалистов,
интенсивность звука 150 дБ - верхняя граница нелетального воздействия на
человека, а по мнению ученых, этот уровень существенно выше и достигает
170 дБ.
Также были проведены количественные сопоставления большого числа
статистических данных по вероятности получения баротравм в горно-руд-
ной промышленности СССР при проведении буровзрывных работ, причем
сравнивали уровни акустического воздействия и давления в воздушной УВ.
Степень опасности воздействия избыточного давления определена и зафикси-
рована нормативными документами как для сильных (ВУВ), так и для слабых
разрывов по давлению (акустические волны низкой и высокой частоты). Дан-
ные о вероятности получения баротравмы в зависимости от давления и
интенсивности звука приведены ниже и являются базой для обеспечения
безопасности взрывных работ в горно-рудной промышленности на террито-
рии России: 7
Давление, кПа . . 400 120 65 35 13 10*
Вероятность получения
баротравмы, % . . 100 75 50 25 5 0 -
Интенсивность звука, дБ . . .. 206 196 190 185 176 174
В отличие от установленных Минздравом СССР и существующих норм
по безопасности уровня звукового поля интенсивностью 130 дБ проведенный
анализ показывает, что безопасный уровень звукового давления значительно
выше и составляет 174 дБ, совпадая с нормами безопасного звукового давле-
ния для человека, принятыми в энергетической отрасли промышленности.
Эти результаты крайне важны для формулировки критериев эффективно-
го нелегального воздействия, оценки энергоемкости выстрела вихрезвукового
действия и установления норм безопасности для операторов, которые будут
применять разрабатываемые выстрелы вихрезвукового воздействия в реаль-
ных условиях.
Для связи интенсивности акустического воздействия с частотой звуковых
колебаний на организм человека в первом приближении можно также исполь-
зовать кривые одинаковой громкости Флетчера - Мэнсона (рис. 12.48).
Критерии поражения глаз при ИК-излучении достаточно хорошо изуче-
ны в офтальмологии и медицине катастроф. Ожоги глазного дна вызывает
видимое и ближнее ИК-излучение в диапазоне 400... 1400 мкм. Тяжесть по-
вреждения определяют импульс облучения на сетчатке (полная энергия, па-
дающая на единицу площади) U, диаметр пятна облучения d и длительность
воздействия излучения х. Пороговые значения импульса излучения U* в за-
висимости от углового размера светящейся области у = DOB1/R , где 7?о ш -
диаметр огненного шара; R - расстояние от огненного шара до глаза, приведе-
ны ниже:
у, град...................
U», кДж/м2................
0,7 1,0 1,7 3,0 3,4
63 42 29 21 21
12.3. Медико-биологические аспекты разработки и применения ОНД
809
Рис. 12.48. Кривые одинаковой громкости Флетчера — Мэнсона:
фон субъективная мера восприятия звуков, выражаемая при помощи единицы измерения (фон),
которая численно равна уровню звукового давления тона 1000 Гц. Уровень громкости в 20 фон
соответствует громкости тона 1000 Гц, имеющего интенсивность 20 дБ над порогом слуха
Рис. 12.49. Кривые одинаковой плот-
ности энергии светового потока:
1 Т<10лс;2 т = 10 3 с; 5 -К 10 2 с
Чем меньше диаметр пятна облучения d и длительность воздействия т,
тем эффективнее теплоотвод за счет тканевой теплопроводности. Для того что-
бы произошел ожог, необходим большой импульс излучения. Соотношение
между диаметром пятна облучения d и диаметром £>о ш огненного шара сле-
дует из геометрической оптики: d/f= Doui/R , где /- фокусное расстояние
глаза человека, которое в среднем равно 17 мм.
Зависимости совершенных пороговых критериев поражения глаза ИК-из-
лучением (рис. 12.49) представляют собой взаимосвязь между импульсом
излучения U», временем воздействия т и
размером изображения d на сетчатке глаза.
При достижении плотности потока энер-
гии на сетчатке порогового значения U*
поражение глаза не приводит к полной сле-
поте, так как ожог локализуется лишь на
тех участках сетчатки, где фокусируется
изображение. Так как время моргания глаза
(периодического закрытия глаза) составляет
в среднем 10 2 с, то экспозиции, превыша-
ющие это время, не имеют практического
значения. Для малых экспозиций (меньших
10 4 с) и достаточно больших изображе-
ний (d > 0,2 мм) критерий поражения соот-
810
12. Оружие нелетального действия
ветствует значению U» = 1,7 кДж/м2, что на порядок меньше значений, приве-
денных выше (по-видимому, указанные значения U» соответствуют d < 0,1 мм).
Изучение воздействия электромагнитного излучения на организм челове-
ка и животных проводилось в Исследовательской лаборатории ВВС США с
использованием штатных систем, способных генерировать импульсы большой
амплитуды. Было обнаружено сильное воздействие ЭМИ (частота импульсно-
го воздействия - 50, 500 и 1000 импульсов в секунду; пиковая напряженность
электромагнитного поля - 61 кВ/м; длительность облучения - 2 минуты в
день, 1 день в неделю, 16 недель) на частоту сердечных сокращений и кровя-
ное давление, а также на вероятность возникновения и интенсивность роста
новообразований (опухолей) у подопытных крыс. Данные о воздействии элек-
тромагнитных полей на человека приведены в табл. 12.6.
Таблица 12.6. Реакция биообъекта на излучающую способность
и частоту импульса электромагнитного поля
Значение. Вт/см2 Значение, Гц Реакция биообъекта -- : •»
10 100 0,1 100 10 ь 50 Ю6 1010 3 100-10 3 6-20 300-700 (10-100)-103 (1-1001-106 (300-1200) 10б 460-106 10 100 20 Максимум чувствительности коры головного мозга, регуляция биоритмов Резонанс с биотоками в мозге, дисфункция сердечной мышцы Значительное превышение удельной проводимости биологических тканей Эффект «жемчужной нити» - выстраивание эритро- цитов и лейкоцитов вдоль линии поля Изменение уровня энцефалограммы (записи биотоков мозга) Перегрев глубоких слоев мозга, его долей, наруше- ние циркуляции периферической крови Нестабильность пульса, изменение систолического объема крови, повышение артериального давления, спазмы периферических сосудов Тяжелейшее воздействие на ЦНС, дисфункция выс- ших вегетативных органов продолжительного действия Порог чувствительности кожных рецепторов
К сожалению, многие другие эффекты воздействия различных видов ОНД
на человеческий организм и их интегральный критериальный количествен-
ный анализ, учитывающий достоверные долговременные последствия и ин-
дивидуальность восприятия к воздействию различных физических полей до-
порогового уровня, не обобщены или исследованы недостаточно подробно и
глубоко для таких обобщений.
В общем случае можно проиллюстрировать качественную картину связи
вероятности достижения требуемого эффекта от применения ОНД с произ-
вольной шкалой безопасности действия ОНД на человека (рис. 12.50). Задачи
конкретных исследований в данном направлении - наполнение этих критери-
12.4. Критерии применимости ОНД
811
Относительный уровень воздействия
Рис. 12.50. Качественная шкала безопасности действия ОНД:
1 - желательный биоэффект; 2 смерть или серьезный вред; 3 - нежелательный биоэффект
•* •
альных зависимостей количественным содержанием. Исходя из этих зависимо-
стей необходимо при проектировании и применении создаваемых видов ОНД
добиваться максимально возможного различия между дозами, обеспечивающи-
ми гарантированные желательный и нежелательный биоэффекты. Это различие
прямо пропорционально степени гуманности использования ОНД, так как ис-
ключает неприемлемые уровни воздействия ОНД на человека.
12.4. Критерии применимости ОНД
Общие требования к ОНД известны. Как и при оценке других видов ору-
жия, необходимо учитывать затраты на разработку, производство, управление,
эксплуатацию, необходимость поддержания дополнительных служб, подготовку
специалистов. Кроме того, необходимо удовлетворять требованиям надежнос-
ти, боеготовности, уязвимости, маневренности и т. д. Поэтому критерий эф-
фективности - ключевой фактор в процессе разработки, размещения и ис-
пользования любого оружия, в том числе нелегального.
В качестве показателя оценки принадлежности оружия к ОНД предлага-
ется отношение площади нелегального воздействия на живую силу Зонд к
общей площади поражения 5пор:
_5онд
S
°пор
В соответствии со значением Г]у существует следующая условная шкала
принадлежности оружия к той или иной категории:
- нелегального действия при 0,9 < Т]х < 1,0;
- менее летального действия при 0,7 < Г)Е < 0,9;
- летального действия при Г]х < 0,7.
Здесь за площадь поражения принимают такую площадь, на которой с
заданной вероятностью Р выводится из строя живая сила на время не менее
812
12. Оружие нелетального действия
заданного т > т*. При этом для определения 5'ОНд требуется проведение со-
ответствующих медико-биологических исследований для набора достовер-
ных статистических данных по воздействию на живую силу различных ти-
пов ОНД.
Нелетальное оружие должно обеспечивать необходимое воздействие на
тактическую ситуацию, иметь достаточный для выполнения тактической за-
дачи радиус действия, быть довольно устойчивым к применению противни-
ком контрмер, быть совместимым с обычным вооружением и дополнять его
новыми функциями, а также повышать общий потенциал подразделения при
решении боевых задач. ОНД не должно ограничивать в случае необходимос-
ти применение обычного оружия огневого поражения.
Оружие нелетального действия индивидуального применения должно быть
достаточно легким и простым в применении и содержании. В идеале обыч-
ное стрелковое оружие, гранатометы и минометы должны использоваться как
средства доставки нелетальных БП, что дает возможность двойного приме-
нения имеющейся военной техники в обычном и нелетальном тактйческом
вариантах. Более крупные системы ОНД могут размещаться на существую-
щих армейских, морских и воздушных платформах без существенной пере-
делки.
Поскольку миротворческие операции предполагают в случае необходимо-
сти быструю подготовку, транспортировку (как правило, авиационную) и раз-
вертывание миротворческих сил, соответствующие требования возникают и к
используемым нелетальным вооружениям и включают мобильность и возмож-
ность транспортировки.
Развитие новых технологий жизненно необходимо государству, которое
заботится о том, чтобы его экономика имела хорошие перспективы на буду-
щее. Еще лучше, если появляется возможность хотя бы частично окупить се-
годняшние инвестиции. Поэтому в качестве приоритетных следует рассмат-
ривать такие ОНД, которые уже имеют или могут иметь коммерческую отда-
чу как на национальном, так и на мировом рынках вооружений. Хорошо, если
для этого требуется лишь небольшая доработка существующих технологий,
поскольку в этом случае можно ожидать быструю окупаемость затрат.
Однако развитие ОНД предполагает максимальное и творческое исполь-
зование всего спектра существующих и перспективных технологий, особен-
но новых передовых технологий, для разработок в области нелетальных во-
оружений. Это позволит создавать ОНД на новых принципах, возможности
которых в настоящее время еще по достоинству не оценены.
Кроме того, внедрение современных технологий будет стимулировать про-
гресс в других, гражданских секторах экономики. Поэтому еще один важный
приоритет при создании ОНД - использование технологий двойного назначе-
ния. Не стоит забывать и о том, что исследования и разработки в военной
области дали в XX в. сильнейший стимул для развития фундаментальной на-
уки. Поэтому появление тех типов ОНД, которые способствуют сохранению
накопленного за прошлые годы научного потенциала, также следует считать
приоритетными.
Помимо перечисленных выше общих требований к ОНД существуют спе-
цифические требования к конкретным видам ОНД.
12.4. Критерии применимости ОНД
813
В процессе создания и испытаний ОНД предлагались различные крите-
рии оценки применимости и эффективности их действия. Обобщение этих
предложений позволяет сформулировать иерархию критериев для оценки пер-
спективности разработки и эффективного использования различных видов
ОНД.
1. Главный критерий (императив): ОНД не должно причинять необрати-
мый ущерб здоровью людей, катастрофические разрушения гражданских
объектов и существенный вред окружающей среде.
2. Критерий правовой легитимности: разработка и применение ОНД не
должны противоречить существующим запретам и быть потенциально под-
верженными большому риску для запрета в будущем, в том числе по причине
пока не изученных отдаленных последствий для здоровья людей.
3. Критерий боевой эффективности: каждый вид ОНД должен надежно
выполнять боевую задачу, обладать необходимой дальностью действия, быть
удобным и простым в обращении, создавать минимальную весовую нагрузку,
иметь требуемую мобильность для быстрой переброски в район применения
и, по возможности, систему управления уровнем воздействия в зависимости
от ситуации.
4. Критерий устойчивости: ОНД должно быть максимально устойчиво
по отношению к средствам защиты и противодействия.
5. Критерий совместимости: ОНД должно быть совместимо со штатным
обычным вооружением и дополнять его возможности. При этом в качестве
средств доставки необходимо использовать штатные носители (стрелковое ору-
жие, артиллерия, авиация, ракетная техника), а крупногабаритные установки
должны быть совместимы со штатными платформами и легко размещаться на
них. Хранение и обслуживание ОНД должны соответствовать существующей
системе материально-технического обеспечения.
6. Критерий безопасности: ОНД должно быть безопасно для обслужива-
ющего персонала и окружающей среды при хранении, применении и в случае
непредвиденных ситуаций и происшествий.
7. Критерий экономической эффективности: работы по созданию и про-
изводству ОНД должны иметь разумную стоимость, научно-производствен-
ную базу и необходимые технологии, приемлемые для серийного выпуска го-
товых изделий.
8. Критерий временной эффективности: сроки создания какого-либо вида
ОНД должны быть соизмеримы со средними сроками разработки обычных
вооружений, выполняющих аналогичные задачи.
9. Критерий неисключительности: технологии, заложенные в основу дей-
ствия и производства ОНД, должны предусматривать их использование в дру-
гих, в том числе гражданских, секторах промышленности.
При разработке того или иного образца ОНД необходимо также соблю-
дать следующие общие военно-технические требования:
- достижение конструкционных характеристик, обеспечивающих просто-
ту использования в полевых условиях, приемлемые массогабаритные харак-
теристики и эксплуатационные возможности, гарантирующие, в том числе, и
безопасность оператора;
814
12. Оружие нелетального действия
- оснащение военнослужащего на индивидуальном уровне при абсолют-
ном минимуме дополнительного снаряжения;
- предпочтительное использование существующих в эксплуатации носи-
телей для доставки ОНД;
- достижение необходимых тактико-технических характеристик, обеспе-
чивающих полное решение поставленных гадач и исключающих необходи-
мость применения обычного вооружения в случае возможных действий;
- обеспечение нейтрализации противостоящей стороны без летального ис-
хода, что особенно важно из-за различной чувствительности субъектов воз-
действия к поражающим факторам;
- варьирование интенсивного воздействия на противостоящую сторону в
зависимости от ситуации, складывающейся во время применения ОНД в ходе
проводимой операции;
- боевая подготовка с использованием ОНД должна быть адаптирована к
аналогичной подготовке с применением других систем оружия, а не приво-
дить к появлению новых военных специальностей и подразделений; ;
- требования к характеристикам ОНД должны быть разумно совместимы
с требованиями к другим системам оружия. » д
Перечисленные требования не ограничивают рассмотрение и других тре-
бований по назначению (виду) ОНД: по живучести и стойкости к внешним
воздействиям, надежности, эргономике и технической эстетике, эксплуата-
ции, удобству технического обслуживания, ремонту и хранению, стандарти-
зации, унификации и технологичности, безопасности, в том числе экологи-
ческой.
Следует отметить, что указанные требования являются самыми общими,
вне зависимости от назначения разрабатываемого образца ОНД и решаемых
им задач (например, тактического или стратегического плана). Конкретные
требования по решению этих задач формулируются в тактико-технических тре-
бованиях на тот или иной образец вооружения и военной техники.
12.5. Международно-правовые аспекты разработки
и применения ОНД
Для определения легитимности использования ОНД с правовой точки зре-
ния необходимо понимать, какими законодательными принципами и ограни-
чениями следует руководствоваться при его применении. В настоящее время
международным сообществом признано, что такими принципами являются во-
енная необходимость, гуманность и пропорциональность. Если соотнести име-
ющиеся международно-правовые документы с конкретными видами различ-
ного вооружения, в том числе и ОНД, то можно сделать негативное заключе-
ние: к сожалению, международно-правовое регулирование применения
большинства видов ОНД полностью отсутствует, а международные соглаше-
ния, имеющиеся по немногим видам ОНД, вызывают сомнения и дискуссии.
В этих условиях необходимо осмыслить опасность, которую может нести это
новое оружие, и установить критерии легитимности его применения.
В целом ОНД можно отнести к гуманным видам оружия, поскольку его
использование не влечет за собой неизбежную гибель личного состава
12.5. Международно-правовые аспекты разработки и применения ОНД 815
воюющих сторон и гражданского населения, не наносит обширный, долго-
временный и серьезный ущерб природной среде, не разрушает гражданские
объекты и объекты, представляющие культурную ценность, не повреждает
установки и сооружения, опасные при разрушении для человека и окружаю-
щей среды.
Оружие нелетального действия может обеспечить политикам и команду-
ющим вооруженными силами дополнительную гибкость при принятии реше-
ний в диапазоне, границами которого являются, с одной стороны, дипломати-
ческие усилия, а с другой - применение обычных видов вооружения. Свой-
ства ОНД могут быть использованы для сдерживания конфликтов, поощрения
ведения переговоров, защиты гражданского населения, содействия оказанию
гуманитарной помощи, повышения эффективности обычных видов вооруже-
ния и снижения потерь личного состава.
В чем же проблема правового регулирования ОНД? Дело в том, что ОНД
может применяться в специальных операциях, таких как антитеррористи-
ческие и миротворческие, операции nQ поддержанию мира, по подавлению
мятежей, снижению эскалации вооруженных конфликтов, операции по ос-
вобождению заложников, обеспечению проведения гуманитарных миссий, в
полицейских операциях. Кроме того, ОНД может поддерживать усилия по
нейтрализации оружия массового уничтожения, производства, хранения и
транспортировки наркотиков, по обезвреживанию вооруженных группировок,
готовящихся пересечь границу в целях атаки, по защите территории, на кото-
рой расположены временные поселения беженцев. Многие из таких операций
проводятся либо объединенными международными силами, либо на террито-
рии одной страны силами других стран. Правовые базы стран - участниц по-
добных операций зачастую имеют очень большие различия. Соответственно
возникают три вопроса: законодательством какой из стран будет регулироваться
использование ОНД; кто будет отдавать конкретный приказ; кто и какую от-
ветственность несет за последствия применения ОНД?
Кроме того, особенно важно понимать, что чаще всего указанные специ-
альные операции проходят в неблагоприятной для осознанного правоприме-
нения обстановке. Практически всегда существует большой риск случайного
поражения гражданского населения.
При определении вопроса легитимности применения оружия следует ру-
ководствоваться прежде всего гуманитарным правом, обычным международ-
ным правом, правом вооруженных конфликтов, конвенционным правом и на-
циональным правом.
Задача международного гуманитарного права заключается в регламента-
ции военных действий в целях смягчения их жестокости. В своей основе нор-
мы международного гуманитарного права призваны обеспечить равновесие
между военной необходимостью и гуманностью. Исходя из этого междуна-
родное гуманитарное право налагает запрет на некоторые действия, напри-
мер, на бесполезные в военном отношении операции, совершаемые с особой
жестокостью. Некоторые нормы этого права представляют собой компромисс
между военной необходимостью и требованиями гуманности. Так, принцип
пропорциональности допускает случайные потери среди гражданского насе-
ления в случае нападения, однако нападение невозможно, если существует
816
12. Оружие нелетального действия
опасность того, что случайные потери среди гражданского населения будут
чрезмерными по отношению к военному преимуществу, которое предполага-
ется получить.
Международное гуманитарное право применяется только в случае воору-
женного конфликта. Необходимо подчеркнуть, что применение этих норм оп-
ределяется только наличием объективных условий и не зависит от того, как
сами воюющие стороны квалифицируют ситуацию. Если возникает вооружен-
ный конфликт между двумя или несколькими государствами, то он квалифи-
цируется как международный, даже в том случае, если воюющие стороны не
признают состояния войны. Существующими международно-правовыми нор-
мами запрещается или ограничивается использование конкретных видов обыч-
ного оружия, которое может нанести чрезмерные повреждения или иметь не-
избирательное действие. Следует подчеркнуть, что сегодня многие нормы меж-
дународного гуманитарного права рассматриваются в качестве обычный норм,
обладающих обязательной силой для всех без исключения государств, b том
числе государств, не являющихся участниками соответствующих международ-
ных договоров. г Л
Согласно определению ОНД, главная цель его применения -лишение бое-
способности живой силы противника без существенного ущерба здоровью.
Однако не будем забывать и о том, что при вооруженных конфликтах, при
проведении антитеррористических и миротворческих операций в зону дей-
ствия ОНД попадает и гражданское население. Но даже при воздействии
ОНД только на личный состав противника необходимо быть уверенным в
том, что оно не станет источником излишних страданий и не повлечет дли-
тельного расстройства здоровья. В противном случае те виды и типы ОНД,
которые не отвечают указанным требованиям, легитимными не являются и
должны быть запрещены.
Приведем несколько конкретных примеров различных точек зрения на при-
менение некоторых видов ОНД.
В области химического и биологического оружия существуют междуна-
родно-правовые документы, регламентирующие или запрещающие их исполь-
зование. Известны Брюссельская международная декларация, касающаяся за-
конов и обычаев войны (1874), Гаагская специальная декларация, касающаяся
удушливых газов (1899) и Гаагские конвенции (1907), Женевский протокол
(1925) о запрещении применения на войне удушливых, ядовитых или других
подобных газов и бактериологических средств. Также существуют Конвенция
о запрещении производства и накопления запасов бактериологического и ток-
сического оружия и об их уничтожении (1975), Конвенция о запрещении во-
енного или любого другого враждебного использования средств воздействия
на природную среду (1978), Соглашение между СССР и США об уничтоже-
нии и непроизводстве химического оружия и о мерах по содействию много-
сторонней Конвенции о запрещении химического оружия (подписано 1 июня
1990 г.), Конвенция о запрещении разработки, производства, накопления и при-
менения химического оружия и его уничтожении (разработана в Женеве на
Конференции по разоружению и подписана в январе 1993 г. в Париже). В со-
ответствии со Ст. II (9) этой Конвенции использование химических веществ
не запрещено:
12.5. Международно-правовые аспекты разработки и применения ОНД 817
- в мирных целях;
- в целях обороны;
- в законопринудительных целях;
- для уничтожения материалов.
Необходимо заметить, что до сегодняшнего дня вокруг проблемы хими-
ческого оружия продолжаются споры. В США вызывает непонимание факт
разрешения в национальном законодательстве применения слезоточивого газа
для подавления бунтов (Riot control agent) и запрещение его использования в
боевых действиях против вражеской стороны. В настоящее время примене-
ние таких газов в боевых действиях существенно ограничено. Когда (если)
Конвенция 1993 г. вступит в силу, использование газов будет полностью зап-
рещено. Кроме того, применение гербицидов и дефолиантов, по мнению ряда
специалистов в США, более гуманно, чем обычных вооружений.
Химические вещества, не вошедшие в Международный регистр потенци-
ально токсичных веществ (ряд усыпляющих веществ, быстроотвердевающие
блокирующие пены, полимеры, маркеры, суперкаустики и пр.), могут исполь-
зоваться в качестве ОНД, поскольку они не причиняют излишних поврежде-
ний или страданий, не делают смерть сражающихся неизбежной, а также не
приводят к массовому разрушению и бессмысленному уничтожению матери-
альных ценностей.
Юридическая основа запрета биологического оружия - Конвенция о зап-
рещении разработки, производства и накопления запасов бактериологическо-
го (биологического) и токсичного оружия и об их уничтожении (1972). При-
нятие этой Конвенции стало первой в истории международных отношений
мерой реального разоружения, направленной на изъятие из арсеналов госу-
дарств целой категории опаснейшего оружия. Именно поэтому попытки при-
менить биологическое оружие даже несмертельного характера будут запреще-
ны международным законодательством. Поскольку некоторые виды биологи-
ческого ОНД, создаваемые сегодня, связаны с использованием технологии
воздействия на этнические группы населения, то этот вид оружия подпадает
под действие Конвенции о предупреждении преступлений геноцида и наказа-
нии за него, утвержденной третьей сессией Генеральной Ассамблеи ООН 9 де-
кабря 1948 г., и должен быть запрещен.
К сожалению, с международно-правовым регулированием применения всех
остальных видов ОНД дело обстоит далеко не так благополучно. К еще боль-
шим сложностям ведет тот факт, что многие виды ОНД разрабатывают в об-
становке строжайшей секретности, исключающей возможность контроля.
Одним из факторов, определяющих легитимность волнового ОНД, явля-
ется его избирательность. Следовательно, оружие, которое наносит вред в
равной степени живой силе воюющих сторон и гражданскому населению, бу-
дет признано неизбирательным, а поэтому незаконным (Конвенция о запре-
щении или ограничении применения конкретных видов обычного оружия, ко-
торые могут считаться наносящими чрезмерные повреждения или имеющими
неизбирательное действие (1976)). Отметим, что по критерию избирательнос-
ти волновое оружие, и особенно лазерное, является легитимным, так как мо-
жет быть наведено очень точно на конкретные цели. В то же время, говоря об
этом виде ОНД, следует упомянуть Международную конвенцию по телекомму-
818
12. Оружие нелетального действия
никациям в Найроби 10 января 1986 г., ограничивающую использование такого
оружия (данную Конвенцию не соблюдают во время военных действий).
Другой фактор определения легитимности - причинение излишних стра-
даний. Воздействие некоторых видов волнового (лазерного) оружия может при-
вести к временной или постоянной потере зрения. Эксперты из Швеции ак-
тивно призывают запретить применение лазерного оружия, так как оно может
причинить излишние страдания и нарушить принцип пропорциональности,
хотя по критерию избирательности данный тип ОНД не вызывает возраже-
ний. США, отвергая эту позицию, указывают, что ослепнуть можно под дей-
ствием обычного оружия в процессе боевых действий, а причиненные при
этом страдания гораздо сильнее. Борьба против лазеров международного об-
щества Красный Крест и Организации по правам человека привела, в частно-
сти, к тому, что был подписан Протокол № 4 Конвенции ООН по обычным
вооружениям (1980), который запрещал создание лазеров, предназначенных
«вызывать необратимую слепоту». Протокол № 4 США подписали осенью
1995 г. Однако известно, что лазерное оружие разрабатывается, и не только в
США, и его запрещение остается большой проблемой.
Еще один пример - акустическое ОНД, применение которого связано с
риском нарушения принципа избирательности. Такое оружие можно законно
использовать лишь при условии, что причинение вреда гражданскому населе-
нию и личному составу произойдет случайно и пропорционально военной не-
обходимости. Здесь также не решена проблема пропорциональности, т. е. со-
ответствие причиняемых страданий мере военной необходимости. Поэтому
пока не существует даже взаимоприемлемых подходов к обсуждению согла-
шений по акустическому ОНД. Однако проблема избирательности, возможно,
будет решена в рамках создания вихревых технологий (разработка vortex-re-
нераторов).
Следующий пример - информационное ОНД. В области законодательно-
го регулирования применения информационного оружия существуют наиболь-
шие сложности. На данный момент действующее законодательство (в основ-
ном национальное) защищает лишь информацию и информационные сети от
несанкционированного доступа. Также запрещено радиоэлектронное подав-
ление определенных частот и систем, предусмотренных Уставом и Конвенци-
ей международного союза электросвязи. Что же касается вопросов воздей-
ствия на человека-оператора, они практически не регулируются ничем. По-
пытки обсуждения проблемы психофизической безопасности человека в
условиях ведения информационной войны пока не находят должного понима-
ния ни у национальных законодательных органов, ни в международных орга-
низациях.
При решении вопроса о легитимности того или иного вида ОНД следует
также рассматривать их в свете Конвенции против бесчеловечного и жестоко-
го обращения (10 декабря 1984 г.), Конвенции по окружающей среде (1977),
Акта о чистом воздухе (применение Монреальского протокола о разрушении
озонового слоя, запрещение производства продукции, содержащей фреон-12
после 31 декабря 1995 г.; фреон-12 составляет 32 % химических пен). Безус-
ловно, на сегодняшний момент те же подходы и принципы должны использо-
ваться при определении легитимности всех видов ОНД.
12.5. Международно-правовые аспекты разработки и применения ОНД 819
Развитие новых технологий в области разработки ОНД идет чрезвычайно
быстрыми темпами. Большая часть видов ОНД никогда еще не применялась
на практике, не проверялась в военных действиях. Таким образом, можно с
определенностью сказать, что ОНД не исследовано в той степени, что и обыч-
ные виды вооружений, в том числе и на их соответствие действующему зако-
нодательству. Необходимо провести оценку существующих видов ОНД для
гарантии их соответствия действующим международным соглашениям, дого-
ворам, законам военного времени и национальному законодательству. Огром-
ные пробелы в международно-правовой сфере по заключению соглашений о
принципах и ограничениях использования различных видов ОНД лишь усу-
губляют те проблемы, которые существуют в технической, военной, медицин-
ской и других областях, связанных с разработкой, применением и оценкой
результатов воздействия ОНД на человека и инфраструктуру, обеспечиваю-
щую его жизнедеятельность.
Есть определенный риск, что по мере появления следующих поколений
ОНД устаревшие его виды попадут в рукк безответственных за свои дей-
ствия людей. Некоторые виды такого оружця можно собрать из компонен-
тов, доступных и террористам. Здесь уместно^роцитировать строчки из пре-
амбулы к Закону Нанна - Лугара II: «Сегодня это оружие доступно злонаме-
ренным странам, террористическим группам и даже отдельным лицам». Это
было сказано об оружии массового уничтожения, но актуально и в отноше-
нии ОНД.
Во избежание риска попадания ОНД в руки террористических формиро-
ваний и преступников, а также интенсификации процесса применения ОНД в
военных целях существует превентивный контроль вооружений - форма ко-
личественного контроля за вооружением, препятствующего развитию воен-
ных технологий прежде чем оружие, производимое с помощью таких техно-
логий, будет развернуто. Другими словами, это контроль, осуществляемый
на стадиях исследования, развития и (или) испытания новых видов оружия,
в том числе и ОНД, нацеленный на предотвращение многих проблем, когда
внедрение новых типов оружия приводит вначале к дестабилизации и лишь
позднее как результат тяжелого переговорного процесса к соглашению о
налагаемых ограничениях (как правило, принимаемых в огромном коли-
честве).
В соответствии с идеей превентивного контроля при вводе в эксплуата-
цию новых видов оружия имеется стандартный набор процедур для того,
чтобы оценить, будут ли ущемлены права и интересы потенциальных и слу-
чайных жертв или нет. Статья 36 Дополнительного протокола к Женевской
конвенции (1949) обязывает страны, подписавшие ее, определять, подлежат
ли международному запрету новый вид оружия, средство или метод ведения
военных действий. Именно поэтому и существует большое количество объяс-
нений того, почему применение новых видов оружия может привести к от-
рицательным последствиям для мирного сосуществования наций и между-
народной безопасности. Ограничения, налагаемые на разработку нового ору-
жия, в том числе и ОНД, могут согласовываться на международном уровне
их ратификацией всеми сторонами. Хотя мероприятия по выработке регули-
рующих законов по использованию ОНД вооруженными силами находятся
820
12. Оружие нелетального действия
только в зачаточном состоянии, идею превентивного контроля вооружений
применительно к ОНД должны реализовать в обязательном порядке как сис-
темный подход к решению данной проблемы.
Превентивный контроль вооружений - многоступенчатый процесс. Во-
первых, это проведение научного анализа, нацеленного на исследование перс-
пективных технологий создания и использования ОНД. Для каждого типа тех-
нологии и операционного сценария должны учитываться все составляющие
аспекты, включая технические характеристики оружия, эффективность дей-
ствия (диапазон действия, избирательность) по цели. Во-вторых, необходим
анализ использования ОНД в военных, антитеррористических и миро-
творческих операциях, а также в операциях по правопринуждению. В этот
анализ должны входить все возможные формы применения ОНД в отноше-
нии различных целей, причем даже в необычных ситуациях или при непред-
виденных результатах. Необходимо также изучение проблемы применения
контрмер. В-третьих, нужен количественный контроль за процессом поста-
новки на вооружение новых систем ОНД, создающий препятствия развитию
военных технологий, прежде чем ОНД, которое производится с помощью та-
ких технологий, будет полностью развернуто.
Перечисленные выше основные этапы превентивного контроля связаны с
соответствующими критериями, которые должны учитывать:
- угрозы, создаваемые договорам по контролю вооружений;
- эффекты дестабилизации;
- эскалацию гонки вооружений;
- возможность неконтролируемого распространения оружия;
- потенциальные возможности пересмотра международных законодатель-
ных актов в военной сфере;
- опасности, создаваемые окружающей среде;
- риски, возникающие в отношении гражданского общества и прав лич-
ности.
В случае военного применения ОНД необходима оценка каждого сцена-
рия военной операции: вооруженный конфликт, миротворческая или антитер-
рористическая операция. Для операций правоохранительного порядка необ-
ходима оценка использования ОНД против толпы и отдельных противников в
различных ситуациях - от тюремного бунта до захвата заложников.
Если все ступени превентивного контроля за разработкой и использова-
нием ОНД пройдены, то страны - разработчики ОНД должны начать перего-
воры и, в идеальном случае, прийти к консенсусу по соответствующим огра-
ничениям, чтобы свести к минимуму применение ОНД в военных целях.
12.6. Специальные средства в системе МВД РФ
Перечень представленных средств нелегального воздействия, квалифици-
руемых Федеральным законом Российской Федерации «О милиции» как спец-
средства, в совокупности с их техническими характеристиками и условиями
применения включает:
- средства непроникающего ударного травмобезопасного воздействия на
правонарушителя (патроны и выстрелы);
12.6. Специальные средства в системе МВД РФ
821
- средства раздражающего действия и иммобилизирующие средства (аэро-
зольные распылители, ручные гранаты, патроны и выстрелы, ранцевые рас-
пылители высокого давления, пиротехнические газовые генераторы);
- светозвуковые средства отвлекающего и психофизиологического воздей-
ствия на правонарушителя для проведения операций по освобождению за-
ложников и по правопринуждению, а также для пресечения массовых беспо-
рядков (кассетные устройства, гранаты, выстрелы, стационарные установки);
- электрошоковые средства;
- средства, ограничивающие подвижность правонарушителя или исполь-
зуемого им транспорта (набрасываемые сети, быстровозводимые труднопре-
одолимые преграды).
Правовые основы применения спецсредств подразделениями МВД РФ
В связи с формированием в Российской Федерации новой правовой сис-
темы, ее гармонизацией с законодательствами стран Европейского союза и
других высокоразвитых государств мира произошло изменение правового поля
деятельности МВД РФ и других правоохранительных ведомств. Принятие фе-
деральных законов «О милиции», «О внутренних войсках МВД РФ», «О част-
ной охранной и детективной деятельности», «Об оружии» стало важным эле-
ментом формирования новой правовой системы РФ. Эти федеральные законы
определили права сотрудников органов внутренних дел по применению ору-
жия и условиям его использования, установили номенклатуру специальных
средств и регламентировали порядок их применения.
Правительством РФ в предусмотренном законом порядке определены мо-
дели оружия и спецсредств и установлены правила их применения. В резуль-
тате этого создана нормативная база, регламентирующая использование спец-
средств при осуществлении правоохранительной деятельности. На основе со-
ответствующих решений разработаны базы данных и механизм определения
адекватности воздействующих факторов оружия и спецсредств, которые при-
нимаются на вооружение органов внутренних дел, поставленным задачам.
Именно наличие хорошо структурированной базы и жесткого механизма при-
нятия решений в Российской Федерации позволяют перевести в практичес-
кую плоскость формирование новых подходов к созданию, производству и
использованию оружия и спецсредств для правоохранительных целей, при этом
учитываются решения 8-го Конгресса ООН по предупреждению преступнос-
ти и обращению с правонарушителями.
Закон запрещает вооружение спецсредствами, которые наносят чрезмер-
но тяжелые ранения или служат источником неоправданного риска.
При проведении испытаний любого нового технического средства оцени-
вается его соответствие установленным медико-техническим требованиям: с
одной стороны, это требования по гарантированному достижению заданного
эффекта воздействия при применении конкретного вида спецсредств; с дру-
гой - выполнение строго определенных ограничений по тяжести последствий
воздействия при использовании данного спецсредства.
Оценку соответствия характеристик воздействия спецсредств задачам и
условиям их применения осуществляют на основании медико-биологических
822
12. Оружие нелетального действия
исследований (МБИ). При этом реализуются различные организационные под-
ходы к процедуре оценки.
В одном случае первоначально осуществляют разработку медико-тех-
нических требований к новым видам спецсредств. Эти нормативные пара-
метры должны обеспечить баланс между двумя противоречивыми требова-
ниями:
требование по эффективному воздействию, которое призвано предотвра-
тить или прекратить такие противоправные действия, как угроза жизни, нане-
сение вреда здоровью, ущерб собственности или правам граждан, юридичес-
ким лицам, государству или общественным организациям;
соответствие силы воздействия и степени опасности предотвращаемых
преступных действий или правонарушений в целях исключения гяжких по-
следствий от применения спецсредств.
В другом случае, когда медико-технические требования предварительно
не разрабатываются, оценка возможности принятия вновь созданных средств
на вооружение осуществляется по результатам медико-биологический испы-
таний с помощью комплексного критерия. В основу структуры комплексно-
го критерия положены два принципа: а) принцип эквивалентности суммар-
ных воздействий при нападении и защите; б) принцип эквивалентности прав
на безопасность сотрудников правоохранительных органов и граждан, ока-
завшихся случайно вовлеченными в инциденты, которые, в свою очередь,
могут попасть под воздействие спецсредств. Эти положения могут быть при-
ведены к простому соответствию тяжести последствий от применения спец-
средств в отношении граждан, случайно попавших под их воздействие, и от
использования оружия правонарушителями против сотрудников правоохра-
нительных органов, экипированных средствами индивидуальной защиты.
Допустимые пределы тяжести воздействия через средства индивидуальной
бронезащиты являются стандартизированными показателями и жестко конт-
ролируются.
Необходимость строгого контроля уровня воздействия спецсредств непо-
средственно следует из введения законодательством права сотрудника мили-
ции на профессиональный риск, согласно которому «на деятельность сотруд-
ника милиции распространяются нормы уголовного законодательства РФ о
необходимой обороне, причинении вреда при задержании лица, совершив-
шего преступление, крайней необходимости, физическом или психическом
принуждении, об обоснованном риске при исполнении приказа или распо-
ряжения».
По существу это означает, что государство берет на себя ответственность
за последствия такого риска и обязано четко определить допустимые его гра-
ницы. Именно это и обеспечивается за счет процедуры МБИ и соответствую-
щих оценок.
Итак, в РФ условия и пределы применения спецсредств сотрудниками ми-
лиции и военнослужащими внутренних войск закреплены в Законе РФ от
18.04.91 г. № 1026-1 «О милиции» и в Законе РФ от 06.02.97 г. № 27-ФЗ
«О внутренних войсках МВД РФ» соответственно, а их выполнение гаранти-
руется за счет стандартизации тактико-технических характеристик соответ-
ствующих спецсредств и соблюдения правил использования. Спецсредства,
12.6. Специальные средства в системе МВД РФ
823
находящиеся на вооружении милиции и внутренних войск, разрешается при-
менять в следующих случаях:
- для отражения нападения на граждан, военнослужащих, сотрудников
органов внутренних дел;
для пресечения сопротивления, оказываемого военнослужащим внут-
ренних войск и сотрудникам милиции при исполнении ими своих служебных
обязанностей;
- для задержания лиц, застигнутых при совершении преступления против
жизни, здоровья или собственности и пытающихся скрыться или оказать со-
противление;
- для задержания лиц по основаниям, установленным законодатель-
ством РФ;
- для задержания лиц, в отношении которых есть достаточные основания
полагать, что они намерены оказать вооруженное сопротивление;
- для доставления задерживаемых лиц в милицию, конвоирования и охра-
ны задержанных, а также лиц, подвергнутых административному аресту и зак-
люченных под стражу, когда они своим поведением дают основание полагать,
что могут совершить побег, либо причинить вред окружающим или себе, либо
оказывают противодействие сотруднику милиции или военнослужащему внут-
ренних войск;
- для отражения нападения на военные городки, воинские эшелоны
(транспорты) и транспортные колонны, объекты, охраняемые внутренними
войсками;
- для освобождения насильственно удерживаемых лиц (заложников), зах-
ваченных зданий, помещений, сооружений, транспортных средств и участков
местности;
- для пресечения массовых беспорядков и действий, нарушающих работу
транспортных средств, средств связи, предприятий, учреждений и организа-
ций независимо от форм собственности, а также дезорганизующих работу ис-
правительных учреждений;
- для остановки транспортных средств, водители которых не выполнили
законные требования сотрудников милиции или военнослужащих внутренних
войск;
- для выявления лиц, совершающих или совершивших преступления.
Указанными законами предусмотрены два ограничения по применению
спецсредств: а) в отношении женщин с видимыми признаками беременности,
лиц с явными признаками инвалидности и малолетних, кроме случаев оказа-
ния ими вооруженного сопротивления, совершения группового или иного на-
падения, угрожающего жизни и здоровью людей; б) при пресечении незакон-
ных собраний, митингов, уличных шествий и демонстраций ненасильствен-
ного характера, которые не нарушают работу транспорта, связи, организаций.
Правила применения спецсредств регламентируют:
порядок вооружения и компетенцию руководителей правоохранительных
органов на вооружение разными видами спецсредств, обладающих различны-
ми типом и силой воздействия, подразделений в зависимости от складываю-
щихся оперативной обстановки и условий действия по предотвращению и пре-
сечению правонарушений;
824
12. Оружие нелетального действия
право принятия решений на использование мощных спецсредств, таких
как водометные установки и т. д.
Предусматривается процедура предварительного предупреждения граж-
дан о применении спецсредств, а также условий, при которых они будут ис-
пользованы.
Законом определены обязанности руководителей правоохранительных ор-
ганов по обеспечению оказания первой медицинской помощи при примене-
нии спецсредств.
Тактико-технические характеристики
и особенности применения спецсредств
Спецсредства непроникающего ударного действия предназначены для
контактного и дистанционного воздействия и включают в себя резиновое пал-
ки, патроны с резиновыми пулями и выстрелы к гранатомету с эластичными
сферическими элементами. Служат для отражения нападения на граждан и
сотрудников милиции, когда их жизнь или здоровье подвергаются опасности,
а также для пресечения попытки завладеть оружием сотрудника милиции, для
прекращения массовых беспорядков и групповых действий, нарушающих ра-
боту транспорта, связи и организаций.
Палки изготовлены из эластичной резины и могут иметь телескопичес-
кую (для использования в ограниченном пространстве и стесненных услови-
ях) или монолитную конструкцию с основным стержнем и дополнительной
перпендикулярной рукояткой. В инструкции по применению резиновых па-
лок запрещено нанесение ударов по голове, шее и области ключицы, животу,
половым органам, области проекции сердца, а также многократное нанесение
ударов в одно и то же место.
23-мм патрон (рис. 12.51) для ударного непроникающего действия от-
стреливается из карабина КС-23 и его модификаций, имеет эффективную даль-
ность до 70 м, применяется для стрель-
бы по нижним конечностям правонару-
шителей, находящихся на расстояниях не
менее 40 м.
Существую! две модификации средств
непроникающего ударного действия к
специальному гранатометному комп-
лексу РГС-50:
выстрел отвлекающего действия
(ЭГ-50М) для временной нейтрализации
правонарушителей и террористов посред-
ством совместного психологического
влияния звука, пламени выстрела и удар-
но-шокового воздействия одиночными
эластичными сферическими элементами
(рис. 12.52) с эффективной дальностью стрельбы до 15 м;
выстрел ударно-шокового действия (ЭГ-50) для травмобезопасного
ударного воздействия на правонарушителей, находящихся на расстоянии
Рис. 12.51. 23-мм патрон с резиновой
пулей
12.6. Специальные средства в системе МВД РФ
825
до 40 м, одиночными эластичными поражающими сферическими элемен-
тами (рис. 12.53).
В первом случае не допускается ведение стрельбы в лицо человека, а во
втором - запрещается стрельба по правонарушителям, находящимся на даль-
ностях менее 17 м. В обоих случаях запрещено применять указанные выстре-
лы в местах, где есть утечка газа, хранятся взрывчатые и легковоспламеняю-
щиеся вещества и материалы.
Рис. 12.52. Выстрел отвлекающего
действия для РГС-50
Рис. 12.53. Выстрел ударно-шокового
действия для РГС-50
Средства раздражающего (слезоточивого) действия представлены аэро-
зольными распылителями, ручными гранатами, патронами и выстрелами, ран-
цевыми аппаратами и распылителями высокого давления, а также пиротехни-
ческими газовыми генераторами. Их применяют в следующих случаях:
нейтрализация правонарушителей с минимально наносимым ущербом
здоровью граждан, а также с небольшими имущественными и материальны-
ми потерями;
- снижение эффективности и подавления огневого противодействия пра-
вонарушителей;
прикрытие своих подразделений;
- прерывание огневого контакта с правонарушителями;
вынуждение правонарушителей без специальной защиты покинуть зда-
ние, сооружение, укрытия и подобные укрепленные пункты;
- защита своих базовых лагерей и огневых точек.
Раздражающие спецсредства снаряжены составами на основе ирритантов -
химических соединений, в незначительных концентрациях вызывающих крат-
ковременную потерю человеком боеспособности вследствие раздражения сли-
зистых оболочек глаз, верхних дыхательных путей и кожных покровов.
Ирританты в виде пара, аэрозоля или дыма воздействуют на человека по
механизму ингаляции и демонстрируют высокую эффективность, а ирритан-
ты в виде капель влияют на кожный покров и обладают сравнительно низкой
эффективностью нслетального действия. Для оценки относительной токсич-
ности указанных ирритантов введен показатель ингаляционной дозы токсич-
ности (ИДТ) С.
826
12 Оружие нелетального действия
Ирританты (табл. 12.7) предназначены для снаряжения многообразных
средств раздражающего действия. Наиболее компактными являются аэрозоль-
ные распылители типа «Сирень», «Контроль», «Черемуха», «Резеда», выпол-
ненные в форме небольших баллончиков для воздействия на правонарушите-
лей, находящихся на дальности до 4 м, причем минимально разрешенная даль-
ность применения находится в диапазоне 0,5... 1,0 м, а диапазон рабочих
температур -10...40 °C.
Таблица 12.7. Относительная токсичность ирритантов по механизму ингаляции
Тип ирританта Cmax, мгмин/м3 Cth, мгмин/м3 С50, мг-мин/м3 Cev мг-мин/м3
CN 500 50 80 2
CS 5000 500 20 5,
CR 25000 2500 5 3 АГ
Примечание. Clh - расчетная максимально допустимая ИДТ; Стах = 10С(Л - макси- мально допустимая ИДТ, разрешенная при использовании ирритантов; С50- ИДТ, обеспечи- вающая выведение из строя 50 % подвергнутых воздействию ирританта; Сех - начальная не- переносимая ИДТ. i
В целях активной самообороны сотрудниками правоохранительных орга-
нов могут применяться распылители высокого давления (РВД) раздражающих
и маркирующих веществ, а также их композиций (рис. 12.54). Дальность дей-
Рис. 12.54. Распылители высокого давления
ствия РВД составляет от 5 до 7 м,
минимальная дальность примене-
ния - 3 м, а время полной разрядки
РВД в зависимости от модифика-
ции - 8...21 с.
Увеличение дальности действия
достигают с помощью другого сред-
ства- ручной аэрозольной гранаты
«Дрейф» (рис. 12.55). предназначен-
ной для ручного забрасывания на
дальность свыше 10 м в целях мгно-
венного создания на открытой мест-
ности облака аэрозоля раздражающе-
го действия, причем расстояние от
точки падения гранаты до ближайше-
го человека не должно быть менее
0,6 м. Гранату «Дрейф» применяют
только на открытой местности, так
как запрещено ее использование в ме-
стах, где есть утечка газа, хранятся
взрывчатые и легковоспламеняющи-
еся вещества и материалы.
Для применения внутри помеще-
ний и создания в них непереносимой
12.6 Специальные средства в системе МВД РФ
827
концентрации раздражающего вещества предназначены ручные газовые грана-
ты типов «Черемуха» (рис. 12.56) и «Сирень», которые забрасывают вручную
или отстреливают на дальность до 150 м из карабина КС-23 при помощи вы-
щибного патрона и специальной насадки. При этом запрещается забрасывать
более одной гранаты в непроветриваемое помещение, объем которого менее
60 м3, а также использовать гранаты в местах, где происходит утечка газа, хра-
нятся взрывчатые и легковоспламеняющиеся вещества и материалы.
Рис. 12.55. Ручная аэрозольная
граната «Дрейф»
Рис. 12.56. Слезоточивая гранага
«Черемуха-12»
Еще большую дальность эффективного применения (до 250 м) на откры-
той местности обеспечивает 40-мм выстрел с аэрозольной гранатой раздража-
ющего действия типа «Гвоздь» к гранатомету ГП-25 (рис. 12.57). При этом
запрещена стрельба по человеку, находящемуся на дальности менее 120 м, а
угол бросания при стрельбе по правонарушителям должен быть не менее 15°.
Для воздействия на правонарушителей, находящихся в помещении, использует-
ся выстрел слезоточиво-раздражающего действия к специальному гранатомет-
ному комплексу. При этом расстояние от точки прицеливания до ближайшего
человека не может быть менее 1 м. Другое ограничение по применению заклю-
чается в недопустимости пребывания людей более 5 мин в непроветриваемом
помещении объемом менее 100 м3 после срабатывания в нем выстрела.
К использованию допущены также 23-мм патроны с гранатами раздража-
ющего действия к карабину КС-23 для прицельной стрельбы на дистанцию
до 150 м в помещение или укрытие, где в результате функционирования гра-
наты образуется непереносимая концентрация облака тонкодисперсного аэро-
828
12. Оружие нелетального действия
золя. Эффективный объем, в котором создается непереносимая концентрация
слезоточивого аэрозоля при срабатывании одной гранаты, составляет от 15 до
60 м3 в зависимости от модификации гранаты. Необходимо отметить, что зап-
рещена не только стрельба непосредственно в человека, но и повторное при-
менение указанных гранат в пределах зоны поражения в период действия раз-
дражающих веществ от предыдущего выстрела.
Различные модификации пиротехнических газовых генераторов (рис. 12.58)
типа «Полынь» устанавливают на охраняемых объектах объемом 20, 100 и
250 м3 для создания облака раздражающего газа или аэрозоля в случае несанк-
ционированного проникновения в помещение.
Рис. 12.58. Пиротехнический газовый генератор:
1 - узел инициирования; 2 - заряд газогенератора;
3 - корпус
Рис. 12.57. Аэрозольная граната
раздражающего действия «Гвоздь»
Для образования на открытой местности аэрозольного облака раздражаю-
щего действия размерами 70x40x45 м с дальностью распространения до 300 м
(при скорости ветра 1...4 м/с) используют ранцевый аппарат «Облако», в кото-
ром порошковый состав в течение 45...60 с вытесняется давлением газа, со-
здаваемого в газогенераторе. Масса аппарата составляет около 8 кг, и он об-
служивается расчетом из двух человек.
Рассмотренные выше раздражающие спецсредства покрывают тактичес-
кую дальность воздействия до 300 м, обусловленную необходимостью обес-
печения операций по задержанию невооруженных и вооруженных правонару-
шителей и преступников, а также по пресечению массовых беспорядков.
Однако интенсификация террористических действий и необходимость прове-
дения антитеррористических операций в целях пресечения крупномасштаб-
ных террористических действий приводят к необходимости разработки спец-
средств (в том числе и на основе ирритантов), которые можно применять на
дальности до 10 000 м. Такими средствами могут быть специальные выстре-
лы к 82-мм миномету (в том числе и для стрельбы газовыми минами), а также
12.6. Специальные средства в системе МВД РФ
829
специальные блоки к вертолетному контейнеру, содержащие спецсредства, ана-
логи которых уже разрешены к использованию в совокупности с другими но-
сителями (гранатами и выстрелами).
Светозвуковые средства отвлекающего действия предназначены для
оказания светозвукового воздействия на правонарушителя и имеют несколько
модификаций.
К ним в первую очередь относятся ручные светозвуковые гранаты типа
«Заря» и «Факел» (рис. 12.59), которые должны использоваться так, чтобы
Рис. 12.59. Светозвуковые средства нелетального действия:
а - граната «Заря» (1 - пробка; 2 - инициатор; 3 - корпус инициатора; 4 - корпус; 5 - замедли-
тель; 6 - трубка замедлителя; 7 - заряд разрывной; 8 - гильза; 9, 15 - прокладки; 10 - крышка;
11 - полусфера; 12 - состав светозвуковой; 13 - оболочка; 14 - крышка);
б - граната «Факел» (/ - взрыватель накольного действия; 2 - втулка; 3 - капсюль-воспламени-
тель; 4 - втулка капсюльная; 5 - втулка резьбовая; 6 - корпус замедлителя; 7- замедлитель; 8 —
втулка замедлителя; 9-кольца; 10 заряд пороховой; 11 элемент светозвуковой; /2-трубка,
13 - кольцо)
830
12. Оружие нелетального действия
расстояние от точки падения гранаты до ближайшего человека составляло не
менее 2,5 м. Другое ограничение - запрещение применения указанных свето-
звуковых гранат в местах, где возможна утечка газа и хранятся взрывчатые и
легковоспламеняющиеся вещества и материалы. Существуют различные моди-
фикации светозвуковых гранат, одни из которых используются только на откры-
той местности, а другие - в салонах транспортных средств и замкнутых поме-
щениях. Кроме гранат применяют также специальный выстрел светозвукового
действия, отстреливаемый из сигнального пистолета типа СПШ/СП-81.
Разработаны и допущены к использованию подразделениями МВД РФ спе-
циальные устройства типа «Гном» (рис. 12.60) и «Туча» для отстрела кассет-
ных элементов светозвукового и комбинированного действия на дальность до
90 м. Эти устройства применяют только на открытой местности и запрещены
к использованию в местах, где есть утечка газа, хранятся взрывчатые и легко-
воспламеняющиеся вещества и материалы. Отметим, что кассетный выстре-
ла
а б
Рис. 12.60. Метательный комплекс «Гном» (а), кассета к нему (б) и ее устройство (в):
/ - кольцо; 2 - электровоспламенитель; 3 - стакан; 4 — заряд пороховой; 5 - втулка; 6 - пробка;
7 - штифт; 8 - трубка; 9 - замедлитель; 10 - полусфера нижняя; 11 - кольцо; 12 - заряд (6 шт.);
13 - кольцо; 14 - полусфера верхняя; 15 - прокладка; 16 - мешочек из ткани
12.6. Специальные средства в системе МВД РФ
831
лы комбинированного действия содержат шесть светозвуковых и шесть дымо-
вых кассетных элементов.
Кроме установок для отстрела кассетных элементов светозвукового и ком-
бинированного действия создан также выстрел ГСЗ-50 светозвукового дей-
ствия (рис. 12.61) для специального гранатометного комплекса РГС-50. Усло-
вия его применения требуют от оператора, чтобы расстояние от точки прице-
ливания (срабатывания) до ближайшего человека было не менее 1 м, а до
горючих материалов - не менее 0,5 м.
Наряду с выстрелами и гранатами используют также стационарное опе-
ративно-техническое средство светозвукового действия «Пламя» (рис. 12.62),
инициирование которого проводят при помощи электрозапала. Указанное из-
делие должно применяться так, чтобы расстояние от точки срабатывания до
ближайшего человека было не менее 2,5 м, а его использование в местах, где
возможна утечка газа или хранятся взрывчатые и легковоспламеняющехся ве-
щества и материалы, запрещено.
Рис. 12.61. Выстрел ГСЗ-50 светозвукового
действия
Рис. 12.62. Оперативно-техничес-
кое средство светозвукового дей-
ствия «Пламя»
Электрошоковые устройства предназначены для нелетального воздей-
ствия на правонарушителей сериями коротких электрических разрядов тока
высокого напряжения. Применение ЭШУ вызывает спазмы мышц, а при дли-
тельном воздействии (более 3 с) может приводить к потере сознания. У су-
ществующих электрошоковых устройств напряжение импульса составляет
45...90 кВ, средний ток импульса - 0,5...8 мА, средняя мощность воздей-
ствия -1,2...3,0 Вт, средняя энергия электрического разряда (энергетическая
доза) - около 30 Дж за 3 с, а максимальная толщина пробиваемой одежды при
плотном контакте для разных значений напряжения импульса 4... 15 мм.
Наиболее эффективны для воздействия ЭШУ - крупные группы мышц
и биологически активные точки организма человека (рис. 12.63). При этом
максимальное время однократного воздействия ЭШУ не должно превышать
3 с, а кроме того, запрещено использовать ЭШУ повторно против одного и
832
12. Оружие нелетального действия
того же лица в течение 5 мин в области рефлекторных (чувствительных) зон
организма (голова, шея, области солнечного сплетения и сердца), а также во
время дождя или против лиц, находящихся в водной среде. Следует отме-
тить, что смертельных случаев от применения ЭШУ зарегистрировано не
было.
Типичный внешний вид ЭШУ имеет форму пенала в габаритах ладони:
160x70x20 мм (ЭШУ-039) или 210x50x30 мм (ЭШУ-200 и ЭШУ-200М) с мас-
сой 250 и 330 г соответственно. У приведенных моделей напряжение разряда
составляет 65...70 кВ, энергия разряда - 3...10 Дж, частота повторения им-
пульсов - 15...35 Гц. Воздействие таким ЭШУ в течение 0,5... 1,0 с вызывает у
нападающего болевой спазм мышц и психологический шок, а в течение 3 с -
потерю сознания.
Существуют модели ЭШУ, выполненные в форме дубинки (рис. 12.64),
например, АИР-107 и АИР-107У (напряжение разряда - 75...90 кВ; толщина
пробиваемой одежды - 5... 7 мм).
Рис. 12.63. Зоны эффективного воз- Рис. 12.64. ЭШУ с возможностью комплекта-
действия ЭШУ: ции дополнительными насадками
1 - верхняя часть груди; 2 — солнечное
сплетение; 3 - низ живота; 4 - верхняя
часть бедра
Некоторые модели ЭШУ могут комплектоваться дополнительными насад-
ками: фонарем и сиреной с интенсивностью звука до 120 дБ. Кроме того, воз-
можно использование насадки в форме сменного, одноразового, дистанцион-
ного (до 4,5 м) картриджа - патрона AIR TASER. Этот картридж - средство
дистанционной доставки электрошокового импульса до цели. Поражение дос-
тигается двумя вылетающими гарпунами на токопроводящей леске, передаю-
щей высоковольтный импульс от базового устройства. Правонарушитель по-
лучает электрошоковый удар только при попадании обоих гарпунов. После
выстрела необходимо быстро поменять картридж или применять ЭШУ, как
обычное контактное электрошоковое средство.
К средствам, ограничивающим подвижность, во-первых, можно отнес-
ти средство сковывания движения биологических объектов «Невод», которое
12.6. Специальные средства в системе МВД РФ
833
предназначено для ограничения двигательных функций преступника и пред-
ставляет собой сеть размерами 3x3 м с грузами по периметру. Эффективная
дальность метания сети составляет 5...10 м, а подробности функционирования
аналогичных устройств подробно описаны выше. Во-вторых, для задержания
лиц, в отношении которых имеются достаточные основания полагать, что они
намерены оказать вооруженное сопротивление, для освобождения насильствен-
но удерживаемых лиц, захваченных зданий, помещений, сооружений, транспор-
тных средств и земельных участков, а также для пресечения массовых беспо-
рядков и групповых действий, нарушающих работу транспорта, связи и органи-
заций, допускается применение водометов типа «Лавина», выполненных на
тяжелом автомобильном шасси. Водомет обеспечивает выброс компактной струи
воды на дистанцию до 60 м, оказывает ударное воздействие и создает диском-
фортное состояние в результате намокания одежды. Ограничением на примене-
ние водометов является температура окружающей среды: запрещено использо-
вание данного средства при температуре воздуха ниже 0 °C.
Перечисленные выше спецсредства позволяют оказывать эффективное не-
летальное воздействие на правонарушителей* находящихся на открытой мест-
ности или в отдельных помещениях (укрытиях) на дальности от 1 до 300 м в
зависимости от типа и модификации устройств (рис. 12.65).
Дальность действия, и
Рис. 12.65. Дальность эффективного действия спецсредств:
I - самооборона и задержание невооруженного нарушителя; II - пресечение массовых беспо-
рядков и задержание вооруженных преступников; III пресечение крупномасштабных терро-
ристических действий
834
12. Оружие нелетального действия
12.7. Сценарии возможного применения ОНД
Оружие нелетального действия может применяться в боевых и специаль-
ных операциях, таких как антитеррористические и миротворческие операции,
операции по подавлению мятежей, снижению эскалации вооруженных конф-
ликтов, по освобождению заложников, обеспечению проведения гуманитар-
ных миссий, в полицейских операциях по правопринуждению. Кроме того,
ОНД может поддержать усилия по нейтрализации оружия массового уничто-
жения; производства, хранения и транспортировки наркотиков; вооруженных
группировок, готовящихся пересечь границу в целях атаки; инфраструктуры,
обеспечивающей террористов. Следует также отметить, что ОНД - лишь до-
полнение к существующим обычным видам вооружений, которое обеспечива-
ет более широкий выбор средств и гибкость при принятии решений команди-
рами, уменьшая риск потерь личного состава и гражданского населения при
ведении боевых действий. Особенно важно понимать, что чаще всего, указан-
ные специальные операции проходят в хаотичной и неопределенной обста-
новке, следовательно, практически всегда существует большой риск, случай-
ного поражения гражданского населения.
Анализ многочисленных военных изданий, а также докладов и дискуссий
на международных конференциях позволяет классифицировать осноййые на-
правления боевого применения ОНД видами вооруженных сил. Использова-
ние ОНД в составе сухопутных войск может быть направлено на дезорганиза-
цию систем управления войсками и вооружением (вывод из строя командных
пунктов), нейтрализацию огневых (ударных) средств и обслуживающего их
персонала, а также живой силы, изоляцию районов боевых действий от по-
ступления резервов, нарушение материального обеспечения противника. Во-
енно-морской флот может использовать ОНД для вывода из строя портовых
сооружений, двигателей и электронных систем авианесущих и других над-
водных кораблей с неядерными энергетическими установками. Вывод из строя
объектов жизнеобеспечения и инфраструктуры (в том числе энергетических
систем и систем водоснабжения), объектов промышленности (без экологичес-
ких последствий) с помощью ОНД осуществляется авиацией дальнего дей-
ствия, а задачи фронтовой авиации, оснащенной ОНД, - дезорганизация сис-
тем управления, объектов ВВС и систем ПВО.
Основные особенности, предопределяющие необходимость наличия ОНД
в арсенале средств борьбы с терроризмом:
- снижение безвозвратных потерь среди гражданского населения и лич-
ного состава, принимающего участие в акциях и боевых действиях;
- уменьшение количества жертв с потерей трудоспособности и здоровья;
- сокращение интенсивности разрушения инфраструктуры жизнеобеспе-
чения и жизнедеятельности людей;
- уменьшение последствий от разрушения установок и сооружений, вы-
ход из строя которых может привести к экологически опасным ситуациям и
катастрофам;
- снижение уровня социальных последствий, причинами которых могут
стать нарушение инфраструктуры и появление жертв среди гражданского на-
селения;
- расширение возможностей получения необходимых сведений о деятель-
ности сил и средств террора от возможно большего числа оставшихся в жи-
вых террористов.
В случае эскалации массовых беспорядков и возникновения столкнове-
ний с правоохранительными органами без использования какого-либо оружия
необходимо применение ОНД. В этот период задачей ОНД становится лока-
лизация конкретных группировок, зачистка захваченных ими зданий, разгон
демонстраций. Например, при выполнении правоохранительных задач по про-
тиводействию агрессивно настроенным болельщикам, провоцирующим мас-
совые беспорядки на стадионах, улицах и транспорте, высокую эффективность
применения показывают в практике разных стран такие виды ОНД, как ЭШУ,
аэрозольные распылители высокого давления и специальные средства непро-
никающего и полупроникающего действия.
Использование средств огневого поражения, как правило, происходит с
появлением боевых групп и началом вооруженных столкновений. В этом слу-
чае задача ОНД сводится к локализации отдельных групп террористов или
мятежников, выводу из строя вооружения и военной техники, снижению эф-
фективности и полному подавлению прицельного огня незаконных вооружен-
ных формирований.
Опыт применения ОНД показал, что средства раздражающего (слезото-
чивого) действия можно эффективно использовать при проведении специаль-
ных операций по разблокированию войсковых колонн, окруженных недруже-
ственными группами невооруженных людей. При выполнении боевых задач
по уничтожению укрепленных пунктов террористов ОНД раздражающего дей-
ствия могут применять для ограничения возможностей будущего использова-
ния местности и сооружений незаконными вооруженными террористически-
ми формированиями. Для этого необходимо произвести заброску в укрытия и
укрепленные пункты раздражающего вещества, действие которого сохраняет-
ся в течение нескольких недель, если не проводить специальные работы по
дегазации.
Высокую эффективность при проведении специальных операций по вытес-
нению террористов с занимаемой территории (подвалов домов, различного рода
укрытий и других инженерных сооружений) демонстрируют дымообразующие
гранаты (шашки). Дымообразующие средства могут быть успешно использова-
ны также для защиты действий своих подразделений и всевозможных манев-
ров: ослепления разведывательных средств боевиков, прикрытия во время вы-
носа раненых и вывода поврежденной техники из зоны обстрела и т. п.
Необходимо отметить, что при выполнении правоохранительных задач по
задержанию и обезвреживанию террористов ОНД применяется правоохрани-
тельными органами в основном совместно с боевым оружием. При этом ОНД
в данной оперативной ситуации используется как вспомогательное средство в
целях создания благоприятных условий для обычных средств вооружения и
повышения эффективности их применения. В указанных условиях наиболее
востребованы такие виды спецсредств, как ручные светозвуковые гранаты и
средства раздражающего действия.
Существуют также тщательно продуманные сценарии использования ОНД
при проведении миротворческих и гуманитарных акций, которые неоднократ-
836
12. Оружие нелетального действия
но обсуждались на различных международных конференциях и семинарах.
Например, разработаны сценарии, в которых задачей объединенных мирот-
ворческих сил (ОМС) являются защита границы от проникновения воору-
женных группировок, либо защита определенной территории, на которой рас-
положены временные поселения беженцев. В таких случаях может быть со-
здана система «нелетальных барьеров», которые устанавливают после
консультации с военными инженерами и правоохранительными органами.
Система включает в себя комбинацию старых и новых технологий (тради-
ционную колючую проволоку, контрольно-пропускные пункты, инженерные
укрепления, обычное оружие и системы ОНД, по команде или автоматичес-
ки запускаемые при несанкционированном проникновении через границу
людей и техники). Системы ОНД комбинируют различные эффекты по на-
растающей от перцовых аэрозолей и сетей-ловушек до быстроотвердеваю-
щих блокирующих пен и волнового ОНД.
Существуют сценарии пресечения попыток морского проникнрЬения на
охраняемую территорию с помощью систем ОНД, в частности, при помощи
электромагнитного оружия могут быть остановлены двигатели суДор терро-
ристов и других незаконных военных формирований.
Еще один реальный сценарий связан с обеспечением гуманитарйой помо-
щи некоторой стране, в которой царят хаос и голод в результате гражданской
войны и анархии. При этом ОМС организуют блокирование дорог в пределах
столицы и начинают агрессивное патрулирование, чтобы обозначить видимое
присутствие. Также устанавливаются посты на ключевых позициях города для
создания ощущения порядка и восстановления стабильности в окрестности
столицы. Другие подразделения ОМС обеспечивают безопасность и оказыва-
ют иную помощь неправительственным организациям, распределяющим за-
пасы гуманитарной помощи. При этом командующий ОМС вводит специаль-
ные правила, которые разрешают использование ОНД в случае неявных враж-
дебных намерений или для защиты невоюющих сторон, а также в случае,
если применение ОНД не подвергает опасности дружественные силы. При
этом те же правила ясно разрешают использование обычного оружия в случае
необходимости защиты людей от враждебных действий незаконных воору-
женных группировок.
Рассмотренные сценарии дают представление о возможном легитимном
применении ОНД в сложной обстановке вооруженных конфликтов или воен-
ных действий. Очевидно, что путем проработки возможных сценариев дости-
гаются тактическая гибкость при принятии решений командирами подразде-
лений ОМС, понимание необходимости использования ОНД гражданским на-
селением и правильная реакция средств массовой информации, освещающих
выполнение миссий ОМС.
Применение ОНД в операциях по правопринуждению может быть настоль-
ко многообразным, что возможно лишь общее описание оперативно-такти-
ческих ситуаций, требующих их использования для защиты от противоправ-
ных действий.
Примеры применения спецсредств для пресечения противоправных
действий. При задержании футбольных хулиганов наряду с резиновыми пал-
ками часто используют ЭШУ и аэрозольные баллоны с ирритантами типа CN
12.7. Сценарии возможного применения ОНД 837
и CS. Это позволяет оказать эффективное избирательное воздействие на пра-
вонарушителей, подавляет возможность их сопротивления, благодаря чему
проводится их беспрепятственное задержание. При этом установлено, что
воздействие ирританта типа CN не всегда оказывается удовлетворительным,
особенно это проявляется в отношении лиц, находящихся в состоянии алко-
гольного опьянения.
При задержании вооруженного преступника, захватившего заложника
и удерживающего его в квартире, сотрудники милиции провели штурмовую
операцию с применением двух светозвуковых гранат. Преступника оглушили,
он потерял способность к сопротивлению и был задержан; заложник не по-
страдал.
Во время беспорядков, инициированных арестованными лицами на терри-
тории следственного изолятора, охрана применила специальный карабин с бое-
припасом, снаряженным 23-мм резиновой пулей. Было произведено четыре
выстрела и зафиксировано попадание с дистанции 50 м в трех правонаруши-
телей - зачинщиков беспорядков: у них возник болевой шок, который оказал
на них отрезвляющее действие, вывел их из психологического состояния, на-
зываемого синдромом толпы, и сопротивление быстро прекратилось.
В хранилище банка для предотвращения несанкционированного проник-
новения установили пиротехнический генератор (при его срабатывании поме-
щение заполняется газодымовой смесью с ирритантом типа CR). Через не-
сколько месяцев в банке сработала сигнализация, а выехавший на вызов от-
ряд милиции задержал в хранилище двух преступников, сделавших подкоп в
здание банка. Покинуть хранилище они не успели, так как воздействие аэро-
золя CR привело к обильному слезотечению и спазму век, тем самым нару-
шив ориентацию преступников в пространстве.
Для устранения краж электрооборудования с железнодорожных подстан-
ций в них устанавливают специальные ловушки, с помощью которых при не-
санкционированном открытии двери на правонарушителя отстреливается кра-
сящий патрон. Помеченного таким образом правонарушителя задержала ми-
лиция, его вина в совершении преступления была полностью доказана.
Практический опыт применения специальных средств нелетального дей-
ствия в контртеррористических операциях и в операциях по поддержанию
общественного порядка показал:
неоднократное использование моносредств нелегального действия (раз-
дражающих, световых, шумовых, травматических и др.) существенно снижа-
ет их эффективность, так как субъекты воздействия вырабатывают и приме-
няют контрмеры защитного характера;
одновременное применение нескольких различных по характеру физичес-
кого и биологического воздействия моносредств нелегального действия обес-
печивает необходимую эффективность их действия и исключает возможность
принятия защитных мер.
В связи с этим наблюдается интенсификация разработки и использования
таких конструкций ОНД, которые обладают возможностью комбинированно-
го воздействия двух или более факторов одновременно или в некоторой пос-
ледовательности. Примеры таких типов ОНД были приведены при описании
ОНД, воздействующего на человека.
838
12. Оружие нелетального действия
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ
Базилевич В.М., Ганжа А.А., Кореньков В.В., Середа Н.В. Нелегальные средства
ближнего боя и их применение в антитеррористических операциях // Вопросы обо-
ронной техники. 2003. Сер. 16. Вып. 11-12.
Байдак В И., Ганжа А.А., Корачков А.С. Нелетальное оружие и направления его
реализации // Вооружение. Политика. Конверсия. 2003. № 5 (53).
Байдак В.И., Ганжа А.А., Корачков А.С. Нетрадиционные средства вывода из строя
систем энергоснабжения // Вооружение. Политика. Конверсия 2004. № 3 (57).
Баранов В.Н., Лазарев В.В., Селиванов В.В. Предпосылки и возможности разра-
ботки и применения специальных средств комбинированного нелегального действия //
Вопросы оборонной техники. 2006 Сер. 16. Вып. 5—6.
Баранов В.Н., Лазарев В.В., Селиванов В.В. Специальные средства нелегального
действия, используемые подразделениями Министерства внутренних дел Российской
Федерации // Вопросы оборонной техники. 2003. Сер. 16. Вып. 11-12.
Бейкер У., Кокс П., Уэстайн П. и др. Взрывные явления. Оценка и последствия.
В 3 т. / Пер с англ.; Под ред. Я.Б. Зельдовича, Б.Е. Гельфанда. М.: Мир, 1986: ,
Бессонов В.А., Иванов В.П., Котов С.В., Шутов А.М. Электропроводящие газо-
дисперсные каналы для защиты от террористов // Вопросы оборонной техники. 2003.
Сер. 16. Вып. 11-12. J*'.»
Григорьев С.Г., Козаръ А.В., Королев А. Ф., Морозов В.О. и др. Генерация электри-
ческих сигналов в биообъектах при воздействии низкоинтенсивного электромагнит-
ного излучения // Вопросы оборонной техники. 2003. Сер. 16. Вып. 11-12.
Гурин А.А., Малый П.С., Савенко С.К Ударные волны в горных выработках. М.:
Недра, 1983.
Каталог специальной техники. М.: ГУНПО «Спецтехника и связь» МВД России,
2006.
Каторин Ю.Ф., Волковский И.Л. Уникальная и парадоксальная военная техника.
М.: ACT; СПб.: Полигон, 2006.
Клочихин В.Л., Загайнов В.А , Лушников А.А., Путилов А.В. и др. Принципы мо-
делирования сценариев применения иммобилизирующих средств в здании с заложни-
ками // Вопросы оборонной техники. 2006. Сер. 16. Вып. 5-6.
Клочихин В.Л., Пирумов В.С, Путилов А.В., Селиванов В.В. Прогноз перспектив-
ных направлений развития оружия нелетального действия для европейского примене-
ния // Вопросы оборонной техники. 2003. Сер. 16. Вып. 11-12
Клочихин В.Л., Пирумов В.С., Селиванов В.В. Современный взгляд на развитие и
применение ОНД в антитеррористических и миротворческих операциях // Вооруже-
ние. Политика. Конверсия. 2001. № 5 (41).
Кобылкин И.Ф., Летников А Ю. Биомеханическая модель взаимодействия непро-
никающих поражающих элементов с биообъектом // Вопросы оборонной техники. 2003.
Сер. 16. Вып. 11 12.
Козырев А В., Леонов В.В.. Селиванов В.В. Моделирование критического поведения
локализованных масс людей // Вопросы оборонной техники. 2004. Сер. 16. Вып. 11-12.
Лазарев В.В., Левин Д.П., Селиванов В.В. Акустическое оружие нелегального дей-
ствия - анализ и перспективы И Вопросы оборонной техники. 2004. Сер. 16. Вып 7-8.
Левин Д.П, Селиванов В.В Анализ возможности использования вихревых колец
в спецсредствах нелегального действия // Вопросы оборонной техники. 2004. Сер. 16.
Вып. 11-12.
Левин Д.П, Селиванов В.В. Анализ результатов исследований вихревых колец для
их использования в спецсредствах нелегального действия // Вопросы оборонной тех-
ники. 2004. Сер. 16. Вып. 11 12.
Левин Д.П, Селиванов В.В. Анализ возможностей использования вихревых колец
в спецсредствах нелегального действия // Вопросы оборонной техники. 2004. Сер. 16.
Вып. 11-12.
Список рекомендуемой литературы
839
Левин Д.П., Селиванов В.В. Инженерная методика расчета параметров устройств,
генерирующих вихревые кольца, и физических характеристик вихревого кольца И Воп-
росы оборонной техники. 2004. Сер. 16. Вып. 11-12.
Леонов В.В., Пирумов В.С., Селиванов В.В. Терроризм в киберпространстве (вир-
туальный враг - реальная угроза) // Вопросы оборонной техники. 2004. Сер. 16.
Вып. 1-2.
Макухин В.Н. Методы и средства оценки воздействия СВЧ-излучения на биоло-
гические объекты // Вопросы оборонной техники. 2006. Сер. 16. Вып. 5-6.
Макухин В.Н. Электронное оборудование для комплексного воздействия на био-
объекты//Вопросы оборонной техники. 2003. Сер. 16. Вып. 11-12.
Онипко Э.И., Селиванов В.В. Применение вихревых технологий для создания не-
летальных средств управления толпой // Вопросы оборонной техники. 2003. Сер. 16.
Вып. 11-12.
Рассоха С.С., Селиванов В.В. Сверхвысокочастотное излучение как средство не-
летального действия // Вопросы оборонной техники. 2005. Сер. 16. Вып. 11-12.
Селиванов В.В., Леонов В.В., Багдасарян Н.Г. Эффективность оружия нелеталь-
ного действия // Вопросы оборонной техники. 2006. Сер. 16. Вып. 5-6.
Селиванов В.В. Оружие нелетального действия как средство борьбы с террориз-
мом и обеспечения миротворческих операций,// Защита и безопасность. 2004. № 2.
Селиванов В.В. Оружие нелетального действия как средство борьбы с террориз-
мом, обеспечения миротворческих операций и операций по правопринуждению // Вест-
ник РАЕН. 2005. Т. 5. № 4.
Селиванов В.В. Разработка и применение нелетального оружия // Защита и безо-
пасность. 2005. № 3 (34).
Селиванов В.В. Современные аспекты разработки и применения оружия нелегаль-
ного действия // Вопросы оборонной техники. 2003. Сер. 16. Вып. 11-12.
Селиванов В.В. Современные аспекты разработки и применения оружия нелегаль-
ного действия // Известия Российской академии ракетных и артиллерийских наук. 2004.
Вып. 1 (38).
Селиванов В.В. Существующие и возможные нелетальные технологии // Вопросы
оборонной техники 2006. Сер. 16. Вып 5—6.
Селиванов В.В. Электрические импульсы и электромагнитное излучение как сред-
ства нелегального действия // Вооружение. Политика. Конверсия. 2004. № 3 (57).
Синицын М.В., Леонов В.В., Селиванов В.В. Компьютерная система моделирова-
ния применения ОНД // Вопросы оборонной техники. 2006. Сер. 16. Вып. 5-6.
Федоренко В.А. Проблемы криминалистического исследования ОНД // Вопросы
оборонной техники. 2006. Сер. 16. Вып. 5—6.
Физика ядерного взрыва. Т. 2. Действие взрыва. М.: Наука, Физматлит, 1977.
Фролов К.С, Гончаревич И.Ф., Лихнов П.П. Инфразвук, вибрация, человек. М.:
Машиностроение, 1996.
Хрупкий В.И., Селиванов В.В., Савостьянов В.В Современные аспекты разработ-
ки и применения оружия нелегального действия // Военно-медицинский журнал. 2004.
Т. 325, № 5.
Шидловский А.А. Основы пиротехники. М.: Машиностроение, 1973.
Alexeev A.G Principles and technology of receiving flexible UNF-absorbers and
materials for electromagnetic compatibility and electromagnetic ecology on the base of
connection magnetic spectrums theory / Russian-American Conference «Non-Lethal Weapons
in Anti-Terrorist Operations». Easton, Maryland, USA. 1999.
Altmann J. Acoustic weapons - a prospective assessment / Science Global Security,
2202. Vol. 9. P. 165-234.
Altman J. Acoustic NLW Working in the Audio Range / Proceedings of the 3rd European
Symposium on Non-Lethal Weapons / 2005. May 10-12. Ettlingen, Germany.
840
12. Оружие нелетального действия
Altman J. Non-lethal Weapons Technologies - the Case for Independent Scientific
Analysis. Medicin, Conflict and Survival. Vol. 17, 234-247 (2001). Published by Frank
Cass, London.
Altman J. Acoustic NLW Working in the Audio Range / Proceedings of the 3rd European
Symposium on Non-Lethal Weapons. 2005. May 10-12. Ettlingen, Germany.
Annaty M. Military Use of Chemical Riot Control Agents, a Case for Legal Assessment /
Proceedings of the 3rd European Symposium on Non-Lethal Weapons. 2005. May 10-12.
Ettlingen, Germany.
Ashe C. The International Development of Practioners’ Requirements by the Interna-
tional Law Enforcement Forum / Proceedings of the 3rd European Symposium on Non-
Lcthal Weapons. 2005. May 10-12. Ettlingen, Germany.
Backhaus J., Schweitzer W, Deirnling L. Impulse Transport by propagating Vortex
Rings - Simulation and Experiment / Proceedings of the 2nd European Symposium on
Non-Lethal Weapons. 2003. May 13-14. Ettlingen, Germany.
Bagdasaryan N.G., Leonov V.V., Selivanov V.V. Social aspects of NLW deployment /
Proceedings of the 3rd European Symposium on Non-Lethal Weapons. 2005. May 10-12.
Ettlingen. Germany.
Baranov V.N., Lazariev V.V, Selivanov V.V. Preconditions and capabilities of development
and deployment of special means of combined non-lethal effect / Proceedings -o£ the 3rd
European Symposium on Non-Lethal Weapons. 2005. May 10-12. Ettlingen, Germany.
Baranov V.N., Lazariev V.V., Selivanov VV. System of special Medns of Non-Lethal
Effect to be applied by Police troops of Ministry of Internal Affairs, Russia and Experience
of their Application / Proceedings of the 2nd European Symposium on Non-Lethal Weapons.
2003. May 13 14. Ettlingen, Germany.
Bazilevich V.M., Ganja A.A., Korenkov V.V, Sereda N.V Non-Lethal close-in Weapon
Systems and their Application during special-purpose antiterroristic Operattions / Proceedings
of the 2nd European Symposium on Non-Lethal Weapons. 2003. May 13-14. Ettlingen,
Germany.
Bessonov V, Fortov V, Kotov S., Parfenov Y, ShutovA., Zdukhov L. Remote Operation
electroshocking Device / Proceedings of the 2nd European Symposium on Non-Lethal
Weapons. 2003. May 13-14. Ettlingen, Germany.
Bohl J. Liquid Taser / Proceedings of the 3rd European Symposium on Non-Lethal
Weapons. 2005. May 10-12. Ettlingen, Germany.
BuguetA., Jacquet J.-F. Advanced Taser: Neurophysiological Aspects / Proceedings of
the 3rd European Symposium on Non-Lethal Weapons. 2005. May 10-12. Ettlingen,
Germany.
Caird R.S. et al. Tests of an Explosive Driven Coaxial Generator / Digest of Technical
Papers, 5th IEEE Pulsed Power Conference. 1985. P. 220. IEEE, New York.
Defense Science. March-April. 1987. Los-Alamos. P. 25-30 (LA-10954-PR),
Edwards J. Initial Simulations of a single shot Vortex Gun / Proceedings of the 2nd
European Symposium on Non-Lethal Weapons. 2003 May 13 14. Ettlingen, Germany.
Eisenreich N., Neutz J., Thiel K.-D., Ebeling H., Konig A., Weller F. Development of a
Mulyi Functional Rapid Deployable Barrier / Proceedings of the 3rd European Symposium
on Non-Lethal Weapons. 2005. May 10-12. Ettlingen, Germany.
Fowler C.M., Caird R.S. The Mark IX Generator / Digest of Technical Papers, 7th
IEEE Pulsed Power Conference. 1989. IEEE, New York. P. 475.
Gibson A., Ives R., Perkins G., Liggins E. Optical Distraction and Disorientation /
Proceedings of the 3rd European Symposium on Non-Lethal Weapons. 2005. May 10-12.
Ettlingen, Germany.
Gnemmi P, Haertig J., Rey C. Preliminary Work on the Generation of a Vortex Ring /
Proceedings of the 2nd European Symposium on Non-Lethal Weapons. 2003. May 13-14.
Ettlingen, Germany.
Список рекомендуемой литературы 841
Granatstein V.L., Alexeffl. High Power Microwave Sources // Artech House, Boston,
London. 1987.
Haverman M., Kainuma M., Takayama K. Influence of Physical and Geometrical
Parameters on Vortex Rings Generated by a Shock Tube / Proceedings of the 3rd European
Symposium on Non-Lethal Weapons. 2005. May 10-12. Ettlingen, Germany.
Heoberling R.F., Fazio M. V. Advances in Virtual Cathode Microwave Sources // IEEE
Transaction on Electromagnetic Compatibility. 1992. August. Vol. 34, N 3. P. 252.
Jacobs T. Less Lethal Systems, the FN303 approach / Proceedings of the 2nd European
Symposium on Non-Lethal Weapons. 2003. May 13-14. Ettlingen, Germany.
Jung M., Wollman G. HPM against Electronic System / Proceedings of the 3rd European
Symposium on Non-Lethal Weapons, 2005. May 10-12. Ettlingen, Germany.
Jussila J. Problematics of integrating new use of Force Options into routine Policing /
Proceedings of the 2nd European Symposium on Non-Lethal Weapons. 2003. May 13-14.
Ettlingen, Germany.
Khrupkin V., Selivanov И, Savostyanov V. Physical and mathematical and medico-
biological modeling of non-lethal kinetic weapons’ functioning and effects / Proceedings of
the 3rd European Symposium on Non-Lethal Weapons. 2005. May 10-12. Ettlingen,
Germany.
Klochikhin И, Lushnikov V, Putilov A., Selivanov V. Principles of modeling of the
scenario of calmative application in a building with deterred hostages / Proceedings of the
3rd European Symposium on Non-Lethal Weapons. 2005. May 10 12. Ettlingen, Germany.
Klochikhin V., Pirumov V., Putilov A., Selivanov V. The complex forecast of perspectives
of NLW for European application / Proceedings of the 1st European Symposium on Non-
Lethal Weapons. 2001. September 25-26. Ettlingen, Germany.
Kobylkin L, Letnikov A. Bio-mechanical Model for Interaction of striking Elements
with protected and unprotected Bio-specimen / Proceedings of the 2nd European Symposium
on Non-Lethal Weapons. 2003. May 13-14. Ettlingen, Germany.
Kobylkin L, Selivanov И Analysis of Development Sources of Blinding Incoherent
Light Based on Impulse Pyrotechnic Emitters / Russian-American Conference «Non-Lethal
Weapons in Anti-Terrorist Operations». Easton, Maryland, USA, 1999.
Kobylkin I., Selivanov V. Analysis possible development of dazzling sources of non-
coherent radiation on the base impulse pyrotechnic radiators / Proceedings of the 1st European
Symposium on Non-Lethal Weapons. 2001. September 25-26. Ettlingen, Germany.
Kozyrev V., Leonov И, Selivanov V. Computer simulation of critical behavior of localized
masses (crowd) / Proceedings of the 3rd European Symposium on Non-Lethal Weapons.
2005. May 10-12. Ettlingen, Germany.
Kruger-Sprengel F. Critical Legal Aspects of Non-Lethal Weapons (NLW) / Proceedings
of the 3rd European Symposium on Non-Lethal Weapons. 2005. May 10 12. Ettlingen,
Germany.
Leonov V., Selivanov V., Sinitsyn M. Computer System to simulate NLW deployment /
Proceedings of the 3rd European Symposium on Non-Lethal Weapons. 2005. May 10-12.
Ettlingen, Germany.
Levin D., Selivanov И Engineering method to calculate Vortex generators parameters -
physical capabilities modeling of Vortex ring its spreading parameters / Proceedings of the
3rd European Symposium on Non-Lethal Weapons. 2005. May 10-12. Ettlingen, Germany.
Makukhin V. Electronic Equipment for complex Influence on biological Objects /
Proceedings of the 2nd European Symposium on Non-Lethal Weapons. 2003. May 13 14.
Ettlingen, Germany.
Makukhin И Methods and Equipment for Assessment of Microwave Radiation Influence
on Biological Objects / Proceedings of the 3rd European Symposium on Non-Lethal Weapons.
2005. May 10-12. Ettlingen, Germany.
Meisterhans D. High Power Microwave-System / Proceedings of the 2nd European
Symposium on Non-Lethal Weapons. 2003. May 13-14. Ettlingen, Germany.
842
12. Оружие нелетального действия
Meisterhans D. Stand-off electrical Incapacitation (Plasma-Taser) / Proceedings of the
2nd European Symposium on Non-Lethal Weapons. 2003. May 13-14. Ettlingen, Germany.
Murphy M.R. NATO Studies on Non-Lethal Weapons (NLWs): Effectiveness, Human
Effects and Future Technologies / Proceedings of the 3rd European Symposium on Non-
Lethal Weapons. 2005. May 10-12. Ettlingen, Germany.
Murphy M.R., Merrit J.H., Mason P.A., D’Andrea J. A., Blick D.W, Scholl D.V. Bio-
effects Research in support of the Active Denial System (ADS) / Proceedings of the 2nd
European Symposium on Non-Lethal Weapons. 2003. May 13-14. Ettlingen, Germany. .
Nicholas N.C. Area Denial / Perimetr Defense employing Non-Lethal Weapons /
Proceedings of the 2nd European Symposium on Non-Lethal Weapons. 2003. May 13-14.
Ettlingen, Germany.
Onipko Е.1., Selivanov V.V. Application of Vortex Technologies for NLW Crowd Control /
Proceedings of the 2nd European Symposium on Non-Lethal Weapons. 2003. May 13-14.
Ettlingen, Germany.
RislingM. Human Factors and Implications of Non-Lethal Options Group / Proceedings
of the 3rd European Symposium on Non-Lethal Weapons. 2005. May 10-12. Ettlingen,
Germany. * .
Risling M., Skold M., Malm E., Sonden A., Larsson I., Angeria M. Observations on
Changes in the Content of Tubulin Protein in Cell Cultures Exposed to Hightower
Microwave, in vitro / Proceedings of the 3rd European Symposium on Non-Lethal Weapons.
2005. May 10-12. Ettlingen, Germany.
Selivanov V, Klochikhin V., Pirumov И Modem views on development and application
of NLW in anti-terrorist and peacekeeping operations (summary of russian-american
conference 1999, Easton, MD, USA) / Proceedings of the 1st European Symposium on
Non-Lethal Weapons. 2001. September 25-26. Ettlingen, Germany.
Selivanov V., Alexander J., Cole D., Klochikhin V., Rams O. Current and emerging
non-lethal technologies / Proceedings of the 3rd European Symposium on Non-Lethal
Weapons. 2005. May 10-12. Ettlingen, Germany.
Sitnikov M. V., Mikhailin A.I. Portable Laser Dazzle Device / Proceedings of the 2nd
European Symposium on Non-Lethal Weapons. 2003. May 13-14. Ettlingen, Germany.
Smith G., Symons M. PSDB Update on UK Less Lethal Technologies / Proceedings of
the 3rd European Symposium on Non-Lethal Weapons. 2005. May 10-12. Ettlingen,
Germany.
Smith R. Analysis of over 2,000 Field Applications of ADVANCED TASER® M26
and Overview of Technology Improvements / Proceedings of the 2nd European Symposium
on Non-Lethal Weapons. 2003. May 13—14. Ettlingen, Germany.
Smith T. Medical Information and Future Product Strategies for TASER Technology /
Proceedings of the 3rd European Symposium on Non-Lethal Weapons. 2005. May 10-12.
Ettlingen, Germany.
Sporer M., Garhofer W., Stark R. Futher Development of Non-lethal Multipurposr
Launcher / Proceedings of the 2nd European Symposium on Non-Lethal Weapons. 2003.
May 13-14. Ettlingen, Germany.
Staines G., Sporer M., Stark R. Compact High-Power RF Sources for Non-Lethal
Applications / Proceedings of the 2nd European Symposium on Non-Lethal Weapons. 2003.
May 13-14. Ettlingen, Germany.
Steinbauer M., Drexler P., Fiala P. Measurement of Vircator Ultra-Short Solitary
Electromagnetic Pulses / Proceedings of the 3rd European Symposium on Non-Lethal
Weapons. 2005. May 10-12. Ettlingen, Germany.
Taylor CD., Harrison C.W. On the Coupling of Microwave Radiation to Wire Structures
// IEEE Transactions on Electromagnetic Compatibility. 1992. Vol. 34, N 3. August. P. 183.
The EMP - A Triangular Impulse // A Handbook Series on Electromagnetic Interference
and Compatibility, Don White Consultans, Maryland, 1978.
13
ВЗРЫВАТЕЛИ
13.1. Общие сведения о взрывателях и взрывательных
устройствах боеприпасов. Основные понятия,
термины и определения
Под взрывателями понимаются автоматические устройства, предназначен-
ные для управления действием БП. Основная задача взрывателей - приведе-
ние в действие БП в соответствии с их назначением и в требуемый момент
времени (на требуемом участке траектории) для обеспечения наибольшего по-
ражающего действия БП по цели.
Отметим, что в соответствии с установившейся терминологией в общем
случае следует различать такие понятия, как взрыватель и взрывательное уст-
ройство (ВУ). Взрыватель, как правило, выполнен в виде моноблока, а ВУ
состоит из двух или более самостоятельных блоков, располагаемых в различ-
ных частях БП и функционально связанных (взаимодействующих) друг с дру-
гом. Взрывательное устройство может включать в себя головную и донную
части, датчики цели, кабели, соединяющие эти части между собой и с прибо-
рами управления БП, а также основные и дополнительные детонаторы.
Взрывательные устройства БП со сложной баллистикой (несколько траек-
торных участков, отличающихся уровнем перегрузок и направлением действия
сил) последовательно вводят в действие и (или) сбрасывают (отстреливают)
отдельные элементы конструкции БП - обтекатели, разгонные и тормозные
твердотопливные двигатели, парашютную систему и т. п.
Несмотря на сравнительно небольшой объем, занимаемый взрывателем
(или ВУ) в БП, он является одним из основных элементов окончательно сна-
ряженных БП и определяет эффективность и надежность функционирования
не только самих БП, но и боевого комплекса в целом, обеспечивая выполне-
ние поставленных боевых задач. В целях безопасности обращения при дли-
тельном хранении на складах и арсеналах БП, как правило, находятся в не-
окончательно снаряженном состоянии, т. е. они не укомплектованы взрывате-
лями или ВУ на заводе-изготовителе, за исключением артиллерийских
выстрелов (патронов) малого калибра. Хранение взрывателей осуществляется
в герметичной укупорке отдельно от БП, для которых они предназначены. Опе-
рации по установке (комплектации) взрывателя в артиллерийский снаряд, авиа-
ционную бомбу, мину или ракету называют окончательным снаряжением БП.
В технической литературе наряду с термином «взрыватель» ранее (в кон-
це XIX и начале XX в.) также широко использовали и другой - «трубка»,
под которым понимали разновидность взрывателей, вырабатывающих началь-
ный импульс, не являющийся детонационным, а в виде луча огня, использу-
844
13. Взрыватели
емого для воспламенения вышибных зарядов. В настоящее время применение
устаревшего термина «трубка» вместо «взрыватель» не допускается, за ис-
ключением отдельных случаев: например, он сохранен для образцов, длитель-
ное время состоящих или бывших на вооружении под этим обозначением, как
исторически установившееся для них название.
Появление первых простейших трубок, с которых и началась история
развития взрывателей, произошло в середине XVI в., а в России - на рубе-
же XVII-XVII1 вв. Это было связано с применением в артиллерии разрыв-
ных снарядов (гранат) в виде полого чугунного ядра, начиненного дым-
ным порохом. В ядро вгонялась деревянная трубка конической формы с
запрессованным в нее дымным порохом в качестве замедлительного соста-
ва, позволяющего получать разрывы ядер на различной дальности («на ди-
станции»), По существу это был простейший дистанционный взрыватель -
дистанционная трубка.
После перехода артиллерии к нарезным орудиям и так называемым про-
долговатым снарядам, стабилизируемым вращением, появились и первые удар-
ные трубки, принятые на вооружение в Российской армии в 1863 г. В Э®от же
период для новых снарядов одновременно с головными ударными трубками
разрабатывались и дистанционные трубки, которые поступили на вооружение
артиллерии в 1873 г. Появление в артиллерии первых собственно взрывателей
связано с заменой дымного пороха на более мощные БВВ. В дальнейшем раз-
работкой и совершенствованием взрывателей артиллерийских боеприпасов за-
нимались талантливые российские, а затем советские ученые и инженеры-
конструкторы: В.И. Рдултовский, М.Ф. Васильев, Д.Н. Вишневский, В.К. По-
номарев, Г.М. Третьяков и другие.
Особые заслуги в создании взрывателей для артиллерийских БП принад-
лежат В.И. Рдултовскому. Он разработал не только инженерные методики рас-
чета основных механизмов взрывателей на безопасность в условиях служеб-
ного обращения и взводимость при выстреле, но и основные тактико-техни-
ческие требования (ТТТ), предъявляемые к трубкам и взрывателям, включая
методики их полигонных испытаний. Рдултовским также разработан ряд взры-
вателей для БП полевой артиллерии, в частности, таких как РГМ и РГМ-2,
которые показали свои превосходные качества в годы Великой Отечественной
войны и были признаны всеми воюющими сторонами лучшими механически-
ми взрывателями своего времени. По безопасности, надежности, безотказнос-
ти действия у цели взрыватели серии РГМ и в послевоенный период еще дол-
гое время оставались непревзойденными образцами. Об этом говорит и тот
факт, что создание многих новых отечественных и зарубежных образцов взры-
вателей для артиллерийских БП в течение нескольких десятилетий проводили
преимущественно на базе отработанных в серийном производстве и прове-
ренных в мировой и локальных войнах взрывателей РГМ-2 и РГМ-6 (В-429).
К 1980-м годам этими взрывателями и их модернизированными вариантами
(включая РГМ-2М) комплектовали практически все осколочно-фугасные сна-
ряды пушек и гаубиц калибров 76...203 мм в более чем 30 странах мира.
Другие отечественные конструкторы - разработчики взрывателей, такие
как М.Ф. Васильев, Д.Н. Вишневский, В.К. Пономарев и возглавляемые ими
коллективы, до Великой Отечественной войны и во время нее также стреми-
13.1. Общие сведения о взрывателях и взрывательных устройствах БП 845
лись к созданию относительно простых, надежных и технологичных (с высо-
кой степенью унификации основных узлов и механизмов) образцов взрывате-
лей артиллерийских и авиационных БП, например, таких как взрыватели се-
рии КТ («Коллектив трубочников»), КТМ и др.
Еще до Второй мировой войны в России и за рубежом начали разработку
электрических и электромеханических взрывателей и ВУ Однако широкое рас-
пространение они получили в период бурного развития управляемого и неуп-
равляемого ракетного оружия и БП различного назначения, требовавших по-
вышения безопасности и надежности (безотказности) взрывателей и ВУ, мгно-
венности их действия у цели, обеспечения многоточечного инициирования
и т. д. Существенный вклад в основы проектирования электрических взрыва-
телей внес Г.М. Третьяков.
Если в довоенный период и в ходе Второй мировой войны в первых авиа-
ционных реактивных снарядах (АРС-82и АРС-132) и РС легендарных «ка-
тюш» (М-8, М-31 и др.) применяли доработанные авиационные и артилле-
рийские (минные) взрыватели, то в послевоенное время при создании новых
РС стали проектировать новые специальные ВУ, которые более полно удов-
летворяли ТТТ, составленным с учетом условий боевого применения и осо-
бенностей баллистики ракет.
Современное развитие ракетных, авиационных и артиллерийских ВУ
характеризуется разработкой и широким использованием взрывателей некон-
тактного действия (первые попытки их применения относятся к периоду
Второй мировой войны, однако наибольшее распространение и быстрое раз-
витие они получили существенно позже с формированием соответствую-
щей элементной базы), а также созданием и внедрением электронных ВУ
комбинированного действия - неконтактно-контактных, дистанционно-кон-
тактных и т. п.
При создании высокоточного оружия, в частности, управляемых или кор-
ректируемых на траектории артиллерийские снарядов, предъявляют повышен-
ные требования к точности действия всех элементов артиллерийских комп-
лексов: системе топографической привязки, лазерным или оптическим даль-
номерам, баллистическим вычислителям и системам управления огнем, ГСН,
боевому (разрывному) заряду и взрывателю в целом. Все это делает актуаль-
ной проблему непрерывного повышения точности определения, обработки,
преобразования и формирования информационных и энергетических сигна-
лов, проходящих по каналам взрывателей и ВУ. Отметим, что тенденции и
перспективы развития взрывателей БП необходимо рассматривать в тесной свя-
зи с развитием техники вообще, и военной техники в частности. Внедрение
электроники и информатики позволяет достичь качественного улучшения ха-
рактеристик оружия, а именно, создания высокоточных, эффективных, высоко-
технологичных взрывателей и ВУ. Один из характерных примеров - появление
в начале 1990-х годов электронных дистанционно-контактных взрывателей
ЗВМ17 и ЗВМ18 для шрапнельных и осколочно-фугасных танковых снаря-
дов, которые за счет использования микроэлектроники обеспечивают высо-
кую точность отсчета времени и, как следствие, высокую эффективность дей-
ствия снарядов у цели. Управление ими осуществляется перед выстрелом по
индуктивной линии связи между установщиком и взрывателем (на требуемое
846
13. Взрыватели
время дистанционного действия взрыватели устанавливаются автоматически
по сигналам от системы управления огнем).
Дальнейшее совершенствование конструкций и расширение областей ис-
пользования электронных взрывателей и ВУ возможно на основе:
- применения в конструкциях взрывателей и ВУ новой элементной базы;
- создания конструкций донных и головодонных ВУ с установкой требуе-
мого времени дистанционного действия по радиокоманде или лазерному лучу;
- разработки новых конструкций ВУ повышенной безопасности, помехо-
защищенности, надежности и эффективности действия к перспективным сис-
темам вооружения, включая адаптивные (автоматически изменяющие свои ха-
рактеристики в зависимости от параметров цели и условий взаимодействия с
ней БП) контактные и неконтактные взрыватели.
Некоторые основные понятия, термины и определения
В ТЗ на проектирование взрывателей и ВУ, в описаниях их устройства и
принципов работы используют основные понятия, термины и определения,
установленные стандартом (они обязательны для применения в документации
всех видов, научно-технической, учебной и справочной литературе; для каж-
дого понятия установлен один стандартизованный термин, применение тер-
минов-синонимов стандартизованного термина не допускается).
Программа функционирования взрывателя - алгоритм, заложенный в кон-
струкцию взрывателя и ВУ и определяющий последовательность снятия сту-
пеней предохранения, моменты его взведения и срабатывания. Для нахожде-
ния оптимального момента времени (или оптимальной точки траектории) сра-
батывания ВУ можно использовать различные физические характеристики,
значения которых непосредственно соответствуют искомой координате, или
отсчитывать пройденный путь (или время) от одной из определенных точек
траектории, выбранной за начало отсчета. За начало отсчета можно принять
точку или момент выстрела (старта, пуска, сброса), момент выключения дви-
гателя, точку или момент контакта с преградой, момент вхождения БП в плот-
ные слои атмосферы. К физическим характеристикам можно отнести плот-
ность и давление среды, скоростной напор, отрицательное ускорение при вхо-
де БП в плотные слои атмосферы, силу реакции преграды, излучение и
отражение электромагнитных волн и др.
Безопасность взрывателя - свойство взрывателя не взводиться и не сра-
батывать преждевременно.
Взведение взрывателя - процесс перехода взрывателя в состояние готов-
ности к срабатыванию.
Ступень предохранения - одно или несколько устройств, предназначен-
ных для обеспечения безопасности взрывателя до момента окончания взведе-
ния и взводящихся при действии одного физического фактора или команды в
условиях нормального движения БП.
Снятие ступени предохранения - взведение устройств, составляющих сту-
пень предохранения взрывателя.
Срабатывание взрывателя - процесс формирования и выдачи взрывате-
лем выходного импульса.
13.2. Общие принципы устройства и классификации взрывателей и ВУ 847
Преждевременное срабатывание - срабатывание взрывателя в служеб-
ном обращении, при выстреле или на траектории вследствие нарушения усло-
вий эксплуатации или неправильного функционирования его механизмов и
устройств.
Траекторное срабатывание взрывателя - преждевременное срабатыва-
ние взрывателя на траектории после окончания взведения от непредусмотрен-
ных воздействующих факторов.
Отказ в срабатывании - несрабатывание контактного взрывателя при
встрече с преградой, неконтактного - у цели, дистанционного - в заданной
точке траектории.
Высота безопасного падения - максимальная высота, при падении с ко-
торой не нарушается безопасность взрывателя.
Дальность взведения - расстояние от орудия или ПУ до БП в момент
окончания взведения взрывателя.
Время срабатывания контактного взрывателя - интервал времени от мо-
мента соприкосновения ВУ с целью или преградой до момента срабатывания
взрывателя.
Область срабатывания неконтактного взрывателя — часть пространства
вблизи цели, в котором происходит срабатывание неконтактного взрывателя.
Эффективность неконтактного взрывателя - свойство неконтактного
взрывателя срабатывать в области поражения БП.
Чувствительность контактного взрывателя - свойство срабатывать при
определенных условиях встречи ВУ с целью или преградой.
Чувствительность неконтактного взрывателя - минимальная мощность
сигнала на входе приемника, обеспечивающая срабатывание взрывателя.
Помехоустойчивость взрывателя - свойство гарантировать эффектив-
ность БП при боевом применении в условиях искусственных и естествен-
ных помех.
Помехозащищенность взрывателя - помехоустойчивость взрывателя в ус-
ловиях специально организованных помех.
Избирательность контактного взрывателя — свойство срабатывать по це-
левым преградам и не срабатывать по нецелевым.
13.2. Общие принципы устройства и классификация
взрывателей и ВУ. Требования, предъявляемые к ВУ.
Огневая цепь механических и электромеханических ВУ
В общем случае взрыватель (или ВУ) представляет собой совокупность
механических, пиротехнических, электрических и других узлов и механиз-
мов, которые, функционируя строго по определенной программе, обеспе-
чивают как его безопасность, так и безотказность действия (формирова-
ние и выдачу взрывателем выходного импульса) у цели или в заданной
точке траектории.
Принципы устройства. Рассмотрение принципов устройства и действия
взрывателей (или ВУ), являющихся достаточно сложными и ответственными
изделиями в составе БП, принято начинать с анализа их принципиальной
структурной схемы, которая, как правило, включает в себя следующие три
848
13. Взрыватели
составные части: инициирующую систему (ИС), огневую цепь (ОЦ) и систе-
му предохранения.
Инициирующая система - совокупность устройств, приводящих в дей-
ствие ОЦ в момент, определяемый программой функционирования взрыва-
теля. Конструктивно ИС состоит из контактных или неконтактных датчиков
цели либо дистанционных устройств. Под датчиком цели понимают устрой-
ство, которое в результате взаимодействия с целью выдает сигнал, исполь-
зуемый для приведения в действие ОЦ взрывателя. Дистанционные (вре-
менные) устройства основаны чаще всего на часовом или пиротехническом
принципе и предназначены для обеспечения дистанционного действия взры-
вателя.
Огневая цепь - цепь из последовательно срабатывающих средств иниции-
рования и (или) пиротехнических элементов, формирующая выходной дето-
национный или воспламенительный импульс. Огневые цепи разных взрыва-
телей могут содержать различный набор огневых средств инициирования. Ко-
нечный элемент ОЦ - детонатор или петарда, предназначенные соответственно
для создания детонационного или воспламенительного импульса, который воз-
действует на разрывной (вышибной) заряд БП. В качестве начального элемен-
та ОЦ в контактных механических ВУ (КМВУ) можно использовать КВ или
КД, в электромеханических (ЭМВУ) соответственно электровоспламёнители
(ЭВ) или электродетонаторы (ЭД).
Система предохранения - совокупность устройств, обеспечивающих без-
опасность взрывателя в служебном обращении, при выстреле и на траектории
до момента окончания взведения. Под термином «взведение» понимается про-
цесс перехода взрывателя, его механизма, блока или устройства в состояние
готовности к действию.
Дополнительно в состав структурной схемы некоторых ВУ могут входить
механизмы и устройства, не относящиеся к вышеперечисленным составным
частям, например, механизм самоликвидации (МСЛ) - устройство, обеспечи-
вающее срабатывание взрывателя в случае несрабатывания датчика цели; ус-
тановочное устройство, которое предназначено для установки перед выстре-
лом требуемого значения изменяемой характеристики взрывателя (вида и вре-
мени действия, длительности работы дистанционных устройств и т. д.);
механизм неизвлекаемости взрывателя - противосъемное устройство, служа-
щее для обеспечения срабатывания БП при попытке извлечения из него взры-
вателя; противовзрывное устройство взрывателя - устройство, исключаю-
щее возможность срабатывания взведенного взрывателя при воздействии на
него внешней УВ; источник питания и др.
Классификация взрывателей и ВУ основана на определенных призна-
ках. Во-первых, взрыватели и ВУ можно подразделить по назначению БП:
для артиллерийских снарядов и мин, для БЧ управляемых ракет различных
классов, для неуправляемых ракет (снаряды РСЗО, НАР), авиационных БП
(авиационные бомбы, в том числе кассетные), морских БП (торпеды, мины,
РГБ), инженерных БП (мины различного назначения, заряды разминирова-
ния), гранат (ручные, ружейные, к подствольным, автоматическим и проти-
вотанковым гранатометам) и т. д. Взрыватели для различных типов БП отли-
чаются конструкцией механизмов предохранения, взведения и другими осо-
13.2. Общие принципы устройства и классификации взрывателей и ВУ 849
бенностями в связи с тем, что силы, возникающие в процессе функциониро-
вания БП (при выстреле, пуске, сбросе и т. д.) и соответственно действую-
щие на детали взрывателей или ВУ этих БП, в каждом случае будут различ-
ными. Кроме того, также отличаются размеры и сложность ВУ и условия их
применения.
Во-вторых, взрыватели и ВУ подразделяют по виду действия на контакт-
ные, дистанционные, неконтактные, командные, а также ВУ комбинированно-
го действия (данный классификационный признак характеризует соответству-
ющий принцип взаимодействия ИС взрывателя с целью).
Контактные взрыватели предназначены для обеспечения контактного дей-
ствия, т. е. срабатывания ВУ в результате соприкосновения БП с целью или
преградой. По времени срабатывания контактные взрыватели, в свою очередь,
подразделяют на три вида: взрыватели мгновенного действия., срабатываю-
щие от реакционного датчика цели без замедлителя (время срабатывания
0,05... 1,0 мс); взрыватели инерционного действия, срабатывающие от инерци-
онного датчика цели без специального замедлителя (1...5 мс); взрыватели за-
медленного действия, срабатывающие от реакционного или инерционного дат-
чика цели (время, определяемое специальным замедлителем, 0,005...0,1 с).
В отличие от артиллерийских, авиационные взрыватели замедленного действия
могут иметь малое (сотые доли секунды), большое (десятые доли секунды) и
штурмовое замедление (от нескольких секунд до нескольких минут). У авиа-
ционных взрывателей длительного действия время срабатывания составляет
от нескольких часов до нескольких суток.
У многоустановочных взрывателей может быть не одна, а несколько уста-
новок по времени действия: мгновенное - инерционное, мгновенное - замед-
ленное, инерционное - замедленное, мгновенное - инерционное - замедлен-
ное, мгновенное - с малым замедлением - с большим замедлением.
Дистанционные взрыватели предназначены для обеспечения дистанци-
онного действия, т. е. срабатывания в заданной точке траектории полета БП
(на дистанции) без какого-либо взаимодействия с целью (срабатывание про-
исходит в результате проведенной перед выстрелом установки). Наибольшее
распространение получили пиротехнические, часовые, электромеханические
и электронные дистанционные взрыватели. Обычно дистанционный взрыва-
тель отсчитывает интервал времени, по истечении которого БП должен дос-
тичь заданной точки траектории. Однако определение пространственного по-
ложения точки срабатывания дистанционного взрывателя на траектории поле-
та БП к цели возможно и другими способами.
Неконтактные взрыватели служат для обеспечения неконтактного дей-
ствия, т. е. срабатывания взрывателя в результате взаимодействия с целью или
преградой без соприкосновения с ней БП. Срабатывание ВУ вблизи цели или
на некотором определенном расстоянии от преграды осуществляется за счет
использования различных физических полей цели (преграды) или взрывателя.
Различают: активный взрыватель, обладающий собственным излучателем энер-
гии для облучения цели и реагирующий на отраженный от цели сигнал; полу-
активный взрыватель, срабатывающий от сигнала, отраженного целью при
облучении ее внешним источником энергии; пассивный взрыватель, реагиру-
ющий на энергию, которая излучается самой целью.
850
13. Взрыватели
Командные (или телеуправляемые) взрыватели - это ВУ, которые сраба-
тывают по команде, подаваемой с наземного или воздушного командного
пункта.
Существуют и так называемые взрыватели комбинированного действия,
обеспечивающие в различных сочетаниях контактное, неконтактное и дистан-
ционное действия, например, неконтактно-контактные, неконтактно-дистан-
ционные или дистанционно-контактные ВУ. Последние, в частности, снабже-
ны дистанционным и ударным механизмами. Дистанционный механизм ос-
новной, а ударный - дублирующий (используется в случае отказа в действии
дистанционного механизма и в некоторых специальных случаях стрельбы на
контактное действие).
По физическим принципам работы неконтактные взрыватели или ВУ под-
разделяют на радиолокационные, оптические, акустические, магнитные, ем-
костные, индукционные и электростатические (более подробно радиолокаци-
онные и оптические НВУ будут рассмотрены в разд. 13.6 и 13.7).
К НВУ иногда относят также взрыватели с датчиками, реагирующими на
изменение параметров среды, в которой движется СП. В частности, баро-
метрические взрыватели под влиянием изменения атмосферного давления мо-
гут обеспечить срабатывание на заданной высоте, а гидростатические - на
заданной глубине (каждые 10м водяного столба увеличивают давленйе в воде
на 1 атм).
По способу возбуждения ОЦ наиболее распространены механические
(удар, накол жалом) и электрические (электромеханические) взрыватели. Кро-
ме них существуют пневматические взрыватели, у которых инициирование
ОЦ происходит в процессе быстрого адиабатического сжатия и нагрева возду-
ха. В большинстве электромеханических ВУ для инициирования ОЦ и обес-
печения безопасности используют электрические и механические устройства.
Взрыватели, в которых для инициирования ОЦ применяют электрохимичес-
кие процессы в гальванических элементах, пьезоэлектрический эффект (пье-
зогенератор), импульсный магнитоэлектрический генератор и заряженный кон-
денсатор, называются соответственно электрохимическими, пьезоэлектричес-
кими, магнитоэлектрическими и конденсаторными ВУ.
По характеру изоляции капсюлей все взрыватели и ВУ делят на три типа:
взрыватели предохранительного типа, в которых КД или ЭД изолированы от
детонатора (Д) таким образом, что их срабатывание до момента взведения
не вызывает его инициирования; взрыватели полупредохранительного типа,
в которых КВ или ЭВ изолированы от КД или пороховой петарды (ПП) та-
ким образом, что их срабатывание до момента взведения не вызывает ини-
циирования КД или петарды; взрыватели непредохранительного типа, в ко-
торых КВ или ЭВ не изолированы от КД или петарды, а КД или ЭД не
изолированы от детонатора.
По виду выходного импульса различают взрыватели с детонационным и с
воспламенительным импульсами. В первых конечный элемент ОЦ - детона-
тор, а во вторых - пороховая петарда
По месту соединения с БП взрыватели и ВУ подразделяют на головные,
донные, головодонные, боковые и универсальные. Головные взрыватели - это,
как правило, высокочувствительные взрыватели мгновенного действия, исполь-
13.2. Общие принципы устройства и классификации взрывателей и ВУ 851
зуемые в осколочных, осколочно-фугасных и фугасных БП. Донные взрывате-
ли, обеспечивающие инерционное или требуемое замедленное действие, при-
меняют в бронебойных, бетонобойных и крупнокалиберных фугасных БП.
В кумулятивных БП используют головодонные ВУ, у которых датчик цели рас-
полагается в головной части, а детонирующее устройство - в донной, что, с
одной стороны, гарантирует мгновенность действия ВУ, а с другой - донное
инициирование кумулятивного заряда. В авиационных бомбах применяют уни-
версальные (могут ввинчиваться как в головное, так и в донное очко) и боко-
вые взрыватели.
По калибру БП артиллерийские взрыватели подразделяют на взрыватели
к снарядам малых (до 57 мм), средних (76... 152 (155) мм) и крупных (свыше
155 мм) калибров.
По функциональному назначению взрыватели бывают боевыми, холосты-
ми (взрыватели, в которых изъяты средства инициирования и пиротехниче-
ские элементы), учебными (специально собранные холостые взрыватели, пред-
назначенные для изучения устройства и принципа действия ВУ), учебно-тре-
нировочными (охолощенные взрыватели для обучения правилам обращения с
ВУ). С этой целью используют массогабаритный макет взрывателя - имита-
тор взрывателя, соответствующий ему по массе, габаритам и присоединитель-
ным размерам; специальную сборку - взрыватель или его составную часть,
подготовленные для испытания и исследования.
Общие требования, предъявляемые к взрывателям и ВУ
Разработку и сравнительную оценку взрывателей проводят на основе
ряда требований, предъявляемых к ВУ (как правило, их формулируют в ТЗ
на разработку ВУ). Основные тактико-технические требования приведены
ниже.
1. Безопасность в производстве и в служебном обращении — отсутствие
преждевременных срабатываний взрывателей как в условиях производства,
так и в обращении (при хранении, транспортировке, монтаже и всех других
условиях нормальной эксплуатации, а также при случайных падениях). Конк-
ретные характеристики по транспортабельности и стойкости к внешним воз-
действиям (механическим, температурным, электромагнитным, радиационным
и т. д.) в условиях эксплуатации оговорены в соответствующих ГОСТах и при
необходимости дополнены в ТЗ. Основные мероприятия, обеспечивающие вы-
полнение этих требований, связаны с применением стойких к перегрузкам
(при служебном обращении) КВ, КД, передаточных зарядов и детонаторов, а
также с использованием возможно минимального количества инициирующе-
го ВВ в их составе. Для обеспечения безопасности применяют предохрани-
тельные механизмы и механизмы изоляции капсюлей (МИК), осуществляют-
ся обесточивание источников питания в электромеханических взрывателях,
шунтирование отдельных цепей (ЭД, ЭВ, запальных конденсаторов и т. д.),
раздельное хранение взрывателей и БП, а также тщательное соблюдение пра-
вил эксплуатации ВУ Все системы ВУ должны строиться так, чтобы любое
несанкционированное воздействие на взрыватель БП приводило не к подрыву
последнего, а к отказу взрывателя.
852
13. Взрыватели
2 Безопасность при выстреле - отсутствие преждевременного срабаты-
вания взрывателя в процессе самого выстрела (в момент выстрела, при дви-
жении в канале ствола или по направляющей) и на начальном участке траек-
тории в пределах дальности, представляющей опасность для орудийного расче-
та в случае разрыва БП (пределы дальнего взведения задают в ТЗ). Основные
мероприятия, обеспечивающие безопасность взрывателя при выстреле, связа-
ны с применением ПМ, механизмов дальнего взведения (МДВ), блокирую-
щих механизмов (БМ) и МИК.
3. Надежность (безотказность) действия зависит от надежности взве-
дения ПМ и МДВ, переводящих взрыватель из служебного положения в бо-
евое, достаточной чувствительности контактных и неконтактных датчиков
цели (разрабатываемых с учетом свойств целевых преград, скоростей и уг-
лов подхода БП к цели при одновременном выполнении требований по ус-
тойчивости к различного рода помехам); применения бокобойных- и всюду-
бойных устройств, дублирования наименее надежных узлов и механизмов
(и использования дублирующих взрывателей, например, в авиабомбах сред-
него и крупного калибра); возможности контроля состояния электрических
цепей перед выстрелом; использования блочно-модульного принципа пост-
роения ВУ; обеспечения требуемой (достаточной) мощности детонатора и др.
Повышенная надежность достигается за счет высокой степени заимствова-
ния узлов и деталей, идентичных условий отработки, постоянного увеличе-
ния статистических данных по безотказности действия в условиях полигон-
ных испытаний и боевого применения, в том числе, в составе новых БП.
Безотказность обеспечивает независимость эффективности действия ВУ от
возможного влияния различных внешних и внутренних факторов (например,
погодных условий, неблагоприятных условий встречи с преградой, случай-
ных отклонений параметров и допусков на изготовление деталей механизмов,
условий и срока хранения ВУ до момента его применения и т. п.). В частно-
сти, для артиллерийских взрывателей массового производства вероятность
безотказной работы в течение всего гарантийного срока хранения должна
быть не менее 0,98.
4. Эффективность действия - обеспечение максимально возможного по-
ражающего действия БП (или БЧ ракет) по цели за счет требуемого вида дей-
ствия, оптимального времени срабатывания ВУ и полноты детонации ВВ раз-
рывного заряда БП или боевого заряда (снаряжения) БЧ. Очевидно, что обес-
печение гарантии безотказности действия взрывателя - это одновременно и
меры по улучшению его эффективности. Однако существуют и конструктив-
ные меры, повышающие эффективность действия ВУ, к которым можно отне-
сти введение во взрыватель механизмов и устройств, фиксирующих момент
наиболее выгодного расположения БП относительно цели (например, меха-
низмов авторегулируемого замедления).
5. Оптимальность габаритов, обтекаемая форма и достаточная меха-
ническая прочность. Нормальное (штатное) функционирование взрывателей
и ВУ в условиях действия сил и перегрузок, возникающих при служебном
обращении с ВУ (в частности, при возможных падениях БП с ВУ на жесткие
основания), при выстреле, на траектории, а также при ударе и проникании в
преграду, может быть обеспечено лишь при достаточной механической проч-
13.2. Общие принципы устройства и классификации взрывателей и ВУ 853
ности всех деталей, узлов и механизмов ВУ. Требования по оптимальности
габаритов и обтекаемости формы взрывателей БП достаточно очевидны и не
нуждаются в разъяснении.
6. Простота эксплуатации взрывателя, быстрота и удобство производ-
ства установок ВУ. Взрыватели, как правило, не должны требовать проверок,
кроме проверки по наружному виду в течение гарантийных сроков хранения,
а также перед установкой (ввинчиванием) в БП. Для многоустановочных ВУ
важна быстрая переустановка взрывателя без его вывинчивания из корпуса
БП. Оптимальная конструкция современных неконтактных взрывателей дол-
жна предусматривать возможность замены вышедших из строя узлов, т. е. иметь
блочную структуру.
7. Стойкость при хранении - обеспечение стабильности боевых свойств
взрывателей и ВУ при длительном (многолетнем) хранении в различных кли-
матических условиях. Срок хранения современных ВУ должен быть не ме-
нее десяти лет. Основные мероприятия, обусловливающие стойкость взры-
вателя при длительном хранении - герметичность ВУ за счет смазывания
резьбовых соединений при сборке ВУ суриковой замазкой, щелочным лаком
или другими составами (герметиками); применение антикоррозийных покры-
тий металлических деталей взрывателя, использование коррозионно-стой-
ких материалов; хранение взрывателя герметически укупоренными до мо-
мента соединения с БП.
Возможны также специфические требования, например, самоликвидация
в случае промаха, автономный контроль готовности механизмов и блоков ВУ
перед стрельбой (пуском ракеты, сбросом АБ) и др.
К производственно-экономическим требованиям, предъявляемым к взры-
вателям и ВУ массового производства, относятся:
- простота конструкции ВУ;
- возможность использования прогрессивных технологий;
- экономичность производства;
- ориентация на отечественные материалы и источники сырья;
- невысокая стоимость и недефицитность материалов;
- простота использования и надежность средств контроля;
- применение унифицированных и стандартизованных деталей, узлов и
блоков.
Конкретные показатели уровня стандартизации и унификации задают в
ТЗ в соответствии с оптимальными условиями, установленными в отрасли.
Присоединительные размеры должны соответствовать стандартным размерам,
установленным в ГОСТах, а упаковка ВУ - удовлетворять требованиям нор-
мативно-технических документов (отраслевых стандартов).
Огневая цепь механических и электромеханических ВУ
Важнейший элемент структурной схемы ВУ - огневая цепь, которая пред-
ставляет собой совокупность огневых и детонационных элементов, служащих
для создания, усиления и передачи импульса детонации разрывному заряду
БП (заряду БВВ) или воспламенительного импульса его пороховому вышиб-
ному или воспламенительному заряду (для шрапнельных, кассетных, агита-
854
13. Взрыватели
Рис. 13.1. Огневая
цепь механического
взрывателя непредо-
хранительного типа:
1 жало; 2 - КВ; 3 -
КД; 4 - детонатор
ционных, осветительных, зажигательных и некоторых
других типов БП). Огневая цепь механического взрыва-
теля непредохранительного типа (рис. 13.1) состоит из
КВ, КД и детонатора, передающего детонацию разрыв-
ному заряду БП. В случае многоустановочного типа ВУ
элементами ОЦ могут быть один или несколько замед-
лителей (3) и усилителей (У), а для ВУ предохранитель-
ного типа - еще и передаточный заряд (ПЗ), размещае-
мый в подвижном движке МИК (рис. 13.2).
Используемые для наполнения отдельных элемен-
тов ОЦ инициирующие (ИВВ) и бризантные ВВ под-
робно рассмотрены в соответствующей литературе
(более подробно в гл. 14). Характерная особенность
ИВВ - их способность взрываться (детонировать) под
влиянием простого внешнего импульса (луча огня, на-
грева, трения, удара, накола и т. д ). К основным ИВВ,
называемым также первичными ВВ и служащим# для
инициирования детонации бризантных или вторичных
ВВ, относят гремучую ртуть Hg(ONC)2. азид свинца
Pb(N3)2, стифнат свинца или ТИРС C6H(NO2)3O2PbH2O
и тетразен C2HgON. Они же используются в качестве
компонентов ударных и воспламенительных составов,
предназначенных для воспламенения пиротехнических
смесей, порохов и т. д.
Создание начального импульса в контактных ме-
ханических и дистанционных пиротехнических ВУ про-
исходит под действием механических сил (удара, нако-
ла). Особенность электромеханических ВУ - исполь-
зование для возбуждения ОЦ начальных электрических
импульсов, которые вызывают срабатывание КВ или
ЭВ, усиливаются и служат для инициирования детона-
ции последующих элементов ОЦ (см. рис. 13.1 и 13.2).
Усиление и передача взрывного импульса продолжа-
ются до тех пор, пока детонация последнего элемента ОЦ не вызовет под-
рыв боевого заряда (БЗ).
Последний элемент ОЦ, как правило, - детонатор, сообщающий детона-
ционный импульс заряду БВВ, объем которого ограничивается габаритами ВУ
В связи с этим иногда необходимый взрывной импульс (более мощный, чем
от детонатора ВУ) получают от дополнительных детонаторов, размещенных в
гнездах (стаканах) или каналах боевого заряда ВВ. В этом случае детонатор
ВУ называют основным, а детонаторы, расположенные в БЗ, - дополнитель-
ными. В качестве ВВ для детонаторов обычно применяют индивидуальные
БВВ и составы более мощные и более чувствительные, чем широко распрост-
раненный ТНТ, а именно, тетрил, состав ТГ, гексоген или тэн (два последних
БВВ, как правило, флегматизированные). Масса заряда детонатора составляет
1... 15 г, но может достигать и 50... 150 г. Чем больше масса разрывного заряда
БП (и чем ниже его чувствительность), тем больше должна быть масса дето-
13.2. Общие принципы устройства и классификации взрывателей и ВУ 855
Механический
взрыватель
Электромеханический
взрыватель
Изоляция
КД(ЭД)-Д
пз
Детонатор
к БЧ
Рис. 13.2. Огневая цепь механического и электромеханического взрывателя или ВУ
предохранительного типа:
КС — контакт срабатывания; ИП - источник питания; ЭВ электровоспламенитель; БЗ - боевой
заряд
натора. Детонатор и разрывной заряд БП, как правило, располагают или соос-
но, или погружая заряд детонатора на его полную высоту в разрывной заряд,
или используя схему «торец к торцу», т. е. не утапливая заряд детонатора в
разрывной заряд.
Детонатор приводится в действие взрывным (детонационным) импульсом
либо от КД (или ЭД) в случае непредохранительных или полупредохрани-
тельных ВУ, либо от ПЗ в случае ВУ предохранительного типа (см. рис. 13.1 и
13.2 соответственно). Передаточный заряд выполняют из таких БВВ, как тэн,
тетрил (реже гексоген и октоген) прессованием до плотности зарядов из тет-
рила и тэна, равной 1,5... 1,6 г/см3, а из гексогена - 1,60... 1,68 г/см3. Взрывча-
тое вещество запрессовывают или в специальный тонкостенный стальной кол-
пачок, или непосредственно в гнездо диафрагмы, являющейся элементом кон-
струкции ВУ.
856
13. Взрыватели
При отсутствии в ОЦ передаточного заряда пусковым элементом детона-
тора ВУ становится КД, в состав которого помимо БВВ входят также более
чувствительные ИВВ. Комбинированные КД дают более мощный взрывной
импульс по сравнению с капсюлями, содержащими только ИВВ, что сводит к
минимуму объем применяемых в капсюлях ИВВ, а следовательно, и размеры
КД. Уменьшение размеров КД существенно повышает безопасность взрыва-
телей. Чем тоньше слой ВВ, тем меньшие напряжения возникают в нем при
перегрузках и тем ниже вероятность самопроизвольного взрыва.
Капсюли-детонаторы взрывателей бывают двух видов: лучевые и наголь-
ные (рис. 13.3), отличающиеся в основном составом ВВ первичного слоя
(в лучевых КД - это ТИРС, а в нагольных - специальный ударный состав).
Существует несколько видов хорошо отработанных КД (рис. 13.4), надежных
как по безопасности и безотказности, так и по мощности действия. Конструк-
торы обязаны при разработке нового образца взрывателя использовать в нем
только штатные КД. Время срабатывания нагольных КД зависит от скорости
накола (удара) и составляет от 20 до 70 мкс. Время срабатывания лучевых КД
обусловлено интенсивностью форса огня, создаваемого КВ или усилителем
(см. рис. 13.2), и достигает 20...200 мкс и более.
Наиболее распространенные КВ содержат ударные составы (механичес-
кие смеси) в двух вариантах:
а) 1ремучая ртуть, бертолетова соль (хлорат калия), антимоний (трехсер-
нистая сурьма Sb2S
б) стифнат свинца, тетразен, нитрат бария, антимоний.
Из всех индивидуальных ИВВ, используемых в КВ и КД, гремучая ртуть
более чувствительна к механическим воздействиям и ее применяют как осно-
Стифнат свинца
с тетразеном,
пи гратом бария
и антимонием
IHPC
.зил свинца
хлоратом калия
антимонием
а
Жало
в
Тетразен
с антимонием
Азид свинца
Тетрил
Рис. 13.3. Типовые конструктивные схемы КВ (а, б) и КД (в, г)
13.2. Общие принципы устройства и классификации взрывателей и ВУ 857
0 3.05
0 6.1
0 3.5
Рис. 13.4. Разновидности конструкций КВ и КД:
а - КВ нагольного действия (КВ-Н-1, КВ-Н-13, КВ-Н-15); б - КД лучевого действия (КД-Л-ЗО-Т,
КД-Л-9, КД-Л-2); в - КД нагольного действия (КД-БШ-30, КД-Н-19, КД-Н-10)
ву в наиболее распространенных рецептах КВ при массовом содержании от
15 до 50 %. Известные рецептуры накольно-ударных составов КВ - компози-
ции азида свинца и ТНРС, которые отличаются повышенной термостойкос-
тью. Существуют и другие рецептуры часто применяемых капсюльных соста-
вов (табл. 13.1).
Масса капсюльных зарядов составляет 0,03...0,20 г. Ее запрессовывают в
металлические колпачки под давлением 100... 130 МПа (для составов с ГР) и
858
13. Взрыватели
Таблица 13.1. Характеристики некоторых К’В для контактных
и дистанционных взрывателей и ВУ
кв Корпус Капсюльный состав, % г Рпрес, МПа
4, мм h, мм 8, ММ ГР БС А НБ
КВ дистанционных взрывателей и ВУ
№ 1 3,05 3,20 0,08 15 25 45 15 0,021 100
Т-3 4,25 4,60 0,13 25 37,5 37,5 — 0,130 ПО
АГДТ 4,24 3,20 0,07 25 37,5 37,5 — 0,080 100
КВ-11 5,72 5,15 0,03 25 37,5 37,5 - 0,130 100
КВ конг пактньи взрыва! пелей и < ЗУ
№2 3,85 4,00 — 15 25 45 15 0,070 120
МД-5 3,85 4,00 0,09 25 3,75 3,75 — 0,075 120
КТМ 5,71 3,33 0,12 25 3,75 3,75 — 0,130 >110
ктд 5,71 3,33 0,07" 25 3,75 3,75 — 0,130 410
МР 5,71 3,33 0,07" 50 25 25 — 0,130 130
РГМ 6,10 3,05 0,16"* ** 50 25 25 — 0,210 124)
АД 4,25 4,60 - 28 36 36 — 0,135 100
мд 3,20 3,20 0,09 25 3,75 3,75 — 0,033 120
гвмз* 5,65 3,85 - - - - - 0,100 50
Примечание, d - диаметр; h - высота; 8 - толщина; ГР - гремучая ртуть; БС - берто-
летова соль; А антимоний; НБ - нитрат бария; т - масса капсюльного заряда; рпрсс - давле-
ние прессования заряда.
* КВ ГВМЗ содержит: ТНРС - 0,2 г, азид свинца - 0,045 г, тротил - 0,2 г.
** Толщина кружка в дне колпачка (со стороны накола).
Толщина дна.
50 МПа (для составов на основе ТНРС и азида свинца). Для изготовления
колпачка КВ кроме меди иногда используют и другие материалы (мельхиор,
алюминий), учитывая при этом, что азид свинца не реагирует с алюминием и
никелем, но взаимодействует с медью, образуя очень чувствительное к воз-
действиям соединение. Гремучая ртуть в присутствии влаги образует с медью
соединение очень чувствительное к трению, а с алюминием реагирует с выде-
лением теплоты и возникновением невзрывчатого продукта.
Время срабатывания КВ зависит от скорости накола vH (скорости движе-
ния жала) и уменьшается от 300...600 мкс до 50...60 мкс при увеличении vK
от 1,2 до 20 м/с. При vH~ 140 м/с время срабатывания КВ снижается пример-
но до 20 мкс. Энергия срабатывания КВ - кинетическая энергия, которой об-
ладает ударник в момент соприкосновения его жала с КВ, составляющая по-
рядка 0,1 Дж.
В целом для ОЦ характерна тенденция снижения чувствительности и уве-
личения мощности действия (в том числе и за счет возрастания масс ВВ и
пиротехнических составов) от одного элемента ОЦ к последующему (см.
рис. 13.1 и 13.2). Капсюль-воспламенитель и ЭВ более чувствительны к меха-
ническим воздействиям (инерционным перегрузкам и нагреву), чем возбуж-
13.2. Общие принципы устройства и классификации взрыватечей и ВУ 859
даемые ими лучевые КД (в электрических взрывателях ЭВ более чувстви-
тельны к электрическому импульсу, чем ЭД).
Все применяемые в современных взрывателях КВ, КД, передаточные за-
ряды и детонаторы должны обладать высокой надежностью действия и быть
термостойкими, ибо при наружной подвеске авиационных БП на современ-
ных сверхзвуковых самолетах они не должны терять своих свойств в услови-
ях кинетического нагрева конструкций ВУ авиационных бомб и ракет. Взры-
ватели артиллерийских БП должны выдерживать (вместе с БП) нахождение
до 30 мин в канале ствола орудия, разогретого стрельбой с максимальным
темпом.
Во взрывателях полупредохранительного типа для устранения преждев-
ременных разрывов БП при самопроизвольном срабатывании КВ (или ЭВ)
их изолируют от КД. Взрывательные устройства с изоляцией КД от детона-
тора получили название взрывателей предохранительного типа. Приспособ-
ление для изоляции КД гарантирует от преждевременного разрыва БП и в
случае срабатывания КВ, поэтому дополнительная изоляция КВ во взрывате-
лях предохранительного типа не нужна.
Создание стойких к перегрузкам КВ-и КД позволяет в некоторых типах
БП применять взрыватели непредохранительного типа (в них нет изоляции
капсюлей). Особенно широкое распространение получили взрыватели непре-
дохранительного типа в БП, для которых характерны сравнительно малые пе-
регрузки (неуправляемые PC, мины, АБ), а также в малогабаритных БП.
В конструкциях контактных ВУ часто имеются установочное устройство
и специальный замедлитель, обеспечивающие срабатывание ВУ при ударе о
преграду с замедлением или без него. В состав замедлителя помимо корпуса
(колпачка, втулки) в общем случае входят следующие пиротехнические эле-
менты: воспламенитель (В или ВПт), усилитель (У или УПт) и собственно
замедлитель (3 или ЗПт), состоящие из пиротехнических составов (ПТС), ко-
торые способны к устойчивому горению и не содержат ИВВ (рис. 13.5). Как
правило, это ПТС на основе дымных порохов или специальных малогазовых
составов, не обладающих гигроскопичностью и другими недостатками, свой-
ственными дымному пороху.
Разновидности ОЦ механических ВУ. В ряде механических ВУ (голов-
ных ВУ мгновенного действия) отсутствует КВ, а жало ударника накалыва-
ет непосредственно КД. В этом случае сокращается время срабатывания,
повышается безотказность, уменьшаются габариты ВУ Однако для контакт-
ных ВУ с установкой на замедление нельзя отказаться от КВ и лучевого КД,
так как замедление можно обеспечить лишь задержкой в передаче луча на
пути КВ —> КД. Задержать же действие взрывателя замедлением передачи
детонационного импульса (на пути КД —> Д) невозможно. Взрыватели с на-
кольными КД (без КВ) могут быть непредохранительного или предохрани-
тельного типа. У взрывателей БП малого калибра (23 и 30 мм) отсутствует
детонатор (а стало быть, и ПЗ), поэтому они бывают непредохранительного
или полупредохранительного типа.
В зависимости от калибра БП и его назначения возможны следующие раз-
новидности ОЦ механических ВУ:
• КВ —> 3 —> У —> КД —» ПЗ —> Д - характерна для ВУ предохранительно-
го типа с несколькими установками;
860
13. Взрыватели
ПТС
УПт
Рис. 13.5. Типовые конструкции пиротехнических элементов замедлителей:
1 - корпус (колпачок, втулка и т. д.)
• КВ —> 3 —> У —> КД —> Д - применяют в многоустановочных артилле-
рийских взрывателях полупредохранительного типа, а также ракетных и авиа-
ционных ВУ непредохранительного типа;
• КВ —> КД —> Д - используют во взрывателях с одной или двумя установ-
ками полупредохранительного (или непредохранительного) типа;
• КД —> ПЗ —> Д - характерна для взрывателей мгновенного действия
предохранительного типа;
• КД —э Д - применяется для взрывателей мгновенного действия непре-
дохранительного типа;
• КВ —э КД - столь короткую цепочку используют во взрывателях к мало-
габаритным БП непредохранительного и полупредохранительного типа (на-
пример, в современных малокалиберных авиационных снарядах);
• КД - одиночный элемент ОЦ, характерный только для взрывателей к
малогабаритным БП непредохранительного типа.
Особенности устройства ОЦ взрывателей и ВУ электрического типа.
Как уже отмечалось выше, ОЦ взрывателей электрического типа срабатывают
13.2. Общие принципы устройства и классификации взрывателей и ВУ 861
при прохождении импульса тока через ЭВ или ЭД (см. рис. 13.2). На практике
наиболее распространены два вида ЭВ: мостиковые и искровые (рис. 13.6).
В качестве главного компонента капсюльного заряда ЭВ, чувствительного к
теплоте, используют ТНРС, но иногда также применяют роданистый свинец
Pb(NCS)2 и азид свинца, реже - ГР. Горючие и окислительные добавки в ЭВ -
те же вещества, что и в КВ. Связующими или цементирующими веществами
в ЭВ служат столярный клей, антимоний, нитролак.
Мостик в ЭВ мостикового типа (рис. 13.7) изготовляют из проволоки (ни-
хрома или константана диаметром 10...30 мкм, длиной 1,0. ..2,5 мм), облада-
ющей большим удельным сопротивлением и не вступающей в химическую
реакцию с ИВВ. Проволока припаивается (или приваривается точечной свар-
кой) к электровыводам и окружается воспламенительным составом - неболь-
шим зарядом высокочувствительного ИВВ, как правило, ТНРС на нитролаке
(ранее широко использовали смесь роданистого свинца и хлората калия, заме-
шанную на водном растворе столярного клея). Формирование капсюльного
заряда ЭВ, предназначенного для артиллерийского выстрела, проводят под дав-
лением около 50 МПа.
Наряду с общими требованиями ко всем средствам инициирования (мощ-
ность взрывного или лучевого импульса, время срабатывания, стойкость к
инерционным перегрузкам, вибрации, нагреву и т. д.) к ЭВ и ЭД предъявля-
ют специальные требования: достаточная чувствительность к энергии воз-
буждения, защищенность от действия блуждающих токов, статического элект-
ричества и т. п.
Электрическая энергия (-10 3 Дж), необходимая для срабатывания ЭВ,
зависит от длительности электрического импульса и амплитуды напряже-
ния. При срабатывании от запального конденсатора емкостью 0,25 мкФ, за-
ряженного до напряжения 35...60 В, время срабатывания типового ЭВ (ТНРС
на нитролаке) с сопротивлением мостика 7.. 20 Ом составляет около
100...500 мкс. Обеспечение термостойкости ЭВ - менее сложная задача, чем
для накольных КВ. Это связано с тем, что в ЭВ используют термостойкие
Рис. 13.6. ЭВ мостикового (я), щелевого (контактно-калильного) (б) и искрового (в)
типов:
1 — электровыводы (электроды); 2 — мостик; 3 — капсюльный заряд (основной); 4 - оболочка
(в том числе многослойная) на основе лака; 5 - контактно-калильный капсюльный состав
с токопроводящими добавками из порошков металлов или графита (воспламенение происходит
за счет теплоты, выделяемой при прохождении тока через состав); 6„ - искровой зазор
862
13. Взрыватели
Рис. 13.7. Разновидности конструкций ЭВ мостикового типа:
1 - колпачок; 2 - капсюльный заряд; 3 - конец провода (электрод); 4 - заливочная масса; 5 -
электрические провода (выводы); 6 - мостик; 7 - электропроводящее покрытие; 8 - пластмас-
совая колодочка; 9 - уплотнительная втулка; 10 - чашечка; 11 - лак; 12 - замедлитель пиротех-
нический; 13 - гильза; 14 - электроконтактная шайба
ИВВ (ТНРС и азид свинца). Например, существуют ЭВ с энергией срабатыва-
ния 1РЭВ = 10-4 Дж, которые сохраняют работоспособность после нагревания
при температуре 230 °C в течение четырех часов.
В ОЦ электрических ВУ находят применение три типа ЭД: мостиковые,
искровые и накольно-искровые. Конструктивная схема мостикового ЭД
(рис. 13.8) представляет собой комбинацию из ЭВ и лучевого КД, объединен-
ных в одном корпусе. Оболочка (корпус) предохраняет ЭД от разрушения, обес-
печивая удобство и безопасность применения. При пропускании через мостик
ЭВ электрического тока напряжением от единиц до нескольких десятков вольт
происходит нагревание мостика до температуры, при которой начинается хи-
мическая реакция разложения (воспламенения) воспламенительного состава
и последующий взрыв усилителя (азида свинца), инициирующего запрессов-
13.2. Общие принципы устройства и классификации взрывателей и ВУ 863
Рис. 13.8. Конструкции мостиковых ЭД:
1 - колпачок; 2 - вторичный заряд из БВВ (чаще-всего тэн); 3 - первичный заряд из ИВВ
(ТНРС или азид свинца); 4 - чашечка; 5 пластмассовая колодочка; 6 - защитный металличес-
кий колпачок; 7 - электрические выводы с электродами Ny, 8 - нитролак с алюминиевой пуд-
рой; 9 — мостик накаливания; 10 — защитная проволочная обмотка; 11 - дополнительная пласт-
массовая колодочка
ку вторичного заряда из БВВ. В некоторых типах мостиковых ЭВ нить нака-
ливания может непосредственно контактировать с азидом свинца (см. рис. 13.8).
Для усиления детонации в таких ЭД размещают несколько слоев тэна различ-
ной плотности, возрастающей по направлению от верхнего слоя к нижнему.
Навески тэна прессуют под давлением около 100 МПа в нижнем слое и около
50 МПа - в среднем, а в верхнем слое используется подсыпка тэна, незначи-
тельно уплотняемого в процессе подпрессовки колпачка с азидом свинца в
корпус ЭД (азид свинца прессуется в колпачок с электрическим мостиком под
давлением до 50 МПа). Время срабатывания мостиковых ЭД от запального
конденсатора, заряженного до напряжения 35...60 В, составляет приблизи-
тельно 10...30 мкс.
В искровых ЭД (ИЭД) электроды не соединяются мостиком накаливания,
а между ними оставляется зазор (искровой промежуток 8И порядка 1 мм), кото-
рый непосредственно заполняется азидом свинца (рис. 13.9, а). Масса навес-
ки ИВВ в типовых ИЭД составляет 0,1...0,2 г, а масса вторичного заряда из
БВВ (обычно из тэна различных плотностей) - 0,2...0,4 г. До установки во
взрыватель искровой промежуток ИЭД шунтируется подпружиненным кон-
тактным колпачком с помощью специального стопорного (предохранительно-
го) винта 3, который после сборки удаляется. При воздействии на ИЭД напря-
жения, достаточного для пробоя зазора (600...3000 В), возникает разряд, вы-
зывающий быстрое воспламенение и взрыв вначале ИВВ, а затем и БВВ. Время
срабатывания ИЭД (2...5 мкс) практически не зависит от мощности начально-
го электрического импульса (достаточна энергия 10-5...10^ Дж), а определя-
864
13. Взрыватели
Рис. 13.9. Конструкции искровых (я) и накольно-искровых (б) ЭД:
1 гильза; 2 - электроконтактный колпачок; 3 - предохранительный винт; 4 пружина; 5 -
центральный электрод; 6 - пластмассовая колодочка; 7 — первичный заряд; 8,9 - слои № 1 и 2
вторичного заряда; 10 - чашечка; 11 - кольцевой электрод; 12 - накольный состав; 13 -
защитный металлический колпачок; 14 защитная проволочная обмотка
ется в основном значением напряжения на электродах ИЭД. Небольшая энер-
гия срабатывания и практическая мгновенность действия позволяют исполь-
зовать ИЭД во взрывателях к кумулятивным БП. При этом в качестве источ-
ника энергии инициирования, как правило, применяют пьезоэлектрический
генератор.
Разновидностью ИЭД является электродетонатор двойного действия - на-
кольно-искровой (рис. 13.9, б), но существуют и мостико-лучевые комбиниро-
ванные ЭД. Наряду со штатными средствами инициирования в настоящее время
разработан ряд новых малогабаритных и миниатюрных ЭД и КД. Номенкла-
тура уже применяемых изделий превышает 20 наименований. Особенность
малогабаритных и миниатюрных ЭД и КД - малый (околокритический) диа-
метр (2...5 мм) и малая высота используемых в них зарядов ВВ. Конструкции
КД содержат последовательно запрессованные в оболочку заряды БВВ и ИВВ
общей массой от 0,04 до 0,3 г. Поверх заряда ИВВ в КД прессуют навески
ТНРС массой 0,005...0,01 г. В электродетонаторах применяют специальный
электровоспламенительный узел с мостиком накаливания, который досылает-
ся в оболочку КД. Оболочки могут быть выполнены из алюминия, мельхиора
или сталей специальных марок.
Перспективны также новые принципы устройства ЭД без инициирующих
ВВ, обеспечивающие повышенную безопасность, например, ЭД со взрываю-
13.3. Контактные механические ВУ боеприпасов
865
щимся мостиком. Инициирование заряда БВВ этих ЭД осуществляется пода-
чей энергии, превышающей энергию сублимации материала мостика. Мгно-
венный переход материала мостика из обычного твердого состояния в паро-
образное (электрический взрыв проводника) сопровождается возникновением
УВ и практически мгновенным (~1 мкс) инициированием ВВ. С этой целью
также можно использовать устройства лазерного инициирования БВВ. меха-
низмы прямого инициирования ВВ с помощью высокоскоростного метания
пластин, а также непосредственное воздействие пучка электронов на ВВ и
некоторые другие методы.
13.3. Контактные механические ВУ боеприпасов. Общие
принципы устройства и действия
При рассмотрении физических принципов устройства и действия КМВУ
помимо четкого представления о его принципиальной структурной схеме и
конструктивных особенностях необходимы также и знания о силах и пере-
грузках, действующих на взрыватель на различных этапах его эксплуатации.
Эти знания требуются как для проведения расчетов при проектировании но-
вых ВУ для штатных БП, так и для предварительных оценок пригодности
существующих взрывателей к новым артиллерийским системам и БП. Кратко
остановимся лишь на тех моментах, которые имеют первостепенное значение
при уяснении принципа действия взрывателей и необходимы для их проверок
на безопасность и взводимость.
Силы, действующие на ВУ в служебном обращении
На этом этапе на ВУ могут действовать как вибрационные, так и ударные
перегрузки, возникающие в процессе транспортировки изделий, а также в ре-
зультате случайных падений БП при переноске и погрузочно-разгрузочных
работах.
Теоретические и экспериментальные исследования показали, что макси-
мальных значений перегрузки, действующие на ВУ в условиях служебного
обращения, достигают: а) при падении ВУ в составе БП дном вниз (или лю-
бом другом положении) с высоты 3...5 м на грунт или песок от 10 до 100 и
более единиц длительностью порядка десятых и сотых долей секунды; б) при
падении на дерево, асфальт или бетон от 100 до 1000 единиц длительностью
порядка единиц и десятков миллисекунд; в) при падении на стальные пре-
грады от 500 до 2000 единиц длительностью от десятых долей до несколь-
ких миллисекунд (в зависимости от положения при падении).
Сравнение характеристик этих перегрузок с характеристиками, возника-
ющими при выстреле (пуске) БП, позволяет правильно выбрать необходимый
в каждом конкретном случае тип предохранительного механизма (ПМ).
Силы, используемые для взведения ВУ
Взрыватели артиллерийских снарядов и некоторых типов ракет при выст-
реле и на траектории полета подвержены действию перегрузок и ускорений,
существенно превышающих те, которые имеют место в служебном обращении.
866 13. Взрыватели
Возникающие на данном этапе (при выстреле или пуске) инерционные силы,
действующие на все подвижные детали взрывателя, используются для взведения
практически всех артиллерийских и многих ракетных взрывателей. Взрыватели
для большинства конструкций авиационных бомб не подвержены действию боль-
ших ускорений. Поэтому взведение бомбовых взрывателей обычно осуще-
ствляется либо с помощью ветряночных механизмов, либо с помощью специ-
альных пусковых устройств (механических и электрических). Рассмотрим ос-
новные силы, используемые для взведения взрывателей снарядов и ракет.
Силы, действующие на ВУ при выстреле (пуске)
Во время движения снаряда по каналу ствола артиллерийской системы
или на активном участке (для РС) на узлы и механизмы ВУ действуют четыре
силы инерции (рис. 13.10, а): t
- осевая сила инерции S, вызываемая ускорением снаряда dvjdt под дей-
ствием давления пороховых газов;
- центробежная сила инерции С, обусловленная вращением БП вокруг
своей оси с угловой скоростью <о;
- касательная или тангенциальная сила инерции Г, возникающая при из-
менении угловой скорости БП;
- кориолисова сила инерции К, действующая на узел взрывателя в случае
его перемещения относительно корпуса взрывателя.
Первую из этих сил определяет так называемый коэффициент линейной
взводимости k} - где Smax - максимальная сила инерции; та - мас-
Рис. 13.10. Схема действия сил инерции на детали взрывателя при движении снаряда
в канале ствола (а) и на траектории (б):
г - удаление центра масс детали от оси вращения ВУ; 5Н - сила набегания
13.3. Контактные механические ВУ боеприпасов
867
са детали взрывателя. Под действием силы S детали ВУ стремятся перемес-
титься в сторону, противоположную направлению движения БП.
Коэффициент кх для данного конкретного орудия, снаряда и его метатель-
ного заряда (так же, как дульная скорость, максимальное давление и пере-
грузки при выстреле) - величина постоянная и служит для нахождения 5тах
от линейного ускорения, развиваемого любой деталью ВУ (5П1ах = кхт^) при
выстреле. Знание к} значительно упрощает предварительные расчеты при про-
ектировании ВУ. По значению коэффициента к} можно судить об усилиях, ко-
торые развиваются во взрывателях, применяемых для данной артиллерийской
системы. Более того, если используется штатный артиллерийский снаряд к
новой системе, то без тщательных расчетов мы можем предварительно су-
дить, будет ли работать этот взрыватель в новой системе (или же на умень-
шенных зарядах существующей артиллерийской системы).
Для современных артиллерийских систем диапазон значений кх составля-
ет от нескольких сотен (минометы) до нескольких десятков тысяч единиц (ма-
локалиберные зенитные и авиационные пушки). Следовательно, при выстре-
ле из артиллерийских систем инерционные перегрузки во много раз превос-
ходят перегрузки, возникающие в служебном обращении. Это обстоятельство
и позволяет для ВУ к таким БП разрабатывать простейшие инерционные пре-
дохранительные механизмы (ППМ) с непрерывным движением взводящейся
детали, которые обеспечивают безопасность взрывателя в служебном обраще-
нии и надежное их взведение при выстреле.
По этим же соображениям для взрывателей к артиллерийским минам (с го-
раздо меньшими значениями А,) применяют ППМ с прерывистым (зигзагооб-
разным) движением взводящей детали. Эти же ППМ используются и для ВУ
к PC. Однако учитывая, что в этом случае перегрузки при пуске значительно
меньше максимальных значений перегрузок в условиях служебного обраще-
ния, а следовательно, и то, что у ИПМ очень слабая предохранительная пру-
жина, взводящаяся деталь этих устройств обычно имеет линейный участок
паза, предшествующий зигзагообразному, в пределах которого она колеблется
при транспортировании ВУ. Необходимое условие надежного взведения ИПМ
данного типа - длительное воздействие перегрузок, что характерно для ВУ к
минам и реактивным снарядам с твердотопливным двигателем.
Для ВУ к ракетам с жидкостным двигателем коэффициент линейной взво-
димости измеряется единицами, что вообще исключает возможность приме-
нения в них ИПМ. В связи с этим во взрыватсльных устройствах к таким БП
широкое использование находят аэродинамические, пиротехнические, газоди-
намические и термические ПМ.
Во вращающихся БП возникает центробежная сила инерции, которая
количественно характеризуется коэффициентом центробежной взводимости
к2 = Cmax/(rmng) = <j)fnax/g, где Cmax - максимальная центробежная сила инер-
ции, действующая у дульного среза; г - удаление центра масс детали от оси
вращения ВУ (эксцентриситет детали); сотах - максимальная угловая ско-
рость ВУ.
Как показываюз расчеты, для большинства артиллерийских ВУ, предназ-
наченных для систем среднего и малого калибров, а также для ВУ к вращаю-
щимся (турбореактивным) PC можно использовать центробежные предохра-
868
13. Взрыватели
нительные механизмы (ЦПМ). В отличие от ИПМ они обеспечивают взведе-
ние узлов ВУ в районе дульного среза (или в конце активного участка траек-
тории для ТРС), что является их очевидным преимуществом. Таким обра-
зом, осевая сила инерции £ и центробежная сила С - самые распространен-
ные взводящие силы для артиллерийских БП.
Касательная сила инерции Т, как и рассмотренная ранее осевая сила инер-
ции S, пропорциональна ускорению поступательного движения. Для оценки
силы Т сравним ее с силой 5:
Т _ 2лг
S~ x\d'
где г| - длина хода нарезов (в современных артиллерийских системах обычно
Г| > 20); d диаметр БП. Эксцентриситет г всегда меньше радиуса БП (J/2).
Поэтому , '
(I) =“«,0.16.
\ 5 /max 20d j’
Таким образом, при выстреле максимальное значение касательной силы Т
составляет не более 16 % от аналогичного значения осевой силы У. В дей-
ствительности г < d/2 и отношение Т/S значительно меньше 0,16. Кроме того,
следует отметить, что вредное влияние силы Тсказывается на взведении ИПМ
через коэффициент трения. В большинстве случаев при анализе процесса дей-
ствия взрывателей этой силой можно пренебречь. Однако в некоторых конст-
рукциях взрывателей встречаются детали и узлы, для которых пренебречь си-
лой Т невозможно. К ним относятся, например, установочные кольца пиро-
технических и часовых дистанционных взрывателей, имеющих ось вращения
или центр масс, совпадающие с осью взрывателя. В данном случае сила инер-
ции от касательного ускорения влияет на взведение установочных устройств
непосредственно через момент пары сил. В связи с этим в конструкциях по-
добных взрывателей предусматривают специальное фиксирующее устройство,
устраняющее вредное влияние силы инерции от касательного ускорения.
К аналогичным выводам можно прийти при оценке силы Т для взрыва-
телей к вращающимся (турбореактивным) снарядам. Действительно, в этом
случае
Т rrctgy
S
где гс - радиус расположения сопел; у - угол между осями сопел, располагае-
мых на периферии соплового блока, и осью снаряда; г, - радиус инерции сна-
ряда. В реальных конструкциях ВУ к PC это отношение также не превышает
0,15...0,20.
Как уже отмечалось выше, при наличии перемещения детали или узла
взрывателя относительно его корпуса возникает еще одна сила - кориолисова
сила инерции К, значение которой определяется выражением
К - 2>нп(£щг,тн sin а,
Д UIН ’
13.3. Контактные механические ВУ боеприпасов
869
где г’отн - относительная скорость детали; а - угол между направлением дви-
жения детали и осью вращения снаряда.
Очевидно, что если деталь относительно взрывателя не движется (со = 0),
то и кориолисова сила равна нулю. Она равна нулю также и в случае, если
векторы со и г’отн коллинеарны. Соответственно эта сила приобретает макси-
мальное значение, если деталь перемещается в плоскости, перпендикуляр-
ной оси ВУ (а = п/2). Следует также отметить, что в тех случаях, когда
скорость г’отн мала (например, при взведении центробежных стопоров), корио-
лисова сила инерции К незначительна даже при больших значениях со и ею
можно пренебречь. Однако для центробежных ударников, перемещающихся
со скоростью 5...6 м/с и более, сила К значительна и с ней приходится счи-
таться.
Безопасность в обращении и взводимость взрывателей при выстреле
Безопасность трубок и взрывателей в обращении обеспечивается предох-
ранителями, удерживающими подвижные детали, от которых зависит взводи-
мость взрывателей. Освобождение таких деталей и, следовательно, взведение
взрывателей в зависимости от конструкции механизма должно происходить в
канале ствола или за дульным срезом. Процесс взведения в канале ствола осу-
ществляется под влиянием сил инерции, а при вылете снаряда за дульный
срез - под действием центробежной силы или взводящих пружин. Дальнее
взведение взрывателей чаще всего обеспечивается при помощи пороховых пре-
дохранителей, воспламеняемых при выстреле накольным механизмом с КВ
или ЭВ и реже механическим путем. Чтобы удовлетворить требованиям без-
опасности и взводимости, предохранители должны надежно удерживать дета-
ли взрывателей от перемещения в условиях служебного обращения и вместе с
тем освобождать их при движении снаряда по каналу ствола или при вылете
за дульный срез под влиянием соответствующих сил.
Вследствие своей противоречивости эти требования выполнимы лишь при
определенных условиях, различных для каждого вида предохранителей. Как
уже указывалось ранее, все механические предохранители подразделяются на
инерционные, центробежные и взводящиеся под давлением пороховых газов.
Инерционные предохранители (взводятся силой инерции от линейного уско-
рения снаряда при выстреле) и предохранители, взводящиеся под давлением
газов боевого заряда, могут быть жесткими или пружинными (упругими). Цен-
тробежные предохранители бывают только пружинными.
Безопасность и взводимость инерционных механизмов с жесткими пре-
дохранителями. Основное отличие жестких предохранителей от пружинных
заключается в том, что под влиянием взводящих усилий они получают оста-
точные деформации и, следовательно, не восстанавливают своей формы и ут-
рачивают сопротивление по прекращении этих усилий.
Основной параметр любого жесткого предохранителя - усилие, выражае-
мое в килограммах или граммах, а точнее сила веса, которую необходимо при-
ложить к удерживаемой предохранителем детали для перемещения ее в поло-
жение, отвечающее взведенному взрывателю. Сила, определяющая сопротив-
ление предохранителя, обозначается через R.
870
13. Взрыватели
В то же время предохранители не могут быть изготовлены строго одина-
ковыми по своей силе сопротивления, поэтому на их изготовление дается до-
пуск, заключенный между наименьшей допустимой силой сопротивления /?тш
и наибольшей /?тах. Предохранители, сила сопротивления которых выходит за
пределы этого допуска, бракуют.
Для определения необходимой силы сопротивления R предохранителя, обес-
печивающего безопасность взрывателя в обращении, требуется учесть все слу-
чайности, которым может подвергаться снаряд с взрывателем в условиях слу-
жебного обращения. Однако невозможность теоретического учета тех сил, кото-
рые действуют на предохранители в условиях служебного обращения с БП,
вынуждает обратиться к многолетнему опыту боевого применения взрывателей
с жесткими предохранителями. Этот опыт позволяет утверждать, что безопас-
ность взрывателя может гарантироваться, если сопротивление предохраните-
ля будет не менее чем увеличенный в 2000 раз вес наиболее тяжелой :йз удер-
живаемых им деталей. Таким образом, условие безопасности определяется
неравенством 2000р, < R , где р} = mag - вес наиболее тяжелой деталй, число
2000 - так называемый коэффициент безопасности. Учитывая, что ciijja со-
противления предохранителя может колебаться между значениями 7?rain и 7?тах,
в эту формулу следует подставить минимальную силу сопротивления, так как
при большой силе сопротивления предохранителя безопасность взрывателя
будет также гарантирована. Таким образом, 2000/?] < Rmm, а условие надеж-
ной взводимости из тех же соображений определяется неравенством Rmax <
25max/3, где 2/3 - коэффициент, обеспечивающий надежную взводимость при
возможных в практическом применении разбросах максимального давления
пороховых газов в канале ствола.
Разделив первое неравенство на величину /?,, а второе - на р2 (вес взводя-
щей детали) и объединив оба неравенства в одно, получим условие безопас-
ности в обращении и надежной взводимости при выстреле механизмов с жест-
кими предохранителями:
п /? 7
2000 <-ИВ- ... -!™*- <-к}.
Pi Pi 3
Если взрыватель предназначен для нескольких орудий, то расчет следует
проводить по наименьшему значению кх. Однако необходимость универсали-
зации взрывателей в целях применения их для орудий с коэффициентами ли-
нейной взводимости менее кх = 3500...4200 вынуждает отступать от требова-
ний, выраженных последним уравнением. При этом возможны следующие до-
пущения:
- уменьшение допуска на силу сопротивления предохранителя до 20.. .25 %;
- увеличение коэффициента при кх,
- снижение коэффициента безопасности до 1000... 1500.
При этом необходимо иметь в виду, что перечисленные мероприятия вле-
кут за собой возможные отказы взрывателей при условиях, неблагоприятных
для взведения, и понижение безопасности взрывателей в условиях служебно-
го обращения.
Безопасность и взводимость инерционных механизмов с пружинными пре-
дохранителями. Пружинные предохранители к инерционным деталям, взво-
13.3. Контактные механические ВУ боеприпасов 871
дящимся при выстреле, обеспечивают большую безопасность механизма в об-
ращении по сравнению с жесткими предохранителями, так как не получают
остаточных деформаций в условиях служебного обращения и восстанавлива-
ют свои размеры и способность к сопротивлению после тряски, ударов и слу-
чайных падений снаряда. Это позволяет снизить коэффициент безопасности
для пружинных механизмов с 2000 до 1500, в результате чего условие без-
опасности и взводимости для этого случая принимает вид
1500<Ашип. ...
Р Р 3
где 7?Hmin и Лнтах - наименьшая и наибольшая допустимые силы сопротивле-
ния пружин соответственно в момент накола жала ударника на КВ для пру-
жин накольных механизмов (НМ) и дистанционных ударных механизмов (УМ);
р - вес ударника.
Пружинные предохранители широко используются в различных типах
взрывателей и ВУ. Пружина обладает тем свойством, что ее сопротивление
возрастает пропорционально сжатию до полного соприкосновения витков друг
с другом. Если силу сопротивления пружины в момент полного сжатия обозна-
чить 7?сж, то сила сопротивления пружины RH в момент накола на капсюль
должна быть меньше /?сж. Чтобы найти значение 7?н, строят график силы со-
противления пружины с нанесением на него предельного положения деталей
рассматриваемого механизма. Предельные значения RH min и RK max для расчета
по последней из вышеприведенных формул подбирают по конкретным дан-
ным для пружин в их предельном положении с учетом допусков на жесткость,
размеров и погрешностей изготовления пружин так, чтобы получить наимень-
шее и наибольшее из всех возможных значений сопротивлений пружины в
момент накола.
Условие правильного действия дистанционного УМ - также необходимое
углубление жала в КВ, гарантирующее воспламенение последнего. Размер
углубления обычно колеблется от 2 до 3 мм.
Расчет безопасности и взводимости ИПМ, представляющих собой меха-
низмы с пружинными предохранителями, аналогичен изложенному. Его отли-
чие заключается лишь в том, что вместо 7?н в уравнение безопасности и взво-
димости следует подставить Ra - силу сопротивления пружины в момент взве-
дения механизма (освобождения удерживаемой им детали, при перемещении
которой происходит взведение ВУ).
На практике коэффициент безопасности для пружины ПМ выбирается зна-
чительно меньшим, чем 1500: он обычно колеблется в пределах 900 1000 или
650 700 во взрывателях для гаубиц и минометов соответственно. Практика
показывает достаточную безопасность таких механизмов, несмотря на отсут-
ствие в них походного крепления. Повышение безопасности пружинных ПМ
обеспечивают увеличением пути взведения детали, на котором работа силы
сопротивления пружины гасит кинетическую энергию оседающей детали, возни-
кающую при ударах и тряске снаряда в условиях служебного обращения.
Безопасность и взводимость механизмов с центробежными предохрани-
телями. Центробежные предохранители, в отличие от инерционных, взводят-
872
13. Взрыватели
ся центробежной силой при движении снаряда по каналу ствола или за дуль-
ным срезом. До выстрела предохранители удерживаются на месте винтовы-
ми, кольцевыми или пластинчатыми пружинами, инерционными стопорами и
реже пороховыми предохранителями.
По устройству и характеру действия центробежные предохранители мо-
гут быть двух типов: поступательного (центробежные стопоры) и вращатель-
ного (плашки) движения. Механизмом с центробежными стопорами оснаще-
ны взрыватели МГ-37, ГКВ, ДБР-2, ДБТ, Т-5, ВМ-30 и др.
Взводимость центробежных предохранителей необходимо рассчитывать
исходя из учета центробежных сил, действующих при выстреле. Что касается
безопасности механизмов с такими предохранителями, то при симметричном
расположении стопоров, свойственном подавляющему большинству .взрыва-
телей, она не может быть нарушена при тряске, случайных падения^ снаряда
и ударах в условиях служебного обращения. Это объясняется тем, «что при
любых ударах снаряда в центробежных стопорах не могут развиться такие
силы, которые были бы одновременно направлены в разные стороны:, t связи
с чем становится невозможным и их взведение. В этом заключается одно из
значительных преимуществ центробежных предохранителей по сравнению с
инерционными.
Тем не менее в условиях служебного обращения с БП могут возникать,
хотя и крайне редко, случаи взведения центробежных предохранителей. Это
может произойти при скатывании снаряда по наклонной плоскости, что более
всего вероятно при погрузке БП в железнодорожные вагоны и на суда. Поэто-
му для установления безопасности взрывателя с центробежными предохрани-
телями определяют центробежную силу, развиваемую стопорами при качении
снаряда по наклонной плоскости. С одной стороны, в целях безопасности ме-
ханизма в обращении необходимо, чтобы эта центробежная сила была мень-
ше силы сопротивления Ra предохранительной пружины в момент освобож-
дения стопорами удерживаемой детали. Однако практика показывает, что при-
менительно к снарядам практически всех калибров наличие во взрывателе
ЦПМ полностью гарантирует его безопасность в условиях служебного обра-
щения.
С другой стороны, для взведения механизма при выстреле нужно, чтобы
центробежная сила стопора была больше силы сопротивления Ra пружины.
При этом введением специального коэффициента учитывают падение угловой
скорости снаряда во время его полета на траектории, а для механизмов, у кото-
рых возвращение стопоров в первоначальное положение после взведения не-
возможно, принимают во внимание допустимое снижение начальной скорости
в зависимости от износа канала ствола и от изменения внешней температуры.
Силы, действующие на детали и узлы ВУ артиллерийских БП
на траектории
При вылете БП за дульный срез (в период последействия) давление поро-
ховых газов на дно снаряда и сила инерции от поступательного ускорения
быстро уменьшаются. За дульным срезом центробежная сила некоторое вре-
мя еще сохраняет свое максимальное значение, а затем начинает относитель-
13.3. Контактные механические ВУ боеприпасов
но медленно снижаться в связи с торможением БП в воздухе. Это снижение
ориентировочно можно определить по эмпирической формуле, предложенной
Слезкиным:
-0.06JL
со = Ц) ехр---- - - -,
2mg| v^dt
о
где со и со0 текущая и начальная (максимальная) угловые скорости БП; lc, d и
mg - длина, калибр и вес БП соответственно; vc - текущее значение линейной
скорости БП.
Установлено, что падение угловой скорости при стрельбе на дальности
действительного огня достигает для снарядов<малых калибров 40 %, средних
калибров 20...30 %, крупных калибров менее 10 %. Таким образом, наиболее
интенсивно угловая скорость уменьшается на траектории для малокалибер-
ных зенитных БП. Этот факт нашел практическое применение в конструкци-
ях взрывателей к этим БП, в частности, на нем основан принцип действия
механических (центробежных) самоликвидаторов.
На траектории под действием силы сопротивления RB воздуха БП тормо-
зится и появляется отрицательное ускорение dvjdt. Соответствующая сила
инерции, получившая название силы набегания 5И (см. рис. 13.10, б), обуслов-
ливает перемещение деталей ВУ в направлении движения БП. Эта сила ха-
рактеризуется коэффициентом набегания k3=SH/(mng). На траектории с умень-
шением скорости БП убывает и сила набегания. В наибольшей степени эта сила
влияет на ударники инерционного действия, поскольку может привести к нако-
лу КВ и, как следствие, к преждевременному срабатыванию ВУ на траектории.
Для устранения указанного явления и применяются контрпредохранители.
Под влиянием нутации и прецессии БП на траектории возникают осевая
сила инерции (сила нутации), определяемая углом нутации 5, углом прецессии v
и скоростями их изменения б' и v', а также радиальная сила инерции, зависящая
от этих же величин и от угловых ускорений нутации 5" и прецессии v".
Теоретические и экспериментальные исследования показали, что в зави-
симости от характера износа канала ствола сила нутации может изменяться в
широких пределах, достигая максимального значения при начальных углах
нутации порядка 20° (соответствующая перегрузка - несколько сотен единиц).
Естественно, что игнорирование этой силы отрицательно сказывается на без-
опасности взрывателя, приводя к повышенному проценту срабатываний на
траектории (РГМ, РГМ-2). В связи с этим в модернизированных конструкци-
ях взрывателей (РГМ-6, РГМ-2М, В-429) применены специальные противону-
тационные механизмы, устраняющие вредное влияние нутации.
Помимо силы набегания к преждевременным срабатываниям на траекто-
рии могут привести и метеорологические факторы, влияющие на мембрану
головного взрывателя (капли дождя, хлопья снега или крупинки града). Как
показали специальные исследования, кинетическая энергия дождевых капель,
воздействующих на мембрану головного взрывателя при скоростях БП от
500 до 1200 м/с, составляет в среднем несколько джоулей. В то же время для
874
13. Взрыватели
надежного инициирования КВ нужна энергия порядка 0,1 Дж, для прорыва
стальной мембраны толщиной 0,13 мм - 0,2...0,3 Дж, а для преодоления силы
сопротивления пружинного контрпредохранителя (например, взрывателя
РГМ)- 0,1 Дж. Таким образом, для срабатывания УМ средней чувствитель-
ности требуется кинетическая энергия, измеряемая десятыми долями джоуля.
Отсюда ясно, насколько трудно обеспечить несрабатывание головных ВУ со
снятым предохранительным колпачком при прохождении зоны дождя.
До Второй мировой войны и во время нее на вооружении артиллерии ни
у одной страны мира не было всепогодных взрывателей. Попытки устранить
преждевременное срабатывание взрывателя утолщением его мембраны поло-
жительного результата не дали из-за сопутствующего снижения чувствитель-
ности. В послевоенных образцах эта задача была решена частично во взрыва-
теле РГМ-6, а полностью - в специальных всепогодных взрывателях к, мало-
калиберным БП. В последнем случае положительное решение поставленной
задачи получили за счет использования различий в физике процесса удара
мембранного взрывателя об одиночные капли дождя и о сплошную преграду
(грунт или обшивку самолета). Л
Необходимо также отметить, что все вышесказанное относительно ВУ к
артиллерийским БП в полной мере справедливо и для взрывателей к неуправ-
ляемым PC, управляемым ракетам и корректируемым БП. К изложенному стоит
сделать лишь небольшое добавление. Как правило, для оперенных (неврагца-
ющихся) PC, УР и корректируемых БП угол атаки изменяется по закону, близ-
кому к синусоиде. Таким образом, силы, возникающие на траектории их по-
лета, а также в момент срабатывания двигателей коррекции для корректируе-
мых БП, также имеют периодический (затухающий по амплитуде) характер
изменения. В связи с этим может произойти резкое возрастание амплитуды
колебаний механических систем взрывателя и, как следствие, нарушение его
функционирования при совпадении частоты собственных колебаний узла или
механизма с частотой внешних периодических воздействий. К таким же ре-
зультатам может привести процесс пульсации реактивной тяги, наблюдающий-
ся в реальных условиях полета PC, УР и корректируемых БП. Перечисленные
выше факторы обусловливают ужесточение требований к ВУ по виброустой-
чивости, а также вибро- и ударопрочности.
Силы, действующие на взрыватель и ВУ при встрече с преградой
Перегрузки, действующие на взрыватель при встрече с преградой, опреде-
ляются ее физико-механическими свойствами, скоростью и углом встречи БП с
преградой. В среднем и по уровню и по времени действия они сопоставимы с
перегрузками, которые испытывает взрыватель при выстреле.
При прохождении БП мягких преград (грунтов) резко падает его угловая
скорость, что приводит к возникновению касательной силы инерции. Вредное
влияние этой силы проявляется, например, в развинчивании резьбовых соеди-
нений, в связи с чем во взрывателях часто применяют кернение или левую
резьбу.
Кроме того, согласно экспериментальным исследованиям, снаряд в прегра-
де движется по очень сложной пространственной траектории, что может приве-
13.3. Контактные механические ВУ боеприпасов 875
ста к развороту некоторых подвижных узлов, расположенных внутри взрывате-
ля. В ряде случаев это крайне нежелательно, например, для установочных уст-
ройств. Во взрывателях можно использовать специальные фиксирующие уст-
ройства, устраняющие это вредное влияние.
Обобщенная функционально-структурная схема КМВУ боеприпасов,
их основные узлы и механизмы
Важный этап в анализе принципов устройства и действия любого типа
взрывателей и ВУ - составление функционально-структурной схемы (ФСС).
При составлении и анализе ФСС рассматриваемых ниже типовых конструк-
ций взрывателей и ВУ будем руководствоваться следующими определениями
основных узлов и механизмов ВУ.
Ударный механизм - контактный датчик цели, в котором воздействие цели
воспринимается ударником. В конструкциях ВУ встречаются:
- реакционный датчик цели, действующий от силы реакции преграды
(рис. 13.11, а);
Рис. 13.11. Реакционный (а), инерционный (б), реакционно-инерционный (в), боко-
бойный (г) и всюдубойный (б) ударные механизмы ВУ:
1 - КВ; 2 реакционный с жалом (а, в) или инерционный (г, <)) ударник; 3 предохранительная
(в) или контрпредохранительная (б-д) пружина; 4 - корпус; 5 - мембрана; 6 - инерционная
втулка с КВ; 7 - бокобойная шайба; 8 - жесткий лапчатый предохранитель
876
13. Взрыватели
- инерционный датчик цели, действующий от силы инерции при встрече
БП с преградой (рис. 13.11, б);
реакционно-инерционный датчик цели, обладающий свойствами реак-
ционного и инерционного датчиков цели (рис. 13.11, в);
У М бокобойного типа, предназначенный для обеспечения срабатывания
взрывателя при действии поперечных или боковых сил (рис. 13.11, г);
УМ всюдубойного типа, обеспечивающий срабатывание взрывателя при
действии сил в любом направлении (рис. 13.11,6).
Ударный механизм с пневматическим способом возбуждения ОЦ не тре-
бует взведения при выстреле (рис. 13.12). Во взводящихся УМ можно исполь-
зовать различные конструктивные решения удержания ударника в условиях
служебного обращения и во время движения снаряда в стволе и в полете (рис.
13.13). После взведения ударник и КВ от сближения и накола удерживают
либо контрпредохранители, либо сила набегания. Ударные механизмы реак-
ционного и инерционного действия могут иметь раздельную (рис. 13.14) или
общую (рис. 13.15) систему предохранительных и взводящих устройств.
Известны конст рукции взрывателей, у которых УМ стопорится шариковым
замком (рис. 13.16). До тех пор пока предохранитель (стопор) 1 не извлечен из
УМ, ударник 3 и капсюльная втулка 4 удерживаются от перемещений-шарика-
ми 2. К моменту взведения предохранительный стопор удаляется из конструк-
ции УМ, а шариковый замок открывается, давая возможность ударнику и втул-
ке перемещаться относительно друг друга. Взрыватели и ВУ, предназначенные
для авиационных бомб с тормозными устройствами, имеют дополнительную
степень предохранения, которая связана с тормозной системой. В случае отказа
тормозной системы эти предохранители (датчики работы тормоза) исключают
возможность срабатывания взрывателя, заклинивая УМ или прерывая ОЦ.
Рис. 13.12. Ударный механизм с пневма-
тическим способом возбуждения ОЦ:
/ алюминиевый обтюратор; 2 - колечко; 3
головная втулка; 4 - мембрана; 5 деревян-
ный стержень; 6 - инерционное кольцо;
7 - корпус; 8 - КВ
Рис. 13.13. Реакционный УМ в исходном
положении:
I — ударник; 2 - оседающая гильза; 3 - пру-
жина; 4 - выкатывающиеся шарики; 5 - КВ
или КД
13.3. Контактные механические ВУ боеприпасов
877
Рис. 13.14. УМ реакционно-инерционно-
го действия с раздельными предохра-
нительными и взводящими устройствами:
1 разгибатель; 2 - предохранитель; 3 - инер-
ционный ударник; 4 реакционный ударник;
5 контрпредохранительная пружина; 6 -
контрпредохранительная «звезда»; 7 — взво-
дящая пружина; 8 - КВ
Рис. 13.15. УМ реакционно-инерционно-
го действия с общей системой предохра-
нительных и взводящих устройств:
1 - стопорные шарики; 2 - оседающая гиль-
за; 3 - взводящая пружина; 4 - предохрани-
тельное кольцо; 5 - жало реакционного удар-
ника; 6 - контрпредохранительная пружина:
7 КВ
В большинстве конструкций взрывателей к артиллерийским снарядам
(рис. 13.17) ударник 1 удерживается от перемещения к капсюлю 4 намотанной
на него медной лентой 2, которая нижним торцом опирается на неподвижную
капсюльную втулку 3. Лента (см. рис. 13.17, сечение А-Л) наматывается на удар-
ник в направлении, противоположном направлению вращения снаряда. При
выстреле под действием центробежных сил С лента стремится развернуться и
освободить ударник. Однако при движении в канале ствола этому препятству-
ют силы трения, возникающие на торцах ленты из-за силы инерции S линейно-
го ускорения, а также силы инерции Т касательного ускорения, под действием
которых лента как бы закручивается, прижимаясь к оси ударника. Силы 5 и Т
заканчивают свое действие при вылете снаряда из канала ствола, а далее лента
под действием центробежных сил разворачивается, освобождая ударник.
Установочное устройство (УУ) - устройство, предназначенное для уста-
новки перед выстрелом требуемого значения изменяемой характеристики взры-
вателя. вида действия (контактные, неконтактные, дистанционные), времени
срабатывания ВУ (мгновенное, инерционное, замедленное), длительности ра-
боты дистанционных устройств и т. д.
Замедлитель (или замедлительное устройство - ЗУ) - специальное уст-
ройство, предназначенное для замедленного срабатывания взрывателя. Разли-
чают три основные разновидности ЗУ: пиротехнический замедлитель (ЗПт),
878
13. Взрыватели
Рис. 13.16. Схема стопорения УМ шари-
ковым замком:
1 предохранитель (стопор); 2 - шарики; 3 -
ударник; 4 - капсюльная втулка; 5 - КВ
Рис. 13.17. Типовая схема стопорения
медной лентой ударников взрывателей ма-
локалиберных артиллерийских сйарядов:
1 - ударник; 2 медная лента; 3 - капсюль-
ная втулка; 4 - КВ
обеспечивающий замедление за счет горения пиротехнического состава; газо-
динамический, осуществляющий замедление за счет истечения газов через
отверстия и каналы малого сечения; авторегулируемый замедлитель (АРЗ),
автоматически изменяющий замедление в зависимости от условий встречи с
преградой и ее характеристик (прочности и толщины преграды), причем сра-
батывание ВУ и разрыв снаряда с АРЗ происходят только после пробития пре-
грады или остановки снаряда в ней.
Замедлительные устройства представляют собой запрессовки из обыкно-
венного пороха или из малогазовых составов. Время замедления определяет-
ся длиной запрессовки. В большинстве конструкций бомбовых взрывателей
возможно получение нескольких времен замедления. Для этого во втулке 1 ЗУ
(рис. 13.18, а) взрывателя с замедлителем на доли секунд имеется несколько
каналов 3 для прохода луча огня от КВ к КД. В центральном канале находит-
ся запрессовка с максимальным временем замедления. Другие каналы, обес-
печивающие различные времена замедления, вплоть до мгновенного действия
(без запрессовок), перекрыты установочными винтами 2. Для установки взры-
вателя на мгновенное действие или на меньшее замедление нужно перед при-
менением ВУ лишь вывернуть соответствующий винт.
Замедлительные устройства, обеспечивающие время замедления от не-
скольких секунд до нескольких минут (рис. 13.18, б), состоят из одного или
нескольких дисков 1, в кольцевых канавках 2 и сквозных отверстиях 3 кото-
рых запрессован замедлительный состав. Соответствующими установочными
винтами или разворотом дисков относительно друг друга длина горящей зап-
рессовки может быть укорочена, в результате чего получают разное время за-
медления.
13.3. Контактные механические ВУ боеприпасов
879
Рис. 13.18. Замедлительные устройства авиационных ВУ:
а - втулка малого времени замедления (1 - втулка; 2 установочные винты; 3 каналы); б -
диски большого времени замедления (1 - диски; 2 - кольцевые канавки; 3 сквозные отверстия
с пиротехническими запрессовками)
Рис. 13.19. Газодинамический
замедлитель:
1 - калиброванные отверстия; 2 -
расширительная камера
Для весьма малого времени замедления (доли миллисекунд) во взрывате-
лях к малокалиберным снарядам применяют газодинамические замедлители
(рис. 13.19). Принцип действия таких замедлителей основан на том, что газы
от КВ поступают на КД, проходя через систему
калиброванных отверстий 1 и расширительную
камеру 2. При этом, естественно, несколько уве-
личивается время от момента срабатывания КВ
до момента инициирования КД.
Предохранительный механизм - механизм,
предназначенный для удержания в исходном по-
ложении деталей, при перемещении которых
происходит взведение взрывателя. Обычно взве-
дение ВУ происходит после снятия нескольких
ступеней предохранения. Под ними понимается
одно или несколько устройств, обеспечивающих
безопасность взрывателя до момента окончания
взведения и взводящихся при действии одного
физического фактора (взводящей силы S или С)
или команды, возникающих при нормальном движении БП. Применение не-
скольких ступеней предохранения полностью гарантирует безопасность ВУ,
но увеличение их числа снижает его надежность. Поэтому в реальных кон-
струкциях ВУ обычно ограничиваются двумя или тремя ступенями предо-
хранения.
По принципу действия различают инерционные (см. рис. 13.13-13.15), цен-
тробежные, пиротехнические (ППМ), аэродинамические (АПМ),-газодинами-
ческие (ГПМ), термические (ТПМ), а также комбинированные (КПМ) ПМ.
Разновидностями ПМ также являются: контрпредохранитель, под кото-
рым подразумевается деталь или устройство, обеспечивающие несрабатыва-
880
13. Взрыватели
ние контактного датчика цели после взведения взрывателя от факторов, кото-
рые действуют на БП во время его движения; фиксирующее устройство, удер-
живающее детали ВУ после их перемещения при взведении ВУ
Механизм дальнего взведения - устройство, служащее для взведения взры-
вателя в заданных пределах дальности или времени. Расстояние дальнего взве-
дения определяется тактико-техническими требованиями, предъявляемыми к БП.
Различают верхний и нижний пределы дальности взведения. Верхний пре-
дел дальности взведения - минимальное расстояние от орудия или ПУ, на
котором происходит 100%-ное взведение взрывателя. Нижний предел дально-
сти взведения - максимальное расстояние от орудия или ПУ, на котором га-
рантируется невзведение взрывателя (определяется требованиями безопасно-
сти для орудия, ПУ или их носителя, например самолета). По принципу дей-
ствия МДВ различают: механические (ММДВ), пиротехнические (ПМДВ),
часовые (ЧМДВ) и аэродинамические (АМДВ) (последние выполняют также
функцию АПМ). Разновидность МДВ - интегрирующий механизм, стабили-
зирующий дальность взведения за счет изменения времени взведения в зави-
симости от воздействующих факторов.
Простейший АМДВ (рис. 13.20, а), широко применявшийся в свое время
во взрывателях к авиационным бомбам, состоял из восьмилопастной ветрян-
ки 1, втулка которой была жестко связана с предохранительным винтом 2,
ввернутым в ударник 3. или со стержнем, вставленным в УМ всюдубойного
типа (см. рис. 13.11, 0). После подвески бомбы ветрянка контрилась специ-
альной проволочной вилкой, связанной тросиком или прутком с замком «взрыв
невзрыв» бомбодержателя. После отрыва бомбы и выдергивания остающейся
на самолете предохранительной вилки ветрянка под действием набегающего
воздушного потока сворачивалась, взводя тем самым УМ. Однако при бомбо-
метании с современных скоростных самолетов ветряночные механизмы не мо-
гут обеспечить дальнего взведения, так как при больших скоростях воздуш-
ного потока ветрянка сворачивается за доли секунды и представляет извест-
ную опасность для собственного самолета и самолетов сопровождения.
Между тем конструктивные варианты ветряночных механизмов до сих
пор находят применение. Так, в бомбовых взрывателях производства США
Рис. 13.20. Простейший (я), планетарный (б) и центробежный (в) ветряночные МДВ:
/ ветрянка; 2 — предохранительный винт (а) или стопор (в); 3 - ударник; 4 - зубчатые колеса
13.3. Контактные механические ВУ боеприпасов
881
Рис. 13.21. МДВ пиротех-
нического типа
/ - шайба; 2 - стержень;
3 - пиротехнический состав;
4 - КВ; 5 - предохранитель;
6 — жало; 7 - вышибной
заряд
используют двухлопастную ветрянку, которая связана с предохранительным
винтом планетарным механизмом (рис. 13.20, б). При этом в 40-50 раз снижа-
ется число оборотов, передаваемых от ветрянки к винту, что увеличивает вре-
мя взведения.
Во взрывателях к кассетным БП находят применение ветряночные МДВ
центробежного типа (рис. 13.20, в). Два подпружиненных центробежных сто-
пора 2 надежно удерживают ударник 3 от перемещений. После раскрытия кас-
сеты ветрянка 1 начинает вращаться и при достижении определенного числа
оборотов стопоры, преодолевая сопротивление своих пружин, расходятся в
стороны и освобождают ударник. Наконец, для возможности использования
старых образцов взрывателей с ветряночными механизмами разработали специ-
альные МДВ пиротехнического типа (рис. 13.21).
Пиротехнический состав 3, горение которого обес-
печивает заданное время дальнего взведения, рас-
положен в пустотелом стержне 2, который крепится
на шайбе 1. Воспламенение ПТС осуществляется с
помощью механического пускового устройства
(МПУ), которое состоит из КВ 4 и подпружиненно-
го ударника с жалом 6, удерживаемого лапками же-
сткого предохранителя 5. В момент сбрасывания
бомбы этот предохранитель, связанный карабинчи-
ком и тросом с самолетной установкой (бомбодер-
жателем), срывается и ударник накалывает КВ пи-
ротехнического МДВ. У основания стержня в конце
запрессовки ПТС расположен вышибной заряд 7.
При подготовке к применению одна из лопастей вет-
рянки взрывателя отсекается, на его хвостовую часть
надевается шайба так, чтобы стержень проходил
между двух лопастей ветрянки, заполнив место от-
сутствующей лопасти, и взрыватель вместе с МДВ
вворачивается в бомбу После сбрасывания бомбы
по истечении времени дальнего взведения сраба-
тывает вышибной заряд 7, разрушается крепление
стержня с шайбой, после чего стержень отбрасывается, освобождая ветрян-
ку. Механизмы дальнего взведения с пиротехническими запрессовками для
отработки требуемого времени широко используют в конструкциях большин-
ства авиационных взрывателей. Как отмечалось выше, для их срабатывания
применяют механические и электрические (ЭПУ) ПУ.
Однако более совершенными являются МДВ, время взведения которых от-
рабатывается часовым механизмом. Двигателем часовых механизмов могут быть
спиральные часовые пружины или, например во взрывателях ракет, инерци-
онные силы (силы инерции линейного ускорения, центробежные силы). В бом-
бовых взрывателях используют часовые механизмы, запуск которых осуществ-
ляют с помощью МПУ или ЭПУ. Двигателем часового механизма, применяемо-
го в ракетных взрывателях (рис. 13.22), служит поворотный диск 1, который с
помощью зубчатого сектора 2 связан с анкерным устройством 4 часового меха-
низма 3. В канале поворотного диска установлен КД 10, передающий детонаци-
882
13. Взрыватели
онный импульс от ЭД 5 к детонаторной шашке 9. В исходном состоянии пово-
ротный диск развернут в положение, при котором ОЦ взрывателя разорвана.
В гаком положении диск с помощью ролика 6 удерживается инерционным пре-
дохранителем 7, который, в свою очередь, удерживается стопором 8. При пуске
ракеты с помощью ЭПУ стопор 8 освобождает инерционный предохранитель 7,
который под действием сил инерции линейного ускорения сжимает пружину и
выходит из зацепления с роликом, освобождая поворотный диск 1. Так как центр
тяжести диска находится выше оси его вращения, он начнет разворачиваться,
приводя в движение систему колес часового механизма. Таким образом, часо-
вой механизм замедляет разворот диска в боевое положение. В этом положении
поворотный диск, замкнув ОЦ, стопорится специальными фиксаторами.
Рис. 13.22. Схема МДВ часового типа:
/ - поворотный диск; 2 - зубчатый сектор; 3 - зубчатые колеса часового механизма; 4 - анкер-
ное устройство; 5 ЭД; 6 — ролик; 7 - инерционный предохранитель; 8 стопор; 9 детонаторная
шашка; 10 КД
По условиям боевого применения с самолета взрыватели подразделяются
на взрыватели для бомбометания с больших и средних высот, для бомбомета-
ния с малых высот и на универсальные взрыватели, обеспечивающие возмож-
ность бомбометания с любых высот. При этом допустимые высоты бомбоме-
тания определяются условиями безопасности самолета от УВ и осколков взор-
вавшейся на земле бомбы. Минимально допустимая высота бомбометания
ограничивается временем дальнего взведения, по истечении которого самолет
сможет удалиться на безопасное расстояние от точки падения бомбы.
Универсальные взрыватели имеют две ОЦ, одна из которых обеспечивает
взрыв бомбы после удара о землю с так называемым штурмовым замедлени-
ем (порядка 10 с и более), что дает возможность самолету удалиться на безо-
пасное расстояние, а другая - либо мгновенный взрыв, либо взрыв с неболь-
шим замедлением (менее 1 с). Боевые цепи у таких взрывателей взводятся
через разное время: первая имеет малое время взведения, а вторая - большое.
При бомбометании с малых высот успевает взвестись только первая цепь, и
взрыватель срабатывает с большим замедлением. При бомбометании с боль-
ших высот взводятся обе цепи, но взрыватель сработает либо мгновенно, либо
с небольшим замедлением.
13.3. Контактные механические ВУ боеприпасов
883
Блокирующий механизм (БМ) - механизм, запирающий подвижные де-
тали в безопасном положении в случае неправильной работы элементов взры-
вателя или нарушения условий эксплуатации. Разновидностями БМ являют-
ся, в частности, стопор-ныряло и противонутационное устройство взрывате-
лей серии РГМ.
Механизмы изоляции капсюлей служат для исключения возможности сра-
батывания ВУ при случайном воспламенении КВ или КД в служебном обра-
щении (при падении, ударе, транспортировке, вибрации), а также при выстре-
ле (за счет больших перегрузок при разгоне БП по стволу артиллерийского
орудия). Различают два типа таких устройств: изолирующее КВ от КД (ПВУ
предохранительно-воспламенительное устройство); изолирующее КД от де-
тонатора (ПДУ - предохранительно-детонирующее устройство).
Как уже отмечалось выше (см. разд. 13.2), в зависимости от наличия того
или иного из этих устройств ВУ бывают трех типов непредохранительного,
полупредохранительного и предохранительного.
Накольный (накольно-воспламенителъиый) механизм механизм, создаю-
щий воспламенительный импульс путем шакола КВ жалом. Он приводит в
действие ППМ, МДВ и самоликвидаторы, являясь по существу их пусковым
устройством. По своей конструкции накольный механизм подобен ударному.
Однако требования, предъявляемые к НМ и УМ, различны. Кроме того, сра-
батывание НМ вызывает воспламенение вспомогательного, а не боевого КВ
(как в УМ). Наконец, они отличаются и по времени действия, так как НМ
срабатывает в начале движения БП (в канале ствола), а УМ в конце траекто-
рии полета БП (при встрече с преградой).
Механизм самоликвидации - устройство, обеспечивающее срабатывание
взрывателя в случае несрабатывания его контактного или неконтактного дат-
чика цели. Механизмы самоликвидации обычно бывают пиротехническими или
часовыми (реже тахометрическими и др.) и, как правило, связаны с одним из
элементов боевой ОЦ взрывателя - с КД (или ЭД), ПЗ или детонатором.
В технических описаниях (руководящих материалах, инструкциях по экс-
плуатации) на некоторые образцы взрывателей и ВУ помимо перечисленных
выше основных узлов и механизмов могут встретиться и некоторые другие
(образованные, как правило, объединением двух и более устройств или меха-
низмов с общими конструктивными элементами или назначением в один кон-
структивно-функциональный узел или блок). К таким узлам и механизмам,
например, относятся:
• успшновочно-замедлительное устройство (УЗУ) или приспособление -
совокупность элементов У У и ЗУ, изменяющих путь прохождения луча огня
от КВ к КД;
• предохранительно-взводящий механизм (ПВМ), конструктивно связан-
ный с УМ и выполняющий функции ПМ и МДВ (например, во взрывателях
для АБ и PC, содержащих взводящийся УМ со смещенным КВ относительно
жала ударника);
• предохранительно-детонирующий механизм (ПдМ) - блок механизмов,
включающий в себя собственно ПДУ (движок, поворотный диск или поворот-
ную втулку с вмонтированными в них КД), передаточный заряд, механизм
дальнего взведения ПДУ, а также стопорные и (или) фиксирующие устрой-
884 13. Взрыватели
ства (ПдМ обеспечивает безопасность взрывателя в служебном обращении,
при выстреле и на траектории до момента окончания взведения, а также на-
дежную передачу детонационного импульса разрывному заряду в момент, оп-
ределяемый программой функционирования взрывателя);
• предохранитечьно-исполнителъный механизм - донный блок контактного
электромеханического ВУ или блок механизмов неконтактного ВУ, обеспечива-
ющий его безопасность в служебном обращении, при выстреле и на траектории
до момента окончания взведения и вызывающий действие заряда боеприпаса
по команде датчика цели, системы управления или собственного МСЛ.
Детали или устройства предохранительных (ПМ. ПВМ. ПдМ) или блоки-
рующих механизмов взрывателя, которые удерживают подвижные детали от
перемещения до взведения, а при взведении взрывателя деформируются или
разрушаются (удаляются, сгорают, растворяются), называются предохраните-
лями взрывателя. Предохранитель может быть упругим (пружинным), восста-
навливающим первоначальные размеры и сопротивление после снятия нагруз-
ки, жестким (пластически деформируется или разрушается при механическом
воздействии), удаляемым вручную или автоматически (например, при снятии
походного предохранения), пиротехническим (состоящим из ПТС и сгораю-
щим от воспламенительного импульса) и т. п.
13.4. Особенности устройства и принципы действия КМВУ
боеприпасов различного назначения
Рассмотренные выше общие принципы построения контактных механи-
ческих взрывателей и ВУ, включая назначение и принципы функционирова-
ния основных механизмов и устройств, которые являются элементами функ-
ционально-структурной схемы КМВУ, едины для всех видов взрывателей. Вме-
сте с тем применение взрывателей и ВУ, в частности артиллерийских, далеко
не универсально. Специфика устройства и действия конкретных образцов
ВУ и взрывателей определяются типом артиллерийской системы, видом БП.
особенностями эксплуатации, характером целей, степенью унификации взры-
вателя и т. п. Конструктивные особенности устройства взрывателей и их прин-
ципы действия удобно рассмотреть в зависимости от назначения ВУ: много-
целевые к снарядам наземной артиллерии; взрыватели к снарядам зенитной
и авиационной артиллерии, взрыватели к кумулятивным снарядам; взрыва-
тели к бронебойным и бетонобойным снарядам; взрыватели к минам стволь-
ных минометов; взрыватели к ГЧ неуправляемых ракет (ракетные ВУ) и БП
безоткатных орудий; взрыватели к авиационным бомбам и кассетам (авиаци-
онные ВУ).
КМВУ многоцелевого назначения к снарядам наземной артиллерии
Контактные механические ВУ многоцелевого назначения применяются к
осколочным, осколочно-фугасным, фугасным, зажигательным, дымовым и не-
которым другим артиллерийским снарядам. Они составляют обширную груп-
пу взрывателей, в которых наиболее полно реализованы рассмотренные выше
традиционные принципы построения КМВУ.
13.4. Особенности устройства и принципы действия КМВУ
885
Все они - головные по размещению в составе БП контактного или комби-
нированного (дистанционно-контактного) вида действия. В качестве датчика
цели КМВУ используют ударные механизмы. Для срабатывания взрывателя
при малых углах встречи и рыхлом грунте, а также для получения инерцион-
ного действия наряду с реакционным ударником применяют инерционный,
причем оба они обычно конструктивно объединены в одном УМ реакционно-
инерционного действия (взрыватели типа КТМ, РГМ, В-429).
Снаряды наземной артиллерии могут выполнять различные боевые зада-
чи (подавление открытой или укрытой живой силы, уничтожение техники,
разрушение легких оборонительных инженерных сооружений, мостов, дорог,
проделывание проходов в минных полях и проволочных заграждениях и т. п.),
поэтому к их взрывателям предъявляется требование максимальной универ-
сальности использования. Для лучшей реализации могущества действия сна-
рядов при решении различных задач предусматривается несколько установок
времени срабатывания взрывателя. Это достигается либо изменением време-
ни срабатывания УМ (например, для ВУ типа КТМ-1 и РГ-6 стрельбу ведут с
навинченными предохранительными колтщчками или без них, см. рис. 13.14 и
13.15), либо изменением времени срабатывания ОЦ (с помощью УУ типа
«кран», см. рис. 13.12 и 13.15) путем включения в ОЦ или исключения из нее
пиротехнических замедлителей. Таким образом, контактные взрыватели име-
ют две (КТМ и его модификации) или три (РГМ, В-429 и их модификации)
установки времени срабатывания, а роль установочных устройств выполняют
колпачок и (или) кран.
При отсутствии у взрывателей установки времени действия предусмотре-
на дополнительная комплектация выстрелов подобными взрывателями с за-
медлением (КТМ-1 У и КТМЗ-1У).
Характерно традиционное разграничение взрывателей для пушечных и га-
убичных артиллерийских систем, что связано с большим различием перегру-
зок и взводящих усилий при стрельбе из этих систем. Отметим, что стремле-
ние к чрезмерной унификации взрывателей в армиях стран НАТО привело к
неудовлетворительному решению вопросов безопасности. Система предохра-
нения отечественных взрывателей типа РГМ обеспечивает им высокую без-
опасность в служебном обращении и при стрельбе: все современные взрыва-
тели данной группы (РГМ-2, РГМ-2М, В-429, В-429В, В-429Е) - предохрани-
тельного типа, с дальним взведением.
Как уже отмечалось, этими взрывателями (разработчик - НИИ «Поиск») к
1980-м годам комплектовались практически все осколочно-фугасные снаряды
пушек и гаубиц калибров 76...203 мм более чем в 30 странах мира. Для нового
класса активно-реактивных снарядов полевых артиллерийских систем среднего
(152 мм) и крупного (203 мм) калибров был разработан взрыватель В-491 с
повышенной мгновенностью срабатывания и высокой эффективностью оско-
лочного действия. Для комплектации осколочно-фугасных 76-мм снарядов мор-
ских артиллерийских комплексов типа АК-176 создан высокочувствительный
контактный механический взрыватель ВГ-67 (он надежно срабатывает по 3-мм
дюралевым листам). В 1990-х годах его заменил взрыватель ВГ-76 с 36-мм оч-
ковой резьбой вместо 56-мм у ВГ-67. Применение нового взрывателя увеличи-
ло эффективность действия осколочно-фугасного снаряда более чем в 1,5 раза.
886
13. Взрыватели
Рассмотрим в качестве типового примера КМВУ многоцелевого назначения
взрыватель РГМ-2 (рис 13.23) с тремя установками на мгновенное (осколочное),
инерционное (осколочно-фугасное) и замедленное (фугасное) действия.
Взрыватель состоит из корпуса с головной втулкой, УМ. установочного
приспособления и ПдМ.
Ударный механизм двойного действия включает в себя ударник реакци-
онного действия 9 с жалом 13, ударник инерционного действия 14 с КВ 75.
На ударник мгновенного действия надет грибок 10. От избыточного давления
воздуха в полете ударник защищен мембраной. В ИПМ входят предохрани-
тельная пружина 6, предохранительное кольцо 12 и три стопорных шарика 5,
контрпредохранительная пружина 4 и лапчатый контрпредохранитель 16.
Установочное приспособление, или точнее УЗУ. содержит установочный
кран 3, предохранительный колпачок 8 и пиротехнический замедлитель, по-
мещенный во втулку 20.
Предохранительно-детонирующий механизм включает в себя ПДУ типа
«поворотная втулка» (втулка 24 с осью и передаточным зарядом 19, поворот-
Рис. 13.23. Взрыватель РГМ-2:
/ - корпус; 2 - стопорное устройство; 3 - установочный кран; 4 - контрпредохранительная пру-
жина; 5 - стопорный шарик; б - предохранительная пружина, 7 - взводящая пружина; 8 - предо-
хранительный колпачок; 9 - ударник реакционного действия; 10 - грибок; 11 оседающая гиль-
за; 12 предохранительное кольцо; 13 - жало; 14 - ударник инерционного действия; 15 КВ;
16 - контр-предохранитель (таганчик); 17 - спиральная пружина: 18 - детонатор; 19 ПЗ;
20 - втулка с замедлителем; 21 - стопор-ныряло; 22 - КД; 23 поворотная втулка; 24 - втулка
13.4. Особенности устройства и принципы действия КМВУ 887
ная втулка 23 с КД 22, крышка со спиральной пружиной 17), стопорное уст-
ройство поворотной втулки и детонатор 18. При сборке взрывателя спираль-
ная пружина 17 заводится поворотом втулки в холостое положение и стопорит-
ся стопорным устройством 2. При этом КД 22 смещается в сторону от переда-
точного заряда 19 и оказывается отгороженным от детонатора толстой стенкой
детонаторной втулки 24.
Инерционный ПМ и ПдМ (выполняет функции механизмов изоляции кап-
сюлей и дальнего взведения), дополненные блокирующим механизмом (сто-
пор-ныряло 21), составляю! систему предохранения данного взрывателя. Ре-
акционно-инерционный УМ - это инициирующая система взрывателя. Огне-
вая цепь (КВ - 3 - КД - ПЗ - Д) - типична для многоцелевых КМВУ
предохранительного типа.
При выстреле оседающая гильза 11 смещается вниз, сжимая взводящую 7
и предохранительную 6 пружины, и захватывает лапками предохранительное
кольцо 12. После вылета снаряда из канала ствола оседающая гильза с пре-
дохранительным кольцом под действием взводящей пружины поднимается
вверх и оба ударника (9 и 14) освобождаются от стопорящих шариков.
В ПдМ при выстреле оседающая гильза стопора поворотной втулки 23
оседает и освобождает шарик; у дульного среза стопор под действием пру-
жины поднимается вверх и освобождает поворотную втулку, которая под вли-
янием заведенной при сборке поворотной пружины поворачивается так, что
КД 22 совмещается с передаточным зарядом 19, и ОЦ замыкается. Взведение
взрывателя заканчивается в 2...5 м от дульного среза.
Действие взрывателя при встрече с преградой зависит от установки: при
реакционном (осколочном) действии (кран на «О», колпачок свинчен) удар-
ник мгновенного действия накалывает КВ, луч огня от КВ передается через
отверстие в кране к КД, взрыв которого вызывает срабатывание ПЗ, а после-
дний, в свою очередь, детонацию ВВ детонатора и разрывного заряда БП.
Повышенная чувствительность и быстродействие реакционного УМ взрыва-
теля обеспечивают и высокие характеристики осколочного поражающего дей-
ствия БП в целом (особенно при стрельбе по наземным целям, так как разрыв
корпуса снаряда происходит на поверхности без заглубления в грунт).
При установке на инерционное действие (кран на «О», колпачок навин-
чен) работает инерционный ударник (ударник реакционного действия предохра-
няется колпачком), а в остальном ОЦ взрывателя функционирует так же, как
при установке на осколочное действие, но время срабатывания взрывателя
возрастает примерно до 1 мс.
При замедленном действии (кран на «3», колпачок навинчен) УМ срабаты-
вает так же, как и при инерционном действии, однако в ОЦ включается замед-
литель, так как кран закрыт. За время горения замедлителя снаряд успевает уг-
лубиться в преграду, обеспечивая требуемое фугасное действие БП, или взор-
ваться в воздухе после отражения от преграды (при рикошетной стрельбе).
С заводов-изготовителей РГМ-2 выпускается с основной установкой на
инерционное действие, т. е. колпачок навинчен, кран открыт (стрелка крана
на «О»). При переходе на другой вид действия совершается только одна опе-
рация: свинчивается колпачок или, при установке на замедленное действие,
кран поворачивается вправо до упора (стрелка крана на «3»),
888
13. Взрыватели
Блокирующий механизм устраняет преждевременное срабатывание взры-
вателя в случае самопроизвольного воспламенения КВ от сотрясения в про-
цессе выстрела при установке взрывателя на замедленное действие. Тогда сто-
пор-ныряло 21 этого механизма под давлением образовавшихся пороховых
газов (от срабатывания КВ и горения замедлителя) срезает удерживавшую его
чеку, перемещается вниз и контрит в нерабочем (безопасном) положении по-
воротную втулку ПДУ. Если взрыватель устанавливается без замедления, при
самопроизвольном взрыве КВ (например, во время выстрела) КД также взры-
вается, находясь в холостом положении, и воздействия БМ на поворотную
втулку не требуется.
Рис. 13.24. Головной взрыва-
тель мгновенного действия
для малокалиберных зенит-
ных и авиационных снарядов
(первые разработки):
/ - ударник с жалом; 2 - спираль
(предохранитель); 3 - КД
Взрыватели к снарядам зенитной и авиационной артиллерии
Для взрывателей малокалиберных БП (20, 23 и 30 мм) характерна высо-
кочувствительные УМ (датчики цели) с реакционными ударниками, которые
срабатывают по дюрали толщиной 2 мм при скорости встречи 300 м/с. Мак-
симальный поражающий эффект (разрыв в 10...30 см за обшивкой самолета)
получают с помощью газодинамических замедлителей. Большие начальные
скорости снарядов зенитной артиллерии требуют постановки мембран, кото-
рые повышают чувствительность УМ (благодаря разгрузке ударника от сил
сопротивления воздуха) и обеспечивают герметичность конструкции взрыва-
теля. Значительные линейные и угловые ускоре-
ния позволяют использовать в системе предо-
хранения простейшие инерционные и центробеж-
ные механизмы и, таким образом, гарантировать
достаточно высокую безопасность взрывателей,
несмотря на их малые габариты. Последним, а
иногда и единственным элементом ОЦ (ввиду
малых габаритов) является КД, который выпол-
няет и функцию детонатора. Механизмы само-
ликвидации, как правило, построены на пиротех-
ническом (реже на тахометрическом) принципе.
Возможны также конструкции с самоликвидаци-
ей от трассера (донные взрыватели к снарядам
малых калибров). Ввиду высокой скорострельно-
сти малокалиберных автоматических пушек у
взрывателей их БП нет установочных устройств.
Несмотря на относительную простоту и высокую
чувствительность взрывателей малокалиберных
БП (рис. 13.24), их основной недостаток - от-
сутствие МИК (ПВУ либо ПДУ), т. е. они отно-
сятся к ВУ непредохранительного типа.
Рассмотрим более подробно авиационный
артиллерийский взрыватель (рис. 13.25). Он име-
ет УМ, в состав которого входят реакционный
ударник 7, жало 4 и КВ 11. Ударный механизм
закрыт мембраной 6. До момента взведения жало
13.4. Особенности устройства и принципы действия КМВУ
889
14
13
Рис. 13.25. Устройство взрывателя мало-
калиберных осколочных снарядов:
а - вертикальный осевой разрез; б - разрез
• плоскостью, перпендикулярной рисунку и
проходящей по оси деталей /, 2, 3; / - жало
,• йЬкольно-воспламенительного механизма; 2 -
пружина; 3, 11 - КВ: 4 - жало УМ; 5 - жест-
кий предохранитель («звезда»); б мембрана;
Z - реакционный ударник; 8 ~ медная спи-
раль (предохранитель); 9 - оседающее коль-
цо; 10 - фиксатор (втулка); /2, 16 - верти-
кальный канал; 13 - замедлитель; 14 - втул-
ка; /5 - КД
удерживается от движения к капсюлю предохранителем (спиралью) 8, в каче-
стве которого применяют медную ленту, намотанную на жало в направлении,
противоположном вращательному движению снаряда. На ленту надето метал-
лическое кольцо 9, которое препятствует развертыванию ленты и опирается
на лапки жесткого предохранителя 5.
Предохранители 5 и 8, являясь элементами соответственно ИПМ и МДВ,
входят в систему предохранения данного взрывателя. Реакционный УМ обра-
зует его инициирующую систему. В огневую цепь взрывателя кроме КВ 11
входят газодинамический замедлитель 13 и лучевой КД 15. Взрыватель также
оснащен механизмом самоликвидации, состоящим из накольно-воспламени-
тельного механизма и запрессовки ПТС. Накольный механизм, включающий
в себя жало 1, КВ 3, пружину 2, служит для воспламенения пиротехнического
состава самоликвидатора.
При выстреле КВ 3 под действием осевой силы инерции S преодолевает
сопротивление пружины 2 и накалывается на жало 1. Луч огня КВ воспламе-
няет ПТС самоликвидатора, запрессованный в вертикальном канале 16, па-
раллельном каналу 12. Каналы 12 и 16 связаны кольцевой канавкой на верх-
нем торце втулки 14. Одновременно кольцо 9, отгибая лапки жесткого пре-
дохранителя 5, оседает и освобождает ленту 8.
Центробежные силы С, возникающие при поступательно-вращательном
движении снаряда в канале ствола, стремятся развернуть ленту. Однако этому
890
13 Взрыватели
препятствуют силы инерции от касательного ускорения и силы трения нижне-
го торца ленты о верхний торец втулки 10. Касательные силы инерции Т дей-
ствуют (см. рис. 13.17) (на плоскости, перпендикулярной оси взрывателя) на
отдельные участки ленты по касательной к ней против направления углового
ускорения снаряда (совпадающего с направлением его вращения) и препят-
ствуют развертыванию ленты. Силы трения ленты о втулку 10 (см. рис. 13.25)
обусловлены действием на жало и ударник осевой инерционной силы S, под
влиянием которой жало, упираясь своей шляпкой в верхний торец ленты, при-
жимает ее к верхнему торцу втулки 10 .
После вылета снаряда из канала ствола действие инерционных сил Т и S
заканчивается, и центробежные силы С (достигнув максимальных значений у
дульного среза и сохраняя их на начальном участке траектории) постепенно
развертывают ленту, прижимая ее к стенкам внутренней полости взрывателя.
Таким образом, снимается вторая ступень предохранения и на расстоянии
2,5...5,0 м от дульного среза взрыватель окончательно взводится. При встрече
снаряда с преградой (целью) под действием сил реакции преграды жало нака-
лывает КВ 11. Пламя от КВ через отверстия в газодинамическом замедлителе
проникает к КД 15. Срабатывание лучевого КД после небольшого замедления
(150...200 мкс) приводит к эффективному
подрыву снаряда за преградой (обшивкой
воздушной цели). Если снаряд на своем пути
не встретит преград (целей), срабатывание
КД происходит от луча огня после выгора-
ния пиротехнического состава самоликвида-
тора.
Недостатки рассмотренных головных
взрывателей малокалиберных БП (помимо
отсутствия изоляции капсюлей) - их невсе-
погодность и малая дистанция дальнего взве-
дения (~3 м), не обеспечивающая полную
безопасность стрельбы для самолетов-носи-
телей авиационного автоматического оружия.
Первую проблему удалось решить примене-
Рис. 13.26. Взрыватель всепогодного исполнения
АГ-30ДТ:
1 - колечко; 2 - наконечник; 3 - шарик; 4 - спираль;
5 - фиксатор; 6 - прокладка; 7 - кружок; 8 - порохо-
вая запрессовка ТО-34; 9 - стопор; 10 - предохрани-
тель; 11 - замедлитель; 12, 13- колпачки; 14 - про-
кладка; 15 - капсюль-детонатор А-ЗО-Т; 16 - втулка
резьбовая; 17 - шайба; 18 - движок; 19 - скоба; 20 -
втулка предохранительная; 21 - втулка; 22 - пружина;
23 жало; 24 - капсюль-воспламенитель КВ-Н-13; 25-
чашечка; 26 - капсюль-воспламенитель КВ-Н-14; 27 -
звездка; 28 - кольцо оседающее; 29 - жало; 30 - кор-
пус; 31 - головка
13.4. Особенности устройства и принципы действия КМВУ 891
нием УМ с мембраной на конической поверхности в сочетании с тремя шари-
ками толкателями жала УМ. Примером типовой конструкции всепогодного
УМ может служить универсальный взрыватель АГ-ЗОДТ (рис. 13.26) к мало-
калиберным БП. Решение поставленной задачи получено за счет использова-
ния различия в физических особенностях процесса удара мембранного взры-
вателя об одиночные капли дождя и о сплошную преграду (грунт или обшив-
ку самолета). В последнем случае происходят обжатие конической мембраны
и передача импульса от преграды к жалу ударника посредством шариков, од-
новременно сходящихся к оси взрывателя. В случае взаимодействия с капля-
ми дождя последние, ударяясь о коническую поверхность мембраны, рикоше-
тируют, передавая мембране лишь часть своего импульса (значительно мень-
шую, чем при прямом ударе по мембране взрывателя, показанного на
рис. 13.24).
В связи с необходимостью решения второй проблемы - увеличения даль-
ности взведения взрывателей до 20... 100 м - наиболее рациональным конст-
руктивным решением, обеспечившим сохранение других унифицированных
механизмов, стало перекрытие газового канала от КВ к КД центробежным
стопором (см. рис. 13.26), который удерживается пиротехнической запрессов-
кой из пороха ТО-34. Воспламенение пороха осуществляется типовым наколь-
но-воспламенительным механизмом, содержащим КВ, пружину и жало.
После выгорания пороховой запрессовки (на расстоянии 20... 100 м от дуль-
ного среза авиационной пушки) стопор под действием центробежных сил от-
крывает канал, после чего (в случае встречи снаряда с преградой) форс пла-
мени боевого КВ пробивает перемычку (про-
кладку) из фольги и через взведенный движок
воспламеняет лучевой КД (см. рис. 13.26).
В невзведенном состоянии движок выполня-
ет функцию заслонки, изолирующей КВ от
КД, т. е. является элементом ПВУ. Благодаря
последнему обстоятельству и сам взрыватель
АГ-30ДТ относится теперь уже к взрывателям
полупредохранительного типа с трехступенча-
тым предохранением.
Описанные выше технические решения
(с жесткими предохранителями в ИПМ, спи-
ральными предохранителями в МДВ, пиротех-
ническими самоликвидаторами и т. п.) приме-
нены и к донным взрывателям малокалиберных
БП (рис. 13.27 и 13.28) с инерционными (вслед-
ствие донного расположения) УМ. Другая раз-
новидность головных взрывателей для зенит-
ных осколочных снарядов - взрыватель МГ-37.
МГ-37(рис. 13.29) - головной,
мгновенного действия, предохранительного
типа, с дальним взведением (40... 100 м) пред-
назначен для 37-мм осколочно-трассирующих
снарядов зенитных пушек. кан воспламенителя
Рис. 13.27. Донный взрыватель
для малокалиберных зенитных и
авиационных снарядов:
/ - КД; 2 - жало 3 - замедлитель
(газодинамический); 4 - КВ; 5 спи-
раль (предохранитель); 6 - оседаю-
щая втулка ИПМ; 7- корпус; 8 - ста-
892
13. Взрыватели
А-А
Рис. 13.28. Донный взрыватель с самоликвидатором для малокалиберных бронебойно-
разрывных снарядов:
/ - КВ накольно-воспламенительного механизма; 2 пружина; 3 - жало; 4 - дистанционный
ПТС механизма самоликвидации
В состав структурной схемы взрывателя (см. рис. 13.29) входят: огневая
цепь (КД 6 - ПЗ 4 - Д 2); инициирующая система - УМ реакционного дей-
ствия (КД б, жало 7, ударник 8); система предохранения, включающая в себя
центробежный ПМ (центробежный стопор 14, предохранительную пружину 15),
ПДУ типа «поворотный диск» 5, пиротехнический механизм дальнего взведе-
ния и накольно-воспламенительный механизм. Последний одновременно слу-
жит и для приведения в действие пиротехнического механизма самоликвида-
ции. состоящего из кольца самоликвидатора 3 и пороховой запрессовки 11.
При выстреле под действием осевой силы инерции 5 срабатывает НМ
(см. рис. 13.29, сечение ББ). Луч огня через боковое отверстие и паз, выпол-
ненный фрезерованием на боковой поверхности втулки НМ, зажигает порохо-
вую запрессовку 11 ПМДВ, а через отверстие в дне гнезда - ПТС самоликви-
датора, расположенный в кольце 3. В это же время ударник 8 под той же си-
13.4. Особенности устройства и принципы действия КМВУ 893
Рис. 13.29. Взрыватель МГ-37:
1 - стакан детонатора; 2 - детонатор; 3 - кольцо самоликвидатора; 4 - ПЗ; 5 поворотный
диск; 6 - КД; 7 - жало; 8 - ударник; 9 - мембрана; 10 - втулка; 11 - пороховая запрессовка;
12 - стопор; 13 - оси диска; 14 - центробежный стопор; 15 - предохранительная пружина
лой оседает вниз до упора в поворотный диск. Распределение массы поворот-
ного диска такое, что сила инерции от линейного ускорения создает удержи-
вающий момент, прижимающий диск ко дну втулки 10. Во избежание дефор-
мации центробежный стопор 14, стопор 12 и ось 13 разгружены. В связи с
этим стопор ЦПМ 14 взводится под действием центробежной силы С (пре-
одолевая сопротивление пружины 15) еще до выхода БП из канала ствола. За
дульным срезом (в конце периода последействия) ударник перемещается вверх
до упора в мембрану. Диск удерживается от поворота под действием момента
центробежных сил лишь стопором 12 ПМДВ. После выгорания его пороховой
запрессовки стопор 12 выжимается поворотным диском (лунка в диске под
стопор 12 имеет сферическую поверхность) и под действием центробежной
силы перемещается на периферию.
Поворот диска и установка КД в вертикальное положение происходят на
траектории на расстоянии 40... 100 м от дульного среза. С этого времени взры-
ватель взведен. При встрече с преградой мембрана 9 прорывается, реакцион-
ный ударник 8 (выполненный из легкого материала и не имеющий к тому же
контрпредохранительной пружины) быстро перемещается и накалывает жа-
лом КД. Взрыв КД вызывает детонацию ПЗ 4, что влечет за собой срабатыва-
ние детонатора и передачу детонационного импульса разрывному заряду БП.
Через 9... 12 с полета БП, если к этому времени не произошла его встреча
с целью, догорает пиротехническая запрессовка самоликвидатора, а форс пла-
894
13. Взрыватели
мени передается снизу на ПЗ. Конструкция последнего обладает следующей
особенностью: в нижней колоколообразной части находится тэн низкой плот-
ности, который загорается и обеспечивает переход горения в детонацию, уси-
ливающуюся верхней частью ПЗ из более плотного тэна. От взрыва ПЗ про-
исходит срабатывание КД, так как он содержит высокочувствительное ИВВ.
Их совместное, хотя и ослабленное (по сравнению со штатным режимом ра-
боты ОЦ и к тому же противоположное по направлению распространения ини-
циирующих УВ) действие все же приводит к подрыву детонатора, который
срабатывает в неидеальном (переходном) режиме. От детонатора взрывной
импульс передается еще менее чувствительному БВВ разрывного заряда БП,
и последний также детонирует в неидеальном переходном режиме, заметно
ухудшая дробимость корпуса зенитного снаряда на осколки и уменьшая ско-
рость их разлета (последнее в ряде случаев более благоприятно для защищае-
мых объектов, особенно на собственной территории).
Взрыватели к кумулятивным снарядам
Взрыватели к кумулятивным снарядам должны формировать кумулятив-
ную струю на определенном фокусном расстоянии от брони, в связи-, с чем
время их срабатывания будет минимальным. Это особенно важно при боль-
ших скоростях встречи кумулятивных БП с броней. В связи с этим все голов-
ные механические взрыватели имеют в качестве датчиков цели только реак-
ционные УМ с малым временем срабатывания. По этим же причинам в ОЦ
взрывателей кумулятивных БП отсутствуют замедлители, а инициирование осу-
ществляется по простейшей схеме: жало реакционного ударника КД (воз-
можно отсутствие ПЗ и Д, если детонационный импульс КД является доста-
точным). Ударные механизмы должны обеспечивать срабатывание при раз-
личных углах встречи с броней, вплоть до 70...80° от нормали. Сложность
выполнения требований по быстродействию для механических взрывателей
обусловлена еще необходимостью донного инициирования кумулятивного за-
ряда БП и, как следствие, задержкой передачи инициирующего импульса на
пути от КД (или Д) головного механического взрывателя к донному КД куму-
лятивного узла БП.
Конструктивные элементы ВУ, расположенные в головной части БП, не
должны снижать могущества действия кумулятивного БП - пробивной спо-
собности его кумулятивной струи, поэтому корпус и другие детали головных
взрывателей изготовляют из легких алюминиевых сплавов и имеют неболь-
шие габариты. Для исключения возможности разрушения кумулятивного узла
при срабатывании взрывателя детонатор последнего также имеет небольшие
размеры и специфическую полусферическую выемку, которая обеспечивает
направленную (сфокусированную) передачу детонационного импульса к КД
кумулятивного узла.
Для выполнения требований по скорострельности у взрывателей к кумуля-
тивным снарядам отсутствуют установочные устройства. В целях безопаснос-
ти стрельбы все взрыватели, за исключением самых первых, - предохрани-
тельного типа и с дальним взведением (5...30 м), т. е. оснащены и ПДУ, и
МДВ (система предохранения).
13.4. Особенности устройства и принципы действия КМВУ 895
Рис. 13.30. Взрыватель В-229
I — пружина; 2 - шарик; 3 - мем
брана; 4 - ударник; 5 - жало;
6 - оседающая гильза: 7 роли
кшЯ-КД
К взрывателям кумулятивных снарядов (как и к другим бронебойным сред-
ствам) предъявляется требование избирательности действия: они не должны
срабатывать при встрече с легкими естественными преградами (ветки деревь-
ев и кустарников), маскировочными сетями и искусственными экранами, ус-
танавливаемыми перед броней. При создании новых образцов взрывателей
также закладывается требование по их срабатыванию при первом падении на
грунт (в случае промаха по цели), что обеспечивает эффект поражения пехо-
ты и небронированной техники, сопровождающей танки.
Современные высокие требования к быстродействию (времени срабаты-
вания) и избирательности действия наиболее полно реализуются в электромеха-
нических ВУ к кумулятивным снарядам и ПТУР, конструкции которых будут
рассмотрены в подразд. 13.6. Здесь же проанализируем предшествовавшие им
механические ВУ для отечес твенных кумулятивных снарядов полевой артил-
лерии калибра 76... 122 мм.
Один из первых таких взрывателей простейшего типа - взрыватель В-229
(рис. 13.30). Рассмотрим его устройство (структурную схему) и принцип дей-
ствия.
Л
Огневая цель взрывателя представлена един-
ственным элементом - КД накольного типа 8
Инициирующая система - УМ реакционного дей-
ствия, состоящий из ударника 4, который выпол-
нен из дерева или пластмассы и снабжен сталь-
ным жалом 5. Ударник имеет характерную для
реакционных УМ поршневидную форму (с рас-
ширенной верхней частью) и закрыт мембраной 3.
Система предохранения взрывателя В-229 - это
двухфазный ИПМ, включающий в себя упругий
предохранительный элемент пружину 1, инер-
ционную деталь оседающую гильзу 6, а также
шарик 2 и ролики 7
До выстрела ударник надежно удерживается
(см. рис. 13.30) роликами, помещенными между
опорной втулкой и пружиной (через шайбу), и
шариком, который не позволяет оседающей гиль-
зе сместиться вверх под действием пружины.
При выстреле гильза оседает под влиянием осевой силы инерции, направлен-
ной вниз, и шарик выкатывается в нижнею полость взрывателя. После вылета
снаряда из канала ствола пружина поднимает гильзу до упора в головку удар-
ника (ближе к головной части на диаметр шарика) и освобождает ролики,
которые под действием центробежных сил выбрасываются в стороны и осво-
бождают ударник. При встрече с преградой (броней или грунтом) мембрана,
предохраняющая ударник от избыточного давления воздуха в полете, проры-
вается, ударник перемещается внутрь взрывателя, накалывая жалом КД. Пос-
ледний срабатывает и продукты его взрыва, разлетаясь вместе с элементами
донной части корпуса КД, инициируют второй капсюль-детонатор (КД куму-
лятивного узла), располагаемый по оси БП в его донной части (т. е. непосред-
ственно в разрывном заряде в области вершины кумулятивной облицовки)
896
13. Взрыватели
Этот КД и передает детонационный импульс ВВ кумулятивного заряда, обес-
печивая требуемый эффект действия БП.
При простоте устройства и высокой чувствительности взрывателя его ос-
новные недостатки - отсутствие механизмов дальнего взведения и изоляции
капсюлей. Непредохранительный тип ОЦ - это недостаток как самого взрыва-
теля, так и БП в целом (учитывая наличие второго неизолированного КД не-
посредственно в разрывном заряде БП).
К механическим взрывателям предохранительного типа с дальнейшим
взведением относятся взрыватели ГКВ и ГКН, предназначенные для 76- и
85-мм кумулятивных вращающихся и невращающихся (стабилизированных
оперением) БП. Подробно рассмотрим ГКН (рис. 13.31), получивший наиболь-
шее распространение.
В состав взрывателя ГКН входят УМ реакционного действия (пружина 6,
ударник 8, жало 9 и КД 10) и бокобойный механизм (реакционная шайба 4),
образующие ИС; огневая цепь - КД (10) - ПЗ (11) - Д (14); а также’система
предохранения, включающая ИПМ (поз. 18, 20-23), ПМДВ (поз. i9, 25-27,
29, 32), ПДУ (поворотный диск 28) и фиксирующее устройство (поз. 3*3, 34).
Перед заряжанием орудия необходимо при помощи тесьмы выдернуть чеку
5 и снять предохранительный колпачок 1 (см. рис. 13.31). При выстреле КВ
26 под действием силы инерции S оседает, сжимая пружину, и накалывается
на жало 29. Луч огня попадает в пороховую запрессовку 19 и зажигает ее.
Рис. 13.31. Взрыватель ГКН:
1 - предохранительный колпачок; 2 - мембрана; 3 - прокладка; 4 - реакционная шайба;
5 - проволочная чека; 6, 23, 27, 31, 33 - пружины; 7 корпус; Л ударник; 9 - стальное жало;
10 - КД; 11 - ПЗ; 12 - стальное колечко; 13 медная чашка; 14 - детонатор; 75 - донная втулка;
16 - свинцовое кольцо; 17 гайка; 18 пробка; 19 пороховая запрессовка; 20, 21 - шарики;
22 - инерционный стопор; 24 - втулка; 25 - чашечка; 26 — КВ; 28 - поворотный диск;
29 - жало; 30 ось; 32 - стопор; 34 стопор-фиксатор
J3.4. Особенности устройства и принципы действия КМВУ
897
Одновременно оседает инерционный стопор 22 и верхний шарик 20 выкаты-
вается через отверстие во втулке 24 в кольцевую выточку корпуса 7, а реакци-
онный ударник опускается вниз до упора в поворотную втулку.
После вылета БП из канала ствола пружина 23 поднимает инерционный
стопор 22 вверх до упора в пробку 18 и ставит выточку стопора против ниж-
него шарика 21. Подъем реакционного ударника вверх до упора в мембрану 2
осуществляется под действием пружины 6 и силы набегания.
Поворотный диск снабжен специальной пружиной 31, надетой на одну из
полуосей диска и помещенной в выточке (углублении) втулки 24. Концы пру-
жины отогнуты: один из них входит в отверстие диска, а другой - в отверстие
втулки 24. После выгорания пороховой запрессовка 19 под действием пружи-
ны 31 происходит поворот диска, шарик 21 выталкивается в выточку стопора,
а КД становится против жала и передаточного заряда.
Поворот диска происходит до упора,, запрессованного во втулку 24. Фик-
сация диска в боевом положении осуществляется стопором-фиксатором 34,
перемещающимся под действием сжатой пружины 33 и заскакивающим в вы-
точку втулки 24. Взрыватель взводится на.удалении 5...30 м от орудия.
При встрече БП с преградой реакционная шайба перемещается вместе с
ударником, и жало УМ накалывает КД. Взрыв КД передается ПЗ, а от него -
детонатору. Последний инициирует КД кумулятивного узла аналогично рас-
смотренному ранее взрывателю В-229.
Положительные особенности взрывателей ГКН (и ГКВ) - предохранитель-
ный тип ОЦ, дальнее взведение, повышенная безотказность (благодаря реак-
ционной шайбе взрыватель срабатывает при углах до 50...60° от нормали).
Кроме того, во взрывателе ГКН обеспечена более быстрая передача детонаци-
онного импульса к донному КД посредством кумулятивной выемки в дне ста-
кана детонатора.
Взрыватели к бронебойным снарядам
Взрыватели этой группы должны срабатывать после проникания камерных
снарядов (снаряженных ВВ) в заброневое пространство. Большие механичес-
кие воздействия, испытываемые взрывателем при ударе снаряда о броню, тре-
буют высокой прочности конструкции и надежного крепления взрывателя в дон-
ной части снаряда. В качестве датчика цели используют инерционные УМ, для
повышения чувствительности и безотказности которых (в случае встречи с бро-
ней под малыми углами) применяют бокобойные устройства. Огневая цепь, как
правило, содержит пиротехнические замедлители. Многообразие целей и раз-
ные толщины брони обусловили использование авторегулируемого замедления.
Установочные устройства отсутствуют из-за требований по скорострельности
и потому, что выстрелы к камерным бронебойным снарядам чаще всего явля-
ются выстрелами унитарного заряжания. Большие осевые и центробежные
перегрузки при выстреле позволяют применять достаточно безопасные в слу-
жебном обращении ИПМ и ЦПМ. Это обстоятельство, а также наличие в ОЦ
замедлителей дали возможность использовать во взрывателях ОЦ непре-
дохранительного (МД-7, МД-8, МД-10) и полупредохранительного (ДБР-2) ти-
пов. Поскольку взрыватели не имеют дальнего взведения (взводятся в канале
898
13. Взрыватели
ствола), огонь по бронетехнике противника можно вести с близкого расстояния.
Отсутствие в системе предохранения сложных механизмов обеспечило неболь-
шие габариты взрывателя при достаточно высоких безопасности, эффективнос-
ти и надежности действия.
Донные взрыватели к бронебойным снарядам конструктивно содержат
трассеры для наблюдения за траекторией полета снаряда. Крепление трассера
во взрывателе должно исключать возможность случайного отрыва трассера
после вылета из ствола, например, за счет проникших в зазоры пороховых
газов. Желательно также легкое отделение корпуса трассера от взрывателя при
попадании БП в броню.
В качестве примера рассмотрим устройство и принцип действия взрыва-
теля МД-7 (рис. 13.32). При выстреле под действием осевой силы инерции
предохранительный разрезной цилиндр 6 оседает вниз до упора в свинцовое
кольцо 11, открывая инерционному ударнику 12 с КВ 13 доступ к жалу. В по-
лете инерционный ударник удерживается контрпредохранительной пружиной
15. При встрече с преградой ударник под действием силы инерции продвига-
ется вперед и накалывает КВ на жало. Огонь от КВ проходит по косому^ана-
лу в основании жала 16 и через отверстие в инерционном кружке 17, воспла-
меняет пороховой замедлитель 4, после выгорания которого срабатывают КД
3 и разрывной заряд.
Рис. 13.32. Донный взрыватель МД-7 (а) и его внешний вид без трассирующего
устройства (б):
/ - стакан; 2 - тетриловый детонатор; 3 - КД; 4 - пороховой замедлитель; 5 - чашечка;
6 - предохранительный разрезной цилиндр; 7 - гайка трассера; 8 - целлулоидный кружок;
9 - трассирующий состав; 10 - трассер; 11 - свинцовое кольцо; 12 - инерционный ударник;
13 - КВ; 14 - предохранительный медный кружок; 15 - контрпредохранительная пружина;
16 - втулка с жалом; 17 - инерционный медный кружок; 18- втулка; 19- корпус взрывателя
13.4. Особенности устройства и принципы действия КМВУ
899
Взрыватели к бетонобойным снарядам
По конструкции эти взрыватели близки к бронебойным: контактного дей-
ствия, донные, с постоянным и (или) авторегулируемым замедлением. Однако
этим взрывателям присущи особенности, обусловленные применением в сна-
рядах крупных калибров со значительным объемом каморы (и массы ВВ); ис-
пользованием для гаубичных артиллерийских систем и для выстрелов раз-
дельного заряжания; сравнительно небольшой скорострельностью артиллерий-
ских систем. Поэтому такие взрыватели имеют значительные габариты, массу
и мощный детонатор (учитывая низкую чувствительность основного снаря-
жения - литого ТНТ), а также несколько установок времени контактного дей-
ствия. В связи с малыми взводящими силами (стрельба из гаубиц, большая
масса снаряда) система предохранения отличается значительным количеством
механизмов и достаточно большой их сложностью. Все взрыватели - предо-
хранительного типа с дальним взведением. Для повышения чувствительности
датчиков цели (инерционных УМ), в частности, в случае промаха, когда при
встрече с грунтом под малыми углами силы инерции малы, широко применя-
ют различные бокобойные устройства. Возможно использование походного
крепления, обеспечивающего дополнительную безопасность в служебном обра-
щении (например, во взрывателе КТД).
Рассмотрим устройство и принцип действия типового взрывателя к бето-
нобойным снарядам - ДБТ (рис. 13.33), который по габаритам соответствует
более ранней разработке - взрывателю КТД.
Взрыватель ДБТ - предохранительного типа с дальним взведением - име-
ет две установки: на инерционное «О» и замедленное «3» действие. Взрыва-
тель снабжен инерционным УМ (инициирующая система), двумя центробеж-
ными ПМ, предохранительно-детонирующим механизмом, МДВ с накольным
механизмом и механизмом безопасности (они образуют систему предохране-
ния); а также АРЗ с установочным приспособлением и фиксирующим устрой-
ством. Огневая цепь: КВ - 3 - КД - ПЗ - Д.
Ударный механизм состоит из инерционного ударника с КВ (удерживает-
ся в исходном положении с помощью двух центробежных стопоров нижнего
ЦПМ), жала, закрепленного в диафрагме, предохранительных пружин, боко-
бойной шайбы с лапчатым предохранителем (удерживает шайбу от смещения
конической хвостовой частью ударника в условиях служебного обращения) и
контрпредохранительной пружины.
Предохранительно-детонирующий механизм содержит центральную втулку
в корпусе, ПДУ типа «центробежный движок» с КД, два фиксирующих сто-
порка с шариком между ними, центробежные стопорки с пружиной (верхний
ЦПМ), диафрагму с передаточным зарядом и детонатор. Механизм дальнего
взведения собран в центральной втулке и включает в себя стопор, поджатый
пружиной, пиротехнический предохранитель, который до выгорания препят-
ствует взведению пружиной стопора и тем самым взведению центробежного
стопорка. Механизм безопасности (сечение Б на рис. 13.33) состоит из запи-
рающей гильзы, упирающейся в стопорок с пружиной, и чашечек, между
которыми находится пружина. Механизм безопасности (разновидность БМ)
введен на случай самопроизвольного срабатывания в условиях служебного
900
13. Взрыватели
Рис. 13.33. Взрыватель ДБТ:
1 - бокобойная шайба, 2 - инерционная втулка, 3 - ударник; 4 - КВ; 5 - клапанная втулка;
6 - клапан; 7, 14, 23 - втулки; 8 - усилитель; 9 - центробежный движок; 10 ПЗ, П - диафраг-
ма; 12 - КД; 13 - замедлитель; 15 - жало; 16 - контрпредохранительная пружина; 17 - устано-
вочный кран; 18 обтюрирующая прокладка; 19 - центробежный стопор; 20 - фиксатор; 21,
38 - шарики; 22 - накольный механизм; 24 - гайка крана; 25 - кольцо; 26 - диафрагма; 27 -
центробежный стопорок (ЦПМ); 28 - предохранительная пружина; 29 - центробежный стопо-
рок к МДВ; 30 - стопор; 31 - пружина; 32 - пороховой предохранитель; 33 - центральная
втулка; 34 - свинцовые кольца; 35 - поддон; 36 - донная втулка; 37 - лапчатый предохрани-
тель; 39 - фиксирующие стопорки; 40 - запирающая гильза; 41 пружина запирающей гильзы;
42 - чашечки; 43 - пружина, перемещающая чашечки
обращения пиротехнического предохранителя или КВ накольного механизма.
В этом случае стопор 30, фиксирующий центробежный стопорок 29, перемес-
тится вниз, запирающая гильза 40 продвинется до упора в центробежный сто-
порок, чашечки 42 выдвинутся пружинкой 43 и будут препятствовать возвра-
щению стопорка 29 (при выстреле будет получен отказ).
13.4 Особенности устройства и принципы действия КМВУ
901
Накольный механизм имеет ударник с КВ, жало и предохранительную
пружину.
Авторе! улируемое замедлитсльное устройство включает в себя пиротехни-
ческий замедлитель, клапан, втулку клапана и пороховой усилитель. Установоч-
ное приспособление содержит кран, поддон, гайку крана и обтюрирующую про-
кладку. Выступ крана установочного приспособления входит в шлиц поддона,
который в свою очередь двумя выемками сцепляется с выступами, находящи-
мися на торце корпуса УМ. Вместе с краном поворачиваются как одно целое
поддон и корпус УМ с прилегающей к нему диафрагмой. Поворот установоч-
ного приспособления ограничен втулочкой. Для закрепления при выстреле ус-
тановки крана на «О» применяют фиксатор 20 с пружиной и шариком 21.
Если стрельба ведется на инерционное действие, то кран повернут до упора
влево, чтобы риска на кране находилась против буквы «О» на донной втулке.
В этом случае отверстие «в» в диафрагме будет расположено против канала
«ж», ведущего непосредственно к КД.
При стрельбе на замедленное действие поворачивать кран не надо, так
как с завода взрыватель выпускается с установкой на замедленное действие.
В этом случае отверстие «в» в диафрагм^ находится против порохового за-
медлителя во втулочке.
При выстреле ударник накольного механизма накалывает КВ, который за-
жигает пиротехнический предохранитель МДВ.
При установке крана в положение «О» фиксатор, сжимая пружину, опус-
кается в гнездо диафрагмы, шарик, двигаясь вслед за фиксатором, отходит в
сторону и исключает подъем фиксатора после вылета снаряда из канала ствола.
При установке крана в положение «3» фиксирующее устройство не рабо-
тает, чему препятствует диафрагма (нет гнезда) Необходимость фиксации при
установке в положение «О» обусловлена тем, что при проникании снаряда в
преграду детали взрывателя стремятся повернуться в направлении установки
крана в положение «3».
Под действием центробежных сил взводятся центробежные стопоры нижне-
го ЦПМ. удерживавшие УМ, и подпружиненный стопорок верхнего ЦПМ, фик-
сирующий ПДУ По мере выгорания порохового предохранителя (50... 150 м от
дульного среза орудия) стопор 30 под действием пружины 31 перемещается
вниз и освобождает второй центробежный стопорок, удерживающий ПДУ (цен-
тробежный движок 9). В полете инерционный ударник с гильзой защищен от
набегания на жало контрпредохранительной пружиной. Инерционная шайба
от боковых перемещений удерживается лапками контрпредохранителя. Дви-
жок 9 переходит в боевое положение, при котором КД встает против переда-
точного заряда в диафрагме и фиксируется в таком положении двумя стопор-
ками, входящими в выемки втулки. Шарик 38, выкатывающийся из ямок сто-
порков 39, препятствует возвращению их в первоначальное положение
При встрече снаряда с преградой ударник с гильзой сжимает контрпре-
дохранительную пружину и КВ накалывается на жало. При установке крана в
положение «О» луч огня проходит к КД, а при установке крана в положе-
ние «3» луч огня проникает через отверстие во втулке клапана, обтекая кла-
пан 6, и зажигает замедлитель. Сам клапан под действием силы инерции при-
жимается к пороховому замедлителю 13, давая газам замедлителя свободный
902
13. Взрыватели
проход через отверстие во втулке. При остановке снаряда в преграде или при
ее пробитии прекращается действие силы инерции на клапан, и он отбрасыва-
ется газами замедлителя назад, а отверстие во втулке клапана закрывается.
Это приводит к резкому подъему давления газов замедлителя и быстрому их
догоранию; луч огня замедлителя передается КД и вызывает его срабатыва-
ние. Капсюль-детонатор вызывает детонацию ПЗ и детонатора, от которого
срабатывает разрывной заряд бетонобойного снаряда.
Взрыватели к минам ствольных минометов
Инициирующая система контактных механических взрывателей к ми-
нам представляет собой реакционные УМ накольного (взрыватели М-5,
М-6, М-12 и М-16) или пневматического (ГВМЗ-1, ГВМЗ-7) действия. Огне-
вая цепь взрывателей к минам малого калибра (осколочным) включает в себя
накольный КД и детонатор (М-5) или КД - ПЗ - Д (М-6), что вместе с, малой
толщиной мембран обеспечивает высокую чувствительность и небольшое вре-
мя срабатывания взрывателя. Взрыватели к минам среднего и больцюго ка-
либров (осколочно-фугасным и фугасным) снабжены замедлителями й уста-
новочными устройствами, позволяющими использовать мину не только как
осколочную, но и как фугасную.
Небольшие линейные перегрузки при выстреле из ствольных минометов
предопределили некоторые особенности в системе предохранения минных
взрывателей. Часть взрывателей оснащены ОЦ предохранительного (М-6) и
полупредохранительного (М-16, ГВМЗ-7) типов. Отсутствие вращения исклю-
чает возможность применения ЦПМ, в связи с чем используются только ИПМ.
Жесткие предохранители не применяются, так как небольшие осевые силы
инерции не обеспечивают их деформации, а используются упругие предо-
хранители. Перемещение движков ПДУ и ПВУ в боевое положение (М-6,
М-12, М-16) осуществляется с помощью пружин. Для обеспечения безопас-
ности в условиях служебного обращения и недопущения взведения ИПМ (на-
пример, при случайном падении) увеличивают путь взводящейся детали или
применяют механизм с зигзагообразным пазом и штифтом, который гасит ки-
нетическую энергию подвижной детали за счет отражения при ударе (М-6,
М-12, М-16). Во взрывателях к минам крупного калибра применен МДВ на
пиротехническом принципе (ГВМЗ-7 взводится на расстоянии около 20 м от
дульного среза). Система предохранения взрывателей у мин калибра 82, 107 и
120 мм должна также гарантировать безопасность расчета при случайном двой-
ном заряжании миномета. Для получения воздушных разрывов мин вспомога-
тельного назначения (осветительных, агитационных и т. п.) используют дис-
танционно-контактный взрыватель Т-1 с дистанционным устройством на пи-
ротехническом принципе и реакционным УМ (более подробное описание
дистанционных и дистанционно-контактных ВУ дано в разд. 13.5).
Типовой минный взрыватель М-12 (рис. 13.34) - контактный, механичес-
кий, реакционного и замедленного действия, с дальним взведением, непредо-
хранительного типа предназначен для 107- и 120-мм осколочно-фугасных мин.
Взрыватель состоит из УМ (с КВ, смещенным относительно жала удар-
ника), ИПМ (с прерывистым движением взводящейся детали), установочного
13.4. Особенности устройства и принципы действия КМВУ
903
Рис. 13.34. Взрыватель М-12:
1 - детонатор; 2 - КД; 3 - установочный кран, 4 даижок; 5 - опорная втулка; 6 - нижний
шарик; 7 жало; 8 - реакционный ударник; 9 - шарик; 10 предохранительный колпачок; 11 -
мембрана; 12 предохранительная пружина; 13 — оседающая гильза; 14 - КВ; 15 - пружина;
16 - гильза; 17 - инерционный ударник; 18- втулка регулятора; / 9 пороховой усилитель
приспособления, замедлительного и детонирующего устройств. Ударный ме-
ханизм взрывателя М-12 включает в себя ударник (грибок и жало), закрытый
медной мембраной, дюралюминиевую опорную втулку (с закрепленным в ней
штифтом), стальной движок с КВ и взводящей пружиной. Движок удержива-
ется в холостом положении жалом, входящим в гнездо движка. Инерционный
ПМ содержит предохранительную гильзу с зигзагообразной прорезью, в кото-
рую вставлен штифт, предохранительную пружину, поджимающую гильзу
вверх, верхний шарик, ограничивающий подъем гильзы, два нижних шарика,
препятствующих осевому перемещению ударника и стальной шайбы под опор-
ной втулкой.
Установочное приспособление конструктивно выполнено в виде латунно-
го крана с конической поверхностью. Замедлительное устройство содержит
два одинаковых пиротехнических замедлителя с пороховыми усилителями. Над
замедлителями находятся втулки-регуляторы с отверстием диаметром 0,5 мм,
служащие для стабилизации и получения малого времени истечения газов.
Детонирующее устройство состоит из лучевого КД и тетрилового детона-
тора. Огневая цепь (КВ - 3 - КД - Д) типична для многоцелевых КМВУ не-
пред охран тельного и полупредохранительного типа.
Перед заряжанием миномета предохранительный колпачок свинчивается
и проводится установка крана взрывателя. При выстреле под действием силы
инерции от линейного ускорения гильза 13 начинает оседать, при этом штифт
неподвижной опорной втулки проходит все три колена зигзагообразной про-
рези гильзы, а верхний шарик 9 выкатывается во внутреннюю полость корпу-
904 13. Взрыватели
са. После вылета мины из миномета предохранительная пружина 12 поднима-
ет гильзу. Вследствие зигзагообразного профиля прорези подъем гильзы тор-
мозится, чем достигается задержка в процессе подъема гильзы. После упора
гильзы в грибок ударника 8 давление пружины передается на ударник и ниж-
ние шарики выкатываются в полость корпуса под давлением конической по-
верхности кольцевого утолщения на жале (см. рис. 13.34). Подъем происхо-
дит до упора грибка ударника в мембрану. После выхода жала из гнезда взво-
дящая пружина 15 перемещает движок в боевое положение. При встрече с
преградой ударник накалывает КВ 14, форс пламени которого (при установке
крана в положение «О») передается по открытому центральному каналу на
лучевой КД 2. Процесс взрыва КД приводит к срабатыванию детонатора, а
затем и разрывного заряда мины. При установке крана в положение «3» форс
пламени КВ сначала передается на замедлители через втулки регулятора 18 и
лишь после их прогорания (и усиления огневого импульса усилителями 19) -
на лучевой КД.
Взрыватель М-12 обладает высокой безопасностью в служебном”обраще-
нии (не взводится при сбросе с высоты 3 м на любую преграду), а при стрель-
бе обеспечивает требуемую точность времени замедления и повышенную
безотказность действия.
Взрыватели к головным частям неуправляемых ракет
и БП безоткатных орудий
Взрыватели к неуправляемым РС в качестве датчика цели используют УМ
с реакционными и инерционными ударниками (для повышения чувствитель-
ности инерционных ударников применяют бокобойные шайбы). Огневая цепь
взрывателей многоцелевого назначения содержит КВ накольного типа, поро-
ховой замедлитель, лучевой КД и детонатор. Наличие в ОЦ некоторых взры-
вателей двух (В-14) или трех (ВД-20) замедлителей обеспечивает ведение
стрельбы с несколькими установками времени контактного действия: мгно-
венное, с малым и большим замедлением.
Небольшие инерционные воздействия при пуске и в полете обусловили
ряд особенностей построения системы предохранения взрывателей РС: а) ис-
пользуются ОЦ непредохранительного и полупредохранительного (например,
взрыватель ВД-20) типов; б) КПМ взводятся при относительно малых осевых
перегрузках и центробежных силах (в ТРС) и в то же время обеспечивают
безопасность в служебном обращении и при пуске; в) МДВ (дальность взве-
дения - примерно 100...200 м от пусковой установки) и различные БМ гаран-
тируют дополнительную безопасность личного состава при аномальной рабо-
те двигателя, на сходе РС с направляющих или «клевке» (падении вблизи пус-
ковой установки).
Системы предохранения взрывателей к оперенным РС могут включать в
себя аэродинамические и (или) инерционные ПМ (ВД-20, В-5, взрыватели к
РПГ и выстрелам безоткатных орудий), причем ИПМ выполняют в виде меха-
низмов с прерывистым движением взводящей детали (с зигзагообразным па-
зом) или механизмов, обеспечивающих двухфазное действие Во взрывателях
к ТРС, имеющим значительные скорости вращения (В-14, В-24, В-25), наряду
с ИПМ используют центробежные ПМ.
13.4. Особенности устройства и принципы действия КМВУ
905
Взрыватель В-14 (рис. 13.35) предназначен для 140-мм турбореактивных
снарядов М-14 ОФ и, как и другие взрыватели для ТРС (В-24, В-25), относит-
ся к ВУ непредохранительного типа с дальним взведением, снабжен реакци-
онно-инерционным УМ (ИС) и пиротехническим замедлителем. Огневая цепь
(КВ - 3 - КД - Д) типична для КМВУ многоцелевого назначения ствольной и
реактивной артиллерии.
Комбинированный ПМ, обеспечивающий предохранение и дальнее взве-
дение взрывателя, состоит из центробежных (относящихся к ЦПМ) и инерци-
онных (ИПМ) стопоров с пружинами. Стопоры ЦПМ 9 удерживаются своими
пружинами и инерционными стопорами 14 ИПМ. Установка на замедление
проводится с помощью установочного крана 12 Предохранительный колпак
имеет чеку с тесьмой.
При движении ТРС по направляющей инерционные стопоры оседают и
освобождают центробежные стопоры 9, но число оборотов ТРС еще мало,
поэтому центробежная сила не может переместить эти стопоры в боевое по-
ложение. После схода ТРС с направляющей ji увеличения числа оборотов (мак-
симум достигается в конце активного участаа траектории) центробежные сто-
поры, преодолевая сопротивление своих' пру-
жин, расходятся в стороны и освобождают
реакционный 8 и инерционный 2 ударники, а
также заслонку 5, которая под действием пру-
жины поднимается и удержи вает центробежные
стопоры во взведенном положении (взрыватель
взведен).
На активном участке траектории реакцион-
ный ударник 8 удерживается от перемещения
контрпредохранительной пружиной 7, а на пас-
сивном участке - контрпредохранительной пру-
жиной 4 (см. рис. 13.35).
При встрече с преградой мембрана дефор-
мируется, реакционный ударник, сжимая контр-
предохранительную пружину, перемещается и
накалывает КВ 3. Форс огня КВ вызывает дей-
ствие КД 13 или замедлителя (в зависимости
от установки крана). При встрече ТРС с пре-
градой под малыми углами одна или обе боко-
бойные плашки 10 перемещаются и оказыва-
ют давление на коническую часть корпуса
инерционного ударника 2, продвигая его впе-
ред. При этом КВ накалывается на жало, и луч
Рис. 13.35. Взрыватель В-14:
1 детонатор; 2 - инерционный ударник; 3 - КВ; 4,7 -
контрпредохранительные пружины; 5 «слойка; 6 - го-
ловная втулка; 8 реакционный ударник; 9 центробеж-
ный стопор; 10 - бокобойные плашки; 11 - корпус; 12 -
установочный крап; 13 - КД; 14 - инерционный стопор
906
13. Взрыватели
огня в зависимости от установки крана передается КД, который приводит к
взрыву детонатора 1 и боевого заряда ТРС.
Взрыватель В-24, предназначенный для 240-мм ТРС М-24-Ф, по устрой-
ству и действию аналогичен взрывателю В-14. В отличие от В-14 и В-24, взры-
ватель В-25 с тремя установками крана (на осколочное действие «О», малое
«М» и большое «Б» замедления) универсален, т. е. может применяться как
для 140-мм ТРС (М-14-ОФ), так и для 240-мм (М-24-Ф).
Взрыватель ГК-2 (рис. 13.36) используется для БП (мин) кумулятивного и
осколочного действия к 82- и 107-мм безоткатным орудиям.
Инициирующая система представлена УМ реакционно-инерционного
действия (с дальним взведением) и бокобойным устройством, которое со-
стоит из бокобойного кольца 15 с ПЗ 17, лапчатого предохранителя 16 и
донной втулки 7. Реакционный ударник 5 имеет ударный стержень и жало 9.
Ударный механизм включает в себя опорную и направляющую /2“ втулки,
хвостовик 14. ввинченный в опорную втулку, и КД 13. Огневая цепь, взрыва-
теля (КД - ПЗ) отличается от рассмотренных ранее типовых ОЦ контактных
механических ВУ.
Инерционный ПМ, обеспечивающий безопасность и дальнее взведение
УМ, также оригинален. Он содержит пружину 6, оседающую гильзу 4’с.зигза-
гообразным пазом, пять шариков (одного верхнего и четырех нижних), штифт,
запрессованный во втулку, пружину, опорную втулку, втулку, вставляемую в
пружину, жесткую лапчатую звездку, которая входит лапками в пазы направ-
ляющей втулки и удерживается от выпадания кольцом, запрессованным в
направляющую втулку, и жесткий контрпредох-
ранительный колпачок 11, напрессованный на
хвостовик.
В служебном обращении безопасность взры-
вателя обеспечивается предохранительным меха-
низмом: нижние шарики удерживаются гильзой,
которая постоянно поджимается в верхнее поло-
жение до упора в шарик предохранительной пру-
жиной. В момент выстрела гильза совместно с
шариком сжимает пружину, продавливает звезд-
ку и оседает в крайнее нижнее положение, в
котором она находится до тех пор, пока сила
инерции не станет равной силе сопротивления
сжатой пружины. Шарик, двигаясь с гильзой,
скользит по пазу в ударнике и благодаря скосу в
конце паза выкатывается во внутреннюю расточ-
Рис. 13.36. Взрыватель ГК-2:
1 — предохранительный колпак: 2 — корпус: 3 - шарик;
4 - оседающая гильза; 5 реакционный ударник; 6 - пружи-
на; 7 - втулка; 8 - шарики; 9 - жало; 10 - инерционный
ударник; // контрпредохранительный колпачок, 12 - на-
правляющая втулка; 13 - КД; 14 - хвостовик; 15 - бокобой-
ное кольцо; 16 - лапчатый предохранитель; 17 - ПЗ
13.4. Особенности устройства и принципы действия КМВУ
907
ку корпуса 2, не препятствуя последующему подъему гильзы в верхнее край-
нее положение.
После вылета мины из канала ствола гильза по мере уменьшения силы
инерции под действием пружины начинает подниматься в верхнее положе-
ние, совершая замедленное движение благодаря наличию во втулке штифта
(на рис. 13.36 не показан) и зигзагообразного паза. Имеющийся в гильзе зиг-
загообразный паз, в который входит штифт, позволяет несколько увеличить
время подъема гильзы в крайнее верхнее положение, в результате чего полу-
чается взведение взрывателя на расстоянии более 2,5 м от дульного среза ору-
дия. После подъема гильзы четыре шарика под действием втулки, продвигае-
мой вверх силой сжатой пружины, выкатываются в полость корпуса. После
этого инерционный ударник 10 под влиянием силы набегания может продви-
нуться в направлении жала 9 до упора острия жала в контрпредохранитель-
ный колпачок 11. Дальнейшему сближению жала с КД 13 препятствуют пру-
жина и колпачок.
При стрельбе без предохранительного колпачка 1 во время встречи мины
с преградой перемещается реакционный ударник 5 и жало 9 накалывает КД 13,
который передает импульс ПЗ 17 взрывателя. От взрыва ПЗ в кумулятивной
мине срабатывает КД кумулятивного узла, в осколочно-фугасной мине - дето-
натор, а затем разрывной заряд.
При стрельбе с предохранительным колпачком в момент встречи мины с
преградой инерционный ударник с КД под действием силы инерции переме-
щается в направлении жала, что также приводит к наколу КД, срабатыванию
взрывателя и разрыву мины.
При встрече мины с преградой под малым углом бокобойное кольцо под
действием силы инерции от удара разгибает лапки предохранителя и передви-
гается в сторону до упора в стенку донной втулки. В результате чего инерци-
онное кольцо конической расточкой резко толкает коническую часть хвосто-
вика и продвигает инерционный ударник с капсюлем-детонатором в направ-
лении жала, вследствие чего КД накалывается на жало и происходит взрыв
мины.
Устройство и действие типовых взрывателей авиационных бомб
Функционально-структурная схема (ФСС) типовых взрывателей авиаци-
онных бомб (АБ) состоит из основных узлов и механизмов, во многом схожих
с аналогичными механизмами ФСС взрывателей артиллерийских снарядов,
мин и РС, но имеется и ряд отличительных особенностей.
Предохранительные устройства ВУ авиационных бомб, обеспечивающие
безопасность на всех стадиях эксплуатации и при боевом применении, кон-
структивно являются составными частями УМ и огневых цепей ВУ. Они не
допускают срабатывания УМ и, разрывая ОЦ, исключают прохождение взрыв-
ного импульса к детонатору (или луча огня к пороховой петарде). Срабаты-
вание взрывателя становится возможным только после снятия всех предо-
хранителей. Процесс снятия предохранителей (взведение взрывателя) начина-
ется с момента отделения бомбы от летательного аппарата (ЛА) и заканчивается
908
13. Взрыватели
по истечении определенного времени (время дальнего взведения), характери-
зующею расстояние (дальность взведения), на которое удаляется ЛА от сбро-
шенной им бомбы к моменту снятия всех предохранителей. Дальность взве-
дения должна быть такова, чтобы взрыв бомбы при случайном срабатывании
взрывателя после взведения был безопасным для ЛА. Время дальнего взведе-
ния - одна из важнейших характеристик авиационных взрывателей. Оно, с
одной стороны, определяет безопасность боевого применения АБ, а с другой
- ограничивает минимально допустимую высоту бомбометания.
Взведение авиационных взрывателей могут выполнять МДВ различного
типа. В настоящее время взрыватели с простейшими ветряночными механиз-
мами разрешено применять только с приставочными МДВ, которые освобож-
дают ветрянки по истечении определенного времени. Ветряночные механиз-
мы продолжают использовать в механизмах взведения центробежного типа,
которые применяют во взрывателях мелких АБ, сбрасываемых в РБК.
В авиационных взрывателях широко распространены встроенные в их кон-
струкцию пиротехнические и часовые МДВ, состоящие из трех основных ус-
тройств: пускового, замедлительного и исполнительного. Пусковое устройство
приводит в действие замедлительное, которое отрабатывает время дальнего
взведения, после чего исполнительное устройство переводит детали взрыва-
теля в боевое положение, т. е. снимает предохранители. Время взведения. ПМДВ
определяется временем сгорания ПТС, а часовых МДВ - временем работы
часового механизма.
В зависимости от типа пускового устройства МДВ взрыватели подразде-
ляются на взрыватели с МПУ и взрыватели с ЭПУ. Взрыватели с МПУ приме-
няют на ЛА, оборудованных механической системой управления взрывателя-
ми, которая включает замок «взрыв-не взрыв» и пруток, связывающий замок
с МПУ взрывателя. Механические пусковые устройства накладывают ограни-
чения на максимальную допустимую скорость ЛА при полете на маршруте и
во время бомбометания. При подвеске бомб на наружные держатели МПУ
способно при больших скоростях полета сработать преждевременно под воз-
действием набегающего на пруток воздушного потока.
Взрыватели с ЭПУ используют на ЛА, оснащенных электрической систе-
мой управления взрывателями, которая через специальное контактное устрой-
ство бомбардировочной установки связывает бортовой источник тока ЛА с
ЭПУ взрывателя. Электрическое пусковое устройство состоит из экраниро-
ванного провода, шариковой вилки и ЭВ. Шариковая вилка разделена изоля-
тором на две контактирующие полусферы, к одной из которых припаян цент-
ральный провод, к другой изолированный от него металлический экран (оп-
летка). С противоположного конца провод припаян к мостику ЭВ. После
подвески бомбы на ЛА шариковая вилка вставляется в гнездо механизма по-
дачи импульсов (МПИ) бомбардировочной установки. Система управления
взрывателями на ЛА позволяет сбрасывать бомбы на «взрыв» и аварийно на
«не взрыв» (импульс тока не подается). У взрывателей для бомб, применяе-
мых в кассетах, пусковые устройства отсутствуют. Кроме предохранителей,
связанных с МДВ, взрыватели могут иметь походные предохранители, кото-
рые удаляются при подготовке к боевому вылету.
13.4. Особенности устройства и принципы действия КМВУ
909
Взрыватель АВ-139 (рис. 13.37) - контактный механический взрыватель уни-
версального расположения, непредохранительного типа, мгновенного, инерци-
онного и замедленного действия, с дальним взведением - предназначен для фу-
гасных и осколочно-фугасных АБ (применяется при высотном бомбометании).
Взрыватель взводится силой тяжести, действующей на АБ при отделении ее от
самолета. Срабатывает взрыватель при встрече АБ с преградой в результате
действия реакционного или всюдубойного инерционного УМ без замедления
или с замедлением, обеспечиваемым пиротехническим замедлителем.
Рис. 13.37. Взрыватель АВ-139:
/ - пружина движка: 2.14 КВ; 3 шток; 4 - предохранительный винт; 5 - штифт; б - мембра-
на; 7 - грибок; 8 - вышибной заряд; 9 - втулка; 10 - ударник; 11, 22 - пружины; 12 - серьга;
13 - предохранительный колпачок; 15, 18 - инерционные ударники; 16 - пружина УМ;
17 - жало; 19- движок; 20 фиксатор; 21, 24 - конусы; 23 - шток
910
13. Взрыватели
В ОЦ взрывателя входят капсюль-воспламенитель типа КВТ, пиротехни-
ческие замедлители (большого и малого замедления), лучевой КД и детона-
тор. Инициирующая система включает в себя УМ реакционного и всюдубой-
ного действия. Система предохранения содержит пиротехнический МДВ с ме-
ханическим ПУ (со стреляющим накольно-воспламенительным механизмом),
ПВМ, БМ и механизм походного предохранения.
Взрыватель АВ-139 оснащен всюдубойным УМ, который состоит из двух
инерционных ударников 15 и 18, жала 17 и КВ 2 (см. рис. 13.37). Всюдубой-
ный УМ дополнен реакционным ударником, включающим в себя шток 3 и
грибок 7. Внутренняя полость взрывателя сверху закрыта мембраной б Кап-
сюль-воспламенитель установлен в движке 19, занимающем до момента взве-
дения положение, при котором КВ 2 находится в стороне от жала 7 7. В этом
положении движок удерживается самим жалом, препятствующим его движе-
нию под действием сжатой пружины 16, которая стремится поднять .жало и
освободить таким образом движок. Однако этому препятствует опущенный
вниз шток, удерживаемый штифтом 5 МДВ. В штифт вставлен вышибной за-
ряд 8 из ТНРС. .»
Кроме штифта 5 к МДВ относится и втулка 9, в кольцевой канал которой
запрессован замедлительный состав. Время горения этого состава (10...12 с)
определяет задержку срабатывания МДВ, пусковым устройством которого слу-
жит накольный механизм, состоящий из ударника 10, пружины 11, серьги 12 и
КВ 14. Под действием сжатой пружины ударник стремится наколоть КВ. Дви-
жение ударника ограничивает серьга, лапки которой охватывают шаровидную
головку ударника. При хранении взрывателя серьга закрывается предохрани-
тельным колпачком 13. К корпусу взрывателя на резьбе крепится стакан с
замедлительной втулкой и детонаторной шашкой. Во втулке есть три канала
для прохода луча огня от КВ 2 к КД детонаторной шашки.
В центральном канале втулки установлен пиротехнический замедлитель
на 0,75 с, а в правом боковом канале - на 0,03 с. Другой боковой канал не
содержит замедлителей и обеспечивает мгновенное действие взрывателя пос-
ле удара о преграду.
Каналы малого замедления и мгновенного действия перекрыты устано-
вочными винтами. В полости взрывателя напротив штифта МДВ размещен
стопорный механизм, исключающий взведение взрывателя при случайном сры-
ве бомбы с ЛА на стоянке, при взлете или посадке. Стопорный механизм со-
стоит из двух конусов 27 и 24, штока 3, пружины 22, фиксатора 20 и предох-
ранительного винта 4. В момент удара бомбы о преграду после срыва ее с ЛА
конусы 21 и 24 под действием инерционных сил сближаются, фиксатор 20
заскакивает в выточку конуса 27 и не дает возможности конусам вернуться в
исходное положение. Сблизившиеся конусы перекрывают полость, в которую
выбивается при взведении штифт 5. Стопорный механизм не допускает взве-
дения взрывателя в тех случаях, когда время падения бомбы до преграды мень-
ше времени дальнего взведения. Для исключения преждевременного срабаты-
вания стопорного механизма в него ввинчен предохранительный винт 4, кото-
рый при окончательной подготовке взрывателя к боевому применению
вывинчивается и устанавливается в то же отверстие коротким концом.
13.5. Дистанционные взрыватели и трубки
911
После ввертывания взрывателя в бомбу, подвешенную на ЛА, серьга МДВ
соединяется с карабином прутка замка «взрыв-не взрыв». При сбрасывании
бомбы на взрыв пруток остается на ЛА и срываег серьгу МДВ. Накольное
устройство действует на КВ 14, который поджигает замедлительный состав,
запрессованный во втулке 9. После выгорания этого состава срабатывает вы-
шибной заряд 8. Давлением газов штифт выбивается из штока 3 в полость
между конусами стопорного механизма. Шток, жало и верхний инерционный
ударник под действием пружины 16 поднимаются вверх. Как только жало вый-
дет из зацепления с движком 19, последний под действием своей пружины
устанавливается в боевое положение: капсюлем против жала. Ввернутый в
головное очко бомбы взрыватель срабатывает от силы реакции преграды, дей-
ствующей через грибок на шток и жало, и от силы инерции, влияющей на
нижний инерционный ударник. В донном снаряжении взрыватель срабатыва-
ет под действием сил инерции, которые, перемещают шток, верхний инерци-
онный ударник и жало. При боковых ударах бомбы о преграду срабатывание
взрывателя происходит в результате сближения инерционных ударников, сколь-
зящих своей конической поверхностью па поверхности внутренней полости
корпуса взрывателя.
В заключение данного раздела отметим, что использованный выше сис-
темный подход к рассмотрению конструкций КМВУ и анализу их ФСС при-
емлем и для любых других образцов взрывателей (или ВУ) независимо от их
устройства и назначения.
13.5. Дистанционные взрыватели и трубки
Дистанционные взрыватели предназначены для обеспечения дистанцион-
ного действия, т. е. срабатывания взрывателя в заданной точке траектории без
воздействия на него цели. Срабатывание ВУ на траектории полета БП (на дис-
танции) обеспечивается в результате проведенной перед выстрелом (пуском,
сбросом) установки дистанционного устройства взрывателя.
По виду дистанционные устройства подразделяются на пиротехнические,
механические (часовые и нечасовые), электрические и электронные.
В пиротехнических дистанционных взрывателях и трубках время от мо-
мента выстрела до момента разрыва снаряда определяется временем горения
запрессованного в кольца пиротехнического дистанционного состава.
В механических дистанционных взрывателях счетчик времени - часовой
механизм либо счетчик числа оборотов на траектории (тахометрические ВУ).
Время в электрических дистанционных взрывателях определяется време-
нем перехода электрического заряда с одного конденсатора на другой (запаль-
ный), вызывающий срабатывание электрозапала (или ЭВ) по достижении на
его обкладках определенной разности потенциалов. Данные типы взрывателей,
первые образцы которых были разработаны еще до начала Второй мировой вой-
ны, по ряду присущих конденсаторам недостатков (как источников питания)
нашли применение только в некоторых авиационных бомбах и видах ракет.
Современные электронные ВУ дистанционного и дистанционно-контакт-
ного действия будут описаны в конце разд. 13.6, а сначала приведем класси-
ческие образцы дистанционных взрывателей и трубок пиротехнического и ме-
912
13. Взрыватели
ханического принципов действия. Для них характерны те же общие принци-
пы построения, что и для рассмотренных выше конструкций КМВУ. Это по-
зволяет проводить анализ функционального назначения и устройства всех
основных узлов и механизмов, являющихся элементами функционально-струк-
турной схемы ВУ, и принципов их действия в едином для всех ВУ ключе, т. е.
использовать системный подход. Наибольшее принципиальное отличие дис-
танционных взрывателей с точки зрения структурной схемы ВУ заключается
в особенностях устройства их ИС, которая содержит пиротехнические или
механические дистанционные устройства, а также пусковые (для пиротех-
нических ВУ - накольные) механизмы или устройства. Основные узлы и
механизмы других систем (ОЦ, системы предохранения) дистанционных
взрывателей подобны, а зачастую и унифицированы с соответствующими
механизмами контактных ВУ (наиболее явно это выражено во взрывателях
дистанционно-контактного действия).
Взрыватель дистанционно-контактного (ударного) действия Д-1-У
(рис. 13.38) предназначен для гаубичных снарядов основного (осколочные и
Рис. 13.38. Дистанционно-ударный взрыватель Д-1-У:
/, 15 - стопоры; 2, 8, 16 - пружины; 3 - оседающая вилочка: 4 корпус: 5 - упор; 6 порохо-
вой предохранитель в чашечке; 7,19 КВ; 9 жало; 10 мембрана; 11 - ударник; 12 верхнее
дистанционное кольцо; 13 - втулка; 14 - плоское жало; 17 среднее дистанционное кольцо;
18 - нижнее дистанционное кольцо; 20 спиральная пружина; 21 - поворотная втулка; 22 -
детонаторная втулка; 23 детонатор; 24 - передаточный заряд; 25 - пороховой замедлитель;
26 - соединительная скоба; 2 7 - предохранительный колпачок (составной); 28 - КД
13.5. Дистанционные взрыватели и трубки
913
осколочно-фугасные) и вспомогательного (дымовые) назначения калибра
107... 152 мм. Взрыватель предохранительного типа с дальним взведением вы-
полнен в габаритах РГМ (см. рис. 13.23).
Инициирующая система включает в себя накольный механизм (КВ 7, пру-
жина 8, жало 9), размещенный в верхнем дистанционном кольце, пиротехни-
ческое дистанционное устройство (кольца 12, 17,18 с пороховыми запрессов-
ками в каналах), а также реакционный УМ (ударник И, плоское жало 14,
КВ 19). Реакционный ударник в условиях служебного обращения и при выст-
реле удерживается от перемещения к КВ 19 стопором 15 с пружиной 16. Сто-
пор упирается в чашечку с пиротехническим предохранителем 6. Предохра-
нительно-детонирующий механизм (заимствованный от взрывателей типа РГМ)
вместе с ППМ (он же обеспечивает и дальнее взведение, т. е. является пиро-
техническим МДВ) составляют систему предохранения. Огневая цепь при ус-
тановке на контактное действие имеет-структуру КВ - КД - ПЗ - Д, а при
установке на дистанционное срабатывание - КВ накольного механизма ПТС
З-КД-ПЗ-Д.
При выстреле жало 9 под действием, силы инерции сжимает пружину 8 и
накалывает КВ 7, огонь от которого передается пороховому составу верхнего
дистанционного кольца 12 и пороховому-предохранителю 6. После выгорания
порохового предохранителя стопор 15 под действием пружины 16 и центро-
бежной силы отходит от оси вращения взрывателя в сторону и освобождает
ударник 11. Через передаточное"окно пламя из верхнего дистанционного кольца
передается пороховому составу среднего дистанционного кольца /7; анало-
гичным образом огонь переходит в нижнее дистанционное кольцо 18. Из ниж-
него кольца огонь через пороховой замедлитель 25 воспламеняет КД и дето-
натор. Время горения определяется длиной дистанционного состава, который
горит с постоянной скоростью (~1 см/с). Длина горящего дистанционного со-
става регулируется поворотом дистанционных колец.
В случае отказа взрывателя при дистанционном действии или при уста-
новке взрывателя на удар он срабатывает так же, как и контактные артилле-
рийские взрыватели (см. разд. 13.4). Взрыватель взводится на всех метатель-
ных зарядах, на которых взводится РГМ-2, имеет удовлетворительное дистан-
ционное действие, а при стрельбе по местности (на удар) более чувствителен,
чем РГМ (из-за особенностей конструкции его реакционного УМ, в частно-
сти, отсутствия контрпредохранительной пружины).
Пиротехнический дистанционный взрыватель Т-5 применяют в осколоч-
ных зенитных снарядах средних калибров (рис. 13.39, а). В состав ФСС взры-
вателя входят: баллистический колпак 14; фиксирующее устройство (нажимная
гайка) 13; накольный механизм 12; пиротехническое дистанционное устрой-
ство 11; комбинированный предохранительный механизм, включающий в себя
ИПМ (пружина 1, инерционный стопор 10) и ЦПМ (стопор 6, пружина 5);
ПДУ - центробежный движок 2 с КД 9 и ПЗ 3. Огневая цепь имеет следую-
щую структуру: КВ - ПТС - У- КД - ПЗ - Д.
На взрыватели при изготовлении навернуты предохранительные колпаки
15, назначение которых - сохранить герметичность собранного механизма взры-
вателя и тем самым предохранить пороховой состав дистанционных колец от
влаги и преждевременного разрушения. Чтобы при снятии колпака со взрыва-
914
13. Взрыватели
а
Рис. 13.39. Пиротехнические дистанционные взрыватель Т-5 и трубка двойного дей-
ствия Т-6:
а - конструкция взрывателя Т-5 (/, 5 - пружины; 2 - центробежный движок; 3 - ПЗ; 4 - детона-
тор; 6 центробежный стопор; 7 - втулка детонатора; 8 - втулка; 9 КД; 10 - инерционный
стопор; 11 - пиротехнические дистанционные кольца; 12 - накольный механизм; 13 - нажим-
ная гайка; 14 баллистический колпак; 15 предохранительный колпак); б - конструкция трубки
Т-6(/ инерционный ударник; 2 жесткий предохранитель; 3 КВ; 4 - контрпредохранитель-
ная пружина; 5 - жало; б - разгибатель; 7 - обтюрирующее кольцо; 8 - втулка); в - схема
работы дистанционной грубки двойного действия Т-6 при различных установках
теля не происходило одновременного вывертывания его из очка БП, резьба
корпуса взрывателя под предохранительный колпак и резьба его хвоста для
ввертывания в очко БП имеют различные направления (резьба под колпак -
левая, а резьба хвоста - правая).
Баллистический колпак 14 улучшает аэродинамические (баллистические)
качества БП, а особенности его конструкции обеспечивают надежное действие
порохового состава дистанционных колец при стрельбе на большие высоты.
Баллистический колпак снабжен одним центральным и четырьмя периферий-
ными отверстиями, выполненными с таким расчетом, чтобы в течение всего
времени горения дистанционного состава создать внутри колпака определен-
ное (постоянное или слабо изменяющееся с высотой) давление смеси воздуха
и продуктов сгорания ПТС.
Дистанционное устройство состоит из трех пиротехнических колец. Ниж-
нее и верхнее кольца, соединенные между собой фигурной скобкой, свободно
вращаются вокруг головной части корпуса. Три выступа среднего кольца на
13.5. Дистанционные взрыватели и трубки
915
внутренней стороне входят в соответствующие пазы головки корпуса, обеспе-
чивая неподвижность закрепления. Установка взрывателя проводится одно-
временным поворотом (с помощью специального ключа) верхнего и нижнего
колец относительно корпуса. При этом в соответствии с имеющейся на ниж-
нем кольце шкалой включаются в работу различные по длине пиротехничес-
кие запрессовки. Шкала имеет 165 делений. Взрыватели, установленные на
полное (максимальное) число делений, дают время действия в пределах
33,0...33,5 с.
У всех дистанционных взрывателей Т-5 заводская установка дистанцион-
ной шкалы соответствует 10 делениям. Цель такой установки - затрачивать
возможно меньше времени на установку взрывателя при стрельбе на короткие
дистанции и, кроме того, исключить вероятность преждевременного разрыва
БП у дульного среза, если орудийный расчет торопясь зарядил бы орудие без
установки взрывателя на соответствующую дистанцию.
При выстреле под действием силы инерции срабатывает НМ 12 и форс
пламени от КВ через отверстия в головке корпуса передается дистанционно-
му пиротехническому составу верхнего кольца. Одновременно нажимная гай-
ка 13 вместе с баллистическим колпаком 14 также оседают и, сжимая резьбу
головки корпуса, плотно поджимает застопоренные зажимным кольцом дис-
танционные кольца, фиксируя установку. Наконец, под действием этой же силы
инерции опускается стопор ИПМ 10, который заходит своим хвостом в выем-
ки на движке 2 и стопорит последний в холостом положении. Центробежные
стопоры 6 расходятся при движении БП в канале ствола, а движок при этом
удерживается одним инерционным стопором.
После вылета БП за дульный срез стопор 10 под действием пружины 1 и
силы набегания поднимается вверх и освобождает движок, который под влия-
нием центробежной силы перемещается в боевое положение и ставит КД над
передаточным зарядом. В это же время происходит горение порохового соста-
ва верхнего дистанционного кольца. Затем пламя последовательно зажигает
пороховой состав среднего и нижнего колец. В конце горения последнего пла-
мя через пороховые столбики, помещенные в наклонный передаточный канал
корпуса, направляется к КД, взрыв которого вызывает срабатывание ПЗ, дето-
натора и разрывного заряда БП.
Осветительные, зажигательные и агитационные снаряды и мины комп-
лектуются не взрывателями, а дистанционными трубками (например, Т-6, рис.
13.39, в). Последние отличаются, во-первых, тем, что ОЦ трубки не имеет ни
КД, ни детонатора вследствие того, что в этих снарядах (минах) нет разрыв-
ного заряда. Огневая цепь трубки заканчивается пороховой петардой, которая
воспламеняет вышибной заряд из дымного пороха, а тот в свою очередь выб-
расывает содержимое осветительных, зажигательных и агитационных сна-
рядов (мин) в воздух. Второе отличие дистанционной трубки Т-6 от взрывате-
ля Т-5 - наличие установок «на удар» (благодаря инерционному УМ, анало-
гичному УМ взрывателей типа КТМ) и «на картечь» (рис. 13.39, в).
Рассмотренные пиротехнические дистанционные взрыватели и трубки
просты по устройству и дешевы в изготовлении, но они обладают меньшей
точностью (разброс времени работы до 5 %) по сравнению с механическими,
а время их действия в большей степени зависит от атмосферного давления и
916
13. Взрыватели
температуры. В связи с этим в настоящее время их применяют лишь в освети-
тельных и агитационных артиллерийских снарядах и минах (при стрельбе до
высот 7 км), а также в авиационных бомбах вспомогательного назначения (см.
гл. 11). Вместе с тем пиротехнические дистанционные устройства используют
в качестве вспомогательных в ряде конструкций сложных, отвечающих совре-
менным требованиям типов ВУ, в частности, в неконтактных взрывателях и
ВУ комбинированного действия. Например, во многих радиолокационных
взрывателях (РВ) пиротехническое дистанционное устройство применяется
в качестве механизма дистанционного включения радиоблока (на расстоянии
1...2 км до цели), что не только снижает расход энергии источника пита-
ния (позволяя сделать его более компактным), но и повышает помехоустойчи-
вость РВ.
Механический взрыватель ВМ-30Л1 (рис. 13.40) предназначен для комп-
лектации выстрелов к зенитным пушкам и используется для обеспечения дис-
танционного срабатывания осколочных снарядов в воздухе (при стрельбе по
воздушным целям). Работа взрывателя начинается с момента выстрела и за-
канчивается разрывом снаряда у цели по истечении заранее установленного
времени, отсчитываемого с помощью специального часового механизма,
называемого временны'м механизмом взрывателя. Все основные механизмы
ВМ-30Л1 заключены в корпусе и узле баллистического колпака, которые скреп-
ляются между собой при помощи соединительной гайки и защищены от вне-
шних воздействий в условиях служебного обращения предохранительным кол-
паком.
Перечислим основные механизмы ФСС взрывателя:
- установочный механизм, состоящий из баллистического колпака 1 и же-
стко скрепленного с ним установочного колпака 2;
- часовой механизм, в который входят спусковой регулятор (баланс с по-
летами и ходовое колесо), зубчатая передача (ось ходового колеса с трибом и
ходовым колесом 40, первая промежуточная ось с трибом и колесом 45, вто-
рая промежуточная ось с трибом и колесом 46, центральная ось с колесом 47),
пружинный двигатель (спиральная пружина 38, вложенная в барабан 49);
- пусковой механизм, содержащий узел пускового ножа 5;
- спусковой механизм, включающий в себя узел стрелы 31, узел сабли 48,
поворотный рычаг 44, удерживающий ударник 25, находящийся под действи-
ем сжатой пружины 8;
- комбинированный предохранительный механизм, состоящий из фикса-
торного ножа 34, носика предохранительной скобы 3, стопора-ныряла 10 ИПМ,
двух центробежных стопоров 36, центробежного движка 19 с КД 14.
Перед выстрелом свинчивают герметизирующий колпак и устанавливают
взрыватель на определенное время действия (в зависимости от дистанции).
Установку на время действия проводят путем поворота узла баллистического
колпака в любую сторону по шкале автоматического установщика или по шкале
ручного установочного ключа. При этом фигурная прорезь колпака смещает-
ся на определенный угол относительно стрелы. Взрыватель не может срабо-
тать до выстрела, так как узел стрелы удерживается от поворота пусковым
ножом, а от перемещения в полость баллистического колпака - носиком пре-
дохранительной скобы.
13.5. Дистанционные взрыватели и трубки
917
Рис. 13.40. Устройство (а) и принцип действия (б) часового дистанционного взрыва-
теля ВМ-30Л1:
1 - баллистический колпак; 2 - установочный колпак; 3 - носик предохранительной скобы;
4 — соединительное кольцо; 5 - пусковой нож; 6 - корпус; 7 - КВ; 8 — пружина ударника;
9 - шпилька; 10 - стопор-ныряло; 11 - пружина ныряла; 12 - втулка ныряла; 13 - крышка; 14 - КД;
15 — втулка под движок; 16 - втулка детонатора; 17 — детонатор; 18 - передаточный заряд;
19 - центробежный движок; 20 - грузик; 21 - канал для передачи луча огня от КВ к КД;
22 - первая пластина; 23 — нижняя планка; 24 - жало; 25 — ударник; 26 — вторая пластина;
27 - первая планка; 28 - вторая планка; 29 - третья планка; 30 - четвертая планка; 31 - стрела;
32 - ось центрального колеса; 33 - поворотная ось; 34 — нож-фиксатор; 35 - пружина стопора;
36 - центробежный стопор; 37 - пружина стрелы; 38 - спиральная пружина; 39 - защелка
барабана; 40 - ходовое колесо; 41 - пружинный волосок; 42 - ползунок; 43 - баланс; 44 -
рычаг; 45 - первое промежуточное колесо; 46 - второе промежуточное колесо; 47 - централь-
ное колесо; 48 - сабля; 49 - барабан
При выстреле под действием сил инерции от линейного ускорения (в ка-
нале ствола) оседают ножи: пусковой и фиксаторный. Своими лезвиями они
врезаются в стенки установочного колпака, фиксируя установку взрывателя.
Стопоры ножей под действием пружин заскакивают в гнезда между пластина-
ми и препятствуют движению ножей вверх. В это же время опускается сто-
918
13. Взрыватели
пор-ныряло, который не дает возможности центробежному движку переме-
щаться во время движения снаряда в канале ствола. После освобождения
стрелы начинает работать часовой механизм. Узел центральной оси 32, не-
сущий стрелу, совершает прерывистое равномерное движение. После выле-
та снаряда за дульный срез (в период последействия) стопор-ныряло под
действием пружины поднимается вверх, а центробежные стопоры под влия-
нием центробежной силы, преодолевая сопротивление пружин 35, выходят
из гнезд центробежного движка. Последний начинает перемещаться, и КД
устанавливается над ПЗ - огневая цепь взрывателя оказывается замкнутой.
Стрела после поворота на некоторый малый угол соскакивает с носика
предохранительной скобы и под действием сжатой пружины немного припод-
нимается до соприкосновения стрелы с внутренней поверхностью установоч-
ного колпака. Узел стрелы продолжает вращение до тех пор, пока стрела не
совпадает с фигурной прорезью установочного колпака 2. После.этого стрела
под действием пружины 37 проскакивает через прорезь в баллистический кол-
пак, освобождая саблю. Сабля под влиянием центробежной силы, 4 также пру-
жины 8 ударника 25 поворачивается. Вместе с ней поворачивает^ поворот-
ный рычаг, который, выходя из паза ударника, освобождает его. Под действи-
ем сжатой пружины 8 ударник накалывает КВ на неподвижно закрепленное
жало 24. Луч огня передается КД. расположенному в движке, а от него через
ПЗ - к детонатору.
Рассмотренные выше и аналогичные взрывателю ВМ-30Л1 механичес-
кие дистанционные взрыватели (ВМ-2, ВМ-30, ВМ-45, ТМ-30 и др.), ранее
наиболее часто применявшиеся в снарядах зенитной артиллерии средних и
крупных калибров (до 130 мм) и БП вспомогательного назначения (авиаци-
онные взрыватели ТМ-24А, ТМ-24Б), в настоящее время используются в кас-
сетных БП различного типа и, по-прежнему, во вспомогательных БП, а меха-
нические часовые устройства - в качестве часовых МДВ и механизмов
самоликвидации ВУ для различных БП.
13.6. Электромеханические и электронные взрыватели
и ВУ контактного и дистанционно-контактного действия
Особенности конструкции и принцип действия контактных
электромеханических ВУ
Электромеханические взрыватели (ЭМВ или ЭМВУ) - одни из видов
взрывателей, в которых для инициирования ОЦ и обеспечения безопасности
в условиях служебного обращения используются электрические и механи-
ческие устройства. Механические и пиротехнические устройства контакт-
ных ЭМВУ по конструкции аналогичны соответствующим устройствам ме-
ханических взрывателей. Характерная особенность ЭМВУ - наличие источ-
ника питания (ИП), обеспечивающего электрической энергией системы
взрывателя, в качестве которых применяют как первичные, так и вторичные
ИП: гальванические элементы, аккумуляторные батареи, импульсные маг-
нитоэлектрические и пьезоэлектрические генераторы, конденсаторы и т. д.
(рис. 13.41).
13.6. Электромеханические и электронные взрыватели и ВУ
919
Рис. 13.41. Принципиальные электрические схейы боевых цепей контактных ЭМВ
с гальваническим (а), импульсным (б, е) и конденсаторным (г) ИП:
Б - батарея; КУ контактное устройство; СР - срезной разъем; С - конденсатор; 1 - корпус
взрывателя; 2 - пьезоэлемент; 3 - металлический диск (электрод); 4 изоляционная втулка
Вторая отличительная особенность ЭМВУ - устройство их огневых це-
пей, инициирование которых проводится за счет электрической энергии, а
именно, применения в ОЦ электровоспламенителей и электродетонаторов. Кон-
структивные схемы и основные характеристики срабатывающих от импуль-
сов тока (мостиковые) или напряжения (искровые) ЭВ и ЭД уже были подроб-
но рассмотрены ранее (см. разд. 13.2). Здесь следует лишь отметить, что наи-
более характерные огневые цепи ЭМВ содержат следующие элементы (см.
рис. 13.2): электрозапал (или ЭВ) - лучевой КД - ПЗ - Д или ЭД - ПЗ - Д.
В электромеханический взрыватель с огневым выходным импульсом входят
лишь два элемента: ЭВ и ПП.
Автономными ИП для ЭМВУ могут быть гальванические элементы, со-
стоящие из корпуса, двух электродов и электролита. Однако такие ИП нахо-
дят ограниченное применение ввиду их плохой сохранности: из-за явления
саморазряда напряжение, обеспечиваемое таким источником, с течением вре-
мени уменьшается, и поэтому в конструкции таких взрывателей должна быть
предусмотрена возможность замены элемента после истечения сроков хране-
ния. Этим недостатком не обладают ИП с жидким электролитом, который изо-
лирован от электродов и до момента боевого применения хранится в стек-
лянной ампуле. При подготовке взрывателя к использованию ампула разбива-
ется, электролит заливает электроды и ИП выходит на заданный режим.
Широкое распространение во взрывателях получили также термобатареи, в
которых электролит находится в твердом состоянии. Электролит плавится под
действием высокой температуры от горения содержащегося в термобатарее
ПТС, которая выдает номинальный ток спустя примерно 1 с после воспламе-
920
13. Взрыватели
нения ПТС, которое осуществляется специальным ЭВ, срабатывающим от на-
пряжения, подаваемого с борта самолета или ракеты.
В качестве импульсных ИП в контактных ЭМВУ наиболее широко ис-
пользуют пьезоэлектрические (ПЭГ) и магнитоэлектрические генераторы
(МЭГ). Как известно, МЭГ вырабатывает электрическую энергию за счет яв-
ления электромагнитной индукции, а ПЭГ - за счет пьезоэффекта.
Конструктивно МЭГ состоит из постоянного магнита и катушки, в обмот-
ке которой при перемещении магнита (при этом магнитный поток пересекает
витки обмотки) возникает импульс тока (см. рис. 13.41, б). Перемещение маг-
нита происходит под действием реакционных или инерционных сил. Импуль-
сный генератор тока через МДВ подключается к искровому ЭВ или ИЭД.
Достоинство взрывателей с магнитоимпульсным генератором тока - их авто-
номность и достаточно высокая мгновенность действия.
Простейший ПЭГ (см. рис. 13.41, в) включает в себя цилиндрический пье-
зоэлемент 2, верхний торец которого контактирует с корпусом взрывателя /, а
нижний - с металлическим диском 3, выполняющим функцию электрода. Ме-
таллический диск и его опорный контактный стержень изолированы от кор-
пуса БП изоляционной втулкой 4. При встрече БП с преградой пьезоэлемент
под действием сил реакции резко сжимается и на его торцевых поверхностях
возникает разность потенциалов, которая подводится к ИЭД. В конструкциях
взрывателей в качестве пьезоэлемента используют диэлектрики (например, ти-
танат бария), обладающие высоким пьезомодулем и точкой Кюри, которая пре-
вышает верхний температурный диапазон эксплуатации БП. Отличительные
особенности пьезоэлектрических взрывателей - высокая мгновенность дей-
ствия, автономность и малые габариты ИП.
Источники питания ЭМВ могут размещаться не только непосредственно
во взрывателе, но и вне его (на борту БП либо вне БП) на пусковой установке,
на борту самолета и т. д. В последнем случае электрическая энергия от борто-
вой сети самолета подается в конденсаторное устройство взрывателя, как пра-
вило, в момент сбрасывания бомбы (пуска ракеты) от специального зарядного
устройства через срезной разъем (см. рис. 13.41, г). Такие взрыватели, в кото-
рых роль ИП играет заряжаемый конденсатор (хотя, строго говоря, конденса-
торы не являются источниками электрической энергии, а лишь ее накопителя-
ми), называются взрывателями конденсаторного типа.
Представленные четыре варианта принципиальной схемы боевой элект-
рической цепи контактных ЭМВУ (см. рис. 13.41) содержат ИП (гальваничес-
кая батарея - Б, МЭГ, ПЭГ или конденсатор С), элемент ОЦ - ЭВ или ИЭД,
механизм дальнего взведения МДВ и контактное устройство КУ. При нали-
чии в качестве ИП импульсных МЭГ или ПЭГ, одновременно выполняющих
и функции датчиков цели, КУ в принципиальной электрической схеме может
отсутствовать. По истечении времени взведения, определяемого временем сра-
батывания МДВ, снимается последняя электрическая ступень предохранения,
и боевая электрическая цепь взрывателя взводится. В момент встречи ЭМВ с
преградой либо срабатывают импульсные источники питания (МЭГ или ПЭГ),
либо замыкается КУ, связывающее источник питания или конденсатор с ЭВ.
В зависимости от сил, используемых для замыкания КУ, последние под-
разделяются на КУ реакционного и инерционного типа. Реакционные КУ -
13.6. Электромеханические и электронные взрыватели и ВУ
921
ударные замыкатели, состоящие из двух электродов, к которым подключается
боевая (запальная) цепь. В исходном состоянии они изолированы и находятся
на некотором расстоянии друг от друга. В момент встречи с преградой элект-
роды подключают ЭВ к источнику питания. Конструктивно КУ реакционного
типа выполняют в разных модификациях: в виде сминаемого колпачка, внут-
ри которого находится изолированный от него воздухом контактный стержень
(рис. 13.42, а); в виде сминаемого обтекателя головной части I, изолирован-
ного от внутреннего электрода-колпачка 2 конической формы (рис. 13.42, б); в
форме электрического жгута, провод 3 сердцевины которого изолирован от
наружной металлической оплетки 2, а в момент удара специальный металличес-
кий нож /, врезаясь в жгут, замыкает сердцевину с оплеткой (рис. 13.42, в).
Контактное устройство реакционного действия для управляемых ракет класса
воздух- воздух, ЗУР и ПКР могут быть выполнены не только в виде моно-
блочных (штыревых, трубчатых, кабельных) конструкций, размещаемых в по-
лостях крыльевых отсеков ракет, но и в виде пленочных покрытий, наноси-
мых на поверхность крыла. Такой тип датчика цели установлен на крыльях
ракеты класса воздух-воздух «Фолкон» (США) и ее 14 модификациях. Прово-
дящие пленки соединены с электронной схемой датчика так, что при соударе-
нии крыла с целью происходит замыкание-двух пленок, разделенных слоем
изоляции. Контактное ЭМВУ срабатывает также в случае замыкания проводя-
щей пленки на корпус ракеты.
Инерционные КУ включают в себя неподвижный и подвижный электроды
(движок). В большинстве конструкций подпружиненный движок своими кон-
тактами замыкает боевую цепь при движении вперед под действием инерци-
онных сил (рис. 13.42, г). При этом в исходном положении, касаясь верхних
Рис. 13.42. Модификации КУ:
а - сминаемый колпачок; б - сминаемый обтекатель головной части (7 - головная часть; 2 -
электрод-колпачок); в - разрезаемый электрический жгут (/ металлический нож; 2 оплетка;
3 — провод; 4 - изолятор); г - КУ инерционного типа; д виброзамыкагель колокольчикового
типа
922
13. Взрыватели
контактов схемы, движок своими контактами шунтирует цепь ЭВ и повышает
степень предохранения взрывателя. К инерционным КУ относятся также виб-
рационные замыкатели (рис. 13.42, д), состоящие из шарика, припаянного к
упругому стержню из стальной проволоки, и полого цилиндра. При встрече
БП с преградой шарик под действием сил инерции, совершая колебания, кос-
нется полого цилиндра и замкнет боевую цепь.
Электрическими устройствами в инициирующей системе ЭМВУ являют-
ся контактные датчики цели - контактные устройства, обеспечивающие замы-
кание боевой электрической цепи взрывателя, а также генераторы (они же
источники энергии инициирования ОЦ). Боевая электрическая цепь электри-
ческая цепь взрывателя, по которой передается энергия, используемая для при-
ведения в действие ЭВ или ЭД огневой цепи. Пьезоэлектрические и магни-
тоэлектрические генераторы совмещают в себе функции контактного датчика
цели и ИП, преобразуя механическую энергию в электрическую. Контактные
ЭМВУ с пьезогенераторами относят к отдельному виду пьезоэлектрических
взрывателей.
В системе предохранения ЭМВУ наряду с простейшими электрическими
устройствами (КУ, инерционные замыкатели, пусковые ЭВ) могут применять
и более сложные, с использованием /?С-цепей, а также микроэлектронные ус-
тройства (микросхемы) и т. п. Электрические устройства системы предохра-
нения ЭМВ выполняют следующие функции: коммутацию электрических це-
пей; шунтирование электрических устройств взрывателя; обеспечение даль-
него взведения; воспламенение ПТС; перемещение деталей взрывателя.
Электрическая энергия в ЭМВ может быть использована для (в Любом
сочетании) обеспечения срабатывания взрывателя при встрече с целью и его
самоликвидации, снятия электрической ступени предохранения, гарантии без-
опасности взрывателя за счет переходных процессов в электрических цепях.
Для ЭМВУ характерна электрическая связь между отдельными блоками
ВУ. Электрическая энергия мгновенно передается в любое устройство ЭМВУ
и легко преобразуется в другие виды энергии. Применение электрических ус-
тройств существенно облегчает выполнение требований по стандартизации и
унификации элементов взрывателей.
В соответствии с приведенной выше классификацией ЭМВУ по типу ИП
рассмотрим несколько образцов конструкций электрических и электромеха-
нических ВУ контактного действия, подразделяемых на гальванические, маг-
нитоэлектрические. пьезоэлектрические и конденсаторные.
Конструктивная и принципиальная электрическая схема одного из пер-
вых гальванических взрывателей (рис. 13.43) была разработана для артилле-
рийских БП еще до Второй мировой войны. Взрыватель простейшего непре-
дохранительного типа имеет три установки (одну - мгновенного действия и
две - замедленного). Замедленное действие осуществляется введением в цепь
ИП одного из сопротивлений - R\ или /?2 _ при помощи переключателя.
Взрыватель состоит из корпуса, стакана детонатора, ИП, ударного замы-
кателя, установочного механизма и детонирующего устройства. В качестве ИП
применен гальванический элемент, электроды которого помещены в специ-
альной коробке 11, а электролит - отдельно в стеклянной ампуле 13. Удар-
ник 15, удерживаемый до выстрела чекой 14, служит для разбивания ампулы
13.6. Электромеханические и электронные взрыватели и ВУ 923
с электролитом при выстреле. Ударный замыкатель включает в себя мембра-
ну 19, служащую в качестве ударника реакционного действия, подвижный кон-
такт 18, впрессованный в изолирующую втулку 17, которая удерживается до
выстрела центробежными стопорами 3, взводящую пружину 16 и жесткий
контрпредохранитель 2. Для предохранения мембраны от повреждений в ус-
ловиях служебного обращения последняя закрыта сверху колпачком 1, кото-
рый снимается перед заряжанием.
В установочный механизм входят два сопротивления 8 и один простой
проводник (7?|, R2 и Ь на рис. 13.43, б), включение которых проводится ввин-
чиванием до упора в контакты 4 одного из винтов 5. Детонирующее устрой-
ство содержит ЭВ 7 контактно-калильного типа (электрозапал ЭВ на электри-
ческой схеме), КД 9 и детонатор 10. Перед заряжанием осуществляют уста-
новку взрывателя ввинчиванием одного цз контактных винтов 5 и снятием
колпачка. ‘ ,
При выстреле ударник 15 под действием силы инерции от линейного ус-
корения срезает чеку и разбивает ампулу, электролит которой под влиянием
Рис. 13.43. Электрический взрыватель с гальваническим ИП (а) и его принципиаль-
ная электрическая схема (б):
1 - колпачок; 2 - контрпредохранитель; 3 - центробежный стопор; 4 - контакты; 5 - винты;
6 - решетка; 7 - ЭВ; 8 - сопротивления; 9 - КД; /0 - детонатор; // - коробка; 12 - электроды;
13 ампула; 14 - чека; 15 - ударник; 16 - пружина; 17 - изолирующая втулка; 18 - контакт;
19 мембрана; УЗ - ударный замыкатель
924
13. Взрыватели
той же силы, пробрызгиваясь через решетку 6. заполняет междуэлектродное
пространство элемента.
При вылете снаряда за дульный срез центробежные стопора освобождают
подвижный контакт, который под действием взводящей пружины поднимается
вверх до упора в жесткий предохранитель и фиксируется в непосредственной
близости от мембраны 19. При ударе в преграду мембрана, прогибаясь внутрь,
соприкасается с контактом 18, в результате чего замыкается цепь ИП и элект-
розапала. При этом ток из гальванического элемента Б (см. рис. 13.43, б) те-
чет через ударный замыкатель УЗ, корпус взрывателя а, переключатель К, одно
из сопротивлений (Т?15 R2 или Ь) и вызывает срабатывание электрозапала (ЭВ) 7,
а также КД и детонатора (9 и 10 соответственно на рис. 13.43, а).
Следует отметить, что наибольшую трудность для электрических взрыва-
телей подобного типа составляет обеспечение мощности ИП, достаточной для
мгновенного срабатывания ЭВ. Другие недостатки этого взрывателяД- его не-
предохранительный тип, излишняя сложность ударного замыкателя и неудоб-
ство установки при помощи винтов.
Рассмотрим конструктивную и электрическую схемы взрывателя с импуль-
сным МГЭ (рис. 13.44) в качестве источника питания. Взрыватель предо-
Рис. 13.44. Взрыватель с импульсным МЭГ (а) и его принципиальная электрическая
схема (б):
1 — цетонатор; 2 - диафрагма; 3 - КД; 4 — пороховой замедлитель; 5 - корпус; 6 - якорь;
7 ударный стержень; 8 - мембрана; 9 - колпачок; 10 - контрпредохранительная пружина;
11 - центробежный стопор; 12 - гайка; 13 - магнит; /4 - обмотка; /5 - зажимная гайка;
16 - переключатель; 17 центробежный движок; 18 - ПЗ; 19 - стакан детонатора
13.6. Электромеханические и электронные взрыватели и ВУ
925
хранительного типа с двумя установками состоит из корпуса 5, головной гай-
ки 12 из немагнитного материала, стакана детонатора 19, УМ реакционного
действия с магнитоэлектрическим генератором тока, установочного механиз-
ма и детонирующего устройства.
Ударный механизм и генератор включают в себя подковообразный маг-
нит 13, обмотку 14, якорь 6, ударный стержень 7, скрепленный с якорем и
удерживаемый до выстрела центробежными стопорами 11, контрпредохрани-
тельную пружину 10 и мембрану S; сверху УМ прикрыт колпачком 9, отвин-
чиваемым перед заряжанием орудия.
Установочный механизм содержит переключатель 16 (ключ К, см.
рис. 13.44, б), с помощью которого генератор тока можно подключить на один
из искровых ЭВ запалов 3, или 32. Включение запала 3, соответствует уста-
новке на замедление, а 32 на мгновенное действие; замедление происходит
за счет горения порохового замедлителя 4. Крепление переключателя 16 в кор-
пусе взрывателя проводится зажимной гайкой 15.
В детонирующее устройство входят центробежный движок /7 с КД 3,
удерживаемый на месте наклонными центробежными стопорами (на рис. 13.44
не показаны), диафрагма 2 с ПЗ 18 и детонатор 1. Движок одновременно мо-
жет служить замыкателем контактов предохранителя (П на рис. 13.44, б).
Перед заряжанием орудия колпачок 9 свинчивается, а переключатель 16
устанавливается ключом на мгновенное или замедленное действие. При выст-
реле под действием центробежных сил инерции оба стопора 11 перемещают-
ся на периферию, освобождая ударник реакционного действия 7. В это же
время, точнее после вылета снаряда за дульный срез орудия, также взводится
и ПДУ с КД. Последний, передвигаясь вправо за счет эксцентриситета массы
центробежного движка 17 (ранее движок удерживался своими наклонными
центробежными стопорами), становится над ПЗ, после чего взрыватель взво-
дится. В полете якорь 6 удерживается от притяжения к магниту контрпредохра-
нительной пружиной 10 и силой набегания.
При ударе снаряда о преграду перемещение якоря в магнитном поле вы-
зывает изменение магнитного потока системы, индуцирование ЭДС в обмотке
и взрыв одного из электрозапалов согласно установке, сделанной перед заря-
жанием.
Пьезоэлектрические ВУ для кумулятивных БП
Взрыватели, комплектующие кумулятивные боевые части ПТУР, а также
реактивных боеприпасов для средств ближнего боя (РПГ и СПГ), помимо из-
ложенных выше, имеют ряд конструктивных особенностей, которые обу-
словлены настильным характером траектории полета БП, сравнительно не-
большими скоростями встречи с броней и относительно малой продолжитель-
ностью действия осевых сил инерции. К взрывателям кумулятивных БП,
помимо прочего, предъявляют следующие требования: обеспечение избира-
тельности действия; малое время инициирования заряда кумулятивного узла;
срабатывание при первом падении на грунт и др. Высокие требования по эф-
фективности действия, надежности и безопасности наиболее полно реализу-
ются в конструкциях ЭМВУ, построенных на пьезоэлектрическом принципе
действия.
926
13. Взрыватели
Преимущества пьезоэлектрических взрывателей (благодаря которым они и
получили наибольшее распространение в кумулятивных БП) в сравнении с обыч-
ными механическими взрывателями и ЭМВ с импульсными МЭГ заключаются
в обеспечении большего быстродействия (меньшего времени срабатывания ОЦ),
большей надежности, более высокой безопасности и лучшего действия при
стрельбе по бронецелям при малых углах встречи с броней. В зависимости от
того, где находится детонирующий узел (предохранительно-детонирующий или
предохранительно-исполнительный механизм), взрыватели подразделяются на
головные и головодонные.
Головные взрыватели содержат в одном блоке и пьезогенератор, и дето-
нирующий узел. У головодонных ВУ пьезогенератор находится в головной
части БП, а детонирующий узел (ПИМ) - в донной части кумулятивного заря-
да. Вначале рассмотрим принципиальное конструктивное устройство голов-
ного пьезоэлектрического взрывателя ГПВ-1 (рис. 13.45), предназначенного
для артиллерийских оперенных кумулятивных снарядов к 76- и 85:мм пуш-
Рис. 13.45. Головной пьезоэлектрический взрыватель ГПВ-1:
1 детонатор; 2 ПЗ; 3 движок ПДУ; 4 изоляционная втулка; 5 - ИПМ; 6 центральный
контакт; 7 - пьезогенератор; 8 - замыкатель (МДВ); 9 - контактный колпачок; 10 - элект-
родетонатор
13.6. Электромеханические и мектронные взрыватели и ВУ 927
кам, а также к 122-мм гаубицам. Он состоит из пьезогенератора 7, ИПМ 5,
МДВ 8 и предохранительно-детонирующего устройства с элементами комму-
тации электрической цепи. Пьезогенератор включает в себя центральный кон-
такт, запрессованный в изолятор, изоляционную втулку 4, пьезоэлемент с про-
кладками и верхний ударник с крышкой (см. рис. 13.45). Пьезогенератор 7
сверху закрыт предохранительным колпаком, удерживаемым в условиях слу-
жебного обращения чекой с тесьмой. Крышка обеспечивает необходимое под-
жатие пьезоэлемента при сборке взрывателя, жесткость узла пьезогенератора
и передачу механического усилия от преграды через ударник на пьезоэлемент.
Электроды пьезоэлемента - это обкладки его торцевых поверхностей.
В систему предохранения механизма взрывателя входят втулка, в пазу ко-
торой расположен движок с контактным устройством и искровым электроде-
тонатором (ПДУ), ИПМ 5 и замыкатель 8 (МДВ). В качестве электродов ИЭД
используются контактный колпачок 9 и корпус электродетонатора 10. До взве-
дения оба электрода пьезоэлемента и ИЭД замкнуты на корпус с помощью
втулки.
При выстреле замыкатель, перемещаясь в крайнее нижнее положение, вка-
тывает (см. рис. 13.45) правый шарик в паз движка, одновременно инерцион-
ный стопор освобождает левый шарик. В полете замыкатель, поднимаясь под
действием пружины вверх до упора в планку, освобождает правый шарик.
Движок под действием пружины передвигается в боевое положение. При этом
контактный колпачок электродетонатора, скользя по планке, набегает на цент-
ральный контакт, после чего взрыватель взводится.
При встрече БП с преградой и сжатии пьезоэлемента возникает разность
потенциалов, передаваемая на ИЭД. Электрический разряд в искровом проме-
жутке электродетонатора вызывает срабатывание ИЭД и затем взрыв ПЗ 2,
который приводит к инициированию детонатора 1. Последний, аналогично ме-
ханическим ВУ (см. разд. 13.4), инициирует КД кумулятивного узла и вызы-
вает срабатывание кумулятивного заряда БП.
Особенности конструкций боевых частей ПТУР
и их взрывательных устройств
Боевые части ПТУР (см. гл. 6), как правило, выполнены в виде самостоя-
тельных отсеков и служат для непосредственного поражения целей за счет
кумулятивного действия (табл. 13.2).
В общем случае боевые части ПТУР состоят из следующих основных
узлов: корпуса, кумулятивного узла и ВУ. Взрывательное устройство мо-
жет быть как конденсаторного (рис. 13.46, а), так и пьезоэлектрического
типа (рис. 13.46, б), однако общая конструкция боевых частей остается не-
изменной.
Структурная схема взрывательных устройств ПТУР так же, как и в слу-
чае описанных выше ЭМВ для других типов БП, содержит три основные сис-
темы: ОЦ, формирующую выходной детонационный импульс; ИС, представ-
ленную в виде источника энергии инициирования - пьезоэлектрического ге-
нератора; систему предохранения; вспомогательные узлы и механизмы, такие
как МСЛ и ИП. Связь между ИС и системой предохранения осуществляется
928
13. Взрыватели
Таблица 13.2. Общие сведения о боевых частях ПТУР
Наименование ПТУР Боевая часть Взрывательное устройство 11римечание
Индекс Калибр, мм Индекс Тип
9М111М «Фактория» 9М112М «Кобра» 9М112М2 «Агона» 9М113 «Габой» 9М113М «Удар» 9М114 «Штурм» 9М115 «Метис» 9М117 «Кастет» 9М117М«Кан» 9М119 «Рефлекс» 9М119М «Инвар» 9М120 «Атака» 9М128 «Зенит» 9М131 «Метис-2» Примечание. В дирующего кумулятивн 9Н122М 9Н124 9Н138 9Н131 9Н131М1 9Н132 9Н135 9Н136М 9Н136М1 9Н142 9Н142 9Н142М 9Н143 9Н149 9Н154 числителе п по узла; КВ 120 125 125 135 135 130 93 100 100 125 125 130 125 130 риведен инд У - конденса 9Э234М 9Э239 9Э285 9Э234М 9Э93 9Э93-1 9Э243 9Э132 9Э256 9Э94 9Э92-1 9Э92 9Э92 9Э94 9Э265 9Э265-1 9Э265-1 ЭКС ДЛЯ ОСН( торное ВУ; КВУ ПЭВУ ПЭВУ КВУ КВУ ПЭВУ КВУ КВУ КВУ КВУ КВУ ПЭВУ ПЭВУ КВУ звного, а ПЭВУ г С лидирующим кумулятивным узлом С лидирующим кумулятивным узлом Tow » ' » » » в знаменателе для ли- шезоэлектрическое.ВУ
через боевую электрическую цепь, по которой энергия от источника иницииро-
вания передается к начальному элементу ОЦ - искровому электродетонатору.
Для обеспечения безопасности в электрических взрывательных устрой-
ствах ПТУР обязательно выполняют следующие операции:
- электрическое шунтирование наиболее опасных элементов ВУ (источ-
ника энергии инициирования и начального элемента ОЦ) на период служеб-
ного обращения, при пуске и на траектории до момента окончания взведения;
- разрыв боевой электрической цепи на тот же период;
электрическое дальнее взведение.
Механизм самоликвидации, используемый в ЭМВУ ПТУР так же, как и в
механических взрывателях, основан на пиротехническом принципе действия.
Для зажигания пиротехнического состава МСЛ в ЭМВУ могут применять как
обычные КВ, входящие в состав накольно-воспламенительного механизма, так
и ЭВ, находящиеся в пусковом воспламенительном устройстве.
Источники питания, применяемые для работы принципиальной электри-
ческой схемы ВУ ПТУР, отдельно не разрабатываются. В качестве ИП ис-
пользуются бортовые батареи ракеты. Подробное описание устройства конст-
рукции и принципов действия штатных и перспективных образцов ЭМВУ
ПТУР приводится в соответствующей технической документации, имеющей-
13.6. Электромеханические и электронные взрыватели и ВУ
929
Рис. 13.46. Принципиальные конструктивные схемы боевых частей ПТУР'
а - с конденсаторным ЭМВУ (/ - втулка; 2 прокладка; 3, 4 - кольца; 5 - кумулятивная ворон-
ка; 6 - корпус; 7 - КЗ; 8 инертная линза; 9 - ПИМ; 10 - провод; 11 - нижний контактный
конус; 12 верхний контактный конус; 13 - винт); б - с пьезоэлектрическим ЭМВУ (/ - верх-
ний контакт; 2 - кольцо; 3, б - изоляторы; 4 - пьезоэлемент; 5 - нижний контакт; 7 - гайка;
8 - конус; 9 - поджимная гайка; 10 - воронка; 11 - КЗ; 12 инертная линза; 13 - конус;
14 - крышка; 15 - ПИМ; 16, 17, 19 втулки; 18 - удлинитель; 20 - обтекатель)
ся в распоряжении специализированных организаций - разработчиков этих
ВУ. Приведем лишь краткий перечень и общую характеристику по номенкла-
туре изделий, созданных в России за последние два десятилетия.
В области разработки взрывательных устройств, ПИМ и командных при-
боров к кумулятивным БП для средств ближнего боя (РПГ и СПГ), ПТУР и
НАР, элементов активной защиты бронетехники, а также кассетных БЭ веду-
щей, а по ряду систем единственной организацией в России является ФГУП
«Научно-исследовательский технологический институт» (НИТИ), особеннос-
тями разработок которого в области современных типов ЭМВУ стали авто-
номность, малогабаритное исполнение, межвидовая унификация и надежность
ВУ при невысокой стоимости, а также предохранительный тип и наличие само-
ликвидации, что предопределяет безопасность систем. К типовым и широко
930
13. Взрыватели
применяемым образцам относятся пьезоэлектрические ВУ типа ВП-7М, ВП-9,
ВП-18, ВП-22, 7В23 и 7В27, комплектующие, соответственно, кумулятивные
гранаты ПГ-7, ПГ-9, ПГ-18, ПГ-22 и «Резюме».
Образцами ПИМ для ПТУР, в том числе и тандемного исполнения, явля-
ются 9Э92, 9Э96, 9Э234М и другие к системам типа «Метис», «Конкурс»,
«Корнет», «Атака» и «Хризантема». Эти устройства отличаются высокой на-
дежностью, быстродействием и универсальностью применения. Полностью
автономны пьезоэлектрические ВУ ЗВ8М, 9Э236, 9Э243 для ПТУР «Фалан-
га», «Малютка», «Штурм» и др.
В начале 1980-х годов в НИТИ были созданы первые образцы пьезоэлек-
трических ВУ индекса 9-К-733 для кумулятивных БЭ кассетного снаряжения
к авиационным бомбам РБК-500 и КОЗ. Это направление получило дальней-
шее развитие при проектировании малогабаритных механических взрывате-
лей и ПИМ для кумулятивных БЭ, в том числе для самоприцеливающихся
(типа «Мотив-ЗМ»), к артиллерийским снарядам и РСЗО. • .
Для НАР типа С-5, С-8, С-13 и С-24 НИТИ разработал ВУ под индексами
В-5КП и У-402, а также взрыватели В-5К, У-404, В-678М и В-24А, отличи-
тельная особенность которых - наличие оригинальных механических интег-
раторов в системе взведения, обеспечивающих безопасность в эксплуатации
при высокой чувствительности устройств.
Локальные войны на Ближнем Востоке привели к бурному развитию ра-
бот по созданию взрывателей, ВУ и командных приборов для осколочно-фу-
гасных, бетонобойных и объемно-детонирующих АБ, в том числе с тормоз-
ными устройствами. В процессе выполнения работ были решены задачи уп-
равления действием АБ, создан виброустойчивый датчик цели на малые
перегрузки, обеспечен надповерхностный (предконтактный) подрыв АБ, по-
вышена термостойкость элементов ВУ и командных приборов. Типовые пред-
ставители таких ВУ - АВУ-529 мгновенного, замедленного и штурмового дей-
ствия, АВУ-581 с термостойким помехоустойчивым ликвидирующим устрой-
ством УП-581, а также У-563 с высокоточными вторичными взрывателями.
В НИТИ также разработаны взрыватели и ВУ для крылатых ракет. Среди
них - ЭМВУ-506, ЭМВУ-515 и ЭМВУ-548 и другие для крылатых ракет
К-ЮС, Д-2М, Д-7У тактического и стратегического назначения, а также успеш-
но зарекомендовавшие себя при эксплуатации АВ-522-1, ЗВ-80, ЗВ-54Э для ра-
кет морского базирования П-15У, «Москит», ЗМ-54Э. Эти ВУ мгновенного или
замедленного действия автоматически регулируются в зависимости от прочнос-
ти преграды, чем достигается высокая эффективность действия крылатых ра-
кет. Заложенные при проектировании технические решения по безопасности
ВУ подтверждены длительной безаварийной практикой эксплуатации систем.
Дистанционные и дистанционно-контактные электронные ВУ
Интенсивное развитие, особенно в последние два десятилетия, высоко-
точных БП (управляемых и корректируемых артиллерийских снарядов и мин,
УАБ, КАБ, снарядов РСЗО и др.), управляемого ракетного оружия с повышен-
ными требованиями по точности действия всех элементов этих комплексов
оружия (включая, естественно, и взрыватели) обусловило переход в дистан-
13.6. Электромеханические и электронные взрыватели и ВУ
931
ционных и дистанционно-контактных взрывателях от пиротехнических и ме-
ханических временных устройств к электронным, которые могут обеспечить
погрешность отработки времени на уровне долей процента. Внедрение мик-
роэлектроники позволило достичь качественного улучшения характеристик и
классических видов оружия. В качестве примера можно привести создание в
начале 1990-х годах в НИИ «Поиск» электронных дистанционно-контактных
взрывателей ЗВМ17 и ЗВМ18 с 52-мм очковой резьбой для шрапнельных и
осколочно-фугасных танковых снарядов. Управление ими осуществляется пе-
ред выстрелом с помощью сигналов от системы управления огнем по ин-
дуктивной линии связи между установщиком и взрывателем (на требуемое
время дистанционного действия взрыватели устанавливаются автоматичес-
ки). Высокая точность отсчета времени, достигаемая в этих ВУ применени-
ем микроэлектроники, обеспечивает высокую эффективность действия сна-
рядов у цели. Направления дальнейшего развития электронных взрывате-
лей использование новой элементной базы; создание конструкций донных
и головодонных ВУ с установкой требуемого времени дистанционного дей-
ствия по радиокоманде или лазерному лучу; разработка новых конструкций
ВУ (к перспективным системам вооружения) повышенной безопасности, по-
мехозащищенности, точности и надежности действия.
Для 100-мм пушки, применяемой на БМП-3, в НИИ «Поиск» разрабо-
тан электронный дистанционно-контактный взрыватель с 36-мм очковой резь-
бой. Установка вида и требуемого времени дистанционного действия прово-
дится по индуктивной связи ручным установщиком (автомата заряжения в
БМП-3 нет). Так решаются сложные задачи микроминиатюризации элект-
ронной схемы взрывателя и контактного датчика цели, а также размещение в
БМП-3 ручного установщика собственной разработки. Создание такого комп-
лекса позволит повысить эффективность стрельбы из БМП-3 осколочно-фу-
гасными снарядами в 3-4 раза по сравнению со штатным взрывателем 3B35.
В конце 1990-х годов НИИ «Поиск» также разработал дистанционный
электронный взрыватель для 120-мм кассетного снаряда САУ типа «Нона» и
«Вена». Взрыватель с очковой резьбой 52 мм является базовым при созда-
нии семейства электронных взрывателей для полевой и морской артилле-
рии. Так, указанный взрыватель практически без изменений может быть ис-
пользован в 152-мм кассетных снарядах САУ 2С19 «Мста-С».
Помимо дистанционных взрывателей нового поколения в НИИ «Поиск»
спроектирован и электронный контактный взрыватель для штатных ОФС, ком-
плектующих САУ. Он предназначен для мгновенного действия по преграде,
замедленного действия при стрельбе по грунту и авторегулируемого запрег-
радного действия при стрельбе по прочным преградам (кирпичные и железо-
бетонные сооружения). Взрыватель обеспечивает высокую эффективность при-
менения артиллерийских снарядов при ведении боевых действий в городских
условиях. Взрыватель устанавливается на требуемый вид действия автомати-
чески.
Для стрельбы на большие дальности по площадям и укрытой в окопах
живой силе противника в НИИ «Поиск» создан многофункциональный взры-
ватель, который будет использоваться в САУ Он имеет контактное (мгновен-
ное и авторегулируемое запреградное) и неконтактное действие на требуемой
932
13. Взрыватели
высоте подрыва, которая устанавливается во взрыватель перед выстрелом. Не-
контактное действие обеспечивается датчиком, работающим в режиме даль-
номера на конечном участке траектории.
К 100- и 130-мм пушкам морской артиллерии разработан многофункцио-
нальный электронный неконтактно-контактный взрыватель для осколочных и
осколочно-фугасных снарядов. Этот взрыватель, обладая всеми характеристи-
ками артиллерийского взрывателя для САУ, может поражать как высоколетя-
щие воздушные цели, так и низколетящие ПКР. В этом случае датчик, кроме
режима дальномера, работает в режиме Доплера с соответствующей обработ-
кой сигнала. Установка взрывателя на требуемый режим в зависимости от типа
цели осуществляется с помощью сигналов от системы управления огнем пе-
ред выстрелом по индуктивной линии связи взрывателя с установщиком (по-
яснение некоторых терминов, связанных с особенностями работы неконтакт-
ных ВУ, приводится в подразд. 13.6).
Номенклатура электронных взрывателей с действием по индуктивной ли-
нии связи с установщиком, разработанных НИИ «Поиск» для БП ствольной
артиллерии, представлена в табл. 13.3, а для боеприпасов РСЗО в табл. 13.4.
Дистанционный взрыватель 9Э260 разработан для РСЗО «Прима». Повы-
шение эффективности действия БЧ снарядов для данной реактивной системы
достигается за счет отделяющейся и спускаемой на парашюте головной час-
ти. Взрыватель имеет огневую и детонационную цепи. Огневая цепь полупредо-
хранительного типа оснащена выходной пороховой петардой для отделения
головной части от ракеты. Детонационная цепь предохранительного типа вклю-
чает в себя детонатор, обеспечивающий подрыв БЧ.
При стрельбе на осколочное действие взрыватель выдает огневой импульс
на воспламенение заряда головной части (в установленное время дистанцион-
ного действия) и детонационный импульс на подрыв БЧ при встрече с прегра-
дой. При стрельбе на фугасно-проникающее действие отделения головной ча-
сти от ракетной не происходит и подрыв БЧ осуществляется с замедлением
после встречи с преградой.
В состав взрывателя входят электронное временное устройство (ЭВУ),
ИП, инерционный замыкатель, реакционный и инерционный датчики цели,
кольцевой детонатор и размещенная внутри него ПП. Требуемое время дис-
Таблица 13.3. Номенклатура электронных взрывателей
Действие Тип взрывателя или артиллерийской системы
ЗВМ17, ЗВМ18 САУ-ДВ САУ-КВ САУ-МФВ АК-100, АК-130
Дистанционное + + - - -
Контактное + - + + +
Авторегулируемое запреградное - - + + +
Неконтактное по целям:
наземным — — — + +
воздушным — - - — +
13.6. Электромеханические и электронные взрыватели и ВУ
933
Таблица 13.4. Номенклатура электронных дистанционных
и дистанционно-контактных взрывателей для РСЗО
Характеристика Тип взрывателя и РСЗО
9Э260 «Прима» 301В «Град IV» 328В «Град IV» 9Б172, 9Б174 «Смерч»
Тип БЧ:
осколочно-фугасная г 4- + +
кумулятивная — — + +
Действие:
дистанционное + + + +
контактное + + — +
Дистанционное управление + + + +
Связь с наземной аппаратурой КК - и и ОР
управления
Коррекция времени действия - - +
Угловая стабилизация - 4- - +
Примечание И индуктивный; КК - контактные коль ца; ОР - отрь вной разъем.
танционного действия устанавливается аппаратурой дистанционного управ-
ления 9П612 через контактные кольца, расположенные на конической части
взрывателя.
Электронное временное устройство собрано из специализированных
микросхем «Дзот-1», обеспечивающих высокую точность отсчета установлен-
ного времени действия без использования прецизионных элементов в задаю-
щем генераторе временного устройства. Для устойчивости к механическим
нагрузкам ЭВУ выполнено на гибкой печатной плате, залитой пенопо-
лиуретаном и закрытой экранирующим металлическим кожухом. В отверстие
внутри ЭВУ по оси взрывателя помещен инерционный замыкатель. В качест-
ве ИП применена тепловая батарея с расплавляемым электролитом, особен-
ности которой - широкий диапазон рабочих температур и длительный срок
хранения. Предохранительный механизм интегрирующего типа с поворотным
диском сделан на базе часового механизма без возвращающей силы. В боевое
положение поворотный диск устанавливается по завершении активного участка
траектории полета снаряда, если интегрирующий механизм зафиксировал в
течение определенного времени существование линейной перегрузки в задан-
ных пределах.
Реакционный контактный датчик цели расположен в носовой части взрыва-
теля и до окончания установленного времени дистанционного действия за-
крыт прочной металлической пластиной. Это, с одной стороны, обеспечивает
высокую чувствительность и помехозащищенность датчика цели, а с другой -
исключает возможность его срабатывания до момента отделения головной ча-
сти снаряда.
При стрельбе на осколочное действие в процессе предстартовой подго-
товки от аппаратуры дистанционного управления (непосредственно перед
934
13. Взрыватели
пуском снаряда) на взрыватель через контактные кольца, размещенные на его
конической поверхности, поступают команды на задействование ИП и сигна-
лы, которые несут информацию о требуемом времени дистанционного дей-
ствия. При пуске снаряда срабатывает инерционный замыкатель и начинается
отсчет установленного времени. Если перегрузки и ее длительность на актив-
ном участке траектории превышают минимально допустимые значения, ПМ
подготавливает перевод в боевое положение поворотного диска по оконча-
нии действия линейного ускорения, тем самым взводя взрыватель после
активного участка траектории. Незадолго до конца отсчета установленного
времени дистанционного действия ЭВУ выдает предварительную электри-
ческую команду на заряд боевого конденсатора. Это исключает выдачу
преждевременной электрической команды на отделение головной части.
После отсчета установленного времени дистанционного действия ЭВУ
формирует команду на подклвэчение предварительно заряженного боевого кон-
денсатора к ЭВ. Срабатывание одного из ЭВ приводит к задействованию ОЦ
с пороховой петардой, выдающей огневой импульс на отделение головной ча-
сти, а срабатывание другого - к отстрелу металлической пластины, которая
исключает преждевременное инициирование контактного датчика цели. При
встрече отделившейся головной части с преградой реакционный контактный
датчик цели выдает сигнал на срабатывание детонационной цепи взрывателя,
приводящий в действие БЧ.
Благодаря использованию парашютной системы головная часть подходит
к преграде под углом, близким к нормали, что значительно повышает эф-
фективность осколочного действия БЧ. При стрельбе на фугасное действие
сигналы от аппаратуры дистанционного управления на взрыватель не поступа-
ют, ИТ не функционирует, ЭВУ время дистанционного действия не от-
считывает, головная часть не отделяется, реакционный контакт ный датчик цели
не работает. В этом случае после взведения взрывателя при встрече с прегра-
дой срабатывает инерционный датчик цели и подрыв БЧ происходит с замед-
лением, вызывая фугасное действие.
Дистанционно-контактный взрыватель 301В по своим характеристикам в
основном аналогичен взрывателю 9Э260. Его отличительные особенности -
отсутствие контактных колец и переход на передачу информации по индук-
тивной линии связи; использование конденсаторного ИП взамен теплового ИП
с расплавляемым электролитом.
Конденсаторный ИП расположен непосредственно под контактным дат-
чиком цели и заряжается от аппаратуры дистанционного управления перед
пуском снаряда. Электронное временное устройство выполнено на специали-
зированной микросхеме «Дзот-2», что снижает количество тока, потребляе-
мого электронным блоком, и дает возможность питания от конденсатора. Ал-
горитмы работы взрывателей 301В и 9Э260 совпадают.
Дистанционный взрыватель 328В полупредохранительного типа с двумя
ступенями предохранения предназначен для выдачи огневого импульса через
установленное время дистанционного действия. Управление и ввод информа-
ции о требуемом времени осуществляются по индуктивной линии связи от
той же аппаратуры дистанционного управления, размещаемой на боевой ма-
шине, которая управляет взрывателем 301В. Для снятия ступеней предохране-
13.6. Электромеханические и электронные взрыватели и ВУ
935
ния используются электрическая команда, поступающая на взрыватель от ап-
паратуры дистанционного управления при пуске снаряда, и перегрузка, дейст-
вующая на снаряд на активном участке траектории.
В состав взрывателя входят двухканальный ЭВУ, конденсаторный ИП,
инерционный замыкатель, приемная катушка, ПВУ и пороховая петарда. Пер-
вый канал ЭВУ, отсчитывающий время дальнего взведения, выполнен на мик-
росхеме «Дзот-1» по схеме псевдоинтегратора, который формирует выходной
сигнал при наличии перегрузки на активном участке траектории в течение
фиксированного времени, а второй канал - на микросхеме «Дзот-2» и опреде-
ляет время дистанционного действия. Инерционный замыкатель служит для
выдачи команды на начало отсчета времени дистанционного действия и фор-
мирования команды на временное устройство первого канала при наличии
перегрузки. Предохранительно-воспламенительное устройство в виде пово-
ротной втулки разрывает ОЦ взрывателя. Кроме этого, в нем имеются ЭВ и
инерционный стопор. Втулка устанавливается в боевое положение путем сня-
тия ступеней предохранения при поступлении на ЭВ электрической команды
с выхода первого канала ЭВУ. Инерционный стопор отслеживает момент по-
ступления электрической команды на взведение. Если эта команда появляется
на активном участке траектории, то стопор не препятствует установке пово-
ротной втулки в боевое положение (в противном случае инерционный стопор
не дает ей развернуться). Огневой импульс, формируемый взрывателем по окон-
чании отсчета установленного времени дистанционного действия, может ис-
пользоваться для раскрытия кассетной БЧ, отделения головной части и ряда
других функций.
Повышение точности и кучности стрельбы в снарядах РСЗО «Смерч»
обеспечивается системами угловой стабилизации и коррекции дальности, в
состав которых входят блоки электронной измерительной аппаратуры 9Б174
и ЭВУ 9Б172. Изделие 9Б174 состоит из электронного блока системы угло-
вой стабилизации, акселерометра и вычислительного устройства. Электрон-
ный блок обрабатывает поступающие на него сигналы от гироскопа, входя-
щего в бортовую систему снаряда, и выдает сигналы на исполнительные
органы для угловой стабилизации его полета. Особенность системы угловой
стабилизации - ее работоспособность во вращающемся снаряде, обеспече-
ние которой представляло собой достаточно сложную научно-техническую
задачу.
Идея создания системы коррекции дальности принадлежит ГНПП «Сплав»
совместно с НИИ «Поиск» и в общих чертах заключается в следующем. С
помощью ЭВУ 9Б172 отсчитывается время дистанционного действия, вводи-
мого аппаратурой дистанционного управления при предстартовой подготовке.
Это время определяет требуемую дальность и находится исходя из номиналь-
ных значений параметров движения снаряда. После пуска снаряда ЭВУ на-
чинает отсчет времени. На траектории полета изделие 9Б174 с помощью аксе-
лерометра и вычислительного устройства определяет истинные значения дли-
тельности активного участка траектории и скорость снаряда в его конце.
В зависимости от истинных значений этих параметров вычислительное уст-
ройство по заданному алгоритму коррекции рассчитывает временную поправку
дистанционного действия. Эта поправка вычисляется таким образом, чтобы
936
13. Взрыватели
учесть коррекцию при отклонении от расчетных фактических параметров дви-
жения снаряда. Определенная вычислительным устройством поправка по-
ступает на ЭВУ 9Б172, которое отсчитывает время дистанционного действия
на отделение головной части уже с учетом введенной поправки. Если фак-
тическая скорость снаряда в конце активного участка траектории оказалась
ниже расчетной, то возможное уменьшение дальности парируется положи-
тельной поправкой и увеличением времени дистанционного действия. Если
же фактическая скорость снаряда в конце активного участка траектории бу-
дет выше расчетной, то возможное увеличение дальности исключается от-
рицательной временной поправкой и уменьшением времени дистанционно-
го действия.
Скорость снаряда определяется интегрированием сигналов, поступаю-
щих от акселерометра на активном участке траектории и пропорциональ-
ных действующему на снаряд ускорению. Показания акселерометра непос-
редственно перед пуском снаряда, определяемые составляющей силы тяже-
сти, которая действует на акселерометр, учитываются вычислительным
устройством при предстартовой подготовке. Акселерометр обладает^высо-
кой точностью измерения линейного ускорения в условиях вращающегося
снаряда при наличии больших вибрационных воздействий, возникающих при
работе двигателя снаряда. Высокая виброустойчивость акселерометра до-
стигается посредством сложной системы амортизации, отфильтровывающей
полезный сигнал на фоне вибрационных воздействий большой амплитуды.
Вычислительное устройство обрабатывает сигналы акселерометра и считы-
вает временную поправку с широким использованием цифрочастотных мето-
дов обработки информации.
Электронное временное устройство, кроме времени дистанционного дей-
ствия, позволяет формировать по заданной программе и ряд дополнительных
команд, таких как раскрытие кассетной БЧ, выбрасывание парашютной си-
стемы и др. Поступающая на траектории полета снаряда от изделия 9Б174
временная поправка дистанционного действия анализируется ЭВУ и по за-
данному алгоритму определяется ее нахождение в допустимых пределах Учет
этой поправки реализуется только при положительных результатах анализа.
При построении изделий 9Б174 и 9Б172 использовались специали-
зированные микросхемы («Дзот-1» и «Дзот-2»), позволяющие не только от-
считывать временные интервалы, но и осуществлять с помощью цифрочас-
тотных методов ряд математических операций, таких как запоминание, сло-
жение, вычитание, деление, умножение и др.
13.7. Неконтактные взрыватели и ВУ
Неконтактными называются взрыватели, обеспечивающие неконтактное
действие, т. е. срабатывание в результате взаимодействия с целью без сопри-
косновения БП с последней. В отличие от дистанционных взрывателей, кото-
рые также осуществляют воздушный подрыв, срабатывание НВ происходит
автоматически при приближении снаряда или ракеты к цели на такое расстоя-
ние, при котором она надежно поражается осколками снаряда или БЧ. Таким
образом, для НВ нет необходимости определять и устанавливать перед стрель-
13.7. Неконтактные взрыватели и ВУ
937
бой время дистанционного действия. Команда на срабатывание исполнитель-
ных устройств НВ, реагирующих на физическое поле цели, вырабатывается
под действием энергии, излучаемой или отражаемой целью. В этом принци-
пиальное отличие НВ (срабатывающих под действием сигнала, полученного
от первичного, излучаемого целью, или вторичного, отраженного целью, поля)
от дистанционных взрывателей с их предварительной установкой на фикси-
рованную дальность подрыва.
С одной стороны, в соответствии с приведенным определением к НВ не
относятся телескопические ВУ авиационных бомб и ВУ с упредителем (лиде-
ром), летящим впереди бомбы и имеющим электрическую связь с исполнитель-
ным устройством взрывателя с помощью гибкого шнура. Хотя эти взрыватели
тоже обеспечивают подрыв АБ на некотором расстоянии от поверхности зем-
ли (или цели), но их датчики команд (сигнала) срабатывают в момент механи-
ческого взаимодействия с преградой. Поэтому такие устройства входят в группу
контактных взрывателей, а не НВ.
С другой стороны, к НВ условно относят устройства, которые реагируют
не на физическое поле цели, а на параметры, характеризующие состояние сре-
ды. Примером таких НВ могут служить взрыватели с гидростатическими и
барометрическими датчиками сигналов. Первые срабатывают в момент по-
гружения в воду на заданную глубину, а вторые - в воздухе при достижении
ими некоторой высоты относительно поверхности земли.
Под определение НВ подпадают также и так называемые координаторы
целей самоприцеливающихся БП. Конечно, такие ВУ более сложны и имеют
свои специфические особенности. Например, у них есть весьма совершенная
система выделения сигнала от малоразмерных целей на фоне земной поверх-
ности, а узкий визирный луч датчика сигнала дает возможность применять
БЧ направленного действия. Однако по принципу действия и основному на-
значению координаторы цели ничем не отличаются от обычных неконтакт-
ных взрывателей.
Наибольшее распространение НВ получили в ЗУР и авиационных раке-
тах класса воздух воздух. Это объясняется тем, что при стрельбе по высоко-
скоростным и маневренным воздушным целям нельзя рассчитывать на пря-
мое попадание даже управляемыми ракетами, а НВ, способные определять
расстояние до цели и относительное положение ракеты и цели (что особенно
важно для БЧ с узконаправленными полями поражения), обеспечивают более
эффективное поражение цели, чем другие типы взрывателей. Таким образом,
при стрельбе по воздушным целям неконтактные взрыватели в известной мере
компенсируют недостатки систем наведения ЗУР и АУР.
В то же время НВ используются и в БП, предназначенных для стрельбы
по открыто расположенным наземным целям. В этом случае НВ применяют
для повышения эффективности осколочного поражающего действия БЧ ракет
по наземным целям за счет предконтактного подрыва над поверхностью зем-
ли, что увеличивает эффективные радиусы разлета осколков (при контактном
подрыве более половины осколков перехватывается грунтом или уходит вверх).
Увеличение радиуса поражающего действия происходит также и в случае функ-
ционирования фугасных (осколочно-фугасных) БЧ ракет и АБ при их воздуш-
ном взрыве, что объясняется образованием вблизи поверхности земли так на-
938
13. Взрыватели
зываемой маховской УВ, являющейся результатом взаимодействия падающей
воздушной ударной волны с УВ, отраженной от грунта.
Общая классификация и требования к НВ уже были рассмотрены ранее
(см. подразд. 13.1 и 13.2), поэтому в настоящем подразделе остановимся бо-
лее подробно на физических принципах устройства и работы двух типов
НВ, получивших широкое практическое распространение среди всех других
их разновидностей - радиолокационных (РВ) и неконтактных оптических
взрывателях (НОВ). Основные узлы этих видов НВ (рис. 13.47) - ИП, пере-
дающее (излучающее) устройство, приемное устройство (приемник), усили-
тель и ПИМ.
Рис. 13.47. Блок-схема неконтактного взрывателя
Источник питания обеспечивает электрической энергией работу всех час-
тей и систем (включая ОЦ) взрывателя. Конструктивно он может быть выпол-
нен в виде батареи гальванических элементов с жидким (ампульного типа)
или с твердым электролитом, в виде магнитоэлектрического или турбогенера-
торов и т. п. Для питания электрической схемы РВ или НОВ могут использо-
ваться и конденсаторные устройства, заряжаемые от бортовой сети носителя
(ПУ, ракеты или самолета).
Передающее устройство (передатчик) преобразует электрическую энер-
гию ИП в другие виды энергии и излучает ее в заданном направлении. Напри-
мер, в РВ таким устройством является генератор высокочастотных колебаний
с антенной (радиопередатчик), в оптических взрывателях - лампа накалива-
ния, газоразрядная лампа и т. д. Передающее устройство - составная часть
взрывателей только активного типа. У взрывателей пассивного и полуактив-
ного типов такое устройство отсутствует.
Приемное устройство (приемник) используется для восприятия энергии,
излучаемой или отражаемой целью, и преобразования ее в электрический сиг-
нал. В РВ приемным устройством служит радиоприемник, в НОВ - фотоэле-
мент с оптической системой.
Усилитель преобразует рабочий сигнал (усиление, селекция, выделение
на фоне помеховых составляющих), возникающий на выходе приемника, так
как рабочий сигнал обычно мал по мощности и недостаточен для срабатыва-
ния ПИМ взрывателя.
Предохранительно-исполнительный механизм обеспечивает выполнение
следующих основных задач:
- безопасность в условиях служебного обращения (при хранении, транс-
портировке, монтаже и других операциях с взрывателем);
13.7. Неконтактные взрыватели и ВУ
939
Рис. 13.48. Схема тира-
тронного реле
- безопасность при выстреле (пуске, отделении от носителя);
- дальнее взведение взрывателя (взведение на безопасном расстоянии от
орудия, пусковой установки, носителя);
— подрыв БЧ ракеты (снаряда, мины, авиабомбы) при поступлении рабо-
чего сигнала;
самоликвидацию БЧ при больших промахах (в случае стрельбы по воз-
душным целям) или ударе (падении) на преграду (ВУ неконтактно-контактно-
го действия).
Исполнительной частью ПИМ обычно является тиратронное реле
(рис. 13.48), управляющее замыканием запальной цепи, которая состоит из
ЭВ (или ЭД) и запального конденсатора С. По истече-
нии времени дальнего взведения РВ конденсатор за-
ряжен до напряжения, достаточного для срабатывания
ЭВ (или ЭД). Однако цепь его разряда разомкнута в
месте включения тиратрона, который заперт отрица-
тельным смещением, поданным на его сетку от источ-
ника Ес. Зажигание тиратрона осуществляет рабочий
сигнал, предварительно усиленный усилителем. Как
только этот сигнал достигает определенного значения,
происходит зажигание тиратрона и замыкание запаль-
ной цепи. Конденсатор при этом разряжается через ти-
ратрон и ЭВ (ЭД), после чего взрыватель срабатывает.
Предохранительные устройства и механизмы,
МИК и механизмы дальнего взведения неконтактных ВУ по конструктивному
оформлению и принципу действия аналогичны ранее рассмотренным соот-
ветствующим устройствам (ПМ, МИК, МДВ) механических и электрических
контактных взрывателей. Узлы ПИМ, как правило, объединены в единую ФСС,
однако следует иметь в виду, что в литературе составные части ПИМ некон-
тактных ВУ иногда называют специфическими терминами. Так, в описаниях
некоторых зарубежных и отечественных НВ можно встретить так называемые
механизмы первой и второй ступеней предохранения. Однако анализ функцио-
нальной схемы этих узлов показывает, что они состоят из ИПМ, МИК типа
предохранительно-детонирующего устройства, ПМДВ или ПМ, т. е. уже изве-
стных узлов, входящих в обобщенную ФСС взрывателей.
Принцип действия РВ активного типа основан на хорошо известных
радиолокационных методах измерения расстояния до объектов: фазовом,
частотном и импульсном. В соответствии с этим различают три основных
вида РВ:
1) доплеровские РВ (функционируют на основе фазового метода измере-
ния расстояния);
2) РВ с частотной модуляцией (работают на основе частотного метола
измерения расстояния),
3) импульсные РВ (функционируют на основе импульсного принципа).
По структурной схеме различают гетеродинные и автодинные РВ. В пер-
вом случае взрыватель имеет две антенны: одна - для передачи радиоволн,
другая - для приема. Во втором случае используют лишь одну антенну, явля-
ющуюся одновременно передающей и приемной.
940
13. Взрыватели
Доплеровский автодинный РВ (рис. 13.49) применяется в артиллерий-
ских снарядах и в общем случае представляет собой объединенные в один
блок радиопередатчик и радиоприемник. При полете снаряда приведенный
в действие взрыватель излучает радиоволны. Отраженная от цели и из-
лучаемая радиоволны взаимодействуют между собой, в результате чего воз-
никает пульсация или скачок напряжения. При определенной интенсивнос-
ти скачка напряжения происходит опрокидывание электронного ключа и за-
мыкание электрической цепи, в результате чего снаряд детонирует на
оптимальном расстоянии от цели. При отказе радиодатчиков взрывателя и
встрече снаряда с твердой преградой срабатывает УМ взрывателя, а снаряд
подрывается от контактного датчика цели (УМ). В РВ
для зенитных снарядов в случае промаха предусмотрен
механизм самоликвидации.
Конструктивно такой РВ состоит из радиопрозрач-
ного пластмассового колпака конической формы и ме-
таллического корпуса (рис. 13.50). В пластмассовой го-
ловной части размещается электронный блок с антен-
ной. В корпусе взрывателя находятся ИПМ и ПдМ,
который смонтирован в нижней цилиндрической части
корпуса и предназначен для обеспечения безопасности
взрывателя в условиях служебного обращения. Суть его
действия заключается в том, чтобы блокировки снима-
лись лишь в момент выстрела. Система взведения РВ
включает в себя механическое и электрическое устрой-
ства взведения. Механическое взведение обеспечивает-
ся оседающим устройством ИПМ. В безопасном поло-
Рис. 13.50. Схема устройства артиллерийского РВ:
1 антенна; 2 - восковая масса; 3 - пластмассовая головка; 4 детали
радиооборудования (приемопередатчик и усилитель); 5 корпус; б -
батарея ИП; 7 - баллон с жидким электролитом; 8 предохранитель-
но-детонирующий механизм с ЭД; 9 МСЛ; 10 - детонатор
13.7. Неконтактные взрыватели и ВУ
941
жении подпружиненный поворотный диск с детонатором застопорен так, что
детонатор смещен относительно оси, поэтому огневая и электрическая цепи
разомкнуты. До тех пор пока под действием осевой силы инерции при выстреле
не произойдет оседание стопора ИПМ, освобождающего поворотный диск,
взрыватель безопасен при служебном обращении и хранении. Освободившись,
поворотный диск поворачивается и замыкает огневую и электрическую цепи.
Это происходит тогда, когда снаряд уже покинул ствол орудия (через 2.. .4 м).
В НВ предусмотрены различные меры безопасности: механическое раз-
деление инициирующего и разрывного зарядов, высокое зарядное сопротив-
ление конденсаторной цепи, ртутный контакт, шунтирующий детонатор. Ме-
ханическая блокировка снимается лишь в момент выстрела. Постоянную ве-
личину времени цепи зарядки конденсатора выбирают так, чтобы обеспечить
определенную задержку времени зарядки конденсатора с момента приведе-
ния в действие батареи. Таким образом, конденсатор не обладает требуемой
электрической энергией до тех пор, пока снаряд не достигнет безопасного
удаления от орудия. Ртутный контакт размыкается после выстрела. Питание
электрической схемы взрывателя осуществляется от источника постоянного
напряжения (электрохимическая батарея в ампуле).
В авиационных БП также применяют доплеровские автодинные РВ, отли-
чающиеся простотой устройства и малыми габаритами.
Генератор высокой частоты (ГВЧ) РВ вырабатывает электрические коле-
бания синусоидальной формы с постоянной амплитудой и частотой, которые
подводятся к антенне и излучаются в окружающее пространство. Во взрыва-
телях обычно используют кольцевые антенны, обладающие диаграммой на-
правленности, мало отличающейся от диаграммы направленности симметрич-
ного диполя. В любой плоскости, проходящей через продольную ось бомбы,
диаграмма направленности РВ (рис. 13 51) имеет два лепестка, близких по
очертанию к окружности.
Рис. 13.51. Схема сближения авиационной бомбы с преградой
Радиоволны отражаются от преграды и, пройдя обратный путь, наводят в
антенне РВ высокочастотную ЭДС - отраженный сигнал, который отличается
от излучаемого амплитудой и частотой. Из-за рассеяния радиоволн сигналы
обладают значительно меньшей амплитудой, которая зависит от высоты Н.
Частота отраженных сигналов превышает частоту излучаемых сигналов на
942 13. Взрыватели
величину F (частота Доплера), пропорциональную скорости падения авиаци-
онной бомбы:
где vc и 0С — скорость и угол сближения бомбы с преградой; А. длина излуча-
емых сигналов.
Частота Доплера во много раз меньше частоты излучаемых сигналов Ее
значение лежит в диапазоне звуковых частот. Из вышеприведенной формулы
следует, например, что при гс= 250 м/с, 0С = 90° и X = I м частота F = 500 Гц,
в то время как длине волны X = I м соответствует частота передатчика, равная
300 МГц.
В ГВЧ происходит сложение высокочастотных колебаний генератора с от-
раженными колебаниями, в результате чего возникаю! биения - колебания,
модулированные по амплитуде. Огибающая результирующих колебаний изме-
няется по синусоидальному закону с частотой Доплера. В автодиннбй схеме
ГВЧ промежуток между сеткой и катодом генераторной лампы играет роль
детектора, выделяя огибающую амплитудно-модулированных колебаний, ко-
торая является рабочим сигналом РВ. По мере сближения бомбы с преградой
амплитуда рабочего сигнала, изменяющегося с частотой Доплера, непрерыв-
но увеличивается. Рабочий сигнал проходит усилитель низких частот (УНЧ) и
после усиления подводится к пороговому устройству. На заданной высоте,
когда амплитуда сигнала достигает определенного значения, пороговое уст-
ройство замыкает цепь разряда запального конденсатора через ЭВ предохра-
нительно-исполнительного механизма, и взрыватель срабатывает. Предохра-
нительно-исполнительный механизм содержит ОЦ, предохранительные уст-
ройства и МДВ, которые по конструкции и принципу действия не отличаются
от соответствующих узлов контактных взрывателей.
В оптических взрывателях используют электромагнитное излучение в ди-
апазоне инфракрасных, видимых и ультрафиолетовых лучей. В отличие от РВ
оптические взрыватели могут быть и пассивного типа, в чем одно из их пре-
имуществ. Кроме того, инфракрасная аппаратура считается практически не
подверженной воздействию внешних естественных и искусственных помех.
Наконец, к числу достоинств инфракрасной аппаратуры относят также малые
габариты, простоту конструкции и, как следствие этого, меньшую стоимость
по сравнению с радиолокационной аппаратурой, предназначенной для выпол-
нения тех же задач.
Оптический взрыватель реагирует на тепловое излучение воздушных це-
лей (рис. 13.52). Оптический приемник взрывателя состоит из оптической си-
стемы и фотосопротивления, включенного в электрическую схему. Оптичес-
кая система собирает энергию, излучаемую целью, и направляет ее на чув-
ствительный элемент, которым является фотосопротивление. Электрическая
схема преобразует изменение проводимости фотосопротивления, происходя-
щее под воздействием излучения цели, в импульс напряжения рабочий сиг-
нал. Во взрывателях могут применять два типа оптических систем: линзовые
и зеркальные. Первая включает в себя одну или несколько линз кругового
обзора, на оси которых (в их фокусе) устанавливается фотосопротивление,
13.7. Неконтактные взрыватели и ВУ
943
чувствительное к ИК-лучам. Зеркальная оптическая система содержит одно
или несколько параболических зеркал, которые собирают падающий на них
поток ИК-лучей и направляют его на установленное в их фокусе фотосопро-
тивление (рис. 13.53). Усилитель импульсов и ПИМ выполняются по схеме,
аналогичной схеме РВ.
Рис. 13.52. Блок-схема оптического взрывателя, реа-
гирующего на тепловое излучение воздушной Дели
Рис. 13.53. Приемник НОВ
зеркального типа:
1 - светофильтр; 2 - фоторезис-
тор; 3 - параболическое зеркало
Принципиальная схема НОВ активного типа (рис. 13.54) состоит из пере-
датчика и приемника лучистой энергии, УНЧ, ПУ и ПИМ. Основные элемен-
ты передатчика: объектив 1, источник лучистой энергии и модулирующий
диск 3. Источником лучистой энергии служит лампа накаливания 2, установ-
ленная в фокальной плоскости объектива. Основная доля энергии, излучае-
мой лампой, приходится на диапазон видимых и инфракрасных лучей. Энер-
гия лампы фокусируется объективом в узкий световой пучок, который направ-
ляется к преграде, освещая на ней некоторую площадь So. От этой площади
происходит диффузное отражение потока лучей.
Модулирующий диск представляет собой четырехлопастную звездочку,
которая при падении бомбы приводится во вращение ветрянкой. Диск уста-
навливается между лампой и объективом, поэтому излучаемая лампой энер-
гия будет попадать в объектив только тогда, когда между ними находится
один из вырезов диска. Вращающийся диск преобразует непрерывное излу-
чение лампы в прерывистое (импульсное) излучение объектива. Частота из-
лучения импульсов зависит от скорости вращения диска. Модуляция лучис-
того потока применяется для того, чтобы приемник оптического неконтакт-
ного взрывателя мог отделить отраженный поток передатчика от постоянного
по интенсивности потока солнечных лучей, отраженных от земли. Вместо
механического способа модуляции лучистого потока может использоваться
электрический.
Основные элементы приемника - объектив 4, фоторезистор и преобра-
зующая электрическая схема. Фоторезистор устанавливается в фокальной плос-
кости объектива 4, одинакового с объективом передатчика. Ширина поля зре-
ния приемника близка к ширине пучка, в которой объективом датчика сфоку-
сирован лучистый поток. Преобразующая схема приемника включает в себя
944
13. Взрыватели
Рис. 13.54. Схема НОВ активного типа:
1 объектив; 2 - лампа накаливания; 3 модулирующий диск; 4 - объектив приемника
источник постоянного тока Е, фоторезистор 7?ф и нагрузочный резистор R,
который через разделительный конденсатор связан с входом УНЧ. Когда фо-
торезистор не подвержен действию отраженного потока лучей, в схеме при-
емника течет постоянный ток, создающий на резисторе R постоянное паде-
ние напряжения, которое не передается конденсатором С на вход УНЧ. При
сближении с преградой часть освещенной площади (на рис. 13.54 отмечена
двойной штриховкой) будет находиться в поле зрения приемника. Поток лу-
чей, отражаемый от этой площади, фокусируется объективом на светочувстви-
тельной поверхности фоторезистора. Под воздействием потока происходит пе-
риодическое изменение сопротивления фоторезистора, что приводит к перио-
дическому изменению тока и падению напряжения на нагрузке R. Переменная
составляющая этого напряжения передается через разделительный конденса-
тор С на вход УНЧ и служит для взрывателя рабочим сигналом.
13.7. Неконтактные взрыватели и ВУ
945
С уменьшением высоты Н относительная величина потока лучей, попада-
ющего с освещенной площади в приемник, увеличивается, достигая на высо-
те Но единицы, а затем уменьшается. В соответствии с этим изменяется и
амплитуда рабочего сигнала, которая сначала растет с уменьшением высоты,
достигает на высоте Но максимального значения, а далее падает. Пороговое
устройство взрывателя настраивается на срабатывание от преград, обладаю-
щих наименьшим коэффициентом отражения потока лучей на высоте //(). При
увеличении коэффициента отражения взрыватель будет срабатывать на высо-
тах, больших Но.
Активные НОВ для БЧ ракет класса воздух-воздух строятся аналогично
радиовзрывателям по принципу использования сигналов, отраженных от цели
(в НОВ такие сигналы - световые лучи видимого спектра). Электронно-опти-
ческий блок НОВ состоит из специальной линзы, фотоэлемента и усилителя.
Линза, установленная в головной части взрывателя, имеет конус обнаружения.
Когда цель пересекает конус обнаружения, под действием светового потока
на выходе фотоэлемента скачком возрастает ток, что является сигналом для
инициирования. Сигнал на подрыв БЧ выдается только в момент нахождения
БП в зоне поражения цели при помощи соответствующей регулировки конуса
обнаружения.
Оптический взрыватель реагирует только на скачкообразное изменение
светового потока, обусловленное прохождением цели через конус обнаруже-
ния, и не реагирует на не меняющееся значение светового потока. Это по-
зволяет использовать оптический взрыватель в условиях, когда световые ха-
рактеристики изменяются в широких пределах. Основные недостатки опти-
ческих взрывателей - невозможность их применения в условиях плохой
видимости (облака, туман и т. п.).
Разработка НВ связана с преодолением ряда технических трудностей из-
за специфики работы взрывателя. Достаточно напомнить, что при выстреле
детали НВ испытывают перегрузки до 20 000 единиц, вращение со скоростью
несколько сот оборотов в секунду и т. д. При этом все они, включая различ-
ные элементы радиоэлектронных приборов, должны быть прочными и безот-
казно работать.
Специалисты отмечают, что плохая видимость не влияет на функциониро-
вание неконтактных, в том числе оптических, взрывателей. Вместе с тем силь-
ный дождь или дождевые облака, град или снег могут существенно увеличить
относительное количество случаев неправильного действия взрывателей зенит-
ной и некоторых образцов наземной артиллерии, вызывая преждевременные
срабатывания на траектории. Например, при стрельбе в сильный дождь НВ либо
не срабатывают вообще, либо срабатывают преждевременно. Причиной этого
являются структурные повреждения или микрофонные эффекты, возникающие
в результате ударов капель дождя о летящий снаряд. Если облака имеют на-
столько большую отражающую способность, что их фиксирует радиолокатор,
то можно определить примерное нарушение точности работы взрывателя. При
частых случаях анормального действия взрывателей под влиянием облаков или
дождя НВ рекомендуется заменять дистанционными механическими.
Неконтактные взрыватели могут также срабатывать под действием близких
взрывов или осколков. Повышенное количество преждевременных разрывов на
946
13. Взрыватели
траектории может быть вызвано залпом, очередью или стрельбой с высоким
темпом из соседних орудий. Указанное влияние можно снизить, увеличивая рас-
стояние между орудиями либо временной интервал между выстрелами.
Основные факторы, влияющие на высоту разрыва снаряда с НВ, - угол
встречи с целью и отражательная способность поверхности цели. С увеличе-
нием утла падения снаряда высота разрыва уменьшается. Наименьшую высо-
ту разрыва дают такие поверхности цели, как сухой песок и лед. Влажный
грунт, вода, густая листва деревьев и растительный покров повышают высоту
разрыва снаряда. При приближении к возвышенностям, большим зданиям,
вышкам, деревьям и другим выступающим объектам неконтактные взрывате-
ли срабатывают на большей высоте, чем при приближении к ровной поверх-
ности.
Дальнейшее развитие НВ идет по пути повышения их помехозащищенно-
сти, применения новой элементной базы, миниатюризации и создания уни-
версальных образцов. При этом тенденция универсализации относится, вооб-
ще говоря, ко всем взрывателям. Например, в США еще около 30 лет назад
принято решение о разработке стандартных взрывателей, которые CBenji к ми-
нимуму обширный ассортимент взрывателей различного назначений^ в част-
ности, предполагалось иметь два стандартных взрывателя для наземной ар-
тиллерии (для снарядов и мин) и единый взрыватель для снарядов корабель-
ных орудий. Предусматривалось также отработать НВ, диаметр хвостовой
части которых был бы такой же, как у контактных взрывателей.
Электростатические, магнитные и акустические
неконтактные взрыватели ,
Большое разнообразие физических полей целей позволяет создавать НВ с
другими типами датчиков сигналов. В качестве примера рассмотрим принцип
получения сигнала датчиками электростатических, магнитных и акустичес-
ких НВ.
Электростатические НВ применяются для снаряжения авиационных бомб
и ракет. Они подразделяются на собственно электростатические и емкостные
(конденсаторные). Действие электростатических НВ основано на явлении ин-
дукции, состоящем в перераспределении электрических зарядов токопроводя-
щих тел под влиянием внешнего электрического поля.
Принципиальная схема простейшего электростатического НВ (рис. 13.55, а)
включает в себя электрод Э, изолированный от корпуса взрывателя, батарею
Рис. 13.55. Схема электростатического НВ (а) и схема работы датчика сигнала элект-
ростатического НВ конденсаторного типа (б)
13.7. Неконтактные взрыватели и ВУ
947
Б, ЭВ и газовый разрядник ГР. Параметры элементов схемы выбраны таким
образом, чтобы ЭДС батареи была несколько меньше напряжения поджига
(пробоя) разрядника, поэтому вдали от цели электрическая цепь взрывателя
разомкнута. При пролете ракеты вблизи цели под воздействием ее электричес-
кого поля между электродом и корпусом взрывателя возникает дополнитель-
ная разность потенциалов, которая возрастая достигает в сумме с ЭДС бата-
реи напряжения пробоя. После пробоя разрядника батарея разряжается на ЭВ,
что приводит к его срабатыванию. Очевидно, что знак напряжения, воз-
никающего дополнительно между электродом и корпусом НВ, будет зависеть
от ориентации вектора напряженности электростатического поля цели и рас-
положения электрода (пластины), а общее напряжение определяется полярно-
стью включения батареи. Однако в случае стрельбы вращающимися ракетами
или снарядами приращение напряжения,,будет знакопеременным, что повы-
шает надежность срабатывания НВ. Достоинства НВ данного типа - чрезвы-
чайно большая простота их устройства, однако весьма существенным их недо-
статком можно назвать низкую помехоустойчивость. Взрыватели легко могут
срабатывать от заряженных облаков, паров^оды, дождя, пассивных помех дру-
гого вида, причем создать какие-либо анализаторы сигнала для устранения
этого недостатка весьма проблематично. ' -
Электростатические НВ конденсаторного типа иногда условно относят к
группе активных. В принципе это неверно, так как их датчики сигналов не
влияют на параметры собственного электрического поля цели, что следует из
рассмотрения принципа действия взрывателя этого типа (рис. 13.55, б). Дат-
чик сигнала состоит из двух генераторов Г, и Г2, работающих на различных
частотах: f и f2. Частота собственных колебаний fx одного из генераторов
стабилизирована, а второго f2 - зависит от значения реактивного сопротивле-
ния колебательного контура, в который дополнительно включается емкость,
возникающая между поверхностью земли и электрически изолированными ча-
стями ракеты (бомбы). Значение этой емкости
будет различна в зависимости от расстояния до поверхности земли, что вле-
чет за собой изменение частоты^ генератора Г2, а следовательно, и частоты
разностного сигнала F =f- f2. На некотором расстоянии (высоте) Но частота
сигнала достигает требуемого значения Fo и взрыватель сработает.
Основной недостаток НВ конденсаторного типа - малый радиус действия.
Магнитные НВ впервые стали применять еще во время Первой мировой
войны для неконтактного подрыва морских мин. В дальнейшем взрыватели
этого типа использовали для других БП, в том числе и для противолодочных
авиационных бомб.
Современные магнитные НВ бывают двух типов - магнитостатические (или
просто магнитные) и магнитодинамические (или индукционные). Магнитоста-
тические взрыватели реагируют на интенсивность магнитного поля цели. Как
известно, каждая цель, обладающая ферромагнитными свойствами, искажает
магнитное поле Земли, так как магнитная проводимость ферромагнитных мате-
948
13. Взрыватели
риалов гораздо выше, чем аналогичная характеристика воздуха или воды. В ис-
каженном магнитном поле целей, таких как танки, самолеты, корабли, силовые
линии магнитного поля сгущаются. Таким образом, каждая из целей как бы
создает свое собственное магнитное поле, напряженность которого равна гео-
метрической разности напряженности магнитных полей Земли в данной точке
без цели и при ее наличии. Датчиком магнитных НВ может служить магнитная
стрелка, отклоняющаяся в искаженном магнитном поле. Отклонение стрелки
на заданный угол является сигналом для срабатывания взрывателя.
Серьезные недостатки магнитных НВ - сложность конструкции и низкая
помехоустойчивость. Сложность конструкции обусловлена наличием устрой-
ства для компенсации магнитного поля Земли в месте установки мин. На ра-
боту взрывателя сильное влияние оказывают магнитные бури, которые могут
вызвать преждевременное срабатывание НВ. Единственный способ борьбы с
этим воздействием - снижение чувствительности НВ, что уменьшаем радиус
его действия. ;•
Общий способ борьбы с НВ магнитостатического и магнитодинамйческо-
го типов - размагничивание кораблей с помощью специальных компенсирую-
щих устройств. Вследствие этого уменьшаются и напряженность магнитного
поля, и его градиент. г
Акустические НВ находят применение в авиационных противолодочных
БП. Такие взрыватели реагируют на собственное или отраженное звуковое
или ультразвуковое поле цели. Они могут быть активными и пассивными.
Пассивные взрыватели срабатывают на собственное акустическое поле
цели, обусловленное движением различных механизмов и устройств, переда-
ваемое через корпус и возбуждающее звуковые волны в воде. Активные акус-
тические взрыватели действуют по принципу гидролокации. Датчиками цели
НВ данного типа служат гидрофоны - устройства, передающие колебания уль-
тразвуковой частоты в виде зондирующих импульсов, которые создаются спе-
циальным генератором. В ультразвуковом диапазоне волн (частота колебаний
свыше 20 000 Гц) удается обеспечить высокую направленность излучения при
ограниченных размерах излучателя. Объясняется это тем, что длина волн в
воде измеряется единицами сантиметров. Обычно диаграмма направленности
гидрофона имеет воронкообразную форму, при которой обеспечивается кру-
говой обзор пространства вокруг БП. Гидрофон изготовляется из пьезоэлект-
рика. При воздействии на гидрофон импульсов электрических колебаний он
преобразует их в ультразвуковые колебания, рассеивающиеся в окружающем
пространстве (рис. 13.56). При попадании подводной лодки в зону излучения
гидрофона происходит отражение ультразвуковых импульсов. Достигнув гид-
рофона, ультразвуковые импульсы принимаются и преобразуются в импульсы
Рис. 13.56. Блок-схема НВ гидроакустического типа
13.7. Неконтактные взрыватели и ВУ
949
электрических колебаний, которые после детектирования и усиления посту-
пают на исполнительный блок взрывателя. Для повышения помехозащищен-
ности в исполнительное устройство включают счетчики импульсов, которые
настроены на определенное число принятых сигналов, следующих с перио-
дом повторения. Период повторения соответствует частоте импульсов моду-
лятора. На исполнительное устройство кроме сигналов от цели приходят так-
же импульсы от модулятора, предохраняющие НВ от срабатывания под воз-
действием зондирующих импульсов в момент их излучения.
В настоящее время в малокалиберных ЗУР ПЗРК и некоторых других ти-
пах ракет все более широкое распространение получают вихревые генерато-
ры - датчики цели магнитокумулятивного действия, функционирование кото-
рых основано на использовании вихревых токов, наводимых в металлической
оболочке воздушной или морской цели магнитным полем самого датчика.
К числу положительных характеристик-Вихревых генераторов по сравнению с
другими типами датчиков относят: > 7
- чрезвычайно широкий диапазон*.екоростей встречи с целью (от 80...
...100 м/с - на догонных курсах до 1400.> 1500 м/с - на встречных курсах ра-
кеты и воздушной цели);
- исключительную простоту конструкции и возможность размещения дат-
чика в любом отсеке ракеты (в том числе н под немагнитной оболочкой);
- высокую устойчивость от действия механических, электромагнитных,
температурных и радиационных помех; •
- избирательность действия по типу материла цели и его толщине;
- обеспечение проникающе-фугасного действия БЧ, т. е. автоматический
подрыв БЧ после внедрения ракеты в цель (при установке вихревого генера-
тора на заднем торце БЧ).
Помехоустойчивость и помехозащищенность
неконтактных взрывателей
Недостаточная устойчивость НВ к помехам может стать причиной низкой
эффективности ракетного комплекса в целом. Применительно к неконтактным
РВ актуальность задачи обеспечения высокой помехоустойчивости и поме-
хозащищенности объясняется применением специальных авиационных средств
радиоэлектронного противодействия. Организованные помехи бывают актив-
ными, создаваемыми специальными станциями помех, и пассивными (отра-
жающими). Активные помехи подразделяются на ретрансляционные (ответ-
ные) и шумовые. Ретрансляционные помехи формируются путем приема
зондирующих сигналов РВ, определения их параметров и переизлучения с
помощью специальных станций. В процессе ретрансляции сигнал помехи об-
ладает значительной мощностью и воспринимается РВ как сигнал от цели с
большой отражающей поверхностью.
Шумовая помеха складывается из гармонических колебаний, составляю-
щих сплошной спектр определенной ширины. Она излучается непрерывно и
независимо от того, есть сигнал от РВ или нет, при этом ширина спектра
помехи должна охватывать спектр рабочих частот реальных приемопередаю-
щих устройств РВ.
ловолокон и других отражателей. В результате падения на них зондирующих
сигналов формируются ложные отраженные сигналы, которые способны выз-
вать преждевременное срабатывание РВ. Отражатели укладывают в отдель-
ные пачки (блоки) и сбрасывают с помощью специальных автоматов. Поста-
новка помех может проводиться также путем стрельбы специальными поме-
хосоздающими артиллерийскими снарядами или ракетами (устройство и
принцип действия помехосоздающих БП см. в гл. 11).
Большинство методов защиты НВ от помех основано на использовании
физических особенностей сигналов помех, которые отличаются от полезного
сигнала. Остановимся на некоторых методах повышения помехозащищеннос-
ти взрывателей, основными из которых являются:
- повышение направленности действия антенн и других индикаторов цели;
- использование программных методов управления работой взрывателей;
- параметрическая селекция рабочего сигнала;
- селекция сигнала по дальности;
- применение многоканальных схем НВ.
Повышение направленности действия антенн способствует улучшению
их помехозащищенности, так как при этом сужается область пространства, из
которой может быть послана помеха, и увеличивается мощность принимаемо-
го сигнала. Последнее снижает чувствительность приемных устройств НВ и
вызывает необходимость использования противником более мощных передат-
чиков помех. При более узких диаграммах приема сигнала требуется- также
большая плотность постановки пассивных отражателей в облаке.
Сужение ширины диаграммы направленности достигают уменьшением
длины волны передатчика. На помехозащищенность РВ, кроме ширины диаг-
раммы направленности, большое влияние оказывают также так называемые
побочные лепестки. Их наличие расширяет область, из которой станция по-
мех может воздействовать на РВ.
Программные методы управления работой взрывателей предполагают
включение их в действие не сразу после пуска ракет, а некоторое время спус-
тя, т. е. на траектории. Для этой цели на борту ракеты или носителя формиру-
ется время, пропорциональное времени полета ракеты в упрежденную точку.
До наступления этого момента НВ либо вообще не принимает какие-либо сиг-
налы, либо не реагирует на них. Команда на включение приемопередающих
устройств НВ формируется в непосредственной близости ракеты от цели, что
затрудняет использование противником технических средств противодействия.
Параметрическая селекция рабочего сигнала применяется достаточно ши-
роко. Она включает в себя реализацию различных видов селекции сигнала по
частным параметрам - несущей частоте, спектру принимаемых волн, периоду
повторения импульсов, их длительности и т. д. Частотная селекция обеспечи-
вается полосой пропускания усилителей низкой или промежуточной частоты.
Чем уже полоса пропускания, тем большей помехозащищенностью обладает
взрыватель. Широкое распространение на практике получила амплитудная се-
лекция сигнала, суть которой состоит в ограничении амплитуды сигнала до
некоторого уровня, не зависящего от мощности принятого сигнала. В сочета-
нии с анализаторами длительности сигнала ограничение его по амплитуде не
13.7. Неконтактные взрыватели и ВУ
951
вызывает срабатывание исполнительных устройств от случайных сигналов,
какой бы мощностью они не обладали.
Селекция сигнала по дальности может обеспечить защиту РВ от ре-
трансляционных помех, которые отличаются от сигналов, отраженных целью,
большим временем распространения. Этот вид селекции может быть исполь-
зован в импульсных и частотно-модулированных РВ. В импульсных РВ се-
лекция по дальности достигается формированием строб-импульсов, а в час-
тотно-модулированных - выбором частотных характеристик УНЧ. При стро-
бировании импульсных РВ ограничивается время приема сигналов интервалом,
соответствующим дальности действия РВ.
Применение многоканальных схем НВ - один из основных путей повыше-
ния помехозащищенности. Многоканальные НВ собираются по различным схе-
мам. В простейшем случае во взрывателе, создаются два или большее число
индикаторов сигналов, работающих на о^Йцую исполнительную цепь по логи-
ческой схеме «И». Отдельные каналы характеризуются различными парамет-
рами зондирующих и принимаемых сигналов, что затрудняет возможность по-
становки помех по всем каналам одновременно. В других схемах многока-
нальных НВ реализуется принцип прийма активных шумовых помех и
фактических сигналов от цели различными.’приемниками. В этом случае сиг-
нал, принятый по каналу помех, используется как команда для блокировки
исполнительного устройства взрывателя. Обычно приемники канала помех об-
ладают более высокой чувствительностью, чем приемники канала основного
сигнала. Поэтому канал помех включается в работу раньше, настраивается на
сигнал помех и в дальнейшем не дает взрывателю срабатывать от мощной
помехи, проходящей по основному каналу.
Описанные методы не охватывают всех возможных путей повышения по-
мехозащищенности НВ. Во взрывателях каждого типа применяются различные
методы повышения помехозащищенности, которые в совокупности определяют
их тактико-технические характеристики. Конкретные способы и меры повыше-
ния помехозащищенности НВ недостаточно освещены в открытой печати.
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ
Барбашов ГВ., Грецова Е.Б., Смирнов А.П. Пиротехнические и огневые цепи си-
стем управления: Учеб, пособие. Ч. 1. СПб.: Изд-во БГТУ, 1999.
Васильев М.Ф. Теория проектирования трубок и взрывателей. М.: Воениздат, 1946.
Взрывчатые вещества, пиротехника, средства воспламенения в послевоенный пе-
риод: Люди. Наука. Производство. М.; СПб.: Изд-во «Гуманистика», 2001.
Голубинский Ю.М., Юзбашев Н.Н. Основания устройства взрывателей к артилле-
рийским боеприпасам. Пенза: Изд-во ПАИИ, 2004.
Горст А.Г. Пороха и взрывчатые вещества. М.: Машиностроение, 1972.
Дорофеев А.Н. Взрыватели ракет. М.: Воениздат, 1963.
Егоренков Л., Платонов И, Левицкий Л. Новые взрыватели для боеприпасов
ствольной артиллерии И Военный парад. 2000. № 2.
Егоренков Л., Платонов Н, Шахмейстер Л. Электронные дистанционные и дис-
танционно-контактные взрыватели РСЗО // Военный парад. 2000. № 3.
Егоренков Л.С., Платонов НА. «НИИ «Поиск» - 70 лет лидерства в разработке и
производстве взрывателей И Военный парад. 2000. № 1.
952.
13. Взрыватели
Миропольский Ф.П., Саркисян Р.С., Вишняков О.Л., Попов А.М. Авиационные бое-
припасы и их исследование. М.: Изд-во ВВИА им. Н.Е. Жуковского, 1996.
НИИ «Поиск». Страницы истории (1930-2000 гг.). СПб.: Изд-во «Формика», 2000.
Носков Б.И. Выстрелы малокалиберных автоматических пушек. М.: Изд-во МГТУ,
1998.
Партала С.В., Алчинов В.И., Бурлов В В и др. Конструкции средств поражения,
боеприпасов, взрывателей и систем управлениями средствами поражения. Конструк-
ция и функционирование ПТУР: Учеб, пособие. Пенза: Изд-во ПАИИ, 2004.
Прохоров Б.А. Боеприпасы артиллерии. М.: Машиностроение, 1973.
Рдултовский В.И. Исторический очерк развития зрубок и взрывателей. М.: Обо-
ронгиз, 1940.
Снегирев П., Федоров В. 60 лет ФГУП «НИТИ»: Широкая номенклатура взрыва-
телей // Военный парад. 2002. № 1.
Сулин ГА. Автоматические приборы управления взрывом: Учеб, пособие. СПб.:
Изд-во БГТУ, 1992. ’ ;
Сулин ГА. Сенсорные системы боеприпасов: Учеб, пособие. СПб/ Изд-во БГТУ,
1998.
Третъяков Г.М. Боеприпасы артиллерии. М.: Воениздат, 1947. / »
Черный В.Г, Охитин В.Н., Козлов В.И. Конструкция и эксплуатация импульсных
тепловых машин: Учеб, пособие. Ч. IV. М.: Изд-во МГТУ им. Н.Э. Баумана,1992.
14
СРЕДСТВА ИНИЦИИРОВАНИЯ И ПЕРЕДАЧИ
ОГНЕВОГО И ДЕТОНАЦИОННОГО ИМПУЛЬСОВ
14.1. Общая характеристика систем инициирования
Система передачи детонационного импульса (СПДИ) - один из основных
элементов любого взрывного устройства, содержащего заряд ВВ, который не-
обходимо в требуемый момент времени и в определенных условиях внешних
физических воздействий привести в действие. При этом нужно таким обра-
зом организовать выполнение команды от упрдйпяющего сигнала (силового
фактора), чтобы выделение энергии в детонационном режиме было макси-
мальным. Не менее важен и фактор стабильности-,- под которым следует пони-
мать параметрическое постоянство выходных характеристик каждого элемен-
та детонационной цепи (ДЦ), обеспечивающее в конечном итоге гарантиро-
ванный уровень параметров последнего элемента цепи. Этим достигается
стабильность параметров поля поражения.
Вместе с тем та же система в целях обеспечения эксплуатационной и функ-
циональной безопасности исключает несанкционированный подрыв даже в
случае выдачи команды на первичный источник инициирования детонацион-
ного процесса. Детонационная цепь (в простейшем случае цепь взрывания)
должна выполнять такие функции, как безопасность, надежность и стабиль-
ность.
Многообразие конструктивных решений, которые включают в себя тра-
диционные ОЦ (КД - ПЗ - Д и дополнительные элементы (замедлители, уси-
лители), детонаторы ВУ разного типа действия, а также сложные схемы де-
тонационных разводок в системах многоточечного инициирования), суще-
ственно затрудняет построение физической модели ДЦ, описывающей
совокупность последовательного развития процесса вплоть до инициирова-
ния боевого заряда. По этим причинам в настоящее время успешно развива-
ются только упрощенные модели, которые содержат не более двух детона-
ционных элементов. Другими словами, если известна предыстория работы
предыдущего элемента, то с высокой степенью надежности можно опреде-
лить параметры работы последующего элемента и т. д. Основная трудность
построения модели функционирования ДЦ состоит в существенной нелиней-
ности протекающих на всех стадиях процессов. Даже если в одном из элемен-
тов детонационный режим выходит на стационарный, то это не означает, что
в следующем элементе он тоже перейдет в стационарный режим. При этом не
обязательно, чтобы на длине данного детонационного элемента детонация раз-
вивалась до стационарного режима, так как уровень выделения и передачи
954
14. Средства инициирования и передачи импульсов
энергии в неидеальном режиме может быть достаточным для возникновения
и развития процесса в последующем элементе цепи. Вместе с тем процесс
носит поступательный характер - его идеальность от элемента к элементу
возрастает, а инициирующий импульс в каждой последующей паре элементов
усиливается.
Уровень представлений о механизме возбуждения, развития и распрост-
ранения детонации и предшествующих ей низкопорядковых форм взрывных
процессов позволяет существенно расширить функциональные возможности
элементов системы управления. Речь идет о принципиальной, а в ряде случа-
ев и реализуемой, возможности создания логических схем на детонационных
элементах. Основное преимущество таких систем - их достаточно высокая
защищенность от различного рода и уровня электромагнитных воздействий,
что существенно с точки зрения безопасности и надежности работы системы
инициирования в целом. »•' ’ ’
Проблема разработки систем возбуждения, развития, усиления и пере-
дачи детонационного импульса в малогабаритных элементах сложной про-
странственной геометрии в условиях существенной неидеальнф'сЧГи взрыв-
ных процессов в изделиях, испытывающих значительные осевые,..боковые и
температурные нагрузки, мало изучена и базируется в основном ria-экспери-
ментальной отработке. В ближайшее время вряд ли возможно построить убе-
дительную и достоверную модель, а также и соответствующее ей аналити-
ческое или численное описание. Системы передачи детонационного импульса
еще долго будут оставаться газодинамическими, экспериментальная отра-
ботка которого является единственно возможным способом обеспечения на-
дежности.
Существующий уровень проработки, основные научные результаты и вос-
полнение недостающих сведений позволят приблизиться к пониманию про-
цессов, происходящих в ДЦ (табл. 14.1).
Таблица 14.1. Состояние и задачи процесса разработки
средств инициирования
Предмет проработки Основные научные результаты Недостающие сведения
Анализ структурных характеристик сис- тем инициирования Физическая модель работы ДЦ Установлены закономерности не- зависимой работы и характеристи- ки элементов ДЦ (КД, передаточ- ный заряд, детонатор взрывателя), обеспечивающие безопасность и безотказность Построена дифференциальная энергограмма работы ДЦ. Получе- ны закономерности передачи-от- бора энергии в условиях режимов, далеких от идеальных детонаци- онных Характеристики и иниции- рующая способность конк- ретных малогабаритных элементов ДЦ в режимах работы и предохранения Физическая модель ДЦ как детонационного усилителя начального импульса. Учет пространственной геомет- рии детонационных эле- ментов и ограничений
14.2. Типы огневых цепей, средства инициирования
955
Окончание табл. 14.1
Предмет проработки Основные научные результаты Недостающие сведения
Физико-математи- ческая модель про- цесса передачи де- тонационного им- пульса в системе малогабаритных за- рядов Оптимизация эле- ментов ДЦ Причины снижения надежности и ста- бильности работы ДЦ Прогноз качества детонационных це- пей Изучены критерии ударно-волно- вого инициирования с учетом неодномерности процессов и воз- можности переноса результатов торцевого инициирования на ра- диальную схему, а также критерии смешанного инициирования и инициирования малогабаритными КД с кумулятивными выемками Обоснован обобщенный.'-критерий инициирования, выбор бВ; матери- алов оболочки и величиньгзазоров Проведен анализ несовершенства элементов ДЦ и возможйых физи- ческих причин снижения надеж- ности. Установлено качество сис- темы инициирования и ее влияние на стабильность работы БП в це- лом Установлено влияние предвари- тельных ударных и тепловых воз- действий на рабочие характерис- тики элементов ДЦ. Исследована возможность замены в узлах ини- циирования штатных составов на перспективные Критерии инициирования и их применимость для раз- личных конструктивных схем ДЦ Алгоритм оптимизации вы- бора конструктивных эле- ментов ДЦ Составляющие надежности, неидеальности. Банк дан- ных, формуляр надежности, стабильности Рекомендации по учету пред- варительных воздействий и по замене существующих со- ставов на перспективные. Критерии перехода от одно- го состава к другому без по- тери имеющегося уровня на- дежности и безопасности
Предполагается, что читатель знаком с изложенным в этом подразделе
материалом: главными положениями теории детонации, критическими усло-
виями ее развития и распространения, а также с основами теории тепловой,
ударной и ударно-волновой чувствительности ВВ,
14.2. Типы огневых цепей, средства инициирования.
Структура огневой цепи
Существуют следующие типы огневых цепей.
Огневая цепь предохранительного типа. ОЦ, в которой КД или ЭД изо-
лированы от детонатора таким образом, что их срабатывание до момента взве-
дения не вызывает инициирования детонатора.
Огневая цепь полупредохранительного типа. ОЦ, в которой КД или
ЭВ изолированы от КД или петарды таким образом, что их срабатывание до
момента взведения не вызывает инициирования КД или петарды.
956
14. Средства инициирования и передачи импульсов
Огневая цепь непредохранительного типа. ОЦ, в которой КД или ЭВ
не изолированы от КД или петарды, а КД или ЭД не изолированы от детона-
тора.
Рис. 14.1. Схема средств инициирования
Рис. 14.2. Структура огневой цепи
На рис. 14.1 и 14.2 представлены структуры средств инициирования и
огневой цепи.
14.3. Средства инициирования взрывных процессов.
Классификация средств инициирования
В условиях служебного обращения в различных конструкциях взрывных
устройств непосредственное инициирование ВВ простыми начальными им-
пульсами невозможно. Поэтому в технике используют специальные средства
инициирования взрывных процессов (детонаторы), которые представляют со-
бой изделия, чувствительные к простым начальным импульсам - удару, нако-
лу, трению, нагреву, искре, лучу пламени - и способные в результате их дей-
ствия вызывать детонацию зарядов БВВ.
14.3. Средства инициирования взрывных процессов
957
По условиям безопасности и конструктивным особенностям объем (мас-
са) непосредственно средств инициирования обычно ограничен. Поэтому в
зависимости от поставленной задачи они в большинстве случаев дополняют-
ся элементами, усиливающими их действие и составляющими так называе-
мую огневую цепь (рис. 14.3).
Рис. 14.3. Схема инициирования зарядов ВВ и порохов без предохранительного
элемента:
а - ВУ (/ - УМ; 2 - механизм дальнего взведения; 3 - КД, состоящий из чувствительного
компонента и мощного БВВ; 4 - детонатор взрывателя; 5 - боевой заряд); б - детонационная
цепь (1 - инициирующий импульс (ударник); 2 - КД; 3 — детонатор взрывателя; 4 - ВВ); в -
цепь воспламенения (1 - инициирующий импульс (боек); 2 - КД; 3 - усилитель; 4 - пороховой
заряд)
в
Средства инициирования по виду импульса подразделяют на средства
воспламенения и детонирования.
Средства воспламенения формируют луч пламени, необходимый для
инициирования пороховых зарядов, трубочных составов, лучевых КД, замед-
лителей и усилителей. К ним относятся патронные и трубочные (взрыватель-
ные) КВ, капсюльные втулки, вытяжные (терочные) трубки, электровоспламе-
нители (электрозапалы, электрические капсюли, электрические капсюльные
втулки, пиропатроны), огнепроводы (огнепроводный шнур, стопин, фитиль)
(рис. 14.4).
Недостаточность действия средства воспламенения усиливают добавле-
нием некоторого количества черного дымного пороха или пиротехнического
состава.
Средства детонирования генерируют достаточно мощный взрывной им-
пульс, необходимый для развития детонации в заряде БВВ. К ним относятся
артиллерийские лучевые и накольные КД, электродетонаторы различного прин-
ципа действия, детонирующий шнур и т. д. (рис. 14.5).
В большинстве случаев для обеспечения полноты взрыва действие ука-
занных средств детонирования усиливают посредством постановки дополни-
тельных детонаторов. В зависимости от требований и условий применения
958
14. Средства инициирования и передачи импульсов
Рис. 14.5. Классификация средств детонирования
взрывного устройства на практике необходимо осуществить либо мгновен-
ный подрыв разрывного заряда, либо подрыв с некоторой задержкой по вре-
мени (с замедлением), что достигается введением в ОЦ специальных замедли-
телей. В дальнейшем описании нецелесообразно приводить многочисленные
конструкции всех средств инициирования, поэтому даны только принципи-
альные схемы их построения.
14.4. Дифференциальная энергограмма детонационной цепи
959
14.4. Дифференциальная энергограмма детонационной цепи
В основу построения дифференциальной энергограммы положен рабочий
цикл детонационной цепи (рис. 14.6). О возможностях цепи судят по выход-
ной энергии каждого ее элемента, которую определяют при помощи диффе-
ренциальной энергограммы. Рассмотрим ДЦ предохранительного типа с тре-
мя каскадами: КД, ПЗ и основной детонатор (рис. 14.7).
В левой части дифференциальной энергограммы представлены два режи-
ма работы ДЦ: нормальный 1 и аномальный 2. Выделение энергии взрывного
превращения капсюля-детонатора Q^, передаточного заряда и детонато-
ра приводит как к истечению продуктов детонации и метанию с кинети-
ческой энергией W доньев капсул (корпусов), в которые запрессованы заряды,
Рис. 14.6. Рабочий цикл ДЦ
960
14. Средства инициирования и передачи импульсов
Рис. 14.7. Дифференциальная энергограмма детонационной цепи: '
1,2 - нормальный и аномальный режимы работы ДЦ соответственно
так и к диссипации энергии Ф. Под энергией диссипации следует понимать
затраты на метание, разрушение и деформирование оболочек детонационных
элементов, не участвующих в инициировании следующих звеньев ДЦ. Если в
нормальном режиме выходная энергия метаемого дна детонатора IVбольше
критической W*, необходимой для возбуждения нормальной детонации, а время
Az(]) меньше ?, то в аномальном - < W* за счет больших химических
(неполная детонация) и диссипативных потерь Ф(2) = Ф<1> + АФ-
Однако даже при нормальном режиме работы детонационной цепи рас-
стояние между дном детонатора и верхним срезом разрывного заряда при-
водит к увеличению времени движения дна детонатора t0 и условиям, схема-
тически представленным в правой части диаграммы. Здесь дно при движе-
нии разделяется на два элемента в форме кольца и тарелочки с кинетической
энергией W} и W2 соответственно. Такой характер разрушения дна в первом
приближении возможен у большинства детонаторов на начальных стадиях
движения. Далее дно может дробиться на ряд более мелких элементов, не-
сущих разную кинетическую энергию (W3, IV4 и IV5) и не одновременно со-
ударяющихся с последующим зарядом. Это приведет к разновременности
(ДО ударного воздействия и нарушению энергетического условия (fVt< W* и
И/5< IV*), хотя общая энергия диссипации, передаваемая заряду, Фвв = +
+ W5 > W*. Кроме того, не все элементы будут взаимодействовать с ВВ (fV3 и
IV4), отдавая заряду лишь нормальную составляющую кинетической энергии
we, w%.
Отметим также, что величина необходимой кинетической (или полной)
энергии W* зависит от состояния заряда ВВ, которое определяется компонент-
ным составом, технологией его снаряжения, условиями стрельбы (ствольные
14.5. Причины снижения надежности и стабильности работы ДЦ 961
перегрузки) и взаимодействием с преградой, когда в процессе нагрузок меня-
ются характеристики заряда (десенсибилизация или сенсибилизация).
Таким образом, анализ работы ВУ с помощью дифференциальной энерго-
граммы позволяет в целях повышения надежности и стабильности работы раз-
рывного заряда определить:
- диссипативные потери при работе ДЦ в целом и ее элементов в отдель-
ности;
- параметры метания (передача-отбор энергии), характер деформации и
разрушения дна оболочки детонатора, распределение энергии между элемен-
тами корпуса детонатора (дно, цилиндрическая часть и область сопряжения);
- механизм возбуждения и развития детонации в последующих зарядах
ДЦ в зависимости от механизма инициирования предыдущего заряда и степе-
ни неидеальности процесса; i 4
- коэффициент усиления ДЦ, т. е. отношение выходного импульса к на-
чальному; *;•-
- причины снижения стабильности рабЗж ДЦ.
14.5. Причины снижения надежности и стабильности работы
детонационных' цепей
Рост надежности и стабильности работы ДЦ только за счет дальнейшего
повышения требований к процессу их проектирования, производства и экс-
плуатации сегодня невозможен. Причина этого заключается в усложнении си-
стем, в состав которых входит ДЦ из-за большей функциональной нагрузки и
усложнения конструкции в целом, а также ее элементов в частности. В этой
связи оказалось, что существующие представления о физических процессах,
протекающих в газодинамических устройствах, недостаточны для гарантии
высоких уровней надежности функционально более сложных элементов. На
рис. 14.8 представлена схема основных причин снижения надежности систем
инициирования.
Структурно-технологические несовершенства зарядов. До последнего
времени конструкторов мало интересовали структурные характеристики раз-
рывных зарядов. В качестве исходных зарядов использовали тот или иной про-
дукт, который в дальнейшем шел на изготовление состава, причем в основном
контролировали химическую чистоту состава, но не учитывали кристаллогра-
фический и структурный состав. Известно, что структура компонентов и тех-
нология изготовления определяют структуру заряда, а следовательно, его чув-
ствительность. Последняя в большей степени проявляется через пористость,
представляющую собой потенциальный свободный объем, в котором возмож-
на локальная генерация теплоты. Пористость в конечном счете характеризует
функциональные качества заряда и его чувствительность. Для литых смесе-
вых зарядов типа ТГ важно не только процентное соотношение компонентов,
но и распределение зерен гексогена в расплаве тротила, определяющее энер-
гетику заряда. Контролируются только крупномасштабные дефекты, которые
в большей степени влияют на эксплуатационную безопасность, чем на надеж-
ность. В той же степени сказанное относится и к участкам неприлипания за-
ряда к элементам конструкции, например, к кумулятивной облицовке. Здесь
ПРИЧИНЫ СНИЖЕНИЯ
НАДЕЖНОСТИ
I
5
е
г
g
с
с
а
X
S
Нагружающая
способность
Метательная
способность
Рис. 14.8. Схема основных причин снижения надежности систем инициирования
14.5. Причины снижения надежности и стабильности работы ДЦ
963
можно говорить и о снижении эффективности передачи энергии, затрачивае-
мой на ускорение оболочки и формирование КС.
Несколько по-иному те же факторы соотносятся с прессованными заряда-
ми. Основная масса взрывчатых составов прессуется с флегматизатором. Рав-
номерность покрытия флегматизатором зерен мощного ВВ - фактор, опреде-
ляющий его плотность (пористость), а следовательно, и его чувствительность.
Необходимо отметить, что процесс прессования является принудительным, в
результате чего естественная исходная структура ВВ в этом процессе сохра-
ниться не может: по существу мы имеем дело с другим структурно отличаю-
щимся зарядом (зерна раздроблены, степень флегматизации может быть как
ниже, так и выше, чем у исходного полуфабриката).
Пространственное расположение элементов. Существует большое раз-
нообразие схем расположения детонацирнных элементов, которые сводятся к
осевым, радиальным и смешанным схемам расположения. Перечисленные схе-
мы не равноценны, прежде всего, по инициирующей способности. При опре-
деленных малых габаритах радиальное инициирование в целом неэффектив-
но. Для систем осевого инициирования критичным является диаметр воздей-
ствия, его влияние особенно существенно на пределе инициирования, когда
технологические несовершенства могут снизить надежность как самого акта
инициирования, так и повлиять на степень идеальности возникшего процес-
са. Важно подчеркнуть, что осевое инициирование самый надежный спо-
соб. В этой связи может быть принято положение: если в данной схеме нет
осевого инициирования, то отсутствует и радиальное.
Ошибочный выбор параметров элементов передачи детонационного
импульса - это следствие недостаточного уровня наших представлений о фи-
зических процессах в детонационных элементах и отсутствие надежных ме-
тодик их расчета. На сегодняшний день ситуация такова: поэлементно мы знаем
каждый этап, можем его описать и представить в эмпирической форме. Одна-
ко для совокупности последовательных детонационных элементов, каждый из
которых не «добирает» до идеального режима, создать универсальную инже-
нерную методику пока нельзя, тем более рано говорить о возможности опти-
мизации элементов, входящих в ДЦ. Вместе с тем уровень физических пред-
ставлений по каждому элементарному акту передачи детонационного импуль-
са достаточно высок, например, переход инициирующей УВ в детонационную
при различных условиях инициирования. Как указывалось, СПДИ в большин-
стве своем работают как многоступенчатые усилители в предельных неиде-
альных условиях. На процесс накладываются множественные взаимодействия
нестационарных ударных и детонационноподобных волн. В этих условиях на-
дежно предсказать характер развития процесса становится делом сложным.
Влияние предварительного воздействия в еще большей степени зат-
рудняет достоверный прогноз надежности и стабильности работы цепи. К мо-
менту работы СПДИ заряд ВВ и его элементы могут испытывать интенсив-
ные динамические и термические воздействия: перегрузки в канале ствола,
при метании кассетных элементов, при проникании в прочные протяженные
преграды, а также аэродинамический разогрев при наружной подвеске и т. д.
Смысл неопределенности в выборе параметров передачи детонационного им-
пульса состоит в том, что существенно изменяются физико-механические свой-
964
14 Средства инициирования и передачи импульсов
ства боевого заряда, что неоднозначно влияет на характеристики чувствитель-
ности (она может как повышаться, так и понижаться). Возможность измене-
ния физико-механических свойств заряда при интенсивных функциональных
взаимодействиях определяется технологией его изготовления и сборки. Воз-
можно, что СПДИ отрабатывается применительно к одному типу заряда, а
используется для другого. Это допустимо, когда элементы цепи имеют запас
по надежности. Если его нет или он мал, изменение свойств заряда под дей-
ствием внешних нагрузок может сделать его неработоспособным. Данные
Рис. 14.9. Зоны напряжений в кумуля-
тивном заряде
по этому вопросу скудны, однако име-
ющиеся подтверждают, что пренебре-
гать фактором интенсивного внешнего
предварительного воздействия нельзя.
Например, напряжения в заряде куму-
лятивного узла, изготовленного мето-
дом раздельно-шашечного снаряжения
с последующей склейкой мест соедине-
ния парафиноцерезиновой мфгуикой
(рис. 14.9), изменяются от 0,5 до-'0,7 ГПа
и наибольший градиент напряжения на-
блюдается в окрестностях линзового
узла.
Данные по изменению средней плотности рср и напряжений G в заряде
вдоль КО после ускорения снаряда в канале ствола (рис. 14.10) свидетель-
ствуют о необходимости учета изменения свойств заряда к моменту санкцио-
Рис. 14.10. Распределение средней плотности и напряжения в кумулятивном заряде
до (7) и после (2) ускорения в канале ствола
14.5. Причины снижения надежности и стабильности работы ДЦ
965
нированного подрыва. Для других типов БП при проникании в плотные пре-
грады нагрузки существенно выше, а следовательно, и структурные измене-
ния в заряде значимы и их нельзя не учитывать.
В этой связи остановимся на некоторых особенностях механического
поведения ВВ в условиях интенсивных нагрузок. Изменение микрострукту-
ры прессованных зарядов ТНТ существенно зависит от давления прессова-
ния. При этом наблюдается большое число пор на межзеренных границах.
На соотношение между внутри- и межзеренными дефектами сильно влияют
размеры частиц исходной фракции и давление прессования, повышение ко-
торого приводит к уменьшению среднего размера дефектов и сокращению
их числа. Если при давлении прессования 0,29 ГПа характерный размер де-
фектов составляет 10... 100 мкм, то при давлении 0,57 ГПа - 2...4 мкм. При
дальнейшем повышении давления прессования до 0,73 ГПа межзеренных
дефектов практически не наблюдаете# (рис. 14.11 и 14.12). Для составов
ТГ40/60 и ТГ50/50 в исходном состоянии размер пор и пористость отлича-
ются незначительно. При этом количество пор в единице объема в составе
ТГ50/50 примерно в 1,5 раза больше, чем в ТГ40/60, что указывает на то,
что пористость в смесях ТГ определяется в первую очередь структурой ТНТ
(рис. 14.13).
Рис. 14.11. Влияние исходного размера ча-
стиц d на прочность прессованного ТНТ:
1 - d< 500 мкм; 2-d= 500.. .600 мкм; 3 d-
= 600. 700мкм, 4- d= 700... 1000мкм
Рис. 14.12. Влияние исходного размера
частиц d на пористость п в зависимости
от давления прессования рпрес:
1 ~Pnpsx = 2900 кг/см3; 2 - рпрес = 7300 кг/см3
При слабом ударно-волновом воздействии на ВВ, когда разложение в ре-
зультате химической реакции отсутствует, основные статистические характе-
ристики объемной структуры заряда изменяются довольно существенно
(рис. 14.14). Основные изменения в структуре заряда сводятся к следующему:
структура фазы ТНТ меняется, первоначальная ориентация фазы нарушается.
С увеличением давления эффекты трещинообразования и дробления частиц
усиливаются, средний размер частиц и среднеквадратическое отклонение
уменьшаются. Количество частиц гексогена в единице объема возрастает в
2,7 раза (р = 0,64 ГПа), при этом происходит незначительное увеличение от-
носительного количества частиц мелкой фракции (до 20 мкм) (0,88...0,96).
966
14. Средства инициирования и передачи импульсов
б
Рис. 14.13. Распределение пор (а) и ча-
стиц (б) гексогена в литых зарядах ТГ:
1 - ТГ40/60, 2 - ТГ50/50; 8П - размер пор
К сожалению, данных по измене-
нию структуры ВВ при динамических
воздействиях недостаточно, что связано
с трудностью их установления и много-
значностью ответных реакций исходной
структуры на динамические воздей-
ствия. Однако большинство случаев
аномального функционирования изде-
лия, при условии отработанной ДЦ, за-
висит от фактора существенного изме-
нения физической структуры заряда.
Отработка многозвенных детонацион-
ных структур со сложными передаточ-
ными функциями обычно проводится
поэлементно и позволяет Драиться при
парном сочетании элементов удовлетво-
рительной их работы. Система переда-
чи детонационного импулйсй является
многозвенной, в результате чего поэле-
ментная отработка цепи в целом не га-
рантирует ее надежной работы при сан-
кционированном режиме. Парное рас-
смотрение работы элементов ДЦ не
всегда дает ответ на вопрос: достаточно
ли обеспечить нормальное инициирова-
ние детонатором передатрчного заряда
для того, чтобы стабильно работал раз-
рывной заряд? Оказывается, что не все-
гда. Дело в том, что неидеальные и нестационарные режимы, по существу, не
моделируются. Сейчас нельзя установить, до какой степени неидеальности
(идеальности) должен развиться процесс, чтобы все его стадии носили посту-
пательно развивающийся характер. Поэтому парная отработка элементов цепи
не гарантирует надежную работу всей цепи.
Неидеалыюсть и нестационарность детонационных процессов - ос-
новная причина снижения надежности. Понятие неидеальности процессов при-
менить к ДЦ довольно сложно (см. рис. 14.8). В предельных условиях разви-
тия нет факторов, определяющих процесс развития детонации, которыми мож-
но пренебречь. Мировой опыт исследования нестационарных взрывных и
детонационных процессов показывает, что их необычайно трудно воспроиз-
вести. Это связано с тем, что распространению детонации предшествует про-
цесс ее возникновения, причем они не только последовательно развиваются,
но и взаимозависимы.
Невоспроизводимость работы многозвенной цепи. При анализе при-
чин отказов работы цепи в несанкционированном режиме довольно трудно
установить причину нестабильности или отказа. Здесь можно отметить два
принципиальных момента: одноразовость сборки (элемента) и отсутствие воз-
можности предварительной или повторной проверки. В последнем случае лю-
14.5. Причины снижения надежности и стабильности работы ДЦ
967
f(d)
0,15
0,10
0,05
0 5 10 15 20 25 d, мкм
Рис. 14.14. Изменение распределения частиц гексогена в ТГ40/60 при слабых ударно-
волновых воздействиях:
1 - исходная структура; 2 - при р = 0,6 ГПа. т = 140 мкс; 3 - при р = 0,6 ГПа, т = 110 мкс
бая функциональная проверка приводит к ликвидации элемента цепи и может
быть проведена только на новом элементе. Более того, срабатывание элемен-
тов цепи, как правило, разрушает всю сборку, что затрудняет даже визуаль-
ный анализ качества работы элемента цепи. По указанным причинам каче-
ство работы элементов цепи СПДИ чаще всего осуществляется по характери-
стикам эффективности действия изделия в целом
Поведение ВВ при механических воздействиях. Взрывчатое вещество
как конструкционный материал способно взрываться. Для наиболее часто ис-
пользующихся смесей ТГ, составов на основе октогена при скоростях деформа-
ции ё= 200...500 с_| и диапазоне температур -20...+80 °C значения отрица-
тельных давлений в УВ /?ув и в волне разрежения (ВР) рВР, при которых на-
блюдается разрушение ВВ, приведены ниже:
Рув> ГПа рВР, ГПа
ТНТ ..................... 0,37 0,07
ТГ50 .................... 0,44 0,14
ОФА...................... 1.35 0,40
Уровень сдвиговых напряжений для типичных составов, приводящих к раз-
рушению образца, лежит в диапазоне 0,1.. .0,5 ГПа. Размягчение пластификато-
ра уменьшает откольную прочность. Взаимное расположение кривых а, - е( для
различных температур представлено на рис. 14.15.
968
14. Средства инициирования и передачи импульсов
Рис. 14.15. Анализ влияния температуры на прочностные характеристики заряда:
1 - Г); 2 - Г2; 3 - Т3; 7) > Тг > Г,
/ь •
Линзовый узел
Линзовый узел - один из источников снижения стабильности КЗ". Дан-
ных, указывающих на то, что линзовый узел в зависимости от конструкции
способен как увеличивать характеристики бронепробития, так и снижать их,
достаточно много. Однако сложность газодинамических процессов, Протека-
ющих в окрестностях линзы при дифракции детонационной волны, отсутствие
модели данного процесса, а также разнообразие конструктивных решений узла
однозначного ответа на вопрос не дают. В последнее время все чаще исполь-
зуют длиннофокусные КЗ, которые формируют градиентные струи. Разнооб-
разие схем и методов их реализации приводит к существенным отклонениям
в глубинах бронепробития и является следствием многих факторов, основные
из которых приведены ниже.
1. Детонационные факторы:
- неидеальность инициирования детонационного процесса;
н еидеальность (нестационарность) дифракции детонационной волны в
окрестности линзы;
- изменение свойств ВВ под линзой (ударно-волновая десенсибилизация);
- нестационарное взаимодействие сходящейся детонационной волны за
линзой с облицовкой в окрестности ее вершины.
2. Структурно-технологические и функциональные факторы:
- различные гидродинамические характеристики ВВ и материала линзо-
вого узла;
- флуктуация плотности заряда линзового узла;
- изменение плотности и расслоение элементов линзового узла при пере-
грузках и повышенных температурах.
Здесь мы не останавливаемся на характеристиках асимметрии элементов
линзового узла при изготовлении и сборке. Данные по влиянию на линзовый
узел перечисленных факторов достаточно хорошо изучены.
Рассматриваемые процессы имеют отношение к составляющим неидеаль-
ности детонационных процессов и приводят к следующим проявлениям, пред-
сказание которых на сегодняшний день затруднительно:
- продольно-поперечная неустойчивость детонационного фронта;
14.5. Причины снижения надежности и стабильности работы ДЦ
969
- сохранение особенностей структуры течения за фронтом детонацион-
ной волны на значительных расстояниях от координат их возникновения и
развития;
- асимметрия течения (данное явление, как правило, связывается с техно-
логическими несовершенствами линзового узла);
- неидеальность энерговыделения, отличная от нормальной детонации;
- неидеальность процесса передачи-отбора энергии при формировании КС.
Любой вид неидеальности обязательно приводит к снижению качеств
СПДИ и существенно уменьшает эффективность кумулятивного заряда в це-
лом. Неидеальность детонационного (детонационноподобного) процесса для
различных ВВ проявляется по-разному и не исключено, что для более мощ-
ной системы степень неидеальности будет такова, что в конечном итоге она
окажется менее эффективной, чем менее^щная.
Таким образом, довольно уместно доделить области в линзовом узле,
включающем в себя и узел инициированйя*в котором зарождаются и развива-
ются неидеальности детонационного пропЦра, ответственные за снижение ста-
бильности работы узла (рис. 14.16): область детонатора; область дифракции
детонационной волны на верхней кромквщинзы; область дифракции детона-
ционной волны на нижней кромке линзы;.<залинзовая область взаимодействия
сходящейся детонационной волны. <.
Дадим краткую характеристику каждой из областей. Область детонато-
ра I (см. рис. 14.16) является наиболее ответственной, так как качество ини-
циирования заряда определяет развитие Дето-
национного процесса. От того, насколыф Оно
поступательно, зависит влияние на этот про-
цесс дифракционных потерь. Если в зоне де-
тонатора устанавливается стационарная дето-
нация, то обтекание линзы, переход через углы
при толщине свода ВВ, превышающей пример-
но в 2 раза критический диаметр детонации,
не могут повлиять на параметры детонацион-
ного процесса.
Области 1 и II оказывают существенное вли-
яние на процесс детонации, когда процесс диф-
ракции начинается, а детонационная волна еще
нестационарна. Это отнюдь не значит, что она
затухнет. Волна может потерять продольно-по-
перечную устойчивость, которая в еще большей
степени разовьется при дифракции на линзе, и,
в конце концов, реализуется асимметричное те-
чение, которое пагубно скажется на формиро-
вании КС.
С точки зрения степени влияния области II
и III равнозначны лишь с тем различием, что
фронт детонационной волны проходит их по-
следовательно. Отсюда следует, что имеющие-
ся негативные процессы, усиливающие неиде-
1
Рис. 14.16. Области снижения
надежности линзового узла КЗ:
I - детонатора; II - дифракции де-
тонационной волны на верхней
кромке линзы; III - дифракции де-
тонационной волны на нижней
кромке линзы; IV - залинзовая об-
ласть взаимодействия сходящейся
детонационной волны; 1 - узел
инициирования; 2 - линза; 3 - ВВ;
4 - облицовка
970
14. Средства инициирования и передачи импульсов
Рис. 14.17. Дифракция детонаци-
онной волны на невзрывопроводя-
щей линзе:
1 - ударный фронт в линзе; 2 - дето-
национный фронт; 3 - траектории ли-
ний пересечения ударного и детона-
ционного фронтов (Г|, ..., г4 - время);
4 - ударный фронт в ВВ
альность, могут только нарастать, причем
особенно это заметно для плоских линз с пря-
мыми углами.
Область IV в процессе струеобразования
играет в этой связи не однозначную роль.
Линзы кумулятивных зарядов являются, как
правило, невзрывопроводящими и их толщи-
ны выбираются таким образом, чтобы непос-
редственно под линзой не возникла детона-
ция (рис. 14.17). Однако это не значит, что
свойства ВВ в указанной области остаются
неизменными (исходными). Известное явле-
ние ударно-волновой десенсибилизации при-
водит к тому, что чувствительность I3B, рас-
положенного за линзой, снижаетсяЛ&дти де-
тонационная волна стационарна, то это никак
не сказывается на процессе, в противном слу-
чае состояние предварительно сжаТО^о ВВ
затрудняет развитие детонации. Факторами,
стабилизирующими детонационный процесс,
могут быть схождение детонационной вол-
ны к оси и непрерывный рост параметров его
течения. Не исключено, что в залинзовом объеме может образоваться маховс-
кое взаимодействие, которое еще более критично к симметрии и идеальности
процесса. Маховские детонационные волны изучены недостаточно, а неста-
ционарные (развивающиеся) - в еще меньшей степени.
14.6. Начальная стадия процесса инициирования
в системе передачи детонационного импульса.
Структура средств детонирования
Основные средства детонирования - детонаторы и электродетонаторы
(рис. 14.18). Нет смысла приводить реальные схемы детонаторов: их много,
они могут отличаться конструктивно, но структурно они, в основном, подоб-
ны. Вид начального импульса - форс пламени, удар, электрический ток, ис-
кровой разряд, взрыв мостика - определяет структуру и построение элемен-
тов средства детонирования, а в конечном счете и две основные его характе-
ристики: время от момента возбуждения начала процесса до момента выхода
детонационного импульса на торец детонатора (время срабатывания) и его
инициирующую способность.
Если время срабатывания (разброс времени срабатывания) - вполне опре-
деленная характеристика, управляемая в достаточно широких пределах, то ини-
циирующая способность во многом условна и зависит от того, что и каким
путем будет инициироваться, каков по своим характеристикам последующий
элемент и какой режим в нем возможен. Так как КД малогабаритны и содер-
жат набор составов, то говорить об определенном режиме взрывного процес-
са необоснованно.
14.6. Начальная стадия процесса инициирования в СПДИ 971
Представленная схема различных структур детонаторов подтверждает по-
ложение о том, что по мере уменьшения элементов, входящих в структуру
средства детонирования, увеличения мощности составов и возрастания ин-
тенсивности начального импульса время срабатывания и его разброс суще-
ственно сокращаются (от миллисекунд до долей микросекунд). Это, в пер-
вую очередь, связано с последовательным усилением возникшего процесса
и переходом его в детонационный. Вся неопределенность и временной раз-
брос заложены именно в процесс инициирования горения и перехода его в
детонацию. При инициировании процесса искровым разрядом (взрывом мо-
стика) возбуждение взрыва близко к ударно-волновому. Горение, как менее
определенная во времени стадия, отсутствует, время срабатывания детона-
тора уменьшается.
Структурный анализ показывает, что для сокращения времени срабатыва-
ния исключаются элементы, в которых горение переходит в детонацию. В со-
временных быстродействующих детонаторах допустимо отсутствие ИВВ, что
при достаточном электрическом импульсе не только снижает время срабаты-
вания, но и уменьшает опасность средства детонирования.
Инициирующая способность детонаторов характеризуется, по существу,
массой БВВ, в котором установился близкий к стационарному процесс. На
практике опасно и технологически неудобно иметь унитарное средство взры-
вания больших масс и габаритов, в связи t чем все средства детонирования
работают на пределе своей инициирующей способности.
Как правило, инициирующая способность детонаторов определяется кос-
венно по свидетелю и впоследствии проверяется в реальной конструкции узла.
Зона разлета ПД и элементов корпуса изучена недостаточно. Причин здесь
несколько. Первая из них - большое количество схемных и конструктивных
решений детонаторов и технологий изготовления. Вторая - абсолютно малый
размер детонаторов, не позволяющий в тонкостях исследовать его параметри-
ческие характеристики, а тем более устанавливать достоверное фугасное поле
и осколочный спектр. Третья заключается в неопределенности, связанной с
конструктивными ограничениями и взаимным расположением детонатора и
последующего детонационного элемента цепи, что оказывает влияние на па-
раметры поля разлета элементов корпуса детонатора.
Анализируя факторы, определяющие инициирующую способность детона-
торов, и опираясь на накопленный опыт, разлет элементов корпуса детонатора
можно представить графически (рис. 14.19). При этом принимается допущение,
по которому зона ИВВ, где возникает горение, впоследствии переходящее в де-
тонацию, исключается из числа инициирующих факторов. Данное утвержде-
ние справедливо, в первую очередь, для малогабаритных детонаторов. Деталь-
ные рентгенографические исследования позволили установить количествен-
ную картину поля разлета элементов одного из часто используемых в системах
подрыва мостикового электродетонатора без ИВВ. Было выявлено, что окон-
чательно основные осколочные потоки от детонатора формируются при зна-
чительных радиусах разлета, г = (4...5)г0, где г0 - начальный радиус разлета,
и за время порядка 10... 15 мкс. Следует отметить, что фрагментация корпуса
детонатора на осколки начинается на расстояниях (1,5...2,О)го. Полученные
результаты дают следующие характеристики по скоростям разлета: дно дето-
Сеточка
Воспламени-
тель но-
пиротехни-
ческий состав
Г
ИВВ *
ТНРС *•
****
Состав,
обеспечивающий
переход горения в Составы последовательного
детонацию усиления детонационного импульса Донышко
so ИВВ бО Азид свинца oU j БВВ р ВВ 1 БВВ р ГВВ2 БВВ р гввз Зазор Последующий элемент цепи
Ударный
Сеточка состав
Состав,
обеспечивающий
«г * ♦
Тивв *
*
переход горения в
детонацию
? ИВВ <О БВВ
Азид свинца PrR)
И °0 &F
БВВ
р
ГВВ2
Донышко
БВВ р гввз Зазор Последующий элемент цепи
ЭВ
э° ИВВ бО
> THPCopJ
о fco1*
ИВВ БВВ
Азид свинца р
ГВВ1
Донышко
БВВ р ГВВ2 Зазор Последующий элемент цепи
Состав последовательного
Детонирующий
состав
Искровой промежуток,
мостик
э° ИВВ б°
Азид свинца
усиления детонационного
импульса Донышко
БВВ р *BB1 БВВ р ВВ2 у Зазор Последующий элемент цепи
Детонирующий
состав
БВВ
р
ВВ1
Искровой промежуток,
Искровой промежуток,
мостик
Состав последовательного
усиления детонационного
импульса Донышко
БВВ
р
ВВ2
Детонирующий
состав
9° ИВВ «о
Азид свинца
о°
Последующий
элемент
цепи
Донышко
Последующий
элемент
цепи
------ Рис. 14.18. Структура средств детонирования:
БВВ типа тетрил, флегматизированный гексоген, тэн, октоген различной начальной плотности рВВ1 < рвв2 < рввз;
jbt> ИВВ, чувствительное к форсу пламени или удару;
ИВВ, обеспечивающее переход горение-детонация
974
14. Средства инициирования и передачи импульсов
Рис. 14.19. Разлет элементов корпуса детонатора при срабатывании:
а - ЭД в исходном состоянии; б - начальная стадия разлета корпуса ЭД; в - конечная стадия
разрушения корпуса ЭД на фрагменты; зоны разлета: I - изолятора; II - цилиндрической части
корпуса; III - элементов, сопряженных с цилиндрической частью корпуса; IV - завальцовки
дна; V - дна; VI - элементов, сопряженных с дном корпуса
натора приобретает скорость порядка 3,5 км/с, а его боковая образующая по-
верхность 1,75 км/с.
Приведенные данные подтверждают установленный факт: наибольшей
инициирующей способностью обладает дно детонатора и в меньшей степени
его боковая цилиндрическая поверхность, которая рассматривается как ини-
циирующий фактор только в ряде случаев. Вместе с тем нельзя отрицать вспо-
могательную функцию боковой поверхности детонатора при донном иниции-
ровании, которая сводится к снижению влияния боковых волн разрежения.
Выделенные (см. рис. 14.19) зоны разлета элементов корпуса детонатора,
сопряженные с цилиндрической частью и зоной завальцовки дна, не следует
рассматривать как факторы, определяющие возможность процесса инициирова-
ния по причине малой массы материала корпуса, разлетающейся в соответствую-
щем направлении, и относительно невысокой скорости разлета (1,0... 1,5 км/с).
Из многообразия характеристик детонатора (габариты, материал оболочки
и т. д.) наиболее существенно влияющим фактором при прочих равных услови-
ях являются его габариты, а в конечном счете - массы ВВ и дна. Вместе с тем
очевидно и другое: алюминиевый корпус детонатора лучшим образом отбирает
14.6. Начальная стадия процесса инициирования в СПДИ 975
энергию у ВВ и приобретает большую скорость, тогда как стальной корпус
прочнее, дольше тянется, ослабляя неоднородные напряжения в местах конст-
рукции с остроугольной геометрией. Динамика образования характерных зон
разлета элементов корпуса детонатора представляет собой сложную картину
взаимодействия УВ и волн разрежения (рис. 14.20). Картина разлета элементов
придонной части типичного детонатора в общих чертах повторяет картину
разлета корпуса КД с тем различием, что процесс детонации в заряде детона-
тора практически идеальный и высокопа-
раметрический. В результате этого возни-
кает более жесткое взаимодействие систем
УВ и волны разрежения, и, как следствие,
образование большого числа потоков оскол-
ков корпуса. Однако по-прежнему основным
инициирующим фактором является дно. ;
Таким образом, разлет элементов кор-
пуса детонатора - это развивающийся в<?
времени процесс. Проведенный анализ
включает в себя последовательные стадий,*
на которых инициирующие возможности
становятся ограниченными. На самом деле,
при сборке элементов ДЦ всегда предусмат-
ривают гарантированные технологические
зазоры, которые по существу ограничива-
ют процесс набора скорости и разлета эле-
ментов корпуса детонатора на начальной
стадии. Начальная стадия разлета по сво-
ей природе в высшей степени нелинейна,
что в основном и затрудняет построение
достоверных физических моделей и разра-
ботку инженерных методик определения
статистических характеристик надежнос-
ти работы ДЦ. И в этой связи подчеркнем,
что КД или ЭД являются в меньшей сте-
пени определенными элементами ДЦ. По
этой причине приходится использовать не-
кие усредненные их характеристики с не-
обходимым запасом инициирующей спо-
собности.
Рис. 14.20. Динамика формирования зон разле-
та элементов корпуса детонатора:
t\, t5- последовательные временные интервалы;
v - скорость по оси; оД - скорость по периферии дна;
v5 - скорость области сопряжения дна с образующей
цилиндрической поверхностью детонатора (боковая);
D - скорость детонации; Do6 - скорость УВ в мате-
риале оболочки детонатора
976
14. Средства инициирования и передачи импульсов
В ряде детонаторов донную часть выполняют в виде конической выемки.
Такое решение связано с попыткой усилить инициирующую способность де-
тонатора за счет кумулятивного эффекта. Опыт показывает, что наличие ку-
мулятивной (а скорее подобной ей) выемки не увеличивает инициирующую
способность, а в некоторых случаях даже уменьшает ее, особенно для малога-
баритных детонаторов. Причин здесь несколько. Во-первых, не совершенен
по классическим понятиям кумулятивный узел, а это приводит к низкоскорост-
ным струям очень малого диаметра (менее 0,5 мм), что меньше критического
диаметра большинства составов, используемых в узлах инициирования, кото-
рые не обладают достаточной инициирующей способностью; во-вторых, де-
тонатор, как правило, находится в контакте с инициирующим зарядом, что не
позволяет сформироваться КС. В случае, если инициируемый заряд покрыт
экраном, возможность инициирования снижается в еще большей степрйи.
Совершенствование капсюлей-детонаторов. Сегодня во многих Снаря-
дах идет замена КД с ИВВ (в основном с азидом свинца) на КД, не содержа-
щие составы с ИВВ. Этим достигается повышенная безопасность пофрдних
в условиях служебного обращения. В качестве заменителя ИВВ используется
мелкодисперсный тэн с удельной поверхностью не менее (4...5)-10< см2/г.
Для таких КД необходим специальный источник питания, обеспечивающий
ток в несколько десятков ампер и напряжение в сотни вольт, причем время
нарастания тока должно быть не более 0,1 мкс.
В менее ответственных случаях, применительно к народно-хозяйствен-
ным целям, когда время срабатывания составляет более 1 мкс, вместо'тэна
возможно использовать октоген с удельной поверхностью (12...15) 103 см2/г.
Исследованы также малочувствительные и термостойкие ВВ, такие как ТАТБ
и гексанитратостильбен, делается попытка создания на их основе быстродей-
ствующих КД в приемлемых габаритах.
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ
Кобылкин И.Ф., Селиванов В.В., Соловьев В.С., Сысоев Н.Н. Ударные и детонаци-
онные волны. Методы исследования. 2-е изд., перераб. и доп. М.: Физматлит, 2004.
Физика взрыва: В 2 т. / Под ред. Л.П. Орленко. М.: Физматлит, 2002.
Приложение
СПИСОК СОКРАЩЕНИЙ*
АгитАБ - агитационная авиационная бомба
АПТ - агитационная парашютная тара
АРЗ - авторегулируемый замедлитель
АУДВ - автоматический установщик дистан-
ционного взрывателя
АУР - авиационная управляемая ракета
БВВ - бризантное взрывчатое вещество
БетАБ - бетонобойная авиационная бомба
БЗО - боевое зарядное отделение
БКФ - блок контейнерный фронтовой
БМ - блокирующий механизм
БМД - боевая машина десанта
БМП - боевая машина пехоты
БОВ - боеприпас объемного взрыва
БОПС - бронебойный оперенный подкали-
берный снаряд
БП - боеприпас
БПС - бронебойный подкалиберный снаряд
БрБП бронебойный боеприпас
БС - бронебойный снаряд
БТР - бронетранспортер
БЧ - боевая часть
БЭ - боевой элемент
В - воспламенитель
ВПт - воспламенитель пиротехнический
ВВ - взрывчатое вещество
ВВС - военно-воздушные силы
ВГ - вихревой генератор
ВКПВ - верхний концентрационный предел
воспламенения
ВМС - военно-морские силы
ВМФ - военно-морской флот
ВОК - волоконно-оптический кабель
ВР - волна разрежения
ВУ - взрывательное устройство
ВУВ - воздушная ударная волна
ВФС - взрывоформируемый снаряд
ГВЧ — генератор высокой частоты
ГМ - головной мозг
ГПТУР - гиперзвуковая противотанковая уп-
равляемая ракета
ГПЭ - готовый поражающий элемент
ГР - газовый разрядник
ГСН - головка самонаведения
ГЦ - групповая цель
Д - детонатор
ДД - дополнительный детонатор
ДАБ - дымовая авиационная бомба
ДВ - детонационная волна
ДЗ - динамическая защита
ДОСАБ - дневная ориентирно-сигнальная
авиационная бомба
ДУЗ - детонирующий удлиненный заряд
ДФ - детонационный фронт
ДЦ - детонационная цепь
ДЦл - датчик цели
ЕД - естественное дробление
ЖБУ - железобетонное укрытие
ЖМВ - жидкое метательное вещество
3 - замедлитель
ЗД - заданное дробление
ЗОР - зона опасных разрывов
ЗПт - замедлитель пиротехнический
ЗУ - замедлительное устройство
3$Р - зенитная управляемая ракета
ИЁВ — инициирующее взрывчатое вещество
ИК.- инфракрасный
ИНС»- инерциальная система наведения
ИП - источник питания
ИПМ инерционный предохранительный
.механизм
ИППП - интеллектуальный пакет приклад-
ных программ
ИС — инициирующая система
ИЭД - искровой электродетонатор
ИЭИ - источник энергии инициирования
КАБ корректируемая авиабомба
КБЦ - кумулятивный боеприпас
КБЭ кумулятивный боевой элемент
КВ - капсюль-воспламенитель
КД - капсюль-детонатор
КЗ - кумулятивный заряд
КЗП координатный закон поражения
клб - калибр
КМВУ - контактное механическое взрыва-
тельное устройство
КМГУ - контейнер малогабаритных грузов
универсальный
КО - кумулятивная облицовка
КОБЭ - кумулятивно-осколочный боевой
элемент
КР - крылатая ракета
КРНС - космическая радионавигационная
система
КС - кумулятивная струя
КУ - контактное устройство
КУВ - комплекс управляемого вооружения
КЦ - координатор цели
КЭ - командный элемент
ЛА - летательный аппарат
ЛО - лазерная обработка
ЛПР - лицо, принимающее решение
МДВ - механизм дальнего взведения
МИК - механизм изоляции капсюлей
* Приведены сокращения, используемые не только в настоящем издании, но и общепри-
нятые в области вооружения и военной техники.
978
Приложение
МПУ - механическое пусковое устройство
МСЛ - механизм самоликвидации
МЭГ - магнитоэлектрический генератор
НАР - неуправляемая авиационная ракета
НВ - неконтактный взрыватель
НВУ - неконтактное взрывательное устрой-
ство
НКПВ - нижний концентрационный предел
воспламенения
НМ — накольный механизм
НОВ - неконтактный оптический взрыватель
НОСАБ - ночная ориентирно-сигнальная
авиационная бомба
НУРС - неуправляемый реактивный снаряд
ОАБ - осколочная авиабомба
ОБП - осколочный боеприпас
ОБЧ - осколочная боевая часть
ОДС - объемно-детонирующая система
ОМАБ - ориентирная морская авиационная
бомба
ОНД - оружие нелетального (несмертельно-
го) действия
ОРС - оперенный реактивный снаряд
ОФАБ - осколочно-фугасная авиационная
бомба
ОФС - осколочно-фугасный снаряд
ОЦ - огневая цепь
ОЦРЗ - осевой центральный разрывной
заряд
ПАБ - практическая авиационная бомба
ПВ - продукты взрыва
ПВРД - прямоточный воздушно-реактивный
двигатель
ПВУ - предохранительно-воспламенитель-
ное устройство
ПГ - подствольный гранатомет
ПГМ - параметризованная геометрическая
модель
ПД - продукты детонации
ПдМ - предохранительно-детонирующий
механизм
ПДМ - противодесантная мина
ПДУ - предохранительно-детонируюгцее ус-
тройство
ПЗ - передаточный заряд
ПИМ - предохранительно-исполнительный
механизм
ПКР - противокорабельная ракета
ПЛ - подводная лодка
ПЛАБ - противолодочная авиационная
бомба
ПЛС - проводная линия связи
ПМ - предохранительный механизм
ПП - пороховая петарда
ППМ - противопехотная мина
ППП - пакет прикладных программ
ПРЛ - противорадиолокационный
ПС - поверхность срабатывания
ПТАБ - противотанковая авиационная
бомба
ПТМ - противотанковая мина
ПТРК - противотанковый ракетный комп-
лекс
ПТС - пиротехнический состав
ПТУР - противотанковая управляемая
ракета
ПУ - пусковая установка
ПЦ - площадная цель
ПЭ - поражающий элемент
ПЭГ - пьезоэлектрический генератор
РБК - разовая бомбовая кассета
РВ - радиолокационный взрыватель
РГБ - реактивная глубинная бомба
РДТТ - реактивный двигатель ^.твердом
топливе ' у
РКЛ - радиокомандная линия i’ •
РЛ - радиолокационный
РЛС - радиолокационная станция > >
РПГ - ручной противотанковый гранатомет
РПО - реактивное пехотное оружие
РРАБ - ротативно-рассеивающие авИацион-
ные бомбы ‘Л-
PC - реактивный снаряд
РСЗО - реактивная система залпового огня
РЭБ - радиоэлектронная борьба
САБ - светящаяся (осветительная) авиаци-
онная бомба
САЗТ - система активной защиты танков
САПР - система автоматизации проектиро-
вания
САУ - самоходная артиллерийская установка
СББ - средства ближнего боя
СВЧ - сверхвысокочастотный
СП - средство поражения
СПБ - средства поражения и боеприпасы
СПБЭ - самоприцеливающийся боевой эле-
мент
СПДИ - система передачи детонационного
импульса
СПр - система предохранения
СПЭ - стреловидный поражающий элемент
СФЗ - снарядоформирующий заряд
ТБР - тактическая баллистическая ракета
ТБС - термобарическая смесь
ТВС - топливно-воздушная смесь
ТГ - тротил/гексоген
ТЗ - техническое задание
ТНТ - тринитротолуол (тротил)
ТРС - турбореактивный снаряд
ТТТ - тактико-технические требования
ТТХ - тактико-технические характеристики
ТУР - танковая управляемая ракета
У - усилитель
УА уязвимый агрегат
УАБ - управляемая авиационная бомба
УАР — управляемая авиационная ракета
Список сокращений
979
УВ - ударная волна
УЗП - условный закон поражения
УЗУ - установочно-замедлительное устрой-
ство
УМ - ударный механизм
УНЧ - усилитель низкой частоты
УПАБ - управляемая планирующая авиаци-
онная бомба
УПЛАБ - учебная противолодочная авиаци-
онная бомба
УПт - усилитель пиротехнический
УР - управляемая ракета
УУ - установочное устройство
ФАБ - фугасная авиационная бомба
ФВС - формируемый взрывом снаряд
ФОТАБ - фотоосветительная авиационная
бомба
ФСС - функционально-структурная схема <
ФСУ - функциональная схема уязвимости
ФУВ - фронт ударной волны
ХТО - химико-термическая обработка
ЦНС - центральная нервная система
ЦП - центрирующая поверхность
ЦПМ - центробежный предохранительный
механизм
ЦСК - целевая система координат
ЧГМ - числовая геометрическая модель
ШОАБ - шариковая осколочная авиацион-
ная бомба
ШПУ — шахтные пусковые установки
ЭВ - электровоспламенитель
ЭВУ - электронное временное устройство
ЭД - электродетонатор
ЭДЗ - элемент динамической защиты
ЭДС - электродвижущая сила
ЭЛО - электронно-лучевая обработка
ЭМВ -^электромеханический взрыватель
ЭМВУ - электромеханическое взрыватель-
ное устройство
ЭПУ - электрическое пусковое устройство
ЭЦ - элементарная цель
ЭШП - электрошоковая пуля
ЭШУ - электрошоковое устройство
AHEAD - Advanced Hit Efficiency and De-
struction
AMARTOF - AntiMissile Ammunition Redu-
ced Time of Flight
АРАМ - AntiPersonnel-AntiMaterial
APDS - Armour Piercing Discarding Sabot
APFSDS - Armour Piercing Fin Stabilized Dis-
carding Sabot
ATACMS - Army Tactical Missile System
ATL - Advanced Tactical Laser
AV - Axial Vircator (Virtual Cathode Oscil-
lator)
BAP - Bombe Acceleree de Penefration
BKEP - Boosted Kinetic Energy Penetrator
BROACH - Bomb Royal Ordance Augment
Charge
CCS - Course Corrected Shell
COM - Component Object Model
DLL - Dynamic Linking Libraiy
EFP - Explosively Formed Projectile
EPDM - Electric Power Distribution Munition
ERA - Explosive Reactive Armour
ERFB - Extended Range Full Bore
ERINT - Extenged Range Interceptor
FAE - Fuel Air Explosive
FCG - Flux Compression Generators
GAM - GPS-Aided Munition
GATS - GPS-Aided Targeting System
GBU - Guidance Bomb Unit
GPS - Global Positioning System
HEAT-MP-T - High Explosive AntiTank-Multi
Purpose-Tracer
HE-MOM - High Explosive Multirole OTO-
BREDA Munition
ЙЕР - High Explosive Plastic
; HESH - High Explosive Squash Head
‘ flF - High Fragmentation
3EJPM - High Power Microwave
' HTSF -Hard Target Smart Fuze
ID AM - Joint Direct Attack Munition
KEPD - Kinetic Energy Penetrator and De-
stroyer
LGB - Laser-Guided Bomb
•LOCAAS - Low Cost AntiArmour Submu-
nition
MEPHISTO - MultiEffect Penetrator High
Sophisticated and Target Optimized
MLRS - Multy Lunch Rocket System
MOAB - Massive Ordnance Air Blast
NERA - Non Explosive Reactive Armour
PFP - Proximity Fuze Programmer
PFPP - Proximity Fuzed Prefragmented Prog-
rammable
PIMPF - Programmable Intelligent MultiPur-
pose Fuze
PVAB - Portable Vehicle Arresting Barrier
RAW - Rifleman Assault Weapon
RHA - Rolled Homogeneous Armour
RSFC - Russian Standard Fragmenting Cy-
linder
SADARM - Sense And Destroy Armor
SAL - SemiActive Laser
SFP - Self Formatting Projectile
SHAFT - Smart Hard target Attack Fuzing
Technology
SLU-FAE - Surface Launched UnitFuel Air
Explosive
SPKE - Separating Penetrator Kinetic Energy
SSB - Small Smart Bomb
STABO - Starthbahn Bombe
TMD - Tactical Munitions Dispenser
TV - Transverse Vircator (Virtual Cathode Os-
cillator)
WAM - Wide Area Mine
ОГЛАВЛЕНИЕ
Предисловие ........................................................... 5
Введение .............................................................. 6
1. Классификация средств поражения и боеприпасов ...................... 19
1.1. Основные понятия, термины и определения......................... 19
1.2. Классификация средств поражения и боеприпасов по ведомственной
принадлежности, способу доставки к цели, назначению и технике- j ’
конструктивным признакам ............................................ 23
1.3. Классификация средств поражения и боеприпасов по принадлежности.-
к комплексам вооружения............................................. 27
Список рекомендуемой литературы ................................\ . 36
2. Основные характеристики эффективности действия средств поражения и
боеприпасов .......................................................,С. . 37
2.1. Роль расчета эффективности действия в проектировании систем ... 37
2.2. Классификация целей и средств поражения, структура показателей
эффективности действия............................................. 39
2.3. Объектное представление исходных данных для расчетов эффективности
действия ........................................................... 47
2.4. Основные элементы теории стрельбы.............................. 63
2.5. Эффективность средств поражения ударного действия.............. 80
2.6. Эффективность поражения цели ударной волной в воздухе.......... 88
2.7. Эффективность средств поражения осколочного действия........... 94
2.8. Особенности оценки эффективности средств поражения непосредствен-
ного действия........................................................135
2.9. Прогнозирование эффективности действия в боевых ситуациях......142
2.10. Оптимизация средств поражения по эффективности действия ..... 161
Список рекомендуемой литературы ................................... 188
3. Боеприпасы осколочного действия....................................189
3.1. Основные понятия и общие сведения .............................189
3.2. Метание осколков...............................................218
3.3. Баллистика осколков ...........................................223
3.4. Характеристики осколочных полей ...............................226
3.5. Поражающее действие осколков ..................................237
3.6. Артиллерийские осколочные и осколочно-фугасные снаряды ........250
3.7. Осколочные и осколочно-фугасные мины к ствольным минометам ....261
3.8. Боеприпасы осколочного и осколочно-фугасного действия реактивной
артиллерии ..........................................................266
3.9. Авиационные бомбы осколочного и осколочно-фугасного действия....277
3.10. Инженерные мины осколочного действия..........................289
3.11. Осколочные ручные гранаты.....................................301
Оглавление 981
3.12. Осколочные гранаты к гранатометам............................315
Список рекомендуемой литературы ...................................321
4. Фугасные боеприпасы ..............................................323
4.1. Основные понятия и общие сведения.............................323
4.2. Артиллерийские снаряды и мины.................................336
4.3. Авиационные бомбы.............................................340
4.4. Ударное действие фугасных боеприпасов ........................346
4.5. Реактивные снаряды, боевые части ракет и торпед...............352
4.6. Инженерные боеприпасы и морские мины .........................364
Список рекомендуемой литературы....................................391
5. Боеприпасы объемного взрыва ......................................393
5.1. Основные понятия и общие сведения.............................393
5.2. Двухтактные боеприпасы объемного взрыва.......................404
5.3. Однотактные боеприпасы объемного взрыва ......................411
5.4. Оценка эффективности боеприпасов объемного взрыва ............419
Список рекомендуемой литературы....................................430
6. Кумулятивные средства поражения и боеприпасы .....................431
6.1. Кумулятивный эффект взрыва и действие кумулятивных зарядов ...431
6.2. Классификация кумулятивных средств поражения и боеприпасов....440
6.3. Артиллерийские кумулятивные снаряды и мины ...................447
6.4. Кумулятивные ручные, реактивные и винтовочные гранаты.........459
6.5. Кумулятивные боевые части противотанковых управляемых ракет...474
6.6. Кумулятивные инженерные мины и заряды разрушения .............489
6.7. Противотанковые авиационные бомбы и кумулятивно-осколочные боевые
элементы кассетного оружия........................................508
6.8. Кумулятивно-осколочные боевые части неуправляемых авиационных
ракет.............................................................518
6.9. Кумулятивно-фугасные боевые части управляемых ракет, бомб и торпед ..521
6.10. Методика расчета параметров функционирования кумулятивных
зарядов ......................................................... 530
Список рекомендуемой литературы....................................537
7. Средства поражения с использованием ударного ядра.................541
7.1. Принцип действия и классификация боеприпасов с ударным ядром .541
7.2. Физические принципы действия снарядоформирующих зарядов
и основные расчетные соотношения..................................546
7.3. Кассетные средства поражения с самоприцеливающимися боевыми
элементами........................................................558
7.4. Инженерные боеприпасы с ударным ядром.........................566
7.5. Средства поражения с ударным ядром, поражающие цель на пролете
сверху .......................................................... 568
Список рекомендуемой литературы ...................................571
8. Кинетические бронебойные боеприпасы...............................573
8.1. Классификация бронебойных боеприпасов.........................573
8.2. Калиберные бронебойные снаряды................................576
8.3. Бронебойные подкалиберные снаряды, стабилизируемые вращением..580
8.4. Бронебойные оперенные подкалиберные снаряды ..................584
8.5. Пути увеличения эффективности действия кинетических бронебойных
боеприпасов.......................................................594
982
Оглавление
8.6. Основные расчетные зависимости для оценки бронебойного действия .... 605
Список рекомендуемой литературы....................................610
9. Бетонобойные боеприпасы ..........................................612
9.1. Классификация бетонобойных боеприпасов .......................612
9.2. Бетонобойные артиллерийские снаряды ..........................615
9.3. Неуправляемые бетонобойные и проникающие авиационные бомбы ...617
9.4. Неуправляемые авиационные ракеты с проникающими боевыми
частями............................................................625
9.5. Бетонобойные боеприпасы и боевые части комбинированного действия
с кумулятивным предзарядом ........................................627
9.6. Боевые части управляемых авиационных бомб и управляемых авиацион-
ных ракет.................................................•-......631
9.7. Перспективные бетонобойные и проникающие боеприпасы...........640
9.8. Основные расчетные зависимости для оценки функционирования бетоцо-
бойных и проникающих боеприпасов ............................... 643
Список рекомендуемой Литературы....................................648
10. Динамическая защита ............................................... 650
10.1. Динамическая защита и принцип ее действия ................/.*. 650
10.2. Проникание кумулятивной струи через взрывную динамическую 7»
защиту.....................................................*•,. 658
10.3. Особенности взаимодействия динамической защиты с бронебойными-/,
подкалибернымиснарядами......................................... 668
10.4. Невзрывная динамическая защита и перспективы ее применения.... 671
10.5. Характерные образцы динамической защиты .................. 673
Список рекомендуемой литературы .................................. .676
11. Боеприпасы вспомогательного назначения ..........................678
11.1. Классификация и общие сведения о боеприпасах вспомогательного
назначения .......................................................678
11.2. Помехосоздающие боеприпасы .................................680
11.3. Осветительные боеприпасы ...................................700
11.4. Фотоосветительные боеприпасы ...............................711
11.5. Дымовые боеприпасы .........................................712
11.6. Ориентирно-сигнальные боеприпасы ...........................721
11.7. Агитационные боеприпасы ....................................723
11.8. Практические и учебные боеприпасы ........................ 725
Список рекомендуемой литературы ..................................734
12. Оружие нелетального действия ....................................735
12.1. Основные понятия и принципы классификации ОНД...............735
12.2. Физические принципы функционирования ОНД....................747
12.3. Медико-биологические аспекты разработки и применения ОНД ...804
12.4. Критерии применимости ОНД...................................811
12.5. Международно-правовые аспекты разработки и применения ОНД...814
12.6. Специальные средства в системе МВД РФ.......................820
12.7. Сценарии возможного применения ОНД .........................834
Список рекомендуемой литературы ..................................838
13. Взрыватели ......................................................843
13.1. Общие сведения о взрывателях и взрывательных устройствах боепри-
пасов. Основные понятия, термины и определения ...................843
Оглавление
983
13.2. Общие принципы устройства и классификация взрывателей и ВУ.
Требования, предъявляемые к ВУ. Огневая цепь механических и
электромеханических ВУ .......................................847
13.3. Контактные механические ВУ боеприпасов. Общие принципы
устройства и действия ............................................ 865
13.4. Особенности устройства и принципы действия КМВУ боеприпасов
различного назначения..............................................884
13.5. Дистанционные взрыватели и трубки............................911
13.6. Электромеханические и электронные взрыватели и ВУ контактного
и дистанционно-контактного действия................................918
13.7. Неконтактные взрыватели и ВУ.................................936
Список рекомендуемой литературы .................................. 951
14. Средства инициирования и передачи огневогр и детонационного импульсов .. 953
14.1. Общая характеристика систем инициирования ...................953
14.2. Типы огневых цепей, средства инициирования. Структура огневой
цепи.............................................................. 955
14.3. Средства инициирования взрывных процессов. Классификация средств
инициирования .........................-.......................... 956
14.4. Дифференциальная энергограмма детонационной цепи.............959
14.5. Причины снижения надежности и стабильности работы детонационных
цепей..............................................................961
14.6. Начальная стадия процесса инициирования в системе передачи
детонационного импульса. Структура средств детонирования ..........970
Список рекомендуемой литературы ................................. 976
Список сокращений ................................................... 977
Учебное издание
Бабкин Александр Викторович
Велданов Владислав Антонович
Грязнов Евгений Федорович
Имховик Николай Александрович
Кобылкин Иван Федорович
Ладов Сергей Вячеславович
Орленко Леонид Петрович
Охитин Владимир Николаевич
Ришняк Андрей Григорьевич
Селиванов Виктор Валентинович ; >_
Соловьев Виктор Сергеевич *' .
СРЕДСТВА ПОРАЖЕНИЯ И БОЕПРИПАСЫ V’
/ *
<
Редактор А. С. Водчиц
Художник С.С. Водчиц j.
Корректор РВ. Царева
Технический редактор Э.А. Кулакова
Компьютерная графика О В. Левашовой, Н.П. Новиковой
Компьютерная верстка Н.Ф. Бердавцевой
Оригинал-макет подготовлен в Издательстве МГТУ им. Н.Э. Баумана
Санитарно-эпидемиологическое заключение
№ 77.99.60.953.Д.003961.04.08 от 22.04.2008 г.
Подписано в печать 05.08.2008. Формат 70x100/16.
Печать офсетная. Бумага офсетная. Усл. печ. л. 79,95.
Уч.-изд. л. 78,65. Тираж 1000 экз. Заказ № 1271
Издательство МГТУ им. Н.Э. Баумана
107005, Москва, 2-я Бауманская ул., д. 5
Отпечатано в ГУП ППП «Типография «Наука»
121099, Москва, Шубинский пер., д. 6
ISBN 978-5-7038-3171-7
9 785 703 83 1 7 1 7