/









































































































Автор: Зеликин М.И.
Теги: математический анализ функциональный анализ математика
ISBN: 5-354-00622-8
Год: 2004



Текст
М. И. Зеликин
ОПТИМАЛЬНОЕ
УПРАВЛЕНИЕ
И ВАРИАЦИОННОЕ
ИСЧИСЛЕНИЕ
Издание второе,
исправленное и дополненное
УРСС
ББК22.161.8Я73
Зеликин Михаил Ильич
Оптимальное управление и вариационное исчисление. Изд. 2-е, испр. и доп.
М.: Едиториал УРСС, 2004. — 160 с.
ISBN 5-354-00622-8
В пособии изложены основы теории экстремальных задач с точки зрения
канонического формализма и принципа максимума Понтрягина.
Для студентов вузов и университетов по специальностям «Математика»
и «Прикладная математика», а также для аспирантов и научных работников
Издательство «Едиториал УРСС» 117312, г. Москва, пр-т 60-летия Октября, 9
Лилснзия ИД №05175 от 25.06 2001 г Подписано к печати 15 03 2004 г.
Формат 60x90/16. Тираж 800 экз Печ. л 10 Зак № 2-13)2/501
Отпечатано в типографии ООО «РОХОС» 117312, г. Москва, пр-т 60-чстия Октября, 9
ISBN 5-354-00622-8
Едиториал УРСС, 2004
ИЗДАТЕЛЬСТВО УРСС
НАУЧНОЙ И УЧЕБНОЙ ЛИТЕРАТУРЫ
E-mail URSS@URSS ru
Каталог изданий
в Internet http //URSS ru
Тел /факс 7 (095) 135-42-16
Тал /факс 7 (095) 135-42-46
2278 ID 18718
Оглавление
Предисловие 7
Список обозначений 9
Глава 1. Принцип максимума Понтрягина 11
§ 1. Постановка задачи 12
§2. Формулировка принципа максимума Понтрягина . . 14
§ 3. Принцип максимума для задачи быстродействия , . . 15
§4. Оптимальный синтез 16
Глава 2. Метод динамического программирования.
Уравнение Беллмана 21
§ 5. Производная в силу системы обыкновенных
дифференциальных уравнений 22
§ 6. Уравнение Беллмана для задачи быстродействия ... 23
§ 7. Достаточные условия оптимальности 26
§ 8. Уравнение Беллмана для задачи с фиксированным
временем 29
Глава 3. Геометрический смысл принципа максимума
Понтрягина 33
§9. Связ уравнения Беллмана с принципом максимума
Понтрл.ина 34
§ 10. Уравнения в вариациях 35
§11. Геометрическая интерпретация принципа
максимума 38
3
Оглавление
Глава 4. Существование решений задачи оптимального
быстродействия 41
§ 12. Пример отсутствия оптимального управления.
(Скользящие режимы) 43
§ 13. Продолжимость решений обыкновенных
дифференциальных уравнений 44
§ 14. Пример отсутствия оптимального управления.
(Уход на бесконечность за конечное время) 45
§ 15. Формулировка теоремы существования 49
§ 16. Доказательство теоремы существования 50
Глава 5. Простейшая задача классического вариационного
исчисления 53
§ 17. Постановка задачи 54
§ 18. Уравнение Эйлера 55
§ 19. Геодезические на римановом многообразии 59
Глава 6. Канонический формализм 63
§ 20. Преобразование Лежандра 64
§21. Канонические переменные 68
§ 22. Механический смысл канонических переменных . . 69
§ 23. Формула вариации функционала с подвижными
концами 70
§ 24. Условия трансверсальности в задаче с подвижными
концами 73
§25. Условия Вейерштрасса—Эрдмана 76
§ 26. Уравнение Гамильтона—Якоби 80
§ 27. Первое возвращение к принципу максимума
Понтрягина 81
Глава 7. Теория второй вариации 85
§28. Постановка задачи 86
§ 29. Необходимое условие Лежандра 87
4
Оглавление
§ 30. Присоединенная задача и определение
сопряженной точки 90
§31. Необходимые условия неотрицательной
определенности 62J 92
§ 32. Достаточные условия положительной
определенности б2 J 93
§33. Продолжение доказательства теоремы 5 99
§ 34. Примеры 101
§35. Теорема Якоби об огибающей 104
Глава 8. Достаточные условия оптимальности 111
§36. Необходимое условие Вейерштрасса 112
§37. Достаточные условия слабого минимума 116
§38. Внешние дифференциальные формы 122
§39. Интегральный инвариант Пуанкаре—Картана .... 125
§40. Лагранжевы многообразия 129
§41. Поле экстремалей. Инвариантный интеграл
Гильберта 132
§42. Погружение экстремали в поле и фокальные точки . 135
§43. Индекс Морса 141
§44. Второе возвращение к принципу максимума 148
§45. Задача оптимального упраатения с разделенными
условиями для концов 149
§46. Критерий оптимальности в терминах двух решений
уравнения Риккати 153
Литература 158
Посвящается светлой памяти
Людмилы Филипповны Зеликиной
Предисловие
Данное пособие примыкает к серии учебников, задачников
и учебных пособий, выпущенных сотрудниками кафедры Общих
проблем управления механико-математического факультета МГУ.
Оно написано на основе лекций, читавшихся автором в течение
ряда лет для слушателей факультета повышения квалификации и для
студентов механико-математического факультета. Основные факты
теории экстремальных задач излагаются в пособии с точки зрения
канонического формализма и принципа максимума Понтрягина.
Для облегчения понимания в процессе изложения приводятся
эвристические мотивировки и объясняется геометрический смысл
рассматриваемых конструкций. Автор руководствовался девизом:
«Ясность и точность».
Книга, по существу, состоит из двух разделов. В первом
разделе (главы 1-4) рассматривается принцип максимума Понтрягина,
метод динамического программирования и теория существования
решения для задач оптимального быстродействия. Второй
раздел (главы 5-8) посвящен изложению вариационного исчисления.
Ключевым пунктом для понимания этого раздела служит формула
вариации функционала с подвижными концами (§23), из
которой выводится большая часть последующих теорем о необходимых
и достаточных условиях оптимальности. Оба раздела можно читать
независимо; связь между ними устанавливается в два приема: в § 27
и в § 44.
За время, прошедшее с момента первого издания пособия
(1985 г.), автором была написана книга [7], которая частично
7
Предисловие
пересекается с настоящим изданием, но содержит много
дополнительного материала, касающегося уравнений Риккати и
многомерного вариационного исчисления (в частности, связь с геометрией
многообразий Лагранжа—Грассмана и классическими областями
однородности Картана—Зигеля в пространстве многих
комплексных переменных).
В настоящем издании добавлены: новое, более простое (по
сравнению с традиционными) доказательство теоремы Морса, а
также последние, ранее не публиковавшиеся, результаты автора,
касающиеся связи гессиана функции Беллмана с решением
уравнения Риккати. С помощью этих результатов в § 46 даются новые
необходимые и достаточные условия оптимальности в терминах
двух полей экстремалей.
В пособии принята сквозная нумерация параграфов.
Нумерация формул внутри каждой главы независима. Так, например,
ссылка (5.4) означает: формула (5) главы 4.
Я считаю своим долгом выразить глубокую признательность
Ю. А. Белову, [Л. Ф. Зеликиной], Э. Л. Пресману, А. О. Ремизову
и В. М.Тихомирову за обсуждения и критические замечания,
способствовавшие значительному улучшению рукописи.
М. К Зеликин
Список обозначений
Rn — стандартное арифметическое n-мерное
пространство векторов-столбцов.
(Rn)* — n-мерное пространство векторов-строк,
сопряженное с Rn.
C([t(b*i]) — пространство непрерывных функций на отрезке
Cr(U) ■— множество отображений, имеющих в U
непрерывные производные до порядка г включительно.
PC]([to,t\]) — пространство непрерывных функций на отрезке,
имеющих кусочно-непрерывную производную.
Снабжено нормой как подпространство
пространства C([to9t)]).
W\ — пространство функций, имеющих суммируемую
в квадрате первую производную.
F: X ->• Y — отображение множества X в множество У.
х н> F(x) — отображение F сопоставляет элементу х элемент
F(x).
F\a — офаничение отображения на множество А.
х(-) — обозначение, которым подчеркивается, что х
является отображением.
(х> у) — значение линейного функционала х на элементе у.
Там, где это не может вызвать недоразумения,
угловые скобки опускаются.
9
Список обозначений
x(t; to» Хо) — решение обыкновенного дифференциального
уравнения, проходящее через начальную
точку (to,Xo).
В остальном (иногда без комментариев) будут использован
обозначения из [1,2].
Глава 1
Принцип максимума
Понтрягина
§ 1. Постановка задачи
Классическим объектом изучения в теории оптимального
управления является управляемая система
*г = Л(яь--- ,&n,Ui,... ,tir), i = 1,... ,n,
или коротко
х = f(x,u)9 (1)
и функционал, определенный на решениях этой системы,
г
J = J fo(x{t)Mt))dt. (2)
о
Здесь
я 6 X С Rn; и € J7 С Rr; /,-: X х U -► R, t = 0,1,..., п;
функции
Л, ir~.' * = М, •.->»*; j = l,...,n
непрерывны на X х J7; множество X открыто, J7 — компакт.
Переменные щ, k = I,... ,г, называются управляющими
переменными, а вектор-функция и(£) — управлением; переменные
х*, г = 1,...,п, называются фазовыми переменными, а вектор-
функция x(t) — траекторией; t — время. Управление — это
12
§ 1. Постановка задачи
внешнее воздействие, с помощью которого можно влиять на
управляемую систему; фазовые переменные описывают ее динамику.
Мы будем считать, что управление u(t) выбирается из
некоторого фиксированного класса функций U. В гл. 1-3 роль класса U
будет играть класс кусочно-непрерывных функций со значениями
из множества U; в гл. 4 — класс измеримых функций со
значениями из множества U, Для того, чтобы найти траекторию x(t),
соответствующую управлению и = u{t) и начальному значению
х(0) = Ж(ь достаточно подставить и = u(t) в систему (1) и
решить задачу Коши: х = f(x,u(t)), х(0) = х0. Функции x(t)9 u(t)
считаются определенными на промежутке [О,Г], время Т
соответствует моменту окончания процесса управления. Различают два
случая. В первом случае момент Т является единым для всех
управлений u(t). Тогда говорят, что время фиксировано. Во
втором случае момент Т зависит от применяемого управления. Тогда
говорят, что время не фиксировано. Постановка задачи с
нефиксированным временем определяется, обычно, заданием замкнутого
подмногообразия Af С Rn, называемого терминальным
многообразием; момент Т определяется как момент первого попадания
траектории x(t) на многообразие ЛЛ Т = inf{£ > 0 | x(t) 6 Л/*}.
Для задачи с фиксированным временем требуется попасть
на многообразие Jsf в заданный момент времени Т.
Определение. Управление u(t) € U называется допустимым
для данной начальной точки xq 6 X, если соответствующая
траектория x(t), начинающаяся в точке х(0) = (Со, в
некоторый момент времени, а для задачи с фиксированным
временем — в заданный момент Г, попадает на терминальное
многообразие АЛ
Задача ?. Для заданного начального значения х{0) = Xq найти
минимум функционала (2) на множестве допустимых управлений.
Отметим, что задача 1 включает в себя как случай
фиксированного, так и нефиксированного времени.
Управление u(t), на котором достигается минимум
функционала (2), называется оптимальным; соответствующая этому
13
Глава 1. Принцип максимума Понтрягина
упраачению траектория x(t) — оптимальной траекторией; набор
{u(t), x(t), О ^ t ^ Т} — оптимальным процессом.
§ 2. Формулировка принципа
максимума Понтрягина
Основной теоремой теории оптимального управления
является принцип максимума Понтрягина. Для того чтобы
сформулировать его, введем в рассмотрение (п -*-1)-мерный вектор
вспомогательных переменных ф = (гро, фх, • • •»i>n) и функцию Понтрягина
п
Теорема 1 (принцип максимума Понтрягина для задачи с
нефиксированным временем). Пусть u(t), x(t), О ^ t ^ Т —
оптимальный процесс. Тогда существует ненулевая непрерывная
вектор-функция i/)(t)9 удовлетворяющая системе уравнений
Ф(=~У2 M)-~(z(t), Щ), i = 1, • • •, п,
а=0 OXi
или коротко
*=-*s«o.«w>=~ №
и следующим условиям*.
Г. Услов^^максимума:
max%(^(t)^(<)^)==^(^(<)^(0,S(<))=0, V>o^O. (4)
2°. Jfowewe трансверсальности:
вектор {ф\,..., Vto) ортогонален многообразию М в точке х(Т),
ая. б. для любого вектора (& ,...,£») > касательного к N в точке
x(t), имеет место равенство
Х>(% = 0. (5)
«=i
14
§3. Принцип максимума для задачи быстродействия
Траектории x(t), удовлетворяющие принципу максимума
Понтрягина, называются экстремальными.
Замечание 1. Теорема 1 остается справедливой и для задач с
фиксированным временем с тем отличием, что условие максимума принимает вид
maxW(tf(t),a(*),ti) =4(${t),x{t),u{t))\ i>0 ^ 0. (4')
Иными словами, отбрасывается условие тождественного равенства
нулю максимума функции Понтрягина.
Замечание 2. В качестве класса U в теореме 1 можно рассматривать
также класс измеримых функций. При этом все равенства следует
понимать как равенства почти всюду.
§ 3. Принцип максимума
для задачи быстродействия
Частный случай задачи 1, когда /0(ж, и) = 1, называется
задачей быстродействия. Такое название объясняется тем, что
функционал (2) принимает вид J = Т, т. е. минимизируется время
попадания из точки х(0) = х0 на терминальное многообразие Л/\
Теорема 1 в этом случае несколько упрощается. Функция
Понтрягина % принимает вид
п
Поскольку tpQ = const, можно рассмотреть «укороченную»
функцию Понтрягина
п
Я = $>«/*.
имеющую те же производные и достигающую максимума при
тех же значениях аргументов, что и %. Отбросив первую
компоненту ^о У (п + 1)-мерного вектора *ф, получим «укороченный»
вектор (^ь...,^я) (за которым оставим прежнее обозначение
гр). В силу условия (4), mzxH(ip,x,u) = -^о ^ 0- Тем самым,
в качестве следствия теоремы 1 получается
15
Глава 1. Принцип максимума Понтрягина
Теорема 2 (принцип максимума Понтрягина для задачи
быстродействия). Пусть u{t), x(t), 0 ^ £ ^ Т — оптимальный
процесс. Тогда существует ненулевая непрерывная вектор-функция
%j)(t) = (у, i(t),..., i>n(t))» удовлетворяющая системе уравнений
и следующим условиям:
Г. Условие максимума:
maxH(ip{t),x(t),u) = Н(Ш>Щ*Щ) > О* (?)
2°. Условие трансверсальности:
для любого вектора £, касающегося многообразия N в точке
х(Т), имеет место равенство
п
Х>(Т)& = 0. (8)
1=1
§ 4. Оптимальный синтез
Прежде чем объяснять смысл понятия «оптимальный синтез»,
приведем пример, в котором это понятие возникает естественным
образом.
Пример 1 (задача Бушоу). Рассмотрим материальное тело М,
которое может без трения передвигаться вдоль горизонтальной прямой I
под воздействием ограниченной по модулю управляющей силы u(t)4 где
\u(t)\ ^ 1. Массу этого тела будем предполагать постоянной и равной 1,
а его размерами будем пренебрегать. Пусть х — расстояние от некоторой
фиксированной точки О прямой J до тела М, тогда движение тела М
будет описываться дифференциальным уравнением
х = и, \и\ ^ 1.
В фазовых координатах Х\ = ж, Xi = х это уравнение имеет вид:
*! = *» (9)
хг = и, М ^ 1. w
{
16
§ 4. Оптимальный синтез
Мы хотим, чтобы тело М как можно быстрее попало в точку О
и остановилось в ней. Иными словами, для управляемого объекта (9)
рассматривается задача наибыстрейшего попадания в начало координат
(0,0) из заданного начального состояния ж0 = (a?i(0), Жг(0)).
Применим теорему 2. Н = тр\Х2 •+- ^2^. Уравнения для сопряженных
переменных имеют вид:
^1=0, ik = -^1.
Отсюда ^] = Сь ^2 = -Cit-гС2- Условие максимума (7) дает и(£) — 1
при С2 - С[t > 0, u(J) = -1 при С2 - C]t < 0; u(t) — любое при
Сг- C\t = 0. Поскольку вектор t/> ненулевой, С2 ~ C\t £ 0.
Поэтому каждое экстремальное управление u(t) является кусочно постоянной
функцией, принимающей значения ±1 и имеющей не более двух
интервалов постоянства (линейная функция меняет знак не более одного раза).
Найдем все траектории, удовлетворяющие полученным
следствиям из принципа максимума Понтрягина. Если и = 1, то х} = ж2,
. х2
±2 = 1 или -1 = ж2, следовательно, Ж] = -^ + С, при этом, в
соответствии с (9), движение по этим параболам происходит снизу вверх (х2
растет). Если и = -1, то ±\ = х2, х2 = -1, или ^ = -ж2, следовательно,
2
х, = - -j- -f C, при этом, в соответствии с (9), движение происходит сверху
вниз (х2 убывает).
Для того чтобы найти экстремали, ведущие из произвольной точки ж0
в начало координат, удобно строить их с конца, т. е. с момента попадания
в начато координат. Здесь необходимо рассмотреть два случая. В первом
случае завершающий участок экстремали отвечает и — 1, он обязан лежать
2
на полупараболе О А: Х\ = Ц, х2 ^ 0. Поскольку момент переключения
является свободным параметром, этот участок может быть произвольным.
Предшествующий участок экстремали (тоже произвольной длины) должен
соответствовать и = — I. Экстремали, соответствующие первому случаю,
«покрывают» область х2 ^ -\/2х\ при х\ ^ 0 и х2 > \J-lx\ при хх < 0.
Во втором случае завершающий участок экстремали соответствует и = -1.
При этом получается центрально-симметричное однозначное «покрытие»
оставшейся части плоскости. В результате имеем следующую картину
(рис. 1.1).
Через каждую начальную точку Xq проходит одна и только одна
экстремаль, являющаяся единственным претендентом на роль
соответствующей оптимальной траектории. В гл. 4 будет доказано, что для рас-
17
Глава 1. Принцип максимума Понтрягина
в
Г,
V
А Х2
^
0
^Л
N
Л »■
J
Рис.1.1
сматриваемой задачи оптимальное управление существует. Следовательно,
найденные выше экстремали являются оптимальными траекториями.
Кривая BOA, состоящая из двух сопряженных в точке О
полупарабол, называется кривой переключения, поскольку при попадании
фазовой точки на эту кривую оптимальное управление переключается
с одного из крайних значений и = ±1 на другое.
Рассмотрим функцию v(x), равную -1 над кривой переключения
и на полупараболе ВО, и равную 4-1 под кривой переключения и на
полупараболе О А. Тогда на каждой оптимальной траектории и(х) = v(x(t)).
Подставив v(x) в (9) и решив полученную систему для любого начального
значения, найдем экстремаль, соответствующую этому начальному
значению. Поэтому функцию v(x) естественно назвать синтезом оптимальных
управлений.
Способ управления системой с помощью управляющей функции
и(х)% зависящей от фазовых координат управляемого объекта, называется
управлением по принципу обратной связи; сама функция и(х) называется
синтезом. Если каждая из полученных траекторий является
оптимальной, то говорят об оптимальном синтезе. В противоположность этому,
рассматриваемое ранее управление u(t), отвечающее фиксированному
начальному значению фазовых переменных, называется программным
управлением.
Оптимальность синтеза, построенного в примере 1, следует
из теоремы существования оптимального управления и из того, что
18
§ 4. Оптимальный синтез
из каждой начальной точки (xi(0), £2(0)) в начало координат ведет
только одна траектория, удовлетворяющая принципу максимума.
Действительно, если оптимальная траектория существует, то она
должна удовлетворять принципу максимума. Принципу максимума
удовлетворяет лишь одна траектория. Значит она оптимальна. Эта
схема рассуждений показывает, сколь важную роль играют в теории
оптимального управления теоремы существования. Их обсуждению
будет посвящена гл. 4.
Глава 2
Метод динамического
программирования.
Уравнение Беллмаиа
§ 5. Производная в силу системы
обыкновенных дифференциальных
уравнений
Пусть дана система дифференциальных уравнений
x = <p(t,x), (1)
где t е Д С R, х € X С R", (р: Д х X -> R", <р € Сг(А х X).
Обозначим через x(t; t0> Xq) решение системы (1) с начальным
значением x(t0) = х0. В случае t0 = 0 будем писать x(t;x0).
Рассмотрим произвольную функцию F: X -> R, F € С"1^).
Определение. Производная функции i^x) по / в силу
системы (1) в точке (to, Xq) определяется формулой
8F
It
d
О)
(<о,«о)= —F(x(t;t0,xQ))
dt
t=t0
Эта производная определяет скорость изменения функции F
вдоль решения системы (1) в точке (t0, х0).
В силу формулы полной производной
dF(x{t\t^xQ))
dt
t=h
dF
= -Q-(Xo)<P(tQ,X0).
(2)
Иными словами, производная функции F(x) в силу
системы (1) равна скалярному произведению фадиента функции F
22
§ 6. Уравнение Беллмана для задачи быстродействия
и вектора фазовой скорости tp. Тем самым эту производную
можно вычислить, не зная решений системы (1).
§6. Уравнение Беллмана
для задачи быстродействия
Рассмотрим задачу наибыстрейшего попадания на
терминальное многообразие N по траекториям системы (1). Относительно
этой задачи, предположим, что
Г. Для любой начальной точки Хо 6 X существует оптимальная
траектория, ведущая на многообразие ЛЛ
При этом предположении каждой точке х € X можно
поставить в соответствие число Т(х) — оптимальное время перехода
из точки х на многообразие ЛЛ
2°. Т(х)еС1(Х\ЛГ).
Определение. Функция ш(х) = -Т(х) называется функцией
Беллмана для задачи быстродействия.
Пусть Хо — произвольная точка множества X\Af; x(t\Xo),
О ^ t ^ Т(хо) — оптимальная траектория, переводящая точку хо
на многообразие .ЛЛ Покажем, что
w(x(t;x0)) =u(x0) + t. (3)
Действительно, если двигаться по оптимальной траектории, то
на переход из точки Хо в точку x(t\ хо) тратится время t> а из точки
x(t; Хо) на многообразие N — время (Т(хо) ~t). Из точки x(t\ Хо)
невозможно попасть на М за время меньшее, чем (Т(х0) - £), так
как в противном случае, переместившись из точки Xq в x(t; Xq)
за время t, а затем из точки x(t; ж0) на Af за время меньшее, чем
(Т(хо) - t), мы осуществили бы переход из Xq на Af быстрее, чем
за время Т(хо), что противоречит определению функции Т(х).
Итак, (T(xq) -t)— оптимальное время перехода из точки x(t; х0)
на ЛЛ
T(x(Uxo)) = T(xQ)-t (4)
23
Глава 2. Метод динамического программирования
Заменив в (4) Т на -о;, получим (3).
Для вывода уравнения Беллмана сначала
продифференцируем (3) по t. Учитывая (2), получим
^(*о)/(*о,6(0)) = 1. (5)
Пусть теперь движение происходит из точки Xq по
траектории xv(-), соответствующей некоторому постоянному управлению
u(t) = v € U. Через время t мы попадем в точку xv(t). Если после
этого использовать оптимальное управление в задаче с начальной
точкой xv ,то по полученной составной траектории придем из точки
х0 наЛА за время t + T(xv(t)). Ясно, что t-rT(xv(t)) ^ Т(х0), т.е.
t-u(xv(t)) ^ -о;(я?о). (6)
Считая t достаточно малым, представим xv(t) в виде
Xv(t) = Xq + /(Хо, V)t + 0(<).
Отсюда и из предположения 2° следует, что
u)(xv{t)) = сф0) + ^(жо)/(яо, v)t -*- o(t).
Подставив последнее выражение в (6), получим
<-^(«o)/(«o,t;)<-ro(0^0.
Разделив на £ и устремив £ к нулю, имеем
jfc(xo)f(xo,v)^l. (7)
Отметим, что неравенство (7) справедливо при любом v.
Соотношения (5) и (7) удобно записать в виде одного равенства
max
vOJ
(8)
Уравнение (8) называется уравнением Беллмана. Рассмотрим
его специфику, как уравнения в частных производных первого
24
§6. Уравнение Беллмана для задачи быстродействия
порядка относительно неизвестной функции ш(х). То, что его
левая часть записана с помощью операции max не должно наг
смущать, так как при фиксированных значениях хи^ скалярное
произведение ^f(x, v) есть известная функция от v, и максимум
этой функции по v 6 U однозначно определен значениями х
и gj. Особенность состоит в том, что этот максимум будет, вообш*
говоря, негладкой функцией от х и jj£ даже в том случае, когда
все исходные функции, определяющие задачу 1, являются скоиь
угодно гладкими.
Вторая особенность состоит в нестандартных граничных
условиях для этого уравнения. Ясно, что ограничение функции
Беллмана на многообразие ]\Г — тождественный ноль. Но размерность
М может быть любой, и если она меньше чем (п - 1), го ipa-
ничного условия ш\ц = 0 недостаточно, чтобы однозначно найте
решение уравнения (8). Каким дополнительным условиям должно
удовлетворять решение?
Заметим, что значение функции Беллмана в любой точке
Xq £ N строго отрицательно. Действительно, рассмотрим шар
Vp(xo) с центром в точке ж0: 2^?(#о) = {# I \х - х0\ ^ р} столь
малого радиуса р, что Т>р(хо) П М = 0. Поскольку /
непрерывна на Т>р(хо) х U, a U — компакт, она ограничена на этом
множестве, и следовательно, время перехода из точки Хо на j\f
ограничено снизу некоторой положительной константой, не за
висящей от применяемого управления. Поэтому и нижняя фань
этих времен —ш(а?о) будет строго положительной.
Исходя из этого, в качестве граничных условий для решения
уравнения (8) можно взять следующие соотношения:
w|>v = 0, Ф)\нм<0. (9)
Итак, задача состоит в отыскании решения w(x) уравнения,
у которого многообразие нулевого уровня совпадает с ЛЛ
Особые трудности возникают, когда Af — вырожденное
многообразие уровня, т.е. dimМ < п - 1. Один из возможных
способов преодоления этих трудностей состоит в том, чтобы рассмотреть
трубчатую окрестность многообразия ЛЛ Afa = {x\ dist(£, J\f) ^ а}
25
Глава 2. Метод динамического программирования
(здесь dist(x, А/) — расстояние от точки х до J\f). При достаточно
малом а граница дМа множества Ма является (п - 1)-мерным
гладким многообразием. Мы можем решить классическую
задачу Коши для уравнения (8) вне множества J\fa, т.е. в области
disl(x,Af) > а с граничными условиями ш\уо = 0. Получим
функцию ыа(х), определенную в достаточно малой окрестности Ма,
Далее следует найти предел и)а при а -> 0.
Тема для самостоятельного исследования
Показать, что область определении функции и)а не стягивается
к нулю при а -> 0.
Другой возможный способ решения задачи (8), (9) состоит
в применении метода характеристик, который, как оказывается,
эквивалентен применению принципа максимума.
§ 7. Достаточные условия оптимальности
Уравнение Беллмана (8) было выведено при априорных
предположениях Г и 2°, которые являются существенными
ограничениями на задачу и которые можно проверить только после
того, как найдено решение. Поэтому, вообще говоря, уравнение
Беллмана нельзя считать необходимым условием оптимальности.
Однако, с помощью этого уравнения можно дать удобные
достаточные условия оптимальности. Для того чтобы сформулировать
соответствующую теорему, предположим, что некоторая функция
ui(x) удовлетворяет в X \J\f уравнению Беллмана. Поскольку в (8)
стоит max, то существует такая функция и(х)9 что
^-(x)f(x,u(x)) = l. (10)
Функция и(х) может оказаться многозначной, так как
максимум в левой части уравнения (8) достигается не обязательно
в единственной точке. Предположим, что нам удалось выделить
однозначную функцию и(х)9 удовлетворяющую уравнению (10).
26
§ 7. Достаточные условия оптимальности
Определение. Будем говорить, что функция и = и(х)
определяет допустимый синтез, если система уравнений
x = f(x,u(x)) (li)
имеет решения при всех начальных значениях ж0 € X \-ЛЛ
причем эти решения за конечное время не уходят на
бесконечность и не покидают множества X (т.е. решения
неограниченно продолжимы по времени).
Достаточное условие продолжимости решений будет
приведено в гл. 4.
Теорема 1 (достаточные условия оптимальности). Пусть
Щх) € С1 (X \ А/*) удовлетворяет на X\J\f уравнению Беллма-
на (8) и граничным условиям (9), и пусть существует однозначная
функция и(х), удовлетворяющая уравнению (10) и
определяющая допустимый синтез. Тогда Щх) — оптимальный синтез;
—Щх) — оптимальное время перехода на многообразие ЛЛ
Доказательство. Рассмотрим производную функции Щх) в си
лу системы (11):
dt
да)
(И) дх
Это равенство означает, что вдоль любого решения x(t)
системы (11) функция Q(x(t)) растет со скоростью 1. Следовательно,
если решение системы (11) x(t\xo) начинается при t = 0 в
точке Хо £ X \ ЛЛ то функция Щх(Ь\ х0)) обращается в ноль при
t = -2(я?о) > 0. В силу граничных условий (9), Щх) обращается
в ноль тогда и только тогда, когда х е ЛЛ Итак, траектория
системы (11) начинающаяся при t = 0 в произвольной точке #0 € Х\М
попадает на М через время —2(а?о). (За это время она не может
уйти на бесконечность или покинуть множество X, поскольку
синтез Щх) допустим.) Покажем, что ни при каком другом выборе
управления невозможно попасть на Jsf за более короткое
время. Действительно, пусть и = u(t) — произвольное управление,
х = x(t; Хо) — решение системы
* = /(*, 2(f)) (12)
27
Глава 2. Метод динамического программирования
дш
(x) = —(x)f(x,u(t))^L (13)
(12) ОХ
с начальным условием х(0) = Хо. Продифференцируем функцию
и) в силу системы (12)
du}\
lit
Предположим, что х = x(t\ х0) попадает на Af за время tf. Инте-
трируя неравенство (13) от 0 до tf, получим
Щх(Ф; хо)) - ЩЩО; х0)) ^ -д.
Но 2?(5?(0;яо)) = 0, а 2(2(0; я0)) = а?(ж0), поэтому -и?(я0) ^ #>
что и требовалось доказать. D
Замечание 1. Последний этап доказательства теоремы является
формализацией простого геометрического факта: функция ш(х(1)), равная
lS(xq) < О при < = 0и имеющая производную по t, не превосходящую 1,
не может достичь нуля за время, меньшее, чем -о/(жо).
Замечание 2. Геометрический смысл уравнения Беллмана (8) можно
пояснить следующим образом. Поверхности уровня функции Беллмана
о;(ж) = const — это те поверхности, для всех точек которых оптимальное
время перехода на А/" одно и то же. Возьмем точку х на
произвольной поверхности уровня и рассмотрим множество допустимых фазовых
скоростей в этой точке {f(x,u) \ и £ 17}. Скорости движения по
оптимальной траектории отвечает тот вектор из множества /(я, U), который
имеет максимальную проекцию на направление градиента функции о/,
т. е. на нормаль к поверхности уровня.
Пример 2. Рассмотрим задачу быстродействия Т -4 inf.
ii = tii,
±i -иъ u = («1,1*2) € U = {u] + u\ ^ 1}.
s,(0) = 1,0, «2(0) = x20y a,(T) = 0, x2(T) = 0.
Выпишем уравнение Беллмана (8):
{:
max
ubU
dxi дх2
= 1. (И)
Легко видеть, что на круге щ -ь щ ^ 1 максимум левой части (14)
достигается при
дш дш
dxi дх2
щ = щ = ,
>/(fe)2+(fe)2 V(ft)2+(fe)2
28
§8. Уравнение Беллмана для задачи с фиксированным временем
При подстановке щ, и2 в (14) получаем
Граничные условия (9) имеют вид:
о/(0) = 0, о/(х)|^0<0. (16)
Рассмотрим функцию и = -у/х] + х\. Легко видеть, что она гладкая
всюду, кроме начала координат, и удовлетворяет уравнению (15) с
граничным условием (16). По теореме о достаточных условиях
оптимальности ш — - у/х] + х\ — оптимальное время перехода, a «j = —Д1—2,
Vxl 72
и2 = —/4^—у — оптимальный синтез.
Замечание 3. Уравнение (15) является основным в лучевой оптике и на
зывается уравнением эйконала. Название происходит от греческого eixcov
(эйкон) — изображение (ср. с русским — икона). Более общее уравнение
эйконала появится ниже в гл. 6, пример 13.
§ 8. Уравнение Беллмана для задачи
с фиксированным временем
Рассмогрим задачу с фиксированным временем для
управляемой системы
* = /(*,&,«), ueU, ж€ХС0?п, t6[t0,T], (17;
и функционала, определенного на решениях этой системы,
г
J = Ф(х(Т)) + [ /<>(<, x(t)9 u(t)) dt (18)
to
Задача 2. Для фиксированного начального значения х0 £ X
минимизировать функционал (18) на множестве кусочно-непрерывных
функций u(t) еи,и^1^т.
В этой задаче левый конец траектории x(to) = #о закреплен,
а правый — х(Т) свободен, т. е. N = X.
29
Глава 2. Метод динамического программирования
Введем вспомогательную скалярную переменную y(t),
удовлетворяющую уравнению
y(t) = fo{t,x(t)9u(t)) (19)
и начальному условию у (to) = уо- Рассмотрим функцию
ot(h, жо, Уо) = min [Ф(ж(Г; *0, х0)) + у(Г; *о, я<ь Уо)], (20)
где минимум берется по всем кусочно-непрерывным функциям
u(t) е U, to ^ t ^ Т; а ж( •; to, х0), у( •; <о> £о> уо) — решение
системы (17), (19), соответствующее управлению w(-). Легко видеть,
что
a(*oiS0,yo) = yo + min
(21)
\ф(х{Т^о,х0))+[ fo(tMt)Mt))dt\
to
Для вывода уравнения, которому удовлетворяет функция
&(t, х, у), предположим, что
1° для всех t € [to,T]9 х € Х9 у е R существует оптимальное
управление, так что функция а определена;
2° aeCl([to,T]xXxR).
Рассмотрим оптимальный процесс
{u(t),$(t),y(t), to^t^T}
с начальной точкой (<<ья<ь1й>)- Покажем, что функция a(t9x,y)
остается постоянной вдоль траектории ж(-),у(*), т.е.
a(s, x(s\ to, хо), у(з; t0i з0, г/о)) = а(<о, а?о. у0).
В самом деле, рассмотрим ограничение управления и(-) на отрезок
[в,Г]. При £ € [$, Т] и при начальных значениях з, х(з), у(з)
соответствующая траектория совпадает с ж(-), у(«), а поэтому
значение Ф(#(Т)) + у(Т) на этой траектории равно a(to, £о> г/о)-
Если бы на некотором управлении и = й(£), £ € [s, Т]
достигалось значение
Ф (ж (Г; 5,2(e)) + у (Г; з, x(s), у (в))),
30
§ 8. Уравнение Беллмана для задачи с фиксированным временем
меньшее чем a(to, #сь 2/о)> то на «составной» траектории,
отвечающей управлению и = u(t) при t G [to, s]; и = u(t) при t € [s, Г],
тоже достигалось бы значение меньшее, чем а(<0, #о? tfo)> чт0 ПР°_
тиворечит определению (20) функции а.
Итак, производная функции а в силу системы
* = f(t,x,u(t)), у = /о(«, ж, 2(f)) (22)
равна
da
"ей
да 0 да 0 да . ч
Предположим теперь, что в точке (£, ж, у) в течение интервала
времени [£, t + т] применяется произвольное постоянное
управление u(t) = v = const. Значение a(i+r, x(f+r), ?/(£+т)), к которому
мы придем через время г, будет не меньше, чем a(t, х, у):
a(t + г, x(t + г), y(t + т)) - а(£, ж, у) > 0. (24)
Имеем:
5а
a(t - т, я(« - г), у(« 4- г)) = a(t, х% у) + —(«, я, »)/(*, ж, «)г 4-
да да
+ «-('»я> »)/о& ж» «)т + — (*, я, у)г -г о(т).
Подставив это выражение в (24), разделив на г и устремив ^
к нулю, получим
да да да
—{t<x,y)f(t,x,v) + —(t,x,y)f0(t,x,v) + —(t,x,y)}tQ. (25)
ох оу 01
Неравенство (25) имеет место при любом v € U и вместе с (23)
может быть записано в форме:
min
•^(t,x,y)f(t,x,v)-t—(t,xty)f0(t,x,v)-b-^(ttx,y)
= 0.
(26)
31
Глава 2. Метод динамического программирования
В силу (21) a(t, ж, у) = a(t, х, 0) 4-1/. Рассмотрим функцию
u(t,x) = a(t9 х, 0).
Тогда
да да _дш да__ди
и уравнение (26) принимает вид:
mniU-(i, x)f(t, х, v) + /<>(*, ж, t/) + -гт(*, ж) = 0. (27)
t/Gtf [С/Ж С/С J
Уравнение (27) называется уравнением Беллмана для задачи 2.
Упражнение J. Сформулировать и доказать теорему о достаточных
условиях оптимальности для задачи 2. (Указание: эта теорема является
аналогом теоремы 1 для задачи 1.)
Глава 3
Геометрический смысл
принципа максимума
Понтрягино
§ 9. Связь уравнения Беллмана
с принципом максимума Понтрягина
Рассмотрим задачу быстродействия.
Задача 3. Т -> inf,
x = f(x,u); u£U\ х(0) = Х(ь х(Т)€ЛГ. (1)
Предположим, что в области X Э М определена функция
ш(х) £ С2(X\Af), являющаяся решением уравнения Беллмана (8.2)
и удовлетворяющая граничным условиям (9.2). Зафиксируем
произвольную точку Xq £ X \ ЛЛ В силу уравнения (8.2) существует
щ £ U такое, что
дш
t-(so)/(so,u0) = 1.
ох
Теперь зафиксируем щ и рассмотрим функцию
Функция Ф(х) ни при каком х £ X \ N не может принимать
значений больших 1 (так как это означало бы нарушение уравнения
Беллмана в соответствующей точке), а при х = xq она равна 1.
Следовательно, Ф(х) достигает максимума в точке х$. Поскольку
ш £ C2(X\flf), функция Ф(х) дифференцируема и Ц(ж0) = 0.
34
§10. Уравнения в вариациях
Имеем
вФ, ^ ^ д2ш
п
+ E^Wfei^'^ = 0' j = l,...,n. (2)
i=\ г У
Обозначим д-г(ж) = ^г- Тогда выражение
S^L(Xo)/i(a:o'"o)
можно рассматривать как производную от tpi(x) по t в силу
системы (1) при х = Жо- При вычислении этой производной
в систему (1) вместо и может быть подставлена любая непрерывная
функция, принимающая в точке Xq значение щ. Уравнение (2)
принимает вид:
~df
(1) tf ^
1=1
Итак, если ш(х) — гладкое решение уравнения Беллмана,
a {u(t), x(t), 0 ^ i ^ Г} •—■ оптимальный процесс, то вектор-функ
ция ^(£), где ip(t) = $§($($))» удовлетворяет принципу максимума
Понтрягина. При этом условие трансверсальности означает, что
вектор ф ортогонален поверхности уровня: ш(х) = const.
В дальнейшем нам потребуются следующие факты из теории
обыкновенных дифференциальных уравнений.
§ 10. Уравнения в вариациях
Рассмотрим систему обыкновенных дифференциальных
уравнений
x-(p(t9x)4 (3)
где х е X С Rn, <р: R х X -* Rn\ <р G C2(R х X).
35
Глава 3. Геометрический смысл принципа максимума Понтрягина
Пусть x(t\t(,,xo) — решение системы (3), проходящее через
точку (*o, жо):
—x(t;to, хо) = <p(t, x(t;t0, xQ)). (4)
Дифференцируя (4) по Xq, имеем:
dt
dx(t; t0, хо)
= -(t,x(t;t0,x0)) dxQ ■ (5)
дхо
Здесь мы воспользовались тем, что для функций класса С2
смешанные производные не зависят от порядка дифференцирования;
гладкость функции x(t; t0, Хо) следует из того, что (p(t, х) е C2(R х X)
(см. [18, с. 125]).
Зафиксируем начальную точку (to, %) и рассмотрим
соответствующую траекторию x(t) = x(t\ to, Хо). Тогда (5) можно
рассматривать как обыкновенное дифференциальное уравнение
относительно неизвестной (п х п) -матрицы E(t) — ^о :
5=^(^х(0)Н. (6)
Начальные значения для матрицы E(t) имеют вид Е(£0) = I, где
/ — единичная матрица. Они получаются при дифференцировании
тождества x(to;to,x0) = Хо по переменным Хо. Векторы-столбцы
& = Q%-Q(t), г = 1,...,п, матрицы E(t) являются решениями
уравнения
1 = ^{ищт, (7)
которое называется уравнением в вариациях системы (3)
относительно решения x(t). E(t) — матрица фундаментальных решений
системы (7).
Поясним геометрический смысл системы (5). Рассмотрим для
этого в плоскости t = tо пространства Rn*] переменных (£, х)
произвольную гладкую кривую 7- Будем считать, что у задается
уравнениями х = х0(а), t = %9 а € [-1, 1], причем ж0(0) = #о- Из
каждой точки кривой 7 выпустим траекторию системы (3). Эти
траектории образуют в Rn+* двумерную поверхность 91, параме!ризо-
ваннуюпеременными (£, а). Координатные линии а = const — это
36
§10. Уравнения в вариациях
траектории системы (3); координатные линии t = const — это обра-
зы кривой 7, получающиеся при отображении Rn~] -»(Rn_1 по
траекториям системы (3) через время t-to. Векторы фазовой
скорости (р суть касательные к кривым а = const, векторы £§(£; to, а?о) -•
касательные к кривым t = const в точках траектории x(t).
По формуле полной производной
дх * дх ~ джо 9хо
^(м„зд = -(м.,г„>^<о) = =<«>*>.
Отсюда следует, что касательные векторы к кривым t = const
в точках траектории x(t), будучи линейной комбинацией столбцов
матрицы Е(£), являются решениями уравнения (7). Иными
словами, уравнение в вариациях — это уравнение для производных
по начальным данным от решений системы (3). По образному
выражению Пуанкаре, уравнение в вариациях — это уравнение
для переноса бесконечно малых векторов вдоль траектории x(t).
Важную роль в геометрической интерпретации принципа
максимума играют
Сопряженные системы линейных уравнений
Рассмотрим линейную систему
i = мы, (8)
где A(t) —■ (п х п) -матрица, £ € Rn — вектор-столбец. Система
f, = -r,A{t), (9)
где 77 € (Rn)* — вектор-строка, называется сопряженной с
системой (8).
Лемма (о сопряженных системах). Если £(t) — решение
системы (8), a rj(t) — решение системы (9), то (г/, £) = const.
Доказательство.
37
Глава 3. Геометрический смысл принципа максимума Понтрягина
Доказанная лемма имеет следующую геометрическую
интерпретацию. В фазовом пространстве (Rn_ul переменных (t, £) для
системы (8) рассмотрим плоскость t — <о- В этой плоскости
возьмем (п - 1)-мерное подпространство Го, определяемое
системой уравнений (т)о,€) = О, где щ € (Кп)* — нормаль к
плоскости Го. Пусть Г[ — образ множества Го, полученный при
отображении по траекториям системы (8) к моменту t = t\. В силу
линейности системы (8), Тх будет (п - 1)-мерным
подпространством плоскости t — t\, состоящим из векторов £(<ь <о> £о)- Пусть
*7(М<ь%) — решение системы (9). По лемме о сопряженных
системах (^ь *о>*7о), £(*ь<(ь£())) = fo<b£o) = °- Следовательно,
J7(*iU<btyo) — нормаль к плоскости Г|. Таким образом, (9) есть
уравнение для переноса гиперплоскостей, при условии, что
составляющие их векторы переносятся по системе (8).
Замечание. Слово «нормаль» в вышеприведенном рассуждении
употреблено только для наглядности. Дело в том, что фазовые пространства
сопряженных линейных систем не всегда обладают евклидовой
структурой. В этом случае вышеприведенное рассуждение остается в силе. В нем
нужно только термин «нормаль» заменить на «аннулятор».
§11. Геометрическая интерпретация
принципа максимума
Вернемся к задаче 3 из § 9. Пусть u(t) — оптимальное
управление, x(t) — соответствующая оптимальная траектория. Уравнение
в вариациях для системы
x = f(x,u(t)) (10)
имеет вид:
i = ^{x(t),u(tm. (и)
Нетрудно заметить, что система уравнений (6.1) для сопряженных
переменных
4> = -^(x(t),u(t)) (12)
38
§11. Геометрическая интерпретация принципа максимума
является сопряженной к системе (11). Если система (11)
описывает перенос бесконечно малых векторов вдоль решения х(-), то
система (12) описывает перенос «бесконечно малых площадок»
вдоль той же траектории. Точный смысл последнего утверждения
состоит в следующем. Рассмотрим в n-мерном пространстве t = tо
гиперповерхность, проходящую через точку (£(ь£о). Из каждой
точки этой гиперповерхности проведем траекторию системы (10)
до момента t = t\. Получим новую гиперповерхность в
пространстве t = t\. Касательные плоскости к этим двум
гиперповерхностям в точках (to, Хо) и (t\9 x(t\;to, Хо)) получаются друг из друга
переносом в силу системы (12). Напомним, что если функция
Беллмана ш(х) является гладкой, то в качестве *ф можно взять
градиент функции и) (который удобно себе представлять в виде
касательной плоскости к поверхности уровня функции а;). В общем
случае мы не можем гарантировать гладкости функции Беллмана.
Более того, даже в очень простых примерах (таких, например, как
пример 1 §4, гл. 1) она часто оказывается негладкой функцией.
Тот реликт, который остается в принципе максимума Понтряги-
на от метода динамического программирования, — это система
площадок tp(t), но уже определенная не во всем пространстве,
а только вдоль траектории x(t).
Упражнение, Найти точки негладкости функции Беллмана в
примере 1 §4, гл. 1.
Итак, принцип максимума означает следующее: пусть
— оптимальный процесс. Тогда на траектории x(t) определена
система площадок VK0» переносимая вдоль этой траектории так,
как если бы это были касательные плоскости к функции ш (т. е.
по системе уравнений, сопряженной к уравнению в вариациях);
при этом проекция вектора фазовой скорости f(x(t)> u(t)),
отвечающей оптимальному процессу, на нормаль к площадке %l>(t) имеет
максимальное значение по сравнению со всеми остальными
векторами фазовых скоростей f(x(t), и); в момент окончания процесса
гр(Т) касается терминального многообразия ЛЛ
Глава 4
Существование решений
задачи оптимального
быстродействия
В теории оптимального управления важную роль играют
теоремы существования. В данной главе мы приведем примеры задач
оптимального управления, в которых оптимального управления
не существует. Значит ли это, что у рассматриваемых задач нет
решения? Здесь уместно привести высказывание Гильберта:
«Всякая задача вариационного исчисления имеет решение, если только
слову „решение" придать соответствующий смысл». Это
высказывание в равной мере применимо и к теории оптимального
управления. Приведенные примеры указывают на пути обобщения
понятия «решение» и позволяют пояснить смысл условий теоремы
существования, которая доказывается во второй части данной главы.
Для того чтобы ввести обобщенные решения, в вариационном
исчислении и в оптимальном управлении пользуются понятием
«минимизирующая последовательность».
Определение. Последовательность допустимых траекторий
{хп(-)} называется минимизирующей для задачи (1), если
функционал J(xn(')) стремится к нижней грани J(x(-))
в классе всех допустимых траекторий.
Здесь под допустимой траекторией принимается траектория,
соответствующая допустимому управлению.
Предел минимизирующей последовательности, если ему
можно придать разумный смысл, принимается за определение
обобщенного решения.
В дальнейшем нам понадобится следующее
42
§12. Пример отсутствия оптимального управления
Определение. Множество /(<r, U) = U f(x, и) называется
вектограммой. u£U
§ 12. Пример отсутствия оптимального
управления. (Скользящие режимы)
Пример 3. Рассмотрим задачу наибыстрейшего попадания в начало
координат из точки (ж(0) = -1, у(0) = 0) по траекториям системы
Для того чтобы доказать, что оптимального управления в этой
задаче не существует, построим минимизирующую последовательность
{яп(*)> Уп(*)}- Разделим отрезок, соединяющий точки (-1,0) и (0, 0) на 2п
равных частей. На всех нечетных участках возьмем и = + 1, на всех четных
и = — 1. Получим последовательность пилообразных кривых,
изображенных на рис.4 1.
Для того чтобы показать, что эта последовательность является
минимизирующей, заметим, что проекция скорости движения на ось Ож
не может быть больше I: х = -у2 + и2 ^ 1, причем эта проекция будет
тем ближе к единице, чем меньше \у\ и чем больше |и|. На
последовательности {жп(«),уп(')} производная xn(t) равномерно стремится к единице,
так как \и\ — 1 (п. в.), a \yn(t)\ равномерно стремится к нулю. Отсюда
следует, что время попадания в начало координат не менее единицы, и что
на последовательности {хп{-),уп(')} оно стремится к единице. Покажем
теперь, что за время, равное единице, попасть в начало координат нельзя.
J
XX XX
-1
к У
X
1 ' W
Рис. 4.1
43
Глава 4. Задача оптимального быстродействия
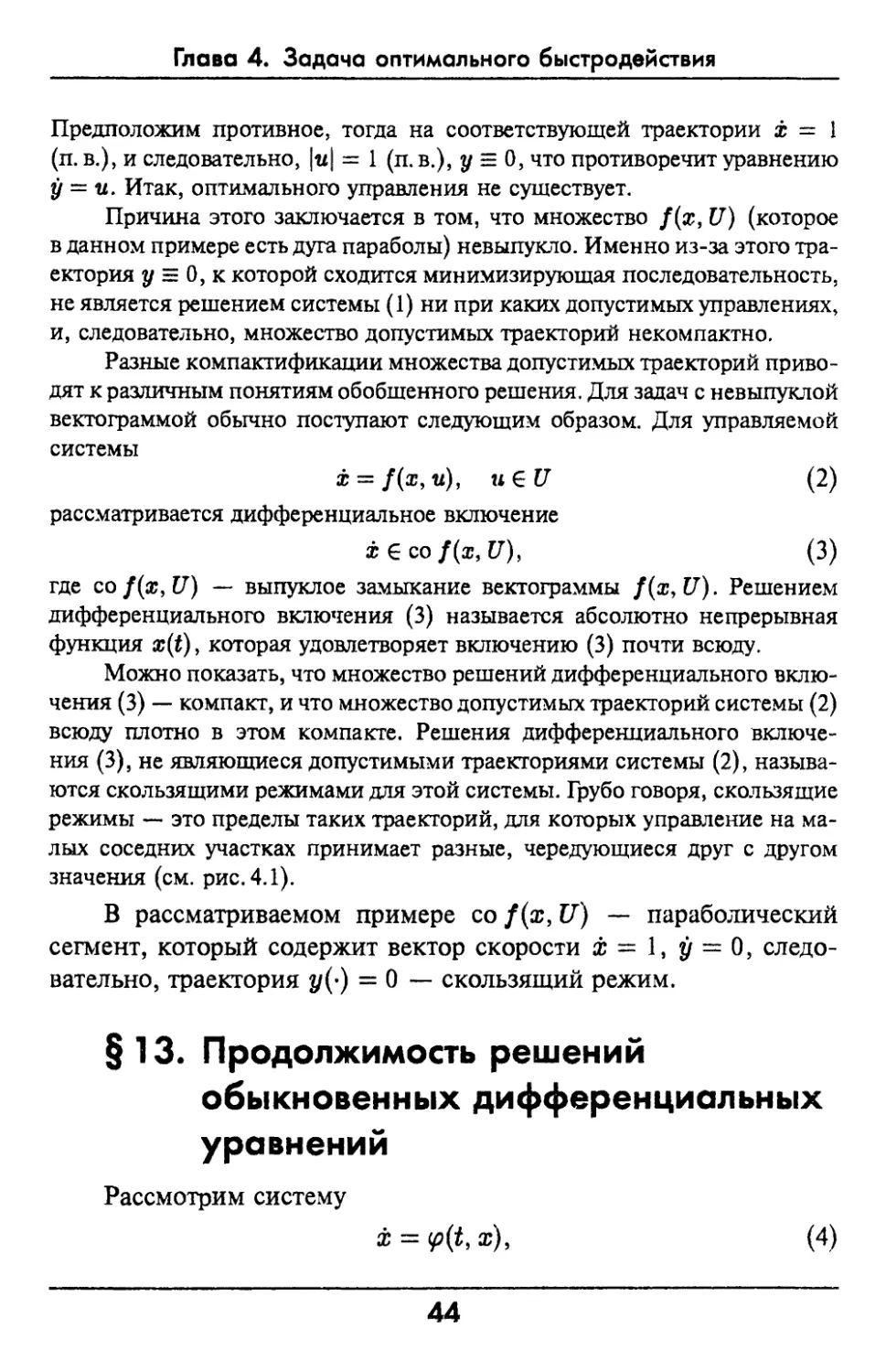
Предположим противное, тогда на соответствующей траектории х — 1
(п. в.), и следовательно, \и\ = 1 (п. в.), у = О, что противоречит уравнению
у ~ и. Итак, оптимального управления не существует.
Причина этого заключается в том, что множество /(#, U) (которое
в данном примере есть дуга параболы) невыпукло. Именно из-за этого
траектория у = 0, к которой сходится минимизирующая последовательность,
не является решением системы (1) ни при каких допустимых управлениях,
и, следовательно, множество допустимых траекторий некомпактно.
Разные компактификации множества допустимых траекторий
приводят к различным понятиям обобщенного решения. Для задач с невыпуклой
вектограммой обычно поступают следующим образом. Для управляемой
системы
ж = /(ж,г*), WGC7 (2)
рассматривается дифференциальное включение
ж Geo/(ж, V), (3)
где со/(ж, 17) — выпуклое замыкание вектограммы /(ж, 17). Решением
дифференциального включения (3) называется абсолютно непрерывная
функция ж(£), которая удовлетворяет включению (3) почти всюду.
Можно показать, что множество решений дифференциального
включения (3) — компакт, и что множество допустимых траекторий системы (2)
всюду плотно в этом компакте. Решения дифференциального
включения (3), не являющиеся допустимыми траекториями системы (2),
называются скользящими режимами для этой системы. Грубо говоря, скользящие
режимы —• это пределы таких траекторий, для которых управление на
малых соседних участках принимает разные, чередующиеся друг с другом
значения (см. рис. 4.1).
В рассматриваемом примере со /(ж, U) — параболический
сегмент, который содержит вектор скорости х = 1, у = 0,
следовательно, траектория у(-) = 0 — скользящий режим.
§ 13. Продолжимость решений
обыкновенных дифференциальных
уравнений
Рассмотрим систему
х = <p{t> х), (4)
44
§ 14. Пример отсутствия оптимального управления
где х £ Rn, <р: [to,t\] х Rn -» Rn непрерывно дифференцируема
по х и измерима по t.
Теорема 1 (о продолжимости решений). Пусть существует
константа С > О такая, что при всех х Е Rn, t G [U, t\]
(x,<p(t,x))^C(\x\2 + l). (5)
Тогда решения системы (4) определены на всем отрезке [to, t\\.
Доказательство. Введем переменную y(t) — \х\1 +■ 1. Имеем
Л = К*' S) = 2(Х' ^ Ж)) ^ 2С(|Х'2 + 1} = 2СУ'
т.е. § ^ 2Су. Если у(0) = А, то y(J) ^ Ae2Citl"kK т.е.
|х| ^ y/Aec(tx^\ (6)
что и требовалось доказать. D
Отметим, что если неравенство (5) выполнено при всех t Е R1,
то из теоремы 1 следует неограниченная по времени
продолжимость решений.
Покажем, что свойство продолжимости решений существенно
при изучении вопросов существования оптимального управления.
§ 14. Пример отсутствия
оптимального управления.
(Уход на бесконечность
за конечное время)
Пример 4. Рассмотрим задачу наибыстрейшего попадания в начало
координат по траекториям системы
{
х = г/,
у = г* ехр {у'}, |и|^1
2, ,.., ^ , (7>
Применим принцип максимума: Я = ф\у + ipiutx${y2}.
ipi = О, Ф2 = -Ф\ - 2уФ2 exp {у2}и. (8)
45
Глава 4. Задача оптимального быстродействия
Из условия максимума имеем и = 1 при гр2 > 0; н = -1 при ф2 < 0
и любое при ф2 = 0.
Покажем, что и(£) — управление, удовлетворяющее принципу
максимума Понтрягина, имеет не более одного переключения. Действительно,
переключение возможно только там, где ip2(t) обращается в ноль. В
силу (8) %j)\ = const.
Пусть i/){ = 0, тогда уравнение для ф2 становится однородным.
Покажем, что на соответствующей траектории не может быть ни одного
переключения.
Действительно, если ip2 обращается в ноль в некоторой точке, то
по теореме единственности ip2{t) = 0, следовательно, вектор ip — нулевой,
что противоречит принципу максимума.
Пусть гр1>0 тогда уравнение для г/>2 имеет вид ip2-\-a(t)ip2 = -ipi < 0.
Покажем, что функция $2{t) не может сменить знак с минуса на плюс (и,
тем самым, две перемены знака ^2 невозможны). Действительно, функция
a(t) = 2y(t)u(t) exp {y2(t)} на любой допустимой траектории ограничена:
\a(t)\ ^ С. В области |^2| < % справедлива оценка ф2 = -ipi -a{t)%j)2 < 0,
т. е. в этой области гр2 убывает и поэтому не может сменить знак с минуса
на плюс.
Аналогично показывается, что если %р\ < 0, то ip2{t) не может сменить
знак с плюса на минус.
Процесс построения синтеза проводится так же как в примере 1.
Берем и = 1. Тогда система (7) принимает вид:
\у = ехр{у2}.
Разделив второе уравнение на первое и взяв х в качестве независимого
переменного, получим уравнение ^ = ехр^у *, траектории которого имеют
вид -\ ехр {-у2} = х + С. Движение по этим траекториям происходит
вверх, так как у > 0.
Аналогично, взяв и — -1, получим траектории \ ехр {-у2} = х + С.
Движение по этим траекториям происходит вниз, так как у < 0.
Скомбинировав из этих двух семейств траектории, ведущие в начало
координат и имеющие не более одного переключения, получим (рис. 4.2):
Здесь кривая переключения (изображенная на рис. 4.2 жирной
линией) состоит из двух сопряженных друг с другом кривых: верхней
половины кривой х = \ ехр {-у2} - j и нижней половины кривой
х = -^ ехр {-у2}-h \. Область G. заполненная траекториями, лежит
46
§14. Пример отсутствия оптимального управления
I v=-\
Рис 4.2
между кривыми х = \ ехр {-у2} + \ и х = -\ ехр{-у2} - |,
изображенными на рис. 4.2 пунктиром. Для любой точки области G существует
и притом только одна траектория, удовлетворяющая принципу
максимума и ведущая в начало координат. Для точек, лежащих вне этой области,
не существует ни одной траектории, удовлетворяющей принципу
максимума и ведущей в начало координат.
Можно подумать, что для точек, лежащих вне области G, не
существует ни одной допустимой траектории системы (7), ведущей в начало
координат. Однако это не так. Например, если для точки (а:0, уо),
лежащей во втором ортанте, взять и = 0, то эта точха начнет двигаться вправо
со скоростью уо и через конечное время достигнет области G.
Следовательно, из точек, лежащих вне области G, нельзя попасть в начало
координат оптимальным образом. Для того чтобы осознать этот феномен,
полезно посмотреть на последовательность траекторий,
минимизирующую время перехода. Поскольку время перехода из точки (ж0, Уо) в начало
координат на всех траекториях положительно, существует точная
нижняя грань таких времен Т(я0>2/о)5 и можно выбрать последовательность
траекторий {а?г)(-),уп(-)}, начинающихся в данной точке (ж<ьУо)> такую,
что время движения по ним до начала координат стремится к Т(ж0,2/0)-
Для точек, лежащих левее области G, траекторию хп(-),уп(-) можно
47
Глава 4. Задача оптимального быстродействия
описать так: сначала и = 1.
при этом движение
происходит вверх до уровня у = п,
далее и = О, при этом
движение происходит по
горизонтали до кривой
переключения, затем и = 1, при
этом движение происходит
по кривой переключения до
начала координат (рис.4.3).
Рис. 4.3 Справа от области G
картина центрально
симметрична.
Упражнение. Доказать, что вышеописанная последовательность
траекторий действительно является минимизирующей.
Указание: а) времена движения по горизонтальным участкам
траекторий {жЛ(-), уп(-)} {и = 0) стремятся к нулю, так как длина
всех этих участков ограничена величиной, не зависящей от п,
а скорость движения по ним х = у = п -► оо; б) при и = 1
траектории системы (5) уходят на бесконечность за конечное
время (именно этот факт является причиной несуществования
оптимального управления в примере 4).
Замечание 1. Минимизирующая последовательность не стремится ни к
какой допустимой траектории в обычном смысле этого слова. Однако,
в данном случае можно ввести обобщенную предельную траекторию. Для
точек, лежащих левее G, эта траектория поднимается (и = +1) до +оо
и «оттуда» спускается по кривой переключения (и = -1) в начало
координат. Формально говоря, эта траектория лежит в «расширенной» фазовой
плоскости, компактифицированной двумя точками у — t-эо и у = -оо.
В такой компактифицированной плоскости оптимальное управление
существует.
Тема для самостоятельного исследования
Изучить виды компактификации фазового пространства,
связанные с различными способами ухода на бесконечность по
траекториям системы (2). Сформулировать и доказать теорему су-
48
§15. Формулировка теоремы существования
шествования оптимальных траекторий в компактифицированном
фазовом пространстве.
§ 15. Формулировка теоремы
существования
Рассмотрим задачу быстродействия Т -> inf.
х = /(ж, и), х(0) = а, х(Т) = Ъ, (9)
где xERn,M6[TCRr, /: RnxU-+Rn.
В качестве класса допустимых управлений возьмем класс
измеримых функций со значениями из множества U. Под
решением системы (1) будем понимать решение по Каратеодори
(см. [9, с. 54]).
Введем обозначение /(ж, U) = \J /(ж, и).
Предположим, что выполнены следующие условия.
Г. Функции f{x,u) непрерывны по совокупности аргументов
и непрерывно дифференцируемы по ж.
2°. Существует такая положительная константа С, что при всех
xeRn,ueu
(x,f(x,u))^C(\x\2 + l).
3°. Множество U замкнуто и ограничено; /(ж, U) выпукло.
Теорема 2 (теорема существования), (Филиппов). Пусть
выполнены условия Г,2°,3°, и пусть существует допустимое
управление u(t) такое, что соответствующая ему
траектория x(t) с начальным условием ж(0) = а попадает в точку b
при некотором t > 0: x(t) = &. Тогда существует оптимальное
управление u(t).
Прежде чем приступить к доказательству теоремы обсудим ее
формулировку. Условие Г играет чисто техническую роль. Его
можно ослабить и оно действительно ослаблялось в целом ряде
работ.
49
Глава 4. Задача оптимального быстродействия
Условие 2° — это по существу условие теоремы I. Для любого
фиксированного отрезка времени [О, Т] оно гарантирует
равномерную ограниченность множества решений системы (9),
начинающихся в точке а и соответствующих любым измеримым
управлениям u(t). Как видно из примера 4, отказ от условия 2° может
привести к несуществованию оптимального управления.
Условие 3° — это условие замкнутости множества решений
системы (9), или, что то же, условие отсутствия скользящих
режимов. Роль этого условия в вопросе существования оптимального
управления выяснена в примере 3. Одновременное выполнение
условий 2° и 3° гарантирует компактность множества траекторий
системы (9), начинающихся в точке а.
§ 16. Доказательство теоремы
существования
Все рассуждения будут проводиться для отрезка [0, t ], на
котором определена траектория x(t). В силу опенки (6) при любом
допустимом управлении и(-)9 \x(t)\ ограничен одной и той же
константой: |ж| ^ y/Aect. Поскольку функция /(ж, и) непрерывна
на компакте и €U, \х\ ^ y/Aect, имеем \f(x,u)\ ^ М.
Рассмотрим множество всех решений системы (9) (при допустимых u(t),
для которых х(0) = a, x(tf) = Ь, 0 < f ^ t). Это множество не
пусто, так как оно содержит х(-). Если это множество конечно, то
утверждение теоремы очевидно. Если оно бесконечно, то
выберем из него последовательность хп(-) такую, что соответствующие
времена перехода t'n стремятся к t\ = inf t1. Функции хп(-)
равномерно ограничены, так как \xn(t)\ ^ y/Aect, и равностепенно
непрерывны, и почти всюду выполнено неравенство
1*п(*)1=|/(М*).М0)|^АГ (п. в.). (ю)
По теореме Ариела из этой последовательности можно
выбрать равномерно сходящуюся подпоследовательность, которую
50
§16. Доказательство теоремы существования
мы по прежнему будем обозначать хп(-). Обозначим ее предел
через ж(-). Покажем, что х(-) — решение нашей задачи. Поскольку
t\ есть нижняя грань времени перехода, не существует
траектории, которая бы переводила а в Ь за время, меньшее t\. Для
траектории ж(-) имеем х(0) = a, xn(t'n) = Ь, ?п -► t{. В силу (10)
\xn(ti) - xn(t'n)\ ^ M|*i - t'nl, поэтому a?(«i) = ft.
Остается показать, что x(f) — допустимая траектория; т. е. что
x(t) соответствует некоторому допустимому управлению. Именно
эта часть доказательства является наиболее тонкой. Нам надо
показать, что существует измеримое управление u(t) такое, что
x(t) = f(x(t),u(t)). Заметим, во-первых, что поскольку все xn(t)
удовлетворяют условию Липшица с одной и той же константой М,
то и предельная траектория x(t) обладает тем же свойством.
Следовательно, x(t) абсолютно непрерывна и \х\ ^ М (п. в.).
Обозначим x(t) = y(t); xn(t) = yn(t). Функции yn(t) и y(t)
определены почти всюду на [0, t\], измеримы и ограничены. Пусть
*о € [0, t\] — такая точка, в которой x(to) существует.
Покажем, что x(to) € f(x(to)yU). В силу непрерывности функции /
многозначное отображение х ь* /(#, U) полунепрерывно сверху
относительно включения, т. е. для любого в > 0 найдется такое
6 > 0, что как только \х - ж(*о)| < £» так /(ж, U) € V€y где V£ —
замкнутая £-окрестность множества f(x(to),U). Уменьшив при
необходимости S, из дифференцируемое™ х(-) в точке <о получим
я?(0 - я(*0) .,, ,
*-*о
<е при |*~*о| <£. (И)
Но
x(t) - ж(«о) я?я(<) - xn(t0)
hm — = km -—- / yn(r) dr =
t — to n"400 t — Го Я-+00 t — to J
to
1
= lim / yn (*0 + (t - *o)s) d5.
П-К5С J
51
Глава 4. Задача оптимального быстродействия
Траектории xn(t) допустимы и уп(т) = хп(т) = /(хп(г),ип{т)).
Эти значения будут принадлежать Ve, если хп(т) окажется
достаточно близко к x(to). Формальное доказательство этой близости
проводится следующим образом: при \т - to\ < д и для всех
достаточно больших п имеем
Ы*о)-ж(*0)| <Мб9
\хп
откуда \хп(т) -x(to)\ < 2MS. Итак, уп(т) G V€. Но Ve — выпуклое
замкнутое множество, как следует из условия 3°. Поэтому интеграл
1
/ yn(to + (t-t0)s)ds
о
также принадлежит V£, как предел выпуклых линейных
комбинаций значений уп(т). (Обратите внимание, как красиво
используется условие выпуклости!) Следовательно, предел этого интеграла,
т. е. *' \Z*q также принадлежит V£. Из (11) следует, что x(to) € Vie
при любом сколь угодно малом е > О, Из того, что f(xo,U)
замкнуто, следует, что £(£0) € f(x(to), Ю>т-е- существует u(t0) такое,
что x(to) = f(x(to), u(to)). Последний этап доказательства состоит
в том, что функцию u(t) можно выбрать измеримой (в общем
случае она определена неоднозначно). Доказательство этого факта
следует из леммы об измеримом выборе, которую мы приведем без
доказательства.
Лемма (об измеримом выборе). Пусть функция f(t, и)
непрерывна, /: R х U -> Rn, Пусть измеримая вектор-функция
y(t) такова, что y(t) £ f(t,U). Тогда существует измеримая
вектор-функция u{t) такая, что y(t) = f(t, u(t)) (я. в.).
Доказательство см. в [19, с. 430].
Глава 5
Простейшая задача
классического вариационного
исчисления
§ 17. Постановка задачи
В 1696 г. И. Бернулли поставил перед математическим миром
задачу о брахистохроне, обещая «воздать заслуженную хвалу тому,
кто справится с ее решением». Современники не остались
равнодушными и за короткое время Бернулли получил три письма (одно
из них анонимное), содержащие различные решения этой задачи.
Именно поэтому 1696 год принято считать годом рождения
вариационного исчисления. Мы предлагаем читателям последовать
примеру анонимного автора (которым был И. Ньютон) и
попробовать откликнуться на призыв из далекого 1696 года.
Задача о брахистохроне ставилась следующим образом: «В
вертикальной плоскости даны две точки а и Ь. Определить путь,
спускаясь по которому под действием собственной тяжести,
тело М, начав двигаться из точки а, дойдет до точки Ъ в кратчайшее
время». (Предполагается, что трение отсутствует.) Введем в
данной плоскости систему координат, приняв за начало координат
точку а и направив ось Оу вниз. Пусть у = у(х) — уравнение
искомой кривой. По закону сохранения энергии скорость М при
прохождении точки (ж, у(х)) будет такой же, как при свободном
падении с высоты у(х), т.е. v — y/2gy(x). Поэтому, интегрируя
вдоль кривой у = у(х), получим, что время движения равно
[ds = fVTTuWdx
J v J ^/Щх) '
54
§18. Уравнение Эйлера
Итак, задача заключается в том, чтобы выбрать функцию у = у(х),
удовлетворяющую условиям у(0) = 0, у(хо) = Уо так, чтобы
функционал (1) принял наименьшее значение.
Чтобы найти решение некоторой конкретной задачи,
математики, как правило, строят общую теорию для решения
произвольных задач того же типа. Иногда, после того, как такая теория,
построена, выясняется, что исходная задача не удовлетворяет тем
предположениям, которые были положены в основу теории.
Тогда начинается процесс обобщения, который нередко превращает
простую исходную конструкцию в существенно более громоздкую
Поскольку нашей целью является скорее построение общей тес
рии, нежели решение задачи о брахистохроне, мы смело пойдем
этим путем и рассмотрим при удобных для нас предположениях
общую задачу о минимизации интегрального функционала.
Задача 4. Среди всех кривых х(-) Е C]([tQ,t\]9Rn)9
удовлетворяющих граничным условиям
х(*о) = а. я?(*0 = Ь, (2)
где а, Ь — две заданные точки из Rn, найти такую, которая дает мини
мальное значение функционалу
Л*0)= f f(t,x(t),t(t))dt9 (3)
к
nie/<EC2([*o,*i] x[RnxRn).
Под минимальным значением здесь и далее в гл. V-VIT
понимается локальный минимум в пространстве Cl([to,ti])-
§ 18. Уравнение Эйлера
Подпространство пространства Cl([to,t\],Rn), определяемое
условиями
M*o) = M*i)=0, (4)
о о
будем обозначать через С1 ([to, t\]) или просто С].
55
Глава 5. Задача классического вариационного исчисления
Пусть кривая ж(-) есть решение задачи 4. Рассмотрим однопа-
о
раметрическое семейство кривых x(t) 4- \h(t), где /i(-) G Cl([to,t\]);
AGR.B силу условий (4) каждая из кривых этого семейства
удовлетворяет условиям (2). Рассмотрим скалярную функцию <р(\),
получаемую подстановкой кривых нашего семейства в функционал (3):
р(А) = f f(t, x(t) + \h(t), x(t) - Xh(t)) dt (5)
к
Поскольку <p(Q) есть значение функционала (3) на #(•),
функция (5) достигает локального минимума при А = 0. Заметим, что
из теоремы о дифференцируемое™ интеграла по параметру и
условия / б С2 (см. [13, т. 2, с. 107]) следует, что функция ^?(А) является
дважды дифференцируемой по А. Поэтому у?'(0) = 0, ^"(0) ^ 0.
(Второе из этих условий будет использовано дальше в гл. 7.) Имеем
р'(0)=/[д(*,£(0>ЭД (6>
Отметим, что уравнение (6) выполнено для любой функции
Л(-) е с1.
Лемма (Дюбуа—Реймона]. Пусть a(t),b(t) € C([<oJi],Rn) «
для любой функции h(t) G С1 ([to, t\]) выполнено условие
/ [а(*)М0 + Ь(*)А(«)] * = 0- (7)
to
Тогда функция b(t) непрерывно дифференцируема и
-^Ь(*) + в(<) = 0. (8)
at
Доказательство. Обозначим через A(t) произвольную перво-
t
образную функции a(t), т.е. A(t) — fa(r)dr^~K. Интегрируя
56
§18. Уравнение Эйлера
первое слагаемое в (7) по частям и учитывая (4), получим
f[-A(t) + b(t)]h(t) dt = 0 (9)
(при любом выборе константы К). Подберем теперь функцию
h(t) так, чтобы под интегралом стоял полный квадрат. Для этого
положим
t
h(t)= f[-A(T) + b(T)]dr. (Ю)
При таком выборе h(to) = 0, а выполнение условия h(t\) = 0
обеспечивается выбором константы К. Подставив (10) в (9), получим:
[-A(t) + b(t)]2dt = 0,
to
т.е. A(t) = b(t). Следовательно, функция b(t) непрерывно
дифференцируема, и выполнено уравнение (8). □
Применяя лемму Дюбуа—Реймона к (6) получаем, что
решение x(t) задачи 4 должно удовлетворять системе
дифференциальных уравнений
- jtu{u ш x(t)) + fx{u я®, m) - o, (i i)
которая называется уравнением Эйлера. Уравнение Эйлера — это
система из п уравнений:
d
каждое из которых является обыкновенным дифференциальным
уравнением второго порядка. Порядок системы равен 2п,
следовательно, общее решение зависит от 2п произвольных постоянных,
которые следует выбрать так, чтобы удовлетворить граничным
условиям (9) (их число также равно 2п).
57
Глава 5. Задача классического вариационного исчисления
Любое решение x(t) уравнения Эйлера будем называть
экстремалью задачи.
Пример 5. Найдем экстремали в задаче о брахистохроне:
\Л -г У2 # . \Л ■+■ У2. ^ У
/ "~ /г: > Л ~~ - Г"7 » Л
Vv ' Jv i^/y1 ' у Vl+y2Vy'
±. _ У у2
dx i у/{\ + ii2YVii V1 + у2Vy1
Поэтому уравнение Эйлера имеет вид
У У2 V1 + У2 = 0
или
2yS +1/2 + 1 = 0.
Поскольку это уравнение не содержит х, его порядок понижается заменой
у = р(у), У=Р%-
dp , , С 1С
2yp-f+p2 + l=Q; ln(l+p2) = ln-; p = ±J--\.
dy у У у
Взяв знак "+", получим ff = ix. Делая замену у = С sin21. имеем
2 sin21 it.
/1С sin £ cos t it _ С
Л/тпт /■
V Sin2 * *
ж + D = C* - C^— = -[2i - sin 2«],
у = Csin21 = -r[l -cos2<].
(12)
Таким образом, экстремалями являются циклоиды.
Замечание 1. Строго говоря, предположения, при которых было
выведено уравнение Эйлера, для задачи о брахистохроне не выполняются,
так как при у = 0 подынтегральная функция терпит разрыв. Поэтому
приведенные вычисления можно рассматривать как эвристический
вывод. Строгое доказательство оптимальности решения (12) можно найти
в [19, с. 24-27].
58
§19. Геодезические на римановом многообразии
В заключение параграфа выпишем простейшие интегралы
уравнений Эйлера.
1. Интеграл импульса. Если подынтегральная функция / не
зависит явно от Х{9 то fx. есть интеграл уравнений Эйлера.
Действительно, г-е уравнение Эйлера имеет в этом случае вид
d
—ft = 0.
dtJit
2. Интеграл энергии. Если подынтегральная функция / не за-
п
висит явно от t, то Н(х,х) = Y^fx&i """ / О1™ кратко
1=1
Н = fxi-f) есть интеграл уравнений Эйлера. Действительно,
d
= ^Т(Д)* + fxX - fx± - fxX = 0
(11) aI
(так как, в силу (11), |Д = fx).
Названия этих интегралов взяты из классической механики.
Они получат свое объяснение в следующей главе.
§ 19. Геодезические на римановом
многообразии
Римановым многообразием называется многообразие М
класса Ст (г > 1), в каждом касательном пространстве которого
определена структура евклидова пространства, т. е. задана
положительно определенная квадратичная форма, определяющая скалярные
произведения касательных векторов. При этом требуется, чтобы
матрицы gij(x), определяющие эту форму в некотором атласе
многообразия М, были функциями класса Ст. Длина кривой x(t),
t € [to, t\]9 лежащей на многообразии, задается формулой:
и
-I
to N *-
£*,««»££* (в)
(см. [5, с. 33]). Геодезическими линиями на М называются
экстремали функционала (13). В том случае, когда многообразие вложено
59
Глава 5. Задача классического вариационного исчисления
в евклидово пространство, на нем можно определить структуру
риманова многообразия, индуцированную этим вложением.
Например, для двумерной поверхности в R3, задаваемой уравнением
г = r(u, v) или, что то же, х = х(и> v), у = у(и, v), z = z(u, v),
метрика, индуцированная вложением, имеет вид дп = (ги,ги),
9п = 9г\ = (rtt, г„), 522 = (r„, rv). Вьфажение
ds = / ^ ^у dit* dtX;
».;
называется первой квадратичной формой поверхности [15, с. 218].
Пример 6 (геодезические на сфере). Без ограничения общности
можно считать радиус сферы равным единице.
В сферических координатах х = cos <р cos ip, у = sin <р cos гр, 2 = sin гр
первая квадратичная форма имеет вид: ds2 = cos2 гр dtp2 -f cty>2. Примем гр
за независимую переменную ip = <р{ф). Тогда
-/*
cos2 гр -ф2 + \ dip.
Поскольку подынтегральная функция не зависит от (р, получаем интеграл
_ со$2^ = Г. uttu urn тп wp ,Л = ±С
V
имеем
импульса /°; ^ = С или, что то же, ф = , , ±С, *===. Интегрируя,
y/cos11рф2-1 Г y/cos* i{)-C2 cos2 i>
'-/
±Cdtg^ . Ctg^
— Б ± arcsin ■
т.е. s\n(<p — B) = i4tg^>. Отсюда: >tisin^cos^-hi42COS^cos^>-f A3sin^:=0,
и значит i4jjc -f Л2у -f 43z = 0. Иными словами, геодезическими служат
сечения сферы плоскостями, проходящими через начало координат, т. е.
большие круги сферы.
Пример 7 (геодезические на плоскости Лобачевского). Модель
Клейна—Пуанкаре плоскости Лобачевского (двумерного многообразия
постоянной отрицательной кривизны) описывается следующим образом.
Рассмотрим верхнюю полуплоскость у > 0 и введем на ней метрику,
определяемую первой квадратичной формой
_ 2 dx2 + dy2
ds = г .
У2
Найдем геодезические. Принимая за независимое переменное ж, получаем
С = f V ^у ^х. Поскольку подынтегральная функция не зависит явно
60
§19. Геодезические на римановом многообразии
от ж, уравнение Эйлера имеет интеграл энергии —jL==y-
уу/у^у2 *
\+Г
С, т. е.
,2
У\/\ н-у2=Д, или dx=—Д=^Ц. Интегрируя, получаем (ан-2>)2 = Д2--у'
Итак, геодезическими служат окружности, ортогональные прямой у = О,
которая в геометрии Лобачевского называется абсолютом. Если за неза
висимое переменное принять у> то для подынтегральной функции
^/x^^
можно записать интеграл импульса
/t2+\
= Су который, помимо
прежних экстремалей, дает при С = 0 вертикальные прямые. Итак, роль
«прямых» плоскости Лобачевского в модели Клейна—Пуанкаре играют
прямые и окружности, ортогональные абсолюту (см. рис. 5.1).
Рис. 5.1
Упражнение 1. Проверить, что для этих «прямых» выполняются все
аксиомы евклидовой плоскости, кроме пятого постулата.
Упражнение 2. Показать, что гауссова кривизна многообразия с
метрикой ds2 = х "2 у постоянна и отрицательна.
Упражнение 3. Показать, что дробно-линейные преобразования,
переводящие верхнюю полуплоскость в себя, сохраняют ds2 и,
следовательно, определяют группу движений плоскости Лобачевского.
Упражнение 4. Существует ли дробно-линейное преобразование,
переводящее верхнюю полуплоскость в себя и переводящее две заданные
точки этой полуплоскости в две другие заданные точки?
Вернемся к общей задаче нахождения экстремалей для
функционала (13). Мы будем рассматривать кривые без особенностей:
1*1 #0.
61
Глава 5. Задача классического вариационного исчисления
Поскольку функционал (13) не зависит от выбора
параметризации на кривой x(t) мы можем считать, что за параметр
выбирается длина дуги. В этом случае
п
^2 9ij(x(t))XiXj = 1. (14)
Найдем уравнение геодезических. С учетом (14) имеем
/ - V* ' / _ I V* &9Ц ■ •
Jxi — 2^9ljxj'^ hi — 2 2-j Qx xixi-
Уравнение Эйлера имеет вид:
;=1
1 v^ %A
1
Е1 v^ иуц . . i v--v Одц .1 v—v dgij . .
*i*i ~ 2 X, ft^S> - 2 E -te*i*i + 2 E J^Wi = °-
i,j~ 1
t\j=l
(15)
Обозначим через <7W матрицу, обратную к матрице д^ (д^
положительно определена и, следовательно, не вырождена). Применим
ды к обеим частям уравнения (15)
ь+ Е«*
4,1=1
Выражение
/ = 1
dgij %[ _ %;
9xt dxj dx\
ы \dgij_ dgu _ dgjj
I dxi dxj dx\
Xi Xj — U.
(16)
обыкновенно обозначают через Гу и называют символом Кри-
стоффеля или коэффициентами связности. В этих обозначениях
уравнение (16) принимает вид:
хк + ^2 Tiju&j = °> * = 1,.. •, п.
Это и есть уравнение геодезических.
(17)
Глава 6
Канонический формализм
§ 20. Преобразование Лежандра
Начнем с функций одного переменного. Рассмотрим класс Q
функций f(u); /: R -> R, / £ C2(R), удовлетворяющих условиям:
1°. /"(ti)>0, ueR.
2°. Отображение /': R -> R сюръекгивно, т. е. его образ совпадает
со всем пространством.
Каждой функции / £ Q поставим в соответствие новую
функцию
/*(p)=pt*-/(ti), (О
где новая независимая переменная р связана с и соотношением
В силу условий 1°, 2° соотношение (2) определяет взаимно
однозначное соответствие между и и р. Именно поэтому
функцию (1) можно считать функцией от р. Отображение Л: / н> /*
называется преобразованием Лежандра.
а) Л отображает Q ъ Q. Действительно,
drip) du df du
-u + p .
dp dp du dp
Два последних слагаемых взаимно уничтожаются в силу (2),
поэтому
df*
64
§20. Преобразование Лежандра
Дифференцируя (3) по р, получаем:
й2Г _du
dp2 dp'
Для нахождения |j дифференцируем (2):
__ d2f du du ' l9 "4
du2 dp' dp
(здесь использовано условие Г). Итак,
d2f*
\du2)
\du2J
dp2~^.,, >0, (4)
что доказьгоает выполнение для /* условия Г. Выполнение
условия 2° следует из формулы (3).
б) Отображение Л инволютивно, т. е. Л2 = I. В самом деле,
формула (3) определяет независимую переменную для функции
(/*)*, при этом
(f)» = up - f(p) = ир-[ри- f(u)\ = f(u).
Геометрический смысл преобразования Лежандра можно пояснить
следующим образом. Соотношение (2) означает, что мы ищем
точку и, касательная в которой к фафику функции z = f(u) имеет
наклон р. Формула (1) означает, что /*(р) есть величина, на
которую надо опустить прямую z = ри, чтобы она стала касательной
к графику функции z = f(u). Тем самым, функция /*(р)
определяет совокупность касательных к графику z = f(u) (рис. 6.1).
Обобщения
1. Все сказанное без труда переносится на случай функций
многих переменных /: Rn -» R. При этом
pe(RnY; /*(p) = <p,t*>-/(ti), ft = |£> « = i п.
65
Глава 6. Канонический формализм
Рис. 6.1
Условия Г и 2° принимают вид:
1°- 1и{щ > 0» т-е. гессиан функции / является положительно
определенной матрицей.
2°. Градиентное отображение и *-* fu(u) сюръективно.
Доказательства свойств а) и б) полностью сохраняются, только
формулы следует понимать в матричном смысле. Геометрический
смысл /*(р) тот же: f*(p) есть величина, на которую надо опустить
плоскость z = {р, и), чтобы она стала касательной к графику
функции z = /(и).
2. Преобразование Лежандра—Юнга. Пусть / € Q* Покажем
тогда, что /*(р) удовлетворяет соотношению
/*(Р) = sup [{р, «>-/(«)]. (5)
Действительно, в силу условия 1° функция (р, ti) - f(u)
является строго вогнутой, а в силу условия 2° при каждом
фиксированном р она имеет единственную стационарную точку р = fu{u).
Следовательно, в этой точке достигается максимум, что и
доказывает (5).
66
§ 20. Преобразование Лежандра
Формула (5) принимается за определение преобразования
Лежандра—Юнга для невыпуклых и негладких функций (сохраним
за ним прежнее обозначение /*).
Из (5) следует неравенство Юнга
/(«W*(p)£<p,«>. (6)
Аналогом свойства инволютивности преобразования
Лежандра—Юнга служит следующая
Теорема 1 (теорема двойственности). Если f — выпуклая и
замкнутая функция, то (/*)* = /.
Здесь замкнутой функцией называется функция, надграфик
которой является замкнутым множеством. Доказательство этой
теоремы можно найти, например, в [2, с. 227]. В случае, когда /
не является замкнутой и выпуклой функцией, (/*)* определяет
выпуклое замыкание /, т. е. наибольшую из выпуклых замкнутых
функций, не превосходящих /.
Пример 8. Найдем преобразование Лежандра функции / = у.
Имеем р = и; /*(р) = ри - у = \.
Пример 9. Найдем преобразование Лежандра—Юнга функции / =
7\Л + N2» где 7 > О, N2 = ]Г)и2. Имеем
»—PyV <7)
V1 - N2
Возводя в квадрат и суммируя поj, получаем \р\2( I + \и\2) = 72М2; отсюда
следует, что |р| < у и |«|2 = ffiл . Подставляя в (7), имеем
^=т/1 + 1ггй2= /rr-inf; tti = ^_i„t2-
I?!2 = 7fr , Pj
Поэтому при |р| < 7
/>)=(Р,«)-/(«)=-^-71=!=-/нйр.
V72 - И2 V72 - 1РГ
67
Глава 6. Канонический формализм
Если |р|=7' то sup[(P*w>-/(tt)l = 0» a если М>7> то sup[(p,ti>-/(«)] =
-нос, так что
+оо при \р\ > 7,
/*(р) =
_у^Т]р|2 при |р|^7.
Упражнение. Найти преобразование Лежандра—Юнга функции
/ = ^(а>1),где«€Кп;М = JEu^.
§21. Канонические переменные
Как уже было сказано, система уравнений Эйлера
--£/*, +Л, = 0, г = \,...,п (8)
имеет порядок 2п. Поставим цель: записать эту систему в
нормальной форме. Для этого естественно потребовать выполнение
условия
\dxidxj)
которое называют условием Гильберта. Если оно выполнено, то
систему (8) можно разрешить (локально) относительно вторых
производных x(t), а первые производные х принять за новые
неизвестные функции. Но есть и другой путь, предложенный
английским математиком У. Р. Гамильтоном.
Предположим для простоты, что функция /, как функция
от х (при любых фиксированных значениях t,x), удовлетворяет
условиям Г, 2° предыдущего параграфа. В частности, это озна-
чает, что условие Гильберта (9) заменяется на условие $х.$х. > 0.
Преобразование Лежандра функции / (как функции от х при
фиксированных t и х) обозначим через H(t,x,p):
Pi = fzn t = l,...,n; H(t,x,p) = (p,&)-f(t9x,x).
Запишем в этих переменных систему (8). Найдем для этого
dH = (dp, х) + (р, dx) - ftdt- fx dx - fx dx.
68
§ 22. Механический смысл канонических переменных
Второе и последнее слагаемые взаимно уничтожаются, так что
dH = {dp, х) - ftdt- fx dx.
В силу теоремы об инвариантности первого дифференциала имеем
дн эн л дн
Тр-=х> IF—'" Tx- = -f- (10)
Используя эти формулы, перепишем систему (8) в виде
* = Hp(t,х,р)9 р = -HX{U х,р). (11)
Системы вида (11) носят название канонических систем
обыкновенных дифференциальных уравнений. Они обладают рядом
замечательных свойств, с которыми можно познакомиться,
например, в [3, с. 57]. Мы используем некоторые из этих свойств
дальше в гл. 8. В случае, когда / не удовлетворяет условиям Г, 2°,
канонические переменные вводятся с помощью преобразования
Л ежандра-— Юнга.
§22. Механический смысл
канонических переменных
Рассмотрим систему из N материальных точек г = 1,..., N
с массами гаг и с координатами rt- = (я;,У»>£») в декартовой
системе координат. Предположим, что потенциальная энергия этой
системы задается функцией U(r\,... ,т\/\г), кинетическая энергия
п
Т — \ Ylmitf- В соответствии с принципом наименьшего дей-
ствия движение системы происходит по экстремалям функционала
действия
С= f L(r9r)dt, (12)
к
где L(r, г) = Г- U. Экстремали — это решения уравнения Эйлера
для функционала (12):
-jtLt + Lr = 0. (13)
69
Глава 6. Канонический формализм
Система (13) состоит из 3N уравнений второго порядка. Запишем
эти уравнения в канонической форме. Имеем pi = L+. = т{Тх,
т. е. pi в декартовой системе координат совпадает с импульсом
материальной точки. Далее
h = J2 Ъ(*ъъ) -т + и = т + и
i
— это полная энергия системы (так как L не зависит явно от i, то
Н = const, т.е. полная энергия системы при движении
сохраняется). Уравнения (13) в канонической форме принимают вид
Pi dU
fi=HPi = —, Pi = -Hr. = -^-, i = \,...,N.
Здесь первая группа уравнений соответствует определению
импульса, а вторая — второму закону Ньютона, так как -Ц£ — это
сила, действующая на г-ю точку.
§23. Формула вариации функционала
с подвижными концами
Формула, которую мы сейчас выведем, будет играть
определяющую роль во всем последующем изложении. Рассмотрим
интегральный функционал
J= [ f(t,x(t)9i(t))dt
to
на однопараметрическом семействе кривых x(t, a) (a £ R); х €
C2(R х R), концы которых меняются с изменением а. Те величины,
которые относятся к левому концу, мы будем помечать индексом О,
а те, которые относятся к правому, — индексом 1. Пусть t = to(a),
х = хо(а) —- гладкая кривая, по которой скользит левый конец;
t = t\(a), х = х\(а) — гладкая кривая, по которой скользит
правый конец.
70
§23. Формула вариации функционала с подвижными концами
Это означает, что
x{t}(a), а) = х\(a); x(to(a), а) = ж0(а). (14)
Имеем
Ш
J(a)= J f(t9x(t,a),x(t%a))dt.
Вычислим ^f(O), используя следующие обозначения: точка над
переменной всегда обозначает дифференцирование по t,
x(t, 0) = x(t), x(t9 0) = Щ, tx(0) = fi, t0(0) = <o,
—0,0) = Л0), —0,0) = МО-
Последняя формула следует из теоремы о независимости
смешанных производных от порядка дифференцирования. Тогда
^^ = /(«,(о),«(«1(о),а),х(<1(о),о))^-
- /(*о(а), ж0о(а), а), ж(<0(а),«)) ^- +
Введем следующие сокращения в записи: f(t,x(t),x(t))
будем обозначать через f(t) или просто /; f(to,x(tQ)9x(to)) будем
обозначать через /о; аналогично f\ = /(ii,&(ii),2c(ii)). Символы
Л* /*> (Д)о и т.д. вводятся также.
Подставив в (15) а = 0, получим
^ = *ta-*ta+J(f*h + M*- (16)
При выводе получаемой в этом параграфе формулы (19) будет
использовано следующее
71
Глава 6. Канонический формализм
Предположение 1. /^(-) € С1([*о> *i])«
Проинтегрируем последнее слагаемое в (]6) по частям:
da da da
fh+/(?'--iA)** (m
к i
к
Преобразуем внеинтегральный член. Для этого
продифференцируем тождества (14) по а при а = 0:
Подставив h(U), i = 0,1 в (17), получим
-й).^+/(д-|й)"'- ™
к
Формулу (18) удобно записать в следующей символической форме;
dj(0)
da (pdx-Hdt)y+J(jx~jJx)hdL (19)
к
В этой записи подстановка верхнего предела t\ в выражение
pdx - Н dt означает не только подстановку t\ под знак
канонических переменных р и Н, но и замену (dt, dx) на касательный
вектор (^, ^) к кривой, по которой движется правый коней
семейства; то же относится и к подстановке £о-
Замечание 1. В дальнейшем формула (19) будет использоваться только
в тех случаях, когда ж(-) — оптимальное решение, и, следовательно,
предположение 1 будет выполнено в силу леммы Дюбуа-Реймона. Поэтому (19)
будет далее применяться без специальных оговорок.
72
§ 24. Условия трансверсальности в задаче с подвижными концами
Дифференциальная форма pdx - Н dt называется формой
Пуанкаре—Картана. Она играет фундаментальную роль в
каноническом формализме и неоднократно будет использоваться в
дальнейшем изложении.
§ 24. Условия трансверсальности
в задаче с подвижными концами
Заменим граничные условия (2.5) в задаче 4 на более обшие
граничные условия
Ф(«о, з(*о)) = 0, *(*i,x(*i)) = 0, (20)
где Ф: Rn+1 -> R*, Ф: Rn+1 -> R*.
Задача 5. Среди всех кривых ж(-) класса С1, удовлетворяющих
условиям (20), найти кривую, которая дает функционалу J локально
минимальное значение.
Пусть x(t), t 6 [ to»*i] — решение этой задачи. Тогда та же
кривая является решением задачи с закрепленными концами х( to),
x(t[) и, следовательно, для нее выполняется равнение
Эйлера (11.5). Однако, для нахождения to, t\ и еще In параметров,
характеризующих искомую экстремаль (т. е. для нахождения 2п-~ 2
параметров) мы имеем пока лишь к + l граничных условий: Ф = 0,
Ф = 0.
Для нахождения дополнительных граничных условий,
которые должны выполняться на оптимальной траектории,
рассмотрим произвольный касательный вектор (6t],dx\) к
многообразию Ф = 0 в точке (ti,x(t\)). По определению
касательного вектора на многообразии Ф существует гладкая кривая
•у: а н-> (t\(a),X\(a))9 касательная к которой совпадает с данным
веетором,т.е.(«1(0),я!1(0)) = (Гьг(Г1)); (*$*, ^f) = (6tu бхх).
Обозначим через x(t, а) гладкое однопараметрическое семейство
кривых, которое при а = 0 содержит ж(£); при t = t)(a) дает
кривую 7» а при t = to(a) дает точку x(to)9 т.е. x(t,Q) = x(t),
x(t](a),a) = «i(a), x(T0,a) = £(f0).
73
Глава 6* Канонический формализм
Возможность построения такого семейства (геометрически
достаточно очевидная) формально обоснована в [4, с. 195].
Подставляя это семейство под знак функционала и учитывая, что при
а = О J достигает минимума, имеем
(pdx-Hdt) I + f(f*-Jtf*)hdt = 0'
to
Поскольку для x(t) выполнено уравнение Эйлера, интегральный
член равен нулю. Нулю равняется и результат подстановки to
во внеинтегральный член, так как все кривые семейства проходят
через точку (^, х(%)) и, следовательно, ^^ = 0, ^~ = 0. Таким
образом имеем, что
Pidxi-Hidti = 0 (21)
для любого вектора (6t\9 6х\)9 касательного к многообразию Ф = О
в точке (t\,x(t\)).
Совершенно аналогично получаем:
ро дхо - #о dt0 = 0 (22)
для любого вектора (dto, дхо) касательного к многообразию Ф = 0
в точке (to,x(To)).
Соотношения (21), (22) называются условиями
трансверсальности.
Проверим, что соотношения (20)—(22) дают полную систему
условий. Размерность многообразия Ф = 0 (в регулярном случае,
когда градиенты уравнений системы Ф = 0 линейно независимы),
равна п + 1 - /, и соотношения (21) дают п + 1 - / независимых
уравнений. Присоединив к ним / уравнений Ф = 0, получаем
на правом конце (так же, как и на левом) п + 1 уравнение. Это
дает нужные 2n -t- 2 соотношения.
Пример 10. Рассмотрим задачу минимизации функционала
[j{t9x)y/l + x2dt,
to
74
§ 24. Условия трансверсальности в задаче с подвижными концами
х Е R, на кривых, ведущих из точки (to,Xo) на терминальное
многообразие х — <p(t). Пусть (St.Sx) — касательный вектор к терминальному
многообразию. Запишем соотношения (21) для нашей задачи:
7Ж
~7
(pdx-H6t)
у/\ + X2 ' л/1 -г Ж2 '
7
(23)
vTTF
= (ж£ж + <«) =0.
Но ^ = у?'(<) — тангенс угла наклона касательной. Поэтому условие (23):
xjjr = -1 есть условие ортогональности экстремали ж(-) к терминальному
многообразию х = у?(2).
Пример 11. Рассмотрим задачу отыскания на римановом
многообразии М кривой минимальной длины, соединяющей точку ж0 G М
с подмногообразием N С М,
Длина кривой на М задается формулой (13.5)
t
-1
п-
£*««»***
где <?,; — метрический тензор. Выпишем канонические переменные для
этого функционала:
п
j--y
Pi = , п =,
«j=i
я = -
E, . da;,- da;,-
EwWlJ
U=<
= 0.
Условие трансверсальности (21) принимает вид:
eta,
^Pt^t = 0, т.е. ]^ftj(a)—ifa,- = 0.
i=i
«.j=
75
Глава 6. Канонический формализм
Это означает, что вектор ^ должен быть ортогонален (в смысле метрики
gtj) к любому вектору 6х, касающемуся Я в точке прихода экстремали
ж(-) на ЛЛ Итак, экстремаль должна подходить к N под прямым углом
(в метрике д|;).
§ 25. Условия Вейерштрасса—Эрдмана
Начнем с примера.
Пример 12 (поверхности вращения с минимальной площадью).
Найти кривую у = у(я), соединяющую точки (ж0,уо) = а и (жь2/]) — &
и имеющую минимальную площадь поверхности вращения вокруг оси
абсцисс.
Площадь поверхности вращения равна
2тг J yds = 2тг Г y^l^tfdx, (24)
поэтому нужно минимизировать функционал f ул/l 4-у2 dx при условии
У(ж0) = 2/о, у(х\) = уь
Интеграл энергии имеет вид
-уу/Т+Р+-*£= = С.
v[+y
Элементарные преобразования дают
у2 = С2 + С2у\ или Г .Cdy = / dx.
После замены переменной у — С ch т получаем:
у = СсЪХ-^-. (25)
Если переписать минимизируемый функционал в виде
J" yds = J y(t)^±W+W2dt,
76
§25. Условия Вейерштрасса—Эрдмана
то интеграл импульса по ж: Дж ' = С, помимо уже найденных решений,
у/х2^у2
при С = О, дает вертикальные прямые х = const.
Кривые (25) называются в механике «цепными линиями», поскольку
именно такую форму принимает тяжелая гибкая однородная
нерастяжимая нить, подвешенная за конды. Для того чтобы пояснить этот
факт, достаточно заметить, что формула (24) определяет ординату центра
тяжести однородной кривой, а нить стремится занять такое
положение, при котором эта ордината
минимальна. Правда, надо
минимизировать этот функционал
на множестве кривых заданной
длины (нить нерастяжима).
Полное решение этой задачи требует
применения правила множителей
Лагранжа, которое следует
изучить по книге [2].
Поверхность вращения
цепной линии носит название
катеноид. Посмотрим, всегда ли мож- ™с ^
но провести кривую (25), соединяющую точки о и 6. Пусть, например,
а = (д, 1), b = (~я, 1). Тогда (вследствие симметрии граничных условий
относительно начала координат) D = 0, а С надо найти как решение
уравнения С ch £ ■= 1. Обозначим £ = z и будем решать уравнение
ch qz = z.
На рис. 6.2 изображены графики кривых w = z и w = ch qz для
различных значений q. При достаточно большом д, эти кривые не
пересекаются, т. е. в этом случае не существует решения уравнения Эйлера,
проходящего через точки о и Ь. Этот факт требует осознания.
Пример 12 является частным случаем задачи Плато, которая
ставится следующим образом: среди всех поверхностей, имеющих
в качестве своей границы данный контур К, найти такую,
которая имеет минимальную площадь. С естественно-научной точки
зрения речь идет о том, чтобы найти форму мыльной пленки,
затягивающей контур К (мыльная пленка, вследствие сильного
поверхностного натяжения, стремится занять положение с
минимальной площадью поверхности). Пример 12 соответствует
случаю, когда контур К состоит из двух окружностей, полученных
77
Глава 6. Канонический формализм
при вращении точек а и Ъ вокруг оси абсцисс. Решением, как мы
видели, служит катеноид. Но как объяснить отсутствие решения
при больших значениях д?
Для того чтобы ответить на этот вопрос, обратимся к общей
теории. Расширим класс допустимых кривых в задаче 4 и будем
искать минимум функционала не в классе гладких кривых, а в классе
кусочно-гладких кривых VCl([to9t\]).
Определение 1. Пространство VCl([to, t\]) — это множество
непрерывных на [to, t\] функций x(t), для каждой из которых
существует конечное число точек т\,..., тп 6 [to, t\] таких, что
ограничение x(t) на любой из отрезков [ta^i], ••• > Ь"ь ?i+iL
••• > hb^i] является гладкой функцией на этом отрезке. Это
множество снабжается топологией подпространства
пространства C([t0Jy]).
Очевидно, что для решения х(-) G VCl([to,t\]) задачи 4,
каждый участок гладкости x(t), t € fr»,r,-+il, должен удовлетворять
уравнению Эйлера, поскольку он должен давать минимум
функционалу J с граничными условиями (т,-, ж(г,)), (т,-+ь х(т^))).
Однако, большинство таких экстремалей заведомо не дает минимума
функционалу J. Оказывается, что в каждой угловой точке должно
выполняться следующее дополнительное условие.
Условие Вейерштрасса—Эрдмана. Канонические переменные
в угловой точке должны быть непрерывными.
Нетривиальность этого условия состоит в том, что в
выражение, определяющее канонические переменные, входит ж, которое
в угловой точке терпит разрыв.
Доказательство условия Вейерштрасса—Эрдмана. Очевидно,
что достаточно рассмотреть случай одной угловой точки. Пусть
х(-) имеет точку излома (г, х(т)). Проведем через эту точку
произвольную прямую I с направляющим вектором (6t, 6х). Так же, как
в § 24, рассмотрим гладкое однопараметрическое семейство кривых
x(t,a) такое, что x(t,Q) = x(t); x(t0ra) = x{to)\ x(t\,a) = x(ti)
и при фиксированном а функция x(t, а) является гладкой всюду,
кроме точки пересечения (т(а), х(т(а), а)) с прямой / (рис. 6.3).
78
§25. Условия Веиерштрасса—Эрдмана
Рис. 6.3
Применим формулу (19), разбив J [а) на два слагаемых,
до и после пересечения с I:
Л<*) = J f(t9z(t><*),z(t><*))dt + J /(*,*(*, a), ±(tf, a)) d*,
к г (a)
^^1=[р(т-0)дх-Н(т-0)дЬ] - \p(r + 0)6x-H(T + 0)6t] =
= |>(т-0)-р(т + 0)]&с- [Я(т-0)-Я(т +0)]<W = 0. (26)
В этой формуле интегральный член отсутствует в силу выполнения
уравнения Эйлера на x(t) = ж(£, 0), а подстановка to и £] также
дает 0, так как все кривые ж(£, а) проходят через точки (to, x(to))
и (t\,x(t\)). Поскольку dt и дх произвольны, из (26) следует
непрерывность канонических переменных в точке т. □
Вернемся теперь к примеру 12 и попробуем найти кусочно-
гладкие решения задачи о минимальной поверхности вращения.
Выпишем для этого канонические переменные:
VI + у2 V1 + у2
Нетрудно показать, что р и Н могут остаться непрерывными
при скачке у тогда и только тогда, когда у = 0. Но ни одна
из линий (25) не доходит до оси абсцисс. Поэтому ломанными
79
Глава 6. Канонический формализм
экстремалями могут служить только линии, состоящие из отрезка
оси абсцисс и двух вертикальных отрезков х = const.
Следовательно, ответ на вопрос, что случится с мыльной пленкой, если две
окружности, составляющие контур К, отодвигать друг от друга,
увеличивая расстояние q между ними, очень прост: пленка
лопнет и затянет две окружности. Это и есть поверхность вращения
найденной ломаной экстремали. Отрезок оси вращения,
соединяющий два диска имеет при этом нулевую площадь и служит лишь
напоминанием о связности катеноида. Оказывается, что в общей
задаче Плато такого рода клетки меньшей размерности играют
весьма важную роль (см. об этом в [17]).
§26. Уравнение Гамильтона—Якоби
Рассмотрим задачу 4 с несколько иной точки зрения.
Зафиксируем начальную точку (t0, ж0) = а и введем функцию S(t\, Х\),
равную минимальному значению функционала J на траекториях,
соединяющих точки а = (<0, ж0) и Ь = (t\9X\). Найдем уравнение
в частных производных, которому удовлетворяет функция 5.
Рассмотрим произвольное гладкое однопараметрическое
семейство траекторий x(t, а) с неподвижным левым и подвижным
правым концом, такое, что x(t, 0) = x(t). Применяя к этому
семейству формулу (19) получим
да da da'
Учитывая произвольность кривых, по которым скользит правый
конец, получим
dS = pdX] - Н dt].
Следовательно, дифференциал функции S(t9 х) равен форме
Пуанкаре—Картана.
Начиная с этого момента будем опускать индекс 1 у
переменных (t, х). Имеем
■5гСя:)=Р' -zr(t,x) = -H(t,x,p).
80
§ 27. Первое возвращение к принципу максимума Понтрягина
Отсюда следует, что
^(t,x) + H(t,x,^(t,x)^ =0. (27)
Это и есть уравнение Гамильтона—Якоби.
Пример 13. Запишем уравнение Гамильтона—Якоби для
функционала
/л
X)
N
1 + Х^ ±2i dt
(28)
Гамильтониан для функционала (28) был найден в примере 9 (с. 67):
N
-£*
i=i
Уравнение Гамильтона—Якоби имеет вид
55
at
N
7'
~?UJ
2 о
'asy v^/55
гаи 'й) +tfl^
72«>*)-
Это уравнение называется уравнением эйконала для неоднородной среды.
(Ср. пример 2, с. 28.)
Упражнение. Найти уравнение Гамильтона—Якоби для
функционала действия на римановом многообразии
71
/!>«££*-
§ 27. Первое возвращение к принципу
максимума Понтрягина
В этом параграфе результаты двух последних глав
сравниваются с принципом максимума Понтрягина и уравнением Беллмана.
Для удобства сравнения упростим граничные условия в задаче 5.
81
Глава 6. Канонический формализм
I
Задача 6. Найти минимум функционала
f(t,x(t),x(t))dt, x^eVC'dto,^])
к
при условиях x(t0) = а, Ф(х(^)) = 0.
Задача 6 может быть включена в общую схему задач
оптимального управления, если считать t: = 1, х = и, и 6 U = Rn. Если
ж(-) — решение вариационной задачи 6, то {u(t) = x(t), x(t),
to ^ t ^ t\} — оптимальный процесс. Терминальное
многообразие N задается уравнением Ф = 0. Применим к задаче 6 принцип
максимума Понтрягина.
п
Н = i>0f(t, х, и) + J2 *М- (29)
i=i
Фг = -%«, = -tfo/«,(<, £(*), 2(*)). (30)
Условие максимума дает
П -1 я
(31)
Условие трансверсальности дает
(^(Г), в) = 0 для любого в касающегося N в точке x(t)). (32)
п
Если ^о — 0, то вектор ^, i == 1,...,п, ненулевой и max 5Z ^i*te»
не достигается ни при каком w Е Rn. Поэтому можно считать,
что tpo — — 1. В точке u(t), в которой достигается максимум,
производная функция Понтрягина равна нулю:
1>i = hi> * = 1,..., п. (33)
Поэтому уравнение для сопряженных переменных (30) принимает
вид
d
Jtfii " fxi
max
ueiRn
82
§ 27. Первое возвращение к принципу максимума Понтрягина
что совпадает с уравнением Эйлера (11.5). В силу (33) ^
совпадает с каноническими переменными Pi. Максимум функции
Понтрягина (31) есть преобразование Лежандра—Юнга функции /
по переменным ж, (ср. с формулой (5.6)) и совпадает с
гамильтонианом задачи 6. Переменные гр и Н в принципе максимума
непрерывны, что находится в полном соответствии с условием
Вейерштрасса—Эрдмана. Условия трансверсальности (32)
эквивалентны условию (22), которое в данном случае имеет вид р dx = О
на любом векторе, касающемся N в точке x(t\).
Рассмотрим, наконец, уравнение Беллмана
шах
ueRn
л дш ди
J дх at
= 0.
Поскольку H(t,x,p) есть преобразование Лежандра—Юнга
функции /, это уравнение может быть записано в виде
что совпадает с уравнением Гамильтона—Якоби. Итак, для
задачи 6 (как впрочем, и для общего случая), принцип максимума
Понтрягина содержит в себе все вышеизложенные классические
конструкции вариационного исчисления.
Глава 7
Теория второй вариации
§ 28. Постановка задачи
Вернемся к § 18 гл. 5, где решение £(•) задачи 4 было
включено е гладкое однопараметрическое семейство кривых x(t) + Xh(t);
о
A £ R, h € Cl([to9t\]) (поскольку значения to,t\ теперь фик-
о о
сированы, будем в дальнейшем вместо Cl([to,t\\) писать С1).
Вычислив значение функционала (3.5) на кривых этого семейства,
получим функцию
<р(\) = ( f(t, x(t) + Xh(t)Mt) + ХШ) dt,
to
которая при А = 0 достигает локального минимума. До сих пор
мы получали следствия из условия (р'(0) = О, а теперь посмотрим,
что дает условие р"(0) ^ 0. Если / £ С2, то (р"{0) можно найти,
дифференцируя подынтегральную функцию:
р"(°)== / X/ (f*i*jbthj + IfiiXjhihj + fxixjhihj) dt. (1)
Здесь, как обычно fx.x = fx.Xj (t, x(t), x(t)), смысл символов
fxtXj и fxiXj аналогичен.
Выражение (1) носит название второй вариации
функционала J в точке #(•) и обозначается 62J. Обозначим матрицу fX{X.
через A(t), fiiXj — через C(t)9 fXiXj ■— через B(t). По теореме
86
§ 29. Необходимое условие Лежандра
о независимости смешанных производных от порядка
дифференцирования матрицы А и В симметричны, С, вообще говоря,
несимметрична. Функционал б2 J принимает вид:
d2J = Г ((Ah, h) -г 2(Ch, h) + (Bh9 h)) dt. (2)
Будем говорить, что функционал S2J неотрицательно опре-
делен (6' J ^ 0), если на функциях h € С1 он не принимает
отрицательных значений, и что он положительно определен (S2 J > 0),
если он неотрицательно определен и принимает нулевое значение
лишь при /&(•) = 0.
Поскольку <рм(0) ^ 0, то необходимым условием минимума
является неотрицательность второй вариации 52J на любых функ-
о
циях /&(•) б С]. Основная цель этой главы — получить условие
положительной определенности функционала 52J.
§ 29. Необходимое условие Лежандра
Определение 1 • Будем говорить, что 52J удовлетворяет
условию Лежандра, если для всех t 6 [to, t\] матрица A(t)
неотрицательно определена (A(t) > 0).
Теорема 1. Для неотрицательной определенности S2J
необходимо выполнение условия Лежандра,
Доказательство. Пусть г € ЦоЛ\) и в точке г
нарушается условие Лежандра, т.е. существует такой вектор £ £ Rn, что
(А£> 0 < 0- Возьмем а > 0 столь малым, чтобы
to<r -а <т + <г <t],
и рассмотрим функцию x(t) (см. рис. 7.1)
а - \t - т\ при \t - т\ < а,
{.
Х® ' 0 при \t - т\ ^ а.
87
Глава 7. Теория второй вариации
/
0
Iх
|
\
т-
/
-а
/\
I
г
\
r-fcr
»
1
t
^
.....^
Рис. 7.1
Вычислим значение Я2^ на функции h(t) = %(£)£:
S2J(x(t)0= f {(A$,0^2Sgn(T-t)(Ct,0x(t) + (B$,0X2(t))dt
r-a
Рассмотрим сначала первое слагаемое. Поскольку A(t) непрерывна
и (А(т)£, £) < 0, существует такое к > О, что (Л(т)£, £) < -А: при
t 6 [т-бг, т + бг] для достаточно малых бг. Все остальные слагаемые
в подынтегральном выражении равномерно стремятся к нулю при
а -> 0, следовательно 52J<0 при достаточно малом бг.
Доказательство на этом еще не завершается, поскольку
функционал б2 J оказался отрицательным не на гладкой, а на кусочно-
гладкой функции. Для завершения доказательства следует
воспользоваться леммой о скруглении углов (см. [2, с. 69]) в которой
доказывается, что значение интегрального функционала на любой
кусочно-гладкой функции можно сколь угодно точно приблизить
его значениями на гладких функциях с теми же граничными
значениями. Так что если 82J на некоторой кусочно-гладкой функции
принимает отрицательное значение, то найдется гладкая функция,
на которой он отрицателен. А это уже противоречит
неотрицательной определенности 52J. □
Мы доказали неотрицательность матрицы A(t) во внутренних
точках отрезка [$o>$i]. Ее неотрицательность на концах является
следствием ее непрерывности.
Возвращаясь к задаче 4, получаем в качестве следствия
необходимое условие локального минимума функционала
88
§ 29. Необходимое условие Лежандра
Теорема 2 (необходимое условие Лежандра). Если
экстремаль ж(-) дает минимум функционалу J в задаче 4, то при всех
t 6 [U,t\] матрица fXiXj{t) неотрицательно определена.
Определение 2. Будем говорить, что б2 J удовлетворяет
усиленному условию Лежандра, если для всех t 6 [to, t\] матрица
A(t) положительно определена (A(t) > 0).
Все дальнейшие исследования второй вариации б2 J будем
по традиции, восходящей к Якоби, проводить только в случае,
когда выполнено усиленное условие Лежандра.
Упражнение. Найти ошибку в следующем (принадлежащем Лагран-
жу) рассуждении, в котором доказывается, что усиленное условие
Лежандра достаточно для неотрицательной определенности функционала S7J.
Пусть п = 1. Тогда
Г 2Chh dt= f Ch2 dt9
to to
и функционал 82 J можно переписать в виде
62J = J [p(t)h2(t) + q(t)h2(t)] dt
k
Пусть p(t) > 0, т.е. выполняется усиленное условие
Лежандра. Прибавим под интегралом выражение jt[w(t)h2(t)], которое
не изменит 52J, так как
f j[w(t)h2(t)]dt = w(t)h2(t) l
k
= 0,
«0
поскольку h £ С1. Подберем w(t) так, чтобы подынтегральная
функция ph2+2whh + (w + q) стала полным квадратом, т. е. найдем
w из уравнения
w + q = p~lw2. (3)
89
Глава 7. Теория второй вариации
Тогда
и
б2 J = f(p]/2h + p~l/2wh)2 dt ^ 0.
Ответ. Уравнение Риккати (3) может не иметь решения,
непрерывного на всем отрезке [£o>£i]* как того требует изложенная
конструкция. Действительно, для этого уравнения не выполнены
условия теоремы о продолжимости решения (гл.4, §13) и, как
показывает следующий пример, решение может уйти на
бесконечность за конечное время.
Пусть
и
б2 J = f(h2 - h2) dt.
к
Тогда уравнение Риккати имеет вид w - 1 = w2. Отсюда arctgu; =
t + C, г. е. w = tg (t + С). Если длина отрезка [t0, t\] больше 7Г,
то w(t) имеет на [to,t\] точку разрыва. Исправление основной
идеи вышеприведенного рассуждения было дано в работах Якоби.
В последующем тексте этой главы соответствующая конструкция
будет обобщена на n-мерный случай.
§30. Присоединенная задача
и определение сопряженной точки
Для изучения вопроса о неотрицательной определенности
квадратичного фунюшонала б2 J воспользуемся вышеизложенными
результатами вариационного исчисления. Заметим, что
неотрицательная определенность функционала б2 J эквивалентна тому, что
Л(-) = 0 дает минимум функционалу 62J. Поэтому рассмотрим
следующую, так называемую присоединенную экстремальную задачу:
h
б2 J = f [(Ah, ft) + 2(Cft, ft) + (Bft, ft)] dt -» inf; ft(-) € C].
to
90
§30. Присоединенная задача и определение сопряженной точки
Запишем уравнение Эйлера для присоединенной задачи
- ii[Ah + C*h] + [Ch -г Bh] = 0. (4)
at
Уравнение (4) называется уравнением Якоби для исходной
задачи 4.
Упражнение. Показать, что уравнение Якоби — это уравнение в
вариациях для уравнения Эйлера (11.5).
Лемма 1, Функционал б2 J обращается в ноль на любом решении
о
ft(-) G С1 уравнения (4).
Доказательство. Запишем б2 J в виде:
h
б2J = J [((Ah + С*ft), ft) + ((Ch + Bh), ft)] dt.
k
Интегрируя первый член по частям и учитывая, что внеинте-
о
гральный член обращается в ноль, поскольку ft(-) G Cl([to9t\]),
получаем
U . _
— (Ah + С*ft) + (Ch + Bh)\9ft ) d* = 0,
at J /
причем последнее равенство следует из того, что Л(-) — решение
уравнения Якоби. D
Рассмотрим матричное решение U(t) уравнения (4):
- ~ [AU' + C*U] + [Ctf' J- BU] = 0. (5)
ill
где !7(<) — (п х п)-матрица, удовлетворяющая начальным
условиям:
U(to) = 09 Г7'(<о) = 1. (6)
Это означает, что г-й столбец матрицы U(t) есть решение h{(t)
уравнения (4), удовлетворяющее условиям Лг(£о) = 0; ft?(£o) = е*>
где ег- — единичный базисный орт.
м-
91
Глава 7. Теория второй вариации
Определение 3. Точка т > to называется сопряженной с
точкой £(ь если существует нетривиальное решение h(t)
уравнения (4) такое, что h(to) = h(r) = 0.
Предложение 1. Точка г > to является сопряженной с
тонкой to тогда и только тогда, когда det?7(r) = 0.
Доказательство. Пусть detf7(r) = 0. Тогда существует
нетривиальный набор констант Cj, г = 1,...,п, такой, что линейная
комбинация столбцов hi(r) матрицы U(r) с коэффициентами
справна нулю: X) <кЫ(т) = 0. Рассмотрим функцию h(t) = X) <kh{t)*
которая является решением системы (4). Это решение не
тривиально, так как в точке to его производная отлична от нуля, и оно
обращается в ноль как при t = to, так и при t = г.
Пусть теперь точка г является сопряженной в смысле
определения 3. Тогда решение Л(-) можно выразить как линейную
комбинацию решений fti(-), разложив Л*(*о) по базису е$: Л(£) =
53 Cihi(t), при этом набор Cj не тривиален. Поскольку Л(т) = 0, мы
имеем нетривиальную линейную комбинацию столбцов матрицы
U(t)9 дающую нулевой столбец. Следовательно, detJ7(r) = 0. D
§31. Необходимые условия
неотрицательной
определенности б1 J
Теорема 3. Для неотрицательной определенности
квадратичного функционала б2 J при условии выполнения усиленного
условия Лежандра (A(t) > 0) необходимо, чтобы интервал (to,t\)
не содержал точек, сопряженных с точкой to.
Доказательство. Предположим противное. Пусть г 6 (to, t\) —
точка, сопряженная с точкой to- Тогда в силу определения 3
существует нетривиальное решение h(t) уравнения Якоби (4),
обращающееся в ноль при t = to и при t = г: h(to) = h(r) = 0.
92
§ 32. Достаточные условия положительной определенности б2 J
Продолжим эту функцию нулем на отрезок [г, t{\:
w, \h(t) при te[t09r]f
U [О при te[r4tx].
Применив лемму 1 jk функции h(t) и отрезку [£о,т], нетрудно
убедиться, что 62J{h(-)) = 0. Поскольку 52J ^ 0, получаем, что
К(-) есть решение присоединенной задачи, имеющее точку
излома т. Следовательно, в этой точке должно выполняться условие
Вейерштрасса—Эрдмана. Запишем это условие. Импульс в
присоединенной задаче равен 2Ah + 2C*h. Поскольку h(r) = 0, а
матрица А невырождена, непрерывность импульса влечет за собой
непрерывность Л. Но h(r + 0) = 0. Следовательно, К(т - 0) = 0.
Функция Л(-) на отрезке [to, т] является решением уравнения
второго порядка (4) и в точке г удовлетворяет условиям Л(т) = 0,
h(r) = 0. Следовательно, h(r) = 0, что противоречит определению
сопряженной точки. Теорема 3 доказана. D
Непосредственным следствием теоремы 3 является
Теорема 4 (необходимое условие Якоби). Пусть ж(-) —
решение задачи 4. Тогда, если на ж(-) выполнено усиленное условие
Лежандра (fxx > 0), то интервал (to,t\) не содержит точек,
сопряженных с
доопределение 4. Будем говорить, что для функционала б2 J
выполнено условие Якоби, если интервал (£о, t\) не содержит
точек, сопряженных с to. Будем говорить, что выполнено
усиленное условие Якоби, если полуинтервал (£0, t\] не содержит
точек, сопряженных с to -
§ 32. Достаточные условия
положительной
определенности д J
Теорема 5. Пусть для функционала 82J выполнены усиленное
условие Лежандра и усиленное условие Якоби. Тогда 62J > 0.
93
Глава 7. Теория второй вариации
Доказательство. Рассмотрим квадратичную форму (W(t)h, ft)
с симметрической матрицей W(t). Наша цель состоит в том, чтобы
найти W(t), удовлетворяющую следующим условиям:
а) Прибавление к подынтегральному выражению jt{W{t)h,h)
и
не должно менять б2J, т.е. / ft{W(t)h, ft) dt = 0.
б) Прибавление jt(W(t)h, ft) к подынтегральной функции
должно превратить ее в полный (скалярный) квадрат.
Посмотрим, какие условия нужно наложить на W, чтобы
выполнялся пункт б). После добавления ft(W(t)h9h)
подынтегральная функция примет вид
(Ah, ft) + 2{Ch, ft) + (Bh, ft) + 2{Wh% ft) + (Wh, ft) =
= [41/2НГ1/2(СЧ^]2-
- [А~1/2(СГ + W)h)2 + ((В + W)h, ft), (7)
где A1?2 — симметрическая положительно-определенная матрица,
квадрат которой равен А. (Чтобы убедиться в существовании
такой матрицы, достаточно привести матрицу А к диагональному
виду, извлечь арифметический корень из собственных значений,
стоящих на главной диагонали, и вернуться к старому базису.)
Выражение (7) будет полным квадратом, если
((W + B)h, ft) = (ЛГ1/2(С* + W)h, A-l/2(C* + W)h) =
= ((C + W)A-\C* + W)h,h)9
т. е. W должно быть решением уравнения
W + В = (С + W)A~\C* + W). (8)
Уравнение (8) называется матричным уравнением Риккати
для функционала 82J. Нам надо найти симметрическую матрицу
W(t), являющуюся решением уравнения Риккати (8) на отрезке
[иЛ\], удовлетворяющую условию а).
94
§32. Достаточные условия положительной определенности 52J
Доказательство теоремы 5 мы завершим в § 33, а оставшуюся
часть данного парафафа посвятим доказательству необходимых
для этого вспомогательных утверждений.
Как известно, скалярное уравнение Риккати возникает при
понижении порядка линейного дифференциального уравнения
второго порядка. Аналогичное соотношение имеет место между
решениями матричного линейного уравнения Якоби (5) и
матричного уравнения Риккати (8). В приведенных далее леммах 2-4
будет показано, что по решению U(t) уравнения Якоби (5),
удовлетворяющему начальным условиям (6), можно построить одно
и только одно решение уравнения Риккати (8), имеющее в точке to
полюс с вычетом (-A(to))>
Лемма 2. Пусть U(t) — матричное решение уравнения
Якоби (5), не вырождающееся на отрезке [to, t\\. Тогда
W(t) = -{AU' + C*U)U~l (9)
— матричное решение уравнения Риккати (8).
Доказательство проводится прямой проверкой. Правая часть
(8) имеет вид
(С - AU'TJ-1 - С*)А'1 (С" - AU'U~l - С*) =
= -(С-Аи'и~1-С*)и'и-[.
Левая часть этого уравнения равна
В - (AU' + С*и)'и~[ + (AU' + C*U)U-xU'U-\
Используя во втором слагаемом уравнение Якоби, получим
В - (CU' + BU)U~l + au'u^u'u-1 + c*u'u~l =
= -CU'U~l 4- AU'U^U'U"1 + c*u'u~\
что совпадает с правой частью. Лемма 2 доказана. D
Решение уравнения Якоби U(t), использующееся в
определении сопряженной точки, невырождено лишь на полуинтервале
(to, t\]. В самой точке to мы имели U(to) = 0, U'(to) = / (см. (6)).
Поэтому W(t), построенное по этой матрице U(t), имеет в точке to
особенность. Уточним ее вид.
95
Глава 7. Теория второй вариации
Лемма 3, Матрица W(t), построенная по формуле (9) с
помощью решения U(t) уравнения (5) с начальными
условиями (6), удовлетворяет в окрестности тонки to соотношению
W(t) = —-tz$ + Ф(0» где матрица Ф(£) непрерывна в
окрестности тонки to.
Именно это мы и имели в виду, когда говорили, что W(t)
имеет в точке £0 простой полюс с вычетом (-Afa)).
Доказательство леммы 3. Используем условия (6) для
разложения матриц U(t), U"l(t), Uf(t) по формуле Тейлора в окрестности
точки to- Имеем
U\t) = !+(*- *o)JM<); U(t) = (t - to) [/+(*- t0)R2(t)}
и, следовательно,
t — to
Здесь матрицы Я*(£), s = 1,2, 3, непрерывны в окрестности
точки t0. Подстановка этих разложений в формулу (9) завершает
доказательство леммы. D
Сформулируем обращение лемм 2 и 3, построив решение
уравнения Якоби по решению уравнения Риккати.
Лемма 4, Пусть W(t) — решение уравнения Риккати (8),
удовлетворяющее условию
где Ф(£) непрерывна при t € [<o^i]- Тогда
1. Существует единственная матрица U(t)> удовлетворяющая
уравнению
AU' = -C*U-WU (11)
и напольным условиям (6), т.е. Ufa) = 0, U'fa) = J.
2. Функция U(i) является решением уравнения Якоби (5).
96
§32. Достаточные условия положительной определенности S2J
Прежде чем доказывать лемму 4, докажем один
вспомогательный результат из теории обыкновенных дифференциальных
уравнений, смысл которого можно пояснить следующим образом.
Траекториями линейной системы уравнений х = х являются лучи,
выходящие из начала координат. Добавление малого нелинейного
слагаемого f(x) в правую часть этого уравнения искривляет эти
лучи, но не меняет качественной картины в окрестности начала
координат фазового пространства.
Лемма 5. Рассмотрим систему обыкновенных
дифференциальных уравнений
x = x + f{x), (12)
где х € Rn; / G C3(F); V — область в Rn, содержащая точку 0;
пусть существует константа К > 0 такая, что \f(x)\ ^ К\х\2
для всех х € V. Тогда для любого I G (Rn, \1\ = 1, существует
и притом только одна фазовая траектория x(t) системы (12),
такая что x(t) -» 0, тЩт -» I при t -¥ -оо.
Доказательство. Введем сферические координаты х = г0,
г G Ri, 0 G 571"1, где 5n_1 — (п - 1)-мерная единичная сфера.
Система (12) принимает вид
fe + re = re + f(re). (13)
Оценка |/| ^ К\х\2 и условие / G C3(V) позволяют записать
функцию / в виде f(r0) = г2<р(г,в), где р е С](К1 х 571"1).
Умножая уравнение (13) скалярно на в и учитывая равенства
(0, 0) = 1, (0, 0> = 0, получаем
r = r4-r2(0,y>(r,0)}. (14)
Подстановка (14) в (13) дает
0 = -r0<0,p(r,0))+rp(r,0),
получаем систему
Г* = г + г20,<р(г,0)>,
U = -r0<0,p(r,0)>+rp(r,0).
97
Глава 7. Теория второй вариации
Из первого уравнения этой системы следует, что г > 0 при до-
статочно малом г, т.е. в достаточно малой окрестности V начала
координат г монотонно стремится к нулю при t -> —оо.
Поэтому г можно принять в области V за независимое переменное.
В результате имеем
сЮ = -g(g,y(M)) + y(r,g)
dr 1 + r(0, p(r, 0)) " l '
Правая часть уравнения (16) в окрестности V является
непрерывной функцией от г и 0. Обозначим ее через #(г, в). Граничным
условиям т|Шт -+ / при t -t -оо соответствует условие 0(0) = /.
Имеем
- = x(r,0); 0(о) = г. О?)
Утверждение леммы следует теперь из теоремы существования и
единственности решения задачи Коши (17). О
Упражнение. Объяснить почему аналогичное доказательство не
проходит для системы х = Кх 4- f(x) при К Ф I.
Доказательство леммы 4. То, что из 1) следует 2)
проверяется прямой выкладкой, практически повторяющей доказательство
леммы 2. D
Упражнение. Провести эту выкладку.
Докажем пункт 1). Уравнение (11) является линейным
дифференциальным уравнением относительно матрицы U(t), но его
коэффициенты разрывны при t = to (именно поэтому при t = to
задано не только U(to), но и Ul(to)). Избавимся от разрыва,
введя новую фазовую координату v = t - to и новое независимое
переменное г = In (t - to). Тогда (11) примет вид:
^ = -(A~lWU)v - (A~lC*U)v,
ат
dv
dr
98
§ 33. Продолжение доказательства теоремы 5
Используя (10), получаем
dU
— = U + R(v)Uv,
I <18>
dv
где R(-) — непрерывная матрица. Начальным значениям U(to) = 0,
Uf(to) = I соответствуют в новых координатах начальные условия
U -» 0, v -► 0 при г -» -оо с направлением /, определяемым
в фазовом пространстве (U, v) парой (/, 1).
Итак, существование и единственность решения уравнения
(1J) с начальными условиями U(to) = 0, U'(to) = I следуют из
леммы 5.
§ 33. Продолжение доказательства
теоремы 5
По функции U(t) — матричному решению уравнения Яко-
би (5) — строим матрицу W(t), являющуюся по лемме 2 решением
уравнения Риккати (8). Эта матрица непрерывна на (to, t\), а в точ-
о
ке to имеет простой полюс. Кроме того, поскольку h(-) 6 С1, имеем
h(t) = (t - to)p(t), где р(£) непрерывна. Используя оба эти факта,
получим
U
ft(W(t)h(t), h(t)) dt = <H4*,)ft(ti), *(<!» -
/
-lim(Hr(OM«).MO> = 0.
Это означает, что величина 52^7 действительно не
изменяется от добавления jt{Wh, h) к подынтегральной функции и мы
установили выполнение условия а) (см. с. 94).
Покажем, что построенная нами матрица W(t) —
симметрическая. Транспонируя обе части уравнения (8), и используя
99
Глава 7. Теория второй вариации
симметричность матриц А и В, получаем
(W*)' ч- В = (С + tHA"1 (С* + W*).
Тем самым матрица W* также является решением уравнения
Риккати (8). Транспонируя формулу (10), получаем (в силу
симметричности А), что W*(t) также, как и W(t), имеет в точке to
простой полюс с вычетом (—A fa)).
Здесь-то нам и понадобится лемма 4, позволяющая по
решению уравнения Риккати построить решение уравнения Якоби.
По лемме 4 матрице W* отвечает одна и только одна матрица
U(t), являющаяся решением уравнения AU' = -C*U - W*U. При
этом U является решением уравнения Якоби (5) с начальными
значениями Ufa) = 0, U'fa) = /^Следовательно, по теореме
единственности для уравнения (5) U(t) = U(t). Сопоставляя
равенства W*U = -AU' - C*U и WU = -AU1 - C*U, заключаем,
что (W - W*)U = 0. Поскольку матрица U невырождена при
t > to, имеем W(t) = W*(t) при t > to» т.е. матрица W —
симметрическая.
Тем самым, мы обосновали формулу
62J= f [A]/2hfA-l/2{C* + W)h]2dL (19)
h
Из нее следует, что б2 J ^ 0. Докажем положительную
определенность d2J.
Пусть S2 J(h(-)) = 0. Тогда АЩ + А-^С* + 17)71 = 0.
Но Л(^о) = 0 и, следовательно, A]t2fa)hfa) = 0. Из
невырожденности матрицы Ax/2fa) следует, что hfa) = 0. Заметим, что
h дает минимум функционалу б2 J и поэтому является
решением уравнения Якоби (4). Начальные условия hfa) = 0, hfa) = 0
означают, что h(t) = 0. Итак, 52j7 > 0. Теорема 5 доказана. □
Упражнение. Доказать следующую теорему.
Теорема 6. Пусть для квадратичного функционала б2 J
выполнено усиленное условие Лежапдра (A(t) > 0). Интервал fa,t\)
100
§34. Примеры
не содержит точек, сопряженных с тонкой to, а тонка t\
сопряжена с тонкой to- Тогда d2J > 0 (при этом 62J не является
положительно определенным).
Указание. Пусть 62J(h(-)) < О. Аппроксимировать y(t) в
метрике С] последовательностью функций, обращающихся в ноль
при t = £о и при t = t\ — ^. Далее использовать теорему 5.
§34. Примеры
Пример 14 (гармонический осциллятор). Рассмотрим
функционал
г
J = Г (x2(t)-w2x2(t))dt
(определяющий функцию действия для гармонического осциллятора)
и экстремаль x(t) = 0. Функционал J квадратичный, поэтому он
совпадает со своей второй вариацией 62J. Уравнение Эйлера (оно же
уравнение Якоби) имеет вид
х + ш2х = 0. (20)
Решение уравнения (20) с начальными условиями ж(0) = 0, х(0) = 1
определяет матрицу U(t) (которая состоит из одного элемента, поскольку
х одномерно)
U{t) = — sinwt.
(х)
Нули этой функции — точки t = ~, k € Z. Следовательно, х(-)
дает строгий минимум 3 при Т < —,
дает нестрогий минимум J при Т = —,
ш
не дает минимума J при Г > —.
ш
Пример 15 (геодезические на цилиндре). Цилиндр зададим
уравнением: х = cos и, у = sin u, z = v. Первая квадратичная форма имеет
вид ds2 = du2 + rfv2. Функционал длины при независимом переменном v
101
Глава 7. Теория второй вариации
есть f ум!2 -\-\dv. Уравнение Эйлера ft I / ■ 2- 1=0 или и" = 0 имеет
решения и = C\V -нс2, которые являются винтовыми линиями. Если за
независимое переменное принять и, то г; = &iU-h&2 и, кроме уже найденных
экстремалей, возникнут прямолинейные образующие v = const.
Уравнение Якоби — это уравнение в вариациях для уравнения Эйлера, т. е. Л" = 0,
его решением с начальными условиями Л(и0) = 0, ft'(u0) = I является
линейная функция. Она не может дважды обратиться в ноль. Поэтому
сопряженных точек нет. Выполнена теорема достаточности (см. ниже,
гл. 8, теорема 3) и каждая геодезическая оптимальна.
Упражнение, Две точки на цилиндре, отвечающие разным
значениям v, можно соединить между собой разными винтовыми линиями,
имеющими различную длину. Кратчайшая из них лишь одна. Как
объяснить тот факт, что остальные, в соответствии с приводимой ниже
теоремой 3 гл. 8, тоже оптимальны?
Пример 7 6 (геодезические на сфере (продолжение примера 6)},
Первая квадратичная форма в сферических координатах имеет вид
ds1 = cos2 чр dip2 + dip2. Уравнение Эйлера имеет вид
d_
dt
1>
L \/coS2 if) 4- if)2
cos V sin ^ =Q ,21ч
л/cos2 ip + ip2
Решениями этого уравнения, как мы видели (пример 6 гл. 5), являются
большие круги сферы. Поскольку любые два больших круга можно
перевести друг в друга вращением сферы, достаточно рассмотреть геодезическую
•ф((р) = 0. Уравнение Якоби получится, если записать уравнение в
вариациях для (21) в окрестности гр(-). Нетрудно проверить, что получится
уравнение Л-нЛ = 0.
Упражнение. Восстановить пропущенную выкладку.
В соответствие с примером 14, сопряженной является
диаметрально противоположная точка сферы. В силу
необходимого условия Якоби, геодезическая, продолженная за диаметрально
противоположную точку, теряет свойство минимальности, а в силу
теоремы 3 гл. 8 всякий отрезок геодезической, который меньше
полуокружности, оптимален. Отрезок, равный длине
полуокружности, дает нестрогий минимум, так как все полуокружности,
соединявшие диаметрально противоположные точки имеют
одинаковую длину. То, что сопряженная точка является здесь точкой
102
§34. Примеры
пересечения всех экстремалей, исходящих из одной точки, —
явление вырожденное, связанное с симметрией сферы. Ниже, в
примере 18, мы встретимся с более типичной ситуацией — наличием
огибающей семейства экстремалей, исходящих из одной точки.
Пример 17 (геодезические на полуплоскости Пуанкаре
(продолжение примера 7)). На этом примере будет продемонстрирован другой
прием нахождения сопряженных точек. В примере 7 (гл.5) было
показано, что общее решение уравнения Эйлера для нашей задачи имеет вид
у = \/В? - (х 4- D)2. Здесь произвольные постоянные R и D
соответствуют начальным данным на геодезической. Уравнение Якоби — это
уравнение в вариациях для уравнения Эйлера. Поэтому решениями
уравнения Якоби являются производные по начальным данным от решений
уравнения Эйлера или, что то же самое, производные по R и D:
dy R ду -(z + D)
9R y/ff-iz+D)2' 9D y/R2-(x + D)2'
Фиксируем произвольную геодезическую R, D. Тогда h\ и h2 являются
линейно независимыми и, следовательно, образуют фундаментальную
систему решений уравнения Якоби. Общее решение уравнения Якоби
является их линейной комбинацией:
_ClR-C2(z + D)
С1Л1 4- С2Л2 = —-===^=.
л/R2 - (х + D)2
Если взять не равное нулю решение, которое при х = Xq обращается
в ноль, то второй раз это решение в ноль уже не обратится, так как
в числителе стоит линейная функция от х. Следовательно, сопряженных
точек нет, и любой отрезок геодезической оптимален.
Пример 18 (задача баллистики).
i
I \/7+k\/{ + У2 dx -> inf. у(0) = 0, у(1) = а > -к.
Интеграл энергии дает \1 ^л = С Общее решение этого уравнения
имеет вид (х - А)2 = АС2{у + к - С2). Для решения, проходящего через
точку (0,0), получаем А2 - АС2{к - С2).
103
Глава 7. Теория второй вариации
Рис. 7.2
За параметр,
определяющий экстремаль, проходящую
через точку (0,0), выберем
величину у'(0) = а. Тогда
Исключив А и С, получим
» =
(1+а2)х2
4А;
+ ха.
Находим огибающую этого
семейства парабол
(1 + а2)х2
У
0 =
4к
+ жа,
ах
2к
\-х.
Так что у = ~ - к (см. рис. 7.2).
Эта кривая носит в баллистике
название параболы безопасности. Точка касания экстремали с параболой
безопасности определяет сопряженную точку.
Упражнение. Проверить этот факт.
§35. Теорема Якоби об огибающей
Как уже отмечалось, типичная ситуация возникновения
сопряженной точки на экстремали — это ее касание с огибающей од-
нопараметрического семейства экстремалей, исходящих из одной
точки. Такие огибающие были найдены Якоби при исследовании
геодезического потока на трехосном эллипсоиде.
Приведем здесь теорему, характеризующую замечательное
геометрическое свойство огибающих однопараметрического
семейства экстремалей. При этом вместо задачи с фиксированными
концами, когда все экстремали выходят из одной точки, будет
рассмотрена более общая задача с подвижным левым концом, что,
iфактически, не усложнит выкладок.
104
§ 35. Теорема Якоби об огибающей
Рис. 7.3
Рассмотрим функционал
J= J f(t,z(t),z(t))dt (22)
to
с граничным условием Ф(^о,ж(<о)) = 0. Здесь x€R, /: Rx Rx R-»R;
/ 6 Cl(D); Ф: R x R -> R, Ф e Cl(D), Ф' # 0; D — окрестность
графика кривой x = x(£), i = x(t)9 t G [£o>?i]i где ж(-) —
экстремаль функционала J, удовлетворяющая условию
трансверсальности (22.6) в точке (£0> я(*о))- Рассмотрим однопараметрическое
семейство экстремалей x(t, а), удовлетворяющих условию
трансверсальности (22.6), и такое, что x(t, 0) = x(t). Предположим, что
это семейство имеет огибающую (дуга BD на рис. 7.3); АС на этом
рисунке — это кривая Ф(£,х) = 0; АВ и CD — экстремали,
соответствующие значениям а\ и cti. Момент касания экстремали
x(t, а) с огибающей обозначим через t\(a).
Теорема 7 (теорема Якоби об огибающей). Если
параметризация огибающей BD выбрана так, что скорость движения
по BD в каждой точке равна скорости движения по
экстремали, касающейся BD в этой точке, то разность значений
функционала J на экстремалях АВ и CD равна значению J
на отрезке огибающей BD,
105
Глава 7. Теория второй вариации
Доказательство. Подставив x(t, а) под знак функционала J у
получим скалярную функцию J(a). В силу формулы (19.6)
dj f Г d 1 дх
*о(о)
*о(о)
Интегральный член в этой формуле равен нулю, поскольку x(t, а)
-- экстремаль, \р5х - Н 5t]\t (а) = 0 в силу выполнения условия
трансверсальности (22.6) в точках (io(a)> x(to(a)> а))- Поэтому
dj дх dt\
Поскольку BD — огибающая, касательная к ней, задаваемая
вектором (^-, j~(t\ (а), а)), совпадает с касательной к экстремали,
задаваемой вектором (l,£($i(ar),ar)), т.е.
*(*i(a)fa)— = — (tx(a)9a).
Подставив это соотношение в (23), получим
^ = /(<i(a),x(«i(a),a)f*(*1(a),a)). (24)
Интегрируя (24) от а\ до с*2 имеем
Jfo) - J(ax) = ^ /(*i(a), х(^(а), а), *(t,(a), a)) da. (25)
Правая часть формулы (25) есть значение функционала J на BD,
о котором говорится в условиях теоремы. D
Доказанная теорема обобщает известное свойство эволюты
плоской кривой (см, [15, с. 129]). Напомним, что эволютой плоской
кривой у — (р(х) называется геометрическое место ее центров
кривизны, и что эволюта является огибающей семейства нормалей
к исходной кривой у = <р(х). На множестве плоских кривых
106
§35. Теорема Якоби об огибающей
х = x(t), у = г/(£), to ^ * ^ t\, удовлетворяющих граничным
условиям y(to) = p(z(to)) рассмотрим функционал
/ \/х2 + у2 <&,
к
определяющий длину кривой. Экстремалями для него служат
прямые; условию трансверсальности удовлетворяют нормали (см.
пример 10 гл. 6). Огибающей семейства нормалей будет эволюта.
Применим теорему Якоби.
Если в двух точках А и С кривой у = tp{x) (см. рис. 7.4)
провести нормали (АВ и CD соответственно) и рассмотреть
расстояния по ним до точек В и D касания с эволютой, то величина
(|АВ| - \CD\) будет равна длине дуги эволюты BD.
Рис. 7.4
Доказанный факт имеет изящное механическое
истолкование. Представим себе гибкую нерастяжимую нить закрепленную
в точке В и навернутую на кривую BDE. Если эту нить начать
развертывать, сматывая с эволюты, но сохраняя ее в натянутом
состоянии, то конец Е опишет кривую у = (р(х).
Пример 19. На множестве плоских кривых х = x(t), у = y(t),
0 ^ t ^ 1, удовлетворяющих граничным условиям я(0) = £, j/(0) = rj,
107
Глава 7. Теория второй вариации
у(1) = ж2(1), рассмотрим функционал
1
о
определяющий длину кривой. Задача минимизации этого функционала
соответствует нахождению экстремального расстояния от точек плоскости
(£, 77) до параболы у = ж2.
Эта задача является одним из вариантов задачи Аполония,
который, изучая расстояние до эллипса, фактически нашел его
эволюту. Обобщением этой задачи является задача нахождения
на римановом многообразии экстремалей расстояния до
данного подмногообразия, которая послужила основой для создания
теории Морса.
Как и в вышеприведенном случае, экстремалями,
удовлетворяющими условию трансверсальности, служат нормали. Уравнение
нормали в точке (а, а2) имеет вид
у-а = - —(я-а).
Огибающая этого семейства удовлетворяет системе
{lay - 2а3 = а - х,
2у - 6а2 = 1.
Исключая параметр о, получаем уравнение полукубической
параболы (см. рис. 7.5). В некоторой фиксированной точке А параболы
у = х2 рассмотрим нормаль, касающуюся эволюты в точке В.
Тогда АВ = R есть радиус кривизны параболы в точке А. Если
точка (£, 7]) лежит на этой нормали между точками А и В
(точка В\ на рис. 7.5), то окружность с центром в точке В\ радиуса
|j4Bi | имеет кривизну большую, чем кривизна параболы в точке А.
Следовательно эта окружность касается параболы «изнутри», т. е.
в окрестности точки А она лежит в области у ^ х1. Тем самым,
на АВ\ достигается локальный минимум.
Если |АВ2| > Л, то окружность с центром в точке В^ радиуса
IAB2I имеет кривизну, меньшую чем кривизна параболы в точке А
108
§ 35. Теорема Якоби об огибающей
и касается параболы «снаружи», т. е. в окрестности точки А лежит
в области у ^ ж2. На АВ2 достигается локальный максимум. Для
точки В соприкасающаяся окружность переходит с одной стороны
параболы на другую — экстремума нет.
Таким образом, огибающая однопараметрического семейства
нормалей (дуга CDE на рис. 7.5) играет в примере 19 ту же роль,
что и сопряженные точки в задачах с фиксированными концами:
до точки касания с огибающей экстремаль локально минимальна,
после касания она перестает быть локально минимальной. Точки
кривой CDE называются фокальными точками параболы.
Для того чтобы пояснить смысл этого понятия, напомним
наглядное определение огибающей однопараметрического
семейства прямых на плоскости: «огибающая есть геометрическое место
точек пересечения бесконечно близких прямых». Иными словами,
если одна из прямых «стремится» к другой, то точка их пересечения
стремится к точке, лежащей на огибающей.
Если представить себе лучи света, испускаемые раскаленной
нитью, имеющей форму параболы (речь идет о плоской задаче
распространения света в однородной изотропной среде), то точки
кривой CDE окажутся наиболее ярко освещенными. Если среда
неоднородна и неизотропна, то роль прямых будут играть экстремали
соответствующего функционала. Если размерность пространства
109
Глава 7. Теория второй вариации
больше двух, то вместо пересечения надо рассматривать
сближение. Действительно, касательные к пространственной кривой
(которая является для них огибающей) не пересекаются между собой,
но при этом точка касания с огибающей — это предельное
положение точек максимального сближения бесконечно близких прямых.
С этой точки зрения между понятиями «сопряженная
точка» и «фокальная точка» принципиальной разницы нет. В первом
случае семейство экстремалей исходит из одной общей точки
по всем направлениям (его особенности — это сопряженные точ-
ки^); во втором — из точек многообразия по направлениям,
удовлетворяющим условию трансверсальности (его особенности — это
фокальные точки).
Понятие «фокальная точка» по смыслу близко понятию
«каустика», используемому в теории дифференциальных уравнений
в частных производных. Кстати сказать, оба названия имеют
общую этимологию: focus (фокус) — по латыни — очаг, жар;
паусгпкбя (каустикос) — по гречески — воспламеняющий,
обжигающий (ср. русское «каустическая сода»). Эти названия связаны
с оптикой и характеризуют точки пространства, в которых
происходит увеличение плотности энергии светового потока, вызванное
сближением лучей света.
В гл. 8 будут изложены условия оптимальности, связанные
с фокальными точками.
Глава 8
Достаточные условия
оптимальности
Вопреки названию главы, начнем с еще одного необходимого
условия — необходимого условия сильного минимума, которое
по своему духу близко к основному содержанию данной главы.
§ 36. Необходимое условие
Вейерштрасса
Определение 1. Будем говорить, что кривая ж(-) реализует
сильный минимум в задаче 4 (гл. 5 § 17), если существует
такая окрестность V точки ж(-) в пространстве VCl([tQ9t\])n
что для любой кривой ж(-) € V J\x(')) ^ J(x(-)).
Очевидно, что всякий сильный минимум является слабым,
и поэтому достаточные условия сильного минимума являются
одновременно достаточными условиями слабого, а необходимые
условия слабого минимума — необходимыми условиями сильного.
Однако не всякий слабый минимум является сильным (см. дальше
пример 20). Поэтому естественно поставить вопрос о необходимых
условиях сильного минимума, не являющихся необходимыми для
слабого. Именно таким является условие Вейерштрасса. Выведем
это условие.
Фиксируем г € [to, t\], вектор £ € Rn и число а > 0.
Рассмотрим семейство кривых (см. рис. 8.1).
П2
§ 36. Необходимое условие Вейерштрасса
Рис. 8.1
*(*),
t$[T,T + ff],
t€[T,T + a],
G — CL
При достаточно малом а кривые x(t, а) попадают в сколь
угодно малую С-окрестность (но не С1-окрестность!) кривой ж(-);
x(t9Q) = z(t).
Подставив x(t, а) под знак функционала J, получим
функцию J {а) у которая определена при а ^ 0 и достигает минимума
при а = 0. Поэтому ff ^ 0. Имеем
т+а
dt
J(a)-J(0)= J f(t,x(t)+S(t-T),t)
T
- / f(t,x,x)dt + I f(t,x(t,a),x(t,a))
dt.
T+Oc
Применив формулу (19.6), получим
^ = /(т+а,х(т)Н<*,£)-\р8х-НН]
T+(T
T+a+J[fx-dtfx.
r+a
да
(0
пз
Глава 8. Достаточные условия оптимальности
Поскольку на ж(-) выполнено уравнение Эйлера, интегральный
член при а = О дает ноль. Так как левый конец семейства x(t, а)
скользит по прямой t — г + а, ж = х(т) + а£ с направляющим
вектором (1.£), вместо вектора (dt,dx) надо подставить вектор
(1, £). В результате получим
f{r^r)^)^f{rMr)Mr))-U{rMr)Mr))(^x(r))^0, (2)
Функция
£(т, ж, ж, 0 = /(т, ж, £) - /(г, ж, ж) - Д (т, ж, ж)(£ - *)
называется функцией Вейерштрасса. Нами доказана следующая
Теорема 1. Пусть экстремаль ж(-) дает сильный минимум
функционалу J. Тогда S(г, ж(т), ж(т),£) ^ 0 л/?и ясех £ G Rn,
T€[to,<i]-
Обсудим смысл этой теоремы. Зафиксируем значения то, Жо, Жо
и рассмотрим у = /(то, Жо, £) как функцию от переменного £. Тогда
функцию Вейерштрасса можно интерпретировать как уклонение
поверхности у = /(то, Жо, £) от касательной плоскости,
проведенной в точке Жо (см. рис. 8.2). Тем самым, условие Вейерштрасса
означает, что при всех т 6 [£o>*i] поверхность у = /(г, ж(т),£)
целиком лежит над касательной плоскостью, проведенной в
точке ж(т).
£
'—»•
Рис. 8.2
114
§ 36. Необходимое условие Вейерштрасса
Замечание 1. Применив формулу Тейлора
f(t,x(t),i) = f{tx(t),x(t))+fx{t,x(t)Mt))(^-x(t)) +
- \(/«(t, z(t), *(t) - 0(£ - *(*)))« - x(t)), (( - £(*))},
где О $C в ^ 1, легко показать, что из условия Вейерштрасса следует
условие Лежандра fxx ^ 0 (но не следует усиленное условие Лежандра).
Пример 20. Минимизируем функционал
1
J= I s3 dt
о
с граничными условиями х(0) = О, х(\) = 1. Решениями уравнения
Эйлера £((3х2) = О являются прямые х — Ct + D. Граничным условиям
удовлетворяет лишь x(t) = t. Выполнено условие Лежандра fxx = 6x(t) = 6 > 0.
Уравнение Якоби имеет вид h = 0, его решения h = Ct пе обращаются
в нуль при t > 0. По доказанной ниже теореме 3, х(£) = £ — слабый
минимум. Проверим условие Вейерштрасса. График функции у = £3 не лежит
над своей касательной в точке х = 1, и условие Вейерштрасса не
выполнено. На экстремали сильный минимум не достигается. Полезно проверить
этот факт прямой выкладкой. Положим х = t+h(t)> ft(0) = ft(l) = 0. Тогда
i iii
AJ= /[(1 + ft)3- l]eft = J3hdt+ I 3h2dt+ f ti dt. (3)
0 0 0 0
Первый из интегралов в правой части (3) — это первая вариация
функционала J в точке $(•):
1
= J 3ft ей =
tj= \ 3ft# = 3ft(l)-3fc(0),
которая равна нулю в полном соответствии с тем фактом, чго х(-) —
экстремаль. Второй интеграл — это вторая вариация, т.е. S2J. Она
положительно определена, что соответствует выполнению усиленных условий
Лежандра и Якоби. Если ||ft||ci достаточно мала, то третье слагаемое
мажорируется вторым, Д^Г ^ 0, т.е. на х(-) достигается слабый минимум.
115
Глава 8. Достаточные условия оптимальности
Однако, если речь идет о сильном минимуме, то \\h\\Ci может быть
произвольной. Именно поэтому условие Вейерштрасса носит нелокальный
характер: в расчет принимаются все ( из (Rn.
В данном примере нетрудно построить последовательность
кривых xn(t), которые попадают в любую С-окрестность
экстремали ж(-), причем lim J(xn(-)) = -оо (см. [1, с. 94]).
§ 37. Достаточные условия
слабого минимума
В предыдущей главе мы выяснили, что достаточным
условием положительной определенности второй вариации б2 J является
выполнение усиленных условий Лежаидра и Якоби. По аналогии
с конечномерным случаем естественно ожидать, что
положительная определенность второй вариации — достаточное условие
минимума, по крайней мере слабого. Именно это в конце концов
и будет доказано. Однако, заметим сначала, что в
бесконечномерном случае имеется одна существенная трудность, которую нам
предстоит преодолеть. Для того чтобы ее объяснить, напомним
стандартный вывод достаточных условий минимума в
конечномерном случае.
Пусть
х 6 Rn, /: Rn -» R, /6 C2(Rn), /'(0) = 0, /"(0) > 0.
Здесь /' — градиент функции /; /" — гессиан.
Основную роль в доказательстве играет неравенство
(f"(0)x,x)>K\\x\\2 (К>0). (4)
Если это неравенство выполнено, то, разложив / по
формуле Тейлора: f(x)-f{0) = (f"(0)x, х) + o(||s||2), можно найти
окрестность V начала координат, в которой имеет место оценка
°(1!ж112) < flNI2> и> следовательно, f(x) ^ /(0) при х 6 V.
В конечномерном случае неравенство (4) является простым
следствием положительной определенности матрицы /"(0).
Действительно, функция (/"(0)ж,ж) строго положительна на Sn"]
116
§ 37. Достаточные условия слабого минимума
и непрерывна. Поскольку Sn~~l — компакт, {f"(0)x,x) достигает
минимума, который должен быть положительным. Обозначив этот
минимум через К, получаем неравенство (4). Однако это
рассуждение не проходит в бесконечномерном случае, поскольку
бесконечномерная сфера не компактна. Именно поэтому в
бесконечномерных пространствах существуют положительно определенные
квадратичные функционалы, которые не удовлетворяют оценке (4).
Пример 21. В пространстве l2 (h ~ это пространство последова-
тельностей действительных чисел {хп} с конечной нормой ||ж||2 = ]Г} хгп)
00 2
рассмотрим квадратичный функционал ip(z) = ]>2 Щ- Этот функционал
п=1
положительно определен, однако inf <р(х) = О, так как <р(ек) = 4, где
вк — к-Pi базисный орт. Следовательно, неравенство (4) для р не
выполняется.
Определение 2. Квадратичный функционал,
удовлетворяющий неравенству (4), называется строго положительно
определенным.
Определение 3. Через W\ будет обозначаться пространство
функций ft(-): [Jo, *i] -* Кп5 У которых квадрат первой
производной интегрируем, а норма определяется формулой
\\h\\2wl =h2(t0)+ fh\t)dt.
к
Через W{ будет обозначаться подпространство пространства
W\, состоящее из функций ft(-), удовлетворяющих условиям:
A(t0) = A(«i)=0.
Теорема 2. Пусть для квадратичного функционала
U
d2J = f ((A(t)h9 ft) + 2(C(t)h, ft) + (B(t)h, ft)) dt
117
Глава 8. Достаточные условия оптимальности
выполнено усиленное условие Лежандра (А > 0) и усиленное
условие Якоби {полуинтервал (to, ti] не содержит точек, сопря-
о
женных с to). Тогда б2 J строго положительно определен на W^
Доказательство. Рассмотрим функционал
h
S2Ja = [ [{(A(t) - a2I)L ft) + 2(C(t)h9 ft) + (B(t)h, ft)) dt.
k
Из неотрицательности этого функционала на W{ следует
утверждение теоремы. Рассмотрим его сначала на пространстве С1.
Проверим, что при достаточно малом а > 0 выполнены все
условия теоремы 5 гл. 7.
а) Проверке усиленного условия Лежандра. Матрица A(t)
непрерывна и положительно определена при всех t € [io^i]-
Поэтому Ф(£) = min (A(t)x9 х) есть непрерывная функция £,
принимающая положительные значения при всех t € [io^i]-
Следовательно, al = min Ф(<) > 0. Взяв а1 < ajL получим,
° «-[Mil
что для 62Ja выполнено усиленное условие Лежандра.
б) Проверка усиленного условия Якоби. Уравнение Якоби для 62Ja
имеет вид
- ^ [(А - a2I)Ul + C*U] + CU1 +BU = 0. (5)
Из а) стедует, что при а2 < а\ матрица (А - а21) —
коэффициентов при старших производных уравнения (5) — невырождена.
Поэтому, после разрешения уравнения (5) относительно старших
производных, его правая часть будет непрерывно зависеть от а.
По теореме о непрерывной зависимости решений
дифференциального уравнения от параметра (см. [18, с. 119]) решение U(t9a)
уравнения (5) с начальными условиями 17(0, а) = 0, 17(0, а) = I
будет непрерывной функцией от (t9 а) при t € [J<b*iL #2 < ®о\
функция det?7(£, а) также будет непрерывной. По условию
теоремы 2 для функционала б2 Jo выполнено усиленное условие Якоби,
118
§37. Достаточные условия слабого минимума
т.е. det?7(£,0) > 0 при всех t 6 {to,t\]- К сожалению, функция
detU(£,0), к которой стремится функция dttU(t, а) при а —► О,
не отделена от нуля в окрестности точки to. Поэтому для того,
чтобы заключить, что det?7(£, а) > О при t £ (to,ti] необходимы
более тонкие оценки.
Покажем, что существует такая окрестность точки £о> в
которой функция det U(t, а) при всех достаточно малых а не
обращается в ноль нигде, кроме точки to. Действительно, из формулы
Тейлора и начальных условий следует, что U(t9 а) = (t-t0)[I+V(t, а)],
где V(to, а) = О и матрица V(t, а) непрерывна по совокупности
переменных на замкнутом множестве {to ^t ^t\, О ^ а2 ^ а2}, где
О < а] < ад, следовательно, матрица V(t, а) равномерно
непрерывна на этом множестве. Соответствующая скалярная функция
detU(i, а) = (t - to)n\l + v(t, а)] обладает таким же свойством;
скалярная функция v(t, а) равномерно непрерывна на множестве
{to ^ t ^ t\, О ^ а2 ^ а2} и на прямой t = to обращается в ноль:
v(to, а) = 0. В силу равномерной непрерывности функции v
найдется не зависящая от а окрестность точки to: to ^ t ^ to + <т>
в которой \v{t, а)\ < 1. Поэтому
det U(t, а) > 0; «0 < < ^ *о + <т, 0 ^ а2 ^ а?. (6)
Теперь уже все подготовлено для проверки условия Якоби.
Имеем det?7(i, 0) ^ /3 > 0 при t0 + (т ^ £ ^ t\\ на этом отрезке
функция det £7(£, а) равномерно стремится к функции det U(t> 0)
при а —> 0, следовательно, существует а^, что
dttU(t,a)>0 при всех t0 + (T^t^tu О^а2^^. (7)
Неравенства (6) и (7) показывают, что при всех значениях а:
а2 ^ rmn{a\,a\}, для функционала 52Ja вьтолнено усиленное
условие Якоби.
Обозначим К = min{a2,a^} > 0. По теореме 5 гл.7
функционал 62Jk положительно определен на С]. Пространство С1
о о
плотно в W\, а функционал 62Jk непрерывен на Wj. Следова-
119
Глава 8. Достаточные условия оптимальности
тельно, д2Зк неотрицательно определен на W\\
t\
f (((А - KI)h, ft) + 2<Cft, h) + (Bh, ft)) dt > 0.
k
Переписав это неравенство в виде
и и
J ((Ah, ft) + 2(Cft, ft) + (Bh9 h}) dt^K I (ft, ft) dt, (8)
to to
получаем формулу, доказывающую теорему 2. □
Упражнение. Проверить непрерывность S2Jk в топологии
пространства W\. (Указание: воспользоваться неравенством Пуанкаре,
доказываемым ниже в лемме 1).
Упражнение. Показать, чтоо функционал S2 J не является строго
положительно определенным на С1.
Перейдем теперь к основной теореме этого параграфа. Пусть
#(•) — экстремаль задачи 4. Множество
{(t,x,x) £R2n~l \te [t0,t\]< x = x(t), x = x(t)}
называется расширенным графиком экстремали х(-). Рассмотрим
открытое подмножество U С R2n+1, содержащее расширенный
график экстремали х(-). Пусть U -— замыкание этого множества.
В дальнейшем будем предполагать, что в функционале J функция
feC\U).
Теорема 3. Пусть на экстремали #(•) заданы 4 выполнены
усиленные условия Лежандра и Якоби. Тогда на х(-) достигается
слабый минимум функционала J.
о
Доказательство. Возьмем произвольную функцию h 6 С]
и рассмотрим приращение функционала:
J(x(-) + h(-))-J@(-)) =
и
= / [f(t, Щ + h(t), x(t) + h(t)) - f(t, x(t), Щ)] dt.
k
/
120
§ 37. Достаточные условия слабого минимума
Разложим подынтегральную функцию в окрестности точки (t, x(t),
x(t)) по формуле Тейлора (см. [6, с. 219]).Члены первого порядка
после интегрирования дадут ноль, поскольку #(•) — экстремаль.
Поэтому
AJ= Г {{Ah, h) + 2(Ch, h) + (Bh, h)) dt + R = 62J + Д, (9)
к
где
t[ ] 2
R = Jif ~2^~/(3) ('•S{t) + Cft(<)' Mt)+Ch(t))(h9 hf}dc\ dt.
to 0
Здесь f®(')(h,h)W — значение кубической формы,
составленной из третьих производных функции / на векторе (ft, ft).
Для доказательства теоремы достаточно показать, что
существует р > 0 такое, что если ЦЛЦс» < Р> т0 Ai7 ^ 0. Выберем р
столь малым, чтобы аргументы коэффициентов формы /(3) при
всех t € [£o>£i] принадлежали множеству U. Поскольку эти
коэффициенты непрерывны на замкнутом множестве U', они будут
ограничены на этом множестве одной и той же константой для
всех функций ft, удовлетворяющих условию \\h\\ci < р. Из условия
Italic < Р следует, что \\h\\wi < Ср. Таким образом мы можем
считать, что ft принадлежит W\ -окрестности нуля.
Покажем, что для любого j > 0 можно подобрать такую
W\ -окрестность нуля, что для всех точек ft этой окрестности
выполнена оценка
\R\<l\\h\\2w.. (10)
Если эта оценка будет доказана, то сопоставление (10) и (8)
завершит доказательство теоремы 3. Таким образом, осталось
доказать оценку (10). Докажем сначала следующую лемму. D
Лемма 1 (неравенство Пуанкаре). Пусть h € W^, h(to) = 0.
Тогда
f h2dt^C Г ft2 dt.
121
Глава 8. Достаточные условия оптимальности
Доказательство. Поскольку h(to) = 0, имеем
t
hl{t)= ( I hdt] .
По неравенству Коши—Буняковского—Шварца
t t t[
h2{t) ^ ( f dtj f h2(t) dt^(t- t0) / h2(t) dt. (11)
to ^0 ^0
Интегрируя (11) по отрезку [<o>*ib получаем
- ^2 <'
fh2(t)dt^(tl 2k) J h\t)dt.
to to
Оценка (10) без труда получается из леммы 1 и неравенства
П j
^Г UijkUiVjWkl ^ С\и\ ■ \v\ • \w\,
•,;,*=! '
справедливого для любой кубической формы в (Rn с
ограниченными коэффициентами. Читателю предлагается самостоятельно
проверить эти факты. □
Замечание 2. Из леммы 1 становится понятно, почему матрица А играет
ведущую роль в вопросе о неотрицательной определенности функционала
52J (условие Лежандра).
§ 38. Внешние дифференциальные
формы
Пусть М — гладкое n-мерное многообразие. ТХМ — п-мер-
ная касательная плоскость к М в точке ж, т, е. линейное
пространство дифференциальных операторов первого порядка на функциях:
(р: М -» R. Если X],... у zn — локальные координаты на М, то
122
§38. Внешние дифференциальные формы
базис ТХМ — это операторы ~-,..., ~р дифференцирования
по Х\,..., хп соответственно. Мы уже имели дело с квадратичной
формой ds2 на ТХМ. Теперь нас будут интересовать кососимме-
трические формы, поскольку их можно интегрировать по
подмногообразиям М. Дифференциальная 1-форма — это линейный
функционал на ТХМ9 точнее, гладкое семейство линейных
функционалов, параметризованное точками многообразия М.
Линейные функционалы на ТХМ в точке х образуют линейное
пространство, двойственное к ТХМ. Его обычно обозначают ТХМ
и называют кокасательным пространством. В качестве базиса
пространства ТХМ можно взять базис, двойственный к { ^-,..., ^- },
т.е. такой базис, что его г-й элемент (обозначаемый dx{) есть
линейный функционал, который на векторе ^ принимает значе-
ние 1, а на остальных векторах ^г.уЗФъ— значение 0. Общий эле-
п
мент ТХМ имеет вид ^ fi ^.Дифференциальная 1-форма о/1' —
i=l п
это зависящее от х семейство таких элементов о/1) = 5D fi(x) dxi,
что функции fi гладко зависят от х и при переходе от одной
системы люкалькых координат к другой преобразуются как
коэффициенты ковариантного вектора. Простейший пример 1-формы —
п
это дифференциал функции F: М -> К, т. с. dF = £} §х ^Xi'
i=i
Дифференциальные 1-формы о/1) можно интегрировать по
кривым Z, лежащим на М. Для этого кривая I разбивается на
куски 1а, в каждом из которых действует одна система локальных
координат; далее, уравнение 1а: х = xa(t) (t^ ^t ^ t*)
подставляется под знак интеграла:
1 П
foj{i)=fj2fi(xtt(t))xmdt
и производится суммирование по а.
Дифференциальные 2-формы — это билинейные кососимме-
трические формы на ТхМхТхМ, т. е. функционалы, определенные
123
Глава 8. Достаточные условия оптимальности
на парах касательных векторов, линейные по каждому аргументу
и меняющие знак при перестановке аргументов местами.
Простейшим примером такого функционала является определитель,
построенный на парах двумерных векгоров:
!' * Ufrb-fc*. (12)
I 6 Г}2 J
Этот пример типичен: любую кососимметрическую
билинейную форм>7 можно разложить в прямую сумму форм вида (12)
(см. [10, с. 416]). Общий вид дифференциальной 2-формы
п
^(2) = £ ЫХ) dxi Л dx3> (13)
где f%j - -fa — гладкие функции, которые при переходе от одной
системы локальных координат к другой преобразуются как
координаты ковариантного тензора второго ранга; дифференциальная
? -форма dxi Л dxj — это форма, принимающая на паре
касательных векторов с координатами £ь ..., £„, г}\,..., г}п значение
й7?; ~" tjVi- Это значение есть площадь параллелограмма (взятая
со знаком «-t-» или «-» в зависимости от ориентации),
построенного на проекциях векторов £ и rj на (*\;)-ю координатную
плоскость в ТХМ.
С любой билинейной кососимметрической формой а/2) в ТХМ
можно однозначно связать кососимметрический линейный опера-
гор Ах: ТХМ -* TJM, который каждому вектору £ 6 ТХМ ставит
в соответствие 1-форму Ах£ 6 Т*М так, что щ {£, *?} = (Ax£9ri).
Кососимметричность оператора Ах означает, что (Ах£, rf) =
-(Axrj, £). В базисе {#f-,..., з§-} элементами матрицы Ах для
формы (13) служат /у (ж).
Дифференциальные 2-формы можно интегрировать по
двумерным подмногообразиям D С М. Для этого подмногообразие
разбивается на куски Da, в каждом из которых действует одна
система локальных координат; далее уравнение DQ: х = xQ(u, v),
124
§39. Интегральный инвариант Пуанкаре—Картана
(и, v) € Да С R2 подставляется под знак интеграла
1^ = 1^2ыЛи,ь))
и производится суммирование по а. Аналогичным образом
определяются дифференциальные fc-формы:
о/** = ]£/<ь„ik{x)dXi^ .../\dxib.
На множестве дифференциальных форм определяется внешнее
умножение (формы перемножаются как полиномы, однако,
перестановка двух дифференциалов внутри каждого монома приводит
к изменению знака этого монома) и внешнее дифференцирование
d [Е Д ..ik(v)dxi} A...Adxikj ='%2dfi]...ih{x) Adxix Л ... Adxih.
Операция внешнего дифференцирования определена с таким
расчетом, чтобы была верна формула Стокса / и = f do/, где
ш — дифференциальная fe-форма, 7 — ориентированный кусок
(fe-hl) -мерного многообразия, бу -~ его граница с индуцированной
на ней ориентацией (доказательство см. в [12, с. 103]).
Дифференциальная fe-форма w называется замкнутой, если
doj = 0, и точной, если ш = d6, где в — некоторая (А; -
^-форма. Всякая точная форма является замкнутой (см. [12, с. 88]).
Ограничение дифференциальной формы ш на подмногообразие
N С М будет обозначаться через ш|#.
§39. Интегральный инвариант
Пуанкаре—Картана
В этом параграфе будет доказано необходимое для
последующего изложения свойство канонических систем обыкновенных
ди dv
дх« дх*.
Яп /hi
dudv
125
Глава 8. Достаточные условия оптимальности
Рис. 8.3
дифференциальных уравнений: наличие интегрального
инварианта. Идея интегрального инварианта возникла в работах Стокса при
изучении стационарного вихревого течения несжимаемой
жидкости. Приведем рассуждения Стокса, следуя изложению в [3, с. 200].
Ъ Пусть г; —
векторное поле скоростей
течения жидкости; rot г; —
поле ротора.
Интегральные кривые векторного
поля ротора
называются вихревыми линиями.
Рассмотрим замкнутый
одномерный контур 71
и через каждую его
точку проведем вихревую
линию. Получим
вихревую трубку. Рассмотрим контур 72 > охватывающий ту же вихревую
трубку (см. рис. 8.3). Боковую поверхность этой трубки с границей
7i - 72 обозначим через Г.
Циркуляцией поля v по контуру j называется fvdl, где
форма v dl имеет вид v dl = v\ dx\ + v2 dx2 -t- v$ dx$. i
Лемма 2 (Стокса). Циркуляции поля v по j\ и j2 одинаковы,
т.е. J v dl = / v dl.
7: 12
Доказательство. Применяя к Г формулу Стокса, имеем
[ vdl- J vdl= J (vox v)n dS = 0.
7i 72 Г
Последнее равенство есть следствие того, что rotv всюду касается
Г и его поток через Г равен нулю. □
Утверждение леммы Стокса можно выразить следующей
фразой: форма v dl есть интегральный инвариант для поля ротора.
Впоследствии А. Пуанкаре показал, что если рассмотреть
отображение R2n -» R2n, (хо,Ро) н> x(t;xo,po),p{t; Жо,Ро) по траекто-
126
§39. Интегральный инвариант Пуанкаре—Картона
риям канонической системы х = Нр,р = -Нх, то
дифференциальная форма р dx есть интегральный инвариант этого отображения.
Дальнейшее обобщение этой идеи принадлежит Э. Картану. В
последующем изложении роль циркуляции играет интеграл по
замкнутому контуру от произвольной 1-формы а/1); роль ротора —
билинейная форма dcv^l\ Ранг билинейной кососимметрической
формы — четное число. Дифференциальная 2-форма и^
называется невырожденной, если ее ранг в каждой точке максимален.
В нечетномерном пространстве R2A;+1 невырожденные 2-формы
имеют ранг 2k. В этом случае матрица отображения АХ9
определяемого формой <jjW, имеет одномерное ядро. Обозначим через £(х)
векторное поле, направленное по этому ядру.
Если двумерная плоскость ст, натянутая на вектора £,7/,
содержит £(ж), то и)х {£, г}} = 0. Действительно, один из векторов,
скажем, £, есть линейная комбинация £ и 7/. Поэтому
42){С 17} = «£ Ч«С + #7, *7> = «<^С> V) + М2){»7. Vh
Первый член в правой части равен нулю, поскольку £ принадлежит
ядру А, а второй — в силу кососимметричности ш®.
Пусть теперь о/1* такая 1-форма в R2A;+i, что ее дифференциал
о/2) = du)W невырожден. Интегральные линии векторного поля
((х) называются характеристиками формы о/1). Для одномерного
контура 7i рассмотрим трубку из характеристик, проходящих через
7ь и контур 72? охватывающий эту трубку (рис. 8.3). Применяя
формулу Стокса к двумерному многообразию с границей 7i - 72 >
получим
у>> - у>>=у1 ^>=о.
7i 72 Г
Действительно, форма durx на 2-мерной площадке аХ9
касательной к Г в точке ж, обращается в 0, так как ах содержит вектор £х.
Таким образом, можно сказать, что форма ш^ есть интегральный
инвариант для поля своих характеристических направлений.
Теперь мы можем перейти к каноническим системам.
Рассмотрим гамильтониан H(t,x,p), определенный на пространстве
127
Глава 8. Достаточные условия оптимальности
переменных (£,ж,р), которое является нечетномерным (t € R,
(х,р) 6 К2п) и дифференциальную форму Пуанкаре—Картана
о/1) = pdx - Н dt. Применим к этой форме вышеописанную
конструкцию. Матрица Atxp формы а/2^ = dw^ имеет вид:
On
In
\дн/дх{ ...дн1дхп
~1п
On
дн/дР1 ...дн/дрп
-дн/dxi \
-дн/дхп
-дн/дрх
-дН/дрп
о )
Эта матрица при всех (t,x,p)) имеет максимальный ранг 2п, так
как ее левый верхний угол — невырожденная (2n х 2п) -матрица.
Определенный выше вектор ((х) для матрицы А имеет
отличную от нуля последнюю компоненту и может быть нормирован
условием C2n+i = 1. Тогда получаем
-с.
я+1
ан
дх\
= 0,
дН
<х~дрг;
о,
-С,2п —
Спая
дхп
ан
дрп
о,
= о, Cto-i = i,
т.е. уравнения характеристик формы Пуанкаре—Картана
dp_dH_ dx_8H_ Ш^_
ds дх ds dp' ds
дают каноническую систему с гамильтонианом Я. Тем самым,
доказана следующая
(14)
Теорема 4 (об интегральном инварианте). Дифференциальная
форма р dx — Н dt является интегральным инвариантом
канонической системы (14).
128
§ 40. Лагранжевы многообразия
Это означает, что интеграл формы pdx - Н dt по любому
замкнутому контуру сохраняется вдоль трубки траекторий
системы (14).
§ 40. Лагранжевы многообразия
В этом параграфе будет изложена конструкция, являющаяся
основой доказательства приводимой ниже теоремы о
достаточных условиях сильного минимума. Пусть дана форма Пуанкаре—
Картанаpdx-Нdt = о;(1), Я G C2(D), где D С R2n+1 — открытое
множество.
Определение 4. Подмногообразие М С D называется
интегральным многообразием формы и, если форма ш обращается
в ноль на любых наборах векторов, касательных к М: ш\м = 0.
Определение 5. Многообразие 9Я С D, dim93t = п + 1
называется лагранжевым относительно формы и/1), если Ш —
интегральное многообразие для формы dcu^K
Пример 22. В каждой точке х многообразия N С Rn, dimiV = к,
рассмотрим множество векторов р Е Rn таких, что
(р, 0 = 0 для любых £ € TxiV. (15)
Множество элементов {ж, р}, обладающих этим свойством,
называется нормальным расслоением для многообразия N. Нормальное расслоение
для произвольного многообразия N С Rn, очевидно, является
интегральным многообразием формы а/1* при любом выборе функции Н.
Размерность нормального расслоения равна п, поскольку условие (р, £) = 0 дает
к независимых уравнений, если само N определяется системой из (п — к)
независимых уравнений.
Пример 23. Для многообразия N С Rnrl, dimN — fc, обозначим
через М множество элементов {t, х,р}, таких, что
(р,£) -H(t,x,p)r = 0 для любых (*, ж) € N\ (r,()eTtzN. (16)
Тогда М — интегральное многообразие формы pdx - Нdt.
Определение 6. Построенное таким образом многообразие
М будем называть поднятием многообразия N в пространство
129
Глава 8. Достаточные условия оптимальности
Рассмотрим задачу классического вариационного исчисления
с подвижным левым и неподвижным правым концом.
Задача 7.
t
J= f{t,x{t),x(t))dt-*\rtf
при условиях X(t}) = Х\\
Ф(«о,а(<о)) =0, Ф: U -> Rn+,~\ Ф G C](U), (17)
где 17 С R1 х Rn — связная область, проекция которой на ось t
содержит отрезок [J0, <i].
Если отображение Ф': U -* (Rn+1~* сюръективно, то
условие (17) определяет в U fc-мерное гладкое многообразие N.
Рассмотрим многообразие М, построенное в примере 23 по
многообразию JV и функции H(t,x,p) (для задачи 7). В условии (16)
нетрудно узнать условие трансверсальности (22.6) для задачи 7.
Определение 7. Будем говорить, что многообразие М в точке
(t, х,р) не содержит характеристических направлений, если
вектор £ = (1,Нр9-Нх) не касается многообразия М, т.е.
С$тм.
Предложение 1. Достаточным условием того, чтобы М в
точке (t, х, р) не содержало характеристических направлений,
является условие
гк(Ь-Нр(их,р)п) = fc, (18)
где {г,-, &}, % = 1,..., &, - базис TtxN.
Доказательство. Достаточно показать, что вектор (1,#р) не
касается многообразия N, т. е. не является линейной комбинацией
векторов (tj,£j). Предположим противное:
к к
Тогда Yl ^i6 ~ Яр !С ^г* = Яр - #р = 0, что противоречит (18). □
130
§40. Лагранжевы многообразия
Следствие 1. Из вышеприведенного доказательства следует,
что при выполнении условия (18) экстремали задачи 7,
удовлетворяющие условию трансверсальности, подходят к
многообразию N под непулевым углом.
При выполнении условия (18) множество значений р,
удовлетворяющих в точке (t, х) равенствам (16), образует гладкое
многообразие. Обозначим это многообразие через Qtx.
Основная конструкция
Пусть М — поднятие многообразия N, определяемого
формулой (17). Проведем через каждую точку (to, Жо, Ро) многообразия
М экстремаль задачи 7, т. е. решение для t ^ to гамильтоновой
системы
х = Hp(t, х, р), р = -Hx(t, х, р). (19)
Если выполнено условие (18), то в результате получится (п + 1)-
мерное гладкое многообразие, которое мы обозначим через 9Л.
Предложение 2. Если выполнено условие (18), то 971 является
лагранжевым многообразием относительно формы Пуанкаре—
Картана.
Доказательство. Рассмотрим произвольный гладкий
замкнутый контур 7 С 3)1 и проведем через него трубку траекторий
Г системы (19). Решения уравнений (19) гладко зависят от
начальных данных и пересекают М под ненулевым углом. Поэтому
7i = Г П М — это гладкий контур. В силу теоремы об
интегральном инварианте /о/1* = /о/1). Но М — интегральное
7 7i
многообразие формы а/1*. Поэтому
/ аг1} = 0 для любой замкнутой кривой у С 9Я. (20)
7
txp
Зафиксируем точку (to,Xo,po) 6 Ш и рассмотрим / с*/1* как
*огоРо
функцию переменного верхнего предела (t, х,р) 6 Ш (в силу
131
Глава 8. Достаточные условия оптимальности
формулы (20) интефал не зависит от пути, если эгот путь лежит
в 9Я). Тогда дифференциал этой функции, определенной на ЯЛ,
равен с^(1)|шг Тем самым, доказана точность формы w^J^. Ее
замкнутость есть следствие точности. □
Следствие 2. Предположим, что многообразие М связно.
Рассмотрим две кривые 1\ и k, соединяющие точку (t, х,р) G 9Л с
многообразием М; 1\,1гС Ш. Тогда f о/1) = / а/1).
h h
Доказательство. Соединив концы кривых 1\ и 12 путем в М9
получим замкнутый контур, интефал по которому в силу
формулы (20) равен нулю. Но М — интефальное многообразие формы
о/1*, поэтому интефал по любой кривой, лежащей на М, равен
нулю. Следовательно, f о/!) = / а/1), как и утверждалось. П
/l h
Всюду в дальнейшем под N,M, Q, 9Л будет пониматься
результат применения основной конструкции к задаче 7.
§41. Поле экстремалей. Инвариантный
интеграл Гильберта
Рассмотрим в пространстве {t, х,р} область Д, содержащую
наряду с любой точкой (t\9X\,p\) все точки решения
канонической системы (19) с конечными значениями (t\,X\9p\), т.е.
(т1ж(г;<],а5ьР1)|р(г;<ьа5ьР1)),приг<*1.Пусть1)==(1ОТ\М)ПД.
Рассмотрим операцию проектирования 7г: (t,x,p) ь* (t,x)
из R2n+1 в Rn~l. х
Определение 8. Пусть проекция 7г, офаниченная на
множество D является диффеоморфизмом, т.е. гладким взаимно
однозначным отображением с невырожденным
дифференциалом. Тогда говорят, что в области G = nD задано поле
экстремалей ф с начальным многообразием N.
Если в G определено поле, то каждой точке (t, х) е G можно
поставить в соответствие одну и только одну точку p(t,x) так,
132
§41. Поле экстремалей. Инвариантный интеграл Гильберта
что (£, x,p{t,x)) Е D. Иными словами, р = p(t,x) — уравнение,
определяющее многообразие Ш в области D.
В этой ситуации проекции экстремалей, лежащих в ЯЯ,
на область G не пересекаются, поскольку экстремали не могут
пересекаться в 971 (по теореме единственности для системы (19)),
а отображение 7г|яп взаимно однозначно. Поэтому в каждой точке
(t, х) Е G однозначно определена функция
g(t,x)=Hp(t,x,p(t,x)). (21)
Она называется геодезическим наклоном поля ф. Уравнения
р = р(£, х) позволяют переписать все формулы, относящиеся
к множеству D, в виде формул на G. Так, например,
уравнения экстремалей в G имеют вид х — g(t, ж); ограничение формы
Пуанкаре—Картана на D можно записать в виде формы на G:
p(t, х) dx - H(t, ж, p(t, х)) dt. (22)
Поскольку fc/^lgyj точна, форма (22) также является точной.
Замечание 3. Точность формы (22) означает, что она является
дифференциалом некоторой функции 5(£, ж), определенной на G:
Sx(t, х) = p(t, х): St(t9 х) = -H{t, х,p(t, х)).
Тем самым, функция S(t, х) является решением уравнения Гамильтона—
Якоби (27.6). При этом 5|д- = const (интеграл от формы (22) по любой
кривой I С N равен нулю).
Итак, интеграл от формы (22) не зависит от пути j в G.
Перепишем этот интеграл в терминах подынтегральной функции /:
*(т) = / Pit я) dx - H(t, х, p(t, x)) dt= fx(t, x, g(t, x)) dx -
7 7
- [-/(*, a, g{t9 x)) -r fx(t, x, g(t, x))g(t, x)] dt. (23)
Интеграл (23) называется инвариантным интегралом
Гильберта для поля ф. Он не зависит от пути в области С, а на экстремалях
поля, т. е. на решениях системы х = g[t, х), интеграл (23) совпадает
133
Глава 8. Достаточные условия оптимальности
с исходным функционалом:
I fxdx- [-/ + f±g] dt = f(t9 x, g(x, t)) dt.
7 7
Функция Вейерштрасса (2) ддя поля ф тоже определяется на G
;%(*, ж, £) = £(t9 ж, g(t, х), £) =
= /(*, ж, О - /(*, ж, <?(*, ж)) - p(t9 х)(£ - g{t, х)). (24)
Теорема 5 (достаточные условия сильного минимума в
терминах поля экстремалей). Пусть в области G определено попе
экстремалей ф с начальным многообразием N, а функция
Вейерштрасса (24) неотрицательна при всех (t, х) G G и при любых £.
Пусть х(-) — некоторая экстремаль поля ф. Тогда для любой
кривой ж(-) такой, что x(t\) = x(t\); x(to) G N, x(t) G G, при
всех t G [to, t\] имеет место неравенство J(x(-)) ^ J{x{-)).
Доказательство. В силу следствия 2: 1(ж(-))=1(ж(-)). Но ж(-) —
экстремаль и поэтому /(£(•)) = ^7 (#('))• Следовательно,
JH-))-i7W) =
= / f(t,x(t),x(t))dt- [{fx(tMt)>9(tMt)))x(t)~
to to
Ч-/(МО.0(МО)) + /*(МО^
= fsv(t9x(t)Mt))dt^0.
to
Итак, чтобы убедиться в том, что на экстремали ж(«) достигается
сильный минимум, следует погрузить эту экстремаль в поле. □
134
§ 42. Погружение экстремали в поле и фокальные точки
§ 42. Погружение экстремали в поле
и фокальные точки
Пусть ж(-) — экстремаль задачи 7, удовлетворяющая
условиям трансверсальности (22.6). Это означает, что (t0>Xo,Po) € М,
где М — поднятие многообразия N, определяемого
условиями (17). Пусть для М выполнено условие (18), т.е. М не
содержит характеристических направлений. Для построения поля
экстремалей, содержащего £(•), применим основную конструкцию
к некоторой окрестности точки (£о,£(ьРо) в многообразии М,
где можно выбрать единую систему локальных координат.
Получим окрестность U траектории (?, x(t),p(t)) в многообразии ЯЯ.
Пусть а = (аь ..., otk) — локальные координаты на N: t = t0(a),
х = х0(а), причем £о(0) = io, ж0(0) = ж0. Обозначим через Qa
многообразие Qtx, где точка (t, х) € N отвечает параметру а.
Пусть /3 = (/5i,... ,Pn-k) — локальные координаты на Qa: р =
Ро(а, /5)» причем р(0, 0) = рЬ • Тогда (а, /3) — локальные
координаты на Му а (£, а, /3) — локальные координаты на Ш: х = ж(£; а, /3),
р = p(t;a,(3), где ж(2; а, /3), р(£;а,/3) — решение системы (19)
с начальными условиями (£0(аО,Жо(#);Ро (#>/?))• РассмотРим яко~
биан отображения 7г|<7 в точках экстремали (£, ж(/),р(£)) (матрица
с элементами |~S i = l,...,n; j — l,...,fc будет как всегда
обозначаться ||; через ||, Я и т.д. будут обозначаться функции,
полученные при подстановке а = 0, /3 = 0).
/1 0 0 \ _ _
Определение 9. Точка т > t0 называется фокальной точкой
многообразия N на траектории #(•), еслис/(г) = 0.
Замечание 4. Определение 9 не зависит от выбора локальных
координат, потому что я* и ШТ определены инвариантным образом, а условие
J?{t) = 0 эквивалентно условию Ktvdir\u Ф 0.
135
Глава 8. Достаточные условия оптимальности
Предложение 3. Пусть x{t), to ^ t $С t) — экстремаль,
удовлетворяющая условиям трансверсальности, усиленному условию
Лежандра и условию (18). Пусть на х(-) нет фокальных точек
многообразия N. Тогда существует такая окрестность V
множества {t,x(t)}, to < t ^ t\, на которой определено ноле ф
с начальным многообразием N.
Для доказательства достаточно заметить, что для отображения
х\и в каждой точке {t,x(t)}, То < t ^ t\ выполнены все условия
георемы о неявной функции, и, следовательно, каждая такая точка
имеет окрестность Vt С Rn_hl, в которой отображение п\ц взаимно
однозначно. Искомой окрестностью служит V = |J Vt.
(Mi]
Теорема 6 (достаточные условия сильного минимума в
терминах одной экстремали). Пусть x(t) — решение уравнения
Эйлера для задачи 7, удовлетворяющее условиям
трансверсальности, усиленному условию Лежандра и условию (18). Пусть,
кроме того, функция / при фиксированных (t, х) выпукла по х;
f(to) ф 0 и на полуинтервале (to,t\\ нет фокальных точек
многообразия N. Тогда на ж(-) достигается сильный минимум.
Доказательство. Хотя предложение 3 и позволяет погрузить
экстремаль x(t), to < t ^ t\ в поле экстремалей, однако
точка {to,Xo) попадает на границу области G, покрываемой полем,
и траектории ж(-), лежащие в сколь угодно малой С-окрестности
х(-), могут выйти за пределы области G при t близком к to
(см. рис. 8.4). Поэтому для доказательства теоремы 6 надо
построить другое поле, для которого точка (to, Хо) попала бы внутрь
области G. Для построения этого поля надо «отодвинуть»
многообразие N левее точки to. Однако, техническое воплощение этой
идеи оказывается достаточно сложным и занимает практически
всю оставшуюся часть доказательства.
Приступим к построению этого поля. Рассмотрим
fc-параметрическое семейство /С экстремалей x(t;a, 0), |а| < е, состоящее
из экстремалей, построенных в предложении 3 при /3 = 0. Пусть
для определенности f(to) > 0. (При /(to) < 0 следует взять а < 0,
136
§42. Погружение экстремали в поле и фокальные точки
Рис. 8.4
а все остальные рассуждения сохранить.) Зафиксируем число а > О
и продолжим каждую из экстремалей семейства К влево за точку
пересечения с многообразием N (т. е. для t < to(a)) до такого
момента tff(a), чтобы
I f(t,x(t;a,l0),x(t;a90))dt = a.
(26)
U(a)
Функция t(r{a), определяемая из уравнения (26), при достаточно
малых а и а оказывается гладкой функцией от а и а, в силу
георемы о неявной функции. Действительно, производная левой
части уравнения (26) по ta(a) в точке а — О, а = О равна
-/(£о); она отлична от нуля в силу условия теоремы 6. При
достаточно малом а > О левые концы экстремалей (ta(a)9xff(a))
(где ха(а) ~ x(tff(a), а, 0)) образуют гладкое многообразие Na.
Действительно, в силу следствия 1
rk
(&(Ua,0)^(t
да
;а,0)\
к+\.
(27)
t=t0>a=0
Будем рассматривать а в качестве координат на Na. Для того чтобы
проверить, что Na — гладкое многообразие, достаточно найти -$£
и убедиться в их линейной независимости. Имеем матрицу
дх<? Л/* л\1 9ta
(dt дх \
*№в•0)U(в)^ + л;(';в•0)l«.(•)J•
137
Глава 8. Достаточные условия оптимальности
ранг которой при а = О, а = О равен к в силу (27), следовательно,
^он равен к при всех достаточно малых а, а.
Применим к Nff основную конструкцию. Получим
многообразие дЯа, содержащее расширенный график экстремали х(-) (в том
числе и точку £о>Яо). В дальнейшем, без специальных оговорок,
все объекты основной конструкции, относящиеся к
многообразию fflff, будут помечаться индексом <т.
Лемма 3. Существует такое не зависящее от а число в > О,
что
М*)*° пРи t<t<ta + 0< (28)
Иными словами, не зависящий от а начальный участок
экстремали х(-) свободен от фокальных точек.
Доказательство. В дальнейшем для краткости будем вместо
дх I
— {t;t0,xo(a),pQ(a,l3))\
да
to-toM
писать просто ^. Отдельно найдем производную по £о-
Дифференцируя тождества x(to;to, Xq,Po) = х0 по to, получим
дх дх
0 = x(to;to,x0,po) + —(to;t0,x0,po), т.е. — = -яг.
ОЧ ОЦ
Якобиан^ в этих обозначениях примет вид
Mt) = te[-fc-z— —у (29)
Имеем Ja{tc) = 0, поскольку последние (п - к) столбцов
обращаются в ноль при t = Tff. Нам надо доказать, что J^t) Ф 0 при
t > tff. Для доказательства вычислим производные от этих
столбцов. Как было показано в § 13 гл. 3, производные по начальным
данным удовлетворяют уравнению в вариациях для системы (19).
Имеем ( щ J = Нрх (Щ) +Щр ( || J. Разлагая по формуле Тейлора
и учитывая, что ^jf (£<т) = 0, получаем
дх * ~ dv ~ ^ ^ л
—(*) = Нрр( *„)^( t,)(t - tv) + (t- tff)2R(t, a), (30)
138
§ 42. Погружение экстремали в поле и фокальные точки
причем существует С > 0 и окрестность точки (to, 0), в которой
элементы матрицы R удовлетворяют неравенству
\R*j(t,a)\<C. (31)
Подставляя (30) в (29) и учитывая, что х = Нр, получаем
Mt)=(t~lrk^(~-Hp^ ЩрЩнь-%)п). (32)
Лемма 4. Матрица
{дх~о filth Й ЭрЛ
я/н/ £ = £ о невырождена.
Доказательство. Предположим, что найдутся Л е (Rn~*)*, /х е
(R*)* такие, что
4^~%w "я»А^я0- (34)
Умножим (34) скалярно на вектор А-#:
Ч^"Яр^,Аж/+\ЯррАЖ'Аж/=0-
Поскольку векторы -Ш касаются многообразия Qq, первое
слагаемое в этой сумме равно нулю, поэтому \ЯррА^,А^у = 0.
Матрица Нрр положительно определена в силу выполнения уси-
ленного условия Лежандра (см. § 20 гл. 6), следовательно, A-jjjj = 0.
Поскольку Ш линейно независимы, отсюда следует, что А = 0.
Равенство (34) принимает вид liyjfe - ЩЩ) = 0- Векторы
Ш " Hplfti в силу Условия О8) линейно независимы, поэтому
fi = 0. Итак, столбцы матрицы (33) линейно независимы. □
139
Глава 8. Достаточные условия оптимальности
Вернемся к доказательству леммы 3. Обозначим детерминант
матрицы (33) через q. Пусть, для определенности, q > 0. Тогда
р силу гладкости функций x7(t, a), pa(t, а), найдутся ао > 0, 0 > 0
такие, что при всех % - в < t < to + 0, а < <т0:
<*(lfW-*<')£(*) я„(*)^(«)) > f. (35)
Матрицы, стоящие под знаком детерминанта в формулах (32)
и (35) отличаются друг от друга на слагаемое (t -Ta)R(t,a), где
Н удовлетворяет неравенствам (31), т.е. равномерно ограничено
по а и t. Отсюда без труда получается утверждение леммы 3. □
Вернемся к доказательству теоремы 6. Выбрав to - tff < \,
получим
ЖЪФЪ при t„<t <?<>+-. (36)
На отрезке to + § ^ t ^ U якобиан J(fy Ф 0, a^(i) при а -» 0
равномерно стремится K^f(t). Следовательно, для всех достаточно
малых а > 0
/ff(t)£0 при ?0+2<<<£. (37)
Соотношения (36), (37) позволяют построить поле экстремалей
с начальным многообразием N^ в окрестности экстремали х(-).
Равенство (26) означает, что исходное многообразие N лежит
на поверхности уровня функции Sff9 отвечающей полю ^ (см.
замечание 3), т. е. значение исходного функционала на участке
экстремали, нежащем между N и Na, одно и то же для всех
экстремалей поля typ. Покажем теперь, что х(-) реализует сильный
минимум. Действительно, траектория х(-), лежащая в достаточно
^алой окрестности экстремали ж(-), попадает в область, покрытую
полем tyo-. Если такая траектория ведет на N и дает функционалу J
значение меньшее, чем J(x(-)), то, продолжив ее до Nff по
экстремали поля ^3^, мы получим траекторию, лежащую в области,
покрытой полем %\а и дающую функционалу J значение
меньшее, чем на соответствующей экстремали поля, что противоречит
теореме 5. □
140
§43. Индекс Морса
§ 43. Индекс Морса
В этом параграфе будет доказана теорема Морса об индексе
квадратичного функционала.
Через rk G будет обозначаться ранг матрицы G.
Определение 10. Кратностью точки т, сопряженной с
точкой to, называется число (п - rk U(r)).
Упражнение. Доказать, что кратность точки г совпадает с числом
линейно независимых решений h(t) системы (4), обращающихся в ноль
в точках t0 и г.
Определение 11. Индексом квадратичного функционала
называется максимальная размерность подпространства, на
котором этот функционал является отрицательно определенным.
Иными словами, под индексом мы всегда будем понимать
отрицательный индекс инерции.
Американский математик М. Морс доказал, что индекс
квадратичного функционала S2J равен числу точек, сопряженных с
точкой to на интервале (£0, t\)> если считать каждую сопряженную
точку столько раз, какова ее кратность.
Смысл этой теоремы можно пояснить на следующей
трехмерной картинке (рис, 8.5). Представим себе, что
бесконечномерное пространство, на котором определен функционал d2J — это
плоскость (ж, у), а значение функционала откладывается по оси z.
Посмотрим, как эволюционирует поверхность z = z(x9y) при
удалении точки t\ от точки to.
Пока точка to достаточно близка к t\, так что на
полуотрезке (to,t\] нет точек, сопряженных с tQi функционал d2J
положительно определен и поверхность является «эллиптическим
параболоидом» (рис. 8.5а).
Когда t\ доходит до первой точки г, сопряженной с to,
функционал б2 J становится неотрицательно определенным. Точнее,
в силу леммы 1 (с. 91), у него возникает «нулевое
подпространство», состоящее из функций h(t), удовлетворяющих
определению 3 (с. 92). Поверхность становится «эллиптическим цилин-
141
Глава 8. Достаточные условия оптимальности
дром» (рис. 8.55), «образующая» которого имеет размерность,
равную кратности точки т.
После того, как t\ пройдет через точку т, эта образующая
уйдет под «плоскость (х> у)», и поверхность станет
«гиперболическим параболоидом» (рис. 8.5 в), с размерностью отрицательного
подпространства, равной кратности точки г; размерность
положительного подпространства всегда равна бесконечности. При
дальнейшем росте t\ от этого бесконечномерного подпространства
будут отщепляться новые подпространства с размерностями,
равными кратности сопряженных точек, проходимых точкой t\.
Теорема 7 (Морс). Пусть для функционала
1
F = J {(A(t)y, у) + 2(C(t)y, у) + (B(t)y, у)) dt,
0 у(0) = 0, у(1) = 0,
где матрицы А и В симметрические, выполнено усиленное
условие Лежандра {А > 0). Тогда индекс А этого функционала равен
числу точек, сопряженных с точкой у(0), если считать каждую
сопряженную точку столько раз, какова ее кратность.
Доказательство. Задачу минимизации функционала F на
пространстве VC1 — кусочно гладких функций на отрезке [О, I] —
будем называть присоединенной задачей. Уравнение Эйлера для
присоединенной задачи называются уравнением Эйлера—Якоби.
Решения уравнения Эйлера—Якоби будем называть присоединен-
142
§ 43. Индекс Морса
ными экстремалями или якобиевыми векторными полями. Будем
рассматривать столь мелкие разбиения 0 отрезка [0,1] точками
to = Q9t\,...,tk,tk-i = 1, что любые две точки полосы [ib^ijxIR"
соединяет единственная присоединенная экстремаль, дающая
минимум функционалу F. Существование такого разбиения 0
следует из усиленного условия Лежандра. Обозначим через Т
подпространство VC], состоящее из функций, обращающихся в ноль
в концах отрезка [0,1] и гладких на любом из интервалов [U, U+\].
Пусть Т) С Т — векторное пространство, состоящее из кусочно
гладких якобиевых векторных полей W, обращающихся в ноль
в концах отрезка [0,1]. Такая ломаная присоединенная экстремаль
однозначно определяется своими значениями в точках U, поэтому
Т\ — конечномерное векторное пространство, dimTi = nk. Пусть
Ti С Т — векюрное пространство, состоящее из векторных полей
W € Г, для которых W(h) = W(t2) = ... = W(tk) = 0.
Для вычислений нам понадобится формула для значения
квадратичной формы F и ассоциированного с ней билинейного
функционала на кусочно гладких траекториях y(t), z(t).
Для данного разбиения 0 функционал F представляется в
виде суммы
к '-1
F = £ / №ш у)+2<сш у) + <Б ю* у))dt (38)
Пусть даны два векторных поля Y = y(t) и Z = z(t).
Ассоциированная с F билинейная форма имеет вид
к k1"1
B(Y,Z) = J2 f ((A№,z) + (Cmz) + (C(t)z,y)+(B(t)y,z)) dt.
»=o /
(39)
Проинтегрируем (39) по частям.
B(Y,Z) =
к ***1
=Е/(-(|(^)*+с*(<)у).*)+<(ад*+я(о»).*>)л+
143
Глава 8. Достаточные условия оптимальности
к
г=0
Y,(((A(tM)y(tM)^C*(tM)y(ti+l)),z(tM))-
»=о ^
-((А(Ь)т + С%МЬ)),г(и))У (40)
Обозначим импульс присоединенной задачи (A(t)y + C*(t)y)
через py(t)(t), а скачок импульса pV{ti)(U + 0) - ру(и)(к - 0) в точке
ti — через Apy(ft). В этих обозначениях, учитывая, что поля у
и z непрерывны, а скачок претерпевает лишь импульс, правую
часть (40) можно переписать в виде
к ^*+1
B(Y, Z) = B(Z, Y) = ]Г J(-(jt(3>y(t)Y *) +
и
\ k
+ ((С^)у + В(г)у)9г))м^(Ару(и)9г(и)). (41)
' i=i
Лемма 5. Векторное пространство Т разлагается в прямую
сумму Т = Т\®Т2. Ограничение квадратичной формы F на
подпространство Ti положительно определено.
Доказательство. Для любого векторного поля W € Т
обозначим через W\ то единственное якобиево векторное поле, для
которого W](ti) = W(ti) при всех г = l...fc. (В данную
вариацию вписываем ломаное якобиево поле.) Тогда Wi := W - W\
принадлежит Ti* Тем самым, Т\ и Т2 порождают Т. Пересечение
W\ Г) W2 = 0, так как единственная присоединенная экстремаль,
соединяющая точки (£а-, 0) и (^-.гЬ 0) есть у = 0. Искомое
разложение получено. Вторая часть леммы следует из того, что ограничение
квадратичной формы F на подпространство Ti представляет
собой сумму интегралов по отрезкам [U, ti+}\ с нулевыми условиями
на концах, а на каждом из этих отрезков соответствующая
квадратичная форма положительно определена, так как на каждом
отрезке [<,-. ti+\] нет точек, сопряженных к точке U. □
144
§ 43. Индекс Морса
Лемма 6.
1) Подпространства Т\ и Т-i ортогональны относительно (псевдо-
эвклидова) скалярного произведения, определяемого формой В.
2) Индекс функционала F на пространстве Т равен индексу его
ограничения на Т\.
Доказательство. Пусть Y е Т\, Z € Г2. Тогда в формуле (41)
чнтеграл обращается в ноль, так как поле Y якобиево; а внеин-
гегральная сумма равна нулю, так как z(ti) = 0, т. е. B(Y, Z) = 0.
Пункт 1) доказан.
Для доказательства пункта 2), пользуясь леммой 5, запишем
произвольное поле X в виде X = Y + Z, где Y € Г], Z € Г2. Тогда
F(X) = Б(ЛГ, X) = B(Y, Y) + 2B(Y, Z) + JB(Z, Z) = F(Y) + F(Z).
Поскольку F(Z) > 0 при любом Z, индекс функционала F
совпадает с индексом его ограничения на Т\. □
Следствие. Поскольку подпространство Т\ конечномерно,
индекс квадратичной формы F конечен.
Обозначим через Л(т) индекс квадратичной формы
*V = У ((A(t)y, у) + 2<С(«)У, у) + <Б(*)у, у)) dt,
У(0) = 0, у(т) = 0.
Лемма 7. А(г) — монотонно неубывающая, непрерывная слева,
кусочно постоянная функция, скачки которой сосредоточены
в сопряженных точках функционала F.
Доказательство. Если Т\<Тг, то существует такое
Х(т\)-мерное подпространство L\, на котором функционал FT] отрицательно
определен. Продолжив функции из этого подпространства нулем
на отрезке [ti,T2], получим A(ri)-MepHoe подпространство L2,
на котором отрицательно определен функционал Fn.
Монотонность доказана.
Для доказательства непрерывности слева можно считать, что
l^i 1Т2] С (ti4ti+i). Обозначим через Т\(т) пространство кусочно
145
Глава 8. Достаточные условия оптимальности
1ладких якобиевых полей с нулевыми значениями на концах
отрезка [0, г]. Так как якобиево векторное поле однозначно
определяется своими значениями в точках деления tj> можно определить
изоморфизм пространств Т\(т\) и Г^Гг), сопоставляя в них поля
с одними и теми же координатами в точках деления.
Функционалы FT[ и FTl при этом изоморфизме будут фактически определены
на одном и том же пространстве, причем FT на нем непрерывно
зависит от т. Функционал FTl отрицательно определен на
подпространстве L-fa) размерности \{ti), следовательно, FT] при
достаточно малом Ti - Г] будет тоже отрицательно определен на L-(ti) ,
т. е. имеет место неравенство \(т\) ^ А(т2). Но в силу уже
доказанной монотонности А(т2) ^ А(т]), это доказывает непрерывность
слева. Если точка г не является сопряженной, то FT
положительно определен на подпространстве L+(t) коразмерности А(т) (ядро
равно нулю), следовательно, он остается положительно
определенным на этом подпространстве и при достаточно малом увеличении
г, т. е. в этой точке функция А(т) локально постоянна. D
Лемма 8, Если т — сопряженная тонка кратности и, то
скачок функции X(t) в точке т равен и.
Доказательство. Пусть как прежде г € (^,^-и)- В точке г
имеется отрицательное подпространство размерности А(т) и
нулевое подпространство размерности v. Следовательно,
функционал FT положительно определен на некотором
подпространстве L коразмерности А(т) + У- При достаточно малом е
функционал FT+€ остается положительно определенным на L. Поэтому
Докажем, что А(т + s) ^ А(т) + v. Построим для этого базис
подпространства М, dimM = А(т) + ^, на котором форма FT^e
отрицательно определена. Поскольку А(т) — индекс
квадратичной формы FT9 существует А(г) линейно независимых векторных
полей W\,... ,W\(r), равных нулю в концевых точках отрезка
[О, г] и таких, что матрица B(W^ Wj) отрицательно определена.
Поскольку кратность сопряженной точки равна v, существует v
гладких, линейно независимых якобиевых полей Jj,..., Jv,
равных нулю в концах отрезка [0, г]. Их линейная независимость
146
§43. Индекс Морса
означает, что соответствующие импульсы в точке т, т.е. вектора
Я/,(т) линейно независимы. Применяя стандартный процесс ор-
тогонализации, построим в точке г двойственный к ним базис Qj,
т. е. v векторов Q\,..., Qu таких, что
Ыг), <?,> = *,-, (42)
где d(j — символ Кронекера. Продолжим Qj до гладкого
векторного поля Qj{t) на отрезке [0, г -f с], с нулями на концах отрезка.
Продолжим поля Wi и Ji нулем на отрезок [г, г + е]. С помощью
формул (41) и (42) нетрудно убедиться, что
B(Jiy Jj) = 0; B(JU Wt) = 0; 5(Jt, Qj) = fy. (43)
Действительно, построенные поля являются гладкими всюду,
кроме точки т. Интеграл в формуле (41) обращается в ноль, так
как поля J{ якобиевы; из внеинтегральных членов сохраняются
только слагаемые, относящиеся к точке т, которые в силу (42)
дают единичную матрицу.
На отрезке [0, г + е] для малого положительного числа с
рассмотрим А(т) + v векторных полей
Wu ..., Wxir), (c-]Jx - cQx)9..., (c'{ J, - cQu),
которые порождают векторное пространство размерности А(т)-ыл
В силу (43), матрица В на этом пространстве имеет вид
(BiWuWj), сА \
{ сА* -21 + с2к)' (44)
где / — единичная матрица; А и К — некоторые фиксированные
матрицы. Если с достаточно мало, то матрица (44) отрицательно
определена. D
Итак, функция X(t) испытывает скачок и, когда переменная t
проходит через сопряженную точку кратности v, и непрерывна
в остальных точках. Из полученного утверждения очевидно
вытекает теорема Морса об индексе. D
147
Глава 8. Достаточные условия оптимальности
§ 44. Второе возвращение
к принципу максимума
Продолжим линию, намеченную в § 27, гл. 6, и сопоставим
результаты, изложенные в гл. 7-8, с принципом максимума Пон-
трягина. Так же, как в § 27 переформулируем задачу 7 так, чтобы
она включалась в общую схему задач оптимального управления.
Задача 8. Найти минимум функционала
*|
/ /(«, х(«), «(*)) dt\ х = и, ueU = R"; x(t}) = Ь,
Ф(*о, «(«о» = 0; x(-)eVCl.
Пусть #(•), и(-) = #(•) — решение задачи 8. Применим к
задаче 8 принцип максимума Понтрягина. Как было показано в §27,
^о = -1, tfi = /*,-. i= 1,...,п.
Условие максимума имеет вид:
max [-fit,x(t),u) + fxu) =-/ + /Д
tieRn
т.е. при всех и € Rn справедливо неравенство
/(*, x(t), и) - /(*, x(t)9 x(t)) - h{U x(t), x(t))(u - Щ) > 0,
что совпадает с условием Вейерштрасса. В § 37, гл. 8 было показано,
что из условия Вейерштрасса следует условие Лежандра. Итак,
из принципа максимума Понтрягина следуют все классические
результаты вариационного исчисления, кроме результатов теории
сопряженных и фокальных точек и теории поля. Раздел теории
оптимального управления, являющийся аналогом классической
теории поля, находится в настоящее время в процессе становления.
Для подтверждения приведем в последующих параграфах только
что полученный автором результат.
148
§ 45. Задача оптимального управления с разделенными условиями
§ 45. Задача оптимального управления
с разделенными условиями
для концов
Рассмотрим задачу минимизации функционала
•J(ti(.))= f f(t,x9u)dt (45)
h
при ограничениях
x = <p(t,x,u)\ (46)
*i(tb*(*i)) = 0, (47)
*2(<2,»(<2)) = 0, (48)
u(t) 6 17. (49)
Здесь x — фазовые переменные, принадлежащие области WCRn;
управление u(t) 6 U непрерывно; функции /, <р, Фь Ф2 гладко
зависят от своих аргументов. Обозначим многообразие левых концов
(47) через JV] С R х 1Л\ многообразие правых концов (48) через
N2 С R х U (размерности этих многообразий произвольны).
Напомним факты, касающиеся задачи (45)-(49). Пусть x(t),
u(t), t Е [<1,<г] реализует сильный минимум. Рассмотрим
функцию Понтрягина H(t, ж, <ф, и) = -/(*, х, и) + i/)(p{ty ж, и).
Обозначим ее максимум по и через H(t, ж, гр) = max?{(t, х, гр, и). ТТред-
полагаем, что задача нормальна, и поэтому коэффициент при /
можно взять равным -1. Всюду в дальнейшем будем также считать,
что значение и, реализующее максимум %9 определено
однозначно, и функция H(t, ж, гр) гладкая.
В силу принципа максимума Понтрягина существует
непрерывная функция V>(*)> Удовлетворяющая следующим условиям.
1. Функция H(t9x(t),ip(t)9u) достигает своего максимума по и
при и = u(t):
H(t, x(t), $(t)) = H{t) = max%(*, x(t), $(t)9 u). (50)
149
Глава 8. Достаточные условия оптимальности
2. Пара функций х(-)>\р(-) является решением гамильтоновой
системы
\j> = -Hx(t9x,1>).
3. Удовлетворяются условия трансверсальности:
i) для левого конца пара (—H(t\),ip(t\)) является анну-
лятором касательной плоскости к подмногообразию JVi
в точке (tj, x(t\))> т.е.
для любых (в, О € T<T[MT]))N};
ii) для правою конца пара (-H(T2),4p{h)) является анну-
лятором касательной плоскости к подмногообразию TV^
в точке (ti, xiti)), т.е.
-Я(Г2)*+ £(£)* = О
для любых (0,0 6 Т*(Г2,*(Г2))^2.
Предположение 1. Функция ^(-), которая для рассматривав
емъис оптимальных траекторий удовлетворет условиям (50)-
(53), определена однозначно.
Определим подъем 9ТХ многообразия JVi в расширенное
фазовое пространство переменных t9x9i/>: идя каждой точки (t, х) G N\
рассмотрим все гр, которые удовлетворяют условию г) в этой
точке. Легко видеть, что dim9?L = п. Подъем многообразия N2
обозначим через 9Т2.
Предположение 2. Будем считать, что вектор скорости
гамильтоновой системы (51)
Ь = {\9Щ(?]),-ЙХ(?1)) (54)
не касается многообразия 9?х; аналогично, вектор
С2 = {1,Щ(Т2),-НХ(Щ (55)
не касается многообразия 912.
150
§ 45. Задача оптимального управления с разделенными условиями
Условие (54) сохраняется для некоторой достаточно малой
окрестности Ы\ С 0?х точки {t\,x(t\)^(t\))\ условие (55)
сохраняется для некоторой достаточно малой окрестности Щ С 9?2
точки (t2,x(t2), ^(^2))- Обозначим n-мерный вектор координат,
параметризующий Wb через <гх\ n-мерный вектор координат, па-
раме физующий Щ, через (72.
Рассмотрим решения гамильтоновой системы (51) с
начальными условиями в точках ст\ — (t\, x(t\), tp(t\)) Е U\. Предположения
I и 2 гарантируют, что в результате получится (п + 1)-мерное
гладкое многообразие 93Т1? которое, в силу теоремы об интегральном
инварианте Пуанкаре—Картана и в силу условий
трансверсальности на левом конце (52), является лагранжевым, т.е.
(f(-Hdt + xpdx) = 0 (56)
для любой замкнутой кривой 7 С ЯЯХ. Уменьшив при
необходимости окрестность U\, потребуем, чтобы соответствующее
многообразие JUti при t б (t\912], где t\, ti зависят от траектории ж(-) G 9ЛХ,
лиффеоморфно проектировалось на некоторую область Mi
пространства (t, х). Если это возможно, то мы говорим, что определено
поле экстремалей ^Зх, отвечающее многообразию N\, и что на
данной экстремали нет фокальных точек многообразия iVi. В этом
случае проекции экстремалей, лежащих в VRL, однозначно
покрывают область Mi. В силу взаимной однозначности проекции, в Mi
определена функция ip\(t, х) и тогда -Я dt+гр dx становится
дифференциальной формой на Mi, причем, (56) означает, что эта
форма точная. Следовательно, существует функция S\(t9 х) такая, что
dS\ =-Hdt-r<ipdx. (57)
Отсюда следует выполнение уравнения Гамильтона—Якоби в
форме Беллмана для S\, и функция S\ является функцией Беллмана
в задаче минимизации функционала J с начальным
многообразием N\ и с правым концом в точке (£, ж).
Точно такую же конструкцию, но только с движением по
времени вспять, реализуем для многообразия JV2, и получим другое
151
Глава 8. Достаточные условия оптимальности
решение S^f, х) уравнения Гамильтона—Якоби, отвечающее
многообразию концов Ni.
Предположение 3. На {t\,ti\ нет фокальных точек
многообразия N\. На [Ь[^2) нет фокальных точек многообразия 7\Г2.
Если бы, скажем, N2 сводилось к точке, то отсутствие
фокальных точек многообразия N{ наряду с принципом максимума
Понтрягина давало бы достаточные условия сильного
минимума, либо в силу теоремы о достаточных условиях оптимальности
в терминах функции Беллмана, либо в силу того, что экстремаль
х(-) была бы погружена в
поле, а условие максимума
функции Понтрягина
гарантировало неотрицательность
функции Вейерштрасса. Однако,
если оба многообразия, как
в N\, так и N2, нетривиальны,
предположение 3 необходимо,
но далеко не достаточно пяя
оптимальности.
Пример 24. Рассмотрим за-
N] \ I JV2 дачу минимизации расстояния
Рис 8.6
между двумя многообразиями N{
и N2, лежащими на двумерной
плоскости и изображенными на рис. 8.6. Очевидно, что экстремалями
служат прямые, а условия трансверсальности сводятся к условию
ортогональности экстремали к JVj и N2. Следовательно, прямая АВ
удовлетворяет принципу максимума Понтрягина. Если, к тому же, радиусы
кривизны Ni и N2 в точках А и В больше расстояния АВ, то отрезок
АВ не содержит фокальных точек ни N\ ни N2. Однако очевидно, что
АВ не дает минимума расстояния, так как любой сколь угодно малый
вертикальный сдвиг АВ приводит к уменьшению функционала.
152
§ 46. Критерий оптимальности
§ 46. Критерий оптимальности
в терминах двух решений
уравнения Риккати
Рассмотрим систему уравнений в вариациях для
уравнений (51) , .
Г Q = Щх(и х9 i))Q + Hn{t9 х, гР)Р,
\P = -Hxx(t,z9tfQ-Hxt(t9z9il>)P. }
Здесь через Q и Р обозначены производные по начальным
данным соответственно для функций х и гр> являющихся решениями
системы (51). В дальнейшем под Q и Р нам будет удобно понимать
(п х п) -матрицы из производных по значениям <Х\. Коэффициенты
системы (58) — это тоже (n х п) -матрицы. Основным
инструментом исследования будет служить матричное уравнение Риккати [7]
для переноса лагранжевых плоскостей по решениям системы (58).
Обозначим через W = PQ~] матричные координаты
лагранжевых плоскостей. Прямым дифференцированием легко получить
матричное уравнение Риккати для W
-W = HXX+ HxrpW + WHn + WH^W. (59)
Теорема 8. Предположим, что на экстремали #(•), гр(-)
выполнены предположения 1, 2 и 3. Пусть решение P(t), Q(t)
уравнений (58) описывает эволюцию производных по начальным
данным на многообразии УЯ± вдоль экстремали х(-)9 гр(-).
Тогда соответствующее решение W(t) уравнения Риккати (59)
задает гессиан функции Беммана S\(t, х) поля фх:
W(t) = ^-(t,x(t)). (60)
Доказательство. Из формулы (57) следует, что вектор Vi в
любой точке it, х), покрытой полем экстремалей, задает градиент
функции Беллмана
dSj(t,x)
tfi(«.*) = —^—• (61)
153
Глава 8. Достаточные условия оптимальности
Матрица Р есть по определению матрица производных от *ф\
по начальным значениям <Tj, а матрица Q -— матрица производных
от х по начальным значениям (Т\. Следовательно, матрица Q~] —
это производные от а\ по ж, т.е.
х _ Щиг) д^ _ d2S^x)
ГЧ " д*х дх ~ дх2 ' U [Ы)
Совершенно аналогично, для поля ф2 имеем
Знак минус появляется из-за того, что ^p2(t,x) = ж?» так
как для получения аналога формулы (57) приходится иметь дело
с нижним пределом интегрирования.
Рассмотрим поле экстремалей ^Jx для левого многообразия N\
и поле экстремалей ф2 для правого многообразия N2. Поскольку
оба поля включают экстремаль х(-), имеем
&(<) = &(*), te[tut2]. (64)
Следовательно,
dSi(t,x(t)) dS2(t,x(t))
дх = to-' (65)
т. е. касательные плоскости к поверхностям уровня функций S\
и Si в точках траектории х(-) совпадают и противоположно
ориентированы.
В нижеследующих теоремах о необходимых и достаточных
условиях оптимальности мы покажем, что критерием
оптимальности является положительная определенность квадратичной формы
с матрицей {W\ - W2).
Теорема 9. Пусть выполнены предположения 1, 2 и 3 для
траектории х(-), удовлетворяющей принципу максимума Понтрягина
(50)-(53).
Тогда необходимым условием для того, чтобы траектория х(-)
доставляла слабый минимум функционалу (45), является
неотрицательность квадратичной формы с матрицей (W\(t) - W2(r))
при любом т £ (to9t\).
154
§ 46. Критерий оптимальности
Доказательство. Для траектории £(♦), дающей слабый
минимум, предположим противное, т. е. что найдется момент г и
вектор £ такие, что
№(т)М)-Шт)М)<0- (66)
Рассмотрим траекторию Х\(-) поля фх, которая кончается в точке
(т, х(т) +£)• Такая траектория существует, так как без ограничения
общности, в силу однородности, можно считать вектор £ сколь
угодно малым. Точно так же существует траектория Ж2О поля ф2,
которая начинается в точке (г, х(т) + £). Заметим, что для любой
точки (t, х) € М\ П м2 и для траектории (ж(-), w(-)), проходящей
через точку (t, х) и составленной из экстремалей полей <pL иф2,
имеет место равенство
£,(*,*) + &(*,*) = ./(*(•)). (67)
Рассмотрим разложения Тейлора
5Kr,x(r)-0 = ^(r,x(r)) + ^^^^ + i(^1(r)|,0 + ^l2).
И
52(г, ад +0 = £2(т, £(г)) + e&fr^i- ±(1Г2(тК, О + о(|£|2).
Складывая эти формулы с учетом (65), получаем
(5, + S2)(t, s(r) + С) - (5, + 52)(г, *(т)) =
= ^ ((W, - W2)(r)£, 0 + о(|£|2) < 0. (68)
В силу (66) и (67) мы добились уменьшения функционала J. В
силу произвольной малости £ и гладкости полей ЭД, углы наклона
как левой, так и правой половины построенной кривой в точке
их стыковки сколь угодно мало отличаются от утла наклона
экстремали х(т). Следовательно, построенную составную экстремаль
х(-) можно сгладить в точке излома, не нарушая неравенства (68)
и не выходя из С1-окрестности траектории х(-). Следовательно,
на траектории ж(-) не достигается слабый минимум, что
противоречит сделанному предположению. □
155
Глава 8. Достаточные условия оптимальности
Теорема 10. Пусть выполнены предположения 1, 2 и 3 для
траектории ж(-), удовлетворяющей принципу максимума Пон-
трягина (50)—(53).
Тогда достаточным условием для того, чтобы траектория х(-)
' доставляла сильный минимум функционалу (45), является
положительная определенность квадратичной формы с матрицей
(W[(r) - Wi{t)) при некотором г £ (to, t\).
Доказательство. Рассмотрим произвольную допустимую
траекторию ж(-) С M\f\Mi, отвечающую управлению гг(-), и
лежащую в е-окрестности (в топологии С) кривой ж(-). Тогда
\х(т) - х(т)\ < е, следовательно, х(т) = х(т) + £, где |£| < е.
Пусть х(-) пересекает N\ при t = t\ и N2 при £ = <2. В силу
определения функций 5,-(i, ж) имеем неравенства
г
/ f(t,x(t),u(t)) dtZ Si(t9x(t))
t\
и
tl
J f{Ux(t)iu(t))dt^S2(rix(r)).
T
Складывая, получаем
J(«(.)) ^ 5,(r, x(t)) + S2(t, x(r)). (69)
Вновь используя разложение Тейлора (68), из (69) получаем
j(«(.)) - J(u(-)) > \ {№ - w2)(t)s, 0 + o(\s\2) > о. □
Замечание 1. Из теорем 2 и 3 следует, что если матрица (W: - W2)
положительна при одном значении t, то она остается неотрицательное
при всех t € (<ь<г).
Замечание 2. Проверка необходимых и достаточных условий,
приведенных в теоремах 2 и 3, не приводит к дополнительным трудностям
по сравнению с проверкой предположения 3. При этом не требуете*
дополнительного интегрирования матричного уравнения Риккати (59)
156
§ 46. Критерий оптимальности
так как решение этого уравнения выражается через решения уравнений
Эйлера—Якоби, которое уже оказывается решенным при проверке
предположения 3. Остается лишь вопрос о положительной определенности
найденных матриц.
Полученные результаты остаются в силе и в более обшей
ситуации, в частности, при наличии поверхностей переключения.
Соответствующие результаты можно найти в [8].
Обсуждение различных аспектов принципа максимума Пон-
трягина дало нам повод поговорить о целом ряде вопросов
классического вариационного исчисления, которое, по словам Л. Янга,
«выступает не только как область математики, но и как летопись
математических понятий».
Литература
1. Алексеев В. М., Галеев Э. М., Тихомиров В. М. Сборник задач по
оптимизации. М.: Наука, 1984.
2. Алексеев В. М.у Тихомиров В. М.. Фомин С В. Оптимальное управление.
М.: Наука, 1979.
3. Арнольд В. И. Математические методы классической механики. М.:
Наука, 1974. Изд. 5. М.: УРСС, 2003.
4. Блисс Г. А. Лекции по вариационному исчислению, М.: ИЛ, 1950.
5. Дубровин Б. А., Новиков С П., Фоменко А. Т. Современная геомегрия.
М.: Наука, 1979. Изд. 5. М.: УРСС, 2001.
6. Дьедонне Ж. Основы современного анализа. М.: Мир, 1964.
7. Зеликин М. И. Однородные пространства и уравнение Риккати в
вариационном исчислении М.: Факториал, 1998.
8. Зеликин М. И. Гессиан решения уравнения Гамильтона—Якоби в
теории экстремальных задач // Математический сборник. В печати.
9. Коддингтон Э.Д., Левинсон П Теория обыкновенных дифференциать-
ных уравнений. М.: ИЛ, 1958.
10. Ленг С Алгебра. М.: Мир, 1968.
11. Милнор Дж. Теория Морса. М.: Мир, 1965. Изд.З. М.: УРСС, 2004.
12. Нарасимхан Р. Анализ на действительных и комплексных
многообразиях. М.: Мир, 1971.
13. Никольский СМ. Курс математического анализа. Т. 1, 2. М.: Наука,
1975.
14. Понтрягин Л. С, Болтянский В. Т., Гамкрелидзе Р. В., Мищенко Е.Ф.
Математическая теория оптимальных процессов. М.: Наука, 1983.
15. Рашевский П. К. Курс дифференциальной геометрии. М.: ГИТТЛ, 1956.
Изд. 4. М.: УРСС, 2003.
158
Литература
16. Филиппов Л. Ф. Дифференциальные уравнения с разрывной правой
частью. М.: Наука, 1985.
17. Фоменко Л. Т. Вариационные методы в топологии. М.: Наука, 1982.
18. Хартман Ф. Обыкновенные дифференциальные уравнения. М.: Мир,
1970.
19. Янг JI. Лекции по вариационному исчислению и теории оптимального
управления. М.: Мир, 1974.