/







Автор: Аннин Б.Д. Бытев В.О. Сенашов С.И.
Теги: свойства и структура молекулярных систем прикладная математика
Год: 1985




Текст
АКАДЕМИЯ НАУК СССР
СИБИРСКОЕ ОТДЕЛЕНИЕ
ИНСТИТУТ ГИДРОДИНАМИКИ им. М. А. ЛАВРЕНТЬЕВА
Б. Д. АННИН В. О. БЫТЕВ С. И. СЕНАШОВ
)
ГРУППОВЫЕ СВОЙСТВА
УРАВНЕНИЙ УПРУГОСТИ
И ПЛАСТИЧНОСТИ
Ответственный редактор
д-р физ.-мат. наук В. В. Пухначее
В
НОВОСИБИРСК
ИЗДАТЕЛЬСТВО «НАУКА»
СИБИРСКОЕ ОТДЕЛЕНИЕ
1985 ’
УДК 539.2 4- 517.858
Авннв Б. Д, Бытев В. О., Сенатов С. И. Группо-
вые свойства уравнений упругости и пластичности.— Но-
восибирск: Наука, .1985.
Монография посвящена систематическому исследованию
методами Ли — Овсянникова групповых свойств и построе-
нию точных решений уравнений теории упругости и пла-
стичности: уравнений Ляме, уравнений теории пластичности
Мизеса в Треска. Дена групповая классификация среды,
характеризуемой общей зависимостью тензора вязких на-
пряжений от тензора градиента скорости.
Книга предназначена для научных работников, специа-
лизирующихся по механике деформируемого твердого тела
и смежным отделам прикладной математики, аспирантов и
студентов.
Рецензенты Г. И. Быковцев, Kf. М. Волчков
1703030000—772
042(02)—85
НО—85—И
© Издательство «Наука», 1985'
ПРЕДИСЛОВИЕ
Во второй половине прошлого столетия норвеж-
ский математик С. Ли начал систематическое ис—
следование непрерывных групп преобразований, ко-
торые теперь называются группами Ли.' Им*было
определено и развито понятие группы, допускаемой
системой дифференциальных уравнений. Однако в
дальнейшем эти идеи оказались р- стороне от основ-
ных путей развития теории дифференциальных
уравнений. .
Л. В. Овсянниковым около 30 лет тому назад
было начато систематическое изучение применения
групп Ли к анализу структуры множества решений
дифференциальных уравнений механики и физики*
Благодаря исследованиям Л. В. Овсянникова, его
учеников и последователей групповой анализ стал
самостоятельным разделом теории дифференциаль-
ных уравнений.
В настоящее время методы группового анализа
широко применяется ко многим конкретным диф-
ференциальным уравнениям. В книге дается при-
менение этих методов к уравнениям теории упру-
гости и пластичности, общим уравнениям механики
сплошной среды... <
Главы 2, 4 написал Б. Д. Аннин; гл. 1, 3, кро-
ме § 7, 8, и гл. 6 — С. И. Сенатов, гл. 7 — В. О. Бы-
тев, § 7, 8 гл. 3 и гл. 5 написаны Б. Д. Анниным
и С. И. Сенапювым совместно.
3
Глава 1
ВВЕДЕНИЕ
В этой главе будут сообщены некоторые понятия и оп-
ределения, необходимые для понимания дальнейшего изложения.
Для более детального знакомства с методами группового анализа
следует обратиться к книгам Л. В. Овсянникова (52, 531.
§ 1. ГРУППЫ ЛИ И АЛГЕБРЫ ЛИ
9
1°. Пусть W — W-мерное евклидово пространство векто-
ров х = (xi, ...,xN), рассмотрим отображение
f-.R^XB^-R^, . (1.1)
где B^R' — открытый шар с центром в точке О е RT. Определим»
преобразования Та пространства RN в себя равенством
х" =*Тах = f(х, a), x<^RN, а*=В. (1.2)
При достаточно малых а, |а| < е, такие преобразования образу-
ют группу относительно операции композиции:
(Та ° Тъ)х == Та(ТьХ) 5= /(/(ж, Ь), я) — ТСХ.
При этом для каждого преобразования существует обратное пре-
образование и существует тождественное преобразование:
f(f(x, а), аг1) = х, f(x, 0) = х.
Предполагается, что f^C"‘(RK, В). Такая группа называется ло-
кальной г-пара&етрической группой Ли GTi
Пример 1. Преобразования растяжений .Х1=еах, и сдвигов
хг — Xi + b (i — i, Ny образуют двухпараметрическую группу пре-
образований пространства RN.
Важное место в теории локальных групп Ли занимают одно-
параметрические группы G,. Можно сказать, что GT как бы «сот-
кана» из своих однопараметрических нодгрупп, ее свойства пол-
ностью определяются свойствами однопараметрических подгрупп.
Для группы Gi шар B^R1 является некоторым интервалом.
Фиксируя х и изменяя параметр а вдоль этого интервала, полу-
4
1им некоторую кривую в пространстве R”, содержащую точку х.
Касательный вектор к этой кривой в точке х вычислим по фор-
муле
(‘-3)
Для группы растяжений из примера 1 касательный вектор имеет
вид 1 = (х,, хя), для группы сдвигов | = (1, 1).
Формулы (1.3) определяют касательное отображение % ; RN -►
которое является лишь первым .приближением соответст-
вующего преобразования группы G^t
х'— х + #,х')а +о(а). (1.4)
Под действием преобразования Тл гладкая функция Fkx) преоб-
разуется следующим образом:
TaF(x) = F(Tax) = Fix) + a|(®)F'(x) + o(a),
или в координатной форме
• / i — 1, ..., 2V\
F(Tax) = F(x) + aa&^ + o(a)
Последнее равенство приводит к понятию инфинитезимального
оператора”
Хв-&г)^ (1-5)
Так, группе растяжений- из примера 1 соответствует оператор
N
Ха = х' 5—, группе x'i = Xi + ь — оператор Хь = У —. Инфи-
нитезимальные операторы (в дальнейшем просто операторы) для
данной группы G, образуют алгебру Ли £„ которая представляет
из себя г-мерное линейное векторное пространство, замкнутое
относительно операции коммутации. При этом операция комму-
тации удовлетворяет тождествам
[X, У] = -[У, XI, [X, аУ + pZ] = atX, У] + р[Х, Z\, •
[X, [У, Z]] + [У, [Z, X1J + [Z, [X, У]] =0.
Пример 2. Векторы из R3 с операцией векторного умноже-
ния есть алгебра Ли Lt.
Для операторов (1.5) операция коммутации определяется по
формулам
rV V ft*' 1 I I ___
• IAO,APJ = feagr,
L г \ « я/г
= (x<4-xp&)JL (1.6)
° По повторяющимся индексам производится суммирование.
5
Если Xi, Хг есть базис алгебры Ли Lr, тогда
[Xj, Xj-] = СуХа (a, I, j — 1);
постоянные Су называются структурными константами. Знание
структурных констант позволяет, с точностью до изоморфйзма,
восстанавливать .алгебру Ли L,.
Для операторов Ха, Хь из примера 1 имеем [Хо, XJ = — Хъ.
Операторы Ха, Хь порождают алгебру Ли L2, которая соответст-
вует группе Gg.
Алгебра Ли — объект гораздо более простой по сравнению с
локальной группой Ли, поэтому в дальнейшем мы будем иметь
дело в основном с алгебрами'Ли. Зная алгебру Ли, при необхо-
димости всегда можно восстановить группу Ли, для- этого, надо
решить систему обыкновенных дифференциальных уравнений
tlZ- / f
= 11 С3- )> v * * * * xi |а=о ~ xi‘
Пример 3. Для оператора X = х, сцстема уравнений Ли
имеет вид =*= xit xt |о=0 == Х{. Решая ее, получаем хг = е х^
Замечено, что уравнения механики, как правило, допускают
следующие преобразования.
1. Перенос по времени t' = t + а, ему соответствует оператор
V а
переноса л0 = .
2. Переносы по координатам x't— x-t + а„ операторы Х| = ^-
(г = 1,2,3). ’ ,
3. Преобразования Галилея: х{ — xs + iait и, — и, + а{, опера-
торыЛ-lj^+i (I-1,2,3). •
4. Вращение вокруг оси xs:
хг = х, cos,a + х2 sin a, ut = и, cos а + и» sin а,
' . » - . (1*7)
xs == — хг sin а 4- х2 cos а, иа = — ut sin а -f- и2 cos а,
vd 0 , д д г, ,
оператор А — — z, — + и2 — и} $-. Вращение вокруг
- 1 2 1 2
других осей получается из (1.7) круговой перестановкой ин-
дексов.
5. Растяжение t' =eat, х\ = ех^, оператор X = t-^ 4-
В каждом из рассмотренных случаев указаны только коорди-
наты преобразуемых величин, те величины, которые явно не ука-
заны, преобразуются тождественно..
2°. Для работы с алгебрами Ли в дальнейшем понадобятся
следующие определения.
6
Определение»^ Векторное подпространство N<=L называ-
ется подалгеброй Ли L, если для любых и, v&N следует, что
lu, v\ &N.
Пусть Gr — группа Ли и Lr — соответствующая ей алгебра Ли,
тогда каждой подгруппе группы Gr соответствует некоторая под-
алгебра из алгебры Ли LT .и наоборот. Такое соответствие харак-
терно и для более специальных классов подалгебр и подгрупп.
Определение. Подалгебра Z^L называется центром ал-
гебры Ли L, если для любых элементов u&Z, v^L следует
In, г) =0.
Определение. Подалгебра I^L называется идеалом ал-
гебры Ли L, если для любых иsL, пе/ следует [и, р]е/.
$ 2. ИНВАРИАНТЫ И ТЕОРИЯ ПРОДОЛЖЕНИЯ
Определение. Не тождественно постоянная функция
7(аг) называется инвариантом группы Gr, если для любого преоб-
разования группы Т'а е GT следует TJ = I.
Пример 4. Для группы растяжений х’ — ах, у' = ау в про-
странстве инварианты -имеют вид х/у == const.
Теорема. Для инвариантности функции I-.R^-^-R1 относи-
тельно группы Gr с базисными операторами Ха = '^1~ (а==
= 1, ..., г) необходимо и достаточно выполнение условий
Ха1 = й±1^0 (а = 1, ...,г).
Определение. Многообразие McR” называется инвари-
антным многообразием группы GT, если для любых х^М и Та^
е Gr следует Тах &М.
Пусть многообразие М задано условием
M:4'°U) = 0 (о == 1, ..., а),
где 4го — функции из класса С* такие, что общий ранг [531
(d4"7dxt)\M~s.
Теорема. Многообразие М является инвариантным относи-
тельно группы Gr тогда и только тогда, когда выполнены тож-
дества'
ХаЧ^а(х) I м == 0 (а = 1, ..., г;; а — 1, ..., а).
Пример 5. Рассмотрим однопараметрическую группу вра- - *
щений на плоскости ху:
х' =>х cos t + у sin t, у'. = —х sin t + у cos t.
Этой группе соответствует оператор X = у — x~Sy‘ Многооб-
разие ж2 + у2 = 1 инвариантно относительно группы вращений.
Рассмотрим систему дифференциальных уравнений первого
порядка
8 : Fa(x, и, р) = 0 (а = 1, ..., s),. (2.1)
7
где x=(.xt, хп), u=^{Ui, ..., ит), р = (pt Система
(2.1) есть система дифференциальных уравнений с т искомыми
ди*
функциями от п независимых переменных, р} — Систему
уравнении (2.1) будем рассматривать как многообразие в прост-
ранстве R 1 (х, и, р). В этом пространстве х, и, р — независимые
переменные, М = п + т + пт. Такое пространство называется
продолженным пространством пространства R 0 (ж, и), N0~m + n.
Бели многообразие М <= /?”+т инвариантно относительно груп-
пы Gr, то продолженное многообразие М a: R 1 инвариантно от-
носительно продолженной группы GT, которую нетрудно восста-
новить по группе GT. . .
Пусть группа Gr порождается операторами Ха, тогда Gr по-
рождается операторами Ха'
• я .. я (i = 1, ’• ч п \
+ , , Ь (2.2)
oxi \к = 1, ...,т/ ' '
Х»-Хв + ЙЛм,- (2.3)
где ga, T]a — функции ТОЛЬКО X, и,
&=£i(»£)-PBMU),
Di = я— *Н~ Pi —5>
dxi дик
Пример 6. Продолжим оператор X — у — х-~ в прост-
ранстве R3{x, у, и), где и — и(х, у). Имеем X = X + Px^.~ Ру
____ ди ___ ди
Рх~~д^' Pv ='до-
определение. Будем говорить, что система уравнений
(2.1) инвариантна относительно группы GT, если система уравне-
ний (2.1) инвариантна относительно продолженной группы Gr-
Это определение дает способ построения группы, допускаемой
системой дифференциальных уравнений (2.1), т. е.
XFa(x, и, р)1в = 0.
(2.4)
Из системы (2.4) получаем уравнения для определения функций
а следовательно, и способ построения алгебры Ли.
Пример 7. Найдем группу непрерывных преобразований*
допускаемую уравнением
[ ди \ 2 [ дц \ 2 '
| -Т— + I Т— = 1.
\ 1 / V i •
(2.5)
Уравнение (2.5) служит для определения функции напряжения
в задаче пластического кручения.
8
Итератор (2.2) для уравнения (2.5). следует искать в виде
X = I1 (жп ж2, и) + |2 (®lt х2, + n(*i, «2, не-
согласно формуле (2.3) продолженный оператор имеет вид
х'-х+с.^ + с,4-.
, вл , йт) / atf , \ ди
где L = -X2- + Pi -а2- — Рв ЙГ~ + Pi ~?Г~ Ь Pi = й~ •
ъг QX гг ди ГР| дх гг qu р п qx
Действуем продолженным оператором X на уравнение (2.5), пог
лучаем
PiSi "I* РгЬ * 0* - (2.6)
Для перехода на многообразие, задаваемое системой (2.5), в урав-
нении. (2.6) положимР2 = У" 1 — Pi- Теперь после несложных
преобразований получаем
^Ч дх ди дх I ди дх ди I ^11 ди дх„ ди I
.п3 «£ Iя = (1 - „2) Г Л _ „ 4- (Л-„2)<Т
+ ди J ' Р1/ Pl ^йа:2 дх^ ди J ' ди J "
(2.7>
Приравниваем нулю коэффициенты при одинаковых степенях pt
в уравнении (2.7). В результате получим определяющие урав-
нения
Jl = 0,’ ^ = 0, ^ = 0, Д = 0,
ди 1 ди дх1 1 дх^ 1
^»_^ = о 15-^ = 0 = 0 (2'8>
ди дх2 ’ ди dxt ’ дх^ дх%
Интегрируя уравнения (2.8), получим
») = aii + cs, =» axt — bxt + с„ = ах2 + bxi + cg,
где а, Ъ, с»; cg, с, — произвольные, постоянные. Следовательно,
уравнение (2.5) допускает группу Gs, при этом базис алгебры
Ли L5 имеет вид
у । । д -у д д
1 ~иШ + Ж1^ + Х2д^ Х2 —
V y & V
4==^’
Если требуется вычислить группу Gr, допускаемую системой
дифференциальных уравнений второго порядка, а именно такие
уравнения в основном и встречаются в механике сплошных сред,
то необходимо воспользоваться условием инвариантности опреде-
9
ляемого системой многюйбрааияотаосительно дважды ^продолжен-
ной группы Gr, которой соответствует оператор X — X + оц ту»
‘ Л к 0
где оЬ - Ъ, (t?) - rf„D, (S’), D, - Д + rf + г^.
а2
k & Uh
“ дх дх-1 *ПРИ этом критерий инвариантности имеет вид
i 3
XF(x, и, р, г) Ге = О, S; F(x, и, р, г) == О,
J" = (X,, . . ., Хп), U =(ЦХ, ..., Um), р=(р{, Рп), Г =(/н, . . ., Г™п).
§ 3. ИНВАРИАНТНЫЕ
И ЧАСТИЧНО ИНВАРИАНТНЫЕ РЕШЕНИЯ ’
ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
Пусть Gr— группа непрерывных преобразований, допус-
каемая системой дифференциальных уравнений
S:F(x, и, р, г) = 0. (3.1)
Оказывается, под действием преобразований группы Gr решения
системы уравнений (3.1) снова переходят в решения этой же си-
стемы. При этом некоторые решения системы (3.1) переходят
сами в себя, т. е. являются неподвижными точками относительно
действия группы Gr. Такие решения находить, как правило, про-
ще, поскольку они зависят от меньшего числа переменных, чем
произвольное решение исходной системы.
Пусть Н — подгруппа группы Gr, допускаемой системой диф-
ференциальных уравнений (3.1).
Определение. Решение и — <р(я) • называется Н-инеариант-
ным решением, если многообразие и = <р(я) инвариантно относи-
тельно группы Н.
Алгоритм построения инвариантных решений (Я-решений)
состоит в следующем. Пусть L<^Lr и L — подалгебра, соответ-
ствующая подгруппе Я, I,, ..., I, — полный набор инвариантов,
который определяется из решения уравнений
Х₽7а = 0, fc=l, s; р = 1, ..., Z, (3.2)
тде X,, ..., Xi порождают L, а Д, ..., 1„ — полный набор функ-
ционально независимых решений уравнений (3.2). Инвариантные
решения можно искать не для каждой подгруппы Я с: Gr, а толь-
ко для подгрупп, удовлетворяющих необходимому условию:
Теорема. Для существования Н-решения необходимо, чтобы
rang l\dltfduh\\ = m. . .(3.3)
Инвариантные решения строятся следующим образом: m ин-
вариантов 7,, ..., 7т, зависящих от искомых функций ut, ..., um,
16
назначаются функциями от оставшихся s — m — l инвариантов, -
в которые входят только независимые переменные. Поскольку
s = т + п — I, то число независимых переменных меньше п я
равно п — 1. После подстановки инвариантного решения в систе-
му S она записывается только в терминах It, ..., I, и называется
системой S/H, которая, как правило, проще исходной системы S.
Плоские, одномерные, осесимметричные, автомодельные реше-
ния— вот далеко не полный перечень инвариантных решений,
широко используемых в механике сплошных сред и ее прило-
жениях.
„ „ / ди\% , / ди\2 . п
Пример 8. Уравнение 1^-) + Igj-I =1 из примера 7 до- -
V & . & , ® ТТ
пускает оператор л1 = + х2 Построим инвари-
антное решение на этой подгруппе. Инварианты имеют вид Л “
= xjxz, h = uJxi. Необходимое условие (3.2) выполнено, поэто-
му инвариантное решение следует искать ,в виде w = «1n(z),
г = Л. После подстановки этого соотношения в уравнение полу-
чаем обыкновенное дифференциальное уравнение, (и + «и')2 +
+ г2и' = 1, которое в данном случае является системой S/H.
Если не выполнено необходимое условие (3.2), то можно ис-
кать частично инвариантные решения, введенные Л. В. Овсян-
никовым [52]. Пусть
rang lld/(/0uAll == т — б, (3.4)
где Л, ..., 7™-* — инварианты группы Н, которые удовлетворяют -
условию (3.4). Переходим к переменным
— и), Уг = 1т-ь+г(х, и) « (3.5)
(i = 1, ..., т — б, i = 1, ..., р), р =! п — г* + б, г* = rang 1|.
Теперь из соотношений
р4==р’(р) (i = l, т — б)
определяем функции иъ ..нт_в через х, у, v и uf — um~t+a
(о = 1, б). Подстановка этих выражений в систему дифференци-
альных уравнений (3.1) приводит к системе дифференциальных
уравнений относительно т — б функций v' от р независимых пе-
ременных у1, ..., и системе уравнений относительно 6 функ-
ций w6 от п переменных. Полученные уравнения описывают
частично инвариантные решения ранга р и дефекта б. К частич-
но инвариантным решениям относятся, например, простые и
двойные волны, которые широко применяются в. механике.
§ 4. ОПТИМАЛЬНЫЕ СИСТЕМЫ ПОДАЛГЕБР
Определение. Две подгруппы Н и Н' группы Gr на-
зовем подобными (сопряженными), если существует внутренний
автоморфизм А группы, Gr такой, что А(Н)—Н'.
11
Пусть Н л Н' подобны, тогда для любого Я-решения в — ф(хг
существует преобразование Т Gr такое, что Т<р(х) — ф(ж), где
и = ф(ж) есть инвариантное Я'-решение. Поэтому для построения
всех существенно различных инвариантных решений необходима
построить систему неподобных подалгебр (оптимальную систему
подалгебр).
Пример 9. Рассмотрим группу движений в пространстве Яг
v д -жг д -гг д д it л,
Л, = -х~, Ла=-г-, ----х-%-. (4.1
• 1 Ох * Оу3 а Ох ду ' *•
Пусть А — автоморфизм, соответствующий оператору К, тогда
автоморфизм А действует на оператор L по формуле 145]
* /.2
A (L) = L + а [К, L\ + |Я, [Я, Я]] + ...
... + £]...]] + ....
Автоморфизм, соответствующий оператору Xi, действует на опе-
раторы (4.1) по формулам
А1(Х1)=Х1, Л(Х2)=Х2, А1(Х3) = Х3-аХ2.
Автоморфизм, соответствующий оператору Xi, действует на опе-
раторы (4.1) по формулам
Л2(Х1)=Х1, А2(Х2)==Х2, А2(Х3)=Х3 + ЬХ.
Автоморфизм, соответствующий оператору А3, действует на опе-
раторы (4.1) по формулам
*
A2(Xj) = Xi cos а + Х2 sin a, Л3(Х2) = —X, sin а + Х2 cos а,.
А3(Х3)=Х3.
Рассмотрим оператор
Х = с1Х1 + с2Х2 + с3Х3. (4.2)
Если с2 0, то
А,А2Х== с,Х, 4“ с2Х2 Ч- с3Х3 с3аХ2 с3ЬХ,.
Полагая а = с,/с3, Ь = — cdga, получим, что прй с3=#=0 оператор
(4.2) подобен оператору Х3. Если с3 = 0, то нетрудно показать,
что оператор (4.2) подобен оператору X,.
Окончательно получаем, что оптимальная система одномерных
подалгебр 0j имеет вид
X., Х3.
Другие способы построения оптимальных систем можно найти
в работах [52, 53, 75, 951.
Замечание. Вообще говоря, необходимо строить оптималь-
ные системы двумерных нодалгебр 02, трехмерных подалгебр 0S
12
а -г. д. Но в дальнейшем изложении в основном будем искать
инвариантные решения построения только на одномерных под-
алгебрах. При необходимости мы будем действовать следующим
образом: для системы дифференциальных уравнений S строим
оптимальную систему 0,, пользуясь 0t, выписываем системы
S/H, для которых ищем допускаемые группы G, а для найден-
лых групп снова строим оптимальные системы, и т. д.
§ 5. ГРУППОВАЯ КЛАССИФИКАЦИЯ
Часто многие уравнения механики содержат произволь-
ные, заранее не < фиксированные параметры или функции, кото-
рые следует, как правило, определять опытрым путем, в группог
вом анализе они называются произвольным элементом. Напри-
мер, это может быть показатель адиабаты в уравнениях газовой
динамики или закон текучести в теории пластичности и т. п.
Оказывается, методы группового анализа позволяют целенаправ-
ленно выбирать аналитический вид таких функций, при этом тре-
буется найти вид произвольного элемента с тем, чтобы заданные
уравнения допускали максимально широкую группу. Такая за-
дача называется задачей групповой классификации. Для уравне-
ний теории пластичности она решалась в работах [39—41, 70,
71, 99].
Необходимо отметить, что задача групповой классификации
всегда решается с точностью до преобразований эквивалентности,
которые действуют на произвольный элемент, сохраняя структу-
ру самого дифференциального уравнения.
Алгоритм решения задачи групповой классификации состоит
из двух частей: сначала ищется основная группа Go, при этом
на. произвольный элемент не накладывается никаких ограниче-
ний. Затем перечисляются все специализации, при которых груп-
па G, допускаемая системой дифференциальных уравнений, ста-
новится шире основной группы Go.
Глава 2 ~111 1 - ------
ГРУППОВЫЕ СВОЙСТВА
УРАВНЕНИЙ ТЕОРИИ УПРУГОСТИ
Пусть t — время, Xi, х2, х3 — декартова система коорди-
нат; ut, и2, иг — компоненты вектора смещения; vt, v2, vs— ком-
поненты вектора скорости, o«, ew (i, j = 1, 2, 3) — компоненты
тензоров напряжений и деформаций соответственно; X, ц — по-
стоянные Ляме, р — плотность.
• 1 ii
13
Динамические уравнения линейной теории упругости имеют
вид (p = const)
йах1 да12 йа13
dt dx^ dx% dxs ’
й»х. йих J /йих йи2\. (0.1>
V1 = ~at' 611 = дх^' ®12 ~2 ^йж^ Т
Оц === Х(вц 4у 622 "Ь" 633) 2рвц,
1
. °12= 2ре12, о*-'о
О<—£
1
Символ £ > означает круговую перестановку индексов.
3<—2
Уравнения (0.1) дополняются начальными и граничными ус-,
ловиями
|t=0 ” (*1, -^2’ ^-э), Vi |t=O = ^2» ®з)» (^1> ^-2» ^з) 4"
СцП} = Т* (t, хх, х2, х3) на ST, (0.2}
' Ui = и* (t, хх, х2, х3) на Su,
Su + ST = S.
Здесь S — поверхность тела V, величины с ноликом- и звездочкой
считаются заданными. Исключая скорости и напряжения, полу-
чим из (0.1) уравнения Ляме
р = (к + р) grad div и 4- рДи, - (0.3)
dt •
02,02 -2
A ss-----1-----1---.
йа:2 дх% йж|
В цилиндрической системе координат г = (х? + х2)1/2, <р
= arctg (жг/хз), z = х», и — (ит, иф, uz) уравнения Ляме имеют вид
(X 4- 2р)
8J
dr
2р
г
a<nz
Йф
А, 4-2р. 9J
г й<р
2ji
даг
Й2
ййг‘
йг
-2
8 “ф
= р^Г’
ot
Ййг] й2иг
^ф]=р"й?“’
(0.4>
= р_^’
ди. 1 я t ди,.
J^—0: 4. А (п. А 1 А—5
' dz г dr V
1 ( 1 8иг 8и<р\
®г- гДУй^ -йГ/’
®г=4-[44г(^ф)-
Г Йф ’ ' .
= 2 \ йг йг
1 вкг]
Г Йф
14
1ри этом компоненты тензора деформаций и напряжений равны
диг . 1 0И<₽ . ит диг
~ Л7’ Е” “ ~~д^ + &г ”
1 ц<р ,, 1
8гч> 2 \ дг г г йф /’
л /ди, ди,\ А ! а ди, йи„\
= + + (°-5>
Or = AJ + 2цег, оф = X/ 4- 2цё„ oz = XJ 4- 2p.ez,
Огф Z= Grx =3 2p8rz, Gfpz S=S 2|18фХ*
Пусть функций <p = <p(i, Xi, хг, x3), ifc = i|>i(t, xu x2, x3) (i =
= 1, 2, 3) суть решения следующих волновых уравнений:
а®£2- = Дф, 6®—£-=Дф4 (г = 1,2,3), /п„.
йг dtz ' (0.6}
о® = р/(Х 4- 2р), 6® = р/р.
Тогда решением уравнений Ляме (0.3), как нетрудно убедиться,
будет
п — grad<p4- rotfy ф2, ifs). (0.7)
Отыскивая точные решения волновых уравнений (0.6), получим
по формуле (6.7) точное решение уравнений Ляме (0.3).
§ 1. ГРУППОВЫЕ СВОЙСТВА
ПРОСТРАНСТВЕННЫХ УРАВНЕНИЙ ЛЯМЕ
Для исследования групповых свойств уравнений Ляме
запишем систему (0.3) в виде U — характерный размер)
—j-= graddrvu 4-0Ди; (1.1).
йт
х* = xjl, т = t (Х4- p)V2p-1/2₽=р/(Х 4-- Ц)> «{= (г, х*, х*, х*).
В дальнейшем звездочки у координат опущены. Оператор, до-
пускаемый системой (1.1), ищем ввиде
v т* । t' д . д *
~^>~дх + +
ГДе т]< & = 1» 2, 3) — искомые функции от т, xt, ut (1=*
= 1, 2, 3). Продолжим оператор X на вторые производные. Затем
из критерия инвариантности многообразия, задаваемого уравне-
ниями (1.1) в продолженном пространстве, получим систему оп-
ределяющих уравнений. Решая эту систему, находим [94] сле-
15
Таблица 1
Тип подал- гебры Подалгебра Базис подалгебры Тип подал- гебры Подалгебра Базис подалгебры
*1 д ©1,1 ©1,2 ©1,3 «1,4 ©1,5 ©1,6 аЯ + Zs Xo+Za aX04-X#4-Za R X. аХ0 + Xg Г ** N co in ® r- co 0a S -f* «• «• 0 0 4 0 фффффф ф ффф.'ф Xg, Xg, R, Za Xo, Xlt Ха, Я Xg, Xg, Xg, aR 4* Za Xg, Xlf Xg, Xs 4-Za Xo, Xlt Xj, Xg Xg, Xg, yXg.+ Xg, aR 4- Za ^lc Xg, <XXO 4" Xg, Xg+Zg Xg, Xg, R, Za aX„4- Xi, Xg, Xg, R ,Zi> Zj, Za» R Zj» Z^, Za» Xg
©2 ффффффффф м . ьа м м bs ьа to ьз ьз Ь оо м о> Ъ Хо, аЯ 4" Za Xg, Xa+Za Х>. X, Хо, Я Я, Za a X0+Xa, R а Xg 4- Х3, yR 4" Za Ха, aX0 4" Xg oX0+X3, Xo + Za
©6 ф ф ф ф ф йл сл «л ел сл (₽* оа м Xg, Xg, Xg, Xa, R Xg, Xlt Xg, R, Za Xg, Xg, Xg, Xg, aR + Zg 'Xg, Xg, aXg+X8, R, Za Zi, Za, Za» Xg, R
©8 ффффф’фффффф woac*5oaww с*з со оа со с*з L * в оо ч ® ел k « N н о Xg, Xg, aR + Za Xo, R, Za Xg, Xg, R Xg,Xg, Xg aX0 4" Ха, Я, Za aX0 4- Xb Xg, R aX0 4- Xlt Xg, Xg -Xb Xg, aR 4- Za Xlt Xg, aX04- X,4-Za Х1г Xg, X04-Za Zj, Za, Za
©e ©6,1 ©6,2 Xg, Xg, Xg, Xg, R, Za Zj, Zj, Za, Xg, Xg, X3
©7 ©7,1 ©7,2 Zi, Z2, Za, Xg, Xlf Xg, Xt Zg, Zg, Za, R, ^1, Xg, Xg
дующие операторы, допускаемые уравнениями Ляме (1.1):
п д , д д п 8 . д
v __ д v ___ д v д
А1 ~ а^’ 2 - а^’ 3 = а^’
г, ь д д. - д д
Z1~~XzdZ a8fcr + «2gr-—“8^-f
о л о л
4-w.jr-, (1-2)
°ди’ ' '
о
(1.3)
16
, — 8 _ 8 , д 0
'2 Ъ Qx Qx ' Wg q U± g ,
1 О 1 0
„ д д . д d
"Я -- Xi A Xg a + a “” Uo л у
®ж2 2 &Х1 1 ®И2 2 0и1
D 0 . 0 , 0 > 0
Л — Т-д- + X, ^—. + X, S----Ь хч -X—,
. дх 1 10л?1 гйяа 30ха
Y______0
А« — дх •
Здесь wt, w2, w3 — произвольное решение уравнений (1.1).
Группа Ли оказалась бесконечномерной с нормальным дели-
телем, порожденным операторами Ро, Ри, что является следствием
линейности и однородности системы (1.1). Фактор-группа по это-
му нормальному делителю порождается восемью операторами
(1.3). Будем ее в дальнейшем обозначать Gs, а соответствующую
подалгебру Lg. Операторы (1.3) соответствуют следующим ко-
нечным преобразованиям, при которых система (1.1) -сохраняет
свой вид (выписываются только фактически преобразуемые ве-
личины):
а) оператор переноса по времени Хо: т' = т + а (а — произ-
вольная постоянная);
б) оператор переноса по координате Xtz = хх + b (Ь — про-
извольная постоянная);
с) оператор растяжения R: х' = 1х, хх = 1хи х2 = 1ха, х8 = 1ха
(Z > 0 — произвольная постоянная);
д) оператор Zs вращения вокруг оси ^3: ф' = ф + с (с — про-
извольная постоянная); действительно, как нетрудно видеть, за-
мена ф на ф + с не меняет вид системы уравнений Ляме (0.4),
записанной в цилиндрической системе координат г =(х® 4- Ха)1/2,
Ф = arctg (xg/x,), z=-x3. В этой, системе оператор Z3 имеет вид
’ (1-4)
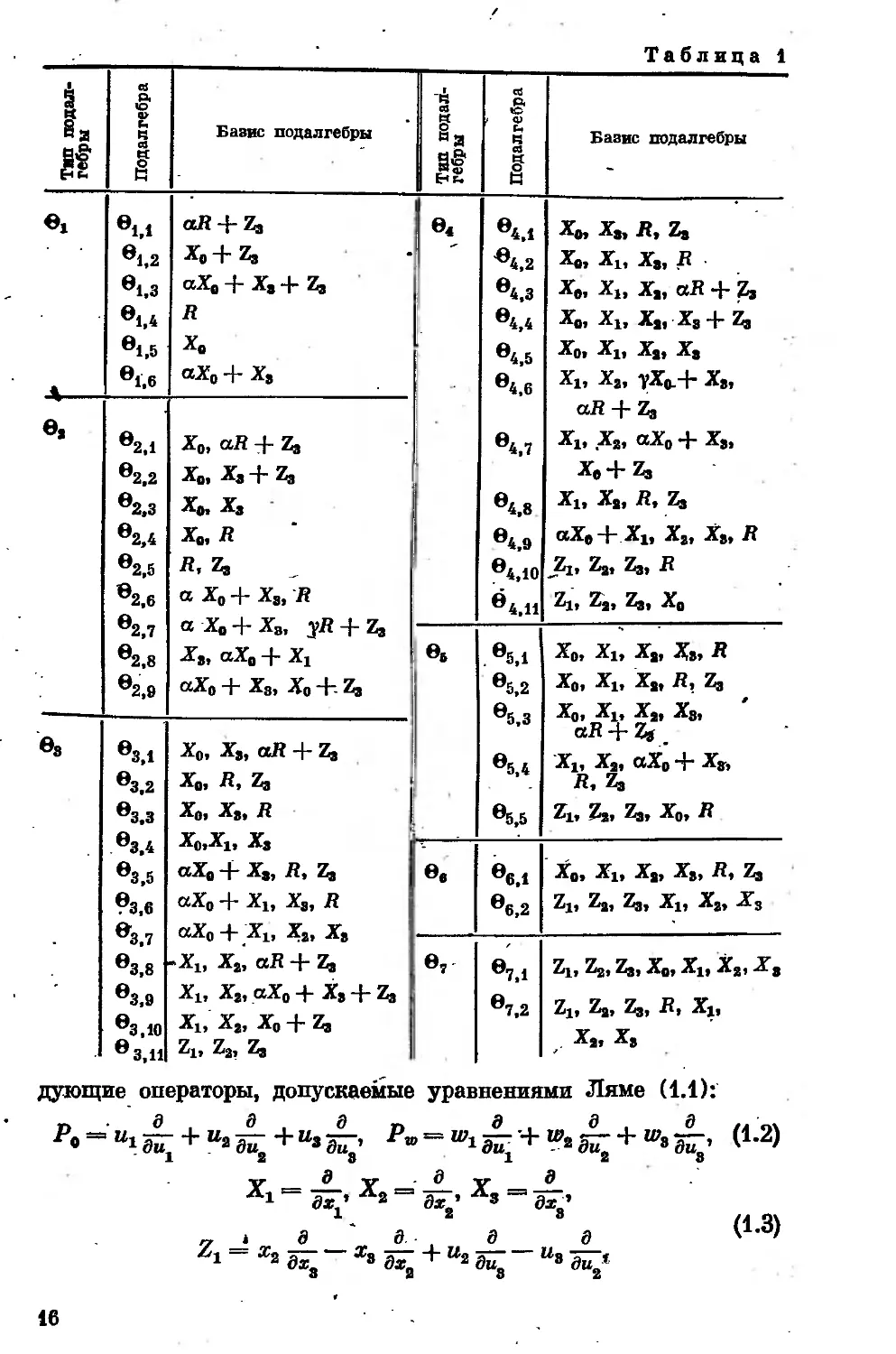
Оптимальные системы подалгебр LT порядка г -1, 2, ..., 7 для
Lg указаны в табл. 1, где a, f — произвольные постоянные.
§ 2. ИНВАРИАНТНЫЕ РЕШЕНИЯ
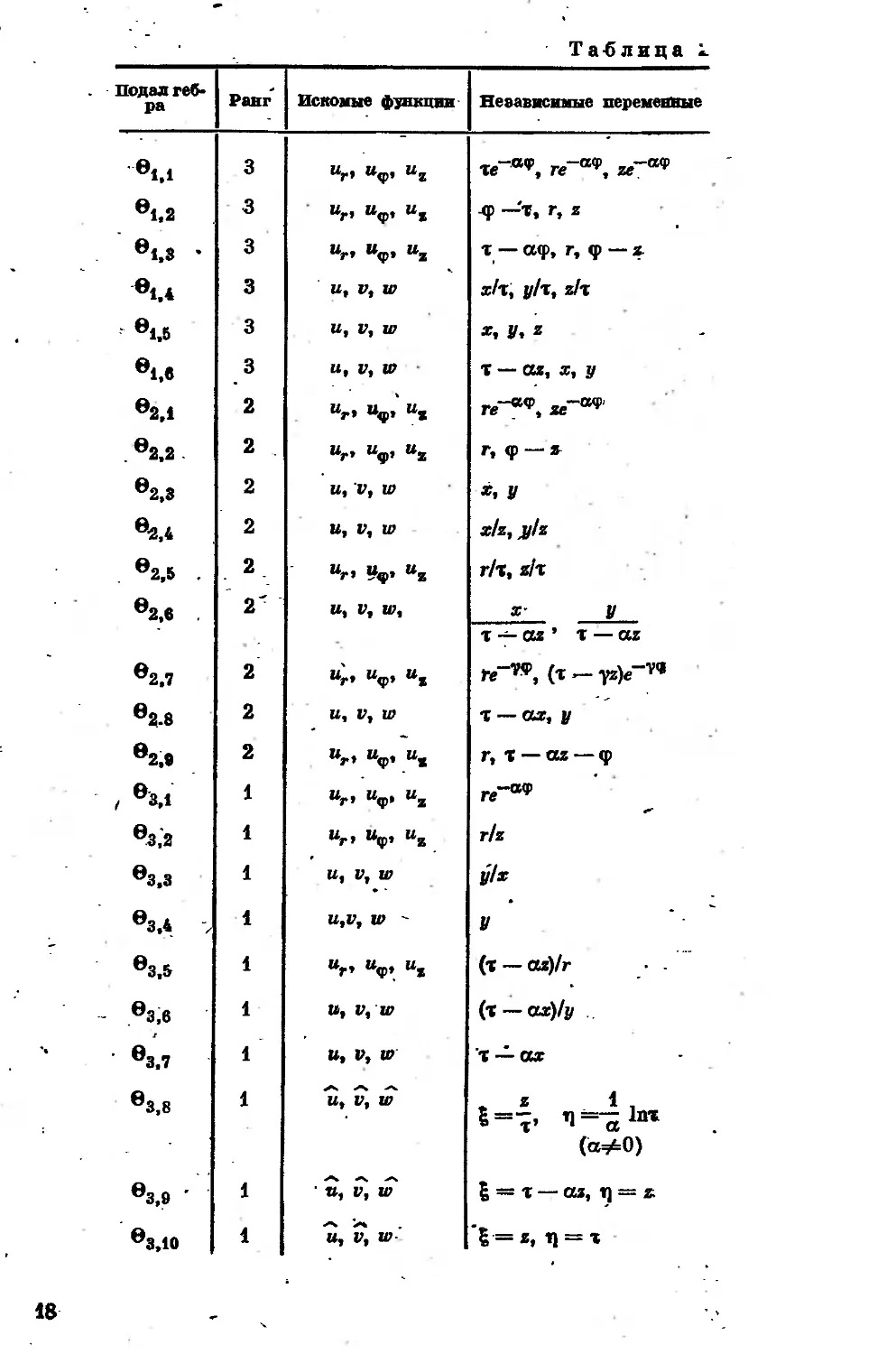
1°. Вид инвариантных решений рангов р_= 1, 2, 3 дан в
табл. 2. При этом введены следующие обозначения:
х = х„ у = х2, z = x3, u = u„ v = u2, iv —Us,
r=‘(xl + у2)172, ср = arctg (y/x),
и = /(g) cos T) + g(g) sin Ц,
v — /(|)jin 4 —_g(£) cos Ц, w = ^(g),
БИБЛИО i £HA
КАЗАНСКОГО
(2.1)
’’ООЮЗ
' Б. Д. Аннин, в. О. Бытев, С. И. Сенатов
17
Таблица к
Подал геб- ра Ранг Искомые функции Независимые переменные
®М 3 те-®’, те~а9, «Г09
®1,2 3 “г. “ф- «1 -<Р —'т, Г, Z
<*1,3 • 3 ^ф> ^Z «4 1 •в 1 н
«1,4 3 ut vt w х/т, у/т, z/t
в1,5 3 U, V, w Х9 У, z
®1,в 3 u9 V, W т — ал, х, у
®2,1 2 ur> “ф. «ж ге-®ф, хе-®*51'
®2,2 2 «Г. «ф. »z г, <р — »
®2,3 2 и, щ w *. У
®2,4 2 U, V, w x/z, j//z
®2,5 . 2 %p> Wz r/t, z/т
®2,в . 2' U, 1/, w, х- у
т — az ’ т — az
®2,7 2 «4» иф> «« te“”, (т >— yz)e“”
®2-8 2 U, Г, w т — ах, у
®2,9 2 Mr» V «Ж r9 т — az — ф
t ®3.1 1 «Г. «ф. И, re"®’
®3,2 1 «г. «ф. «Z r/z
®3,3 1 u, w ylx
«3,4 7 1 U,V, w " У
®з.з 1 «г» «ф» И» (т — az)/r
«3,8 1 U, V, W (т — ах)/у
«3,7 1 U9 V, w х —ах
«3,8 1 Ut Г, w <Trt Н 1» II rI- 3
(a¥=0)
«3,9 ‘ 1 Щ V, w 5 = т — az, г) = z.
X*
«3,10 1 Щ V, w tTrt II -Й II <4
18
i u<f, и* — компоненты., вектора смещены в цилиндрической си-
стеме координат, а, 1-— произвольные постоянные.
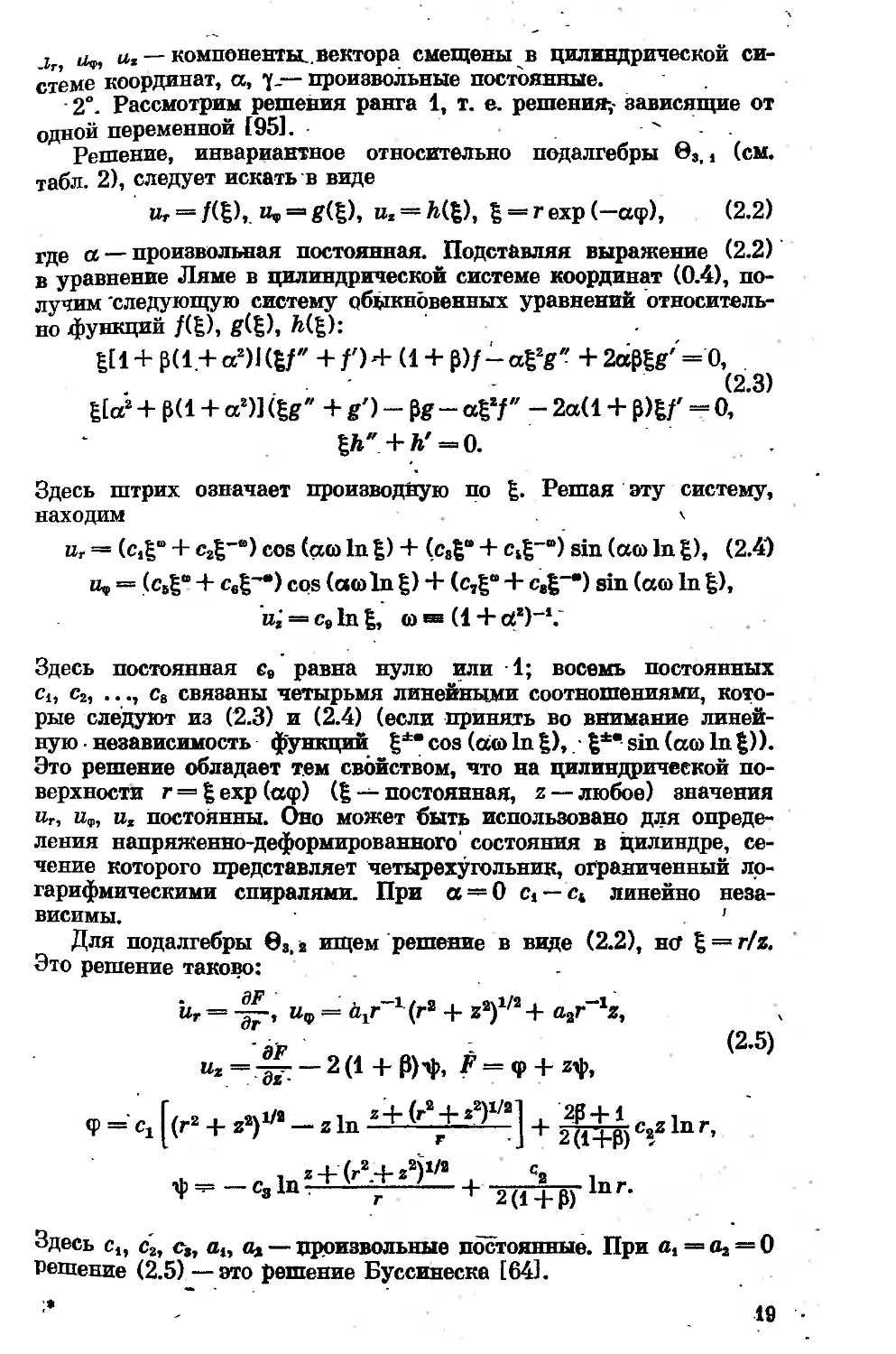
2°. Рассмотрим решения ранга 1, т. е. решения;- зависящие от
одной переменной [95]. -' . .
Решение, инвариантное относительно подалгебры 03, i (см.
табл. 2), следует искать в виде
иг = /(£),. к,. — g(£), ut — h(&, £ = г exp (—сыр), (2.2)
где а — произвольная постоянная. Подставляя выражение (2.2)
в уравнение Ляме в цилиндрической системе координат (0.4), по-
лучим следующую систему обыкновенных уравнений относитель-
но функций /(|), g(£), й(|):
|[1 + ₽(1 4- а2)1 (V* + П + (1 + ₽)/ - al2g” + 2a₽gg'= 0,
(2.3)
|[а2 4- 0(1 4- a2)] fa” 4- g') - 0g - agf" ~ 2а(1 + ₽)£/' - 0,
Здесь штрих означает производйую по Решая эту систему,
находим \
иг = (с,|“ + c2g-“) cos (a® In |) 4- (cs£“ 4- c4g-“) sin (a® In g), (2.4)
a, = (ceg“ 4- ce^~“) cos (a® In g) + (c7g“ + c.g-*) sin (a® In |),
Ur = ce In I, ® = (14- ct2)-1.'
Здесь постоянная ce равна нулю или 1; восемь постоянных
с,, с2, ..., се связаны четырьмя линейными соотношениями, кото-
рые следуют из (2.3) и (2.4) (если принять во внимание линей-
ную независимость функций £=*=• cos (a® In |), • sin (a® In £)).
Это решение обладает тем свойством, что на цилиндрической по-
верхности г = £ exp (а<р) (| — постоянная, z — любое) значения
Ur, Ur постоянны. Оно может быть использовано для опреде-
ления напряженно-деформированного состояния в цилиндре, се-
чение которого представляет четырехугольник, ограниченный ло-
гарифмическими спиралями. При а = 0 с» — с* линейно неза-
висимы. ’
Для подалгебры 6s.s ищем решение в виде (2.2), нет £ = r/z.
Это решение таково:
йг = -|-г, и<₽ = (г8 4- z8)1/2 4- а2г~\
- (2.5)
«z = — 2 (1 4- 0)"ф, F = ф 4- zip,
<Р = С1 [(Г2 + z8)1/8 _ z Ь *4-.(<+/)1/!^ + 2₽+1. ь
ф — с3 In г 4- 2 (4 эд In г.
Здесь с„ с2, с», at, a* — произвольные постоянные. При «, = Ог = 0
Решение (2.5) — это решение Буссинеска [64].
19 •
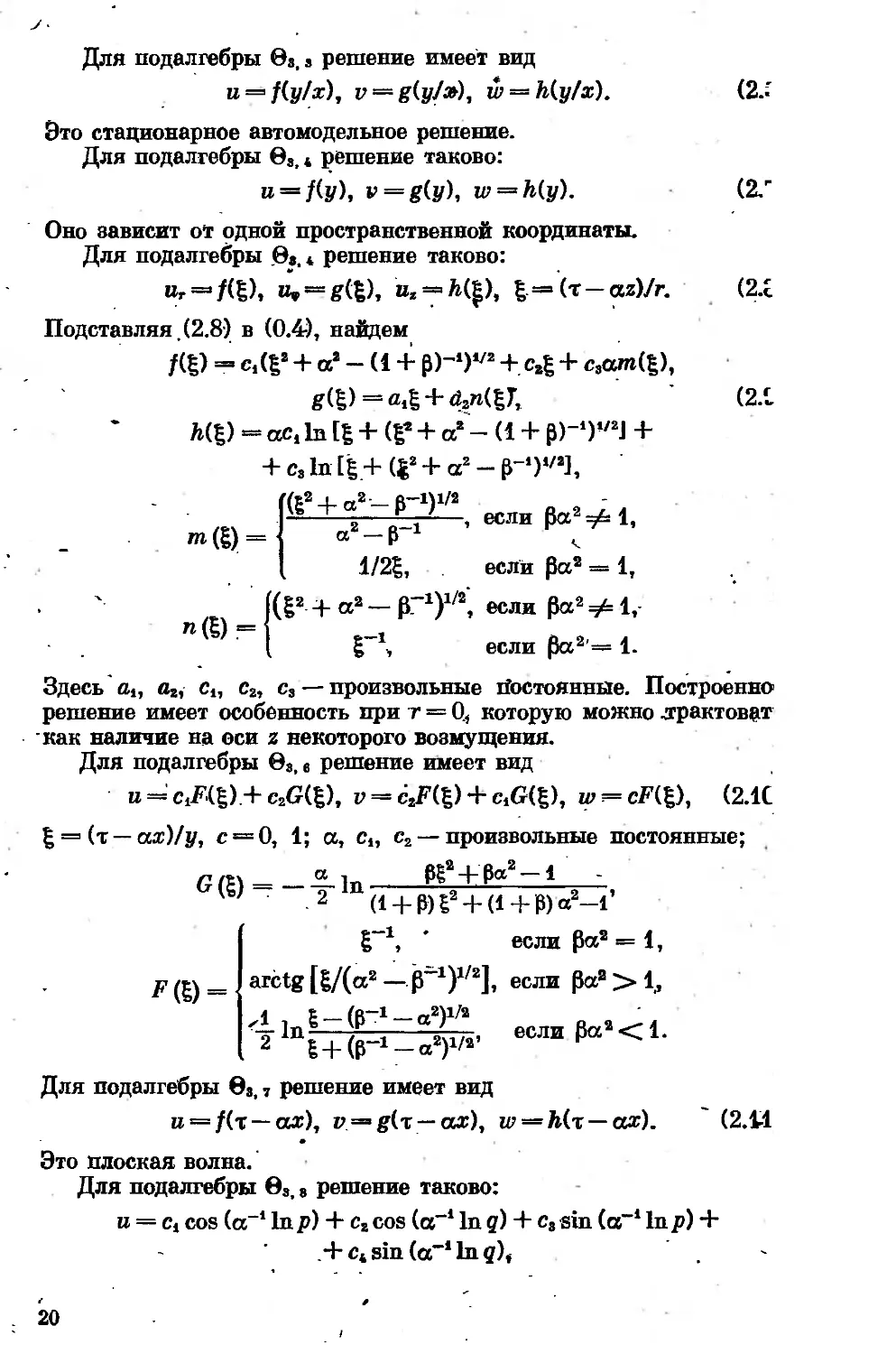
Для подалгебры 03,3 решение имеет вид
u = fly/x), v = g(y/»), w = h(y/x).
Это стационарное автомодельное решение.
Для подалгебры 03,4 решение таково:
u = /(y), v = g(y), w — h(y).
Оно зависит от одной пространственной координаты.
Для подалгебры 0»,4 решение таково:
Wr = /(g), Ur=g(^), Нх = Л(р, g== (т - az)Jr.
Подставляя.(2.8) в (0.4), найдем
/(g) = c,(ga + аа - (1 + р)’1)172 + c»g + c3am(g),
g(g) = + d2n(gT,
h(l) = aCi In [g + (g* + a2 — (1 + p)"1 )*/2J +
+ c3 In:[g+ (g2 + a2 - Р“‘)‘/а1,
a2_p-l <
l/2g, если Pa® = 1,
a2 — p-1)172, если Pa2 =/= 1,
g-1, если pa2'= 1.
т (g) =
п(Ю =
(2..'
(2.”
(2Л
(2.L
Здесь а,, а2, с,, с2, с3— произвольные йостоянные. Построенно
решение имеет особенность при г = О, которую можно лрактовцт
как наличие на оси z некоторого возмущения.
Для подалгебры 03, в решение имеет вид
w = C1F.(g) + c2G(g), v-4aF(g) + C1G(g), n^cF(g), (2.1С
£ = (т — ах)/у, с = 0, 1; a, ct, с2 — произвольные постоянные;
G = — — In_________^а~ИР?г~1----_
.2 ln(l + ₽)g2 + (1+₽)a2_l’
g""1, ’ если ₽аа = 1,
arctg[g/(a2— Р-1)172], если ра2>1,
А , g-ftT1-»*2)172 r а^-л
o’ In 2—Г—:-5ГГ77, если Ваа < 1.
2 &+(Р-1-а2)1/2
Для подалгебры 03.7 решение имеет вид
и = /(т —ах), р = £(т —ах), w = h(x — ах). (2.1-1
Это плоская волна.
Для подалгебры 03,8 решение таково:
и = ct cos (a-1 In р) + с2 cos (а~‘ In q) + с3 sin (а-1In р) +
.+ с* sin (а-1 Ing),
Л0 =
20
v == Cj sin (a-1 In p) + c2 sin (a-1 In g) — cg cos (a-1 In p) —
— Ct cos (a-1 In g),
w = c5ln (<z + (1 + 0)‘^2)/(z — (1 + p)1/2)),
Где р==‘г + тУр, g = z —тУр, ct — c5— произвольные постоянные.
Это решение — суперпозиция плоской продольной волны, рас-
пространяющейся вдоль оси z и плоских поперечных волн.
Решения, построенные на подалгебрах. 03>в и 03,«,— это пло-
ские, волны. * • - |
§ 3. НЕКОТОРЫЕ ДРУГИЕ РЕШЕНИЯ
1°. Используем представление (0.6), (0.7) для получения
новых классов решений уравнений теории упругости.
Потенциалы ср, (к = 1, 2, 3) удовлетворяют волновому
уравнению
C2d2a/dt2 = д2т/дх2 + д2а/ду2 + dW5z2. (3.1)
1
Если ввести новые переменные ^ — it/C, £2 = я, Ъ=^у, £t = z'
(i2 = —1), то уравнение (3.1) примет вид
52<о/5Й + 52<о/5^ + д 2<о/0^ + 52<о/5Й = 0. (3.2)
Уравнение (3.2) допускает группу Л15, порожденную оператора-
ми [53]
zk = [%& - (й + ^ + Ц + И) М (kj-i, 2,3,4),
• 8 11, Л=/,
Кроме того, уравнение (3.1) допускает операторы
7’ = (в^-, 5 = <о*^-.
й<0 ’ д(й
Здесь <0* — произвольное решение уравнения (3.2).
Используя эти операторы, можно строить классы точных ре-
шений волнового уравнения.
2°. Рассмотрим функционально-инвариантное решение волно-
вого уравнения [81, 531. Запишем уравнение (3.1) хв виде
системы
C2da/dt = да/дх + дЫду + dc/dz,
да/дх = да/dt, да/ду = дЫdt, da/dz = dc/dtf (3.3).
да/ду = db/dx, da/dz = дс/дх, db/dz = дс/ду.
21
Здесь искомые функции а, Ь, с, о зависят от t, х, у, ъ. Эта сист
ма допускает группу, порожденную операторами Хо, Xit Хг, .
(см.1°). Ищем частично инвариантное решенье, системы (3.
в виде ] ' •' .. .
а = Дю), 6 = §(ю), с = Л(ю). . . (3.-
Здесь искомыми функциями являются Дю), #(ю), Л(ю)
х, у, z). В дальнейшем производные от функций Дю), g(a
Л(ю) по ю будем обозначать большими буквами:
'<?Дю)/</ю =.F(to), dg(o)/d& = G(j£>)^ dh(.tt>)/d& — Н(м).
Подставляя (3.4) в (3.3), найдем
~ ='F (ю) = G (ю)*4^, - Н (ю) -2£,
дх ' 9 dt * ду 4 9 dt ’ Oz 4 9 dt (3
(>•+ G2 + Я2 — С2) ди/dt = 0.
Считая, что O(b/dt¥=O, получим общее решение системы (3..:
в виде
t + F(u)x +G(a)y + Я(ю)г = Р(ю), (3.f
где
/’а + Сг + Я2-Сг.= 0. (3.'
Функция ю = <o(t, х, у, z), определяемая неявно из (3.6), и ц-
зывается функционально инвариантным решением волновог
уравнения. При этом /'’(со), С(ю), Я(ю) — произвольные дважд
дифференцируемые функции, удовлетворяющие соотношени.
(3.7). Прямым вычислением можно убедиться, что решением ypai
нения (3.1) будет.также функция где (?(ю) — произвольна
дважды дифференцируемая функция своего аргумента, а ю от
ределяется из (3,6),
3°. Приведем другой вывод функционально-инвариантног
решения (3.6). Вместо ю введем новую неизвестную функцш
t = t(a, x, у, z), зависящую от независимых переменных ю, х, у.
(аналогично можно принять за искомую фушщию х, зависящую
от t, ю, у, z). Вычислим первые и вторые производное функции
по ю, х, у, z (индекс обозначает производную):'
Ю| — to ч Юдс = txttii , 3)^ == •— tytta ,
у—J __g
(Oz = tzico ? (Oft »
(Охае “ — (ixitoto 4" tatxx t® , (3,t_
Ю|^у == — + tf^yy to'ч *
Ю^г “ (izi®® “1“ totzz ^tztzofo^ to *
Уравнение (3.1) эквивалентно уравнению
tffiOxX + tyy + izz) + too(tx + ty + tz —* C2) -
-«®3(Й + ^+«’-^2)/Зю=0. z (3.f
22
•астным решением уравнения (3.9) будет функция / = /(©,'
л, </, Д удовлетворяющая системе
txx + tyy + tzt ~ 0, tx + ty + й - С2 = 0.
Такой будет только функция
£ = —.F(&)x— Gt&)y — Я(<о)г Ч-Р(со), (3.10)
где F(a>), G(g>), Н(&), Р(м) — произвольные функции, связанные
соотношением -
F* + G* + Н* *= С*.
Совершая обратное преобразование, т. е. выражая из (3.10) со
через t, х, у, z, получаем рещзние уравнения (3.1).
4°. Найдем функционально-инвариантное решение уравнении
теории упругости. Уравнения Ляме (0.3) эквивалентны системе
pdujdt — yidajdxi + dbJQxt + dcjdxt} 4= •
+ (X + рКдщ/да^ + da,z/dxz + 5a3/5x3),
• pdUi/dt = рХдаз/дх, + dbjdxz + dcjdx,) +
+ (X + \k){dbjdxi + dbt/dxt + db3/dxs), (3.11)
рдщ/dt = n^dat/dxt + dbzfdxt + dcjdxs) +
+ (X + p.)(dct/dxt + dcjdxz + dcjdx^t
dajdx2 = dbJdXi, ddl/dxi = dcl/dxl, dbildxz=*dcjdxti
dajdxz = dbjdxt, dajdx3 = dcjdxi, dbjdxt = dcjdxt, (3.12)
dajdxt = ЗЬз/ftCj, da2/d#s = dcjdx2, dbt/dxs =? дс^/дхг,
dujjbxi = da^dt, dui/dx2 => dbjdt, ffbi/dx» — dci/dt,
daJdXi = dajdt, dujdxz = dbjdt, dujdxz = dcjdt, (3.13)
dujdxi =» ctaj/df, du Jdx% =* db2/dl, ди21дх9 = dcjdt. '
Здесь Ut, af, bi, ct (i = l, 2, 3) —искомые функции, зависящие от
/, Xi, xz, xt. Система (3..11)—(3.12) допускает операторы
Хо == А -х _ ’ х -Л, X, - Л- 4 (ЗЛ4)
v dt1 1 дх' л дх' 3 дхп # '
± А 3
Полный набор инвариантов группы, соответствующей (3.14),
таков: - 1
uj, а{, bt, ct (i = 1, 2, 3>.
Ищем частично инвариантное решение системы (3.11)—(3.13)
в виде - '
«i ==/i(wi), bi = gi(Ui), Ci = hi(.Ui),
; dj^Afwi),- bz = gziui), Cz^hziuz), (3.15).
вз = М»Л bg^gziUz), Cz = ht(Uz).
Здесь девять функции Д, git hi d**11, 2, 3), а также wt, и», и3 под- .
лежат определению. В дальнейшем производные функций /<, g<, hi
23
по соответствующим аргументам будем обозначать большими
буквами, например,
' edgj.u2)/du2 = G2{u2), dhiluj/dui — Н2{и2).
Йз (3.15), (3.12), (3.13), находим выражения производных функ-
ции /<, g<, ht (i = l, 2, 3) по Xi, х2, х3 через dujdt (г = 1, 2, 3).
Например, «
dajdx± =г F^dujdx^^ *= Fflajdt = F^OuJdt,
dajdx2 = FiduJ^Xi = l\dbjdt = FiGidaJdt,
daJdXi = Fidujdxs = Fidcjdt = FJIiduJdt.
Подставляя эти производные в систему (3.12), получйм сист^ру
линейных однородных уравнений относительно dujdt ii — 1, 2, 3):
Andujdt + Aibdujdt + Alsdus/dt = О,
A2ldu.i/dt + A22du,2ldt + A^dujdt — 0,
Audujdt + Азздиз/dt + AZi()uJdt = О,
4 = -p + p(F||+ G\ + Я|) + (X + p) F?,
A12=(X + p)F2G2,. А13=Р3Я3, (3.16)
/121 = (X + ц)СЛ, А2з e G2H3,
= — P + р'(Рг + G* 4- Я|) + (X + p) G%,
A2l = (X + р)НЖ, A22 = H2G2,
Л33 = — p 4- p(Fg + Gg + H3) +(X + p) Hg.
X *
Условие существования» ненулевого решения системы (3.16)
detlL4yll = 0 (3.17)
представляет соотношение, связывающее функции Ft, Gt, Ht
(i = 1,2,3).
Переходим к определению функций u,: = Ui(f, ж4, ж2, ж2). Из
(3.13), (3.15) следует система для определения щ = uSt, xt,x2,x3)-.
FiiuJdUi/dt == дщ/dXi, Gitu^dUi/dt = dujdx2,
• Hi(ui)dut/dt — dui/dx2.
Общим решением этой системы является функция ut, определяе-
мая неявно из уравнения
t4-F1(u1)x1 + G1(u1)a:2 + H1(ij1)x2 = P1(w1), (3.18)
где Pi(u.) — произвольная дважды дифференцируемая функция.
Аналогично находим функции и2, и2:
t + F2(u2)i:t + б?2(«2)ж2 + Я2(и2)ж2 = f^(fo2), •
t + Р2(ц2)ж1 + Gt{u2)x2 + Я2(и2)ж2>= Р2(н3).
' t
Здесь P2(u2), P3(w3) — произвольные дважды дифференцируемые
- функции.
24
‘ аким оОразом, функции = xit х2, ха) определяются не-
явно из (3.18) и (3.19). Производные по времени от этих функций
находятся из продифференцированных по t равенств (3.18) и
(3.19), они должны удовлетворять уравнениям (3.16), что накла-
дывает дополнительные ограничения на функции /,, gt, ht, Pt.
Рассмотрим случай, когда Ft, Н(, Gt (i = 1, 2, 3) суть постоян-
ные, которые будем обозначать теми же буквами, снабженными
звездочкой сверху. Из (3.18) и (3.19) следует
Щ = Pi{t + F*xv + G*x2 + H* x3),
z
где pi—произвольные дважды дифференцируемые функции,
обратные к Pt(ut). Вычисляя производные по времени dpjdt и
подставляя их в (3.16); получим
Atjdp)/dt = ^ (i, j=l, 2, 3).
Эта система линейных однородных уравнений относительно'
dpjdt имеет, в частности, ненулевое решение, если
Fl ==Gl = Hl = ± (р/(Х + 2|х))1/а, Fl ^Fl =Gl = С^Я^Я^ О'
или если G* = ± (р/(Х+2р))1/2,
Fl = F*2 = F* = Hl = H* = Я8* =.0, G* = G3 - ± (p/p)1/2.
Заметим, что решение (3.18), (3.19) можно получить аналогично1
п. 3°, приняв за новые независимые переменные u,, Uz, иа, а за
искомые функции ж,, х& х2.
5°. Найдем функциональногинвариантные решения уравнений
анизотропной теорий упругости. Закон Гука для анизотропного
тела имеет вид (Ew — упругие постоянные)
, Оу — Efjuidu^/dXi + dui/QxhH2, ,r
(.3.2UJ1
Ецм = ЕЫц — Ejtu — Eijn. .(i, j, к, I = 1, 2, 3).
Подставляя (3.20) в уравнение движения (0.1), будем иметь
Eiju.kd^fdXtdXj + SP’uJdxifiXj)/^ = ргРвУЛ*. (3.21)
Система (3.21) относительно u,= u<(^, ж,, ж2, ха) эквивалентна
системе
Eaukdqta/dXj + dqiJdxj)/2 = pdujdt, (3.22)
dqa/dt = dujdxj, (3.23)
dqjdx^dqjdxi, (3 24>
i, j, к, 1= 1, 2, 3.
Здесь искомыми функциями, зависящими от t, ж„ х2, х2, являются
девять функций q{j (i, j = 1, 2, 3) и и2, и2. Система (3.22) до-
пускает операторы
Хо = .A, Xi = Xs = (3.25>
° dt 1 1 дх^ 2 дх,У 3 дх3 < v '
25
Полный набор инвариантов группы, соответствующей (3.25)
таков: ’
ui j ~ 1» 2, 3).
Ищем частично инвариантное решение системы (3.22) в виде
= /«(“<) (К j == 1» 2, 3) (по i не суммировать). (3.26.
Здесь искомыми являются функции /« == /«(«,), Щ= »i(f, Х2, Х>)
В дальнейшем будем обозначать большими буквами производные
•функций /о по в»:
dftj(ui)/dUi = Fij tno i не'суммировать). (3.27)
Из (3.23), (3126), (3.27) находим
• dqJdx^FuduJdx^F^d'q^/dt^-
х . = FtaF^duiJdt (по к. не суммировать). (3.28J
Подставляя (3.28) в (3.22), получим систему трех линейных
•однородных уравнений относительно duK/dt\
A<Kduh/dt=^pdiii/dt, (3.29.
A{k^ЕцмРнРы (по Л не суммировать). (3.30)
Условие существования ненулевого1 решения системы . (3.29)
представляет соотношение, связывающее функции Ftj:
detllAj — рбйП = 0. - (3.31)
Функции u*(f, Xi, xt, Хг) определяются из системы.
duJdXj^Fijdu^fdt (по А: не суммировать); (3.32)
Решая систему (3.32), находим, что ult u2, us определяются иг
. -соотношений
t + FuM*i + Fn(nt)Xi + Fn(.Ui)Xi == P1(u1),
t + Fn(.Ui)xi + ?Мхг + Fa(Ui)Xi = PM, .. (3.33
£ + FMfa + PM% + Рц{иъ)х3 = Pa(u3).
Здесь Pi, Рг, Ря — произвольные дважды дифференцируемые
-функции своих аргументов. Производные по времени от функциг
щ, u2< Ut, определяемые из продифференцированных по t ра-
венств (3.33), должны удовлетворять уравнениям (3.29), что на-
кладывает дополнительные ограничения на выбор функций ftj, Pt
В частности,, когда Atj == рбу, i, j *= 1, 2, 3; — символ Кронекера
необходимость удовлетворять соотношениям (3.29) отпадает.
В заключение отметим, что в [89] найдена группа, • допускав
мая уравнениями Ляме в нелиёвском смысле. Другие уравнения
описывающие упругие процессы, также изучались с групповой
. точки зрения. Так, в [721 найдена группа, допускаемая уравне
пнями нелинейной теории упругости. В статье [761 изучались
. групповые свойства плоской неоднородной теории упругости i
решена ^задача групповой классификаций этих уравнений по ко
26
дффициентам Ляме. В работе [96] методами группового анализа
исследованы уравнения движения упругой пластины типа Тимо-
шенко, там же показано применение группового -анализа Для кон-
струирования приближенных уравнений. В [99] решена задана
групповой классификации- для одномерного уравнения нелинейной
теории упругости. В [91J изучались групповые свойства уравне-
ний специальной нелинейной теории упругости.
Глава 3 ; . ., , . ...' ,1 — ' уг
ГРУППОВЫЕ СВОЙСТВА _ ' .
КВАЗИСТАЦИОНАРНЫХ УРАВНЕНИЙ МИЗЕСА
Эта глава Посвящена построению решений^ описывающих
квазистационарные,- течеЯйя пластического несжимаемого мате-
риала, который удовлетворяет условию пластичности Мизеса.
В § 1—6 и частично в § 9 строятся точные решения простран-
ственной задачи, в §7 — Осесимметричной, в § .8—плоской
задачи.
Пространственные задачи — наиболее важный и наиболее
трудныВ~кла<Ж^ЗЗДач' в Любомразделемеханики сплошйых сред,
и в этом смысле теория пластичности не является исключением.
В настоящее время пространственные-задачи теории пластично-.,
сти — наименее исследованная область как По методам построе-
ния тойных^ решений, так и по численным расчетам.
. Самое первое' пространственное решение было построено
Р. Хиллом 1103]’ в 1948 г. Оно описывает напряженно-деформи-
рованное состояние прямоугольного стержня, подвергнутого дей-*
ствию растягивающих сил и крутящих моментов. В. Прагер
в 1954 г. успешно решил задачу построения поля скоростей для
пластического материала, находящегося в однородном напряжен-
ном состоянии [631. В 60-е гг. построил интересные классы про-
странственных решений Д. Д. Ивлев [29, 301; им, в частности,
найдено решение, обобщающее плоское решение Л/Прандтля.
Несколько позднее появились работы М. А. Задояйа, в которых
построены новые классы решений, окидывающих пространствен-
ное напряженно деформируемое состояние пластических тел
[20—22]. Отметим, что все описанные решения были в основном
найдены методом подбора и, конечно ж'е, не могли охватить всего
многообразия 'решений уравнений. Систематический подход,
основанный на методах группового анализа дифференциальных
уравнений, позволяет взглянуть на точные решения с единой
точки зрения, последовательно и с достаточной полнотой охватить
все множества инвариантных решений. Такой подход, развивав-,
мый в работах Л. В. Овсянникова [52, 531, для пространствен-
27
вых уравнений пластичности был реализован в работах Б. Д. ль
вина, С. И. Сенашова [1, 2, 4, 69, 73, 741.
Осесимметричные задачи также являются традиционно труд-
ными для построения точных решений. Это в первую очередь
объясняется тем, что такие задачи, как правило, не являются
статически определимыми. Точных решений здесь немного, они
построены в работах (2, 5, 29, 42, 47, 69, 90, 97].
Плоские задачи — наиболее полно и хорошо разработанный
раздел теории, пластичности. Такие задачи, как правило, принад- '
лежат гиперболическому типу, а поля скоростей и напряжений
можно рассматривать отдельно. Несмотря на это, точных, анали-
тических решений здесь тоже немного. Большой вклад в решение
плоских задач внесли Л. Прандтль, С. А. Христианович,
В. В. Соколовский, А. Надаи, С. Г. Михлин и многие другие.
Тем не менее даже здесь групповой анализ позволяет .строить
новые классы точных решений [1, 77, 78, 100].
Пусть xtx2xa — декартова прямоугольная система координат,
Оу, Stj U, j — lr. 2, 3) — компоненты тензора напряжений и девиа-
тора тензора напряжений. При этом компоненты o(j удовлетворя-
ют системе уравнений равновесия
Оу., = 0 (i, у-1,2,3), (()1j
Оу = — Pftii, —3P = Оубу,
где P— гидростатическое давление, часто компоненты St} при
i Ф j обозначаются Оу, бу — символ Кронекера.
В силу условия Мизеса компоненты тензора напряжений или'
компоненты - девиатора тензора напряжений связаны условием
текучести Мизеса
(Он — о22)2 + (о22 — о33)2 + (о33 — оп)2 + 6о?2 + 6о?3 + 6а23 '= 6*1,
(0.2).
*$11 + *$22 + *$83 + 2 (ч$1а + *$13 + *$2з) = 2*1, (0.3)
где к, — предел текучести при чистом сдвиге.
Пусть ву — компоненты тензора скоростей деформации, тогда
2еу — utfJ+ Uj>t, где u=(u,, ц2, п3) —вектор скорости.-Среда пред-
полагается несжимаемой, поэтому
' div и — и,. 4 = 0. (0.4)
Для замыкания системы уравнений (0.1)—(0.4) предполагается
выполненным закон теяения, который связывает компоненты Si}
и ву: ' . " .
Stj — Kctjt X > 0. (0.5)
В результате получаем замкнутую систему уравнений, которая
и будет рассматриваться в этой главе:
Оу, j== 0, Stj== Хеу, Оу Stj Рбу,
а (0.6)
— ЗР = Оуб{у, SjjSij = 2kl, uiA = 0.
28
Тсключая из уравнении (0.6) ai}, Stj, X, получим четыре уравне-
ния, связывающие только величины Р, ut,. u£, us:
V2fc, V2k,
“ ,i 2A ^3 yj
Ujj — 0, A2 = emrfimn-
Необходимо отметить, что система уравнений (0.7) в общем
случае не имеет действительных характеристик [83].
§ 1. ГРУППОВЫЕ СВОЙСТВА
ПРОСТРАНСТВЕННЫХ УРАВНЕНИЙ МИЗЕСА
1°. Запишем систему уравнений (0.6) в развернутом виде:
^11 , Й*12 , 55 SS22 : дх^ дх^ dS13 SS23 дхг дх3 1 „ ' ди, dSis дР дхя~ дх±' , dS33 ' 8Р - ,л ,ч
5*3 • 5®/ dS33 __ SP дх3 дх3' ди ди,
+ <Sa2 + ^'зз “ ~я^~ + ~дГ + ~д^ = °’ (1-2)
i 2 3
5ii + 5га + 5^ + 2 («Sia + + <Sas) = 2Л1, ди, / ди, ди„ \ 5U = X-z-1, 2512 = М -й-1 + -л-1 , 11 дх, ' 12 . 1 дх„ дх, 1' х д д 1 J -ди / ди ди \ (1-3)
522 — ^513 — 5зз — \ 25,2з== х —L + -л. , V в2Сз dxi / (ди ди \ X 1 -Л 4" "д'" I . \ дхз дхз / (1.4)
Известно [2, 74], что система уравнений (1.1)—(1.4) допускает
группу непрерывных преобразований, порождаемую операторами
д .у ______ д у ______ д
дх^ 2 дх% 3-— дх3'-
Yi = Y2 = /-, Ys = (1.5) '
1 ди^ и ди^ 3 диа’ ' ’
кт 9 , 6 , 9 -
N = --Р Х9 3-Р ХЧ
1 дх1 2 дха 3 дх3 ,
М = и. ~ + и2 ~ + и,
1 ди, 2 ffu„ 3 ди'
12 3
~ 5 ~ 9 Т ~ 9 9
1 3 du 3 ди' 2 3 ди, 1 ди' '
од 13'
29
жт • . u v
« 8 8 ' 8 0
Z'~X*^~Xzfc + U*W~ Us 8u’
о л м 2
4 ~ 8 S , 8 ' 8 .
Z„ = x~ т--x, = F w« s-и,—,
8 . -3 8x, 1 dxa 3 8u, 1 du'
* 13 13
„ 8 d 8 :8-
“’aiTf
-Оптимальная система одномерных подалгебр имеет вид
• X., N, У2, Tlt Xt±Zt, M + aN., N+Ylt Y^T»
(1.6>
Zi + aN ± У., Zt + aM.+ 02V, X, + aZt + M,Xt±Tt + аТг,
X, ± Yt + aTt, Xt±Zt± Tit M + N +T., Z, ± У. + aTit
Х, + аХя±Тя + ^Т„ X^Z^Yi + aT^ Z^aiM + N)^^
Здесь a, p — произвольные постоянные, различным, значениям
а, р соответствуют неподобные подалгебры, оператор S порожда-
ет центр алгебры .Ли (1.5), это учтено при' построений систе-
мы (1.6). ’
2°. В силу критерия инвариантности [52] инвариантные ре-
шения могут быть построены только на следующих однопарамет-
рических подгруппахив (1^6):
X,, Xt±Z1K ЛГ+aM, Zx + cdViy,,
Z» + aM+0, Xt + aZt + llf, X,±Tt + aT2,
Х^^ + аТ!, XiiZ.iT,, Лf + ^+7,l,
ZidzY. + aTi, Х| + аХ2±Л+₽Г»,
• ’ X»±Z1±yi4-a7’1, 'Z.'+aCJlf +'N)^^.
$ 2. ИНВАРВА0ТЯЫЕ РЕШЕНИЯ
Укажем вид инвариантных решений, которые могут быть.
' построены на подгруппах, указанных в п. 2. Бели решение тако-:
го вида построено, то приводится номер параграфа, где оно рас-
сматривается..
1. X. (§ 9).
nt — nAXi, Жх), ' Ui^lhtXi, Хг), U»=iUi{Xt, Хг), Р = P(«i, Х2).
2. N+aM ’(§ 3). -
, (a = 0) », = »,(£, q), »2'=»2(g, q), q), J°«=P(£, qK
(a y=0) ut = (g, q), ua = xi/s/2 (g, q),
/ из e жУ*/з (^» Ч)» P = P (S, Ч)» 5 = Яд/Яа» 4 '= xJxs'
30
.. '(§ 4). '
Решение в цилиндрической системе координатямеет вид
в(г, В\ в(г, В), u>(r, ВХ Р(г, ВХ В = 24=^0. -
4. И, + аУ±У1.
Решение в цилиндрической системе координат имеет вид:
(а=/=0) в 4=0 = /(4» ВХ i>==<p(i], ВХ ВХ Р(В, q)T
B = r/z, г] = ге-“\
(а = 0) в 4=0 =/(г, z), в==в(г, я), w*=w(r, z), P = P(r, z).
5. Z^+aM+fyN (§ 7 при а = 0 = 0).
Решение в цилиндрической системе координат .имеет вцд:
(0^0) ’ u = u(B, q)e“®, v = и(В, q)e“®, w = w(g, г])е“в,
Р = Р(В, чХ В = rfz, т] = re"”
(0 = 0) в = в(г, z№*, v = y(r, z)ee®, w = w(r, z)ee®, P = P(r, z):
6. Xt '+aiZt + M (если ot = 0, то решение построено в § 9)..
Решение в цилиндрической системе координат имеет вид:
(ач^О) в = в(г, z —а0)еж, в = в(г, z — а0)е',
w = w(r, z — affie1, P = P(r, z —а8),
(cc “ 0) =5= a?g) e , (^*i? ^2)
“8 = «3 (^1, Xt) P = P (®1, X4).
7. X^Ti + aTi (§ 6).
Ut«= 0X4X3 + Xt), 02 = TXiXt +/з(х2, xs),
«3 = — -у ®i®a + Л («а. ®з). P = P («а» ®з)-
8. XiF. + aT, (§ 5).
«1 ч= Xi = /1’(хз, x4), u> “ aXjXs + /2(x2, x/f,.
Ba** —OCXiXa+'/gtXa, Хз), Р = Р(х2, Xg). ‘
9. X^ZiiTi. , .
Решение в цилиндрической системе координат имеет вид '
в = в(г, 0 ± z), v =* у(г, .0 ± z) ± г0, w = w{r, 0-± z),
P = P(r, 0±z).
10. Л/+ЛГ+7Ь
Bl —XiB<B. 4). Ва — -Хз1нХз + Хз/и, тр,
и,**Ха1пХз+ха£(В, q), Р«=Р(В, чЬ В*=®/«а» x\ = xjxt.
11. ZiTi + T,.
31
Решение в цилиндрической системе координат имеет вь
ц = ±6 + и(г, z), р = ссг6+'р(г, z), ip = ip(t, z), P = P(r, z).
12. X1 + aX2±T’2 + pT8.
Uj ~ хгха + Pa:^ + (xa, x2 — ахг), ия = P/»*i +
+ /а (®з> И'а = zfc + / (®s« ®s ®®i)>,
P=°P(xs, Xi — aXi).
13. Xld:Zi±Yl + aTl.
Решение в цилиндрической системе координат имеет вид
u = u(r, z-F0), и = ±аг6 + /1(г; гТ0),
w:Fz = fi(rt z?F0)f P'—P(r, zT0).
14. Z>+ а(2И+Лт)±7\.
Решение в цилиндрической системе координат имеет вид
(а = 0) в = п(г, z), н±т0 = н(г, z), w = w(r, z), P — P(r, z),
(ач^О) a = rf(£, ц), p = ±(r/a)lnr+n(g, 4), w — rw(& »]),
P = P(|, 4), £ = r/z, i] = r^e. * '
§ 3. ПЛАСТИЧЕСКОЕ ТЕЧЕНИЕ КОНИЧЕСКИХ ТЕЛ
В этом параграфе будут строиться решения, инвариант-
ные относительно подгруппы (N+aM'>, решения такого типа
следует искать в виде
, вг = т"в(0, ф), Ве = 7"н(0, ф), В, = 7"ю(0, ф), Р = Р(0, ф).
- ' (3.1)
Решение вида (3.1) используется, как . правило, для описания
либо пластических течений конических тел *[25], лцбо напряжен-
но-деформированного состояния пластического, материала, сжа-
того Тиежду коническими поверхностями [19].
Система уравнений (1.1)—(1.4) в сферической системе коор-
динат запишется в виде
I 1 Г । 1 । 9 с с с । с о! .
~дГ + ~ [-5ё~ + SSe- ~д^г + - Se — + Яо ct« е] - “аГ>
(3*2)
~дГ’+ ‘rt'dT + + <Se “ cfg® + 35rfl] = 4"^’
~д^ + + +35гч’ + ?50фс1« °]-
= 5е = | (^ +«), ^ = ^(> + «^0 + ^080),
32
•C 11* v _i_ 1 дц\ 1 f 1 du div w\
= Л r + —-$Q j, ZO„J> «= A^j0 dtp + fr —T}'
25^4=7^5(sme-ao--u,cose +“^)’
5j + 5§ + Sj + 2 (fi?e + 5§ф + <8гф) = 2fcJ,
sr+s.+s.=o,
где u, v, w — компоненты скорости Перемещения вдоль осей
г, в, <р. С учетом (3.1) система (3.2) запишется так:
_+ 25г — Se — 5Ф + + Srectge = О,
>+эт> + ^-^)с^е + 3^ = -^’ <3-3)
>•+^^+3^ + 25^0186 = ^-^,
где
Sr == ka»(0, q>), 25ёф = ^fT^sin 6-fr “ шсоз° + ^г)’ S* “
. /dv \
= x(ae +“)»
25rq> = b(^0-+ (« — 1) Sq, ('fj +“sine+vCOS0)’
25r0 = x((a-l)v + -f|-).
Система уравнении (3.3) допускает следующие операторы:
1 5<р ’ • а du dv w ' 3 &Р <
Ищем решение, инвариантное относительно подгруппы Xt +
+ рХ? + цЭто решение имеет вид
и = и*(6)е₽ф, п=р*(0)е9ф, w = w*(G)eP*t Р = рр + Р*(0), (^.4)
где у, р — постоянные, и*, v*, w* — функции только 0. Подстав-
ляя соотношения (3.4) в (3.3), получдем'
'аё'~ ® = О»
^+(5e-5v).ctg0 + 35;0 = .^-, (3.5)
дО? + 35гф + 25eg,ctg0 = 7»
При этом
- Sr + Sq + 5ф = 0, Sr = cxXu*, Sq ==-^,f~50—
Б. Д. Аннин, В. О. Бытев, С. И. Сенатов
за
3JF (₽"* +• и* ain 6 + v* cos 25,6 ~1 (<«-*)?* + -Ж7>
25^1(s4^u*+(a-l>*), 2Sw-'^g(pP*+^e^-4P*<SMe).-‘
Система (3.5) есть система обыкновенных дифференциальных
. уравнений. - 1 ’
1°. Рассмотрим случай а — 1. Тогда в предположении »♦ =
==у=«0имеем
. Sr = Sre s Srt “ 0 .
' ' и система (3.5) сведется к уравнениям
; ^+(^-^)ctg0 = -^>^- + 2^ctge==o. (3.6>
Первое уравнение системы (3.6) служит для определения функ-
’ ции Р*(0), а из второгоуравнения получаем '
; 5в» = Cj/sin10, Ci = const. - , (3-7)
j С учетом (3.7), условий несжимаемости и текучести имеем
' j/sjsin4©— с|
i - • sin80
, Отсюда получаем условия на промежуток изменения угла 0, если <
; 0<е<&
't arcsin 1/. sC0 < Ji — arcsin "1/
j *
। Компонента тензора напряжений o« определяется из уравнения :
i + (Se*— S4>)ctgO = О
I и имеет вид
। и® + 06 e '—
‘ ~:1 ~ 1“ 0 + (^» sin4 0 — |, (3.8>
где с, —произвольная постоянная.
Это решение можно использовать йдя анализа несущей спо-
собности конической трубы, границы которой совпадают с коор- .
динатными поверхностями 0t ~ const, .0»?= const, где задано дав-
ление'Pt-соответственно» *
~ Если Ci¥=O, то для определения Компонент v*, w* получаем
следующую систему обыкновенных дифференциальных уравне-
ний: '. . _
*е-5<р . 2-Жатв
25п_ “ дш* !
_ си>* —w*cos04-sin0—
ein0 + COS0V* + сип* = 0..
VV
34
Исли с*.-— 0, тог^а S9y= О и из (3.8) получаем решение най-
денное в [271: ; ' .
Ое = 2&,ln Jsin0t+ Ct, O, = Oe + 2fc,.
В этом случае для определения поля скоростей деформации
имеем уравнения ~ *
sin0v*'4-v*cos0+pw* = 0, sin 6w*'id* cos 6 + Pt>* = 0,
’ . <3.9)
где штрих означает производную по 6.
Заметим, что если р = О, то
v* = 7i/sin0, u?* = ‘flsinG.
При 71 = 0 найденное поле скоростей совпадает с колем скоро-
стей, построенным в 127, с. 106] .
Если 0¥=О, то сделаем замену в системе (3.9) по формулам .
y*(G) = Z(cosO), u?* = A(cosG), тогда система (3.9) примет вид
Z?(l = B2) + Z| + ₽ft = 0, (3.10).
где штрих означает производную по £ = cos 0. '
Из второго уравнения системы (3.10) выразим Z и подставим
в первое, уравнение этой же системы. В результате получим
h" -1)1 + 2£(£* - 1)Л' - Л(1 + р1) - 0.
Решение итого уравнения [ЗЗРймеет вид
'-₽х[1т|Г+₽’1ШГ-
где р,,‘ Pi — произвольные постоянные. -
Окончательно получаем, что поле скоростей деформации при
ci == 0, Р ¥» 0 можно задавать следующими формулами:
и == 0;
„Рр= wcosO—^-sin2G.
ОН
2°. Еще одно решение для случая сферического деформиро-
ванного состояния, названного так по аналогии с плоским дефор-
мированным состоянием, построено в работе [19], оно соответ-
ствует а = 1. Это решение имеет вид
и =0, v .= ?В, w = — rBy sin G Ч- г sin 0 dG +
Sre = <8>тф = Q,
0В «=- _ J F (0) ctg 0J0 — А<р + <?„
о» =J'F (0) ctg OJ0 — F (0) Aq> + cit
Se, = (ci — A cos 0)/sin2 0,
35
где - ...
----я^- /В cos О—2с. cos 0\ S_B
F (0) - 2» /*• - S*. М&- —
К == sign (ов — о»),
Л-, В, ct, ci, ct, ct — произвольные постоянные.
Полученное решение описывает сжатие пластического слоя
шероховатыми коническими поверхностями <р = const, течение
которого ограничено гладкими > сферическими поверхностями
г = const.
3°. Рассмотрим случай, когда а = 0. Тогда система (3.5) за-
пишется в виде _ .
. д0Г6, + Фе °tg 0 = 0,
-яг- + (Se — ctg 0 4- 35rt«-~-, >
SSn®
“30—Ь З^гф + 2Se* ctg 0 = у, = 0,
So = Л('Ж + u*)’ = sEF + “* sin 0 + p* cos 0)« ’
2^ = 8йПГ<₽и* — u>*sin0), 2Srf — Ц-7^-— *>*)» ’ ‘
25ev = ^(₽v* + sin0-^.-w*cos0y j
- • <
Из-первого уравнения системы (3.11) получаем. • , (
Sre = Ci/sin0, Ct —const. .(3.12) i
Пусть v* — 0, тогда из условия несжимаемости So + 5, = 0 следует |
» 2n* sin 0 + ₽и>* = 0. (3.13)
Если Р^О, то из (3.13) имеем
Sr0 + 5e<p = O-. ?
Отсюда получаем .
5е. = -2С1/₽. (3.14) 1
Из последнего уравнения системы 43.11) имеем
5r»“4T+w’ctge* (3*15)
Из формул (3.12)—(3.15) следует
S 4 4с ' «*(₽ + -^-).
-J = ^-Tsine + -^-cos0-------,au*P—• <ЗЛ6)
00
36
Сравнение (3.16) сводится к квадратуре
In и*3 f (3.17)
J у Р sm 0i^Cos 0 ' '
Для простоты ограничимся случаем 7 =0, тогда из (3.17) по-
лучаем
' ' lB(cu*)«^-|’(Pa-|-l)ln|tg^ + ^|-sine], (3.18)
где с — произвольная постоянная. Считая 3(рг-Ц1)/4с»’“С = 1,.из
(3,18) имеем ' _
*'х7й,0\ г, sin 0 \
“* “ *g (v + -у)ехр (“гГГ7Г
Л . / \ Р + Ч
Отсюда й из (3.13) следует
* 2srn0, /л . 0\ • { sin0 \
Окончательно с учетом (3.4) получаем
(я . О \ / sin 6 , а \
Т +т)ехр( — ₽2"^i+ to/»
р « 0,.
2sin0. / л 0 V I sin® , о Л
w + —jexp^-^—Р<р).
Компоненты тензора'напряжений равны (7 = 0)
1 • с • 2с
5г0 = та’ •5й>“ —ТП’
‘ 4с '
^’,Ф=-Зр~ ®»
5’ —
пе == 2 J <Sectg0d0+3 JiSrtdO+e,.
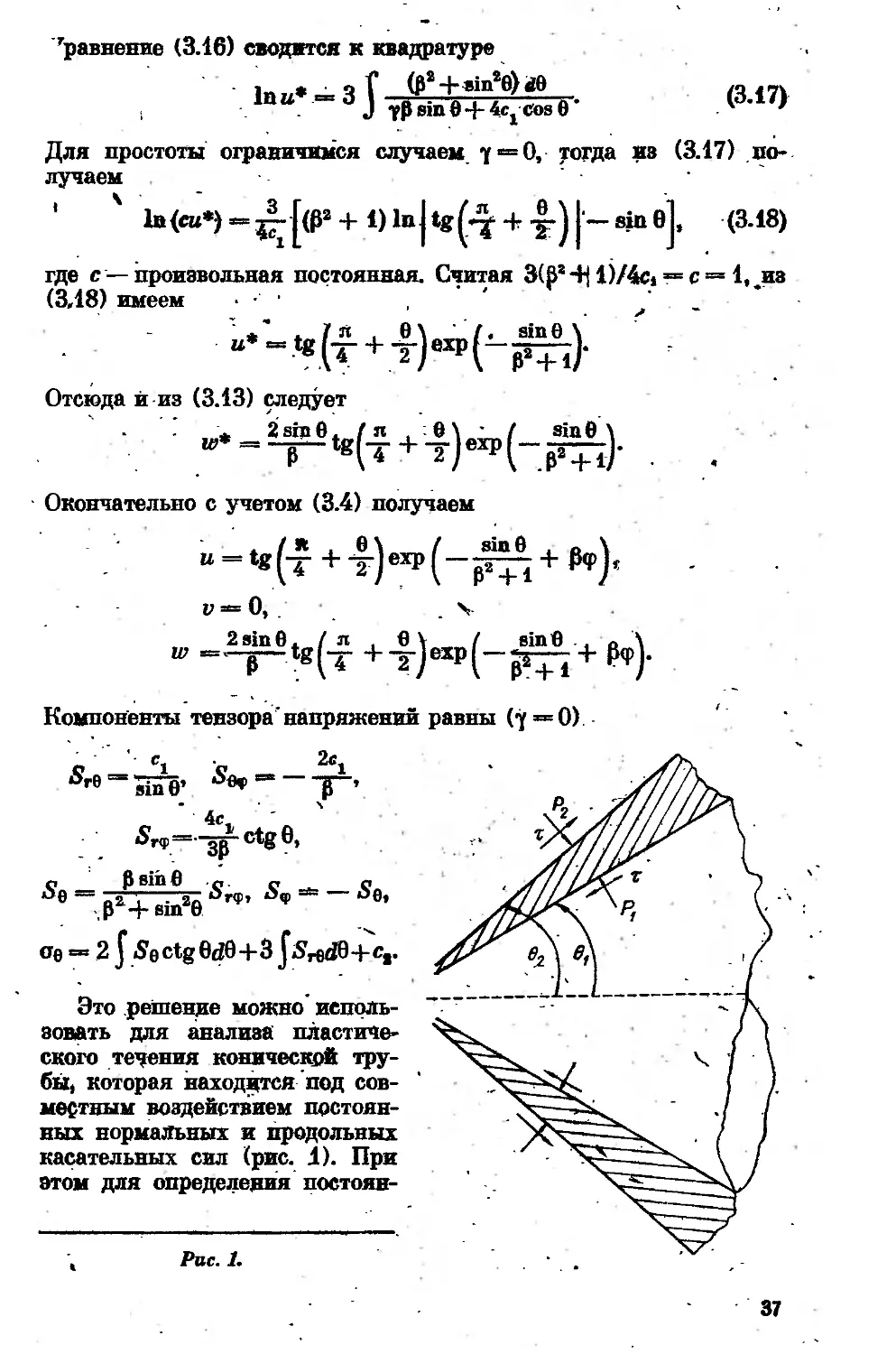
Это решение можно' исполь-
зовать для анализа пластиче-
ского течения конической тру-
бы, которая находится под сов-
местным воздействием постоян-
ных нормальных и продольных
касательных сил (рис. 1). При
этом для определения постоян-
Рис. 1.
37
ных Ct, Ct, P инеем следующие граничные условия;
ое |еА — Pit Oele, = — Pi, ^rele, = t.
Некоторые другие решения,* инвариантные относительно рассмот-
ренной подгруппы, содержатся в работе [25].
5 4. ТЕЧЕНИЯ СО СПИРАЛЬНО-ВИНТОВОЙ СИММЕТРИЕЙ
Решения, инвариантные относительно подгруппы Z3 — kXs,
следует искать в виде
а = и(т, £), • v = v(r,; g), w^wXr, g), •
р=р(г,-в), .
Такие решения можно использовать для описания пластических
течений, обладающих спирально-винтовой симметрией. .
Запишем, систему уравнений (1.1)—(1.3) в цилиндрической •;
системе координат
98т , 1 98тв , 98п , sr — 8е _дР
8г ' г ве "* 8г ' ' j* dr *
e5re ,1 е5е , 9S oz , _ 1 8Р 9.
8г + г 86 8z + г ~ г
98 п , 1 98 to , 98z , 8rz _ 8P_
dr . r &e ; dz ' r 8z. ’ *
8.^ *
25re = b(*7> + + 4?)’
Sr + Se.+ £=O,
S*+ Si 4- SI + 2S*„ + 2S%> + 2Slt = 2kl,
где и, v, w — компоненты вектора скорости в цилиндрической
системе координат r, 0,-z. С учетом (4.1) система (4.2) запишется i
следующим образом:
к 98тв 98п , вр
dr ' V 8^ -aj т г ' дг * .
0SrO fc 9SC , 9S& , fore __ к 8P . a
98 rz i fc 9sf* , . srz _
Jdr . г r ’
Sr + Se + £=O,
5Г = Х-^-, ^г8 = Л^г 0g T dr r)'
38
ст b I & i \ ОС bl i \
Ле — -gg- + —j, 25„ — Ц-gg- 4--gp),
C « 9w «, c . / * dw dv 1
*» — л-gg-, 2Ste «= л^— -gg’ 4- -gg-j,
S* 4- 5§ + 51 + 25fe 4- 25?z + 25g, - 2#.
Система* описывает пластическое течение вещества при условии
спиральной симметрии.
1°. Ищем решение системы (4.3) в виде
. u ==u(r) sing-, i>.= u(r) cos g, u> = u>(r) cos g, P = P(r, g).
Пусть S,e == Sn = 0, тогда оставшиеся компоненты девиатора тен-
зора напряжений зависят только от одной переменной г. Если
Р = Р(г), то втцрое и третье уравнения системы (4.3) удовлетво-
ряются тождественно, первое служит для определения Р(г).
В этом случае для определения функций из системы- п, u, w
получаем систему обыкновенных дифференциальных уравнений
ки 4- rv' — v = 0, w' + u = 0, ,, ...
(4.4)
ги 4-u — kv — rw — 0.
Система (4.4) сводится к уравнению Бесселя
r’u" 4-гп'4-(г24-Л2 — Du = 0.
Решая это уравнение, получим
и = с,Д 4- с2У¥, v = У1 — к*.
При I Л| 1 функция и принимает вещественные значения, если
же 1 А] > 1, то можно воспользоваться интегральным представле-
нием функции Бесселя [981: -
. я/«
' J cos^cos^sm^dt,
. °
учитывая только действительную часть.
Окончательно решение имеет вид (при сг = 0)
- г
и ciA» w~ — f “4г, kv = rw — rur—и.- (4.5)
о
Для определения компонент девиатора напряжений введем обо-
значения
f — Si/Se, <p — Sei/Se;
Тогда аналогично Г90] имеем
S» — -тг-^ -/ ..... , S6z = q>Se,
-Vl + f+f + tp* ’
г (4.6)
Sz = fSe, Sr = -(/ 4-1)Se, P - Sr- iti^Sedr.
I J r
39
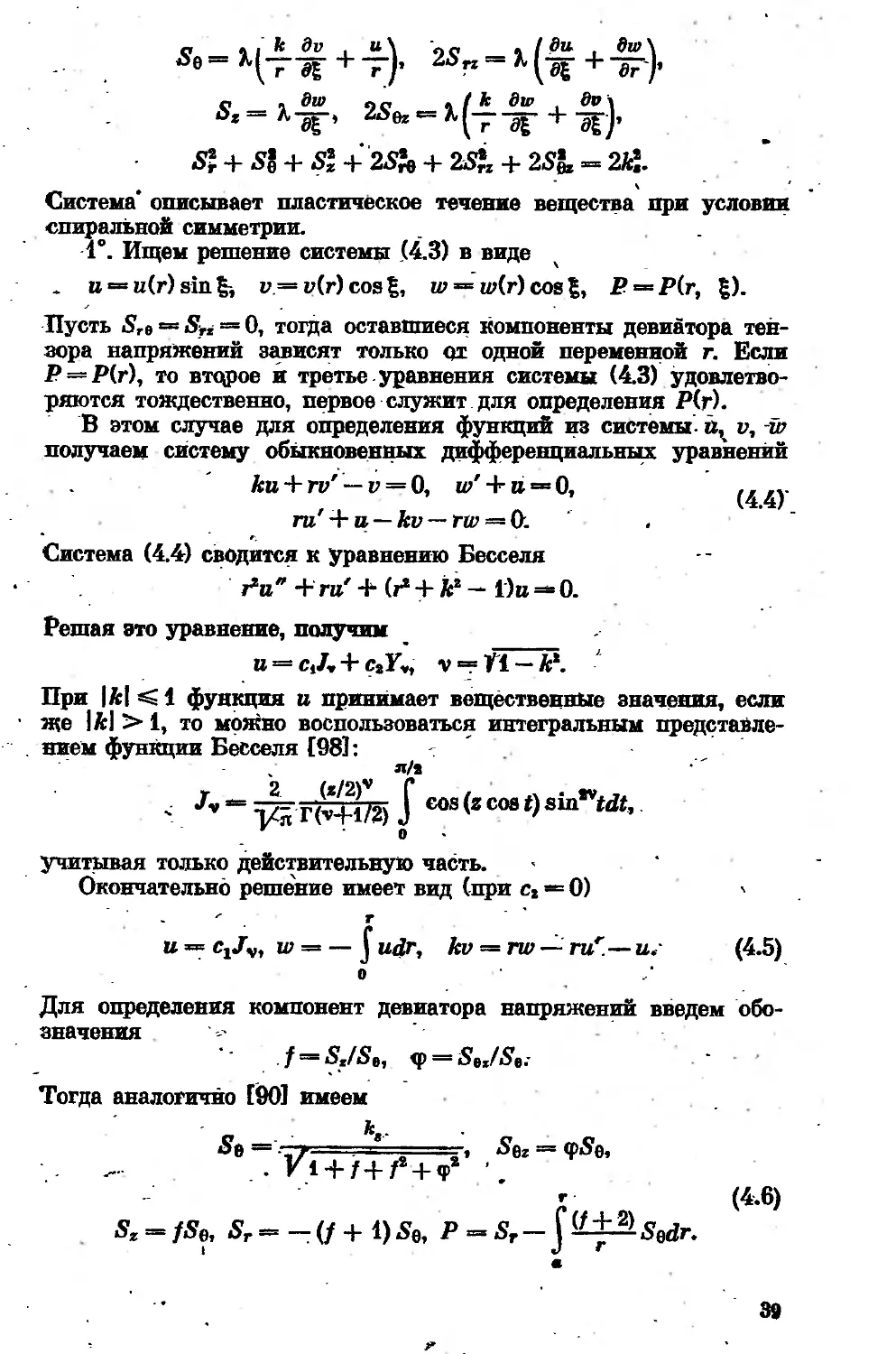
Решение можно интерпретировать, в частности, при с, > О, а>0
как пластическое.течение круглой трубы длины L (O^z^L,
а г Ь), которая • находится под действием внутреннего давле-
ния Р: -
• Orlr_0 = —Р, Ог.1г=Ь—О,
осевой силы
. ь
' N = 2л J azrdr
. °
и крутящего момента
- ' Ь
М = 2л J S^r^dr*
а
_ Да рис.- 2 построен график функции М(Ь), для а — я/20, а < b
л, к = 1. На рис. 3 Для а = л/20 построен график распределе-
ния напряжения о, на конце трубы (о<гСл). Заметим, что
при Л = 0 решение (4.5)—(4.6) переходит в осесимметричное ре-
шение Р. Хилла, см. § 7, п, 5..
2°. Система уравнений (4.3) допускает алгебру Ли операторов
с базисом
л д 'л & л & л 3 , & ~д Л д
А, — -нг» А» = А, = А, = и-г- + —Ь w-s-, ^в=г-3“*
1 2 dw' 3 дР' • . ди dv dw’ 6 dv
Оптимальная система подалгебр для Ьъ имеет вид:
©ь ,Л.а±.Л.5; Ait Ая, А8,
ва: <Лг±Л5, Д*>, <Аг; Ai>, (Ai, As>, <Д>, Д5>.
Здесь мы учли, что операторы Ai и Аа порождают - центр в
алгебре Ли Ls.
Построим решение, инвариантное относительно подгруппы
<Д, —Д*>. Решение ищем в виде
Р = Р0(г),- u = Mr) ехр v — н,(г) exp g, w = w<>(r) exp g.
Здесь величины Po, »o, nJ, «>о суть функции только от г. Из (4.3)
следует
Sr^Ci/r1, Sn^Ct/r, Ci, са —const.
40
юлагая с1 = с1 = О, получаем систему обыкновенных дифферен-
циальных уравнений
Aw0 + rv'o — v0 — 0, и0 + u>o == 0, (4.7>
{гиеУ + kve + rw0 — 0.
После преобразований система (4.7) сводится к уравнению Бес-
селя
г2«о 4- гио — (Л2 + 1 + г2) и0 — 0. (4.8>
Решение уравнения (4.8) имеет вид
В() = 4Д(г), т = УТ+А*. ' (4.9>
Считая, что .«о ограничена при г = 0 (иначе в (4.9) добавляем
функцию Макдональда),/имеем
u0 = AJv(r), % = — A j Jv(r)dr,
. . ______ (4.10>
kvv = — rwt> — (ruo)', т = У1 + А2,
где Jv — функция Бесселя мнимого аргумента, удовлетворяющая
условию /v(01= 0 для всех v > О, А — произвольная постоянная.
Обозначая /(г) = S.jSe, <p(r) = находим компоненты деви-
атора тензора напряжений аналогично [90]:
к
Se — - z •* “==> — <pSe,
V 1+/ + /2 + ф2
& = У£в, 5r = -(/+l)5e, (4.10
P0 = 5r_J±±£5edr.
Решение (4.10)—(4.11) при Л>0 описывает пластическое те-
чение круглой трубы, которая находится под действием внутрен-
него давления Р, осевой силы N и крутящего момента М.
Если положить к = 0, то М = 0 и из (4.10) поЛучаем осесим-
метричное решение, найденное Б. Д. Анниным [51, которое опи-
сывает пластическое течение, кругового цилиндра со свободной от
напряжений боковой поверхностью.
' 3*. Инвариантное решение на подгруппе <А, + аАа + [L46>
ищем в виде
и = /(г), w — а£ = ф(г), v — Ygr = ф(г), Р == Р(г), «у = 0/а.
Подставим эти выражения в систему уравнений (4.3). Из урав-
нения несжимаемости
df/dr + f/r + а+ ук = О • '
имеем
/ = С1Г + саг-1, С1 = Va (а + ?*),
«1» — постоянные.
4f
Пусть <р = ip -=0, тогда $г3 = = 0 и остальные компоненте
тензора напряжении имеют вид
Sr = k(Ci-c^), Se^Mkf + ci + c^), (4.12)
S, = oA, 25в1 = hlak/r + 7г],
2Х-аг4й5 === [for2 — с2)2 4- [(ку + fo) г3 + с2]2+1/2 (акт+уг3)2 4- а2г4],
Р = 5Г 4- J X [— ку — 2czlr*\ dr. '
' А
Это решение описывает предельное состояние трубы под действи-
,ем внутреннего давления Ро, осевой сил^х Л'о и крутящего^мо-
мента ,Мв. Граничные условия на поверхности трубы запишутся
- в виде
- А
Ро °rdr, Ог |г=г2 ” О,
а
А А
N = 2л j rcfzdr, М = 2л J r2S$tdr.
-А А
Это решение обобщает решение Панареллй и Ходжа [59] и
переходит в него при к = 0. Из решения (4.12), в частности, вид-
но, что увеличение к ведет к увеличению величины крутящего
момента.
$ 5.-РЕШЕНИЕ ХИЛЛА
1°. Решение Хилла еёть инвариантное решение, постро-
енное на подгруппе <2с054-Х14-аУ14-р7’1>. После-преобразова-
ний группы (1.5) его можно привести к виду, в котором оно и
было получено* Хиллом:
и = 6ж2х3 —ух%/2 4- у(х2 — &l}/2 — ^хгх2/2 — ал^/2,
v = — дхгх3 — 0я|/2 4- у — ж2)/2 — ухгхй/2 — аж2/2,
w = $х2ха 4- yxtxa 4- аха 4- ^(arj, ж2),
Р = 2a>*j + P(®i, х2).
Здесь а, £, Ъ — произвольные постоянные, функция tf(^j, х2У
определяется из нелинейного уравнения второго порядка.
Это первое пррстранственное решение уравнений идеальной
пластичности, оно построено Хиллом в 1948 г. [103]. Решение
описывает - пластическое течение призматического стержня из
жестко-пластического материала с произвольной формой попереч-
ного сечения,’ деформируемого силой, приложенной на краях.
42
Внешние нагрузки, приложенные на краях стцржйя статисти-
чески эквивалентны продольной^ силе ~
Fg — i /Зй» J У 1 0J3 OjgdXjtZXg,
крутящему моменту
Gs « У У -(^1^23 a'2*^is)
изгибающему моменту с компонентами
, . Gi = ± /ЗА, У У |Л 1 — gJ, — Gsjd^dxj,
=F Кзл. J У хх КГ— °12 —
G2
2°. Еще одно решение, инвариантное относительно этой же
подгруппы <cfS + X, + 2aYt + рУД при 0 = 0 построено Д. Д. Ив-
левым [301. Оно имеет вид
* U2 —— ttXi^ U2 &Хз,
м3'== — (а + Ь) х3 — 2х (а2 + Ь2 + ab) (1 — х?), х = ± 1,.
Он == — С4, Gia кх^, O12 “ Р23== 0, (5.1)
O2J = — кха — q 4- **(а'7^’)- = К1 —
Уа2 + Ь* + аЬ
<*зз = — kx3 — ct+ g*(2? + bL- К1 — х£.
у a2 + b2 + ab
Решение (5.1) обобщает плоское решение Прандтля (см. §. 8,
п. 2) на пространственный, случай. Это решение описывает пла-
стическое течение бруса в форме параллелепипеда, сжатого че-
тырьмя плитами, сближающимися с заданными скоростями.
3°. Пусть 0 = 7 = б=О, —а = 2а, тогда решение Хилла пере-
ходит в следующее решение:
Bi = вх4, — ах2, В3 = — 2ах» + 4>(xi, х2),
Р = 2с0Хз + P(xf, х2).
При этом компоненты" тензора скоростей деформации имеют вид
вц == в, е2з==: я, взз = —2в, *.
ем = 0, 2eis = (ty/dxi, 2e2S ~ dty/dx2,
компоненты тензора напряжений равны
Оцss= 2x2Cq + Ci, о2з==х 2хзС0 + Ci,
On — О, O33 = —ЗаХ + 2xtct + с*,
2oi3 = Mty/dxi, 2о2з = M^/dxt,
2 I dx, I "* 2 I dx*
(5.2)
. (5.3)'
I = /2k [ба2 + 4
,-1/2
43
Если положить i£ = V12aq>, то для определения функции ф(ж», х2/
получим уравнение
_____\ j__£_ /____^2_____\___п со 2с /5 А\
('/»+ф>,+)+ (/1+J ’*•'
Из уравнения (5.4) следует, что поверхность к — q>(xlt х2) имеет
постоянную среднюю кривизну,' равную с. Если с = 0, то уравне-
ние (5.4) называется уравнением минимальных поверхностей.
Минимальная поверхность — это такая поверхность, которая из
всех поверхностей, натянутых на 'заданный контур, имеет наи-
меньшую площадь. Физически минимальная поверхность реали-
зуется мольной пленкой, натянутой на заданный контур.
4е. Изучим групповые свойства уравнения (5.4) и построим .
его точные решения. Уравнение (5.4) при с = О допускает группу •
непрерывных преобразований, которая порождается операторами
Xt—d7dxt, Х2 = д/дх2, Xs — d/dqi,
Хя = x2djdxi — Xid/dx2> Х5 = xid/dxi + х2Ыдх2 + <рд/5<р.-
Если с ¥= 0, то уравнение (5.4) допускает операторы Xi, Х2, Х2, Х4.
Оптимальная система однопараметрических подалгебр для алгеб-
ры £в имеет вид
Х. + аХз, aXs + X4, Х4 + аХ6, X,,
где а — произвольная постоянная, различным значениям а соот-
ветствует неподобные подалгебры.
Пользуясь оптимальной системой, выпишем инвариантные ре-,
шения. ' •
5е. Инвариантное решение на подгруппе X(-FaX3 следует ис-
кать в виде *
ф = CLXt + /(ж2),
тогда для определения функции /(х2) получим уравнение
/ Г ) 2- f -
V /rw+W ’ ‘
Его решение имеет вид
f=- V1 - (2сха + са)* + с3, (5.5)
где с2, с3 — произвольные постоянные.
6°. На подгруппе аХ3 + Х4 решение ищем в виде
Ф = аб + /(г), (6-6)
где г0 — полярная система координат. В этой системе координат .
44
уравнение (5.4) запишется следующим образом:
_L I _ = 2с
Зг \ /га + r2<p'2+<p'g ) дв /г2 + г2ч>'2+<р'§ ) ’ (5.7)
* дф / дф
<Рг = ’ё7’ 4)0=Iff-
Подставляя (5.6) .в уравнение (5.7), после несложных преобразо-
ваний получим Дифференциальное уравнение
где К — произвольная постоянная.
Рассмотрим несколько случаев.
Если с = а = 0, то получаем известное решение
/ == Arcch г/К, ‘ (5.9)
которому соответствует минимальная поверхность — катеноид.
Это единственная минимальная поверхность вращения, она полу-
чается вращением цепной линии вокруг оси Ох,.
Если с = 0, а^О, то получаем новую минимальную поверх-
ность
/ - «In( ± arcsill
(5.10)
Если с =/= 0, то решение уравнения- (5.8) получаем квадратурой
C(cr2 + g)/r2 + «2
J г/г2_(СГ2 + Х)2
(5.11)
7°. Решение, инвариантное относительно подгруппы X» + аХв,
следует искать в виде
ф = г/(1п г + а0) = r/(£), В = In г + аб.
В этом случае с = 0 и приходим, к достаточно сложному обыкно-
венному дифференциальному уравнению второго порядка
d / J + (l + «2)f • \ , f + Г = 0
\ /1 + (/ + П2 + а2/'2 / /1 + (/ + Г)2 + а?/'2
8°. Инвариантное решение на подгруппе Хв следует искать в
виде (с = 0)
Ф = г/(6). (5.12)
После подстановки (5.12) в уравнение (5.7) получим
А : / + Г=0. (5.13)
Отсюда / = A cos 6 + В sin 0.
45
9°. Еще одно решение уравнения (5.4; удается построить,
если искать его в виде {при с — 0)
Ф = fix,) + g(®a).
В результате приходим к уравнению
/',(l + g,i) + g"(l + D = 0.
Разделяя в нем переменные, получим известное решение ф =
= In (cos Xj/cos хл), которому соответствует минимальная поверх-
ность — «поверхность Шерка»..
Замечание. Описанными классами решений, конечно, не
исчерпывается множество минимальных поверхностей, а тем бо-
лее поверхностей с постоянной средней кривизной. Известно, что
каждой аналитической функции соответствует некоторая мини-
мальная поверхность, которую можно восстановить по определен-
ному правилу [50]. К сожалению, большинство минимальных
поверхностей не задано в виде u = f(x, у), а задается либо опи-
сательно, например: «поверхность Эннепера», либо параметриче-
ски [50, 58]. Все это затрудняет, но не исключает возможность
использования этих поверхностей *в теории идеальной пла-
стичности.
10°. Теперь, пользуясь результатами решения уравнения (5.4),
применим полученные решения к теории пластичности.
Если ф выражается формулой '(5.5), то это решение есть
частный случай решения Ивлева.
Пусть решение уравнения (5.4) выражается формулой (5.9).
Тогда искомое решение уравнения пластичности запишется так:
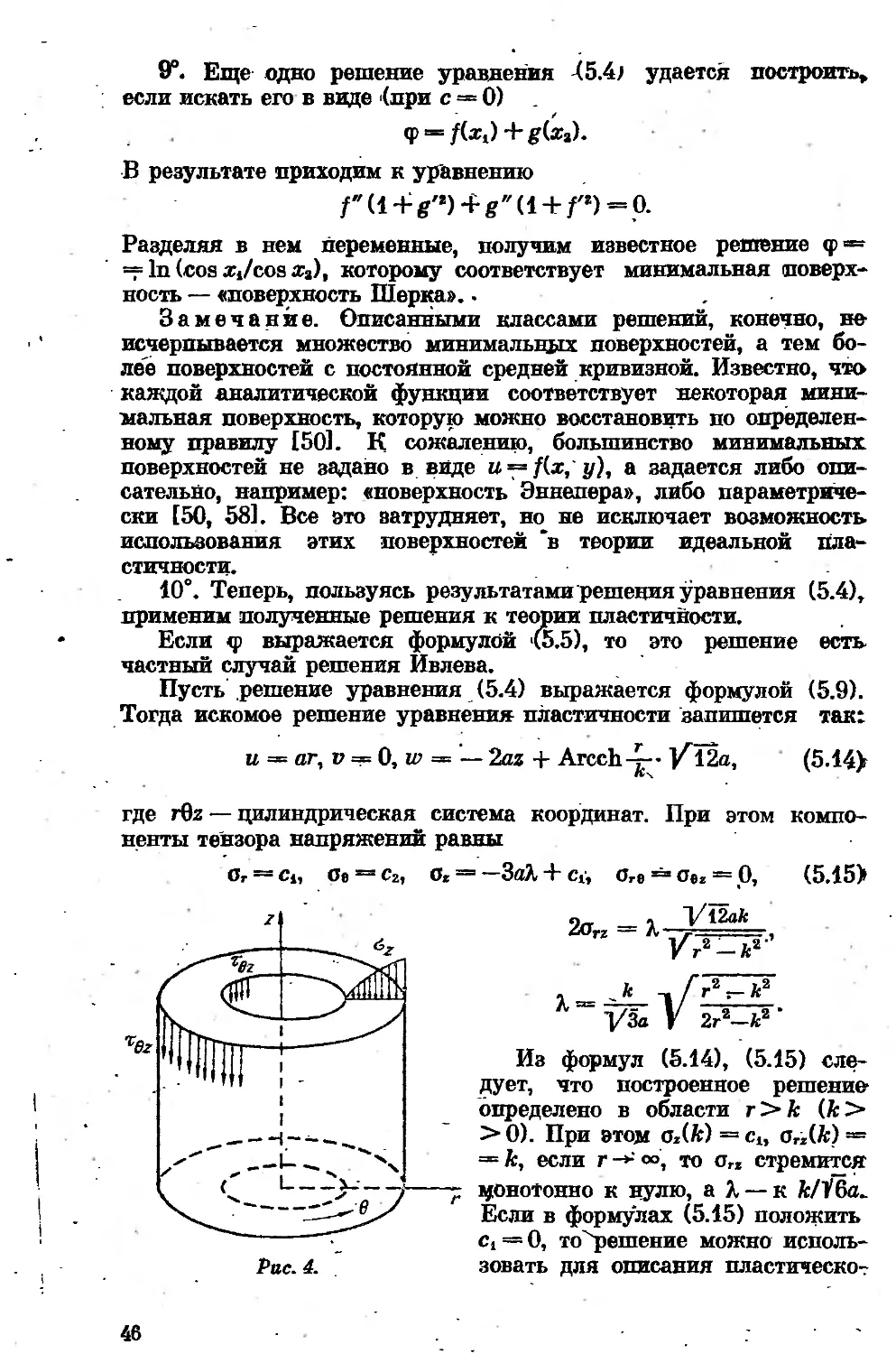
и — ar, v == 0, w — — 2az + Arcch-— V 12a, (5.14>
где r0z — цилиндрическая система координат. При этом компо-
ненты тензора напряжений равны
о, = с15 о® = с2, о» = —ЗаЛ + ci, а,е = ов1 = 0, (5.15>
2ст„ =
/г2-Л2’
= к г* — к2
"[/За г 2г2—к2
Из формул (5.14), (5.15) сле-
дует, что построенное решение-
определено в области r>ft (ft>
> 0). При ЭТОМ Gz(k) — Ci, о„(А:) =
— к, если г-*<», то Orz стремится
монотонно к нулю, а 1 — к k/Vfia.
Если в формулах (5.15) положить
Ci = 0, то^решение можно исполь-
зовать для описания пластическое
46
го течения толстой трубы, которая подвергнута действию’ каса-
тельных. напряжений т„ на внутренней и внешней поверхности,
а по торцам задано напряжение, распределенное по закону
ог= —ЗаХ (рис. 4).
11°. Пусть решение уравнения (5.4) выражается формулой
(5.10), тогда поле скоростей имеет вид
и —ar, v = 0, w = — 2az + V12a(a6+<p(r)),
где
<p(r) = ft In (г2 + a2 — /г2 — ft2) + arcsin V.JL?* *-
м r {a -pk )
Компоненты тензора напряжений запишутся так:
Ог = с^ <h = c„ ох = —3aX + clt о,в = 0, 2a6t = V12aar"‘,
Лк Д/12а -у Г г2 + а2
2я”'—— Уит^--
• _______•_______кг /г2 — к2 -__________
“ Уба /(г2 + а2/2) (г2 - Л2) + (Л2/2) (г2 + а2) *
Найденное решение (г > ft) можно интерпретировать точно так
же, как и в предыдущем пункте. Здесь а„(к) = к,ап стремится
к нулю, когда г-> «*>, X(ft) = 0, X стремится к ft/V6a, когда г стре-
мится к бесконечности.
12°. Рассмотрим решение (5.11) для уравнения (5.4). В этом
случае поле скоростей определится формулами
и = ar, v— 0, w = — 2az + У 12a (2a+ f -fe.r-dl-^. ----- a_
k J г /г2-(сг2 + Л)2 J
Компоненты тензора напряжений при этом равны
о, = 2c„z + cit 09 = 2692 + 04, ox==Or —ЗХ,
,— (5Л6)
0,9 = 0, 2ов» = XV 12aar~1,
2о„== ]ЛУ2аХ ^г2 + &)
г /r2_(r,2 + fc)2’
. _ кг / ^_(СГ2 + Л)2 \1/а
А У&((2^ + а2)(гя-(Сг« + *)’) + (вг2 + *)2(га + а2) ) '
Из соотношений (5.16) следует, что решение существует, для
Q<.г У1 — 2cfc— Vl — 4cfc r— 2cfc+Vl — iek
Это неравенство выполняется при некоторых значениях парамет-
ров с, ft. Нетрудно видеть, что т#х и X-равны нулю.при г =» г*, г*,
а компонента %„ при этих значениях г достигает максимального
значения, равного ft. Полученное решение можно использовать
47
для описания напряженного состояния трубы, внутренний радиус
которой г*, а внешний равен г*.
13°. Пусть <р = In (cos Xj/cos я2), тогда поле скоростей дефор-
мации запишется в виде
“1 = — -у хг, us = V + ~ х3 + ф («!, х2), (5.17)
фл = 12с [in cos — In cos-^-1, а —----
I 2л 2л J Л
где с, h, V — постоянные. При этом компоненты тензора напря-
жений имеют вид
JW, пх
«13 = fetg ~2^ ® (®1, я2), о23 к, tg -у5- (О х2),
ч
Зс г-
®33 ~ ---1” С1’ ®11 ~ ^22 = с1> ~ 0’ (5.18)
(яг, \—1/2
1+tg2-2/r +'
Из (5.18) следует, что при Xi—dzh касательное напряжение ом
достигает предела текучести kt, аналогично о2а достигает предела
текучести при x3 = ±h. Такое явление может, наблюдаться при
развитых пластических деформациях. Аналогичный эффект воз-
никает в решении Прандтля о сжатии пластического слоя.
Решение (5.17)—(5.18) можно использовать для описания пла-
стического течения материала, сжимаемого двумя парами парал-
лельных жестких- и шероховатых плит. При этом каждая плита
надвигается на слой со скоростью с. Из постоянства напряжений
«и и о22 следует, что постоянен вектор касательных напряжений
т„, который направлен вдоль оси Oxs и пропорционален нормаль-
ному (цр Кулону) давлению о„р = —тв. Предполагая край х, — О
свободным от напряжений и учитывая несжимаемость материала,
можно установить связь постоянных с4 и .У.
§ 6. РЕШЕНИЕ ПРАГЕРА
1°. В. Прагером [63] в 1954 г. построено точное простран-
ственное решение, которое описывает пластическое течение, соот-
ветствующее однородному напряженному^ пластическому со-
стоянию.
Пусть однородное напряженное состояние задано соотно-
шениями
iSnк9 St& = 2, £>з9s=s S12= р, 5*13= г, Sza == ц. (6.1)
Тогда с точностью до поля скоростей, соответствующего дви-
жению твердого тела, наиболее общее поле скоростей, совмести-
48
гое с уравнениями 1.6.1), определяется формулами
их = с (кххх3 + рхах3 + rxl), и2 = с(рххха + lxax3 + qxl), (6-.2)
и3 = — 1/ас (кх% + 1х% + 2рхгха — пга£),
к-+ 1 + т = 0.
Здесь к, I, т, р, к, г, с — некоторые постоянные. .Из (6.1), (6.2)
следует, что поле скоростей (6.2) содержит только одну произ-
вольную постоянную с, в противоположность плоскому течению,
когда возможно даже появление произвольных функций [63]. Как
заметил В. Прагер, поля напряжений и скоростей типа (6.1)—(6.2)
могут быть использованы в задачах о пластических пластинках,
подвергнутых действию постоянных изгибающих и крутящих
моментов.
. 2°. Можно показать, что решение (6.2) инвариантно, с точ-
ностью до преобразовании подобия группы (1.5), относительно
подгруппы. Xi + аТг + aS. Инвариантное решение, построен-
ное на этой подгруппе, имеет вцд
Ui = aXjZs + и(х2, xs), и2~ ^'х,Хз + v{x2, ха), ’
(6.3)
Ug = i ххха + w (х2, x3)f Р2 = cujj + Р (х3, х3).
Подставляя соотношения (6.3) в систему уравнений (1.1)—(1.4),
получаем
" dsn , _ дР
дх Ох ’ Ох дх„ дха ’
• Z о л 3 а
‘ + «^+^ + /^ = 0, - (6.4)
дХ3 3 дх2 дх3 - '
^11 = S22 *= ^33 =
251а = ar3), 2Sr13 = 1—, 2S23 =
Эта система допускает операторы
Y 0 Т г д ~ д у_______________0 у_______0 у 0 С
дх2'л~х*дш Хз dv' Х Х Х з~
Решение, инвариантное относительно . подгруппы X + pf + yS,
следует искать в вцде
и = / {х3), v = — р^агз + <р (х8),
w =»4 Х* + Ф (Жз). Р = ?®2 + Р (х3). <6’5)
После подстановки выражений (6.5) в систему (6.4) она перехо-
дит в следующую систему:
^3 д ^23 v ^зз 0Р
дх3 ’ дх3 ь
‘ Ц. Ампим, В. О. Вытев, Ск И. Сенатов
49
Sji = ocXx3, Saa — — plx3, S33 — 'k -g*,
. . 3
2512 = T Xx3, 2iS18 = 2S23 == %
3 3
, »
Если а — 7 = 0, то получаем решение типа решения Прагера,
в противном случае имеем аналогично
On = ^>4- сь Ом = + с2, о33 = axt + 7±а +'<%,
Оц = о33 + (2еи 4- е2г) о, ом— е12®, о22 = 03з + («и + 2ег2)©,
и == 2^ dx3 4* о.х^х3, v — § ф8 dx3
Ш =4(xl ± 2W + M +^), ®« = e2 2 /8+Л—-
*11 4- *ц*33 4- e22 • *12
Замечание. Решение, найденное M. А. Задояном [211; по-
строено, на подгруппе, которая подобна подгруппе Х? ±7\ 4- аТ2 +
4- aS. Поэтому оно может быть получено из (6.7) преобразования-
ми группы" (1.5). Решение (6.7) можно использовать для описа-
ния пластического течения между шероховатыми плитами, при
анализе напряженно-деформированного состояния прямоугольной
плиты, подвергнутой действию изгибающих, крутящих и растяги-
вающих .усилий [21]. -
§ 7. ОСЕСИММЕТРИЧНЫЕ РЕШЕНИЯ
*
Iе; Осесимметричные задачи идеальной пластичности пред-
ставляют значительный интерес для приложений. В этом случае
напряженное, состояние может быть описано компонентами тен-
зора напряжений а„ ов, аг, с„. Деформированное состояние опре± -
деляется компонентами тензора скоростей деформации ег, ее,
е„, где гбх — цилиндрическая система координат. При этом пред- .
полагается, чтох вектор скорости деформации имеет две отличные
от- нуля компоненты ur, ut, которые полагаются функциями г и z
и обозначаются и, ш. - .
Уравнения равновесия в данном случае имеют вид
&ег да*. а_ — ов . _да„ да, а_ . л
—Г+—S-4--r—-=0,-^ + -т44- —= 0. - (7.1>
дг dt г dr дг г ' '
Третье уравнение, связывающее компоненты тензора напря-
' жений, является условием текучести
(Or-oe)24-(oi0-o2)24- (ог-ог)24-6о?г = 6/с1 (7.2}
Нетрудно видеть, что система (7.1)—(7.2) содержит четыре ис-
комые величины и поэтому, в отличие от плоской задачи, рас-
смотренной ниже, не является* локально статически определенной,
и раздельный анализ напряжений и скоростей в данном случае
SO
включается. Таким образом, осесимметричные задачи образуют
:ак бы промежуточное звено между пространственными и плоски-
ми задачами—они содержат лишь две компоненты вектора ско-
рости й, w и обладают принципиальными сложностями простран-
ственных задач: 1) задача не является статически определимой;
2) система (7.1)—(7.2) не является гиперболической. Поэтому
анализ общей осесимметричной задачи наталкивается на большие
математические трудности и все точные решения получены об-
ратными методами. .
Присоединим к уравнениям (7.1)—(7.2) условии несйшмаемо-
сти и уравнения., связывающие компоненты тензора скоростей
деформации с компонентами тензора напряжений:
ди , и dw А
' ~д7 + 7 + ~дГ = °’
-g- = * (2<ir - qe - аО. 7- = А (2ое - <тг - <т2), (7.3)
= А (2*, - Ог - ае),~
~ЗР = О, + Оо + щ,
где 1 — положительная функция, определяемая из условия (7.2).
Группа, допускаемая системой (7.1)—(7.3), порождается* сле-
дующими операторами [5J:
•у •V’ . 1 -у ' &
1 dz - 2 ~ dr Z dz 8 dw ’
_ я (7.4)
Хд , 0 v 3 . ' '
.=u ——Ь Ae = - ай-.
• du dw 0 dP
Построим оптимальную систему однопарамётрических подгрупп.
Она, имеет вид , •
. ^+аХа'+₽Х5, Х1 + аХ4 + ₽Хв, ХВ + ₽ХВ, (?g
Х2 + аХ, + ₽Х6, Х2 + + ₽Х5, Х4 + Хв.
В силу критерия из [53] инвариантные решения можно построить
только, на подгруппах
Х. + аХз + рХ., Х1 + аХ4 + ₽Хв, Ха + аХв + ₽Хв, Х»+'аХ4+₽Хв.
2°. Рассмотрим решение на подгруппе Xi + Xt + aX8. Решение-
ищем в виде [2, 5]
or = az + о* (г), <т0 = az + о* (г), о2 ==' az + а* (г), о„ = o*z (г),
и — и* (r)expz, w = w* (r) expz.- (7.6)
Здесь а — произвольная постоянная, величины со звездочкой за-
висят только от г. Из (7.1) следует.
о„ = — Vjjar + сг"1, (7.7)
где с — произвольная постоянная. Подставляя (7.6)—(7.7) в С7.1)—
(7.3), получим для и*; w* систему обыкновенных дифференциалы-
Л
51
пых уравнений. Если предположить, что\г = с = 0, тогда из урав-
нений несжимаемости и условия (7.7) получим (предполагая, что
w ограничено при г = 0)
и = Aj'o (г) exp z, w — — AJo (г) exp z. (7.8) ~
Если w неограничено при г="0, то в (7.8) следует'добавить
функцию Макдональда. В выражении (7.8) А — произвольная по-
стоянная, /о — функция Бесселя нулевого порядка от мцимого
аргумента, удовлетворяющая уравнению
tJq + Jо — tJ0 = 0 ".
и условиям /о(О) = 1, Jo (0) я» 0.
Обозначим —rJ0/J0=/. Здесь /(г) принимает значения от
- —2 до —оо. Находим
в.
т1 == - f [/ (0 + 2] r*F (г) dr, F (г) == (1 + f + f)"1/2T
* ' (7-9)
g— -£ + [/ (r) + 2] F (r), =- + [2/ + 1] F (r),
где R — произвольна^ постоянная. Это решение при R > 0, А > 0
’ описывает пластическое течение кругового цилиндра длины L
(—Z=Cz=C0, 0 С г =C.R), который нагружен по плоским Торцам
напряжением, распредёленным по закону (7.9), и свободен от на-
пряжений на? боковой поверхности.
3°. Рассмотрим решение на подгруппе Xi + аХа + 0XS. Оно
совпадает с решением, найденным в [29], и ищется в виде
dr = — рг + фЛг), Ое ==•— ₽z + i]>2(r), щ = — 0z + i£3(r),
Grz = ^r/2 + mJr, u = qM, w^—az + fM.
Подставляя эти выражения в (7.1)—(7.3), получим решение
- в виде
Зп г2 и
°2 ~ — Сто) + Т (°г ~
(m/2 + m2)2 . -
2pn
Ge = or------2
f Г г2 — (th ,r2 + т )® Jr
о^==пг1г + 7ге2/г, к = п1г+п2/г, .
w==
г(2не-ах-аг) ’
где nt, пг, mi, т2 — постоянные, а = 2л„ 0 = 2mt. Полученное ре-
шение соответствует сдавливанию пластического цилиндрического
52
слоя шероховатыми квартальными цилиндрическими поверхно-
стями. Если т2 = п*= 0, то получим - решение, исследованное
в монографии [90], которое описывает осевое течение трубы под
действием осевого растяжения и внутреннего давления [82].
4°. Рассмотрим осесимметричное решение, инвариантное отно-
сительно подгруппы Х2. Решение будем искать в виде
u — ukty, w = Р = Р(Ъ), —z/r.
В этом случае система (7.1)—(7.3) сведется к следующей си-
стеме обыкновенных дифференциальных уравнений:
- lSlt + S'„ + Sr - Se + IP' = 0, (7.10)
- + Sz + Sn - P' = 0, (7.11)
Sr + Se + S, = O, (7.12)
S? + S2 + Si + 2S?Z = 2*| (7.13)
Sr*=—Agu , S&^=fai, St ~ faff , (714)
2STZ = fau' — fyi/),
где Se, ST, St, STt — компоненты девиатора тензора напряжений,
штрих означает производную no_g. *
Умножим уравнение (7.11) на g и сложим с уравнением (7.10),
имеем
- gsr + (1 - g2) S'„ + gS^ + (Sr - Se) + gS„ - 0. (7.15)
Воспользуемся уравнением (7.12) и, исключая из (7.15) и (7.13)
S2, получим '
- 2gS?.+ S'r'z (1 g2) - gSe + Sr - Se + gS„ = 0, (7.16)
Sj + S| + S*, + U-iJ. ' (7.17)
Из соотношений (7-14) следует, что
2S„ = fau' - lw') = (l/g)[(g2 - l)Sr + g2Se'l. (7.18)
Подставим (7.18) в (7.16) и (7.17), получим
- g*(l + g2)2S? - g2 (1 + g2) Se + (1 + & Sr « 0;
(1 + g2)2S? + 2SeS£* (1 + g2) + S%* = 4g2 (ftl - S§). ( ’
Последнее уравнение перепишем в виде
(1 + g2) Sr + S& - 2£ (7-2°)
Выражая из уравнения (7.20) ST и подставляя его в .(7.19), после
приведения подобных получим
2£2 /*1-Sg + 2g (1 + g2) (jAl-S§)' = 0.
53
Отсюда следует / • .
- Ж
V*’-^§== i+s2'
Решая последнее уравнение, Подучим
' 5в—
где с — произвольная постоянная.
Из уравнения (7.20) находим
sr= 21с1£ ^_JLSe.
' r О + Е2)8'2 -Г+6> е
Пусть с = к‘„ тогда
Ъ = ь i с _ ь Е<2 —Еа)
8 *• yj+p* 5г“л* (1+№'
Отсюда и из уравнений (7.14) получаем
£т_ _Ы_ 2-Г . „ л (1 + ^'3
«е“ « 1 + £2’ Е2
где А — произвольная постоянная. Из уравнения неразрывности
получаем
и = ЗА - В (Г+ g2)17? - In [ В + /ГТРI) + в.
Компоненты тензора напряжений имеют вид
g __ъ S (2 %2) о ________ь Е
г “ ‘ (1 +W ’ ® ~ (1 + № ’
С __’;_Qr. 6 — С __ Ь 2£2 —1
йг- fft*(1 + £«)3/2’ C>rZ_ft,(H-Ea)’72 '
Это решение описывает пластическое течение при продавливании
материала через коническую матрицу
h^z^H, n^|oz.
5°. В заключение параграфа .приведем решение, которое не
является инвариантным решением системы (7>1)—(7.2), но явля-
ется инвариантным решением более общей системы (1Л)—(1.4).
Это решение, найденное Р. Хиллом [901, ищется в виде
Ог = оДг), о« = о„(г), ов=о.в(г), Ог^о/г),
. u = u*(r) cos z, w = w*(r) sin z,
предполагая, что ori —0. Тогда из условия несжимаемости м ра-
венства о,, = 0 имеем
+ 6;^-+ «♦-©.
дг г . 1 от
54
1з этих уравнений получаем
и =-=—Л/о(г)созх, №=•= — J0(r)sinz, (7.21)
тде А чг- положительная постоянная, Л — функция Бесселя нуле-
лого порядка, определяемая так: ' -
+ Л + Го (0):== 1, (0) = 0.
Заметим, 4TQ iz> = 0, когда z«0, и что и = 0, когда г=0, а рас-
пределение и по поверхности представляет собой развитие выпу-
чины. Условие = 0 согласуется с требованием, чтобы цилинд-
рическая поверхность была свободной от напряжений:
Обозначая rJ0 (r)/j'o (г) = /(г), • где /(г) меняется от —2 до бес-
конечности, в то время, когда г изменяется от нуля до второго
нуля функции Jo, из уравнений равновесия и условия текуче-
сти имеем
ММ-2) М2/ + 1)
°6 — Ог — “7=========, 0Z &г > t=
Vl+f+f3 Уи-7 + f
к,
2 dr
При. этом К должно быть положительно:
А 2==
(7.22)7
3fc.r
Если 2Z — длина цилиндра, то условие (7.22) требует, чтобы I <
<л/2, а <3,83 (приблизительно).
Распределение напряжения по концам цилиндра, необходимое
для получения этого пластического состояния,' таково:
, 2/4-1 f /+2 dr
Vi+t+f г /Г+7+7 г
При этом напряжение oz является сжимающим в центре, оно
уменьшается численно по направлению к краям, становясь растя-
гивающим тамл
§ 8. ПЛОСКАЯ ДЕФОРМАЦИЯ
- 1°. Плоская задача считается наиболее изученной задачей
теории идеальной пластичности. -Изученность этой задачи озна-
чает, что большое количество плоских задач может быть решено
построением линий скольжения.' С другой стороны, точных ана-
литических решейий уравнений даже в плоском случае не так
' много.
55
В этом параграфе дадим описание известных точных решёник
разбросанных в ,настоящее время по различным статьям и моно-
графиям, причем описание будет дано с единых позиции — с точ-
ки зрения группового анализа.
Система уравнений плоской задачи идеальной пластичности
с условием текучести Мйзеса имеет вид
- ,^.+ £._O,£+.Jt-O, (8.1)
ох ду дх ду . ' '
(о, - Си)2 4- 4т2 = 4А1, (8.2)
(ди dvA [ ди , dv \ , ди , dv Л /о
№ ~ аг)т = ( *• + Ъ) (*« “ = °. (8.3)
где оя, о», т— компоненты тензора напряжений, и, v — координа-
- ты вектора скорости деформации, к, — предел текучести при чи-
стом сдвиге.
Из уравнений (8.1)—(8.3) видно,-что для плоской задачи
теории идеальной пластичности можно строить сначала поля на-
пряжений, а потом по ним восстанавливать поля скоростей, при-
чем последние восстанавливаются, как правило, неоднозначно.
Нетрудно показать, что система уравнений. (8.1)—(8.3) явля-
* е-тся гиперболической, характеристики и соотношения па них об-
щеизвестны, поэтому сейчас мы касаться этих вопросов не будем,
а далее будет дюказано, что соотношения на характеристиках
являются следствием нередуцируемости частично инвариантных,
решений к инвариантным. ' ''
Группа, допускаемая системой (8.1)—(8.3), порождается сле-
дующими операторами:
v д । - 8 ‘ v д Y д
1 Х дх ду ’ 3 ~ дх ’ 4 = ду'
(8-4)
v д д д д о д' , . д п д
— ---—h р-н——u-д- + 2т д—h (ov — ах) -х- — 2тт—,
2 э дх ду ди dv дох . ' v 1 дх дс^
V д , 8 Y д д
6 да„ да' ъ ди dv'
X у
у' т д ___ д у _ д у _
. .. 7 dv dv' 8 дц'. • dv ’
Поскольку удобно исследовать сначала систему в напряже-
ниях, ‘то необходимо знать и группу, допускаемую системой
(8.1)—(8.2). Она порождается следующими, операторами [1001:
v д . д „ д v д
Х дх Ну' s ~~ дх' 4 ду' /Я
д д , п д , , . д д (8‘5*
2=^-5------х~я~ + + \aV — axi-^ ~
2 а дх ду дах ' * ' дх дОу
- д<!х+ дОу
56
Ниже мы будем действовать следующим образом: сначала,
пользуясь методами группового анализа, строим инвариантное-
решение системы (8.1)—(8.2), далее с известными о», Ov, т вы-
писываем систему (8.3) и ищем группу, допускаемую этой систе-
мой. Группа, допускаемая конкретной системой (8.3), является,
как правило, подгруппой группы, порождаемой следующими опе-
раторами:
V д , ’ & -W & V д
Y* ~~ Х На-У ду ' “° да' = ~ду'
lr д д , д д ю
У» — х-----y-z- + u-x----v-z-, (8.о>
8 ду a да dv ди' ~ '
Ys ~ и ди + V dv' “ Х ~dv ~~ У~дй' ~ Л?’ -^а ~ ~dv'
Для построения всех существенно различных инвариантных
решений системы (8.1)—(8.2) необходимо построить оптимальную
систему подалгебр для алгебры -Ls (8.5). Поскольку система урав-
нений (8.1)—(8.2) зависит от двух переменных, то можно огра-
ничиться перечислением неподобных однопараметрических под-
групп. Оптимальная система имеет вид-(1001
Х. + аХ5, aXt + X2-+7X5, Xs + -fXs. (8.7)
Для алгебры Ли La (8.6) оптимальную систему удобнее строить
в каждом конкретном случае.
Теперь, имея всю необходимую информацию, будем строить
точные решения.
2°. Поля скоростей для решения Прандтля.
1. Ищем инвариантное решение системы (8,1)—(8.2) относи-
тельно подгруппы <Xi +-уХ') из . (8.7). Решение ищем в виде
оя = ,уа:+/,(рГ, о, =-уж + (г(р), т = Жр), (8.8)
где F, G, Н — некоторые функции переменной у. Подставляя (8.8>
в систему (8.1)—(8.2), получим известное решение Прандтля:
ох = — Р — Мтг — 21/ 1—Та b av= — р~к*1> т==
(8.9}
где h, Р — произвольные постоянные. Оно описывает сжатие пла-
стического слоя между параллельными жесткими и шероховаты-
ми плитами. При этом толщина слоя 2h считается значительно-
меньше протяженности слоя 21. Необходимо отметить, что данное
решение часто используется для решения инженерных задач.
Например, в работе [92J решение Прандтля применяется для рас-
чета напряженного состояния в пластическом слое угля вблизи,
забоя.
Для определения компонент вектора скорости имеем два
уравнения: . _____
+ ’ (8.10)
Uv+Vx У
57
Найдем группу, допускаемую системой (8.10). Эта группа по-
рождается следующими операторами: -
Х.-^Х,-и£ + »±. (8.41)
Оптимальная система однопараметрических подалгебр имеет вид
Хм Xi + aXSi Xt + aXt, Х,+аХ4. Х, + аХ2 + ₽Х8. (8.12)
В силу критерия инвариантности инвариантные решения могут
быть построены только на подалгебрах Xt + aXs, Xt + aX2 + pXs.
X Рассмотрим подгруппу Xt+eXi + pX,. Решение, инвариант-
ное относительно этой подгруппы, ищем в виде
и — —агр+p® + g(p), v == (кх/2)®а-+ /(р), (8.13)
где /, g — функции,' подлежащие определению из системы (8.10).
Подставляя (8.13) в(8.10) и решая полученную систему обыкно-
венных дифференциальных уравнений, получим
и = — аху + ₽х — -^-arcsin-p + ^-Vh2 — у2 — р Vh2 — р2.+сх,
. г? = (а/2)(гг + у2)^у+ с2, ' (8.14)
где е*, с» — произвольные постоянные. Заметим, что при а = 0
(8.14) переходит в известное решение Падай [821,.. при а^О
получаем новое поле, скоростей.
3. Построим возможною-инвариантные решения на подгруппе
Xi + aX*. Решение, инвариантное относительно этой подгруппы,
ищем в виде
' _ Uf=/(y)e®I, u = g(y)e'“. (8.15)
Подставляя (8.15) в (8.'10), получим систему обыкновенных диф-
ференциальных, уравнений. Отсюда получаем:
Эта система сводится ^уравнений Риккати.
3° .. Инвариантные решения, описывающие течения в сходя-
. щихся каналах. , . • - ’
1. Инвариантные решения на подгруппе Xi + тХ* удобно ис-
кать в полярной системе координат гв. Система (8.1)—(8.2) при.
- этом перепишется следующим образом:
дт °е_д
dr + г 9Q + г ’
0т , 1 flge , 2т
— дг г дв ' г
; (о,-о0)2 + 4т2= 44Г (8.17)
58 - -
(8.16)
О,
Эператор X, +tXs в полярной системе имеет вид
Инвариантное решение относительно этой подгруппы ищем
в виде
0г==71пг + «(0), ов —у Ы г 4r’Мб), т = с(0), (8.18)
где a, Ь, с —искомые функции. Подставляя (8.18) й формулы
(8.16)—(8.17), получим систему обыкновенных дифференциальных
уравнений
у + с' + а — Ъ = .0, Ь' + 2с = 0, (а —6)2 + 4с2 = (8.19)
Из этой системы следует дифференциальное уравнение для опре-
деления с(0):
с'-Ьу = 2)/Л?-с2. ,г ' (8.20)
Пусть тогда из (8.19)—(8.20) находим решение Падай [481
с(0) = й,8нг(26 + Л,), Ы6) = &,со5,(20+.Л1)+Л2, (ggj)
а(0) = — к. соз('20.+ Л4) + Аг,
где Л 1э Л» — произвольные постоянные.
Пусть у ¥= 0. Обозначим с=к, sin 25, тогда уравнение (8.20)-
запишетсяследующим образом:
2/cs cos 25—+ у = 2/c8cos 2В.
Отсюда получаем
2kt cos2B dB
— у-|-2Л4 Cos 2В
Теперь, считая, что у® > 4&?, имеем
B + (8'22>' -
где 0в — постоянная.
Считая, что 1 — большой параметр^люлучим из (8.19) и (8.22).
согласно [821
(8.23)
где а — произвольная постоянная, у — kja. Решение (8.23) при-
ближенно описывает напряженное состояние, возникающее при
плоском течении пластической массы й сходящемся канале в фор-
ме плоского клина, если клин имеет'раствор 2а и а мало.
59.
2. Отметим также случай, когда с = б Тогда « = +Р, Ь = Р +
+ 2к„ Р = const и компоненты тензора напряжений равны
о, = — Р + 2к, In (а/r), ов = Or + 2ks, т = 0. (8.24)
Это решение описывает напряженное состояние в пластической
зоне около круглого отверстия радиуса а. Решение (8.24) можно
использовать для расчета напряжений, возникающих под действи-
ем сил внутреннего давления в толстостенной трубе.
3. Для поля напряжений (8.24) поле скоростей деформации
определяется из системы линейных дифференциальных уравнений
Система (8.25) приводится к линейному' уравнению второго по-
рядка в частных производных '
. d2v 2 d2v dv
дв2 dr2 дг
которое можно решить методом разделения переменных.
4. Рассмотрим случай, когда с #= 0, а функция а(0), Ь(0), с(0)
суть решения системы (8.19). При этом компоненты вектора ско-
рости определятся из системы
„ ди -
- 2г* ..*
дг а — Ь ди , и , 1 dv п пС\
—----------= __— — + — Ч---------— = 0. (8.26)
ди dv 2с дг г г дв ' '
~db+r~fr-v
Система уравнений (8.26) допускает группу непрерывных преоб-
разований, порождаемую операторами
Z2 = u-^- + p4-,^3 = r#-. (8.27)
1 dv ’ 2 ди dv' • - dr ' '
Инвариантное решение системы (8.26) можно построить только
на подгруппе Z3 + 0Z2. Это решение ищем в виде
* « = ^/(0), p = rpg{0), (8.28)
где /(0), g(0) — некоторые искомые функции, [J— произвольная
постоянная. ’ -
Подставляя (8.28) в (8.26), имеем
«"+ /»+«>-<>: (8.29)
Из формул (8.29) видно, что для определения / и g получается
уравнение второго порядка с переменными коэффициентами.
В общем случае трудно ожидать, что его удастся свести к квад-
ратурам. Но система (8.29) сводится к квадратурам при £ = ±1.
Пусть р = —1, тогда
g = A, (f-2A)F(V = -2f, (8.30)
где А — постоянная. Если положить, что А = 0, а величину а
ко
«читать малым параметром, то из уравнения (8.30) и (8.23) по-
лучим приближенное значение 'компоненты скорости
ц = А(1.+ 2 /а2 —62),
где иа — произвольная постоянная.
Пусть Р = 1, тогда из (8.29) имеем
/72/ = 2с/(«-Ь), g' = -2f, (8.31)
отсюда получаем
, / = А ехр( g' = -2/, (8.32)
где А — произвольная постоянная. Считая а. малым парайетром,
из (8.23) и (8.32) имеем - .
f = A exp (—4а V1 — 07а*), g' = —2/. (8.33)
Поля скоростей (8.32) и (8.33) тоже могут быть использованы
при анализе напряженно-деформированного состояния в сходя-
щихся плоских каналах.
4°. Инвариантные решения, описывающие течения в канале,
стенки которого образованы логарифмическими спиралями.
В последнее время широкое применение получило горячее
прессование кольцевых и спиральных заготовок в криволинейных
каналах. Такой процесс для жаропрочных сталей и сплавов ти-
тана весьма эффективен, так как позволяет исключить операцию
гибки, уменьшить припуски и получить значительную экономию/
металла. В ряде случаев профиль матрицы можно описать в виде
логарифмических спиралей [91.
В книге [45] упоминается о том, что Гартман показал воз-
можность существования .пластических'течений, границами кото-
рых слуцсат Две логарифмические спирали. В работах Б. Д. Ан-
нина [1, 100] для таких течений были указаны поля напряжений.
Некоторые частные случаи подобных течений позднее рассмотре-
ны в статье (91.
,1. Спиральные течения суть инвариантные решения, построен-
ные на подгруппе аХл + Хг,+ Их следует искать в виде
Or = +/(X), о, = + g(X), ог(р = й(Х), Х = гехраф. (8.34)
Подставляя соотношение (8.34) в систему (8.16)—(8.17), получим
систему обыкновенных дифференциальных уравнений от пере-
менной X, которая имеет вид 11001
X/' + ah*К + / — g = 0, - ХЛ' + f + aXg' + 2h — 0,
(f-g)a + 4fe2 = 4tf,
где штрих означает производную по X.
2. Пусть а — 0, тогда из (8.35), получаем
rf' + f — g = 0, th' + 2h + у = 0,
(/-g)2 + 4fea = 4A3.
(8.35)
(8.36)
61
Из второго уравнения (8.36)имеем
^с/^-7/2, , (8.37)
где с — произвольная постоянная. Из условия текучести получаем
• /-Г-±2/«-Ла. (8.38)
Теперь функция f находится квадратурой из первого уравнения
системы (8,36). ' ~
Если y = 0, .то найденное решение переходит в решение Мих-
лина'[34]. ' .
3. Для нахождения поля скоростей в случае а = 0 имеем сле-
дующую систему уравнений: _
ди и 4 ди г---------------
дт т г д& У. ди и 1 Qv п oQ\
д (vx~~-l~dir = —h—’ аг + 7 + = °(8,d9>
т дг (г ) + г dQ
Система (8.39) допускает операторы
*1“ "аё’ *2 =иаё + V~dv’ Х« =* г аё’
Оптимальная система имеет вид
x, + 0x2, Х, + 0Х3.
Инвариантное решение на подгруппе Xt4-0X2 ищем в виде
и *= и*(г) ехр 06, v = р*(г) ехр 06. (8.40)*
Подставляя (8.40) в уравнение (8.39), имеем
2гц*'_______V(к1 — Т2^2) г* + 2Усг2 ~ с” =
г2 (v*/r)‘ + 0u* с — (у/2) г2
= 21 (г), ги*' + и* + 0р* == 0. (8.41)
Выразим из второго уравнения и* и подставим в первое. В ре-
зультате получим уравнение второго порядка
20га*' =А(г)[—г2и*" — ги*' 4- и*(1 +.а*)].
Если 0 = 0, .то получаем известное решение:
u==^l, у = r I? [ з^ГГ + Са1’
т I J г Л(г)
где Ci, с2 — произвольные постоянные.
4. Рассмотрим подгруппу X, 4- 0XS. Решение на этой подгруп-
пе ищем в виде ,
ы = фДг), -V = 0лр 4- tp»(r).
62 '
Система для определения функций ф2 имеет вид
' , ~л^ ^м‘,+₽г-°;
где Л(г) определена в (8.41), В результате имеем
В ci Л С с — ₽га
“--4'--- 1'“^+ч-7^г'гг’ -
где с, — произвольная постоянная.
5. В случае а =¥= 0 - из системы (8.35) • получаем уравне-
ние [100]: '
aX(/,-g,).+X(aa-l)V + a(f-g)-<2fe+Y) = 0. (8.42)
Выражая из последнего уравнения системы (8.35) f — g и под-
ставляя в (8.42), получим уравнение для определения hz
Ш' + 2Х (a2 — 1) К —Л2 + 2a (Л? — Л2) —
— (2fe + у) —Л2= 0- ’ (8-43)
Особенно просто выглядит последнее уравнение при а = ±1.
Пусть а = Д, тогда (8.43) переходит в уравнение
2М' + 2 ]Л*2-й2 (^Л? —— (h + у/2)) = б.
Разделяя переменные, имеем
• f /-=.-?7Л=--------------т =-In(<*•). (8-44)
* У к» -Л»(]Л2 “ Л*“ <Л + V/2))
где с — произвольная постоянная.,.
Сделаем в уравнении (8.44) замену h = к, sin z. В результате
получим
J Access — Zc8sinz — у/2 1п(сХ).
Последний интеграл преобразуется следующим образом:
[ —----Г -----------=— 1п(сХ).
J — у/2 -}- sin (2 ~’ я/4)
При йтом
(я \
8-т) •
—-у + V2 fc, sin (* — т)
63
Для простоты ограничимся случаем у = 0, тогда
Отсюда получим
. z = 2 arctg [(cl) + л/4,
или
/ 2/ял. /ал, Д
h = 1/2 / X +2СХ —С2 \
Л, 2 I 2/ift Г
’ \ Л “7" v /
График функции И/к, показан на рис., 5 (с = 1), где £ = %
Напряжения о„ о, определяются из уравнения системы (8.35)
квадратурой:
f /л® —Л2 _ -----
ог = / = — h — j —-------dh, o<p = Or — 2 у Aj— (8.45)
Вдоль линии re<f = l + V2 (0^<рС2л) касательное напряжение
минимально. Когда с стремится
к бесконечности, то Тфг->-Л,/У2,
при атом Or, ov стремится к
бесконечности в силу расходи-
мости интеграла в (8.45).
Это решение можно интер-
претировать как течение в ка-
нале, образованном двумя стен-
ками в форме логарифмиче-
Рис. 5.
64
ких спиралей. При этом можно подобрать такую фо^му кана-
ла, что касательные напряжения на стенках будут равны. Тогда
поле скоростей можно восстановить из уравнении
-w “ 1 ' = ,/-, W + u + W = Q. ‘
Ли — v + лг А ’
5°. Частично инвариантные решения уравнений плоской тео-
рии пластичноети.
Большой интерес в механике представляет частично инвари-
антные решения, впервые введенные Л. В. Овсянниковым. К этим '
решениям, в частности, относятся кратные волны, давно и ус-
пешно используемые в различных разделах механики сплош-
ных сред.
В этом пункте будет показано, что известные соотношения
Генки и уравнения Гейрингер суть следствия нередуцируемости
частично инвариантных решений к инвариантным.
Систему (8.1)—(8.2) известной подстановкой Леви
. оя — о — к, sin 26, о, .= о + к, йт 20< т = к, cos 20.
приводи}! к виду - 7
-g — 2ks (cos 20 + sin 20 = О,
дх дх ду ]
3» / . оо 36 оо 30 \ п (8.46)
s----2As|sin20-x----cos 20-х-1=0.
а» Y' дх j
Уравнение наименьшего инвариантного многообразия [521, необ-
ходимого для поиска частично инвариантных решений, ранга
р = 1 й. дефекта б — 1, может быть взято в виде '
о = о(0, х, у). (8.47)
Подставляя (8.47) в (8.46), получаем'
. (o;_2A,cos20)-g + ^sin20-|| = --g,
—• 2fc,sin20-g +(o;-2)cscos20)^ = .-^
Для нередудируемых решений [52] должно выполняться условие^
(ое)8 — 4# (cos2 20 + sin2 20) = О. ч
Интегрируя это уравнение, получйм
о = ±2А«0 + с (с = const). (8.48)
При условии (8.48) уравнение (8.46) сводится к одному урав-
нёнию
2кг (± 1 - cos 20) g + 2к, sib 20 g - 0.
Первые интегралы этого уравнения равны
-g==tg0, -g = -ctg0. . (8.49)
’ Б. Д. Аннин,'В. О. Бытев, С. И. Сенатов . 65
Соотношение (8.48) есть известный интеграл Генки, а (8.49; сут-
уравнения линий скольжения.. Следовательно, любое нередуци-
руемое инвариантное решение системы (8.46) ранга р = 1 и де-
фекта 6 = 1 определяется из известных соотношений. Обратимся
теперь к уравнениям, определяющим поле скоростей. С учетом
соотношений Леви уравнения .(8.3)—(8.4) примут вид
:dv/dy «л ди , г» /о
'duTdy + dvidx = ^20’ 17+а7 = ()- <8-50)
Для отыскания возможных частично инвариантных решений ран-
га р = 1 и дефекта 6 = 1 возьмем уравнение наименьшего инва-
риантного многообразия в виде
и = и(х, у, и). (8.51)
Подставим (8.51) в уравнение (8.50). Получим
ди ди dv dv _______ „„ / ди ди dv dv \
дх dv дх ду . ду dv ду дх j'
ди ди dv dv ___z.
дх dv дх ’’’ ду
Для нередуцируемых частично инвариантных решений' должно
выполняться условие
(-g)2tg2e + 2-g-tg2e = 0. (8.52)
После решения квадратного уравнения (8.52) с учетом (8.51)
получаем х
du.+ tg 6 dv = 0, du — ctg 6 dp = 0. (8.53)
При этом система (8.50) сводится к уравнениям
tg6-^=|- ^- = 0, ctg 6-^ +-^- = 0. (8.54)
6 дх ду ’ 6 дх ду ' ’
Первые интегралы уравнений (8.54) совпадают с (8.49), а урав-
нения (8.53) суть известные соотношения Гейрингер.
Следовательно,- показано, что уравнения (8.52) служат для
определения частично инвариантных решений panta р = 1 и де-
фекта 6 = 1. Такие решения называются еще простыми волнами.
' § 9. НЕКОТОРЫЕ ДРУГИЕ РЕШЕНИЯ
В этом параграфе, будем строить решения, инвариантные
относительно подгруппы Х8. Такие решения следует искать.
в виде
“ ZzQT|, 32g), - р(я?|, ^2), Мд — Хд), J? — jP(*Tl, «Гд)" (9.1)
Цодставляя соотношения (9.1) в систему уравнений (1.1)—(1.4),
имеем
66
SU , aS12 ap 9S12 dSM gp
dx± - dx% dx^ dxt dx% dx^
q^~ + dl~ = 0, + S22 + S83 = 0,
1 2 Ь (9.2)
5Ц = Х^, S22 = X^, S33-0,
11 dx* 22 dx* 33 • ’
9 0 _ 1 ( du 1 Sv \ ОС \ dw ОС 4 dw
^i2-A^— + 3a.J. <^>13— л-g-,. 2d23-X—
«—8 97,2 {( du\2 / dv\2 , 1 / du , dv \2 1 / dw\2 , 1 ( dw \2]
Л — za:, 1 1 + 11 + 2 1 1 + 2 1-^—1 + 2 I 1 u
L\ 1/ \ 2/ \ 2 1/ \ 1/ \ 8/ J
Система (9.2) допускает группу непрерывных преобразований,
порождаемую операторами
v д v d . v d d , d _ d
1 . dx^‘ 2 dx% 8 ' a'2 dx^ X1 dxa & du dvf‘
v ___~ a i T ' Y__________ a X — a X __________ a X________—
A*~X2 du"~Xi dv' &~~дР’ Л6— du' A1~S^ A»~ tto*
® X± + x2 Xlo = и + V
' » 1 dx* 2 dxj 10 du 1 dv ‘ dw
Оптимальная система одномерных подалгебр для алгебры Ли
(9.3) имеет вид <*
X, + aXt ± X, + ₽£„ X, + аХ4 + ₽(ХВ + Х10),
X, + dX4 ± X., X, т X, + ₽Х„ Х3 + аХв + ₽Х10,
- Хв + аХв + рХв, Х1±Х10, Х8±ХВ, Хв + аХ10,
Х4 + а(Хв + Xi0), Х4±Х8, X», Х8, Х10.
Здесь учтено, то, что X» йорождает центр алгебры Ли (9.3),
а, , р — произвольные постоянные, различным значениям а и £
соответствуют неподобные подалгебры. Инвариантные рещения
можно искать только на подгруппах
Xi, Х4 + а(Хв + Xl8), Xj + аХ10, Х8 ± Хв, Xt ± Xi0,
X. + аХ8 + рХв, Хз + аХв + 0Х1О, Х3 ± X, + рХ8,
Х3 + аХ4 ± Х8, X, + аХ4 ± X. + £Х8, Хз + аХ4 + ₽(ХВ + Х10).
Эти решения имеют вид
Xt + аХ5: и = /(хг), v = §(х2), w = h(xj, Р =» ow:i + Р(жа),
Х* + а(Х8 + Х10) + рХ5 (а^О): u = rf(0), i? = arlnr + rg(6), w =
= rh(&), P = g(6) + (₽/a) In r,
X, + aX10 + pX5: u = r“/(6), i?=“<"g(6), ^==г“Л(О), P=JJlnr +
+ P(6), '
67
ХГ± Хы + аХъ 'u — f (я2) в**1, V — g (жа) е±х\ w = ,
= Л(гг2)е±Х1, Р — ажх + Р(ж2),'
Х8 + аХ8 + pXs + уХ5: u~= (1/0) In я,+ /(£), i’ = g(^), w = h(D +
+ (а/р) In xt, P = (y/p) In ач + P(g), g -
Х. + аХ, + ₽Хи + <гХ,: u=3i*z“/(g), v = T*'ag(&, w = i*'ah(l), P =
== 76 + P(g\ g = re~“e,
X, ± X, + 0XS + yXs: u = /(g), v = g(g), w = Mg) ± 0, * P = y0 +
+ P(g), g = re"se,
X8 + aXt±X8 + pXs: u = /(r), u> = g(r)±6, v = arO + h(r), P =
, =pe+P(r),
Xt + aX4 ± XB + 0X8 + yX6: и = ± x± + axtx2 + / (x2), v =
= — (a/ty.xl + 4 (ж2), w = fix1 + g (x2), P = yx±+P (xs),
X3 + aX* ± 0(X. + X10) + yXs: u^rftg); v = rln r + rg(g), w =
= rMg), P = 70 + P(g), g = re~“e.
1°. Инвариантное решение на подгруппе Х2 + Xi0 из (9.3) сле-
дует искать в виде
- и = и(хЛе\ v = v(Xj)
‘ ’ (9.4)
w — w(ajx)е 2, Р = Р(гх).
дР dgia — Q agi3 _ л с 1 с л
дх^ dxt ’ дх^ ’ 11 2а ’ “
!a -= ^v, SM = 0, 2Si2 = k(u + v'), 2Su^kw', (9.5)
u'2 + г2 +4 (u + i/)2q- 4 + 4-H-
Подставляя соотношения (9.4) в систему уравнений (9.3), полу-
чаем
dSu
дх^-. ।
* «S^ll ==: Хи , 5;
2523 = Xw, Х“3 = 2Л8
Из (9.5) имеем
4
<512 — С,, S13 — Са,
где cr, ca — некоторые постоянные.
Если а 4й 0, с2^0, то система (9.5) сводится к обыкновенным
дифференциальным уравнениям
и' + v == 0, Х(н + v) = cu Kw' = ci,
которая после Исключения X сводится к обыкновенному.нелиней-
ному дифференциальному уравнению третьего порядка.
Пусть а =“ 0, -тогда для определения в, v получим систему
уравнений и + v = 0, г' + в = 0, из которой следует
u = aeac+<pe“*, v = — ас* + ре-*, (9.6)
где р — произвольные постоянные.
Для определения этих постоянных поставим следующую за-
дачу. Пусть имеются две жесткие' параллельные плиты, которые
сближаются с постоянной скоростью с вдоль оси Oxt. При этом
плиты изготовлены так, что материал выдавливается вдоль оси
Ох2 без трения, а вдоль оси Ох,' с трением. Этого, в частности,
можно добиться изготовлением канавок, параллельных оси Ох2.
Расстояние между плитами 2Л. Тогда для определения a; v име-
ем. следующую краевую задачу: .
и(Л) = —с, и(—Л) = с.
Ее решение имеет вид
с sh х, с ch ж •
и ==----г-г1» —г-г-5--
sh А * - sh А
Заметим, что аналогично можно рассмотреть задачу о' сближении.
плит, когда их скорости различны.
Для определения w получаем уравнение
2kw' с2 }/Л2 sh2*! + н>2, Л2 = — са, Л = c/sh h, (9.7)
которое Сложно свести к уравнению Абеля [33].
Замечание. Если в соотношениях (9.6) положить ₽ = 0,
то уравнение (9.7) примет вид
2kw' — с2 (а2^1 + ы>2)1/2, к2 = Jc£ — с2,
которое заменой w = ае / (*х) приводится к уравнению
2k(f+f) = cjl + f, " •' 1
а последнее решается квадратурой. При этом
+ с = vSr + —-аг2 Ь (еа + 2к - (еа - 2к) F),
где F *= / + V1 + Д с — постоянная..
Это решение можно интерпретировать точно так же, как и
предыдущее, только скорости сближения плит, здесь различны.
2°. Запишем систему (9.2) в цилиндрической системе коор-
динат:
SSr , 4 Sr - дР
sr + T~d0- +~^7—= Т’
•aSr0 1 SSe . 2<Уг9. д
дт ’’’ г дб " г г
dS„ ' 1 aSfa S„ •
ar + r ae
Sr + Se *. 0, Sr - Se = +
5I = 0, + 2Sn==^t
2Sor = + A®—)- 2(<Sfe 4* + <$ez) ~ 21&
dP
ao?
(9-8)
Ищем инвариантное решение. системы (9.8) на подгруппе —
,+ Х10. Решение имеет вид
и = и(.г) ехрО, г = г(г) ехрб, и>= в?(г).ехрб, Р = Р(г). (9.9)
Подставляя соотношения (9.9) в систему (9.8), имеем
asr Sr-Se дР. _а
дг + г . dr' dr + г U’
, . ^+->=°-> + т + т = 0’
. я . й , х, (9.10)
- Se = + Sr 2Sro - + r± (-£-)).
2Ste=X^-? 25„ = X-g-2
v + <Se + 2(iSr6 +xSyz + Sez) = 2Л».
-Из уравнении (9.10) следует
Sr6 = с,/г2, S„ = cjr, (9.11)
где Ci, c2 — произвольные постоянные.
Полагая Ci — 0, для определения в, v получаем уравнения
+ Z =0, u + r2^(-] = 0. (9.12)
dr г { . ’ dr I г j ' '
Исключая из системы (9.12) функцию в, получаем уравнение
Эйлера
r®r" + rv' — 2г = 0. (9.13)
Решение уравнения (9.13) имеет вид
v == а^2 + а2г~^2, (9.14)
где Bi, а2— произвольные постоянные. Из второго уравнения си-
стемы (9.13) следует
в = а1(4—*/2)г^-Ь^(/2 + 1)г"1"5. (9.15) .
_ ' . I
Теперь w определяется из уравнения
rw' = с2 [в- + (у + --) + w'2 + 1 ’ (9-16) ,
где в, v заданы формулами (9.13), (9.15).
Пусть а2 = с2 = 0. Тогда решение имеет вид
и = (1 — /2) г^ейа,, v •= a^r^e^, w = Вев, В = const.
Полагая ai == 1/8(2 — У2), найдем компоненты тензора напряже-
ний
70
ln(r’^ + г” + B2) + D, D = const.
Найденное решение, в частности, можно использовать для опи-
сания пластического течения цилиндра с вырезанным сектором
раствора а. При этом на торцах цилиндра действует суммарная
R
сила Р, Р = 2л Jozrdr, на боковую поверхность r — R действует
внешнее давление q, а на грани сектора, первоначально задавае-
мые условием 6 = 0, 6 = а, действует нормальное давление
<? = Ое. ' ' - .
3°. Ищем решение на подгруппе X, + aXUt оно имеет вид
и = 7"/(0), v - 7-g(6), w = т-Л(О), Р = Р(0).
При этом компоненты девиатора тензора* напряжений равны
S, = Ла/, «е = Л($' + /), Sx = О,
2Sr« = Л(/+(а—l)g), 25„-=ЛаЛ, 2Sez = Xft', (9.17)
Л 2k, [2 (а/)2 + -i- (/ + (а -1) g)2 + -J* «2^2 + | Л'*]"1'2-
С учетом (9.17) система уравнений (9.8) запишется следующим
образом: .•
^+Sr-Se-0, Sr + Se = O,‘
/ uXj
§ + 2Sr6'= < + S„ = 0, (9.18)
S2 + S2 + 2S2e + 2S2Z + 2S|Z = 2Af. * .
Решим эти уравнения при a = 1, В этом случае имеем S, =
= —Se=2Sre, поэтому из первого уравнения системы (9.18) сле-
дует .
^ + 4S^ + 0, Sr0 = C1e-40.
Теперь для определения оставшихся компонент тензора напря- '
жения имеем два уравнения
+ s„ = 0, S?2 + - 4eje“8®.
Если в системе уравнений (9.17), (9.18) положить u = v = 0,
тогда
So, = CjCos 0 +c2sin0, Srt = sin 0 — c2 cos 0,
1де c2 + c2 = fcj, при этом 1
ip = c(circos0 + c2rsinO)®, c — const.
71
N«.
Это решение можно интерпретировать как пластическое течение
отрезка трубы, ограниченного поверхностями 6 = 0Ъ 6= 02, г —
— fit, r = R2 (рис. 6).
4°. Ищем решение на подгруппе Х8±Хв + аХ5, оно имеет вид
iz =7(0), и==Л(0), u> = ±lnr + g(0), P = alnr +jP(O),
при этом компоненты девиатора тензора напряжении равны
5r = 0, St—Mh /)', St — 0, • (919)1
2SrtKf, 2Srt =’ 25#z = Xg'.
С учетом уравнений (9.19) система (9.8) сводится к следующей
системе обыкновенных дифференциальных уравнений:
= а, 25r0 = ^-, ^ + j5„ = 0, 5е = 0.
dt/ dv dv *
Sre + + Sn —
Из этой системы следует ’
5,# —а0 + со, fe/ + / = 0,
< + 52„.= А*-(а0 + со)2, ^Г + 5„ = О.
Если положить здесь а == 0,' то имеем
: 5#».= Ci cos 0 + ct sin 0, ' " '
Srz = Asm© — c2cos0, с2 + c* = kl — c^~K.
Поскольку 25г» = ±1 = Cj sin 0 — c2 cos 0, to
X = x(cj sin 0 — cos 0)/2, x = sign (c4 sin 0 — ct cos 0),
отсюда
' (4^ + ?)-+c’
72. .
де sm р = cjK, cos p — cJK, c — произвольная постоянная. Функ-
ция g определяется из уравнения kg' = StI,
g = — In (c, sin fll — c2 cos 6).
Окончательно при a = 0 получаем
и = ^'^n + + c' v — — f
A. • у л 5«/ -j
w = ±ln r — In (c, sin 0 — сл cosO).
Это решение можно интерпретировать как пластическое тече-
ние сегмента трубы, ограниченного поверхностями 0=fri, 0 —02,
r = Ri, r=R2 (рис. 7). На внутреннюю и внешнюю поверхности
трубы действует равномерно распределенное касательное напря-
жение Sri = с0. На -плоскости 0 == 0,, 0 == 02 действуют равномер-
но распределенные касательные напряжения S3t — A, S6t = B.
Глава 4 .. .;....- ' . J.. . .... —
ГРУППОВЫЕ СВОЙСТВА
КВАЗИСТДТИЧЕСКИХ УРАВНЕНИЙ ТРЕСКА /
- В случае полной, пластичности (ребро призмы "Треска)
компоненты тензора напряжений равны [29]
ч de = 2Is,(P6e + VfVj),
гДе щ, vt, v9 — направляющие косинусы первого главного направ-
ления. Подставляя их в уравнение равновесия (0.1), гл. 3, имеем \
следующую. систему квазистатических уравнений Треска:
+ (i,/, s = 1, 2, 3), .
, - vl+1£ + p’ = l, ' (0.1) ’
P — P(xu Xi, X3), Vi = VilXi, Xi, Xs).
Заметим [1011, что если
<\.^=0, . (0.2)
то система (ОД), (0.2) есть система уравнений, описывающие
стационарное течение несжимаемой жидкости с постоянным мо-
дулем скорости (винтовое течение).
5 1. ДОПУСКАЕМАЯ ГРУППА
Допускаемый системой (0.1) оператор ищем в виде
' + . (1.1>
' 73?
Таблица .
в
1
2
3
4
5
6
а) Xlt Ь) Х4, с) Хт + Xs, d) аХ4 + Х6
a) Хь аХ4 -J- Х5, b) Xj, Х4, с) Х4, Х5, d) Х2, Х2
а) Хь Х2, Х4, Б) Хь Х4, Xs, с) Х2, Х3> аХ4 +
+ Х8, d) Xs, X., Х7 -
а) Х2, Х3,Х4, ХБ, Ь) Xlt Xt, Xs, аХ4+ХБ„
с) Х4, Хе, Хв, X,
а) Хт, Х2„Хз, Х4, ХБ
а) Xlt Х2, Х8, Х6, Хв, Х7
Здесь Л,-, Bi, С (i = l, 2, 3) — функции xt, vt, Р. Продолжив*
один раз этот оператор, подействуем им на уравнение (0.1). За-
тем, используя первые три уравнения (0.1) и уравнения, полу-
ченные дифференцированием четвертого уравнения (0.1) один
раз по xi (i= l, 2, 3), найдем определяющие уравнения. Интег-
рируя последние, получим, что Af, Bf, С — линейные функции
от Xt, Vt, Р. Базисные операторы при этом таковы 111:
= = (*==1,2,3),
у _ д ‘а а 1 a d-2)
Хъ~Х^дх9~ Хадхл + V*dv* ~ V»dv2 ’
я операторы Хв, Х7 получаются из Хъ круговой перестановкой
индексов 1, 2, 3.
Замечание. Способ отыскания операторов, допускаемых
«истемой (0.1), описанной выше, не является вполне строгим в .
«вязи с тем, что система (0.1) содержит конечное соотношение
между неизвестными функциями. Но поскольку операторы обра-
зуют алгебру Ли Ья, то эта алгебра является подалгеброй алгеб-
ры Ли операторв, допускаемых системой (0.1). Параметризуя
конечное соотношение в (0.1), можно показать, что полная ал-
гебра операторов, допускаемых системой (0.1), совпадает с В*.
Оптимальные система! подалгебр 0, порядка г=1, 2, ..., о
алгебры Ls указаны в табл. 3. При этом а — любое действитель-
ное число; ко всем операторам необходимо добавить рператор
Хо, умноженный на произвольное число, поскольку Ха образует
центр алгебры Ls.
§ 2, ИНВАРИАНТНЫЕ РЕШЕНИЯ
Построим инвариантные решения системы (0.1) на под-
группах первого .порядка. В случаях 1а, 26 (см. табл. 3) реше-
ние имеет вид ф — произвольное число) ' -
ni = V<(i, р), Р = Р(Х, p) + g(a;i) (i — 1, 2, 3), (2.1)
74
причем для la будет Х = х2, р = у3, g = p®4, а для 16 соответст-
венно Х = xjxi., |Л = ач/яз, g = pin|a?±|. Уравнения для функций
V*(X, ц), Р(Х, ц) получаются из . (0.1) после подстановки в
них (2.1). ' i
В случаях 1с, Id решение имеет вид. (р •— произвольное число)
Щ = ViOi, |Д Р =*Р(Х, ц) + g(xj, (2 2)
vt = V2(X, g) cos tv, vt = V3(X, p.) sin w,
причем для ic
к —(x% + xf)1/2, p, = x± — arctg xB/xa, (2.3)
ip = a;1 + Q(l, p),
а для Id ' -
&=хГ\х1 + x2)1/2,. p = In 13^ |V« — arctg
. 2 .
g (xt) = P In.l»! I, w = In I Xi |v« 4, Q (X,p). (2.4)
Для получения уравнений относительно функций Vit V, Р, й,
зависящих только от X, р, следует поставить (2.2), (2.3) или
(2.2), (2.4) в (0.1). .Это удобно делать в цилиндрической системе
координат.
Таким образом, в случаях Id -* d пространственная задача
сводится к двумерной.
Строим инвариантные решения на" подгруппах второго поряд-
ка. В случае 2d функции Tj/P зависят только от х3, в случае 26
функции vt, Р зависят от полярного угла 0 = arctg xjx3. При этом
можно также к Р добавить функцию g(a:,, х2, ж3), равную ра^ +
+ в случае 2d и “flnla^l в случае 26, где р,f — произволь-
ные постоянные. В случаях 2а и 2с решение имеет вид
Vi = 1/1(Х), Р=Р(л), v2==V(K)cosw, v3 = V(X) sin w. (2.5)
При этом в случае 2а
X = In (х2 + 4)1/2 - « arctg J,
хз (2.6)
w = arctg i(xs/«2) + g(X),
а в случае 2с
X = + а^)1/2, w = arctg (х3/ха) + g (X). (2.7)
Отыскание функций V4, V, Р, g, зависящих только от X, сводит-
ся к интегрированию системы обыкновенных дифференциальных
уравнений, получаемой из (0.1), (2.7)—(2.9), и в ряде" случаев
может быть доведено до квадратур. На подалгебрах 0Г, г >2,
содержательных инвариантных решений нет.
75
S 3. ЧАСТИЧНО ИНВАРИАНТНЫЕ РЕШЕНИЕ
. Переходим к построению некоторых частично инвариант-
ных решений. В случае За (см. табл. 3) ищем решение в виде
щ = У1(Р), Р = «г, х,) (i=l, 2, 3). (З.Г)
Из (0.1) получим
(Р6ц+ y1y,)/Pi = 0. . (3.2>
Здесь и ниже штрих обозначает производную по Р. Прирав-
нивая нулю определитель этрй системы относительно Р,.. (i =
= 1, -2,'3) и учитывая (0.1), найдем
(v;)5+.(v;)a+(v4)2=i. дз.з>
Если теперь взять функции V.CP), удовлетворяющие (3.3), и оп-
ределить P — P(.xt, хг, х,) из (3.2), получим решение системы
(0.1). Это решение будет зависеть, вообще говоря, от двух про-
извольных функций одной переменной. Например, для
v,=sinРcosy, Vi — sinP sin 7, ra = cosP, (3.4>
где 7 — произвольная постоянная, из (3.2) находим
Xi cos 7 + хг sin 7 + x, tg (P + л/4) = G(P)„ ч (3.5>
Здесь G(P) — произвольная функция от P. Придав- ей определен-
ное значение, найдем P = P(Xi, хг, х»), а затем по (3.4) и Vt.
В этом решении Р = Рв = const, vt — const на плоскости, опреде-
ляемой йз (3.5) с Р. = Ро, В случае 86,-Зс ищем решение в видя
щ=со8 0(Р), v2 я= sin 0CP) cos w, vs = sin 0(Р) sin w. (3.6)
Принтом в случае 36
’ . w = arctg«s/x2+,g(P), (3.7>
а в случае Зе-’
i» = lnl«|,M + g(P). (3.8>
Подставляя (3.6), (3.7) или (3.8) в (0Л) и исследуя совместность
полученной системы уравнений относительно . Р = Р(«1* х2, х3),
найдем вид функций 0 = 8(Р), g — g(P), а затем и .функцию
Р = P{xi, х2, «»). Для случая 3<? будем иметь
= Р= Р(Л), Х = (^ + ^ + а£)1/2. (3.9>
Для случая 4с
XiVi = g (Р) (xl + £ + а$}1/2.
Последние два Олучая удобно исследовать в сферической системе-
координат. • . ч
;В других случаях таблицы 3 частично инвариантные решения
можно искать в виде (3;6)- с w = w(xt, хг, xs). Подставляя теперь
(3.6) в (0.1), исследуем совместность полученной системы отно-
76 .
ительно функций Р(«ь х2, х3),. w(xt, х2, ж3). Это позволит найти
ФУНКЦИЮ 0(Р) И фуНКЦИИ Р(хи'Хг, «,), wkxi, х^, xs).
Замечание. Если в полученных выше частных решениях
сделать замену зависимых и независимых переменных посред-
ством формул преобразования, соответствующих общему опера- ,
тору Lt, то получим другие выражения для частных решений.
Глава 5 ....... — .' zzr
. ГРУППОВЫЕ СВОЙСТВА
ДИНАМИЧЕСКИХ ЗАДАЧ ПЛАСТИЧНОСТИ
Если в уравнениях теории пластичности учитывать силы
инерции, то уравнения движения имеют вид
dv.
. > = 0,7=^ 1,2,3), (0.1)
dv. dvt
где -тг = — + VjVitj называется субстационалъной или полной
' . • dv, dv,
производной; в ряде случаев принимают . Присоединяя
к уравнениям (0.1) условие пластичности Мизеса, условие не-
сжимаемости, закон пластического течения, получим полную си-
стему уравнений теории течения Мизеса
dv,
df==<^ (0.2)
."^•ЗР = <т«, Si} =, Pfijj + Оц, 8ц8ц — 2]<£,
1 Sij= Аец, Of,<= 0, 2вц = V{t j 4* Vjt <..
Если предположить, что конвективные члены в выражений
для полного ускорения малы, то получим упрощенный вариант
теории пластического течения среды Мизеса: •
ч at
— ЗР = а«, — Рбу = o{j, SijSjj = 2A:?, (0.3)
S« = vt, t = 0, 2еъ- = vt, s + v}.
Исключая из уравнений (0.2) или (0.3) величины А, Оц, Sfj, по-
лучаем систему четырех уравнений, которая служит для опреде-
ления четырех* функций Р, v^ v2, vt‘
dvt _ • У2Л, 1/2kt
' ^.« = o, ‘ (0.4).
где A* «=
77
§ 1. ГРУППОВЫЕ СВОЙСТВА УРАВНЕНИЙ
ДИНАМИЧЕСКИХ ЗАДАЧ ПЛАСТИЧНОСТИ
1°. Если в уравнениях (0.4) то группа,
допускаемая этими уравнениями, порождается следующими опе-
раторами [2, 691:
V d ir * а , d а д
Хо~ dt' М — S— q>(t)dp,
г
—«i/i (no i ие суммировать), (1.1)
„ d д , d d
1 z dx, a dxo 2 dv, a dv,'
o - a . • z
Еще два оператора Z2, Zs получаются из Z, круговой переста-
новкой индексов, /{, ф — произвольные функции из класса С".
dv. . dvf
Если в уравнениях (0.4) положить-^-»то группа, до-
пускаемая этими уравнениями, порождается операторами (2, 691
Хо — dt' “ dx,' М ~ * dt + Xi dx.'
я я ' я (1-2)
m d dm д dm d д
T1~x^dv. ^dv' T^~Xf>dv. X1dT'T3~X1dv, x*dv*
О A A 0 a A
Li = gi (0 — Xigi (0 -^p (no i не суммировать),
где ф, gt — произвольные функции из класса С°°. Из (1.1), (1.2)
следует, что уравнение (0.4) допускает бесконечнопараметриче-
скую. группу непрерывных преобразований. Это, с одной стороны,
расширяет класс инвариантно-групповых решений, а с другой —
осложняет построение таких решений, поскольку бесконечные
группы еще плохо изучены. Поэтому в дальнейшем ограничимся
изучением некоторых конечномерных подалгебр для алгебр Ли
(1.1) и (1.2).
2°. Положим в (1.1) ф(0 = 1, А = 1, fi — t (i = 1, 2, 3), тогда
соответствующая конечномерная алгебра Ли Lti имеет базис
V а V д ЛТ ♦ 3 ч - 0
— dtr Зх/ М 1 dt + Xi дх^ z
Z1,Za,Z„S- = ^,' (1.3)
. 78
)птимальная система одномерных подалгебр имеет вид
X.±y1 + ₽Z1,’X.±Z1,Xe,
X* ± У2 + аУ2, Xi ± У2, Xi, Xi ± У2 + ₽Z4, (1.4)
X, ±Z,, У,+ аМ + $Zi, M+aZi, Zt,
где а, р — произвольные постоянные, различным значениям а,
соответствуют неподобные подалгебры. Подалгебра S порождает
центр в алгебре (1.3), это учтено при построении систему (1.4).
Пусть ф(1) = 1, gi = l в (1.2), тогда соответствующая конеч-
номерная подалгебра порождается операторами
Y ___ & V _____ д уг &
Ao-0t’ '
«р d '3 гр ( d d гр d d
21==3Xadv. Ха dv’' 12 — dv, X1 dv’ 2a~X1dv„ Xzdv’
3 2 * a о 2 A
„ d d:dd
Z-i^= Xa----Хя------h V2-----17.-T—,
2 &X3 dX2 Sv3 S0P2
' <7 d d , d. d '
"2 "^3 a ' ”” "а "У Ko ’a" * Hl "a 1
2 3 dx, dx, 3 dv, dv’
А О A О
„ d d , d d ,p d
— *^1 л *^2 л * " a -”r ^2 д ? ~ л л'
3 A дх^ л дхг x dv2 , 2 dv^ dP
Оптимальная система одномерных подалгебр» для (1.5) имеет вид
Xe + ciXi + $Yi + 4Ti + 6Zi, M+N+aTi + f>Zi, (1.6)
Xt + aYi + p7\' + '{Zi, Xe + a(M —JV) + $Z,, M+aN+^Z,,
Yi + aM+ f>Zi, Yi + аТ, + &Z,, Xt + ,aN + pZ2,
Xi 4- aX2 + p7\, N + aZt, Тл + aZi, Zi,
где a, P, Y, 6 — произвольные постоянные, различным значениям
этих постоянных соответствуют неподобные подалгебры. S по-
рождает центр в алгебре Ли (1.6), это учтено при построении
системы (1.6).
3°. Приведем вид инвариантных решении,' построенных на
подгруппах (1.4) и (1.6).
1. Инвариантные решения системы уравнений (0.2), постро-
енные на подгруппах (1.4), имеют вид:
Zi + S: u(r, z, t,), v(r, z, t), w(r, z, t), P = aB + P(.r, z, t), ..
M + aZi + f>S: u(|, 4, z), i?(g, t], z), w(g, »], z), p = 01nr +
+ p(£, 4, z), I — r/t, t] = r“e®,
Yi + aM + $Zi + tS": £u = — 0 + u(|, »], z), v = n(g, 4, z), w =
0P = —76 + P(g, t], z), ^ = r/t, T] = ^expa0,
79
Xt ±Zt 4- aS: u — uCz^FQ, r, t), v — v(z T 6, r, t), w = w(z T6, r, t,
P = az 4- P(r, t, z T 0),
Xf+aS: Ut^uSy, z, t), иг = иг(у, z, t), w» = w^(y, z, t), P —
= ax + P(y, z,t),
. Xt ± Ki 4- $Zt + 7$: u = u(pz4-0, r, t)., v = v(r, t, |), w — ±z+
+ w(r, P = yz + P(r, t, %), i^fyz+6,
Xl±Yl + aYt + ^S: и^и&у, t, z)±x, b2 = <xx 4-b2U, 'y, z), b5 =
= »s(?, t, z), P = px 4- P(y, t, z),
- JG± y2 + £5: Ui = uSy, z, t), U2 = Uz(.y, t, z)4-x, us = us(t, y, z),
P. = px + P(y, t, z),
XB + aS: Ui — uAX'.y, z), U2^=u2(x, y, z), u3 = u3(x, y, z), P =
= at + P(x, y, z),
Xa + aYt + fyZt + yS: Ui—at + ui^, r, z), r = r(£, r, z), w=*
= r, z), Р = ^4-Р(£, r, *), £ = pz4-0,
где в, v, w — компоненты вектора скорости. в цилиндрической
системе координат. .
2. Инвариантные решения, построенные для системы уравне-
ний (0.3) на подалгебрах оптимальной системы (1.6):
7\ + aZt 4- pS: и =₽ u(r, z, t), v =_ v(r, z, t) -kart), w = w(r, z, t),
aP = P(.r, z, t),
JV + aZj+.piS: u = tu(r, z, g), v = tv(r, z, £), w = tw(r, z, |), aP =
=— p0 + P(r, z, |), | = at + 0,
X + aX2+ рЛ + 'У'У: «!=»!(!, x3, t), w2 = —pxjxs + Oitl, x2, t),
u3 = (P/2a) 4- u3 (g, x3, t), P = -Y«1 + P(g, x3, t), | =
= axj — x2,
X, + aN+ pZi + ^S: u = tu<£, ц, r), v — tv(r, g, тр, w — tw(r, %, 7]),
P = — 7Z + P(r, ц), g — pz + 6, T] = In t — qz,
Yt 4- aT, 4- pZj 4- (p=#0): u = u(r, z, t), pr = art) 4- r(r, z, t),
w = w(r, z, t), PP = —Tf0 4- P(r, z, t),
Y3 4-aM4- pZj 4- kS (lai 4- Ipl =#0): u=.u(g, t), £), г = г(|, ц, £),
pw = —0 4-и>(£, т], £) . (aw = In 14- w(|, ц, £)), pP =
= -Y04-P(g, 4, £) (aP = lni4-P(g, t], £)),
(a 0)>| = r/t, i) = z/t, £ = p In 14- a0,
(a = 0): £ = r, r] = z, £ = f, „ i
80
J+aN + fiZt + 7‘S’: u = z"u(tj, T], £), p=s=r“r(g, rj, £), w =
= r“u>(£, T), £), P = 71nr + P(g, t], £), l = r/t, r\ = z/t,
£ = £lnr + 0,
X0 + a(Af — 2V)4-0Zt + TS (a^O): ruj=«(£, П, £), r₽ = i< 4, £),
rW = w(l, ц, U P = tf + P(l, n, U £ = 00 + 1, n=*r/z,
at + In r — Z,
(a = O): u = u(r, z, g), v — v(r, z, £), w=w{r, z, g), p=^(t +
+ p(r, z, D,
Xi+.aYl + ^>Tt + iZt + 8S: u — u(.r, t, g), n=0rz + i>(r, i, |), w =
= az +w(r, t, £), P =? 6z + p(r, t, £), £ = 7Z + 0,'
M + N + aT^ + fyZ^ + fS: и — ги(.%, 4, £), t> = arjnr+r(£, ц, £),
w = rw(%, г), g), P = 71nr±P(g, T], £), % = i] = ^/t,
£ = 01nr+0, - '
Xo + aXt + 0У, + 'fTt + 8Zt + e5: u = u(r, £, tj), v — —yrt+p(g, r, tj),
u? = pz+ iz>(|, r, tj), P = gt4-P(£, r, Tj), g = ai—z, 4 =
= 6«-e,
где и, v, u? — компоненты вектора скорости в цилиндрической
системе координат.
§ 2. ПЛОСКАЯ ЗАДАЧА
1°. Уравнения .плоской задачи динамической теории плас-
тичности имеют вид , ' ч
--1 + ^1^1,1 + V2Vlti + Р,1 = J$U,1 +
dv • (2Л)
+-H1V2.1 + V2Va, 2 + ^,2 = £12,1 + £22,2»
£11 = ^1,1, £22 ^..^2,2> . 2^12 ~ У (^1,2 + 1?2,1)>
__ F1.1 + 1^2,2 = О, £11 +,£22 Ч? 2$12 = 2кв.
Группа, допускаемая системой (2.1), порождается, операторами
v д лт t 9 , _ д , д
Х» dt' М {dt + Х1 дх.+ Жг дх'
я а Я Я я (2-2)
17 । - & О /л\
S-^TP'
Li = fi (О Д + fi (*) ~ — Xifi (t) (no i не суммировать),
где <p(i), ft(t) произвольные функции из класса С*.
' Б. Д. Аннин, В. О. Бытев, С. И. Сенатов 81
Если ограничиться конечной подалгеброй с. оазисом
X0,M,Z,5 = ^, Yi^t± + ±., (2.3)
то оптимальная система' одномерных подалгебр для алгебры Ли
(2.3) имеет вид
Х0 + аУ1, Xi+aYz, XB + aZ, M+aYi, M + aZ, Z, (2.4)
где a— произвольная постоянная, различным значениям а соот-
ветствуют неподобные подалгебры, S — центр алгебры Лц £«.
2°. Инвйриантцые решения, построенные на одномерных под-
алгебрах системы (2.4), имеют вид
Z+aS: i?2(r, t), P = a6+P(r, t),
Х0 + аУ1 + р5: Vi = — at+vt{x2, at — xj, v2 — v2(xa, at — xP,
P = pt + P(x2, at — xt),
Xo + aZ + pS: Vi = рДг, at — 6), v2 = v2(r, at — 6),
P = pt + P(r,at-e),
Xi + aY2 + PS: t>i — i>i(t, ip, v2 = v2(t, ip + ax15 P = px4 + P(t, ip,
ц = atx,. — x2‘,
M+аУ1 + PS: Vi = vjfc, ip, v2 — v2(g, ip, P = p In t + P(g, ip,
£ = Xi/t — a In t, i] = xjt,
Jf + aZ+pS: n1 = v1(^, ip, v2 = v2^, тр, P = pinr+P(g, ip,
.5 - r/t, Ц = r“e®.
3°. Рассмотрим инвариантное решение на подгруппе М.
Это решение следует искать в виде
Vi = u^, ip, i?2 = v(g, ip, P = P(g, fp, ^ = Xi/t, f\ = x2/t. (2.5)
После подстановки (2.5) в систему уравнений (2.1) получаем
u, {(w — £) + и, n(v — ip + Р s« Sa, s + Si2, ч,
v,{(в —g) + v 4(V —i]) + P,4 = iS12,{ + iS22,,4, (2.6)
Ut {4“ Vt = 0, Sii 5, iS22 = fa?' q, 2Si2 = Л(в, q *(“ Vt j).
Ищем решение системы (2.6) в виде
и = — g + 2/(ip, v = i), P = P(gjip, (2.7)
тогда из (2.6),. (2.7) получаем
К
‘ P = ^== + ^2 + c(t),: (2.8)
. 2/(ч)=£(Йж} (М>
где c(t) — произвольная функция от t.
82
Из соотношений (2.1), (2.7) получаем следующие выражения,
для компонент девиатора тензора напряжений:.
?ц =ту=-8= S22 = —'Sin = 1/7^78 ‘ (2-10)
/1 + /% . +
Интегрируя уравнение (2.9), имеем -
f , Vi-Ha+c)2 "L mf + c * 1 т = Г/ (2.11) '
где с — произвольная постоянная.
' С учетом (2.11) соотношения (2.10) перепишутся следующим
образом:
. • । = k(mf + с), S22 = -5И, 'Sl2 = k11~(mf + ci (2.12)
Решая уравнение (2.11), получаем
т| (/) - п (0) = ± (2 [2? g, Й-Е(ф, Л)1 - [/g, Л) - F («р,Л)||
(2-13)
"l/jnf 1
- где <р = arccos—т==, к
VI — с
ские интегралы первого и второго рода.
Для того чтобы было удобнее интерпретировать решение (2.5),
преобразуем переменные с помощью преобразований подобия
хх — — «х1, = — ахг, t' — Н — at.
——; 2?(<р, Л), Г(ф, к} — эллиптиче-
, Тогда решение (2.5) запишется следующим образом:
аХ1 I ЛХ9 0ХВ
U = ~H—ta + — )’ V = — Я —at *
(2.14)
Решение (2.14) можно использовать для описания пластического
течения слоя, расположенного вдоль оси Oxt, с первоначальной
толщиной 2Н, который сжимается в направлении х2 жесткими
шероховатыми плитами, сближающимися с постоянной скоростью
а. Тогда 2h — H — at — толщина слоя в момент времени t.
.Замечание. Решение вида (2.14) найдено в [111 при усло-
вии, что VlA/i — малый параметр. '
' 4°. Рассмотрим в плоском случае систему уравнений
Она имеет вид
+ Р,1 = + <$12,2, — <5»,2 + <^12,1>
+ *5'22 + 251Я = 2Ki, 1>1д + 1>а,2 — 0»
S11 == = ^2,8з 2512 -?= Z (fl,2 + у2,1)-
(0.3k
(2-15)
S3
Группа, допускаемая системой (2.15), порождается операторам^
0 dt ’ 0^’ 1 ~ dv2 dv^
М~‘-5Г + Х^ К-‘-5Г + ^ <216>
г г
•7 & <? , д da . . д
z-x^-x^ + v^~v^ s =
л 1 2 1
Li = fi (t)+ fi (t) £'— Xif (t) ~ (no i не суммировать),
где ft, q> — произвольные функции из- класса С“, S порождает
центр алгебры Ли (2.16).
Построим инвариантное решение на подгруппе N, его будем
искать в виде [781
u1 = ta(xl + 2f(.x2)'), v2 = —tax2, Р = Р(.х1,х2), (2.17)
где а — произвольная постоянная, / — искомая функция от х2.
Подставляя (2.17) в уравнения (2.15), получаем
axl + 2af^Ptl = kJ—h=\ , ' (2.18)
— az2 4- Р,2 = ks / 1 \ . (2.19)
Из уравнений (2.18), (2.19) следует
Р.= ^-а(х|-х?) + —A_ + c(f), (2.20)
где c(t) — произвольная функция от t.
Для определения функции / получаем уравнение '
Zaf-h( . U ) (2.21)
интегрируя которое, имеем
= ± т =
mj + с Ks
где с — произвольная постоянная. С учетом (2.22) получаем сле-
дующие выражения для компонент тензора напряжений:
^22 = -у а (*2 — ач) + с (О.
, (2.23)
0ц = 2kt (mf 4- с) + -у а(х^ — а:?) + с (t)t
>, Si2 = k,1t — (mf + c)2.
«4
Тзвестно 1331, что уравнение (2.21) имеет единственное решение
для краевой задачи
/(-Л) = /(Л) = О, /Сг2)>0, |ж21<Л, . (2.24)
если т удовлетворяет неравенству
v — Г « 0 2995
?— 8 Г (5/4) и,2УУ0,
где Tit) — гамма-функция.
Это решение расположено симметрично относительно оси /,
максимальное значение /, равное /+, удовлетворяет неравенству
Л • 2Лиг(л — у)/+ < л2.
/Решение задачи (2.21), (2.24) выписывается с помощью эллинти-
* ческйх интегралов
. ®20)-®2(0) = ±^{2^(^,Л:)--Е(ф,Л)]-
-[^(у.М-^ф,*)]}, (2.25)
где х2(0) = h, <р = arccos , к — у- с-; Е(ф, к), Г(ф, к) —
эллиптические интегралы первого и второго рода. В табл. 4 при-.
ведена зависимость между ж2 и f при с = 0, тп = 1, h = 0,6060.
Построенное решение можно интерпретировать следующим об-
разом. Пластическая полоса сжимается жесткими и шероховаты-
ми плитами с силой трения на плитах к„ толщина полосы 2h.
При этом считается, что плиты длиннее полосы и перекрывают ее
концы. Из (2.17), (2.23) следует, что вдоль оси Ох2 величины
«2 = 0, 512_=0. Вдоль контактных прямых x2 = ±h выполняются
условия S12 — ks, Ui — ±aht. Следовательно, построенное решение
описывйет сжатие пластического слоя жесткими и шероховатыми
плитами, которые сближаются с постоянным ускорением и0, при
a — ujh. Пластический слой выдавливается в стороны и течет от
середины к краям; на поверхности контакта при этом возникают
большие касательные напряжения. Как и в случае решения
Прандтля, они достигают предела текучести.
Таблица 4
Хг / / f
0,6060 0 0,5835 0,4 0,4089 0,8
0,6044 0;6031 0,1 0,2 0,5496 0,5310 0,5 0,6 0,2975 0,9
0,5955 0,3 0,4885 0,7 0 1,0
85
Условиям на свободном конце удовлетворим, как и в случа:
• решения Прандтля, в смысле Сен-Венана: -
h
f = °-
-л
Предельное напряжение сжатия вычисляем по формуле
2Р = J'-0'22
О
где 21 — длина пластического слоя.
Если в формуле (2.22)' положить с = — 1, то решение уравне-
ния (2.21) выписывается в элементарных функциях:
^ + ^=1 Lt-ln V2+ /2-т/2 _
V^ L V2 vmf -
Здесь ci — произвольная постоянная. Зависимость между х2 и f
изображена на рис. 8 (ж2 «—0, 2664). Как следует из рис. 9,
на котором изображена зависимость <У12 = т от х2, решение (2.26)
можно использовать для описания следующих пластических
течений.
А. Решение, соответствующее ветви II на рис. 9, описывает,
.в частности, пластическое течение материала, сжимаемого двумя
г Рис. 9.
X* ’ -
жесткими плитами. Одна из
плит движется с постоянным
ускорением и является шеро-
ховатой, а вторая (гладкая) не-
подвижно расположена вдоль
оси Oxi.
Б. Решение, соответствующее ветви I на рис. 9, можно исполь-
зовать для описания сжатия пластического полупространства
yZ>y* жесткой и шероховатой плитой, которая движется с по- .
стоянным ускорением. При этом. значение Sl2 стремится к нулю
при х2, стремящемся к бесконечности.
§ 3. ОБОБЩЕНИЕ РЕШЕНИЯ ПРАНДТЛЯ
В этом параграфе рассмотрим инвариантное решение, по-
строенное на подгруппе <Lt, L2>,
М= /i(f)aZ + fi U) eJT. — Xifi (f) dP ’
I г
где ft — некоторые фиксированные функции. Тогда инвариантно!
86 . •
(3.1)
решение следует искать в виде [21
Рд = у ф xi + Аг (х3, t) = а1х1 + А1,
^2 Я ' j ^2 + ^2 (*^3’ 0 s ^2*^2 “f" ^2>
z23 = flg3?s "4^ .Аз(хд, i),
x2 .
P = ~~ (— щ — «!) — b^i 4- m + Ла3,
£л
A = Л, [ a2 + (Лд)а + (Л2)2]-1/2, Ъ = с + са3,
a2 ss (3/2)[Cai — а2)2 + (щ — ва)2+ («2 — а3)2], «Зя —«1 — «г-
Здесь аи а2, bi, b2, с, т, А2 — функции только от t; Ai, А2 — функ-
• ции от х3 и t, которые удовлетворяют системе t
Л{ + аД + (а3а^ + с) Яд(Л-Л)'— Ь{ = 0 (i = l,2). (3.2)
(производная по времени обозначена, точкой,. а по х2 — штрихом).
Это решение может быть использовано для анализа течения па-
раллелепипеда, сжимаемого жесткими плитами.
Аналог решения (3.1) для плоского деформированного состоя-
ния, определяемого соотношениями
Xi, х2), v2 — v2(t, xt, х2), v3 = 0, . '(3.3)
имеет вид
v, = ах, + Л., и, = — axz 4- b, А s=s —====-,
- , ]/V + (4)s
. X2 • •
Р“= -s- (— а — а2) ж®-(я2 — a) — (b — db)x3 + m — Aa — схг.
Здесь а, Ь, с, т — функций только от t, At — функция только от
t, х2, которая удовлетворяет уравнению
Лд 4- Лдв + (— ах3 + Ъ) Лд + с —(АА1)' = О,
при этом дифференцирование по времени обозначено точкой,
а дифференцирование по х2 —штрихом. Компоненты тензора на-
пряжений равны
Одд = — Р + аА, о22 = —Р — аА, <г1а == 1/2ЛЛ^.
В этом решении при фиксированном значении Xs величины о12, и2
зависят только от времени. Решение может быть использовано для
анализа напряженно-деформированного состояния, возникающего
при сжатий пластического слоя: Iх2| h, ,-тоо < х, < оо. П]ри этом
следует считать 6 = 0, a = v(t)/h, где i?(f) — скорость сближения
плит, и Л(—хг) = Л(ж3). Случай, когда а, Ъ, с, т, А, не зависят
от времени, рассмотрен в работе [491.
87
Глава 6 .. . , ...... . .' г
ГРУППОВЫЕ СВОЙСТВА УРАВНЕНИЙ
НЕОДНОРОДНОЙ И АНИЗОТРОПНОЙ ТЕОРИИ
ПЛАСТИЧНОСТИ
В современных конструкциях наряду с материалами, обыч-
но при расчетах, принимаемыми за однородные и изотропные,
используются для изготовления деталей анизотропные и неодно-
родные материалы, у. которых наблюдается резкое различие в
пластических свойствах для разных направлений и различие ме-
ханических свойств в разных точках среды.
Пластическая анизотропия материалов может быть вызвана
целым рядом причин. Нанример, резко выраженной анизотропией
обладают многие синтетические материалы, кристаллы и горные
породы. В практике часто приходится встречаться й с конструк-
тивной или искусственной анизотропией: гофрированные пласти-
ны, часто поставленные ребра и т. п.- Анизотропия может появить-
ся в металлических изделиях в результате соответствующих тех-
нологических процессов (прокатка труб, протяжка проволоки
и др.).
Пластическая неоднородность материалов может возникнуть
под влиянием потоков элементарных частиц, воздействием темпе-
ратурных градиентов и поверхностной обработки, может быть
вызвана неоднородностью состава и другими причинами [571. На-
пример, воздействие излучения на материалы вызывает изменение
ряда механических свойств материалов и, в частности, пластиче-
ских свойств. Для ряда углеродистых и низколегированных сталей
характерно повышение предела текучести.
Для того чтобы иметь возможность рассчитывать на прочность
анизотропные и неоднородные детали, испытывающие пластиче-
ские деформации, необходимо уметь определять напряжения и
деформации в анизотропных и неоднородных материалах теоре-
тическим путем, т. е. решать аналитическими методами задачи
теории пластичности для анизотропных и неоднородных тел.
Необходимо отметить, что теория пластичности неоднородных
и анизотропных сред является еще недостаточно разработанным
разделом теории пластичности. Так, пластическая неоднородность
сильно влияет и на механику пластического равновесия тела, и на
математическую сторону вопроса. Усложняются уравнения, теря-
ют силу некоторые обычные теоремы и представления [571,
В теории пластичности неоднородных и анизотропных тел
трудно рассчитывать на прямые методы решения краевых задач,
поэтому здесь существенна возрастает роль обратных и полуоб-
ратных методов решения. Эти методы позволяют получать реше-
ния в замкнутом виде-и качественно проанализировать влияние
неоднородности и анизотропии,, оценить точность приближенных
методов.
88
J этой главе, пользуясь методами группового анализа, построе-т
иы точные пространственные решения для некоторых видов не-
однородных и, анизотропных сред. Здесь же решена задача груп-
повой классификации для анизотропных сред с законом текучести
о„ = аох + /Ст)
и неоднородных сред с законом текучести
(ох-оу)2 + 4х*^4КЧу),
ч при этом выделены классы функций /, К, которые являются наи-
более перспективными для построения, точных решений.
§ 1. АНИЗОТРОПНАЯ ТЕОРИЯ ПЛАСТИЧНОСТИ
1°. Пространственные решения уравнений пластического'
течения анизотропных сред..
Рассмотрим систему уравнений
дпху daxz ~ даху дпу dayz _
----1-------1--а-----------V, --------а- “I-я- I-Н- V,
дх ду dz-------------------------------------дх ду, дг
двхг йс2 л ' * ’ г
—22. +4 - = 0
дх ду dz -
с условием текучести вида [901
ап (°« — °*)2 + «22 (0Z — Ох)2 + «33 (рх — Оу)2 +
Ч- 2ct12o^p + 2ct13Oxz 4" 2ct23o^z = !• (1.2)1
Параметры а,, характеризуют текущее состояние анизотропии.
Компоненты тензора скоростей деформации связаны с компо-
нентами тензора напряжений соотношениями
Хек = Z (ох »oz) 4" Язз (о’к о^),
= X -д^- = Яц (Оу Oz) + Язз (Оу — ох),
№г = Ь^ = ац (°« — °v) + «22 (°г — Ox), (1.3>
--- A f g^ "t- g^, I - ^.ai2Oxy,
=. "I" ~ ^OJ3Oxz,
^VZ = X ^~g^ + ~g^ == 2a23O!/Z-
Группа непрерывных преобразований, допускаемая системой
уравнений (1.1)—(1.3), порождается следующими операторами1
89»
£73]: -
у 0 у у у - _ a у _____ &
Л1~й7’ л2=й7’ Лз = -^-. Л*~&Г’ Лб~ё7.
у . О у д д у д д '
-Х|> - -> j --- У а И .. , -Л о — % а •£ а '
® дш ’ 7 ° dw. • dv ’ » ди dw
v d д v d ' . d d
Хл — х—~—У s~, А.„ = д; ——l-W-s—l-z-s-,
8 r dv - ° ди ’ 18 dx ^dy oz ’
у а . . а V а , д . а
Л,-. = и -з— .+ V -х—f- w ——, Л12 = —— + з~—|- 3—
11 ди dv - dw Li ocl. до,.. da.
л у л.
Алгебра Ли (1.4) есть цодалебра Ли, допускаемой уравнениями
пластического течения в изотропном случае. Отсюда следует, что
часть пространственных решений, при построении которых не ис-
пользованы операторы вращения, могут быть найдены и в ани-
зотропном случае. В частности, М. А. Задоян в работе [21] пере-
нес некоторые решения, найденные в работах [20, 29], на анизо-
тропный случай. Из гл. З.видпо, что то же самое можно сделать
« решениями Хилла, Ивлева и некоторыми другими решениями.
1. Будем искать инвариантное решение на подгруппе <Х34-Х6>
в виде 173]
и = Ах, v — By, w = —(A + B)z + f(x,y).
Здесь А, В — постоянные, /— гладкая функция.
Компоненты тензора скоростей деформации равны
= А, ₽1а = 0, 2е13 =-/®.
е22 = езз ~ 2eZ3 = fy
(1-5)
Компоненты тензора напряжений определятся из выражений
а22(ая — а2) + а33(аж — оу) = ХА,
' / ац(Оу — о2) + а33(о„ — о») = ХВ, (1.6)
Ох^ = 0, 2flj3Oxz — X/х, 2<2j3OyZ — ^fy .
Система (1.6) не может быть решена относительно компонент
тензора напряжений, поскольку определитель системы равен ну-
лю. Но если предположить, что
' Ох = -Х(А + В)+Р(х,р), (1.7)
где Р(х, у) — некоторая искомая функция, то из (1.6)
получим
Ох = —о.1Р(х, у) + ХРц Оу = —а2Р(х, у) + Хр», (1.8)
O'xz — Т1Л/к» Gyt ~ Vz^A/»
где
а _________ а11 ~_______ a _ _____________g22_________
1 а11а22+(О11 + °22) вЗЗ ’ 2. °иа22+(а11+а22) в33*
ац(2А + Д) + За88(А + Д)
°11а22 + (“11 “22) °33
ag8 (4 + 2В) + За33 (4 4-В)
а11в22 + (“1J "Ь “22) °33
Yi = 1/2а13, у2 = 1/2а23.
Подставляя (1.7), (1.8) в (1.2), имеем
= 1а11 (Рз — Рз)2 + а22 (Р1 — Рз)2 + ®33 (Рз — Р1)2 + Vi (/*) +
+ т2(4>2]-1/2 = 1т + Ж)2 + W)TV2.
Пусть А и В связаны соотношением
(A В)/3(А "Р В) =!^йз2/(1ц — ^33/^22,
которое в изотропном случае переходит в равенство А = В, тогда
из (1.1)—(1.3) получим '
Р = (ai/Pi)X + const,
а функция / определяется из уравнения :
Это уравнение сводится к уравнению минимальных поверх-
ностей заменой __
- / = У»п'ф(х/у1, р/^г)-
Решение имеет такую же интерпретацию, как в гл. 3.
2. Будем искать решение, инвариантное относительно под-
группы
Ш-Хн + аХ12, Xs-X„ + aXi2>.
Решение ищем в виде. [73]
, и = и(х) ехр £, v = v(x) ехр |,
' (1.9)
ш = ш(х)ехр|, Р = Р(х) + а^, % = y + z.
Подставим (1.9) в (1.6), предполагая, что ох = с == const. Имеем
Zv — (Пц 4“ CLyy^Oy —— ^з3С,
(1.10)
— (&22 Ч" Пц)Ох — ' ^22^> ‘
Х(р + ш) =2a2Sol,z, Х(м+ v’} = 2aI20xV, X(u + w’} = 2а)3охг.
Из (1.1) имеем
^ху CLX I Cf, -Ojcz —— CLX I C2.
Если Ci '=e2 и a12 = ais, тогда тХ1, — тхг. Отсюда следует, что v' = w'.
Пусть v — w, тогда из (1.10) получим
<jy = atKw + ог = а2Аш+у,
где at = (2аи + а22)Д, а2 = (2ац + а33)Д, у = сД(а11а22+а33(аи +
* Л4
+ а22)), Д“‘ = а22ааа+а11(а22 + о«з). Следовательно,
ов = «23^10^2 4- f= р4оВ2 + у,
(1.11)
Oz = a2aa2ovz 4- Tf = p2oBz 4- Tf-
Подставляя (1.11) в условие пластичности (1.2), получим квадрат-
ное уравнение для определения овг: ~
Аа^ + 2Bavz + Сх = 0, (1.12)
где А = а1г (0* 02) 4* 02а22 4" 01язз 4" 2агз, В = (у с) (02п22 4*
4- Раз)» = 4a12olj, 4- (Т — г)2 («22 4- азз) — 1- Из (1.12) имеем
Acvz = -В ±УВ2 -АС,. - -
Это решение можно интерпретировать как трехмерное течение
пластического анизотропного материала между плитами, парал-
лельными плоскости Oyz, которые сближаются вдоль оси Ох.
2°. Групповая классификация уравнений теории идеальной
пластичности с -общим законом текучести.
Систему уравнений, записанную в декартовой системе коорди-
нат ху: ' -
п , '•дх Л . .. .о.
л—Ь 'д— = 0, 4- д— = О, о„ = / (оя, т), (1-13)
дх ду ’ ду дх ’ ®
назовем системой уравнений теории идеальной пластичности с
условием текучести общего вида.
Решить для системы (1.13) задачу групповой классификации —
значит найти вид функции /, которая предполагается «произволь-
ным элементом», чтобы группа, допускаемая системой (1.13), была
более широкой по сравнению с Go. Здесь Gt — группа, допускае-
мая системой (1.13) при произвольном виде функции f. Задача
в такой постановке решена в [711. Здесь мы ограничимся сис-
темой
^ + 4^=0, ^ + -|1=0, оу = аох 4- / (т), (1.14)
дх ду ду дх ’ - » • v >' ' г
где а — постоянная, / — функция только от т, при этом из даль-
нейшего рассмотрения исключаем случай, когда •/ = ат +& (в, & —
постоянные), поскольку тогда систему можно свести к линейному
уравнению второго порядка, для которого группа известна [521.,
— Допустимый оператор ищем в виде
V » в , д , . б д , - „ д
’ Х ~ £1 дх± + дх2 + 111 дсх + 112 дт + 713 дву
Продолжая" оператор, получим
+ + -<М5)
92
-де-
dax „2 dx r>3 d°V
= 3—, Pi = 3—, Pi = x, = X, x„ = y.
dxi ’ ’ • dx ’ 1 dx. ’ 1 ’ - 2 °
Действуя продолженным оператором (1.15) на систему (1.14) и
переходя на многообразие, задаваемое системой, получим
£1 _ р2 £1 _ рз fll . рЗ £1! Р2 £ _ pl ± .
дх ' 2 да 2 дх 1 да ’’ 2дх 2 дх- ' дох
1 -Х у 1 1 ^2
pl р2 рЗ ^2 рЗ д^- р2 di, ________ „ (4 4ft\
+ Р*д^'+Р^ + + (1ЛЬ)
л 'У 2 5Г
^2 _ П2 £12 _ ПЗ д_\ . рЗ . рЗ _ Р2 ,
дх^ 2 дах 2 дх ' "1 2дхг едх2 дх2
. ₽1 5,13 , р2 5t>s 8 5tls р8 з д^ _ n
+ Ра дТх + Р2 77 + Р2 d^v ” Р1д^2 ~ Р* д^ ~ °’
1}з = at]i +/'г]2-
Замечание: Здесь для краткости мы воспользовались ре-
ГП41 ЙЕ’ д^ „
зультатами 1711, где показано, что ~ = 0.
В результате расщепления системы,(.1.16) получаем
дах дх^ дх "г дх^ ’
- . _ о £1 4. - о
дах и’ дхг ^' дх2 и*
дх дхг 1 дау дх^ ’
О, ^_о, S + ^-o, \
Да_ ’ дх, дхо ’ .
л 12
Р\
(117)
О,
ат12 д? %
до, дх, ~~~ дх-
• et>2 dl'
За„ дх- '
Си = аах + /(т), т)3 = аги + f т]2.
Из формул (1.17) получаем
= Ла;, + Ьх2 + ct, Ц— —аба:, + Ax2’-t- с?,
г], — 2Ьх + оха + Мхь х2),
ц2 == — abox + ба, + ах+g(xt, xt\
т]з = — 2абт + асу + «рСзс,» хг),
гДе dj- + ^~ = 0, ~ = 0. В результате из системы (1.16)
получим классификационное уравнение
a(f—fx) —b(Aax + ff) + <p — ah + f'g — 0. (1.19)
(1.18)
Полагая в уравнении (1.19) функцию / произвольной, получим
основную группу Go:
V V V 9 , 9 Y 9 i „ 9 /л oov
Л, = -т—, Ха - —~, Ха = “ Ц- <Х « , X, - ~ X F У —• (1-20)
1 дх' 2 ду' 8 д(Зх дау' 4 дх а ду ' '
Найдем группу преобразований эквивалентности для системы
(1.14). Вычисляя ее согласно 152], получим, что она порождается
операторами
xl,x2,xs,xi,xb =
Y 9 , 9 , 9 , i 9 V 9 . 9 С1-21)1
Ав~ахд^х + о’'д^ + гдТ + ''дГ W + d^v'
Отсюда следует общая форма преобразования эквивалентности
произвольного элемента, которая может быть записана в виде
/ — af (ат + Ь) + с, (1.22>
где а, 6, с — независимые параметры. С учетом преобразовании
эквивалентности из уравнения (1.19) получим
я(/ —/т) — Ь(4ат +//') =0. (1.23) \
Для уравнения (1.23) возможны два случая: 1) я = 0, 2) а¥=0>
Рассмотрим первый случай: а = 0. Тогда из (1,23) имеем.
4ат + //'—,0. Решая это уравнение, получаем / = Ус —4атг, где
с — произвольная постоянная. Полагая с = Л,, где к, — предел те-
кучести при чистом сдвиге, получаем следующий закон текучести::
(ах — аау)2 + 4ат2 = /4-
При этом допускается оператор
ХБ = Ха -Я---ах, ~ + 2т 4- — апх) -т---2ат
5 2 дх^ 1 дх2 до„ ' v ’ дт дау
. Рассмотрим второй случай: а */= 0. Положим а = 1, b = (J, тогда
уравнение (1.23) переходит в уравнение
/‘-Гт-р(4ат + ///) = 0. (1.24>
Введем обозначение z = f/x, тогда уравнение (1.24) перейдеГ в
уравнение
tz' + р(4а + tzz' +"22) = О. (1.25)
Если Р = 0, то /=^с,т+с2. Этот случай из рассмотрения исключа-
ем, поэтому (J^O. Разделяя переменные в уравнении (1.25) и
интегрируя его, имеем
iln|^ + *ф| + = -Ь|СТ|,
где с — произвольная постоянная. Окончательно получаем j
агс«
S4
1оскольку f — ox — аот имеем
In {[(о» — aav)2 + 4ат2] 0с} + —= arctg °х -™v = О,
р уа 2т уа
где с — произвольная постоянная. При этом допускается оператор
ж у
Тем самым задача групповой классификации полностью решена.
3°. Некоторые, точные решения для уравнений, описывающих
плоские течения анизотропной пластической среды.
В результате групповой классификации нами выделены два
закона текучести:
(ру — <хож)2 + 4ат2 = 4&1, (1.26>
(ау — астж)2 + 4ат2 = ехр {— arctg (1 -27>
при которых группа Go расширяется на один оператор. Построим
для уравнений (1.13) возможные инвариантные решения.
1. Система уравнений
дах дх = п , дх р
дх ду ’ . ду дх ’ _ (1.28}
(ои — аоя)2 + 4ат2 = 4й2
описывает плоское течение ортотропной среды. Как показано вы-
ше, уравнения (1.28) допускают группу непрерывных преобразо-
ваний, порождаемую операторами
г~дх' Х2^=ду' Х» ~ дё~ + “do? ~ Х~дх + У Ту,
. а а а а (1-29>
*> - УТх -х д~у + 2т^ + Тх~ 2ат^-
Инвариантные решения можно построить только на подалгебрах
Х4 + ₽Ха, 0Х4 + Х5Ч-дХ3, Х, + УХ3.
1а. Решение на подалгебре <0Х4 + Х54-^Х3> в системе коорди-
нат г0: Iя = (оса:)2 + р2, tg 0 = р/(оке), где
о, = ас» cos20 + ov sin2 0 + 2ат sin 0 cos 0,
о® = аоя sin2 0 + ов cos2 0 — 2ат sin 0 cos 0,
Tre = ar(cos2 0 — sin2 0) + (Оу — аоя) sin 0 cos 0,
следует искать в виде
о, — — ау0 + /(|), ое = —ау0 + <р(|), (1.30У
т = ф(|), | = гехр00.
95-
После подстановки (1.30) в систему уравнений (1.28), записанную
- s системе координат г0, приходим ц. уравнениям, которые иссле-
дованы в гл. 3, § 8, и. 4. Решение вида (1.30) может быть исполь-
зовано для описания пластического течения ортотропного мате-i
риала в матрице с профилем в виде логарифмических спиралей^
16. Решение на подгруппе <Х4 4* (JX3> следует искать в виде
Or = оф1пг + а(0), ов =а₽1пг+Ь(0), (1.31^
Тге = с(0), г2 = (ал)2 + уг, у — ах tg 0. j
Решение виДа (1.31) можно использовать для описания пласти-
ческого течения в сходящемся плоском канале с шероховатыми
. стенками, на которых задана равномерно распределенная каса-
тельная компонента тгв. На входе канала задано давление. Это
решение строится аналогично, решению Надаи, гл. 3, § 8, п. 3.
1в. Решение на подгруппе Х4 + уХ3 следует искать в виде
O3; = Tfx + F(y), т = Я(у), Оу = уж + G(y). (1.32)
Подставляя (1.32) в уравнения (1.28), нетрудно получить
ас* = -Р + к(ух - 2V1 - fg»), . (1.33)
Оу = —Р — уж, ат e fcyg,
Это решение ёсть обобщение решения Прандтля на ортотропный
случай, подобное решение получено в работе. [84]. Его можно
использовать* для описания - пластического течения материала,
сжимаемого жесткими шероховатыми плитами.
2. Рассмотрим систему уравнений
• +
дх ' ду ’ ду ' дх • ’
' , * 1 (1-34),
(о,-И# + tax’ -рехр
I
Группа непрерывных преобразований для системы (1.34) порож-.
дается операторами
Xt,X„X„X„X,-c.^- +о,^- + 1^+ рх„.
ОС у
Инвариантные решения системы (1.34) можно искать только на
подгруппах
Х4 + уХ3, уХ4 + Хе + сХе, , X, + уХ3/
2а. Решение на подгруппе Х4 + уХ3 следует искать в виде
аОх=ух + 7’(г/), т = Жу), oB=®=ya:+G(g).
Решение такого вида найдено в работе [19J Для более общего
закона текучести. Это решение обобщает решение Прандтля на
анизотропный случай и может быть использовано для описания-,
пластического течения материала, сжимаемого жесткими шерохо-
ватыми плитами. . j
96
;б. Решение на подгруппе Х4 + уХ3 следует искать в виде
aor = Tflnr + a(0), _Oe = Ylnr+&(0), т = с(0).- (1.35)
Решение вида (1.35) можно использовать для описания пласти-
ческого течения анизотропного материала в сходящемся плоском
канале.
2в. Решение системы (1.34), записанной в системе координат
г0: г2 = (ax)2 + р2, p = aa:tg0, на подгруппе <уХ4 + Ха + 6Ха> сле-
дует искать в виде .
о, = —aS + /(£) exp (—0/£), ое = —aS + q>(£) exp (—0/(J),
т == ip(g) exp (—0/(J), £ = гехр(у0).
Это решение можно использовать для описания пластического
течения анизотропного материала между двумя логарифмическими
спиралями.
§ 2. НЕОДНОРОДНАЯ ТЕОРИЯ ПЛАСТИЧНОСТИ
1°. Этот пункт мы посвятим построению пространствен-,
ных решений теории пластичности неоднородных тел, когда функ-
ция неоднородности имеет вид К = К(г}.
Запишем систему уравнений в виде
, 1 d°r9 , gprz , рг~°
dr ' г 50 dz г
dpr8 , 1 дае , gtrez 2рг0__п
' дг + г 56 + dz + г ~v'
a°re , 1 5p6z . даг ' атг п
5Г+'7“5Г + ^Г + Т =и’
(ar — ae)2 + (az — ae)2 + (ar — аг)а + 6 (a|z + + а?г) = 6^2 (г),
^5r ~ — °z’
= 2аг — ar — 06,
о,
(2.1)
= 2ог0, •
'rzt
1 ди t dv у
X 50 ** дг г
(1 dw ду\
\r &Q dz J
Будем искать группу непрерывных преобразований, допускае-
мую системой (3.1), полагая К(г) произвольной функцией. Эта
группа порождается следующими операторами [73]:
у _ д y д у у ___ д
~ dz' А2 “ 56’ ~ dw' Ai~r dv’
Y д , д , О v д д д
Х& - и + w Х« +
X7 = zcos0^-— zsin0k-^- —rcos ©
‘ ди . dv . . dw'‘
Xg = rsin0-/--zsin©/-— zcosO-^-.
° dw du dv - -
Б. Д. Ашшн, В. О. Бытев. С. И. Сенатов
Построим некоторые инвариантные решения системы уравне
ний (2.1). . |
1. Будем искать решение, инвариантное относительно, пода
группы — Х2>, в виде |
u = u(g, г), у = у(|, г), tr = ip(g, г), % — z+kQ. |
В переменных г, g бистема (5.1) запишется следующим образом!
*4, . Л <Чо durz аг - ае
ffore. , Л а°е . 5°ег' 2oer п ^2'2^
“ё7-+7'< + ‘ёГ + V = U’ '
ggrz , к a°ez a°z orz _ a .
~d7 + 7 ж + eg + ~ ~ v*~
(Or — oe)2 + (or — Oz)a + (oz — Oe)a + 6 (OrO + GrZ + Ofc) = 6№ (r),
xg=2or-ne-oz,. X^g + ^)=2oe-or-oz,
X-ff 2oz - o0 - or, x(-J + = 2tT-’
du к dv v\ n . / к dw , dv\
di r- + dr ~7J~~ Zffre’ a(7 "aT + "sg / — ZCT“’
2г Решение будем искать в виде
« = u(r) sin g, v = лЯг)-cos ,w = w(r) cos I,
—3P = Or + Oe + 0z = — 3P(r).
Пусть Or» = orz = 0, тогда оставшиеся компоненты цензора на-i
пряжений суть функции переменной г. Второе и третье урав-?
нения системы (2.2) удовлетворены тождественно) а первое елу-г
.жйт для определения Р(г). *
Длй определения и, v, w получаем систему обыкновенных
дифференциальных уравнений
ku 4- v'r — v = 0, w' + й~= 0, ru + и — kv — w = 0. (2.3)
Эта система совпадает с системой (4.4) гл. 3.
Таким образом, поле скоростей в нашем случае совпадает с
полем скоростей в однородном случае. Поле напряжений опре-
делится аналогично формулам *(4.6) гл. 3:
5fc = <p5e, 5z = /5e.
/1 + / + /2 + <Р2'
г - (2.4)
5r = _(/ + l)5e,P^.Sr-J^^.
о
где Se, ST, St — компоненты девиатора тензора напряжений. Поле
напряжений (3.4) совпадает с полем напряжений гл. 3 при
Л'(г) =ь const. •
Наше решение при Л —0 обобщает решение Р. Хилла 190]
на неоднородный случай.- Это решение описывает пластическое
течение кругового цилиндра, изготовленного из неоднородного
пластического материала, сжатого усилиями, распределенными
на торцах и подвернутого действию крутящего момента М =
в
2л J r^dr.
о .
3. Пусть
Ore — ОЛ = 0.
При этом предположении будем искать решение системы (2.2)
в виде
u = u*(r)sh|, y = y*(r)ch|, w = w*(r) ch P = P(r)1 £ —z + /i:6,
(2.5)
где и*, v*, w*— функции только г, к,— произвольная постоян- .
ная. Тогда из условия несжимаемости и уравнений (2.5) полу-
чаем систему обыкновенных дифференциальных уравнений для
определения функций «*, к*, w*:
и* -+
dw* л d ( v*\ , к * л
—г— = 0, г — ( — 4 и* = 0,
dr dr у г J г
(ги*) + kv* + rw* = 0,
(2.6)
при этом давление Р восстанавливается из уравнения
dtTr , °r ~ °е n
__—---------------------------------= у.
dr г
Система уравнений (2.6) сводится к уравнению Бесселя
fti* ” + ги*' — (г3 + Л2 + Du* == 0,
решение которого имеет вид
u* = CiJ,(D + c2X,(r), v = VF+T, (2.7)
где Д— функция Бесселя мнимого аргумента, Kv — функция
Макдональда, с,, с2 — произвольный постоянные. Если положить
с2 = О, то поле скоростей имеет вид
и = q Jv (г) sh g, v = — I rcj/f 4 Д (г) -ДI ch В,
I J r J (2.8)
. «z — — q chi J Л (г) dr.
При этом компоненты тензора напряжений равны
о? = с + J F ~ dr, ote = фЛ
Ов = о, + (<р — DF, о2 = о, — (2 +tp)F, (2.9)
F = (4 + + (I + Ф)М- (к2)ф2)-1/г,
оа
u* -|- kv* . ku>* + rv*
Решение (2.8)—(2.9) можно использовать для описания пласту
ческого течения цилиндра (0<гR, нагруженного
по торцам напряжением, распределенным по закону
<h = - (2 + <р) F + dr,,
О
и крутящим моментом
r
М = 2 л J GQZr2dr.
о
Предполагая боковую поверхность свободной от напряжений
определим постоянную с из условия ог(Я) = 0.
Если в формуле (2.7) положит^ с2#=0, то построенйое реше-
ние можно использовать для описания пластического теченш
трубы, даходящейся под действием растягивающих усилий, кру
тящего момента и внутреннего давления.
4. Из групповых свойств уравнений (24) следует, что аналг-
ги решений (4.5), (4.10), (4.12) из гл. 3 могут быть построень.
для системы,уравнений (2.1). Например, аналог решения Р. Хил-
ла [90] построен в работе [24], зто решение можно использовать
для описания пластического течения неоднородного материала
выдавливаемого из сжимающейся цилиндрической втулки. Неко-
торые другие решения, в частности, описывающие пластическое
течение толстостенной трубы под действием внутреннего давле-
ния, а также? обширная библиография приведены в обзоре [57].
' Там . же можно найти сведения о точных решениях, построенных
для других видов пластической неоднородности.
2°. Группрвая классификация уравнений неоднородной тео-г
v рии пластичности.
В предыдущих параграфах были рассмотрены уравнения тео-
рии идеальной пластичности, когда предел текучести не меня-
ется при переходе от одной точки материала к другой. В прак-
тике "часто встречается пластическая неоднородность, которая
может быть вызвана следующими причинами: воздействием тем-
пературных градиентов, потоками элементарных частиц, неодно-.
родностью состава, механической обработкой и т. п. Указанные -
неоднородности по-разному влияют на пластическое течение,;
материала и вид закона текучести. Ниже будут рассмотрены, -
следуя [57], только неоднородности, которые определяют предел'
текучести как функцию координат. При этих предположениях,
основные уравнения можно записать в виде [57]
+ (2.10)
(a.-o.F+W -«(», »>.
100
’равнения (.2.10) представляют собой сложную систему уравне-
ний. Построение решений аналитическими методами весьма про-
блематично [57]. Для решения системы (2.10) используются в
основном обратные и полуобратные методы, поэтому вполне
естественно воспользоваться здесь аппаратом группового. анализа.
Если считать функцию К произвольным элементом, то задача
групповой классификации для системы (2.10) в работе [70] ре-
шена. В, результате выделены классы функций К(х, у), наиболее
перспективных для построения точных решений уравнений [52].
Ниже для простоты будем предполагать, что К = К(у). Этот 4
случай важен для приложений, поскольку именно, такая неодно-
родность возникает при воздействии облучения на материал.
Итак, имеем уравнение вида
а-r да,.
-2Е + = 0, = 0, (2.11)
дх • ду дх ду '
(.ох — оу)2 + 4т?=;4КЧу').
Введем функцию напряжения по формулам
_ д*и « _ д*и _ д2Ц
°Х — ду2у~ дх2' Т— дхдУ
(2.12)
и обозначим иг = и2 = В результате уравнения (2.11)
перейдут в следующие:
Idu, ди.\2 (ди\2 дио ди, _
+4 М = 47Г(г/) —2 = —1- 2.13)
\ дх ду / \ дх ] я'7 дх ду ' '
Система (2.13) сохраняет свой вид при преобразованиях
и\ = аги, + bi (i = 1, 2), (2.14)
х' = а2х + Ъз, у' = а2у + Ь4.
Две системы будем называть эквивалентными, если одна из них
переходит в другую при некотором преобразовании (2.14). Отне-
сенное к функции КХу), это преобразование действует по фор-
муле •
К^у) — (A/aJKta^ + Ь4) + с. (2.15)
Допустимый оператор ищем в виде
где В‘, Ц* — функции от Xi, х2, Ut, и2, Xi = x, х2 = у. Продолжен-
ным оператором
X = X + — 4- £21 + £12 + ^2 —,
др{ . др^ др^
где
Pi =
ди.
,1
дх.' =*^ дх- duk I дх- + duh )'
J J п \ J К t
3 ''“h
101
действуем на систему (2.13) и переходим на многообразие, зада-
ваемое этой системой. Расщепляя полученные выражения нс.
вторым степеням pj, имеем
+ п1 —2 + п8 —2-- п2 < - п1 =
- дх1 Р* du± ди2 Р1 dx^ Р2 дх^
= л. D»fix n2di£^_ni
дх P* du + P2 ди P1 dx P* dx '
“ X Z 4 A
9 F = ° (x,7 = l,2),
-ig + ₽^-riS-
2 £2? , _2 . 2 ,
Ли Pl d,x P* dx I
А А A J
(2.16)
mk2-(₽»t,[^+p:
P2 dxt dxt P2 dul P2 du2
Др2 (dl}2 , 1 9Т12 , 2 Й1,2 8 d? 2 _ Zt2jZlf'
+ 4Pi(0Z + Pid7 + Pi-^-Pi^-^P^\-4%KK. -
\ 1 ‘ 1 2 1 1/
Расщепляя соотношения (2.16) по степеням р]*' приводя подоб-
ныеп решая полученные уравнения'на т]*, имеем
£* == qxi + Ьхг + Wi, t)i = aut + Ьиг 4- cxz +.dt,
(2.17)
£z =« —bxt + qx2 + w2, t)2 = — but + au2 + cx2 +
где a, b, c, q, d{, wi—некоторые постоянные. С учетом (2.17)
классификационное уравнение примет вид
. K(a-q)~.(-bx2 + qy + w2)^-. (2.18)
Из (2.18) в предположении, что К — не тождественная постоян-
ная, следует Ъ =» 0. При этом имеем
„ / v , ак\ ак п
aK-q\K + y =0.
а. Если д¥=0, то, полагая 5 = 1, в = тп+1, уравнение (2.18)
приведем к виду
Решая это уравнение, имеем К — сут, где с — произвольная по-
стоянная.
б. Если ?=.0, а=^0, iff2^0. Положим я = 1, тогда уравнение
(2.18) приведется к виду
К - =F 0.
ду
Его решение имеет вид К = cev, где с — произвольная постоянная.
Окончательно получаем:
102
j. Если К — произвольная функция- переменной у, то система
(2.11) допускает операторы
. ^=^+4’' (219)
2. Если К=.су™, то система (2.11) допускает операторы
Х2, Х3 = х-^ + у-^ + т(ах^- +т-^ + ои±\ (2.20)
3. Если К = се“, то система (2.11) допускает операторы
+ -(2.21)
Построим все инвариантные решения для найденных видов функ-
ции К(у).
3°. В случае произвольной функции К(у) - оптимальная систе-
ма для алгебры Ли (2.19) имеет вид
аХ. + Х2, Xt. (2.22)
Инвариантное решение можно построить только на подгруппе
ccXi + Xa. Решение ищем в виде
Стх = ах + ф(у), о„ = си:+ф(у), т = /(у). (2.23)
Подставляя (2.23) в систему (2.11), получаем
х — ау + Ь, Ок = оке — с,
. (2.24)
ои— ах - с + 2[Л?(у) - (ах + Ь)]1/2.
Постоянные а, Ъ, с определяются из граничных условий
у — Л, т = mK(h), ОС 1,
• _ у = —h, т = nK(h), 0 п 1.
Решение (2.24) описывает пластическое течение неоднородного
материала мещду жесткими шероховатыми плитами. Это решение
найдено А. И. Кузнецовым 137].
4°. Если неоднородность имеет вид К = сут, оптимальная си-
стема для алгебры Ли (2.20), получается из (2.22) добавлением
подалгебр
X, <Х, Х»>, <Х2, Хз>.
Инвариантное решение можно построить только на подалгебре
Х3. Оно имеет вид '.,
Cx = ymf(x/y), су = ymtf(x/y), х — у^(х1у). (2.25)
Подставляя (2.25) в систему (2.11), получаем систему обыкно-
венных дифференциальных уравнений
/' + ф — gif' = 0, ф — |ф' + if' = 0, (/ — ф)1 + 4ф2 — 1lc\
где штрих означает производную по | == х/у.
103
5°. Неоднородность имеет вид К — cev.
Неоднородность К = се~т (ц> 0) часто используется длй
металлов, облученных радиационным потоком. В этом случае
алгебра Ли порождается операторами
Y & Y 1 V 0 д д . д \
Х1 “ Й?’ Х* ~ + + Р+ су—}.
Оптимальная система имеет вид
Xt + aX2, Х, + аХ4, Х2, Xit <Х„ Х2>, <Х„ Х4>, <Х2, Х>>.
Новое инвариантное решение может быть построено только на
подгруппе Х4. Решение на этой подгруппе ищем в виде
Ох== ф(а:)е~™, os = if(x)e~w, т== f(.x)e~fiV. (2.26)
Подставляя соотношение (2.26) в (2.21), имеем .
ф' — p.f = 0, — р.ф = 0, (ф — ф)2 + 4/2 = 4с2. (2.27)
Заменой ф = д_2ф", система (2.27) сводится к нели-
нейному уравнению
(ф - (1/д2)ф" )2 + 4(ф7р)2 = 4с2. (2.28)
Одно из решений уравнения (2.28) имеет вид ф = сйш(цх),
тогда
сх —с sin (juOe-14', Оу — —сх, т = с cos (цх)е~,1у.
Эте решение можно интерпретировать как напряженное состоя-
ние полупространства у > 0 под действием периодической систе-
мы штампов.
Глава 7 ...... — —'. ' - v - -..........-
ГРУППОВЫЕ СВОЙСТВА
ЧИСТО МЕХАНИЧЕСКОГО КОНТИНУУМА
§ 1. ПРЕДВАРИТЕЛЬНЫЕ СВЕДЕНИЯ
. Будем использовать феноменологический подход. Счи-
таем, что выполняются законы сохранения массы, импульса,
момента импульса и энергии. Введем обозначения: р — плотность
рассматриваемой среды; и = (щ, н2, »з) — вектор скорости, Т —
тензор напряжений; U — внутренняя энергия; q — вектор потока
тепла, тогда
+ div (ри) = °,
104
р + (u-V) w j — div Z = 0,> (1.1)
— (pU) + div [put/ + (u- 71)] + div q = 0.
1
Эти уравнения можно использовать для описания сплошных сред
самой разной природы. Однако наличие одних только законов
сохранения не позволяет адекватно описать возможные движе-
ния конкретной сплошной среды. Чтобы .это стало возможным,
необходимо вв££ТИ_так. ^называемые определяющие соотношения.
Есть нечто общее, характерное для всех сплошных сред —
это законы сохранения. Разнообразие же тел, обусловленное раз-
личием материалов, из которых они состоят, регулируется опре-
деляющими соотношениями. К выводу последних мы вскоре при-
ступим. В механике сплойшых сред определяющее уравнения —
это не что иное, как некоторые ограничения^ накладываемые на
силы и (или) движения. Ясно, что единственные силы, пред-
ставляющие интерес — это контактные силы, которые определя-
ются заданием поля тензора напряжений Т. Тем самым возни-
кает задача классификации -полей Т. Каковы же подходы к ре-
шению этой задачи? Йдеи, заимствованные из геометрии, позво-
ляют надеяться на нахождение решения, исходя из соображений
симметрии и инвариантности. Заметим, что именно из этих со-
ображений были получены классификационные результаты в
теории кристаллических тел (Шубников; Лохин и Седов, см. [431).
В 1958 г. Ноллом были сформулированы аксиомы, которые
затем составили основу дисциплины, названной Трусделлом
рациональной механикой. Наибольшие ограничения возникают
при применении третьей аксиомы Нолла — «Принципа материаль-
ной независимости». Как правило, аксиома Нолла используется
следующим образом. Пусть задана ортогональная группа или ее
собственная подгруппа, тогда из требования инвариантности
рассматриваемых процессов относительно них находятся опреде-
ляющие соотношения.
В отличие от общего подхода, при котором рассматривается
определяющие соотношения на внутреннюю энергию, энтропию,
напряжения и поток тепла [31,63,85,871, будем изучать поведе-
ние материалов, термодинамическое уравнение которых связывает
давление, плотность и температуру, а реологическое уравнение
состояния (определяющее соотношение) связывает внутренние
напряжения с кинематическими переменными, типа градиента
скорости; поток тепла с распределением температуры и гра-
диентом . ее; внутреннюю энергию с другими термодинамически-
ми переменными.
Систему уравнений, которую приходится решать в общем слу-
чае, можно описать так:
— термодинамическое уравнение, связывающее S, р, р;
— баланс массы;
— баланс импульса;
105
— реологическое (определяющее уравнение);
— баланс энергии;
— термическое уравнение, связывающее поток тепла с. темпе-
ратурой и градиентом ее;
— энергетическое уравнение.
Сделаем дальнейшее ' упрощающее предположение. Будем
рассматривать адиабатические движения чисто механического
континуума, для которого характерна зависимость
- n = n(Va),
-v ’ •
где П — тензор вязких напряжений. В эту модель входйт, в част-
ности, теория жидкости, в которой
П = П(1»,
где D — тензор скоростейдеформаций — симметричная часть
тензора Vu.
§ 2. ОПРЕДЕЛЯЮЩИЕ УРАВНЕНИЯ
ЧИСТО МЕХАНИЧЕСКОГО'КОНТИНУУМА
Предположим, что тензор напряжении, фигурирующий в
уравнениях (1.1), выражает чисто механические свойства опи-
сываемого континуума.. Тогда его можно в общем случае пред-
ставить как сумму двух тензоров. Первая часть зависит от со-
стояния чисто механического континуума, вторая — от скорости
изменения этого состояния. Это означает, что тензор напряжений
чисто механического континуума состоит из равновесной части
Т* и неравновесной части Т”, обозначаемой в дальнейшем П,** т. е.
7’ = 7’е.+ 7”’=<Т* + П.
Поскольку П зависит.'от скорости изменения состояния и, сле-
довательно, от ее градиента, и так как вязкие силы обусловлены
именно градиентами, то П называется тензором вязких напряже-
ний. Поэтому П = 0 для любого континуума, находящегося в
состоянии равновесия, например, тензор вязких напряжений ра-
вен нулю для покоящихся газов иди жидкостей. Далее, в таких
случаях в силу изотропии равновесная часть Т* тензора напря-
жений превращается в скаляр, т. е. Т = ^-р1, где р — давление
(гидростатическое); I — единичный тензор. Это разложение пока-
зывает, что в случае неподвижных жидкостей и газов .отсутст*-
вуют напряжения сдвигов, которые определяются внедиагональ-
ными элементами матрицы тензора напряжений Т. Что касается
неравновесной части тензора напряжений, то в общем случае
тензор вязких., напряжений П является функцией тензора
==gradu. Следующее предположение исключает из -рассмотре-
ния полярные среды: тензор вязких напряжений является сиМ-
406.
летричным, т. е.
П" = 1Р' (Vi, j).
Далее, как известно, закон сохранения энергии выражает
тот факт, что изменение полной энергии газа или жидкости
(в 1 с) должно*равняться полному потоку энергии через границу
этого объема. В тон# случае, когда рассматриваются модели
сплошных сред, учитывающие наличие вязких сил, в плотность
энергии будет входить еще одно слагаемое, обусловленное про-
цессами внутреннего трения.
Если дополнительно не предполагать изотермичности проис-
ходящих процессов, то возможен перенос тепла посредством так
называемой теплопроводности. Ясно, что, вообще говоря, этот
процесс не связан с макроскопической скоростью движения и
может происходить в неподвижной жидкости или газе.
Как правило, предполагается выполненным закон Фурье,
согласно которому .
q — — «V0,
где V. — коэффициент теплопроводности. Поэтому полная плот-
ность потока энергии в жидкости при наличии вязких сил и
теплопроводности имеет вид (см., например, [38]):
pu((l/2)|u|? + i) — Си Ш — xV0.
Следовательно, общий закон сохранения энергии будет выражать-
ся уравнением — _
— (р*У~ + * ~~ div Грм (W” + -* <«’П) — xV©]*
£ + (l/2)lu|2 = H.
Преобразуем полученное уравнение к* виду, более удобному для
исследования. Вычислим производную; стоящую в левой частщ-
исходя из уравнений движения:
О. ( I и I2 , II **р др , .1^ ди , п дЕ „ др
. dt 2 "* 2 lU* dt ’ "* P dt J P dt % dt “*
= — -y |ufdiv(pu) + p(u-V)-yU|a — (“-VpJ + u’^-b
+ p4t* —(p«)-
Используя термодинамическое тождество
dE == &dS — pdV = QdS + p~2pdp,
получим
$ - e % + •
107
Вводя энтальпию
' i — E + pV, ~
имеем
(р у I + Р£) = — (2 + u I2) div (Ры) ~
— p(u-V)-2-|u| — (u-V)p+ р0-^- + “
Теперь, исходя из термодинамического сос/тношевия
di = 8dS +' V.dp,
имеем ’
Vp = pVi-p©VS.
Учитывая равенство •
f дП± = д - п _ пУ( диУ d.v ~ П) _ П№ &А
дхк дхк ' дхк ' дхк
и вычитая div (xv0), получим
^р-у | и j2 + р-Е^ =.— div jpu 1 и |2 + ij — (u-П) — xV©j +
+ p©[~:+ (и- V)si-nih^- div (XV©).
|_ P1 J 0xR
Сравнивая с исходным уравнением, получим уравнение для про-
изводства энтропии
р© [-^- + (U- V) si = (П: Vu) + div (xV0).
I иИ I
Первый член, стоящий в правой части написанного уравнения,
представляет собой энергию, диссипирующуюся в виде тепла
(из-за наличия вязкости), а второй — тепло, подводимое в рас-
сматриваемый объем за счет теплопроводности.
Предположим, что чисто механический континуум, который
мы изучаем, является нетеплопроводным (х = 0) и двухпарамет-
рическим (в термодинамическом смысле). Последнее означает,
что имеются две независимые термодинамические переменные,
например, р и р. Тогда можно считать, что
S = S(p, р),
и уравнение для производства энтропии может быть преобразо-
вано в уравнение вида
здесь А и В —функции только р и р, а С — диссипативная функ-
ция Фа(П: ^в), отнесенная к плотности. Уравнение состояния
в таком виде впервые было введено Р. Мизесом- [46]. Нетрудно
108
заметить, что функции А и В могут быть выражены через
энтропию и абсолютную температуру. Действительно,
as ds др os dp
dt ~ dp at + dp at’
отсюда следует равенство
I ' Pespf+ P05pf = (n:vu).
Используя уравнение неразрывности, йолучаем
pBSp&L _ P205p div u - Ф - 0, '
или эквивалентное ему \
- (pesP)-M> = о.
Введем обозначения: ' ’ ’ •
г,/ ч dSldS тт. , Г
G(p,.p)s-p—, Я(р,-р)^.-|р6^ ;
тогда _
dpJdt + и Vp + G div u+НФ — 0.
Постановка задачи. Дана система уравнений
+ (w- V) U — р-1 div П (Vu) + p^1 VP = о,. (2.1)
• ^ + div(pu) = 0, (2.2)
+ (u-v)p + G(p, p)djv w +/7 (р, р)Ф = 0. (2;3)
(7ь ►
*
Уравнения движения конкретной сплошной среды получаются из
(2.1)—(2.3) путем специализации тензора вязких напряжений Пи
задания'уравнения состояния. Сформулируем основные предполо-
жения, при которых будут построены определяющие уравнения
на компоненты тензора вязких напряжений П и перечислены
возможные уравнения состояния.
1. Тензор П является симметричным.
2. Описываемая среда — простая неполярная и нётеплопро-
водная среда с чисто механическими свойствами. Это означает,
что тензор рязких напряжений П зависит только от тензора Vu.
3. Сплошная среда является двухпараметрической (в терйо-
динамическом смысле).
- 4. Объемные силы или отсутствуют, или потенциальны.
Замечание. Сделанные предположения не носят принци-.
пиального характера, а преследуют лишь одну цель — упростить
вычисления.
40В
Для получения определяющих уравнений на компоненты- тен-
зора вязких напряжений П 'и на функции & и Я, а как след-
ствие— возможные структуры тензора П и возможные уравне-
ния состояния, поставим задачу групповой классификации си-
стемы (2.1)—(2.3) с произвольными элементами II(Vh) G(b, р)»
Я(р,р). . ‘ •
Введем обозначения:
и? = р, и1 = и1, и4 = и*, и3 — и3, «* = р,
а ди? а д^и?
. : ОХ
т, п, 9 = 0, 1, 2, 3; i, j, к, I, s, t, & — 1, 2, 3;
®, ₽, 7 = 0, 1, 2, 3, 4; Я= 1, 2, 3. _
Тогда система уравнений (2.1)—(2.3) перепишется в виде
р'о + + Gp\ + НФ0,
Ро + — («4) 1 ~Т- rlt + (и4) = 0,
.Ро + и*Р* + u4Pi = 0:"
Подействуем на систему уравнении (2.1) дважды продолженным-
инфинитезймальным оператором
д а д га д , д
х--1 .5*’
Коэффициенты ^, задаются формулами
: Й = Р/~рЖ^ . .
OS = DsDtxT + 4 - (ГтА + rSnHt) Г - р™ (Я.А + 4
OUT \ ОУг]
Поэтому результат действия X на систему уравнений 12.1)—(2.3)
может быть представлен в следующем виде:'
0<Й4 + pS.fe * Ро - Pi + n*Pi +
X OU .‘OU OU
. + Po fe - pS ^7 - Р/ - «4^|Й +
\dir 3u’ - du* * , /
_L n4f^____Я tO-i. п*2ё^.и‘П.Х0__________
- +Ро1й? ** Pii)u4
- Р*Ы + + и^гП* + »l4/>i»f - w WiV - o* (2.4)
110
pw Р1ви° u*Dk4 +
nfc^,
j П I + Po ti — Po-fi — Pi —5 +
du J -I du. du du1
1 »пм
Lft_n*<__
' *"\du* f°3w4 ,J
+ ^^Г’АВ° + ^^Г^‘Т/Л‘^г J- t
- р$ (ад’л ц W) - p№ + W - pfyg) +VpL+
\w / aP8 Xй J. . u
- -e-—- (rUb, + rUot) г - plj (DJ)t + rfi ЛА
t * \ dwj
_L° _ ~ о co _ рчХ V + »4 ( <
; W - Po du° Рз^?1 TPo\^ * du^
= 0, (2.5)
‘W
двП° + Х/ —
— Pj-^1 + — Po^“ Pt—, — GD&0 — h—.d&0}— :.
Зди*1 "°\диг - ди* ’du1 • dpi 3 )
- pW + G(Di4‘ - P}D£) + H - pW) +
. a₽j •
+ (^0Ч’ + С„4Ч4) + Ф(Яи0П° + Яи4П4) + ^ (2.6) •
Переходя в уравнении, (2.4) на многообразие
р2 = -(иМ^ад + ^Ф)<
к _ 1 О , .,i_h , 1 ^ПМ I
Ро 4 Ph. " Pi "I* “Т ' I rtf,
и* , и dp.
(2.7)
Ро = — (и>< + U4Pi)t
получим после расщепления по Рь Pj .
. in^ln(xt, х1, г2,'^), х (2.8)
J + + (2;9)
. ди
(210)
/^+^\/^_Ы4^=0; (2.П)
\,'Зр; М/\№ • / -
; 4Ф1
4
^оП4 — (GPi + ЯФ)^ + + и*дщ —
-«‘Xfe -д0^-и^\+.и*рХ-и*р^1} + т]4р| = 0. (2.12)
\Qu / ... du1
Поскольку диссипативная функция Ф нелинейна, то
Дальнейшее расщепление (2.12) приводит к следующим резуль-
татам: '
- ?^д£-и}д£> (2.13)
и* А (4) = 2и?£° + д&° - д£'+ (г == 1, 2, 3), (2.14)
ди \и J ди1
dotf + u4)ii\* + uldiif=6. (2.15)
- Из уравнений (2.8)—(2.10) следует, что
—+ U4—г
ди3 ди*
тогда из (2.14) вытекает (/ = 1, 2, 3)
л 9 Г 4 9 ( п4
-41 = u4 -1 « —7 Нг
ди3 ) - ди* ди* \ и*
.-т-'2иЧ-1°-ад°, (2.17)
а из (2.9)
а
?7 + и*Т~* (п) - ~ д^°+ и^° ~ “^° <' = 2’ 3>*
диг ди \ди' /
' • (2.18)
поэтому
Проделав операцию перехода на многообразие (2.7) в уравнениях
(2.5), (2.6) и расщепив их по rlsti r*t, r°,t, р*, р°, получим, в част-
0. /ап**, ] *>nto\gi] _
у ди* ’ др^ ' др[ у ди°
ности,
9р1»
^-о,. (2.21)
I
112
G^ + Я^^-О, (2.22)
- du* . dp j dir
4‘*-ttV + M‘ + »4V + 4.n< <2-23)
U du'
- S:+ 6' (**-•£«•£) -«* + •*’ 5? - °- (2'2i)
Из уравнения (2.24),следует, что (
^* + ^=0 JC = O, (2.25)
ди
а из (2.10). z ' ~ --у»
• Й^о; . (2.26)
dir . ,
' ’ _2а^ + 2^«-4+?5 = 0- (2^27)
и • du
Продифференцировав (2.22) по и’ (?=^/), имеем
=0,' (2.28)
..Л»4.1 Л»4\и Л1 •
поэтому из (2.17), (2.18) следует равенство
«(jlY-O. .’ (2.29)
du* \ U4 / . '
Производя дальнейшее -расщепление по и1, .и*, с учетом получен-*'
ных равенств имеем ’
2г-0’ й = °/^»*“0’ W=o, .
В результате проделанных расщеплении получим систему диф-
ференциальных уравнений для определения коэффициентов ин- .
финитезимальных операторов и систему, определяющих уравне-
нии на компоненты тензора -вязких напряжений. и функций G,;
Н, 'которая будет" играть роль ограничений, накладываемых на
«широту» группы, допускаемой в смысле Ли исходной -системой
<2.1)-Д2.3). " . '
Вначале выпишем систему уравнений на коэффициенты i)a;
4ft “ — ufcde£’+ д<>&*
Agfc+0*i‘=o (iVw7
« M* = 9ai3 == e(x’, ж1,«?),
«49
5Г'=0, '•
д = (1/2) 6*W°, л4 = «4Ф (*°),: (2.30)
A(4> + 4-W’)-°. ?о = 2(£-бв5«) + ф(^,
^=30.^-«=0 — = 0.
Эи* дх* ’ . дил
Решение данной системы уравнений может быть записано в видь
равенств: * •
В* •= нв(ж0)2 + а^х9 + d,
£*“= aox’i*-+ амж‘|+ а2ж4 + а^х* + смх’ + Ък.
j “
ам = I 0, » = к,
Ч*=—\(аоЖв—а8)и* + вы»‘+ «о®*+®*о,
'Ч‘ “= (е—2а5—Miex”)»*,
т]" = le - UV + 2)ав3?] и9 + ф(х°),
а0. аг, as, d, akl, aM, bk, e — групповые постоянные, N'= 1, 2, 3.
: Выпишем соответствующие инфинитезимальные операторы X,
Y~t/xl + &ulf 21~л31+^едх^
Z^xli+U1^~^¥
z»=+z* “f2 £> -
. , op op
У-2:
Я = t-^— I .т* 7 = xi ! и* —
Z* f dt + Х to<’ Z2 = X + U
X12 = x2 ~ ‘ x1 -^s + u2 .
12 • dx1 dx2 du‘
S
„ . ' д , д
Z‘-Plf + P^f
д , д
— « —5.
йи2
Г-«.— 4tp-£r — 2ip
Эи* r др
«4
л-> ^-г-7<-^+^.<г-‘-2-3)-,;
«-♦«>£. Л-р£+₽£.
Y J 8 -rR A JL.„lJL_-„*JL (Ъ<11 \
Аы а«* ^l + дйк ди.1 '\М = 1ДЗ?
Zo - t2|t + »*“,“(*«* ~ *’)£. “.Й^т'Зф £. '
Обратимся к оставшимся уравнениям:
ЛГ 4“ 2 гтМ i . /Л ОЛ\
со~^5—Л аеЙ~7Т> . (2.31)
pi
N ..
. ... «
амП» + а„П« + еПм 4- azrt~ + ^Р**Ь = 0; (2.33)
/ вр; % дР»
эоЧ? - (нф + ~ д°1°)+ G ^fl° ~ &(2аоЖв + °2^ +
+<пй+(&ч’+54р1+Ф(5п°+ (2-^
Вначале рассмотрим группу членов типа
/ ^Pt J
= — Н Ф[е — (N + Qaox* — aj — —
Д i^idpi дР> .
' дФ'j , дФ I , п о 10ф|
. -^«^4’5й»*+2^,л^|-
Заметим что
<дПм t _ 1дФ
Pi"TT Ръ ~ Р1Тл ®»
~ &Pj °р}
поэтому из (2.31) следует равенств^
во(Я + 4)Ф=ЧР1й
«Pi
Далее,
= я01гП.
N .. N
2апм t va® . г,
4=ГЭД| ыЭД;
поэтому из (2.32) получаем ' ' -
<=1 эд
Умножим (2.33) па pl и просуммируем по Л, t от 1 до N:
йм1&О-и+ЯнРкП**+ер*П“.4- а2Р» Рй-’-Рк^-рР&ц+Р* ~ТТ Р^г=® *
эд; эд; ЭД;
' Отметим следующие очевидные равенства:
t дпм дФ „ ...
Pk—г=—; —4гП,
\ЭД| ЭД|
„t.TTfet Л. ж,г дПь< t _z вф ж
Рк“ =Ф, Р«"гтРк ==Р«77 —
ЭД; *ЭД;
t anw t дФ г . t-nih
Рк-~тР,аи = ~-р:аи +анрьП г
, эд* ЭД» ••
191$* i дФ г tTTi*
Pfe .-7T- Piai. = 7-l P/4*-akiPfcn-
ЭД» ЭД»
Поэтому из (2.33) после небольших преобразовании получим
еФ+ e,pi^—ааФ—^р^ац + ^р^^О. (2.35)
. ЭД» . ЭД, ЭД, -
Учитывая полученное равенство, указанную группу членов мож-
но привести к ввду:
Г#(ж тт . |дФ дФ I .. дФ I
Я |еФ — fle tr П + аар;—j ——7 pjaw +—т p/ij,—
, ' I ЭД ЭД* эд,
L ЭДЛ
ЭД
Поэтому уравнение (2.34) перепишется в виде
- (Я + 2) а^° + $ (ж") - рИ G № - + 2а6^ + -
I \ ои /
-г*4*]+Ла*+*»“п*♦(£*+5*)-°-'
(2.36)
Далее, поскольку имеет место (2.32), то
g(trll)
8р\
= 0,
поэтому дифференцируя (2.36)- по р< и суммируя По i от 1 до
N, имеем ,
| \ди е у \&и ди /1
+ (^Пв + ^П4ЬгП=0. . (2.37)
\ди ди /
Отсюда следует, что либо trJI — O, либо . . ’
’ ^ + ^П‘ = 0, . (2,38)
• - mi
однако если 1гП = б, то из (2.36) ввиду нелинейности Ф получим*
(-2.38). Следовательно, (238) имеет место всегда, независимо от
того; равняется нулю след тензора вязких напряжений П или
нет. Тогда из (237) вытекает
<?(-{-*>+ + =0, (2.39)
\ди т« • - / \ои . ди ]
а уравнение (2.36) приводится к виду .
a0NG — a<i(N ' +2)u° + ip'lx0) + asff tr П •=; О,
которое распадается на два:
* aA2VG-aoW + 2)B0 + t'(a:#) = 0, - (2.40)
а»Н Ы1=0, (2.41)
поэтому ф(хв) >= кхв + г, a6[NG— (2V + 2)ri°J и так как
из (2.40) следует, что
G “° + ® (essconst),
ТО Х«=—воВ*. -
Рассмотрим (2.39). Это уравнение после небольших преобра-
зований может быть записано в форме ,
' ? ’ noe2»[^i^-(^ + 4)]^O1 (2.42)
поэтому е^® 0 и л) = г & const.
Следовательно, уравнения, играющие роль1 ограничений, на-
кладываемых на «широту» .допускаемой системой (2.1)—(2.3)
группы,'имеют вцд* .
+ с2-43)
- L \ J
117
a0[(AT + 2)u°-M?]>=0, (2.44)
o^_G\ ^_2 4а? = 0> (2.45)
{ дц* du° } ди° 6 . ди*
а0 f (N + 2) u«'J? + Nu* = 0, (2.46)
L ди ди\
соЯ1гП = О, (2.47)
f лдН . дН\ дН п л tn »о»
е I и° —= + и* —; I + г —„ — 2ам*—; = и,. (2.4о)
V 0“ ди*} ди° ди*
N- -j- 2 rrht ' г дПМ in /q\
«о —5— nftt = ад} тр <2-49)
dPJ
а«2^Г=0’ (2-50)
ЙМП“ + а«Пм + еПы + fl2pi pjay* + = 0.
v ’ Р' Р& Р° (2.51)
Исходя из системы' уравнений (2.43)—(2.51), нетрудно сделать
следующие выводы: при произвольных П, G, Н исходные уравне-
ния допускают операторы
. Xt,-X<, Yt (i=l, 2, N)
(в дальнейшем группу, порождаемую этими, операторами, будем
обозначать через Го). Максимальная группа непрерывных преоб-
разований, допускаемая в смысле Ли-уравнениями (2.1)—(2.3),
соответствует П = 0.
$ 3. СТРУКТУРА ТЕНЗОРА
ВЯЗКИХ НАПРЯЖЕНИЙ И .УРАВНЕНИЙ
СОСТОЯНИЯ ЧЙСТО МЕХАНИЧЕСКОГО КОНТИНУУМА
Рассмотрим систему определяющих уравнений (2.43)—
(2.51). Как уже неоднократно отмечалось, эту систему следует
трактовать как ограничение на «широту» группы непрерыв-
ных преобразований, допускаемую исходными уравнениями
(2.1)—(2.3).
Наша' задача состоит в том, чтобы определить возможные
типы связей между групповыми постоянными, входящими в. эту
систему, и как следствие — получить системы дифференциальных
уравнений на компоненты тензора вязких напряжений П и на
функции G, Н. На этом пути мы получим не только общие пред-
ставления тензора напряжений чисто механического континуума
как в изотропном, так и в анизотропном случае, и соответствую-
щие уравнения состояния, но и наиболее широкие группы не-
прерывных преобразований, допускаемые уравнениями движения
118
каждом конкретном случае специализации тензора П и функ-
ций G, Н. Иными словами, каждой тройке элементов Gt{pt р),
Я,(р, р), Ili(Vu) ставится в соответствие группа Г,-, содержащая
в качестве собственной подгруппы группу Гв.
Важность решения подобной задачи Очевидна.' Дело в том,
что в качестве конечного «продукта» мы получаем классифика-
цию моделей чисто механического континуума, что позволит не
только отобрать наиболее перспективные в смысле- возможности
решения конкретных задач значения и формы экспериментально
определяемых физических величин и зависимостей, но и «подска-
зать», какие именно* макроскопические параметры сплошной сре*
ды следует измерять для того, чтобы воспользоваться, той или
иной из предлагаемых моделей [52].
Замечание. В рамках этого подхода (групповая классифи-
кация) и сделанных предположений других моделей чисто меха-
нического континуума, кроме тех, которые будут полечены, не
существует. В этом смысле мы получим исчерпывающий ответ
на вопрос, какие именно математические модели чисто механи-
ческого континуума возможны и какие эксперименты следует
провести для возможности использования той или иной из пред-
лагаемых моделей. ' •
N — 1. В этом, случае классификация проводится особенно
.просто. Поэтому приведем полностью те характерные рассужде-
ния, которые будут использованы и при классификации в случае
2V=2 и N«=3.. Прежде всего заметим, что
П=с(рОц; ао = 0, ц-^0, (3.1)
поэтому определяющие уравнения примут вид
е(рСгр + pGp — G) + rGp — 2aspGp — 0, (3.2)
e(pffp + рНР) + rHp - 2а5рЯР = 0, . (3.3)
е + ^-о, G, (3.4)
Рассмотрим уравнения (3.2). Введем вектор А = {Я,, Л2, Л»}, где
Л, = pGp + pGp — G, Аг — Gp. Ла — — 2pGp.
Пусть все векторы Л компланарны, но существуют два не кол-
линеарных, тогда найдётся вектор {а', Ъ', с'}, ортогональный плос-
кости векторов Л:
(а'р + b')Gp + (а' — 2c')pGp—a’G = 0.
- Если а & 0, те за счет преобразования эквивалентности
р->-ар, П-»-аП, р-^ар + Ъ, G-*-aG, Ф->аФ
вектор с компонентами {o', Ь', сЗ перейдет в вектор с компонен-
тами {1, 0, т},уравнение (3.2) примет вид
pGp + (1 — 2m)pGp — G = 0,
119
общее решение последнего находится без затруднений:
G^pGW~imp~1}.
Еслц а' —О, b'-.&'O, то вектор с компонентами {а','Ь', с'} пе-
рейдет либо в Ю, 1, 0), либо в {0, 1, 1), соответственно этому
'имеем уравнения GP = 0 с общим решением G=G(p) и GP=2pGp
с- общим решением G = G(peXp). Если a'<=Q, 6'i=0, то имеем
вектор {0, 0, 1} и уравнение GP'=f=O с общим решением G = G(p).
Пусть все Лекторы типа А компланарны и параллельны век-
* '
тору с компонентами {а', Ъ'г —2с'}. тогда если А не постоянный,
то -найдется такая функция В(р, р), что
pGp + pGt>—(3.5)
GP = b'B, (3.6)
pGp = c'fi. - (3.7)
Из (3.5)—’(3.7) следует, что G*=Wp + c' — а'}В, тогда из (3.6),
(3.7)
Wp + c'— а'}Вр'—0, р(Ъ'р + с'— a'}Bfi — c'B,
поэтому Ь'==0 и с'^а', иначе Я = 0, но в этом случае, как легко
видеть, Вр = 0, а' — т — Т, с' = гп, следовательно, В = Вор™, G ='
==Gopm. Если А не зависит от р и р, то В — 1. А так как G —
^(Ь'р + с' — а'УВ, то или-6'|= 0, G — 1, или Ъ‘ ¥0, G — ^p. Ио
следование в случае нулевого вектора А проводится тривиально.
Теперь заметим, что в случае компланарных векторов типа А вы-
полнены равенства
- . е^а'с, г—Ъ'с, .a^-c'c,
поэтому возможные .типы векторов {е, г, as) имеют следую-
щий вид: , - '
(1, 0, т}; {0,1, 1); {0,1, 0)- {0, 0, 1); {2m, г, т-1);
{е, 0, а5); {0, г, а5); {2, г, 1); {е, г, а5).
Этим векторам соответствуют уравнения на Н, которые легко ре-
. шаются. Для удобства .дальнейшего исследования приведем пары
' функций {G, Я) “которые следует рассматривать: '
{рС(р'-2тр~1), Н(р2~Хтр~2)};{С(.ре^р),ff(peXp)};
{G(p), H(p)>; {Gopm, HJ; {Glp}, Н(р)};
’ . {-гр, Яй); {1, Яо); {0, Я(р)}; {0, Яо), 1
Go, Яо — постоянные;
Если во ¥= 0, то следует рассматривать только пары
я.], ШДр, ,н(Р™'™Р-0).
Переходим, к формулировке результатов‘по классификации*..
одномерных моделей чисто механического континуума. Доцолни-
120
-ельные операторы будем обозначать через Xt *:
G=.pG(p‘-2mp-*), Я = Я(р‘-2тр-‘),
Ха = Zi — pZ3 — mnZ3j
G'—G(pe2p), Я«=Я(ре2₽),
Xi — Zj -- flZg, Xg — Zg-^-Sf . z
G«=G(p), Я = Я(р),
X; = Zi-pZ3, Xj = 5;
G'= Gop”, Я*=Я0,
X* = 2m (Z^— )iZa) — p.(m — 1) Za, X* = S;
G = 4P, H*=H9,
Xi = Zi — pZ3, Xj =Za,
G =l, Я = Я^
Xi = Zi—pZs, Xa==S, Xs=Za;
G==G(p), H = H(p),
«. • Xi — Zt — pZ3, xa =.za,
6 = 0,Я = Я(р),
Xi e 2Zi — 2pZ3 — pZ3, Xa = S; .
G = 0, Я = Я0, '
Xi — Zi — [iZ3, X2 = Z2- X3 = 5;
N<c=2. Необходимо рассмотреть два случая: со'=О и а^О.
I. a0Jf=Q- В этом случае определяющие уравнения примут вид
/ 4 q dG t dG o л dG л /л oV
e “ n+'u ro~G +T’-2a‘“ r* = 0‘- <3-8)
\ du du ] du - du
[ л i о \ i о i n - /от
е м4— + u0—g ) + r—j — 2asu4—= 0f (3.9J
\ du4 au° J Suv s йи4
еП^ + а^^ + а^С^ПИ + гП^^О,; (ЗЛО)
&Pt .
• еП“ + + a12 (£4IP« + П22 - П11) = 0/. (ЗЛ1)
aps ' .
•здесь -
сПЧ+<ЗД1-^ + а„(Ь,Пи-21Р’)-0, (3.12)
Ьх - (pl - rf) + Ы + Pl) - £)•
\opi &PII . \dp£ dpj
121
Определим возможные связи между е, г, а-,, аг, аа. Для оолегче-
яия процедуры заметим, что в качестве следствий: из системы
(3.10)—(3.12) имеем
eV + a2r1i-^ + 2a12-^ = 0,
а<₽
. 2eZ + °alli^ + 2<ll2'^ = 0’ •
где
V^trll, *-(П“-П“)* + 4(П“)*
(очевидно, Нто V и % одновременно в нуль не обращаются). Новые
независимые переменные тр, ф определяются формулами
Ч1 = 1Л/4 ~ + PiA
* ' I)2 “ + Ръ if* = Рг — Pi> Ф = arctg-*’2
Смысл введенных координат очевиден: — интенсивность тен-
зора вязких напряжений в линейном случае; ц1— дивергенция
вектора скорости; ц3 — единственная отличная от нуля .компонен-
та вектора rot и, <р — угол между первым главным направлением
тензора П (в линейном случае) и осью Ох1.
Пусть с = 0. Тогда *"
n = AZ + FQ,
тде .
I Р 0^ ( cosjp, sin<p
— \0 1/’ $ \ S> п Q ~~ \— sintp, cos<p
'&=G(pe^), Н^Н(рег^
it) f, g, h — однородные функции переменных ц1, нулевой сте-
пени однородности;
X* ~Z2 + S, X* = Zn Х3* = Х12;
A gt произвольные функции переменных ц1; •
X? + S, X* = Х1а;
b) ft gt h — функций переменных ц’ ехр (—<р/2а);
= Z2. -|- S, Х2 = Zj + аХ12;
i4) если а'—О, то Пм — однородные функции по ц*, степени
однородности нуль, зависимость от <р произвольная;
А\‘ = Zj + S, X* = Zx;
Z? = G(p), Я«=Я(р),
ix) x: = 5,x:==zlt х; = х12;
iJXt^Xt-Xn-
122
«) X* - S, X* = Zx + aXM;
G=G(p), H = H(p),
i1)X: = Z2,X2* = Z1,X3* = X12;
QX^Zg, X2* = X12;
*3) X'l = ^2’ -^2 = + a-^12»
ijx:-z„ x,*-zi; ч
G =₽i, H = HC, 1 J
, Q X? = S, X* - Z2, X* - Zv Xt _ X„; .
i2) X? = 5, X2 =. Z2, X* = X12;
*3) a= ^> -^2 = Zgj.Xg = Zx + aX12;
i4) x; = s, x2 =za, x;=zv
Пусть e^O. Тогда '
G^pG(pl-2mp~l), Н^Н(р*-2тр-1). :
n = e^lhI+FQi,
ii) A g> Л — функций переменных т]4 ехр (—aq>/2p)j _
Xj = Z3 + aZj + ₽X12 4- ?nZ2;
is) если p — 0, то Пы — однородные функции по переменным
i]1 степени однородности —1/а, зависимость от <р произвольная;
X* = Zs + aZt + mZs;
h) f, g,'h — однородные функции по переменным степени
однородности - нуль;
Хх = Zj, Х2 = Zs + рХ12 4- mZ2.
D>=hI+FQ,
- X
А) /, g, Л —однородные функции по переменным т]* степени
однородности —1/а (а=?^0);
Xj = Х12, Х2 = Zs + aZx + znZ2.
fi gi — однородные функции по переменным ц1 степени
однородности а; _ '
Хх = Zx — ccZg — maZ2> ^2 — 2Z3 — 2jnZz}
если Пм — однородные функции по т>* степени'однородности 1,
123
а зависимость от <р произвольная, то
Xi = — Za —г mZa^
ix) = ^2> Ха = Za + + рХ12;
i2) Ха “ ^2» .^2 “ %з + °^1»
i3) Х? = Z2, . Х2 = Zlt х; = Za + рХ12;
U х; =-Z2, Х2 = Х12, х; = Za + azi;
t6) Xi = Z2, XJ . ZA - aZ3. Xj = 2Z3 - X12; 1
^в) .^1 “ ^2» ,^2 '^1 — Za,
G=Gtpm, H^H0, • -
.fj-x; = S, X* = 2m (Za + aZx + ₽XI2) 4- (m -1) Z2;
i2) = S, X2 = 2m (Z, + aZx) + (m;— 1) Z2;,
i3) X* = 8, X* = 2m (Za + ₽X42) + (m - 1) Z2, Xa - Zx; .
14) Xx = S, X2 = 2m (Z3 + ccZ]) 4- (m.— 1) Za, X3 = XX2;
is) . X£ = 5, X2 = 2m (Zi — aZs)' —г a (m — 1) Z2, X3= 4
=z m (X]2 — 2Z3) -— (m 1) Z,
ta) X* = S, Xl~2m(Zi^Za)—(m—l)Za,
G = 0,H^HB,
. о x:=5, x:^%,'
i2) X*^s, x:^za,
ia) x; = 5, X* = z2.
i4) 'x; = S, x; = z2,
Xj = Sf Xa = Z2,
»e) x; = s, x2*=z2,
G = 0, H
W X-l = S, ’X2 = Za + ctZi 4- pXJ2 4- -g- Z2;
J ^2) Xa — Za -}-'(zZi 4—^"^2»
ia) X? = 5, X* = Z3 4- pX12 4-’ ±za, Xj = Zi,
^*) Xi = S, X2 = Za 4- aZx + ~a~Xa, X3 = X12;
£t
X3 = Za 4- «^1 + PX12;
X3 = Za 4r <xZx,
X3 ₽ ^3.4*v P^12’ X& — Zi^:--
X3 = Za 4- oc’Zj, X4 = Xjgj
X3 = Zi — ctZa, X4 = X12 2Za',
X^Zx-Z,;
124
iB) Xx «= S, X2 = Zx — aZ3 —^-аЯ2, X3 — Xx2 — 2Z3.— Z2;
ie) X* = Я X* = Zx - Z3 - 4- Z2;
II. Пусть ae^O, тогда
^=6^1^+^],, trn = Oi (3.13)
G=^p, Я = Я0, •
A St Л— функции переменных t]s (p= l/k\ а правая
часть (3.13) — однородные функции по переменным р} степени
однородности два;
' x; = Zx - 2Z3, x: = xX2 + ftz3, x: = z2, x: = z0;,
П-Л7+ЯС»,' trn = O, ’ (3.14)
i2) A g'i Л —функции переменных i)i, qs, а правая часть
(3.14) — однородные функции по переменным р) степени одно-
родности два; -
X? = Хха, X* = Z. - 2Z3, Х| = Z2, X* = Zo;
G «=« Я = Я (р^’р"1),'
. A) & =ZX-2Z3-(1/2)Z2, Xt=XI2+7iZs+(l/4)A-Z2, X?-Zj
ii)X^ Xlgf X2* = Zx -2Z3-(1/2)Z2, X*=Ze. '
Я^З.- Запишем определяющие уравнения в виде, удобном
для дальнейшего исследования:
+ p^’~G/ +r —2 бР^Р “°’ . (315)
e(P-»r + '’»fZ+rs7-«F-0’. <зл6)
' „;[(W+2)(Pg-c)+.ffp^]-O, (3.17)
' a„[(A?+2)p-AY?]=0, ' (3.18)
аоЯ1гП = О, (3.19)
- ^[(Я+^рЯр + ЯрЯр! =0, (3.20)
. (3.21)
«.2^-0, (3.22).
i=l М
«П“ + axLJI“ + oaUtH11 + 2П«) 4- а^ЬгП11 + 2П“) + виГ»П“ - 0,
(3.23)
еП*2 + а2ЬДГ2 + а12(£1П‘2 + Пи - П*‘) + а,«(£2П,г + П2а) +
+ а21(£3Й,2 + П13)'=0, (3.24)
еП‘3 + а2ДП13 + а^ЛП*3 + П23) + a13(L.H,s + П33 -П“) +
+ а21(£3П,3-П,3)=О, -(3.25)
еП22 + а2Ь4П23 + а12(£1П22 - 2П*2) + aiSZ2IP2 + а„(£3П22;+ 2П23)'=0,
(3.26>
еП23 + а2£4П23 + ^(AIP* - П‘3) + а12(£2Пгз - П12) +•
+ й2,(£3П23 + П33-П22) = 0,^ (3.27л
еП” + а2Ь4П33 + a12LJI” + а„Ь2(Пм - 2П13) + а23ЩП3’ - 2П33) = 0,
(3.28)
здесь L„ Li, L3, Lt— линейные дифференциальные операторы
следующего вида: - '
= Ы~"Р®)(^ + (^ + +Рз^~
2 & 3 0 3 &
dpi ’ др& Р^ др&* ।
= Ы — р!) + rf) ~ 1^1)+
1 д з д **. g д а ‘
’ дрЗ dpi Pi дрз dpi1
= (р® — Рз) (—~i +
^4
13 . 2 3 # 0
N N
1=1 «=1 Ops
Поставленная задача была бы все еще трудна для полного ис-
следования, если бы не два обстоятельства, играющие решающую
роль в классификации трехмерных нестационарных моделей, опи-^
сывающих движения чисто механического континуума.
Во-первых, й качестве следствий из (3.23)—(3.28) получаем
уравнения
eV + a2LtV + а12ДУ + auL2V+g23L3F = 0 (3.29К
и
2ех + а»£4х + ап£1х + al3L2-^ +a23L^= 0, (3.30)
где .
• У»ЬгП, »
126
X- (1/6) [ СП22 - П")2 + (П“ - П”)2 + (Пи - П22)2] +
+ (П‘2)2+(П‘2)2+(П2,)г.
Ясно,что функции У и х одновременно в нуль обратиться не мо-
гут (в противном случае тензор вязких напряжений будет нуле-
вым). Поэтому для получения возможных типов связей между
групповыми постоянными достаточно рассмотреть уравнения
(3.15)—(3.22) и (3.29), (3.30У, а затем с учетом полученных свя-
зей решать систему (3.15)—(3.28). Результатом описанной про-
цедуры и будет искомая классификация.
Во-вторых, Lt, Lt, Lt, Lt образуют алгебру Ли. Для доказа-
тельства этого утверждения достаточно убедиться в том, что
операция коммутации не выводит из множества указанных опе-
раторов и выполняется тождество Якоби. Вычислим, например,
коммутатор [£,, L21:
' l^i, /’al ~ (Pi — Ра.
.Л)_« + й)^ + А)_
dp]
д
dpi)
+•($> + Ра) 8- ~3
\dpl dp‘
+ Ргт-;
°р}
L3.
\ "/'г "Г
dpi dp\ ’ Я"3
+ Ра Т-j + Р17Д + (Рз + Pi)
• др3
(/' а зЛ { д d '
= —(Р2 —Рз) т1 + —з
.1 \8Рз дРы
1 д г 2 5 s д 1
-Ps-i + Pi-5-pl—,-г
dpi dpi . dpf
Остальные вычисления проделываются аналогично.
Поскольку рассуждеция, приводящие к классификационному
результату, вполне аналогичны проделанным в случае 1 или
2V= 2, те сразу же переходим к перечислению структур П и типов
функций G и 'Н. Как и прежде, дополнительные операторы будут
обозначаться X*. ’
Изотропные модели (а0'= 0). Введем новые независимые
переменные
= pj (i = 1, 2,3), xt = р3, х6 — р3, хв = Pi, х? — р3,
*8 = Р1, *9 = Р1-
Тензор П может быть представлен в виде
H-=fI + 2gD + 4hD\ (3.31)
здесь 1 — единичный тензор,- a D — тензор скоростей деформации
с компонентами
А) = |-(Р1 + рО (М-1,2,3).
127
Обозначим через т]“ (м = 0, .1,2,3) соответственно Irotul и инва-
рианты тензора скоростей деформации.
G^G(pe^), Я = Я('ре2р),
г,) /, g, Л— произвольные дифференцируемые, функции пере-
менных т]",
х; = Z2 + S, X* = Хх2' X* = Х18, X* = Х28;.
iz) если правая часть (3.31)— однородные функции по пере-
менным xt (т*= 1, 2, ..9) степени однородности нуль, то
• . . X* = Z2 + S, ха* « zi,_ Х3* = Х12, Х*4 = Х„, х; = Ха8;
С^Жр), Я = Я(р),
ix) X? = S, Ха = Х12, Х8 = Ххз, х; = Х23; ;
Л) Хх = 5, X* = Zx, Х3 = Х12, Х: = Х1з, Х: =₽ Х28;
ix) X* == Z2, Х; = Хх2, Х3* = Х18, X: = Хаз;
- fa) xf = Z2, X = Хха, Х8 = Ххз, X* = Х23, Xj = Zx; 7
н^ц9, . , .
. ix) х; = S, х:=Zz;xi = хХ2, х: = Хш X* = Х28; f
\)X^ = S. x: = z2, х3*^хХ2,-х: = хх8,
Пусть е¥=0, тогда
23,
'1>
Tl^fI + 2gD + ihD^, (3.32^
правая часть-, (3.32) однородные функции переменных. хг сте*?
пени одиородности к, ' t
* ‘ X? = Zx - hZs - mkZz, Х2* = Хх2, Х8* = Х13, X? = Х28?
G = H—Jffe,
7ix) X^z,, X2* = Zx-*Z3, X3* = X12, X4* = XX3, х: = хад;<г
<? = Gop’", H = Hb, .. ' - '
О Xj = S, X* = гт^ ^kZ3y-k(m- 1)Z2, X* = X12t. j
Xt= XX3, X6 = Xa3jj
€? = 0, Я = Яо, J
у x; = S, Xj = Z2, X3 = Zx - kZ3, X* = xX2, x:» хи, j
x; = x2s;\
42R
х = о, Я = Я(р),
iJX^-S, X* = Zx — kZs— ~ZV Х3*=Х12,
X?
- х13, xj=x28.
Пусть ав ¥* 0. Тогда
С = ^-2/Л Я = Яо,1гП = О,
Ъ) f, g, h — функции переменных £s — (1/2)£(,|а — (1/9) Si, Sa,
S4, .причем правая часть (3.32) — однородные функции, степени
однородности 5/2 по переменным хх (т'= 1, 2, ..9),
# = Х2=Х13, Х3 = Х23, X‘ = Z0, х: = 22х-
— 5Z3/X* = Z2.
Переменные Si, Sa, Ss, задаются формулами
S, = tr D — Xi + Ж2 + xt,
£а = ж4 + 4 + | K^i — ж2)а + (х, — х3)? + (х3 — а)2],
Sa = *5 + xl + xl + | [(«1 + х2) х\ + (хг + xs) 4 +
+ (жа + жз) хв +
£4'=|rotii|;
G = ^±-2 р, Н = Н (pWN+2)p~l), tr П = 0, Я = 3,
ii); Хх = Х121! Х2 = Х13, Х3 = Х23, X4=Z0, X3=Z2+5Z3—2ZX.
Указанными вариантами исчерпываются изотропные модели чис-
то механического континуума.’
Анизотропные модели. Введем переменные Si, Sa,
..Se По формулам -
|1 “= xi + «2, Sa '= Zf. — x»i Is — ) (^1 — Xi)2 + (ж4 + Xi)\
= ]/~xn 4" Se = 4* я-#» Se ~ хз^
I l X, 4- X. X- xn \
I? = 2 I arctg —-5 — arctg -2- — arctg-A |,
z \. xi ~~ xz ’ жб xb J
- 1 / x. 4- x. x„ * x \ •
l8 = ? I arctg / + arctg -2- + arctg 1,
z . xi ~ 2 Xb ®8 /
z
Se = arctg — arctg
Б 8
I. Oo «= 0. Пусть ,e «= О/ тогда
(—g, h, 0\ / cos So, sm|8, 0\ //, 0, A\
h, g, 0 )| —sin£M c6S|3, o| + | 0, /, Я I,
0. 02Я/\ 0, 04 1/ \AB,0Z
' Б. Д. Ланин, В, О. Еытев, С. И. Сенатов 429
где
Л == (?cosi-g8 — Psmjfcg, В = Pcos^8 + (jsin^-gg»
G-=G(pe2₽), Я=(рех’),
А) А g, Л, P, _Q, R— однородные функции по переменным
gi, ..., ge степени однородности нуль, зависимость от g7, про-
' издольная, .
х* - z2 + 5, х;=х12, х; = zx;
i2) A g, h Pi Q) R — произвольные дифференцируемые функ-
ции переменных
^ехр(-^8/2а), Ь. Ь (i= 1, 2, ..., 6У;
x:-^ + s,.i:-zl.+.^
i3) если а = 0, то Пм произвольные однородные функции ну-
левой степени однородности по переменны^ £«, зависимость 01
£7, £s, £s произвольная,
X* = Za + S, X2* = Zx;
i4) A g, К A Qt R — произвольные функции переменных g*
&,.&• (i«=l, 2, 6),
X* = Z2 + X, X* = X12;
g=g(p), А=жР), . :
ix) x; = S, X2* - Zx, X3 = X12;
i2) X* = 5, Xj'= Zx + aXx2; -
•: i3) Xx=5, x: = Zx; ‘ ’ J
i4) Xx* = 5, X2 = Xxa; . J
С«=С(р),Я = ЯХр), /. i
ix) Xj = Z2, X; = ZU X3*^ XX2;
i2) Xx == Z2, X2 = Zx + aXX2;
. i3) Xj = Z2, X2*^Zx; A
i4) x;=z2, x;=xX2; ' - i
G = l, Я«=Я0, • -J
jx) x; = 5, x; = z2, X3* = Zx, Х^Хи; I
ia) Xx = 5, X2 = Z2, X3 == ZX + cxXX2;
^3) At = = ^з = А» '
i4) x; =, s, x* = z2, xj = xX2.
130
lycib e &= 0, тогда
_Esr/— g h Ox / cosg8, sin gg. 0\ // 0 Л\-|
П = e 2₽ I h g 0 41 — sing8, cosg^f 0 I + I 0 f В j L
0 0 В/\ 0, 0, 1/ \AB0j\
G^pG(pl-imp-ll Н(р1-гтр~1\ ’
it) A g, h, P, Q, В — функции переменных gi exp (—ccg8/2p), g7,
g, (i-i, 2, ..., 6)/ " " .
Xx = Za + aZ1 + pX12 + mZa;.
i2) если P == Q,-to П" произвольные однородные функции сте-
пени однородности —1/а по переменным g{ (/*== 1, 2, 6), за-
висимость от g7, g8, go произвольная,
Х2 = Z3 •+• ctZl 4 mZ2i • • -
i3) f, g, h, P, Q, R—одноредные по переменным gt степени
однородности нуль, зависимость от g7, ge произвольная,
Xj = Zj, х; — Za -$ pXia + mZ2.
(—g h 0\7 cosg8, sing8, 0\ // 0 Л\
П = | h g OH—singe, cosgg, 01 +1 0 / BL
Д 0 0 RJ\ 0, 0, , 1/ \Л В
id A gi К P, Qi В — однородные функции по переменным g< .
степени однородности —1/а, зависимость от g7, *g0 произвольная,.
Xj = Xls, Х2 = Zs.+ aZf + mZ2. ..
cos gg, singe,
singe, cosg8,
0, 0,
0\ // о- Л\‘
0 I + I 0 f Bl
V \b в oj.
fc)' A gi h, P, Q, R — однородные функции то переменным g<
степени однородности а, зависимость oi g7, g? произвольная,
x Ха = Zj — aZg — TnaZ2, X2 = X^2 2Zg’— 2iiAZ2$
ia) если Пм — однородные функции степени однородности 1
по переменным g«, а зависимость от g7, g8, g8 произвольная, то
Xtj =,Za — Zs;— mZ2]
ij) Xx .= Z2, X2 = Z3 +’ aZx + pX12; j;
*2) Л1=^2> -^2 — %з + a^it , /
is).?i* = Z2, X2* = Z8 + pX12, X8* = Zi;
i4) Xj^Z,, Х: = г8 + а^, Xj = X12; ,
fB) Xj — Z2, X2 = Zx — aZ8, X3 — X12 — 2Z3,
i6)X* = Z2, X2* = Zx-Z3;
G — Gtpm, H — Яо,
- й) = ^2 “ 2m (Z3 + aZx + PX12) + (m — 1) ^2»
i2) ~ &> X3 = 2m (X3 + a^i) + (m — 1) Z2j]
i3) X? = 5, X£ = 2m (Z3 + ₽X12) + (m -1) Z2, Xj = Zx;
i4) Xx = S, X2 =: 2m (Z3 + aZx) + (m— 1) Z2, X3 = Xx2;
iB) X* = S, X2 = 2m (Zi — aZ3) — (m — 1) aZ2,
X* = m (X12 - 2Z3) - (m— 1) Z2;
ie)X; = 5, X2 = 2m (Zx — Z3) + (1 — m) Z2;
G = O, H*=Ha,
*1) Xt ~ &• -^2 = ^2, — Z3 + aZi + PX12;
. *2) ~ = Zz,, X3 =Z3+ aZx; ~
ц) X* = S, X2* - Z2, x; = Z3 + PX12, XI = Zx;
i4) X? = S, X2* = Z2, X; = Z3 + aZi, X: = X12;
IJX^S, X* = Z2, Xl = Zi-aZ3, X4* = X12-2Z3;
l3)X*i=S, X2* = Z2, Xe* = Z1-.Z3;
в=О, Н = Я(р),
’ ii) x: = S, x: = Z3 + aZi + pxi2 + (1/2) Z2;
^2) Xi ~ -^-2 ^3 + ®Xx + (1/2) Z2;
1з) Xj* = s, X2* = Z3 4- pxi2 + (1/2) Z2, Xt = Zi-,
ii)Xi=S, X2* = Z3 + aZ1 + (l/2)Z2, X3* = X12;
k) Xt = S, X* = Zi — aZ8 - (1/2) aZ2, X3* = X12 - 2Z3 - Z^i
k) Xi^S, x: = Zj-Z3-(1/2)Z2. J
II. Пусть «о =И= 0. Введем переменные
t],-=(1/2)1, +go, (т = 2, 3, 4, 5),
Ч.-= (l/2)g,-go, qo-go (i = 7, 8, 9),
ft,
g,
0,
sin t]8,
COStjg,
0,
0\7 cost]8,
0 II — sinrjg,
Я/\ 0,
1 1 ♦ ’ 1 1
A = Q cos ~2" t]8 — P sin -y t]8, В = P cos 1]8 + Q sin 1|8,
Я = Я0, trII==O, 2V = 3,
-i) /. Л, P, Q, R— однородные функции, степени однород-
ности 5/2 по переменным тр (т= 1, 2, 6), зависимость от тр,
г]в произвольная,
х^гг.-зг,, x* = x12 + kz:i, x* = z0, x* = z^
G = p,' . H - H (p^+V1)! tr П = Q,
ii) X± — Z2 + 523 —* 2Zi,
X2 — X12 + kZ3 + -jr- kZs,' X3 = Ze-
§ 4. НЕКОТОРЫЕ МОДЕЛИ
Вначале рассмотрим частный случай (двумерные дви-
жения) и построим пример, когда компоненты тензора вязких на-
пряжений П линейным образом зависят от компонента тензо-
ра Vu.
Пусть
п11 = fr'pj, п12 = п21 = 4р|, -П22 = <йр|, _
bi, ci, di — постоянные, тогда очевидно, что аа = 0, и мы полу-
чим систему определяющих уравнений вида
/ dG dG dG л dG л
еДРтг- + Pt--G +z л-----2абРзг = 0»
V &Р др / др or dp
( dH , dH\ ~ dH „ dH '
Цр w+ р^) + г^-2а^ = °’
(c + «з) bipj + e12 [(pi — Рз)(Ьз + bi) + (pi + Р1)(Ьз — b|) 4--
+ 2cip:] = 0, (4.1)
(e + a2) cip* + aj2 [(p| — pl) (cj + c?) + (pi + pl) (c^ — c}) +
+ (di-bi)pl] = o, . (4:2)
(e -j- dtPi + «i2 [(pi — pl) (d2 4- i^) +. (pj + pl) (dl — d}) —
— 2cipl] = O. (4.3)
Предположим, - что e + «2 = 0, тогда общее решение (4.1)—(4.3)
имеет вид
П11 = Ь}р} + pi^l + bjpl + bipl,
п"—4-« + Ч) /4 + 4- и - «) W+й) + -г«+Ч) А
И22 = ь2р} + Ь}р2 - bfpl bid.
t
Вводя новые постоянные по формулам
a = 4(fc}-fc2), b~bl c = 4(b1a + bl), d = 4(6i-^
Al Al .Al .
138
и. идентифицируя а, Ь, с, d с первой, второй, третьей и четверто*»
вязкостью соответственно, имеем (м=(н, v))
П“ = 2цих + v div и + ©(Uy + vx) + e(uv — va),
П12 = — a>(ux — Vj,) + |л(п„ + vx), - 2
П22 = 2pvu + v div и — ©(u,, + vx) + в(iiv — vx),
du . du _____ du “* ___(du dv \
WxSSaJ’ Uy==~d^' ut —
Вычислим диссипативную функцию Ф, входящую в уравнение!
для производства энтропии. Она должна быть неотрицательной:!
Ф — (П: V w) == Ппиж + П12 (iiy 4- vx) + П22^ = 2цих + j
"’1
.+ VUX div U + ©Мж (Uy + Vx) + 8UX (иу — Vx) — © (ux — Vy) (lly + Vx) -Ь3
+ P- (uv + b’*)2 + 2pv2 + vvy div и — a (uv + vx) i>y + в (uy — vx) vy = ,
= 2P(u2 + Vy) + p, (Uy + Vx)2 + V (Ux + Vy)2 + &(Uy — Vx) (Ux + Vy).
Выражение, стоящее в правой части, может-быть записано в виде
(|1 + v)(Ux + Vv)2 + p[(lZa — Vy)2 + (uv + Vj2l + e(uv — Vx)(Ux + vv>.
Приводя эту квадратичную форму к каноническому виду, заме-
чаем, что она неотрицательна тогда и только тогда, когда
е=0, р>0, p + v>0.
В силу последнего замечания имеем
n,1 = 2p,MI + vdivn + a(nlz-l- va), ’ . '
П*2 = — ©(ия — vy) + pCuy + va),
• П22 = 2p,Vj, + v div и — ©(ггу + vx).
Третья вязкость а, как мы видим, Имеет несколько неожидан-
ный характер: она не приводит к диссипации энергии. Заметим,
что вывод о тождественном равенстве нулю четвертой вязкости
справедлив только для сжимаемо^ сплошной среды; совершаю-
щей непотенциальные движения.
Наличие третьей вязкости у сплошной среды проще всего ин-
терпретировать как результат действия магнитного поля, направ-'
ленного перпендикулярно плоскости потока. В ряде частных, но
практически важцых* случаев введение сторонних сил, обуслов-
ленных наличием магнитного поля, приводит лишь к переопреде-
лению понятия давления, поэтому группа непрерывных' преоб-
разований, допускаемая соответствующими системами вместе с
уравнениями состояния, может быть найдена методами, разви-
тыми в § 3, что, безусловно,, важно для приложений. Одной
из таких моделей являются уравнения плазмодинамики в одно-
134
1
жидкостном приближении и с произвольным Qt (Q —ларморов-
ская частота, т — характерное время столкновений). Рассмотрим
еще одну модель такого же типа. Пусть p’=v=e = 0, сплошная
среда — несжимаемая и однородная..
Модель I. Запишем уравнения движения:
щ'+ иих + vuy — ©Ар + ро 1рх = 0, (4.4)
vt + uvx + Wy + ©Au + р^Ру = 0, (4.5)
Hx+nv = 0, . (4.6)
здесь р0 — плотность рассматриваемой среды, а = ©р^1 — вязкость.
Ясно, что диссипация механической энергии при наличии вязких
сил такого типа тождественно равно нулю, причем знак а без-
различен.
Предположим, что движение является установившимся, тогда,
вводя функцию тока
П=»фи, Р = -фх,
можно свести систему уравнений (4.3)—(4.6) к одному уравне-
нию на ф:
0(Ф, Дф) п
й(х, У) ' _
Это равенство означает,, что ф удовлетворяет уравнению
Аф = /(ф), -
где Р(ф) — произвольная дифференцируемая функция. Разреши-
мость краевых задач для уравнений такого вида исследовалась
в работах С. И. Похожаева [58—601.
Модель II. Уравнения'Навье — Стокса* Полагая <а!=е = 0,
—> - \
<Jivn=0, р«=*ро — const, получим
щ + (u-V) и — рр^Ам + Po^Vp == 0, divu = 0.
Замечание. Мы не можем утверждать, что группы, кото-
рые были получены, являются наиболее широкими (это неверно).
Это происходит потому, что многообразие, которое, задается си-
стемой уравнений Навье.— Стокса, отлично от исходного (2.7).
Модель III. Если ©'=е'=0, то получим уравнения дви-
жения вязкого газа:.
р[м( + (м-V)m] — |1Ам — vv(divn) 4-^=0,
pt + div,(pu) =0,
Pt + (и • V)р + G(p, р) div и + Шр, р)Ф = 0.
Для получения замкнутой системы следует присоединить уравне-
ние состояния: одно из тех, которые были получены.
135
Модель IV. Уравнения Эйлера. Полагаем p.==v = 8 = ©l=l
имеем
ut + (и • V)u + vp = 0, V-u ==0.
Модель V. Уравнения движения невязкого газа (сжимае-
мого):
plut + (и • V )ц] + Vp = О,
pt + div (рп) = О,
pt + (и • V)p + G(p, p) div и = 0.
Замечание. Групповая классификация' системы уравнений
адиабатического движения идеального газа в пространстве раз-
мерности N (физический смысл имеют TV = 1, 2,- 3) с. произволь- *
ным элементом — фуцкцией G(p, р), задающей уравнение состоя-
ния в виде
pc2 = G(p, р),
где с — скорость звука, была выполнена в работе Л. В. Овсянни-
кова [52]. Основной результат ртой работы состоит в следующем.
Относительно группы Г преобразований эквивалентности
р ар, р ар + b, G -> aG
* . 1
с произвольными постоянными а, Ь были найдены представители
классов эквивалентных систем, соответствующие специализациям
функции G(p, р):
p/Cp’V1); /(р₽_2р); /(р); тр, ^трр, 1;
где / — произвольная функция, a GB, m и f — произвольные по-
стоянные.,
В заключение приведем простейшую нелинейную модель, опи-
сывающую одномерные нестационарные движения неньютонов-
ской сплошной среды.
Модель VI.
> (ди . ди \ д {Ьи \к , др п
r \ dt дх ) ~ дх \дх) дх
ар , е(рц) _ л
dt дх V’
+ и g Ч- G (Р, р)^ + Н (р, р) и (>)h+1= о.
Оь ил . \ил /
136
ЛИТЕРАТУРА
1. Аннин Б. Д. Двумерные упруго-пластические задачи. Новосибирск: изд.
Новосиб. ун-та, 1967. 119 с.
2. Аннин Б. Д. Современные модели пластических тел. Новосибирск: изд.
Новосиб. ун-та, 1975. 96 с.
3. Аннин Б. Д., Черепанов Г. П. Упруго-пластическая задача. Новосибирск:
Наука, 1983. 238 с. *
4. Аннин Б. Д. Групповые свойства и точные решения уравнений пластич-
ности Мизеса и Треска.— В ни.: Теоретична и прилежна механика. Тр.
IV конгресса. Кн. 1. София, БАН, 1981, с. 644—649.
5. Аннин Б. Д. Одно точеное решение осесимметричной задачи идеальной
пластичности.— Журн. прикл. математики и техн, физики, 1973, № 2Г
с. 171—172.
6. Аннин Б. Д. Об одной задаче с неизвестной границей для уравнения
Пуассона в пространстве.— В кн.: Уравнения в частных производных
и задачи со свободной границей. Киев: Наукова думка, 1983, с. 12—15.
Т. Балеску Р. Равновесная и неравновесная статистическая механика.
Т. 1, 2. М.: Мир, 1978. Т. 1 — 405 с. Т. 2 — 399 с.
8. Бердичевский В. Л. Построение моделей сплошных сред при помощи
вариационного принципа.— Прикл. математика и механика, 1966, т. 30,
вып. 3, с. 510—530. '
9. Бровман М. Я. О движении пластической массы в криволинейном ка-
нале.— Прикл. механика, 1983, т. 19, № 8, с. 121—124.
10. Быковцев Г. И. О Плоской деформации анизотропных идеально-пласти-
ческих тёл.— Изв. АН СССР. Отд-нце техн, наук, механика и машино-
строение, 1963, № 2, с. 66—75.
11. Быковцев Г. И. О сжатий пластического слоя жесткими шероховатыми
плитами с учетом сил. инерции.—.Изв. АН СССР. Отд-ние техн. наукг
. механика и машиностроение, I960, 6, с. 140—142.
ч-1 2. Бытев В. О. Группы Ли и модели механики. Красноярск: изд. Красно-
ярск. ун-та, 1980. 56 с.
13. Бытев В. О. О структуре тензора напряжений чисто механического кон-
тинуума.— Динамика сплошной среды/Ин-т гидродинамики СО АН
СССР, Новосибирск, 1978, вып. 37, с. 40—49.
\14. Бытев В. О. О.некоторых возможных уравнениях состояния чиюуо ме-
ханического континуума.— Динамика сплошной среды/Ин-т гидроди-
намики СО АН СССР, Новосибирск, 1979, вып. 40.
15. Гред X. О кинетической теории разреженных тазов.— Механика. Сб. со-
кращенных переводов иностр, лит., 1952, № 4, с. 71—97: № 5, с. 61—106,.
16. Григорьев О. Д. Некоторые задачи теории пластичности неоднородных
тел. Новосибирск, 1969. 207 с. ’(Новосиб. ин-т инж. водного транспорта..
Труды. Вып. 48).
17. Друяиов Б. А. Предельное равновесие пластически неоднородного кли-
на.— Докл. АН СССР, 1959, т. 127, № 5, с. 990—992.
137
48. Друянов Б. А. Вдавливание шероховатого штампа в тонкую пластиче-
ски неоднородную полосу —Изв. АН СССР. Отд-ние техн, наук, меха-
ника и машиностроение, 1960,75» 4, с.129—133.
19. Ершов Л. В., Ивлев Д. Д., Романов А. В. Об " обобщении решения
Л. Прандтля о сжатии пластического слоя шероховатыми плитами.—
В кн.: Современные проблемы авиации и механики. М., 1982, с. 137—144.
20. Задоян М. А. Частное решение уравнений теории идеальной пластич.-
ности в цилиндрических координатах.— Докл. АН СССР, 1964; т. 157,
№ 1, с. 73—75.
21. Задоян М. А. О некоторых решениях уравнений пластического тече-
ния анизотропной среды.— Изв. АН СССР. Сер. «Механика твердого
тела», 1966, 75» 2, с. 91—96.
22. Задоян М. А. Частное решение уравнений идеальной пластичности.—
Докл. АН СССР, 1964, т. 156, № 1, с. 38—39.
23; Задоян М. А. О сжатии пластически неоднородной по длине полосы
двумя жесткими плитами.— Изв. АН СССР. Отд-ние техн, наук, 1962,
выц. 4, с. 142—145.
24. Задоян М. А. О течении пластически неоднородного материала через
сходящийся канал.— Изв. АН АрмССР. Сер.-физ.-мат. наук, 1962, № 2,-
с.-51—57.
25. Задоян М. А. Пластическое течение конусообразных тел;— Прикл. мате-
матика и механика, 1983, т. 47, выть 2, с. 209—218.
26. Ильюшин А. А. Некоторые вопросы теории пластического течения,—
Изв. АН СССР. Отд-ние техн, наук, 1958, вып. 2, с. 64—86.
27. Ильюшин А. А. Механика сплошной среды. М.: Изд-во МГУ, 4978. 287 с. ~
28. Ибрагимов Н. Х. Группы преобразований в математической физике. М.:
Наука, 1983. 280 с.
29. Ивлев Д. -Д. Теория идеальной пластичности. М.: Наука, 1966. 231 с.
-30. Ивлев Д.- Д. -Об одном классе решений общих уравнений теории иде-~
альной пластичности.— Изв. АН СССР. Отд-ние техн, наук, 1958, № 11,
с. 107—109.
31. Идин М. А. Анизотропные сплошные среды, энергия и напряжение'в „
которых зависят от градиентов деформации и других тензорных вели-
чин.— Прикл. математика и механика, 1966, т. 30, вып. 3, с. -531—540.
32. Ишлинский А. Ю. Осесимметрическая задача теории пластичности и'
проба Бринеля.— Прикл. математика и механика, 1944, т. 8, вып. 3,
с. 201—224. '
33. Камке 3. Справочник по обыкновенным дифференциальным уравне-.
- ниям. М.: Наука, 1971. 576 с.
34. Качанов Л.М. Основы теории пластичности. М.: Наука, 1969. 420 с.
35. Композиционные материалы: В- 8 т. Пер. с англ./Под ред. Л. Браутман,
Р. Крок. М.: Мир, 1978. Т. 2. Механика композиционных материалов.
564 с.
36. Кузнецов А. И. Плоская деформация неоднородных пластических
тел.— Вести. ЛГУ, 1958, № 12, с. 112—131.
37. Кузнецов А. И. Задача о неоднородном пластическом слое.— Прикл. ’
механика, 1960, т. 12, № 2, с. 163—172.
38. Ландау Л. Д., Лифшиц Е. М. Механика сплошных сред. М.: Гостехиз-
дат, 1954. 788 с.
' - J 39. Леонова Э. А. Групповые свойства уравнений деформационной теории
термопластичности.— В кн.: Упругость и неупругость. М.: Изд-во МГУ,
1973, с. 79—88.
-^?40. Леонова Э. А. Групповая классификация и инвариантные решения
уравнений течения и теплообмена вязко-пластической среды.— Журн.
прикл. механики и техн, физики, 1964, № 4, с. 3—18.
4 -41. Ленский Э. В. О групповых свойствах уравнений движения нелиней-
ной вязко-пластической среды.— Вести. МГУ. Сер. математика, меха-
ника, 1966, 75» 5, с. 116—125.
42. Липман Г. Теория главных траекторий при осесимметричной пласти-
ческой деформаций.— Механика. Сб. переводов и обзоров иностр, лит.,
1963, № 3, с. 155-167.
43. Лохин В. В.,. Седов Л. И. Нелинейные тензорные функции от несколь-
438
лих тензорных аргументов.—Прикл. „математика- и механика, 1963,
. т. 27, вып, 3, с. 393—417.
44. Матченко Н. М., Толоконников Л. А. Плоская задача теории идеаль-
ной пластичности, анизотропных материалов.— Изв. АН СССР. Сер.
«Механика твердого тела», 1975, № 1, с. 169—170.
45. Миллер У. Симметрия и разделение переменных. М.: Мир, 1981. 340 с.
46. Мизес Р. Математическая теория течений сжимаемой жидкости. М.:
Изд-во иностр, лит., 1961. 588 с.
47. Надаи А. Пластичность и разрушение твердых тел. Т. 1. М.: Изд-во
иностр, лит., 1954. 647 с. -
48. Надаи А. Пластичность. М.— Л.: ОНТИ, 1936. 280 с.
49. Наяр Е. Некоторые плоские инерционные течения пластических ма-
териалов.— В кн.: Механика сплошных сред. Конференция по' меха-
нике сплошных сред, 1966. София, 1968, с. 269—277.
50. Ниче И. С. С. О новых результатах в теории минимальных поверхно-
стей.— Математика. Сб. переводов, 1967, т. 11, № 3, с. 37—100.
51. Новожилов В. В. Теория упругости. Л.: Судпромгиз, 1958. 370 с.
52. Овсянников Л. В. Групповой анализ дифференциальных уравнений.
М..: Наука, 1978. 399 С. . '
53: Овсянников Л. В. Групповые свойства дифференциальных уравнений.
. Новосибирск: Изд-во СО АН СССР, 1962. 239 с.
54. Овсяйников Л. В. Программа курса «Введение в механику сплошных
сред». Новосибирск: изд. Повесиб, ун-та, 1976. 76 с.
55. Овсянников Л. В., Ибрагимов Н. X. Групповой анализ дифференциаль-
ных уравнений механики.— В кн.: Итоги науки и техники. Общая ме-
ханика, 1975. М.: Наука, 1975, с. 5—52.
56. Ольшак В., Мруз 3., Пежина П. .Современное состояние теории пла-
стичности. М.: 1964. '243 с.
57. Ольшак В., Рыхлевский Я., Урбановскнй В. Теория пластичности не-
однородных тел. М.: Мир, 1964. 156 с.
58. Оесерман Р. Минимальные поверхности.— Успехи мат. наук, 1967, т. 22,
вып. 4, с. 55—135.
59. Панарелли Ж., Ходж П. Жестко-пластический анализ' папряженного
состояния круглой трубы, находящейся под действием давления, осе-
вой силы и крутящегося момента.— Прикл. механика. Тр. Амер, о-ва
инж.-мех., 1963, сер. Е, т. 30, № 3, с. 8. s*
60. Похожаев С. И. О задаче Дирихле для уравнения Ди = и2.— Докл. АН
СССР, 1960, т. 134, № 4, с. 769—772.
61. Похожаев С. И. О краевой задаче для уравнения Ди = и2.— Докл. АН
СССР, 1961, т. 138, № 2, с. 305—308. ✓
62. Похожаев С. И. О собственных функциях уравнения Ди -|- Z/(u) = 0.—
Докл. АН СССР, 1965, т. 165, № 1, с. 36—39,
63. Прагер В. Трехмерное пластическое течение при однородном напря-
женном состоянии.— Механика. Сб. переводов и обзоров иностр, лит.,
1958, № 3, с. 23—27.
\/ 64. Работнов Ю. Н. Лекции по теории упругости. М.: изд-во МГУ, 1967.
, 155 с. '•
-X/ 65 Работнов Ю. Н. Механика деформируемого твердого тела. М.: Наука,
1979. 744 с.
66. Румер ТО. Б., Рывкин М. Ш. Термодинамика, статистическая физика
и кинетика. М.: Наука, 1977. 552 с.
67. Седов Л. И. Механика сплошных сред. Т. 1, 2. М.: Наука, 1973. Т.1 —
536 с. Т. 2 — 584 с.
68. Седов Л. И, Математические методы построения новых моделей сплош-
ных сред.— Успехи мат. наук, 1965, т. 20, Вып. 5, С. 121—181.
69. Сенатов С. И. Групповые свойства уравнений Идеальной пластичности
с условием текучести Мизеса,— Динамика сплошной среды/Ин-т гидро-
динамики СО АН СССР, Новосибирск, 1977, вып. 28, с. 109—117.
70. Сенатов С. И. Групповая классификация уравнений идеальной пла-
стичности неоднородных тел.—Динамика сплошной среды/Ин-т гидро-
динамики СО АН СССР, Новосибирск, 1978, вып. 33, с. 93—101.
139
71. Сенатов С. И. Групповая классификация уравнений идеальной пла-
стичности с условием текучести общего вида.— Динамика сплошной
среды/Ин-т гидродинамики СО АН СССР, Новосибирск, 1978, вып. 37,
с. 101—112. '• ,
72. Сенатов С. И. Групповые свойства уравнений нелинейной теории
упругости.— В кн.: Всесоюзная конференция по теории упругости.
Тезисы докладов, Ереван, 1979, с. 313—314.
73. Сенатов С. И. Точные пространственные решения уравнений, описы-
вающие пластическое течение анизотропных и неоднородных сред.—
Динамика сплошной среды/Ин-т гидродинамики СО АН СССР, Новоси-
бирск, 1979, вып. 43, с. 98—107.
74. Сенатов С. И. Инвариантные пространственные решения уравнений
идеальнрй пластичности.— Журн. -прикл. механики и техн, физики,.
1980, № 3, с. 159-163.
75. Сенатов С. И. О построении оптимальной системы подалгебр алгебры-
Ли, допускаемой системой дифференциальных уравнений.— Динамика
сплошной среды/Ин-т гидродинамики СО АН СССР, Новосибирск, 1981,
вып. 50, с. 150—162.
76. Сенатов С. И. Групповая классификация уравнений плоской неодно-
родной теории упругости.— Динамика сплошной среды/Ин-т гидроди-
намики СО АН СССР, Новосибирск, 1982, вып. 55, с. 164—170.
77. Сенатов С. И. Поля скоростей в задаче Прандтля о сжатии пластиче-
ского слоя.— Журн. прикл. механики и техн, физики, 1984, № 1, с. 155—
156.
78. Сенатов С. И. Сжатие пластического слоя между жесткими плитами,,
сближающимися с постоянным ускорением.— Динамика сплошной сре-
ды/Ин-т гидродинамики СО АН СССР, Новосибирск, 1984, вып. 68,
. с. 112—119.
79. Спенсер Э. Теория инвариантов. М.: Мир, 1974. 156 с.
80. Слепян Л. И. Нестационарные упругие волны. Л.: Судостроение, 1972.
376 с.
81. Смирнов В. И.,-Соболев С. Л. О применении нового метода к изучению
упругих колебаний.— Тр. Сейсмологического ин-та АН СССР, 1932, № 20,
с. 1—37; 1933, 29, с. 1—49.
82. Соколовский В. В. Теория пластичности. М.: Высшая школа, 1969. 608 с.
83. Томас Т. Пластическое течение и разрушение в твердых телах. М.: Мир,
1964 308 с.
84. Толоконников Л. А., Матченко Н. М. Теория плоского пластического
течения ортотропных материалов.— Прикл. механика, 1973. вып. 9, № 6,
с. 113—115. '
85. Трусдел- К. Первоначальный курс рациональной механики сплошных
сред. М.: Мир, 1975,. 592 с.
86. Ферцигер Дж., Кепер Г. Математическая теория процессов переноса в-
газах. М.: Мир, 1976. 544 с.
87. Фомин В.. Л. Механика континуума для инженеров. Л.: Изд-во ЛГУ,
1975. 1Q7 с.
88. Фрейнденталь А., Гейрингер X. Математическая теория неупругой
сплошной среды. М.: Физматгиз, 1962. 432 с.
- 89. Фушич В. И., Наконечный В. В. Теоретико-алгебраический анализ;
уравнений Ламе,—Укр. мат. журн., 1980, т. 32, вып. 8, с. 267—272.
90. .Хилл Р. Математическая теория пластичности. М.: Гостехиздат, 1954.
- 407 с.
91. Харламов П. В., Хохлов А. И. Операторы, допускаемые динамическими
уравнениями теории упругости.— В кн.: Механика твердого тела. Киев:
Паукова думка, 1972, вып. 4, с. 161—176.
92. Христиаиович С. А. Механика сплошных сред. М.: Наука, 1981. 483 с.
93. Черчиньяии К. Математические методы в кинетической теории газов.
М.: Мир, 1973. 495 с.
94. Чиркунов Ю. А. Групповое свойство уравнений Ламе.— Динамика
сплошной среды/Ин-т гидродинамики СО АН СССР, Новосибирск, 1973,
‘ вып. 14, с. 138—140.
95. Чиркунов Ю. А. Групповой анализ уравнений Ламе.— Динамика
140
плошнои среды/Ин-т гидродинамики СО АН СССР, Новосибирск, 1975,
вып. 23, с. 219—225,
96. Шамройский А. Д. Применение методов теории групп к решению за-
дач теорйи пластин типа Тимошенко.— Гидроаэромеханика и теория
упругости/Днепропетровский ун-т, Днепропетровск, 1972, вып. 14,
• с; 157—164.
97. Шилд Р. Т. Пластическое течение в сходящемся коническом канале.—
Механика. Сб. переводов и обзоров иностр, лцт., 1956, № 3, с. 140—150.
98. Ямке Е., Эмде Ф., Леш Ф. Специальные функции. М.: Наука, 1977.
342 с.
99. Ames W. F., Adams Е., Lohner R. J. Group properties of solids utl =
=<(J(u)ux)x.— Int. J. Non-linear Meeh., 1981, v. 16, N 5/6, p. 439—447.
100. Annin B. D. A new exact solution of equations of the plane problem of
ideal plasticity with von Mises conditions.— In: Euromesh III symp.-
const, model'in inilastisity. Czechoslovakia, 1978, p. 6—8.
101. Annin B. D. New .partial solution of a spaticaj problem of ideal plastici-
ty.— In: 17 Polish conference of mechanics of solid PAN, Abstracts, War-
saw, 1975, p. 22—23.
102. Annin B. D., Baev L. V. Criteria of composite material strength.— In:
Fracture of composite materials., Sijthoff and Noordhoff, 1979, p. 241—246.
103. Hill R. A varitional prinsiple of maximal plastic wortrin classical plasti-
sity.— Quart. J. Meeh., 1948, N .1, p. 18—48.
104. Mises R.. On some topics in fundamentals of fluid theory.— Proc. Fist.
Nat. Congr. Appl. Mesh. Chicago, 1950, p. 567—617.
x 105. Olsak W., Rychlewski J.- Geometric properties of stress filds in plastically'
nonhomogeneous bodies under conditions of plane strain. IUTAM, Sympo-
sium, Haifa, 1962.
ОГЛАВЛЕНИЕ
Предисловие. . 3
Глава 1. Введение . ............*••». <« 4
§ 1. Группы Ли и алгебры Ли.............................—
§ 2. Инварианты и теория продолжения ...... 7
§ 3. Инвариантные и частично инвариантные решения диф-
ференциальных уравнений ’. . . .—.................... 10
§ 4. Оптимальные системы подалгебр . . . J . . . 11
§ 5. Групповая классификация.........................~ 13^
Глава 2. Групповые свойства уравнений теории упругости . . '. —
§ 1. Групповые свойства пространственных уравнений Ляме 15
§ 2. Инвариантные решения . . . ..................'17
§ 3. Некоторые другие решения . . . . ............... 21
Глава 3. Групповые свойства квазистационарных уравнений Мизеса 27 -
§ 1. Групповые свойства пространственных уравнений Ми-
зеса . ..........................................'29
§’2. Инвариантные решения..................• . . . • 30
§ 3. Пластическое течение конических тел ...... 32
§ 4. Течения со спирально-винтовой симметрией . . . 38
§ 5. Решение Хилла........................ 42
§ 6. -Решение Прагера.....................•. . . . 48
§ 7. Осесимметричные решения......................50
§ 8. Плоская деформация................................ 55
Л 9. Некоторые другие решения ..........................66
Глава 4. Групповые свойства . квазистатических уравнений Треска 73
§ 1. Допускаемая группа..................................—
. § 2. Инвариантные решения............74
§ 3. Частично инвариантные решения .. . . -. . . 76
Глава 5. Групповые свойства динамических задач пластичности 77
§ 1. Групповые свойства уравнений динамических задач
пластичности . 78
§ 2. Плоскаи задача.....................................81
§ 3. Обобщение решения Прандтля.......................86
Глава 6. Групповые свойства уравнений неоднородной и анизотроп- -
ной теории пластичности . '...........................88
§ 1. Анизотропная теория пластичности...................89
§ 2. Неоднородная теория пластичности...................97
Глава 7: Групповые свойства чисто механического' континуума 104
§ 2. Определяющие уравнения чисто механического конти-
нуума ..................................................106
§ 3. Структура • тензора вязких напряжений и уравнений
состояния чисто механического континуума .... 118
. § 4. Некоторые модели............................... 133
Литература 137
Борис Дмитриевич Аннин
Владислав Олегович Бытов
Сергей Иванович Сенатов
ГРУППОВЫЕ СВОЙСТВА
УРАВНЕНИЙ УПРУГОСТИ И ПЛАСТИЧНОСТИ
Утверждено к печати
Институтом гидродинамики СО АН СССР - ' У
• $
Редакторы издательства В. Н. Дятлов, IL П. Зайцева '
Художественный редактор Т. Ф. Каманина ’ ’
Художник Н. А. Пискун - <5^'5г
Технический редактор Г. Я. Керасимчук \Sf'aissJ
Корректоры Г. Д. Смоляк, А. А. НаОтачлёВ
, ИБ К 23668 - ‘ _ .
Сдано в набор 20.07.84. Подписано к печати 20.03.85. МН-02514. Фермат бОХОО’/и.
Бумага типографская № 3. Обыкновенная гарнитура. Высокая печать. Усл. печ. л. 9.
Усл. кр.-отт. 9,2. Уч.-изд. л. 13. Тираж 1650 эка. Заказ J4 307. Цела 2 руб. . .
Ордена Трудового Красного Знамени Издательство «Наука», Сибирское отделение.
630099, Новосибирск, 99, Советская; 18.
4-я типография издательства «Наука». 630077, Новосибирск, 77, Станиславского, 25.