/








































































































































Автор: Шишмарев В.Ю. Шанин В.И.
Теги: электротехника электрические и магнитные измерения физика электроника измерительные приборы
ISBN: 978-5-534-08586-0
Год: 2018




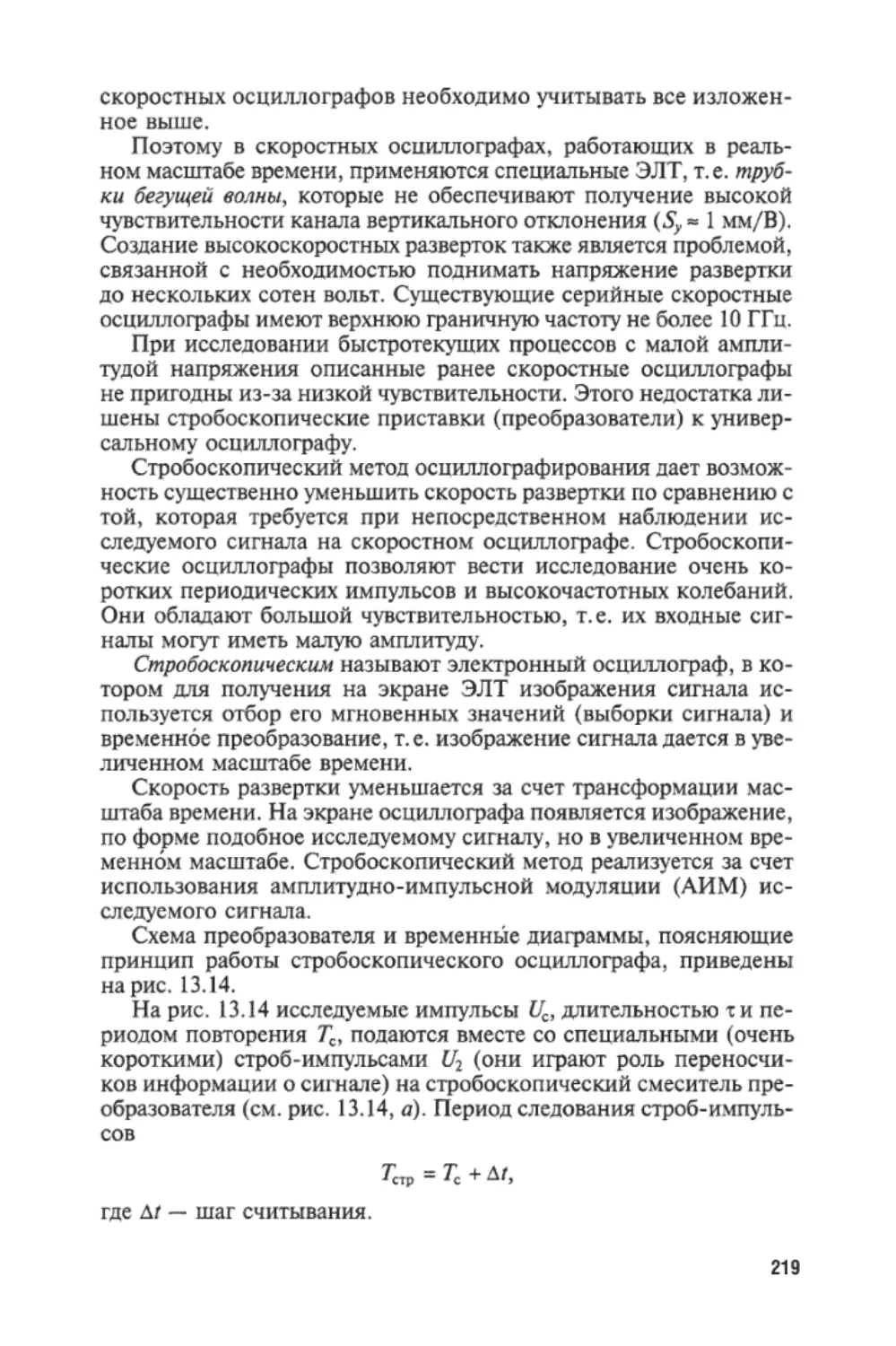
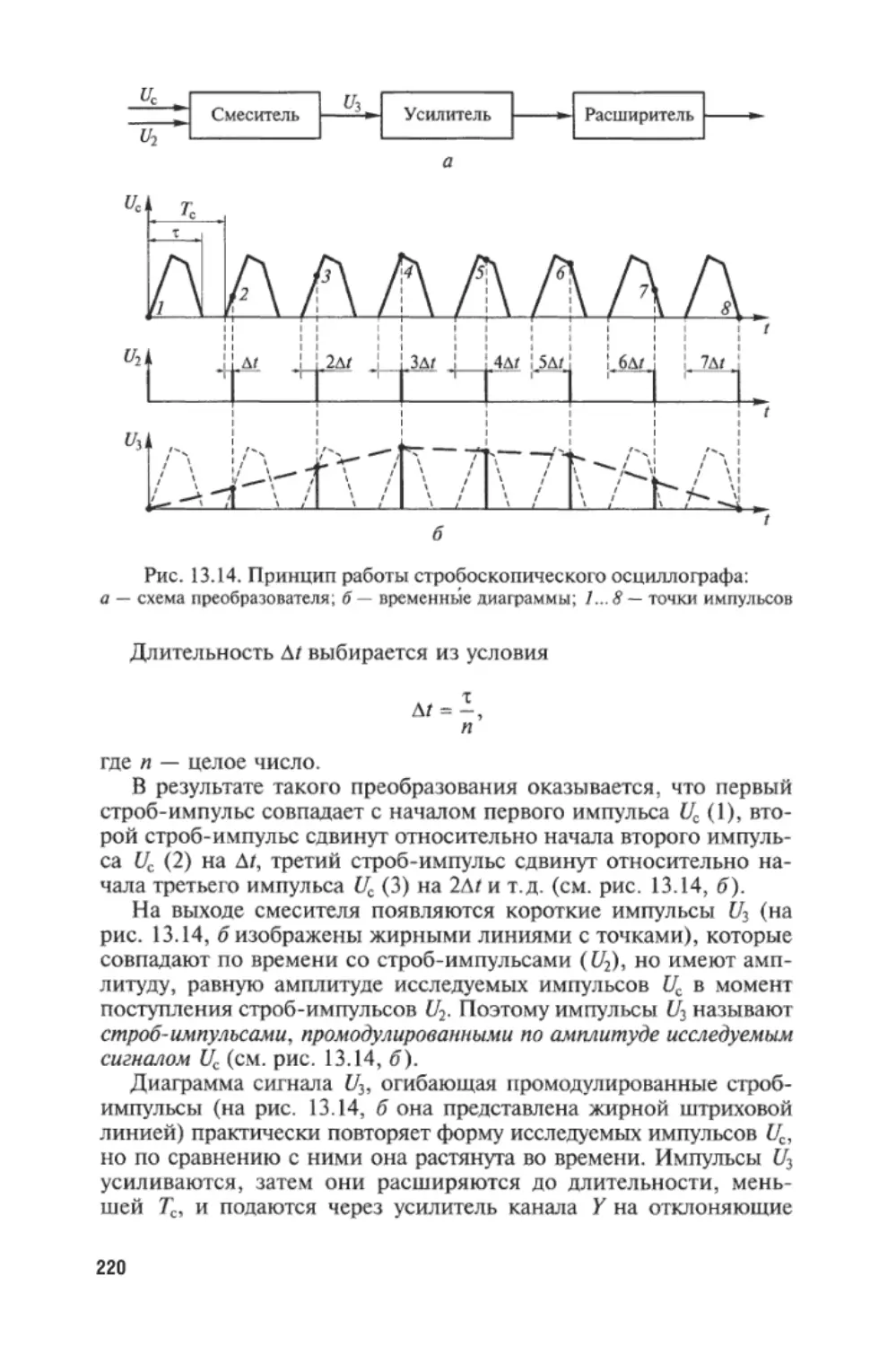
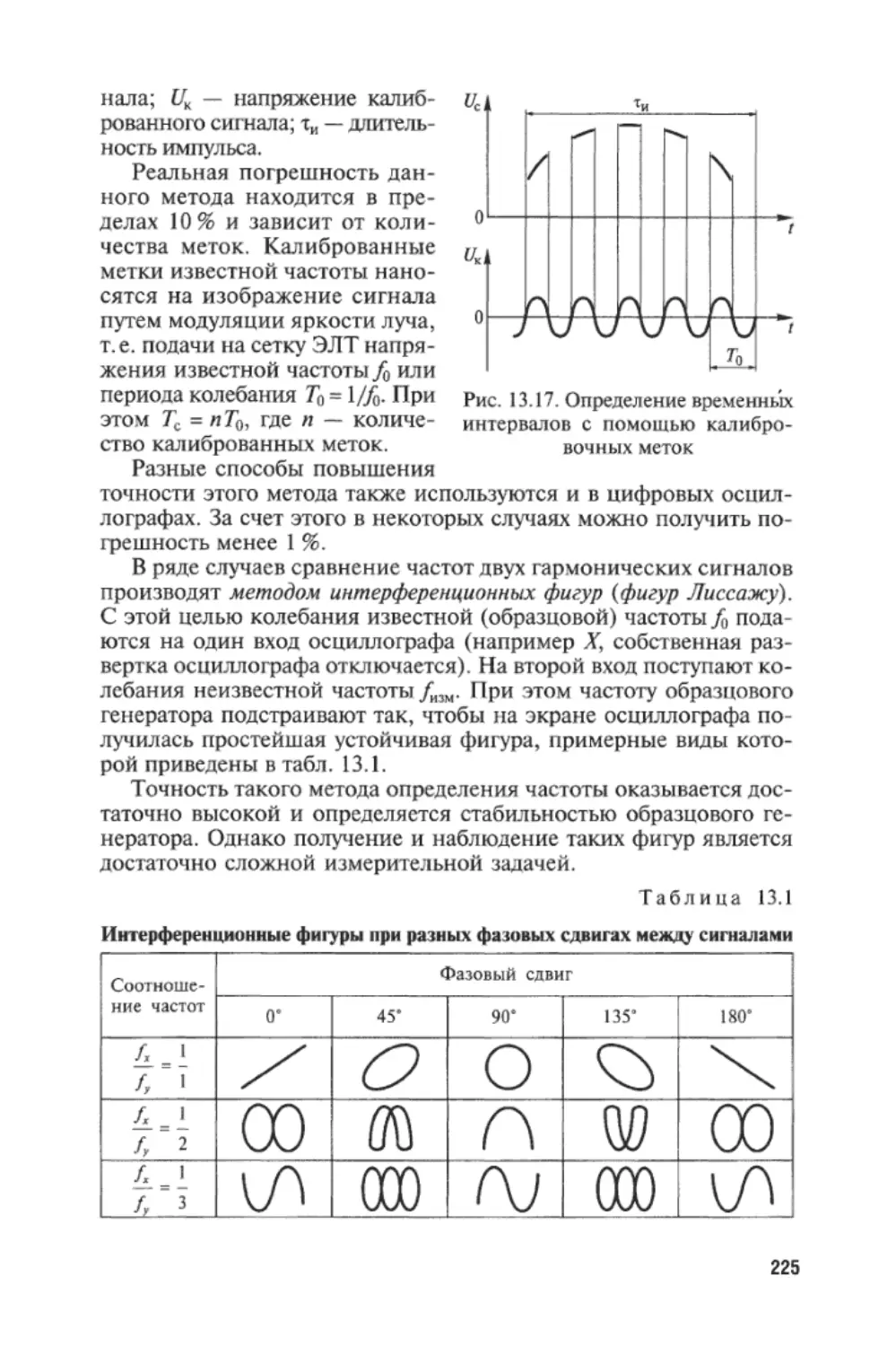
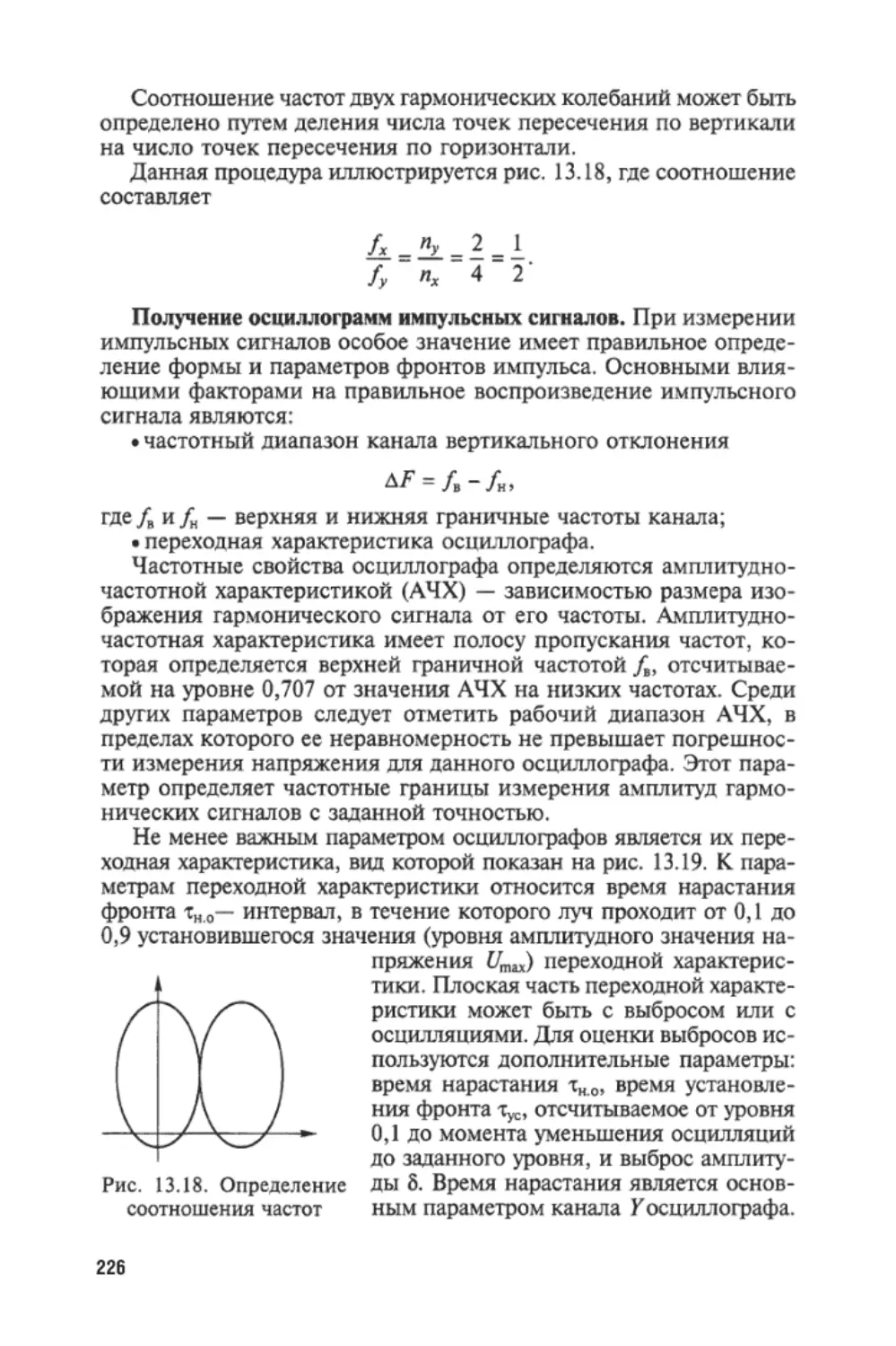
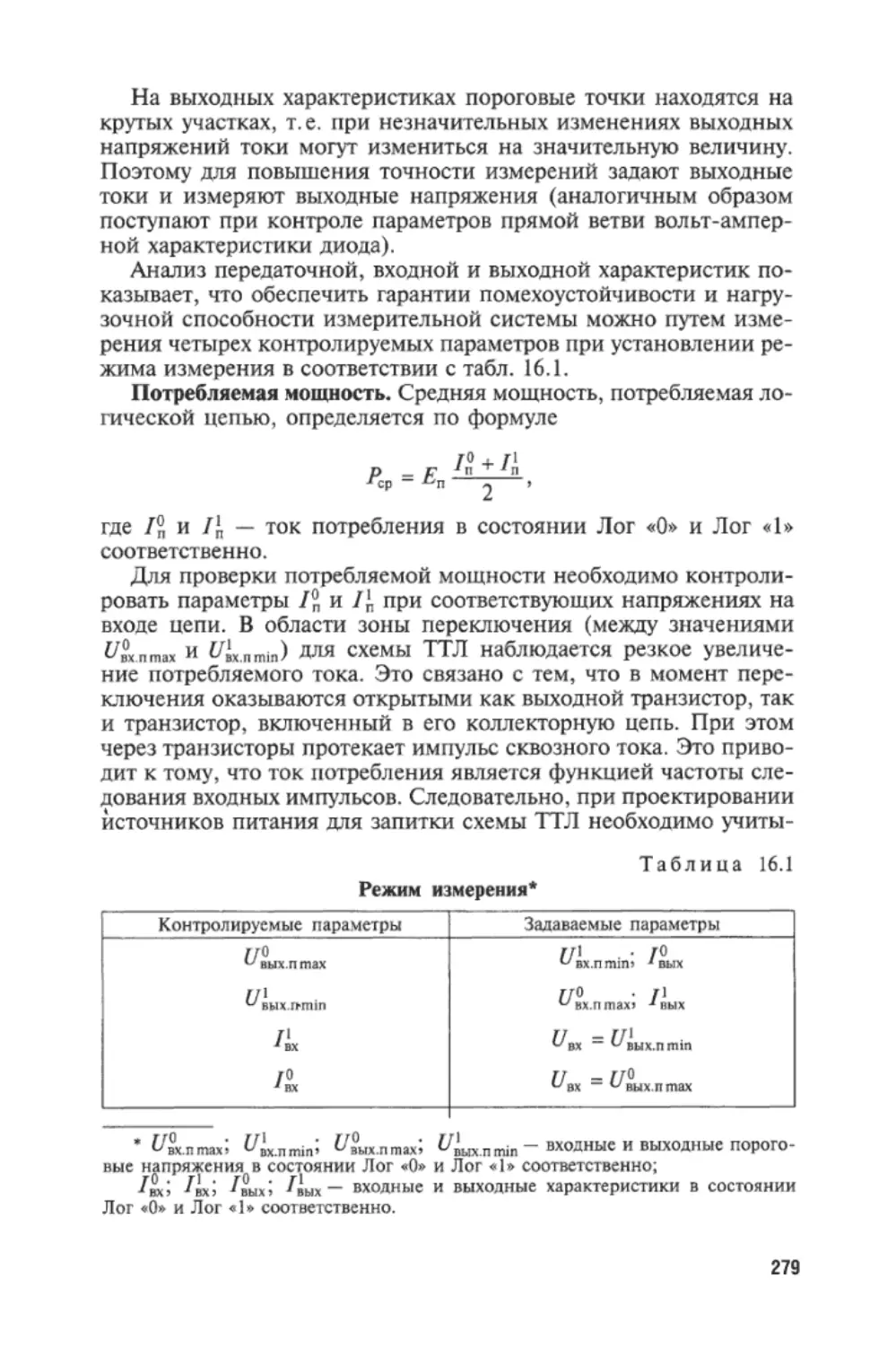
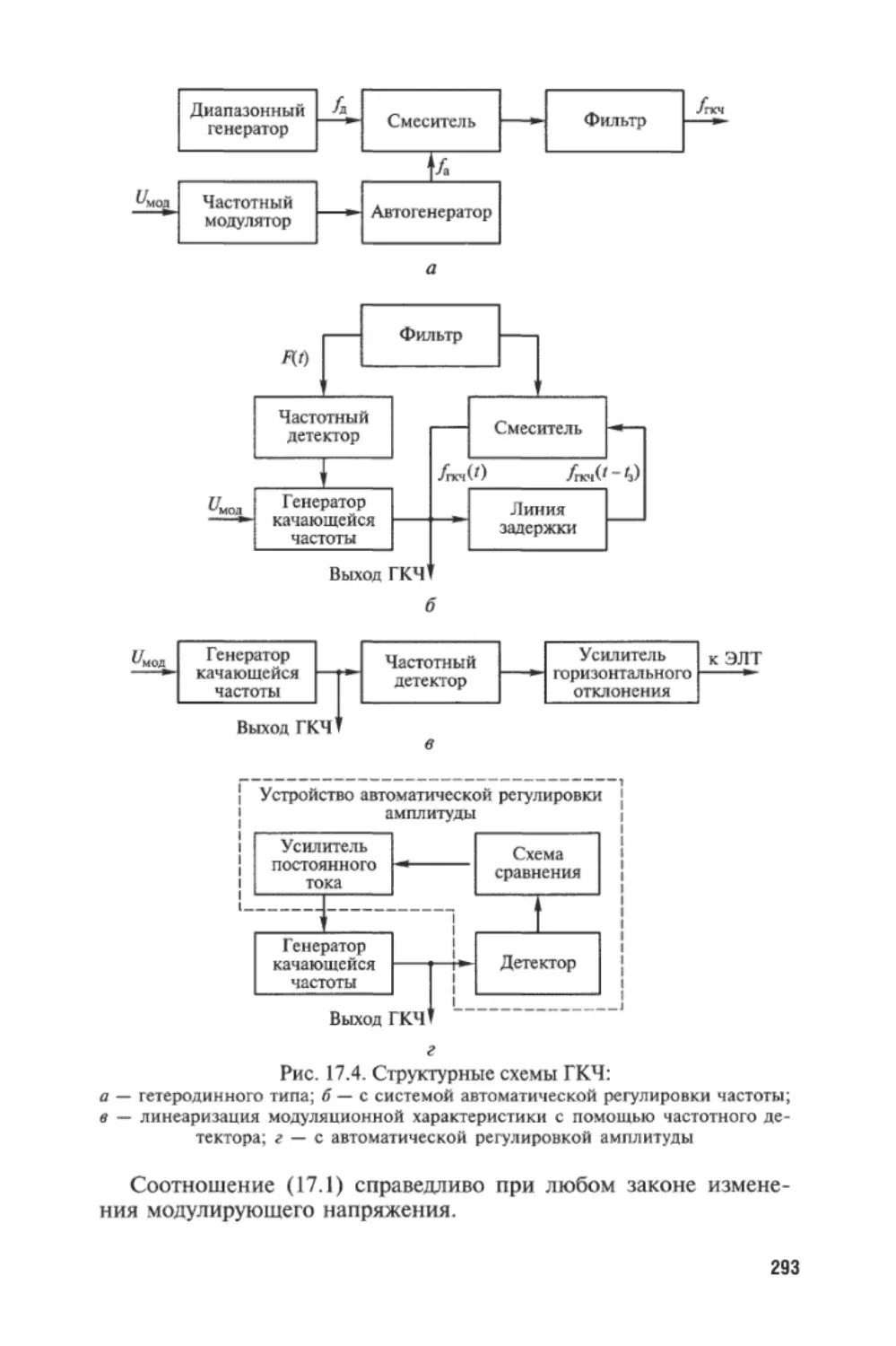
Текст
В. Ю. Шишмарёв, В. И. Шанин
ЭЛЕКТРОРАДИО-
ИЗМЕРЕНИЯ
УЧЕБНИК ДЛЯ СПО
3-е издание, исправленное и дополненное
Рекомендовано Учебно-методическим отделом среднего
профессионального образования в качестве учебника для студентов
образовательных учреждений среднего профессионального образования
Допущено Министерством образования Российской Федерации
в качестве учебника для студентов образовательных учреждений
среднего профессионального образования, обучающихся
по группам специальностей «Приборостроение и оптотеника»,
«Электронная техника, радиотехника и связь», «Автоматика и управление»,
«Информатика и вычислительная техника»
Книга доступна в электронной библиотечной системе
biblio-online.ru
Москва Юрайт 2018
УДК 621.3.08(075.32)
ББК 31.22я723
Ш65
Авторы:
Шишмарёв Владимир Юрьевич — доктор технических наук, профессор,
действительный член (академик) Академии безопасности, обороны и право-
порядка, действительный член (академик) Московской академии естествоз-
нания, гранд-доктор философии Европейской академии информатизации,
почетный работник высшего профессионального образования РФ, профес-
сор кафедры технологии производства приборов и информационных систем
управления летательных аппаратов Института аэрокосмических конструк-
ций, технологий и систем управления Московского авиационного института;
Шанин Владимир Иванович — доктор технических наук, профессор
кафедры технологии производства приборов и информационных систем
управления летательных аппаратов Института аэрокосмических конструк-
ций, технологий и систем управления Московского авиационного института.
Рецензенты:
Лобачевский М. К. — главный метролог Московского научно-производ-
ственного комплекса «Авионика»;
Симонова Т Ю. — преподаватель высшей категории, заместитель дирек-
тора Московского политехнического колледжа «Царицыно».
Шишмарёв, В. Ю.
Ш65 Электрорадиоизмсрения : учебник для СПО / В. К). Шишмарёв,
В. И. Шанин. — 3-е изд., испр. и доп. — М. : Издательство Юрайт, 2018. —
336 с. — (Серия : Профессиональное образование).
ISBN 978-5-534-08586-0
В учебнике описаны основные методы и средства измерений, метрологи-
ческие показатели, приборы измерений метрологических величин. Рассма-
триваются преобразователи электрических величин с различными видами
механизмов. Отдельный раздел посвящен характеристике радиотехнических
измерений. Приложение включает условные обозначения на шкалах измери-
тельных приборов.
В третьем издании актуализирована нормативная база, обновлены уста-
ревшие ГОСТы.
Соответствует актуальным требованиям Федерального государствен-
ного образовательного стандарта среднего профессионального образования
и профессиональным требованиям.
Для студентов образовательных учреждений среднего профессионального
образования, аспирантов, преподавателей и всех интересующихся.
УДК 621.3.08(075.32)
ББК31.22я723
Все права защищены. Никакая часть данной книги не может быть воспроизведена
Ж в какой бы то ни было форме без письменного разрешения владельцев авторских прав.
Правовую поддержку издательства обеспечивает юридическая компания «Дельфи».
ISBN 978-5-534-08586-0
© Шишмарёв В. Ю., Шанин В. И., 2018
© ООО «Издательство Юрайт», 2018
Оглавление
Предисловие................................................9
Введение...................................................10
Раздел I
ОСНОВЫ ТЕОРИИ ИЗМЕРЕНИЙ
Глава 1. Физические величины, методы и средства
измерений.............................................13
1.1. Физические величины как объект измерений......13
1.2. Международная система единиц физических величин....14
1.3. Основные понятия об измерениях................16
1.4. Виды средств измерений........................18
1.5. Эталоны единиц физических величин.............21
1.6. Эталоны единиц системы СИ.....................23
1.7. Российская система калибровки.................26
1.8. Методы поверки и калибровки, поверочные схемы.28
1.9. Основные методы измерений.....................31
1.10. Классификация и показатели измерительных приборов.33
Контрольные вопросы................................36
Глава 2. Метрологические показатели измерений..............36
2.1. Основные термины и определения................36
2.2. Причины возникновения и способы исключения
систематических погрешностей.......................39
2.3. Оценка случайных погрешностей.................42
2.4. Погрешности средств измерений.................46
2.4.1. Основные термины и определения...........46
2.4.2. Нормируемые метрологические характеристики
средств измерений...............................47
2.4.3. Основная погрешность.....................49
2.4.4. Дополнительная погрешность...............50
2.4.5. Динамическая погрешность.................51
Контрольные вопросы................................52
3
Раздел II
ПРЕОБРАЗОВАТЕЛИ
Глава 3. Преобразователи электрических величин
в перемещение.........................................53
3.1. Общие сведения об измерительных механизмах....53
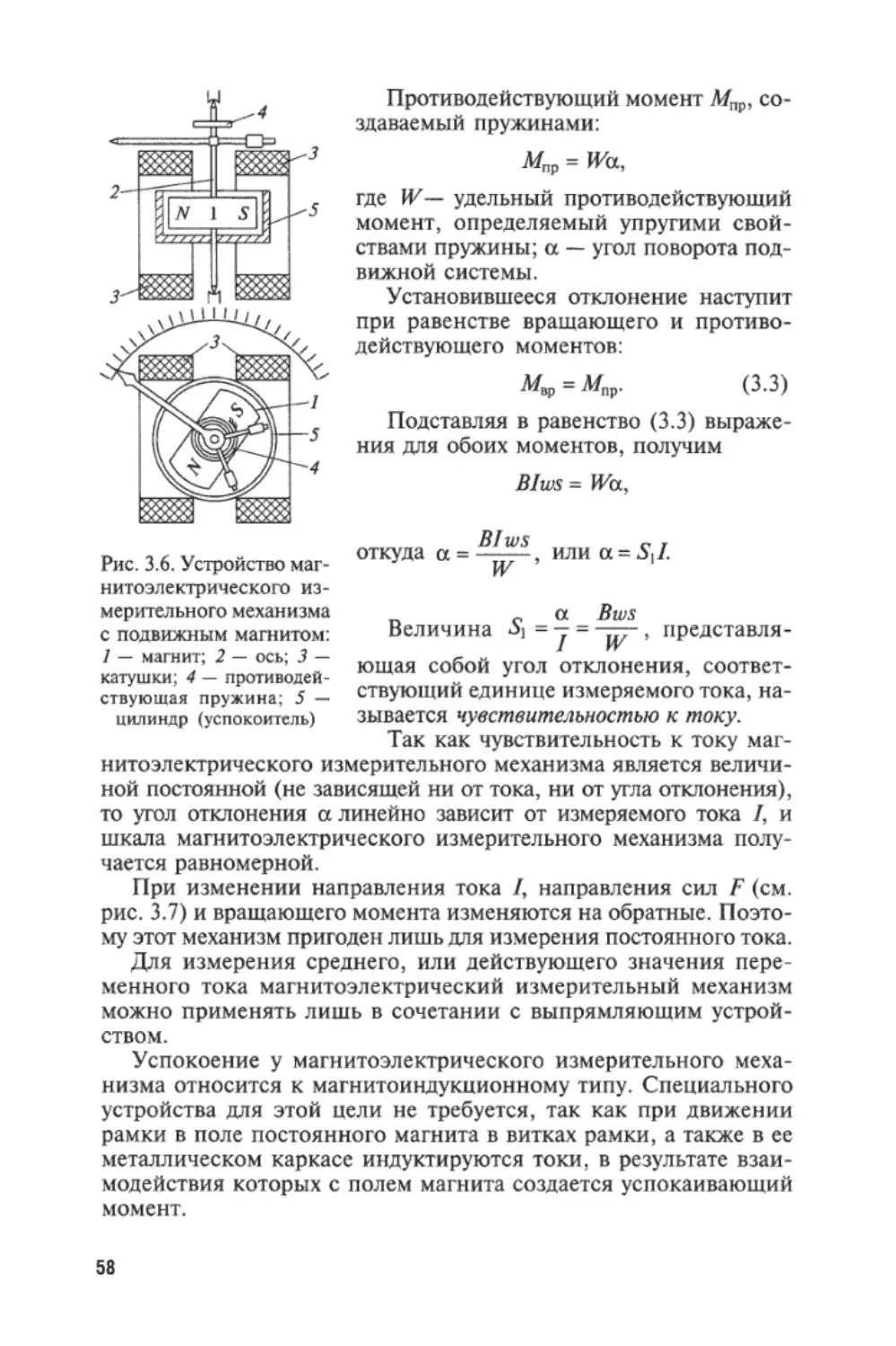
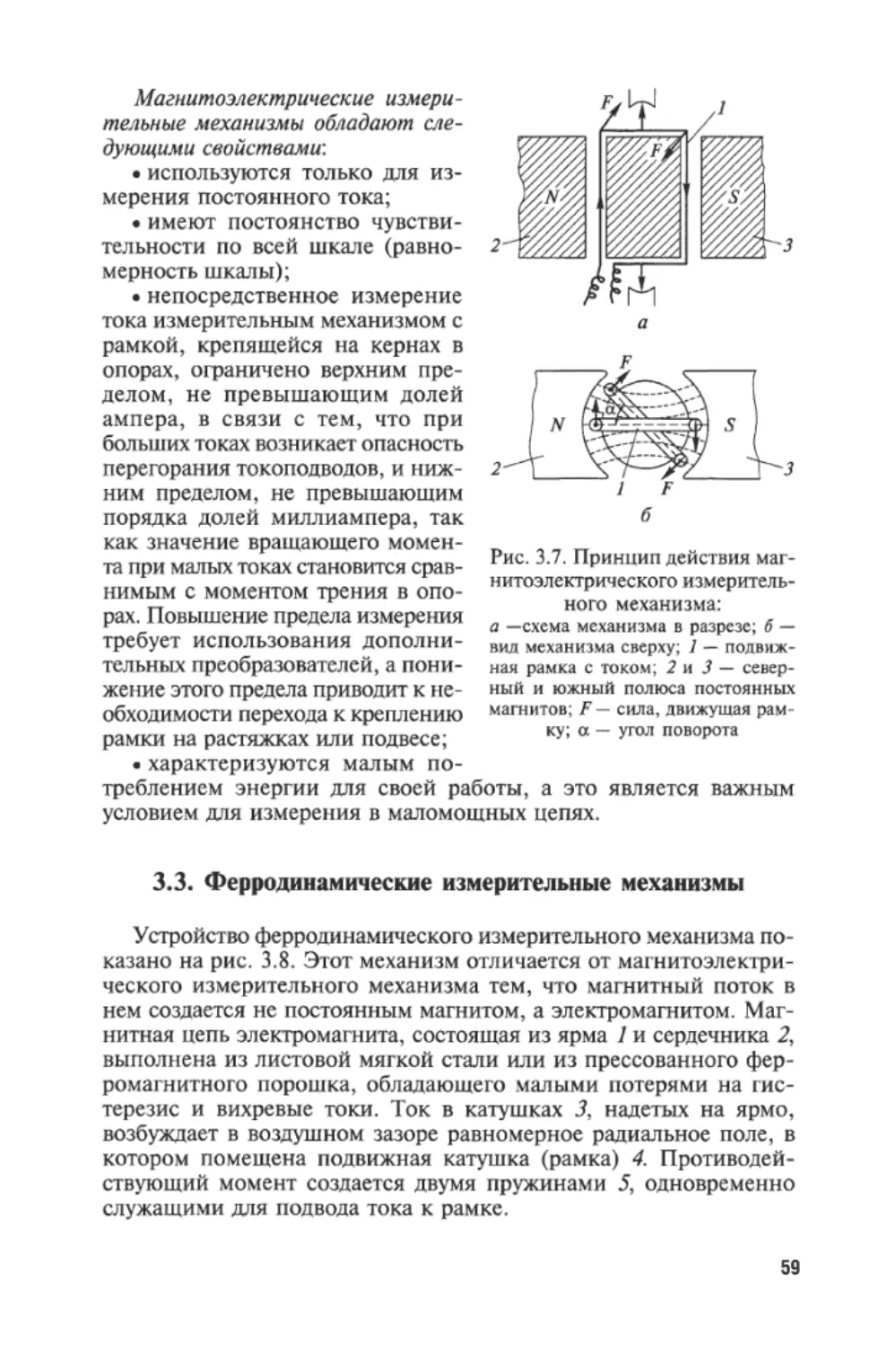
3.2. Магнитоэлектрические измерительные механизмы..56
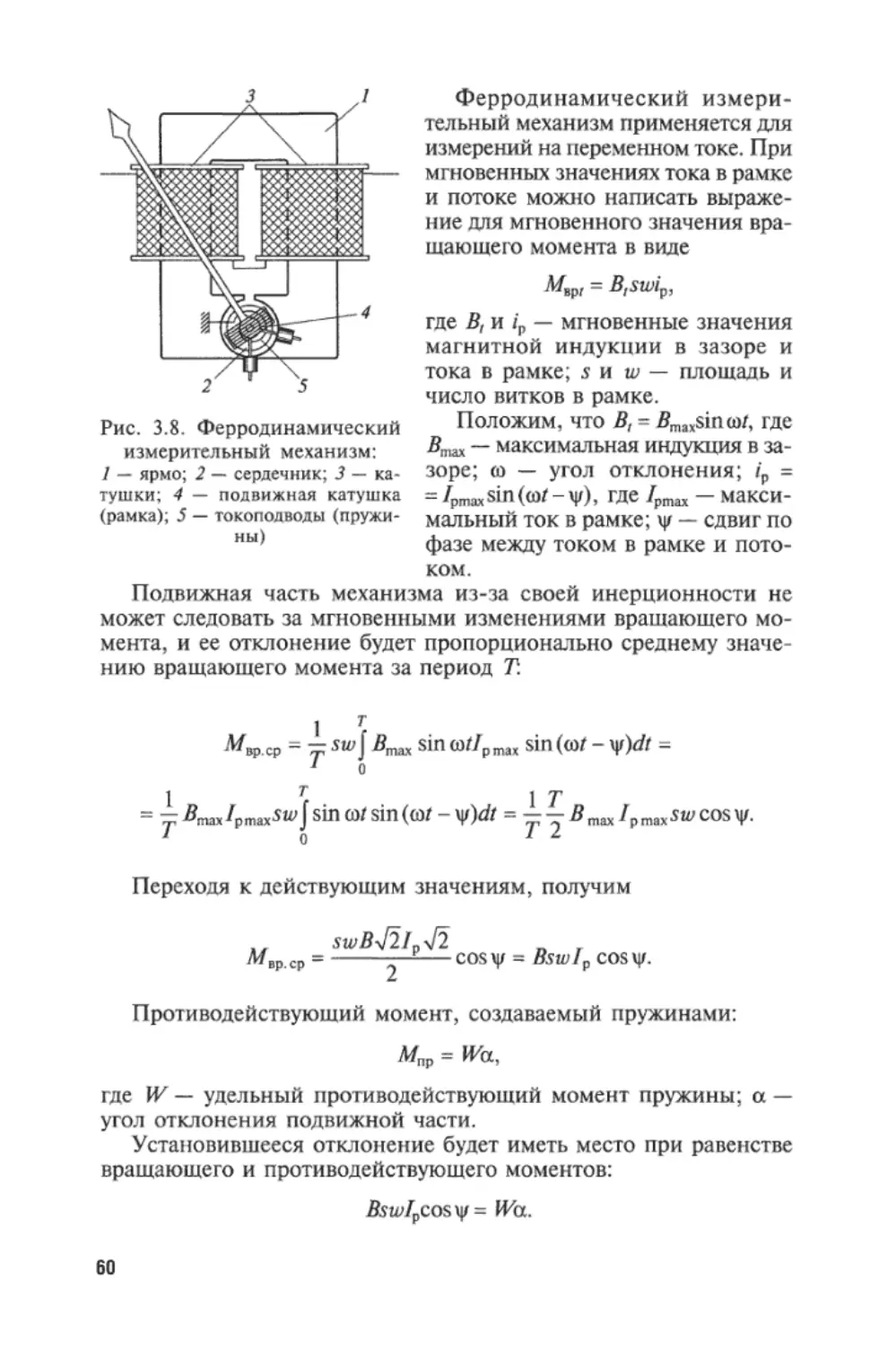
3.3. Ферродинамические измерительные механизмы.....59
3.4. Электродинамические измерительные механизмы...62
3.5. Электромагнитные измерительные механизмы......64
3.6. Электростатические измерительные механизмы....67
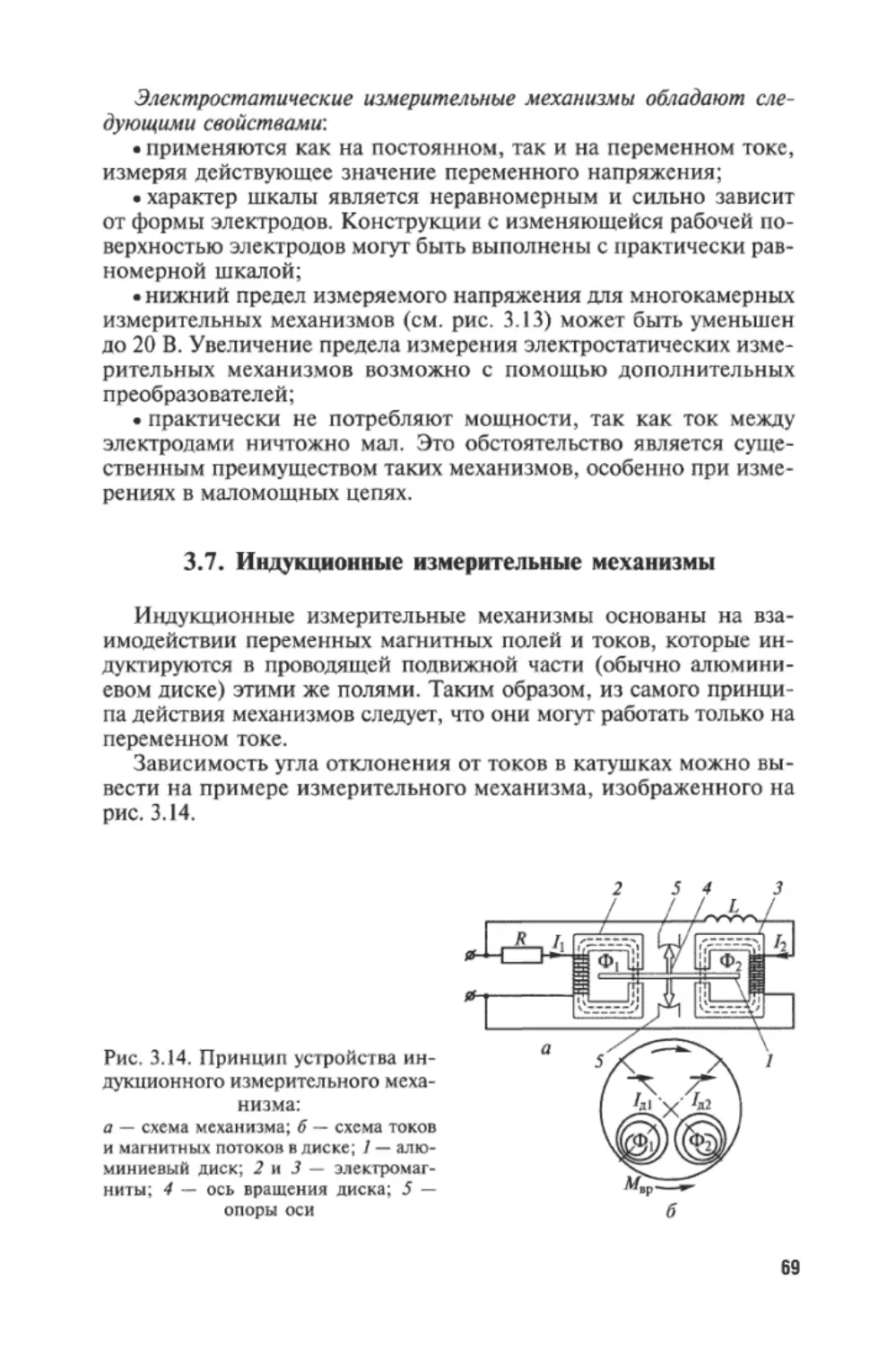
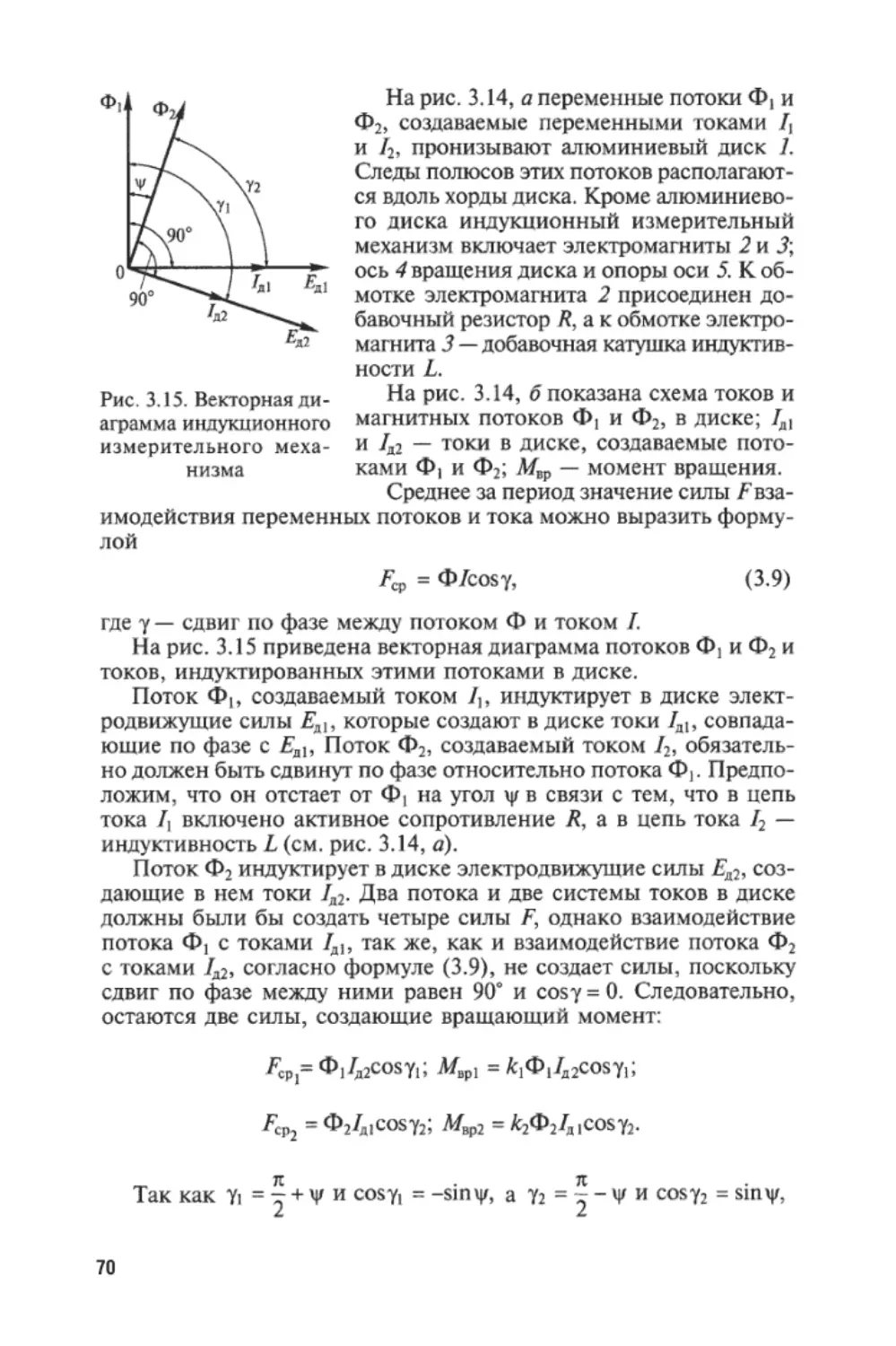
3.7. Индукционные измерительные механизмы..........69
3.8. Измерительные механизмы логометров............72
Контрольные вопросы................................73
Глава 4. Преобразователи электрических величин
в электрические.......................................74
4.1. Основные сведения.............................74
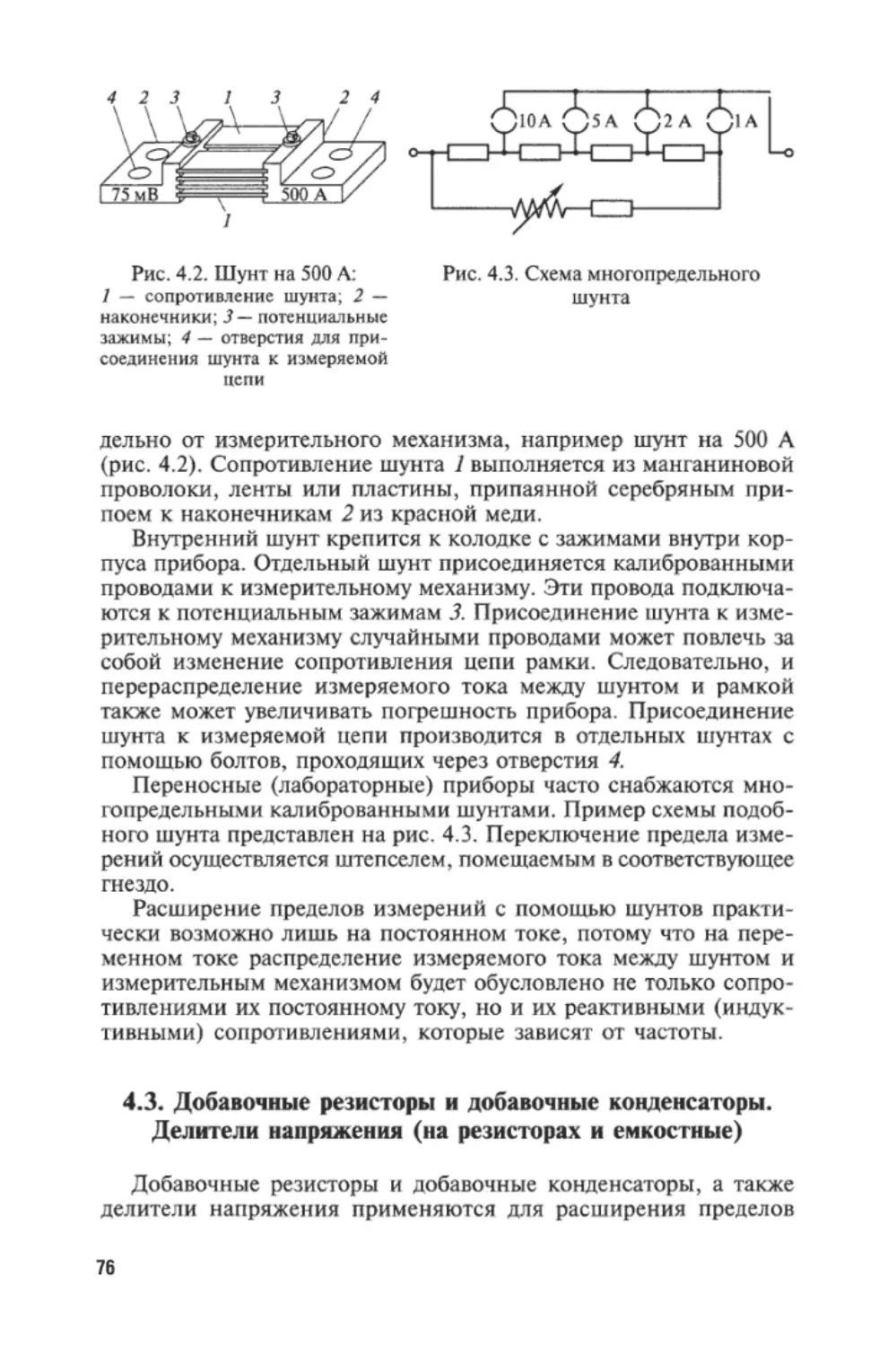
4.2. Шунты.........................................74
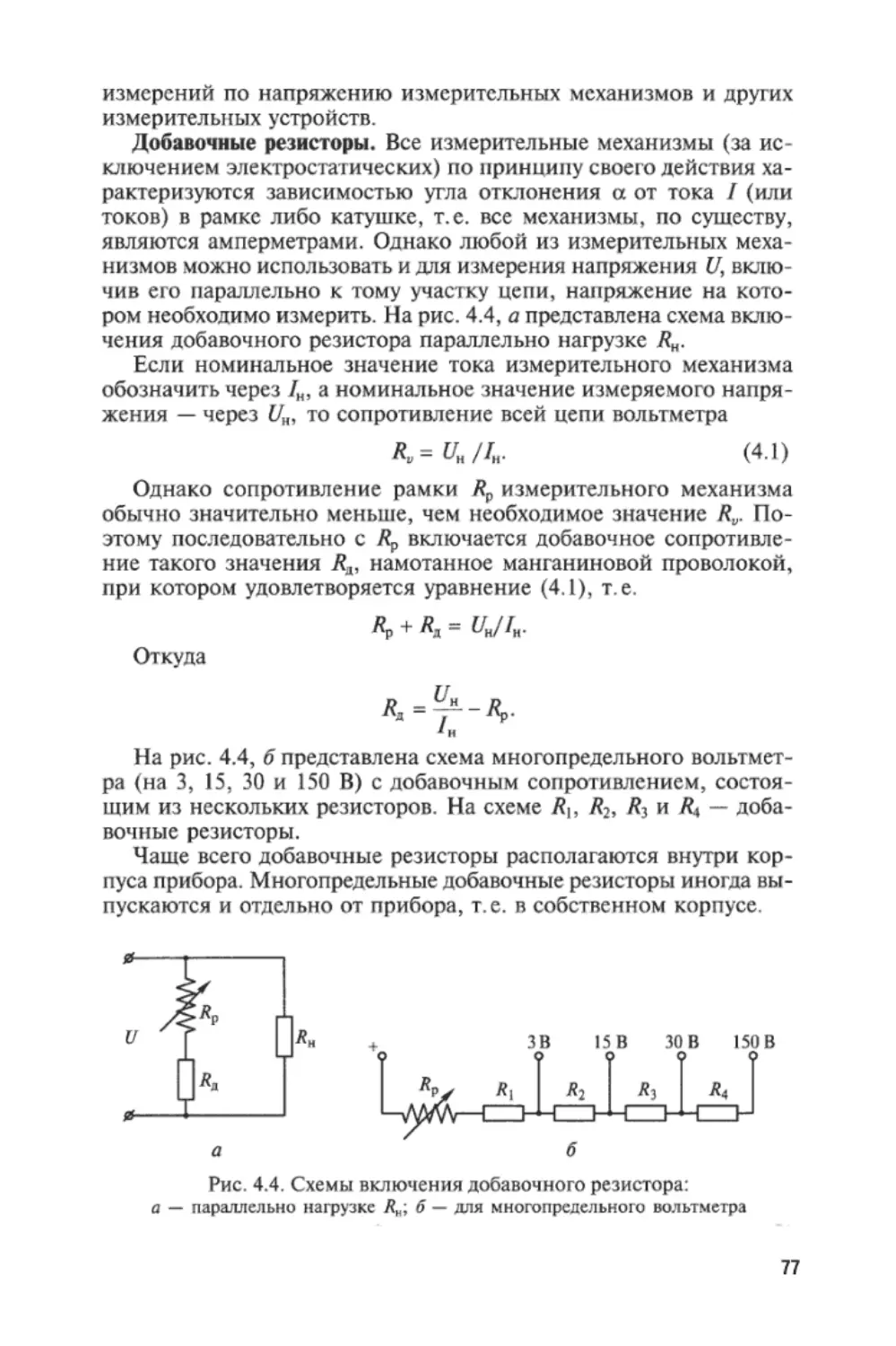
4.3. Добавочные резисторы и добавочные конденсаторы.
Делители напряжения (на резисторах и емкостные).76
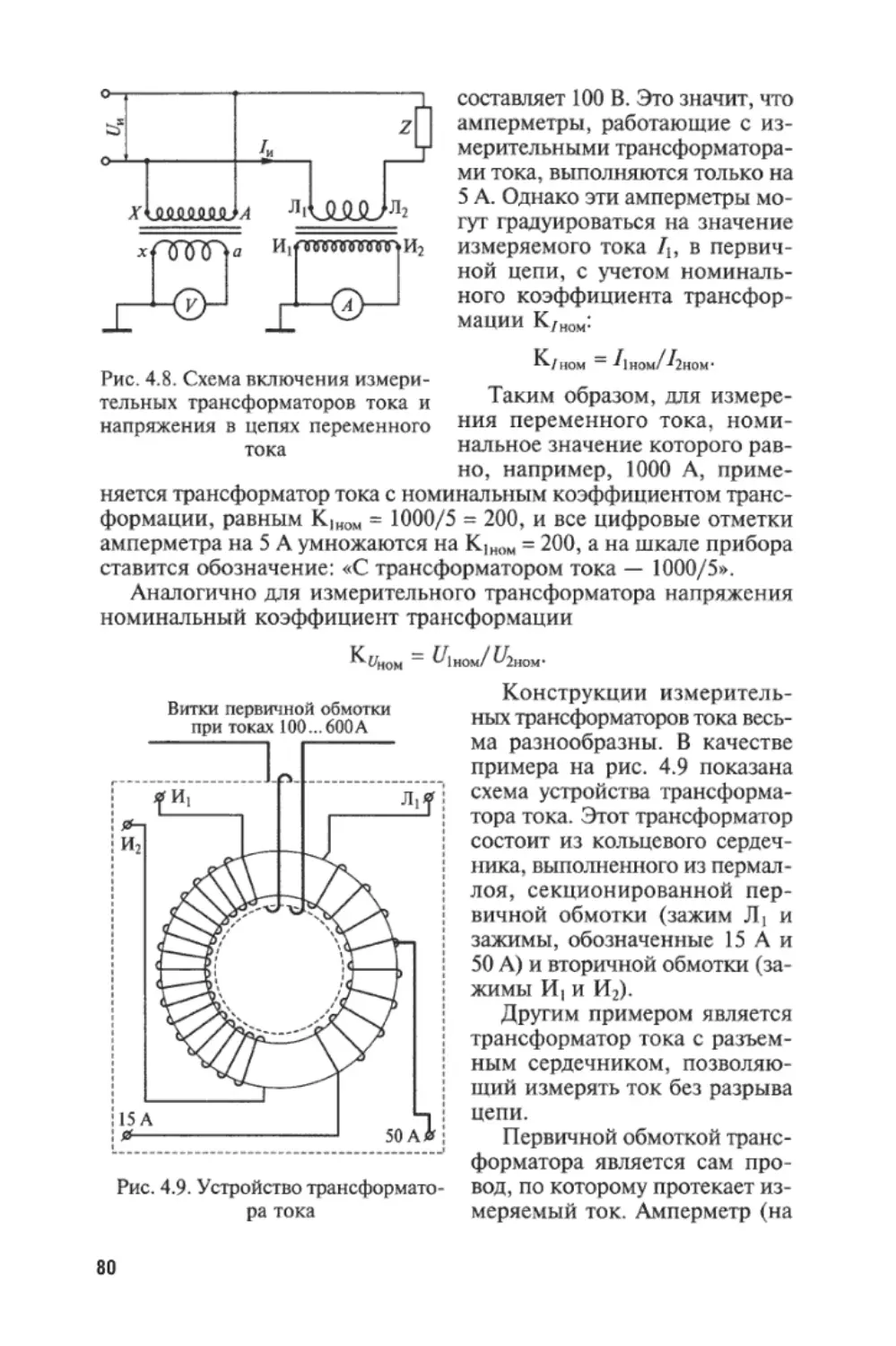
4.4. Измерительные трансформаторы..................79
4.5. Разделительные и согласующие трансформаторы...81
Контрольные вопросы................................82
Глава 5. Преобразователи неэлектрических величин
в электрические.......................................83
5.1. Основные сведения.............................83
5.2. Реостатные преобразователи....................83
5.3. Индуктивные и индукционные преобразователи....84
5.4. Емкостные преобразователи.....................88
5.5. Тензорезисторы................................89
5.6. Термометры электрического сопротивления.......91
5.7. Термоэлектрические преобразователи............92
5.8. Пьезоэлектрические преобразователи............94
Контрольные вопросы................................97
Раздел III
МЕТОДЫ И ПРИБОРЫ ИЗМЕРЕНИЙ
ЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН
Глава 6. Методы электрических измерений...............98
6.1. Классификация методов электрических измерений.98
4
6.2. Основные структурные схемы электрических
измерительных приборов..............................99
6.2.1. Структурные схемы электрических приборов
для измерения электрических величин.............100
6.2.2. Структурные схемы электрических приборов
для измерений неэлектрических величин...........101
6.3. Мостовые схемы................................102
6.4. Оценка точности измерительных приборов
непосредственной оценки............................103
6.5. Оценка точности измерительных приборов,
работающих по методу сравнения......................105
Контрольные вопросы................................106
Глава 7. Измерение токов и напряжений.................107
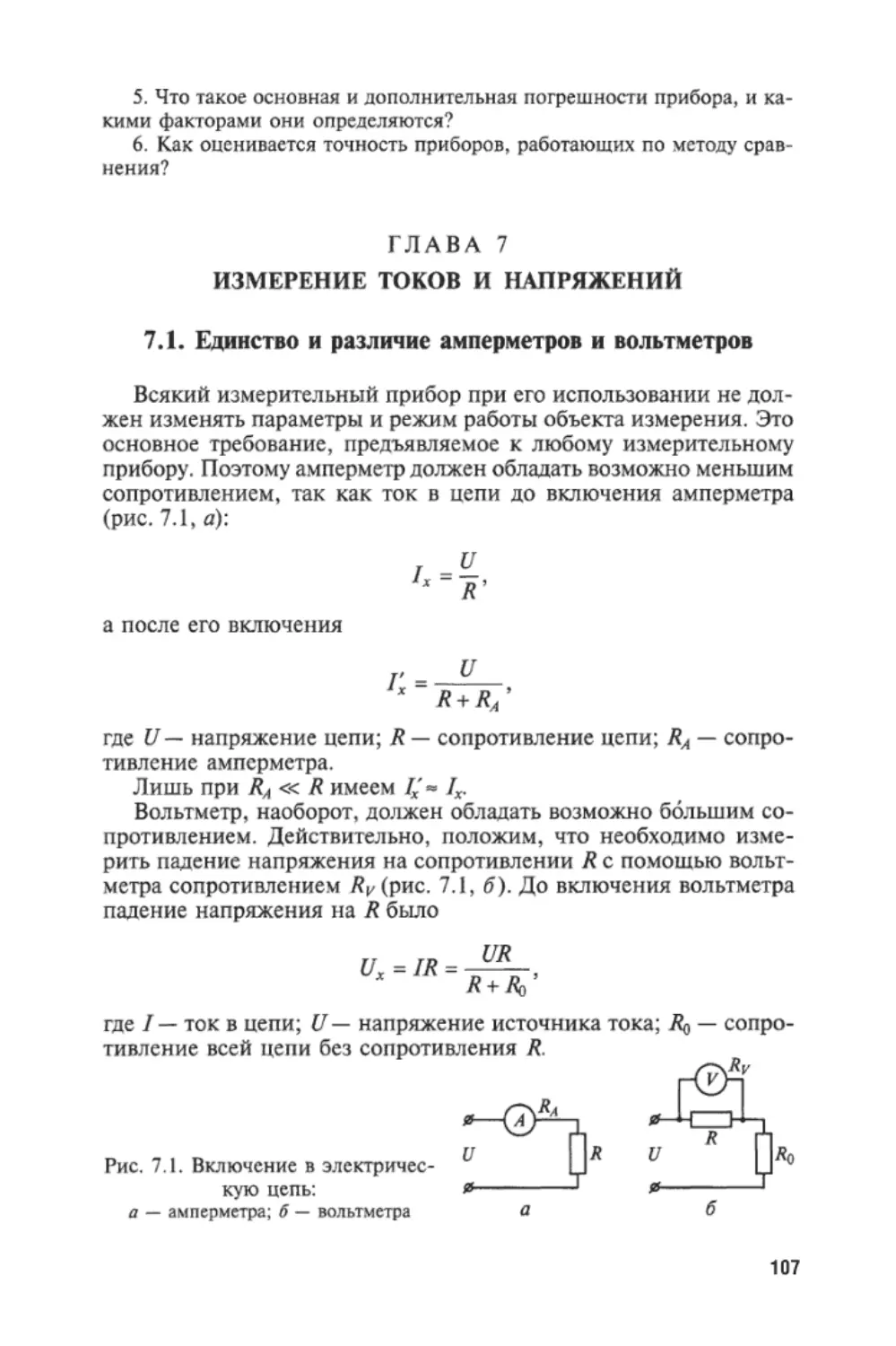
7.1. Единство и различие амперметров и вольтметров.107
7.2. Измерение постоянных токов и напряжений.......108
7.3. Измерение действующих значений переменных
токов и напряжений электромагнитными,
электродинамическими, ферродинамическими
и электростатическими приборами....................109
7.4. Измерения средних и амплитудных значений
переменного тока...................................112
7.5. Измерение малых токов и напряжений. Нулевые
указатели..........................................113
7.6. Электронные и цифровые вольтметры.............115
7.6.1. Электронные аналоговые вольтметры........115
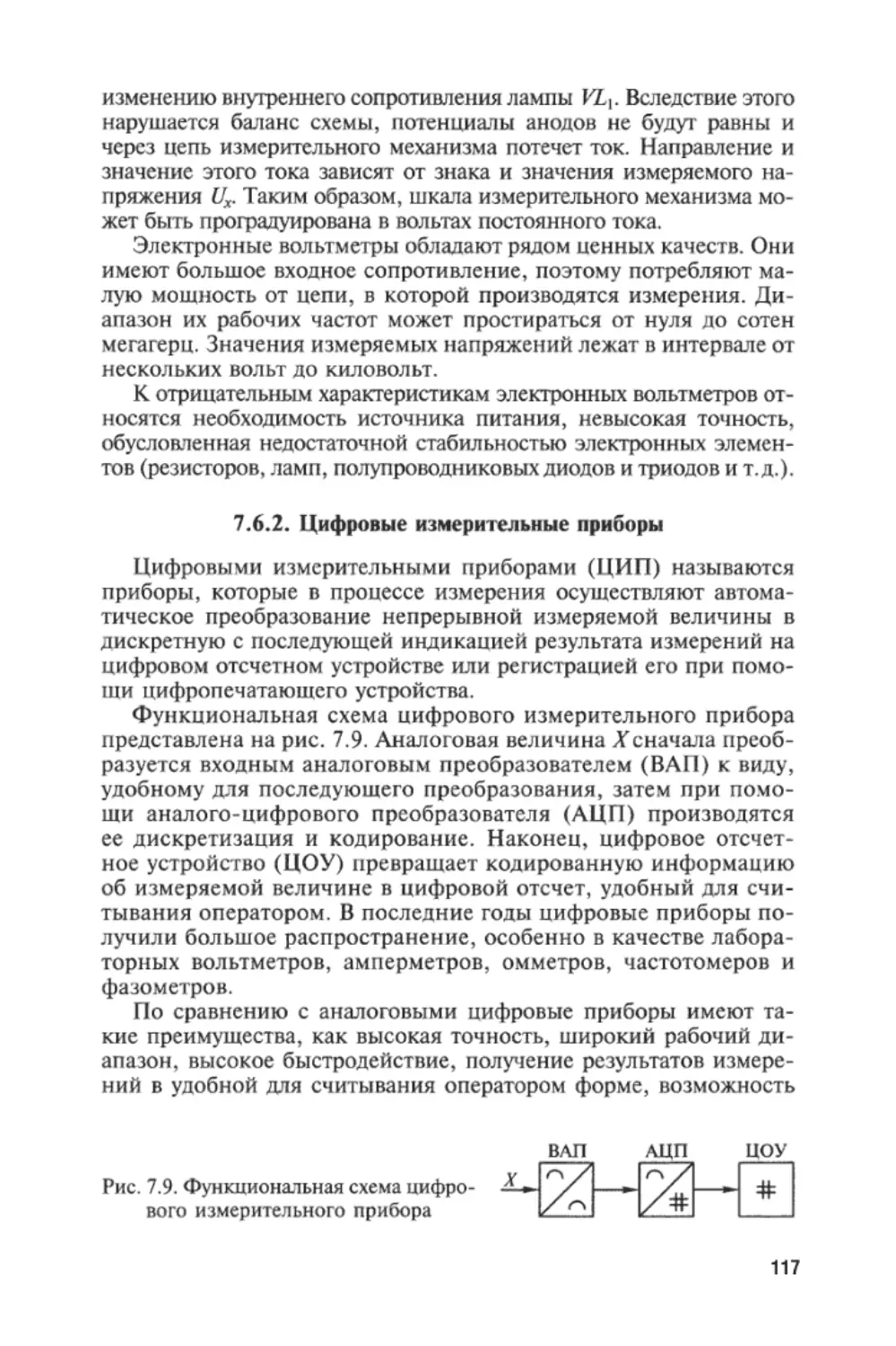
7.6.2. Цифровые измерительные приборы...........117
Контрольные вопросы................................120
Глава 8. Измерение сопротивлений.......................121
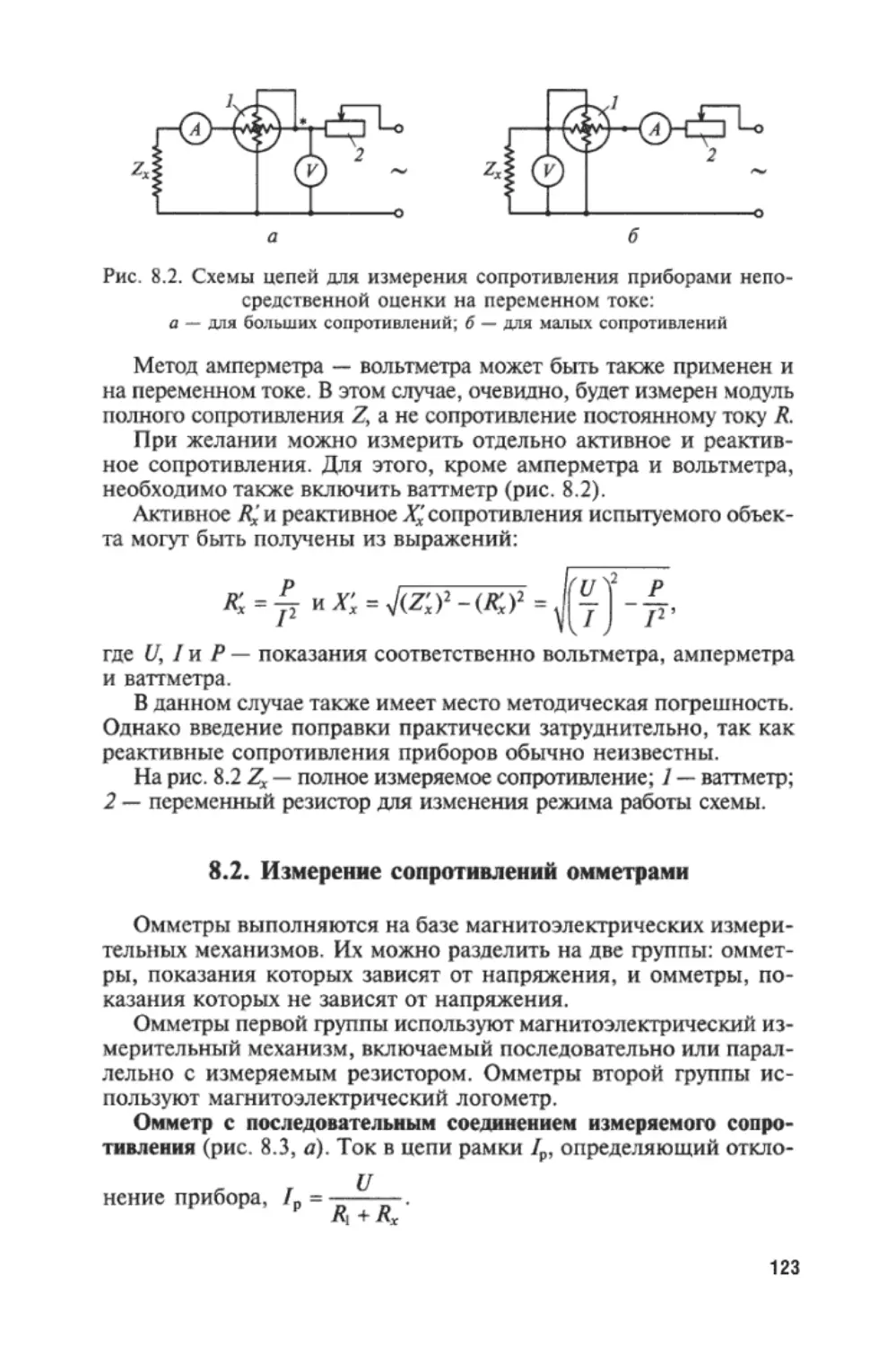
8.1. Измерение сопротивлений методом амперметра —
вольтметра.........................................121
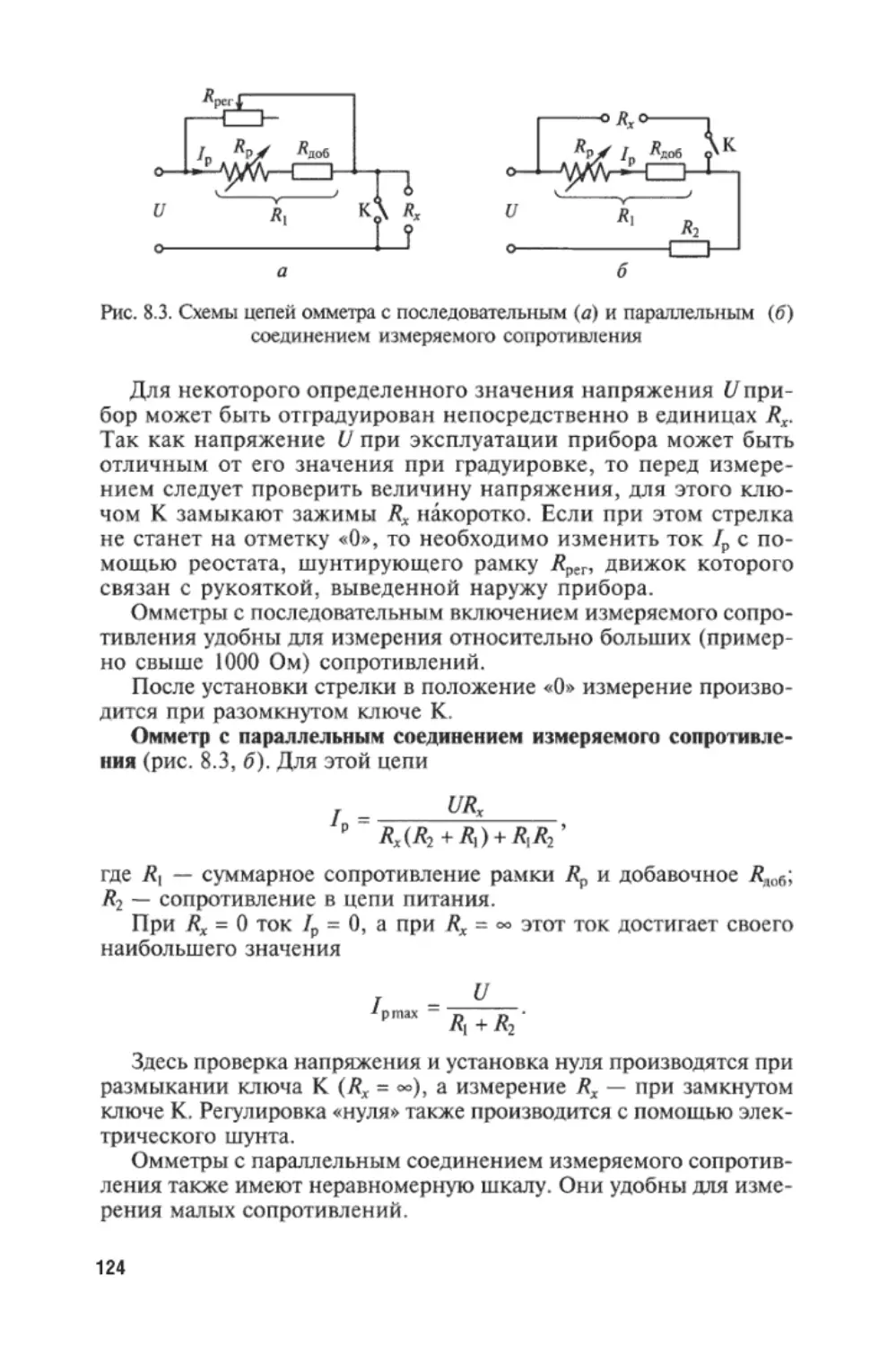
8.2. Измерение сопротивлений омметрами.............123
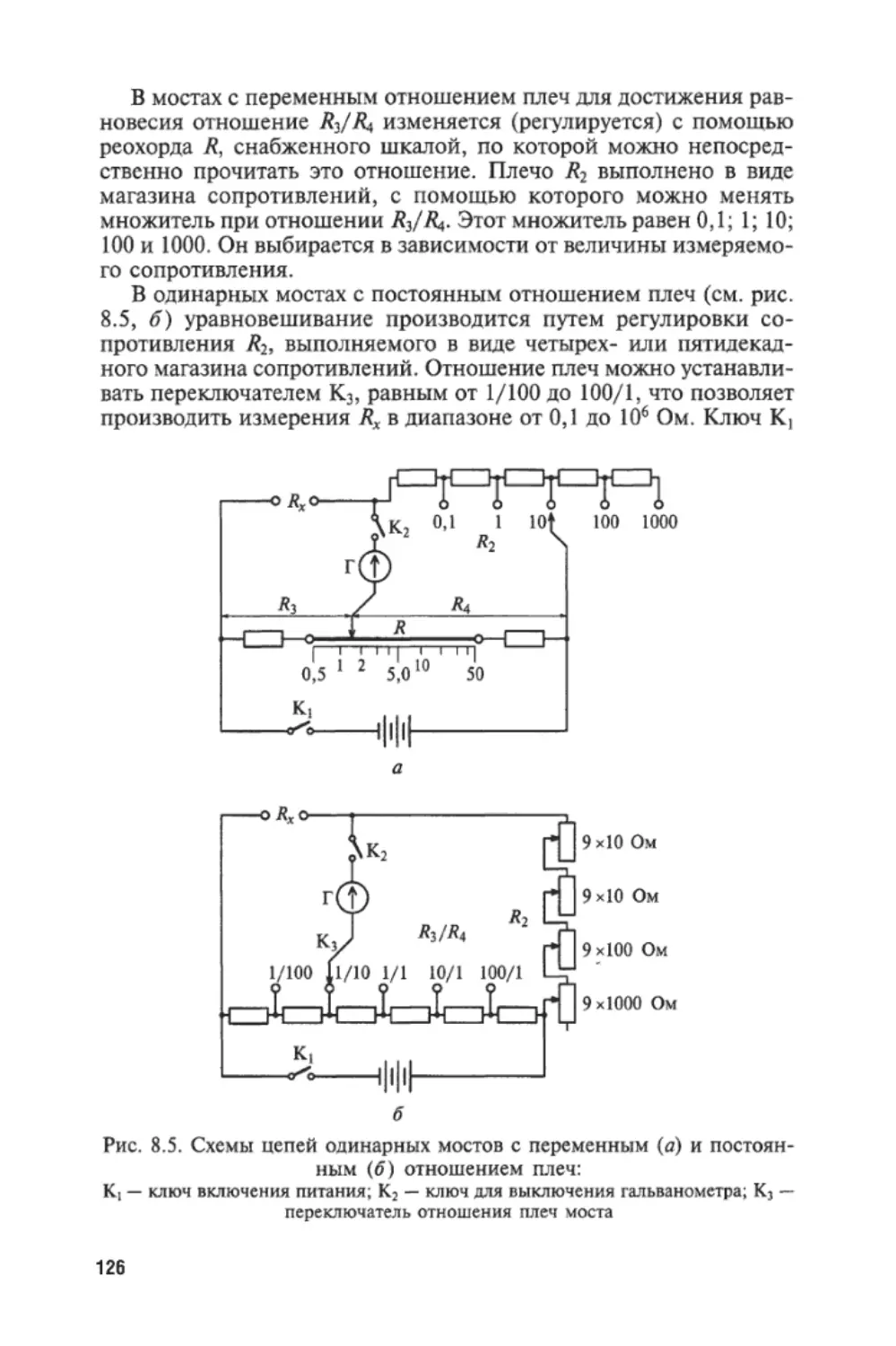
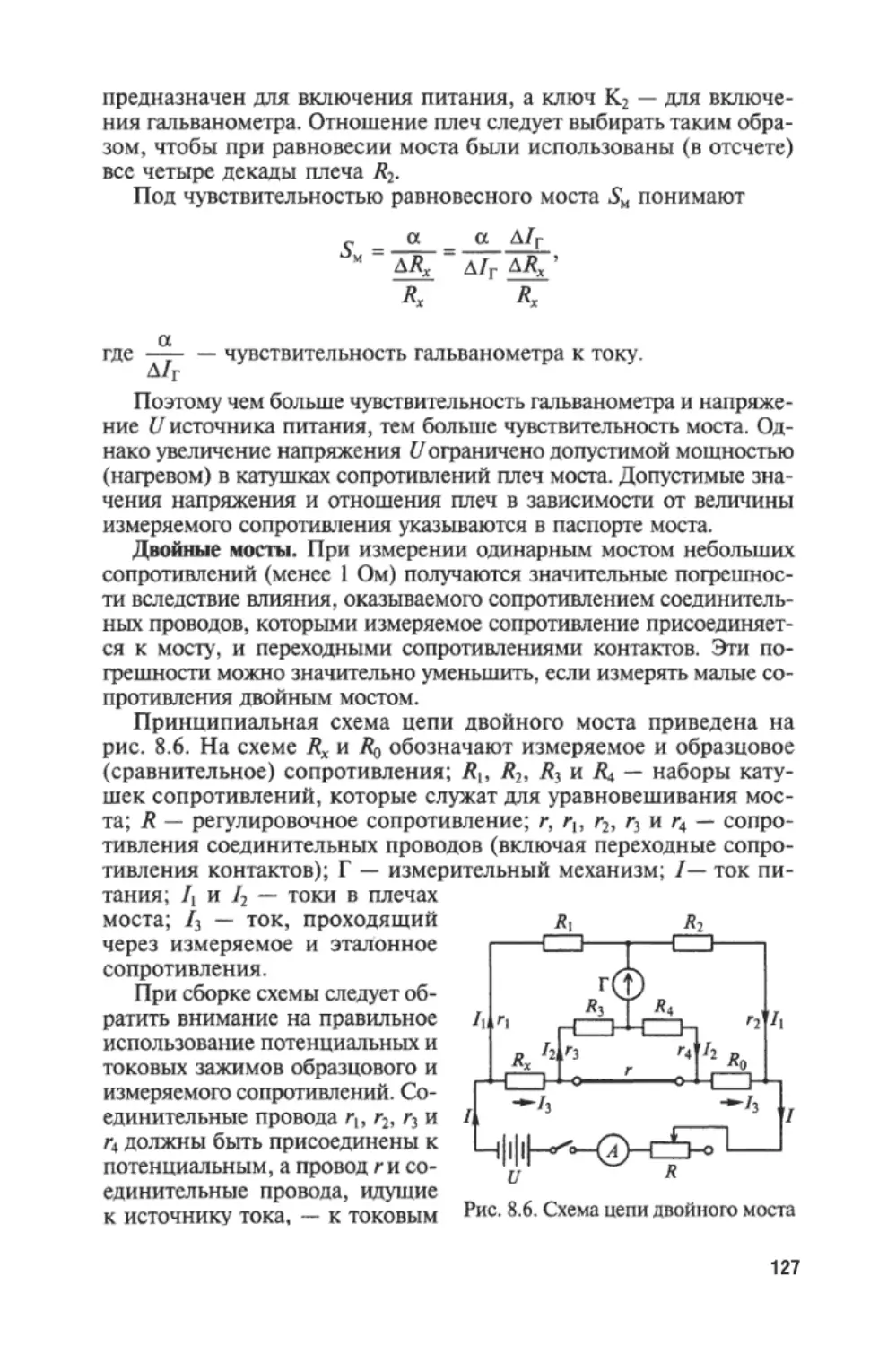
8.3. Измерение сопротивлений мостовыми методами....125
8.3.1. Равновесные мосты........................125
8.3.2. Неравновесные мосты......................128
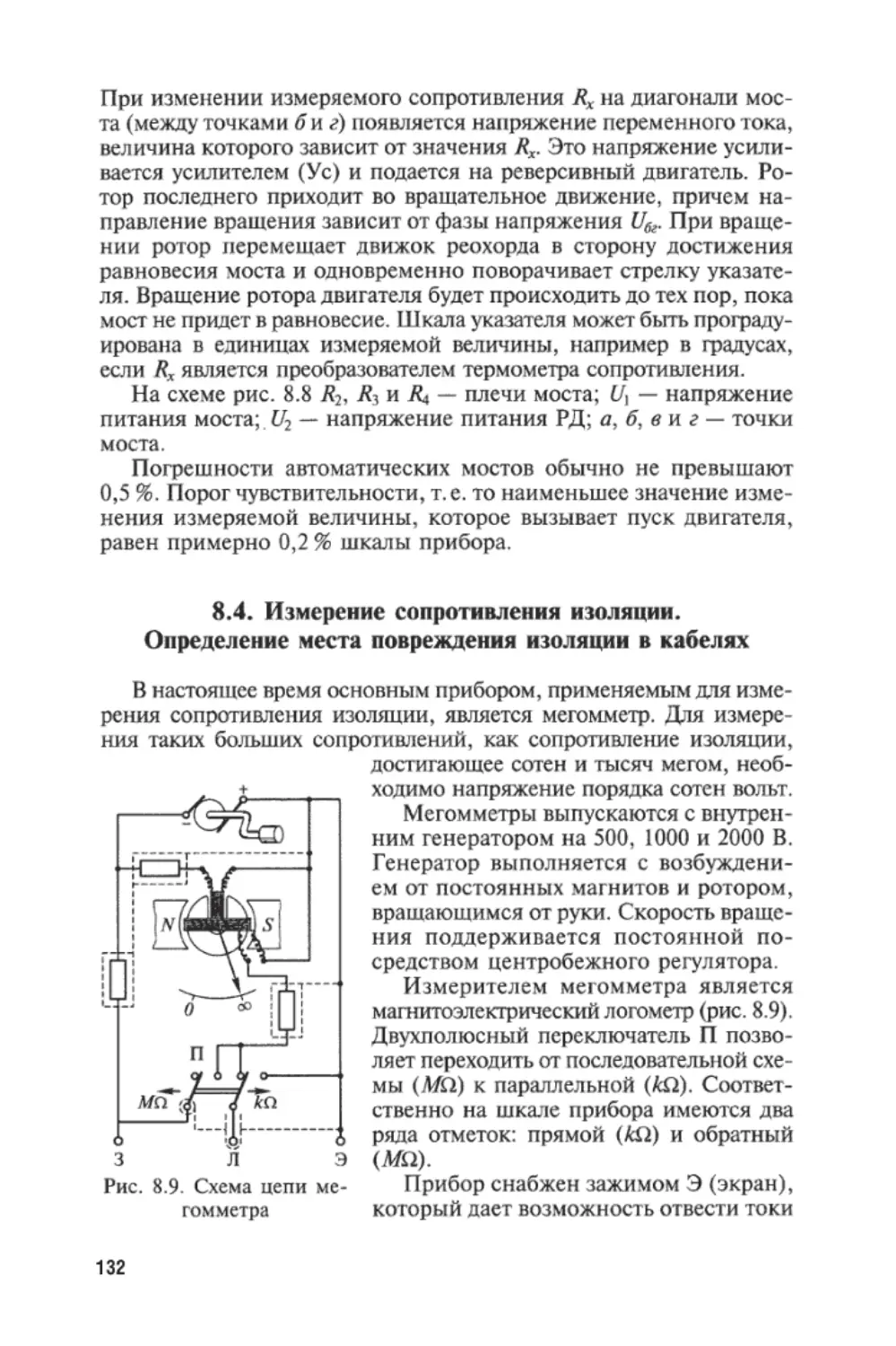
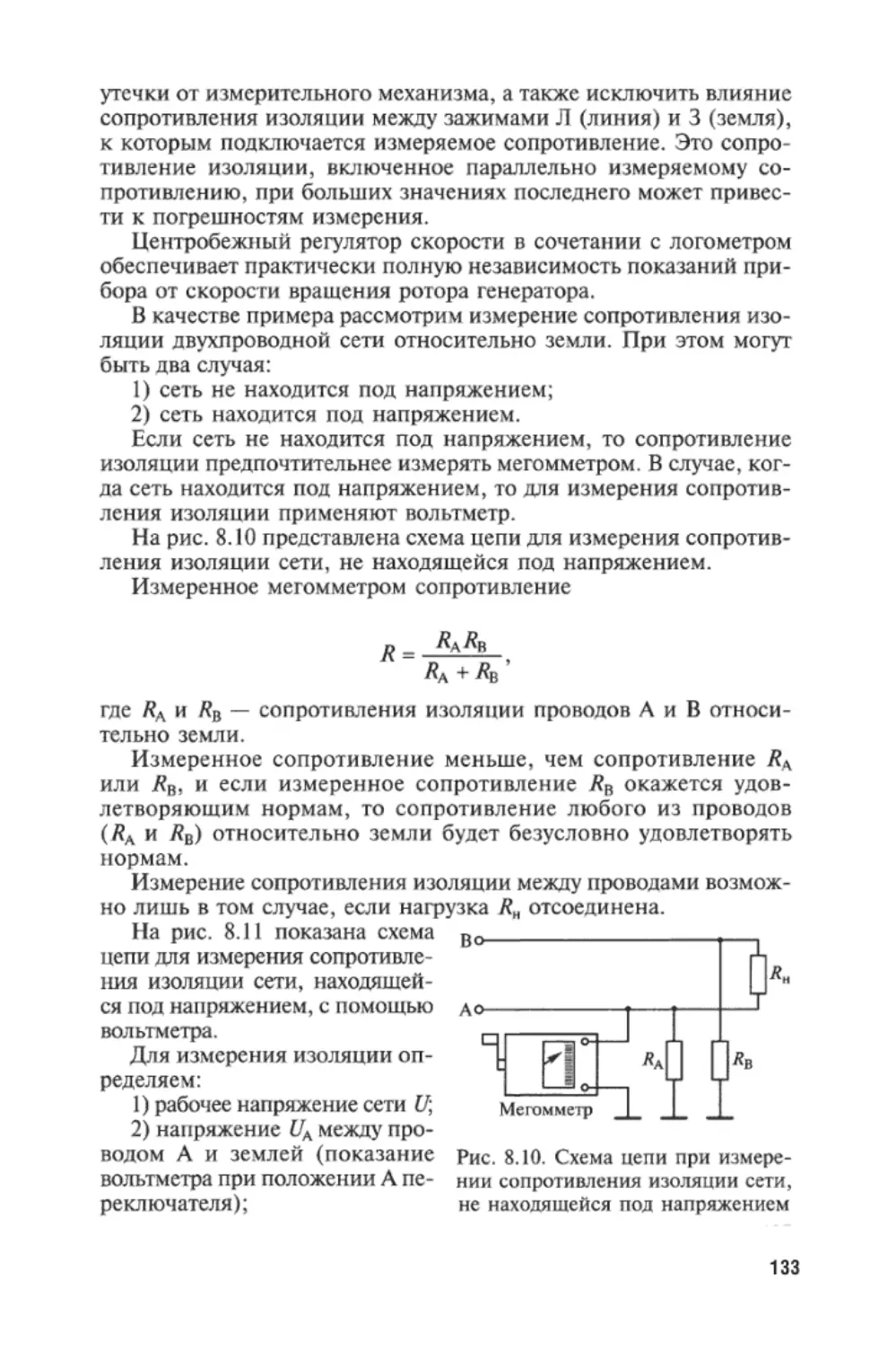
8.4. Измерение сопротивления изоляции. Определение
места повреждения изоляции в кабелях...............132
Контрольные вопросы................................136
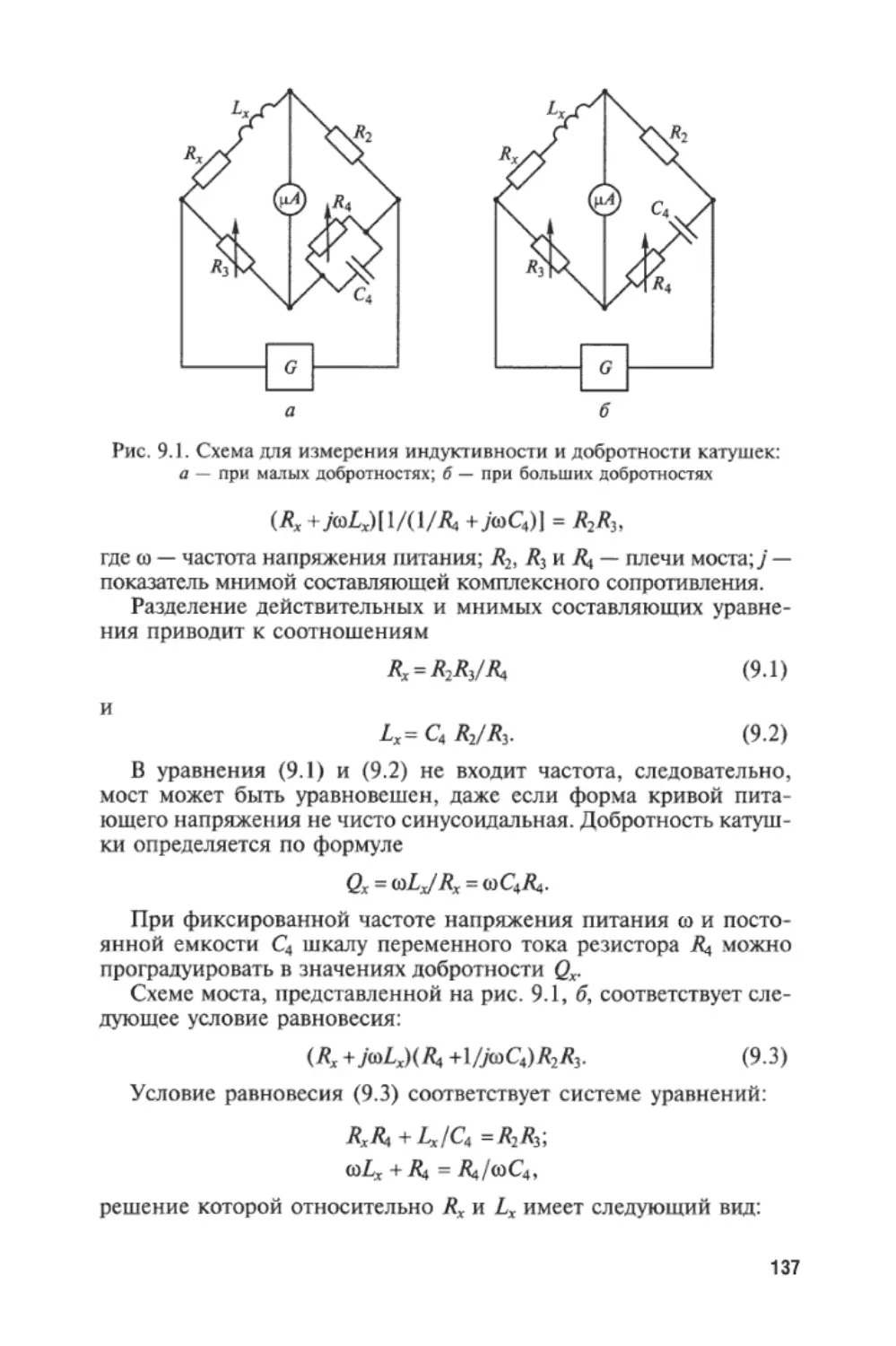
Глава 9. Измерение емкости и индуктивности............136
9.1. Мосты для измерения индуктивности.............136
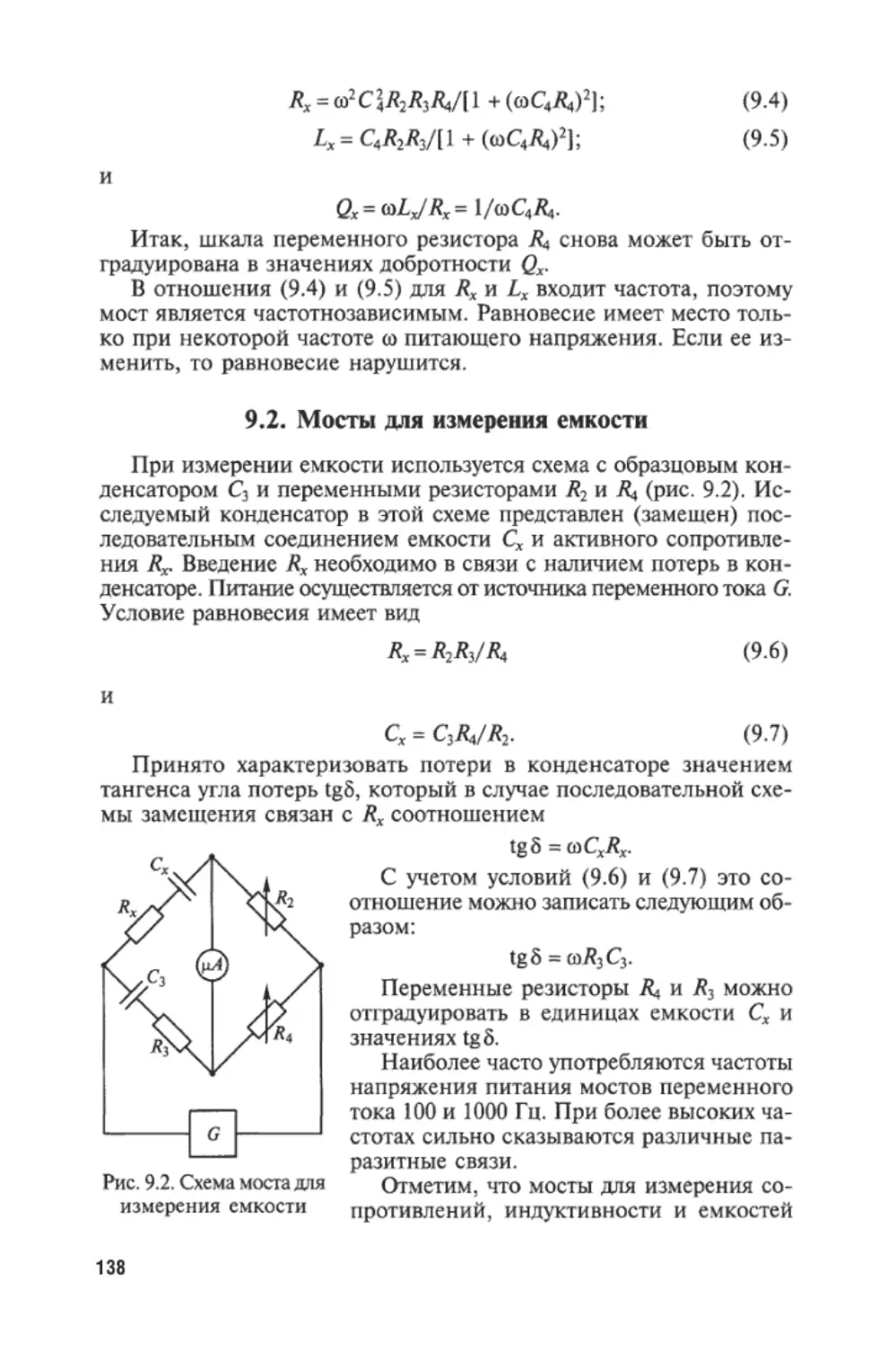
9.2. Мосты для измерения емкости...................138
Контрольные вопросы................................139
5
Глава 10. Измерение электрической мощности
и энергии............................................139
10.1. Измерение мощности в цепях постоянного
и однофазного переменного тока ваттметрами.......139
10.2. Измерение энергии в цепях постоянного тока..142
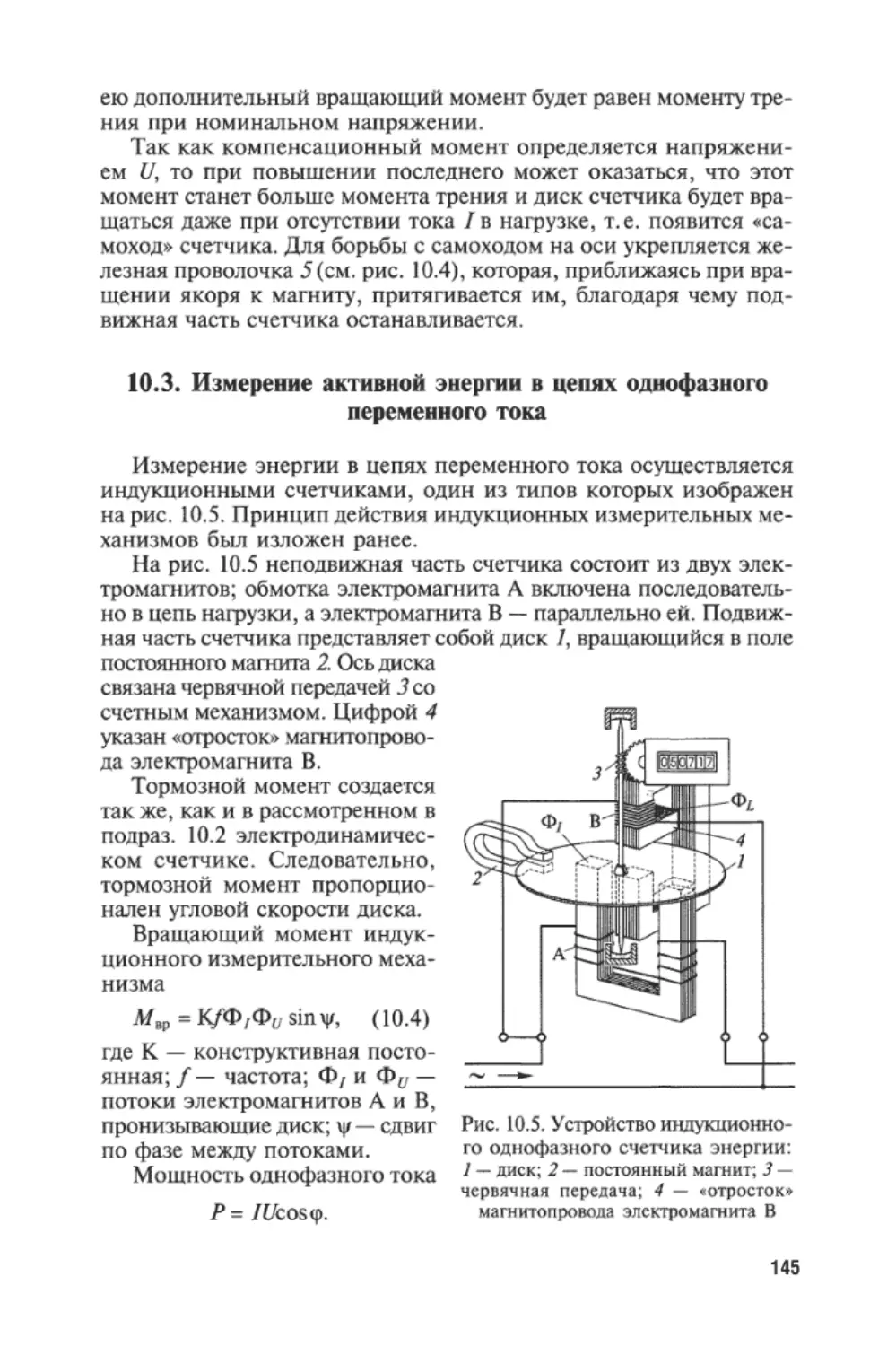
10.3. Измерение активной энергии в цепях однофазного
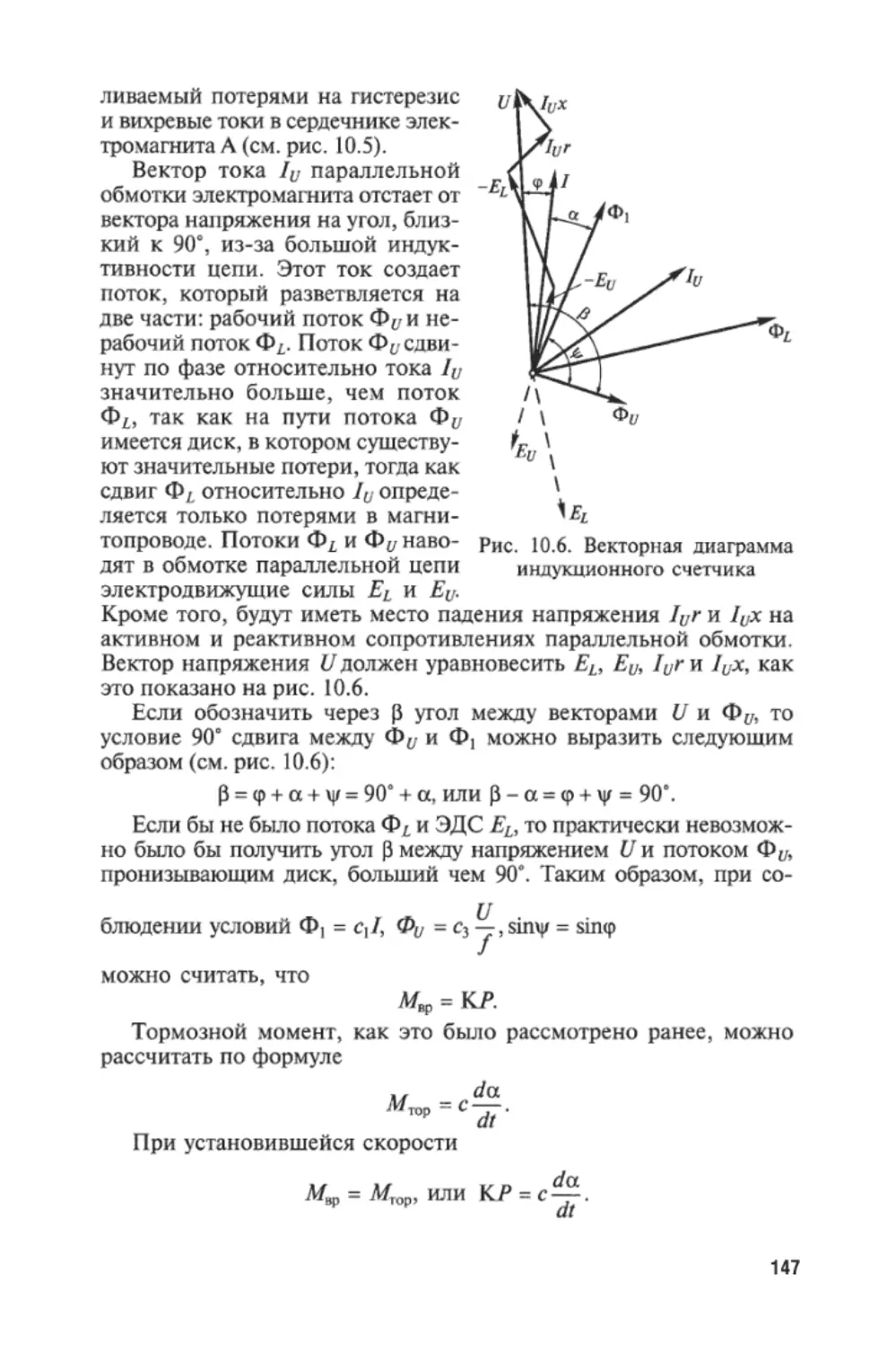
переменного тока..................................145
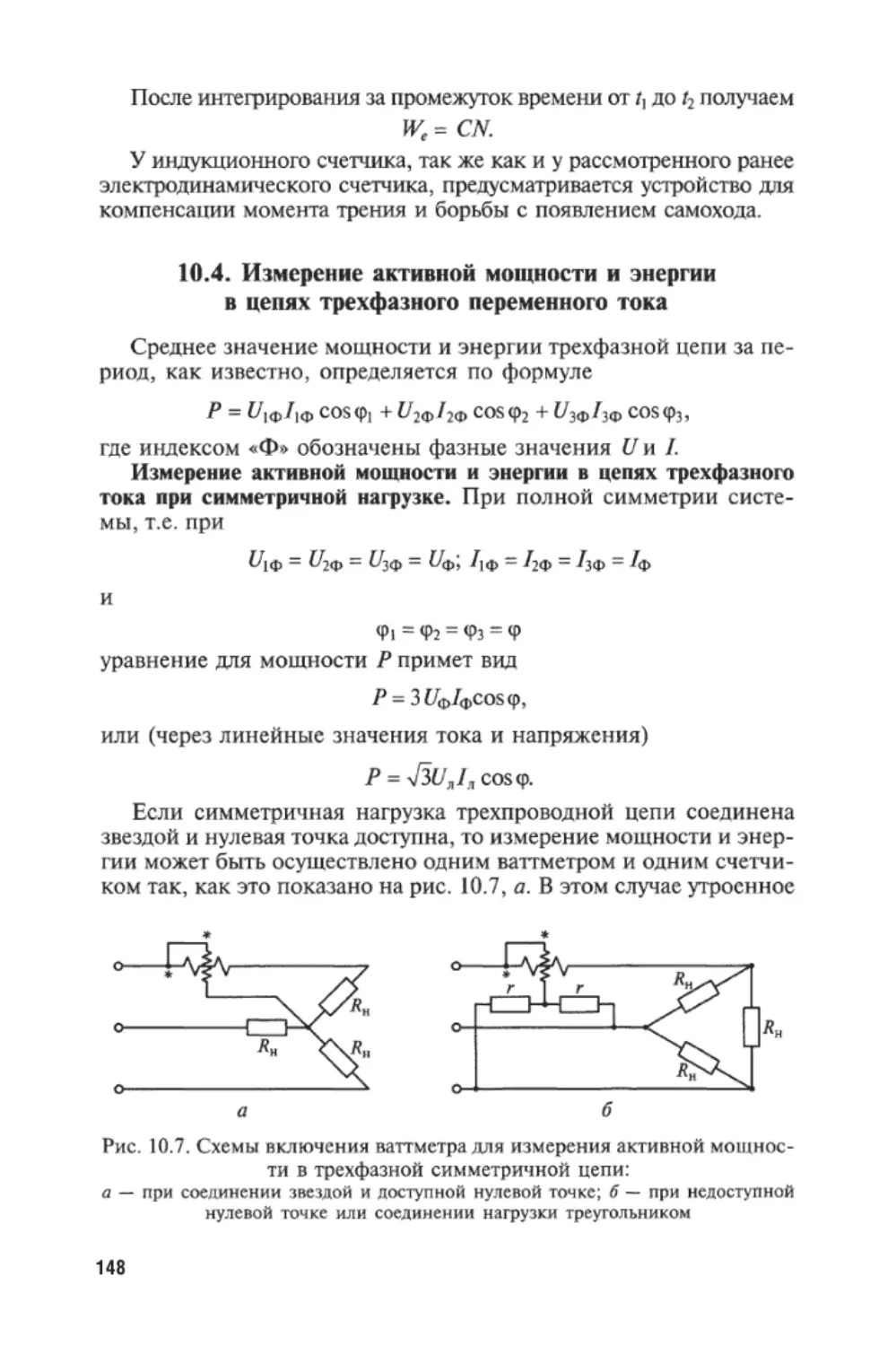
10.4. Измерение активной мощности и энергии в цепях
трехфазного переменного тока......................148
10.5. Измерение реактивной мощности и энергии.....151
10.6. Измерение коэффициента мощности.............153
Контрольные вопросы...............................155
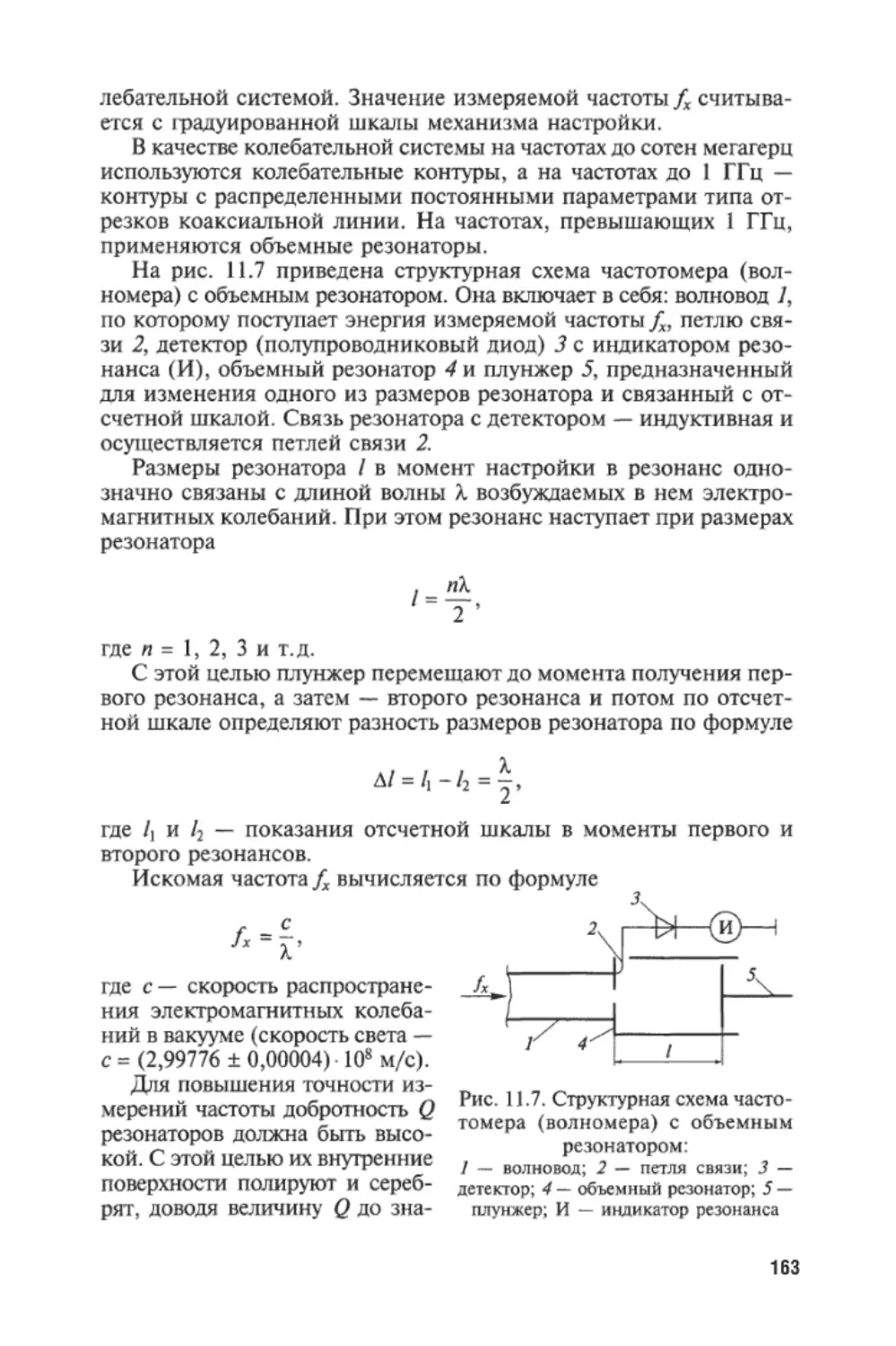
Глава 11. Измерение частоты и интервалов времени.........155
11.1. Основные сведения...........................155
11.2. Измерение частоты приборами непосредственной
оценки при помощи частотомеров....................158
11.3. Измерение частоты при помощи частотозависимых
мостов............................................161
11.4. Резонансный метод измерения частоты.........162
11.5. Измерение частоты методом заряда и разряда
конденсатора......................................164
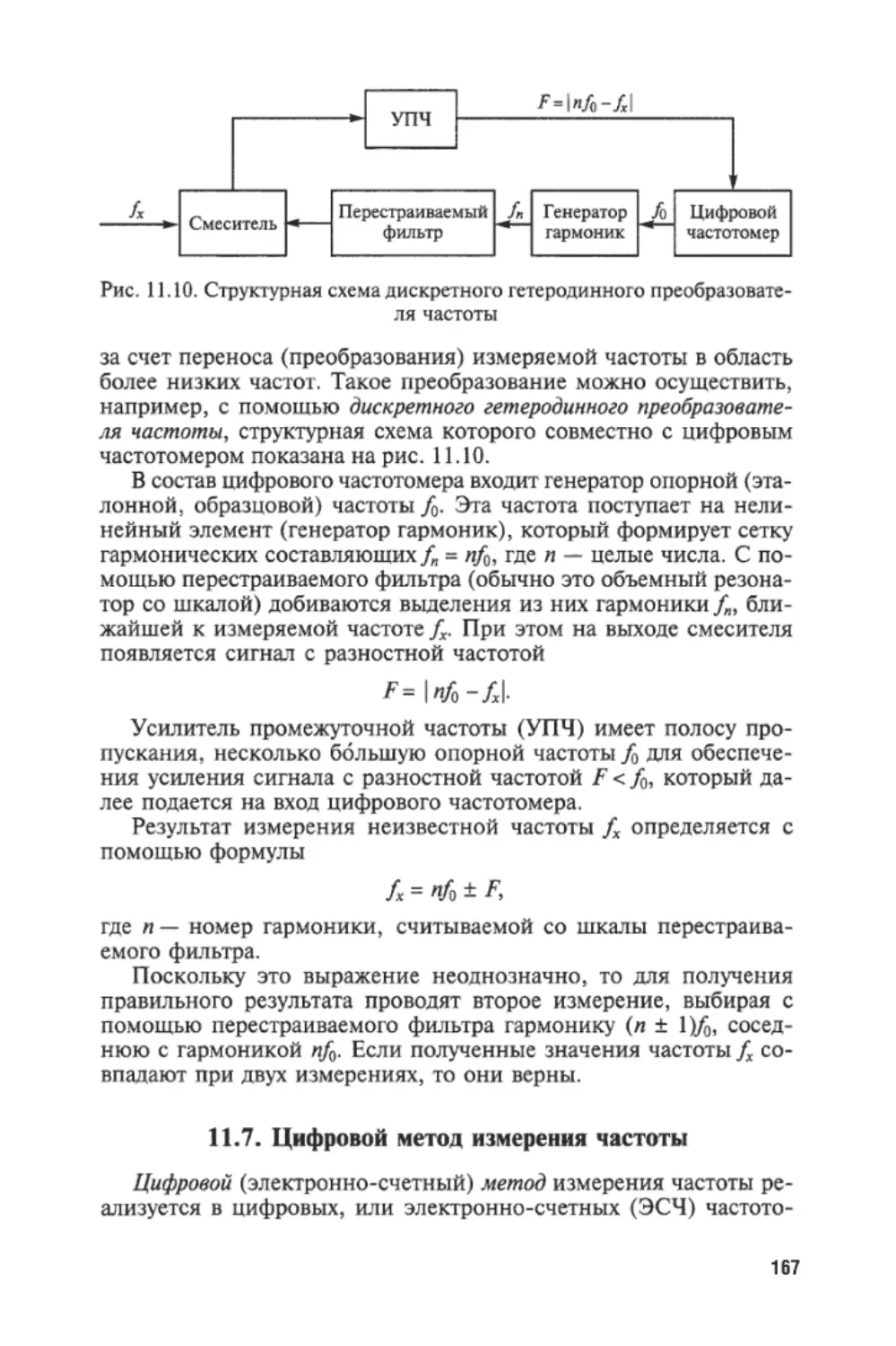
11.6. Гетеродинный метод измерения частоты........165
11.7. Цифровой метод измерения частоты............167
11.8. Цифровой метод измерения интервалов времени.172
11.9. Автоматизация процессов измерения частоты
и интервалов времени..............................177
Контрольные вопросы...............................179
РАЗДЕЛ IV
РАДИОТЕХНИЧЕСКИЕ ИЗМЕРЕНИЯ
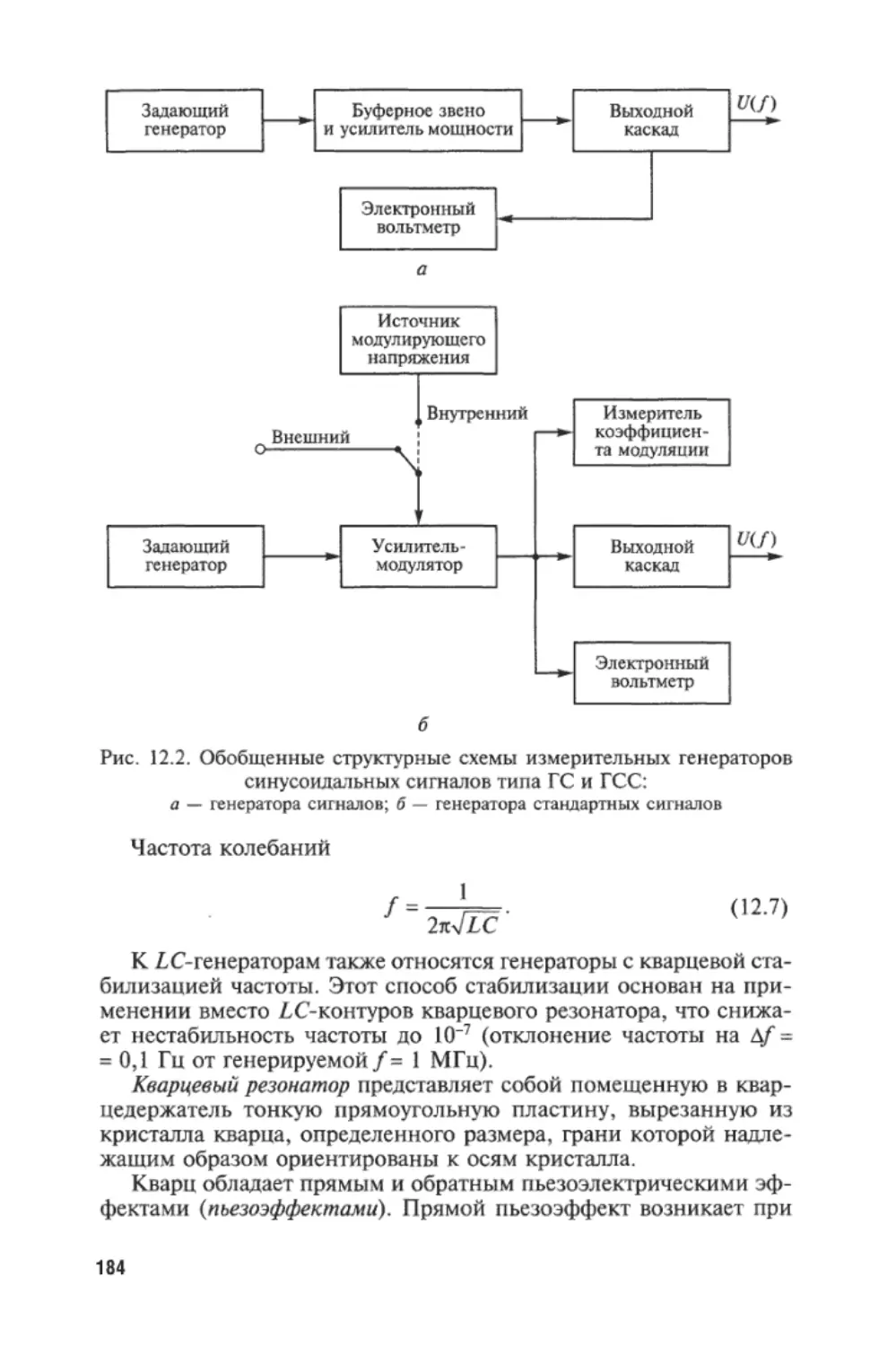
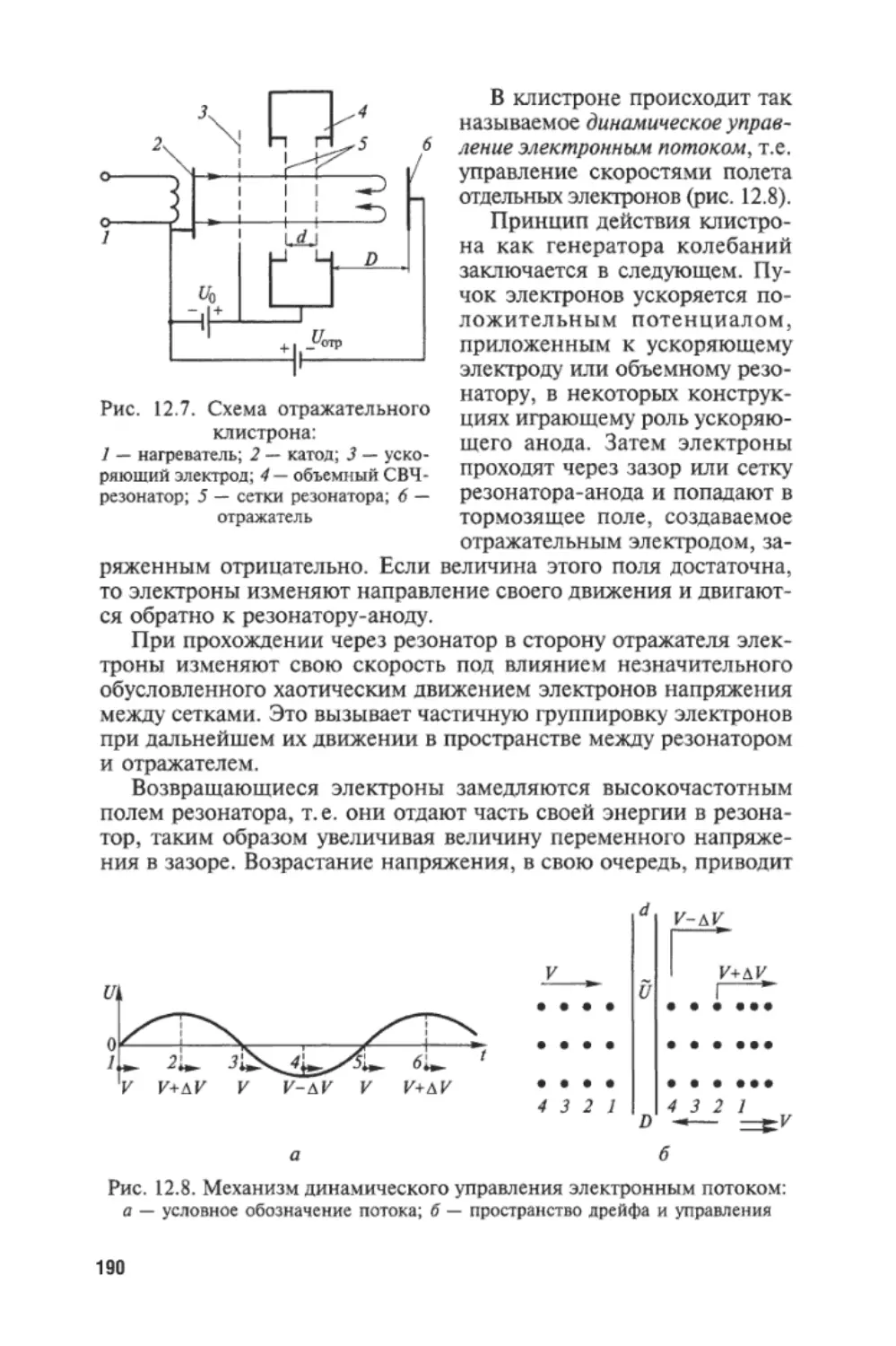
Глава 12. Генераторы измерительных сигналов..........180
12.1. Основные сведения...........................180
12.2. Генераторы синусоидальных колебаний.........183
12.3. Цифровые измерительные генераторы низких частот.192
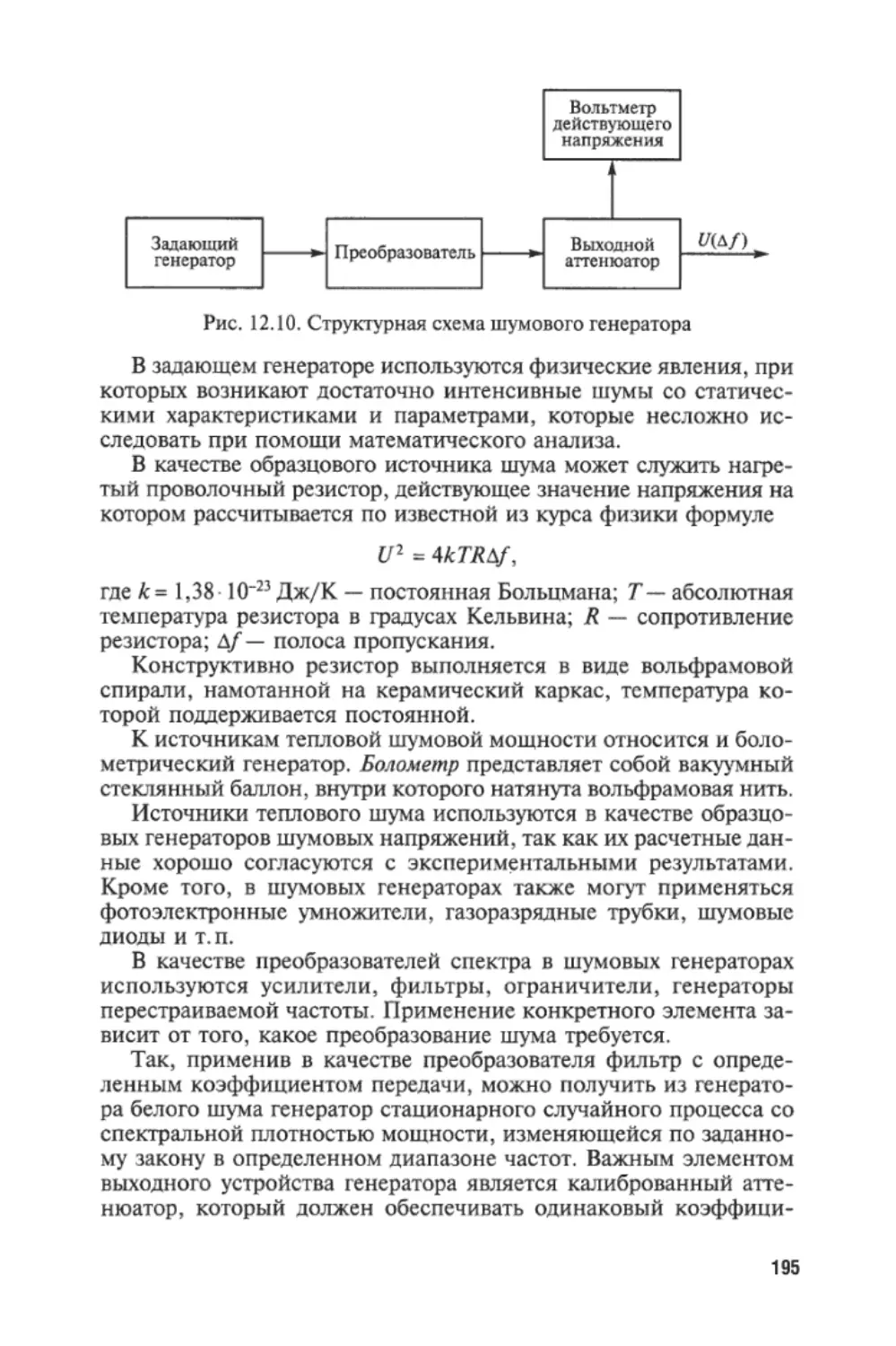
12.4. Генераторы шумовых сигналов.................194
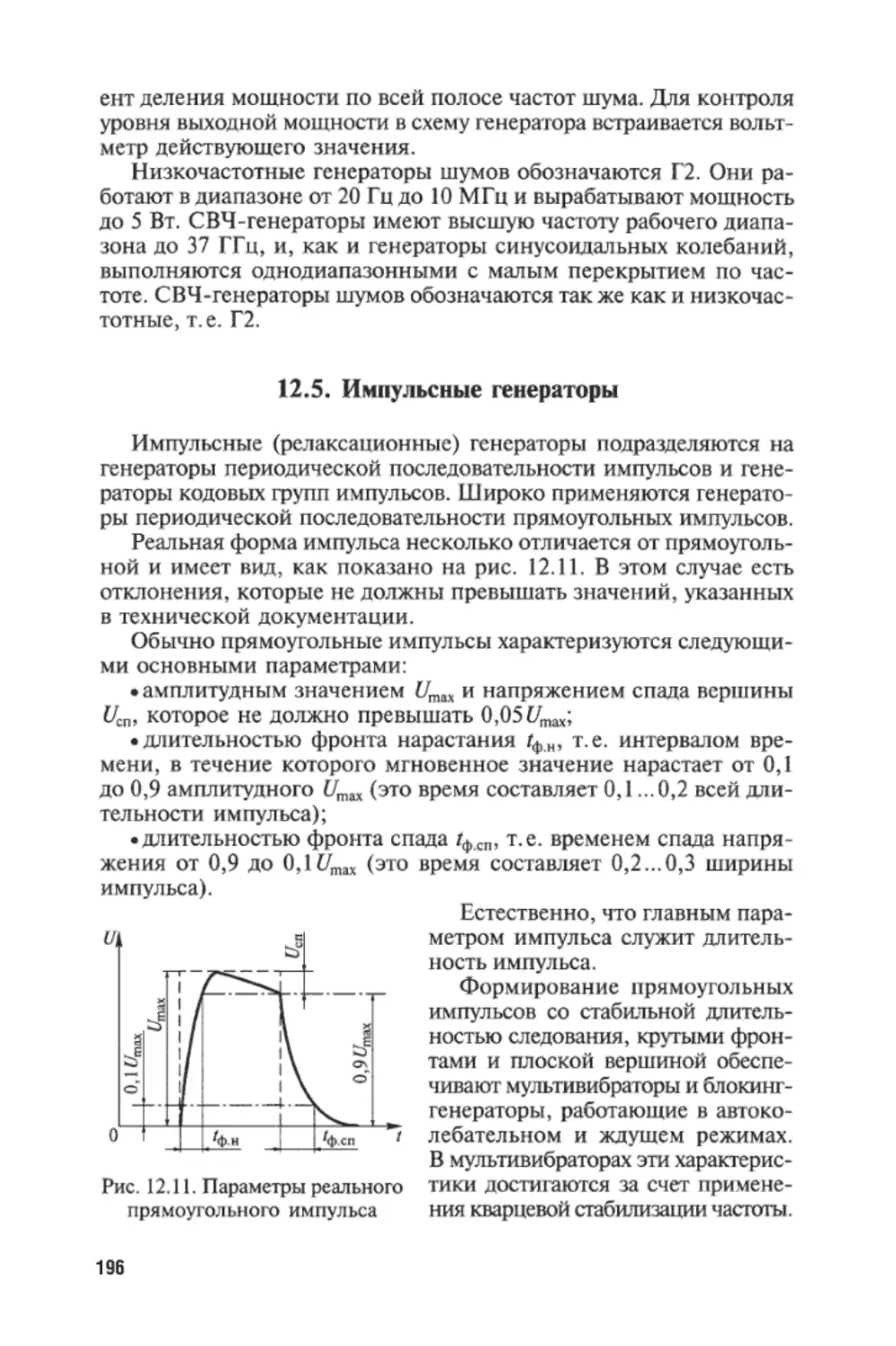
12.5. Импульсные генераторы.......................196
12.6. Стандарты частоты. Синтезаторы частоты......198
Контрольные вопросы...............................201
Глава 13. Анализ формы и параметров сигнала..........201
13.1. Основные сведения...........................201
6
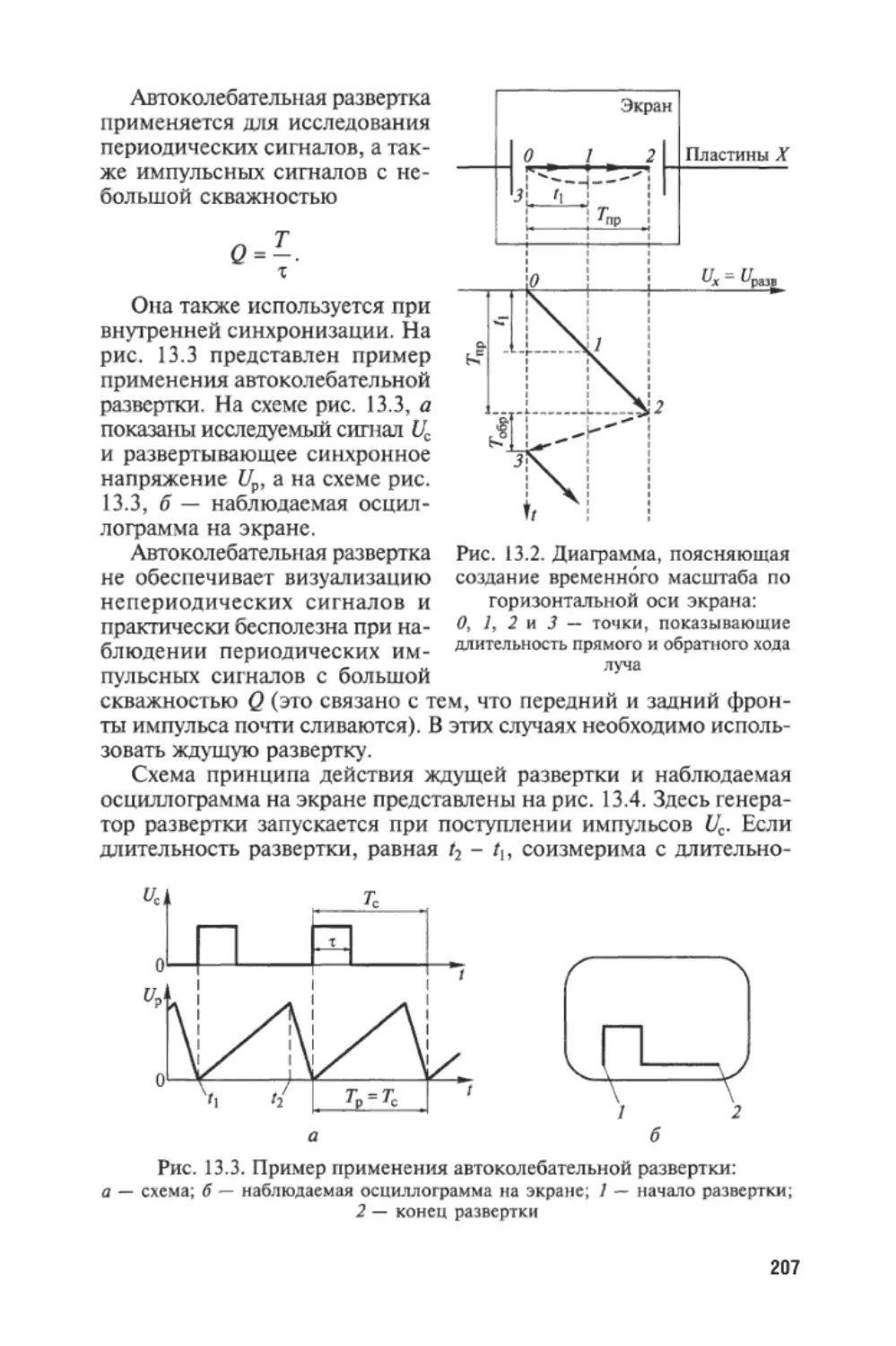
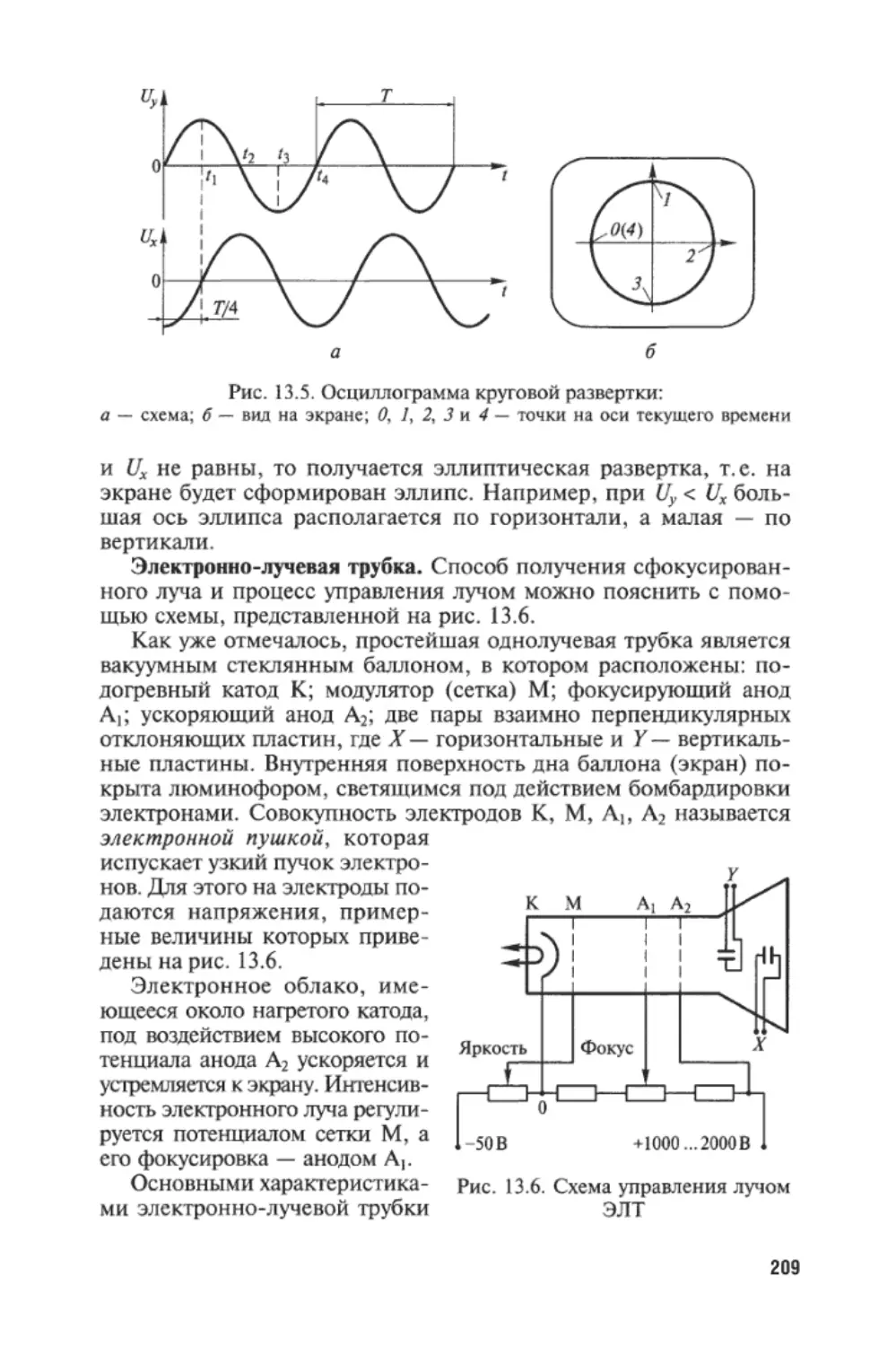
13.2. Структурная схема универсального осциллографа.203
13.3. Скоростные и стробоскопические осциллографы...218
13.4. Цифровые осциллографы.........................221
13.5. Методика получения осциллограмм непрерывных
и импульсных сигналов...............................223
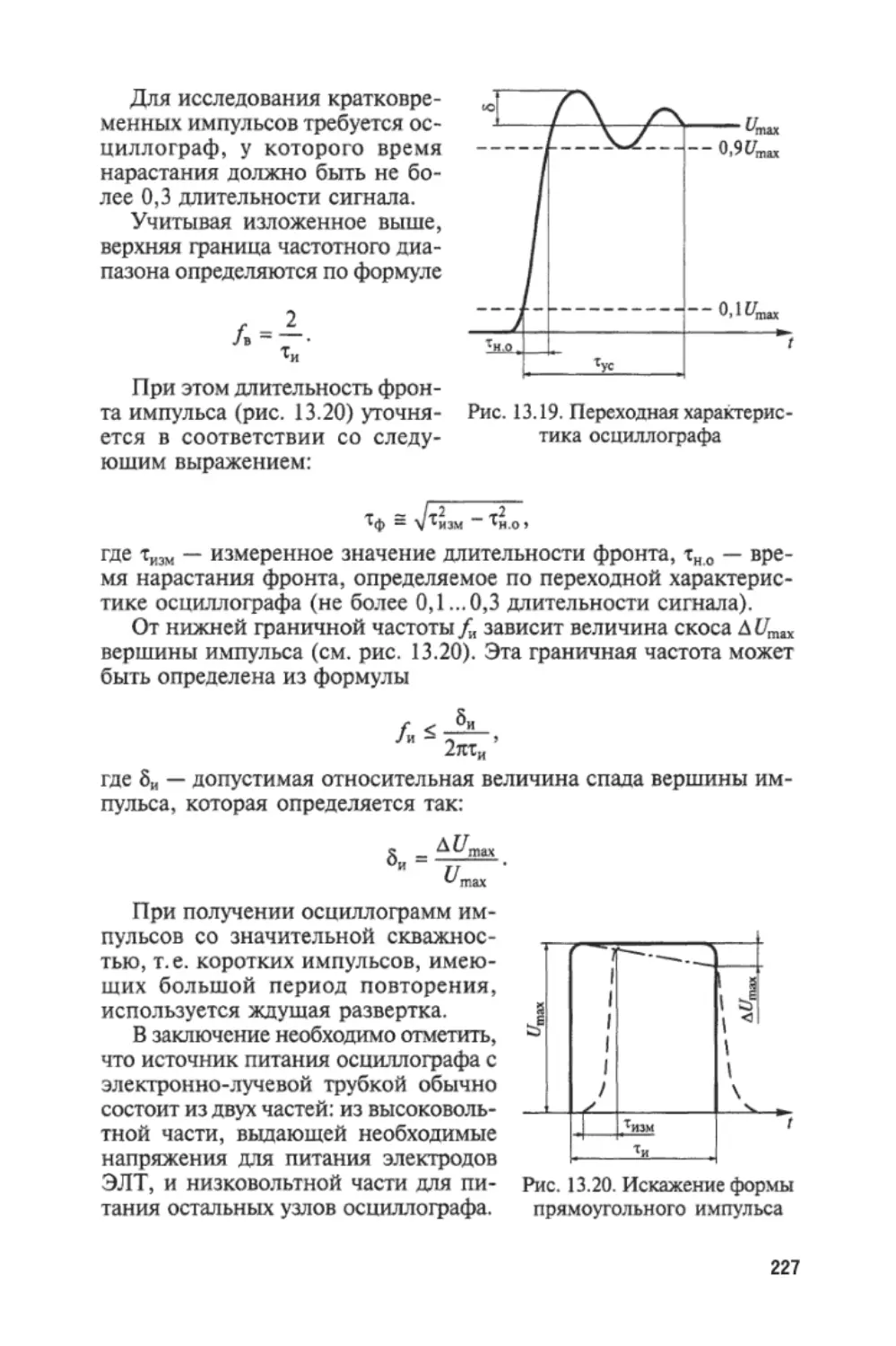
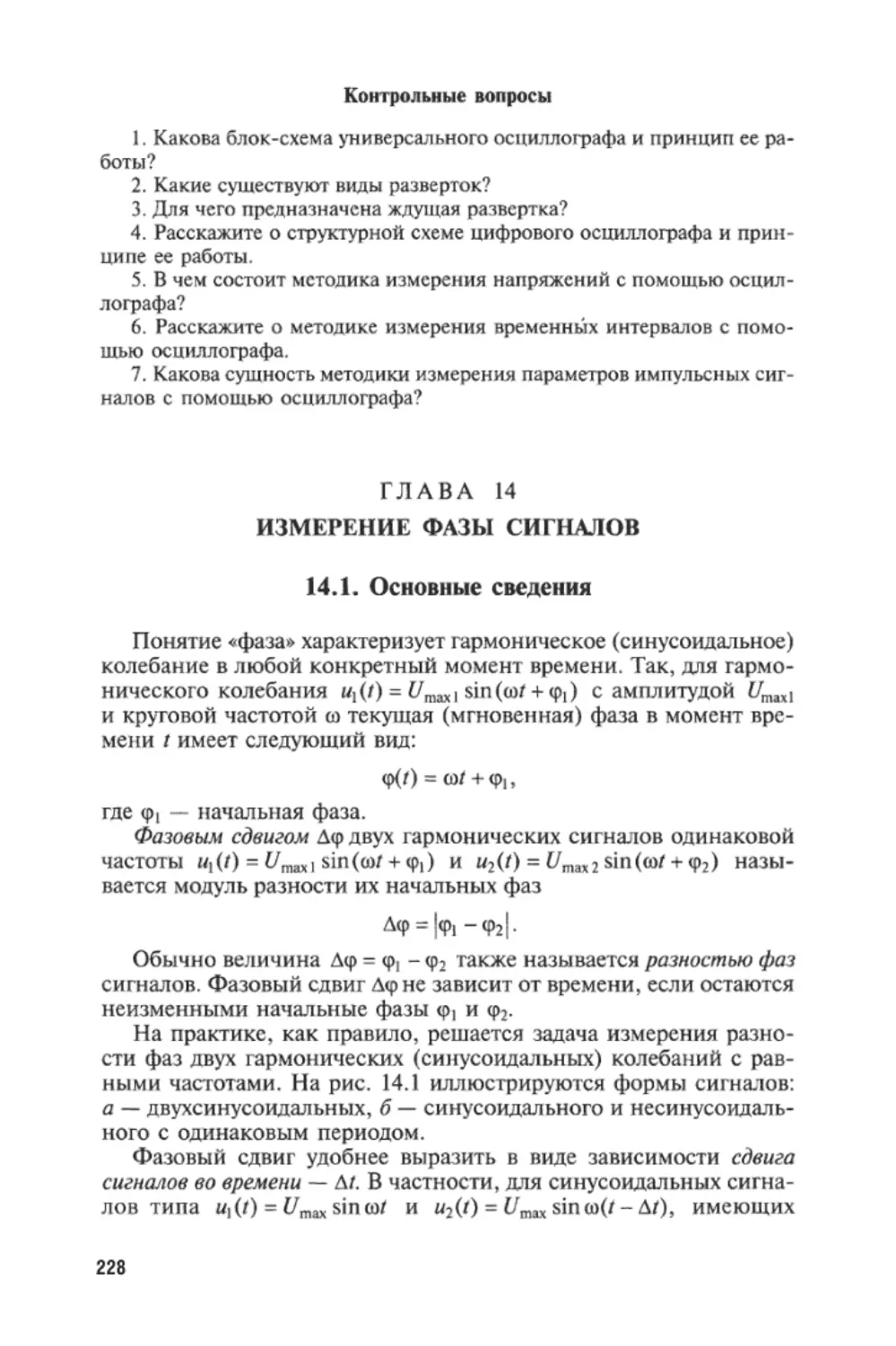
Контрольные вопросы...................................228
Глава 14. Измерение фазы сигналов......................228
14.1. Основные сведения.............................228
14.2. Осциллографический метод......................229
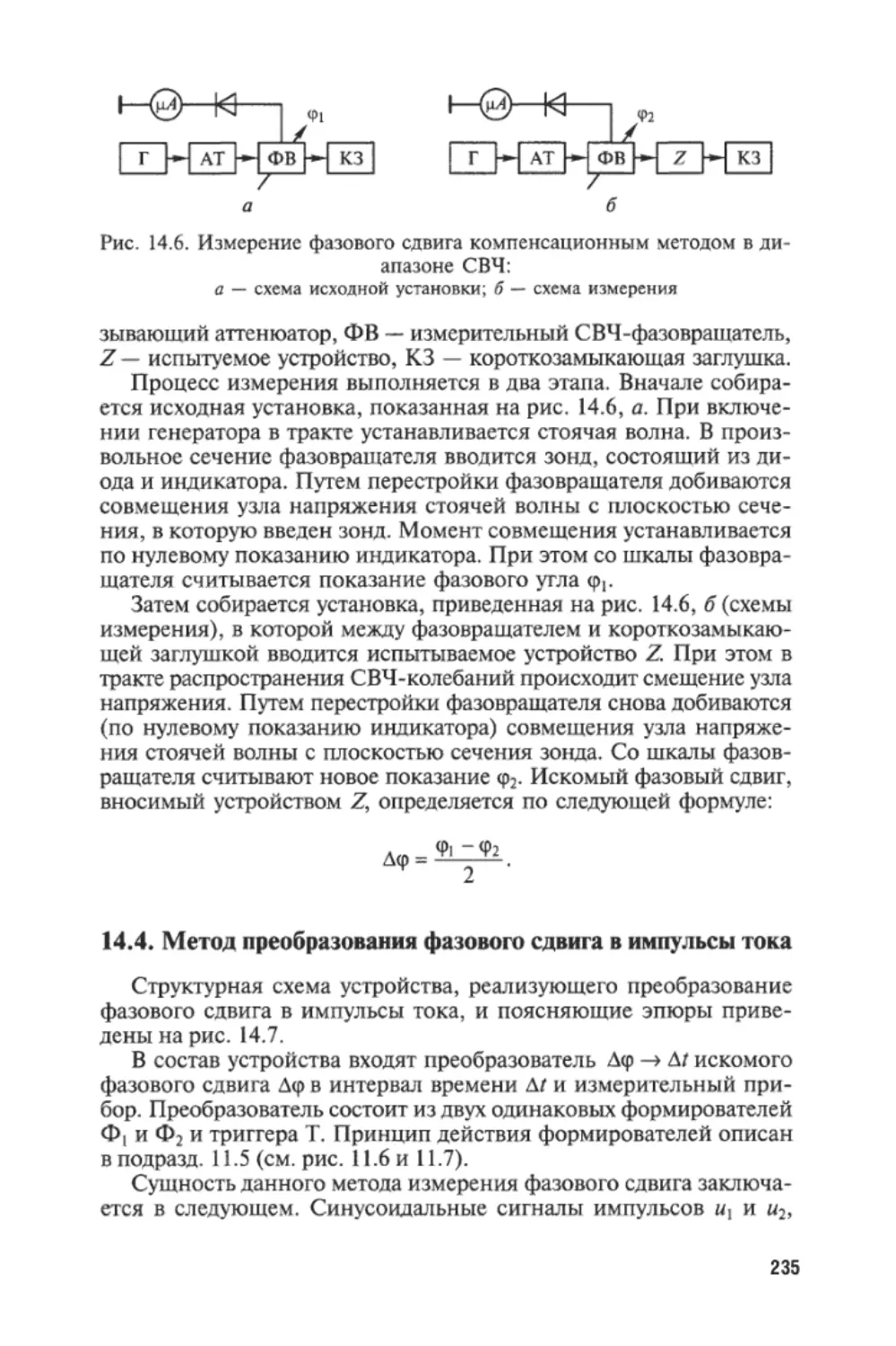
14.3. Компенсационный метод.........................234
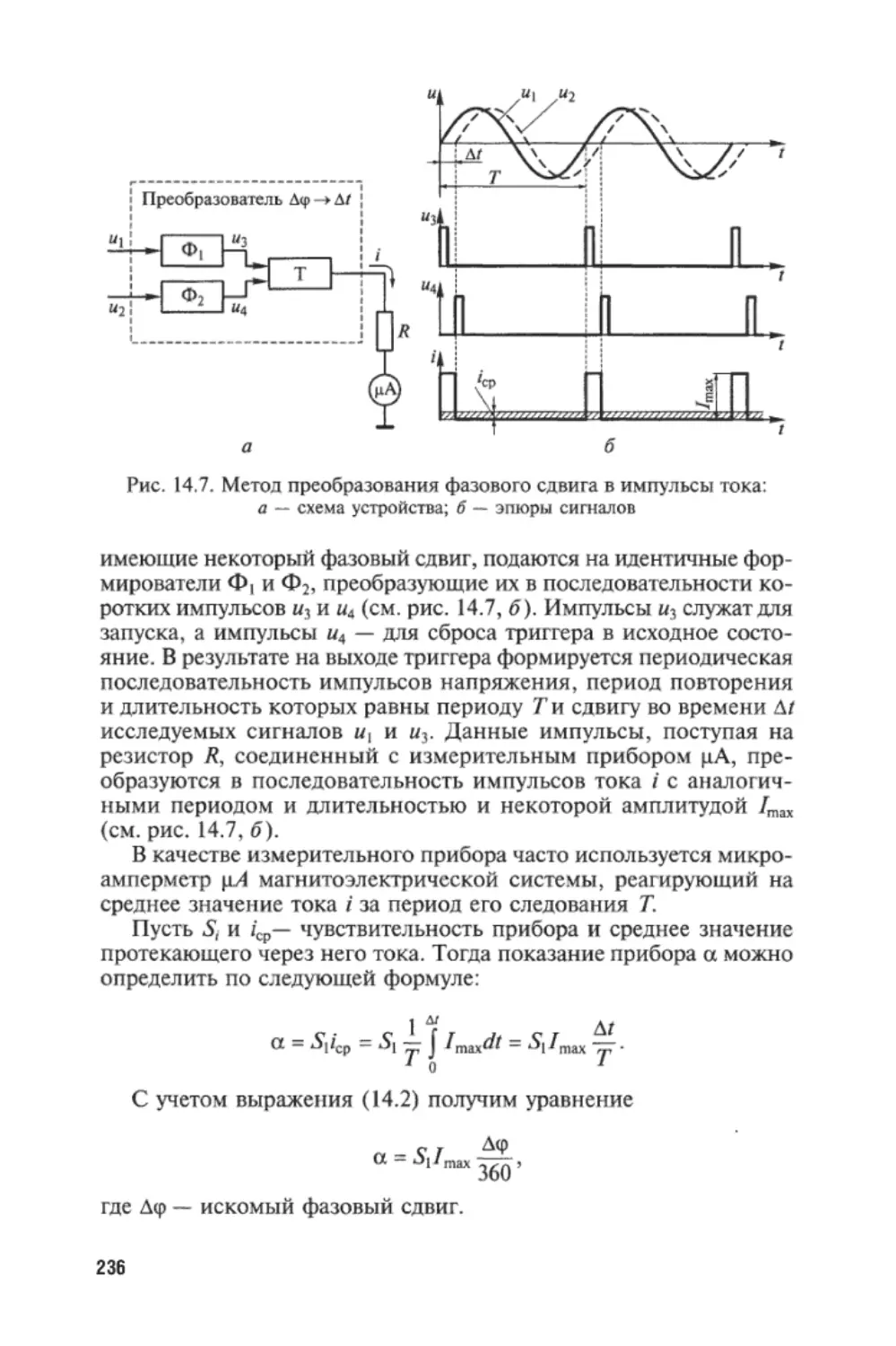
14.4. Метод преобразования фазового сдвига в импульсы
тока................................................235
14.5. Метод дискретного счета.......................237
14.6. Фазометр на основе микропроцессорной системы..241
14.7. Методы измерения фазового сдвига
с преобразованием частоты сигналов..................243
Контрольные вопросы...................................245
Глава 15. Анализ спектра сигналов. Измерение
коэффициента нелинейных искажений......................245
15.1. Основные сведения.............................245
15.2. Метод параллельного анализа...................247
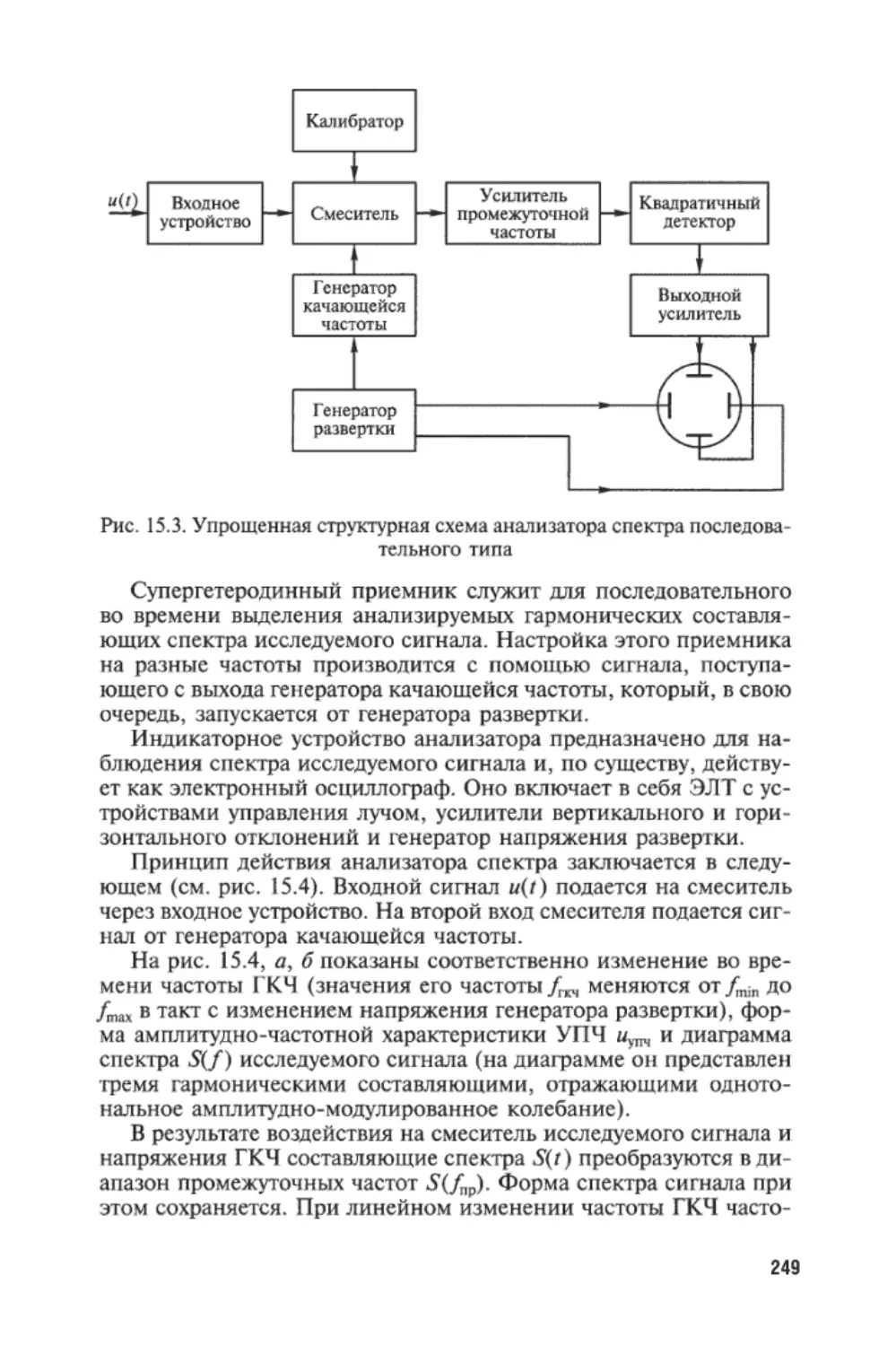
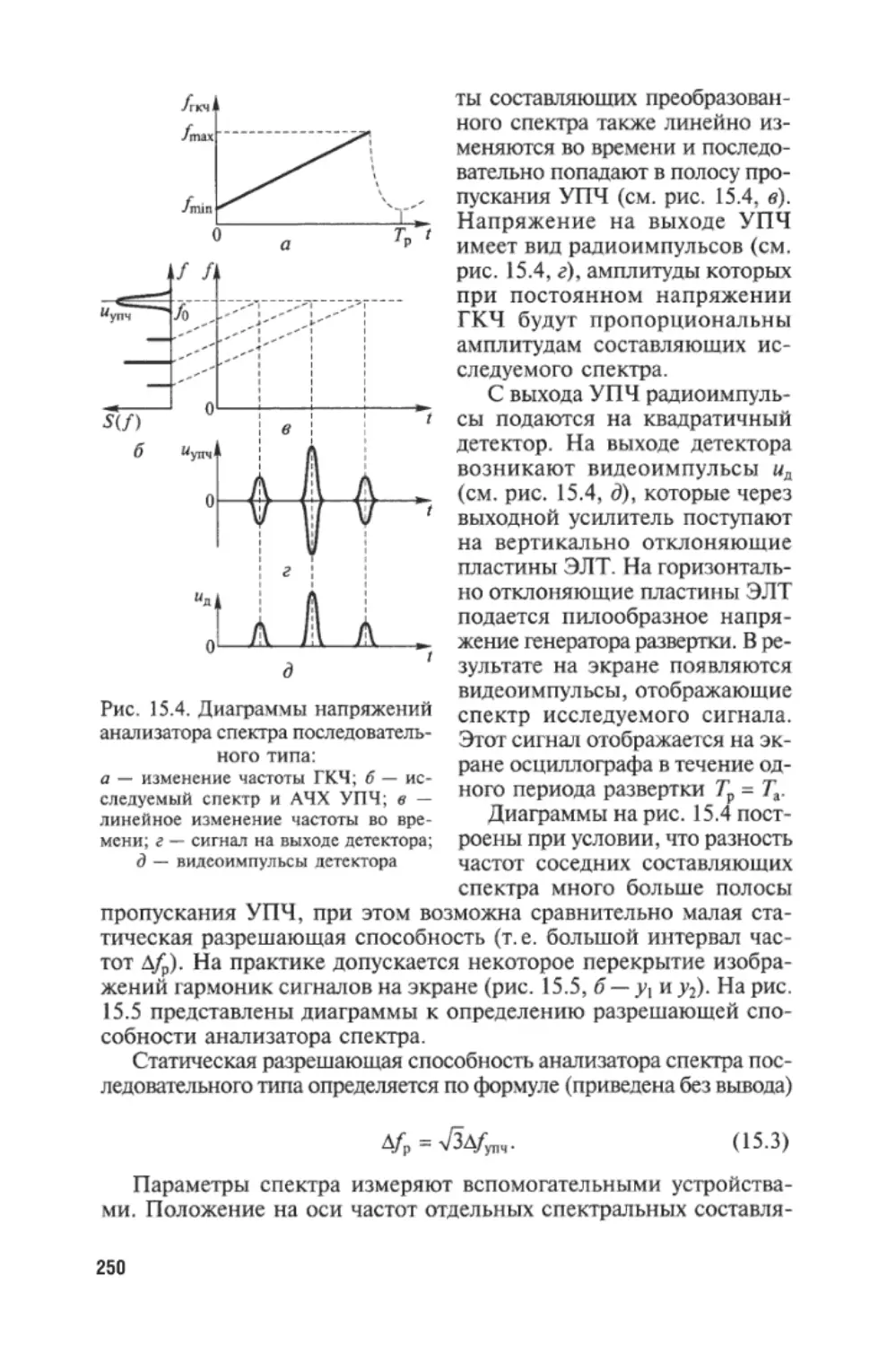
15.3. Метод последовательного анализа...............248
15.4. Цифровой метод анализа........................252
15.5. Анализаторы спектра на цифровых фильтрах......259
15.6. Измерение нелинейных искажений................262
Контрольные вопросы.................................263
Глава 16. Измерение электрических параметров
диодов, транзисторов и интегральных схем...............264
16.1. Основные сведения.............................264
16.2. Измерение параметров полупроводниковых приборов.264
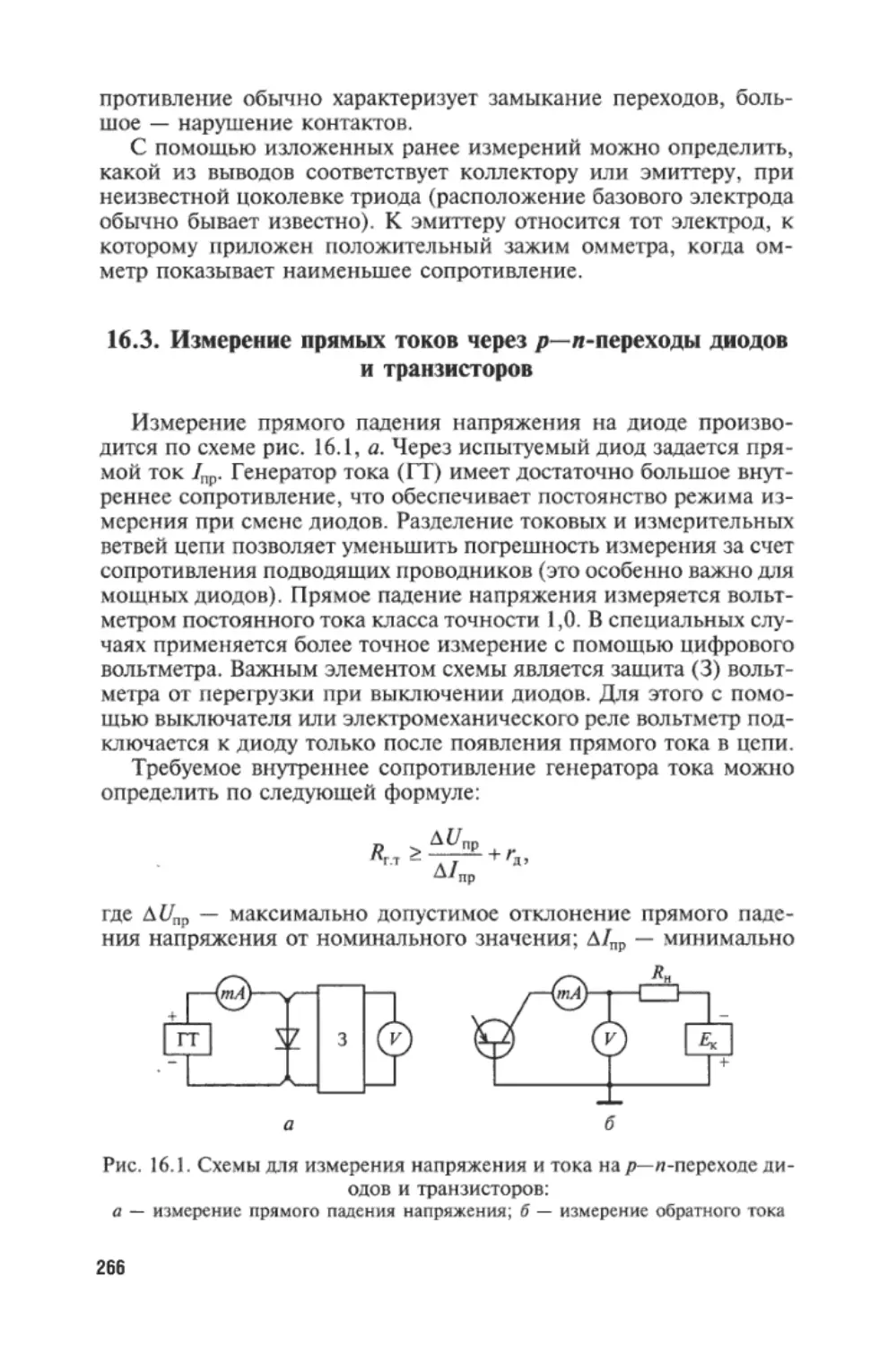
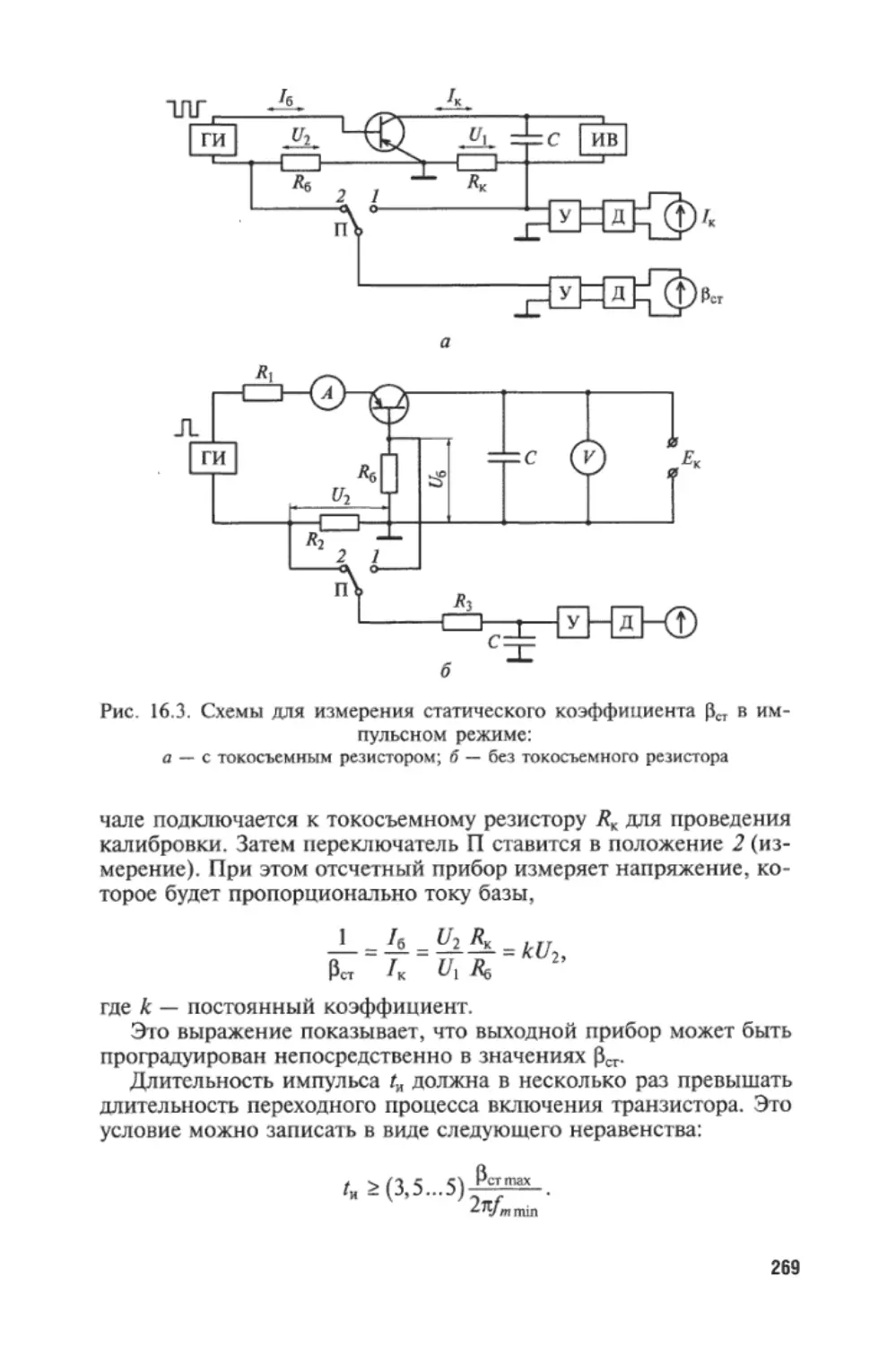
16.3. Измерение прямых токов через р—zi-переходы диодов
и транзисторов......................................266
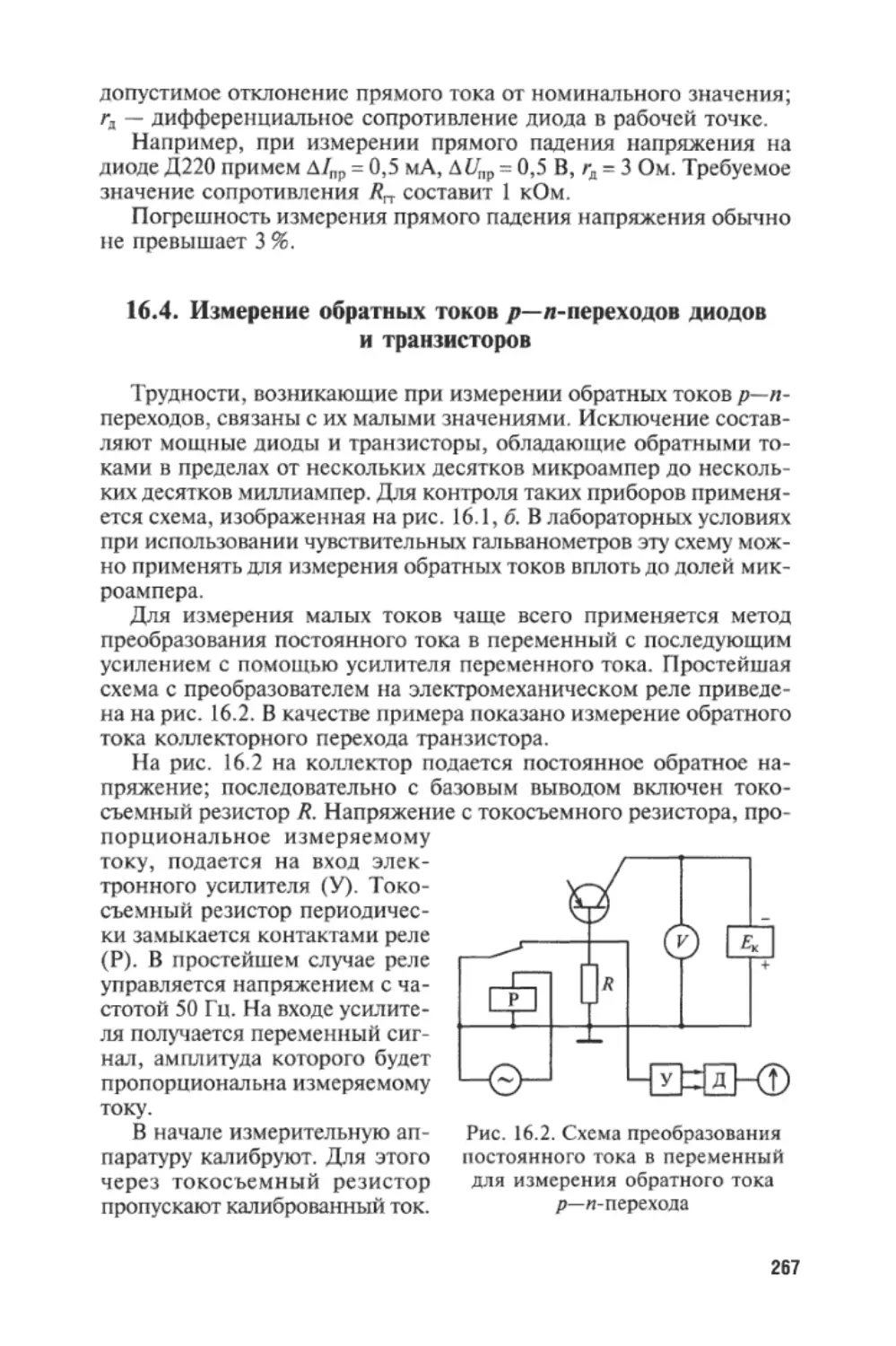
16.4. Измерение обратных токов р—n-переходов диодов
и транзисторов......................................267
16.5. Измерение статических параметров транзисторов.268
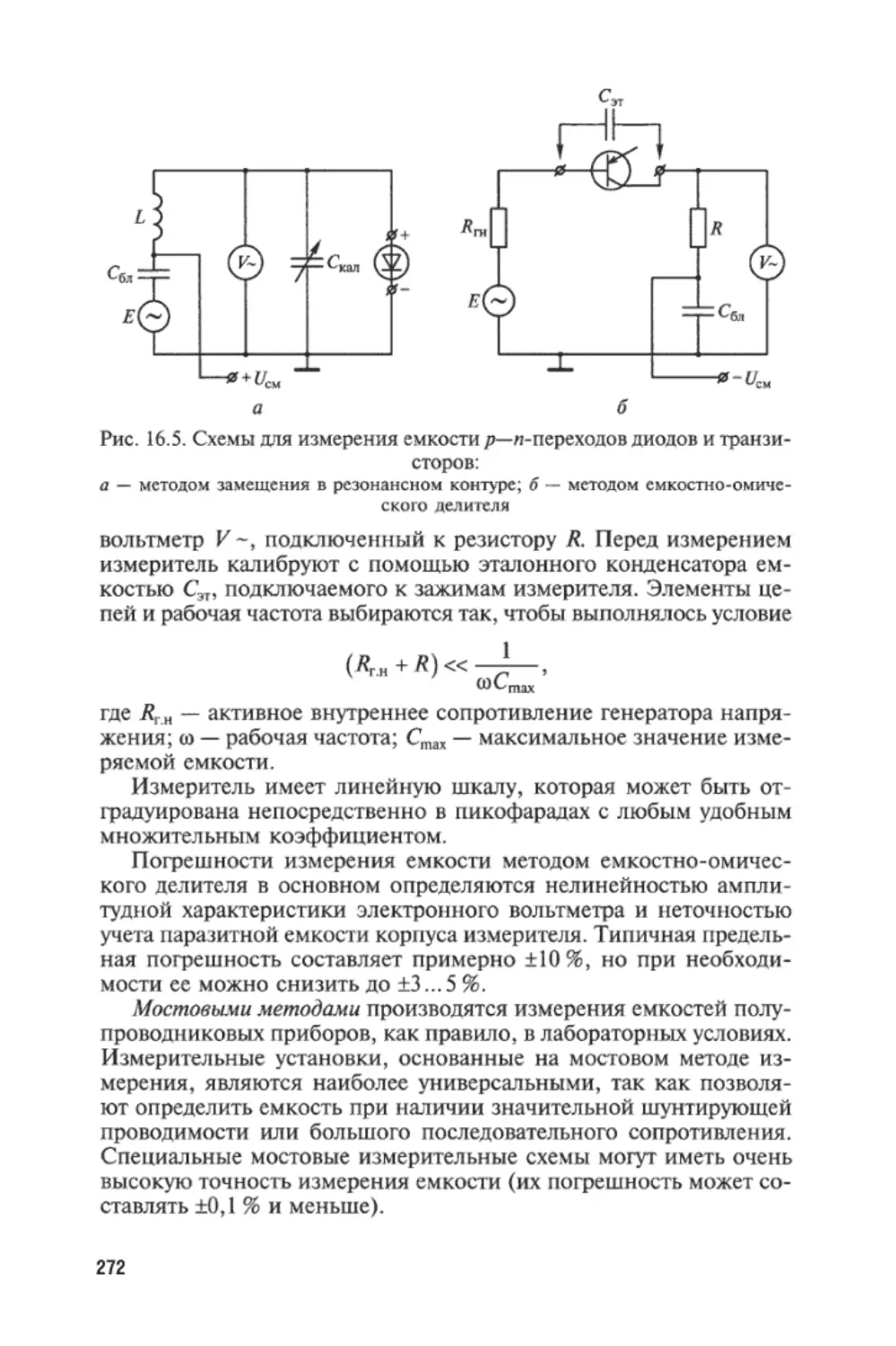
16.6. Измерение емкостей полупроводниковых приборов.271
16.7. Измерение импульсных параметров
полупроводниковых диодов............................273
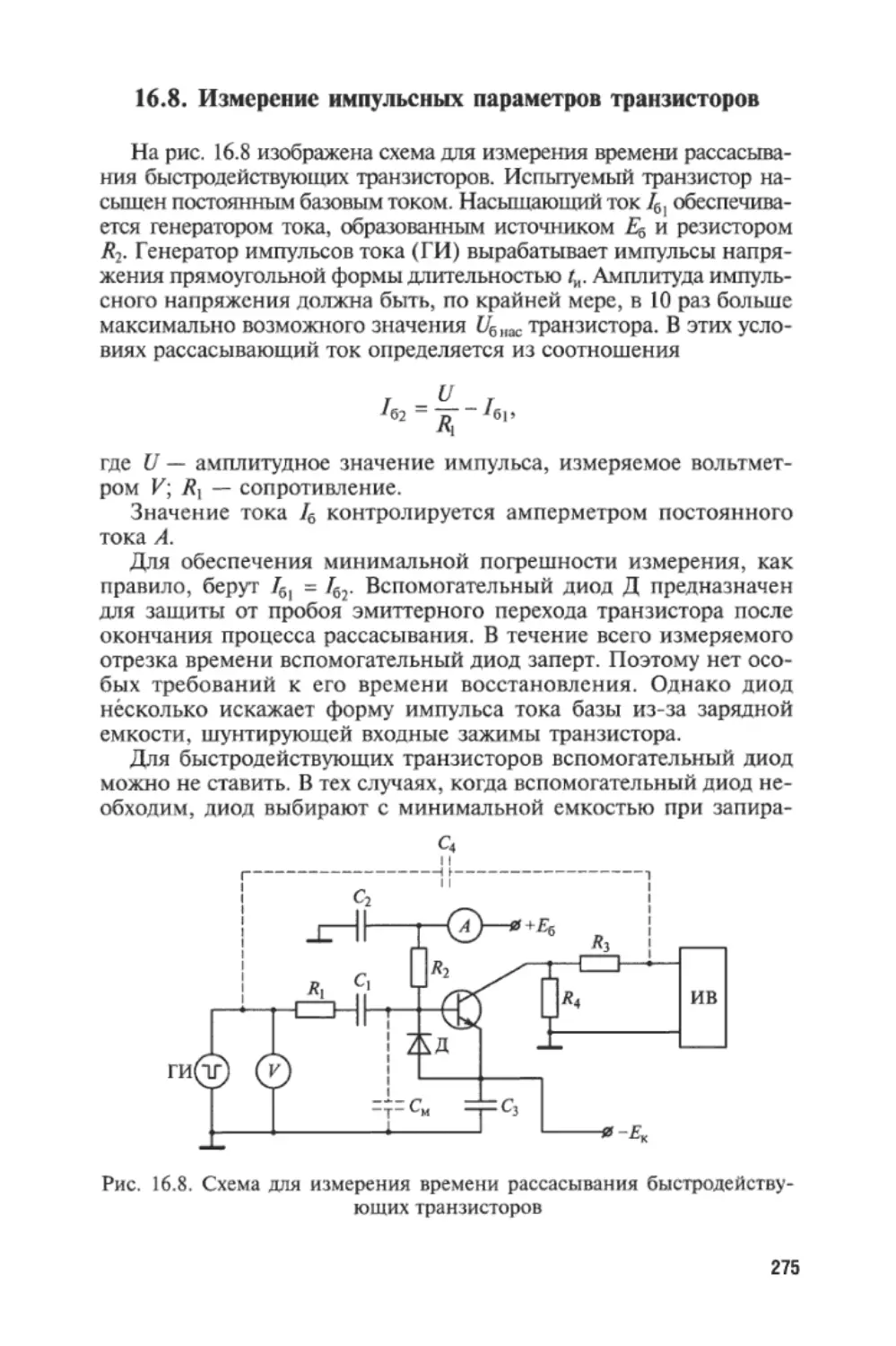
16.8. Измерение импульсных параметров транзисторов..275
7
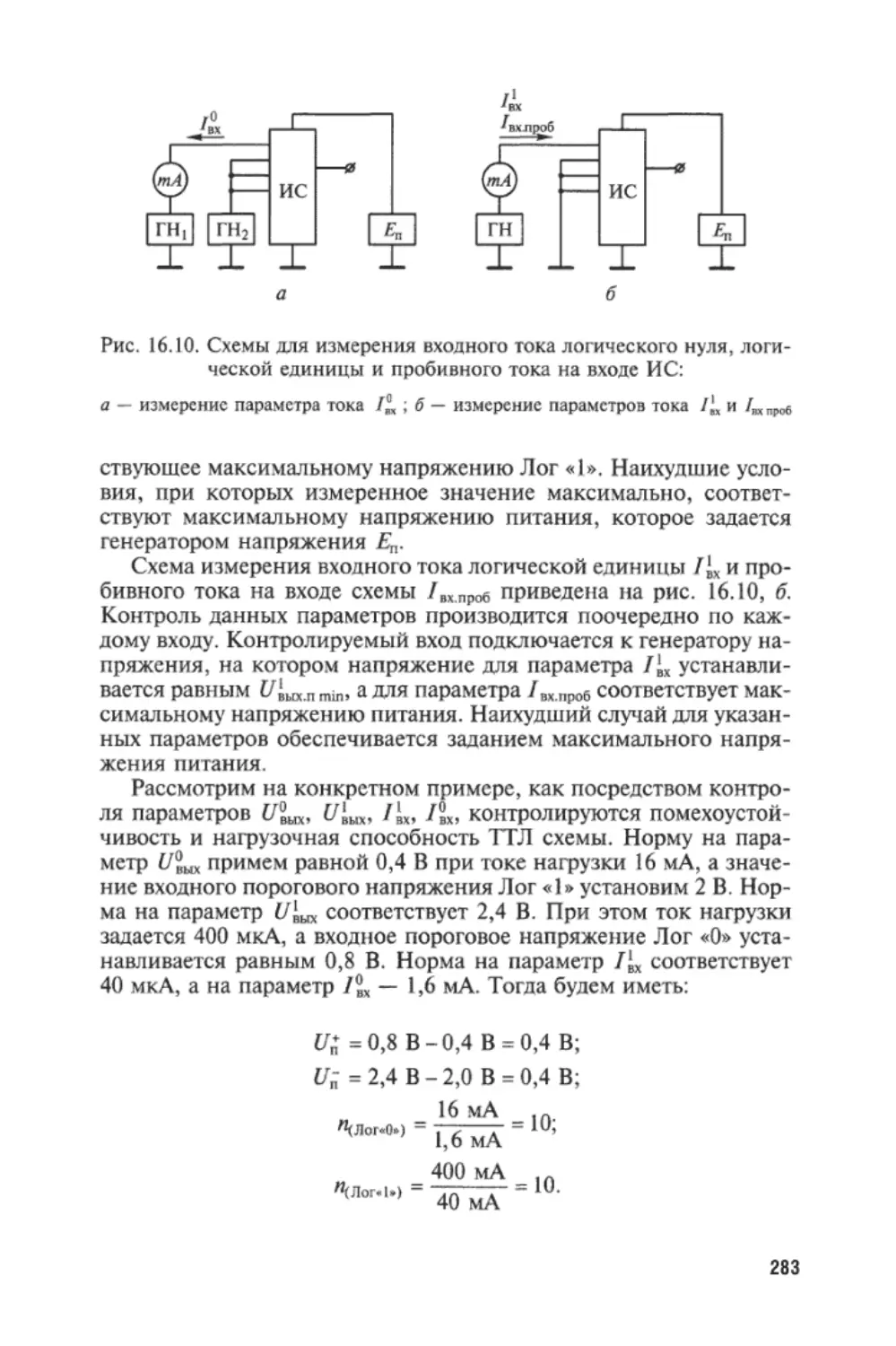
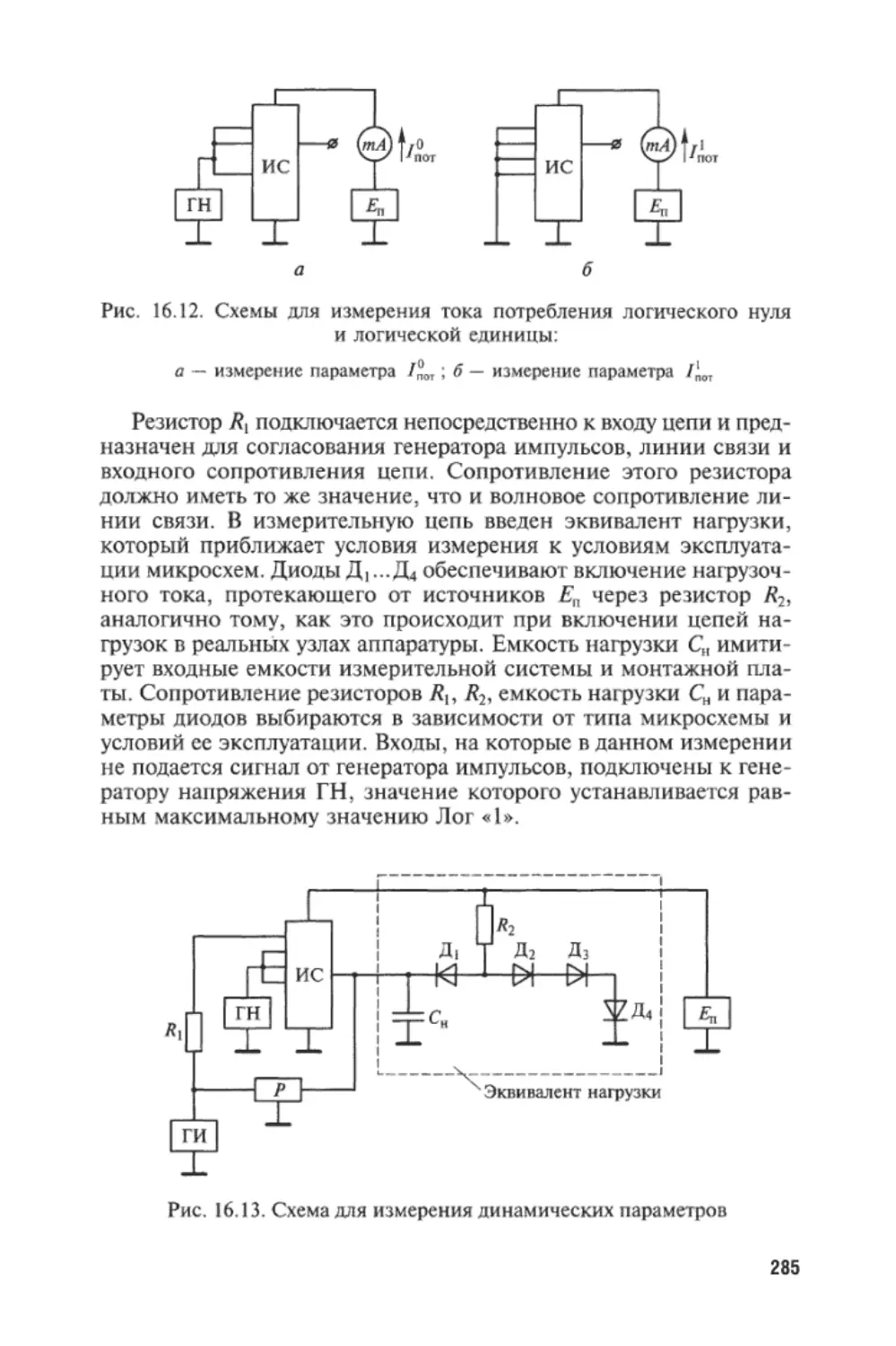
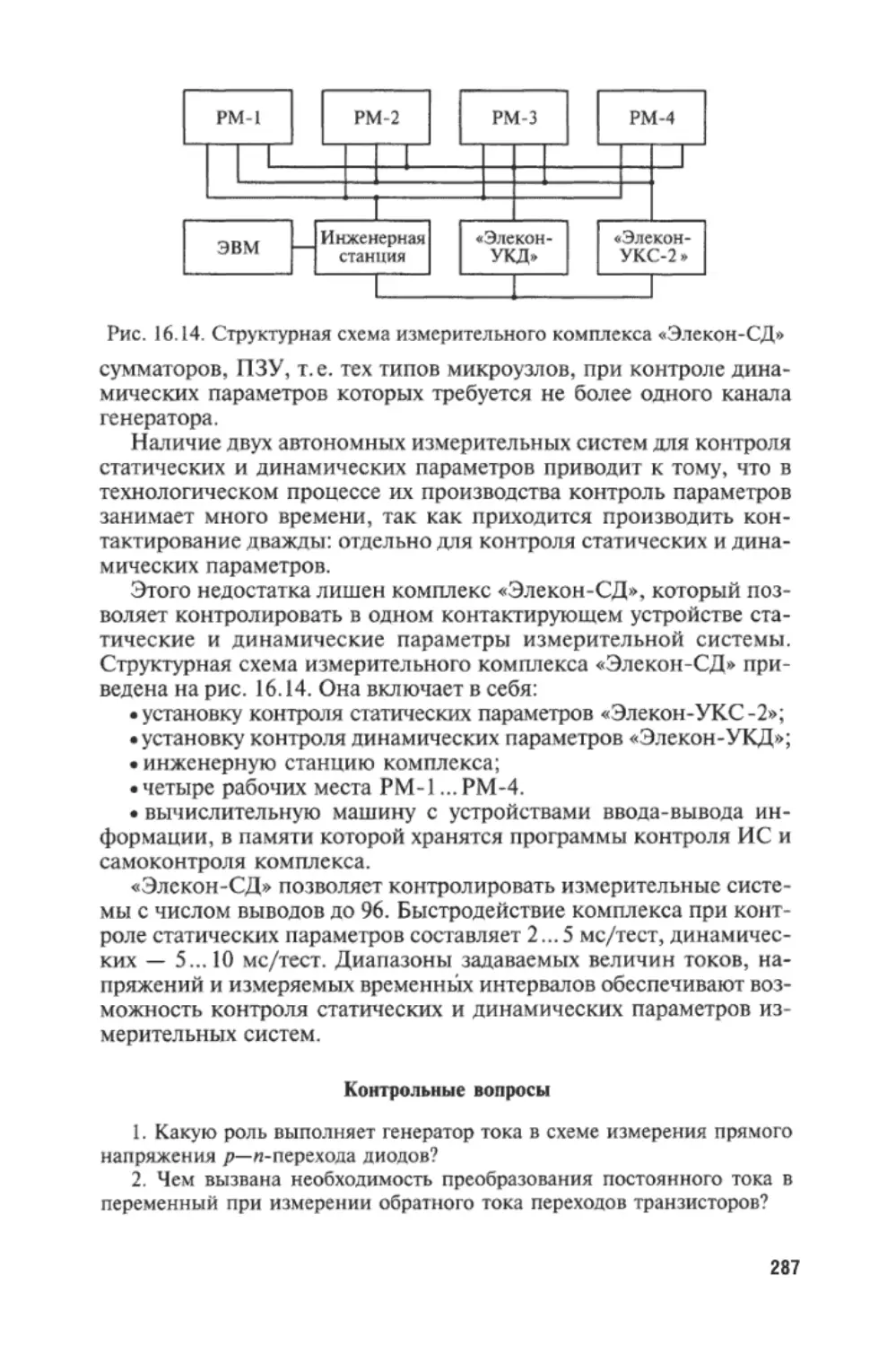
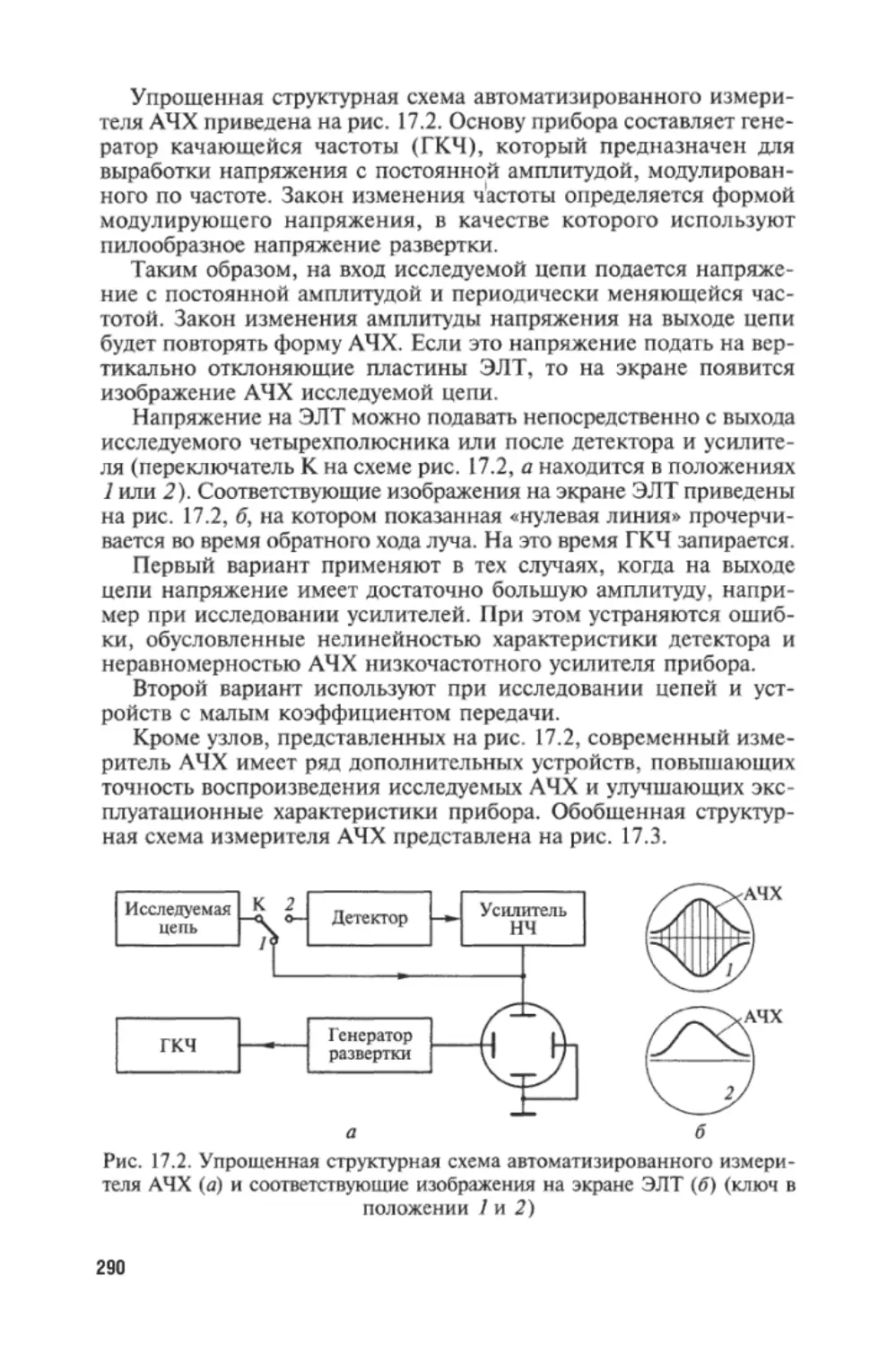
16.9. Измерение электрических параметров интегральных
схем.............................................276
Контрольные вопросы...............................287
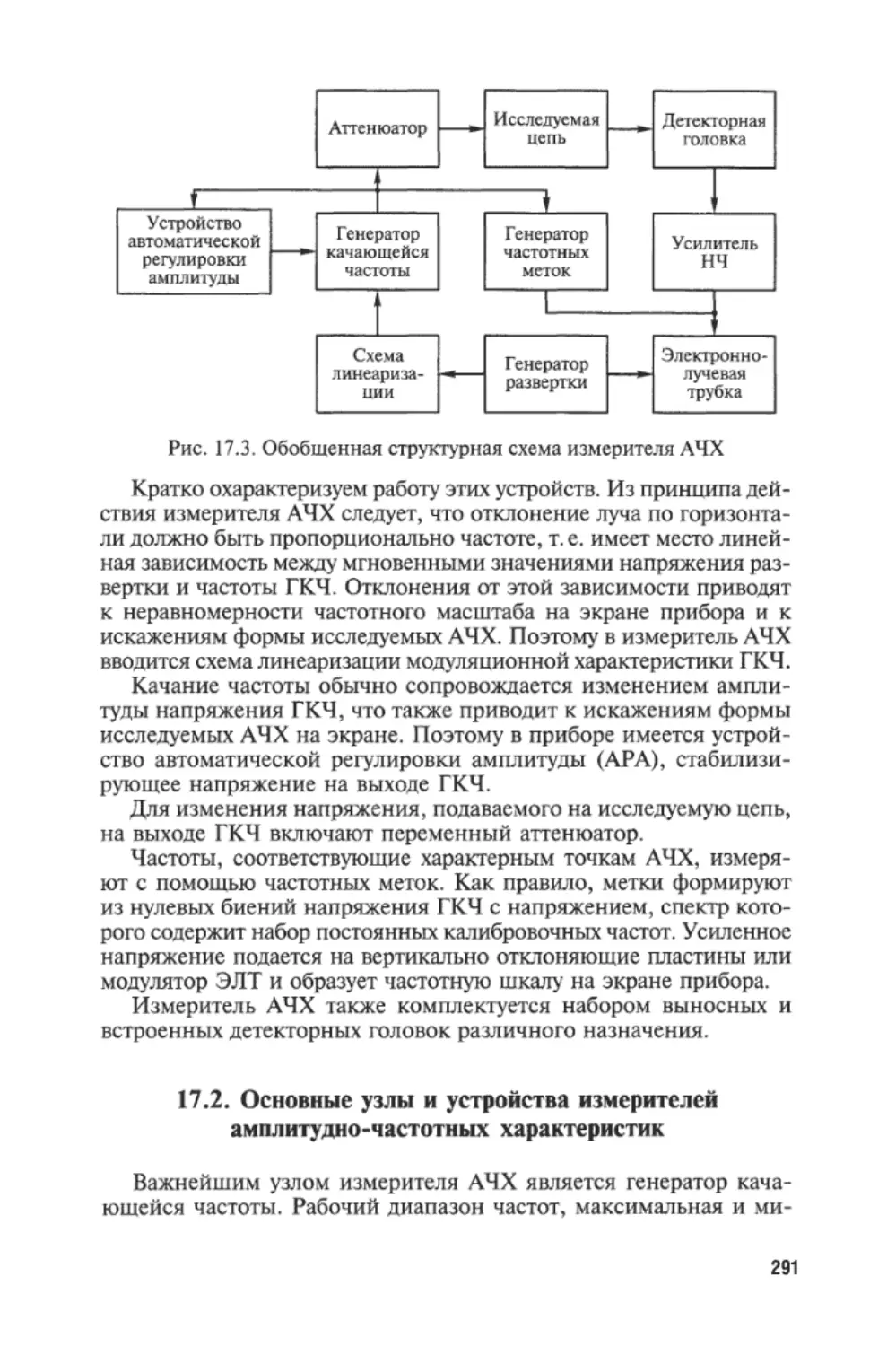
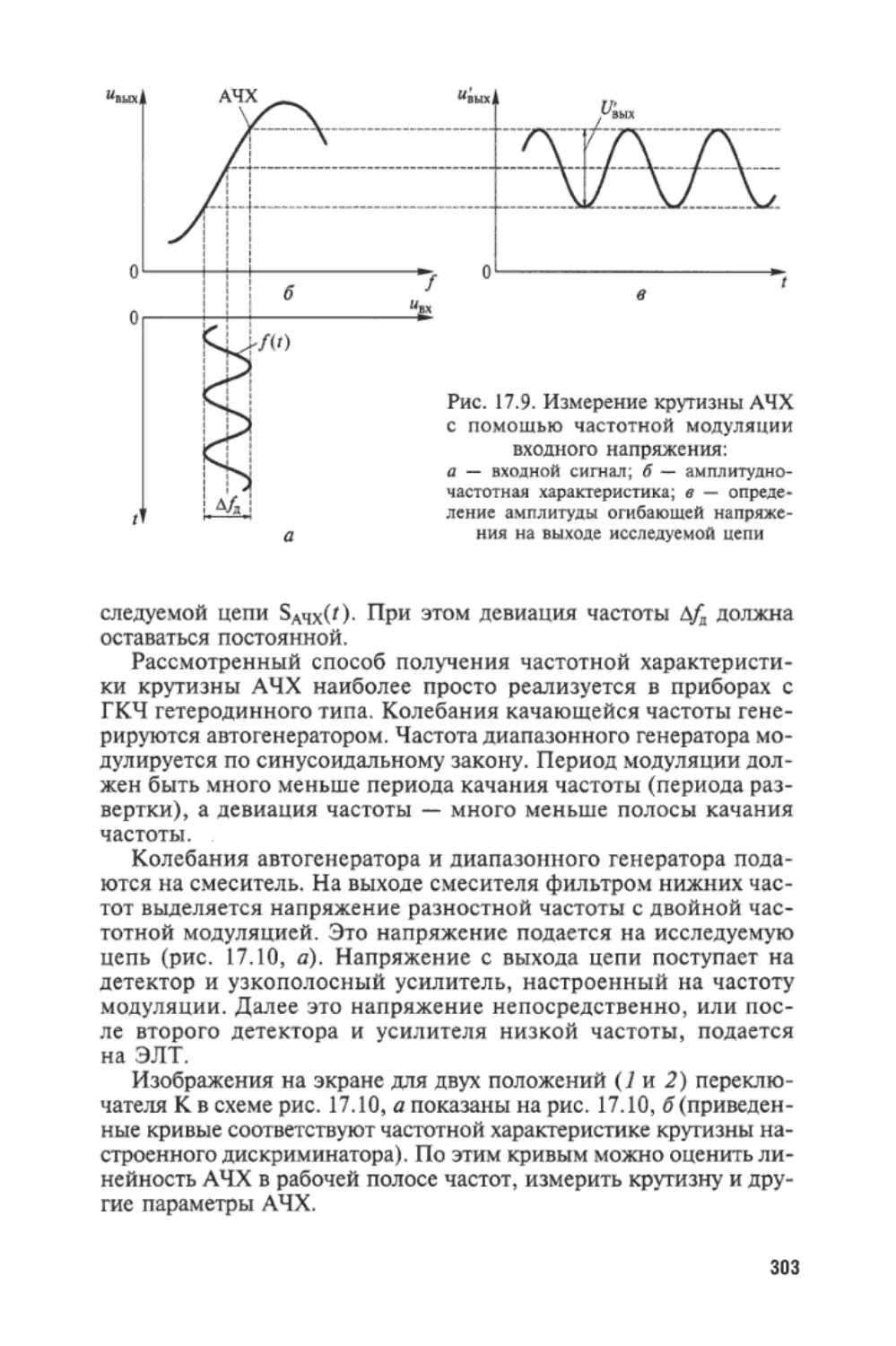
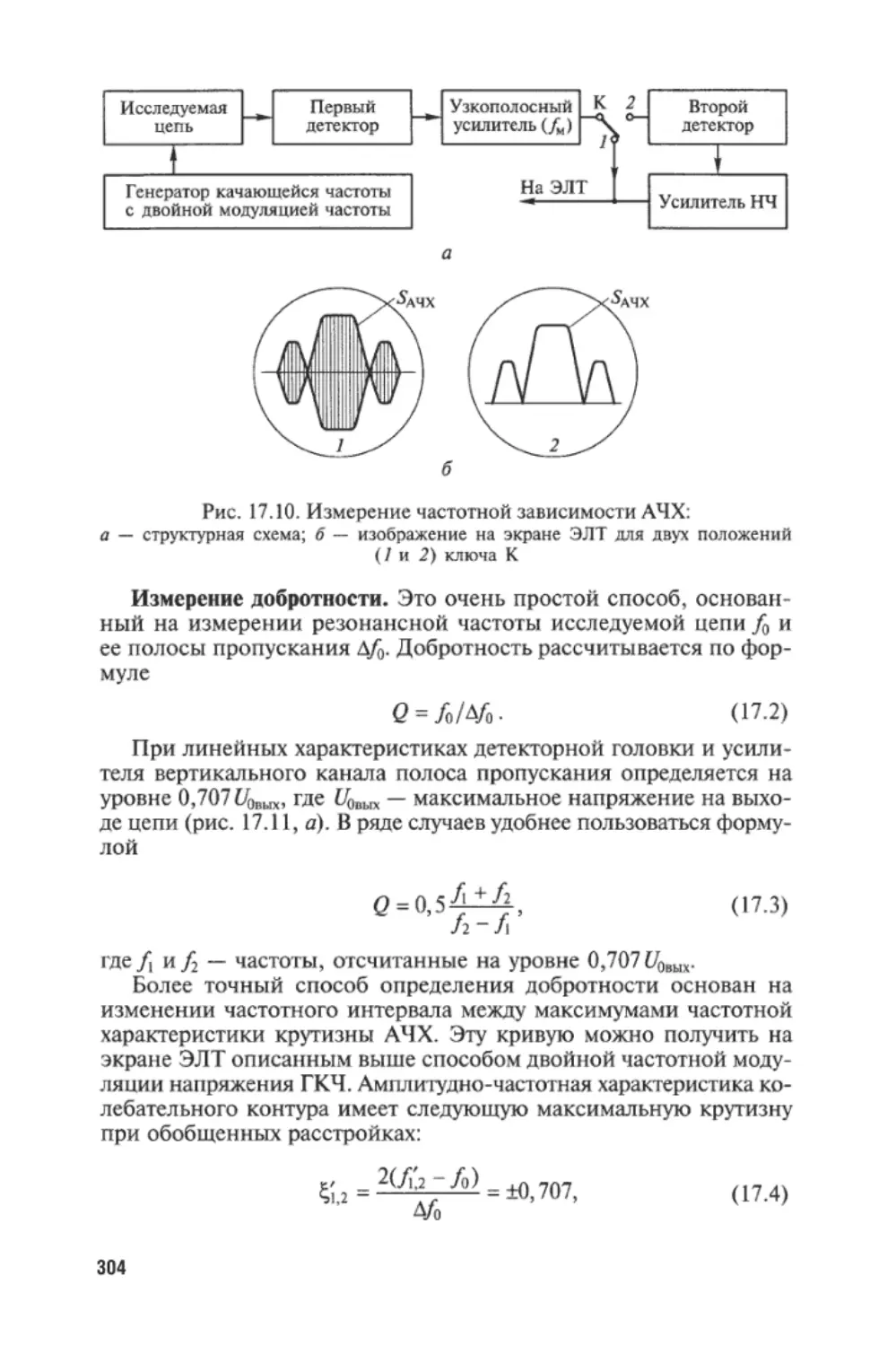
Глава 17. Измерение амплитудно-частотных
характеристик........................................288
17.1. Структурные схемы измерителей амплитудно-
частотных характеристик...........................288
17.2. Основные узлы и устройства измерителей
амплитудно-частотных характеристик................291
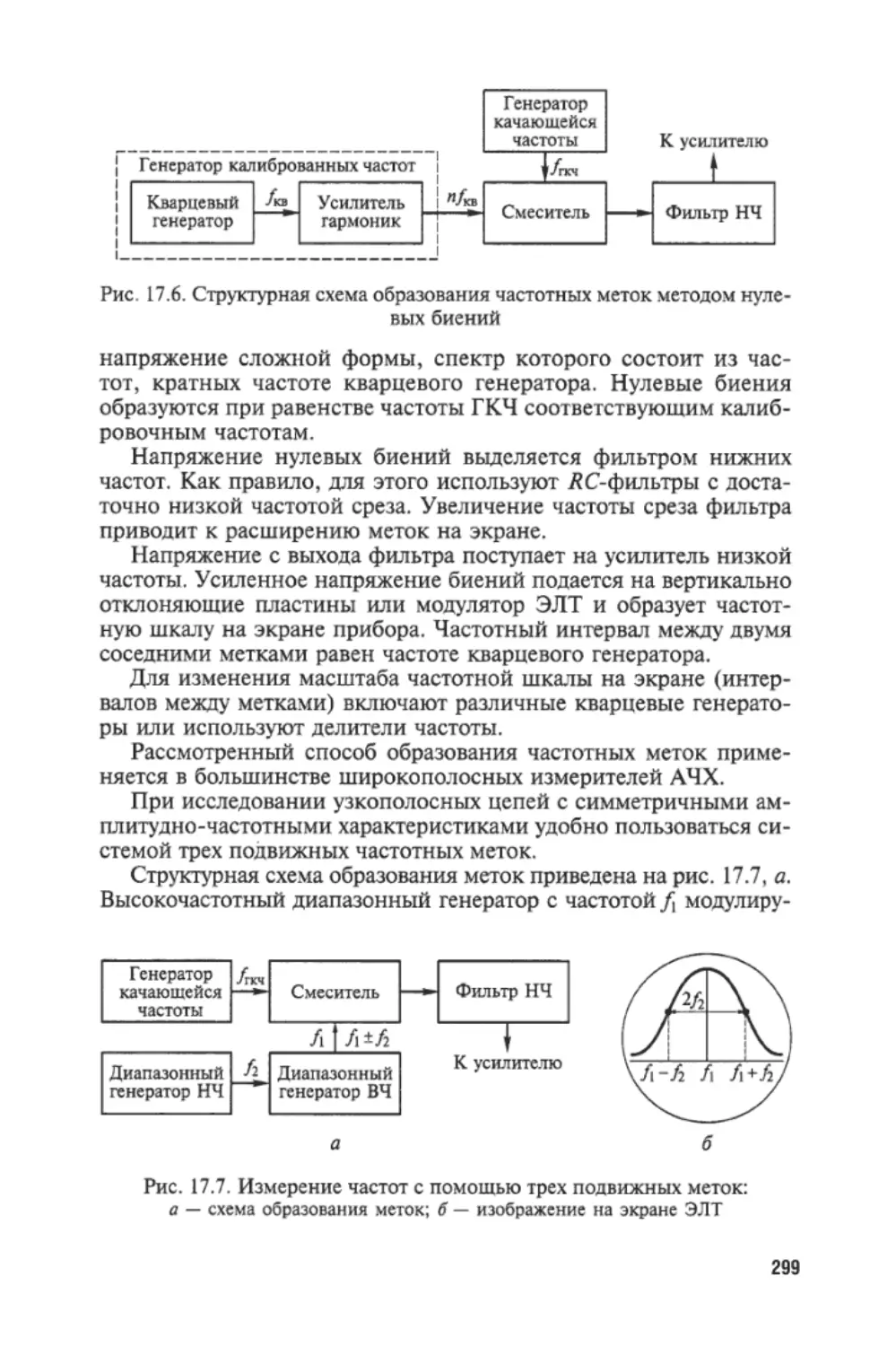
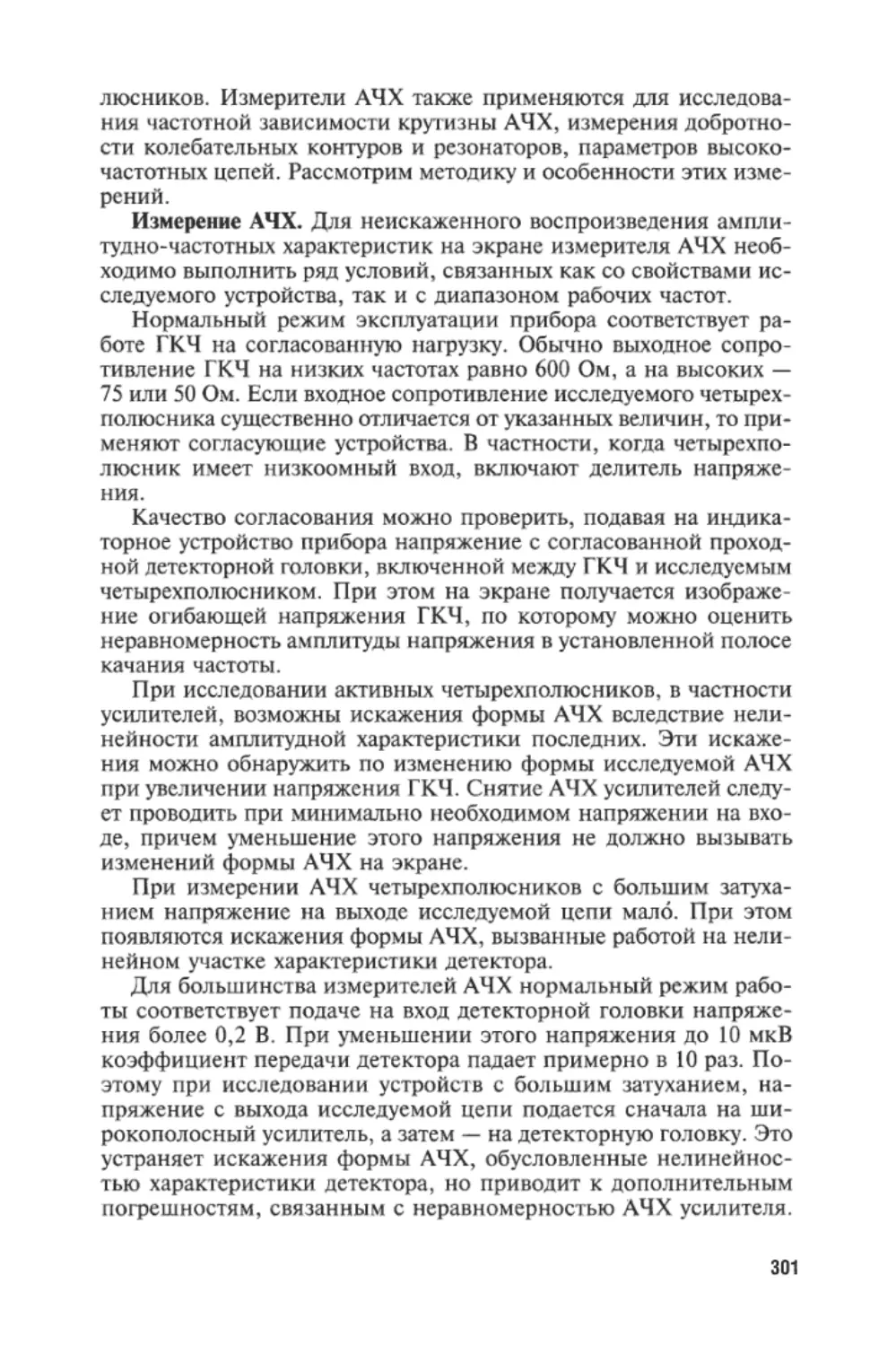
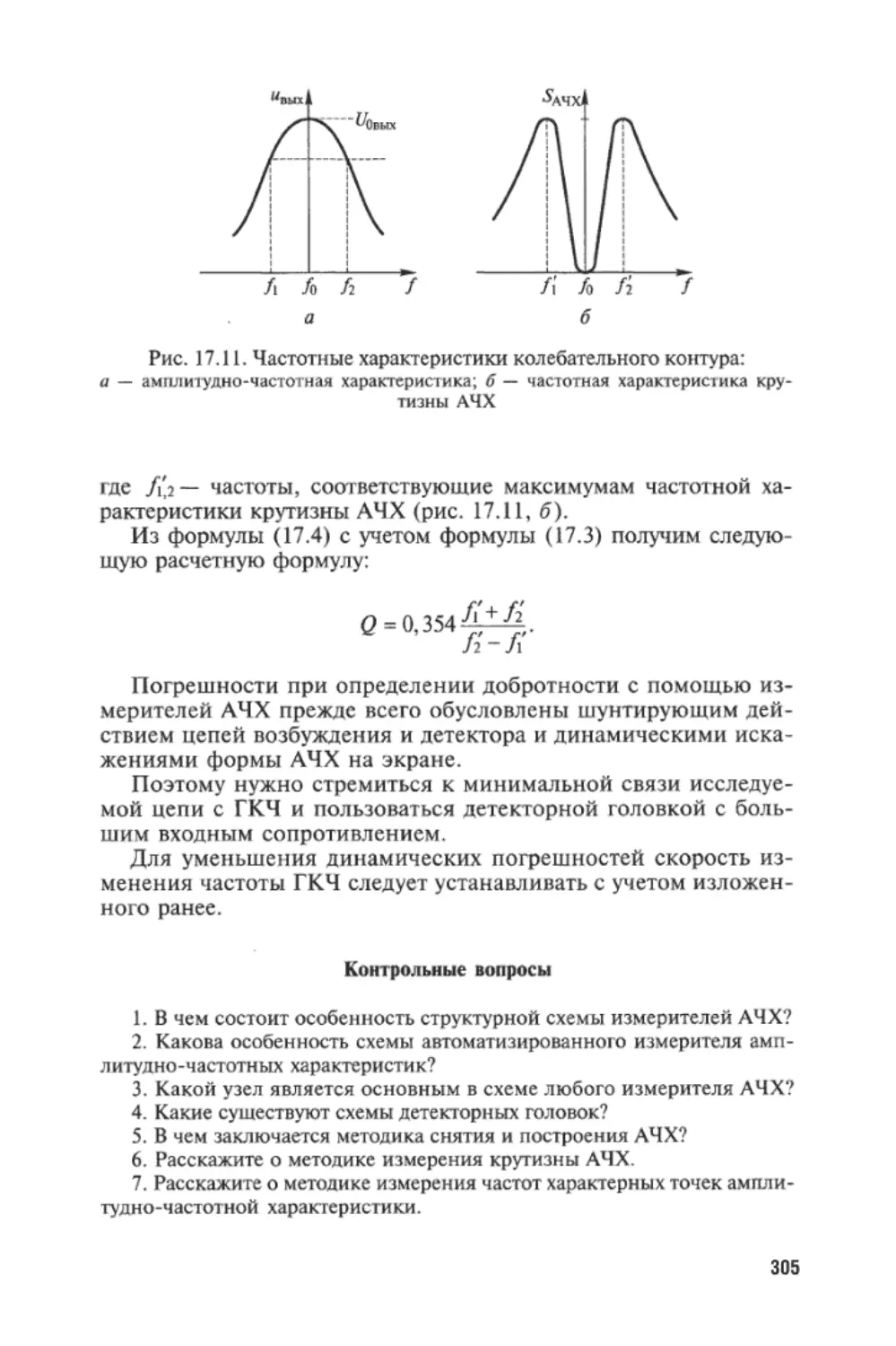
17.3. Измерение частот характерных точек амплитудно-
частотных характеристик..........................298
17.4. Применение измерителей амплитудно-частотных
характеристик....................................300
Контрольные вопросы...............................305
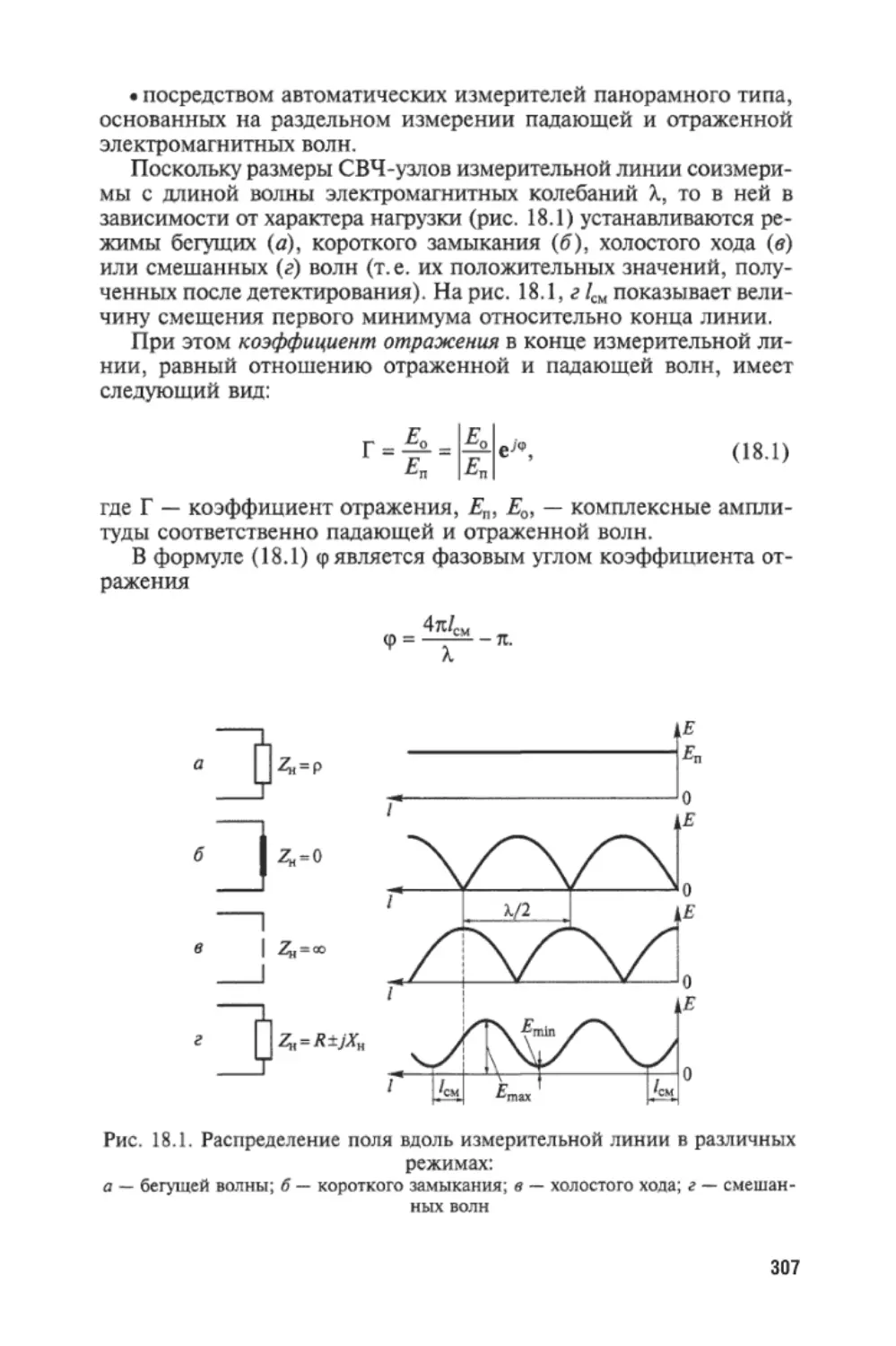
Глава 18. Измерения в цепях с распределенными
параметрами..........................................306
18.1. Основные сведения...........................306
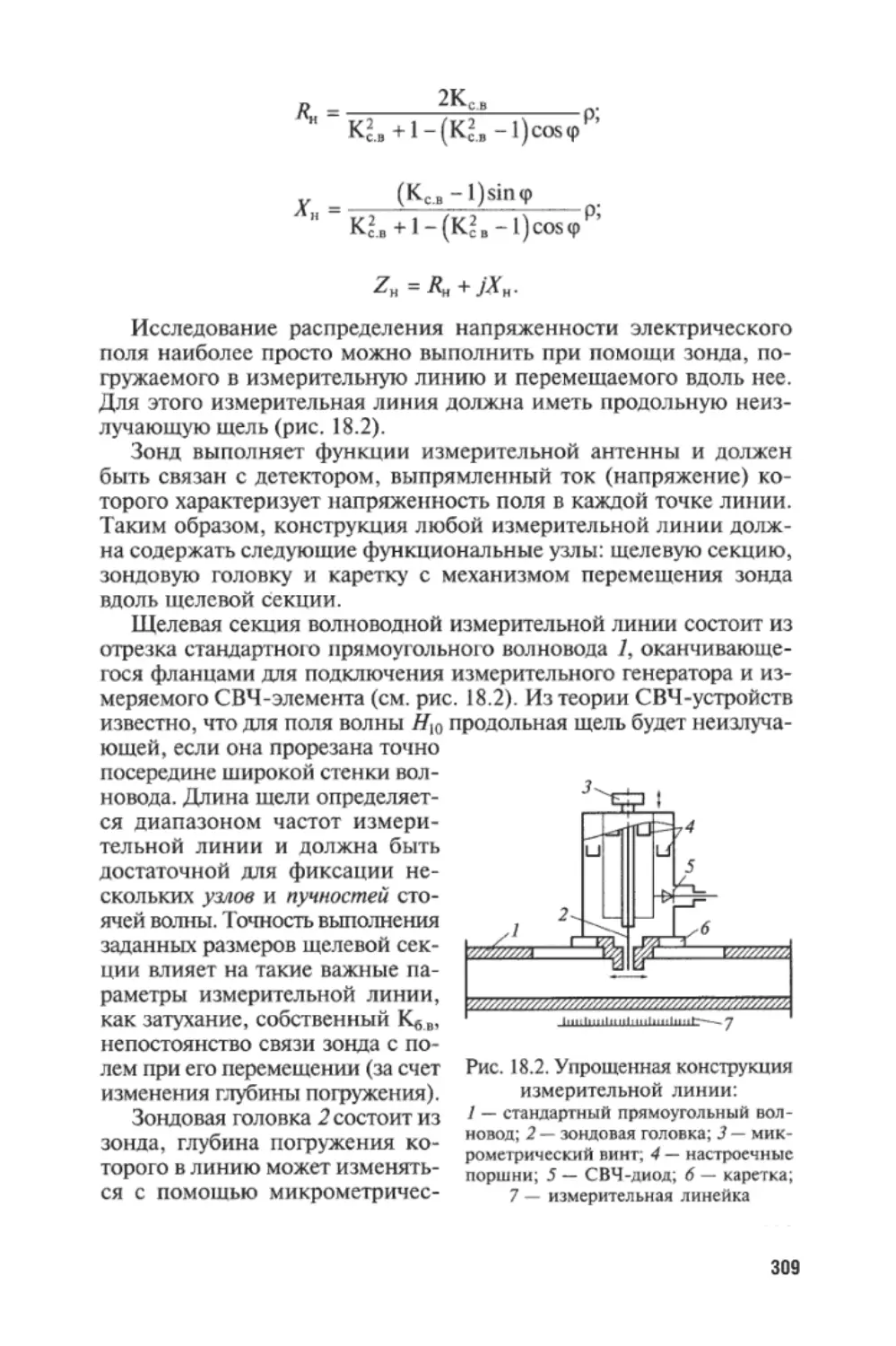
18.2. Измерение параметров линейных СВЧ-устройств.306
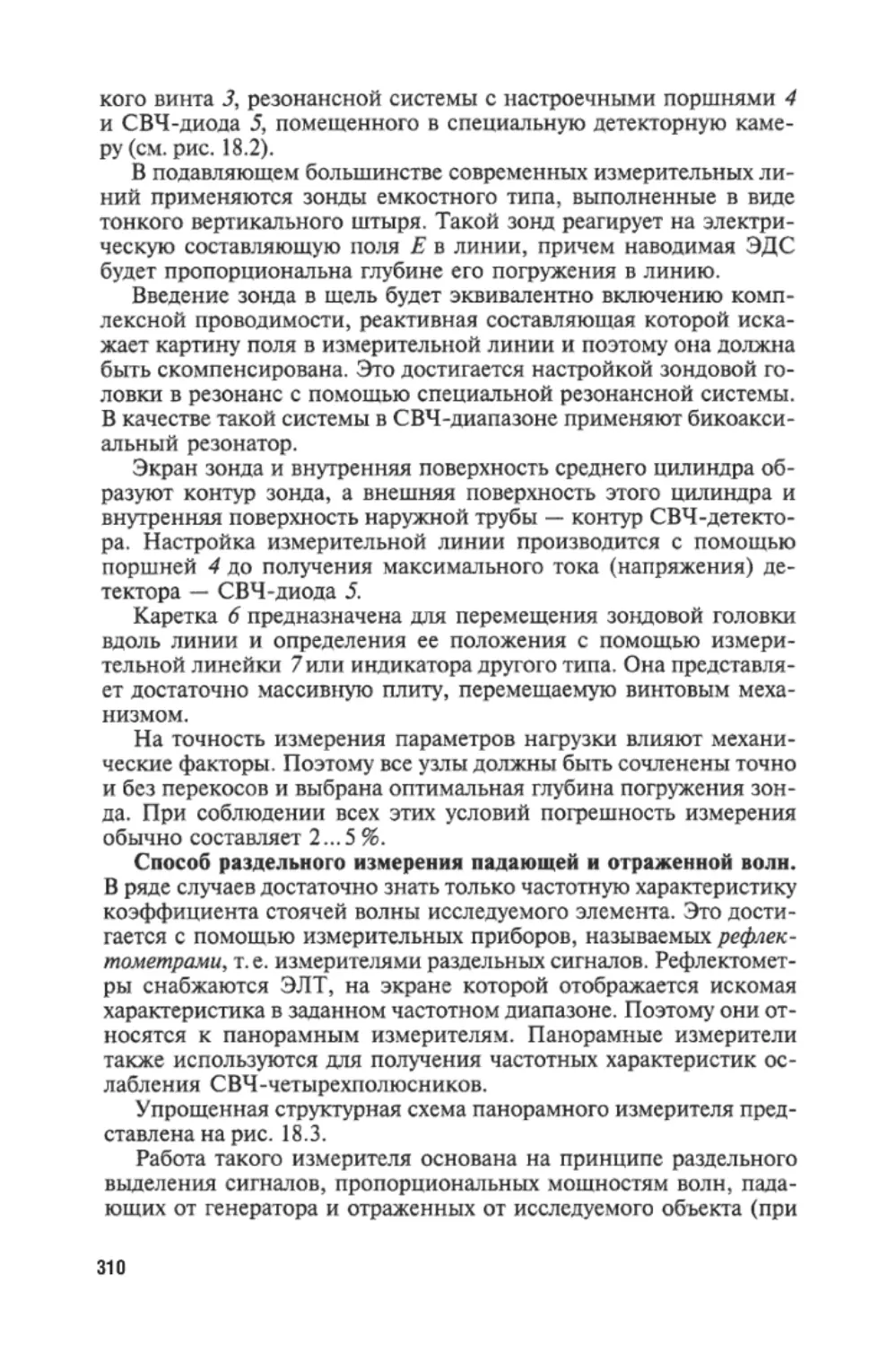
18.3. Измерение мощности СВЧ-колебаний............312
Контрольные вопросы...............................322
Глава 19. Автоматизация электрорадиоизмерений........323
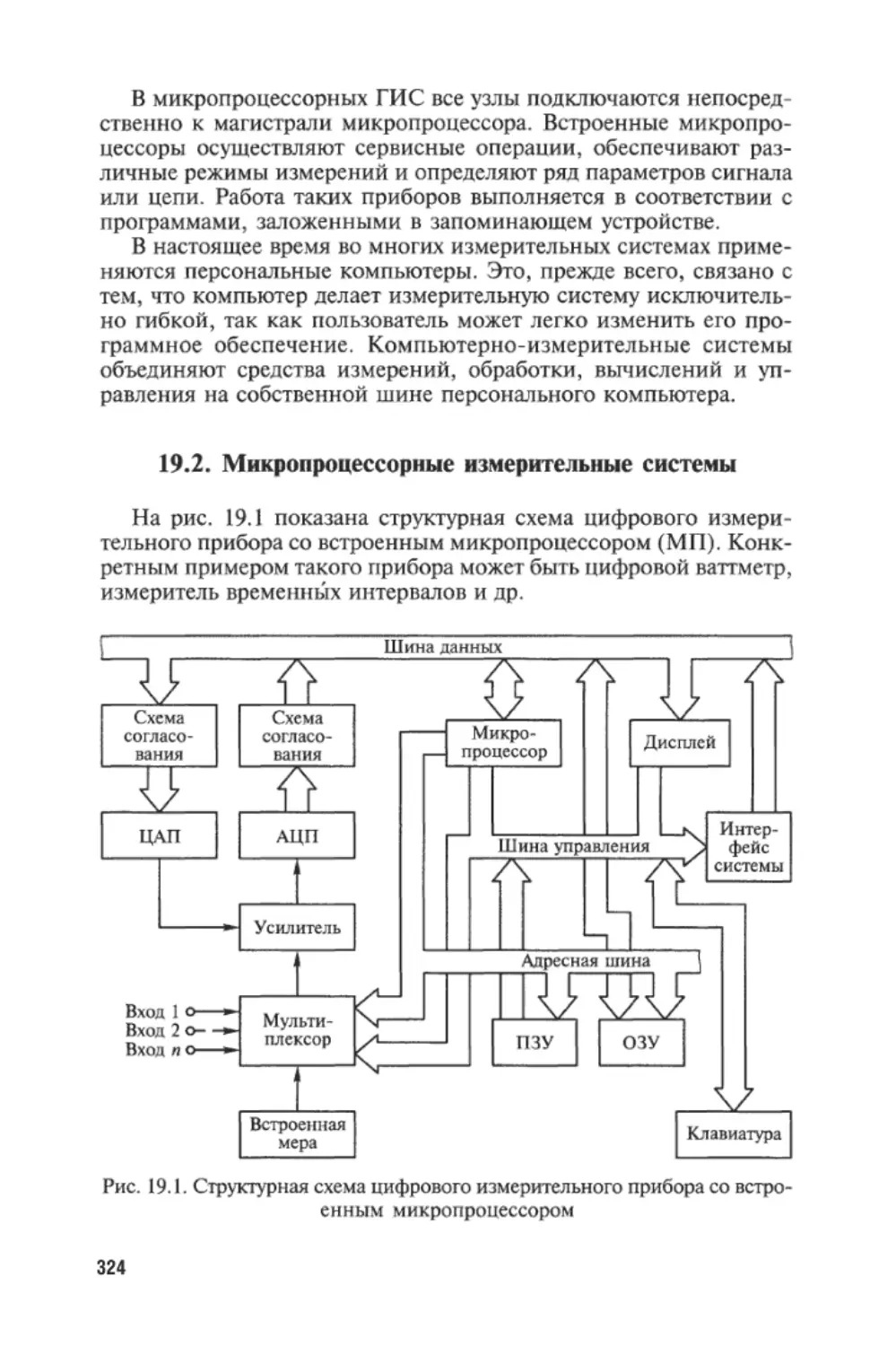
19.1. Основные сведения...........................323
19.2. Микропроцессорные измерительные системы.....324
19.3. Компьютерно-измерительные системы...........326
19.4. Виртуальные приборы.........................328
Контрольные вопросы...............................331
Приложение...........................................332
Список литературы....................................334
Новые издания по дисциплине
«Электрорадиоизмерения» и смежным дисциплинам.... 336
ПРЕДИСЛОВИЕ
В настоящее время электрорадиоизмерения широко применя-
ются в целях автоматического контроля и в автоматизации многих
производственных процессов, а также в научно-исследовательской
работе во всех областях знаний. Поэтому курс электроизмерений
входит в учебные планы не только техникумов, но и вузов, кото-
рые выпускают специалистов по электротехническим и приборо-
строительным специальностям. В последние годы точные методы
и технологии, требующие измерений, широко используются в ма-
шиностроении, химии, медицине и других отраслях.
Из многолетнего преподавательского опыта авторам известно,
что для формирования специалиста систематизированные осно-
вы знаний более ценны, чем изучение отдельных разделов курса.
Поэтому в данный учебник авторы включили основные методы
измерений, метрологические показатели измерений, а также при-
вели современную терминологию и классификацию методов и
средств измерений, принципиальные схемы электроизмеритель-
ных приборов и вопросы погрешностей измерений. В учебнике так-
же рассматриваются конкретные конструкции измерительных при-
боров, созданные на базе относительно установившихся методов.
Любой электро- и радиоизмсритсльный прибор состоит из ряда
преобразователей одной физической величины в другую, поэто-
му в этом учебнике последовательно рассматриваются различные
системы преобразователей, сгруппированные по виду функции
преобразования: электрической величины в перемещение подвиж-
ной части прибора, одной электрической величины в другую и
различных неэлектрических величин в электрические величины,
и описываются основные методы измерений и типовые схемы элек-
тро- и радиоизмерительных приборов, сгруппированные по из-
меряемым величинам.
Подобное изложение материала в учебнике, по мнению авто-
ров, отвечает научной классификации современных методов и
средств электроизмерительной техники.
ВВЕДЕНИЕ
Развитие общества сопровождалось созданием и совершенство-
ванием средств и методов измерений. Сегодня ни одна сфера че-
ловеческой деятельности не обходится без разнообразных измере-
ний. Особенно важную роль они играют в повышении качества
изделий, контроле технологических процессов, управлении про-
изводством, научных исследованиях.
Формирование мировоззрения человека сопровождается воз-
никновением множества задач, для решения которых необходимо
располагать количественной информацией о том или ином свой-
стве объектов материального мира (явления, процесса, вещества,
изделия).
К основному способу получения такой информации относятся
измерения, при правильных организации и выполнении которых
получают результат, с определенной точностью отражающий ин-
тересующие свойства измеряемого объекта или процесса. Измери-
тельная информация является основой для принятия технических
и управленческих решений при испытаниях продукции, оценива-
нии ее технического уровня, аттестации и сертификации каче-
ства. Поэтому знания современных правил, норм и требований в
области измерений необходимы для специалистов, не только тех-
нического профиля, но и для работников, осуществляющих фун-
кции управления и организации производства.
С точки зрения точности измерений следует заметить, что уро-
вень, к которому надо стремиться, должен определяться крите-
риями технической и экономической целесообразности. Извест-
но, что повышение точности измерения в два раза удорожает про-
цесс измерения в несколько раз. В то же время снижение точности
измерения в производстве ниже определенной нормы приводит к
браку продукции.
Ежедневно в стране выполняются миллионы измерений. Оче-
видно, что измерения, производимые с помощью разнообраз-
ных по принципу действия методикам применения и точности
средств измерения, могут быть полезны лишь тогда, когда их
результатам можно доверять, и результаты измерения, получен-
ные разными экспериментаторами в разнос время и разных мес-
тах, при необходимости можно сопоставить между собой. Кроме
10
того, должно существовать единство измерений в масштабе от
каждого предприятия до государства в целом. Для этого метроло-
гия наделена законодательными функциями. Законы в области
метрологии разрабатываются с учетом норм и правил выполне-
ния измерений, требований, направленных на достижение един-
ства измерений, порядка разработки и испытаний средств изме-
рений; устанавливаются термины и определения, единицы фи-
зических величин и правила их применения. Все эти нормы, пра-
вила и требования определяются стандартами Государственной
системы обеспечения единства измерений (ГСИ) и другими обя-
зательными к применению нормативно-техническими докумен-
тами.
Выполнение различных измерений требует изучения методов
измерений и основных принципов построения средств измерений
физических величин. Поэтому сначала следует освоить методы из-
мерений.
Это обусловлено тем, что именно методы измерений и физи-
ческие принципы работы приборов являются наиболее постоян-
ными компонентами, тогда как конкретные схемные решения и
элементная база средств измерения непрерывно изменяются и со-
вершенствуются.
Следует отметить, что электрические способы измерений име-
ют значительные преимущества по сравнению с другими спосо-
бами измерений. Это незначительное потребление энергии, воз-
можность дистанционной передачи измеряемых значений, боль-
шая скорость измерений и передачи их результатов, высокая то-
чность и чувствительность.
Учебник состоит из четырех разделов и девятнадцати глав. При-
ложение позволит читателю усвоить наиболее часто встречающи-
еся условные обозначения на шкалах измерительных приборов. Для
более глубокого изучения дисциплины приведен список рекомен-
дуемой литературы.
В разд. I «Основы теории измерений» рассматриваются государ-
ственная система обеспечения единства измерений, основные
физические величины, эталоны, методы и средства измерений, а
также метрологические показатели измерений.
Разд. II «Преобразователи» посвящен изучению преобразовате-
лей электрических величин в перемещение, электрических вели-
чин в электрические и неэлектрических величин в электрические.
В разд. III «Методы и приборы измерений электрических вели-
чин» изложены основные методы электрических измерений, а так-
же принципы работы и схемы приборов для измерения электри-
ческих величин: токов и напряжений, сопротивлений, емкости и
индуктивности, электрической мощности, энергии и частоты.
В разд. IV «Радиотехнические измерения» представлены типо-
вые методы, схемы и принципы действия приборов, предназна-
11
ценных для широкого комплекса радиоизмерений, имеющих боль-
шое разнообразие и ряд специфических особенностей, связанных
с измерениями высокочастотных сигналов и распределенных па-
раметров.
В заключительной главе авторы уделили большое внимание
современным направлениям в электрорадиоизмерительной тех-
нике, а именно компьютерным измерительным системам, в том
числе виртуальным приборам, позволяющим пользователю полу-
чать измерительные приборы для решения конкретных измери-
тельных, метрологических и исследовательских задач.
В результате изучения дисциплины студент должен освоить:
трудовые действия
• владения современными методиками для решения задач элек-
трорадиоизмсрений;
• методами синтеза схем дня проведения различных видов изме-
рений;
• методиками расчета и построения преобразователей электри-
ческих величин;
• способами анализа формы, параметров, фаз и спектра сигна-
лов;
• методами построения амплитудно-частотных характеристик;
• принципами построения виртуальных приборов;
необходимые умения
• классифицировать виды средств измерений по различным
признакам;
• выбирать преобразователи для проведения электрических
и радиотехнических измерений;
• проводить анализ формы и параметров сигналов;
• строить амплитудно-частотные характеристики цепей;
• выбирать методы и схемы для проведения электротехнических
и радиотехнических измерений;
необходимые знания
• основ теории измерений;
• принципов построения преобразователей электрических
и неэлектрических величин;
• методов электрических и радиотехнических измерений;
• способов измерения токов, напряжений, сопротивлений,
емкости, индуктивности, мощности, энергии, частоты;
• схем измерения параметров диодов, транзисторов, интеграль-
ных схем;
• микропроцессорных и компьютерных измерительных систем.
РАЗДЕЛ I
ОСНОВЫ ТЕОРИИ ИЗМЕРЕНИЙ
ГЛАВА 1
ФИЗИЧЕСКИЕ ВЕЛИЧИНЫ, МЕТОДЫ И СРЕДСТВА
ИЗМЕРЕНИЙ
1.1. Физические величины как объект измерений
Объектом измерений являются физические величины, кото-
рые принято делить на основные и производные.
Основные величины независимы друг от друга, но они могут
служить основой для установления связей с другими физически-
ми величинами, которые называют производными от этих вели-
чин. Например, в формуле Эйнштейна основной величиной явля-
ется масса, а производной величиной — энергия. Зависимость меж-
ду основной величиной и другими величинами определяет данная
формула. Основным величинам соответствуют основные единицы
измерений, а производным — производные единицы измерений.
Совокупность основных и производных единиц называется си-
стемой единиц физических величин.
Первой системой единиц считается метрическая система, в
которой за основную единицу длины был принят метр, а за еди-
ницу веса1 * — вес 1 см3 химически чистой воды при температуре
около +4 °C — грамм (позже — килограмм). В 1799 г. были изготов-
лены первые прототипы (эталоны) метра и килограмма. Кроме
этих двух единиц метрическая система в своем первоначальном
варианте включала ешс и единицы площади (ар — площадь квад-
рата со стороной 10 м), объема (стер, равный объему куба с
ребром 10 м) и вместимости (литр, равный объему куба с реб-
ром 0,1 м).
Таким образом, в метрической системе еще не было четкого
подразделения единиц величин на основные и производные.
Понятие системы единиц как совокупности основных и произ-
водных впервые было предложено немецким ученым К.Ф.Гаус-
1 В XVIII в. понятия «вес» и «масса» не различались и выражали одну и ту же
величину.
13
сом в 1832 г. В качестве основных единиц в этой системе были
приняты: единица длины — миллиметр, единица массы — мил-
лиграмм, единица времени — секунда. Эту систему единиц назва-
ли абсолютной.
В 1881 г. была принята система единиц физических величин
СГС, основными единицами которой были: сантиметр — едини-
ца длины, грамм — единица массы, секунда — единица времени.
Производными единицами системы считались единица силы —
килограмм-сила и единица работы — эрг. Неудобство системы СГС
состояло в трудностях пересчета многих единиц в другие системы
для определения их соотношения.
В начале XX в. итальянский ученый Джорджи предложил еше
одну' систему единиц, получившую название МКСА. (Русская транс-
крипция. — Прим, авт.) и довольно широко распространившуюся
в мире. Основные единицы этой системы: метр, килограмм, секун-
да, ампер (единица силы электрического тока), а производные:
единица силы — ньютон, единица энергии — джоуль, единица
мощности — ватт.
Кроме вышеперечисленных учеными разных стран предлага-
лись и другие системы единиц физических величин. Таким обра-
зом ученые стремились создать единую международную систему
измерений. Однако в настоящее время некоторые страны мира
продолжают проводить измерения на основе исторически сложив-
шихся у них единиц измерения. Известно, что Великобритания,
США и Канада основной единицей массы считают фунт, причем
его размер в системе «британских имперских мер» и «старых вин-
честерских мер» различен.
В мировой практике наиболее широко распространена Между-
народная система единиц. Рассмотрим ее сущность.
1.2. Международная система единиц физических величин
В 1954 г. на Генеральной конференции по мерам и весам (ГКМВ)
были определены шесть основных единиц физических величин
для их использования в международных отношениях: метр, кило-
грамм, секунда, ампер, градус Кельвина и свеча. На Генеральной
конференции по мерам и весам в 1960 г. была утверждена Между-
народная система единиц — SI. Аббревиатура системы составлена
из начальных букв французского названия «Syst^me International
d’Unites» — Система Интернациональная (СИ). В последующие годы
на заседаниях ГКМВ были приняты ряд дополнений и измене-
ний, в результате чего в систему стали входить семь основных
единиц, две дополнительных и ряд производных единиц физи-
ческих величин, а также были разработаны следующие определе-
ния основных единиц:
14
• единица длины — метр — длина пути, который проходит свет
в вакууме за 1/299 792458 долю секунды;
• единица массы — килограмм — масса, равная массе междуна-
родного прототипа килограмма;
• единица времени — секунда — время, равное 9 192 631 770 пе-
риодам излучения, соответствующего переходу между двумя
сверхтонкими уровнями основного состояния атома цезия-133 при
отсутствии возмущения со стороны внешних полей;
• единица силы электрического тока — ампер — сила неизменя-
юшегося тока, который при прохождении по двум параллельным
проводникам бесконечной длины и ничтожно малой площади кру-
гового поперечного сечения, расположенным в вакууме на рас-
стоянии 1 м один от другого, создал бы на каждом участке про-
водника длиной 1 м силу взаимодействия, равную 2-10"7 Н;
• единица термодинамической температуры — кельвин — термо-
динамическая температура, равная 1/273,16 части термодинами-
ческой температуры тройной точки воды. Кроме термодинамичес-
кой температуры допускается применение температуры Цельсия
(единица — градус Цельсия);
• единица количества вещества — моль — количество вещества
системы, содержащей столько же структурных элементов, сколь-
ко содержится атомов в углероде-12 массой 0,012 кг;
• единица силы света — кандела — сила света в заданном на-
правлении источника, испускающего монохроматическое ихлу-
чение частотой 540-1012 Гц, энергетическая сила света которого в
этом направлении составляет 1/683 Вт/ср.
Приведенные определения — сложные, они требуют опреде-
ленного уровня знаний, прежде всего в физике. Однако они дают
представление о природном, естественном происхождении при-
нятых единиц. Их толкование становилось все более сложным по
мере развития науки и благодаря новым достижениям в теорети-
ческой и практической физике, механике, математике и в других
фундаментальных областях знаний. Изложенное выше, позволи-
ло, с одной стороны, основные единицы представить как досто-
верные и точные, а с другой, — они стали объяснимыми и понят-
ными для всех стран мира, а это является главным условием для
того, чтобы система единиц была международной.
Международная система СИ считается наиболее совершенной
и универсальной по сравнению с предшествовавшими ей систе-
мами. Кроме основных единиц, в системе СИ есть дополнитель-
ные единицы для измерения плоского и телесного углов — ради-
ан и стерадиан соответственно, а также большое количество про-
изводных единиц пространства и времени, механических вели-
чин, электрических и магнитных величин, тепловых, световых и
акустических величин, а также производных единиц в области
ионизирующих излучений.
15
После принятия Международной системы единиц СИ практи-
чески все крупнейшие международные организации включили ее
в свои рекомендации по метрологии и призвали все страны —
члены этих организаций ее принять. В России система СИ офици-
ально была принята путем введения в 1963 г. соответствующего
государственного стандарта, причем следует учесть, что в то вре-
мя все государственные стандарты имели силу закона и были строго
обязательны для выполнения.
Сегодня система СИ действительно стала международной, но
вместе с единицами этой системы применяются и внесистемные
единицы, например, тонна, сутки, литр, гектар и др.
1.3. Основные понятия об измерениях
Рассмотрим общепринятые в метрологии определения, кото-
рые соответствуют понятиям «измерения», «средства», «принци-
пы», «методы» и «объекты измерений», «алгоритмы измерений»
и «шкалы измерений» и др.
В соответствии с рекомендациями РМГ 29—2013. ГСП. Метро-
логия. Основные термины и определения — измерением называется
процесс нахождения значения физической величины опытным
путем с помощью специальных технических средств. Получаемая
при этом информация называется измерительной.
Определенная информация об объекте измерения должна быть
известна до проведения исследований, что является важным фак-
тором, обусловливающим эффективность измерения. Такую ин-
формацию об объекте измерения называют априорной информаци-
ей. При полном отсутствии этой информации измерение в прин-
ципе невозможно, так как неизвестно, что же необходимо изме-
рить, а следовательно, нельзя выбрать нужные методы и средства
измерений.
Информация, получаемая в результате измерения, может со-
держаться в объекте измерения в двух формах: пассивной и актив-
ной. Пассивная информация представляет собой совокупность све-
дений, характеризующих объект. К такой информации, напри-
мер, относится информация о величине напряжения источника
питания. Информация является активной, если она имеет форму
энергетической характеристики какого-либо явления. Подобные
энергетические явления называются сигналами. Их примерами яв-
ляются электрические, оптические и акустические сигналы, ис-
пользуемые для передачи информации.
При определении значения интересующей физической вели-
чины результат измерения может быть представлен в виде анали-
тического соотношения, известного как основное уравнение мет-
рологии:
16
A - kA{],
где A — значение измеряемой физической величины; к — отноше-
ние измеряемой величины к образцу; Ао — значение величины,
принятой за образец.
Принцип измерений представляет собой совокупность физичес-
ких принципов, на которых основаны измерения, например при-
менение эффекта Холла для измерения мощности или эффекта
Джозефсона для измерения электрического напряжения.
Метод измерений — совокупность использования принципов и
средств измерений. Это общее определение на практике часто кон-
кретизируют, относя его только к применяемым средствам изме-
рений, например метод измерения частоты частотомером, напря-
жения — вольтметром, силы тока — амперметром и т.д.
Понятие «метод измерений» следует отличать от понятия «мето-
дика измерений», которое представляет собой общий или поэтап-
ный план проведения измерений, т.е. намеченного распорядка
измерений, определяющего состав применяемых приборов, пос-
ледовательность и правила проведения операций.
Объект измерений — реальный физический объект, свойства
которого характеризуются одной или несколькими измеряемыми
физическими величинами.
В технической литературе и нормативной документации часто
встречается термин «алгоритм измерений», под которым следует
понимать точное предписание о перечне и порядке выполнения
операций, обеспечивающих измерение искомого значения физи-
ческой величины.
Достоверность измерений определяется степенью доверия к ре-
зультату измерения и характеризуется вероятностью того, что ис-
тинное значение измеряемой величины находится в указанных
пределах. Данную вероятность называют доверительной.
Правильность измерений — метрологическая характеристика,
отражающая близость к нулю так называемых систематических
погрешностей результатов измерений.
Сходимость результата измерений характеризует качество изме-
рений, отражающее близость друг к другу результатов измерений
одной и той же величины, выполняемых повторно одними и теми
же методами и средствами измерений в одних и тех же условиях.
Воспроизводимость результатов измерений — характеристика
качества измерений, отражающая близкие результаты измерений
одной и той же величины, полученные в разных местах, разными
методами и средствами измерений, разными операторами, но
приведенные к одним и тем же условиям.
Виды измерений. Измерения как экспериментальные процеду-
ры определения значений измеряемых величин весьма разнооб-
разны. Это объясняется множеством измеряемых величин, харак-
17
тером их изменения во времени, разными требованиями к точно-
сти измерений и т.д. Итак измерения классифицируют по опреде-
ленным признакам. Одним из таких признаков является способ
получения результата измерения. Измерения подразделяются на
прямые и косвенные.
Прямым называется измерение, когда искомое значение физи-
ческой величины находится непосредственно из опытных данных.
Следует отметить, что часто под прямыми понимаются такие из-
мерения, при которых не производится промежуточных преобра-
зований. Это, например, измерение напряжения и силы тока та-
кими электроизмерительными приборами, как вольтметр и ам-
перметр. Прямые измерения очень распространены в практике
измерений. Математически прямые измерения можно охаракте-
ризовать элементарной формулой
А = х,
где А — измеряемая величина; х — значение величины, найден-
ное путем ее измерения и называемое результатом измерения.
Косвенным называется измерение, при котором искомое значе-
ние величины находят на основании известной зависимости меж-
ду этой величиной и величинами, подвергаемыми прямым изме-
рениям. Косвенные измерения можно охарактеризовать следующей
формулой:
Л=(Х1,х2,...,хж),
где хн х2,..., хт — результаты прямых измерений величин, связан-
ных известной функциональной зависимостью с искомым значе-
нием измеряемой величины А.
Косвенные измерения также характерны для практики элек-
трорадиоизмерений, например измерение мощности методом ам-
перметра — вольтметра, определение резонансной частоты коле-
бательного контура по результатам прямых измерений емкости и
индуктивности контура и т.д.
1.4. Виды средств измерений
На практике при измерении единицы величины применяются
технические средства, которые имеют нормированные погреш-
ности и называются средствами измерений. К средствам измере-
ний относятся:
• меры;
• измерительные преобразователи;
• измерительные приборы;
• измерительные установки и системы;
• измерительные принадлежности.
18
Мерой называют средство измерений, предназначенное для
воспроизведения физических величин заданного размера. К дан-
ному виду средств измерений относятся гири, концевые меры
длины и т.п. На практике используют однозначные и многознач-
ные меры, а также наборы и магазины мер. Однозначные меры вос-
производят величины только одного размера (гиря). Многознач-
ные меры — несколько размеров физической величины. Напри-
мер, миллиметровая линейка выражает длину предмета в санти-
метрах и миллиметрах.
Наборы и магазины представляют собой объединения (сочета-
ния) однозначных или многозначных мер для получения возмож-
ности воспроизведения некоторых промежуточных или суммар-
ных значений величины. Набор мер составляет комплект однород-
ных мер разного размера, которые применяются в нужных соче-
таниях, например набор лабораторных гирь. Магазин мер — соче-
тание мер, объединенных конструктивно в одно механическое
целое, в котором предусмотрена возможность посредством руч-
ных или автоматизированных переключателей, связанных с от-
счетным устройством, соединять составляющие магазин меры в
нужном сочетании. По такому принципу устроены магазины элек-
трических сопротивлений.
При пользовании мерами следует учитывать номинальное и
действительное значения мер, а также погрешность меры и ее
разряд. Номинальным называют значение меры, указанное на ней.
Действительное значение меры должно быть зафиксировано в спе-
циальном свидетельстве в качестве результата высокоточного из-
мерения с использованием официального эталона. Разность меж-
ду номинальным и действительным значениями называется по-
грешностью меры.
Измерительный преобразователь — средство измерений, кото-
рое служит для преобразования сигнала измерительной информа-
ции в форму, удобную для обработки или хранения, а также пе-
редачи в показывающее устройство. Измерительные преобразовате-
ли либо входят в конструктивную схему измерительного прибо-
ра, либо применяются совместно с ним, но сигнал преобразо-
вателя не поддается непосредственному восприятию наблюдате-
лем. Например, преобразователь может быть необходим для пе-
редачи информации в память компьютера, для усиления напря-
жения и т.д. Преобразуемую величину называют входной величи-
ной, а результат преобразования — выходной величиной. Основ-
ной метрологической характеристикой измерительного преобра-
зователя считается соотношение между входной и выходной ве-
личинами, называемое функцией преобразования.
Преобразователи подразделяются на первичные, непосредствен-
но воспринимающие измеряемую величину; передающие, на вы-
ходе которых величина приобретает форму, удобную для регист-
19
рации или передачи на расстояние; промежуточные, работающие
в сочетании с первичными и не влияющие на изменение рода
физической величины.
Измерительные приборы — средства измерений, которые поз-
воляют получать измерительную информацию в форме, удобной
для восприятия пользователем. Различаются измерительные при-
боры прямого действия и приборы сравнения.
Приборы прямого действия отображают измеряемую величину на
показывающем устройстве, имеющем соответствующую градуировку
в единицах этой величины. Изменения рода физической величины
при этом не происходит. К приборам прямого действия относятся,
например, амперметры, вольтметры, термометры и т.п.
Приборы сравнения предназначаются для сравнения измеряемых
величин с величинами, значения которых известны. Эти приборы
широко используются в научных целях и на практике для измере-
ния таких величин, как яркость источников излучения, давление
сжатого воздуха и др.
Измерительные установки и системы — совокупность средств
измерений, объединенных по функциональному признаку со вспо-
могательными устройствами, для измерения одной или несколь-
ких физических величин объекта измерений. Обычно такие систе-
мы автоматизированы и обеспечивают ввод информации в систе-
му, автоматизацию самого процесса измерения, обработку и ото-
бражение результатов измерений для восприятия их пользовате-
лем. Эти установки (системы) используются и для контроля (на-
пример производственных процессов), что особенно актуально для
метода статистического контроля.
Измерительные принадлежности — вспомогательные средства
измерений величин. Они необходимы для вычисления поправок к
результатам измерений, если требуется высокая степень точности.
Например, термометр может быть вспомогательным средством,
если показания прибора достоверны при строго регламентиро-
ванной температуре; психрометр — когда строго оговаривается
влажность окружающей среды.
Следует учитывать, что измерительные принадлежности вно-
сят определенные погрешности в результат измерений, связан-
ные с погрешностью самого вспомогательного средства.
По метрологическому назначению средства измерений делят
на два вида:
• рабочие средства измерений;
• эталоны.
Рабочие средства измерений применяют для определения пара-
метров (характеристик) технических устройств, технологических
процессов, окружающей среды и др. Они могут быть лаборатор-
ными (для научных исследований), производственными (для обес-
печения и контроля заданных характеристик технологических про-
20
цессов), полевыми (для самолетов, автомобилей, судов и т.п.).
Каждый из этих видов рабочих средств отличается особыми пока-
зателями. Так, лабораторные средства измерений должны быть
самыми точными и чувствительными, а их показания — характе-
ризоваться высокой стабильностью. Производственные средства
обладают устойчивостью к воздействиям температуры, влажно-
сти, вибрации и другим факторам производственного процесса,
которые могут оказать влияние на достоверность и точность пока-
заний приборов. Полевые средства работают в условиях, которые
постоянно изменяются в широких пределах внешних воздействий.
Особым средством измерений является эталон.
1.5. Эталоны единиц физических величин
Эталон — средство измерений (или комплекс средств измерений),
предназначенное для воспроизведения и/или хранения единицы
физической величины и передачи се размера нижестоящим по по-
верочной схеме СИ и утвержденное в качестве эталона в установ-
ленном порядке. Классификацию, назначение и общие требования
к созданию, хранению и применению эталонов устанавливает ГОСТ
Р 8.815—2015. Национальный стандарт РФ. Государственная систе-
ма обеспечения единства измерений. Эталоны. Основные понятия.
Конструкция эталона, его физические свойства и способ вос-
произведения единицы определяются физической величиной (ФВ),
единица которой воспроизводится, и уровнем развития измери-
тельной техники в данной области измерений. Эталон должен об-
ладать, по крайней мере, тремя взаимосвязанными свойствами:
• неизменностью;
• воспроизводимостью;
• сличаемостью.
Неизменность — свойство эталона удерживать неизменным раз-
мер воспроизводимой им единицы в течение длительного интер-
вала времени. При этом все изменения, зависящие от внешних
условий, должны быть строго определенными функциями вели-
чин, доступных точному измерению. Реализация этих требований
привела к идее создания «естественных» эталонов различных ве-
личин, основанных на физических постоянных.
Воспроизводимость — возможность воспроизведения единицы
физической величины на основе ее теоретического определения с
наименьшей погрешностью для существующего уровня развития
измерительной техники. Это достигается путем постоянного иссле-
дования эталона в целях определения систематических погрешнос-
тей и их исключения путем введения соответствующих поправок.
Сличаемость — возможность обеспечения сличения с эталоном
других СИ, нижестоящих по поверочной схеме, в первую очередь
21
вторичных эталонов, с наивысшей точностью для существующе-
го уровня развития техники измерений. Это свойство предполага-
ет, что эталоны по своему устройству и действию не вносят ка-
ких-либо искажений в результаты сличений и сами не претерпе-
вают изменений при проведении сличений.
Различают следующие виды эталонов (рис. 1.1):
• первичный — обеспечивает воспроизведение и хранение еди-
ницы с наивысшей в стране точностью (по сравнению с другими
эталонами той же величины). Первичные эталоны являются уни-
кальными СИ. Они часто представляют собой сложнейшие изме-
рительные комплексы, созданные с учетом новейших достиже-
ний науки и техники, и составляют основу государственной си-
стемы обеспечения единства измерений;
• специальный — обеспечивает воспроизведение единицы в осо-
бых условиях, в которых прямая передача размера единицы от
первичного эталона с требуемой точностью не осуществима, и
служит для этих условий первичным эталоном;
• государственный — первичный или специальный эталон, офи-
циально утвержденный в качестве исходного эталона для страны.
Утверждение проводит главный метрологический орган страны.
Государственные эталоны создаются, хранятся и применяются
центральными метрологическими научными институтами страны.
Точность воспроизведения единицы физической величины долж-
на соответствовать уровню лучших мировых достижений и удов-
летворять потребностям науки и техники. В состав государствен-
ных эталонов включаются средства измерений, с помощью кото-
рых воспроизводят и/или хранят единицу физической величины,
контролируют условия измерений и неизменность воспроизводи-
мого или хранимого размера единицы, осуществляют передачу
размера единицы. Государственные эталоны подлежат периоди-
ческим сличениям с государственными эталонами других стран;
• вторичный — хранит размер единицы, полученной путем сличе-
ния с первичным эталоном соответствующей физической величины.
Вторичные эталоны являются частью подчиненных средств хране-
Рис. 1.1. Классификация эталонов
22
ния единиц и передачи их размеров, создаются и утверждаются в тех
случаях, когда это необходимо для организации поверочных работ,
а также для обеспечения сохранности и наименьшего износа госу-
дарственного эталона. В состав вторичных эталонов включаются СИ,
с помощью которых хранят единицу физической величины, конт-
ролируют условия хранения и передают размер единицы.
По метрологическому назначению вторичные эталоны делятся
на следующие:
• эталон-копию — предназначен для передачи размера единицы
рабочим эталонам. Он создается в случае необходимости проведе-
ния большого числа поверочных работ с целью предохранения
первичного или специального эталона от преждевременного из-
носа. Эталон-копия представляет собой копию государственного
эталона только по метрологическому назначению, поэтому он не
всегда является его физической копией;
• эталон сравнения — применяется для сличения эталонов, кото-
рые по тем или иным причинам не могут быть непосредственно
сличаемы друг с другом;
• эталон--свидетель — используется для проверки сохранности
и неизменности государственного эталона и замены его в случае
порчи или утраты. В настоящее время только эталон килограмма
имеет эталон-свидетель. Его основное назначение — обеспечивать
возможность контроля постоянства основного эталона;
• рабочий эталон — применяется для передачи размера единицы
рабочим средствам измерений. Это самые распространенные этало-
ны. С целью повышения точности измерений физических величин
рабочие эталоны применяются во многих территориальных метро-
логических органах и лабораториях министерств и ведомств.
1.6. Эталоны единиц системы СИ
Эталонную базу России составляют 114 государственных эта-
лонов (ГЭ) и более 250 вторичных эталонов единиц физических
величин. Из них 52 эталона находятся во Всероссийском научно-
исследовательском институге метрологии им. Д. И. Менделеева
(Санкт-Петербург), в том числе эталоны метра, килограмма, ам-
пера, кельвина и радиана; 25 эталонов — во Всероссийском науч-
но-исследовательском институте физико-технических и радиотех-
нических измерений (Москва), в том числе эталоны единиц вре-
мени и частоты; 13 эталонов — во Всероссийском научно-иссле-
довательском институте оптико-физических измерений, в том чис-
ле эталон канделы; соответственно 5 и 6 эталонов — в Уральском
и Сибирском научно-исследовательских институтах метрологии.
В области механики в стране созданы и используются 38 госу-
дарственных эталонов, в том числе первичные эталоны метра,
23
килограмма и секунды, точность которых имеет чрезвычайно боль-
шое значение, поскольку эти единицы участвуют в образовании
производных единиц всех научных направлений.
Единица времени секунда впервые определялась через период
вращения вокруг оси Земли или Солнца. До недавнего времени
секунда равнялась 1/86 400 части солнечных средних суток.
В 1967 г. на X1IJ Генеральной конференции по мерам и весам
было принято новое определение секунды как интервала времени, в
течение которого совершается 9 192 631 770 колебаний, соответству-
ющих резонансной частоте энергетического перехода между' уровня-
ми сверхтонкой с труктуры основного состояния атома цезия -133 при
отсутствии возмущения со стороны внешних полей. Данное опреде-
ление реализуется с помощью цезиевых реперов частоты.
Репер, или квантовый стандарт частоты, представляет собой
устройство для точного воспроизведения частоты электромагнит-
ных колебаний в сверхвысокочастотных и оптических спектрах,
основанное на измерении частоты квантовых переходов атомов,
ионов или молекул.
Государственный первичный эталон и поверочная схема для
средств измерения времени и частоты определены в стандарте СТ
РК 232-2010.
Государственный первичный эталон единицы времени состоит из
комплекса следующих средств измерений:
• метрологических цезиевых реперов частоты, предназначен-
ных для воспроизведения размеров единицы времени и частоты в
Международной системе единиц;
• водородных стандартов частоты, предназначенных для хране-
ния размеров единиц времени и частоты и одновременно выпол-
няющих функцию хранителей шкал времени. Использование водо-
родных реперов позволяет повысить стабильность эталонов. В на-
стоящее время за период времени от ста секунд до нескольких
суток она не превышает 5 10"14 с;
• группы квантовых часов, предназначенных для хранения шкал
времени. Квантовые часы — устройство для измерения времени, со-
держащее генератор, частота которого стабилизирована кварцевым
резонатором, и управляемое квантовыми стандартами частоты;
• аппаратуры, состоящей из группы синхронизированных лазе-
ров и сверхвысокочастотных генераторов, для передачи размера
единицы частоты в оптический диапазон;
• аппаратуры внутренних и внешних сличений, включающей
перевозимые квантовые часы и перевозимые лазеры.
Диапазон значений интервалов времени, воспроизводимых эта-
лоном, составляет 1 • 10‘10... 1Ю8 с, диапазон значений частоты
равен 1... 11014 Гц. Единицы времени воспроизводятся со сред-
ним квадратичным отклонением результата измерений, не пре-
вышающим 1-10-14 с за три месяца, при этом неисключенная си-
24
ним квадратичным отклонением результата измерений, не пре-
вышающим 1-10-14 с за три месяца, при этом неисключенная си-
стематическая погрешность не превышает 5-10’14 с. Нестабильность
частоты эталона за интервал времени от 1000 с до 10 сут не пре-
вышает 5-10"15 с.
В области измерений электрических и магнитных величин, вклю-
чая радиотехнические, созданы и функционируют 32 эталона. Они
охватывают не только большой диапазон значений измеряемых
величин, но и широкий спектр условий их измерений, прежде
всего частоты, доходящей до десятков гигагерц. Основу составля-
ют эталоны, которые наиболее точно воспроизводят основные
единицы и определяют размеры производных единиц. Это госу-
дарственные первичные эталоны единиц ЭД С, электрического
сопротивления и электрической емкости. Первые два из них раз-
работаны недавно и основаны на квантовых эффектах Джозефсо-
на и Холла соответственно.
До последнего времени единицу силы электрического тока —
ампер на практике приходилось определять по тем действиям,
которые ток оказывал в окружающей среде, например выделение
теплоты при прохождении тока через проводник, осаждение веще-
ства на электродах при прохождении тока через электролит, меха-
нические действия тока на магнит или проводник с током. Послед-
ние и были положены в основу эталона ампера, реализованного
на токовых весах.
В связи с введением в метрологическую практику эталона
единицы электрического напряжения вольта на основе эффекта
Джозефсона (ГЭТ 13—01, утвержденный Постановлением ГК РФ
по стандартизации и метрологии от 2 апреля 2001 г. № 30) и эталона
единицы электрического сопротивления ома на базе эффекта Холла
назначение ампер-весов как средства, необходимого .тля представ-
ления единицы напряжения, утратило смысл. Применение эффекта
Джозефсона (для аппаратурной реализации) и константы Джозеф-
сона (для воспроизведения единицы напряжения) позволило повы-
сить точность воспроизведения единицы тока примерно на два
порядка. Новый эталон ампера состоит из двух комплексов. Пер-
вый основан на принципе установления размера ампера через вольт
и ом с использованием квантовых эффектов Джозефсона и Холла,
а второй — через фарад, вольт и секунду с применением методов
электрометрии.
Государственный первичный эталон ампера состоит из аппа-
ратуры, выполненной на основе:
• квантовых эффектов Джозефсона и квантования магнитного
потока (эффект Холла), включая меру электрического напряже-
ния, меру электрического сопротивления, сверхпроводящий ком-
паратор тока и регулируемые источники тока;
• использования методов электрометрии, включающих вход-
ной блок с набором мер постоянной электрической емкости, ин-
25
тегратор, измерительный блок с частотомером, цифровым вольт-
метром и компаратором.
Государственный первичный эталон и государственная повероч-
ная схема для средств измерений силы постоянного электрическо-
го тока в диапазоне от 1 • 10’16 до 30 А установлены ГОСТ 8.022-—91.
Современный государственный эталон ампера имеет следующие
диапазоны воспроизводимых значений силы тока: 1 • 10-3... 1 А (по-
средством квантовых эффектов) и 1 • 10“16... 1 • 10-9 А (при исполь-
зовании методов электрометрии). Он обеспечивает воспроизведе-
ние единицы силы тока со средним квадратичным отклонением
результата измерений, не превышающим 5-10-8 А при номиналь-
ных значениях силы тока 1 • 10"3... 1 и 10-10“3... 2 -10-4 А. Неисклю-
ченная систематическая погрешность не должна превышать 2 • 10“8 А
при номинальных значениях силы постоянного тока 1 • 10“3 и 1 А.
1.7. Российская система калибровки
Калибровка средств измерений представляет собой совокупность
операций, выполняемых с целью определения и подтверждения
действительных значений метрологических характеристик и/или
пригодности к применению средств измерений, не подлежащих
государственному метрологическому контролю и надзору.
Под пригодностью средства измерений подразумевается соответ-
ствие его метрологических характеристик ранее установленным
техническим требованиям, которые могут содержаться в норма-
тивном документе или определяться заказчиком. Вывод о пригод-
ности средства измерений делает калибровочная лаборатория.
Калибровка заменила ранее существовавшую в нашей стране
ведомственную поверку и метрологическую аттестацию средств
измерений. В отличие от поверки, которую осуществляют органы
Государственной метрологической службы (ГМС), калибровка мо-
жет проводиться любой метрологической службой (или физичес-
ким лицом) при наличии надлежащих условий для квалифициро-
ванного выполнения этой работы. Калибровка — добровольная
операция, и ее также может выполнить метрологическая служба
самого предприятия. Это еще одно ее отличие от поверки, кото-
рая, как уже сказано выше, обязательна и подвергается контролю
со стороны органов ГМС.
В странах с развитой экономикой калибровочные работы ус-
пешно развиваются и расширяются на основе повышения конку-
рентоспособности продукции, и при этом поверке (как обяза-
тельной функции) подлежит ограниченная номенклатура средств
измерений.
Внедрение калибровки в России имеет свои особенности. В ре-
зультате отказа от всеобщей обязательности поверки в России
26
калибровка явилась продуктом разгосударствления процессов кон-
троля за исправностью приборов.
Российская служба калибровки (РСК) базируется на таких
принципах, как добровольность вступления; обязательная пере-
дача размеров единиц физических величин от государственных
эталонов рабочим средствам измерений; профессионализм и тех-
ническая компетентность субъектов РСК.
Основным желанием предпринимателя вступить в РСК долж-
но быть стремление к возрастанию доверия потребителей к пока-
зателям качества его продукции. Развитие российской системы ка-
либровки сопровождается формированием в стране системы ак-
кредитации испытательных лабораторий, которая охватывает и ка-
либровочные организации. Кроме того, членство в РСК обеспе-
чивает надлежащее информационное обеспечение калибровочной
деятельности. Окупаемость РСК за счет собственных средств рас-
сматривается как вполне реальный принцип, поскольку потреб-
ность в точных и достоверных результатах измерений возрастает.
На рис. 1.2 представлена схема Российской службы калибровки.
Рис. 1.2. Схема Российской службы калибровки (РСК)
27
Правовые основы калибровки средств измерений определяются
законом РФ об обеспечении единства измерений. Закон устанав-
ливает границы применения калибровки и гласит: «средства изме-
рений, нс подлежащие поверке, могут подвергаться калибровке
при выпуске из производства или ремонта, при ввозе по импорту,
при эксплуатации, прокате и продаже». Закон также указывает,
что заинтересованные метрологические службы юридических лиц
могут быть аккредитованы на право проведения калибровочных
работ. Порядок аккредитации устанавливается Госстандартом Рос-
сии. В целях реализации этого положения действующим законо-
дательством разработаны РМГ 127—2013. Порядок аккредитации
метрологических служб юридических лиц на право аттестации
методик выполнения измерений и проведения метрологической
экспертизы документов. Этот документ создан на основе анализа
организации национальных калибровочных служб Англии, США,
ФРГ и других стран, а также в соответствии с руководствами И СО
и МЭК, стандартами EN 45001-45003.
1.8. Методы поверки и калибровки, поверочные схемы
Допускается применение четырех методов поверки и калиб-
ровки средств измерений:
• непосредственное сличение с эталоном;
• сличение с помощью компаратора;
• прямые измерения величины;
• косвенные измерения величины.
Метод непосредственного сличения с эталоном соответствующего
разряда поверяемого средства измерений широко применяется для
различных средств измерений в таких областях, как электричес-
кие и магнитные измерения, для определения электрического
напряжения, частоты и силы электрического тока.
В основе метода лежит проведение одновременных измерений
одной и той же физической величины поверяемым и эталонным
приборами. При этом определяют погрешность как разницу пока-
заний поверяемого и эталонного средств измерений, принимая
показания эталона за действительное значение величины. Достоин-
ства этого метода заключаются в его простоте, наглядности, воз-
можности применения автоматической поверки, отсутствии потреб-
ности в сложном оборудовании.
Метод сличения с помощью компаратора основан на примене-
нии прибора сравнения, с помощью которого сличаются поверя-
емое и эталонное средства измерений. Компаратор используется в
случае, если невозможно сравнить показания приборов, измеря-
ющих одну и ту же величину, например двух вольтметров, один из
которых пригоден для измерения постоянного тока, а другой —
28
переменного. В подобных ситуациях в схему поверки вводится про-
межуточное звено — компаратор. Для приведенного примера по-
требуется потенциометр, который и будет компаратором. На прак-
тике компаратором может служить любое средство измерений, если
оно одинаково реагирует на сигналы как поверяемого, так и эта-
лонного измерительного прибора. Достоинством данного метода спе-
циалисты считают последовательное во времени сравнение двух ве-
личин.
Метод прямых измерений величины применяется, когда имеет-
ся возможность сличить испытуемый прибор с эталонным в опре-
деленных пределах измерений. В целом принцип работы этого ме-
тода аналогичен принципу работы метода непосредственного сли-
чения, однако методом прямых измерений производится сличе-
ние на всех числовых отметках каждого диапазона (и поддиапазо-
нов, если они имеются в приборе). Метод прямых измерений ве-
личины применяют, например, для поверки или калибровки вольт-
метров постоянного электрического тока.
Метод косвенных измерений величины используется когда дей-
ствительные значения измеряемых величин невозможно опреде-
лить прямыми измерениями, либо если косвенные измерения
оказываются более точными, чем прямые. Вначале этим методом
находят не искомую характеристику, а другие характеристики,
связанные с искомой определенной зависимостью. Искомая ха-
рактеристика определяется расчетным путем. Например, при по-
верке и калибровке вольтметра постоянного тока эталонным ам-
перметром устанавливают силу тока, одновременно измеряя со-
противление. Затем расчетное значение напряжения сравнивают с
показателями калибруемого или поверяемого вольтметра. Метод
косвенных измерений обычно применяют в установках автомати-
зированной поверки и калибровки.
Поверочные схемы. Для обеспечения правильной передачи раз-
меров единиц измерений от эталона к рабочим средствам измере-
ний составляют поверочные схемы, устанавливающие метроло-
гические соподчинения государственного эталона, разрядных эта-
лонов и рабочих средств измерений.
Поверочные схемы разделяют на государственные и локаль-
ные. Государственные поверочные схемы распространяются на все
средства измерений данного вида, применяемые в стране. Локаль-
ные поверочные схемы предназначены для метрологических орга-
нов министерств. Они также распространяются и на средства из-
мерений подчиненных предприятий. Все локальные поверочные
схемы должны соответствовать требованиям соподчиненности,
которая определена государственной поверочной схемой (рис. 1.3).
Государственные поверочные схемы разрабатываются научно-ис-
следовательскими институтами Госстандарта РФ, держателями
государственных эта-тонов.
29
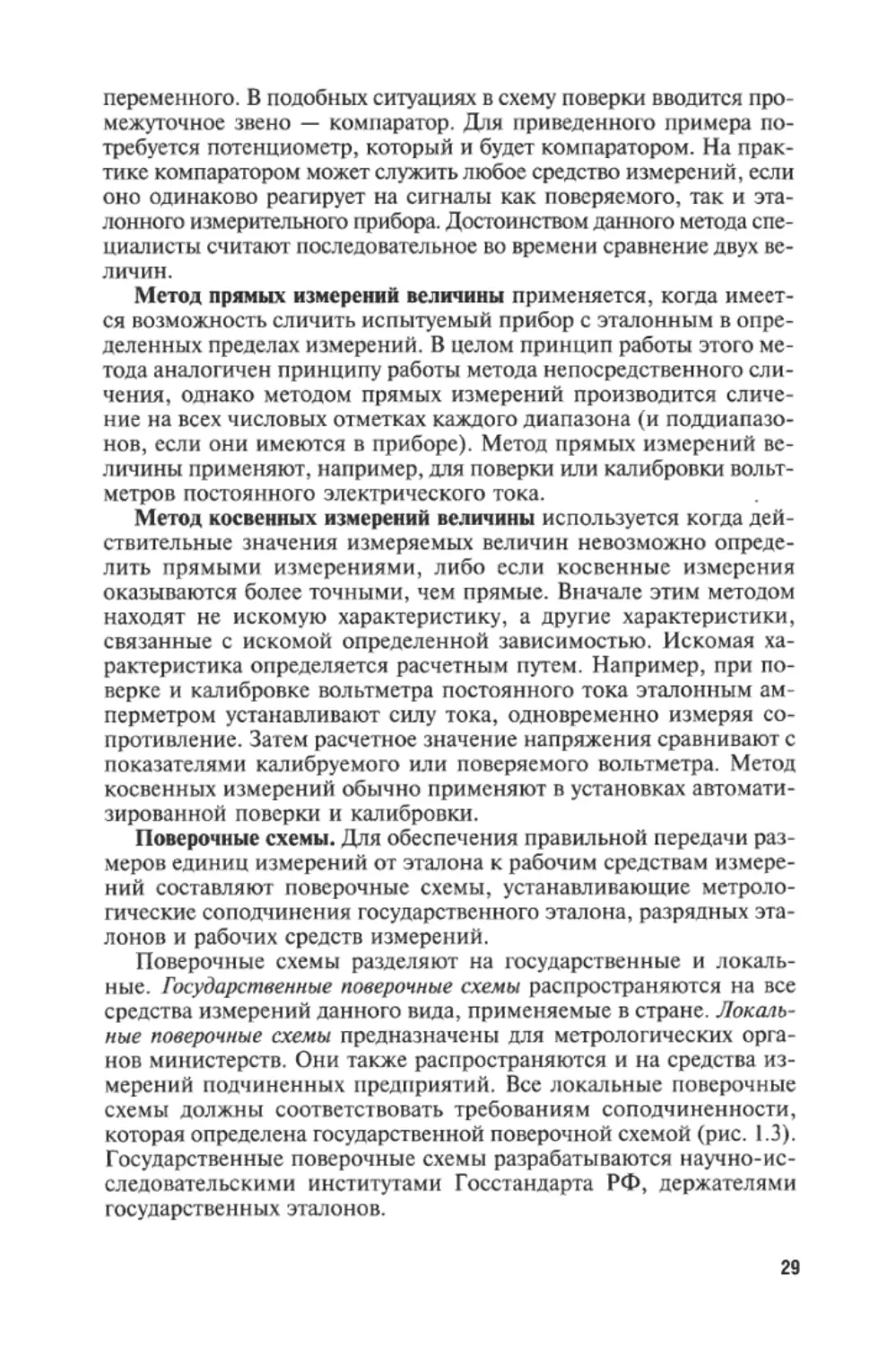
Рис. 1.3. Общий вид государственной поверочной схемы
Рассмотрим общий вид государственной поверочной схемы.
Наименование эталонов и рабочих средств измерений обычно
располагают в прямоугольниках (для государственного эталона
прямоугольник является двухконтурным). Здесь же указывают мет-
рологические характеристики для данной ступени схемы. В ниж-
ней части схемы расположены рабочие средства измерений, ко-
торые в зависимости от их степени точности (т.е. погрешности
измерений) подразделяют на пять категорий: наивысшую точность,
30
высшую точность, высокую точность, среднюю точность, низ-
шую точность. Наивысшая точность обычно соизмерима со степе-
нью погрешности средства измерений государственного эталона.
Эталоны 1—4-го разрядов соответствуют методам передачи выс-
шей, высокой, средней и низшей точностей.
В каждой ступени поверочной схемы регламентируется поря-
док (метод) передачи размера единицы. Наименования методов
поверки и калибровки располагаются в овалах, в которых также
указывается допустимая погрешность метода поверки и калибровки.
Основным показателем достоверности передачи размера единицы
величины является соотношение погрешностей средств измере-
ний между вышестоящей и нижестоящей ступенями поверочной
схемы. В идеале это соотношение должно быть 1:10, однако на
практике достичь его не удается, и минимально допустимым со-
отношением принято считать 1: 3. Чем больше величина этого со-
отношения, тем меньше уверенность в достоверности показаний
измерительного прибора.
1.9. Основные методы измерений
Электрорадиоизмерения, так же как и другие виды измере-
ний, базируются на определенных принципах. Под принципом из-
мерений понимается совокупность физических явлений, на кото-
рых основаны измерения.
Совокупность приемов использования принципов и средств
измерений определяется как метод измерений, являющийся ос-
новной характеристикой конкретных измерений. Методы измере-
ний подразделяют на метод непосредственной оценки и метод
сравнения.
При методе непосредственной оценки численное значение из-
меряемой величины определяется непосредственно по показанию
измерительного прибора (например, измерение напряжения с
помощью вольтметра).
Метод сравнения представляет собой метод измерений, при
котором измеряемую величину сравнивают с величиной, воспро-
изводимой мерой. Это может быть, например, измерение уровня
напряжения постоянного тока путем сравнения с ЭДС нормаль-
ного (эталонного) элемента. Различают следующие разновиднос-
ти метода сравнения:
• нулевой метод — действие измеряемой величины полностью
уравновешивается образцовой величиной;
• дифференциальный метод — в этом случае измеряется разница
между измеряемой и близкой ей по значению известной эталон-
ной величиной (например, измерение электрического сопротив-
ления методом неуравновешенного моста);
31
• метод замещения — действие измеряемой величины замеща-
ется (например, с помощью последовательно проводимых во вре-
мени действий) образцовой величиной.
Из всех перечисленных методов сравнения нулевой метод обес-
печивает наибольшую точность измерений физической величины.
К нулевому методу относятся:
• компенсационный метод — действие измеряемой величины
компенсируется (уравновешивается) образцовой величиной;
• мостовой метод — при его использовании достигают нулево-
го значения тока в измерительной диагонали моста, в которую
включается чувствительный индикаторный прибор (обычно нуль-
индикатор).
Измерения также можно классифицировать и по другим спо-
собам. Так, по способу преобразования измеряемой величины и
форме представления результаты измерений делятся на аналого-
вые (непрерывные) и цифровые (дискретные).
При осуществлении аналоговых измерений измерительный при-
бор производит непрерывное преобразование измеряемой вели-
чины, результатом которого является перемещение указателя от-
носительной шкалы, луча осциллографа по экрану и т.д. Заклю-
чение о численном значении величины делает оператор (наблю-
датель), отмечая положение указателя относительно отметок шкалы
измерительного прибора. Точность измерения при этом ограничи-
вается геометрическими особенностями указателя и шкалы и обыч-
но нс превышает 0,05 %.
При цифровых измерениях сравнение измеряемой величины с
рядом образцовых значений производится в приборе автомати-
чески, а оператор получает численное значение измеренной ве-
личины в цифровой форме. В этом случае все показатели зависят
от точности сравнения в приборе и исключаются субъективные
ошибки оператора. Современные цифровые приборы, как прави-
ло, обеспечивают более высокую точность, чем аналоговые. Роль
оператора упрощается, так как его работа заключается лишь в
правильном считывании числового значения.
По характеру изменения измеряемой величины во времени
различают статический и динамический режимы измерений.
Статический режим измерений представляет собой режим из-
мерений, при котором средство измерений работает в статичес-
ком режиме, т.е. когда выходной сигнал остается неизменным в
течение времени его использования (или меняется так медленно,
что каждый результат измерений может быть выражен только од-
ним числом).
Динамический режим измерений — режим измерений, резуль-
татом которого является функциональная зависимость измеряе-
мой величины от времени, т.е. в этом случае выходной сигнал
средства измерений изменяется во времени в соответствии с из-
32
менением во времени измеряемой величины. Таким образом, ди-
намические измерения применяют для измерения параметров ве-
личин, имеющих зависимость во времени.
В соответствии с методом и свойствами применяемых средств
измерений все рассмотренные выше виды измерений могут вы-
полняться либо с однократными, либо с многократными наблю-
дениями.
Наблюдением при измерении (измерительным наблюдением)
называется единичная экспериментальная операция, итогом ко-
торой является результат наблюдения. Он всегда имеет случайный
характер и представляет собой одно из значений измеряемой ве-
личины.
1.10. Классификация и показатели измерительных приборов
Измерительные приборы по принципу действия в общем виде
можно разделить на электромеханические и электронные. По струк-
турной схеме приборы делятся на аналоговые и цифровые.
Аналоговый измерительный прибор (АИП) — средство измере-
ний, показания которого являются непрерывной функцией изме-
нения измеряемой величины. Аналоговые измерительные прибо-
ры делятся на четыре основные группы.
В первую, самую большую группу, входят приборы для изме-
рения параметров и характеристик сигналов (например, осцил-
лографы, вольтметры, частотомеры, анализаторы спектра и т.д.).
Вторую группу образуют приборы для измерения параметров и
характеристик активных и пассивных элементов электрических схем.
Это измерители сопротивления, емкости, индуктивности, пара-
метров микросхем, транзисторов, а также приборы для снятия
частотных и переходных характеристик.
Третью группу составляют измерительные генераторы, явля-
ющиеся источниками сигналов различной амплитуды, формы и
частоты.
К четвертой группе относятся такие элементы измерительных
схем, как преобразователи, аттенюаторы, циркуляторы, фазо-
вращатели, направленные ответвители и т.д.
Цифровым измерительным прибором (ЦИП) называется сред-
ство измерений, автоматически вырабатывающее дискретные сиг-
налы измерительной информации, показания которого представ-
лены в цифровой форме.
По конструктивному исполнению измерительные приборы
подразделяются на показывающие и регистрирующие, среди ко-
торых различают самопишущие и печатающие.
Показывающий измерительный прибор — устройство, допуска-
ющее только считывание показаний оператором.
33
Регистрирующий измерительный прибор — прибор, в котором
предусмотрена регистрация показаний.
Самопишущий измерительный прибор — регистрирующий из-
мерительный прибор, в котором предусмотрено печатание пока-
заний в форме диаграммы.
По принципу действия измерительные приборы подразделя-
ются на ряд классов, перечисленных ниже:
измерительные приборы прямого действия — в них предусмотре-
но одно или несколько преобразований сигнала измерительной
информации в одном направлении, т.е. без применения цепей
обратной связи, например, амперметры, вольтметры;
измерительные приборы сравнения — предназначены для непо-
средственного сравнения измеряемой величины с известной ве-
личиной, например электроизмерительный потенциометр;
интегрирующие измерительные приборы — устройства, в кото-
рых измеряемая величина интегрируется по времени или по дру-
гой независимой переменной, например электрический счетчик
энергии;
суммирующие измерительные приборы — приборы, показания
которых функционально связаны с суммой двух или нескольких
величин, подводимых к ним по различным каналам, например
ваттметр для измерения суммы мощностей нескольких электри-
ческих генераторов.
Измерительные приборы характеризуются следующими основ-
ными показателями.
Диапазон измерений — область значений измеряемой величи-
ны, для которой нормированы допустимые погрешности измери-
тельного прибора (средства измерений).
Диапазон показаний — размеченная область шкалы, ограничен-
ная ее начальным и конечным значениями, т.е. указанными на
ней наименьшим хт|П и наибольшим возможными значения-
ми измеряемой величины (этот диапазон может быть шире диапа-
зона измерений).
Предел измерений — наибольшее или наименьшее значение ди-
апазона измерений.
Область рабочих частот (диапазон частот) — полоса частот, в
пределах которой погрешность прибора, полученная при измене-
нии частоты сигнала, не превышает допустимого предела.
Цена деления шкалы (РМГ 29—2013) — разность значений из-
меряемой величины, соответствующих двум соседним отметкам
шкалы.
Чувствительность (5) по измеряемому параметру — отно-
шение изменения сигнала на выходе измерительного прибора к
вызвавшему его изменению измеряемой величины. Чувствитель-
ность подразделяется на абсолютную, относительную и предель-
ную.
34
Абсолютную чувствительность можно рассчитать по формуле
5 = ^,
Ах
где &у — изменение сигнала на выходе; Ах — изменение измеря-
емой величины.
Относительная чувствительность определяется следующим об-
разом:
„ _ Ау/Ах
° ~ х ’
где х — измеряемая величина.
Предельная чувствительность (по напряжению, току или мощ-
ности) — минимальная величина исследуемого сигнала (напря-
жения, тока или мощности), подаваемого на вход прибора, кото-
рая необходима для получения отсчета с погрешностью, не пре-
восходящей допустимой.
Разрешающая способность — минимальная разность двух значе-
ний измеряемых однородных величин, которая может быть раз-
личима с помощью прибора.
Порог реагирования (чувствительности) — изменение измеряе-
мой величины, вызывающее наименьшее изменение показаний,
обнаруживаемое наблюдателем при нормальном для данного при-
бора способе отсчета.
Вариация показаний — средняя разность между показаниями
прибора, соответствующими данной точке диапазона измерений,
при двух направлениях медленного многократного изменения из-
меряемой величины.
Показанием называется значение измеряемой величины, оп-
ределяемое по отсчетному устройству прибора и выраженное в
принятых единицах этой величины.
Вариация характеризует, насколько устойчиво повторяются
показания прибора при измерениях одних и тех же значений ве-
личин.
Время установления показаний (время успокоения) — промежу-
ток времени, прошедший с момента изменения измеряемой ве-
личины до момента установления показаний. Для аналоговых при-
боров момент установления показаний определяется моментом,
когда амплитуда колебаний указателя становится не больше, чем
погрешность прибора.
Погрешности измерительного прибора (инструментальные погреш-
ности) оказывают существенное влияние на точность измерения
физической величины.
Более подробно вопросы инструментальных погрешностей рас-
смотрены в гл. 2.
35
Контрольные вопросы
1. Сформулируйте понятия основной и производной физических ве-
личин.
2. Что представляет собой Международная система единиц?
3. Дайте определения терминам: «измерение», «объект измерения»,
«метод и средства измерений».
4. Перечислите основные виды и методы измерений.
5. Какое назначение имеют различные виды эталонов и как организо-
вана передача размеров от эталонов к рабочим измерительным приборам?
6. Что такое эталоны единиц: силы электрического тока, времени и
частоты?
7. Дайте определение понятию «средства измерений» и приведите его
классификацию.
8. Как классифицируются и какими показателями характеризуются
измерительные приборы?
9. Перечислите основные задачи поверки средств измерений и Рос-
сийской системы калибровки средств измерений.
ГЛАВА 2
МЕТРОЛОГИЧЕСКИЕ ПОКАЗАТЕЛИ ИЗМЕРЕНИЙ
2.1. Основные термины и определения
14 ноября 2013 г. Международным советом по стандартизации,
метрологии и сертификации приняты Рекомендации по междуна-
родной стандартизации «ГСИ. Метрология. Основные термины
и определения».
В указанных Рекомендациях, в частности, узаконены основ-
ные термины и определения, касающиеся погрешностей измере-
ний и средств измерений.
Далее приводятся наиболее часто используемые термины и оп-
ределения погрешностей, установленные в Рекомендациях.
Погрешность результата измерений — отклонение результата
измерений от истинного (действительного) значения измеряемой
величины. Истинное значение величины неизвестно, его приме-
няют только в теоретических исследованиях. На практике исполь-
зуют действительное значение величины хд. Погрешность измере-
ния Ах.изм определяют по формуле
А^изм = *изм “
где хизм — измеренное значение величины.
36
Синонимом термина «погрешность измерения» является термин
«ошибка измерения», применять который не рекомендуется.
Систематическая погрешность измерений — составляющая по-
грешности результата измерений, которая остается постоянной
или закономерно изменяется при повторных измерениях одной и
той же физической величины. В зависимости от характера измере-
ния систематические погрешности подразделяют:
• на постоянные;
• прогрессивные;
• периодические;
• погрешности, изменяющиеся по сложному закону.
К постоянным относятся погрешности, которые длительное время
сохраняют свое значение, например в течение времени выполне-
ния всего ряда измерений. Они встречаются наиболее часто.
Прогрессивными являются непрерывно возрастающие или убы-
вающие погрешности. К ним относятся, например, погрешности
вследствие износа измерительных наконечников, контактирующих
с деталью при контроле ее прибором активного контроля.
Периодические погрешности представляют собой погрешности,
значение которых является периодической функцией времени или
перемещения указателя измерительного прибора.
Погрешности, изменяющиеся по сложному закону, происходят
вследствие совместного действия нескольких систематических по-
грешностей.
Инструментальная погрешность измерений — составляющая по-
грешности измерений, обусловленная погрешностью применяе-
мого средства измерений.
Погрешность метода измерений — составляющая систематичес-
кой погрешности измерений, обусловленная несовершенством
принятого метода измерений. Вследствие упрощений, принятых в
уравнениях для измерений, нередко возникают существенные
погрешности, для компенсации действия которых следует вво-
дить поправки. Погрешность метода иногда называют теоретичес-
кой погрешностью. Иногда погрешность метода может проявляться
как случайная.
Субъективная погрешность измерений — составляющая систе-
матической погрешности измерений, обусловленная индивиду-
альными особенностями оператора. Встречаются операторы, ко-
торые систематически опаздывают снимать отсчеты показаний
средств измерений или опережают сроки снятия показателей. Иног-
да субъективную погрешность называют личной погрешностью или
личной разностью.
Случайная погрешность измерений — составляющая погрешности
результата измерений, изменяющаяся случайным образом (по знаку
и значению) при повторных измерениях, проведенных с одинако-
вой тщательностью, одной и той же физической величины.
37
Абсолютная погрешность измерений — погрешность измерений,
выраженная в единицах измеряемой величины.
Относительная погрешность измерений — погрешность измере-
ний, выраженная отношением абсолютной погрешности измере-
ния к действительному или измеренному значению измеряемой
величины. Относительную погрешность (8) в долях или процен-
тах, %, находят из отношений
8 = — или 8 = —100,
где Ах — абсолютная погрешность измерений; х — действитель-
ное, или измеренное значение величины.
Рассеяние результатов в ряду измерений — несовпадение ре-
зультатов измерений одной и той же величины в ряду равноточ-
ных измерений, как правило, обусловленное действием случай-
ных погрешностей.
Количественную оценку рассеяния результатов в ряду измере-
ний вследствие действия случайных погрешностей обычно полу-
чают после введения поправок на действие систематических по-
грешностей. Оценками рассеяния результатов в ряду измерений
могут быть: размах, средняя арифметическая погрешность (по
модулю), средняя квадратичная погрешность или стандартное от-
клонение (среднее квадратичное отклонение, экспериментальное
среднее квадратичное отклонение), доверительные границы по-
грешности (доверительная граница или доверительная погреш-
ность).
Размах результатов измерений представляет собой оценку Rn
рассеяния результатов единичных измерений физической вели-
чины, образующих ряд (или выборку из п измерений), вычисля-
емую по формуле
-^тах ^ттйп»
где Хтдх и — наибольшее и наименьшее значения физической
величины в данном ряду измерений.
Рассеяние обычно обусловлено проявлением случайных при-
чин при измерении и носит вероятностный характер.
Средняя квадратичная погрешность результатов единичных из-
мерений в ряду измерений — оценка S рассеяния единичных ре-
зультатов измерений в ряду равноточных измерений одной и той
же физической величины около среднего их значения, вычисля-
емая по формуле
n ,
5 = 1M=L
л-1
(2.1)
38
где N — общее количество измерений; х, — результат /-го едини-
чного измерения; х — среднее арифметическое значение измеря-
емой величины из п единичных результатов.
На практике широко распространен термин среднее квадрати-
чное отклонение (СКО). Под отклонением в соответствии с фор-
мулой (2.1) понимают отклонение единичных результатов в ряду
измерений от их среднего значения. В метрологии это отклонение
называется погрешностью измерений.
Доверительные границы погрешности результата измерений пред-
ставляют собой наибольшее и наименьшее значения погрешно-
сти измерений, ограничивающие интервал, внутри которого с за-
данной вероятностью находится искомое (истинное) значение
погрешности результата измерений.
Доверительные границы погрешности в случае нормального
закона распределения вычисляются по формуле (± ± tSx). Пока-
затели 5, 5Х являются средними квадратичными погрешностями
соответственно единичного и среднего арифметического резуль-
татов измерений; t — коэффициент, зависящий от доверительной
вероятности Р и числа измерений п.
Поправка — значение величины, вводимое в неисправленный
результат измерений с целью исключения составляющих систе-
матической погрешности. Знак поправки противоположен знаку
погрешности. Поправку, прибавляемую к номинальному значе-
нию меры, называют поправкой к значению меры. Поправку, вво-
димую в показание измерительного прибора, называют поправкой
к показанию прибора.
Точность результата измерений — одна из характеристик каче-
ства измерений, отражающая близость к нулю погрешности ре-
зультата измерений. Считают, что чем меньше погрешность изме-
рений, тем больше их точность.
Статическая погрешность измерений — погрешность результата
измерений, свойственная условиям статического измерения.
Динамическая погрешность измерений — погрешность резуль-
тата измерений, свойственная условиям динамического измере-
ния.
Промах — погрешность результата отдельного измерения, вхо-
дящего в ряд измерений, которая для данных условий резко отли-
чается от остальных результатов этого ряда. Иногда вместо терми-
на «промах» применяют термин «грубая погрешность измерений».
2.2. Причины возникновения и способы исключения
систематических погрешностей
Природа и происхождение систематических погрешностей обыч-
но обусловлены спецификой конкретного эксперимента. Поэтому
39
обнаружение и исключение систематических погрешностей во
многом зависят от мастерства экспериментатора, от того, насколь-
ко он изучил условия проведения измерений и особенности при-
меняемых им средств и методов. Вместе с тем, существуют неко-
торые общие причины возникновения систематических погреш-
ностей, в соответствии с которыми их подразделяют:
• на методические;
• инструментальные;
• субъективные.
Методические погрешности происходят от несовершенства ме-
тода измерений, использования упрощающих предположений и
допущений при выводе применяемых формул, влияния измери-
тельного прибора на объект измерения. Например, измерение тем-
пературы с помощью термопары может содержать методическую
погрешность, вызванную нарушением температурного режима
исследуемого объекта (вследствие внесения термопары).
Инструментальные погрешности зависят от погрешностей при-
меняемых средств измерения. Неточность градуировки, конструк-
тивные несовершенства, изменения характеристик прибора в про-
цессе эксплуатации и другие являются причинами возникнове-
ния инструментальных погрешностей.
Погрешности измерений также возникают из-за неправильной
установки средства измерений, влияния на них магнитных или
электрических полей, наличия дополнительных и динамических
погрешностей. Дополнительные погрешности обусловлены откло-
нением от нормальных условий, в которых работает прибор. Дина-
мические погрешности возникают из-за инерционности применя-
емых технических средств при быстрых изменениях измеряемой
величины. Все эти погрешности отличают от инструментальных
(ГОСТ Р 8.568—2009), поскольку они связаны нс столько с самими
средствами измерений, сколько с условиями, при которых они
работают. Их устранение производится иными способами, нежели
устранение инструментальных погрешностей.
Субъективные погрешности вызываются неправильными отсче-
тами показаний прибора человеком (оператором). Это может слу-
читься, например, из-за неправильного направления взгляда при
наблюдении за показаниями стрелочного прибора (погрешность от
параллакса). Использование цифровых приборов и автоматических
методов измерения позволяет исключить такие погрешности.
Систематические погрешности могут оставаться постоянными
либо закономерно изменяться. В последнем случае их подразделя-
ют на прогрессирующие (возрастающие или убывающие), перио-
дические и изменяющиеся по сложному закону.
Обнаружение причин и источников систематических погреш-
ностей позволяет принять меры к их устранению или исключе-
нию посредством введения поправки.
40
Поправкой называется значение величины, одноименной с из-
меряемой, которое нужно прибавить к полученному при измере-
нии значению величины с целью исключения систематической
погрешности.
В некоторых случаях используют поправку или поправочный
множитель — число, на которое умножают результат измерений
для исключения систематической погрешности.
Поправка или поправочный множитель определяется при по-
мощи калибровки технического средства, составления и исполь-
зования соответствующих таблиц и графиков. Применяются также
расчетные способы нахождения поправочных значений.
Существуют специальные методы организации измерений, уст-
раняющие систематические погрешности. К ним относятся, напри-
мер, метод замещения и метод компенсации погрешности по знаку.
Метод замещения заключается в том, что измеряемая величина
замешается известной величиной, получаемой при помощи регу-
лируемой меры. Если такое замещение производится без каких-
либо других изменений в экспериментальной установке и после
замещения установлены те же показания приборов, то измеряе-
мая величина равняется известной величине, значение которой
отсчитывается по указателю регулируемой меры. Этот прием поз-
воляет исключить постоянные систематические погрешности. По-
грешность измерений при использовании метода замещения оп-
ределяется погрешностью меры и погрешностью, возникающей
при отсчете значения величины, замешаюшей неизвестную.
Метод компенсации погрешности по знаку применяется для ис-
ключения систематических погрешностей, которые в зависимос-
ти от условий измерений могут входить в результат измерений с
тем или иным знаком (погрешность от термоЭДС, от влияния
напряженности постоянного электрического или магнитного по-
лей и др.). В этом случае можно провести измерения дважды так,
чтобы погрешность входила в результаты измерений один раз с
одним знаком, а при повторном измерении — с обратным зна-
ком. Среднее значение из двух полученных результатов будет яв-
ляться окончательным результатом измерений, свободным от ука-
занных выше систематических погрешностей.
При проведении автоматических измерений широко использу-
ются схемные методы коррекции систематических погрешностей.
Компенсационное включение преобразователей, различные цепи
температурной и частотной коррекции являются примерами их
реализации.
В последнее время в измерительной технике широко применя-
ются средства, содержащие микропроцессорные системы. С помо-
щью последних удается производить исключение или коррекцию
многих видов систематических погрешностей. Особенно это отно-
сится к инструментальным погрешностям. Автоматическое введе-
41
нис поправок, связанных с неточностями градуировки, расчет и
исключение дополнительных и динамических погрешностей, ис-
ключение погрешностей, обусловленных смещением нуля, — эти
и другие корректировки позволяют существенно повысить точ-
ность измерений.
Следует, однако, заметить, что часть систематической погреш-
ности, несмотря на все усилия специалистов, остается неисклю-
ченной. Эта часть погрешности входит в результат измерений и
искажает его. Она может быть оценена, исходя из сведений о мет-
рологических характеристиках использованных технических средств.
Если таких сведений недостаточно, то можно использовать ре-
зультаты сравнения измеренных значений с аналогичными ре-
зультатами, полученными в других лабораториях.
2.3. Оценка случайных погрешностей
Адекватным математическим аппаратом описания случайных
погрешностей является теория вероятностей. Согласно последней
случайная величина наиболее полно характеризуется законом рас-
пределения (или плотностью распределения) вероятностей. Из-
мерителям чаше всего приходится принимать нормальную и рав-
номерную плотности распределения. Возможны и другие законы
распределения, которые обычно аппроксимируются стандартны-
ми функциями. Если выполняются предположения о том, что по-
грешности измерений могут принимать непрерывный ряд значе-
ний и при большом числе измерений частота появления погреш-
ностей, равных по абсолютной величине, но имеющих различ-
ный знак, одинакова и малые погрешности встречаются чаще,
чем большие, то для описания случайных погрешностей следует при-
менять нормальный закон распределения вероятностей, для которого
(А)2
2о2
(2.2)
Рис. 2.1. Нормальный закон распре-
деления случайных погрешностей
О
где у (А) — плотность вероятное-
о
тей случайной погрешности А;
о — среднее квадратичное значе-
ние случайной погрешности.
Кривые, соответствующие вы-
ражению (2.2) для разных значе-
ний о, приведены на рис. 2.1, на
котором видно, что при малых
42
значениях о вероятней получить малую погрешность измерений,
нежели при больших значениях а.
Вероятность (Р) того, что погрешность результата измерений
находится между заданными предельными значениями Д1 и Л:,
вычисляется по формуле
О 0 0 Д? о о
Р(Д| < Д<Д2)= J
Д2
ехр
(А)
2а2
db. (2.3)
Al
Интеграл в формуле (2.3) можно вычислить, используя табли-
цы функции Лапласа Ф(г) = 2/ >/2тсJе-'2!1dt, приводимые в книгах
/ о
по теории вероятностей и статистической обработке эксперимен-
тальных результатов.
Нетрудно заметить, что вероятность
/о о о
Р Д1 < А < Д2
В табл. 2.1 приведены значения вероятностей для некоторых ин-
тервалов дн д2 , заданных в единицах о.
В первой графе табл. 2.1 указываются интервалы, которые харак-
теризуются нижними и верхними границами Д1И Д2 соответствен-
но. Во второй графе показаны вероятности Р того, что случайная
погрешность результата измерений нс выходит за границы соответ-
ствующих интервалов. В третьей графе рассматриваются вероятнос-
ти выхода случайной погрешности за пределы интервалов.
Согласно табл. 2.1 вероятности получения значения случайных
погрешностей в интервале [-(2/3)а, +(2/3)а] и за его пределами оди-
наковы, в то время как в среднем только 0,3 % измерений имеют
погрешности, абсолютное значение которых превышает За. Значе-
ние погрешности (2/3)а называется вероятной погрешностью, а зна-
чение За часто считают практически наибольшей возможной погреш-
ностью. Однако при большом числе измерений 20...30 (п > 1) мак-
симальная погрешность нередко может превышать За.
Суммирование погрешностей. При измерениях может быть не-
сколько источников как систематических, так и случайных по-
грешностей. Поэтому практически важным является вопрос о пра-
вилах нахождения суммарной погрешности измерений по извест-
43
Таблица 2.1
Значения вероятностей Рдля некоторых интервалов
Д1, Дз ,
заданных в единицах а
"о о Интервал д,, Д2 Вероятность Р попадания в интервал " 0 0 Д), Д2 1 - Р
[-2/Зо, 2/3 о] [-о, а] [-2о, 2о] [-Зо, Зо] [-4о, 4о] 0,5 0,68 0,95 0,997 0,99993 0,5 0,32 0,05 0,003 0,00007
ным значениям погрешностей составляющих ее частей. При сум-
мировании составляющих неисключенной систематической по-
грешности их конкретные реализации можно рассматривать как
реализации случайной величины. Если известны границы состав-
ляющих неисключенной систематической погрешности 0„ а рас-
пределение этих составляющих в пределах границ равномерно, то
граница неисключенной систематической погрешности результа-
та измерения 0 вычисляется по формуле
9=1©? >
N м
где к — коэффициент, определяемый принятой доверительной
вероятностью. При доверительной вероятности 0,95 он принима-
ется равным 1,1 (см. ГОСТ Р 8.736—2011); т — количество неис-
ключенных систематических погрешностей.
При суммировании случайных погрешностей необходимо учи-
тывать их корреляционные связи. Суммарная средняя квадратич-
ная погрешность оЕ при двух составляющих может быть вычисле-
на по формуле
о£ = +(jj + 2pOIG2,
(2.4)
где Oj и g2 — средние квадратичные погрешности отдельных со-
ставляющих; р — коэффициент корреляции.
44
Поскольку на практике трудно получить удовлетворительную
оценку коэффициента корреляции р, приходится ограничиваться
крайними случаями, т.е. считать, что либо р = 0, либо р = ±1.
Тогда формула (2.4) примет вид
а£ = + <^2, если Р = О
или
О£ =| Gj ± о2 I, если Р = ±1 •
Таким образом, при отсутствии корреляционной связи средние
квадратичные погрешности складываются геометрически, а в случае
жесткой корреляционной зависимости — алгебраически. Этот вывод
справедлив и для случая нескольких источников погрешностей.
Исключение грубых погрешностей. Выделение грубых погреш-
ностей (промахов) — не простая задача, она требует глубокого
понимания особенностей поведения измеряемой величины. Наи-
более часто для обнаружения промаха используют так называе-
мый критерий Райта. Согласно этому критерию, если случайное
отклонение какого-либо измерения от среднего арифметического
значения превышает Зо, то считают, что данное измерение со-
держит промах. Критерий Райта в гаком виде целесообразно при-
менять при не очень большом числе измерений (о < п < 20). Если
же число измерений 20 < п < 100, то рекомендуется вместо значе-
ния Зо использовать значение 4о.
Необходимое число измерений. Вопрос о необходимом числе
измерений весьма важен, так как от его решения зависит весь
последующий ход эксперимента.
Надо четко понимать, что с увеличением числа измерений
можно уменьшить только случайную составляющую погрешнос-
ти, т.е. уменьшить средние квадратичные погрешности о и оср,
которые зависят от числа измерений п. В то же время системати-
ческая погрешность не уменьшается при увеличении п. Поэтому
если остаточная систематическая погрешность является преобла-
дающей, то увеличение числа измерений практически не дает
уменьшения погрешности. В этом случае чаще всего ограничива-
ются одним измерением. Например, при измерении напряжения
сети неточным переносным стрелочным прибором нерациональ-
но производить многократные измерения и статистическую обра-
ботку результатов измерений. Поскольку систематические погреш-
ности заведомо превышают случайные, то достаточно провести
всего одно измерение. При более точных измерениях основными
могут являться случайные погрешности. Тогда проведение много-
кратных измерений будет оправданным. Число измерений нужно
выбирать таким образом, чтобы средняя квадратичная случайная
погрешность оср не превышала максимального допустимого зна-
45
чения Перлон- Однако уменьшения оср за счет многократных изме-
рений следует добиваться только до тех пор, пока вклад случай-
ных погрешностей в общую погрешность измерения не будет срав-
ним с вкладом остаточных систематических погрешностей.
2.4. Погрешности средств измерений
2.4.1. Основные термины и определения
В Рекомендациях РМГ 29—2013. Метрология. Основные тер-
мины и определения — узаконены термины и определения (см. под-
разд. 2.1), которые выражают погрешности средств измерений.
Приведем наиболее часто употребляемые термины и определения
погрешностей средств измерений в соответствии с указанными
Рекомендациями.
Погрешность средства измерений представляет собой разность
между показанием средства измерений и истинным (действитель-
ным) значением измеряемой физической величины. Для меры по-
казанием является ее номинальное значение. Поскольку истинное
значение физической величины неизвестно, то на практике пользу-
ются ее действительным значением. Приведенное определение по-
нятия «погрешность средства измерений» не противоречит форму-
лировкам, принятым в отечественной литературе по метрологии.
Однако по своей сущности это определение не отличается от опре-
деления понятия «погрешность измерений», поэтому оно не явля-
ется достоверным и требует дополнительного уточнения.
Систематическая погрешность средства измерений — составля-
ющая погрешности средства измерений, принимаемая за посто-
янную или закономерную изменяющуюся величину. Системати-
ческая погрешность данного средства измерений, как правило,
будет отличаться от систематической погрешности другого экзем-
пляра средства измерений этого же типа, поэтому для группы
однотипных измерений систематическая погрешность иногда мо-
жет рассматриваться как случайная погрешность.
Случайная погрешность средства измерений является составля-
ющей погрешности измерений, изменяющейся случайным образом.
Абсолютная погрешность средства измерений представляет со-
бой погрешность средства измерений, выраженную в единицах
измеряемой физической величины.
Относительная погрешность средства измерений — погрешность
средства измерений, выраженная путем отношения абсолютной
погрешности средства измерений к результату измерений или к
действительному значению измеренной физической величины.
Приведенная погрешность средства измерений показывает от-
носительную погрешность, выраженную отношением абсолютной
46
погрешности средства измерений к условно принятому значению
величины, постоянному во всем диапазоне измерений или в час-
ти диапазона. Условно принятое значение величины называют
нормирующим значением. Часто за нормирующее значение прини-
мают верхний предел измерений. Приведенную погрешность обыч-
но выражают в процентах.
Основная погрешность средства измерений — погрешность сред-
ства измерений, применяемого в нормальных условиях.
Дополнительная погрешность средства измерений является со-
ставляющей погрешности средства измерений, возникающей до-
полнительно к основной погрешности вследствие отклонения ка-
кой-либо из влияющих величин от нормального ее значения или
ее выхода за пределы нормальной области значений.
Статическая погрешность средства измерений представляет со-
бой погрешность средства измерений, применяемого при измере-
нии физической величины, принимаемой за неизменную.
Динамическая погрешность средства измерений — погрешность
средства измерений, возникающая при измерении изменяющей-
ся в процессе измерений физической величины.
Класс точности средства измерений — обобщенная характеристи-
ка данного типа средств измерений, как правило, отражающая уро-
вень их точности, выражаемая пределами допустимых основной и
дополнительных погрешностей, а также другими характеристика-
ми, влияющими на точность. Класс точности средств измерений дает
возможность судить о том, в каких пределах находится погрешность
измерений одного типа, но он не является непосредственным пока-
зателем точности измерений, выполняемых с помощью каждого из
этих средств. Это важно при выборе средств измерений в зависимос-
ти от заданной точности измерений. Класс точности средств измере-
ний конкретного типа устанавливают в стандартах технических тре-
бований (условий) или в других нормативных документах.
Точностные характеристики средства измерений показывают
совокупность метрологических характеристик средства измерений,
влияющих на погрешность измерения. К точностным характерис-
тикам относят погрешность средства измерений, нестабильность,
порог чувствительности, дрейф нуля и др.
2.4.2. Нормируемые метрологические характеристики средств
измерений
Госстандартом России утвержден ГОСТ 8.009—84. Государ-
ственная система обеспечения единства измерения. Нормируемые
метрологические характеристики средств измерений. В стандарте
дастся новый подход к оценке погрешностей средств измерений
и к нормированию их метрологических характеристик (MX). Основ-
ная направленность стандарта заключается в стремлении прибли-
47
зить оценку погрешностей средств измерений, и в частности ана-
логовых электроизмерительных приборов (АЭП), к ее действи-
тельному значению. Принципиальным отличием стандарта явля-
ется то, что некоторые MX АЭП при необходимости должны ото-
бражать свойства не одного экземпляра средства измерений, а всей
совокупности средств измерений данного типа.
В отличие от использования старых ГОСТов при нормирова-
нии MX АЭП применение новых документов позволяет решать
важнейшие задачи теории и практики измерений, например за-
дачу подбора комплекта аналоговых измерительных преобразова-
телей, обеспечивающих получение заданной погрешности АЭП и
минимизации общей погрешности АЭП, т.е. перейти к решению
задач проектирования оптимальных АЭП.
В стандарте предусмотрена регламентация четырех составля-
ющих погрешности, обусловленных:
1) отличием реальной характеристики преобразования средств
измерений в нормальных условиях эксплуатации от номинальной
характеристики преобразования. Эта составляющая погрешности
называется основной погрешностью средств измерений;
2) изменением характеристик аналоговых средств измере-
ний при изменении влияющих факторов окружающей среды и
неинформативных параметров входного сигнала. Данная состав-
ляющая погрешности именуется дополнительной погрешностью
АЭП;
3) неидеальностью динамических характеристик АЭП и пре-
образователей. Эта составляющая погрешности называется дина-
мической погрешностью. Величина динамической погрешности за-
висит как от свойств аналоговых средств измерений, так и от ха-
рактеристик входных сигналов;
4) мощностью потребляемой средствами измерений. Погреш-
ность зависит от свойств средств измерений и источника измери-
тельных сигналов, а также от характеристик этих сигналов. Она
называется погрешностью взаимодействия.
Метрологические характеристики аналоговых средств измерений,
регламентируемые стандартами. В соответствии с ГОСТ 8.009—84
и другими стандартами для аналоговых средств измерений норми-
руются следующие метрологические характеристики:
1) номинальная статическая характеристика преобразования в
нормальных условиях эксплуатации /ном (х);
2) характеристики систематической составляющей погрешно-
©
сти Дс средств измерений;
3) характеристики случайной составляющей д погрешности
средств измерений;
4) характеристики погрешности Д средств измерений;
5) вариация показаний (Я);
48
6) дрейф показаний (J);
7) входное (Z^x) и выходное полные сопротивления элек-
трической цепи;
8) динамические характеристики средств измерений;
9) неинформативные параметры входного сигнала;
10) функция влияния на систематическую погрешность средств
измерений (у(£));
И) наибольшее допустимое изменение метрологической ха-
рактеристики, вызываемое изменением внешних влияющих фак-
торов и неинформативных параметров входного сигнала (А|(^));
12) диапазон измерений;
13) классы точности в соответствии с ГОСТ 8.009—84.
2.4.3. Основная погрешность
Основная погрешность отражает свойства средств измерений и
нормируется для нормальных или рабочих условий эксплуатации,
если дополнительные погрешности малы. Для аналоговых средств
измерений, применяемых в качестве самостоятельных приборов,
может нормироваться только основная погрешность для указан-
ной области значений влияющих факторов, если изменение по-
грешности средств измерений во всей рабочей области значений
влияющих факторов составляет менее половины основной погреш-
ности. Для аналоговых средств измерений, предназначенных для
информационной связи с другими средствами измерений, основ-
ная погрешность нормируется для нормальных условий эксплуа-
тации в случае, если наибольшее изменение погрешности средств
измерений во всей рабочей области значений влияющих факто-
ров составляет более 20% основной погрешности. Иначе основ-
ная погрешность нормируется для рабочих условий применения
средств измерений, которые указываются в стандартах или тех-
нических условиях на конкретные средства измерений.
Характеристики основной погрешности в общем случае долж-
ны отражать свойства всей совокупности средств измерений дан-
ного типа. Для каждого конкретного средства измерений ее мож-
но определить, если задаться моделью погрешности средств из-
мерений. В качестве модели основной погрешности До(/) можно
принять модель вида
Ао(0 = Дос(0 + До (О + Аов>
где ДосО) — систематическая по1решность средств измерений. В об-
щем случае — это нестационарный процесс, который изменяется
настолько медленно, что на практике величину ДоД/) считают
постоянной или закономерно изменяющейся; до(/) — стацио-
49
парный [эргодический] центрированный случайный процесс. Эта
составляющая погрешности средств измерений может иметь ши-
рокий спектр частот. Поэтому удобно полагать, что
со о
До(0 = Ловч(/) + Донч(0,
о с
где Довч(Г), Донч(/) — соответственно высокочастотная и низкоча-
стотная составляющие погрешности средств измерений. Соседние
значения процесса дОвч(/) некоррелированы, а соседние значе-
ния процесса ДОнч(/) коррелированы; Дов — случайная величина,
учитывающая явления типа гистерезиса.
В ряде случаев для применения средства измерений бывают необ-
ходимы знания автокорреляционной функции (см. ГОСТ 8.508 — 84).
о
Некоррелированные составляющие д0(/) нормируются заданием
среднего квадратичного отклонения (СКО) о До . Практически
разбросом характеристик случайной составляющей погрешности
средств измерений данного типа пренебрегают, а для получения
оценки сверху нормируют предел допустимого значения СКО, т.е.
Од Д . Разброс систематической погрешности средств измерений
данного типа велик, и поэтому в стандартах нормируется значение
математического ожидания М[ДС] ~ дс и среднего квадратичного
отклонения о[Дс| этой погрешности.
Естественно, что значения погрешностей могут изменяться
вдоль шкалы АЭП. Поэтому возникает задача определения коли-
чества точек, в которых необходимо найти погрешности средств
измерений так, чтобы по их значениям можно было бы оценить
с известной погрешностью точность средств измерений. В ГОСТ
8.009—84 указано, что точки выбирают соответствующими 5, 25, 50,
75, 95 % диапазона измерений, если в АЭП имеется существенная
вариация показаний, и соответствующими 0, 25, 50, 75, 100% диа-
пазона изменений, когда вариация отсутствует.
2.4.4. Дополнительная погрешность
Дополнительная погрешность отражает влияние изменения
внешних факторов и неинформативных параметров сигнала на
работу АЭП. Весь диапазон возможных значений внешних фак-
торов, влияющих на работу АЭП, делится на условные зоны,
50
одну из которых принимают за нормальные условия работы АЭП
(см. ГОСТ 22261—94. Средства измерений электрических и магнит-
ных величин. Общие технические условия).
При отклонении каждого фактора за пределы, соответствую-
щие этой зоне, на некоторое, заранее определенное число единиц
измерения этого фактора Д£, оговаривается, что появляется допол-
нительная погрешность Ал(х, %) или изменение метрологических
характеристик (например, частотной характеристики). Если изме-
нение погрешности во всей рабочей области значений влияющих
факторов невелико (см. подразд. 2.4.3), то может нормироваться
только основная погрешность для указанной области значений
влияющих факторов. Рабочие области значений влияющих фак-
торов указаны в стандартах (ГОСТ 22261—94. Средства измерений
электрических и магнитных величин. Общие технические условия)
или технических условиях на средство измерений конкретного
типа. Погрешность Ад(х, ^) должна нормироваться теми же число-
выми характеристиками, что и основная погрешность АЭП.
Наибольшее возможное значение дополнительной погрешнос-
ти Ад(х, £), вызываемое изменением какого-либо одного влия-
ющего фактора определяют, вычисляя максимальное значе-
ние погрешности в диапазоне возможных значений измеряемой
величины.
2.4.5. Динамическая погрешность
В АЭП динамические погрешности возникают из-за отличия их
характеристик от идеальных. Поэтому при вычислении погрешно-
стей полагаем, что известна идеальная характеристика АЭП. В ана-
логовых электроизмерительных приборах с идеальной характери-
стикой динамическая погрешность будет отсутствовать. Естествен-
но, что значения динамических погрешностей зависят от свойств
входного сигнала и влияющих факторов.
Для определения динамических погрешностей необходимо знать
одну из динамических характеристик АЭП, описывающую связь
между входным и выходным сигналами, изменяющимися во вре-
мени. К таким характеристикам относятся полные и неполные ди-
намические характеристики АЭП.
Полная динамическая характеристика определяет изменение
выходного сигнала прибора или преобразователя при любом из-
менении во времени информативного или неинформативного
параметров входного сигнала или влияющей величины. К таким
характеристикам относятся:
• дифференциальное уравнение Г[х (/), у (t), у(1)(/),..., у )] =
= 0, где х (/), у (г) — входной и выходной сигналы средств изме-
рений, а верхние индексы (1) и (/) означают операцию диффе-
ренцирования во времени;
• импульсная (весовая) характеристика Л(/);
• переходная характеристика g(/);
51
• передаточная функция K(S);
• совокупность амплитуд но- и фазочастотной характеристик
Я^со) и <р(со).
Неполная, частотная динамическая характеристика представ-
ляет собой параметр или функпионал полной динамической ха-
рактеристики АЭП. Например, параметры переходной характери-
стики электронно-лучевого осциллографа: время нарастания, выб-
рос, неравномерность вершины; время установления показаний
показывающих приборов; полоса частот, пропускаемая измери-
тельным преобразователем, и прочие характеристики, знание ко-
торых позволяет выполнить измерение с требуемой точностью.
Выбор конкретного набора динамических характеристик опре-
деленных групп АЭП и аналоговых измерительных преобразовате-
лей оговаривается в РМГ 29—2013, а также техническими услови-
ями на конкретные АЭП. Например, в соответствии со стандартами
для показывающих приборов в нормальных условиях следует нор-
мировать время установления показаний. Допускается указывать
и другие сведения о динамических свойствах приборов, например,
величину степени успокоения, характер переходного процесса и т.д.
Контрольные вопросы
1. Дайте определение терминам: «случайная, систематическая, абсо-
лютная и относительная погрешности измерения».
2. Что такое средняя квадратичная погрешность результатов измере-
ний?
3. Объясните причины возникновения методических, инструменталь-
ных и субъективных погрешностей.
4. Каким образом производится суммирование различных погрешно-
стей?
5. Перечислите основные виды погрешностей средств измерений.
6. Какие метрологические характеристики средств измерений регла-
ментируются стандартами?
7. Чем определяются основная, дополнительная и динамическая по-
грешности измерительных приборов?
РАЗДЕЛ II
ПРЕОБРАЗОВАТЕЛИ
ГЛАВА 3
ПРЕОБРАЗОВАТЕЛИ ЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН
В ПЕРЕМЕЩЕНИЕ
3.1. Общие сведения об измерительных механизмах
Измерительный механизм имеет подвижную часть, на кото-
рую действуют механические силы, зависящие от измеряемой
электрической величины.
Вращающий момент. Измерительные механизмы работают на
принципе преобразования электромагнитной энергии в механи-
ческую энергию, воспринимаемую подвижной частью механизма.
Механические силы и вращающий момент Л/вр этих сил, действу-
ющий на подвижную часть механизма, возникают в результате
взаимодействия магнитных или электрических полей, создаваемых
током, напряжением, намагниченными или наэлектризованны-
ми телами.
Измерительные механизмы по принципу работы классифици-
руются:
• на магнитоэлектрические (в них вращающий момент создает-
ся путем взаимодействия магнитного поля постоянного магнита и
контура (рамки) с током; подвижной частью может быть как рам-
ка, так и магнит);
• ферродинамические (вращающий момент в механизмах возни-
кает в результате взаимодействия магнитного поля, создаваемого
электромагнитом, и подвижного контура (рамки) с током);
• электродинамические (вращающий момент в механизмах со-
здается путем взаимодействия двух контуров (рамок) с током,
один из которых — подвижный);
• электромагнитные (в них вращающий момент создается бла-
годаря действию магнитного поля неподвижной катушки на фер-
ромагнитное тело, являющееся подвижной частью механизма);
• электростатические (вращающий момент в механизмах воз-
никает путем взаимодействия двух или нескольких заряженных
тел, одно из которых является подвижной частью механизма);
53
• индукционные (в них используются неподвижные контуры с
переменным током, создающие переменные магнитные поля,
индуктирующие токи в диске, являющемся подвижной частью
механизма).
Противодействующий момент. Для работы измерительного ме-
ханизма необходимо, чтобы каждому значению измеряемой ве-
личины и вращающего момента соответствовал только один угол
поворота подвижной части. Для этого в измерительном механизме
предусмотрено создание противодействующего момента Л/пр, на-
правленного навстречу вращающему моменту и являющегося функ-
цией угла отклонения.
Установившееся отклонение. При равенстве вращающего и про-
тиводействующего моментов будет иметь место установившееся
отклонение.
Противодействующий момент обычно создается механически-
ми силами с помощью спиральных пружин (рис. 3.1, а), растяжек
(рис. 3.1, б) или подвесов (рис. 3.1, в). Противодействующий мо-
мент Л/пр, создаваемый закручиванием пружинок, растяжек и
подвесов, пропорционален углу закручивания а поворота подвиж-
ной части:
Мпр = И/а,
где W — удельный противодействующий момент, зависящий от
упругих свойств материала и геометрических размеров ленты (дли-
ны, ширины и толщины), из которой выполнена пружина.
В качестве материала для изготовления пружин, растяжек и
подвесов обычно применяется бронза.
Рис. 3.1. Способы создания противодействующего момента:
а — с помощью спиральных пружин; б — посредством растяжек; в — с помощью
подвесов; 1 — спиральная пружина, создающая противодействующий момент;
2 — ось измерительной системы; 3 — рычаг для установки стрелки в нулевое
положение; 4 — эксцентрик для поворота рычага 3 и 5 — стрелки; 6 — баланси-
рующие противовесы;
54
Рис. 3.2. Отсчетные устройства из-
мерительных механизмов:
а — обычная шкала и стрелка, име-
ющая копьевидный конец; б — зер-
кальная шкала и стрелка, содержа-
щая ножевидный конец
Отсчетные устройства. В изме-
рительных механизмах в основ-
ном применяются три типа от-
счетных устройств:
• обычная шкала и стрелка,
имеющая копьевидный конец
(рис. 3.2, а)\
• зеркальная шкала и стрелка,
содержащая ножевидный конец
(рис. 3.2, б)\
• световой отсчет с помощью
зеркальца (рис. 3.3).
На рис. 3.3 показан прибор с
внутренним световым отсчетным
устройством. Луч света от лампы 1
через линзу 2, диафрагму 5, зер-
кал 4 и 5 и линзу 6 направлен на зеркальце 7 подвижной части,
отразившись от которого, через зеркала 8 и 9 попадает на шкалу
10. На шкале получается изображение нити лампы в виде круглого
светового пятна с чертой посередине. Многократное отражение
позволяет удлинить расстояние от зеркальца до шкалы и получить
значительно большее перемещение светового пятна по шкале.
Успокоители. Подвижная часть механизма представляет собой мас-
су, соединенную с упругим элементом, т.е. является колебательной
системой. Для успокоения колебательной подвижной системы пре-
дусмотрены успокоители (демпферы). В измерительных механизмах
применяются воздушные и магнитоиндукционные успокоители.
Рис. 3.3. Прибор с внутренним световым отсчетом:
1 — лампа; 2 и 6 — линзы; 3 — диафрагма; 4 и 5 — зеркала; 7 — зеркальце
подвижной части; 8 и 9 — зеркала; 10 — шкала
55
a
Рис. 3.4. Типы успокоителей:
а — воздушный крыльчатый; 1 — алюминиевая пластинка; 2 — ножка; 3 — ось
подвижной части; 4 — камера; б — воздушный поршневый; 1 — алюминиевая
пластинка; 2 — ножка; 3 — ось подвижной части; 4 — камера; в — магнитоин-
дукционный; 1 — постоянный магнит; 2 — алюминиевая пластинка; 3 — ось
подвижной части
Воздушные успокоители обычно выполняются в виде крыльча-
тых (рис. 3.4, а) и поршневых (рис. 3.4, б) успокоителей. Крыль-
чатые успокоители представляют собой алюминиевую пластинку
7, перемещающуюся в камере 4 и укрепленную на ножке 2, сидя-
щей на оси 3 подвижной части. Зазоры между крылом и камерой
малы (0,3...0,5 мм), поэтому сопротивление воздуха в камере дви-
жения подвижной части велико. Аналогично работает и поршне-
вый успокоитель.
Магнитоиндукционный успокоитель показан на рис. 3.4, в. Мо-
мент успокоения создается силами взаимодействия поля посто-
янного магнита 7 и токов, которые индуктируются в алюмини-
евой пластинке 2, перемещающейся в камере 4, закрепленной на
оси 3 подвижной части, при ее движении в поле магнита.
3.2. Магнитоэлектрические измерительные механизмы
Магнитоэлектрический измерительный механизм с подвижной
катушкой (рамкой) показан на рис. 3.5. В нем подвижной частью
является рамка 7, укрепленная на кернах и расположенная в зазоре 2,
образованном магнитопроводом 3 с полюсными наконечниками 4
и сердечником 5из мягкой стали. Магнитное поле создается посто-
янным магнитом 6; силовые линии магнитного поля, замыкаясь
через полюсные наконечники и сердечник, проходят в воздушном
зазоре 2 в радиальном направлении, создавая, таким образом, в
зазоре равномерное радиально направленное поле.
Измеряемый ток подводится к рамке 7 через два пружинных
токоподвода 7, которые одновременно служат для создания про-
тиводействующего момента. На оси рамки укреплена стрелка 8,
перемещающаяся над шкалой. Для уравновешивания подвижной
части служат грузики 9. Цифрой 10 обозначен корректор, пред-
назначенный для установки стрелки в нулевое положение.
56
6.
Рис. 3.5. Магнитоэлектрический измерительный механизм с подвижной
катушкой:
1 — подвижная катушка (рамка); 2 — воздушный зазор; 3 — магнитопровод; 4 —
полюсные наконечники; 5 — сердечник; 6 — постоянный магнит; 7 — пружин-
ный токоподвод; 8 — стрелка; 9 — уравновешивающие грузики; 10 — корректор
нулевого положения стрелки
Распространение получили также магнитоэлектрические изме-
рительные механизмы с подвижным магнитом, схема которого
представлена на рис. 3.6.
Магнит 7 укреплен на оси 2. Ток, протекающий по катушкам 5,
создает магнитное поле, и подвижной магнит стремится устано-
виться вдоль этого магнитного поля. Противодействующий момент
создается пружиной 4. Успокоение в приборе достигается с помо-
щью неподвижного медного цилиндра (успокоителя) 5, в кото-
ром при движении магнита индуктируются токи, взаимодейству-
ющие с полем магнита.
Принцип действия магнитоэлектрического измерительного ме-
ханизма поясняют схемы, представленные на рис. 3.7.
Так как силовые линии при рабочем повороте рамки перпен-
дикулярны се вертикальным сторонам, то на основании закона
Био-Савара, учитывая равномерность поля в зазоре, можно написать:
F= Mwl,
(3.1)
где В — индукция в зазоре; 7 — сила тока в рамке; w — число
витков рамки; / — длина вертикальной стороны рамки.
Пара сил F создает вращающий момент
Мр = я?,
(3.2)
где а — плечо пары, равное ширине рамки.
Подставляя в выражение (3.2) значение F из формулы (3.1),
получим
Л/вр = BIwla - Blwsy
где s = la — площадь рамки.
57
Рис. 3.6. Устройство маг-
нитоэлектрического из-
мерительного механизма
с подвижным магнитом:
1 — магнит; 2 — ось; 3 —
катушки; 4 — противодей-
ствующая пружина; 5 —
цилиндр (успокоитель)
Противодействующий момент Л/пр, со-
здаваемый пружинами:
Чр = ИЪ,
где W— удельный противодействующий
момент, определяемый упругими свой-
ствами пружины; а — угол поворота под-
вижной системы.
Установившееся отклонение наступит
при равенстве вращающего и противо-
действующего моментов:
Мвр = Л/пр. (3.3)
Подставляя в равенство (3.3) выраже-
ния для обоих моментов, получим
Blws = РРа,
BIws с ,
откуда а =----, или а = 8}1.
W
a Bws
Величина ^1=7 = _^7", представля-
ющая собой угол отклонения, соответ-
ствующий единице измеряемого тока, на-
зывается чувствительностью к току.
Так как чувствительность к току маг-
нитоэлектрического измерительного механизма является величи-
ной постоянной (не зависящей ни от тока, ни от угла отклонения),
то угол отклонения а линейно зависит от измеряемого тока /, и
шкала магнитоэлектрического измерительного механизма полу-
чается равномерной.
При изменении направления тока /, направления сил F (см.
рис. 3.7) и вращающего момента изменяются на обратные. Поэто-
му этот механизм пригоден лишь для измерения постоянного тока.
Для измерения среднего, или действующего значения пере-
менного тока магнитоэлектрический измерительный механизм
можно применять лишь в сочетании с выпрямляющим устрой-
ством.
Успокоение у магнитоэлектрического измерительного меха-
низма относится к магнитоиндукционному типу. Специального
устройства для этой цели не требуется, так как при движении
рамки в поле постоянного магнита в витках рамки, а также в ее
металлическом каркасе индуктируются токи, в результате взаи-
модействия которых с полем магнита создается успокаивающий
момент.
58
Магнитоэлектрические измери-
тельные механизмы обладают сле-
дующими свойствами'.
• используются только для из-
мерения постоянного тока;
• имеют постоянство чувстви-
тельности по всей шкале (равно-
мерность шкалы);
• непосредственное измерение
тока измерительным механизмом с
рамкой, крепящейся на кернах в
опорах, ограничено верхним пре-
делом, не превышающим долей
ампера, в связи с тем, что при
больших токах возникает опасность
перегорания токоподводов, и ниж-
ним пределом, не превышающим
порядка долей миллиампера, так
Рис. 3.7. Принцип действия маг-
нитоэлектрического измеритель-
ного механизма:
а —схема механизма в разрезе; б —
вил механизма сверху; 1 — подвиж-
ная рамка с током; 2 и 3 — север-
ный и южный полюса постоянных
магнитов; F — сила, движущая рам-
ку; а — угол поворота
как значение вращающего момен-
та при малых токах становится срав-
нимым с моментом трения в опо-
рах. Повышение предела измерения
требует использования дополни-
тельных преобразователей, а пони-
жение этого предела приводит к не-
обходимости перехода к креплению
рамки на растяжках или подвесе;
• характеризуются малым по-
треблением энергии для своей работы, а это является важным
условием для измерения в маломощных цепях.
3.3. Ферродинамические измерительные механизмы
Устройство ферродинамического измерительного механизма по-
казано на рис. 3.8. Этот механизм отличается от магнитоэлектри-
ческого измерительного механизма тем, что магнитный поток в
нем создается не постоянным магнитом, а электромагнитом. Маг-
нитная цепь электромагнита, состоящая из ярма 1 и сердечника 2,
выполнена из листовой мягкой стали или из прессованного фер-
ромагнитного порошка, обладающего малыми потерями на гис-
терезис и вихревые токи. Ток в катушках 3, надетых на ярмо,
возбуждает в воздушном зазоре равномерное радиальное поле, в
котором помешена подвижная катушка (рамка) 4. Противодей-
ствующий момент создается двумя пружинами 5, одновременно
служащими для подвода тока к рамке.
59
Рис. 3.8. Ферродинамический
измерительный механизм:
1 — ярмо; 2 — сердечник; 3 — ка-
тушки; 4 — подвижная катушка
(рамка); 5 — токоподводы (пружи-
ны)
Ферродинамический измери-
тельный механизм применяется для
измерений на переменном токе. При
мгновенных значениях тока в рамке
и потоке можно написать выраже-
ние для мгновенного значения вра-
щающего момента в виде
где В, и /р — мгновенные значения
магнитной индукции в зазоре и
тока в рамке; s и w — площадь и
число витков в рамке.
Положим, что В, = Z?maxsina)/, где
Z?max — максимальная индукция в за-
зоре; со — угол отклонения; /р =
= /ртахsin (ш/ - у), где /ртах — макси-
мальный ток в рамке; у — сдвиг по
фазе между током в рамке и пото-
ком.
Подвижная часть механизма из-за своей инерционности не
может следовать за мгновенными изменениями вращающего мо-
мента, и ее отклонение будет пропорционально среднему значе-
нию вращающего момента за период Т
1 т
МВр.ср = 7 SW'J В^ sin <orzp max sin (<о/ - y)dt =
1 о
= у В^ lpnmsw J sin at sin (at - ~ Bm3X Ip max sw cos y.
Переходя к действующим значениям, получим
^вр.ср “
swBy/2Ip\l2
2
COS\|/ = Bswlp cosy.
Противодействующий момент, создаваемый пружинами:
Мпр = ИЪ,
где W — удельный противодействующий момент пружины; а —
угол отклонения подвижной части.
Установившееся отклонение будет иметь место при равенстве
вращающего и противодействующего моментов:
Bswlpcos v = И'а.
60
Откуда
а =
Bs w cos у т
~w p
Так как индукция в зазоре пропорциональна току в неподвиж-
ных катушках, т.е. В = к{1ь то
a = ^^/,/pcosv, (3.4)
W
где — сила тока в неподвижных катушках; /р — сила тока в рамке.
В зависимости от назначения измерительного механизма ка-
тушки возбуждения 2 и рамка 1 между собой могут соединяться
последовательно (рис. 3.9, а), параллельно (рис. 3.9, б) или же
включаться в различные участки измеряемой цепи (например, в
случае ваттметра). Если катушки возбуждения питаются независи-
мо от измерительной цепи и в нее включается лишь рамка изме-
рительного механизма (рис. 3.9, в), то справедлива формула (3.4).
В данном случае шкала (а = /(/р)) измерительного механизма по-
лучается равномерной.
При соединении катушек последовательно (см. рис. 3.9, а)
/, = /р = /, где / — измеряемый ток и cosy = 1. Тогда
<х = ^Г. (3.5)
При соединении катушек параллельно (см. рис. 3.9, б) токи в
катушках будут пропорциональны измеряемому току I: Ц = k2f;
/р = к3/. Следовательно,
k\k2k3sw Т1 ksw г2
a = - „—72 cosy =-—cosy/\ (3.6)
W W
где к, к]...к3 — коэффициенты пропорциональности.
Формулы (3.5) и (3.6) показывают, что шкала получается не-
равномерной.
Рис. 3.9. Схемы соединений катушек ферродинамичсского измеритель-
ного механизма:
а — последовательно; б — параллельно; в — независимо; 7 — рамка; 2 —
катушки возбуждения
61
Ферродинамический механизм обладает следующими свойствами'.
• угол отклонения подвижной системы пропорционален действу-
ющим значениям переменных токов, протекающих по катушкам;
• шкала может быть либо равномерной, либо неравномерной;
• непосредственное измерение тока при независимом возбужде-
нии и креплении рамки на кернах ограничено, так же, как и у
магнитоэлектрических приборов, верхним пределом, не превыша-
ющим долей ампера, и нижним пределом — порядка долей милли-
ампера. При параллельном соединении катушек возбуждения и рамки
верхний предел может достигать 5... 10 А. Повышение предела из-
мерения требует применения дополнительных преобразователей;
• потребление мощности при независимом возбуждении ана-
логично потреблению мощности магнитоэлектрическим механиз-
мом; при последовательном или параллельном соединении рамки
и катушек возбуждения потребление мощности возрастает.
3.4. Электродинамические измерительные механизмы
Электродинамические измерительные механизмы основаны на
взаимодействии полей двух токов, протекающих соответственно
по двум катушкам: неподвижной катушке 1 и подвижной катушке
(рамке) 2 (рис. 3.10). Неподвижную катушку выполняют из двух
частей, между ними проходит сквозная ось 3, на которой укреп-
лена подвижная катушка. Противодействующий момент создается
пружинами, служащими также и для подвода тока к подвижной
катушке.
В электродинамических механизмах обычно применяются воз-
душные успокоители, так как при использовании магнитоин-
дукционпых успокоителей возможно искажение сравнительно
слабых полей катушек полем рассеяния магнита успокоителя.
На рис. 3.10 цифрой 4 обозначено крыло успокоителя, а циф-
рой 5 — камера успокоителя.
В данном механизме подвижная катушка помешается в неравно-
мерном поле. Поэтому вращающий момент, действующий на под-
вижную катушку, зависит от взаимного расположения катушек.
В этом случае выражение для вращающего момента в общем
виде можно получить, исходя из того, что подвижная часть любо-
го электромеханического устройства стремится расположиться та-
ким образом, чтобы электромагнитная энергия устройства была
наибольшей. При этом вращающий момент определяется скоро-
стью изменения электромагнитной энергии Ае при угловом пере-
мещении а подвижной части:
М
_ ^Ае
62
Электромагнитная энергия ме-
ханизма, состоящего из двух ка-
тушек с токами /j и /2, может быть
представлена в виде
Л = ^Д/12 + |12/22 + л/|2/|/2,
где £| и “ индуктивности не-
подвижной и подвижной катушек;
Л/12 — взаимная индуктивность
между катушками.
Так как индуктивности Ц и А2
катушек при повороте рамки не
изменяются, то их производные
по углу а равны нулю. Тогда
Рис. 3.10. Электродинамический
измерительный механизм:
1 — неподвижная катушка; 2 — под-
вижная катушка (рамка); 3 — ось; 4 —
крыло успокоителя; 5 — камера успо-
коителя
л/Вр = Л/2^-.
da
Следовательно, вращающий
момент зависит не только от токов
/| и /2, но и от взаимного расположения катушек, т.е. от угла откло-
нения а подвижной катушки.
При одновременном изменении направления токов Ц и /2 на-
правление вращающего момента не изменится. Следовательно,
электродинамический измерительный механизм может применять-
ся как на постоянном, так и на переменном токе. Однако при
измерениях на переменном токе последнее выражение будет спра-
ведливо лишь для мгновенных значений токов ix и /2.
Руководствуясь теми же рассуждениями, которые были приве-
дены для ферродинамических приборов, получим среднее за пе-
риод значение вращающего момента (определяющее угол откло-
нения подвижной части):
л / 1 т dM 12
ЛЛр.ср = /i/2cosv—
da
где v — сдвиг по фазе между токами /] и /2.
Противодействующий момент, создаваемый пружинами, бу-
дет следующим:
Мир = И4х,
где W — удельный противодействующий момент пружины. Уста-
новившееся отклонение будет наступать при равенстве
^Ар = -^пр»
63
или LI2 cos v ^'2 = ГГа.
da
Откуда
_ IJ2 cosy dM]2
W da
Если неподвижная и подвижная катушки соединены последо-
вательно или параллельно, то
кх12 dMn
W da
а =
2I2 dM
и а = -^—cos^ —
W da
где I — значение измеряемого тока; к2 — коэффициенты про-
порциональности.
Шкала электродинамического измерительного механизма имеет
квадратичный характер. Однако при правильном выборе геомет-
рических размеров катушек и их начального взаимного располо-
жения можно достичь такой зависимости Л/!2 от угла отклонения,
чтобы вращаюший момент практически не зависел от угла пово-
рота а на значительном участке шкалы. При включении катушек в
различные участки измерительной цепи шкала измерительного
механизма имеет практически равномерный характер.
Электродинамические измерительные механизмы обладают сле-
дующими свойствами:
• применяются как для измерений на постоянном, так и на
переменном токе. На переменном токе эти механизмы измеряют
действующее значение;
• характер шкалы неравномерный; при использовании элек-
тродинамического измерительного механизма в ваттметрах шкала
практически равномерна;
• непосредственное измерение тока обычно ограничивается верх-
ним пределом, составляющим 5 А (редко 10 А), и нижним преде-
лом порядка 30...60 мА. Повышение предела измерения требует
использования дополнительных преобразователей;
• потребление мощности относительно велико. Например, при
пределе измерения 5 А потребление мощности достигает порядка
5 Вт, что примерно в 20 раз больше, чем у магнитоэлектрическо-
го измерительного механизма с дополнительным преобразовате-
лем (шунтом) на тот же предел измерения.
3.5. Электромагнитные измерительные механизмы
Принцип действия и устройство наиболее распространенных
типов электромагнитных измерительных механизмов показаны на
рис. 3.11 (с плоской катушкой) и рис. 3.12 (с круглой катушкой).
64
Рис. 3.11. Электромагнитный из-
мерительный механизм с плос-
кой катушкой:
/ — неподвижная катушка; 2 —
ферромагнитный сердечник; 3 —
ось; 4 — противодействующая пру-
жина
Рис. 3.12. Электромагнитный из-
мерительный механизм с круг-
лой катушкой:
1 — неподвижная катушка; 2 — не-
подвижный сердечник; 3 — подвиж-
ный сердечник; 4 — противодейству-
ющая пружина; 5 — ось
В механизме с плоской катушкой (см. рис. 3.11) измеряемый
ток, протекая по неподвижной катушке 7, создает в ее щели маг-
нитное поле, под действием которого ферромагнитный сердеч-
ник 2, насаженный эксцентрично на оси 5, стремится располо-
житься так, чтобы усилить это магнитное поле. Иначе говоря, сер-
дечник 2 втягивается в шель катушки. Благодаря эксцентричному
креплению на оси сердечник, втягиваясь в щель катушки, пово-
рачивает ось, на которой укреплена стрелка. Противодействую-
щий момент создастся пружиной 4.
В механизме с круглой катушкой (см. рис. 3.12) в поле, создава-
емом измеряемым током, протекающим по неподвижной катуш-
ке 7, помешаются два ферромагнитных сердечника. Сердечник 2
укреплен неподвижно внутри катушки, а подвижный сердечник 3
скреплен с осью 5. Оба сердечника под воздействием поля катуш-
ки намагничиваются одноименно, в результате подвижный сер-
дечник 3 отталкивается от неподвижного сердечника 2, повора-
чивая таким образом ось 5 со стрелкой и крылом успокоителя.
Противодействующий момент создается пружиной 4.
В этих механизмах чаще применяется воздушный успокоитель,
так как при использовании магнитоиндукционного успокоителя
возможно искажение относительно слабого собственного поля
катушки полем рассеяния магнита. При перемещении сердечника
конфигурация силовых линий магнитного поля катушки изменя-
65
ется, поэтому вращающий момент зависит от расположения под-
вижного сердечника относительно катушки (при использовании
плоской катушки) или неподвижного сердечника (при примене-
нии круглой катушки). На вращающий момент влияет угол откло-
нения подвижной части измерительного механизма.
Для получения зависимости угла отклонения а от измеряемого
тока /, протекающего по катушке, воспользуемся общим выраже-
нием для вращающего момента:
М = ^4-
вр da ’
где электромагнитную энергию Ае одной катушки с током можно
выразить следующей формулой:
где L — индуктивность катушки.
Тогда
При перемене направления тока на обратное сердечник пере-
магнитится и будет втягиваться в щель катушки, т.е. направление
вращающего момента сохранится неизменным. Электромагнитные
измерительные механизмы могут применяться как на постоянном,
так и на переменном токе. При измерениях на переменном токе
выражение (3.7) будет справедливым лишь для мгновенных значе-
ний вращающего момента и тока. Угол отклонения определяется
как среднее за период 'Г значение вращающего момента:
1 dL 1 rf .2 . 1 Л2 dL
2 dal J 2 da
1 г
где I1 = -—$i2dt —квадрат действующего значения тока.
' о
Противодействующий момент, создаваемый пружиной,
Л/11р = ИЪ,
где И7 — удельный противодействующий момент.
Установившееся отклонение подвижной части наступает при
равенстве вращающего и противодействующего моментов:
I/2 — = Wa.
2 da
66
Откуда
1 иdL
а =---.
2JT da
Характер шкалы электромагнитного измерительного механиз-
ма неравномерен. Путем подбора формы сердечника можно так
изменять —, чтобы при малых токах этот множитель увеличи-
ла
вал, а при больших токах уменьшал вращающий момент. Тогда
можно получить шкалу, близкую к равномерной на значительном
ее участке. Однако в начале шкалы деления обычно сильно сжаты.
Электромагнитные измерительные механизмы характеризуются
следующими свойствами:
• применяются как на постоянном, так и на переменном токе. На
переменном токе эти механизмы измеряют действующее значение;
• характер шкалы неравномерен: в начале ее деления сильно
сжаты, однако последние (примерно) две трети шкалы можно
сделать близкими к равномерной;
• непосредственное измерение тока возможно примерно до 100 А.
Дальнейшее увеличение предела измерения требует использования
дополнительных преобразователей;
• погребление мощности относительно велико. Например, при
пределе измерения, равном 5 А, потребление мощности достига-
ет порядка 2...5 Вт.
3.6. Электростатические измерительные механизмы
Электростатические механизмы основаны на взаимодействии
двух или нескольких заряженных тел. Одно из этих тел выполняет-
ся подвижным и его перемещение вызывает изменение энергии
электрического поля, образованного заряженными телами.
Энергия электрического поля подобной системы заряженных
тел выражается следующим уравнением:
4=|ct/2,
где С — емкость системы заряженных тел; U — напряжение (в дан-
ном случае — измеряемое), приложенное к телам.
На рис. 3.13 показано устройство наиболее распространенно-
го типа электростатического измерительного механизма. В этом
типе электростатического измерительного механизма емкость ме-
няется в результате изменения рабочей поверхности электродов
(пластин), образующих систему конденсаторов. Механизм состо-
67
Рис. 3.13. Электростатический
измерительный механизм:
/ — подвижные алюминиевые
пластины; 2— неподвижные ка-
меры; 3 — ось
ит из неподвижных камер 2 и под-
вижных алюминиевых пластин 7, зак-
репленных на оси 3 (или на подвесе).
Измеряемое напряжение подводится
к неподвижным камерам и подвиж-
ным пластинам, которые стремятся
расположиться так, чтобы емкость си-
стемы была наибольшей, т.е. подвиж-
ные пластины продвигаются внутрь
камер.
Противодействующий момент со-
здается при помощи подвеса или спи-
ральных пружин. В качестве успокои-
телей применяются как воздушные,
так и магнитоиндукционные успоко-
ители.
Вращающий момент можно выра-
зить следующей формулой:
da 2 da
Выражение справедливо как для постоянного, так и для пере-
менного напряжения, причем U — действующее значение изме-
ряемого переменного напряжения. Противодействующий момент
ЧР = И'а,
где W — удельный противодействующий момент.
Установившееся отклонение а имеет место при равенстве обо-
их моментов:
-V1 — = Wa.
2 da
Откуда
1 dC
a = —U2—.
2W da
Электростатические измерительные механизмы могут приме-
няться для измерения как постоянных, так и переменных напря-
жений. На переменном токе эти механизмы показывают действу-
ющие значения напряжения.
Характер шкалы, как это видно из выражения (3.8), является
неравномерным. Квадратичную зависимость угла отклонения от
измеряемого напряжения в значительной степени можно прибли-
зить к равномерной соответствующим выбором формы пластин.
68
Электростатические измерительные механизмы обладают сле-
дующими свойствами'.
• применяются как на постоянном, так и на переменном токе,
измеряя действующее значение переменного напряжения;
• характер шкалы является неравномерным и сильно зависит
от формы электродов. Конструкции с изменяющейся рабочей по-
верхностью электродов могут быть выполнены с практически рав-
номерной шкалой;
• нижний предел измеряемого напряжения для многокамерных
измерительных механизмов (см. рис. 3.13) может быть уменьшен
до 20 В. Увеличение предела измерения электростатических изме-
рительных механизмов возможно с помощью дополнительных
преобразователей;
• практически не потребляют мощности, так как ток между
электродами ничтожно мал. Это обстоятельство является суще-
ственным преимуществом таких механизмов, особенно при изме-
рениях в маломощных цепях.
3.7. Индукционные измерительные механизмы
Индукционные измерительные механизмы основаны на вза-
имодействии переменных магнитных полей и токов, которые ин-
дуктируются в проводящей подвижной части (обычно алюмини-
евом диске) этими же полями. Таким образом, из самого принци-
па действия механизмов следует, что они могут работать только на
переменном токе.
Зависимость угла отклонения от токов в катушках можно вы-
вести на примере измерительного механизма, изображенного на
рис. 3.14.
Рис. 3.14. Принцип устройства ин-
дукционного измерительного меха-
низма:
а — схема механизма; б — схема токов
и магнитных потоков в лиске; / — алю-
миниевый диск; 2 и 3 — электромаг-
ниты; 4 — ось вращения диска; 5 —
опоры оси
69
Рис. 3.15. Векторная ди-
аграмма индукционного
измерительного меха-
низма
лой
На рис. 3.14, а переменные потоки Ф| и
Ф2, создаваемые переменными токами Ц
и /2, пронизывают алюминиевый диск 1.
Следы полюсов этих потоков располагают-
ся вдоль хорды диска. Кроме алюминиево-
го диска индукционный измерительный
механизм включает электромагниты 2 и 3\
ось 4 вращения диска и опоры оси 5. К об-
мотке электромагнита 2 присоединен до-
бавочный резистор Я, а к обмотке электро-
магнита 3 — добавочная катушка индуктив-
ности L.
На рис. 3.14, б показана схема токов и
магнитных потоков Ф| и Ф2, в диске; 7^
и /д2 — токи в диске, создаваемые пото-
ками Ф) и Ф2; Л/вр — момент вращения.
Среднее за период значение силы /'вза-
имодействия переменных потоков и тока можно выразить форму-
Лр = Ф/cosy, (3.9)
где у — сдвиг по фазе между потоком Ф и током I.
На рис. 3.15 приведена векторная диаграмма потоков Ф! и Ф2 и
токов, индуктированных этими потоками в диске.
Поток Ф|, создаваемый током /ь индуктирует в диске элект-
родвижущие силы Ед1, которые создают в диске токи /д1, совпада-
ющие по фазе с Ед1, Поток Ф2, создаваемый током /2, обязатель-
но должен быть сдвинут по фазе относительно потока фь Предпо-
ложим, что он отстает от Ф| на угол у в связи с тем, что в цепь
тока /] включено активное сопротивление R, а в цепь тока /2 —
индуктивность L (см. рис. 3.14, а).
Поток Ф2 индуктирует в диске электродвижущие силы Ед2, соз-
дающие в нем токи /д2. Два потока и две системы токов в диске
должны были бы создать четыре силы Г, однако взаимодействие
потока Ф! с токами /д1, так же, как и взаимодействие потока Ф2
с токами /д2, согласно формуле (3.9), не создает силы, поскольку
сдвиг по фазе между ними равен 90° и cosy = 0. Следовательно,
остаются две силы, создающие вращающий момент:
ЛР1=Ф|4йСО8У1; Мвр1 =*10|/a2cosy1;
Лр2 = Фг/цсозуз; Мвр2 =M>24iCOsy2.
_ Л . Л
Так как Yi = - + V и cos^ = -sin ц/, а у2 = х - V и cosy2 = sin у,
л-
70
то
Л^вр, =-Л|Ф1/д2 8шу;
Кр, = ММд1 sin у.
Из этих выражений видно, что моменты Л/вр1 и Л/вр2, действу-
ющие на диск, имеют разные знаки. Однако именно благодаря
разным знакам оба момента будут действовать на диск, вращая
его в одну сторону. Разные знаки у моментов Л/вр1 и Л/вр2 свиде-
тельствуют лишь о том, что один контур токов притягивается к
взаимодействующему с ним полю, а другой контур выталкивает-
ся из взаимодействующего с ним поля.
Предположим, что контур тока /Д1 притягивается к потоку Ф2;
тогда вращающий момент Л/нр будет вращать диск в направлении,
указанном на рис. 3.14, б стрелкой. Тогда контур тока 1а2 будет
отталкиваться от потока Фь что создаст вращающий момент в
том же направлении. Таким образом, суммарный момент, дей-
ствующий на диск, можно выразить формулой
Л/кр =- /чФ|/Л2$т\|/+ Л2Ф2/л1$шу. (3.10)
Если потоки Ф| и Ф2 изменяются синусоидально, то действу-
ющие значения ЭДС, индуктируемых в диске этими потоками, равны:
= 4Л//Ф]тах =
^д2= 4А//Фгтах = ^д/Фг,
где kf — коэффициент формы кривой;/— частота; Ф1тах и Ф2тах —
максимальные значения потоков.
Если принять сопротивление токам в диске только активным,
то можно записать:
41 = /д2 = ^б/^2-
Тогда выражение (3.10) после подстановки в него выражений
для /Д| и /д2 и объединения постоянных коэффициентов примет вид
Л/вр = A4pi + Л/вр2 = А/Ф,Ф251п у.
Если принять, что потоки Ф| и Ф2 пропорциональны созда-
ющим их токам, то
Л/вр = A//i/2siny.
Индукционные измерительные механизмы обладают следующими
свойствами:
• могут работать только на переменном токе;
71
• применяются исключительно для измерения электрической
энергии, т.е. в счетчиках переменного тока. Поэтому дальнейшие
сведения об устройстве и эксплуатационных характеристиках этих
механизмов приводятся ниже.
3.8. Измерительные механизмы логометров
Логометрами называются приборы, измеряющие отношение
двух токов или напряжений.
Измерительным механизмом логометра может служить любой
из описанных ранее измерительных механизмов, если в нем про-
тиводействующий момент создавать не механически (пружиной
или растяжкой), а таким же путем, как вращающий момент. Та-
ким образом, в логометре должны иметь место два одинаково соз-
даваемых момента, направленных навстречу друг другу. В конст-
руктивном отношении измерительные механизмы логометров ха-
рактеризуются наличием двух подвижных (или неподвижных)
катушек и отсутствием пружин.
Если катушки в измерительном механизме логометра являют-
ся подвижной частью механизма, то подвод тока к катушкам осу-
ществляется через так называемые «безмоментные» токоподводы,
выполняемые из тонких (3...5 мкм) тщательно отожженных се-
ребряных или золотых лент.
Обозначим моменты, создаваемые в измерительном механиз-
ме логометра, через М\ и М2. Тогда в общем случае можно запи-
сать:
где /| и /2 — токи в соответствующих катутиках; a — угол отклоне-
ния; п = 1 или п = 2 в зависимости от принципа действия измери-
тельного механизма.
Так как моменты направлены навстречу друг другу, то устано-
вившееся отклонение наступит при
Л/, =Л/2, или = k2I^f2(a),
Откуда
ЧТ .лЛ(а)
Ji J /i(a)’
Если обеспечить условие
/(а) */2(а), (3.11)
то а = F у-.
h
72
Рис. 3.16. Магнитоэлектрический
логометр:
1 — ось; Л и Р2 — подвижные рамки; F{
и Р2 — силы, действующие на рамки
Условие (3.11) выражает требование
различной зависимости обоих моментов
от положения подвижной части.
Наибольшее распространение полу-
чили магнитоэлектрические логометры
(рис. 3.16).
На рис. 3.16 подвижная часть состоит
из двух рамок Р\ и Р2, жестко укреплен-
ных на оси 7. Поле в воздушном зазоре
неоднородно, так как сердечник и по-
люсные наконечники неконцентричны. Поэтому силы Г, и Г2, а
также моменты М} и М2, создаваемые этими силами, при поворо-
те подвижной части изменяются неодинаково:
Л/2 ~ ^2^2W2^2'
Так как В} =/,(а) и В2 =Л(а)5 то при SjWj = s2u^
I\ _ Л (а)
Л /(а)
или а = г-Ч
h
При отсутствии токов в рамках подвижная часть может зани-
мать любое положение, а стрелка, следовательно, находиться на
любом делении шкалы.
Контрольные вопросы
1. Каким образом создаются вращающий, противодействующий и
демпфирующий моменты в измерительных механизмах?
2. Какие виды подвесов и отсчетных устройств применяются в изме-
рительных механизмах и приборах?
3. Изложите принцип действия магнитоэлектрического механизма.
4. Нарисуйте схему и объясните принципы работы ферромагнитного
механизма.
5. Как работает электродинамический измерительный механизм?
6. Нарисуйте схемы и объясните работу электромагнитных и электро-
статических механизмов.
7. Сформулируйте особенности работы индукционных измерительных
механизмов.
8. Объясните принцип работы и особенности логометров.
73
ГЛАВА 4
ПРЕОБРАЗОВАТЕЛИ ЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН
В ЭЛЕКТРИЧЕСКИЕ
4.1. Основные сведения
Преобразователи электрических величин в электрические обы-
чно применяются для измерений при любом токе, в цепях высо-
кого напряжения, высокой частоты и т.д.
Преобразователи могут выполняться либо как самостоятель-
ные конструкции, либо в конструктивном сочетании с измери-
тельным механизмом. Использование таких преобразователей рас-
ширяет эксплуатационные характеристики приборов.
К преобразователям электрических величин в электрические,
используемым в электроизмерительной технике, относятся:
• шунты;
• добавочные резисторы;
• добавочные конденсаторы;
• делители напряжения (на резисторах и емкостные);
• измерительные, разделительные и согласующие трансформа-
торы;
• выпрямители и т.д.
При рассмотрении преобразователей целесообразно обратить
внимание на тс их параметры, которые помогли бы оценить
влияние преобразователей на свойства прибора в целом, а в
частности — на точность результата измерения и на диапазон
измерения.
4.2. Шунты
Шунты применяются для расширения пределов измерения из-
мерительного механизма по току и представляют собой резис-
тор, параллельно которому включается измерительный механизм
(рис. 4.1, а). На рис. 4.1, а представлен пример правильного вклю-
чения шунта.
В соответствии с обозначениями на рис. 4.1 можно записать
•^р _ Ли
Л
где /р — измеряемый ток в рамке; /ш — измеряемый ток, проходя-
щий через шунт; Ли — сопротивление шунта; Ар — сопротивле-
ние рамки измерительного механизма.
74
Рис. 4.1. Примеры схем правильного (а) и неправильного включения
шута (би в):
а—а — токовые зажимы; б—б — потенциальные зажимы
Откуда
4
IpRp
где I — измеряемый ток.
Обычно сопротивление шунта /?ш значительно меньше, чем со-
противление рамки измерительного механизма R?, поэтому боль-
шая часть измеряемого тока / проходит через шунт:
Ли - А>Л/
Значение = /ШЯШ, т.е. падение напряжения на шунте при
номинальном значении измеряемого тока, является стандартизо-
ванным и составляет 45, 75, 100 или 150 мВ. Это падение напря-
жения и номинальное значение измеряемого тока всегда указыва-
ются на шунте.
Шунты подразделяются на индивидуальные и калиброванные.
Индивидуальные шунты пригодны только для того измерительного
механизма, с которым они градуировались. В этом случае не тре-
буется точной подгонки шунта на заданное падение напряжения.
Калиброванные шунты подгоняются на заданное падение на-
пряжения с высокой точностью и пригодны для работы с любым
измерительным механизмом, имеющим такое же падение напря-
жения при номинальном отклонении.
Каждый шунт снабжен двумя парами зажимов (см. рис. 4.1, а).
Первая пара зажимов (а—а) служит для включения шунта в цепь
измеряемого тока и называется токовыми зажимами. Вторая пара
зажимов (б—б) подключается к шунту измерительного механиз-
ма и называется потенциальными зажимами.
На рис. 4.1, б и в приведены примеры неправильного включе-
ния шунта, поскольку’ при таком включении измерительный ме-
ханизм измеряет падение напряжения большее, чем на ве-
личину падения напряжения в контактах (см. рис. 4.1, б) и в со-
единительных проводах Л пр (см. рис. 4.1, в).
Шунты на сравнительно малые пределы измерения обычно
монтируются внутри корпуса прибора, а на большие токи — от-
75
Рис. 4.2. Шунт на 500 А:
1 — сопротивление шунта; 2 —
наконечники; 3— потенциальные
зажимы; 4 — отверстия для при-
соединения шунта к измеряемой
цепи
Рис. 4.3. Схема многопредельного
шунта
дельно от измерительного механизма, например шунт на 500 А
(рис. 4.2). Сопротивление шунта 1 выполняется из манганиновой
проволоки, ленты или пластины, припаянной серебряным при-
поем к наконечникам 2 из красной меди.
Внутренний шунт крепится к колодке с зажимами внутри кор-
пуса прибора. Отдельный шунт присоединяется калиброванными
проводами к измерительному механизму. Эти провода подключа-
ются к потенциальным зажимам 3. Присоединение шунта к изме-
рительному механизму случайными проводами может повлечь за
собой изменение сопротивления цепи рамки. Следовательно, и
перераспределение измеряемого тока между шунтом и рамкой
также может увеличивать погрешность прибора. Присоединение
шунта к измеряемой цепи производится в отдельных шунтах с
помощью болтов, проходящих через отверстия 4.
Переносные (лабораторные) приборы часто снабжаются мно-
гопредельными калиброванными шунтами. Пример схемы подоб-
ного шунта представлен на рис. 4.3. Переключение предела изме-
рений осуществляется штепселем, помещаемым в соответствующее
гнездо.
Расширение пределов измерений с помощью шунтов практи-
чески возможно лишь на постоянном токе, потому что на пере-
менном токе распределение измеряемого тока между шунтом и
измерительным механизмом будет обусловлено не только сопро-
тивлениями их постоянному току, но и их реактивными (индук-
тивными) сопротивлениями, которые зависят от частоты.
4.3. Добавочные резисторы и добавочные конденсаторы.
Делители напряжения (на резисторах и емкостные)
Добавочные резисторы и добавочные конденсаторы, а также
делители напряжения применяются для расширения пределов
76
измерений по напряжению измерительных механизмов и других
измерительных устройств.
Добавочные резисторы. Все измерительные механизмы (за ис-
ключением электростатических) по принципу своего действия ха-
рактеризуются зависимостью угла отклонения а от тока / (или
токов) в рамке либо катушке, т.е. все механизмы, по существу,
являются амперметрами. Однако любой из измерительных меха-
низмов можно использовать и для измерения напряжения U, вклю-
чив его параллельно к тому участку цепи, напряжение на кото-
ром необходимо измерить. На рис. 4.4, а представлена схема вклю-
чения добавочного резистора параллельно нагрузке Ян.
Если номинальное значение тока измерительного механизма
обозначить через /н, а номинальное значение измеряемого напря-
жения — через 6/н, то сопротивление всей цепи вольтметра
^=^/4- (4.1)
Однако сопротивление рамки /?р измерительного механизма
обычно значительно меньше, чем необходимое значение /?у. По-
этому последовательно с /?р включается добавочное сопротивле-
ние такого значения Ад, намотанное манганиновой проволокой,
при котором удовлетворяется уравнение (4.1), т.е.
+ /?я = UH/ /н.
р Д пг п
Откуда
На рис. 4.4, б представлена схема многопредельного вольтмет-
ра (на 3, 15, 30 и 150 В) с добавочным сопротивлением, состоя-
щим из нескольких резисторов. На схеме /?2, /?з и RA — доба-
вочные резисторы.
Чаше всего добавочные резисторы располагаются внутри кор-
пуса прибора. Многопредельные добавочные резисторы иногда вы-
пускаются и отдельно от прибора, т.е. в собственном корпусе.
Рис. 4.4. Схемы включения добавочного резистора:
а — параллельно нагрузке Ян; б — для многопредельного вольтметра
77
г/о
Рис. 4.5. Схема вклю-
чения добавочного
конденсатора
Добавочные конденсаторы. Они применя-
ются для расширения предела измерения элек-
тростатического измерительного механизма на
переменном токе (рис. 4.5).
Если принять, что сопротивления изоля-
ции измерительного механизма г0 и добавоч-
ного конденсатора га равны бесконечности,
то напряжение UQ на зажимах измерительно-
го механизма Со запишется в виде
и0
_ J-T _ тт
1/<оСд л я с0 ’
где Сд — емкость добавочного конденсатора; £/д — напряжение на
добавочном конденсаторе; со — частота измеряемого напряжения.
то
Так как U = UQ + и
Uo + Со + Сд
U = UQ
Cq + Сд
Сд
Делители напряжения на резисторах. С помощью таких делителей
напряжения осуществляют уменьшение измеряемого напряжения
в определенное, обычно кратное десяти, число раз, чтобы на вы-
ходе делителя получить значение, соответствующее пределу изме-
рения (или меньшее) напряжения измерительного механизма. Де-
лители напряжения обычно выполняются многопредельными.
На рис. 4.6 в качестве примера представлена схема включения
делителя напряжения на высокоомных резисторах для умсньше-
Рис. 4.6. Схема включения де-
лителя напряжения
ния измеряемого напряжения Ux.
Величина n-UJU^ называется пере-
водным множителем. Un — напряже-
ние, подаваемое на измерительный
прибор. На рис. 4.6 rb г2, г3 и г4 —
сопротивления делителя напряжения.
Емкостные делители напряжения.
Они состоят из ряда последователь-
но соединенных конденсаторов и
предназначены для расширения пре-
делов измерения электростатических
измерительных механизмов на пере-
менном токе, а также для измере-
ния напряжений на высокой частоте.
На рис. 4.7 представлена схема ем-
костного делителя напряжения, ко-
78
торая может применяться в сочетании с элек-
тростатическим измерительным механизмом.
Здесь измеряемое напряжение Ux подключе-
но к конденсаторам С} и С2, составляющим
делитель. Измерительный механизм Со под-
ключен параллельно к С2, причем С2 » Со.
Так как сопротивления изоляции измеритель-
ного механизма весьма велики, то
. Ux
с2 с,
МН—W
ЧР
Со
Рис. 4.7. Схема емко-
стного делителя
£/0 = q
q Cq + С2
Тогда
UX=UQ+U} =t/0
4.4. Измерительные трансформаторы
Измерительные трансформаторы применяются:
1) для расширения пределов измерения (по току и напряже-
нию) измерительных механизмов и приборов при работе на пере-
менном токе;
2) в случае проведения измерений в цепях высокого напряже-
ния — для электрической изоляции измерительной аппаратуры
от высокого напряжения, что, в частности, обязательно с точки
зрения безопасности обслуживания приборов. В зависимости от
назначения измерительные трансформаторы выполняются в ка-
честве трансформаторов тока и трансформаторов напряжения.
Измерительные трансформаторы, как и силовые трансформа-
торы, представляют собой замкнутый сердечник из листовой элек-
тротехнической стали (или из специальных сплавов) с двумя об-
мотками: первичной и вторичной.
На рис. 4.8 показана схема включения измерительных транс-
форматоров тока и напряжения в цепь переменного тока. На схе-
ме X— А — зажимы обмотки трансформатора напряжения, под-
ключенные к сети; х — а — зажимы обмотки трансформатора на-
пряжения, подключенные к вольтметру; Л,—Л2 — зажимы транс-
форматора тока, подключенные в цепь измерения; Hj —И2 — за-
жимы трансформатора тока, подключенные к амперметру; Z —
нагрузка в измеряемой цепи; Ц, — измеряемое напряжение; /и —
измеряемый ток.
Согласно ГОСТу номинальное значение вторичного тока для
всех трансформаторов тока равно 5 А, а номинальное значение
вторичного напряжения для всех трансформаторов напряжения
79
хЬшшишл Л|ЦЮ_$МЛ2
Рис. 4.8. Схема включения измери-
тельных трансформаторов тока и
напряжения в цепях переменного
тока
составляет 100 В. Это значит, что
амперметры, работающие с из-
мерительными трансформатора-
ми тока, выполняются только на
5 А. Однако эти амперметры мо-
гут градуироваться на значение
измеряемого тока 7Ь в первич-
ной цепи, с учетом номиналь-
ного коэффициента трансфор-
мации К/ном:
К/ном — Лном/Аном*
Таким образом, для измере-
ния переменного тока, номи-
нальное значение которого рав-
но, например, 1000 А, приме-
няется трансформатор тока с номинальным коэффициентом транс-
формации, равным К|НОМ = 1000/5 = 200, и все цифровые отметки
амперметра на 5 А умножаются на К1НОМ = 200, а на шкале прибора
ставится обозначение: «С трансформатором тока — 1000/5».
Аналогично для измерительного трансформатора напряжения
номинальный коэффициент трансформации
Kf/ном “ ^Аном/^Аном-
Витки первичной обмотки
при токах 100...600А
Рис. 4.9. Устройство трансформато-
ра тока
Конструкции измеритель-
ных трансформаторов тока весь-
ма разнообразны. В качестве
примера на рис. 4.9 показана
схема устройства трансформа-
тора тока. Этот трансформатор
состоит из кольцевого сердеч-
ника, выполненного из пермал-
лоя, секционированной пер-
вичной обмотки (зажим Л] и
зажимы, обозначенные 15 А и
50 А) и вторичной обмотки (за-
жимы И| и И2).
Другим примером является
трансформатор тока с разъем-
ным сердечником, позволяю-
щий измерять ток без разрыва
цепи.
Первичной обмоткой транс-
форматора является сам про-
вод, по которому протекает из-
меряемый ток. Амперметр (на
80
5 А) встроен в корпус трансформатора. Вторичная обмотка транс-
форматора секционирована, что позволяет иметь несколько пре-
делов измерения. Погрешность коэффициента трансформации по-
добного трансформатора — порядка 2 %.
Измерительные трансформаторы напряжения. В них вторичный
ток определяется потреблением тока вольтметром (или параллель-
ными обмотками ваттметра, счетчика и т.д.), обычно не превы-
шающим 20 ... 30 мА. Поэтому трансформатор напряжения работа-
ет в условиях, близких к режиму холостого хода.
Значение допустимой мощности приборов (в вольт-амперах),
подключаемых ко вторичной обмотке, всегда обозначено на щитке
трансформатора. Поэтому прежде чем подключить несколько при-
боров к трансформатору напряжения необходимо проверить, не
будет ли мощность всех параллельно включенных приборов
Р = , ИЛИ Р = U2/2
больше, чем допустимая мощность для данного трансформатора.
В формуле под /2 понимается сумма токов всех приборов, вклю-
ченных во вторичную обмотку трансформатора напряжения; U2 —
измеряемое напряжение; Я2 — сумма сопротивлений, включен-
ных во вторичную обмотку.
4.5. Разделительные и согласующие трансформаторы
Разделительные трансформаторы применяются для устранения
токов утечек от источника питания переменного тока через эле-
менты измерительной цепи прибора. ЭИ'и токи утечки могут ока-
заться сравнимыми с измеряемыми токами. Поэтому измеритель-
ную цепь в подобных случаях подключают к источнику питания
через разделительный трансформатор, изолирующий измеритель-
ную цепь от источника питания. Особенно необходимо примене-
ние разделительных трансформаторов при питании прибора от
силовой сети, так как такие сети, как правило, либо заземлены,
либо имеют плохую изоляцию относительно земли.
При измерениях на переменном токе необходимо считаться не
только с утечками тока через плохую изоляцию на землю, но и с
утечками тока через емкостные связи между отдельными элемен-
тами измерительной цепи и прибора в целом. В частности, подоб-
ная емкость существует и между обмотками разделительного транс-
форматора.
Для того чтобы гальванические и емкостные связи между об-
мотками были возможно меньше, обмотки в разделительных транс-
форматорах тщательно изолируются друг от друга и разделяются
металлическим экраном.
81
Коэффициент трансформации разделительных трансформато-
ров чаще всего равен единице. Лишь в тех случаях, когда такой
трансформатор также выполняет функции согласующего транс-
форматора, его коэффициент трансформации выбирается отлич-
ным от единицы.
Согласующие трансформаторы обеспечивают передачу мощно-
сти от одного звена прибора к другому с наименьшими потерями
мощности, т.е. с наибольшим коэффициентом полезного действия.
В теоретических основах электротехники доказывается, что наи-
большая мощность, получаемая нагрузкой, имеет место при ра-
венстве внутреннего сопротивления источника питания и сопро-
тивления нагрузки. В приборах со сложной структурой, т.е. с боль-
шим числом различных преобразователей между измеряемой ве-
личиной и отсчетным устройством, это положение можно рас-
пространить на связь между двумя любыми соседними преобразо-
вателями, ибо всегда эквивалентную схему прибора можно изо-
бразить таким образом, чтобы один преобразователь отображал
источник питания, а следующий за ним преобразователь — на-
грузку.
Однако далеко не всегда можно так выбрать и рассчитать пара-
метры отдельных преобразователей, чтобы они имели одинаковое
сопротивление. В подобных случаях и применяются согласующие
трансформаторы. Если, например, передача мощности поступает
от высокоомного преобразователя к низкоомному, то между ними
следует включить понижающий трансформатор, первичная обмотка
которого по сопротивлению согласуется с сопротивлением высо-
коомного преобразователя, а вторичная обмотка (с малым чис-
лом витков) — с низкоомным преобразователем.
Потеря мощности при использовании согласующих трансфор-
маторов определяется только коэффициентом полезного действия
самого трансформатора. Следует отметить, что небольшие транс-
форматоры, применяемые в качестве согласующих, обычно име-
ют коэффициент полезного действия в пределах 70... 75 %. Однако
без согласующего трансформатора потеря мощности была бы зна-
чительно больше.
Контрольные вопросы
1. Какое назначение имеют преобразователи электрических величин в
электрические?
2. Каково назначение шунтов? Нарисуйте схемы правильного и не-
правильного включения шунтов.
3. Нарисуйте схемы включения и изложите назначение добавочных
резисторов, добавочных конденсаторов и делителей напряжения.
4. Какие отличия имеют измерительные трансформаторы тока и на-
пряжения? Нарисуйте схемы их включения.
5. Что такое согласующие и разделительные трансформаторы?
82
ГЛАВА 5
ПРЕОБРАЗОВАТЕЛИ НЕЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН
В ЭЛЕКТРИЧЕСКИЕ
5.1. Основные сведения
Основной частью всякого электрического прибора, предназна-
ченного для измерения неэлектрической величины, является так на-
зываемый измерительный преобразователь, или преобразователь, ис-
пользуемый для преобразования измеряемой (входной) неэлектриче-
ской величины в электрическую (выходную) величину.
Преобразователи классифицируются по принципу их действия,
т.е. по тому физическому явлению, которое используется для пре-
образования неэлектрической величины в электрическую.
Преобразователи, в которых измеряемая величина преобразуется
в такие электрические параметры, как сопротивление R, индуктив-
ность А, взаимная индуктивность Мили емкость С, называются па-
раметрическими преобразователями. Преобразователи, в которых из-
меряемая неэлсктрическая величина преобразуется в электродвижу-
щую силу (ЭДС), называются генераторными преобразователями.
При применении параметрических преобразователей обяза-
тельно наличие вспомогательного источника электрической энер-
гии, тогда как генераторные преобразователи сами являются ис-
точником электрической энергии, и при их использовании вспо-
могательный источник бывает нужен лишь при необходимости
усиления преобразованной величины.
Один и тот же преобразователь может быть применен для изме-
рения различных нсэлсктричсских величин.
5.2. Реостатные преобразователи
Реостатный преобразователь представляет собой реостат, дви-
жок которого перемешается под воздействием измеряемой неэлек-
трической величины X, создавая зависимость
/?=/(%),
где R — сопротивление преобразователя.
На рис. 5.1 представлено устройство реостатного преобразова-
теля, выполненного в виде изогнутой пластины / из изоляцион-
ного материала (текстолит, пластмасса, алюминий, покрытый ла-
ком), на которую намотана проволока с большим удельным со-
противлением и малым температурным коэффициентом сопро-
тивления, изготовленная из манганина, платино-иридиевых спла-
вов. Для более плавного изменения сопротивления и уменьшения
83
Рис. 5.1. Устройство реостатного
преобразователя:
1 — изогнутая пластина из изоляцион-
ного материала; 2 — контактная щетка;
3 — токоподвод к щетке; 4 — ось; 5 —
поводок
момента трения щетки о контак-
тную поверхность число витков
обмотки должно быть возможно
большим. Контактная щетка 2,
выполняемая из платино-иридие-
вого сплава или серебра, переме-
щается по очищенной от изоля-
ции обмотке посредством поводка
5, укрепленного на оси 4, свя-
занной с объектом измерения. На-
пряжение со щетки снимается
через токоподвод к щетке (спи-
ральную пружину) 3.
Для получения надежного
контакта щетки с проволокой
необходимо обеспечить контак-
тное усилие порядка 5... 10 г. В на-
стоящее время имеются преоб-
разователи с контактным усили-
ем от 0,5 до 2,0 г.
Реостатные преобразователи
применяются в приборах для измерения линейных и угловых пе-
ремещений, а также для измерения ряда других величин, кото-
рые могут быть механически преобразованы в линейные или уг-
ловые перемещения.
5.3. Индуктивные и индукционные преобразователи
Индуктивный преобразователь. Принципиальные схемы ин-
дуктивных преобразователей показаны на рис. 5.2. Индуктив-
ный преобразователь (см. рис. 5.2, а — схема для измерения ма-
лых перемещений) представляет собой электромагнит 1 с воз-
душным зазором, величина (длина) 8 которого изменяется в
функции от измеряемой механической величины F. Особенно
широко применяются дифференциальные преобразователи (см.
рис. 5.2, 6), в которых одновременно и притом с разными зна-
ками изменяются два зазора двух электромагнитов, что увели-
чивает чувствительность и улучшает другие характеристики пре-
образователя.
При изменении зазора 8 изменяется магнитное сопротивление
/?м магнитопровода электромагнита, связанное с его размерами
известной зависимостью
,=л / я
К =£— + —,
м М/ Но*
84
Рис. 5.2. Принципиальные схемы индуктивных преобразователей:
а — для измерения малых перемещений; б — дифференциальный преобразова-
тель; в — для измерения больших перемещений; 1 — электромагниты; 2 — ка-
тушки; 3 — якорь
где ц, — длина, площадь поперечного сечения и магнитная
проницаемость /-го участка стальной части магнитной цепи; ц0 —
магнитная проницаемость воздуха; 5 и s — длина и площадь попе-
речного сечения воздушного зазора.
Изменение магнитного сопротивления /?м оценивается по ве-
личине полного сопротивления Z катушки 2 (см. рис. 5.2, а), так
как при перемещении якоря 3 изменяются как активное, так и
реактивное сопротивления катушки. Первое изменяется в резуль-
тате изменения потерь на гистерезис и вихревые токи, а второе —
из-за изменения индуктивности катушки.
Индуктивность катушки связана с магнитным сопротивлением
Ям следующей зависимостью:
Фи» _ Iw W W1
где Ф — магнитный поток; tv — число витков катушки; /— ток в
катушке.
Сопротивление /?Fc, эквивалентное потерям PFc, можно запи-
сать следующей формулой:
R -
Однако потери PFc в первом приближении пропорциональны
квадрату потока Ф, поэтому
_КФ2 и?
r:
где К — коэффициент, зависящий от конструкции преобразователя.
При изменении воздушного зазора 5 меняются как активное,
гак и реактивное сопротивления катушки, а следовательно, и пол-
ное ее сопротивление Z.
85
Таким образом, в индуктивных преобразователях имеет место
последовательное преобразование F -> Д5 -> RM -> Z.
Преобразователи описанных типов применяются при срав-
нительно небольших перемещениях якоря относительно сердеч-
ника. Для измерения больших перемещений якоря используют-
ся дифференциальные индуктивные преобразователи с разом-
кнутой магнитной цепью (см. рис. 5.2, в), в которых якорь 3
перемещается внутри катушек 2, изменяя их полные сопротив-
ления.
Приборы с индуктивными преобразователями могут быть ис-
пользованы для измерения как перемещения, так и любых меха-
нических величин, функционально связанных с перемещением
якоря, например сил, давлений, крутящих моментов и т.д.
Индукционный преобразователь. Он представляет собой преоб-
разователь, в котором измеряемая неэлектрическая (механичес-
кая) величина преобразуется в индуктированную ЭДС. Согласно
закону электромагнитной индукции индуктированная электродви-
жущая сила Е определяется скоростью изменения магнитного по-
тока Ф, сцепленного с катушкой из w витков:
Индукционные преобразователи непосредственно могут при-
меняться только в приборах для измерения скорости линейных
или угловых перемещений.
На практике индукционные преобразователи применяются в
приборах для измерения скорости вращения (в тахометрах), а также
в приборах для измерения параметров вибраций, т.е. для измере-
ний переменных во времени линейных и угловых перемещений и
ускорений (в виброметрах и акселерометрах).
Индукционные преобразователи для тахометров представляют
собой небольшие генераторы постоянного или переменного тока,
вал которых механически связан с валом испытуемого двигателя.
Чаще всего применяют генераторы переменного тока. Электро-
движущая сила генератора Е, как известно, выражается уравне-
нием
где с — конструктивная постоянная, определяемая числом витков
и числом пар параллельных ветвей; Ф — поток возбуждения, соз-
даваемый обычно постоянными магнитами; р — число пар полю-
сов; п — число оборотов в минуту (скорость вращения).
Величина рл/60 = / является частотой переменной ЭДС, ин-
дуктируемой в генераторе.
86
Таким образом, критерием измеряемой скорости вращения
может служить либо ЭД С генератора Е, либо частота f Принцип
устройства индукционных преобразователей приборов для изме-
рения параметров вибраций и ускорений показан на рис. 5.3.
На рис. 5.3, а представлен принцип устройства индукционных
преобразователей приборов для измерения линейных вибраций.
Цилиндрическая катушка 7, связанная с объектом измерения по-
средством вала 2 и расположенная в кольцевом зазоре магнито-
провода 3, совершает линейные перемещения (колебания) в на-
правлении, указанном стрелками. Цилиндрические постоянные
магниты 4 намагничены вдоль образующей и создают в зазоре
радиальное поле. При своем перемещении витки катушки под пря-
мым утлом пересекают линии магнитного поля и в них индукти-
руются ЭД С.
Если линейное перемещение Ах является некоторой функцией
времени Ах = f (г), то мгновенное значение ЭДС
Е = wBla
at
где w — число витков катушки; В — индукция в зазоре; /а — актив-
ная длина витка.
Точно так же индуктируется ЭДС в цилиндрической катушке 1
(см. рис. 5.3, б), помещенной на ферромагнитный сердечник 5,
когда он вместе с катушкой совершает угловые перемещения в
направлении, указанном стрелками.
Рис. 5.3. Принцип устройства индукционных преобразователей приборов
для измерения параметров вибраций и ускорений:
а — для измерения линейных вибраций; б — для измерения угловых вибраций;
1 — цилиндрическая катушка; 2 — вал, связывающий катушку с объектом
измерения; 3 — зазор магнитопровода; 4 — постоянные магниты; 5 — ферро-
магнитный сердечник
87
5.4. Емкостные преобразователи
Емкостным преобразователем является плоский или цилин-
дрический конденсатор, емкость которого изменяется с измене-
нием измеряемой неэлектрической величины.
Как известно, емкость плоского конденсатора выражается фор-
мулой
г - —
S’
где с — диэлектрическая проницаемость; s — площадь обкладки;
5 — расстояние между обкладками.
Измеряемая неэлектрическая величина может быть функцио-
нально связана либо с диэлектриком, либо с площадью, либо с
расстоянием между обкладками.
На рис. 5.4, а иллюстрируется принцип действия емкостного
преобразователя прибора для измерения уровня жидкости. Он пред-
ставляет собой коаксиальный конденсатор.
Для каждого значения уровня емкость преобразователя может
быть определена как емкость двух параллельно соединенных кон-
денсаторов. Один конденсатор образован частью электродов и ди-
электриком — жидкостью, уровень которой измеряется, а второй
образован остальной частью электродов и диэлекгриком — воздухом.
Если трубка преобразователя была бы заполнена воздухом, то
емкость конденсатора можно было бы выразить с достаточной точ-
ностью следующей формулой:
Со = akfah
где а — конструктивный параметр преобразователя, зависящий
от поверхности внутреннего стержня, внутренней поверхности
трубки и расстояния между электродами; /0 — полная длина пре-
образователя (трубки); Еф — диэлектрическая проницаемость воз-
Рис. 5.4. Принципиальные схемы емко-
стных преобразователей:
а — для измерения уровня жидкости; б —
для измерения малых перемещений; 1 —
подвижная обкладка конденсатора; 2 —
неподвижная обкладка конденсатора
88
духа. Если часть трубки длиной / заполнена жидкостью с диэлект-
рической проницаемостью е, то емкость этой части преобразова-
теля составит
С| = ale,
а полная емкость преобразователя
С = alt + д(/0 - / )£<).
Таким образом, С - f (/).
На рис. 5.4, б демонстрируется принцип использования емкос-
тного преобразователя для измерения малых перемещений X или
других механических величин (силы, давления и др.), вызыва-
ющих перемещение подвижной обкладки 1 относительно непод-
вижной обкладки 2
При использовании емкостных преобразователей необходимо
обратить особое внимание на влияние паразитных емкостей, глав-
ным образом емкости соединительных проводов (линии) относи-
тельно земли. Во многих случаях паразитные емкости сравнимы с
емкостью преобразователя. Поэтому вопросом экранирования со-
единительных проводов и правильного выбора точки заземления
измерительной цепи следует уделять большое внимание.
Экранирование самого преобразователя от влияния электри-
ческих полей также весьма важно, обычно экраном служит метал-
лический корпус преобразователя.
5.5. Тензорезисторы
Тензорезисторы предназначены для измерения деформаций и
механических напряжений, обусловленных этими деформация-
ми. Они представляют собой тонкую (диаметром 0,02...0,04 мм)
зигзагообразно уложенную и приклеенную к полоске бумаги I
проволоку А (рис. 5.5, а), изготовленную из материала высокого
удельного сопротивления. Бумага с проволокой прочно прикле-
ивается к поверхности испытуемой детали так, чтобы направле-
ние ожидаемой деформации совпадало с длинной стороной пе-
тель проволоки. Тогда при деформациях детали, например при ее
растяжении или сжатии, проволока будет воспринимать эти де-
формации, вследствие этого ее длина / и диаметр будут изме-
няться. Кроме того, как показывает опыт, при этом может изме-
ниться и ее удельное сопротивление. В результате произойдет из-
менение сопротивления R проволоки, являющееся функцией де-
формации детали и, следовательно, функцией механических на-
пряжений в ней.
Относительное изменение сопротивления может быть выраже-
но следующим образом:
89
*2
F
Рис. 5.5. Тензорезистор
(проволочный преобразователь):
а — схема тензометра; б — схема
расположения тензометра для изме-
рения силы и деформации; А — про-
волока; 7 — бумага; 2 — сварка или
силы и деформации; 3 — выводы
I
ДА .(Ы\ .. .
А/
где — — относительная деформа-
ция; о — напряжение в детали.
Опыт показывает, что функция
/(S) при небольших деформациях
является линейной:
А/
А К / ’
Для изготовления тензорезисто-
ров целесообразнее использовать
такую проволоку, которая облада-
ла бы возможно большей чувстви-
тельностью. т.е. возможно большим
значением коэффициента К. Чаше
всего для ее изготовления исполь-
зуется проволока из константана,
для которого К = 1,9...2,1.
Так как относительные дефор-
мации А/ //, например, стальных
деталей в пределах упругих деформаций не превосходят 2,5-10-3,
то АЯ/7? = КЛ1/1 не превосходят 5• 10"3, т.е. 0,5 %. При столь малых
рабочих изменениях сопротивления преобразователя весьма важ-
но, чтобы изменение его сопротивления из-за возможных коле-
баний температуры испытуемой детали, к которой он приклеен,
не вызывало изменения показаний прибора. Поэтому проволока
должна обладать возможно меньшим температурным коэффици-
ентом сопротивления. Константановая проволока имеет достаточ-
но малый температурный коэффициент сопротивления от 0,02 до
0,05 % на 10 *С. Однако при изменении температуры, например на
20 °C, относительное изменение сопротивления такой проволоки
может достигать 0,1%, что соизмеримо с рабочим изменением
сопротивления, обусловленным измеряемой деформацией.
С точки зрения малого температурного коэффициента лучше все-
го использовать манганин, однако относительная чувствительность
коэффициента манганиновой проволоки в три-четыре раза меньше,
чем чувствительность проволоки, изготовленной из константана.
При использовании тензорезистора необходимо принимать меры
для компенсации температурной погрешности.
Длина петли преобразователя / называется базой преобразова-
теля. Размеры тензорезисторов колеблются от 2,5 до 150 мм по
длине и от 3 до 60 мм по ширине. Сопротивление преобразователя
чаще всего составляет 100...200 Ом. К концам проволоки, уло-
90
женной зигзагообразно на бумагу, привариваются или припаива-
ются выводы 3 (см. рис. 5.5, а). Увеличение числа витков тензомет-
ра будет повышать его чувствительность.
В настоящее время тензорезисторы также изготовляются из тон-
кой фольги. Для этого на ленте из фольги путем травления выби-
рается часть металла таким образом, что оставшаяся часть мате-
риала образует форму тензорезистора.
Проволочные преобразователи применяются непосредственно
для измерения деформаций. Однако они также используются и
для измерения других механических величин, которые могут быть
преобразованы в деформацию вспомогательной детали (называ-
емой обычно упругим элементом), воспринимающей измеряемую
механическую величину. Например, балку’ с наклеенными тензо-
резисторами R{ и R2 (рис. 5.5, б) можно использовать для измере-
ния силы Гили перемещений, если объект измерения при своем
перемещении будет воздействовать на свободный конец балки,
т.е. вызывать ее прогиб. Тогда деформация балки будет функци-
онально связана с измеряемой величиной.
5.6. Термометры электрического сопротивления
Наиболее часто терморезисторы используются в приборах для
измерения температуры. Они называются термометрами электри-
ческого сопротивления, или термометрами сопротивления. Такие
терморезисторы работают при малой нагрузке током, чтобы выде-
ляемое ими тепло было возможно малым по сравнению с теплом,
получаемым от среды, температура которой измеряется.
Наибольшее распространение получили преобразователи тер-
мометров сопротивления, выполненные из платиновой или мед-
ной проволоки.
Платиновые терморезисторы применяются для измерения тем-
ператур в интервале от -183 до +500 °C (температура кипения кис-
лорода составляет -182,97 °C).
Зависимость сопротивления платины от температуры t в ди-
апазоне от 0 до +660 °C подчиняется следующему выражению:
= 2?о( 1 + Р)/ + р2/),
где Rq — сопротивление при температуре 0 °C.
В интервале от 0 до -183 ’С зависимость сопротивления плати-
ны от температуры выражается уравнением
Rf - Л)П + Р1* + Р^2 + РзО ” ЮО)/3].
Значения температурных коэффициентов в приведенных выше
формулах следующие:
р! =3,940 10-3 1/1 °C; р2=-5,8 10-7 1/1 °C; р3=4Ю-12 1/1 °C.
91
Термометры сопротивления с преобразователем из медной
проволоки применяются для измерения температур не выше
100... 150 °C, так как при более высоких температурах медь замет-
но окисляется.
Зависимость сопротивления меди от температуры можно опре-
делить по формуле
= Ло(1 + РсЛ
где К) — сопротивление при температуре 0 °C; рСи — температур-
ный коэффициент меди, равный 4,28-10"3 1/1 °C.
Рабочий ток в преобразователе термометра сопротивления обы-
чно не превышает 10... 15 мА. Начальное сопротивление (при 0вС)
таких преобразователей составляет 50 Ом, реже — 100 Ом. При
подобных параметрах теплота, выделяемая током в промышлен-
ных термометрах сопротивления, не отражается на точности из-
мерения.
В платиновых термометрах сопротивления применяется про-
волока без изоляции, наматываемая на каркас из слюдяных пла-
стин; в медных термометрах сопротивления используется прово-
лока, изолированная эмалью или шелком, которая наматывает-
ся на каркас из пластмассы либо керамики. В последнее время
иногда в качестве преобразователей термометров сопротивления
применяют полупроводниковые термосопротивления, имеющие
отрицательный температурный коэффициент сопротивления по-
рядка 0,03...0,04 1/1 °C, что обеспечивает чувствительность пре-
образователя в 8... 10 раз большую, чем чувствительность преоб-
разователя из металлической проволоки. Эти терморезисторы от-
личаются малыми размерами и большим сопротивлением (от 1000
до 200 000 Ом). Они пригодны для работы в диапазоне температур
от -100 до + 120 °C.
Недостатком полупроводниковых терморезисторов является за-
метная неидентичность их характеристик, что требует подгонки
температурного коэффициента каждого из них к заданному зна-
чению путем последовательного или параллельного присоедине-
ния к нему сопротивления из манганина. Это ограничивает воз-
можность широкого использования полупроводниковых терморе-
зисторов для измерений температуры.
5.7. Термоэлектрические преобразователи
Термоэлектрическим преобразователем является термопара,
представляющая собой два проводника А и В (рис. 5.6, а) из раз-
нородных материалов, соединенных между собой в точке 1 (рабо-
чий конец термопары — «горячий спай») и точке 2 (свободный
конец термопары — «холодный спай»).
92
Если изменять температуру одной из этих точек, то в цепи
появится термоЭДС, являющаяся разностью функций темпера-
тур мест соединения проводников:
£дв =/(6) ~/(6)-
Если поддерживать температуру одной точки соединения по-
стоянной, например точки 2, то
Последнее выражение и положено в основу измерения темпе-
ратуры с помощью термопар.
Измерение термоЭДС производится либо милливольтметром
(рис. 5.6, б), либо компенсатором. Точка соединения / называется
рабочим концом термопары, а точки соединения 2 — свободны-
ми концами термопары. Милливольтметр с данной термопарой
образует термоэлектрический термометр.
Градуировка такого термометра производится при температу-
ре свободных концов, равной О °C. При практическом использо-
вании термометра температура свободных концов обычно выше
нуля, что вызывает погрешность измерения: прибор показывает
несколько меньшую по сравнению с действительной температуру.
Введение поправки на температуру свободных концов сводится
к тому, что к показаниям прибора прибавляют температуру сво-
бодных концов.
Удлинительные термоэлектроды. Чтобы обеспечить постоянную
температуру свободных концов и облегчить введение поправки,
желательно отвести свободные концы дальше от зоны высокой
температуры.
Термопара обычно помешается в жесткую защитную армату-
ру (от химического воздействия испытуемой среды и от механи-
ческих повреждений), поэтому приходится надставлять се гиб-
кими термоэлектронами, присоединяя их, с одной стороны, к
коробке зажимов термопары, а с другой — к проводам, идущим
к милливольтметру. Такие термоэлектроды часто называют ком-
пенсационными проводами, однако это название не является
точным, так как эти термоэлектроды ничего не компенсируют.
Рис. 5.6. Принцип действия термоэлектри-
ческого преобразователя (термопары):
а — схема образования термоЭДС; б — схема
измерения термоЭДС; / — рабочий конец тер
мопары; 2 — свободный конец термопары; А и
В — проводники
93
Таблица 5.1
Характеристика распространенных термопар
Наименование термопары ТермоЭДС при 100‘С (/0 = 0*С), мВ Верхний предел измеряемой температуры, *С
при длительном применении при кратко- временном применении
Платинородий (90% Pt + 10% Ph) - платина 0,64 1400 1600
Медь — копель (56 %Си + 44 % Ni) 4,75 350 500
Железо — копель 5,75 600 800
Хромель (90 % Ni + + 10% Сг) — копель 6,90 600 800
Хромель — алюмель (94,83 %Ni + 2%Al + 4-2% Мп 4- 1 % Si 4- + 0,17% Fe) 4,10 1100 1250
Характеристики наиболее распространенных термопар приведе-
ны в табл. 5.1.
Характеристика плати нородий-плати новой термопары нс яв-
ляется линейной: при температуре 1600 °C эта термопара развива-
ет термоЭДС, равную 16,76 мВ. Характеристики остальных термо-
пар практически линейны.
5.8. Пьезоэлектрические преобразователи
Различают прямой и обратный пьезоэлектрические эффекты.
Прямой пьезоэлектрический эффект состоит в появлении электри-
ческих зарядов на поверхности некоторых диэлектриков и элек-
трической поляризации внутри них под влиянием механических
напряжений или деформаций. При исчезновении напряжений ди-
электрик снова приходит в ненаэлектризованное состояние. По-
добные диэлектрики называют пьезоэлектриками.
Обратный пьезоэффект заключается в том, что в пьезоэлектри-
ках, помешенных в электрическое поле, возникают деформации.
Наиболее сильно пьезоэлектрический эффект выражен у сег-
нетоэлектриков. Под сегнетоэлектриками понимают некоторые
94
Рис. 5.7. Расположение
осей симметрии в крис-
таллах кварца:
а — схема кристалла в изо-
метрии; б — вид на крис-
талл сверху; 1 — продоль-
ный пьезоэффект; 2 — по-
перечный пьезоэффект
кристаллические вещества и поляризованные керамики, облада-
ющие высокой диэлектрической проницаемостью и сильным пье-
зоэлектрическим эффектом. Типичным сегнетоэлектриком, нашед-
шим широкое применение, является сегнетова соль. В последнее
время в измерительной технике используются такие сегнетоэлек-
трики, как титанат бария и фосфат аммония.
Кварц. Для измерений наибольшее применение получил кварц,
у которого пьезоэлектрические свойства сочетаются с высокими
механической прочностью и изоляционными качествами, а так-
же независимостью пьезоэлектрической характеристики от тем-
пературы в широких пределах.
На рис. 5.7 показано расположение осей симметрии в кристал-
лах кварца: схема кристалла в изометрии (а); вид на кристалл
сверху (б).
В кристаллах кварца различают следую-
щие главные оси: продольная ось Z—Z,
называемая оптической осью; ось Х—Х,
проходящая через ребра шестигранной
призмы перпендикулярно оптической
оси, — электрическая ось; ось Y— Y, пер-
пендикулярная граням, — нейтральная,
или механическая ось.
Если из кристалла кварца вырезать па-
раллелепипед таким образом, чтобы его
грани а, Ь, сбыли параллельны электричес-
кой оптической и механической осям, то
под влиянием сил, действующих перпен-
дикулярно оптической оси, кристалл
электризуется, причем заряды появляют-
ся на плоскостях, перпендикулярных элек-
трической оси. При действии силы, на-
правленной вдоль оптической оси, элект-
ризации кварца наблюдаться нс будет.
Если на параллелепипед действует
сжимающая сила Fx вдоль оси ^продоль-
ный пьезоэффект —7), то вектор поля-
ризации будет направлен по оси X. При
этом интенсивность поляризации П бу-
дет пропорциональна деформации или в
пределах упругих деформаций — давле-
нию:
П = d\px = d^Fx/sx),
где d} — постоянный коэффициент, на-
зываемый пьезоэлектрической постоян-
ной, или пьезоэлектрическим модулем; рх,
95
Fx — давление и сила, действующие на площадь грани be, sx —
площадь грани Ьс. Тогда заряд q, возникающий на каждой из гра-
ней, перпендикулярных электрической оси X, согласно опреде-
лению интенсивности поляризации можно рассчитать по формуле
q = ПхХ) или q = dxFx.
(5.1)
Уравнения (5.1) показывают, что величина зарядов, возника-
ющих на гранях Ьс, при действии силы, направленной вдоль элек-
трической оси, не зависит от геометрических размеров кристалла.
Заряды, появляющиеся на гранях Ьс при сжатии кварца силой,
направленной вдоль электрической оси, будут иметь противопо-
ложные знаки по сравнению с зарядами, возникающими на них
при растяжении.
Если сжимающая сила FY, действующая на кварц, направлена
вдоль механической оси (поперечный пьезоэффект — 2), то заряды
также возникают только на гранях Ьс, перпендикулярных электри-
ческой оси, однако направление вектора поляризации будет проти-
воположным по сравнению с его направлением при продольном
пьезоэффекте. На рис. 5.7, a Fz — Fz — сжимающая сила, направлен-
ная вдоль оси Z— Z.
Значение пьезоэлектрической постоянной кварца
dx = 2,110-12 Кл/Н =2,Ы0-11 Кл/кг.
Пьезоэлектрическая постоянная кварца dx практически не за-
висит от температуры в диапазоне от 0 до 470...500°C.
Титанат бария. Он используется в качестве пьезоэлектрика и
выполняется в виде керамики. Однако для того чтобы керамика
титаната бария получила пьезоэлектрические свойства, ее надо по-
ляризовать, т.е. подвергнуть воздействию постоянного электричес-
кого поля напряженностью от 20 до 30 кВ/см в течение примерно
трех часов. Поляризацию керамики титаната бария производят обыч-
но в направлении оси Z (рис. 5.8). Необходимо учитывать измене-
ние свойств керамики титаната бария во времени, т.е. его старение.
В течение двух лег он снижает свои по-
лезные качества примерно на 20%.
Если механическая сила F дей-
ствует по оси поляризации П, то за-
ряды возникают на гранях, перпен-
дикулярных направлению поляриза-
ции. При этом пьезоэлектрический
модуль dx = 107 • 10 |2Кл/Н, т.е. он
примерно в 50 раз больше, чем у
кварца. Диэлектрическая проница-
емость е = 1240- 10‘п Ф/м, т.е. она
Рис. 5.8. Поляризация титана- примерно в 350 раз больше, чем у
та бария
кварца.
96
Пьезоэлементы из керамики титаната бария обладают высо-
кой механической прочностью, и на ее свойства не влияет вла-
га. На практике большое значение имеет зависимость парамет-
ров керамики титаната бария от температуры. При температурах
примерно -80, 4-10 и +120 °C титанат бария переходит из одной
кристаллической структуры в другую, следовательно при этих тем-
пературах параметры (свойства) титаната бария претерпевают рез-
кие изменения. Поэтому пьезоэлектрическая постоянная мало из-
меняется лишь в сравнительно узком температурном диапазоне:
от -80 до 0 °C и от 15 до 100 °C.
Несколько лучшими температурными свойствами обладает ти-
танат бария с присадкой титаната кальция (CaTiO3) или титаната
свинца (PbTiO3). Например, присадка к титанату бария 12 %-го
титаната свинца позволяет сдвинуть точку структурного перехода
от 120 до 180 °C.
Контрольные вопросы
1. Изложите принцип работы и назначение реостатных преобразова-
телей.
2. Нарисуйте схемы и расскажите о принципах работы индуктивных и
индукционных преобразователей.
3. Как работают емкостные преобразователи и какие существуют их
разновидности?
4. Каковы назначение и область применения тензорезисторов?
5. Каковы назначение и принцип работы термометров электрического
сопротивления?
6. Изложите принцип работы и область применения термоэлектри-
ческих преобразователей.
7. Что такое «пьезоэлектрический эффект» и как он используется в
измерительной технике?
РАЗДЕЛ III
МЕТОДЫ И ПРИБОРЫ ИЗМЕРЕНИЙ
ЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН
ГЛАВА 6
МЕТОДЫ ЭЛЕКТРИЧЕСКИХ ИЗМЕРЕНИЙ
6.1. Классификация методов электрических измерений
Измерение любого вида электрических величин может быть осу-
ществлено различными методами в зависимости от условий изме-
рения, требуемой точности и т.д.
В практике электрических измерений используются в основ-
ном два метода:
• метод непосредственной оценки;
• метод сравнения в равновесном и неравновесном режимах.
Метод непосредственной оценки. Этот метод позволяет полу-
чать результат измерения непосредственно по показанию прибо-
ра, шкала которого градуирована в единицах измеряемой вели-
чины. При этом образцовая мера, как вещественное воспроизве-
дение единицы измерения, в самом измерении прямого участия
не принимает. Однако при градуировке приборов, работающих
по методу непосредственной оценки, используются образцовые
меры.
Таким образом, метод непосредственной оценки предполагает
лишь косвенное использование образцовых мер. Поэтому точность
измерения этим методом относительно невелика.
Метод сравнения. Данный метод заключается в том, что в про-
цессе измерения измеряемая величина сравнивается с образцо-
вой мерой, либо с той же физической величиной, либо косвенно
с мерой другой величины.
Чаще всего используется метод сравнения в равновесном режи-
ме, когда разность между измеряемой величиной и мерой или раз-
ность между эффектами, вызываемыми измеряемой величиной и
мерой, сводится к нулю. В этом случае метод сравнения обычно
называют нулевым методом. Типичным примером нулевого мето-
да является измерение массы на весах. Примером нулевого метода
в электрических измерениях являются равновесные мостовые и
98
компенсационные методы, когда о равновесии судят по отсут-
ствию тока или напряжения в определенном участке цепи. Так
как отсутствие тока или напряжения может быть отмечено с боль-
шой точностью с помощью весьма чувствительных нулевых при-
боров, то метод сравнения в равновесном режиме обеспечивает
значительно большую точность измерения, чем метод непосред-
ственной оценки.
Метод сравнения в неравновесном режиме сводится к получе-
нию результата измерения путем измерения разности между из-
меряемой величиной и заведомо известной величиной (мерой)
методом непосредственной оценки. Если эта разность значитель-
но меньше, чем измеряемая величина, то результат измерения
может быть получен с большей точностью, чем точность непос-
редственного измерения величины.
Так, если разность
а=Х-А
в десять раз меньше, чем измеряемая величина Х(А — известная
величина), то погрешность в измерении а вызовет в десять раз
меньшую погрешность измерения X. Таким образом, в отноше-
нии точности измерения метод сравнения в неравновесном ре-
жиме занимает промежуточное положение между методом не-
посредственной оценки и нулевым методом. Метод сравнения в
неравновесном режиме также называют дифференциальным ме-
тодом.
6.2. Основные структурные схемы электрических
измерительных приборов
Любой электрический измерительный прибор можно рассмат-
ривать как цепочку преобразователей, в которых происходит пос-
ледовательное преобразование измеряемой величины в показание
отсчетного устройства.
Поэтому под прибором следует понимать всю совокупность этих
преобразователей, независимо от того, объединены они конст-
руктивно в единое целое или выполнены в виде нескольких от-
дельных блоков.
Структурные схемы современных электрических измеритель-
ных приборов весьма разнообразны и иногда являются слож-
ными.
Эти структурные схемы можно подразделить по двум признакам:
• по роду измеряемой величины (электрическая или неэлек-
тричсская);
• по используемому методу измерения в соответствии с клас-
сификацией, приведенной на рис. 6.1, а...д.
99
6.2.1. Структурные схемы электрических приборов для измерения
электрических величин
Простейшей структурной схемой электрического прибора для
измерения электрической величины является схема, изображен-
ная на рис. 6.1, а. Этот прибор состоит только из преобразователя
измеряемой электрической величины Х3 в показание отсчетного
устройства измерительного механизма (ИМ).
Угол поворота измерительного механизма а, являющийся функ-
цией Х3 чаше всего отсчитывается по положению стрелки, укреп-
ленной на оси подвижной части и перемещающейся над шкалой.
Шкала измерительного механизма обычно проградуирована непос-
редственно в единицах измеряемой электрической величины.
Однако в большинстве случаев возможности измерительного
механизма не могут удовлетворить всем условиям измерения, на-
пример в отношении предела измерения, требуемой мощности,
защиты персонала от цепи высокого напряжения и т.д.
В этом случае измеряемая электрическая величина Х3 пред-
варительно подвергается преобразованию в преобразователе Пээ
(см. рис. 6.1, б) в электрическую величину Уэ, которая соответ-
ствует параметрам измерительного механизма.
К таким преобразователям электрической величины в электри-
ческую относятся: измерительные трансформаторы, шунты, дели-
тели напряжения и добавочные резисторы, преобразующие пере-
менный ток в постоянный (см. гл. 4). Приборы со структурными схе-
мами (см. рис. 6.1, а и б) работают только по методу непосредствен-
ной оценки и называются приборами непосредственной оценки.
Структурная схема прибора, работающего по методу сравне-
ния в неравновесном режиме, представлена на рис. 6.1, в. Измеря-
емая электрическая величина Х3 или эффект, ею вызываемый,
компенсируется на некотором участке цепи, однородной с Х3 вс-
-£-|Ймр-
а
Пээ РМ ИМ Н"~
б
Лк
|дЛ=Л-Лк
г
ДЛ=Л~Лх
X,. , ,хж
^Х3~Х3 -Хзк
Ус
Рис. 6.1. Структурные схемы приборов для
измерения электрических величин:
а — только с измерительным механизмом; б —
с преобразованием электрической величины в
электрическую; в — по методу сравнения в не-
равновесном режиме; г — по методу сравнения
в равновесном режиме; д — с автоматическим
уравновешиванием
100
личиной Хзк постоянного значения, получаемой от вспомогатель-
ного источника питания UKn через преобразователь, который обыч-
но именуют измерительной цепью (ИЦ).
Если величина Аэк компенсирует измеряемую величин}' Х3 не
полностью, то разность ДХЭ = Х3 - Хэк поступает в измерительный
прибор непосредственной оценки (Г), и отсчет по этому прибору
будет функцией ДХЭ.
Измерительный прибор непосредственной оценки, в случаях
использования его на выходе приборов сложной структуры, бу-
дем в дальнейшем называть измерителем.
Если же прибор работает по методу сравнения в равновесном
режиме, т.е. по нулевому методу, то его структурную схему можно
изобразить согласно рис. 6.1, г. В этом случае величина Аэк изменяет-
ся до тех пор, пока она не уравновесит измеряемую величину Х3, о
чем будут свидетельствовать отсутствие тока и показание нулево-
го указателя (НУ).
Если равновесия нет, то разность &Х3 = Х3 - Хзк будет обнаруже-
на по показанию нулевого указателя. Тогда производят изменение
того или иного параметра измерительной цепи до тех пор, пока
не наступит равновесие, т.е. равенство Х3 = JV3K.
Отсчетным устройством, градуированным в единицах измеря-
емой величины, в этих приборах является та часть измерительной
цепи, параметр которой регулировался для получения равнове-
сия. В данной схеме уравновешивание производится вручную пу-
тем изменения
В приборе, работающем по схеме, показанной на рис. 6.1, д,
уравновешивание производится автоматически. Разность сиг налов
ЛХ3 = Хэ- Хзк, возникающая при отсутствии равновесия, поступа-
ет в усилитель (Ус), на выходе которого включен реверсивный
двигатель (РД), механически связанный с движком потенциомет-
ра, являющегося частью измерительной цепи. Двигатель переме-
шает движок потенциометра в таком направлении и до тех пор,
пока не наступит равновесие, т.е. равенство Х3 = Хэк. При этом АЛЭ
станет равным нулю и реверсивный двигатель остановится.
Одновременно реверсивный двигатель перемещает стрелку по
шкале. Таким образом, каждому значению измеряемой величины
соответствует определенное положение движка потенциометра и
стрелки на шкале. Основными измерительными цепями приборов
сравнения являются компенсационные и мостовые цепи.
6.2.2. Структурные схемы электрических приборов для измерений
неэлектрических величин
Эти схемы аналогичны схемам, рассмотренным выше, и от
них отличаются лишь наличием преобразователя для преобразо-
вания измеряемой неэлектрической величины в электрическую.
101
Рис. 6.2. Структурные схемы электрических приборов для измерения
неэлектрических величин:
а — с преобразованием неэлектрической величины в электрическую и с измери-
тельным механизмом; б — с преобразованием неэлектрической величины в элек-
трическую и сравнением в неравновесном режиме; в — с преобразованием не-
электрической величины в электрическую и сравнением в равновесном режиме
Структурная схема, изображенная на рис. 6.1, б, при измерении
неэлектрической величины превращается в схему, представлен-
ную на рис. 6.2, а, где измеритель (Г) объединяет преобразователь
Пээ, и измерительный механизм (ИМ).
Схема рис. 6.1, в превращается в схему рис. 6.2, 6, а схема рис.
6.1, г — в схему рис. 6.2, в.
6.3. Мостовые схемы
Мостовые схемы широко используются в приборах для изме-
рения параметров электрических цепей (/?, С, Л/, L,f)n разнооб-
разных неэлектрических величин, преобразуемых в параметры R,
С, Л/, £,/
Основные свойства мостовых схем рассмотрим на примере про-
стейшей мостовой схемы, работающей на постоянном токе, изобра-
Рис. 6.3. Мостовая
схема
женной на рис. 6.3. Резисторы 7?1} Я2, Яз и
образуют так называемые плечи моста. Один из
них, например R}1 является измеряемым со-
противлением (R] = Rx). В диагональ ab моста
включается измеритель гальванометра, сопро-
тивление которого равно Rr. Источник пита-
ния напряжением U подключен ко второй ди-
агонали, т.е. к точкам с и d.
Условием равновесия моста, т.е. равен-
ства нулю тока гальванометра /г, является
равенство
R\Ri — Т?2/?з.
102
Откуда измеряемое сопротивление Rx =
= r^r2 (ад).
Мостовые схемы работают как в неравно-
весном, так и в равновесном режимах.
В первом случае мост уравновешивается
при начальном значении сопротивления R{ =
= Rrf при изменении RXi т.е. при Rx ^R^ мост
выходит из равновесия, и в измерителе по-
является ток /г. Шкала измерителя градуиру-
ется непосредственно в единицах Rx. При этом
ток 7Г зависит не только от соотношения со-
противлений плеч моста, но и от значений Рис. 6.4. Мостовая
питающего напряжения U или тока I. Поэто- иепь переменного
му при колебаниях питающего напряжения тока
U возникает дополнительная погрешность.
При работе в равновесном режиме мост уравновешивается при
любом значении Rx путем изменения сопротивления любого из
остальных плеч. В настоящее время широко применяются автома-
тические мосты, в которых процесс уравновешивания осущест-
вляется устройством, следящим за возникновением неравновесия.
Основные соотношения в мостовой цепи на переменном токе.
Чаще всего мостовые цепи на переменном токе применяются в
равновесном режиме.
На рис. 6.4 представлена мостовая цепь переменного тока. На
схеме а и б — точки моста; б и г — диагональ моста; Г — измери-
тель.
Положим, что все четыре плеча моста содержат как активные,
так и реактивные сопротивления. Условие равновесия моста в этом
случае будет выражаться равенством
ZjZ4 = ^Z3,
где Z], 2^, Z3 и Z4 — комплексы полных сопротивлений плеч моста.
6.4. Оценка точности измерительных приборов
непосредственной оценки
Оценивать точность измерительного прибора, работающего
по методу непосредственной оценки, абсолютной или относи-
тельной погрешностью измерения не представляется возмож-
ным.
Предположим, например, что вследствие трения оси в опорах
амперметра на 100 А со шкалой в 100 делений возникает погреш-
ность на одно деление, т.е. на 1 А. Так как погрешность от трения
относится к случайным погрешностям, и ее величина и знак не
зависят от отклонения подвижной части, то при измерении этим
103
прибором тока, равного 90 А, относительная погрешность изме-
рения составит
^100 = 1,1%.
90Л
Если этим прибором измеряется ток, равный 20 А, то относи-
тельная погрешность
20Х,00 = 5%-
Таким образом, относительная погрешность измерения для дан-
ного прибора может иметь разное значение в зависимости от от-
клонения подвижной части.
Поэтому качество (точность) прибора оценивают так называ-
емой приведенной погрешностью у„, под которой понимают отно-
шение абсолютной погрешности прибора ДУк пределу измерения
прибора Хп:
В рассмотренном выше примере приведенная погрешность при-
бора на 100 А составит
1А
^Т100 = 1%-
100А
Отсюда необходимо сделать важный вывод о том, что любой
прибор непосредственной оценки должен использоваться лишь
при отсчете показаний в последней трети (лучше четверти) шка-
лы.
Итак, в случае работы в начале шкалы даже у лучшего прибора
относительная погрешность измерения может быть высокой.
С точки зрения оценки качества прибора в различных условиях
его эксплуатации погрешности прибора делятся на две катего-
рии, которые рассматриваются ниже.
Основная погрешность, обусловленная несовершенством конст-
рукции и изготовления прибора. Она определяется как приведен-
ная погрешность, имеющая место при градуировке прибора, т.е.
при так называемых нормальных условиях работы. Под нормаль-
ными условиями работы обычно понимают: температуру окружа-
ющей среды 20 °C (или ту температуру, которая указана на шкале
прибора); частоту 50 Гц (или ту частоту, которая отмечена на
шкале прибора); нормальное положение прибора, обозначенное
определенным знаком на шкале; отсутствие внешних магнитных
и электрических полей и т.д.
104
Погрешности, в сумме составляющие основную погрешность
прибора, по своей природе являются случайными погрешностя-
ми. К главной составляющей основной погрешности относится
погрешность от трения.
В зависимости от допустимой основной (приведенной) погреш-
ности приборы подразделяются на следующие классы: 0,05; 0,1;
0,2; 0,5; 1,0; 1,5; 2,5; 4,0. Каждый класс прибора характеризуется
наибольшей допустимой основной погрешностью, величина ко-
торой равна номеру класса. Класс прибора обозначается на шкале
соответствующей цифрой в кружке.
Дополнительные погрешности, вызванные отступлением от нор-
мальных условий, т.е. от условий, имевших место при градуировке
приборов. Они также зависят от параметров, совершенства конст-
рукции и выполнения приборов. Дополнительные погрешности
по своей природе, как правило, являются систематическими по-
грешностями. Они также нормируются стандартом. Так, допусти-
мая дополнительная погрешность (приведенная) от колебания
окружающей температуры на каждые 10 °C не должна превосхо-
дить по величине номера класса.
Влияние внешнего магнитного поля нормируется следующим
образом: действие внешнего поля напряженностью 400 А/м (5 эр-
стед) не должно вызывать изменение показаний прибора, превы-
шающее ±(0,5...5,0) %, в зависимости от категории защищенности,
т.е. от конструктивных мер защиты от влияния внешних полей.
Дополнительная погрешность от колебания частоты на ±10%
от 50 Гц или от частоты, указанной на шкале, не должна превы-
шать величины, соответствующей номеру класса.
6.5. Оценка точности измерительных приборов,
работающих по методу сравнения
Рассмотрим вопрос о точности измерительных приборов, ра-
ботающих по методу сравнения в равновесном режиме (нулевых
приборов).
Точность измерения компенсационным методом ЭДС и паде-
ний напряжения определяется:
• точностью подгонки сопротивлений рабочей цепи под их но-
минальные значения;
• точностью установки рабочего тока;
• чувствительностью гальванометра;
• плавностью регулировки равновесия, т.е. точностью отсчета
(числом отсчитываемых знаков).
Подгонка сопротивлений рабочей цепи под их номинальные
значения может быть выполнена с погрешностью, не превыша-
ющей ±0,01 %.
105
Точность установки рабочего тока определяется погрешностью
нормального элемента, погрешностью подгонки сопротивлений
между рабочей цепью и чувствительностью гальванометра. Если
нормальный элемент не перегружать током, превышающим 1 мкА,
и хранить при комнатных температурах, то погрешность ЭДС,
развиваемая им, не будет превышать ±0,01 %.
Чем выше чувствительность гальванометра, тем лучше он бу-
дет обнаруживать отсутствие равновесия и точнее осуществится
измерение Ех. Чувствительность гальванометра не должна вызы-
вать погрешность больше, чем 0,01 %. Для этого необходимо, что-
бы падение напряжения в гальванометре при минимальном от-
клонении, которое можно заметить глазом, было на четыре по-
рядка меньше (в 10 000 раз), чем измеряемое напряжение.
Точность измерения различных величин компенсационным
метолом можно охарактеризовать погрешностью, не превышающей
±(0,02...0,05) %.
Приборы, использующие мостовую цепь в равновесном режи-
ме, характеризуются погрешностью измерения Rx, которая опре-
деляется точностью подгонки сопротивлений остальных трех плеч
моста, чувствительностью нулевого указателя и точностью отсче-
та. Повторяя приведенные выше рассуждения применительно к
компенсационным цепям, можно прийти к выводу, что погреш-
ность измерения равновесным мостом может быть снижена до
±(0,01...0,02) %.
При использовании мостовой цепи, работающей в неравно-
весном режиме, погрешность измерения Rx в основном определя-
ется погрешностью измерителя. Это обстоятельство ограничивает
точность неравновесных мостов погрешностью, практически не
меньшей, чем ±(0,2...0,5) %.
Однако в ряде случаев использование мостовой цепи в нерав-
новесном режиме дает возможность уменьшить дополнительные
погрешности преобразователей неэлектрических величин в элек-
трические. В подобных случаях применение приборов сравнения в
неравновесном режиме более выгодно, чем использование при-
боров непосредственной оценки.
Контрольные вопросы
1. Чем отличается метод непосредственной оценки от метода сравне-
ния? Какой метод точнее и почему?
2. Нарисуйте и объясните структурные схемы приборов для измере-
ния электрических величин.
3. Чем отличаются структурные схемы приборов для измерений не-
электрических величин?
4. Какими показателями оценивается точность измерительных прибо-
ров непосредственной оценки?
106
5. Что такое основная и дополнительная погрешности прибора, и ка-
кими факторами они определяются?
6. Как оценивается точность приборов, работающих по методу срав-
нения?
ГЛАВА 7
ИЗМЕРЕНИЕ ТОКОВ И НАПРЯЖЕНИЙ
7.1. Единство и различие амперметров и вольтметров
Всякий измерительный прибор при его использовании не дол-
жен изменять параметры и режим работы объекта измерения. Это
основное требование, предъявляемое к любому измерительному
прибору. Поэтому амперметр должен обладать возможно меньшим
сопротивлением, так как ток в цепи до включения амперметра
(рис. 7.1, а):
а после его включения
где U — напряжение цепи; R — сопротивление цепи; RA — сопро-
тивление амперметра.
Лишь при RA « R имеем 1Х« 1Х.
Вольтметр, наоборот, должен обладать возможно большим со-
противлением. Действительно, положим, что необходимо изме-
рить падение напряжения на сопротивлении R с помощью вольт-
метра сопротивлением /?и(рис. 7.1, б). До включения вольтметра
падение напряжения на R было
Uх = IR =
UR
/? + Ло
где J — ток в цепи; U — напряжение источника тока; R$ — сопро-
тивление всей цепи без сопротивления R.
Рис. 7.1. Включение в электричес-
кую цепь:
а — амперметра; б — вольтметра
107
После включения вольтметра получаем
RRy
UX^U
R + Rv
RRV
R +Ry
если Rv » R, to U' = Ux.
Вместе с тем измерительный механизм может быть исполь-
зован в качестве амперметра и вольтметра. Отклонение подвиж-
ной части измерительного механизма является непосредствен-
ной функцией тока, протекающего через измерительный меха-
низм:
а = /(/и).
При включении измерительного механизма в качестве вольт-
метра ток
где Ux — измеряемое напряжение; Rv — сопротивление цепи из-
мерительного механизма.
Если Ry = const, то
Таким образом, принципиального или конструктивною раз-
личия между амперметром и вольтметром нет. Их различия состо-
ят лишь в требованиях, предъявляемых к их сопротивлению, что,
естественно, вызывает различия в параметрах измерительного ме-
ханизма и в структуре измерительной цепи прибора.
7.2. Измерение постоянных токов и напряжений
В большинстве случаев измерение постоянных токов и напря-
жений осуществляется с помощью магнитоэлектрических прибо-
ров. Магнитоэлектрические амперметры являются сочетанием мил-
ливольтметра с шунтом, а вольтметры — миллиамперметра с до-
бавочным сопротивлением.
Магнитоэлектрические приборы принадлежат к наиболее точ-
ным приборам непосредственной оценки. Они выпускаются в ка-
честве лабораторных приборов классов 0,1; 0,2 и 0,5, а также как
щитовые приборы классов 1,0 и 1,5.
108
Рис. 7.2. Схема измерительной цепи комбинированного вольтметра — ам-
перметра
Магнитоэлектрические лабораторные приборы, как правило,
выпускаются универсальными и многопредельными. На рис. 7.2
приведена схема измерительной цепи комбинированного вольт-
метра — амперметра. При включении прибора на зажимы «+» и
«/» он работает в качестве амперметра с внутренними шунтами
на 0,15; 0,3, 1,5 и 3 А. При включении на зажимы «+» и «Ц» прибор
является вольтметром с добавочными сопротивлениями на 3; 15;
30 и 150 В. К зажимам «+» и «45 мВ» можно включать отдельные
(наружные) шунты, рассчитанные на падение напряжения в 45 мВ
при номинальном токе. К зажимам «+» и «3 мА» (1000 Ом) можно
подключать отдельные (наружные) добавочные резисторы, рас-
считанные на номинальный ток вольтметра 3 мА. Остальные рези-
сторы измерительной цепи необходимы для компенсации темпе-
ратурной погрешности прибора.
7.3. Измерение действующих значений переменных токов
и напряжений электромагнитными, электродинамическими,
ферродинамическими и электростатическими приборами
Ранее было отмечено, что электромагнитные, электродинами-
ческие, ферродинамическис и электростатические измерительные
механизмы могут быть использованы для измерений действующих
значений переменного тока и напряжения, и указаны верхние
пределы токов и напряжений, непосредственно измеряемых эти-
ми механизмами.
Расширение пределов измерений перечисленных измеритель-
ных механизмов по току осуществляется с помощью измеритель-
109
ных трансформаторов тока, так как падение напряжения в этих
механизмах в несколько раз больше, чем в магнитоэлектричес-
ких, поэтому шунты получились бы громоздкими и дорогими.
Расширение пределов измерения по напряжению может быть
достигнуто как с помощью добавочных сопротивлений, так и пу-
тем использования измерительных трансформаторов напряжения.
Последние главным образом применяются при необходимости изо-
ляции прибора от сети высокого напряжения.
Расширение пределов измерения электростатических измери-
тельных механизмов производится с помощью добавочных кон-
денсаторов.
Электромагнитные приборы в основном применяются в каче-
стве щитовых приборов класса 1,5, а также лабораторных много-
предельных приборов класса 0,5.
Электродинамические амперметры и вольтметры являются наи-
более точными приборами на переменном токе. Они выпускаются
только в качестве лабораторных приборов классов 0,1; 0,2 и 0,5.
Электромагнитные, электродинамические и ферродинамичес-
кие приборы обычно градуируются (и поверяются) либо на пере-
менном токе промышленной частоты, либо на постоянном токе.
При измерении на повышенных частотах эти приборы имеют зна-
чительную погрешность, обусловленную в основном индуктив-
ностью катушек. Для работы на высоких частотах указанные при-
боры не могут быть использованы.
На практике электростатические вольтметры могут быть ис-
пользованы на любых частотах, за исключением малых частот (до
30...40 Гц), так как при малых частотах полное сопротивление Z
измерительного механизма и добавочного конденсатора несколь-
ко зависит от сопротивления изоляции, шунтирующего емкост-
ное сопротивление.
Для измерения действующих значений переменных токов и
напряжений также могут быть использованы термоэлектричес-
кие приборы. Схемы цепи термоэлектрических приборов пред-
ставлены на рис. 7.3. Термоэлектрический прибор представляет
Рис. 7.3. Схемы цепи термоэлектрических приборов:
а — с единичной термопарой; б — с батареей термопар; 1 — термопара; 2 —
терморезистор, через который протекает измеряемый ток
110
собой магнитоэлектрический измерительный механизм Г (см.
рис. 7.3, а — с единичной термопарой) в сочетании с термопа-
рой 7, служащей для измерения температуры / проволоки (тер-
мосопротивления) 2, через которую протекает измеряемый
переменный ток /.
Угол отклонения а магнитоэлектрического измерительного ме-
ханизма пропорционален термоЭДС Ем, т.е.
а = Sjlr = St
Er
/?г + /?т
= £ЕТ,
где S, — чувствительность гальванометра к току; /г — ток термопа-
ры гальванометра; Ер — термоЭДС; /?г — сопротивление измери-
тельного механизма; 7?т — сопротивление термопары; к — коэф-
фициент пропорциональности.
ТермоЭДС Ер при постоянстве температуры свободных концов
термопары является функцией температуры рабочего конца тер-
мопары:
£г=71(/).
Температура t будет функцией теплоты, выделяемой измеря-
емым током /, которая в свою очередь пропорционально квадрату
тока:
7 = Л(/2),
и, следовательно, угол отклонения а = /(72),т.е. является функ-
цией действующего значения переменного тока I.
Характеристика шкалы не будет строго квадратичной, так как
температура t терморезистора определяется тепловым равновеси-
ем проволоки, т.е. потерями выделяемой теплоты, зависящими
от многих факторов.
Если измеряемый ток мал, то мало и значение термоЭДС.
В этом случае можно использовать батарею из нескольких термопар
(см. рис. 7.3, о).
Однако непосредственный контакт рабочих концов термопар с
терморезистором невозможен, ибо термопары оказались бы замк-
нутыми накоротко. Поэтому рабочие концы термопар обычно изо-
лируются от терморезисторов каплей стекла.
Терморезистор часто называют нагревателем, а сочетание на-
гревателя с термопарой — термопреобразователем. Терморезистор
(нагреватель) обычно выполняется из константана или из сплава
платины с родием. В качестве термопары чаще всего применяется
термопара хромель — копель.
Индуктивность терморезистора очень незначительна, поэтому
основное применение термоэлектрические приборы получили для
измерения токов высокой частоты (в мегагерцах — МГц).
111
7.4. Измерения средних и амплитудных значений
переменного тока
Измерения средних и амплитудных значений переменного
тока могут быть осуществлены путем использования магнито-
электрического измерительного механизма в сочетании с полу-
проводниковыми и вакуумными диодами, а также вакуумными
триодами. Приборы с полупроводниковыми диодами называ-
ются выпрямительными приборами. Они измеряют средние зна-
чения переменного тока. Приборы с вакуумными диодами и
триодами являются ламповыми приборами. Они измеряют амп-
литудные или средние значения переменного тока. Однако и
те, и другие приборы градуируются в действующих значениях
переменного тока, поэтому цифровые отметки на шкале вып-
рямительных приборов умножены на 1,11 (коэффициент фор-
мы кривой для синусоиды), а на шкале ламповых приборов —
поделены на \2 (отношение амплитуды к действующему зна-
чению для синусоиды).
Рис. 7.4. Схема цепи многопредельного выпрямительного прибора:
Г — измерительный механизм; П] и Г12 — переключатели
112
Выпрямительные приборы. Они обычно выполняются в каче-
стве универсальных многопредельных приборов постоянного и пе-
ременного тока.
На рис. 7.4 показана схема цепи многопредельного выпрями-
тельного прибора. На схеме переключатель П] служит для пере-
ключения измерительного механизма либо на работу с выпрями-
телями (переменный ток), либо на работу без выпрямителей (по-
стоянный ток).
Переключатель Г12 позволяет изменять пределы измерения как
по току, так и по напряжению. Прибор имеет по шесть пределов
измерения по току (0,003; 0,015; 0,06; 0,3; 1,5 и 6 А) и по напря-
жению (6; 15; 60; 150; 300 и 600 В).
Выпрямительные приборы могут быть использованы для измере-
ния переменных токов и напряжений лишь до частот 3... 5 тыс. Гц,
так как при более высоких частотах начинает сказываться ем-
костное сопротивление выпрямителей, шунтирующее их обрат-
ное сопротивление. Выпрямительные приборы удовлетворяют
лишь требованиям приборов класса 1,5. Они потребляют столько
мощности, сколько потребляют и магнитоэлектрические при-
боры (3 мВт/B и 75 мВт/A).
7.5. Измерение малых токов и напряжений.
Нулевые указатели
Необходимость измерения малых токов и напряжений встре-
чается в практике электрических измерений очень часто. При этом
нужно различать два случая. В первом случае необходимо количе-
ственно измерить ток или напряжение. Тогда шкала прибора гра-
дуируется в единицах тока или напряжения, или той неэлектри-
ческой величины, которая преобразуется в ток или напряжение.
Главным требованием к подобным приборам является их точ-
ность.
Во втором случае в задачу прибора входит лишь выявление
факта наличия тока (точнее — отсутствия тока) в том или ином
участке цепи, что имеет место при измерениях по методу срав-
нения в нулевом (равновесном) режиме. Подобные приборы на-
зываются нулевыми указателями. Главным требованием к ним
является высокая чувствительность. Точность нулевых указателей
практически не играет никакой роли. Предел увеличения чувстви-
тельности ставится помехами, вызывающими отклонение нуле-
вого указателя. К этим помехам следует отнести токи утечки, обус-
ловленные несовершенством изоляции источников питания и от-
дельных частей установки, механические сотрясения, ЭДС и токи,
индуктируемые в катушках и проводах измерительной цепи вне-
шними магнитными полями, и т.д.
113
Нулевые указатели. В качестве нулевых указателей используют-
ся различные гальванометры постоянного и переменного тока, а
также ламповые и фотоэлектрические усилители с магнитоэлек-
трическим измерительным механизмом.
Магнитоэлектрический гальванометр представляет собой обы-
чный магнитоэлектрический измерительный механизм с крепле-
нием подвижной рамки (или магнита) на подвесе и с зеркальным
отсчетом. Высокая чувствительность гальванометра достигается в
основном за счет резкого уменьшения противодействующего мо-
мента подвеса по сравнению с противодействующим моментом
пружинки. Однако при столь малом противодействующем момен-
те начинает играть большую роль момент успокоения.
Если обмотку рамки намотать на алюминиевый каркас, как
это делается у обычных магнитоэлектрических приборов на кер-
нах, то момент успокоения, создаваемый взаимодействием тока,
индуктируемого в каркасе при движении рамки, с полем посто-
янного магнита будет значительно больше, чем вращающий или
противодействующий момент. Поэтому рамку гальванометра вы-
полняют бескаркасной.
На рис. 7.5 показаны кривые движения подвижной части галь-
ванометра к положению равновесия (т.е. к установившемуся от-
клонению) Ор. Кривая I имеет место, когда сопротивление Явн
велико. Этот режим работы прибора является колебательным, или
периодическим (недоуспокоенным).
Кривая П соответствует критическому режиму движения под-
вижной части, являющемуся граничным между периодическим и
апериодическим режимами.
Кривая III соответствует так называемому апериодическому
(переуспокоенному) движению, что характерно при малых зна-
Рис. 7.5. Кривые движения под-
вижной части гальванометра к
установившемуся отклонению 04,:
I кривая колебательного движения;
II — кривая критического движения;
Ш — кривая апериодического дви-
жения
чсниях /?вн.
Следует отметить, что в одном
гальванометре сочетать высокую
чувствительность к току и напря-
жению практически невозможно.
В гальванометрах, чувствительных
к току, обычно выбирают значи-
тельное число витков, что непос-
редственно ведет к увеличению
сопротивления рамки и числа по-
токосцеплений у, а следователь-
но, к увеличению критического
сопротивления. Гальванометры,
чувствительные к напряжению,
имеют малое сопротивление рам-
ки и малое критическое сопротив-
ление.
114
7.6. Электронные и цифровые вольтметры
7.6.1. Электронные аналоговые вольтметры
В электронных вольтметрах конструктивно объединены элек-
тронный преобразователь и измерительный механизм. Электрон-
ный преобразователь может быть ламповым и полупроводнико-
вым. Измерительный механизм обычно берется магнитоэлектри-
ческим. Электронные аналоговые вольтметры позволяют произ-
водить измерения в широком диапазоне напряжений и частот.
Электронные вольтметры постоянного тока выполняют по схе-
ме, представленной на рис. 7.6. Измеряемое напряжение Ux пода-
ется на входное устройство, представляющее собой многопредель-
ный высокоомный делитель на резисторах. С делителя напряжение
поступает на усилитель постоянного тока и далее — на измери-
тельный механизм. Делитель и усилитель постоянного тока ослаб-
ляют или усиливают напряжение до значений, необходимых для
нормальной работы измерительного механизма.
Одновременно усилитель обеспечивает согласование высокого
сопротивления входной цепи прибора с низким сопротивлением
катушки измерительного механизма. Входное сопротивление элек-
тронного вольтметра составляет обычно несколько десятков мега-
ом. Это позволяет производить измерения в высокоомных цепях
без заметного потребления мощности от объекта измерения.
Диапазон измеряемых напряжений постоянного тока — от де-
сятков милливольт до нескольких киловольт. Для измерения ма-
лых напряжений используют микровольтметры с преобразовани-
ем постоянного тока в переменный. В таких приборах усиление
измеряемого сигнала производится на переменном токе, что по-
зволяет достичь больших значений коэффициента усиления и сни-
зить порог чувствительности до нескольких микровольт. Рабочий
диапазон электронных микровольтметров постоянного тока ле-
жит в пределах от 10"8 до 1 В.
Электронные вольтметры переменного тока выполняются по двум
структурным схемам, представленным на рис. 7.7. На схеме рис. 7.7, а
измеряемое переменное напряжение сначала преобразуется в по-
стоянное при помощи детектора, а затем усиливается усилите-
лем постоянного тока и воздействует на измерительный механизм.
На схеме рис. 7.7, б усиление производится на переменном токе
(для этого служит усилитель переменного тока) и лишь затем пред-
Рис. 7.6. Структурная схема электронного вольтметра постоянного тока
115
Рис. 7.7. Структурные схемы электронных вольтметров переменного тока:
а — схема для вольтметров, обладающих широким частотным диапазоном; б —
схема для вольтметров, обладающих высокой чувствительностью
варительно усиленный сигнал выпрямляется детектором и откло-
няет стрелку измерительного механизма. Схемы рис. 7.7, а и б до-
полняют друг друга. Каждая их них обладает своими преимущества-
ми и недостатками.
По схеме рис. 7.7, а .могут строиться вольтметры, обладающие
широким частотным диапазоном (10 Гц... 1000 МГц), но обычно
не способные измерять напряжения меньше нескольких десятых
долей вольта: детектор выпрямляет только достаточно большие
напряжения.
Схема рис. 7.7, б позволяет строить чувствительные вольтмет-
ры, нижний предел измерения которых составляет всего лишь
единицы микровольт. Однако эти приборы имеют меньший диа-
пазон, поскольку частотный диапазон усилителя переменного тока
трудно сделать достаточно большим.
Как видно из структурных схем, приведенных на рис. 7.7, а и б, в
состав каждого электронного вольтметра входит усилитель постоян-
ного или переменного тока. Одна из возможных схем усилителя по-
Рис. 7.8. Схема усилителя постоян-
ного тока для электронного вольт-
метра
стоянного тока (в упрошенном
виде) представлена на рис. 7.8. Из-
меряемое напряжение Ux подает-
ся на сетку триода УЦ через ре-
зистор который вместе с кон-
денсатором Сф образует фильтр,
уменьшающий пульсации на сет-
ке лампы. При коротко замкну-
том входе, т.е. в отсутствие напря-
жения Ux, потенциалы сеток обе-
их ламп VLX и VIq равны и уста-
новка на нуль измерительного
механизма вольтметра V может
быть выполнена при помоши пе-
ременного резистора /^. Появле-
ние напряжения 1/х приводит к
116
изменению внутреннего сопротивления лампы VL}. Вследствие этого
нарушается баланс схемы, потенциалы анодов не будут равны и
через цепь измерительного механизма потечет ток. Направление и
значение этого тока зависят от знака и значения измеряемого на-
пряжения Ux. Таким образом, шкала измерительного механизма мо-
жет быть проградуирована в вольтах постоянного тока.
Электронные вольтметры обладают рядом ценных качеств. Они
имеют большое входное сопротивление, поэтому потребляют ма-
лую мощность от цепи, в которой производятся измерения. Ди-
апазон их рабочих частот может простираться от нуля до сотен
мегагерц. Значения измеряемых напряжений лежат в интервале от
нескольких вольт до киловольт.
К отрицательным характеристикам электронных вольтметров от-
носятся необходимость источника питания, невысокая точность,
обусловленная недостаточной стабильностью электронных элемен-
тов (резисторов, ламп, полупроводниковых диодов и триодов и т.д.).
7.6.2. Цифровые измерительные приборы
Цифровыми измерительными приборами (ЦИП) называются
приборы, которые в процессе измерения осуществляют автома-
тическое преобразование непрерывной измеряемой величины в
дискретную с последующей индикацией результата измерений на
цифровом отсчетном устройстве или регистрацией его при помо-
щи цифропечатающего устройства.
Функциональная схема цифрового измерительного прибора
представлена на рис. 7.9. Аналоговая величина ^сначала преоб-
разуется входным аналоговым преобразователем (ВАП) к виду,
удобному для последующего преобразования, затем при помо-
щи аналого-цифрового преобразователя (АЦП) производятся
ее дискретизация и кодирование. Наконец, цифровое отсчет-
ное устройство (ЦОУ) превращает кодированную информацию
об измеряемой величине в цифровой отсчет, удобный для счи-
тывания оператором. В последние годы цифровые приборы по-
лучили большое распространение, особенно в качестве лабора-
торных вольтметров, амперметров, омметров, частотомеров и
фазометров.
По сравнению с аналоговыми цифровые приборы имеют та-
кие преимущества, как высокая точность, широкий рабочий ди-
апазон, высокое быстродействие, получение результатов измере-
ний в удобной для считывания оператором форме, возможность
Рис. 7.9. Функциональная схема цифро-
вого измерительного прибора
ВАП АЦП ЦОУ
117
цифрового преобразования и ввода измерительной информации в
ЭВМ, автоматического введения поправок для уменьшения си-
стематических погрешностей, автоматической калибровки, авто-
матизации процесса измерения.
Недостатками цифровых приборов являются сложность, срав-
нительно высокая стоимость и меньшая, чем у аналоговых прибо-
ров, надежность. Следует, однако, указать, что развитие техники
интегральных схем в значительной мере позволяет устранить ука-
занные недостатки. Основой всякого цифрового прибора служит
аналого-цифровой преобразователь, который осуществляет диск-
ретизацию, квантование и кодирование информации.
Дискретизация представляет собой процесс получения отсче-
тов измеряемой величины в определенные дискретные моменты
времени. Непрерывная величина X (t) заменяется последователь-
ностью отсчетов X (tk), взятых в некоторые моменты времени tk.
Обычно промежутки времени между двумя последовательными
отсчетами ДГ = - tk выбираются одинаковыми. В этом случае
говорят, что шаг дискретизации Дг постоянен.
Процесс квантования заключается в замене непрерывных значе-
ний величины X(j) конечным набором ее дискретных значений Хп.
Каждое из этих значений совпадает с одним из установленных
уровней квантования, отстоящих друг от друга на интервал (шаг)
квантования. Непрерывные значения величины заменяются зна-
чениями уровней квантования в соответствии с некоторым пра-
вилом. Например, вместо непрерывных значений величине при-
писываются значения ближайших уровней.
Кодированием называется процесс представления численного
значения величины, определенной последовательностью цифр или
сигналов, т.е. кодом. Для преобразования цифрового кода в напря-
жения, воздействующие на цифровое отсчетное устройство и фор-
мирующие показания ЦИП, используется устройство, называемое
дешифратором.
Процессы дискретизации и квантования являются принципиаль-
ными источниками погрешностей ЦИП. Ясно, что замена непре-
рывной величины рядом ее значений, считанных в определенные
дискретные моменты времени, ведет к потере информации о пове-
дении этой величины в промежутках между отсчетами. Однако число
уровней квантования также является причиной погрешностей ЦИП.
Аналого-цифровые преобразователи. Это измерительные преоб-
разователи, назначение которых состоит в автоматическом пре-
образовании измеряемой аналоговой величины в дискретную ве-
личину, представленную в виде цифрового кода. В соответствии с
методом построения все АЦП можно разделить на три группы:
• с времяимпульсным преобразованием;
• с частотно-импульсным преобразованием;
• поразрядного уравновешивания.
118
Рис. 7.10. Упрощенная схема АЦП
с времяимпульсным преобразова-
телем
Рис. 7.11. Структурная схема преоб-
разователя «временной интервал —
код»:
1 и 2 — входы временного селектора
Вход
В качестве примера рассмотрим АЦП с времяимпульсным пре-
образованием.
АЦП с времяимпульсным преобразованием. В основу времяим-
пульсного метода положено преобразование измеряемой величи-
ны в интервал времени, заполняемый затем импульсами со ста-
бильной частотой следования (счетными импульсами). Аналого-
цифровые преобразователи, использующие этот метод, применя-
ются для преобразования временного интервала, напряжения, ча-
стоты, разности фаз и других величин в код.
Упрошенная схема АЦП с времяимпульсным преобразовани-
ем представлена на рис. 7.10.
В схему рис. 7.10 входят два преобразователя. Первый преобразует
входную величину X в интервал времени ДГ, второй — интервал
времени Д/ в последовательность импульсов (цифровой код) N.
Если структура первого преобразователя может быть различной
в зависимости от вида входной величины X, то структура преобра-
зователя «временной интервал — код» одинакова для всех АЦП
(рис. 7.11). Временной интервал Д/х = t2 -6 задается двумя коротки-
ми импульсами: опорным (в момент времени и1} и интерваль-
ным (в момент времени /2) wf2. Эти импульсы поступают в блок
формирования (БФ), вырабатывающий прямоугольный импульс wnp
длительностью Д/х = /2 - 6- Указанный прямоугольный импульс по-
дается на вход 1 временного селектора (ВС). На вход 2 временного
селектора от генератора счетных импульсов (ГСП) постоянно по-
ступает последовательность счетных импульсов исч со строго опре-
деленной частотой следования Усч- Счетные импульсы могут прохо-
дить через ВС на выход только тогда, когда ВС открыт прямоуголь-
ным импульсом Ипр, т.е. в течение временного интервала ДГХ.
Поскольку период следования счетных импульсов Гсч = 1/£ч
выбирается много меньшим, чем дгх, то можно утверждать, что
число счетных импульсов N, прошедших через ВС, выражается
формулой
У-ДГХ/ТСЧ=ДГХ/СЧ.
119
Следовательно, AZX* N/f^. Таким образом, каждому временно-
му интервалу ставится в соответствие последовательность опреде-
ленного числа импульсов на выходе АЦП, т.е. цифровой код.
Цифровые отсчетные устройства. Они служат для представле-
ния результатов измерений в виде обычных, удобных для считы-
вания оператором десятичных цифр. В цифровых отсчетных уст-
ройствах применяется несколько типов цифровых индикаторов.
Наиболее распространены газоразрядные, светодиодные и жид-
кокристаллические индикаторы.
Газоразрядные индикаторы имеют набор проволочных катодов,
выполненных в форме десяти арабских цифр, и общий сетчатый
анод. Катоды собраны в пакет и размещены по глубине один за
другим в баллоне, наполненном неоном. Если напряжение подается
на анод и какой-либо из катодов, то между ними возникает тлею-
щий разряд в виде светящейся соответствующей цифры. Рабочее
напряжение газоразрядных индикаторов составляет 170...200 В.
Индикаторы с таким высоким напряжением плохо совместимы с
низковольтными интегральными микросхемами. Это является их
основным недостатком.
Светодиодные индикаторы применяют полупроводниковые ин-
жекционные светоизлучающие диоды. Светодиоды излучают в ви-
димой части спектра. Цвет излучения зависит от материала и может
быть практически любым — от красного до зеленого. Индикаторы
этого типа обычно имеют сегментную структуру. Таким образом
цифра формируется высвечиванием определенных сегментов. К до-
стоинствам светодиодных индикаторов относятся высокая яркость,
большая долговечность, низкие рабочие напряжения (несколько
вольт). Однако эти индикаторы имеют только небольшие размеры.
Жидкокристаллические сегментные индикаторы используют свой-
ство некоторых органических веществ, называемых жидкими кри-
сталлами, изменять коэффициент преломления под влиянием
приложенного напряжения. Конструктивно индикаторы выполнены
в виде конденсатора, обкладками которого являются проводящие
электроды, нанесенные в виде прозрачных пленок на две стек-
лянные пластинки. Тонкий слой жидкого кристалла находится
между этими пластинками. Индикаторы не излучают собственной
энергии, они работают в отраженном свете, используя контраст
между участками с приложенным напряжением и фоном. Поэто-
му жидкокристаллические индикаторы очень экономичны. Недо-
статком этих индикаторов является зависимость контрастности
изображения от внешней засветки, а также невысокая яркость.
Контрольные вопросы
1. В чем состоят единство и различие амперметров и вольтметров?
Какими параметрами они отличаются?
120
2. Как построены многопредельные приборы для измерения постоян-
ных токов и напряжений?
3. Какими приборами можно измерять действующие значения пере-
менных токов и напряжений?
4. Как измеряются средние и амплитудные значения переменного тока?
5. Каковы особенности измерений малых токов и напряжений? Какие
требования предъявляются к нулевым указателям?
6. Для чего предназначены и как работают электронные аналоговые
вольтметры?
7. Изложите принцип работы, преимущества и недостатки цифровых
измерительных приборов.
ГЛАВА 8
ИЗМЕРЕНИЕ СОПРОТИВЛЕНИЙ
8.1. Измерение сопротивлений методом амперметра —
вольтметра
Измерение сопротивления постоянному току R может быть осу-
ществлено с помощью амперметра — вольтметра, либо по схемам
рис. 8.1. Так как
где Ux и 1Х — падение напряжения и ток непосредственно в измеря-
емом сопротивлении, то схемы (см. рис. 8.1) приводят к методиче-
ской погрешности, обусловленной соотношением между измеря-
емым сопротивлением и значениями сопротивлений используемых
приборов. В самом деле, при измерении Rx по схеме рис. 8.1, а сопро-
тивление, вычисленное по показаниям приборов вольтметра Uv и
амперметра 1Л, будет следующим:
1л
Рис. 8.1. Схемы цепей для измерения сопротивления методом ампермет-
ра — вольтметра:
а — для измерения больших сопротивлений; б — для измерения малых сопро-
тивлений
121
Однако показание вольтметра
Uy = их + 1ЛЯЛ,
где 1А — ток, протекающий через амперметр; RA — сопротивление
амперметра и ток 1А = 1Х.
Поделив правую и левую части этого уравнения на 1Х, получим
+ ЯА = Rx + Ra.
* X
Абсолютная погрешность измерения по этой схеме
&RX = Rx ~ Rx = Ra ,
а относительная погрешность
7 = ^100.
Кх
Следовательно, рассмотренную схему можно применять лишь
при измерении больших сопротивлений, когда RA « Rx.
При измерении RA по схеме рис. 8.1, б имеем:
Следовательно,
R> _ vx _ их 1 _ ях
х т Vx г t Ux . Rx ’
/ + —X. 1 + 1 + —JL
Ry 1XRV Ry
В этом случае относительная погрешность
У _ ~ Ях _ 1 _ j _ Rx
Rx । + Rx Rx + Ry
или & у
y =----£-100.
Таким образом, схему рис. 8.1, б можно использовать лишь при
измерении малых сопротивлений, когда Ry» Rx. На рис. 8.1 R} —
переменный резистор для изменения режимов работы схемы.
Приведенные выражения могут служить как для оценки по-
грешности, так и для введения поправки к измеренному значе-
нию RXi если известны сопротивления приборов.
122
Рис. 8.2. Схемы цепей для измерения сопротивления приборами непо-
средственной оценки на переменном токе:
а — для больших сопротивлений; б — для малых сопротивлений
Метод амперметра — вольтметра может быть также применен и
на переменном токе. В этом случае, очевидно, будет измерен модуль
полного сопротивления Z, а не сопротивление постоянному току R.
При желании можно измерить отдельно активное и реактив-
ное сопротивления. Для этого, кроме амперметра и вольтметра,
необходимо также включить ваттметр (рис. 8.2).
Активное ЛЛ' и реактивное ^'сопротивления испытуемого объек-
та могут быть получены из выражений:
К = и х'х = V(z;)2-(/rx)2 =
где £/, I и Р — показания соответственно вольтметра, амперметра
и ваттметра.
В данном случае также имеет место методическая погрешность.
Однако введение поправки практически затруднительно, так как
реактивные сопротивления приборов обычно неизвестны.
На рис. 8.2 Zx — полное измеряемое сопротивление; 1 — ваттметр;
2 — переменный резистор для изменения режима работы схемы.
8.2. Измерение сопротивлений омметрами
Омметры выполняются на базе магнитоэлектрических измери-
тельных механизмов. Их можно разделить на две группы: оммет-
ры, показания которых зависят от напряжения, и омметры, по-
казания которых не зависят от напряжения.
Омметры первой группы используют магнитоэлектрический из-
мерительный механизм, включаемый последовательно или парал-
лельно с измеряемым резистором. Омметры второй группы ис-
пользуют магнитоэлектрический логометр.
Омметр с последовательным соединением измеряемого сопро-
тивления (рис. 8.3, а). Ток в цепи рамки /р, определяющий откло-
г У
нение прибора, /р = ———-.
Ki + Rx
123
Рис. 8.3. Схемы цепей омметра с последовательным (а) и параллельным (6)
соединением измеряемою сопротивления
Для некоторого определенного значения напряжения U при-
бор может быть отградуирован непосредственно в единицах Rx.
Так как напряжение U при эксплуатации прибора может быть
отличным от его значения при градуировке, то перед измере-
нием следует проверить величину напряжения, для этого клю-
чом К замыкают зажимы Rx накоротко. Если при этом стрелка
не станет на отметку «О», то необходимо изменить ток /р с по-
мощью реостата, шунтирующего рамку Лрег, движок которого
связан с рукояткой, выведенной наружу прибора.
Омметры с последовательным включением измеряемого сопро-
тивления удобны для измерения относительно больших (пример-
но свыше 1000 Ом) сопротивлений.
После установки стрелки в положение «0» измерение произво-
дится при разомкнутом ключе К.
Омметр с параллельным соединением измеряемого сопротивле-
ния (рис. 8.3, б). Для этой цепи
! UR*
₽ ^х(^2 + ^1) + ^1^2
где А| — суммарное сопротивление рамки и добавочное Я1Об;
/?2 — сопротивление в цепи питания.
При Rx = 0 ток /р = 0, а при Rx = ©о этот ток достигает своего
наибольшего значения
pmax"7?1+/?2-
Здесь проверка напряжения и установка нуля производятся при
размыкании ключа К (Rx = «>), а измерение Rx — при замкнутом
ключе К. Регулировка «нуля» также производится с помощью элек-
трического шунта.
Омметры с параллельным соединением измеряемого сопротив-
ления также имеют неравномерную шкалу. Они удобны для изме-
рения малых сопротивлений.
124
Омметры с логометром. Измеряемое сопро-
тивление Rx включается либо последовательно
в цепь одной из рамок, либо параллельно од-
ной из рамок. На рис. 8.4 показана наиболее
распространенная схема цепи омметра с лого-
метром. На схеме Rx — измеряемое сопротив-
ление; Tj и г2 — сопротивления рамок логомет-
ра; RK — компенсационное сопротивление.
Токи в рамках /| и /2 могут быть выражены
следующими формулами:
Рис. 8.4. Схема цепи
омметра с логомет-
ром
1 - у •1 и
1 Л + Ял ’ 2 гг + Як '
Так как угол отклонения алогометра является функцией отно-
шения токов
А + А Л + Я/
'^(л + aJ ^л + Ях/
Итак, показания логомстра принципиально нс зависят от напря-
жения. На практике некоторая зависимость от напряжения есть. В хо-
роших логометрах влияние напряжения не превосходит ±(0,1 ...0,2) %
при изменении напряжения на ±20 % от номинального.
8.3. Измерение сопротивлений мостовыми методами
8.3.1. Равновесные мосты
Принцип действия и основные соотношения мостовых цепей
были рассмотрены ранее. Приведем примеры устройств и свойств
мостов постоянного тока.
Для измерения сопротивлений примерно от 1 Ом и выше при-
меняются одинарные мосты. Для измерения весьма малых сопро-
тивлений (меньше 1 Ом) используются двойные мосты.
Одинарные мосты. Рассмотрим схему цепей двух типов одинар-
ных мостов с переменным (рис. 8.5, а) и постоянным (рис. 8.5, б)
отношением плеч.
Из условия равновесия одинарного моста имеем
Rx = Я2§->
R,
где R2, Ry и — плечи одинарного моста.
125
В мостах с переменным отношением плеч для достижения рав-
новесия отношение Я3/Я4 изменяется (регулируется) с помощью
реохорда R, снабженного шкалой, по которой можно непосред-
ственно прочитать это отношение. Плечо R2 выполнено в виде
магазина сопротивлений, с помощью которого можно менять
множитель при отношении R^/R^ Этот множитель равен 0,1; 1; 10;
100 и 1000. Он выбирается в зависимости от величины измеряемо-
го сопротивления.
В одинарных мостах с постоянным отношением плеч (см. рис.
8.5, б) уравновешивание производится путем регулировки со-
противления R2i выполняемого в виде четырех- или пятидекад-
ного магазина сопротивлений. Отношение плеч можно устанавли-
вать переключателем К3, равным от 1/100 до 100/1, что позволяет
производить измерения Rx в диапазоне от 0,1 до 106 Ом. Ключ К!
9 xio Ом
9x10 Ом
9x100 Ом
9x1000 Ом
Рис. 8.5. Схемы цепей одинарных мостов с переменным (а) и постоян-
ным (6) отношением плеч:
Kj — ключ включения питания; К2 — ключ для выключения гальванометра; К3 —
переключатель отношения плеч моста
126
предназначен для включения питания, а ключ К2 — для включе-
ния гальванометра. Отношение плеч следует выбирать таким обра-
зом, чтобы при равновесии моста были использованы (в отсчете)
все четыре декады плеча R2.
Под чувствительностью равновесного моста 5М понимают
с а _ а Д/г
м ~ SRX ~ д/г ДЯХ ’
Л ^х
где —— — чувствительность гальванометра к току.
Д/г
Поэтому чем больше чувствительность гальванометра и напряже-
ние U источника питания, тем больше чувствительность моста. Од-
нако увеличение напряжения U ограничено допустимой мощностью
(нагревом) в катушках сопротивлений плеч моста. Допустимые зна-
чения напряжения и отношения плеч в зависимости от величины
измеряемого сопротивления указываются в паспорте моста.
Двойные мосты. При измерении одинарным мостом небольших
сопротивлений (менее 1 Ом) получаются значительные погрешнос-
ти вследствие влияния, оказываемого сопротивлением соединитель-
ных проводов, которыми измеряемое сопротивление присоединяет-
ся к мосту, и переходными сопротивлениями контактов. Эти по-
грешности можно значительно уменьшить, если измерять малые со-
противления двойным мостом.
Принципиальная схема цепи двойного моста приведена на
рис. 8.6. На схеме Rx и R$ обозначают измеряемое и образцовое
(сравнительное) сопротивления; Rl9 R2, Ry и RA — наборы кату-
шек сопротивлений, которые служат для уравновешивания мос-
та; R — регулировочное сопротивление; г, гь гъ г3 и г4 — сопро-
тивления соединительных проводов (включая переходные сопро-
тивления контактов); Г — измерительный механизм; /— ток пи-
тания; 1{ и 12 — токи в плечах
моста; /3 — ток, проходящий
через измеряемое и эталонное
сопротивления.
При сборке схемы следует об-
ратить внимание на правильное
использование потенциальных и
токовых зажимов образцового и
измеряемого сопротивлений. Со-
единительные провода и, г2, Гу и
г4 должны быть присоединены к
потенциальным, а провод г и со-
единительные провода, идущие
к источнику тока, — к токовым
Рис. 8.6. Схема цепи двойного моста
127
Используя метод контурных токов, для равновесия моста мож-
но написать следующие уравнения:
= да;
ЛА+ I2R4 =
/2(/?з + Д) = (Z3 ”Л)Г-
Решив эти уравнения относительно Rx, эту величину можно
определить по формуле
Rx= — Rq +
r2
Rs ( R\ R-j
А + Ra + r R2 R4 )
Для того чтобы результат измерения можно было бы определять
только по первому члену правой части уравнения, необходимо
Л. Л3
А + А + г R2 Ra
-»0.
=___Лг
Для выполнения этого условия в двойных мостах пары сопро-
тивлений А и а также R2 и А имеют ручки, механически
связанные таким образом, чтобы при регулировке равновесия моста
изменением отношения RJR2 отношение R3/Ra изменялось оди-
наково с отношением RJR2.
Так как идеального равенства этих отношений может и не быть,
то сопротивление г нужно выполнить в виде короткого провод-
ника большого сечения с тем, чтобы г имело очень малое значе-
ние. Тогда величина d будет практически равна нулю и
Таким путем исключается влияние переходных сопротивлений
в местах присоединения г к сопротивлениям Rx и R$.
Переходные сопротивления в местах присоединения наружных
проводников, подводящих ток /, очевидно, не сказываются на
точности измерения, а влияют лишь на величину тока /. Что же
касается переходных сопротивлений в потенциальных зажимах и
сопротивлений соединительных проводов гь гъ г3 и г4, то, выби-
рая сопротивления /?, и R2 и сопротивления R3 и Ra достаточно
большими (не менее 10 Ом), можно сделать влияние этих сопро-
тивлений ничтожно малым.
8.3.2. Неравновесные мосты
При работе с неравновесными мостами прежде всего следует
позаботиться о том, чтобы показания измерителя зависели только
от сопротивлений плеч моста и не зависели от колебаний напряже-
128
ния источника питания. Поэтому неравновесные мосты, как пра-
вило, используют логометр в качестве измерителя. В тех случаях,
когда чувствительность моста мала и приходится применять лампо-
вые усилители тока или напряжения измерительной диагонали,
необходимо использовать стабилизатор питающего напряжения.
На практике нашли применение два типа мостовых цепей по-
стоянного тока с магнитоэлектрическим логометром в качестве
измерителя (рис. 8.7).
На рис. 8.7, а одна из рамок логометра (Rr) включена в измери-
тельную диагональ моста, и вторая рамка (Я,,) — в диагональ пита-
ния моста. При изменении сопротивления Rx, включенного в одно
из плеч моста, изменяется ток лишь в рамке R?] логометра, тогда как
ток в рамке /?г2 не зависит от изменения сопротивления Rx.
Угол отклонения логометра является функцией отношения
токов в рамках:
Так как токи 1Т] и /Г2 пропорциональны напряжению Uисточни-
ка питания моста, то отклонение а не зависит от постоянства U.
В мостовой цепи с логометром, изображенной на рис. 8.7, о,
при изменении сопротивления Rx происходит изменение токов в
обеих рамках, причем с разными знаками, что может обеспечить
большую чувствительность этой цепи по сравнению с цепью на
рис. 8.7, а. Однако и в данном случае оба тока одинаково зависят
от U, и угол отклонения а логометра также не будет зависеть от
напряжения источника питания.
Рис. 8.7. Схемы мостовых цепей с логометром:
а — с включением рамок в разные диагонали; б — с включением рамок в одну
измерительную диагональ
129
На схемах рис. 8.7 Rl (Rx) — измеряемое сопротивление; R2, R3
и Л, — плечи моста; R$ — полудиагональ моста; точки а и с —
диагональ моста.
Важным вопросом при использовании неравновесных мостов
является выбор сопротивлений плеч, обеспечивающий наиболь-
шее отклонение а измерителя при заданном изменении &RX, т.е.
при заданном относительном изменении Rx
Д/L
£х ’ Rx ‘
Угол отклонения а магнитоэлектрического измерительного ме-
ханизма по существу пропорционален корню квадратному из мощ-
ности рамки. Зависимость утла отклонения а от тока в рамке
a = Cjtp/r, (8.1)
где С| — постоянная, равная 777; w — число витков.
С одной стороны, если исходить из обычно заданной площади
окна рамки
где d — диаметр провода намотки; ку — коэффициент укладки,
меньший единицы и определяемый толщиной изоляции прово-
локи, то
nd2 _ Sky
4 w
С другой стороны, сопротивление рамки
АГ=Н^-, (8.2)
ndz
4
где р — удельное сопротивление материала рамки; /] — длина од-
ного витка рамки.
Из этого выражения имеем
nd2 _ pw'i (8
4 Аг ’
Сопоставляя выражения (8.2) и (8.3), получаем
Sky _
w Rf
130
Откуда
ПГ
& = . - , ''' = №
N Ар
Тогда выражение (8.1) принимает следующий вид:
а = С]С2/гх/Л = = Су]Рг,
где Рг — мощность в рамках логометра.
Поэтому при выборе сопротивлений плеч моста необходимо
стремиться к получению максимальной мощности в измерителе.
При использовании мостовых цепей (как в неравновесном, так
и в равновесном режимах) для измерения неэлектрических вели-
чин, когда в плечо моста включается преобразователь, особенно
важным является исключение дополнительных погрешностей от
температуры, частоты и т.д.
При использовании мостовой цепи включения преобразовате-
ля радикальным средством компенсации температурной погреш-
ности является включение в соседнее с рабочим плечом R{ моста
нерабочего преобразователя /?2, аналогичного рабочему преобра-
зователю, при этом температурные изменения 7?, и R2 будут ком-
пенсировать друг друга.
Автоматические мосты. Принципиальная схема цепи моста с
автоматическим уравновешиванием для измерения активного со-
противления переменному току приведена на рис. 8.8.
На схеме рис. 8.8 в два плеча моста включены части R' и R"
реохорда R, движок которого связан через передачу с осью ревер-
сивного двигателя (РД). Если мост уравновешен, то напряжение
между точками биг равно нулю и ротор двигателя неподвижен.
Рис. 8.8. Принципиальная схема цепи моста с автоматическим уравнове-
шиванием
131
При изменении измеряемого сопротивления Rx на диагонали мос-
та (между точками б и г) появляется напряжение переменного тока,
величина которого зависит от значения Rx. Это напряжение усили-
вается усилителем (Ус) и подается на реверсивный двигатель. Ро-
тор последнего приходит во вращательное движение, причем на-
правление вращения зависит от фазы напряжения ибг. При враще-
нии ротор перемещает движок реохорда в сторону достижения
равновесия моста и одновременно поворачивает стрелку указате-
ля. Вращение ротора двигателя будет происходить до тех пор, пока
мост не придет в равновесие. Шкала указателя может быть програду-
ирована в единицах измеряемой величины, например в градусах,
если Rx является преобразователем термометра сопротивления.
На схеме рис. 8.8 R2, R^n R4 — плечи моста; U\ — напряжение
питания моста;. U2 — напряжение питания РД; а, б, в и г — точки
моста.
Погрешности автоматических мостов обычно не превышают
0,5 %. Порог чувствительности, т.е. то наименьшее значение изме-
нения измеряемой величины, которое вызывает пуск двигателя,
равен примерно 0,2 % шкалы прибора.
8.4. Измерение сопротивления изоляции.
Определение места повреждения изоляции в кабелях
В настоящее время основным прибором, применяемым для изме-
рения сопротивления изоляции, является мегомметр. Для измере-
ния таких больших сопротивлений, как сопротивление изоляции,
достигающее сотен и тысяч мегом, необ-
Рис. 8.9. Схема цепи ме-
гом метра
ходимо напряжение порядка сотен вольт.
Мегомметры выпускаются с внутрен-
ним генератором на 500, 1000 и 2000 В.
Генератор выполняется с возбуждени-
ем от постоянных магнитов и ротором,
вращающимся от руки. Скорость враще-
ния поддерживается постоянной по-
средством центробежного регулятора.
Измерителем мегомметра является
магнитоэлектрический логометр (рис. 8.9).
Двухполюсный переключатель П позво-
ляет переходить от последовательной схе-
мы (М2) к параллельной (Ш). Соответ-
ственно на шкале прибора имеются два
ряда отметок: прямой (Ш) и обратный
(М2).
Прибор снабжен зажимом Э (экран),
который дает возможность отвести токи
132
утечки от измерительного механизма, а также исключить влияние
сопротивления изоляции между зажимами Л (линия) и 3 (земля),
к которым подключается измеряемое сопротивление. Это сопро-
тивление изоляции, включенное параллельно измеряемому со-
противлению, при больших значениях последнего может привес-
ти к погрешностям измерения.
Центробежный регулятор скорости в сочетании с логометром
обеспечивает практически полную независимость показаний при-
бора от скорости вращения ротора генератора.
В качестве примера рассмотрим измерение сопротивления изо-
ляции двухпроводной сети относительно земли. При этом могут
быть два случая:
1) сеть не находится под напряжением;
2) сеть находится под напряжением.
Если сеть не находится под напряжением, то сопротивление
изоляции предпочтительнее измерять мегомметром. В случае, ког-
да сеть находится под напряжением, то для измерения сопротив-
ления изоляции применяют вольтметр.
На рис. 8.10 представлена схема цепи для измерения сопротив-
ления изоляции сети, не находящейся под напряжением.
Измеренное мегомметром сопротивление
/?А + /?в
где Яд и Rq — сопротивления изоляции проводов А и В относи-
тельно земли.
Измеренное сопротивление меньше, чем сопротивление /?А
или /?в, и если измеренное сопротивление /?в окажется удов-
летворяющим нормам, то сопротивление любого из проводов
(ЯА и Rq) относительно земли будет безусловно удовлетворять
нормам.
Измерение сопротивления изоляции между проводами возмож-
но лишь в том случае, если нагрузка RH отсоединена.
На рис. 8.11 показана схема
цепи для измерения сопротивле-
ния изоляции сети, находящей-
ся под напряжением, с помощью
вольтметра.
Для измерения изоляции оп-
ределяем:
1) рабочее напряжение сети U\
2) напряжение i/A между про-
водом А и землей (показание
вольтметра при положении А пе-
реключателя);
Рис. 8.10. Схема цепи при измере-
нии сопротивления изоляции сети,
не находящейся под напряжением
133
Рис. 8.11. Схема цепи для измере-
ния сопротивления изоляции сети,
находящейся под напряжением
3) напряжение [/в между про-
водом В и землей (показание
вольтметра при положении В пе-
реключателя).
Обозначив через Rv сопротив-
ление вольтметра, /?А и Яв — со-
противления изоляции проводов
А и В относительно земли, мо-
жем написать выражение для
тока 7Ь идущего через изоляцию
провода В при включении вольт-
метра на провод А:
. , U-Uk _______U
7?в R^Ry
При вольтметре, подключенном к проводу В, можно написать
выражение для тока /2> идущего через изоляцию провода А:
_U-UB_ U
лА _Мк_ + Аа
/?в + Ry
Решая два полученных уравнения относительно и Лв, най-
дем сопротивление изоляции провода А относительно земли:
ЛА = Ry
U-Ua-U*
иъ
(8.4)
и сопротивление изоляции провода В относительно земли:
(8.5)
D _ Я
лв - Ли----—----
и ь
Для нахождения значения сопротивления изоляции каждого
из проводов относительно земли необходимо считать показания
вольтметров при их включении и подставить эти показания в при-
веденные формулы.
Если сопротивление изоляции проводов относительно земли
велико по сравнению с сопротивлением вольтметра, то можно
пренебречь током, идущим через сопротивления Rx и Яв, а также
падениями напряжения UK и в выражениях (8.4) и (8.5). Тогда
выражения (8.4) и (8.5) примут более простой вид:
( U \ и А
яА=/?и^--1 ; R^Ry .
) \Ук )
Определение места повреждения изоляции. Повреждение изо-
ляции кабеля может произойти при пробое изоляции кабеля меж-
134
ду жилой и броней, пробое изоляции кабеля между жилами, об-
рыве жилы кабеля.
Для определения места повреждения кабеля от пульта управле-
ния электрической сетью применяются различные методы. Наи-
более часто для этой цели используются одинарные мосты с пет-
лей из двух жил, образующих два плеча моста.
В качестве примера на рис. 8.12 приведена схема мостовой цепи
для определения места пробоя изоляции между жилой и броней
кабеля. Концы исправной и поврежденной жил А и Б закорачива-
ются. Тогда получаем мост, образованный магазинами сопротивле-
ний Ri и R2> сопротивлением Rx и сопротивлением 2Rt — Rx (R{ —
сопротивление одной жилы).
При равновесии моста (путем регулировки R[/R2) имеем
R\ _ > _ Rx
R2~k~ 2Rt-Rx'
где к — коэффициент.
Откуда
Тогда
4 = V, (8.6)
р
где 1Х — расстояние от измерительного моста до места поврежде-
ния; s — сечение провода; р — удельное сопротивление.
Если сечение кабеля одинаково по всей длине, то в формулу
(8.6) вместо Rx и R, можно подставить 1Х и /.
Тогда
Рис. 8.12. Схема мостовой цепи для определения места пробоя изоляции
между жилой и броней кабеля
135
Сопротивления всех соединительных проводов измерительной
цепи должны быть значительно меньше, чем сопротивления Rx и
Rh ибо в противном случае будет иметь место значительная по-
грешность измерения.
В ряде конструкций одинарных мостов предусмотрена возмож-
ность их использования для определения мест повреждения кабе-
ля рассмотренным методом.
Контрольные вопросы
1. Какие методические погрешности возникают при измерении со-
противлений методом амперметра — вольтметра?
2. Что такое омметр и какие имеются способы соединения с ним из-
меряемого сопротивления?
3. Какие сопротивления измеряются одинарными, а какие — двойны-
ми мостами? Что такое равновесный и неравновесный мосты?
4. Как работает автоматический мост для измерения сопротивлений?
5. Какими приборами и каким образом измеряется сопротивление изо-
ляции?
6. Расскажите, как можно определить места повреждения изоляции
кабелей.
ГЛАВА 9
ИЗМЕРЕНИЕ ЕМКОСТИ И ИНДУКТИВНОСТИ
9.1. Мосты для измерения индуктивности
Измерение емкости и индуктивности в основном произво-
дится при помощи мостов переменного тока. Они обеспечивают
высокую точность и чувствительность при относительной про-
стоте.
Для измерения индуктивности и добротности катушек приме-
няются схемы, показанные на рис. 9.1. Схема рис. 9.1, а использу-
ется при малых добротностях (Q < 30), а схема рис. 9.1, б — при
больших добротностях (Q> 30). Измеряемая катушка с индуктив-
ностью Lx и сопротивлением Rx включается в первое плечо моста,
образцовый конденсатор С4 и переменный резистор Ад — в проти-
воположное плечо. Еше одним переменным элементом является
резистор Ry. Резистор R^ может быть включен либо параллельно
(см. рис. 9.1, а), либо последовательно (см. рис. 9.1, б) с образцо-
вым конденсатором С4. Питание осуществляется от источника пе-
ременного тока G. В соответствии с равенством комплексных со-
противлений плеч ZXZA - Z2Zy) запишем условие равновесия мос-
та для рис. 9.1, а:
136
Рис. 9.1. Схема для измерения индуктивности и добротности катушек:
а — при малых добротностях; б — при больших добротностях
(Ах +;<о£х)[ 1/( 1/К, +>С4)| = Я2Я3,
где со — частота напряжения питания; Я2, 7?3 и — плечи моста;/ —
показатель мнимой составляющей комплексного сопротивления.
Разделение действительных и мнимых составляющих уравне-
ния приводит к соотношениям
л=лад (9.D
и
Lx=C4R2/R,. (9.2)
В уравнения (9.1) и (9.2) не входит частота, следовательно,
мост может быть уравновешен, даже если форма кривой пита-
ющего напряжения не чисто синусоидальная. Добротность катуш-
ки определяется по формуле
Qx = mLJRx = (0С4Л4.
При фиксированной частоте напряжения питания со и посто-
янной емкости С4 шкалу переменного тока резистора 7^ можно
проградуировать в значениях добротности Qx.
Схеме моста, представленной на рис. 9.1, б, соответствует сле-
дующее условие равновесия:
(Rx+jd)Lx)(R4 +1//соС4)Л2/?3. (9.3)
Условие равновесия (9.3) соответствует системе уравнений:
Rx^4 + Lx/C4 =R2R$\
(x)Lx + Яд = /<i/coC4,
решение которой относительно Rx и Lx имеет следующий вид:
137
^ = (D2C24A2^/[l+(coW2];
1Х = СМ/[\^^СМ2];
(9.4)
(9.5)
и
Qx = (tiLJRx - l/(oC4/?4.
Итак, шкала переменного резистора R4 снова может быть от-
градуирована в значениях добротности Qx.
В отношения (9.4) и (9.5) для Rx и Lx входит частота, поэтому
мост является частотнозависимым. Равновесие имеет место толь-
ко при некоторой частоте (о питающего напряжения. Если ее из-
менить, то равновесие нарушится.
9.2. Мосты для измерения емкости
При измерении емкости используется схема с образцовым кон-
денсатором С3 и переменными резисторами R2 и (рис. 9.2). Ис-
следуемый конденсатор в этой схеме представлен (замешен) пос-
ледовательным соединением емкости Сх и активного сопротивле-
ния Rx. Введение Rx необходимо в связи с наличием потерь в кон-
денсаторе. Питание осуществляется от источника переменного тока G.
Условие равновесия имеет вид
Rx - ^2^з/ ^4 (9.6)
и
Сх = C3Ra/R2. (9.7)
Принято характеризовать потери в конденсаторе значением
тангенса угла потерь tgS, который в случае последовательной схе-
мы замещения связан с Rx соотношением
Рис. 9.2. Схема моста для
измерения емкости
tgS = uCxRx.
С учетом условий (9.6) и (9.7) это со-
отношение можно записать следующим об-
разом:
tgS = a>R3C3.
Переменные резисторы 7^ и R3 можно
отградуировать в единицах емкости Сх и
значениях tgS.
Наиболее часто употребляются частоты
напряжения питания мостов переменного
тока 100 и 1000 Гц. При более высоких ча-
стотах сильно сказываются различные па-
разитные связи.
Отметим, что мосты для измерения со-
противлений, индуктивности и емкостей
138
часто совмещают в одном приборе. Такие приборы называются уни-
версальными измерительными мостами. Они позволяют измерять
индуктивность от долей микрогенри до тысяч генри, емкость — от
сотых долей пикофарад до тысяч микрофарад. Относительная по-
грешность измерения может не превышать сотых долей процента.
Контрольные вопросы
1. Каким способом измеряется индуктивность катушек?
2. Чем отличаются мосты для измерения малых и больших значений
добротности катушек.
3. Как производится измерение емкости конденсаторов?
4. Каким прибором можно измерить тангенс угла потерь конденсатора?
5. Что такое универсальный измерительный мост?
ГЛАВА 10
ИЗМЕРЕНИЕ ЭЛЕКТРИЧЕСКОЙ МОЩНОСТИ
И ЭНЕРГИИ
10.1 . Измерение мощности в цепях постоянного
и однофазного переменного тока ваттметрами
В цепях постоянного тока для измерения мощности применяют-
ся электродинамические ваттметры, а в цепях однофазного тока —
электродинамические (в качестве лабораторных приборов классов
0,2 и 0,5), ферродинамические и индукционные ваттметры (в ка-
честве щитовых приборов классов 1,0 и 1,5).
Рассмотрим общие свойства для всех ваттметров на примере
электродинамического ваттметра. При использовании электро-
динамического измерительного меха-
низма в качестве ваттметра его катуш-
ки включаются по схеме, изображенной
на рис. 10.1. Обе половины неподвиж-
ной катушки 1 включены последователь-
но в цепь тока /, а подвижная катушка
2 — параллельно нагрузке Ru на напря-
жение U Добавочное сопротивление Адо6
служит для расширения предела изме-
рения ваттметра по напряжению. Поэто-
му неподвижную катушку часто назы-
вают последовательной, а подвижную
катушку — параллельной. Показатель г2
выражает сопротивление подвижной ка-
тушки.
Рис. 10.1. Схема включе-
ния электродинамическо-
го ваттметра:
1 — неподвижная (последо-
вательная) катушка; 2 — под-
вижная (параллельная) ка-
тушка
139
Выше было получено следующее выражение для зависимости угла
отклонения а ог токов 1Х и /2 в катушках электродинамического из-
мерительного механизма:
_ cos\y dM
W da ’
где с — конструктивная постоянная; у — сдвиг по фазе между
токами /| и /2; И7 — удельный противодействующий момент; М —
взаимная индуктивность между последовательной и параллельной
катушками.
Если ваттметр включен в цепь постоянного тока, то
Л = /; Л = -^; v = o,
К2
где R2 = г2 + Яд
Тогда
cIU dM YpdM
R2W da da
(Ю.1)
c
В формуле (10.1) постоянная К =----, а Р — мощность.
Я2РИ
Если ватгметр включен в цепь переменного тока, то необходи-
мо учесть фазовые сдвиги в соответствии с рис. 10.2. Вследствие
небольшой индуктивности цепи подвижной катушки ток /2 в ней
отстает от напряжения U на весьма небольшой угол 5. Сдвиг по
фазе ф между током в последовательной катушке (/, = /) и напря-
характером нагрузки.
Так как у = ф - 6, то
жением определяется
Рис. 10.2. Векторная ди-
аграмма электродина-
мического ваттметра
а = СЩ 008(9-8)^/, (
ZiW da
где z2 — модуль комплексного сопротивле-
ния цепи параллельной катушки.
Подставляя z2 =—в формулу (10.2),
coso
получим
а _ cIU cos 6 cos (ф - 6) dM
R2W da
Если величиной 8 можно пренебречь, то
„ rjj dM „DdM
a = К/t/ соБф—— = Кг — .
da da
140
Таким образом, показания
электродинамического ваттметра
как на постоянном, так и на пе-
ременном токе пропорциональ-
ны мощности Р. Шкалы их прак-
тически равномерны.
Генераторные зажимы. Если
переключить направление тока в
одной из катушек, то, как сле-
дует из формулы (10.1) или фор-
мулы (10.2), отклонение а изме-
нит знак на обратный, т. е. стрел-
ка прибора отклонится в обрат-
ную сторону. Поэтому при вклю-
чении ваттметра необходимо со-
блюдать определенное направле-
Рис. 10.3. Схема цепи многопредель-
ного электродинамического ватт-
метра
ние токов в катушках.
Чтобы отличить «начала» обмоток катушек от их «концов», в
ваттметрах «начала» обмоток катушек всегда обозначаются осо-
бым знаком «*» (звездочкой) или «+» (плюсом). Выводы, обозна-
ченные этим знаком, называются генераторными выводами или
генераторными зажимами. Такое название обусловлено тем, что
они включаются в провода, идущие к источнику тока (к генера-
тору), а не к нагрузке.
Электродинамические ваттметры являются обычно лаборатор-
ными приборами высоких классов точности и выпускаются на
несколько пределов измерения по току и напряжению. Схема внут-
ренних соединений такого ваттметра изображена на рис. 10.3.
На схеме две половины неподвижных катушек, образующих
последовательную цепь, включаются либо последовательно, либо
параллельно. В последнем случае тот же ток по этой катушке будет
проходить при удвоенном номинальном токе прибора. Добавоч-
ное сопротивление параллельной цепи секционируется, в резуль-
тате этого имеется несколько пределов и по напряжению. Кроме
того, обычно выводится еше и так называемый 1000-омный за-
жим, служащий для присоединения наружных добавочных сопро-
тивлений. Так как номинальный ток параллельной цепи электро-
динамических ваттметров составляет 30 мА, то этот зажим соот-
ветствует напряжению 30 В. На схеме A,, R2 и R3 — добавочные
сопротивления.
Чаше всего ваттметры рассчитываются так, что полное откло-
нение стрелки наступает при номинальном токе, номинальном
напряжении и cos<p = 1. В соответствии с этими значениями и чис-
лом делений на шкале определяется постоянная ваттметра, или
цена его деления. Так, ваттметр на 5 А, 150 В и cos(p= 1 со шка-
лой, имеющей 150 делений, имеет постоянную составляющую
141
5 150-1 . D ,
с = = 5 Вт/дел.
1 •> V/
Ферродинамические и индукционные ваттметры выпускаются
в качестве щитовых приборов классов точности от 1,5 и ниже.
10.2 . Измерение энергии в цепях постоянного тока
Измерение энергии в цепях постоянного тока чаще всего осу-
ществляется электродинамическими счетчиками (рис. 10.4), пред-
ставляющими собой электродвигатель постоянного тока, в кото-
ром поле создастся неподвижными катушками А—А, а якорем
служат катушки В, включаемые в цепь через коллектор 1.
Катушки А—А включаются в цепь нагрузки последовательно, а
якорь В с катушкой К (назначение которой будет пояснено далее)
и добавочным сопротивлением /?доб включаются в цепь параллельно.
На оси подвижной части расположен алюминиевый диск 2,
вращающийся между полюсами постоянного магнита 3. Вращение
подвижной части через червячную передачу 4 передается счетно-
му механизму. Цифрой 5 указана железная проволочка.
Рис. 10.4. Устройство электродинамического счетчика энергии:
1 — коллектор; 2 — алюминиевый диск; 3 — постоянный магнит; 4 — червячная
передача; 5 — железная проволочка
142
Вращающий момент Л/вр электродинамического счетчика про-
порционален произведению токов в подвижной и неподвижной
катушках:
“ ^1-^2»
где с — конструктивная постоянная, зависящая от взаимного рас-
положения и числа витков катушек; = I — ток в последователь-
г и
нои катушке; /2 = — — ток в якоре, определяемый напряжени-
л2
ем Uи сопротивлением Я2 всей цепи якоря.
Следовательно, вращающий момент, равный
Л/вр=с/^ = КР,
я2
пропорционален мощности Р, потребляемой нагрузкой. Под дей-
ствием этого вращающего момента подвижная часть начинает вра-
щаться со все возрастающей скоростью.
Благодаря вращению диска 2 в магнитном поле постоянного
магнита в нем индуктируются токи /я, которые, взаимодействуя с
потоком Ф постоянного магнита, создают противодействующий
(тормозной) момент Л/тор.
Выражение для Л/7ор можно получить, исходя из следующих
соображений. Токи в диске
/ = ^-
д Л/
где Ел = -ф— — ЭДС, индуктируемая в диске при его враше-
dt
da
нии в поле Ф с угловой скоростью — ; /?л — сопротивление дис-
ка для токов /д.
Тормозной момент
М тор
= ФЛ =
Ф2 da _ da
di ~Cz dt'
т.е. пропорционален скорости вращения диска.
Установившаяся скорость диска определяется равенством вра-
щающего и тормозного моментов:
КР = с2-у-. (10.3)
dt
Таким образом, установившаяся скорость счетчика пропорци-
ональна мощности.
143
Интегрируя выражение (10.3) за промежуток времени (r2—Zj)
измерения энергии, найдем
Ъ f2
c2J</a = KjA*.
/1 а
Интеграл j Pdt — это энергия И', израсходованная в нагрузке
о
за время (z2 — /]).
Интеграл j da = |af представляет собой угол, на который по-
А
ворачивается якорь счетчика за время (/2 — />), т.е.
К= 2nyv’
где N — полное число оборотов якоря за время (z2 — 6).
Таким образом,
КИ4 = с22тсМ
или
Wc = CN,
Г
где С = — называется постоянной счетчика.
N
Таким образом, число оборотов якоря, отсчитываемое счет-
ным механизмом, пропорционально электрической энергии.
Номинальная постоянная счетчика всегда указывается на щит-
ке счетчика. Например, если на щитке указано, что 1 кВт ч равен
200 оборотам, то
1000-3600 1ОПППТЭ /Л
С =----™-----= 18 000 Вт • с/об.
200 '
Погрешность счетчика определяется в основном трением в опо-
рах, коллекторе и счетном механизме. При малых нагрузках, ког-
да потребляемая мощность невелика, момент трения соизмерим с
вращающим моментом и подвижная часть вращается медленнее,
чем это должно быть, счетный механизм показывает меньше, чем
нужно, и возникает большая отрицательная погрешность.
Для уменьшения погрешности от трения прибегают к компен-
сации момента трения дополнительным, так называемым ком-
пенсационным моментом. Этот момент создастся дополнительной
неподвижной катушкой К (см. рис. 10.4), включенной в парал-
лельную цепь счетчика. Положение этой катушки относительно
подвижной части счетчика можно подобрать так, что создаваемый
144
ею дополнительный вращающий момент будет равен моменту тре-
ния при номинальном напряжении.
Так как компенсационный момент определяется напряжени-
ем (/, то при повышении последнего может оказаться, что этот
момент станет больше момента трения и диск счетчика будет вра-
щаться даже при отсутствии тока I в нагрузке, т.е. появится «са-
моход» счетчика. Для борьбы с самоходом на оси укрепляется же-
лезная проволочка 5 (см. рис. 10.4), которая, приближаясь при вра-
щении якоря к магниту, притягивается им, благодаря чему под-
вижная часть счетчика останавливается.
10.3 . Измерение активной энергии в цепях однофазного
переменного тока
Измерение энергии в цепях переменного тока осуществляется
индукционными счетчиками, один из типов которых изображен
на рис. 10.5. Принцип действия индукционных измерительных ме-
ханизмов был изложен ранее.
На рис. 10.5 неподвижная часть счетчика состоит из двух элек-
тромагнитов; обмотка электромагнита А включена последователь-
но в цепь нагрузки, а электромагнита В — параллельно ей. Подвиж-
ная часть счетчика представляет собой диск /, вращающийся в поле
постоянного магнита 2. Ось диска
связана червячной передачей 3 со
счетным механизмом. Цифрой 4
указан «отросток» магнитопрово-
да электромагнита В.
Тормозной момент создается
так же, как и в рассмотренном в
подраз. 10.2 электродинамичес-
ком счетчике. Следовательно,
тормозной момент пропорцио-
нален угловой скорости диска.
Вращающий момент индук-
ционного измерительного меха-
низма
Л/вр = 10Ф/Ф(/ sin у, (10.4)
где К — конструктивная посто-
янная; f — частота; Ф/ и —
потоки электромагнитов А и В,
пронизывающие диск; у — сдвиг
по фазе между потоками.
Мощность однофазного тока
Р= Я/cos ф.
Рис. 10.5. Устройство индукционно-
го однофазного счетчика энергии:
1 — диск; 2 — постоянный магнит; 3 —
червячная передача; 4 — «отросток»
магнитопровода электромагнита В
145
Так как по последовательной обмотке Л протекает ток /, то
поток <t>! в первом приближении можно считать пропорциональ-
ным току /:
Ф, = cl.
Параллельная обмотка В состоит из большого числа витков тон-
кой проволоки и включена на напряжение Uбез добавочного со-
противления. Поэтому ее активное сопротивление мало по срав-
нению с реактивным, и можно считать, что приложенное к ней
напряжение почти полностью уравновешивается ЭДС самоиндук-
ции Е, которая может быть выражена формулой
U ~Е - со^Фц),
где со — угловая частота; w — число витков параллельной обмот-
ки; Ф^ — полный поток, создаваемый ею.
Исходя из этого
Ф(/о
и
Часть этого потока, а именно Фу, пронизывает диск. Поток Фо-
также пропорционален напряжению и обратно пропорционален
частоте, т.е.
U U
Фг/ = с2 — = с3 —
W(D f
где со = 2л/
Таким образом, в выражении (10.4) Ф! можно заменить про-
порциональной ей величиной /, а Фу/ — величиной U. Тогда ос-
тается лишь обеспечить равенство
siny = coscp, т.е.
л
V = 2 - Ф-
Итак, вращающий момент будет пропорционален мощности
Мвр= K/t/cos(p = KP.
Это последнее условие можно иначе выразить следующим об-
разом: при ф = 0 (безындукционная нагрузка) угол между пото-
ками Ф^и Фь пересекающими диск, должен быть равен 90°. Имен-
но для создания такого сдвига в индукционных счетчиках поток
параллельной обмотки разделяется на две части: на рабочий по-
ток Фу, пронизывающий диск, и на нерабочий поток Фь иду-
щий мимо диска через «отросток» 4 (см. рис. 10.5).
Увеличение угла у вследствие наличия потока Ф£ иллюстрирует
векторная диаграмма счетчика, представленная на рис. 10.6. На этой
диаграмме U — вектор приложенного к параллельной обмотке на-
пряжения, от которого отстает на некоторый угол ср вектор тока I
(предполагается индуктивный характер нагрузки). Вектор потока
Ф| последовательной обмотки отстает от тока 1 на угол а, обуслов-
ив
ливаемый потерями на гистерезис
и вихревые токи в сердечнике элек-
тромагнита А (см. рис. 10.5).
Вектор тока Iv параллельной
обмотки электромагнита отстает от
вектора напряжения на угол, близ-
кий к 90°, из-за большой индук-
тивности цепи. Этот ток создает
поток, который разветвляется на
две части: рабочий поток Ф^и не-
рабочий поток Фд. Поток Ф6' сдви-
нут по фазе относительно тока 1ц
значительно больше, чем поток
Фд, так как на пути потока Ф^
имеется диск, в котором существу-
ют значительные потери, тогда как
сдвиг Фд относительно Iv опреде-
ляется только потерями в магни-
топроводе. Потоки Фд и Ф^ наво-
дят в обмотке параллельной цепи
электродвижущие силы EL и Ец.
Кроме того, будут иметь место падения напряжения lyr и 1их на
активном и реактивном сопротивлениях параллельной обмотки.
Вектор напряжения U должен уравновесить Ед, Еу, 1цг и /ьх, как
это показано на рис. 10.6.
Если обозначить через р угол между векторами U и Ф^, то
условие 90° сдвига между Фу и Ф, можно выразить следующим
образом (см. рис. 10.6):
р = Ф + а + у = 90° + а, или р-а = ф + ф = 90°.
Если бы не было потока Фд и ЭДС Ед, то практически невозмож-
но было бы получить угол Р между напряжением U и потоком Ф^,
пронизывающим диск, больший чем 90е. Таким образом, при со-
блюдении УСЛОВИЙ Ф| = С|7, Фи = С3 SinV|/ = БШф
Рис. 10.6. Векторная диаграмма
индукционного счетчика
можно считать, что
Мвр = КР.
Тормозной момент, как это было рассмотрено ранее, можно
рассчитать по формуле
^тор
da
~C~di'
При установившейся скорости
Кр = Мор, или КР = с — .
147
После интегрирования за промежуток времени от /] до t2 получаем
И4 = CN.
У индукционного счетчика, так же как и у рассмотренного ранее
электродинамического счетчика, предусматривается устройство для
компенсации момента трения и борьбы с появлением самохода.
10.4 . Измерение активной мощности и энергии
в цепях трехфазного переменного тока
Среднее значение мощности и энергии трехфазной цепи за пе-
риод, как известно, определяется по формуле
Р = £АфЛф COS(P| + £Аф^2Ф COS(02 + ^ЗфЛф СОБфз,
где индексом «Ф» обозначены фазные значения U и /.
Измерение активной мощности и энергии в цепях трехфазного
тока при симметричной нагрузке. При полной симметрии систе-
мы, т.е. при
Цф = и2ф = ^зф = Цр; /]ф = Лф = Лф = /ф
и
Ф1 = Ф2 = <Р1 = ф
уравнение для мощности Р примет вид
Р = 3£7ф/фС0$ф,
или (через линейные значения тока и напряжения)
Р = JWnlt СОБф.
Если симметричная нагрузка трехпроводной цепи соединена
звездой и нулевая точка доступна, то измерение мощности и энер-
гии может быть осуществлено одним ваттметром и одним счетчи-
ком так, как это показано на рис. 10.7, а. В этом случае утроенное
Рис. 10.7. Схемы включения ваттметра для измерения активной мощнос-
ти в трехфазной симметричной цепи:
а — при соединении звездой и доступной нулевой точке; б — при недоступной
нулевой точке или соединении нагрузки треугольником
148
показание ваттметра будет равно полной активной мощности, а
утроенное показание счетчика — полной активной энергии, по-
требляемой в нагрузке /?н.
Если нейтральная точка недоступна или нагрузка соединена
треугольником, то можно воспользоваться схемой, приведенной
на рис. 10.7, б, где два сопротивления г, по величине равные со-
противлению параллельной цепи ваттметра, образуют искусствен-
ную нейтральную точку. Для получения полной мощности и в дан-
ном случае показание ваттметра следует утроить. Применение ис-
кусственной нулевой точки практически возможно лишь при ис-
пользовании электродинамических ваттметров, параллельные цепи
которых обладают малым реактивным сопротивлением.
Измерение мощности и энергии в цепях трехфазного тока при
несимметричной нагрузке. Наиболее часто измерение в подобных
случаях осуществляется двумя приборами, включенными по од-
ной из трех схем, показанных на рис. 10.8, а, б и в. На схемах 7, 2
и 3 — фазы трехфазной цепи; 4 — нагрузка. Последовательные
катушки включаются в любые две линии, к ним же присоединя-
ются генераторные концы параллельных катушек. Негенератор-
ныс концы параллельных катушек включаются в свободную от
последовательных обмоток линию.
Положим, что ваттметры включены по схеме рис. 10.8, а. Тогда в
трехфазной системе, независимо от схемы соединения нагрузки тре-
угольником или звездой, мгновенное значение мощности системы
будет равно сумме мгновенных значений мощностей отдельных фаз:
Р = Р\ + Pi + Ру
При соединении приемников звездой это уравнение можно
переписать в следующей форме:
Р = «10zl + «20z2 + «Зоб, (10.5)
где Wio, «го, «зо — мгновенные значения фазных напряжений; б, /2,
б — мгновенные значения фазных токов.
На основании первого закона Кирхгофа, имеем
б + б + б =
откуда
б =“ (/’1 + /3). (10.6)
Подставляя из выражения (10.6) значение тока б в уравнение
(10.5) для мгновенной мощности, получим
Р = «юб + «Зоб “ «2о(б + б) = «юб + «зоб “ «20zl “ «2об =
= б(«10 ~ «2о) + б(«30 - «2о)>
где W|0 - zz20 = ы12 и w30 - и2о = w32 — мгновенные значения линейных
напряжений.
149
Рис. 10.8. Схемы измерения мощности в цепях трехфазного тока при не-
симметричной нагрузке:
а, б и в — варианты схем подключений ваттметров к различным фазам; 7, 2 и 3 —
фазы трехфазной цепи; 4 — нагрузка
Таким образом,
Р - zlw12 + 6W32-
К точно таким же выводам можно прийти и при включении
системы по схеме треугольника. В этом случае необходимо только
учесть, что мгновенные значения фазных и линейных напряжений
равны друг другу, что согласно второму закону Кирхгофа
М|ф + 1/2ф + ^ЗФ = 0»
и разности мгновенных значений токов равны мгновенным зна-
чениям соответствующих линейных токов.
Переходя от мгновенного значения к среднему значению мощ-
ности, получим
Р = /|6/|2 cos(3| + I-jU-n cosp2,
где p, — сдвиг по фазе между Un и р2 — сдвиг по фазе между
i/32 и
Трехфазные счетчики энергии состоят из двух измерительных
механизмов (рис. 10.9) с общими подвижными частями (диска-
ми), укрепленными на одной оси и включенными по одной из
схем рис. 10.8.
На рис. 10.9 показано устройство трехфазного счетчика с двумя
дисками на одной оси. На схеме 7, 2, 3 — фазы трехфазной цепи;
4 и 5 — измерительные механизмы счетчика.
Измерение мощности и энергии в трехфазной четырехпроводной
цепи. Измерение мощности и энергии в подобном случае осуще-
ствляется тремя ваттметрами (И^, И^, И^) или счетчиками, вклю-
ченными по схеме, изображенной на рис. 10.10. Каждый из ватт-
метров учитывает мощность одной фазы. На схеме 7, 2 и 3 — фазы
цепи; 4 — нулевой провод; ЯН|, Т?„2 и 7?нз — нагрузки в фазах.
Полную мощность системы можно определить путем суммиро-
вания показаний грех ваттметров, т. е.
150
Рис. 10.9. Устройство трехфазного
счетчика энергии с двумя дисками,
укрепленными на одной оси:
1, 2 и 3 — фазы трехфазной цепи; 4 и 5 —
измерительные механизмы счетчика
Рис. 10.10. Схема включения ватт-
метров или счетчиков для измере-
ния мощностей в трехфазных че-
тырехпроводных цепях:
/, 2 и 3 — фазы цепи; 4 — нулевой
провод
Р\ + Р2 + Ру = UlQI{ COS ф, + U2^12 СО$ф2 + t/зоЛ COS93.
Трехфазные ваттметры и счетчики для четырехпроводной цепи
имеют три измерительных механизма с подвижными частями,
укрепленными на одной оси.
10.5 . Измерение реактивной мощности и энергии
Реактивная мощность определяется выражением
Pr = t/Zsincp.
Хотя эта мощность не характеризует передаваемой энергии за
единицу времени, измерение реактивной мощности и энергии на
практике необходимо, так как наличие реактивной энергии в ли-
ниях электропередачи в них вызывает увеличение тока, а следова-
тельно, увеличение потерь и падения напряжения. Поэтому надо
стремиться к уменьшению созф, т.е. к уменьшению sintp, иначе
говоря, к уменьшению реактивной мощности и энергии.
На практике большое значение имеет измерение реактивной
мощности и энергии в цепях трехфазного тока.
151
Рис. 10.11. Схема включения двух ваттметров (а) и векторная диаграмма (б)
измерения реактивной мощности в трехфазных цепях при простой сим-
метрии
На рис. 10.11, показаны схема (а) и векторная диаграмма (б)
измерения реактивной мощности трехфазной цени с помощью
двух электродинамических ваттметров и с искусственной
нулевой точкой. Эта схема применяется при простой асимметрии,
т.е. при симметрии напряжений и несимметрии потоков и сдви-
гов фаз. Сопротивление г должно быть равно сопротивлениям па-
раллельных обмоток ваттметров. На схеме 7, 2 и 3 — фазы цепи;
Zb Zj, Z3 — нагрузка в фазах цепи.
На рис. 10.11, б представлена векгорная диаграмма токов и на-
пряжений для схемы рис. 10.11, а. Показания ваттметров в соот-
ветствии со схемой рис. 10.11, а определяются выражениями:
Р । = ^озАсо$(^зоЛ) = ^4)3AcosYl>
Рис. 10.12. Схема включения (а) и векторная диаграмма (б) трехфазного
счетчика реактивной энергии с разделенными последовательными об-
мотками
152
^2 - ^)оАс05(С7|о/з) - ^io4cosY2-
Для измерения реактивной энергии трехфазного тока при про-
стой асимметрии широко распространен индукционный счетчик с
дополнительными последовательными обмотками, схема которого
приведена на рис. 10.12, а. Здесь последовательная цепь каждого эле-
мента состоит из двух обмоток с одинаковым числом витков.
Согласно векторной диаграмме (рис. 10.12, б) показания ватт-
метров будут следующими:
Р} = i/23Z1cosy1 + U23I2 cosу2;
Р2 = cos уз + и[212 cosy4,
где /2 = -/2, так как вторая обмотка присоединена к генератору
не генераторным концом.
По рассмотренной схеме выпускаются только индукционные
счетчики реактивной энергии. На рис. 10.12, a W\ и — ваттмет-
ры: 7, 2 и 3 — фазы цепи; Zh Zo и Z3 — сопротивления нагрузки
в фазах цепи.
10.6 . Измерение коэффициента мощности
Измерение коэффициента мощности cos<p возможно произво-
дить как приборами непосредственной оценки, специально пред-
назначенными для этой цели и имеющими шкалу, градуирован-
ную в единицах costp, так и по показаниям приборов, не предназ-
наченных для этой цели, например с помощью двух ваттметров в
случае симметричной трехфазной трехпроводной цепи.
Электродинамический фазометр. На рис. 10.13 изображена схема
устройства и включения однофазного электродинамического фа-
зометра, представляющего собой логомстр с неподвижной катуш-
кой 7 и двумя подвижными ка-
тушками 2 и 2', сидящими на
одной оси и скрепленными под
углом у друг к другу.
В цепь катушки 2 включено
активное сопротивление, а в цепь
катушки 2' — реактивное сопро-
тивление (дроссель). Тогда век-
торную диаграмму для данного
Рис. 10.13. Схема устройства и вклю-
чения однофазного электродина-
мического фазометра:
1 — неподвижная катушка; 2 и 2’ —
подвижные катушки
153
прибора можно изобразить согласно рис. 10.14, где ток /2 в катушке
2 совпадает по фазе с напряжением U, а ток Ц катушки 2' отстает
от U на угол р. Поток Ф совпадает по фазе с током / в последова-
тельной катушке. Сдвиг по фазе <р тока / от напряжения U опреде-
ляется характером нагрузки Z.
Если неподвижные катушки достаточно велики по длине и
создают равномерное поле, то выражения для вращающих мо-
ментов можно написать следующим образом:
Л/ВР| = С) //j cos (Р - <р) cos а;
Мвр2 = с2П2 со5фсо5(у-а),
где а — пространственный угол между потоком Ф и плоскостью
рамки 2; (у - а) — пространственный угол между потоком Ф и
плоскостью рамки 2'.
Моменты Л/ВР1 и Л/ВР2 направлены навстречу друг к другу. По-
этому при равновесии имеем
Мвр, = qHi cos(Р ” ф)cos a = ЛГвр2 = ci^2cos Фcos(Y ~ «).
Полагая, что конструктивные постоянные q = с2, получаем
Ji cos(P- ф) _ cos(Y-a)
/2 cos ф cos a
Если параметры параллельной цепи фазометра подобраны так,
что /) = /2 и р = у, то a = ф, т.е. пространственное положение под-
вижной части прибора определяется измеряемым сдвигом фаз ф.
Шкала прибора получается равномерной относительно угла ф,
но неравномерной по отношению к со$ф.
Рис. 10.14. Векторная диаграм-
ма однофазного электродина-
мического фазометра
Рис. 10.15. Схема включения
трехфазного электродинами-
ческого фазометра:
/, 2 и 3 — фазы тока; 4 — электро-
динамический фазометр
154
Наличие в цепи подвижной катушки 2 индуктивного сопро-
тивления приводит к зависимости показания прибора от частоты,
так как при этом изменяются ток /] и угол 0. Поэтому, как прави-
ло, фазометры градуируют при определенной частоте.
Электродинамический фазометр трехфазного тока. Описанный
выше электродинамический фазометр (см. рис. 10.13) может быть
включен в цепь трехфазного тока (1, 2 и 3), как показано на рис. 10.15.
Благодаря включению в трехфазную цепь сдвиг по фазе между
токами в подвижных катушках получается вследствие питания этих
катушек от напряжений, сдвинутых по фазе. Здесь при всех часто-
тах сдвиг по фазе равен 60°, поэтому показания данного фазомет-
ра 4 не зависят от частоты. Если в этом фазометре сделать угол
между плоскостями подвижных катушек, равным 60°, то шкала в
углах сдвига фаз будет равномерной. В схему включены добавоч-
ные сопротивления нагрузки Z.
Контрольные вопросы
1. Каким образом можно измерить мощность в цепях постоянного тока
и однофазного переменного тока?
2. Как работает электродинамический счетчик для измерения энергии
в цепях постоянного тока?
3. Объясните принцип работы индукционного счетчика для измере-
ния активной энергии в цепях однофазного переменного тока.
4. Как измеряются активная мощность и энергия в цепях трехфазного
переменного тока при симметричной и несимметричной нагрузках?
5. В чем состоит особенность измерения мощности и энергии в трех-
фазных четырехпроводных цепях?
6. Как измеряется реактивная мощность и энергия?
7. Что такое «коэффициент мощности» и как его измеряют?
ГЛАВА 11
ИЗМЕРЕНИЕ ЧАСТОТЫ И ИНТЕРВАЛОВ ВРЕМЕНИ
11.1. Основные сведения
Измерение частоты и интервалов времени необходимо для ре-
шения многих научных и технических задач.
Частотой f называется число одинаковых событий или циклов
процесса, происходящих в единицу времени. Единицей измере-
ния циклической частоты f является герц (Гц), что соответствует
одному событию за 1 с. Отмстим, что исторически в радиоэлек-
тронике высокие частоты (ВЧ) принято обозначать буквой /, а
низкие частоты (НЧ) — F. Гармонические сигналы характеризу-
ются также угловойу или круговой частотой
155
co = 2я/,
выражаемой в радианах на секунду (рад/с) и равной изменению
фазы сигнала <р(/) в единицу времени. Угловая частота обычно
записывается для высоких и низких частот соответственно, как
со = Inf и Q = 2л/7. Для гармонических сигналов (в том числе и
искаженных) частота определяется числом переходов через ось
времени, т.е. через нуль за единицу времени.
При непостоянстве частоты используется понятие мгновенной
угловой частоты
at
где /(/) — мгновенная циклическая частота.
В настоящем разделе для описания методов измерения частоты
применяется ее среднее значение за время измерения. При этом
также необходимо иметь в виду долговременную и кратковремен-
ную нестабильность частоты, которая связана соответственно с
постоянным изменением частоты за длительный и короткий ин-
тервалы времени и с ее флуктуационными изменениями. Граница
между этими нестабильностями условна и она задается путем ука-
зания времени измерения.
Интервалом времени Ы в общем случае называется время, про-
шедшее между моментами двух последовательных событий. К чис-
лу таких интервалов относятся, например, период колебаний,
длительность импульса или длительность интервала, определяе-
мая сдвигом по времени двух импульсов.
Периодом Т любого периодического детерминированного сиг-
нала u(t) называется наименьший интервал времени, через кото-
рый регулярно и последовательно повторяется произвольно выб-
ранное мгновенное значение этого сигнала.
Таким образом, периодический сигнал можно записать по
формуле
и(/) = u(t + nt),
где w = 1,2,3 и т.д.
Для синусоидального сигнала вида
= Um sin [<p(z)],
и(Г) = Um sin
If J
где m — целые натуральные числа, период колебания Топределя-
ется как интервал времени, в течение которого фаза сигнала <р(г),
выраженная в радианах, изменяется на 2л.
Из физики известно, что частота f и период колебания Т рав-
ноправны и связаны между собой формулой
156
7 т'
Поскольку эти две физические величины неразрывно связаны
между собой, то измерение одной величины можно заменить из-
мерением другой величины. На практике же чаше всего измеряют
частоту.
Измерение частоты, периода и других временных параметров
электрических сигналов является одной из важнейших задач в ра-
диотехнике и телекоммуникационных системах. Технические сред-
ства для частотно-временных измерений образуют единый комп-
лекс приборов, обеспечивающий процесс проведения измерений
с непосредственной их привязкой к Государственному эталону
частоты и времени. Это фактически гарантирует возможность по-
лучения высокой точности измерений.
Основными измерительными приборами и средствами измерении
обозначенных величин являются:
• осциллографы;
• приемники сигналов эталонных частот и компараторы;
• преобразователи частоты сигналов;
• резонансные частотомеры;
• частотомеры на основе метода заряда-разряда конденсатора;
• цифровые частотомеры;
• цифровые измерители интервалов времени.
Измерение частоты чаще всего выполняется с помощью циф-
рового метода (дискретного счета), на базе которого создаются
цифровые (электронно-счетные) частотомеры. К достоинствам
цифрового метода относятся высокая точность измерений, широ-
кий диапазон измеряемых частот, возможность обработки резуль-
татов измерений с помощью вычислительных средств (микропро-
цессоров, персональных компьютеров и др.). Кроме того, цифро-
вые частотомеры дают возможность измерять не только частоту
колебаний, но и интервалы времени.
Для измерения частоты также применяются и методы сравне-
ния с частотой источника образцовых колебаний (резонансный, ге-
теродинный и с помощью осциллографа). Гетеродинное преобразо-
вание частоты применяется лишь в том случае, когда требуется
перенос частоты СВЧ-колебания в область, удобную для измере-
ния цифровыми приборами.
Методы сравнения в основном используются для градуировки
генераторов различных измерительных приборов. Их техническая ре-
ализация требует обязательного наличия образцового генератора или
устройства сравнения частот более высокой точности.
С помощью осциллографа в качестве устройства сравнения ре-
шаются следующие задачи:
1) определение частоты методом интерференционных фигур
(фигур Лиссажу);
157
Рис. 11.1. Круговая
развертка луча на эк-
ране осциллографа
2) определение интервалов времени (пе-
риода, длительности импульса и т.д.) с ис-
пользованием калиброванной развертки ос-
циллографа;
3) определение частоты при помоши яр-
костных меток на круговой развертке.
Применение осциллографа для решения
первой и второй задач рассмотрено в гл. 13.
Отметим, что погрешность измерения ин-
тервала времени с помощью осциллографа
обусловлена нелинейностью его развертки и
погрешностями отсчета начала и конца интервала. Для решения
третьей задачи применение осциллографа для измерения интер-
вала времени возможно при условии, что неизвестная частота fx
будет больше образцовой частоты /0-
Технически круговая развертка реализуется путем подачи на вхо-
ды Yn Xосциллографа гармонических сигналов образцовой часто-
ты, сдвинутых по фазе друг относительно друга на 90°. Подавая гар-
монический сигнал с измеряемой частотой fx на вход Z, где проис-
ходит модуляция яркости луча осциллографа, и регулируя частоту
fo, можно получить практически неподвижную и модулированную
по яркости круговую развертку на экране (рис. 11.1).
В результате по круговой развертке нетрудно определить значе-
ние измеряемой частоты, для этого достаточно подсчитать число
ярких дуг или темных промежутков и подставить это число в фор-
мулу
А =
где N — число ярких или темных промежутков (fx = 8/0).
Решение всех трех задач при помоши осциллографа имеет не-
высокую точность измерений (относительная погрешность изме-
рений находится в диапазоне от 1 • 10“2 до 5-10-2). Верхняя граница
диапазона измеряемых частот зависит от параметров осциллогра-
фа и для большинства из них она нс превышает 250 МГц.
11.2. Измерение частоты приборами непосредственной
оценки при помоши частотомеров
Частотомеры для измерения малых (промышленных) частот
выполняются на базе различных измерительных механизмов. Наи-
более широкое распространение получили резонансные электро-
магнитные частотомеры. Применяются также и ферродинамичес-
кие частотомеры.
Резонансные электромагнитные частотомеры (вибрационные герц-
метры). Устройство подобного частотомера иллюстрирует рис. 11.2,
158
на котором электромагнит /, питаемый переменным током из-
меряемой частоты, дважды за период притягивает стальные пла-
стины-язычки 2 и дважды за период эти язычки под действием
сил упругости возвращаются в свое начальное положение. Таким
образом, язычки колеблются вместе с изменением магнитного
потока электромагнита. Однако из всех язычков с наибольшей
амплитудой будет колебаться тот, у которого частота собствен-
ных колебаний точно равна частоте изменения силы притягива-
ния. Язычки подобраны так, что каждый из них настроен на оп-
ределенную частоту, и по отметке шкалы против вибрирующего
язычка можно отсчитать частоту измеряемого тока. Если измеря-
емая частота окажется в промежутке между частотами собствен-
ных колебаний двух соседних язычков, то колебаться будут оба
язычка, но с меньшей амплитудой.
На рис. 11.3 показана часть шкалы частотомера в момент, когда
частота переменного тока находится в промежутке между 50 и
50,5 Гц, причем она ближе к 50 Гц. Частотомер включается в цепь
параллельно (как вольтметр).
Ферродинамические частотомеры. В частотомерах этого типа ис-
пользуются ферродинамические логометры.
На рис. 11.4, а показано устройство ферродинамического лого-
метра, а на рис. 11.4, б приведена схема его применения в каче-
стве частотомера.
На рис. 11.4 описываемый частотомер состоит из двух непод-
вижных (А, и Л2) и двух подвижных (Bj и Б2) катушек. Последние
скреплены друг с другом в одной плоскости. Зазоры для обеих
катушек неодинаковы (поле катушки Б] неравномерно), что яв-
ляется обязательным условием работы логометра.
Рис. 11.2. Резонансный электромаг-
нитный частотомер:
1 — электромагнит; 2 — стальные плас-
тины-язычки
48 50 52
Рис. 11.3. Часть шкалы резо-
нансного частотомера
159
Рис. 11.4. Устройство (а) и схема (б) включения ферродинамического
логометра
В цепь последовательно соединенных подвижной и неподвиж-
ной катушек А2 и Б2 включен резонансный контур из емкости С и
индуктивности L, а в цепь катушек Aj и Б! включено активное
сопротивление гх (см. рис. 11.4, б).
Токи, протекающие в катушках, можно выразить следующей
формулой:
U
Л, +Г| +г2’
‘ 2 ~ |-------------Г >
If 1 У
V I 2л/С J
где U — напряжение на параллельных ветвях; /?, и /?2 — суммар-
ные сопротивления катушек обеих частей измерительного меха-
низма; Г! и г2 — активное и добавочное сопротивления.
Вращающий момент каждой пары катушек является функцией
произведения токов в подвижной и неподвижной катушках, а так
как они соединены последовательно и по ним протекает один и
тот же ток, то
л/|=/|(А2); M2 = z(/22).
Следовательно, угол отклонения а логометра
160
Частотомер включается в цепь параллельно (зажимы а и б); сопро-
тивление г2 является добавочным сопротивлением (см. рис. 11.4, б).
Описываемый частотомер выполняется на узкий предел изме-
рения, например на 45...55 Гц. Его класс точности — 1,0.
11.3. Измерение частоты при помощи частотозависимых
мостов
Рассмотренные выше мосты переменного тока для измерения
емкости С, индуктивности L и вращающих моментов М являются
частотонезависимыми мостами, так как в условия равновесия этих
мостов, частота нс входит. Однако существуют частотозависимые
мосты, в уравнение равновесия которых входит частота. С помо-
щью таких мостовых цепей можно измерить частоту, если питать
эту цепь напряжением измеряемой частоты. Уравновесив такой
мост, можно из условий равновесия найти частоту.
Рассмотрим две из многочисленных модификаций частотоза-
висимых мостов, получившие распространение в практике изме-
рений частоты.
На рис. 11.5, а показана схема резонансной мостовой цепи. На
схеме в одно из плеч моста включены последовательно индуктив-
ность L и емкость С (и активное сопротивление и катушки индук-
тивности); г2, и г4 — плечи моста. Условия равновесия этого
моста:
2 1
Г|ГЗ = ГЛ;“ =^с-
Мост уравновешивается путем изменения одного из сопротив-
лений и емкости С. Так как при низких частотах произведение LC
должно быть большим, то этот мост предпочтительно применять
при звуковых и более высоких частотах.
Рис. 11.5. Схемы частотозависимых мостовых цепей для измерения частоты:
а — резонансная мостовая цепь; б — мостовая цепь с последовательно-парал-
лельным соединением емкости
161
На рис. 11.5, б изображена мостовая цепь с последовательно-
параллельным соединением емкости.
Условия равновесия этой цепи получаются из уравнения
Л;---:—тг
1 + усог3С2
'г
после приравнивания вещественных и
мнимых его частей в виде
исо2=—.
г2 г3 С, С,С2г3г4
Если выбрать параметры цепи так, чтобы Q = С2 = С, г3 = г4 = г
Г
и, следовательно, — = 2, то тогда
'г
2 1 1
ИЛИ <0 = —.
Сг
При уравновешивании моста сопротивления г3 и г4 должны из-
меняться одновременно с помощью одной рукоятки, чтобы все-
гда сохранялось равенство г3 = г4
В качестве указателей равновесия частотозависимых мостов удоб-
но использовать ферродинамические измерительные механизмы
с независимым возбуждением, а также указатели равновесия с
электронно-лучевой трубкой.
11.4. Резонансный метод измерения частоты
Сущность резонансного метода измерения частоты состоит в
сравнении измеряемой частоты fx с собственной резонансной ча-
стотой^ градуированного колебательного контура или резонато-
ра. Обычно данный метод применяется в диапазоне сверхвысокой
частоты (СВЧ), но он может быть использован и в диапазоне вы-
сокой частоты (ВЧ диапазоне). Измерительные приборы, реали-
зующие этот метод, называются резонансными частотомерами. Их
обобщенная структурная схема приведена на рис. 11.6.
На рис. 11.6 перестраиваемая колебательная система возбужда-
ется сигналом измеряемой частоты U(fx) через входное устрой-
ство. Интенсивность колебаний в колебательной системе резко уве-
личивается в момент резонанса, т.е. при fx = fp. Данный момент
фиксируется с помощью индикатора резонанса, связанного с ко-
Рис. 11.6. Структурная схема резонансного частотомера
162
лебательной системой. Значение измеряемой частоты fx считыва-
ется с 1радуированной шкалы механизма настройки.
В качестве колебательной системы на частотах до сотен мегагерц
используются колебательные контуры, а на частотах до 1 ГГц —
контуры с распределенными постоянными параметрами типа от-
резков коаксиальной линии. На частотах, превышающих 1 ГГц,
применяются объемные резонаторы.
На рис. 11.7 приведена структурная схема частотомера (вол-
номера) с объемным резонатором. Она включает в себя: волновод 1,
по которому поступает энергия измеряемой частоты fXi петлю свя-
зи 2, детектор (полупроводниковый диод) 3 с индикатором резо-
нанса (И), объемный резонатор 4 и плунжер 5, предназначенный
для изменения одного из размеров резонатора и связанный с от-
счетной шкалой. Связь резонатора с детектором — индуктивная и
осуществляется петлей связи 2.
Размеры резонатора / в момент настройки в резонанс одно-
значно связаны с длиной волны X возбуждаемых в нем электро-
магнитных колебаний. При этом резонанс наступает при размерах
резонатора
I _
~ Т’
где п = 1, 2, 3 и т.д.
С этой целью плунжер перемешают до момента получения пер-
вого резонанса, а затем — второго резонанса и потом по отсчет-
ной шкале определяют разность размеров резонатора по формуле
1
Д/ = /1-/2=р
где Д и /2 — показания отсчетной шкалы в моменты первого и
второго резонансов.
Искомая частота fx вычисляется по формуле
где с — скорость распростране-
ния электромагнитных колеба-
ний в вакууме (скорость света —
с = (2,99776 ± 0,00004) Ю8 м/с).
Для повышения точности из-
мерений частоты добротность Q
резонаторов должна быть высо-
кой. С этой целью их внутренние
поверхности полируют и сереб-
рят, доводя величину Q до зна-
Рис. 11.7. Структурная схема часто-
томера (волномера) с объемным
резонатором:
/ — волновод; 2 — петля связи; 3 —
детектор; 4 — объемный резонатор; 5 —
плунжер; И — индикатор резонанса
163
чения (5... 10)-103. С целью уменьшения сопротивления в месте
подвижного контакта плунжера применяют системы длинных ли-
ний (отрезки линий длиной у, ^).
Резонансные частотомеры (волномеры) имеют достаточно про-
стую конструкцию и удобны в эксплуатации. Наиболее точные из
них обеспечивают измерение частоты с погрешностью 10"3... 10"4.
Основными источниками погрешностей измерения являются по-
грешность настройки в резонанс, погрешность шкалы и погреш-
ность считывания данных.
11.5. Измерение частоты методом заряда и разряда
конденсатора
Применение метода заряда и разряда конденсатора дает возмож-
ность создавать простые в эксплуатации и недорогие частотомеры,
работающие в диапазоне от 0,02 до 1,0 МГц. Они имеют сравни-
тельно невысокую точность измерений. Их относительная приве-
денная погрешность может достигать 5 %. Принцип действия такого
частотомера можно пояснить с помощью схемы, изображенной на
рис. 11.8, а. На схеме входной периодический сигнал любой фор-
мы с неизвестной частотой u(fx) преобразуется в импульсный уп-
равляющий сигнал Мупр тина «Меандр», имеющий ту же частоту.
На схеме рис. 11.8, б показан принцип преобразования входно-
го синусоидального колебания в колебание типа «Меандр» wy71p с
сопутствующими этому процессу сигналами.
Рис. 11.8. Измерение частоты методом заряда и разряда конденсатора:
а — схема включения: б — принципы преобразования входного сигнала
164
Ар -
Сигнал аупр обеспечивает управление ключом К (см. рис. 11.8, а):
при положительной полярности ключ замкнут, при отрицатель-
ной — разомкнуг.
При замкнутом положении ключа происходит заряд емкости С
током /3, протекающим через диод 7),. При разомкнутом ключе
емкость разряжается током /р, протекающим через диод Т)2, изме-
рительный прибор mA и сопротивление R. Непременным услови-
ем работы данного типа частотомеров является то, что емкость в
течение зарядного времени должна успеть полностью зарядиться
до некоторого постоянного значения £, а при разряде напряжение
на емкости должно быть практически нулевым. Тогда максималь-
ное значение разрядного тока /р будет оставаться неизменным,
т. е. /щах, а время разряда т — постоянным. При этом среднее зна-
чение тока, протекающего через измерительный прибор, можно
определить по формуле
J I тах^,
х zO
где Тх — измеряемый интервал времени.
Таким образом, показания измерительного прибора оказыва-
ются пропорциональны частоте fx - \/Тх, а средний ток равен
Ар = УхАпах^-
Необходимо отметить, что в настоящее время этот метод ис-
пользуется редко и здесь он приведен исключительно для озна-
комления.
11.6. Гетеродинный метод измерения частоты
Гетеродинный метод измерения частоты является одной из раз-
новидностей методов сравнения измеряемой частоты fx с частотой
эталонного (кварцевого) генератора /кв (аналог метода нулевых би-
ений), где в качестве последнего используется гетеродин. Струк-
турная схема гетеродинного частотомера представлена на рис. 11.9.
Она включает: входное устройство, кварцевый генератор, смеси-
тель, гетеродин, усилитель низкой частоты и индикатор нулевых
биений.
Рассмотрим принцип действия гетеродинного частотомера (см.
рис. 11.9). При переключении ключа К в положение 7 производит-
ся корректировка шкалы гетеродина; при положении 2 — измере-
ние частоты, подаваемой на входное устройство.
Корректировка шкалы гетеродина, когда ключ К находится в
положении 7, осуществляется непосредственно перед проведени-
ем измерений с помощью кварцевого генератора. Сигнал, поступа-
165
Рис. 11.9. Структурная схема гетеродинного частотомера
юший с кварцевого генератора, имеет сложную форму и содержит
ряд гармонических составляющих с кратными частотамиЛвь/квг, —,
Авй —где п — номер гармоники. Частоты гармоник кварцевого
генератора в радиотехнике называются кварцевыми точками.
В процессе измерения отсчетный лимб гетеродина устанавлива-
ется в положение, соответствующее ближайшей к измеряемой ча-
стоте /в кварцевой точке. Для этого примерное значение измеря-
емой частоты должно быть известно, иначе процесс измерения ста-
новится очень сложным. Поскольку измеряемый и гетеродинный
сигналы поступают на смеситель, то на его выходе возникают ко-
лебания с суммарными, разностными и комбинационными часто-
тами. Индикатор служит для отображения сигнала биений на ми-
нимальной разностной частоте /б = |/в, - /г|, проходящего через
усилитель низкой частоты. Высокочастотные составляющие, полу-
чающиеся в результате смешивания частот кварцевого генератора
и гетеродина, через усилитель частоты не проходят. Меняя емкость
гетеродина, получают нулевые биения, следовательно частота ге-
теродина становится равной частоте кварцевой гармоники, т.е./ s
=Лв/- Необходимо измерить неизвестную частоту/. Для этого ключ К
переводится в положение 2. Путем вращения отсчетного лимба ге-
теродина добиваются нулевых биений и по откорректированной
шкале гетеродина определяют значение/ ==/.
Гетеродинные частотомеры являются достаточно точными из-
мерительными приборами. Их относительная погрешность изме-
рения находится в пределах от 10‘3 до 10 5. Однако в диапазоне
средних частот (до 200 МГц и ниже) они вытесняются электрон-
но-счетными частотомерами, которые обеспечивают ту же высо-
кую точность измерения, но значительно более простые и удоб-
ные в эксплуатации.
В диапазоне СВЧ гетеродинный метод измерения применяется
совместно с электронно-счетными (цифровыми) методами. В этом
случае расширение предела измерения до 10... 12 ГГц достигается
166
УПЧ
Рис. 11.10. Структурная схема дискретного гетеродинного преобразовате-
ля частоты
за счет переноса (преобразования) измеряемой частоты в область
более низких частот. Такое преобразование можно осуществить,
например, с помощью дискретного гетеродинного преобразовате-
ля частоты, структурная схема которого совместно с цифровым
частотомером показана на рис. 11.10.
В состав цифрового частотомера входит генератор опорной (эта-
лонной, образцовой) частоты/,. Эта частота поступает на нели-
нейный элемент (генератор гармоник), который формирует сетку
гармонических составляющих fn = nfQ, где п — целые числа. С по-
мощью перестраиваемого фильтра (обычно это объемный резона-
тор со шкалой) добиваются выделения из них гармоники fni бли-
жайшей к измеряемой частоте fx. При этом на выходе смесителя
появляется сигнал с разностной частотой
Усилитель промежуточной частоты (УПЧ) имеет полосу про-
пускания, несколько большую опорной частоты /> для обеспече-
ния усиления сигнала с разностной частотой F <fQi который да-
лее подается на вход цифрового частотомера.
Результат измерения неизвестной частоты fx определяется с
помощью формулы
/х = «/о ± f,
где п — номер гармоники, считываемой со шкалы перестраива-
емого фильтра.
Поскольку это выражение неоднозначно, то для получения
правильного результата проводят второе измерение, выбирая с
помощью перестраиваемого фильтра гармонику (п ± 1)/, сосед-
нюю с гармоникой nfQ. Если полученные значения частоты fx со-
впадают при двух измерениях, то они верны.
11.7. Цифровой метод измерения частоты
Цифровой (электронно-счетный) метод измерения частоты ре-
ализуется в цифровых, или электронно-счетных (ЭСЧ) частото-
167
мерах. Данные средства измерений удобны в эксплуатации, име-
ют широкий диапазон измеряемых частот (от нескольких герц до
сотен мегагерц) и позволяют получить результат измерений с вы-
сокой точностью (относительная погрешность измерения частоты
составляет от 10-6 до 10-9).
Как уже отмечалось, цифровые частотомеры являются много-
функциональными средствами измерений. В зависимости от режи-
ма их работы можно проводить измерения не только частоты и
отношения двух частот, но и интервалов времени (периода следо-
вания периодических сигналов и интервала, заданного времен-
ным положением двух импульсов).
Процесс измерения частоты гармонического сигнала с помо-
щью цифрового метода поясняется рис. 11.11, где приведены струк-
турная схема цифрового частотомера в режиме измерения часто-
ты (я) и временные диаграммы его работы (б).
Исследуемый гармонический сигнал, имеющий частоту fx, по-
дается на входное устройство (ВУ), в задачу которого входит уси-
ление или ослабление сигнала до значения, требуемого для рабо-
ты последующего устройства частотомера (см. рис. 11.11, а).
Снимаемый с выхода ВУ гармонический сигнал i/j (см. рис.
11.11; а) поступает на первый формирователь импульсов (ФО,
Nx импульсов
б
Рис. 11.11. Структурная схема (а) и временные диаграммы (б) работы
цифрового частотомера
168
который преобразует его в последовательность коротких однопо-
лярных импульсов и2, следующих друг за другом с периодом
и называемых счетными. Причем передние фронты этих импуль-
сов практически совпадают с моментами перехода сигнала и{ че-
рез нулевое значение на оси времени при его возрастании. Фор-
мирователь Ф| включает в себя усилитель-ограничитель и компа-
ратор (триггер Шмитта).
Счетные импульсы и2 поступают на один из входов временного
селектора (ВС). На другой вход селектора от устройства формиро-
вания и управления (УФУ) подается строб-импульс и3 прямо-
угольной формы и калиброванной длительности Го > Тх. Интер-
вал времени называется временем счета. Временной селектор
открывается строб-импульсом w3, и в результате на его вход посту-
пает группа импульсов и2. Таким образом на счетчик поступает
пакет из Nx импульсов и4.
Из схемы рис. 11.11, ^следует, что интервал времени
То = NXTX - Д/н + Д/к = NxТх - Д/д,
(11.1)
где Д/н и Д/к — погрешности дискретизации начала и конца интер-
вала времени, вызванные случайным положением строб-импуль-
са относительно счетных импульсов и2; Ып - - Д/к — общая
погрешность дискретизации.
Пренебрегая в выражении (11.1) погрешностью ДГд, получим,
что число импульсов в пакете
^х=^ = 7'оЛ.
' X
В результате измеряемая частота оказывается пропорциональ-
ной числу счетных импульсов, поступающих на счетчик, т.е.
(И.2)
С целью формирования строб-импульса на УФУ поступают
короткие импульсы с периодом Го (на рис. 11.11, а для упроще-
ния не показаны) от схемы, включающей в себя генератор об-
разцовой частоты (ГОЧ) и второй формирователь импульсов
(Ф2), аналогичный формирователю импульсов Ф,. В свою оче-
редь в состав ГОЧ входят кварцевый генератор образцовой час-
тоты /кв и декадный делитель (Д) частоты с коэффициентом
деления Кд (каждая декада уменьшает частоту /кв в десять раз).
Период импульсов на выходе формирователя Ф2 и длительность
169
строб-импульса равны периоду сигнала на выходе делителя час-
тоты, т.е.
Отсюда выражение (11.2) можно представить в следующем виде:
/х=^. (11.3)
Кд
Из выражения (11.3) следует, что соотношение между часто-
тами можно дискретно менять путем вариации коэффициента Кд,
т.е. за счет изменения числа декад делителя.
В счетчике определяется число импульсов Nx и формируется
соответствующий код, подаваемый в цифровое отсчетное устрой-
ство (ЦОУ)- Отношение /^/Кл должно быть равным 10я Гц, где
п — целое число. При этом в ЦОУ отображается число Nxy соот-
ветствующее измеряемой частоте fx в выбранных единицах. На-
пример, если за счет изменения Кд выбрано п = 6, то число NXi
отображаемое на ЦОУ, соответствует частоте выраженной в
мегагерцах. Перед началом измерений необходимо показания счет-
чика УФУ сбросить в нуль.
Измерения частоты fx сопровождаются систематической и слу-
чайной погрешностями.
Систематическая погрешность в основном обусловлена долго-
временной нестабильностью частоты кварцевого генератора f^. Ее
уменьшение достигается путем термостатирования кварца или за
счет применения в кварцевом генераторе элементов с термоком-
пенсацией. При этом относительное изменение частоты за сут-
ки обычно не превышает величины 8^ = 5 • 10“9. Погрешность из-за
неточности установки номинального значения частоты /кв можно
существенно уменьшить за счет калибровки кварцевого генерато-
ра по сигналам эталонных значений частоты, передаваемых по
радио или с помощью переносных квантовых стандартов частоты.
Относительная погрешность калибровки кварцевого генератора не
превосходит величины (1 ...5) -1О“10.
Кроме того, требуемая стабильность частоты может быть дос-
тигнута за счет введения в схему кварцевого генератора системы
фазовой автоподстройки частоты (ФАПЧ).
Случайная погрешность определяется погрешностью дискре-
тизации
Д/д = Д/н - Д/к.
Так как взаимная синхронизация строб-импульса и счетных
импульсов отсутствует, то погрешности Д/н и Д/к, определяющие
положение начала и конца строб-импульса между соседними дву-
170
мя счетными импульсами (см. рис. 11.11, б), могут принимать во
времени с одинаковой вероятностью значения от 0 до Го. Поэто-
му погрешности Д/н и Д/к являются случайными и их распределение
соответствует нормальному закону. Из-за независимости этих по-
грешностей общая погрешность дискретизации дгя подчиняется тре-
угольному закону распределения с предельными значениями ±Г0.
Максимальное значение погрешности Д/д = ±Г0 принято учи-
тывать через эквивалентное случайное изменение числа счетных
импульсов Nx на ±1 импульс. При этом максимальная абсолютная
погрешность дискретизации может быть определена через разность
значений частоты fx в соответствии с формулами (11.2) или (11.3)
при Nx ±1 и Nx.
Afx=±^-
у0
Соответствующая максимальная относительная погрешность
5 = ^ = ± ‘
fx Nx Tofx'
С учетом изложенного суммарная относительная погрешность
измерения частоты с помощью цифрового частотомера может быть
пронормирована в процентах согласно соотношения
8/х = ± 5кв ±
T<JX J
100.
Отсюда видно, что суммарная погрешность измерения из-за
погрешности дискретизации увеличивается по мерс уменьшения
измеряемой частоты fx. При достаточно малом значении частоты fx
погрешность может превзойти допустимое значение даже при мак-
симальном времени счета Го, которое в цифровых частотомерах
обычно не превышает 1 с или 10 с. В этом случае целесообразно
сначала измерить период Тх = l/fx, а затем провести вычисление
искомой частоты fx.
Уменьшение влияния погрешности дискретизации на резуль-
тат измерений частоты fx достигается за счет многократного на-
блюдения частоты и последующей статистической обработки ре-
зультатов измерений.
Диапазон измеряемых частот цифровых частотомеров снизу ог-
раничивается погрешностью дискретизации, а сверху — конечным
быстродействием используемых счетчиков-делите лей. Верхний пре-
дел измерения частоты обычно не превосходит 200 МГц.
Для расширения частотного диапазона применяется гетеродин-
ное преобразование (перенос) измеряемой частоты в область бо-
лее низких частот. Для этого в структурную и принципиальную
171
схемы частотомера включаются блоки автоматической регулиров-
ки усиления (АРУ) и подавления внешних помех. При малом уров-
не входного сигнала (ниже милливольта) измерения прекраща-
ются и показания счетчика обнуляются. Кроме того, здесь также
необходимы меры защиты от перегрузок.
В современных цифровых частотомерах широко применяются
синтезаторы частот, которые предназначены для создания сигна-
лов с дискретной сеткой частот. Цифровые частотомеры с про-
граммно-управляемыми синтезаторами частот и встроенными
микропроцессорами являются новым поколением развития изме-
рительных средств. К достоинствам таких средств следует отнести
высокую точность измерений, широкий диапазон измеряемых ча-
стот и удобство их сопряжения с автоматизированными измери-
тельными комплексами.
11.8. Цифровой метод измерения интервалов времени
Цифровой метод измерения интервалов времени включает сле-
дующие этапы: сначала измеряемый интервал времени Тх запол-
няется импульсами, следующими друг за другом с образцовым
периодом Го, затем подсчитываются числа Nx этих импульсов. Тех-
ническая реализация метода на базе цифрового осциллографа и
временные диаграммы процесса измерения периода гармоничес-
кого колебания поясняются рис. 11. 12.
Назначение всех блоков схемы и принцип их действия были
описаны в подраз. 11.7. Структурный состав генератора опорной
частоты при измерении периода будет рассмотрен ниже.
Гармонический сигнал, период которого Тх требуется измерить,
после прохождения входного устройства (и\ — выходной сигнал ВУ)
и формирователя импульсов Ф2 преобразуется в последовательность
коротких импульсов и2 с тем же самым периодом. В устройстве фор-
мирования и управления из коротких импульсов формируется строб-
импульс д3 прямоугольной формы и длительностью Гх, который по-
ступает на один из входов временного селектора. На другой вход
этого селектора подаются короткие импульсы w4 с образцовым пе-
риодом следования Го, создаваемые формирователем Ф] из колеба-
ний генератора опорной частоты. С временного селектора счетные
импульсы и4 в течение времени Тх, равного длительности строб-
импульса н3, поступают на счетчик числа импульсов.
На рис. 11.12, б видно, что измеряемый период /^определяет-
ся по формуле
ГХ = /УХГО + А/Д, (11.4)
где АГД = Агн - АГК — общая погрешность дискретизации; АГН и ДГК —
погрешности дискретизации начала и конца периода Тх.
172
Рис. 11.12. Цифровой метод измерения интервалов времени:
а — структурная схема; б — временные диаграммы
Если пренебречь погрешностью Дгд в формуле (11.4), то число
Т
импульсов, поступившее на счетчик, будет равно Nx = а из-
Л)
меряемый период будет пропорционален числу импульсов Nx, т.е.
TX=NXTO. (11.5)
Выходной код счетчика, выдаваемый на цифровое отсчетное
устройство, соответствует числу подсчитанных им счетных импуль-
сов N„ а показания цифрового отсчетного устройства — периоду Тх.
Период следования счетных импульсов выбирается из соотноше-
ния То = 10_", где п — целое число. В частности, при п = 6 цифро-
вое отсчетное устройство отобразит число импульсов соответ-
ствующее периоду Тх.
Погрешность измерения периода Т„ как и при измерении час-
тоты, имеет систематическую и случайную составляющие.
Систематическая составляющая погрешности зависит от ста-
бильности 5КВ генератора образцовой частоты (его кварцевого ге-
173
нератора), а случайная составляющая в основном определяется
погрешностью дискретизации ДГд, рассмотренной в подраз. 11.5.
Максимальное значение этой погрешности удобно учитывать че-
рез эквивалентное изменение числа счетных импульсов Nx на ±1
счетный импульс. При этом максимальная абсолютная погрешность
дискретизации может быть определена через разность двух значе-
ний периода Тх, получаемых по формуле (11.5) при Nx ± 1 и NXi и
она будет выражаться следующим образом:
дтх = ±г0-
Соответствующая максимальная относительная погрешность за-
пишется по формуле
+ -+-L-+-L
Тх
где /о = -zr — значение образцовой частоты генератора.
1 о
На погрешность измерения также влияют шумы в каналах фор-
мирования строб-импульса и3 и счетных импульсов и4 (см. рис. 11.12, а).
вносящие в их положение временную модуляцию по случайному
закону. Однако в реальных приборах с большим отношением сиг-
нал/шум погрешность измерения из-за шума каналов пренебре-
жимо мала по сравнению с погрешностью дискретизации.
Суммарная относительная погрешность измерения интервала
времени, выраженная в процентах, определяется по формуле
1
8т = ± 8^, + ———
г’ “ Л/о
100.
(11.6)
Из выражения (11.6) видно, что суммарная погрешность из-
мерения возрастает при уменьшении интервала времени Тх и точ-
ность измерений повышается при увеличении частоты /0 генера-
тора образцовой частоты, т.е. за счет увеличения числа счетных
импульсов Nx. С этой же целью в схему измерения после входного
устройства вводится делитель частоты исследуемого сигнала с ко-
эффициентом деления К (на рис. 11.12, а он не показан). При
этом процесс измерения сводится к определению значения коэф-
фициента К периодов Тх. В результате будет уменьшаться относи-
тельная погрешность в К раз.
Кроме того, погрешность дискретизации можно уменьшить за
счет многократно повторенного измерения одного и того же ин-
тервала времени со статистической обработкой результатов изме-
рений. Правда, при этом значительно увеличивается время про-
цесса измерений. Поэтому в настоящее время разработаны мето-
ды, позволяющие уменьшать погрешность дискретизации при ра-
174
зумном времени процесса измерения. К таким методам относятся
нониусный метод и метод интерполяции.
Метод интерполяции состоит в том, что помимо целого числа
периодов счетных импульсов, заполняющих измеряемый интер-
вал времени, учитываются и дробные части периода, заключен-
ные между опорным и первым счетным импульсами, а также между
последним счетным и интервальным импульсами.
Сущность метода интерполяции для измерения интервала вре-
мени, который поясняется рис. 11.13, заключается в следующем.
Пусть измеряется интервал времени Тх, начало и конец которо-
го заданы двумя импульсами ин и ик (см. рис. 11.13, а). При этом
предполагается, что начало измеряемого интервала времени не-
синхронно со счетными импульсами (см. рис. 11.13, а и 6).
Для уменьшения составляющих погрешности дискретизации (Дгн
и Д/к) в начале и конце интервала Тх соответствующие данным
погрешностям интервалы расширяют в к раз и каждый интервал
измеряют, заполняя его счетными импульсами. Учитывая погреш-
ности расширителей, на практике расширяют интервалы боль-
шей длительности, например интервалы = 2Г0 - Д/н и х2 = 27'0 -
- ДГК (см. рис. 11.13, в). Расширители строят, используя обычно
способ заряда и разряда конденсатора с разной скоростью.
На рис. 11.13, в приведены выходные импульсы расширителей
цк1 и wk2, определяющие концы расширенных интервалов, а сами
расширенные интервалы обозначены через к^ и к2т2.
Расширенные интервалы, а также интервал х0 между конца-
ми импульсов Т| и х2 измеряют цифровым методом, используя
каналы, содержащие временной селектор и счетчик. Счетные
импульсы, поступившие на вход каждого счетчика при измере-
нии расширенных интервалов, показаны на рис. 11.13, г. Итак,
Рис. 11.13. Измерение временного интервала методом интерполяции:
а — измеряемый интервал; б — счетные импульсы; в — выходные импульсы
расширителей; г — группы счетных импульсов, отражающих расширенные ин-
тервалы
175
измеряемые интервалы можно представить в следующем виде
(см. рис. 11.13):
£iTi= N,T0 + Д/к1; k2x2=N2T0 + ДГк2; t0= N0T0, (11.7)
где к} и к2— коэффициенты расширения; 7V0, М и N2 — числа счет-
ных импульсов, заполнивших отмеченные интервалы; Д/к1 и Д/^ —
погрешности дискретизации при измерении расширенных интер-
валов.
Из рис. 11.13 также видно, что искомый интервал определяется
зависимостью Тх = т0 + Ti - т2- Подставляя в это выражение пара-
метры То, Ti и т2, вычисляемые по формуле (11.7), находим, что
Т - Т Л. ^1^0 + А/К| -^2^0 + ^к2
Tx-NoTo+ - -----.
В случае равенства коэффициентов расширения (к{ = к2 = к)
получим
тх - То М) +
М ~ ^2 + Mei ~ Щд
к J к{
Погрешности дискретизации Д/к1 и ДГк2 имеют равномерное рас-
пределение с пределами от 0 до Го, а их разность Д/к1 - Д^ будет
распределена по треугольному закону с пределами ±Т0. Поэтому
максимальная погрешность дискретизации при измерении интер-
вала времени Тх равна Г0Д, и она уменьшается по мере роста
коэффициента расширения к. На практике коэффициент расши-
рения выбирают равным 128 или 256, так как при его дальней-
шем увеличении существенно возрастает погрешность расшири-
телей интервалов.
Следует отметить, что современные прецизионные измеритель-
ные приборы на базе микропроцессоров выполняют функции из-
мерения интервалов времени и частоты на единой основе. Послед-
нее связано с тем, что процессы формирования и измерения ин-
тервала времени функционально совмещены в едином устройстве.
Для уменьшения погрешности дискретизации сформированный
подобным путем интервал измеряется цифровым методом с при-
менением интерполяции.
В результате при измерении расширенных интервалов Л,Т| и
к2г2 и интервала т0 (см. рис. 11.13) счетные импульсы (7Vb TV2 и AM
заполняют эти интервалы и накапливаются в отдельных регист-
рах.
При этом длительность Тх одиночного интервала вычисляется
микропроцессором в соответствии с формулой
= 7J Nq +
Nq-n2- длгср
к
176
где ANcp — поправочное число, учитывающее взаимное рассогла-
сование расширителей и определяемое в процессе их автомати-
ческой калибровки с помощью микропроцессора.
При измерении повторяющихся интервалов (с усреднением)
дополнительно подсчитывается число импульсов Лг£, усреднен-
ных за время измерения интервалов. В этом случае интервал вре-
мени вычисляется согласно выражению
л = +(м " " ^длгср)А]-
£
В случае измерения периода Т число NE является количеством
усредняемых периодов. При этом период вычисляется по формуле
= +(м -ЛГ2 - А^р)/Л].
£
11.9. Автоматизация процессов измерения частоты
и интервалов времени
В связи с повсеместным внедрением в радиоэлектронику вы-
числительной техники и в приборостроение интегральной мик-
роэлектроники и компьютерной техники выявилась новая тен-
денция построения измерителей временных интервалов (ИВИ) и
частоты. В настоящее время на практике такие измерительные при-
боры, как И ВИ, не разрабатываются и не применяются. Сейчас
существуют и разрабатываются многофункциональные средства
измерений, полностью удовлетворяющие всем требованиям, ко-
торые раньше в отдельности предъявлялись к этим средствам. На-
пример, в последних поколениях измерительных приборов на базе
микропроцессорного контроллера функции измерения интерва-
лов времени, периода и частоты сигналов реализуются одним из-
мерительным прибором.
Схема цифрового измерительного прибора с микропроцессор-
ным контроллером представлена на рис. 11.14. Она содержит сле-
дующие основные блоки: измеритель частоты и времени, селек-
тор, интерполятор, формирователь, блок регистров, цифровой
аналоговый преобразователь (ЦАП), источник питания, синтеза-
тор частоты (выполнен в виде кварцевого генератора с последую-
щим умножением частоты), микропроцессорный контроллер
(МПК), интерфейс, блоки управления, индикации и питания.
Микропроцессорный контроллер является основной частью
прибора и включает в себя вычислительное управляющее устрой-
ство, оперативное запоминающее устройство (ОЗУ), постоянное
запоминающее устройство (ПЗУ).
177
Рис. 11.14. Цифровой измерительный прибор с микропроцессорным
контроллером
В состав измерителя частоты и интервалов времени входят уси-
литель-формирователь входных сигналов, делитель частоты, ком-
мутатор, запоминающее устройство и дешифратор, который со-
держит программу работы прибора с данным блоком.
Селектор измерительного прибора формирует из входного ко-
лебания измеряемый интервал времени, а из сигнала опорной
частоты кварцевого генератора — эталонный интервал времени,
равный измеряемому интервалу с точностью до длительности пе-
риода сигнала опорной частоты.
Схема интерполятора содержит два одинаковых канала и слу-
жит для расширения импульсов, отражающих погрешности дис-
кретизации, и последующего их измерения методом счета числа
колебаний опорной частоты. Формирователь готовности состоит
из дешифратора управления селектором и счетчиков числа им-
пульсов. Он предназначен для выработки специального сигнала,
задающего время работы селектора.
Блок регистров составляет основную часть счетчиков, в него
входят дешифратор управления, вырабатывающий сигнал сброса
регистров, установки в исходное состояние селектора, приема и
выдачи информации. Схема совпадения выдает сигнал в момент
переполнения счетчика. Сигнал с выхода схемы совпадения под-
готавливает окончание времени счета прибора. В данной схеме узел
ЦАП предназначен для измерения уровня запуска прибора в ре-
жиме ручного управления и для установки требуемого уровня за-
пуска в режиме дистанционного управления прибором.
178
Блок управления и индикации предназначен для управления
работой блока индикатора и преобразования командных сигна-
лов, поступающих с МП К, в управляющие сигналы прибора. Он
также содержит цифровой индикатор и клавиатуру для ввода дан-
ных. Интерфейс обеспечивает работу прибора в системах с кана-
лом общего пользования. Блок питания вырабатывает необходи-
мые питающие напряжения. Синтезатор частоты с кварцевым ге-
нератором вырабатывает стабильные гармонические колебания
различной частоты (например частоту 5 МГц и т.д.).
Технические характеристики МПК в основном определяются
параметрами стандартных современных отечественных или ино-
странных микропроцессоров, на которых построено большинство
устройств сопряжения. Микропроцессорный контроллер подклю-
чается к устройствам памяти непосредственно через приборную
магистраль, а также к другим устройствам измерительного при-
бора — частично через приборную магистраль и блок управления.
В приборе предусмотрен режим самоконтроля, осуществляемый
путем измерения частоты или периода собственного опорного сиг-
нала кварцевого генератора частотой 100 МГц. Для внутренних
связей и подключения к внешним устройствам, например к ком-
пьютеру, в измерительном приборе имеются три вида цифровых
магистралей: шина управления (ШУ), шина адресная (ША) и шина
данных (ШД).
Контрольные вопросы
1. Как работает вибрационный электромагнитный частотомер?
2. Каким образом можно измерить частоту с помощью ферродинами-
ческого логометра? Какова особенность конструкции логометра для из-
мерения частоты?
3. Как построены частотозависимые мосты для измерения частоты?
4. Какие методы применяются для измерения частоты и интервалов
времени?
5. Расскажите о принципе работы гетеродинного частотомера.
6. В чем состоит принцип работы резонансного частотомера?
7. Расскажите о принципе работы емкостного частотомера.
8. В чем состоит принцип работы цифрового частотомера?
9. Какова сущность цифрового метода измерений интервалов времени?
РАЗДЕЛ IV
РАДИОТЕХНИЧЕСКИЕ ИЗМЕРЕНИЯ
ГЛАВА 12
ГЕНЕРАТОРЫ ИЗМЕРИТЕЛЬНЫХ СИГНАЛОВ
12.1. Основные сведения
Генераторы измерительных сигналов (автогенераторы) являют-
ся источниками сигналов различных форм и частот, предназна-
ченных для настройки и регулировки радиоэлектронной аппара-
туры.
В зависимости от формы выходных сигналов различают генера-
торы синусоидальных и релаксационных (импульсных) колебаний.
Спектр сигнала генератора синусоидальных колебаний имеет одну
или несколько гармоник. Выходные сигналы релаксационного ге-
нератора содержат широкий спектр гармоник, имеющих разные
амплитуды.
По частотному диапазону генераторы подразделяются:
• на инфранизкочастотные (0,01... 20 Гц);
• низкочастотные, или генераторы звукового диапазона
(20...300 000 Гц);
• генераторы высоких частот (0,3...300 МГц);
• генераторы сверхвысоких частот (СВЧ — свыше 300 МГц).
Отдельную группу представляют генераторы случайных колеба-
ний — шумовые генераторы. Следует отметить, что и генераторы
линейно изменяющихся напряжений (ГЛИН) также относятся к
релаксационным генераторам. Этот тип генераторов может быть
использован как генератор разверток, а также в качестве измери-
тельного прибора.
Независимо от назначения, принципа действия и схемы гене-
ратор любых из перечисленных колебаний (кроме параметричес-
ких схем генерации) состоит из нелинейного усилителя, цепи поло-
жительной обратной связи (ОС) и источника питания постоянного
тока. Форма и частота выходных сигналов определяются только
параметрами самого генератора.
180
Генератор гармонических колебаний в своем составе обязательно
должен содержать узкополосную колебательную систему. Принцип
действия релаксационных генераторов основан на зарядно-раз-
рядных или накопительно-поглощающих явлениях, протекающих
в широкополосных цепях положительной обратной связи.
Условия самовозбуждения генератора синусоидальных колеба-
ний состоят в следующем. Для возбуждения и генерации колеба-
ний часть их энергии с выхода усилителя (точнее, с колебатель-
ной системы) подается на его вход по организованной для этого
случая цепи положительной обратной связи. Другими словами,
подобное устройство «возбуждает само себя» и поэтому называет-
ся генератором с самовозбуждением.
Механизм возбуждения колебаний в автогенераторе упрощен-
но можно представить следующим образом. В момент запуска в
колебательной системе автогенератора возникают свободные ко-
лебания, обусловленные включением источников питания, замы-
канием цепей, электрическими флуктуациями и т.п. Благодаря
наличию положительной обратной связи эти первоначальные ко-
лебания усиливаются и растут по амплитуде. Причем на первом
этапе, пока амплитуды малы, усиление имеет практически ли-
нейный характер и автогенератор может рассматриваться как ли-
нейная система.
Энергетически процесс нарастания амплитуд объясняется
тем, что за один период колебания усилитель сообщает конту-
ру энергии больше, чем она расходуется за это же время в кон-
туре. С ростом амплитуд начинает проявляться нелинейность си-
стемы (кривизна вольтамперной характеристики усилителя) и уси-
ление снижается до уровня, при котором только компенсируется
затухание колебаний в контуре, т.е. когда энергия, отдаваемая
усилителем в контур за один период, равна энергии, расходуемой
за это же время в колебательном контуре. В результате амплитуда
выходных колебаний автогенератора достигает некоторого уста-
новившегося уровня и потом становится практически постоян-
ной. Поэтому в этом случае говорят о стационарном режиме рабо-
ты автогенератора.
Генератор синусоидальных коле-
баний (как и колебаний любой фор-
мы и частоты) можно представить
в виде обобщенной структурной
схемы (рис. 12.1), состоящей из не-
линейного резонансного усилителя
с комплексным коэффициентом
усиления К и цепи положительной
обратной связи с комплексным ко-
эффициентом передачи по напря-
жению К^с-
Рис. 12.1. Обобщенная структур-
ная схема генератора
181
В описании обобщенной структурной схемы участвуют комп-
лексные амплитуды следующих напряжений:
входное напряжение — £/вх;
выходное напряжение — (7ВЫХ;
напряжение обратной связи — Uoc.
Выражение для напряжения обратной связи на любой частоте
генерации запишем в следующем виде:
^о.с = ^х = Кс.сС4ых. (12.1)
Тогда выходное напряжение С/вых = К£/ах или с учетом выраже-
ния (12.1)
6/^К^К^. (12.2)
Из выражения (12.2) следует, что автогенератор будет рабо-
тать в стационарном режиме при условии
КК0С = 1. (12.3)
Если KKqc > 1, то амплитуда выходных колебаний нарастает,
что определяет необходимое условие самовозбуждения генератора.
Формулу (12.3) можно разложить следующим образом:
К(ш)е7ф‘(“)Кос(со)е-'“*°'<“) = ККо;еЛ’*-“-‘> = 1. (12.4)
В формуле (12.4) К(со) = К и K^Jo) = — действительные
значения коэффициента усиления собственно усилителя (без цепи
обратной связи) и коэффициента передачи цепи положительной
обратной связи; ф*(со) = ф* и ф^с(со) = ф^.с — фазовые сдвиги,
вносимые соответственно усилителем и цепью положительной
обратной связи на текущей частоте со.
Из формулы (12.4) следует, что для возникновения устойчи-
вых автоколебаний в замкнутом контуре необходимо выполнить
следующие условия:
• обеспечить подачу сигнала положительной обратной связи,
т.е.
ККо.^1; (12.5)
• возникший в замкнутом контуре сдвиг фазы должен отвечать
равенству
ф* + ф*ос = 2лт; <12.6)
•для постоянства амплитуды автоколебаний статическая харак-
теристика усилителя должна иметь линейный участок и ограниче-
ния, где Ко.с — коэффициент усиления усилителя с обратной свя-
зью; т — натуральные целые числа 1, 2, 3 и т.д.
Соотношение (12.5) определяет условие баланса амплитуд в
автогенераторе. Из него следует, что в стационарном режиме на
182
генерируемой частоте коэффициент усиления усилителя с обрат-
ной связью Кос = К
Равенство (12.6) характеризует условие баланса фаз. Оно пока-
зывает, что в стационарном режиме суммарные фазовые сдвиги
сигнала на частоте генерации, создаваемые усилителем и цепью
положительной обратной связи, должны быть равны нулю или
кратны 2л. Отметим, что только условие баланса фаз позволяет
определить частоту генерируемых колебаний.
В схемах генераторов синусоидальных колебаний, работа-
ющих в стационарном режиме, соотношения (12.5) и (12.6)
выполняются на одной фиксированной частоте <о, которая яв-
ляется резонансной для узкополосной колебательной системы.
При работе автогенератора негармонических колебаний усло-
вия (12.5) и (12.6) должны выполняться для некоторой поло-
сы частот.
В генераторах синусоидальных колебаний колебательными си-
стемами служат резонансные ZC-контуры (в СВЧ-генераторах
для этих целей используются резонаторные системы) и частот-
но-зависимые (фазирующие) АС-цепи. Генераторы синусоидаль-
ных колебаний с LС-контурами называются ЛС-генераторами,
а с фазирующими АС-цепями — АС-генераторами. £С-генера-
торы вырабатывают колебания достаточно высокой частоты (бо-
лее 100 кГц), а АС-генераторы применяют для создания низко-
частотных синусоидальных колебаний (от единиц герц до де-
сятков килогерц).
12.2. Генераторы синусоидальных колебаний
Генераторы синусоидальных колебаний для средств измере-
ния выполняются в двух видах: генераторы сигналов (ГС) и
генераторы стандартных сигналов (ГСС). Последние имеют бо-
лее высокие показатели стабильности частоты и формы коле-
баний, но меньшие уровни по амплитуде, чем ГС. Генераторы
сигналов имеют маркировку ГЗ, а генераторы стандартных сиг-
налов — Г4.
Обобщенные структурные схемы измерительных генераторов
синусоидальных сигналов типа ГС и ГСС показаны на рис. 12.2.
На рис. 12.2, а представлена структурная схема генератора сигна-
лов, а на рис. 12.2, б — генератора стандартных сигналов. Пара-
метр U(f) показывает частоту колебаний напряжения.
В £ С-генераторах, для которых выполняются условия баланса
амплитуд и фаз, частота в основном определяется резонансом ко-
лебательного контура, как это показано, например, на рис. 12.3, а.
На схемах рис. 12.3, а и б U(f) — частота колебания напряжения;
Zj и Z> — комплексные сопротивления.
183
a
Рис. 12.2. Обобщенные структурные схемы измерительных генераторов
синусоидальных сигналов типа ГС и ГСС:
а — генератора сигналов; б — генератора стандартных сигналов
Частота колебаний
2rtVZc'
(12.7)
К Л С-генераторам также относятся генераторы с кварцевой ста-
билизацией частоты. Этот способ стабилизации основан на при-
менении вместо £С-контуров кварцевого резонатора, что снижа-
ет нестабильность частоты до 10-7 (отклонение частоты на Д/ =
= 0,1 Гц от генерируемой f = 1 МГц).
Кварцевый резонатор представляет собой помещенную в квар-
цедержатель тонкую прямоугольную пластину, вырезанную из
кристалла кварца, определенного размера, грани которой надле-
жащим образом ориентированы к осям кристалла.
Кварц обладает прямым и обратным пьезоэлектрическими эф-
фектами (пъезоэффектами). Прямой пьезоэффект возникает при
184
Рис. 12.3. Структурные схемы:
а — LС-генератора; б — /?С-генератора
о
U(f)
о
механическом сжатии или растяжении кварцевой пластины и со-
провождается появлением на ее противоположных гранях элект-
рических зарядов.
Однако £С-генераторы всех типов находят ограниченное при-
менение в измерительной технике, так как частота их трудно
перестраивается в широких пределах, а на низких частотах тре-
буются слишком большие величины индуктивностей и емкос-
тей.
В измерительных генераторах синусоидальных колебаний чаще
применяются схемы с /?С-цепями — обычно с мостом Вина (см.
рис. 12.3, б), который предназначен для сдвига фазы сигнала
на 180°. Здесь схема генератора строится на базе усилителя, у
которого в широком диапазоне частот коэффициент передачи К
является вещественной величиной, а фазовый сдвиг <р= 2л обес-
печивается за счет моста Вина и преобразования сигнала в кас-
кадах усиления.
Для выполнения условия (12.5) необходимо, чтобы коэффи-
циент передачи цепи положительной обратной связи также был
величиной вещественной.
Из схемы рис. 12.3, б видно, что коэффициент представля-
ет собой следующее отношение:
Z2
к°с Z, + z2 ’
где Z, и Zq — комплексные сопротивления;
Z, =Л + Д-;
jeo С
z R
2 1 + jwCR
185
После несложных преобразований этих соотношений получим
следующую формулу:
К
о.с ~
3 + у (оСА-
1 Л
toCR
Величина Кох становится вещественной, когда
<oGR -
1
соСА
= 0.
Следовательно, частота синусоидальных колебаний
1 . 1
СО = “^77, ИЛИ f = 37—•
RC 2nRC
При этом параметр = 1/3, а К = 3.
В реальных схемах автогенераторов применяют усилитель с боль-
шим коэффициентом усиления К, а для стабилизации частоты
его охватывают дополнительной цепью отрицательной обратной
связи.
Характеристики звуковых генераторов. Генераторы звукового
диапазона частот (низкочастотные генераторы) обычно имеют зна-
чительный уровень мощности выходного сигнала (до 5... 10 Вт).
Однако такая мощность может выделяться только на согласован-
ной нагрузке, например на нагрузке 60, 600, 6000 Ом, поэтому
на выходе генератора часто включается согласующий трансфор-
матор. Показания электронного вольтметра выходного напряже-
ния будут также правильными только при согласованной нагруз-
ке генератора. Погрешность установки частоты генератора можно
снизить до величины, меньшей 1 %. Повышение стабильности ча-
стоты достигается путем применения прецезионных внешних эле-
ментов (конденсаторов, катушек индуктивности, резисторов).
Кроме того, для повышения стабильности частоты таких схем
измерительных генераторов часто применяют задающие генера-
торы на биениях. Упрошенная структурная схема такого генерато-
ра представлена на рис. 12.4.
Здесь колебания низкой частоты образуются путем смешива-
ния двух близких по частоте синусоидальных колебаний и /2 в
преобразователе (на рис. 12.4 для упрощения он изображен в виде
смесителя). При этом частота/2 может меняться от/j до + F, где
F — наибольшая частота рабочего диапазона. На выходе смесителя
получают комбинационные частоты, в том числе и так называ-
емую промежуточную частоту Fm -fi -f. Колебание промежуточ-
ной частоты Fm выделяется с помошью фильтра промежуточных
частот.
186
ВЧ-генератор 1
Рис. 12.4. Упрошенная структурная схема генератора на биениях
Характеристики высокочастотных генераторов. В измеритель-
ных системах для радиочастотного диапазона используются как
генераторы сигналов, так и генераторы стандартных сигналов.
Генераторы сигналов имеют большую среднюю мощность вы-
ходного сигнала (до 3 Вт) и применяются для питания изме-
рительных передающих антенн и других мощных устройств. Ге-
нераторы стандартных сигналов представляют собой маломощ-
ные источники сигнала с низким уровнем выходного напряже-
ния (до 1 В). Они применяются при испытаниях и настройке
узлов радиоаппаратуры.
К основным требованиям, предъявляемым к ГСС, относятся
следующие:
• высокая стабильность частоты и амплитуды выходного сигнала;
• малый коэффициент нелинейных искажений.
В генераторах стандартных сигналов предусматривается возмож-
ность получения амплитудной модуляции за счет использования
как внешнего, так и внутреннего источников напряжения. Внут-
ренняя модуляция обычно имеет частоты 400 и 1000 Гц.
Генераторы инфранизких частот. Упрошенная структурная схе-
ма генератора инфранизких частот аналогична схеме ГС звуковых
частот (см. рис. 12.2, а). Ее главное отличие заключается в том, что
в последнюю схему включена схема задающего генератора. Зада-
ющий генератор может выполняться либо по схеме генератора на
биениях, либо по схеме, представляющей собой электронную мо-
дель колебательного звена без затухания.
На рис. 12.5, а показана структурная схема электронной моде-
ли колебательного звена, включенного в цепь положительной об-
ратной связи автогенератора инфранизких частот. Электронная
модель содержит усилитель и два последовательно включенных
интегратора.
У силительное и интегрирующее звенья (рис. 12.5, б и в) опи-
сываются следующими уравнениями:
187
Рис. 12.5. Структурные схемы колебательного звена:
а — электронная модель; б — усилительное звено; в — интегрирующее звено
f/2 =-£[/<> =-кц>; =
R} at т
где К = —коэффициент усиления усилителя; т = RC — посто-
янная времени АС-цепи.
На рис. 12.5 Uq — напряжение интегратора; U\ — входное, а
U2 — выходное напряжения; R} и /?2 — резисторы; RC — цепь тока.
Частота колебаний генератора
Примерные параметры подобных генераторов при работе в стан-
дартных условиях (температура, влажность и т.д.) имеют следу-
ющие значения: нестабильность частоты составляет около 0,25 %,
амплитуда выходного напряжения достигает 25 В.
Генераторы сверхвысоких частот. Генераторы сверхвысоких
частот, или СВЧ-генераторы работают в диапазоне частот от 1,0
до 40 ГГц. По типу выходного соединителя с исследуемой схемой
они подразделяются на коаксиальные и волноводные, причем пос-
ледние являются более высокочастотными. Для СВЧ-генераторов
характерным является однодиапазонное построение с небольшим
перекрытием по частоте (около октавы — в 2 раза). Некалибро-
ванная выходная мощность измерительного СВЧ-генератора со-
ставляет несколько ватт, а калиброванная — достигает несколь-
ких микроватт. Шкалы калиброванных аттенюаторов СВЧ-генера-
торов градуируются в децибелах, а у генераторов ГСС — в децибе-
лах и микроваттах.
188
Генераторы сверхвысоких частот необходимы для настройки и
регулировки радиоприемных устройств, радиолокационных и ра-
дионавигационных станций, систем космической связи и спутни-
кового вещания, измерения параметров антенн и т.д. Обобщенная
структурная схема СВЧ-генератора приведена на рис. 12.6.
Отличительной особенностью измерительных генераторов этого
типа являются относительная простота электронной части схемы и
сложность механических узлов. Схема генератора сверхвысоких ча-
стот включает в себя задающий СВЧ-генератор, импульсный мо-
дулятор, измеритель малой мощности, частотомер и калиброван-
ный аттенюатор. Все высокочастотные узлы генератора соединяют-
ся волноводами (на рис. 12.6 показаны цифрой 7). На рис. 12.6
Авч — мощность СВЧ-генератора.
Задающие СВЧ-генераторы измерительных приборов выпол-
няются на отражательных клистронах с внешним или внутренним
резонатором, на диодах Ганна, лавинно-пролетных диодах (ЛПД)
или на лампах бегущей волны (ЛБВ).
В измерительных СВЧ-генераторах необходима тщательная экра-
нировка, так как утечки энергии излучения с ростом частоты возра-
стают. Провода питания выполняются в виде коаксиальных кабелей
со специальным наполнителем, который хорошо поглощает энер-
гию СВЧ-излучения. Повышенные требования предъявляются и к
источникам питания, так как активные элементы СВЧ-диапазона
весьма чувствительны к нестабильности питающих напряжений.
В качестве примера остановимся на принципе действия задаю-
щего СВЧ-генератора на базе отражательного клистрона. Его уп-
рощенная схема показана на рис. 12.7.
Клистрон относится к электронным электровакуумным прибо-
рам, представляюшим собой сочетание объемного СВЧ-резона-
тора 4 с электронной лампой. В его состав входят катод 2 с нагре-
вателем 7, ускоряющий электрод 3, отражатель 6, объемный ре-
зонатор с встроенными в него сетками 5 и источники ускоряюще-
го напряжения Uq и напряжения отражателя £/отр. На схеме d —
пространство зоны управления, D — пространство дрейфа.
Рис. 12.6. Обобщенная структурная схема СВЧ-генератора:
/ — волноводы
189
Рис. 12.7. Схема отражательного
клистрона:
1 — нагреватель; 2 — катод; 3 — уско-
ряющий электрод; 4 — объемный СВЧ-
резонатор; 5 — сетки резонатора; 6 —
отражатель
ряженным отрицательно. Если
В клистроне происходит так
называемое динамическое управ-
ление электронным потоком, т.е.
управление скоростями полета
отдельных электронов (рис. 12.8).
Принцип действия клистро-
на как генератора колебаний
заключается в следующем. Пу-
чок электронов ускоряется по-
ложительным потенциалом,
приложенным к ускоряющему
электроду или объемному резо-
натору, в некоторых конструк-
циях играющему роль ускоряю-
щего анода. Затем электроны
проходят через зазор или сетку
резонатора-анода и попадают в
тормозящее поле, создаваемое
отражательным электродом, за-
величина этого поля достаточна,
то электроны изменяют направление своего движения и двигают-
ся обратно к резонатору-аноду.
При прохождении через резонатор в сторону отражателя элек-
троны изменяют свою скорость под влиянием незначительного
обусловленного хаотическим движением электронов напряжения
между сетками. Это вызывает частичную группировку электронов
при дальнейшем их движении в пространстве между резонатором
и отражателем.
Возвращающиеся электроны замедляются высокочастотным
полем резонатора, т.е. они отдают часть своей энергии в резона-
тор, таким образом увеличивая величину переменного напряже-
ния в зазоре. Возрастание напряжения, в свою очередь, приводит
Рис. 12.8. Механизм динамического управления электронным потоком:
а — условное обозначение потока; б — пространство дрейфа и управления
190
к углублению модуляции по скорости, улучшению группировки
электронов, увеличению передаваемой энергии резонатору и т.д.
В результате в резонаторе устанавливаются незатухающие коле-
бания.
Колебания в генераторе на отражательном клистроне возбуж-
даются только при определенных соотношениях между напряже-
ниями на аноде и отражателе.
Генерируемая частота в основном определяется частотой на-
стройки резонатора. Она также зависит от скорости и времени
пролета электронов в замедляющей зоне, т.е. в некоторой степе-
ни от напряжений на аноде и на отражателе. Изменяя напряжение
на отражателе при постоянном напряжении на аноде, можно пе-
рестраивать клистрон по частоте в пределах 1 %.
На рис. 12.8, а показаны моменты нахождения отдельных элек-
тронов условного потока в управляющем поле U . Электроны, на-
ходящиеся в этом поле, не отклоняются, а только изменяют ско-
рость в моменты времени, когда напряжение не равно нулю (элек-
троны 2, < 6). Электроны 7, 5, 5 не изменяют начальной скоро-
сти V. Если теперь дать возможность электронам пролететь неко-
торое расстояние дальше (в пространстве дрейфа D), то ускорен-
ные электроны (их скорость составляет И+ Д Й) будут догонять элек-
троны, вылетевшие раньше и не изменившие своей скорости V
(электроны 2 догоняют электроны 7).
Замедленные электроны 4 (их скорость V - ДИ) будут сбли-
жаться с электронами 5, вылетевшими позже. В равномерном вна-
чале потоке электронов появятся их сгустки и разрежения по
плотности — количеству электронов в пространстве дрейфа D
(см. рис. 12.8, б).
Такой процесс протекает и в клистроне. Под действием поло-
жительного напряжения UOi приложенного к ускоряющему элек-
троду и резонатору, электронный поток выходит из катода и про-
низывает зазор между сетками резонатора. В результате действия
флуктуаций потока в резонаторе на резонансной частоте наводит-
ся слабое СВЧ-напряжение. Это напряжение, возникшее в резуль-
тате флуктуаций, в свою очередь, будет изменять скорость элек-
тронов.
Данное изменение скорости электронов происходит в простран-
стве зоны управления d между сетками объемного резонатора. За
резонатором в пространстве дрейфа D модулированный по скоро-
сти поток электронов постепенно превращается в поток, модули-
рованный по плотности. Эти сгустки электронов попадают в тор-
мозящее поле отрицательно заряженного отражателя (оно созда-
но напряжением £/01р), которое поворачивает электроны назад, и
они снова проходят зазор между сетками объемного резонатора.
Обратное прохождение потока электронов между сетками уве-
личивает энергию СВЧ-колебаний, если отраженный пучок элек-
191
тронов возвращается в резонатор через интервалы времени ЗГ/4,
(ЗТ/4 + Т), (ЗГ/4 +2Т) и т.д. Это время можно изменять в неболь-
ших пределах напряжениями Uq и (/отр. Следовательно, таким же
образом можно изменять в малых пределах частоту генерации кли-
строна /= \/Т.
12.3. Цифровые измерительные генераторы низких частот
Цифровые генераторы низких частот по сравнению с аналого-
выми генераторами имеют более эффективные метрологические
характеристики. В частности, они обладают более высокими точ-
ностью установки и стабильностью частоты, малым коэффици-
ентом нелинейных искажений (строго синусоидальной формой)
и постоянством уровня выходного сигнала.
Цифровые генераторы широко применяются, так как по срав-
нению с аналоговыми они более удобны в эксплуатации, имеют
высокое быстродействие и наглядную индикацию. В них существен-
но проще устанавливать требуемую частоту. Кроме того, в цифро-
вых генераторах можно автоматически перестроить частоту по за-
ранее заданной программе и возможно легкое сопряжение с циф-
ровыми средствами обработки информации.
В основе принципа действия цифровых генераторов лежит фор-
мирование числового кода с последующим преобразованием его
в аналоговый гармонический сигнал. Последний аппроксимиру-
ется функцией, моделируемой с помощью цифрового аналогово-
го преобразователя (ЦАП).
Принципы аппроксимации. Самый простой вид аппроксимации —
ступенчатая (рис. 12.9, а). Она заключается в замене гармонического
колебания напряжением ступенчатой формы, весьма мало отлича-
ющейся от синусоидальной кривой.
Поясним сущность ступенчатой аппроксимации сигналов. Пусть
аппроксимируемое гармоническое напряжение
"(/) = ^max sin (О/
дискретизируется по времени (при равномерной дискретизации с
шагом Л/) и в интервале, разделяющем два соседних момента
времени и + Р Это синусоидальное колебание заменяют напря-
жением постоянного тока, т.е. ступенькой, высота которой равна
значению аппроксимируемого напряжения в момент т.е.
И(Г,) = (71Пах5т(ОГ/.
В результате такой замены, вместо кривой синусоидальной фор-
мы получается ступенчатая линия, изображенная на рис. 12.9, а.
При имеющемся периоде Т синусоидального колебания число
ступенек р, приходящихся на один период, определяется шагом
192
Рис. 12.9. Цифровой генератор низких частот:
а — ступенчатая аппроксимация сигналов; б — упрошенная структурная схема; 1 —
ступенчатая (аппроксимированная) кривая; 2 — аппроксимируемая кривая (сину-
соида)
дискретизации р = Т/Д1. Если же из технических соображений чис-
ло ступенек задано, то изменение шага дискретизации приводит
к изменению периода формируемого напряжения, поскольку Т -
= рД/.
Если t, = i&t, то уравнение ступенчатой кривой можно предста-
вить в следующем виде:
м(/ДГ) = sin(zcoAr),
2л
или, с учетом значения р и соотношения е>= —, записать так:
w(/Ar) = £/max sin
/2я
Р /
Кроме того, ступенчатая кривая тем точнее приближается по
форме к синусоиде (уменьшается погрешность аппроксимации),
чем больше выбрано число ступеней р. Когда это число достаточно
велико, сформированное С1упенчатое напряжение можно рассмат-
ривать как низкочастотное синусоидальное напряжение, искажен-
ное в небольшой степени высокочастотной аддитивной помехой.
Спектральный анализ напряжения, полученного путем ступен-
чатой аппроксимации, выявляет, что его спектр содержит гармо-
нику основной частоты. Разложение в ряд Фурье показывает, что
193
ближайшей высшей гармоникой будет составляющая (р - 1), сле-
дующей гармоникой станет (р + 1), затем — гармоники (2р - 1)
и (2р + 1) и т.д. Например, при р = 25 и частоте напряжения f
основной гармоники ближайшими высшими гармониками будут
24, 26 и 49 и 51-я гармоники, т. е. напряжения частот 24/, 26/
49/и 51/
Такие соотношения между основной и высшими гармониками
позволяют просто осуществить высококачественную фильтрацию,
резко ослабляющую высшие гармоники, т.е. получить синусо-
идальное напряжение, характеризуемое очень малым коэффици-
ентом нелинейных искажений (коэффициентом гармоник).
Упрощенная структурная схема цифрового генератора, фор-
мирующего ступенчатую кривую, приведена на рис. 12.9, б. Им-
пульсный кварцевый генератор вырабатывает периодическую пос-
ледовательность коротких импульсов с периодом следования Т.
На выходе делителя частоты с регулируемым коэффициентом де-
ления g получается последовательность импульсов с периодом
следования А/ = gT, задающим шаг дискретизации.
Импульсы поступают в счетчик емкостью р. Кодовая комбина-
ция, определяемая числом i импульсов, накопленных в счетчике,
передается в схему ЦАП. Последний вырабатывает напряжение,
соответствующее числу' /, т.е. w(/A/) = £/maxsin(/2п/р). Таким обра-
зом формируются ступеньки аппроксимируемой кривой рС1. После
накопления р импульсов счетчик переполняется и сбрасывается в
нуль. С приходом (р + 1)-го импульса начинается формирование
нового периода ступенчатой кривой.
Частоту формируемого колебания при фиксированном числе
ступенек рст регулируют, изменяя шаг дискретизации А/, что дос-
тигается путем изменения коэффициента деления g делителя час-
тоты.
12.4. Генераторы шумовых сигналов
Генераторы шумовых сигналов (шумовые генераторы) предназна-
чены для формирования флуктуационного напряжения с определен-
ными (заданными) вероятностными характеристиками. На рис. 12.10
представлена структурная схема шумового генератора, в которую
входят задающий генератор, преобразователь, выходной аттенюа-
тор, вольтметр действующего напряжения. Параметр U(bf) пока-
зывает изменение напряжения в зависимости от частоты колеба-
ния.
Основным узлом схемы шумового генератора является зада-
ющий генератор. Его сигналы должны иметь равномерную спект-
ральную плотность мощности по всей требуемой полосе частот
(теоретически — это белый шум).
194
Рис. 12.10. Структурная схема шумового генератора
В задающем генераторе используются физические явления, при
которых возникают достаточно интенсивные шумы со статичес-
кими характеристиками и параметрами, которые несложно ис-
следовать при помощи математического анализа.
В качестве образцового источника шума может служить нагре-
тый проволочный резистор, действующее значение напряжения на
котором рассчитывается по известной из курса физики формуле
U2 = 4kTRtf,
где к = 1,38-10-23 Дж/К — постоянная Больцмана; Т — абсолютная
температура резистора в градусах Кельвина; R — сопротивление
резистора; Д/ — полоса пропускания.
Конструктивно резистор выполняется в виде вольфрамовой
спирали, намотанной на керамический каркас, температура ко-
торой поддерживается постоянной.
К источникам тепловой шумовой мощности относится и боло-
метрический генератор. Болометр представляет собой вакуумный
стеклянный баллон, внутри которого натянута вольфрамовая нить.
Источники теплового шума используются в качестве образцо-
вых генераторов шумовых напряжений, так как их расчетные дан-
ные хорошо согласуются с экспериментальными результатами.
Кроме того, в шумовых генераторах также могут применяться
фотоэлектронные умножители, газоразрядные трубки, шумовые
диоды и т.п.
В качестве преобразователей спектра в шумовых генераторах
используются усилители, фильтры, ограничители, генераторы
перестраиваемой частоты. Применение конкретного элемента за-
висит от того, какое преобразование шума требуется.
Так, применив в качестве преобразователя фильтр с опреде-
ленным коэффициентом передачи, можно получить из генерато-
ра белого шума генератор стационарного случайного процесса со
спектральной плотностью мощности, изменяющейся по заданно-
му закону в определенном диапазоне частот. Важным элементом
выходного устройства генератора является калиброванный атте-
нюатор, который должен обеспечивать одинаковый коэффици-
195
ент деления мощности по всей полосе частот шума. Для контроля
уровня выходной мощности в схему генератора встраивается вольт-
метр действующего значения.
Низкочастотные генераторы шумов обозначаются Г2. Они ра-
ботают в диапазоне от 20 Гц до 10 МГц и вырабатывают мощность
до 5 Вт. СВЧ-генераторы имеют высшую частоту рабочего диапа-
зона до 37 ГГц, и, как и генераторы синусоидальных колебаний,
выполняются однодиапазонными с малым перекрытием по час-
тоте. СВЧ-генераторы шумов обозначаются так же как и низкочас-
тотные, т.е. Г2.
12.5. Импульсные генераторы
Импульсные (релаксационные) генераторы подразделяются на
генераторы периодической последовательности импульсов и гене-
раторы кодовых групп импульсов. Широко применяются генерато-
ры периодической последовательности прямоугольных импульсов.
Реальная форма импульса несколько отличается от прямоуголь-
ной и имеет вид, как показано на рис. 12.11. В этом случае есть
отклонения, которые не должны превышать значений, указанных
в технической документации.
Обычно прямоугольные импульсы характеризуются следующи-
ми основными параметрами:
• амплитудным значением £/тах и напряжением спада вершины
t/cn, которое не должно превышать 0,05 [/тах;
• длительностью фронта нарастания /фн, т.е. интервалом вре-
мени, в течение которого мгновенное значение нарастает от 0,1
до 0,9 амплитудного t/max (это время составляет 0,1 ...0,2 всей дли-
тельности импульса);
• длительностью фронта спада гфсп, т.е. временем спада напря-
жения от 0,9 до 0,16Lax (это время составляет 0,2...0,3 ширины
импульса).
Рис. 12.11. Параметры реального
прямоугольного импульса
Естественно, что главным пара-
метром импульса служит длитель-
ность импульса.
Формирование прямоугольных
импульсов со стабильной длитель-
ностью следования, крутыми фрон-
тами и плоской вершиной обеспе-
чивают мультивибраторы и блокинг-
генераторы, работающие в автоко-
лебательном и ждущем режимах.
В мультивибраторах эти характерис-
тики достигаются за счет примене-
ния кварцевой стабилизации частоты.
196
Упрошенная структурная схема импульсного генератора и вре-
менные диаграммы ее работы представлены на рис. 12.12.
На рис. 12.12 формирователь временных интервалов может ра-
ботать в режиме автогенератора (ключ К в положении /) или в
ждушем режиме (ключ К в положении 2). Однократный запуск
осуществляется при помощи пусковой кнопки Кп (ручной пуск).
Интервал Топределяет частоту следования импульса/= \/Т. Дли-
тельность импульсов зависит от времени задержки, как в одно-
именной схеме, т.е. ти =т3 (см. рис. 12.12, б).
В зависимости от длительности прямоугольных импульсов им-
пульсные генераторы делятся на микросекундные и наносекунд-
ные. Классы точности импульсных генераторов устанавливаются
отдельно по амплитуде, частоте следования и длительности им-
пульса. Кроме того, в документации по эксплуатации генератора
указываются длительность фронта нарастания гфн и длительность
фронта спада гфсп. Классы точности по амплитудному значению
устанавливаются через приведенную погрешность, а по осталь-
ным параметрам — через относительную погрешность от измеря-
Рис. 12.12. Импульсный гене-
ратор:
а — структурная схема; б — вре-
менные диаграммы
197
емой величины. Причем погрешности установки временных пара-
метров в среднем достигают нескольких процентов. Генераторы
периодических прямоугольных импульсов обозначаются Г5.
12.6. Стандарты частоты. Синтезаторы частоты
Формирование стабильного по частоте и фазе измерительного
сигнала осуществляется с помощью кварцевых генераторов. Здесь
долговременная нестабильность частоты выходного сигнала обус-
ловлена старением элементов и для кварцевых генераторов она
составляет: за первую неделю работы — порядка 10“7, а после двух
месяцев — около 10-6. Кварцевые стандарты частоты имеют еще
более высокие показатели по стабильности и их нестабильность
находится в пределах 10"8... 10’9.
Более высокую стабильность частоты (нестабильность порядка
10"12) обеспечивают квантово-механические стандарты частоты,
действие которых основано на использовании электромагнитного
излучения атомов определенного химического элемента при пе-
реходе их из одного энергетического состояния в другое. Именно
на основе электромагнитного излучения и созданы водородные,
цезиевые и рубидиевые генераторы.
Следует отметить, что кварцевые генераторы и стандарты час-
тоты обеспечивают формирование высокостабильных сигналов
только для нескольких (порядка 3) значений частот. При необхо-
димости иметь большой набор генерируемых частот используют
кварцевые синтезаторы частоты.
Кварцевые синтезаторы частоты — это многочастотные гене-
раторы гармонических колебаний с дискретной перестройкой ча-
стоты. Упрощенная структурная схема аналогового синтезатора
частоты представлена на рис. 12.13. Схема включает в себя квар-
цевый генератор частоты /0, устройство формирования опорных
частот /ь ..., fn, переключающее устройство с частотой коммута-
ции fky подключающее на выход сигнал нужной частоты, отсчет-
ное и выходное устройства.
Синтезаторы позволяют получать напряжения фиксированных
частот с дискретностью (сеткой частот) по десятых и сотых до-
лей герц.
В современных высококачественных широкодиапазонных изме-
рительных генераторах требования высокой стабильности частоты
и возможности ее быстрой перестройки являются несовместимы-
ми. Поэтому при разработке синтезаторов частоты переходят к
дискретному перекрытию частотного диапазона, при котором
допускается генерирование сигналов на любой из множества час-
тот, следующих друг за другом с определенным фиксированным
интервалом, называемым шагом дискретной сетки.
198
Рис. 12.13. Упрощенная структурная схема аналогового синтезатора час-
тоты
На рис. 12.14 показана одна из структурных схем аналогового
синтезатора частоты с цифровым управлением. Синтезатор содер-
жит опорный кварцевый генератор (ОКГ), управляемый делитель
частоты (УДЧ), управляемый генератор (УГ), фазовый детектор
(ФД) с цепью фазовой автоматической подстройки частоты и
программируемое цифровое устройство (ПЦУ).
На фазовый детектор поступают два колебания: первое со ста-
бильной частотой УоП от опорного кварцевого генератора; второе —
с частотой f/N ~ fon через управляемый делитель частоты с коэф-
фициентом деления Л’от управляемого генератора. Напряжение с
выхода фазового детектора через фильтр нижних частот (ФНЧ)
воздействует на управляемый генератор и подстраивает его до обес-
печения равенства частот f/N иДг Изменяя с помощью ПЦУ ко-
эффициент деления N, можно получить требуемую сетку частот с
шагом, равнымУоП. Поскольку выходная частота синтезатора свя-
зана с частотой опорного кварцевого генератора формулой
f - Nf>n> то относительные нестабильности этих частот равны.
Если в таком синтезаторе требуется стабилизировать очень низ-
кую частоту, то между' опорным кварцевым генератором и фазо-
вым детектором необходимо дополнительно ввести делитель ча-
стоты (ДЧ).
Рассмотренный простейший вариант синтезатора частоты имеет
ряд недостатков. Один из них связан с конечной величиной ши-
Рис. 12.14. Структурная схема аналогового синтезатора частоты с цифро-
вым управлением
199
рины полосы синхронизации управляемого генератора, которая
зависит от управляющих элементов генератора и коэффициентов
передачи ФД и ФНЧ. Поэтому для получения широкой сетки ча-
стот приходится изменять собственную частоту f управляемого
генератора.
Другой недостаток обусловлен ограниченными возможностя-
ми УДЧ, построенного, как правило, на основе счетчика импуль-
сов. Если ввести обратную связь в делитель частоты, то можно
изменять его коэффициент деления, который будет принимать
любые целочисленные значения, допустимые разрядностью счет-
чика.
В современных передатчиках часто требуется использовать дроб-
ные значения коэффициента деления частоты. Метод дробного
преобразования частоты используется в современных разработках
цифровых синтезаторов, реализуемых по следующей базовой схе-
ме (рис. 12.15).
В таком синтезаторе коэффициент деления программно-управ-
ляемого делителя частоты (ПУДЧ) изменяется во времени, обра-
зуя последовательность временных циклов определенной дли-
тельности. Полученный цикл можно делить на несколько под-
циклов, в течение каждого из которых коэффициент деления
постоянен. Изменение коэффициента деления производится в
момент перехода от одного подцикла к другому таким образом,
чтобы средний за время цикла коэффициент деления был равен
заданному.
В схеме цифрового синтезатора частоты используются цифро-
вой фазовый детектор (ЦФД), цифровой аналоговый преобразо-
ватель (ЦАП) и микропроцессор (МП). Подстройку выходной ча-
стоты производят в конце каждого цикла. Для этого предназначен
управляемый генератор, напряжение подстройки частоты на ко-
торый подается с ЦАП. Сигнал управления (ошибки, рассогласо-
вания) вырабатывается ЦФД и соответствует значению средней
за время цикла разности фаз колебаний, получаемых от ОКГ и УГ.
Затем сигнал управления с ФД подается на МП, который через
ЦАП по заданному коду требуемой частоты осуществляет про-
граммное управление схемой ПУДЧ.
Рис. 12.15. Структурная схема цифрового синтезатора частоты
200
Контрольные вопросы
1. По каким признакам классифицируются измерительные генераторы?
2. Какие необходимы условия для возбуждения гармонических коле-
баний в генераторе с резистивно-емкостной настройкой?
3. Каковы особенности построения генераторов сверхвысоких частот?
4. Каковы основные достоинства цифровых измерительных генераторов?
5. В чем состоит принцип аппроксимации в работе цифровых измери-
тельных генераторов?
6. В чем заключается принципиальная особенность задающего генера-
тора при построении генераторов шума?
7. Каковы особенности построения аналоговых и цифровых синтеза-
торов частоты?
8. За счет чего достигается высокая стабильность частоты в современ-
ных синтезаторах частоты?
ГЛАВА 13
АНАЛИЗ ФОРМЫ И ПАРАМЕТРОВ СИГНАЛА
13.1. Основные сведения
В настоящее время для анализа формы сигнала чаше всего ис-
пользуются осциллографы с электронно-лучевой трубкой — элек-
тронно-лучевые осциллографы (ЭЛО). Электронно-лучевой осцил-
лограф является одним из наиболее универсальных измеритель-
ных приборов, предназначенных для визуального наблюдения
электрических сигналов и измерения их параметров. В настоящее
временя разработаны и используются различные типы электрон-
но-лучевых осциллографов:
• универсальные;
• скоростные;
• стробоскопические;
• запоминающие;
• специальные.
На основе первоначальной схемы универсального осциллогра-
фа (он обозначается С\ — CN) создан целый ряд специализиро-
ванных приборов:
С7 — скоростные стробоскопические;
С8 — запоминающие;
С9 — специальные, в том числе цифровые.
Самыми распространенными осциллографами являются уни-
версальные осциллографы. Они позволяют исследовать широкий класс
электрических сигналов с длительностью от единиц наносекунд
до нескольких секунд в диапазоне от долей милливольт до сотен
201
вольт. Полоса пропускания частот современных универсальных
осциллографов составляет 300...400 МГц. Изображение сигнала
на экране отображается практически одновременно с появлени-
ем сигнала на входе. Поэтому такие приборы называются осцил-
лографами реального времени. Часто универсальные осциллогра-
фы выполняют со сменными блоками, которые существенно рас-
ширяют их функциональные возможности.
Для исследования быстро протекающих процессов (например,
нано- и пикосекундной длительности) применяются скоростные
осциллографы, основным узлом которых служит специальная элек-
тронно-лучевая трубка бегущей волны. В скоростных осциллогра-
фах, как правило, предварительное усиление входного сигнала
не производится и поэтому их чувствительность невелика. Эти при-
боры также являются осциллографами реального времени, кото-
рые дают возможность наблюдать и фотографировать как одиноч-
ные, так и периодические сигналы.
Повторяющиеся кратковременные процессы исследуются с
помощью стробоскопических осциллографов. По принципу действия
стробоскопические осциллографы относятся к приборам с преоб-
разованием временного масштаба и отличаются высокой чувстви-
тельностью и широкой (до 25 ГГц) рабочей полосой частот.
Запоминающие осциллографы, в которых используются специ-
альные электронно-лучевые трубки, обладают способностью со-
хранять и воспроизводить изображение сигнала в течение дли-
тельного времени после снятия сигнала со входа осциллографа.
Основным назначением запоминающих осциллографов является
исследование однократных и редко повторяющихся временных
процессов. Запоминающие осциллографы имеют почти те же ха-
рактеристики, что и универсальные, однако они отличаются рас-
ширенными функциональными возможностями.
Специальные осциллографы оснащаются дополнительными бло-
ками целевого назначения. К этой группе осциллографов относят-
ся и телевизионные осциллографы, позволяющие выделять ви-
деосигнал заданной строки изображения, и цифровые осцилло-
графы, дающие возможность не только наблюдать сигнал, но и
передавать его в цифровом виде на компьютер для дальнейшей
обработки. Специальные осциллографы снабжаются блоками из-
мерения напряжений, токов и сопротивлений (мультиметрами),
а также устройствами для исследования вольтамперных характе-
ристик полупроводниковых приборов.
По числу одновременно наблюдаемых на экране сигналов ос-
циллографы подразделяются на одноканальные и многоканальные. Со-
вмещение на экране изображений нескольких входных сигналов
достигается или использованием специальной многолучевой труб-
ки, или путем периодического переключения осциллографа на раз-
ные входы с помощью электронного коммутатора.
202
13.2. Структурная схема универсального осциллографа
Универсальны осциллографом называется измерительный при-
бор, в котором исследуемый электрический сигнал подается че-
рез канал вертикального отклонения на вертикально отклоняющую
систему электронно-лучевой трубки (ЭЛТ), а горизонтальное от-
клонение электронного луча трубки осуществляется при помощи
напряжения горизонтальной развертки.
Упрошенная структурная схема универсального осциллографа
представлена на рис. 13.1. В осциллограф кроме ЭЛТ и каналов вер-
тикального и горизонтального отклонений входят следующие функ-
циональные блоки: устройство синхронизации и запуска развертки,
канал модуляции луча, вспомогательные устройства и источник
питания. В стеклянном баллоне ЭЛТ расположены подогревный ка-
тод К, модулятор (сетка) М, фокусирующий анод Аь ускоряющий
анод А2, две пары взаимно-перпендикулярных отклоняющих плас-
тин, где X — горизонтальные, а У- вертикальные пластины.
Канал вертикального отклонения луна Y включает в себя атте-
нюатор, линию задержки и усилитель (см. рис. 13.1). Канал Услу-
жит для подачи на пластины Y исследуемого сигнала wc(Z), кото-
рый подается на вход Y. Аттенюатор канала предназначен для ос-
лабления сигнал wc(/) в определенное число раз. Линия задержки
является регулируемой и обеспечивает подачу сигнала на пласти-
ны Y с задержкой относительно начала горизонтально разверты-
вающего напряжения Ux. Усилитель обеспечивает получение амп-
литуды сигнала на пластинах К, достаточной для требуемого от-
клонения луча на экране даже малым исследуемым сигналом uc(t).
В свою очередь, усилитель Y канала вертикального отклонения
включает в себя следующие звенья (на рис. 13.1 они не показаны):
входной усилитель с изменяемым коэффициентом усиления Кус,
линию задержки и парафазный (с противофазными выходными
сигналами) усилитель, обеспечивающий положение светового пят-
на в центре экрана при отсутствии исследуемых сигналов. В канал
вертикального отклонения луча также может входить калибратор
амплитуды (на рис. 13.1 он не показан). Сигнал от калибратора
поступает на вход первого усилителя для установки заданного ко-
эффициента усиления Кусг При этом цену деления (В/дел.) мас-
штабной сетки на экране осциллографа можно определить по
формуле
Кус А
где UK — напряжение калибратора; КуС| — коэффициент усиления
при одном положении регулировки усилителя; пк — число деле-
ний сетки, занятое изображением калибровочного сигнала.
203
го
CD
4*
Рис. 13.1. Упрощенная структурная схема универсального осциллографа
Выход
Калибратор
Цена деления масштабной сетки с учетом коэффициента деле-
ния аттенюатора са = скл.
Если в процессе работы параметр с остается постоянным, то
величина сл может быть указана на дискретном переключателе ат-
тенюатора, что и делается на практике. Основными характеристи-
ками канала вертикального отклонения являются верхняя гранич-
ная частота порядка 100 МГц и чувствительность
5у = Кус5ус,
где 5ус — чувствительность усилителя.
При этом при кл = 1 чувствительность составляет около 1 мм/мВ.
Канал горизонтального отклонения луна X служит для создания
горизонтально отклоняющего — развертывающего напряжения Ux
с помощью напряжения генератора развертки и для передачи (че-
рез аттенюатор и усилитель) на пластины X исследуемого сигна-
ла, подводимого к входу X осциллографа. Схема синхронизации
обеспечивает формирование сигнала синхронизации, поступаю-
щего на генератор развертки (для получения четкой неподвижной
осциллограммы). Усилитель канала усиливает и преобразует сиг-
нал развертки Up в Ux.
Канал горизонтального отклонения характеризуется чувстви-
тельностью и полосой пропускания частот, которые в два раза
меньше, чем в канале вертикального отклонения. Основным бло-
ком в канале является генератор развертки, который может рабо-
тать как в непрерывном, так и в ждущем режиме.
К форме пилообразного напряжения генератора предъявляют-
ся следующие требования:
• время обратного хода луча должно быть много меньше, чем
время прямого хода Гобр « 7^. В противном случае часть изображе-
ния сигнала будет отсутствовать;
• для того чтобы изображение на экране было неподвижным,
осциллограмма должна начинаться всегда с одной и той же точки
экрана и фазы сигнала. Это достигается путем синхронизации на-
пряжения развертки с напряжением сигнала. Поэтому период раз-
вертки должен быть равен или кратен периоду исследуемого сиг-
нала:
7 разе = Л 7С,
где п = 1, 2, 3, 4 и т.д.; Тс — период сигнала;
• напряжение развертки при прямом ходе луча должно быть
линейным, иначе луч будет двигаться по экрану с различной ско-
ростью и нарушится равномерность временного масштаба по оси X.
Это может привести к искажению сигнала.
Канал Z (канал управления яркостью) осциллографа служит
для передачи со входа Z на управляющий вход ЭЛТ сигнала, ко-
торый модулирует ток ее луча и, следовательно, яркость свечения
205
люминофора. В состав этого канала входят: аттенюатор, схема из-
менения напряженности и усилитель Z.
Калибратор предназначен для формирования периодических
импульсных сигналов с известной амплитудой, длительностью и
частотой для калибровки осциллографа. Таким образом обеспечи-
ваются правильные измерения параметров исследуемого сигнала.
Виды разверток в осциллографе. Одним из основных узлов ос-
циллографа является электронно-лучевая трубка, выходными эле-
ментами которой служат две пары пластин. Пластины с помощью
специальной развертки отклоняют луч в горизонтальном и верти-
кальном направлениях.
Развертка имеет вид линии, которую чертит луч на экране при
отсутствии исследуемого сигнала в результате действия только
одного развертывающего напряжения. Если развертывающее на-
пряжение приложено к одной паре отклоняющих пластин (обыч-
но к пластинам X), то развертку называют по форме развертыва-
ющего напряжения (например, линейной или синусоидальной).
Если развертывающие напряжения приложены к отклоняющим
пластинам X и Y трубки осциллографа одновременно, то назва-
ние развертки дается по ее форме (например, круговая или эллип-
тическая).
Наиболее широко используется линейная развертка, создавае-
мая пилообразным напряжением Up генератора развертки. Для обес-
печения различных режимов работы осциллографа существуют
несколько видов разверток. Рассмотрим некоторые из них.
Автоколебательная развертка представляет собой развертку, при
которой генератор развертки периодически запускается при от-
сутствии сигнала запуска на его входе.
Ждущей разверткой называется развертка, при которой гене-
ратор развертки запускается только с помощью сигнала запуска.
Однократная развертка — это развертка, с помощью которой
генератор развертки запускается только один раз с последующей
блокировкой.
При подаче на горизонтально отклоняющие пластины на-
пряжения Ux пилообразной формы (рис. 13.2) сфокусированный
электронный луч под воздействием этого напряжения перемеща-
ется слева направо в интервале Гпр (точки 0 — 1 — 2 — длитель-
ность прямого хода луча) и справа налево в интервале (точки
2 — 3 — длительность обратного хода луча). При этом скорость
движения луча в обратном направлении много больше (обычно
луч при этом гасится), чем в прямом направлении.
С помощью напряжения развертки, подаваемого на горизон-
тально отклоняющие пластины электронно-лучевой трубки (пла-
стины X) осциллографа, на экране можно наблюдать исследу-
емый сигнал, поступающий на пластины Y и изменяющийся во
времени, т.е. развернугый во времени.
206
Автоколебательная развертка
применяется для исследования
периодических сигналов, а так-
же импульсных сигналов с не-
большой скважностью
Она также используется при
внутренней синхронизации. На
рис. 13.3 представлен пример
применения автоколебательной
развертки. На схеме рис. 13.3, а
показаны исследуемый сигнал Uc
и развертывающее синхронное
напряжение tZp, а на схеме рис.
13.3, б — наблюдаемая осцил-
лограмма на экране.
Автоколебательная развертка
не обеспечивает визуализацию
непериодических сигналов и
практически бесполезна при на-
блюдении периодических им-
пульсных сигналов с большой
скважностью Q (это связано с i
Рис. 13.2. Диаграмма, поясняющая
создание временного масштаба по
горизонтальной оси экрана:
О, 7, 2 и 3 — точки, показывающие
длительность прямого и обратного хода
луча
и, что передний и задний фрон-
ты импульса почти сливаются). В этих случаях необходимо исполь-
зовать ждущую развертку.
Схема принципа действия ждущей развертки и наблюдаемая
осциллограмма на экране представлены на рис. 13.4. Здесь генера-
тор развертки запускается при поступлении импульсов Uc. Если
длительность развертки, равная t2 - /ь соизмерима с длительно-
Рис. 13.3. Пример применения автоколебательной развертки:
а — схема; б — наблюдаемая осциллограмма на экране; 7 — начало развертки;
2 — конец развертки
207
Рис. 13.4. Принцип действия ждущей развертки:
а — схема; б — наблюдаемая осциллограмма на экране; 1 — начало развертки;
2 — конец развертки
стью исследуемого импульса, то его изображение на экране ото-
бражается в полной мерс. Для улучшения полноты отображения
сигналов в осциллографах начало ждущей развертки несколько
задерживается относительно фронта (переднего скачка) импуль-
са Uc. Особенно это важно, если фронт импульса очень короткий.
В этом случае он может не отобразиться на осциллограмме. Для
наблюдения короткого фронта сигнала Uc его задерживают по вре-
мени в канале Y с помощью линии задержки (на рис. 13.4 она
изображена в виде штриховых импульсов Щ. Осциллограмма та-
кой развертки также изображена штриховой линией на экране на
рис. 13.4, б.
Однократная развертка применяется при фотографировании с
экрана осциллографа неповторяющихся сигналов. В этом режиме
генератор развертки запускается исследуемым сигналом только
один раз.
Рассмотрим получение на экране ЭЛТ круговой развертки. Для
этого на пластины Y надо подать синусоидальный сигнал
Uy - U sin(coZ) = U sin(2rcr/T),
а на пластины X — аналогичный по форме сигнал, но задержан-
ный по времени на четверть периода (по фазе на <р = 90°), т.е.
сигнал
Ux = U sin [со(/ - Т/4)] = ~U cos(wr).
Схема осциллограммы круговой развертки представлена на
рис. 13.5, а, а вил круговой развертки на экране осциллографа —
на рис. 13.5, б.
Под действием напряжений развертки Uy и Ux луч формирует
на экране осциллографа окружность за время, равное периоду Т
Положение луча на экране в момент времени t = 0 отмечено точ-
кой 0, а в момент — точкой 7 и т.д. Если амплитуды сигналов Uy
208
Рис. 13.5. Осциллограмма круговой развертки:
а — схема; б — вил на экране; 0, 7, 2, 3 и 4 — точки на оси текущего времени
и Ux не равны, то получается эллиптическая развертка, т.е. на
экране будет сформирован эллипс. Например, при Uy < Ux боль-
шая ось эллипса располагается по горизонтали, а малая — по
вертикали.
Электронно-лучевая трубка. Способ получения сфокусирован-
ного луча и процесс управления лучом можно пояснить с помо-
щью схемы, представленной на рис. 13.6.
Как уже отмечалось, простейшая однолучевая трубка является
вакуумным стеклянным баллоном, в котором расположены: по-
догревный катод К; модулятор (сетка) М; фокусирующий анод
Аь ускоряющий анод А2; две пары взаимно перпендикулярных
отклоняющих пластин, где X — горизонтальные и У — вертикаль-
ные пластины. Внутренняя поверхность дна баллона (экран) по-
крыта люминофором, светящимся под действием бомбардировки
электронами. Совокупность электродов К, М, Аь Л2 называется
электронной пушкой, которая
испускает узкий пучок электро-
нов. Для этого на электроды по-
даются напряжения, пример-
ные величины которых приве-
дены на рис. 13.6.
Электронное облако, име-
ющееся около нагретого катода,
под воздействием высокого по-
тенциала анода А2 ускоряется и
устремляется к экрану. Интенсив-
ность электронного луча регули-
руется потенциалом сетки М, а
его фокусировка — анодом А,.
Основными характеристика-
ми электронно-лучевой трубки
Рис. 13.6. Схема управления лучом
элт
209
являются чувствительность, полоса пропускания частот, длитель-
ность послесвечения и площадь экрана.
Чувствительность трубки определяется по формуле
где — отклонение луча на экране трубки под воздействием на-
пряжения (7Г, приложенного к паре отклоняющих пластин. Обыч-
но чувствительность 5Т составляет около 1 мм/В.
С увеличением частоты исследуемого сигнала чувствительность
трубки падает. Верхняя граница полосы пропускания частот ЭЛТ
устанавливается на уровне, где чувствительность составляет при-
мерно 0,7 номинального значения. Для универсальных осцилло-
графов широкого использования эта частота достигает 100 МГц.
В современных осциллографах часто применяются многолуче-
вые трубки, в которых увеличено количество электродов. Более
практичным оказывается использование однолучевого осцилло-
графа в режиме поочередной подачи двух сигналов на отклоня-
ющие пластины (двухканальные осциллографы). В этом случае за
счет эффекта послесвечения трубки и свойств глаза на экране од-
новременно наблюдается изображение двух сигналов, хотя они
подаются поочередно.
Одним из важных параметров ЭЛТ является площадь рабочей
части экрана, в пределах которой искажения осциллограммы яв-
ляются минимальными. Для улучшения использования площади
экрана современные ЭЛТ имеют экран прямоугольной формы.
К определяющим параметрам ЭЛТ относятся следующие све-
товые характеристики:
• диаметр светового пятна, который при оптимальной яркости
определяет разрешающую способность ЭЛТ;
• максимальная яркость свечения экрана, зависящая от плотнос-
ти электронного пучка и регулируемая путем изменения отрица-
тельного напряжения на модуляторе;
• цвет свечения экрана. Чаще всего используются зеленый и жел-
тый цвета, которые обеспечивают наименьшую утомляемость глаз;
для фотографирования с экрана применяют ЭЛТ с голубым све-
чением, к которому более чувствительны фотоматериалы;
• время послесвечения. Для улучшения визуального восприятия
осциллограммы время свечения экрана должно превышать время
воздействия на него электронов. Если требуется наблюдать процес-
сы с частотой более 10 Гц, то используются экраны с послесвечени-
ем со средней продолжительностью до 100 мс. Для фоторегистрации
более предпочтительным является люминофор с малым (0,01 с)
послесвечением. При исследовании медленно меняющихся процес-
сов используются экраны, имеющие послесвечение более 0,1 с.
210
Как уже отмечалось, зависимость изменения напряжения раз-
вертки при прямом ходе луча должна быть линейной, иначе могут
появиться искажения исследуемого сигнала, которые показаны
на рис. 13.7, а. Параметр [^.показывает напряжение на вертикаль-
ной пластине У; Up — напряжение развертки; т, т', т" — длитель-
ность импульсов и производные аг длительности импульсов.
Нелинейность рабочего участка развертки прямого хода элек-
тронного луча характеризуется коэффициентом нелинейности
fdU^
\dl *-100,
dt
к—______
(dU,
<dt э*
физический смысл которого виден из рис. 13.7, б. Коэффициент
нелинейности показывает относительное изменение скорости на-
растания напряжения в начале Н
(dUp\
dt 4
\ л
и конце К
ио
<dt 1
ра-
бочего хода развертки. Величина коэффициента нелинейности ра-
Рис. 13.7. Искажения осциллограммы
сигнала:
а — искажение вследствие нелинейнос-
ти развертки; б — иллюстрация к поня-
тию коэффициента нелинейности; в —
начало развертки; г — конец развертки
211
бочего участка развертки должна быть не более 1 %. На рис. 13.7, в
показана схема начала развертки, а на рис. 13.7, г — схема конца
развертки.
Перечисленным выше требованиям отвечает только идеальный
генератор развертки, упрощенная структурная схема которого по-
казана на рис. 13.8.
От источника тока / заряжается (/мр) бесконечно большая ем-
кость С в течение времени 7’пр, а затем на протяжении очень ко-
роткого времени при замкнутом ключе К происходит разряд (/раз).
Время замыкания ключа соответствует времени обратного хода
Тобр. Тогда напряжение развертки t/p для рабочего участка можно
записать следующим образом:
~ UС = £ J Лар^ = 4ар ^|0 ₽,
т.е. имеет место линейная зависимость.
На рис. 13.9 изображена упрощенная структурная схема реаль-
ного генератора развертки.
Для схемы на рис. 13.9 изменение напряжения на конденсаторе
в течение рабочего времени определяется по формуле
С7с=£(1-е^),
где Е —источник напряжения; т = RC.
Другими словами, изменение напряжения на конденсаторе
носит экспоненциальный характер. Наиболее линейным участком
этой зависимости является начальный участок. Поэтому для полу-
чения линейно изменяющейся развертки выбирают начальный
участок изменения напряжения на конденсаторе при т » Гпр. Это
значит, что режим работы источника напряжения Е должен при-
ближаться к режиму работы генератора тока.
Практически линейную развертку на экране при ограничен-
ном уровне питающего напряжения Е можно создать в схемах с
интеграторами на операционном усилителе (рис. 13.10).
Рис. 13.8. Упрощенная структур-
ная схема идеального генерато-
ра развертки
Рис. 13.9. Упрощенная структур-
ная схема реального генерато-
ра развертки
212
Рис. 13.10. Генератор развертки на
операционном усилителе:
7 — операиионный усилитель
Рис. 13.11. Упрощенная схема за-
поминающей ЭЛТ:
1 — экран; 2 — мишень; 3 — коллек-
тор
Поскольку в схеме рис. 13.10 в силу идеальности операционно-
го усилителя ток = 0, то зависимости для токов iR и ic будут
иметь следующий вид:
; _ ^ВХ . ; _
Приравняв эти токи, после несложных преобразований получим
1 t । t
“вых = - 7777 / Umdt =------f umdt,
о 0
т.е. данное устройство на операционном усилителе будет осущест-
влять линейное интегрирование напряжения развертки. На схеме
изображены: операционный усилитель 1, R — резистор, iR — ток,
проходящий через резистор; С7ВХ и — напряжение развертки
на входе и выходе; С — конденсатор; ic — ток, проходящий через
конденсатор; UQ — эталонное напряжение.
Запоминающие электронно-лучевые трубки применяются при ис-
следовании одиночных сигналов и сигналов с большой скважно-
стью. Эти трубки содержат те же элементы, что и ЭЛТ широкого
применения, но они еще дополнительно оснащаются узлом па-
мяти и системой воспроизведения изображения.
На рис. 13.11 изображена упрошенная схема запоминающей ЭЛТ.
Узел памяти состоит из двух сеточных электродов, расположен-
ных параллельно экрану 7. Непосредственно у экрана находится
мишень 2, покрытая слоем диэлектрика. Поверх мишени разме-
шен другой электрод в виде сетки с более крупной структурой —
коллектор 3.
Изображение записывается электронным лучом высокой энер-
гии (записывающий луч). Электроны луча оседают на мишени,
причем количество заряда будет пропорционально току луча. При
213
перемещении луча на мишени создается потенциальный рельеф,
повторяющий форму осциллограммы. После прекращения действия
сигнала потенциальный рельеф мишени сохраняется длительное
время. Наблюдение записанного изображения обеспечивает вос-
производящая система, состоящая из катода К' с подогревате-
лем, модулятора М' и анода Д2' (см. рис. 13.11).
Катод трубки К создает поток электронов малой энергии, плот-
ность которого регулируется модулятором М. В результате форми-
руется широкий расфокусированный пучок электронов, который
равномерно облучает мишень. Потенциал мишени подобран та-
ким образом, чтобы при отсутствии записанного изображения
медленные электроны воспроизводящего пучка не могли через
нее пройти. При наличии потенциального рельефа в этих точках
мишени часть электронов проходит к экрану, вызывая таким об-
разом его свечение. На экране появляется осциллограмма, повто-
ряющая форму потенциального рельефа мишени. Стирание запи-
си осуществляется за счет подачи на коллектор отрицательного
импульса, выравнивающего потенциал мишени.
В режиме работы такой ЭЛТ можно выделить три момента:
1) наблюдение сигнала без записи, которое характеризуется не-
большим положительным напряжением 6/кол = 50 В на коллекторе,
нулевым потенциалом = 0 на мишени, прозрачностью мишени
для быстролетяших электронов;
2) режим записи. Он имеет напряжение на коллекторе £/кол = 50 В,
положительный потенциал = 30 В на мишени, меньшую про-
зрачность мишени. В результате быстролетяшие электроны выбива-
ют вторичные электроны и создают на мишени зарядный положи-
тельный рельеф, который может сохраняться длительное время;
3) режим воспроизведения. Его параметрами являются нулевой
потенциал на мишени (/м =0, кроме тех мест, где записан рельеф;
облучение мишени широким потоком медленно летящих элек-
тронов с воспроизводящей системы. Для этого потока мишень про-
зрачна только в местах рельефа, где записан сигнал.
Основными параметрами запоминающих ЭЛТ являются:
• яркость свечения экрана в режиме воспроизведения. Она регули-
руется напряжением модулятора системы воспроизведения и мо-
жет быть высокой, так как воспроизведение производится непре-
рывно;
• время воспроизведения изображения. Оно в основном ограничи-
вается устойчивостью потенциального рельефа к ионной бомбар-
дировке. В современных ЭЛТ время воспроизведения может дости-
гать десятков минут;
• время сохранения записи. Оно определяется при снятом напря-
жении с ЭЛТ;
• скорость записи. Этот параметр характеризует быстродействие
ЭЛТ в режиме запоминания. Он зависит от времени, необходимо-
го
го для создания потенциального рельефа достаточной величины.
Современные запоминающие ЭЛТ имеют скорость записи сиг-
налов от 2,5 до 4000 км/с.
Матричная индикаторная панель. Одним из последних дости-
жений в области отображающих устройств является матричная ин-
дикаторная панель. Она представляет собой совокупность распо-
ложенных определенным образом отдельных дискретных излу-
чателей (газоразрядных, жидкокристаллических, твердотельных
и т.д.). На рис. 13.12 представлена конструкция матричной газо-
разрядной панели.
Данное матричное устройство содержит две стеклянные пласти-
ны 7, на внешние поверхности которых напылены тонкие токопро-
водящие полоски — аноды 2 и катоды 3. Аноды располагаются на
лицевой пластине, через которую проходит световое излучение, и
поэтому их делают прозрачными. Между пластинами размещается
диэлектрическая матрица 4 с отверстиями, образующими газораз-
рядные (или другие) ячейки в точках пересечения электродов. Па-
нель заполняется гелий-неоновой газовой смесью и затем гермети-
зируется. Изображение исследуемого сигнала воспроизводится за счет
поочередного свечения газоразрядных ячеек. Для этого со схемы уп-
равления панелью в каждый момент времени на аноды и катоды
пластин подаются соответственно положительный и отрицательный
импульсы напряжения поджига. Номер анода, на который подается
импульс напряжения поджига, определяет строку развертки, а но-
мер катода — столбец. На их пересечении располагается светящаяся
ячейка панели. Такой принцип управления лучом развертки называ-
ют матричным. На практике он реализуется цифровыми методами и
устройствами.
К достоинствам матричных индикаторных панелей следует отне-
сти малые габариты, небольшой вес, низкие напряжения питания
и отсутствие геометрических искаже-
ний. Цифровой принцип управления
позволяет достаточно просто совмес-
тить изображение сигнала с цифровой
и буквенной индикацией его парамет-
ров на одном экране.
К недостаткам матричных инди-
каторных панелей следует отнести
сложность схемного решения, срав-
нительно невысокую разрешающую
способность и низкое быстродей-
ствие.
Запоминающие цифровые осцил-
лографы. В последние годы в изме-
рительной технике широко применя-
ются запоминающие цифровые ос-
Рис. 13.12. Матричная газораз-
рядная панель:
1 — стеклянные пластины; 2 —
аноды; 3 — катоды; 4 — матрица
215
циллографы (ЗЦО). Упрошенная структурная схема запоминаю-
щего цифрового осциллографа приведена на рис. 13.13.
Такой осциллограф может работать в двух режимах. Так, если
сдвоенный переключатель П находится в положении 7, то схема
представляет собой обычный универсальный осциллограф, а если
в положении 2, то схема работает как запоминающий цифровой
осциллограф (см. рис. 13.13). Его принцип действия заключается в
следующем.
Исследуемый сигнал Uz(t) со входа Y подается через аттеню-
атор на информационный вход аналого-цифрового преобразова-
теля (АЦП); на АЦП с контроллера (управляющего устройства)
также поступают тактовые импульсы UTc периодом следования Т.
При поступлении в некоторый момент времени /, одного из им-
пульсов АЦП преобразует амплитуду сигнала £/с(/,) в двоичный
код Ц/,), т. е. в набор уровней 0 и 1. В конце такого преобразования
АЦП выдает на контроллер соответствующий сигнал. Получен-
ный таким образом цифровой код подается в определенную ячей-
ку запоминающего устройства (ЗУ).
Вход внешней
Вход Y синхронизации
Рис. 13.13. Упрошенная структурная схема запокгинаюшего цифрового ос-
циллографа
216
За время исследования сигнала Uc(t) в ЗУ накапливаются коды
его амплитуд 14(6), £4(6 + Г), £4(6 + 2Г) и т.д. В запоминающем
устройстве они могут храниться сколь угодно долго, поскольку
оно, как известно, представляет собой энергонезависимое уст-
ройство. Для воспроизведения хранимой информации по команде
контроллера из памяти ЗУ выбираются (считываются) коды в тре-
буемой последовательности и заданном темпе и подаются на циф-
ровой аналоговый преобразователь, который из каждого кода фор-
мирует соответствующее ему напряжение. Эти напряжения пере-
даются через усилитель на пластины У. В результате осциллограм-
ма представляет собой набор светящихся точек. Для получения
непрерывного изображения исследуемого сигнала после запоми-
нающего устройства устанавливают блок сглаживания (на рис. 13.13
он не показан).
К достоинствам ЗЦО относятся неограниченное время хране-
ния информации, широкий диапазон скорости ее считывания,
возможность замедленного воспроизведения отдельных участков
запомненного сигнала, яркие и четкие осциллограммы, возмож-
ность обработки информации в цифровом виде на ЭВМ или внут-
ри самого осциллографа.
Основной недостаток ЗЦО состоит в том, что большинство из
них могут запоминать сигналы, имеющие частоту до 1 или 10 МГц,
так как они обладают сравнительно невысоким быстродействием
АЦП.
Электронно-лучевая трубка как устройство отображения за-
поминающего осциллографа имеет следующие недостатки: боль-
шие габариты (длина), высокие питающие напряжения, срав-
нительно малую долговечность, невысокую механическую проч-
ность. Поэтому в последние годы во многих ЗЦО стали исполь-
зоваться плоские матричные газоразрядные и жидкокристалли-
ческие панели.
Двухканальные и двухлучевые осциллографы. Двухканальные
осциллографы имеют два идентичных канала вертикального от-
клонения (вход Kj и вход У2) и электронный переключатель (ЭК),
который может поочередно подавать выходные сигналы каналов
на одни и те же пластины Y.
В зависимости от управления работой электронного переклю-
чателя можно реализовать следующие основные режимы работы
осциллографа:
одноканальный режим (на экране виден один сигнал, подава-
емый на вход Kj или на вход У2);
поочередный режим (на экране видны одновременно оба сигна-
ла за счет переключения электронного переключателя во время
каждого обратного хода развертки).
На основе двухканального принципа построения создаются мно-
гоканальные осциллографы с числом каналов до восьми.
217
Двухлучевые осциллографы имеют два канала Y и специаль-
ную двухлучевую ЭЛТ, в состав которой входят две электронные
независимые пушки и две системы отклоняющих пластин. В этом
случае горизонтальная развертка электронных лучей — общая (от
генератора развертки), а вертикальная — каждая от «своего» ка-
нала X Это дает возможность наблюдать на экране осциллограм-
мы двух сигналов (без их периодического прерывания, как в двух-
канальных). Такие осциллографы намного сложнее и значительно
дороже двухканальных.
13.3. Скоростные и стробоскопические осциллографы
При наблюдении и исследовании коротких импульсов (сигна-
лов наносекундного диапазона) и колебаний СВЧ-диапазона воз-
никают проблемы, которые усложняют применение обычных ос-
циллографов. Специалисты выделяют шесть основных причин,
которые существенно препятствуют применению для этих целей
универсальных осциллографов.
1. Возникающие в цепях паразитные резонансы, обусловлен-
ные емкостью пластин и индуктивностью подводящих проводов,
включая вводы пластин. При этом необходимо помнить, что па-
разитная резонансная частота должна быть намного больше выс-
шей гармоники исследуемого сигнала.
2. Влияние емкости пластин ЭЛТ на крутизну фронта исследу-
емого импульса.
3. Влияние конечного времени пролета электронов между пла-
стинами ЭЛТ, которое должно находиться в диапазоне от 1 до
10 нс. Если за время нахождения электрона между пластинами
сигнал изменится, то отклонение электронного луча может быть
непредсказуемым.
4. Следует иметь очень широкую полосу пропускания канала X
Полоса пропускания для передачи прямоугольного импульса мо-
жет быть приближенно рассчитана по формуле 2/ти. Тогда при
длительности импульса ти = 1 нс полоса пропускания д/= 2 ГГц.
5. Необходимость наблюдения наносекундных импульсов и ко-
лебаний СВЧ требует высокой скорости движения луча по экрану.
Например, для получения изображения импульса длительностью
ти = 5 нс на экране ЭЛТ шириной L = 100 мм скорость движения
луча должна быть порядка V= 20 000 км/с, где V = — — скорость
ти
движения луча, L — размер изображения на экране.
6. Изображение сигнала на экране осциллографа может ока-
заться очень бледным, поскольку электронный луч перемеща-
ется по экрану с огромной скоростью. При конструировании
218
скоростных осциллографов необходимо учитывать все изложен-
ное выше.
Поэтому в скоростных осциллографах, работающих в реаль-
ном масштабе времени, применяются специальные ЭЛТ, т.е. труб-
ки бегущей волны, которые не обеспечивают получение высокой
чувствительности канала вертикального отклонения (Sy « 1 мм/В).
Создание высокоскоростных разверток также является проблемой,
связанной с необходимостью поднимать напряжение развертки
до нескольких сотен вольт. Существующие серийные скоростные
осциллографы имеют верхнюю граничную частоту не более 10 ГГц.
При исследовании быстротекущих процессов с малой ампли-
тудой напряжения описанные ранее скоростные осциллографы
не пригодны из-за низкой чувствительности. Этого недостатка ли-
шены стробоскопические приставки (преобразователи) к универ-
сальному осциллографу.
Стробоскопический метод осциллографирования дает возмож-
ность существенно уменьшить скорость развертки по сравнению с
той, которая требуется при непосредственном наблюдении ис-
следуемого сигнала на скоростном осциллографе. Стробоскопи-
ческие осциллографы позволяют вести исследование очень ко-
ротких периодических импульсов и высокочастотных колебаний.
Они обладают большой чувствительностью, т.е. их входные сиг-
налы могут иметь малую амплитуду.
Стробоскопическим называют электронный осциллограф, в ко-
тором для получения на экране ЭЛТ изображения сигнала ис-
пользуется отбор его мгновенных значений (выборки сигнала) и
временное преобразование, т.е. изображение сигнала дается в уве-
личенном масштабе времени.
Скорость развертки уменьшается за счет трансформации мас-
штаба времени. На экране осциллографа появляется изображение,
по форме подобное исследуемому сигналу, но в увеличенном вре-
менном масштабе. Стробоскопический метод реализуется за счет
использования амплитудно-импульсной модуляции (ДИМ) ис-
следуемого сигнала.
Схема преобразователя и временные диаграммы, поясняющие
принцип работы стробоскопического осциллографа, приведены
на рис. 13.14.
На рис. 13.14 исследуемые импульсы Uc, длительностью ти пе-
риодом повторения Гс, подаются вместе со специальными (очень
короткими) строб-импульсами U2 (они играют роль переносчи-
ков информации о сигнале) на стробоскопический смеситель пре-
образователя (см. рис. 13.14, а). Период следования строб-импуль-
сов
ГС1Р = Тс + ДГ,
где дг — шаг считывания.
219
a
Рис. 13.14. Принцип работы стробоскопического осциллографа:
а — схема преобразователя; б — временные диаграммы; /...8 — точки импульсов
Длительность Д/ выбирается из условия
где п — целое число.
В результате такого преобразования оказывается, что первый
строб-импульс совпадает с началом первого импульса Uc (1), вто-
рой строб-импульс сдвинут относительно начала второго импуль-
са Uc (2) на Дг, третий строб-импульс сдвинут относительно на-
чала третьего импульса Uc (3) на 2ЛГ и т.д. (см. рис. 13.14, б).
На выходе смесителя появляются короткие импульсы t/3 (на
рис. 13.14, б изображены жирными линиями с точками), которые
совпадают по времени со строб-импульсами (1/2)5 но имеют амп-
литуду, равную амплитуде исследуемых импульсов Uc в момент
поступления строб-им пульсов U2. Поэтому импульсы t/3 называют
строб-импульсами, промодулированными по амплитуде исследуемым
сигналом Uc (см. рис. 13.14, б).
Диаграмма сигнала 6/3, огибающая промодулированные сгроб-
импульсы (на рис. 13.14, б она представлена жирной штриховой
линией) практически повторяет форму исследуемых импульсов Uz,
но по сравнению с ними она растянута во времени. Импульсы U3
усиливаются, затем они расширяются до длительности, мень-
шей 7с, и подаются через усилитель канала Y на отклоняющие
220
пластины стробоскопического осциллографа. В результате на экра-
не осциллографа с обычными ЭЛТ и пилообразной разверткой на-
блюдается форма импульсов Uc.
Степень растянутости наблюдаемого импульса во времени (вре-
менное преобразование) характеризуется коэффициентом транс-
формации масштаба времени
К -
Ктр“ т ’
где п — число строб-импульсов, участвующих в считывании им-
пульса Uc. Поскольку п = —, то Ктр =
AZ Д/
В современных осциллографах Ктр достигает десятков тысяч,
что при обычных развертках позволяет наблюдать форму наносе-
кундных импульсов.
Полоса пропускания частот современных стробоскопических
осциллографов составляет несколько гигагерц, и уровень входно-
го сигнала находится в пределах от нескольких милливольт до де-
сятков вольт.
13.4. Цифровые осциллографы
Цифровые осциллографы обеспечивают одновременное наблю-
дение на экране сигнала и получение численного значения его
параметров с большей точностью по сравнению с традиционным
способом получения количественных данных непосредственно с
экрана осциллографа. Это обусловлено тем, что измерение пара-
метров сигнала осуществляется непосредственно на входе цифро-
вого осциллографа, а не на выходе канала вертикального откло-
нения, где на сигнал накладываются все ошибки канала, эти ошиб-
ки могут достигать до 10 %.
С помощью цифровых осциллографов измеряются следующие
параметры: амплитуда сигнала, его частота, а также длитель-
ность импульса. Однако измерением этих параметров не ограни-
чиваются возможности цифровых осциллографов. Сопряжение
цифровых осциллографов с микропроцессорами позволяет оп-
ределять действующее значение напряжения сигнала и даже вы-
числять и отображать на экране преобразование Фурье для лю-
бого вида сигнала.
В цифровых осциллографах осуществляется полная цифровая
обработка сигнала. Поэтому здесь для отображения информации,
как правило, используются последние достижения в области соз-
дания индикаторных панелей.
221
В цифровых осциллографах при отображении результатов из-
мерения возможны три режима работы.
1. Одновременное наблюдение динамического изображения
сигнала на экране с высвечиванием на световом табло его чис-
ленных параметров.
2. Оператор подводит к изображению сигнала на экране свето-
вые метки так, чтобы отметить измеряемый параметр, и по циф-
ре на соответствующей регулировке определяет величину интере-
сующего параметра.
3. Использование специальных кинескопов (например, матрич-
ных индикаторов) и растрового метода для формирования изо-
бражения исследуемых сигналов и цифровой информации.
В современных цифровых осциллографах установка оптималь-
ных размеров изображения на экране трубки выполняется авто-
матически. Рассмотрим упрощенную структурную схему цифро-
вого осциллографа на рис. 13.15 и его параметры.
В состав структурной схемы цифрового осциллографа входят:
аттенюатор входного сигнала; усилители вертикального и гори-
зонтального отклонений; измерители амплитуды и временных ин-
тервалов; интерфейсы сигнала и измерителей; микропроцессор-
ный контроллер; генератор развертки; схема синхронизации и
электронно-лучевая трубка.
Техническими характеристиками типового цифрового осцилло-
графа являются:
Рис. 13.15. Упрощенная структурная схема цифрового осциллографа
222
• полоса пропускания частот — 0...50 МГц;
• коэффициенты отклонения — 0,002... 10 В/дел.;
• коэффициенты развертки — 20 нс/дел....20 мс/дел.;
• погрешность коэффициентов отклонения и развертки —
2...4%;
• погрешность цифровых измерений — 2...3 %;
• размер экрана — 80x100 мм.
К функциональным возможностям цифровых осциллографов
относятся:
• автоматическая установка размеров изображения;
• автоматическая синхронизация;
• разностные измерения между двумя метками;
• автоматическое измерение размаха, максимума и минимума сиг-
налов, периода, длительности, паузы, фронта и спада импульсов;
• вход в канал общего пользования.
Габаритные размеры корпуса цифрового осциллографа нахо-
дятся в пределах 335 х 280 х 566 мм; масса составляет около 14 кг;
диапазон рабочих температур — в интервале от -10 до +50 °C.
Из структурной схемы рис. 13.15 видно, что амплитудные и
временные параметры исследуемого сигнала определяются с по-
мощью встроенных в прибор измерителей. На основании данных
измерений микропроцессорный контроллер производит вычис-
ление требуемых коэффициентов отклонения и развертки и через
интерфейс вводит эти коэффициенты в аппаратную часть кана-
лов вертикального и горизонтального отклонений. Это обеспечи-
вает стабильность размеров изображения по вертикали и горизон-
тали и автоматической синхронизации сигнала.
Кроме того, микропроцессорный контроллер также опраши-
вает положение органов управления на передней панели, и дан-
ные опроса после кодирования снова поступают в контроллер,
который через интерфейс включает соответствующий режим ав-
томатического измерения. Результаты измерений отображаются на
отдельном световом табло (оно может быть встроено в экран труб-
ки), причем амплитудные и временные параметры сигнала отоб-
ражаются одновременно.
13.5. Методика получения осциллограмм непрерывных
и импульсных сигналов
При выборе осциллографа в первую очередь следует обращать
внимание на его технические характеристики: на частотный диа-
пазон, чувствительность, размер экрана. При этом изображение
должно занимать центральную часть экрана и составлять 70...80 %
его площади. В цифровых приборах это требование обычно выпол-
няется автоматически. Диаметр луча должен быть минимальным
223
при достаточной его яркости. Следует также обращать внимание
на входные параметры осциллографа. Так, у некоторых осцил-
лографов входное сопротивление находится в пределах 1 МОм,
что может оказывать шунтирующее действие на высокоомную ис-
следуемую схему. Такое же неблагоприятное действие оказывает и
входная емкость, которая вместе с емкостью соединительных про-
водов может составить несколько десятков пикофарад. При изме-
рении импульсов и напряжений высоких частот для подсоедине-
ния исследуемой схемы должны использоваться специальные вы-
сокочастотные кабели.
Измерение амплитудных значений напряжения. В универсаль-
ных осциллографах используется метод измерения амплитуд сиг-
налов с помощью масштабной сетки, помешенной на экране ос-
циллографа. Цена деления сетки устанавливается заранее с помо-
щью калибратора амплитуды. Пример определения параметров
сигнала с помощью масштабной сетки представлен на рис. 13.16.
Параметры импульсов определяются следующим образом:
С/р = Cyly — размах (амплитуда импульса);
Т = CXLX — период следования импульсов;
тл = СЛ — длительность импульса;
Сх — цена деления сетки по горизонтали, с/дел.;
Су — цена деления сетки по вертикали, В/дел.,
где 1У, Lxy 1Х выражены в делениях сетки.
Погрешность измерения амплитуды сигнала при этом методе
измерения составляет 4...7 %.
Существуют способы, при помощи которых можно повысить
точность измерения амплитуды исследуемого сигнала, например
при использовании компенсационных методов. Эти методы чаше
всего применяются только в цифровых осциллографах, что по-
Рис. 13.16. Определение пара-
метров сигнала с помощью
масштабной сетки
зволяст получать численные значе-
ния измеряемых параметров с по-
грешностью 1... 2 %.
Измерение временных параметров
сигнала. В отличие от частотомеров и
измерителей временных интервалов с
помощью осциллографов можно из-
мерять параметры сигналов сложной
временной структуры, например сту-
пенчатых сигналов или сигналов кодо-
вой последовательности. Можно также
измерять параметры случайных и пе-
реходных процессов. Наиболее простым
методом измерения является метод ка-
либрованной развертки, или калибро-
ванных меток (рис. 13.17). На схеме
Uc — напряжение исследуемого сиг-
224
нала; UK — напряжение калиб-
рованного сигнала; ти — длитель-
ность импульса.
Реальная погрешность дан-
ного метода находится в пре-
делах 10% и зависит от коли-
чества меток. Калиброванные
метки известной частоты нано-
сятся на изображение сигнала
путем модуляции яркости луча,
т.е. подачи на сетку ЭЛТ напря-
жения известной частоты f0 или
периода колебания То = 1//о. При
этом Тс = л То, где п — количе-
ство калиброванных меток.
Разные способы повышения
Рис. 13.17. Определение временных
интервалов с помощью калибро-
вочных меток
точности этого метода также используются и в цифровых осцил-
лографах. За счет этого в некоторых случаях можно получить по-
грешность менее 1 %.
В ряде случаев сравнение частот двух гармонических сигналов
производят методом интерференционных фигур (фигур Лиссажу).
С этой целью колебания известной (образцовой) частоты То пода-
ются на один вход осциллографа (например X, собственная раз-
вертка осциллографа отключается). На второй вход поступают ко-
лебания неизвестной частоты /изм. При этом частоту образцового
генератора подстраивают так, чтобы на экране осциллографа по-
лучилась простейшая устойчивая фигура, примерные виды кото-
рой приведены в табл. 13.1.
Точность такого метода определения частоты оказывается дос-
таточно высокой и определяется стабильностью образцового ге-
нератора. Однако получение и наблюдение таких фигур является
достаточно сложной измерительной задачей.
Таблица 13.1
Интерференционные фигуры при разных фазовых сдвигах между сигналами
225
Соотношение частот двух гармонических колебаний может быть
определено путем деления числа точек пересечения по вертикали
на число точек пересечения по горизонтали.
Данная процедура иллюстрируется рис. 13.18, где соотношение
составляет
А =«У = 2 = 1
4 пх 4 2 ’
Получение осциллограмм импульсных сигналов. При измерении
импульсных сигналов особое значение имеет правильное опреде-
ление формы и параметров фронтов импульса. Основными влия-
ющими факторами на правильное воспроизведение импульсного
сигнала являются:
• частотный диапазон канала вертикального отклонения
где /в и /н — верхняя и нижняя граничные частоты канала;
• переходная характеристика осциллографа.
Частотные свойства осциллографа определяются амплитудно-
частотной характеристикой (АЧХ) — зависимостью размера изо-
бражения гармонического сигнала от его частоты. Амплитудно-
частотная характеристика имеет полосу пропускания частот, ко-
торая определяется верхней граничной частотой отсчитывае-
мой на уровне 0,707 от значения АЧХ на низких частотах. Среди
других параметров следует отметить рабочий диапазон АЧХ, в
пределах которого ее неравномерность не превышает погрешнос-
ти измерения напряжения для данного осциллографа. Этот пара-
метр определяет частотные границы измерения амплитуд гармо-
нических сигналов с заданной точностью.
Не менее важным параметром осциллографов является их пере-
ходная характеристика, вид которой показан на рис. 13.19. К пара-
метрам переходной характеристики относится время нарастания
фронта тно— интервал, в течение которого луч проходит от 0,1 до
0,9 установившегося значения (уровня амплитудного значения на-
пряжения £7тах) переходной характерис-
тики. Плоская часть переходной характе-
ристики может быть с выбросом или с
осцилляциями. Для оценки выбросов ис-
пользуются дополнительные параметры:
время нарастания тно, время установле-
ния фронта Тус, отсчитываемое от уровня
0,1 до момента уменьшения осцилляций
до заданного уровня, и выброс амплиту-
Рис. 13.18. Определение ды 8. Время нарастания является основ-
соотношения частот ным параметром канала Yосциллографа.
226
Для исследования кратковре-
менных импульсов требуется ос-
циллограф, у которого время
нарастания должно быть не бо-
лее 0,3 длительности сигнала.
Учитывая изложенное выше,
верхняя граница частотного диа-
пазона определяются по формуле
При этом длительность фрон-
та импульса (рис. 13.20) уточня-
ется в соответствии со следу-
ющим выражением:
Рис. 13.19. Переходная характерис-
тика осциллографа
“ у^изм ^н.о»
где тизм — измеренное значение длительности фронта, тн о — вре-
мя нарастания фронта, определяемое по переходной характерис-
тике осциллографа (не более 0,1...0,3 длительности сигнала).
От нижней граничной частоты/, зависит величина скоса Аитлх
вершины импульса (см. рис. 13.20). Эта граничная частота может
быть определена из формулы
/ £ --и -
У И /ч ,
2лти
где 6И — допустимая относительная величина спада вершины им-
пульса, которая определяется так:
Зи =
Англах
^Лг.ах
При получении осциллограмм им-
пульсов со значительной скважнос-
тью, т.е. коротких импульсов, имею-
щих большой период повторения,
используется ждущая развертка.
В заключение необходимо отметить,
что источник питания осциллографа с
электронно-лучевой трубкой обычно
состоит из двух частей: из высоковоль-
тной части, выдающей необходимые
напряжения для питания электродов
ЭЛТ, и низковольтной части для пи-
тания остальных узлов осциллографа.
Рис. 13.20. Искажение формы
прямоугольного импульса
227
Контрольные вопросы
1. Какова блок-схема универсального осциллографа и принцип ее ра-
боты?
2. Какие существуют виды разверток?
3. Для чего предназначена ждущая развертка?
4. Расскажите о структурной схеме цифрового осциллографа и прин-
ципе ее работы.
5. В чем состоит методика измерения напряжений с помощью осцил-
лографа?
6. Расскажите о методике измерения временных интервалов с помо-
щью осциллографа.
7. Какова сущность методики измерения параметров импульсных сиг-
налов с помощью осциллографа?
ГЛАВА 14
ИЗМЕРЕНИЕ ФАЗЫ СИГНАЛОВ
14.1. Основные сведения
Понятие «фаза» характеризует гармоническое (синусоидальное)
колебание в любой конкретный момент времени. Так, для гармо-
нического колебания = £/max| sin(cor + (pj) с амплитудой £/тах1
и круговой частотой со текущая (мгновенная) фаза в момент вре-
мени 1 имеет следующий вид:
ф(Г) = со/ + <рь
где (р! — начальная фаза.
Фазовым сдвигом Д(р двух гармонических сигналов одинаковой
частоты //!(/) = £/maxl sin (со/+ <р|) и и2(1) = Um3X2 sin(cor + <р2) назы-
вается модуль разности их начальных фаз
Дф = |ф| -<р2|.
Обычно величина Aq> = <pj — <р2 также называется разностью фаз
сигналов. Фазовый сдвиг Дсрне зависит от времени, если остаются
неизменными начальные фазы <pj и <р2.
На практике, как правило, решается задача измерения разно-
сти фаз двух гармонических (синусоидальных) колебаний с рав-
ными частотами. На рис. 14.1 иллюстрируются формы сигналов:
а — двухсинусоидальных, б — синусоидального и несинусоидаль-
ного с одинаковым периодом.
Фазовый сдвиг удобнее выразить в виде зависимости сдвига
сигналов во времени — А/. В частности, для синусоидальных сигна-
лов типа U\(t) = i/max sin со/ и u2(t) = Um3X sin со(/ - А/), имеющих
228
Рис. 14.1. Формы сигналов:
а — двухсинусоидальные; б — синусоидальный и несинусоидальный с одинако-
вым периодом
одинаковый период Т = —, сдвиг фазы (см. рис. 14.1, а) можно
со
записать по формуле
Дф = <оД/ = ^. (14.1)
Сигналы называются синфазными, противофазными и находя-
щимися в квадратуре, если фазовый сдвиг между ними равен 0, л
и я/2 соответственно. Применительно к периодическим синусо-
идальным и несинусоидальным сигналам (см. рис. 14.1, б) и к
двум несинусоидальным сигналам с одинаковым периодом Т ис-
пользуется понятие об их сдвиге (задержке) во времени Д/.
Для измерения фазового сдвига используются приборы, кото-
рые называются фазометрами. В данном случае в качестве мер та-
кого сдвига используются фазовращатели, т.е. линейные четырех-
полюсники, у которых выходной сигнал задерживается по фазе
относительно входного. Фазовращатели подразделяются на регу-
лируемые и нерегулируемые.
Для оценки величины фазового сдвига используются следующие
методы измерения:
• осциллографический;
• компенсационный;
• преобразования фазового сдвига в импульсы тока;
• дискретного или цифрового счета;
• с преобразованием частоты сигналов.
14.2. Осциллографический метод
Для измерения фазового сдвига с помощью осциллографа при-
меняются следующие методы разверток:
•линейной;
• синусоидальной (или эллипса);
• круговой.
229
Кроме того, используется метод полуокружности.
Метод линейной развертки реализуется при наблюдении на эк-
ране одновременно двух сигналов (см. рис. 14.1). Для этого можно
использовать двухлучевой осциллограф, подавая сигналы на вхо-
ды вертикального отклонения лучей (входы У). Кроме того, также
применяется однолучевой осциллограф, если на его вход У пода-
вать исследуемые сигналы поочередно через электронный комму-
татор. И в том и в другом случаях горизонтальные развертки ос-
циллографов должны быть синхронизированы одним из сигналов.
Измерив временные отрезки Дг и Т, вычисляют фазовый сдвиг
сигналов в радианах по формуле (14.1) или в градусах по следу-
ющему выражению:
Дф = 360у. (14.2)
При данном методе погрешность измерения фазового сдвига
Дф близка к ±(5...7)в и обусловлена нелинейностью развертки,
неточностью замера интервалов дг и Г, а также ошибками опре-
деления положения оси времени.
Метод синусоидальной развертки, или эллипса, реализуется с
помощью однолучевого осциллографа при подаче одного сигна-
ла на вход У, а второго — на вход X отклонения электронного
луча. При этом генератор развертки осциллографа должен быть
выключен.
Пусть на входы X и У были поданы соответственно сигналы
г/, (г) = щ = t/maxl sin cor и u2(t) = и2 = t/max2 sin (cor + ф) , для которых
фазовый сдвигДф = ф (далее в выражениях для щ(г) и u2(t) аргу-
мент t будет везде опушен). Мгновенные отклонения луча на экра-
не по горизонтали и вертикали будут описываться по формулам:
* = Ахатах 1 sin cor = a sin со/; (14.3)
У = Лунтах 2 sin (соГ + ф) = b sin (cor + ф), (14.4)
где hx и hy — коэффициенты чувствительности осциллографа к
отклонению луча по горизонтали и вертикали; а = и
b = hyUmM 2 — амплитуды отклонения луча.
Для определения формы фигуры, вычерчиваемой лучом на
экране осциллографа, найдем ее аналитическое описание. Для этого
достаточно из формул (14.3) и (14.4) исключить переменную t и
затем отклонение у представить как зависимость от величины х:
X { X V
sincor = —, cos cor = ±.1- —
у = b sin (cor + ф) = Z>(sin cor cos ф + cos cor sin ф).
(14.5)
(14.6)
230
После подстановки формулы (14.5) в формулу (14.6) получим
следующее выражение:
У-
Ь\
- XCOS(p
a J
± \!а2 -х2 sin <р
(14.7)
представляющее собой известное уравнение эллипса. На рис. 14.2
показывается измерение разности фаз методом эллипса.
Определим величину фазового сдвига двух сегментов. Частям
эллипса, представленным непрерывной и штриховой линиями на
рис. 14.2, соответствует выражение (14.7), в котором перед кор-
нем стоят знаки «плюс» и «минус» соответственно. Величины от-
резков уои.^ находятся из выражения (14.7), если положить для
непрерывной линии х = 0, а для штриховой линии у = 0, т.е.
у0 = Z>sin ф, х0 = язтф. Отсюда искомый фазовый сдвиг
Дф = ф = arcsin
/о
b
= arcsin
(14.8)
*0
а
Перед началом измерения фазового сдвига Дф обычно уравни-
вают на экране амплитуды b и а (см. рис. 14.2). Для этого поочеред-
но отключают сигналы их и и2 от входов X и Y осциллографа, и с
помощью регулировок коэффициентов чувствительности hx или hy
добиваются равенства b - а, когда у0 = хь. Измерив на экране от-
резки 2у0 и 2Ь (или 2xq и 2*7), подставляют их отношение в форму-
лу (14.8) и находят Дф.
Метод эллипса не позволяет однозначно определить фазо-
вый сдвиг в диапазоне от 0 до 360 е. Это хорошо видно из
осциллограмм, представленных на рис. 14.3, для различных зна-
чений Дф.
Можно добиться более точного результата измерений сдвига фаз,
если подать один из сигналов на вход осциллографа через фазовра-
щатель на 90° и проанализировать
изменение поведения осциллог-
раммы. Положим, что мы имеем
осциллограмму, соответствую-
щую сдвигу фаз Дф = 60° или 300°.
Если теперь мы подадим сигнал
и2 на вход /через фазовращатель,
то фазовый сдвиг станет равным
150 или 30°. Как видно из рис. 14.3,
при Дф = 60° осциллограмма из
квадрантов 1 и 3 переместится в
квадранты 3 и 4, а при Дф = 300°
останется в квадрантах 1 и 3.
Погрешность измерения фа-
зового сдвига между двумя си-
Рис. 14.2. Измерение разности фаз
методом эллипса
231
135°(225°)
120e(240*)
Дф = (180°)
150°(210°)
60°(300°)
90°(270°)
Рис. 14.3. Формы осциллограмм при разных фазовых сдвигах:
7, 2, 3 и 4 — квадранты осциллограммы; Дф — фазовый сдвиг
Дф = 0°(360°)
ЗО°(ЗЗО°)
45°(315°)
нусоидальными сигналами методом эллипса зависит от точности
измерения длин отрезков, входящих в выражение (14.8), и точно-
сти фокусировки луча на экране осциллографа. Эти причины ока-
зывают тем большее влияние на точность измерения, чем будет
ближе измеряемый сдвиг фаз к 0 или 90°. Кроме того, в этом слу-
чае также есть и систематическая погрешность измерения, обус-
ловленная наличием фазового сдвига, создаваемого усилителями
каналов вертикального и горизонтального отклонений лучей.
Для снижения этой погрешности перед началом измерений по-
ступают следующим образом. Один из исследуемых сигналов пода-
ется на вход Y осциллографа непосредственно, а на вход X — через
регулируемый фазовращатель. Далее, изменяя настройку фазовра-
щателя, добиваются появления на экране осциллографа наклон-
ной прямой линии. Затем, сохраняя эту настройку, на вход фазов-
ращателя подается второй сигнал (отключив предварительно пер-
вый) и проводится требуемое измерение фазового сдвига сигналов.
Метод круговой развертки обеспечивает измерение фазового
сдвига практически в пределах от 0 до 360°. Сущность метода пояс-
няется схемами и эпюрами, приведенными на рис. 14.4, для слу-
чая измерения фазового сдвига между сигналами = £/тах1 sin со/
И U2 =t/max2sinoX/-A/).
Генератор развертки осциллографа предварительно выключает-
ся и на входы Уи Xподаются сигнал и} и сигнал и3 (см. рис. 14.4, д),
задержанный относительно по фазе на 90° (с помощью допол-
нительного фазовращателя — ФВ). При одинаковом отклонении
электронного луча по горизонтали и вертикали на экране осцил-
лографа будет наблюдаться осциллограмма, имеющая вид окруж-
ности (см. рис. 14.4, б).
Анализируемые сигналы и и2 также поступают на входы
идентичных формирователей Ф! и Ф2, которые осуществляют
232
a
Рис. 14.4. Метод круговой развертки:
а — схема измерения; б — осциллограмма; в — эпюры сигналов 1 и 2 — отметки
повышенной яркости
преобразование синусоидальных колебаний в последовательность
коротких однополярных импульсов w4 и и5 (см. рис. 14.4, в). Перед-
ние фронты этих импульсов практически совпадают с моментом
перехода синусоид через нулевое значение при их возрастании.
Импульсные сигналы и4 и w5 объединяются с помощью логичес-
кой схемы ИЛИ. Ее выходной импульсный сигнал и6 в виде двух-
импульсных последовательностей подается на вход Z управления
яркостью луча осциллографа. В результате на окружности в точках
1 и 2 появляются отметки повышенной яркости (см. рис. 14.4, б).
Процесс измерения фазового сдвига Дф между сигналами и} и
и2 поясняется рис. 14.4, б. Отсчет величины фазового сдвига про-
изводится по шкале прозрачного транспортира, центр которого
совмещается с центром окружности.
В основе данного метода измерения лежит следующее. Полную
окружность, которой соответствует угол 360°, луч описывает за вре-
мя, равное периоду Т сигналов и и2. Дугу между точками / и 2,
которой соответствует некоторый угол а, электронный луч опи-
сывает за время задержки этих сигналов Дг = ДфГ/ЗбО*. Отсюда сле-
дует, что угол а равен Дф.
Погрешность измерения данного метода зависит от точности
формирования окружности и определения се центра, а также от
233
степени идентичности порога срабатывания формирователей и
точности измерения угла Дф с помощью транспортира.
14.3. Компенсационный метод
Сущность компенсационного метода состоит в сравнении из-
меряемого фазового сдвига с известной величиной фазового сдвига,
который создается с помощью измерительного фазовращателя.
Структурная схема измерительной установки, реализующей
данный метод, и вид ее на экране приведены на рис. 14.5. Схема
включает измерительный фазовращатель 1 и индикатор 2 равен-
ства фаз, в качестве которого использован осциллограф с отклю-
ченным генератором развертки. Сигнал подается на вход Y ос-
циллографа через фазовращатель, а сигнал и2 на вход X — непо-
средственно на осциллограф.
Фазовый сдвиг Дф между двумя сигналами и и2 определяется
путем изменения фазы дополнительного сигнала и3 с помощью
фазовращателя до момента появления на экране наклонной пря-
мой линии (см. рис. 14.5, 6), т.е. до момента равенства фаз сигна-
лов и2 и w3. При этом величина фазового сдвига Дф считывается по
шкале фазовращателя.
С целью более точных измерений следует проверить и ском-
пенсировать возможное неравенство фазовых сдвигов, создаваемых
усилителями вертикального и горизонтального отклонений луча
осциллографа. Эта процедура выполняется в порядке, изложен-
ном выше при рассмотрении метода эллипса.
Погрешность измерения данного метода в основном определя-
ется качеством градуировки шкалы фазовращателя и достигает
0,1...0,2е.
Компенсационный метод используется и в диапазоне СВЧ для
измерения фазового сдвига, создаваемого различными устройства-
ми (фильтром, отрезком волновода и т.п.).
Процесс измерений можно пояснить структурными схемами,
приведенными на рис. 14.6, где: Г — СВЧ-генератор, АТ — развя-
Рис. 14.5. Определение фазового сдвига компенсационным методом:
а — схема: 1 — фазовращатель; 2 — индикатор; б — вид на экране
234
а б
Рис. 14.6. Измерение фазового сдвига компенсационным методом в ди-
апазоне СВЧ:
а — схема исходной установки; б — схема измерения
зываюший аттенюатор, ФВ — измерительный СВЧ-фазовращатель,
Z — испытуемое устройство, КЗ — короткозамыкающая заглушка.
Процесс измерения выполняется в два этапа. Вначале собира-
ется исходная установка, показанная на рис. 14.6, а. При включе-
нии генератора в тракте устанавливается стоячая волна. В произ-
вольное сечение фазовращателя вводится зонд, состоящий из ди-
ода и индикатора. Путем перестройки фазовращателя добиваются
совмещения узла напряжения стоячей волны с плоскостью сече-
ния, в которую введен зонд. Момент совмещения устанавливается
по нулевому показанию индикатора. При этом со шкалы фазовра-
щателя считывается показание фазового угла ф|.
Затем собирается установка, приведенная на рис. 14.6, б (схемы
измерения), в которой между фазовращателем и короткозамыкаю-
щей заглушкой вводится испытываемое устройство Z. При этом в
тракте распространения СВЧ-колебаний происходит смещение узла
напряжения. Путем перестройки фазовращателя снова добиваются
(по нулевому показанию индикатора) совмещения узла напряже-
ния стоячей волны с плоскостью сечения зонда. Со шкалы фазов-
ращателя считывают новое показание ф2- Искомый фазовый сдвиг,
вносимый устройством Z, определяется по следующей формуле:
Дф=^.
14.4. Метод преобразования фазового сдвига в импульсы тока
Структурная схема устройства, реализующего преобразование
фазового сдвига в импульсы тока, и поясняющие эпюры приве-
дены на рис. 14.7.
В состав устройства входят преобразователь Д(р —> Д/ искомого
фазового сдвига Д<р в интервал времени Д/ и измерительный при-
бор. Преобразователь состоит из двух одинаковых формирователей
Ф1 и Ф2 и триггера Т. Принцип действия формирователей описан
в подразд. 11.5 (см. рис. 11.6 и 11.7).
Сущность данного метода измерения фазового сдвига заключа-
ется в следующем. Синусоидальные сигналы импульсов их и и2,
235
Рис. 14.7. Метод преобразования фазового сдвига в импульсы тока:
а — схема устройства; б — эпюры сигналов
имеющие некоторый фазовый сдвиг, подаются на идентичные фор-
мирователи Ф1 и Ф2, преобразующие их в последовательности ко-
ротких импульсов и3 и ил (см. рис. 14.7, б). Импульсы w3 служат для
запуска, а импульсы и4 — для сброса триггера в исходное состо-
яние. В результате на выходе триггера формируется периодическая
последовательность импульсов напряжения, период повторения
и длительность которых равны периоду 7’и сдвигу во времени А/
исследуемых сигналов щ и w3. Данные импульсы, поступая на
резистор R, соединенный с измерительным прибором цА, пре-
образуются в последовательность импульсов тока / с аналогич-
ными периодом и длительностью и некоторой амплитудой /тах
(см. рис. 14.7, б).
В качестве измерительного прибора часто используется микро-
амперметр рЛ магнитоэлектрической системы, реагирующий на
среднее значение тока / за период его следования Т.
Пусть 5, и /ср— чувствительность прибора и среднее значение
протекающего через него тока. Тогда показание прибора а можно
определить по следующей формуле:
С учетом выражения (14.2) получим уравнение
с т Дф
“ " 5,/т“ 360 ’
где Дф — искомый фазовый сдвиг.
236
Так как чувствительность Sj и амплитуда постоянны, то
шкалу микроамперметра можно проградуировать непосредствен-
но в градусах. Измеренное значение фазовою сдвига является сред-
ним за время измерения.
Погрешность измерения на частотах до 200 кГц равна (0,5 ±
± 0,15Дф)°, а на частотах до 1 МГц составляет (1 ± 0,02Дф)в.
14.5. Метод дискретного счета
Метод дискретного счета (более точное название — цифровой
метод измерения фазового сдвига), используемый в цифровых фазо-
метрах, включает две основные операции:
• преобразование фазового сдвига в соответствующий интервал
времени;
• измерение интервала времени методом дискретного счета.
Рассмотрим реализацию метода дискретного счета на струк-
турной схеме цифрового фазометра (рис. 14.8, а), в состав которо-
го входят преобразователь Дф -> Д/ искомого фазового сдвига Дф
в интервал времени Д/, временной селектор (BCj), генератор счет-
ных импульсов (ГИ), счетчик (СЧ) и цифровое отсчетное уст-
ройство (ЦОУ).
а
“a! i :
llli^
: ! : : : t
б
Рис. 14.8. Цифровой метод измерения фазового сдвига:
а — структурная схема; б — эпюры сигналов
237
Устройство и принцип действия преобразователя Дф -> А/ рас-
смотрены в подразд. 14.4. Временной селектор представляет собой
ключевую логическую схему. Генератор счетных импульсов состо-
ит из кварцевого генератора гармонических колебаний стабиль-
ной частоты и схемы формирования импульсов.
Цифровой фазометр работает следующим образом. Преобразо-
ватель Дф —> Д/ из подаваемых на его входы синусоидальных сиг-
налов щ и и2, обладающих фазовым сдвигом Дф, формирует пос-
ледовательность прямоугольных импульсов (см. эпюры сигна-
лов на рис. 14.8, б), имеющих длительность Д/ и период повторе-
ния Г, равные соответственно сдвигу' во времени и периоду сиг-
налов их и и2.
Импульсы и3, а также счетные импульсы w4, вырабатываемые
генератором, подаются на входы временного селектора ВСЬ Дан-
ный селектор открывается на время, равное длительности Д/ им-
пульсов и3, и в течение этого времени пропускает на вход им-
пульсы генератора и4. При этом на выходе селектора ВС| форми-
руются пакеты импульсов и5, следующие с периодом Т.
За один период повторения Т сигналов и} и и2 на счетчик с
выхода селектора поступает количество импульсов, содержащее-
ся в одном пакете
« = (14.9)
где То — период следования счетных импульсов генератора.
Подставляя в формулу (14.9) соотношение для Д/ из формулы
(14.2), находим выражение для измеряемого фазового сдвига сиг-
налов «1 и и2.
Д<р = «360^.
Кодовый сигнал, пропорциональный фазовому сдвигу Дф, со
счетчика подается на цифровое отсчетное устройство, показания
которого считываются в градусах.
Погрешность такого цифрового фазометра определяется погреш-
ностью дискретизации и аппаратурной погрешностью. Погрешность
дискретизации связана с тем, что интервал времени Д/ можно из-
мерить с точностью до одного периода счетных импульсов. Аппа-
ратурная погрешность определяется нестабильностью времени сра-
батывания триггера преобразователя Дф -»Дг.
Уменьшение погрешностей может быть достигнуто путем ис-
пользования фазометров среднего значения, результат измерения
которых является средним значением измеряемого фазового сдвига
за большое число периодов Т.
238
Структурная схема цифрового фазометра среднего значения
вместе с поясняющими эпюрами представлена на рис. 14.9. В отли-
чие от схемы рассмотренного выше фазометра (см. рис. 14.8, а) в
схему рис. 14.9, а включены второй временной селектор (ВС2) и
формирователь импульсов (ФИ).
Принцип работы фазометра удобно проанализировать, выде-
лив в нем функционально законченные устройства, из которых
два первых рассмотрены ранее. К их числу относятся преобразова-
тель Дер -> Дг искомого фазового сдвига Дф двух синусоидальных
сигналов и{ и и2 в интервал времени Дг, формирующий импуль-
сный сигнал «з (см. рис. 14.9, б), а также преобразователь Дг -> п
интервала ДГ в соответствующее число (пакет) импульсов п. Пре-
образователь дг -> п, формирующий пакеты импульсов м5, состо-
ит из генератора импульсов и временного селектора ВСЬ Номи-
нальное число импульсов п в одном пакете определяется выраже-
нием (14.9).
Для усреднения результата измерений пакеты импульсов пода-
ются на устройство, выдающее т таких пакетов за калиброван-
а
N=nm импульсов
б
Рис. 14.9. Измерение сдвига фаз фазометром метолом среднего значения:
а — структурная схема; б — эпюры к структурной схеме
239
ный отрезок времени Тк» Г где Т — период повторения исследу-
емых сигналов W| и и2. В состав устройства входят формирователь
импульса с длительностью Гк и временной селектор ВС2. Схема
формирователя импульса построена на базе делителя частоты им-
пульсов с коэффициентом деления Кд. На его вход поступают им-
пульсы (на рис. 14.9, б эти импульсы показаны в пачках) с пери-
одом повторения TQ от генератора импульсов. При этом на выходе
формирователя импульса формируется импульс w6 длительностью
гк = кдг0.
Этот импульс предназначен для открытия временного селек-
тора ВС2. За время действия импульса через выход селектора про-
ходит ряд пакетов импульсов м5, число которых можно рассчитать
по формуле
"> = у- = Кд^-. (14.10)
Импульсный сигнал на выходе селектора ВС2, обозначенный
на рис. 14.9, б через поступает на счетчик, связанный с циф-
ровым отсчетным устройством (ЦОУ). Общее число импульсов,
поступивших на этот счетчик, с учетом выражений (14.8), (14.9)
и (14.10), будет следующим:
W = пт = = Кд = Кд
То Т Т 360
Отсюда можно найти измеряемый фазовый сдвиг двух сигна-
лов и и2 по формуле
Д<р = N
360 = У
Кд к *
(14.11)
В выражении (14.11) коэффициент к является постоянным для
данного прибора и выбирается равным 1О‘°, где а — целое число.
При этом на шкале ЦОУ величина фазового сдвига выражается в
градусах. Чем больше а, тем выше разрешающая способность
фазометра, определяемая коэффициентом к.
В фазометре (см. рис. 14.9, а) генератор импульсов и исследу-
емые сигналы Wj и и2 не имеют взаимной синхронизации. Поэто-
му возможны изменение номинального числа счетных импуль-
сов п в одном пакете на ± 1 импульс (погрешность дискретиза-
ции) и потеря части пакета в пределах интервала времени Гк,
что и является причинами погрешности фазометра. Анализ этой
погрешности показывает, что ее максимальная величина равна
W/fTK, где f — частота исследуемых сигналов. Отсюда ясно, что
в случае минимальной частоты f сигналов и{ и и2 погрешность
240
фазометра можно уменьшить только за счет увеличения време-
ни измерения Гк.
Наряду с указанными причинами на погрешность измере-
ния фазометра влияют неточность фиксации формирователями
Ф| и Ф? моментов перехода сигналов «| и и2 через нулевой уро-
вень, отличие этих сигналов от синусоидальной формы, а так-
же влияние шумовых помех на преобразование фазового сдвига
в интервал времени. Однако погрешности от этих причин сни-
жаются путем усреднения результата измерений за интервал
времени Гк, который значительно больше периода исследуемых
сигналов Т.
Погрешность измерения цифрового фазометра указывается в
его паспорте. Если у фазометра преобладает аддитивная составля-
ющая погрешности, то в паспорте приводится предел его допус-
тимой основной абсолютной погрешности, т.е. Днпрсл = ± Д<Ро (на-
пример, Дп прея = ± 0,5°).
Если же аддитивная и мультипликативная составляющие по-
грешности соизмеримы по величине, то указывается зависимость
предела допустимой погрешности от показания фазометра <рп, т.е.
Дп.пред = ±(фо + *Фп), где b — постоянное число (например,
Дппред =±(0,5 + 0,01фп)°).
14.6. Фазометр на основе микропроцессорной системы
Фазометры на основе микропроцессорной системы позволяют
измерять фазовый сдвиг между двумя периодическими сигналами
за любой выбранный период, наблюдать флуктуации подобных
сдвигов и оценивать их статистические характеристики, а имен-
но: математическое ожидание, дисперсию, среднее квадратичное
отклонение. Такие фазометры могут измерять и среднее значение
фазового сдвига.
Структурная схема микропроцессорного фазометра приведе-
на на рис. 14.10, а. Принцип измерения фазового сдвига между
двумя синусоидальными сигналами их и и2 за один выбранный
период Т их следования поясняется временными диаграммами на
рис. 14.10, б.
В фазометре в схеме импульсного преобразователя (ИПР) сиг-
налы W| и w2 с входного устройства (ВУ) преобразуются в корот-
кие импульсы и{ и и2 сотвстствснно. В формирователе Ф| с помо-
щью первой пары этих импульсов вырабатывается импульс и3 дли-
тельностью Д/, равной сдвигу во времени сигналов и} и и2. Им-
пульсом открывается временной селектор ВСЬ который в тече-
ние времени Д/ пропускает на вход счетчика СЧ | счетные импуль-
сы, следующие с периодом TQ и вырабатываемые микропроцес-
сорной системой (МПС). Поступающий на вход СЧ| пакет им-
241
Рис. 14.10. Фазометр на основе микропроцессорной системы:
а — структурная схема; б — временные диаграммы
пульсов на рис. 14.10, 6 обозначен через иА. Число импульсов в
пакете рассчитывается по формуле
" = (14.12)
'о
Одновременно в формирователе Ф2 вырабатывается импульс
длительность которого равна периоду Т исследуемых сигналов
и и2. Импульс z/5 открывает на время Т временной селектор ВС2,
пропускающий от МПС на вход счетчика СЧ2 пакет импульсов н6.
Период импульсов в пакете равен Го, а их число
N = (14.13)
70
242
Для оценки искомого значения фазового сдвига Дф за выбран-
ный период 7требуется найти отношение величин (14.12) и (14.13):
п _ Д/
N ~ ~Т'
Затем с учетом формулы (14.2) необходимо умножить это от-
ношение на 360е.
Окончательно получим следующую формулу:
Д<р = 360-£. (14.14)
N
Определение фазового сдвига в соответствии с выражением
(14.14) осуществляется МПС, на которую подаются вырабатывае-
мые счетчиками СЧ! и СЧ2 коды чисел п и N. При соответствую-
щей программе работы МПС на дисплее (Д) отображается значе-
ние фазового сдвига Дф для любого выбранного периода Т. Сравне-
ние таких сдвигов в разных периодах исследуемых сигналов дает
возможность выявить флуктуации Дф и оценить их статистические
параметры.
В режиме оценки фазометром среднего значения фазового сдвига
Дф за заданное число Q периодов длительностью Т в счетчиках
СЧ! и СЧ2 осуществляется накопление кодов, т.е. кодов чисел nQ
и NQ соответственно, которые затем подаются в МПС.
14.7. Методы измерения фазового сдвига
с преобразованием частоты сигналов
В основе данного метода измерения фазового сдвига лежит ге-
теродинное преобразование частоты.
Гетеродинное преобразование частоты исследуемых сигналов
используется для расширения диапазона частот, в котором изме-
ряются фазовые сдвиги.
Структурная схема фазометра с гетеродинным преобразовани-
ем частоты приведена на рис. 14.11.
Предположим, что через входные цепи (BUi и ВЦ2) на смесите-
ли (СМ, и СМ2) гетеродинного преобразователя частоты (Г) посту-
пают соответственно сигналы щ = (/maxlsin(or и и2 = t7max2sin(cor - ф),
имеющие друг относительно друга фазовый сдвиг Дф = ф, и гармо-
ническое напряжение гетеродина иг = [/maxr sin(a)rr + фг).
В результате на смеситель СМ) воздействуют напряжение на
вход и} и импульсы от гетеродинного преобразователя частоты wr,
т.е. (И| + иг), а на смеситель СМ2 — (и2 + иг). На выходе каждого из
смесителей (относящихся к нелинейным или параметрическим кас-
кадам) появляются колебания с суммарными разностными и ком-
243
Рис. 14.11. Фазометр с гетеродинным
преобразованием частоты
бинационными частотами, со-
ставленными из частот анали-
зируемых входных сигналов и
напряжения гетеродина.
Колебания с разностной ча-
стотой сопр=(о-(ог, называе-
мой промежуточной частотой,
поступают на усилители проме-
жуточной частоты (УПЧ] и
УПЧ2) каждого канала. Если в
фазометре с гетеродинным пре-
образованием частоты каскады
ВЦ| и ВЦ2, СМ) и СМ2, УПЧ) и УГ1Ч2 идентичны, то выходные
сигналы усилителей промежуточной частоты и{ и w2 после не-
сложных преобразований можно представить следующим образом:
W|(/) — ^^maxl^maxr COS(ti) CDr )/,
(14.15)
«2(0 = ^tZmax2^maxrCOS[((O-C0r)/-<p]. (14.16)
В этих формулах к представляет собой постоянный коэффици-
ент, характеризующий эффект преобразования сигналов.
Из выражений (14.15) и (14.16) следует, что фазовый сдвиг
сигналов на выходах УПЧ равен фазовому сдвигу исследуемых
сигналов uv и и2. Сигналы и и2 поступают на низкочастотный
фазометр (НЧ-фазометр), измеряющий фазовый сдвиг на проме-
жуточной частоте. Чтобы проводить измерения в широком спект-
ральном диапазоне сигналов щ и w2, применяют гетеродин с пе-
рестраиваемой частотой.
В настоящее время существуют фазометры с гетеродинным пре-
образованием частоты, работающие, например, в диапазоне от
20 Ги до 20 МГц, а также в диапазоне СВЧ от 0,1 до 15 ГГц.
Фазометры с умножением частоты применяются для измере-
ния малых фазовых сдвигов. В фазометре используются два оди-
наковых умножителя, на один из которых подастся сигнал
а на другой — и2. Если эти сигналы имеют фазовый сдвиг Дф, то
после умножения их частоты в п раз фазовый сдвиг увеличивает-
ся и становится равным Дф) = иДф. Такой фазовый сдвиг можно
измерить с меньшей погрешностью:
Дф = Дф) /п.
Фазометры с умножением частоты могут иметь дополнитель-
ную погрешность измерения, вызванную усилением влияния по-
сторонних шумов. Такие шумы, поступая на оба умножителя вме-
сте с сигналами и} и и2, вызывают случайные отклонения фазы
каждого из этих сигналов. Чем больше коэффициент умножения
п, тем больше флуктуации фаз сигналов на выходе умножителей
244
и больше погрешность измерения. Наличие систематической по-
грешности измерения связано с неидентичностью фазовых харак-
теристик обоих умножителей. Эту’ погрешность можно существен-
но снизить, если подать на каждый умножитель частоты один и
тот же сигнал (например, и}). Показания фазометра, взятые с об-
ратным знаком, следует использовать в качестве поправки для
последующих измерений.
Контрольные вопросы
1. Какова сущность осциллографического метода измерения фазового
сдвига электрических сигналов?
2. Как работает фазометр на основе микропроцессорной системы?
3. Расскажите о структурной схеме цифрового фазометра. Каков прин-
цип ее работы?
4. Расскажите о методике измерения с помощью компенсационного
метода.
5. Какова сущность осциллографического метода измерения фазового
сдвига сигналов?
ГЛАВА 15
АНАЛИЗ СПЕКТРА СИГНАЛОВ. ИЗМЕРЕНИЕ
КОЭФФИЦИЕНТА НЕЛИНЕЙНЫХ ИСКАЖЕНИЙ
15.1. Основные сведения
В начале XIX в. французский физик и математик Ж. Фурье дока-
зал, что любое изменение во времени некоторой периодической
функции можно представить (аппроксимировать) в виде конеч-
ной или бесконечной суммы ряда гармонических колебаний с раз-
ными амплитудами, частотами и начальными фазами. В частно-
сти, в радиоэлектронике этой функцией может быть ток или на-
пряжение в некоторой электрической цепи.
На рис. 15.1 показан пример, доказывающий рассуждения Ж. Фурье.
Периодическая достаточно сложная по форме кривая напряже-
ния u(t) (см. рис. 15.1, а) представляет собой сумму двух синусо-
ид равной амплитуды, но разных частот и начальных фаз (см. рис.
15.1, б): основной W|(/) (первой гармоники) и удвоенной и2(0
по отношению к ней частоты (см. рис. 15.1, в). Для детерминиро-
ванных периодических функций (сигналов) Ж. Фурье ввел разло-
жение по различным видам рядов — тригонометрическим, комп-
лексным и т.д. Ж. Фурье доказал, что непериодические (импуль-
сные) сигналы также можно описать с помощью двух его преоб-
разований — прямого и обратного.
245
Рис. 15.1. Пример к анализу Фу-
рье:
а — сложное колебание; б, в — пер-
вый и второй суммируемые сигналы
Итак, периодический электри-
ческий сигнал любой сложной
формы можно представить в виде
суммы гармонических составля-
ющих, амплитуды и частоты ко-
торых могут быть определены с
помощью прямого преобразова-
ния Фурье. Этот спектр гармони-
ческих составляющих можно
изобразить графически, если по
оси абсцисс откладывать обозна-
чение частот, а по оси ординат —
величины амплитуд гармоник. Ав-
томатическое представление
спектра осуществляется специ-
альными приборами — анализа-
торами спектра.
Большинство анализаторов
обозначаются С4—CN. Основны-
ми метрологическими характери-
стиками анализаторов являются:
разрешающая способность, время анализа и погрешности изме-
рения частоты и амплитуды. Сущность этих понятий будет объяс-
нена далее. Отметим лишь, что метрологические характеристики
анализатора определяются его схемой.
Для спектрального анализа непериодических сигналов (функ-
ций) используется аппарат интегрального преобразования Фурье.
При этом применяется известная формула прямого преобразова-
ния Фурье, характеризующая спектральную плотность неперио-
дического (импульсного) сигнала:
5(w)= J u(z)e->“'A. (15.1)
—<х>
Однако существует одно обстоятельство, общее для всех схем
анализаторов, ограничивающее точность анализа спектра сигна-
ла: теоретически прямое преобразование Фурье должно произво-
диться во временном диапазоне от -«> до <», тогда как реальный
анализ проводится в течение ограниченного времени Та.
Иными словами, текущая спектральная плотность зависит от
времени анализа:
5(со,7'а)=/и(/)е->'Л. (15.2)
О
Отличие текущего спектра от спектра закончившегося процес-
са находится так: определяется, выявились ли за время наблюде-
246
ния Та все характерные особенности сигнала. Если исследуемый
анализатором сигнал является периодическим с периодом следо-
вания Т, то необходимо, чтобы Тл » Т.
Практически во всех анализаторах аналогового типа выделение
гармонических составляющих сигнала производится узкополосны-
ми фильтрами. Эта процедура реализуется методами параллельного
(одновременного) или последовательного анализа сигнала.
15.2. Метод параллельного анализа
Метол параллельного анализа спектров сигналов реализуется
за счет применения набора фильтров (резонансных устройств),
настроенных на различные частоты (рис. 15.2).
При этом исследуемый сигнал u(t) подается одновременно на
все фильтры (на рис. 15.2 — Ф|} Ф2 и Ф„). Напряжения на выходе
фильтров определяются составляющими спектра анализируемого
сигнала. Далее спектральные составляющие после прохождения
через детекторы (Дь Д2 и ДЛ) поступают на регистрирующие ус-
тройства (РУ|, РУ2 и РУ„)-
Погрешность метода параллельного анализа определяется сле-
дующими факторами: конечным временем установления коле-
баний на выходе фильтра и зависимостью от полосы пропуска-
ния последнего, а также отличием характеристик фильтров, на-
строенных на разные частоты. Анализаторы такого типа приме-
няются в основном для анализа спектров одиночных импуль-
сных сигналов.
Для выделения спектральных составляющих сигнала в диапа-
зоне частот А/, необходимы п фильтров с полосой пропускания
каждого
Д/ф = ^.
п
Полоса пропускания фильтра определяет статическую разре-
шающую способность анализатора (при условии Га » «>, т.е. Га
велико). Разрешающая способность
анализатора характеризует его
способность различать гармони-
ческие составляющие спектра с
близкими частотами. Чем уже по-
лоса пропускания фильтра, тем
выше разрешающая способность.
При широкой полосе пропуска-
ния несколько гармонических со-
ставляющих нс будут разделяться.
Если оценивать разрешающую
Рис. 15.2. Упрощенная структурная
схема анализатора параллельного
типа
247
способность полосой частот Д/р, при которой возможно разделе-
ние ближайших гармонических составляющих, то при идеальной
прямоугольной частотной характеристике фильтра можно пола-
гать, что Д/р = Д/ф. Для реальных фильтров Л/Р = 2Д/Ф. Если время
анализа сигнала мало, то говорят о динамической разрешающей спо-
собности.
Необходимое время анализа для правильного воспроизведения
спектра можно приблизительно оценить следующим образом. Время
анализа при параллельном исследовании может быть принято
примерно равным ту, т.е. времени установления напряжения на
выходе фильтра с прямоугольной частотной характеристикой и
рабочей полосой Д/ф (от уровня 0,1 до уровня 0,9 установившсго-
ч °’86
ся значения). Известно, что время установления ту = , следо-
А/Ф
вательно, Та « ту = ——.
Д/ф
Скорость параллельного анализа
v 7 ДА, = яД/ф
Ta l/A/i
= «д/Ф2.
Скорость анализа резко снижается при сужении полосы про-
пускания фильтра. К достоинствам анализаторов параллельного
действия следует отнести малое время анализа и возможность ре-
гистрировать спектры одиночных импульсов. Однако из-за слож-
ности системы фильтров такие анализаторы не получили широ-
кого распространения.
15.3. Метод последовательного анализа
Для исследования периодических сигналов чаще всего приме-
няется метод последовательного анализа спектров. На рис. 15.3
показана упрощенная структурная схема анализатора последова-
тельного типа, а на рис. 15.4 — временные диаграммы, поясня-
ющие принцип его действия.
Анализатор спектра электрических сигналов последовательно-
го типа состоит из входного устройства, супергетеродинного при-
емника, включающего в себя смеситель, генератор качающейся
(перестраиваемой) частоты (ГКЧ) (устаревшее название — свип-
генератор) и узкополосный усилитель промежуточной частоты
(УПЧ), калибратор (вырабатывает частотные метки), квадратич-
ный детектор, выходной усилитель и индикаторное устройство
(обычно осциллографическая трубка или цифровое табло).
248
Калибратор
Рис. 15.3. Упрощенная структурная схема анализатора спектра последова-
тельного типа
Супергетеродинный приемник служит для последовательного
во времени выделения анализируемых гармонических составля-
ющих спектра исследуемого сигнала. Настройка этого приемника
на разные частоты производится с помощью сигнала, поступа-
ющего с выхода генератора качающейся частоты, который, в свою
очередь, запускается от генератора развертки.
Индикаторное устройство анализатора предназначено для на-
блюдения спектра исследуемого сигнала и, по существу, действу-
ет как электронный осциллограф. Оно включает в себя ЭЛТ с ус-
тройствами управления лучом, усилители вертикального и гори-
зонтального отклонений и генератор напряжения развертки.
Принцип действия анализатора спектра заключается в следу-
ющем (см. рис. 15.4). Входной сигнал u(t) подается на смеситель
через входное устройство. На второй вход смесителя подастся сиг-
нал от генератора качающейся частоты.
На рис. 15.4, а, б показаны соответственно изменение во вре-
мени частоты ГКЧ (значения его частоты /гкч меняются отД^ до
/тах в такт с изменением напряжения генератора развертки), фор-
ма амплитудно-частотной характеристики УПЧ и диаграмма
спектра 5(/) исследуемого сигнала (на диаграмме он представлен
гремя гармоническими составляющими, отражающими одното-
нальное амплитудно-модулированное колебание).
В результате воздействия на смеситель исследуемого сигнала и
напряжения ГКЧ составляющие спектра S(t) преобразуются в ди-
апазон промежуточных частот 5(/пр). Форма спектра сигнала при
этом сохраняется. При линейном изменении частоты ГКЧ часто-
249
Рис. 15.4. Диаграммы напряжений
анализатора спектра последователь-
ного типа:
а — изменение частоты ГКЧ; б — ис-
следуемый спектр и АЧХ УПЧ; в —
линейное изменение частоты во вре-
мени; г — сигнал на выходе детектора;
д — видеоимпульсы детектора
ты составляющих преобразован-
ного спектра также линейно из-
меняются во времени и последо-
вательно попадают в полосу про-
пускания УПЧ (см. рис. 15.4, в).
Напряжение на выходе УПЧ
имеет вид радиоимпульсов (см.
рис. 15.4, г), амплитуды которых
при постоянном напряжении
ГКЧ будут пропорциональны
амплитудам составляющих ис-
следуемого спектра.
С выхода УПЧ радиоимпуль-
сы подаются на квадратичный
детектор. На выходе детектора
возникают видеоимпульсы ид
(см. рис. 15.4, д), которые через
выходной усилитель поступают
на вертикально отклоняющие
пластины ЭЛТ. На горизонталь-
но отклоняющие пластины ЭЛТ
подается пилообразное напря-
жение генератора развертки. В ре-
зультате на экране появляются
видеоимпульсы, отображающие
спектр исследуемого сигнала.
Этот сигнал отображается на эк-
ране осциллографа в течение од-
ного периода развертки Гр = Тл.
Диаграммы на рис. 15.4 пост-
роены при условии, что разность
частот соседних составляющих
спектра много больше полосы
пропускания УПЧ, при этом возможна сравнительно малая ста-
тическая разрешающая способность (т.е. большой интервал час-
тот Д/р). На практике допускается некоторое перекрытие изобра-
жений гармоник сигналов на экране (рис. 15.5, б — и у2). На рис.
15.5 представлены диаграммы к определению разрешающей спо-
собности анализатора спектра.
Статическая разрешающая способность анализатора спектра пос-
ледовательного типа определяется по формуле (приведена без вывода)
д/р = 7зд/упч. (15.3)
Параметры спектра измеряют вспомогательными устройства-
ми. Положение на оси частот отдельных спектральных составля-
250
Рис. 15.5. Диаграммы к опре-
делению разрешающей спо-
собности анализатора спектра:
а — спектр сигнала; б — эпюры
спектров на экране ЭЛТ
ющих и характерных участков спек-
тра определяют частотными метка-
ми. Наиболее просто создается одна
частотная метка путем подачи на
вход анализатора спектра вместе с
исследуемым сигналом напряжения
от измерительного генератора сину-
соидальных колебаний. В этом слу-
чае на экране анализатора появится
частотная метка — риска, соответ-
ствующая частоте сигнала генерато-
ра, изменяя частоту которого доби-
ваются совпадения метки с опреде-
ляемой точкой спектра. Затем часто-
ту находят по шкале генератора.
Чтобы создать набор равноотсто-
ящих друг от друга меток, в анализа-
торах спектра применяют специаль-
ные генераторы (например, генераторы частотно-модулированного
сигнала). Известно, что спектр частотно-модулированного сигнала
состоит из ряда гармонических составляющих, отстоящих друг от
друга на величину частоты модуляции. Здесь имеется возможность
изменения средней частоты колебаний fcp и частоты модуляции FM.
При изменении частоты модуляции меняется интервал между’ мет-
ками, а при изменении средней частоты колебаний все метки сдви-
гаются по оси частот. Напряжение от генератора частотно-модули-
рованных колебаний вместе с исследуемым сигналом подается на
вход анализатора спектра. В результате на экране ЭЛТ наблюдается
наложение двух спектров. Путем изменения параметров напряжения
калибровки (средней частоты и частоты модуляции) производят
совмещение метки с характерными точками исследуемого спектра.
Динамическая разрешающая способность анализатора спектра
зависит от скорости изменения (перестройки) частоты ГКЧ. При
увеличении скорости перестройки напряжение на выходе УПЧ не
успевает изменяться с изменением напряжения на входе, так как
энергия, запасенная в избирательной системе (например, в кон-
туре), не может измениться мгновенно. Это явление имеет место в
том случае, если длительность переходного процесса в УПЧ соиз-
мерима с временем изменения частоты колебаний на входе и в
пределах его полосы пропускания.
Динамические искажения изображения спектра ограничивают
допустимую скорость изменения частоты ГКЧ. Отсюда время ана-
лиза определяется неравенством
"Г 'КЧ
* ЯД/^’
251
где Д/гкч « /тах - /min; А — коэффициент, определяемый схемой
УПЧ и допустимыми динамическими погрешностями.
Используя формулу (15.3) для интервала частот, определяющего
статическую разрешающую способность Д/р, получим значение
времени анализа:
Т' > 3 ДАкч
а Wp2*
В настоящее время серийные анализаторы могут обеспечивать
работу в диапазоне частот от 10 Гц до 40 ГГц с полосой пропуска-
ния от 0,001 до 300 кГц и разрешающей способностью 1 кГц. По-
грешность измерения уровней напряжений достигает 5 %.
15.4. Цифровой метод анализа
Цифровой метод анализа спектра заключается в преобразова-
нии исследуемого сигнала в цифровой код, а затем в вычислении
составляющих спектра с помощью специализированных микро-
процессоров.
В цифровых анализаторах спектра по совокупности дискретных
отсчетов (выборок) аналогового сигнала производится вычисле-
ние составляющих спектра путем замены интеграла формулы (15.1)
на конечную сумму из некоторого числа выборок. Такие вычисле-
ния осуществляются с помощью дискретного и быстрого преоб-
разований Фурье.
Алгоритм дискретного преобразования Фурье. Если сигнал //(/)
со спектральной плотностью 5(со) (рис. 15.6, а и б)у являющий-
ся непрерывной функцией времени в некотором ограниченном
интервале от 0 до Ти, преобразуется в дискретную форму в соответ-
ствии с теоремой Котельникова в виде А отсчетов {u(k£t)} = {uk}y где
к — порядковый номер отсчета с частотой дискретизации
_ 2я _ 2л
““ - Т„ ~ ~Nbt'
то его можно представить в виде дискретного преобразования
Фурье (ДПФ).
Спектр сигнала, полученный численными методами в виде
конечных сумм дискретных решетчатых функций (ДРФ), отлича-
ется от спектра, вычисленного интегральными преобразованиями
по формуле (15.2).
Спектр ДПФ непрерывного сигнала периодически размножа-
ется, т.е. повторяется по оси частот с периодом, равным частоте
следования отсчетов.
252
Алгоритм дискретного пре-
образования Фурье имеет следу-
ющее математическое выраже-
ние:
1 ЛГ-1
сп = Z ике-^,
™ к=0
где Сп — комплексные гармо-
нические составляющие спект-
Т
pa; W = — — необходимое чис-
Дг
ло отсчетов, отвечающих требо- Рис. 15.6. Представление непрерыв-
ваниям теоремы Котельникова; ного сигнала дискретным прсобра-
z д, ч зованием Фурье:
м л 1 л —- —1 I а ~ сигнал; б — спектр сигнала; в —
п = °- 1 - 2. - • [ 2 1J - номер дпф сигн£1а
спектральной составляющей.
Это фундаментальное для дискретных сигналов соотношение
представлено на графике рис. 15.6, в. Дискретное преобразование
Фурье, по существу, является алгоритмом цифрового вычисле-
ния гармонических составляющих спектра Сп по заданным диск-
ретным отсчетам ик аналогового сигнала w(r), что значительно
сокращает время и объем обработки информации.
Быстрое преобразование Фурье. Вычисления спектральной функ-
ции требуют больших затрат времени. Это обстоятельство стало
препятствием для широкого распространения цифровых методов
спектрального анализа. Многократно сократить число операций
при вычислениях позволяет быстрое преобразование Фурье (БПФ),
обеспечивающее более скоростное и эффективное цифровое вы-
числение коэффициентов ДПФ.
В основу этого алгоритма положен принцип разбиения задан-
ной последовательности отсчетов дискретного сигнала на ряд про-
межуточных последовательностей (подпоследовательностей). Это
значит, что сначала число дискретов А разделяется на множители
(например, N = 8 = 2-2-2, N = 60 = 3 4 5). Затем определяются
спектры этих промежуточных последовательностей и через них на-
ходится спектр всего сигнала. В зависимости от состава, числа и
порядка следования указанных множеств можно создать различ-
ные алгоритмы БПФ.
В цифровой технике удобнее обрабатывать сигнальные после-
довательности со значениями числа отсчетов N, являющимися
степенью с основанием два (4, 8, 16 и т.д.). Это позволяет много-
кратно делить входную последовательность отсчетов исследуемо-
го сигнала на более мелкие подпоследовательности.
253
Пусть требуется вычислить ДПФ входной последовательности
дискретного сигнала = {и*}, имеющей четное число от-
счетов (рис. 15.7, а), причем N-2ry где г — целое число (если это
условие не выполняется, то последовательность искусственно до-
полняют нулями до требуемого значения N).
Представим входную последовательность в виде двух подпос-
ледовательностей с четными (ЧТ) и нечетными (НЧ) номерами
и половинным числом членов в каждой последовательности (рис.
15.7, бу в)\
ичг = и1к\ WH4 =
где к = 0, 1, 2,..., N/2 - 1 — число гармоники.
В диапазоне номеров отсчетов от 0 до N/2 - 1 ДПФ входной
последовательности определяется следующим соотношением:
Сц = Рпчт + е-/2-^Спнч. (15.4)
Дискретное преобразование Фурье входной последовательнос-
ти для отсчетов с номерами от N/2 до У- 1 имеет вид
CNlu„ = сячг - e-^'NCnm, (15.5)
где п = 0, 1, 2,...,N/2 - 1.
Соотношения (15.4) и (15.5) представляют алгоритмы БПФ.
Здесь экспоненциальные фазовые множители е_у'2*л/А' учитывают
Рис. 15.7. Последовательности и подпоследовательности дискретного сиг-
нала:
а — входная последовательность; б — подпоследовательность с четными номера-
ми; в — подпоследовательность с нечетными номерами
254
влияние сдвига нечетной подпоследовательности дискретов отно-
сительно четной.
Если требуется еще уменьшить число вычислений, то четную
и нечетную подпоследовательности также разбивают на две про-
межуточные части. Разбиение продолжается вплоть до получения
простейших двухэлементных последовательностей. Определив ДПФ
данных простейших пар отсчетов, можно вычислить ДПФ четы-
рехэлементных, восьмиэлементных и сколько угодно подпосле-
довательностей. Для объединения ДПФ четной и нечетной под-
последовательностей используются выражения (15.4) и (15.5), в
которых вместо N и п подставляют соответствующие значения.
Нетрудно заметить, что вычисления по формулам (15.4) и
(15.5) не требуют операций умножения. В этих формулах исполь-
зуются только операции сложения и вычитания комплексных
чисел. Операции умножения должны учитываться лишь в алго-
ритмах (15.4) и (15.5) для различных п при разбиениях массива
отсчетов на мелкие подпоследовательности. Число этих опера-
ций при первом разбиении составляло N/2. Такое же число N/2
операций следует выполнить при каждом последующем разби-
ении. Таким образом, вдвое увеличивается число подпоследова-
тельностей и вдвое сокращается наибольшее число п в формулах
(15.4) и (15.5).
Вычисление коэффициентов ДПФ последовательности из N от-
счетов по алгоритмам БПФ требует совершения примерно A4og2W
операций умножения. Алгоритмы БПФ сокращают число операций
по сравнению с алгоритмами ДПФ в N2/(N Iog2 N) = A71og2 N раз.
В частности, при количестве отсчетов А = 210 имеем log2TV= 10
и сокращение числа операций составляет TV/log2jV^ 100. При очень
больших массивах отсчетов входного сигнала выигрыш в скоро-
сти обработки может достигать нескольких тысяч раз.
Принцип действия цифрового анализатора спектра основан на
вычислительных процедурах определения параметров и характе-
ристик различных сигналов и процессов. В функциональные воз-
можности цифрового анализатора заложены следующие алгорит-
мы (рис. 15.8):
• восстановление сигнала по его спектру, т.е. вычисление об-
ратного преобразования Фурье;
• анализ и синтез характеристик электрических цепей: опреде-
ление импульсных (реакция цепи на элементарные сигналы), пе-
редаточных и фазовых характеристик цепей с сосредоточенными
(постоянными) параметрами; анализ диаграмм Вольперта — Смитга
(характеристики и параметры цепей с распределенными посто-
янными); анализ диаграммы, т.е. критерия устойчивости, Найк-
виста; устойчивость цепей со звеньями обратных связей;
• цифровая обработка и фильтрация сигналов и вычисление
произведения спектров;
255
ho
сл
a>
Рис. 15.8. Функциональные возможности современного цифрового анализатора спектра
• спектральный анализ периодических, импульсных и случай-
ных сигналов: анализ квадратурных (сдвинутых на 90°) составля-
ющих: определение модуля спектра, фазового спектра, комплекс-
ного спектра; нахождение спектра мощности случайного процес-
са и его функции когерентности; вычисление взаимного спектра;
усреднение спектра по полосе частот; линейный анализ мульти-
пликативных сигналов;
• измерение параметров сигналов (амплитуды, частоты, фазы,
коэффициента или индекса модуляции, девиации (отклонения) ча-
стоты сигналов; определение параметров импульсных сигналов —
амплитуды, длительности, длительностей переднего и заднего
фронтов, периода следования и т.д.);
• корреляционный анализ детерминированных и случайных
сигналов: вычисление корреляционных и взаимно корреляцион-
ных функций; определение фазовых соотношений двух сигналов
(идентификация сигналов);
• анализ статических характеристик случайных процессов; по-
строение гистограмм мгновенных значений сигналов (столбчатых
распределений величин); определение одномерной плотности ве-
роятности и интегральной функции распределения случайных про-
цессов, характеристической функции.
Структурная схема современного цифрового анализатора спек-
тра приведена на рис. 15.9.
Исследуемые аналоговые сигналы по одному (А) или двум
(А, Б) каналам подаются на соответствующие усилители с пере-
менным коэффициентом усиления, которые приводят различные
уровни входных сигналов (от 0,01 до 10 В) к стандартному значе-
нию, необходимому для нормальной работы последующих трак-
тов. Затем сигналы поступают на фильтр нижних частот (ФНЧ), в
котором выделяется полоса частот, подлежащая анализу. По ко-
манде исследователя фильтр может быть выключен.
С выхода фильтров сигналы поступают на аналого-цифровой
преобразователь (АЦП), где они преобразуются в параллельный
десятиразрядный двоичный код. Возможна работа как одного, так
и обоих каналов. В последнем случае выборки мгновенных значе-
ний сигнала проходят одновременно по обоим каналам, что по-
зволяет в цифровом коде сохранить информацию о фазовых соот-
ношениях сигналов, необходимую для измерения взаимных ха-
рактеристик.
Частота выборки определяется кварцевым генератором и мо-
жет изменяться исследователем в пределах от 0,2 до 100 кГц. Эта
частота определяет отсчетный масштаб прибора во временной и
частотной областях.
Тракт сигнала от входа усилителей до выхода АЦП имеет ка-
либрованные значения коэффициента передачи во всем диапазо-
не частот и уровней напряжений. Информация о значении коэф-
257
Рис. 15.9. Структурная схема современного цифрового анализатора
спектра
фициента передачи и частота выборки вводятся в цифровое вы-
числительное устройство (микропроцессор) и учитываются при
формировании конечного результата.
Микропроцессор работает в соответствии с заложенной в него
программой. Программа состоит из ряда подпрограмм, организу-
ющих ту или иную вычислительную операцию (вычисление спек-
тра корреляционной функции, построение гистограммы и т.д.).
Вызов необходимой подпрограммы осуществляется с устройства
управления. Результаты вычислений выводятся на индикаторное
или регистрирующее устройство, в качестве которого могут быть
использованы цифровой графопостроитель, принтер, цифровой
магнитофон, дисковый накопитель, осциллограф или самописец.
Отметим, что осциллограф и самописец должны подключаться
через цифровой аналоговый преобразователь. Все результаты со-
провождаются масштабным коэффициентом для их перевода в фи-
зические единицы.
При анализе сигналов, представленных в цифровом виде, дан-
ные вводятся непосредственно в цифровое вычислительное уст-
ройство с помощью устройства ввода числовых данных с набор-
ного табло пульта управления в десятичном коде.
Такие цифровые анализаторы спектра имеют следующие ре-
жимы работы:
• спектральный, статистический и корреляционный анализ;
• измерение амплитудного и фазового спектров;
• измерение передаточных функций электрических звеньев;
258
• измерение свертки двух сигналов;
• измерение спектра мощности, взаимного спектра;
• измерение корреляционных функций;
• измерение гистограмм амплитуд.
15.5. Анализаторы спектра на цифровых фильтрах
Цифровой фильтр имеет стабильную частотную характеристи-
ку, не нуждается в подстройке, компенсирующей погрешности
из-за старения элементов, и его универсальность намного выше
аналогового фильтра. При перестройке цифрового фильтра нет не-
обходимости менять элементы, а достаточно его перепрограмми-
ровать. Однако главное преимущество цифровой фильтрации в из-
мерительной технике состоит в применении высокоточных циф-
ровых детекторов и устройств усреднения (цифровых интеграто-
ров). Цифровой детектор измеряет практически истинное действу-
ющее значение анализируемого сигнала без ограничений, свя-
занных с его амплитудным значением.
Цифровое устройство усреднения отличается универсальнос-
тью и эффективностью, недостижимыми для аналоговых усред-
няющих устройств.
Цифровая обработка информации в анализаторах спектров. Од-
ним из важнейших методов цифровой обработки информации в
современной измерительной технике и, в частности, в анализа-
торах спектров, является цифровая фильтрация. Она заключается
в преобразовании последовательности числовых отсчетов входно-
го сигнала {м(&Д/)} = {и*} в последовательность цифровых кодов
{j> (&Д/)} = {л } выходного сигнала.
Рассмотрим упрощенную структурную схему цифровой обра-
ботки сигналов (рис. 15.10). Непрерывный сигнал wBX(z) = иах (да-
лее в описании схемы для упрощения аргумент t опущен) посту-
пает на вход АЦП. На входе АЦП создается цифровой код в виде
двоичного числа {//(АгД/)} = {//г} = ит с фиксированным количе-
ством разрядов и с соответствующим дискретным отсчетом вход-
ного сигнала.
Последовательность закодированных определенными цифрами
отсчетов {wr} поступает в цифровой фильтр (ЦФ), представля-
ющий собой специализированный микрокомпьютер (ранее его
называли «спсцвычислитель»). В цифровом фильтре осущсствляст-
Рис. 15.10. Упрощенная структурная схема цифровой обработки сигналов
259
ся цифровая обработка сигнала в соответствии с определенным
алгоритмом. В результате на его выходе появляются новые цифро-
вые коды = {мц} = иц, соответствующие профильтрован-
ному входному сигналу.
Обычно обрабатываемый сигнал с цифрового фильтра посту-
пает на ЦАП, в котором цифровая форма сигнала преобразуется
в аналоговую wa(/) = «а. Однако в измерительной технике часто
используется преобразованный сигнал непосредственно в циф-
ровой форме. В этом случае ЦАП не применяется. Если цифровой
аналоговый преобразователь включен в схему обработки, то на
его выходе необходимо иметь синтезирующий фильтр (СФ) низ-
кой частоты (который, по существу, представляет собой ФНЧ).
При помощи синтезирующего фильтра будет происходить сгла-
живание полученного аналогового сигнала. В результате сглажива-
ния форма кривой выходного сигнала мвых(0 = wBbK становится
плавной, а не ступенчатой.
Структурные схемы линейных цифровых фильтров. Существуют
два больших класса цифровых фильтров:
• рекурсивные;
• нерекурсивные.
Термин «рекурсивный» связан с известным математическим
приемом, который называется рекурсией, т.е. циклическим обра-
щением к вычисленным данным, полученным на предыдущих эта-
пах математических операций.
Нерекурсивные цифровые фильтры. В нерекурсивных, или транс-
версальных (от англ, transverse — поперечный — с позиции структу-
ры их графического построения), цифровых фильтрах отклик за-
висит только от значений входной последовательности, и для
формирования &-го выходного отсчета используются лишь пре-
дыдущие значения входных отсчетов. Такие фильтры обрабатыва-
ют входной дискретный сигнал {ик} в соответствии со следующим
алгоритмом:
Ук = Wk + + Wk-2 + - + Wk-m. (15.6)
где yk — выходной сигнал; а{}, ah а2,...ат — действительные по-
стоянные (весовые) коэффициенты; т — порядок нерекурсивно-
го фильтра, т.е. максимальное число запоминаемых чисел.
С аналитической точки зрения смысл алгоритма обработки
(15.6) наглядно характеризует структурная схема нерекурсивного
цифрового фильтра, представленная на рис. 15.11.
Основой любого цифрового фильтра являются элементы за-
держки входной цифровой последовательности {и*} на интервал
дискретизации Z"1 (задержка сигнала на интервал ДГ в общепри-
нятых символах известного в математике Z-преобразования), а так-
же масштабные (весовые) блоки ат, выполняющие в цифровой
форме операции умножения на соответствующие коэффициенты.
260
Рис. 15.11. Структурная схема нерекурсивного цифрового фильтра
Часто, и по существу, элементы задержки называют ячейками па-
мяти. Сигналы с масштабных блоков поступают в сумматор (+),
на выходе которого образуется последовательность кодов выход-
ного сигнала {л }•
Не проводя соответствующего подробного анализа (он широко
представлен в специальной литературе), отметим, что коэффи-
циенты ah аъ...у а„ совпадают с соответствующими отсчета-
ми, так называемой импульсной характеристики цифрового филь-
тра й0, й„ й2,..., hm.
Рекурсивные цифровые фильтры. Возможности нерекурсивного
цифрового фильтра существенно расширяются при введении в его
схему обратных связей, которые позволяют формировать k-й вы-
ходной отсчет путем использования предыдущих значений как
входного, так и выходного дискретных (выраженных в цифровой
форме) сигналов
Ук - °0ик + а\ик-1 + а2ик-2 + ••• + атик-т + z , _
, , к (15.7)
+Ь\Ук-1 + ^2 У к-2 + ••• + Ьпук_п.
В формуле (15.7) постоянные коэффициенты а0, ah а2,...,ат,
как и в алгоритме обработки (15.6), характеризуют нерекурсив-
Рис. 15.12. Структурная схема цифрового рекурсивного фильтра
261
ную часть, а коэффициенты b]f b2i..., bn — рекурсивную часть ал-
горитма цифровой фильтрации, причем последние не равны нулю
одновременно. Порядок такого цифрового фильтра определяется
коэффициентом т нерекурсивной части алгоритма обработки.
Структурная схема цифрового рекурсивного фильтра показана на
рис. 15.12.
На цифровых фильтрах можно создавать анализаторы спектра
различных сигналов, в частности и последовательного, и парал-
лельного типов.
15.6. Измерение нелинейных искажений
При прохождении сигнала по цепи с нелинейной амплитуд-
ной характеристикой возникают искажения сигнала, т.е. колеба-
ния теряют синусоидальную форму' (искажаются) и в их спектре
появляются высшие гармоники. Эти гармоники можно выявить
и измерить с помощью анализаторов спектра. Для оценки иска-
жений сигнала наибольшее распространение получил коэффи-
циент нелинейных искажений (коэффициент гармоник), представ-
ляющий собой отношение действующего значения высших гар-
моник U2, Un напряжения (или тока) к действующему зна-
чению его первой гармоники Ux\
„ Ju}+u*+...+u*
к'=——’ (15.8)
где КЛ — коэффициент нелинейных искажений.
Если детектор анализатора является линейным, то в формулу
(15.8) вместо напряжений иъ...,ип можно подставить значе-
ния их амплитуд, измеренных на экране анализатора в единицах
длины.
Существуют также и специальные приборы, измеряющие ко-
эффициент нелинейных искажений, называемые измерителями не-
линейных искажений. Упрошенная структурная схема аналого-циф-
рового измерителя нелинейных искажений приведена на рис. 15.13.
В основе работы таких приборов лежит метод подавления основ-
ной частоты. Входное устройство служит для согласования измери-
тельного прибора с источником исследуемого сигнала. Перед изме-
рением переключатель К ставят в положение 1 (калибровка — пер-
вый случай). С помощью усилителя уровень исследуемого напря-
жения повышают до такого фиксированного значения, при кото-
ром электронный цифровой вольтметр действующего значения
будет проградуирован в величинах коэффициента нелинейных ис-
кажений. При этом измеряется действующее значение напряже-
ния всего исследуемого сигнала
262
Рис. 15.13. Упрощенная структурная схема аналого-цифрового измерите-
ля нелинейных искажений
и = ^и?+и}+...+иц.
Затем переключатель К прибора ставят в положение 2 (измере-
ние — второй случай). Путем настройки заграждающего фильтра
подавляется напряжение основной частоты (первой гармоники U\).
Полное подавление гармоники фиксируется при минимальном по-
казании прибора. В этом случае цифровой вольтметр показывает
действующее (эффективное) значение суммы высших гармони-
ческих составляющих сигнала
иг=№ + и} + ...+и;.
Используя полученные показания во втором и первом случа-
ях, определяют коэффициент нелинейных искажений
rl Ju*+u}+u]+...+ul ’
Практически при положении 2 переключателя К будет изме-
ряться коэффициент Кг1. Тогда коэффициент Кг можно вычис-
лить также по формуле
к -
При небольших величинах нелинейных искажений сигнала
(Кг < 0,1) коэффициент Кг отличается от коэффициента Кг1 по-
казателем, который меньше 1 %. Обычно измерители нелинейных
искажений применяются для измерения коэффициента Кг в пре-
делах от 0,1 до 30 % в диапазоне частот от 0,01 кГц до 10 МГц и
более.
Контрольные вопросы
1. По каким признакам классифицируются анализаторы спектра элек-
трических сигналов?
263
2. В чем заключается методика параллельного анализа спектра сигна-
лов?
3. Расскажите о методике последовательного анализа спектра сигна-
лов.
4. Какова сущность метода быстрого преобразования Фурье?
5. Какие элементы входят в состав цифрового анализатора спектра
сигналов?
6. Каков принцип работы рекурсивного цифрового фильтра?
7. Как определяется коэффициент нелинейных искажений?
8. Что входит в состав аналого-цифрового измерителя нелинейных
искажений?
ГЛАВА 16
ИЗМЕРЕНИЕ ЭЛЕКТРИЧЕСКИХ ПАРАМЕТРОВ ДИОДОВ,
ТРАНЗИСТОРОВ И ИНТЕГРАЛЬНЫХ СХЕМ
16.1. Основные сведения
Любое современное радиоэлектронное устройство строится на
базе полупроводниковых элементов: диодов, транзисторов и ин-
тегральных схем. Характеристики всех этих элементов даются в
виде паспортных данных. Однако реальные характеристики в боль-
шинстве случаев не совпадают с паспортными данными. Поэтому
в тех случаях, когда разработчик не располагает справочными дан-
ными или желает получить более точные сведения об имеющихся
в его распоряжении полупроводниковых элементах, необходимо
провести измерения своими силами и определить наиболее важ-
ные их параметры.
К таким параметрам у полупроводниковых диодов и транзис-
торов относятся прямое и обратное сопротивления по постоянно-
му току, прямые и обратные токи и емкости р—«-переходов, им-
пульсные параметры (прямое импульсное напряжение, время ус-
тановления и восстановления падения напряжения на р— «-пере-
ходе), а также статические параметры транзисторов.
Для интегральных схем параметрами являются быстродействие,
потребляемая мощность, помехоустойчивость и нагрузочная спо-
собность.
16.2. Измерение параметров полупроводниковых приборов
Проверка исправности диодов при помощи омметра. Она может
быть произведена при помощи обычного пробника или омметра.
Зная полярность омметра, легко определить полярность диода,
264
так как в случае, когда омметр показывает минимальное сопро-
тивление, полярности диода и омметра совпадают. Показания
омметра (в омах) при изменении полярности диода будут соот-
ветствовать прямому /?пр и обратному сопротивлениям по по-
стоянному току.
Для исправного диода имеет место » 7?пр.
При проверке исправности диодов желательно использовать
омметр с низковольтной батареей Е = 1,5...2 В, чтобы не превы-
сить напряжения пробоя. Для силовых и точечных диодов это
условие не обязательно, так как > 10 В, для стабилитронов
{/обр > 8 В. Однако для СВЧ-диодов < 1 В и проверка их ис-
правности при Е> 1,5 В может дать слишком малые значения для
/?обр или при длительном измерении привести к их пробою. По-
этому для СВЧ-диодов указанный способ проверки не может быть
рекомендован. Это условие также относится и к туннельным дио-
дам, для которых Г70бр = 0. Следовательно, показания омметра для
прямого и обратного направлений будут практически неразличимы.
Проверка неисправности транзисторов при помощи омметра. Она
также может быть произведена при помощи обычного омметра, в
котором используется батарея с напряжением, не превышающим
10 В. При проверке транзистора при помощи омметра необходимо
подключить один из его зажимов к базе триода, а другой — по-
очередно к эмиттеру и коллектору. Если к базе триода подключен
положительный зажим омметра, то для исправного триода типа
р—п—р оба измерения должны дать значения сопротивлений, ле-
жащие в интервале от 0,1 до 5 МОм. Обычно обратное сопротив-
ление эмиттерного перехода бывает больше, чем у коллекторного.
Если одно из сопротивлений будет много меньше нижней грани-
цы данного диапазона, то это свидетельствует о неисправности
триода (например, пробит один из переходов).
При перемене полярности (отрицательный зажим омметра под-
ключен к базе триода) оба указанные измерения должны дать
величины сопротивлений порядка нескольких единиц или десят-
ков Ом. Если окажется, что сопротивление одного из переходов
много больше нужной величины, то триод следует считать неис-
правным (например, нарушен контакт между полупроводником
и металлическим электродом).
Кроме перечисленных измерений следует проверить сопротив-
ление между эмиттером и коллектором. Если к эмиттеру подклю-
чить положительный зажим омметра, то сопротивление между ука-
занными электродами у исправного плоскостного р—п—р-триода
должно лежать в пределах от 10 кОм до 1 МОм. При перемене
полярности сопротивление между эмиттером и коллектором, как
правило, бывает в несколько раз больше. Если измеренные значе-
ния сопротивлений оказываются лежащими далеко за указанны-
ми пределами, то триод следует считать неисправным. Малое со-
265
противление обычно характеризует замыкание переходов, боль-
шое — нарушение контактов.
С помощью изложенных ранее измерений можно определить,
какой из выводов соответствует коллектору или эмиттеру, при
неизвестной цоколевке триода (расположение базового электрода
обычно бывает известно). К эмиттеру относится тот электрод, к
которому приложен положительный зажим омметра, когда ом-
метр показывает наименьшее сопротивление.
16.3. Измерение прямых токов через р—л-переходы диодов
и транзисторов
Измерение прямого падения напряжения на диоде произво-
дится по схеме рис. 16.1, а. Через испытуемый диод задается пря-
мой ток /пр. Генератор тока (ГТ) имеет достаточно большое внут-
реннее сопротивление, что обеспечивает постоянство режима из-
мерения при смене диолов. Разделение токовых и измерительных
ветвей цепи позволяет уменьшить погрешность измерения за счет
сопротивления подводящих проводников (это особенно важно для
мощных диодов). Прямое падение напряжения измеряется вольт-
метром постоянного тока класса точности 1,0. В специальных слу-
чаях применяется более точное измерение с помощью цифрового
вольтметра. Важным элементом схемы является зашита (3) вольт-
метра от перегрузки при выключении диодов. Для этого с помо-
щью выключателя или электромеханического реле вольтметр под-
ключается к диоду только после появления прямого тока в цепи.
Требуемое внутреннее сопротивление генератора тока можно
определить по следующей формуле:
*ч-.т + Г2. >
Д'пр
где Д4/пр — максимально допустимое отклонение прямого паде-
ния напряжения от номинального значения; Д/пр — минимально
Рис. 16.1. Схемы для измерения напряжения и тока на р—и-переходе ди-
одов и транзисторов:
а — измерение прямого падения напряжения; б — измерение обратного тока
266
допустимое отклонение прямого тока от номинального значения;
гд — дифференциальное сопротивление лиода в рабочей точке.
Например, при измерении прямого падения напряжения на
диоде Д220 примем Д/пр = 0,5 мА, Д[711р = 0,5 В, гд = 3 Ом. Требуемое
значение сопротивления Rn составит 1 кОм.
Погрешность измерения прямого падения напряжения обычно
не превышает 3 %.
16.4. Измерение обратных токов р—л-нереходов диодов
и транзисторов
Трудности, возникающие при измерении обратных токов р-п-
переходов, связаны с их малыми значениями. Исключение состав-
ляют мощные диоды и транзисторы, обладающие обратными то-
ками в пределах от нескольких десятков микроампер до несколь-
ких десятков миллиампер. Для контроля таких приборов применя-
ется схема, изображенная на рис. 16.1, б. В лабораторных условиях
при использовании чувствительных гальванометров эт>' схему мож-
но применять для измерения обратных токов вплоть до долей мик-
роампера.
Для измерения малых токов чаще всего применяется метод
преобразования постоянного тока в переменный с последующим
усилением с помощью усилителя переменного тока. Простейшая
схема с преобразователем на электромеханическом реле приведе-
на на рис. 16.2. В качестве примера показано измерение обратного
тока коллекторного перехода транзистора.
На рис. 16.2 на коллектор подается постоянное обратное на-
пряжение; последовательно с базовым выводом включен токо-
съемный резистор R. Напряжение с токосъемного резистора, про-
порциональное измеряемому
току, подается на вход элек-
тронного усилителя (У). Токо-
съемный резистор периодичес-
ки замыкается контактами реле
(Р). В простейшем случае реле
управляется напряжением с ча-
стотой 50 Гц. На входе усилите-
ля получается переменный сиг-
нал, амплитуда которого будет
пропорциональна измеряемому
току.
В начале измерительную ап-
паратуру калибруют. Для этого
через токосъемный резистор
пропускают калиброванный ток.
Рис. 16.2. Схема преобразования
постоянного тока в переменный
для измерения обратного тока
р—^-перехода
267
При этом чувствительность усилителя регулируется так, чтобы по-
казания соответствовали калиброванному току. Чувствительность
измерителя обратных токов увеличивается с увеличением R и ог-
раничена сверху условием
r < min
ioo/Komax ’
где £Kmin — минимальное напряжение коллектора, /К(|Гпах— тепло-
вой ток коллектора.
Измеритель, в котором используется описанный метод, имеет
наивысшую чувствительность I0-7 А на всю шкалу.
16.5. Измерение статических параметров транзисторов
Рассмотрим метод измерения статического коэффициента пе-
редачи тока базы транзистора рст. Для этого транзистор включают
по схеме с общим эмиттером и задают требуемое напряжение на
коллектор. Далее увеличивают ток базы до тех пор, пока ток кол-
лектора не достигнет заданного значения. Затем измеряют ток базы
и вычисляют Рет по формуле
R - ~
Рст г J »
где /к — ток коллектора; — начальное значение тока коллекто-
ра; 7б — ток базы.
Использование постоянного тока при таких измерениях, связан-
ных с выделением значительной мощности, приводит к определен-
ным трудностям. Их можно предотвратить, если измерить статичес-
кие параметры транзистора при работе его в импульсном режиме.
Схема для измерения статического коэффициента рст мощных
транзисторов в импульсном режиме показана на рис. 16.3. Напря-
жение на коллекторе задается от источника постоянного напря-
жения. На рис. 16.3, а генератор коротких импульсов (ГИ) имеет
регулируемую амплитуду. В паузе между импульсами гранзистор за-
перт, измерение производится за время длительности импульса. Ам-
плитуда импульсов базового тока 76 увеличивается до тех пор, пока
импульсный ток коллектора /к нс достигнет заданного значения. Ток
коллектора контролируется импульсным вольтметром (ИВ), изме-
ряющим напряжение на токосъемном резисторе RK. Отсчетный при-
бор непосредственно проградуирован в значениях тока. На рис. 16.3,
а параметр U2 показывает напряжение базы в импульсе.
Для определения рст используется второй импульсный вольт-
метр, который при помощи переключателя П в положении 1 вна-
268
Рис. 16.3. Схемы для измерения статического коэффициента 0СТ в им-
пульсном режиме:
а — с токосъемным резистором; б — без токосъемного резистора
чале подключается к токосъемному резистору для проведения
калибровки. Затем переключатель П ставится в положение 2 (из-
мерение). При этом отсчетный прибор измеряет напряжение, ко-
торое будет пропорционально току базы,
1 _ 4 _ ^2 , тг
Рот 4 29
где к — постоянный коэффициент.
Эго выражение показывает, что выходной прибор может быть
проградуирован непосредственно в значениях рст.
Длительность импульса ги должна в несколько раз превышать
длительность переходного процесса включения транзистора. Это
условие можно записать в виде следующего неравенства:
tK >(3,5...5)^&-
min
269
Однако длительность импульса генератора коротких импульсов
должна быть много меньше тепловой постоянной времени транзи-
стора, чтобы разогрев транзистора выделяющейся мощностью не
искажал результатов измерений. Обычно длительность импульса при
измерениях мощных транзисторов должна удовлетворять условию:
1 мс < ги < 15 с.
Схема для измерения статического коэффициента маломощ-
ных транзисторов показана на рис. 16.3, б. На схеме ток эмиттера
задается от генератора тока.
Преимуществом схемы рис. 16.3, б является постоянство режи-
ма при смене транзистора. Кроме того, в коллекторной цепи от-
сутствует токосъемный резистор, что облегчает поддержание по-
стоянного напряжения на коллекторе. Импульсный вольтметр при
перемещении переключателя П в положение 2 (измерение) изме-
ряет напряжение на токосъемном резисторе в базовой цепи /?б.
Таким образом, отклонение стрелки вольтметра будет пропорци-
онально току базы в импульсе.
Для непосредственного измерения коэффициента передачи тока
транзистора переключатель П перед измерением ставят в положе-
ние 1 (калибровка) и регулировкой коэффициента усиления им-
пульсного вольтметра стрелку отсчетного прибора устанавливают
на полное отклонение. В результате реализуется зависимость
1 _ /б _ £б
рсг + 1 1К 6’
(16.1)
где к — постоянный коэффициент; R2 — сопротивление.
На рис. 16.3, б Ек показывает напряжение в коллекторе; С —
конденсатор.
Из выражения (16.1) следует, что измерительный прибор можно
градуировать в значениях (рст + 1).
С помощью такой схемы достигается высокая точность измере-
ния параметров транзистора (суммарная погрешность не превы-
шает 5 %).
Измерение параметров транзисторов в режиме насыщения (на-
пряжение коллектор — эмиттер £/к нас и напряжение база — эмит-
тер t/б.нас) можно провести с помощью схемы, показанной на
рис. 16.4. Здесь сопротивления R} и R2 выбирают достаточно боль-
шими, чтобы при смене транзисторов режим измерения токов /б
и /к оставался неизменным.
Величины указанных сопротивлений выбираются из следующих
условий:
Л1 2 100 ^настах * 1QQ на;max
min Л min
270
Рис. 16.4. Схема для измерения напряжений насыщения 7/кнас и 7/бнас
где t/б.настах — максимальное напряжение база — эмиттер; 76min —
минимальное значение тока базы; £4.настах — максимальное на-
пряжение коллектор — эмиттер; /Kmin — минимальное значение
тока коллектора.
16.6. Измерение емкостей полупроводниковых приборов
Зарядные емкости р—л-переходов обычно измеряются в режи-
ме, когда на переход подано постоянное обратное смещение.
Существующие методы измерения емкостей р—^-переходов ба-
зируются на предположении, что зарядная емкость не зависит от
частоты вплоть до частот порядка 100 Гц.
Для измерения емкостей р—//-переходов используются три ме-
тода:
• метод замещения в резонансном контуре;
• метод емкостно-омического делителя;
• мостовой метод.
Метод замещения в резонансном контуре осуществляется на ос-
нове схемы, представленной на рис. 16.5, а. На схеме Е — генератор
напряжения высокой частоты; Сбл — блокировочный конденсатор;
L — катушка индуктивности; — напряжение смешения. Перед
измерением резонансный контур настраивается в резонанс — кри-
терием настройки служит максимум показаний высокочастотного
вольтметра V Калибровочный переменный конденсатор Скал
снабжен шкалой, отградуированной в единицах емкости.
Вначале фиксируют положение конденсатора, соответствующее
настройке контура в отсутствие объекта измерения. Затем под-
ключают измеряемый прибор, задают необходимый режим по по-
стоянному току, с помощью конденсатора добиваются резо-
нанса в контуре и фиксируют новое значение емкости по шкале.
Разность двух значений показаний шкалы и дает искомую вели-
чину емкости. Преимуществом такого метода измерений является
простота процедуры измерения.
Метод емкостно-омического делителя показан на схеме рис. 16.5, б.
Основными элементами этой схемы являются генератор напря-
жения высокой частоты £, чувствительный высокочастотный
271
Рис. 16.5. Схемы для измерения емкости р—л-переходов диодов и транзи-
сторов:
а — методом замещения в резонансном контуре; б — методом емкостно-омиче-
ского делителя
вольтметр подключенный к резистору R. Перед измерением
измеритель калибруют с помощью эталонного конденсатора ем-
костью Сэт, подключаемого к зажимам измерителя. Элементы це-
пей и рабочая частота выбираются так, чтобы выполнялось условие
(Ягн + К)«
1
wCmax ’
где Rt н — активное внутреннее сопротивление генератора напря-
жения; оз — рабочая частота; Стах — максимальное значение изме-
ряемой емкости.
Измеритель имеет линейную шкалу, которая может быть от-
градуирована непосредственно в пикофарадах с любым удобным
множительным коэффициентом.
Погрешности измерения емкости методом емкостно-омичес-
кого делителя в основном определяются нелинейностью ампли-
тудной характеристики электронного вольтметра и неточностью
учета паразитной емкости корпуса измерителя. Типичная предель-
ная погрешность составляет примерно ±10%, но при необходи-
мости ее можно снизить до ±3...5 %.
Мостовыми методами производятся измерения емкостей полу-
проводниковых приборов, как правило, в лабораторных условиях.
Измерительные установки, основанные на мостовом методе из-
мерения, являются наиболее универсальными, так как позволя-
ют определить емкость при наличии значительной шунтирующей
проводимости или большого последовательного сопротивления.
Специальные мостовые измерительные схемы могут иметь очень
высокую точность измерения емкости (их погрешность может со-
ставлять ±0,1 % и меньше).
272
16.7. Измерение импульсных параметров
полупроводниковых диодов
Схема для измерения максимального прямого импульсного
напряжения £/ПрИмптах и времени туст установления представлена
на рис. 16.6, а. На испытуемый диод подаются импульсы прямого
тока от генератора импульсного тока (ГТ). Измерение напряже-
ния на диоде во время переходного процесса и отсчет интервалов
времени производятся при помощи измерительного устройства
(ИУ), в качестве которого обычно используется осциллограф. При
этом наибольшую трудность вызывает обеспечение достаточно
крутого фронта импульса прямого тока. Параметры Цф.имптахи Туст
измеряются при последовательно укорачивающемся фронте им-
пульса тока (при прочих равных условиях). Длительность фронта
можно считать приемлемой в том случае, когда измеряемые пара-
метры перестают от него зависеть.
Основным источником методической погрешности измерения
Л имитах является индуктивность цепи между точками а и b (см.
рис. 16.6, а), включая индуктивность самого исследуемого диода.
Экспериментально оценить эту составляющую погрешности из-
мерения можно при помощи макета, представляющего собой кор-
пус диода с коротким замыканием в том месте, где должен рас-
полагаться кристалл полупроводника.
С точки зрения снижения погрешности измерения существен-
ным является выбор скважности импульсов прямого тока. Прак-
тически скважность импульсов выбирают в пределах от 100 до 1000.
Возникающая при этом погрешность оценивается эксперименталь-
но путем сравнения результатов измерения для нескольких значе-
ний скважности. Суммарная погрешность измерения параметров
Мтр.имптах И Туст ОбЫЧНО СОСТаВЛЯСТ ±20 %.
Схема для измерения времени восстановления обратного со-
противления импульсных диодов показана на рис. 16.6, б. Гене-
ратор импульсов (ГИ) обеспечивает в паузе смешение испытуе-
Рис. 16.6. Схемы для измерения прямого импульсного напряжения, вре-
мени восстановления напряжения (а) и времени восстановления обрат-
ного сопротивления импульсных диодов (б)
273
Рис. 16.7. Усовершенствованная схема для измерения времени восстанов-
ления обратного сопротивления диодов
мого диода током /пр в прямом направлении. В течение импульса
генератор выдает запирающее напряжение установленного уров-
ня. Измерение интервала времени твос осуществляется измери-
тельным устройством (ИУ).
В простейшем случае таким измерительным устройством мо-
жет быть осциллограф. Измерительное устройство подключается
к сопротивлению нагрузки RH. Напряжение на входе измеритель-
ного устройства, так же, как и ток, протекающий через диод,
зависит от времени. Наибольшую трудность здесь представляет
фиксация момента времени, когда переходный обратный ток па-
дает до отсчетного уровня 7^.
На рис. 16.7 изображена модификация схемы измерительного
устройства, в значительной степени облегчающая проведение
процедуры измерений. На испытуемый диод подается смешен-
ный в прямом направлении импульс тока от генератора импуль-
сов. Импульсы отрицательной полярности от генератора импуль-
сов обеспечивают быстрое переключение диода с прямого тока
на обратный.
Вспомогательные диоды Д) и Д2 образуют цепь постоянного
тока в паузе между импульсами. В результате напряжение на со-
противлении RH в паузе равно нулю, и на осциллограмме появ-
ляется нулевой уровень отсчета величины I^R".
Вспомогательная цепь из диода Д3 и источника постоянного
напряжения £3 служит для устранения выброса напряжения в пер-
вый момент после переключения. Источник постоянного напря-
жения £3 выбирают порядка (1,5...2)InocRH.
Обязательным критерием применимости схемы рис. 16.7 явля-
ется малая инерционность вспомогательных диодов Дь Д2 и Д3.
Время восстановления этих диодов должно быть, по крайней мере,
на порядок ниже измеряемого значения t^.
При тщательном выполнении всех методических требований
суммарная погрешность измерения параметра твос при использо-
вании осциллографа составляет 15... 30 %.
274
16.8. Измерение импульсных параметров транзисторов
На рис. 16.8 изображена схема для измерения времени рассасыва-
ния быстродействующих транзисторов. Испытуемый транзистор на-
сыщен постоянным базовым током. Насыщающий ток /б1 обеспечива-
ется генератором тока, образованным источником и резистором
Я2. Генератор импульсов тока (ГИ) вырабатывает импульсы напря-
жения прямоугольной формы длительностью /и. Амплитуда импуль-
сного напряжения должна быть, по крайней мере, в 10 раз больше
максимально возможного значения £/бнас транзистора. В этих усло-
виях рассасывающий ток определяется из соотношения
Аг - Ар
где U — амплитудное значение импульса, измеряемое вольтмет-
ром И; Л] — сопротивление.
Значение тока /б контролируется амперметром постоянного
тока А.
Для обеспечения минимальной погрешности измерения, как
правило, берут 7б| = 7б2. Вспомогательный диод Д предназначен
для зашиты от пробоя эмиттерного перехода транзистора после
окончания процесса рассасывания. В течение всего измеряемого
отрезка времени вспомогательный диод заперт. Поэтому нет осо-
бых требований к его времени восстановления. Однако диод
несколько искажает форму импульса тока базы из-за зарядной
емкости, шунтирующей входные зажимы транзистора.
Для быстродействующих транзисторов вспомогательный диод
можно не ставить. В тех случаях, когда вспомогательный диод не-
обходим, диод выбирают с минимальной емкостью при запира-
Рис. 16.8. Схема для измерения времени рассасывания быстродейству-
ющих транзисторов
275
ющем напряжении порядка 1 В. Емкость диода, как и паразитная
емкость монтажа от зажима базы на «землю», снижает качество
генератора импульсного тока.
Величины емкостей диода и монтажа должны выбираться с
учетом следующего соотношения:
сд+см<0,1^-,
^б.нас
где С, — емкость диода; См — емкость монтажа; /р — время расса-
сывания накопленного на базе заряда.
Измеритель времени (ИВ) с входным сопротивлением RBX =
= 50 Ом подключен к коллектору транзистора через резистор 7?3.
Соединение безындуктивных резисторов /?3, RA и входного сопро-
тивления измерителя времени /?вк формирует сопротивление кол-
лекторной нагрузки /?н, которая имеет следующий вид:
_ Яг(7?з + Rm)
R4 + R3 + Ям
Блокировочная емкость С3 выбирается из условия
С3>100^К
где /к — ток коллектора в режиме насыщения; /и — длительность
импульса переключения; Ёк — напряжение коллекторного источ-
ника питания.
Величины проходной емкости и блокировочной емкости С2
должны выбираться с условием
г > ЮО'и
А.
При определении /р, когда в качестве измерителя времени при-
меняется осциллограф, необходимо на экране фиксировать мо-
мент появления запирающего импульса. Для более точной фикса-
ции момента появления переключающего импульса лучше пользо-
ваться двухлучевым осциллографом.
Ориентировочная суммарная погрешность измерения времени
переключения транзистора рассмотренного схемного решения
составляет ±10...30 %.
16.9. Измерение электрических параметров интегральных схем
Для логических интегральных цепей к техническим показате-
лям относятся: быстродействие, потребляемая мощность, поме-
хоустойчивость и нагрузочная способность.
276
Применение того или иного класса измерительной системы
(ИС) в радиоэлектронной аппаратуре связано со специфически-
ми требованиями. Такими требованиями для цепей гранзисторно-
транзисторной логики (ТТЛ) являются:
• согласование входных характеристик при работе с устройства-
ми, с которых может сниматься сигнал с амплитудой больше ло-
гической единицы, например t/BX = £п;
• контроль характеристик, гарантирующий подавление помех,
возникающих при работе цепей друг на друга. Условия согласова-
ния особенно важны при работе цепей эмиттерно-связанной ло-
гики (ЭСЛ). Поэтому в состав системы параметров некоторых се-
рий цепей ЭСЛ входит контроль не только выходных пороговых
напряжений, но и контроль выходных уровней с двухсторонним
ограничением, а также контроль динамических параметров с двух-
сторонним ограничением.
Статическая помехоустойчивость. Помехоустойчивость логичес-
кой цепи характеризуется нормальным напряжением, на которое
можно изменить уровни на входе цепи, не вызывая изменения
напряжения на ее выходе за пределы граничных значений логи-
ческого нуля или логической единицы. Это определение можно
отнести и к совокупности логических цепей, если учесть мини-
мальное и максимальное значения напряжений в соответствую-
щих состояниях. Допустимое напряжение статической помехи оп-
ределяется по семействам передаточных характеристик [7ВЫХ =/(i/BX),
полученным с учетом технологического разброса параметров эле-
ментов схем. При этом можно выделить помехоустойчивость по
отношению к отпирающим помехам
U+ =UQ (16 2)
v'n ^вх.птах вых.п max >
а также по отношению к запирающим сигналам
=^Bb«nmin -^BX.nmin, (16.3)
где 6/выхпшах и ^ых.птш” соответственно максимальное и мини-
мальное значения логического нуля и логической единицы на вы-
ходе цепи; (/®хптахи f/^nmin — максимальное и минимальное на-
пряжения на входе, характеризующие ее открывания и закрыва-
ния.
Анализ передаточных характеристик показывает, что при от-
сутствии технологического разброса параметров элементов, влия-
ния условий эксплуатации на пороговые напряжения логических
цепей и зоны переключения на передаточной характеристике вы-
полняется условие:
6/п++Гп-=£/л,
где Un — напряжение логического перепада.
277
Критерием оптимального выбора параметров и решением схе-
мы логической цепи является максимальная помехоустойчивость
по отношению к обоим типам помех, т.е.
t/n+=t/n-=C/nmax=0,5t/jV
Для получения максимальной помехоустойчивости необходи-
мо правильно выбирать граничные точки областей при различных
формах и расположении предельных передаточных характеристик,
а также параметры элементов с учетом обеспечения максимально
возможной помехоустойчивости.
Анализ формул (16.2) и (16.3) показывает, что характеристи-
ка помехоустойчивости определяется входными и выходными на-
пряжениями схемы, поэтому для гарантий помехоустойчивости
необходимо устанавливать заданное напряжение на входе цепи и
контролировать напряжение на ее выходе. Конкретные методики
контроля выходных напряжений будут рассмотрены далее.
Нагрузочная способность. Нагрузочная способность п опреде-
ляет допустимое количество цепей нагрузок, которые можно под-
ключить к управляющей цепи. При этом выходной ток /вых должен
быть больше допустимого суммарного тока цепей нагрузок, т.е.
/нх < /вых. Отсюда при идентичности входных токов цепей на-
грузок находим
и = ^.
Iвх
Обозначим напряжения t/0xl и UBX2, соответствующие выход-
ным напряжениям, Лог «О» и Лог «1». При напряжении (7ВХ1 из
измерительной системы вытекает ток /^х. При аналогичном на-
пряжении на выходе измерительной системы в выходную цепь
вытекает ток /£Ь1Х. Следовательно, нагрузочная способность цепи в
открытом состоянии, соответствующем Лог «О» на выходе, опре-
делится исходя из рассмотренных характеристик по формуле
*(ЛоГ.0.) = 4^ (16.4)
' вх
Аналогичным образом определяется нагрузочная способность
цепи в состоянии Лог «1»:
«(Лог.1.) = 4^- (16.5)
вх
Из формул (16.4) и (16.5) видно, что для проверки фактичес-
кой нагрузочной способности цепи необходимо проводить изме-
рения входных и выходных токов при заданных значениях вход-
ных и выходных напряжений.
278
На выходных характеристиках пороговые точки находятся на
крутых участках, т.е. при незначительных изменениях выходных
напряжений токи могут измениться на значительную величину.
Поэтому для повышения точности измерений задают выходные
токи и измеряют выходные напряжения (аналогичным образом
поступают при контроле параметров прямой ветви вольт-ампер-
ной характеристики диода).
Анализ передаточной, входной и выходной характеристик по-
казывает, что обеспечить гарантии помехоустойчивости и нагру-
зочной способности измерительной системы можно путем изме-
рения четырех контролируемых параметров при установлении ре-
жима измерения в соответствии с табл. 16.1.
Потребляемая мощность. Средняя мощность, потребляемая ло-
гической цепью, определяется по формуле
/о + /1
п _ с 7 п f п
Гср ~ Г'П 2 ’
где и — ток потребления в состоянии Лог «О» и Лог «1»
соответственно.
Для проверки потребляемой мощности необходимо контроли-
ровать параметры и 7 при соответствующих напряжениях на
входе цепи. В области зоны переключения (между значениями
№.nmax и ^Jx.nmin) л;,я схемы ТТЛ наблюдается резкое увеличе-
ние потребляемого тока. Это связано с тем, что в момент пере-
ключения оказываются открытыми как выходной транзистор, так
и транзистор, включенный в его коллекторную цепь. При этом
через транзисторы протекает импульс сквозного тока. Это приво-
дит к тому, что ток потребления является функцией частоты сле-
дования входных импульсов. Следовательно, при проектировании
источников питания для запитки схемы ТТЛ необходимо учиты-
Режим измерения*
Таблица 16.1
Контролируемые параметры Задаваемые параметры
Л/0 17 вых.птах 7/1 . • /0 v вх.п тт> 1 вых
т вых.гнтп jy° . т\ и вх.п max> 7 вых
4, 77 = U1 ивх vBUX.nmin
& 11 = [JQ и вх 17 вых. птах
•^кпп»; ^ax.nmi<p ^вых-пшах! пmin ~ входные и выходные порото-
вые напряжения в состоянии Лог «О» и Лог «1» соответственно;
Л°х; ^вх> ^вых» ^вых“ входные и выходные характеристики в состоянии
Лог «О» и Лог «1» соответственно.
279
вать повышение потребляемой мощности при увеличении рабо-
чей частоты устройства.
Контроль тока потребления на высокой частоте проводить весь-
ма сложно. Поэтому' вводится контроль дополнительного парамет-
ра — тока короткого замыкания /кз, т.е. контролируется ток, про-
текающий в выходной цепи при замыкании ее на «землю» и при
закрытом выходном транзисторе.
При выборе источников питания, обеспечивающих работу ап-
паратуры на цепях ТТЛ на высокой частоте, можно ориентиро-
ваться на следующее неравенство:
+ Л 3 > Л (/«/шах)’
т.е. сумма двух измеренных токов будет всегда несколько больше
тока потребления на предельной частоте.
Быстродействие. Быстродействие интегральной цепи опреде-
ляется средним временем переключения из одного логического
состояния в другое:
Л° .,01
*з.р т *з.р
(16.6)
где t з°р — задержка распространения сигнала из состояния Лог «1»
в состояние Лог «0»; t?’р — задержка распространения сигнала из
состояния Лог «0» в состояние Лог «1».
Эти значения времени, измеряемые на уровне порога пере-
ключения (1,5 В), состоят из двух этапов переходного процесса:
4р = 'э++0,5/£;
=г3- + 0,5Гф,
где — задержка включения, которая характеризуется временем,
в течение которого происходит заряд барьерных емкостей транзи-
сторов и паразитной емкости изолирующего р—л-перехода; /ф —
время включения цепи (фронт нарастания), которое характеризу-
ется накоплением заряда неосновных носителей в базе выходного
транзистора, а также перезарядом барьерной емкости коллектор-
ного перехода и разрядом нагрузочной емкости, подключенной к
выходу микросхемы.
В аппаратуре нагрузочная емкость определяется входной емко-
стью схем-нагрузок и емкостью печатного монтажа; г; — задержка
выключения, которая характеризуется временем рассасывания из-
быточного заряда, накопленного в области коллектора выходного
транзистора; /ф — время выключения цепи (фронт спада), кото-
рое характеризуется рассасыванием неосновных носителей в базе,
перезарядом емкости коллекторного перехода и зарядом емкости
нагрузки.
280
В качестве параметров, гарантирующих быстродействие, кон-
тролируются /эр и / J°p. Для цепи ТТЛ среднего быстродействия /°р -
< 22 нс и /*ор < 15 нс. Среднее время переключения в соответствии
с формулой (16.6) составляет гзср < 18,5 нс.
Дополнительные параметры. Очень часто при построении бло-
ков радиоэлектронной аппаратуры (РЭЛ) интегральные цепи
включаются от различных устройств (например, мощных ключей),
которые имеют общий источник питания. В этом случае на вход
может подаваться напряжение, равное напряжению питания. Для
обеспечения гарантии работоспособности измерительной систе-
мы при таком режиме работы в систему измеряемых параметров
вводится параметр /вхпро6 (ток входного пробивного напряжения),
который контролируется при £вх = £п.
В линиях передачи возможно появление помех, искажающих
информационные сигналы, в результате могут происходить лож-
ные срабатывания цепи. Анализ переходного процесса показыва-
ет, что амплитуда помехи определяется входными и выходными
характеристиками измерительной системы и волновым сопро-
тивлением линии связи. Для уменьшения амплитуды колебаний
во входные цепи введены ограничительные («антизвонные»)
диоды. Это конструктивное решение привело к тому, что вход-
ная характеристика в области £вх <0 изменила свой наклон. Если
диод в цепи в результате какого-либо дефекта будет отсутство-
вать, то наклон входной характеристики не изменится. Для кон-
троля качества диода вводится параметр Ua (напряжение на ан-
тизвонном диоде), который контролируется при определенном
входном токе /вхл.
Контроль статических и динамических параметров логических
интегральных цепей. Интегральные логические цепи предназначе-
ны для работы в электронной аппаратуре при самых разнообраз-
ных условиях, в том числе и в наихудших условиях, допустимых
техническими условиями. Поэтому электрические параметры долж-
ны контролироваться в условиях, соответствующих наихудшим
условиям работы. При этом следует отмстить, что для каждого
конкретного параметра и типа измерительной системы наихуд-
шие условия могут быть различными.
Рассмотрим методы контроля параметров на примере транзис-
торно-транзисторной логической цепи, выполняющей функцию
И-НЕ.
Схема измерения выходного напряжения логического нуля
исследуемой системы (ИС) показана на рис. 16.9, а. Параметр (/вых
является характеристикой помехоустойчивости и гарантируется при
заданной нагрузочной способности. Следовательно, его измерение
производится при одновременной подаче на все входы входного
порогового напряжения Лог «1» (1/’х задается генератором на-
пряжения (ГН)), при протекании в выходной цепи тока /2Ь1Х (зада-
281
Рис. 16.9. Схемы для измерения выходного напряжения логического нуля
и логической единицы:
а — измерение параметра ; б — измерение параметра
ется генератором тока (ГТ)) и минимальном напряжении пита-
ния, разрешенном условиями эксплуатации (задается генератором
напряжения Е^). Эти условия являются наихудшими для контроли-
руемого параметра.
Одновременная подача на все входы напряжения Лог «1» обес-
печивает контроль выполняемой функции. Действительно, если
хотя бы по одному входу напряжение Лог «1» окажется недоста-
точным для открывания цепи, то на выходе установится напря-
жение, не соответствующее Лог «О» (измеренная величина не бу-
дет больше, чем t/вых шах), и изделие будет отбраковано по данно-
му параметру.
Схема измерения выходного напряжения логической единицы
приведена на рис. 16.9, б. Контроль данного параметра произво-
дится при вытекающем токе который задается генератором тока
при минимальном напряжении питания, т.е. задается генератором
напряжения Е^. Для обеспечения режима Лог «1» на выходе можно
на все входы ИС подать напряжение, соответствующее Лог «О». Од-
нако в этом случае не будет гарантироваться помехоустойчивость.
Для гарантии помехоустойчивости на один из контролируемых вхо-
дов подается напряжение, соответствующее значению т.е.
оно задается генератором ГН|. При этом на оставшиеся входы по-
дается напряжение, соответствующее максимальному значению Лог
«1», т.е. оно задается генератором ГН2. Контроль выполняемой фун-
кции обеспечивается поочередным подключением входов к гене-
ратору напряжения ГН) и при этом каждый раз производится из-
мерение выходного напряжения.
Схема для измерения входного тока логического нуля /$х при-
ведена на рис. 16.10, а. Контроль данного параметра производится
поочередно по каждому входу. В этом случае к контролируемому
входу подключается генератор ГНЬ напряжение которого равно
£7?ых, и измеряется ток, протекающий в данной цепи. При каж-
дом измерении оставшиеся входы подключаются к генератору на-
пряжения ГН2, на котором выставляется напряжение, соответ-
282
Рис. 16.10. Схемы для измерения входного тока логического нуля, логи-
ческой единицы и пробивного тока на входе ИС:
а — измерение параметра тока /£ ; б — измерение параметров тока /1х и fmnpo6
ствуюшее максимальному напряжению Лог «1». Наихудшие усло-
вия, при которых измеренное значение максимально, соответ-
ствуют максимальному напряжению питания, которое задается
генератором напряжения Еп.
Схема измерения входного тока логической единицы 1\х и про-
бивного тока на входе схемы /вх.проб приведена на рис. 16.10, б.
Контроль данных параметров производится поочередно по каж-
дому входу. Контролируемый вход подключается к генератору на-
пряжения, на котором напряжение для параметра /‘х устанавли-
вается равным Г/вьа.птт, а для параметра /вх.Проб соответствует мак-
симальному напряжению питания. Наихудший случай для указан-
ных параметров обеспечивается заданием максимального напря-
жения питания.
Рассмотрим на конкретном примере, как посредством контро-
ля параметров С/Ц, /VBX, /<JX, контролируются помехоустой-
чивость и нагрузочная способность ТТЛ схемы. Норму на пара-
метр примем равной 0,4 В при токе нагрузки 16 мА, а значе-
ние входного порогового напряжения Лог «1» установим 2 В. Нор-
ма на параметр UBbIX соответствует 2,4 В. При этом ток нагрузки
задается 400 мкА, а входное пороговое напряжение Лог «0» уста-
навливается равным 0,8 В. Норма на параметр /вх соответствует
40 мкА, а на параметр 7ВХ — 1,6 мА. Тогда будем иметь:
U* =0,8 В-0,4 В = 0,4 В;
U- = 2,4 В - 2,0 В = 0,4 В;
16 мА 1П
',<Лor•,,” = 1,6 мА = 10’
400 мА , А
40^А '°
283
Приведенный пример показывает, что помехоустойчивость
логической цепи составляет 0,4 В, а на«рузочная способность рав-
на 10.
Схема контроля параметра С/д приведена на рис. 16.11, а. Конт-
роль данного параметра производится поочередно по каждому входу.
Генератором тока (ГТ) задается вытекающий ток /я и измеряется
напряжение на входе цепи. Так как этот параметр определяется
при открытом состоянии антизвонного диода, то измеряемое на-
пряжение будет отрицательным. Наихудшие условия для данного
параметра соответствуют режиму, когда напряжение питания ми-
нимально (оно задается источником напряжения Ец) и на остав-
шиеся входы подается напряжение, соответствующее максималь-
ному значению Лог «1».
Схема контроля параметра /кз приведена на рис. 16.11, б. Кон-
троль данного параметра заключается в измерении тока, протека-
ющего в выходной цепи при замыкании его на общую шину. При
этом все входы микросхемы также подключены к обшей шине.
Наихудшие условия обеспечиваются заданием максимального на-
пряжения питания.
Схемы контроля параметров /?1ОТ и /^от приведены на рис. 16.12.
Контроль данных параметров заключается в измерении токов, про-
текающих в цепи питания ИС, когда она находится в состоянии
Лог «0» и Лог «1» на выходе. Состояние Лог «0» обеспечивается
подключением всех входов к генератору напряжения ГН, напря-
жение которого устанавливается равным напряжению питания.
Состояние Лог «1» обеспечивается подключением всех входов к
общей шине. Наихудшие условия, при которых измеренные зна-
чения параметров максимальны, соответствуют максимальному
напряжению питания (оно задается генератором напряжения Еп).
Схема для измерения динамических параметров t '°р, приве-
дена на рис. 16.13. Контроль данных параметров заключается в из-
мерении посредством двухлучевого осциллографа Р временных ин-
тервалов.
Рис. 16.11. Схемы для измерения напряжения антизвонного диода и тока
короткого замыкания ИС:
а — измерение параметра {/д; б — измерение параметра IKi
284
Рис. 16.12. Схемы для измерения тока потребления логического нуля
и логической единицы:
а — измерение параметра /£от ; б — измерение параметра
Резистор подключается непосредственно к входу цепи и пред-
назначен для согласования генератора импульсов, линии связи и
входного сопротивления цепи. Сопротивление этого резистора
должно иметь то же значение, что и волновое сопротивление ли-
нии связи. В измерительную цепь введен эквивалент нагрузки,
который приближает условия измерения к условиям эксплуата-
ции микросхем. Диоды Д,...Д4 обеспечивают включение на!рузоч-
ного тока, протекающего от источников Еп через резистор /?2,
аналогично тому, как это происходит при включении цепей на-
грузок в реальных узлах аппаратуры. Емкость нагрузки Си имити-
рует входные емкости измерительной системы и монтажной пла-
ты. Сопротивление резисторов /?2, емкость нагрузки Сн и пара-
метры диодов выбираются в зависимости от типа микросхемы и
условий се эксплуатации. Входы, на которые в данном измерении
не подается сигнал от генератора импульсов, подключены к гене-
ратору напряжения ГН. значение которого устанавливается рав-
ным максимальному значению Лог «1».
Рис. 16.13. Схема для измерения динамических параметров
285
Для интегральных цепей ТТЛ среднего быстродействия задерж-
ки включения и выключения составляют rjp 22 нс и < 15 нс.
Среднее время переключения с учетом этих данных /з ср <18,5 нс.
При этом входной импульс имеет следующие параметры: амп-
литуду 3 В, длительность импульса 100 нс, частоту следования
импульсов 1 МГц, фронты импульса 10 нс.
Измерительные средства. Основной особенностью контрольно-
измерительной аппаратуры, предназначенной для оценки пара-
метров измерительных средств, является то, что она должна иметь
несколько источников и измерителей напряжения и тока. Важны-
ми показателями работы такой аппаратуры служат точность зада-
ния режима и погрешности измерения параметров интегральных
схем. К такой аппаратуре, например, относится контрольно-из-
мерительный комплекс «Интеграл», который обеспечивает изме-
рения цепей ТТЛ при массовом производстве.
Измерительный комплекс предназначен для контроля по за-
данной программе статических характеристик цепей с количеством
выводов до 24 и напряжением питания не более 16 В. Комплекс
содержит ЭВМ, позволяющую одновременно хранить в памяти
до пяти измерительных программ. Он характеризуется следующи-
ми основными показателями: количеством измерительных пуль-
тов (5); максимальным количеством измерений в одной програм-
ме (до 200); количеством программируемых источников напряже-
ния (4); источником тока (1).
В измерительном комплексе имеется устройство, обеспечива-
ющее измерение напряжения и тока, а также сравнение с эталон-
ными значениями. Устройство по напряжению имеет два диапазо-
на, которые по всем характеристикам совпадают с программиру-
емыми источниками напряжения.
Измерительный комплекс обеспечивает подключение любого
из 24-х выводов к одному из программируемых источников на-
пряжения или к измерительному устройству. Время цикла срав-
нения напряжения или тока с образцовым значением составляет
от 3 до 50 мс в зависимости от величины измеряемого тока или
выходного сопротивления источника.
Для контроля динамических параметров цепей измерительной
системы применяются установка контроля динамических пара-
метров микроузлов «Лодка-1», универсальный полуавтомат для
контроля динамических параметров цифровых микроузлов «Эле-
кон-ДЛ» и испытатель микроузлов ИИС-1Д.
Измерительная система «Лодка-1» позволяет контролировать ди-
намические параметры логических элементов типа ТТЛ, ДТЛ, ЭСЛ,
а также триггеров, счетчиков, ОЗУ, так как в ее составе имеются
три автономно управляемых канала генераторов импульсов.
Измерительные системы «Элекон-ДЛ» и ИИС-1Д обеспечива-
ют контроль динамических параметров логических цепей ТТЛ,
286
Рис. 16.14. Структурная схема измерительного комплекса «Элекон-СД»
сумматоров, ПЗУ, т.е. тех типов микроузлов, при контроле дина-
мических параметров которых требуется не более одного канала
генератора.
Наличие двух автономных измерительных систем для контроля
статических и динамических параметров приводит к тому, что в
технологическом процессе их производства контроль параметров
занимает много времени, так как приходится производить кон-
тактирование дважды: отдельно для контроля статических и дина-
мических параметров.
Этого недостатка лишен комплекс «Элекон-СД», который поз-
воляет контролировать в одном контактирующем устройстве ста-
тические и динамические параметры измерительной системы.
Структурная схема измерительного комплекса «Элекон-СД» при-
ведена на рис. 16.14. Она включает в себя:
• установку контроля статических параметров «Элекон-УКС-2»;
• установку контроля динамических параметров «Элекон-УКД»;
• инженерную станцию комплекса;
• четыре рабочих места РМ-1... РМ-4.
• вычислительную машину с устройствами ввода-вывода ин-
формации, в памяти которой хранятся программы контроля ИС и
самоконтроля комплекса.
«Элскон-СД» позволяет контролировать измерительные систе-
мы с числом выводов до 96. Быстродействие комплекса при конт-
роле статических параметров составляет 2...5 мс/тест, динамичес-
ких — 5... 10 мс/тест. Диапазоны задаваемых величин токов, на-
пряжений и измеряемых временных интервалов обеспечивают воз-
можность контроля статических и динамических параметров из-
мерительных систем.
Контрольные вопросы
1. Какую роль выполняет генератор тока в схеме измерения прямого
напряжения р— w-перехода диодов?
2. Чем вызвана необходимость преобразования постоянного тока в
переменный при измерении обратного тока переходов транзисторов?
287
3. Какие существуют методы измерения емкости р—^-переходов по-
лупроводниковых приборов?
4. Что понимается под термином «статическая помехоустойчивость»?
5. Дайте определение термину «антизвонный» диод.
6. С какой целью в схему измерения напряжения логической единицы
включен генератор THj?
7. Чем отличается методика измерения параметра Ua от методики из-
мерения параметра 1КЗ?
8. С какой целью в схему измерения динамических параметров вклю-
чен эквивалент нагрузки?
ГЛАВА 17
ИЗМЕРЕНИЕ АМПЛИТУДНО-ЧАСТОТНЫХ
ХАРАКТЕРИСТИК
17.1. Структурные схемы измерителей
амплитудно-частотных характеристик
Свойства цепей и устройств в существенной степени зависят
от их частотных и переходных характеристик.
Для цепей с сосредоточенными элементами важную роль игра-
ют амплитудно-частотная и фазочастотная характеристики.
Амплитудно-частотной характеристикой (АЧХ) называют кри-
вую зависимости амплитуды напряжения на выходе цепи от час-
тоты при постоянной амплитуде напряжения на входе. Амплитуд-
но-частотную характеристику избирательных цепей, в частности
колебательных контуров, называют резонансными кривыми.
Фазочастотная характеристика (ФЧХ) представляет собой час-
тотную зависимость разности фаз между напряжениями на выходе и
входе исследуемой цепи. Производная от ФЧХ по угловой частоте
является частотной характеристикой группового времени задержки.
При экспериментальном исследовании цепей обычно опреде-
ляют их АЧХ. Это объясняется следующими причинами.
Амплитудно-частотная характеристика наглядно отображает
свойства цепи в исследуемом диапазоне частот. Ее можно полу-
чить сравнительно простыми техническими средствами на базе
стандартной измерительной аппаратуры. Кроме того, у минималь-
но-фазовых цепей существует однозначное соответствие между
частотными характеристиками, поэтому ФЧХ можно вычислить
по измеренной АЧХ.
Минимально-фазовыми цепями являются колебательные кон-
туры, фильтры, усилители и другие радиосхемы, в которых отсут-
ствуют перекрестные связи. К неминимально-фазовым цепям от-
носятся мостовые и некоторые специальные схемы. Практически,
288
при настройке минимально-фазовых цепей достаточно обеспечить
заданную форму их АЧХ. При этом цепь имеет вполне определен-
ные ФЧХ и характеристику группового времени задержки.
Приборы для исследования амплитудно-частотных характери-
стик радиосхем и радиоустройств называются измерителями АЧХ.
Структурная схема простейшего измерителя АЧХ приведена на
рис. 17.1, а. Генератор синусоидальных колебаний перестраивают
в заданном диапазоне частот. Амплитудно-частотную характерис-
тику или зависимость амплитуды напряжения на выходе исследу-
емой цепи от частоты при постоянной амплитуде напряжения на
входе снимают по точкам при последовательной настройке гене-
ратора на частоты/ьА/ь---, Л- По результатам измерений строят
искомую кривую (рис. 17.1, б).
Способ снятия амплитудно-частотных характеристик (см. рис. 17.1)
является трудоемким. Длительность процесса измерения АЧХ при-
водит к появлению ошибок, обусловленных нестабильностью час-
тоты генератора и питающих напряжений. Кроме того, могут быть
пропущены резкие изменения АЧХ в промежутках между точками
измерений.
Недостатки этого способа особенно заметны при настройке
цепей и устройств, когда после каждого изменения элементов
схемы всю процедуру снятия АЧХ приходится повторять.
В настоящее время широко применяются панорамные автома-
тизированные измерители АЧХ, построенные на основе генера-
тора с качающейся частотой и электронно-лучевого индикатора.
Использование этих приборов существенно уменьшает время из-
мерения параметров АЧХ и повышает качество настройки радио-
схем.
По принципу действия и построению эти приборы близки к
гетеродинным анализаторам спектра. Однако между измерителя-
ми АЧХ и анализаторами спектра имеются и существенные раз-
личия, связанные с тем, что анализатор спектра предназначен
для измерения параметров сигналов, а измеритель АЧХ служит
для исследования характеристик цепей и устройств.
Рис. 17.1. Снятие АЧХ по точкам:
а — структурная схема; б — построение АЧХ
289
Упрошенная структурная схема автоматизированного измери-
теля АЧХ приведена на рис. 17.2. Основу прибора составляет гене-
ратор качающейся частоты (ГКЧ), который предназначен для
выработки напряжения с постоянной амплитудой, модулирован-
ного по частоте. Закон изменения частоты определяется формой
модулирующего напряжения, в качестве которого используют
пилообразное напряжение развертки.
Таким образом, на вход исследуемой цепи подается напряже-
ние с постоянной амплитудой и периодически меняющейся час-
тотой. Закон изменения амплитуды напряжения на выходе цепи
будет повторять форму АЧХ. Если это напряжение подать на вер-
тикально отклоняющие пластины ЭЛТ, то на экране появится
изображение АЧХ исследуемой цепи.
Напряжение на ЭЛТ можно подавать непосредственно с выхода
исследуемого четырехполюсника или после детектора и усилите-
ля (переключатель К на схеме рис. 17.2, а находится в положениях
1 или 2). Соответствующие изображения на экране ЭЛТ приведены
на рис. 17.2, б, на котором показанная «нулевая линия» прочерчи-
вается во время обратною хода луча. На это время ГКЧ запирается.
Первый вариант применяют в тех случаях, когда на выходе
цепи напряжение имеет достаточно большую амплитуду, напри-
мер при исследовании усилителей. При этом устраняются ошиб-
ки, обусловленные нелинейностью характеристики детектора и
неравномерностью АЧХ низкочастотного усилителя прибора.
Второй вариант используют при исследовании цепей и уст-
ройств с малым коэффициентом передачи.
Кроме узлов, представленных на рис. 17.2, современный изме-
ритель АЧХ имеет ряд дополнительных устройств, повышающих
точность воспроизведения исследуемых АЧХ и улучшающих экс-
плуатационные характеристики прибора. Обобщенная структур-
ная схема измерителя АЧХ представлена на рис. 17.3.
а
Рис. 17.2. Упрошенная структурная схема автоматизированного измери-
теля АЧХ (о) и соответствующие изображения на экране ЭЛТ (б) (ключ в
положении / и 2)
290
Рис. 17.3. Обобщенная структурная схема измерителя АЧХ
Кратко охарактеризуем работу' этих устройств. Из принципа дей-
ствия измерителя АЧХ следует, что отклонение луча по горизонта-
ли должно быть пропорционально частоте, т.е. имеет место линей-
ная зависимость между мгновенными значениями напряжения раз-
вертки и частоты ГКЧ. Отклонения от этой зависимости приводят
к неравномерности частотного масштаба на экране прибора и к
искажениям формы исследуемых АЧХ. Поэтому в измеритель АЧХ
вводится схема линеаризации модуляционной характеристики ГКЧ.
Качание частоты обычно сопровождается изменением ампли-
туды напряжения ГКЧ, что также приводит к искажениям формы
исследуемых АЧХ на экране. Поэтому в приборе имеется устрой-
ство автоматической регулировки амплитуды (АРА), стабилизи-
рующее напряжение на выходе ГКЧ.
Для изменения напряжения, подаваемого на исследуемую цепь,
на выходе ГКЧ включают переменный аттенюатор.
Частоты, соответствующие характерным точкам АЧХ, измеря-
ют с помощью частотных меток. Как правило, метки формируют
из нулевых биений напряжения ГКЧ с напряжением, спектр кото-
рого содержит набор постоянных калибровочных частот. Усиленное
напряжение подается на вертикально отклоняющие пластины или
модулятор ЭЛТ и образует частотную шкалу на экране прибора.
Измеритель АЧХ также комплектуется набором выносных и
встроенных детекторных головок различного назначения.
17.2. Основные узлы и устройства измерителей
амплитудно-частотных характеристик
Важнейшим узлом измерителя АЧХ является генератор кача-
ющейся частоты. Рабочий диапазон частот, максимальная и ми-
291
нимальная полоса качания частоты, точность воспроизведения ис-
следуемых АЧХ на экране определяются схемой и параметрами
ГКЧ. Генератор качающейся частоты строится на принципах, ко-
торые были рассмотрены в гл. 11. Поэтому здесь О1раничимся крат-
кой характеристикой генераторов качающейся частоты, приме-
няемых в измерителях АЧХ (рис. 17.4).
В тех случаях, когда требуются небольшой коэффициент пере-
стройки по частоте (менее 5) и малая полоса качания частоты,
применяют ГКЧ, состоящий из частотного модулятора и одно-
контурного автогенератора с перестраиваемой средней частотой
(см. рис. 17.4, а).
При исследовании широкополосных цепей возникает необхо-
димость автоматического изменения частоты в широкой полосе.
В этом случае применяют ГКЧ гетеродинного типа.
Напряжения с выходов диапазонного генератора и автогенерато-
ра, настроенные на постоянную среднюю частоту, подаются на сме-
ситель. С помощью фильтра нижних частот на выходе смесителя вы-
деляется колебание разностной частоты
/гкч = fn. ~
где/i — частота диапазонного генератора;— частота автогенера-
тора.
Полоса качания частоты равна полосе, в которой изменяется
частота автогенератора. Частоты обычно значительно ниже сред-
ней частоты колебаний автогенератора, поэтому можно получить
коэффициент перестройки по частоте до 104 при относительной
полосе качания более единицы.
Достоинством такой схемы является возможность получения
большой мощности на выходе.
Недостатками этой схемы являются возможность появления
искажений формы выходного напряжения (вследствие попадания
в полосу пропускания фильтра комбинационных колебаний вы-
соких порядков) и сравнительно малая мощность на выходе.
Модулятор (генератор развертки) вырабатывает напряжение для
управления частотой ГКЧ и горизонтальным отклонением луча. Форма
модулирующего напряжения в измерителях АЧХ, в принципе, мо-
жет быть любой. Необходимо лишь обеспечить постоянный частот-
ный масштаб по оси х, т. е. линейную связь между мгновенными зна-
чениями частоты ГКЧ и величиной горизонтального отклонения луча.
Поскольку в измерителях АЧХ в качестве напряжения разверт-
ки используют модулирующее напряжение и отклонение луча по
горизонтали, пропорциональное ему, то сформулированное ус-
ловие можно записать следующим образом:
/га(0 = ^О). (17.1)
где а и b — некоторые постоянные коэффициенты.
292
Устройство автоматической регулировки
амплитуды
г
Рис. 17.4. Структурные схемы ГКЧ:
а — гетеродинного типа; б — с системой автоматической регулировки частоты;
в — линеаризация модуляционной характеристики с помощью частотного де-
тектора; г — с автоматической регулировкой амплитуды
Соотношение (17.1) справедливо при любом законе измене-
ния модулирующего напряжения.
293
Практически применяются напряжения пилообразной, тре-
угольной и синусоидальной форм. Период модулирующего напря-
жения делится на время прямого и обратного хода луча. В течение
прямого хода луч прочерчивает на экране исследуемую АЧХ, а
обратный ход используется для фиксации линии развертки, т.е.
линии, соответствующей нулевому отклонению луча по верти-
кали. Это достигается путем запирания ГКЧ на время обратного
хода луча специальными импульсами, вырабатываемыми в мо-
дуляторе.
В измерителях АЧХ с треугольным законом качания частоты
генератор качающейся частоты не запирают, и луч прочерчивает
исследуемую АЧХ как при прямом, так и при обратном ходе. Это
позволяет контролировать динамические погрешности измерений
(см. подразд. 17.4).
Зависимость /гхч(^мод) называют модуляционной характеристи-
кой ГКЧ. Как следует из формулы (17.1), эта зависимость должна
быть линейной. Ее нелинейность приводит к искажению формы
исследуемых АЧХ на экране прибора.
Рассмотрим основные способы линеаризации модуляционной
характеристики ГКЧ.
1. В ряде случаев эту задачу решают путем введения в схему
измерителя диодного функционального преобразователя. Диодный пре-
образователь включают между модулятором и нелинейным эле-
ментом в контуре автогенератора. С помощью этой схемы осуще-
ствляется такое изменение формы модулирующего напряжения,
при котором обеспечивается нужный закон изменения частоты
ГКЧ, т.е. линейность модуляционной характеристики.
Этот способ весьма удобен, так как он обладает простотой схем
диодных преобразователей, возможностью аппроксимировать с их
помощью практически любую функцию с высокой степенью точ-
ности.
2. При пилообразном модулирующем напряжении линейность мо-
дуляционной характеристики обеспечивается при изменении час-
тоты ГКЧ по линейному закону. В этом случае целесообразно ис-
пользовать систему автоматической регулировки частоты, изо-
браженную на рис. 17.4, б.
Напряжение на смеситель подается с выхода ГКЧ и с линии
задержки. Время задержки не должно зависеть от частоты. При этом
колебания на выходе линии задержки по отношению к колебани-
ям на входе буду]' сдвинуты на время /3. С помощью фильтра ниж-
них частот на выходе смесителя выделяется колебание разностной
частоты
ЛО =/пя(0-/гкч('-(,)•
Очевидно, что при линейной зависимости f^(t) разностное
колебание будет иметь постоянную частоту, т.е.
294
Л)(0 ~ /гкч(^з) /гкч min >
где /гкч „цп — значение минимальной частоты ГКЧ.
На эту частоту и настраивают частотный детектор. При откло-
нении закона изменения частоты ГКЧ от линейного на выходе
частотного детектора появляется напряжение ошибки. Воздействуя
на нелинейный элемент в схеме автогенератора, это напряжение
линеаризирует модуляционную характеристику ГКЧ.
3. Способ линеаризации модуляционной характеристики, ос-
нованный на применении частотного детектора, поясняется
структурной схемой рис. 17.4, в.
Колебания автогенератора с качающейся частотой подаются
на частотный детектор, настроенный на среднюю частоту автоге-
нератора. Напряжение с выхода частотного детектора использует-
ся для горизонтального отклонения луча. Как известно, величина
этого напряжения линейно зависит от частоты колебания на вхо-
де частотного детектора.
Данный способ линеаризации модуляционной характеристики
целесообразно применять при постоянной средней частоте авто-
генератора, т. е. когда он включен в схему ГКЧ гетеродинного типа
(см. рис. 17.4, а). Практически этот способ используют лишь при
малой полосе качания частоты из-за трудности создания частот-
ного детектора с линейной характеристикой в широкой полосе
частот.
Амплитудно-частотная характеристика должна сниматься при
постоянной амплитуде напряжения на входе исследуемого уст-
ройства, т.е. при постоянной амплитуде напряжения ГКЧ.
Нестабильность амплитуды напряжения ГКЧ в пределах поло-
сы качания вызывает искажения формы исследуемой АЧХ на эк-
ране. Изменение этой величины при перестройке ГКЧ приводит к
ошибкам при определении коэффициента передачи исследуемой
цепи.
В современных измерителях АЧХ принимают специальные меры
для стабилизации амплитуды напряжения ГКЧ. В схему прибора
вводится устройство автоматической регулировки амплитуды
(АРА), изображенное на рис. 17.4, г.
Напряжение ГКЧ поступает на детектор системы АРА. Напряже-
ние на выходе детектора, пропорциональное амплитуде напряже-
ния ГКЧ, сравнивается с постоянным опорным напряжением UQ.
Усиленное разностное напряжение (сигнал ошибки) подается на
ГКЧ и стабилизирует амплитуду его колебаний.
В качестве детектора АРА на низких частотах используют высо-
коомную детекторную головку, на высоких частотах применяют го-
ловку проходного типа (описание детекторных головок приводится
далее). Усилителем системы АРА, как правило, является усилитель
постоянного тока с малым дрейфом выходного напряжения.
295
Недостатком рассмотренного способа стабилизации амплиту-
ды напряжения ГКЧ является то, что изменение амплитуды коле-
баний, как правило, приводит к дополнительной модуляции час-
тоты, что вызывает искажения формы АЧХ на экране.
Этого недостатка нет у другого способа стабилизации ампли-
туды напряжения ГКЧ. Между генератором качающейся частоты
и исследуемым устройством включают широкополосный усили-
тель с электрически изменяемым коэффициентом усиления. На-
пряжение с выхода системы АРА регулирует коэффициент усиле-
ния, стабилизируя, таким образом, напряжение на входе иссле-
дуемого устройства.
На высоких частотах для стабилизации амплитуды напряжения
ГКЧ применяют широкополосные электрически управляемые ат-
тенюаторы.
Измерители амплитудно-частотной характеристики комплек-
туются выносными и встроенными детекторными головками трех
типов: высокоомными, согласованными оконечного типа и со-
гласованными проходными. Принципиальные схемы детекторных
головок приведены на рис. 17.5.
Рис. 17.5. Принципиальные схемы детекторных головок:
а — высокоомной; б — согласованной оконечной; в — согласованной проходной
296
Высокоомные детекторные головки предназначены для измере-
ния напряжения с минимальным влиянием на исследуемую цепь.
Они применяются на частотах до нескольких сотен мегагерц. Вы-
сокоомная детекторная головка должна иметь достаточно боль-
шое входное активное сопротивление, малую входную емкость и
равномерную АЧХ в рабочей полосе частот.
Выравнивание частотной характеристики детекторной головки
достигается путем включения последовательно с диодом неболь-
шого активного сопротивления (на рис. 17.5, а эту роль выполняет
резистор Rx)y ослабляющего влияние резонанса входной цепи.
Согласованные детекторные головки оконечного типа служат для
измерения напряжения на выходе высокочастотных трактов, ра-
ботающих в режиме бегущей волны. Эти головки должны иметь
малый коэффициент стоячей волны напряжения IQ в на входе и
равномерную АЧХ в рабочем диапазоне частот.
Малый коэффициент стоячей волны напряжения обеспечива-
ют согласованием входа детекторной головки с высокочастотным
трактом. Для этого сопротивление поглощающего резистора Rx (см.
рис. 17.5, 6) устанавливают равным волновому сопротивлению
исследуемого тракта. Равномерность амплитудно-частотной харак-
теристики детекторной головки достигается компактностью кон-
струкции, в частности включением диода в непосредственной бли-
зости от резистора R}.
Согласованные проходные детекторные головки используют для
контроля неравномерности амплитуды напряжения ГКЧ, а также
при некоторых измерениях. Проходная детекторная головка пред-
ставляет собой отрезок коаксиальной линии, к внутреннему про-
воднику которой подключен диод (см. рис. 17.5, в). Для компенса-
ции емкости диода диаметр внешнего коаксиала в области распо-
ложения диода несколько увеличивают.
Основным недостатком детекторной головки любого типа яв-
ляется нелинейность ее характеристики детектирования. Это
связано с неидеальной формой вольт-амперной характеристи-
ки диода.
Кривую, изображающую характеристику детектирования, с
достаточной для практики точностью можно разбить на два участ-
ка — начальный с квадратичной зависимостью тока детектора от
амплитуды входного напряжения и линейный.
Для детекторных головок с германиевыми полупроводниковы-
ми диодами граничное значение амплитуды входного напряже-
ния обычно составляет 0,2 В. В измерителях амплитудно-частот-
ной характеристики работают на линейном участке характеристи-
ки детектирования. Для этого амплитуда напряжения на выходе
исследуемой цепи должна быть больше указанной величины.
На рис. 17.5 R{ и R2 — резисторы; Cj и С2 — конденсаторы;
Д2Е, Д605 — используемые диоды.
297
В индикаторное устройство измерителя АЧХ входят усилители
вертикального и горизонтального каналов и электронно-лучевая
трубка.
Выбор типа ЭЛТ определяется ее эксплуатационными свой-
ствами, а именно: размерами экрана, чувствительностью, каче-
ством фокусировки луча, рабочей полосой частот и т.д. В зависи-
мости от частоты модулирующего напряжения используют ЭЛТ с
нормальным или длительным послесвечением.
В измерителях АЧХ применяют как осциллографические труб-
ки с электростатическим отклонением луча, так и трубки телеви-
зионного типа с магнитным отклонением луча. Последние имеют
обычно прямоугольный экран значительно больших размеров, чем
трубки с электростатическим отклонением, и лучшую фокуси-
ровку луча.
Недостатками магнитных ЭЛТ являются большие мощности,
необходимые для отклонения луча и малая рабочая полоса частот,
что обусловлено, в основном, большими индуктивностями откло-
няющих катушек. Для выравнивания частотных характеристик ин-
дикатора применяют отрицательную обратную связь в оконечных
каскадах усилителей вертикального и горизонтального каналов.
17.3. Измерение частот характерных точек амплитудно-
частотных характеристик
При исследовании амплитудно-частотных характеристик воз-
никает необходимость измерения частот и частотных интервалов,
соответствующих характерным точкам изображения на экране
измерителя АЧХ. Эти измерения выполняются с помощью час-
тотных меток, которые могут быть подвижными или неподвиж-
ными.
Рассмотрим способы образования частотных меток и измере-
ния частот, применяемые в современных приборах.
В измерителях АЧХ чаше всего пользуются системой непод-
вижных равностоящих частотных меток. Метки формируют из ну-
левых биений напряжения ГКЧ с напряжением, спектр которого
содержит набор постоянных калибровочных частот.
Сущность этого способа образования частотных меток поясня-
ется структурной схемой, приведенной на рис. 17.6.
Напряжение от генератора с повышенной стабильностью ча-
стоты (обычно кварцевого) подается на усилитель гармоник,
представляющий собой усилитель-ограничитель с индуктивной
нагрузкой (см. рис. 17.6). Его режим работы подбирают так, что-
бы получить достаточно большое число гармоник кварцованной
частоты на выходе. На смеситель поступают напряжение ГКЧ с
частотой, меняющейся во времени по определенному закону, и
298
Рис. 17.6. Структурная схема образования частотных меток методом нуле-
вых биений
напряжение сложной формы, спектр которого состоит из час-
тот, кратных частоте кварцевого генератора. Нулевые биения
образуются при равенстве частоты ГКЧ соответствующим калиб-
ровочным частотам.
Напряжение нулевых биений выделяется фильтром нижних
частот. Как правило, для этого используют АС-фильтры с доста-
точно низкой частотой среза. Увеличение частоты среза фильтра
приводит к расширению меток на экране.
Напряжение с выхода фильтра поступает на усилитель низкой
частоты. Усиленное напряжение биений подается на вертикально
отклоняющие пластины или модулятор ЭЛТ и образует частот-
ную шкалу на экране прибора. Частотный интервал между двумя
соседними метками равен частоте кварцевого генератора.
Для изменения масштаба частотной шкалы на экране (интер-
валов между метками) включают различные кварцевые генерато-
ры или используют делители частоты.
Рассмотренный способ образования частотных меток приме-
няется в большинстве широкополосных измерителей АЧХ.
При исследовании узкополосных цепей с симметричными ам-
плитудно-частотными характеристиками удобно пользоваться си-
стемой трех подвижных частотных меток.
Структурная схема образования меток приведена на рис. 17.7, а.
Высокочастотный диапазонный генератор с частотой f модулиру-
а б
Рис. 17.7. Измерение частот с помощью трех подвижных меток:
а — схема образования меток; б — изображение на экране ЭЛТ
299
МОД I
Рис. 17.8. Линейно-ступенчатое
напряжение
стся по амплитуде синусоидаль-
ным напряжением с частотой /2
от низкочастотного диапазонно-
го генератора. Напряжение с вы-
хода высокочастотного генерато-
ра подается на смеситель. Таким
образом, на смеситель поступа-
ют колебания частот f,f - fa, fa +
+ fan напряжение ГКЧ с часто-
тойменяющейся во време-
ни. Напряжение меток формиру-
ется фильтром нижних частот из нулевых биений между колебани-
ями указанных частот и напряжением ГКЧ.
Усиленное напряжение меток подается на ЭЛТ. Меняя частоты
настройки высокочастотного и низкочастотного генераторов, сов-
мещают метки с характерными точками исследуемой АЧХ (см.
рис. 17.7, б). Частоты меток определяют по шкалам генераторов.
Точность измерения частот на экране измерителя АЧХ можно
повысить, используя для модуляции частоты ГКЧ и горизонталь-
ного отклонения луча напряжение линейно-ступенчатой формы
(/мол (рис. 17.8). В момент времени соответствующий началу сту-
пеньки, останавливаются частота ГКЧ и электронный луч. На ис-
следуемой амплитудно-частотной характеристике появляется све-
тящаяся точка, яркость которой определяется длительностью сту-
пеньки, а диаметр — качеством фокусировки луча.
Частота измеряется за время ступеньки электронно-счетным
частотомером. Для запуска частотомера используют импульсы,
совпадающие по времени с началом ступеньки. Перемещая сту-
пеньку и соответственно светящуюся точку на экране ЭЛТ, изме-
ряют частоты, характеризующие исследуемую АЧХ.
Линейно-ступенчатое напряжение формируют с помощью фан-
тастронных схем или путем подключения к обычному генератору
пилообразного напряжения схемы образования ступеньки (элек-
тронного ключа). Длительность ступеньки определяется временем
счета частотомера, т.е. временем измерения частоты.
Рассмотренный способ позволяет измерять частоты с высокой
точностью, однако он требует существенного увеличения перио-
да качания частоты (практически до нескольких секунд), что ог-
раничивает его применение.
17.4. Применение измерителей амплитудно-частотных
характеристик
Основным назначением измерителей АЧХ является исследова-
ние амплитудно-частотных характеристик линейных четырехпо-
300
люсников. Измерители АЧХ также применяются для исследова-
ния частотной зависимости крутизны АЧХ, измерения добротно-
сти колебательных контуров и резонаторов, параметров высоко-
частотных цепей. Рассмотрим методику и особенности этих изме-
рений.
Измерение АЧХ. Для неискаженного воспроизведения ампли-
тудно-частотных характеристик на экране измерителя АЧХ необ-
ходимо выполнить ряд условий, связанных как со свойствами ис-
следуемого устройства, так и с диапазоном рабочих частот.
Нормальный режим эксплуатации прибора соответствует ра-
боте ГКЧ на согласованную нагрузку. Обычно выходное сопро-
тивление ГКЧ на низких частотах равно 600 Ом, а на высоких —
75 или 50 Ом. Если входное сопротивление исследуемого четырех-
полюсника существенно отличается от указанных величин, то при-
меняют согласующие устройства. В частности, когда четырехпо-
люсник имеет низкоомный вход, включают делитель напряже-
ния.
Качество согласования можно проверить, подавая на индика-
торное устройство прибора напряжение с согласованной проход-
ной детекторной головки, включенной между ГКЧ и исследуемым
четырехполюсником. При этом на экране получается изображе-
ние огибающей напряжения ГКЧ, по которому' можно оценить
неравномерность амплитуды напряжения в установленной полосе
качания частоты.
При исследовании активных четырехполюсников, в частности
усилителей, возможны искажения формы АЧХ вследствие нели-
нейности амплитудной характеристики последних. Эти искаже-
ния можно обнаружить по изменению формы исследуемой АЧХ
при увеличении напряжения ГКЧ. Снятие АЧХ усилителей следу-
ет проводить при минимально необходимом напряжении на вхо-
де, причем уменьшение этого напряжения не должно вызывать
изменений формы АЧХ на экране.
При измерении АЧХ четырехполюсников с большим затуха-
нием напряжение на выходе исследуемой цепи мало. При этом
появляются искажения формы АЧХ, вызванные работой на нели-
нейном участке характеристики детектора.
Для большинства измерителей АЧХ нормальный режим рабо-
ты соответствует подаче на вход детекторной головки напряже-
ния более 0,2 В. При уменьшении этого напряжения до 10 мкВ
коэффициент передачи детектора падает примерно в 10 раз. По-
этому при исследовании устройств с большим затуханием, на-
пряжение с выхода исследуемой цепи подается сначала на ши-
рокополосный усилитель, а затем — на детекторную головку'. Это
устраняет искажения формы АЧХ, обусловленные нелинейнос-
тью характеристики детектора, но приводит к дополнительным
погрешностям, связанным с неравномерностью АЧХ усилителя.
301
Измерители АЧХ могут использоваться для исследования амп-
литудно-частотных характеристик схем и устройств с преобразо-
ванием частоты. При этом необходимо учитывать, что частотные
метки соответствуют частоте ГКЧ, а наблюдаемая АЧХ — частоте
на выходе исследуемой схемы. Так, в случае гетеродинного преоб-
разования частоты и выделения напряжения разностной состав-
ляющей, метки на экране прибора соответствуют частотам f -
-/гет, где /м — частота метки; /гет — частота настройки гетеродина
исследуемой схемы.
При этом частотные интервалы между метками не меняются.
Ранее было указано, что измерители АЧХ снабжаются комп-
лектом детекторных головок.
При измерении АЧХ низкочастотных устройств пользуются
высокоомными детекторными головками, которые могут вклю-
чаться как на выходе, так и в промежуточных точках исследуе-
мого устройства. С повышением частоты входное сопротивление
детекторной головки падает и становится заметным ее влияние
на исследуемую цепь. Поэтому на высоких частотах применяют
согласованные детекторные головки, включаемые на выходе цепи
вместо нагрузки. Входное сопротивление такой головки должно
быть равно сопротивлению нагрузки. При необходимости детек-
торная головка включается через согласующее устройство.
Измерение крутизны АЧХ. При исследовании устройств с ли-
нейной зависимостью амплитуды выходного напряжения от час-
тоты, например дискриминаторов, удобно иметь на экране ЭЛТ
частотную зависимость крутизны АЧХ:
с ( — ^вых(У)
^ачх ) ----37— ’
На линейных участках амплитудно-частотной характеристики
крутизна АЧХ является величиной постоянной. На экране она
наблюдается в виде горизонтальной линии. Отклонения от этой
линии характеризуют нелинейность АЧХ.
Кривую частотной зависимости крутизны АЧХ можно получить
при двойной частотной модуляции напряжения ГКЧ. Для этого на
вход исследуемой цепи подают напряжение с частотой / модули-
рованной по синусоидальному закону (рис. 17.9, а). При достаточно
малой и постоянной девиации частоты амплитуда огибающей
напряжения на выходе исследуемой цепи (см. рис. 17.9, в) про-
порциональна крутизне исследуемой АЧХ (см. рис. 17.9, б), так как
^вых = А/д^ачх(/)«
Полученное соотношение непосредственно следует из графи-
ков рис. 17.9. При качании частоты /закон изменения напряжения
(О будет повторять частотную характеристику крутизны ис-
302
a
Рис. 17.9. Измерение крутизны АЧХ
с помощью частотной модуляции
входного напряжения:
а — входной сигнал; б — амплитудно-
частотная характеристика; в — опреде-
ление амплитуды огибающей напряже-
ния на выходе исследуемой цепи
следуемой цепи SA4X(O- При этом девиация частоты Д/1 должна
оставаться постоянной.
Рассмотренный способ получения частотной характеристи-
ки крутизны АЧХ наиболее просто реализуется в приборах с
ГКЧ гетеродинного типа. Колебания качающейся частоты гене-
рируются автогенератором. Частота диапазонного генератора мо-
дулируется по синусоидальному закону. Период модуляции дол-
жен быть много меньше периода качания частоты (периода раз-
вертки), а девиация частоты — много меньше полосы качания
частоты. .
Колебания автогенератора и диапазонного генератора пода-
ются на смеситель. На выходе смесителя фильтром нижних час-
тот выделяется напряжение разностной частоты с двойной час-
тотной модуляцией. Это напряжение подается на исследуемую
цепь (рис. 17.10, а). Напряжение с выхода цепи поступает на
детектор и узкополосный усилитель, настроенный на частоту
модуляции. Далее это напряжение непосредственно, или пос-
ле второго детектора и усилителя низкой частоты, подается
на ЭЛТ.
Изображения на экране для двух положений (7 и 2) переклю-
чателя К в схеме рис. 17.10, а показаны на рис. 17.10, б (приведен-
ные кривые соответствуют частотной характеристике крутизны на-
строенного дискриминатора). По этим кривым можно оценить ли-
нейность АЧХ в рабочей полосе частот, измерить крутизну и дру-
гие параметры АЧХ.
303
Рис. 17.10. Измерение частотной зависимости АЧХ:
а — структурная схема; б — изображение на экране ЭЛТ для двух положений
( / и 2) ключа К
Измерение добротности. Это очень простой способ, основан-
ный на измерении резонансной частоты исследуемой цепи и
ее полосы пропускания Добротность рассчитывается по фор-
муле
Q = (17.2)
При линейных характеристиках детекторной головки и усили-
теля вертикального канала полоса пропускания определяется на
уровне 0,707 £/Опых, где ^овых — максимальное напряжение на выхо-
де цепи (рис. 17.11, а). В ряде случаев удобнее пользоваться форму-
лой
0 = 0,54^, (17.3)
J2 ~ J\
где f и /2 — частоты, отсчитанные на уровне 0,707 £/Овых.
Более точный способ определения добротности основан на
изменении частотного интервала между максимумами частотной
характеристики крутизны АЧХ. Эту кривую можно получить на
экране ЭЛТ описанным выше способом двойной частотной моду-
ляции напряжения ГКЧ. Амплитудно-частотная характеристика ко-
лебательного контура имеет следующую максимальную крутизну
при обобщенных расстройках:
^2 = 21Al_^2 = ±o>7o7> (17.4)
Д/о
304
Рис. 17.11. Частотные характеристики колебательного контура:
а — амплитудно-частотная характеристика; б — частотная характеристика кру-
тизны АЧХ
где /г2— частоты, соответствующие максимумам частотной ха-
рактеристики крутизны АЧХ (рис. 17.11, б).
Из формулы (17.4) с учетом формулы (17.3) получим следую-
щую расчетную формулу:
6 = 0,354 4^,.
J2 ~ J\
Погрешности при определении добротности с помощью из-
мерителей АЧХ прежде всего обусловлены шунтирующим дей-
ствием цепей возбуждения и детектора и динамическими иска-
жениями формы АЧХ на экране.
Поэтому нужно стремиться к минимальной связи исследуе-
мой цепи с ГКЧ и пользоваться детекторной головкой с боль-
шим входным сопротивлением.
Для уменьшения динамических погрешностей скорость из-
менения частоты ГКЧ следует устанавливать с учетом изложен-
ного ранее.
Контрольные вопросы
1. В чем состоит особенность структурной схемы измерителей АЧХ?
2. Какова особенность схемы автоматизированного измерителя амп-
литудно-частотных характеристик?
3. Какой узел является основным в схеме любого измерителя АЧХ?
4. Какие существуют схемы детекторных головок?
5. В чем заключается методика снятия и построения АЧХ?
6. Расскажите о методике измерения крутизны АЧХ.
7. Расскажите о методике измерения частот характерных точек ампли-
тудно-частотной характеристики.
305
ГЛАВА 18
ИЗМЕРЕНИЯ В ЦЕПЯХ С РАСПРЕДЕЛЕННЫМИ
ПАРАМЕТРАМИ
18.1. Основные сведения
Электрические цепи представляют собой совокупность соеди-
ненных определенным образом источников электрической энер-
гии и нагрузок, по которым протекает постоянный или перемен-
ный ток. С точки зрения соотношения размеров цепей и рабочей
длины волны электрических колебаний, имеющих в них место,
различают цепи с сосредоточенными и распределенными (постоян-
ными) параметрами.
Радиоэлектронные цепи, размеры которых гораздо меньше
рабочей длины волны, называются цепями с сосредоточенными
параметрами (их измерение было рассмотрено ранее). Свойства
данных цепей практически не зависят от конфигурации выводов
(электродов) активных и пассивных элементов и размеров соеди-
нительных проводов.
Радиоэлектронные цепи, физические размеры которых соизме-
римы с рабочей длиной волны колебаний, относятся к цепям с
распределенными параметрами. Каждый элемент или соединительный
провод такой цепи обладает сопротивлением (активными, т. е. не-
возвратимыми потерями мощности), индуктивностью и емкостью.
Эти цепи часто называют длинными линиями или СЪЧ-трактами.
18.2. Измерение параметров линейных СВЧ-устройств
При проведении измерений в СВЧ-диапазоне необходимо учи-
тывать следующее:
• соизмеримость длины волны колебания с геометрическими
размерами элементов;
• наличие пространственного электромагнитного поля в лини-
ях передач, которое и является основным носителем электриче-
ской энергии.
К СВЧ-устройствам относятся: коаксиальные, волноводные и
полосковые тракты (линии передач), двухполюсные, четырехпо-
люсные и многополюсные устройства, работающие на частотах от
300 МГц до 300 ГГц.
Измерение параметров СВЧ-устройств выполняется двумя ос-
новными способами:
• с помощью измерительной линии анализируется распределе-
ние электромагнитного поля в СВЧ-тракте и расчетным путем
определяются искомые параметры;
306
• посредством автоматических измерителей панорамного типа,
основанных на раздельном измерении падающей и отраженной
электромагнитных волн.
Поскольку размеры СВЧ-узлов измерительной линии соизмери-
мы с длиной волны электромагнитных колебаний X, то в ней в
зависимости от характера нагрузки (рис. 18.1) устанавливаются ре-
жимы бегущих (а), короткого замыкания (б), холостого хода (в)
или смешанных (г) волн (т.е. их положительных значений, полу-
ченных после детектирования). На рис. 18.1, г /см показывает вели-
чину смещения первого минимума относительно конца линии.
При этом коэффициент отражения в конце измерительной ли-
нии, равный отношению отраженной и падающей волн, имеет
следующий вид:
(18.1)
где Г — коэффициент отражения, £п, £0, — комплексные ампли-
туды соответственно падающей и отраженной волн.
В формуле (18.1) <р является фазовым углом коэффициента от-
ражения
X
Рис. 18.1. Распределение поля вдоль измерительной линии в различных
режимах:
а — бегущей волны; б — короткого замыкания; в — холостого хода; г — смешан-
ных волн
307
Фазовый угол коэффициента отражения определяется величиной
смещения /см первою минимума относительно конца линии. Смеше-
ние /см может быть найдено в любой точке измерительной линии,
принятой за ее условный конец. Условный конец определяется по
удобному для отсчета минимуму при закороченной линии. В свою оче-
редь, коэффициент отражения можно найти через параметры нагруз-
ки и волновое сопротивление измерительной линии:
r = |»zP>
ZH + Р
где — комплексное сопротивление нагрузки; р — волновое сопро-
тивление измерительной линии на высоких частотах: р = ^L/C, где
L и С — соответственно индуктивность и емкость линии на единицу
длины.
Модуль коэффициента отражения в линии можно определить
через параметры электромагнитного поля, которые выражаются
через коэффициент бегущей или стоячей волны. Коэффициент бе-
гущей волны
K6.b=^, (18.2)
£тах
а коэффициент стоячей волны
ксв=^, (18.3)
^min
где £min, £max — соответственно минимальная и максимальная ам-
плитуды смешанной волны.
Поскольку Етт = |£п| + |£0|; Етп = |£„|-|£о|,
ТО
_ |£п| + |£о| _ 1 + |Г|
св ’ |£п|-|£0| " 1-|Г|’
(18.4)
откуда модуль коэффициента отражения
|Г| = Ксв 1. (18.5)
1 1 Кс,. + 1
Коэффициенты бегущей и стоячей волн связаны между собой
зависимостью
К - 1
*^с.в
Совместное решение уравнений (18.2)...(18.5) дает возможность
найти активную Rl{ и реактивную Хн составляющие полного со-
противления нагрузки линии:
308
R 2KC,
Квв +1 -(Квв -l)cosq>
• (Ксв - l)sin<p
Kc.B +1 - (K?„ - l)cos<pP’
= Ян + jX
н •
Исследование распределения напряженности электрического
поля наиболее просто можно выполнить при помощи зонда, по-
гружаемого в измсрителыгую линию и перемещаемого вдоль нее.
Для этого измерительная линия должна иметь продольную неиз-
лучающую щель (рис. 18.2).
Зонд выполняет функции измерительной антенны и должен
быть связан с детектором, выпрямленный ток (напряжение) ко-
торого характеризует напряженность поля в каждой точке линии.
Таким образом, конструкция любой измерительной линии долж-
на содержать следующие функциональные узлы: щелевую секцию,
зондовую головку и каретку с механизмом перемещения зонда
вдоль щелевой секции.
Шелевая секция волноводной измерительной линии состоит из
отрезка стандартною прямоугольною волновода 7, оканчивающе-
гося фланцами для подключения измерительного генератора и из-
меряемого СВЧ-элемента (см. рис. 18.2). Из теории СВЧ-устройств
известно, что для поля волны 77i0 продольная щель будет неизлуча-
ющеи, если она прорезана точно
посередине широкой стенки вол-
новода. Длина щели определяет-
ся диапазоном частот измери-
тельной линии и должна быть
достаточной для фиксации не-
скольких узлов и пучностей сто-
ячей волны. Точность выполнения
заданных размеров щелевой сек-
ции влияет на такие важные па-
раметры измерительной линии,
как затухание, собственный К*в,
непостоянство связи зонда с по-
лем при его перемещении (за счет
изменения глубины погружения).
Зондовая головка 2 состоит из
зонда, глубина погружения ко-
торого в линию может изменять-
ся с помощью микрометричес-
1111II111111111:11111111111 иt~— - 7
Рис. 18.2. Упрощенная конструкция
измерительной линии:
1 — стандартный прямоугольный вол-
новод; 2 — зондовая головка; 3 — мик-
рометрический винт; 4 — настроечные
поршни; 5 — СВЧ-диод; 6 — каретка;
7 — измерительная линейка
309
кого винта 3, резонансной системы с настроечными поршнями 4
и СВЧ-диода 5, помещенного в специальную детекторную каме-
ру (см. рис. 18.2).
В подавляющем большинстве современных измерительных ли-
ний применяются зонды емкостного типа, выполненные в виде
тонкого вертикального штыря. Такой зонд реагирует на электри-
ческую составляющую поля Е в линии, причем наводимая ЭДС
будет пропорциональна глубине его погружения в линию.
Введение зонда в щель будет эквивалентно включению комп-
лексной проводимости, реактивная составляющая которой иска-
жает картину поля в измерительной линии и поэтому она должна
быть скомпенсирована. Это достигается настройкой зондовой го-
ловки в резонанс с помощью специальной резонансной системы.
В качестве такой системы в СВЧ-диапазоне применяют бикоакси-
альный резонатор.
Экран зонда и внутренняя поверхность среднего цилиндра об-
разуют контур зонда, а внешняя поверхность этого цилиндра и
внутренняя поверхность наружной трубы — контур СВЧ-детекто-
ра. Настройка измерительной линии производится с помощью
поршней 4 до получения максимального тока (напряжения) де-
тектора — СВЧ-диода 5.
Каретка 6 предназначена для перемещения зондовой головки
вдоль линии и определения ее положения с помощью измери-
тельной линейки 7или индикатора другого типа. Она представля-
ет достаточно массивную плиту, перемещаемую винтовым меха-
низмом.
На точность измерения параметров нагрузки влияют механи-
ческие факторы. Поэтому все узлы должны быть сочленены точно
и без перекосов и выбрана оптимальная глубина погружения зон-
да. При соблюдении всех этих условий погрешность измерения
обычно составляет 2...5 %.
Способ раздельного измерения падающей и отраженной волн.
В ряде случаев достаточно знать только частотную характеристику
коэффициента стоячей волны исследуемого элемента. Это дости-
гается с помощью измерительных приборов, называемых рефлек-
тометрами, т.е. измерителями раздельных сигналов. Рефлектомет-
ры снабжаются ЭЛТ, на экране которой отображается искомая
характеристика в заданном частотном диапазоне. Поэтому они от-
носятся к панорамным измерителям. Панорамные измерители
также используются для получения частотных характеристик ос-
лабления СВЧ-четырехполюсников.
Упрощенная структурная схема панорамного измерителя пред-
ставлена на рис. 18.3.
Работа такого измерителя основана на принципе раздельного
выделения сигналов, пропорциональных мощностям волн, пада-
ющих от генератора и отраженных от исследуемого объекта (при
310
Рис. 18.3. Упрошенная структурная схема панорамного измерителя:
1 — осциллографический индикатор
изменении) или прошедших через измеряемый объект (при из-
мерении ослабления). На экране трубки воспроизводятся частот-
ные характеристики коэффициента стоячей волны Ксв и ослаб-
ления.
Конструктивно панорамный измеритель состоит из СВЧ-гене-
ратора качающейся частоты, двух направленных ответвителей мощ-
ности (HOj и НО2), ориентированных на падающую и отражен-
ную волны двух детекторных головок (Дj и Д2), измерителя отно-
шения волн и осциллографического индикатора 7.
Пилообразное напряжение генератора развертки модулирует
напряжение ГКЧ и одновременно отклоняет луч ЭЛТ по горизон-
тали. Таким образом, ось абсцисс на экране является осью частот.
Через направленные ответвители сигнал СВЧ проходит к нагрузке.
Через эти ответвители производится ответвление мощности сигна-
лов, пропорциональных значениям падающей и отраженной волн.
Выделенные направленными ответвителями падающая и отра-
женная волны, демодулированныс соответствующими детектор-
ными головками (с квадратичными детекторами), подаются на
измеритель отношения Еп/Е0. Выходное напряжение последнего
будет пропорционально квадрату коэффициента отражения на-
грузки и, следовательно, однозначно соответствует значению ко-
эффициента стоячей волны. После усиления в усилителе верти-
кального отклонения это напряжение поступает в канал верти-
кального отклонения осциллографического устройства.
Поскольку напряжение генератора развертки, подводимое че-
рез усилитель к горизонтально отклоняющим пластинам ЭЛТ,
изменяется синхронно с напряжением частотной модуляции, а
311
значит, и с выходным колебанием СВЧ-генератора, то на экране
трубки наблюдается зависимость квадрата коэффициента отраже-
ния от частоты. Эта зависимость показывает изменение коэффи-
циента стоячей волны К^.в, т.е. панораму. Изменение частоты ко-
лебаний ГКЧ контролируется по частотомеру.
Для повышения точности измерения предусмотрена автома-
тическая регулировка мощности (АРМ), с помощью которой под-
держивается постоянной амплитуда сигнала ГКЧ.
Стабилизация мощности основана на построении прямопока-
зывающих панорамных измерителей. Постоянство мощности не-
обходимо поддерживать с точностью 1 %, а система стабилизации
не должна быть инерционной (т.е. качание должно быть с часто-
той 10...50 Гц).
Устройства стабилизации мощности, представляющие собой
схемы автоматического регулирования, бывают с внутренним и
внешним управлением. Схема с внутренним управлением предпо-
лагает воздействие сигнала ошибок, снимаемого с детекторной
головки направленного ответвителя падающей мощности, непо-
средственно на генератор качающейся частоты.
Действие схемы с внешним управлением, для которой харак-
терно отсутствие паразитной частотной модуляции, основано на
применении регулируемых элементов. Под воздействием сигналов
ошибки они изменяют мощность в СВЧ-тракте.
Источниками погрешностей в панорамных рефлектометрах яв-
ляются нестабильность амплитуды падающей волны и неидентич-
ность характеристик направленных ответвителей и детекторных
головок. Рассогласование характеристик отмеченных узлов состав-
ляет от 0,3 до 0,5 дБ. Верхняя граничная частота измерителя дос-
тигает 12,5 ГГц.
18.3. Измерение мощности СВЧ-колебаний
Отдельную группу представляют приборы для измерения мощ-
ности в диапазоне СВЧ. Косвенные методы, описанные ранее,
здесь не находят применения, так как токи и напряжения имеют
различные значения в разных сечениях линии передач (стоячие
волны). Кроме того, подключение измерительного прибора изме-
няет режим работы измерительной цепи. Поэтому в СВЧ-диапа-
зоне используются методы преобразования электромагнитной
энергии в другие виды, например в тепловую энергию, а затем
последующее измерение мощности преобразованной энергии.
Различают два основных метода измерения мощности СВЧ-
колебаний.
1. Измерение мощности источника электромагнитных колеба-
ний (генератора). Согласно общепринятому определению под мощ-
312
ностью генератора понимают мощность, отдаваемую в согласо-
ванную нагрузку (рис. 18.4, а). В этом случае измеряемая мощность
полностью рассеивается на некотором измерительном эквивален-
те нагрузки с последующим измерением мощности теплового
процесса. Такие измерители мощности называются ваттметрами
поглощающего типа.
Так как нагрузка должна полностью поглотать измеряемую
мощность, то использование прибора возможно лишь при отклю-
ченном потребителе. Результат измерения будет наиболее точным,
если входное сопротивление прибора полностью согласовано с
выходным сопротивлением исследуемого генератора или волно-
вым сопротивлением линии передачи.
2. Измерение электрической мощности, выделяемой в на-
грузке, полное сопротивление которой может быть произволь-
ным. В этом случае между генератором и нагрузкой включается
устройство, преобразующее в другую форму лишь незначитель-
ную часть передаваемой по линии энергии и не нарушающее про-
цесса передачи энергии (рис. 18.4, б).
Измерение мощности с помощью терморезисторов. Основным
методом измерения малых мощностей, на котором построены
промышленные ваттметры, является метод измерения проводи-
мости терморезистора при рассеянии в нем электромагнитной
энергии. В качестве терморезисторов применяются термисторы и
болометры.
Термистор является полупроводниковым прибором, сопротив-
ление которого зависит от температуры, а следовательно, от рас-
сеиваемой на нем мощности. Термисторы имеют отрицательную
температурную характеристику7. Их чувствительность находится в
пределах от 10 до 100 Ом/мВт.
Болометр — это проволочный или пленочный терморсзистор с
положительной температурной характеристикой. Болометры име-
ют меньшую чувствительность, чем терморезисторы, но они яв-
ляются более стабильными и не зависят от температуры окружа-
ющей среды характеристики.
а б
Рис. 18.4. Способы измерения мощности ваттметром:
а — поглощающей мощности; 6 — проходящей мощности
313
Термистор или болометр помещается внутри измерительной
головки, представляющей собой отрезок волновода или коакси-
альной линии. Изменение величины сопротивления терморезис-
тора обычно измеряется с помощью мостовых схем.
Схема неуравновешенного моста представлена на рис. 18.5.
Исходное уравновешивание моста (при отсутствии измеряемой
мощности СВЧ) обеспечивают схемой температурной компенса-
ции, состоящей из потенциометра R с плавной регулировкой и
вспомогательного генератора Г с частотой выходных колебаний
от 50 до 100 кГц (см. рис. 18.5). При равновесии моста ток в изме-
рительной диагонали и показания гальванометра равны нулю. Из-
меряемую СВЧ-мощность Рвх подают на термистор. Если схема
измерителя согласована с генератором, то мощность полностью
рассеивается на термисторе. В результате его сопротивление пони-
жается и через гальванометр начнет протекать ток. Шкалу гальва-
нометра градуируют в единицах мощности, используя калибро-
ванный источник постоянного тока Е^.
На схеме рис. 18.5: Rt — терморезистор; С — емкость; L — ин-
дуктивность; Rl9 R2 и Ry — резисторы.
К преимуществу измерителей электрической мощности с не-
уравновешенными мостами относится наглядность индикации
результата измерений, а к недостатку — сравнительно малая точ-
ность. Последнее объясняется двумя основными причинами.
Во-первых, неизбежное при измерении мощности СВЧ изме-
нение сопротивления термистора влечет за собой нарушение со-
гласования сопротивлений термисторной камеры и линии пере-
дачи электромагнитных колебаний. Из-за этого возникает частич-
ное отражение электромагнитной волны от нагрузки, что приво-
дит к неполному рассеянию измеряемой мощности на термисто-
ре.
Во-вторых, по мере естественного изменения характеристик
термистора (или его замене) нарушается установленное при гра-
дуировке соответствие между показаниями прибора и величиной
рассеиваемой мощности.
Рис. 18.5. Схема неуравновешенного моста
314
Более высокую точность измерений обеспечивают уравновешен-
ные мосты, в которых измеряемую мощность СВЧ сравнивают с
калиброванной мощностью постоянного тока. Пример одной из
схем измерительного уравновешенного моста с терморезистором
представлен на рис. 18.6.
Терморезистор Rt, находящийся в головке, включают в одно из
плеч моста (см. рис. 18.6). Остальными плечами моста являются рези-
сторы R\, R2n R3, равные по величине R^ — сопротивлению термо-
резистора в рабочей точке. Напряжение питания на мост подается
через резистор R4, сопротивление которого является большим. Па-
раллельно мосту включен делитель из сопротивлений R5 и R^. Резис-
тор R6 представляет собой реостат, с движком которого связана от-
счетная шкала. От сопротивления 7^ зависит ток через терморезис-
тор, поскольку ток питания моста /м = /0 - /ш, где /ш — ток в [щите,
а ток через данный резистор, когда мост уравновешен, IR( = 0,5/м.
До подачи мощности СВЧ мост сбалансирован за счет двух ис-
точников питания: постоянного тока и переменного тока генерато-
ра Г. При этом положение движка резистора R^ должно быть таким,
чтобы сопротивление R^ было максимальным, если используется
термистор, или минимальным при применении болометра.
При подаче сигнала СВЧ баланс моста нарушается, и его вос-
станавливают, изменяя ток питания моста (следовательно, и тер-
морезистора) с помощью сопротивления Rf, источника Е. Для тер-
мисторов нужно увеличивать шунтирующее действие, т.е. умень-
шать а для болометров — наоборот. Шкала движка R6 граду-
ируется в ваттах. Начальная балансировка моста переменным на-
пряжением генератора позволяет исключить влияние температу-
ры окружающей среды и сохранить градуировку при старении тср-
морсзисторов и их замене.
Промышленные терморезисторные ваттметры имеют общую
погрешность порядка 4... 10 %. Погрешности измерения определя-
ются в основном степенью согласованности нагрузки и качеством
измерительной головки.
Рис. 18.6. Схема уравновешенного .моста с терморезистором
315
Измерение мощности с помощью термопары. Данный метод из-
мерения основан на регистрации значения термоЭДС, возника-
ющей при нагревании термопары энергией СВЧ-колебаний.
Структурная схема ваттметра состоит из приемного термопреоб-
разователя и измерительной части. Основным элементом преоб-
разователя является блок высокочастотных дифференциальных
термопар, одновременно выполняющих функции согласованной
нагрузки и дифференциального термометра.
В СВЧ-диапазоне чаще применяют термопары в виде тонких
металлических пленок, напыленных на диэлектрическую подложку.
Основным элементом измерительной части прибора является
вольтметр постоянного тока с цифровым дисплеем.
К достоинствам термоэлектрических ваттметров следует отнести
малую зависимость результатов измерения от колебаний температу-
ры окружающей среды и малое время подготовки прибора к работе.
Отрицательными характеристиками таких ваттметров являют-
ся ограниченный верхний уровень динамического диапазона и не-
достаточная устойчивость к перегрузкам, которая ограничивает
при измерении допустимое значение средней мощности импуль-
сных сигналов.
Существенным недостатком термисторных и болометрических
вагтметров является ограничение максимального значения изме-
ряемой мощности. Известно, что стандартные термисторы спо-
собны выдерживать без разрушения мощность, нс превышающую
нескольких десятков милливатт. Уровень измеряемой мощности
может быть несколько увеличен, если перед термисторной каме-
рой включить калиброванный аттенюатор.
Аттенюатором называется устройство, которое имеет выход-
ную мощность Рвых в заданное число раз меньшую входной мощ-
ности Рвх. Результат измерения равен показанию прибора, умно-
женному на коэффициент ослабления аттенюатора:
р
к — в*
л-осл “ р •
'вых
Аттенюаторы различают по принципу действия (поглощающие,
предельные) и конструкции (волноводные, коаксиальные, по-
лосковые). Они бывают с фиксированным или изменяемым коэф-
фициентом ослабления (затухания).
Волноводный поглощающий аттенюатор представляет собой
отрезок волновода, внутри которого помешен слой вещества, эф-
фективно поглощающего СВЧ-энергию. Коэффициент ослабления
(поглощения) энергии определяется свойствами вещества, а так-
же размерами и расположением поглощающего слоя относитель-
но электрической составляющей электромагнитного поля волно-
вода.
316
В предельных аттенюаторах используется явление экспоненци-
ального затухания электромагнитного поля вдоль волновода, по-
перечные размеры которого выбраны меньше, чем критические
для рабочей длины волны.
Аттенюаторы с плавным изменением коэффициента затухания
и шкалой, проградуированной в децибелах, применяются в при-
борах, результат измерения которых фиксируется в относитель-
ных единицах.
Калориметрический метод измерения мощности. Калориметри-
ческий метод измерения мощности отличается высокой точнос-
тью. Метод является универсальным и используется во всем ра-
диотехническом диапазоне частот, как для малых, так и для боль-
ших мощностей. Метод основан на преобразовании энергии элек-
тромагнитных колебаний, поглощаемых согласованной нагруз-
кой, в тепловую энергию.
Калориметрические измерители состоят из двух частей: погло-
щающей нагрузки и измерителя температуры. Наиболее распрост-
ранены нагрузки с проточной водой. Мощность, поглощаемая в
водяной нагрузке с проточной водой, определяется по разности
темпера гур Л Г на входе и выходе калориметра и по скорости рас-
хода протекающей воды у. В этом случае значение мощности опре-
деляется по формуле
Р = 4,17сбУдГ,
где с — удельная теплоемкость жидкости (для воды с = 1); G —
объем воды, протекающей через нагрузку’, см3/с; d — удельная
масса поглощающей нагрузки; ДТ — разность температур на входе
и выходе калориметра.
Конструктивная схема водяной нагрузки калориметрического
ваттметра показана на рис. 18.7. Внутри отрезка волновода / зак-
реплен стеклянный конус 2, через который протекает вода. В ос-
нование конуса впаяны две трубки 3 и 4. Вода входит в трубку 4, а
вытекает через трубку 3. Нагрузка соединяется с источником из-
меряемой мощности соедини-
тельным фланцем 5. Заполнен-
ный водой конус представляет
собой нагрузку с большим зату-
ханием. Разность температур из-
меряется термопарами, включен-
ными на входе и выходе воды в
нагрузку.
Термопары включены встреч-
но так, что индикаторный при-
бор фиксирует разность темпера-
тур. Как уже говорилось, калори-
метрический метод является са-
Рис. 18.7. Водяная нагрузка кало-
риметрического ваттметра:
1 — отрезок волновода; 2 — стеклян-
ный конус; 3 и 4 — трубки; 5 — со-
единительный фланец
317
мым точным. Погрешности измерения образцовых калориметров
лежат в пределах 1%, а промышленных калориметров — в ди-
апазоне 5... 10 %.
Ваттметры проходящей мощности. Под проходящей мощнос-
тью Рпр понимают разность мощностей падающей Рпад и отра-
женной Рртр электромагнитных волн, т.е.
р = р _ р
•* пр z пад * отр*
Проходящую мощность электромагнитной волны можно изме-
рить рассмотренными ранее ваттметрами, если их объединить с
направленными ответвителями или приборами, действие которых
основано на использовании физических явлений, не требующих
полного поглощения измеряемой энергии. К таким приборам от-
носятся измерители мощности на преобразователях Холла, с
поглощающей стенкой и др. В последние годы для измерения мощ-
ности СВЧ-энергии начали использовать эффект, так называемых,
горячих носителей тока в полупроводниках.
В волноводных измерителях мощности разделение падающих и
отраженных волн СВЧ-энергии удобно осуществить волноводным
направленным ответвителем, упрошенная конструктивная схема
которого представлена на рис. 18.8. На схеме Ротв — мощность от-
ветвителя; Рпад — падающая мощность электромагнитных волн;
Ротр — отраженная мощность электромагнитных волн.
Структура классического направленного ответвителя состоит из
двух волноводов, связанных между' собой двумя отверстиями с рас-
стоянием мсжду? ними, равным четверти длины волны (см. рис. 18.8).
Один из волноводов ответвителя включается в исследуемый тракт,
а другой подключается к измерительному устройству. При этом в
закрытом его конце помещается поглощающее сопротивление. Этот
ответвитель позволяет отделить определенную часть от падающей
мощности, т.е. прямой бегущей волны, что обусловлено четверть-
волновым расстоянием между отверстиями. Это можно объяснить
следующим образом. Оба отверстия возбуждают во вспомогатель-
ном волноводе две волны, распространяющиеся в противополож-
ных направлениях, т.е. к измерительному устройству и поглотите-
Рис. 18.8. Волноводный направленный ответвитель
318
лю. Волны (сплошная линия), проходящие через отверстия в на-
правлении измерительного устройства, складываются, так как вслед-
ствие равенства пути волны имеют одинаковую фазу. В обратном
направлении (к поглотителю) волны, прошедшие через отверстия,
будут складываться в противофазе ввиду разницы в пути на вели-
чину половины длины волны и взаимно компенсироваться. Отра-
женная волна (пунктирная линия) во вспомогательном волноводе
будет распространяться только лишь к поглотителю и в нем погло-
щаться, а в направлении измерительного устройства она поступать
не будет из-за прогивофазности волн обоих отверстий. В результате
падаюшая волна поступает на ваттметр, а мощность отраженной
волны рассеивается на согласованной нагрузке-поглотителе. Так про-
исходит измерение мощности падающей волны.
Измерение мощности отраженной волны, необходимое для
определения проходящей мощности, может осуществляться тем
же ответвителем, или вторым ответвителем, развернутым на 180°.
Измерение мощности преобразователями Холла. Прямое пере-
множение при измерении мощности можно также получить, ис-
пользуя полупроводниковые преобразователи Холла. Если специ-
альную полупроводниковую пластину 7, по которой течет ток 1
(на рис. 18.9, а он показан пунктиром), возбуждаемый электри-
ческим полем с напряженностью £, поместить в магнитное поле
с напряженностью магнитного поля Н (индукцией В), то между
ее точками, лежащими на прямой, перпендикулярной направле-
ниям тока и магнитного поля, возникает разность потенциалов
или эффект Холла:
Ux=k(EH),
где к — коэффициент пропорциональности.
Рис. 18.9. Эффект Холла:
а — возникновение эффекта в электромагнитном поле; б — принцип измерения
мощности в волноводе; 1 — полупроводниковая пластина ПХ; 2 — волновод
319
Согласно известной в физике теореме Умова — Пойтинга, плот-
ность потока проходящей мощности СВЧ-энергии в некоторой
точке поля определяется векторным произведением электричес-
кой и магнитной напряженностей этого поля: П = [Е- И]. Отсюда,
если ток I будет функцией электрической напряженности Е, то с
помощью датчика Холла можно получить зависимость напряже-
ния от проходящей мощности в виде £/х = ГЛ где г — постоянный
коэффициент, зависящий от параметров преобразователя Холла
(частоты и пр.). Для измерения мощности пластину полупровод-
ника (пластину' Холла — ПХ) размещают в волноводе 2, как по-
казано на рис. 18.9, б. Вектор Ёявляется результирующим вектором.
Измерители проходящей мощности на эффекте Холла облада-
ют следующими достоинствами:
• возможностью работать при любой нагрузке, а не только при
согласованной нагрузке;
• высокое быстродействие ваттметра способствует его приме-
нению при измерении импульсной мощности.
Однако практическая реализация ваттметров на эффекте Хол-
ла является сложной технической задачей в силу многих факторов.
Тем не менее в настоящее время существуют ваттметры, измеря-
ющие проходящую импульсную мощность до 100 кВт с погреш-
ностью не более 10%.
Ваттметры на основе эффекта «горячих* носителей тока. Из
физики известно, что под воздействием электрического поля в
полупроводнике увеличивается средняя хаотическая скорость сво-
бодных носителей заряда (электронов или дырок), что эквива-
лентно повышению их температуры относительно температуры
кристаллической решетки материала. Это явление в теории полу-
проводников называется «разогревом» носителей зарядов.
Если осуществить неоднородный «разогрев» полупроводнико-
вой пластины, то должен возникнуть поток носителей зарядов из
«горячей» области в «холодную». Вместе с тем оказывается, что
ток в разомкнутой цепи равен нулю. Это обстоятельство свиде-
тельствует о возникновении ЭДС, противодействующей движе-
нию зарядов. Величина такой ЭДС зависит от степени «разогрева»
полупроводниковой пластины.
Для усиления эффекта «разогрева» следует выбирать полу-
проводник, концентрация носителей в котором является про-
странственно однородной. Если «разогрев» осуществляется по-
лем СВЧ, то по значению ЭДС можно судить о проходящей
мощности СВЧ. Поскольку интервал установления температу-
ры носителей зарядов на несколько порядков меньше времени
установления температуры кристаллической решетки, то ватт-
метры на основе «разогрева» носителей зарядов позволяют не-
посредственно измерять импульсную мощность при длительно-
стях импульсов до 0,1 мкс.
320
Основными узлами такого ваттметра являются приемный пре-
образователь с полупроводниковым элементом и измерительное
устройство с цифровым отсчетом.
Цифровые ваттметры. В настоящее время широкое развитие по-
лучила автоматизация процесса измерения. Это вызвано двумя при-
чинами: во-первых, из-за необходимости развития автоматических
систем контроля и, во-вторых, из-за сложности управления рабо-
той, связанной с балансировкой мостовых схем, которые являются
основными элементами любого терморезисторного ваттметра.
В цифровых ваттметрах применяются различные типы преобра-
зователей мощности, в том числе и термисторные.
Структурная схема цифрового ваттметра приведена на рис. 18.10.
Основным элементом схемы является микропроцессор. Усилитель
постоянного тока (УПТ) усиливает выходное напряжение терми-
сторного преобразователя до величины, обеспечивающей устой-
чивую работу блока аналого-цифрового преобразователя (АЦП).
Напряжение, пропорциональное измеряемой мощности, с помо-
щью времяимпульсного преобразователя (на схеме рис. 18.10 он
не показан) преобразуется в интервал времени, который запол-
няется импульсами опорной частоты. Число импульсов, пропор-
циональное измеряемой мощности, отображается на цифровом
отсчетном устройстве (ЦОУ) или вводится в специализирован-
ное устройство обработки измерительной информации.
Микропроцессор ваттметра содержит элементы автоматического
управления режимами работы и дистанционного переключения из-
мерения и индикации условного обозначения измеряемой величи-
ны. Калибратор мощности постоянного тока необходим для самока-
либровки ваттметра. Он используется для калибровки цифрового ватт-
Рис. 18.10. Структурная схема цифрового ваттметра
321
метра, работающего на средних и больших уровнях мощности. Все
узлы ваттметра запитываются от встроенного источника питания.
Первичный преобразователь представляет собой отрезок коак-
сиальной линии или волновода со стандартным высокочастотным
разъемом, поглощающий элемент, термоэлектрический модуль и
эталон для сравнения. Поглощающий элемент выполнен в виде
тонкопленочного резистора на теплопроводящей керамике.
Центральным проводником коаксиального тракта является тон-
костенная трубка из нержавеющей стали, исключающая тепловое
влияние внешней среды на поглощающий элемент. Для уменьше-
ния потерь мощности СВЧ трубка покрывается медью и серебром.
Поглощающий элемент одним концом должен иметь надежный
контакт с центральным проводником. Другой его конец впаян в
согласующий медный экран с серебряным покрытием. В согласу-
ющем экране предусмотрено ступенчатое изменение диаметра,
что обеспечивает согласование поглощающего элемента с трак-
том во всем диапазоне частот.
Термоэлектрический модуль представляет собой диск с отвер-
стием и расположен так, что горячий спай имеет тепловой кон-
такт с внешней поверхностью согласующего экрана в месте пай-
ки поглощающего элемента, а холодный спай — с эталоном срав-
нения. К выводам термоэлектрического модуля припаиваются про-
вода соединительного кабеля.
Для защиты модуля от случайных внешних тепловых воздей-
ствий применяется внешний экран. На нем находятся ребра, ко-
торые вместе с экраном образуют радиатор. Радиатор позволяет
увеличить мощность рассеивания преобразователя.
В цифровом ваттметре благодаря применению микропроцессо-
ра осуществляются автоматический выбор пределов измерения,
автоматическая установка нуля и самокалибровка. Кроме того, здесь
предусматривается вывод информации на канал общего пользо-
вания при его включении в состав измерительной системы.
Контрольные вопросы
1. Какие существуют способы измерения мощности в СВЧ-диапазоне?
2. В чем заключается принцип работы двухдырочного ответвителя?
3. Расскажите о принципе работы термисторного ваттметра.
4. Какова особенность калориметрического метода измерения мощности?
5. Что необходимо учитывать при проведении измерений параметров
СВЧ-устройств?
6. Какие существуют способы измерения параметров СВЧ-устройств?
7. Что представляет собой щелевая секция волноводной измеритель-
ной линии?
8. Расскажите о принципе работы измерителя с раздельным выделе-
нием сигналов.
9. Какие погрешности присутствуют в панорамных измерителях?
322
ГЛАВА 19
АВТОМАТИЗАЦИЯ ЭЛЕКТРОРАДИОИЗМЕРЕНИЙ
19.1. Основные сведения
Автоматизация электрорадиоизмерений способствует более
быстрой обработке большого числа измеряемых параметров, по-
вышению требований к точности измерений и их быстродействию
(при ограниченных возможностях оператора в восприятии и об-
работке больших объемов информации) и, следовательно, к сни-
жению загруженности и роли оператора в процессе измерений.
Переход к построению цифровых средств измерений привел к
созданию автоматизированных измерительных систем с использова-
нием микропроцессоров. Автоматизированными средствами измере-
ний считают автономные непрограммируемые приборы и гибкие изме-
рительные системы (ГИС), построенные на базе цифровой техники.
Автономные непрограммируемые приборы работают по жест-
кой программе и предназначены для измерений определенных
параметров сигналов и характеристик цепей. В этих приборах авто-
матически выполняется только часть измерительных операций,
например таких, как определение полярности входного сигнала и
установка пределов измерения.
Гибкие измерительные системы позволяют программным спо-
собом перестраивать систему для измерения различных физиче-
ских величин и менять режим измерений. При этом аппаратная
часть измерительной системы не изменяется. По структурному по-
строению ГИС подразделяются на интерфейсные, микропроцессор-
ные и компьютерно-измерительные.
Наиболее мощными типами ГИС являются измерительно-вы-
числительные комплексы (ИВК), которые создаются путем объ-
единения с помошью специальной многопроводниковой магист-
рали в одну измерительную систему компьютера, измерительных
приборов и устройств отображения информации. Связь между ком-
пьютером и всеми остальными узлами и их совместимость обеспе-
чиваются с помошью совокупности аппаратных, программных и
конструктивных средств.
Устройство сопряжения компьютера со средствами измерений или
любыми другими внешними системами называют интерфейсом. Иног-
да в это понятие включают и программное обеспечение автоматизи-
рованной системы. Обычно в ИВК используются стандартные уст-
ройства (модули), подключенные к общей магистрали, и стан-
дартные интерфейсы (в России это интерфейсы типа МЭК 625.1,
КАМАК и др.). При этом для решения новой метрологической зада-
чи достаточно сменить часть модулей, используемых в качестве исто-
чника или приемника информации, и программное обеспечение.
323
В микропроцессорных ГИС все узлы подключаются непосред-
ственно к магистрали микропроцессора. Встроенные микропро-
цессоры осуществляют сервисные операции, обеспечивают раз-
личные режимы измерений и определяют ряд параметров сигнала
или цепи. Работа таких приборов выполняется в соответствии с
программами, заложенными в запоминающем устройстве.
В настоящее время во многих измерительных системах приме-
няются персональные компьютеры. Это, прежде всего, связано с
тем, что компьютер делает измерительную систему исключитель-
но гибкой, так как пользователь может легко изменить его про-
граммное обеспечение. Компьютерно-измерительные системы
объединяют средства измерений, обработки, вычислений и уп-
равления на собственной шине персонального компьютера.
19.2. Микропроцессорные измерительные системы
На рис. 19.1 показана структурная схема цифрового измери-
тельного прибора со встроенным микропроцессором (МП). Конк-
ретным примером такого прибора может быть цифровой ваттметр,
измеритель временных интервалов и др.
Рис. 19.1. Структурная схема цифрового измерительного прибора со встро-
енным микропроцессором
324
Работа такого прибора происходит следующим образом. Кла-
виатура содержит поле задания режима, поле цифровых данных и
шифраторы. С помощью поля режима задаются режим измерения
и измеряемая величина. Диапазон измерения вводится посредством
цифровой клавиатуры. Сигналы с клавиатуры с помощью шифра-
тора преобразуются в код и поступают на шину данных.
Микропроцессор по подпрограмме установки режима анали-
зирует данные с клавиатуры, сравнивая их с константами из по-
стоянного запоминающего устройства (ПЗУ), и вырабатывает уп-
равляющие коды на цифровой аналоговый преобразователь (ЦАП)
(для обеспечения предела измерений), на мультиплексор (для под-
ключения входного канала) и т.д. Одновременно вводимая ин-
формация с клавиатур интерпретируется для вывода на дисплей.
Отображение вводимых данных на дисплее целесообразно пол-
ностью идентифицировать с надписями на клавиатуре, для этого
в ПЗУ необходимо программировать зоны интерпретации кодов
вводимых данных в символы, показываемые на дисплее. Кроме
программирования режима работы прибора, анализ входных дан-
ных может включать контроль вводимых данных (синтаксический
контроль, контроль полноты исходных данных и т.п.).
Собственно режим измерений должен начинаться с прихо-
дом команды «пуск» (с клавиатуры — при местном управле-
нии, с интерфейсной шины — при дистанционном управле-
нии). Сформированный в аналого-цифровом преобразователе
(АЦП) код поступает в МП, где производится обработка по
программе и вычисление вторичных параметров. Передача кода
из АЦП в МП может осуществляться как в режиме прерывания
по запросам от АЦП, так и в режиме обращения к АЦП в каче-
стве адресуемого регистра (особенно при работе АЦП в режиме
запуска от МП).
Для получения информации о коррекции погрешности и для
диагностики работоспособности прибора МП по шине данных на
мультиплексор передает код для подключения к АЦП встроенной
образцовой меры (в случае цифрового вольтметра — опорное на-
пряжение). Код с АЦП, соответствующий образцовой мере, по-
ступает в МП и сравнивается с константой из ПЗУ. Вычисляется
соответствующая поправка, которая будет участвовать в расчете
измеряемых параметров до следующего цикла калибровки прибо-
ра. Прибор с подобной структурой легко перестраивается на дру-
гие (близкие по характеру) виды измерений. Для этого достаточ-
но заменить ПЗУ (программу и константы, включая интерпрета-
цию входной информации о режимах) и клавиатуру (если меня-
ется состав измеряемых параметров, т.е. тип прибора). Включение
на вход прибора мультиплексора позволяет измерять параметры
сигналов с нескольких входов, т.е. проводить комплексные (мно-
гопараметровые) измерения.
325
19.3. Компьютерно-измерительные системы
В настоящее время сформировалось новое направление в мет-
рологии и электрорадиоизмерительной технике — компьютерно-
измерительные системы (КИС) и их разновидность, или направ-
ление развития — виртуальные (виртуальный — кажущийся) из-
мерительные приборы (виртуальные приборы). В компьютерно-изме-
рительную систему обязательно входит компьютер, работающий
в режиме реального масштаба времени или, как теперь принято
говорить, в режиме on-line.
В последние годы персональные компьютеры используются не
только как вычислительные средства, но и в качестве универсаль-
ных измерительных приборов. Компьютерно-измерительная систе-
ма на базе персонального компьютера позволяет заменить стандарт-
ные измерительные приборы (вольтметры, осциллографы, анали-
заторы спектра, генераторы и др.) системой виртуальных прибо-
ров. При этом ряд приборов могут быть активизированы (воспроиз-
ведены) на одном персональном компьютере одновременно.
К отличительным особенностям и преимуществам компьютер-
но-измерительных систем по сравнению с микропроцессорными
приборами относятся:
• обширный фонд стандартных прикладных компьютерных про-
грамм, доступных для оператора, позволяющих решать широкий
круг прикладных задач измерения (исследование и обработка сиг-
налов, сбор данных с датчиков, управление различными промыш-
ленными установками и т.д.);
• возможность оперативной передачи данных исследований и
измерений по локальным и глобальным (например, сети Internet)
компьютерным сетям;
• высокоразвитый графический интерфейс пользователя, обес-
печивающий быстрое освоение взаимодействия с системой;
• возможность использования внутренней и внешней памяти
большой емкости;
• возможность составления компьютерных программ для реше-
ния конкретных измерительных задач;
• возможность оперативного использования различных устройств
документирования результатов измерений.
Структурная схема КИС. В самом общем случае КИС может
быть построена двумя способами: с последовательной или парал-
лельной архитектурой.
В компьютерно-измерительную систему с последовательной ар-
хитектурой (ее иногда называют централизованной системой) вхо-
дят части системы, преобразующие анализируемые сигналы, ко-
торые обрабатывают в последовательном режиме. Поэтому вся со-
ответствующая электроника размещается на слотах компьютера.
Достоинства такой архитектуры построения КИС очевидны — бла-
326
годаря использованию принципа разделения обработки по време-
ни стоимость системы невелика.
В компьютерно-измерительной системе с параллельной архитек-
турой содержится ряд параллельных каналов измерения и каждый
канал имеет собственные узлы преобразования анализируемых
сигналов и только процессор компьютера работает в режиме муль-
типлексирования (т.е. объединения сигналов). Посредством тако-
го принципа построения КИС могут производить оптимизацию
обработки сигналов в каждом канале независимо. В этой системе
преобразование сигналов выполняется локально в месте располо-
жения источника исследуемого сигнала, что позволяет передавать
сигналы от измеряемого объекта в цифровой форме.
На рис. 19.2 представлена обобщенная структурная схема КИС,
отражающая как последовательную, так и параллельную архитек-
туру построения.
Взаимодействие между отдельными элементами КИС осуще-
ствляется с помощью внутренней шины персонального компью-
тера, к которой подключены как его внешние устройства (дис-
плей, внешняя память, принтер), так и измерительная схема,
состоящая из коммутатора, АЦП и блока образцовых программно
управляемых мер напряжения и частоты.
С помошью ЦАП можно вырабатывать управляющие аналого-
вые сигналы. Интерфейсный модуль (ИМ) подключает измери-
тельный прибор к магистрали приборного интерфейса. Коммута-
тор устройства обеспечивает подачу аналоговых напряжений с
внешних датчиков на узлы системы.
сигналы
Рис. 19.2. Обобщенная структурная схема компьютерно-измерительной
системы
327
Достаточно простые компьютерно-измерительные схемы мо-
iyr быть размещены на одной плате персонального компьютера.
Существуют и более сложные структуры КИС, в которых в соот-
ветствии с решаемой измерительной задачей по установленной
программе коммутируются необходимые измерительные элемен-
ты, т.е. меняется архитектура построения системы.
Одним из элементов КИС является блок образцовых программно
управляемых мер напряжения и частоты. В качестве встроенных
образцовых мер напряжения в КИС чаще всего применяются ста-
билитроны, температурный коэффициент напряжения которых
составляет около 2-10“5. К наиболее эффективному способу стаби-
лизации опорного напряжения относится термостатирование блока
стабилитронов. Термостат поддерживает температуру элементов
около 30 °C со стабильностью не ниже 0,1 °C.
Недостатком такой схемы являются достаточно длительный
прогрев термостата (до 30 мин), а также большие скачки темпера-
туры при включении термостата. Температурные перепады уско-
ряют процесс старения стабилитронов, а следовательно, снижа-
ют их долговременную стабильность.
В настоящее время в КИС имеется возможность учитывать
температурную нестабильность элементов программными ме-
тодами.
19.4. Виртуальные приборы
Одним из наиболее перспективных направлений в развитии
компьютерно-измерительных систем является разработка вирту-
альных приборов.
Виртуальный прибор состоит из быстродействующего персо-
нального компьютера и одной-двух плат сбора данных (ПСД). Плата
устанавливается в персональный компьютер (обычно в слот ISA
или PCI) или внешнее дополнительное устройство, подключа-
емое через LPT-порт в комплекте с соответствующим программ-
ным обеспечением.
Пользователь виртуального прибора включает объект графи-
ческой панели с помощью клавиатуры, мыши или специализиро-
ванной прикладной программы. Виртуальные измерительные при-
боры сочетают большие вычислительные и графические возмож-
ности персонального компьютера с высокой точностью и быст-
родействием аналоговых цифровых преобразователей и цифровых
аналоговых преобразователей, применяемых в ПСД. По существу
виртуальные приборы (как и практически все типы КИС) выпол-
няют анализ амплитудных, частотных, временных характеристик
различных радиоэлектронных цепей и измеряют параметры сиг-
налов с точностью примененных АЦП и ЦАП, а также формиру-
328
ют сигналы как для процесса измерений, так и для автоматиза-
ции измерительных систем.
Программная часть виртуального прибора может эмулировать
(создать) на экране дисплея компьютера виртуальную переднюю
управляющую панель стационарного измерительного прибора. Та-
ким образом, панель с виртуальными кнопками, ручками и пере-
ключателями, сформированная на экране дисплея, становится па-
нелью управления виртуального прибора. В отличие от реальной
панели управления стационарного измерительного прибора, та-
кая виртуальная панель может быть многократно пересгросна в
процессе работы для адаптации к конкретным условиям экспери-
мента. В зависимости от используемой платы и программного обес-
печения пользователь получает измерительный прибор под ту или
иную метрологическую задачу.
В качестве примера рассмотрим виртуальный цифровой запо-
минающий осциллограф ЦЗО-01, реализованный на специали-
зированной плате сбора данных и персональном компьютере в
московском ЗАО «Руднев—Шиляев» Центра АЦП. Внешний вид
программного интерфейса (виртуальной графической измеритель-
ной панели) цифрового виртуального осциллографа представлен
на рис. 19.3.
Рис. 19.3. Внешний вид программного интерфейса цифрового виртуаль-
ного осциллографа
329
Виртуальный цифровой запоминающий осциллограф типа
ЦЗО-01 предназначен для наблюдения, регистрации, долговре-
менного хранения, анализа и измерения амплитудных и времен-
ных параметров различных видов одиночных (импульсных), пе-
риодических и случайных процессов.
Программный пакет «Осциллограф», заложенный в память пер-
сонального компьютера или внешнюю память, осуществляет об-
мен данными с платой сбора данных по готовности прибора к
обработке. После выдачи плате специальной команды на сбор дан-
ных программа ожидает от нее сообщения об окончании процеду-
ры заполнения буферной памяти, встроенной в ПСД. Затем ана-
лизируемые сигналы поступают в осциллограф (компьютер), их
обработка и исследование полностью передаются процессору.
Работа с программными файлами с помощью компьютера поз-
воляет документировать исследуемые (измеряемые) процессы,
сравнивать сигналы с эталонными и отображать сигналы, создан-
ные пользователем в его программах.
Упрощенно принцип действия платы сбора данных можно ус-
ловно подразделить на два этапа:
1) запись оцифрованных сигналов во внутреннюю буферную
память ПСД (соответствует обратному ходу луча реального осцил-
лографа);
2) передача данных в виртуальный осциллограф, их обработка
и вывод на экран (соответствует прямому ходу луча реального
осциллографа).
Нетрудно понять, что режим «прямого хода луча» (интервал
обновления изображения на экране) будет зависеть от объема
памяти записывающего буфера ПСД, быстродействия процессора
и оперативного запоминающего устройства (ОЗУ) компьютера и
числа каналов осциллографа.
Несмотря на то, что исследуемые сигналы являются аналоговы-
ми, изображение на виртуальном экране (дисплее компьютера)
осциллографа формируется после аналого-цифрового преобразо-
вания и поэтому является дискретным. Виртуальные кнопки, руч-
ки, переключатели и другие элементы графического интерфейса
практически не отличаются от реальных. Единственное и главное
их отличие заключается в изменении положения ручек и переклю-
чателей, которое осуществляется с помощью мыши (или клавиату-
ры), а нс ручки, как у реальных измерительных приборов.
К основным преимуществам виртуальных цифровых запоми-
нающих осциллографов относятся:
• яркий, хорошо сфокусированный экран на любой скорости
развертки;
• резко очерченные контуры изображения;
• высокая точность измерений параметров сигналов или цепей;
• широкая полоса пропускания;
330
• возможность запоминания эпюры сигнала на произвольное
время;
• автоматическое измерение параметров сигналов;
• предусмотрена статистическая обработка результатов измерения;
• возможность подключения принтера и плоттера для создания
отчета о результатах измерений;
• сравнение текущих данных с образцовыми или предваритель-
но записанными данными;
• наличие средств самокалибровки и самодиагностики;
• возможность исследования переходных процессов, протека-
ющих в электрических цепях;
• упрощенная архивация результатов измерений.
В данном осциллографе предусмотрена его синхронизация по
комбинации сигналов от нескольких генераторов.
Виртуальные приборы имеют большое преимущество перед
микропроцессорными измерительными приборами, поскольку
пользователь получает доступ к обширным объемам прикладных
программ, может использовать внешнюю память большой емкос-
ти и различные устройства документирования результатов изме-
рений. Сочетание платы сбора данных, измерительного устрой-
ства и персонального компьютера предоставляет человеку новые
возможности, недостижимые при использовании автономных из-
мерительных приборов. Теперь для проведения эксперимента и
измерений необходимо только наличие компьютера, а все осталь-
ные программно-аппаратные средства подбираются, исходя из тех-
нических требований самого проводимого эксперимента.
К преимуществам виртуальных приборов также относится их
экономическая эффективность, так как практически любая плата
сбора данных компьютерных программ обработки измерительной
информации дешевле реального измерительного прибора.
Совершенно очевидно, что многие метрологические исследо-
вательские задачи в XXI в. будут решаться с помощью виртуаль-
ных приборов.
Контрольные вопросы
1. Какие существуют гибкие измерительные системы по структурному
построению?
2. Что дает использование микропроцессоров в измерительной технике?
3. Из каких частей состоит измерительный прибор на базе микропро-
цессора?
4. Какие существуют способы построения структурных схем КИС?
5. Как реализуется учет температурной нестабильности в КИС?
6. Чем определяется режим «прямого хода луча» в виртуальном осцил-
лографе?
7. Каковы достоинства виртуальных цифровых запоминающих осцил-
лографов?
331
Приложение
Условные обозначения на шкалах электроизмерительных приборов
Наименование Условное обозначение
Прибор магнитоэлектрический с подвижной рамкой Логометр магнитоэлектрический Прибор электромагнитный Прибор электродинамический Прибор ферродинамический Прибор индукционный Прибор электростатический Прибор магнитоэлектрический с выпрямителем (выпрямительный прибор) Прибор магнитоэлектрический с электронным преобразователем в измерительной цепи (электронный прибор) Прибор магнитоэлектрический с неизолиро- ванным термопреобразователем (термоэлектри- ческий прибор) Ток постоянный ф * 0 -м- 0 0 O-bZ-O
332
Окончание пр ил.
Наименование Условное обозначение
Ток переменный (однофазный) X
Ток постоянный и переменный ^~Х_х
Ток трехфазный переменный
(общее обозначение)
Прибор применять при вертикальном положении
шкалы
Прибор применять при горизонтальном I I
положении шкалы 1 1
Класс точности прибора, например 1,5 1,5 (D)
Напряжение испытательное, например 2 кВ
Прибор защищен от влияния внешнего т
магнитного поля (I категория защищенности) 1
Прибор защищен от влияния внешнего Г-Г1
электрического поля (I категория защищенности) LLJ
Внимание! Смотри указания в инструкции по
эксплуатации прибора
СПИСОК ЛИТЕРАТУРЫ
I. Федеральный закон от 26 июня 2008 г. № 102-ФЗ «Об обе-
спечении единства измерений».
2. ГОСТ 8.057—80. ГСИ. Эталоны единиц физических величин.
Основные положения.
3. ГОСТ 8.417—2002. ГСИ. Единицы величин.
4. ГОСТ 8.566—2011. ГСИ. Межгосударственная система дан-
ных о физических константах и свойствах веществ и материалов.
Основные положения.
5. Аналоговые электроизмерительные приборы: Учеб, пособие /
Е. Г. Бишард, Е. А. Киселева, Г. П. Лебедев и др. — М.: Высш, шк.,
1991.
6. Гаврилова, А. Н. Электротехнические измерения. Задачи
и упражнения: Учебник для ссузов / А. Н. Гаврилова, Е. Ф. Сысо-
ева и др. — М.: КноРус, 2011.
7. Дубина, И. Н. Электротехнические измерения / И. Н. Дубина. —
М.: КноРус, 2012.
8. Измерение электрических и неэлектрических величин: Учеб,
пособие / Н. Н. Евстихиев, Я. А. Купершмидт, В. Ф. Популовский
и др.; Под рсд. Н. Н. Евстихисва. — М.: Энергоатом и здат, 1990.
9. Метрология и электрорадиоизмерения в телекоммуникаци-
онных системах: Учебник/ В. И. Нефедов, В. И. Хахин, Е. В. Федо-
рова и др.; Под рсд. В. И. Нефедова. — М.: Высш, шк., 2001.
10. Мерцалова, А. И. Электротехнические измерения. Практи-
кум (СПО) / А. И. Мерцалова. — М.: КноРус, 2013.
11. Назаров, С. В. Электротехнические измерения. Задачи
и упражнения (СПО): Учеб, пособие /С. В. Назаров, Л. П. Гудыно,
А. А. Кириченко. — М.: КноРус, 2013.
12. Панфилов, В. А. Электрические измерения: Учебник для сред,
проф. образования. — М.: Издательский центр «Академия», 2004.
13. Раннее, Г. Г. Методы и средства измерений: Учебник для
вузов / Г. Г. Раннев, А. П. Тарасенко, — 2-е изд., стер. — М.: Изда-
тельский центр «Академия», 2004.
14. Тартаковскии, Д. Ф. Метрология, стандартизация и тех-
нические средства измерений: Учебник / Д. Ф. Тартаковский,
А. С. Ястребов. — М.: Высш, шк., 2001.
334
15. Хромоин, П. К. Электротехнические измерения: Учеб, посо-
бие / П. К. Хромоин. — М.: Форум, 2013.
16. Хрусталева, 3. А. Электротехнические измерения: Учебник /
3. А. Хрусталева. — М.: КноРус, 2012.
17. Хрусталева, 3. А. Электротехнические измерения: Практи-
кум: Учеб, пособие / 3. А. Хрусталева. — М.: КноРус, 2013.
18. Хрусталева, 3. А. Электротехнические измерения. Задачи
и упражнения: Учеб, пособие / 3. А. Хрусталева. — М.: КноРус, 2013.
19. Шишмарёв, В. Ю. Измерительная техника: Учебник для стул,
сред. проф. образования / В. Ю. Шишмарёв. — 6-с изд, стер. — М.:
Издательский центр «Академия», 2014.
20. Шишмарёв, В. К). Средства измерений: Учебник для студ.
сред. проф. учеб, заведений / В. Ю. Шишмарёв. — 6-е изд., испр. —
М.: Издательский центр «Академия», 2013.
21. Шишмарёв, В. Ю. Технические измерения и приборы: Учеб-
ник для студ. учреждений высш. проф. образования / В. Ю. Шиш-
маврёв. — 2-е изд., испр. — М.: Издательский центр «Академия»,
2012.
22. Шишмарёв, В. К). Электрорадиоизмерения: Учебник для сред,
проф. образования / В. Ю. Шишмарёв, В. И. Шанин. —3-с изд.
стер. — М.: Издательский центр «Академия», 2011.
23. Шишмарёв, В. Ю. Электрорадиоизмерения. Практикум:
Учеб, пособие для студ. сред. проф. образования / В. Ю. Шишма-
рев. — 3-е изд. стер. — М.: Издательский центр «Академия», 2011.
24. Шишмарёв, В. Ю. Электротехнические измерения: Учебник
для студ. учреждений сред. проф. образования / В. Ю. Шишма-
рёв. — 2-е изд. стер. — М.: Издательский центр «Академия», 2014.
НОВЫЕ ИЗДАНИЯ ПО ДИСЦИПЛИНЕ
«ЭЛЕКТРОРАДИОИЗМЕРЕНИЯ»
И СМЕЖНЫМ ДИСЦИПЛИНАМ
I. Волегов, А. С. Метрология и измерительная техника: элек-
тронные средства измерений электрических величин: Учеб, посо-
бие для вузов / А. С. Волегов, Д. С. Нсзнахин, Е. А. Степанова. —
М.: Издательство Юрайт, 2018.
2. Жуков, В. К. Метрология. Теория измерений: Учеб, пособие
для бакалавриата и магистратуры / В. К. Жуков. — М.: Издатель-
ство Юрайт, 2018.
3. Латышенко, К. П. Метрология и измерительная техника.
Лабораторный практикум: Учеб, пособие для вузов / К. П. Латы-
шенко, С. А. Гарелина. — 2-е изд., испр. и доп. — М.: Издательство
Юрайт, 2018.
4. Метрология. Теория измерений: Учебник и практикум
для академического бакалавриата / В. А. Мещеряков, Е. А. Бадеева,
Е. В. Шалобаев; Под обш. ред. Т. И. Мурашкиной. — 2-е изд., испр.
и доп. — М.: Издательство Юрайт, 2018.