/






































Автор: Васильев Ф.П.
Теги: вычислительная математика численный анализ физика математика решение задач
Год: 1981




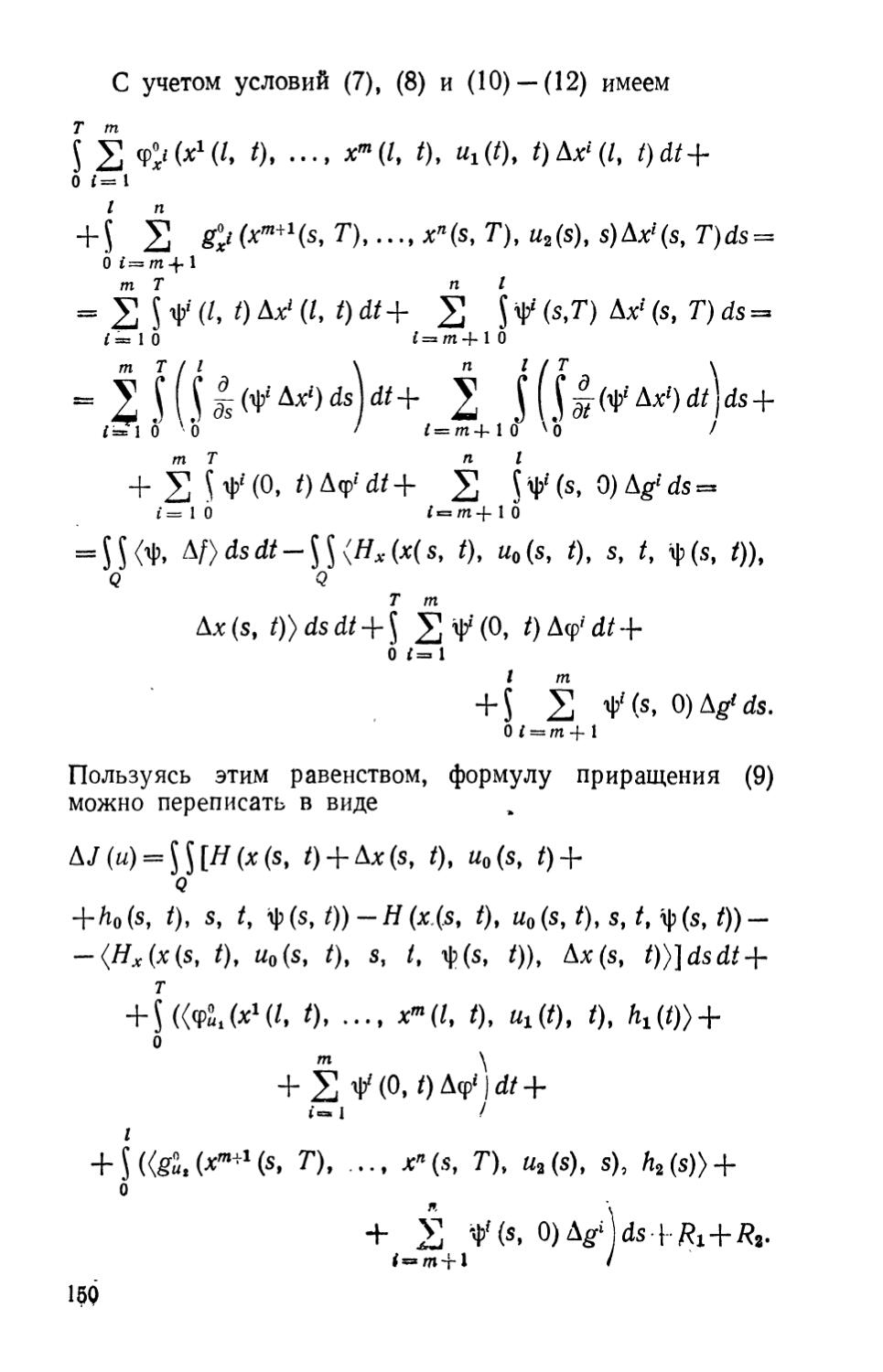
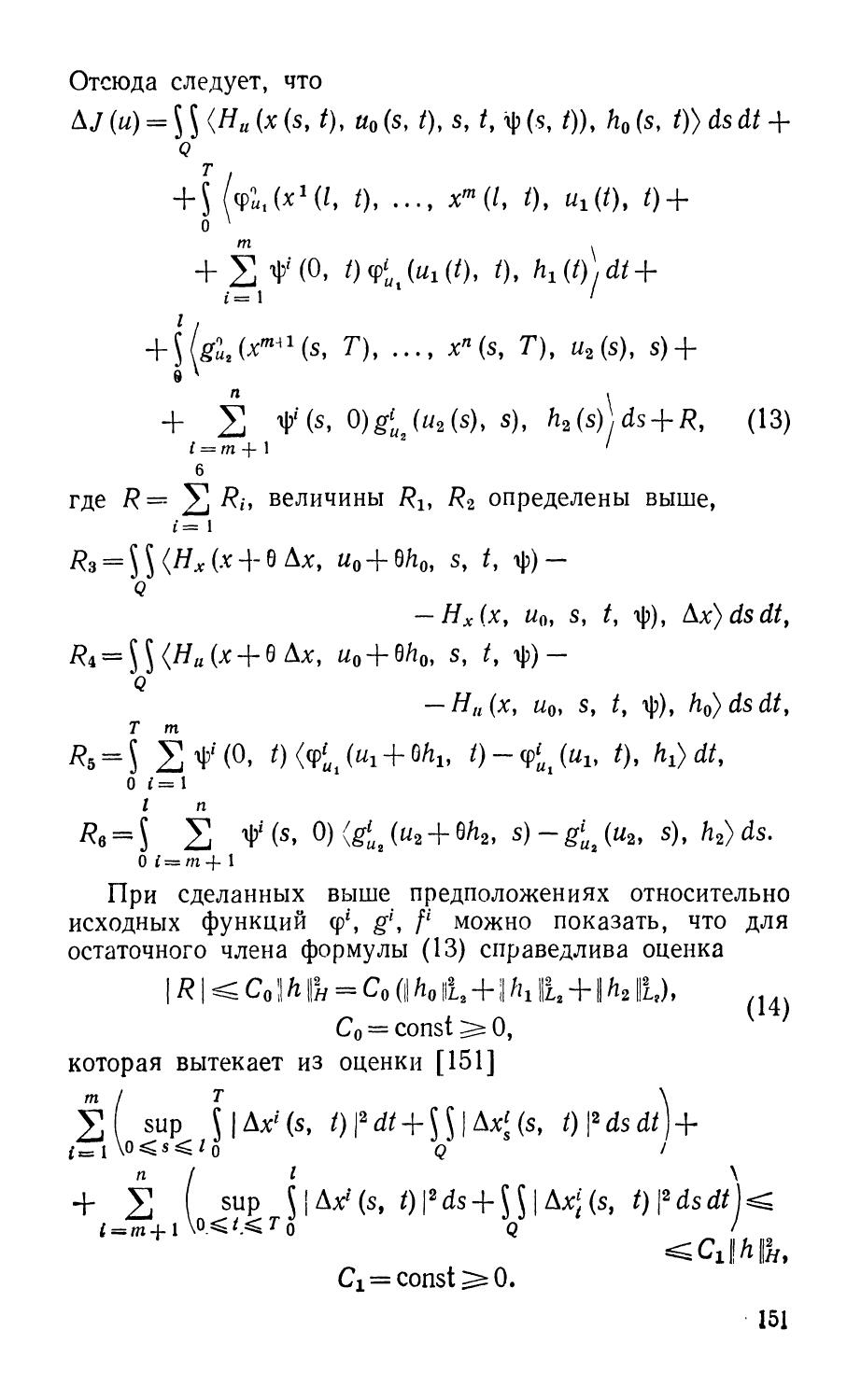
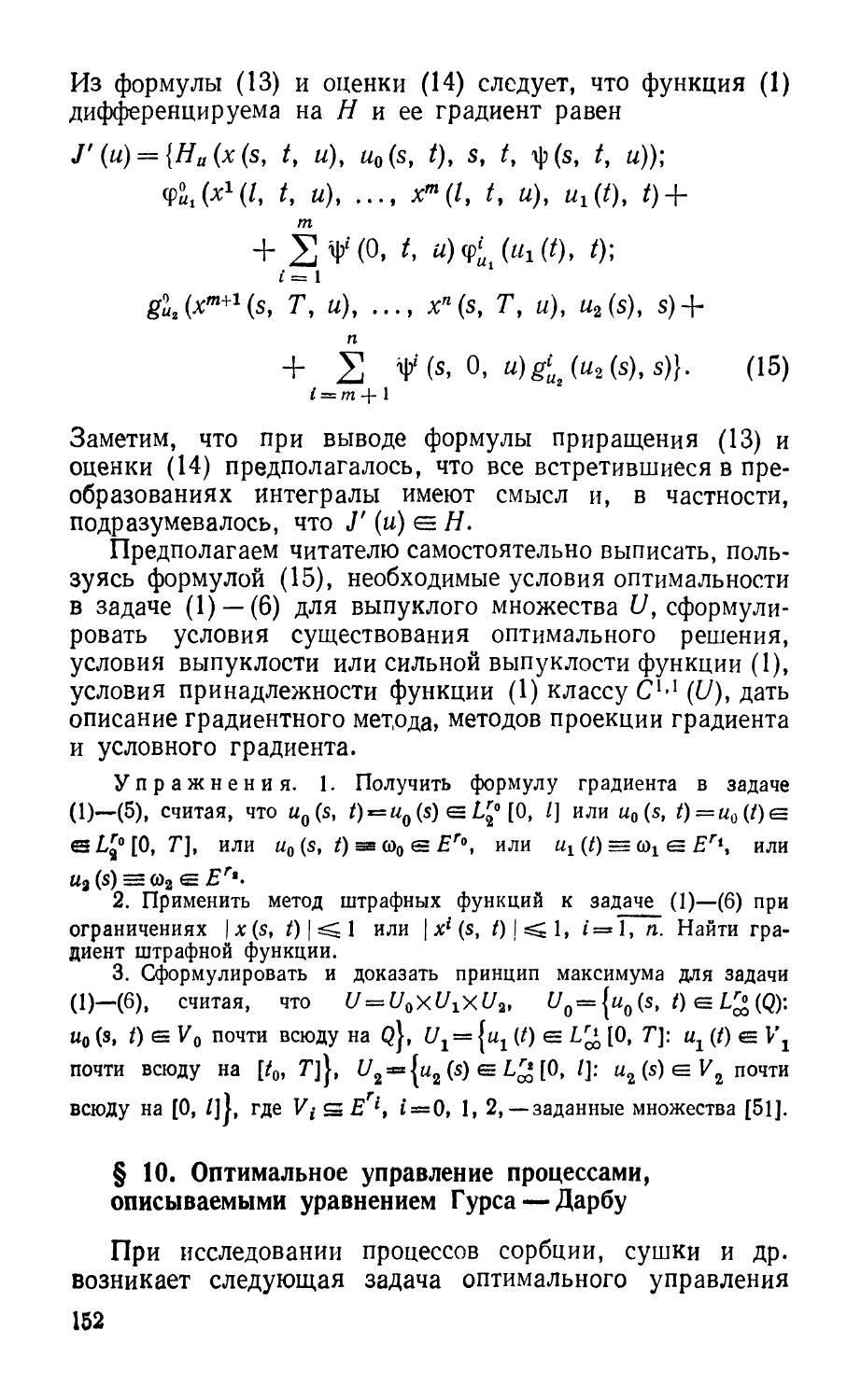
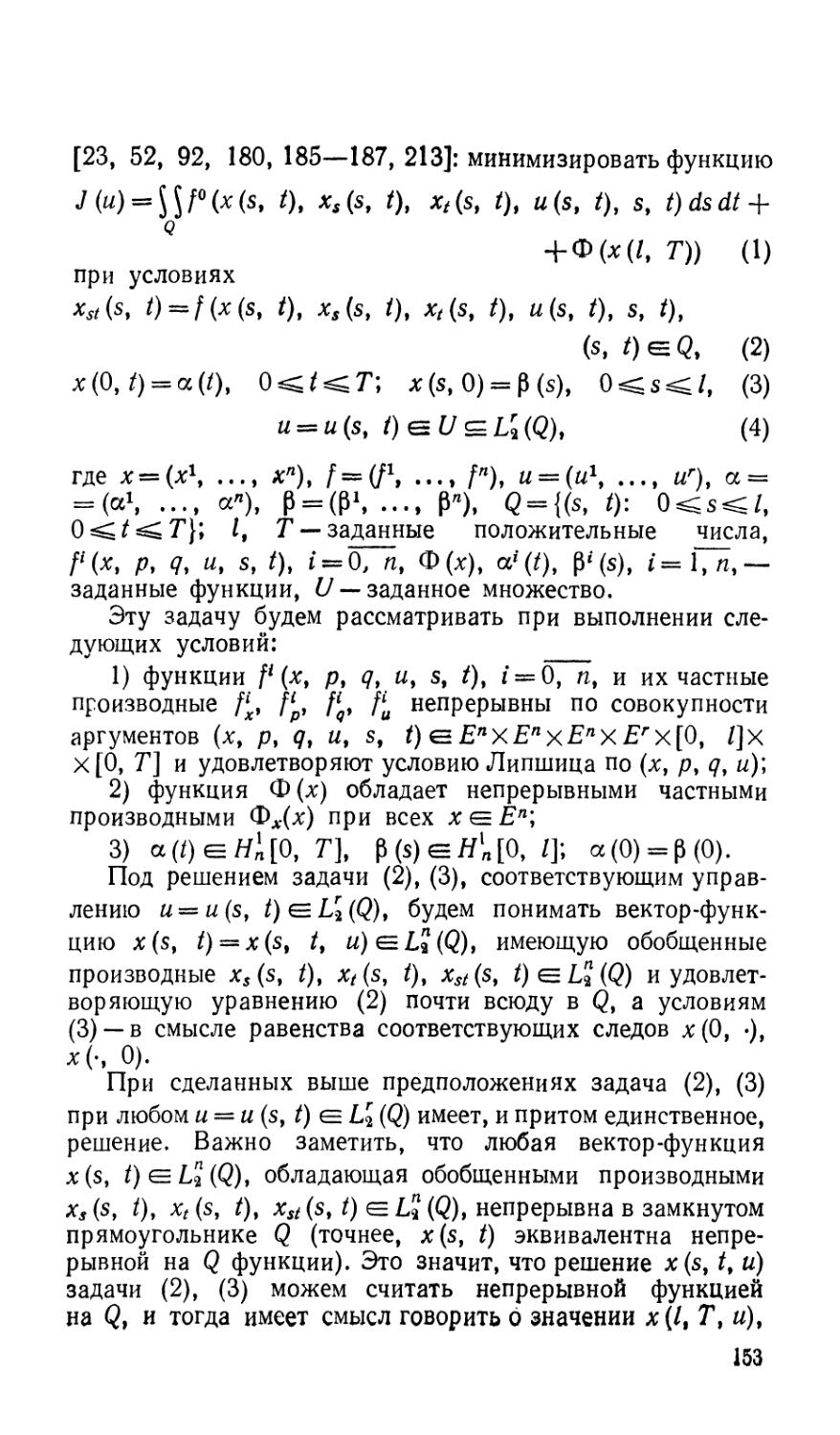
Текст
Ф. П. ВАСИЛЬЕВ
МЕТОДЫ
РЕШЕНИЯ
ЭКСТРЕМАЛЬНЫХ
ЗАДАЧ
ЗАДАЧИ МИНИМИЗАЦИИ
В ФУНКЦИОНАЛЬНЫХ
ПРОСТРАНСТВАХ,
РЕГУЛЯРИЗАЦИЯ,
АППРОКСИМАЦИЯ
Допущено Министерством
высшего и среднего специального образопаиия СССР
в качестве учебного пособия
для студентов высших учебных заведений
МОСКВА «НАУКА»
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
1 981
22.193
В 19
УДК 519.6
Методы решения экстремальных задач. Васильев Ф. П.:
Учебное пособие. — М: Наука. Главная редакция физико-математи-
физико-математической литературы, 1981. — 400 с.
В книге излагаются методы минимизации функций (функциона-
(функционалов), заданных на множествах из функциональных пространств, рас-
рассматриваются приложения к задачам оптимального управления про-
процессами, описываемыми системами обыкновенных дифференциаль-
дифференциальных уравнений и уравнениями с частными производными. Значи-
Значительное место в книге занимают методы решения некорректных экс-
экстремальных задач, условия аппроксимации экстремальных задач.
Может рассматриваться как продолжение книги того же автора
«Численные методы решения экстремальных задач», вышедшей в
1980 г.
Для студентов старших курсов и аспирантов университетов и
других вузов по специальности «Прикладная математика».
Федор Павлович Васильев
МЕТОДЫ РЕШЕНИЯ ЭКСТРЕМАЛЬНЫХ ЗАДАЧ
Редактор Н. Л. Григоренко
Техн. редакторы Н. В. Кошелева, С. Я. Шкляр
Корректор О. А, Бутусова
ИБ № 11864
Сдано в набор 15.08.80. Подписано к печати 26.02.81. Формат 84Х108!/з2-
Бумага тип. № 2. Литературная гарнитура. Высокая печать. Условн.-печ. л.
21. Уч.-изд. л. 26,11. Тираж 20 000 экз. Заказ № 810. Цена 1 р. 10 к.
Издательство «Наука»
Главная редакция физико-математической литературы
11707i, Москва, В-71, Ленинский проспект, 15
Ордена Октябрьской Революции, ордена Трудового Красного Знамени Ленин-
Ленинградское производственно-техническое объединение «Печатный Двор» имени
А. М. Горького Союзполиграфирома при Государственном комитете СССР
но делам издательств, полиграфии и книжной торговли. 197136, Ленинград,
П-136, Чкаловский пр., 15
Отпечатано с матриц во Владимирской типографии «Союзполиграфпрома» при
Государственном комитете СССР по делам издательств, полиграфии и книжной
торговли. 600000, г. Владимир, Октябрьский проспект, д. 7
9П9ПА HQ7 © Издательство «Наука»
JUJ04—037 ,™лл-ллл Главная редакция
й T 4-01. 1702070000 физико-математической
1 литературы, 1981
ОГЛАВЛЕНИЕ
Предисловие 5
Глава 1. Методы минимизации в функциональных простран-
пространствах 7
§ 1. Предварительные сведения. Обозначения 8
§ 2. Градиент. Условия оптимальности 18
§ 3. Теорема Вейерштрасса в функциональных простран-
пространствах 46
§ 4. Методы минимизации 66
§ 5. Градиент в задаче оптимального управления со сво-
свободным правым концом 91
§ 6. Градиент в одной дискретной задаче оптимального
управления 106
§ 7. Оптимальное управление процессом нагрева стержня 116
§ 8. Оптимальное управление колебательными процес-
процессами 134
§ 9. Оптимальное управление процессами, описывае-
описываемыми системой первого порядка с частными произ-
производными 146
§ 10. Оптимальное управление процессами, описывае-
описываемыми уравнением Гурса —Дарбу , 152
Глава 2. Методы решения некорректных экстремальных задач 159
§ 1. Постановка задачи 160
§ 2. Стабилизатор 165
§ 3. Нормальное решение 174
§ 4. Основные леммы о регуляризации . , 178
§ 5. Метод Тихонова 183
§ 6. Метод невязки 202
§ 7. Метод квазирешений , , , 206
1* 3
§ 8. Регуляризация задач минимизации на множествах,
заданных приближенно 218
§ 9. Итеративная регуляризация метода проекции гра-
градиента , ¦ ¦ , , 244
§ 10. Непрерывная регуляризация градиентного метода 260
§11. Итеративная регуляризация метода условного гра-
градиента 269
§ 12. Итеративная регуляризация методов высокого по-
порядка 281
Глава 3. Аппроксимация экстремальных задач 292
§ 1. Разностная аппроксимация для одной квадратич-
квадратичной задачи оптимального управления . , , 293
§ 2. Общие условия аппроксимации ....,,..,,,,. 305
§ 3. Разностная аппроксимация для квадратичной за-
задачи с фазовыми ограничениями 316
§ 4. Регуляризация аппроксимаций экстремальных задач 325
§ 5. Разностная аппроксимация квадратичной задачи
с переменной областью управления 338
§ 6. Аппроксимация задачи быстродействия 350
§ 7. Об аппроксимации максиминных задач 364
Основная литература 387
Дополнительная литература . 388
Предметный указатель ...,...,.,.,...,.,...,.*,, 399
ПРЕДИСЛОВИЕ
Настоящая книга написана как учебное пособие для студентов
факультетов и отделений прикладной математики университетов и
технических вузов. В ней рассматриваются бесконечномерные экстре-
экстремальные задачи, т. е. задачи поиска экстремума функций на множе-
множествах из бесконечномерных функциональных пространств.
В главе 1 кратко излагаются элементы теории и методы решения
таких задач, рассматриваются приложения к задачам оптимального
управления процессами, описываемыми обыкновенными дифференциаль-
дифференциальными уравнениями и" уравнениями с частными производными. Глава 2
посвящена некорректным экстремальным задачам, методам регуляри-
регуляризации таких задач. В главе 3 изучаются условия аппроксимации
экстремальных задач, исследуется сходимость разностных аппрокси-
аппроксимаций для задач оптимального управления.
Для понимания содержания книги желательно знание элементов
функционального анализа в объеме программ, обычно изучаемых
в университетах и технических вузах с повышенной математической
подготовкой. Однако следует заметить, что отсутствие знаний по
функциональному анализу не будет мешать пониманию и усвоению
излагаемых в книге основ методов и приложений к конкретным клас-
классам экстремальных задач, если читатель будет готов принять некото-
некоторые приводимые в книге утверждения не в самой общей их форме.
Настоящую книгу можно рассматривать как продолжение книги
[4], в которой излагались теория и методы решения задач минимизации
в конечномерных пространствах, принцип максимума и динамическое
программирование в задачах оптимального управления процессами,
описываемыми обыкновенными дифференциальными уравнениями. Учи-
Учитывая, что теория и методы экстремальных задач в конечномерных и
бесконечномерных пространствах наряду с существенными отличиями
имеют много общего, мы в данной книге заново не повторяем изло-
изложенные в [4] идеи и эвристические соображения, лежащие в основе
методов минимизации. Поэтому для лучшего понимания содержания
5
настоящей книги желательно знакомство с книгой [4] (или с книгами
[3, 5, 7, 10, 12-16]).
Часть текста, содержащая материал, который дополняет и расши-
расширяет основное содержание книги и может быть использован при
чтении специальных курсов, набрана петитом.
В книге затрагивается широкий круг проблем, имеющих обшир-
обширную библиографию, насчитывающую много тысяч названий. Список
литературы, который приведен в конце книги, содержит лишь те
работы, которые были непосредственно использованы в книге или
близко примыкают к ней, дополняя ее содержание.
Как и в [4], нумерация формул, теорем, лемм, определений,
упражнений в каждом параграфе самостоятельная; ссылки на мате-
материалы, расположенные в пределах данного параграфа, нумеруются
одним числом, вне данного параграфа, но в пределах данной главы —
двумя числами, вне данной главы — тремя числами. Так, например,
теорема 5 из § 2 главы 1 в пределах этого параграфа именуется
просто теоремой 5, в других параграфах 1-й главы— теоремой 2.5,
в других главах — теоремой 1.2.5. Аналогично, параграфы при ссыл-
ссылках на них в пределах данной главы нумеруются одним числом,
а вне этой главы — двумя числами: первое число означает номер главы,
второе —номер параграфа в этой главе. Такой же смысл имеют ссылки
на материалы книги [4].
Автор выражает глубокую благодарность академикам А. Н. Тихо-
Тихонову и А. А. Самарскому за внимание и поддержку при написании
книги, С. М. Цидилину и Ю. Н. Черемных, прочитавшим книгу
в рукописи и сделавшим ряд ценных замечаний, Н. Л. Григоренко,
взявшему на себя труд по научному редактированию книги и устра-
устранившему многочисленные погрешности изложения, а также Е. Р. Ава-
кову, Н. С. Бахвалову, И. С. Березину, В. И. Благодатских,
A. М. Денисову, Я. И. Заботину, А. 3. Ишмухаметову, В. Г. Кар-
манову, М. Ковач, Т. А. Леонтьевой, В. А. Морозову, М. С. Николь-
Никольскому, М. М. Потапову, Н. А. Прохорову, А. С. Стрекаловскому,
B. Г. Сушко, В. В. Федорову, М. Ячимовичу, Е. А. Маркину за мно-
многочисленные полезные дискуссии и советы, способствовавшие улучше-
улучшению содержания книги, В.П. Крушининой, В. И. Селиверстовой за
помощь при подготовке рукописи к изданию.
Автор будет признателен читателям за критические замечания
по содержанию книги.
Ф, /7, Васильев
ГЛАВА 1
МЕТОДЫ МИНИМИЗАЦИИ
В ФУНКЦИОНАЛЬНЫХ ПРОСТРАНСТВАХ
В [4] мы занимались задачами минимизации функций
конечного числа переменных и задачами оптимального
управления процессами, описываемыми системами обык-
обыкновенных дифференциальных уравнений. Наряду с этими
задачами большой интерес для практики представляют
задачи оптимального управления процессами, описывае-
описываемыми уравнениями с частными производными, интегро-
дифференциальными уравнениями, задачи наилучшего при-
приближения функций и др. Оказывается, все вышеупомяну-
вышеупомянутые задачи можно трактовать как экстремальные задачи
в подходящим образом выбранных функциональных про-
пространствах, и для исследования этих задач использовать
аппарат и методы функционального анализа. Такая трак-
трактовка позволяет выявить общие закономерности, прису-
присущие широким классам экстремальных задач, создавать и
исследовать общие методы решения таких задач [1, 17,
27, 28, 30, 31, 42, 43, 45, 49, 50, 55, 60, 63, 68, 69,
71-73, 75, 78,79, 89,91,96,99-102, 105-107, 111 —
114, 119, 122, 126-128, 130, 135-138, 140, 141, 144,
148, 159, 166, 182, 188, 189, 191, 192, 200, 202-203,
207, 209-212, 221, 222, 224-233].
В этой главе мы кратко остановимся на элементах
теории экстремальных задач в гильбертовых и банаховых
пространствах, на методах их решения, рассмотрим неко-
т@рые классы задач оптимального управления процессами,
описываемыми обыкновенными дифференциальными урав-
уравнениями и уравнениями с частными производными. Для
понимания содержания излагаемого ниже материала до-
достаточно знания начальных глав функционального ана-
анализа и элементов теории функций действительных пере-
переменных [8, 9, 11, 87, ПО]. Впрочем, заметим, что рас-
рассмотрение конкретных классов задач оптимального управ-
7
ления в §§5—10 в основном ведется в терминах, свя-
связанных с этими задачами, и для понимания не требует
знания элементов функционального анализа.
§ 1. Предварительные сведения. Обозначения
Здесь мы не будем приводить определения линейных,
метрических, банаховых и гильбертовых пространств — эти
определения, а также основные свойства этих пространств
читатель может найти в [11]. Ограничимся рассмотрением
лишь вещественных банаховых и гильбертовых про-
пространств, не оговаривая этого в дальнейшем. Элементы
этих пространств часто будем называть точкой или век-
вектором. Норму элемента в банаховом пространстве В будем
обозначать через \и\в, скалярное произведение двух эле-
элементов и, v из гильбертова пространства Я— через (и, v)H.
Напоминаем, что всякое гильбертово пространство Н
является банаховым пространством с нормой \и$н =
= ((и, и)нУ/2> Во всяком банаховом пространстве В можно
ввести метрику, взяв в качестве расстояния р (и, v) между
точками ut v^B величину р(ы, 0) = |м — v!B. В тех слу-
случаях, когда ясно, о каком банаховом или гильбертовом
пространстве идет речь, знаки В и Н в обозначениях
\и\в> (с, и)н будем опускать и писать просто \и\, (с, и).
Всюду ниже такие понятия, как ограниченность, сходи-
сходимость, замкнутость, полунепрерывность сверху или снизу,
компактность, будут пониматься в сильном смысле, т. е.
в смысле нормы или метрики рассматриваемых банахо-
банаховых пространств. Если эти понятия будут употребляться
в слабом смысле, то будем говорить о слабой сходимости,
слабой замкнутости, слабой полунепрерывности сверху
или снизу, слабой компактности. Определение некоторых
из этих понятий мы приведем и кратко поясним ниже по
мере необходимости.
Кратко остановимся на понятии отображения. Пусть
X и У —два произвольных множества. Говорят, что на X
определено отображение, если каждому элементу хеХ
поставлен в соответствие некоторый однозначно опреде-
определяемый элемент jgF, Для обозначения отображения F
из X в Y часто пользуются записью y = F(x) или y = Fx
или F: X -> Y, В зависимости от того, какова природа
множеств X и У, вместо общего термина «отображение»
в соответствии с установившимися традициями часто упот-
употребляются термины «функция», «функционал», «оператор»
8
и т. д. В частности, если Y представляет собой множе-
множество на числовой оси Е1, то отображение F: X-+E1 часто
называют функцией. В классическом вариационном исчис-
исчислении, когда в роли X выступают различные функцио-
функциональные пространства, вместо термина «функция» часто
употребляют термин «функционал». Мы ниже будем отож-
отождествлять термины «функция» и «функционал» —это позво-
позволит нам без изменения формулировок пользоваться мно-
многими определениями и теоремами из [4] и в тех случаях,
когда X представляет собой множество из метрического
или банахова пространства.
Через В* будем обозначать пространство, сопряжен-
сопряженное к банахову пространству В. Напоминаем, что В*
состоит из линейных ограниченных функций (функциона-
(функционалов), определенных на В. Значение линейной функции
{:еВ* в точке и ?Е В будем обозначать через (с, и)в или
{с, и). По определению, линейная ограниченная функция с
такова, что
/г пи 4- RfA = rt. /r. u\ 4- R //; x)\
X
при всех и, иеВ и всех вещественных числах а, Р;
М — неотрицательная постоянная, зависящая от функции г,
но не зависящая от w g В. Сопряженное пространство В*
само является банаховым с нормой \\с\\в* = sup (с, и)в,
где верхняя грань берется по единичному шару (|м|я^ 1.
Отсюда следует, что | (с, и)в | ^ | с fB* || и \в при всех и^В,
се- В*.
Если Н — гильбертово пространство, то для всякой
линейной ограниченной функции на Н найдется элемент
сеЯ такой, что значение этой функции в любой точке
иеЯ можно представить в виде скалярного произведе-
произведения (с, и)н- Поэтому пространство Я*, сопряженное
к гильбертову пространству Я, можно отождествить с са-
самим //, причем такое отождествление будет изометрич-
ным, т. е> |!<мл*= sup (с, и)н = \\с\\н. Последнее равен-
ство вытекает из неравенства Коши — Буняковского
\(и, v)h\*?[uIhIvIh, и, veeH.
Гиперплоскостью в банаховом пространстве В называют
множество
Г = {и: (с, и) = тЬ
где сфО — фиксированный элемент из В*, называемый
нормальным вектором гиперплоскости, а у — некоторое
вещественное число.
Если X и У —два банаховых пространства, то прямое
произведение В = X х Y также является банаховым про-
пространством с нормой | и \\в = || х \\х + IIУ h элемента и =
= (*, |/)gB, и сопряженное к В пространство В* пред-
ставимо в виде В* = Х*хУг*.
В банаховых пространствах наряду с понятием схо-
сходимости по норме или, как еще говорят, сильной сходи-
сходимости, важную роль играет понятие слабой сходимости.
Напомним
Определение 1. Говорят, что последовательность
{uk} из банахова пространства В сходится к точке и^В
c/ia6o в В, если
lim {с, иЛ) = (с, и) при всех с& В*.
Если последовательность {uk} сходится к точке и
сильно в В, т. е. lim |нЛ —и| = 0, то {uk} сходится к той
k—>оо
же точке также и слабо в В, так как
\(с, uk)-(cy и) 1 = 1 (с, ик-и)\^1с1в*\\ик-и\\-*-0
при &~>оо. Обратное неверно: из слабой сходимости
последовательности, вообще говоря, не следует ее силь-
сильная сходимость.
Пример 1. Пусть Н — гильбертово пространство,
пусть {еи\ — некоторая бесконечная ортонормированная
система в Я, т. е. (eiy ek) = 0 при f^b {ek, ek)=ly
где /, ft=l, 2, ... Возьмем произвольный элементен
<~Н*=Н. Тогда числа сЛ = (с, е*}, fe=l, 2, ..., пред-
представляют собой коэффициенты Фурье элемента с по си-
системе {ek}. Согласно неравенству Бесселя ([И], стр. 151)
оо оо
2 cl^lcl,2, т. е. ряд ^ с% сходится. Тогда lim с,г =
= lim (с, gft) = O = (c, 0} при всех с^Н. Это значит,
/г-у со
что последовательность {е^} слабо в Я сходится к нулю.
Однако {ek} сильно не сходится в Я. Допустим против-
противное: пусть {ek} сильно в Я сходится к некоторому эле-
элементу е. Выше было замечено, что тогда {ek} сходится к е
слабо в Я. В силу единственности слйбого предела воз-
возможно лишь равенство е = 0. А тогда |e*[->0 при &->оо.
10
Однако это невозможно, так как |j^I=l при всех &=1,
2, ..• Противоречие. Следовательно, \ek) сильно в Я не
сходится.
В частности, пусть H = L2[ay b] — пространство Лебега
функций u = u(i), a^t^b, с нормой \\u\\L2*=
= ;Ч ; и (t) |2 d/ { и со скалярным произведением (и, v)l2 =
\ м (О У @ ^- Тогда ортонормированные системы \ek =
слабо
b
в L2[tf, Ь] сходятся к нулю, т. е. ^c(t)ek(t)dt--+O при
а
k-yoo для любой функции c(/)gL2[q, ft].
Так как сопряженное пространство i3* само является
банаховым, то в свою очередь можно рассматривать вто-
второе сопряженное пространство (В*)*=В**, состоящее из
линейных ограниченных функций на В*. Каждому эле-
элементу и е В можно поставить в соответствие линейную
ограниченную функцию (с, и) переменной с ^Б*, т. е.
некоторый элемент из Б**. Оказывается, это соответствие
таково, что норма \\и\в совпадает с нормой порожденной
им функции (с, и), с^В*. Поэтому, отождествляя эле-
элемент из В с порожденной им функцией из Б**, получаем
изометричное вложение пространства В в пространство
В**. В общем случае указанное вложение BczB**
является строгим, т. е. возможно, что ВфВ**. В тех
случаях, когда это вложение таково, что В = В**, бана-
банахово пространство В называется рефлексивным.
Отображение А: Х->У, где X, У7 —банаховы про-
пространства, называют линейным оператором, если А (ах +
+ р>/) = аАх-\-$Ау для всех х, у^Х и всех веществен-
вещественных чисел а, р. Линейный оператор A: X-^Y называется
ограниченным, если существует постоянная М^О такая,
что р Ах \\у ^.ЛЦх \\х для всех xgX. Если для каждого
линейного ограниченного оператора А определить норму
II А; = sup ЦЛяЦк, то линейное пространство таких опе-
раторов превращается в банахово пространство, которое
принято обозначать через 35(X-+Y). Для каждого опе-
оператора А ез X (X -> Y) равенство
(с, Ах) = (А*с, х)% хеХ,се Г*
11
однозначно определяет оператор Л* e<S?(F*-vX*), назы-
называемый сопряженным к оператору Л. Можно показать,
что ||Л*|| = |И||.
В частности, когда X = J5, Y = B*$ сопряженный
к А <=%{В-+В*) оператор Л* принадлежит X (В**-^В*);
тогда в силу указанного выше вложения В<=В** опера-
оператор Л* определен на В и справедливо равенство
(Аи, v)~(u, Л*у), м, dgB.
Каждый оператор Ле<^(В->В*) порождает билиней*
ную функцию (Аи, v), и, dgS, Напоминаем, что били-
билинейной называют функцию Q(u, v) двух переменных и,
УбВ, являющуюся линейной по каждой из переменных
при фиксированном значении другой переменной. Били-
Билинейная функция Q(u, v) называется ограниченной, если
существует постоянная М ^ О такая, что | Q (и, v)\^
^М S мЦ-Ци! при всех и, v^B. Билинейная функция
Q(u, v) называется симметричной, если Q(u, v) = Q(v, и)
при всех и, v^B. Симметричная билинейная функция
Q (и, v) при u = v порождает функцию J(u) = Q(u, и),
называемую квадратичной функцией.
Если X = Y = Н — гильбертово пространство, то И =.
= Я*=Я** и при каждом А^Х(Н->//) сопряженный
оператор Л*, определяемый равенством (Ли, v)H =
= (и, Л*у)я, также действует из // в Я. Поэтому здесь
возможно равенство Л = Л*—такой оператор Л называют
самосопряженным. Всякий самосопряженный оператор
А: Н-+Н порождает симметричную ограниченную били-
билинейную функцию (Аи, v) и квадратичную функцию
(Аи, и).
Приведем определения и обозначения некоторых конк-
конкретных банаховых и гильбертовых пространств, которые
нам понадобятся в дальнейшем.
В конечномерном линейном вещественном простран-
пространстве R" точек и = (и1, ..., ип) наряду с евклидовой нор-
/ п \1/2
мой |и| = ( 2 \и112) могут быть введены различные дру-
/ п \h'P
гие нормы. Например, полагая |и|р= 2!^'1Р) при
1 ^ р < оо или ! и \CJO = max | и11, получим различные
1 <; I. < п
банаховы пространства Rp, l^p^oo. Прэстранства R^
12
и Rj, где р-1 + <7=1 при 1<р<оо, д=\ при р = оэ
и д = оо при р = 1, являются взаимно сопряженными.
В частности, (Rj)*= R? = ?n. Заметим, что все нормы в Rn
эквивалентны, т. е. если \и}\ и IIа|ц— какие-либо две
нормы в R", то найдутся числа съ с2>0 такие, что
CitM|!i ^il и!'н ^c2||a!!i при всех mgR". Заметим также,
что в любом конечномерном банаховом пространстве поня-
понятия сильной и слабой сходимости равносильны.
Через 1ру 1^р<оо, будем обозначать банахово про-
пространство последовательностей и = (и1, ..., uk, ...) с ко-
/ оэ \\/р
нечной нормой \u\i =[^\uk\p\ .В случае р = оо под 1^
р
понимают банахово пространство последовательностей
и = (м1, .••> «fe, •..) с конечной нормой || w?/00 = sup | w*|.
Можно показать, что lim|wf/ =1^1'/^ Для всех u<=l^-
р
1
р
Сопряженным для /р, 1^р<со, пространством является
пространство /^, где р, <7 связаны равенством р^ q~l~ 1
при 1<р<оо и q = + (x> при р=1. Описание сопря-
сопряженного к Г» пространства см. в [87, 110]. Пространство 1Р
при 1<р<оо рефлексивно. Пространство /2 является
гильбертовым со скалярным произведением (и, и)/, =
= 2 a?t;t и с нормой I «?/, = ««, t/>I/2.
i= 1
Пусть G — некоторое фиксированное измеримое по
Лебегу множество из евклидова пространства Еп. Через
Lp(G), где Iscp<cx3, r —целое положительное число,
будем обозначать банахово пространство измеримых век-
вектор-функций u = u(t) = (u1(t)y ..., ur(t))9 /еб, с конеч-
конечной нормой
Если р = оо, то через Ljo(G) будем обозначать банахово
пространство ограниченных измеримых вектор-функций
u = u(t) = (u1(t)J ..., ur(t)) с нормой
[ и |!loo = esssup | и (t) \Er = inf sup | v (t) \pF
tELG V t^G
где v = и (t) пробегает множество всех измеримых вектор-
функций, совпадающих с u(t) почти всюду на G. Можно
13
показать, что lim \u\L =|«||^оо для всех u^L^(G). Если
г=1, то вместо Lp(G) будем писать просто LP{G), 1^
^р^ + оо. Если р = 2, то пространство L2 (G) является
гильбертовым пространством со скалярным произведением
(и, v)Ll = J <« @, у (OV d/ = $ ( i] и' (/) v< (t)) d^;
тогда |ttli1 = (w, ^>l2. Пространство Lp(G) при 1<р<
<; сю является рефлексивным, а при р = 1 и р = со оно
нерефлексивно. Сопряженным для Lp (G), 1 < р < 00,
является пространство Lj (G), где 1 < <7< оо, p-1-\-q-1= 1,
для L[(G) сопряженным является пространство Lr^(G);
описание сопряженного пространства для Ljo (G) см.
в [87, ПО].
Через С (G) будем обозначать банахово пространство
непрерывных на замкнутом множестве G функций с нор-
нормой ||м|!с = тах | u(t) |; это пространство нерефлексивно;
описание сопряженного к нему пространства см. в [87, 110].
Пусть множество G из Еп имеет непустую внутрен-
внутренность. Через С"° (G) будем обозначать множество функ-
функций, бесконечно дифференцируемых на множестве G.
Говорят, что функция f(s) = /(§!, ..., Snj^LiiG) имеет
обобщенную производную df (s)/dSi = fs.(s) по переменной st
в С, если fs (s) (= Lx (G) и J q> (s) /s. (s) ds = — К ф5. E) / (s) rfs
дая любой функции cp(s) gCx (G), обращающейся в нуль
в некоторой приграничной полосе множества G; здесь
ф5. (s) — частная производная функции 9(s) по перемен-
переменной S/.
Через Я1 (G) (или И?2 (G)) принято обозначать гиль-
гильбертово пространство функций /(s)^L2(G), обладающих
обобщенными производными fs.(s) ^L%{G) по всем пере-
переменным sb ..., S/Z, причем скалярное произведение в этом
пространстве определяется так:
а норма имеет вид 1/1я* = ((/» /)//*I/2*
14
Через Нт (G) (или W™ (G)) обозначают гильбертово
пространство функций f(s)^L2(G), обладающих всеми
обобщенными частными производными до порядка т вклю-
включительно, принадлежащими L2(G)\ скалярное произведе-
произведение в Нт (G) определяется равенством
dsi l ... dsn"
а норма имеет вид 1/|ят = ((/, /)ятI/2.
Ниже нам понадобятся пространства #™(G), m^l,
представляющие собой обобщение пространств Hm(G) на
случай r-мерных вектор-функций. Приведем соответствую-
соответствующие определения для случая, когда G = [a, b] = {t^El:
a^t^b}, a<b. Через Н?[а} Ь] обозначим гильбертово
пространство вектор-функций и = и (t) = (и1 (/), ..., ur(t)) e
&L[[a, b], обладающих обобщенными производными
p^i р-» •••> р-Ь i=:1» m> принадлежащими
Lj[^, &]; скалярное произведение в этом пространстве
определяется равенством
норма равна
Удобно считать, что Яг[а,. b] = Lr2[a, b]. Можно показать
[35, 169, 204], что если u(t)&H?[a, й], m^l, то w(/),
представляют собой аосолютно непре-
непре(t)
(t)
dt
рывные вектор-функции на отрезке [а, Ь\
Пусть Q = Gx{0</<T}, G^En, T - заданное поло-
положительное число. Через Ят> ^ (Q) будем обозначать про-
пространство функций f(s, /)eL2(Q). обладающих обобщен-
ными частными производными 1
d1
L2(Q)\
15
0 ^ i\ + •. • + in ^ my .'— ^ ^2 (Q)» ^' — '» 95 это про-
пространство является гильбертовым со скалярным произве-
произведением
П п\ ... . =
И НОРМОЙ l/f^m. * = (</, g)Hm,qf!\
При постановках краевых задач для уравнений с ча-
частными производными и связанных с ними задач опти-
оптимального управления важное значение имеет понятие
следа функции, обобщающее понятие значения функции
для классов разрывных функций. Мы здесь ограничимся
следующим определением (более общие определения см.
в [35, 157]).
Определение 2. Пусть Q = {(s, /): O^s^Z, 0^
^t-^T) и пусть функция z = z(s, /)gLi(Q). Функция
g(s) eLx[0, I] называется следом функции z(s, i) при
/ = т, если для любого е;>0 найдется число 6>0 такое,
что для почти всех t е [0, 71], для которых \t —
имеет место неравенство
Если след функции z(s, /) при < = т существует, то
его будем обозначать через г (s, т), O^s^c/, или 2(-, т).
Аналогично определяется след z (s, -)==z(s, /), O^t^T,
при каждом фиксированном sg[0, /]. Можно показать,
что если след функции существует, то он определяется
единственным образом.
Если функция z (s, t) непрерывна на Q, то след z(- y t)
этой функции при каждом i е [0, Т] совпадает со значе-
значением этой функции, представляющим собой функцию z (s, /)
переменной s ge [0, /] при фиксированном /.
Пусть z = z(s, t)^Li(Q). Напоминаем, что под эле-
элементом из Lx (Q) понимается не одна функция, а класс
эквивалентных функций, т. е. функций, отличающихся
друг от друга на множестве нулевой меры. Поскольку
мера множества GT = {(s, t): O^s^/, t = x} равна нулю,
то эквивалентные функции на этом множестве могут при-
16
нимать произвольные значения или даже могут быть Fie
определены. Поэтому говорить о значениях функции
2 (s, t) e Lx (Q) при фиксированном t или s не имеет смысла,
а введенное выше понятие следа функции естественным
образом обобщает понятие значения функции для функ-
функций из U (Q).
Однако в общем случае нельзя ожидать, что функция
из Li (Q) будет иметь след при всех значениях /е[0, Г]
или s e [0, /].
Пример 2. Пусть z (s, /) = 0 при 0 ^ s ^ /, T/Bk) <
</<77B*-1), ?=1, 2, ..., z(s, 0= 1 при O^s^/;
T/Bk+l)<t^T/BkI k=l, 2, ... Эта функция принад-
принадлежит La(Q), но при / = 0 не имеет следа.
Для того чтобы функция z = z(s, /) ^LxiQ) имела след
при всех / е fO, T1], на нее нужно наложить дополнитель-
дополнительные ограничения. Например, функция z(s, t)^Li(Q),
обладающая обобщенной производной zt(s, tj^mQ),
имеет след при каждом / е [0, 71], и ее можно изменить,
на множестве двумерной меры нуль так, что она при всех
/ ее [0, Т] будет иметь значения, совпадающие со следом
почти всюду на отрезке O^s^L Замечательно то, что
в этом случае справедлива формула, обобщающая фор-
формулу Ньютона —Лейбница:
— z(s, a),
где z(s, b), z(s, a), O^s^/, — следы функции z(s, t) при
i = b и t — а соответственно; a, b — любые числа из отрезка
O^t^T, причем в формуле равенство имеет место для
почти всех s e [0, /]. Если дополнительно известно, что
z(s, t)y zt{s, t) ^LP(Q)> 1 ^p<oo, то следы такой функ-
функции принадлежат LP[0, I] и непрерывны по t в метрике
МО, /], т.е.
lim$jz(s, t)-z(s, T)\Pds = 0
при всех tg[0, T]. В частности, если z(s, t)()
то такая функция имеет следы z (•, t) e L2 f0, /] при всех
*€=[0, Г] и z(s, -)^^[0, Г] при всех se[0, /], при-
причем указанные следы непрерывно зависят в метрике
L2[0, /] и L2[0, T] соответственно.
1?
Если для функции z (s, t) e L2 (Q) существует после-
последовательность {zk(st /)}eC°°(Q) такая, что
lim esssup \\zk(s, t) — z(s, /)|2ds = 0,
fe /[0 T] 5
esssup \
/e[0, T] 5
то z (s, 0 также имеет след z (•, f) e L2 [0, /] при каж-
• дом / <= [0, Г], причем существует эквивалентная функ-
функция, значения которой совпадают со следом z (•, t) при
всех /€=[0, Г] [35].
Остальные обозначения, определения и факты из
функционального анализа будем приводить ниже по мере
надобности.
§ 2. Градиент. Условия оптимальности
1. При исследовании экстремальных задач в банаховых,
пространствах, как и в случае ^-мерного пространства
Еп9 большую роль играет понятие градиента функции.
Определение 1. Пусть В —некоторое банахово
пространство, пусть функция J (и) определена в некото-
некоторой ^-окрестности О (и, y) = {v: v^By \\v — и||<у} точки
и. Говорят, что функция J (и) дифференцируема в точке
и, если существует элемент J' (и) е В* такой, что при-
приращение функции можно представить в виде
и), A)
¦где |А|я<7, |о(Л, и) |/||h\B->• 0 при ||Л||д->0. Величина
dJ (u) = {Jf (и), h)B представляет собой главную линейную
часть приращения A) и называется дифференциалом функ-
функции J (и) в точке а, а элемент У (и) из В* —первой про-
производной или градиентом этой функции в точке н.
Если градиент существует, то он определяется одно-
однозначно. В самом деле, если Л (и) и Л(и)—дра градиента
функции в точке и, то из A) имеем
(Х(и)-Л(и), h) = Oi(h, u)-o2(h, и)
при всех ft, [й||<у- Возьмем произвольный элемент е<= В,
ефО, и положим h = te, O<Ct<.to = y/\\e(. Тогда (J[(u) —
— Л (и), e)t = o(t), где lim o(/)/ = 0. Поделив на * и
устремив f к +0, отсюда получим (/! (и) — /? (м), ^) = 0
при всех ^б5, т. е. Л(и) = Д(и).
18
Нетрудно видеть, что если функции J (и), G (и) диф-
дифференцируемы в точке и, то функция g(u) = aj (u)-\-$G(u)
при любых действительных а, C также дифференцируема
в этой точке, причем
Далее, если функция J {и) дифференцируема в точке
и еВ, а функция / (/) одной переменной дифференци-
дифференцируема в точке t = J(u)} то сложная функция g(u) =
= f(J(u)) дифференцируема в точке и, причем справед-
справедлива формула
g'(u) = f'(J(u))J'(u).
В самом деле, если f(t + At)—f(t) = f'(t)At + Oi(At, /),
( h)() f(J( + h))f(J()) f'(J()A
g( )g) ( ))()) ())()
+ Ol(AJ(u), J(u)) = f'(J(u)){J'(u)% h) + f'(J(u))o(h, u) +
+ Ol(AJ(u), J(u)) = (f'(J(u))J'(u), h) + o2(h, и), где
o2(h, u)!\h\\-+0 при 11/ihO.
Очевидно, если функция дифференцируема в точке и9
то она непрерывна в этой точке в метрике простран-
пространства В.
Определение 2. Функция J (и) называется непре-
непрерывно дифференцируемой на множестве U из банахова
пространства В, если она дифференцируема во всех точ-
точках u<=U и [ J' (и + /г) — J' (и) \в* ->¦ 0 при ||А|Ь-^О для
всех и, u-\-h^U. Множество всех функций, непрерывно
дифференцируемых на (У, будем обозначать через CX(U).
Заметим, что определение 1 предполагает, что если
функция / (и) дифференцируема в точке u<=U\ то она
определена в некоторой окрестности этой точки. Поэтому,
говоря о принадлежности функции J (и) множеству С1 ((У),
обычно подразумевают существование некоторого откры-
открытого множества W из Б, которое содержит U и на кото-
котором определена эта функция.
Приведем несколько примеров дифференцируемых
функций в банаховых и гильбертовых пространствах.
Пример 1. Пусть Н — гильбертово пространство.
Тогда функция J (и) = \\и\\2н = (и, и)н дифференцируема
во всех точках и е Я, так как
J(u) = Bu, h)H + (hy h)H.
Отсюда следует, что J'(u) = 2u и J {u)<=Cl{H).
При м е р 2. Пусть оператор А^?{Н-+Н), где Я—*
гильбертово пространство, Ъ — фиксированный элемент из
19
Н. Рассмотрим функцию
J(u) = -lu-(Au, и)-(Ьч и), иевН.
Приращение этой функции представимо в виде
/±(Л + Л*)а-&, h^
I (Ah,
где Л*— оператор, сопряженный к оператору А. Отсюда
следует, что J (и) дифференцируема во всех точках и^Н,
причем ее градиент равен
Г(и)= \ .(А + А*)и-Ь.
Нетрудно видеть, что J (и) ^С1{Н). В частности, если
Л— самосопряженный оператор, т. е. Л* = Л, то J'(u) =
^Аи-Ь.
Пример 3. Пусть В —банахово пространство, Н —
гильбертово пространство, Л?=^C-^Я), b еЯ. Рас-
Рассмотрим функцию
J(u) = \Au-b}i, ueeB.
Имеем
J{u + h)-J(u) = 2(Au-b, Ah)H + lAhih =
= BA*(Au-b), h)B + (A*Ah, h)D,
где Л* <=cS?(H->S*) — оператор, сопряженный к опера-
оператору А. Отсюда следует, что J (и) ^C1(B)i причем
J'(u) = 2A*(Au-b).
Пример 4. Пусть
[A(sf t)u(t)dt-b{s)fds4
с а
где b{s)<=U[c, d], A(s, t)<=U(Q), Q=\(s, t)eEE2:
d tb}. Пользуясь теоремой Фубини [11, 157],
30
имеем
d fb
J (u + h) - J (u) = 2 $ |] A (s, 0 и (t) dt —
c a
-b(s))\A(s, l)h(l)dlds+\[lA(s, t)h(t)dt) ds-
а г. а
Ь\ й !Ъ \
s, H)(U(s, l)ii(t)dt-b{s))ds
b b Id \
A(s, t)A(s9 t)ds)h(t)h(t)dtdt.
Отсюда следует, что J (и) непрерывно дифференцируема
на L2[a, b]t причем
d fb \
A(s, t)u(t)dt-b(s)]ds.
Предлагаем читателю вывести эту формулу, пользуясь
результатом примера 3.
Г)
Пример 5. Пусть J (и) = jj F (и (/)) dt, где F (и) — не-
а
прерывно дифференцируемая функция одной переменной
и^Е1, a a = a(/)EC[fl, b]. Тогда
ь
J{u + h)-J{u) = \F' (и @)h (t)dt + o(h, и),
a
b
где о (ft, и) = I [Fr {и (t) + в (/) ft @) - Z7' (м @)] h @ df• Так
a
как F' (м) непрерывна, то при /1|!с->0 будем иметь
F' (a (/) + 9 (t) ft @) - F' (a (/)) -+ 0 равномерно по / ge [a, &].
Тогда о (ft, u)/}\
а
при |:Л|!с->0. Таким образом, J(и) дифференцируема на
С[а,Ы
Другие содержательные примеры дифференцируемых
функций, связанных с задачами оптимального управле-
управления процессами, описываемыми обыкновенными диффе-
дифференциальными уравнениями, разностными уравнениями
и уравнениями с частными производными, будут рассмот-
рассмотрены ниже,
21
2. При исследовании экстремальных задач в банахо-
банаховых пространствах могут быть использованы также и
вторые производные.
Определение 3. Пусть В — банахово пространство
и пусть функция J (и) определена в некоторой у-окрест-
ности О (и, у) точки и е В. Говорят, что функция / (и)
дважды дифференцируема в точке и, если приращение
А/ (и) = J (u + h) — J (и) можно представить в виде
ДУ = </' (и), А> + У- (Г {и) А, Л> + а (А, и), B)
где У (и) — градиент функции J(«) в точке и; оператор
J" (и) е «5? (В ->- В*), порождающий симметричную били-
билинейную функцию (J"(u)h, г), h, zgS, называют второй
производной функции J (и) в точке и\ квадратичную форму
d2J (u) = (J" (u)h, h) называют вторым дифференциалом
этой функции в точке и; a (A, u)l\ h f -> 0 при ii/i||->0.
Функция J (и) называется дважды непрерывно дифферен-
дифференцируемой на множестве U ^ В, если она дважды диф-
дифференцируема во всех точках u^U и \J"(u-\-h) —
— J"(u)\-+Q при ||А|!->-0 при всех a, u + h^U. Множе-
Множество всех функций, непрерывно дифференцируемых на (/,
будем обозначать через C2(U).
Нетрудно видеть, что функции из примеров 1—4
дважды непрерывно дифференцируемы на рассматрива-
рассматриваемых пространствах, причем вторая производная функции
из примера 1 имеет вид J" (и) = 2Еу где Е — единичный
(тождественный) оператор на Я; в примере 2 J"(u) =
А А*)/2 в примере 3 ,Г(и) = 2Л*Л, в примере 4
J"(u) = 2\A(s, t)A(s, I) ds.
с
3. Если функция J(u)^Cl(U) или С2 (U) и точка
u-\-th принадлежит U при всех /, 0^/^1, то функция
/(/) = /(и + *А)
переменной / принадлежит С1 [О, 1J или С2 [О, 1J соот-
соответственно, причем
f'(t) = (J'(u + th), Л), r(t) = (J"(u + th)h, А), 0</<1,
и, кроме того, справедливы следующие формулы конечных
22
приращений:
-J(u)
| А),
где О^8Ь 82, 63^1- Эти формулы вытекают из опре-
определений 1—3 и доказываются дословно так же, как
аналогичные формулы B.3.1) —B.3.4) из [4]. В частности,
если U — выпуклое множество, то эти формулы верны
для любых и, u + h^U.
Определение 4. Множество U из линейного про-
пространства называется выпуклым, если оно содержит
вместе с любыми двумя своими точками и и v и отрезок
[и, v] = {ua~av-{- (I — а) иу О^ос^Ц, соединяющий
эти точки.
Определение 5. Пусть U<=B и функция J (и)
принадлежит Cl(U). Скажем, что градиент J'(и) этой
функции удовлетворяет условию Липшица на множестве
U с константой L^O, если || J' (и) — J' (v) \\в* ^L\\и — v\&
при всех и> ue[/. Класс таких функций будем обозна-
обозначать через С1»1 ([/).
Функции из примеров 1—4 принадлежат классу С1»1
на рассматриваемых пространствах, причем в примере 1
1 = 2, в примере 2 L = \\A\\, в примере 3 L = 2[i4Mj|^
^21| А ||2, в примере 4
b bid \2 \ 1/2
Щ5ЛE, t)A(s, l)ds\ dldt\ ^
а а \с I I
Ъ d
\A2(s, t)dsdt.
Лемма 1. Пусть U — выпуклое множество из В,
J(u)eeCx>{(U). Тогда
\J(")-J(v)-(J'(v), u~v)\^L\u-v |2/2
при всех ut v e t/.
Доказательство проводится дословно так же, как
доказательство аналогичной леммы 2.3.1 из [4].
23
4. При исследовании экстремальных задач в банахо-
банаховых пространствах важную роль играют такие понятия,
как выпуклая и вогнутая функция, строго выпуклая,
сильно выпуклая функция.
Определение 6. Функция J (и), определенная на
выпуклом множестве ?/, называется выпуклой на этом
множестве, если
J (аи + A -а)у)<>а J (u) + (l -a) J (v)
при всех и, уеС/ и всех ае[0, 1]. Если в последнем
неравенстве равенство возможно только при а = 0 и ос— 1,
то функция J (и) называется строго выпуклой на U.
Функцию J (и) называют вогнутой (строго вогнутой)
на выпуклом множестве ?/, если (-J (и)) выпукла (строго
выпукла) на U.
Примерами выпуклой функции на банаховом прост-
пространстве В являются аффинная функция J(u)-^=(c, u) + a,
где се В*, а = const, и норма J (и) = | и fB.
Определение 7. Функция J (и), определенная на
выпуклом множестве U из гильбертова пространства //,
называется сильно выпуклой на U, если существует
постоянная х>0 такая, что
J (аи + A - a) v) < aj (и) + A - а) J (v) - а A - а) к || и - у fH
при всех а, ost/ и as[0, 1]. Постоянную х называют
константой сильной выпуклости функции J (и) на мно-
множестве U.
Очевидно, сильно выпуклая на U функция будет
выпуклой и даже строго выпуклой на U. Примером
сильно выпуклой функции на Н может служить функция
J (и) = | и \\н = (и, и)И, и е= Я; для этой функции нера-
неравенство из определения 7 превращается в тождественное
равенство с константой и=1.
Приведем несколько критериев выпуклости и сильной
выпуклости гладких функций.
Теорема 1. Пусть U — выпуклое множество из бана-
банахова пространства В. Тогда для того чтобы функция J (и)
из С1 (U) была выпукла на (У, необходимо и достаточно,
чтобы при всех и, v e(/ выполнялось одно из следующих
двух неравенств;
u-v)
24
или
(J'(u)-J'(v)t ы-1>)
Если тШфф и /(«)бС2((/), то для выпуклости J (и)
на U необходимо и достаточно, чтобы (J"(u)l, 1)^0
при всех ?gB, u^U.
Теорема 2. Пусть U — выпуклое множество из гиль-
гильбертова пространства Я и пусть функция J (и) принад-
принадлежит С1 (U). Тогда для того чтобы J (и) была сильно
выпуклой на U\ необходимо и достаточно выполнение одного
из следующих двух условий:
1) существует постоянная х>0 такая, что
r (v), и —t;> + xj|tt —0||лг, W> vzeU;
2) существует постоянная \i > 0 такая, что
(Jr (и) — J' (v), u-v)>~\i\u — vfH, и, v<^U.
Если int U Ф ф и J (и) е С2 (U), то для сильной выпук-
выпуклости J (и) на U необходимо и достаточно существование
постоянной [!>0 такой, что («/"(«)?, l)^[i^l0i при
всех Eg Я, и: е (/.
Теоремы 1, 2 доказываются совершенно так же, как
и аналогичные теоремы 4.2.2, 4.2.4, 4.2.5, 4.3.2 — 4.3.4
из [4]. Между константами к и \i из теоремы 2 сущест-
существует простая связь: \х = 2к. Если J (и) сильно выпукла и
принадлежит Cll{U), то fi = 2x^L.
Если в примере 2 оператор Л— самосопряженный и
положительно определенный (неотрицательный), т. е.
ЕеЯ, [i = const > 0 [^1 = 0],
то согласно теореме 2 (теореме 1) функция / (и) =
= -^(Аи, и)— (Ь, и), и&Н, сильно выпукла (выпукла)
на Я.
Функция
( Abf B
из примера 3 выпукла на В, Если В = Я и (Л* Л?, g) =
= <4?, Л?> = J Лg||а^= |х ( g pf ?е=Я, ц = const >0, to со-
согласно теореме 2 эта функция сильно выпукла на Я.
25
Аналогично, функция J (и) из примера 4 выпукла на
[а, й], а если [а, 6] = [с, d],
\\(\A(s, t)A(s9 x)ds)t(t)t(T)dsdr =
a a \fl '
_ г
Ji4(s, 05@ Л
U@si,K H
то она сильно выпукла на L2[a, b].
5. Пусть U — некоторое множество, a J(u) — функция,
определенная на этом множестве. Всюду ниже, если
не оговорено противное, будем рассматривать лишь функ-
функции, принимающие конечные вещественные значения. Для
обозначения задачи минимизации функции У (и) на мно-
множестве U часто будем пользоваться следующей краткой
стандартной записью:
У (w)-Mnf; и е(/. C)
Напомним определения некоторых понятий. Функ-
Функцию У (и) называют ограниченной снизу (сверху) на мно-
множестве U, если существует число М такое, что J(u)^M
(J(u)^M) для всех u^U. Функция У (и) не ограничена
снизу (сверху) на U, если существует последовательность
{uk}^U, для которой \\mj(uk) = — оо film J(Uk) =
k —* оо \k —> со
= +OOj.
Пусть функция J (и) ограничена снизу (сверху) на U.
Тогда число а называют нижней (верхней) гранью J (и)
на Uy если 1) J (и)^а [J(u)^a] при всех и е U; 2) для
любого е > 0 найдется точка ие е ?/, для которой i (w8) <
<а + е [J(uE) >a — е]. Если /(а) не ограничена снизу
(сверху) на U, то в качестве нижней (верхней) грани J (и)
на U принимают а = — оо (а= + °°)» Нижнюю (верхнюю)
грань J (и) на (У обозначают
inf J (и) = У* /sup У (и) = У*V
с/ [и J
Точки множества
называют точками минимума (максимума) функции J (и)
на множестве U.
26
Последовательность {uk} e U называют минимизирую-
минимизирующей (максимизирующей) для функции J (и) на множестве (У,
если
lim J (uk) = У* (lim J (uk) = J*\.
Пусть (У —множество из метрического (например, бана-
банахова) пространства, р (#, v) — расстояние между точками и
и v в этом пространстве. Точку v% e U называют точкой
локального минимума (максимума) функции J (и) на мно-
множестве U, если существует число а > О такое, что J (v^) ^
<с У (а) [«/(и*) ^ У (^)j для всех и ^ U f] {и: р (и, у*) <а} =
= 0^/(^^, а). Если при некотором а>0 справедливо
неравенство J(v*)<.J(u) (J (v*)> J (и)) для всех ае
^0б/(и*» а)> ифъ*) то ^^ называют точкой строгого
локального минимума (максимума).
Точки и% е U% часто называют точками глобального
минимума функции J (и) на множестве U.
Выпуклая функция на выпуклом множестве не может
иметь локальных минимумов, отличных от точек глобаль-
глобального минимума. Точнее, верна
Теорема 3. Пусть U — выпуклое множество из бана-
банахова пространства В, а функция J (и) определена и выпукла
на U. Тогда всякая точка локального минимума J (и) одно-
одновременно является точкой ее глобального минимума на Uy
причем множество U* выпукло. Если J (и) строго выпукла
на (У, то U% содержит не более одной точки.
Доказательство проводится дословно так же, как дока-
доказательство аналогичной теоремы 4.2.1 из [4].
6. Как и в конечномерных экстремальных задачах,
с помощью первых и вторых производных могут быть
сформулированы необходимые и достаточные условия
экстремума функций на множествах из банаховых про-
пространств.
Теорема 4. Пусть функция J (и) задана на банахо-
банаховом пространстве В и пусть J (aj = У* = inf J (и). Если
в
J (и) дифференцируема в точке и%, то необходимо выпол-
выполняется равенство
./>*) = О, D)
а если J (и) дважды дифференцируема в точке w*, то не-
необходимо
У'(и*) = Оэ {Г(и^)е, е)^0, е(=В. E)
27
Доказательство. Возьмем произвольный элемент
^6i5 и в A) положим и = и*, h = tey — оо<С/< + оо.
Так как в точке минимума ДУ (и*) = J (и* + te) — J (и*) ^
^0, то из A) следует 0^ (J' (м*)е) t + o(t) при всех /,
где limo(/)// = 0. Поделив это неравенство сначала на
затем на /<0 и устремив / к нулю, получим
(У (и*), е) = 0 для всех беВ, что равносильно усло-
условию D). Если J (и) дважды дифференцируема в точке и#>
то из B) при и — и*, h~te г учетом уже доказанного
равенства D) будем иметь О^ДУ («*) = (.Г(«*)е, еI2/2 +
+ o(t2). Отсюда, деля на гфЪ и устремляя /~>0, придем
к второму из условий E).
Как видим, условия D), E) представляют собой обобще-
обобщение известных необходимых условий минимума функций
конечного числа переменных. Нетрудно видеть, что эти
условия необходимы не только для глобального, но и
локального минимума функций на банаховом простран-
пространстве. Любопытно заметить, что, в отличие от конечно-
конечномерных задач в банаховых пространствах, условия
У(м#) = 0, (J"(u*)e, e)>0, ефО не являются достаточ-
достаточными для локального минимума (см. ниже упражне-
упражнения 6, 7).
Следующая теорема дает необходимые и достаточные
условия минимума гладких выпуклых функций на выпуклом
множестве.
Теорема 5. Пусть U — выпуклое множество из бана-
банахова пространства В, */(^)eC1(L/) и пусть и% =
= |ае(/: J (и) = J^ = inf J (u)\ — множество решений за-
дачи C). Тогда в любой точке и* е6;* необходимо выпол-
выполняется неравенство
(У(«*)э и — и*)^0 при всех u^U, F)
которое в случае и% е int U эквивалентно равенству
jr(u^) — 0. Если, кроме того, J (и) выпукла на U, то
условие F) является достаточным для того, чтобы u^^U*.
Доказательство этой теоремы проводится так же, как
доказательство аналогичной теоремы 4.2.3 из [4].
Если Л— самосопряженный неотрицательный оператор,
то для функции J (и) из примера 2 условие F), которое
здесь имеет вид
(Аи# — Ь, и — и*)^0 при всех u^U,
является необходимым и достаточным для того, чтобы J (и)
28
достигала в точке и* своей нижней грани н? выпуклом
множестве U ^ Н\ если U — Н, то это условие равно-
равносильно условию
Аи* ~Ь.
Пусть в примере 3 В = // — гильбертово пространство.
Тогда согласно теореме 5 условие
<Л* (Аи* — &), и — w#>.^0, wGti,
необходимо и достаточно для того, чтобы функция из
примера 3 достигала своей нижней грани на выпуклом
множестве U^H в точке и*\ если U = Hy то это условие
эквивалентно равенству
А*Аи* = А*Ь.
Далее, из теоремы 5 и результатов примера 4 сле-
следует, что
d /Ъ \2
V(tt) = JJ A(s, i)u{t)dt-b(s)\ ds
достигает своей нижней грани на множестве ?/ = L2fa, b]
в точке и = и* (t) e L2 [a% b] тогда и только тогда, когда
и% (/) является решением следующего интегрального урав-
уравнения Фредголь^ла первого рода
\ (I A (s, I) A (s, 0 ds) u(t)dl = \A (s, H) / (s) ds,
7. Как увидим ниже, условие оптимальности F) при-
применимо к широкому классу задач оптимального управле-
управления. Здесь мы для иллюстрации ограничимся рассмотрев
нием следующей простейшей задачи оптимального управ-
управления: минимизировать функцию
J(u) = \x(T9 и)-у\*Еп G)
при условиях
i(t) = A(t)x(t) + B(t)u(t) + f(t), to^t^T, (8)
x(to) = xo, (9)
U = tl(t)EElJc=:Lri[to, T]t A0)"
где A (t) = {aif (/)} — матрица порядка пхп, В (t) = {by (t)\—
матрица порядка яхг, /(/) = {/|- (/)} — матрица порядка
пх 1, т. е. n-мерный вектор-столбец; моменты времени /0» Тч
а также точки х0, у ^Еп заданы; U — заданное множество
29
«з Lri[tOt Г]; x(tf u) = x(t) = (xl(t), ..., xn (t)) - решение
(траектория) задачи (8), (9), соответствующее управлению
и = а@ = (а1 @, .... ur(t))<=ti[t*, П
Будем предполагать, что элементы %(/), bij(t), /,-(/)
матриц А (/), В (/) и соответственно / (/) кусочно непре-
непрерывны на отрезке [/0, Т] (или принадлежат L^[t0} Г]).
Тогда согласно теореме 6.1.2 из [4] при каждом u = u(t)&
€L?[/0» T] существует, и притом единственное, решение
*(/, и) задачи (8), (9). Напоминаем (см. определение 6.1.1
в [4]), что траекторией — решением задачи (8), (9), соот-
соответствующим управлению и = и (/) e L\ [t0, T], называется
непрерывная функция x(tf u)t to^t^T, удовлетворяю-
удовлетворяющая интегральному уравнению
x(tt и) = ](А(х)х(т, u) + B(T)u(T)+f(x))dT + xQ. A1)
to
Согласно теореме 6.1.2 из [4] функция x(t, и) абсолютно
непрерывна и почти всюду на [/0, Т] удовлетворяет урав-
уравнению (8), ее производная jt(t9 и) принадлежит L* [/0, Т],
а также справедливо равенство (9). Таким образом, функ-
функция G) определена при всех m = «(/)gLJ[/o, 7"].
Задача G) — A0) имеет простой физический смысл:
среди всех траекторий задачи (8), (9), соответствующих
всевозможным управлением и е (/, ищется такая, правый
конец которой удален от заданной точки у на возможно
меньшее расстояние. Эта задача тесно связана с так на-
называемой проблемой управляемости, заключающейся
в выяснении того, существует ли хотя бы одно управле-
управление и = и% g(/, для которого правый конец траектории
х(Т, и*) совпадает с данной точкой у. И если в задаче
G) — A0) окажется, что существует управление и* = и# (/) s
е U такое, что J (и%) = inf J(u) = J* = 0, то такое управ-
управление решает проблему управляемости.
Покажем, что функция G) при условиях (8), (9) диф-
дифференцируема на Li[t0, T]. Для этого нам понадобится
следующая
Лемма 2. Пусть функции ср (/), b (t) неотрицательны
и непрерывны на отрезке to^t^T, a = const. Пусть
30
Тогда
to
В частности, если Ъ(/) = b = const^0, то
Если же
т
0^q>{t)^a\
t
mo
т
t
и при b(t) = b = const ^ 0 имеем
Доказательство приведено в [4], см. лемму 6.3.1 из [4].
Теорема 6. Пусть матрицы A(t), B(t),f (t) кусочно
непрерывны на отрезке [t0, T]. Тогда функция G) диффе-
дифференцируема во всех точках u<=L\ [tQy T] и ее градиент
имеет вид
Jr (и) = J (/,
где \|) = г|) (t, u) = ('
решением задачи
•ф (/, a) =
г|)
= —Лг
(Г, «)
3T(t)ty(t, и)
... *„@).
(/)¦({)(/, и),
= 2(*G\ и)
» ч
-у)
,<^Т, A2)
: / ^ Г, является
= /<Т, A3)
A4)
{здесь Ат, Вт — транспонированные матрицы А, В). Функ-
Функция G) при условиях (8), (9) принадлежит классу С1'1 на
Z/J'o, Г], т. в.
irH-J'H!!L2<L^-u|!L2,
1 = 2(Г-/в)В-1Ив2Л»«(Г-Ч ( У
где Лтах= sup |Л(/I, Вгаах= sup |fi@I.
Доказательство. Возьмем произвольные управ-
управления и, u-\-h^Ll[tOi T] и соответствующие им решения
х(/, и), x(t, u + h)% to^t^cT, задачи (8), (9). Обозначим
Д* (/) = *(/, u + h)-x(t, и), to^t^T. Из (8), (9) сле-
31
дует, что Ax(f) является решением задачи Коши
Ах (t) = A (t) Ax(t)-{-B (t)h (t)9
A6)
или с учетом (И)
Ах (/) = (А (т) Ах (х) + B(x)h (т)) dxt
Тогда
| Ах@ [< Лтах 5
Отсюда с помощью леммы 2 получим
т
Г /Г М/2
Так как J|ftt/)|d/<G-/0I/2 $|Л(/)|аЛ , то из A7)
/а Ч /
следует оценка
тде С1 = (Г^/оI/2
Приращение функции G) имеет вид
-\х(Т, u)-y\* = 2(x(Tt u)-y, Ах(Т))Еп +
+ \Ax(T)\hn. A9)
Покажем, что
т
2 (л G, и) - у, Ах (Т))Еп - \ (Вт (t) г|) (/, и), Л (/)>Ег Л, B0)
где ^(^, а) —решение задачи A3), A4). Заметим, что под
решением задачи A3), A4) в соответствии с определе-
определением 6.1.1 из |4] здесь естественно понимать непрерыв-
непрерывную функцию ip(/f и), удовлетворяющую интегральному
32
уравнению
, u) = \ AT (х)г|>(т, u)dT + 2(x(Ty и)-у), B1)
Существование и единственность решения задачи A3),
A4) доказывается так же, как в теоремах 6.1.1, 6.1.2
из [4]. Функция \|з(/, и) абсолютно непрерывна, почти
всюду на [tOy T\ удовлетворяет уравнению A3) и началь-
начальному условию A4). Поэтому, учитывая условия A3), A4),
A6), имеем
2(х(Т, и)-у, Ах(Т)) = (у(Т, и), &х(Т)) =
т т
, и), Ал: @) dt = J ((% Ах) + <ф, Ах» dt =
t
Равенство B0) доказано. Подставляя B0) в A9), получим
т
&J (и) = ^ <^г @ * (^ "). Л (/)>?г Л +1 А* (Г) |2. B2)
Сравнивая формулу B2) с A) и учитывая оценку A8)
при /-Т, приходим к выводу, что функция G) диффе-
дифференцируема на Lr2[to, T] и ее градиент представим в виде
A2). Докажем неравенство A5). С этой целью положим
Да|5 (t) = я|) (/, а)-~я|)(/, v). Оценим |Д-ф(/)|. Из равенства
B1) имеем
7
\АТ (т) Дг|) (т) dx + 2 Ах (Т) | ^
Отсюда с помощью леммы 2 и оценки A8) получим
^У2еА™*(т-^\х(Т, и)-х(Т, о)К
^^«^-'«JCilw-tfji... B3)
2 Ф. П. Васильев 33
Из формулы A2) следует, что
1 Г (и) - Г (v) ft, = \ | В? (t) Дф (t) |2 Л < S^ax J ! Дф @ |2 Л.
Подставляя сюда оценку B3), придем к неравенству A5).
Теорема 6 доказана.
Таким образом, для вычисления градиента функции G)
в некоторой точке u = u(t) 6L2r[/0, T] сначала нужно ре-
решить задачу Коши (8), (9) и определить x(t, и), затем
подставить найденное значение х(Т, и) в A4) и, решая
задачу Коши A3), A4), определить i|)(/, и) и, наконец,
по формуле A2) найти J' (и).
С помощью градиента нетрудно написать условие оп-
оптимальности в задаче G) —A0) для случая выпуклого
множества U. А именно, если в точке и = и* (t) e V
функция G) при условиях (8) —A0) достигает своей ниж-
нижней граниГ то согласно условию F) необходимо выполня-
выполняется неравенство
$ <Д7 (/)*(/, и*), u(t)-u*(t))Erdt^O
при всех и = и (t) e U. B4)
Покажем, что функция G) при условиях (8) — (9) вы-
выпукла на La [/о, Т]. С этой целью заметим, что
x(t, au + (l—a)v)=ax(t, u) + (l—a)x(t, v)y
to^t^T, B5)
при всех и, v e L\ [/0, 7"] и всех вещественных а. В са-
самом леле, левая и правая части этого равенства, как
нетрудно видеть, представляют собой решение одной ,и
той же задачи Коши (8), (9), соответствующее управлению
att-\-(\—a)v. Отсюда и из единственности решения за-
задачи (8), (9) следует равенство B5). Далее, с учетом
выпуклости функции g (х) = | х — у |2 переменной х^Еп и
равенства B5) имеем
a)v) = \x(T, au + (l-a)v)-y|2 =
= aJ(u) + (l-a)J(v), ар[0, !!,
Выпуклость функции J (и) установлена.
34
Согласно теореме 5 тогда условие B4) является и до-
достаточным для оптимальности управления и = и% (/) в за-
задаче G)-A0).
Условие B4) перепишем в виде
т
min jj (BT (t)^(t, uj, u(t))Erdt =
= 5 (BT(t)y(t,u*),u*(t))Erdt. B6)
Если ввести функцию Гамильтона — Понтрягина
то условие B6) можно записать в так называемой форме
интегрального принципа минимума:
т
min \ H(x(t, и*), u(t), /,
т
to
Если множество (У имеет вид
U = {u = u(t)eELt[t0, T]: u(t)ezV
почти всюду на [f0, Г]}, B7)
где У —выпуклое множество из Егу то из B6) имеем
r T t, uj, u*(t)),
Взяв здесь вместо if (/, и*) функцию (—*ф(/, w#)), полу-
получим принцип максимума Понтрягина для задачи G) —A0),
B7). Заметим, что в теореме 6.3.1 из [4] принцип мак-
максимума был доказан для более общей задачи оптималь-
оптимального управления без предположения выпуклости множе-
множества V. С другой стороны, условие B6; справедливо для
всех выпуклых множеств U из Z4|Y0, 7\J, необязательно
имеющих вид B7).
Отметим, что формула приращения B2) на самом деле
означает, что функция G) дважды дифференцируема на
?«['©, Т}% так как | Ах (Т) f = | Ах G\ и, h)f является
квадратичной функцией переменной h% порожденной сим-
2* 35
метричной ограниченной билинейной функцией (ДяG\ и,
/ix), Ax (Г, w, А2)> переменных Ль А2. При необходимости
можно выписать и явную формулу для оператора J" (и)^
^<%(Ц[10, T]->L[[tQy T]), порождающего квадратичную
функцию \Ax(ty ut A) |2. Для этого нужно воспользоваться
формулой Коши
х (/, и) = Ф (/, /о) *о + J Ф (*, т) [В (т) и (т) + / (т)] dT B8)
для решения задачи (8), (9), где Ф(/, т) —матрица по-
порядка пхя, определяемая условиями
BlL*i = A(t)<b(U т), /о^^,т<Г, Ф(т, т) = Я, B9)
Е — единичная матрица порядка пхп. Из B8) следует
Ах (/, и, /г) = J Ф (/, х) В (т) h (т) dr.
Тогда
\Ах(Т, и, ft)!2-
= J ^ <ЯТ (т) ФГ (Г, т) Ф (Г, |) В (I) h (|), Л (т))?, dl dt,
так что
J"(u) = J"(u; т, g) =
= Вт (т) Ф7' (Г, т) Ф (Г, 6) 5 (g), U ^ *, т ^ Г. C0)
Кстати, с помощью матрицы Ф(/, т) можно получить сле-
следующее представление для решения задачи A3), A4):
^) = 2ФГ(/, Т)(х{Т, и)-у), to<:t<:T. C1)
Заметим, что формулы B8), C0), C1) весьма полезны для
теоретических исследований задач оптимального управле-
управления, связанных с системой (8), но при численном реше-
решении таких задач они применяются крайне редко из-за
трудностей в определении явного выражения матрицы
Ф(/, т).из B9). Поэтому для приближенного решения
задач Коши (8), (9) и A3), A4) на практике обычно ис-
используют разностные методы.
8. Кратко остановимся на задаче C), когда множество
U задается ограничениями типа равенств или неравенств.
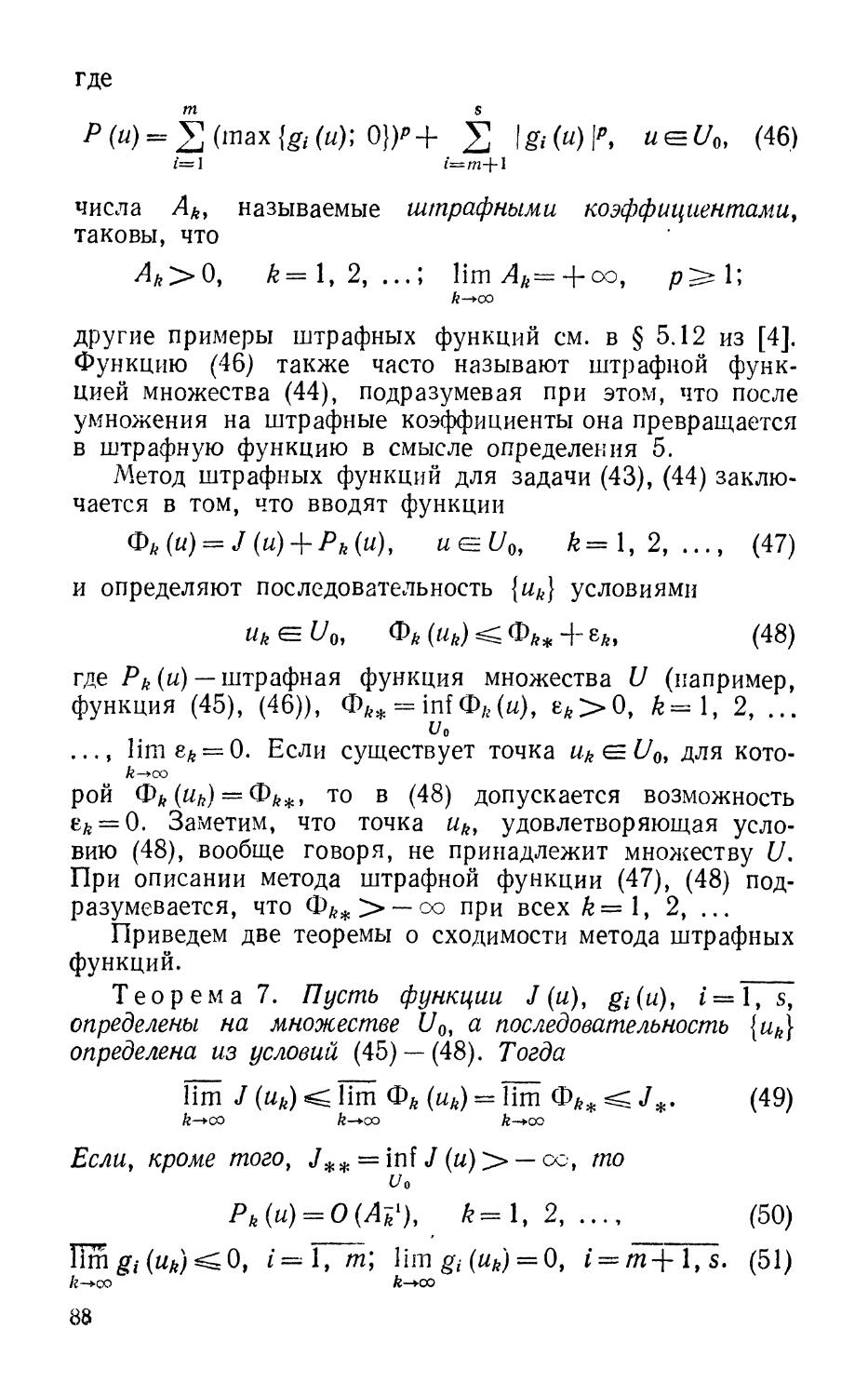
Сначала рассмотрим задачу
y(a)->inf; mg(/, C2)
ft(w)=0, i = m+l, s},
где t/0 — заданное множество из банахова пространства В,
функции J(u), gx(u)t ..., gs(u) определены на Uo. Будем
предполагать, что
У* = inf У (и) > — со;
и C3)
?/, = {«?(/: У (а) = У*}=^ф.
Для формулировки необходимых и достаточных условий
оптимальности введем функцию Лагранжа задачи C2):
L(u9 Х) = /(и) + 2 ^W/ C4)
где и e ?/0, а переменные X = (Яь ..., Ks)y называемые
множителями Лагранжа, принадлежат множеству
Определеннее. Точку (и%, Я*) <=?/охЛо называют
седловой точкой функции Лагранжа C4), если
, Я*), ие(/0, ЯеЛ0.
Лемма 3. Для того (^ )о
седловой точкой функции Лагранжа C4), необходимо
и достаточно, чтобы выполнялись следующие условия:
A(, Я*) при всех u^U0'y
Uz)=0, i=l, s; u*eeU.
Доказательство этой леммы проводится дословно так
же, как и доказательство аналогичной леммы 4.8.1 из [4].
В следующей теореме дается достаточное условие оп-
оптимальности в задаче C2).
Теорема 7. Пусть (и%, Я*) е (УоXЛо — седловая точка
функции Лагранжа задачи C2). Тогда
т. ?. точка и^ является решением задачи C2).
Доказательство проводится дословно так же, как и до-
доказательство аналогичной теоремы 4.8.1 из [4J.
ш
Как известно (см. пример 4.8.1 из [4]), даже в конеч-
конечномерных задачах выпуклого программирования функция
Лагранжа может не иметь седловой точки. В следующей
теореме приводятся условия существования седловой точ-
точки для случая, когда в C2) отсутствуют ограничения
типа равенств.
Теорема 8. Пусть множество Uo выпукло, функции
J(u), gi(u), /=1, /п, выпуклы на Uo, множество
1/ = {ие Uo: gi(и)<0, i ==ТГ~^} C5)
удовлетворяет следующему условию регулярности: сущест-
существует точка п<=и0 такая, что gt (п) < 0 при всех i ==
= 1, m. Кроме того, пусть для множества C5) выпол-
выполнены условия C3). Тогда для каждой точки и* е ?/* необ-
необходимо существуют множители Лагранжа Л* = (А*,"...
..., ^)gA0=|1gP: Aj^rO, ..., km^0} такие, что
пара (и#, Я*) образует седловую точку функции L(u, k) =
т
= J (и) + 2j ^i?i (u) в смысм определения 8.
Доказательство этой теоремы ничем не отличается от
доказательства аналогичной теоремы 4.8.2 из [4].
Приведем формулировки двух теорем, дающих необходимые ус-
условия оптимальности для задачи
J(a)->inf; ae(/ = {«s(/fl:^(^0, e = l, m\
C6)
где U0—заданное множество из банахова пространства В, функции
J («)» й («), ••-» gm(u) определены на Uo, F — отображение, дейст-
действующее из пространства В в некоторое банахово пространство У.
Заметим, что задача C2) является частным случаем задачи C6), когда
Y = Es~m, F(u)=^(gm^(u)y ..., gs (и)). Будем предполагать, что для
задачи C6) выполнены условия C3) Введем функцию Лагранжа за-
задачи C6):
где u^U0\ Я/ —вещественные числа, f = 0, m; c^Y*.
Теорема 9. Пусть функции J(u)t gi(u), ..., gm (и) выпуклы на
В, U0—выпуклое множество из В, а отображение F: B-+Y является
аффинным, т. е. F (и) = Аи + у0, А е X (В -> Y), yo^Y. Тогда для
любой точки и* & U* существуют не равные одновременно нулю мно-
множители Лагранжа к* ^ 0, Xf ^ 0,... Д^ ^ 0, с* еУ* такие, что
*, с*)=* min «5?(и, Я*, Л*, с*);
С/ C7)
l, т.
Если, кроме того, образ множества Uo при отображении u-+F(u)
содержит окрестность нуля пространства Y и существу&п точка
Ле(/0 такая, что F (й) = 0, gi (и) < 0, i = I, /л, то XJ > О (можно
принять %J = 1). В последнем случае условия C7) являются также и
достаточными для того, чтобы и* е^.
Примером задачи вида C6) является рассмотренная выше задача
оптимального управления G) —A0): в ней ограничения типа g( (и)^0
отсутствуют (т = 0), отображение F: L? [/o, Tj-^-H^[tQt T] описы-
описывается задачей Коши (8), (9) или A1). Применяя теорему 9 к задаче
G) — A0), можно получить условия B4).
Для формулировки следующей теоремы нам понадобится понятие
дифференцируемого отображения, обобщающего определение 1.
Определение 9. Пусть Bt Y — банаховы пространства, пусть
отображение F: В -» Y определено в окрестности О (и, y) = {v: ug5,
\\v — m||<y} точки и. Говорят, что отображение F дифференцируемо
в точке w, если существует оператор F' (и) е= X (В -> Y) такой, что
-F(u)=F'(u)h + o(h, и),
где \\o(h, u)ly/\hlB-+0 при ||Л|д-*0. Оператор F' (и) называют
производной отображения F в точке и.
Простейшим примером дифференцируемого отображения может
служить аффинный оператор F (u) — Au+yr A е= X (В -+Y), у е Y.
Теорема 10. Пусть в задаче C6) Uo=B, функции J (и),
g\(u), ..., gm (и) и отображения F (и) непрерывны и дифференцируемы
в некоторой окрестности точки u^^U^, причем производная F' (и)
отображения F непрерывна в точке и# и образ пространства В при
отображении u-+F' (u^)u замкнут. Тогда существуют не равные
одновременно нулю множители Лагранжа %% ^ 0, Щ :>= 0, ..., Я^ ^ 0,
с* у*
Если, кроме того, образ значений оператора F' (и#) совпадает с Y
(т. е. для любого у gK найдется точка иеВ, удовлетворяющая ус-
условию F' (и#)и = у) и существует такая точка и ?= В, что F' (й*) й =
= 0, ($(#„.), «)<0 для тех i, l^t^m, для которых g. (и^) = 0,
то Я? > 0 (можно принять A,J = 1).
Теоремы 9, 10 представляют собой обобщение аналогичных конеч-
конечномерных теорем из §§ 4.8, 4.9 [4]. Доказательство этих теорем,
а также другие теоремы такого типа можно найти в [1, 91, 100, 137,
138, 140, 144, 188, 189, 207, 209, 232].
9. Напомним, что при доказательстве теорем из §§ 4.8, 4.9 [4]
были существенно использованы теоремы отделимости 4.5.1 — 4.5.3 [4].
Аналогичные теоремы отделимости играют важную роль при иссле-
исследовании условий оптимальности в задаче C6) и во многих других
вопросах выпуклого анализа в банаховых пространствах.
Приведем одну из таких теорем. Сначала напомним определения
отделяющей и опорной гиперплоскостей.
Определение 10. Пусть М и N — два множества из банахова
пространства В. Говорят, что гиперплоскость (с, и)— у отделяет
89
множества М и N', если (г, а)^у при всех аеМи(с,())^^ при
всех 6 е Л', или, иначе говоря, выполняются неравенства
sup (с, b)^y^ inf (с, а).
Если sup (с, b) < inf (с. а), то говорят, что множества М и N
сильно отделены. Если (с, 6) < (с, а) при всех абМ, b e М, то
говорят о строгом отделении этих множеств.
Определение 11. Пусть X — множество из банахова про-
пространства В, точка # е X —замыкание X в метрике В. Гиперпло-
Гиперплоскость (с, и)—у называют опорной к множеству X в точке «/,
если (с, х) ^7 ПРИ всех х е X и (с, у)=у. Иначе говоря, опор-
опорная гиперплоскость отделяет множество X и точку у.
Теорема 11. Пусть М, N —выпуклые множества из банахова
пространства В, причем ий М — множество внутренних точек мно-
множества М непусто и mtM(]N = 0. Тогда суи^ествует гиперпло-
гиперплоскость (с, и) =_у, разделяющая эти два множества, а также их за-
замыкания М и Nt_m. _в. (с, и) ^7^ (с> v) nPu всех и е= М9 v e N.
При этом, если М, N имеют общию граничную точку у, то у =
= <с, у> [11, 200].
В теореме 11 в отличие от аналогичной конечномерной теоремы
4.5.2 из [4] требуется условие \п{МФф. Приведем примеры, пока-
показывающие существенность этого условия для справедливости тео-
теоремы 11.
Пример 6. Пусть U = |и = (а1, ... , ип, ...) е /а: |ия|^ —,
л=1, 2, ..Л —«гильбертов кирпич» Покажем, что это множество
не имеет внутренних точек. Возьмем произвольную точку и =
= (и1, ..., wrt, ,,,)e(/. Положим ^ = (ех, ..., еЛ, ...), где еЛ =
со
= signип/па, л = 1, 2, ..,5 1/2<а<1. Так как ||б||2=^] |е»|а =
= 2 ^~sct<oo, то бе/2, Возьмем точку u + eef где е>0. Для
п = 1
каждого е>0 найдется номер N = N(e) такой, что \ ип-\-геп \ =
= | ип | -\-еп~а ^ ел~а > п'1 при всех п > N. Это значит, что w +
+ &ефО при всех 8>0. Таким образом, \ntU = 0, т. е. (/ состоит
лишь из граничных точек.
Далее, множество V выпукло. В самом деле, если | ип | ^ tr1,
\vn\^nr\ n=ly 2, ..., то | aaw + (l — a) vn \ ^п~ъ при всех /г=1,
2, ..., O^a^l. Отсюда следует, что если и, dg(/, to аи -f-
-f(l-a)o?(/ при всех a, O^a^l. Выпуклость ?/ доказана.
Геометрические представления о выпуклых множествах «подска-
«подсказывают» нам гипотезу о том, что через любую граничную точку вы-
выпуклого множества, по-видимому, можно провести опорную гипер-
гиперплоскость. В евклидовом пространстве Еп эта гипотеза подтверди-
подтвердилась—в [4] была доказана теорема 4.5.1.
Посмотрим, справедлива ли эта гипотеза для «гильбертова кир-
кирпича». Возьмем любую точку с/ = (у1, ..., vn, ...) е U такую, что
\vn\<n"xt n = l, 2, ... (например, v = 0). Предположим, что через
эту точку можно провести опорную гиперплоскость к множеству Цг
4Э
т. е. существуют вектор с = (с1у ..., сл, ...) ФО, се/2) и число y
такие, что (с, и)^у при всех u^U и (с, v) = y. Так как с Ф О,
то спф0 для некоторого я^1. Возьмем вектор е = @, ..., 0, е^ =
^ — sign cn/n — vny О, ...)е/2 Так как ]уя + ел| = я~~1, то у + ее?/,
и поэтому должно выполняться неравенство (с, v-j-e)^y. Однако
/с v^e) = y+{ct e)=y-{-cnen = y~\cn \ n~1 — cnvn^y—\cn\n~1 -\-
V | с" | • | v" | = y4 с* I (я*1-1 0я I) < Т.
Противоречие. Следовательно, множество (У и ее граничная точ-
точка v неотделимы. Это значит, что не через всякую граничную точку
рассматриваемого множества V можно провести опорную гипер-
гиперплоскость.
Таким образом, высказанная выше гипотеза в банаховых про-
пространствах, вообще говоря, неверна. Для ее справедливости согласно
теореме 11 нужно еще потребовать, чтобы выпуклое множество имело
непустую внутренность. Рассмотренный пример также показывает,
что условие intM = 0 в теореме 11 существенно.
Любопытно заметить, что через любую точку w = (w1t ..., wn, ...),
имеющую хотя бы одну координату wn, \wn\=n~1f можно провести
опорную гиперплоскость к «гильбертову кирпичу». Достаточно взять
с = @, ..., О, сп = —sign wn, О, ...)^0, у = — л", и получим
(с, w) =y» (с» и)=== — иП s*Sn w~n ^— I цП I ^ Y Для всех и е U•
Пример 7. Пусть (/=(m = «(/)gL2[0, 1]: | и (t) \ ^ 1 почти
всюду на [0, 1]}. Покажем, что множество U не имеет внутренних
точек в L2 [0, 1]. Возьмем любую функцию u — u(t)^U. Положим
ek(t) = kll4t при O^t^\/ky ^@ = 0 при \/k<t^l, k=lt 2, ...
Ясно, что и (t) + ek (t) = uk (t) ф U при всех k > 16, так как \uk (t)\^
^\ek(t)\ — \uk(t)\> 2—1 = 1 при Os^/^l/fc, Л>16. В то же
время | uk (t) — u (t) 11^ = ! ^ (/) ||?f = Г1/2 -^0 при k-+co. Это значит,
что множество U не имеет внутренних точек. Очевидно, множество U
выпукло. Покажем, что не через всякую точку из U можно провести
опорную гиперплоскость. Возьмем, например, v~v (/) = 0. Допустим,
что существует c=c(i)GL2[0, I], c(t)=?O, что (с, u)Li — ^c(t)x
X и (t) dt ^ (с, у) = 0 для всех и е(/. Возьмем «о = ^о @ =
= — sign с @- Ясно, что и0 ge ^/, поэтому должно быть (с, «0)>:0.
Однако (с, uQ) = -—[\c(t)\dt<0. Противоречие. Следовательно,
-J
множество U и точка и = 0 не могут быть отделены гиперплоскостью.
Приведем формулировку еще одной теоремы об отделимости вы-
выпуклого множества и точки.
Теорема 12. Пусть М—выпуклее замкнутое множество из ба-
банахова пространства В, точка у не принадлежит М. Тогда мно-
множество М и точка у сильно отделимы.
10. Как видим, многие важные понятия теории экстремальных
задач, такие, как понятия градиента, второй производной, выпуклого
множества, выпуклой функции, отделяющей гиперплоскости и т. д.,
представляют собой естественное обобщение соответствующих поня-
понятий, введенных для конечномерных евклидовых пространств Еп Это
означает, что многие утверждения, сформулированные и доказанные
в [4] (см главы 2, 4) для пространства Еп, остаются верными и
в любых банаховых пространствах. Примерами таких утверждений
являются приведенные выше формулы конечных приращений для
41
дифференцируемых функций, а также теоремы 1—5. В то же время,
как показывают теорема 11 и примеры 6, 7, такая аналогия имеет
место далеко не всегда: имеется немало утверждений, справедливых
в конечномерном пространстве Еп, но не имеющих аналога в общих
банаховых и гильбертовых пространствах. Это значит, что теоремами,
приведенными в [4] в главах 2, 4, можно пользоваться при исследо-
исследовании экстремальных задач в конкретных банаховых или гильберто-
гильбертовых пространствах лишь после тщательной проверки того, что они
верны и в рассматриваемом пространстве.
Еще раз возвращаясь к примерам 6, 7, заметим, что в банахо-
банаховых и гильбертовых пространствах отделимость выпуклых множеств
может быть гарантирована при более жестких ограничениях, чем
в конечномерном пространстве Еп. Это обстоятельство приводит
к тому, что ряд важных результатов теории экстремальных задач,
опирающихся на конечномерные теоремы отделимости, не имеет ана-
аналога в банаховых и гильбертовых пространствах. В частности, как
свидетельствует следующий пример, в задачах оптимального управ-
управления, у которых фазовое пространство является гильбертовым про-
пространством, принцип максимума, сформулированный в [4] в главе 6
для задач с фазовым пространством ?Л, в общем случае не имеет
аналога.
Пример 8. Пусть управляемый процесс описывается системой
уравнений [96]
i<@ = "'@, t>0; *Ч0) = 0, i=l,2,..., C8)
где и1 @ — ограниченные измеримые на каждом конечном отрезке
O^t^T, i = l, 2, ..., функции. Под решением системы C8), соот-
соответствующим управлению и — и (t)-(u1 (t), ..., ип (/), ...), / > О,
будем понимать функцию x(t, u) = (x1(t), ..., хп (t), ...), />0, где
t
х?Ц) = х*у, и*)=\и* (t)dt, t>0, t=l, 2, ..., такую, что x(t, и) е
е /2 при всех t >> 0. Это значит, что фазовым пространством си-
системы C8) является гильбертово пространство /2. Пусть
к = \% 2, ...}.
Рассмотрим задачу быстродействия: найти управление u = u(t)&V>
t > 0, такое, чтобы соответствующее ему решение х (t, и) системы C8)
удовлетворяло условию
х(Ту iO = *la=(l, 1/2, 1/3, ..., 1/k, ...)
при минимальном Т.
Пользуясь принципом максимума из главы 6 [4], нетрудно пока-
показать, что при каждом фиксированном п ^ 1 минимальное время пере-
перехода из точки *w@) = 0 в точку хп(Т)—\/п при движении по тра-
траектории дифференциального уравнения хп (t)=.un (/), />0, с огра-
ограничениями | un{t) | ^ l/rt+1/л2, tf^O, равно ^^^«(n-fl) и
реализуется на управлении «/Л# (/) = 1//г -f- 1/лг2, /^0. Отсюда сле-
следует, что оптимальное время ?# в исходной задаче не может быть
меньше tniit, т. е. **^/л*, л==1, 2, ... Отсюда при п->оо получим
/*^1. С другой стороны, для управления u^ — u^(t) = (ly 1/2, ...
..., 1//г, ...) имеем х(\, и^^х^. Это значит, что ^ = 1 —оптималь-
—оптимальное время, а и = и^— оптимальное управление в исходной задаче
быстродействия.
42
Убедимся в том, что принцип максимума в этой задаче не вы-
выполняется. Для этого по аналогии с задачами оптимального управ-
управления из главы 6 [4] напишем функцию Гамильтона —Понтрягина
Н(х, и, г|), г|H) = г
и сопряженную систему
**(/) = -#ж, (МО. "• @. ¦• ^о) = О,
/^0, /=1, 2, ...
Отсюда имеем ^ @ = с* = const, г|) @ = (съ с2, ..., сЛ, ...) е /2- Если
С/1 =^ 0 для некоторого п ^ 1, то из условия max #(#* (/), и, гр @, фо)
однозначно определится ип (t) = A/л + \/п2) sign сл, / ^ 0, что не
совпадает с ип* (t) = \/n. Это значит, что принцип максимума в рас-
рассматриваемой задаче может иметь место только при cn = 0, я = 1,
2, ..., т. е. ф(/) = 0 и Я (МО, МО. *@. 1>о)=Фо = const. Со-
Согласно условию трансверсальности F.2.44) из [4] тогда Н \t_t =0,
так что iEo = O. В результате получаем (ф0, ур (/))^0, что противо-
противоречит принципу максимума (см. теорему 6.2.3 из [4]).
Рассмотренный пример Показывает, что для задач оптимального
управления в банаховых пространствах принцип максимума в общем
случае не имеет места. Тем не менее существуют классы задач опти-
оптимального управления, для которых принцип максимума остается
верным и в том случае, когда фазовое пространство не является
конечномерным [51, 96, 201]. С другой стороны, можно также ука-
указать и такие классы задач оптимального управления с конечномер-
конечномерным фазовым пространством, в которых принцип максимума не имеет
места; такие задачи с дискретным временем см. ниже в § 6, с непре-
непрерывным временем —в [53, 73].
11. В заключение отметим, что функцию, дифференцируемую
в смысле определения 1, в литературе часто называют сильно диффе-
дифференцируемой или дифференцируемой по Фреше, а градиент функции —
произзодной Фреше. Существуют и другие определения дифференци-
руемости функции, отличные от сильной дифференцируемости. При-
Приведем одно из них.
Определение 12. Пусть функция J (и) определена в некото-
некоторой окрестности О (а, у) точки и из банахова пространства В. Сла-
Слабым дифференциалом или дифференциалом Гато функции J (и) в точ-
точке и называется предел
lim (J (и + th)-J (u))lt = J' (и, h)t C9
если этот предел существует при всех Ле В.
Пример 4.2.6 из [4] показывает, что дифференциал Гато не всегда
является линейной функцией переменной h. В том случае, когда су-
существует представление
/' (и, Л) = <У (и), h)B, Jf (и) е= В*, D0)
то J' (и) называют слабой произзодной или производной Гато функ-
функции J (и) в точке и. Нетрудно видеть, что из дифференцируемости
по Фреше следуют дифференцируемость по Гато и представление D0),
а также совпадение производных Фреше и Гато. Обратное утвержде-
утверждение неверно даже для функций двух переменных.
43
Пример 9. Пусть
( 1, если у = х2,
( I 0, если f/^x2,
*. у) е= ?2.
Эта функция в точке и = @, 0) = 0 имеет производную Гато У @) =
= @, 0), но по Фреше она недифференцируема и, более того, раз-
разрывна в этой точке.
Такое различие между производными Фреше и Гато вызвано тем,
что в случае дифференцируемости по Фреше сходимость в предель-
предельном переходе C9) является равномерной по всем п, lJMi<Y> а в слу-
случае дифференцируемости по Гато такой равномерности может и не
быть.
Если в C9) возьмем h = e, |)е[|=1, то получим величину J' (и, е) =
= —-r-^t называемую произзодной функции J (и) в точке и по на-
направлению е. Если функция J (и) в точке и имеет производную Фре-
Фреше или Гато, то она дифференцируема в этой точке по любому на-
dJ (и) . Т. . . ч
правлению е, причем —-±-L=(J' (и), в).
Понятие производной Гато широко используется при исследо-
исследовании экстремальных задач в банаховых пространствах [1, 11, 188]
и др.
Упражнения. 1. Показать, что всякая линейная ограничен-
ограниченная функция на банаховом пространстве дифференцируема.
2. Пусть Я —гильбертово пространство. Доказать, что функция
/ (и) = 1| и \\н дифференцируема во всех точках и Ф 0, причем У (и) =
= и/\\и\\.
3. Написать условие F) применительно к функции из примера 4;
рассмотреть случай U — L2[ay b].
4. Написать необходимое условие минимума функции из при-
примера 5 для случая U — C[a, b].
5. Доказать, что если F {и) е С2 (?х), то функция из примера 5
дважды дифференцируема на С [а, Ь].
6. Пусть В — банахово пространство, функция J (и) принадлежит
С1 (В). Показать, что если в некоторой точке и^. е В выполняются
условия J'(u#) = 0, {J"(Ux)h, /г)>0 при всех h Ф 0, то этого,
вообще говоря, еще недостаточно для того, чтобы в точке и* дости-
достигался локальный или глобальный минимум J (и) на В. Указание:
оо
рассмотреть функцию J (и)= ^] ((ипJ/п3 — (ип)*), и е /2> в точке
/2=1
^=0 при /г==@, ..., 0, 1/л, 0, ...)•
7. Пусть В — банахово пространство, функция J (и) принадлежит
С2 (В). Пусть в некоторой точке и# е В выполняются условия
J' («*) = 0, (J" (и*) h, h)^\i\\h ||2, /igB, \i = const > 0.
Доказать, что в точке и% достигается локальный минимум функ-
функции / (и) на В.
8. Доказать, что при выполнении условий теоремы 6 функция
J (и, хо) = \х(Т, и, хь) — у\2, где x(t, и, хо)~ решение задачи (8),
(9), дифференцируема по совокупности переменных (и, х0) на
L^[/o, Т]хЕп и ее градиентом является пара (Вт (t)ty(t, u} хь)\
44
-ф (to* ut хо))> гДе ^ ('» и> хо) — решение задачи A3), A4). Показать,
что J(u, XoleC^^xf").
9. Доказать, что при выполнении условий теоремы G функция
г
J{u) = l \x{tt u)-y(t)\*dty
to
.где x(t, и) — решение задачи (8), (9), у (/) — заданная кусочно непре-
непрерывная функция на [tQ, Т], дифференцируема по и на LJ[*O, Т]э
причем /' (и) —ЯГ(ОФ (f, и), to^t^T, где ty(f, и)—решение
задачи
Показать, что / (и) <= С1*1 (L?).
10. Показать, что утверждения теоремы 6 и упражнений 8, 9
сохраняют силу, если аи (t) gee L^ [tQ, T], bif (/), ft (/) e L2 [/o» Tl
11. Исследовать возможность дифференцирования функции
b
J(u) = ^F(u @, и @, 0 ^. « @ е= Ci [а, 6], а (а) = Л, а F) = В,
а
считая функцию F (и, г, t) достаточно гладкой.
12. Доказать, что функция J (и) = \и[в дифференцируема в В~
— Lp [0, 1], 1</?<оо, всюду, кроме i/ = 0, и найти /'(м). Будет
ли 7 (и) дифференцируема в 5 = ^[0, 1] и 5 = ^@, 1]? В С [0, 1]?
13. Доказать дифференцируемость отображения F: L2 [a, b] ->¦
"*" ^2 I % ^]» определяемого равенством
ь
/=" (а) = J Л (s, t)u(t)dt, c^s^d; u = u (t) e= L2 [а, 6],
где Л (s, t) e= L2 (Q), Q = {(s, /) e= ?2:
14. Найти производную отображения F: L%[t0, T]-+ Hn[t0, 71],
определяемого условиями (8), (9).
15. Пусть В — банахово пространство, пусть функция J (и) имеет
производную Гато во всех точках и е= В. Доказать, что если и% —
точка локального минимума / (и), то в ней производная Гато рав-
равна нулю.
16. Показать, что множество U из примера 7 не имеет опорной
гиперплоскости во всех точках v = u (t) e U, для которых | v (t) | < 1
почти всюду на [0, 1]. Доказать, что если у = у(/)е{/ и .1у(/)|=1
на множестве Л положительной меры, то через такую точку v можно
провести опорную к U гиперплоскость с нормальным вектором с =
= c(/)gL2[0, 1], где с(/) = —signy @ при t е= А и с@ = 0при
17. Пусть в пространстве ??=С[0, 1] даны два множества М ==
= {и = и (/) е L2 [0, 1]: |w@!^l, O^^^l} и /V = -{a = w(O€=
J. 1
eL2[0, 1]: ^ sign A/2 — /) u(t)dt= 1>. Доказать, что М и ЛГ выпуклы,
о J
45
замкнуты, не имеют общих точек, отделимы, но не могут быть
сильно отделимы (ср. с теоремой 4.5.3 из [4]).
18. Пусть и = {и = (и\ ..., и", ...)е='2- | ип | ^ 1/Я + 1/Л2,
п=1, 2, ...}. Доказать, что в точке и = A, 1/2, ..., 1/п, ...)е(/
нельзя провести опорную к U гиперплоскость (см. пример 8). Имеет
ли U внутренние точки в /2? Выяснить, к каким точкам из U можно
провести опорную к U гиперплоскость.
§ 3. Теорема Вейерштрасса
в функциональных пространствах
Как и в [4], теоремами Вейерштрасса будем называть
теоремы, содержащие утверждение о достижении нижней
грани некоторой функции на. каком-либо множестве.
1. Сначала приведем теорему Вейерштрасса, обобщаю-
обобщающую теорему 2.1.1 из [4] на случай метрических про-
пространств. Для ее формулировки нам понадобятся понятия
компактного множества и полунепрерывности снизу функ-
функции в метрическом пространстве. Напоминаем, что мно-
множество М называется метрическим пространством, если
на нем введена некоторая метрика р, т. е. для любых
двух точек и, v е М определено расстояние р(и, v) между
ними, которое подчинено следующим аксиомам: 1) р(иу v)^
^0 при всех и, v^M, причем р (м, v) = 0 тогда и
только тогда, когда u = v\ 2) р (и, v)=p(vy и) при всех и,
v^M; 3) р(и, v)^p(u, w) + p(w, v) при всех и, vt
w gM,
Определение 1. Множество (У из метрического про-
пространства М называется компактным в метрике этого
пространства или, короче, р-компактным, если из любой
последовательности \uk}^0 можно выбрать хотя бы одну
подпоследовательность {uk^t которая р-сходится к неко-
некоторой точке hg(/, т. е. 4m p(^*m, v\ = 0.
т—+оо
Определение 2. Функцию J(и), определенную на
некотором множестве U из метрического пространства М,
называют р-полунепрерывной снизу {сверху) в точке u^U,
если для любой последовательности {uk}^.U, р-сходящейся
к точке м, имеет место неравенство
lim J (uk) s*J(u) (lim J (uk) ^ / (u)\
k~*co \k -* oo /
Функция J (и) называется р-полунепрерывной снизу (свер-
(сверху) на множестве Uy если она р-полунепрерывна снизу
(сверху) в каждой точке u^U. Функция J (и) называется
46
р-непрерывной в точке u^U (на множестве U), если она
р-полунепрерывна снизу и сверху в точке и (на множе-
множестве f/).
Определение 3. Говорят, что последовательность
{uk} е М сходится к множеству U ^ М в метрике р или,
короче, р-сходится к (У, если \\mp(uk, U) = 0, где
fc->oo
> ?/) = inf p(u> v) — расстояние от точки и до множе-
ства U.
Рассуждая так же, как при доказательстве леммы
2.1.2 из [4], нетрудно доказать, что функция р(и, U)
переменной wgM р-непрерывна на М и, более того, спра-
справедливо неравенство
|р(«, ?/) — p(v, U)\^p(u, v) при всех w, уеМ.
Теорема 1. Пусть U — р-компактног множество из
метрического пространства М, а функция J (и) определена,
конечна и р-полунепрерызна снизу на U. Тогда У* =--=
=; inf J(u)> — со, множество V^ = {u^U\ J(u) = JA
и
непусто, р-компактно и любая минимизирующая последо-
последовательность {uh} р-сходится к множеству 0\.
Эта теорема доказывается так же, как аналогичная
теорема 2.1.1 из [4].
Для применения теоремы 1 к конкретным задачам
минимизации полезно иметь критерии компактности в наи-
наиболее часто встречающихся в приложениях функциональ-
функциональных пространствах. Например, в пространствах С (G),
Lp(G)y 1<р<оо, где G —ограниченное замкнутое мно-
множество из Еп, критерий компактности может быть
сформулирован так: замкнутое множество U в этих
пространствах компактно тогда и только тогда, когда
1) множество U равномерно ограничено, т. е. sup I и | < оо;
и
2) множество U равностепенно непрерывно, т. е. для любого
е>0 найдется число 6>0такое, что sup \u(t + &t) — и(Щ<Сг
U
для всех t, t + At&G, |Д/|<6; здесь || и \\ означает норму
пространства С(G) или LP(G), 1<р<оо.
Доказательство этого утверждения, а также критерии
компактности в различных других функциональных про-
пространствах читатель может найти в [11, 35, 87, 169, 204],
некоторые критерии компактности будут обсуждаться ниже
в s 2.2,
47
В евклидовом пространстве Еп множество компактно
тогда и только тогда, когда оно замкнуто и ограничено.
Доказательство этого факта существенно опирается на
известную теорему Больцано — Вейерштрасса, согласно
которой из любой ограниченной последовательности {uk}?E
<= Еп можно выбрать хотя бы одну сходящуюся подпосле-
подпоследовательность. Однако, как показывает пример 1.1, такая
теорема в метрических пространствах, вообще говоря,
неверна. По этой причине, оказывается, в метрических
пространствах замкнутости и ограниченности множества,
вообще говоря, недостаточно для его компактности. Пока-
Покажем это на примерах.
Пример 1. Пусть Я — гильбертово пространство,
U — {и^Н: \\и||^ 1} — единичный шар в Я, пусть \ек) —
некоторая бесконечная ортонормированная система в Я.
Из последовательности {ек) ее U нельзя выбрать подпосле-
подпоследовательность, сходящуюся к какой-нибудь точке в мет-
метрике Я. В самом деле, в примере 1.1 было установлено,
что {ек\ сходится к нулю слабо в Я. Поэтому, если бы
из {ек} удалось выбрать подпоследовательность {е*тЬ схо-
сходящуюся к точке е в метрике Я, то обязательно имели
бы е — 0 и IIi7i !ек Ц = lie 1 = 0. Однако это невозможно,
m-oo" m
так как \ek\=\ при всех &=1, 2, ... Таким образом,
шар в любом бесконечномерном гильбертовом простран-
пространстве Я не может быть компактным в метрике Я.
Пример 2. Пусть U =>{u = u(t) <=L2[0t Ч: |и@1<*
почти всюду на [0, 1]}. Это множество не является ком-
компактным в метрике /~2[0, 1]. В самом деле, возьмем
последовательность uk = &mnkt, O^t^l, &=1, 2, ...
В примере 1.1 было замечено, что {nk}-+0 слабо в L2[0, 1].
Но | ик | — 1/|/, к = 1, 2, ... , поэтому из {ик} нельзя выбрать
последовательность, которая по норме L2[0, 1] сходилась
бы к нулю. Следовательно, U некомпактно в метрике
МО, 1].
Пример 3.МножествоU - {и = и (t) е=С[0,• 1]: \ u(t) |^c 1,
0=^^ 1} —шар вС[0, 1] —некомпактно в метрике С[0, 1].
Это может быть доказано с помощью тех же рассужде-
рассуждений, которые проводились в предыдущем примере, с учетом
того, что из сходимости в метрике С [0, 1J следует сходи-
сходимость в метрике L2[0, lj.
2. Заметим, что множества, подобные рассмотренным
в примерах 1 — 3, часто встречаются в прикладных задачах
оптимального управления. Отсутствие свойства компакт-
48
ности этих множеств не позволяет применять теорему 1
для доказательства существования оптимального управле-
управления в таких задачах. Поэтому желательно иметь такие
теоремы Вейерштрасса в банаховых и гильбертовых про-
пространствах, которые не требуют компактности множества
в метриках этих пространств.
Для формулировки таких теорем введем несколько
понятий, связанных с понятием слабой сходимости в бана-
банаховом пространстве.
Определение 4. Множество U из банахова про-
странства В называется слабо компактным, если из любой
последовательности {uk} <= U можно выбрать хотя бы одну
подпоследовательность {wfcm}, которая слабо в В сходится
к некоторой точке v e [/.
Определение 5. Функцию J (и), определенную на
некотором множестве U из банахова пространства В,
называют слабо полунепрерывной снизу (сверху) в точке
и ?Е U, если для любой последовательности {uk} <= U, кото-
которая слабо в В сходится к точке и, имеет место неравенство
lim J (uk) ^ J (и) (Urn" J (uk) < J (и)).
k~*OD &-ЮО
Функция J (и) называется слабо полунепрерывной снизу
(сверху) на множестве U, если она слабо полунепрерывна
снизу (сверху) в каждой точке u^U. Функция J (и)
называется слабо непрерывной в точке и ^0 (на множе-
множестве ?/), если она слабо полунепрерывна снизу и сверху
в точке и (на множестве U).
Примеры слабо компактных множеств и слабо полуне-
полунепрерывных функций будут приведены ниже.
Определение 6. Пусть В —банахово пространство.
Скажем, что последовательность {uk} e В сходится к мно-
жеству U слабо в В, если \uk) имеет хотя бы одну слабо
сходящуюся подпоследовательность, причем все точки v,
являющиеся слабым пределом какой-либо подпоследова-
подпоследовательности последовательности {uk}, принадлежат U.
Теорема 2. Пусть U — слабо компактное множество
из банахова пространства В, функция J (и) определена,
конечна и слабо полунепрерывна снизу на U. Тогда J^ =
= inf J(u)> — оо, множество U^ = {u<eeU: J(u) = J^\
непусто, слабо компактно и любая миним.изируюи\ая после-
последовательность {uk} слабо сходится к U%.
49
Доказательство. Возьмем произвольную миними-
минимизирующую последовательность {uk}: uk^U, A= 1, 2, ...
..., lim J(uk) = J*. Так как (У —слабо компактное мно-
&-*оо
жество, то {uk} имеет хотя бы одну подпоследовательность,
слабо сходящуюся к некоторой точке из U. Пусть
u^^U — одна из таких точек и пусть подпоследователь-
подпоследовательность {ukm}слабо сходится к и*. Пользуясь определени-
определением нижней грани и слабой полунепрерывностью функциг,
имеем
(M]fem)= \im J (uk) = J%,
т. e. J(u%) = J*. Отсюда следует, что /*> — со, и^Фф.
Кроме того, показано, что любая точка и%> являющаяся
слабым пределом какой-либо подпоследовательности после-
последовательности {uk}y принадлежит U*. Это значит, что {uk}
слабо сходится к U*.
Остается доказать, что /У* слабо компактно. Возьмем
произвольную последовательность {vk}^.U*. Так как
{vk} e [/ — компактное множество, то существует подпосле-
подпоследовательность |^^т}, слабо сходящаяся к некоторой точке
и* е U. Но J (vk) = J*, k = 1, 2, ..., поэтому {vk} — мини-
минимизирующая последовательность. По доказанному {vk}
слабо сходится к U#, поэтому v^^U^. Это значит, что
множество Uъ слабо компактно. Теорема 2 доказана.
3. Для удобства пользования теоремой 2 желательно
иметь набор сравнительно легко проверяемых достаточных
условий слабой компактности множеств и слабой полуне-
полунепрерывности снизу функций в банаховых пространствах.
Приведем несколько таких условий.
Определение 7. Множество U из банахова прост-
пространства называется слабо замкнутым, если оно содержит
любую точку, являющуюся слабым пределом какой-либо
последовательности {uk} ее U.
Теорема 3. Всяког ограниченное слабо замкнутое
множество из рефлексивного банахова пространства слабо
компактно.
Доказательство этой теоремы можно найти, например,
в [200], стр. 34.
Поскольку проверка слабой замкнутости множества не
всегда проста, то на практике вместо теоремы 3 может
оказаться более удобной следующая
50
Теорема 4. Всякое ограниченное замкнутое выпуклое
множество U из рефлексивного банахова пространства В
слабо компактно.
(Подчеркнем, что в этой теореме замкнутость множества
понимается в сильном смысле, т. е. в смысле метрики
5,—это обстоятельство часто облегчает проверку условий
теоремы 4 в приложениях.)
Доказательство. Возьмем произвольную после-
последовательность \uk) e ?/, слабо сходящуюся к некоторой
точке и. Покажем, что u^U. Через М обозначим мно-
множество всевозможных конечных выпуклых комбинаций
точек иъ и2, ..., uk, ... Согласно теоремам 4.1.7 и 4.1.2
из [4], которые сохраняют силу и в банаховых простран-
пространствах, множество М и его сильное (в метрике В) замы-
замыкание М также выпуклы. Так как U выпукло и замкнуто,
то М ^ М ^ U. Покажем, что и^ М. Допустим, что
ифМ. Согласно теореме 2.12 тогда множество М и точ-
точка и сильно отделимы. Это значит, что найдется элемент
cgB*, сФО, такой, что (су и)<у= inf_(c, v)^(c, v)
для всех v ^ Ж. В частности, поскольку uk e УЙ, то
(с, и)<у^(с, uk) при всех 6=1, 2, ..., что противо-
противоречит слабой сходимости последовательности \uk) к точке и.
Следовательно, и^ M^U.
Тем самым установлена слабая замкнутость множе-
множества U. Кроме того, U ограничено по условию. Согласно
теореме 3 тогда U слабо компактно.
Приведем примеры слабо компактных множеств в про-
пространстве L[(G).
Пример 4. Пусть U = {u = u(t) = (и1 (/), ..., W (/)) е=
e=L2r(G): |и-як, = ($ \u(t) -a(t)\*dt)m^ /?} - шар pa-
G
диуса R с центром в заданной точке u = u(t). Возьмем
произвольную последовательность j«ft}ef/, сходящуюся
к точке v = v(t) по норме L[{G). Тогда \v — Д)^!|о--мл| +
+ \uk — u\^\v — uk\ + R, k=l, 2, ... Отсюда при fe->oo
получим, что ||и —й||^/?, т. е. не!/. Замкнутость мно-
множества U в метрике L\ (G) установлена. Нетрудно видеть,
что U выпукло и ограничено. Согласно теореме 4 множе-
множество U слабо компактно.
Аналогично доказывается, что в любом гильбертовом
пространстве шар слабо компактен. Пример 1 показывает,
что в бесконечномерном гильбертовом пространстве шар
не может быть сильно компактным.
51
Пример 5. Пусть ?/ = {я = и (*) = (и1 (/), ..., ur (t)) ^
^ (G): а/ (/) ^ и1 (t) <fr (/) почти всюду на G, * = 1, г},
где а/(/)^р/(/), i"= 1,/\ —заданные функции из L2(G).
Покажем, что U замкнуто в метрике Lr^{G). Пусть после-
последовательность )^(/)}е(/ сходится к u = u(t) по норме
Ц(й)> Тогда найдется [11, стр. 388] подпоследовательность
\ukm(t)), сходящаяся к u(t) почти ' всюду на G. Но
а*(/)<*4ш@<М0 почти всюду на G, i === 1, г, т= 1, 2, ...
Отсюда при /л -> со получим а,- (/) ^ и* (/) ^ р,- (/) почти
всюду на G для всех /=1,г. Следовательно, u(t)^.U>
т. е. У замкнуто в метрике L\{G). Нетрудно видеть, что
U выпукло и замкнуто. Согласно теореме 4 U слабо ком-
компактно. Из примера 2 видно, что множество U при щ (t) Ф
Ф${A) не является компактным в метрике L[(G).
Приведем один критерий слабой полунепрерывности
снизу функции.
Теорема 5. Пусть U — выпуклое множество из бана-
банахова пространства В. Выпуклая функция J (и) слабо полу-
полунепрерывна снизу на U тогда и только тогда, когда J (и)
полунепрерывна снизу на U.
Доказательство. Необходимость. Пусть /(и)
слабо полунепрерывна снизу на U. Возьмем произвольные
точку и ее U и последовательность uk <=. U, сходящуюся
к точке и в метрике 5. Тогда {uk} сходится к и слабо
в В, и UmJ(uk)^J(u). Полунепрерывность снизу на U
функции J (и) в метрике В доказана. Заметим, что выпук-
выпуклость J (и) здесь не использовалась.
Достаточность. Пусть J (и) полунепрерывна снизу
на U. Возьмем произвольную последовательность {uk}^U,
слабо в В сходящуюся к точке uzeU. Выбирая при
необходимости подпоследовательность, можем считать, что
lim J (uk) = lim J(uk). Как и при доказательстве теоремы 4,
fe-+OO k -+ОО
нетрудно установить, что точка и принадлежит замыканию
выпуклой оболочки точек {uk, uk+li ...}, где k — любое
фиксированное натуральное число. Это значит, что для
каждого номера Л=1, 2, ... найдутся целое число m^k
и вещественные числа akmi^Oy / = &, k+U •••> tn,
2] ®<kmi = 1 такие, что последовательность vk = У]
будет сходиться к точке и в метрике 5, т. е. \\Vk —
52
при fe->co. Тогда в силу полунепрерывности снизу J (и)
в точке и имеем lim J(vk)^ J (и). Из выпуклости J (и)
6->оо
следует
Im \ m
J (Vk) = «М 2 VkmiUi)^ 2 akmiJ (Щ) < SUp J {щ),
или /(у*) ^sup J(ui) при всех /е=1, 2, ... Однако
lim sup J(tii)=
)
поэтому, переходя к пределу в предыдущем неравенстве,
получим
J (и) ^ lim / (vk) ^ lim sup J {ut) = lim / (uk) = lim J(uk).
Слабая полунепрерывность снизу на U функции J {и)
доказана.
Пример 6. Пусть У (w) -= || а || — норма в банаховом
пространстве В, Так как \\аи + A — a) t/1| ^ а || я || +
-f- A —а) j v|| при всех и, ?>geB, O^ot^l, то J (и) вы-
выпукла па В. Далее, из нсравенстаа j || uk j — !| и 11 ^ || u — uk\
следует, что У(а) = |м| непрерывна в метрике S во всех,
точках и^В. Согласно теореме 5 тогда / (и) = || и || слабо
полунепрерывна снизу на В, т. е. lim || г^ | ^ || ^ | для любой
&-»оо
последовательности {^^}, слабо сходящейся к точке и.
Полезно заметить, что норма в В, вообще говоря, не
будет слабо непрерывной функцией. Например, если
B = L2[0, 1], то последовательность uk = s\nnkt9 O^t^
^1, fe=l, 2, ..., слабо сходится к нулю, но J (uk) =
= 1 «^ 1 - 1/1/2 т4 J @) = 101 = 0, так что _Hm J (uk) > J @).
k—>oo
Аналогично устанавливается слабая полунепрерывность
снизу на В функции J(u)=^lu'f при всех у^1.
Из теорем 2 — 5 следует
Теорема 6. Пусть U —выпуклое замкнутое ограни-
ограниченное множество из рефлексивного банахова пространства В,
функция J (и) выпукла и полунепрерывна снизу на U.
Тогда J%> — oo, U% непусто, выпукло, замкнуто, огра-
ограничено и любая минимизирующая последовательность \uk)
слабо сходится к U%.
Приведем несколько примеров задач минимизации,
показывающих, что условия доказанных выше теорем не
могут быть существенно ослаблены.
53
Пример 7. Рассмотрим задачу минимизации функции
при условиях x(t) = u (t), О ^/< 1; х @) = 0, и = м (t)eEU=
= {и(/)е1а[0,1]: |м(/)|<1 почти всюду на [0, 1]}. Как
было показано в примере 7.4.2 из [4], в этой задаче
функция J (и) не достигает на U своей нижней грани
У# =—1. Заметим, что здесь множество слабо компактно
(см. примеры 2 и 5). Функция J (и) непрерывна на И
в метрике L2[0, 1], но она не является слабо полунепре-
полунепрерывной снизу. В самом деле, возьмем последовательность
uk = smnkty 0<;?^l, &=1, 2, ..., слабо сходящуюся
к нулю. Нетрудно проверить, что YimJ(uk) =—1/2 <
/г-*оо
< j @) == 0, т. е. слабой полунепрерывности снизу нет.
Пример 8. Рассмотрим задачу минимизации функции
1
/ (и) = $ sign A/2- t)u(t)dt
о
при u = u(t)€EU = {u(t)e=C[0, 1]: |и(*)|<1, 0};
(/ — единичный шар в С [0,1]. Нетрудно видеть, что
J(u)>— 1 при всех u^U, но lim J(uk) = —1, где иЛ =
= и* @ = fe (/ — 1/2) при | / — 1/21 «^ 1/Л, МО = sign (/-1/2)
при \t— 1/2|>1/&, ^== 1, 2, ... Следовательно, /* = —1,
но нижняя грань J (и) на U не достигается. Заметим,
что здесь J (и) выпукла и непрерывна в метрике С[0, 1]
и согласно теореме 5 она слабо полунепрерывна снизу
на С[0, 1] (точнее говоря, она даже линейна и слабо непре-
непрерывна на С[0, 1]). Кроме того, множество U выпукло,
замкнуто и ограничено в С [О, 1]. Однако пространство
С[0, 1] не является рефлексивным и множество U не
будет слабо компактным. Любопытно, что на более широ-
широком множестве кусочно непрерывных функций, удовлет-
удовлетворяющих условию |и@1<^1, рассматриваемая функция
достигает своей нижней грани при и% = si^n (/— 1/2),
0/1
4. Теоремы 2 и 6 отличаются от теоремы 1 тем, что
требования к множеству U в теоремах 2, 6 несколько
ослаблены по сравнению с теоремой 1, но зато на мини-
минимизируемую функцию накладываются более жесткие
ограничения. Действуя в этом же направлении, в част-
54
ности, отказываясь от требования ограниченности мно-
множества U, можно получить другие теоремы Вейерштрасса.
Приведем несколько таких теорем.
Теорема 7. Пусть U — выпуклое замкнутое множе-
множество из рефлексивного банахова пространства В, функ-
функция J (и) выпукла, полунепрерывна снизу на V и для
некоторой фиксированной точки v e U множество Лебега
ограничено. Тогда J% > — оо, и#Фф9 U%— выпукло,
замкнуто, ограничено и, кроме того, любая минимизирую-
минимизирующая последовательность {uk} <= M (v) слабо в В сходится
к U*.
Доказательство проводится так же, как и доказатель-
доказательство аналогичной теоремы 2.1.2 из [4]. А именно, сначала
устанавливаем, что нижняя грань J (и) на U может до-
достигаться лишь в точках множества М (v). Затем дока-
доказываем, что М (v) выпукло и замкнуто в метрике В.
Кроме того, М (v) ограничено по условию. Применяя
теорему 6 к функции J (и) на множестве М (v), получаем
все утверждения теоремы 7.
Достаточным для ограниченности множества М (v)
является условие lim J (uk) = +oo, которое должно выпол-
няться для любой последовательности {uk} e U, lim |м*||=
fe-»oo
= + оо (ср. с теоремой 2.1.3 из [4]).
К функциям, удовлетворяющим последнему условию,
относятся сильно выпуклые функции —см. определе-
определение 2.6. Для таких функций справедлива
Теорема 8. Пусть U — выпуклое замкнутое множе-
множество из гильбертова пространства Н, а функция J (и)
сильно выпукла и полунепрерывна снизу на V, Тогда
1) множество Лебега M(v) = {u^U: J(u)^J(v)}
выпукло, замкнуто и ограничено при всех ие();
2) J# > — оо, и%Фф, причем U% состоит из единст-
единственной точки и#;
3) любая минимизирующая последовательность {uk\
сходится к точке и% по норме Н, причем
n\uk-um[*^J(uk)-J(ut)9 k=l, 2, ...
Доказательство ограниченности множества М (v) про-
проводится дословно так же, как в теореме 4.3.1 из [4].
Отсюда и из теоремы 7 следует, что */#> — со, 1/%Фф.
Так как J (и) строго выпукла, то V\ состоит из единст-
65
венной точки и*. Справедливо неравенство
K\U~U^f^J (и) - J (U*), II €= U,
которое доказывается так же, как это было сделано при
доказательстве теоремы 4.3.1 из [4]. Отсюда следует
утверждение 3) теоремы.
Утверждение, аналогичное теореме 8, справедливо
также и для класса равномерно Еыпуклых функций,
более широкого, чем класс сильно выпуклых функций.
Определение 8. Функцию J (u)y определенную на
выпуклом множестве U из банахова пространства В, назы-
называют равномерно выпуклой на Uy если существует неотри-
неотрицательная функция б(/), определенная при всех t, 0^
^^diam?/ = sup |w —i>J, б@) = 0, б(^0)>0 при неко-
тором /0, 0</0<diam(/, и такая, что
при всех и, и <= ?/, ae[0, 1]. Функцию б(/) называют
модулем выпуклости функции J (и) на U, а функцию
ii(t)= inf irif aJ
^ } о<а<1 ||и-»|| = / a(l-a)
u, v<=U
— точным модулем выпуклости J (и) naU. Если б(/)>0
при всех t, 0</<diam?/, то такую функцию называют
строго равномерно выпуклой на U.
Если функция J (и) строго равномерно выпукла на ?/,
то существует модуль выпуклости (например, можно взять
6(/) = |i(tf)), который строго монотонно растет при воз-
возрастании t и стремится к нулю тогда и только тогда,
когда *->- + 0 (см. лемму 4.7.2 из [4]).
Всякая сильно выпуклая функция является строго
равномерно выпуклой с модулем выпуклости б (f) — кг2.
Заметим, что в любом гильбертовом пространстве Н
существуют равномерно выпуклые функции. Например,
функция J (и) = || и |я строго равномерно выпукла на Я
при всех y^ 2 с модулем выпуклости б (/) = A/2)^~Ну [69].
В пространствах Lrp(G) и 1Р функция J(и)=^1и\У строго
равномерно выпукла на всем пространстве при всех
у^р7^2 с модулем выпуклости 8Ц) = A/2)у-Ц^\ а при
1<р<2 эта функция строго равномерно выпукла при
всех у>\ на любом выпуклом ограниченном множестве
из рассматриваемого пространства L'P(G) или /Р[6У],
56
Так как сумма любой выпуклой функции и равно-
равномерно выпуклой функции является равномерно Еыпуклой,
то классы равномерно выпуклых функций в упомянутых
пространствах достаточно богаты.
Теорема 9. Пусть U — выпуклое замкнутое множе-
множество из рефлексивного банахова пространства В, функция
J (и) равномерно выпукла и полунепрерывна снизу на U.
Тогда
1) множество Лебега М (v) выпукло замкнуто и огра-
ограничено при всех og(/;
2) /*> — со, и*Фф, причем U^ выпукло, замкнуто
и ограничено]
3) если, кроме того, функция J (и) строго равномерно
выпукла на 0', то U% состоит из единственной точки и%
и всякая минимизирующая последовательность {uk\ схо-
сходится к точке и* по норме В, причем
^(«*). ?=1, 2,...
Доказательство ограниченности множества M(v) про-
проводится так же, как в теореме 4.7.1 из [4]. Отсюда и
из теоремы 7 следуют утверждения 1), 2) теоремы. Строго
равномерно выпуклая функция строго выпукла, значит,
U% состоит из единственной точки м#. Неравенство
б (|| Ы - И* |i) < / {U) - J (Н#), Иб(/,
доказывается так же, как в теореме 4.7.1 из [4]. Отсюда
следует утверждение 3) теоремы.
Теоремы 1, 2, 6—9 широко используются в различ-
различных приложениях: при доказательстве существования
элемента наилучшего приближения в теории приближе-
приближения функций, существования решения в задачах опти-
оптимального управления и т. д. Некоторые из таких прило-
приложений будут рассмотрены ниже. Более тонкие теоремы
существования, учитывающие специфику конкретных клас-
классов экстремальных задач, можно найти в [1, 49, 71, 109,
122, 144, 220] и др.
5. Для иллюстрации приведенных выше теорем Вейер-
штрасса рассмотрим задачу
J(u) = \x(T, t/)-f/|2->inf, (I)
?(t) = A(t)x(t)+B(f)u(t)+f(t)9 U^t^T, B)
x(to) = xO9 C)
^«M?(/cl;[/0, t\% D)
67
где А (t), B(t), f(t) — заданные кусочно непрерывные мат-
матрицы-функции порядка пхп, пхг, пх\ соответственно;
моменты времени /0, Т и точки х0, у ^Еп заданы;
(/ — некоторое множество из Ц[10, Т] (см. задачу B.7) —
B.10)).
В § 2 было установлено, что функция A) при усло-
условиях B), C) принадлежит классу С1'1 на L[[t0, T] (см.
теорему 2.6) и, следовательно, непрерывна в метрике
L[ [t0, Т], кроме того, она выпукла на L\ [t0, T]. Согласно
теореме 5 тогда J (и) слабо полунепрерывна снизу на
Lr*[to9 T]. На самом деле, оказывается, эта функция слабо
непрерывна на Lr2[t0, T].
Теорема 10. Пусть матрицы А (/), В (/), f (t) кусочно
непрерывны на отрезке to^t^T. Тогда функция A) при
условиях B), C) слабо непрерывна на Lr2[t0, T]. Если,
кроме того, U — выпуклое, замкнутое и ограниченное мно-
множество из L*[tOy T], то множество U% точек миниму-
минимума задачи A) — D) непусто, выпукло, замкнуто, ограниче-
ограничено, и любая минимизирующая последовательность слабо в
Т] сходится к t/^.
Доказательство. Возьмем произвольную после-
последовательность {uk}^L[[tQ, T], слабо сходящуюся к неко-
некоторой точке u = u(t) ^ L? [t0, T]. Покажем, что тогда
{J (uk)}-+J (и). Для этого сначала установим, что
\\mx(t, uk) = x(tt и) при всех /, to^t^T. E)
fe-*oo
Обозначим Zk(t) = x(t, uk)—x(t, и), to^t^T. Из равен-
равенства B.11), определяющего решение задачи Коши B),
C), следует
Тогда
\B(x)(uk(r)-u(x))dx
где Лтах = sup !Л(т)|. Отсюда с помощью леммы 2.2
53
получим
n
+ Лтах $
5 <6i(т), иы{х)-и(х))&%\
т I2U/2
j
l/2
\ (bi (?),
где bi(t) = (bn(t), ..., bir(t)) — r-я строка матрицы ?(/),
ttT. Положим
0,
В силу слабой сходимости {uk(t)) к w(/) при &->оо имеем
j (bi (т), wft (т) - а (т)> dx = J (ct (т), аЛ (т) - и (т)> dt ^ О
при всех фиксированных /е[/0, 71]. Отсюда и из F)
с помощью теоремы Лебега (см. [11], стр. 302) получаем
равенство E).
В частности, при t = T из E) имеем {х(Т, ии)\->
-+х(Т, и). А тогда J(uk)=\x(T, uk)-y\2^\x(T, a)-y;!2=
=r.J(u). Слабая непрерывность J (и) на L[[t0, T] доказана.
Остальные утверждения теоремы 10 следуют из теорем 2, 6.
Из доказанной теоремы 10 вытекает, что задача A)—D)
имеет решение на множествах из примеров 4, 5, когда
G = [/o, П
Заметим, что из слабой непрерывности функции J (и)
следует слабая непрерывность функции (— J (и)). Поэтому,
применяя теорему 2 к функции (—J (и)), убеждаемся
в том, что функция A) при условиях B), C) достигает
своей верхней грани на любом выпуклом замкнутом огра-
ограниченном множестве из ?Ц/0> Т].
Рассмотрим задачу минимизации функции
7
J(u) = \x(T% u)-y? + a\\u(t)\*dU a = const>0, G)
при условиях B) —D). Так как функция G) представ-
представляет собой сумму выпуклой и сильно выпуклой функции,
то она сильно выпукла. Из теоремы 8 тогда вытекает
Теорема 11. Пусть матрицы A(t), В (t), f (t) кусочно
непрерывны на отрезке [/0, Т], a U — выпуклое замкнутое
множество из La[/0> T]. Тогда функция G) при условиях
B) —D) достигает своей нижней грани на V в единствен-
единственной точке и* = и% (t) e V и любая минимизирующая по-
последовательность сходится к и* по норме L[[tOi T].
6. В различных руководствах по функциональному анализу
читатель обнаружит и другие, отличные от приведенных выше, ва-
варианты теоремы Вейерштрасса, основанные на других определениях
понятий компактности и полунепрерывности функций. Для того
чтобы облегчить читателю ориентацию в этих вопросах, совершим
небольшой экскурс в топологические пространства. Сначала напомним
некоторые определения [11, ПО].
Определение 9. Пусть X — некоторое множество. Говорят,
что на X задана топология, если в X выделена система т его под-
подмножеств, удовлетворяющая следующим трем условиям (аксиомам):
1) ©> А^бт; 2) объединение любого числа множеств из т является
множеством из т; 3) пересечение конечного числа множеств из т
является множеством из т. Все множества Ggt называются откры-
открытыми, а их дополнения F=X\G— замкнутыми.
Множество X с заданной на нем топологией т называют топо-
топологическим пространством и обозначают через (X, т).
Пусть (X, т) — топологическое пространство. Окрестностью точки
иеХ называется всякое множество Get, содержащее точку и.
Окрестностью множества U а X называется всякое множество (?ст,
содержащее U. Точка меА' называется точкой прикосновения мно-
множества U а X, если каждая окрестность точки и содержит хотя бы
одну точку из U. Совокупность всех точек прикосновения множе-
множества U называется замыканием множества U и обозначается через Их
или просто U. Пусть U a W а X. Совокупность всех точек прикос-
прикосновения множества U, взятых из множества IF, называется замыка-
замыканием U во множестве W и обозначается через Uw
Можно показать, что U~Ux тогда и только тогда, когда
U — замкнутое множество.
Определение 10. Пусть (X, т) — топологическое простран-
пространство. Говорят, что последовательность {и^} е X сходится к точке
мёХй топологии т или, короче, {uk} т-сходится к точке и, если
для любой окрестности G точки и найдется номер N = N (G) такой,
что uk e G при всех k^N. Последовательность {uk} т-сходится
к множеству U, если для любой окрестности G множества U най-
найдется номер N = N(G) такой, что Uk^G для всех k'^N.
Определение 11. Точка и называется предельной точкой
последовательности )^}gA в топологии т, или, короче, х-предель-
ной точкой {и^}, если для любой окрестности G точки и и любого
номера т найдется номер km > т такой, что и^т <= G или, иначе
говоря, в любой окрестности G точки и найдется бесконечно много
членов последовательности {uk\ со сколь угодно большими номерами.
Банахово пространство В превращается в топологическое прост-
пространство, если в нем открытые множества ввести как объединение
любого числа открытых шаров О (и, e) = {veEBuv — ul<&}> где
и —произвольная точка из В} 8 —произвольное положительное число.
Так введенная топология называется сильной топологией банахова
пространства В Сходимость последовательности {и^} к точке и
в сильной топологии В эквивалентна сходимости этой последователь-
последовательности к той же точке по норме (в метрике) В.
В банаховых пространствах могут быть введены и другие топо-
топологии. Для нас наибольший интерес представляет так называемая
слабая топология. Открытыми множествами в слабой топологии бана-
банахова пространства В называются множества, представимые в виде
объединения любого числа множеств вида
G(uy е, съ ..., cm) = {v eeB :\ (cit v) — {ch и) |< 8, / = 1, т\, (8)
где и — произвольная точка из В, т — произвольное натуральное
число, m^l, съ с2> ... , ^ — произвольные элементы из сопряжен-
сопряженного пространства ?*, 8 — произвольное положительное число. Заме-
Заметим, что из сходимости последовательности {tik} в слабой топологии В
вытекает слабая сходимость {и^} в смысле определения 1.1.
Для того чтобы легче было уяснить различие между вводимыми
ниже понятиями компактного множества в топологических простран-
пространствах, обращаем внимание читателя на то, что в метрических про-
пространствах (в частности, в Еп) часто пользуются другим определе-
определением предельной точки последовательности, отличным от определения
11. Л именно, точку v называют предельной точкой последователь-
последовательности {и/;} в метрике р, или короче, р-предельной точкой {и^}, если
существует подпоследовательность {^&т}, р-сходящаяся к v. Оказы-
Оказывается, в метрических пространствах оба определения предельной
точки последовательности эквивалентны. А именно, справедливо сле-
следующее утверждение [9, 11]: в любом метрическом пространстве М
точка v является предельной точкой последовательности {и^\ в смысле
определения 11 тогда и только тогда, когда существует подпоследо-
подпоследовательность {Ukm\, р-сходящаяся к точке v. Однако в топологиче-
топологических пространствах в общем случае такой эквивалентности может не
быть: здесь возможны ситуации, когда предельная в смысле опреде-
определения 11 точка последовательности {uk\ e X не является т-пределом
никакой подпоследовательности {Ukm}. Покажем это на примере.
Пример 9. В пространстве /2 в качестве топологии возьмем
слабую топологию. Возьмем последовательность uk^Y~kek, где ек —
= (О, ..., 0, 1, 0, ...) с единицей на k-м месте. Покажем, что точка
d = 0gI2 является предельной точкой в слабой топологии /2 в смысле
определения 11. Будем рассуждать от противного: пусть существуют
окрестность Go точки и = 0 и номер N0^l такие, что и^фп^ для
всех k^N0. Поскольку любое открытое множество, в частности, Gu,
представляет собой объединение множеств вида (8), то найдутся
число ео>О, натуральное число m^l, элементы съ с2, ..., ст е /2
такие, что uk ф. G @, е0, съ ..., ст) при всех k^N0. Это значит,
что для любого k^N0 найдется номер : = i^, l^i^m, такой, что
\(ci> uk)-(ci> °>i =
или I c) I ^ eo/V k. Тогда
oo oo m oo
' '" _ V* V |r/|2Z> V1 P2/k— -1-СГ)
Получаем противоречие с тем, что q е /2 и поэтому !'. с-г \ < оо.
'^l, т. Следовательно, v = 0 — слабая предельная точка последова-
последовательности {ик} в смысле определения 11.
61
Покажем, что никакая подпоследовательность {и^п} не может
слабо сходиться к нулю. Допустим противное: пусть существует под-
подпоследовательность {и^Л, сходящаяся при n-^оо к v — О слабо в /2,
причем kx <&2< ••• < kn < ... Выбирая при необходимости из \ukn}
оо
еще подпоследовательность, можем считать, что ^] */?« < оо (напри-
п = \
мер, можно сделать kn^2n, п = \, 2,...). Положим co = (cj,..., с%,...),
где c\ — \lVkn при ? = &Л, /г= 1, 2,... и cjj =0 при всех остальных k.
Тогда (cQ, ukr^ = {\lVltn)VKi — 1 при всех л=1, 2, .... Это значит,
что, с одной стороны, последовательность {«#} сходится к точке
v — О слабо в /2, с другой стороны, мы нашли окрестность G =
= G@, 1, co) = {w: | <с0, w> — (с0, 0>| = | (с0, м)|<1} такую, что
иъпф0 при всех /1=1, 2, ... Противоречие. Следовательно, хотя
точка у = 0 является слабой предельной точкой последовательности
{uk}, но ни одна подпоследовательность [Ukn] не сходится к у = 0
слабо в /2 (ни в смысле определения 1.1, ни в смысле определения 10).
Любопытно заметить, что подпоследовательность |ая2, /i=l,2, J.
рассмотренной последовательности не имеет ни одной слабой предель-
предельной точки в /2.
Перейдем к определениям понятий компактного множества и
полунепрерывности снизу функций, которые нам понадобятся при
формулировке теорем Вейерштрасса в топологических пространствах.
Определение 12. Последовательность {и^} е U, где (/ — мно-
множество из топологического пространства (Л", т), называется %-секвен-
циально компактной в U> если существует хотя бы одна подпоследова-
подпоследовательность {икп}> которая т-сходится к некоторой точке и е U. Мно-
Множество U <=, X называется %-секвенциально компактным, если любая
последовательность {uk} e V является т-секвенциально компакт-
компактной в U.
Определение 13. Последовательность {и^} е U, где U —
множество из топологического пространства (X, т), называется
х-счетно компактной в U, если {и^} имеет хотя бы одну т-предельную
(в смысле определения 11!) точку и из U. Множество U с= х назы-
называется т-счетно компактным, если любая последовательность {uk} e
е U является т-счетно компактной в U
Определение 14. Система множеств {Ga\ из топологиче-
топологического пространства (X, т) называется покрытием множества U из X,
если U a \}Ga Покрытие {Ga} называется открытым, если все Ga —
а
открытые множества. Если некоторое подсемейство {Ga$} покрытия
{Ga} само образует покрытие U, то {Gap} называется подпокрытием
покрытия {Ga}. Множество U из X называется %-компактным, если
из любого открытого покрытия {Ga} множество U можно выбрать
конечное подпокрытие {Gal, Ga2, .... Gan\
В метрических пространствах (в частности, в Еп и в банаховых
пространствах с их сильной топологией) все три понятия компактно-
компактности равносильны [ПО, стр. 43]. Замечательно и то, что в слабой
топологии банаховых пространств эти три понятия компактности
также равносильны ("ПО, стр. 292]. В других топологических про-
пространствах эти понятия, вообще говоря, не будут равносильными, и
можно лишь сказать, что в общем случае из т-компактности (опре-
62
деление 14) и т-секвенциальной компактности (определение 12) сле-
следует т-счетная компактность (определение 13) [11, 110].
Определение 15. Функция J (и) называется т-секвенциально
полунепрерывной снизу в точке и е U, если для любой последователь-
последовательности {«^)g(/, т-сходящейся к точке и, справедливо неравенство
lim J(uk)^ J (и). Функция J (и) называется т-секвенциально полу-
k ->оо
непрерывной снизу на множестве U, если она т-секвенциально полу-
полунепрерывна снизу в каждой точке и е V.
Определение 16. Функция J (и) называется т- полунепрерыв-
полунепрерывной снизу в точке и ge U', если для любого числа 8>0 найдется
окрестность G?et точки и такая, что J (v)^ J (и) — е для всех v e
е Ge П U. Функция J (и) называется т-полу непрерывной снизу на мно-
множестве U, если она т-полунепрерывна снизу в каждой точке и е U.
Нетрудно видеть, что если функция т-полунепрерывна снизу, то
она т-секвенциально полунепрерывна снизу. В метрических простран-
пространствах (в частности, в Еп и в банаховых пространствах с их сильной
топологией) понятия т-полунепрерывности снизу и т-секвенциальной
полунепрерывности снизу равносильны.
Согласованно используя введенные выше различные понятия
компактности множества и полунепрерывности снизу функции, можно
получить различные варианты теоремы Вейерштрасса. Приведем фор-
формулировки нескольких таких теорем. В этих теоремах будет предпо-
предполагаться, что U — некоторое множество из топологического простран-
пространства (Ху т), а функция / (и) определена и конечна на множество U.
Теорема 12. Пусть множество U т-секвенциально компактно,
а функция J (и) т-секвенциально полунепрерывна снизу на U. Тогда
j^ = inf /(«)> — оо, множество U**={u e U: J («) = «/*} непусто и
т-секвенциально компактно; любая минимизирующая последовательность
{Uk} т-секвенциально компактна и т-сходится к U*.
Доказательство этой теоремы аналогично доказательству тео-
теоремы 2.
Теорема 13. Пусть множество U т-компактно, а функция
J (и) т-полунепрерывна снизу на U. Тогда J* > — сю, множество U*
непусто, замкнуто в множестве (J (т. е. U^—U^u) и т-компактно;
любая минимизирующая последовательность {uk} х-счетно компактна
и т-сходится к 0%.
Доказательство утверждений о том, что J# > — оо Ц^Фф,
см в [11].
Теорема 14. Пусть множество V т-счетно комткпш, а функ-
функция J (и) т-полунепрерывна снизу на U. Тогда J % >> — оо, множество V\
непусто и т-счетно компактно; любая минимизирующая последова-
последовательность {и^} т-счетно компактна и т-сходится к U*.
Читатель может теперь заметить, что при формулировке и дока-
доказательстве теорем Вейерштрасса 1,2,6—11 этого параграфа мы поль-
пользовались понятиями секвенциальной компактности и секвенциальной
полунепрерывности снизу в соответствующих топологиях. Это обстоя-
обстоятельство может быть оправдано двумя причинами: во-первых, про-
проверку секвенциальной компактности множества и секвенциальной
полунепрерывности функции во многих прикладных задачах можно
осуществить гораздо проще, чем других понятий компактности и
полунепрерывности снизу, и, во-вторых, для экстремальных задач,
рассматриваемых в метрических и банаховых пространствах с их
сильной или слабой топологией, в которых, как было замечено, все
63
три понятия компактности равносильны, этот подход не приводит
к потере общности.
Упражнения. 1. Показать, что функция J (и) = J ч2 (t) dt
6
непрерывна на С [0, 1] в метрике С [0, 1]. Установить, что на мно-
множестве (/ = {м = и(/)еС[0, 1]: w@) = 0, ы A) == 1} эта функция не
достигает своей нижней грани ./* = 0. Ограничена ли эта функция
на U сверху?
2. Пусть J (u) = ^u(t)dt — и A/2), ц = й(/)еС[0, 1]. Доказать,
6
что 1) эта функция линейна и непрерывна на С [0, 1] в метрике этого
пространства; 2) на единичном шаре U = {и —и (t) е С [0, 1]: \u(t)\^
sC 1, O^/^l} эта функция ограничена сверху и снизу, но не до-
достигает на U ни нижней грани /* = — 2, ни верхней грани J* =2.
1
3. Доказать, что функция J (u) = (^u (t) dt — u(\/2)-{-2)~1 конечна
О
и непрерывна в метрике С [0, 1] на множестве U = {u = u (t) ^?[0, 1]:
| и (t) |=^1, O^^^l}, но не ограничена на U снизу.
4. Проверить, что теоремы 10, 11 сохраняют силу, если от эле-
элементов а/у(/), bij{f)t ft(t), to^t^Ty матриц Л (/), B(t)t f (t) вместо
кусочной непрерывности на [tQ, Т] потребовать ан (t) e L^ [/0, 71];
btJ(t)9 ft@eLa[/fl, Г].
5. Пусть матрицы Л (/), В (/), / (/) удовлетворяют условиям тео-
теоремы 10 (или условиям предыдущего упражнения) и пусть у (t) e
eLg [/0, Г] —заданная функция. Доказать, что тогда функция
т
\x(t, u)-y\Q\*dt
при условиях B), C) слабо непрерывна на L?|70, 71] и достигает
своей нижней и верхней грани на любом выпуклом замкнутом огра-
ограниченном множестве U из Lj[/0, Г]. Указание: установить, что
предельный переход в E) является равномерным на отрезке [/0, Т].
6. Пусть J (u) — ^f (u(t)) dt. 1) Доказать, что если / (и) непре-
непрерывна на Е1, то функция / (и) непрерывна на С [0, 1] в метрике этого
пространства.
2) Доказать, что если | / (a + s) — / (и) | =^С (| и \ \ s ' + ! Sj2 i при
всех «,se Е1, С = const ^ 0, то функция J (и) непрерывна на L2[0, 1]
в метрике L2 [0, 1].
3) Если / (и) полунепрерывна снизу на Е1, то будет ли J (и)
полунепрерывной снизу в метрике С [0, 1] или L2 [0, 1]?
4) Доказать, что если / (и) (сильно) выпукла на Е1, то J (и)
(сильно) выпукла на L2 [0, 1].
5) Доказать, что если } (и) выпукла и удовлетворяет условию
п. 2), то J (и) достигает своей нижней грани на любом выпуклом
замкнутом ограниченном множестве V из L2 [0, 1].
7. Пусть Л —линейный ограниченный самосопряженный опера-
оператор, действующий из гильбертова пространства Н в Я, b e H. Если
64
Л—-сильно положительный оператор, т. е. (Ли, и) ^ ja | и |,2, иеЯ,
jx — const > 0, то функция
/(«) = -' (Аи, и)-(Ь, и)
сильно выпукла ка Н и на любом выпуклом замкнутом множестве
U s // достигает своей нижней грани на единственном элементе
и* е ?/. Доказать. При L/ = H u# является единственным решением
уравнения Ли = Ь\ это обстоятельство лежит в основе метода Ритца
решения уравнений Ли = Ь.
8. Доказать, что в рефлексивном банаховом пространстве В спра-
справедливо равенство \с\в* — max (с, и) при всех се Б*.
9. Доказать, что функция J (и) = 1и — й !j на любом выпуклом
замкнутом множестве (У рефлексивного банахова пространства дости-
достигает своей нижней грани (иначе говоря, существует проекция любой
точки п (Е: В на множество V или элемент наилучшего приближения
из U для заданного элемента п е Б).
10. В пространстве Lrp (G), 1 < р < оо, рассмотрим два множества
^ и1 (t) ^ Р/ @ для почти всех t e G, i'= 1, /-},
(/2 = |и = и @ е L? (G): ^ | а (/) — й (t) fdt^l
где функции й = й (/) g= L^ (G), af. (/), Р; @ е Lp (G), t— I, r, и число
/? > 0 заданы. Доказать, что эти множества слабо компактны в Lrp(G),
\ <с р < оо, но не компактны в метрике этого пространства. Будут
ли эти множества слабо компактными в /,J (G) или L^ (G)?
11. Доказать, что «гильбертов кирпич» (см. пример 2.6) компак-
компактен в метрике /2-
12. Доказать, что функция J (и) ~ [ и* (t) dt не является непре-
о
рывной в метрике L2 [0, 1]. Будет ли она полунепрерывной снизу
в метрике L2 [0, 1]?
13. Доказать, что функция J («) = \ \ и (t) |2 dtt определенная на
о
Я1 [0, 1], разрывна в метрике С [0, 1]. Будет ли она полунепрерывной
снизу в этой метрике?
14. Пусть Р — линейное нормированное пространство всех алгеб-
алгебраических многочленов на отрезке [0, 1 ] с нормой || и (t) | = max \u(t)\.
n n
Положим / (a)= 2 i ai i Для « = w @= 2 a'lti e P' Д°казать» что
J \Щ выпукла на Р, но не является непрерывной на Р. Указа-
Указание: рассмотреть последовательность и^ -- и^ (/) = tk — /ft+l, 0^^ ^ 1.
by дет ли / (а) полунепрерывной снизу на Р?
3Ф. П. Васильев 65
15. Пусть U — открытое выпуклое множество из банахова про-
пространства В, а функция J (и) конечна, полунепрерывна снизу и
выпукла на U. Доказать, что J (и) имеет субградиент во всех точках
и е U и слабо полунепрерывна снизу на V [79].
16. Пусть J (и) — выпуклая функция на открытом выпуклом множе-
множестве U банахова пространства В. Доказать, что следующие четыре
утверждения эквивалентны: 1) J (и) полунепрерывна сверху в точке
v ^ U в метрике В; 2) J (и) непрерывна в точке v в метрике В; 3) / (и)
ограничена в некоторой окрестности точки v; 4) J (и) ограничена
сверху в некоторой окрестности точки v [79].
17. Пусть ?/ —множество из топологического пространства (Ху т),
а функция / (и) определена и конечна на U'. Доказать, что для того
чтобы J (и) была т-полунепрерывной снизу (см. определение 16) на U,
необходимо и достаточно, чтобы множество M(c) = {u^U: J (u)^c\
было замкнутым в (X, т) при любом вещественном с.
18. Пусть (/ — множество из топологического пространства (X, т),
а функция J (и) определена и конечна на U. Назовем функцию J (и)
т-счетно полунепрерывной снизу на множестве U, если в любой точке
и е U и для любой последовательности {uk\ e U, для которой
точка и является т-предельной (см. определение 11), справедливо
неравенство lim J (u^)^ J (и). Доказать, что множество т-счетно
k-*oo
полунепрерывных снизу на U функций исчерпывается функциями
J (и) = const, и е U. Указание: пусть и, v e U, u=?v, J (и)Ф
ф] (v). Рассмотреть последовательность {uk}\ u2m = u, u2m+i — v,m = 0t
1,..., и получить противоречие.
§ 4. Методы минимизации
Здесь мы будем предполагать, что читатель знаком
с большинством из рассмотренных в [4] методов миними-
минимизации. Заметим, что из этих методов лишь некоторые
являются сугубо конечномерными, т. е. приспособленными
для решения задач минимизации лишь в конечномерных
пространствах — это симплекс-метод, метод покоординат-
покоординатного спуска и некоторые другие методы. Большинство же
описанных в [4] методов минимизации вполне могут быть
применены для минимизации функций на множествах из
бесконечномерных банаховых и гильбертовых прост-
пространств—это градиентный метод, методы проекции градиента,
условного градиента, возможных направлений,, сопряжен-
сопряженных градиентов, штрафных функций, Ньютона и др. Идеи
и описание упомянутых методов минимизации в беско-
бесконечномерных пространствах по форме ничем не отличаются
от их описания в конечномерном случае. Поэтому здесь
мы можем ограничиться лишь кратким описанием этих
методов, отсылая читателя за подробностями к главе 5
из [4]. Далее, формулировки и доказательства теорем
сходимости для большинства упомянутых методов в беско-
66
нечномерном случае могут быть получены путем неболь-
небольшой корректировки соответствующих конечномерных тео-
теорем и их доказательства из [4]. Для того чтобы показать,
как это делается, мы ниже приведем несколько таких
теорем. Кроме того, некоторые из излагаемых методов
проиллюстрируем на примере следующей задачи оптималь-
оптимального управления, рассмотренной в §§ 2, 3:
J(u) = \x(T, w)-*/|2-Hnf; A)
x(to) = xo\ B)
« = a@e(/gL5[/o, T] C)
(обозначения см. в § 2); примеры других задач оптималь-
оптимального управления см. ниже в §§ 5—10.
1. Градиентный метод может применяться для прибли-
приближенного решения задачи
J(a)-Mnf; u^H,
где Я — гильбертово пространство, J (и) е С1 (Я). Этот
метод заключается в построении последовательности {uk}
по правилу
uk-akJr (uk), k = 0y 1, ..., D)
где «о — некоторая заданная начальная точка, ak — поло-
положительная величина. Если У (ик)ф0у то ak можно выбрать
так, чтобы J (uk+1)<.J(uk). В самом деле, из равенства
B.1) имеем
/ («*+i) - J (ик) = *k (— II Г (uk) i,2 + о (ak)/ak) < 0
при всех достаточно малых аЛ>0. Если У (ик)Ф§, то
процесс D) прекращается и при необходимости прово-
проводится дополнительное исследование поведения функции
в окрестности точки uk для выяснения того, будет ли uk
принадлежать V'% или нет. В частности, если J (и) —
выпуклая функция на Я, то согласно теореме 2.5«fte{/!|!.
Существуют различные способы выбора величины ak в ме-
методе D). Перечислим некоторые из них:
1) ak выбирается из условия
fk (a,) = inf fk (а) = /**, fk(*) = J (uk - аУ (uk)) E)
>0
— этот вариант градиентного метода принято называть
методом скорейшего спуска. Точное определение вели-
3* 67
чины ак из E) не всегда возможно, поэтому на практике
вместо E) пользуются условием
/** < fk Ш < /** + 6Л| б, ^ 0, ^ б* < °°.
* = 0
или
/а* < fu Ы < A - ЛЛ) /* @) + V^, 0 < I ^ Я, ^ 1;
величины 8к, ЯЛ здесь характеризуют погрешность выпол-
выполнения условия E).
2) ак выбирают из условия монотонности: J (uk+1)<
<CJ(uk). Для этого задают какую-либо постоянную а;>0
и в методе D) на каждой итерации берут ак ~а. Затем
проверяют условие монотонности, и в случае его нару-
нарушения величину а^==а дробят до тех пор, пока не вы-
выполнится условие монотонности.
3) Если J (и)(=С11(Н) (см. определение 2.5) и по-
постоянная L > 0 из неравенства
\J' (и)- J' (v)\*^L\u-vl и, vzeH,
известна, то величину ak в D) можно взять из условий
где е, 80 —положительные числа, являющиеся парамет-
параметрами метода.
4) Возможен выбор ak из условия
J (ак) - J (и, - акУ (ик)) 5* еак I У (ик) |2, в > 0;
для определения такого ак обычно задают аЛ = а и затем
дробят а до тех пор, пока не выполнится выписанное
неравенство.
5) Возможно априорное задание величин ак из условий
= 0,1,...,
k=0
Например, можно принять ak = c(k+ l)~a, c=- const >0,
1/2<а^1- Такой выбор ак прост для реализации, но
не гарантирует выполнения условия монотонности
J (^л+i) < J (uk) и, вообще говоря, сходится медленно.
6) В тех случаях, когда заранее известна величина
J% =» inf J (и) > — оо, в D) можно принять
н
«Л = (J (Ih) ~ JJ/I J' (Пи) В2-
68
Иа практике итерации D) продолжают до тех пор,
пока не выполнится какой-либо критерий окончания счета.
Здесь возможно использование таких критериев:
i|Wj*--H*+1j!^e, или J {uk)-J (uk+1)\^8, или М'(^IК
^Y» гДе е» 6, у —заданные числа; иногда заранее задают
число итераций. Разумеется, к этим критериям окончания
счета надо относиться критически, поскольку они могут
выполняться и вдали от искомой точки минимума.
Посмотрим, как выглядит градиентный метод для
задачи A) — C) при U — Lr9[tO9 T]. Согласно формуле B.12)
градиент функции A) равен
J'(u) = BT(t)${t> u)y to^t^T,
где i|)(/, и) — решение задачи B.13), B.14). Тогда метод D)
для задачи A) —C) можно записать в следующем виде:
Uk+i(t) = u*(t)-abBT(t)y(t9 uk)9
to^t^T, ft = 0, 1, ... F)
Покажем, что в рассматриваемой задаче для параметра akf
определяемого из условия E), можно получить явное
выражение. С этой целью вспомним формулу B.25):
x(t, av + {l-a)u) = ax(t9 v) + (l-a)x(t, и),
справедливую для всех и, уеЦ[/0) Т] и всех вещест-
вещественных а. Полагая здесь v = u + h, t = Tf получим
хG\ u + ah) = x(T9 u) + a(x(T, и + к)-х(Т, и)),
— оо<а<С + оо«
Отсюда с учетом равенства B.20) имеем
, и) + а(х(Т, u + h)-x{T, a))^f/|2-
, u)-y9 x(T, u + h)-x(T, u
2|jcG, u + h)-x(T, u)\* = J(u) +
t + a*\x(T9 u + h)-x(T9 u)\\
o; ut Ле1Ц<0, Т\. G)
Из этой формулы при u = uk, h = — J' (uk) получим явное
выражение для функции E):
fk(a) = J(uk) + 2a(x(T, uk)-y% х{Ту Uk-Jr(uk))-
-x(Tt uk)) + a*\x(T, uk-J'(uk))-x(T, uk)\* =
\ uk-J'(uk))-
to
-x(T9 uk)\\ -oo<a< + oo. (8)
Может случиться, что х(Т, uk — J1 {uk)) — x(T, нЛ) = 0.
Тогда из (8) следует fk (a) = J(uk) = const при всех а. По-
Поэтому fk{oC) = {J {Uk — aJ1 {uk))y — J'(uk)) = 0 при всех а.
В частности, при а = 0 имеем Д@) = — | У (uk) f = 0, т. е.
J'(uk) = Q. В силу теоремы 2.5 тогда u% = uk~uk(t) —
оптимальное управление, задача A) — C) при и = Ц[{0, Т]
решена.
Рассмотрим случай х (Г, uk — J' (uk)) — х (Г, uk) Ф 0.
Тогда функция (8) представляет собой квадратный трех-
трехчлен и достигает своей нижней грани на числовой оси
при
<Г Т -J' (uk))-x{T, uk)) __
x(T, uk-J'(uk))-x(Tt uk)\*
T
uk)\2dl
2 \x(Tt uk-J' {uk))-x(T, uk)? =^u'
Если а| = 0, то J'(uk) = 0 и и* = uk (() — оптимальное
управление; задача решена. Если а*>0, то ак = а% удов-
удовлетворяет условию E) и в F) остается принять a/? = a|.
Один шаг метода скорейшего спуска D), E) примени-
применительно к задаче A) — C) при (/ = ЩЛ, Т] описан.
Приведем теорему сходимости метода скорейшего
спуска, представляющую собой обобщение теорем 5.1.1 —
5,1.3 из [4] на случай гильбертовых пространств. Здесь
мы ограничимся рассмотрением варианта D), E).
Теорема 1. Пусть функция J (и) определена на гиль-
гильбертовом пространстве Н, J (и) е С11 (Я), J\ = inf J (и) >
н
> — оо. Пусть \uk) — последовательность, полученная ме-
методом D), E) при некотором начальном приближении
Uq^H. Тогда последовательность {J (иk)\ монотонно убы-
убывает и
Ит1У'Ыи = 0. (9)
k-+co
70
Если, кроме того, функция J (и) выпукла на Н и мно-
множество M(uo) = {u^.U: J(u)^J(u0)} ограничено, то по-
последовательность {uk} минимизирует эту функцию на Н и
слабо в Я сходится к множеству U%, причем справедлива
оценка скорости сходимости
?=1,2,..., Ci = const^0. A0)
Если функция J (и) еще и сильно выпукла на Я, то {uk}
сходится к единственной точке минимума и% по норме Я,
причем
|| uk - и* !,2 < B/A) (J(u0) -J*)q\ 6 = 0,1,...,
где q=l— fi/L, 0 ^ g < 1, (x>0 — постоянная из тео-
теоремы 2.2.
Доказательство. Справедливо неравенство
J(uk)-J(uk+1J*l/BL)lJ'(ukh*t 6 = 0, 1, ..., A1)
которое доказывается точно так же, как неравенство E.1.12)
из [4]. Отсюда следует монотонность и сходимость {J (uk)}9
а также равенство (9). Далее с учетом выпуклости J (и)
рассуждая так же, как при доказательстве оценки E.1.15)
из [4], устанавливаем, что
Jt^d\r (uk)\, 6 = 0, 1, ..., A2)
где d= sup I и — v II — диаметр множества М(и0).
и, v е М («о)
Отсюда и из (9) следует, что последовательность {uk\
минимизирует J (и) на Я. Поскольку {uk} ^М (и0), то
согласно теореме 3.7 {uk\ сходится к U% слабо в Я.
Из A1) и A2) имеем
ak+1-ak^al/BLd*), 6 = 0, 1, ...
Отсюда и из леммы 2.3.4 из [4] следует оценка A0). По-
Последнее утверждение теоремы для сильно выпуклых функ-
функций доказывается точно так же, как это делалось в тео-
теореме 5.1.3 из [4].
2. Метод проекции градиента может применяться для
приближенного решения задачи
/(a)->inf; иб(/, A3)
где U — выпуклое замкнутое множество из гильбертова
пространства Я, J (и) е С1 (U). Для описания этого метода
нам понадобится понятие проекции точки на множество.
71
Определение 1. Проекцией точки и^Н на мно-
множество U czH называется точка w g(/ такая, что
|ы — w\= inf |ы —i>j.
Проекцию точки и на множество V часто обозначают
через Я^ (и).
Теорема 2. Пусть V — выпуклое замкнутое множе-
множество из Я. Тогда
1) всякая точка и^Н имеет, и притом единствен-
ную, проекцию на это множество-,
2) для того чтобы точка w ^U была проекцией точки и
на множество U, необходимо и достаточно выполнение
неравенства
(w — и, v — w) ^ 0 при всех v e U\
3) справедливо неравенство
|Ри (и) — Ри (v) \^\u — v\ при всех и, v <= Н.
Доказательство этой теоремы проводится дословно
так же, как и доказательство аналогичных теорем 4.4.1,
4.4.2 из [4].
С помощью оператора проектирования можно сформу-
сформулировать условия оптимальности в задаче A3) следующим
образом.
Теорема 3. Пусть U — выпуклое замкнутое множе-
множество из Я, J (и) <=l С1 (U) и пусть b* Ф 0. Если и% е U^,
то необходимо выполняется равенство
и% = Рц (и* — а/' (и*)) при всех а > 0.
Если, кроме того, J (и) выпукла на U, то всякая точка
и% е U, удовлетворяющая приведенному равенству\ при-
надлежит множеству U^.
Доказательство этой теоремы полностью совпадает
с доказательством аналогичной теоремы 4.4.3 из [4].
Метод проекции градиента для решения задачи A3)
заключается в построении последовательности {uk) по
правилу
Ь0, 1, .... A4)
где аЛ —положительная величина. Если при некотором k
оказалось, что ик^ = ик, то процесс A4) прекращают.
В этом случае согласно теореме 3 точка u.k удовлетворяет
необходимому условию оптимальности. Для выяснения
72
того, будет ли ик принадлежать U*, нужно провести
дополнительное исследование поведения функции J (и)
в окрестности точки uk. В частности, если /(и) —выпук-
—выпуклая функция, то tik^U*.
Существуют различные способы выбора величины ак
в методе A4). Приведем некоторые из них:
1) ak выбирается из условия
/* (ak) = inf fk (a), fk (а) = J (Ри (ик - aJf
>0
2) полагают а# = а>0, затем проверяют условие мо-
монотонности: J (uk+1)< J (Uk)9 и при необходимости дробят
величину ее, добиваясь выполнения условия монотонности;
3) если J (и) ^С1»1 (И) (см. определение 2.5) и кон-
константа Липшица L для градиента известна, то в A4)
в качестве ak можно взять любое число, удовлетворяющее
условиям
A5)
где 80, 8 — положительные числа, являющиеся парамет-
параметрами метода;
4) возможен выбор ak из условия
J (uk) - J (Ри (uk - акГ К») >
^*г\ик-Ри (uk -акГ (uk))f, e>О
(для определения такого ak можно задать ал = а и затем
дробить ак до тех пор, пока не выполнится указанное
неравенство);
5) возможно априорное задание величин ак из условий
00 ОО
а*>0, * = 0, 1, ..., 2а* = оо, % а|<оо.
Заметим, что описанные здесь варианты метода A4)
при и = Н переходят в соответствующие варианты гра-
градиентного метода.
Методом A4) удобно пользоваться лишь в тех слу-
случаях, когда имеется явная формула для проекции точки
на множество. Укажем несколько примеров множеств,
когда нетрудно получить такую формулу. Проекция точки
аеЯ на шар
73
представима в виде
иЦ':ЯХ\и
проекция на гиперплоскость
Г = {
выражается формулой
Ри(и) =
если
ПРИ \и-й
при \u-u
: (с, и) = у}
-(с, ti»cfhcf;
A6)
где Л е<5?(#->#), 6бЯ, оператор АА^ имеет обрат-
обратный, то проекция точки ие=Н может быть записана
в виде
ри(и) = и- Л* (АА*)-1 (Аи-Ъ).
Приведенные формулы для проекций доказываются
так же, как это делалось в примерах 4.4.1 —4.4.6 из [4].
Посмотрим, как выглядит метод проекции градиента
для задачи A) —C), когда множество U имеет вид
^ul(t)^$i(t) почти всюду на [tOt Г], / = ^7}; A7)
здесь &i(t), р,- (t) — заданные функции из L2[t0, T]. Про-
Проекция любой точки u = u(t)=* (и1 @, .. •, ur (t)) e Lr2 [tQ, 71]
на это множество представляет собой вектор-функцию
pu(u)=t(wi(t)f ..., ur(t)), to^t^T, где
»,(/) при ui(t)<ai(tI
Pi @ при Р,@<^@» 1 = ТГг'
(ср. с примером 4.4 5 из [4]). Поэтому (/г+1)-е прибли-
приближение uk , j (t) = (ихк,{ (/), ..., u'l(t)), tQ^t^T, метода
проекции градиента для задачи A) —C), A7) будет полу-
получаться по правилу
ос. (t) при u^i) — oik(BT (t)ty(t, uk))(<.
uk))l при a. (t)^ A8)
< 4 (t) - ak (BT (t) Ц (t, uk))t < ^ (/),
при uUt) — оск
74
/=1,г; здесь (Вт A)^A, uk))i — i-n координата вектора
Вт (t)ty(t, uk). Согласно теореме 2.6 градиент функции A)
удовлетворяет условию Липшица с постоянной L =
= 2(Т-t0)B2maxe2Ama*iT-to). Поэтому при выбореak в A8)
можно воспользоваться условием A5). Однако следует
заметить, что указанная выше оценка для L может ока-
оказаться довольно грубой, а это может привести к слишком
малым значениям ak из A5) и к слишком медленной схо-
сходимости метода проекции градиента.
Если в задаче A) —C) множество U является шаром
из Lr2 [/о, 7*], т. е.
U = {u =
A9)
где # = ?(/) — заданная функция из Lr2[tQt 7], R — задан-
заданное положительное число, то в силу формулы A6) метод
проекции градиента приведет к последовательности, кото-
которая строится по правилу
uk(t)-akBT
uk)-u(t)
\uk(t)-akBT
при \\uk{t)-akBT
\ A8')
при
i
Приведем теорему сходимости метода A4), A5), обоб-
обобщающую теоремы 5.2.1, 5.2.2 из [4] на случай гильбер-
гильбертовых пространств.
Теорема 4. Пусть функция J(u) определена на
выпуклом замкнутом множестве V гильбертова прост-
пространства Ну J (и) еС1'1 ({/), У* = inf / (и) > — оо. Пусть
{uk) — последовательность, полученная методом A4), A5)
при произвольном начальном приближении и0 е V. Тогда
последовательность {J (uk)} монотонно убывает и
llm |i uk — uk+11| = 0. ?сла, кроме того, функция J (и)
/г-» оо
выпукла на Н и множество М (н0) = {« е ?/: J(u)^J (ы0)}
75
ограничено, то последовательность {uk} минимизирует
эту функцию на V и слабо в Н сходится к множеству
1/%, причем справедлива оценка
О ^ J (uk) — J* ^ cxjk, k = 1, 2, ...; ct = const ^ 0.
Если функция J (и) еще и сильно выпукла на ?/, то {uk)
сходится к единственной точке минимума и* по норме Н,
причем
I uk — "* i!2 ^ c2/kf k = 1, 2, ...; с2 = const s^ 0.
Доказательство. Первое утверждение теоремы
вытекает из оценки
J {uk) -
которая доказывается так же, как соответствующая оценка
E.2.11) из [4]. Доказательство второго утверждения тео-
теоремы для выпуклых функций полностью аналогично дока-
доказательству теоремы 5.2.2 из [4] с той лишь разницей,
что вместо теоремы 2.1.2 здесь нужно использовать тео-
теорему 3.7. Утверждения теоремы для сильно выпуклых
функций являются следствием предыдущих утверждений
и теоремы 3.8.
Для сильно выпуклых функций можно предложить
другой вариант метода проекции градр1ента, имеющий бо-
более высокую скорость сходимости [78].
Теорема 5. Пусть U —выпуклое замкнутое множе-
множество из Н, функция J {и) принадлежит Clfl(U) и сильно
выпукла на U и пусть 0<a<2jLiL~2, где постоянные jn,
L, jii^L, взяты из определения 2.5 и теоремы 2.2. Тогда
последовательность {uk\y получаемая из A4) при ak = ay
k = 0, I, ..., сходится к точке минимума и% по норме
Н, причем справедлива оценка
где q (а) = A - 2|ла + a2L2I/2, 0 < q (a)< 1.
Доказательство этой теоремы проводится дословно так
же, как и доказательство аналогичной теоремы 5.2.3
из [4].
3. Метод условного градиента может применяться для
приближенного решения задачи
J(u)-+ml\ u^U,
где f/ —выпуклое замкнутое ограниченное множество из
гильбертова пространства Я, J (и) еС1^), Этот метод
76
заключается в построении последовальности по следую-
следующему правилу: по известному &-му приближению находят
вспомогательное приближение uk^.U из условия
() ) ( ) u-uk)%
и
или, что равносильно, из условия
uk = U, (J'(uk)9uk) = inl(J'(uk), и), B0)
и затем полагают
Ит==и* + а*(й*-и*), 0<аЛ<1. B1)
Заметим, что линейная функция («/' (uk), и) слабо непре-
непрерывна на U, а множество U согласно теореме 3.4 слабо
компактно. Отсюда и из теоремы 3.2 следует, что нижняя
грань в B0) достигается хотя бы на одном элементе
Если при некотором k оказалось, что uk = uk, то про-
процесс B0), B1) прекращают. В этом случае в силу усло-
условия B0) ini(J'(ufc)f u — tib) = (J'(uk), uk — uk)=0f т. е.
и
(</' (uk), u — uk)^0 при всех u^U. Согласно тео-
теореме 2.5 это означает, что точка uk удовлетворяет необ-
необходимому условию оптимальности, и для выяснения того,
будет ли ик^и%, нужно дополнительно исследовать по-
поведение функции в окрестности точки uk. В частности,
если J (и) — выпуклая функция, то согласно теореме 2.5
Существуют различные способы выбора величины ak
в B1). Приведем некоторые из них:
1) ak выбирается из условия
fk (ak) = inf fk (а) =/Л#, fk (a) = J (uk + a(uk - uk)).
B2)
В тех случаях, когда точное определение ak из этого ус-
условия затруднительно, то вместо B2) можно пользоваться
условием
или
77
величины 6Ь Xk здесь характеризуют погрешность выпол-
выполнения условия B2).
2) Можно задать ак~\, проверить условие монотон-
монотонности: J (uk+1) < J (ик)у а затем при необходимости дро-
дробить ак до тех пор, пока не выполнится условие моно-
монотонности.
3) Если J (и) е С1-1 (U) и константа Липшица L для
У (и) известна, то возможен выбор ak в B1) из условия
где 0<80^pft^2/(L + 2e), е0, е-параметры метода,
8>0.
4) Можно принять ak = X{% где /0 — минимальный среди
номеров /^0, удовлетворяющих условию
J (uk) -J(uk + V (пк - ик)) ^ Л'е | (J' (uk), uk - uk) |,
где Я, е-параметры метода, 0<Я; е<1.
5) Возможно априорное задание величин ak из условий
оо
0<afe<l, * = 0, 1, ..., lim ал = 0, 2ал= + °о-
В том случае, когда задачу B0) точно решить не удается,
то вспомогательное приближение uk^U можно опреде-
определить из условия
</' (uk), uk - uk) < inf <У (^), u — u
A = 0, 1, ..., lim 8^ =
Посмотрим, как выглядит метод условного градиента для
задачи A) —C), когда множество U имеет вид A7) или
A9). Согласно B0) для определения uk = uk(t) нужно на
множестве U минимизировать линейную функцию
\ (В1 (/)i|)(/, uk), u(t))Erdt = *
Отсюда видно, что в случае множества A7) будем иметь
пк (/) = (п\(/), ..., пгк @), to^t^T, где
_, _ | а,- (/) при (Вт (t) if (/, uk))i ^ 0,
1 Pi @ при
78
а если U — шар A9), то с помощью неравенства Коши—»
Буняковского получим
Параметр ось определяемый условиями B2) в рассматри-
рассматриваемой задаче, может быть выписан явно. В самом деле,
из формулы G) при и = ику h = uk — uk имеем
а<хG\ ик)-у, х(Ту пк)-х(Т% и,г)) +
а*\х(Т, пк)-х(Т, uk)\* =
т
\ (BT (t)$(t9 и*), uk(t)-uk(t))Erdt +
E
to
аа|хG\ пк)-х(Т, uk)\\ -oo<a< + oo. B3)
Если х(Т, uk) — x(Ty uk) = 0y то fk (a) = / (uk) = const
при всех а. Следовательно, Д (а) = (J' (ик + а (йА — w/e)),
uk — uk)=Q при всех а. Отсюда с учетом условия B0)
получаем Д @) = 0 = </' (мЛ), uk — uk)^(J'(uk), и — ик)
для любого u^U. Согласно теореме 2.5 тогда и% — ик —
= uk (t) — оптимальное управление в задаче A) — C) (здесь
подразумевается, что (У —выпуклое замкнутое ограничен-
ограниченное множество из L[[tQ, Г]).
Теперь рассмотрим случай х(Т, пк)Фх(Т, ик). Тогда
функция B3) представляет собой квадратный трехчлен и
достигает своей нижней грани на числовой оси гр
/, иЛ), uk(t)-uk(t)) rdt
ОС — ОС/г —
2 | лг(Г, йЛ)-*G\ иЛ)|^п
I Г /Т fl \ Y.IT U \ \2 "* V /
Так как в силу B0)
Т ^), uk(t)-uk(t))Erdt =
79
то ясно, что at 7^0. Возможен случай а? = 0. Согласно
условию B0) и формуле B4) это значит, что
^(Jf (uk), u-uk)
при всех и е U. В силу теоремы 2.5 тогда и% = ик = uk (t) —
оптимальное управление в задаче A) —C).
Если о$>0, то квадратный трехчлен достигает своей
нижней грани на отрезке O^a^cl при
; а*}. B5)
Это и есть искомое явное выражение для aky удовлетво-
удовлетворяющее условию B2). Для получения (&+1)-го прибли-
приближения остается положить
ukn (() = ыи (t) + ak (fik (t) - uk (/)), U^t^T.
Сходимость метода условного градиента для задачи A) —
C) вытекает из следующей теоремы.
Теорема 6. Пусть U —выпуклое замкнутое ограни-
ограниченное множество из гильбертова пространства Н, функ-
функция, J (и) принадлежит C1'1(f/). Тогда для последователь-
последовательности {ик}, определяемой методом B0) —B2) при любом
выборе начального приближения и0 <= U, справедливо ра-
равенство
lim (J'(uk), uk-uk) = 0. B6)
к~*оо
Если, кроме того, функция J (и) выпукла на U, то после-
последовательность {uit} минимизирует эту функцию на U и
слабо в Н сходится к множеству U%t причем справедлива
оценка
0 < J (uk) — J* < c±/k, ?=1,2,...; сг = const ^ 0.
B7)
Если J (и) еще и сильно выпукла на U, то {uk} схо-
сходится к единственной точке минимума и% по норме Н,
причем
\uk — u*f^c2lk, ?=1, 2, ...; с2 = const^0.
Доказательство. Прежде всего заметим, что из
ограниченности множества ?/, условия J (и) е С1»1 (U) и
леммы 2.1 следует, что
\J(и) |<| J («о) I +1! J' ЫЦи- и,| + Liu- и01|2/2<;
<: I J (uq) i + ii J' (uo) i d + Ld2j2 < со
80
при всех u^U\ здесь d= sup Ци —и] —диаметр множе-
U
ства U. Это значит, что функция J (и) ограничена на U.
Следовательно, J* > — оо. Обозначим Jk (и) = (У (uk)%
u — uk). Из B0) следует, что
Далее, справедливо неравенство
^a\Jk (пк) | - <x2Ld2/2 B8)
при всех a, O^a^l, k = 0, 1, ..., которое доказывается
так же, как аналогичное неравенство E.4.18) из [4].
Отсюда
0 < р Л (пк) | ^ ссЫ2/2 + (У (мЛ) - J (ик+1))/а, B9)
/г==0, 1, ...; 0<сс^1. Так как J(ик) не возрастает и
«/ {uk) 3^ У# > — со, то {/ (мЛ)} сходится и J (ик) — J (ик+1)->
->-0 при fe~>-oo. Поэтому, переходя в неравенстве B9)
к пределу при ?->-со, будем иметь
0 < lim | Jk (пк) | < Km | Jk (пк) | < aLd2/2
при всех а, 0<а^1. Отсюда при а->4-°° получим
равенство B6).
Пусть теперь J (и) выпукла на [/. Согласно теореме
3.6 тогда и*фф. Возьмем произвольную точку и% е
еУ^, Из теоремы 2.1 и условия B0) имеем
0 < ak = / (мА) — У (и#) < <«/' (мЛ), ик — w#) =
* = 0> 1. -.. C0)
Отсюда и из равенства B6) следует, что {и*} —минимизи-
—минимизирующая последовательность. Согласно теореме 3.6 тогда
\ик} слабо сходится к U%.
Докажем оценку B7). Так как «/Л(й*)->0 при &->-оо,
то найдется номер k0 такой, что 0 ^ yk = | Jk (пк) \/(Ld2) <;
^cl при всех k^k0. Тогда максимальное значение функ-
функции a! Jk (пк) | — a2d2L/2 переменной а при — со < а <
< + со, которое достигается при 0L = yky будет совпадать
с максимальным значением этой функции на отрезке 0^
^a^l при всех k^k0. Поэтому, полагая в оценке B8)
а = 7л» получим
ак - ак+1 = У М - У (мЛ+1) ^ | УЛ (й*) |2/BId2), k ^ ft0-
81
Отсюда и из неравенств C0) следует
al/BLd2I k ^ k0.
Остается применить лемму 2.3.4 из [4] и убедиться
в справедливости оценки B7). Последнее утверждение
теоремы для сильно выпуклых функций следует из оценки
B7) и неравенства к1ик — и% f^ J (uk) — J (и*), & = 0, 1,...
Заметим, что описание метода условного градиента и
теорема б сохраняют силу и в том случае, когда (/ — вы-
выпуклое замкнутое ограниченное множество из рефлексив-
рефлексивного банахова пространства.
4. Метод возможных направлений может применяться
для приближенного решения задачи
J(и)->¦ inf; и <^U = {и<= В: gi(u)^Q, i = 1, m},
C1)
где В —банахово пространство, J (и), gi(u), ..., gn(u)ei
€еС1(В). Для описания этого метода нам понадобятся
следующие два понятия.
Определение 2. Пусть U — некоторое множество из
В и u^lU. Направление ее В, ефО, называется возмож-
возможным в точке и, если существует число ^0>0 такое, что
u + te^U при всех ty O^t^to.
Определение 3. Направление е^В, ефО, назы-
называется возможным направлением убывания функции J (и)
в точке и на множестве (/, если е — возможное направле-
направление в точке и и, кроме того, J (u + te)<.J (и) при всех
i, 0</</ь где 0<*!<*,,•
Метод возможных направлений заключается в следую-
следующем. Пусть ио^и, 8о > 0 — некоторое начальное прибли-
приближение. Допустим, что k-e приближение (uk, eft), uk e (/,
8fe>0 при каком-то k^O уже известно. Определим мно-
множество номеров
и в пространстве переменных г = (е, о)^ВхЕ1 рассмот-
рассмотрим вспомогательную задачу
o->inf; г = (е, o)<=Wk = {{e, о): (Г (uk),
(gi(uk), е>^а, ie/A; lkl<l}. C2)
Множество Wk выпукло, замкнуто и ограничено, поэтому
если В является рефлексивным банаховым пространством,
82
то согласно теореме 3.6 задача C2) имеет решение. Пусть
(ek> Ok) — решение задачи C2), т. е. (ек, ok) ее Wk и
аЛ= infer. Так как г = @, 0) е 1^^, то ясно, что Q
w
k
Имеются две возможности:
1) (j?^ — гк. Тогда направление ek^0 является воз-
возможным направлением убывания функции J (и) в точке uk
на множестве U. Полагаем
и*+1 = и* + а*е*. 0<а*^р*; е*+1 = е*, C3)
где
2) —е^<огЛ^0. Тогда полагаем
где 9 —параметр метода, и снова переходим к рассмотре-
рассмотрению задачи C2) с заменой множества /# на множество
{ }
i { g()}
Величина ak в C3) может выбираться из условий:
1 /() if /И /^, где /ftH /
На практике это условие можно реализовать прибли-
приближенно в следующем смысле:
fe=0
или
2) Можно задать аЛ = рЛ, проверить условие монотон-
монотонности: J (uk+1)< J (uk), а затем при необходимости дро-
дробить ak до тех пор, пока не выполнится условие моно-
монотонности.
3) Если J (и) е С1»1 (U) и константа Липшица L для
У (м) известна, то в C3) можно принять
fe; \ok\/L}.
4) Возможен выбор ak из условия
-J(uk + akek) ^ ea^ j ok |, 0 <е < 1/2;
для определения такого ak сначала можно положить
ak = $ki а затем при необходимости дробить эту величину.
63
Заметим, что задача C2) далеко не всегда просто
решается. Поэтому методом возможных направлений
пользуются для решения лишь таких задач C1), в кото-
которых решение вспомогательных задач C2) может быть
легко найдено.
Предлагаем читателю самостоятельно исследовать схо-
сходимость этого метода и рассмотреть, в частности, воз-
возможность обобщения теоремы 5.5.2 из [4] на случай бана-
банаховых пространств.
5. Метод сопряженных направлений применяют для
решения задачи
где Н — гильбертово пространство, J (и) е С1 (//). Этот
метод заключается в построении последовательности {uk}
по правилу
иш = ик-акрк, * = 0, 1, ..., C4)
где
Ро = J' (ио), Pk = J' Ш - §kPk-i, k=l 2, ..., C5)
величина $k определяется по одной из формул
h = {Г (ик), J' (мм) - J' (uk)) I Г (tik^
или
a ak в C4) находят из условия
fk (ak) = inf fk (a), fk (a) = J(uk- apk)y a ^ 0. C6)
>0
Как показывает практика, погрешности, неизбежно
появляющиеся при определении ak из условия C6), могут
привести к тому, что векторы [pk\ из C5) перестают ука-
указывать направление убывания функции и сходимость
метода может нарушиться. Чтобы бороться с этим явле-
явлением, метод сопряженных градиентов время от времени
обновляют, полагая в C5) рЛ==0.
В отличие от конечномерных пространств (см. § 5.6
из [4]), в гильбертовых пространствах нельзя ожидать,
что точку минимума сильно выпуклой квадратичной
функции
J(u)^\-(Au9 u)-{by и), и<=Н, At=X(H-+H)f b<=H,
84
удастся найти за конечное число шагов метода сопряжен-
сопряженных градиентов.
Предлагаем читателю самостоятельно сформулировать
и доказать аналог теоремы 5.6.1 из [4] для гильберто-
гильбертовых пространств, а также рассмотреть возможность при- •
менения метода сопряженных градиентов к задаче A)—C).
6. Метод Ньютона может быть использован для реше-
решения задачи
где (/ — выпуклое замкнутое множество из банахова про-
пространства В, J (и) ^С2 (?/). Этот метод заключается
в построении последовательности {ик} по следующему
правилу: по известному k-uy приближению uk^U находят
вспомогательное приближение uk s U из условия
inUk(u), C7)
где
Jk (и) = (J' (uk), u-~uk)+ ~ (Г (ик) (и - йк), и - ик),
и затем полагают
«л+1 = ин + ock (пк -ик), 0 < ak < 1. C8)
В частности, если t/==S, то в точке минимума функции
Jk(u) ее производная Jk(u) обращается в нуль, т. е.
Л (пи) = J' Ш + J" (uk) (ak - uk) = 0.
Если оператор J" (uk) имеет обратный оператор (J" (ик))-\
то отсюда имеем
пк = ик-(Г(ик))-Ч'(ик).
Подставляя это выражение для пк в C8), получим
= иц-<*к(Г(ик))-Ч'(ик)9 ? = 0, 1, ... C9)
Таким образом, при ?/ = В метод C7), C8) представляет
собой широко известный метод Ньютона для решения
операторных уравнений (в данном случае уравнения
Jf(u) = Q).
Существуют различные способы выбора величины ak
в C8). Приведем некоторые из них:
1) в C8) часто полагают аЛ=1, k = 0, 1, ... В этом
случае при U — B из C9) имеем
Uk-(J"W)-lJ'(uk), k = 0, 1, ....
85
— это классический вариант метода Ньютона решения
уравнения J' (и) = 0.
2) В качестве ak в C8) можно принять ak = ki% где
i0 — минимальный среди номеров/^0, удовлетворяющих
условию
J Ы -J(uk + ti (uk - uk)) S* eV | Jk (ak) |,
где Я, е— параметры метода, 0<Л; е<1.
3) Возможен выбор ak в C8) из условий
fk(ak)= min fk (а), /Л (а) = У (iik-{-a(uk — uk)).
4) Иногда полагают о^=1, проверяют условие моно-
монотонности: J (uk+1) < J (uk), а затем при необходимости
дробят ak до тех пор, пока не выполнится условие моно-
монотонности.
Метод Ньютона обычно применяют в тех случаях,
когда вычисление производных J' (и), Г (и) не представ-
представляет особых трудностей и вспомогательная задача C7)
решается достаточно просто.
Предлагаем читателю самостоятельно сформулировать
и доказать аналоги теорем 5.7.1—5.7.3 из [4] о сходи-
сходимости метода Ньютона для задач минимизации в бана-
банаховых пространствах. Достоинством метода Ньютона
является высокая скорость сходимости. Однако этот метод
весьма чувствителен к выбору начально приближения
«о —если точка и0 далека от искомой точки минимума,
то метод может не сходиться.
7. Метод с кубической скоростью сходимости, изло-
изложенный в § 5.8 из [4] (см. также [223]), может быть при-
применен для решения задачи
J (и) -> inf; u^B,
где В — банахово пространство, J (и) ^С1(В). Для опи-
описания этого метода нам понадобится понятие разделенной
разности дл^ градиента.
Определение 4. Пусть J (и) ^Сг(В). Разделенной
разностью градиента J' {и) называется линейный симме-
симметричный оператор J' (и, v), действующий из В в В* и та-
такой, что
Г {иу v) {а - v) - Г (и) - Г (v) D0)
при всех и, v <= В.
Заметим, что равенство D0), вообще говоря, неодно-
неоднозначно определяет оператор J' {и, v) ^.X (В->В*). Мы
будем дополнительно к равенству D0) еще требовать,
чтобы для функций J (и) е С2 (В) оператор J' {и, v) удов-
удовлетворял условию
J' (иу v) = J" (и) + е (uy v), и, dgB, D1)
где |e(w, v) 1-^0 при lu — t;j->0. Пример разделенной
разности для градиента функции конечного числа пере-
переменных, удовлетворяющей условиям D0), D1), был при-
приведен в § 5.8 [4].
Предположим, что функция / (и) <= С1 (В) такова, что
разделенная разность J' {и, v) при всех и, v eB суще-
существует и, кроме того, имеет обратный оператор (Jr (uy v))-1.
Тогда для минимизации функции J (и) на В можно пред-
предложить следующий двухшаговый итерационный процесс:
uk = uk-TkJ'(uk), иЛ+1 = 0*-Г*/'@*). Л = 0, 1 D2)
где
ГЛ = (/'("*. uk-$kr (uk)))-\
Ра — параметр метода, рЛ=^0.
Предлагаем читателю самостоятельно сформулировать
и доказать аналог теоремы 5.8.1 из [4] для случая, когда
В = Н — гильбертово пространство, и убедиться, что при
достаточно хорошем выборе начального приближения и0
для сильно выпуклых функций метод D2) имеет кубиче-
кубическую скорость сходимости.
8. Метод штрафных функций может быть применен
для решения задачи
J(u)-*inf; u^l\ D3)
l/={M<=t/o:ft(w)<Of /=TTm; gi(u)=0J i'=m+l,s}, D4)
где Uo — заданное множество из банахова пространства В,
функции J (и), gi(u)9 ..., gs(u) определены на Uo.
Определение 5. Последовательность функций
{Рк(и), fe=l, 2, ...}, определенных и неотрицательных
на множестве UOy содержащем множество U, называют
штрафом или штрафной функцией множества U на мно-
множестве Uо, если
Г 0 при u^U,
lim /5/г(^) = { , /г ч г/
fe-voo I +co при u^U0\U.
Примером штрафной функции множества D4) на множе-
множестве Uo является функция
Ph(u) = AkP(u)t uezUo, D5)
87
где
Р (и) = J] (шах {gi (и); 0})" + % \gt (и) \р, и е Uo, D6)
числа ЛЛ, называемые штрафными коэффициентами,
таковы, что
А=1, 2, ...; Iim4= + w, /?S*1;
другие примеры штрафных функций см. в § 5.12 из [4].
Функцию D6) также часто называют штрафной функ-
функцией множества D4), подразумевая при этом, что после
умножения на штрафные коэффициенты она превращается
в штрафную функцию в смысле определения 5.
Метод штрафных функций для задачи D3), D4) заклю-
заключается в том, что вводят функции
ueeUo, Л=1, 2 D7)
и определяют последовательность {uk} условиями
uk <= Uо, Ф* Ы < ФЛ# + вЛ> D8)
где Pk (и) — штрафная функция множества U (например,
функция D5), D6)), Ф^ = ШФй(й), еЛ>0, ft=l, 2, ...
..., НтеЛ = 0. Если существует точка uk^U0, для кото-
/е->со
рой Ф^ (ии) = Ф/?*, то в D8) допускается возможность
еЛ = 0. Заметим, что точка uki удовлетворяющая усло-
условию D8), вообще говоря, не принадлежит множеству U.
При описании метода штрафной функции D7), D8) под-
подразумевается, что Ф^> — со при всех &=1, 2, ...
Приведем две теоремы о сходимости метода штрафных
функций.
Теорема 7. Пусть функции J (и), gi(u), t=l, s,
определены на множестве Uo, а последовательность {uk\
определена из условий D5) —D8). Тогда
Пт / (uk) < Пт ФЛ (uk) = Tim ФЛ# ^ У*. D9)
fe-»co /г-^оо /г-*оо
Если, кроме того, ,/** = inf J (и)> — ос, то
С/о
), Л= 1, 2 E0)
(и*) *S0, /=Т7т; limg-,(«ft) = 0, f = m+TTi. E1)
88
Доказательство этой теоремы проводится дословно
так же, как и теоремы 5.12.1 из [4j. В § 5.12 [4] приве-
приведен пример, показывающий, что в D9) неравенства могут
быть строгими.
Теорема 8. Пусть Uo — выпуклое замкнутое множе-
множество из рефлексивного банахова пространства Ву функции
J(U), gi(u), ..., gm(u), \gm+l(u)\, ..., \ gs (и) \ СЛабО ПОЛу-
непрерывны снизу на Uo (например, эти функции выпуклы
и полунепрерывны снизу в метрике В), /# # = inf У (w)> — со;
множество
1=1, т\
l, S}
выпукло и ограничено при некотором 6>0. Тогда
довательность {uk}t определенная условиями D5) —D8),
глабо в В сходится к [/*, и, кроме того, lim J (uk) — J*.
/г-*оо
Доказательство. При сделанных предположениях
для \uk) соотношения D9) —E1) сохраняют силу. Из E1)
следует, что uk^U(b) при всех k^kQ. Однако согласно
теореме 3.4 множество U F) слабо компактно. Тогда
существует хотя бы одна точка у#е(/F), к которой
слабо сходится некоторая подпоследовательность {«л;}.
В силу слабой полунепрерывности снизу указанных
в теореме функций и соотношений E1) имеем
=1, пг\
|ft |( )| lf s.
Это значит, что v# e (/. Тогда с учетом D9) получаем
У* < У (о») < lim У (нЛ/.) < lim У
так что
= lim y(w/?^) = y5fc или
г—>оо
Таким образом, показано, что любая точка
щаяся слабым пределом какой-либо подпоследов
\uk }, принадлежит U% и lim J (uk )==У*. Отсю
что {аЛ} сходится к множеству [/# слабо в В и lim
89
Доказанная теорема является аналогом теоремы 5.12.2
из [4]. Читателю предлагаем самостоятельно исследовать
возможность обобщения других теорем из § 5.12 [4] на
случай банаховых пространств.
Для иллюстрации метода штрафных функций рассмот-
рассмотрим задачу A) —C) при дополнительных фазовых огра-
ограничениях вида
f=l, m; m^n, E2)
или
x*G\ w) = *i, i=*TTsi s<n9 E3)
где ait biy x\— заданные числа. Для учета ограничений
E2) можно взять штрафную функцию
т Т
Pk(u)-=Ak^[(max{xi(t9 u)-bt; 0}J +
1=1 t0
+ (max{?%-jc'(/f и); 0}J1d/f
где у4л>0, lim Ak= +oo; ограничения E3) можно учесть
k-+co
с помощью штрафной функции
, и)-х{)\ k=l, 2,...
Тогда задача A) — C), E2) или E3) сведется к решению
последовательности задач минимизации функции
Фь(и) = \х(Т9 u)-y\2 + Pk(u), k=l, 2, ..., E4)
при условиях B), C). Вопрос о том, как определить
градиент функции E4) при условиях B), C) и как мини-
минимизировать функцию E4), будет обсужден в следующем
параграфе.
9. Предлагаем читателю самостоятельно дать обобще-
обобщения методов множителей Лагранжа, барьерных и нагру-
нагруженных функций из §§ 5.11, 5.13, 5.14 [4] на случай
задач минимизации на множествах из гильбертовых или
банаховых пространств, исследовать сходимость этих ме-
методов.
Заметим, что в ряде приведенных выше теорем о схо-
сходимости методов (см., например, теоремы 1—3) сильная
(по норме) сходимость указанных в них минимизирующих
последовательностей гарантируется лишь для сильно
90
выпуклых функций; если же минимизируемая функция
не является сильно выпуклой, то эти последовательности
будут сходиться к множеству точек минимума, вообще
говоря, лишь слабо. О том, как нужно видоизменять
методы минимизации для получения сильно сходящихся
минимизирующих последовательностей, речь пойдет в сле-
следующей главе.
Упражнения. 1. Пусть U — {u (t)^(u1 (t), ..., ur (t)) e
еЦ[/0, 71]: ul(t)^O почти всюду на отрезке tQ^t^Tt t = 177}.
Найти проекцию любой точки из Lr^ [70, Г] на множество U. Описать
метод проекции градиента для задачи A) —C) с этим множеством.
2. Описать метод сопряженных градиентов для задачи A) — C)
при </ = LS[/0. T].
3. Описать градиентный метод, методы проекции градиента,
условного градиента, сопряженных направлений для задач миними-
минимизации функций
т
J(u)=*\x{T9 и) —yp + aj |и(/)|аЛ, a = const>0,
to
(tt u)-y(t)\*dt, y(t)e=L«[t0, Г],
т
= \ \x(f, u)-y(t
%to
т
) I2 dt + a ^ | и (/) j2 dtt a — const > 0
при условиях A) — C). Исследовать сходимость методов.
4. Описать метод возможных направлений для задачи C1.) в пред-
предположении, что и е Н — гильбертово пространство, взяв во вспомога-
вспомогательной задаче C2) поиска возможного направления убывания усло-
условие нормировки || е || = 1.
5. Описать градиентный метод, методы проекции градиента,
условного градиента, сопряженных направлений для задач миними-
минимизации функций из примеров 2.1—2.4, считая, что «?Я, Н — гиль-
гильбертово пространство (в случае примера 2.4 H = L2[a, b]). Рассмот-
Рассмотреть случаи, когда U = H, или U — шар или гиперплоскость в Н.
6. Сформулировать и доказать теоремы сходимости методов
барьерных, нагруженных функций из §§ 5.13 — 5.14 [4] для множе-
множества из гильбертовых пространств.
§ 5. Градиент в задаче оптимального управления
со свободным правым концом
Рассмотрим следующую задачу оптимального управле-
управления: минимизировать функцию
91
при условиях
x(t)=f (x@, и@, /), io^i^T; х(t0)=*о, B)
h = h(/)€=?/?L?[/o, T], C)
где л: = (х\ х2,..., хя), и = («3,..., О, функции /°(аг, и, t),
f (xy и, t) == (Z1 (х, и, t), ..., fn(х9 и, /)), Ф(х) переменных
(х, а, /) е ?"л X ^ х [/о, 71] считаются известными, (/ — за-
заданное множество из L[[tQi Т], моменты времени /о, Т и на-
начальная точка х0 заданы.
Определение решения (или траектории) x = x(t) ==x(/, «),
to^t^T, задачи Коши B), соответствующего управлению
u = u(t) e L2 [/о, 74], а также условия его существования
обсуждались в гл. 6 из [4J (см. теорему 6.1.1 [4]); там
же был доказан принцип максимума для задачи A) — C)
(см. § 6.3 из [4]).
1. Ниже будут сформулированы достаточные условия
дифференцируемое™ функции A) на L[[tQy T] и получена
формула для ее градиента. Примем обозначения
Здесь fxj = ~j — частная производная функции /' по
переменной xJ\ Г —знак транспонирования матрицы. На-
Напомним, что нормой матрицы А = {а^, i'=l,/z; /=l,m}
порядка пхт называется число й A |' = sup | Ах\еп, где
верхняя грань берется по единичному шару \z\Em^kl-
Справедливо неравенство \Az\En^lA\\z\Em при всех
г^Ет. Введем знакомую нам по гл. 6 из [4] функцию
Гамильтона — Понтрягина
Н (х, и, U Ф) = —/° (х, "> 0 + </' (*. «. 0> ф), /4)
92
Обозначим
Нхп) \Ни
Теорема 1. Пусть функции /°, /, Ф непрерывны по
совокупности своих аргументов вместе со своими частными
производными по переменным xt и при (х, и, t) e
е Еп X Ег х [/0, Т] и, кроме того, выполнены следующие
условия:
u + h9 t)-f(x, и, t)\^L(\bx\ + \h\), E)
. t)-fx(x, u,t)\\^L(\Ax\ + \h\), F)
G)
, t)-fu(x,u, t)\\^L(\Ax\ + \h\)t (8)
u + h, t)-fl(x,u, t)\^L(\bx\ + \h\), (9)
| Ф,, (x + Ax) -Ox(x)\^L\Ax | A0)
яры аяя (х + Ал:, u + A, /), (x, и, t)^ EnxErx[t0, T]y где
L = const ^0.
Гог^о функция A) npa условиях B) непрерывна и диф-
дифференцируема по и = и (/) в яор>гв L$ [/0, 7"] вс/од# «^
^Н^о. Т1]^ причем ее градиент J' (и) = J' (и, t)^.Lr2[t0y T]
в точке u = u(t) представим в виде
Jf (U) = — HU{X, U, /, 1|)) \х=хЦ, и), u=u(t),t = y> (/,«)==
- /i (^ (/, и), «@. 0 - (/«(^(^ и), и (/), /))Г^ (/, и),
to^t^T, (И)
г^ x(t) = x(t, и), to^t^Ty— решение задачи B), соош-
ветствующее управлению u = u(t), a ^{t) = yp(t9 и), t0^
^t^T, является решением сопряженной системы
= П (х (t9 и), и (/), t) - (fx (х (/, и), и (/), t))Ty (/),
to^t^T, A2)
начальных условиях
-Фх(х)\х=,х1т.и). A3)
Доказательство. Пусть u — u(t), u + h = u(i) -f-
+ h(/)eL2[/e, Tj, а дс(/, н), х(/, и + Л), to^t^T,—
соответствующие этим управлениям решения задачи B).
S3
Из условия теоремы следует
\f(x, и, 0|<|/(*. и, 0-/@. 0, 01 + 1/@, 0, *)|<
sup 1/@,0,01, {x,u,t)<=EnxErx[h,T].
Отсюда и из теоремы 6.1.1 [4] и замечания 2 к ней сле-
следует существование и единственность решения задачи B)
при всех и = u(t) e LJ [Аь 71]-
Обозначим Л* (*) = *(*, u + h)—x(ty и), to^t^T.
В § 6.3 из [4] было установлено (см. оценку F.3.13)), что
IЛ*@ I^Сг{ |h (t) \dt^Cx(T-/0I/21hUM,
to
to^t^T; A5)
здесь и ниже через Съ С2, ... будем обозначать константы,
не зависящие от выбора м = я (/) е L? [/<>» Т].
Кроме того, в § 6.3 [4] было получено следующее
представление для приращения функции A) (см. фор-
формулу F.3.17) из [4]):
-H(x(t), u(t)% U *(/)) dt + Ri + Ъ, A6)
где
Rx = (Фх (х (Т) + ех Ах (Т)) - Ф, (х (Т))у Ах
т
R2 = -\(Hx(x + B,Axt u + h, t9 тр)-Нх
to
причем
) A7)
С помощью формулы конечных приращений имеем
Н(х, u + h, U У)-Н(х, u,t,yp) = (Hu(x,u + d3httyq),h),
. Подставим это равенство в A6) и получим
т
, u(t)9 /, $@), h(t))dt + R, A8)
где # = #1 + /?2 + #з, величины Ru R2 определены выше, а
7'
Я3 = — \{Ни(хч u + b3h, и *)-#«(*. и% U Ч>), h{t))dt.
и
Так как Я« = — fu + (fu)T"ф, то с учетом условий (8), (9)
и оценки A5) имеем
/ \ т
sup |^(/, и) | )L\(\Ax(t)\\h(t)\ +
Суммируя оценки для /?ь R2, /?3, получим
|/?КС4$|Л(/)|8Л = С4-3А^. A9)
to
Из формулы A8) и оценки A9) следует дифференцируе-
мость функции A) и формула A1) для градиента. Тео-
Теорема доказана.
Таким образом, для вычисления градиента функции A)
при условиях B) нужно последовательно решить две
задачи Коши: сначала из задачи B) нужно определить
x(t9 и), затем из A2), A3) г|э(/, и) и, наконец, по фор-
формуле A1) найти искомый градиент. При решении упомя-
упомянутых задач Коши B) и C2), A3) можно использовать
различные приближенные методы [2, 32, 81, 153, 193, 194].
Заметим, что дифференцируемость функции A) в тео-
теореме 1 доказана при довольно жестких ограничениях на
исходные данные задачи A) —C). На самом деле, фор-
формулу A8) с остаточным членом R, R/\h\L2-+0, при
||A||z,f-»-O, можно получить при несколько меньших тре-
требованиях. Например, вместо условия A0) можно требо-
требовать Ф (х) е С1 (Еп), а вместо условий F) — (9) для про-
производных fXt /1И, / = 0, п% можно ограничиться условиями
типа
, t)-f[(x, и,
где 0<v^l, o(a)/a-v0 при a->0. Существование про-
производной Гато (см. определение 2.12) и производной no-
направлению функции A) удается доказать еще при более
слабых требованиях к данным задачам A) —C).
95
Заметим, что формулу градиента функции A) иногда
записывают в несколько ином виде: вместо функции D)
берут
Н(ху и, /, 4>) = /°(х, ". t) + <J(x9 uy t), ф), B0)
сопряженную задачу A2), A3) заменяют на задачу
$(/) = — #,(*, и, /, ф@I* = *</. „,. Ив<|@, to^t^T, B1)
Ч>G-) = Ф*(*)|*=*<7\,«), B2),
и тогда вместо формулы A1) будем иметь
J' (и) = На(Х, U, t9 ty)\x==x{ttu)t u = u(t), Ч? = ф(/, и)»
/о<*<7\ B3)
Нетрудно видеть, что функции Я и \|)(/, и) и, следова-
следовательно, производная Н„ из D), A1) -A3) и B0)-B3)
отличаются друг от друга лишь знаком.
Пользуясь формулами B0) —B3), найдем градиент,
в задаче B.7) — B.10), являющейся частным случаем за-
задачи A)-C) при /о = О, /(х, u,t) = A(t)x + B(t)u + f(t),
ф(х) = |л'-*/|2. Тогда Н(х, щ /, 4>) = <г|>, A(t)x + B(t)u +
+ f(t)) = (AT(t)y, х) + (В*№9 и) + (Ъ /@>; сопря-
сопряженная задача имеет вид
2(х(Т9 и)-у),
а градиент равен J' (u) = BT (t)ty(t, и), to^t^T. Как
видим, получившиеся формулы совпадают с теми, кото-
которые были выведены в § 2.
Для иллюстрации теоремы 1 приведем пример задачи
оптимального управления для нелинейной системы.
Пример 1. Рассмотрим задачу об оптимальном успо-
успокоении математического маятника (см. примеры 6.1.1 и
6.2.6 из [4]):
J (и) = (х1 (Г)J + (х2 (Г)J = 1 х (Т) I2 -> inf; B4)
i1 @ = х2 @, i2 @ = - sin x* (t) - $x* (/) + и (/),
= Xo = W, xl)\ B6)
tt = a@€=t/s=LH'o, Л; B7)
здесь момент Т>0, постоянная р, начальная точка х0
считаются известными. Задача B4) —B7) является частным
96
случаем задачи A) —C), когда /° = 0, Ф(х) = Ф(*1, х2) =
^2 + BJ /*( /J /2( ; t) i1
() ) ( )
— Р^2Ч- а, /0 = 0, м = 2, г=1. Все условия теоремы 1 для
задачи B4) — B7) выполнены. Для вычисления градиента
функции B4) составим функцию Гамильтона —Понтрягина
Н(х, и, i|))==T
Поскольку Hxi = — г|J cos х1, Нх* = % — р|
Ф*1 = 2я2, то сопряженная задача B1), B2) запишется
в виде
1^, и), ф8 = —
Так как //« = г|э2, то согласно формуле B3) градиент равен
Г (и) = г|J (*, гг),
2. Имея формулу градиента, нетрудно расписать гра-
градиентный метод, методы проекции градиента, условного
градиента —это делается так же, как было сделано в §4
для задачи D.1) —D.3). Заметим, что в задаче A) —C)
в общем случае, конечно, нельзя ожидать, что функция
/(а) = J (u-\-ah) переменной а будет квадратным трехчле-
трехчленом, и поэтому параметр ak из условий типа D.5), D.22)
будет определяться не так просто, как в задаче D,1) — D.3).
Во многих теоремах о сходимости методов минимиза-
минимизации требуется, чтобы минимизируемая функция принад-
принадлежала классу С1'1 (U). Приведем достаточные условия
принадлежности С1'1 (U) для функции A) при условиях B).
Теорема 2. Пусть выполнены все условия теоремы 1
и U = {u = u(t)^L2[tOi T]: u(t)<=V(t) почти всюду на
[to, Т]}, где V (t) — заданные множества из Ег, причем
sup sup \u\^R<oo.
Тогда
|] J'(u) — J' (v) \Lz ^ Li || и - v ||l,, Lx = const ^ 0, B8)
при любых и, v g(/.
Доказательство. Возьмем произвольные и = и(t),
v = v(t)^U. Из оценки A5) для Дл;(/) = *(?, и) — x(t, v),
4 Ф* П. Васильев 97
, следует
|!с= max
B9)
Далее, с учетом неравенства A4) имеем
(x (т, и), «(т),
|и(т)|Л + |*о| +
+ sup J/@, 0, О1(Г-'оХ
| x (т, a) | dx + L (T -
Отсюда с помощью леммы 2.2 получим
sup j
C7. C0)
Оценим \yp(t, u)\. С этой целью заметим, что (x(t, и),
^Ry to^t^T\ при всех u^U. Так как функции
Ф*» /S, /л:, /« непрерывны по совокупности аргументов на
замкнутом ограниченном множестве G, то
тахтахЦФД |/J|, Ifxh ll/el} = C8<oo. C1)
G
Отсюда и из A2), A3) имеем
т
и)\= Фх(х(Т, u)) + \[fox(x(x, и)у и(т), т)-
, ы), и(т),
, u)]dx
Тогда из леммы 2.2 следует
sup , а|) (/, и) Не ^ С8 A + Т -10) ес> <г - « = С,. C2)
we с/
98
Далее, оценим А-ф (/) = ^ (/, и) - \|з (/, о)„ /<><*< 7\ Из A2),
A3), оценок B9)-C2) и условий F), G), A0) имеем
«(t), т)-#(*(т, у), о(т), т
т
S, «)—Ф(т, »)||/»(Jf(T, и), н(т), т)| +
|| /л; (X (Т, И), М (Т), Т) - fx (X (Т, V), V (т), Т) ||) <h
т
T
t
Отсюда и из леммы 2.2 следует
= Cu|itt-t;|Li. C3)
Наконец, из формулы A1), оценок. B9) — C3) и усло-
условий (8), (9) получим требуемое неравенство B8):
\\J'(u)-J'(v)\\L2 =
IT
\Hu(x(U и), u(t)9 t, y(t, u))-Hu(x(t, v)9
v(t), и ч>е. v))
\l/2
)
\l/2
Теорема 2 доказана.
4* 99
3. Отдельно остановимся на одном частном случае
задачи A) —C), когда система B) линейна по х, и, т. е.
x(to) = xo, C4)
где A(t)9 B{t), f(t) — заданные матрицы порядка пхп,
nxr, nxl соответственно. Для задачи A) —C), C4) при-
принадлежность классу С1»1 (U) может быть установлена при
меньших требованиях, чем в теореме 2, и, кроме того,
удается сформулировать условия, гарантирующие выпук-
выпуклость и сильную выпуклость функции A).
Теорема 3. Пусть функции f°(x9 и, t), Ф(х) удов-
удовлетворяют условиям теоремы 1 и матрицы А (/), В (/),
/(/) кусочно непрерывны на отрезке [t0, T]. Тогда функ-
функция A) при условиях C4) принадлежит классу С1»1 на
всем пространстве L\ [t0, T]9 причем ее градиент Г (и)
в точке u = u(t) ^L[ [tQ} T] вычисляется по формуле
Г {и) = К (х (t, и), и @, t) - В? (t) ф (/, и), to^t^T, C5)
где x(t, и)— решение задачи C4), -ф^, и) —решение
задачи
-Фх(х(Т9 и)).
Доказательство. В рассматриваемой задаче усло-
условия F), (8), очевидно, выполнены. Далее, оценка B9)
совпадает с ранее доказанной оценкой B.18). С помощью
оценки B9), дословно повторяя доказательство теоремы 1,
приходим к соотношениям C5), C6). Для Дя|) (t) = ij) (/, и) —
(/ v) с учетом условий G), A0), C6) будем иметь
Л* @1 *? Ашах \ | Дф (т) | dx + L | А^ (Т) | +
\ \u(I)-v(t)\)dt.
Отсюда и из леммы 2.2 следует опенка C3). Наконец, из
формулы C5) и условия (9) с учетом оценок B9), C3)
100
получим
U'(u)-J'(v)\L2^
\ 1/2
, u)9 u{t)y t)-fl(x(t9 v), v(t), t\)*dtj +
T \ 1/2
\\, и)-я|>(/, v)\*dt) ^Lxltt-ok,.
Укажем достаточные условия выпуклости и сильной
выпуклости функции A) при условиях C4), кратко обсу-
обсудим условия оптимальности в задаче A) —C), C4).
Теорема 4. Пусть матрицы А (/), В (t)f f (t) кусочно
непрерывны на отрезке [t^ T], функция Ф(х) выпукла
на Еп, a f°(x, и, t) выпукла по совокупности переменных
(х, и), т. е.
< a/0 (x, и, t) + A - а) /о (у, v, t) C7)
при всех (х, и, t), (у, v, t)&EnxErx[t0,T], 0<a^l,
u% кроме того, f°(x(t), u(t), /)eLi[/0, 71] яра каждой
непрерывной функции x(t), to^t^T, u(t)^.L\ [t09 T].
Тогда функция A) при условиях C4) будет определена и
выпукла на LjJ^o, T].
Если при этом функции f°(x> и, t), Ф(х) удовлетво-
удовлетворяют условиям теоремы 1, то функция A) при усло-
условиях C4) достигает своей нижней грани на всяком выпук-
выпуклом замкнутом ограниченном множестве U cz L\ [tOf T]9
причем для оптимальности управления и% == и% (t) e U
необходимо и достаточно выполнение неравенства
т
a#)f u{t)-u*{t))dt^O C8)
p u(t)^U. Если и%— внутренняя точка множе-
множества U, то условие C8) равносильно условию
П (х {U и*)9 и* @, t) - ВТ (t) ф (/f aj = 0, to^t^T. C9)
вместо C7) справедливо неравенство
(l-a)v, t) <
-a)/°(i/, у, /)-аA-а)н|«-о|а,
x = const > 0 D0)
101
при всех а, 0 ^а^ 1, (х, ut /), (у, v, t) <=EnxErx[tOi Г],
то функция A) при условиях C4) является сильно выпук-
выпуклой на Ll[tOi T] и будет достигать своей нижней грани
на любом выпуклом замкнутом множестве V ^ L? [^<ъ Т\
причем оптимальное управление единственно.
Доказательство. В § 2 было доказано, что реше-
решения задачи C4) обладают свойством
(\ a)x(t, v)
при всех и, уеЦ^о, Т] иа?[0, 1]. Тогда выпуклость
(сильная выпуклость) функции A) при условиях C4)
является простым следствием выпуклости Ф(;с) и усло-
условия C7) (условия D0)). Остальные утверждения теоремы
вытекают из теорем 2.5, 3.6, 3.8.
Пример 2. Пусть требуется минимизировать функцию
при условиях i(/) = — ax(t) + u(t), O^t^T; x(O) = xo\
u = u(t) eL2 [0, T] = ?/, где а, х0, Т > 0 —• заданные числа.
Эта задача является частным случаем задачи A) — C),
C4) при f° = (x2 + u2)/2, Ф(х) = 0, f = — ax + u, п = г=1
и к ней применимы теоремы 1—4. Поскольку здесь
функция f°(x, и) удовлетворяет условию D0) при х =
= 1/2, то функция J (и) сильно выпукла на L2[0, T] и
достигает на L2[0, T] своей нижней грани в единствен-
единственной точке и# = Ux (t) eL2[0, Т]. Поскольку
Н(х, и, у) = — (х* + и*)/2 + Ъ(—ах+и),
то сопряженная задача C6) (или A2), A3)) здесь имеет
вид
*, и),
а градиент согласно формуле C5) (или A1)) равен
Г (и) - и (/) --ф (/, и), O^t^T.
Условие C9) для оптимального управления тогда приве-
приведет к равенству
Этот же результат был получен в примере 6.2.3 из Г4]
с помощью принципа максимума. В силу теоремы 4 пос-
102
леднее равенство является не только необходимым, но и
достаточным для оптимальности управления и* = и* (/).
Заметим, что, пользуясь условием C7) выпуклости
функции /° (х, и, t) и теоремой 2.1, неравенство CS) можно
переписать в эквивалентном виде
т
$[//(*(/, и*), МО. U W* м*))-
-H(x(t, и*), u(t)9 U Ф(/, и#))]Л^0, «(/)?(/, D1)
где
Н(х, и, U Ф)=-/о(*. и, 0 + <Ф.
Предлагаем читателю установить связь между принципом
максимума и условием оптимальности D1) — это может
быть сделано так же, как в § 2 при исследовании задачи
B.7) -B.10).
4. Рассмотренная выше задача A) —C) является ча-
частным случаем задачи оптимального управления, когда
правый конец траектории свободен. Более общие задачи
оптимального управления, когда, например, правый конец
траектории закреплен или подвижен, или имеются какие-
либо другие ограничения на фазовые координаты и управ-
управление, могут быть сведены к задаче вида A) — C) с помощью
штрафных функций (см. § 5.12 из [4] или § 4, п. 8).
Например, если задача A) —C) рассматривается при
дополнительном условии х(Т) = х\ (правый конец закреп-
закреплен), то в качестве штрафной функции для этого условия
можно взять
Pk(u)=*Ak\x(T, u)-xi\\ fe=l, 2, ...,
и рассмотреть задачу минимизации функции
®k(u) = if*(x(t9 и), u(t), t)dt +
to
+ Ф(х(Т, u)) + Ak\x(T, a)-*i|a
при условиях A) — C); здесь и ниже {А&}-- некоторая
заданная положительная последовательность, стремящаяся
к бесконечности. Нетрудно видеть, что если функции /°,
/, Ф удовлетворяют условиям теоремы 1, функция Ф*(н)
дифференцируема и ее градиент определяется той же
формулой A1), нужно лишь условие A3) для if (Г, и)
103
заменить на
¦ (Г, и)=-Фх(х(Т, u))-2Ak(x(T, и)-хг).
Если задача A) —C) рассматривается при дополни-
дополнительных фазовых ограничениях вида
ai^x^t, u)^bi, to^tz^T, i = l, m, m<n, D2)
где ah bi — заданные постоянные, то штрафом может слу-
служить функция
m T
^(«) = ^SJ[(maxj^ft и)-ЬЛ 0}J +
+ (max {о*-**('. u)\ 0}J]dL
Тогда задача A) —C), D2) сведется к решению последо-
последовательности задач минимизации функции
(x(tt u)t u(f)% t)dt +
(Т. и))9 k=l, 2, ... D3)
при условиях B), C), где
m
F°k(x9 и, 0==/°(^ и, 0 + ^2 [(max {^-6i; 0}J +
+ (max{ai-xi\ О}J].
При каждом &=1, 2, ... задача D3) B), C) имеет тот
же вид, что и задача A) —C). Заметим, что
Flu = П* Flxi(x, и, 0=/> (*, Щ 0 +
+ 2ЛАmax {я1 — Ъь\ 0} — 2ЛЛтах{а,— х{\ 0},
Отсюда ясно, что если функции /°, /, Ф удовлетворяют
условиям теоремы 1, то и для задачи D3), B), C) также
будут выполнены условия теоремы 1, и формула градиента
для функции D3) будет определяться теми же формулами
D), A1)— A3), нужно лишь в них /° заменить на Н-
Если задача A) —C) рассматривается при дополни-
дополнительном условии
\t9 и), u
104
то штрафной функцией для этого неравенства можно взять
Pk(u) = Ak(max{g(u); О}J.
Возможно использование и других штрафных функций,
аналогичных приведенным в § 5.12 из [4]. Комментарии
к методу штрафных функций, сделанные в § 5.12 из [4],
сохраняют силу и для задач оптимального управления.
Отметим, что метод штрафных функций может быть
использован не только для численного решения задач
оптимального управления при самых различных ограни-
ограничениях, но и для получения условий оптимальности
в таких задачах, для доказательства принципа максимума
и т. д. [217, 218].
Упражнения. 1. Рассмотреть задачу минимизации функции
т
/(и) = 5 u*(t)dt
при условиях B5) —B7) и с закрепленным правым концом траекто-
траектории: x(T) = xl\ моменты Т и точка х1 заданы. Применить метод
штрафных функций для учета условия на правом конце; найти гра-
градиент штрафной функции.
2. Доказать, что при выполнении условий теоремы 1 функция
A) при условиях B) дифференцируема по переменной х0 е Еп, и по
совокупности переменных (л:0, u)&EnxL[[tQt 71]; найти градиент.
3. Рассмотреть функцию
т
°(x(t, w), w, t)dt + O(x(T9 w))
при условиях x(t) = f(x(t), w, Оэ to^t^T; x(to) = x0, w = (w\ ...
..., wr) — управляющие параметры, не зависящие от времени. Пока-
Показать, что если функции /°, /, Ф непрерывны и имеют непрерывные
частные производные по х, w и j/(* + A*, w, t) — f(x, w, t)\^L\Ax\
при всех (д: + Ал;, wt t), (x, wt t) ^ EnXErX[tOi T]t то функция J (w)
дифференцируема и ее градиент равен
т
Hw(x(t, w). wt tt y(t, w))dt,
где H{xf wy t, г|з) = /о(л, w, t)+(f(x, ш, 0» ^)» ty (U ^) —решение
задачи
y(t) = -Hx(x(t, w)t wt t,t(t)), t^t^T; Ч>(Г) = Ф,(*G\ к))-
Указание: воспользоваться техникой доказательства теоре-
теоремы 1.
4. Пусть выполнены все условия теорем 3,4 (кроме, быть может,
условия D0)) и пусть (/ = |м = и @ е L?[70, 71]: и (t) e V почти
всюду на [tOt Г]|, где V — выпуклое множество из Ег. Доказать, что
тогда принцип максимума является необходимым и достаточным
условием оптимальности в задаче A)—C), C4).
105
Указание: доказать выпуклость функции Н (х, и, t, ф) по и
и воспользоваться неравенством C8).
1
5. Пусть J (и) = [ (и2 (t) — ax2 (/)) dt9 где x(t) = u (t) е= L2 [0, 1],
о
x @) = 0, а —постоянная. При каких значениях параметра a функ-
функция / (и) будет выпуклой или сильно выпуклой на L2 [0, 71]? Пока-
Показать, что J (и) е С1'1 (L2), и найти градиент.
6. Пусть функции /° (х, и, /), / (х, и, /), Ф (а;) непрерывны по
(a;, ut t)^EnxErX[t0, Г], выполняется условие E) и |/°(х, u + h, /)—
— /°(х, и, OI^Mi А|2 + |и| |Л|), L = const^0, при всех (х, и + Л, /),
(х, ut t) (=EnxErx[tQ> T]. Доказать, что тогда функция A) при
условиях B) непрерывна на L'2[tQi 7] в метрике этого пространства.
7. Пусть функции f°(x, uy t), Ф (х) непрерывны по (х, и, /) е
??лХ^Х[1у, 71], f° (х, и, t) выпукла по переменной и <= Ег при
каждом фиксированном (я, t) ^ EnX[t0, T]. Доказать, что тогда
• функция A) при условиях C4) достигает своей нижней грани на
любом выпуклом замкнутом ограниченном множестве U с L? p0, 74.
Указание: установить, что J (и) слабо полунепрерывна снизу на
8. Пусть выполнены все условия теоремы 4 (кроме, быть может,
условия D0)), V — выпуклое замкнутое ограниченное множество из
L?[70, 71], функция g(x, t) непрерывна по (х, t)^Enx[t0, T] и вы-
выпукла по х е Еп при каждом фиксированном t e [f0, T]. Пусть су-
существует хотя бы одна траектория х {t, и0) задачи C4), ии е U, такая,
что g(x(t, u0), t)^0 при всех t <= [tOf T]. Доказать, что тогда функ-
функция A) при условиях C4) и ограничении g(x(t} u)f t)^0, to^t^
^ Ту достигает на U своей нижней грани.
9. Пусть /°(*, «, t) = a(x, t) + (b (x, t), и), f (x, uf t)=*A(x, Q
В ( t) А ( t) В ( t) b ( t)
у /(, , ) (, ) + ( (, ), ), f (, f )(, Q +
+ В (xt t)u и пусть матрицы А (х, t), В (xf t)t b (x, t) — порядков
/iXl, nxr, пХ\ соответственно и функции a (xt t), Ф (х) непре-
непрерывны по (х, 0е?яХ[/о, Т], \\A{x, i)\\^Co\x\ + Clf \\B(xt t)\\^
г^С2, гДе Q» ^i» C2 — неотрицательные постоянные. Пусть (/ — вы-
выпуклое замкнутое ограниченное множество из L^ [70, Г! и существует
управление uo^U такое, что соответствующее решение я (/, и0) за-
задачи B) удовлетворяет условию х(Т, wo) = a:i. Показать, что тогда
функция A) при условиях B) и дополнительном условии х(Т, и) =
= *1 достигает своей нижней грани на U. Указание: установить,
что если {пь\ — минимизирующая последовательность, слабо сходя-
сходящаяся к точке и#| то J (Uk)-**J (и#).
§ 6. Градиент в одной дискретной задаче
оптимального управления
1. Рассмотрим следующую задачу оптимального управ-
управления с дискретным временем: минимизировать функцию
106
при условиях
if щ)у / = 0, N — 1; хо = а, B)
t = 0, Л7 — 1> C)
где *, = (*), ..., *?)• и( = (и\у ..., Щ)у функции Ft =
= (FJ, ..., F"), F?, Ф предполагаются известными, У,- —
заданное множество из Егу натуральное число JV^l и
начальная точка а заданы.
Задача A)—C) уже изучалась нами выше: в § 7.1 [4]
с помощью динамического программирования исследова-
исследовалась проблема синтеза для этой задачи. В настоящем
параграфе сформулируем достаточные условия дифферен-
цируемости, выпуклости функции A) при условиях B),
C), а также выведем необходимые условия оптимально-
оптимальности. Будем пользоваться следующими обозначениями:
fF)xi ... Flixn\
, рп р".
\П*~Пг V\
iuj
Через L%[0, N] обозначим гильбертово пространство век-
вектор-функций дискретной переменной [щ] = {и0, иъ ..., uN-±)
со скалярным произведением ([щ], f^]>i2= ^j (и*> v^Er
1 = 0
/N-l \l/2
и с нормой J [щ] I = ( 2 !и* \ег • Пусть U — множество
\t=0 " /
всех дискретных управлений [щ] = (и0, ..., uN~i)y удов-
удовлетворяющих условию C); очевидно, U^L[[09 N].
Заметим, что A) представляет собой функцию Nr пе-
переменных иОу иъ ..., uN-v Если функции Ft (x, и) непре-
непрерывны, a Ft, Ф полунепрерывны снизу по совокупности
переменных (ху и) еEnxVj> множества Vt замкнуты и
ограничены в Егу / = 0, Л^—1, то функция I([щ]) полу-
полунепрерывна снизу и существование оптимального управ-
107
ления [til*], на котором функция A) достигает своей ниж-
нижней грани при условиях B), C), следует из теоремы :\Л.
Для приближенного решения задачи A)—C) могут Сыть
использованы методы гл. 5 из [4]. Из-за большого числа
переменных задачу A)—C), по-видимому, удобнее рас-
рассматривать в пространстве L?[0, ДО], считая функцию A)
зависящей от ДО векторных переменных и0, иъ ..., uN.v
Выведем формулу градиента функции A) при усло-
условиях B), C) в пространстве L?[0, ДО].
Теорема 1. Пусть функции F?, Fiy Ф непрерывны по
совокупности своих аргументов вместе со своими частными
производными по переменным х, и при х е Еп, и <= Vи
* = 0, ДО —1. Кроме того, пусть
\Er) D)
при всех xt х-\-Ах и всех и, m + /igF,-, i' = 0, ДО — 1.
Тогда функция A) при условиях B), C) непрерывна и диф-
дифференцируема в норме Ь[[0у ДО], причем ее градиент
Г ([щ]) в точке [щ] е U представим в виде
I'([Ui]) = {Hiu(xh %, щ), f = 0f Л/-1}еД[0, ДО], E)
где
Hi(x, % u) = Fl(x, u) + ($, Ft(xt и)),
[xi] = (x0, ..., xN) — дискретная траектория задачи B),
соответствующая выбранному управлению [щ] е (/, а век-
вектор-функция [\pi] = (ij)-!, г|H, ..., ^Ar-i) определяется из
условий
ty-i = HiX(xh %, щ), 1 = 0, ДО-1, %-1 = Ф^(^). G)
Доказательство. Пусть [«,], [а,-] + [/гг-] е(/и пусть
[х,-] и [xt] + [Д^] — соответствующие этим управлениям ди-
дискретные траектории задачи B), а / ([«/]) и / ([^] + [Л;]) =
= / ([щ]) + Д/ — соответствующие значения функции A).
Из B) следует, что приращение [Ал:,] удовлетворяет
условиям
FiiXi, щ),
t = 0, ДО-1, Дл:0 = 0. (8)
Так как Ф(л; + Да:)~Ф(а:) = <Ф^(л: + е Дх), Дд;>,
J08
то из A) получим
А/ = S 1Л (х, + Axh и, + А,) - F? (*,-, u,)
+ <Ф*(*л'), AxN) + Rlt (9)
где
/?1 = <Ф*(*лг + еД*лг)-Ф*(*лг), Ддсдг). (Ю)
С учетом соотношений G), (8) имеем
i 0
N — l
- 2 (Hix(Xi, %, ^), Ал:/).
t = 0
Подставляя полученное выражение в (9) и используя
функцию Яг- (я, я|), а), получим следующее представление
для приращения функции:
N — 1
i=0
— (Hix{xu %, M/)f A^
Из формулы конечных приращений следует
0< 0^ ^ 1, ? = 0, W—1.
Подставим это равенство в предыдущее представление
для А/; будем иметь
А/= ^ <^«(^,*ь^),А/> + /?, /? = «i + /?2 + /?8, (И)
Л—1
/?«= Д] (Я^^ + бгАл;,-, %, и, + в,А,)-
-Н1х(х„ %, и,). Ал:,), A2)
N — 1
-Htu(xit %, щ), hi). A3)
109
Для оценки остаточного члена R формулы A1) нам по-
понадобится одна лемма, представляющая собой дискретный
аналог леммы 2.2.
Лемма 1. Если некоторые величины yh i = OtN, удов-
удовлетворяют неравенствам
то справедлива оценка
если же
т=0
N — 1
0, Л^ — 1, A4)
, N,
A5)
t = 0, N-l;
то верна оценка
— 1.
A6)
A7)
Доказательство можно провести по индукции. При
k = 0 по условию 0 ^ ф0 ^ а. Если неравенство 0 ^ ф^ ^
+ &)m верно при всех m = 0, f, to из A4) следу-
следует
a(l+6)m = a
1. Аналогично
т 0
можно убедиться, что из A6) вытекает оценка A7).
Продолжим доказательство теоремы 1. Из соотноше-
соотношений (8) для [Axi] с учетом условия D) имеем
4+1
(Ад:т+1 - Ал:т)
т=0
1 ~ &хт)
i; i^
m = 0
iV-1
Полагая в A4), A5) a^
получим оценку
ЛГ-1
\Ы\* ft = (l+L), Ф, =
A8)
110
Из условий теоремы следует непрерывность функций Ф^,
Htx, Hiu по совокупности своих аргументов. Тогда с учетом
опенки A8) из выражений A0), A2), A3) заключаем, что
остаточный член R в формуле A1) имеет порядок o(|[Aj]f).
Таким образом, в формуле A1) приращения функции пер-
первое слагаемое является линейной ограниченной функцией
на L\ [0, N] относительно [hi], а второе слагаемое имеет
порядок o(l[hi]\). Это значит, что функция A) при усло-
условиях B), C) дифференцируема и ее градиент имеет вид E).
2. Зная формулу градиента, нетрудно расписать методы
минимизации применительно к задаче A)—C). Например,
метод проекции градиента здесь приводит к построению
последовательности [Ui]k = (uok, ..., Ujv-ltk) по формулам
где ak>0 выбирается, как в § 4 п. 2; [xt]k = (xoki ..., xNk)9
№]* = СФ-i.*. • •> ^-i,a) — решения задач B) и G) соот-
соответственно при [ui] = [ui]k.
Приведем достаточные условия для того, чтобы гради-
градиент функции A) при ограничениях B), C) удовлетворял
условию Липшица.
Теорема 2. Пусть выполнены все условия теоремы 1
и пусть функции Фх, Fix, F'}x, FiUi F}u удовлетворяют
условию Липшица по совокупности (х, и) е Еп X Vt с кон-
константой L > 0, i = 0, Л^ — 1. Пусть, кроме того,
\Fi(x, и)\^Аг + А2\х\; Аъ А2 = consts*0, A9)
при всех х е Еп, и е Vx-, и множества Vt из C) замкнуты
и ограничены в Er, i = 0, Л^ — 1. Тогда градиент функ-
функции A) дгра ограничениях B), C) удовлетворяет условию
Липшица.
Доказательство этой теоремы полностью аналогично
доказательству теоремы 5.2; предлагаем читателю прове-
провести его самостоятельно.
3. Используя полученную формулу градиента, выведем
необходимые условия оптимальности для задачи A) — C).
Теорема 3. Пусть выполнены все условия теоремы 1.
Пусть [щ*] —оптимальное управление, [Xi*}~-соответст-
[Xi*}~-соответствующая ему траектория системы B), т. е. I ([щ*]) =
= inf/([«,•]), где нижняя грань берется по всем [и{\ из ус-
условий B), C). Пусть [i|)/#] — решение задачи G), соответ-
Ш
ствующее управлению [щ#]. Тогда необходимо выполняются
неравенства
#*«(*<*. %*> "«*), и,--и**>^°. i = 0, Л/-1, B0)
всех щ е V,-, для которых направление е—щ — щ*
является возможным для множества V г в точке щ#, при-
причем если щ%—внутренняя точка множества Vu то
Hiu(Xi*, %*, м**) = 0; B1)
функции Hi(x, \|>, а) определяются равенствами F).
Доказательство. Положим в формуле (И) я* =
= ***> % = fpi#, W/ = И/,; получим
S B2)
Пусть Wf — произвольная точка из V,-, для которой и,-# +
+ а(^ —Mi#) e 1/^ при всех а, 0<а^а0. Возьмем в B2)
[М (° ° Ы{щ-иы)у 0, ..., 0). Очевидно, при
[М ( {ы)
таком выборе [hm] управление [«ij + [ftjs?/, ив силу
оптимальности [щ*] из B2) тогда получим
0 <Д/= <#
Поделив обе части этого неравенства на а>0 и перейдя
к пределу при а-> + 0, сразу придем к неравенству B0).
Если м,-# — внутренняя точка Vu т0 в B0) можно поло-
положить щ да ^^ — еЯ,-и (х,-#, я|?/#, «/,>) s Ft при некотором
е>0, 4fo сразу приведет к равенству B1). Если Vi —
выпуклое множество, то условие B0), очевидно, выпол-
выполнено для любого щ е Vt. Если Vi выпуклы при всех
t' = 0, 1, ..., W— 1, то неравенства B0) в силу формулы
E) равносильны одному неравенству (/'([««*]), [щ] —
— [^i*])rr^O при всех [щ} е (У, что совпадает с условием
•2
оптимальности из теоремы 2.5.
Таким образом, согласно теореме 3 оптимальным может
быть лишь управление [м,-#] е t/, удовлетворяющее усло-
условиям B0). Однако, как связано управление [щ#] с экстре-
экстремальными точками функции Нь(хг^, г|^*, и) на множестве
Vu условия B0) на это не дают ответа. В частности, воз-
возникает естественный вопрос: нельзя ли по аналогии
с системами с непрерывным временем утверждать, что
112
оптимальное управление [щ*\ удовлетворяет принципу
минимума
Hi(Xi*> %*, w**)= min Hi(Xi*, tft#, u)9 / = 0, tf-l
B3)
(чтобы здесь, как и в гл. 6 из [4], можно было говорить
о принципе максимума, нужно изменить знаки функций
#,, %). Ведь необходимое условие оптимальности тем
ценнее, чем меньше управлений, подозрительных на опти-
оптимальность, оно выделяет. В этом смысле условие B3)
явно имело бы преимущество перед условиями B0), так
как неравенства B0) могут выполняться не только в тех
точках, где имеет место B3), но и в других точках,
в которых, например, Я,-в(х,-#, %*, *//#) = 0. К сожалению,
оказывается, в управляемых системах с дискретным вре-
временем принцип минимума, вообще говоря, не имеет места:
на оптимальном управлении функция #,-(;<;,•*, %*, и) мо-
может и не достигать своего абсолютного минимума по и еК«.
Пример 1. Пусть фазовое состояние системы описы-
описывается двумя координатами (я,-, 0,-), t = 0, I, 2, причем
Пусть требуется минимизировать функцию / (и0, иг) =
= — у2 = Ф (хъу у2) при условии [щ] = («о» и±) ^ U =
= \(и0, Wi): |м^|^5, t = 0, 1}. Нетрудно вычислить явное
выражение / («0, "i) = 3 (и0 + 2J — и\ + 6. Отсюда следует,
что оптимальное управление («0*» wi*) имеет вид: н0# =
== — 2, «i^ = 5 (возможность иы = — 5 предоставляем чи-
читателю рассмотреть самостоятельно). Оптимальная траек-
траектория тогда такая: #0:}: = 3, я1# =—1, х2* = 9; г/0}{: = 0,
Ух* = — 5, 02* =— 19; минимальное значение функционала
равно /* =— 19.
Составим функцию Ht (х,-, 0Ь if)^-, ^2i) = Ч3^ (^* + 2w,-)+
Н? !)• Система G) здесь имеет вид
Подставив сюда оптимальные (***, 0^), получим г|?11а|в = 0t
%2 1 1 Т Я(
|* # 0*ф*
. Как видим, на оптимальном уп-
ИЗ
равлении w = ^0* = — 2 функция #о(#о*, Уо*> tyio*, ^20*, «)
достигает своего абсолютного максимума, в то время
как ее минимальное значение при |н|^5 достигается
в точке и — Ь. Таким образом, для управляемых систем
с дискретным временем принцип минимума, вообще го-
говоря, не имеет места.
4. Рассмотрим задачу оптимального управления линей-
линейными дискретными системами: минимизировать функцию A)
при условиях B), C), если
Ft (xh щ) = AiXi + BtUi + fi9 i = 0, N - 1, B4)
где Ah Bh fi — заданные матрицы порядков nXn, nXr и
nxl соответственно.
Теорема 4. Пусть функции F?, Ф удовлетворяют
условиям теоремы 1. Тогда функция A) при условиях B),
C), B4) дифференцируема в LafO, ЛГ| и ее градиент
Г ([щ]) в точке [щ] вычисляется по формуле
щ) + В1%, i = 0, tf-1}, B5)
где [^] = (д-0, ..., xN) —решение задачи B), соответствую-
соответствующее выбранному управлению [щ], а [яр,-] = (ф-i, ..., г^л^-i)
определяется из условий
%_х = A J % - fL (xh щ)9 i = 0, ЛГ— 1, if^.x = фл (Xjv)f
B6)
матрицы At, Bi получены транспонированием матриц
Aiy Bt. Если, кроме того, ФХу F°ix, F°iu удовлетворяют ус-
условию Липшица по совокупности (х, и) ^ЕпхЕг, то гра-
градиент Г ([щ]) удовлетворяет условию Липшица на всем
пространстве ??[0, N].
Формулы B5), B6) вытекают из теоремы 1; условие
Липшица для градиента доказывается аналогично тому,
как это делалось в теореме 5.3.
Укажем достаточные условия выпуклости и сильной
выпуклости функции A) при условиях B), C), B4).
Теорема 5. Пусть выполнены условия B4), функция
Ф (х) выпукла по х на Епу a F°i (x, и) выпукла по совокуп-
совокупности переменных (х, и), т. е.
< aF°c (х, и) + A - a) F? (у, v) B7)
114
при любых ху у<=Еп, и, UE^aGfO, 1] и i = О, N — 1.
Тогда функция A) выпукла на Ц[0у N]. Если при этом
функции Ф, F\ удовлетворяют условиям теоремы \, мно-
множества Vi9 1 = 0, N — ly выпуклы, то для оптимальности
управления [и(%] необходимо и достаточно, чтобы
иы) + fif%*, и/ - иы) ^ 0, B8)
Доказательство. Решение задачи B), B4), оче-
очевидно, обладает свойством x-t (ос [^/] + A — а) [и,-]) »
= o«Ci([Mi]) + (l — а)^/ ([fj), * = б] Л/^ при любых а и
любых [щ], [fi]GL5[0, Л^]. Тогда выпуклость функ-
функции A) на Z,2[0, A^J является простым следствием выпу-
выпуклости Ф(лг) и условия B7). Условие оптимальности B8)
вытекает из теоремы 2.5 и формулы B5). С помощью
теоремы 3.8 аналогично доказывается
Теорема 6. Пусть выполнены условия B4), функция
Ф (х) выпукла по х^Еп и, кроме того,
x = const >0,
любых ^,!/g ?Л, и, v ^Er, aE[0, 1 ] и i' = 0, Л^ — 1 •
Тогда функция A) сильно выпукла на Lr2[0, N] и задача
A)—C), B4) имеет, и притом единственное, решение на
любом замкнутом выпуклом множестве (/^L?[0, N].
iV—1
Упражнения. 1. Доказать, что / ([щ]) е= a ^ I wi I 2 +
t = 0
N— 1
2 ^ при условиях B), B4)
дважды дифференцируема в L? [0, Л^]. Доказать, что если при этом
а, р, 7^0, то /([**/]) выпукла, а если а>0, Р, 7^0» т0 сильно
выпукла на L% [0, N].
2. Пусть выполнены все условия теоремы 5. Доказать, что тогда
условие B3) является необходимым и достаточным условием опти-
оптимальности в задаче A) —C), B4).
115
§ 7. Оптимальное управление
процессом нагрева стержня
Рассмотренные в гл. 6, 7 из [4] и §§ 1.2—1.5 задачи
оптимального управления относились к управляемым си-
системам, описываемым обыкновенными дифференциальными
уравнениями. В приложениях также возникает большое
количество задач оптимального управления процессами,
описываемыми дифференциальными (или интегро-дифферен-
циальными) уравнениями с частными производными. Таким
задачам посвящена обширная литература, для широ-
широких классов таких задач исследованы вопросы существо-
существования и единственности оптимального управления, полу-
получены необходимые и достаточные условия оптимальности,
разработаны методы их решения [22, 23, 28, 46 — 48, 50,
52/54, 55, 59, 62, 63, 92-96, 103, 108, 114, 120, 123,
124, 129, 131-133, 142, 146, 147, 149-152, 155, 166,
170-180, 200, 201, 208, 214, 227, 231] и др. Ниже бу-
будут рассмотрены некоторые из таких задач. В этом пара-
параграфе мы займемся задачами оптимального управления
процессами, описываемыми параболическими уравнениями.
Такие задачи возникают при изучении управляемых про-
процессов теплопроводности, диффузии, фильтрации и т. д.
[46-48, 59, 93, 95, 213].
1, Будем рассматривать задачу, которая в теплофизи-
ческих терминах может быть сформулирована следующим
образом. Имеется однородный стержень 0^s^/, левый
конец s — 0 которого теплоизолирован, на правом конце
s = / происходит теплообмен с внешней средой и, кроме
того, в стержне имеются источники (или стоки) тепла.
Через x = x(s9 t) обозначим температуру стержня в точке
s в момент t. Пусть x(s, O) = cp(s), O^s^/-—распреде-
O^s^/-—распределение температуры в стержне в начальный момент вре-
времени ? = 0. Требуется, управляя температурой внешней
среды и плотностью источников тепла в стержне, к за-
заданному моменту Г>0 распределение температуры
в стержне сделать как можно ближе к заданному рас-
распределению y(s), 0^s=sc/.
Математическая формулировка этой задачи: требуется
минимизировать функцию
J(u) = {\x(st 7\ u)-y(s)\*ds A)
о
116
при условии, что x = x(St ?, и) является решением крае-
краевой задачи
(s, /)eQ = {0<s</, 0<^Г}, B)
C)
\ D)
*к-о = ф(«), O^s^/, E)
где а2, /, v, T — заданные положительные величины; p (/)—
температура внешней среды, / (s, /) — плотность источни-
источников тепла; предполагается, что и = (р (/), /(s, t)) — управ-
управление— принадлежит множеству ?/, состоящему из пар
(р@, /(s, /)) таких, что
p = /7(/)eL2[0, Г], pmm^p(t)^
ПОЧТИ ВСЮДУ На [О, Г]", F)
R\ G)
где Ртш<Ртах, ^ > 0 —заданные числа; ф(в), #(s)e
eL2[0, /].
Для краткости обозначим Я = L2[0, Т] xL2[Q] —гиль-
—гильбертово пространство пар u = (p(t)> /(s, /)) со скалярным
произведением
и с нормой \и|я = «и, «>яI/2 = ^ у
При каждом фиксированном управлении и = (р, f)^H
из краевой задачи B) — E) однозначно определяется соот-
соответствующее решение x(s, t) = x(s, ty и). Так как управ-
управление u = (p(t)> /(s, t))^H может иметь бесконечно
много разрывов, то классического решения задачи B)-—
E) может не существовать. Поэтому решение этой крае-
краевой задачи будем понимать в обобщенном смысле.
Обобщенным решением краевой задачи B) —E), соот-
соответствующим управлению u = (p(t), f(s, t))^H, называ-
называется функция x(s, t)=x(s, t, u) efl1-0 (Q), имеющая следы
x(s, -)eL2[0, Т], непрерывные в метрике L2[0, Т] при
всех se[0, /], следы x(-, t)^L2[0, /], непрерывные
в метрике L2[0, /] при всех t е [О, Т], и удовлетворяющая
П7
интегральному тождеству
\x(st T)^(sy T)ds-\<p(s)ty(s, O)ds~
о о
S $ dsdt- S
Q
T
-a*v\(p(t)-x(l9 t))q(l, t)di = O
о
при всех \|) = \|)(s, t)^Hx(Q), и, кроме того, след х(-у t)
при t==0 совпадает с функцией cp(s) почти всюду на
[О, /].
Можно доказать, что при каждом и^Н краевая за-
задача B)—-E) имеет, и притом единственное, решение —
по этим вопросам отсылаем читателя к работам [139, 157,
213]. Можно также доказать, что если последовательность
{^}еЯ слабо в Н сходится к и, то J (uk)-^J (и), т. е.
функция A) слабо непрерывна на Я. Отсюда и из тео-
теоремы 3.2 следует, что в задаче A) —G) множество U* оп-
оптимальных управлений непусто.
Покажем, что функция A) дифференцируема в Я. Для
этого возьмем произвольные управления и = (р, /), u + h —
= (р + Ар, / + Д/)е=Я. Пусть x(s, t, и), x(s, t, u + h)—
соответствующие этим управлениям решения краевой за-
задачи B) —E). Обозначим Ax(s, /) = x(s, ty u + h)—x(s, t).
Из B) — E) следует, что Ах (s, /) является обобщенным
решением краевой задачи
Axt = a2Axss + Af, (s, *)<=(?, (8)
^T, (9)
A0)
Тогда приращение функции A) можно записать в виде
i
= j(|*(s, T, u) + Ax(s, T)-y(s)|»-
0
/
|*(s. T9 u)-y(s)\*)ds = l2(x(s, Г, и)-
0
- у (s)) Ax (s, T)ds + {\Ax (s, T) |« ds. A1)
0
118
Покажем, что
г
$2(x(st 7\ u)-y{s))bx(s%
о
A2)
где ty(s, /, m) = \|)(s, /) —обобщенное решение следующей
вспомогательной краевой задачи:
* = —<*|^, (s> O^Q, A3)
^U = 0, ^U = —vi|)(/, /), 0</<Г, A4)
4>l/-r = 2(jc(s,. T, u)-y(s))y 0<s</. A5)
С учетом условий (8) — A0) и A3)— A5) имеем
\2(x{s, T, u)-y(s))Ax(s, T)ds =
о
/ I ,Т
о \o
s + Ф A/) ds dt =
j J
0 Q
7
-a2v^(/, f, t/)Ap(Od/ + $^(s, /f a)A/(s, t)dsdt.
0 Q,
Равенство A2) получено. Подставляя A2) в A1), будем
иметь
т
&J {и) - [ a2vi|) (/, /, и) Ар @ d/ +
о
+ U $ ф (s, t, и) A/ (s, /) ds dt +1 j Ax (s, T) P ds. A6)
*Q 0
И9
Покажем, что
< С, /$ | Ар @ |2 dt + $ $ I A/ (s, t) \2 ds d/] = Сх (/i !Ь, A7)
где Сх> О — постоянная, не зависящая от выбора h =
= (Ар, Д/)еЯ и н = (р, /) е Я. Для получения этой
оценки умножим уравнение (8) на Ax(s, t) и проинтегри-
проинтегрируем его по прямоугольнику Q. С учетом условий (9),
A0) будем иметь
0= \ \ (Axt-a2Axss-Af)Axdsdt =
Q
i т
s, О)
- J a2
s=G
dt +
-\-a?\\\Axs\2dsdt-\\AfAxdsdt
Q Q
i т
:(s, T)\4s+a2v^\Ax(l, /)
о
т
-a2v\ Ax(l9 t)Ap{t)dt+a2\\\Axs\2dsdi-
o q
q
-\\AfAxdsdU
или
/
1 С
0
1
i
| Ал; (s,
=
- тв2,
0l2ds+a2v
a2v ^ Да: (/,
0
-a2vet \ \Ax
0
\ \ j Ax (s, /J
J|Ax(
0
/) Ар (t)
(/, 012^
/, t)\2dt + a2 \[\Axs\2d,
Q
dt + j j A/ A^ ds d/ ^
«+gJ|Ap@i2d/ +
1 о
0
ex>0, e2>0;
sdt =
A8)
J20
здесь мы воспользовались неравенством ah ^ еа2/2 +
4- Ь2/Bе), справедливым при любых действительных а, Ь
6>0.
Так как
\
TO
T
\\l\ \Ax(l, t)\2dt. A9)
Q 0
В правую часть неравенства A8) подставим оценку A9);
после приведения подобных членов получим
/ т
¦И I Д* (s, Г) I2 ds + (a2v - i a2vex - Ze2) J | Дх (/, <) |2 dt +
о о
Q
T
B0)
Q
Пользуясь произволом в выборе чисел &х>0, е2>0, по-
положим е2 = a28j и 0 < ех < min {1/Z2; 2v/(v + 2/)}. Тогда из
B0) получим оценку A7) с константой
C1 = max{a2v/e1;
Из формулы A6) для приращения функции A) и
оценки A7) следует, что функция A) дифференцируема
в Я и ее градиент имеет вид
Г (и) = (a2vi|)(/, t4 u)\ i|)(s, U и))(=Н9 B1)
причем первая компонента пары B1) является «частной»
производной функции A) по переменной р, вторая ком-
компонента—по переменной /.
121
Как видим, для получения градиента функции A) при
фиксированном и^Н нужно решить две краевые задачи:
сначала из B) —E) надо определить функцию x(s, t, u)t
затем в A5) подставить получившееся x(s> T, и) и из
A3) —A5) найти -ф (s, /, и) и, наконец, полученное
\|)(s, /, и) подставить в B1). На практике для численного
решения краевых задач используют разностные схемы
[33, 153, 154, 190, 193-198, 213] и вместо формулы B1)
получают ее разностный аналог.
Можно показать, что функция A) принадлежит классу
С1'1 (Я), т. е.
\1/2
s, t)\*dsdt)
\ 0 ¦ Q I
,Т Л/2
($ |A(/)|2d/ + $$|A/(, t)\2dsdt) =Llhyt B2)
t) =L
/
где Ai|)(s, t) = ty(st ty u + h) — ^^, t, и). Для доказатель-
доказательства неравенства B2) нужно выписать с помощью усло-
условий A3) —A5) краевую задачу для Ai|)(s, t) и по анало-
аналогии с соотношениями A8), A9) получить
If I Aife (st 0)|2ds + a2vJ|A^(Z, t)\*dt +
s, T)\2ds,
2dsdt + 2l\ |A^(Z, t)\2dt.
0
Отсюда и из оценки A7) сразу следует искомое неравен-
неравенство B2); читателю предлагаем выписать явное выражение
для константы L из B2).
Заметим, что приведенные выше доказательства равен-
равенства A2), оценок A7), B0), B2) нельзя признать вполне
строгими, так как существование некоторых встретившихся
в выкладках интегралов, законность операций интегриро-
интегрирования по частям не всегда вытекают из определения реше-
122
ния рассматриваемых краевых задач и остались необосно-
необоснованными. Для строгого доказательства нужно было бы
сначала сгладить функции u(t), cp(s), /(s, t), //(s), про-
провести указанные преобразования для классических реше-
решений соответствующих сглаженных краевых задач, а затем
перейти к пределу по параметру сглаживания и прийти
к требуемым соотношениям для обобщенных решений крае-
краевых задач. Полная реализация намеченной здесь схемы
строгого доказательства соотношений A2), A7), B0), B2)
довольно громоздка для изложения, поэтому мы здесь
вынуждены ограничиться приведенными выше рассужде-
рассуждениями, а читателя отсылаем за подробностями к руко-
руководствам и монографиям по уравнениям с частными про-
производными [139, 157, 213]. Это замечание сохраняет силу
для аналогичных рассуждений, которые будут встречаться
в последующих параграфах настоящей главы.
2. Имея формулу B1) для градиента, можно написать
условия оптимальности для задачи A) —G), изложить
методы ее решения.
Заметим, что функция A) при условиях B) — E) выпукла
на Я. В самом деле, в силу линейности краевой задачи
B) — E) и единственности ее обобщенного решения имеем
x(s, t, au + (l — a)v) =
= a*(s, t, M) + (l-a)*(sf *, v)\ s, /e=Q, B3)
при всех и, v e H и всех действительных а. Отсюда и из
выпуклости функции \х — у\* переменной х следует, что
функция A) при условиях B) —E) выпукла на
# = L2[0, T]xU(Q).
Кроме того, из F), G) следует выпуклость множества U.
Согласно теореме 2.5 тогда для оптимальности управления
м# = (р# (/), /# (s, t))^U в задаче A) — G) необходимо и
достаточно, чтобы
г
\ a2v^ (/, /, и,) (р @ - р* @) dt +
О
Q
123
при всех u = (p(t), f(s, t))^U. С учетом равенстваA2)
это условие оптимальности может быть переписано в виде
\(x(s, Т, u0)-y(s))(x(s, Т, в).
— x(s, Tf u
u&U.
Для численного решения задачи A) —G) могут быть
использованы методы проекции градиента и условного
градиента (см. § 4).
Метод проекции градиента в задаче A) —G) сведется
к построению последовательности \uk^(pk(t)f fk(s, t))}
по правилу
\РнЩ-
Рш @ =
, t, uk) при pmin ^ pk (t) —
9 t, «Л)
при
Ртах ПРИ
fk(s, t)
, t, uk)<pm\nt
^(lf t, Uk) > pmax,
при \\\fk(st 0-
' B4)
при
uk)\*dsdt\i/2
»(s, /, uk)\*dtds>R*
B5)
(ср. с формулами D.18) и D.18')); выбор параметра <хк
можно проводить с помощью одного из описанных в § 4,
п. 2 приемов. В частности, наличие оценки B2) указы-
указывает на возможность выбора ak из условий D.15):
e>0.
B6)
Метод условного градиента в задаче A) —G) сведется
к построению последовательности {uk — (pk{t), fk(s, t))\
по правилу
/*+i (s, 0 = /a (s, 0 + «ft (f»(s, 0 - /* (s, t)), (s, t)<=Q,
124
где
_/ Pmln ПрИ $(/, t, Uk)^0,
-\ при гИ/, /,«*)<0,
/. <s t) - R^(s> u Uk)
( ^
а параметр ak, 0^а*^1, может быть выбран одним из
указанных в § 4, п. 3 приемов. Вспомогательное прибли-
приближение tik~{pk{t)> ?k(s> t))^U здесь определено из усло-
условия минимума линейной функции
т
(J'(uk), u)H = [a*v$(l9 t9 uk)p(t)dt +
JSf U uh)f(s,i)dsdt
Q
при ограничениях F), G).
Заметим, что из равенства B3) следует, что функция
i
\(x(s, T, uk)-y(s))X
о
X(x(s, T, uk)-x(s, T, uk))ds +
i
+ a*\\x(s, 7\ uk)-x{sy Г, uk)\4s
при х (s, T9 itk) ф х (s, T9 uk) является квадратным трех-
трехчленом относительно переменной а. Поэтому, рассуждая
так же, как при выводе формулы D.25), из условий
/*(аЛ)= min /Л(а), 0<аЛ<1, C0)
получаем
; а!}, C1)
125
где
i
$(*(s, 7\ uk) — y(s))(x{sy 7\ UfJ — xiStT, uk))ds
* _o
jx(s, 7", nk) — x (s, T, Uk)\2ds
т
;ф(/, U tik)iPk(t)-Pk(t))dt
7:
*(s, 7\ йл) —*(s, Г, ы*
(s, /, uk) ("/л (s, 0 -/*(s,
:
:
В случае, когда x(s, T, uk) = x(sf T, uk)y O^s^/, или
a|==0, то tib^Ux —оптимальное управление задачи A) —
G).
Согласно теоремам 4.4 и 4.6 последовательность {uk},
построенная методом B4) —B6) или B7) —C1), является
минимизирующей для задачи A) —G) и слабо в Н схо-
сходится к U*.
На практике приходится пользоваться разностными
аналогами этих методов: встречающиеся в B4) — B6) и
B7) —C1) интегралы вычисляются с помощью формул
численного интегрирования (например, формулы прямо-
прямоугольников или трапеций), а при решении краевых задач
B) —E) и A3) —A5) можно пользоваться, например,
неявной разностной схемой в сочетании с прогонкой
[2, 32, 33, 153, 154, 190, 193—198, 213].
3. Перейдем к рассмотрению более сложной задачи
минимизации функции A), когда наряду с условиями B) —
G) требуется, чтобы температура стержня не превышала
некоторой заданной величины х, т. е.
x(s9 U u)^X, (s, /)e=Q. C2)
Такие задачи возникают при исследовании таких тепловых
процессов, когда перегрев материала выше определенной
критической температуры х не допустим.
Для решения задачи A) —G), C2) можно воспользо-
воспользоваться методом штрафных функций. Для учета ограниче-
120
ния C2) возьмем штрафную функцию
Pa(M) = i4a^|max{jc(s, U и) — *; 0}\2dsdt,
Q
где {Лл} — заданная положительная последовательность,
{Ak}->oo и при каждом &=1, 2, ...будем рассматри-
рассматривать задачу минимизации функции
Ф, (и) = J | х (s, T,u)-y (s) j2 ds + Pk (и) C3)
о
при условиях B) — G). Функция C3) дифференцируема
на Я и ее градиент имеет вид
ФИ«) = (<Л*Ы'. U и)\ ^М,и))е//, C4)
где % (s, /, и) — решение уравнения
qt = -a^ss-2Akmax{x(sy t, u)-X\ 0}, (s, O^Q, C5)
при краевых и начальных условиях A4), A5).
В самом деле, приращение ДФ^ (и) = <3)k(u-\-h)— Фк (и)
здесь представимо в виде
АФ, (и) = $ 2 (х (s, Г, и) - j, (s)) Ax (s, Г) ds +
о
+ \\2Akmax{x(b, t, u)-x\ 0}Ax(s, t)dsdt + Rki C6)
Q
где Ajc(s, /) = a:(s, t, u-\r-h) — x(sy t, и) — решение краевой
задачи (8)-—A0), а остаточный член Rk оценивается так:
i
|#*K$|A*(s, T)\*ds + 2Ah§\bx(s9 t)\*dsdt. C7)
0 Q
При выводе соотношений C6), C7) мы воспользовались
тем, что функция g(z) = (max {г; О}J имеет производную
gf (г) = 2 max {г; 0}, и неравенством |тах{г + Дг; 0} —
— max {г; 0} | ^ | Аг|.
Справедливо равенство
о
\\ypk(s, U u)Af(s, t)dsdt —
о
s, t, u)—x\ U}Ax(s, t)dsdtf
127
которое следует из условий (8) —A0), C5), A4), A5) и
доказывается так же, как аналогичное равенство A2).
С учетом этого равенства из C6) получим
т
ДФ* (и) = $ a2v% (/, /, и) Ар (t) dt +
о
ЭД , t)dsdt + Rk. C8)
Из оценок C7), A9), B0) следует, что \Rk\^\
Ck = const ^0. Отсюда и из C8) вытекает дифференци-
руемость функции C3) и получается формула C4).
Как видим, формула C4) вполне аналогична фор-
формуле B1), и поэтому нет ничего удивительного в том, что
методы проекции градиента и условного градиента для
задачи C3), B) — G) реализуются по тем же формулам B4),
B5) и B7) - B9) с заменой t|? на %.
4. В рассмотренных задачах при выводе формулы градиента
важную роль играли вспомогательные краевые задачи вида A3)—A5)
и C5), A4), A5), которые принято называть сопряженными краевыми
задачами, соответствующими исходной задаче оптимального управле-
управления. Возникает вопрос, откуда берется сопряженная краевая задача,
по каким правилам она составляется?
Здесь мы приведем некоторые эвристические соображения, помо-
помогающие в составлении сопряженной краевой задачи, установим связь
между решением сопряженной краевой задачи и множителем Лагранжа
задачи оптимального управления. Все построения проведем на при-
примере задачи A)—E), считая, что
и = (р, /)g=?/ = #=L2[0, T]xL2(Q).
Следуя уже известной нам процедуре исследования задач на условный
экстремум (см. §§ 2.2, 4.8, 4.9, 6.2 из [4] и § 2), составим функцию
Лагранжа задачи A)—E):
L{x, р, /, W j $
+ a?xss(st t) + f{s, i))dsdt, C9)
где г|з (s, t) — множитель Лагранжа, соответствующий ограничению B).
Будем предполагать, что функции х (s, t), ip (s, t) являются достаточно
гладкими на Q={(s, t): O^s^/, O^t^T}. Поскольку уравне-
уравнение B) уже учтено в C9), то от функций х (s, t) и р if) будем требо-
требовать лишь удовлетворения граничным и начальным условиям C)—E);
дополнительные условия на функцию i|) (s, t) будут наложены ниже.
Дадим приращения (вариации) переменным х, р, f, т. е. рас-
рассмотрим __ функции x(s, t) + Sx(s, Of P@ + 6p(*)i /(s, O'+*/(s, 0.
(s, /) e ft удовлетворяющие условиям C)—E). Тогда
0), &r|/-o = O. D0)
128
Вариация функции Лагранжа C9), представляющая собой глав-
главную линейную часть приращения этой функции, имеет вид
6L=J2(a:(s, T)-y(s)Nx(s,
Учитывая условия D0), преобразуем двойной интеграл с помощью
интегрирования по частям. Получим
, Г) —y(s))—^(s, T)]6x(s, T)ds +
(*/ + a2^ss) бх ds dt + [Ш ds dt +
Q
T
\ (v* (/, 0+ *,('. t))bx(l, t)dt +
0
T T
+ a2v U (/, 0 6p (t) dt + ^s(O, t) 6x @, /) dt.
о о
Считая, что в оптимальной точке выполняется условие стационар*
ности oL*=0, и пользуясь достаточно большим произволом в выборе
ЙE, t)t приравняем нулю коэффициенты при вариациях 6*(s, Г),
(s, 0, охA, t), Ьх @, t) и придем к условиям для множителя
Лагранжа ib (s, /), полностью совпадающим с сопряженной краевой
задачей A3)—A5); приравнивая нулю коэ(Ьфициенты при бр (t)^ и
6f(s, t)% получим условия г(?(/, /) = 0, \|>(s, 0 = 0, которые согласно
формуле B1) означают равенство J' (и)«=0 — условие оптимальности
в задаче A)—E) при u&U — H.
Изложенный на примере задачи A)—(б) подход к получению
сопряженной краевой задачи применим для широкого класса задач
оптимального управления процессами, описываемыми как обыкновен-
обыкновенными дифференциальными уравнениями, ?&jt и уравнениями с част-
частными производными. Этот подход кратко можно Сформулировать в ё
следующих правил:
1) сначала нужно записать задачу минимизации Ь виде
у («)-^inf, м*, w, 5)«o, |6G/, f-THKi h[x, u)=*o9
где Oiг- заданная область из евклидова пространства ?л/, л:«=д:(|)=в
= (^A)' •••» лЛ(Й)— фазовые переменные, и-й^ ...,^(|)) —
управления, ^/—дифференциальны^ оператор, /^^РПераторы гра-
гранчых началных услвии и составить функцию Лагранжа
L(X, U, ¦) =
Ф. П Васильев
2) затем нужно найти вариацию функции Лагранжа по фазовым
переменным и управлениям с соблюдением граничных и начальных
условий li (#, и)— О, / = 1, р, и с помощью интегрирования по частям
(или с помощью формулы Гаусса —Остроградского для сложных
многомерных областей) с учетом граничных и начальных условий
преобразовать полученную вариацию так, чтобы выражения под зна-
знаками интегралов по областям Gt не содержали частных производных
вариаций фазовых переменных;
3) наконец, пользуясь условием стационарности функции Лаг-
Лагранжа и произволом в выборе вариаций фазовых переменных, при-
приравнять нулю коэффициенты при соответствующих вариациях; сово-
совокупность полученных при этом равенств представляет собой условия
на множители Лагранжа и образует искомую сопряженную краевую
задачу.
Предлагаем читателю, пользуясь этими правилами, самостоятельно
вывести сопряженную краевую задачу для задачи C3), B) —E),
а также для рассматриваемых ниже задач оптимального управления.
Подчеркнем, что приведенные в этом пункте рассуждения, ко-
конечно, не могут считаться строгими и являются лишь полезными
наводящими соображениями при получении сопряженной краевой
задачи, выводе формулы градиента, необходимых условий оптималь-
оптимальности. Для полной строгости нужно еще выполнить большую и труд-
трудную работу и определить, что понимается под решением исходной
и сопряженной краевых задач, исследовать вопросы существования
и единственности решения этих задач, дать строгий вывод формулы
приращения с оценкой остаточного члена и т. п.
5. Выше были подробно рассмотрены задачи оптимального управ-
управления для простейшего уравнения теплопроводности с одной прост-
пространственной переменной. Из этих рассмотрений видно, что хотя
окончательные расчетные формулы, реализующие методы проекции
градиента и условного градиента для ограничений вида F), G),
достаточно просты и удобны для использования на ЭВМ, однако
вывод этих формул связан с довольно громоздкими оценками, и
строгое исследование таких задач является весьма тонким и хлопот-
хлопотным делом. Еще более трудным и громоздким становится исследова-
исследование задач оптимального управления системами, описываемыми более
общими параболическими уравнениями при более сложных функцио-
функционалах, граничных условиях, ограничениях на управления и на
решения. Здесь мы ограничимся лишь приведением формул градиента
для следующей задачи.
Пусть Q — заданная область в евклидовом пространстве Еп пере-
переменных s — (sly ..., sn) с кусочно гладкой границей Г; пусть 1\ и
Г2 —кусочно гладкие части границы Г, не имеющие общих точек,
причем Г1иГ2 = Г (в частности, одно из этих множеств 1\ или Г2
может быть пустым). Пусть /(„ Т — заданные моменты времени.
Обозначим Q={{s, t): seQ, tQ^t^T}. Пусть в Q имеется конеч-
конечное число кусочно гладких поверхностей, разбивающих Q на конеч-
конечное число подобластей Qh i = l, 2, ..., р (случай р=1, Qi = Q не
исключается). Поверхнолъ, которая служит границей для подобла-
подобластей Qi и Qk, обозначим через Tki. Будем считать, что физические
характеристики рассматриваемой области Q (плотность, теплопровод-
теплопроводность, удельная теплоемкость и т. п.) непрерывны внутри каждой
подобласти Qi и могут терпеть разрывы типа скачка лишь на поверх-
поверхностях Тцч
130
Рассмотрим задачу минимизации функции (функционала)
т
t0
^-, ul{s,t))drldt +
т
\ Ф2E, t, x(s, t, и), M2(s,
, J Ф3 (s, * (s, Г, и), w3 (s)) ds D1)
при условиях
1
~Фо(«, /• M*. 0). (s. OsQ; D2)
. 01гЛ| = 0, p^]pw = 0, (s, 0 e Г„; D3)
s« 0 Is e I\ e Ф1 (s» '. «1 (*. 0)|s Grt> ^0 ^ / ^ T; D4)
D5)
* (s, 0 |/=/o = Фз (s, w3 (s)), s €= Q, D6)
^ (s, t) vi , ,4 /" ^^ \ dx (s, 0 ,
где —W~^ e 2j fl*/ (s> ^ cos ^» s" —gi "" производная функ-
функции я по конормали к границе подобласти Qk в точке (s, /); л =
= rt(s, 0 —внешняя для Q^ нормаль в той же точке (s, t) с направ-
направляющими косинусами cos(nfsj, (=1, 2, ...я; [z (s, f)lr —Раз"
ность предельных значений функции г (^, т) при стремлении точки
(g, т) к (s, /) 6 Ги изнутри подобласти Qk и Qi соответственно;
a//(s, 0. ^(s, 0. <P/(s, /, и), c(s, 0. Y(s. 0. ф/(s» ^. z» и) — задан-
ные функции своих аргументов, 2 аИ (s> 0 5/5/ ^а 2 5f» a//s
i,/=1 t=l
= ay7, при всех (s, QeQ, g = (gx, ..., ln)\ a = const>0; afy(s, t)9
bi (s, /) непрерывны внутри подобластей Q и могут терпеть разрывы
типа скачка лишь на поверхностях Г^; функции и = (и0 (s, /),
Mi (s, 0» w2 (s, 0» ив (s)) являются управлениями, подлежащими
определению из условия минимума функции D1). Будем считать,
что щ(s, 0 €= L2 (Q), w?(s, 0eL2(rf) (f=l, 2), «3(s)gL2(Q)h
удовлетворяют ограничениям типа F) или G).
Нетрудно видеть, что рассмотренные выше задачи оптимального
управления для уравнения теплопроводности B) являются простым
частным случаем задачи D1)— D6). Заметим, что некоторые из управле-
управлений Uf (/= 0, 1, 2, 3) могут отсутствовать в задаче D1) —D6), —в
этом случае функции Ф,-, ф; не зависят от иу,
б* 131
Управление и = (и0 (s, /), иг (s, /), м2 (s, t), u3(s)) в задаче
D1) — D6) удобно считать элементом гильбертова пространства Н =
== ^a(Q)X^2 (^i)xL2 (Г2)х12(^)> в котором скалярное произведение
двух любых элементов щ = (wOl- (s, /)» «и* (s> 0» ичХ (s> 0» «з« (s)) (' =
= 1, 2) определяются посредством формулы
, О 2(S» t)dsdt +
т
bj j«n(s, t)u12(stt)dT1dt +
JoTt
7
+ ^ ^ «21 (S» 0 «22 E, 0 dS Л + f *% (S) /
П 1 (S, 0
/ога
а норма —формулой Ц и 1//=» ((«ь «г)^I^2* ^Ри некоторых требова-
требованиях к функциям а,у, ^-, с, y» Фп Ф/ и к области Q можно доказать,
что при каждом и^Н обобщенное решение x(s, t, и) краевой за-
задачи D2) — D6) существует и единственно [139, 157, 213], а функция
D1) при условиях D2) —D6) дифференцируема в Я и ее градиент
имеет вид
; cos (я, sf
2
я, sf) Ф1г
где частные производные ф,-я вычислены для аргументов (s, i%
Ui(s, t)), i = 0, 1, 2, 3, а Ф/м и Ф^—-для тех же аргументов,
с которыми функция Фг- входит в D1), t=0, 1, 2, 3; г|) = \р (s, ^, w)
—решение сопряженной краевой задачи
ь = - 2 (<w»V/+S
[S (ауф),. cos (nTsi) - 2 6,- cos (Oi
+^cos(/C4<) =0, (s, /)бГы;
¦ (s, t)
132
I, /=1
(я, sj + y(s, О Ф - 2 ^ cos v1» s" *
s<=r2
*, t, u), u2(s,
^
s, Г, ц),
Имея формулу градиента и опираясь на общую схему методов про-
проекции градиента и условного градиента из § 4, пп. 2, 3, нетрудно
расписать формулы, реализующие эти методы применительно к за-
задаче D1) —D6).
Упражнения. 1. Рассмотреть задачу A) — E), G), заменив
условие F) на условие p(/)eL2[0, rj,| \ P (t)—p (t) \2 dt^R20, где
р (t) e L2 [О, Т] и число RQ>0 заданы. Описать методы проекции
градиента и условного градиента.
2. Найти градиенты функции A) при условиях B) —E) по каж-
каждой из переменных ф = ф (х) е L2 [0, /], р (/) g I2 [0, /], /(s, /)e
<= L2 (Q) и по совокупности переменных и = (ф (*), р (/), / (s, t)) <= Н ~
= L2 [Of /JX^2№> ^]X^2(Q)« Описать методы проекции градиента и
условного градиента, считая, что р (f), /(s, /) удовлетворяют усло-
условиям B) — E), и, кроме того, фт1п ^ ф (s) ^ фтах почти всюду на
[О, 1\.
I
3. Рассмотреть функцию J{u)=*$A\x (s, Г, и) — f/ (s) |2 ds +
+Pi ( I P @ I2 * + PsJJ I / (s» 0 I2 ds dt ПРИ Условиях B) - E), считая
P,-== const > 0, i = 0, 1, 2; у (s) s La [0, /]. Доказать, что эта функ-
функция сильно выпукла на Я; найти ее градиент; описать градиентный
метод при (/ = Я и методы проекции градиента и условного гради-
градиента при ограничениях F), G).
/
4. Рассмотреть функцию /(/?)«= f|*(s, Г, м)~у (s) |2 ds +
Г
+ Р t |p@i2^> P = const>0, при условиях B) —F), считая функ-
функцию / (s, t) e La (О заданной. Доказать, что тогда управление р# =
= Р* @ минимизирует J (р) тогда и только тогда, когда Я (р* (*),
г|, (/, /, рф)) «s min Я (р, if (/, ^, р+)), O*^t^T, где минимум берется
по отрезку Pmin^P^/W» Я(^' W^^vp^ + pp2, Jp(s, t, p)-ре-
p)-решение задачи A3)-—A5). Указание: заметить, что Н (р, \р) вы-
выпукла по р, /' (р) «= Я„ (р @, 1|э (/, ^, Р)), и воспользоваться теоре-
теоремой 2.5.
5. Рассмотреть задачу A) — G) при ограничениях #^;*(s, t,u)^
, где л> х —заданные величины; учесть эти ограничения с по-
помощью штрафной функции,
133
г
6. Требуется минимизировать функцию J (р) = ([ р2 (/) dt при
о
условиях B) — F), считая функцию / (s, t)^L2(Q) заданной, и до-
дополнительном условии x(s, T, p) = y(s), O^s^/, (/(s)eL2[0, /].
Указать штрафную функцию Pk (p) для дополнительного условия;
начти градиент функции Фк (р) = J (p) + Pk (p); описать методы про-
проекции градиента и условного градиента.
§ 8. Оптимальное управление
колебательными процессами
Задачи оптимального управления колебательными про-
процессами имеют многочисленные приложения —к ним, на-
например, приводят задачи об успокоении качки судна или
стрелы подъемного крана, о работе вибротранспортеров,
об организации виброзащиты, амортизации и т. п. 46—48,
108, 120, 201, 213, 214]. Здесь мы рассмотрим две за-
задачи оптимального управления процессами, описываемыми
уравнением колебания струны и уравнением поперечных
колебаний стержня.
!. Пусть имеется однородная упругая гибкая струна,
один конец которой свободен, на другой ее конец дейст-
действует внешняя сила и, кроме того, к каждой точке струны
также приложена внешняя сила. Требуется, управляя
указанными внешними силами, к заданному моменту вре-
времени привести струну в состояние, как можно меньше
отличающееся от некоторого заданного состояния (напри-
(например, состояния покоя).
Математическая формулировка этой задачи: минимизи-
минимизировать функцию
7
J{u)^^\\x{s, T, «)-«/n(s)!2ds +
о
7
+ Vi\\xt(s, T, u)-yi(s)\*ds A)
о
при условиях
xti = a*xss + f(s, t)y (s, 0e=Q40<s</, 0<^<Г}, B)
*,@, 0 = P@. xs(l9 0 = 0, 0</<7\ C)
x(s9 0) = <po(s), xt(s9 0) = ф1(б), 0<s</, D)
и = (p @, /fe0)e(/?ff = U [0, T] x U (Q), E)
где a2 > 0, / > 0, T > 0, p0 ^ 0, p t ^ 0 — заданные постоян-
постоянные, po + Px>O; Ф/E),У/E), * = 1, 2f 0 < s </ — заданные
134
функции, причем ср0(s) е= Ях[0, /], (px(s), yQ(s)fy1{s)^
gL2[O /], /У —заданное множество из Я. В частном слу-
случае, когда yo(s)=yi(s) = 0, Po = Pi==:1» мы будем иметь
дело с задачей о наилучшем успокоении струны к мо-
моменту Т\ в частности, если inf J (и) = 0у то можно гово-
говору
рить о возможности полного успокоения струны к мо-
моменту Т.
Под решением краевой задачи B)—D), соответствующим
управлению u = (p(t), /(s, /)) ge Я, будем понимать функ-
функцию x = x(s, t) — x(Sj ty u)eiH1{Q), след которой при
/ = 0 совпадает с ф0 (s) и которая удовлетворяет интег-
интегральному тождеству
для всех функций i|) = i|)(s, /JgW1^), след которых при
t = T равен нулю.
Можно показать, что краевая задача B)—D) при каж-
каждом аеЯ имеет, и притом единственное, решение. Это реше-
решение может быть представлено с помощью формулы Да-
ламбера [213]:
х (s, /, и) = [Фо (s + at) + Фо (s - at)]/2 +
s + at
ts-\-a(t-x)
\ \ F0&x)dldx +
0 s — a{t — T)
)||p1(/-^), F)
m = 0
где O0(s), Ф1E), ^(s, 0~-четные относительно s = 0,
2/-периодические по s* продолжения функций (po(s), 9i(s),
/(s, /) соответственно, а
/M/) = -jp(S)d? при />0, РхСО^О при
0
Формулы для обобщенных производных xs, xt могут
Оыть получены из F) формальным дифференцированием
135
по s, t соответственно. Пользуясь формулами для x(s, tt u)9
xt(sy t, и), нетрудно показать существование следов
х(-, t> и), */(-, ty w)eL2[0, /], непрерывно зависящих
от t е [О, Т] в метрике 12 [0, /]• Это значит, что функ-
функция A), в которой под x(s4 7\ и), xt{s, 7\ и) понимаются
соответствующие следы функций ху Xt при t=*T, опреде-
определена при всех и е Я. Далее, пользуясь формулой F),
можно показать, что если последовательность {uk} схо-
сходится к и слабо в Я, то следы л:(-, /, ик)-*х(', t% и),
Xt(-, t, uk) -> xt (•, t, и) сходятся слабо в L2 [0, /] при
каждом t e [0, Т]. Отсюда, учитывая, что норма в гиль-
гильбертовом пространстве слабо полунепрерывна снизу, по-
получаем слабую полунепрерывность снизу функций A)
в Я. Согласно теореме 3.6 тогда функция A) достигает
своей нижней грани на любом выпуклом замкнутом огра-
ограниченном множестве U из Я, т. е. и±фф.
В силу линейности краевой задачи B)—D) имеем
равенство
х (s, /, оси + A — а) и) =
= ах (s, /, u) + (\-*)x (s, /f v), (s, t) e Q, G)
справедливое при всех uf v^ H и всех действительных а.
Отсюда следует выпуклость функции A) на Я,
Покажем, что функция A) дифференцируема на Я.
Возьмем произвольные и, u + h&H и соответствующие
им решения x(s, /, и), x(s, t, u + h) краевой задачи
B)—D). Обозначим Ал: ($9 t) = x (s, /, u + h) — x(s, /, и).
Из B)~D) следует, что Ax(s, <) является решением
краевой задачи
Ахн - а2 А^ + A/ (s, О, E, /) е Q,
A*,|,_/-0f 0</<Г, (8)
Ал:^|/_0 ===== 0, O^s^/;
здесь /i = (Ap@, A/(s, t))&H. Тогда приращение функ-
функции A) запишется в виде
= $ 2р0 (^ (s, 7, «)-<
о
+ \ 2Pi (^ (s, Г, «) - (/! (s)) Д^ (s, Г) d5 + R, (9)
о
где
i г
tf = 2po$|A*(s, Г)|М5 + 2р^|Л^E, T)\*ds.
о о
Пользуясь формулой F), можно написать явные выра-
выражения для Ал:, kxty из которых будет следовать оценка
l\s, t)\*dsdt)=C0\\h\\%,
Q I
Со = const ^0. A0)
Для дальнейших преобразований формулы прираще-
приращения (9) введем функцию ij) = i|)(s, 7\ и) как решение сле-
следующей краевой задачи:
, Г, w)-r/0(s))
Под решением краевой задачи A1) будем понимать функ-
функцию t|) = if (s, /) e L2 (Q), имеющую следы г|) (s, •) е
eL2[0, T]9 t|)(.,<)EL2[0, /] при BcexsefO, Z], /e
е[0, Т], и удовлетворяющую интегральному тождеству
2р0 (х (s, T,u)-y0 (s)) Ф (s, Г) ds +
J Г» w) - Л Ф)ф^ (s» r) ds>
справедливому при всех Ф (s, t) e Я2 (Q) со следами
Фко^Ф/к-о^ФЛ-о^ФЛ-z^O- Решение задачи A1)
может быть представлено с помощью формулы Далам-
бера, откуда, кстати, и следует его существование.
С помощью решения \|>(s, /, и) краевой задачи A1)
приращение (9) можно преобразовать к виду
? t)dsdt + R. A2)
137
В самом деле, с учетом условий (8), A1) имеем
ДУ(и) = $(—4>,(s, 7)Ajc(s, T) +
О \0
/
= $ $ (— ф„ Дл: + ф Д*„) ds d/
Q
Q
т
о
т
= \ а2ф @, t) Ар (О Л + И * & ') А^ <s' *)ds d/+ /?'
О Q .
Разумеется, приведшие к формуле A2) преобразования
нельзя признать строгими; относительно строгого дока-
доказательства формулы A2) можно высказать то же замеча-
замечание, которое было сделано в § 7 в аналогичном случае.
Из A2) и A0) следует, что функция A) при условиях
B)—D) Дифференцируема во всех точках и^Н, причем
ее градиент в точке и имеет вид
Г (и) = (а2г|) @, t, и); ф (s, t, и)) е= Я. . A3)
Таким образом, для получения градиента в заданной
точке «еЯ нужно последовательно решить две краевые
задачи — задачу B)—D) и задачу A1), а затем восполь-
воспользоваться формулой A3). Можно показать, что J(u)&
еР^Я).
Так как функция A) выпукла на Я, то согласно тео-
теореме 2.5 эта функция на выпуклом множестве U^H
133
будет достигать своей нижней грани в точке ич =
= (Р* @» /* (s» 0) е ^ тогда и только тогда, когда
при всех u = (p(t), f(s, t))<=U.
Для решения задачи A)—E) могут быть использованы
описанные выше методы минимизации. Кратко остано-
остановимся на методах проекции градиента и условного гра-
градиента, предполагая, что множество U состоит из управ-
лений u = (p(t), f(s, /))еЯ, удовлетворяющих условиям
dt
d/
A4)
{ l $ $ /2 (sf
0 Q
где /?0, /?! — заданные положительные числа.
Метод проекции градиента для задачи A)—E), A4)
с учетом формулы A3) сведется к построению последова-
последовательности {uk = (pk(t), fk(s> 0)} по правилам
pk(t)-aka^@, t% uk)
т
при \ | pk (t) - aka^ @, ty uk) |2 dt < Rl
Pk+i @ =<
при j I pft @ -
, /, uk) |2
' fk(s, t)—at$(s>t, uk)
при W\fk(s, t)-akq(sy /, uk)\2dsdt*
A5)
(У
при 5 51 ^ E, 0 - а/л|) (s, /, ^) |2 ds dt > #J,
Q
где параметр ал>0 выбирается одним из способов, опи-
описанных- в § 4, п. 2,
Г39
Одна итерация метода условного градиента для задачи
A)—(б), A4) будет выглядеть так:
где
Г pM(t) = pk(t)+*k(Pk(t)-PkV)h
I /*+1 E, t) - fk (s, t) + ak (fk (s, t) - U (s, /)),
г /, Л
(У
а величина аь 0^аЛ^1, может быть выбрана одним
из указанных в § 4, п. 3 способов. В частности, из ра-
равенства G) следует, что функция fk (a) = J (uk + a (uk ~ uk))
переменной а представляет собой квадратный трехчлен.
Поэтому, рассуждая так же, как при выводе формулы
D.25), из условия fk(ak)= min fk(a) можно определить
i{l, aj}, где
s,f)-h(s,t))dsdt\x
Q J
xKBpo|jc(s, T, uk)-x(s, T, uk)\2 +
-\-2f>1\x,(s, T, uk)-xt(s, T, S*)|3)dsJ f A8)
причем если выражение в первой или во второй квад-
квадратной скобке обращается в нуль, то uk = (pk (t), fk (s, t)) —
оптимальное управление в рассматриваемой задаче A)—E),
A4).
2. Пусть дан однородный упругий стержень, один
кон§ц которого жестко закреплен, другой конец свободен.
Требуется, управляя внешней поперечной нагрузкой,
привести стержень к заданному моменту времени как
можно ближе к заданному состоянию. Эту задачу мате-
140
матически можно сформулировать в виде следующей за-
задачи минимизации:
J(u) = \(\x(s, 7\ tt)-yo(s)la +
о
+1 xt (s, 7\ и) - ух (s) |2) ds -+ inf, A9)
sss = u(st t), (s, 0eQ = {0<s</, 0<f<T}, B0)
x|,-o = *,U = O, 0</^7\ B1)
ss\s-l = XSss\s-l = O, 0<t^T, B2)
x Im, = Фо (s), x/1,-0 = <Pi (s) 0 ^ s < /f B3)
- {a (s, /) e= L2 (Q): J J u* (s, /) ds Л </?«}, B4)
Q
где a2, /, T, /? —заданные положительные числа; ф, (s)f
yt (.s), t = 1, 2, — заданные функции; ф0 (s) e Я2 [О, I],
Фо @) = ф; @) = 0; ф1 (s), f/o (s), й (s) es L2 [0, /].
Под решением краевой задачи B0) — B3), соответст-
соответствующим управлению u = u(s, /)eL2(Q), будем понимать
функцию x(s9 t) = x(s, t9 ^еЯ2-1^), имеющую следы
*(-t 0» xt(-9 0eL2@, /] при всех fe[0, T], x(s, •),
Xj(s, -)^^2[0, /] при всех se[0, /] и удовлетворяющую
условиям B1), B3) в смысле равенства соответствующих
следов и интегральному тождеству
Ssbs ~ Щ) ds dt -
при Bcexx|) = \|)(s, t)EEH2'l(Q), t|?U-o = ^U-o = 0,
Можно показать, что при каждом u*=u(s, t) решение
задачи B0) — B3) существует и единственно.
Покажем, что функция A9) дифференцируема на L2(Q)
и найдем ее градиент [108]. Возьмем произвольные и,
u-\-h<^L2(Q) и соответствующие им решения x(s, t, u)t
x(s, ty u + h) краевой задачи B0) —B3).
Обозначим Ax(s, /) = x(s, t, u-\-h) — x(s, t, и). Из
i20) - B3) следует, что Дл; (s, t) является решением
Щ
краевой задачи
Axtt + a*Axssss = А (s, t), (s, t) «= Q, B5)
Да:|(У.о = Аа:^^о = О, Axm|^ = Дл^Л-/ = 0. 0<f<7\ B6)
Ал: |^о = Д*, 'м> = 0, 0^ </. B7)
Тогда приращение функции A9) запишется в виде
/
AJ(u) = J (u + h) - J(u)=\[2(x(sy 7\ u)-yo(s))bx(s, T) +
о
, +2(xt(s, T, «)-ir!(s))A«/(s, r)]ds + 7?, B8)
где
7? = JO Ax (s, T)\* + \Axt(s, T)\')ds.
О
Справедлива оценка
5, t)\*dsdt, Q^const^O. B9)
Наметим схему доказательства этой оценки. Умножим
уравнение B5) на Axt(s, t)y проинтегрируем по прямо-
прямоугольнику Qt = {{s, т): O^s^/, О^т^/} и получив-
получившееся равенство преобразуем с учетом условий B6), B7);
будем иметь
\ \ hAxt ds dx = \\ {Axtt + a2Axssss) Axt ds dx =
2Дл:^5Дл:/ ' dr —
J | Axt (s, 0 |2 ds -
-^ а2Дх„Д^|J = 0d/ + \\a2AxssAxss,dsdt =
Q
^ | \
о Qt
i i
х/ (s, 0 j2 ds +1- ^ (Дх„J1^ 0 ds =
i
f
о
142
при всех /, 0</s=c7\ Отсюда с помощью неравенства
\ab\^(a2 + Ь2)/2 получим
til s T I
<$($|Ax,(s, T)|ads)dT + $$ft2(s,
о \o /oo
Тогда из леммы 2.2 при ф@ = $ |Ax,(s, t)\2ds, b =
о
eSJ^a(s> t)dsdt, a=\ следует, что
Q
i
$|Ax/(s, /)|2ds<^rJjAa(s. 0*Л, 0</<7. C0)
0 Q
В частности, при i = T имеем
^ | bxt (s, Г) |2 ds < ^ ^ /i2 (s, 0 ds Л. C1)
0 Q
Далее, из равенства
о
с учетом первого условия B7) и оценки C0) получим
\
J(s \d
о о \6 /
О \0 / Q
Сложив эту оценку с C1), придем к оценке B9).
Для преобразования правой части формулы прираще-
приращения B8) введем сопряженную краевую задачу
^ + <A|W = 0, (s, t)e=Q,
*U = ^Uo = O, fe 1^ = ^,1^ = 0, O^t^T, C2)
q\r-T=2(xt(sy D-yJs)), ty|,_r = —2(x(s,
Под решением задачи C2) здесь понимается функция
143
г|эE, tt t/) = \j)(s, /)eL2(Q), удовлетворяющая интеграль-
интегральному тождеству
I $ (Ф« + а2Ф,т) г|) ds Л - 2 $ (х (s, Г) - у0 00) Ф (s, Г) ds +
Q 0 ,
+ 2 $(*,(«, T)-yi(s))Ф,E, 7)ds
для всех функций Ф = Ф (s, t) e Я4«2 (Q), обладающих
обобщенными производными Ф*/, Ф^/е!2((Э) и таких,
что Ф|^0 = Ф*|5ч> = Ф*Л-/ = Ф5«1*-/ = 0 ПРИ 0<'<Ги
ф |^0 = ф^ \^0 = 0 при 0 ^ s < /.
С помощью решения \f>(s, /, а) краевой задачи C2)
приращение функции A9) можно представить в виде
Д/ (и) = ^ ф (s, /, и) /i (s, t) ds dt + R. C3)
Q
В самом деле, из B8) с учетом условий B5) — B7), C2)
имеем
Д J (и) - $ (- ifc (s, Г) Д* (s, Г) + г|) (s, Г) AXt (s,
о
И
Q
T
= a2 J (ф,мА* - «фиЛх, + fybxss - \pAx,w) IJ -10 dt +
о
f U u)h(s, t)dsdt + R.
Q Q
Формула C3) получена. Из C3) и оценки B9) следует,
что функция A9) дифференцируема на L2(Q) и ее градиент
равен
/'(«) = *& *, и), (s, f)e=Q. C4)
Конечно, как и в задаче A) —E), приведенный выше
вывод формулы C3) и оценки B9) нельзя признать стро-
144
гим; относительно строгого доказательства формулы C4)
см. замечание, высказанное в § 7 в аналогичном случае.
Можно показать, что функция A9) принадлежит С1Л(^2)«
Далее, поскольку решение задачи B0) — B3) также
удовлетворяет равенству G), то функция A9) выпукла.
Отсюда и из теоремы 3.6 следует, что задача A9)— B4)
имеет хотя бы одно решение. Согласно теореме 2.5 для
оптимальности управления t/*»u*(s, t)&U необходимо
и достаточно, чтобы $ $ \J)(s, /, u*)(u(s, t) — и* (s, t)) dsdt^O
Q
при всех u = u(s, t) e V.
Предлагаем читателю самостоятельно написать итера-
итерации методов проекции градиента и условного градиента
и для (?+1)-го приближения получить формулы, анало-
аналогичные формулам A5) —A8).
Упражнения. 1. Показать, что функция Jx(и) = / (ы) +
т
p*(t) dt + $^f*(s, t)dsdt, p = const >0, где J (и) взята из A),
при условиях B) —D) сильно выпукла на tf = L3[0, /]xL2(Q). Опи-
Описать метод скорейшего спуска для задачи минимизации Jx (и) на всем
пространстве Н.
2. Показать, что функция /х (м) = / («) + Р \ J u2(s, t)dsdtt P>0,
Q
где J (и) определяется формулой A9), при условиях B0) —B3) сильно
выпукла на L2 (Q). Описать метод скорейшего спуска для минимиза-
минимизации Jxiu) на L2(Q).
3. Найти градиент функций A) и A9) по начальным условиям
(Фо» 9i)-
4. Используя описанный в § 7 эвристический прием, получить
сопряженные краевые задачи (И) и C2).
5. Пусть в задаче A) — E) или A9)— B4) имеются дополнитель-
дополнительные ограничения | х (s, t, и) \ ^ у0, | xt (s, t, и)\^ у2* (s> 0 е Q- Учесть
эти ограничения с помощью штрафных функций, вывести формулу
градиента для штрафной функции; описать метод штрафных функ-
функций в сочетании с методом проекции ^градиента или условного гра-
градиента.
т
6. Пусть требуется минимизировать функцию / (и) =* \ р2 (t) dt +
+ ^/2(s» t)dsdt при условиях B) — E), A4) или функцию /(м) =
!«2(s, t)dsdt при условиях B0) —B4) и дополнительных огра-
'У1
ничениях x(s, Г, а)=«0, xt (s, 71, w)«0, O^s^/, где Т >0 — задан-
заданное время. Учесть дополнительные ограничения с помощью штрафных
функций; найти градиент штрафной функции.
145
§ 9. Оптимальное управление процессами,
описываемыми системой первого порядка
с частными производными
При исследовании ряда химико-технологических про-
процессов возникает следующая задача оптимального управ-
управления [149, 151, 179, 213]: минимизировать функцию
/ (И) = J J /О (X E, 0, Uo (S, 0, 5, t) dS dt +
О О
0. .... хтA, 0, «i@. t)dt +
, Г), .... x"(s, T), h2(s), s)ds A)
при
Xs(S,
xlt(st
0
условиях
t) = P(x(s,t)9
t) = r(x(s,t),
x*@f 0 = Ф'(и
uo(s, t), ux(t),
uo(s,t),s
U.(8,t),t
Ж t),
2E), s),
', t),
(s, 0e
(s, t) i
sQ,i=l,m, B)
sQ, i = m+l, «> C)
t=l, m, D)
г' = т+ 1, n, E)
/]f F)
где Q = {(sy t): 0^s</, 0<*<Г}; /, Г-заданные по-
положительные числа, х = (х1,..., х") — фазовые переменные,
/ = (f\ ..., /л), Ф = (ф1, . Г., Ф™), g = (g^+i,.,., gn) - задан-
заданные функции, щ = [и],..., а^) — управляющие параметры,
f = 0, 1, 2.
Под решением задачи B) — E), соответствующим управ-
управлению u = (uo(sf t)} ux(t), Ui(s))^Hf будем понимать
вектор-функцию х (s, t) = x (s, t, и)«(x1(si t),..., xn (s, 0) ^
^Lt(Q), имеющую обобщенные производные ^(s, t) ее
e L2 (Q), t = 1, m; x' (s, /) e? La <Q), i «"m -flT~n» удовлет-
удовлетворяющую уравнениям B), C) почти всюду в Q, а усло-
146
виям D), E)— в смысле равенства соответствующих сле-
следов функций х1 (s% t).
Будем предполагать, что выполнены следующие условия:
1) функции р (х, н0, s, /), 1 = 0, п вместе с частными
производными flx, flu непрерывны по совокупности пере-
переменных (х, и0, s, /) е Еп X Ег° х [0, /]х[0, Т] и удовлет-
удовлетворяют условию Липшица по переменным (х, и)\
2) функции ц>°(х\ ...,' xm, tii, t), -ф'("ь 0. * = ГГт,
вместе с частными производными ф°, ф^, i = 0, m, непре-
непрерывны по совокупности переменных (я1, ..., хп\ иъ t) e*
е?тх?Л1Х[0, 7] и удовлетворяют условию Липшица по
переменным (х1, ..., хт, ах);
3) функции g° (хт+1у ..., хп, иъ s), gl (u2y s), / = т+1, /г,
вместе с частными производными g°, gj , g"^+1, .... g^
непрерывны по совокупности переменных (хт+1, ..., ;сл,
w2, s) ^En-mxEr*x[0, I] и удовлетворяют условию Лип-
Липшица по переменным (хт+1, ..., хп, и2).
Тогда \f*(x, и0, s, Ol^l/Чл:, w0, s, /) -/»@, 0, s, *) | +
+ 1/Ч0, 0, s, OI^MI*l + l"o|) + sup|/4O, 0, s, 01 при
Q
всех (х, иОу s, /) е ?лх?Гвх[0, /]х[0, 7], откуда следует,
что f'(^(s» 0» wo(s, 0» s» 0e^2(Q) при любых x(s, 0^
^L%(Q)\ uQ(s, t)^L>2°(Q). Можно также показать, что
Ф° (х1 @, ..., х™ @, иг @, 0. Ф1 («1 (')• 0. ¦... Ф^1 @, 0 е=
gL2[0, 7] для любых ^(/)gL2[0, Г], /=1, m, «j (/) g
? [0, Г], g° (x^+1 (s), ..., х» (s)9 и2 (s), s), gw+1 (и2 (s), s), ...
((), s)gL2[0, /] для любых x'(s)eL2[0, /],
i = m + 1, /г, м2 (s) e L?* [0, /]. Аналогичные утверждения
справедливы для производных /^, /^о, ф°, ф^, grO, g^.
Проводя рассуждения по той же схеме, которая исполь-
использовалась при доказательстве теоремы 6.1.1 из [4], можно
показать, что при выполнении перечисленных условий
решение задачи B) — E) при каждом и^Н существует,
единственно [151] и, следовательно, функция A) опреде-
определена на Н.
Покажем, что при некоторых дополнительных предпо-
предположениях, которые будут сформулированы ниже, функ-
функция A) дифференцируема на Н. Возьмем произвольные
а = (и0, «1, м2), u + h = (uo + ho, ux + hu «2 + А2)еЯ и
соответствующие им решения x(s9 /, и), x(s, /, u + h)
HI
задачи B) —E). Обозначим
Ax(s, t) = x(s, t, u + h)-x(s, t, u),
A/* = f(*(s. t, u + h), «0(s, t) + ho(s, t), s, 0-
-f'(x(s, t, u), uo(s, t), s, t), t = 67raf
ДфО^Ф^а. t, u + h), .... xm(l, t, u + h), Ul(t) +
Q. О-Ф0^1^ '. «). -. ^w^. <. «)• МО. 0.
АФ' = Ф' (Ul (t) + h, (t), t) - Ф* (нх @, 0. *-!.«,
. т. и + А), ••-, x"(s, Г, и + Л), «2(s) +
+Ms, T, u), .... x»(s, T, u), ut(s), s),
s), s)~^(u2(s), s), t = m+l, n.
Тогда из B) —E) имеем
Axj^Af, i = m+l, n; (s, /)eQ, G)
; t=l, m;
l, л. (8)
Приращение функции A) запишется в виде
г
j J l
Q 0 0
J 2 ф^(х»(/, 0 ^m(/. 0,
6 ;«i
, /) d/ + J (ф^С^С/, 0,.. - ^m(/, 0, «i@, 0. Ai(
0
/ n
\ ^(^m+1(s,T) x"(s,T)tu%(s),s)Mis,T)ds +
0 f=*m + l
|, (9)
148
где
*i - J S [<< (** ('• о+в д*1 (/, o,..., «i (o+efti @. t) -
0 *1
$Ш*1(/. t) + tbx4t, t) «x@+e/ti@, 0-
-Ф&, (**('. 0 MO. f),fh(i))dt,
t, [Si*(^m+1 (*. 71) +eд^т+1 («, 71) (s) +
0 i == m + 1
^-^(^^(s, Г), ..., «2(s)> s)]№(s9 T)ds +
i
+ \(gu2(xm+1(s, T) + Qte»*(s9 T), ..., «2(s) + e/i2(s),s)~
0
~gl(xm+1 (s,T), ..., u2(s), s), fta(s)>ds, 0<0 < 1.
Для преобразования правой части формулы прираще-
приращения (9) введем функцию Гамильтона —Понтрягина
Н(х, и0, s, /, Ч>) = /°(*. wo, s, 0+ 2/Чл:, Щ, s,
а также выпишем сопряженную задачу для ij) = 'i|)(s, t) =
Задача A0)— A2) линейна относительно \|3 = i|)(s, /, и) и
яэля?ется задачей того же типа, как и исходная задача
B) —E), поэтому определение решения задачи A0) —A2),
а также условия существования и единственности решения
быть сформулированы так же, как для задачи
>
149
С учетом условий G), (8) и A0) —A2) имеем
T m
0 i== 1
/
6 i =
m
vn
~"~* { 1
m
p°xi (X1
n
2
m+ 1
T
о
о \'o
m
(/, /) Ax1 (/, 0 d
\ \
T
\ i|)' @, t) Дф1' 6
(/, t), ux(t), t)Axl
...,x»(s, T), ut(s)$
n I
t+ 2 W(sJ)
n I (T
dt+ 2 Mis-
' яг: /71 -|- 10 0
n I
it+ 2 W'(s,
(/, t)dt +
s)&xi(stT)ds =
Aa;?(s, 7)ds =
WAx<)dt)ds +
OJAgds^
t= 1 6 f=m+lO
$5<Я^(ХE, /), Uo(s, t)9 S, /f
Г m
о ;=i
/ m
Пользуясь этим равенством, формулу приращения (9)
можно переписать в виде
$$ s, 0, uo(s, t) +
Q
hQ(s, /), s, *, ^(s, t))-H(x.(s% t), uo(s, f)% s$ t, \|)(s, 0)-
-(Hx(x(s, t), uo(s, /), s, /, tfc(sf /)), Ajc(s, t))]dsdt +
{ lt t)y Ul(t)9 t)% h1(t)) +
«1
16Q
)f s),
2
Отсюда следует, что
Л/ (и) = $ $ (Ни (х (s, *), й0 (s, 0, s, f, \|> (s, 0), ft0 (s, ')> ds dt +
Q
T ,
$ ЫЪЛхгA, t), ..., x™(U t), ux(t)% t) +
0 ^
k(xml(s, 7), ..., *«(sf T)f Ma(s), s) +
2 (t/a(s), s), fta(s))ds + /?, A3)
где R = 2 /?f, величины /?ь /?2 определены выше,
— Hx(x, w0, s, f, ф), &x)dsdt,
ho, s, /, ф)-
— #„(*, w0, s, f, ф), ho)dsdtt
t = m+\
6
о f=i
/ /г
^6-5 2 f(st OXsi, («2 + 6/12, s)-g' (Ma, s), /i2)ds.
При сделанных выше предположениях относительно
исходных функций ф*, g\ fl можно показать, что для
остаточного члена формулы A3) справедлива оценка
Со = const ^ 0, '
которая вытекает из оценки [151]
\
sup \\Ax4s, t)\*dt + \\\№s(s9 t)\*dsdt
\
sup 5|A^(sf 0l8ds + SS|A^(s, Oladsd/ <
< Cx| Aft,
d = const ^0.
151
Из формулы A3) и оценки A4) следует, что функция A)
дифференцируема на Я и ее градиент равен
J'(u) = {Hu(x(s, t, и), uo(s, t), s, t, xp(s, t, «));
«ИЛ*1**. /, и), .... xm(l, t, u), Ul(t), t) +
+ ||f @, t, u)tp{ (Ul(t), t);
i = l
gl,(xm+1(s, T, u), .... Xя(s, T, и), и,®, s) +
П
+ 2 V(s, 0, u)g* (u2(s)9s)}. A5)
Заметим, что при выводе формулы приращения A3) и
оценки A4) предполагалось, что все встретившиеся в пре-
преобразованиях интегралы имеют смысл и, в частности,
подразумевалось, что J' (и) е Я.
Предполагаем читателю самостоятельно выписать, поль-
пользуясь формулой A5), необходимые условия оптимальности
в задаче A) —F) для выпуклого множества U, сформули-
сформулировать условия существования оптимального решения,
условия выпуклости или сильной выпуклости функции A),
условия принадлежности функции A) классу С1-1 (/7), дать
описание градиентного метода, методов проекции градиента
и условного градиента.
Упражнения. 1. Получить формулу градиента в задаче
A)—E), считая, что uQ(s, t) = uQ (s) <=L?° [0, /] или uQ(s, t) = uo(t)e~
LJ° [0, T], или u0 (s, /K©ое Er°> или "i @ = ©x s Er\ или
J
2. Применить метод штрафных функций к задаче A)—F) при
ограничениях \x(st 01^1 или I &! (s> /)|^1. t = l, п. Найти гра-
градиент штрафной функции.
3. Сформулировать и доказать принцип максимума для задачи
A)-F), считая, что U^UiXU&U» U0={u0(s, t)ezLr?(Q):
щ (s, t) e= Vo почти всюду на Q}, иг = {иг (/) г L^ [0, Г]: ^ @ е \\
почти всюду на [/0, Г]}, U2«|a2 (s) e= L^ [0, /]: w2 (s) s V2 почти
всюду на [0, l]\t где V,- s ?Г|', t«0, 1, 2,— заданные множества [51].
§ 10. Оптимальное управление процессами,
описываемыми уравнением Гурса — Дарбу
При исследовании процессов сорбции, сушки и др.
возникает следующая задача оптимального управления
152
[23, 52, 92, 180, 185—187, 213]: минимизировать функцию
(st t)9 xs(s, t), x,(sf t)t u(s, t), s, t)dsdt +
+ <&(*(*, Т)) A)
при условиях
Xst(s, 0 =/(*($, 0. X*(S> 0» *t(S9 Of U(S> 0» 5, 0,
(s,0sQ, B)
Jc(Of/) = a(/), О^/^Г; *(s, O) = p(s), 0<s</, C)
h = «(s, 0eI/sL5(Q)f D)
где * = (**, ..., *"), / = (Л ..., /*), м = (и\ ..., и% a =
0 ^ / ^ Т)\ I, T — заданные положительные числа,
/'(*. р, 9, и, *, 0. 1«0Гл, Ф(х)э (*'(/)• P'(s). t=lT^,—
заданные функции, (/—-заданное множество.
Эту задачу будем рассматривать при выполнении сле-
следующих условий:
1) функции f* (х, р, <7> иу s» 0» i = 0, n9 и их частные
производные /?, /^, /Jf /^ непрерывны по совокупности
аргументов (х, р, <?, u, s, 0е?ях?лх?ях?гх[0, /]Х
Х[0, Т] и удовлетворяют условию Липшица по (#, р, ^> иУ>
2) функция Ф(х) обладает непрерывными частными
производными Фх(х) при всех х е ?л;
3) a@effi[OfT]f РE)еЯ1„[0,/]; а@) = р@).
Под решением задачи B), C), соответствующим управ-
управлению u — u(s, t)&L[(Q), будем понимать вектор-функ-
вектор-функцию x(s, t)=*x(s, t9 w)sL?(Q)f имеющую обобщенные
производные xs(s9 /), xt{s, t), xst(s, t)^L%(Q) и удовлет-
удовлетворяющую уравнению B) почти всюду в Q, а условиям
C) —в смысле равенства соответствующих следов х@, •),
*(-, 0).
При сделанных выше предположениях задача B), C)
при любом u = u(s, t) e L\ (Q) имеет, и притом единственное,
решение. Важно заметить, что любая вектор-функция
x(s, /)eLj(Q), обладающая обобщенными производными
xs(s, 0» xt(s> 0» ^(s,/) е L^ (Q), непрерывна в замкнутом
прямоугольнике Q (точнее, x(s, /) эквивалентна непре-
непрерывной на Q функции). Это значит, что решение x(s9 t, и)
задачи B), C) можем считать непрерывной функцией
на Q, и тогда имеет смысл говорить о значении #(/, 71, и),
153
t> величине Ф(хA, 7\ и)). Таким образом, при сделанных
выше предположениях функция A) определена при всех
u = u(s, t)<=Lr%(Q).
Можно показать, что непрерывная на Q вектор-функ-
вектор-функция x(s, t) является решением краевой задачи B), C)
тогда и только тогда, когда она удовлетворяет интеграль-
интегральному уравнению
х (s, t) = a (s) + Р (t) — а @) +
s t
+ $$/(*(?» т)> Xs(l> f), xt{lj т), и (I, r), ?, T)dldx. E)
о о
Опираясь на это интегральное уравнение, существование
и единственность решения задачи B), C) могут быть до-
доказаны с помощью рассуждений, аналогичных рассужде-
рассуждениям из доказательства теоремы 6.1.1 в [4].
Полезно заметить, что если ввести переменные z = xt,
У1 = х, y2 = xs, то задачу B), C) можно переписать в виде
задачи (9.2)—(9.5):
*s = f(y\ У2, г, ut s, /),
У1 = г, yt=f(y\ y\ г, и, s, *), (s, /)e=Q,
2@, t) = a'(t), 0<*<7\
у1 (s, 0) - р (s), у2 (s, 0) == Р' (s), 0 < s < I.
С другой стороны, если в задаче (9.2)—(9.5) положить
t
zl (s, t) = jj xl (s, т) dt, i = l, m;
то для г = (гх, ..., г^), как нетрудно проверить, получим
задачу вида B), C). Указанная связь между задачами B),
C) и (9.2)—(9.5) позволяет свести задачу оптимального
управления A)—D) к задаче (9.1)—(9.6). Однако, желая
получше оттенить специфику задачи A)—D), а также
желая продемонстрировать несколько отличный от выше-
вышеизложенного подход к получению сопряженной задачи и
к выводу формулы градиента в задачах оптимального
управления, мы здесь проведем самостоятельное исследо-
154 -
вание задачи A)—D), не опирающееся на результаты
предыдущего параграфа.
Покажем, что при некоторых дополнительных пред-
предположениях функция A) дифференцируема на Lj(Q). Возь-
Возьмем произвольные и, u + h^L[(Q) и соответствующие им
решения x(s, t, и), x(s, t, u + h) задачи B), C). Обо-
Обозначим
Ax(s, 0 = *(s» U u + h) — x(s, t, и),
A/' = /'(x(s, t, u + h),
xs(s, t, u + h), xt(s9 t, u + h), u(s9 t)+h(s, t)% s, *)-
s. 0. xs(st /), xt(st t), u(s, /), s9 t)9 i^&Tn.
Из B), C) следует, что
Дх„ = Д/, (s,/)eQ, F)
Дх@, 0 = 0, O^t^T, kx{s9 0) = 0, O^s^Z. G)
Можно доказать, что
max | Ax (s, /) | + ess sup \ | Axs (s9 t) |2 ds +
7
+ ess sup \ \bxt(s9 t)\2dt<:Co\\h2(s9 t)dsdt9
Co = const >0. (8)
Приращение функции A) равно
ДУ (w) = J (u + h) - У (а) = \\ Af°ds dt + ДФ, (9)
<?
где
Ф(х(/, т, u + h))-O(x(l9 T, и)).
Умножим уравнение F) на некоторую функцию г|? =
= $("$ t) s Ll (Q) и проинтегрируем полученное равенство
по прямоугольнику Q. Будем иметь
Сложим это равенство почленно с (9) и получим
Если ввести функцию Гамильтона —Понтрягина
Я(х, р, ?, и9 sy t9 \j)) =
^ Р. <?. «, s, О, $>, A0)
155
то приращение AJ (и) можно переписать в виде
^ A1)
где Atf = A#(s, t) = H{x + Ax, xs + Axsy xt + Axh u + h,
s, /, -ф) — H{x, xsy xu u, s, /, t|>); аргументы (s, t) функ-
функций x, Ад: и их производных, а, /г, ij? для краткости здесь
опущены.
Учитывая ограничения, наложенные выше на функ-
функции /', t = 0, /2, Ф(х), a(t), [3@, с помощью формулы
конечных приращений Лагранжа и оценки (8) из A1)
имеем
AJ (и) =
+ (Фх(хAу Т))у Ax(ly T)) + R, A2)
где остаточный член R удовлетворяет условию
\R\\hEl,-+0 при 1Ак,-*О; A3)
частные производные НХУ Нру Hqy Hlt в A2) вычислены
в точке (x(s, /), xs(s, t)y xt{sy t)y и (s, t), s, tf \f)(s, /)).
Преобразуем первые три слагаемых в A2) интегриро-
интегрированием по частям с учетом условий G). С помощью тео-
теоремы Фубини [И, 157] получим
$$<#,*, Ax)dsdt =
Q
Т , I
\\(\НХ{\> t)dl, Axs(s, t))dsdt =
Q X I
T I
Q \ s
(
тИ^т, bxs,(s, t))dsdt;
[ [ (Hp, Ax,) ds dt = ^ (J Яр (s, т) Л, A^ (s, o) ds <tf,
, t)dt,Axsl(s, t))dbdt.
Q
156
Кроме того, в силу условий G) имеем
Ах (/, Т) = { Axs (I Г) d? = $ J Axst (Б, т) d| <*т =
О 00
О 00
поэтому
JJ,(x(/, T))f &xst(s, t))dsdt.
Подставим полученные равенства в формулу A2). Будем
иметь
$$( l9 T))+\Hp(stT)dx +
Q y t
I T I
+ \Hqft, t)dl + HHx(t, Tjdtdx, A^(s, t))dsdt +
8 t S I
+ \\(Hu(s, t)fh(s, t))dsdt + R. A4)
Q
До сих пор ^ = ^E, /) была произвольной функцией
из L%(Q). Теперь выберем эту функцию так, чтобы
T I
Hx(t, T)dgdx, (s, /N=Q. A5)
Так как в A5) Hp(s, t), Hq(s, t), Hx(s, t) представляют
собой частные производные Нру Hq, Hx функции A0), вы-
вычисленные в точке (х (s, /), xs (s, t)t xt (s, /), и (s, t), s, t,
ij)(s,/)), причем Н (x, p> q, u, s, /, of) линейно зависит от
переменной -ф, то A5) является линейным интегральным
уравнением относительно г|) (s, t). Уравнение A5) анало-
аналогично уравнению E), и существование и единственность
его решения г|) ($, /) = г|) ($, /, и) при сделанных выше пред-
предположениях доказывается аналогично тому, как доказы-
доказывалась теорема 6Л.1 в [4].
С учетом условия A5) из A4) имеем
157
Отсюда и из условия A3) следует, что функция A) диф-
дифференцируема и ее градиент равен
Г (и) = Ни (s, t) = Ни (х (s, /, и), xs (s, /, и), xt (s, /, и),
u(sy /), s, /, i|>(sf U и)). ( }
Подчеркнем, что при выводе формулы A6) исходные функ-
функции /°, / предполагались такими, что Ни(ь, i)^L[(Q).
Предлагаем читателю самостоятельно выписать, поль-
пользуясь формулой A7), необходимые условия оптимально-
оптимальности в задаче A)—D) для выпуклого множества ?/, сфор-
сформулировать условия существования оптимального реше-
решения, условия выпуклости и сильной выпуклости функции
A), дать описание градиентного метода, методов проек-
проекции градиента и условного градиента.
Упражнения. 1. Получить формулу A7) для градиента,
сведя задачу A)—D) к задаче вида (9.1)—(9.6) и пользуясь резуль-
результатами § 9.
2. Получить формулу градиента в задаче A)—C), считая, что
u(s, 0 == и (s) e= L? [0, /] или и (s, t)==u (I) e= L[ [0, Т], или «(s,/) =
Е@??Г.
3. Применить метод штрафных функций к задаче A)—D) при
ограничениях ! х (s, 01^1 или ! х*(s> Ol^l» i=U n, или
\ ( ! х (s, t) ,2 ds dt ^ 1. Найти градиент штрафной функции.
Q
4. Сформулировать и доказать принцип максимума для задачи
A)—D), считая, что ?/ = jw (s, t) e L^ (Q): и (s, t)^V почти всюду
на Q}, где V — заданное множество из Er [92J.
ГЛАВА 2
МЕТОДЫ РЕШЕНИЯ
НЕКОРРЕКТНЫХ ЭКСТРЕМАЛЬНЫХ ЗАДАЧ
При численном решении прикладных задач важное
значение имеет тот факт, будет ли решение рассматриваемой
задачи непрерывно зависеть от исходных данных или,
иначе говоря, будет ли искомое решение устойчивым по
отношению к возмущениям входных данных. Если реше-
решение устойчиво по входным данным, то можно быть уве-
уверенным в том, что достаточно малые погрешности в зада-
задании входных данных приведут к малым погрешностям
в определении решения. Иное дело решать неустойчивую
или, как говорят, некорректную задачу, решение которой
не является непрерывно зависящим от входных данных:
в этом случае приближенное решение задачи, отвечающее
неточным входным данным, может как угодно сильно
отличаться от искомого точного решения. Между тем
некорректные задачи возникают в самых различных обла-
областях физики, техники, экономики и т. д. [17], и возни-
возникает важная проблема: как численно решать такие
задачи?
Основы теории и методов решения некорректных задач
заложены в работах А. Н. Тихонова, В. К- Иванова,
М. М. Лаврентьева и др. К настоящему времени создана
достаточно полная общая теория некорректных задач,
созданы приближенные методы решения таких задач,
с помощью которых успешно решены и решаются многие
прикладные задачи. По поводу общей теории некоррект-
некорректных задач и ее приложений, а также библиографии по
этим вопросам отсылаем читателя к [17, 105]. Здесь мы
рассмотрим методы решения некорректных экстремальных
задач; по этим вопросам см. обзорную статью [212] и
библиографию к ней, а также [10, 21, 43, 44, 55, 57, 58,
61, 64-68, 80, 90, 105, 109, 117, 118, 143, 160, 161, 163 —
165, 206, 211, 218].
190
§ 1. Постановка задачи
Рассмотрим задачу
J(u)-+lnU use U, A)
где (У— заданное множество, функция J (и) определена
на U. Следуя [17], будем различать два типа задач мини-
минимизации. К задачам первого типа отнесем те задачи A),
в которых ищут величину J***ini J(и), не интересуясь
тем, достигается ли нижняя грань функции J (и) на мно-
множестве U в каких-либо точках или не достигается. В за-
задачах второго типа наряду с J* ищется также точка и*,
в которой J (и) достигает своей нижней грани на мно-
множестве /У, т. е. и* е(У* = {ы: u&U, J{u) = J*). Для
краткости задачу первого типа ниже будем именовать
задачей /, а задачу второго типа — задачей II. В задаче I
естественно предполагать, что J*> —ос, а в задаче II,
кроме того, U+Фф.
Получить точное решение этих задач возможно лишь
в редких случаях. Учитывая это обстоятельство, полезно
дать другую более удобную в приложениях формули-
формулировку задач I, II.
Задача I. По заданной точности е>0 найти число
Уе такое, что
|/.-/»|«в. B)
На практике в качестве /t часто берут значение функ-
функции J (и) в каких-либо подходящим образом выбранной
точке ия&иу т. е. J(ue)*=*Jz.
Приближенное решение задачи II предполагает, что
вместо точки и* можно ограничиться нахождением точки
м„е(/, которая близка ко множеству U* и для которой
| } (ut) — /* | < е. Здесь, однако, возникает вопрос, в каком
смысле следует понимать близость точки ив ко множе-
множеству (У*? Мы будем предполагать, что на множестве U
введена некоторая метрика р, и близость точки ко мно-
множеству U* будем оценивать в этой метрике. Точнее,
пусть (/ — метрическое пространство с расстоянием р(и} v)
между точками и, v qe t/, и пусть р (и, U#) = inf p (и, v)—
U
расстояние от точки и до множества ?/*.
Задача II. По заданным точностям е > 0, б > О
найти точку и^ъши такую, что
1J Ы - <?* ! < *, Р (Ki.e, </») ^ 9. C)
160
Заметим, что в одной и той же задаче минимизации
на множестве U могут быть введены, вообще говоря,
различные метрики. Тем не менее, выбор подходящей мет-
метрики на U не совсем произволен и определяется особен-
особенностями конкретной задачи, характером проводимых
исследований, требованиями практики. В конечномерных
задачах минимизации, когда и = (и1, ..., ит)у чаще всего
I m \\;2
выбирают евклидову метрику р (и, v) = j 2 j u{''— v*r j2! ;
возможны случаи, когда удобнее пользоваться метриками
/ т \vp
р (и, v) = max | и1 — и1' j или р (м, v) = V | и1 — vl \p \ ,
p0» и ДР- В задачах оптимального управлении,
где и = а (/) = (а1 (/), ..., «г (/)), to^t^T, многие иссле-
исследования удобно проводить в метрике L[[to, 71, когда
IT r \1/2
р (и, v) = I ^ 21 ^ @ "~ ^ (О I2 ^) • в вопросах приближе-
приближено *=i I
ния функций, минимизации функционалов, связанных
с интегральными или дифференциальными уравнениями
математической физики, возможно использование более
сложных метрик, гарантирующих близость в среднем или
равномерную близость не только самих функций, но и
их производных до определенного порядка. Некоторые
конкретные примеры метрик, используемых в экстремаль-
экстремальных задачах, были приведены в § 1.1; см. также §§ 2, 5.
Для приближенного решения задачи I достаточно
с помощью какого-либо метода построить любую мини-
минимизирующую последовательность {uk)\
ukeE(Jy ?=1,2,...; lim J{uk) = J^ D)
k—>oo
и в качестве искомой величины /8, удовлетворяющей
условию B), взять значение функции J (uk) с достаточно
большим номером k. /Ложно попробовать воспользоваться
последовательностью D) и при решении задачи II и, как
это иногда делают на практике, попытаться взять в ка-
качестве искомой точки «8)б, удовлетворяющей условиям
C), точку ик с достаточно большим номером k. Однако
здесь сразу возникает вопрос: будет ли такая точка uk
близка ко множеству U# в требуемой метрике? Рассмот-
Рассмотрим несколько примеров.
Пример I. Пусть J (и) = и2A + и*)-г при и^О,
У.((/) = О при w<0; i/ = ?'1={— oo<w<co}. Очевидно,
б Ф. П Васильев 161
здесь </*=0, и* = {и: и^О}. Последовательность uk = kf
k=l, 2,..., является минимизирующей: lim J (k) = d.
Но она не сходится к U* в метрике Е1 и, более того,
Пример 2. Пусть требуется минимизировать функ-
1
цию J (и) — ^ х2 (t) dt, где х (/) является решением задачи
о
Коши: x(t) = u(t)y O^/^l, jc(O) = O, а управление и =
= а(/), 0*^/^1, принадлежит множеству U ограничен-
ограниченных измеримых функций, удовлетворяющих неравенству
)м(/)|<;1 почти всюду на 0^/^1. Метрика на мно-
множестве U пусть задана нормой \и\ пространства L2[0, 1]
или Loc[0, 1]. Очевидно, в этой задаче «/# = 0, причем
нижняя грань </* достигается на управлениях и* (/), почти
всюду на O^^^l равных нулю, и только на них.
Последовательность uk (/) = sin Bnkt), O^/^l, k=lt
2, ..., является минимизирующей для этой задачи. В самом
деле, xk (t) = х (/, uk) = Bnk)~l [ 1 - cos Bnkt)], A = 1 f 2, ...,
так что 0^ J(uk) = C/8) n~2k-2-+0 при k-+co. Однако
{^Л(/)} не сходится к и* @ = 0 ни в норме L2[0, 1], ибо
II ^а — ^* !:12 = $ sin2 Bjx^) d^ = 1/2, ни тем более в норме
Loo[0, 1].
Пример 3. Рассмотрим задачу минимизации функции
J(u) = \u2(t)dt на множестве (/ = С[0, 1]. Здесь /* = 0
о
и U* состоит из единственной точки и%=и%Ц)=0. Возь-
Возьмем произвольную минимизирующую последовательность:
{мЛ(/)}е=С[0, 1], lim \u\(t)dt = Q. Имеем: luk-u+\l =
Л-»оо0
1
s= ^ м| (/) dt-+Q при ^ ->• сю. Это означает, что любая
о
минимизирующая последовательность в рассматриваемой
задаче будет сходиться к оптимальной точке по норме
L2[0, 1]. В то же время существуют минимизирующие
последовательности, которые не сходятся к и* (t) по норме
С[0, lj. Примером такой последовательности может слу-
служить
! 1 -;1Ш-1 !, 0</< l/k,
Vk{t)=[o9 "l/ft«<l, ft=lf 2, ...
162
В самом деле, |t>A — и* |?2 = 1/C&)~^0 при &->-со, а
11^-^1^=1740.
Пример 4. Пусть У(ы) = max | м (/) |, f/ = C[O, 1].
Тогда </* =0, ?/# = {и# (/) === 0}. Здесь любая минимизи-
минимизирующая последовательность, очевидно, сходится к и% (/)
по норме С[0, 1]. Однако, если мы захотим построить
последовательность {uk(t)\, сходящуюся к u%(t), скажем,
равномерно на [0, 1] вместе со своей производной, то
должны проявить осторожность при выборе минимизирую-
минимизирующих последовательностей, ибо не все из них будут схо-
сходиться к и% (t) в указанной метрике. Например, uk(t) =
= sin (kt)/k2, &=1, 2, ..., сходится в этой метрике
к и% (/), а у минимизирующей последовательности vk(t) =
= sinkt/kl/2, k=l, 2, ..., производная {vk(/)} не схо-
сходится к п# (t) по норме С[0, 1].
Эти простые примеры показывают, что в одних зада-
задачах минимизации любая минимизирующая последователь-
последовательность будет сходиться к оптимальной точке в требуемой
метрике, в других задачах могут существовать минимизи-
минимизирующие последовательности, не обладающие таким свой-
свойством. Кроме того, одна и та же задача может обладать
указанным свойством в одной метрике и не обладать
им при выборе другой метрики на множестве ?/.
Таким образом, в зависимости от выбора метрики за-
задача A) может быть отнесена к одному из двух классов
задач, которые принято называть корректно поставленны-
поставленными и соответственно некорректно поставленными задачами
минимизации. Перейдем к более строгим формулировкам.
Определение 1. Задача A) называется корректно
поставленной в метрике р или, короче, р-корректной>
если 1) J# = inf J («)> — оо и множество G# = {ие17:
/(?/) = «/*} непусто; 2) любая минимизирующая последо-
последовательность {uk} в этой задаче р-сходится ко множеству [/*,
Если нарушено хотя бы одно из условий 1) или 2)
определения 1, то задачи A) называют некорректной
в широком смысле слова. В дальнейшем нас будут инте-
интересовать методы решения задачи II, в которой условие 1)
предполагается всегда выполненным, и поэтому некор-
некорректность задач минимизации всюду ниже будем пони-
понимать в следующем более узком смысле.
Определение 2. Задача A) называется некорректно
поставленной в метрике р, если 1) /^<; —оо, 0^^ф\
6* 163
2) существует минимизирующая последовательность {uk}t
не сходящаяся к f/# в метрике р.
В смысле этих определений задача из примера 1
является некорректной в евклидовой метрике; задача из
примера 2 некорректна в метрике пространств L2[0, 1]
и Loo [0, 1]; задача из примера 3 некорректна в метрике
С [О, 1], но в то же время она корректна в метрике
МО, 1].
Классы корректных задач минимизации в различных
метриках выделяют теоремы 1.3.1, 1.3.8, 1.3.9, 1.3.11
о существовании оптимальной точки.
Однако имеются широкие классы практически важных
задач минимизации, являющиеся некорректно поставлен-
поставленными в нужных для приложений метриках. Многие задачи
минимизации функций конечного числа переменных на
неограниченных множествах некорректны в евклидовой
метрике. Большинство задач оптимального управления,
исследованные в главе 1 некорректно поставлены в мет-
метрике тех банаховых пространств, которые чаще всего
используются в прикладных задачах. Другие классы
некорректных экстремальных задач, возникающих в самых
различных областях физики, техники, экономики и т. д.,
см. в [17].
Корректно поставленные задачи минимизации хороши
тем, что в них в качестве решения задачи C) можно
взять один из членов произвольной минимизирующей
последовательности D) с достаточно большим номером.
Для некорректных задач аналогичные действия могут
привести к ошибочным результатам, так как в этом слу-
случае нет никаких гарантий того, что полученная тем или
иным методом минимизирующая последовательность \ик}
непременно будет р-сходиться к множеству U%. Иначе
говоря, если в качестве входных данных, по которым
будет определяться р-приближение к ?/#, использовать
значения минимизируемой функции, то можно потерпеть
неудачу, ибо из малости погрешности J (uk) — J* не всегда
следует близость uk к U^ в требуемой метрике р.
Это значит, что для приближенного решения некор-
некорректных задач требуются специальные методы, позволяю-
позволяющие с гарантией строить минимизирующие последователь-
последовательности, р-сходящиеся к множеству оптимальных точек.
Такие методы существуют и их принято называть мето-
методами регуляризации [17, 105, 163, 212]. Ниже будут опи-
описаны три метода регуляризации.
164
Упражнения. 1. Пусть U = {u: и <= Е1, 0^м<4-°°}- Рас-
Рассмотреть задачи минимизации на множестве U функций /(«) = w2,
/() A+I J()\ /() A+2I У() AаI +
() (+) (), () (+). () (+) + >
a = const>0. Выяснить, какие из этих задач корректны и какие
некорректны в естественной метрике р (и, a)= w — iH.
2. Будет ли корректной задача минимизации функции J (и) =
= \u*(t)dt на множестве ?/ = L2[0, 1] в метрике L2 [О, 1]? С [0, 1]?
6
3. Рассмотрим задачу минимизации функции v2(l, и) при усло-
условиях: * = м@, 0=^*^1; х@) = 0, u = u@s[/ = {tt(/): «(/)s
eL2[0, 1], ' и (/) | ^ 1 почти всюду на [0, 1]}. Будет ли эта задача
корректно поставленной в метрике С [0, 1]? L2 [О, 1]? Указание:
рассмотреть последовательность uk(t) = sin kt, 0=^/^1, /г=1, 2, ...
4. Выяснить, будет ли корректной в метрике L2 [af b] задача
минимизации функции J (и) = *\
\ К (t, s) и (s) ds
dt на множестве
а
= L2[at b], где К (/, s) — заданная функция из L2(Q), Q — {(t, s):
t^b, a^s^b} Указание: рассмотреть последовательность
) = smkt, a^t^b, k=\, 2, ...
5. Выяснить, будет ли задача минимизации функции J (и) =
]u(s)ds-f(t)
dt на множестве U — L2 [a, b] корректной в мет-
а „
рике С [а, Ь] или L2 [a, b], если здесь /(/) —заданная дифференци-
дифференцируемая функция, причем производная / (/) eL2k b], /@) = 0 (задача
численного дифференцирования). Указание: рассмотреть последо-
последовательность iif? (s) = f (s)-j-cos ks, a ^s ^b, k= 1, 2, ...
§ 2. Стабилизатор
В методах регуляризации некорректных экстремаль-
экстремальных задач важную роль играет понятие стабилизирующей
функции или, короче, стабилизатора.
Определение 1. Функция й (и), определенная на
непустом множестве Uq ^ 0\ называется стабилизатором
задачи A.1) в метрике р или, короче, р-стабилизатором,
если:
1) Q(u)^0 при всех ае(/о;
2) множество Qc = {u: ae(/fi,Q(a)<C} является р-
компактным при любом C==const^0, т. е. из любой
последовательности {uk) e Qc можно выбрать подпоследо-
подпоследовательность {Ukn\, р-сходящуюся к некоторой точке v e Qc\
3) множество U$ = и^(]и^ непусто.
Ниже будет показано, что методы регуляризации поз-
позволяют получить для задачи A.1) минимизирующие после-
последовательности {и,г}у принадлежащие множеству Qc при
некотором достаточно большом значении константы С.
165
Свойство 2) стабилизатора тогда будет гарантировать р-
компактность {uk}, а из своГства 3) и свойств непрерыв-
непрерывности минимизируемой функции J (и) будет следовать р-
сходимость {uk} к U*. Заметим, что свойство 3) требует
выбора такого стабилизатора, согласованного с задачей
A.1), чтобы область определения стабилизатора была
достаточно широкой и содержала хотя бы одну точку
минимума. Впрочем, в тех случаях, когда U* Ф([)> UQ == ?/,
свойство 3) Есегда выполняется, так как тогда Uq = U%,
Наряду с понятием р-стабилизатора задачи A.1) ниже
нам понадобится понятие слабого стабилизатора.
Определение 2. Функция Q (и), определенная на
непустом множестве Uq ^ U, принадлежащем банахову
пространству В, называется слабым стабилизатором
задачи A.1), если:
1) Q(u)^0 при всех u^Uq\
2) множество Qc = {u: u^Uq, Q(u)^C} слабо ком-
компактно при любом С^О, т. е. из любой последователь-
последовательности {uk\ e Qc можно выбрать подпоследовательность
Ык 1, слабо в В сходящуюся к некоторой точке v^Qc\
3) множество Uq — Uq^U^ непусто.
Приведем примеры функций Q (и), которые могут слу-
служить стабилизаторами в некорректных задачах миними-
минимизации A.1) в основных часто встречающихся в приложе-
приложениях пространствах.
Пример 1. Начнем с евклидова пространства Ет.
Пусть требуется минимизировать функцию «/ (и) на замк-
замкнутом множестве V s Emy пусть множество точек мини-
минимума U% непусто. В качестве стабилизатора этой задачи
можно взять функцию
Эта функция определена и неотрицательна на Ет. Поло-
Положим UQ = U. Множество Qc = {w: u^Ui}, Q(u)^C}
замкнуто, ограничено и, следовательно, компактно в мет-
метрике Ет при любом С^О. Наконец, и*ъ = и^{\Uq =
Стабилизатором здесь могут служить также функции
Q(u) = \u\, Q(u) = \u — u\2 или, в более общем виде,
ИN
где u = (uly ..., ит) — заданная точка из Ет, P = {pif} —
заданная положительно определенная матрица.
Пример 2. Пусть рассматривается задача миними-
минимизации функции J (и) на выпуклом замкнутом множестве U
из гильбертова пространства Я; пусть Ц^фф. В каче-
качестве слабого стабилизатора этой задачи можно взять
функцию
где п — заданная точка из Н. В самом деле, п{а)^0
при u^Uq^U. Далее, множество Qc = {u: u^U,
Q(u)^C} выпукло, замкнуто, ограничено, и следова-
следовательно, слабо компактно в Н (см. теорему 1.3.4). Нако-
Наконец, 1/а = и^Ф ф по предположению.
Отсюда следует, что в пространстве Lr2[tOi T] слабым
стабилизатором могут служить функции Q (и) =
т т
= \\u(t)\2dt или Q(u) = l\u(t)-u(t)\2dt, где 0(*) —
*о to
заданная функция из Lj[/0, T].
Пример 3. Рассмотрим примеры стабилизаторов
в метрике пространства Сг[а, Ь]. Заметим, что банахово
пространство Cr[a, b] r-мерных непрерывных вектор-
фун.кций u(t) = (u1(t), ..., ur(t))% a^t^b, с нормой
!!м|с= max \u(f)\ не является рефлексивным.
Пусть (У —множество из Сг[ау Ь]у замкнутое в метрике
этого пространства, пусть множество U* точек минимума
функции J (и) на U непусто. Предположим, что ?/# содер-
содержит хотя бы одну точку w# (/) е Hr [a, b] (обозначения
см. в § 1.1).
Рассмотрим функцию
на множестве Uq =Uf]Hlr[af b]. По условию множество
U* (] Н\- [а, Ь] непусто. Следовательно, непусты множества
UQ и 0q = U4.(]Uq. Кроме того, п{и)^Ь на UQ. Пока-
Покажем, что множество Qc = {и: и ^Uq, ^ (и) ^С} компактно
в метрике Cr[a, b] при любом С^О. В самом деле, из
неравенства Q (и) ^ С следует существование хотя бы
одной точки t1^[a, b] такой, что | и (tt) \ ^(СF — а)-1I12.
167
Тогда |«(/)| =
х(\\й (т) ,2 tfrI/2 < (С (&_fl)-i)i/2+(C F—a)I/2 = const для
любой функции из Q. Далее, имеем
I и (/) - и (т)! =
х
й (s)
\1/2
OZ-TJ^jfld^^rfs <(С|*-Т|I/2
а
для всех w (/) е Qc. Таким образом, множество функций Qc
равномерно ограничено и равностепенно непрерывно на
отрезке [а, Ь]. Из теоремы Арцела ([11], стр. НО) тогда
следует, что из любой последовательности jwft(/)}eQc
можно выбрать подпоследовательность, сходящуюся к неко-
некоторой непрерывной функции u(t) равномерно на отрезке
[а, Ь]. Убедимся в том, что «(/)еЙс.
Прежде всего, так как uk(t)^Uy k = 1, 2, ..., a U
замкнуто в метрике Сг[а, 6], то и (/) е (У. Остается пока-
показать, что u(t) e Hr[a, b] и Q(m)^C. С этой целью заме-
заметим, что из Q (uk) ^ С, Л = 1, 2, ..., следует, что \\uk\\i2 ^ С,
т. е. {«л@} слабо компактно BLj[a, b]. Поэтому, выбирая
при необходимости последовательность и произведя пере-
перенумерацию ее членов, можем считать, что сама последо-
последовательность \uk(t)} сходится к u(t) в метрике Cr[a, b\,
а ее производная \uk(t)) сходится к некоторой функции
v(t)^L\[a9 b] слабо в Ц[а, Ь]. Нетрудно видеть, что
v(t) = u(t). В самом деле, uk{t) удовлетворяют интеграль-
ь ъ
ному тождеству: \(икA), z(t))dt = — §(uk(t), z(t))dt9
а а
k=l9 2,..., для любой бесконечно дифференцируемой
функции z (/), обращающейся в нуль на концах отрезка
[а, Ь] вместе со всеми своими производными. При &->оо
b b
отсюда имеем тождеств® \(u(t)9 z(t))dt= — ^(v (/),
а а
z (/)> dt9 которое означает, что й (t) существует и u(t) =
so(/)eL5[fl, b\. Тогда \uk(t)}-*u(t)9 u(t)<=Hlr[ay b]9 и
в метрике Cr[a, b]9 {&k(t)\-> u{t) слабо в Ц[а, Ь]. Это
168
значит, что (uk-u, />„!=$««*-«, f) + (uk-u, /»<//->
a
->0 при &->oo для любой функции f (i) ^Н1г[а, b]y т.е.
{uk(t)} сходится к u(t) слабо в H{r[ay b]. Но в гильбер-
гильбертовом пространстве Н\\а, Ь] шар {Q (и) = \\и\\2н\ ^ С} сла-
слабо замкнут, поэтому из Q(uk)^Cy k=l, 2, ..., следует,
что Q (и) ^ С. Этим завершается доказательство компакт-
компактности множества Qc в метрике Cr[ay b] при любом СЬ>0.
Таким образом, функция Q(u) = \\u\\2Ht удовлетворяет
всем требованиям определения 1 и может служить стаби-
стабилизатором задачи минимизации в метрике Cr[ay Ь].
Заметим также, что из приведенных рассуждений сле-
следует, что из слабой сходимости некоторой последователь-
последовательности {uk(t)) к u(t) в Н1г[а, Ь] следует ее сходимость
к u(t) в норме Cr[a, b]. В самом деле, если последова-
последовательность {uk (t)} ^H[r[ay b] и слабо в Н{г[а, Ь] сходится
к некоторой функции u(t), то она ограничена по норме
Нг[а9 Ь]у т. е. supQ(^)^C при некотором С>0. Это
значит, что {uk(t)\ e Qc- Остается повторить рассуждения,
аналогичные вышеприведенным, и убедиться, что {uk{t)\
сходится к u(t) в метрике Cr[a, b].
Примерами более общих, стабилизаторов в метрике
Cr[a, b] являются функции
ь
Q (и) = \\и - Щ)г? = \ (| и (t) - п @ |2 + | и @ - п (t) |2) dt,
а
Ь
п{и) = \ (k (t) \u(t)-a (t) |2+q (t) i u(t)-a (t) j2) dt,
a
где п(/) — заданная функция из Hlr[a, b]; k(t), q(t) —
положительные непрерывные функции на [а, Ь].
Пример 4. Рассмотрим другой класс стабилизаторов
в метрике Cr[ay b]. Обозначим через Cj[a} b] банахово
пространство непрерывных вектор-функций и U) = {и1 (/),...
..., иг (/)) с конечной нормой
\\u\\ v= max \u(t)\+ sup
где y = const, y
Пусть (У —множество из Сг[а, Ь], замкнутое в метрике
этого пространства; пусть множество V\ точек минимума
169
функции J (и) на U непусто и содержит хотя бы одну
точку u*(t) ^Суг[а, Ь]. Рассмотрим функцию
на множестве UQ=U()СУ[а, Ь]. По условию множество
U* П СУГ [а, Ь] непусто. Следовательно, непусты мно-
множества Uq и (/й = {/*П^о- Кроме того, Q(u)^Q на l/ft.
Покажем, что множество Qc — {u: wg(/q, й(м)^С} ком-
компактно в метрике Сг[а, Ь] при любом С^О. В самом деле,
из неравенства Q (и) ^ С следует, что max \u(t)\ = \\u\\c ^ С,
| u(t) — и(х) | ^C\t — t|y, /,те[о, 6] для любой функции
u(/)eQc. Это значит, что множество функций Qc рав-
равномерно ограничено и равностепенно непрерывно на от-
отрезке [а, 6]. В силу теоремы Арцела тогда из любой пос-
последовательности {uk(t)}^Qc можно выбрать подпоследо-
подпоследовательность, сходящуюся к некоторой непрерывной функции
и (/) равномерно на [а, Ь]. Убедимся в том, что и (t) e Qc.
Прежде всего, из замкнутости U в метрике Cr[a, b]
и условия uk(t)^U, k=l, 2, ... следует, что «(/)g(/.
Далее, в неравенстве Q (uk) ^ С можно совершить предель-
предельный переход по соответствующей подпоследовательности
и получить, что w(/)eCj[fl, b] и Q(u)^C. Это значит,
что и (/) е Qc- Тем самым компактность множества Qc
в метрике Cr[a, b] доказана.
Следовательно, функция Q {и) = ||m!IcY удовлетворяет
всем требованиям определения 1 и может служить стаби-
стабилизатором задач минимизации в метрике Cr[a, b].
Аналогично показывается, что в качестве стабилизатора
здесь можно взять функцию Q (и) = || и — п\\су, где п = it (t)
— известная функция из Cj[a, b].
Пример 5. Остановимся на примерах стабилизаторов
для задач минимизации J (и) на множестве U^C?[a, b].
Здесь С™[а, Ь] — банахово пространство т раз непрерыв-
непрерывно дифференцируемых r-мерных вектор-функций с ко-
т
нечной нормой ||w|lcm= / max " . . Сходимость по-
следовательности {Uk(t)\ к«(/)в метрике С?[а, Ь] означает
равномерную на [а, Ь] сходимость последовательностей
d4!)rfM0 при каждом » = 0, 1, ..., т. Пусть U
170
замкнуто в метрике С™[ау b]> a [/* непусто и содержит хотя
бы одну точку и* из H?+l [а, Ь] (см. обозначения в § 1.1).
Рассуждая по аналогии с примером 3, можно показать,
что стабилизатором здесь можно взять функцию
О(о)
Другим стабилизатором в задачах минимизации в
С? [я, Ь] может служить функция
Q (и) = У max
d'u (t)
dtl
+
+
sup
t, те [а,
b]
dmu (t)
dtm
(т)
dttn
\t-T\~\
где у = const, O^y^I. Эта функция определена на ба-
банаховом пространстве С'?' у[ау b] m раз непрерывно диф-
дифференцируемых вектор-функций u(t) = (ul(t), ..., иг(/))
с нормой ||а||сШ, v = ^ (и). Если множество U замкнуто
в метрике СТ[а, Ь] и хотя бы одна точка минимума J (и)
на U принадлежит пространству С?' v [a, &], то по анало-
аналогии с примером 4 нетрудно показать, что Q (и) в самом
деле является стабилизатором такой задачи в метри-
метрике С?[а, &].
Пример 6. Пусть рассматривается задача минимиза-
минимизации функции J (и) на множестве U<=Lrp[ay b]9 где 1<
<р^оо. Пусть U замкнуто в метрике Lrp[ay b] и хотя
бы одна точка минимума принадлежит пространству
НПг^х[а, h] или СТ'у[ау Ь] при каком-либо целом т^О.
Тогда б качестве стабилизаторов в метрике Lrp [a, b] можно
взять ii (и) = ||^||2ят4 1 или Q (и) = \\и\\ст' у соответственно.
Это следует из того, что равномерная сходимость функции
на [а, Ь] влечет за собой сходимость по норме простран-
пространства Lp[a, b].
Пример 7. Наконец, приведем пример стабилизатора в метрике
пространства L\ [a, b]. Пусть U множество из L[ [a, b], замкнутое
в метрике этого пространства, пусть множество U* точек минимума
функции / \и) на U непусто. Предположим, что 6/# содержит хотя
оы одну точку u*(t) <=:Vr[af b]. Здесь под Vr [a, b] понимается
171
банахово пространство вектор-функций и (t) = (u1(t)i ... , иг (/)) с огра-
ограниченным изменением; нормой в этом пространстве является величина
[ и lv= : и (a) \ + Vba (u)> гДе Vba (и) —полное изменение функции и (t)
на отрезке [а, ft]. Напомним, что функция и (t) имеет ограниченное
п
изменение на [а, ft], если верхняя грань суммы 2:и(^)—-ы (//_-,) j
по всевозможным разбиениям {^} = {а = /^< tx < ... < tn~b\ отрезка
[а, 6] ограничена равномерно по п>\, а величина
Vь {и) e sup SUp yj j и (/) _ a й ) i
называется полным изменением u(t) на [a, b] ([11J, гл. VI § 2). Про-
Пространство Vr [a, b] является подпространством L[ [a, 6].
Рассмотрим функцию
на множестве ?/Q = t/ f] Vr \a^ b]. По условию множество U+ (] Vr [ay b]
непусто. Следовательно, непусты множества Uq и UQ = U+\)Un.
Кроме того, Q(u)^0 на UQ. Покажем, что множество ^c=«
= |и: u&iUQ, Q(u)^CJ компактно в метрике Ц [a, ft] при любом
С^О. В самом деле, из неравенства Q(u)j^C следует
\u(t)\^\u(a)\ + \u{t)--u{a)\*z:\u{a)\ + Vba (и)^С
при всех t e [a, ft] для любой функции и (/) из Qc. Далее, считая
для определенности u(t)^u(b) при / > ft, будем иметь
ь ь ь
\ | и (t + T)-u(t) | Л ^j Vj+T (и) Л-J [F^+T (и)- Vla (и)} Л»
j }
в а
b a
при всех т>0 и всех « (/) е Йс. Следовательно, множество функ-
функций Qc равномерно ограничено и равностепенно непрерывно по
норме Life. ft]. Это значит ([204], стр. 114; [87], стр. 324 —325),
что из любой последовательности {и^ (t)} sQf можно выбрать под-
подпоследовательность, сходящуюся в метрике L\ [a, ft] к некоторой
функции и (t) e L\ [a, ft].
Убедимся в том, что и (t) e Qc. Прежде всего, так как uk (t)&U,
k~\, 2, ..., a U замкнуто в метрике L[ [a> ft], то и (t) m U. Остается
показать, что и (/) е Vr [a, ft] и Q(w)^C. В силу теорем Хелли
([11], стр. 366 —369) из {иПО} можно выбрать подпоследовательность,
сходящуюся в каждой точке отрезка [a, ft] к некоторой функции
v(t)E=Vr[a, ft]. He умаляя общности, можем считать, что сама
последовательность {и^ (t)} сходится к v (t) при всех / es [a, ft] и
к и (/) в метрике Ц [a, ft]. Но из сходимости {ик (/)} к а (/) в L[ [a, ft]
следует существование подпоследовательности, сходящейся к и (t)
172
почти всюду на [а, Ь] ([11], стр. 388). Поэтому, изменив функцию и (t)
на множестве меры нуль, можем считать, что и (t) = v (t)ie Vr [a, b].
n
Наконец, из соотношений | и (а) \ + У) \ и (tfi — u (t^) | = lim (| uk (a)\ +
f _- I k-+CO
n
+ .2 I uk iU)— uk (h-л) ) ^C, справедливых для любого конечного
i=l
разбиения {//} отрезка [я, Ь], следует, что Vba(u)^C. Компактность
множества Q^ в метрике L[ [я, b) доказана Таким образом, функция
Q (w) = || и \у обладает свойствами стабилизатора в метрике L[[a} b].
Как видно из приведенных примеров, при построении стабилиза-
стабилизаторов весьма полезны знания критериев компактности множеств
в используемых метрических пространствах, теорем вполне непрерыв-
непрерывного вложения одного функционального пространства в другое.
С помощью теорем вложения [35, 157, 169, 204] аналогично могут
быть построены стабилизаторы для задач минимизации в простран-
пространствах Lr (G), С™ (G) и других, где G — некоторая заданная область
из n-мерного евклидова пространства.
Упражнения. 1. Можно ли взять функцию Q(u) =
I (| и (/) B + | и (t) |2) dt в качестве стабилизатора в метрике С [0, 1]
1
в задаче минимизации функции J (и) = \ \ и (t) f2 dt на множестве U-
= М0, 1]?
2. Пусть функция J («) = max ,u(t)\+ max j и (t) \ минимизи-
руется на множестве U — C2[0, 1]. При каких m, р функция Q (и)=
С \i | dlu (t) р ^
= 1 7 ——t— dt может служить стабилизатором этой задачи в
0 1=1
метрике С2 [0, 1]?
3. Какие из функций Q(u)=[\u{t) vdt, Q (и) = max \u{t)\t
о
1
Q (u) = ( (| и (t) \ + \u (t) ;) dt и в каких метриках могут служить стаби-
1
лизатором в задаче минимизации J (а)= (| и (t) \ dt на множестве U-
= ^|0, 1]?
4. Для задачи минимизации функций на выпуклом замкнутом
множестве из Lp [а, Ь\, 1 < р < + оо привести примеры слабых
стабилизаторов.
5. Пользуясь теоремами вложения из книги B04] показать, что
шар lu (s) : || и (s) ]i. m+1 ^ R < ool из Hm+1 (G) компактен в метрике
Нт (G) при всех т^О (обозначения см. в § 1.1). Опираясь на этот
факт, предложить стабилизатор для задачи минимизации функций на
множествах U из Нт (G) в метрике Нт (G).
173
6. Доказать, что если Qx (и) и Q2 (и) — р-стабилизаторы [слабые
стабилизаторы] с одной и той же областью определения UQ э то
Q (i/)==a1Q1(«) + a2Q2(w), ах^0, а2^0, а! + а2 > 0 также явля-
является р-стабилизатором [слабым стабилизатором].
§ 3. Нормальное решение
Остановимся еще на одном аспекте задач минимизации.
В тех случаях, когда множество ?/* точек минимума
функции J (и) на U состоит более чем из одной точки,
можно поставить задачу об отыскании наилучшей в неко-
некотором смысле точки этого множества. Например, может
возникнуть задача об определении точки и%^0%, бли-
ближайшей к некоторой фиксированной точке п в некоторой
метрике рь т. е. pi(w*, S) = .infp1(w, и).
*
В более общем виде подобную задачу можно сформу-
сформулировать так: на множестве Uq ^ U задана функция
Q (и), причем ?/fi = ?/я П ?А* =И= Ф и требуется найти такую
точку и#е(/о, в которой Q (и) достигает своей ниж-
нижней грани на Uq.
Определение 1. Точку m4g[/q назовем нормаль-
нормальным решением задачи A.1) по функции Q(u) или, короче,
Q-нормальным решением задачи A.1), если
В задачах оптимального планирования функция Q (и)
может выражать собой стоимость затрат на организаци-
организационные и технологические перестройки при переходе от
существующего состояния производства к его новому
состоянию, соответствующему плану и. Тогда среди всех
оптимальных планов u^U# естественно выбрать тот
план и%, для которого стоимость затрат Q(m*) мини-
минимальна. Таким образом, в данном случае наилучший оп-
оптимальный план представляет собой Q-нормальное реше-
решение задачи A.1) [10, 17].
Следует подчеркнуть, что задача определения Q-нор-
мального решения
Й(и)-мп{; u&Ub, A)
весьма осложняется тем, что множество Uq задано неявно,
и оно лишь в редких случаях может быть точно и кон-
конструктивно описано. Как было замечено выше, задача
описания множества U& особенно сложна в том случае,
174
когда исходная задача A.1) некорректна в требуемой
метрике.
Рассмотрим еще один аспект задачи A), связанный
с явлением неустойчивости множеста иЪ, при неточном
задании функции. А именно, пусть вместо точного значе-
значения функции J (и) известны лишь его приближения Jk(u),
k=l, 2, ..., и пусть lim (J (и) — Jk(u)) = 0 при каждом
/г-»оо
u^U. Тогда для отыскания Q-нормального решения за-
задачи A.1) можно попытаться найти множества U% =
= {и: u^U, Jk (и) = inf Ju (v) = Jk\ и точки uk^U% из
и
условия п (Uk) = inf Q (и), k=l, 2, ..., а затем в каче-
и%
стве приближения к Q-нормальному решению взять точку
uk с достаточно большим номером k. При этом неизбежно
возникнет вопрос: будет ли последовательность {ик) схо-
сходиться ко множеству Q-нормальных решений в требуемой
метрике? Оказывается, ответ на этот вопрос в общем
случае отрицательный, поскольку предыдущие действия
могут привести к большим погрешностям в определении
Q-нормального решения. Поясним это на простых при-
примерах.
Пример 1. Пусть требуется минимизировать функ-
функцию J (и) = | аи — Ь |2 на множестве U = Е1 при условии,
что величины а и Ь заданы с погрешностями. Пусть точ-
точные значения а = & = 0, так что / (и) = 0s J# = inf J (и),
U% = El. Если Q (и) = и2, то Q-нормальным решением
этой задачи является единственная точка и* = 0. Предпо-
Предположим, что величины а, Ь известны лишь приближенно
и при вычислениях с некоторым числом десятичных знаков
задаются как aft, bk, так что вместо точной функции J (и) мы
будем иметь дело с ее приближениями Jk (и) = | aku — bk j2,
й=1, 2, ... Пусть lim ak= Y\mbk = 0t т. е. точные зна-
&—»-оо /г-*оо
чения а = Ь = 0 могут быть получены с любой наперед
заданной точностью. Так как ал, bk, вообще говоря, от-
отличны от нуля, то множество U% точек минимума Jk(u)
на U состоит из единственной точки ик = Ьк/аку k= 1, 2,...
Нетрудно видеть, что величина uk, являющаяся отноше-
отношением малых чисел, может принимать любые значения.
Следовательно, как бы точно ни задавались величины aki
bki безнадежно пытаться использовать ик в качестве при-
приближения к Q-нормальному решению и* = 0 в метрике Е1.
175
Этот пример показывает, что и в более общей задаче
линейной алгебры Аи = Ь, сводящейся к минимизации
функции / (и) = | Аи — Ъ j2, при поиске й-нормального ре-
решения с Q(u) = \u\2 могут наблюдаться аналогичные яв-
явления гекорректности из-за погрешностей в задании мат-
матрицы А и вектора Ь [17].
Пример 2. Пусть требуется найти Q-нормальное
решение задачи минимизации функции J(u)=x-\-y на
множестве U= {и = (х, у): х^0у у^0у 2^х-\-у^З} при
Очевидно, inf 7(и) = У# = 2, U* = {u = (x, у):
= 2, лг^О, у^О}. Так как функция J (и) непрерывна и
множество U компактно, то задача минимизации J (и) на
U корректно поставлена в метрике Е2. Точка ^ = A, 1)
является единственным Q-нормальным решением этой за-
задачи, причем Q(u#) = 2. Предположим, что функция J (и)
задана неточно и нам известны лишь ее приближения
Jk(u) = akx + bky, где \\mak= limft*=l. Так как, вообще
говоря, акФЬк, то минимум Jk(u) на U будет достигаться
либо в точке uk = B, 0) (при ak<cbk)y либо в точке ик =
= @, 2) (при ak>bk), т. е. множество U% точек минимума
при акФЪи состоит из единственной точки ии. Ясно, что
последовательность {и^} не сходится к Q-нормальному
решению и* = @, 0), и кроме того, Q (ии) = 4, k=l, 2,...,
так что lim Q (uk) =4 Фп (и*) = 2. Таким образом, как
k-+co
бы мы ни уменьшали погрешность задания величин а, Ьу
попытки использовать {ык} в качестве приближения
к и* = @, 0) обречены на неудачу.
Приведенные примеры показывают, что при- сколь
угодно малых погрешностях в задании функции J (и)
множества U% = {и: и^ ?/, Jk (и) = inf Jk (v)\ могут отли-
и
чаться от U# столь значительно, что использование точек
ukj определяемых условием Q(uk) = inlQ(u), в качестве
ut
приближения к Q-нормальному решению может привести
к большим погрешностям. Это означает, что задача опре-
определения Q-нормальных решений относится к классу не-
некорректно поставленных задач, и для ее решения требуются
специальные методы. Оказывается, методы регуляризации,
которые будут изложены в последующих параграфах, по-
позволяют решать и такую задачу.
176
В заключение остановимся на условиях, гарантирую-
гарантирующих существование Q-нормального решения задачи A.1).
Теорема 1. Пусть функция Q(u) является ^-стаби-
^-стабилизатором задачи A.1) и пусть функции J (и)у Q (и) р-
полунепрерывны снизу на множестве Uq. Тогда сущест-
существует хотя бы одно й-нормальное решение задачи A.1).
Доказательство. По определению стабилизатора
множество Uq = Uq() U* непусто. Возьмем какую-либо
точку v* <= Uq и составим множество й? = {и: «g(/*q,
п(и)^С}у где C = Q(uj. Очевидно, п%Фф9 так как,
например, и# е Qc- Покажем, что Q? р-компактно. С этой
целью возьмем любую последовательность {uk) e Qc- Так
как QJ ^ Qc> т0 {"*} ^ Йо Но множество Qc р-компактно
по определению р-стабилизатора, поэтому из {uk} можно
выбрать подпоследовательность ЫкЛ* р-сходящуюся к не-
некоторой точке v e Qc- Покажем, что v e Qc. Включение
^ейс означает, что uk^Uby т. е. J{uk) = J*, &=1,
2, ... С учетом р-полунепрерывности снизу У(и) на t/д
отсюда при k = kn->- со имеем J% ^ J (v) ^ lim J{uk\^
k~*co
==*J*, т. е. J{v) = J^. Таким образом, уе^. В тоже
время включение уейс означает, что ие(/й и Q (и) ^
^С. Следовательно, v e Qc« Тем самым р-компактность
Qc доказана.
Так как функция Q (м) р-полунепрерывна снизу на
Qc, то из теоремы 1.3.1 тогда следует, что Q(u) достигает
своей нижней грани на Q'c хотя бы в одной точке и* е
е Qc- Однако, очевидно, Q^ = inf Q (и) = inf Q(u) = Q (м#),
т. е. и* является Q-нормальным решением задачи A.1).
Аналогичная теорема может быть сформулирована
с использованием слабого стабилизатора задачи A.1).
Теорема 2. Пусть в задаче A.1) множество U при-
принадлежит банахову пространству В и функция Q (и) явля-
является слабым стабилизатором этой задачи. Пусть, кроме
того, функции J (и), п(и) слабо полунепрерывны снизу на
Uq. Тогда существует хотя бы одно Q-нормальное реше-
решение задачи A.1).
Доказательство опирается на теорему 1.3.2 и проводит-
проводится так же, как теорема 1.
Упражнения. 1. Дайте геометрическую иллюстрацию задач
из примеров 1, 2.
2. Пусть требуется минимизировать функцию J (и) = (ах-\-Ьу-\-сJ
на плоскости ?2, пусть коэффициенты а, Ь, с известны неточно. Будет
177
ли корректна в метрике Е2 задача нахождения Q-нормального реше-
решения, если взять Q (и) = х2-\-у2?
3. Найти й-нормальное решение «* задачи минимизации функ-
функции J (и) = (х— 1J + @- у— IJ при и = (х, у) <= U=E2, считая, что
Q(u) = x2 + y2. Показать, что \ик — и* |->со при k -> оо, где uk пред-
представляет собой ^-нормальное решение задачи минимизации приближен-
приближенной функции Jk(u) = \ x—\ |2 + | oky— 1 |2на?2, гдеа/,-» 0 при k -> оо.
4. Найти Q-нормальное решение следующей задачи линейного
программирования: минимизировать функцию J (и) = с1х-\-с2у на мно-
множестве U = {и = (х, у): аих-\-а12у=Ьъ а2Хх-{-а22у = Ь2> х ^ 0, у^О}.
где вектор с — (съ с2) и матрица Л={а//} известны неточно, а Q (w) =
= х2 + #2. Будет ли задача нахождения Q-нормального решения кор-
корректной в метрике ?2?
5. Найти Й-нормальное решение задачи минимизации функции
J (и) = х2A, и) при условиях ? = и@, 0^/^ 1, х@) = 0, и(/)е
gL2[0, 1], |u@l^l почти всюду на [0, 1], если Q (и) = ^ и2 (t) dt
Будет ли задача определения Q-нормального решения корректной
в метрике С [0, 1]? L2 [0, 1]?
§ 4. Основные леммы о регуляризации
В методах регуляризации, которые будут описаны
ниже, важную роль играют следующие две леммы. Для
формулировки этих лемм нам понадобится понятие р-ре-
гулярной последовательности.
Определение 1. Минимизирующая цоследователь-
кость {и/г] задачи A.1) называется регулярной в метрике
р или, короче, р-регулярнойу если:
1) последовательность {uk} р-компактна, т. е. из нее
можно выбрать хотя бы одну подпоследовательность, р-схо-
дящуюся к некоторой точке из 1)\
2) {uk} сходится ко множеству и% в метрике р.
Лемма 1. Пусть 1) U — множество с заданной на
нем метрикой р; функция J (и) определена и ^-полуне-
^-полунепрерывна снизу на U, J* — mlJ(u)> —со, множество
и
1/^ = {и^и : J (u) = J^} непусто]
2) функция Q (и) определена на множестве Uq ^ U и
является р-стабилизатором задачи минимизации J (и) на U\
3) последовательность {uk} такова, что
uk?EUQy /(^^У^ + р,, Л= 1, 2, ..., A)
2W<Q*+b k=l 2, ..., B)
где Q* = miQ(u), P/<>0, Л=1, 2, ..., lim рл = 0,
sup | Yi<
178
Тогда последовательность {uk} минимизирует функцию
J (и) на U, р-регулярна и
HmpK ?/&) = Of иъ = ип()ит. C)
ft-» 00
Если, кроме того, Q (и) р-полунепрерывна снизу на Uq и
lim уk = 0, то
fc-co
lim Q («*) = ?}*, lim p{uky ?/**) = О, D)
ft -*оо ft-*oo
где Uxx~{u: и е (/д, й («) = Q^} — множество Q-нормаль-
ных решений.
Доказательство. С учетом того, что J{uk)^J^
из неравенства A) сразу получаем lim J(uk)^J^y т. е.
{^ — минимизирующая последовательность. Далее, из B)
следует, что Q (uk) ^ Q* + sup I yk ! = С < оо, ^ = 1, 2, ...,
т. е. {«4)?Йс = {и: u&Uq, Q(u)^C}. По определению
р-стабилизатора множество Qc р-компактно. Поэтому
последовательность {uk\ р-компактна. Пусть ^ — произ-
произвольная точка, являющаяся р-пределом какой-либо под-
подпоследовательности {и-ья}. Покажем, что ^eUq. Поль-
Пользуясь тем, что J (и) р-полунепрерывна снизу и^ейс?
?(/, из неравенства A) при & = &„->оо получим J*^
^ J (у*) ^ П_т У (ukn) ^ ^*- Это значит, что J (v^) = У#, т. е.
/7-+00
у* еЕ (/#. В то же время i^ e Qc ^ ^'q. Следовательно,
v.j, e f/§ = (У^ П ^*- Тем самым доказано, что любая точка,
являющаяся р-пределом какой-либо подпоследовательности
{uk\ принадлежит Uq. Отсюда уже нетрудно получить
соотношение C).
В самом деле, из неотрицательности расстояния следу-
следует ijm р (ии$ г/S) ^ 0. Пусть lim p (uk, U%) == lim p (^ U%).
k-+co к-*со п -+ со
В силу р-компактности множества Qc и включения
{иьп\ е Йс можем считать, что \ukfi} р-сходится к некото-
некоторой точке у#. Тогда из р-непрерывности функции р(и, Uq)
(см. § 1.3) имеем lim р(ик , U%)~p(v^ U%). Но по
А2-*ОО
доказанному ^g[/q, так что limp (и*, f/S)=p(o#t
ft->oo
(/g)==0. Это значит, что lim p(uk,U&) существует и ра-
к-+оо
вен нулю. Тем самым, р-регулярность {ик) и равенсхво
C) доказаны.
179
Пусть теперь lim y^ = 0 и функция Q (и) р-полунепре-
к —»-оо
рывна снизу на UQ. Заметим, что тогда множество G,,. не-
непусто—это следует из теоремы 3.1. Покажем справедли-
справедливость соотношений D). Пользуясь тем, что ^g(/q, из
неравенства B) при ? = ?„-> со получим Q* ^ Q (v^) <;
^ lim Q (ukj == lim Q (ukj ^ Q* + Hm ук = п^. Это зна-
чит, что lim Q (иЛд) = Q (^) = Й*, т. е. ^Gt/^. Таким
/2-*OO
образом, любая точка, являющаяся р-пределом какой-либо
подпоследовательности \uk}, принадлежит множеству U^^.
Рассуждая так же, как при доказательстве равенства C),
отсюда имеем limp(^, ?)*j = 0.
Наконец, покажем, что lim Q(uk) = Q:i:. Из B) следует
k ~+ со
lim Щал)^?2*. Пусть lim Q (ик) = lim Q(ukfi). В силу
р-компактности Qc и включения \ukn) e Qc можем счи-
считать, что {ukn} р-сходится к некоторой точке v*.
Но тогда, как было показано выше, lim Q (ukj = Q^ =
П -* С5О
Итак, lim Q (^) = lim Q (мл) = Q*, что равно-
сильно соотношению lim Q(^) = Q^. Лемма 1 доказана.
fc-юо
Следующая лемма показывает, как с помощью слабого
стабилизатора можно получить минимизирующие последо-
последовательности, регулярные в метрике банахова пространства.
Лемма 2. Пусть выполнены следующие условия: 1)
U — выпуклое замкнутое множество из рефлексивного бана-
банахова пространства В\ метрика р на U задается равен-
равенством р(и, v) = lu — viB\ функция J (и) определена, огра-
ограничена снизу и слабо в В полунепрерывна снизу на U-,
множество U^—lu: u^U, J(и) = У* = inf J(v)\ непусто]
и
2) функция Q (и) определена, строго равномерно вы-
выпукла, неотрицательна и р-полунепрерывна снизу на Uq =
= U (например, В == Н — гильбертово пространство,
Q (и) = |м — ufH — сильно выпуклая функция на V, где п—
фиксированная точка из Н)\ 3) последовательность {uk}
удовлетворяет условиям A), B) с limyft = 0.
k-+ со
Тогда {uk\ минимизирует функцию J (и) на U, р-регу-
лярна, и, кроме того, справедливы соотношения D).
180
Доказательство. Из строго равномерной выпук-
выпуклости Q (и) и теоремы 1.3.9 следует ограниченность мно-
множества Qc = {u: u^U, Q(u)^C} в метрике В при любом
С^О. Выпуклость множества U и функции Q (и) обеспе-
обеспечивают выпуклость множества Qc, а из замкнутости U и
полунепрерывности снизу Q (и) вытекает замкнутость Qq
в метрике В. Тогда по теореме 1.3.4 множество Qc слабо
компактно в В. Следовательно, Q (и) — слабый стабилиза-
стабилизатор задачи минимизации J (и) на U.
Далее, в силу теоремы 1.3.5 Q (и) слабо в В полуне-
полунепрерывна снизу на U. Из теоремы 3.2 тогда следует, что
множество U#* Q-нормальных решений задачи минимиза-
минимизации / (и) на 0 непусто. Рассуждая так же, как при до-
доказательстве леммы 1, из неравенств A), B) получим,
что любая точка v^, являющаяся слабым пределом неко-
некоторой подпоследовательности последовательности {uk}, при-
принадлежит множеству и*ъ и
lim
k —> оо
Покажем, что последовательность {uk} компактна в мет-
метрике В. Возьмем любую подпоследовательность Ыкп}. Учи-
Учитывая, что {иЛ/1} принадлежит слабо компактному множе-
множеству Qc пРи С = Q* + sup \yk\, можем считать, что \uk \
слабо сходится к некоторой точке v%. Поскольку функ-
функция Q (и) строго равномерно выпукла на U, то
Q {аи + A - а) V) ^ ccQ (и) + A - а) Q (v) -
— а A — а) б (|| и — v I)
при всех м, v^U, а?[0, 1], где б(/)>0 при />0,
6@)^=0 и б (t)-> 0 тогда и только тогда, когда /->-}-0.
Положим здесь а=1/2, и = ик, v = v*. Получим
: б (!| ик - v, S) < 2 [Q (uk) + Q (v,)] - 4Q ((ик + uJ/2), •
k-\ 2 @)
/С 1 , Z-, ...
Очевидно, из слабой сходимости {ик\ к v* следует сла-
слабая сходимость последовательности Uukn-\-v^y2\ к той
же точке V*. Поскольку Q (и) слабо полунепрерывна
снизу, то lim Q ((ukfi + v#)/2Mг= Q (t;#) = Q*. Поэтому из
k —*¦ оо
181
соотношения limQ(Wb) = Q# и из E) при k — kn-+oo
П --* со
получим 0^ lim 6(|яЛ — v* !|)< lim 6(|«* — v# |!)<
^2/lim Q(^/i)+Q#\-4 lim О((иЛ/1+0#)/2)^О. Следова-
тельно, lim б(||иЛя —1>#|!) существует и равняется ну-
п —*• со '
лю, что возможно только при limfjukfi — v# || = 0. Это
л —>oo'
значит, что v% является р-пределом подпоследователь-
подпоследовательности ЫкЛ в метрике В. Тем самым компактность {uk}
в метрике В доказана.
Остается показать, что lim p(uk, ?/**) = (). Пусть
limp (и*, ?/**) = lim p(^rt, ^**)« Можем считать, что /иА }
слабо в В сходится к точке х>#. По доказанному v^. ^U%%
и {w/^} сходится к v^ в метрике 5. Следовательно, 0 <.
< lim p(uk, ?/**)^ Hm p(wb t/#J|c)= lim p(ukr% и*Л =
*^Г5Ь ^-^^ /I-*°°
= P (^*» ^**) = 0, что равносильно соотношению
lim p(ukf f/**) = 0. Лемма 2 доказана.
k-*oo
Леммы 1, 2 указывают пути получения р-регулярных
минимизирующих последовательностей в некорректных
задачах минимизации: для этого нужно научиться строить
последовательности, удовлетворяющие условиям A), B).
Перейдем к описанию методов построения таких последо-
последовательностей—методов регуляризации. Будут описаны и
исследованы три метода регуляризации: метод Тихонова,
метод невязки и метод квазирешений.I
Упражнения. 1. Показать, что в лемме 1 р-полунепрерыв-
ность снизу функции J (и) достаточно было потребовать лишь на
множестве Vп и з леммах 1, 2 р-полунепрерывность снизу функ-
функции Q (и) нужна лишь на иЬ*
2. Провести доказательство леммы 2 для случая, когда В = Н —
гильбертово пространство, a Q(u) = jia — й |!jj, не ссылаясь на тео-
теоремы 1.3.8, 1.3.9.
3. Применима ли лемма 2 к задаче из примера 1.2, если принять
Q («)«=(; и (t)Vdrt
6
4. Можно ли в лемме 2 вместо строго равномерно выпуклой
функции Q (и) взять равномерно выпуклую функцию? Указание:
в задаче из примера 1.2 взять Q (и) ¦=*? (| и |Lf [0> jj)f г&е ?(/) = Опри
01 и ?(/)=-(/—IJ при t^U
182
§ 5. Метод Тихонова
Итак, пусть задача минимизации функции J (и) на
множестве U некорректна в метрике р. Требуется по-
построить минимизирующую последовательность, которая
заведомо была бы р-регулярной, т. е. была бы р-компакт-
ной и р-сходилась ко множеству точек минимума J (и)
на U.
1. Одним из эффективных средств решения некоррект-
некорректных задач является метод регуляризации, разработанный
А. Н. Тихоновым [17]. При пользовании этим методом
нужно выбрать какой-либо стабилизатор рассматриваемой
задачи. Пусть таким стабилизатором является функ-
функция Q (и)> определенная на множестве Uq s U. Далее
берется какая-либо положительная последовательность
{а*}, сходящаяся к нулю, и при каждом &=1, 2, ... на
множестве Uq определяется функция
Tk(u) = J (u) + akQ (и), и е= UQ, A)
которую принято называть функцией Тихонова. После
этого рассматривается задача минимизации функции Tk (и)
на Uq как задача первого типа. А именно, при каждом
k=\, 2, ... определяется точка uky удовлетворяющая
условиям
Т% - inf Tk (и) < Tk (uk) < Tt + e,, uk e UQ, B)
Uq
где величина гк характеризует точность решения задачи
минимизации Tk(u) на Uq, ел>0 при /?=1, 2, ..., и
lim 8^ = 0. Такая точка uk существует по определению
нижней грани, так как ek — положительная величина,
а функция Tk(u) ограничена снизу на Uq. Ограниченность
Тк(и) на Uq доказывают неравенства Tk(u)^J(u)^
^«/*> — оо, u^Uq, вытекающие из неотрицательности
стабилизатора й(и)> величины ak и условия ml J (и) =
= J*> — °°» предполагаемого самой постановкой задачи.
В том случае, когда нижняя грань Tk (и) на Uq дости-
достигается хотя бы в одной точке uk e Uq, в B) можно до-
допустить ел = 0.
Для определения точки uk из условий B) могут быть
использованы любые подходящие для этой цели методы
решения задач минимизации первого типа (см. задачу A.2)).
183
Поскольку дальнейшее изложение не зависит от способа
нахождения точки uf{, то мы можем здесь ограничиться
предположением, что при каждом ?=1, 2, ... имеется
хотя бы один метод, позволяющий достаточно эффективно
вести поиск точки ak в соответствии с условием B) при
любом еЛ>0.
Для пояснения основной сути метода Тихонова
сразу же заметим, что задача минимизации функции Тк (и)
на множестве Uq при каждом фиксированном k= 1, 2,...,
как правило, оказывается более «устойчивой» по сравне-
сравнению с исходной задачей A.1) и даже может быть корректно
поставленной. Например, если в задаче из примера 1.1
взять стабилизатор Q (и) = и2, то для функции Тk (и) =
= ц2A + и*)~г + щи2 из-за наличия слагаемого aku2 будем
иметь lim Tk (и) = + оо. В силу теоремы 1.3.7 это соот-
| и I —¦• оо
ношение гарантирует корректность постановки задачи
минимизации Tk(u) на V = EL. Для задачи из примера 1.2,
некорректной в метрике Lo[0, 1], тихоновская функция
1
Tk (и) = J (и) + ak J и2 (/) At является сильно выпуклой при
о
каждом k=l, 2, ..., и следовательно, задача минимиза-
минимизации Tk(u) на 0 будет корректной в метрике L2[0, 1].
Как показывают эти примеры, добавление к исходной
функции J (и) слагаемого a^Q (и) делает задачу миними-
минимизации более «устойчивой». Имея в виду это обстоятель-
обстоятельство, метод Тихонова иногда будем называть методом
стабилизации.
Однако тот факт, что задача минимизации функ-
функции Tk(u) на Uq обладает большим «запасом устойчиво-
устойчивости», чем исходная задача, сам по себе еще не гарантирует
того, что последовательность {uk}y определяемая условиями
B), будет минимизирующей и р-регулярной. Это связано
с тем, что чем меньше значение параметра ak, тем меньше
слагаемое affQ(u), входящее в выражение A), и следова-
следовательно, тем меньше «запас устойчивости» в задаче минимиза-
минимизации Tk{u) на Uq. Оказывается, для получения последова-
последовательности {uk} с требуемыми свойствами уменьшение «за-
«запаса устойчивости» следует компенсировать согласованным
изменением величин ak, ek, являющихся параметрами ме-
метода. Произвол в выборе этих параметров может привести
к тому, что последовательность \uk}% определяемая усло-
условиями B), даже в простейших задачах не будет р схо-
сходиться ко множеству точек минимума Например, в задаче
184
из примера 1.1 возьмем стабилизатор Q(u) = u2 и поло-
положим ak = /г2, гк = 2krl, k = 1, 2, Условия B) тогда
примут вид
0 = П<71Л((/Л) = «|A+4)-1 + *-2«1^2/Л| *=1, 2, ...
Нетрудно видеть, что последовательность uk — kl/2y k =
= 1, 2, ..., удовлетворяет этим условиям, но не схо-
сходится к (/г В то же время, если согласовать изменение
параметров aky гк так, чтобы lime/?a^1 = 0 (например, взять
k -+со
а^ = /г\ еА = /г2), то любая последовательность {uk}y опре-
определяемая условиями B), будет сходиться к t/r В этом
легко убедиться, написав следующую очевидную цепочку
неравенств:
О < и\ <
Аналогично, если для задачи из примера 1.2 взять ста-
стабилизатор Q (и) = $ а2 (/) Л и положить ak = k~3, гк = ^,
6
Л=1, 2, ..., то последовательность w& (/) = sin2n^/, k~
= 1, 2, ..., будет удовлетворять условиям B):
О = Т% < П («л) - 3 (Зя^2)-1 + B**)-1 < й-2 - г,,
й=1, 2, ...,
но не будет сходиться к и#(/) = 0 в метрике 12[0, 1].
Между тем, условие lim еЛа^1 = 0 и здесь приводит к схо-
димости последовательности {uk(t)} из B) к ^„е(/) = 0 по
норме L2[0, 1], так как тогда
Приведенные примеры убедительно показывают, что
для получения из B) р-регулярной последовательности (uk)
крайне важно обеспечить согласованное изменение пара-
параметра ak с точностью гк решения задачи минимизации
функции Tk (и) на множестве Uq в смысле неравенства B).
Строгое обоснование метода Тихонова с указанием
условий согласования параметров аь гк дается в следую-
следующей теореме.
Теорема 1. Пусть функции J (и), Q (и) и множе-
множество U удовлетворяют условиям 1), 2) леммы 4.1 или
185
леммы 4.2, а последовательности {ал}, {е^} положительны
и lim ал= lim 6^ = 0, sup е^а*1 < оо.
?_юо ? —оо к^ 1
Тогда последовательность {ик}у определяемая усло-
условиями B), минимизирует функцию J (и) на U, ^-регулярна
и р-сходится ко множеству Uq=^Uq[\U\?. Если, кроме
того, lim ел/осл = 0, Q (и) р-полунепрерывна снизу на UQf
k —»¦ со
то справедливы соотношения
lim Q(uk) = Q^ = inf Q(u),
*"°° иЬ C)
(и ^) 0 ;
где U**— множество Q-нормальных решений задачи мини-
минимизации J (и) на U.
Доказательство. Достаточно показать, что после-
последовательность {uk) из B) удовлетворяет условиям D.1),
D.2) из основных лемм о регуляризации. С этой целью
возьмем произвольную точку и# е U& и напишем следую-
следующую цепочку неравенств, вытекающую из определения J%,
Т%, неотрицательности Q(u), {ak} и условия B):
k=l, 2, ...
Отсюда имеем: oc^Q(w^)^a^Q(i/Jf.) + e/f или Q(uk)^Q (и%)-\-
-\-ека?\ fe=l, 2, ... Последнее неравенство верно для
любого и% g(/q, поэтому, переходя в нем к нижней грани
по м#е(/о, получим: Q (uk) < Q^ +у^, где ук = ча*\
Л=1, 2, Неравенство D.2) доказано. Вторично обра-
обращаясь к выведенной выше цепочке неравенств, будем
иметь J* ^ У(м*) ^ y^ + o^Q (а#) + еЛ при любом выборе
u*<=Ub- Поэтому У*</(«л)<У* + Рл, ^6^ = ^^^ +
+ еЛ-^0 при fc->oo. Неравенство D.1) также доказано.
Имея неравенства D.1), D.2), с помощью леммы 4.1 или
леммы 4.2 получаем все утверждения теоремы 1.
2. При описании и исследовании метода Тихонова
выше предполагалось, что значения функций J (и), Q(u)
в каждой точке и е U& нам известны точно. Однако
в практических задачах вместо функций J (и), Q(u), как
правило, приходится иметь дело с их приближениями Jk (и),
Qk(u)t fe=l, 2t ... Будем предполагать, что погрешности
в задании функции J (и) согласованы со стабилизатором
186
Q (и) в следующем смысле:
\J(u)-Jk(u)\^6k A+0(и)), as(/r, Л= 1, 2,..., D)
где {$*} — некоторая неотрицательная последовательность,
стремящаяся к нулю. Пусть, кроме того, вместо точного
значения стабилизатора Q (и) нам известны его прибли-
приближения ?2Л(ыK*0, k=l9 2, ..., причем
\Q(u)-Qk(u)\^vk(l+Q(u))t useUq, Л=1, 2, ..., E)
где {v^} — некоторая последовательность, такая, что 0^
^v*<lf fe=l, 2, ... Условие E) при больших значе-
значениях Q(u) характеризует собой относительную погреш-
погрешность в задании этой функции, так как тогда
)^vky k=l, 2, ...
Наличие в правой части неравенств D), E) слагаемого 1
оправдано тем, что возможны малые значения Q (и) или
даже Щм)=0, и замена l + Q(u) на Q(u) в D), E) тогда
привела бы к чрезмерно жестким требованиЯхМ на точность
задания функций J (и), Q(u).
Тихоновская функция в рассматриваемом случае имеет
вид
Tk (и) = h (и) + akQk (и), и е UQ. F)
Метод стабилизации будет заключаться в нахождении
последовательности \uk) из прежнего же условия B), где
под Tk(u) вместо функции A) теперь будет подразуме-
подразумеваться функция F). Для того чтобы получаемая при этом
последовательность {uk} минимизировала J {и) на U, была
р-регулярной, здесь уже нужно обеспечить согласованное
изменение четырех величин akt е/г, бл, vk. Условия согла-
согласования этих величин и обоснование метода стабилизации
дается в следующей теореме.
Теорема 2. Пусть множество U и функции J (и),
Q(u) удовлетворяют условиям 1), 2) леммы 4.1 или леммы
4.2, приближенные значения Jk(u), й^(м) этих функций
удовлетворяют неравенствам D), E), а последовательности
Ы, {М, {v*}, {ak} из B), D)-F) таковы, что
a*>0, &=1, 2,
lim 8ft= lim 8k= lim ал = 0,
k —*¦ со k-*co k-* со
sup ел/а* < со, sup (vk + bk/ak) < 1.
k^i л> l
187
Тогда последовательность {uk), определяемая усло-
условиями B) для функции F), минимизирует J (и) на U,
р-регулярна и р-сходится ко множеству Uq = Uq[}U%.
Если, кроме того, lim (v* + (e* + 6*)/a*) = 0, q ^ р.П0Лу.
?»оо
непрерывна на Uq, то справедливы соотношения C).
Доказательство. Из неравенств D), E) и опре-
определения F) функции Tk (и) имеем
| Ли) + якп (и) - Tk (и) | < akPk A + Q («)), и е= t/0> G)
где р* = v* + bkark\ k = 1, 2, ... Тогда Г* (w) ^ J (и) +
+ ak(l-i)k)Q(u) — ahpk при всех u(=UQ, ?=1,2,...
В силу условий теоремы 0 ^ р* <С 1, Q (и) ^ 0 и У («) ^ /„.
при и е ^/q, поэтому Т1 (и) ^ /^ — sup аЛрЛ > — оо, « е ^/й,
т. е. величина 7"? = inf 7"^ (и) конечна для всех k= 1, 2,...
Из конечности 71! и определения нижней грани следует
существование последовательности {uk}, удовлетворяющей
условиям B).
Покажем, что для последовательности {uk} имеют место
неравенства D.1), D.2) из основных лемм о регуляриза-
регуляризации. Возьмем произвольную точку u^^Ub и напишем
следующую цепочку неравенств, вытекающую из опреде-
определения У#, 7*, неотрицательности й (w), {} {} {б}
\vk) и соотношений B), G):
1 + Q (мЛ)) <
< У (мЛ) + а* A + р*) Q (w*) + «*Р*Й Ш + ^ + 2аЛрЛ, (8)
*=1, 2, ...
Отсюда имеем: a^Q (uk)^ak(l +pk) Q («
или
ft=l, 2, ...
В силу произвольности w^ e (/S из этого неравенства полу-
получим оценку ?2(^)<Й„с + Тл. гДе Ук= 2[p^(Q# + l)+eAa^]x
ХA— рл), Л == 1, 2, ... Неравенство D.2) доказано.
Вторично обращаясь к цепочке неравенств (8), с уче-
учетом произвольности и#е(/в и уже доказанной оценки
188
D.2) имеем У* ^ J (uk) < J* + рл, 6^1, где Р* »
= ал[A+рл)О#+рл(Й#+ул + 2)] + ел^0 при Л-*оо.
Неравенство D.1) также доказано. Имея неравенства D.1),
D.2), с помощью леммы 4.1 или леммы 4.2 получаем все
утверждения теоремы 2.
3. Из проведенного исследования метода стабилиза-
стабилизации видно, что условия sup гк/ак < °° в теореме 1 и
k ^ 1
sup (v* + bk/ak) < 1, sup ek/ak < oo в теореме 2, обес-
fe> 1 /г >1
печивающие согласованное изменение параметров {ак\,
{в*Ь {б/г}, {v*}, играют важную роль в получении р-регу-
лярной минимизирующей последовательности, а условия
lim гк/ак = 0 в теореме 1 и lim (v* + (8к + ел)/а*) = 0 в тео-
/г ->• oo fe -* оо
реме 2 существенно используются при доказательстве
р-сходимости построенной последовательности ко множе-
множеству Q-нормальных решений. Возникает вопрос, не слиш-
слишком ли ограничительны принятые условия согласованного
изменения параметров метода и нельзя ли их ослабить?
Покажем, что эти условия близки к необходимым и суще-
существенно ослаблены быть не могут.
С этой целью обратимся к задаче из примера 1.1.
В качестве стабилизатора возьмем функцию О (и) = (w+1J.
Тогда Q-нормальное решение задачи единственно и равно
и* = — 1. Очевидно, функции J (u)> Q(u) удовлетворяют
всем условиям теоремы 1 в метрике Е1. Возьмем ak=k-*y
ek = 2h2y uk = k, k=l, 2, ... Тогда 0 = П<Т*(млХ
^ к2 A + &4) + к'2 ^ 2кг2 = ел, то есть условие B) выпол-
выполнено. Однако \ик\ не сходится к [/^ в хметрике Е1. Заме-
Заметим, что здесь Sb/ak = 2k2, так что условие sup
/>1
не выполнено. Далее, возьмем як — к~2, гк =
k=l, 2,... Тогда0<Г/г(^Х^2A+^4)
=8Л, то есть условие B) выполнено. Кроме того, lim uk=
k-+OD
^Oef/^, так что \uk) сходится к (/# в метрике Я1.
Однако \uk) не сходится к нормальному решению и# = —1.
Здесь хотя и е^/а^, = 5, то есть sup гк/ак = 5 < со, но-
/г ^ 1
нарушено условие lim ел/ал = О.
/г ->оо
Обратимся еще к примеру 3.1, в котором для задачи
минимизации J (и) = @- а — ОJ на U = E1 ищется Q-нор-
мальное решение при Q (и) = w2. Пусть вместо точного
значения У (и) известны его приближения Jk (и) = (аки — ЬкJ>
189
где |а*|<сгл, \bk\^ok, k=l, 2,..., lim а* = 0. Тогда
А*оо
\J (и) — Jk (и) | ^ о\(\и | + IJ < 2<г| A + а2), так что оценка
D) выполняется при 6Л = 2а?. Значения стабилизатора
й (и) = и2 для простоты будем предполагать известными
точно. Нетрудно подсчитать, что нижняя грань тихонов-
тихоновской функции Tk(u) = (aku — bkJ-\-aku2 на Е1 равна Т% =*
=аЛ&? (а^ + а!)-1, а последовательность uk^akbk (ak+al)~l+
+ al)~iy/2> k=l, 2, ..., удовлетворяет условию
() = 71 + ?ь &=1, 2, ... Если, в частности, ak=bk =
= аЛ, то м^аИал + а^ + СеПал + аг)-1I/2, Л=1. 2, ...
Эта последовательность удовлетворяет условиям B) и
вполне может быть результатом применения метода ста-
стабилизации к рассматриваемой задаче. С учетом связи
8k = 2ok перепишем выражение для uk в виде uk = 8ha~klx
X B + б^1)-1 + BеЛа*' B + W)I72, Л = 1, 2, ... Отсюда
следует, что для компактности \ик) нужна ограниченность
последовательностей {б^1}, {e^1}, а для сходимости {и^}
к нормальному решению а* = 0 необходимо, чтобы
Из этого примера видно, что условия согласованного
изменения параметров, принятые в теоремах 1, 2 не могут
быть существенно ослаблены.
4. Следует, однако, отметить, что на практике погрешность зада-
задания исходных данных обычно бывает фиксированной и не может
быть сделана сколь угодно малой. В частности, условие стремления
к нулю последовательности {6/г} из D) выполняется лишь в редких
случаях и является весьма жестким требованием к задаче. В то же
время при д/г >г б > 0 равенства llm (д^-\-г^)а^1=0 и lim а? = 0не-
, /г-»оо к -*оо
совместимы, и бессмысленно требовать их выполнения. В этом случае
естественным образом возникает следующая проблема: как при фикси-
фиксированном 6# = 6:>0 выбрать параметр регуляризации a^ = a = aF)
и точность 6^ = 6 = 8F), чтобы точка tik*=uF) из B) была бы по
возможности ближе к V^ в нужной метрике р?
В [17, 80, 105, 163] предлагаются и обсуждаются различные под-
подходы к проблеме выбора параметра регуляризации применительно
к задачам минимизации функций вида J (и) = (| Ли — b jj2, связанным
с уравнениями Аи — b, где А — некоторый оператор, действующий
из одного банахова пространства в другое банахово пространство.
Для более широких классов задач минимизации эта проблема пока
еще малоизучена. Поэтому мы здесь ограничимся некоторыми эври-
эвристическими соображениями по поводу выбора параметров метода Ти-
Тихонова.
Сначала сделаем общее замечание, касающееся практического
определения корректности или некорректности той или иной задачи
минимизации. За исключением известных классов некорректных задач
[17, 80, 105, 163], далеко не всегда ясно, будет ли рассматриваемая
190
задача корректной в требуемой метрике р или нет. Поэтому в таких
случаях численное решение задачи минимизации, видимо, следует
начинать не с использования метода стабилизации, а с более простых
итерационных методов, пригодных, вообще говоря, для решения лишь
задач первого типа. Предположим, что выбранный нами метод пост-
построения {Uk\ оказался сходящимся и монотонным, т. е. lim J (и^)=
fe-юо
= /*, / (uk) > J (w/?+i), &= 1, 2, ... Пусть, кроме того, множество U*
состоит из единственной точки и*. Если задача корректна в мет-
метрике р, то последовательность {##} будет р-сходиться к и*, и можно
ожидать, что расстояние р (uk, um) при близких номерах k, m ведет
себя «правильно», т. е. не меняется резко и постепенно уменьшается.
Если же задача минимизации не является р-корректной, то возможны
два случая: 1) последовательность {и^} тем не менее ведет себя
«правильно» —это может служить признаком того, что применяемый
метод дает р-регулярную последовательность, и в этом случае, видимо,
нет необходимости в использовании метода стабилизации или какого-
либо другого метода регуляризации; 2) последовательность \uk} ведет
себя «неправильно», дает большой «разброс», т. е. расстояние р (uk,
ит) при близких k, m резко меняется и не имеет тенденции к убы-
убыванию при возрастании /?, т — это явление «разброса» {и^} может
служить признаком некорректности задачи. К сожалению, понятия
«правильного» или «неправильного» поведения последовательности {а#},
«разброса» {иь} вряд ли могут быть строго определены. Здесь можно
лишь утешиться тем, что на практике упомянутые понятия выраба-
вырабатываются при решении большой серии однотипных задач минимизации,
при анализе физического смысла параметров задачи и оказываются
полезными при численном решении рассматриваемого класса задач.
Предположим, что при решении задачи минимизации выбранным
методом мы заметили «разброс» {uk}, и сделав вывод о некорректности
задачи, далее воспользовались методом стабилизации. Тогда выбор
ал = а(б), ek = е (б) при фиксированном 6д, = 6>0, можно бы осу-
осуществить, например, следующим образом. Сначала задаемся не очень
«малыми» числами е# = е, а/, = а. Затем начинаем дробить величину а,
например, беря а? = а-2~*, 6 = 0, 1, ..., и при каждом таком а/,
и фиксированном е# = е из условия B) определяем точки uQf иъ ...
..., ilk, ••• Этот процесс продолжаем до тех пор, пока не будет за-
замечен «разброс» {ilk}. Появление «разброса» считаем признаком рас-
рассогласования в изменении величин {а^,}, {гк — г}у {6^ = 6}. Пытаясь
преодолеть «разброс», далее дробим е# = 8 (например, пополам) и при
фиксированном новом значении 8^ = 8 начинаем дробить полученную
ранее величину а, определяем точки {uk} из условия B) и т. д.
Такой процесс попеременного дробления а и 8 продолжаем до тех
пор, пока с его помощью удается устранить явление «разброса» {и^.
Если дальнейшее дробление перестает устранять «разброс» {uk}} то
процесс прекращаем, считая, что при заданной точности 6^ = 6 полу-
получено «лучшее» согласование параметров а^, е&. Если достигнутый
результат все же неудовлетворителен, то надо поточнее задать исход-
исходные данные, т. е. обеспечить новое меньшее значение 6^ = 6 и снова
повторить описанный процесс дробления а, е и т. д.
Выше мы предположили для простоты, что величины vk из E)
равны нулю. Если же v/v. = v>0, то в процессе дробления, конечно,
должна участвовать и величина v,—для этого, разумеется, нужно
обеспечить вычисление приближенных значений стабилизатора с любой
требуемой относительной погрешностью в смысле неравенства E).
191
Подчеркнем, что все рассуждения этого пункта не претендуют
на какую-либо строгость и могут быть легко раскритикованы. Тем
не менее изложенные эвристические соображения могут быть полез-
полезными при применении метода стабилизации для решения некоррект-
некорректных задач минимизации.
Как видим, практическое использование метода стабилизации,
вообще говоря, является непростым делом и может потребовать от
вычислителя немалого искусства и терпения. Впрочем, то же самое
можно сказать, пожалуй, о большинстве численных методов.
5. Остановимся на применениях метода Тихонова к
некоторым классам задач минимизации.
Пример 1. Начнем с задачи минимизации функции
J(u) = \Au-b\2 (9)
на множестве U = En, где Л —матрица порядка тхпу
6 —вектор из Ет. Эта задача тесно связана с линейной
алгебраической системой уравнений
Аи = Ь. A0)
А именно, если система A0) имеет хотя бы одно реше-
решение у#, то inf J(u) = J(v*) = J* =^0, и обратно, если
J(v^) = J^ = 0, то v# — решение системы A0). В том слу-
случае, когда J% = </(^)>0, точку v% называют квазиреше-
квазирешением системы A0).
Покажем, что квазирешение всегда существует, т. е.
функция (9) на Еп достигает своей нижней грани. Для
этого введем множество LA = {v: v^Em> v=Au}. Оче-
Очевидно, LA — подпространство в Ет. Как известно [70],
любое подпространство в конечномерном евклидовом про-
пространстве замкнуто в евклидовой метрике. Поэтому La—
замкнутое выпуклое множество в Ет. По теореме 1.4.2
тогда существует проекция Pla (b) = Ъа точки Ь на мно-
множество La, причем bA — b ортогонально к множеству La,
т. е. (bA—b> Аи) = 0 для всех и^Еп, в частности,
(Ьа — Ь, Ьа} = 0. Условие Ьа^^л означает, что сущест-
существует точка v^En такая, что Av = bA- Нетрудно убе-
убедиться, что во всех точках v, удовлетворяющих системе
уравнений Av = bA> и только в них функция (9) достигает
своей нижней грани на Еп. В самом деле, J(u) = \Au —
— ЬА + ЬА~Ь\2 = \Аи-ЬА1? + 2(Аи, bA-b)-2(bAi bA-
— b) + \bA-b !2Н Аи - bA |*+i bA - b |8 ^\bA-b \2=\ Av —
— b\2=J(v) при всех u?zEn Отсюда следует, что ./* =
= J (v) и множество точек минимума U* = {и: и е Еп,
192
j(u) = j^} непусто, и, более того, и# = {и: и^Еп1 Аи —
^Ьа) — гиперплоскость размерности п — г, где г— rang Л.
Рассмотрим задачу отыскания точки и%^и%, ближе
всего расположенной к заданной точке п ^ Еп. Иначе
говоря, будем искать Q-нормальное решение задачи мини-
минимизации функции (9) при условии, что Q(u) = \u — п\2.
Так как L^— выпуклое замкнутое множество, а п(и)—*
сильно выпуклая функция, то й-нормальное решение и%
существует и единственно.
Пусть вместо матрицы А и вектора Ь известны лишь
их приближения Ak, bky причем
\\Ak-A\\^okt \bk-b\^Gk, ?=1,2,..., lim <тл = 0.
fe-*oo
A1)
Тогда вместо точной функции J (и) нам придется иметь
дело с ее приближением Ju (и) = | Aku — bk |2. Как было
показано в § 3 (см. пример 3.1 и упражнение 3.3), в этом
случае задача определения ^-нормального решения, вообще
говоря, будет некорректной. Покажем, что для решения
этой задачи может быть применен описанный выше метод
стабилизации.
Прежде всего заметим, что функции J (и), Q(u) удов-
удовлетворяют условиям 1), 2) леммы 4.2 при В = ЕП. Далее
покажем, что погрешность | J (и) — Jk (и) | согласована со
стабилизатором Q (и) в смысле неравенства D). С уче-
учетом (И) имеем
Но 1 +1 и | ^ 1 + I п | +1 и - п j <: A +1 п |) A +1 и ~ п |
^2A + |д|)A + |^-й|2), так что \Jn(u)-J(u)\
X(l + Q(u))9 где 6л = 4A + |0|)(||Л| + |&|+-а*)ал, fe ==
= 1, 2, ..., ueeE".
Составим функцию Тихонова Тк (и) = \ Аки — bk\2-\-akx
Х\и — й|2, ?=1, 2, ... С помощью какого-либо метода
минимизации при каждом k=l, 2, ... определим точку
ик ^Еп из условия
Тк(ик)^1п1Тк(и) + &к. A2)
Еп
7 Ф. П, Васильев 193
Если {ek}f {ak}, {ak} будут стремиться к нулю, причем
lim (&k-\-Gk)akl = 0 (считаем, что vk из E) равен нулю
fe —оо
при всех k), то получаемая из A2) последовательность \uk\
сходится к Q-нормальному решению и%. Поскольку в рас-
рассматриваемой задаче функция Tk(u) сильно выпукла и
дифференцируема, то для определения точки uk вместо A2)
можно воспользоваться условием T'k (uk) = 2 (A%Akuk —
Atb ( = 0, т. е.
k = A%bk + aku, fc=l, 2, ... A3)
Таким образом, метод стабилизации в этой задаче свелся
к решению линейной алгебраической системы A3). По-
Поскольку равенство A3) в силу теоремы 1.2.5 эквивалентно
равенству Tk (uk) = inf Tk(u), то точка uk из A3) удовле-
Еп
творяет условию A2) при 8^ = 0. Тогда, как следует из
теоремы 2, при Нтал = lim oka%1 = 0 последовательность
k-*co ?-»оо
{uk) из A3) сходится в метрике Еп к й-нормальному
решению.
Пример 2. Рассмотрим задачу минимизации функции
A(s, t)u(t)dt-b(s)) ds A4)
на множестве U = L2[a, b]> где [a, b], [с, d] — заданные
отрезки, b(s)?EL2[c, d], A(s, t)e=L2(Q), Q = {(s, t)\ c^
^s^d, a^t^b}. Эта задача тесно связана с интеграль-
интегральным уравнением Фредгольма первого рода
ь
\A{s> t)u(t)dt = b(s), c^s^d, A5)
а
и является некорректной в метрике L2[a, b] (см. упраж-
упражнения 1.4 и 1.5). Как известно (см., например, [17, 105]),
уравнение A5), в общем случае, не имеет решения при
каждом b(s)^L2[cy d], а функция A4) достигает своей
нижней грани не при всех b(s)^L2[cy d]. Чтобы задача
второго типа имела смысл для функции A4), мы будем
предполагать, что при заданных A (s, /), b (s) множество
U^ = {u = u{t)\ u(t)^L2[ay b], ./(w) = inf J (и)} непусто.
Поскольку J (и) выпукла и непрерывна в метрике
L2[a> b], то U+ выпукло и замкнуто в этой метрике.
Кроме того, согласно теореме 1.3.5, тогда J (и) слабо
194
полунепрерывна снизу в L2[a, b]. В качестве стабилиза-
ь
тора возьмем Q (и) = $ | и (t) |2 dt = || и ||1а — эта функция пе-
отрицательна, сильно выпукла на L2[a, b] и непрерывна
в метрике L2[a, b]. Таким образом, функции J (и), Q(u)
и множество U—L2[a, b] удовлетворяют условиям леммы 4.2.
Далее, из теоремы 1.3.8 следует существование и единст-
единственность Q-нормального решения и% = и% (t) задачи мини-
минимизации функции A4) на L2[af b].
Будем предполагать, что вместо функций A (s, /), b (s)
известны лишь их приближения Ak(s9 /)eL2(Q), bk(s) =
= L2[c, dj, &=1, 2, ..., такие, что
\Ак — А \\Li ^ ok, Ibb — b \\l2 ^ ok, ok ^ 0,
6=1, 2, ...; lim ak = 0. A6)
Тогда вместо точной функции J (и) нам придется иметь
d tb
дело с ее приближением Jk(и) = \[ \ Ak(s, /) и (t) dt —
у с \а
—bk(s)) ds. С помощью тех же выкладок, какие были исполь-
использованы в примере 1, нетрудно показать, что
| Jk (и) - J (и) | <4а, (IА \ц +1|Ь\и + ок)A+\и|2). A7)
Это значит, что неравенство D) имеет место при 8k =;
(|Л^|&к )
d jb
Составим функцию Тихонова Tk(u) = ^[\ Ak(sf t)u(t)x
с \а
\2 Ь
xdt — bk (s) ) ds + ak J u2 (t) dt. С помощью какого-либо
/ a
метода минимизации при каждом ft=l, 2, ... определим
функцию uk = ^ (/) е L2 [a, 6] из условия
inf Тк{и) + гк9 k=l, 2, ...
Li [а, &]
Если {еА}, {ak}y {6k} стремятся к нулю, причем lim (sk+
л)^1 = 0, то согласно теореме 2 получаемая последо-
последовательность {uk(t)\ будет сходиться в метрике L2[a, b]
ь
к Й-нормальному решению u%(t)t т. е. lim ^1^@ •—
7* 195
Поскольку в рассматриваемой задаче функция Тк (и)
сильно выпукла и дифференцируема, то функция uk — u;i(l)
может быть определена из условия T'k(u)=0. Это усло-
условие с учетом формулы из примера 1.2.4 можно пере-
переписать в виде
Ak(s, %)Ak(s, t))
/
= \Ak(s, t)bh(s)ds. A8)
С
Таким образом, метод стабилизации в этой задаче привел
к интегральному уравнению Фредгольма второго рода-
Как следует из теоремы 2, при lima^ = limafta^ = O пос.
Л-+ОО &-*00
ледовательность {uu(t)}y определяемая из уравнения A8),
в метрике L2[a, b] сходится к Q-нормальному решению.
Читатель, конечно, заметил, что задачи из примеров 1, 2
являются частным случаем задачи минимизации функции
J (и) = \\Аи — Ь ||2, где А — линейный оператор, действующий
из одного банахова пространства в другое. Общее иссле-
исследование таких задач минимизации и связанных с ними
уравнений Аи = Ь проведено в [17, 105, 163] и др.
Пример 3. Предположим, что хотя бы одна функция
vt = v^(t), a^t^b, доставляющая минимум функции A4)
на L2[a, ft], имеет обобщенную производную v* (t)e^L2[ay b].
Иначе говоря, пусть и*[\Н1[а, Ь]Фф. Тогда можно
построить минимизирующую последовательность, сходя-
сходящуюся к U* равномерно или даже в метрике Н1[а, Ь].
ь
Для этого нужно взять стабилизатор Q (и) = J (| и (t) |2 +
а
+ I и (t) |2) dt = \\uI//1, определенный на множестве U& =
-==Н1[а, b\a L2[ay b] = U. Так как Я1 fa, b] — гильбертово
пространство, то Q (и) будет слабым стабилизатором в этом
пространстве (см. пример 2.2) и стабилизатором в метрике
С [a, b] (см. пример 2.3).
Далее, из непрерывности функции J (и) в метрике
L2[a, b] следует ее непрерывность в более сильной метри-
метрике Н1 [а, Ь]. Отсюда и из выпуклости J (и) следует выпу-
выпуклость и замкнутость в метрике Н1[а, Ь] множества
U^ = и^(]Н1 [а, Ь\. Поскольку Q (и) = J и fHi — сильно
выпукла и непрерывна в метрике Я1 [a, b], то по теоре-
теореме 1.3.S й-нормалыюе решение u% = u%(t) существует и
196
единственно. Таким образом, J(u), Q(u) удовлетворя-
удовлетворяют условиям леммы 4.2 на множестве U = Hl[a, b] = B.
Предположим, что погрешности в задании функций
A (s, /), b(s) по-прежнему удовлетворяют условиям A6).
Тогда с учетом неравенства || и \l2 =sc || и ||//i из оценки A7)
имеем I Jk (и) - / (и)|< Аак (|| A \Lz +1Ь к2 + afc)(l+\u |'Ь),
т. е. погрешность в задании функции согласована со
стабилизатором в смысле неравенства D). Функция Тихо-
Тихонова для рассматриваемой задачи имеет вид:
Тк (и) -1 (\ Ak (s, /) и (t) dt - bk (s)\ ds +
с \a I
b
+ *k\(\u{t)? + \u(t)\2)dt, u(t)^H'[ay b].
a
При согласованном изменении параметров {ак}у {ak}y {ек\,
как это требуется в теореме 2, последовательность {uk(t)}y
определяемая из условия Тk (ик) <с inf Tk (и) + 8Л, к = 1,
И1 [а, Ь)
2, ..., сходится к u*(t) в метрике Я1 [я, Ь], т. е.
lim U | ик (/) - и# (/) |2 + \uk (/) - ^^ (/) |'2) Л=0. Как было по-
казано в примере 2.3, тогда {^@} сходится к u%(t)
равномерно на [а, Ь].
Пример 4. Пусть требуется минимизировать функцию
d ,Ь v 2
j(u) = WA(s, U u(t))dt)ds
с \а I
на множестве U = C[ay 6], где Л (s, /, ^ — непрерывная
функция по совокупности аргументов при (s, t, и) q
е[с, d]x[a, fcjxf1. Эта задача тесно связана с инте-
ь
тральным уравнением $ A (s, /, u(t))dt = O, c^s-scd, и,
a
вообще говоря, некорректна в метрике С [a, b\ Рассмотрим
возможность построения минимизирующей последователь-
последовательности {uk{t)\, сходящейся ко множеству точек минимума
U* в метрике С [а, Ь]. Естественно, предполагаем, что
«/*= inf J(u)> — сю, и%Фф. Пусть, кроме того,
С [а, Ь)
Ub = U^(]H1[a% Ь\фф. Тогда функция Q(a) = |ufHi =
b
^ \ (!г/ @ Р + \и @ Р) dt является стабилизатором в метрике
а
197
C[a, b] (см. пример 2.3). Ясно, что функции J(u)> п(и)
удовлетворяют условиям леммы 4.1, когда метрика р
задается нормой пространства С [a, b], Uq = Hl[a, b]aU.
Пусть вместо точной функции A (s, /, и) нам известны
приближения Ak (s, /, и)у причем | Ak (s, t, и) — A (s, t, и) | <:
«^сг*A + |и|)э crft^O, fe=l, 2, ...; НтаЛ = 0. Пусть,
/г-*оо
кроме того, \A(s, /, «) | ^C(l + | u\), C = const>0.
Тогда для приближенного значения Jk (и) =
d ,Ъ ,2
= 5 J4(s, /, i/(/))dnds функции У (и) получим
с \а j
(и) - J (и) | =
s, /, u(t))-A{s, t, u(t)]dtx
с \а
/Ъ
X J[4(s, U u(t)) + A(sf U u(t))dt)ds
( u(t)\)dt\ds =
c\a a I
= ak (a* + 2C) (d - c)f\ A +, ы (/) |)dt\
т. е. погрешность согласована со стабилизатором в смысле
неравенства D). Функция Тихонова
lt(s, t, u(t))dt)ds +
j
определена на множестве Uu = Hl[a, b]. Пусть с помощью
какого-либо метода минимизации при каждом &=1, 2,...
найдены функции uk(t)^Hl[a, b] из условия Tk(uk)^
^ inf 7"/г(^) + 8^. Если при этом параметры \ok}y \ak}, \ek}
согласованы так, как это требуется в теореме 2, получен-
полученная последовательность {tik{t)\ сходится ко множеству U%
198
в метрике С [а, Ь]. В частности, если Uq состоит из
единственной функции и% (t), то {uk(t)\ сходится к u#(t)
равномерно на [а, Ь].
Если в рассматриваемой задаче U*{\C]\a, Ъ\Фф,
0<v^l, то стабилизатором в метрике С [а, Ь) можно
взять Q (w) = |j w ||cy (См. пример 2.4).
Пример 5. Рассмотрим задачу минимизации функции
J(u) = \x(T, u)-y\* . A9)
при условиях
x(to) = xo\ B0)
cL2r[/0, 4 B1)
рассмотренную в §§ 1.2 — 1.4. Здесь всегда J%^0. Будем
предполагать, что и*Фф. Заметим, что в § 1.3 было
показано, что функция J (и) слабо непрерывна на Lr^\t^ T]
и на выпуклом замкнутом и ограниченном множестве U
из Lr2[t0, Т] достигает своей нижней грани —см. теоре-
теорему 1.3.10.
Возьмем функцию Q (и) = |!и|?, = J \u(t)\2dty которая
определена, неотрицательна, сильно выпукла на U и явля-
является слабым стабилизатором для рассматриваемой задачи
(см. пример 2.2). Таким образом, функции J (a), Q(u)
и множество V удовлетворяют условиям леммы 4.2 при
В = /,2[/(ь Т]. Поскольку U^ выпукло и замкнуто, a Q (и)—
сильно выпукла, то по теореме 1.3.8 существует и притом
единственное Q-нормальное решение и%=и%(().
Рассмотрим возможность применения метода стабили-
стабилизации для поиска Q-нормального решения задачи A9) —
B1). Предположим, что вместо матриц А (/), В (/), f(t)
нам известны их кусочно-непрерывные приближения
Ak(t)y Bb(t), fk(t), вместо точек х0, у— их приближения
*ой, Ук, причем
max! sup \\Ak(t)-A(t)l sup \\Bk(t)-B(t)l
sup \fk(t)—f(t)u
/5=1, 2, ... ;
?-¦00
199
Пусть xk = xk @ — решение задачи
Тогда для Axk (t) = хЛ (/) — x (/) имеем
+ ^Bk(r)-B(x)l\u{x)\dT +
to
t
to
t
sup i А (т) I + ak) \ \ Axk (x); dx -
Ofc\(T-t0) SUp |
Так как множество /7 ограничено в Lr2[t0y T], то
5ир|м|^8^С0<оо, и из оценки A.2.18) при м = 0,
А = и получим supL\:(T, y)(|c=^Ci; здесь и ниже через
Со, Съ С2, ... обозначаются положительные константы,
не зависящие от u^U, /?=1, 2,..., /е[/0, Г]. Тогда
|Ax*(/)KC2j|Axft(T)idT + a*C8, to^t<,T, k=l, 2,...
Отсюда с помощью леммы 1.2.2 получим | Дх^ (/) | ^ С^зку
to^t^T, k=ly 2, ... Для приближенной функции
Jk(u) = \xk(T, и) — уь\2 будем тогда иметь:
-(уь-у), xk(T, u) + x(T, u)-yk-
l)(\xk(T, и)\ + \х(Т, и)
так что погрешность согласована со стабилизатором
в смысле неравенства D),
200
Минимизируя с помощью какого-либо метода функцию
т
Тихонова Tk {и) = |xk (T, и) -yk? + 0Lk\\u(t)\2dt на множе-
множено
стве Uy найдем uk (t) e U из условия Tk (uk) ^ inf Tk (и) + еь
с/
ft=l, 2,... Если {еЛ}, {аЛ}, {аЛ} удовлетворяют условиям
теоремы 2, то \uk(t)} сходится в метрике Lr2[t0y T] к Q-нор-
мальному решению и% (/).
Если хотя бы одно оптимальное управление рассматри-
рассматриваемой задачи принадлежит Hlr[tOf 7], то можно взять
т
стабилизатором функцию й (и) = $ (\u(t)\2+\u(t) |2)Л =
= 1и1я1 и с помощыо метода стабилизации построить
минимизирующую последовательность {uk(t)}, сходящуюся
к й-нормальному решению в метрике H[r[t0, T] и, тем
более, в метрике Сг[/0, Т]. Предлагаем читателю самосто-
самостоятельно исследовать возможность применения метода
Тихонова к задачам оптимального управления из §§ 1.5 —
1.10 для построения последовательности, сходящейся
ко множеству точек минимума или к Q-нормалыюму
решению в метриках рассматриваемых в них прост-
пространств.
Упражнения. 1. Нарисовать график тихоновской функции
Tk(u) = u2(\-\-uA)~1 + akU2 для задачи минимизации функции J (и) =
= и2 A +и*У1 на U — E1. Показать на этом графике, что для получения
регулярных минимизирующих последовательностей из условия B)
необходимо согласованное стремление к нулю параметров ос/г, ед,.
2. Выбрать подходящий стабилизатор для задачи из примера 1.2
и указать метод построения минимизирующей последовательности,
регулярной в метрике L2 [0, 1].
3. В задаче из примера 1.3 взять стабилизатор Q(u) = \u^
(см. пример 2.3) и выяснить возможность применения метода стабили-
стабилизации для построения минимизирующей последовательности, регуляр-
регулярной в метрике С [0, 1].
4. Выяснить характер сходимости (равномерно или в среднем)
производной минимизирующей последовательности для задачи из
примера 1.4, если в качестве стабилизатора взяты Q (и) = || и ||я, или
Q (и) =}и\гл v (см- примеры 2.3 и 2.5), а минимизирующая после-
довательность построена методом стабилизации.
5. В задаче из упражнения 1.3 взять стабилизатор Q (и) =ь
= \ I и (t) \2dt. В какой метрике и к какий точке тогда сходится после-
последовательность, построенная методом стабилизации?
201
6. В задачах из упражнений 1.4 и 1.5 взять стабилизатор Q (и) =
ь ь
= \\u{t)\2dt или u(u)^{\u(t)\2 + \u(t)?)dt. В какой метрике и
а
к какой точке будут сходиться последовательности, построенные мето-
методом стабилизации?
7. Применить метод стабилизации к задачам из упражнений
3.2 — 3.4, выбирая в качестве и^ точку минимума тихоновской функции;
исследовать сходимость.
8. Пусть J (и) — выпуклая полунепрерывная снизу функция на
выпуклом замкнутом ограниченном множестве U из гильбертова
пространства Я, Q (u) — \ufH. быяснить возможность применения
метода стабилизации для поиска Q-нормального решения задачи
минимизации J (и) на 0.
9. Пусть иа — точка минимума функции Та (и) = \ Ли — Ь\2-}-а\и\2
на Еп (обозначения здесь взяты из примера 1). Доказать, что тогда
| иа — и* \ ^а \v\, где v — решение уравнения (А*АJи — А*Ь с мини-
минимальной нормой ([70], стр. 301; другие оценки для \и^ — и* [;!, где и^
определяется из A3), см. в [163J, § 24).
10. Пусть функция Тихонова, определяемая формулой A) при
каждом /г=1, 2, ..., достигает своей нижней грани на Uq хотя бы
в одной точке и^\ пусть U^ = UQ П ^* непусто и Q(w)^0
при всех и ^UQ. Доказать, что тогда Q (и^) zsc Q^ = inf Q (и), k = l,
V*Q
2, ... Указание: рассмотреть доказательство теоремы 1 при е^ = 0.
11. Какие методы можно использовать при минимизации функции
Тихонова из задач примеров 1—5?
§ 6. Метод невязки
Опишем второй метод регуляризации некорректных
задач минимизации — метод невязки.
1. Сначала для простоты остановимся на случае,
когда значения минимизируемой функции J (и) и стабили-
стабилизатор Q (и) известны точно. Для реализации метода
невязки выбираются две положительные последователь-
последовательности {%/г}> {jLi/е}, являющиеся параметрами метода, причем
такие, что lim %k = lim [ik = 0, после чего берется множество
A)
и ищется точка uky удовлетворяющая условиям
Vk9 k=l, 2, ... B)
Таким образом, в методе невязки минимизируется ста-
стабилизатор Q (и) на множестве точек, в которых исходная
функция J (и) принимает значения, близкие к своей ниж-
202
ней грани J% на множестве U. Заметим, что множество A)
непусто, так как содержит множество U% = U*{)Uq, не-
непустое по определению стабилизатора. Поэтому существо-
существование точки uk, удовлетворяющей условиям B), следует
непосредственно из определения нижней грани Q (и) на
непустом множестве Vk- Для получения величины У* -fx*i
входящей в определение множества A), и точки ик из B)
могут быть использованы любые подходящие методы реше-
решения задач минимизации первого типа (см. задачу A.2)).
Мы здесь ограничимся предположением, что при каждом
&=1, 2, ... имеется хотя бы один достаточно эффектив-
эффективный метод поиска «/#+Хь uk> поскольку дальнейшее изло-
изложение не зависит от используемых для этих целей конк-
конкретных методов.
Поясним название метода невязок. Этот метод перво-
первоначально применялся для минимизации функции / (и) =
= р (Аи, /), возникающей при исследовании уравнений
Au = f, где Л —оператор, действующий из некоторого
метрического пространства 0 в метрическое простран-
пространство У, p(vt /) —расстояние между точками о/е^.
Величину J (и) = р(Аи, /) принято называть невязкой
уравнения Au = f. Если это уравнение имеет решение, то
inf У (?/) = </* = 0, и множество Vk={u: u^UQy J(u)^%k}
и
состоит из точек, для которых невязка уравнения мала.
В случае общей задачи минимизации J (и) на U невязкой
можно назвать величину J(u) — J^. Таким образом, метод
невязок заключается в минимизации стабилизатора Q (и)
на множестве точек из /7q, для которых невязка мала.
Это обстоятельство нашло отражение в названии рас-
рассматриваемого метода.
Теорема 1. Пусть J(u), Q (и) и множество U
удовлетворяют условиям 1), 2) леммы 4.1 или леммы 4.2,
а последовательности {%&}>. {м^} положительны и limx^ =
= lim \ik = 0.
k-+CQ
Тогда последовательность {uk}, определяемая усло-
условиями A), B), минимизирует J (и) на U, р-регулярна и
р-сходится к множеству U%==Uq[]U'%. Если же, кроме
того, Q (и) р-полунепрерывна снизу на Uq, то последова-
последовательность {uk} из A), B) р-сходится к множеству п-нор-
мальных решений задачи минимизации J (и) на U', и
lQ Q if Q(
203
Доказательство. Покажем, что последователь-
последовательность {uk} из A), B) удовлетворяет условиям D.1), D.2)
лемм 4.1, 4.2. По определению величины Q^ при каждом
fe=l, 2, ... найдется точка и^ е (/q такая, что Q(vk)^
^Q^ + k-1. В то же время vk<=Vki так как J(vk) =
= /* ^ J*+%k> &=1, 2, Поэтому из B) имеем
Q (uk) < ul + \ik < Q (^) + |а* < Q* +Л-1 + И* =
А=1, 2, ...э
где Y* = H* + ?""\ ^=1, 2,..., Нтул = 0. Неравенство
D.2) получено. Далее, условие m^g^ в силу A) озна-
означает, что J*<zJ(uk)^Jb+ik, &=1,2,..., limx* = 0.
?оо
Положив рЛ = х/г» отсюда придем к неравенству D.1). Имея
неравенства D.1), D.2), из леммы 4.1 или леммы 4.2
получаем все утверждения теоремы 1.
2. Теперь опишем метод невязки для случая, когда
вместо точных значений J(u), Q(u) известны их прибли-
приближения Jk(a), Qft(tt)Si0, fe=l, 2, ... Будем предполагать,
что погрешности в задании этих функций по-прежнему
удовлетворяют условиям E.4), E.5). Возьмем положи-
положительные последовательности {%k}, \\ik} со свойствами
lim %k= lim /ыЛ = 0. Образуем множество
k -> со k —> оо
Vk = {u: u<=UQ, Jk(u)^J* + Xk) C)
w определим точку uk из условий
inf Qk (и) - Q| ^ Qk (uk) < QJ + ixki uk e (/Q> ft = 1, 2, ... D)
Справедлива
Теорема 2. Пусть функции J (и), п (и) и множество U
удовлетворяют условиям 1), 2) леммы 4.1 или леммы 4.2,
а последовательности {8k}y {vk}y {xfe}, {\ik} из E.4), E.5),
C),D)mafcoew, wio6?^0, v^^O, x^>0, N>0, fe= 1,2,...,
lim 8^= lim %k= Hm 8Лх*1 == lim vk= lim jlx^ = 0.
k~* CO k—>CjQ k - + OO fe -> OO k-+ ОЭ
Тогда последовательность {uk}, определяемая условиями
C), D), минимизирует J (и) на U, р-регулярна и р-схо-
дится к множеству Uh = UQ[]U^. Если, кроме того, Q (и)
р'пол у непрерывна снизу на t/Q, то последовательность \uk)
из C), D) р-сходится к множеству Q-нормальных решений
задачи минимизации на U, и lim Q (uk) = Q* = inf Q (м).
204
Доказательство. Покажем, что последователь-
последовательность ик из C), D) удовлетворяет условиям D.1), D.2)
лемм 4.1, 4.2. По определению Q* при каждом k най-
найдется точка vk^Ub такая, что ?2(иА)^й* +&-1, й= 1, 2, ...
Кроме того, из Птб^1 = 0 следует, что М2 + ?2*)^Х*
при всех k^k0. Поэтому с учетом условия E.4) имеем
h (vk) < J (vfc) + 6k A + Q Ы) < /# + бЛ A + Q U1
<^* + SftB + Qfe)^y#+Xft, &^?0. Это значит, ^,
т. е. множества V* непусты при всех k^k0. По опреде-
определению нижней грани Qk(u)^0 на непустом множестве Vk
точка «#, удовлетворяющая условиям D), существует при
всех k^k0.
Перепишем условие E.5) в виде
A -v,) Q (и) - vk < Qk (и) < A + v,) Q (u) + vk,
ueeUq, k=l, 2, ... E)
Так как lim ул = 0, то можем считать, что sup v^< + co.
k -¦> со k^k0
О учетом определения точки иЛ е У/,, неравенств D), E)
тогда имеем
п {ин) < (Qk (uk) + vk) A - v*)-1 ^
< (Й| + lift + Vft) A - v,)-1 < (Qk (vk) + \ih + vk)(l- v,)-1 ^
A _ v*)-*<
,)-1, ft^*0. F)
Иначе говоря, получена оценка D.2)
k^-ko, где Y/, = Bv,Q5fs + ^-1(l+v,) + 2 )
k^kOi lim y* = 0.
Наконец, из условий E.4), uk g 1/л и уже доказан-
доказанной оценки D.2) следует, что J%^J(uk)^Jk(uk) +
+ 6лA + Й(и*))<^ + Х* + 6лA+Й*+Уа). *^*о. Это
значит, что последовательность {«/J удовлетворяет не-
неравенству y*</(Mft)<y* + pft., ^^^o, где рЛ=.-х^ +
бA + Й+) kkOy причем lim pft = 0. Неравенство
^г *оо
D.1) также получено. Имея неравенства D.1), D.2), из
основных лемм 4.1 или 4.2 о регуляризации получим все
утверждения теоремы 2.
Предлагаем читателю самостоятельно рассмотреть воз-
возможность применения метода невязки к задачам из при-
примеров 5.1—5.5.
Упражнения ! Применить метод невязки к задачам из
упражнений 3.2—3.4, исследовать сходимость.
205
2. Можно ли применить метод невязки к задачам из упражне-
ниГ| 1 3—1.5, взяв стабилизатором функцию Q(a) = ||« j ?
3. В задачах из примеров 1.2—1.4 взять стабилизатор Q (и) —
= j; и [j^, и выяснить возможность применения метода невязки для
построения минимизирующей последовательности, регулярной в мет-
метриках С [0, 1] и Я1 [0, 1].
4. Показать, что при выполнении условии 1), 2) леммы 4.1
р-регулярность последовательности {и^}, построенной методом невязки,
и соотношение lim p (uk, ?/^) = 0 можно получить при замене усло-
&-»оо
вия lim jx.=O в теореме 1 и условии lim vft— lim \ik~ Hm б/д^1 = 0
/г->оо k -усо k-*co k-^co
в теореме 2 более слабым условием sup (лд.< + оо в теореме 1 и
k^ 1
sup jLi? < + oo, sup Vk< 1, SaB + Q*)^x*» k=\% 2, ..., в теореме 2.
К ^2 1 № ^^ 1
5. Пусть / (и) — выпуклая полунепрерывная снизу функция на
выпуклом замкнутом множестве U из гильбертова пространства Я,
пусть Q (и) = (| a ji^. Выяснить возмоленость применения метода невязки
для поиска Q-нормального решения задачи минимизации J (и) на U.
§ 7. Метод квазирешений
1. Перейдем к изложению третьего метода решения
некорректных задач минимизации — метода квазирешений.
Сначала для простоты предположим, что значения мини-
минимизируемой функции J (и) и стабилизатора Q (и) известны
точно. Обозначим со* = inf Q (и), Q* = inf п (и). Так как
Uq = Uq П ^* ^ ^q, то co^^Q*. В методе квазирешений
последовательность \uk) определяется условиями
uke=Qk, fe=l, 2, ..., A)
где
Qk = {u: u<= UQ, Q (u) < Q* + л*}, B)
параметры метода {с-*}, {Лл} таковы, что ?fc>0, со^ — Й^ <
<%, fe=l, 2..., lim ^= lim r]/; = 0. В частности, если
] при всех &=1, 2,..., то условие со* — Q% <Ci]^
тривиально выполняется. Если же со*<?2*, то условие
о)^ — Q* < г)й допускает возможность r\k < 0 при некоторых
или даже при всех k = 1, 2, ...
Нетрудно видеть, что неравенство со* <?!* + т;* гаран-
гарантирует непустоту множества QA. Кроме того, из Q* g=. U
имеем, что Jt^J*l> — ;>? при всех k=l9 2, .. Поэтому
существование точки и%% удовлетворяющей условиям A),
206
B), следует непосредственно из определения нижней грани
J (и) на непустом множестве Qk-
Заметим, что по определению стабилизатора множе-
множество Qk р-компактно при всех k=l9 2, ... Это значит,
что в методе квазирешений исходная функция J (и) мини-
минимизируется на р-компактном подмножестве множества U.
Название метода квазирешений также связано с урав-
уравнением Au = f, где Л— оператор, действующий из некото-
некоторого метрического пространства U в метрическое про-
пространство V. Пусть J (и) = р(Аиу /), где р (и, /) —расстоя-
—расстояние между точками v и / в пространстве V. Квазире-
Квазирешением уравнения Au = f называют точку u%^U, для
которой J (u*) = inf J (u) = J*. Если J (и*) = 0 = /*, то
и
квазирешение и* превращается в обычное решение урав-
уравнения Au = f. Однако квазирешение может существовать
и тогда, когда уравнение Au=f не имеет решения. Описан-
Описанный выше метод A), B) был предложен и исследован
В. К. Ивановым для отыскания квазирешений уравнений
Au = f> что нашло отражение в названии метода.
В описании B) множества Qk присутствует неизвестная
величина Й*, и поэтому на первый взгляд метод квази-
квазирешений A), B) выглядит неконструктивным и трудным
для реализации. Тем не менее существуют достаточно
простые способы численной реализации этого метода, один
из которых будет описан ниже. Пока мы отвлечемся от
вопросов реализации метода квазирешений и, опираясь
лишь на существование последовательности {Uk} из A),
B), дадим обоснование этого метода.
Теорема L Пусть функции J (и), п{и) и множест-
множество U удовлетворяют условиям 1), 2) леммы 4.1 или леммы
4.2, а последовательности {\k}, {щ} таковы, что ?*>0,
!]*;>--&* +со*, &=1, 2, ..., lim ?л= lim % = 0, причем
k -+со ?->оо
если последовательность {%} неположительна или суще-
существует ее неположительная подпоследовательность ЫкЛу
то дополнительно еще потребуем выполнения следующего
соотношения:
lim /*(О*-а) = ^. C)
а —+ 0
где JjC) = inf/(«), Qc = {m: uzeUq, Q(u)<:C}.
QC
Тогда последовательность {uk}y определяемая условиями
A), B), минимизирует J (и) на U, ^-регулярна и р-схо-
207
дится к множеству U%. Если же, кроме того, Q (и) р-полу-
непрерывна снизу на UQy то последовательность {uk} из
A), B) р-сходится к множеству ^-нормальных решений
задачи минимизации J (и) на U, и lim Q(iik)--=Q%.
k ->оо
Доказательство. Сначала покажем, что lim J%-=J*.
Для этого из последовательности {r\k} выберем подпосле-
подпоследовательность ЫиЛ всех ее положительных членов. По
определению Q% тогда для каждого щп>® найдется
точка nfc/iE(/J такая, что Q(y^)^c Q* +Щп. Это значит,
что JfVft^^Jx и tifr/l g ^*Л) /1 = 1, 2,... Следовательно,
) = ^*, л=1, 2, ... С другой стороны, из
имеем J*^Jlny я = 1, 2, ... Сравнивая полу-
полученные неравенства, заключаем, что J%n = J:? при всех
/г=1, 2, ..., так что lim ]% =•/*.
Пусть теперь {л^} ~~ подпоследовательность всех непо-
неположительных членов последовательности {щ}. По условию
lim т)Л = 0, поэтому lim 1^ = 0. Это значит, что для
k-*CO П-+СО
любого а>0 найдется номер Af такой, что—a<r))$.rt^0
или Q^ -~а< Q:{:+r)<y/i<Q:f: для всех sn^N. Отсюда
следует, что Qq* — a s QSn s C/q при sn ^ Л/". Тогда /^. ^
*^Jsn^J* (?2* —а) для всех sn^N. Перейдем в этих
неравенствах к пределу сначала при s«->oo, затем при
а-> + 0. С учетом соотношения C) получим lim/*„=/*¦
П-+СО
Тем самым доказано, что последовательность {У|}
имеет единственную предельную точку, равную «/#, т. е.
lim Л = «Л*. Перепишем условие A) в виде J*^J(uk)^
<Л + Б* = /* + Р*, 6=1, 2f?fM где рл = Л-/* + Е*.
С учетом условия Пт^ = 0и уже доказанного равенства
lim Л = «/* имеем lim P^ = 0. Неравенство D.1) получено.
/г->оо /г ->оо
Наконец, из условия uk e Й^ следует Q (и*) ^?2* + т]Ь
й=1, 2, ... Положив yk^y\k} отсюда придем к неравен-
неравенству D.2). Имея неравенства D.1), D.2), из леммы 4.1
или леммы 4.2 получим все утверждения теоремы 1.
Напомним, что условие C) обсуждалось в § 5.13 из
[4], там же были приведены достаточные условия, гаран-
гарантирующие выполнение C).
2. Теперь опишем метод квазирешений для случая,
когда вместо точных значений J(u), Q (и) известны их
приближения Jk(u), ^^(^)^0, k=l, 2, ... Будем пред-
предполагать, что погрешности в задании этих функций удов-
удовлетворяют условиям E.4), E.5). Тогда последователь-
последовательность {uk} определяется условиями
Л = inf h (и) < h (uk) < Л + Ik,
*k D)
«лей*, * = 1, 2
где
йл = {«: «et/fi, Й*(и)<Й? + Л*Ь Q* = infQ*(«). E)
а описание параметров метода {?к}, {цк} дается в следую-
следующей теореме.
Теорема 2. Пусть функции J(и), Q (и) и множе-
множество U удовлетворяют условиям 1), 2) леммы 4.1 или
леммы 4.2, а последовательности {8k}y {vk}, {tk}y \ц/г] из
E.4), E.5), D), E) таковы, что б/г^0, v^O, Е„>0,
т]/г>со| — Q|, о)| = inf ?>? (и)у k= 1, 2, ..., lim б^= limv/l? =
G q k -> со k-xy:y
= lim Н/г= !im T]ft= lim vAji]^1 = 0, причем если последова-
fc-yoo /г-»оо /г -¦ со
тельнесть {%} неположительна или существует ее неполо-
неположительная подпоследовательность {r\kn}, пго справедливо
равенство C).
То2Eа последовательность {uk)> определяемая условиями
D), E), минимизирует J (и) на (/, ^-регулярна и р-схо-
дится к множеству Uq. Если же, кроме того, Q {и) р-полу-
непрерывна снизу на Uq, то последовательность {uk} из
D), E) р-сходится к множеству ^-нормальных решений
задачи минимизации J (и) на U, lim Q (uk) = Q* = inf Q (и).
*-°° ' uQ
Доказательство. Так как Uq<=Uq, to co|^fi|,
и неравенство со| — Q* < т]^ гарантирует непустоту мно-
множества Q/e при каждом.'k=l, 2,... Покажем, что
J%> — oo. Перепишем условие E.5) в виде
A -v,) Q (u)-vk < Qk (и) < A + v,) Q (a) + vk9
mg(/q, fe=l, 2, ... F)
Поскольку неравенства F) верны для всех u^U'q, to
переходя в F) по ленно к нижней грани на U*}> получим
(l--v^Q*-v*<^^(l+v^* + vb *=1, 2, ... G)
209
Так как lim vk = 0 и v^ ^ 0, ^ = 1, 2, ..., то 0 ^ sup
для некоторого k0. С учетом неравенств F), G) и опре-
определения E) множества Qk тогда будем иметь
для
где
Из
всех
E.4),
(и)—8
u^Qkj k
Q (и) ^ i
¦•Bvk(l+\
(8) для
k(l + Q(u)
Следовательно,
Д =
= inf Jt
о.
UQ к
/1 + Q*4
'^k0. Отсюда
Й*) + Г]*)A-
k
/e->-co
всех точек i
- sup |уЛ [)>¦
следует
sup v^)-1, k^kQ;
ig?!a получим Jk(
r^*+ sup (Yah, k:
-oo, ^>^0.
(8)
(9)
»^
A0)
Конечность величины J% доказана. По определению J%
тогда найдется хотя бы одна точка uky удовлетворяющая
условиям D), E) при всех k^k0. Таким образом, после-
последовательность {Uk\, определяемая условиями D), E), суще-
существует, причем в силу (8), (9)
Q(uk)^Q*+yk, k^ko\ limYft = 0. A1)
fe-»-00
Далее, покажем, что
lim Л = «/*. A2)
Для этого сначала рассмотрим подпоследовательность Ь\иЛ
всех положительных членов последовательности {x\k\. По
определению п* для каждого т|Л/1>0 найдется точка
vkn(=Ub такая, что Q(vkn)^Qt+i\ln, /2 = 1, 2,... Из
неравенств F), G) имеем
Q Ю + vkn < A+ v,n) (О
где АЛ^^о, Л = 4(Й* + 1)/1- sup
210
Так как по условию lim цк= Hmv^1 =0, то Avkn +
k-*co k ->оо
+ 24kn = (Avknr\kln + 2i)bn)r)kn<t'f\kn при всех kn^Nx^K
и поэтому ^kn(^kn)^^tnJrriknj kn^Nv Это значит, что
о*яе2*я, kn^Nv Тогда Jtn^Jkn(Vkn)^J(vkn) + 8kx
>^ + Q{vkn))<:J* + 6kn(l+Q*+i\ln), kn^Nv Отсюда
lim Лп^«/*- С другой стороны, из A0) имеем lim J%
П—ЮО
Следовательно, lim Jtn=
п о
п
Пусть теперь {г]^} — подпоследовательность всех непо-
неположительных членов последовательности {r\k}- Рассмотрим
множества Q^-ccs ={u: u^UQ, Q (и)^?1* — aSn}9 где
«^^2]^^ /z=l, 2, ..., lim0^ = 0. Для каждой точки
mgQq -as с учетом неравенств F), G) получим QSn (и) ^
< A + v%) Q (и) + vSn ^ A + v,rt) (Q* - а,я) + v% < A +
+^Я)[(О?Я + v#II) A - v^-a^] + ^я< ОУЯ + A vSn - а,я<
<?}?„+ЛvJn — 2|т),л|, s^^^o, где по-прежнему А =4 (Q^ +
+ 1) A — sup V/j)-1. Так как по условию lim v^1==0, то
Avsn-1i\sn I = IЛ^ I(Л I v%r)^I - 1)<О при всех sn^N2n
поэтому QSn (и) ^ Qs*rt — | r\Sfl | = QJrt + т)^ Для всех
аЕЙйгаз и sn^N2. Это значит, что &Q^_as ^ Й^при
любом sn^N2- Поэтому с учетом E.4), (8) имеем J*n^
< inf J(u) + 8Sn(l +
Q
2. Однако inf
fn
->«/,,. при а%->0в силу условия C), поэтому Цщ Jfn
л->-оо
С другой стороны, из A0) имеем lim J%^ J%. Следова-
тельно, lim */*„ = */*•
я-»оо
Тем самым доказано, что последовательность {Л} имеет
единственную предельную точку, равную /*, что равно-
равносильно соотношению A2).
Из E.4), D), E), A1) следует, что JJ()
J() 8(l+Q())J^ + b + ^(\+Q+)} т. е.
A3)
211
где рл = Л - </* + h- + бл A + &* + ?*)• с Учетом условий
lim ?л = lim ск ^ 0 и равенства A2) имеем Нтрл = 0.
fe -¦ оо к -* со А? --+ о.)
С помощью оценок (И), A3), равносильных неравен-
неравенствам D.1), D.2), из основных лемм 4.1 или 4.2 о регу-
регуляризации получим все утверждения теоремы 2-
3. Как уже отмечалось выше, метод квазирешений представляется
трудно реализуемым из-за неконструктивности описания множества
Q#, так как множество Ub> следовательно, величины Q$ = inf Qk (и),
входящие в определение Q#, заранее неизвестны. В связи с этим
желательно иметь способы численной реализации метода квазиреше-
квазирешений, которые явно не используют множество (Jq и величины Q^
[44, 57, 105, 212]. Опишем один из таких способов в предположении^
что функции J (и), Q (и), удовлетворяют всем условиям теорем 1,2.
Для упрощения изложения будем считать, что эти функции при всех
и е Uq известны точно, так что в E.4), (Б.5) нужно положить 6^ =
= v* = 0, k^l, 2, ...
Предлагаемый способ реализации метода квазирешений предпо-
предполагает, что известно число R такое, что
Q(H,)s^# A4;
хотя бы для одной точки ^ 6 (/о, Сразу же заметим, что необхо-
необходимость в такой априорной информации о решении задачи миними-
минимизации J (и) на U отпадает, если supQ(«)< + oo.; ибо в этом случае
UQ
в качестве R для A4) можно взять любое число, не меньшее sup Q (и),
и неравенство A4) тогда будет выполняться не только для точек
и* е ?/q, но и для всех ti(= U Q-
Наряду с числом R из условия A4) нам понадобится последова-
последовательность \(дп} такая, что
¦Юл^Юл--ъ /г = 1, 2, ... , lim 0)^ = 0)* = inf Q (и). A5)
U
Для определения последовательности {сол} нужно решить задачу ми-
минимизации функции Q (и) на известном множестве UQ. Для этой цели
могут быть использованы любые подходящие методы решения задач
минимизации первого типа (см. задачу A.2)).
Итак, пусть число R и последовательность {ып\ из A4), A5)
известны. В качестве начального приближения произвольно задаем
число ?0> 0 и точку uQ e Uq. Пусть уже сделано и— 1 шагов
(п^\) и найдена величина ^_2>0 и точка «^е^. Положим
Ъп = *Ч*-1 A6)
и образуем множества
fiw-{tt: K€=?/Q, Й(и)^юл}, л=1, 2, ... , A7)
д { Q R]. A8)
212
Заметим, что множество QR непусто в силу A4). Далее, если ©Л ><*>*,
то множество Qn также непусто по определению со* согласно A5).
На практике иногда удается точно вычислить значение о* (например,
если Q («) = i! и [Р, [а] —норма банахова пространства, р ^ 1, 0 е U Q]
то ясно, что Q @) = ©^ =0), и тогда в предлагаемом методе можно
положить юп = (дх, /г=1, 2 Чтобы и в последнем случае rapiH-
тировать непустоту множества Qn, естественно предполагать, что
равенства а)Л = (о*, я = 1, 2, ... , в A5) возможны только тогда, когда
нижняя грань inf Q(u) = coH. достигается хотя бы в одной точке
v* e Uir Очевидно, тогда о# е &„, т. е. &пф Ф, я = 1, 2, ...
Далее, решая задачи минимизации первого типа для функции / (и)
на введенных множествах QM и QDy найдем точки и„, v такие, что
у;«inf у (и)^у («„)«?/;+?„, «„ей, A9)
/г
У* = inf У (и) ^ J (vn) ^ /, + ЕЯ, vn e Q^. B0)
Заметим, что при написании B0) использованы равенства J# =
= inf / (и) = inf / (w), вытекающие из предположения A4). После опре-
U QR
деления unt vn проверяем неравенство
J(un)-J(vn)>ln. B1)
Если B1) не выполняется, то повторяем описанный процесс A6)—B0)
с новыми |л+1, соя+1 и т. д. Может оказаться, что при каком-либо
номере п впервые выполнится неравенство B1). Как только это слу-
случится, то следующую (/г+1)-ю итерацию и все последующие итера-
итерации будем проводить по несколько иным правилам, описание которых
будет дано ниже. А пока выясним, при каких условиях может вы-
выполниться неравенство B1) и что оно означает. С этой целью дока-
докажем следующие три леммы.
Лемма 1. Пусть множество U и функции J (и), Q (и) удов-
удовлетворяют условиям 1), 2) леммы 4.1 или леммы 4.2. Пусть С< Q^ =
= inf Q (и) и множество Qc = |w: и е Uq, Q (и)^С\ непусто. Тогда
inf J(u) = J* (С) > /* = inf / (и).
"С UQ
Доказательство. Поскольку Qc ? (/Q, то J#(C)>z J^.
Допустим, что J\(C) = J*. Так как при выполнении условий 1), 2)
леммы 4.1 функция J (и) р-полунепрерывна снизу на непустом р-ком-
пактном множестве Йс, а при выполнений условий 1), 2) леммы 4.2
J (и) слабо полунепрерывна снизу на непустом слабо компактном
множестве Qc, то согласно теореме 1.3.1 и соответственно теореме
1.3.2 существует точка vc е Qc такая, что J (ус)==У* (С) = У„..
Отсюда следует, что vc e 6^^ и поэтому Q (i>c) >= Q*. С другой сто-
стороны, vc e Qc и, следовательно, Q (ус) ^С < Q*. Полученное про-
противоречие показывает, что равенство J^.{C)^=J^ невозможно. Таким
образом, остается лишь одна возможность: J % (С)> J %.
213
Лемма 2. Пусть множество U и функции J (и), Q (и) удовлет-
удовлетворяют условиям 1), 2) леммы 4.1 или леммы 4.2, а невозрастающие
последовательности {сол}, Цп} таковы, что
о)*^ lim о>я<0„ ?л>0. л=1, 2, ... , lim ?„ = 0. B2)
гс-*оо /i-*oo
Тогда для последовательностей {ип\у {vn\, определяемых условиями
A9), B0), найдется номер я^О, при котором выполняется неравен-
неравенство B1).
Доказательство. Сначала установим, что
lim Л>/*. B3)
п -*оэ
Поскольку {(оя} монотонно убывает, то Qn+i S Qrt, и следовательно,
./*^/*+1> /г = 0, 1, 2, ... Кроме того, из условий B2) следует,
что (on<Q* при всех n^N. С учетом леммы 1 тогда имеем J% <
J%J ((dn)==J%> n^N> так что lim Jt^J%>J*< Неравен-
ство B3) доказано.
Из A9), B0), B3) следует, что lim (J (un) — J (vn)) =
s= lim J* ~ J* = d>0. С другой стороны, по условию B2)
п -*ос
Пт^я = 0<d. Таким образом, найдется номер л^О, при котором
rt —> 00
выполняется неравенство B1).
Лемма 3. Пусть множество V и функции J (и), п (и) удов-
удовлетворяют условиям 1), 2) леммы 4.1 или леммы 4.2, и, кроме того,
Я (и) ^-полунепрерывна снизу на UQ. Пусть для последовательностей
\ип}> {v*} аз A9)» B0) при некотором п^О имеет место неравенство
B1). Тогда ®n<Qm.
Доказательство. Пусть вопреки утверждению ©л ^ Q „,.
Согласно теореме 3.1 или теореме 3.2 существует хотя бы одно
Q-нормальное решение и*. Это значит, что Q (и^) = п^ ^юл, т. е.
и* е Qn. Тогда J (a*) = J* = J*. Поэтому из неравенств A9)-—B1)
имеем: \п < J {un)~ J {vn)^ «/* + ?w —^#=5/г- Получили противоре-
противоречивое неравенство. Следовательно, озл<0<:.
Теперь вернемся к описанному выше итерационному процессу
A5)—B0), предполагая, что все условия леммы 3 и неравенство A4)
выполнены. Так как co*^:Q*, то или co# = Q#> или со* < Q*. Рас-
Рассмотрим сначала случай «)* = &*. Тогда из условий A5) следует
lim co/z=:coJJS = Q:{: ^юя при всех я = 0, 1, ... Согласно лемме 3 это
п ->оо
означает, что неравенство B1) в этом случае не будет выполняться
и, следовательно, процесс A5)—B0) не оборвется ни при каких п =
= 0, 1, 2, ... Нетрудно видеть, что тогда последовательности {ип},
{?/гЬ {1Цп==соп — ^*} из A5)—B0) удовлетворяют всем требованиям
метода квазирешений A), B), поскольку соотношения A9), A7) рав-
равносильны соотношениям A), B), причем
lim ?л= lim go2"w = 0
Я->00 П-*СО
и
lim %= lim (сол — Q#) = (dst. — Q^ = 0.
214
Свойство р-регулярности построенной таким образом последователь-
последовательности {ип}7 ее р-сходимость к множеству Q-нормальных решений и
равенство lim п(ип) = п^ следуют из теоремы 1. Впрочем, надо
п —> оо
заметить что теорема 1 была доказана в предположении выполнения
строгого неравенства цп > со* — Q*> я=1, 2, ... а мы же выше
допустили возможность сол = со%, что приведет к равенствам цп~
= со* — Q*, м=1, 2, ... Однако нетрудно видеть, что строгое нера-
неравенство г)^ ;> (о* — ?2* в теореме 1 использовалось только для того,
чтобы гарантировать непустоту множества B). Поэтому эта теорема
остается верной и тогда, когда г]л = а)#— Q^ для некоторых или
даже для всех м=1, 2, ... , лишь бы множество Qn = {u: u^Uu,
Q (и) ^ Q* + цп = сол} не было пустым. Тем самым случай co* = Q*
рассмотрен полностью.
Пусть теперь со% <с ?2*. Тогда из условий A5) следует, что
CD/j^cQ* при всех n^N0. Следовательно, по лемме 2 найдется номер
n^NQ, для которого будет справедливо неравенство B1). Пусть
n = k—1 есть наименьший среди п^\ номер, когда впервые выпол-
выполнилось неравенство B1). В силу леммы 3 это означает, что со^ —
~(»)?_! <й*. Следующее k-e приближение будем искать так. Поло-
Положим
юА, „ = «*_! +(Я-со*--!) 2-я, ?*.л = ?*-1-2-<*+1\ л = 0, 1, ... B4)
Затем, решая задачи минимизации первого типа для функции / (и)
на известных множествах Q^ из A8) и
Й*,„={": "et/Q- Q («) <»*.»} B5)
при фиксированном к, найдем точки ил, л, и^, я, п==0, 1, ... , такие,
что
n + tkn, ииб0м, B6)
/г
и при каждом п = 0, 1, ... будем проверять неравенство
J(Uk.n)-J(Vk.n)>lk.n' B8)
Так как {o)/j, w}, {^, n} монотонно убывают при п-^со и ©* ^
^@^-1= ^m ^л. /г<^*> ^т ?л, /г = 0, то применяя лемму 2 при
м-»-оо п-*со
фиксированном k, заключаем, что неравенство B8) обязательно вы-
выполнится при некотором конечном п ^ 0. Через я# обозначим тот
наименьший номер п ^ 0, для которого впервые выполнится нера-
неравенство B8), и положим
Щ = Щ.пк> Ik^lk.nfr uk = uk,nk- B9)
По лемме 3 неравенство B8) влечет за собой оценку (oA = co/j, nk<Z Q*.
Описание ?-го шага закончено. Следующий (&+1)-й шаг и все даль-
дальнейшие шаги являются повторением процесса B4)—-B7) с новыми
с проверкой условия B8), соответствующего номеру & + 1 и т. д.
Из соотношений B4), 28), B9) и леммы 3 следует, что сол_1<о)/г<
215
Таким образом, при со* < Q* рано или поздно процесс A5)—B0)
закончится выполнением условия B1) и заменится аналогичным про-
процессом B4)—B7), каждый шаг которого в свою очередь будет завер-
завершаться выполнением неравенства B8) и получением очередного при-
приближения по правилам B9). Убедимся теперь, что построенные по-
последовательности {иfj}, {|fc}> {лfe — ®k — ^*} удовлетворяют всем
требованиям метода квазирешений A), B). Поскольку нас будет ин-
интересовать поведение этих последовательностей при &->оо, то можем
пренебречь начальным этапом, когда члены указанных последова-
последовательностей определяются процессом A5)—B1), и считать, что про-
процесс B4)—B9) начался с 6=1, 2, ... Положим /| = /?л , Qk =
~&k,nfr 4k — ®k — ?2*- Тогда соотношения B6), B5) с учетом обо-
обозначений B9) можно переписать в виде A), B). При этом lim ?Л = 0,
k-+co
так как в соответствии со вторым из равенств B4) исходная вели-
величина ?0 на каждом шаге дробится, по крайней мере пополам. Кроме
того, со* — Q* < G)? — Q*=r|? < 0, /г=1, 2, ...
Остается показать, что lim т]& = 0 или lim (ak = Q^, По по-
&-+ОО k-+0O
строению соЛ_х <(x)k < Q*, k=l, 2, ... , поэтому lim co^ = a сущест-
k
вует и a^Q*. Предположим, что #<&#. Возьмем произвольное
число b, a</;<Q#, и обозначим У* (b)— inf / (и), где Q& =
— {и: u^Uq, Q(u)^b}. Согласно лемме 1 J*(b)> У*. Положим
е = /* (b) — J% >0. Так как lim ?fe = 0, lim co^ = a, то найдется
?-¦00 k—* 00
номер к такой, что
g*_i < 2-*8, 0 < а — щ_г <Ь—а. C0)
Рассмотрим k-й шаг итерационного процесса B4)—B9). Поскольку
®k, я = °>л-1 + (# ~~ ^ft-i) ^~п монотонно убывает и стремится к co^.j
при п-+со и co?_i<a< 6 < Q* 5Ссо^,, о = ^» т0 найдется номер п^ 1
такой, что со#, п < b^(x)k, я._х. Это значит, что Qfe) n g Q6 и следо-
следовательно,
•^.„^•M*W. + e- C1)
Покажем, что со^>л>а. В самом деле, из b^a)k, n_x следует, что
(/?—©л_1Jл<(/?~со^ х). А тогда (оЛ,л—0=0^.!—a+(R—щ_г) 2'"^
^ сод,_1 — а -\- (Ь — (dk-i) 2 г = (Ь + со/^_! — 2а) 2 > 0, так как b + o)/,_i—
— 2а > 0 в силу второго неравенства C0). Таким образом, (о^,п>а.
Далее, из первого неравенства C0) с учетом формул B4) полу-
получим: J/,, n < lk_i < 2~1?. Отсюда и из неравенств B6), B7), C1) сле-
следует, что
J (Щ, n) — Hvk, п)^ J%tn — J* — lk,n^e — lk,n>lk, п-
Это означает, что неравенство B8) впервые выполнится при номере
nk^n. А тогда o)? = cofc, ^^сол, л>а. Полученная оценка проти-
противоречит тому, что по построению со#_1<сод.< lim com —а Следо-
т->оо
вательно, lim со^==й# и lim т]л = 0, Случай о^ <с Q# также рас-
k -->• со А -юо
смогрен.
216
Таким образом, если функции J (и), Q (и) удовлетворяют всем
условиям теоремы 1 и число R выбрано из условия A4), то итера-
итерационный процесс A5)—B1), переходящий при со* < Q* в процесс
B4)—B9), позволяет реализовать метод квазирешений A), B) без ап-
априорного знания множества иЪ и величины Q^. Разумеется, эффек-
эффективность описанного способа реализации метода квазирешений зави-
зависит от того, существуют ли достаточно простые методы минимизации
функции J (и) на множествах Q^, Qn> Qk n в соответствии с усло-
условиями A9), B0) или B6), B7).
Предлагаем читателю самостоятельно исследовать возможность
применения метода квазирешений к задачам из примеров 5.1—5.5.
4. Мы рассмотрели три метода регуляризации некорректных задач
минимизации: Тихонова (стабилизации), невязки, квазирешений. Более
удобным в приложениях является, пожалуй, метод стабилизации.
Дело в том, что для реализации методов невязки и квазирешений
нужно иметь оценки величин У|, Q|, в то время как метод стабили-
стабилизации предварительного знания таких оценок не требует. Кроме того,
если в методе стабилизации нужно минимизировать функцию Tk (и)
на «простом» множестве Uп, то в двух других методах минимиза-
минимизация проводится на более «сложном» множестве —в них наряду
с «s(/fi нужно учитывать еще дополнительные ограничения:
hi (и) ^^* + Х? —в методе невязки, и п/г (и) ^ Qt + Щ — в методе
квазирешений. Впрочем, если эти дополнительные ограничения учесть
с помощью метода штрафов или метода множителей Лагранжа, то
придем к функции Lk(u) —XkJk (и)-{-akQk (и), u^UQy совпадающей
при Х?=1 с функцией Тихонова Tk(u). Последнее обстоятельство
подчеркивает наличие тесной связи между изученными тремя мето-
методами регуляризации. Строгое исследование этой связи трех методов
для некоторых классов некорректных задач см., например, в [105],
стр. 77—83.
Упражнения. 1. Применить метод квазирешений к задачам
из упражнений 3.2—3.4, исследовать сходимость.
2. Выяснить возможность применения метода квазирешений
к задачам из упражнений 1.3—1.5, взяв стабилизатор Й(и) = ||и|? .
3. В задачах из примеров 1.2—1.4 взять стабилизатор Q (и) =
= I и IJft и выяснить возможность применения метода квазирешений
для построения минимизирующей последовательности, регулярной
в метриках С [0, 1] и Н1 [0 1].
4. Показать, что при выполнении условий 1), 2) леммы 4.1
р-регуляркость последовательности {и^}, построенной методом квази-
квазирешений, и соотношение lim p (uky UfA = Q можно получить при
замене условия lim г)/г = 0 в теореме 1 и условий lim r\k ~
k -*-оо k-+co
= lim V/^= lim v^'^O в теореме 2 более слабым условием
k-+co k ->oo
sup r)fc< + oo, lim rj^^O в теореме 1 и sup
sup v*<l;4(Q, + l)(l- sup ч)'
в теореме 2,
817
5. Пусть J (и)— выпуклая полунепрерывная снизу функция
на выпуклом замкнутом ограниченном множестве U из гильбертова
пространства Я, пусть Q (и) = || и Щ. Выяснить возможность приме-
применения метода квазирешений и описанной выше схемы численной реа-
реализации этого метода для поиска ^-нормального решения задачи
минимизации J (и) на U.
6. Описанный в п. 3 способ реализации метода квазирешений
обобщить на случай приближенно заданных функций J (и), Q (и),
когда в E.4), E.5) величины 6/г, vk положительны [57, 212].
§ 8. Регуляризация задач минимизации
на множествах, заданных приближенно
1. Выше были рассмотрены методы регуляризации
некорректных задач минимизации в предположении, что
множество I), на котором ищется минимум функции J (и),
известно точно. Однако имеется немало прикладных за-
задач минимизации, в которых множество V задается при-
приближенно и которые относятся к некорректно постав-
поставленным задачам. Здесь мы ограничимся рассмотрением
множеств Uу представимых в виде
'=l, m;
i = m + 1, s;
А/(й)<0, / = 177; Л/(и) = 0, / = /+1, r}, A)
где Uo — заданное множество, функции g1 (и), ..., gs(u),
hi (и), ..., hr(u), а также минимизируемая функция J (и)
определены на Uo. Ограничения типа равенств и нера-
неравенств, задаваемые функциями gi(u), ..., gs(u)> ниже
будут учитываться с помощью штрафных функций, и по-
поэтому выделены от остальных ограничений типа равенств
и неравенств из A). Впрочем заметим, что в последую-
последующих рассмотрениях не исключаются также и случаи,
когда в A) отсутствуют какие-либо из ограничений типа
равенств или неравенств, т. е. m = 0, s = m, s = 0, / = 0,
r = l или.г = 0. Будем предполагать, что
U?^(D,J*= inf У(и)>-оо,
?/„ = {и: ueeU, J (и) - /„} ф ф. B)
Пусть вместо точных значений функций J (и), gi(u),
hf(u) на& известны лишь их приближения Jk(u)> gik(u),
hjk(u), we (/0, k=l, 2, ...; множество Uo известно точно.
Тогда вместо исходной задачи минимизации J (и) на U
218
можно попытаться рассмотреть задачу минимизации функ-
функции Jk (и) на множестве
&() , .<; C)
Л/а(м)<0, /=Г7Т; hfk(u) = 09 / = /+1, г}.
Первая неприятность, с которой мы можем при этом
столкнуться,—это то, что множество C) может оказаться
пустым, хотя исходное множество A) непусто. Однако
пусть все-таки Uk Ф ф и пусть даже удалось точно найти
Ji = inf Jk(u) при всех 6=1, 2, ... Можно ли тогда на-
деяться хотя бы на выполнение равенства lim Д =
= J* при условии, что погрешности | Jk {и) — J (и) |,
max j gik (и) — gi (и) |, max | hik (u) — ht {и) \ при всех и е Uo
стремятся к нулю при й->оо? Оказывается, в общем слу-
случае ответ на этот вопрос отрицательный. Нетрудно при-
привести примеры выпуклых или даже линейных задач ми-
минимизации, когда lim
k+CQ
Пример 1. Пусть ищется минимум функции J(u) — u
на множестве 11 = {и: и^Е1, g(u) = \u—l\ + \u-\-l\ —
— 2 = 0}. Очевидно, У* = inf J (и) = —1, и множество точек
ие=и
минимума U^ состоит из одной точки и% = — 1. Предпо-
Предположим, что функция g(u) нам точно неизвестна и задана
в виде gk (и) = ! aku — 1 ; —(— , bku -(-1—2, где lim ak =
/г->оо
= lim bb=L Может случиться, что а/г>6/г>0, и тогда
Л-*оо
множество Uk = {u: u^E1, gA;(w) = O} будет состоять из
двух точек: w = 0 и u = 2(ak + bk)~\ k=\, 2, ..., функ-
функция Jk(u)==u в этом случае будет достигать своей ниж-
нижней грани Л = 0 на Uk в точке uk = 0. Ясно, что lim Л =
?->00
= 0^=—1 = </*, lim икфи*.
к-+со
Пример 2. Если в предыдущем примере взять U =
= {«: «e?l, g(u)<;0, Uk = {u: ue=E\ Ы«)^°Ь то
также нет гарантий того, что lim Jt = J*. В самом деле,
может оказаться, что ah>bk>09 и тогда Uk = {u: 0^
^^2( + bk)-l\. Функция Jk(u) = J(u)^u достигает
219
нижней грани на Uk при uk = 0, и снова lim У* =
k-+co
lim икфи%.
/г—оо
Пример 3. Пусть J(u) = — x — y,U = {u = (
?2 01 () 0
eft( g) y}
Очевидно, что У* = inf У (u) =—2 достигается в единствен-
ной точке и = A, 1). Предположим, что Jk(u)z== J (и),
а множество С/ точно неизвестно и задано приближенно
в виде Uk = {u = (x, у): 0<х<1, gi*(a) = (l + *- )х —
Л=1, 2, ... По-
(}
скольку f/fe состоит всего из одной точки uk—@, 0), то
;j = j(O) = Oh lim /| = 0^ У* = — 2, lim иЛ^=и#. Заме-
= у—[1 — -Ах-\- л» то множества (/Л = {и = (я, //):
тим также, что если gik(u) = [ 1 + k )x — У+j, gvt{u) =
:тва Uk = {и = (#, у): 0^
будут пустыми при всех
/2=1, Z, ...
Пример 4. Пусть ищется минимум функции J(u) = u
на множестве ?/ = {a: t/e ?*, g(u) = и2 A 4~^4)~1^0}. Так
как U состоит из одной точки «*=(), то У* = У @) = 0.
Допустим, что функция g(&) задана приближенно в виде
gk(u) — g(u) — J-* Тогда нижняя грань функции Jk(u) = u
на множестве Uk = {u: и е Я1, ^А'(^)^0} равна У| = — оо
при каждом &:>1. Таким образом, lim У|=^ — со=^0 =
== У^, хотя в рассматриваемом случае \g(u)—gk(u)\z~ ,
| Jk (и) — У (и) | г= 0, ^ = 1, 2, ..., и погрешности стре-
стремятся к нулю равномерно на Е1. Заметим, что если
gb(u)=g(u)-{-l/k, то множества Uk = {u: и ^ Е1, gk(u)^
^0}, k=l, 2, ..., будут пустыми.
Эти примеры показывают, что при сколь угодно малой
погрешности в задании множества A) нижняя грань функ-
функции на возмущенном множестве C) может значительно
отличаться от нижней грани этой функции на исходном
точно заданном множестве. Иначе говоря, погрешности
в задании множества A) могут привести к неустойчивости
даже задач первого типа (см. задачу A.2)), когда ищут
значение У*, не интересуясь точками, в которых может
достигаться нижняя грань.
220
Таким образом, широкие классы задач, когда миними-
минимизируемая функция J (и) и множество U известны лишь
приближенно, относятся к некорректным задачам. Для
решения таких задач мы снова воспользуемся методами
регуляризации. При этом часть ограничений из A) учтем
с помощью штрафных функций, а множество, задаваемое
остальными ограничениями, будем несколько расширять
с учетом погрешности задания исходных данных. Исполь-
Использование штрафных функций и расширений множеств из-
избавит нас от необходимости рассматривать такой непро-
непростой вопрос, как выяснение пустоты или непустоты мно-
множества C), а методы регуляризации укажут пути такого
согласования величин погрешностей задания исходных
данных, точности решения вспомогательных задач, штраф-
штрафных коэффициентов, параметров регуляризации и расши-
расширения множеств, чтобы получаемые последовательности
{^}g[/0 были минимизирующими и регулярными в тре-
требуемой метрике [58, 61, 211].
2. Итак, пусть на множестве Uo введена некоторая
метрика и пусть для задачи минимизации функции J (и)
на множестве U требуется построить минимизирующую
последовательность, регулярную в этой метрике. Так как
множество (/, определяемое условиями A), известно лишь
приближенно, то нахождение хотя бы одной точки, при-
принадлежащей U, или даже проверка включения u^U для
какой-нибудь точки и из Uo может вызвать затруднения.
Поэтому здесь нам придется отказаться от требования,
чтобы минимизирующая последовательность непременно
принадлежала множеству [/, и несколько обобщить это
понятие.
Определение 1. Скажем, что последовательность
{uk} минимизирует функцию J (и) на множестве U> опре-
определяемом условиями A), если
аЛе{/0, "й== 1, 2, ..., lim J (uk) = «/* = inf J (и).
Определения 1.1, 1.2, 4.1 р-регулярных последователь-
последовательностей, р-корректных и некорректных задач минимизации
оставим прежними, но встречающееся в них понятие
минимизирующей последовательности будем понимать
в смысле нового определения 1. Далее, при построении
р-регулярных минимизирующих последовательностей по-
прежнему важную роль будет играть понятие стабилиза-
стабилизатора. Однако в связи с введением определения 1 нам
221
придется теперь несколько видоизменить и это понятие,
заменив в определениях 2.1 и 2.2 условие Ua^U, где
Uq — область определения стабилизатора Q (и), условием
UQ s Uo, сохранив все остальные пункты в этих опре-
определениях.
Ограничения типа равенств и неравенств из A), зада-
задаваемые функциями gi (и) или их приближениями gik (и),
будем учитывать с помощью штрафных функций. Мы здесь
ограничимся рассмотрением штрафных функций
Р (и) = j] I gt (и) |", Pk (и) = 2 I gtk (и) \р, и е= Uo, D)
где p^l и
^)=jmax{0;^)}' '=Г[^_ E)
1 \gi(u)\, i^tn+U s,
ff&W = j , , ,. . ——=— F)
Выбором параметра p^l в D) можно управлять глад-
гладкостью штрафных функций, согласовывая при необходи-
необходимости их гладкость с гладкостью исходных данных. Оче-
Очевидно, что Р (и) = 0 при и е U. Заметим, что Рк (и)
определена даже в том случае, когда множество C) пусто.
Пусть й (и) — некоторый стабилизатор задачи миними-
минимизации / {и) на множестве A). Как и выше, будем считать, что
погрешности в задании исходных данных согласованы
с выбранным стабилизатором Q(u). А именно, пусть
в каждой точке и g(/q имеют место неравенства
6ЛA + О(и)), G)
ibk(\ + Q(u)), (8)
max \hf(u)-h/k(u)\^6k(l + Q(u)), (9)
(и) ^0, | Q (и) - Qk («)|<vft(l+Q (и)), A0)
где {бЛ}, {vfe} — неотрицательные последовательности, стре-
стремящиеся к нулю, v*<l, A=l, 2, ... Введем множество
222
представляющее собой некоторое расширение множества
= 0, / = /+1, г};
здесь {0*} — положительная последовательность, стремя-
стремящаяся к нулю. Заметим, что в отличие от множества Wk,
которое может быть и пустым, множество Wk заведомо
непусто, если параметр расширения б/г согласован с ха-
характеристиками погрешности 6*, vk из G)—A0) в смысле
следующего неравенства:
6*^6,A-v,)-\ й=1, 2, ... A2)
Покажем это. Перепишем неравенство A0) в виде
wgI/q, *=1, 2, ... A3)
Возьмем произвольную точку ие(/йП^« С учетом нера-
неравенств (9), A3) имеем hfk(u)^hj (u) + 6k(l + Q (w))<
6[l(Qn) + )(lI] 6(lI(l + Q())
5:_
при /=1,/, и аналогично |й/л(и)
Q N 1 1 1 ?2 (и)) < 0
( + ()) р |/()|
< |hj (и) | + б, A + Q (ц))<6А A - v,)-1 A + ?2Л (и)) < 0, X
x(l + Qft(w)) при / = /+1, г, wg[/q. Тем самым пока-
показано, что если выполнены неравенства A2), то (У^П^^
<^Wk при всех &==1, 2, ... Однако по определению ста-
стабилизатора Uq(]U Ф фу так что ШкФф.
Перейдем к описанию метода Тихонова (стабилизации).
Для этого введем тихоновскую функцию
Tk (и) = h (и) + AkPk (u) + akQk (u)y A4)
определенную на множестве U&, где а/г>0, Л
Пта^ Пт Лл1==0, и рассмотрим задачу минимизации
этой функции на множестве Wk как задачу первого типа.
А именно, при каждом й=1, 2, ... определим точку uky
удовлетворяющую условиям
71= inf Тк(и)<:Тк(ик)<:П + ек9 uk(=Wk, A5)
w
где e/j>>0, lim 8^ = 0 (если нижняя грань Tk(u) на Wk
fe-vOO
достигается хотя бы в одной точке uk^Wk, то в A5)
можно допустить вЛ = 0). Поскольку дальнейшее изложе-
223
ние не зависит от способа получения точки uky то здесь
мы можем ограничиться предположением, что при каждом
k--=\, 2, ... имеется достаточно эффективный метод полу-
получения такой точки. Заметим лишь, что трудоемкость за-
задачи определения uk из A5) может существенно зависеть
от того, какие из ограничений типа равенств или нера-
неравенств включены в штрафную функцию и какие — в опре-
определение множества Wk. При этом важно позаботиться
о том, чтобы множество Wk имело структуру, облегчаю-
облегчающую применение выбранного метода минимизации (напри-
(например, если для решения задачи A5) используется метод
проекции градиента, то проектирование на множестве Wk
не должно вызывать затруднений). Укажем на крайние
случаи: 1) все ограничения типа равенств и неравенств
из A) учитываются с помощью штрафных функций —тогда
множество Wk имеет наиболее «простой» вид: Wk^Uo
(этот случай соответствует r = 0, hj (u) = hjk(u) = 0, n не-
необходимость в выборе параметра Bk здесь отпадает); под-
подробнее этот случай рассмотрен ниже, в п. 5; 2) все упо-
упомянутые ограничения учитываются при составлении мно-
множества Wk согласно A1) —тогда тихоновская функция
имеет наиболее «простой» вид: Tk (и) = Jk (и) + 0LkQk (и),
а множество Wk будет задаваться максимальным числом
ограничений типа равенств и неравенств (этот случай
соответствует s = О, Р (и) = Рь (и) = 0; необходимость в вы-
выборе штрафных коэффициентов Ak здесь отпадает). Кстати,
если r = s = 0, т. е. U = U0, то излагаемый здесь вариант
метода стабилизации переходит в метод, исследованный
выше в § 5.
3. Как и в § 5, нетрудно понять, что для того, чтобы
последовательность {ик}, удовлетворяющая условиям A5),
существовала, была минимизирующей и р-регулярной,
нужно обеспечить согласованное изменение величин 8ft,
v*, 6*, ak, Аи, z>k из G)—A5). Прежде чем переходить
к строгой формулировке условий согласования этих вели-
величин и условий сходимости метода стабилизации, сначала
докажем две леммы, обобщающие основные леммы 4.1,
4.2 о регуляризации.
Лемма 1. Пусть выполнены следующие условия:
1) Uq — множество с заданной на нем метрикой р; функ-
функции J(u), gi(u), i= 1, ш, \gi(u)\, i = m+l, s, hi (и), i =
*= 1, /, \hj(u)\, / = /+1, s определены и ^-полунепрерывны
снизу на с/0; имеют место условия B);
224
2) функция Q (и) определена на множестве UQ <^U0 и
является р-стабилизатором задачи минимизации J (и) на
множестве A);
3) последовательность {uk) такова, что
ukt=UOy У (и*) </* + ?*, k=l 2, ..., A6)
ft=l, 2, ..., A7)
O, A8)
?->00 &-*oo
где Q*= inf Q(w), p*>0, *=1, 2, ..., lim P^ =
p|v!
^ 1
Тогда последовательность {uk} минимизирует функцию
J (и) на U, р-регулярна и lim р (uki f/&) = О, U& = (/а fl i/*-
того, Q (w) р-полунепрерывна снизу на U& и
lim y* = 0, то
fe->oo
lim Q(^) = Q^ limp (и*, ?/**) = 0, B0)
где U** = {^*. иеУа, Й (w) = Q^} — множество п-нормаль-
ных решений.
Доказательство. Из A7) следует, что Q(
< Q* + sup | у* | = С < со, k = 1, 2, ..., т. е. {}
()}. По определению р-стабилизатора множе-
множество Qc р-компактно. Поэтому последовательность {uk} так-
также р-компактна. Пусть у* — произвольная точка, являющая-
являющаяся р-пределом какой-либо подпоследовательности \ukf^.
Покажем, что v%^Uq. Для этого прежде всего убедимся
в том, что v%^U. Из условия A8) и определения D),
E) функции Р (и) следует, что
со, i = 1, m;
li m gi (Ub) = 0, i = m + 1,
Пользуясь тем, что gi(u), i=l, m, \gi(u)\, / = m+l, s
р-полунепрерывны снизу на Uo и v* e йс ^ f/0> отсюда
при k = kn-+cx) имеем ^ (u#) < lim^ (ал ) ^ lim gt {uk) < 0,
8 Ф. П. Васильев 225
=l, m\ \gt(v*)\^ ]im\gi(ukn)\=lim\gi(uk)\ = O, т. е.
6
*) , + s.
Аналогично, из соотношений A9) следует
(ukn)<Tim hf (uk)< 0, / = ГЛ;
|Ay(»,)|< Iim |А/(«»„)| = 0,/ = Z+l,r.
Тем самым показано, что v* e f/. Далее, с уче-
учетом р-полунепрерывности снизу J (и) на Uo из нера-
неравенства A6) при k = kn-+-(x) получим J*^J(Vx)^
^ Iim J(Ukn)^ Iim J(uk)^J*- Это значит, что
Iim J(Ukn) = J(v*) = J*, т. е. ^е(/г Но, кроме того,
^g!5c^ ^q, так что v* e ^/q. Итак, доказано, что лю-
любая точка у#> являющаяся р-пределом какой-либо подпо-
подпоследовательности последовательности {uk)y принадлежит Uq.
Дальнейшее доказательство леммы 1 проводится так же,
как в лемме 4.1.
Лемма 2. Пусть выполнены следующие условия: 1) Uo —
выпуклое замкнутое множество из рефлексивного банахова
пространства В; метрика р на Uo задается равенством
р (и, v) = \\u - v у, функции^ {и), gt {и), i = ГГ^> I gi (и) |,
j
, s, |/() / |/(I /
w слабо в В полунепрерывны снизу на Uo; справедливы
условия B); 2) функция Й (и) определена, строго равно-
равномерно выпукла, неотрицательна и р-полунепрерывна снизу
на U0 = Uq (например, В = Н— гильбертово пространство,
Q(u) = \\u}Ih)> 3) последовательность {uk\ удовлетворяет
условиям A6)—A9), причем последовательность {yk} из A7)
стремится к нулю. Тогда {uk\ минимизирует функцию
J (и) на U, р-регулярна и справедливы соотношения B0).
Доказательство того, что Q(u) — слабый стабилизатор
задачи минимизации J (и) на U, проводится так же, как
это делалось в лемме 4.2. Рассуждая так же, как при
доказательстве предыдущей леммы, из соотношений
A6)—A9) получим, что любая точкам*, являющаяся сла-
слабым пределом какой-либо подпоследовательности последо-
последовательности {uk}, принадлежит ?/** и Iim Q (uk) = Q*. Ha-
конец, р-регулярность \uk) и равенство Iim p (uk, f/*J^=O
устанавливаются аналогично лемме 4,2,
226
4. Продолжим исследование метода Тихонова —
приведем достаточные условия его сходимости.
Теорема 1. Пусть 1) выполнены условия \) и 2)
леммы 1 или леммы 2;
S
2) функция Лагранжа L(ut Я, ii) = J(u) + ^ Kgt{u) +
i=\
/1
И, ..., fir)'- ^i^0, ..., Ят^0, j^i^O, ..., jx^O} «а
множестве UoxAo имеет седловую точку (и%, Я*, ц,*) <=
3) приближенные значения Л(^), g*^(w), hjk(u)y Q*(w)
функций J (u)y gi (и), hj (и), Q (и) на Uu удовлетворяют
неравенствам G)—A0);
4) последовательности {бА}, {v^}, {G^}, {ал}, {Л^}
t/з G)—A5), таковы, что sup v* < 1, 6k ^ Qk A —
= lim
k—>oo k—*oo
= lim 6*/ссл = 0; НтЛК"ал = оо, 2^^ q = p(p— l)-1
p=l последнее условие не нужно).
Тогда последовательность {uk}y определяемая условиями
A5), существует, минимизирует функцию J (и) на U>
р-регулярна и р-сходится к множеству Uq. Если, кроме того,
Q(u) р-полунепрерывна снизу на Uq, то справедливы B0).
Доказательство. Согласно теореме 1.2.7 сущест-
существование седловой точки (м#, Я*, |л,*) функции Лагранжа
в смысле неравенств B1) означает, что и%^и%, «/* =
= J (и%) = Ь(и%у Я*, |я*). Кроме того, для любой точки
и ^Wk из (9)—A3) вытекает, что hj (и) ^ hik (и) +
+ 6(l+Q())e[l+(l+)J2[) k] + eik(l-Y*)x
), /=1,/, аналогично, |fty(tt)|<
|у()| ( ())(+()), / = / + 1,/-. Та-
Таким образом,
max I max hf (и), max I hf (и) II ^
<2влA+Й(и)), ^геГ,, А = 1, 2, ... B2)
Из B2), определения E) функции gf(u) и условия
(Я*, ii*) е Ло следует, что Л?& (м) < | X? | g/ (a),
&* 227
* = 1, s\ tiJhf(u)^\[if\-2ek(l + Q(ii)), i=U г для всех
«е^, я=1, 2, ... Поэтому из правого неравенства
B1) имеем
ut=Wk> B3)
г
где ln*|i=2 11*71» *=1» 2> ••• Далее, пользуясь извест-
известным неравенством [ 11J | аЬ | ^ | а \р р~l +1 b |* q~l, справед-
справедливым для всех действительных чисел я, Ь, р>1, q>\%
S S
/г' + Г1-!. получим 2 l*f|gY+(«) = 2] ({pAk^'gtW) x
X (I V | (P))
= /1,ЯИ + 5ЛГ', где «g(/0, B=2 WWP*-1). Под-
ставив это неравенство в B3) при р>1, будем иметь
B4)
(ii)+ 5Л^ +21 |i* |a 8^1+Q ())
we HTfrf fe=l, 2, ..
Если р=1, то взяв k0 столь большим, чтобы
> max |Я* | при всех k^k0, из B3) получим
*?j(u) + AkP (и) + к | fx* h 6, A + Q (u)), B5)
Далее, наряду с функцией A4) введем функцию Тихо-
Тихонова с точными исходными данными* Tk (и) = J (и) +
+ АкР (и) +akQ (и), u^U&. Из G)—A0) следует оценка
| Tk (и) - fk (и) \ ^ (б, + Ak8k + akvk) (l+ti (и)) =
= akPk(l+Q(u)), uezUQ, Л=1, 2, .... B6)
где для краткости обозначено рк = б^а^1 -f ЬьАкаТ +• vft.
Пользуясь опенками B4)—B6), покажем, что функция
Tff {и) ограничена снизу на Wk при всех достаточно боль-
22Ь
Ших *. В самом деле, из B4)—B6) имеем Tk(a)^Tk(u) —
____ anPk (i + Q (и)) = J(u) + AkP (и) + aku (и) - akpk (I +
+ Q (и)) ^К- BA\-q - 2 | v* \г h A + Q
1«()) ^0Zl^
р(^ ()
— BA\~~q — akPk — 2 I !^* |i ©л ПРИ всех u<^Wk, k^>k0. Так
как по условию lim bk/ak= lim р* = 0, то, взяв ^Одоста-
/fe->OO k-*CQ
точно большим, можем сделать sup (рЛ + 2 | ц* |х вЛа-1)<1.
Тогда из предыдущего неравенства получим Tk (и) ^
^ У# - sup (ВЛ1~* + akpk + 21 fx* |х б/?) > - со при всех
k0. Таким образом, величина 7|= inf ^(м),
k^k0, конечна и последовательность {uk}, удовлетворяю-
удовлетворяющая условиям A5), существует.
Покажем, что {uk} удовлетворяет соотношениям A6)—
A9) основных лемм о регуляризации. С этой целью возь-
возьмем произвольную точку u^^Uq^UqCHJ. Выше было
показано, что при выполнении неравенства A2) справед
ливо включение UQ(]U^Wk. Следовательно, u^^Wkr
k=l^2, ... Тогда, пользуясь соотношениями A5), B4)—B6)
и учитывая, что Й(иK*0 на UQ и Р(и#) = 0, можем на-
написать следующую цепочку неравенств:
AkP (uk) + aku (uk)
J (ик) + S I V I gt ("к) + 21 V* li h A + Q (и*)) +
229
Отсюда имеем ал0(ил)<ал0(и#)
Q()) или Q(uk)<,
[(+Р) (*) p ^~ V1 +2 | ц* |, б.аГ1] X
X A — Pk — 2 | (i* |i б^а*1)-1, & ^ Ао- Последнее неравенство,
как и вся цепочка неравенств B7), справедливо при лю-
любом выборе точки и# е I/&, поэтому его можно перепи-
переписать в виде
B8)
где 7,-[(^ )(р,+||1) ]
X Г1 — sup (Pk + 2 | jut* jx e^o:^1)]-1—^0 при &->оо. Неравенство
A7) доказано.
Далее, из той же цепочки неравенств B7) следует, что
1=]
4-2|(i*!,6ft)(l+Q(«ft)), ft^Ao- B9)
Отсюда, используя известное неравенство [11]
V i / \
уже доказанную оценку B8), имеем
где IЛ
+ (Рй + 2| \i* ii Bkakl) (\ +Й* + sup ykX\. Если обозначить
zk a (P (uk))l/p, то последнее неравенство можно перепи-
переписать в виде 0 ^ Akzpu ^ | Я* |9 гк + С^^ + еЛ, или
где Ьа == j ^* |^ Л^1, d/г = (Cxak -f- ^д) Л^1.
Из C0) и леммы 2.3.11 из [4] имеем
230
при ?->оо. Соотношение A8) для случая р>1 дока-
доказано. Если же р = 1, то B9) можно переписать в виде
0^Ak
Учитывая,
имеем
P(Uk
что
Р (и
)
»>
^тах л*
Ак> max
Р^ + С^ + еь
Я* | при всех k
гк)(Ак— max |Л*
^ ^о» отсюда
при й->оо. Соотношение A8) для случая р = 1 также
доказано. Предлагаем читателю убедиться в том, что на
самом деле доказано более сильное утверждение: 0^
^AkP (uk) <const • (АХГЯ' + ak + ek) при р>1 и 0^
^AkP(uk)^ const (ak + Ek) при р==1.
Далее, из неравенства B2) при u = uk^Wk с учетом
оценки B8) имеем
max { max h, (ик)\ max \hj (uk) \} ^
При &->оо отсюда получим соотношения A9).
Осталось доказать неравенство A6). Снова обращаясь
к иепочке неравенств B7), имеем
Так как AkP (uk)^0, то отсюда следует оценка J(uk)^
^</* + Рь *^*о, где Pft = Cja* + е*-* 0 при А->оо.
Неравенство A6) также доказано. Теперь, чтобы убе-
убедиться в справедливости всех утверждений теоремы 1,
остается обратиться к лемме 1 или лемме 2.
5. Отдельно остановимся на случае, когда все огра-
ограничения типа равенств и неравенств из A) учитываются
с помощью штрафных функций. А именно, пусть
C1)
Возьмем какой-либо стабилизатор Q (и), и gJ/q ^ f/0>
задачи минимизации функции У (а) на множестве C1).
Пусть, по-прежнему, Jk(u), gik{u>), ЙЛ(и), k=l, 2, ...,—
приближения функций J (и), gt{u)y Q(u)y а штрафные
функции Р(и)} Рк(и) определяются посредством формул
231
D) — F). Составим функцию Тихонова
Tk(u) = Jk (и) + AkPk (и) + akuk (и),
u<=Uiiy *=1, 2, ...,
и рассматривая задачу минимизации Тк(и) на множестве
Uц как задачу первого типа, с помощью какого-либо ме-
метода минимизации определим точку uk из условий
Т% = inf Tk (и) ^ Tk (uk) < Tt + вк, ukt=UQ, C2)
"о
где efe>0, k=l, 2, ..., Нтв4=0. Заметим, что если
'<—>ОО
нижняя грань Tk (и) на Uq достигается хотя бы в одной
точке uk, то в C2) не исключается возможность еЛ = 0.
Справедлива
Теорема 2. Пусть: 1) выполнены условия 1), 2)
леммы 1 «уш леммы 2;
S
2) функция Лагранжа L (и, к) = У (а) + 2j **?* (")¦ w G
еУо, ЯеЛо = {(Яь Я2..., УЛеР, А^'о,1..., Ят^0}
имеет седловую точку (u*< Я*)е(УохЛо, т. б.
L(a#, X)<L(tt*t ^*)^L(tt, Я*), ие(/0, ^Ло; C3)
3) при ' г,(женные значения Jk (и), gik (и), Qk (и) функ-
функций J (u)y gi(u), п(и) на Uq удовлетворяют неравенст-
неравенствам G), (8;, A0);
4) последовательности {8k}y {vk\, {ak}y \Ak), {ek} та-
таковы, что 6k ^0, vk ^ 0, ak > 0, Ak > 0, ek > 0, Л = 1,
2,..., sup v^< 1, lim (8k+vk+ak+ek+Akl) = 0, lim M^1-
¦•V ^ 1 k-*oo /г-*оо
= lim Bfea^'=0, lim Л^1а/г=оо, где q = p(p— l)-1
p = l последнее равенство не нужно).
Тогда последовательность [uk)y определяемая условиями
C2), существует, минимизирует функцию J (и) на мно-
множестве C1), ^-регулярна и р-сходится к множеству и%.
Если, кроме того, й (и) р-полунепрерывна снизу, то
lim Q(iik) = &*, Птр(«ь (/##) = 6, гд<? //## = {м: ае(Уо,
Q (а) = inf fi (и) = Q*} — множество Q-нормальных решений
Доказательство этой теоремы проводится с использо-
использованием леммы 1 или леммы 2 и дословным повторением
доказательства теоремы 1 при h/ (и) = hjk (и) = 0, \х; = 0,
/ = ТГт; ^=о, л = 1? 2, .,,
6. Проиллюстрируем возможность применения описан-
описанного выше метода Тихонова и теорем 1, 2 к некото-
некоторым классам некорректных задач минимизации.
Пример 5. Рассмотрим задачу линейного програм-
программирования: минимизировать функцию J(u) = (c, и) на
множестве U = {u = (uly ..., ип): и^Еп, и;'^0, /е/,
(а,у и) — Ь^О, i'=l, т\ (ah и)—&,-=0, f = w+l, s],
где с, аъ ..., as — некоторые векторы из евклидова про-
пространства Еп, Ьъ ..., 6у —некоторые числа, / — заданное
множество индексов /, 1<^/^д. Предположим, что V Ф
Ф ф и эта задача имеет хотя бы одно решение, т. е.
у^ = inf <c, ы)> —оо, U* = {u: и ее U, J(u) = J*}Фф.
Тогда согласно теореме 4.8.4 из [4] функция Лагранжа
L(u, k) = (c, M> + S^««fl/i u) — bi) на UoxAo имеет седло-
«= i
вую точку в смысле неравенств C3); здесь UQ = {u: и е
? ^О //} Л {Я (Л1 ^) ?P Я
^, . т^}
Пусть вместо точных с, aiy ht известны лишь их при-
приближения cky aik, bik с погрешностями
\ck - с | < Gkj | а/Л - fl/1 < аЛ, | bik -bi\^ ok%
i=ly s; aft^0, /? = 1, 2, ... limaft = 0.
fe->oo
Тогда вместо точных функций J(u) = (c, и), gi(u) =
= (ль ti) — bi придется пользоваться их приближениями
Л (и) = (ck, u)t gik (и) = (aik, и) - biki i - l7s, * = 1, 2, ...
Как показывает пример 3, в этом случае задача линей-
линейного программирования, вообще говоря, будет некоррект-
некорректна в метрике Еп. Покажем, что для ее решения может
быть использован описанный выше метод стабилизации.
Ограничения типа равенств и неравенств, задаваемые
функциями gi (и), учтем с помощью штрафной функции
т s
<й,ь u)-bik;
В качестве стабилизатора возьмем функцию Q(u) = \u\d
при d^py которая определена и непрерывна на мно-
множестве Uq=U0, (например, можно взять rf—р = 2). Так
как i/^.—выпукло и замкнуто, то функция \и\2 и, сле-
233
довательно, Q (и) = | и \d достигает своей нижней грани
на U^ в единственной точке ^ е^^., т. е. Q-нормальное
решение существует и определяется однозначно. Пока-
Покажем, что погрешности в задании функций J (u)y gf(u)
согласованы со стабилизатором в смысле неравенств G),
(8). Для этого заметим, что |тах{а; 0} — max {6; 0}|^с
^ | а — Ь |, || а | — | Ь || ^ | а — b | при всех действительных
а, Ьу так что с учетом обозначений E), F) будем иметь
gik (и) - gt (и) | < | gik (и) - gi (и) | C4)
для любых функций gik (и), gi (и). В нашем случае из
C4) следует
y u)-bik-(ah u)
<М1+|и|), и^Е\ C5)
Пользуясь формулой конечных приращений Лагранжа
для функции g(z) — zp, из определения D)
i; Uk (и) - ^ (и)) р \gi (и)+a [g+ik (и) - gi (u))\p~{
S
С учетом C5) тогда \Рк(и)-Р( )\^ 21 Р°*A +
+ I и | у (| щ | +1Ь, j + а*)"-1. Поскольку sup A +1 и | у A +
4-1 и I")-1 = A (p, d)<c», то
\Pk{u)-P{u)\^akpA(p, rfJ
t=l
Аналогично
Таким образом, погрешности согласованы со стабилиза-
стабилизатором п(и) = \и\а в смысле неравенств G), (8) при лю-
любых d ^ р ^ 1.
Составим функцию Тихонова Tk(u) = (cky u) +
+ ^4/Л (^) + ak I w |rf и с помощью какого-либо метода
234
минимизации определим точку ak e UOi удовлетворяющую
условию C2). Если параметры ak, Aky ok, zk согласо-
согласованы так, чтобы lim ak = lim Ak1 = lim (akAk + н) tik1 =
fe-voo fe-*oo /е-юо
= 0, lim A<j-X ak = со (при р = 1 последнее равенство не
feoo
нужно), то из теоремы 2 следует сходимость {иЛ} к Q>
нормальному решению и* в метрике Еп.
Предлагаем читателю самостоятельно рассмотреть
случай, когда некоторые из ограничений типа равенств
и неравенств в рассматриваемой задаче линейного про-
программирования учитываются посредством множества Wk
согласно A1). Заметим, что хотя множество {и: (а, и) —
— Ь^О} выпукло, но множество {и: (а, и) — Ь^0A +
-f|tt|rf) при б>0, d>l невыпукло, так что множество
Wk здесь также может оказаться невыпуклым.
Пример 6. Рассмотрим задачу выпуклого програм-
программирования в гильбертовом пространстве Я. Пусть (/0^-
выпуклое замкнутое множество из Я (например, U0 = H),
функции J(и), gi(u), ..., gr(u) выпуклы и полунепре-
полунепрерывны снизу на Uо в метрике Я, а функции gy+i(w), ...
..-, Usia) имеют вид gt(и) = (ah u) — bh где ^ — некото-
некоторые элементы из Я, bt — числа, (aiy а) —скалярное про-
произведение в Я. Пусть на множестве U = {u: u&U0,
g"/(w)< 0, i = 1, m; gi(u) = 0y / = m+l, s}, m^r, функ-
функция J(u) ограничена снизу и достигает своей нижней
грани хотя бы в одной точке, т. е. /#> — оо, U*Ф ф.
Предположим, что функция Лагранжа L (а, X) = J (и) +
т
+ 2 ^Bi (и) имеет седловую точку на множестве l\ x Л
в смысле неравенств C3) (достаточные условия существо-
существования седловой точки см. в теореме 1.2.8; см. еще
гл. 4 [4]).
Будем пользоваться штрафными функциями D) при
некотором р ^ 1. Возьмем функцию Q (и) = || и \\d, d ^
^max{p; 2}, которая строго равномерно выпукла на Я
и является слабым стабилизатором рассматриваемой за-
задачи. Таким образом, множество Uo и функции J (и),
gi(u), ..., gs(u)9 U(u) удовлетворяют условиям 1), 2)
леммы 2. Кроме T6f6, U* — выпукло, замкнуто, и согла-
согласно теореме 1.3.9 Q-нормальное решение и* существует
и определяется единственным образом.
Пусть вместо точных значений J (и), gi{u) известны
их приближения У*(и), gik{u), t = l,s, fe=l, 2, ...,
235
причем погрешности согласованы со стабилизатором
Q(u)=\uf в смысле неравенств G), (8) при некотором
d^maxjp; 2}. Составим функцию Тихонова Tk(u) =
= Jk(u) + AkPk(u) + ak\\u\\d и при каждом /г = 1, 2, ...
определим точку uk^U&i2=U0 из условия C2). Если
параметры бЛ, v*, aky Aky sk удовлетворяют условию 4)
теоремы 2, то из этой теоремы следует сходимость по-
построенной последовательности {Uk} к Q-нормальному
решению и* по норме Я.
7. Для решения рассматриваемых некорректных задач миними-
минимизации наряду с методом стабилизации могут быть применены и дру-
другие методы регуляризации. Здесь мы остановимся на одном варианте
метода невязки, предполагая, что множество U имеет вид C1).
В качестве штрафных функций возьмем те же функции Р (u), Pk (и),
определяемые соотношениями D) —F), и положим
Ф k(u) - J (и) + AkP (и), и е= U0, C6)
где Ак > 0, lim Ak — -\-co. При каждом k=l, 2, ... определим
k-+co
точку и^ из условиi
Qk = inf Qk (и) ^ Qk (ak) ^Q% + \Lkt uk e= Vk) C7)
v k
где
{ ? Ь C8)
— последовательности {|i&}, {y^k} положительны и стремятся к нулю,
ф| = inf Фа- ("). Q (и)— какой-либо стабилизатор, Qk(u)
Q
женное значение Q (и).
Теорема 3. Пусть: 1) функции J (a), gx (и), ... gs (и), Q (и)
и множество Uq удовлетворяют условиям 1), 2) леммы 1 или лелшы 2;
2) функция Лагранжа L (и, X) имеет сед лову ю точку в смысле
неравенств C3);
3) приближенные значения Jk (и), gik (u)y Qk (и) функций J (и),
gi(u), Q (и) на U0 удовлетворяют неравенствам G), (8), A0);
4) последовательности {бд,}, {v*}, l^1}, {fx*b ilk) из G), (8),
A0), C6) —C8) положительны, стремятся к нулю и, кроме того,
sup vk< I, lim bkAky^v = 0, lim Aqk~x Xk == °°» ^ q = p(p — l)-i
fe^l fe-^-oo fe-*oo
(если p = 1, mo последнее условие не нужно).
Тогда последовательность {и^}, определяемая условиями C7), C8),
существует, минимизирует J (и) на множестве C1), ^-регулярна и
^-сходится к множеству U& = Uq()U%. Если, кроме того, Q (и)
^-полунепрерывна снизу на U®, то справедливы соотношения B0).
236
Доказательство. Из существования седловой точки функ-
функции Лагранжа следуют неравенства
J* ^ J (и) + S I Ь* | gf (и) ^ / (и) + AkP (и) + ВА\-* C9)
*=1
при р>1 и
S
./* ^ J (и) + 2 \ti\gt(u)^J(u) + AkP (и), и е= ?/0, D0)
при р= 1, Л&> max | ^f |? k^kOt получаемые из аналогичных
неравенств B4), B5) при \х* = 0. Далее, из G), (8), A0) имеем
I Ф* (м)-Ф* (и) | ^ (вл + 6лЛл) О + Q («)). " е 6/Q. D1)
Покажем, что множество C8) непусто. Для этого возьмем точку
vk e /7q, для которой Q (ул) ^ Q#+^~1» С учетом условия
lim (Axk~Q+ 6k + &kA)yJl =0 и неравенств C9) —D1) получим
fe>оо
Это значит, что у^ е V^, т. е. Vk Ф ф при всех к ^ ^0. Отсюда и
из Qfc(u):>=0, u^lUq следует существование точки uk, удовлетво-
удовлетворяющей условиям C7) при всех k^k0.
Остается показать, что {uk\ удовлетворяет соотношениям A6) —
A8). Неравенство A7): Q (u^^Q^+y^ k^k0, где limY/f = 0, до-
k—кх>
казывается так же, как аналогичное неравенство F.6). Далее, из
оценок A7), D1) и условия uk e Vk следует, что
= Ф* (uk) ^ Ф* (uk) + («л + М*) A + Q (uk)) ^
т. е.
J(ud + AkP(uk)^Jm + tk, k^K lim Pfe = 0. D2)
fe-»-cx>
Отсюда с учетом А^Р (ujJ^O сразу получаем оценку A6). Кроме
того, из D2) с помощью неравенств C9), D0) имеем
S
0^ AkP (uk) ^ /, -
так что zk = (Р (у^)I/р удовлетворяет неравенствам вида C0). Отсюда
следует соотношение A8): iim P(uJe) = 0. Все утверждения теоремы
fe-юо
2 теперь следуют из леммы 1 или леммы 2,
237
8. Далее, кратко рассмотрим один вариант метода квазирешений
Для задачи минимизации функции J (и) на множестве U, имеющем
вид C1). Последовательность {uk} будем определять условиями
Фл + Бл» uke=Qk> D3)
где
, Q*= inf Qk(u), D4)
функция Ф k(u) определена по формуле C6), Q^ (w) —приближенное
значение стабилизатора Q (и), а последовательности {?#}, {щ} поло-
положительны и стремятся к нулю.
Теорема 4. Пусть выполнены условия 1), 2), 3) теоремы 3 м
последовательности {6k}> {v*}, {Л*1}, {?*,}, {щ} из G), (8), A0), C6),
D3), D4) положительны, стремятся к нулю и, кроме того, sup Vb<l,
Л>1
Л>1
i^ lim б^Л^ = 0. Тогда последовательность \uk), определяв-
жая из D3), существует, минимизирует функцию J (и) на множестве C1),
р-регулярна и р-сходится к множеству Uq. Если кроме того, Q (и)
р-полунепрерывна снизу на UQf то справедливы соотношения B0).
Доказательство. Так как т]?>0, то Q^^=0, k—\, 2, ...
Покажем, что функция Ф& (и) ограничена снизу на Q^. Для этого
заметим, что если ке^, то справедлива оценка
Q(M)^Q#+Y*. lim v* = 0, D5)
6-ЮО
которая доказывается так же, как аналогичные оценки G.8), G.9).
Отсюда и из неравенств C9) —D1) имеем Ф^, (и) ^ Фк (u) — (dk-\-8kAk)x
))JBAlc>6 &A} -оо для
\ ^ J
всех и е Q^. Это значит, что Ф# (и) ограничена снизу на Q# и точ-
точка «д,, удовлетворяющая условиям D3), существует.
Покажем, что для последовательности {и^\ справедливы соотно-
соотношения A6) —A8). Оценка A7) сразу следует из D5). Далее, возьмем
точку Vk& Uq, такую, что Q (u$)^ ill* +r\k. Рассуждая так же, как
при доказательстве оценки G.12), получим, что Q^ (v^)^ Q| + T]I, т. е.
uft e fife. Тогда с учетом неравенств D1), D3), D5) имеем У()
Таким образом, и в методе квазирешений справедлива оценка D2),
из которой, как и выше, можно получить соотношения A6), A8).
Тогда все утверждения теоремы 4 следуют из леммы i или леммы 2.
9. При исследовании задач минимизации приходится иметь дело
с минимизирующими последовательностями, для которых сходимость
к множеству точек минимума не может быть описана с помощью
какой-либо метрики. Например, при исследовании вопроса существо-
существования оптимального решения задач минимизации в гильбертовом или
банаховом пространстве мы пользовались последовательностями, схо-
сходящимися лишь в слабом смысле (см. теоремы 1.3.2, 1.3.6, 1.3.7).
238
Для единообразного исследования различных возможных способов
сходимости минимизирующих последовательностей (в частности, схо-
сходимости в какой-либо метрике или слабой сходимости в банаховых
пространствах), видимо, удобнее всего использовать аппарат и язык
топологических пространств. С помощью этого аппарата и языка
можно также провести общее и единообразное исследование методов
регуляризации [212]. Проведем такое исследование для задачи мини-
минимизации функции на множестве U, определенном условиями C1).
Предположим, что на множестве ?70 введена некоторая тополо-
топология т, и сходимость последовательностей к точке или к множеству
будем ниже понимать в смысле этой топологии (см. определение 1.3.10).
Задачу минимизации второго типа (см. § 1) теперь естественно пере-
переформулировать в следующем виде: для заданных числа 8 > 0 и окре-
окрестности Об множества U*, О5 e т, найти точку иг> б <= UQ, такую, что
K(«8,6W*|^e, ие,бе=06. D6)
Введенные выше определения корректной и некорректной задач,
регулярной последовательности, стабилизатора на топологическом
языке будет выглядеть так.
Определение 2. Задача минимизации функции / (и) на мно-
множестве U называется корректной в топологии т или, короче, т-кор-
ректной, если 1) J^ > — 00, и*фф\ 2) любая минимизирующая
последовательность в этой задаче т-сходится ко множеству U*. Если
существует хотя бы одна минимизирующая последовательность, которая
не будет т-сходиться ко множеству (/*, то задача минимизации
называется некорректной в топологии т.
Определение 3. Последовательность {и^}, минимизирующая
функцию J (и) на множестве U (см. определение 1), называется
т-регулярной, если {и^} секвенциально компактна в U (см. определе-
определение 1.3.12) и т-сходится ко множеству U*.
Определение 4. Функция О (w), определенная на непустом
множестве [/й ? (/0, называется х-стабилизатором задачи минимиза-
минимизации J (и) на множестве /7, если 1) Q(a)^0 при всех и <=. U^\
2) множество Qc = |ue/7^; Q(w)s^C). т-секвенциально компактно
при любом С^О; 3) множество (Jq~Uq[)U* непусто.
Классы корректных задач минимизации в различных топологиях
выделяют теоремы 1.3.1, 1.3.2, 1.3.6—1.3.14. Ясно, что в т-коррект-
ных задачах для получения точки ие, б, удовлетворяющей условиям
D6), достаточно взять любую минимизирующую последовательность {uk\
и положить uz,Q = uk при достаточно большом k. Также можно
определять ие< б и в некорректных задачах, если только минимизи-
минимизирующая последовательность будет т-регулярной. Для построения
т-регулярных минимизирующих последовательностей в некорректных
задачах нужно взять какой-либо т-стабилизатор Q (и) и воспользо-
воспользоваться, например, одним из трех описанных выше методов регуляри-
регуляризации. При исследовании сходимости этих методов важную роль
играет следующая лемма о регуляризации, обобщающая леммы 1, 2,
а также леммы 4.1, 4.2.
Лемма 3. Пусть выполнены следующие условия: 1) ?/0 — множе-
множество с заданной на нем топологией т; функции J (u)y gi (и), ... , gm (и),
I Sm+i (u) I» • • • I Bs (u) I определены и х-секвенциально полунепрерывны
снизу на Uq\ множество U определено условиями C1) и справедливы
соотношения B); 2) функция Й (и) определена на множестве U Q s UQ
239
и является т стабилизатором задачи минимизации J (и) на U\
3) последовательность \и^\ такова, что и^ е UQ, J (Wfc)^^* + Pb
Q (uk)^ й#+7л, lim Р (uk) = 0, где Q* = inf Q(w), P(и) — штрафная
k *
?/*
функция, определенная равенствами D), E); Р#>0, &=1, 2, ...
..., lim P* = 0, sup j yk | < + co.
Тогда последовательность {иk] минимизирует функцию J (и) на U,
т-регулярна и т-сходится к множеству Uq. Если, кроме того, Q (и)
т-секвенциально полунепрерывна снизу на UQ и lim yk = 0, то
koo
lim Q (u^ — Q^ и {и/;} %-сходится к множеству ?/*„. = {#: и е ?/?>,
Доказательство. По условию Q (uk) ^ Q^ +sup | у^ | = С <
&>1
<оо, т. е. {^д,} е Qc. По определению т-стабилизатора множество Qc
т-секвенциально компактно. Поэтому существует хотя бы одна точка
v e Qc, к которой т-сходится некоторая подпоследовательность {"#„}.
Покажем, что любая такая точка v# принадлежит множеству Uq.
Для этого прежде всего заметим, что из равенства lim P (uk) = Q
следует, что lim gi(u^)^:07 /=1, т; lim gi(uk) = 0, i = /n+l, s.
k-+co k-+co
Отсюда, пользуясь т-секвенциальной полунепрерывностью снизу функ-
функций gt (и), ... , gm (и), 1 gm+1 (и) |, ... |^5 (м) | на 6/0, получим # (»ф)^
Jmi_^ (ukn) ^ 0, г = 1, m;| ft (»„) | ^ lim | ft (ukn) | == 0, т. е.
&-(г>#) = 0, t = m+l, s. Следовательно, v*^U. Л тогда с учетом
т-секвенциальной полунепрерывности снизу функции J (и) из нера-
неравенства J (Uk)^J*+fik ПРИ k=;kn~+co будем иметь /^/()
^ lim / (м^л) ^ lim J (ukn)^J*. Это значит, что l
п—юэ п—voo л—»-оо
=/ (и^) = /^, т. е. v* e [/#. Но, кроме того, ^ейсд{/й, так что
Таким образом, доказано, что любая точка v*f являющаяся
т-пределом какой-либо подпоследовательности {^л}, принадлежит U$
и lim / (Ukn) = J (v*)~ ^*- Отсюда следует, что lim J(uk) — J*.
rt->oo fe-»-oo
В самом деле, пусть а —некоторая предельная точка числовой после-
последовательности {/ (uk)}9 пусть а= lim J (uk ). В силу т-секвенциальной
Л-КХ5
компактности Qc можем считать, что {«#„} т-сходится к некоторой
точке V,.. По доказанному тогда lim J (uk\ — Jm. Это значит, что
П-+СО
число У# является единственной предельной точкой последовательности
{/(ил)}, т. е. lim J{uk) = Jm.
/г-»- со
Покажем, что {а^} т-сходится к Uq. Пусть, вопреки утвержде-
утверждению, {uk} не будет т-сходиться к U^. Это значит, что существует
окрестность Сет множества U^ такая, что для любого номера п
найдется номер kn >• п, для которого и^п ф. G. Можем считать, что
kn<.kn+i и что \u,kn} т-сходится к некоторой точке у#. Как было
240
доказано выше, v^ ^ Uq. Но тогда окрестность G множества Uq
является и окрестностью точки i\y поэтому в G должно содержаться
бесконечно много членов подпоследовательности \ик/1\. Однако по
построению ukn ф. G при всех п = 1, 2, ... Противоречие. Следовательно,
{и;} т-сходится к множеству Uq.
Наконец, пусть Q (и) т-секвенциально полунепрерывна снизу
на UQ и lim yk = 0. Пусть lim Q(w^) = lim Q (uk\. В силу т-секвен-
к-*ао ?^ л-юо
цнальной компактности {«#} можем считать, что Ыкп\ т-сходится
к некоторой точке vt. По доказанному v g(/q. Тогда с учетом
неравенства Q (uk) ^ Q* -\-yk имеем Q* -^ Q (vj) ^ lim Q (ик\ =
л-юо
= lim Q (Uf^ ^ lim ^(«^^Q^, что эквивалентно существованию
предела числовой последовательности {Q (и^)} и равенству lim Q (и^—
k-+CQ
= Q + . Отсюда же следует, что любая точка у*, являющаяся т-пре-
делом какой-либо подпоследовательности [ик\, такова, что Q (v*) ==
-— Q* = lim Q (Ukn), т. е. v* e ?/**. Следовательно, {u^} т-сходится
AZ-»OO
кЧ/^—это доказывается так же, как выше была получена т-сходи-
мость {uk\ к U^. Лемма 3 доказана.
Теперь покажем, как можно получить т-регулярные минимизи-
минимизирующие последовательности, используя один из трех описанных выше
методов регуляризации.
Теорема 5. Пусть: 1) выполнены условия 1), 2) леммы 3;
S
2) функция Лагранжа L(u, Я) = J (и) + J] A,/g,- (и) ыжет сед лову ю
точ/о/ в смысле неравенств C3);
3) приближенные значения Jk (u)y gik (и), Qk (и) функций J (и), gi (и),
Q (и) на Uq удовлетворяют неравенствам G), (8), A0), где б^^О,
v/j^O, &=1, 2, ..., lim 6/j= lim v^ = 0, sup vft< 1; 4) последо-
k-*co k-+co k"^ 1
вательность {uk\ определяется
а) либо из условий A4), C2) при ou>0, Ль>0, еь>0, ^ =
= 1,2,...,
lim (ak + A^ + ek + 6kAhap+ekail)^0, lim ^-1^ = 00,
где q = p(p—\)~1 (метод стабилизации);
б) либо из условий C6) —C8) при Л^>0, |1>г>0, %k > О,
(метод невязки);
в) лабо аз г/словии C6), D3), D4) при Лл > О, lk > О, п^ > О,
&=1, 2, ..., lim (A^l + ^k + y]k + vkr\^l + bkAk) = O (метод квази-
fe->oo
решений).
Тогда справедливы равенства:
lim i4A,P(ufc) = O, lim J(uk) = J^t
241
последовательность {uk\ т-реёулярна и t-сходится к множеству U^,
Если, кроме того, Q (и) т-секвенциально полунепрерывна снизу на UQf
то lim Q (uk) = Q* и {uk} т-сходится к множеству ?/** = {«: и е Ь'%
?-юо ' 1
0(и) = 0.}.
Заметим, что формулировка теоремы 5 дана для случая, когда
параметр р из D) строго больше 1. Эта теорема остается верной
и при р=1—нужно лишь исключить из ее формулировки все соот-
соотношения, содержащие А%~1,
Доказательство. Существование точек uk, а также соотно-
соотношения / (uk) ^ /* + рЛ, Q (uk) ^ Q*+Y*, k=U 2,..., lim AkP (uk)=
k
k
= 0 для каждого из методов регуляризации доказываются так же,
как это делалось в теоремах 2 — 4 выше, поскольку соответствующие
рассуждения никак не связаны с топологией множества Uo. Отсюда
и из леммы 3 следуют все утверждения теоремы 5.
Как видим, при выполнении всех условий теоремы 5 наряду
с т-сходимостью последовательности {uk\ к U** мы дополнительно
имеем равенство lim Q (uk) — Q^. Это означает, что последователь-
k—юо
ность {и^} сходится к ?/**, вообще говоря, в более сильной тополо-
топологии, чем топология т. Наиболее ярко это можно увидеть на примере
тех задач минимизации, в которых т —слабая топология гильбертова
пространства Я, Q (и) = || и \jj — слабый стабилизатор: здесь из слабой
сходимости {uk} к точке м^ий (uk)~\ uh l2H -+- п (и„.) = | и* |2 следует
сильная сходимость uk к и^, т. е. сходимость по норме Н. Именно
подобные соображения лежат в основе леммы 2, а также леммы 4.2.
В заключение заметим, что аналогичное исследование методов
регуляризации можно провести, используя другие понятия компакт-
компактности множеств в топологических пространствах (см. § 1.3).
Упражнения. 1. Применить изложенные выше методы регу-
регуляризации для решения задач из примеров 1—4.
2. Привести полное доказательство лемм 1 и 2.
3. Доказать теоремы 3.1 и 3.2 о существовании Q-нормального
решения, предполагая, что выполнены условия леммы 1 или 2, и
учитывая, что множество U имеет вид A), а стабилизатор Q (и) опре-
определен на множестве Uu^ i/Q (в § 3 предполагалось, что U п ? V).
4. Показать, что при выполнении условий 1), 2) леммы 1 р-регу-
лярность и р-сходимость к U^ последовательности {ид.}, построен-
построенной методом стабилизации A5), можно получить при замене в
теореме 1 условий lim 6kAka^1=\im Qka^l=\\m vk— lim e^a^1 =
&-ЮО k—ЮЭ k-+CO &-+OO
= lim Л1—<7aiI=0 более слабыми условиями
fc-юо «
gj> (vft + (М* + s* + 2 I »* I h) «*') < 1 • sup (Ai-ч + eft) a?<oa
5. Показать, что при выполнении условий теоремы 1 для после-
последовательности {uk} из A5) имеет место следующая оценка скорости
сходимости:
{AkP(uk); iJ(uk)-J,\}
где M = const>0, а множитель р —1 при А\~~Я символизирует, что
242
при р—1 последнее слагаемое в этой оценке отсутствует. Указа-
Указание: внимательно рассмотреть доказательство теоремы 1.
6. Воспроизвести доказательство теоремы 2.
7. Сформулировать и доказать теорему 1 при условии, когда
ограничения, задаваемые функциями gt (и), в A) отсутствуют, т. е.
s = 0. Указание: принять в теореме 1 gt (и) == gik (и) =0, i = 1, s$
р (w) = pfe(a) = 0, последовательность {Ak} не вводить.
8. Показать, что теорема 5.2 является следствием теоремы 1,
если в A) r=s = 0, т. е. U = UO.
9. Показать, что при выполнении условий 1), 2) леммы 1 р-регу-
лярность и р-сходимость к U^ последовательности {uk}> построенной
методом невязки C7), можно получить при замене в теореме 3 усло-
условий lim \Xft= lim v^= lim (б^Л^ + Л^"'7)^1 = 0 более слабыми
&—юо k-+co k-+co
условиями supvfc<l, supLU< + oo,
l« ^xh k=l, 2,..., lim6^=0.
k-+co
10. Показать, что при выполнении условий теоремы 3 для после-
последовательности {ilk) из C7) справедлива следующая оценка скорости
сходимости:
0<max {AkP(uk); \J(uk)-Jm \}^M(%k + 8k+6kAk+(p-l) А\~%
где М = const > 0.
11. Показать, что при выполнении условий 1), 2) леммы 1 р-регу-
лярность и р-сходимость к Ufi последовательности {uk\t построенной
методом квазирешений D3), можно получить при замене в теореме 4
условий lim щ — lim v& = lim v^1 более слабыми условиями
&-юо /г-юо fc-юэ
sup v*<l, sup щ < + co, 4@^ + 1)П —sup
fc=l, 2, ,.
12. Показать, что при выполнении условий теоремы 4 для после-
последовательности {uk} из D3) справедлива следующая оценка скорости
сходимости:
0^тах{Л*РЫ; \J(uk)-J* \}^M(lk + dk + 6kAk + (p~\)Al~q),
где М = const > 0.
13. Пусть I gi (u)—gik (и) | ^ak A + Q (и)), и е Uq, i = TTs, пусть
функции Р (и)у Pkiu) определяются равенствами D) —F) при р=1.
Доказать, что тогда ! Р (и) — Pk (и) | ^ sak A + Q (и)), и е U^,
Указание: воспользоваться неравенством C4).
14. Рассмотреть возможность использования в методах регуляри-
регуляризации других штрафных функций, отличных от D).
15. Привести пример задачи минимизации функции J (и) на мно-
множестве U вида A), которая корректна в метрике R", и при неточном
задании исходных данных, т. е. lim J^==J lim p (uki [/*) = 0,
k—юо k—>co
где /| = inf Jk (и), множество V\ определяется посредством C),
{uk}— любая последовательность, для которой Jk (uk} ^ ^f + 8^,
ek > 0, lim ek -0, а погрешности в задании J (и), gi(u)t hi {и) стре-
k~* со
мятся к нулю.
243
§ 9. Итеративная регуляризация
метода проекции градиента
1. На каждом шаге описанного выше метода Тихонова
(стабилизации) определяется точка uk из условий
71= inf Tk(u)^Tk(uk)^Ti + eki ukeEWk, A)
W
где Tk(и) — функция Тихонова, е^>0, fe=l, 2, ...
..., limeA = 0. Выше отмечалось, что при каждом фик-
сированном k для получения такой точки uk в принципе
могут быть применены любые методы минимизации, схо-
сходящиеся по функции. Допустим, что мы выбрали один
из таких методов — назовем его методом А — и построили
последовательность {vn} <= Wk такую, что lim Tk(vn) = Т%.
П-+СО
По определению предела найдется конечный номер яА,
при котором Tk(ynk)^Tt-\-Ek, и следовательно, в A)
мсжно принять uk = vnk. Заметим, однако, что с увеличе-
увеличением номера k свойства функции Tk (и), вообще говоря,
ухудшаются, а задачу минимизации Tk (и) на Wk согласно
A) приходится решать со все более высокой точностью.
Поэтому число итераций nk метода Л, необходимое для
определения uk — vn из A), может оказаться слишком
большим при больших k9 и может даже случиться, что
lim nk= + оо.
fe-^oo
Понятно, что это обстоятельство может создать опре-
определенные трудности при практической реализации метода
стабилизации. Для преодоления возникающих здесь труд-
трудностей на практике часто поступают следующим образом:
при каждом фиксированном k делают несколько шагов
метода А применительно к функции Tk (и) и затем пере-
переходят к функции Tk+1(a), применительно к которой снова
делают несколько шагов метода Л и т. д. Конечно, при
таких действиях условие A) вряд ли будет выполняться
при всех k=l, 2, ... Однако если надлежащим образом
согласовать параметры метода стабилизации с парамет-
параметрами метода Л или, как еще говорят, провести итератив-
итеративную регуляризацию метода Л, то на этом пути возможно
получение минимизирующих последовательностей, регу-
регулярных в требуемой метрике. Мы здесь не будем подроб-
подробнее останавливаться на принципе итеративной регуляри-
регуляризации и его применениях к различным методам миними-
244
зации — по этим вопросам отсылаем читателя к работам
[24 - 26, 58, 61, 65 - 67, 90, 97, 118,233] - и сразу же перей-
перейдем к изложению итеративной регуляризации метода
проекции градиента.
2. Пусть Uo — выпуклое замкнутое множество из гиль-
гильбертова пространства //, пусть функции J (и), gi(u), ...
..., gs(u) и их приближения Jk{u), glk(u), ..., gsk(u)
определены и дифференцируемы на UOt а множество U
имеет вид
, s}. B)
В качестве штрафных функций, как и выше, возьмем
функции
р (и) = 2 I si (и) 1Р. ^* (*) = i] I eft и Р,
TRegt(u), gfk(u) определены формулами (8.5), (8.6). Будем
рассматривать лишь случай р>1. Тогда функции Р (и),
Pk (и) дифференцируемы на Uo и их градиенты имеют вид
t = l
Будем считать, что погрешности в задании градиентов
функций J (и), gi(u) таковы, что
max {1Г (и) - П (и) |, | Р' (и) - P'k (и) |} ^
<бЛA+|м1), иб(/0, C)
где 5fe^>0, fe=l, 2, ..., НтбЛ = 0. Введем функцию
/г-*оо
Тихонова
Tk {и) = У, (и) + ЛЛ/>Л (м) + ak I u Е2/2, и ge f/0, D)
где Л/г>0, a^>0, fe=l, 2, ..., ПтЛЛ =
а стабилизатором служит функция й (и) = || w |2/2. При
сделанных предположениях функция D) дифференцируема,
причем ее градиент имеет вид
П (и) = J'k (и) + AkP'k (и) + аки, и «= 1/0. E)
243
Построим последовательность {t^} по следующему правилу:
PuAv*-№'k(vk)), 6=1, 2, ...; ^et/o, F)
где Рц0 (v) — проекция точки v на множество Uo, Р
lim рЛ=»0. Согласно теореме 1.4.2 проекция Puo(v) суще-
1г-*оо
ствует и определяется однозначно, так что последователь-
последовательность {Vk\ из F) определится тотчас же, как только будут
заданы Ak, aky рь k=l, 2, ... Оказывается, параметры
бл, ^ь «Л из C) — E) и длину шага рЛ метода проекции
градиента F) можно согласовать таким образом, что при
определенных требованиях на исходные данные последова-
последовательность {vk\ будет минимизирующей и будет сходиться по
норме Я к ^-нормальному решению. А именно, справедлива
Теорема 1. Пусть 1) функции J(и), g\{u), ...
.-•» gm{u), ]gm+l(u)\, ..., \gs(u)\ вЫПЩЛЫ Ни вЫПуКЛОМ
замкнутом множестве Uo из гильбертова пространства Н\
градиенты функций J (и), gt {и) таковы, что
max {!/'(")(, \Р'(и)\}<>и{\+\и\), u<=U0, G)
Lq = const > 0; множество B) непусто, J'# = inf У (и)> — со,
2) функция Лагранжа L(u% X) = J (и) + ^ %igt (и),
ue*UOy ЛеЛо-!*,**^, ..., Л,): Ai^O, ..., Тт^0} на
множестве UoxAo имеет седловую точку (и*> Я*) ef/oxAo,
m. ^. L(w^, %)^L(u*y X*)^L(ut Я*) я/ш e^x u&UOi
3) погрешности в задании приближений J'k(u), g'ik(u)
для градиентов J' {и), gi (и) удовлетворяют условиям C);
4) последовательности {8k}, {Ak}, {ak)y {$k\ из C) —F)
таковы, что
lim 8k = lim Л^1 = lim a/e ==¦ lim pA =
/г~»оо /г—>oo k-+co k—*oo
= lim б^Л/^а^" = lim ^""^ocj" =0, ^ = p(p— I)*1, (8)
lim
= lim (Лт- /4л)аларл1= lim | аА+1 - ал | а^1 = 0.
/г->оо Л-»-оо
246
Тогда последовательность {vk\, определяемая из F),
сходится по норме Н к Анормальному решению задачи
минимизации J (и) на U.
Доказательство. Прежде всего заметим, что
последовательности Aky аь рд,, удовлетворяющие усло-
условиям (8), существуют. Их, например, можно искать в виде
Ak = kl'fAy a^k-1^, рЛ = ?-1/3, где А, а, р--любые нату-
натуральные числа, удовлетворяющие системе неравенств
Очевидно, что если сначала взять достаточно большим
число Р, затем А и, наконец, а, можно удовлетворить
этой системе. В частности, при р = 2 можно взять Ak =
= kx'b, ak = k~v\ §k = k~v\ k=lt 2, ... Остальные усло-
условия lim 6Л= lim б^Л/Аь1 = 0 из (8) указывают, какие
fe-юэ fe->oo
требования предъявляются к погрешности задания гра-
градиентов в соответствии с неравенствами C).
Далее, из выпуклости и замкнутости множества Uo и
выпуклости и непрерывности функций gi{u), i=l, m,
1^.(^I, i=m+l, s, следует выпуклость и замкнутость
множества V, а отсюда и из выпуклости и непрерывно-
непрерывности J (и) тогда имеем выпуклость и замкнутость множе-
множества U#. Поэтому сильно выпуклая функция Q(u) = \\uf/2
на U* достигает своей нижней грани в единственной
точке и*. Таким образом, Q-нормальное решение задачи
минимизации J (и) на множестве U существует и един-
единственно.
Из выпуклости gi(u), ;=1, m, \gt (и) |, i = m+1, s,
следует выпуклость штрафной функции Р (и). А для вы-
выпуклых дифференцируемых функций J (и), Р (и) согласно
теореме 1.2.1 имеем
(J'(u)-J'(v), u-v)^0, (P'(u)-P'(v),u-v)^0,
и, dg(/0.
Поэтому для точной функции Тихонова
f k(u) = J (и) + AkP (и) + ak» и f/2
при каждом &=1, 2, ... получаем
(t'k(u) -t'k(v), u-v) = (J'(u)-J'(v), u-v) +
+ (P'(u)~P'(v)y u-v) + ak(u-v, u-v)^
-vf, u, v<=UQ. (9)
247
Так как а^>0, то в силу теоремы 1.2.2 отсюда получаем
сильную выпуклость функции tk (и) на выпуклом замк-
замкнутом множестве UQ. Тогда по теореме 1 3.8 существует,
и притом единственная, точка uk такая, что
и*е?/0, fk(uk) = inftk(u)9 k=l, 2, ... (Ю)
и0
Замечая, что множество Uo и функции J (u)y gi(u),
Q(u) удовлетворяют условиям 1), 2) леммы 8.2, и приме-
применяя теорему 8.2 при 6Л = уЛ = еЛ = 0 к последовательно-
последовательности {uk} из A0), получаем lim \ ик — и* * = 0.
k -»оо
Для величины || vk — и* j!, где vk определяется усло-
условиями F), имеем
lVk-u*".^lVk-ukl + luk-u*h A=l, 2, ... A1)
Только что было показано, что последнее слагаемое стре-
стремится к нулю. Поэтому для доказательства теоремы до-
достаточно установить, что lim P vk — ukl = 0.
k-+CQ
Обозначим bk = !|vk — ukI, ^= 1, 2, ... Покажем, что
последовательность а)Л = 6|, fe=l, 2, ... удовлетворяет
условиям леммы 2.3.6 из [4]. С этой целью заметим, что
ft=l, 2, ... A2)
Сначала оценим f uk — ик+1К Напомним, что uk опреде-
определяется из условия A0), которое в силу теоремы 1.2.5
равносильно неравенству
(f'h(uk), u-uk)^0, uzeUq, k=U 2, ... A3)
В частности, взяв здесь и = uk+i^U0, получаем
(ПЫ, и*+1-и*>3*0, ft=lt 2, ... A4)
Аналогично доказывается, что
(f'k+1(uk+1), ик-им)^0, k=l, 2, ... A5)
Кроме того, из lim ||w* —и#|| = 0 следует оценка
Л=1, 2, ...; A6)
здесь и ниже через Со, Сь ... будем обозначать положи-
положительные постоянные, не зависящие от k. Тогда из (9)
248
с учетом неравенств G), A4)— A6) имеем
ak || uk+l - uk f ^ (fk (uk+l) - t'k (uk), uk+l - uk)
- и к) <>(\Ak- Ak+i 1^A+1 w*+i I!) +
^ d (| Лл - Ak?l | +1 ал - ak+11) j uk+1 - uk ||,
или, после деления на ¦ и^\ — uk || аЛ,
?I), fe=l, 2, ... A7)
Теперь перейдем к оценке слагаемого | vk+t — uk | из
A2). Согласно теореме 1.4.2 \\Рио(и) —Puo(v)\\^\\u-v\\
для всех и, иеН, поэтому с учетом F) имеем
I vM - ик ||2 = | PUo (vk - hn (vk)) - Pt/o (uk) f <
= I vk - мл |,2 - 2рл <П (»*), t;* - ил> +
, fe=l, 2, ... A8)
Заметим, что из выражения T'k(u) = J'(u)-\-AkP'{и)+
+ ал« для градиента точной функции Тихонова, фор-
формулы E) и неравенств C) следует оценка
!), ae^/о, *=1, 2, ...
В частности, при u — vk отсюда имеем
fnW-n(fft)l<C8eH*(l+|f*i!), A=l, 2, ... A9)
Кроме того, приняв в A3) u — vki приходим к неравенству
(П(ик)щ 0*-и*>5*О, *=1, 2Э ...
Отсюда и из неравенств (9), A9) получаем
(T'k(vk), vk-uk) =
= (f'k(Vk), Vk-uk)-(T'k(vk)-rk(vk), vk-uk)^>
^ (T'k (v,) - f'k (uk)y vk - uk) - СабИл( 1 + \vk ) vk- uk I! ^
^ ал,, ул - uk :, - C2 бл/1лA -Ь, ул i) j ^A — ал |, B0)
Л= 1, 2, ...
249
Далее, из условия G) и оценки A9) имеем
i П (vk) f < (I T'k (vk) [ + СфкАк A +1 vk |))a ^
< (Lo + AkL0 + ak + С26*Л*J A +1 vk |)" <
<С,Л|A+|о*0*, *=1, 2, ... B1)
Подставим оценки B0), B1) в A8):
- uk S« = I vh - uk f - 2aftpft 1 vk - uk f +
C2 A +1! vk |i) |i vk - uk 1 +
?Л!A+«у*!J, ft=l, 2, ... B2)
Заметим, что в силу A6) \+\vk\^\-\-\vk — ui,\-\-\uk\^
<!fft-«ft!4-C04-l и, кроме того, 2\vk-uk\*sk I -f
+ II f* — «* li2- Поэтому оценку B2) можно переписать
в виде
+ (Р* «И* + РИ1) С«] ] oft - Mft f
= A - 2aftpft + a*P*V*)l Vk - uk f + а*р*у4, B3)
ft=l, 2, ....
где Vft = C4 (б*Лй 4- Pft^I) a*' -*¦ 0 при ^->сов силу усло-
условий (8). Подставим опенки A7), B3) в A2) и, вспомнив
обозначение Ьк = ]! vk — ик \, получим
(A - 2а»рЛ + «*P*Vft) W 4-«*Р//Ы1/2 +
к1)С1, k=l, 2, ...
Так как (а + bf = а2 + b2 + 2ab < а2 + Ъг + а2
4-^2(aftPft)-1 = A4-aftPft)(a24-^afe)P*'), то возведя преды-
предыдущие неравенства в квадрат, будем иметь
+ A + «ftP*) [a*P»Y* + (М* - Ak+i I a*1 +
+ \ак-аы\ак')*С1а?№]^
61 [ 1 - «ftPft - 2aipi + aftpfty,e A + a*Pft)] +
ИЛИ
0 ^ 6I+, ^ 6I( + лрлцл k$k) + лрЛ|л,
*=1, 2, .... B4)
где (АА>0 и [i/fc-^O при А->оо в силу условий (8).
250
Неравенство B4) можно переписать в виде
&=1, 2, ...,
где sk = afcpft (I — |xft), dk = a$kl*k- Заметим, что из lim \ik **
fe—00
= lim sk = 0 следует 0<sk^l для всех k^ko. Далее,
?-¦00
из условий (8) при достаточно больших k0 имеем 0^
^ ЛЛ+1- Ak = (Ak+i- Ak)ab2$kla2$k<,ak$k для всех k^z
^ ?0. Отсюда, суммируя эти неравенства по k от k0 до N,
N N
получим 2 а*Р*^ 2 Мл+i — Л*) = Л/v-i — /4feo->oo при
. Можем считать, что 1—j^^l/2 при всех
N N
а тогда 2j s*^ 2 a4W2-^oo при /V-^сю, так что
оо
2 **= + °°- Наконец, dft/sfe = ^(l — ju^-^O при &->оо.
Аг = 1
Таким образом, последовательность a)A = fc|, Л=1, 2, ...,
удовлетворяет всем условиям леммы 2.3.6 из [4], откуда
следует lim bk = Hm || vk — w^ || = 0. Вспоминая неравенство
fe-*oo /г-*оо
A1), заключаем, что lim \vk— w#| = 0. Теорема 1 доказана.
/г-»оо
3. Отдельно остановимся на случае, когда множество U,
на котором минимизируется функция J (и), известно
точно. Этот случай соответствует частному виду множе-
множества B), когда ограничения типа равенств и неравенств,
задаваемые функциями gi(u)t отсутствуют, т. е. s = 0 и
U~U0. Поскольку здесь нет необходимости во введении
штрафные функций Р (и) и коэффициентов Aky условия
согласованного изменения параметров метода будут не-
несколько отличаться от условий (8).
Теорема 2. Пусть 1) U — выпуклое замкнутое мно-
множество из гильбертова пространства Н\ функция J (и)
выпукла и дифференцируема на (У, причем
||Г (и)|<UA +1!и 1), weU, Lo = const ^O; B5)
кроме того, J#> — оо, U % ф 0;
2) погрешности в задании приближений Л (и) для
градиента У (и) удовлетворяют условию
I Jk(u) - У (и) j ^ бА A +1 и ||), «el/,
6=1, 2 lim6* = 0; B6)
fe-юо
251
3) последовательности \6к], \ак], \$k] таковы, что
2s 0,aft>0, pft>0, k=l,2,...; lim
k
k-+ 00
lim I «**-«» I - Hm |t - Hm |s— 0, B7)
A-*oo a*P* fc-oo a* fe-*oo aA V '
Тогда последовательность {vk}, определяемая условием
= /V (*>а ~ Р* (Л (^а) + о^а)). А = 1, 2, ...; ^ е f/,
B8)
сходится по норме Н к точке и% е [/* с минимальной
нормой.
Доказательство проводится аналогично теореме 1. По-
Поэтому мы здесь наметим лишь схему доказательства.
Прежде всего заметим, что последовательности {ak}, {p^},
удовлетворяющие условиям C0), существуют. Их можно
подобрать, например, ввидеаА = /г~1/а, |3/г = k~l/^, где a, p —
натуральные числа, удовлетворяющие системе неравенств
а-1 + р-1< 1, Р<а. В частности, можно взять afe = ft-1/3,
fik = k-~l/29 ft=l, 2, ... Условие lim bka~kx = 0 накладывает
fc->oo
требование на погрешность задания градиента в соответ-
соответствии с условием B6).
Так как Q (и) = || и |2/2 — сильно выпуклая функция,
а [/# — выпукло и замкнуто, то й-нормальное решение
существует и единственно. Для точной функции Тихонова
Т k (и) = J (и) + ak || и ||2/2 справедливо неравенство G^ (и)—
~fk{v), u — v)^ak\u — vf, и, уе(/, и кроме того,
существует, и притом единственная, точка uk^U такая,
что tk (uk) = inf fk (u)y — это доказывается так же, как
и
соотношения (9), A0) в теореме 1. Замечая, что функции
J(u), Q(u) и множество U удовлетворяют условиям 1), 2)
леммы 4.2, и применяя теорему 5.1 при е^^О, для после-
последовательности {uk} получим: lim || uk — и* || = 0. Поэтому
&-+ОО
с учетом неравенства A1) для доказательства теоремы
достаточно показать, что Ь* = ||и* — нл!|->0 при ft->oo.
Неравенство A2) остается верным и здесь. Оценим
каждое слагаемое в правой части A2). Полагая Р(и) = 0
252
в рассуждениях, проведенных при выводе оценки A7),
здесь вместо A7) получим
1 ик+1 - и*; :^ | ak+1 - ak \ а?Съ k = 1, 2, ... B9)
Приближенная функция Тихонова имеет вид Tk(u) =
= h (u) + ock!! и f/2. Поэтому с учетом B6) вместо A9) здесь
будем иметь
iT'k(vk)-T'k(vk)l^6k(l+lvkd, 6=1,2,... C0)
Используя вместо A9) неравенство C0) и рассуждая
так же, как при выводе оценки B3), получим
- ик i ^ A—2аЛрЛ + а*рлТл) Ы + аАрЛтЛ, C1)
к = 1, z, ,,.,
где ук = С^(бк-{-^к)а^ при й->оо. Подставим оценки B9),
C1) в A2) и проведем преобразования, которые привели
нас к неравенству B4). Получим
fe=l,2,..., C2)
где
|ыЛ = max
при k-*oo. Нетрудно проверить, что величины ак *=*
= a^pfe(l — |nft), dk = ak$k\ik удовлетворяют условиям лем-
леммы 2.3.6 из [4|. Из C2) и этой леммы следует, что
lirn Ни* — W/fl — O. Теорема 2 доказана.
4. Проиллюстрируем возможность применения мето-
методов F), B8) и теорем 1, 2 к некоторым классам задач
минимизации.
Пример 1. Рассмотрим задачу минимизации функции
J (и) = \ Аи — fe|2/2 на множестве U = En, предполагая, что
вместо J (и) нам известно лишь ее приближение Jk(u) =
H^-fe*|2/2, где 1Л*-Л!1^а*, |ЬЛ-Ь|<ол, ft = lf
2, ..., lim ok = 0 (обозначения см. в примере 5.1).
Так как J' (u) = AJАи —A2b, j[(u) = A\Aku — Albk> то
253
Непустота множества и% доказана в примере 5.1. Таким
образом, условия 1), 2) теоремы 2 для рассматриваемой
задачи выполнены. Итерационный процесс B8) здесь
будет выглядеть так:
= vk-f>k {ATkAkvk - Albk + akvk), k = 1, 2,...
Если величины ak, $k удовлетворяют условиям B7) и
llm oka^1 = 0, то получаемая отсюда последовательность
6-юо
{vk}, согласно теореме 2, будет сходиться в метрике Еп
к решению ищ с минимальной нормой при любом выборе
начального приближения vv
Пример 2. Для задачи минимизации функции
У(а) = ~ \ A(s, t)u(t)dt-b{s)
на множестве V — L2 [a, b] (обозначения см. в примере 5.2)
итерационный процесс B8) имеет вид
O/W-1 W = Vk (t) -
Id jb \
- h К Л* (s, 0 К Л, (s, ?) uft (g) dE - bk (s)J ds + akvk (t) ,
ft=l, 2, ...
Предлагаем читателю самостоятельно убедиться в том,
что если относительно Л, Ak, b, bk выполнены все пред-
предположения из примера 5.2, то для рассматриваемой задачи
имеют место условия B5), B6). Поэтому, если U* ф ф и
параметры 6fe = const, oky aky $k удовлетворяют услови-
условиям B7), то согласно теореме 2 последовательность {vk(t)}
сходится в метрике L2[ay b] к решению и# (t) с мини-
минимальной нормой при любом выборе начальной функции
vl(t)f=L2[a, b].
Пример 3. Рассмотрим задачу минимизации функции
J(u) = \x(T, u)-y\\ C3)
где х (ty и) определяется из условий
x(to)=xOy C4)
а управления u~u(t) принадлежат выпуклому замкнутому
множеству U из пространства L*2 [Л> Т] (см. обозначения
254
в § 1.2; см. еще пример 5.5). Напомним, что функция C3)
при условиях C4) дифференцируема в L\ [to, T] и ее гра-
градиент имеет вид (см. § 1.2):
t, и), to^t^T, C5)
где г|)(/, и) определяется из условий
2(хG\ и)-у).
Из оценок A.2.18) при и=0 и A.2.23) при v===0 получаем
\x(t, tt)|<
здесь и ниже через Со, Съ С2, ... обозначаются положи-
положительные постоянные, не зависящие от t е [/о» ^J» ^ =
= u(t)^Lr2[tOi T]. Отсюда и из C5) следует, что
sup | В (/) ICM1+JI а||).
Предположим, что вместо матриц Л (t), B(t), f(t) и то-
точек х0, ^ известны лишь их приближения: Ak (О, В^ (О»
fk (t) — кусочно непрерывные матрицы и xoki уи — некоторые
точки, причем
max! sup \Ak(t)-A(t)\, sup \\Bk{t)-B{t)\\
sup I/HO-/(Oil; \xok-xo\; \yk-y\\<*oh, C7)
fe= 1, 2,...; lim ok = 0.
k-+oo
Пусть xk(ty и) определяется условиями
tu V) = Ah @ xk @ + Bk (t) и (t) + fk @,
Тогда разность hxk (t) = xk {ty u) — x (tf и) удовлетворяет
условиям
Axk (t) = Ak (/) bxh (t)+(Ah (t) - A (t)) x (t)+
+ (Bk(t)-B(t))u(t)+fh(t)-f(t),
tQ^t^T\ &xk (t0) = xko — xQ.
Отсюда с учетом условий C7) и неравенств C6) имеем
| Ахк @1 *? /sup IА @1| + аЛ \ | Axk (т) | dx +
о
k=\, 2, .... h^t^T.
Применяя к этому неравенству лемму 1.2.2, получим
\xk(t, u)-x(t, и) | <стйС2A +№),
fo^'^-'» к=1, z, ...
В качестве приближения для градиента J' (и) возьмем
функцию
J'() Bt(t)(t, и), to^t^T, C9)
где % (/, и) определяется из условий
, u)-yk).
Тогда для разности Аг|)Л (/) = tyk {U и) — ¦ф (^, и) имеем
ДоЬ (/)= - Л Г @ Лг|>* (/)-(Л1 @ - Л* (/)) ф @,
, u)-x(T, и))-2(!,„-¦ у).
С учетом неравенств C6)—C8) отсюда получаем
k^k @1 ^ /'sup IA (t) 1 + ak )\ | Д% (т) I dx +
\ t Jj-
+ \okC1(\+\uiL2)d% + 2ekC2(l+lti\Li) + 2ok,
to
Применяя к этому неравенству лемму 1.2.2, будем иметь
h D0)
to^t^T, k = l, 2, ...
Из C5)—C7), C9), D0) следует
1/2
y u)fdi)
256
Таким образом, функция C3) и ее приближения удовлет-
удовлетворяют условиям B5), B6) теоремы - 2.Итерационный
процесс B8) здесь запишется в виде
t, vk) + akvk(t)])>
D1)
Л=1, 2, ...
Если U* Ф ф и величины aky §k удовлетворяют услови-
условиям B7), lim акар = 0, то в силу теоремы 2 получаемая.
k—>ОО
из D1) последовательность сходится по норме Lr<i\U, T]
к оптимальному управлению м# (/) с минимальной нормой
при любом выборе начального приближения ^(^еУ.
Пример 4. Рассмотрим задачи квадратичного и ли-
линейного программирования: минимизировать функцию
J (и) = <Си, и) + {с, и)
на множестве
0, (ah «) —b/^0, i = l, m\
где Uo — выпуклое замкнутое множество из гильбертова
пространства Я, (а, а) —скалярное произведение в Н\
С —линейный ограниченный оператор, действующий из Н
в Я; с, аъ ..., as — некоторые элементы из Я, Ьъ ..., bs —
числа. В частности, если С = 0, то получим задачу ли-
линейного программирования. Будем предполагать, что /„.=
= inf J (w)> — (X), и* = {и: u^U, J(u) = JЛфф и функ-
и
s
ция Лагранжа L(u, X) = (Cuf и)+(с, и)+ ^К({<Ц> «> — &/)
имеют седловую точку в смысле условия 2) теоремы 1.
Функция J (и) дифференцируема и ее градиент имеет
вид/'(ц) = (С + С*)г/ + с (см. пример 1.2.2). Отсюда следу-
следует, что |/'(«)KB|C| + lc|)(l+||aDt ие(/0. Штрафная
функция
Р(и) =
m s
Imax 1<а«' "> - ^; 0} |2 +1 2 I <а'« «> - 6« I2
Ф- П. Васильев 257
также дифференцируема, и для ее градиента
Р'(и)=- |] max {{а,, и) -bt; 0} а,- + ? «а«- «>
имеем оценку
Таким образом, условие G) теоремы 1 в рассматриваемой
задаче выполнено.
Пусть вместо точных С, с, аи bt известны их прибли-
приближения Ck (Ck — линейный ограниченный оператор), cki
виг, bik, k=l, 2, ..., с погрешностью
max {jjCk-C|; \ck-c 1, f;aik -at«; IЬ,Л-Ь| |} < аЛ,
fe=l, 2, ..., lim aft = 0.
Тогда вместо точных J (и), gi(u)=(ah и) — Ь( будем иметь
дело с их приближениями Д (u) = {Cku, u)-\-{ck, и), gik(u) =
= (^/л, и) —bik. В качестве приближений для градиентов
У {и), Р' (и) возьмем соответственно
P'k(u) = 2] max {(aik, u) — bik\ 0} <
Тогда
и
s
I P'k (u) - P' (u) I ^ Д] I fir& (w) a;ft - g-/- (a) a,- J <
s
< 2 I Stk (u) - ^ (a) 11 an,[ + I gt (u) \ f aik - ax \.
С учетом определения C.5), (8.6) функций gt (и), gtk(u)
здесь имеем
\gtb (U) - gt (И) I ^ I g;* (U) - gi (U) I <
Кроме того, iia/ft'is?|OiH-aA. Поэтому
+ ak) A +|| a||), и e Uo.
L=\
Таким образом, в рассматриваемой задаче условия
1)—3) теоремы 1 выполнены. Итерационный процесс F)
здесь будет выглядеть так:
vk+i - PuQ К - Р* {(Ск + Cg) v, + ck +
m
+ Afi^imax{(aiky u)-bik\ 0}aik +
s ' \Л
-rAk Ц «flift, vk)-btk)ailt + akvk)\9 D2)
/' = m -j- 1 / J
Если величины ЛЛ, ak, рЛ удовлетворяют условиям (8)
при p==q^2, lim а/,ЛЛа^:--=0, то согласно теореме 1
к —>СО
построенная таким образом последовательность {vk\ при лю-
любом выборе начальною приближения vx e Uo сходится по
норме Н к решению u^^U ^ имеющему минимальную корму.
В частности, если Н = Еп, С = 0, fyo={w = (м1, ..., ал):
w'^0, i=\y n\, то рассматриваемая задача превращается
в конечномерную задачу линейного программирования и
процесс D2) запишется в следующем виде:
= max{0; ui — рл[ск + Ак ? a{kmax{(aikf vk)—bik\
/ = 1, п, &=1, 2, .,.; ихе(У0.
Упражнения. 1. Применить метод (б) или B8) к задачам
из примеров 1.2—1.4, 3.1, 3.2, 8.1—8.4.
2. Применить к задаче C3), C4) метод B8), предполагая, что
множество U имеет вид A.4.17) или A.4.19).
3. Применить метод B8) к задаче минимизации функции / (w)=
= \\ Аи —bl2 на гильбертовом пространстве Я, где Л —линейный
ограниченный оператор, действующи Г) из Н в II, а 6— элемент Н.
19* 259
4. Применить метод (б) к задаче линейного программирования
из примера 8.5.
5. Рассмотреть возможность применения методов F), B8) к за-
задачам оптимального управления из §§ 1.5—1.10
§ 10. Непрерывная регуляризация
градиентного метода
Как отмечалось в § 5.1 из [4], для минимизации диф-
дифференцируемой функции на всем пространстве Еп может
быть использован непрерывный вариант градиентного
метода, заключающийся в определении траектории диф-
дифференциального уравнения й (/)= — J' (и (/)), /^0, при
некотором начальном условии и@) = и0. Там же было
показано, что для сильно выпуклой функции любая тра-
траектория этого дифференциального уравнения минимизирует
функцию J (и) на Еп и сходится к точке минимума
(см. теорему 5.1.4 из f4j). Однако если задача минимиза-
минимизации некорректна в метрике Еп, то не всякая минимизи-
минимизирующая траектория будет сходиться к множеству U#
точек минимума J (и) на Еп. В этом случае можно по-
попытаться модифицировать непрерывный вариант градиент-
градиентного метода по аналогии с предыдущим параграфом и
получить такое дифференциальное уравнение, траектории
которого сходились бы к U'„., или, иначе говоря, провести
непрерывную регуляризацию градиентного метода.
Следуя [118], покажем, как это можно сделать для
задачи минимизации функции J {и) на множестве
V ={и: и^Н, gi(u)^0, /=l, т\
&(и) = 0, r=m+l, s}, A)
где J (и), gi(u), ..., gs(u) — функции, определенные на
гильбертовом пространстве Я. В качестве стабилизатора
возьмем Q (u) = jufH/2. Будем предполагать, что вместо
точных значений функций J («), gt (и) нам известны лишь
их приближения J («, /), gt(u9 t)% зависящие от параметра
Q Введем штрафные функции
2 S
1= 1 ' = т -f- 1
т
Р(и, 0= .? ; max {g; (ы, 0; 0\'р+ 2
р>\, t^-0.
260
Пусть функции J {и), gi(u) и их приближения J (и, t),
gt(uy t) дифференцируемы по а и пусть погрешности вы-
вычисления их градиентов удовлетворяют условиям
max {|| /' (и) - Г (и, t)\\; \\Р'(и)-Р'{иу t)\}^
*S6(f)(l+|w||), t^zO, u^Hy B)
где б(/)^0, lim 6(/)=0. Введем функцию Тихонова
t-*co
Т(и, t) = J(u, t) + A(t)P(u, t) +
, О)
где A(t)>0, а@>0, /=э=0, lim Л(/) = + оо, lim <x(t) =
t-+CQ t-+oo
= 0. При сделанных предположениях эта функция диф-
дифференцируема по и, причем ее градиент имеет вид
Т'(и, t) = J'(u, t) + A(t)P'(ut t)+a(t)u, ueH,
D)
Рассмотрим траектории u = u(t) дифференциального
уравнения
'(и@, /), /^0, E)
при произвольном начальном условии и @) = uQj где
Р0 *° limp @ = 0. Здесь u(t)= lim (u(t + At)—
/ Д/0
— u{t))lkt, и сходимость понимается по норме Я. Не-
Нетрудно видеть, что итерационный процесс (9.6) при Uo =
= Н превращается в метод ломаных Эйлера для численного
интегрирования уравнения E). Однако ясно, что для числен-
численного решения уравнения E) могут быть применены и другие,
вообще говоря, более точные методы решения задач Коши
[2, 32, 153, 193, 194], и это обстоятельство является
достоинством рассматриваемого подхода к регуляризации
некорректных задач минимизации.
Теорема 1. Пусть 1) функции J (и), gi(u), ...
...LfoW, Iff/mi (w) I, .... \gs(u)\ выпуклы и J(u)9gi(u),
/ = 1, s, непрерывно дифференцируемы на всем гильберто-
гильбертовом пространстве Н\ градиенты функций J (и), gt(u)
таковы, что
max {[ У (")ii; iP()l}0(+{$
аеЯ, U = const > 0; F)
261
множество U, определяемое условиями (\), непусто]
2) функция Лагранжа L (и, X) = J (и) -\- ^ Xigj (и), и е
1=1
€eU0 = H, леЛ0=:{1: ?ig?j, Ях^0, ..., Лт^0} на
множестве #хЛ0 имеет седловую точку в смысле нера-
неравенств (8.33);
3) функции J (и, /), gi (и, t) непрерывно дифференци-
дифференцируемы по и, причем соответствующие градиешпы У (и, /),
g't (и, I) измеримы (например, непрерывны) по t на любом
конечном отрезке [О, Г] и при любом фиксированном и^
е: Н\ погрешности удовлетворяют неравенствам B);
4) функции б(/), Л(/), а (О, Р (/) из B) -E) непре-
непрерывны при i^O w таковы, что 6@^>0, /!(/)>О, а@>
>0, Р(/)>0 при всех /^0; Л (/) вогнута и возрастает,
lim Л(О= + ^;а(/) выпукла и убывает, Пта(/) = 0;
р (/) убывает и 1 im 0 (/) = 0; sup p (/) Л (/) < + оо,
Пт а@^-1@ = + оо, г^ <7 = Р(Р-I)"; lim 6@ =
= оГ Пт б(/) Л @ а-1 @ = 0; Л @, а @ и fat) "'имеют
непрерывные производные и
А @ 1 • а @ 1 • Р @ л
Тогда решения дифференциального уравнения E)
любом начальном условии и @) = w0 продолжимы на всю
числовую полуось [0, -foo) и lim ||и (/) — и% ii = 0, г5в и# е
/-¦00
eL'^, !l t/# :; = infill,
с/*
Доказательство. Прежде всего заметим, что функции А (/),
а @> Р @> удовлетворяющие условиям теоремы, существуют. Их
можно подобрать, например, в виде A {t) = (/+ 1I/Л, а (/) = (/+ 1)"*1/а?
Р (/)«= (/+1Г1у'^, где Л, а, Р~натуральные числа, удовлетворяющие
неравенствам 2a' + j3~1 + А'1 < 1, р ^ Л, Л<(? — 1) а. Существова-
Существование таких А> а, C очевидно, можно взять сначала Р достаточно боль-
большим, затем А и, наконец, а. В частности, при р==2 можно взять
Л(/)=/1/4} сс(/)==Г1/6, Р@ = Г1/4. Условия lim 6@= lim 6(/)x
X А (/) а*1 (/) = 0 выражают требования к погрешностям в задании
производных в соответствии с условиями B).
262
Рассмотрим точную функцию Тихонова f (и, () = J (u) +A (t)x
хР («) + -к ос (О ; и 2; ее градиент по и равен
Г (и, t) = Г (и) + Л (/) Р' (и) + а (/) а, ие/1, * ^ 0. G)
Из B), ,4), G) имеем
| Г (а, t)-f' (и, 0 || ^ (б @ + Л @ б.(/)) A +|! и !!) ^
^б(/) A (t) A + Л-1 @)) A +1 «!|) = Соб@ Л @ A+J и||),
/^0, меЯ; (8)
злссь и ниже через Сг-, / = 0, 1, 2, ..., будем обозначать положитель-
положительные константы, не зависящие от и и ^. Далее, из F), G) следует
!; Г (а, 0 !i ^ 1 ^' (и) S + А (() J Р' (м) ? + а (/) | и || ^
^ [Lo A + Л (/)) + а (/)] A +|! и D ^ СИ @ A +!! а ||), (9)
Тогда из (8), (9) получим ;; V (и, /)! ^ II 71'(«. 01 + 1 7" («. 0 —
-Г (и. 0!1^(С1Л(О + Соб@Л(/))A+!«;1)^С2Л(ОA+^1|), так
что
max {Р@;Г(", 0-;; Р(О,;7"(и, /)!,} ^
р (/) Л @ A +!! и !) ^С3 A +1 и ||), A0)
Я, f^0.
Из рыпуклости g,- (w), /=1, m, !gi(«)|, i = m+l, s, следует выпук-
выпуклость P (w) при любом р>1. Согласно теореме 1.2.1 {J'\u)—J(v)t
u — v)^Q, (Р' (и) — Р' (v), u — v)'^0 при всех и, УеЯ. Поэтому
из G) получим
(f'(u9 t) — f'{v, t), u — v)^a{t)}u — vf, и, vceH, /^0. A1)
Согласно теореме 1.2.2 отсюда следует сильная выпуклость Т (и, !)
по и на И. По теореме 1.3.8 тогда существует, и притом единствен-
единственная, точка и* (/) е Я, для которой
inf f (и, t) = f(u* @, 0. '^0- A2)
я
Наряду с w* (/) рассмотрим еще функции v (/, т), у (^), являющиеся
решениями следующих вспомогательных задач Коши:
^о@,т) = и0| A3)
0 @ = - Р @ ?' (» @, 0, t > 0, и @) = и0. A4)
Заметим, что правые части уравнений E), A3), A4) имеют вид
f(и, /), где функция /(и, 0 измерима по / на любом конечном от-
отрезке [0, Т] при всех фиксированных и <= Н и непрерывна по и на
Н для всех t^0. Кроме того, из A0) имеем, что If (и, /)S^=
^С3 A +!! и ||). Отсюда следует, что в случае Н = Еп дифференциаль-
дифференциальные уравнения E), A3), A4) при любом начальном условии ио^вЕп
263
имеют хотя бы одно решение, определенное на любом конечном от-
отрезке [О, Т] или, иначе говоря, при всех t^O — см., например, [49],
стр 217 (в случае, если Н Ф Еп, то будем предполагать существова-
существование и продолжимость на полуось [0, +°°) решений этих уравнений).
Наконец заметим, что существование и единственность Q-нор-
мального решения и^ задачи минимизации J (и) на U доказывается
так же, как в теореме 8.2 или 9.1
Теперь можем написать неравенство
-Ну(т, т) — v (т),;+ ; о (т) — и (т)!, т^О A5)
Покажем, что каждое слагаемое в правой части A5) стремится к нулю
при т-*-со Начнем с первого слагаемого Возьмем произвольную
последовательность {/#}, ^ ^ О, /# —» оо Заметим, что функции J (и),
gi (и), Q (и) удовлетворяют условиям леммы 8.2, а последовательность
иь = иц. {tk), &=1, 2, ..., где и# (t) взята из A2), удовлетворяет ус-
условиям теоремы 8.2 при 6^ = \-/, = р,, = 0, afr = a (/*,), Лд, = Л (//?),
б^ = 6(//г) Из теоремы 8 2 юг да следует lim и^—ы# {tk) ^ = 0 В си-
k —* оо
лу произвольности последовательности {^}, lim tk — ca. отсюда по-
/г —»-оо
лучим lim \и+ — м#(т).| = 0 Таким образом, первое слагаемое в пра-
г-*оо
вой части A5) стремится к нулю при т->-оо Кроме того, неравен-
неравенство (8.28) Q (uk)^ Q («*) + Yfc, полученное при доказательстве теорем
8.1, 8.2, в рассматриваемом случае запишется в виде ^+(^)|,2^
li 2 + 2flct l(tk) Л1 -i{tk)t k = \ 2, ... Отсюда следует, ' что
21! 2 + 2# sup a-l(t)Al~<*(t) = Ci. Тогда
1 «• -«• (/) I ^ 1 «•' + :: «* @ , ^ с5, ^ 2з=о. A6)
Для оценки остальных слагаемых в правой части A5) наряду
с неравенством A6) нам понадобится следующая
Лемма 1 Пусть функция х (t) дифференцируема при всех t ^> 0
и ее производная х (t) g L\ [0, Т] на любом конечном отрезке [О, Т].
Пусть, кроме того,
*5*0. A7)
где a(t), b (t) — непрерывные функции на [О, оо). Тогда
i t
¦\b(Q)e° dd, t^O A8)
и
— J (Hs)ds
Док а з а те ль ств о. Умножим неравенство A7) на е ° >
/ г х \
\ — a(s)ds \ — \ a (s)ds
d \ n J о
> 0 и перепишем его в виде ~тЛхФе / ^ J @ е ?
264
t
— J a(s)ds
O. Интегрируя это неравенство, получим x(t)e ° — jc(O)^
о
t -ja(s)ds
^ J 6 F) г ° de, что равносильно A8)
и
Заметим также, что из lim А (/) а~2 (О Р (/) = 0 и остальных уело
/->оо
вий 4) теоремы следует, что
t t
$a(sN (s)ds^C6 \jA(s)ds=^Ce{A (t)— A @)) -» oo (f-*co). A9)
о о
Теперь перейдем к оценке второго слагаемого !i 0 (т, т) —м#(т)"! из
правой части неравенства A5) С этой целью рассмотрим функцию
|!у(/, т) — и* (т) I2. Заметим, что из условия A2) следует V {и* (т),
т)=0, т^О. Отсюда и из A3) с учетом неравенства A1) имеем
^-2Р@<Г7(о(/, т), т)-7°>«,(т), т), ор, т)-и#
«s^ —2a (т)р (/)!!»(/, т)-м#(тJ,
Это значит, что функция x(t) — ^v(t, т) — ы* (т.) ;'2 удовлетворяет не-,
равенству A7) при а(/) = —2а(т) Р @, Ь@ = 0, ^^0. Из леммы 1
тогда получаем
— 2a(x) J
° 0. B0)
Отсюда с помощью оценки A6) прежде всего имеем
(v(tt x)~w# (тН^Цио —«•(*) ^"и -и«Т + 1и*-"«(тI^С7, B1)
/ ^ 0, т > 0
Тогда, полагая в B0) / = т и учитывая монотонность Р @, получим
!;у(т, т) —м«,(т)||*^С|е"ата(Т)Р<х\ т^0. B2)
Вычислим lim та (т) Р (т) Поскольку здесь мы имеем дело с неопре-
Т-+ОО
деленностью вида оо • 0, можем применить известное правило Лопи-
таля [8]. Получим
lim та (т) Р (т) = lim ^-
а (т) р (т)
Отсюда и из B2) следует lim \\v(x, т) — w^ (т) |] = 0.
т-юо
265
Оценим третье слагаемое ! v (т, т) —и(т)!| из правой части A5)
Из A3), A4) с учетом A1) и F) имеем
= -2р@<Г'(И'). /)-?>(<, т), 0, о@-о(/, т)>-
-2р (Q<f'(о (<, т), t)-f'(v{l, т), т), с- @ -v(t, т)>й5
(О J v (О-» (/, т) з» + 2р(/) (, Л (О- Л (т) | /.,A + !»(/, т)!) +
+1 a (t) -a (т); \ v (/, т)!;)! у (/) -о ('. т) ] B3)
при всех t'^Q, тэ^О. Заметим, что из A6), B1) следует оценка
[v(t, тI«?|»(/, т)-в,(т)| + |и.(т)-н,Ц-!и.|«С„
Учитывая эту оценку, с помощью неравенства 2ай^аа + 62 из B3)
имеем
А [„ (<)_„(/, T);2=s:-2a@P@io@-c(', т)^ +
+ 2 ((а (О р (/)I/2 i с @ -о (/. т) j) (Р (О a i (/)I/2х
X(L0+ 1) A +!if (<. т) D (I А (О- А (т) | + i a (fl-o (т) !)
+ Сор @ а 1 @ (; A(t)-A(t)\+ a @ -а (т) |)«
при всех ^ ^ 0, т ^ 0. Таким образом, функция ;: (t) = ¦¦ v (t) — v (t> т) •2
удовлетворяет неравенству A7). Из леммы 1 с учетом я@) = 0 получим
|| v w__ v (/, T) ,2 ^ |^ Сйр (б) a -i (9) (| А(д)~А (т) |
о
+ |a@)-a (т)
Положим здесь ( = ти получим
Свр (8) a-i (б) (| Л (в) _ Л (т) |
0 (т, т) J»^ J
/ г \
+1 а (б) —а (т) Г)» ехр — \ a (s) p (s) ds rf8, т ^ 0. B4)
\ в /
Далее, из вогнутости А (/), выпуклости a (t), дифференцируемо-
сти и монотонности этих функций имеем
| А (б)- А (т) | =р Л (т) - А (б) ^ Л (б) (т -б) =; А (б) | (т-б),
| а F)-а (т) | ^ i (б) (б-т)Н а (б) ! (т-б)
266
для всех т, 8, О^в^т. Подставим эти неравенства в B4):
S v (т) -V (т, т) i« s? С,$ р F) а-1 F) (| А @) | +
/ т \
+1 а F)')»(т- 0J ехр - {а (s) Р (s) ds W B5)
Л 6 /
Покажем, что правая часть B5), которую мы перепишем в виде дроби
т ¦ ' /Ч \
f р (б) а -1 (б) (| Л @) | +1 а (б) IJ (т- 6J exp I \ a (s) p (s) Js 6?0
j±L
\о /
стремится к нулю при т -> оо. Заметим, что в силу A9) знаменатель
этой дроби стремится к оо при т -* оо. Поэтому если ее числитель
ограничен, то, очевидно, lim е(т) = 0. Если числитель неограничен,
Т-юо
то он стремится к оо при т -> оо, и для раскрытия неопределенности
— можно применить правило Лопиталл. Трижды применяя это пра-
со
вило, с учетом условий теоремы получим
х /в \
2 \'рF)а 1@)( Л(в)\-\-а (д) |Jехр \ а (s) p (s)ds Ы6
lim в(т)= lim — j^ • X
(\a(s)P(s)ds)
о /
« I -у/1 [ ft (t) I
1 а2 (т) р (т) а (т) p2 (t)
of 1>4(т)! |а(т)| )
\ «г W р (т) + «2 (т) р (т) 1 Х
«г W р (т) + «2 (т) р (т)
а«(т)Р(х)-а(х)Р*(х)
Отсюда и из B5) следует, что lim | v (т) — у (т, т) [ = 0. Это озна-
Т-»оо
чает, что I! v (г) — v (т, т)! ^ 1 при всех т^Т. А на отрезке [О, Т]
из B5) имеем sup [j v (т) — и (т, т) !| = Сю < оо. Следовательно,
0; 1} = Си<оо, г^О. B6)
267.
Наконец, перейдем к оценке четвертого слагаемого || и (т) —• v (т) 1
в правой части неравенства A4). С учетом E), (8), (И), A4) имеем
« - 2р (т) (Г (и (т), т) - Г (и (т), т), и (т) - v (т)> -
- 2р (т) (Г (и (т), т) - Г (v (т), т), и (т) - v (т)> ^
^_2а (т) р (т) || а (т)- v (т) i« + 2p (т) Сод (т) Л (т) A +[ и (т) !|)х
X Iu(t)-v(tI т^О. B7)
Заметим, что 1 +1| и (т) || <с || и (т) - у (т) || +1| v(t) — v (т, т) | + [у(т, т) —
— и* (т) !| + II "* (т) — и# [ + II и* !| + 1 ^ I1 и (т) — v (т) | + С12, — здесь мы
воспользовались неравенствами A6), B1), B6). Тогда из B7) следует
? :! U(X)-V (Т) « й? - 2а (Т) р (Т) | И (Т) - О (Т)
+ 2р (т) 6 (т) Л (т) С„ A и (т) - v (т) р + С12 Р« (т) - у (т) |:), т ?= 0.
Однако || и (т) — и (т) [I s? (I + j| и (т) — и (т) \?)/2, поэтому
^ [- 2а (т) р (т) + С13Р (т) б (т) А (т)] Я и (т) - v (т) [* +
+ С14р(т)б(т)Л(т),
Отсюда с помощью леммы 1 получим
т
1 и (т) - v (т) р s? | С14Р (8) б F) А (д) X
6
Г? \
X ехр \ [- 2а (s) 0 (s) + C13p (s) б (s) Л (s)] Js Ve.
\9
Снова применяя правило Лопиталя, для правой части этого нера-
неравенства будем иметь
lim
\§ (б) б (б) А (б) ехр J [2a (s) p (s) -С13р (s) б (s) A (s)] ds)
_о \о] /
ехр {I [2а (s) ft (s) - С13Р (s) б (s) A (s)) ds j
Следовательно, lim j и (т) — v (т) l| = 0. Тем самым установлено, что
Т-*оо
правая часть неравенства A4) стремится к нулю при т-»оо. Теорема
доказана.
Пример 1. Рассмотрим задачи квадратичного и линейного
программирования: минимизировать функцию J (и) = (Си, и)-\-(с, и)
на множестве (/ = {а: «ер, (а^ u) — b^^0, i=l, /и; (я/, и) -^
— &j = 0, / = m+l, s}, где С — неотрицательно определенная симмет-
симметричная матрица порядка пхп\ аъ ..., aSy с—векторы из Еп\ Ьъ ...
..., bs — числа. Пусть ./*>—оо, и*фф. Если все исходные дан-
данные С, с, aiy bi известны точно, то для рассматриваемой задачи диф-
дифференциальное уравнение E) будет иметь вид
и @= - р @ \2Си A) + 2А @ 2 max {(а,-, и @> -Ь,; 0) в|
S
+ 2А @ 23 «**' w W> ~ W ai + « @ « @
где в качестве функций р (/), Л (t), a (t) можно, например, взять
@ (+Г, ()( + ), @ (+Г
Если вместо точных С, с, ah bi известны их приближения С (t),
@» ai@. ^/@ с погрешностью max |(|С — С(/) ||; \с — c(t)\,
max 1^ — ^@1, max 1^ — ^@11^^@» lima @ = 0, то
дифференциальное уравнение E) запишется в виде
) и @ ,
B8)
Рассуждая так же, как в примере 9.4, нетрудно убедиться в том,
что для рассматриваемой задачи выполнены условия 1) —3) тео-
теоремы 1. Если функции Р (/), A (t), a(t) удовлетворяют условию 4)
теоремы 1 при р = ^ = 2 и, кроме того, a (t) непрерывна и lim c(t) =
t-*co
= lim a (t) A (t) a @ = 0, то траектория и (t) системы дифферен-
циальных уравнений B8) при любом начальном условии u@) = uli
сходится к точке и* е U*, |] и* || = inf | и |.
и *
§11. Итеративная регуляризация
метода условного градиента
1. Рассмотрим задачу: минимизировать функцию J(и)
на множестве
U = {и: «е(/0; gi(u)^0, /== 1, m,
, s}, A)
где 1/0 — выпуклое замкнутое ограниченное множество из
гильбертова пространства Я; функции / (и), gx (и),..., ^ (а)
определены на UQ и принадлежат классу Cl(U0). Пусть
вместо точных значений этих функций известны их при-
приближения Jk (и), glk (и), ..., gsk (и) €= С1 (f/0), * = 1, 2, ...
Составим функции Тихонова с приближенными данными
(и) =
и с точными данными
где
(и) = ykJ (и)
(а) + ykak :| а |
lim ak= lim у/^^0»
B)
и е Uо, C)
max
I ft*
2
i = m 4- 1
2; gl(u)}\P+ У]
1=1 i = m + 1
Заметим, что если функции B), C) поделим на yk и
обозначим Ab = yi\ то придем к функциям Тихонова,
рассмотренным в предыдущих параграфах.
Итеративная регуляризация метода условного гра-
градиента заключается в том, что к каждой из функций Nk (и)
применяют один шаг этого метода, а затем переходят
к следующей функции Nk+1 (и), u^U0. А именно, пусть
1>! —произвольная точка из Uo. Пусть k-e приближение
Vk e Uo уже известно. В качестве следующего приближе-
приближения Vk+i примем
у* — vk), D)
где
определяются из условий [65]
inf (N'k(vk)fu-vk)
«G(/o
1, Nk (vk+1) ^ inf Nk (v} + p
0<|3<l
E)
- vk)) + 6,, F)
=1, 2.
lim ek= lim бЛ = 0. Отме-
тим, что при сделанных предположениях относительно
исходных данных задачи нижние грани в E), F) дости-
достигаются. Покажем, что при определенных условиях на
исходные данные и согласованном изменении параметров
метода D) —F) последовательность {uk} по норме Н схо-
сходится к точке минимума с наименьшей нормой.
Теорема 1. Пусть: 1) Uo — выпуклое замкнутое огра-
ограниченное множество из гильбертову пространства Ц\
279
функции J(u), gi(u)y ..., ^(mJgC1^) и их градиенты
J' (и), g'i (и) таковы, что
lJ'(u)-J'(v)\\^:L\\u-vi \\P'(u)-P'{v)\^L\\u-v\ G)
при всех и, v ^Uo, L = const; функции J(u)y gt (и), i = 1, m,
\gi(u)\> i = m+l, s, выпуклы на Uo\ 2) функция Лагранжа
s
? (а, X) = J (и) + 2 ^iff/ (u) имеет седловую точку в смысле
«¦ = 1
неравенств (8.33); 3) функции Jk(u), glk(u), ..., gsk(u)<=
е С1 (i/0) « таковы, что
\J(u)-Jk{u)\^4ky \P{u)-Pk{u)\^x\k, uzEUOi (8)
КЕ*. IP'W-^WKE*. "^^о, (9)
где ri/e^O, g/г^О, /г=1, 2, ..., lim T|ft= lim ?* = 0;
k -*¦ оо & -> оо
4) последовательности {ал}, {^л}, {бл}, {е/,}, {t]fe}, {?*} аз
B), E), F), (8), (9) таковы, что
Q = oo9 q = p(p — l)-1; A0)
о (yk — ya+i); A1)
Y* - Vft+i + Л* + Ik + ел -h 6ft < dft-»?, 0 < p < 1; A2)
oo
ft-V, 0 < v < p; ^ (e* + Ла) < ~, A3)
г<Эг Со, Сь С2 — какие-либо положительные постоянные*
Тогда lim !у* —м# J = 0, где и#е^и%, \и# | = inf |w|.
Л —оо" ' ' 1/#
Доказательство. Заметим, что при любом фикси-
фиксированном р, 0 < р < 1, существуют последовательности
W, {?*}. \bk\, {ч}, {Цк}> {Ik}, удовлетворяющие всем
условиям A0) — A3). Эти последовательности можно,
например, взять в виде ak = /ra, yk = k~y, 8k = /г6, е^ = fe-8,
г|/г = /г*1, ^Л = Л~^, ^ = 1, 2,..., где у — произвольное число,
удовлетворяющее условием 0 < у < р при 0 < р ^ 1/2
или 2р—1^7<р при 1/2<р<1; а берется из нера-
неравенств 0<a<min{p — y\ y(q—l)}; e=| = 2p; в ка-
качестве т] и б можно взять любые числа, лишь бы
т]>тах{1; 2р}, б>тах{1; 2р}; тогда в A3) v =
J
(a + v + P)/2.
В силу теоремы 1.3.6 У* = inf J (а)> — сю, ?/# =
{a: u^Ut J(u) = J*)=?0, а из теоремы 1.3.8 следует
271
существование и единственность нормального решения
и*'- i! w* || = inf | и ||. В дальнейшем наряду с \vk) нам пона-
понадобится последовательность {uk}, определяемая условиями
и*е="?/0> Л^, ((/*) = inf Л/Л (а), 6 = 1, 2, ...; A4)
из теоремы 1.3.8 следует существование и единствен-
единственность ик при каждом &=1, 2, ... Из теоремы 8.2 при
&k = Vk = е* = О, Л* = у^1 вытекает lim || иЛ — и# \ = 0. Тогда,
/г-юо
как следует из неравенства \vk — u*\^\Vk — ^Il + Mfc — w#|,
для доказательства теоремы достаточно получить равенство
lim '|?/Л-иЛ1 = 0. A5)
По условию множество [/0 ограничено, так что
sup i wf^/?<oo, sup Цм —o| = d<oo. A6)
t/o «, OS t/o
Отсюда и из условий G) с помощью леммы 1.2.1 имеем:
т. е.
sup|/(a)|<C8; A7)
здесь и ниже через Ct обозначаются положительные
постоянные, не зависящие от и, k. Тогда из оценки (8)
следует
SUp | Jk (U) | < SUp | J (U) | + Т]Л <
u0 u0
<C8 + sup г)Л = С4, Л=1, 2, ... A8)
*> l
Аналогично доказывается, что
maxIsup|P(a)|; sup |Pk(и) \\<С5, й=1, 2, ... A9)
Из A6)-A9) имеем
max {sup | Nk (и) |; sup | Nk (u) \\ < C6, *=lf 2, ... B0)
Далее, из условий (8), (9) следует, что
| Nk {и) - Nk (и)
| ^ (и) - Afc (а) | < v*6* + ^ < С7|ь
272
а из A1), A6), A7)
I Nk (и) - Nk+1 (и) | < (ук - ук+1) | J (и) | +
«I2 < С8 (v* - v*+i) B2)
при всех и е t/0, &=1, 2, ... Тогда с помощью соотно-
соотношений A6), B1) будем иметь
+1 (и) - Nk+1 (и) | < C7 (rift + r]ft+1) +
y* - Yft+i) =sS C9 (г)* + T]ft+1 + Yft - Yft+i), B3)
nel/i, k=l, 2, ..
Далее, из G), A6) следует
^_C10lu-v\\, u,v<=U0, Л=1, 2, ... B4)
Поэтому с учетом оценок B1) из B4) получим
| N'k (и) - N'k (и) || + |! N'k (и) - N'k (v) || +
+ \\N'k(v)- N'k (о) К 2C7?ft + С101 и - v |, B5)
и, »?(/,, ? = 1, 2, ...
Введем числовую последовательность а^ = iV
— Nk(uk), *=1, 2, ... Из A4) и B0) имеем 0=?=aft<2Ce.
Выведем рекуррентное неравенство для ак. Имеем
- N\ (k+
ЛГ* (у,)] + [/V* (о*) - Nk (vk)] +
(vk) - Nk (uk)] + [Nk (и*) - Nk (uk+1)] +
+ [Nk(uk+i)-Nk+1(uk+1)].
Заметим, что пятое слагаемое из правой части этого ра-
равенства есть ак, шестое слагаемое неположительно в силу
A4), первое и седьмое слагаемые оценим с помощью B2),
273
второе и четвертое —с помощью B1). В результате
О ^ akvl ^ 2С8 (у* - yk+1) +
+ 2С7г)* + [Nk (vfc+1) - Nk (vk)] + ak <
^ a* + Cu (у, - yk vl + лЛ) + [Nk (vk+1) - Nk (vk)l B6)
*=1, 2, ...
С последним слагаемым из правой части B6) придется
повозиться. Для него из F) имеем оценку
Nk(vkn)-Nk(vk)^8k, й=1, 2, ... B7)
Однако ниже нам понадобится более тонкая оценка, чем
B7). Для ее получения сначала покажем, что
0. B8)
(
k ->00
Из B3), B7) имеем
W*+i (иЛ .i) ^ Л^/г (ил+1) + С9 (т)Л + Я^ я + Yfe - Тл+i) <
< Nk (vk) + 6k + C9 (T)ft + rift+i + Y* ~ 7/,ы), ft = 1, 2, ... B9)
Поскольку {Nit(vk)} ограничена в силу B0), а
<оо, то из леммы 2.3.2 [4] следует существование пре-
предела lim Nk (vk). Тогда lim [Nk+1 (vk+1) - Nk (vk)] = 0.
k —> со k -+ со
Отсюда и из B3) получим j Nk (vk+1) - Nk (vk) \^\Nk (vk+i) —
-^пЫ| + |^;.1Ы-^ЫК0 пРи k-+co. Ра-
Равенство B8) доказано. Далее убедимся в том, что
lim (Nk{Vk), vk-vk) = 0. C0)
Из условия F), оценок A6), B5) с помощью леммы 1.2.1
имеем
ИЛИ
Nk(vh)-Nk
)- inf
k(vk)-Nl
5г-Р<#;
k =
,vk-
1, 2,
^ + P (у* — f *)) ^
Oft) - 7 A, - 10
vk — vk) —
1 /.
C1)
274
Множество натуральных чисел N = {1, 2, ...} разобьем на
два множества /+ = {&: AsiV, (N'k(vk)y vk — vk)^0} и
I~z=zN\I+. С учетом того, что inf {N'k(vk), u — vk)^c
U
o
<:(N'k(vk)> vk — vk) = 0, из условия E) получим 0<
<*{N'k(Pk)* vk — Vb)^sk для всех k^I+. Следовательно,
если /+— бесконечное множество, то
lim (N'k(vk), ??Л —иЛ>=0. C2)
6-»оо, k(=I +
Для k^I~ из C1) имеем 0^ — (N'k(vk)t vk — vk)^
^ Nk(vk)-Nk(vM) +C^ + C^6k9 0<Р<1. Если
/" — бесконечное множество, то переходя к пределу сна-
сначала при &->оо, fee/-, а затем при fJ-^ + O, с учетом
B8) и равенств lim E* + 6Л) = О получим lim ^
^Л —1^)=0. Отсюда и из C2) следует C0).
Далее, из выпуклости функции Л^ (и), условия E) и
оценок A6), B1) имеем
0^ak^(N'k(vk), vk-uk)-=(N'k(vk)-N'k{vk), vk-uk)-
-(N'k(vk), uk-vk)^C1dlk-(Nfk(vk), vk-vk) + ek,
или
-(N'k(Vk), Vk-vk)^ak — Culk-bk, k=l, 2, ... C3)
Множество натуральных чисел N разделим на два класса:
множество тех fceN, для которых ak > С14^ + ?*, обозна-
обозначим через /0, а множество тех ieN, для которых ak^
^С14Ь + еЛ, — через /1# Из C3) следует, что /0^/". Так
как 0^аЛ<;2Св, то из C3) для всех k^I0 имеем
Св ^ а! - С15 &к + г,). C4)
Учитывая, что /0 ^ /", оценку C1) можно переписать
в виде
иЛ), ti, - оЛ> | - С12р2/2 - Сг?к - 6Л, C5)
где ? е /0, 0 ^ р ^ 1. Заметим, что функция ср (Р) =
:= р ,(^ (у^), ^/г — Vk) \ - СгЛ2/2 достигает своего макси-
мума на числовой оси в точке f>k = \ (N'k (vk), vk — vk) |/C12 ^
^гО. В силу C0) lim Р* = 0. Поэтому беря при необхо-
k-+ 00
димости постоянную С12 еще большей, можем считать
0<р*^1 при всех &=1, 2, ... Полагая Р = р*, из C5)
учетом C4) получим
I (N'k {vk)y vk - vk) |2/BC12) - С13Ь - б* ^
^ fli/BCia) - C1G (?* + б, + 8,), * е /о.
.гывая последнее неравенство и условие A2), из B6)
имеем
ak ы < аЛ - а|/BС12)
+ С16 {lk + б, + еЛ) < ak - а\/С17
для всех k е /о- Если же & е Д, то в правую часть B6)
подставим оценку B7) и получим
0*+i ^ а* + Сп (у* - Y*+i + Лл) + бл < ak + C19k~2^ k<=Iv
Кроме того, 0<:ak<:Culk + ek^Cl(Cu+ l)^20, *e/,.
Таким образом, последовательность \ak) удовлетворяет
условиям леммы 2.3.5 из [4]. Следовательно, 0 ^ ak^ C20^-p.
Из A4), сильной выпуклости Nk(u) и теоремы 1.2.2
имеем
Uk ll2 < Nk (vk) - Nk (uk) = ak^ C2Ok-p.
Отсюда с учетом первого неравенства A3) получим
\\Vk-uk\\2^C2ok-Qak1ykl^C21k-<)+v-+O при Л-^оо. Равен-
Равенство A5) и вместе с ним теорема доказаны.
Отдельно остановимся на случае, когда в задании
множества A) ограничения типа gi(u)^0, gi(u) = O
отсутствуют и множество U = U0 известно точно. Здесь
справедлива
Теорема 2. Пусть: 1) U — выпуклое замкнутое огра-
ограниченное множество из гильбертова пространства Н\
функция J (и) е С1 (?/), выпукла и \Jr (и) — J1 (v) \\^L\\ u — v\,
и, v et/, L = const >0;
2) функции Jk (и) еС1^) и \J (и) - Jk (и) \ < i\k9
lJ'(u) — j'k(u)\*z?:lbf и евU, k=l, 2, ...; 3) числовые по-
276
следовательности {ak}, {8k}, {ek}, {r\k}, {|ft} таковы, что
0, 6fcSs0, eft2sO, rift^O,
^ 0, aft =г aft+1, lim (aA + 8k + ek + r\k + ?A) = 0,
ak3*C2*-v, 0<v<p, 2 (
C2 — какие-либо положительные постоянные;
4) последовательность {vk} определяется так:
Vk+i = »л + Рл (уа ~ »л), А = 1, 2, ...,
1>х — произвольная точка из U\ vk e f/,
^)^ inf
u(=U
inf П(^
lim 1^ — ^^11 = 0, г5^ u^^U^, |м#|| = inf||м||.
Доказательство. Из теорем 1.3.6, 1.3.8 следует,
что «/*> — оо, и%Фф, существует, ипритом единствен-
единственное, нормальное решение м#, а также существование и
единственность точки uk^U, fk(uk) = inifk(u)9 fk(u) =
и
= J (u) + a,klu*- В силу теоремы 5.1 lim || uk — u^ || = 0.
/г о
Соотношение lim |уЛ — иА|| = 0 доказывается так же, как
в теореме 1, нужно лишь в этом доказательстве принять
р (и) = Pk(u) = 0, у/г = 1 и произвести небольшие очевид-
очевидные изменения. Остается лишь заметить, что при любом
фиксированном р, 0<р<1, существуют последователь-
последовательности {afe}, {бЛ}, {е/г}, \r)k}, {%k}, удовлетворяющие усло-
условиям 3) теоремы. Эти последовательности можно, напри-
например, взять в виде ak = k-^, 8k = k~6, ek = k~ey r\k = k-^y
lk = k^y k=l, 2, ..., где a —произвольное учисло, удо-
удовлетворяющее условию 0<a<p при 0<p^cl/2 или
2p-l<a<p при 1/2<р<1; e = g^2p, т)>тах{1; 2р},
б>тах{1, 2р}.
2. Рассмотрим возможность итеративной регуляризации другого
варианта метода условного градиента для задачи минимизации функ-
функции J (и) на множестве A) [233].
Теорема 3. Пусть выполнены условия 1), 2) теоремы 1 иу
кроме того%
277
3) функции Jk (и), gik (и) g= С1 (Uo), i = 1, s, и справедливы нера-
неравенства (9);
4) числовые последовательности {а^}, {Рл}, {е^}, {?#}, {Ak}
таковы, что
Р
O, Л*+1^Л*>0, ?-1,2,...; C6)
lim (ал + рл + ел + 5л+Л^) = 0;
/г-*оо
lim аП2"==00» tf^PCP-ir1; C7)
= lim M^ + 6^ + efe=().
5) последовательность {v^} определяется из условий
Vk+i = Vk + tbk(Vk-vk), Л=1. 2, ..., C9)
г^ Vi — произвольная точка из ?/0»
^ei/o. <^(^)' ^~^>^ inf (^(w*). "-Ол) + еА| D0)
функция Тихонова
отличается от функции B) множителем Yk — Akl>
Тогда lim || yfe — и* "=0, г^в u^^U*, \и*\ — тг\и\.
k ->со "и*
Доказательство. Заметим, что последовательности, удовле-
удовлетворяющие условиям C6) —C8), существуют; их можно, например,
взять в виде ak = k~ay р^ = ?-Э, гк = /г~г, gfr = &-?, Л/р = ^л, где 0<
(IL l 61 Л + {Р 1 0}
(^), , 6, + {Р, 0}
Наряду с {и/г} введем последовательность {«#}, которая одно-
однозначно определяется условиями
fk(uk) = mffk(u), ukezU0, Л=1, 2, ..., D1)
где функция fk (и) = J(u) + AkP (и) + ak\\u |2 отличается от функ-
функции C) множителем 7^в^1- Из теоремы 8.2 следует, что lim \uk —
— и#[ = 0. Поэтому, как видно из неравенства lvk--uiH^Jlvk~-uk\-\-
4-1| Щ — и* I!, для доказательства теоремы достаточно показать, что
lim \vk — мЛ| == 0.
fe-юо
Введем величину а^ == 7^, (ул) — Tk (uk) ^ 0. Тогда
(uk)] +
Л+1)]. D2)
Заметим, что третье слагаемое в правой части D2) представляет
собой akt четвертое слагаемое неположительно р силу D1), а первое
27*
и пятое слагаемые оцениваются сверху так:
а,г) , vM !* -с С5 (Аш - Ak)
Tk (uk+i) ~ fk+i (uk+l) ^ R2 (ak - a/V4x),
где постоянные R и С\. взяты из A6) и A9). Таким образом: из D2)
следует неравенство
0^ak+1^ak + Cb(Ak+1-Ak) +
+ R4ak-**+\) + [Tk{vk+l)-fk(Vb)]. D3)
Оценим последнее слагаемое из правой части D3). С это:1 целью за-
заметим, что
u — v ^C22Aklu~v\} и,
Отсюда с помощью леммы 1.2.1 имеем
D4)
Так как lfk(u) — T'k{u)'^lk-\-Abl>i^C23Ak?)k, a e (/0) то с учетом
выпуклости Tk(u) и условия D0) получим
0 ^ ak ^ (f'k (vk), vk - uk) = (f'k (vk) - Tk (vk), Vk - uk) +
+ (Tk(vk), Vk-Vk>-(Tk{vk)> Uk-
т. e.
(T'k(vk), Vk-vk)>-ak-
Отсюда и из D4) следует
Tk (»a+i) ~ Tk (vk) ^ - №k + Mft + РИkCnlkd + & AkC.i2dV2.
Подставим полученную оценку в D3):
Учитывая условия '38), отсюда имеем
Введем новую величину bk = akctkl. Обозначим vk = (ak —
xajf1?^1 так что аЛ+1-=аЛ A — v^ft). Тогда из D5) следует
где
..(l-v^)P^ ,_
с»
Ясно, что — = г— ^0 при /?->оо. Покажем, что ряд / s& рас-
sk \-vk Ad
k=\
ходится. Так как lim рЛ= lim vk = Q, то 0 <рЛ < 1,
279
или аЛа^, ^A -р*) для всех
Кроме того, Ит — Т = 1» поэтому можем считать, что
ft-» 00 Pft
ln(l — рл.) ^ ЗР^/2, k^k0. Следовательно, In-^-^ In (I — Р*)^
/г /г
^ ~2 Ра ^ 3s^, k ^ &0. Отсюда имеем 3 \ s?^ \ (ша/?"~"ш afc+i)=
CO
= lna^0 — 1паЛ+1-*" + оо при /г->оо, т. е. ^ s^==+oo. Таким обра-
fc=i
зом, последовательность \bk] удовлетворяет условиям леммы 2.3.6
из [4]. Следовательно, lim bk= lim aka~kl~0. Из D1). сильной
ft-*oo /г->оо
выпуклости fk (и) с помощью теоремы 1.2.2 имеем !: Uk — Vkti2^
k1 ¦ 0 при k-+co. Теорема 3 доказана.
Кратко остановимся на случае, когда в задании множества A)
ограничения типа gt (и) ^0, gi (и) —0 отсутствуют и множество U — Uo
известно точно. Здесь справедлива
Теорема 4. Пусть 1) U —выпуклое замкнутое ограниченное
множество из гильбертова пространства U, функция J (и) е С1 (U),
выпукла и ||/' (и) — J' (v)\\^L \u — v\t и, v<=U, L = const >0;
2) функции Jk (и) €= С1 (V) и \ J' (и) — /л (") II ^ Ел. « е ?/, А; = 1,
2, ...;
3) числовые последовательности \ak], {Рд}, {еЛ}, {^} таковы, что
l^pft>0, e^^O, Е^О, ^=1, 2, ...;
lim (а* + р* + е* + Ы = 0 D6)
Л —оо
lim g»-»*^ = lim S»= lim «*-e lim -^-
4) последовательность {v^} определяется так: fc+
— vk)> ?=1* 2, ..., г<9е vi —произвольная точка из
ft). ^-»*>^ inf (rjt^), и-оЛ)+вЛ, РЛе[/.
lim |! vk — w% || = 0, где u^^V^ \u* ' = inf jj и \.
Доказательство этой теоремы получается из доказательства тео-
теоремы 3, если в последнем положить Р (и) = Рь (и) = 0, А^=\ k —
= 1, 2, ... В качестве последовательностей, удовлетворяющих усло-
условиям D6), можно взять, например, ос? = &~а, рА> = /?~Р г^ = к"г, tk =
==ЛЛ где 0<a<min {S; e; ?}, р< 1.
Предлагаем читателю самостоятельно рассмотреть возможность
применения описанных выше вариантов итеративной регуляризации
метода условного градиента к задачам из примеров 9.1—9.4.
§ 12. Итеративная регуляризация
методов высокого порядка
В § 1.4 (см. также §§ 5.7, 5.8 из [4]), были рассмо-
рассмотрены метод Ньютона и метод с кубической скоростью
сходимости, причем их сходимость была установлена для
сильно выпуклых функций. Было также замечено, что
эти методы, хотя и имеют высокий порядок сходимости,
но сходятся, вообще говоря, лишь при выборе достаточно
хорошего начального приближения.
Покажем, что можно провести такую итеративную
регуляризацию метода Ньютона (см. § 1.4, п. 6) и метода
с кубической скоростью сходимости (см. § 1.4, п. 7), кото-
которая для выпуклых задач при обычных ограничениях
гарантирует сходимость этих методов при любом выборе
начального приближения. Будем рассматривать задачу
минимизации функции J (и) на множестве
{ g()
?,(") = 0, i = m+l,s}, A)
где функции J(и), gi{u), /=l,s, предполагаются опреде-
определенными на всем гильбертовом пространстве Я. Как и
всюду в данной главе, будем предполагать, что множе-
множество U непусто и, более того,
inf У(^) = У51в>-схэ, U* = {u: u^U, J(u) = J*)=?(t). B)
Ограничения типа равенств и неравенств из A) будем
учитывать с помощью штрафной функции
Р(и)= |] (max{0; gt(u)})P+ j] \gi(u)\*>,
i= 1 i=m-\-l
ikelH, p>2. C)
Составим функцию Тихонова
Tk (и) = J(u) + AkP (и) + ak Ч и ;,2/2, меЯ, D)
где аЛ>0, ЛЛ>0, & = 0, 1, ..., lim ak= lim A? = 0
fc-юо fc-*oo
1. Сначала опишем итеративную регуляризацию метода
Ньютона. Предположим, что функции J (и), gt (и) е С2 (Я)
и существует (ТЪ(и))-1 при каждом «еЯ, fe = 0, 1, ...
Тогда итерационный процесс [66J
* = 0, 1, ..., E)
с некоторым начальным приближением v0 e H представ-
представляет собой итеративную регуляризацию метода Ньютона
(ср. с процессом A.4.39)). Справедлива
Теорема 1. Пусть 1) функции J (u)y gi(u)y /=1, s,
принадлежат С2(#), функции J (и), gi{u)> i= I, m, \gi(u)\f
/ = //z-fl,s, выпуклы на //, выполняются условия B) а,
кроме того,
ii/>»j!-cLo(l+|«|), we /У, L0 = consts*0, F)
max {j| У (и) - J" (v) И, |; Я" (и) - Я" (у) И} < L j; и - а ||,
ы, уеЯ, L = const ^0; G)
2) функция Лагранжа L(uy X) = J(u)+ ^ hgi(u) на
i= 1
множестве //хЛ0, Ло = {Х== (Яь ..., Лд.): Ях ^> 0,..., Ат^?0}
имеет седловую точку (v%, Я*) еЯх Ло в следующем смысле:
3) 5^я нормального решения и^ задачи минимизации
J (и) на U (т. е. и^ еУ^, ii а^ || == inf [! w I;) известна априор-
и*
нал оценка fu^f^d]
4) числовые последовательности \ak}y \Ak\ таковы, что
lim ал —
ah~\ ^
0, lim А
k -*ос
?>RLl '
[(,= lim а.кА'1
(P- I),
«If.
= 3LL^A+/
(8)
(9)
= 2j i ^? .7» a t ~~ пр'>извг> ib we фиксированное число, лишь
/= l
бы /^96 (например, можно язять / = 96);
5) начальное приближение v0 для последовательности
{vk\f определяемой E), и числа Ло, «о таковы, что
(II)
Тогда lim J рл — и^ | = 0,
Доказательство. При сделанных предположениях
функция Tk(u) ^С2(Н), сильно выпукла на Я и
(T'k(v)u, u)^ak\uf, г/, &6Й, ? = 0, 1, ... A2)
Покажем, что тогда существует обратный оператор (ТЪ (у)),
причем
С этой целью возьмем произвольную точку w e Я и рас-
рассмотрим функцию G* («) = 2 (Tk (v) и, и) — (w, и), mg Я.
Так как GJ (и) = Г? (и), то из A2) и теоремы 1.2.2 сле-
следует сильная выпуклость Gk(u) на Я. В силу теоремы 1.3.8
тогда Gk(u) достигает на Я своей нижней грани
в единственной точке гЛэ причем по теореме 1.2.5 для
этого необходимо и достаточно, чтобы G'k (zk) = T"k (v) zk —
— w = 0. Это значит, что уравнение Tl(v)u = w при
каждом w e Я имеет, и притом единственное, решение
и-=гк, что равносильно существованию обратного опера-
оператора (Tb(v))~l. Подставим в A2) и = (Т" (v))~xw. Получим
а„ (TUv))-lw*^(w, (Tl(v))-lw)^[w^\(Tl(v))-lwl шей.
Отсюда имеем \(Tk(v))~lw\^akx\wi при всех w^H, что
равносильно оценке A3).
Таким образом, последовательность {vk}y определяемая
условиями E), существует. Наряду с \vk} введем после-
довательноеть \uk\f которая однозначно определяется
условием Tk(uk) = \n\Tk(u) или T'k(uk) = 0, ft = 0, I, ...
н
Из теоремы 8.2 при бл = тА = ел = 0, U0 = H Еытекает
lim I uk — w# ] = 0, где w^ — нормальное решение задачи
к -юо
минимизации J (и) на ?/; существование и единствен-
единственность м# показаны при доказательстве теоремы 9.1. Из
неравенства )vk — u* ! ^ [ vk — uk I +1 uk — «# j тогда следует,
что нам осталось установить равенство lim |f? — мл|| = 0.
/?—со
Введем числовую последовательность я* = || 7* (и*) ||,
ft = 0, 1, ... Из определения D) функции ^(м) с учетом
условия F) имеем
7^ (и*+1), + (а, - ал+1),: »т | + (Ак+1 - Л,) 1
< JT'k (vk+i),; + [а, - «*+i + ^о(ЛА+1 - Ak)] •
-Ак). A4)
Из сильной выпуклости Тк (и) следует, что ak {vk+1 — uk f ^
< (Tk (vk+l) - T'k (ик), vk+l - мл) = (Гк (vk+1), vkn - uk).
283
Отсюда имеем \\vkn — uk\\^\\T'k(vk+1)\\/ak. Кроме того, из
оценки (8.28) при ek = 8k = vk = dk = pk = 0, Q(u) = tuf/2
имеем lukl^R. Тогда
IIvk+11^||ukjj +!! vk+1 -Uk\\ )
Подставим эту оценку в A4) и с учетом неравенства
2ak — ak+1 +L0(Akn —Ak)^4ak+ly вытекающего из усло-
условий (9), получим
ak+1 ^ 4аЛ+1аЛ и T'k (vk+1) || +
+ R(ak-ak+1)+Lo(l+R)(Ak+1-Ak). A5)
Далее T'k (vk+1) = T'k (vk) + T"k (vk + 6* (vk+1 - vk)) (vk+1 - vk)=
=[Ti (vk) - Ti(vk + h(vk+i - vk))}(n(vk))-*T'k(vk), 0<6,<l.
Из условия G) и оценки A3) тогда имеем
II Т'и (vk+l) J ^ L A + Ak) I uA+1 - vk 1 a^!aA ^ 2LAka\ark\
Подставив это неравенство в A5), с учетом условий A0)
получим следующее рекуррентное соотношение для после-
последовательности {ak\:
аш ^ 8LAkaiak+1a? + B/3) (L/)-1 а|+1Л^ь к = 0, 1, ...
Для последовательности ck = аЛа^, * = 0, 1, ..., тогда
имеем
, k = 0, I, ... A6)
Докажем по индукции, что
ck^akA-kl(Lt)-\ 6 = 0, 1, ... A7)
При Л = 0 справедливость оценки A7) следует из усло-
условия A1). Пусть A7) верно для некоторого k^Q. Тогда
из A6) имеем
ck+1 < 81ЛАа1ЛГ (L/)ar + B/3) (LO-^+H^ =
k+1/Ak) t1 + 2/3] ^
2/3)
Оценка A7) доказана. Наконец, из ak\\vk — ukf^ (T'k(vk)9
vk — uk) <: ak | vk — uk I имеем || иЛ - иЛ || ^ a^ai1 = ck = аЛЛ^ X
X(L/)-v0 при A~>cx;, что и требовалось.
Теперь обсудим вопрос о возможности выбора {аЛ},
{Л*}, v0, удовлетворяющих условиям теоремы 1. Если
вначале выбрать {a*}, {Ak\ из условий (8)—AС), то для
выполнения условия A1) нужно взять такую точку v0,
для которой величина || Т'о (v0) ( мала. Это значит, что для
284
выбора начального приближения нужно поточнее решить
задачу минимизации Т0(и) на Н как задачу первого типа.
Такой подход к выбору начального приближения вполне
может быть использован на практике. Однако в рассмат-
рассматриваемом методе, оказывается, на самом деле можно взять
в качестве начальной любую точку v0 e Я, а затем, зная v0,
задать последовательности {аЛ}, \Ak} так, чтобы удовлет-
удовлетворить всем условиям (8)—A1) теоремы. Можно, напри-
например, принять
A8)
сло-
сло, A9)
где положительные числа Л, Б, а определяются усло-
условиями
Шй; (81L42\X*
\f | Я* \<* ^p1^I75.
2Lt || v01|; BU | У (u0) + Я' (v0) llI/2}, B0)
a / — какое-либо фиксированное число, /^96. Нетрудно
проверить, что при таком выборе {ak}, \Ak] все усло-
условия (8) и первые три условия (9) выполняются. Далее, по-
скольку (Ak+l-Ak)a];l1 = B-i[(k + 2)A-(k+l)*](k + 2r =
=¦¦ В'1 A (k + 1 + б)*-1 (fe + 2)а < В-1 A [(k + 2)/(fe + l)]1-^ X
х(^ + 2)л+а~1^В~1, где 0<G<l, то последнее из усло-
условий (9) будет выполняться, если B^L0.
Рассмотрим условия A0), A1). Заметим, что для после-
последовательностей A8) sup a^1Al~Q = B~\ и поэтому R =
= (d2 + 21X* \* q-Y^B11I1^ Поскольку (а* - а*+1) АмоЦг^
^3/BБ), то первое из условий A0) приводит к нера-
неравенству В ^ (9/2) RU = (9/2) Lt (d2 + 21 Я* |^ q^p^B- у* или
B3^(81/4)L2/2d2B + (81/2)L2/2j^*|^-1P1^. Это неравен-
неравенство заведомо будет выполнено, если fi^max{9L/d;
(81L2/2! Я* \9 rV'9I'*}- Аналогично, (ak - ak+1) Ак+1аЦх <
^В~2, и второе из условий A0) приведет к неравенству
B*^3LLot(l+R)y или B4^9L2Lg/2(l+/?J. Поскольку
A + RJ ^2A+ R2)y то предыдущее неравенство можно
заменить более сильным неравенством B4^18L2Lo/2(l -\-R2),
откуда следует Bb^l8L2Llt2(l +d2)B + 36L2L^2|^* \«q-*p1-9.
Это неравенство заведомо удовлетворяется, если
В > max {C6L2Llt2 (I + d2)I/4; G21*ЦР \ Я*
285
Наконец, условие A1) с учетом равенств A0=U cto^B
приводит к неравенству U \ J' (v0) + Р' (vQ) | + BLt | v0 J ^ В2,
которое выполняется, например, при B^max{2Lt\\vo\\;
BL/S J' (v0) + P'(v0) IЛ2}. Собрав вместе все получившиеся
ограничения на В, придем к неравенству B0). Требуемые
теоремой последовательности \ак), \Ак) построены.
Наконец, нужно заметить, что условием B0) для
выбора В практически трудно пользоваться, так как
постоянные L, Lo, d, |А*|? далеко не всегда известны.
Тем не менее предложенная выше итеративная регуляри-
регуляризация метода Ньютона указывает на принципиальную
возможность устранения одного из существенных недо-
недостатков этого метода, заключающегося в требовании хоро-
хорошего выбора начального приближения, и намечает пути
для этого. Важно также заметить, что в отличие от §5.7
из [4] вместо сильной выпуклости от функции J (и) в тео-
теореме 1 требуется лишь выпуклость.
2. Кратко остановимся на случае ?/ = //, когда в A)
ограничения gt (и) ^ 0, gy (и) = 0 отсутствуют. Тогда функ-
функция Тихонова имеет вид
Tk(u) = J(u) + ak\u№, и^Н7 ? = 0,1,... B1)
Теорема 2. Пусть: 1) функция J (и) выпукла на //,
J (и) е С2 (Н), выполняются условия B) при U — H и
\J"(u)-J"(v)\^Liu-vl и, ое/У, L-const^O;
2) для нормального решения и* задачи минимизации
J (и) на Н известна априорная оценка ;;w*:|^;d;
3) числовая последовательность {ak) такова, что
lim ak = 0, ak > 0, 1 < ед^ ^
<min{2; \+BШ)-1ам)% ? = 0, 1, ...
где t — фиксированное число,
4) начальное приближение v0 для последовательности
{vk}, определяемой из E), B1), и число а0 таковы, что
Ltl' ( \\l
l (o) + o\\l
Тогда lim | vk — и* I = 0.
Доказательство теоремы 2 получается из доказатель-
доказательства теоремы 1, если в последнем положим Р (и) = 0,
Ak = 1, & == 0, 1, ..., и проведем небольшие очевидные
286
изменения. В качестве {а*}'здесь можно, например, пред-
предложить
)\ Л = 0, 1, ...,
Виллах {4Ш; 2Ltivol BLt\ Г К)!'I/2Ь l '
О других способах итеративной регуляризации метода
Ньютона см. в [24, 25, 65].
3. Перейдем к изложению итеративной регуляризации метода,
описанного в § 1.4, п. 7, для задачи минимизации функции J (и) на
множестве (I). Будем предполагать, что функции J (и), g/(и), i=l, s,
принадлежат классу С1 (И) и существуют разделенные рсзности У («, и),
Р' (а, и) градиентов функции J (и) и соответственно штрафной функ-
функции Р {и) из C). Напоминаем, что согласно определению 1.4.4 раз-
разделенные разности Г (и, v), P' (w, v) представляют собой линейные
операторы, действующие из Я в Я и такие, что
У (и, v)(u — v) = J' (и) — Г (у), B3)
Р' («, v) (u — v) = Р' (и) — Pf (v) B4)
при всех и, неЯ,
Тогда градиент функции Тихонова D) также обладает разделен-
разделенной разностью Tk (и, v), причем
Tk(u, v) = J'(u, v) + AkP'(u, v) + akE, ut v<=?H, B5)
где Е — единичный оператор. Предположим, что существует обратиыл
оператор (Tk(u, v))~l при всех //, оеЯ и рассмотрим итерацион-
итерационный процесс [67]
B6)
где
ГЛ = (Tk {vki vk))'\ щ - vk - §kTk (vk). B7)
уо__заданное начальное приближение, рд, —параметры метода. Не-
Нетрудно видеть, что процесс B6), B7) представляет собой итеративную
регуляризацию метода A.4.42): к функции Тихонова 1\(и) приме-
применяется один шаг метода A.4.42), затем совершается переход к сле-
следующей функции Tk+l (и), к которой снова применяется один шаг
метода A.4 42) и т. д. Справедлива
Теорема 3. Пусть функции J (a), gt (a), i= I, s, принадлежат
С1 (h'\ и такочы, что градиенты J' {и)} Р' (и) функции J (и) и штраф-
штрафной функции Р (и) из C) обладают разделенными разностями «/' {и, у),
Р' (и, v), причем
' {Г(и% v)t D^O, <P'(u, v)t, 1)^0 B8)
при всех и v ^еЯ,
hP'(и, v) — Pf (v, w)[}^
-wD B9)
при всех и, v, w^H, L
|| Р' (и) |[ ^ U A+1 и ||), «ёЯ, Lo = const ^ 0;
пусть последовательность {р^} такова, что
0; C0)
кроме того, пусть выполнены условия 2)—5) теоремы 1 с заменой нера-
неравенства t^96 на неравенство
^1, C1)
где число с взято из C0), t — фиксированное положительное число,
участвующее в неравенствах A0). Тогда последовательность {v^},
определяемая из B6), B7), сходится по норме Н к нормальному реше-
решению и^ задачи минимизации J (и) на множестве A).
Доказательство. Положим в B8) g"= и — v. С учетом
равенств B3), B4) получим
(J'(и, v)(u — v), и — р) = </'(«) — Jf (v), u — v)^0f
(Р'(и, v)(u — v)y и — v) = (P'(u) — Р'(v), u — v)^0
при всех и, v^H. В силу теоремы 1.2.1 отсюда следует выпуклость
функций J (и), Р (и) на Н. Отсюда и из A), C) получим, что
множество [/ = (а?//:Р(м) = 0[ = (аеЯ:Р(и)^0| выпукло. Сог-
Согласно теореме 1.2.3 тогда U * выпукло. Из непрерывности функций
J (и), Р (и) в метрике И следует, что U^ замкнуто. Конечно, еще
надо оговорить, что множество 11+ непусто — это вытекает из суще-
существования седловой точки функции Лагранжа рассматриваемой задачи
и теоремы 1.2.7. Согласно теореме 1.3.8 сильно выпуклая функция
Q (и) = || и ;,2/2 на выпуклом замкнутом множестве {/# достигает своей
нижней грани в единственной точке и# е ?/#. Существование и един-
единственность нормального решения задачи минимизации функции J (и)
на множестве (I) установлено.
Далее, из условий B8) и формулы B5) следует, что
(Tk(u, v)l, l) = {J'{u, v)l, t) + Ak(P'(u, v)t, l) +
+ ak(El, g>^a*[|gj* при всех g e H, k = 0, 1, ... C2)
Покажем, что при всех и} v e H существует обратный оператор
(Tk(u, v))'1, причем
l(Tk(u, v))-1!^!^, k = Qt 1, ... C3)
С этой целью возьмем произвольную точку w e H и рассмотрим
функцию Gk(z) = (Tk(u, v)z,z)/2 — (w, z) переменной z^H. Так
как Gk (z) = Т1^ (a, v), то неравенство C2) можно переписать в виде
ifik (z) ^, 5) ^ afe I! Eii2> z» g e Я. Согласно теореме 1.2.2 функция
й^(г) сильно выпукла на Я, а по теореме 1.3.8 достигает на Н
своей нижней грани в единственной точке zk. В силу теоремы 1.2.5
это возможно тогда и только тогда, когда Gk (г^) = Гл (a, v) zk — w = 0.
Таким образом, уравнение Tk(uy v)z = w при каждом w^H имеет
и притом единственное решение г = г^, что равносильно существова-
существованию обратного оператора {т'и [и} v))'1* Полагая в C2) | = (Г^ (и, i/))~%,
238
приходим к оценке C3). Отсюда же следует, что при фиксйроЬанных.^ и
{pk} условия B6), B7) однозначно определяют последовательность {i)k\-
Далее, из C2) при | = и — v с учетом формулы
Tk (и, v) (и - v) = Tk (и) - Tk (v), и, vezH, C4)
получим
(Tk(u)-T'k(v)9 u-v)^au\u-vf, и, vezH. C5)
Согласно теореме 1.2.2 функция Tk (и) сильно выпукла на Я и по
теореме 1.3.8 достигает на Н своей нижней грани в единственной
точке uki причем Tk(uk)*=Q. Из теоремы 8.2 (при 6^ = v^ = 8^ = 0,
(/0 = Я), которая остается справедливой при выполнении условий
доказываемой теоремы, вытекает, что || uk — и# Ц-+-0 при k-+co. Тогда
из неравенства \\vk — и* |^||f& — uk\\ + \и^ — и* || следует, что нам
осталось убедиться в справедливости равенства lim lVk — Uk\\ = Q.
k-+ 00
С этой целью введем последовательность ak = \\ Tk (vk) ||, & = 0, 1,...
Имеет место неравенство
а,гл1 ^ 4 (akJrJak) \\ Tk (vk+1) | +
-Ak), fc = O, 1,..., C6)
которое доказывается дословным повторением доказательства нера-
неравенства A5).
Далее, из условия B9), формулы B5) с учетом неравенства Л^^ 1
получаем
-ai||)f utv,wezH. C7)
Из формул B6), B7), оценки C3) и условия C0) следует
lvk-vhl^ailak; \\vk-vk \\^ \ §k | ak ^callak\ C8)
*JI Tk (vk) || ^ ail A + c) ak + all | Tk (vk) |. C9)
С помощью формул B6), C4) можно написать следующее равенство
Tk (vk) = Tk (vk) + Tk (vkf vk) (vk - vk) =
= TllTkTk (vk) - Tk (vk/ vk) TkTk Ы =
= {Tk{vk> vk)-Tk(vkt vk))TkTk(vk).
Отсюда с помощью оценок C3), C7), C8) имеем
I Tk (vk) I ^ 2LAk A vk-vk\ +1 vk-vk I) cTkak ^
^2LAk(\+c)a-k*al D0)
Снова воспользуемся формулами B6), C4) и напишем равенство
Tk (vk+1) = Tk (vk) + Tk (vk+i, vk) (vk+i - vk) =
= (Tk (vk, vk) - Tk (vk, vk+x) + Tk (vk, vM) -
-Tk(vM> vk)ThT'k{vk).
10 Ф. П. Васильев . 289
Отсюда с помошыо оценок C3), C7)— D0) получим
I! Tk (vk+1) j ^ 2LAk (;; vk-vk || + 2 , vk-vk+l .+
- vk !;) all \ Tk(vk) I ^
a~k4ak(\ + 2a~k2akLAk).
Подставим эту оценку в C6). Учитывая условия A0), для последова-
последовательности {а^\ получим рекуррентное неравенство
2l +cf a^
Тогда для последовательности с^^а^/а^ 6 = 0, 1, ..., имеем
сы^ 48L"M| (l + cf akVk {\+2LAka~kCk) +
+ B/3)(U)-lak+lAkll, 6 = 0, 1,... D1)
Докажем по индукции, что
6==0, 1, ... D2)
При 6 = 0 справедливость оценки D2) следует из условия (И).
Пусть D2) верно для некоторого 6^0. Тогда из D1) с учетом усло-
условий (9), C1) имеем
ck+1 ^ 48 A + cf fL^akAk1 (I + 2Г1) + 2сс*+1 CLtAk+1fl =
U)-i [48 A +cf (Г2 + 2ГЗ) (ak/ak+l) (Ak+l/Ak) + 2/Z]
Оценка D2) доказана. Наконец, из неравенства C5) при м = уЛ)
v — Ub с учетом условия Tk(uk) = 0 получим
lvk — ukl^ak/ak = ck^ak/(AkLt)-^0 при 6->оо,
что и требовалось.
Если задано какое-либо начальное приближение v0 и зафикси-
зафиксированы некоторые положительные /, t из условия C1), то в качестве
последовательностей {а^}, {Л^}, удовлетворяющих условиям тео-
теоремы 3 (или, иначе, условиям (8)—A1)), можно кыбрать те же после-
последовательности A8) с постоянными а, Л, В из A9), B0).
4. Отдельно остановимся на случае (У = Я, когда в A) ограни-
ограничения gi(u)^Q, gy(i/) = O отсутствуют.
Теорема 4. Пусть 1) U=*H, выполнены условия B), J (и) е
е С1 (Я), градиент J' (и) обладает разделенными разностями J' («, v)
при всех и, оеЯ, причем
(Г (и, v)l, Б>^0, ge#,
Ц/' (и, у) — /' (у, aOI^LflM — у|; + !;и — о; Ц),
npw бс<?л и, v} w е Я; L == const ^0;
2) для нормального, решения иф задачи минимизации функции J (и)
на И известна априорная оценка \\d
290
3) числовые последовательности {ak}y {&h\ таковы, что
lim
k —* оо
положительные постоянные с, t связаны неравенством
*-2 + Г)^1; D3)
4) начальное приближение v0 для последовательности {v^}, опре-
определяемой формулами B6), B7) для функции B1), и число а0 удовлет-
удовлетворяют неравенству Lt || J' (vQ) + аоуо [ ^ ag.
lim !|ул —м#|| = 0.
fe —> оо
Доказательство теоремы 4 получается из доказательства теоремы 3,
если в последнем положить P(w) = 0, Л^= 1, ^ = 0, 1, ..., и внести
небольшие очевидные изменения. В качестве {а^} здесь можно,
например, взять последовательность B2), где t берется из условия D3).
Таким образом, регуляризация (итеративная или непрерывная)
существенно расширяет возможности методов: регуляризованные методы
позволяют строить минимизирующие последовательности, сходящиеся
по норме ко множеству точек минимума, менее чувствительны к вы-
выбору начального приближения, и их сходимость удается доказать
при меньших требованиях на исходные данные.
Заметим, наконец, что в этой главе мы всюду пользовались
штрафными функциями вида C). Как показывают работы [64, 117],
здесь возможно использование других классов штрафных функций,
а также барьерных функций.
ГЛАВА 3
АППРОКСИМАЦИЯ ЭКСТРЕМАЛЬНЫХ ЗАДАЧ
Численная реализация многих методов решения задач
оптимального управления процессами, описываемыми систе-
системами обыкновенных дифференциальных уравнений или
уравнений с частными производными, невозможна без
использования тех или иных методов приближенного ре-
решения возникающих здесь начально-краевых задач, при-
приближенного вычисления встречающихся интегралов.
Для решения начально-краевых задач часто применяют
такие методы, как разностный метод, метод конечных элемен-
элементов, метод прямых, метод характеристик, методы Ритца или
Галёркина и т. д., для приближенного вычисления инте-
интегралов используют формулы численного интегрирования
[2, 32, 33, 153, 154, 190, 193-198]. В результате исход-
исходная задача оптимального управления заменяется некото-
некоторой последовательностью вспомогательных аппроксими-
аппроксимирующих экстремальных задач. Здесь возникают естествен-
естественные вопросы: будут ли сходиться решения вспомогательных
экстремальных задач к решению исходной задачи, каким
условиям должны удовлетворять аппроксимирующие
экстремальные задачи для обеспечения сходимости? Ана-
Аналогичные вопросы возникают, когда исходные данные —
целевая функция и множество — известны с погрешно-
погрешностью.
В этой главе мы ограничимся рассмотрением разност-
разностных аппроксимаций для простейших задач оптимального
управления и, кроме того, приведем общие условия
аппроксимации экстремальных задач. Вопросам аппрокси-
аппроксимации различных классов экстремальных задач посвя-
посвящены, например, работы [18 — 20, 34, 40, 41, 43, 55,
68, 98, 125, 143, 145, 160-162, 165, 185-187, 218,
219].
292
§ 1. Разностная аппроксимация для одной
квадратичной задачи оптимального управления
Рассмотрим следующую задачу оптимального управ-
управления:
J(u) = \x(T, w)-*/P-+inf, A)
B)
почти всюду на [ft,, T]}, C)
где A (t) = {aij (t)} — матрица порядка пхп, B(t) = {&//(/)} —
матрица порядка п хг, / (/) = {/' (t)} — матрица порядка
пх 1, т. е. вектор-столбец; моменты времени to> Т, а также
точки Хо, У ^ Еп заданы; V — заданное множество из Ег>
х (t, u)=x (t) = (х1 (/), ..., хп (/)) — решение (траектория)
задачи B), соответствующее управлению u = u(t) =
= (ul(t)y ..., ur(t)) ^L\[t0, T]. Будем предполагать, что
элементы аг] (/), Ьц (/)» Р @ матриц Л (/), В (<), /(/) кусочно
непрерывны на отрезке to^t^T.
Напоминаем, что задача A) —C) уже рассматривалась
в §§ 1.2—1.4. Здесь мы займемся исследованием разност-
разностных аппроксимаций этой задачи. Разобьем отрезок ^0^
^t^T на N частей точками {tif i = 0, N}: to<ti<...
...</7V_1</iv = 71» приняв эти точки в качестве узловых,
уравнения B) заменим разностными уравнениями с по-
помощью простейшей явной схемы Эйлера. В результате
придем к следующей задаче:
In ([u]n) = I *n {[u]n) - У |2 -* inf, D)
xM = Xi + Mt (Atxi + BiUi + ft), i = 0, tf-1, E)
[u]N <=UN=
= {[u]N = (uOy uu ..., UN-г): ut^Vy / = 0, Л^—l}, F)
где Aft = ti+1 - tiy At = A ft + 0), В, = Д (/, + 0), ft = / ft + 0),
/ = 0, iV-1; [дс([м]лг)]^ = (^1([м]^), ..., xN ([u]N)) - реше-
решение задачи E), соответствующее управлению [u]N-
Введем пространство L[n дискретных функций — управ-
управлений [u]N = (uOt иъ ..., w^-i), Mw = (уо, .. •, Улг-i). ... — со
скалярным произведением
yv — 1
1=0
293
и с нормой
7V-1
Пространство L$n является разностным аналогом прост-
пространства L[[t0, T], соответствующим разбиению \th / = 0, N}
отрезка |Y0, Т].
Таким образом, задаче A) —C), рассматриваемой
в пространстве L[[t0, T] при каждом целом N^\ и раз-
разбиении {th i = 0, N} отрезка [/0, Г], соответствует диск-
дискретная задача оптимального управления D) —F), рассмат-
рассматриваемая в пространстве L\n*
При каждом фиксированном N ^ 1 и разбиении
{/,-, i = 0, N} задачу D) —F) можно решать с помощью
разностного аналога методов проекции градиента, услов-
условного градиента и других методов из § 1.4; при вычисле-
вычислении градиента функции D) можно пользоваться резуль-
результатами § 1.6; здесь возможно также использование метода
динамического программирования (гл. 7 [4]).
Предположим, что при каждом N^\ и заданном раз-
разбиении {//, / = 0, jV} с помощью какого-либо метода мини-
минимизации получены приближенное значение /д^ + ед' ниж-
нижней грани /дг* функции D) при условиях E), F) и
дискретное управление [и]мг = (иОг, ..., uN-1$e): uie<^V,
i = 0, N — 1, такие, что
/,v* ^ In ([u]nb) < In* + ^дг, G)
где {8дг} — положительная последовательность, сходящаяся
к нулю.
Возникают вопросы, будет ли сходиться последова-
последовательность {In*} к У* нижней грани функции A) при
условиях B), C), если неограниченно измельчать шаг
разбиения {//, / = 0, N}, т. е.
lim max А/г = 0,
и можно ли принять дискретное управление [u\Nz из G)
в качестве некоторого приближения оптимального управ-
управления задачи A) —C)?
Для ответа на эти вопросы нам понадобятся некото-
некоторые свойства решений задач B) и E), Приведем эти
294
свойства. Будем пользоваться обозначениями
Атах= SUp || А (/)!,
5max=
|| Б (/)S, /max= max
t0 < / < T
Если W — произвольное ограниченное множество из
[/o, 71]» т- е- SUP №.<Ж°°» T0
HZ
sup max | x (/,
Wt^t^T
Co,
(8)
где
В самом деле, по определению решения задачи B)
имеем
х (/, и) = $ [А (т) х (т, и) + В (т) и (т) + / (т)] &% + х0. (9)
При всех tt to
тогда справедливо неравенство
Отсюда с помощью леммы 1.2.2 получаем оценку (8).
Далее, если W — произвольное ограниченное множе-
множество из Lj[/0, T], то
sup \x(t, и)-х(т, ^I^CilZ-tl1/2, /o^/, t^7, A0)
где
Сг = ЛтахС0 (Г - /0I/2 + S
/0I/2 /m
постоянная Со взята из (8). Действительно, из (9) с по-
помощью оценки (8) имеем
\x(t, и) — х(т, и)\ =
при всех (, те [t0, T] и и е W.
295
Если W — ограниченное множество из L^[/o, T], то
вместо A0) можно аналогично получить более лучшее не-
неравенство
sup \x(t9 и)-х(т, tt)|<Ci|/-x|f /0</, %<*T% A1)
«Gil/
где С1 = ЛтахС0 + 5ГПах sup \u\L
Далее, если последовательность {uk = uk{t)} сходится
к u = u(t) слабо в L[[t0, Т], то {х(/, ик)} сходится Kx(ty и)
равномерно на отрезке [t0, Г], т. е.
lim sup \x(t, uk)-x(U «) 1 = 0. A2)
kt<t^T
В § 1.3 (см. равенство A.3.5)) уже было показано, что
{x(t, uk)} сходится к x(t9 и) при каждом /ер0, Т]. До-
Допустим, что {x(tf uk)} не сходится к x(t, и) равномерно
на [^о, Т]. Это значит, что существует число ео>О такое,
что для любого номера m ^ 1 найдутся номер km > m и
точка tkm е [<0> 71], для которых | х (tkm, ukfn) - х (/Л|Я, и) \ >
^=е. Можем считать, что &i<?2<..-<^m<.. • Заметим
также, что слабо сходящаяся последовательность {uk}
ограничена по норме L[[t0, Г], т. е. sup || и*||i2
k ^ 1
k ^ 1
Согласно оценкам (8), A0) тогда семейство функций
{x(t> ukm)} равномерно ограничено и равностепенно непре-
непрерывно на отрезке [tOy T]. В силу теоремы Арцела [11] из
{x(t, M*m)} можно выбрать подпоследовательность, кото-
которая равномерно на [/0, Т] сходится к x(t, и). Без ума-
умаления общности можем считать, что сама подпоследова-
подпоследовательность {л;(/, Щт)\ равномерно сходится к х(/, и). Это
означает, что для любого е>0, в частности, для е = е0,
найдется номер т0 такой, что.|х(*, uk/n) — x(t, «)[<е0
для всех т^т0 и всех /е[/0, Т]. В то же время по
определению подпоследовательности {x(t, ukm)\ имеем
\x(fkm* ubm)~~x{tkm> w)|^eo- Противоречие. Равенство A2)
доказано.
Далее, для любых и, deL^[t0, T] справедлива оценка
sup |x(/, u)-x(t, v)l^C2\\u-vtLi, A3)
где
296
В самом деле, из (9) следует, что
\x(t, U) — X(t9 0)| =
{[А(х)(х(т, и)
h
t
w
X
X
(X, V)
(T, U)
) + B(x)(u(x)-v
-x(x, v)\dx +
(x))]dx
\1/2
)
Отсюда с помощью леммы 1.2.2 получаем оценку A3).
На любом ограниченном множестве W из L[[tQi T]
функция A) удовлетворяет условию Липшица
\J(u)-J(v)\^C3lu-vkt> и, v^W, A4)
где С3 = DС0 + 21 у |) С2, постоянные Со, С2 взяты из A1),
A3). Действительно,
так что
\J(u)-J(v)\^2(\x(T9u)\ +
+ \х(Т, v)\ + \y\)\x(T, u)-x(T9 v)\.
Отсюда и из оценок (8), A3) следует неравенство A4).
Если Wh — произвольное ограниченное множество
из Lr2N> т. е. sup || [w]at II ^ /? <d oo, и, кроме того,
wN
dN=- max A^^(r~jo)M, M = const>0, A5)
0 ^ f < /V - 1 N
TO
sup max \Xi([u]N)\^Cb A6)
где
В самом деле, из E) имеем
2 уЛ Лу , / = 0, N. A7)
297
Следовательно,
t
I Xi+1 | ^ AmaxdN 2 I Xf | + Bmax (T - /0I/2 I [«к
С помощью леммы 1.6.1 отсюда получаем
+ fmax(T-to))9 1=0, Л^. A8)
Поскольку \+х^ех при всех действительных я, то
с учетом условия A5) имеем
(l+^max^I^^™"^^^"^^^^™"^""^^. A9)
Отсюда и из A8) следует оценка A6).
Для исследования связи между задачами A) — C) и
D) — F) нам ниже будут полезны следующие два отобра-
отображения QN и PN\ отображение QN, действующее из про-
пространства L?[/o, T] в L^N, которое определяется так:
= {u0, иъ
U i==°> N~l B0)
и отображение PN, действующее из L\n в L[\t0, Г], ко-
которое определяется так:
Pn{{u]n) = ",• при ti<t^tUl, i = 0, N-l. B1)
Из B0), B1) следует, что
N-l/ (U1 V
u(t)dt
\ l I
2
(t)dtK
N — 1 */+i
298
ГI"' ?dt = Ё A/' I«' I2 = 1 f«k \i\n- B3)
t. t' = 0
Докажем несколько лемм, связанных со свойствами
отображений Q,v и Р^.
Лемма 1. Пусть V — выпуклое замкнутое множество
из ЕТ', а управление u = u(t) принадлежит L'[fOy T] и
u(t)^V почти всюду на отрезке [tOy T]. Тогда
(t)dteEV
при всех th /i+ie[/0, T], ti<ti+1.
Доказательство. Сначала установим, что всякое
выпуклое замкнутое множество V из Ег является пересе-
пересечением полупространств, образованных всевозможными
опорными гиперплоскостями к множеству V и содержа-
содержащих V (см. определение 4.5.2 из [4]). Возьмем произволь-
произвольную граничную точку v множества V. Пусть cv — опорный
вектор множества V в точке v, т. е. cv^0 и (cv, u — v)^0
при всех ме1/. Обозначим
Надо показать, что W=V Если w^F, то (cVi u — )
для всех L'^FpK, поэтому «eIF. Это значит, что
W
Покажем, что справедливо включение W ^ V. Допустим
противное: пусть существует точка aiGf, но хюфУ.
Тогда по теореме 4.5.1 из [4] множество V и точка w
сильно отделимы, и гиперплоскость (сгп u — v) = 0, где
v ее Pv (w) — проекция точки w на множество V, обла-
обладает свойствами: (c.vi u — v)^0 при всех «еУ,
а (с™ re» —1;> <C 0. Но поскольку 'v e ГрУ и куе!^,
то (^7(, ш —у)^0 по определению множества W. Противо-
Противоречие. Следовательно, W ^ V. Требуемое равенство W7 = У
доказано.
Возьмем произвольное управление u = u(t), удовлетво-
удовлетворяющее условию леммы. Пусть v — любая точ:ка из ГрУ,
с,,— опорный вектор к V в точке v. Тогда (qv, u(t) — v)^O
почти всюду на [/0, Т]. Интегрируя это неравенство на
299
отрезке [/,-, ^+1], получим
или (ст Ui — v)^0 для всех v^TpV. Следовательно,
щ е W = V Лемма 1 доказана.
Лемма 2. Пусть матрицы А (/), 5(/), f(t) кусочно
непрерывны на отрезке to^t^T, разбиения {/,-, f = 0^ Af}
отрезка [/0, Т] удовлетворяют условию A5). Пусть W и
W)v — произвольные ограниченные множества из L\[t0, T]
и Ь[м соответственно, т. е. sup || и |l,«
N
. Тогда
sup max \x(th u)-Xi(QN(u))\^6Nf B4)
sup max \x(th PN([u]N))-Xi([u]N)\^8N9
ЛГ=1, 2,..., B5)
sup _ max
t = o
sup
при N-*oo. B6)
Доказательство. Возьмем произвольные и s
LJt/o, 71] и Mat^LU, Для которых |tt|L,</?,
hlLiN<:Rt и соответствующие им решения x(t, и) и
300
Г* ([«]лг)]лг задач B) и E). Из равенств (9) и A7) следует
< '/+1
+ ^(x(t, u)-x(t,,
+ (В (т) - В,) и (т) + В/ (и (т) - и,) + (/ (т)
^ AmaxdN
T
- fj)] их
/=0
1/2
|/(T)-/y|)?fT+
/=0
Отсюда с помощью леммы 1.6.1 и неравенств A8) получаем
\x(U, u) — Xi([u]N)\^
yv—i
/=o
B7)
для всех и, [u]Ny lu\\L2^R, \\[u]n\\l2N ^R- Однако, если
Iи||l,<#, то в силу B2) \\Qn(u)\\l2N^R- Поэтому, учи-
тывая, что
= 0, / = 0, TV-l, из B7)
при [w]at = Qat(^) получим оценку B4). Аналогично, если
II[u]nk2N <Я, то согласно B3) |jPN ([u]N) \\l2^R и поэтому,
учитывая, что \ (Рм(\и\м) — щ)йх=-Оу / = 0, N—1, из
B7) при u = PN({u]N) получим оценку B5).
301
Остается доказать, что величина 8Ni определяемая
равенством B6), стремится к нулю при N-^оэ. Пусть
6i, ... , 6^ —точки разрыва элементов матрицы A (t) на
отрезке [t0, T]: fo = 0o<8i<...<8J<71 = eJ+1. Доопреде-
Доопределим матрицу A(t)% 6/</<8^ь при * = 0,- и * = 8|Ч1 пре-
предельными значениями при /->б/ + 0 и t-+bi+1 — 0; тогда
A(t) будет непрерывной и, следовательно, равномерно
непрерывной на отрезке [9/, б|Ч1], / = 0, s. Отсюда следует,
что для любого е>0 можно указать номер #0 = #„(е)
такой, что как только N^NOy 0<^+1 —^- = Д^-^d^
и отрезок [tly ti+1] не содержит ни одной точки {6у} разрыва
Л(/), то сразу || Л (т) — Л-||<8 для всех т, ti^x^ti+v
Имеем
Л —1
, B8)
где 2' означает суммирование по тем номерам /, для
которых отрезок [th ti+1] не содержит ни одной точки
разрыва A (t), а %" — суммирование по остальным номерам /.
Тогда
J |Л(т)-
t t.
для всех
Взяв при необходимости номер iV0 еще большим, можем
сделать
для всех N^N0. Отсюда и из B8) следует, что
N-l U+X
2] \ \\A(T)-AildT-^0 при N-*co.
i
302
Аналогично доказывается, что
= 0 *, '=0 /.
при W->oo. Отсюда ¦ и из неравенств (8), A0) следует,
что 8уу->0 при N -+оо. Лемма 2 доказана.
Лемма 3. Пусть выполнены все условия леммы 2, пусть
и = и (t) — произвольное управление из W. Тогда
С5 = 2С0Ч-2С4 + 2|*/|, #=1, 2,... B9)
где Со, С ?— постоянные из (8), A6), а величина 8N опре-
определена формулой B6).
Доказательство. Заметим, что
\\xN(QN(u))-y\*-\x(T, и)-
-f/, xN(QN(u))-*(T, u))\9
0<6<1. Отсюда и из оценок (8), A6), B4) следует
утверждение леммы 3.
Лемма 4. Пусть выполнены все условия леммы 2 и
пусть \u]N — произвольное управление из Wjy. Тогда
J (Pn №)) - In (\u]n) I < С6б^,
|, /V = 1, 2, C0)
где Со, С\ — постоянные из (8), A6), 8N определена фор'
мулой B6).
Доказательство. Имеем
Отсюда и из оценок (8), A6), B5) следует утверждение
леммы 4.
Теорема 1. Пусть матрицы А (/), 5(/), /(/) кусочно
непрерывны на отрезке to^it^T, V — выпуклое замкнутое
ограниченное множество из Ег, разбиения {th i = 0, Л^}
отрезка f/0, 7"] удовлетворяют условию A5). Пусть J^ —
нижняя грань функции A) лгр^ условиях B), C), /уу* —
303
нижняя грань функции D) при условиях E), F), после-
последовательность {[и]Мг\ определена из условий G). Тогда
lim /лг* = ^* и справедливы оценки
N-+oo
=l, 2..., C1)
/V=l, 2,...,
C2)
где постоянные С5, С6 взять/ из оценок B9), C0) я/ш
W = U и Wn = ?//v соответственно, а величина bN опреде-
определена формулой B6). Последовательность {Pn([u]nz)} слабо
в Lr2[t0, T] сходится к множеству U* оптимальных управ-
управлений задачи A) —C).
Доказательство. Согласно теореме 1.3.10 V\Ф ф.
Возьмем какое-либо управление м^еУ*. Согласно лемме 1
QN (и*) е UN. Отсюда и из леммы 3 следует
In* < In (Qn (и*)) ^ J (и*) + C,8N =
=l, 2... C3)
Далее, функция D) конечного числа переменных [u]N =
= (ио> ..., a^-x) на компактном множестве UN достигает
своей нижней грани, т. е. /;v*> —со, ?/#*?=(?>• Возьмем
какое-нибудь управление [u]N* e f/^*. Из B1) непосред-
непосредственно следует, что Ядг ([«]лг*) ^ 0. Из леммы 4 тогда
получим
^, iV-1, 2, ... C4)
Из неравенств C3), C4) следует оценка C1). Так как
согласно лемме 2 lim 6^ = 0, то lim 7^^ = /^.
Рассмотрим последовательность {[^ke} из G). Тогда
PN([u]Ne)eEU и 0^J(PN([u]NB))-J* = [J(PN([u]Ne))-
- In ([иЫ] + Un ([«Ы ~ /лг#] + [/лг* - /#], /V = 1, 2, ...
Отсюда и из неравенств G), C0), C1) следует оценка C2).
Тем самым установлено, что {PnH^Ine)} — минимизирую-
минимизирующая последовательность задачи A) — C). Слабая сходимость
этой последовательности к множеству U* следует из
теоремы 1.3.10. Теорема 1 доказана.
Заметим, что множество U, определяемое условиями C),
при выполнении условий теоремы 1 ограничено в метрике
Lroo[t0y T] и, следовательно, справедливо неравенство A1).
Поэтому, если матрицы А (/), B(t), f(t) на интервалах
304
непрерывности удовлетворяют условию Липшица (напри-
(например, если эти матрицы не зависят от времени), то из (8),
(И), B6) и C1) следует оценка
У* | ^ C7dN = C7 max Mt. C5)
Заметим также, что при доказательстве теоремы 1
неравенства B9), C0) были использованы неполностью:
для получения оценки C1) оказалось достаточно справед-
справедливости неравенств C3), C4). В следующем параграфе
будет выяснено, что неравенства C3), C4) в некотором
смысле являются необходимыми для справедливости равен-
равенства lim /лг* = «/*-
В заключение предлагаем читателю в качестве упраж-
упражнения доказать оценки типа C1), C2) в предположении,
что в задаче A) —C) элементы матриц A(t), B(t), f(t)
принадлежат L^[tQy T], а в D) —F) принято
= д7. \ A^dt> Bi = It> \
1 h l h
§ 2. Общие условия аппроксимации
Перейдем к рассмотрению общей задачи минимизации
и сформулируем критерий аппроксимации по функции.
Пусть X, Хъ Х2, ... , XNi ... — некоторые множества
произвольной природы. Элементы множества X будем
обозначать через иу а элементы XN — через [u]N. Пусть
U — некоторое непустое множество из X, (/^ — непустое
множество из XNi N=1, 2, ... Пусть функции J(и),
h (Mi)> • • • у In ([u]n)> • • • определены соответственно на
множествах ?/, Ul9 ..., UN, ... Рассмотрим задачу
/(tt)-*inff «g(/, A)
и последовательность «аппроксимирующих» ее задач
In (Wn) -> inf, [u]N g^, N = 1, 2, ... B)
305
Определение 1. Обозначим
J* = inf J (u)y IN:? = ini IN ([u]N)t /V=l, 2, ...
и uN
Скажем, что последовательность задач B) аппроксимирует
задачу A) по функции, если
lim /;v* = «/*- C)
JV-+oo
Нетрудно видеть, что в схему задач A), B) уклады-
укладываются задачи A.1)—A.3) и A.4)—A.6), в которых роль
множеств X и XN играют пространства Lj[/0, T] и LLv
соответственно, множества О и UN описываются усло-
условиями A.3) и A.6), причем в теореме 1.1 сформулированы
условия, гарантирующие аппроксимацию по функции.
Заметим, что в задачах A.1)—A.3) и A.4)—A.6) множе-
множества X и XN имеют различную природу: в задаче
A.1)—A.3) управления и траектории зависят от непре-
непрерывного времени, а в A.4)—A.6) —от дискретного вре-
времени.
В § 1 для задачи A.1)—A.3) аппроксимирующая по-
последовательность задач A.4)—A.6) была получена с по-
помощью разностной аппроксимации уравнений A.2) и
множества A.3). В этой и других задачах оптимального
управления, рассмотренных в §§ 1.5—1.10, при констру-
конструировании аппроксимирующих задач наряду с разностными
методами могут быть использованы и другие методы, та-
такие, как например, метод конечных элементов, метод пря-
прямых, возможна аппроксимация управления с помощью
частичных сумм ряда, представляющего собой разложение
по каким-нибудь базисным функциям или по степеням
какого-либо параметра и т. п. Все эти методы аппрокси-
аппроксимации экстремальных задач также укладываются в схему
задач A), B). Разумеется, в A), B) не исключается и
такая возможность, когда множества X и XN имеют одну
и ту же природу, а множества UN и функции In ([u]n) =
= //v(^), Af=l, 2, ..., представляют собой приближенно
заданные множество U и функцию J (и) соответственно.
Таким образом, задачи A), B) позволяют охватить
широкие классы экстремальных задач и их аппроксима-
аппроксимаций. Возникает важный вопрос: каким условиям должна
удовлетворять последовательность задач B) для того,
чтобы она аппроксимировала задачу A) по функции, т. е.
чтобы выполнялось равенство C)?
306
1. Следующая теорема дает один из возможных отве-
ответов на этот вопрос, указывает подход к построению по-
последовательности аппроксимирующих задач в конкретных
экстремальных задачах, к исследованию сходимости
в смысле равенства C).
Теорема 1. Для того чтобы последовательность за-
задач B) аппроксимировала задачу A) по функции, необхо-
необходимо и достаточно, чтобы существовали отображения Q^:
X-+XN и PN: XN->-X такие, что
1) для любой точки u^U справедливо включение
QN(u)(=UN, N=1, 2, ..., и
((())J(u))^0', D)
ЛГ-юо
2) для любой точки [u]N e UN справедливо включение
PN([u]N)^U, N=l, 2, ..., и
Ш (J (PN ([u]N)) - IN ([u]N)) < 0. E)
N->00
Если выполнены условия 1), 2) и, кроме того, последова-
последовательности {Ptv}> {Yvv} неотрицательны, стремятся к нулю
и таковы, что
то справедлива оценка
Наконец, если последовательность
N-+co
1 О
— 1, А ..
N=1,2,
, 2,...
• такова,
lim e,v =
•. F)
.... G)
(8)
что
= 0, (9)
то при выполнении условий 1, 2) lim
N-+oo
а из условий F), G) следует оценка
tf=l,2,... A0)
Доказательство. Необходимость. Пусть по-
последовательность задач B) аппроксимирует задачу A) по
функции, т. е. справедливо равенство C). Возьмем про-
произвольные последовательности {vN}, {[v]n\ такие, что
vNtzU, N=l, 2, ...; lim (У(^)-/,)-0, A1)
[v]N<=UN, N = l,2,...\ lim (/*([»]*)-/**) = 0. A2)
N-*oo
807
Существование таких последовательностей вытекает из
определения нижней грани. Определим отображения QN
и Pn следующим образом:
Qn(u) = [v]n при всех W€=X, ^^^ g
Pn{[u]n) = vn при всех [ti\N<=XNy ~~ *
Ясно, что QN(u)(=UN при всех «<=f/, Я^ ([гф) e I/ при
всех [u]N^UNj N=l, 2, ... Далее, так как J#^J(u)
при u^Uy то
/*(Q*(a)W(a) =
= (/* (Qn (и)) - In*) + (In* - </*) + (/* - / (и)) <
при Есех u^U, N=ly 2, ... Переходя в этом неравен-
неравенстве к верхнему пределу при Af->-oc, с учетом условий C),
A2) придем к неравенству D). Наконец, поскольку I
*^In([u]n) при [ii\N<=UNi то
J(Pn([u]n))-InMn) =
- In*) + (In* - In №n)
при всех [ti\N^UN> N=1, 2, ... Переходя в этом нера-
неравенстве к верхнему пределу при N-^oo, с учетом усло-
аий C), A1) получим неравенство E). Необходимость до-
доказана.
Достаточность. Пусть для некоторых отображе-
отображений QN, PN выполнены условия 1), 2). Докажем, что
тогда справедливо равенство C). Поскольку QN(u)^UN
при всех ti^U, то IN*<:IN(QN(и)) и
In* -J* = (In* - In (Qn (u))) + (IN (Qn (u)) - J (u)) +
+ (/ (u) - /J < (/^ (Q^ («)) - / (u)) + (J (и) - /J
при всех u^U и Af=l, 2, ... Переходя в этом неравен-
неравенстве к верхнему пределу при iV->oo, с учетом усло-
условия D) получим
Левая часть этого неравенства не зависит от и, поэтому,
переходя в правой части к нижней грани по u^U, будем
иметь lim (IN* — J^) < /# — /# = 0. С другой стороны,
308
поскольку PN ([u]N) e U при всех [u]N e UN, то J*
+ (J (Pn (Ш) - In (Hn)) + (In (Ш -
- In ([«
для всех [и]к е UN, N = 1, 2, ... При N -у оо отсюда
с учетом условия E) получим
Шт5 (Jt-Jx^^tim (In([u]n)-In*)
N -ЮО 7V-+OO
при любом выборе [гф/et/^, Л^=1, 2, ... В частности,
если, пользуясь определением нижней грани /дг*, при
каждом #=1,2,... взять [w]^ e f/^ так, чтобы /// ([^]лг) ^
1N, то из предыдущего неравенства будем иметь
llm (У* —/^*Х lim l/# = 0.
Итак, показано, что
= lim (/лг^-^Х Tim
— lim (У* —
т. е.
lim (/w* - У*) = Пгп (/д.* - У#) = 0.
Отсюда следует, что предел lim Jn* существует и равен
N-*oo
J^. Достаточность доказана.
Докажем оценку (8). Так как QN (и) е UN при всех
а е (/, то с учетом оценки F) имеем IN:it ^ IN (QN (и)) ^
^J (u) + $N> или /a>^/(^) + Ptv для всех «ef/, # =
= 1, 2, .. Переходя в правой части последнего неравен-
неравенства к нижней грани по u^U, получим /дч^У* + Рл'>
или /лг* — /*^Рлг, #=1, 2, ... Правое неравенство (8)
доказано. Далее, так как PN ([u]N) e U при всех [u]N e
еt/дг, то с учетом оценки G) имеем J*^J(Pn([u]n))^
^ Улг ([^к) + Тлг, или J*^In ([u]n) + Тлг для всех [а]дг е
t^ UN, N — 1, 2, ... Переходя в правой части этого нера-
неравенства к нижней грани по [u]N e UN, получим J# ^
</лг*+Тлг, или —Ytv^/лг*-*/*, #=1, 2, ... Левая
оценка (8) также доказана.
309
Наконец, пусть последовательность [u]Ns удовлетво-
удовлетворяет условиям (9). Тогда
([u]Ne)) - IN ([u]Ne)) +
+ (In ([«Ы - In*) + (In* - J*) ^ (J (Pn ([u]nb)) -
- In ([«Ы) + *n + (In* -¦/*), N=l,29 ...
Отсюда и из C)—E) следует, что последовательность
{Pn([u].ve)} является минимизирующей для задачи A),
а из оценок F)—(8) вытекает оценка A0). Теорема 1 до-
кагана.
Нетрудно видеть, что проведенное в § 1 исследование
поведения разностных аппроксимаций A.4)—A.6) задачи
A.1)—A.3) укладывается в схему теоремы 1. В самом
деле, отображения Qx и Р^ в этой задаче были опреде-
определены формулами A.20), A.21), в леммах 1.3 и 1.4 были
установлены неравенства D), E) и оценки F), G),
а оценки A.31), A.32) являются следствиями оценок (8),
(Ю).
2. Для иллюстрации теоремы 1 кратко остановимся
здесь еще на задаче A.1), A.2) при условии
<ь T]: l\u(t)\*dt^R*V A3)
где /?> 0 — заданное число. В качестве аппроксимирую-
аппроксимирующей последовательности для задачи A.1), A.2), A3) возь-
возьмем разностные аппроксимации A.4), A.5) при условии
*= о
A4)
В качестве отображений QN и PN возьмем отображения,
определяемые формулами A.20), A.21). Справедлива
Теорема 2. Пусть матрицы А (/), В(/),/(/) кусочно
непрерывны на отрезке [to> Г], разбиения {th j' = 0, N}
отрезка [tQ, Т] таковы, что dN= max A^^
^(T-to)M/N, N=l, 2, ..., M = const>0. Пусть J* —
нижняя грань функции A.1) при условиях A.2), A3),
/yv* —нижняя грань функции A.4) при условиях A.5), A4),
а последовательность {[u\nz] определена из условий (9).
310
Тогда справедливы оценки
У^С^, ЛГ= 1. 2, ...,
< (С5 + Св) 8N + eN, N = 1, 2, ...,
где постоянные С5, Св взятб/ из оценок A.29), A.30) р
W = U и WN = UN соответственно, величина &N опреде-
определена формулой A.26). Последовательность {PN ([и]ме)}
слабо в L\ [t0, T] сходится к множеству U% оптимальных
управлений задачи A.1), A.2), A3).
Доказательство. Из соотношений A.22), A.23)
следует, что отображения A.20), A.21) таковы, что
QN(и) еUN при всех u&U и Рм(Mv) ^U при всех
[u]n<=eUn, N=l, 2, ... Далее, оценки A.8), A.10), A.16)
и леммы 1.2—1.4 остаются справедливыми и для мно-
множеств A3), A4). Поэтому из лемм 1.3 и 1.4 имеем нера-
неравенства D), E) и оценки F), G). Отсюда и из теоремы 1
следуют все утверждения теоремы 2.
3. При исследовании аппроксимаций задач оптималь-
оптимального управления при наличии фазовых ограничений часто
приходится работать с некоторыми расширениями U+Q — UQ
и с сужениями и~г множества (/, на котором ищется ми-
минимум. В таких задачах вместо теоремы 1 удобнее поль-
пользоваться другими теоремами. Приведем две такие теоремы.
Теорема 3. Для того чтобы последовательность за-
задач B) аппроксимировала задачу A) по функции, необхо-
необходимо и достаточно, чтобы при некотором ео>О сущест-
существовали семейства непустых множеств UG ^ X, U"e ^ X,
0<в<80, и отображения QN: X-+XNy PN: XN-*X
такие, что функция J (и) определена на объединении мно-
множеств иг, U~e no всем е, 0<е<80 и, кроме того,
1) для любого е, 0 < 8 < 80, найдется номер Nx = Nx (e)
такой, что Qn{u) ^.Un при всех u^U~G и N^N± и
при каждом фиксированном е, 0<е<е0, для всех u^U~e
выполняется неравенство
Ш (In(Qn(u))-J(u))^0\ A5)
/V-*oo
2) для любого г, 0 < е < е0, найдется номер N2 = Af2 (e)
такой, что PN ([u]N) e Ue для всех [u]N ^UN и N ^ N2
и при любом выборе [u]N^UNy N^ly выполняется нера-
неравенство
Ш (J (PN ([u]N)) - IN ([u]N)) ^ 0; A6)
N->oo
311
3) справедливы неравенства
Пт/,(е)г^ A7)
Шп\м-е)^*. A8)
где J* (е) = inf J (и), J* (— е) = inf J (и).
Доказательство. Необходимость. Пусть по-
последовательность задач B) аппроксимирует задачу A) по
функции, т. е. справедливо равенство C). Положим ео= 1,
t/8 = f/-8 = t/, 0<С&<80. Тогда J% (г) — J% (—е) = У^,
0<е<е0, и условия A7), A8) тривиально выполняются.
Выберем произвольные последовательности {vN}> {[v]N}
такие, что
vNeU, N=U 2, ..., lim (J(vN)-J*) = 0, A9)
N-юэ
[v]N eUK, N = 1, 2, ...; lim (IN ([v]N) - IN,)=0. B0)
N-+O0
Определим отображения QN и PN следующим образом:
Qn (и) = [v]n, и <= X\ PN ([u]n) = vN,
[u]Ne=XN, N=1, 2, ...
Ясно, что Qn (и) e UN при всех ^ e f/-8 = i/ и всех е,
0<e<e0, N^l = Nlf PN([u]N) ^Uz = U при всех
[#]лге?/дг и всех е, 0<e<e0, N^\ =N2.
Далее, так как J*^J (и) при u<=U = ?/~8, то
In (Qn (и)) — J(u) = (IN ([v]N) -
*
при всех иеУ = (/-8, 0<e<e0, Л/" = 1, 2, ... Переходя
в этом неравенстве к верхнему пределу при N-^oo с уче-
учетом условий C), B0), придем к неравенству A5).
Наконец, поскольку /#* ^/лг (М#) при [а]дге(/^, то
(Pn (Mjv)) - /^ ([«Ы = (J Ш - J*) + (J* -
+ (In* ~ /* ([^Ы)
при всех [u]N е (/^, N = 1, 2, ... Отсюда с учетом усло-
условий C), A9) при N-> сю получим неравенство A6). Необ-
Необходимость доказана.
Достаточность. Пусть выполнены условия 1) — 3).
Докажем, что тогда справедливо равенство C). Зафикси-
812
руем произвольное число е, 0<е<е0. Так как QN()
<=?/w при всех u^U~e и N^Nlf то IN* ^ IN (QN (и))
и
In* -J*= (In* - In (Qn (и))) + (In (Qn (u)) - J (w)) +
+ (J (u) - /„) < (/* (Q* (a)) - J (u)) + (J (u)) - JJ,
Отсюда при iV->cx) с учетом условия A5) получим
Tim (/tv* — ^*)^ J(u) — J*> u<=:U-z, 0<e<e0.
N-+CQ
Левая часть этого неравенства не зависит от «g U~e,
поэтому, переходя в правой части к нижней грани по
и е ?/~е, будем иметь
Пт (INwi - /*) < J* (—8) - y#f 0 < е < е0.
При е~>0 отсюда с помощью условия A8) получим
lim (/лг* — J*) ^ 0. С другой стороны, поскольку
при Есех [^sf/^, N^N2y то J* (e)<
и
(8) - /„* = (</* (е) -
n &u]n) - М < (^ (Pn ([u]n)) - In ([u]n
Отсюда с учетом условия A6) при N-+oo получим
Пт (У# (е) - /дг*) < Пт (IN ([u]N)
N N
N-+co
при любом выборе [u]N^UN, N^zl, и любом фиксиро-
фиксированном 8, 0 < е < е0. В частности, если, пользуясь опре-
определением IN^y при каждом N^1 взять [u]N^UN так,
чтобы In(Mn)<:In* + ^/N$ to из предыдущего неравен-
неравенства будем иметь
Urn (У# (е) - INJ = /# (е) + Tim (-IN*)
N N
при любом е, О<е<ео' Отсюда с помощью условия A7)
при е->0 получим
Urn («/* — A/v*) = J * + lim (— INJ ^ 0.
313
Итак, показано, что
Ит (/л'*-«/*)^ lim (/
N-+co N-*cq
, т. е. 1НП /лг* = lim
W-юо Л^оо
Отсюда следует равенство C). Достаточность доказана.
Теорема 4. Для того чтобы последовательность
задач B) аппроксимировала задачу (\) по функции, необ-
необходимо и достаточно, чтобы существовала последователь-
последовательность непустьа множеств UeN ^ X, N = 1, 2, ..., а
отображения QN: X-+XNi PN: XN-+X такие, что
функция J (и) определена на объединении множеств
/ 00 \
U UBN)[jU и, кроме того,
1) яра бо?л; «g(/ справедливо включение
N = 1, 2, ..., г/ выполняется неравенство
lim (In(Qn(u))-J(u))^0\
N-+oo
2) я/ш б^л: [^]лг е f/^r справедливо включение Pjv ([u]x)
{/СА, Л^ = 1, 2, ..., и выполняется неравенство
Ш (J (PN ([u]N)) - 1N ([u]N)) ^ 0;
N-+CQ
3) справедливо неравенство
* (8;v) ^ /*, г^ /^ (e^) = inf / (u).
N
Если же выполнены условия 1) —3) и> кроме того,
имеются неотрицательные последовательности {рл4, {ТлгЬ
{}, сходящиеся к нулю и такиеш что
J(u)^:$N9 ue=Uf Л/ = 1, 2, ..., B1)
J (Pn ([u]n)) - In([u]n) < Таг, [^]tv (=UNt N = 1, 2,...t B2)
^-^(^)^v^, Л^ = 1, 2, ..., B3)
то справедлива оценка
- Y* - vat ^/^-./,<?*, Л/Т = 1, 2, ... B4)
Доказательство того, что условия 1) —3) необходимы
и достаточны для выполнения равенства C), проводится
так же, как в теореме 3, нужно лишь в этих рассужде-
314
ниях заменить U~e на U, Ue на {UeN}. Докажем оценку
B4). Из того, что QN(u)<=UN при всех u^U, N = l,
2, ..., и из условия B1) следует, что In*^In(Qn(u))^
^J(u) + $N, или IN* ^ J(и) + Рлг при всех wet/, N =
= 1, 2, ...
Переходя к нижней грани по u^U, отсюда получим
In* < J* + $n, N = 1, 2, ... Правое неравенство B4)
доказано. Далее, так как PN \\u]N) e UeN при всех
[a]iv е (/дг, Af = l, 2, ..., то с учетом условий B2), B3)
имеем
J* - vN < </* (еv) < J (Pn ([u]n)) ^ IN ([u
или J* — vN^IN([u]N) + yN при всех [«]^e(/^. Л/-=1,
2, ... Отсюда следует, что У# -vN^INiii + yN, N = ly
2, ... Оценка B4) доказана.
Приложения критериев аппроксимации, приведенных
в теоремах 1, 3, 4, будут рассмотрены ниже. Заметим,
что наряду с теоремами 1, 3, 4 существуют и другие
варианты критериев аппроксимации по функции [41, 98,
187]; некоторые такие критерии сформулированы ниже
в виде упражнений.
Упражнения. 1. Равенство C) имеет место тогда и только
тогда, когда выполнены следующие два условия: 1) для любого
числа 6 ;>0 существует номер Ni = Ni(d) такой, что для всех N ^
^N2 и u^U найдется точка [u]N6 e UN, удовлетворяющая нера-
неравенству IN (Мдгб) ^ J (и)+ 6; 2) для любого числа 6 > 0 существует
номер N2 = N2 (б) такой, что для всех N ^ Л/2 и [u]N e VN найдется
точка uNb^U, для которой J (uNb) ^ IN ([«]дг) + б. Доказать.
2. Для того чтобы имело место равенство C), необходимо и
достаточно, чтобы существовали отображения QN: X -> XN и
PN: XN-*X такие, что 1) для некоторой последовательности ju^} е-
g(/, lim (/ (uN) — J%) = 0» выполняются условия: QN(uN) <^UN,
N+co
ЛГ = 1, 2, ..., и lim (lN(QN(uN)) — J(uN))^0\ 2) для некоторой
последовательности [u]N ^ UN, N — l, 2, ..., lim (IN ([u]N\ —
N-+co
— /^^ = 0, выполняются условия: PN ([u]N) e U> N — l, 2,..., и
lim (J (PN( [u]N)) - 1N ([u]N)) ^ 0. Доказать.
N+co
3. Равенство (З) имеет место тогда и только тогда, когда при
некотором е0 > 0 существуют семейства непустых множеств UG s
s X, U~e sX, 0 < e < e0, и отображения QN: X -+XN и PN\ XN ->
-> ^ такие, что функция / (и) определена на объединении множеств
Ue, и~г по всем е, 0<е<е0, и, кроме того, 1) для некоторого
семейства {ие\, ue^U~s, 0<е<80, lim (J (ue) — J* ( — e)) = 0, при
е-о
каждом е найдется номер N1 = N1(&) такой, чго QN(ue)^UN при
315
всех N^NX и lim (IN (QN (ue)) — J (us)) ^ 0; 2) для некоторой
N—*co
последовательности [u]N e UN, # = 1, 2, ..., lim (IN ([^]дг) —
N—ЮЭ
—]N^=s0, и любого е, 0<е<е0, найдется номер УУ2 = #2(в) та-
такой, что PN([u]N)e= UG при всех N^N2n Пгп
— ^N (fwW)) ^ ^; ^) выполнены условия A7), A8). Доказать.
§ 3. Разностная аппроксимация для квадратичной
задачи с фазовыми ограничениями
1. Рассмотрим следующую задачу оптимального управ-
управления:
\x(T, */)-y|2->inf, A)
T, x(to)=xo, B)
и = и(/)еУ = {и(Ое1;Ро, Т]: u{t)<=V
почти всюду на [/<,, 71], л:(/, u)<=G(t), to^t^T}, C)
где G (^) —заданные множества из ?"Л при каждом /е
е[/0, Т], xo^G(to); остальные обозначения см. в § 1.
В качестве аппроксимирующих задач возьмем после-
последовательность задач
In №) = I xN ([u]N) -y\2-> inf, D)
i==0, Л/-1, E)
x, ([м]лг) <=Gi = G (tt)% i = 0, N} F)
(все обозначения здесь взяты из § 1).
Для того чтобы задача A) —C) имела смысл, естест-
естественно требовать, чтобы {]фф. Возникают вопросы:
можно ли тогда гарантировать, что при достаточно мел-
мелком разбиении отрезка G0> Т] множество UN также будет
непустым, и при каких условиях последовательность за-
задач D) —F) будет аппроксимировать задачу A) — C) по
функции?
Как показывает следующий пример, из того, что V Ф
Фф, вообще говоря, не следует, что имфф.
Пример 1. Пусть требуется минимизировать функ-
функцию J(u)=x2(l) при условиях Jt(t)=x(t) — u(t), 0<
316
^<1, х@) = 1, и = «(/)еУ=1«(/)Е12[0, 1]: 0<
=s^m@^1 почти всюду на [0, 11; x(t, и)~^ё при всех
*е=[0, 1]}.
/ t \
Поскольку х (/, и) = еч 1 — $ ети (т) dx < е', 0 ^ t < 1,.
при всех «@eL2[0, I], 0^u(t)^l9 то условие
л;(/, и)^е(, O^f^l, выполняется лишь при и = иA)=з
===0. Следовательно, множество V непусто и состоит из
единственного управления u(t)=E=0.
Рассмотрим следующую разностную аппроксимацию
этой задачи:
(xt - щ), i = о, // — 1, xQ = 1,
{[u]N <=Е L2N: 0<^^l, t = 0, Л^~1;
Л^ = 1, 2, ...
Из 0 < щ ^ 1 следует, что A + A/) xt — At ^ a:/+1 = A +
+ A/)*i-Ate/<(l+A/)x?, i = 0, Л^-l, хо=1. Отсюда
по индукции нетрудно получить, что l^Xi^(l+At)\
; = 0, Л/. Так как 1 + Дг<ед' при всех А^>0, то xi<
<е1А*=е'* для всех t = l, Л/при любом выборе Miv = («o,
иъ ..., w^_i), 0^«/^l, t = 0, N —1. Это значит, что
множество UN пусто при всех iV == 1, 2, ...
2. Таким образом, важно выяснить, при каких усло-
условиях из непустоты множества C) следует, что множество
F) также не будет пустым, а также указать способы ап-
аппроксимации задачи A) —C) для случаев, когда условие
Цфф не гарантирует, что Цмфф. Здесь мы ограни-
ограничимся изложением результатов, принадлежащих М. М. По-
Потапову (теорема 1) и Е. Р. Авакову (теорема 2). Для
упрощения выкладок задачу A) —C) будем рассматривать
при дополнительном предположении, что множество G(t)
не зависит от /, т. е. G(t) = G, to^t^T.
Ниже нам понадобятся так называемые г-расширения
G8 и ^-сужения G~8 множества G, определяемые так:
inf |*-г|<
G~B=\x<=G: inf | *-г I s^ el e^O,
\ J
317
где Гр G — совокупность граничных точек множества G.
Кроме того, мы будем широко пользоваться оценками и
соотношениями A.8) — A.26), считая, что встречающиеся
в них константы Со, Clf ... отвечают множествам управ-
управлений
W = {u(t)^Lr2[t0i Т]: u(t)eEV почти всюду на [t0, Т]},
W N = {[u]N = (и0, ЫЪ ..., UN-X)^L.2N'. Ui<=V,
f-0, tf-lb (8)
Теорема 1. Пусть матрицы A(t), B(t), f(t) кусочно
непрерывны на отрезке to^t^T', V — выпуклое замкну-
замкнутое ограниченное множество из Er\ G —выпуклое замкну-
замкнутое множество из Еп с непустой внутренностью, причем
существуют число е0 > 0 и управление п = и (t) e U та-
такие, что
x(U й)е(/Л to^t^T. (9)
Пусть, кроме того, разбиения {th / = 0, N) отрезка
[/0, Т] удовлетворяют условию
dN^ max Mi^(T-to)Mo/N,
Mo = const >0, N = l, 2, ...
Тогда множество UN> определяемое условиями F), при всех
достаточно больших N непусто и WmIN^ = /*, где
N-*oo
J% — нижняя грань функции A) при условиях B), C),
In* —нижняя грань функции D) при условиях E), F).
Доказательство. Положим X = U2[t0, T], XN =
= Lr2N, N — I, 2, ...,
U^ = \u = u(t) ^W: x(t, u)^Ge, to^t^T\,
где 0<е<е0, число е0 взято из условия теоремы, мно-
множество W — из (8). Определим отображения QN: X-*XN
и PN* XN-+X формулами A.20), A.21):
=-д^~ i u(x)dx, i==0, N—l, A0)
1 и
318
Проверим, что для введенных множеств Ue, U~e и ото-
отображений QN, PN выполнены все условия теоремы 2.3.
Зафиксируем произвольное число е, 0 < е < е0. Возьмем
какое-либо управление u^U-8. Согласно оценке A.24)
max :*(/,., u)-Xi(QN(u))\^8Ni tf=l, 2, ... A1)
Так как бдг-^О при N—>-оо, то найдется номер jVx =
= Ni(e) такой, что б^^е при всех N^NX. По опреде-
определению G) множества G~8 шар \х — г\^г принадлежит
множеству G при всех z e G~8. Тогда для любого и е
Ue шар |а:--а:(/ь а)|^е принадлежит множеству G
при всех / = 0, N и N^NV Отсюда и из оценки A1)
следует, что Xi(QN(u)) gG при всех i' = 0f N9 u^U-Q9
N^Ni. Кроме того, согласно лемме 1.1 Qn(u) принадле-
принадлежит множеству WN из (8) при всех меУ, Тем самым
показано, что QN (и) е UN при всех и е ?/~8 и Л[^ iVi.
Кроме того, из леммы 1.3 имеем
Hm AN (Qn (и)) - J (и)) = 0, «g U~*.
N-+ оо
Таким образом, условие 1) теоремы 2.3 выполнено.
Далее, согласно оценке A.25), получаем
max | х (/ь PN ([u]N) - Xi &u]N) \^8Nj N = 1,2,...,
а из оценки A.11) имеем
при всех t, U^t^ti+1, i = 0, N — 1, [u]N e f/^, ЛГ =
= 1, 2, ... Тогда
Ix(t, PN&u]N)) -xi ([u]N) \^8N + CxdN A2)
для всех /, ti^t^ tMf i = 0, N — 1, [u]N e G^, Л/"=
= 1, 2, ... Однако бдг->0, d^-^0 при Af->oo, поэтому
найдется номер N2 = N2(e) такой, что б/^ + С^^е при
всех M^N2- Отсюда, из оценки A2) и определения F)
множества UN следует, что х (t, PN ([^]^v)) e G8 при всех tf
to^t^T, т. е. PN([u]N)<=Ue при всех N^zN2. Кроме
того, из леммы 1.4 имеем
Hm (J(Pn([u}n))-In([u]n)) = 0.
/V-*oo
Таким образом, условие 2) теоремы 2.3 также выполнено.
319
Наконец, проверим, выполняется ли условие 3) тео-
теоремы 2.3. Сначала установим, что lim J* (г) = /„., где
е — 0
J* (e) = inf J (и). Заметим, что если 0<е1<е2<е0, то
иг
U^Uei<=Ue* и, следовательно, J* (е2)^ J* (8Х)^ </*.
Отсюда следует, что существует предел lim У^ (е), причем
Пт/Ле)^*' ? A3)
е-0
При каждом е, 0<е<е0, выберем ue^Ue так, чтобы
lim (J* (г) — J (ие)) = 0. Так как множество W из (8) слабо
е —0
компактно в LH/c Т] и \иг) е Wy 0<8<e0, то суще-
существует последовательность {гк}у сходящаяся к нулю, 0<
<еА<е0, и такая, что последовательность управлений
{Ub = uek} будет слабо сходиться к некоторому управлению
v = v(t)^W. Согласно A.12) тогда последовательность
{x(ty uk)} сходится к x(t, v) равномерно на отрезке [tOt T],
т. е. sup \x(t, Uk) — x(t, v)\ = lb-+0 при ft->-oo. По-
скольку x (tt uk) e G8&, то
x(t9 v)(=Gek+\ to^t^T, fe=l, 2, ... A4)
Однако 8Л + ?/?-^0 при ^->оо, траектория x(t, v)
от номера k не зависит, множество G замкнуто. Отсюда
и из A4) следует, что x(t, u)eG при всех t, to^t^T.
Это значит, что v^U и J(v)^J*. Поскольку {uk}
сходится к v слабо в Lr2[t0, Т], а функция J (и) слабо
непрерывна, то lim J(Uk) = J{v)l>zJ*. С учетом опреде-
&->оо
ления последовательности {uk = uek\ тогда получим
lim У* (е) =5 lim J* (гк) = / (v) ^ У^.
Отсюда и из A3) следует, что lim «/* (е) = У*.
Теперь покажем, что MmJ*(—е)=«/*, где J* (—е)=
е-+0
«= inf */(«). Заметим, что если 0<е1<е2<е0, то U-^^
s f/-81 ? L/ и, следовательно, /* ^ У# (е^ < У* (е2). От-
Отсюда следует, что существует предел НтУ#.(—е), причем
е —О
^(—8)^У#. A5)
S20
Возьмем какую-либо последовательность управлений
{uk} e Ur, lim У (uk) = ./*, и числовую пос ледов ате ль -
ность {а^}, 0<ссл<1, ПтаА = 0. По условию теоремы
существует управление п = а(/)е/7, для которого спра-
справедливо включение (9). Составим последовательность vk =
= аЛй + A — oik)uk, &=1, 2, ..., и покажем, что уЛе
е(У"еоал, &=1, 2, ... Так как й, uke=-W, то ^ е= Я7,
& = 1, 2,..., в силу выпуклости W\ Остается показать, что
*(*, ^)gG"8^ *о<*<7\ k=l, 2, ... A6)
Заметим, что
x(t, vk)=akx(t, u)+(l—ak)x(t, uk),
/o«<7\ 6=1, 2, ... A7)
Из условия (9) следует, что при каждом t е [^0» 71] и
&=1, 2, ...шар S(^) = {jc: \x — x(t, п)\^г0} принадлежит
множеству С Покажем, что тогда шар Sk(t) = {x: \x —
— x(t, vk)\^eoak} также принадлежит G при всех /е
е [4, 71] и й=1, 2, ... Возьмем произвольную точку
x^Sk(t) и положим г = л;(^ u)+(x — x(t, vk))/ak. Так как
|г — лс(/, u)\ = \x — x(t9 vk)\/ak^e0, то 2eS(/)eG. Из
определения точки г и равенства A7) тогда имеем х =
=¦*(*, УЛ) + аЛ(г —а;^, й)) = аАг + A — аЛ)д:(/, мЛ), где
zgG, x(/, uk) ^G, 0<Cak<A- В силу выпуклости
множества G отсюда следует, что хеС Таким образом,
Sk(t)^G при всех ^[Аь Т], k=l, 2, ... Отсюда и из
определения шара S^@ вытекает включение A6). Тем
самым показано, что ий е (/~8Л, А=1, 2, ...
Зафиксируем некоторый номер k и возьмем число г
таким, чтобы 0 < е < eoak. Тогда vk e [/""а*ео с= ?Г~е и
J*(—z)^J(Vk) при всех е, 0<8<80ай. Отсюда при
8->0 получим
НтУ#(—&)^J(Vk) при всех Л=1, 2, ... A8)
8->0
Так как lim а* = 0, sup || м Ц ^ 7? < оо, то с учетом
fc-^co W
оценки A.14) имеем | J (uk) — J (vk) \^C3\\uk — vk\\ = C3akx
X1 uk — п I ^ 2RC3ak ->¦ 0 при k-+co. Следовательно,
lim J (vk)= lim J (uk) = J*. Отсюда и из неравенства A8)
k —юо k-*co
вытекает, что lim «/* (—е)^/*. Сравнивая полученное
11 Ф. П. Васильев 321
неравенство с A5), заключаем, что lim J* (—е) = /*.
Таким образом, условие 3) теоремы 2.3 также выполнено.
Из теоремы 2.3 следует, что lim «/лг* = */*- Теорема 1
¦\ -»-оо
доказана.
3. При доказательстве того, что множество F) непусто,
в теореме 1 было существенно использовано условие (9).
Однако это условие не всегда легко проверяемо и не
всегда оно выполняется. Поэтому при аппроксимации
задачи A) —C) вместо задачи D)— F) можно попытаться
рассмотреть задачу минимизации функции D) при усло-
условии E) на несколько расширенном по сравнению с F)
множестве
UN = {[u]Ne=W: Xi([u]N)eEG^, i = 67~N}. A9)
Оказывается, если исходное множество C) непусто, то
при достаточно большом ?# и множество A9) не будет-
пустым, и, кроме того, если ^-^0 при N-*oo согласо,
ванно с им— max Ath то последовательность задач
D), E), A9) будет аппроксимировать задачу A) —C)
по функции. А именно, справедлива
Теорема 2. Пусть матрицы А (/), В (/), f (t) кусочно
непрерывны на отрезке to^t^T\ V —выпуклое замкнутое
ограниченное множество из Er\ G — замкнутое множество
из Еп\ множество C) непусто. Пусть, кроме того, раз-
разбиения отрезка [t0, T] удовлетворяют условию
dN^ max Mi^(T—U)MolNy M0=const>0, N=1,2,...,
и lim ?# = 0, In^Sn, A/=l, 2, ..., где величина 6iV
определена формулой A.26). Тогда множество A9) непусто
при всех Лг=1, 2, ... и lim /^*=«/*» г^е J* —нижняя
/V*oo
грань функции A) при условиях B), C), In*— нижняя
грань функции D) при условиях E), A9). Если, кроме
того, множество G выпукло, имеет непустую внутрен-
внутренность и выполнено условие (9), а также \N^MxbNi
М, = const^ 1, iV=l, 2, ..., то справедлива оценка
N=l, 2, ..., B0)
322
где постоянные Съ С3, С5, Св взяты из A.10), A.14),
A.29), A.30) соответственно, sup|!w|^i?.
w
Доказательство. Положим X=Lr2\t^ T\, XN =
= Lr2N, ЛГ = 1, 2, ..., ?/8"={t/(/)eE№: x(ty w)geC8"},
где 8,y = lN + бдг + Cidli2 (кстати, здесь можно было бы
воспользоваться оценкой A.11) и всюду ниже принять
gn = In + &n + Ci<In). Определим отображения Q^, PN
формулами A0). Проверим выполнение условий тео-
теоремы 2.4.
Возьмем произвольное управление u^U. Согласно
оценке A.24)
max \x((h u)-Xi(QN(u))\^6N, Л/-1, 2, ...
0 < i < Л^
Отсюда, учитывая, что x(t, m)g6, to^t^T, и 6iV^^,
N=l9 2, ..., имеем включение xt (QN(и)) е G*N при всех
i = 0, iV, yv=l, 2, ... Это значит, что QN(u)^UN при
всех u^U и Af=l, 2, ... Кроме того, из леммы 1.3
имеем оценку
Таким образом, выполнение условия 1) теоремы 2.4
проверено и, кроме того, установлена оценка B.21).
Далее, согласно оценке A.25), имеем
max \x(tiy PN([u]N))-Xi([u
[u]n<=eUn, tf=l, 2, ...
Из оценки (Ы0) следует
|х(/, PN([ti]N))-x(th Рлг([м1лг)I<С^/2
при всех /, ti^t^ti+li / = 0, Л/—1, [w]tv^^, Л^=1, 2,...
Тогда
для всех ty ti^t^ti+i, i = 0, N—ly [u]N^UN, N =
= 1, 2, ... Отсюда, учитывая, что по определению мно-
жества 1/# точки xt {[u]N) принадлежат G1n, i = 0, Л/,
имеем
х (t, PN ([u]n)) e G8^ при e/V = ^ + 6* + Cxd^2
для всех [u]N<=UNy N=l, 2, ... Тем самым показано,
что PN([u]N)^UeN при всех [u]neeUn, Л/=1, 2, ...
11* 323
Кроме того, из леммы 1.4 следует
J (Pn №)) - In <[u]n) ^ C^n = Vn,
[u]Nt=UN, N=lt 2, ...
Таким образом, выполнение условия 2) теоремы 2.4 также
проверено и, кроме того, установлена оценка B.22).
Далее, рассуждая так же, как при доказательстве
равенства lim J# (e) = J# в теореме 1, можно показать,
8 — 0
что lim /* (8jv) = «/*• Это значит, что условие 3) теоре-
N->00
мы 2.4 также выполнено. Из теоремы 2.4 следует, что
lim /л'* = У*.
N-+oo
Дополнительно предполагая, что G — выпуклое множе-
множество и существует управление u = u(t)^U такое, что
x(t, m)gG'8», to^t^T, eo>O, докажем оценку B0).
Так как множество U&N слабо компактно в Lr2[tQi Г],
а функция A) слабо непрерывна на UeN9 то в силу тео-
теоремы 1.3.2 при каждом фиксированном Af= 1, 2, ...суще-
...существует управление uN*^U*N такое, что У* (е^) = J{uN*).
Составим управление vN = aNu + A — ocN) uN*, где aN =
= &n/(&o-\-&n), N=l9 2, ... Так как ^ — выпуклое мно-
множество, 0 < aN < 1, а пу uN* e W, то а# е 1^ при
всех Л/=1, 2, ...Далее, в силу определения G) суже-
сужения множества G 8° = (G8Ar) (8° е^ —это (ео +^-суже-
+^-сужение множества G*N. Тогда x(t, a) ^G~^ = (G8n)"^+Sn\
x(tj u<n*) ^ G&N. Повторив рассуждения, проведенные
при доказательстве включения A6), получаем, что
X (t9 VN) S {G&NY
= G° = G, to^t^T, JV=1, 2, ...,
поскольку 8дг-—a^ (e0 + e^/v) = 0 в силу определения а^.
Следовательно, vN e t/ и /(у^)^«/*, Л/ = 1, 2,... С уче-
учетом оценки A.14) тогда имеем 0^ У^ — У^ (sN) = J% —
— J (uN+) = {J*-J (vN)) + (J (vN) - J (uNill)) ^ J (vN) -
J)C1 ||. Из определения vN следует || vN—.
2R, так что
О < J * - J m (sN) ^ 2RC3aN = 2RCssN/(e0 + ?N) =
--=2RC3(lN + 8N + C,dJ/2)/(e0 + In + 8n + Cxd)l2\ N=1,2,...
Поскольку 8N ^ lN ^ Мхбдг, то 0 ^ У^ — J * (e^) ^ Vtv —
- 2RC3((M1+ l)8N + C1dli2)/(e0+28N + C1dtf), N=l, 2,...
324
Оценка B.23) получена. Теперь ясно, что оценка B0)
является следствием оценки B.24). Теорема 2 доказана.
Предлагаем читателю самостоятельно убедиться в спра-
справедливости теорем 1, 2, когда вместо множеств C), F),
A9) берутся соответственно множества
U={u(t)ezLr2[to, П i\u\\L2^R,
x(t9 u)eeG, }
UN = {[u]N(=Lr2N: 1 [wfor ||12Л, < #,
r2N: II [u]N \\l2N < R,
§ 4. Регуляризация аппроксимаций
экстремальных задач
Пусть X —заданное множество, на котором введена
некоторая топология т (см. определения в § 1.3, п. 6),
функция J (и) определена на X. Рассмотрим задачу
/(a)-Hnff w<=?/, A)
где [/ — заданное подмножество из X. Предположим, что
Пусть последовательность задач
/*№)-*inf, ueeUnc=Xn, N=l, 2, ..., B)
где XN, UN — заданные множества, IN ([u]N) — заданные
функции на UN, N = 1, 2,..., аппроксимирует задачу A)
по функции.
Возникает вопрос: нельзя ли провести регуляризацию
последовательности задач B) или, иными словами, нельзя
ли с помощью задач B) построить минимизирующую
последовательность для задачи A), сходящуюся к мно-
множеству U% в топологии т?
1. В следующей теореме, принадлежащей Е. Р. Ава-
кову, указываются достаточные условия для регуляриза-
регуляризации последовательности задач B).
Теорема 1. Пусть выполнены следующие условия:
1) /*> —оо; и^Фф; функция Q(u) определена и
неотрицательна на X;
325
2) последовательность \[v]N} определена из условий
[v]N e= UNy TN([v]N)^TN* + iiNi JV=lf2 C)
где
— функция Тихонова задачи B); QN([u]N)—заданная на
Ujv функция; 7V# = inf 7V (Mw)*> {м^лг}, {ocN} — положи-
uN
тельные последовательности, сходящиеся к нулю (если ниж-
нижняя грань Tn* достигается в какой-либо точке из UNy то
в C) не исключается возможность |Ыдг = О);
3) существуют последовательность множеств UBn ? X
и отображения Р^\ Х^-^Х такие, что
Л^= 1, 2, — D)
J (Pn ([v]n)) ~ In ([v]n) < Тлг, Л7 -1,2,..., E)
Q (Pn (Ш) < Йл^ ([i;]^) + ?„, W = 1, 2 F)
^ {Y/i}, {^n} —последовательности, сходящиеся к нулю;
4) существуют отображения QN: Х-^Х^ такие, что
для всех и* ^.U'* выполняются соотношения
*
Qn(uJeeUn, N=l, 2, ..., G)
MQ^*)W("*)<Pa-,' iV-1, 2, ..., (8)
Qjv(Q^(«*))<О (ttj + ллг, Л^=1, 2, ..., (9)
{рл^}» {y\n} — последовательности, сходящиеся к нулю;
5) имеются оценки
-/«(e^Xvjv, /*(etf) = inf/(M)f iV = 1, 2 A0)
{vN} — последовательность, сходящаяся к нулю.
Тогда
([»Ь)) = ^. (И)
N -+оэ
Пусть наряду с условиями 1) —5) выполняются еще сле-
следующие условия:
6) функции J (и), Q (и) т-секвенциально полунепрерывны
снизу на X; функция Q(u) является х-стабилизатором,
т. е. множество Qc = {meX, Q(и)^С} х-секвенциально
компактно при любом С^О; всякая точка v^X, являю-
являющаяся х-пределом какой-либо последовательности {uN}>
uN ge U&N, N=l, 2, ..., принадлежит U;
326
7) справедливо равенство
lim (P;V + 77v + ^ + vAr)/a/v = 0. A2)
Л'
Тогда последовательность {Pn([v]n)\ х-сходится к
множеству (/** = {ау е ?/*: Q(^) = inf Q(u) = Q*} a
)) Q
N -+OO
Доказательство. Возьмем произвольную точку
и* ^ (У*. Из условий C)—A0) следует цепочка неравенств
./* ^ J* Ы + vN^J (PN ([v]N)) + vN^
^ J (Pn ([v]n)) + aNQ (PN
< In ([v]
= TN ([v]N) + yN
< TN (QN (w*
= In (Qn («*)) + a^^Tv (Qat (w*)) + ^ + V.v + v^ + (ZnIn
а^т1дг + \iN + yN + vN + aNl
aNQ(u*) + tiN + yN + aN X
X (bv + 4n)^J (Pn &v)n)) + aNQ (aj + 2v^ +
+ ?^ + ajv(Tliv + ^)t N=l, 2, ...
Отсюда с учетом произвола в выборе и* е ?/* имеем
*-vN^J (PN ([v]N)) ^ У# H-a^Q^ + Рдг +
, Л^=1, 2, ..., A3)
N=l, 2, ... A4)
Из A3) следует равенство A1), причем неравенства A3)
представляют собой оценку скорости сходимости в (И).
Далее предположим, что выполнены все условия 1)—7)
теоремы. Для краткости обозначим vn = Pn([v]n), N =
= 1,2,... Из A4) имеем ' Q(i^)^Q#+const = C<oo.
Кроме того, согласно D) vN e UeN ? X, jV=1, 2, ...Это
значит, что {удг} ge Qc- По условию, множество Qc т-сек-
венциально компактно. Поэтому последовательность {vN}
имеет хотя бы одну т-сходящуюся подпоследовательность.
Возьмем произвольную точку у#| являющуюся т-преде-
лом какой-либо подпоследовательности {vwk}. По условию
теоремы v* c= U Тогда с учетом т-секвенциальной полу-
полунепрерывности снизу функции J (и) и равенства A1) имеем
327
lim J(vNk)= lim Jiv^^J*, т. e.
= «/*, или у*<=?У*. Далее, из т-секвенциальной полуне-
полунепрерывности снизу функции Q (и) и неравенства A4) вы-
вытекает, что Q* ^ Q (v*) ^ lim Q (у^Л ^ lim Q (vNk) ^ Q*,
т. е. lim Q (vNk) = ^* = Q (f#), или ^еУ^. Тем самым
& —*¦ оо
показано, что любая точка t;#f являющаяся т-пределом
какой-либо подпоследовательности {ujvj, принадлежит
множеству (/## и {й (^fe)}-> Q^. Отсюда, рассуждая
так же, как при доказательстве леммы 2.8.3, получаем,
что последовательность {vN} т-сходится к множеству U**
и {Q(vN)}-+-U* при N-*oo. Теорема доказана.
2. Для иллюстрации теоремы 1 рассмотрим задачу
J(u)=*\x(T, u)-y\*-*inft A5)
, x(to)^xOy A6)
u = u(t)f=U*={u(t)<=lJb[t0, T]: u(t)<=V
почти всюду на [tOf T]\ x(t, «)gG, to^t^T}; A7)
все обозначения здесь взяты из §§ 1, 3. Так же, как
в § 3, для аппроксимации этой задачи рассмотрим после-
последовательность разностных задач
In №) = I xN ([u]N) -y\*-> inf, A8)
* = 0, Л^-1, A9)
[u\N eeUn = {[u]n «(u0, uu • • •, un-х): щ е F,
i = 0, Л^-l; Xi([u]N)e=GlN, t-бГлГЬ Л^=1,2, ... B0)
(обозначения см. в §§ 1, 3). Если в задаче A5) —A7) фа-
фазовых ограничений нет, т. е. G^En, то в B0) нет необ-
необходимости рассматривать расширения G1n и можно при-
принять
g* = 0, G*" = ?", tf=l, 2, ...
Положим X = LS[/0, T], Xn = Lin, N=ly 2, ...,
т
в качестве стабилизатора возьмем Q(w)= J|«(f)|ad/ =
= 1^11, и определим отображения Q^: Х->Хдг, Pjv-
328
XN-+X формулами
4// i
Из соотношений A.22), A.23) следует, что
®n (Qn (и)) < Q (a), Q (PN &u]N)) = I [u]N \\l,N = Q^([wk)
B1)
при всех ибЦ[/0, Т], [а]лг\^12^.
Заметим также, что ниже мы будем пользоваться соот-
соотношениями A.8) —A.26), считая, что встречающиеся в них
константы Со, Сь ... соответствуют множествам
W = {u(t)ezLl[t0, Т]: u(t)<=V
почти всюду на [*0, Г]},
Wn = {[u]neeL[n: Ui<=EVt t = 0, ЛГ-1}, iV= 1, 2,...
Теорема 2. Пусть матрицы A(t), B(t), f(f) кусочно
непрерывны на отрезке [t0, T]; V — выпуклое замкнутое
ограниченное множество из Er\ G — выпуклое замкнутое мно-
множество из Еп, int G Ф 0; существуют число е0 > 0 и управ-
управление п = п (t) е У такие, что х (t, п) е G~80, to^t^T.
Пусть разбиение {th i = 0, N} отрезка [tOy T] удовлет-
удовлетворяет условию
d;v = max Mt^(T — t0) Mo/N, N=l, 2, ...,
°^'^-1 Mo = const >0,
а, кроме того,
Sn^In^M^n, Afi = const^1, iV=l, 2, ...,
г5^ величина 8N взята из A.26), a последовательности
{aN}y {\xN} таковы, что
limVt^+^ = 0. B3)
N -+ oo аЛГ
Наконец, пусть последовательность {[v]N] определена усло-
условиями
[v]N e t/iv, 7V ([«Ы < ^* + Цлг, Л/ = 1, 2, ..., B4)
329
где
TN ([v]N) = IN ([u]N) + aN% Mt | ui |2
UN
Тогда последовательность {Pn([v]n)\ сходится к Q-
нормальному решению и* = и* (t) задачи A5) — A7) по норме
Доказательство. Из условий теоремы следует,
что множество A7) непусто, выпукло, замкнуто и огра-
ограничено, а функция A5) выпукла и непрерывна в метрике
L*Po» 71] (она даже слабо непрерывна в L[[tQ4 T]). В силу
теоремы 1.3.6 тогда множество U\. непусто, выпукло, замк-
замкнуто и ограничено. Тогда сильно выпуклая функция Q(u) =
= |wSI2 на множестве U* согласно теореме 1.3.8 дости-
достигает своей нижней грани infQ(w) = Q* в единственной
и*
точке и* = и%(г) ^U*. Таким образом, ^-нормальное ре-
решение задачи A5)— A7) существует и единственно.
Определим множество
где e^ = |^ + e^ + Cid^' (если G = Eny то едг = 0), Л^==
= 1,2,... Заметим, что поскольку множество W из B2)
ограничено в метрике L^[^o, 71], то можем пользоваться
оценкой A.11). Рассуждая так же, как при доказатель-
доказательстве теоремы 3.2, можно показать, что в рассматриваемом
случае для введенных множеств (/8д/, отображений QN, PN
справедливы включения D), G) и неравенства E), (8),
A0) при $N = C58N, yN = Ce8Ny vN=2RC3Eo1((M1+l)x
X bN + CidN)> N=\, 2, ... Тогда из условия B3) выте-
вытекает условие A2). Из B1) следуют неравенства F), (9)
при Lv = r]Ar = 0, N= I, 2, ...
Далее, функция J (и) слабо непрерывна, п(и) неотри-
неотрицательна и слабо полунепрерывна снизу на L[[tQj T]y
множество Qc = \и ^ L[ [tOf T]: Q (и) ^ С} слабо компактно
при любом С^О.
Наконец, всякая точка v = v(t) &Lr%[t0, T], являю-
являющаяся слабым пределом какой-либо последовательности
{uN}, им е UeNy N=l, 2, ..., принадлежит множеству U.
330
В самом деле, условие uN^UEN означает, что uN^Wt
x(t, им)<=ве"у to^t^Ty #=1, 2, ... Из слабой замк-
замкнутости множества W следует, что v^W. Далее, согласно
A.12),
sup \x(t, uN)-x(t, v)\=xn-+0
при iV->oo, поэтому x(t, и) o
N=lj 2, ... Поскольку е# + %лг-^О, множество G замк-
замкнуто, a x(t, v) не зависит от N, то последнее включение
возможно только при х(t, d)eG, to^t^T. Следова-
Следовательно, уеУ.
Таким образом, в рассматриваемом случае все условия
теоремы 1 выполнены, если в качестве топологии т в ней
взять слабую топологию пространства L[[tQ, T\. Из тео-
теоремы 1 тогда следует, что последовательность \Pn([v]n)}
сходится к и^ слабо в L^[tQy T] и, кроме того,
I Рм (Ш II, = Q (Pn (Ш) -И и* IL - Q (mJ
при N-+-O0. Но
|| Pw ([v]n) -u*!l = 2 (I P,v ([^) 11, +1 и* ft,) -
-\\Pn([v]n) + uJI? yv=l, 2, ...
Отсюда, пользуясь слабой полунепрерывностью снизу
нормы в Z4[/o» T], получаем, что последовательность
{Pn([v]n}} сходится к и# по норме Lj[<0. ^]- Теорема 2
доказана.
3. Прокомментируем условие B3). Оно означает, что
шаг dN= max д?,- разбиений отрезка [tOy T], а также
0<t^A'—1
точность решения задачи минимизации функции Тихонова
Tn(\u\n) на множестве UN в смысле неравенства B4)
должны быть согласованы с параметром регуляризации ад*.
В частном случае, когда матрицы А @» B(t), f(t) на ин-
интервалах непрерывности удовлетворяют условию Липшица
(например, когда эти матрицы не зависят от t), пользуясь
оценкой A.11) из A.26), имеем 8N^C8dNi C8 = const>0.
Тогда условие B3) запишется в виде
=Oe B5)
/V-+oo aN
331
Заметим, что теорема 2 остается верной и в случае,
когда в задачах A5) —A7) и A8) —B0) множества U и UN
отличны от множеств A7), B0) и имеют, например, вид
U = {u(t)<=Lr%[t0, П |и|а<Я,
x(t, u)(==G, to^t^T},
UN = {[u]N e LriN: II [u]N kiN < Я - B6)
x;([«k)e=G4/ = 671V}, ЛГ=1, 2, ...
Однако для множеств B6) условие B3) нужно заменить на
Игл ^^-0. B7)
N-*oo aN
Подчеркнем, что если при регуляризации разностных
аппроксимаций задач оптимального управления параметр
регуляризации aN и шаг dN разбиений отрезка [/0, Т]
стремятся к нулю несогласованно, то получающаяся при
этом последовательность {Pn([v]n)} может не сходиться
к множеству Q-нормальных решений в нужной метрике.
Это видно из следующих примеров, приналежащих
А. 3. Ишмухаметову и М. М. Потапову.
Пример 1. Рассмотрим задачу
J(u) = x(l, u)-\(x(t, и)+ tu(t))dt-+in!9
о
x(t) = u(t), O^t^l, *@) = 0,
u = u(t)€zU = {u(t)e-Lp[0, 1], \u(t)\^l
почти всюду на [0, 1]},
где р — фиксированное число, 1<р<оо.
t 1 1
Поскольку I tu (t) &t = \t*(t)dt = x(\)-\x(t) dt, то
0 0 0
J(u) = 0 при всех u^lU. Следовательно, /* = 0, U%=U.
Возьмем стабилизатор Q (и) = J | и (t) \p dt. Тогда и%% ==
о
= {уе(/^: Q (o) = inf Q(u)} = {0}, т. е. Q-нормальное
^*
решение единственно и равно ^^=0.
332
Рассмотрим следующую разностную аппроксимацию
этой задачи:
N — 1
In([u]n) = xn- 21 (Xi + tiia) M-+lnf,
N = {[u]N = (w0, Wi, ...,
dN, yv=l, 2, ..
Введем разностную функцию Тихонова
Л' - 1
t = 0
Л' — 1
л^ i yv i л^
Так какxN — 2 ktXi=xN— 2] (^+1-^)^=^—21^-1
i=0
iV —1
/V-l
21 ^te~^-i)-^-i=2] **(**—**-i) =
2] i, то Глг([«Ы= Ц
i = 0 < = 0
довательно,
min T^ ([m]jv) = 7"iv* =
A/-1
= 21 Д^ min (Д^ + алг|^|р)= min {Mu-\-aN\u\p).
i==Q |м|<1 !и!<1
Отсюда, исследуя поведение функции ср (а) = ktu + aN \ и\р
на отрезке [—1, 1], нетрудно установить, что
( At / At
)
при
At
причем нижняя грань достигается при [v]m = (v0, vlt ...
..., i>tv-i)> где
/ At \i/(P-D At ,
— 1
при
At
/ = 0, N-l.
зза
Таким образом, если kt = d2\~ l/iV->0, адг->-0, но
-^->1, то Pn([v]n) = —1 при всех t% Q^c^l, W =
= 1, 2, ..., и последовательность {PjvfMjv)} не может
сходиться к нормальному решению и% — 0 в метрике
LP[Q, 1] ни при каких р, 1<р<со. Остается рассмот-
рассмотреть случай, когда At — dN-*Q, а^->-0, ^1. Тогда
ВСех
Отсюда ясно, что для сходимости последовательности
{Pjv([v]n)} к ^* = 0 в метрике Lp[0, 1], 1<р<оо, необ-
необходимо и достаточно, чтобы —^- == -г-т >0 при N-^oo.
aN /V0CiV
Пример 2. Рассмотрим задачу
<1. *@) = 0,
^ и
почти всюду на [О, 1J}, 1<Ср<Соо.
Поскольку х (/, i/) = ^ а (т) dx, то
о
1 1 1
J{u)^4\u{t)dt-2>\u{t)dt = \u (/) d/ ^ 0
О 0 0
при u^U. Отсюда ясно, что «/*=0, [У* = {0}. В каче-
качестве стабилизатора возьмем Q(u) = " и\? .
р
334
Рассмотрим следующую разностную аппроксимацию
этой задачи:
In([«Ы -4( *Л±1™) -3 Y Л'и, - inf.
1 = 0
i, :=0, W, ^о = О,
л- — 1
1 = 0
Д/=1/М, N=1, 2, ...
Введем разностную функцию Тихонова
V - 1 .V — 1
1 = 0 i = О
/
Так как х/+1= ^ At uif / = 0, N — l> то
1 = 0
TV (l^Jw) =
Л7—2
^М{— uN^ + aN \uN^ \p), [u]N e UN.
Отсюда, исследуя поведение функции ср (и) = — и + a^ | м |"
при ' w |р Д / ^ 1, w ^ 0, или при 0 ^ и ^ (Д /)- 1/р9 нетрудно
получить, что
^7
при
причем нижняя грань Гдг* достигается в точке
@, 0, ..., 0, (Д /)-]/р) при Д / > (p*N)*,
(О, 0, ..., О, (ра^)-*/</>-U) при
Таким образом, если А ^ = 1/Л/, a^->oo, N-+oot но
Д t>ipaNL, то Pyv ([^Ы —0 при 0^/^ 1 - Д /, Рлг([»Ы =
Д^ при 1-Д/</<1 и \Pn([v]n)\? =lf iV =
335
= 1, 2, ..., так что {PN ([v]N)} не будет сходиться к и* = О
в метрике Lp[0y 1] ни при каких /?, 1<р<оо.
Остается рассмотреть случай At^(paN)q. Тогда
Pn([v]n) = 0 при 0*1Д /ММHI/A)
при 1-Д,<^1 и ?r^ 7^
/V=l, 2,... Следовательно, для сходимости {-Pjv([y];v)}
к и^ = 0 в метрике Lp[0, 1], 1<р<оо, необходимо и
rfw 1
достаточно, чтобы —— = —г-->-0 при N-+oo.
Любопытно, что в примере 2 условие сходимости
{Pn([v]n)} в метрике Lp[0, 1] зависит от р, а в при-
примере 1 такое условие -г? >0 не зависит от р, но зато
i\aN
UczLp[0y 1] при всех р, 1^р^ + оо.
Приведенные примеры показывают, что при регуляри-
регуляризации разностных аппроксимаций задач оптимального
управления условия типа B3), B5) или B7) являются
существенными.
4, При построении разностной задачи A8)—B0), аппрок-
аппроксимирующей задачу A5)— A7), были использованы рас-
расширения множества G, согласованные с шагом dN раз-
разбиения {/,-}. Следуя Е. Р. Авакову, покажем, что при
выполнении условий теоремы 2 регуляризованную аппрок-
аппроксимирующую задачу можно построить и без расширений
множества G. А именно, в качестве множества UN вместо B0)
введем множество
UN == {[u]N = (и0, иъ ..., ttjv-i)*- и*е V,
i' = 0, ^V-l, ^([^)eG, i = 67^} B8)
и возьмем число Л/'о столь большим, чтобы
при всех N^N0, B9)
где величина бдг взята из A.26), а е0 —из условий тео-
теоремы 2.
Прежде всего покажем, что тогда множество B8) не-
непусто при всех N ^ No. Будем пользоваться теми же
отображениями QN, PNi а также множествами B2), кото-
которые были введены в п. 2. Возьмем й-нормальное реше-
решение и* задачи A5) — A7) и положим
wN =
336
В силу B9) 0 < ?дг ^ 1. Отсюда и из выпуклости мно-
множества W следует, что %ef. Так как x(t, w)eG~8°,
x(t, a^GG, to^t^T, то, рассуждая так же, как при
доказательстве включения C.16), получим, что х (t, Wn) ^
е(ГЧ, tQ^t^T. Отсюда и из оценки A.24) следует,
6
что xi(QN(wN))^G~'lNeo^6N===Gi i = 0^~N. Это значит»
что
QN(wN) <=имфф, N^NQ. C0)
Далее, \\wN-u*\\==t)N\\u-u*\\^2RiN = 2RbNlzQ, где
||<co. Поэтому
| Q (wN) - Q (и*) \ = \\\wN f -1и* f | ^4R28N/e0 C1)
и, кроме того, из оценки A.14) имеем
| J (wN) - J (uj | < 2RCs6N/e0t N ^ Л^о. C2)
Наконец, согласно оценке A.29)
In (Qn (wn)) - J (wN) < Cb8N = рл,, N ^ NQ. C3)
Теперь возьмем последовательность {[у]л4> определен-
определенную условиями B4) для множества B8). Тогда х{ ([v]N) e G,
/ = 0, N. Из оценок A.11), A.25) получим x(t, Pn([v]n))e=.
eG8A', to^t^T, где 8^ = 6^ + ^^. Положим vN =s
= Xa^ + A~X//)^(Mtv), Xn = е^/(ео + 8лг), N^N0. Так
какйе^, ^([G]tf)elFf О<хлг<1, то vNe=W, По
условию теоремы 2 л: (/, ^) е G~ e°, to^t^T. Однако
G- е0 = QeN - (е0 + е^) = (QeNy (e0 + eN) _ 3TQ ^ + 8^).сужение
множества G8yv. Поэтому, рассуждая так же, как при
доказательстве включения C.16), получим #(/, vN) ^
е (q*n)-*n(eo+^)^QJo^t^T. Это значит, что 1^ е (/,
Далее, |! vN - PN ([v]N) \ = %N \\ п - Р^ ([о]^) || < 2R%N. Из
оценки A.14) тогда имеем
I J Ш - J (PN ([v]n)) I < 2RC3%n <
Следовательно,
^* < / (^) < / (Pn ([v]n)) + vat, Л^ ^ Л^о. C4)
Наконец, согласно оценке A.30)
J (Pn (Mn)) - In №) < C66^ = yN, N^ NQ. C5)
12 Ф. П. Васильев 337
Из соотношений B1), B4), C0) —C5) следует цепочка
неравенств
J (Pn
In ([v ]
+ Vn + Vn < TN (QN (wN)) + vln
= In (Qn (wn)) + адгй^ (Qn (wn)) + pN + yN
uj + 2R (C8 + 2R aN) 6N/e0 +
+ 2R (C8 + 2R aN) 8N/e0 + $N + pN + yN + 2vN,
Отсюда имеем
+ 2R (C8 + 2R aN) 6N/e0 + $N + р„ + yN, N^ NQ,
+ BR (C8 + 2R aN) 6N/s0 + $N
< Q # + const (8N + dN + iiN)/ocNy N ^ iV0.
Следовательно, lim J(Pn([v]n)) = «/*• Кроме того, повто-
N—00
рив рассуждения, проведенные выше, получаем, что после-
последовательность {Pn([v]n)} сходится к и# слабо в L^f/o» T]
и {Q (Ядг ([v]N))}->Qx = Q (а*), что равносильно сходимости
{Pn([v]n)\ к ^^ в метрике Lj[/0, 71]-
§ 5. Разностная аппроксимация квадратичной задачи
с переменной областью управления
1. Рассмотрим задачу
J(u) = \x(T, tt)-#|2->inf, A)
x(to)=xo, B)
[
(=!/(/) почти всюду на [/0, Т]}, C)
где У (/) —заданное семейство множеств, зависящих от
t^[t0, Т\; остальные обозначения см. в§ 1. Для аппрок
338
симации этой задачи введем последовательность разностных
задач
In ([u]n) = I xN ([u]N) - у |2 -> inf, D)
xt-n = Xt + bti(AiXi + BiUt + fi), i = 0, N-l, E)
[mJ/V €E Un = {[^]дг == (по, Ui, . . . , ^дг-i): t^j ^
обозначения см. в § 1.
Для исследования поведения решений задачи D)— F)
при Л7 ->оо ниже будут использованы теорема 2.1 и схема
рассуждений из § 1. Однако из-за зависимости области
управления от времени в рассматриваемой задаче не все
результаты из § 1 сохраняют силу. Например, для ото-
отображения QN (и) = (и0, ..., z/jv-i), где ut = -^ \ и (/) dty
/ = 0, A/'—l (см. формулы A.20)), включения «,• е У/ =
= V (/,•) могут нарушаться, несмотря на то, что u = u(t) e
е У (/) почти всюду на [/0, Г]и У (/) выпукло при каж-
каждом / е [^0> ^]- Аналогично, для отображения Я^ ([^]лг),
определяемого формулами A.21), включение Pn([u]n) ^U
может соблюдаться не при всех [u]N из множества F).
В то же время, кажется, что если множества V (/) непре-
непрерывно зависят от t, то упомянутые включения, по-види-
по-видимому, будут нарушаться незначительно. Однако пока
неясно, что значит, что множества V (t) непрерывно зави-
зависят от /, как понимать близость между множествами,
что такое расстояние между множествами. Перейдем
к обсуждению этих вопросов.
2. Из различных возможных подходов к определению
понятия расстояния между множествами здесь мы оста-
остановимся на понятии расстояния в смысле Хаусдорфа или,
короче, хаусдорфова расстояния.
Определение 1. Пусть М — метрическое простран-
пространство с расстоянием р(а9 Ь) между точками a, 6gM, и
пусть А и В —два множества из М. Хаусдорфовым рас-
расстоянием между множествами А и В называется величина
h(A, В) = max (sup inf p(a, b)\ sup inf р(а, Ь)\. G)
\at=Ab<=B б?Вв?Л J
339
Поясним геометрический смысл хаусдорфова расстояния,
считая, что множества А и В замкнуты в метрике М.
Напомним, что величина
р(а, Z)= inf p(a, z)
Z
называется расстоянием от точки йеМ до множества
Z с: М. Кроме того, как и в §§ 3, 4, введем е-расшире-
ние множества Z так:
Z8 = JGiM: р(г, Z)=^e}, е^О.
Тогда величина
sup inf p(a, b)= sup р(а, В) = 6 (Л, ?) = |3,
ае л /?gB og А
называемая уклонением множества А от множества В,
равна минимальному числу, на которое надо расширить
множество Bf для того чтобы получившееся после расши-
расширения множество содержало множество Л, т. е. А <= Ве
при всех 8^C и АфВг при О^е<р. Аналогично,
величина
sup inf p(a, b)= sup p(&, Л) = б(В, Л) = у,
называемая уклонением множества В от множества А,
такова, что В ^ Ае при всех г^у и fi gt Ae при 0^е<7-
Таким образом, хаусдорфово расстояние h (Л, В) между
множествами Л и S равно нижней грани всех тех чисел
е>0 таких, что Л^=В8 и В ^ Л8.
Отсюда следует, что если Л(Л, Б) ^е, то справедливы
следующие два включения:
Л<=58, ?^Л8, е>0. (8)
Рассмотрим несколько примеров.
Пример 1. Пусть М = Е1У А = {и<=Ег: а^и^Ь},
В = {и ^ Е1: c^u^d}. Пользуясь приведенной выше
геометрической интерпретацией хаусдорфова расстояния,
нетрудно вычислить, что
h(A, ?) = max{|a-c|, \b — d\].
Пример 2. Пусть М = Rroo — r-мерное линейное про-
пространство с метрикой Роо^, у)= max \и( — и*\9 соответ-
340
ствующей норме: 1^^= max |w'|, и пусть
1 < i <
А = {и = (и\ и\ ..., ur): cf^uf^V, * = Т77},
В = {и = (и\ и\ ..., иг): с«<и'<^, 1 = 177}.
В рассматриваемой метрике Л8 — е-расширение множе-
множества Л-имеет^вид Ав*={и = (и\ ..., иг): а1' —е<и'<
^^' + 8, /=1, дг}. Тогда ясно, что
Лоо (Л, В) - max {|а - с U, | Ь - d U =
= maxf max | а? — с*|; max |br'~rf|},
где а = (ах, ..., а'), Ь = FХ, ..., Ьг), ^^(с1, ..., сГ), d =
= (d\ ..., dr).
Если те же множества А и В рассматривать в евкли-
евклидовом пространстве М = Ег с метрикой о (u, v) =
= ( У] | и1 — f112) , то для соответствующего хаусдор-
\i = 1 ^
фова расстояния имеем оценку
Лоо (Л, Д)<А(Л, Б)</1оо(Л, В)>/7,
или
max{|a-c|co, | b — й|оо}</1(Л, В)^
^ ]/r max {| а — с | со , | Ъ — d Ц
Эти оценки следуют из неравенств | w |со ^ | м |?г <; У г \ и |оо.
Пример 3. Пусть_М = ?r,T/(/) = {w = (w1, ...,аО^?г:
а, @<и1"< Pi @, i=U /-}, to^t^Ty гдеа(/) = (а1@, ...
..., аг(/)), P(/) = (Pi(O, ..., Рг@) — заданные функции,
ai@^P«@i to^t^T. Пользуясь результатами при-
примера 2, имеехМ
r; IP @"P W|?r} <
Л (V @; V (т)) < у~г шах {| a (/) - а (т) \ЕЛ
Пример 4. Пусть М = ?2, Л = {^ = (а:, у): %2 + }
В@ { ( ) B02 + 2^^2}, ^^0. Из гео-
341
метрических соображений нетрудно получить, что б(Л, В) =
/+ 1
= /+1
Заметим
при
6
А
всех t^
(В, А) = -
(А,
, что
В) =
здесь
= 0;
( °
\ 3/-1
1 t+l
\ 3/ — 1
h(B(t),
при
при
при
при
В(х))
t>
t>
= 3|1
1/3,
1.
' — т| при всех
Покажем, что хаусдорфово расстояние обладает сле-
следующими тремя замечательными свойствами:
1) Если Л и В —замкнутые множества из метриче-
метрического пространства /W, то А (Л, В) = 0 тогда и только
тогда, когда Л = В. В самом деле, если замкнутые мно-
множества Л и В не совпадают, то либо б (Л, В)>0, либо
б (В, Л) > 0, поэтому А (Л, В)-шах {б (Л, В); б (В, Л)}>
>0. Если же А = ВУ то, очевидно, А (Л, В) = 0.
2) Хаусдорфово расстояние симметрично, т. е. А(Л, В) =
= А(В, Л). Это свойство следует из определения G) и
симметричности расстояния р(ау Ь) в исходном метри-
метрическом пространстве М.
3) Справедливо неравенство треугольника
А(Л, В)^А(Л, С) + А(С, В), Л, В, С е= М. (9)
В самом деле, из неравенства треугольника для исход-
исходного пространства М имеем р (ау b)^p(a, c)-{-p(cy b)
при всех аеД 6еВ, с^С. Тогда
р (а, В) = inf р (а, Ь) ^ р (ау с) + inf p (с, fe) =
= р(а, с)+ 6(С, В)<р(а, с) + А(С, В)
для всех йе^, сеС. В силу произвольности с^С
отсюда получаем
р (а, В) ^ inf р (а, с) + А (С, В) = р (а, С) + А (С, В) ^
^б(Л, С) + А(С, В)^А(Л, С) + А(С, В), оеА
Следовательно,
б (Л, B)=supp(a, В)^А(Л, С) + А(С, В).
342
Поменяв в предыдущем рассуждении множества А и В
ролями, будем иметь
б (В, A)^h(A, C)+h(C, В).
Из последних двух неравенств следует неравенство (9).
Приведенные свойства 1) — 3) хаусдорфова расстояния
показывают, что множество всех ограниченных замкну-
замкнутых подмножеств метрического пространства в свою оче-
очередь образует метрическое пространство с метрикой h(A, В).
3. Изучим некоторые свойства множеств, зависящих
от времени.
Определение 2. Пусть V (t)y t0^ *<;Т, — некото-
некоторое семейство множеств из метрического пространства М.
Говорят, что это семейство множеств непрерывно по Хаус-
дорфу в точке /, если для любого е>0 найдется число
6>0 такое, что h(V (/), У(т))<е для всех т, для кото-
которых 11 — т | <б.
Лемма 1. Пусть V (/), tQ^t^T,— семейство мно-
множеств из Ег, причем в каждой точке t^[tQy T] множе-
множество V (t) замкнуто, ограничено и непрерывно по Хаус-
дорфу. Тогда множества V (t) ограничены равномерно по
t е [/0, Т], т. е. найдется постоянная R > 0 такая, что
sup sup \u\^R.
<t^T U(=V(t)
Доказательство. Пусть, вопреки утверждению,
множества V (/) не являются равномерно ограниченными
на [/0, Т]. Это значит, что для любого натурального
числа п найдутся /„ е [/0, Т] и ип е V (tn) такие, что
\ип\^п9 п=1у 2, ... Так как отрезок [tOy T] — ограни-
ограниченное замкнутое множество на числовой оси, то из по-
последовательности {tn} можно выбрать подпоследователь-
подпоследовательность {tnk}> сходящуюся при яй->оо к некоторой точке
т е [t0, T}. Без ограничения общности можем считать,
что сама последовательность {tn} стремится к т. Так как
семейство V (t), to^t^T, непрерывно по Хаусдорфу
в точке т, то для любого е>0 найдется номер п0 такой,
что h(V(tn), V(t))<8 при всех п^п0. Согласно (8) это
означает, что V (tn) а (V (т))8, п^п0. Но V (^ — ограни-
ограниченное множество, поэтому его е-расширение (V (т))8 также
ограничено. Тогда последовательность {ип}: un^V (tn) a
c=(V(t))8, /г = 1» 2, ..., будет ограниченной. В то же
время по построению \ип\^п, п=\у 2, ... Полученное
противоречие доказывает лемму 1.
343
Лемма 2. Пусть V (t), to^t^Tt —семейство мно-
множеств из ЕТ, причем в каждой точке t е [tOi Т] множе-
множество V (t) замкнуто, ограничено и непрерывно по Хаус-
дорфу. Тогда это семейство равномерно непрерывно на
отрезке [/0, Т\ т. е. для любого е>0 найдется б>0
такое, что h (V (/), V (т)) < е для всея /,те [*о> ^"]> лмш&
бы |/-т|<6.
Доказательство. Пусть множества V (t) не
являются равномерно непрерывными на [/0, Т]. Это зна-
значит, что существует число ео>О такое, что для любого
натурального числа п найдутся точки tn, тл е [/0, Т\ для
которых хотя | tn — хп |< 1/п, но А (V (tn), V (тя)) ^ е0,
п=1, 2, ... Из последовательности {tn} выберем подпос-
подпоследовательность Нп 1, сходящуюся к некоторой точке
?<=[7о, Т]. Так как \tn — Tn\<\/n, то Jt,,.) также схо-
дится к t. Из непрерывности !/(/) по Хаусдорфу следует,
что h(V{tnk), V(t))-+O, h(V(%nk), V(t))-+O при *->оо.
Тогда, пользуясь неравенством треугольника (9), получим
k), V (/))->О
при &->оо. В то же время по построению h{V (tn^9
V(TrtJj^e0>0, ft=l, 2, ... Полученное противоречие
доказывает лемму 2.
Определение 3. Хаусдорфовым модулем непрерыв-
непрерывности семейства множеств V (t), to^t^T, называется
функция coy (d) = sup h (V (/), У(т)), где верхняя грань
берется по всем t, те[/0, Т], для которых |/ — x|^d.
Нетрудно видеть, что (ov(d) не убывает при возраста-
возрастании d. Если выполнены условия леммы 2, то ©y(d)->-
->0 = o)K@) при d->0.
Заметим, что для множеств Л (t) из примера 4 модуль
непрерывности равен &B(d) = 3d. Для множеств V (/) из
примера 3 для модуля непрерывности V @ справедлива
оценка со у (d) ^ У г max {coa (d); cop (d)}, где соа (d), cop (d) —
модули непрерывности функций a(t), $(t), to^t^T.
В частности, если а(^), р (/) удовлетворяют условию Гель-
дера |a@-a(T)|<L|*-T|a, |Р(/)-р(т)|<1|/-т|а,
0<а<1, то (ov(d)^VrLda.
Лемма 3. Пусть V (t), to^t^T,— семейство мно-
множеств из Е\ причем в каждой точке t e [t0> T] множе-
множество V (t) выпукло, замкнуто, ограничено и непрерывно по
344
Хаусдорфу. Если функция и (t) = (и1 (/), ..., ur (t))t t0 ^
^t^T, непрерывна в точке t, то функция
v(t) = PV{()u(t), to^t^T, A0)
где Ру щг —проекция точки z^Er на множество V (/),
также непрерывна в точке t. Если функция u(t) кусочно
непрерывна на отрезке [/0, Г], то функция A0) тоже
кусочно непрерывна на этом отрезке.
Доказательство. Пусть t e [tOj T] — какая-либо
точка непрерывности функции u(t). С учетом A0) имеем
(т) -Pv(x)U (t)\ + \Pv(x)U (t) - v (t) I,
tePo, T]. A1)
Операция проектирования обладает сжимающим свой-
свойством (см. теорему 1.4.2):
| PV{x)u (т) - PV{x)u (t) | < | и (т) - и (t) [.
Отсюда и из непрерывности и (t) в точке t следует, что
первое слагаемое в правой части неравенства A1) стре-
стремится к нулю при т-^t. Покажем, что и второе слагае-
слагаемое стремится к нулю при %->t.
По лемме 1 семейство множеств V (т) ограничено рав-
равномерно по те [/о, 7']. Следовательно, множество точек
{PV{x)u(t)} e V (т), to^x^T, ограничено и имеет хотя
бы одну предельную точку со при %->t. Это значит, что
существует последовательность {тЛ}->/ такая, что (ok =
= Pv(x \U (t)-*® при k-^-сю. Покажем, что a)==Pv^)U(t) =
= v (t). Сначала убедимся в том, что ogV (t). В силу
непрерывности семейства множеств V (t) по Хаусдорфу
для любого s>0 найдется номер k0 такой, что h(V (xk)y
V(t))^e при всех k^k0. Согласно (8) тогда V (т*) с:
a(V(t))e при всех k^k0. Поэтому щ е (V (О)8, ?^?0.
Так как У (/) замкнуто, то (V (t))e также замкнуто. Отсюда
и из того, что {соЛ}-хо, следует, что со g (F (/))8. В силу
произвольности е > 0 и замкнутости V (t) последнее вклю-
включение возможно лишь в случае (оеУ (/).
Далее, имеем
= inf \u-u{t)\^\PV(TAv{t)-u(t)\^
V{4)v(t)-v(t)\, ft=l, 2, ...
345
Поскольку
\Pvpk)v(t)-v(t)\= inf \u-v(t)\ =
= p(v(t), V(rk))<: sup
V(
при &->oo, то, переходя к пределу при &->оо, из пре-
предыдущего неравенства получим | о.) — а(/) | ^ | v (t) — u(t) [.
С другой стороны, по определению проекции точки и
условию A0) с учетом со g F (/) имеем
v(t)-u(t)\= inf |и-и@|^|(о
ИЕУ(/)
Следовательно,
Однако проекция точки и (t) на выпуклое замкнутое мно-
множество V @ определяется однозначно (см. теорему 1.4.2),
т. е. (o = v(t) = PVit)u(t).
Тем самым показано, что любая точка со, являющаяся
предельной для семейства точек {Pv(x)u(t)} при т->?,
совпадает с v(t). Это значит, что указанное семейство
сходится к v(t), т. е. \Pv{x)u(t) — v (t)\~->-0 при %-+t.
Таким образом, второе слагаемое в правой части нера-
неравенства A1) также стремится к нулю при т->/. Следо-
Следовательно, если u(t) непрерывна в точке t, то и функция
v(t) из A0) также непрерывна в этой точке. В частности,
если и (t) непрерывна на отрезке [tOf T], то v (t) также
непрерывна на этом отрезке.
Наконец, из приведенного доказательства видно, что
если существует предел lim и (т) = и (t ± 0), то суще-
*±0
±
ствуЬт lim v (%) = PVit)U(t±0). Это значит, что если
и (t) кусочно непрерывна на отрезке [^0, Т]> то v (t) также
кусочно непрерывна на этом отрезке. Лемма 3 доказана.
4. Вернемся к задачам A) —C) и D) —F). Через J*
обозначим нижнюю грань функции A) при условиях B),
C), через /дг+ — нижнюю грань функции D) при усло-
условиях E), F).
Теорема 1. Пусть матрицы А (/), В (t), f (t) кусочно
непрерывны на отрезке [tOi T], множества V (t) выпуклы,
замкнуты, ограничены и непрерывны по Хаусдорфу при
всех t^[tOf T]. Пусть разбиения {th t = 0, Л^} отрезка
346
[/0, 7"] таковы, что
dN= max Mi<:(T-to)Mo/N, N=l, 2, ...
0<t<W— 1
Тогда lim IN^==J^. и справедлива оценка
JV->oo
— СьЬм^1цщ-]^СьЬы% N = l, 2, .... A2)
где C5 = 2C0 + 2C4 -\-2\у\=Св, постоянные Со, С4 взяты
из A.8), A.16) яра № = ?/, WN = UN соответственно, а
величина dN определяется формулой
"!1 'f
SUp |
u<=V(t)
)dx\ A3)
со (d) — хаусдорфов модуль непрерывности множеств
V (t)y to^t^T, или какая-либо оценка сверху этого модуля,
Дпах == sup IA (t) f, 2Jmax = sup |j Б (/) |!, постоянная С±
взята из оценки A.11) при W = U.
Доказательство. Положим X = LS[/0, T], XN =
= Ljn. Отображения Q^: Х->-Хлг, P,v- XN->X опреде-
определим так:
= (u0, иъ ..., адг-i): Ui = PVi(Vi)f
u(t)dt, A4)
A5)
где Pv{z) — проекция точки z^Er на множество V. Как
видим, в рассматриваемом случае отображения QNi PN
имеют несколько более сложный вид, чем в предыдущих
параграфах, в которых задача вида A) — C) исследова-
исследовалась при V (/) = ]/, to^t^T. Кстати говоря, при V(t) = V,
to^t^T, формулы A4), A5) превращаются в формулы
A.20) и A.21) соответственно.
Так как множества V (t) выпуклы и замкнуты при
каждом / е [/0, Т\, то отображения QN, PN из A4), A5)
определяются однозначно. Функция v (t) = P^ ([t/]yv) =
347
=Pv{t)u N(t), полученная проектированием кусочно постоян-
постоянной функции uN(t) = uh ti^t<.tirly 1 = 0, N — 1, согласно
лемме 3, кусочно непрерывна на [/0, Т] и, следовательно,
Pn (M/v) ^ 1Л [U, Т] при всех [и]м ^L^n. Отсюда и из
A4), A5) вытекает, что
QN(u)ezUN9 Pn([u]n)eeU
при всех u^U, [u]n eUN> N = 1, 2, ...
Заметим также, что согласно лемме 1
sup sup |и|^/?<оо,
откуда следует, что множество C) ограничено в метрике
Lroz [/0, 7"]» и мы можем пользоваться оценкой A.11)
при W = U, а также оценками A.8), A.16) при W =U>
Покажем, что справедливы оценки
sup max \x(th u)-Xi(QN(u))\^8Ny
ueeU, N=l, 2, ..., A6)
sup max \x(th PN([u]N))-Xi([u]N)\^dNi
[u]nzeUn, tf=l, 2, ..., A7)
где величина бдг определяется формулой A3). Рассуждая
так же, как при получении неравенства A.27), с помощью
оценок A.8) и (Ы1) имеем
\x(th u)^Xi([u]N
Г С А W - л*
$ {и{т)-щ)йх
U
ue=U,lu]Ne=UN, i = 0, N, N=1,2,... A8)
Зафиксируем какое-либо управление и и в A8) при-
примем [u\n = Qn№- Поскольку по условию h(V(x), Vi)^
при ^Tsg/j+i. то согласно (8)
при всех т €=[*/, /i+1]f t = 0, Л^ — 1. Тогда
из включения w (т) си V (т) следует, что и (т) е К" ^^
348
почти всюду на [th ti+1]. Отсюда, замечая, что множество
y®(dN) выпукло, замкнуто и не зависит от т, с помощью
'/+1
леммы 1.1 получаем ^ =-^- С u(i)dT^V^dNK i=0f N—l.
Ч
Следовательно,
/ = 0, N—l.
Отсюда и из A4) имеем
J
(dN), i = 0, tf-
Тогда из A8) при [u]N = QN (и), u^U, получим оценку A6).
Далее, возьмем какое-либо [u]N^UN и в A8) примем
u = PN([u]N). Из того, что АA/(т), К,)^ ю (|т- <f |)<
^(o(dN) при /,-^т^//+ь согласно (8) следует, что У;с:
с(У(т))°(^) при всех те[/|( //+1]. Поскольку [w]^ =
= (w0, Mi, .. • , Илг-i) е i/^ означает, что t/f g К/, то
щ е (У (т)H(^) при всех т е- [^-, tM], I =0y N-l. Следо-
Следовательно, \РуюЩ-щ |=р (и/,К^
; отсюда и из A5) имеем
<:Mi<d(dN), / = 0,/V-1. Тогда из A8) при w = P^(Mtv)
[w];vet/^ следует оценка A7).
Далее, рассуждая так же, как в леммах 1.3 и 1.4,
из оценок A6), A7) получаем, что
N = fa, uzeU, N=U 2, ...,
N = yN, [и]„<=и„, N=l9 2, ...
Таким образом, выполнены все условия теоремы 2.1,
из которой следует оценка A2). Остается заметить, что
величина 8N из оценки A2), определяемая формулой A3),
стремится к нулю при N-*oo; это доказывается так же,
как аналогичное утверждение в лемме 1.2. Теорема 1
доказана.
349
Предлагаем читателям самостоятельно рассмотреть за-
задачи A) — C) и D) — F) при наличии фазовых ограничений
x(t, w)e=G(/), to
где G (t) — замкнутые множества, непрерывные по Хаус-
дорфу на отрезке [/0, Г], и доказать аналоги теорем
из §§ 3, 4.
§ 6. Аппроксимация задачи быстродействия
1. Пусть процесс описывается условиями
х @ = А (/) x(t) + B (t) и (t) +f (О, Шо, х (t0) = xo, A)
u~u(t)^L[[tOy а] при любом а>tOy
u(t)<=V (t) для почти всех t ^ t0, B)
где A (t), В@, /@ — матрицы порядка пхп, nxr, nxl
соответственно, определенные при всех t^t0 и кусочно
непрерывные на любом конечном отрезке [t0, a]\ началь-
начальный момент t0 и точка х0 е Еп известны; V (t) — заданное
при t Ss tQ семейство множеств из Ег. Через x(t, u),t^t0,
как обычно, будем обозначать траекторию задачи A),
соответствующую управлению u = u(t), t^t0.
Пусть Y и G(t), t ^ t0, — заданные множества из Еп.
Определение 1. Скажем, что система A), B)
(Г, G(t), ^-управляема, если существуют хотя бы одно
управление u = u(t), t^t0, удовлетворяющее условиям B),
и момент t = t(u)y to^t(u)^Ty такие, что
x(t9 u)<=G(t), *0<*«(и), C)
x(t(u), u)<=Y, X(t, и)фУ при to^t<t(u). D)
Момент времени t(u), удовлетворяющий условиям D),
назовем временем первой встречи траектории х (/, и) с мно-
множеством Y.
Таким образом, (Г, G(t), К)-управляемость системы A),
B) при некотором T^t0 означает, что множество U (Т),
которое состоит из всех управлений u = u(t), удовлетво-
удовлетворяющих условиям B) —D), непусто.
Будем рассматривать задачу
t(u)-+mf, и ее U (Г), E)
представляющую собой задачу быстродействия, в которой
требуется за наименьшее время попасть из точки х0 на
350
множество F, двигаясь по траекториям системы A), B)
с соблюдением фазовых ограничений C).
Величину t% = inf t (и) называют оптимальным ере-
U(T)
менем задачи A) —E); управление и^ = и^A) ^U(Т), для
которого t{u^)=^t^, называют оптимальным управлением,
a x(t, и#) — оптимальной траекторией задачи A)—-E).
2. Приведем достаточные условия, при которых в E)
нижняя грань достигается.
Теорема 1. Пусть матрицы A(t), B(t)y /(/), t^tOy
кусочно непрерывны на любом конечном отрезке, мно-
множество V (/) при каждом t выпукло, замкнуто и
sup sup \и\ ^R = R(а)<со при всех а > t0] мно-
жества G(t), t^tOi и Y замкнуты', система A), B) G,
G (t), У)-управляема при некотором Т|>/о- Тогда t^ =
= inf t(u)^T и в задаче A) — E) существует оптимальное
U (Т)
управление.
Доказательство. По условию множество U (Т) Фф>
и при любых u^U(T) справедливо неравенство /0^
^t(u)^ Т. Поэтому t0 ^ t* <; Т < со. По определению
нижней грани E) существуют последовательность {**}->-/*,
Tt*, k=l, 2, ..., и управления uk
k=l, 2, ..., такие, что
x(t, uk)t=G(t), to^t^tb, x{tk, uk)
x(t, uk)^Y, to^t<itk, *=lt 2,
Заметим, что множество
W(T) = {u = u(t)eELr,[tQ, T]: u(t)e=V(t)
почти всюду на [/0, Т]} F)
выпукло, замкнуто и ограничено в метрике L[[t^ T] и,
следовательно, слабо компактно в L[[tQ, T]. Поэтому,
выбирая при необходимости подпоследовательность из {uk}9
можем считать, что сама последовательность \uk\ сходит-
сходится к некоторому управлению и# = и* (t) e W (Т) слабо в
^[^о, Т]. Тогда {x(t, uk)} сходится к x(t, u^.) равно-
равномерно на [t0, Т]. Однако х {t, uk) e G (t) при всех /,
to^t^t^^tb^T, поэтому в силу замкнутости G(t)
справедливо включение x(t, и*) gG@, to^t^t*. Далее,
в силу оценки A.11) имеем
sup \x(tk9 u)—x(t*, ^I^CJ^ — ^I-^O пРи ^->-со.
351
Тогда \x(tk, uk) — x(t*, и*)|<|*(/*, uk)-x(t*, uk)\ +
+ \x(t*, uk)— x(t*, и*)|->0при &->oo, т. e. {*(**, w*)}-*¦
->x(?*, м*). Однако x(tky uk)^Yy k=l, 2, ..., причем
F —замкнутое множество. Следовательно, *(/„., и*) е У.
Таким образом, и* ^U(T) и время первой встречи /(я*)
траектории я(<, а*) с множеством 7 таково, что f(w#)s^
^1*. С другой стороны, t*^t(u*) в силу определения *#.
Это значит, что *(и*) = /#, т. е. и* — оптимальное управ-
управление в задаче A) — E). Теорема 1 доказана.
3. Для аппроксимации задачи A) —E) для каждого
натурального числа N^\ на полуоси t^t0введем точки
to = toN <tiN <• • • < Un < • • •, lim tiN=oo. Положим AiN=
( ) BiN=B (tiN+0), /,X = /ftw+0), ViN=V(tiN),
Gw = G(tiN), ktiN = tMN — tiN, и рассмотрим следующую
аппроксимацию системы A), B):
Xi+1N = XiN + A4/V (AiNXiN + BiNUiN
/ = 0, 1, ..., Холг = -х;о, G)
["]ЛГ = ("ON, UlN, • • • , ^rW, • • -): ЩМ ^ ViN, t = 0, 1, . . . (8)
Через [л: ([м]^)]^=(дг0 ([«k)=^o, • • •, xt ([u]N) =xiN,...) будем
обозначать траекторию дискретной задачи G), соответст-
соответствующую управлению [u]N.
Введем расширение множеств G5jV, YVn, где {^},
{} — положительные последовательности, стремящиеся
к нулю. Напоминаем, что согласно C.7) е-расширением
множества Z с: Еп называется множество
Ze = {x<=EEn: p(x, Z)= inf |л?-г|<е}.
Определение 2. Систему G), (8) назовем (Г,
Y*^-управляемой, если существуют хотя бы одно управ-
управление [и]Лг, удовлетворяющее условиям (8), и точка Unn e
, такие, что
1 = 67717, (9)
V при 0<f^iV-l. (Ю)
Момент времени tiNN = tN([u]N), удовлетворяющий усло-
условиям A0), назовем временем первой встречи дискретной
траектории [х ([u]n)]n с множеством YVN.
352
Таким образом, (Т, G?$, К^-управляемость системы
G), (8) означает, что множество UN(T), которое состоит
из всех управлений [u\N, удовлетворяющих условиям (8) —
A0), непусто.
Рассмотрим дискретную задачу быстродействия
Ml>fo)->inf, [u]N<=UN(T). A1)
Величину tN* = inf tN ([u]N) будем называть опта-
UN(T)
мальным временем задачи G) —A1).
Приведем достаточные условия, при которых из (Г, G(t),
У)-управляемости системы A), B) следует (Т, G^, YVNy
управляемость системы G), (8) и последовательность задач
G) — A1) аппроксимирует задачу A) — E) по функции, т. е.
lim tN* = t*.
N-ьоэ
Теорема 2, Пусть матрицы A(t), B(t), f(t) опре-
определены при t ^ t0, кусочно непрерывны на любом конечном
отрезке [t0, a]\ множество V (t) при всех t^t0 выпукло,
замкнуто, ограничено и непрерывно по Хаусдорфу; множе-
множество G (t) при всех t^t0 замкнуто и непрерывно по
Хаусдорфу: система A), B) (Г, G(t), У)-управляема для
некоторого 7\ t0 ^ Т < со. Пусть разбиения {tiN\ = {t0N =
= to<tiN...<LtiN<...) таковы, что
dN = dN (T) = max AtiN =
0 < i < mN
= (T-to)M(T)/(mN+l)y N=\, 2, ...,
где тм — число, определяемое условием tmNN < Т ^ tmN+\t Ny
;W0G) = const>0; последовательности {lN}, {vN} из (9),
A0) стремятся к нулю и таковы, что
InЭ*бдг, \'дг^ бдг + CxdN + coG (dN), N=l, 2,
где величина бдг определяется формулой E.13), постоянная Сх
взята из A.11) при W = W (Т), a coG (d) — хаусдорфов модуль
непрерывности множеств G (t) на [t0, T] или оценка сверху
для него. Тогда дискретная система G), (8) (Г, G^, YVNy
управляема при N=1, 2, ... и lim tN^ = t^..
Доказательство. Положим Х = ^[/о» Т], XN~
= Lr2N= {[u]N=(u0N, u1N,..., umNN): 2 tifNAtiN=i[u]Nli2N<
353
<оо|. Напоминаем, что tmNN<iT^tmN^\, N. Ниже будем
считать, что tmN+ i, n = T\ узловые точки tiN>T нам не
понадобятся, так как все рассуждения будут проводиться
на отрезке [t0, T]. Введем отображения QN: X->XNy
PN: XN-+X следующим образом:
4n
hn
u(t)dt, i = 0, mN, A2)
N, 1 = 0, mN, A3)
где Pv (z) — проекция точки z^Er на множество V.
Дальнейшие рассуждения, представляющие собой про-
проверку условий 1) —3) теоремы 2.4, оформим в виде трех
лемм.
Лемма 1. Пусть выполнены условия теоремы 2. Тогда
Qn(u)eeUn(T), tN(QN(u))^t(u)
при всех u^U(T), Af = 1, 2, ...
Доказательство. Возьмем произвольное управле-
управление u^U(T). Тогда существует момент t(и) — время пер-
первой встречи траектории x(t, и) с множеством У, опреде-
определяемый условиями C), D). Возьмем точку tSNN e {tiN) ¦
такую, что tsNN<t(u)^tSN+it N. Рассмотрим задачу G)
при [u]N = QN(u). Покажем, что соответствующая дискрет-
ная траектория xr-(Q;v(^)), / = 0, тдг+1, такова, что
Xi(QN(u))f=Glt», ? = 0Г^, XsN(QN(u))eEYv*. A4)
В самом деле, согласно оценке E.16)
| х (/,, и) - xt (QN (и)) \^8N, i = 0, mN + 1. A5)
Так как х(/, u)^G (t) при to^t^t(и), то х{th и) е GiN
и Xi (Qjv (и)) е G*j(jf cz G^ при всех i = 0, s^. Далее, согласно
оценке A.11) и выбору узла tSNN имеем
x(t(u), u) — x(tsNN, a)|<Ci(fSjV+i. iv — tsNN)^C1dN.
Отсюда и из A5) с учетом включения x(t(u)> u)^Y
получаем xSN (QN (и)) е Y6n h" ci^ ^ yVN. Включения A4)
доказаны. Отсюда следует, что время первой встречи
354
(()) траектории \x(Qn(u))]n с множеством YVN удо-
удовлетворяет неравенствам tN(QN(u))^tSNN<t (u)^T'. Кроме
того, Q^ (и) ее ?/„ (Г), так что система G), (8) (Г, G*#, Г")-
управляема и дискретная задача быстродействия G) —A1)
имеет смысл. Лемма 1 доказана.
Лемма 2. Пусть выполнены все условия теоремы 2,
и пусть U2N (Т)—множество всех управлений u=u(t),
которые удовлетворяют условиям B) и для которых суще-
существует момент t(u), to^t(u)^T, такой, что
x(ty u)z
x(t(u), u)<=Y*"y x(t,u)s?YeN при
Пусть ?n = In + Vn> jV=1, 2, ... Тогда
T), t (PN
при всех [u]N ^UN(T), jV=1, 2, ...
Доказательство. Возьмем произвольное управле-
управление [u]N ^UN(T). Тогда существует момент tN ([u]N) =
= Unn^T, определяемый условиями (9), A0). Рассмотрим
задачу A) при u = Pn([u]n) и покажем, что
@, to^t^Nf
x(tiNNy Pn([u]n))e=Y8". A6)
Согласно оценке E.17)
I x (th PN ([u]N)) - xt ([u]N) | ^ блг, i == 0, f^. A7)
Отсюда и из (9) следует, что x(th PN([u]N)) e
t = 0, iV. Далее из оценки A.11) имеем
I х (U Pn ([u]n)) ~ x (th PN ([u]N)) | < d | / - ^ I <
при всех /, tiN^t^ti+1Ni i = 0, iN. Это значит, что
Наконец, из h(G(t), G(tiN))^(oQ(dN),
следует, что G (/,w) с G0)G^) @, или
(t), tiN^t^ti+lN, i='0Th. Тогда *(*,
<=GeN(t), to^t^tiNN. Кроме того, из A0) и A7) имеем
x(tiNN, PN([u]N))z=Yv» + 6»czYe». Включения A6) дока-
355
заны. Отсюда следует, что PN {[u]N) e U*N (T) и время
t (PN ([u]N)) первой встречи траектории x(t, Pn([u]n))
с множеством У8дг не превышает tN ([u]N). Лемма 2 дока-
доказана.
Наряду с задачей A) —E) рассмотрим расширенную
задачу быстродействия. Для этого при каждом е>0 вве-
введем множество UZ(T) всех управлений u = u(t), t^tOi
которые удовлетворяют условиям B) и для которых суще-
существует момент t(u), to^t(u)^T, такой, что
x(t, w)e=Ge(/), to^t^t(u), A8)
x(t(u), и)е=У8, x(ty u)e?YG при to^t<t(u). A9)
Рассмотрим задачу
t(u)-*inf9 ueeU*(T). B0)
Обозначим /* (e) = inf t (и) оптимальное время задачи
Ue(T)
быстродействия A), B), A8)-B0).
Лемма 3. Пусть выполнены все условия теоремы 2.
Тогда lim /# (е) = ^.
8-^ + 0
Доказательство. Поскольку G(/) с: G8(/) cz GY(/),
Y cz У8 d Yу при всех 0<е<у, то U(T)^U*(T)^
^Uv(T). Отсюда следует, что система A), B), G\ G8(/),
УЕ)-управляема при всех е > 0 и /* (у) ^ /# (е) ^ /# при
0 < е < у. Тогда существует lim /# (е) = То ^ /#. Пока-
жем, что T0 = t#. Возьмем какую-либо последовательность
{еА}->0, еА>0, &=1, 2, ... Заметим, что из замкнутости
множеств G(/), F следует замкнутость G8(/), У8. Отсюда
и из теоремы 1 с учетом уже установленной G, G8(/), У8)-
управляемости системы A), B) вытекает, что в задаче A),
B), A8) —B0) существует хотя бы одно оптимальное
управление иг* = ие* (t) e Ue (Т). Положим uk = иек# (/),
to^t^T, k=l, 2, ... Таким образом,
UbZEW(n x(t, «*)?(?*(<), to^t^tk = t*(ek),
x(tk, uk)^Y*k, x(t, uk)^Yz*,
ft=l, 2, ... B1)
Поскольку множество W (Г), определяемое условиями F),
слабо компактно в L[[U, T], то, выбирая при необходи-
необходимости подпоследовательность из {uk}y можем считать, что
356
сама последовательность {uk} слабо в L^f/o, T] сходится
к некоторому управлению ^е^(Г). Согласно A.12)
тогда
sup \x(t, uk)—x(t, v*)\=\xk-+-0 при k-*oo.
t<t<T
Отсюда и из
*(*, ^)EGe
Кроме того,
! х \1> и%} л
поэтому
x(t,
B1) следует, что
согласно оценке A.11)
(То, 0*)|<С!(Го-/Л)
0*)eGe*+|1*+p*(W.
?» 1 О
k=l, 2, ...
B2)
B3)
B4)
Далее, учитывая, что множество G (/) непрерывно по
Хаусдорфу и ft (О @, G(To))<©o(To--9*SooGWft) =
= 7а при всех /, tk^t^Tq, имеем G(/*) е Gv*(/) при
ty tk^t^T0. Отсюда и из B3) получаем включение
x(U »*)eGe* + |i*+pA+v*@ при tk^t^T0. С учетом
первого из включений B2) тогда будем иметь, что
Л=1,-2, ... B5)
Поскольку е^ + ^ + Рй + уй-^О при &->оо, а множества
G (О, У замкнуты, то из B4), B5) при fe~>oo получим,
что x(t, ^)eG@, to^t^To, x(T09 v*)t=Y. Таким
образом, v^^lU(Г) и время первой встречи t(и#) траек-
траектории .*(?, »#) с множеством Y таково, что t^^tiv^)^
^ То. Отсюда имеем неравенство /# ^ То. Выше было
установлено, что T0^t%. Следовательно, ^ = То =
= lim ^ (е). Лемма 3 доказана.
Таким образом, если принять J (u) = t(u), u&.U =
= f/(T), /лг([иЫ = М[и]лг). [*е^ = ^(Г), то из
лемм 1—3 вытекает выполнение условий 1) — 3) теоремы
2.4. Отсюда следует справедливость утверждения ,тео-
,теоремы 2.
4. Таким образом, показано, что при выполнении
условий теоремы 2 для приближенного решения задачи
357
быстродействия A) —E) может быть использована после-
последовательность разностных аппроксимирующих задач G) —
A1). В свою очередь, для решения разностной задачи
G) —A1) при каждом фиксированном N можно рассмот-
рассмотреть следующее семейство задач: минимизировать функцию
In([u]n, y) = \xj([u]N)-y\2 B6)
при условиях G), (8) и
х(. ([«]„) geG^, i = 0j, y^Y, B7)
где / — фиксированный номер, последовательно пробегаю-
пробегающий значения / = 0, 1, ..., mN\ здесь номер т^ опреде-
определяется условием tmjvN<iT^tmN+hNy момент Т взят из
теоремы 2. Для решения задачи B6), B7), G), (8) при
каждом фиксированном / могут быть использованы изве-
известные методы минимизации функций конечного числа
переменных или дискретные аналоги методов из главы 1.
Обозначим py^ = inf In([u]n, У), где нижняя грань
берется по всем ([и]м> у), удовлетворяющим условиям G),
-(8), B7). Может случиться, что pyw>0 при всех /, 0^
^ / <с &, a pkN = 0 — это значит, что tN% = tkN. Если же
Р/лг>0 при всех / = 0, mNy то ясно, что tN*
Отсюда следует, что, взяв номер N достаточно большим,
согласно теореме 2 в принципе можно получить доста-
достаточно точное значение оптимального времени задачи A) —
E). Однако нужно заметить, что такой подход к решению
задачи быстродействия на практике может оказаться не
очень удобным, поскольку с ростом N растет число задач
вида B6), B7), G), (8) и, следовательно, вообще говоря,
растет и объем вычислений. Поэтому желательно иметь
другие более удобные методы решения задачи A) —E),
не требующие перебора всех задач вида B6), B7), G), (8).
5. Остановимся на одном из таких методов. Для про-
простоты ограничимся рассмотрением задачи быстродействия
A) —E) при дополнительных предположениях, когда
фазовые ограничения отсутствуют, множество Y состоит
из одной точки, а множество V (/) не зависит от времени,
т. е.
G(t)^E\ V(t)^V при to^t^Tt Y = {y}. B8)
Как и выше, будем предполагать, что матрицы А (/),
B(t), f(t) кусочно непрерывны на любом конечном отрезке
358
[tOf а], множество V выпукло, замкнуто и ограни-
ограничено.
Возьмем некоторое достаточно большое число Т >> tQy
зафиксируем /, to<t^T, и рассмотрим задачу 1
J(u9 t) = \x{ty w)-y|2->inf, B9>
x(x) = A (x)x(x) + В (x) u(x) + f (x),
/0<т<*, x(to)=xOy C0)
u = u(x)<=W=W (T)=={u(x)eEL[\t0, T]: u(x)eeV
почти всюду на [t0, T]}. C1)
Заметим, что значения управлений и(х) при t^x^T на
задачу B9) — C1) не влияют. Но тем не менее мы здесь
рассматриваем множество C1), так как в дальнейшем
нам будет удобно считать, что управления доопределены
на всем отрезке f/0, T]. Обозначим
p(f)= inf J(u, t), to<t^T\ C2)
при t = U положим p (t0) = \x0 — у !2. Будем считать, что
P(U)>0, так как при р (t0) = О = \хо — у\2 задача A) — E),
B8) становится тривиальной: /# = /0.
Так как множество W слабо компактно в L^[tOy T] и
функция J (uy t) слабо непрерывна на W, то в C2) ниж-
нижняя грань достигается, т. е. существует управление и =
= tit^W такое, что p(t) = J (uh t) = \x(t, щ) — у |2.
Отсюда ясно, что для того, чтобы момент *# был опти-
оптимальным временем задачи A) —E), B8), необходимо и
достаточно, чтобы
р(^)-=0, р@>0 при U<,t<t^
т. е. /#—минимальный корень уравнения р(/) = 0. Это
значит, что для поиска /* могут быть использованы изве-
известные методы решения уравнений. В частности, здесь
может быть использован метод, описанный в п. 4 § 16
гл. 5 книги [4]. Этот метод был описан в предположе-
предположении, что функция р (t) удовлетворяет условию Липшица.
Покажем, что в рассматриваемой задаче это условие
выполняется. Пусть
Р(ОН*(*. и*)-0|2. Р(*) = !*(*, "х)-У\\ Щ, ux<=W.
35^
Тогда из определения C2) функции р (/) с учетом оценок
A.8), A.11) имеем
ux)\^2(C0+\y\)C1\t-x\,
Следовательно,
. C3)
Для поиска минимального корня t# уравнения р (^) = О
Ба отрезке [/0, Т] может быть использован итерационный
процесс
C4)
По условию р (t0) > 0. Сделаем индуктивное предположе-
предположение: пусть р@>0 при to^t^tk. Тогда при всех t,
tth имеем
Следовательно, р (/) > 0 при to^t<Z tk+1. Может случиться,
что р (tk+1) = 0. Тогда tkjcl = /# — искомый корень уравне-
уравнения р(?) = 0. Если pD+i)>0> то процесс C4) продол-
продолжаем дальше. Здесь имеются три возможности:
1) Процесс C4) закончится определением момента tk
такого, что to<tk^T, p(f,)>0, t = 0, Л-l, р(^Л) = 0.
Тогда tk = t# — задача решена.
2) р(^)>0, ^<Т, при всех 6 = 0, 1, ... Так как
последовательность {tk} монотонна, то существует lim tk =
k
^ Из C4) при &~>сх) получим р(^) = 0. Кроме
того, р@>0 при to^t<tki 6 = 0, 1, ..., так что р@>
>0 при to^t^t*, Следовательно, t* —искомое время.
3) Найдется номер m такой, что tm^T<Ctm+1, p(//)>
>0 при всех / = 0, /п. Тогда t^>T.
Таким образом, метод C4) позволяет выяснить, будет
ли t* принадлежать [tOy T], и если это так, то найти
приближение tk^t*. В том случае, если выяснится,
что ^>Т, аналогично можно продолжать поиск /# на
отрезках [Г, 7\], [Тъ Т2], ...; ири этом в методе C4)
360
каждый раз нужно использовать ту константу L, которая
соответствует рассматриваемому отрезку.
6. Описанный метод C4) предполагает, что значения
функции р (/) известны точно. Перейдем к изложению
метода C4), свободного от этого недостатка. А именно,
предположим, что при каждом t> to^t^T, вместо точ-
точного значения р(/) может быть найдено его приближение
Рлг@ такое, что
\p(t)-9N(t)\^lN, РИО^О, /о<*<7\ C5)
где {?лг}-^0. Пусть известно (Л/" — 1)-е приближение tN-l9
N^\ (начальное приближение t0 нам задано). Для опре-
определения следующего приближения tN рассмотрим итера-
итерационный процесс
tNk+l = tNk + PN(tNk)/L, Й = 0, 1, ..., fNO = tOy C6)
аналогичный процессу C4). Из-за погрешностей равенство
pN (/) = 0 не влечет за собой равенства р (t) = 0 и наобо-
наоборот, поэтому процесс C6) следует прекращать не по кри-
критерию ptv (tNk) = 0, как было выше, а по условию вида
pN(tNk)<.®N, где {6д-} стремится к йулю при iV->oo
согласованно с погрешностью {%N} из C5). В рассматри-
рассматриваемом случае, когда функция р(/) удовлетворяет усло-
условию C3), такое согласование означает, что
6^2^, #=1, 2, ... C7)
Имеются две возможности:
1) tNk^T при всех k = 0, 1, ... Так как {tNk} моно-
монотонна, то существует lim tNk^T. Тогда из C6) следует,
/г-* оо
что lim p^v(^) = O.
fe->00
2) Существует номер s такой, что tNs^T<CtNs+v
Отсюда следует, что за конечное число шагов процесса
C6) найдется номер k = mN такой, что будет выполнена
одно из двух следующих условий:
PN (^Nk) ^ ®N>
ИЛИ
k
PN (tNk) > ®Nt k
Положим
Метод описан
= 0,
= 0,
tA
•
mN —
PN (tNn
mN —
1,
w
1,
tNmpj-1 ^
VmN\ T).
^T<CtjvmN.
C8)
C9)
140)
361
Теорема 3. Пусть выполнены условия C3), C5),
C7). Тогда последовательность {tN}, определяемая мето-
методом C6), C8)-D0), сходится к min{^; T).
Доказательство. Сначала рассмотрим случай
to^ty.<T. При каждом фиксированном N имеются две
возможности:
1) twk<K ПРИ всех А = 0, 1, ... В силу монотонности
{^Nk} тогда существует lim tNk^t* и из C6) следует
/г —оо
lim pN(tKk) = 0- Это значит, что за конечное число шагов
/г-» оо
итерационный процесс C6) закончится выполнением усло-
условий C8).
2) Найдется номер s такой, что tNs^^<tNs+1. Тогда
из соотношений C3), C5), C6) имеем
= tNs + (рЛ' (tNs) - р (tNs))/L + (р (tNs) - р (
InH + (t* - tNs) = U + lN!L.-
Так как {^}-^0 и to<:t*<T, то f
при всех N^N0. Отсюда и из условий C5), C7) сле-
следует, что
Pn
- Р (Wl)) + (Р (tNs+l) - Р (/*)) <
Это значит, что условия C8) выполняются при некото-
некотором mN^s+l.
Объединяя обе рассмотренные возможности, заклю-
заключаем, что при /о^^*<^ процесс C6) при каждом N ^
^No закончится за конечное число шагов выполнением
условий C8), причем
tN = tNmN < /* + In/L < Ту N^ No.
Отсюда имеем lim tN^t%. Пусть lim tN= lim tNr = a.
Тогда с учетом условий C3), C5), C8) получаем
О ^ р (а) = (р (а) - р (^г)) + (р (tNr) - 9Nr (tNr)) + 9мr {tN) ^
^L\a-tNr\ + lNr + BNr-+O при r-+oo.
362
Это значит, что р(а) = 0 и, следовательно, a^t*. Таким
образом, имеем /^^а= Нт/дг= lim tN^t%, т. е.
lim tN = t*. Случай го^г*<.Т рассмотрен.
Пусть теперь t*^T. Зададим произвольное число е,
0<е<Г — to. Так как функция p(t) непрерывна и p(t)>
>0 при to^t^T — е, то ре= min p(t)>0. Тогда
существует номер Ыг такой, что pb>In + ^n при всех
N^Ni. Следовательно,
pN(t)^p(t)-lN^pe-tN>bN при to
Из C8) —D0) тогда имеем T — z<tN^T при всех N^
^Л/V В силу произвольности е отсюда получаем lim tN =
= Г. Теорема 3 доказана.
Заметим, что если функция p(t) монотонно убывает,
то вместо C7) можно взять условие ?лг^блг» jV = 1,
2, ...; теорема 3 остается справедливой и в этом случае»
Монотонность р(/) в задаче A) —E), B8) имеет место,
например, при / = 0, OgF, y = 0.
7. Для получения величины pN(t)> удовлетворяющей
условиям C5), можно воспользоваться разностной аппрок-
аппроксимацией задачи B9) —C1). А именно, пусть {^: /0<^i<
<...<tN = T}, Лг~1, 2, ..., — разбиения отрезка [/0> Т1},
удовлетворяющие условию
dN = max (ti+1 — Ц) < A — r,
W = l, 2, ..., M0 = const>0. D1)
Пусть / — некоторый фиксированный момент времени,
to<t^Tf и пусть tmN<t^tmN+1. Если t<tmN+1, то на
время вычисления искомого значения pN (t) узловую точку
tmjv+1 заменим точкой t, т. е. примем tmN+i = t. Ясно, что от
такого переопределения одной точки разбиения {^-} свойство
D1) не изменится, нужно лишь в D1) вместо Мо взять 2М0.
Рассмотрим задачу
In ([u]n, t) = | xmN+x ([u]N) -y\2->- inf, D2)
= {[tt]w = (a0, •••> «лг-i): «/gV, / = 0, N — 1}. D4)
Положим piv @ = inf /# ([и]лг, /).
363
Ясно, что на задачу D2) —D4) величины итмлЪ ...
,.., &лг-1 не влияют. Но тем не менее, как и в задаче
B9)—-C1), мы здесь рассматриваем множество D4), так
как при нижеследующих ссылках на § 1 удобнее рабо-
работать с множеством Wм. А именно, важно заметить, что
все оценки из § 1 для траекторий х(т, и), u^W, и
[%i i[u]N)]Ny [u]N е WN, полученные для отрезка [/0, Т],
остаются справедливыми и для отрезка [tOj t] с теми же
постоянными Со, Съ ..., не зависящими от выбора t,
to^t^T. Поэтому, повторив рассуждения из § 1, со-
согласно оценке A.31) получим
\P*(t)-PV)\^C6Nt *0<*<7\ N=l, 2, ..., D5)
где С = тах{Сб; Сб}, величина 8N определяется форму-
формулой A.26).
Далее, учитывая, что задачу D2) —D4) придется ре-
решать приближенно, заметим, что на практике вместо
величины pjv(t) нам удастся найти лишь некоторое ее
приближение pN (/) с погрешностью | pN (t) — pN (t) \ ^ %N.
Будем считать, что с увеличением N точность решения
задачи D2) — D4) повышается и {хл^-^-0- Отсюда и из D5)
будет следовать, что величина p^(t) удовлетворяет усло-
условиям C5) при 5лг = С6^ + хл^-*-О, N-*co.
Заметим, что описанный выше метод поиска минималь-
минимального корня уравнения р(/) может быть модифицирован
на случай функций р(/), удовлетворяющих условиям
где со (d) — неубывающая функция переменной d ^ О,
со@) = 0, и применен для решения более сложных задач
быстродействия [56, 60].
О других аспектах задач быстродействия, различных
приложениях, о дифференциальных играх преследования-
уклонения, обобщающих задачи быстродействия на слу-
случай конфликтных ситуаций, см., например, в [15, 29,
36-39, 49, 54-56, 60, 82-86, 93, 104, 106, 107, 113,
116, 125-128, 156, 158,167-173, 175—177,183,184,
199, 215, 216, 229, 230].
§ 7. Об аппроксимации максиминных задач
1. Пусть X, К —множества произвольной природы, ?/, V — за-
заданные множества, U s X, VsK, функция J (a, v) переменных и% v
определена при всех (и, и)(/У
364
Рассмотрим задачу: найти величину
sup inf J (и, у) = / A)
&UV
Задачи такого типа возникают в теории игр и исследовании опера-
операций, в вопросах приближения функций, при исследовании влияния
погрешности исходных данных на решение задачи минимизации и
т. д. [6, 18 — 20, 76, 77, 88, 119, 121, 123, 127, 128, 131, 134, 136,
144, 149, 150, 160, 161, 170—177, 181, 183—187,205,210,217-219,
229, 230].
Пусть Лдг, Y N, N = 1, 2, ..., — некоторые множества произволь-
произвольной природы, Uдг, VN — заданные множества, UN^XN, VN^YNt
функции IN ([u]N, [v]N) определены при всех ([u]N, [v]N) e=
^ UNxVN, N = lt 2, ... Рассмотрим последовательность задач: найти
lN(lu]N, lv]N) = IN^ N = l. 2, ... B)
N
Возникает интересный для приложений вопрос: каким условиям
должны удовлетворять множества V' N, VN и функции IN ([u]N, [v]N)
для того, чтобы последовательность задач B) аппроксимировала
задачу A) по функции, т. е.
^V*=V C)
Следующая теорема дает ответ на этот вопрос.
Теорема 1. Для того чтобы последовательность задач B)
аппроксимировала задачу A) по функции, необходимо и достаточно
выполнения следующих двух условий:
1) для каждого натурального числа N^\ существует отображе-
отображение РN: XN-+X и для любого [u]N^UN существует отображение
QN: Y-+YN такие, что PN ([u]N) e= U при [u]N e= UN, QN(v) e=VN
при v e V и
Ш^ [1„ {[u]N, QN (vN)) - J (PN ([u]N), vN)] ^ 0 D)
при любом выборе [u]N e UN и vN e V (подчеркнем, что отобра-
отображение QN в D), вообще говоря, зависит от [u]N e UN)\
2) для каждого натурального числа N ^ 1 существует отображе-
отображение QN :X -> XN и для любого uN e U существует отображение
PN: YN-*y такие, что QN (и) е UN при ue=U, PN ([v]N) ?E V
при [v]N e VNi
mjj (uN, PN ([v]N))-IN (ON (uN), [v]N)]^0 E)
при любом выборе uN <= U и [v]N ^VN (подчеркнем, что отображе-
отображение PN в E), вообще говоря, зависит от uN e U).
Доказательство. Из определений величин J , IN сле-
следует, что
365
1) существуют uN^ е ?/, N — l, 2, ..., такие, что
при любом выборе ^?У;
2) существуют [u]N^ ei/^, N=l, 2, ..., такие, что
" *
N
[V]n))
G)
при любом выборе [v]N e Удг;
3) для каждого фиксированного «A» e V найдется точка
такая, что
e V
(8)
найдется точка
В самом деле, из определения верхней грани следует существо-
существование таких uN^ g{/ и [u]n^ e= UN, что
™fv J (u**> V)
Ш (J(uN, vN)-J)
/V —> оо
4) для каждого фиксированного [u]N
^ е К^ такая, что
™т (In (Wn> f^TV*)"
Вспоминая определение нижней грани, отсюда при любом выборе
f^eV, M,ve ^ имеем
или
1/ЛГ. W = l, 2, ...
Отсюда при N-*-co получим неравенства F) и G).
Далее, зафиксируем произвольные uN e U и [u]N e 6^^. По
определению величин inf / (uN, v), inf IN ([u]N, [v]N) най-
дутся vN:? e V, [o]^^ e V^ такие, что
/(«дг, »^*)^ inf J(UN> V
'n(Mn> [v]v*^[v]™IvnInAu]n'
или
Отсюда при /V->-oo получим неравенства (8), (9).
Необходимость. Пусть задачи A), B) таковы, что выпол-
выполнено равенство C). Покажем, что тогда необходимо выполняются
366
условия 1), 2). Определим отображение PN: XN->X так: РN ([u]N)=
= un* ПРИ всех Wn^Xn' N = 1,2,..., где uN^ e U взяты
из F). Тогда из неравенства F) следует, что
[u]N е= ^, Удг е= V.
Зафиксируем произвольный элемент [u]N e ?/^, возьмем соответствую-
соответствующие ему [»]^g^ из (9) и определим отображение Q^: У-^-У^
так: QN (v) = [v]N^ при всех deF, N = lt 2, ... Отсюда и из (9)
имеем
ПЙ
Из C), A0), A1) тогда следует, что
Ш
N-+QQ
N-+oo N-+CQ
+ ITS (Л—
при любом выборе [u]N^UN и vN e У, Необходимость условия 1)
установлена.
Далее, определим отображение QN: X-+XN так: ОЛГ (а) = [u]N^
при всех иеХ, Л/ = 1, 2, ... , где [и]^^ взяты из G). Тогда из
неравенства G) следует, что
Зафиксируем произвольный элемент w^ e t/, возьмем соответствующий
ему у^^ ^ V из (8) и определим отображение РN: YN-*-Y так:
^n{Mn)=sVn* пРи всех ^N^YN^ ^я1> 2> ••• Отсюда и из (8)
имеем
ЛГ-юо
Из C), A2), A3) тогда следует, что
N-+co
^ л/5»(/* ~ /л'*}+J5L(У (%> p;v ([0 W)) ~ J*)+
при любом выборе uN e t/, [v]N e У^.. Необходимость условия 2)
также установлена.
367
Достаточность. Пусть выполнены условия 1), 2) теоремы.
Покажем, что тогда имеет место равенство C). Возьмем точки [u)Ni(, e
^Un из G) и положим uN = PN (Myy*)> а затем из (8) возьмем
точки vN^&Vf соответствующие именно точкам uN — PN ([u]N^y
N = 1, 2, ... Тогда, полагая в D) [u]N = [u]N^ vN = vN^ и взяв в
качестве отображения QN то, которое соответствует точке М^*,
с учетом неравенств G), (8) получим
Л —»оо N —»-оо
Далее, возьмем точки uN%<=U из F) и положим [u]N=QN ("#*),
а затем из (9) возьмем точки [у]дг^. е 7^, соответствующие именно
точкам [^1^=0^ (^*)« ^ = 1» 2> ••• Тогда, полагая в E) uN = uN^^
\v]n~[v]n*> и взяв в качестве отображения PN то, которое соответ-
соответствует точке Ыд^, с учетом неравенств F), (9) получим
т^ (^-/^) ^ ш^ {j^-j (uNv pn (iv]
+ Ш (J(uNv pn([v)n,))-in(Qn(
/V —>-00
Таким образом, имеем
N^-oo ч N-+oo N-*oo
или lim IN%= Hm IN:?~J^ т. е. равенство (З). Теорема 1 доказана.
N-+co Лг-*оо
2. Для иллюстрации теоремы 1 рассмотрим задачу: найти
sup inf /(w, у)==У*, A4)
wet/ t»ev
где
/(w, о) = |*(Гэ и, и)-^/|2 A5)
при условиях
х @ = Л @ ^ @ + Д @ и @ + С @ v (/)+/ @, A6)
почти всюду на [/0, 71]}, A7)
v = v(t)<=V = {v(t)f=zLl[t0, T]: v(t)e=Q
почти всюду на [tQ, Г]}, A8)
где Л@, 5@, С@, /@~матрицы порядка пхп, nxr, nxq, nxl
363
соответственно: моменты t0, 7\ точки х0, у g= Еп заданы; Р и Q —
заданные множества из Ег и ?V соответственно: x(t, uy v) — решение
задачи A6), соответствующее управлениям м = и (f) е Ц [*о. ^1»
d = d(/)gLJ[/0, Г]. Будем предполагать, что матрицы Л(*), 5@,
С@, I (t) кусочно непрерывны на отрезке [/0, Т].
Разобьем отрезок to^t ^Т на N частей точками t$ < tL<....
...<:tN = T и приняв эти точки в качестве узловых, уравнения A6)
заменим разностными уравнениями с помощью схем л Эйлера. В
результате придем к следующей разностной аппроксимации задачи
A4) — A8): найти
где
7л^ (Mn> Wn) = I xn (Wn, Mn) - У I2 B0)
при условиях
i), / = 0, iV—1, B1)
B2)
[1^е^ = {[^ = (Уо, ... , ^.JeL^: o/eQ, / = 0, tf-l}; B3)
здесь Mi = tux-ti, Ai = A( + O) 5 B (/ + 0) Q C(^
( ^ ) f
[ )] ( ([u]Ni [v]N), ...,xN ([u)N9 [v]N))-
— решение задачи B1), соответствующее управлениям
[u]N<=LZN, [v]Ne=L$N, N = 1, 2, ...
Опираясь на теорему 1, сформулируем условия, при которых
последовательность задач A9) —B3) аппроксимирует задачу A4) — A8)
по функции.
Теорема 2. Пусть матрицы A{t), В (t), С (t), f(t) кусочно
непрерывны на отрезке [t0, Т], множества Р a. Er, Q e Eq выпуклы,
замкнуты и ограничены, разбиения {/,-, f = Q, Л^} отрезка [tQ, T] таковы,
что
d*r= max Ati^(T — to)Mo/N< JV = 1, 2, ...
Тогда
lim /^«У,.
Лг —>oo
Доказательство. Заметим, что
sup sup max | х (/, м, у) ! ^ Со < со, B4)
sup sup max I *j ([и]Л,, [и]^) ^C4<co, B5)
sup sup ;jc(/, «, v) — x(x, ut и)\^Сг It — t \, tQ^t, т^Г, B6)
где Со, Сь С4 —положительные константы. Оценки B4) —B6) доказы-
доказываются так же, как соответствующие оценки A.8), A.16), A.11).
13 Ф. П. Васильев 369
Положим X = L?[/e> П xN = Lr2N, K = Lf[/0, 7],
Определим отображения QN\ X-+XN, QN: Y-+YNi P N\
PNl YN -> Y следующим образом:
= (uOi иъ
-* J
(М^)вИь pN(ivh) = vi ПРИ U^t
С помощью леммы 1.1 имеем
0^ (и) е i/iV при всех и
Qv (у) <= Кд^ при всех De
p;v (tr/]/v) s ^ ПРИ всех t"W
Яд, ([у]л,) е V при всех [v]N
Л/ = 1, 2, ...
Справедливы оценки
sup sup max \x (th PN([u]N) у) —
sup sup max
где
+sup!« ijb (T)-a,{+sup! о 11С (т)-с, ц
при N -> со. Оценки B7), B8) доказываются с использованием оце-
оценок B4), B6) совершенно так же. как аналогичные оценки A.24),
A.25).
Далее, рассуждая так же, как в леммах 1.3 и 1.4, с помощью
оценок B4) — B8) получаем, что
при
все
всех [u]N <= UN
Из оценок B9),
условия теоремы
Теорема 2 доказана.
370
;<й
r(v))-J
= Vt и.
C0) следуют
1 выполнены
[v]N) I < Cb6N
неравенства D), E). Таким
. Отсюда следует, что lim /
AT . , '
C0)
..., где
образом,
3. Кратко остановимся на условиях аппроксимации многократ-
многократного максимина.
Пусть U;, VI, 1 = 1, п, — некоторые непустые множества, функ-
функция J («ь vly u2, v2, ..., иПУ vn) определена на (УхХ^хХ^Х V2X...
...XUNxVN. Пусть требуется найти
sup inf sup inf ...
... sup inf J (иъ vlt ..., мЯ1 1'Л) = /*. C1)
uneunvn€=vn
В качестве последовательности аппроксимирующих задач пусть взяты
задачи: найти
sup inf ... sup inf
lv]lN, [и]2Ю [v]2N, ..., [u]nN, [v)nN) = rN^t /V = I, 2. .... C2)
где UiN, ViNy t'=l, n, —заданные непустые множества, 1N ([u]1My
[v]1N* •••» f"W» IyW) ~" ФУНК^ИЯ» определенная на VlNxVlNX..\
Возникает вопрос: каким условиям должны удовлетворять мно-
множества UiN, VtN, i=!7~n, и функции IN ([u]lN, ... , [v]nX) для
того, чтобы последовательность задач C2) аппроксимировала задачу C1)
по функции, т. е. lim lx* = J*} Ответ на этот вопрос дает следую-
Л^-^-оо
щая теорема.
Теорема 3. Для того чтобы последовательность задач C2)
аппроксимировала задачу C1) по функции, необходимо и достаточно
выполнения следующих двух исловий А и В:
Условие А: 1) а) существует отображение P1N'- ^im~^^i\
б) для произвольного фиксированного [u]lN e U1N существует отобра-
женив Q1N: V1-^V1N;
2) а) для имеющегося PlN ([^]1?) ^Иг и произвольного фиксиро-
фиксированного vlN e V± существует отображение P2N\ U2N -+U2; б) для
имеющихся [u]1N e UlN, QlN (vlN) s VlN и произвольного фиксиро-
фиксированного [u]2N e U2N существует отображение Q2N: ^2~>^2ЛГ>
п) а) для уже имеющихся P1N ([u]1N) e Uv vlN e Klf
Р2Л- (Мм) ^ ^2> ^27V ^ V2> ••' > Pn-1.N (Мп-1.к) s ^-1 « ^Л
произвольного фиксированного ^п_^ N e 1/Л/г_1 существует отображение
рпк: UnN -* ^' б) аля ^Жв имеющихся [u]1N €= i/lA., QljV (уш) s 71ЛГ,
I«]2.V S ^2Л" ^2.V (М ^ K27V' - . <гл-1.ЛГ (Vn-1,N) S ^-1,ЛГ W djW
произвольного фиксированного [u\nN e ^/яЛ^ существует отображение
QnN- Vn-+VnN-
При этом для всех этих отображений PlN, Q1N, •••, PnN> QnN
и уже имеющихся фиксированных выше элементов [u]1N, v1N, ...,
13* 371
[л-1.лг> Vn-\,N> WnN справедливо неравенство
л/ш ««* vnN e= КлЛг.
Условие В: 1) а) существует отображение Q1N: ^1~*-^\ц\
б) для произвольного фиксированного uiv e U1 существует отображе-
пае Рш: Уш-*Уг;
2) а) для имеющегося Q1N («lV) e ?/i;v w произвольного фиксиро-
фиксированного [t>]lV е К1Лг существует отображение Qo^' ^2~^^2Nf ^ ^лл
имеющихся ulN t= Uv PlN ([v]1jV) & Vl и произвольного фиксирован-
фиксированного u2N e U2 существует отображение P2yv: ^2V~> ^2»
/г) а) алл уже имеющихся Q1N {ulN) e ?/liV, [r]LV e FliV>
02Л^ (a2N) ^ ^2.V ty]2^ ^ V2N> '•• ' 0Л-Ш ("я-1Лг) е Un-IN U UP0U3'
вольного фиксированного [v]n_1N e ^^.j^ существует отображение
$nN: Un^_UnN; б) ^я ^^ имеющихся ulN е ?/х, Рш ([у]1ЛГ) е Кь
%е(/2- ^(^Ы^^. -" pn-iN(Wn-iN)^Vn-itl ^* про-
произвольного фиксированного un^^Un существует отображение PnV#
При этом для всех этих отображений Qln, ^ьу> •••> ^,гЛг' ^nN
и уже имеющихся фиксированных выше элементов ulNi [v]1N, ...
'••*un-iN> [y)/i-iiV llnN справедливо неравенство
> P
nN
Доказательство этой теоремы см. в [18].
4. В рассмотренных выше максиминных задачах A), B) или C1),
C2) множества (У?-, V",-, а также их «аппроксимации» UiN, ViN не
связаны между собой, поэтому такие задачи принято называть макси-
минными задачами с несвязанными множествами. В приложениях,
например в теории игр с непротивоположными интересами [76, 77,
121, 160, 161, 205, 218, 219], часто встречаются максиминные задачи,
в которых множества ?/;, Vt и их «аппроксимации» связаны друг
с другом. Такие задачи называют максиминными задачами со свя-
связанными множествами.
Рассмотрим простейшую задачу такого типа. Пусть X, Y — мно-
множества произвольной природы, G —заданное подмножество из X, и
пусть каждой точке и е U поставлено в соответствие множество
V (и) е Y. Пусть функция J (и, v) определена при всех (и, р)'е= UxY.
Рассмотрим задачу; найти величину
sup inf J (и, v) — J4i. C3)
372
Пусть Xn, У n, N=\, 2, ..., —некоторые множества произволь-
произвольной природы, UN—заданное множество из XN, и пусть каждому
[u]N e UN поставлено в соответствие множество VN ([u]N) s YN$
функция lN([u]N, [v]N) определена при всех ([u]N, [v]N)(=UNxYN.
Рассмотрим последовательность задач: найти величины
sup inf MHv Ma') = W # = 1, 2, ... C4)
В следующей теореме даются условия, при которых последова-
последовательность задач C4) аппроксимирует задачу C3) по функции, т. е.
Теорема 4. Для того чтобы последовательность задач C4)
аппроксимировала задачу C3) по функции, необходимо и достаточно
выполнения следующих двух условий:
1) для каждого натурального числа N^\ существует отображе-
отображение РN\ Хд, -> X и для произвольного фиксированного [u]N &.UN
существует отображение QN: У -> УN такие, что
PN ([u]N) е= U при всех [u]N e UNt C5)
Q^ (и) е= ^д, ([м]^) «ра «?« tiEKfP^ ([t/]^)), C6)
npa ec^ vN€=V (PN ([и] v)), [wj^ ?= ^/д,;
2} <5лл каждого натурального числа N ^ 1 существует отображе-
отображение QN: X-+*XN и для любого фиксированного uN<^U существует
отображение РN\ YN-+Y такие, что
QN (и) е UN при всех u<=U, C8)
Pn Wn) е V (un) »Pu 6cex Mn ^ vn ($n Ы), C9>
~^ 0 D0)
при всех [v]N €= VN (QN (uN)), uN e [/.
Доказательство. Из определений верхней и нижней граней,
величин /#, /дг^ следует, что
1) для каждого натурального N^ 1 существуют uN^ e t/ такие,
что
2) для каждого N ^ 1 существуют [м]дг s ^Удг такие, что
D2)
при всех [v]N e 1^ A«]Л>);
873
3) для любого uN g= U существует элемент vN^ e= V (uN) такой,
что
4) для любого [u]N e= UN существует [v)N^ ge VN ([u]N) такой,
что
Справедливость соотношений D1) — D4) устанавливается так же
как и аналогичных соотношений F) — (9).
Необходимость. Пусть lim IM = «/ . Определим отобра-
N-юо iV* *
жение PN: XN-+X так: PN ([u]N) = «дг^ при всех [ы]^ е *^,
N = 1, 2, ..., где йдг^ g(/ взят из D1). Ясно, что тогда включение
C5) выполнено и, кроме того, согласно D1)
Е(У* ~J {Pn ([u]n)'
Возьмем произвольный элемент [w]^ e f/^, no нему из D4) найдем
соответствующий [^]дг^ ^ ^дг (["],у) и определим отображение
(?дг: ^-^^дг так: QN (v) = [v]N:i: при всех уеК, #=1, 2, ...
Тогда справедливо включение -36) и, кроме того, согласно D4)
Отсюда следует, что
to (ММ.у, РлгЫ)—' (p/v (Млг). ^))^ .
+ Ш (J*-J(PN(MNb °N))<&
N-+oo
при всех vN^.V (PN (\u]N))y [u]N e (/^. Необходимость условия
1) доказана.
Далее, определим отображение Одг* Х->-Хмчж: QN{u) = [u)N^
при всех mgX, W = l, 2, ..., где Мд^ взят из D2). Ясно, что
тогда включение C8) выполнено и, кроме того, согласно D2)
Возьмем произвольный элемент uN <= U, по нему из D3) найдем
соответствующий vN^ e V (г/д,) и определим отображение PN\ YN -+¦
-+Y так: PN ([v]N)*=vN4i при всех [v]N e= Кд,, iV = l, 2, ... Тогда
справедливо включение C9) и, кроме того, согласно D3)
374
Отсюда следует, что
(J(uN, PN{MN))-iN(QN{uN), MN)
N~*co
при всех [у]^ е У^ @^ ("#))» ^ е ?/. Необходимость условия 2)
также доказана.
Достаточность. Пусть выполнены условия 1), 2). Возь-
Возьмем [u]Nj? ^UN из D2), положим uN = PN([u]N4t) и из D3) возь-
мем vN^ s V (uN) = V (PN (lu]NJ). Обозначим fv]N = QN (vNj.
Из C6) тогда имеем [^?^([«1^)^ = 1, 2, ... Пользуясь ус-
условием C7) при [u]N=[u]Njii, vn^vn*> c Учетом D2), D3) получим
j\—+co /v—>оо
Далее, возьмем un^<=eU из D1), положим WN^QN
из D4) возьмем соответствующий элемент [и]^ е= ^д^ ([^]дг) =
= ^ Фм (UN*))' Обозначим vN = PN([v]N4ty Из .C9) тогда сле-
следует, что vN е V («дг#)| Л^=1, 2, ... Пользуясь условием D0) при
un = un*> Mn^Mn** с Учетом D1)> D4) имеем
lim (/,-^(«лг*« у^))+ lim
N-+OO N-+CO
Таким образом, lim/^ =UmIN ~J , т. е. lim ^n±~^^
N—*co
Теорема 4 доказана.
Для иллюстрации теоремы 4 рассмотрим задачу C3) для случая,
когда
J(u, v) = \x(T, и, v)-y\\
где x(tt и, v) — решение задачи A6), и& X = Lr2[t0, T], v<=Y=*
— Li [t0, T], множества U и V имеют вид A7), A8), а множество
V (и) при каждом и е= U определяется так:
т \
г К: I g (и @, v(t))dt^O\. D5)
375
Эту задачу кратко будем называть задачей C3), A5) —A8),
D5).
Для аппроксимации этой задачи рассмотрим последовательность
задач C4), где IN([u]N, MN) = \ xN ([и]ЛГ, [v]N)-y\2; х. {[и\Чу
[v]N}t / = 0, Л', —решение задачи B1), соответствующее управлениям
[u]N <= XN = Lr2N, [v]N e YN = Lq2N; множества Ux, VN имеют вид
B2), B3)', а множество V^([u]N) при каждом [u]N — (uQt uv ...
•••uN-i) ^ ^N СТРОИТСЯ так:
I
_ D6)
i==Q
Эти задачи кратко будем называть задачами C4), B0) — B3), D6).
Оказывается, если выполнены все условия теоремы 2 и, кроме
того, функция g (и, v) непрерывна по совокупности (и> v) ее PxQ>
выпукла по переменной не? при каждом фиксированном йеР
и вогнута по переменной и е Р при каждом фиксированном и е Q,
то последовательность задач C4), B0) — B3), D6) аппроксими-
аппроксимирует задачу C3), A5) —A8), D5) по функции. Для того чтобы убе-
убедиться в этом, достаточно проверить выполнение условий теоремы 4.
Определим отображения PN, PN, QA-, 0N так же, как в зада-
задачах A4) —A8) и B0) —B3). Тогда условия C5), C8) будут выпол-
выполняться. Проверим справедливость включений C6), C9). С этой целью
заметим, что из выпуклости g(u, v) по переменной и следует нера-
неравенство
h j h
«=0, N-\, ue=U, D7)
I tn \ m
обобщающее неравенство g \ u, ^ ajVj\ ^ У] g (и,и/)а/, а;-^0,
\ /=l / 1=1
m
2] a/= 1 (см. неравенство D.2.2) из [4]). Аналогично, из вогнутости
g(и, v) по переменной и получаем
f = 0, N— 1, ye I/. D8)
Зафиксируем некоторое [«]дг = (, ..., и^-i) и возьмем произ-
вольное управление у?^ (Р^ ([«]дг)), т. е. v е= V, ^ ^ (Рдг ([«]iV).
v(t))dt^.Q. Тогда для (?Лг(») = (и0, ^ vn-i)> vi=="
376
•I 1-1
] if*
: -г— i v (t) dt, /==0, N — 1, с учетом неравенства D7) имеем
-l n-\ / tM
N~\ ti+1 T
^2 \* g("i, v(t))dt = $ g(PN([u]N), v
Это означает, что Qv (и) е Vv ([u]N)- Включение (Зб) доказано.
Далее, зафиксируем некоторое uw = uN (t) e= U, найдем Q v (i/д,) =
, V' '
= (w0, wlf ..., и.у..^), ui==~Tf \ ujy(t)dt> l' = °» A^ — 1, и возьмем
произвольное управление [v]N = (v0, ... , иЛГ_1) е VN (QN (uN)), т. е.
N-\
[v]N^VN, 2 ^- (й?, у^Д/,. г^О. С учетом неравенства D8) тогда
0
имеем
Это означает, что PN ([v]N) e F («^). Включение C9) также дока-
доказано. Неравенства C7), D0) являются следствием неравенств B7), B8).
Таким образом, все условия теоремы 4 выполнены. Согласно
теореме 4 тогда последовательность задач C4), B0) —B3), D6) ап-
аппроксимирует задачу C3), A5) —A8), D5) по функции.
5. Об условиях аппроксимации более сложных максиминных
задач
sup inf ... sup
"ieCVieVV"i) uneUn(uv vv "•• un-v vn~i)
inf J (ult vl9 ..., unt vn) = J* D9)
vneVn(uv vi vn-v un)
задачами
sup inf ... sup
inf
говорится в следующей теореме. Здесь подразумевается, что функ-
377
ция /(Mi, t)b ... un, vn) определена на непустом множестве A"tX
xKxX...xXnxFn) функция /Л,([«]1Л., [v]1N [в]пЛГ. [v\nN)
определена на непустом множестве XlNxY1NX-..xXnNxYnN, все
множества, встречающиеся в D9), E0), также непусты, причем
Vn(uv vv .... Vl, «,)
VnN ([" W •¦¦> Мя-1. ЛГ• Г«Ы S YnN-
Теорема 5. Для того чтобы последовательность задач E0)
аппроксимировала задачу D9) по функции, необходимо и достаточно
выполнения следующих условий Л и В:
Условие А: 1) а) существует отображение P1N: XlN-+X1 такое,
что РlN (UlN"j ^ U±; б) для произвольного фиксированного [w]lV<=
с U1N существует отображение Q1N: Yx -> Y1N, такое, что
Qin (Vi (Р1Л' (Win))) s у1лг (K.v);
2) а) ^ля имеющегося P1N ([u]lN) ^ U± и произвольного фиксиро-
фиксированного элемента vlN e Vx (^1Лг (["Jiat)) существует отображение
X Чт0 P2N(U2N(\-UhN> $1N
2AЛAл) it) б) ^ЛЯ ^же имеющихся MLV1A
Q17V (у1ДГ) е V17V ([u]lN) и произвольного фиксированного [и]2М е
^U2n(Win> Qin(vin)) существует отображение Q2N: Y2-+Y2Nt
такое, что Q2N (V2 (P1N ([u]lN), v1N, P2N ([u]2N))) s V2N ([u]lNy
n) а) для уже имеющихся PlN ([и]1ЛГ) s [/lf ^liV e Kx (P1N([u]1N))9
•••» Р/г-2 N (Wn-2 n)> vn-2 n) u ^ля произвольного фиксированного
элемента ' vn_h N e Vn_1 (P^N ([u)lN), vlN, ..., Pn_x N ([u]n_lt N))
существует отображение PnN: XnN ->¦ Xn, Рпм{ипм (["li^,
P
Pn-i лг(Мя-1 n)> vn-i,N)\ б) ^2Я ^Ж^ имеющихся [u]1nee
%N{V2N)&V2N{WlN> Qllv(VlN)> М2Лг)' -. Qn-1, N (vn-l, n) e
w <9ля произвольного фиксированного [u]nN e ?/яЛГ ([^JiAr, Q1Ar (yLv)> •••
•••» [/1-1.ЛГ» Q/i-i,TV (V-i,;v)) существует отображение QnN: Yn-+
-+YnN такое, что QnN (Vn (Pw ([u]lN), vlN, P2N([u]2!V)y ...
Для этих отображений Р1ДГ, Q1Ar, ... , PnN, QnN ti уже имею-
имеющихся фиксированных выше элементов [u]1N> vlN, ..., vn_x N, [u]nN
378
справедливо неравенство
/zpa всех vnN€=Vn(PlN([u]lN), vlN, ..., ол.1§лг, PnN{[u]nN)).
Условие В: 1) а) существует отображение QlN: ^A->XlV ma-
кое, что QlN (U^ s V1N\ б) для произвольного фиксированного
u (=:Ul существует отображение Рцу'' Y\n ""*" ^1 такое> чт0
Pin (vin (SW("ijv)))^i("ijv);
2) а) ^ля имеющегося Q1N (u^T) e 6/lAr w произвольного фиксиро-
фиксированного элемента [^Iitv e ^iyv (^itv (wia^)) сУи№ствУет отображение
Q2N: X2^X2N такое, что QiN(U2(uw, ^(Иш)))е^-Х
хС?ш ("ш)> ["Jijv); б) 5лл ^^ имеющихся u1N e t/p ЯШ([&]1ЛГ) е
е Vj (Uj^) u для произвольного фиксированного «2Л, s U2 (u1Ny
PlN ([^]1Лг)) существует отображение P2N: Y2N-+Y2 такое, что
PV0 Q'V PM
n) а) для уже имеющихся QlN (ulN) e UlN, [v]1N
4 [vJN
е1/я-1.Аг(О1Лг(иш)' Кл' O«-2,7v("»-2,iY)> K-2. ^) " ^
произвольного фиксированного [v]n_1N<^ Vn-i,N (Qin_(uin)< Win' •••
•••• Qn-i.N(un-i.N)) Чествует отображение QaN: Х„-*ХпМ
такое, что QnN(Un_(uw, PlN([v]lN), .... «„.1ЛГ> РЯ_1>ДГХ
Х(М«-1Л'))) = (/«^(^ш("ш)- IV- °«-i.^("n-i,Jv),
имеющихся u1N s t^, Р1Л. ([о]1ЛГ) е_^1Af(uLV),
Р
2Лг)_. Vu(ll»-a)«l(l№ Ш(МШ) 2JV
..., Рп_2 дг ([р]„_2 дг)' "л-1 Л^) " для произвольного фиксированного
unN^Un(uiN> PiN([vhN)' -' un-i,N> Pn-i.N(lv\n-i,N)) суще-
существует отображение PnN: YnN-*Yn, pnN (VnN @1N (ulN)t
UhN) U2N> •••' Pn-l,N(Wn-l,N)> UnNl-
Для этих отображений Q1N, PlN, ¦••, Qn^> Pn^ и уже имею-
имеющихся фиксированных выше элементов u1N, [v]1N, ..., [u]n_i дг. «„^
справедливо неравенство
„д „д AЛ (lN) 1N п1Л „д(пЛ))
Доказательство этой теоремы см. в [20].
6. В прикладных максиминных задачах построение аппроксими-
аппроксимирующих задач, удовлетворяющих условиям сформулированных выше
373
теорем, далеко не всегда является простым делом. Например, в зада-
, чах вида C3), C4) может встретить трудности построение отображе-
отображений РдГ, QN, PN, QN, удовлетворяющих условиям C5), C6), C8),
^39), обеспечение непустоты множеств UN, Vjv([u]jv)- Эти трудности
еще более возрастают при исследовании более сложных задач D9),
E0). Для преодоления указанных трудностей часто бывает полезно
работать с расширениями множеств, встречающихся в исходной и
аппроксимирующей максиминных задачах [19], [186], [187]. Здесь
мы приведем результаты, принадлежащие Е. Р. Авакову и автору.
Ограничимся рассмотрением задач C3), C4).
Теорема 6. Для того чтобы последовательность задач C4)
аппроксимировала задачу C3) по функции, необходимо и достаточно,
чтобы существовали последовательности множеств \UeN\ a X,
{v%N (и)}, {vVN (и)} е Y таких, что U&N Фф и V%N (и) Ф ф при
ue~U, VVN (и)Фф при uezUeN, JV = 1, 2, ..., функция J (и, v)
// \ \
//00 \ \
определена при всех (и, y)s U U N ) [) U)xY, и кроме того,
\\л/= 1 / /
выполнены следующие условия:
• 1) для каждого натурального числа М^ 1 существует отображе-
отображение PN: XN-+X, и для произвольного фиксированного [u]N&UN
существует отображение QN: У ->¦ YN такие, что
PN([u)N)^UeN, E1)
QN (v) e VN ([u)N) при всех v e VVn (Pn ([u]N))t E2)
Um^ (IN ([u]N, QN (vN)) - J (PN ([u]N), vN)) ^ 0 E3)
при ecexvN^VyN (PN([a]N));
2) для каждого натурального числа N ^ 1 существует отобра-
отображение QN: X -> XN, и для любого фиксированного uN e U сущест-
существует отображение PN: YN ~> Y такие, что
QN(uN)<=UNt E4)
PN ({v)N) e V%N (uN) при всех [v]N e VN (QN (и v)), E5)
(J (uN, PN ([v]N)) - IN (QN (uN), [v]N)) ^ 0 E6)
при всех [v]N e VN (QN (uN));
3) справедливы неравенства
E7)
J* (8iV» V^)e SUP inf Hu* v)> J* (°' Хдг) =
«?[/8jV us VVN (u)
sup inf J (u, v).
380
Доказательство. Из определений величин / (е^, 7дЛ,
У* @) Ы' 7Л'* слеДУет, что
1) для каждого N ^ 1 существуют uN^ e 6/ такие, что
лПтда (^ @, Xjv)-'(«**• M) ^° E9)
при любом выборе vN ^VXN («дг^);
2) для каждого N ^ 1 существуют [w]^ e ?/дг такие, что
при любом выборе [у]дг е 7^ ([«]^#);
3) для каждого фиксированного элемента w^r g(/ ^ найдется
элемент ^^g^ л' (мдг) такой, что
^Пгп^(У(^, vnJ-J^(bn, YyV))^0; F1)
4) для каждого фиксированного элемента [w]^ e (/^ найдется
элемент [v]N4: e FAr ([и]дг) такой, что
/^,) =S0. F2)
Справедливость соотношений E9) —F2) устанавливается также, как
и аналогичных соотношений F) —(9) или D1) —D4).
Необходимость. Пусть Игл /А'* = ^о.« Положим U^N =
,V-»oo Л* *
= (/, КУдГ (и) = V/X^ (и) = 1/ (а) при всех ие?/, W=l, 2, ... Тогда
М8*. Va^^(°' Xjv) = ^. Л^Ь 2, ..., F3)
и условия E7), E8) тривиально выполняются. Определим отображе-
отображение PN\ XN-+X так: PN ([u]Ar) = uN^ при всех [u]N s XN, N =
= 1, 2, ..., где элемент uN^ ^ U = (JeN взят из E9). Ясно, что
тогда включение E1) выполнено и, кроме того, согласно E9), F3)
Ш (J,-J(PN(lu]N), v„))*?, 0 при всех vN<=VXN(uN) =
N * 00
зафиксируем любой элемент [u]N e UN, по нему из F2) найдем
соответствующий \v]N^ e VN ([u]N) и определим отображение QN;
Y-+YN так: Qv (у) = [у]дг:1: ПРИ всех tisF, /V=l, 2, ... Тогда
справедливо включение E2) и, кроме того, согласно F2)
Ш (IN ({u)N, QN (yN)) - IN ) *? 0 при всех vN e VVA/ (РЛ ([«]Л.)).
Л7 -¦ oo
381
Отсюда следует, что
Ш (IN ([u)N, QN (vN)) - J (PN ([«]„), vN))
при всех vN e УУм (РN (M/vr)), [u]N <= UN. Необходимость условия
1) доказана.
Далее, определим отображение QN\ X-+XN так: QN (u) = [u]Niit
при Есех и е X, Л/ = 1, 2, ..., где [«]ЛгНс взят из F0). Тогда вклю-
включение E4), очевидно, выполнено и, кроме того, согласно F0)
J7™ G,v* - !N (О v (uN), lv]N)) ^ 0 при всех [v]N e К v (^ (^)),
/V —* оо
w^Y e f/. Зафиксируем произвольный элемент uN ^ U ==U N, по нему
из F1) найдем соответствующий УдГ el/ ^ (wv)= V N(uw) и опРе"
делим отображение Рд,: YN -> К так: ^ ([у]дг) = ^л^ при всех
[^еУ]У, N=1, 2, ... Тогда справедливо включение E5) и, кроме
того, согласно F1), F3) lim (У (uN, PN ([v]N))-~У ) ^0 при всех
Л^ ->оо
[и]л'е^(блг(млг))- Отск)Да следует, что
Ш (J (uN, PN (lv]N)) - IN (QN (uN), [v]N)) ^
/V —*¦ oo
при всех [у]д^ е Кдг ((ЭЛ' ("//))» UN e ^* Необходимость условия 2)
также установлена.
Достаточность. Пусть выполнены условия 1) — 3). Пока-
Покажем, что тогда lim ^дг^^^а* Возьмем Мд,-^ е 6/дг из F0), поло-
N -* со
жим Иу = ^(Млг*)' а из F1) возьмем Уд^ е FV;V (м^) =
= l/VA/ (pyv([4v*)) и обозначим [y]^ = Q^ (w^^). Из E2) тогда
имеем [v]N ^VN ([u]N^, /V=l, 2, ... Пользуясь условиями E2),
E3) при MN = [u]Ni.* VN = VN*> c Учетом соотношений E8), F0),
F1), получим
(J
382
Далее, возьмем uN^^U из E9), положим [u]N = QN (^д^), а из
F2) возьмем [и]ЛГ]|8 е= V^ (MN) = VN (ON («#*)) и обозначим vn==
= PN (№]#*)• Из E5) Т0ГДа следует, что уд, е= V%N («Л^), # =
= 1, 2, ... Пользуясь условиями E5), E6) при uN — uN^, [v]N =
= [у]дГ#, с учетом соотношений E7), E9), F2), имеем
+ /^ (/, @, Хдг)-У («л> ^)) 4-^ (У# -^ @,
Таким образом, lim /л, = lirn /лг =У т. е. lim /л; =
= Jм. Теорема 6 доказана.
Для иллюстрации теоремы 6 рассмотрим задачу C3) для случая,
когда J (и, v) = \x(T. и, v) — y\2, где х (t, и, v), to^t^ T, — реше-
решение задачи A6), соответствующее управлениям w е X = Ц [/0, ТЛ
W = {tt = w@eL5[/0, T]: u{t)s=P
почти всюду на [/0, Г]}, F4)
V = {0 = 0(OeLf[/o, Г]: v @ <= Q
почти всюду на [/0, Г]}, F5)
К(а)={у = у@е V: х(^, a, ojsG, ^o^^^T1}' F6)
6/ = {i/eW: V {и)Фф}\ F7)
здесь Р, Q, G — заданные множества из евклидовых пространств
Ег, ЕЯ, Еп соответственно. Зту задачу кратко будем называть зада-
задачей C3), A5), A6), F4) -—F7). Для аппроксимации этой задачи рас-
рассмотрим последовательность задач C4), где IN ([u]N, [v]N) =
= I XN (Wn> tyW)""^|2' x/(t"W» 1уЫ' i = 071V — решение задачи
B1), соответствующее управлениям [u]N e XN — Lr2N, [v]N e
f = O^V^T}, F9)
GUA'. C = 0 A'}, G0)
UN={[u]N e Гл,: существует [о]^ е Кд, такой, что
Л/=1,2, ... G1)
Эти разностные задачи кратко будем называть задачами C4), B0)
B1), F8) —G1).
Для исследования поведения аппроксимирующих разностных
задач определим отображения PN, QN, PN, QN так же, как р гшда-
383
чах A4) — A8), A9) —B3). Будем предполагать, что выполнены все
условия теоремы 2 и, кроме того, G выпукло и замкнуто. Тогда
справедливы включения QN (и) е WN при и ^W, QN (v) <= VN при
v e V, PN ([u)N) e Г при [М]„ е И^^, /^ ([v]N) e= К при [и]д, ее
е Кд,. Кроме того, нетрудно видеть, что здесь по-прежнему сохра-
сохраняют силу оценки B4) — C0) с заменой в них U на W, UN на W ^ч
где W, WN взяты из F4), F8). Имеют место также неравенства
sup sup max | *. ([u\N, [v]N) —
где 6V взято из B7), B8).
Для того чтобы задача C3), A5), A6), F4) —F7) имела смысл,
естественно предполагать, что множество F7) непусто. Оказывается,
что тогда при достаточно больших и,д,; ?jV множества G0), G1) также
непусты. А именно, выберем \iN, lN в G0) так, чтобы
Возьмем какие-либо и <= U, v е У (м). Тогда jc(/, м, у) е Об,
<7\ Отсюда в силу G3), G4) xi{QN(u)t QN(v))<=GN
i = Q~~N. Зто значит, что QN(u)&UN, т. е. имфф. Кроме того,
из G4) следует, что VN (\u]N) Ф ф при всех [и] N e б^дг. Таким
образом, задачи C4), B0), B1), F8) —G1) имеют смысл, и величины
^Л'*' ^^^ 2, ... определены.
В дальнейшем будем предполагать, что выполнено условие:
существуют число |3 > 0 и управления uo^W, v0 e V такие, что
x{t, uOt Va) <= G~P, to^t^T. Введем множества
VVN (u) = {v<=V: x(t, и, v) <=GyN, to^t^r}, G5)
?ye'v = {u €= i/: V8// («) ^=ф}, G6^
где
8лг ^ In + 6n + cidN> Ум = м2?лг/(Р + ел^)' iV = 1, 2, ... G7)
Здесь М2 = 2/?(Г — /0I/2 Mj, R—диаметр множества Р, а константа
Мг взята из неравенства (см. A.13)) sup sup \x(t, и, v) —
— x(t, w, v) \^M1\\u — w\\Li%
Будем предполагать, что
, Л^=1, 2, ...,
Пт yv=0 G8)
N-*oo v;V
Проверим выполнение условий теоремы 6. Заметим, что V (и) cz
cz VEN (и) при всех и е U. Это значит, что ?/ с i/SNt т. е. (У8^ # ф.
Непустота множеств V N (и) при всех и <= U N будет установлена
ниже перед проверкой условия E8).
384
Зафиксируем iV^l и [и]дг g (/дг. Согласно G1) это значит, что
существует [v]N^VN такой, что х- ([u]N, [v]N) e G v, i = 0, N.
Отсюда с учетом соотношений B6), G2), G7) имеем х (/, ЯЛ, ([u]N)y
PN ([v]N)) e^, tQ^t^T. Это значит, что Лv ([v]N) s
e 1/8'V (P;v (f"W) и ^ (f"W) e uZN' Включение E1) установлено.
Далее, возьмем любое v s VV;v (PN (|>];V)). Согласно G5), тогда
x(t, PN([u]N), v)<=GVN, to^t^T, Из B7), G8) следует, что
*. ([и]„, QN(v))t=G6N+ VjVc: GUjV, t = onv. Отсюда и из G0)
заключаем, что QN (v) <= VN (Мдг). Включение E2) доказано. Нера-
Неравенство E3) является следствием неравенства B9). Условие 1) тео-
теоремы 6 выполнено.
С помощью соотношений B6), B8), C0), F4) — G1), G3) - G8)
аналогично убеждаемся в справедливости условий 2) этой теоремы.
В самом деле, возьмем произвольный элемент uN e U. Это значит,
что существует и е V такой, что х (^, uN, u)gG, to^t^T. Отсюда
и из G3), G4) имеем х. (QN (и v), QN (v)) e= G&N с: G1n , i = oT^»
т. с. QN (ux) e ^/дг. Включение E4) установлено. Далее, возьмем
произвольный элемент [v]N е К;У (О (w,v))- Согласно G0) это значит,
что х. (QN (uN), M^eGT t = CUV. Из B6), B8), G8) следует,
что х(/, ^, ^(MyV))eGX\ to*?t*?T, т. е. Pv([^)e l/X^(%).
Включение E5) доказано. Неравенство E6) является следствием
неравенства C0). Условие 2) теоремы 6 также выполнено.
Остается проверить выполнение условия 3). Сначала докажем
неравенство E7). По определению величины J* из C3) для любого
к ^ 1 существует tik^O такой, что inf / (uk, v)^ J^ — l/k.
Далее, по определению нижней грани найдутся элементы vkN
k' Тогда
VXN(uk) такие, что J (ик, vkN)^ inf J (uk
A/, k=\, 2, ... Выбирая при необходимости подпоследовательности
можем считать, что lim / (uk, vkN\= lim / (uk, vkNy a [vkN\
N~ao N^co
слабо сходится в ^2[^c ^] ПРИ ^~>0° к некоторому элементу ^G
e=V\ Так как vkN <=VXN (uk), то л: (/, ^, ^л,)еСХлг, to^t^T,
N=\, 2, ... Поскольку ^ G, wft, улл,) -> x (/, w^, y^) равномерно на
[t0 T] при Л/ -> со, а множество G замкнуто, то х (t, uk> v^) e G,
U^t^T. Это значит, что ул е К («^), и поэтому inf J (u^ v)^
385
vk)' Tor^a' учитывая, что lim / (uk, vkN) = J (uk, vk)^
N —юо
из G9) при N-+co имеем lim (J —J @, у.Л) ^ inf J (ub,v)—
— У (w^,, vk)-{-2/k^2/k при всех & = 1, 2, ... Наконец, устремляя
здесь k->co, получим lim (.Л— J ^ @, Ya,))^0, что равносильно
N-+oo v * * v /v//
условию E7).
Заметим, что выше мы пользовались тем, что V N (и) Ф ф при
всех и е f/8^ Докажем это. Пусть и е ?/8^, не К8дг (w). Поло-
Положим % = РЛг + A-рЛГ)«, ^==Мо + A~Му' где
,)<1. (80)
Так как x(t, и, v)^G N, x(t, uQ, v0) e G~P, то с учетом (80) имеем
а:(^,%, ^)eG« Ho \хA> u^vn)-x(^un*vn)\^MiIu-'uivIl2^
^ MgP^, и поэтому с помощью G7), (80) получаем х (tt ut vN) e
(=GM^N=GyN. Следовательно, VVN(u)=?O при всех u<=UZn.
По определению У^ (&N, yN) существует uN^ е(/^ такой, что
J (eN, yN) — \/N^ inf У (un*> v)- Возьмем некоторый
V8iV ("дг^). Положим и^ Лг ( М ч
iV0 ( рдг) г^д,, где р^ взято из (80). Как и выше, получаем,
что ' х (t, uN, vN)e^G, т. е. V (uN) Ф ф. Возьмем vN^t=V (uN)
таким, чтобы inf J (uM, v\-\-\IN^J (uM, vM\. Так как
vt=V(uN) V A ' V N ^*7
\х(*> UN> "л)('
то *(/, «i^, ^)еО^ т. e.
Таким образом,
inf
Отсюда при N-*co получаем условие E8). Таким образом, при сде-
сделанных выше предположениях согласно теореме 6 последовательность
задач C4), B0), B1), F8) —G1) аппроксимирует задачу C3), A5),
A6), F4)-F7) по функции.
ОСНОВНАЯ ЛИТЕРАТУРА
1. Алексеев В. М., Тихомиров В. М., Фомин СВ.
Оптимальное управление. — М.: Наука, 1979.
2. Б а х в а л о в Н. С. Численные методы, т. 1. — М.: Наука, 1973.
3. Б у б л и к Б. Н., Кириченко Н. Ф. Основы теории упра-
управления. — Киев: Вища школа, 1975.
4. Васильев Ф. П. Численные методы решения экстремальных
задач. — М.: Наука, 1980.
5. Габасов Р., Кириллова Ф. М. Методы оптимизации. —
Минск: Изд-во Белорусского ун-та, 1975.
6. Гермейер Ю. Б. Введение в теорию исследования операций. —
М.: Наука, 1971.
7. 3 у б о в В. И. Лекции по теории управления. — М.: Наука,
1975.
8. И л ь и н В. А., П о з и я к Э. Г. Основы математического ана-
анализа. — М.: Наука, 1971, ч. I; 1973, ч. II.
9. Ильин В. А., Садовничий В. А., Сеидов Бл. X. Ма-
Математический анализ. — М.: Наука, 1979.
10. Карманов В. Г. Математическое программирование. — М.:
Наука, 1975.
11. Колмогоров А. Н., Фомин СВ. Элементы теории функ-
функций и функционального анализа. — М.: Наука, 1976.
12. Ляшенко И. Н., Кара год о ва Е. А., Черни-
Черникова Н. В., Шор Н. 3. Линейное и нелинейное программи-
программирование. — Киев: Вища школа, 1975.
13. М о и с е е в Н. Н. Элементы теории оптимальных систем. — М.:
Наука, 1975.
14. Моисеев Н. Н., Иван и лов Ю. П., Столярова Е.М.
Методы оптимизации. — М.: Наука, 1978.
15. Понтрягин Л. С, Болтянский В. Г., Гамкре-
лидзе Р. В., Мищенко Е. Ф. Математическая теория
оптимальных процессов. — М.: Наука, 1976.
16. П ш е н и ч н ы й Б. Н., Данилин Ю. М. Численные методы
в экстремальных задачах. — М.: Наука, 1975.
17. Т и х о н о в А. Н., А р с е н и н В. Я? Методы решения некор-
некорректных задач, — М.: Наука, 1979,
387
ДОПОЛНИТЕЛЬНАЯ ЛИТЕРАТУРА
18. А в а к о в Е. Р. Об условиях аппроксимации кратного макси-
мина. — Вестник Московск. ун-та. Сер. вычислит, матем. и киберн.,
1977, № 3, с. 37—43.
19. А в а к о в Е. Р. Об условиях аппроксимации максиминных задач
со связанными множествами. — Ж- вычислит, матем. и матем.
физики, 1978, 18, № 3, с. 603-613.
20. А в а к о в Е. Р. Об условиях аппроксимации кратного макси-
мина по связанным множествам. — Вестник Московск. ун-та. Сер.
вычислит, матем. и киберн., 1979, № 2, с. 16—25.
21. А н т и п и н А. С. Метод регуляризации в задачах выпуклого
программирования. —Экономика и матем. методы, 1975, 11, № 2,
с. 336—342.
22. А р м а н Ж--Л. П. Приложения теории оптимального управле-
управления системами с распределенными параметрами к задачам оптими-
оптимизации конструкций. — М.: Мир, 1977.
23. А х м е д о в К. Т., А х и е в С. С. Необходимое условие опти-
оптимальности для некоторых задач теории оптимального управления. —
Докл. АН Азерб. ССР, 1972, 28, № 5, с. 12-15.
24. Б а к у ш и н с к и й А. Б. Методы решения монотонных вариа-
вариационных неравенств, основанные на принципе итеративной регу-
регуляризации. —- Ж- вычислит, матем. и матем. физики, 1977, 17,
№ 6, с. 1350-1362.
25. Бакушинский А. Б. К принципу итеративной регуляриза-
регуляризации. — Ж- вычислит, матем. и матем. физики, 1979, 19, № 4,
с. 1040—1043.
26. Б а к у ш и н с к и й А. Б., Поляк Б. Т. О решении вариа-
вариационных неравенств. — ДАН СССР, 1974, 219, №5, с. 1038—
1041.
27. Б а л а к р и ш н а н А. Введение в теорию оптимизации в гиль-
г бертовом пространстве. — М.: Мир, 1974,
28. Б е й к о И. В., К о п е ц М. М. О нуль-управляемости линейных
стационарных систем в банаховом пространстве. — Украинский
матем. журн., 1976, 28, № 1, с. 70—72.
29. Б е л о л и п е ц к и й А. А. Численный метод решения линейной
задачи оптимального быстродействия сведением ее к задаче Коши. —
Ж- вычислит, матем. и матем. физики, 1977, 17, № 6, с. 1380—
1386.
30. Б е р д ы ш е в В. И. Устойчивость задачи минимизации при воз-
возмущении множества допустимых элементов. — Матем. сб., 1977,
103 A45), № 4 (8), с. 467-479.
31. Бердышев В. И. Непрерывность многозначных отображений,
связанных с минимизацией выпуклых функционалов. — ДАН
СССР, 1978, 243, № 3, с. 561—564.
32. Б е р е з и н И. С, Жидков Н. П. Методы вычислений,
т. I. — М.: Наука, 1966.
33. Б е р е з и н И. С., Жидков Н. П. Методы вычислений,
т. II. — М.: Физматгиз, 1962.
34. Б е р к о в и ч Е. М. 05 одном классе многоэтапных задач стоха-
стохастического оптимального управления. — Ж- вычислит, матем. и
матем. физики, 1977, 17, № 1, с, 52—63.
35. Б е с о в О. В., Ильин В. П., Никольский СМ.
Интегральные представления функций и теоремы вложения, —
М.: Наука, 1975,
388
36. Благодатских В. И. К теории достаточных условий опти-
оптимальности. — Труды Матем. института АН СССР, 1976, 142,
с. 78—87.
37. Благодатских В. И. Задача управляемости для линейных
систем. — Труды Матем. института АН СССР, 1977, 143, с. 57—67.
38. Благодатских В. И. Линейная теория оптимального упра-
управления. — М.: Изд-во Московск. ун-та, 1978.
39. Благодатских В. И. Теория дифференциальных включе-
включений, ч. 1. — М.: Изд-во Московск. ун-та, 1979.
40. Б у д а к Б. М., Беркович Е. М., Соловьева Е. Н.
О сходимости разностных аппроксимаций для задач оптимального
управления. — Ж- вычислит, матем. и матем. физики, 1969, 9,
№ 3, с. 522—547.
41. Б у д а к Б. М., Беркович Е.М. Об аппроксимации экстре-
экстремальных задач, I, II.—Ж. вычислит, матем. и матем. физики,
1971, 11, № 3, с. 580—596; № 4, с. 870—884.
42. Б у д а к Б. М., Васильев Ф. П. Приближенные методы ре-
решения задач оптимального управления (тезисы лекций), вып. 2. —
М.: Изд-во Московск. ун-та, 1969.
43. Б у д а к Б. М., Васильев Ф. П. Некоторые вычислительные
аспекты задач оптимального управления. — М.: Изд-во Московск.
ун-та, 1975.
44. Б у д а к Б. М., В и н ь о л и А., Гапоненко Ю. Л. Об
одном способе регуляризации для непрерывного выпуклого функ-
функционала. — Ж* вычислит, матем. и матем. физики, 1969, 9, № 5,
с. 1046—1056.
45. Булатов В. П. Методы погружения в задачах оптимизации. —
Новосибирск: Наука, 1977.
46. Б у т к о в с к и й А. Г. Теория оптимального управления систе-
системами с распределенными параметрами. — М.: Наука, 1965.
47. Б у т к о в с к и й А. Г. Методы управления системами с распре-
распределенными параметрами. — М.: Наука, 1975.
48. Б у т к о в с к и й А. Г. Управление системами с распределенными
параметрами. — Автоматика и телемеханика, 1979, № 11, с. 16—65.
49. Варга Дж. Оптимальное управление дифференциальными и
функциональными уравнениями. — М.: Наука, 1977.
50 Васильев О. В. Методы оптимизации в функциональных
пространствах. — Иркутск: Изд-во Иркутск, ун-та, 1979.
51. Васильев О. В., Срочко В. А. К оптимизации одного
класса управляемых процессов с распределенными параметрами. —
Сибирский матем. журнал, 1978, 19, № 2, с. 466—470.
52. В а с и л ь е в О. В., Тятюшкин А. И. К вычислению опти-
оптимального программного управления в одной задаче с распределен-
распределенными параметрами. — Ж« вычислит, матем. и магем. физики, 1975,
15, № 4, с. 1047—1053.
53. В а с и л ь е в Ф. П. Условия оптимальности для некоторых
классов систем, не разрешенных относительно производной. —
ДАН СССР, 1969, 184, № 6, с. 1267-1270.
54. Васильев Ф. П. Об итерационных методах решения задач
быстродействия, связанных с параболическими уравнениями. —
Ж- вычислит, матем. и матем. физики, 1970, 10, № 4, с. 942—957.
55. Васильев Ф. П. Лекции по методам решения экстремальных
задач. — М.: Изд-во Московск. ун-та, 1974.
56. Васильев Ф. П. Численный метод решения задачи быстродей-
быстродействия при приближенном задании исходных данных, — Вестник
389
Московск. ун-та. Сер. вычислит, матем. и киберн., 1977, № 3,
с. 26—36.
57. Васильев Ф. П. О методе квазирешений в некорректных
экстремальных задачах. — В сб.: Вычислительные методы и про-
программирование / НИВЦ. М.: Изд-во Московск. ун-та, 1977, вып. 26,
с. 119—126.
58. Васильев Ф. П. О регуляризации некорректных экстремаль-
экстремальных задач.—ДАН СССР, 1978, 241, № 5, с. 1001 — 1004.
59. Васильев Ф. П. О градиентных методах решения задач опти-
оптимального управления системами, описываемыми параболическими
уравнениями. — В сб.: Оптимальное управление. — М.: Знание,
1978, с. 118—143.
60. Васильев Ф. П. О методах поиска оптимального времени
в динамических играх преследования-уклонения с программным
управлением. — ДАН СССР, 1979, 246, № 4, 788—792.
61. Васильев Ф.П. О регуляризации некорректных задач мини-
минимизации на множествах, заданных приближенно. — Ж. вычислит,
матем. и матем. физики, 1980, 20, № 1, с. 38—50.
62. Васильев Ф. П., Воронцов М. А., Литвинова О.А,
Об оптимальном управлении процессом теплового самовоздейст-
самовоздействия.—Ж- вычислит, матем. и матем. физики, 1979, 19, №4, с. 1053—
1058.
63. Васильев Ф. П., Иванов Р. П. Некоторые приближен-
приближенные методы решения задач быстродействия в банаховых простран-
пространствах при наличии фазовых ограничений. — ДАН СССР, 1970,
195, № 3, с. 526-529.
64. Васильев Ф. П., Ковач М. О регуляризации некоррект-
некорректных экстремальных задач с использованием штрафных и барьер-
барьерных функций. — Вестник Московск. ун-та. Сер. вычислит, матем.
и киберн., 1980, № 2, 29—35.
65. Васильев Ф. П., Я чимович М. Д. Об итеративной
регуляризации метода условного градиента и метода Ньютона при
... неточно заданных исходных данных. — ДАН СССР, 1980, 250,
№ 2, с. 265—269.
66. В а с и л ь е в Ф. П., Я ч и м о в и ч М. Д. Об итеративной регу-
регуляризации метода Ньютона. — Ж- вычислит, матем. и матем. фи-
физики, 1981, 21.
67. В а с и л ь е в Ф. П., Хромова Л. Н., Ячимович М. Д.
Итеративная регуляризация одного метода минимизации третьего
порядка. — Вестник Московск. ун-та. Сер. вычислит, матем. и
киберн., 1981, № 1.
68. В а с и н В. В. Устойчивая аппроксимация бесконечномерных
задач линейного и выпуклого программирования. — Известия ву-
вузов. Сер. математика, 19?8, № 11 A98), с. 23—33.
69. Владимиров А.А., Нестеров Ю. Е., Чеканов Ю. Н,
О равномерно выпуклых функционалах. — Вестник Московск.
ун-та. Сер. вычислит, матем. и киберн., 1978, № 3, с. 12—23.
70. В о е в о д и н В. В» Линейная алгебра. — М.: Наука, 1974.
71. Габасов Р., Кириллова Ф. М. Качественная теория
оптимальных процессов. — М.: Наука, 1971.
72. Габасов Р., Кириллова Ф. М. Особые оптимальные
управления. — М.: Наука, 1973.
73. Г а б а с о в Р., Кириллова Ф. М. Принцип максимума
в теории оптимального управления, — Минск: Наука и техника,
1974.
390
74. Г а б а с о в Р., Кириллова Ф. М. Основы динамического
программирования. —- Минск: Изд-во Белорусск. ун-та, 1975.
75. Г а м к р е л и д з е Р. В. Основы оптимального управления. —
Тбилиси: Изд-во Тбилисского ун-та, 1977.
76. Гермейер Ю. Б. Игры с непротивоположными интересами. —
М.: Наука, 1976.
77. Гермейер Ю. Б., Морозов В. В., Сухарев А. Г.,
Федоров В. В. Задачи по исследованию операций. — М.:
Изд-во Московск. ун-та, 1979.
78. Г л о в и н с к и Р., Лионе Ж--Л., Тремольер Р. Чи-
Численное исследование вариационных неравенств. — М.: Мир, 1979.
79. Голыитейн Е. Г. Теория двойственности в математическом
программировании и ее приложения. — М.: Наука, 1971.
80. Гончарский А. В., Черепащук А. М.» Я г о л а А.Г.
Численные методы решения обратных задач астрофизики. — М.:
Наука, 1978.
81. Г р а ч е в Н, И., Евтушенко Ю. Г. Пакет программ для
решения задач оптимального управления. — М.: ВЦ АН СССР»
1978.
82. Григоренко Н.Л. Линейная дифференциальная игра убега-
убегания с разными ограничениями. — Вестник Московск. ун-та. Сер.
гатем., механика, 1975* № 2, с. 52—57.
83. Григоренко Н. Л., Никольский М. С. Некоторые
вычислительные аспекты метода убегания Л. С. Понтрягина и
Е. Ф. Мищенко. — В сб.: Численные методы нелинейного програм-
программирования. — Харьков, 1976, с. 143—147.
84. Гусятников П, Б., Мезенцев А. В. Дифференциальная
игра убегания с интегральными ограничениями на управления
игроков. —ДАН СССР, 1977, 232, № 4, с. 753—755.
85. Гусятников П. Б., Мезенцев А. В., ЦветковаН.В.
Убегание в дифференциальной игре с интегральными ограниче-
ограничениями и невыпуклыми управляющими множествами. — Вестник
Московск. ун-та. Сер, вычислит, матем. и киберн., 1979, № 2,
с. 38-45.
86. Гусятников П. Б., Никольский М. С Об оптималь-
оптимальности времени преследования. — ДАН СССР, 1969, 184, № 3,
с. 518-521.
87. Д а н ф о р д Н., Шварц Дж. Т. Линейные операторы, Общая
теория. — М.: ИЛ, 1962.
88. Демьянов В. Ф., Малоземов В. Н, Введение в мини-
макс. — М : Наука, 1972.
89. Демьянов В.Ф., Рубинов А. М. Приближенные методы
решения экстремальных задач. — Л.: Изд-во Ленинградск. ун-та,
1968.
90. Д е н и с о в Д. В. Метод итеративной регуляризации в зада-
задачах условной минимизации.—Ж- вычислит, матем. и матем.
физики, 1978, 18, № 6, с. 1405—1415.
91. Д у б о в и ц к и й А. Я., Милютин А, А. Задачи на экстре-
экстремум при наличии ограничений. — Ж- вычислит, матем, и матем.
физики, 1965, 5,; № 3, с, 395—453.
92. Е г о р о в А. й. Оптимальные процессы в системах с распреде-
распределенными параметрами и некоторые задачи теории инвариантно-
инвариантности. — Изв. АН СССР. Сер. матем., 1965, 29, № 6, с. 1205—1260.
93. Е г о р о в А, И, Оптимальное управление тепловыми и диффу-
диффузионными процессами.. — М,: Наука, 1978»
391
94. Егоров А. И., Гаса нов 3. М. О синтезе оптимального
управления для систем с распределенными параметрами. — Изв.
АН Азерб. ССР. Сер. физ., техн. и матем. наук, 1978, № 3. с. 5—10.
95. Егоров Ю. В. Некоторые задачи теории оптимального упра-
управления.—Ж- вычислит, матем. и матем. физики, 1963, 3, № 5,
с. 887—904.
96. Егоров Ю. В. Необходимые условия оптимальности в банахо-
банаховых пространствах. — Матем. сборник, 1964, 64 A06), № 1, с. 79—
101.
97. Е р е м и и И. И., Мазуров В. Д. Нестационарные процессы
математического программирования. — М.: Наука, 1979.
98. Е р м о л ь е в Ю. Мм Г у л е н к о В. П., Ц а р е и к о Т. И.
Конечно-разностный метод в задачах оптимального управления. —
Киев: Наукова думка, 1978.
99. 3 а б о т и н Я-И., К о р а б л е в А. И., X а б и б у л л и н Р. Ф.
О минимизации квазивыпуклых функционалов. — Известия вузов.
Сер. матем., 1972, № 10 A25), с. 27—33.
100. 3 а б о т и н Я. И., К о р а б л е в А. И., X а б и б у л л и н Р. Ф.
Условия экстремума функционала при наличии ограничений. —
Кибернетика, 1973, № 6, с. 65—70.
101. 3 а б о т и н Я. И., К о р а б л е в А. И. Псевдовыпуклые функ-
функционалы и их экстремальные свойства. — Известия вузов. Сер.
матем., 1974, № 4 A43), с. 27—31.
102. 3 а б о т и н Я. И. Минимаксный метод решения задачи матема-
математического программирования. — Известия вузов. Сер. матем.,
1975, № 6 A57) с. 36-43.
103. Зубарев С. В. К необходимым условиям оптимальности для
некоторых систем с распределенными параметрами. — Украин-
Украинский матем. журнал, 1979, 31, № 4, с. 484—436.
104. Иванов В. В., Березовский А. И., ЗадиракаВ. К.,
Здоренко Л. Д., Лепеха Н. П. Методы алгоритмиза-
алгоритмизации непрерывных производственных процессов. — М.: Наука,
1975.
105. Иванов В. К., Васин В. В., Т а п а н а В. П. Теория
линейных некорректных задач и ее приложения. — М.: Наука,
1978.
106. Иванов Р. П. Об одном критерии оптимальности и связанном
с ним итерационном методе решения задачи быстродействия. —
Ж- вычислит, матем. и матем. фи:ики, 1971, 11, № 3, с. 597—610.
107. Иванов Р. П. Об одном итерационном методе решения задачи
быстродействия. — Ж- вычислит, матем. и матем. физики, 1971,
11, № 4, с. 1031 — 1037.
108. Ишмухаметов А. 3. Применение градиентных методов для
решения одной задачи оптимального управления. — В сб.: Во-
Вопросы оптимизации и управления / НИВЦ. М.: Изд-во Московск.
ун-та, 1979, с, 19—23.
К а л г
109. Калашников А. Л. Порядковая регуляризация некоррект-
некорректной задачи оптимального управления. — В сб.: Дифференциаль-
Дифференциальные и интегральные уравнения, вып. 2. Горький: Изд-во Горьковск.
ун-та, 1978, с. 124—129.
ПО. Канторович Л. В., Акилов Г. П. Функциональный
анализ. — М.: Наука, 1977.
111. Карманов В. Г. Оценки сходимости итерационных методов
минимизации. — Ж» вычислит, матем. и матем. физики, 1974,
14, № 1, с. 3-14,
392
112. К а р м а н о в В. Г. Об одном подходе к исследованию сходи-
сходимости релаксационных процессов минимизации. — Ж- вычислит,
матем. и матем. физики, 1974, 14, № 6, с. 1581 — 1585.
113. Кир и н Н. Е. Вычислительные методы теории оптимального
управления. — Л.: Изд-во Ленинградск. ун-та, 1968.
114. К и р и н Н. Е. Методы последовательных оценок в задачах оп-
оптимизации управляемых систем. — Л.: Изд-во Ленинградск.
ун-та, 1975.
115. Киселев 1С Н. Дифференцируемость отображения, описыва-
описывающего изохронные поверхности в линейной задаче оптимального
быстродействия. — Дифференц. уравнения, 1971, 7, №8, с. 1385—
1392.
116. Киселев Ю. Н. Линейная задача оптимального быстродейст-
быстродействия при аналитических возмущениях начальных условий. —
Дифференц. уравнения, 1971, 7, № 12, с. 2151—2160*
117. Кова ч М. О регуляризации некорректных экстремальных за-
задач с использованием метода барьерных функций. — В сб.: Чи-
Численный анализ / Труды НИВЦ МГУ и БУВЦ. Будапешт, 1978,
с. 62—78.
118. Ковач М. Непрерывный аналог итеративной регуляризации
градиентного типа. — Вестник Московск. ун-та. Сер. вычислит,
матем. и киберн., 1979, № 3, с. 36—42.
119. Коллатц Л., Крабе В. Теория приближений. Чебышев-
ские приближения и их приложения. — М.: Наука, 1978.
120. Комков В. Теория оптимального управления демпфированием
колебаний простых упругих систем. — М.: Мир, 1975.
121. К о н о н е и к о А. Ф. О равновесных позиционных стратегиях
в неантагонистических дифференциальных играх. — ДАН СССР,
1976, 231, № 2, с. 285—288.
122. Корнейчук Н. П. Экстремальные задачи теории приближе-
приближения. — М.: Наука, 1976.
123. Короткий А. И., Осипов Ю. С. Аппроксимация в зада-
задачах позиционного управления параболическими системами. При-
кладн. матем. и механика, 1978, 42, № 4, с. 599—605.
124. К р а й к о А. Н. Вариационные задачи газовой динамики. —
М.: Наука, 1979.
125. К р а с о в с к и й Н. Н. Об одной задаче оптимального регулирова-
регулирования. — Прикладная матем. и механика, 1957, 21, № 5, с. 670—677.
126. Красо некий Н. Н. Теория управления движением. — М.:
Наука, 1968.
127. Красовский Н, Н. Игровые задачи о встрече движений. —
М.: Наука, 1970.
128. Красовский Н. Н., Субботин А. И. Позиционные
дифференциальные игры. — М.: Наука, 1974.
129. Кривей ков Ю. П. Условие оптимальности для квазилиней-
квазилинейной задачи с дифференциальными уравнениями в частных произ-
производных при наличии фазовых ограничений. — ДАН СССР, 1979,
249, № 1, с. 37—41.
130. Кротов В. Ф., Гурман В. И. Методы и задачи оптималь-
оптимального управления. — М.: Наука, 1973.
131. К р у ж к о в С. Н. Нелинейные уравнения первого порядка и
связанные с ними дифференциальные игры. — Успехи матем.
наук, 1969, 24, № 2, с. 227—228.
132. Крылов Н. В. Управляемые процессы диффузионного типа. —
М.: Наука, 1977,
393
133. Кузнецов Ю. А. О необходимых условиях оптимальности в
задачах управления системами, описываемыми уравнениями
эллиптического типа. — Сибирск. матем. журнал, 1979, 20, № 3,
с. 586-596.
134. Кукушкин Н.С., Морозов В. В. Теория неантагони-
неантагонистических игр. — М.: Изд-во Московск. ун-та, 1977.
135. Куликовский Р. Оптимальные и адаптивные процессы
в системах автоматического регулирования. — М.: Наука, 1967.
136. Куржанский А. Б. Управление и наблюдение в" условиях
неопределенности. — М.: Наука, 1977.
137. Кусраев А. Г. О необходимых условиях экстремума для не-
негладких векторозначных отображений. — ДАН СССР, 1978, 242,
№ 1, с. 44—47.
138. Кутателадзе С. См Рубинов A.M. Двойственность
Минковского и ее приложения. — Новосибирск: Наука. Сибир-
Сибирское отделение, 1976.
149. Ладыженская О. А. Краевые задачи математической фи-
физики. — М-: Наука, 1973.
140. Левитин Е. С, Милютин А. А., Осмоловский Н .П.
Условия высших порядков локального минимума в задачах с ог-
ограничениями. — Успехи матем. наук, 1978, 28, № 6 с. 85—
148.
141. Левитин Е. С, Поляк Б. Т. Методы минимизации при
наличии ограничений. — Ж- вычислит, матем. и матем. физики,
1966, 6, № 5, с. 787-823.
142. Лионе Ж--Л. Оптимальное управление системами, описывае-
описываемыми уравнениями с частными производными. — М.: Мир, 1972.
143. Лисковец О. А. Дискретные схемы в методе регуляризации
для некорректных экстремальных задач. — ДАН СССР, 1979,
248, № 6, с. 1299—1303.
144. Лоран П.-Ж- Аппроксимация и оптимизация. — М.: Мир,
1975.
145. Лубышев Ф. В. О дифференциально-разностных аппроксима-
аппроксимациях многомерных задач оптимального управления с распределен-
распределенными в пространстве параметрами. — Дифференц. уравнения,
1977, 13, № 4, с. 711-717.
146. Лукьянов А. Т., Неронов В. С. Об оптимальном упра-
управлении одной параболически-гиперболической системой. — Изв.
АН Казахской ССР, 1976, № 3, с. 77—80.
147. Л у р ь е К. А. Оптимальное управление в задачах математиче-
математической физики. — М.: Наука, 1975.
148. Макаров В. Л., Рубинов А. М. Математическая теория
экономической динамики и равновесия. — М.: Наука, 1973.
149. Маркин Е.А. Об антагонистических играх для одного класса
динамических систем, описывающих взаимодействия в химических
реакторах. — Вестник Московск. ун-та. Сер. вычислит, матем.
и киберн., 1978, № 1, с. 44—52.
150. Маркин Е.А.О задаче уклонения для одного класса динами-
динамических систем, описываемых волновым уравнением. — Киберне-
Кибернетика, 1978, № 1, с. 132—133.
151. М а р к и н Е. А., С т р е к а л о в с к и й А. С. О существова-
существовании, единственности и устойчивости решения для одного класса
динамических систем, описывающих химические процессы. —
Вестник Московск, ун-та, Сер, вычислит, матем. и киберн., 1977,
№ 4, с, 3-11.
394
152. М а р ч у к Г. И. Окружающая среда и проблемы оптимизации
размещения предприятий. — ДАН СССР, 1976, 227, № 5, с. 1056—
1059.
153. М а р ч у к Г, И, Методы вычислительной матема1кки. — М.:
Наука, 1977.
154. Марчук Г. И., Шайдуров В. В. Повышение точности
решений разностных схем. — М.: Наука, 1979.
155. Матвеев А. С, Якубович В. А. Оптимальное управле-
управление некоторыми системами с распределенными параметрами. —
Сибирск. матем. журнал, 1978, 19, № 5, с. 1109—1140.
156. Мезенцев А. В. Об одной дифференциальной игре. — Диф-
ференц. уравнения, 1972, 8, № 10, с. 1767—177Ь
157. Михайлов В. П. Дифференциальные уравнения в частных
производных. — М.: Наука, 1976.
158. М и щ е н к о Е. Ф. О некоторых игровых задачах преследования
и уклонения от встречи. — Автоматика и телемехан., 1972, № 9,
с. 24—30.
159. Моисеев Н. Н. Численные методы в теории оптимальных
систем. — М.: Наука, 1971.
160. М о л о д ц о в Д. А. Сходимость метода сеток в одной задаче
теории игр. — Ж« вычислит, матем. и матем. физики, 1974, 14,
№ 3, с. 783—785.
161. М о л о д ц о в Д. А. Регуляризация множества точек Парето. —
Ж- вычислит, матем. и матем. физики, 1978, 18, № 3, с. 597—602.
НJ. Мордухович Б. Ш. О разностных аппроксимациях систем
оптимального управления. — Прикладная матем. и механика,
1978, 42, № 3, с. 431-440.
163. Морозов В. А. Регулярные методы решения некорректно по-
поставленных задач. — М.: Изд-во Московск. ун-та, 1974.
164. М о р о з о в В. А. Регулярные методы решения нелинейных
операторных уравнений. — Известия вузов. Математика, 1978,
№ 11, с. 74-86.
165. Морозов В. А. О решении операторных уравнений 1-го рода
методом конечно-ранговых аппроксимаций. — ДАН СССР, 1979,
247, № 6, с. 1317—1320.
166. Мосолов П. П. О некоторых математических вопросах теории
несжимаемых вязкопластических сред. — Прикладная матем. и
механика, 1978, 42, № 4, с. 737—746.
167. Никольский М. С. Об одном способе убегания. — ДАН
СССР, 1974, 214, № 2, с. 287—290.
168. Никольский М. С. О квазилинейной задаче убегания, —
ДАН СССР, 1975, 221, № 3, с. 539-542.
169. Никольский СМ. Приближение функций многих перемен-
переменных и теоремы вложения. — М.: Наука, 1977.
170. Осипов Ю. С. К теории дифференциальных игр в системах
с распределенными параметрами. — ДАН СССР, 1975, 223, № 6,
с. 1314—1317.
171. Осипов Ю. С. Позиционное управление в параболических систе-
системах. — Прикладная матем. и механика, 1977,41, № 2, с. 195—201.
172. Осипов Ю. С., О х е з и н С. П. К теории дифференциальных
игр в параболических системах. — ДАН СССР, 1976, 226, № 6,
с. 1267—1270.
173. Осипов Ю. С, О х е з и н С. П. К теории позиционного управ-
управления в гиперболических системах.—ДАН СССР, 1977, 233,
№ 4, с. 551-554,
395
174. Островский Г. М., Волин Ю. М. Моделирование слож-
сложных химико-технологических схем. — М.: Химия, 1975.
175. О х е з и н СП. Дифференциальная игра сближения — уклоне-
уклонения для параболической системы при интегральных ограничениях
на управления игроков. — Прикладная матем. и механика, 1977,
41, № 2, с. 202—209.
176. О х е з и н С. П. Об управлении гиперболической системой в усло-
условиях неопределенности. — Прикладная матем. и механика, 1978,
42, № 4, с. 606—612.
177. Петросян Л. А. Дифференциальные игры преследования. —
Л.: Изд-во Ленинградск. ун-та, 1977.
178. Плотников В. И. Теоремы существования оптимизирующих
функций для оптимальных систем с распределенными парамет-
параметрами. — Изв. АН СССР. Сер. матем., 1970, 34, № 3, с. 689—711.
179. Плотников В. И. Необходимые и достаточные условия оп-
оптимальности и условия единственности оптимизирующих функ-
функций для управляемых систем общего вида. — Изв. АН СССР.
Сер. матем., 1972, 36, № 6, с. 652—679.
180. Плотников В. И., Сумин В. И. Оптимизация объектов
с распределенными параметрами, описываемых системами Гурса —
Дарбу. —Ж- вычислит, матем. и матем. физики, 1972, 12, № 1,
с. 61-77.
181. П о д и н о в с к и й В. В., Г а в р и л о в В. М. Оптимизация
по последовательно применяемым критериям. — М.: Советское
радио, 1975.
182. П о л а к Э. Численные методы оптимизации. Единый подход. —
М.: Мир, 1974.
183. П о н т р я г и н Л. С. О линейных дифференциальных играх, I,
II. — ДАН СССР, 1967, 174, № 6, с. 1278—1280; 175, № 4, с. 764—
766.
184. Понтрягин Л. С. Линейная дифференциальная игра убега-
убегания. — ДАН СССР, 1970, 191, № 2, с. 283—285.
185. Потапов М. М. Разностная аппроксимация и регуляризация
задач оптимального управления системами Гурса — Дарбу. —
Вестник Московск. ун-та. Сер. вычислит, матем. и киберн., 1978,
№ 2, с. 17—26.
186. Потапов М. М. Разностная аппроксимация максиминных
задач для систем Гурса — Дарбу при наличии фазовых ограниче-
ограничений. — Вестник Московск. ун-та. Сер. вычислит, матем. и киберн.,
1978, № 4, с. 28—36.
187. Потапов М. М. Об аппроксимации по функционалу макси-
максиминных задач со связанными переменными. — Ж. вычислит, матем.
и матем. физики, 1979, 19, № 3, с. 610—621.
188. Пшеничный Б. Н. Необходимые условия экстремума. —
М.: Наука, 1969.
189. Пшеничный Б. Н. Выпуклый анализ и экстремальные за-
задачи. — М.: Наука, 1980.
190. Рождественский Б. Л., Я н е н к о Н. Н. Системы
квазилинейных уравнений и их приложения к газовой динамике. —
М.: Наука, 1978.
191. Ройтенберг Я. Н. Автоматическое управление. — М.:
Наука, 1978.
192. Р о к а ф е л л а р Р. Выпуклый анализ. — М.: Мир, 1973.
193. Самарский А, А, Введение в теорию разностных схем, —
М,: Наука, 1971,
396
194. Самарский А. А, Теория разностных схем. — М.: Наука*
1977.
195. Самарский А. А., Андреев В. Б. Разностные методы
для эллиптических уравнений. — М.: Наука, 1976.
196. Самарский А. А., Г у л и н А. В. Устойчивость разност-
разностных схем. — М.: Наука, 1973.
197. Самарский А. А., Николаев Е. С. Методы решения
сеточных уравнений. — М.: Наука, 1978.
198. Самарский А. А., Попов Ю. П. Разностные схемы га-
газовой динамики. — М.: Наука, 1975.
199. Сатимов Н.Ю. Об одном способе убегания в дифференциаль-
дифференциальных играх. — Матем. сборник, 1976, 99 A41), № 3, с. 380—393.
200. С е а Ж. Оптимизация. Теория и алгоритмы. — М.: Мир, 1973.
201. С и р а з е т д и н о в Т. К. Оптимизация систем с распределен-
распределенными параметрами. — М.: Наука, 1977.
202. Слугин С. Н., Шашков В. М. Минимизируемость функ-
функционала на топологическом произведении дуальных пространств. —
Известия вузов. Сер. матем., 1974,. № 5 A44), с. 188—193.
203. С л у г и и С. Н., Шашков В. М., Миронов А. В. То-
Топологический достаточный признак существования оптимального
управления динамической системой. — Известия вузов. Матема-
Математика, 1977, № 10 A85), с. 134—137.
204. Соболев С. Л. Введение в теорию кубатурных формул. —
М.: Наука, 1974.
205. Современное состояние теории исследования операций; Сб. работ /
Под ред. Н. Н. Моисеева. — М.: Наука, 1979.
206. Старостенко В. И. Устойчивые численные методы в зада-
задачах гравиметрии. — Киев: Наукова думка, 1978.
207. Стрекаловский А. С. Об условиях оптимальности в глад-
гладкой задаче оптимального управления в банаховом пространстве. —
В сб.: Численные методы анализа (прикладная математика).
Иркутск: Изд-во Сибирск. энергетич. ин-та, 1978, с. 76—88.
208. Стрекаловский А. С. К оптимальности по векторному
критерию систем, описываемых эллиптическим уравнением. —
В сб.: Прикладная математика. Иркутск: Изд-ео Сибирск. энерге-
энергетич. ин-та, 1978, с. 71—79.
209. Тер-Крикоров А. М. Оптимальное упрапление и мате-
математическая экономика. — М.: Наука, 1977.
210. Тихомиров В. М. Некоторые вопросы теории приближе-
приближений. — М.: Изд-во Московск. ун-та, 1976.
211. Т и х о н о в А. Н., Васильев Ф. П., Потапов М. М.,
Юрий А. Д. О регуляризации задач минимизации на множест-
множествах, заданных приближенно. — Вестник Московск. ун-та. Сер.
вычислит, матем. и киберн., 1977, № 1, с. 4—19.
212. Тихонов А. Н., Васильев Ф. П. Методы решения не-
некорректных экстремальных задач. — В кн.: Banach Center Pub-
Publications. V. 3. Mathematical models and numerical methods. War-
szawa, 1978, p. 297—342.
213. Тихонов А. Н.* Самарский А. А. Уравнения математи-
математической физики. — M.: Наука, 1972.
214. Троицкий В. А. Оптимальные процессы колебаний механи-
механических систем. — Л.: Машиностроение, 1976.
215. Тынянский Н. Т., Арутюнов А. В. Линейные про-
процессы оптимального быстродействия. — Вестник Московск. ун-та.
Сер. вычислит, матем. и киберн., 1979, № 2, с, 32—37.
397
216. Федоренко Р. П. Приближенное решение задач оптималь-
оптимального управления. -— М.: Наука, 1978.
217. Федоров В. В. Принцип максимума для минимакской задачи
управления с фазовыми ограничениями. — Вестник Московск.
ун-та. Сер. вычислит, матем. и киберн., 1978, № 4, с. 36—46.
218. Федоров В. В. Численные методы максимина. — М.: Наука,
1979.
219. Федоров В. В., Молодцов Д. А. Устойчивость прин-
принципов оптимальности. — В кн.: Современное состояние теории
исследования операций. — М.: Наука, 1979, с. 23.6—262.
220. Филиппов А. Ф. О некоторых вопросах теории оптималь-
оптимального регулирования. — Вестник Московск. ун-та. Сер. матем.,
механика, 1959, № 2, с. 25—32.
221. X а р а т и ш в и л и Г. Л., М а ч а и д з е 3. А., М а р к о з а-
швили Н.И., Тадумадзе Т. А. Абстрактная вариацион-
вариационная теория и ее применения к оптимальным задачам с запазды-
запаздыванием. — Тбилиси: Мецниереба, 1973.
222. Хоменюк В. В. Оптимальные системы управления. — М.:
Наука, 1977.
223. Хромова Л. Н. Об одном методе минимизации с кубической
скоростью сходимости. — Вестник Московск. ун-та. Сер. вычи-
вычислит, матем. и киберн., 1980, № 3, с. 52—56.
224. Цискаридзе К. Ш. Экстремальные задачи в банаховых
пространствах. — В сб.: Некоторые вопросы математической
теории оптимального управления. — Тбилиси: Изд-во Тбилис-
Тбилисского ун-та, 1975, с. 5—150.
225. Чан X а н ь. Некоторые методы минимизации при наличии ог-
ограничений в гильбертовом пространстве. — Ж- вычислит, матем.
и матем. физики, 1977, 17, № 6, с. 1387—1395.
226. Черемных Ю. Н. Качественное исследование оптимальных
траекторий динамических моделей экономики. — М.: Изд-во
Московск. ун-та, 1975.
227. Черноусько Ф. Л., Баничук Н. В. Вариационные
задачи механики и управления. — М.: Наука, 1973.
228. Черноусько Ф. Л., Колмановский В. Б. Вычи-
Вычислительные и приближенные методы оптимального управления. —
В сб. ВИНИТИ: Математический анализ. — М., 1977, 14, с. 101 —
167.
229. Черноусько Ф. Л., Колмановский В. Б. Опти-
Оптимальное управление при случайных возмущениях. — М.: Наука,
1978.
230. Черноусько Ф. Л., Меликян А. А. Игровые задачи
управления и поиска. — М.: Наука, 1978.
231. Э к л а н д И., Темам Р. Выпуклый анализ и вариационные
проблемы. — М.: Мир, 1979.
232. Якубович В. А. К абстрактной теории оптимального управ-
управления. — Сибирск. матем. журн., I, 1977, 18, № 3, с. 685—707;
II, 1978, 19, № 2, с. 436—460.
233. Ячимович М. Итеративная регуляризация одного варианта
метода условного градиента. — Вестн. Московск. ун-та. Сер.
вычислит, матем. и киберн., 1980, № 4.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Аппроксимация задачи быстродейст-
быстродействия 350
— максиминных задач 364
— — — со связанными множествами
373
— многократного максимина 371
— экстремальных задач по функции
306
Верхняя грань функции 26
Время оптимальное 351
— первой встречи 350
Гильбертов кирпич 40
Гиперплоскость 9
— опорная 40
— отделяющая 39
Градиент 18
Дифференциал 18
— второй 22
— Гато 43
— Фреше 43
Достаточное условие минимума 28
Задача быстродействия 350
— линейного, квадратичного про-
программирования 233, 257
Итеративная регуляризация метода
Ньютона 281
— — — проекции градиента 244
— — — с кубической скоростью схо-
сходимости 287
— — — условного градиента 269
Константа сильной выпуклости 24
Корректно и некорректно поставлен-
поставленная экстремальная задача 163,
239
Коэффициент штрафной 88
Критерий выпуклости функции 24
— сильной выпуклости функции 25
Метод возможных направлений 82
— градиентный 67, 260
— квазирешений 206, 238, 241
— невязки 202, 236, 241
— Ньютона 85, 281
— проекции градиента 71, 244
— регуляризации 164
— скорейшего спуска 67
— с кубической скоростью сходимо-
сходимости 86, 287
— сопряженных направлений 84
— Тихонова (стабилизации) 183, 223,
241
— условного градиента 76, 269
— штрафных функций 87, 222
Минимум функции (абсолютный, гло-
глобальный) 26
Множество выпуклое 23
— компактное 46, 62
— Лебега 55
— секвенциально компактное 62
— слабо компактное 49
— счетно компактное 62
Множители Лагранжа 37
Модуль выпуклости 56
— — точный 56
— непрерывности множеств по Хаус-
дорфу 344
Направление возможное 82
— — убывания 82
Необходимое условие минимума 27,
28
Непрерывная итеративная регуля-
регуляризация градиентного метода
260
Непрерывность множеств по Хаус-
дорфу 343
Неравенство Коши — Буняковского
9
Нижняя грань функции 26
Норма оператора 11
Нормальное решение 174
Нормальный вектор гиперплоскости
10
Максимум функции (абсолютный, гло-
глобальный) 26
Окрестность множества 60
— точки 60
399
Оператор линейный 11
— неотрицательный 25
— ограниченный 11
— положительно определенный 25
— самосопряженный 12
Отделимость множеств 39
— — сильная 40
—- — строгая 40
Отображение 8
— аффинное 38
— дифференцируемое 39
Последовательность максимизирую-
максимизирующая 27
— минимизирующая 27, 221
— — регулярная 178, 239
Предельная точка последовательности
СО
Проекции точки на множество 72
Производная вторая 22
— Гато (слабая) 43
— обобщенная 14
— отображения 39
— первая 18
— по направлению 44
— Фреше (сильная) 43
Пространство банахово 8
— — рефлексивное 11
— — сопряженное 9
— гильбертово 8
— линейное 8
— метрическое 46
— топологическое 60
Разделенная разность градиента 86
Разностная аппроксимация квадра-
квадратичной задачи 293, 310, 316, 328,
338
Расстояние между множествами по
Хаусдорфу 339
— от точки до множества 47
Регуляризация аппроксимаций экст-
экстремальных задач 325
— некорректных экстремальных за-
задач 164
— разностных аппроксимаций квад-
квадратичной задачи 328
Седловая точка 37
Слабая сходимость последовательно-
последовательности 10
След функции 16
Стабилизатор 165. 239
— слабый 166
Сходимость последовательности к
множеству 47, 60
— — -х. _ слабая 49
Теорема Вейерштрасса 46
Топология банахова пространства
сильная 60
— — — слабая 61
Точка локального максимума, мини-
минимума 27
— максимума, минимума 26
— строгого локального максимума,
минимума 27
Управление процессами, описывае-
описываемыми уравнениями Гурса — Дар-
Дарбу 152
— —, — — колебания стержня 141
— —;____ стругы 134
— —, — — обыкновенными диффе-
дифференциальными 29, 57, 69, 74, 78,
92, 199, 254, 293
— —, — — параболического типа
131
— —. _ _ первого порядка с част-
частными производными 146
— •—, — — с дискретным временем
107
— —, — — теплопроводности 116
Управляемость системы 350
Условия аппроксимации максимин-
ных задач 364
— — экстремальных задач 305
Формула конечных приращений 23
— Ньютона — Лейбница 17
Функция (функционал) 8
—- билинейная 12
— — ограниченная симметричная 12
— вогнутая 24
— выпуклая 24
— Гамильтона — Понтрягина 35, 92
— дифференцируемая 18
— — дважды 22
— квадратичная 12
— Лагранжа 37, 38
—• неограниченная сверху, снизу 26
— непрерывная 47
— непрерывно дифференцируемая 19
— — — дважды 22
— ограниченная сверху, снизу 26
— полунепрерывная сверху 46
— — снизу 46, 63
— разномерно выпуклая 56
— сильно выпуклая 24
— слабо непрерывная 49
— — полунепрерывная сверху, сни-
снизу 49
— строго вогнутая 24
-— — выпуклая 24
— — равномерно выпуклая 56
— штрафная 87