


















































































































































































































































































































Автор: Глазунов В.А.
Теги: автоматика системы автоматического управления и регулирования интеллектуальная техника технология управления оборудование систем управления техническая кибернетика самодействующие системы кибернетика электроника электротехника робототехника
ISBN: 978-5-94836-537-4
Год: 2018



и мех атр о н и к и
Новые механизмы
в современной
робототехнике
под редакцией
д.т.н., профессора В.А. Глазунова
Т ЕХН О СФЕРА
Москва
2018
УДК 681.5+007.52
ББК 32.816
Н74
Рецензенты:
Н.П. Алёшин – академик РАН, д.т.н. (МГТУ им Н.Э. Баумана)
А.С. Дорохов – член-корреспондент РАН, д.т.н.
(Федеральный научный агроинженерный центр «ВИМ»)
Н74 Новые механизмы в современной робототехнике
Под редакцией В.А. Глазунова
М.: ТЕХНОСФЕРА, 2018. – 316 стр. ISBN 978-5-94836-537-4
В книге представлены новые механизмы параллельной структуры различных
классов, имеющие широкие возможности применения в робототехнических системах для технологических и транспортных процессов в различных отраслях промышленности, а также космической и медицинской робототехнике. Проведены исследования в области кинематики, динамики и управления такими системами.
Рассмотрены механизмы мобильных роботов технологического и медицинского
назначения, исследованы вопросы их динамики и управления.
Представленные механизмы разработаны и исследованы в Институте машиноведения им. А.А. Благонравова Российской академии наук.
Книга предназначена для специалистов в области теории механизмов и машин,
научных работников и инженеров, чья деятельность связана с созданием новых робототехнических систем, а также студентов, аспирантов и преподавателей.
УДК 681.5+007.52
ББК 32.816
© 2018, Воробьев Е.И., Гаврюшин С.С., Глазунов В.А., Горобцов А.С.,
Емельянова О.В., Ефимов С.В., Носова Н.Ю., Пащенко В.Н., Петраков А.А.,
Рашоян Г.В., Саяпин С.Н., Соколов С.В., Тывес Л.И., Филиппов Г.С., Хейло С.В.,
Царьков А.В., Яцун С.Ф.
© 2018, АО «РИЦ «ТЕХНОСФЕРА», оригинал-макет, оформление
ISBN 978-5-94836-537-4
Содержание
Предисловие . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Глава 1. СТРУКТУРНЫЙ СИНТЕЗ И КЛАССИФИКАЦИЯ
l-КООРДИНАТНЫХ МЕХАНИЗМОВ С УЧЕТОМ
РАСПОЛОЖЕНИЯ ПРИВОДОВ МЕЖДУ ОСНОВАНИЕМ
И ВЫХОДНЫМ ЗВЕНОМ
Рашоян Г.В., Глазунов В.А. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1 .1 . Классификация l-координатных механизмов
без учета расположения приводов
и наличия промежуточных звеньев . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1 .2 . Расширенная таблица классификации
l-координатных механизмов с расположением
приводов между основанием или выходным звеном
и одним из промежуточных звеньев . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1 .3 . Синтез структур механизмов с расположением
приводов вне рабочей зоны
и с дополнительными стержнями-вводами . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Литература . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
Глава 2. СИНТЕЗ, АНАЛИЗ И УПРАВЛЕНИЕ
ПОСТУПАТЕЛЬНО-НАПРАВЛЯЮЩИМИ
И СФЕРИЧЕСКИМИ МЕХАНИЗМАМИ
Хейло С.В., Глазунов В.А. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
2 .1 . Структурно-геометрический синтез
и кинематический анализ
поступательно-направляющего механизма . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
2 .2 . Анализ динамических свойств
поступательно-направляющего механизма
параллельной структуры
и разработка алгоритмов управления . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
2 .3 . Структурно-геометрический синтез
и кинематический анализ
сферических механизмов . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
2 .4 . Анализ динамических свойств
сферического механизма
параллельной структуры
и разработка алгоритма управления . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
2 .5 . Построение экспериментальных образцов
поступательно-направляющих
и сферических механизмов
и области их применения . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
Литература . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
4
Содержание
Глава 3. СИНТЕЗ, АНАЛИЗ И УПРАВЛЕНИЕ МЕХАНИЗМАМИ
С ТРЕМЯ КИНЕМАТИЧЕСКИМИ ЦЕПЯМИ
ДЛЯ АДДИТИВНЫХ ТЕХНОЛОГИЙ
Носова Н.Ю ., Глазунов В.А. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
3 .1 . Структурно-геометрический синтез механизмов
с тремя кинематическими цепями
и различным числом степеней свободы . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
3.2. Кинематический анализ механизма
с тремя кинематическими цепями
и различным числом степеней свободы . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
3.3. Динамический анализ механизма
с тремя кинематическими цепями
и управление им . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .113
3.4. Элементы конструкции
экспериментальной модели
механизма с тремя кинематическими цепями
для аддитивных технологий . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .116
Литература. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
Глава 4. СИНТЕЗ НОВОГО МЕХАНИЗМА
ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ 3 × 2
С ПОЛНОЙ ГРУППОВОЙ
КИНЕМАТИЧЕСКОЙ РАЗВЯЗКОЙ
Тывес Л.И. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .121
Литература. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
Глава 5. РАЗРАБОТКА НОВЫХ МЕХАНИЗМОВ
ДЛЯ СОВРЕМЕННЫХ РОБОТОТЕХНИЧЕСКИХ СИСТЕМ,
ПРЕДНАЗНАЧЕННЫХ ДЛЯ ТЕХНОЛОГИЧЕСКИХ,
МЕДИЦИНСКИХ, АДДИТИВНЫХ
И ДИАГНОСТИЧЕСКИХ УСТРОЙСТВ
Глазунов В.А., Филиппов Г.С.,
Петраков А.А., Царьков А.В.. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .131
Литература. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
Глава 6. НОВЫЕ МЕХАНИЗМЫ ДЛЯ ПРОТЕЗОВ РУК И
ДВУРУКИХ РОБОТОВ
Воробьев Е.И.. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144
6.1. Целеуказание положения предмета
и осуществление переносных движений . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
6.2. Определение управляющих сил
при выводе схвата манипулятора
в заданную точку пространства
с заданной скоростью . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
6.3. Осуществление ориентирующих движений . . . . . . . . . . . . . . . . . . . . . . . . . . . 150
6.4. Осуществление захвата объектов
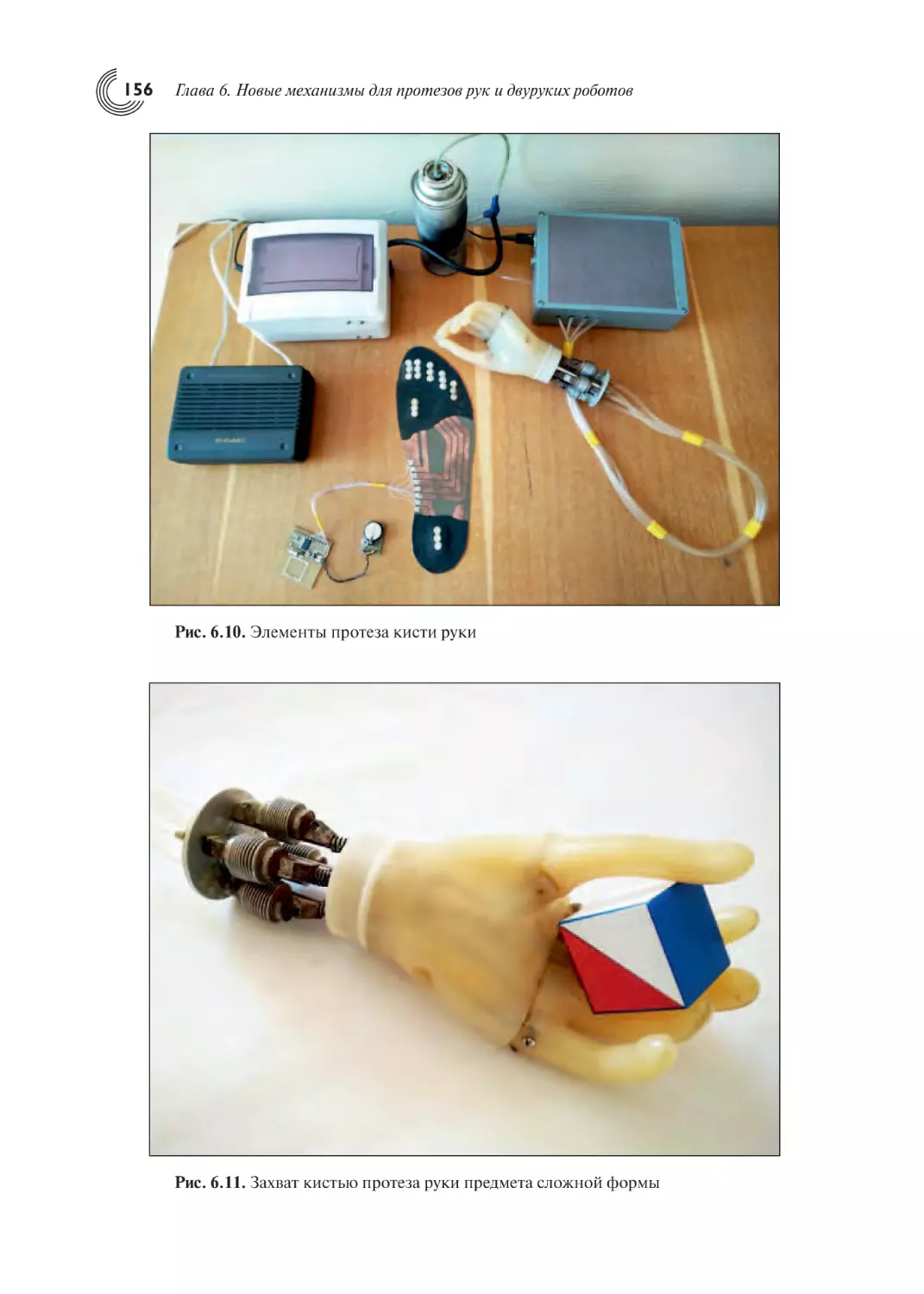
различной формы. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
6.4.1. Протез кисти руки с пневмоприводом . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
6.4.2. Дистанционное управление
протезом руки . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
Содержание
5
6 .5 . Алгоритм управления
пальцами протеза руки . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
6.6. Очувствление протеза руки . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
6.7. Двурукие роботы . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 160
Литература. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168
Глава 7. НОВЫЕ МЕХАНИЗМЫ РОБОТ-ШАРОВ,
ПРИВОДИМЫХ В ДВИЖЕНИЕ
ВНУТРЕННИМИ ПЕРЕМЕЩЕНИЯМИ
ЗВЕНЬЕВ
Соколов С.В. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169
Введение . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169
7.1. Сфероробот с роторно-инерционным
движителем . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .170
7.2. Сфероробот с внутренней омниплатформой . . . . . . . . . . . . . . . . . . . . . . . . . .173
Заключение . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 180
Литература . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .181
Глава 8. ИСПОЛНИТЕЛЬНЫЕ ЭЛЕМЕНТЫ
РОБОТОТЕХНИЧЕСКИХ УСТРОЙСТВ
С УПРАВЛЯЕМОЙ УПРУГОЙ
ДЕФОРМАЦИЕЙ
Гаврюшин С.С. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182
8.1. Способы реализации механического движения
и силового воздействия на объект . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182
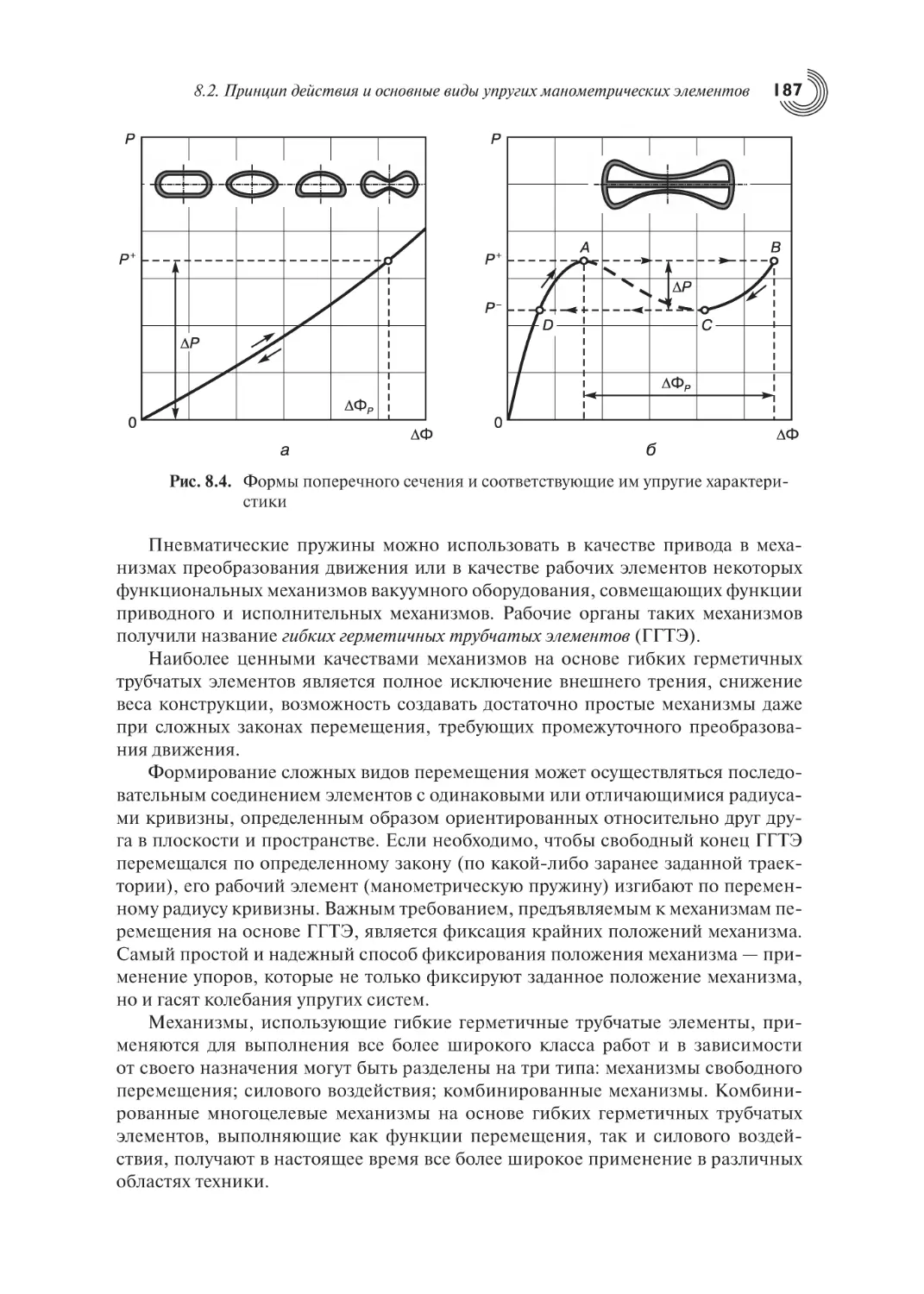
8.2. Принцип действия и основные виды
упругих манометрических элементов. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185
8.3. Математическая модель для анализа
больших прогибов гибких
осесимметричных оболочек. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 189
8.4. Уравнения, описывающие
осесимметричную деформацию
тонкостенных оболочек . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191
8.5. Алгоритм сведения нелинейной
краевой задачи к системе нелинейных уравнений
и задаче Коши . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 199
8.6. Исполнительные робототехнические механизмы
с релейной упругой характеристикой
и нетрадиционными способами перемещения . . . . . . . . . . . . . . . . . . . . . . . 202
Заключение . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 205
Литература . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 206
Глава 9. НОВЫЕ МЕХАНИЗМЫ
КОСМИЧЕСКОЙ РОБОТОТЕХНИКИ
Саяпин С.Н. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 207
Введение . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 207
Заключение . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 228
Литература . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 228
6
Содержание
Глава 10. НОВЫЕ МЕХАНИЗМЫ ВИБРАЦИОННЫХ
ВНУТРИТРУБНЫХ РОБОТОВ
Яцун С.Ф . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232
10 .1 . Механическая модель робота . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232
10.2. Математическая модель
вибрационного робота . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 234
10.3. Результаты моделирования
движения робота . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 239
10.4. Экспериментальные исследования . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242
Литература . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 245
Глава 11. МЕХАНИЗМЫ КОНВЕРТОПЛАНОВ
Яцун С.Ф., Емельянова О.В., Ефимов С.В.. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 247
11.1. Кинематический анализ конвертоплана . . . . . . . . . . . . . . . . . . . . . . . . . . . . 247
11.2. Определение сил, действующих
на конвертоплан . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 250
11.3. Математическая модель движения
конвертоплана. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253
11.4. Моделирование движения
конвертоплана. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 257
11.5. Экспериментальные исследования . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 261
Заключение . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 266
Литература . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 266
Глава 12. РАЗРАБОТКА РОБОТОВ ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ
ДЛЯ СОВМЕСТНОГО ОТНОСИТЕЛЬНОГО
МАНИПУЛИРОВАНИЯ
ТЕХНОЛОГИЧЕСКИМИ СИСТЕМАМИ
Пащенко В.Н. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 268
12.1. Структурный синтез механизмов совместного
относительного манипулирования . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 270
12.2. Структуры механизмов совместного относительного
манипулирования. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273
12.3. Решение прямой задачи о положениях
механизма совместного относительного
манипулирования. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12.3.1. Решение прямой задачи о положениях
механизма совместного относительного
манипулирования, включающего
шестизвенный и поворотный механизм . . . . . . . . . . . . . . . . . . . . . .
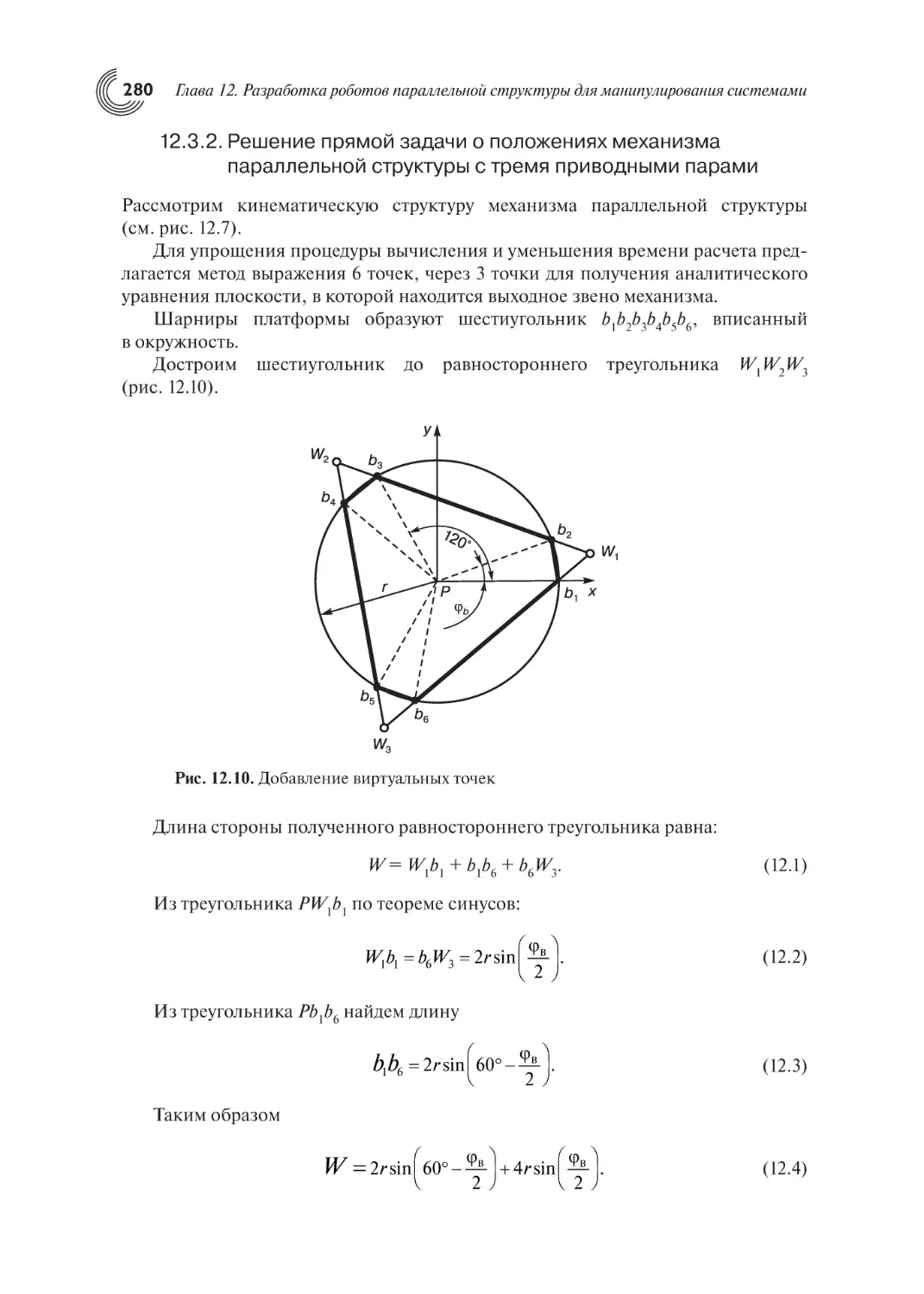
12.3.2. Решение прямой задачи о положениях
механизма параллельной структуры
с тремя приводными парами . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12.3.3. Решение прямой задачи о положениях
механизма совместного относительного
манипулирования, включающего
пятизвенный и поворотный механизм. . . . . . . . . . . . . . . . . . . . . . . .
277
277
280
283
Содержание
7
12 .4 . Проверка решение прямой задачи
о положениях механизма совместного
относительного манипулирования . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 286
12.5. Экспериментальное исследование механизма
совместного относительного манипулирования. . . . . . . . . . . . . . . . . . . . . . 288
Литература . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 293
Глава 13. НОВЫЕ МЕХАНИЗМЫ ДВУНОГИХ
И МНОГОНОГИХ ШАГАЮЩИХ РОБОТОВ
Горобцов А.С.. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 295
13.1. Методы синтеза управления шагающими роботами . . . . . . . . . . . . . . . . . . 295
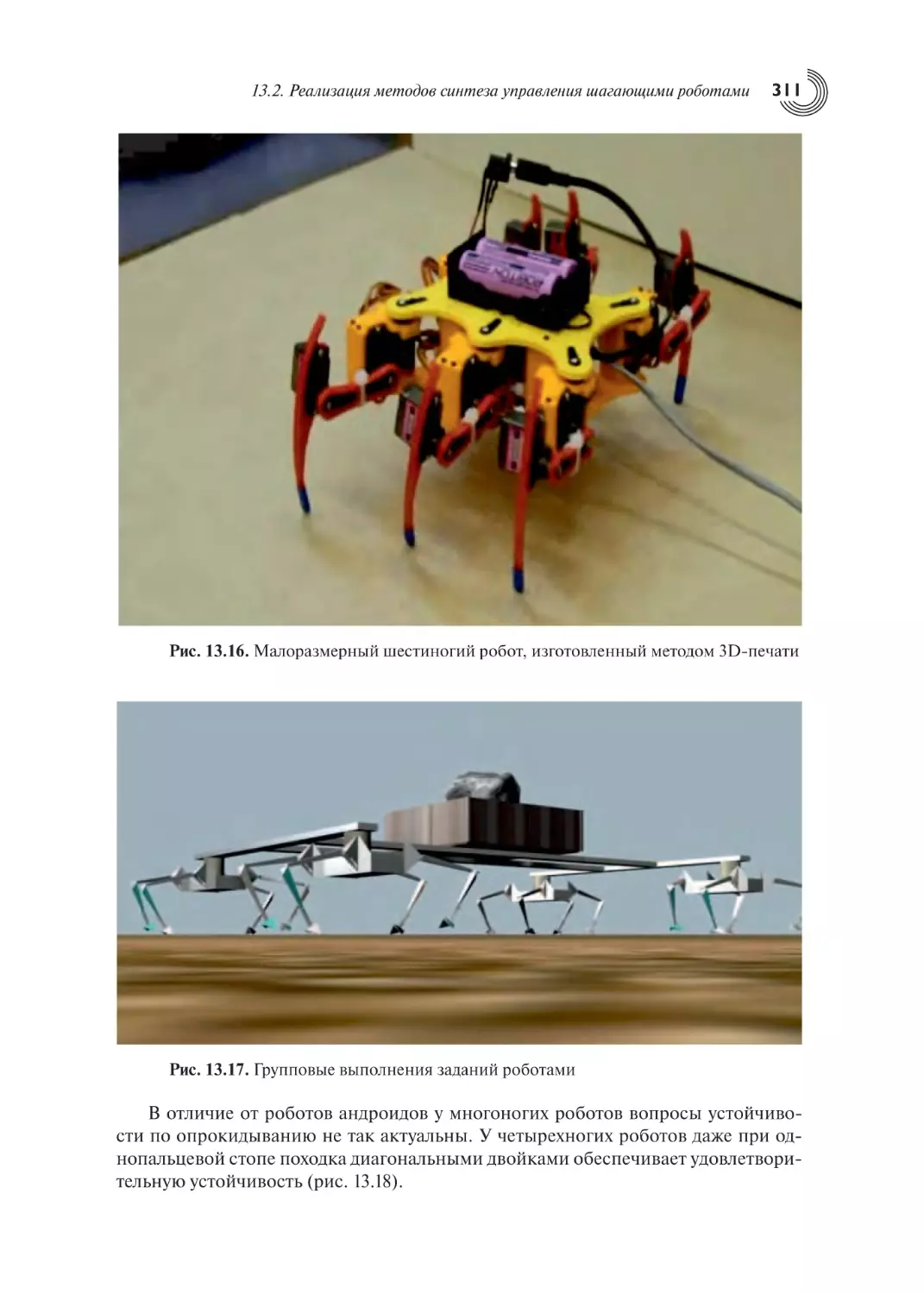
13.2. Реализация методов синтеза управления
шагающими роботами на натурных
и виртуальных образцах . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 302
Литература . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .314
Предисловие
Значение робототехники для современной жизни трудно переоценить, роботы
играют заметную роль в производстве, медицине, образовании, в научной деятельности, обороне . Хорошо известно, что робот, условно говоря, состоит из двух частей — это механическая часть и система управления . В настоящее время вопросы,
касающиеся системы управления, получили бурное развитие — меняется элементная база, совершенствуются управляющие системы и программы . Роботы становятся все более автономными и «интеллектуальными» . Вполне естественно, что на
передний план выдвигаются проблемы создания цифровых производств, сквозных
технологий и т .д .
Однако развитие указанных процессов совершенно не исключает важность рассмотрения и совершенствования механической части робототехнических систем .
Более того, наличие цифровых технологий лишь повышает роль механической части — во-первых, речь идет о новых компьютерных средствах наиболее адекватного
проектирования механической части, во-вторых, новые вычислительные возможности позволяют эффективно управлять вновь создаваемыми сложными механическими
системами .
Именно с данных позиций в течение многих лет ведутся исследовательские работы в Институте машиноведения имени А .А . Благонравова РАН (ИМАШ) . В этом
институте усилиями академика И .И . Артоболевского и проф . А .Е . Кобринского были
начаты работы по синтезу и внедрению роботов в различные сферы жизни . В частности, был разработан первый в мире биотехнический протез руки, сформулирована
концепция станков с числовым программным управлением .
В настоящее время работы по созданию новых высокоэффективных многофункциональных механизмов для различных применений продолжаются . При этом имеется в виду та идеология, которая была сформулирована основоположниками науки
о машинах и механизмах — для каждой технической задачи должен быть синтезирован
механизм, наиболее полно ей соответствующий — для того, чтобы на самых ранних
стадиях решить проблемы управления, динамики, точности и т .д .
В данной коллективной монографии представлены исследования сотрудников
(некоторые из них работают в ИМАШ по совместительству) Института машиноведения . Эти исследования посвящены синтезу и анализу многих механизмов, которые
востребованы в современной робототехнике . Представлены общие подходы и методологии, касающиеся синтеза новых механизмов, обеспечивающих серьезное повышение функциональных возможностей, в частности, речь идет о механизмах параллельной структуры .
Кроме того, представлены конкретные механизмы, которые нашли свое применение в различных отраслях современной робототехники — это мобильные роботы (летающие, ползающие, перемещающиеся на основе внутренних перемещений звеньев),
технологические роботы (в частности, применяемые для аддитивных технологий),
медицинские роботы (они могут быть применены для полостных и ортопедических
операций), космические роботы .
Данная работа выходит в свет в год 80-летнего юбилея Института машиноведения
им . А .А . Благонравова РАН и посвящается этой знаменательной дате .
ГЛАВА 1
СТРУКТУРНЫЙ СИНТЕЗ
И КЛАССИФИКАЦИЯ
l-КООРДИНАТНЫХ МЕХАНИЗМОВ
С УЧЕТОМ РАСПОЛОЖЕНИЯ
ПРИВОДОВ МЕЖДУ ОСНОВАНИЕМ
И ВЫХОДНЫМ ЗВЕНОМ
Рашоян Г.В., Глазунов В.А.
В данной главе рассматривается расширенная классификация l-координатных
механизмов, которая по сравнению с известной классификацией Колискора и Арзуманяна [1] отличается тем, что приводы могут располагаться не только между
основанием и выходным звеном, но и между одним из этих звеньев и каким-либо
промежуточным звеном . Такое расширение структур позволяет в значительной
степени изменить функциональные возможности данных механизмов, в частности расположить приводы вне рабочей зоны и тем самым изменить и расширить
область их применения . Это соответствует основным положениям теории синтеза
и анализа механизмов параллельной структуры [2—10] .
1.1. КЛАССИФИКАЦИЯ l-КООРДИНАТНЫХ МЕХАНИЗМОВ
БЕЗ УЧЕТА РАСПОЛОЖЕНИЯ ПРИВОДОВ
И НАЛИЧИЯ ПРОМЕЖУТОЧНЫХ ЗВЕНЬЕВ
В данном параграфе рассматривается классификация l-координатных механизмов, в которых приводы расположены между основанием и выходным звеном .
Подобная классификация была приведена Колискором и Арзуманяном . В данном
случае представлена другая форма интерпретации этой классификации .
Рассмотрим табл . 1 .1, где признаками классификации является количество точек крепления на основании и выходном звене и при этом будут рассмотрены различные варианты этих соотношений . Прежде всего представим в наиболее общем
виде L (n, m) возможные варианты структурных схем механизмов . Здесь обозначение L указывает, что имеют место l-координатные структурные схемы, при этом
количество точек крепления n на выходном звене и на основании m удовлетворяет
условиям: 3 ≤ n ≤ 6 и 3 ≤ m ≤ 6, а количество приводных кинематических цепей
равно шести .
10
Глава 1. Структурный синтез и классификация l-координатных механизмов
Таблица 1.1
Количество точек крепления на основании
Pi
Bi
3
Количество
точек крепления
на выходном звене
3
4
5
6
L (3,3)
L (3,4)
L (3,5)
L (3,6)
L (4,4)
L (4,5)
L (4,6)
L (5,5)
L (5,6)
4
5
L (6,6)
6
Детально рассмотрим все строки данной таблицы, в которых сгруппированы
структурные группы механизмов . В первой строке приведена группа структурных схем механизмов L (3,3); L (3,4); L (3,5); L (3,6) . В структурных схемах данной
группы на основании (либо на выходном звене, если поменять местами основание
и выходное звено) имеется три точки, а на противоположном звене — выходном
звене — количество точек крепления кинематических цепей варьируется, соответственно, как 3, 4, 5 и 6 .
Рассмотрим структурные схемы, относящиеся к случаю L (3,3) . На основании
и на выходном звене имеются по три точки крепления шести кинематических
цепей . Нетрудно убедиться в том, что в трех точках крепления кинематических
цепей на основании и на выходном звене можно получить два сочетания расположения приводов, а именно 321 и 222 . В первом случае в первой точке сходятся
3 кинематические цепи, во второй точке — две, а в третьей точке — одна кинематическая цепь . При втором сочетании 222 имеются три точки, в каждой из которых сходятся по две кинематические цепи . Эти структурные схемы приведены
на рис . 1 .1 .
Рис. 1.1
Далее на рис . 1 .1, а в виде условных схем приведены возможные сочетания точек креплений на основании и выходном звене . Общее количество вариантов соотношений равно четырем: L-321-321; L-321-222; L-222-321 и L-222-222 . Из них
отбираем три, так как схемы L-321-222 и L-222-321 являются симметричными .
1.1. Классификация l-координатных механизмов без учета расположения приводов
11
Для сочетаний L (3,4); L (3,5); L (3,6) выводятся следующие варианты:
L-321-3111; L-321-2211, L-222-3111; L-222-2211
L-321-21111; L-222-21111
L-321-111111; L-222-111111 .
Синтез этих структур иллюстрируется рис . 1 .1, б, 1 .2, а и 1 .2, б .
Рис. 1.2
Случай, когда на основании либо на выходном звене имеются четыре точки
крепления кинематических цепей (соответственно, это варианты L (4,4); L (4,5);
L (4,6)) относится ко второй строке табл . 1 .1 . Для данных сочетаний получатся следующие варианты комбинаций:
L-2211-3111; L-3111-3111, L-2211-2211
L-3111-21111; L-2211-21111
L-3111-111111; L-2211-111111 .
Данные схемы соответствуют рис . 1 .3, а; 1 .3, б и 1 .4, а .
Рис. 1.3
Следующим случаем является ситуация, когда на одном из звеньев (соответственно, основании либо выходном звене) расположены пять точек . При этом
12
Глава 1. Структурный синтез и классификация l-координатных механизмов
имеем варианты L (5,5) и L (5,6) . И, наконец, существует один случай L (6,6) . Для
последних трех сочетаний получатся следующие варианты:
L-21111-21111 (рис . 1 .4, б);
L-21111-111111;
L-111111-111111 (для последних двух структур схемы тривиальны) .
Рис. 1.4
Таким образом, можно выделить всего десять основных вариантов структур
в зависимости от количества точек крепления приводов на основании и выходном звене .
Далее в табл . 1 .2 представлены все указанные варианты . Прежде всего представлены варианты, когда на основании и выходном звене располагаются по три
точки крепления . Соответственно, это варианты L-321-222; L-321-321; L-222-222 .
Существует, соответственно, три различных случая .
Другой вариант соотношения количества точек на основании и выходном звене это четыре и три . В данном случае будут существовать четыре варианта, это
L-321-3111; L-321-2211; L-222-3111; L-222-2211 .
Рассуждая далее подобным образом, будем иметь различные ситуации с разным количеством точек на основании и выходном звене . В частности, при наличии пяти точек на одном из этих звеньев и трех точек на противоположном звене
имеет место два варианта, что следует из табл . 1 .2 .
При наличии на одном звене шести точек, а на противоположном звене трех
точек будем иметь, соответственно, два варианта, это L-321-111111 и L-222-111111 .
Далее в таблице следуют варианты, когда на одном из звеньев (основании либо
на выходном звене) имеет место четыре точки и, соответственно, на противоположном звене пять точек крепления . Этой̆ ситуации соответствуют два варианта .
Когда на одном из указанных звеньев есть четыре точки, а на другом — шесть,
также два варианта .
Далее, если на одном из указанных звеньев есть пять точек и на другом звене
тоже пять, то существует один вариант, так же, как и в случае L (5,6) . Наконец, один
вариант существует и для наличия шести точек на основании и на выходном звене .
Таким образом, существует двадцать один вариант подобного расположения
приводов и точек их крепления на основании и на выходном звене (см . табл . 1 .2) .
1.1. Классификация l-координатных механизмов без учета расположения приводов
13
Таблица 1.2
14
Глава 1. Структурный синтез и классификация l-координатных механизмов
Окончание табл. 1.2
Отметим, что все механизмы имеют по шесть степеней свободы. Это следует
из известной формулы Сомова — Малышева:
W = 6n – 5P5 – 4P4 – 3P3 – 2P2 – P1,
где n — количество подвижных звеньев механизма, P1, P2, P3, P4, P5 — количество
пяти-, четырех-, трех-, двух-, одноподвижных кинематических пар. Для любого
механизма из табл. 1.1 имеем:
n = 13; P5 = 6; P4 = 6; P3 = 6.
В статье, при расчете W, для устранения местной подвижности шесть сферических кинематических пар заменены на двухподвижные:
W = 6 ∙ 13 – 5 ∙ 6 – 4 ∙ 6 – 3 ∙ 6 = 6.
Таким образом, число степеней свободы равно шести.
1.2. РАСШИРЕННАЯ ТАБЛИЦА КЛАССИФИКАЦИИ
l-КООРДИНАТНЫХ МЕХАНИЗМОВ
С РАСПОЛОЖЕНИЕМ ПРИВОДОВ
МЕЖДУ ОСНОВАНИЕМ ИЛИ ВЫХОДНЫМ ЗВЕНОМ
И ОДНИМ ИЗ ПРОМЕЖУТОЧНЫХ ЗВЕНЬЕВ
Рассмотрим варианты l-координатных механизмов, в которых некоторые l-координаты крепятся не к основанию или выходному звену, а к одному из промежуточных звеньев, при этом каждой базовой схеме (в них все приводы расположены
непосредственно между основанием и выходным звеном), введенной в табл. 1.2,
1.2. Расширенная таблица классификации l-координатных механизмов
15
может быть сопоставлено несколько вариантов расположения упомянутых l-координат или приводов, соответствующих этим l-координатам . Эти варианты
представлены в табл . 1 .3 . Рассмотрим более подробно некоторые из них .
Варианты структурных схем, соответствующих структуре L-222-321, различаются следующим образом: три l-координаты могут быть расположены между
основанием и штоком линейного двигателя, расположенного в соседней кинематической цепи . Другой случай может быть таким, что три l-координаты расположены между точками, расположенными на выходном звене, и цилиндрами линейных двигателей, расположенными в соседних кинематических цепях .
Следующая версия имеет место в том случае, когда три l-координаты расположены между точками, размещенными на основании, и цилиндрами линейных
двигателей, размещенных в соседних кинематических цепях .
Еще один вариант связан с ситуацией, когда три l-координаты расположены
между точками, расположенными на выходном звене, и штоками цилиндров линейных двигателей, размещенных в соседних кинематических цепях .
Понятно, что могут быть другие версии размещения l-координат . В таблице
представлены только основные базовые версии . Можно показать, что указанное
размещение некоторых l-координат между основанием или выходным звеном
и каким-либо промежуточным звеном не меняет сущности задач о положениях,
а кроме того, задач, связанных с сингулярностями, предельными положениями
и др . Подобное расширение класса l-координатных механизмов, во-первых, достаточно существенно, во-вторых, в значительной степени расширяет функциональные возможности данных устройств .
Второй структурой, которую мы более подробно рассмотрим, является структура L-321-321 . Ей в табл . 1 .3 также соответствует четыре версии . Одна из них
имеет место в том случае, когда три l-координаты расположены между основанием и штоками линейных двигателей соседних кинематических цепей . Другая
ситуация соответствует случаю, когда три l-координаты расположены между точками основания и цилиндрами линейных двигателей, размещенных в соседних
кинематических цепях . Третий случай характеризуется ситуацией, когда три l-координаты расположены между точками выходного звена и цилиндрами линейных
двигателей, расположенных в соседних кинематических цепях . И, наконец, четвертая версия характеризуется расположением трех l-координат между точками
выходного звена и штоками трех цилиндров, расположенных в соседних кинематических цепях . Рассуждая подобным образом, далее можно установить, что
структурам L-222-222, L-321-3111, L-321-2211 также соответствуют по несколько
вариантов .
Схема L-222-3111 также может быть представлена совокупностью как минимум четырех соответствующих ей схем, в которых три l-координаты расположены
не между основанием и выходным звеном, а между одним из этих звеньев и одним из промежуточных звеньев, размещенных в соседних кинематических цепях .
То же самое можно сказать о схемах L-222-2211, L-321-21111, L-222-21111 .
Несколько более подробно остановимся на схеме L-321-111111 . Этой схеме будут соответствовать лишь два варианта механизмов, в которых три l-координаты расположены между основанием или выходным звеном и одним из промежуточных звеньев . То, что имеют место только два варианта, объясняется тем, что
Таблица 1.3
16
Глава 1. Структурный синтез и классификация l-координатных механизмов
1.2. Расширенная таблица классификации l-координатных механизмов
17
Продолжение табл. 1.3
18
Глава 1. Структурный синтез и классификация l-координатных механизмов
1.2. Расширенная таблица классификации l-координатных механизмов
19
Продолжение табл. 1.3
20
Глава 1. Структурный синтез и классификация l-координатных механизмов
1.2. Расширенная таблица классификации l-координатных механизмов
21
Продолжение табл. 1.3
22
Глава 1. Структурный синтез и классификация l-координатных механизмов
1.2. Расширенная таблица классификации l-координатных механизмов
23
Окончание табл. 1.3
24
Глава 1. Структурный синтез и классификация l-координатных механизмов
1.2. Расширенная таблица классификации l-координатных механизмов
25
26
Глава 1. Структурный синтез и классификация l-координатных механизмов
на основании имеется шесть точек крепления и поэтому невозможно представить
механизмы, отличающиеся от исходного, где бы три l-координаты были бы размещены между основанием и одним из промежуточных звеньев соседних кинематических цепей . Сказанное относится также к схеме L-222-111111 .
Схема L-2211-3111 также имеет четыре варианта, в которых две l-координаты
расположены между основанием либо выходным звеном и одним из промежуточных звеньев соседних кинематических цепей . Сказанное справедливо также для
схем L-3111-3111, L-2211-2211, L-3111-21111, L-2211-21111, L-21111-21111 .
Что касается схемы L-3111-111111, то для нее имеет место лишь два варианта,
получаемых переносом одной из точек крепления l-координат на выходном звене, а на основании механизма имеет место шесть точек крепления и невозможно
изменить структуру .
Указанным свойством обладают также схемы L-2211-111111 и L-21111-111111 .
Наконец, для варианта L-111111-111111, когда на основания и на выходном звене
имеют место по шесть точек крепления, невозможно найти дополнительные (модифицированные) варианты, при которых одна или несколько l-координат размещались бы между основанием либо выходным звеном и одним из промежуточных
звеньев соседних кинематических цепей .
Обобщая вышеизложенное, можно представить случаи взаимного расположения l-координат и соответствующих положений точек B1, B2, B3 и P1, P2, P3
(рис . 1 .5) . Могут существовать модификации этих положений, когда соответствующие точки на основании либо на выходном звене смещаются и после этого располагаются между основанием или выходным звеном и одним из промежуточных
звеньев соседних кинематических цепей (рис . 1 .6) .
Рис 1.5
Так, при схождении в одном центре P1 или B1 двух l-координат имеем четыре модифицированных варианта (точки P1ʹ, P1ʺ, B1ʹ, B 1ʺ) . При схождении в одной точке B1 или P1 трех l-координат имеем два модифицированных варианта
(точки) .
Продолжая анализ рис . 1 .6, можно указать, что смещение одной из точек приводит к тому, что мы имеем структуру и, соответственно, геометрическую фигуру,
не изменяющую принципов решения задачи о положениях . Указанное смещение
не нарушает расположение плоскости, в которой размещены точки основания
и выходного звена . Смещается лишь одна из точек, принадлежащих той же самой
1.2. Расширенная таблица классификации l-координатных механизмов
27
плоскости . Зная l-координаты при смещенном положении точек, можно восстановить l-координаты при исходном расположении точек — при этом алгоритм решения задач о положениях не изменится .
Рассмотренный класс l-координатных механизмов может быть расширен
за счет того, что некоторые штоки приводов могут быть продолжены за пределы
основания либо выходного звена . При этом точки, где сходятся оси l-координат,
могут быть более не связаны с выходным звеном или основанием . Сказанное
является принципом построения l-координатных механизмов с расположением
приводов внерабочей зоны . Это обстоятельство существенно расширяет класс
l-координатных механизмов .
Остановимся на табл . 1 .4 и схеме L-222-321 . В таблице показан случай, когда
стержни, передающие движение на выходное звено, расположены так, что один
из них проходит через точку, где сосредоточены два привода, другой стержень
проходит через точку, где сосредоточены три привода, и третий стержень проходит
через точку, где сосредоточен один привод .
Укажем на необходимость такого расположения данных стержней, что каждый из них должен исходить из точки, расположенной на убираемом впоследствии
звене, где сходятся, соответственно, по несколько приводов . Если из одной точки,
где сходятся несколько приводов, будет проведено два или более стержней, то это
будет нерабочий случай . Можно показать, что рассматриваемые преобразования
приводят вновь к ситуации, когда механизм имеет шесть степеней свободы . Это
следует из того, что каждый стержень не налагает никаких дополнительных связей
на движение выходного звена и соответствующие структурные группы, содержащие приводы, также не налагают дополнительных связей, то есть выходное звено
имеет шесть степеней свободы .
Рассматривая случай L-321-321, можно видеть, что получаемая структура
со стержнями, пересекающими плоскость одного из звеньев (выходного звена
либо основания), имеет особенность, что оси вводных стержней должны пересекаться с осями приводов, при этом конструкция соответствующих узлов может
быть выполнена с применением вращательных кинематических пар, пересекающих точку пересечения осей стержней и привода .
Далее, не останавливаясь подробно на структуре L-222-222, укажем, что ее
особенность примерно такая же, что и для предыдущих случаев .
Затем в таблице расположены случаи, когда на одном из звеньев (основании
либо на выходном звене) расположены четыре точки, а на противоположном звене три . Структура L-321-3111 соответствует ситуации, где в одной точке сходятся
три оси, в другой — две оси и один привод не сопрягается с другими приводами . Следует отметить сложность конструктивного исполнения этого варианта .
Также при указанном соотношении количеств точек пересечения осей приводов
и стержней в таблице представлены варианты L-321-2211, L-222-2211 .
Далее в таблице следуют варианты с количеством точек на основании либо
выходном звене, равным трем, и с количеством точек на противоположном звене,
равным пяти . Это варианты L-321-21111 и L-222-21111 . Наконец следует отметить
варианты, где трем точкам противостоят шесть точек на противоположном звене .
Затем рассматривается случай, когда на основании либо выходном звене имеется четыре точки крепления приводов и такое же количество точек
28
Глава 1. Структурный синтез и классификация l-координатных механизмов
Рис. 1.6
1.2. Расширенная таблица классификации l-координатных механизмов
29
Таблица 1.4
30
Глава 1. Структурный синтез и классификация l-координатных механизмов
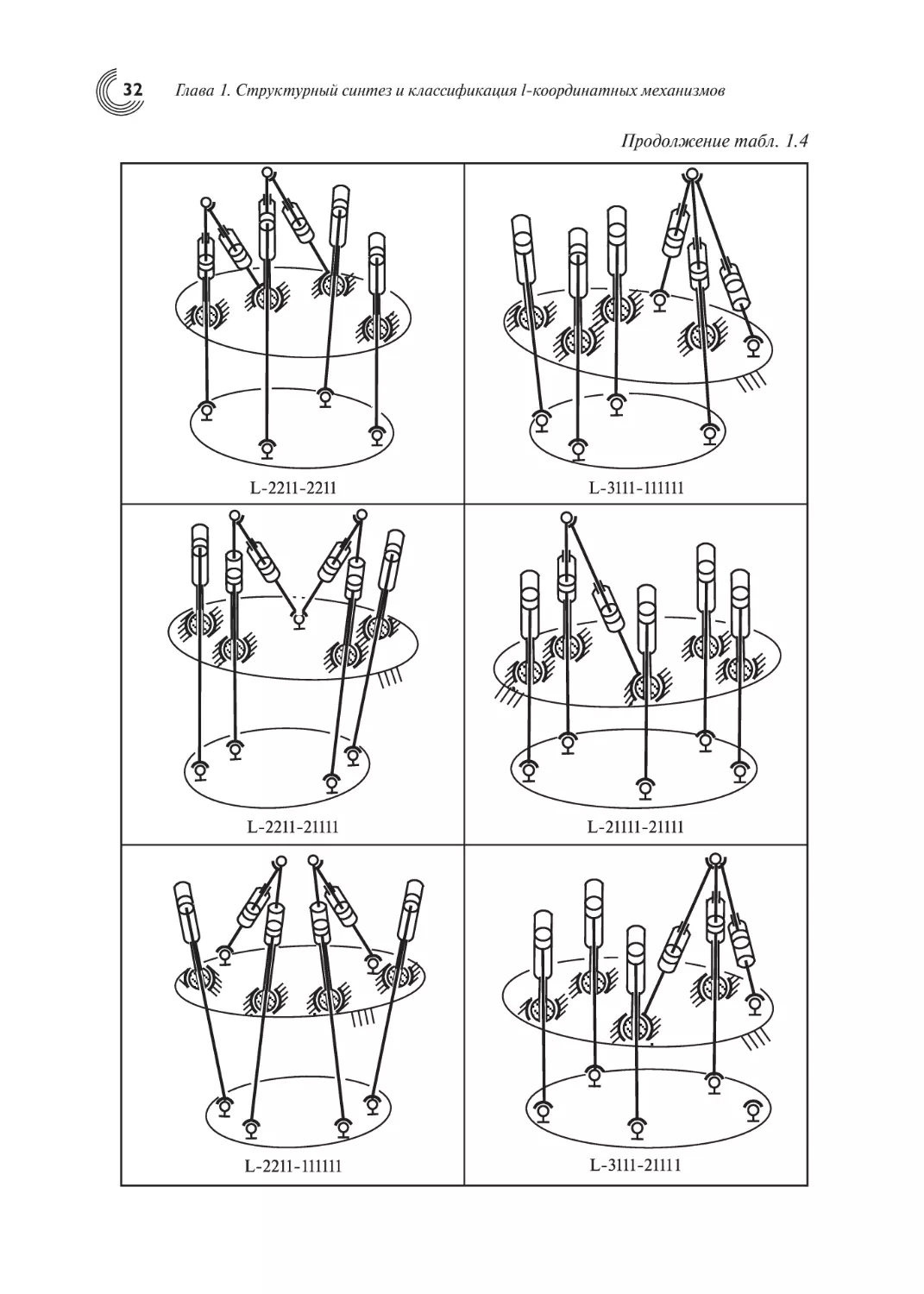
Продолжение табл. 1.4
1.2. Расширенная таблица классификации l-координатных механизмов
31
Продолжение табл. 1.4
32
Глава 1. Структурный синтез и классификация l-координатных механизмов
Продолжение табл. 1.4
1.2. Расширенная таблица классификации l-координатных механизмов
33
Окончание табл. 1.4
Рис. 1.7
34
Глава 1. Структурный синтез и классификация l-координатных механизмов
крепления существует и на противоположном звене . Это структуры L-2211-3111,
L-3111-3111 и L-2211-2211 . Далее в таблице представлены варианты, когда четырем
точкам на основании либо выходном звене противостоят пять точек на противоположном звене . Это варианты L-3111-21111 и L-2211-21111 .
Два варианта существуют для соотношения количеств точек крепления приводов четыре и шесть . Это структуры L-3111-111111 и L-2211-111111 . Укажем, что
в первом из этих случаев также имеется одна точка, где должны сходиться по три
стержня — такой узел выполнить конструктивно достаточно сложно .
Заканчивая рассмотрение данной таблицы, имеются варианты, когда соотношение количеств точек крепления приводов — пять и пять, пять и шесть и шесть
и шесть . Эти соотношения приводят к одному варианту для каждого из соотношений, они представлены в таблице и обозначаются, соответственно, L-21111-21111,
L-21111-111111 и L-111111-111111 .
Представим возможные варианты взаимного расположения стержней —
вводов, пересекающихся в одной точке (рис . 1 .7) . Один из стержней может быть
выполнен обычным образом (прямолинейной формы) . Другие стержни (один
или два) должны иметь изогнутую форму и сопрягаться посредством вращательных пар .
1.3. СИНТЕЗ СТРУКТУР МЕХАНИЗМОВ
С РАСПОЛОЖЕНИЕМ ПРИВОДОВ
ВНЕ РАБОЧЕЙ ЗОНЫ
И С ДОПОЛНИТЕЛЬНЫМИ СТЕРЖНЯМИ-ВВОДАМИ
В предыдущем параграфе рассмотрены синтез и классификации l-координатных механизмов, в которых приводы могли крепиться к основанию и выходному
звену, а также к основанию или к выходному звену и одному из промежуточных
звеньев . Кроме того, были представлены случаи, когда несколько шток линейных
двигателей «протыкали» основание .
В данном параграфе будут продолжены исследования в этом направлении, т .е .
будут представлены случаи, когда штоки линейных двигателей «протыкают» выходное звено, а также случаи, когда имеют место дополнительные стержни, расположенные между основанием и выходным звеном .
Рассмотрим табл . 1 .5, в которой представлены механизмы, где приводы,
так же, как и в табл . 1 .4, расположены в нерабочей зоне, однако представляемые
механизмы получаются из исходных механизмов (см . табл . 1 .2) путем продолжения
штоков вверх относительно выходного звена . Первый рассматриваемый вариант
L-222-321 . В данном случае три штока проходят вверх относительно основания,
соответственно, на выходном звене имеет место три точки . Одна из этих точек
связана с центром, где сходятся три привода, вторая точка связана с центром, где
сходятся два привода, и третья точка связана с одним приводом .
Затем следует случай L-321-321, тут также имеет место три стержня — штока,
которые проходят через основание и сопрягаются с выходным звеном . Такая же
ситуация имеет место для случая L-222-222 .
Более подробно остановимся на структуре L-321-3111 . Здесь существует одна
точка на основании, через которое проходят два приводных штока . Один из них
1.3. Синтез структур механизмов с расположением приводов вне рабочей зоны
35
Таблица 1.5
36
Глава 1. Структурный синтез и классификация l-координатных механизмов
Продолжение табл. 1.5
1.3. Синтез структур механизмов с расположением приводов вне рабочей зоны
37
Продолжение табл. 1.5
38
Глава 1. Структурный синтез и классификация l-координатных механизмов
Окончание табл. 1.5
должен иметь такую связь с основанием, которая состоит из трех вращательных
кинематических пар, и, кроме того, стержень должен иметь непрямолинейную
форму (подобные случаи были в табл. 1.4).
Рассматривая структуру L-3111-3111, можно констатировать, что у нее также
присутствует подобный узел, где два стержня имеют непрямолинейную форму.
Для структуры L-321-21111 наблюдается узел, в котором сходится три стержня.
Структура L-222-21111 содержит два узла, в которых сходятся по два стержня-ввода. В соответствующих узлах по одному стержню должны иметь непрямолинейную форму.
Схема L-321-111111 содержит два узла с пересечением в них, соответственно,
двух и трех вводных стержней. Соответственно с этим всего три стержня должны
иметь непрямолинейную форму.
Структура L-222-111111 содержит три узла, в которых пересекается три узла
стержня-ввода. В этих узлах по одному из стержней должны иметь непрямолинейную форму.
Что касается структур L-2211-3111 и L-2211-2211, то здесь не наблюдаются
узлы, в которых сходятся по два или более вводных стержней, соответственно, все
вводные стержни имеют прямолинейную форму. Однако структура L-3111-3111
имеет один узел, в котором сходятся сразу три вводных стержня, соответственно,
два из них должны иметь непрямолинейную форму.
Последующие структуры: L-3111-21111, L-2211-21111, L-3111-11111, L-2211-111111,
L-2111-21111 — не имеют таких узлов, в которых могли бы пересечься по два и более вводных стержня. Однако структура L-21111-111111 имеет один такой узел, где
один из стержней должен иметь непрямолинейную форму.
Наконец структура L-111111-111111, очевидно, не имеет узлов с пересекающими стержнями-вводами, она отличается от классической l-координатной структуры тем, что приводы расположены в нерабочей зоне.
Далее рассмотрим случаи l-координатных механизмов, в которых имеются дополнительные связи — стержни, расположенные между точками соединения приводов и оснований (табл. 1.6).
Таблица 1.6
1.3. Синтез структур механизмов с расположением приводов вне рабочей зоны
39
Продолжение табл. 1.6
40
Глава 1. Структурный синтез и классификация l-координатных механизмов
1.3. Синтез структур механизмов с расположением приводов вне рабочей зоны
41
Окончание табл. 1.6
42
Глава 1. Структурный синтез и классификация l-координатных механизмов
1.3. Синтез структур механизмов с расположением приводов вне рабочей зоны
43
Начнем со схемы L-222-321 . В таблице представлен механизм, получаемый
из исходного путем введения трех стержней — вводов, расположенных между точками соединения приводов (в каждой по два) и оснований .
Схема L-321-321 преобразуется в схему с тремя стержнями — вводами, при
этом один из них связан с точкой, где сходятся три привода, второй связан с точкой, где сходятся два привода, третий связан с точкой, на которой расположена
ось одного привода .
Структура L-222-222, очевидно, характеризуется так же тремя стержнями —
вводами, причем каждый стержень связан с точкой, где сходятся по два привода .
Далее представим схемы L-321-3111, L-321-2211, L-222-3111 и L-222-2211, все
они характеризуются тем, что на выходном звене имеются три точки крепления
приводов, а на противоположном звене — четыре точки . В табл . 1 .6 представлены
варианты, где имеются по три стержня — ввода .
Подобным образом можно развить схемы L-321-21111, L-222-21111, L-321-111111
и L-222-111111 . Тут и схемы также характеризуется тем, что на основании либо
на выходном звене имеются три точки крепления приводов, а на противоположном звене, соответственно, 5 и 6 точек . При этом получаемые схемы характеризуются тремя стержнями — вводами .
Остановимся на схемах L-2211-3111, L-3111-3111, L-2211-2211 . Эти схемы соответствуют случаю, когда на основании и выходном звене имеются по четыре точки
крепления приводов . Соответственно, в данных схемах есть по четыре стержня
ввода . Указанное свойство наблюдается для других схем, в которых на основании
либо на выходном звене есть по 4 точки крепления приводов, а на противоположном звене — 5 или 6 точек . Это схемы L-3111-21111, L-2211-21111, L-3111-111111,
L-2211-111111 . В каждой из этих схем имеем по четыре вводных стержня, сопрягающих точки соединения приводов и выходное звено .
Для схем, характеризуемых случаями, когда на основании либо на выходном
звене имеется пять точек крепления приводов, а на противоположном звене —
шесть (это схемы L-21111-21111 и L-21111-111111), имеются по пять стержней вводов .
Далее рассмотрим различные варианты расположения стержней — вводов для
некоторых схем .
Следующим условием расширения рассматриваемого класса l-координатных механизмов является введение дополнительных стержней, которые расположены между точками соединения l-координат с основанием и выходным звеном . При этом приводы вновь расположены вне рабочей зоны, а упомянутые
дополнительные стержни должны проходить «сквозь» основания либо выходное
звено (рис . 1 .8) . Соединительный стержень связан с тем звеном, «сквозь» которое он проходит, сферическим шарниром с расположенной внутри него поступательной парой .
В соответствии с изложенным, точки B1, B2, B3 (см . рис . 1 .8) расположены
на основании, с которым связана неподвижная система координат 0XYZ . Три соединительных вводных стержня I, II, III связаны с выходным звеном посредством
сферических шарниров C1C2C3, имеющих отверстие, — охватывающий элемент
поступательной кинематической пары .
l-координаты l1 — l6 выражают перемещения в приводах, которые расположены между точками, соответственно, P1, P2, P3, P4, P5, P6 и точек D1, D2, D3 .
44
Глава 1. Структурный синтез и классификация l-координатных механизмов
Рис. 1.8
Такое расположение приводов показывает, что они связаны с выходным звеном и вводными стержнями, а основания связаны лишь с указанными стержнями .
Такая структура востребована для мобильных роботов, работающих в экстремальных сферах, к примеру в космосе .
Можно убедиться, что движение выходного звена соответствует шести степеням свободы, для этого воспользуемся формулой Сомова — Малышева .
n = 16, P5 = 6, P3 = 15, P2 = 3;
W = 6 ∙ 16 – 5 ∙ 6 – 3 ∙ 15 – 2 ∙ 3 = 96 – 81 = 15;
W = Wосн + Wместн = 6 + 9,
где Wосн = 6, Wместн = 9 .
Местная подвижность связана с вращением кинематических цепей P1D1, P2D1,
P3D1, P4D2, P5D2, P6D3 и дополнительных звеньев I, II, III вокруг собственных осей .
Эти подвижности не влияют на кинематику механизма . Их можно устранить, если
заменить сферические шарниры в точках P1, P2, P3, P4, P5, P6 выходного звена и
в точках B1, B2, B3 основания на двухподвижные шарниры (например, сферический
шарнир с пальцем) . В таком случае здесь и далее получим следующий результат:
n = 16, P5 = 6, P4 = 9, P3 = 6, P2 = 3;
W = 6 ∙ 16 – 5 ∙ 6 – 4 ∙ 9–3 ∙ 6 – 23 = 96 – 90 = 6 .
1.3. Синтез структур механизмов с расположением приводов вне рабочей зоны
45
Развивая предложенный подход к образованию новых l-координатных механизмов, укажем, что один из приводов, не сопряженный с другими приводами «l-координатами», может быть своим штоком жестко сопряжен со стержнем-вводом, так
что их оси совпадают (рис . 1 .9) . Здесь все обозначения соответствуют приведенным
выше . Можно убедиться, что число степеней свободы также равно шести .
n = 15, P5 = 6, P4 = 8, P3 = 6, P2 = 2;
W = 6 ∙ 15 – 5 ∙ 6 – 4 ∙ 8 – 3 ∙ 6 – 2 ∙ 2 = 90 – 84 = 6 .
Так же, как и в предыдущем случае, со стержнем-вводом может быть связан
другой шток привода, сопряженного с одной l-координатной (рис . 1 .10) . Здесь
вновь все обозначения соответствуют предыдущим, а число степеней свободы
вновь равно шести .
n = 15, P5 = 6, P4 = 8, P3 = 6, P2 = 2;
W = 6 ∙ 15 – 5 ∙ 6 – 4 ∙ 8 – 3 ∙ 6 – 2 ∙ 2 = 6 .
Рассуждая далее подобным образом, можно указать случай, когда стержень-ввод связан со штоком привода, сопряженного с еще двумя l-координатами
(рис . 1 .11) . Обозначение, как и в предыдущих случаях, аналогичны, число степеней свободы вновь равно шести .
n = 15, P5 = 6, P4 = 8, P3 = 6, P2 = 2;
W = 6 ∙ 15 – 5 ∙ 6 – 4 ∙ 8 – 3 ∙ 6 – 2 ∙ 2 = 90 – 84 = 6 .
Можно продолжить рассмотрение синтезируемых механизмов таким образом, что со стержнями-вводами будут совпадать по два привода (рис . 1 .12 и 1 .13),
а также три привода (рис . 1 .14) . Число степеней свободы во всех подобных случаях
равно шести .
n = 14, P5 = 6, P4 = 7, P3 = 6, P2 = 1;
W = 6 ∙ 14 – 5 ∙ 6 – 4 ∙ 7 – 3 ∙ 6 – 2 ∙ 1 = 84 – 78 = 6 .
Перейдем к рассмотрению l-координатных механизмов, в которых имеют место четыре вводных стержня . Один из них представлен на рис . 1 .15 и соответствует
случаю, когда через точки D1 и D2 проходят оси двух приводов, а через точки D3
и D4 проходят оси одного привода (все обозначения в данном случае соответствуют ранее рассмотренным механизмам) .
Как и ранее, приводы и вводные стержни могут быть связаны как с основанием,
так и с выходным звеном . В частности, в рассматриваемом механизме точки P1, P2,
P3, P4, P5, P6 расположены на основании, а точки B1, B2, B3, B4 расположены на выходном звене . Можно вновь убедиться, что число степеней свободы равно шести .
n = 17, P5 = 6, P4 = 10, P3 = 6, P2 = 4;
W = 6 ∙ 17 – 5 ∙ 6 – 4 ∙ 10 – 3 ∙ 6 – 2 ∙ 4 = 102 – 96 = 6 .
Так же, как и в случае с тремя стержнями-вводами, некоторые штоки приводов могут совпадать с указанными стержнями . В частности, один из таких случаев
соответствует ситуации, когда ось одного привода совпадает с осью одного стержня (рис . 1 .16) . Число степеней свободы, как и прежде, равно шести .
n = 16, P5 = 6, P4 = 9, P3 = 6, P2 = 3;
W = 6 ∙ 16 – 5 ∙ 6 – 4 ∙ 9 – 3 ∙ 6 – 2 ∙ 3 = 96 – 90 .
Рис. 1.10
Глава 1. Структурный синтез и классификация l-координатных механизмов
Рис. 1.9
46
Рис. 1.11
Рис. 1.12
1.3. Синтез структур механизмов с расположением приводов вне рабочей зоны
47
Рис. 1.14
Глава 1. Структурный синтез и классификация l-координатных механизмов
Рис. 1.13
48
Рис. 1.15
Рис. 1.16
1.3. Синтез структур механизмов с расположением приводов вне рабочей зоны
49
Рис. 1.18
Глава 1. Структурный синтез и классификация l-координатных механизмов
Рис. 1.17
50
1.3. Синтез структур механизмов с расположением приводов вне рабочей зоны
51
Рис. 1.19
Аналогичным образом можно указать, что с вводными соединительными
стержнями могут совпадать два штока приводов (рис . 1 .17), три штока приводов
(рис . 1 .18) и все четыре штока приводов (рис . 1 .19) .
Исходя из изложенного, можно утверждать, что синтезируемый расширенный
класс l-координатных механизмов достаточно большой и универсальный . Кроме
прочего, можно указать на то, что линейные двигатели могут быть расположены
по-разному: расстояние между точками B1 и D2 может быть постоянным либо переменным, в последнем случае постоянным является расстояние между точками
D2 и C2 .
Таким образом, в данной главе проведены структурный синтез и классификация нового класса механизмов — l-координатные механизмы с приводами, расположенными между основанием либо выходным звеном и промежуточными звеньями соседних кинематических цепей .
Литература
1 . Арзуманян К.С ., Колискор А.Ш . Синтез структур l-координатных систем для исследования и диагностирования промышленных роботов / Испытания, контроль и диагностирование гибких производственных систем . — М .: Наука, 1988 . — С . 70—81 .
2 . Gough V.E . Contribution to discussion of papers on research in Automobile Stability, Control
and Tyre performance // Proc . Auto Div . Inst . Mech . Eng ., 1956—1957 . — Рp . 392—394 .
52
Глава 1. Структурный синтез и классификация l-координатных механизмов
3. Stewart D. A Platform with Six Degrees of Freedom // Proc. Institute of Mechanical Engineering, 1965. — Рp . 371—386 .
4 . Hunt K.H . Geometry of Robotic Devices // Institution of Engineers Austral Mechanical Engineering, Transaction, 1982 . — Vol . 7 . — № 4 . — Рp . 213—220 .
5 . Merlet J.-P . Parallel Robots // Kluwer Academic Publishers, 2000 . — 372 p .
6 . Глазунов В.А ., Колискор А.Ш ., Крайнев А.Ф ., Модель Б.И . Принципы классификации
и методы анализа пространственных механизмов с параллельной структурой // Проблемы машиностроения и надежности машин, 1990 . — № 1 . — С . 41—49 .
7 . Глазунов В.А ., Колискор А.Ш ., Крайнев А.Ф . Пространственные механизмы параллельной структуры . — М .: Наука, 1991 . — 95 с .
8 . Rashoyan G.V ., Shalyukhin K.A ., Gaponenko E.V . Development ofstructural schemes of parallel
structure manipulators using screw calculus // 2018IOP Conference Series: Materials Science
and Engineering 327 (4), 042090 .
9 . Antonov A.V ., Glazunov V.A ., Aleshin A.K . // Journal of Machinery Manufacture and Reliability . —
Vol . 47 . — Issue 2 . — Pp . 121—127 .
10 . Глазунов В.А ., Брио С ., Аракелян В . Новый класс манипуляционных механизмов параллельно-перекрекрестной структуры . Классификация и исследование: справочник //
Инженерный журнал, 2008 . — № 4 . — С . 35—40 .
ГЛАВА 2
СИНТЕЗ, АНАЛИЗ И УПРАВЛЕНИЕ
ПОСТУПАТЕЛЬНО-НАПРАВЛЯЮЩИМИ
И СФЕРИЧЕСКИМИ МЕХАНИЗМАМИ
Хейло С.В., Глазунов В.А.
В данной главе рассматривается синтез и анализ механизмов, выполняющих поступательные или вращательные движения . Здесь приводятся алгоритмы управления этими устройствами, основанные на динамическом анализе . Особенности
этих механизмов таковы, что они могут быть эффективно применены в оборудовании для технологических и транспортных операций, а также для ориентирующих движений .
2.1. СТРУКТУРНО-ГЕОМЕТРИЧЕСКИЙ СИНТЕЗ
И КИНЕМАТИЧЕСКИЙ АНАЛИЗ
ПОСТУПАТЕЛЬНО-НАПРАВЛЯЮЩЕГО МЕХАНИЗМА
В данном параграфе рассмотрен структурно-геометрический синтез поступательно-направляющих механизмов с тремя степенями свободы и тремя кинематическими цепями [1, 2] . Представим манипулятор параллельной структуры, в котором для обеспечения поступательных перемещений в каждой кинематической
цепи содержится по три поступательные пары, причем две из трех пар выполнены
в виде шарнирного параллелограмма (рис . 2 .1) . Такой механизм может найти применение в 3D-принтерах .
Рассмотрим перемещения в первой кинематической цепи . Точка В1 перемещается вдоль оси х . Точка С1 перемещается по окружности радиусом l1 на угол φ11
в плоскости xОz . Точка А1 будет перемещаться также по окружности радиусом
l2 в плоскости, параллельной плоскости xОz, на угол φ12 . При этом расстояние
от точки А1 до центра платформы (до точки О) равно длине l3 (см . рис . 2 .1, 2 .2) .
Запишем уравнения для описанных перемещений (от точки В1 к С1, далее
к А1) . Координаты точки С1 (xC1; yC1, zC1) определяются как:
xC1 = xB1 – l1 cos φ11; yC1 = 0; zC1 = l1 sin φ11 .
Координаты точки A1 (xA1; yA1, zA1) составляют:
xA1 = xC1 – l2 cos φ12; yA1 = –l2 sin φ12; zA1 = zC1,
где l1, l2 — длины сторон параллелограммов; φ11, φ12 — углы поворотов в первом и втором параллелограммах . Координаты точки B1 (xB1; yB1, zB1) таковы, что
yB1 = 0, zB1 = 0 .
54
Глава 2. Синтез, анализ и управление поступательно-направляющими механизмами
Рис. 2.1. Поступательно-направляющий механизм параллельной структуры
с шарнирными параллелограммами
Считаем, что известно перемещение платформы . Для нахождения перемещения в приводах задаем координаты O (xO; yO, zO) и, учитывая длину l3, имеем координаты точки A1 (xA1; yA1, zA1) . Выражаем координаты точки В1 через координаты А1 .
Найдем угол поворота в первом параллелограмме:
ϕ12 = −arcsin
yA 1
l2
.
С учетом приведенных уравнений имеем:
zA1 = zC1 = l1 sin φ11;
ϕ11 = arcsin
zA1
l1
;
xB = xC + l1 cos φ11; xC = xA + l2 cos φ12 .
1
1
1
1
Далее xB1 = xA1 + l2 cos φ12 + l1 cos φ11 . После преобразований:
yA
x B 1 = x A 1 + l2 cos − arcsin 1
l2
zA
+ l1 cos arcsin 1
l1
.
2.1. Структурно-геометрический синтез и кинематический анализ
55
Рис. 2.2. Перемещения в трех кинематических цепях
Аналогично рассматриваем перемещения для второй и третьей кинематических цепей и вычисляем зависимости координат точек Вi (обобщенных координат) от координат точек Аi (i = 2, 3) . В результате можно выразить обобщенные
координаты q1, q2, q3:
yA
zA
q1 = x A 1 + l2 cos − arcsin 1 + l1 cos arcsin 1 ;
l2
l1
zA 2
xA
+ l1 cos arcsin 2 ;
q2 = y A 2 + l2 cos − arcsin
l2
l1
xA 3
yA
+ l1 cos arcsin 3 .
q3 = z A 3 + l2 cos − arcsin
l2
l1
где все обозначения пояснены выше .
56
Глава 2. Синтез, анализ и управление поступательно-направляющими механизмами
Для решения задачи о скоростях будем использовать подход, основанный
на дифференцировании уравнений связей, получаемых на основе задачи о положениях:
y0
z0
F1 = q1 − x0 − l3 − l2 cos − arcsin − l1 cos arcsin = 0;
l
l1
2
z0
x0
F2 = q2 − y0 − l3 − l2 cos − arcsin − l1 cos arcsin = 0;
l2
l1
x
y
F3 = q3 − z0 − l3 − l2 cos − arcsin 0 − l1 cos arcsin 0 = 0 .
l2
l1
(2 .1)
Из данных уравнений можно выразить скорости манипулятора:
AV = (–B)Vi1,
где
∂F1
∂x0
∂F
A = 2
∂x0
∂F
3
∂x0
∂F1
∂y0
∂F2
∂y0
∂F3
∂y0
∂F1
∂z0
∂F2
∂z0
∂F3
∂z0
;
∂F1
∂q1
B= 0
0
0
∂F2
∂q2
0
0
0 ;
∂F3
∂q3
V x
V = V y ;
V
z
V11
Vi1 = V21 ,
V31
А — матрица частных производных от неявной функции по x0, y0, z0; В — матрица
частных производных от неявной функции по обобщенным координатам q1, q2, q3;
V — вектор скорости выходного звена, разложенный по осям x, y, z — Vx, Vy, Vz;
Vi1 — обобщенные скорости .
Найдем частные производные от неявной функции по обобщенным и абсолютным координатам, в результате получим уравнения:
l1
l2
y0
−1
l2 1 −
x0
1−
x02
1−
−1
l22
z0
x0
x02
l22
l2 1 −
l1 1 −
V x
1 0 0 V11
z0
V y = − 0 1 0 V21 ,
2
z
0 0 1 V
l2 1 − 20 V z
31
l2
−1
z0
y02
l22
z02
l22
где все обозначения пояснены выше .
z02
l12
2.1. Структурно-геометрический синтез и кинематический анализ
57
Составим систему уравнений, основанных на понятии относительного момента, для трех кинематических цепей:
Vx r1x + Vy r1y + Vz r1z = V11(r1x + r1y + r1z);
Vx r2x + Vy r2y + Vz r2z = V21(r2x + r2y + r2z);
Vx r3x + Vy r3y + Vz r3z = V31(r3x + r3y + r3z),
где rix, rix, riy — плюккеровы координаты силового винта, действующего на выходное звено со стороны кинематический цепи .
В кинематических цепях (для примера рассматриваем первую из них) имеют
место следующие кинематические винты . Это единичный винт (вектор) E11, перпендикулярный плоскости, которая образована двумя векторами: вектором, расположенным вдоль оси промежуточного звена первого параллелограмма, и вектором направления оси вращения кинематической пары, он представляет собой:
i
E11 = e11 x
0
j
e11 y
1
k
e11z ,
0
где e11x = cos φ11; e11y = 0; e11z = –sin φ11 .
Или
i
E11 = cos ϕ11
0
j
k
0 − sin ϕ11 = i ( sin ϕ11 ) + j ( 0 ) + k ( cos ϕ11 ) .
1
0
Единичный вектор E12, перпендикулярный плоскости, которая образована
двумя векторами: вектором, расположенным вдоль оси промежуточного звена
второго параллелограмма, и вектором направления оси вращения кинематической пары, он представляет собой:
i
E12 = e12 x
0
i
E12 = cos ϕ12
0
j
sin ϕ12
0
j
e12 y
0
k
e12 z ;
1
k
0 = i ( sin ϕ12 ) + j ( − cos ϕ12 ) + k ( 0 ) .
1
Силовой винт R1 будет перпендикулярен плоскости, образованной единичными векторами E11 и E12, и равен
i
R1 = E11 x
E
12 x
j
E11 y
E12 y
k
E11z ,
E12 z
или
i
R1 = sin ϕ11
sin ϕ
12
j
0
− cos ϕ12
k
cos ϕ11 .
0
58
Глава 2. Синтез, анализ и управление поступательно-направляющими механизмами
Рассуждая аналогичным образом, найдем силовые винты, присущие другим
кинематическим цепям . Для второй и третьей цепей винты будут равны:
i
R 2 = cos ϕ21
0
j
sin ϕ21
sin ϕ22
;
− cos ϕ22
k
0
i
0
R3 =
− cos ϕ
32
j
cos ϕ31
0
k
sin ϕ31 .
sin ϕ32
Плюккеровы координаты ортов осей кинематических пар первой кинематической цепи:
E11 x
E11 y
E
11z
E12 x
E12 y
E12 z
E13 x 1 sin ϕ11
0
E13 y = 0
E13 z 0 cos ϕ11
sin ϕ12
− cos ϕ12 .
0
Плюккеровы координаты ортов осей пар второй и третьей кинематических
цепей можно записать в виде:
E21 x
E22 y
E
21z
E22 x
E22 y
E22 z
E23 x 0 sin ϕ21
E23 y = 1 cos ϕ21
E23 z 0
0
0
sin ϕ12 ;
− cos ϕ12
E31 x
E31 y
E
31z
E32 x
E32 y
E33 x 0
0
E33 y = 0 cos ϕ31
E33 z 1 sin ϕ31
cos ϕ32
0
.
− sin ϕ32
E32 z
Для определения особых положений первого типа рассматриваем одну из кинематических цепей манипулятора, например, первую цепь . Матрица, составленная из плюккеровых координат кинематических винтов
E21 x
E22 y
E
21z
E22 x
E22 y
E22 z
E23 x 0 sin ϕ21
E23 y = 1 cos ϕ21
E23 z 0
0
0
sin ϕ12 ;
− cos ϕ12
E31 x
E31 y
E
31z
E32 x
E32 y
E33 x 0
0
E33 y = 0 cos ϕ31
E33 z 1 sin ϕ31
cos ϕ32
0
.
− sin ϕ32
E32 z
вырождается при следующих значениях углов: φ11 = 0°, φ12 = 90°; φ11 = 0°, φ12 = –90° .
Такое положение соответствует сложенному параллелограмму .
Рассматривая механизм в целом, исследуем матрицу, составленную из плюккеровых координат силовых винтов:
r1 x
R = r2 x
r
3x
r1 y
r2 y
r3 y
r1z
r2 z .
r3 z
2.1. Структурно-геометрический синтез и кинематический анализ
59
Матрица вырождается при следующих значениях углов:
φ11 = 0°; φ12 = 0°; φ21 = 0°; φ22 = 0°; φ31 = 90°; φ32 = 0° .
Рассмотрим решение задачи об ускорениях . Дифференцируя уравнения связей Fi (x0, y0, z0, qi) = 0 по t, получаем систему уравнений, связывающих скорости
входных и выходных звеньев:
∂Fi
∂F
∂F
∂F
xɺ + i yɺ + i zɺ + i qɺi = 0 , i = 1, 2, 3 .
∂x
∂y
∂z
∂qi
Дифференцируя уравнения связей второй раз по t, получаем уравнения, связывающие ускорения входных и выходных звеньев:
∂ 2 F1
∂x 2
+2
xɺ 2 + 2
∂ 2 F1
∂ 2 F1
∂ 2 F1
∂ 2 F1
∂2 F
ɺɺ + 2
ɺɺ + 2
ɺ ɺ1 + 21 yɺ 2 + 2
ɺɺ +
xy
xz
xq
zy
∂x∂y
∂y∂z
∂x∂z
∂x∂q1
∂y
∂F
∂2 F
∂F
∂ 2 F1
∂F
∂ 2 F1
∂F
∂2 F
ɺ ɺ1 + 2
ɺ ɺ1 + 21 zɺ 2 + 21 qɺ1 + 1 xɺɺ + 1 ɺɺ
y + 1 zɺɺ + 1 qɺɺ1 .
yq
zq
∂x
∂y
∂y∂q1
∂z
∂z∂q1
∂q1
∂q1
∂z
Вводим следующие обозначения:
a = 1−
y02
l22
;
b = 1−
z02
l12
;
c = 1−
x02
l12
.
Далее находим частные производные и получаем уравнения для ускорений:
y
qɺɺ1 = xɺɺ − 0
la
y02 2
z02 2 1
z0 1
ɺɺ
ɺɺ
ɺ
−
−
+
−
+
yɺ ;
y
z
z
3 3
la l 3 a3
lb lb l b
1
1 x2
z2
z x
qɺɺ2 = ɺɺ
y − 0 zɺɺ − 0 xɺɺ − + 3 0 3 zɺ 2 − + 3 03 xɺ 2 ;
lb l b
lc l c
lb lc
y
qɺɺ3 = zɺɺ − 0
la
x
y − 0
ɺɺ
lc
1 x02 2 1
y02 2
ɺɺ
ɺ
+
yɺ .
−
+
x
−
x
3 3
3 3
la l a
lc l c
Рассмотрим кинематическую точность данного механизма [3] . В данном случае следует использовать неявные функции положения, записанные в следующем виде:
Fi = (Li1, Li2, Li3, x, y, z, qi),
откуда
∂Fi
∂F
∂F
∂F
∂F
∂F
∂F
δx + i δy + i δz + i δqi + i δLi1 + i δLi 2 + i δLi3 = 0,
∂x
∂Li3
∂y
∂z
∂qi
∂Li1
∂Li2
где Li1, Li2, Li3 — длины звеньев i-й цепи .
60
Глава 2. Синтез, анализ и управление поступательно-направляющими механизмами
Согласно линейной теории точности приравниваем перемещения в приводах
нулю: ∂q1 = 0, ∂q2 = 0, ∂q3 = 0 . Тогда уравнения для трех кинематических цепей
можно записать в виде системы уравнений:
∂F1
∂F
∂F
∂F
∂F
∂F
δx + 1 δy + 1 δz = − 1 δL11 + 1 δL12 + 1 δL13 ;
∂E
∂y
∂z
∂
∂
∂
L
L
L
13
12
11
∂F2
∂F
∂F
∂F
∂F
∂F
δx + 2 δy + 2 δz = − 2 δL21 + 2 δL22 + 2 δL32 ;
∂E
∂
∂y
∂z
∂
∂
L
L
L
22
32
21
∂F3
∂F
∂F
∂F
∂F
∂F
δx + 3 δy + 3 δz = − 3 δL31 + 3 δL32 + 3 δL33 .
∂E
∂
L
∂y
∂
L
∂z
∂
L
33
32
31
Частые производные будут равны:
∂F 1
1
= − 1− 2 z2 −
∂L11
L11
∂F 1
1
= − 1 − 2 y2 −
∂L12
L12
z2
z2
1− 2
L11
2
L11
y2
2
2
1−
L12
;
y
2
L12
;
∂F 1
= −1 .
∂L13
Остальные производные выражаются аналогично . Из данных линейных уравнений можно найти ошибки положения выходного звена по отклонениям линейных размеров .
Далее исследуем механизмы в рамках нелинейной теории точности, тем самым проверив применимость линейной теории . Зависимости между входными
и выходными координатами можно записать в виде:
x0 = f (L1, L2, L3, q1, q2, q3);
y0 = f (L1, L2, L3, q1, q2, q3);
z0 = f (L1, L2, L3, q1, q2, q3),
где x0, y0, z0 — значения координат выходного звена идеального механизма . Фактическое положение можно записать в виде:
xi = f (L1 + ∆Li1, L2 + ∆Li2, L3 + ∆Li3, q1, q2, q3);
yi = f (L1 + ∆Li1, L2 + ∆Li2, L3 + ∆Li3, q1, q2, q3);
zi = f (L1 + ∆Li1, L2 + ∆Li2, L3 + ∆Li3, q1, q2, q3),
где xi, yi, zi — координаты выходного звена при наличии отклонений в длинах звеньев механизма .
Разность приведенных уравнений характеризует общую ошибку положения:
∆x = xi – x0; ∆y = yi – y0; ∆z = zi – z0 .
2.2. Анализ динамических свойств поступательно-направляющего механизма
61
Были исследованы различные положения в рабочей зоне, проведено сравнение результатов, полученных на основе линейной и нелинейной теорий . Оказалось, что указанные результаты весьма близки .
2.2. АНАЛИЗ ДИНАМИЧЕСКИХ СВОЙСТВ
ПОСТУПАТЕЛЬНО-НАПРАВЛЯЮЩЕГО МЕХАНИЗМА
ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ
И РАЗРАБОТКА АЛГОРИТМОВ УПРАВЛЕНИЯ
В данном параграфе рассмотрим поступательно-направляющий механизм параллельной структуры с точки зрения его динамических свойств [4, 5] . Прежде всего
проанализируем собственные частоты механизма .
Уравнения движения манипулятора с тремя степенями свободы будет описываться системой дифференциальных уравнений .
d ∂T ∂T
∂Π
, i = 1, … , 3 .
=−
−
ɺ
dt ∂qi ∂qi
∂qi
где T — кинетическая энергия системы; П — потенциальная энергия системы .
Потенциальная энергия системы определяется, как
Π =
1 n
∑ ci qi2 ,
2 i =1
где сi — жесткость цепи .
Кинетическая энергия является квадратичной функцией обобщенных скоростей
1
T = m V x2 + V y2 + V z2 ,
2
(
)
где m — масса выходного звена, кг; Vx, Vy, Vz — скорости выходного звена, м/c .
Система дифференциальных уравнений (2) имеет частное решение
qi = Ai sin ωt .
Это частное решение после подстановки в дифференциальное уравнение движения позволяет получить частотное уравнение в виде:
c1 − a1ω2
m1ω2
m2 ω2
m1ω2
c2 − a2 ω2
m3 ω2
2
m2 ω
2
m3 ω
= 0,
c3 − a3 ω
2
где сi — жесткость цепи; ai, mi — коэффициенты .
Решением частотного уравнения являются значения собственных частот колебаний .
Рассмотрим положение манипулятора с координатами точки О (0,5; 0,5; 0,5) .
Примем массу выходного звена m = 0,5 кг, а жесткость приводов с = 10 000 Н/мм .
62
Глава 2. Синтез, анализ и управление поступательно-направляющими механизмами
Отклоним выходное звено вдоль осей х, y, z, соответственно, на 0,02 мм, 0,05 мм,
0,01 мм . В результате численного решения получаем законы изменения координат
(рис . 2 .3) .
Рис. 2.3. Графики изменения координат выходного звена, x, y, z
При больших отклонениях можно получить уточненные решения с применением численных методов . При этом картина колебаний становится более полной,
возможно проследить за сложным процессом движения исполнительного органа,
а также оценить поведения системы при наличии внешних возмущающих сил различного характера .
2.2. Анализ динамических свойств поступательно-направляющего механизма
63
Уравнение движения, используя принцип возможных перемещений, имеет вид:
mxɺɺ
∂x
∂y
∂z
∂z
δqi + myɺɺ
δqi + mzɺɺ
δqi + mg
δqi + m1qɺɺi δqi + Pi δqi = 0,
∂qi
∂qi
∂qi
∂qi
где δx, δy, δz — элементарные перемещения; Pi — усилия в приводах .
Коэффициенты, составленные из частных производных, определяются дифференцированием уравнений связей и в рассматриваемой задаче не являются постоянными величинами .
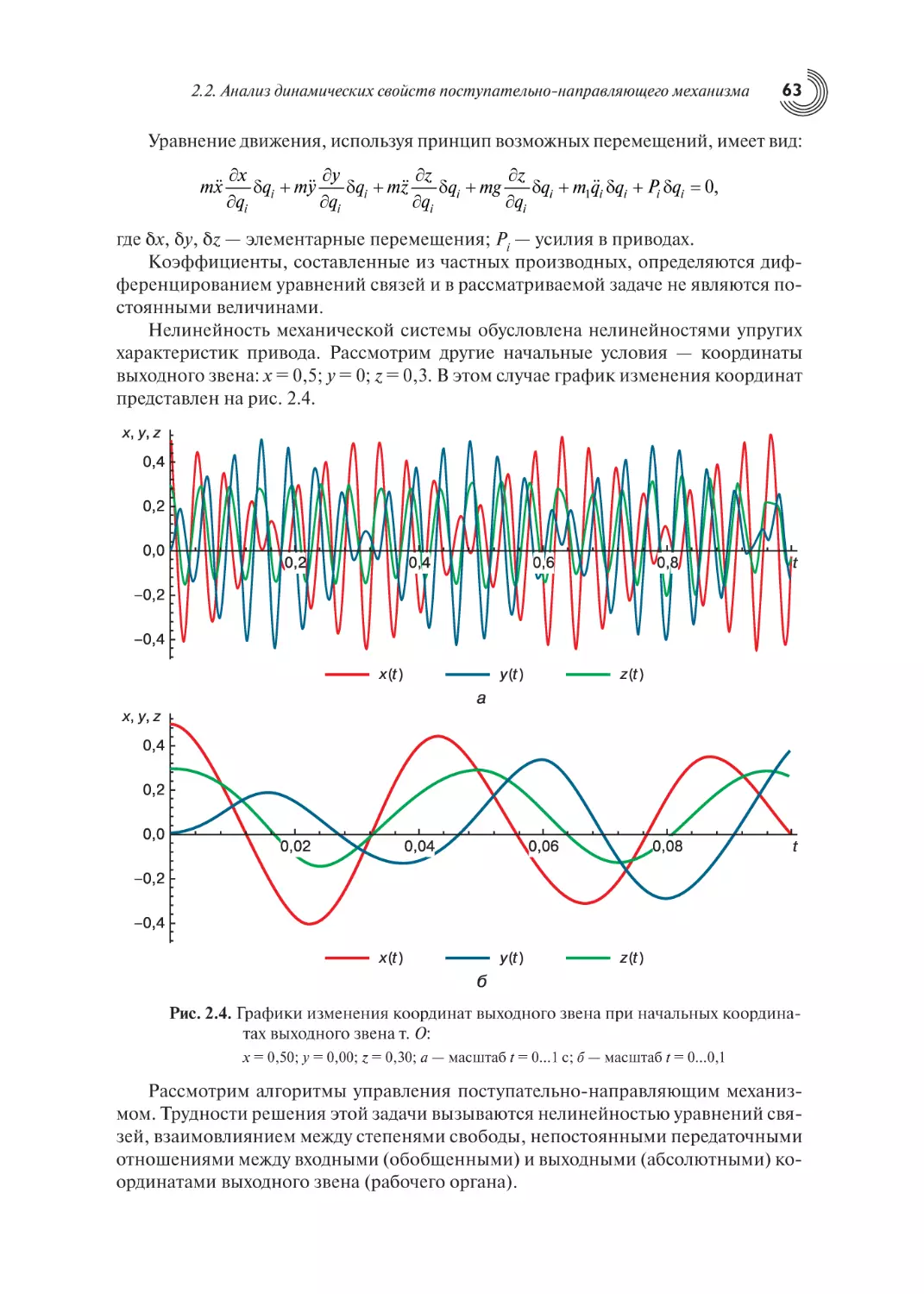
Нелинейность механической системы обусловлена нелинейностями упругих
характеристик привода . Рассмотрим другие начальные условия — координаты
выходного звена: x = 0,5; y = 0; z = 0,3 . В этом случае график изменения координат
представлен на рис . 2 .4 .
Рис. 2.4. Графики изменения координат выходного звена при начальных координатах выходного звена т . О:
x = 0,50; y = 0,00; z = 0,30; а — масштаб t = 0…1 с; б — масштаб t = 0…0,1
Рассмотрим алгоритмы управления поступательно-направляющим механизмом . Трудности решения этой задачи вызываются нелинейностью уравнений связей, взаимовлиянием между степенями свободы, непостоянными передаточными
отношениями между входными (обобщенными) и выходными (абсолютными) координатами выходного звена (рабочего органа) .
64
Глава 2. Синтез, анализ и управление поступательно-направляющими механизмами
Используемый алгоритм управления [6, 7] основан на минимизации отклонений от заданного закона движения . Будем считать, что задан закон изменения координат: xT (t), yT (t), zT (t) . После дифференцирования имеем требуемые скорости
x∙T (t), y∙T (t), z∙T (t) и ускорения ẍ T (t), ÿT (t), z̈ T (t) .
Задача управления формулируется так, что требуется найти силы (моменты)
в приводах, при которых происходит минимизация ошибки по координате:
∆1(t) = xT (t) – x (t); ∆2 (t) = yT (t) – y (t); ∆3(t) = zT (t) – z (t);
по скорости:
∆ɺ 1 ( t ) = xɺT ( t ) − xɺ ( t );
∆ɺ 2 ( t ) = yɺT ( t ) − yɺ ( t );
∆ɺ 3 ( t ) = zɺT ( t ) − zɺ ( t );
ɺɺ ( t ) = ɺɺ
∆
yT ( t ) − ɺɺ
y ( t );
2
ɺɺ ( t ) = zɺɺ ( t ) − zɺɺ( t ),
∆
3
T
по ускорению:
ɺɺ ( t ) = xɺɺ ( t ) − xɺɺ ( t );
∆
1
T
где x (t), y (t), z (t), xɺ ( t ), yɺ ( t ), zɺ ( t ), xɺɺ ( t ), ɺɺ
y ( t ), zɺɺ( t ) — фактические значения координат, скоростей, ускорений выходного звена .
Для оценки быстроты затухания и величины отклонения используем функционал — квадратичную интегральную оценку переходного процесса
T
∫ (∆
2
ɺɺ 2 ) dt ,
+ k1∆ɺ 2 + k2 ∆
t0
где ∆, k1, k2 — векторы, соответственно, функционала, ошибки и весовых коэффициентов .
Отметим, что минимум функционала реализуется на траекториях, соответствующих условию:
ɺɺ + γ ∆ɺ + γ ∆ = 0,
∆
i
i1 i
i0 i
или в иной форме:
ɺɺ + 2ζ τ ∆ɺ + ∆ = 0;
τi2 ∆
i
i i i
i
τi2 =
1
;
γ 0i
2 ζ i τi =
γ1i
,
γ 0i
где i = 1, 2, 3, γ i 0 = ki 2 , γ i1 = ki1 + 2 γ i 0 , τi — постоянные времени; ζi — коэффициенты затухания .
При указанных условиях закон изменения ускорения имеет вид:
xɺɺ = xɺɺT + γ1 ( xɺT − xɺ ) + γ 0 ( xT − x );
ɺɺ
y = ɺɺ
yT + γ1 ( yɺT − yɺ ) + γ 0 ( yT − y );
zɺɺ = zɺɺT + γ1 ( zɺT − zɺ ) + γ 0 ( zT − z ) .
2.2. Анализ динамических свойств поступательно-направляющего механизма
65
При перемещениях в приводах δq1, δq2, δq3 имеем следующие уравнения:
mxɺɺ
mxɺɺ
∂x
∂y
∂z
∂z
δq1 + myɺɺ
δq1 + mzɺɺ
δq1 + mg
δq1 + m1qɺɺ1δq1 + P1δq1 = 0;
∂q1
∂q1
∂q1
∂q1
∂x
∂y
∂z
∂z
δq2 + myɺɺ
δq2 + mzɺɺ
δq2 + mg
δq2 + m2 qɺɺ2 δq2 + P2 δq2 = 0;
∂q2
∂q2
∂q2
∂q2
mxɺɺ
∂x
∂z
∂y
∂z
δq3 + m3 qɺɺ3 δq3 + P3 δq3 = 0 .
δq3 + myɺɺ
δq3 + mzɺɺ
δq3 + mg
∂q3
∂q3
∂q3
∂q3
где m1, m2, m3 — масса входных звеньев; m — масса выходного звена, P1, P2, P3 —
силы в приводах; ẍ , ÿ, z̈ — ускорения выходного звена; q̈ 1, q̈ 2, q̈ — ускорения в при∂x ∂y ∂z
— переменные коэффициенты, определяемые из уравнений
водах;
,
,
∂qi ∂qi ∂qi
связей .
Силы Рi могут быть найдены подстановкой ускорений ẍ , ÿ, z̈ – из соответствующих уравнений:
∂x
∂y
+ m ɺɺ
yT + γ1 ( yɺT − yɺ ) + γ 0 ( yT − y ) +
∂q
∂q
∂z
+ m ( zɺɺT + γ1 ( zɺT − zɺ ) + γ 0 ( zT − z ) ) + mg + mi qɺɺi .
∂q
Pi = m xɺɺT + γ1 ( xɺT − xɺ ) + γ 0 ( xT − x )
Зададим закон движения выходного звена:
xT (t) = 0,1 sin (ωt); yT (t) = 0,12 sin (ωt); zT (t) = 0,15 sin (ωt) .
Пусть масса выходного звена равна 5 кг, масса входных звеньев — 1 кг, круговая частота — ω = 15 рад/c .
Зададим коэффициент демпфирования ζ = 2 /2 и время переходного процесса t = 0,05 с . При этом постоянная времени будет равна τ ≈ 0,011 с, а коэффициенты обратной связи будут равны γ0 = 7200, γ1 = 120 . Закон изменения ускорений
принимает вид:
xɺɺ = xɺɺT + 120 ( xɺT − xɺ ) + 7200 ( xT − x );
ɺɺ
y = yT + 120 ( yɺT − yɺ ) + 7200 ( yT − y );
zɺɺ = zɺɺT + 120 ( zɺT − zɺ ) + 7200 ( zT − z ) .
При движении робота динамическая ошибка, изменяясь, входит в заданный
коридор (рис . 2 .5) .
Рассмотрим случай, когда массой входных звеньев в модели пренебрегли . Законы изменения ошибки положения выходного звена (рис . 2 .6) для двух случаев
(при учете массы входных звеньев и без учета ее) показывают, что массой входных
звеньев можно пренебречь, так как разность отклонений положения выходного
звена не превышает 5 % .
66
Глава 2. Синтез, анализ и управление поступательно-направляющими механизмами
Рис. 2.5. График изменения ошибки координат
Рис. 2.6. Графики изменения ошибки:
а — масса входных звеньев равна массе
б — масса входных звеньев в модели равна нулю
входных
звеньев
в
модели;
Для того чтобы определить, насколько данный алгоритм работоспособен при
неадекватности модели, рассмотрим случай, когда реальная масса выходного
звена не равна массе выходного звена в модели . Зададим массу выходного звена,
на 20 % отличающуюся от массы выходного звена модели .
Как видно из полученных зависимостей (рис . 2 .7), при отклонении массы выходного звена робота от массы выходного звена модели в пределах 20 % отклонение в ошибке положения не превышает 3 % .
Далее, для уяснения, насколько алгоритм может работать при начальных условиях, весьма сильно отличающихся от задаваемого закона, рассмотрим движение
выходного звена по окружности:
xT (t) = 0,1 sin (ωt); yT (t) = 0,1 cos (ωt); zT (t) = 0 .
Длительность цикла составляет 0,20 с, при частоте ω = 45 рад/c . Оказывается,
что алгоритм управления вполне работоспособен (рис . 2 .8) .
2.3. Структурно-геометрический синтез и кинематический анализ сферических механизмов
67
Рис. 2.7. Графики изменения ошибки:
а — масса выходного звена равна массе выходного звена модели;
б — масса выходного звена превышает массу выходного звена модели на 20 %
Рис. 2.8. Движение по окружности:
а
—
ошибки
положения
б — траектория движения выходного звена
выходного
звена;
Таким образом, представлен алгоритм управления поступательно-направляющим механизмом .
2.3. СТРУКТУРНО-ГЕОМЕТРИЧЕСКИЙ СИНТЕЗ
И КИНЕМАТИЧЕСКИЙ АНАЛИЗ
СФЕРИЧЕСКИХ МЕХАНИЗМОВ
В данном параграфе рассмотрен структурно-геометрический синтез сферических
механизмов с тремя степенями свободы и тремя кинематическими цепями . Такие
манипуляторы применяются в устройствах для ориентирования антенн, телескопов, в испытательных стендах, для обработки сферических поверхностей, в смесителях .
68
Глава 2. Синтез, анализ и управление поступательно-направляющими механизмами
Как отмечалось, кинематические цепи могут налагать одинаковые связи, при
этом все кинематические винты входят в трехчленную замкнутую группу винтов .
Однако могут иметь место и такие случаи, когда кинематическими цепями налагаются различные связи, например когда каждая из них отбирает по одному поступательному движению, и соответствующая связь — это силовой винт нулевого
параметра, то есть сила .
Рассмотрим сферический манипулятор, в котором оси вращательных пар пересекаются в одной точке — начале координат под углом 90° [8] (рис . 2 .9) . Каждое
входное звено цепи соединено с вращательным двигателем, который определяет
значение соответствующей входной (обобщенной) координаты φ11, φ21, φ31 .
Рис. 2.9. Структурная схема сферического манипулятора
с тремя кинематическими цепями
Выходное звено представляет собой подвижную платформу, вращающуюся
вокруг трех осей координат, пересекающихся в точке О . Выходными координатами являются углы поворота подвижной платформы: угол β поворота вокруг оси x,
угол в поворота вокруг оси y и угол γ поворота вокруг оси z .
Запишем матрицу, описывающую переход от подвижной системы координат
к неподвижной системе координат . Матрицы поворота вокруг осей x, y, z имеют
следующий вид:
• вокруг оси х:
0
0
1
A 1 = 0 cos α − sin α ;
0 sin α cos α
2.3. Структурно-геометрический синтез и кинематический анализ сферических механизмов
69
• вокруг оси у:
cos β 0 sin β
1
0 ;
A2 = 0
− sin β 0 cos β
• вокруг оси z:
cos γ − sin γ 0
A 3 = sin γ cos γ 0 .
0
0
1
Матрица, описывающая переход от подвижной системы координат к неподвижной системе координат, будет иметь вид:
А = А3 А2 А1 .
В первой кинематической цепи входное звено осуществляет поворот вокруг
осей в последовательности: x, y, z . Матрицы поворота Вʹ вокруг осей x, y, z имеют
следующий вид:
• вокруг оси х:
0
1
B1′ = 0 cos ϕ11
0 sin ϕ
11
0
− sin ϕ11 :
cos ϕ11
• вокруг оси y:
cos ϕ12
B′2 =
0
− sin ϕ
12
0 sin ϕ12
1
0 ;
0 cos ϕ12
• вокруг оси z:
cos ϕ13
′
B3 = sin ϕ13
0
− sin ϕ13
cos ϕ13
0
0
0 .
1
Матрица, описывающая переход от подвижной системы координат к неподвижной системе, будет иметь вид:
Bʹ = B1ʹ B2ʹ B3ʹ .
Единичный вектор оси пары выходного звена первой цепи имеет координаты
0
0 .
1
70
Глава 2. Синтез, анализ и управление поступательно-направляющими механизмами
Подставив в уравнение связи
0
0
A 0 = B′ 0
1
1
найденные значения матриц А и Вʹ, получаем уравнение
sin ϕ12
sin γ sin α + cos α cos γ sin β
cos α sin γ sin β − cos γ sin α = − cos ϕ12 sin ϕ11 ,
cos ϕ cos ϕ
cos β cos α
11
12
из которого можно выразить угол φ11 через углы α, β, γ .
Во второй кинематической цепи единичный вектор оси выходного звена имеет координаты (1, 0, 0)Т, в третьей кинематической цепи единичный вектор оси
пары выходного звена имеет координаты (0, 1, 0)Т, при этом последовательность
расположения кинематических пар различна .
На основе изложенного была решена задача о положениях, при этом получены неявные функции, связывающие абсолютные и обобщенные координаты:
cos γ sin γ sin β + cos γ sin α
= 0;
F1 = tg ϕ11 −
cos α cos β
sin β
− tg ϕ21 = 0;
F2 =
cos γ cos β
F = cos γ sin β sin α − cos α sin γ + tg ϕ = 0,
31
3 cos α cos γ + sin α sin β sin γ
где все обозначения пояснены выше .
Далее рассмотрим сферический механизм, в котором каждая цепь отбирает
по одной степени свободы [9] (рис . 2 .10) . В каждой кинематической цепи имеют
место три вращательные кинематические пары, оси которых перпендикулярны
оси двигателя, конечная вращательная пара сопряжена с выходным звеном, ее ось
перпендикулярна осям промежуточных пар и пересекает ось двигателя .
В первой цепи ось вращательного двигателя расположена вдоль оси х, ось
начальной вращательной пары расположена параллельно оси у, ось конечной
вращательной пары расположена вдоль оси z . Во второй кинематической цепи
ось вращательного двигателя расположена вдоль оси у, ось начальной вращательной пары расположена вдоль оси z, ось конечной вращательной пары
расположена вдоль оси х . В третьей кинематической цепи ось вращательного
двигателя расположена вдоль оси z, ось начальной вращательной пары расположена параллельно оси х, ось конечной вращательной пары расположена
вдоль оси у .
Первая цепь совершает следующие перемещения: поворот вокруг оси х
на угол φ11, поворот вокруг оси у на угол φ12, перенос по оси z на расстояние l3,
2.3. Структурно-геометрический синтез и кинематический анализ сферических механизмов
71
перенос по оси х на расстояние l2, поворот вокруг z на угол φ13 . Эти перемещения
описываются соответствующими матрицами:
0
1
0
cos
ϕ11
B1′ =
0 sin ϕ11
0
0
1
0
B3′ =
0
0
0
1
0
0
0 0
0 0
;
1 l3
0 1
0
− sin ϕ11
cos ϕ11
0
1
0
B′4 =
0
0
0
0
;
0
1
cos ϕ12
0
B′2 =
− sin ϕ12
0
0 0 l2
1 0 0
;
0 1 0
0 0 1
0 sin ϕ12
1
0
0 cos ϕ12
0
0
cos ϕ13
sin ϕ13
B5′ =
0
0
0
0
;
0
1
− sin ϕ13
cos ϕ13
0
0
0
0
1
0
0
0
.
0
1
Рис. 2.10. Сферический механизм с пятью кинематическими парами
в каждой кинематической цепи
Матрица перехода входного звена первой цепи от подвижной системы координат к неподвижной равна:
Bʹ = Bʹ1 Bʹ2 Bʹ3 Bʹ4 Bʹ5 .
72
Глава 2. Синтез, анализ и управление поступательно-направляющими механизмами
Единичный вектор оси входной пары равен Р1 = (0, 0, 1, 1)Т (четвертый элемент — вспомогательный) .
Выходное звено совершает последовательный поворот на углы γ, β, α . Матрицы, описывающие поворот вокруг осей z, y, x, соответственно, выглядят следующим образом:
0
0
1
α
α
0
cos
sin
−
A1 =
0 sin α cos α
0
0
0
0
0
;
0
1
cos β
0
A2 =
− sin β
0
0 sin β 0
1
0
0
;
0 cos β 0
0
0
1
cos γ − sin γ
sin γ cos γ
A3 =
0
0
0
0
0
0
1
0
0
0
.
0
1
Матрица, описывающая переход от подвижной системы координат к неподвижной, будет иметь вид:
A = A1 A2 A3 .
Используя указанные соотношения, получаем матричное уравнение AP1 = BʹP1,
откуда:
sin ϕ12 + l2 cos ϕ12 + l3 sin ϕ 12
sin γ sin α + cos γ cos α sin β
cos
ϕ
−
sin
ϕ
−
l
sin
ϕ
+
l
cos
ϕ
+
sin
γ
cos
α
sin
β
−
cos
γ
sin
α
12 )
11 ( 2
12
3
12
=
.
cos ϕ11 ( cos ϕ12 + l3 cos ϕ12 − l2 sin ϕ12 )
cos β cos α
1
1
Полученное уравнение используем для определения угла φ11 через α, β, γ:
tg ϕ11 =
sin γ cos α sin β − cos γ sin α
.
cos β cos α
Аналогичным образом составляются уравнения связи для второй и третьей
кинематических цепей . В результате имеем:
cos γ cos β cos ϕ21 ( cos ϕ22 + l1 cos ϕ22 − l2 sin ϕ22 )
− sin ϕ22 + l2 cos ϕ22 + l1 sin ϕ22
;
sin γ cos β =
− sin β sin ϕ21 ( l2 sin ϕ22 − l1 cos ϕ22 − cos ϕ12 )
1
1
cos γ sin β sin α − sin γ cos α sin ϕ31 ( l3 sin ϕ32 − l1 cos ϕ32 − cos ϕ32 )
cos α cos γ + sin γ sin β sin α = cos ϕ31 ( cos ϕ32 + l1 cos ϕ32 − l3 sin ϕ32 ) .
cos β sin α
sin ϕ32 + l3 cos ϕ32 + l1 sin ϕ32
1
1
Таким образом, полученные уравнения связей для двух рассмотренных сферических механизмов совпали .
Теперь рассмотрим механизм с частичной кинематической развязкой, при
которой один двигатель определяет вращение выходного звена вокруг своей оси,
а два двигателя задают угол наклона оси указанного звена [10] (рис . 2 .11) .
2.3. Структурно-геометрический синтез и кинематический анализ сферических механизмов
73
Рис. 2.11. Сферический механизм с двигателем, задающим вращение
выходного звена вокруг своей оси
Для данного механизма проводим анализ связей, аналогичный ранее рассмотренным случаям . В результате получаем решение задачи о положениях:
tg ϕ11 =
sin γ cos α sin β − cos γ sin α
;
cos β cos α
tg ϕ21 =
cos β cos α
;
sin γ sin α + cos γ cos α sin β
tg ϕ31 =
cos γ sin β sin α − sin γ cos α
.
cos α cos γ + sin γ sin β sin α
Это решение несколько отличается от тех, что получены для предыдущих случаев, что объясняется разницей в структуре цепей .
Для решения задачи о скоростях будем использовать аналитический подход,
основанный на дифференцировании уравнений связей . Уравнения скоростей
можно представить в виде:
AV = (–B)ω,
74
Глава 2. Синтез, анализ и управление поступательно-направляющими механизмами
где
∂F1
∂α
∂F
A = 2
∂α
∂F3
∂α
∂F1
∂β
∂F2
∂β
∂F3
∂β
∂F1
∂γ
∂F2
∂γ
∂F3
∂γ
;
∂F1
∂ϕ11
B= 0
0
0
∂F2
∂ϕ21
0
0
0 ;
∂F3
∂ϕ31
αɺ
V = βɺ ;
γɺ
ϕɺ 11
ω = ϕɺ 21 ,
ϕɺ
31
А — матрица частных производных от неявной функции по α, β, γ; В — матрица
частных производных от неявной функции по обобщенным координатам φ11, φ21,
φ31; ω — обобщенные скорости .
Найдем частные производные от неявных функций по обобщенным и абсолютным координатам:
∂F1
cos γ cos α + sin γ sin β sin α sin α cos γ sin α − sin γ cos α sin β
;
=−
−
∂α
cos β cos α
cos β cos 2 α
sin β ( cos γ sin α − sin γ cos α sin β )
∂F1
;
= sin γ −
∂β
cos 2 β cos α
∂F1 sin γ sin α − cos γ cos α sin β
;
=
cos β cos α
∂γ
∂F1
= tg 2 ϕ11 + 1 .
∂φ11
Для остальных цепей уравнения аналогичны .
Рассмотрим решение задачи о скоростях с применением теории винтов .
Можно утверждать, что угловая скорость выходного звена равна сумме угловых
скоростей шарниров звеньев одной цепи . Зададим ωx = 1 рад/c, ωy = 1 рад/c,
ωz = 1 рад/c .
Для первой кинематической цепи составляем уравнения:
ωx = ω11 x11 + ω12 x12 + ω13 x13;
ωy = ω11 y11 + ω12 y12 + ω13 y13;
ωz = ω11 z11 + ω12 z12 + ω13 z13,
где x11, … , z12, … , y13, z13 — координаты ортов осей кинематических пар . Для первой
цепи уравнения скоростей имеют вид:
ωx 1
0
ω y = 0 cos ϕ11
ω 0 − sin ϕ
11
z
sin α sin γ + cos α cos γ sin β ω11
cos γ sin α sinβ
β − cos α sin γ ω12 .
ω
cos β cos γ
13
Скорости в шарнирах кинематической цепи определяем, решив полученные уравнения . Подобным образом нужно рассмотреть две другие кинематические цепи .
2.3. Структурно-геометрический синтез и кинематический анализ сферических механизмов
75
При рассмотрении прямой задачи о скоростях рассматриваем силовой винт Ri
с координатами
0
0
0
ix , riy , riz , rix , riy , riz
(r
),
который взаимен двум ортам осей ei 2, ei 3 неприводных пар .
Относительный момент mom (R i , Ω) силового винта, передаваемого со стороны кинематической цепи, и кинематического винта выходного звена, равного сумме кинематических винтов движения в кинематических парах Ωi1, Ωi 2, Ωi 3
с координатами соответственно
( xi1 , yi1 , zi1 , xi01 , yi01 , zi01 ) ωi1 ;
( xi 2 , yi 2 , zi 2 , xi02 , yi02 , zi02 ) ωi 2 ;
( xi 3 , yi 3 , zi 3 , xi03 , yi03 , zi03 ) ωi 3 .
В соответствии с изложенным можно записать:
mom (R i , Ωi ) = mom (R i , Ωi 1 + R i , Ωi 2 + R i , Ωi3),
и далее:
mom ( R i , Ωi ) = ωx rix0 + ω y riy0 + ωz riz0 ;
(
)
mom ( R , Ωi1 ) = ωi1 xi1rix0 + yi1riy0 + zi1ri01z ,
где xi 1, yi 1, zi 1 — плюккеровы координаты единичных векторов ei 1, расположенных
вдоль осей входных кинематических пар; r1x0 , r1y0 , r1z0 — координаты моментной части силового винта .
На основе изложенного составляем систему уравнений для трех кинематических цепей:
(
(x
(x
)
ωx r10x + ω y r10y + ωz r10z = ω11 x11r10x + y11r10y + z11r10z ;
ωx r20x + ω y r20y + ωz r20z = ω21
ωx r30x + ω y r30y + ωz r30z = ω31
)
) .
0
21 r2 x
+ y21r20y + z21r20z ;
0
31 r3 x
+ y31r30y + z31r30z
где (x11, y11, z11) — координаты орта оси первой пары; (x21, y21, z21) — координаты
орта оси второй пары, равные произведению матрицы, описывающей поворот
вокруг первой оси, на координаты орта оси второй пары в начальном положении;
(x31, y31, z31) — координаты орта оси третьей пары, равные произведению матрицы,
описывающей поворот выходного звена, на координаты третьей пары в начальном положении .
Для первой кинематической цепи координаты моментной части силового
винта можно рассчитать, как
r10
i
= e12 e13 = x12
x13
j
y 12
y13
k
z12 .
z13
76
Глава 2. Синтез, анализ и управление поступательно-направляющими механизмами
Аналогично рассчитываются моментные части силовых винтов для второй
и третьей цепей .
Используя найденные плюккеровы координаты, получаем значения обобщенных скоростей .
Для определения особых положений, когда механизм теряет одну или несколько степеней свободы, рассматриваем плюккеровы координаты кинематических
винтов каждой кинематической цепи . Оказывается, что такие ситуации возникают, когда угол поворота в промежуточной кинематической паре равен 0° или 180° .
Для определения особых положений механизма, связанных с наличием неуправляемой подвижности, необходимо исследовать плюккеровы координаты силовых винтов:
r10x
R = r20x
0
r3 x
r10y
r20y
r30y
r10z cosϕ12
r20y = sin ϕ11 sin ϕ12
r30z cos ϕ11 sin ϕ12
− cos ϕ21 sin ϕ22
− cos ϕ22
− sin ϕ21 sin ϕ22
− sin ϕ31 sin ϕ32
cos ϕ31 sin ϕ32 .
cos ϕ32
Данная матрица вырождается, когда три винта компланарны .
Задача об ускорениях может возникнуть при анализе динамики механизма .
Для получения уравнения ускорений дважды дифференцируются уравнения
связей .
Далее рассмотрим задачу определения ошибок положения выходного звена
в зависимости от первичных ошибок параметров звеньев [11] . Представим функцию положения в виде:
Fi = (α, β, γ, θi 1, θi 2, φi1),
где θi1, θi2 — углы между осями кинематических пар .
Полный дифференциал данной функции можно записать в виде:
∂Fi
∂F
∂F
∂F
∂F
∂F
δα + i δβ + i δγ + i δθi1 + i δθi 2 + i δϕi1 = 0 .
∂α
∂β
∂γ
∂θi1
∂θi 2
∂φi1
Согласно линейной теории точности примем приращения обобщенных координат равными нулю, ∂φ11 = ∂φ21 = ∂φ31 = 0 . В результате имеем:
∂F
∂F1
∂F
∂F
∂F
δα + 1 δβ + 1 δγ = − 1 δθ12 + 1 δθ11 ;
θ
θ
∂α
∂β
∂γ
∂
∂
11
12
∂F
∂F
∂F
∂F
∂F2
δα + 2 δβ + 2 δγ = − 2 δθ22 + 2 δθ21 ;
∂α
∂β
∂γ
∂θ21
∂θ22
∂F
∂F
∂F
∂F
∂F3
δα + 3 δβ + 3 δγ = − 3 δθ32 + 3 δθ31 .
∂β
∂γ
∂θ31
∂α
∂θ32
В рассматриваемом механизме углы между осями кинематических пар θi 1, θi2
равны 90°, однако значения этих углов могут иметь отклонения, это и есть первичные ошибки .
2.3. Структурно-геометрический синтез и кинематический анализ сферических механизмов
77
Матрица перехода от подвижной системы координат к неподвижной будет
иметь вид:
B1 = Fz Fx B′x C ′y B′y C ′x B′z ,
где Bʹх , Bʹу , Bʹz — матрицы поворотов вокруг осей первой, второй и третьей кинематических пар, причем всякий раз система координат располагается так, что вращение происходит вокруг подвижной оси z на углы φ11, φ12, φ13 соответственно,
cos ϕ11
′
B x = sin ϕ11
0
− sin ϕ11
cos ϕ11
0
0
0 ;
1
cos ϕ12
′
B y = sin ϕ12
0
− sin ϕ12
cos ϕ12
0
0
0 ;
1
cos f13
′
B z = sin f13
0
− sin f13
cos f13
0
0
0 ;
1
Сʹх , Сʹу — матрицы поворотов вокруг осей x, y на углы θ11, θ12 соответственно (углы
между осями соседних пар)
0
1
C ′x = 0 cos θ11
0 sin θ
11
0
− sin θ11 ;
cos θ11
cos θ12
C ′y = 0
sin θ
12
0 − sin θ12
1
0 ;
0 cos ϕ12
Fʹz, Fʹх — матрицы дополнительных поворотов для совмещения подвижной и неподвижной системы координат вокруг осей z, x на углы ξ11, ξ12 соответственно,
причем ξ11 = 90°, ξ12 = 90°,
cos ξ12
′
Fz = − sin ξ12
0
sin ξ12
cos ξ12
0
0
0 ;
1
0
1
′
Fx = 0 cos ξ11
0 − sin ξ
11
0
sin ξ11 .
cos ξ11
Эти повороты обусловлены тем, что без них координатные оси были бы направлены по неверным направлениям .
Аналогичные соотношения существуют для других кинематических цепей .
Функция положения для первой кинематической цепи будет иметь вид:
cos α sin γ sin β − cos γ sin α
−
cos β cos α
cos ϕ11 cos θ12 sin θ11 − sin θ12 ( cos ϕ12 sin ϕ11 + cos ϕ11 cos θ11 sin θ12 )
F1 =
−
sin θ12 ( cos ϕ11 cos ϕ12 − cos θ11 sin ϕ11 sin ϕ12 ) + cos θ12 sin ϕ11 sin θ11
= 0 .
Для других кинематических цепей вид функции аналогичен .
Частные производные будут иметь вид:
cos ϕ11 cos θ11 cos θ12 + cos ϕ11 sin ϕ12 sin θ11 sin θ12
∂F1
−
=−
∂θ11
sin θ12 ( cos ϕ11 cos ϕ12 − cos θ11 sin ϕ11 sin ϕ12 ) + cos θ12 sin φ12 sin θ11
( cos θ11 cos θ12 sin ϕ11 + sin ϕ11 sin ϕ12 sin θ11 sin θ 12 )
×
2
−
ϕ
θ
ϕ
ϕ
+
θ
ϕ
θ
cos
sin
sin
cos
sin
sin
θ
ϕ
sin
cos
cos
( 12 ( 11 12
11
11
12 )
12
11
11 )
× ( sin θ12 ( cosϕ
ϕ12 sin ϕ12 + cos ϕ11 cosθ11 sin ϕ12 ) − cos ϕ11 cos θ12 sin θ11 ) .
−
78
Глава 2. Синтез, анализ и управление поступательно-направляющими механизмами
Выражения для других частных производных по углам между осями кинематических пар имеют схожий вид . Отклонения углов выходного звена определяются из линейных уравнений, представленных выше .
2.4. АНАЛИЗ ДИНАМИЧЕСКИХ СВОЙСТВ
СФЕРИЧЕСКОГО МЕХАНИЗМА
ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ
И РАЗРАБОТКА АЛГОРИТМА УПРАВЛЕНИЯ
В данном параграфе рассмотрим сферический манипуляционный механизм
с точки зрения его динамических свойств . Вновь вначале рассмотрим собственные частоты, используя уравнения Лагранжа II рода . Кинетическая энергия является квадратичной функцией обобщенных скоростей:
1
1
1
T = J x ω2x + J y ω2y + J z ω2z ,
2
2
2
где ωx , ωy , ωz — угловые скорости выходного звена вокруг осей x, y, z соответственно; Jz = (1/2)mr 2; Jy = Jz = (1/12)mr 2 — моменты инерции выходного звена
относительно осей, соответственно, x, y, z, кг ∙ м2; m — масса выходного звена, кг
(примем m = 0,5 кг, r = 0,1 м); r — радиус платформы выходного звена, м . При этих
условиях выражение для кинетической энергии примет вид:
T=
1 1
1 1
11 2 2
mr 2 ω2x +
mr 2 ω2y +
mr ωz .
2 12
2 12
22
Рассмотрим положение выходного звена манипулятора с углами α = 1 рад,
β = 1 рад, γ = 1 рад . Такому положению соответствуют углы поворота между звеньями: φ11 = 0,242 рад; φ12 = 1,265 рад; φ21 = 1,237 рад; φ22 = 0,472 рад; φ31 = 0,081 рад;
φ32 = 0,472 рад . Входные и выходные скорости связаны соотношением:
αɺ
ϕɺ 11
ɺ
( A ) β = ( − B ) ϕɺ 21 .
γɺ
ϕɺ 31
Матрицы А и В, входящие в эти уравнения, имеют вид:
−3, 425 0, 456 3, 266
A = 0
6,34 4, 489 ;
1, 067 0,311 −1, 006
0
0
1, 060
0 .
B= 0
−9,315
0
1, 006
0
Для данного случая частные производные равны:
d ∂T
ɺɺ11 + 1,349ϕ
ɺɺ 21 + 2,149ϕ
ɺɺ 31 ;
= 0,73ϕ
dt ∂ϕɺ 11
d ∂T
ɺɺ11 + 2,64 ϕ
ɺɺ 21 + 3, 96ϕ
ɺɺ 31 ;
= 1,346ϕ
dt ∂ϕɺ 21
d ∂T
ɺɺ11 + 3,96ϕ
ɺɺ 21 + 6,37ϕ
ɺɺ 31 .
= 2,149ϕ
dt ∂ϕɺ 31
2.4. Анализ динамических свойств сферического механизма параллельной структуры
79
Линеаризованная система дифференциальных уравнений имеет частные решения:
φ11 = A1 sin ωt; φ21 = A2 sin ωt; φ31 = A3 sin ωt .
Задав жесткости с1 = с2 = с3 = 10 000 Н ∙ м/рад и подставив значения частных
решений, а также их вторые производные в дифференциальные уравнения движения, после преобразований имеем:
− A1 10 000 − 0, 73ω2 − A2 1,349ω2 − A3 2,149ω2 = 0;
2
2
2
− A11,346ω + A2 10 000 − 2,64 ω − A3 3,96ω = 0;
2
2
2
− A1 2,149ω − A2 3,96ω + A3 10 000 − 6,37ω = 0 .
(
)
(
)
(
)
Условием совместности уравнений является равенство нулю определителя,
составленного из коэффициентов А1, А2, А3 . Составив и раскрыв этот определитель, имеем уравнение для определения частот возможных колебаний:
10 000 − 0, 73ω2
−1,349ω2
−2,149ω2
−1,346ω2
10 000 − 2,64 ω2
−3, 96ω2
−2,149ω2
−3,96ω2
10 000 − 6,37ω2
=
= −46, 29 ⋅10−1 ω6 + 1280 ⋅103 ω4 − 9,74 ⋅109 ω2 + 1012 .
Решив данное уравнение, получаем значения круговых частот ω1 = 31 рад/c,
ω2 = 92 рад/c, ω3 = 110 рад/c, которым соответствуют собственные частоты колебаний ν1 = 5,1 Гц, ν2 = 14,3 Гц, ν3 = 17,5 Гц .
Рассмотрим сферический механизм в положении, близком к особому . При
приближении к особому положению второго типа, соответствующему наличию
неуправляемой подвижности, по крайней мере, одна собственная частота стремится к нулю, что связано с уменьшением жесткости механизма .
Проведем анализ нелинейных колебаний сферического механизма с тремя
степенями свободы [12] . Уравнения движения для этого устройства имеют вид:
∂ϕ
∂ϕ
∂ϕ
ɺɺ ξ = M1 11 + M 2 21 + M 3 31 + ϕɺ η ϕɺ ζ ( J ζ − J η );
J ξϕ
∂ϕξ
∂ϕξ
∂φξ
∂ϕ
∂ϕ
∂ϕ
ɺɺ η = M1 11 + M 2 21 + M 3 31 + ϕɺ ξ ϕɺ ζ ( J ξ − J ζ );
J ηϕ
∂
ϕ
ϕ
∂
∂ϕη
η
η
∂ϕ
∂ϕ
∂ϕ
ɺɺ ζ = M1 11 + M 2 21 + M 3 31 + ϕɺ ξ ϕɺ η ( J η − J ξ ) .
J ζ ϕ
∂ϕζ
∂ϕζ
∂ϕζ
где Jξ = Jη, Jζ — моменты инерции относительно осей ξ, η, ζ; M1, M2, M3 — моменты
в приводах, Н ∙ мм; ∂φi j /∂φξ — переменные коэффициенты; φ#ξ, φ∙ξ, φ# η, φ∙η, φ# ζ,
φ∙ζ — проекции ускорений и скоростей на оси ξ, η, ζ .
80
Глава 2. Синтез, анализ и управление поступательно-направляющими механизмами
Переменные коэффициенты можно определить из уравнений задачи о скоростях . Кроме того, важно соотнести угловые скорости, выраженные в системе
координат подвижной платформы, со скоростями изменения углов α, β, γ:
ɺ + γγ
ɺ ξ + ββ
ɺ ξ;
ωξ = αα
ξ
ɺ + γγ
ɺ η + ββ
ɺ η;
ωη = αα
η
ɺ + γγ
ɺ ζ + ββ
ɺ ζ,
ωζ = αα
ζ
где
αξ 1
αη = 0
αζ 0
— координаты орта оси вращения, соответствующего изменению угла α, в системе ξ, η, ζ;
0
0 0 0
βξ 1
0
cos
sin
=
β
α
α 1 = cos α
η
βξ 0 -sin α cos α 0 − sin α
— координаты орта оси вращения, соответствующего изменению угла β, в системе
ξ, η, ζ;
0
0 cos β 0 − sinβ
β cos γ sin γ 0 0 − sin β
γξ 1
1
0 − sin γ cos γ 0 0 = cos β ⋅ sin α
γ η = 0 cos α sin α 0
γ ξ 0 -sin α cos α sin β 0 cos β 0
0
1 1 cos β ⋅ cos α
— координаты орта оси вращения, соответствующего изменению угла γ, в системе
ξ, η, ζ .
Выразим α, β, γ∙через ωξ, ωη, ωζ:
αɺ =
ωξ cos β + ωη sin α sin β + ωζ sin β cos α
cos β
βɺ = ωη cos α − ωζ sin α;
γɺ =
;
ωη sin α + ωζ cos α
cos β
.
Моменты в приводах равны:
M1 = − c1ϕ11 ;
M 2 = − c2 ϕ21 ;
M = − c ϕ .
3 31
3
где сi — жесткость соответствующего привода, Н ∙ м/рад .
Сферический механизм находится в равновесии при следующих углах:
φ11 = 0; φ21 = 0; φ31 = 0; α = β = γ = 0 .
2.4. Анализ динамических свойств сферического механизма параллельной структуры
81
Выведем механизм из состояния равновесия и найдем изменения координат
выходного звена при следующих начальных условиях: α = 0,1 рад; β = 0,05 рад;
γ = 0,325 рад . Примем массу выходного звена m = 0,5 кг, радиус платформы выходного звена r = 0,1 м .
Законы изменения α, β, γ для нелинейных колебаний выходного звена получены с использованием численного интегрирования (рис . 2 .12) .
Рис. 2.12. Изменения координат выходного звена сферического механизма при
свободных колебаниях
Рассмотрим вопросы управления сферическим механизмом [6, 13] . Зададим
требуемое движение выходного звена в виде закона изменения координат: αT (t),
∙
βT (t), γT (t) . Требуемые скорости α∙ T (t), βT (t), γ∙T (t) и ускорения α#T (t), β#T (t), γ#T (t)
получаем после дифференцирования . Задача управления состоит в минимизации
ошибки по координате: ∆1(t) = αT (t) – α(t), ∆2(t) = βT (t) – β(t), ∆3(t) = γT (t) – γ(t),
∙
∙
∙
∙
∙
по скорости: ∆1(t) = α∙ T (t) – α∙ (t), ∆2(t) = βT (t) – β(t), ∆3(t) = γ∙T (t) – γ∙(t) и по ускорению: ∆# 1(t) = β#T (t) – β#(t), ∆# 2(t) = β#T (t) – β#(t), ∆# 3(t) = γ#T (t) – γ#(t), где αT (t), βT (t),
γ(t) — фактические значения координат выходного звена .
Проведем численное моделирование движения сферического механизма параллельной структуры с помощью использованного ранее алгоритма оптимального управления . Зададим коэффициент демпфирования ζ = 2 /2 и время переходного процесса t = 0,05 с . При этом постоянная времени будет равна τ ≈ 0,011 с,
а коэффициенты дифференциального уравнения ошибки: γ0 = 7200, γ1 = 120 .
82
Глава 2. Синтез, анализ и управление поступательно-направляющими механизмами
Законы изменения ускорений:
ɺɺ = α
ɺɺ T + γ1 ( αɺ T − αɺ ) + γ 0 ( αT − α );
α
(
)
ɺɺ = β
ɺɺ + γ βɺ − βɺ + γ ( β − β );
β
T
1
T
0
T
ɺγɺ = ɺɺγT + γ1 ( γɺ T − γɺ ) + γ 0 ( γT − γ ) .
Зададим закон движения исполнительного звена: α (t) = 0,1 sin (ωt); β(t) =
= 0,12 sin (ωt); γ(t) = 0,15 sin (ωt) .
Дифференциальные уравнения ускорений принимают вид:
ɺɺ = α
ɺɺ T + 120 ( αɺ T − αɺ ) + 7200 ( αT − α );
α
(
)
ɺɺ = β
ɺɺ + 120 βɺ − βɺ + 7200 ( β − β );
β
T
T
T
ɺɺγ = ɺɺγT + 120 ( γɺ T − γɺ ) + 7200 ( γT − γ ) .
Зная заданные и реальные координаты и скорости, а также заданные ускорения, из приведенных уравнений находим ускорения движения, а затем требуемые
моменты в приводах . При численном решении дифференциальных уравнений
движения находим ошибки абсолютных координат — углов (рис . 2 .13) .
Рис. 2.13. Изменения отклонений углов выходного звена ∆α, ∆β, ∆γ
Таким образом, представлен алгоритм управления сферическим механизмом .
2.5. ПОСТРОЕНИЕ ЭКСПЕРИМЕНТАЛЬНЫХ ОБРАЗЦОВ
ПОСТУПАТЕЛЬНО-НАПРАВЛЯЮЩИХ
И СФЕРИЧЕСКИХ МЕХАНИЗМОВ
И ОБЛАСТИ ИХ ПРИМЕНЕНИЯ
Конструкция поступательно-направляющего механизма (рис . 2 .14) с шарнирными параллелограммами выполнена из стали с использованием сварных
соединений .
2.5. Построение экспериментальных образцов поступательно-направляющих механизмов
83
Рис. 2.14. Поступательно-направляющий механизм
Шарнирные соединения звеньев параллелограмма (рис . 2 .15) выполнены
в виде подшипников скольжения .
Рис. 2.15. Шарнирное соединение звеньев параллелограмма
Для поступательно-направляющего механизма были определены размеры
рабочей зоны и исследованы положения, близкие к особым, при которых шарнирные параллелограммы близки к сложенному положению (рис . 2 .16) . При
определении границ рабочего пространства модели манипулятора установлено,
что максимальные перемещения центра подвижной платформы вдоль осей координат составили 0,7 м .
При создании действующей модели сферического манипулятора выбрана
структурная схема, в которой две кинематические цепи наклоняют выходное
84
Глава 2. Синтез, анализ и управление поступательно-направляющими механизмами
звено, а третья цепь обеспечивает его вращение вокруг собственной оси . В разработанном механизме звенья первой и второй кинематических цепей выполнены
с использованием алюминиевого стержня диаметром 6 мм . Два промежуточных
звена первой и второй цепей выполнены с использованием стержня диаметром
4 мм . Эти звенья имеют переменную длину (50—70 мм) .
Рис. 2.16. Положения поступательно-направляющего механизма,
близкие к особым
Промежуточные звенья соединены между собой подшипниковыми узлами,
выполненными в виде шестигранников (рис . 2 .17) .
Рис. 2.17. Промежуточные вращательные пары
2.5. Построение экспериментальных образцов поступательно-направляющих механизмов
85
В этом узле использован однорядный подшипник (внутренний диаметр 3 мм,
наружный диаметр 10 мм, толщина 4 мм) (рис . 2 .18) . Корпус узла выполнен из латунных шестигранников .
Рис. 2.18. Конструкция подшипникового узла
В каждом шестиграннике имеется резьба для соединения с элементами
звеньев . На оси выходного звена третьей кинематической цепи расположены
два двухподвижных шарнира Гука (рис . 2 .19) . В двухподвижных шарнирах использован шариковый однорядный подшипник с внутренним диаметром 8 мм, наружным диаметром 16 мм, толщиной 5 мм .
Рис.2.19. Выходное звено с двумя двухподвижными шарнирами
Входное звено третьей кинематической цепи соединено с приводом также
с помощью универсального шарнира (рис . 2 .20) . Результаты экспериментальных
исследований модели манипулятора подтвердили работоспособность предложенной конструкции (рис . 2 .21) .
86
Глава 2. Синтез, анализ и управление поступательно-направляющими механизмами
Рис. 2.20. Двухподвижный шарнир
третьей кинематической цепи
Рис. 2.21. Конструкция механизма
с приводом третьей цепи
Рассмотрим некоторые возможные применения механизмов, представленных
в данной главе [14] . В частности, поступательно-направляющий механизм может
быть использован в легкой промышленности (рис . 2 .22) .
Рис. 2.22. Обработка изделия обувной промышленности
2.5. Построение экспериментальных образцов поступательно-направляющих механизмов
87
Сферические механизмы могут быть применены в устройствах наведения телескопов и радиолокаторов (рис. 2.23).
Рис. 2.23. Устройства ориентации антенн
Таким образом, в главе представлены новые механизмы параллельной структуры с тремя степенями свободы для совершения поступательных и вращательных
движений. Сопоставлены результаты, полученные на основе дифференцирования
уравнения связей и аппарата винтового исчисления. Показано соответствие этих
подходов. Исследованы динамические свойства механизмов различных классов.
Апробирован алгоритм управления этими механизмами, а также исследован вопрос кинематической и динамической точности. Разработанные конструкции механизмов подтвердили их работоспособность.
Литература
1. Хейло С.В. Решение задачи кинематики поступательно-направляющего манипулятора / С.В. Хейло, В.А. Глазунов, Р.Ю. Сухоруков // Машиностроение и инженерное образование. — 2011. — № 4. — С. 11—17.
2. Хейло С.В. Манипуляционные механизмы параллельной структуры. Структурный
синтез. Кинематический и силовой анализ: монография / С.В. Хейло, В.А. Глазунов,
С.В. Палочкин — М.: ФГБОУ ВПО МГТУ им. А.Н. Косыгина, 2011. — 153 с.
3. Глазунов В.А., Хейло С.В., Разумеев К.Э., Палочкин С.В. Кинематическая точность механизма параллельной структуры // Кожевенно-обувная промышленность, 2015. —
№ 3—4. — С. 10—11.
4. Хейло С.В. Определение собственных частот колебаний манипулятора параллельной
структуры / С.В. Хейло, М.А. Ширинкин, В.А. Глазунов // Известия высших учебных
заведений. Технология текстильной промышленности, 2011. — № 4 — С. 120–124.
5. Глазунов В.А., Хейло С.В., Костюков А.М. Исследование колебаний механизма параллельной структуры. В сб.: Вибрационные технологии, мехатроника и управляемые машины сборник научных статей по материалам XII международной научнотехнической информации. — В 2 ч. 2016. — С. 23—28.
88
Глава 2. Синтез, анализ и управление поступательно-направляющими механизмами
6. Glazunov V.A., Kheylo S.V. Dynamics and control of planar, translational, and spherical parallel
manipulators (Book Chapter). Dynamic Balancing of Mechanisms and Synthesizing of Parallel
Robots. Springer, 2016. — Рр . 365—403 .
7 . Хейло С.В . Решение задачи об управлении поступательно-направляющим механизмом
параллельной структуры: справочник / С .В . Хейло, В .А . Глазунов // Инженерный журнал, 2013 . — № 10 . — С . 17–24 .
8 . Синтез сферических манипуляторов параллельной структуры: справочник / С .В . Хейло // Инженерный журнал, 2012 . — № 6 . — С . 23—28 .
9 . Структурно-геометрический анализ сферического манипулятора параллельной структуры: справочник / С .В . Хейло // Инженерный журнал, 2012 . — № 12 . — С . 9–14 .
10 . Решение задачи кинематики сферического манипулятора параллельной структуры /
С .В . Хейло // Машиностроение и инженерное образование, 2010 . — № 4 . — С . 18–22 .
11 . Хейло С.В ., Старожук Е.А ., Гарин О.А ., Разумеев К.Э ., Костюков А.М . Кинематическая
точность сферического механизма // Сб . мат . Междунар . научно-техн . конф . «Дизайн, технологии и инновации в текстильной и легкой промышленности» (ИННОВАЦИИ-2016) . — М .: МГУДТ, 2016 . — С . 138—140 .
12 . Хейло С.В . Анализ ускорений и нелинейных колебаний механизма параллельной структуры / С .В . Хейло, В .А . Глазунов, Ю .В . Кулемкин, В .Л . Эфрос // Проблемы машиностроения и надежности машин, 2013 . — № 3 — С . 9—17 .
13 . Глазунов В.А . Решение задачи управления сферическим механизмом параллельной
структуры / В .А . Глазунов, С .В . Хейло // Проблемы машиностроения и автоматизации,
2014 . — № 2 . — С . 27–33 .
14 . Хейло С.В. Возможные применения механизмов параллельной структуры / С .В . Хейло,
В .А . Глазунов, М .А . Ширинкин, А .В . Календарев // Проблемы машиностроения и надежности машин, 2013 . — № 5 — С . 19—24 .
ГЛАВА 3
СИНТЕЗ, АНАЛИЗ И УПРАВЛЕНИЕ
МЕХАНИЗМАМИ С ТРЕМЯ
КИНЕМАТИЧЕСКИМИ ЦЕПЯМИ
ДЛЯ АДДИТИВНЫХ ТЕХНОЛОГИЙ
Носова Н.Ю., Глазунов В.А.
В данной главе рассматривается синтез и анализ механизмов с разным числом
степеней свободы от четырех до шести, являющихся развитием известного робота
ORTHOGLIDE [1] . Это развитие заключается в том, что к имеющимся поступательным движениям выходного звена добавляются еще вращательные движения .
Для разрабатываемых схем проводится структурный синтез и анализ . С помощью
метода винтов определяется работоспособность полученных механизмов с выявлением особых положений и неуправляемой подвижности .
Рассматриваемые механизмы представляются перспективными с точки зрения применения в аддитивных технологиях, поскольку они могут обеспечивать
не только послойное изготовление деталей с нанесением материала по плоскости,
но и движения по сложным поверхностям с обеспечением положения нормали
к поверхности .
3.1. СТРУКТУРНО-ГЕОМЕТРИЧЕСКИЙ СИНТЕЗ
МЕХАНИЗМОВ С ТРЕМЯ
КИНЕМАТИЧЕСКИМИ ЦЕПЯМИ
И РАЗЛИЧНЫМ ЧИСЛОМ СТЕПЕНЕЙ СВОБОДЫ
В данном параграфе рассмотрим механизмы, являющиеся развитием робота
ORTHOGLIDE, у которого добавлена одна или несколько вращательных степеней
свободы, и при этом каждое вращение передается той же кинематической цепью,
которая обеспечивает поступательное движение [2] . Такое построение данных
механизмов важно для аддитивных технологий, так как при необходимости добавить дополнительные вращательные движения технологической головке это легко
сделать, не меняя в целом структуру соответствующего устройства .
В первом из рассматриваемых механизмов (рис . 3 .1) две кинематические
цепи содержат по две вращательные кинематические пары с параллельными осями, по одной поступательной кинематической паре и по одному шарнирному
параллелограмму . В третьей кинематической цепи к названным элементам добавляются еще две вращательные кинематические пары с параллельными осями .
90
Глава 3. Синтез, анализ и управление механизмами с тремя кинематическими цепями
Рис. 3.1. Структурная схема механизма с четырьмя степенями свободы
Шарнирные параллелограммы можно рассматривать как поступательные кинематические пары, и в соответствии с этим для подсчета числа степеней свободы
можно использовать известные структурные формулы . Данный подсчет даст результат, равный двум .
Заменим в двух кинематических цепях, не содержащих двигатель вращательного перемещения, шарнирные параллелограммы карданными шарнирами,
а в третьей кинематической цепи, содержащей двигатель вращательного перемещения, шарнирный параллелограмм, как и ранее, будем принимать как поступательную кинематическую пару (рис . 3 .2) . В этом случае согласно структурным формулам получаем значение для числа степеней свободы, равное
четырем .
В данном случае замена в двух кинематических цепях шарнирных параллелограммов на шарниры Гука (карданные шарниры) возможна, поскольку при
наличии параллелограммов имели бы место повторяющиеся связи . При наличии
двухподвижных шарниров Гука такой ситуации не наблюдается .
Для определения работоспособности данных механизмов следует рассмотреть плюккеровы координаты ортов осей кинематических пар . Этот метод позволяет выявить возможные особые положения (сингулярности), а также неуправляемую подвижность . При этом каждой кинематической паре ставится
в соответствие орт ее оси (рис . 3 .3) и составляется матрица плюккеровых координат этих ортов .
3.1. Структурно-геометрический синтез механизмов с тремя кинематическими цепями
91
Рис. 3.2. Механизм, в котором шарнирные параллелограммы заменены
на карданные шарниры
Единичные винты, характеризующие положения осей кинематических пар,
имеют координаты:
E11 (1, 0, 0, 0, 0, 0); E12 (0, 0, 0, 1, 0, 0); E13 (0, –1, 0, 0, 0, e 013z );
E14 (0, 0, 0, 0, 1, 0); E15 (0, –1, 0, 0, 0, e 015z ); E16 (1, 0, 0, 0, 0, 0);
E22 (0, 0, 0, 0, 1, 0); E23 (0, 0, 1, e 023x, 0, 0); E24 (0, 0, 0, 0, 0, –1);
E25 (0, 0, 1, e 025x , 0, 0); E26 (0, 0, 0, 0, 0, 1); E33 (–1, 0, 0, 0, e 033y , 0);
E34 (0, 0, 0, 1, 0, 0); E35 (–1, 0, 0, 0, e 035y , 0) .
Рассмотрим первую кинематическую цепь . В среднем положении единичные
векторы Е11 и Е16 лежат на одной оси, значит один из них можно не принимать
во внимание . В других положениях это также можно сделать ввиду наличия внутренней подвижности . В таком случае имеем пять единичных векторов . Условия
взаимности плюккеровых координат единичных и силовых винтов можно записать в виде пяти уравнений, из которых необходимо найти одно неизвестное и,
следовательно, получить один силовой винт:
0
0
0
0
0
0
rx e11
x + ry e11 y + rz e11 z + rx e11 x + ry e11 y + rz e11 z = 0;
rx ⋅ 0 + ry ⋅ 0 + rz ⋅ 0 + rx0 ⋅1 + ry0 ⋅ 0 + rz0 ⋅ 0 = 0;
92
Глава 3. Синтез, анализ и управление механизмами с тремя кинематическими цепями
0
0
0
0
0
0
rx e12
x + ry e12 y + rz e12 z + rx e12 x + ry e12 y + rz e12 z = 0;
rx ⋅1 + ry ⋅ 0 + rz ⋅ 0 + rx0 ⋅ 0 + ry0 ⋅ 0 + rz0 ⋅ 0 = 0;
0
0
0
0
0
0
rx e13
x + ry e13 y + rz e13 z + rx e13 x + ry e13 y + rz e13 z = 0;
0
0
0
0
rx ⋅ 0 + ry ⋅ 0 + rz ⋅ e13
z + rx ⋅ 0 + ry ⋅ ( −1) + rz ⋅ 0 = 0;
0
0
0
0
0
0
rx e14
x + ry e14 y + rz e14 z + rx e14 x + ry e14 y + rz e14 z = 0;
rx ⋅ 0 + ry ⋅1 + rz ⋅ 0 + rx0 ⋅ 0 + ry0 ⋅ 0 + rz0 ⋅ 0 = 0;
0
0
0
0
0
0
rx e15
x + ry e15 y + rz e15 z + rx e15 x + ry e15 y + rz e15 z = 0;
0
0
0
0
rx ⋅ 0 + ry ⋅ 0 + rz ⋅ e15
z + rx ⋅ 0 + ry ⋅ ( −1) + rz ⋅ 0 = 0,
0
0
где еijx , eijy , eijz , eijx
, eijy
, eijz0 — векторная и моментная части единичного винта, соответственно (i = 1, … , 3; j = 1, … , 3); rijx , rijy , rijz , rijx0 , rijy0 , rijz0 — (i = 1 – 3; j = 1 – 3) — векторная и моментная части силового винта, соответственно (i = 1, 2, 3; j = 1, 2, 3) .
Из данной системы получаем один силовой винт R1 (0, 0, 0, 0, 0, 1) .
Рис. 3.3. Механизм с четырьмя степенями свободы и орты осей
кинематических пар
3.1. Структурно-геометрический синтез механизмов с тремя кинематическими цепями
93
Рассмотрим вторую кинематическую цепь . Имеем четыре единичных вектора .
Условия взаимности плюккеровых координат единичных и силовых винтов можно записать в виде четырех уравнений, из которых необходимо найти два неизвестных, в данном случае получим два силовых винта:
0
0
0
0
0
0
rx e22
x + ry e22 y + rz e22 z + rx e22 x + ry e22 y + rz e22 z = 0;
rx ⋅ 0 + ry ⋅1 + rz ⋅ 0 + rx0 ⋅ 0 + ry0 ⋅ 0 + rz0 ⋅ 0 = 0;
0
0
0
0
0
0
rx e23
x + ry e23 y + rz e23 z + rx e23 x + ry e23 y + rz e23 z = 0;
0
0
0
0
rx e23
x + ry ⋅ 0 + rz ⋅ 0 + rx ⋅ 0 + ry ⋅ 0 + rz ⋅ 1 = 0;
0
0
0
0
0
0
rx e24
x + ry e24 y + rz e24 z + rx e24 x + ry e24 y + rz e24 z = 0;
rx ⋅ 0 + ry ⋅ 0 + rz ⋅ ( −1) + rx0 ⋅ 0 + ry0 ⋅ 0 + rz0 ⋅ 0 = 0;
0
0
0
0
0
0
rx e25
x + ry e25 y + rz e25 z + rx e25 x + ry e25 y + rz e25 z = 0;
0
0
0
0
rx e25
x + ry ⋅ 0 + rz ⋅ 0 + rx ⋅ 0 + ry ⋅ 0 + rz ⋅ 1 = 0,
где все обозначения пояснены выше . Из системы уравнений получаем два силовых винта с координатами R2 (0, 0, 0, 1, 0, 0); R3 (0, 0, 0, 0, 1, 0) .
Рассмотрим третью кинематическую цепь . Имеем четыре единичных вектора .
Условия взаимности плюккеровых координат единичных и силовых винтов можно записать в виде четырех уравнений, из которых необходимо найти два неизвестных:
0
0
0
0
0
0
rx e32
x + ry e32 y + rz e32 z + rx e32 x + ry e32 y + rz e32 z = 0;
rx ⋅ 0 + ry ⋅ 0 + rz ⋅1 + rx0 ⋅ 0 + ry0 ⋅ 0 + rz0 ⋅ 0 = 0;
0
0
0
0
0
0
rx e33
x + ry e33 y + rz e33 z + rx e33 x + ry e33 y + rz e33 z = 0;
0
0
0
0
rx ⋅ 0 + ry e33
y + rz ⋅ 0 + rx ⋅ ( −1) + ry ⋅ 0 + rz ⋅ 0 = 0;
0
0
0
0
0
0
rx e34
x + ry e34 y + rz e34 z + rx e34 x + ry e34 y + rz e34 z = 0;
rx ⋅1 + ry ⋅ 0 + rz ⋅ 0 + rx0 ⋅ 0 + ry0 ⋅ 0 + rz0 ⋅ 0 = 0;
0
0
0
0
0
0
rx e35
x + ry e35 y + rz e35 z + rx e35 x + ry e35 y + rz e35 z = 0;
0
0
0
0
rx ⋅ 0 + ry e35
y + rz ⋅ 0 + rx ⋅ ( −1) + ry ⋅ 0 + rz ⋅ 0 = 0,
Из системы уравнений получаем два силовых винта с координатами R4 (0, 0, 0,
0, 1, 0); R5 (0, 0, 0, 0, 0, 1) .
94
Глава 3. Синтез, анализ и управление механизмами с тремя кинематическими цепями
Координаты силовых винтов можно представить в виде соответствующей матрицы (R) 6 × 5:
0
0
R = 0
0
0
0 0 0 0
0 0 1 0
0 0 0 1
0 0 0 1
0 0 0 0
1
0
0 .
0
1
Из этой матрицы следует, что имеют место лишь три независимых силовых
винта . Это винты бесконечно большого параметра (моменты), ограничивающие
вращения .
Вновь рассмотрим отдельно первую кинематическую цепь, при этом сместим
ее относительно осей координат и найдем для данной цепи плюккеровы координаты кинематических винтов (рис . 3 .4) .
Рис. 3.4. Первая кинематическая цепь механизма
Единичные винты, характеризующие положения осей кинематических пар
данной цепи, имеют координаты:
E11 (1, 0, 0, 0, 0, 0); E12 (0, 0, 0, 1, 0, 0); E13 (0, -1, 0, 0, 0, e 013z );
E14 (0, 0, 0, e 014x , e 014y , 0); E15 (0, –1, 0, 0, 0, e 015z ); E16 (1, 0, 0, 0, 0, e 016z ) .
Составим матрицу из полученных координат единичных винтов:
1 0
0 0
0 −1
E =
0 0
0 −1
1 0
0
0
0
1
0
0
0
0
0
0
0
e14
x
0
e15
y
0
0
0
0
0
0
0
0
0
e13
z
.
0
0
e15
z
0
e16
z
3.1. Структурно-геометрический синтез механизмов с тремя кинематическими цепями
95
Уберем из полученной матрицы один столбец, в котором имеют место нули:
0
1 0
0
0
1
0 −1 0
E =
0
0 0 e14
x
0 −1 0
0
1 0
0
0
0
0
e14
y
0
0
0
0
0
e13
z
.
0
0
e15
z
0
e16
z
Выпишем матрицы размера 5 × 5, вычеркивая по одной строке . Одной из получаемых матриц будет:
0
1 0
0 −1 0
0
E2 = 0 0 e14
x
0 −1 0
1 0
0
0
0
0
e14
y
0
0
0
0 .
0
e15
z
0
e16
z
0
e13
z
Анализируя эту матрицу с точки зрения возможности внутренней подвижности в данной цепи, можно показать, что частичная цепь, включающая четыре кинематических пары (за исключением поступательного привода), имеет подвижность . В этой связи рассмотрим эту матрицу, попытавшись выразить последнюю
строку через четыре первых строки . Задача сведется к системе линейных уравнений относительно скалярных множителей . Очевидно, что множитель при третьей
строке этой матрицы должен быть равен нулю . Получим систему трех уравнений
относительно трех неизвестных . Запишем эту систему:
a ⋅1 + 0 + 0 + 0 = 1;
0 + b ( −1) + 0 + c ( −1) = 0;
0
0
0
0 + be13
z + 0 + ce15 z = e15 z .
Решим эту систему:
a = 1;
b = − c;
0
0
0
be13
z = e16 z − ce15 z ;
c=
0
e16
z
0
0
e15
− e13
z
.
Таким образом, можно найти указанные коэффициенты, которые выражают скорости в соответствующих кинематических парах . В данной цепи имеется
внутренняя подвижность, что свидетельствует о возможности передачи вращения
с вращательного привода на вращательную кинематическую пару, сопряженную
с выходным звеном .
Подобный анализ можно сделать для модифицированного механизма, в котором два шарнирных параллелограмма заменены на карданные шарниры (рис . 3 .5) .
96
Глава 3. Синтез, анализ и управление механизмами с тремя кинематическими цепями
В данном случае все выкладки, касающиеся первой кинематической цепи, останутся в силе . Для двух других кинематических цепей замена шарнирных параллелограммных механизмов на карданные шарниры приведет лишь к исключению
повторяющихся связей, не влияющих на число степеней свободы и виды возможных движений .
Рис. 3.5. Механизм, в котором шарнирные параллелограммы заменены
на карданные шарниры, и орты осей кинематических пар
Далее рассмотрим механизм с пятью степенями свободы, добавив к исходной
схеме механизма ORTHOGLIDE в две кинематические цепи по одному двигателю
вращательного движения (рис . 3 .6) . [4] . Заменим в кинематической цепи, не содержащей двигатель вращательного перемещения, шарнирный параллелограмм
карданным шарниром, а в двух других кинематических цепях, содержащих двигатели вращательного перемещения, шарнирные параллелограммы будем принимать как поступательные кинематические пары (рис . 3 .7) .
В данном случае согласно структурным формулам число степеней свободы
будет равно пяти . Заменяя карданные шарниры вновь на шарнирные параллелограммы, не получим изменения указанного числа степеней свободы, так как
вновь добавляемые связи — повторяющиеся .
Для определения работоспособности данного механизма следует рассмотреть
плюккеровы координаты ортов осей кинематических пар (рис . 3 .8): E11 (1, 0, 0, 0, 0, 0),
3.2. Кинематический анализ механизма с тремя кинематическими цепями
97
E12 (0, 0, 0, 1, 0, 0), E13 (0, –1, 0, 0, 0, e 013z ), E14 (0, 0, 0, 0, 1, 0), E15 (0, –1, 0, 0, 0, e 015z ),
E16 (1, 0, 0, 0, 0, 0); E21 (0, 1, 0, 0, 0, 0), E22 (0, 0, 0, 0, 1, 0), E23 (0, 0, 1, e 023x , 0, 0),
E24 (0, 0, 0, 0, 0, –1), E25 (0, 0, 1, e 025x , 0, 0), E26 (0, 1, 0, 0, 0, 0), E32 (0, 0, 0, 0, 0, 1),
E33 (–1, 0, 0, 0, e 033y , 0), E34 (0, 0, 0, 1, 0, 0), E35 (–1, 0, 0, 0, e 035y , 0) .
Рис. 3.6. Структурная схема механизма с пятью степенями свободы
Рассматривая первую кинематическую цепь в начальном положении, можно
вновь убедиться, что имеет место один силовой винт, взаимный ортам осей кинематических пар . Затем, аналогично ранее рассмотренному случаю, можно показать, что в любом положении эта цепь передает вращение на конечную вращательную кинематическую пару .
Рассмотрим вторую кинематическую цепь в начальном положении . Так как
единичные векторы Е21 и Е26 лежат на одной оси, то в рассмотрение принимаем
лишь один из них . Условия взаимности можно записать в виде пяти уравнений,
из которых необходимо получить один силовой винт:
0
0
0
0
0
0
rx e21
x + ry e21 y + rz e21 z + rx e21 x + ry e21 y + rz e21 z = 0;
rx ⋅ 0 + ry ⋅ 0 + rz ⋅ 0 + rx0 ⋅ 0 + ry0 ⋅1 + rz0 ⋅ 0 = 0;
0
0
0
0
0
0
rx e22
x + ry e22 y + rz e22 z + rx e22 x + ry e22 y + rz e22 z = 0;
rx ⋅ 0 + ry ⋅1 + rz ⋅ 0 + rx0 ⋅ 0 + ry0 ⋅ 0 + rz0 ⋅ 0 = 0;
98
Глава 3. Синтез, анализ и управление механизмами с тремя кинематическими цепями
0
0
0
0
0
0
rx e23
x + ry e23 y + rz e23 z + rx e23 x + ry e23 y + rz e23 z = 0;
0
0
0
0
rx e23
x + ry ⋅ 0 + rz ⋅ 0 + rx ⋅ 0 + ry ⋅ 0 + rz ⋅ 1 = 0;
0
0
0
0
0
0
rx e24
x + ry e24 y + rz e24 z + rx e24 x + ry e24 y + rz e24 z = 0;
rx ⋅ 0 + ry ⋅ 0 + rz ⋅ ( −1) + rx0 ⋅ 0 + ry0 ⋅ 0 + rz0 ⋅ 0 = 0;
0
0
0
0
0
0
rx e25
x + ry e25 y + rz e25 z + rx e25 x + ry e25 y + rz e25 z = 0;
rx e205 x + ry ⋅ 0 + rz ⋅ 0 + rx0 ⋅ 0 + ry0 ⋅ 0 + rz0 ⋅1 = 0 .
Из системы уравнений получаем силовой винт с координатами R2 (0, 0, 0, 1, 0, 0) .
Рис. 3.7. Структурная схема механизма с пятью степенями свободы с заменой
шарнирных параллелограммов карданным шарниром
Рассматривая третью кинематическую цепь, найдем два силовых винта:
R3 (0, 0, 0, 0, 1, 0) и R4 (0, 0, 0, 0, 0, 1) . Координаты всех силовых винтов можно
представить в виде соответствующей матрицы (R) 6 × 5:
0
0
R =
0
0
0 0 0 0
0 0 1 0
0 0 0 1
0 0 0 0
1
0
.
0
1
3.2. Кинематический анализ механизма с тремя кинематическими цепями
99
Из этой матрицы следует, что имеют место лишь три независимых силовых винта .
Это винты бесконечно большого параметра (моменты), ограничивающие вращения .
Рис. 3.8. Орты осей кинематических пар механизма с пятью степенями свободы
Так же, как в предыдущем случае, следует рассмотреть первую и вторую кинематические цепи, сместив их из среднего положения . В двух кинематических цепях имеет место внутренняя подвижность — передача вращения от вращательного
привода к конечной вращательной кинематической паре . Частичный механизм,
расположенный между подвижной платформой и выходным звеном, должен обладать двумя степенями свободы . В этом можно убедиться, используя структурную формулу для сферического механизма .
Для модифицированного механизма, в котором шарнирный параллелограмм
заменен двумя карданными шарнирами, могут быть представлены орты осей кинематических пар (рис . 3 .9) .
Далее рассмотрим механизм с шестью степенями свободы, добавив к исходной схеме механизма ORTHOGLIDE три двигателя вращательного движения
и три кинематические цепи сферического механизма (рис . 3 .10) .
В данном случае, рассматривая шарнирные параллелограммы как поступательные пары, приходим к выводу, что подвижная платформа имеет три поступательные степени свободы, а сферический механизм добавляет еще три вращения .
100
Глава 3. Синтез, анализ и управление механизмами с тремя кинематическими цепями
Рис. 3.9. Орты осей кинематических пар механизма с пятью степенями свободы
с заменой шарнирного параллелограмма на карданные шарниры
Вновь представим орты осей кинематических пар (рис . 3 .11) . Это нужно для
обоснования работоспособности механизма . Плюккеровы координаты указанных
ортов имеют значения: E11 (1, 0, 0, 0, 0, 0), E12 (0, 0, 0, 1, 0, 0), E13 (0, 1, 0, 0, 0, e 013z ),
E14 (0, 0, 0, 0, –1, 0), E15 (0, 1, 0, 0, 0, e 015z ), E16 (1, 0, 0, 0, 0, 0), E21 (0, 1, 0, 0, 0, 0),
E22 (0, 0, 0, 0, 1, 0), E23 (0, 0, –1, e 023z , 0, 0), E24 (0, 0, 0, 0, 0, 1), E25 (0, 0, – 1, e 025z , 0, 0),
E26 (0, 1, 0, 0, 0, 0), E31 (0, 0, 1, 0, 0, 0), E32 (0, 0, 0, 0, 0, 1), E33 (–1, 0, 0, 0, e 033y , 0),
E34 (0, 0, 0, 1, 0, 0), E35 (–1, 0, 0, 0, e 035z , 0), E36 (0, 0, 1, 0, 0, 0) .
Принимая во внимание записанные плюккеровы координаты, можно, аналогично предыдущим случаям, установить, что в каждой кинематической цепи возможна передача вращения от начальной к конечной кинематической паре .
Составленные на основе имеющихся плюккеровых координат уравнения
дают возможность определить силовые винты, соответствующие взаимодействию
кинематических цепей и выходного звена . Координаты силовых винтов можно
представить в виде соответствующей матрицы (R) 6 × 5:
0 0 0 0 0 1
R = 0 0 0 1 0 0 .
0 0 0 0 1 0
3.2. Кинематический анализ механизма с тремя кинематическими цепями
101
Рис. 3.10. Схема механизма с шестью степенями свободы
Из этой матрицы следует, что имеют место три винта бесконечно большого
параметра, которые определяют движения подвижной платформы . Кроме того,
имеются и вращательные движения относительно данной платформы . Таким образом, выходное звено может совершать все шесть движений .
3.2. КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА
С ТРЕМЯ КИНЕМАТИЧЕСКИМИ ЦЕПЯМИ
И РАЗЛИЧНЫМ ЧИСЛОМ СТЕПЕНЕЙ СВОБОДЫ
В данном параграфе рассмотрим задачи кинематического анализа механизмов,
представленных в предыдущем параграфе . Как отмечалось, данные механизмы
предназначены прежде всего для аддитивных технологий в том смысле, что при
необходимости обеспечивать дополнительные ориентирующие степени свободы
могут быть использованы те же кинематические цепи, что и для поступательных
движений .
Прежде всего рассмотрим решение обратной задачи о положениях механизма параллельной структуры с линейными двигателями, расположенными по осям
декартовой системы координат . Как отмечалось, поступательные движения обусловлены тем, что в каждой цепи имеется шарнирный параллелограмм . Эту
структуру можно заменить на механизм «пирамиды» (рис . 3 .12) . Замещающий
102
Глава 3. Синтез, анализ и управление механизмами с тремя кинематическими цепями
механизм получается из исходного таким образом, что все кинематические цепи
мысленно сдвигаются к центру выходного звена . Обобщенными координатами
будут отрезки, характеризующие положения точек В1, В2, В3 . Абсолютными координатами выходного звена (иными словами, выходными координатами) будут
координаты точки А .
Рис. 3.11. Орты осей кинематических пар механизма с шестью степенями свободы
Нужно осуществить поиск переменных положения входных звеньев
(хB1, yB2, zB3) (далее q1, q2, q3, соответственно) по известным координатам рабочей
точки манипулятора (хA ; yA ; zA ) . Иными словами, нужно найти, на какое расстояние L*х , L*y , L*z переместятся входные звенья механизма . Для решения задачи запишем следующие уравнения:
2
2
( x A − x B ) + ( y A − yB ) + ( z A − z B )
1
1
2
= L2 ;
2
= L2 ;
2
= L2 .
1
2
2
( x A − x B ) + ( y A − yB ) + ( z A − z B )
2
2
2
2
2
( x A − x B ) + ( y A − yB ) + ( z A − z B )
3
3
3
3.2. Кинематический анализ механизма с тремя кинематическими цепями
103
где L — длина промежуточного звена каждой цепи . Координаты y 2B1, z 2B1, х 2B2, z 2B2,
х 2B3 и y 2B3 обратятся в ноль, поскольку соответствующие входные звенья расположены вдоль координатных осей, то имеем следующие выражения:
( x A − q1 )
2
+ y A2 + z A2 − L2 = 0;
2
x A2 + ( y A − q2 ) + z A2 − L2 = 0;
2
x A2 + y A2 + ( z A − q3 ) − L2 = 0 .
Рис. 3.12. Вспомогательная схема для решения задачи о положениях
Из полученных трех уравнений необходимо найти три неизвестных, а именно
хB1, yB2, zB3, причем эти уравнения не зависимы .
Уравнения с двумя неизвестными можно привести к виду квадратного уравнения:
Aq12 + Bq1 + C = 0,
откуда
q1 =
− B ± B 2 − 4 AC
,
2A
где B = –2xA; C = xA2 + yA2 + zA2 – L2; Aq22 + Bq2 + C = 0 .
Аналогично определяются yB2, zB3:
q2 =
где B = –2yA, C = xA2 + yA2 + zA2 – L2 .
− B ± B 2 − 4 AC
,
2A
104
Глава 3. Синтез, анализ и управление механизмами с тремя кинематическими цепями
Для решения прямой задачи о положениях используем уравнения, записанные ранее . При этом координаты хА , yА , zА будут равны:
xA =
− B ± B 2 − 4 AC
,
2A
где
A = b2 + d 2 ;
a=
q22 − q12
;
2q2
b=
B = −2q1 + 2ab + 2cd ;
q1
;
q2
y A = a + bx A ;
C = q12 + a 2 + c 2 − L2 ;
z A = c + dx A ;
c=
q32 − q12
;
2q3
d=
q1
.
q3
Таким образом, обе задачи о положениях имеют аналитические решения .
Решение задачи о скоростях проведем методом дифференцирования уравнений связей, которые можно представить в виде:
2
F1 = ( x A − q1 ) + y A2 + z A2 − L2 = 0;
2
F2 = x A2 + ( y A − q2 ) + z A2 − L2 = 0;
2
F3 = x A2 + y A2 + ( z A − q3 ) − L2 = 0 .
Как и ранее, представим уравнения скоростей в матричном виде:
AV = (–B)q,
где А — матрица частных производных от неявной функции по xA , yA , zA ; B — матрица частных производных от неявной функции по обобщенным координатам
хB1, yB2, zB3; V — вектор скорости выходного звена; q∙ — вектор скоростей во входных звеньях (обобщенные скорости) .
Продифференцируем уравнения связей и получим следующие выражения:
∂F1
= 2 yA ;
∂y A
∂F1
= 2z A ;
∂z A
∂F1
= 2q1 − 2 x A ;
∂q1
∂F2
= 2xA ;
∂x A
∂F2
= 2 y A − 2q2 ;
∂y A
∂F2
= 2z A ;
∂z A
∂F2
= 2q2 − 2 y A ;
∂q2
∂F3
= 2z A ;
∂x A
∂F3
= 2 yA ;
∂y A
∂F3
= 2 z A − 2q3 ;
∂z A
∂F3
= 2q3 − 2 z A .
∂q3
∂F1
= 2 x A − 2q1 ;
∂x A
В общем виде уравнения скоростей будут иметь вид:
2 x A − 2q1
2 yA
2z
A
2 yA
2 y A − 2q2
2 yA
2 z A V x
2q1 − 2 x A
2 z A V y = −
0
2 z A − 2q3 V z
0
где все обозначения пояснены выше .
0
2q2 − 2 y A
0
0
qɺ1
0
qɺ2 ,
2q3 − 2 z A qɺ3
3.2. Кинематический анализ механизма с тремя кинематическими цепями
105
Далее рассмотрим сферическую часть механизма с шестью степенями свободы
(рис . 3 .13), состоящую из трех кинематических цепей с пересекающимися осями .
Каждое входное звено сопряжено с двигателем вращательного перемещения . Выходное звено представляет собой две пересекающиеся полусферы и инструмент,
вращающийся вокруг трех осей x, y, z с пересечением в точке О .
Рис. 3.13. Сферическая часть механизма
Выходными координатами являются углы поворота платформы: α, β, γ — повороты вокруг осей x, y, z, соответственно . Обобщенными координатами являются углы φ11, φ21, φ31 — углы поворота входных звеньев первой, второй и третьей
кинематической цепи .
Найдем взаимосвязь между входными и выходными координатами . Выходное
звено совершает последовательный поворот вокруг осей x, y, z . Матрицы, описывающие повороты вокруг осей x, y, z при переходе от подвижной системы координат к неподвижной системе, выглядят следующим образом:
0
0
1
A1 = 0 cos α − sin α ;
0 sin α cos α
cos β 0 sin β
1
0 ;
A2 = 0
− sin β 0 cos β
cos γ − sin γ 0
A 3 = sin γ cos γ 0 .
0
0
1
Матрица, отражающая переход выходного звена от подвижной системы координат к неподвижной системе, будет иметь вид:
cos β cos γ cos γ sin α sin β − cos α sin γ sin α sin γ + cos α cos γ sin β
Aa = cos β sin γ cos α cos γ + sin α sin β sin γ cos α sin β sin γ − cos γ sin α .
− sin β
cos α cos β
cos β sin α
106
Глава 3. Синтез, анализ и управление механизмами с тремя кинематическими цепями
В первой кинематической цепи входное звено осуществляет поворот в следующей последовательности: вокруг осей x, y, z . Соответствующие этому матрицы
поворота имеют вид:
0
1
B1′ = 0 cos ϕ11
0 sin ϕ
11
0
cos ϕ12
− sin ϕ11 ; B2′ =
0
− sin ϕ
cos ϕ11
12
0 sin ϕ12
cos ϕ13
1
0 ; B3′ = sin ϕ13
0
0 cos ϕ12
− sin ϕ13
cos ϕ13
0
0
0 ,
1
где φ11 — угол поворота входного звена; φ21 — угол поворота второго звена; φ31 —
угол поворота третьего звена . Матрицу перехода от подвижной системы координат к неподвижной можно представить как:
Bʹ = Bʹ1 Bʹ2 Bʹ3;
B′ =
cos ϕ12 cos ϕ13
− cos ϕ12 sin ϕ13
sin ϕ12
= cos ϕ11 sin ϕ13 + cos ϕ13 sin ϕ11 sin ϕ12 cos ϕ11 cos ϕ13 − sin ϕ11 sin ϕ12 sin ϕ13 − cos ϕ12 sin ϕ11 .
sin ϕ sin ϕ − cos ϕ cos ϕ sin ϕ cos ϕ sin ϕ + cos ϕ sin ϕ sin ϕ
cos ϕ11 cos ϕ12
13
11
13
12
13
11
11
12
13
11
Единичный вектор оси кинематической пары первой цепи, сопряженной
с выходным звеном, имеет координаты (0, 0, 1) . Преобразование этого вектора
с помощью двух указанных матриц должно давать одинаковый результат:
0
0
Aa 0 = B ′ 0 .
1
1
Отсюда имеем
sin ϕ12
sin α sin γ + cos α cos γ sin β
cos α sin β sin γ − cos γ sin α = − cos ϕ12 sin ϕ11 .
cos ϕ cos ϕ
cos α cos β
11
12
Далее можно выразить угол φ11:
tg ϕ11 −
cos γ sin α − cos α sin β sin γ
= 0 .
cos α cos β
Матрица перехода от подвижной системы координат к неподвижной системе
для второй цепи можно представить так:
Bʺ = B2ʹ B1ʹ Bʹ3;
B ′′ =
cos ϕ21 cos ϕ23 + sin ϕ21 sin ϕ22 sin ϕ23 cos ϕ23 sin ϕ21 sin ϕ22 − cos ϕ21 sin ϕ23 cos ϕ22 sin ϕ21
=
cos ϕ22 sin ϕ23
cos ϕ22 cos ϕ23
− sin ϕ22 .
cos ϕ sin ϕ sin ϕ − cos ϕ sin ϕ
cos ϕ21 cos ϕ22
22
23
23
21 sin ϕ21 sin ϕ23 + cos ϕ21 cos ϕ23 sin ϕ22
21
3.2. Кинематический анализ механизма с тремя кинематическими цепями
107
Проводя выкладки, аналогичные случаю первой цепи, имеем:
sin α sin γ + cos α cos γ sin β cos ϕ22 sin ϕ21
cos α sin β sin γ − cos γ sin α = − sin ϕ
.
22
cos α cos β
cos ϕ21 cos ϕ22
Отсюда получаем:
tg ϕ21 −
sin α sin γ + cos α cos γ sin β
= 0 .
cos α cos β
Для третьей кинематической цепи матрица перехода от подвижной системы
координат к неподвижной системе имеет вид:
B‴ = Bʹ3 Bʹ1 Bʹ2 ;
B ′′′ =
cos ϕ31 cos ϕ33 − sin ϕ31 sin ϕ32 sin ϕ33 − cos ϕ32 sin ϕ31 cos ϕ31 sin ϕ33 + cos ϕ33 sin ϕ31 sin ϕ32
= cos ϕ33 sin ϕ31 + cos ϕ31 sin ϕ32 sin ϕ33 cos ϕ31 cos ϕ32 sin ϕ31 sin ϕ33 − cos ϕ31 cos ϕ33 sin ϕ32 .
− cos ϕ32 sin ϕ33
sin ϕ32
cos ϕ32 cos ϕ33
В соответствии с этим получаем соотношение:
cos γ sin α sin β − cos α sin γ − cos ϕ32 sin ϕ31
cos α cos γ + sin α sin β sin γ = cos ϕ cos ϕ ,
31
32
cos β sin α
sin ϕ32
из которого можно выразить угол φ31:
tg ϕ31 −
cos α sin γ − cos γ sin α sin β
= 0 .
cos α cos γ + sin α sin β sin γ
Таким образом, уравнения связей для сферического манипулятора с тремя
кинематическими цепями имеют вид:
cos γ sin α − cos α sin β sin γ
= 0;
F1 = tg ϕ11 −
cos α cos β
sin α sin γ + cos α cos γ sin β
= 0;
F2 = tg ϕ21 −
cos α cos β
= ϕ − cos α sin γ − cos γ sin α sin β = 0 .
F3 tg 31 cos α cos γ + sin α sin β sin γ
Для решения задачи о скоростях продифференцируем уравнения связей и составим матричное уравнение:
CV = (–D)ω;
∂F1
∂α
∂F
C = 2
∂α
∂
F3
∂α
∂F1
∂β
∂F2
∂β
∂F3
∂β
∂F1
∂γ
∂F2
∂γ
∂F3
∂γ
;
∂F1
∂ϕ11
D= 0
0
0
∂F2
∂ϕ21
0
0
0 ;
∂F3
∂κ31
αɺ
V = βɺ ;
γɺ
ϕɺ 11
ω = ϕɺ 21 ,
ϕɺ 31
108
Глава 3. Синтез, анализ и управление механизмами с тремя кинематическими цепями
где С — матрица частных производных от неявных функций по α, β, γ; D — матрица частных производных от неявных функций по обобщенным координатам
φ11, φ21, φ31; V — скорости изменения углов ориентации выходного звена, то есть
скорости изменения углов α, β, γ; ω — обобщенные скорости (входные скорости) .
Обозначим скорости изменения углов ориентации выходного звена α, β, γ как
α∙ , β∙ , γ∙ , а проекции угловой скорости на оси x, y, z — ωx , ωy , ωz . Их соотношение
описывается выражениями:
ωx = αɺ xα + βɺ xβ + γɺ x γ ;
ω y = αɺ yα + βɺ yβ + γɺ yγ ;
ωz = αɺ zα + βɺ zβ + γɺ z γ ,
xα
где yα — координаты единичного вектора оси кинематической пары фиктивz
α
ной кинематической цепи соответствующей угловой скорости α∙ , эти координаты
равны произведению матриц поворота вокруг оси z и вокруг оси у на координаты
кинематической пары в начальном положении (вдоль оси х):
xα
1 cos β cos γ
yα = Aa 0 = cos β sin γ ;
z
0 − sin β
α
xβ
yβ — координаты единичного вектора оси кинематической пары фиктивной
z
β
кинематической цепи соответствующей угловой скорости β∙ , эти координаты равные произведению матрицы поворота вокруг оси z на координаты кинематической пары в начальном положении (вдоль оси y):
xβ
0 − sin γ
yβ = A3 1 = cos γ ;
0 0
z
β
xγ
∙
yγ — координаты кинематической пары, соответствующие угловой скорости γ .
z
γ
Так как ось z неподвижна, то координаты xγ , yγ , zγ будут иметь значения:
xγ 0
yγ = 0 .
zγ 1
3.3. Динамический анализ механизма с тремя кинематическими цепями и управление им
109
Исходя из изложенного, можно записать:
ωx = αɺ ( cos β cos γ ) + βɺ ( − sin γ ) + γɺ ⋅ 0;
ω y = αɺ ( cos β sin γ ) + βɺ cos γ + γɺ ⋅ 0;;
ωz = αɺ ( − sin β ) + βɺ ⋅ 0 + γɺ ⋅1 .
Нужно найти частные производные от неявных функций, связывающих обобщенные и абсолютные координаты, при этом получим уравнения:
∂F1
∂α
∂F2
∂α
∂F3
∂α
∂F1
∂β
∂F2
∂β
∂F3
∂β
∂F1
∂γ
∂F2
∂γ
∂F3
∂γ
∂F1
∂ϕ11
αɺ
ɺ
β = − 0
γɺ
0
0
∂F2
∂ϕ21
0
0
ϕɺ 11
0 ϕɺ 21 .
ϕɺ
∂F3 31
∂ϕ31
Используя данные частные производные, можно решить прямую и обратную
задачи о скоростях .
Теперь представим решение задач о скоростях методом винтов (в данном случае винты имеют нулевой параметр, то есть это векторы) . Учтем, что угловая скорость выходного звена равна сумме угловых скоростей шарниров звеньев одной
цепи . Составим уравнения для первой кинематической цепи:
ωx = ω11 x11 + ω12 x12 + ω13 x13 ;
ω y = ω11 y11 + ω12 y12 + ω13 y13 ;
ωz = ω11 z11 + ω12 z12 + ω13 z13 .
где (x11, y11, z11) — координаты единичного вектора оси первой пары, они равны
(1, 0, 0), (x12, y12, z12) — координаты единичного вектора оси второй пары, которые
определяются произведением матрицы поворота вокруг оси х на координаты единичного вектора оси второй пары в ее начальном положении:
0
0 0 0
x12 1
y12 = 0 cos α − sin α 1 = cos α ;
z 0 sin α cos α 0 sin α
12
(x13, y13, z13) — координаты единичного вектора оси третьей пары, которые определяются произведением матрицы поворота выходного звена на координаты единичного вектора оси третьей пары в ее начальном положении .
x13
0 sin α sin γ + cos α cos γ sin β
y13 = Aa 0 = cos α sin β sin γ − cos γ sin α .
z
1
cos α cos β
13
110
Глава 3. Синтез, анализ и управление механизмами с тремя кинематическими цепями
Исходя из изложенного, уравнения скоростей для первой кинематической
цепи можно записать в следующем виде:
ωx 1
0
sin α sin γ + cos α cos γ cos β ω11
ω y = 0 cos α cos α sin β sin γ − cos γ sin α ω12 .
ω
ω 0 sin α
cos α cos β
13
z
Из этого матричного уравнения можно найти скорости в шарнирах первой
кинематической цепи .
Составим уравнения скоростей для второй кинематической цепи:
ωx = ω21 x21 + ω22 x22 + ω23 x23 ;
ω y = ω21 y21 + ω22 y22 + ω23 y23 ;
ωz = ω21 z21 + ω22 z22 + ω23 z23 ,
где (x21, y21, z21) — координаты единичного вектора оси первой пары второй кинематической цепи:
x21 0
y21 = 1 ;
z 0
21
(x22 y22, z22) — координаты единичного вектора оси второй пары, которые определяются произведением матрицы поворота вокруг оси y на координаты единичного вектора оси второй пары в ее начальном положении:
x22 cos β 0 sin β 1 cos β
1
0 0 = 0 ;
y22 = 0
z − sin β 0 cos β 0 − sin β
22
(x23, y23, z23) — координаты единичного вектора оси третьей пары, которые определяются произведением матрицы поворота выходного звена на координаты единичного вектора оси третьей пары в ее начальном положении
0 sin α sin γ + cos α cos γ sin β
x23
y23 = Aa 0 = cos α sin β sin γ − cos γ sin α .
1
z
cos α cos β
23
В соответствии с изложенным уравнения скоростей для второй кинематической цепи представим в следующем виде:
ωx 0 cos β sin α sin γ + cos α cos γ cos β ω21
0
cos α sin β sin γ − cos γ sin α ω22 .
ωy = 1
ω
ω 0 − sin β
cos α cos β
23
z
3.3. Динамический анализ механизма с тремя кинематическими цепями и управление им
111
Составим уравнения скоростей для третьей кинематической цепи:
ωx = ω31 x31 + ω32 x32 + ω33 x33 ;
ω y = ω31 y31 + ω32 y32 + ω33 y33 ;
ωz = ω31 z31 + ω32 z32 + ω33 z33 .
где (x31, y31, z31) — координаты единичного вектора оси первой пары третьей кинематической цепи:
x31 0
y31 = 0 ;
z 1
31
(x32, y32, z32) — координаты единичного вектора оси второй пары, которые определяются произведением матрицы поворота вокруг оси z на координаты единичного
вектора оси второй пары в ее начальном положении:
x32 cos γ − sin γ 0 1 cos γ
y32 = sin γ cos γ 0 0 = sin γ ;
z 0
0
1 0 0
32
(x33, y33, z33) — координаты единичного вектора оси третьей пары, которые определяются произведением матрицы поворота выходного звена на координаты единичного вектора оси данной пары в ее начальном положении:
x33
0 cos γ sin β sin α − sin γ cos α
y33 = Aa 1 = cos γ cos α + sin γ sin β sin α .
z
0
cos β sin α
33
Исходя из приведенных соотношений, уравнения скоростей для третьей кинематической цепи можно представить в следующем виде:
ωx 0 cos γ cos γ sin β sin α − sin γ cos α ω31
ω y = 0 sin γ cos γ cos α + siin γ sin β sin α ω32 .
ω
ω 1
0
cos β sin α
33
z
На основе приведенных уравнений можно решить обратную задачу о скоростях . Теперь рассмотрим решение прямой задачи о скоростях . Для решения
данной задачи необходимо определить силовые и кинематические винты, соответствующие каждой кинематической цепи . Силовой винт Ri некоторой цепи
с координатами (rix , riy , riz , rix , riy , riz) взаимен двум ортам осей ei2 и ei3 неприводных
пар . Винт Ri уравновешен совокупностью винтов — реакций в парах, соответствующих ортам ei2 и ei3 .
Относительный момент mom (Ri , Ωi ) силового винта кинематической цепи
и кинематического винта, соответствующего входной кинематической паре
112
Глава 3. Синтез, анализ и управление механизмами с тремя кинематическими цепями
данной цепи, равен относительному моменту того же силового винта и кинематического винта выходного звена, отсюда имеем:
mom ( Ri , Ωi ) = ωx rix0 + ω y riy0 + ωz riz0 ;
(
)
mom ( Ri , Ωi1 ) = ωi1 xi1rix0 + yi1riy0 + zi1riz0 .
где (xi1, yi1, zi1) — плюккеровы координаты единичных винтов ei1, расположенных вдоль
осей входных пар; ri0 — моментная часть силового винта с координатами (r1x , r1y, r1z ) .
Составим систему уравнений из трех кинематических цепей:
(
(x
(x
)
ωx r10x + ω y r10y + ωz r10z = ω11 x11r10x + y11r10y + z11r10z ;
ωx r20x + ω y r20y + ωz r20z = ω21
ωx r30x + ω y r30y + ωz r30z = ω31
)
) .
0
21 r2 x
+ y21r20y + z21r20z ;
0
31 r3 x
+ y31r30y + z31r30z
x11 1
где (x11, y11, z11) — координаты оси первой пары: y11 = 0 ; (x12, y12, z12) — коор z 0
11
динаты оси второй пары, равные произведению матрицы, описывающей поворот
вокруг первой оси, на координаты второй пары в начальном положении;
0
0 0 0
x12 1
y
0
=
−
cos
α
sin
α 1 = cos α ;
12
z 0 sin α cos α 0 sin α
12
(x13, y13, z13) — координаты оси третьей пары, равные произведению матрицы, описывающей поворот выходного звена, на координаты третьей пары в начальном
положении:
0 sin α sin γ + cos α cos γ sin β
x13
y13 = Aa 0 = cos α sin β sin γ − cos γ sin α .
1
z
cos α cos β
13
Для первой кинематической цепи координаты моментной части силового
винта можно определить следующим образом:
r10
i
= e12 e13 = x12
x13
j
y12
y13
k
z12 .
z13
Для второй и третьей кинематических цепей координаты моментной части
силовых винтов r2, r3 можно представить в виде
r20 = e22e23; r30 = e32e33 .
Итак, задачи кинематического анализа решены .
3.3. Динамический анализ механизма с тремя кинематическими цепями и управление им
113
3.3. ДИНАМИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА
С ТРЕМЯ КИНЕМАТИЧЕСКИМИ ЦЕПЯМИ
И УПРАВЛЕНИЕ ИМ
В данном параграфе рассмотрим задачи динамического анализа механизмов,
имеющих три кинематические цепи . Вначале составим уравнения динамики для
поступательно-направляющей части механизма . При этом используем принцип
Даламбера и принцип возможных перемещений . Задавая элементарные приращения входным координатам ∂q1, ∂q2, ∂q3, получаем следующие уравнения движения относительно координат выходного звена:
mxɺɺ
mxɺɺ
∂x
∂y
∂z
∂z
δq1 + myɺɺ
δq1 + mzɺɺ
δq1 + mg
δq1 + m1qɺɺ1δq1 + P1δq1 = 0;
∂q1
∂q1
∂q1
∂q1
∂x
∂y
∂z
∂z
δq2 + myɺɺ
δq2 + mzɺɺ
δq1 + mg
δq2 + m2 qɺɺ2 δq2 + P2 δq2 = 0;
∂q2
∂q2
∂q2
∂q2
mxɺɺ
∂x
∂z
∂y
∂z
δq3 + myɺɺ
δq3 + mzɺɺ
δq3 + mg
δq3 + m3 qɺɺ3 δq3 + P3 δq3 = 0 .
∂q3
∂q3
∂q3
∂q3
где m1, m2, m3 — масса входных звеньев соответствующих цепей; m — масса выходного звена; Р1, Р2, Р3 — силы в приводах; x#, ÿ, z# — ускорения выходного звена; q#1, q#2,
q#3 — ускорения в приводах . Для определения коэффициентов ∂x/∂q1, ∂x/∂q2, ∂x/∂q3
целесообразно использовать уравнения связей, представленные ранее .
Здесь, как и в предыдущих случаях, используем алгоритм управления, минимизирующий ошибки по ускорению, скорости и координате [6—10] . Известны
требуемые законы изменения координат xТ (t), yТ (t), zТ (t), скоростей xТ (t), yТ (t),
zТ (t) и ускорений x#Т (t), ÿТ (t), z#Т (t) . Необходимо найти силы в приводах, при которых происходит минимизация ошибки по координате, по скорости, по ускорению .
Закон изменения ошибки должен соответствовать движению колебательного
звена, при котором обеспечивается устойчивость и минимизация ошибки .
Законы ускорений выходного звена в системе с обратными связями имеют вид:
xɺɺ = xɺɺT + γ1 ( xɺT − xɺ ) + γ 0 ( xT − x );
ɺɺ
y = ɺɺ
yT + γ1 ( yɺT − yɺ ) + γ 0 ( yT − y );
zɺɺ = zɺɺT + γ1 ( zɺT − zɺ ) + γ 0 ( zT − z ) .
где γ0, γ1 — коэффициенты обратных связей .
Зададим значения координат для точки А (x; y; z): х = 1 м, y = 1 м; z = 1 м . Длина
звена L = 3 м . Зададим постоянную времени τ, характеризующую длительность
протекания переходного процесса, равную τ = 0,018 с, время переходного процесса при этом будет равняться t ≈ 0,076 с, а коэффициенты обратной связи γ0 = 3086,
γ1 = 78,5 .
114
Глава 3. Синтез, анализ и управление механизмами с тремя кинематическими цепями
Силы в приводах Рi должны подчиняться уравнениям, полученным подстановкой при использовании соотношений, полученных для ускорений (весом
входных звеньев пренебрегли):
∂x
∂y
+ m ( ɺɺ
+
yT + γ1 ( yɺT − yɺ ) + γ 0 ( yT − y ) )
∂qi
∂qi
∂z
∂z
+ m ( zɺɺT + γ1 ( zɺT − zɺ ) + γ 0 ( zT − z ) )
+ mg
+ mi qɺɺi ,
∂qi
∂qi
Pi = m ( xɺɺT + γ1 ( xɺT − xɺ ) + γ 0 ( xT − x ) )
где i = 1, 2, 3 .
Зададим закон движения выходного звена в виде:
xТ (t) = 0,1 sin (ωt); yТ (t) = 0,1 sin (ωt); zТ (t) = 0,1 sin (ωt) .
Рассмотрим движение при частоте ω = 40 рад/с . Уравнения для ускорений
принимают вид:
xɺɺ = xɺɺT + 78,5 ( xɺT − xɺ ) + 3086 ( xT − x );
ɺɺ
y = ɺɺ
yT + 78,5 ( yɺT − yɺ ) + 3086 ( yT − y );
zɺɺ = zɺɺT + 78,5 ( zɺT − zɺ ) + 3086 ( zT − z ) .
В результате расчета были получены графики изменения ошибок по различным координатам (рис . 3 .14) .
Рис. 3.14. График изменения ошибки по координате
Анализируя графики на рис . 3 .14 можно заключить, что при принятых начальных условиях и приложении к динамической системе внешнего воздействия в виде
синусоиды система принимает установившиеся значения в пределах установленного
переходного процесса, при этом можно отметить появление незначительной ошибки движения выходного звена, которая также имеет установившиеся значения .
Теперь рассмотрим сферическую часть механизма параллельной структуры,
в котором каждое входное звено цепи соединено с вращательным двигателем .
3.3. Динамический анализ механизма с тремя кинематическими цепями и управление им
115
Выходное звено представляет собой платформу, которая вращается вокруг трех
осей, пересекающихся в точке О .
Выходными координатами являются углы поворота платформы α, β, γ . Обобщенными координатами являются углы φ11, φ21, φ31 — углы поворота входных звеньев . Выходному звену механизма поставим в соответствие подвижную систему
координат ξ, η, ζ; при нулевых значениях углов ориентации (α = β = γ = 0) направления осей ξ, η, ζ совпадают с направлениями осей х, y, z, соответственно .
Уравнения движения сферической части манипулятора параллельной структуры имеют вид:
∂ϕ
∂ϕ
∂ϕ
ɺɺ ξ = M1 11 + M 2 21 + M 3 31 + ϕɺ η ϕɺ ζ ( J ζ − J η );
J ξϕ
∂ϕξ
∂ϕξ
∂ϕξ
∂ϕ
∂ϕ
∂ϕ
ɺɺ η = M1 11 + M 2 21 + M 3 31 + ϕɺ ξ ϕɺ ζ ( J ξ − J ζ );
J ηϕ
∂ϕη
∂ϕη
∂ϕη
∂ϕ
∂ϕ
∂ϕ
ɺɺ ζ = M1 11 + M 2 21 + M 3 31 + ϕɺ ξ ϕɺ η ( J η − J ξ ) .
J ζ ϕ
∂
ϕ
ϕ
∂
∂ϕζ
ζ
ζ
где Jξ, Jη, Jζ — моменты инерции относительно осей ξ, η, ζ; М1, М2, М3 — моменты
в приводах; ∂φij /∂ φk — переменные коэффициенты; φ∙ ξ, φ#ξ, φ∙ η, φ#η, φ∙ ζ, φ#ζ — проекции скоростей и ускорений на оси ξ, η, ζ .
Для нахождения переменных коэффициентов ∂φij /∂ φk следует воспользоваться дифференцированием уравнений связей, проведенным ранее .
Зададим требуемое движение выходного звена в виде закона изменения коор∙
динат: αТ (t), βТ (t), γТ (t) . Требуемые скорости α∙Т (t), βТ (t), γ∙ Т (t) и ускорения α#Т (t),
β#Т (t), γ#Т (t) получаем после дифференцирования . Задача управления состоит в минимизации ошибок по координате, по скорости, по ускорению .
Проведем численное моделирование движения механизма . Зададим коэффициент демпфирования ζ = 2 /2 и время переходного процесса t ≈ 0,05 с . При этом
постоянная времени будет равна τ = 0,011 с, а коэффициенты обратных связей
будут равны γ0 = 7200, γ1 = 120 . Пренебрегаем массой входных звеньев .
Закон изменения ускорения соответствует колебательному звену:
ɺɺ = α
ɺɺ T + γ1 ( αɺ T − αɺ ) + γ 0 ( αT − α );
α
(
)
ɺɺ = β
ɺɺ + γ βɺ − βɺ + γ ( β − β );
β
T
1
T
0
T
ɺγɺ = ɺɺγT + γ1 ( γɺ T − γɺ ) + γ 0 ( γT − γ ) .
При законе движения выходного звена:
αТ (t) = 0,1 sin (ωt); βТ (t) = 0,1 sin (ωt); γТ (t) = 0,1 sin (ωt)
уравнения для ускорений принимают вид:
ɺɺ = α
ɺɺ T + 78,5 ( αɺ T − αɺ ) + 3086 ( αT − α );
α
ɺɺ = α
ɺɺ T + 78,5 ( αɺ T − αɺ ) + 3086 ( αT − α );
α
ɺɺγ = ɺɺγT + 78,5 ( γɺ T − γɺ ) + 3086 ( γT − γ ) .
116
Глава 3. Синтез, анализ и управление механизмами с тремя кинематическими цепями
Графики изменений ошибки положения (рис . 3 .15) показывают, что алгоритм
управления работоспособен .
Рис. 3.15. График изменения ошибки положения ∆α, ∆β, ∆γ выходного звена
сферической части механизма
Таким образом, представленный алгоритм управления поступательно-направляющей и сферической частями механизма параллельной структуры с тремя
кинематическими цепями вполне пригоден с точки зрения минимизации ошибок
по положению, скорости и ускорению .
3.4. ЭЛЕМЕНТЫ КОНСТРУКЦИИ
ЭКСПЕРИМЕНТАЛЬНОЙ МОДЕЛИ МЕХАНИЗМА
С ТРЕМЯ КИНЕМАТИЧЕСКИМИ ЦЕПЯМИ
ДЛЯ АДДИТИВНЫХ ТЕХНОЛОГИЙ
В данном параграфе рассмотрим некоторые конструктивные особенности экспериментальной натурной модели механизма параллельной структуры с тремя кинематическими цепями и четырьмя степенями свободы, предназначенного для использования в аддитивных технологиях . Как отмечалось, механизм содержит три
кинематические цепи, в каждой из которых содержится шарнирный параллелограмм .
Поступательные двигатели (по одному в каждой кинематической цепи) располагаются на основании, выполненном в виде стойки с тремя лучами (рис . 3 .16) .
Привод одной из кинематических цепей содержит два двигателя — поступательный и вращательный (рис . 3 .17) . Как отмечалось, каждая кинематическая
цепь содержит шарнирный параллелограмм, который может передавать как поступательные, так и вращательные движения (рис . 3 .18) .
Три кинематические цепи механизма связаны с подвижной платформой, которая сопряжена с конечным звеном — рабочим органом (рис . 3 .19) . В данном
случае рабочий орган представлен в виде стержня с круговым наконечником для
фиксирования технологической головки . Важно то, что конструкция кинематических цепей и подвижной платформы позволяет достраивать механизм в зависимости от того, какие движения он должен выполнять или, иными словами, какие
дополнительные вращения нужно обеспечивать .
3.4. Элементы конструкции экспериментальной модели механизма
Рис. 3.16. Стойка механизма с тремя кинематическими цепями
для аддитивных технологий
Рис. 3.17. Привод кинематической цепи, содержащей поступательный
и вращательный двигатели
117
118
Глава 3. Синтез, анализ и управление механизмами с тремя кинематическими цепями
Рис. 3.18. Шарнирный параллелограмм, предназначенный для передачи
поступательных и вращательных движений
Рис. 3.19. Подвижная платформа и конечное звено — рабочий орган
3.4. Элементы конструкции экспериментальной модели механизма
119
Следует отметить важный факт, что механизм снабжен оригинальной системой уравновешивания, что позволяет при работе с разными технологическими
устройствами использовать одни и те же приводы . Система уравновешивания
выполнена в виде изгибных упругих стержней, размещенных в каждой кинематической цепи (рис . 3 .20) .
Рис. 3.20. Система уравновешивания механизма
Экспериментальные исследования модели механизма показали его работоспособность, которая обусловлена прежде всего тем, что шарнирные параллелограммы обеспечивают передачу как поступательных, так и вращательных движений . Кроме того, можно говорить о том, что объем зоны обслуживания вполне
приемлем, а система уравновешивания повышает функциональные возможности
устройства . Таким образом, данный механизм целесообразно использовать для
аддитивных технологий .
120
Глава 3. Синтез, анализ и управление механизмами с тремя кинематическими цепями
Литература
1 . Chablat D ., Wenger P . A new concept of modular parallel mechanism for machining applications // Proceedings of the 2003 IEEE International Conference on Robotics and Automation
(ICRA), Taipei, Taiwan, September 14-19 .
2 . Патент на изобретение № 2534706 . Пространственный механизм с четырьмя степенями свободы / Носова Н .Ю ., Глазунов В .А ., Палочкин С .В ., Хейло С .В ., 2013 .
3 . Патент на изобретение № 135283 . Пространственный механизм с пятью степенями
свободы / Носова Н .Ю ., Глазунов В .А ., Палочкин С .В ., Хейло С .В ., 2013 .
4 . Патент на изобретение № 2536735 . Пространственный механизм с четырьмя степенями
свободы / Носова Н .Ю ., Глазунов В .А ., Палочкин С .В ., Хейло С .В ., Комисарук Л .В .,
2013 .
5 . Хейло С.В ., Глазунов В.А ., Кулемкин Ю.В ., Эфрос В.Л . Анализ ускорений и нелинейных
колебаний сферического механизма параллельной структуры // Проблемы машиностроения и надежности машин, 2013 . — № 3 . — С . 9—17 .
6 . Paul R ., Modelling, planning trajectory and control of robot manipulator . — Мoscow: Nauka,
1976 . — 104 p .
7 . Glazunov V ., Kheylo S ., Dynamics and control of planar, translational, and spherical parallel
manipulators (Book Chapter) // Dynamic Balancing of Mechanisms and Synthesizing of Parallel Robots . Springer, 2016 . — P . 365– 403 .
8 . Крутько П.Д . Обратные задачи динамики управляемых систем . Нелинейные модели . —
М .: Наука . Гл . ред . физ .-мат . лит ., 1988 . — 328 с .
9 . Kheylo S ., Glazunov V . Kinematics, Dynamics, Control and Accuracy of Spherical Parallel Robot // Advances on Theory and Practice of Robots and Manipulators . Proceedings
of ROMANSY 2014 XX CISM-IFToMM Symposium on Theory and Practice of Robots and
Manipulators . Springer Cham Heidelberg New York Dordrecht London, 2014 . — Рp . 133—140 .
10 . Craig J.J . Introduction to Robotics: Mechanics and Control . — 2nd ed . — Reading, MA:
Addisson-Wesley, 1989 .
ГЛАВА 4
СИНТЕЗ НОВОГО МЕХАНИЗМА
ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ
3 × 2 С ПОЛНОЙ ГРУППОВОЙ
КИНЕМАТИЧЕСКОЙ РАЗВЯЗКОЙ
Тывес Л.И.
В данной главе рассмотрен новый механизм с полной групповой развязкой . Применяемые пространственные механизмы параллельной структуры имеют большое число степеней свободы . Одной из важных задач является синтез механизмов
с максимально возможной развязкой . В этом случае система уравнений кинематики и динамики распадается на независимые подсистемы уравнений меньшего
порядка . Это дает возможность упростить решение задачи кинематики .
Идея неполной групповой кинематической развязки была реализована в триподе POLMAN 3 × 2 [1] (рис . 4 .1) . Три кинематические цепи, в каждой из них имеются расположенные соосно линейный и вращательный двигатели, а также две
пары шарниров с пересекающимися осями . Шарниры, сопряженные с выходным
звеном, образуют сферический механизм .
Рис. 4.1. Манипулятор POLMAN 2 × 3
122
Глава 4. Синтез нового механизма параллельной структуры 3 × 2
Задача синтеза механизмов параллельной структуры с шестью степенями
свободы, в котором бы в общем случае реализовывалась полная групповая кинематическая развязка между положением и ориентацией подвижной платформы,
остается актуальной .
Решение задачи полной групповой развязки [2—4] базируется на свойствах
карданной передачи (карданного вала), состоящей из входного и выходного валов, промежуточного звена и двух универсальных шарниров .
При разработках механизмов параллельной структуры с шестью степенями
свободы и, в частности, к триподов 3 × 2 предпочтение совершенно справедливо
(из-за возможности установки двигателей на основании) отдается кинематическим схемам «ног» с блоком приводов поступательного перемещения и вращения
ведущего звена каждой ноги . На рис . 4 .2 представлен манипулятор-трипод с шестью степенями подвижности .
Рис. 4.2. Трипод 2 × 3 с полной развязкой
Внутренние оси универсальных шарниров, связанные промежуточным звеном друг с другом, параллельны и параллельны оси входного и выходного валов,
поэтому передаточное отношение между валами постоянно и равно единице .
На основании установлены три блока приводов поступательного и вращательного движений входных валов карданных передач . Внешние оси универсальных
шарниров каждой ноги параллельны, так как входят в состав параллелограмма .
Выходные валы карданных передач парами вращения связаны с подвижной платформой и являются ведущими звеньями установленного на ней сферического механизма с вращательными парами и рабочим органом .
Глава 4. Синтез нового механизма параллельной структуры 3 × 2
123
Кинематические связи обеспечивают поступательное перемещение подвижной платформы и одновременно параллельность осей входных и выходных валов
карданных передач . При этом линейные перемещения платформы определяются
только линейными перемещениями входных валов карданных передач . Угловые
перемещения выходных валов карданных передач относительно подвижной платформы в этом случае в соответствии со свойствами карданной передачи равны
угловым перемещениям входных валов независимо от перемещений платформы .
При переходе к координатам рабочего органа — ведомого звена сферического
механизма — получим блочно-диагональную матрицу J частотных передаточных
отношений . Система шести уравнений для расчета положений рабочего органа,
связывающая шесть координат его положения с шестью координатами положений выходных валов приводов, распадается на две независимые подсистемы . Индикаторная матрица — блочно-диагональная:
∆X
∆Y
∆Z
θX
θY
θZ
*
*
*
=
0
0
0
*
*
*
0
0
0
*
*
*
0
0
0
0
0
0
*
*
*
0
0
0
*
*
*
0
0
0
⋅
*
*
*
∆q1
∆q2
∆q3
∆q4
∆q5
∆q6
.
В расчетной модели механизма поступательного перемещения универсальные шарниры
исходного механизма заменены сферическими,
а промежуточные валы параллельно перенесены
так, что центры сферических шарниров платформы имеют общий центр в точке пересечения
осей выходных валов, образуя сдвоенный сферический шарнир (рис . 4 .3) .
При этом сферические шарниры расчетной
модели на входе сместятся вдоль соответствующих осей неподвижной системы координат
OXYZ так, что соотношение между входными
координатами модели и исходного механизма
будут:
qx – q1 = qy – q2 = qz – q3 = d,
Рис. 4.3. Модель поступательного
механизма
где qx, qy, qz — координаты центров универсальных шарниров исходного механизма на осях
X, Y, Z неподвижной системы координат; q1, q2, q3 — координаты сферических кинематических пар расчетной модели на тех же осях соответственно; d — расстояние от центров универсальных шарниров на подвижной платформе исходного
механизма до точки пересечения осей выходных валов карданных передач .
В обратной задаче о положениях модели заданы ХП, YП, ZП — координаты совмещенного центра сферических шарниров платформы в неподвижной системе координат; требуется определить координаты (q1, 0, 0), (0, q2, 0)
124
Глава 4. Синтез нового механизма параллельной структуры 3 × 2
и (0, 0, q3) центров сферических шарниров на осях неподвижной системы координат . Заданные координаты — центр сферы радиусом l; искомые — точки пересечения сферы с осями координат . Имеем:
( q − X )2 + (Y )2 + ( Z )2 = l 2 ;
Π
Π
Π
1
2
2
2
2
( X Π ) + ( q2 − YΠ ) + ( Z Π ) = l ;
2
2
2
2
( X Π ) + (YΠ ) + ( q3 − Z Π ) = l .
(4 .2)
Решения системы уравнений (1) относительно qi (i = 1, 2, 3) очевидны . Например,
2
2
q1 = X Π ± l 2 − (YΠ ) + ( Z Π ) .
Продифференцируем (2) по времени и следуя методике [4], представим полученные выражения в виде Āx∙ = Bq∙ :
X Π − q1
YΠ
XΠ
YΠ − q2
XΠ
YΠ
Xɺ Π
ZΠ
X Π − q1
0
ɺ
Z Π ⋅ YΠ =
0
YΠ − q2
Z Π − q3 Zɺ Π
0
0
qɺ1
0
⋅ qɺ2 .
0
Z Π − q3 qɺ3
Решение прямой задачи кинематики о положениях расчетной модели, которое можно трактовать как поиск точки пересечения трех сфер радиусом l
с центрами в заданных точках (q1, 0, 0), (0, q2, 0) и (0, 0, q3), приводит к решению системы уравнений (2) относительно неизвестных ХП, YП, ZП . Вычитанием
из первого и второго уравнений системы (2) третьего, получим две линейные
зависимости между переменными . Подстановка этих функций в третье уравнение приводит при условии qi ≠ 0 к алгебраическому квадратному уравнению
относительно ZП:
aZП2 + bZП + c = 0,
где
a = q1q2 + q2 q3 + q1q3 ;
b = − q3 ( q12 + q22 );
c=
( q34 + q12 q22 ) ( q12 + q22 ) − 4l 2 q12 q22 .
4
Задача имеет всего два решения . Им соответствуют точки (XП, YП, ZП), лежащие
по разные стороны от плоскости, проходящей через три точки (q1, 0, 0), (0, q2, 0)
и (0, 0, q3) .
Частный случай сферического механизма ориентации рабочего органа с тремя
степенями свободы характеризуется тем, что оси вращения ведущих звеньев совпадают с осями декартовой системы координат, а каждое звено, включая ведущие звенья, входит в две кинематические вращательные пары, оси которых пересекаются под прямым углом (рис . 4 .4) .
В исходном состоянии оси неподвижной и подвижной систем координат OXYZ
и OX′Y′Z′ совпадают . Подвижная система координат связана с рабочим органом .
Глава 4. Синтез нового механизма параллельной структуры 3 × 2
125
Рис. 4.4. Сферический механизм
В расчетной модели механизма будем
считать, что все характерные точки механизма Ai (i = 1, 2, 3) и Bi (i = 1, 2, 3) лежат на сфере единичного радиуса . Точка А1, 2 — сдвоенный цилиндрический шарнир . Координаты
точек А1, 2 и А3 в подвижной системе координат OX′Y′Z′ будут (0, 0, 1) и (1, 0, 0) .
Обратная задача о положении сферического механизма: даны углы Эйлера (ψ, θ, φ)
ориентации подвижной системы координат;
требуется определить углы поворота звеньев
в опорах неподвижной платформы q4, q5, q6 .
Координаты точек А1, 2 и А3 в системе координат OXYZ:
XA
1, 2
= sin ψ sin θ; YA1, 2 = –cos ψ sin θ; ZA1, 2 = cos θ;
XA3 = cos ψ cos φ – sin ψ sin φ cos θ; YA3 = sin ψ cos φ – cos ψ sin φ cos θ;
ZA3 = sin φ sin θ .
В системе координат OXYZ точки (1, 0, 0), (0, 1, 0) и (0, 0, 1) определяют векторы-нормали к плоскостям, в которых по окружностям единичного радиуса перемещаются точки B1, B2, B3 . Координаты точки А1, 2 определяют вектор-нормаль
к плоскости, которой принадлежат точки B1 и B2 . Координаты точки А3 определяют нормаль к плоскости, которой принадлежит точка B3 . Уравнения линий пересечения соотвествующих пар упомянутых плоскостей и единичных окружностей
в соответствующих координатных плоскостях позволяют выразить координаты
точек Bi (i = 1, 2, 3) через координаты точек А1, 2 и А3 . Первые определены углами
q4, q5, q6, а вторые — углами Эйлера . Например: координаты точки B1 удовлетворяют системе уравнений:
X A1, 2 X B 1 + Y A1, 2 Y B 1 + Z A1, 2 Z B 1 = 0;
X B 1 = 0;
2
2
(Y B 1 ) + ( Z B 1 ) = 1 .
И далее: tg q4 = ZB /YB = – YA /ZA .
1
1
1, 2
1, 2
Окончательно:
arctg q4 = cos ψ tg θ;
arctg q5 = − sin ψ tg θ arctg;
q6 =
sin ψ cos ϕ + cos ψ sin ϕ cos θ
.
sin ψ sin ϕ cos θ − cos ψ cos ϕ
Прямая задача: заданы углы q4, q5, q6 требуется определить углы Эйлера:
(ψ, θ, ϕ) . Логика решения не меняется; радиусы-векторы точек B1{0; –cos q4; –sin q4}
126
Глава 4. Синтез нового механизма параллельной структуры 3 × 2
и B2{–cos q5; 0; sin q5} являются нормалями к плоскостям, которым принадлежит
точка А1, 2:
YA cos q4 + ZA sin q4 = 0, XA cos q5 – ZA sin q5 = 0 .
1, 2
1, 2
1, 2
1, 2
Кроме того, она принадлежит сфере (XA1, 2)2 + (YA1, 2)2 + (ZA1, 2)2 = 1 . Поэтому:
X A1, 2 =
Y A1, 2 =
tg q5
2
( tg q5 ) + ( tg q4 )
2
;
+1
− tg q4
2
( tg q5 ) + ( tg q4 )
2
;
+1
−1
cos θ = Z A1, 2 =
2
( tg q5 ) + ( tg q4 )
2
.
+1
Плоскость, определяемая вектором {XA1, 2; YA1, 2; ZA1, 2}, пересекает координатную плоскость XOY (Z = 0) по линии узлов: XA1, 2 x – YA1, 2 y = 0 .
Угол наклона линии узлов к оси X: tg ψ = – XA1, 2 /YA1, 2 = tg q5 /tg q4 . Далее, по координатам точек B3 (–sin q6; –cos q6; 0) и А1, 2 (XA1, 2; YA1, 2; ZA1, 2) и единичной сфере
определяются координаты точки A3:
Z A 3 = X A 3 ( tg q6 tg q4 − tg q5 );
Y A 3 = X A 3 tg q6 ;
X A3 =
1
2
1 + ( tg q6 ) + ( tg q6 tg q4 − tg q5 )
2
.
Точка A3 принадлежит оси X′, уравнение которой:
x
y
z
= =
.
X A3 Y A3 Z A3
Угол между осью X′ и линией узлов
x
y
=
Y A1, 2 X A1, 2
есть угол чистого вращения:
cos ϕ =
tg q4 + tg q6 tg q5
1 + tg q62 + ( tg q6 tg q4 − tg q5 )
2
.
( tg q5 ) + ( tg q4 )
2
3
Таким образом, получены решения поставленных задач в явном виде .
Заметим, что при решении задач о положениях сферического механизма использованы традиционные углы Эйлера . Следует, однако, помнить о «дефекте»
Глава 4. Синтез нового механизма параллельной структуры 3 × 2
127
этой системы углов, приводящей к особой точке в центре рабочей зоны при решении задач о скоростях рабочего органа (или точности его положения), и переходить к системе углов Эйлера — Крылова . Нельзя не отметить также, что ошибки
изготовления и сборки подвижной платформы со сферическим механизмом в реальной конструкции приводят к избыточным связям, а иногда и к невозможности
сборки . В этом случае целесообразен сферический самоустанавливающийся механизм .
Возвращаясь к проблеме групповой кинематической развязки движений
в рассматриваемом классе механизмов, отметим, что существует и другая возможность конструкторского решения задачи развязки движений на основе карданной
передачи, но без подвижной платформы . Заменим связи, накладываемые подвижной платформой на выходные валы карданных передач, связями в виде механизмов параллелограмма непосредственно между входными и выходными валами каждой карданной передачи . Естественно, при этом механизмы параллелограммов
должны содержать по две вращательные и по две сферические кинематические
пары, так как выходной вал каждой передачи по отношению к входному должен
иметь возможность совершать двумерные перемещения . Такого рода механизмы
параллелограмма обычно используются для компенсации ошибок изготовления
и сборки в плоских параллелограммах, устраняя избыточные связи, накладываемые вращательными парами .
В нашем случае необходимо обеспечить условие связи (условие параллельности осей входного и выходного валов карданной передачи) в механизмах
с двумя степенями свободы . Обратим внимание на то, что при этом функцию
удержания осей выходных валов трех карданных передач во взаимно перпендикулярных направлениях с пересечением в одной точке выполняет сферический
механизм .
Два механизма различной конструкции, но одного назначения, открывают возможности их совместного использования для ужесточения конструкции
и устранения зазоров, по крайней мере, в кинематических цепях карданных передач . Для экспериментальной проверки этих возможностей и полученных выше
теоретических результатов по групповой кинематической развязке движений механизмов параллельной структуры разработан и построен макет (рис . 4 .5) . Макет
с ручным приводом по всем шести координатам вектора q, с возможностью фиксации в любом допустимом положении, позволяет собрать любую из описанных
конструкций . Опыты на макете показали соответствие его движений результатам
анализа .
Рассмотрим конструктивные особенности действующей модели данного механизма . Приводы трех кинематических цепей расположены так, что их оси пересекаются под прямыми углами . Весь механизм размещен на основании, выполненном в виде равностороннего треугольника .
Кинематические цепи механизма могут быть расположены так, что одна кинематическая цепь воспринимает практически весь вес конструкции, а две другие
цепи расположены близко к горизонтали (рис . 4 .6) .
Неравномерность распределения нагрузки требует использования уравновешивающего устройства, выполненного в виде пружины (рис . 4 .7) .
128
Глава 4. Синтез нового механизма параллельной структуры 3 × 2
Рис. 4.5. Прототип механизма 2 × 3
Рис. 4.6. Расположение трех кинематических цепей механизма
Рис. 4.7. Одна из кинематических цепей с горизонтально установленными
двигателями и устройство уравновешивания
Сферическая часть механизма (рис . 4 .8) включает в себя три входных вала,
а также три кинематические цепи, содержащие звенья, выполненные в форме дуг .
Для поступательных перемещений были использованы шаговые двигатели
и реечные передачи (рис . 4 .9) . Для вращательных движений приводной узел включает сектор зубчатого колеса (рис . 4 .10) .
Глава 4. Синтез нового механизма параллельной структуры 3 × 2
Рис. 4.8. Сферическая часть механизма
Рис. 4.9. Приводной узел поступательного перемещения, установленного
горизонтально
129
130
Глава 4. Синтез нового механизма параллельной структуры 3 × 2
Рис. 4.10. Приводной узел поступательного вертикального перемещения
Литература
1 . Mianovski K . Singularity analysis of parallel manipulator POLMAN 3 × 2 with six degrees
of freedom // 12th IFToMM World Congress, Besanзon (France), June 18—21 2007 . —
P . 126—132 .
2 . Данилин П.О ., Тывес Л.И ., Глазунов В.А . Групповая кинематическая развязка движений
в механизмах параллельной структуры // Проблемы машиностроения и надежности
машин, 2010 . — № 3 . — С . 27—35 .
3 . Крайнев А.Ф . Словарь-справочник по механизмам . — М ., Машиностроение . 1987 . —
560 с .
4 . Данилин П.О . Разработка и анализ механизмов параллельной структуры с групповой
кинематической развязкой: дис . … канд . техн . наук . — М ., 2011 . — 141 с .
5 . Аракелян В ., Брио С, Глазунов В.А . Исследование особых положений манипулятора
с параллельной структурой «ПАМИНСА», 2006 .
ГЛАВА 5
РАЗРАБОТКА НОВЫХ МЕХАНИЗМОВ
ДЛЯ СОВРЕМЕННЫХ
РОБОТОТЕХНИЧЕСКИХ СИСТЕМ,
ПРЕДНАЗНАЧЕННЫХ
ДЛЯ ТЕХНОЛОГИЧЕСКИХ,
МЕДИЦИНСКИХ, АДДИТИВНЫХ
И ДИАГНОСТИЧЕСКИХ УСТРОЙСТВ
Глазунов В.А., Филиппов Г.С.,
Петраков А.А., Царьков А.В.
В работе проанализированы различные проблемы современного машиноведения, связанные с требованиями, предъявляемыми к создаваемым устройствам
различного назначения: технологические и медицинские роботы, измерительные
и испытательные устройства, тренажеры, манипуляторы для агрессивных сред .
Одним из приоритетных направлений развития науки, технологий и техники Российской Федерации являются робототехнические комплексы (системы)
военного, специального и двойного назначения [1] . Согласно Стратегии научно-технологического развития Российской Федерации, в ближайшие 10–15 лет
приоритетами развития следует считать направления, которые позволят создать
технологии, являющиеся основой инновационного развития внутреннего рынка
продуктов и услуг, устойчивого положения России на внешнем рынке, и обеспечат в том числе переход к роботизированным системам, применяемым в различных областях техники [2] . Подобные приоритеты имеют место также в Программе
«Цифровая экономика Российской Федерации» [3] . В частности, одними из основных сквозных цифровых технологий являются новые производства компонентов робототехники и сенсорики . Одновременно с вышеперечисленным, важнейшей частью экономического развития и безопасности страны является снижение
зависимости от импортных поставок научного, испытательного оборудования,
приборов и электронных компонентов [4] .
Институт машиноведения им . А .А . Благонравова РАН (ИМАШ РАН), обладая богатейшим опытом глубокого изучения технологических особенностей,
связанных с функционированием соответствующих машин, активно развивает
направления, предусматривающие широкое внедрение результатов науки о машинах в различные области отечественной экономики [5—7] . В Институте имеются
132
Глава 5. Разработка новых механизмов для современных робототехнических систем
уникальные методики по синтезу или выбору схемы устройства, позволяющие
на начальных этапах проектирования предусмотреть возможные проблемы, связанные с динамикой, управлением, особыми положениями, точностью, получены эффективные технические решения, позволяющие удовлетворить весьма
противоречивым и трудновыполнимым требованиям, предъявляемым пользователями [8—10] . Стоит отметить современный уровень робототехники, определяемый достижениями выдающихся исследователей [11—22] . Принимая во внимание и используя этот опыт, Институт развивает машиноведение России .
Особое место в развитии теории машин и механизмов занимает исследование
механизмов параллельной структуры, где несколько кинематических цепей связывают выходное звено с основанием [23] . Преимущество таких систем, в сравнении с обычными роботами и станками, имеющими последовательную структуру
и воспринимающими нагрузку как консоль, заключается в увеличенных показателях точности и грузоподъемности .
Одна из наиболее удобных методик эффективного синтеза и анализа систем
параллельной структуры — методология, основанная на винтовом исчислении,
созданная в ИМАШ РАН [24] . Винтовое исчисление основано на векторном исчислении и оперирует объектами более высокой, чем вектор, размерности . Важным преимуществом винтового исчисления является возможность компактной
записи уравнений, соответствующих столь сложным многоконтурным системам,
как роботы параллельной структуры . К тому же существует ряд случаев, например, при структурно-геометрическом синтезе или при анализе сингулярностей,
когда разработанная методология дает возможность вообще избежать составления уравнений и решить проблему на качественном уровне .
В Институте машиноведения им . А .А . Благонравова РАН разработан ряд эффективных решений некоторых технических проблем с использованием принципов параллельной структуры . Приведем их примеры .
Решение задачи создания новых схем механизмов, предназначенных для различных технологических систем, в том числе станочного оборудования, является
актуальной проблемой машиностроения . Разработка механизмов, не содержащих
в себе массивных прямолинейных направляющих, тем самым зачастую отличающихся повышенными показателями по габаритам и весу, является более предпочтительной, чем станки традиционной компоновки . Устройства с параллельной
структурой удовлетворяют данной концепции .
Десятки лет исследования в данном направлении проводились в разных странах . На сегодняшний день существуют различные решения . Одним из наиболее
известных является технологический робот Metrom, имеющий 5 степеней свободы и 5 соединительных кинематических цепей . Данный робот содержит вращательный двигатель, шариковинтовую пару, конечный шарный (одно или двухподвижный), сопрягающий соответствующую кинематическую цепь с выходным
звеном — рабочим органом .
Робот Metrom, обладая важным преимуществом — большей рабочей зоной
по сравнению с гексаподом (платформа Гауфа), что говорит о правильном структурном синтезе, имеет недостаток в виде вероятности столкновения между кинематическими цепями . Разработанный в ИМАШ РАН запатентованный механизм
лишен данного недостатка, поскольку, подобно роботу Metrom, имея 5 степеней
свободы, содержит всего три кинематических цепи [25] . Данный робот выполнен
в металле (рис . 5 .1) и характеризуется следующими особенностями .
Глава 5. Разработка новых механизмов для современных робототехнических систем
133
Рис. 5.1. Механизм с пятью степенями свободы в сборке
Две штанги, жестко установленные на основании, связаны с кинематическими цепями, содержащими вращательные шарниры, позволяющие соединительным стержням вращаться относительно оси выходного звена . Дополнительную
жесткость конструкции основания придают две стойки, снабженные откосами,
а также взаимное расположение кинематических цепей, образующих треугольную пирамиду .
Разработанный в Институте механизм, характеризующийся пятью степенями
свободы и тремя кинематическими парами, обладает перечисленными выше преимуществами эффективного внедрения в станкостроении и других робототехнических областях .
В институте машиноведения им . А .А . Благонравова РАН проводятся многочисленные исследования по созданию установок, использующих принципы
аддитивных технологий, что является важной задачей, стоящей перед современным машиностроением [26—29] . Механизмы параллельной структуры типа IZOGLIDE, обладая свойством изоморфности, то есть постоянства передаточного отношения между приводами и выходным звеном, имеют недостаточную жесткость .
134
Глава 5. Разработка новых механизмов для современных робототехнических систем
В Институте разработаны схемы для устранения данного недостатка, где в каждой
из трех кинематических цепей имеются дополнительные «диады», увеличивающие нагрузочную способность (рис . 5 .2) . Особенностью робота являются три кинематические цепи при отсутствии направляющих, вместо которых используются
по две группы стабилизирующих звеньев, содержащих три шарнира с параллельными осями .
Рис. 5.2. Изоморфный механизм параллельной структуры повышенной жесткости
Широкое распространение во всем мире малоинвазивных, в частности лапароскопических хирургических операций, привело к возрастающей потребности
специальных вспомогательных инструментов . Для обеспечения возможности
проведения высокоточных манипуляций внутри пациентов через небольшие,
величиной в несколько сантиметров, надрезы, применяется как ручной инструмент, так и роботизированный . Наиболее известным в этой сфере является робот
daVinci, используемый в России и за рубежом в урологии, проктологии, гинекологии, кардиохирургии, эндокринологии и других медицинских специальностях .
К недостаткам данной системы, кроме дороговизны самого робота и применяемого в нем специализированного одноразового инструмента, относится используемая последовательная схема устройства, где специализированный лапароскоп
весом в несколько десятков граммов управляется манипулятором, вес которого
составляет порядка ста килограммов, что может негативно отразиться на точности и безопасности использования механизма . Принимая во внимание высокую
значимость развития данного направления для отечественной и мировой науки,
Глава 5. Разработка новых механизмов для современных робототехнических систем
135
а также в качестве обеспечения снижения зависимости российской медицины
от импортных поставок, в Институте машиноведения им . А .А . Благонравова разработан ряд механизмов для решения подобных задач [30] .
При полостных операциях наиболее приемлемой схемой механизмов является сферическая, в которой место ввода инструмента сохраняется неподвижным
и совпадает с точкой центра сферического движения звеньев . Реализация подобной схемы позволяет значительно снизить размеры и вес хирургического робота .
Одним из примеров реализации данной схемы является механизм, в двух кинематических цепях которого содержатся направляющие дуги, обеспечивающие движение рабочего органа по сфере (рис . 5 .3) .
Рис. 5.3. Робот параллельной структуры с направляющими дугами
Другим вариантом схемы устройства является механизм с круговой направляющей, снабженной зубчатым колесом . По данной направляющей передвигаются
три каретки, обеспечивающие три сферические степени свободы . Также необходимо обеспечить перемещение инструмента вдоль собственной оси . В роботе
daVinci применяется последовательная структура механизма, для обеспечения необходимых манипуляций используется 8 двигателей . Разработанный в Институте
механизм (рис . 5 .4) имеет параллельную структуру и не требует избыточных приводов . Он включает в себя три кинематические цепи, каждая из которых содержит
приводную каретку, расположенную на круглой направляющей, вращательную
кинематическую пару и сферическую кинематическую пару, связанную с подвижной платформой, причем оси всех вращательных пар пересекаются в точке О .
136
Глава 5. Разработка новых механизмов для современных робототехнических систем
Кроме того, на подвижной платформе установлен поступательный двигатель,
перемещающий инструмент, ось которого также проходит через точку О . Центр
О является точкой ввода инструмента .
Ввиду того, что оси вращательных пар проходят через точку О, движения
вдоль оси инструмента, осуществляемые поступательным приводом, расположенным на платформе, не меняют положение указанной точки, то есть данный
механизм обеспечивает сохранение центра ввода инструмента без наличия избыточности приводов . К тому же расположение приводов ближе к основанию позволяет кинематическим цепям содержать лишь достаточно легкие звенья, что
позволяет уменьшить значение веса и габаритов в десятки раз по сравнению с роботом daVinci . Применение разработанного механизма может быть как в качестве
манипулятора обычного лапароскопа, так и в качестве устройства перемещения
видеокамеры, либо других вспомогательных инструментов . В Институте машиноведения РАН изготовлен прототип подобного робота (рис . 5 .5) .
Рис. 5.4. Схема механизма с четырьмя
степенями свободы для лапароскопических операций
Рис. 5.5. Прототип механизма параллельной структуры с постоянной точкой входа
Глава 5. Разработка новых механизмов для современных робототехнических систем
137
Каретки сопрягаются с круговой направляющей посредством зубчатой передачи, при этом на каретках установлены двигатели, осуществляющие вращение
приводных зубчатых колес .
При проведении вертебральных операций на позвоночнике существенным
является не только точность производимых манипуляций, но и возможность приложения значительных усилий на выходное звено . Для выполнения данной задачи в ИМАШ РАН разработан ряд механизмов параллельно-последовательной
структуры с пятью степенями свободы [30] (рис . 5 .6) .
Рис. 5.6. Схема механизма с пятью степенями свободы
Данные устройства имеют возможность линейно перемещать выходное звено
по трем координатам, а также вращать его вокруг двух осей координат . Рассматриваемые механизмы могут использоваться в том числе и в аддитивных технологиях,
когда имеется необходимость перемещать инструмент относительно изготавливаемой детали с изменением ориентации .
Для обеспечения требований точности и жесткости схема механизма имеет
определенную геометрию и логику построения кинематических цепей . Рабочий
инструмент крепится к оси, расположенной в плоскости несущей рамы, имеет
возможность вращаться вокруг нее, сама же ось может перемещаться внутри несущей рамы, при этом она сохраняет ортогональность длинным сторонам рамы
и параллельна коротким . Несущая рама соединена с основанием с помощью трех
кинематических цепей в точках А1, А2, А3 . Две кинематические цепи имеют сходное строение: несущая рама соединена с поступательными кинематическими парами через жесткую штангу со сферическими шарнирами на концах, при этом
один шарнир соединяет штангу с закрепленной на основании приводной кинематической парой, а второй — непосредственно с несущей рамой . Третья цепь
имеет следующую структуру: поступательный привод закреплен на основании
механизма, выходное звено которого передает движение на несущую раму через шарнир Гука . Важной особенностью механизма является то, что расстояние
от центра шарнира Гука до несущей рамы равно расстоянию от центра верхнего
сферического шарнира до несущей рамы и равно величине крепления рабочего
инструмента для проведения лапароскопических операций L1 .
138
Глава 5. Разработка новых механизмов для современных робототехнических систем
Решая задачу о положениях для представленного механизма, получаем матрицу перехода
cos (β )
0
sin (β )
0
(
)
(
)
(
)
0
sin (β ) sin α cos α − cos (β ) sin α
(
)
(
)
x sin ( β ) − y cos ( β ) sin α + z cos ( β ) cos α − L1 ,
− cos ( α ) sin (β ) sin ( α ) cos ( β ) cos ( α ) z + L1 −
cos (β ) cos ( α )
0
0
0
1
где α — угол вращения вокруг оси OX; β — угол вращения вокруг оси OY; L1 — величина крепления рабочего инструмента .
Координаты точек в системе координат основания соответственно для A2 и А3
− a cos ( β )
b cos ( α )
− a sin(β)sin ( α )
2
;
(
)
(
)
(
)
z + L + b sin α + a cos ( α ) sin ( β ) + x sin ( β ) − y cos ( β ) sin α + z cos ( β ) cos α − L1
1
2
cos ( β ) cos ( α )
1
− a cos ( β )
b cos ( α )
− a sin(β)sin ( α )
2
.
( )
( )
( )
z + L + a cos ( α ) sin ( β ) − b sin α + x sin ( β ) − y cos ( β ) sin α + z cos ( β ) cos α − L1
1
2
cos ( β ) cos ( α )
1
Для привода, перемещающего платформу в точке А1, перемещение в двигателе
LпрА1 составляет изменение координаты z в точке А1
LΠ p A 1 =
L1 + x sin ( β ) − y cos ( β ) sin ( α ) + ( z + L1 ) cos ( β ) cos ( α )
cos ( β ) cos ( α )
.
Отсюда, приняв величину штанги между сферическими шарнирами как L,
длину основания c, а ширину d, имеем перемещение LпрА2 и LпрА3 в линейных
приводах первых двух кинематических цепей
(
LΠp A 2 = z ′A 2 + L2 − x ′A 2 − ( − c )
(
LΠp A 3 = z ′A 3 + L2 − x ′A 3 − ( − c )
)
)
2
2
d
− y ′A 2 − ;
2
2
2
d
− y ′A 3 − − .
2
Применение механизмов параллельной структуры имеет важное значение
для улучшения показателей зондовой диагностики . В условиях сжатых сроков,
Глава 5. Разработка новых механизмов для современных робототехнических систем
139
отведенных на проведение зондовой диагностики плазменных потоков, регистрируемые показатели весьма чувствительны к времени измерений и рабочим
температурам . Зачастую, используемая исследователями методика ручных манипуляций зондом ограничивает количество проводимых экспериментальных
замеров, а также негативно сказывается на их точности . Механизмы параллельной структуры могут позволить проводить зондовую диагностику плазменных
потоков, истекающих из авиационных и космических двигателей, составлять
вольт-амперные характеристики по радиусу, при этом оказывая на них минимальное влияние [31] . В Институте синтезированы механизмы, использование
которых может качественно улучшить результаты проводимых зондовых экспериментов (рис . 5 .7) .
Рис. 5.7. Механизм с пятью степенями свободы и шестью двигателями
Разработанный механизм состоит из основания с размещенным на нем порталом, состоящим из закрепленных на основании вертикальных стоек, связанных
между собой продольными и поперечными горизонтальными балками . Первый
подвижный линейный привод установлен на стойке посредством рамы, сопряженной с помощью вращательной кинематической пары с подвижной платформой . Второй подвижный линейный привод также сопряжен с подвижной платформой посредством рамы, связанной со стойкой посредством поступательных
кинематических пар .
Между рамой и платформой расположено промежуточное звено, связанное
с рамой и подвижной платформой вращательными кинематическими парами .
На подвижной платформе размещена поперечная каретка, связанная с платформой с одной стороны приводом поступательного перемещения, а с другой стороны — поступательными кинематическими парами . С поперечной кареткой,
140
Глава 5. Разработка новых механизмов для современных робототехнических систем
в свою очередь, связана продольная каретка с одной стороны приводом поступательного перемещения, а с другой стороны поступательными кинематическими
парами . На продольной каретке жестко установлен корпус вращательного двигателя, с валом которого связано выходное звено . На выходном звене располагается
рабочий орган, в качестве которого может быть зонд . При расположении механизма так, чтобы длинная сторона рамы была перпендикулярна оси исследуемого
двигателя, и закрепив на выходном звене, к примеру, плоский ориентированный
зонд, появляется возможность проведения зондовых измерений плазменных потоков с необходимой скоростью по заданной траектории с минимальным влиянием на турбулентные потоки . Благодаря рассматриваемому механизму параллельной структуры с пятью степенями свободы, возрастает качество исследований
краевых и концевых эффектов, влияния ориентации зонда в потоке плазмы, получению вольт-амперных характеристик по радиусу в зависимости от параметров
задачи [32] .
В Институте машиноведения им . А .А . Благонравова ведутся разработки механизмов, способных выполнять специальные задачи авиационной промышленности . Такими задачами являются проблемы снижения уровней шумов, а также
тепловых излучений авиационных двигателей . В условиях высоких температур,
воздействия направленных потоков газа и плазмы снижение акустических шумов
и инфракрасного излучения является сложной технической задачей [33, 34] . Для
ее выполнения существует ряд технических решений [35, 36], основой в которых
является изготовление центрального тела сопла в виде сложной трехмерной структуры (рис . 5 .8) . Она состоит из множества концентрических поверхностей, полостей, объединенных друг с другом перемычками различных толщин . Применение
подобных конструкций допускает значительное снижение
шума и излучения, но обладают недостатками дороговизны производства и высокой массой изделий в условиях сохранения требований к внешней поверхности материала и
прочности изготавливаемой детали .
Рис. 5.8. Схематичное изображение внешней поверхности центрального тела сопла ТРД
Для решения данной проблемы в Институте синтезирован механизм параллельной структуры, позволяющий значительно уменьшить перечисленные недостатки, а также существенно повысить прочность, надежность, антикоррозионные свойства изготавливаемого трехмерного объекта посредством применения
аддитивной технологии высокой точности (рис . 5 .9) .
Ферменная конструкция механизма, где двигатели располагаются на основании, обеспечивает высокую точность позиционирования рабочего инструмента,
снижение влияния вибраций двигателей на выходное звено, увеличение возможности силовой нагрузки .
Глава 5. Разработка новых механизмов для современных робототехнических систем
141
Рис. 5.9. Схематичное изображение механизма параллельной структуры
с пятью степенями свободы
Разработанный манипулятор параллельной структуры, имеющий пять степеней свободы, содержит основание, выходное звено, подвижную платформу, установленную на платформе каретку продольного перемещения с закрепленным
на ней выходным звеном, а также кинематические цепи, связывающие основание с кареткой . Платформа и каретка выполнены прямоугольной формы из полых труб и сочлены между собой с взаимно перпендикулярным расположением
длинных сторон . Кроме того, платформа соединена с основанием посредством
установленных попарно на длинных сторонах платформы четырех кинематических цепей, каждая из которых содержит жестко установленный на основании
вращательный привод и два шарнирно соединенных между собой передаточных
звена, первое из них закреплено на оси привода, а второе шарнирно сопряжено
с длинной стороной платформы, причем оси вращения приводов и поворота шарнирных соединений кинематических цепей параллельны направлению длинных
сторон платформы . Каретка установлена на платформе с возможностью движения вдоль платформы и вращения вокруг собственной оси с помощью комбинированного двигателя и двух скользящих шарниров, расположенных на противоположных длинных сторонах платформы соответственно, при этом соединение
каретки с комбинированным двигателем осуществлено посредством центральной
оси, а с поворотными шарнирами — двумя перемычками .
Применение роботов параллельной структуры, разработанных в ИМАШ
РАН, в аддитивных технологиях при создании технически сложных элементов
авиационной техники, может оказаться эффективным и позволить реализовать
их широкий функциональный потенциал .
Таким образом, в Институте машиноведения им . А .А . Благонравова успешно
ведутся работы по претворению в жизнь положений Стратегии научно-технологического развития, разработки механизмов для современных робототехнических
142
Глава 5. Разработка новых механизмов для современных робототехнических систем
систем широкой сферы применения, включая технологическую в станочном оборудовании, изоморфных роботов, медицинскую для лапароскопических и вертебральных операций, аддитивную в производстве сложных авиационных элементов, диагностическую при исследовании плазменных потоков . При этом широко
используются достижения науки о машинах, которая зародилась и успешно развивается в ИМАШ РАН .
Литература
1 . Указ Президента РФ от 16 .12 .2015 № 623 «О Национальном центре развития технологий
и базовых элементов робототехники» .
2 . Указ Президента РФ от 01 .12 .2016 № 642 «Об утверждении стратегии научно-технологического развития Российской Федерации» .
3 . Распоряжение Правительства Российской Федерации от 28 .07 .2017 № 1632-р
«Об утверждении программы «Цифровая экономика Российской Федерации» .
4 . Указ Президента РФ от 31 .12 .2015 № 683 «О Стратегии национальной безопасности
Российской Федерации» .
5 . Ганиев Р.Ф ., Глазунов В.А . Манипуляционные механизмы параллельной структуры и их
приложения в современной технике // ДАН, 2014 . — Т . 459 . — № 4 . — С . 1—4 .
6 . Ганиев Р.Ф ., Глазунов В.А . Актуальные проблемы машиноведения и пути их решения:
справочник // . Инженерный Журнал с приложением, 2015 . — S11 . — С . 1—16 .
7 . Ганиев Р.Ф ., Глазунов В.А . Перспективы теории машин в связи с развитием современного машиностроения: справочник // Инженерный Журнал с приложением, 2015 . —
5 (218) . — С . 3—7 .
8 . Ганиев Р.Ф . Проблемы механики машин и технологий . Перспективы развития Института машиноведения им . А .А . Благонравова РАН . — Ч . I // Проблемы машиностроения
и надежности машин, 2010 . — № 1 . — С . 3—20 .
9 . Ганиев Р.Ф . Проблемы механики машин и технологий . Перспективы развития Института машиноведения им . А .А . Благонравова РАН . — Ч . II // Проблемы машиностроения и надежности машин, 2010 . — № 3 . — С . 3—17 .
10 . Ганиев Р.Ф . О современном состоянии и перспективах развития ИМАШ РАН // Проблемы машиностроения и надежности машин, 2014 . — № 3 . — С . 11—36 .
11 . Каляев И.А ., Капустян С.Г . Групповое управление роботами: проблемы, решения // Известия высших учебных заведений . Машиностроение, 2011 . — № 13 . — С . 7—12 .
12 . Bolotnik N.N ., Nunuparov A.M ., Chashchukhin V.G . Capsule-Type Vibration-Driven Robot
with an Electromagnetic Actuator and an Opposing Spring: Dynamics and Control of Motion // Journal of Computer and Systems Sciences International, 2016 . — Т . 55 . — № 6 . —
С . 986—1000 .
13 . Черноусько Ф.Л . О движении тела, содержащего подвижную внутреннюю массу // ДАН,
2005 . — Т . 405 . — № 1 . — С . 56—60 .
14 . Павловский В.Е . О разработках шагающих машин // Препринты ИПМ им . М .В . Келдыша, 2013 . — № 101 . — С . 1—32 .
15 . Лопота А.В ., Спасский Б.А . Robotics . A View of the Future // Мехатроника, автоматизация, управление, 2017 . — Т . 18 . — № 9 . — С . 612—615 .
16 . Formalskii A.M . Unstable Mechanical Objects: Motion Control, Stabilization // Horizon Research Publishing Corporation . Universal Journal of Mechanical Engineering, 2017 . — Т . 5 . —
№ 5 . — С . 150—169 .
17 . Керестень И.А ., Войнов И.Б ., Боровков А.И . Конечно-элементное моделирование и исследование влияния относительного поворота ротора микромеханического гироскопа
на возникающий электростатический момент // Неделя науки СПбПУ Материалы научного форума с международным участием . Институт прикладной математики и механики . 2016 . — С . 71—73 .
Глава 5. Разработка новых механизмов для современных робототехнических систем
143
18 . Григорьянц А.Г ., Шишов А.Ю ., Фунтиков В.А . Технологии локальной лазерной обработки
электротехнической анизотропной стали диодными лазерами прямого действия // Технология машиностроения, 2017 . — № 8 . — С . 37—42 .
19 . Ющенко А.С . Коллаборативная робототехника — новые задачи и решения // Десятая
Всероссийская мультиконференция по проблемам управления (МКПУ-2017) . Материалы 10-й Всероссийской мультиконференции в 3-х томах / Отв . ред . И .А . Каляев .
2017 . — С . 137—139 .
20 . Хейло С.В ., Разумеев К.Э ., Гаврюшин С.С ., Гарин О.А ., Глазунов В.А ., Шарапов И.Б . Роботы
параллельной структуры медицинского назначения // Биотехнология: состояние и перспективы развития материалы IX международного конгресса, 2017 . — С . 315—318 .
21 . Артоболевский И.И . Научное наследство: Естественнонаучная серия / Сост . Е .С . Артоболевская, В .С . Ярунин / Отв . ред . К .В . Фролов . — М ., 2005 . — Т . 32: «Жизнь и наука» . — Сер .: «Научное наследство» .
22 . Корендясев А.И ., Саламандра Б.Л ., Тывес Л.И . Теоретические основы робототехники . —
М .: Наука, 2006 . Кн . 1: 382 с .; Кн . 2: 375 с .
23 . Чунихин А.Ю ., Глазунов В.А . Разработка механизмов параллельной структуры с пятью
степенями свободы, предназначенных для технологических роботов . // Проблемы машиностроения и надежности машин, 2017 . — № 4 . — С . 3—11 .
24 . Диментберг Ф.М. Метод винтов в прикладной механике . — Москва: Машиностроение .
1971 . — 264 с .
25 . Пространственный механизм с пятью степенями свободы / Чунихин А .Ю ., Глазунов В .А .,
Скворцов С .А ., Духов А .В . / Патент РФ на полезную модель № 160127 . Б .И . — 2016 . — № 7 .
26 . Пространственный поступательный механизм с тремя степенями свободы / Козырев А .В ., Глазунов В .А ., Артеменко Ю .Н ., Каганов Ю .Т . / Патент РФ на полезную модель № 133043 . Б .И . — 2013 . — № 28 .
27 . Пространственный механизм со стабилизирующими кинематическими цепями / Ганиев Р .Ф ., Касилов В .П ., Глазунов В .А ., Левин С .В ., Шалюхин К .А . / Патент РФ на полезную модель № 133045 . Б .И . — 2013 . — № 28 .
28 . Пространственный механизм / Ганиев Р .Ф ., Касилов В .П ., Глазунов В .А . / Патент РФ
на полезную модель № 134474 . Б .И . — 2013 . — № 32 .
29 . Пространственный механизм / Ганиев Р .Ф ., Касилов В .П ., Глазунов В .А . / Патент РФ
на полезную модель № 142566 . Б .И . — 2013 . — № 32 .
30 . Манипулятор параллельной структуры с пятью степенями степени подвижности /
Глазунов В .А ., Борисов В .А ., Левин С .В ., Шалюхин К .А ., Шарапов И .Б . / Патент РФ
на полезную модель № 169275 . Б .И . — 2017 . — № 8 .
31 . Котельников В.А ., Котельников М.В ., Филиппов Г.С . Диагностика плазменных потоков
с помощью ориентированных зондов . Теория и практика зондовых измерений // LAP
LAMBERT Academic Publishing, 2016 . — С . 340 .
32 . Котельников В.А ., Котельников М.В ., Филиппов Г.С . Физическое, математическое и численное моделирование пристеночной плазмы применительно к системам авиационнокосмической техники и волновым технологиям . Регулярная и хаотическая динамика . —
Ижевск, 2018 . 280 С .
33 . Филиппов Г.С ., Николаенко В.С ., Ященко Б.Ю ., Евдокимов И.Е . Расчет индикатрисы сложного излучателя // Научно-технический вестник Поволжья, 2012 . — Т . 5 . — С . 50—54 .
34 . Николаенко В.С ., Филиппов Г.С ., Раца И.И ., Ященко Б.Ю . Расчет и снижение тепловой
заметности двигателя летательного аппарата // 15-я Международная конференция
«Авиация и космонавтика», 2016 . Москва .
35 . Lee F . Webb Hush kit for jet engine . US Patent № US 5592813 . 1995 .
36 . Noise reduction conduit for non rotary components of aircraft engines . Patent № ЕР 1391597 .
2002 .
ГЛАВА 6
НОВЫЕ МЕХАНИЗМЫ
ДЛЯ ПРОТЕЗОВ РУК
И ДВУРУКИХ РОБОТОВ
Воробьев Е.И.
В главе предложена функциональная схема системы управления и алгоритм управления протезами рук и двуруких роботов . Метод полуавтоматического управления
протезами рук позволяет реализовать манипуляционными роботами наиболее
сложные операции . В этом случае часть операции выполняется в автоматическом
режиме, а часть — в следящем режиме при участии человека . Применение данного метода к протезам рук позволяет значительно увеличить функциональность
протезов . Применение этого метода к двуруким роботам позволяет выполнять
сложные операции, в том числе и дистанционно . Протез руки рассматривается
как манипуляционная робототехническая система, оснащенная устройством целеуказания положения предмета среди других, датчиками положения и микроконтроллером . При этом переносные движения кисти протеза выполняются в автоматическом режиме, а ориентирующие движения кисти — в следящем режиме,
с помощью движения от задающего устройства, расположенного в обуви .
Созданием протезов рук люди занимаются уже много лет, однако задача создания протеза руки, приближающегося по своим функциональным возможностям
к руке человека, до сих пор не решена . Одним из основных препятствий для решения этой задачи является дефицит управляющих сигналов, необходимых для
управления протезом . Причем этот дефицит возрастает с увеличением потерянной части руки .
Наибольшие успехи в настоящее время достигнуты при создании протезов
кисти руки . В этом случае используются управляющие сигналы от биопотенциалов, оставшихся мышц предплечья и плеча . Впервые метод управления протезами
рук от биопотенциалов был предложен профессором Кобринским А .Е . в 1957 году
и с тех пор развивается в разных странах [1] .
Однако при полной потере руки такие возможности отсутствуют . Во многих
странах мира ведутся интенсивные работы по использованию для управления
протезами рук сигналов, получаемых от остатков нервов плеча или непосредственно снятой информации с головного мозга . Однако большинство этих методов предполагает использование хирургических операций .
Альтернативным подходом для управления протезами рук является метод использования сигналов от движения удаленных от протеза частей тела человека .
В частности, для управления пальцами протеза и ориентации кисти в работе [2]
предложено использовать сигналы от движения пальцев ног и стопы .
6.1. Целеуказание положения предмета и осуществление переносных движений
145
В настоящей работе предлагается для управления полным протезом руки (при
потере всей руки) метод полуавтоматического управления . Метод предполагает,
что при управлении протезом руки часть операций выполняется в автоматическом режиме (переносное движение кисти), а часть операций (ориентация кисти
и движения пальцев протеза) от движений пальцев ноги и стопы .
6.1. ЦЕЛЕУКАЗАНИЕ ПОЛОЖЕНИЯ ПРЕДМЕТА
И ОСУЩЕСТВЛЕНИЕ ПЕРЕНОСНЫХ ДВИЖЕНИЙ
Для осуществления переносного движения кисти протеза в автоматическом режиме необходимо знать положение захватываемого предмета среди других, располагаемых, например, на столе .
Для этого предполагается использовать систему целеуказания . Предлагаемая
система целеуказания состоит из налобной повязки с контроллером, лазерного
дальномера и системы гироскопов (рис . 6 .1) .
Рис. 6.1. Функциональная схема системы целеуказания протеза руки
Определение положения предметов производится в системе координат OXYZ, связанной с телом человека и расположенной в плече. С головой человека связана система
координат 01X1Y1Z1.
Будем считать, что система O1X1Y1Z1 смещена относительно системы OXYZ на величины a, b, c, соответственно осям X, Y, Z. В системе O1X1Y1Z1 расстояние R до предмета определяется дальномером, а углы α и β, определяющие поворот головы человека, — гироскопом. С учетом вышесказанного, координаты предметы в системе X, Y, Z
будут равны:
x = a + r cos β sin α;
y = b + r cos β sin α;
z = r sin β + c .
(6 .1)
146
Глава 6. Новые механизмы для протезов рук и двуруких роботов
Переносное движение кисти руки к предмету может быть реализовано в автоматическом режиме, например по одной команде «кивка» от головы .
Кинематическую схему механизма переносного движения протеза руки примем в виде механизма с тремя степенями свободы (рис . 6 .2) .
Рис. 6.2. Кинематическая схема механизма переносного движения протеза руки
В качестве управляющих функций примем углы относительного поворота звеньев механизма протеза: φ1, φ2, α . Для построения алгоритмов управления движением кисти протеза из начального положения в конечное, необходимо знать
значения углов φ1, φ2, α в этих, заданных положениях кисти . Значения углов в начальном положении и в текущем задаются датчиками относительного положения,
которыми оснащается протез .
В конечном положении кисти управляющие углы могут быть определены через координаты X, Y, Z, которые, в свою очередь, определяются системой целеуказания . Запишем координаты кисти (точки C) в следующем виде:
x = cos φ1(l2 cos φ2 + l3 cos φ3);
(6 .2)
y = sin φ1(l2 cos φ2 + l3 cos φ3);
(6 .3)
z = l2 sin φ2 + l3 sin φ3 .
(6 .4)
где φ3 = φ2 + α; l2, l3 — длины звеньев .
Определим угол φ1 из (6 .2) и (6 .3), получим:
y
ϕ1 = arctg .
x
(6 .5)
Далее определим угол α, возводя в квадрат и складывая (6 .2) и (6 .4):
−1
α = arccos
x 2 ( cos 2 ϕ1 ) + z 2 − l22 − l32
2l2 l3
.
(6 .6)
6.1. Целеуказание положения предмета и осуществление переносных движений
147
Угол φ2 найдем из (6 .4), учитывая, что φ3 = φ2 + α, получим:
a sin φ2 + b cos φ2 + c = 0,
(6 .7)
где a = l2 + l3 cos α; b = l3 sin α; c = –z .
Уравнение (6 .7) сводится к квадратичному путем замены sin φ2 и cos φ2 через
tg φ2/2, таким образом получим:
a12 tg 2
ϕ2
ϕ
+ b1 tg 2 + c1 = 0,
2
2
(6 .8)
откуда
0,5
−1
ϕ2 = 2 arctg − a1 ± ( c1 − b1 ) ( c1 + b1 ) ( c1 − b1 ) ,
(6 .9)
где a1 = c – b; b1 = 2a; c1 = c + b .
Полученные выражения для углов φ1, φ2, α позволяют построить алгоритм автоматического управления переносным движением протеза руки к предмету для
его захвата от одной команды (рис . 6 .3) .
ϕ1 = arctan
y
x
x2
+ z 2 − l22 − l32
2
cos ϕ1
α=
2l2 l3
− a ± a2 − ( c − b ) ( c + b )
ϕ2 = 2 arctan
c−b
Рис. 6.3. Алгоритм определения конечного положения протеза руки
148
Глава 6. Новые механизмы для протезов рук и двуруких роботов
6.2. ОПРЕДЕЛЕНИЕ УПРАВЛЯЮЩИХ СИЛ
ПРИ ВЫВОДЕ СХВАТА МАНИПУЛЯТОРА
В ЗАДАННУЮ ТОЧКУ ПРОСТРАНСТВА
С ЗАДАННОЙ СКОРОСТЬЮ
Зная положение и скорость механизма в начальном и конечном положениях, можно осуществить переносное движение кисти протеза на основе решения обратной
задачи динамики [3] .
Чтобы осуществить движение схвата манипулятора по заданной траектории,
необходимо вначале вывести его в некоторую точку этой траектории с вектором
линейной скорости, касательным к траектории . Пусть в исходном состоянии
схват имел координаты (xk yk zk ), а его линейная скорость была равна нулю . Требуется определить управляющие силы, осуществившие перевод манипулятора
в состояние, в котором схват занял положение (xk yk zk ), с вектором скорости uk ,
причем движение было устойчивым и носило плавный характер .
Дифференциальное уравнение движения манипулятора с n степенями свободы имеет вид:
∑ Aij ( q j , cs ) qɺɺi + B j ( q j , qɺi ) = Q j ( j = 1, …, n),
где cs (s = 1, … , m) — постоянные параметры механизма .
Это уравнение для решения поставленной задачи удобно решить в векторной
форме:
A ( q ) qɺɺ + B ( q , qɺ ) = Q ,
(6 .10)
где A(q) — матрица размером nxn; B ( q , qɺ ) — вектор размером 1xn; q , qɺ , qɺɺ — векторы размером 1xn .
Связь обобщенных координат q1 с декартовыми координатами схвата тоже
можно представить в векторном виде:
X = F(q),
(6 .11)
где x = [x, y, z]T; F(q) — вектор размером 1xn .
Выражение (6 .11) определяется конкретной схемой манипулятора . Дифференцируя (11) дважды по времени, получим:
xɺ = J ( q ) qɺ ;
(6 .12)
Xɺɺ = J ( q ) qɺɺ + p ( q , qɺ ),
(6 .13)
где J(q) — матрица Якоби, имеющая вид:
∂F ( q )
J (q ) =
,
∂q
p ( q , qɺ ) — вектор размером 1xn .
6.2. Определение управляющих сил при выводе схвата манипулятора в заданную точку
149
Для обеспечения плавности нарастания скорости примем закон ее изменения в виде:
xɺ = Φ ( t ) ( v0 − vk ) − v0 ,
(6 .14)
где Ф(t) — матрица, имеющая вид
Ф(t) = exp At,
Для устойчивости движения системы все собственные значения матрицы
А должны быть либо отрицательными, либо иметь отрицательную действенную часть .
Запишем решение дифференциального уравнения (6 .13) в виде:
X ( t ) = A −1 [ I − Φ ( t )]( v k − v 0 ) + v k t + x0 .
(6 .15)
Так как вектор скорости схвата в начальный момент времени равен нулю,
получим:
x ( t ) = A −1 [ I − Φ ( t )] vk + vk t + x0 .
(6 .16)
Используя (6 .16), найдем параметры матрицы А из условия достижения заданной скорости vk в заданной точке rk . Для этого поставим значение вектора положения схвата в точке Mk в выражение (6 .16), получим:
X k ( t ) = A −1 I − Φ ( tk ) vk + vk tk + x0 .
(6 .17)
Учитывая то, что все проекции вектора скорости схвата должны быть сформированы одновременно, а также свойство экспоненты, можно записать:
tk I = 3A–1 .
(6 .18)
A = αI .
(6 .19)
Следовательно, задача сводится к отысканию коэффициентов α . Для их нахождения из (6 .17) и (6 .19) запишем:
xk = vk tk + x0 .
(6 .20)
Однако эти условия будут справедливы только в случае идеальной обработки
движения . Но в процессе нормального функционирования системы возможно
влияние возмущений, которые приведут к тому, что схват будет двигаться по смещенной траектории и в результате разовьет требуемую скорость не в заданной точке
xk , а в некоторой другой точке пространства . Чтобы исключить это нежелательное
явление, потребуем, чтобы отклонение от x(t) было убывающей функцией вида:
2
X ( t ) − ( x0 − vk t + A −1 [ I − Φ ( t )] vk ) = ∑ exp Bi t cI .
(6 .21)
i =1
Выражение (6 .21) является решением однородного вектора дифференциального уравнения второго порядка вида:
∆xɺɺ = K1∆xɺ + K 2 ∆x .
(6 .22)
150
Глава 6. Новые механизмы для протезов рук и двуруких роботов
Здесь K1 = B1 + B2; K2 = –B1B2, где B1 и B2 — матрицы, у которых все собственные
значения отрицательные либо имеют отрицательные действительные части . При
этом обеспечивается устойчивость движения около программного значения координат; кроме того, обозначено:
∆xɺɺ = xɺɺ ( t ) − AΦ ( t ) vk ;
∆xɺ = xɺ ( t ) − ( I + Φ ( t ) ) vk ;
(6 .23)
∆x = x ( t ) − x0 + It − A −1 ( Φ ( t ) − I ) vk .
С учетом (6 .22) формулу для ускорения можно представить следующим образом:
Xɺɺ ( t ) = K1∆xɺ + K 2 ∆x + AΦ ( t ) vk .
(6 .24)
Далее, если организовать движение схвата так, чтобы ускорение изменилось
по закону (6 .23), то поставленная задача будет выполненной .
Решая совместно (6 .10) и (6 .11), находим вектор управляющих моментов:
Q = D ( q ) J −1 ( q ) ( K1∆xɺ + K 2 ∆x ) − p ( q , qɺ ) − H ( q , qɺ ) .
(6 .25)
Выражение (6 .25) для управляющих сил Q представляет собой нелинейную
вектор-функцию времени, обобщенных координат и скоростей, которые обеспечивают выход схвата манипулятора и заданную точку пространства с заданным
вектором скорости и при котором гарантирует требуемое свойство движения
по скорости и положению .
Таким образом, переносное движение кисти протеза или схвата робота может
быть реализовано в автоматическом режиме от одной команды после определения
положения захватываемого предмета .
6.3. ОСУЩЕСТВЛЕНИЕ ОРИЕНТИРУЮЩИХ ДВИЖЕНИЙ
Ориентирующий механизм с двумя поступательными и одним вращательным
приводами .
Ориентирование кисти протеза руки целесообразно осуществлять механизмом, имеющим один вращательный и два поступательных привода (рис . 6 .4) .
Задача управления сферическим механизмом параллельной структуры рассматривалась в работах [4] .
Связь между углами поворота кисти φ1 и φ2 и перемещениями в поступательных приводах S1 и S2 имеет вид:
S12 = b1 + h + a1 − 2b1a1 cos ϕ2 − b1h cos ϕ1 sin ϕ2 ;
(6 .26)
S22 = b22 + a22 − 2b2 a2 cos ϕ1 − 2b2 hsin ϕ1 ,
(6 .27)
где h, bi , ai (i = 1, 2) — постоянные размеры механизма ориентации; Si (i = 1, 2) —
перемещения в линейных приводах .
6.3. Осуществление ориентирующих движений
151
Рис. 6.4. Кинематическая схема механизма ориентации кисти протеза руки
При заданных углах φ1 и φ2 перемещения в линейных приводах определяются
из (6 .26) и (6 .27) . Поворот вокруг оси Z на угол φ3 реализуется независимо . Алгоритм управления ориентирующим движением кисти показан на рис . 6 .5, где Sx,
Sy — сигналы углов от датчиков положения кисти, S1, S2 — преобразованные значения углов текущего положения кисти .
Рис. 6.5. Алгоритм управления ориентирующим движением протеза кисти руки
152
Глава 6. Новые механизмы для протезов рук и двуруких роботов
Сложность реализации ориентирующих движений протеза руки связана
с отсутствием точных конечных значений положения кисти протеза при захвате предмета . Это положение определяется на основе зрительной обратной связи человека . Поэтому это движение реализуется в следящем режиме от угловых
перемещений стопы ноги и под визуальным контролем человека . Управляющие
сигналы формируются от тактильной стельки, вложенной в обувь, и от угловых
перемещений стопы .
Для реализации необходимых угловых перемещений используется принцип
обратной связи .
Текущее положение кисти протеза определяется на основе зрительной обратной связи . Разница между текущим и реальным положением кисти в виде управляющего сигнала от стельки переводится в цифровую форму и поступает в вычислительный блок, где происходит сравнение текущего положения с необходимым
и выработка управляющих сигналов для приводов . Привод управляется при помощи двух двоичных сигналов: сигнала включения и сигнала выбора направления
перемещения . Направление перемещения определяется знаком разности . При
равенстве измеренного и заданного положений одного привода он отключается
и выдается сигнал разрешения включения второго привода, который работает
аналогично . Текущие значения углов хранятся в запоминающих суммирующих
регистрах команды на поворот по осям X и Y, вызывают увеличение или уменьшение значений углов в соответствующих запоминающих регистрах на 10 градусов каждую секунду, пока команда активна, для чего на синхронизирующие входы
регистров подаются тактовые импульсы со специального генератора . Движение
ориентации кисти протезом выполняется в следящем режиме от сигналов специальной стельки, располагаемой в обуви .
6.4. ОСУЩЕСТВЛЕНИЕ ЗАХВАТА ОБЪЕКТОВ
РАЗЛИЧНОЙ ФОРМЫ
6.4.1. Протез кисти руки с пневмоприводом
Наиболее привлекательным для управления протезом кисти руки является использование движений пальцев ног, которые обладают наиболее высокой подвижностью и позволяют получить независимые движения пальцев протеза, которое
может развиваться путем тренировок . Для повышения удобства таких протезов
необходимо использовать дистанционную систему управления .
На рис . 6 .6 показана реализованная на практике функциональная схема
протеза кисти руки с управляемыми пневматическими упругими элементами
(сильфоны) в качестве приводов . Контур управления содержит оператора с пультом-стелькой 5 управления, который размещен на стопе, систем управления и исполнительный механизм захвата (пальцев) . На пульте-стельке управления соответствующим образом выполнены контактные датчики, принимающие сигналы
оператора, которые через усилители 2 поступают на электромагнитный пневмораспределитель 10 . Учитывая особенность работы пневмораспределителей, предусмотрен глушитель шума 11 . Возвратные пружины 13 обеспечивают пальцам
нормально раскрытое положение . Усилие захвата создают сильфоны-приводы,
6.4. Осуществление захвата объектов различной формы
153
деформируемые избыточным давлением воздуха, поступающим из ресивера 1,
давление в котором поддерживается насосом постоянной производительности 4 .
Давление в ресивере настроено на максимальную мощность, которую может развить протез при захвате предмета .
Рис. 6.6. Функциональная схема протеза кисти руки с управляемыми пневматическими упругими элементами:
1 — аккумулятор; 2 — воздухозаборник; 3 — воздушный фильтр; 4 — компрессор;
5 — стелька; 6 — контактный датчик на стельке; 7 — усилитель; 8 — датчик давления; 9 — ресивер; 10 — электромагнитный пневмораспределитель; 11 — глушитель
шума; 12 — сильфон привода пальца; 13 — возвратная пружина; 14 — тяга; 15 — рычаг для поворота пальца
На стельке размещено 6 тактильных датчиков, преобразующих силу нажатия
пальцев ноги и отдельных областей стопы в электрические сигналы, необходимые
для управления протезом . Сигналы с четырех датчиков, размещенные в области
пальцев, используются для непосредственного управления перемещениями пальцев протеза . Датчик в области пятки служит для фиксации положения кисти и отключает управление при ходьбе . Оставшийся датчик позволяет контролировать
усилие, развиваемое захватом .
Каждый датчик состоит из изолирующего основания 1 с металлизацией
в виде двух групп соединенных между собой контактов 2 и 3, ячеистой прокладки из изоляционного материала и мембраны 6 с токопроводящим покрытием 5
(рис . 6 .7) . Один полюс источника напряжения подключен к первой группе контактов . Второй — через нагрузочный резистор Rн ко второй группе . Когда к мембране в районе ячейки прикладывается внешняя сила Р, мембрана, прогибаясь,
замыкает контактные группы проводящим слоем . Через резистор протекает ток,
154
Глава 6. Новые механизмы для протезов рук и двуруких роботов
пропорциональный площади соприкосновения мембраны с контактами, которая
зависит от внешней силы . Падение напряжения на нагрузочном резисторе служит
выходным информационным сигналом .
Рис. 6.7. Контактный датчик на стельке
6.4.2. Дистанционное управление протезом руки
Для удобства управления протезом от удаленных движений тела необходимо дистанционное управление . На рис . 6 .8 и 6 .9 представлена функциональная схема
дистанционного управления .
Рис. 6.8. Устройство управления (на стельке)
В памяти контроллеров управляющего устройств записаны частоты 100 радиоканалов и уникальный номер для идентификации .
1 . Включение управляющего и исполнительного устройства .
2 . Управляющее устройство сканирует рабочий диапазон на наличие помех
и выбирает канал для передачи .
3 . Управляющее устройство посылает команду исполнительному устройству
перейти на выбранный канал и включить выходные усилители .
4 . Исполнительное устройство отправляет подтверждение приема .
6.4. Осуществление захвата объектов различной формы
155
5 . Управляющее устройство при приеме подтверждающего сигнала включает индикатор готовности к работе и начинает считывать состояние
датчиков .
6 . При получении сигнала с датчика на стельке управляющее устройство посылает кодовый сигнал .
7 . Исполнительное устройство принимает сигнал и включает соответствующий пневмораспределитель, а также посылает подтверждение
приема .
8 . Исполнительное устройство считывает состояние пневмораспределителей
и посылает подтверждение срабатывания привода . Если привод не сработал, то он отключается и посылается сигнал ошибки .
9 . Если сигнал подтверждения от исполнительного устройства не принят через заданное время, управляющее устройство меняет номер канала и подтверждает передачу .
Рис. 6.9. Исполнительное устройство
На рис . 6 .10 и 6 .11 показан многофункциональный протез кисти руки, управляемый от пальцев ноги .
156
Глава 6. Новые механизмы для протезов рук и двуруких роботов
Рис. 6.10. Элементы протеза кисти руки
Рис. 6.11. Захват кистью протеза руки предмета сложной формы
157
6.5. Алгоритм управления пальцами протеза руки
6.5. АЛГОРИТМ УПРАВЛЕНИЯ
ПАЛЬЦАМИ ПРОТЕЗА РУКИ
В работе предложен алгоритм управления пальцами протеза руки при захвате
жесткого объекта на основе нелинейной динамической модели пальцев протеза .
Для решения задачи использовался метод обратных задач динамики .
Динамическая модель системы
Будем считать, что палец протеза имеет две
степени свободы и представляет из себя
два стержня, соединяющихся между собой
и с кистью вращательными парами А и В
(рис . 6 .12) .
Рис. 6.12. Кинематическая схема пальцев руки:
φ1 и φ2 — углы, образуемые осями стержней 1 и 2
с осью Ах, соответственно
Будем считать, что масса звеньев m1 и m2 расположены в шарнирах B и C .
Скорости точек B и C, соответственно, равны
V B = ϕɺ 1l1 ;
VC = V B + VCB ;
2
+ 2V BVCB cos ( ϕ2 − ϕ1 ) = ϕɺ 12 l12 + ϕɺ 22 l22 + 2ϕɺ 1ϕɺ 2 cos ( ϕ2 − ϕ1 ) .
VC2 = V B2 + VCB
Кинетическая энергия системы равна
T = T1 + T2 = ϕɺ 12 ( m1 + m2 ) l12 + ϕɺ 22 m2 l22 + ϕɺ 1ϕɺ 2 l1l2 cos ( ϕ2 − ϕ1 ),
здесь l1, l2 — длина звеньев 1 и 2; φ̇ 1, φ̇ 2 — производные по времени от углов φ1 и φ2 .
Используя уравнение Лагранжа, получим следующие уравнения движения
системы
ɺɺ1 ( m1 + m2 ) l12 + ϕ
ɺɺ 2 m2 l1l2 cos ( ϕ2 − ϕ1 ) − ϕɺ 22 m2 l1l2 sin ( ϕ2 − ϕ1 ) +
ϕ
+2 m2 l1l2 sin ( ϕ2 − ϕ1 ) ϕɺ 1ϕɺ 2 = M1 ;
(6 .28)
ɺɺ 2 m2 l22 + ϕ
ɺɺ1m2 l1l2 cos ( ϕ2 − ϕ1 ) + ϕɺ 12 m2 l1l2 sin ( ϕ2 − ϕ1 ) = M 2 ,
ϕ
(6 .29)
здесь M1 и M2 — моменты приводов в шарнирах А и В .
φ2 = φ1 + β .
Задачей построения движения пальцев протеза руки при захватите объекта
будем считать перемещение пальцев протеза из некоторого начального положеi
i
, φ 20
(i = 1, 2, 3, 4, 5) в конечное положение с координатания с координатами φ 10
i
i
ми — φ 11, φ 21 .
158
Глава 6. Новые механизмы для протезов рук и двуруких роботов
Управляющими функциями в данном случае будем считать моменты приводов M1 и M2 или при использовании электроприводов, управляющие напряжением приводов .
Алгоритм управления движением пальцев синтезируем, исходя из условия изменения углов поворота звеньев согласно решению дифференциального уравнения вида эталонной модели
ɺɺ ∗j ( t ) + α j1ϕɺ ∗j + α j 0 ϕ∗j = α j1ϕ∗j1 ,
ϕ
(6 .30)
здесь φ*j — углы координат звеньев эталонной модели j = 1, 2 индекс; αj 0 = const > 0,
αj1 = const > 0, при этом характеристические уравнения для (6 .30) будет иметь корни, расположенные в левой полуплоскости, а решение уравнения будет обладать
свойством φ*j (t) → φ*j1 .
Движение пальцев будет происходить по предписанному закону, если для
каждого момента времени будет выполняться равенство
ɺɺ j ( t ) = ϕ
ɺɺ ∗j ( t ),
ϕ
то есть ускорение обобщенных координат механизма будет равно ускорению
по этим же координатам эталонной модели .
Согласно эталонной модели (6 .30) это ускорение равно
ɺɺ ∗J = α j 0 ( ϕ∗J 1 − ϕ∗J ) − α j1ϕɺ ∗J .
ϕ
(6 .31)
Представим уравнение движения пальцев в виде
ɺɺ1 + a12 ϕ
ɺɺ 2 + a13 ϕɺ 22 = M1 ;
a11ϕ
(6 .32)
ɺɺ1 + a22 ϕ
ɺɺ 2 + a23 ϕɺ 2 = M 2 ,
a21ϕ
где
a11 = ( m1 + m2 ) l12 ;
a21 = m2 l1l2 cos ( ϕ2 − ϕ1 );
a12 = m1l1l2 cos ( ϕ2 − ϕ1 );
a22 = m2 l22 ;
a13 = m1l1l2 sin ( ϕ2 − ϕ1 ) .
a23 = m2 l1l2 sin ( ϕ2 − ϕ1 ) .
Подставляем (6 .31) в выражение (6 .32) динамической модели, получим для
каждого пальца два уравнения для управляющих моментов
(
(ϕ
)
−ϕ )−α
(
(ϕ
)
−ϕ )−α
∗
M1 = a11 α10 ϕ10
− ϕ1∗ − α11ϕɺ 1∗ − a12 α 20 ϕ∗20 − ϕ∗2 − α 21ϕɺ ∗20 + a13 ϕɺ 22 ;
M 2 = a21 α10
∗
10
∗
1
ɺ∗
11ϕ1
+ a22 α 20
∗
20
∗
2
ɺ∗
21ϕ2
+ a23 ϕɺ 2 ,
где aij (i, j = 1, 2) — коэффициент уравнений динамики пальцев .
Если принять за управление функции момента M1(φ1, φ2, φ̇ 1, φ̇ 2) и M2(φ1,
φ2, φ̇ 1, φ̇ 2), то эти функции могут быть реализованы с использованием обратных связей от механизма . Структурная схема алгоритма управления показана
на рис . 6 .13 .
6.6. Очувствление протеза руки
159
Рис. 6.13. Структурная схема алгоритма управления
6.6. ОЧУВСТВЛЕНИЕ ПРОТЕЗА РУКИ
При использовании метода полуавтоматического управления протезом руки число управляющих сигналов может быть значительно уменьшено, в том числе и сигналов от биопотенциалов .
Для надежного захвата предметов различной формы и жесткости необходимо оснащение протеза системой тактильного и силового очувствления . Наиболее
легко решение этих задач достигается использованием электроприводов .
Биопотенциалы мышц регистрируются при помощи электродов (2 электрода
на сгибающую и разгибающую мышцы и 1 нулевой электрод) . Электрические сигналы электродов усиливаются инструментальными усилителями . Из усиленного
сигнала выделяется переменная часть, несущая информацию об интенсивности
нервных импульсов, которая поступает на выпрямитель и усилитель постоянного
тока . Усиленный постоянный сигнал переводится в цифровую форму встроенным АЦП микроконтроллера .
Привод протеза осуществляется коллекторным двигателем постоянного тока .
Двигатель подключен к транзисторному H-образному мосту, что позволяет менять
направление и скорость вращения . Сигналы управления поступают от входов микроконтроллера . В цепь питания мостовой схемы включен шунтирующий резистор, падение напряжения на котором пропорционально току двигателя . Сигнал
шунта усиливается, проходит фильтр и подается на вход АЦП микроконтроллера .
Оцифрованные сигналы биопотенциалов сравниваются с пороговым значением и при превышении подается сигнал включения двигателя . Сигналы от сгибающей и разгибающей мышц сравниваются между собой, и по результатам
160
Глава 6. Новые механизмы для протезов рук и двуруких роботов
выбирается направление вращения двигателя . Скорость двигателя пропорциональна амплитуде сигнала с мышц .
Бионическая обратная связь осуществляется при помощи вибрационного актуатора, установленного на браслете вместе с электродами, размещаемыми на руке .
Амплитуда и частота вибрации пропорциональна силам, развиваемым протезом
(сила сжатия кисти, поворот запястья и т .д .) . Вибрационный актуатор состоит
из электродвигателя с закрепленным на нем эксцентриком, транзисторного ключа, который управляется сигналами шин (широтно-импульсной модуляции) .
Частота и амплитуда актуатора пропорциональны значению тока двигателя
привода .
Система очувствления использует датчики нормальной силы, расположенные
в подушечках пальцев протеза . Датчики представляют собой резисторы, чувствительные к давлению, включенные в делитель напряжения . При действии внешней
силы на палец протеза изменяется сопротивление датчика и напряжение на делителе . Полученный сигнал усиливается логарифмическим усилителем и поступает
на вход порогового устройства, которое не пропускает сигналы меньше заданного
уровня, что позволяет исключить влияние помех . Логарифмический усилитель
увеличивает чувствительность в диапазоне малых усилий и расширяет рабочий
диапазон системы . Обработанная таким образом информация используется для
управления приводами пальцев и осуществления тактильной обратной связи .
Тактильная обратная связь достигается при помощи пяти вибрационных актуаторов (микродвигатели с эксцентриками на валах), встроенных в специальный
браслет . Амплитуда вибрации зависит от силы, действующей на соответствующий
датчик .
6.7. ДВУРУКИЕ РОБОТЫ
Двурукие роботы используются при выполнении сложных рабочих операций
в космосе, океане, при работе с радиоактивными материалами и в медицине .
В последнее время двурукие роботы рассматриваются как одно из направлений
развития робототехники .
Манипуляционные возможности двуруких роботов
Появление двуруких роботов обусловлено несколькими причинами . Одна из этих
причин связана с возможностью обеспечения относительного движения рабочих
звеньев с бóльшим числом степеней свободы при помощи двух разных манипуляторов, использующих меньшее число степеней свободы каждого . Например,
шесть степеней свободы рабочих звеньев (φ, ψ, θ, ∆x, ∆y, ∆z) при относительном движении рабочих звеньев можно обеспечить, задействуя оба манипулятора
с тремя степенями свободы каждого, что позволяет значительно повысить точность относительного манипулирования .
Другая причина связана с необходимостью совершения относительного манипулирования рабочих звеньев при выполнении сложных операций двумя руками и сборке изделий . Действие двух рук на объект одновременно при переносе
объекта позволяет также снизить нагрузку на каждую руку .
Известно, что необходимым условием реализации движения твердого тела
в пространстве является наличие шести степеней свободы у манипуляционной
6.7. Двурукие роботы
161
системы . Определим число степеней свободы механической манипуляционной
системы, образующейся при захвате твердого тела двуруким роботом, имеющим
два манипулятора, каждый с шестью степенями свободы .
При захвате объекта обоими манипуляторами с шестью степенями свободы
звено 6 манипулятора I, объект и звено 6 манипулятора II образуют одно звено,
следовательно, общее число звеньев системы n = 11 . Число пар пятого класса всей
системы равно 12 .
Таким образом, число степеней свободы всей системы при одновременном
захвате объекта обоими манипуляторами равно шести:
W = n – 5p5 = 6 · 11 – 5 · 12 = 6 .
Это означает возможность реализации общего случая твердого тела в пространстве данным двуруким роботом .
Одной из основных задач, возникающих при выполнении двурукими роботами различных операций, является задача реализации относительных движений их
рабочих звеньев — схватов [5] .
Кроме того, при построении рабочих движений двуруких роботов необходимо
учитывать, что манипуляторы работают в пересекающихся рабочих зонах и следует избегать столкновения звеньев при одновременном воздействии на объект .
Будем считать, что оба манипулятора имеют антропоморфную схему с парами
пятого класса, обладают каждый шестью степенями свободы, имеют общее неподвижное звено и единую систему управления .
Наиболее сложные операции выполняются человеком с помощью двух рук .
C точки зрения механики эти операции сводятся к осуществлению заданного относительного движения двух твердых тел .
Двурукий робот имеет возможность обеспечить относительное движение рабочих звеньев с большим числом степеней свободы при помощи двух разных манипуляторов, использующих меньшее число степеней свободы каждого . Например,
шесть степеней свободы рабочих звеньев (φ, ψ, θ, ∆x, ∆y, ∆z) при относительном
движении рабочих звеньев можно обеспечить, задействуя оба манипулятора с тремя степенями свободы каждый (рис . 6 .14), что позволяет значительно повысить точность относительного манипулирования . Рассмотрим этот вопрос на примере двурукого робота, имеющего два манипулятора с тремя степенями свободы каждый .
На рис . 6 .14 показан двурукий робот с трехподвижными манипуляторами
у которого 1, 2, … , 6 — звенья манипуляторов; Ai , Bi , Ci — кинематические пары
манипуляторов, где i = 1, 2, 3; C3 и C4 — точки центров схватов манипуляторов .
Другая причина связана с необходимостью совершения относительного манипулирования рабочих звеньев при выполнении сложных операций двумя руками, например при сборке изделий . Действие двух рук на объект одновременно при
переносе объекта позволяет также снизить нагрузку на каждую руку .
Относительное положение рабочих звеньев 3 и 4 будем определять матрицей .
M 43
α11
α
= 21
α31
0
α12
α 22
α32
α13
α 23
α33
a
b
,
c
0
0
1
162
Глава 6. Новые механизмы для протезов рук и двуруких роботов
где αi j (i, j = 1, 2, 3) — косинусы углов между координатными осями систем координат С3 x3 y3 z3, С4 x4 y4 z4, связанных, соответственно, с рабочим звеном первого
и второго манипуляторор, a, b, c — координаты начала системы С3 x3 y3 z3 в системе
С4 x4 y4 z4 . Элементы этой матрицы считаем заданными . При непрерывном движении элементы этой матрицы являются функциями относительных углов поворота
звеньев, подлежащих определению .
Рис. 6.14. Манипуляторы двурукого робота
Абсолютные и относительные положения
звеньев манипуляторов
Абсолютные положения звеньев i относительно неподвижной системы координат
определяются произведением матриц
n
M oi = ∏ M i − 1i ,
i =1
где Mi – 1, i — матрица перехода от системы номера i к системе i – 1; n — число звеньев манипулятора .
Будем считать, что оси соседних пар перпендикулярны друг другу . Со звеньями свяжем системы декартовых координат . Тогда система координат предыдущего
звена i может быть совмещена с системой последующего звена i + 1 поворотом
вокруг оси zi на угол φi + 1, и переносом по этой оси на li + 1; или поворотом вокруг
оси xi – 1 на угол φi .
Соответствующие матрицы имеют вид .
cos ϕi + 1
− sin ϕi + 1
M i , i + 1 =
0
0
sin ϕi + 1
cos ϕi + 1
0
0
0
0 0
;
1 li +1
0 0
0
M i − 1, i
0
1
cos
ϕi
0
=
0 − sin ϕi
0
0
0
sin ϕi
cos ϕi
0
0
0
. (6 .33)
0
1
6.7. Двурукие роботы
163
Согласно (6 .33) абсолютные положения звеньев
манипулятора определяются путем перемножения
матриц относительного положения звеньев .
Найдем элементы αi j в матрице, определяющие
относительную угловую ориентацию схватов, через направляющие косинусы αi(1)
и αi(2)
, определяj
j
ющих угловые положения схватов в неподвижной
системе координат, показанной на схеме относительного положения рабочих звеньев манипулятора
(рис . 6 .15) .
Рис. 6.15. Рабочие звенья
Направляющие косинусы αi(1)
и αi(2)
являются манипуляторов
j
j
проекциями единичных векторов систем координат схватов на оси неподвижной системы координат . Тогда по свойству скалярного произведения векторов можно записать выражение для угла между векторами осей x1 и x2:
(1) ( 2 )
(1) ( 2 )
(1) ( 2 )
α12 = α11
α 21 + α12
α 22 + α13
α 23 .
Аналогично можно найти углы между любыми сочетаниями орт систем координат, связанных со звеньями первого и второго манипулятора, и построить
матрицы относительного углового положения звеньев, входящих в разные манипуляторы .
Условия допустимого сближения звеньев
При построении рабочих движений двух манипуляторов в одной рабочей зоне необходимо избежать пересечения звеньев .
Допустимое расстояние между точками рабочих звеньев d разных манипуляторов, например F1 и F2, можно определить по формуле
2
2
2
d < ( x1 − x2 ) + ( y1 − y2 ) + ( z1 − z2 )
12
,
где xi , yi , zi (i = 1, 2) — координаты характерных точек рабочего звена . Эти точки
выбираются в зависимости от формы рабочих звеньев и выполняемой операции .
Определим расстояние между звеньями манипуляторов . Будем считать, что
звенья манипулятора представляют собой стержни .
Кратчайшее расстояние между осями звеньев разных манипуляторов можно
найти, зная абсолютное положение этих осей . Кратчайшее расстояние между осями звеньев d1 может быть определено как проекция вектора (lm – l n) на направление h:
d1 = ( lm − ln ) h ,
где l m и l n − соответственно, радиус-векторы точек M и N, лежащих на осях звеньев; h — единичный вектор, направленный по линии кратчайшего расстояния
между осями .
164
Глава 6. Новые механизмы для протезов рук и двуруких роботов
Условие отсутствия пересечения звеньев в пространстве имеет вид
( lm − ln ) h ≥ d1 ,
где d1 — расстояние безопасного сближения звеньев .
Реализация заданного относительного движения двух твердых тел
Рассмотрим задачу реализации заданного относительного движения двух
твердых тел, перемещающихся в пространстве с помощью двурукого робота, каждая рука которого имеет три степени свободы, общее число степеней свободы
равно шести .
Будем считать, что с захватами 3 и 4 связаны декартовые системы координат
соответственно С3 x3 y3 z3 и С4 x4 y4 z4, и задача состоит в реализации относительного
движения систем координат С4 x4 y4 z4 относительно систем С3 x3 y3 z3 .
Задание относительного движения тел 3 и 4 означает задание их ориентации
и задание положения начал систем координат, в относительном движении .
Произведем переход от системы координат С3 x3 y3 z3, связанной со звеном 3,
к неподвижной системе координат Axyz двумя способами, через звенья манипулятора 1 и через звенья манипулятора 2 .
Тогда можем записать матричные уравнения связи:
M01M12M23 = M06M65M54M43,
где Mij (i, j = 0, 1, … , 6) — матрицы перехода 4-го порядка от системы номера i
к системе номера j .
Произведя перемножение матриц в левой и правой частях, получим систему
двенадцати нелинейных уравнений, связывающих шесть углов относительного
поворота звеньев . Углы относительного поворота звеньев могут быть использованы как управляющие функции при реализации заданного относительного движения тел 3 и 4 .
Однако полученные уравнения являются нелинейными и их решение в конечном виде может быть получено лишь в некоторых частных случаях .
Рассмотрим решение задачи, когда один манипулятор имеет только поступательные кинематические пары . Перемножив матрицы, получим:
M 03 =
C ϕ1C ϕ3 − S ϕ1C ϕ2 S ϕ3
−C ϕ1S ϕ3 − S ϕ1C ϕ2C ϕ3
S ϕ1S ϕ2
xC3
S ϕ1C ϕ3 + C ϕ1C ϕ2 S ϕ3
− S ϕ1S ϕ3 + C ϕ1C ϕ2C ϕ3
−C ϕ1S ϕ2
yC3
S ϕ2 S ϕ3
S ϕ2C ϕ3
C ϕ2
zC3
0
0
0
1
, (6 .34)
где Cφi , Sφi (i = 1, 2, 3) — cos φi и sin φi соответственно .
Четвертый столбец матрицы представляет собой координаты точки С3 в неподвижной системе координат .
xC3 = l3 (C ϕ1C ϕ3 − S ϕ1C ϕ2 S ϕ3 ) + l2 S ϕ1S ϕ2 ;
yC3 = l3 ( S ϕ1C ϕ3 + C ϕ1C ϕ2 S ϕ3 ) − l2C ϕ1S ϕ2 ;
zC3 = l3 S ϕ2 S ϕ3 + l2C ϕ2 + S1 .
165
6.7. Двурукие роботы
Для манипулятора 2 с поступательными парами ориентация системы С4 x4 y4 z4,
связанной со звеном 4 не меняется при движении в этих парах, следовательно,
ориентация систем 3 и 4 определяется только углами φ1, φ2, φ3 .
Приравнивая соответствующие элементы матриц (6 .34) и (6 .33) найдем выражение управляющих функций для манипулятора 1 в виде
ϕ1 = arctg
α13
;
α 23
ϕ2 = arccos α33 ;
ϕ3 = arctg
α31
.
α32
Четвертый столбец матрицы (6 .34) также может быть представлен в виде:
xC3 = xC4 + a;
yC3 = yC4 + b;
zC3 = zC4 + c,
где xC4 , yC4 , zC4 — координаты точки C4 в неподвижной системе координат, реализуемые перемещением в поступательных парах l1, l2, l3 манипулятором 2 . Управляющие функции для манипулятора 2 имеют вид:
l1 = xC3 + a;
l2 = yC3 + b;
l3 = zC3 + c .
Для реализации заданного относительного сферического движения звеньев 3
и 4 координаты точек C3 и C4 должны совпадать, то есть в этом случае a = b = c = 0;
=
l1 x=
yC3 ; l3 = zC3 .
C3 ; l2
Реализация заданного плоско-параллельного движения
двух твердых тел
Заданы постоянные параметры плоского двурукого робота, показанного на кинематической схеме (рис . 6 .16) . li (i = 1, 2, 3, 4) — длины звеньев, AE = l .
Задано относительное движение системы координат, связанной со схватом
звена 4 C4x4y4, относительно системы координат схвата C2x2y2,
( )
xC24 ( t ) = a ( t );
( )
yC24 ( t ) = b ( t )
(6 .35)
угол α(t) между осями Cx2 и Cx4 систем C2 x2 y2 и C4 x4 y4:
α = α (t) .
(6 .36)
Выражение (6 .35) и (6 .36) будем считать программой относительного манипулирования . Управляющими величинами в данном случае являются величины
φi (t), i = 1, 2, 3, 4 углы относительного поворота смежных звеньев .
Найдем эти управляющие функции .
Через α2 и α4 обозначим углы абсолютного поворота звеньев 2 и 4 относительно системы Axy .
Запишем координаты точки C4 в неподвижной системе координат Axy с одной
стороны:
xC4 = ( l2 + a ) cos α 2 − b sin α 2 + l1 cos ϕ1 ;
yC4 = ( l2 + a ) sin α 2 + b cos α 2 + l1 sin ϕ1 .
(6 .37)
166
Глава 6. Новые механизмы для протезов рук и двуруких роботов
Рис. 6.16. Кинематическая схема плоского двурукого робота
С другой стороны:
xC4 = l4 cos α 4 + l3 cos ϕ3 + l ;
yC4 = l4 sin α 4 + l3 sin ϕ3 .
(6 .38)
Приравниваем (6 .37) и (6 .38), получим:
( l2 + a ) cos α2 - b sin α2 + l1 cos f1 = l4 cos α4 + l3 cos f3 + l ;
( l2 + a ) sin α2 + b cos α2 + l1 sin f1 = l4 sin α4 + l3 sin f3 .
(6 .39)
Кроме того, имеем
α2 – α4 = α .
(6 .40)
Уравнения (6 .39) и (6 .40) связывают параметры заданного относительного
движения: a, b, α с управляющими функциями φ1, φ2, φ3, φ4 и могут быть использованы для их определения . Причем:
φ2 = α2 – φ1; φ4 = α4 – φ3.
Отметим, что три уравнения связывают четыре искомые функции φi (i = 1, 2,
3, 4), поэтому одну из этих функций, например φ1, примем постоянной .
6.7. Двурукие роботы
167
Найдем другие управляющие функции . Определим вначале KC4 и KN, где точка K — точка пересечения осей звеньев 2 и 4, причем C4N перпендикулярна BK
KC4 =
b
;
sin α
KN = b ctg α .
Тогда
BK = l2 + a + b ctg α = b2 ;
DK = l4 +
b
= b4 .
sin α
Далее можно найти величину BD через известные величины:
BD = b22 + b4 2 − 2b2 b4 cos α
12
= f .
Зная величину BD найдем угол φ3, запишем:
(BD)2 = (xB′ – xD)2 + (yB′ – yD) 2 = f 2,
xD = l3 cos φ3, yD = l3 cos φ3.
(6 .41)
Подставив xD и yD в (6 .41), получим
2
= C;
A cos ϕ3 + B sin ϕ3 = x B2 + yB2 + l32 − l23
A = 2 x B l3 ;
B = 2 yB l3 ;
(6 .42)
C = x B2 + yB2 + l32 − f 2 .
Из уравнения (6 .42) найдем угол φ3, решая квадратное уравнение для φ3/2 .
Найдем угол φ2:
φ2 = γ + β – φ1,
где γ — угол DBA; β — угол DBK .
Угол β находится из треугольника BKD и равен
b
β = arcsin α 4 .
f
Угол γ находится из треугольников ABD и AED и равен
l 2 + l32 + 2ll3 cos ϕ − l1 − f 2
γ = arccos
.
2l1 f
Угол φ4 находится из выражения φ4 = φ1 + φ2 + α – φ3 .
Задача осуществления заданного относительного движения двух твердых
тел с помощью двух манипуляторов является одной из новых задач робототехники . Задача сводится к решению прямых и обратных задач кинематики и динамики манипуляторов с учетом дополнительных условий устранения пересечения звеньев .
Для реализации заданного относительного движения общего вида двух твердых тел можно использовать два манипулятора с числом степеней свободы,
168
Глава 6. Новые механизмы для протезов рук и двуруких роботов
равным трем у каждого, причем один из которых должен иметь не менее трех вращательных пар .
Для реализации заданного относительного плоского движения двух твердых тел достаточно использовать два манипулятора соответственно с двумя
и одной степенью свободы, один из которых должен иметь не менее двух вращательных пар .
Литература
1 . Кобринский А.Е . и др . Биоэлектрическая система управления // Доклады АН СССР,
1957 . — Т . 117 . — № 1 . — С . 78—80 .
2 . Воробьев Е.И., Михеев А.В ., Моргуненко И.О . Метод управления протезом руки от движения пальцев ног и стопы // Проблемы машиностроения и надежности машин, 2017 . —
№ 1 . — С . 73—76 .
3 . Воробьев Е.И ., Попов С.А ., Шевелева Г.И . Механика промышленных роботов . — Кн . 1:
Кинематика и динамика . — М .: Высшая школа, 1988 . — С . 304
4 . Глазунов В.А ., Хейло С.В . Решение задачи управления сферическим механизмов параллельной структуры // Проблемы машиностроения и автоматизации, 2014 . — № 2 . —
С . 27—33 .
5 . Воробьев Е.И . Осуществление заданного относительного движения двух твердых тел
двуруким роботом // Механика твердого тела, 2018 . — № 2 . — С . 122—128 .
ГЛАВА 7
НОВЫЕ МЕХАНИЗМЫ
РОБОТ-ШАРОВ,
ПРИВОДИМЫХ В ДВИЖЕНИЕ
ВНУТРЕННИМИ ПЕРЕМЕЩЕНИЯМИ
ЗВЕНЬЕВ
Соколов С.В.
ВВЕДЕНИЕ
Использование существующих моделей трения в традиционной постановке при
моделировании динамики мобильных роботов с нетрадиционной конструкцией
движителей дает большие погрешности, при сравнении с экспериментальными
данными . Причем анализ работ ведущих зарубежных [1—2] и отечественных исследователей [3, 4], работающих в области разработки новых роботов, подтвердил необходимость разработки математических моделей, способных описать взаимодействие тел сложной формы, изготовленных в том числе и из современных
композиционных материалов . В результате проведения аналитических и численных исследований качения и скольжения тел по различным поверхностям были
сформулированы новые комбинированные математические модели движения тел
по поверхностям, включающие различные режимы качения и скольжения . При
помощи полученных моделей получено описание регулярных и хаотических типов движения в рассматриваемых системах, указаны особо замечательные периодические решения, проведен их бифуркационный анализ . Результаты этих исследований и подробное изложение математических моделей, описывающих как
современную точку зрения на движение тел по шероховатым поверхностям, так
и приложения этих концепций к математическим моделям движения конкретных робототехнических устройств, а также идеи управляемости движений этих
устройств и принципы, лежащие в основе управления (в том числе оптимального)
данными системами, опубликованы в работах [5—15 и др .] . Данные модели послужили основой создания высокоточных систем управления целого класса робототехнических систем, разработанных с использованием принципиально новых
движителей .
В данной главе описаны экспериментальные образцы сферических роботов,
приводимых в движение и управляемых различными способами . Приведены технические решения компоновки как движителей, так и схем управ сферических
роботов . В вышеуказанных работах, в частности, разработаны математические
170 Глава 7. Новые механизмы робот-шаров, приводимых в движение внутренними перемещениями
модели движения роторного сфероробота при наличии трения различного рода
в точке контакта .
Для образцов робототехнических устройств развиты необходимые алгоритмы управления на базе предложенных в перечисленных работах моделей качения
и конструктивных особенностей роботов . Наиболее важной частью робототехнических систем является их информационно-измерительная система, которая
обеспечивает взаимодействие с человеком, окружающим миром или подобными
роботами . Проведение крупных ежегодных мировых соревнований и конференций в этой области демонстрирует огромный интерес всего мирового сообщества
к решению научных и технических задач очувствления роботов . В ходе разработки описанных в данном разделе сферических роботов особое внимание уделялось
разработке алгоритмов управления движением мобильных транспортных роботов,
разработке систем их ориентации и навигации, интеллектуальные системы локального позиционирования с применением системы технического зрения и алгоритмов распознавания окружающих объектов . В частности, реализованы алгоритмы,
использующие заранее спланированные движения (в частности, оптимальные)
и игровые (генетические) алгоритмы управления в условиях неопределенности и
с дефицитом управляющих воздействий, для сконструированных сферороботов .
7.1. СФЕРОРОБОТ
С РОТОРНО-ИНЕРЦИОННЫМ ДВИЖИТЕЛЕМ
Сфероробот с роторно-инерционным движителем предназначается для перемещения по горизонтальной плоской поверхности . Движение сфероробота происходит за счет создания инерционной движущей силы (момента) при обеспечении
ускоренного движения масс (роторов), расположенных внутри сферы . Для этого внутри сферического корпуса в экваториальной плоскости установлены три
электромеханических привода с маховиками таким образом, что оси маховиков
расположены под углом 90 по отношению друг к другу . Для обеспечения точного поддержания заданных скоростей и ускорений приводы оснащены датчиками
обратной связи . Движущая сила заданной величины и нужного направления обеспечивается при создании определенного уровня ускорения инерционных масс,
а также направлений вращения одного, двух или сразу трех маховиков .
Экспериментальная модель роторного сфероробота была разработана, спроектирована и изготовлена для установления возможности осуществления управляемого движения сферического тела, оснащенного новым типом движителя .
Дополнительно в лабораторных условиях могут быть выяснены характеристики
подвижности, маневренности, а также возможные варианты реализации различных режимов управления движением . Целесообразно также оценить способность сфероробота начинать движение с исходной позиции в любом направлении
по углу (относительно неподвижной системы координат), при следовании по простым и усложненным траекториям, при поступательном движении, вращении
на месте, вращении во время движения по направлению и т .п .
Изучение и анализ характеристик движения предполагается проводить путем
наблюдения с помощью видеокамер перемещений сферы и видеозаписи параметров движения сфероробота с целью дальнейшей компьютерной обработки информации .
7.1. Сфероробот с роторно-инерционным движителем
171
Предполагается также изучить движение сфероробота по поверхностям, покрытым различными материалами .
На рис . 7 .1 и 7 .2 приведена конструктивная схема сфероробота с роторноинерционным движителем, соответственно, на виде сбоку и на виде сверху .
Рис. 7.1. Конструкция и основные узлы
экспериментальной модели сфероробота на виде сбоку
Рис. 7.2. Конструкция и основные узлы
экспериментальной модели сфероробота
на виде сверху
Сферический корпус состоит из двух одинаковых полусфер 1, выполненных
из прозрачного материала и присоединенных друг к другу по экваториальной плоскости . Диаметр сферы составляет D = 300 мм . Толщина сферической оболочки
(3—4 мм) и применяемый материал обеспечивают необходимую прочность при
движении (перемещении) сфероробота .
В целом сфероробот выполнен в виде сборно-модульной конструкции, основой которой является сферический корпус (оболочка) . Внутри оболочки на металлической дискообразной плите — платформе 2 — размещены и смонтированы
все узлы привода движения . Для установки платформы в экваториальной плоскости изнутри по краю каждой из полусфер прикреплен металлический обод 3 .
Поперечный профиль обода имеет Г-образную форму, что придает жесткость самому ободу и присоединенной оболочке полусферы . Это также дает возможность
соединить полусферы между собой и одновременно с платформой по посадке,
позволяющей легко надевать и снимать полусферы . Размещение узлов на платформе выполнено таким образом, чтобы в максимальной степени сосредоточить
массу вблизи геометрического центра сферы, а также по возможности обеспечить
минимальное отклонение центра масс по отношению к геометрическому .
Основным узлом привода движения является модуль-ротор 4 . В него входят
маховик 5, высокомоментный мотор-редуктор 6, размещенные на опорной детали
(опоре) 7, которая, в свою очередь, смонтирована на платформе 2 . В центральной
части платформы на нижней и верхней плоскости между маховиками 5 модульроторов установлены аккумуляторы 8 по три штуки с каждой стороны . Крепление аккумуляторов к платформе выполнено с помощью прижимов 9 . С нижней
172 Глава 7. Новые механизмы робот-шаров, приводимых в движение внутренними перемещениями
стороны платформы на прижимах размещены модули управления 10, выполняющие функции управления приводами, связи, контроля за перемещениями и др .
Управление движением, передача данных реализованы на беспроводном варианте связи . Устройство управления сферороботом предназначено для управления приводами трех роторов и связи с персональным компьютером, определяющим траекторию движения робота . На рис . 7 .3 приведена структурная схема
системы управления сфероробота, а на рис . 7 .4 — сфероробот с роторно-инерционным движителем в собранном состоянии .
Рис. 7.3. Структурная схема системы управления сферороботом:
ПК — персональный компьютер; МК —
микроконтроллер; ДПТ — двигатель постоянного тока
Рис. 7.4. Сфероробот с роторно-инерционным движителем в собранном состоянии
7.2. Сфероробот с внутренней омниплатформой
173
7.2. СФЕРОРОБОТ
С ВНУТРЕННЕЙ ОМНИПЛАТФОРМОЙ
Важным свойством мобильных роботов является маневренность, то есть способность робота быстро менять направление движения . К тому же, большое значение
имеет подвижность робота — способность к передвижению в заданных условиях .
Большинство современных мобильных роботов имеют недостаточную маневренность для выполнения различного рода задач . Например, движение при недостаточном свободном пространстве для оптимального перемещения транспортных
роботов или движение в труднодоступных, труднопроходимых и опасных для человека условиях . Одним из путей обеспечения высокой маневренности является
применение в качестве движителя сферы, а точнее роботов, все механизмы которых заключены внутри сферической оболочки . Присущая сферороботу полная
геометрическая симметрия дает ему принципиальную возможность перемещаться
в любом направлении . Для реализации такого движения необходимо разработать
определенный движущий механизм . Предлагаемый мобильный сфероробот имеет омниплатформу, которая позволяет ему начать движение в любом направлении
без предварительного переориентирования, что дает ему большое преимущество
в ряде подобных задач .
Все известные движущие механизмы сферических роботов можно разделить
на три группы:
• управление путем перемещения центра масс,
• управление путем создания переменного гиростатического момента,
• управление путем деформации формы шара .
Роботы, использующие первую схему управления, наиболее распространены .
Для перемещения центра масс внутри схемы используются такие варианты как
система маятникового типа, слайдеры, полозья, по которым движется масса, различные тележки, катающиеся внутри шара . Первый сфероробот был реализован
в 1996 г . Хальме и его комадой . Их робот имел одно активное колесо и одно поворотное . Активное колесо имело точку контакта со сферой в нижней части, над ним
располагался модуль управления, а поворотное колесо контактировало со сферой
в верхней части . С течением времени данный принцип управления сферороботами получил большое распространение, было спроектировано достаточно много
роботов, усовершенствованы схемы и алгоритмы управления .
Роботы, относящиеся ко второй категории, передвигаются за счет создания
переменного гиростатического момента, то есть для управления шаром используется гиростатический эффект . Еще в конце XIX в . С .А . Чаплыгиным была поставлена задача о качении уравновешенного динамически несимметричного шара
по плоскости . В дальнейшем данная система исследовалась многими учеными,
в частности показана алгебраическая управляемость этой системы, получены законы управления .
Третья схема управления, также получившая распространение в последнее
время, реализуется за счет деформации формы шара . Имея мягкую оболочку,
сфероробот может перемещаться и даже прыгать за счет ее деформаций .
Очевидно, что использование внутреннего приводного механизма в виде
платформы с тремя омниколесами позволит получить высокоманевренного робота . Рассмотрим существующие конструкции подобных моделей роботов .
174 Глава 7. Новые механизмы робот-шаров, приводимых в движение внутренними перемещениями
Первый робот — это робот-шар, внутри которого свободно размещается
трехколесное средство передвижения (рис . 7 .5) . Это устройство, которое может
перемещаться по плоской поверхности и менять направление, когда сталкивается с препятствием, которое не может быть преодолено . Данный робот состоит
из твердой полой оболочки 1, внутри которой располагается платформа 8, имеющая привод 2, который передает необходимый вращающий момент на правое
колесо 3 для движения вперед и поворотов . Левое колесо 4 свободно вращается
на оси, соединенной с платформой 8 . Переднее колесо 5 имеет сферическую форму, что позволяет роботу выполнять повороты . Привод соединен с аккумуляторной батареей 6 через выключатель 7, который выполняется либо магнито- либо
светочувствительным, что позволяет включать робота удаленно . Недостатком
данного изобретения является то, что приводным является только одно колесо .
Это сильно ограничивает подвижность и маневренность робота . Этот недостаток
устраняется установкой приводов на каждое колесо . Также можно отметить, что
при данной форме колеса крутящий момент от колеса к оболочке передается через
одну точку контакта .
Рис. 7.5. Робот-шар с трехколесной платформой
Второй подобный робот представляет из себя транспортное средство на гусеницах 2 в пустой прозрачной сфере 1 (рис . 7 .6) . Внутренняя платформа имеет
по одному приводному колесу с каждой стороны 12, 13, на которых с помощью
поддерживающих колес 3 установлены резиновые ленты 4, 5 . Привод 7 передает
крутящий момент на колеса 12, 13 через дифференциал 10, что приводит в движение гусеницы и, следовательно, сферическую оболочку . Для выполнения поворотов предусмотрены тормозные механизмы 8, 9, которые блокируют либо правую,
либо левую гусеницы . Тормозные механизмы приводятся в движение сервоприводом 14 . Также на платформе имеется радио-модуль 11, который принимает сигналы управления и запускает двигатель 7 и сервопривод 13, питающиеся от аккумуляторной батареи 6 . По сравнению с предыдущим рассмотренным роботом,
данная модель имеет преимущество в том, что гусеницы имеют большую площадь
контакта с внутренней поверхностью сферы, что обеспечивает большее сцепление
между платформой и сферой, а значит меньшую вероятность проскальзывания .
7.2. Сфероробот с внутренней омниплатформой
175
Но как и предыдущая модель, этот робот имеет недостаточную маневренность,
то есть не может начать движение в любом направлении без переориентирования
внутренней платформы . Кроме того, использование одного привода обеспечивает движение только в прямом направлении, так как нет возможности вращать гусеницы с разными скоростями .
Рис. 7.6. Робот-шар с гусеничной платформой
Далее рассмотрим робота, изображенного на рис . 7 .7, который внутри сферической оболочки 1 содержит 2 контактирующих с корпусом колеса 2, приводимые
в движение двумя двигателями 6, которые закреплены на платформе 10 . Так же
к платформе крепится груз 3, который обеспечивает устойчивость робота . Сигналы управления передаются с платы управления 7 по беспроводному интерфейсу .
Отличительной особенностью данного робота является то, что плата управления
имеет связку датчиков гироскоп-акселерометр 9, с помощью которых микроконтроллер 8, в зависимости от угла наклона платы, передает управляющий сигнал
приемникам 4, установленным на роботе . Таким образом, разработанная система
позволяет управлять роботом движениями кисти руки, предварительно закрепив
на ней плату управления . На платформе робота также находится микроконтроллер 5, который обрабатывает полученные сигналы с приемников и формирует
управляющие сигналы для вращения двигателей . Недостатком данного робота,
как и предыдущих, является невозможность движения в любом направлении без
переориентирования платформы . С предлагаемой системой управления робот
может работать только в ручном режиме управления .
Помимо недостаточной маневренности, все рассмотренные роботы не имеют
автономного режима работы . Для его реализации необходимо использовать
какую-либо навигационную систему, чтобы определять текущее положение
робота в пространстве .
Современным и перспективным направлением развития сферороботов является конструкция, содержащая трехколесную омниплатформы внутри сферической оболочки . Робота с данной конструкцией разработали ученые из Тайваня .
176 Глава 7. Новые механизмы робот-шаров, приводимых в движение внутренними перемещениями
На каждом колесе по периметру располагаются пассивные ролики, имеющие
иное направление вращения и расположенные под углом 90° к оси колеса .
Учеными были выведены кинематические уравнения движения и проведены
эксперименты, включающие движение по прямой, окружности и квадрату .
Ошибка перемещения робота составила от 10 до 50% . Это говорит о том,
что необходимо реализовать новый алгоритм управления, для повышения
маневренности и точности перемещения, т .е . получить возможность реализации
движений сфероробота по максимально сложным траекториям и обеспечения
автономности управления . Также на точность влияют некоторые механические
параметры робота, например чтобы исключить проскальзывание роликов,
необходимо их изготовить из материала с максимальным коэффициентом трения
о внутреннюю поверхность сферы .
Рис. 7.7. Робот-шар с двухколесной платформой
Сфероробот с омниплатформой внутри предназначается для перемещения
по горизонтальной плоской поверхности . Движение сфероробота происходит
за счет вращения трех омниколес . Для этого внутри сферического корпуса
на платформе установлены три омниколеса под углом 120° по отношению друг
к другу . Для обеспечения точного поддержания заданных скоростей и ускорений
используются шаговые приводы . Движущая сила заданной величины и нужного
направления обеспечивается при определенных скоростях вращения каждого
из омниколес .
Экспериментальная модель сфероробота с омниплатформой была разработана, спроектирована и изготовлена для установления возможности осуществления
управляемого движения сферического тела, оснащенного новым типом движителя . Дополнительно в лабораторных условиях могут быть выяснены характеристики подвижности, маневренности, а также возможные варианты реализации различных режимов управления движением . Целесообразно также оценить
7.2. Сфероробот с внутренней омниплатформой
177
способность сфероробота начинать движение с исходной позиции в любом направлении по углу (относительно неподвижной системы координат), при следовании по простым и усложненным траекториям, при поступательном движении,
вращении на месте, вращении во время движения по направлению и т .п .
Изучение и анализ характеристик движения предполагается проводить
путем наблюдения с помощью видеокамер перемещений сферы и видеозаписи
параметров движения сфероробота с целью дальнейшей компьютерной обработки
информации .
Предполагается также изучить движение сфероробота по поверхностям,
покрытым различными материалами .
На рис . 7 .8 приведена конструктивная схема сфероробота с омниплатформой .
Рис. 7.8. Конструкция и основные узлы экспериментальной модели сфероробота
Сферический корпус состоит и двух одинаковых полусфер 1, выполненных
из прозрачного материала из присоединенных друг к другу по экваториальной
плоскости . Диаметр сферы составляет D = 300 мм . Толщина сферической оболочки
(3—4 мм) и применяемый материал обеспечивают необходимую прочность при
движении (перемещении) сфероробота .
В целом сфероробот выполнен в виде сборно-модульной конструкции,
основой которой является сферический корпус (оболочка) . Внутри оболочки
на платформе 3, выполненной из АВС-пластика, размещены и смонтированы
все узлы привода движения . Размещение узлов на платформе выполнено таким
образом, чтобы в максимальной степени сосредоточить массу на минимально
возможном расстоянии от поверхности, для улучшения управляемости, а также
по возможности обеспечить минимальное отклонение центра масс по отношению
к геометрическому .
Основным узлом привода движения является шаговый мотор 5 . В него
входят омниколесо 2, высокомоментный шаговый мотор 5, размещенные
178 Глава 7. Новые механизмы робот-шаров, приводимых в движение внутренними перемещениями
на опорной детали (основании) 3 . Между колесными модулями установлены
аккумуляторы 4 . Крепление аккумуляторов к платформе выполнено с помощью
прижимов . С верхней стороны платформы на прижимах размещены модули
управления, выполняющие функции управления приводами, связи, контроля
за перемещениями и др .
Управление движением, передача данных реализованы на беспроводном
варианте связи .
На рис . 7 .9 приведена структурная схема системы управления сфероробота .
Обмен данными между персональным компьютером и микроконтроллером
устройства управления осуществляется по беспроводному высокочастотному
каналу связи Bluetooth . Каждый привод имеет энкодер (датчик вращения вала
с фиксацией направления) для обеспечения обратной связи по положению
вала двигателя постоянного тока, что в результате позволит задать необходимые
скорости вращения роторов .
Рис. 7.9. Структурная схема системы управления сферороботом:
ПК — персональный компьютер; МПУ — микропроцессорное устройство
Оператор на персональном компьютере (ПК) задает команды движения робота . Затем управляющие команды передаются на микропроцессорное устройство
(МПУ) по беспроводному интерфейсу связи . Далее микропроцессор обрабатывает полученные данные и формирует управляющий сигнал, подаваемый на драйверы двигателей, которые, в свою очередь, подают напряжение нужной формы
и амплитуды на шаговые двигатели . Плата управления также содержит трехосевой
датчик ускорений, датчик угловых скоростей и магнитометр, которые являются
внутренней навигационной системой и используются как датчики обратной связи для ориентации сфероробота в пространстве . Но данная система не позволит
отслеживать положение с достаточной точностью, так как при интегрировании
величин, принимаемых с датчиков, с течением времени накапливается ошибка .
7.2. Сфероробот с внутренней омниплатформой
179
Чтобы исключить эту ошибку, необходимо также использовать внешнюю навигационную систему . Например, это могут быть камеры, следящие за движением
робота, сопряженные с вычислительной системой для определения его текущих
координат .
Для управления роботом и определения его ориентации в пространстве
разработан специальный интеллектуальный измерительный модуль, выполняющий одновременно роль трехосевого акселерометра и трехосевого гироскопа .
В основе интеллектуального модуля выбрана микросхема MPU-6000: устройство, объединяющее 3-координатный гироскоп, 3-координатный акселерометр
и 9-координатные алгоритмы MotionFusion . Компания InvenSense, специализирующаяся в этой области, представила новое семейство датчиков MotionProcessors, предназначенных для потребительской электроники . В моделях семействах MPU-6000 впервые в мире в одном кристалле интегрирован гироскоп,
работающий в трех осях, и акселерометр, работающий в трех осях . Микросхема
содержит цифровой процессор Digital Motion Processor (DMP), обрабатывающий
сигналы, поступающие от датчиков . Помимо датчиков, есть 16-битные АЦП,
программируемые цифровые фильтры, генератор, работающий с точностью 2 %
в диапазоне температур от –40 °C до 85 °C, и датчик температуры . Потребляемый
ток составляет 5,5 мА, а напряжение питания — 2,5—3,6 В . Для связи с другими
компонентами системы используются шины I2C и SPI . Высокая степень интеграции MPU-6000 упрощает проектирование, высвобождает место на печатной плате, избавляет от необходимости калибровать отдельные датчики и кондиционировать сигналы перед обработкой . На рис . 7 .10 представлена структурная
схема данного модуля .
Рис. 7.10. Функциональная схема MPU-6000
Управление транспортным роботом осуществляется с персонального компьютера по каналу Bluetooth на частоте 2,4 ГГц .
Для управления сферороботом разработана программа на языке программирования С# . В программе предусмотрен один режим управления сферороботом — управление с помощью кнопок, расположенных на клавиатуре . Кнопки
позволяют выбирать ротор и направление его вращения . Причем возможно одновременное вращение нескольких роторов .
180 Глава 7. Новые механизмы робот-шаров, приводимых в движение внутренними перемещениями
Сфероробот, приводимый в движение за счет передвижения внутренней тележки на механум-колесах, представлен на рис . 7 .11 .
Рис. 7.11. Сфероробот в собранном состоянии
ЗАКЛЮЧЕНИЕ
В настоящей главе были рассмотрены две конкретные из достаточно многочисленного семейства схем приведения в движение сферических мобильных роботов .
Необходимо отметить, что на этих двух примерах проиллюстрированы основные
идеи, лежащие в основе конструирования движетелей нового типа . Это, с одной
стороны, различные связи, налагаемые на движение сферической облочки робота, а с другой стороны — перемещение внутренних масс, в результате создание
моментов внешних сил, действующих на робототехнический комплекс и приводящих его в движение . Создание новых сферических мобильных робототехнических устройств, безусловно, является актуальной научно-технической проблемой, прогресс в которой выведет на новый уровень решение таких прикладных
задач, как зондирование ландшафта зоны разграничения при боевых столкновениях наземных вооруженных сил, исследование поверхностей космических тел
на участках этих поверхностей, труднодоступных для колесных робототехнических комплексов и в условиях агрессивной окружающей среды и многих других .
Маневренность, управляемость, герметичность внутренних частей комплекса делает сферические роботы уникальными и перспективными .
7.2. Сфероробот с внутренней омниплатформой
181
Литература
1 . Ishikawa M ., Kitayoshi R ., Sugie T . Volvot: A spherical mobile robot with eccentric twin
rotors // Proc . of the IEEE Internat . Conf . on Robotics and Biomimetics (Phuket, Thailand,
Dec . 7—11, 2011) . — Pp . 1462—1467 .
2 . Svinin M ., Morinaga A ., Yamamoto M . On the dynamic model and motion planning for a class
of spherical rolling robots // Proc . of the IEEE Internat . Conf . on Robotics and Automation
(ICRA, 14—18 May, 2012) . — Pp . 3226—3231 .
3 . Маркеев А.П . Динамика тела, соприкасающегося с твердой поверхностью . — 2-е изд .,
испр . и доп . — М .—Ижевск: НИЦ Регулярная и хаотическая динамика ., Институт
компьютерных исследований, 2011 . — 463 с .
4 . Чаплыгин С.А . О движении тяжелого тела вращения на горизонтальной плоскости //
Исследования по динамике неголономных систем / С .А . Чаплыгин . — М .—Л .:
Гостехиздат, 1949 . — С . 9—27 . (См . также: Чаплыгин С.А . Собр . соч . — Т . 1 . — M .—Л .:
Огиз, 1948 . — С . 57—75 .)
5 . Borisov A.V ., Kilin A.A ., Mamaev I.S . Generalized Chaplygin′s transformation and explicit
integration of a system with a spherical support // Regul . Chaotic Dyn ., 2012 . — Vol . 17 . —
No . 2 . — Pp . 170— 190 .
6 . Борисов А.В ., Килин А.А ., Мамаев И.С . Как управлять шаром Чаплыгина при помощи
роторов // Нелинейная динамика, 2012 . — Т . 8 . — № 2 . — С . 289—307 . (См . также: Borisov A.V ., Kilin A.A ., Mamaev I.S . How to control Chaplygin′s sphere using rotors // Regul .
Chaotic Dyn ., 2012 . — Vol . 17 . — No . 3—4 . — Pp . 258—272 .)
7 . Kilin A.A . The dynamics of Chaplygin ball: The qualitative and computer analysis // Regul .
Chaotic Dyn ., 2001 . — Vol . 6 . — No . 3 . — Pp . 291—306 .
8 . Болсинов А. В ., Борисов А.В ., Мамаев И.С . Топология и устойчивость интегрируемых
систем // УМН, 2010 . — Т . 65 . — № 2 (392) . — С . 71—132 .
9 . Borisov A.V ., Mamaev I.S ., Kilin A.A . The rolling motion of a ball on a surface: New integrals
and hierarchy of dynamics // Regul . Chaotic Dyn ., 2002 . — Vol . 7 . — No . 2 . — Pp . 201—219 .
10 . Borisov A.V ., Mamaev I.S . The rolling motion of a rigid body on a plane and a sphere: Hierarchy
of dynamics // Regul . Chaotic Dyn ., 2002 . — Vol . 7 . — No . 2 . — Pp . 177—200 .
11 . Borisov A.V ., Mamaev I.S ., Bizyaev I.A . The hierarchy of dynamics of a rigid body rolling without slipping and spinning on a plane and a sphere // Regul . Chaotic Dyn ., 2013 . — Vol . 8 . —
No . 3 . — Pp . 277—328 .
12 . Borisov A.V ., Mamaev I.S ., Kilin A.A . Dynamic of rolling disk // Regul . Chaotic Dyn ., 2003 . —
Vol . 8 . — No . 2 . — Pp . 201—212 .
13 . Борисов А.В ., Килин А.А ., Мамаев И.С . Тележка с омниколесами на плоскости и сфере //
Нелинейная динамика, 2011 . — Т . 7 . — № 4 . — C . 785—801 .
14 . Borisov A.V ., Kilin A.A ., Mamaev I.S . How to Control Chaplygin′s Sphere Using Rotors, Regul .
Chaotic Dyn ., 2012 . — Vol . 17 . — No . 3—4 . — Pp . 258—272 .
15 . Borisov A.V ., Kilin A.A ., Mamaev I.S ., How to Control Chaplygin′s Sphere Using Rotors . II,
Regul . Chaotic Dyn ., 2013 . — Vol . 18 . — No . 1—2 . — Pp . 144—158 .
ГЛАВА 8
ИСПОЛНИТЕЛЬНЫЕ ЭЛЕМЕНТЫ
РОБОТОТЕХНИЧЕСКИХ
УСТРОЙСТВ С УПРАВЛЯЕМОЙ
УПРУГОЙ ДЕФОРМАЦИЕЙ
Гаврюшин С.С.
Достигнутые к настоящему времени успехи в области механики деформируемого
твердого тела и численных методов анализа, в сочетании с увеличением производительности вычислительной техники открыли возможность для создания на базе
стержневых и тонкостенных оболочечных конструкций новых и более совершенных функциональных элементов технических устройств .
Элементы нового поколения робототехнических, микроэлектромеханических
и микрооптоэлектромеханических устройств, в которых поставлена задача реализации заданного механического движения или силового воздействия на объект, допуская при этом возможность миниатюризации, получили наименование — актуаторы .
Актуаторная компонента, наряду с логической и сенсорной компонентой составляет триаду свойств, присущих современному техническому устройству и составляет основу для его последующей интеллектуализации в робототехнической
системе . Ведущие специалисты в области робототехники, микроробототехники
и микротехнологий признают, что имеющийся задел в подходах к созданию подсистем для сбора информации (сенсоры) и воздействия на объект (актуаторы) является сегодня слабейшим звеном систем управления в микроэлектромеханических
системах . Это заставляет переосмыслить традиционные подходы к разработке механической части робототехнических систем и активизировать работы по созданию
и внедрению принципиально новых механических функциональных устройств .
В этом свете весьма перспективной представляется идея создания актуаторов
на основе принципа управляемой упругой деформации . Использования принципа управляемой упругой деформации при проектировании технических систем,
в том числе и в конструкциях роботов, позволит существенно повысить их функциональные возможности и выйти на новый технический уровень, отвечающий
потребностям современного общества .
8.1. СПОСОБЫ РЕАЛИЗАЦИИ
МЕХАНИЧЕСКОГО ДВИЖЕНИЯ
И СИЛОВОГО ВОЗДЕЙСТВИЯ НА ОБЪЕКТ
Говоря о реализации механического перемещения в традиционных робототехнических приводах электродвигателя, сервопривода, гидравлического и пневматического устройства, отмечаем, что наряду с определенными преимуществами
8.1. Способы реализации механического движения и силового воздействия на объект
183
им присущи отдельные недостатки, которые могут перечеркнуть возможность их
практического использования . Так, в конструкциях сервоприводов подразумевается наличие движущих как жесткое целое деталей, систем, что влечет сопутствующие проблемы обеспечения герметичности, уменьшения трения, необходимости применения смазки . Особое место занимают пьезоприводы, однако масштаб
создаваемых ими перемещений может оказаться недостаточным для решения
ряда технологических задач .
В этой связи в качестве особого класса движителей (актуаторов) могут рассматриваться тонкостенные деформируемые конструкции, реализующие движение
за счет процесса управляемой упругой деформации .
Особенно остро необходимость в создании подобных робототехнических
устройств ощущается в области вакуумной техники и технологии . Технологический вакуум очень чувствителен к воздействию находящихся в нем объектов и,
тем более, работающих в нем механизмов . Работающие механизмы влияют на состав технологической остаточной газовой среды и ухудшают ее качественные характеристики, что в свою очередь оказывает непосредственное влияние на качество получаемых изделий .
Использование в исполнительных устройствах упруго-деформируемых тонкостенных элементов предоставляет уникальную возможность свести к минимуму неблагоприятные явления внешнего трения и воздействия нежелательного
дополнительного газового потока, ухудшающих технологическую среду . Такие
элементы механум-колеса, получили в литературе [1, 2, 3] название элементы
управляемой упругой деформации .
Элементы управляемой упругой деформации, используемые для межоперационной транспортировки и позиционирования полуфабрикатов изделий электронной техники при нанесении тонких пленок, оказались незаменимыми при
конструировании специфических робототехнических механизмов, известных как
белые роботы .
Впервые белые роботы, предназначенные для работы в электровакуумном
приборостроении, вакууме и сверхчистых средах, были рассмотрены в работах
А .Т . Александровой [1] . Роботы представляли собой комбинированные механизмы, использующие сильфоны и гибкие герметичные трубчатые элементы (рис . 8 .1) .
На рис . 8 .1 схематично представлен робот-манипулятор с четырьмя степенями свободы, предназначенный для формирования горизонтального перемещения, кругового перемещения в вертикальной и горизонтальной плоскостях,
а также захвата изделия . Внутри корпуса, смонтированного на соединительном
фланце 9, в направляющих втулках перемещается полый шток 1, внутрь которого
через штуцер 2 подается давление . Шток герметично введен в вакуумный объем
с помощью сильфонного разделительного элемента 8 . На конце штока, расположенного в атмосфере, расположен ролик, помещенный в паз кулачка 7, с помощью которого задается закон перемещения штока в горизонтальном направлении .
В части, расположенной в вакууме, полость штока герметично соединена с торцом гибкого герметичного трубчатого элемента 3 . Вертикальное и горизонтальное
круговые перемещения осуществляются в результате упругого деформирования
трубчатых элементов 3 и 6 . Суммарное перемещение формирует пространственное перемещение захватов 4 . Элементы 3 и 6 срабатывают одновременно при
184
Глава 8. Исполнительные элементы робототехнических устройств
подаче сжатого воздуха через штуцер 2 . К захватам 4 сжатый воздух поступает
через трубку 5 .
Рис. 8.1. Робот-манипулятор [1]
Последовательность движений робота, в соответствии с циклограммой работы, устанавливается кулачком, задающим цикл работы штоку 1 и распределительному золотнику . Фиксация относительно изделия в крайних положениях достигается установкой специальных упоров .
Для устранения внешнего трения (трения движения) в вакууме целесообразно
применять механизмы, в которых перемещение исполнительных органов является следствием их упругого деформирования под действием внешнего, не соприкасающегося со средой энергоносителя . Этому условию наиболее полно удовлетворяют элементы в форме тонкостенных оболочек: мембраны, сильфоны и гибкие
герметичные трубчатые элементы, известные как пружины Бурдона . Такие элементы известны достаточно давно и, в частности, применялись для измерения
давления в манометрах, за что получили название манометрических элементов .
Рабочая часть манометрических элементов под действием внутреннего давления
упруго деформируется, совершая при этом перемещения, величину которых при
соответствующем проектировании можно довести до размеров, соизмеримых
с геометрическими размерами самого элемента .
8.2. Принцип действия и основные виды упругих манометрических элементов
185
8.2. ПРИНЦИП ДЕЙСТВИЯ И ОСНОВНЫЕ ВИДЫ
УПРУГИХ МАНОМЕТРИЧЕСКИХ ЭЛЕМЕНТОВ
Рассмотрим принцип работы упруго-деформируемого трубчатого элемента — пружины Бурдона (рис . 8 .2), представляющего собой изогнутую по некоторому радиусу кривизны трубку, имеющую некруглую форму поперечного сечения [4, 5] .
Рис. 8.2. Манометрическая пружина (трубка Бурдона)
Одна из взаимно перпендикулярных осей поперечного сечения является продолжением главного радиуса кривизны оболочки . Как правило, один конец трубки жестко закреплен и соединен с энергоносителем, а второй конец загерметизирован и может перемещаться .
При подаче энергоносителя во внутреннюю полость трубки (рис . 8 .2a) поперечное сечение деформируется, стремясь при этом приблизиться к форме
окружности рис . 8 .2б . За счет смещения w в радиальном направлении волокно AB
должно было бы занять положение А′D, но поскольку стремится сохранить свою
первоначальную длину, оказывается в положении А′В′ . При этом трубка разгибается, ее центральный угол Ф0 изменяется на угол ∆Ф, а свободный конец перемещается на некоторое расстояние .
186
Глава 8. Исполнительные элементы робототехнических устройств
Угол ∆Ф зависит от ряда факторов, главными из которых являются давление,
подаваемое во внутреннюю полость трубки, центральный исходный угол, также
механические характеристики материала трубки, форма и размеры ее поперечного сечения и толщина стенки .
В качестве рабочих элементов механизмов робототехнических систем вакуумного оборудования можно используются различные конструктивные исполнения
манометрических пружин [2, 6] .
Рис. 8.3. Виды манометрических пружин
В регистрирующих и регулирующих манометрических приборах применяют
одновитковые пневматические пружины (рис . 8 .3а) . В приборах, где требуются
большие перемещения упругих элементов, используют многовитковые спиральные пружины (рис . 8 .3б) . При их использовании можно получить большие угловые перемещения, что значительно упрощает конструкцию передаточно-множительного механизма прибора . Для манометрических приборов высокого давления
находят применение витые манометрические пружины (рис . 8 .3в), которые вследствие деформации поперечного сечения под действием давления раскручиваются
вокруг центральной оси .
Формы поперечных сечений манометрических пружин также могут быть
весьма разнообразны . Как правило, форма поперечного сечения имеет сплюснутую форму (рис . 8 .4а), которая обеспечивает монотонную упругую характеристику пружины, т .е . зависимость изменения угла ∆Ф от рабочего давления Р . Для таких сечений для достижения заданного значения изменения угла ∆Фp необходимо
обеспечить изменения рабочего давления в диапазоне от 0 до Р + .
Имеется возможность за счет конструктивного изменения формы поперечного сечения [7] обеспечить реализацию дискретной характеристики (рис . 8 .4б) .
Следует отметить, что в этом случае показанная пунктиром ветвь диаграммы АС
является неустойчивой . При достижении значения верхнего критического давления Р + (точка А на диаграмме) манометрическая пружина скачком изогнется
на угол ∆Фp (точка В на диаграмме) . При снижении рабочего давления до Р – пружина скачком вернется в дочку D . Предложенное конструктивное решение позволяет создавать быстродействующие и более экономные с позиций энергопотребления робототехнические механизмы, поскольку для получения требуемого угла
∆Фp требуется изменение рабочего давления не на величину ∆Р = Р +, а на существенно меньшую величину ∆Р = Р + – Р – .
8.2. Принцип действия и основные виды упругих манометрических элементов
187
Рис. 8.4. Формы поперечного сечения и соответствующие им упругие характеристики
Пневматические пружины можно использовать в качестве привода в механизмах преобразования движения или в качестве рабочих элементов некоторых
функциональных механизмов вакуумного оборудования, совмещающих функции
приводного и исполнительных механизмов . Рабочие органы таких механизмов
получили название гибких герметичных трубчатых элементов (ГГТЭ) .
Наиболее ценными качествами механизмов на основе гибких герметичных
трубчатых элементов является полное исключение внешнего трения, снижение
веса конструкции, возможность создавать достаточно простые механизмы даже
при сложных законах перемещения, требующих промежуточного преобразования движения .
Формирование сложных видов перемещения может осуществляться последовательным соединением элементов с одинаковыми или отличающимися радиусами кривизны, определенным образом ориентированных относительно друг друга в плоскости и пространстве . Если необходимо, чтобы свободный конец ГГТЭ
перемещался по определенному закону (по какой-либо заранее заданной траектории), его рабочий элемент (манометрическую пружину) изгибают по переменному радиусу кривизны . Важным требованием, предъявляемым к механизмам перемещения на основе ГГТЭ, является фиксация крайних положений механизма .
Самый простой и надежный способ фиксирования положения механизма — применение упоров, которые не только фиксируют заданное положение механизма,
но и гасят колебания упругих систем .
Механизмы, использующие гибкие герметичные трубчатые элементы, применяются для выполнения все более широкого класса работ и в зависимости
от своего назначения могут быть разделены на три типа: механизмы свободного
перемещения; силового воздействия; комбинированные механизмы . Комбинированные многоцелевые механизмы на основе гибких герметичных трубчатых
элементов, выполняющие как функции перемещения, так и силового воздействия, получают в настоящее время все более широкое применение в различных
областях техники .
188
Глава 8. Исполнительные элементы робототехнических устройств
К механизмам свободного перемещения относятся механизмы, в которых
упругое деформирование манометрической пружины в форме гибкого герметичного трубчатого элемента вызывает лишь свободное перемещение конца элемента и не воспринимает внешней нагрузки, приложенной в плоскости действия
пружины . Примером механизма первой группы могут служить устройства экранирования, использующиеся в установках нанесения пленок или в различных вакуумно-термических установках . Схема такого устройства приведена на рис . 8 .5 .
Упругая деформация манометрической пружины под действием давления сжатого
воздуха обеспечивает отклонение рычага на угол, достаточный для того, чтобы
экраны перемещались за пределы смотрового окна и обратно .
Рис. 8.5. Устройство экранирования
Устройство экранирования аналогичного назначения, но с использованием
двух створок, приведено на рис . 8 .6 .
Рис. 8.6. Двухстворчатое устройство экранирования
К механизмам силового действия относятся механизмы на основе гибких герметичных трубчатых элементов, свободный конец которых вступает в силовое
взаимодействие с объектом в плоскости деформирования элемента . Наиболее характерными механизмами этого типа являются захваты .
Захват, показанный на рис . 8 .7, обеспечивает удержание на горизонтальной
поверхности плоской детали круглой формы, диаметр которой равен диаметру захвата в рабочем положении .
8.3. Математическая модель для анализа больших прогибов гибких оболочек
189
Рис. 8.7. Манометрический захват
На рис . 8 .8 показан комбинированный механизм [2], служащий для безударной фиксации в горизонтальной плоскости плоских деталей круглой формы с последующим поворотом относительно вертикальной оси . Диаметр детали равен
диаметру внутреннего контура захватывающего устройства в недеформированном состоянии . Основным элементом захватывающего устройства служит манометрическая пружина 1 . Круговое перемещение обеспечивает многовитковая
манометрическая пружина 2 .
Рис. 8.8. Механизм фиксации и поворота деталей круглой формы
8.3. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ
ДЛЯ АНАЛИЗА БОЛЬШИХ ПРОГИБОВ
ГИБКИХ ОСЕСИММЕТРИЧНЫХ ОБОЛОЧЕК
Основным свойством актуаторов, использующих принцип управляемой деформации, является реализация заданной траектории движения за счет изменения
формы элемента — его деформирования . При этом заложенные процессы деформирования должны обеспечивать большие перемещения, то есть перемещения,
190
Глава 8. Исполнительные элементы робототехнических устройств
соизмеримые с характерными размерами конструкции [4, 5, 8, 9] . В рамках этого
требования традиционные расчеты, предполагающие справедливость принципа
неизменности начальных размеров [8—10] в большинстве случаев оказываются
неприменимыми .
Реализовать движение за счет деформации для массивных тел представляется
проблематичным . Хотя и здесь возможны решения, связанные с использованием
сложных процессов и особых материалов: например, фазовые переходы в материалах с памятью формы . Поэтому в последующем изложении основное внимание будет
уделено стержневым и тонкостенным оболочечным элементам . Именно стержневые
и тонкостенные оболочечные элементы представляют широкое творческое поле для
создания спектра конструкций, реализующих принцип управляемой деформации .
Известно, что в тонкостенных элементах, даже находясь в рамках относительно малых упругих деформаций, можно реализовать большие перемещения [4, 8] .
При этом процесс деформирования может быть вызван действием разнообразных
внешних факторов: силового и кинематического воздействий, внутреннего или
внешнего давления, изменения температуры, фазовых превращений в сплавах
с памятью формы и т .д .
Для обеспечения требуемых эксплуатационных характеристик в процессе численного моделирования и проектирования элемента требуется провести
своеобразное программирование свойств будущей конструкции, при котором закладывается возможность реализации требуемых нелинейных деформационных
процессов, в том числе процессов, происходящих посредством хлопков или перескоков [11—13] . Как уже отмечалось выше, такие элементы получили в литературе
название элементы управляемой упругой деформации .
Наиболее адекватной и пригодной для обсуждаемых конструкций является
расчетная схема осесимметричной тонкостенной оболочки [14] . Данная схема позволяет свести задачу анализа процесса деформирования к решению нелинейной
краевой задачи для системы дифференциальных уравнений в обыкновенных производных .
Гибкие тонкостенные оболочечные конструкции находят широкое применение в современном машиностроении и приборостроении . В рамках данного
раздела работы излагается вывод основных соотношений и алгоритм численного
исследования для обширного класса гибких тонкостенных оболочек: осесимметричных мембран и куполов, манометрических криволинейных пружин (трубок
Бурдона), сильфонов, тороидальных компенсаторов, биметаллических куполов
и других тонкостенных конструкций, работающих при больших перемещениях .
При выводе использованы общие закономерности геометрической формы,
нагружения и напряженного состояния, обеспечивающие данным оболочкам
способность к упругим перемещениям, во много раз превышающим их толщину .
По своей форме оболочки перечисленных типов являются осесимметричными или близкими к сектору оболочки вращения . Во втором случае будем называть
оболочки — осесимметричными оболочками незамкнутыми в окружном направлении . Напряженное состояние для основной части такой оболочки предполагается постоянным или слабо изменяющимся в направлении окружной координаты, что накладывает определенные ограничения на закон изменения внешней
нагрузки вдоль окружной координаты и требует особых условий закрепления
и нагружения на окружных торцах .
8.4. Уравнения, описывающие осесимметричную деформацию тонкостенных оболочек
191
8.4. УРАВНЕНИЯ, ОПИСЫВАЮЩИЕ
ОСЕСИММЕТРИЧНУЮ ДЕФОРМАЦИЮ
ТОНКОСТЕННЫХ ОБОЛОЧЕК
В настоящем разделе приводятся основные соотношения варианта теории тонких
осесимметричных оболочек, сохраняющие преемственность с уравнениями, предложенными в работах [9, 15] . Соотношения подготовлены для применения метода,
использующего сведение нелинейной краевой задачи к решению системе нелинейных уравнений и задаче Коши . Поскольку при записи уравнений встречаются
некоторые, принципиальные для дальнейшего изложения моменты, а также некоторые модификации, связанные с расширением спектра исследуемых с их помощью задач, целесообразно остановиться на выводе соотношений более подробно .
Для описания формы произвольной оболочки вращения воспользуемся ассоциированной с оболочкой отсчетной поверхностью . В частном случае, в качестве
отсчетной поверхности используется эквидистантная или срединная поверхность
оболочки . Меридиональное сечение отсчетной поверхности в недеформированном состоянии запишем в параметрическом виде:
x0 = x0 (s0); y0 = y0 (s0),
(8 .1)
где s0 — независимая координата, отсчитываемая от предварительно выбранной
начальной точки до текущей точки — А0 вдоль дуги меридиана (рис . 8 .9); Х, Y —
правосторонняя декартова система координат, в которой ось Х направлена по радиусу, а ось Y совмещена с осью вращения оболочки x0; y0 — декартовы координаты текущей точки меридиана .
Рис. 8.9. К выводу основных геометрических соотношений
Введем в рассмотрение текущий угол наклона касательной к меридиану в недеформированном состоянии — θ0, отсчитываемый по правилу для правосторонней
192
Глава 8. Исполнительные элементы робототехнических устройств
системы координат, т .е . от оси Х к касательной, против часовой стрелки . Отметим
справедливость следующих геометрических соотношений:
dx
= cos θ0 ;
ds0
dy
= sin θ0 .
ds0
(8 .2)
Для обозначения параметров, относящихся к недеформированному состоянию оболочки, будем использовать нижний индекс «0» .
В деформированном состоянии (см . рис . 8 .9) рассматриваемая материальная
точка А0, принадлежащая отсчетной поверхности, переместится в новое пространственное положение А, характеризующееся координатами x, y и s, соответственно .
Геометрические соотношения, аналогичные (8 .2), но уже для деформированного состояния, запишутся в виде:
dx
= cos θ;
ds
dy
= sin θ .
ds
(8 .3)
Горизонтальная (u) и вертикальная (v) компоненты перемещения точки А,
и изменение угла поворота нормали ∆θ определяются соотношениями:
u = x – x0; v = y – y0; ∆θ = θ – θ0 .
(8 .4)
Для главных радиусов кривизны в рассматриваемой точке в исходном (недеформированном) и актуальном (деформированном) состояниях справедливы зависимости:
dθ
1
= 0;
ρm 0 ds0
1 dθ
= ;
ρm ds
sin θ0
1
=
;
ρt 0
x0
1 sin θ
=
.
ρt
x
(8 .5)
В выражениях (8 .5) и далее для обозначения величин, соответствующих меридиональному направлению используется нижний индекс «m», а окружному — «t» .
Линейная деформация элемента отсчетной поверхности в меридиональном направлении для текущего состояния будет равна:
εm =
ds − ds0
.
ds0
(8 .6)
При деформировании оболочек вращения незамкнутых в окружном направлении (пружин Бурдона) изменяется центральный угол оболочки . Введем в рассмотрение центральные углы оболочки Ф0 и Ф для исходного и актуального состояний, соответственно (рис . 8 .10) .
Относительное изменение центрального угла определится выражением:
χ=
Φ − Φ0
.
Φ0
(8 .7)
Для оболочки, замкнутой в окружном направлении, χ = 0 . Линейная деформация отсчетной поверхности в окружном направлении в соответствии с (8 .6)
и (8 .7) запишется в виде:
εt =
( x0 + u ) Φ − x0 Φ 0 = χ +
x0 Φ 0
u
(1 + χ ) .
x0
(8 .8)
8.4. Уравнения, описывающие осесимметричную деформацию тонкостенных оболочек
193
Рис. 8.10. К определению изменения центрального угла осесимметричной оболочки вращения незамкнутой в окружном направлении
Полное изменение главных кривизн элемента отсчетной поверхности связано с изменением текущего угла наклона касательной и длиной дуги следующими
соотношениями:
∆κ m = κ m − κ m 0 =
dθ dθ0
−
;
ds ds0
∆κt 0 = κt − κt 0 =
sin θ sin θ0
−
.
x
x0
(8 .9)
Отметим, что полное изменение кривизны в обоих направлениях складывается из изменения кривизны, вызванного действием нагрузки ∆κ F, и измерения
кривизны, вызванного изменением линейных размеров оболочки ∆κ L .
∆κ m = ∆κ mF + ∆κ Lm , ∆κt = ∆κtF + ∆κtL .
(8 .10)
Для описания непосредственно оболочки, являющейся трехмерным телом,
введем две лицевые поверхности оболочки, отстоящие от отсчетной поверхности на расстояниях h(+)(s0) и h(–)(s0) . Расстояния отсчитываются по направлению
внешней нормали к недеформированной отсчетной поверхности . Толщина оболочки в текущей точке является известной функцией координаты — S0 .
h (s0) = h(+) (s0) + h(–) (s0) .
(8 .11)
Нормальная координата ζ текущей материальной точки, принадлежащей оболочке, изменяется в пределах:
–h(–) (s0) ≤ ζ ≤ h(+) (s0) .
В соответствии с допущением о тонкостенности оболочки:
max |h (s0)| min (|ρmo |, |ρto |) .
(8 .12)
194
Глава 8. Исполнительные элементы робототехнических устройств
В рамках допущения о справедливости кинематической части гипотезы Кирхгофа — Лява [10, 14], материальные точки, принадлежащие нормали к недеформированной отсчетной поверхности, в процессе деформирования переходят
на нормаль к деформированной отсчетной поверхности, сохраняя фиксированное расстояние ζ = ζ0 до деформированной отсчетной поверхности . Следовательно, для линейных деформаций произвольного элемента, в малой окрестности
материальной точки с координатами s0 и ζ0 будут справедливыми соотношения:
εξm = ε m + ξ∆κ mF ;
εtξ = εt + ξ∆κtF .
(8 .13)
Следствием принятых гипотез является линейное распределение деформаций
по толщине оболочки, и то обстоятельство, что эти деформации будут полностью
определены, если удастся вычислить изменения кривизн и деформации отсчетной поверхности в меридиональном и окружном направлениях .
Используя соотношения (8 .1—8 .11), можно представить геометрические соотношения рассматриваемого варианта уравнений осесимметричных оболочек
в следующем виде:
du
= (1 + ε m ) cos θ − cos θ0 ;
ds0
dν
= (1 + ε m ) sin θ − sin θ0 ;
(8 .14)
ds0
dθ
dθ
= (1 + ε m ) κ mF + 0 .
ds0
dS0
Рассмотрим напряженное состояние элемента биметаллической оболочки,
отсчетную поверхность которой совместим со слоем спая . В дальнейшем, если
не будет специально оговорено, будем считать, что материал оболочки следует закону Гука, а модули упругости Еi , коэффициенты Пуассона νi и коэффициенты
линейного расширения материала αi для верхнего (i = 1) и нижнего (i = 2) слоев
оболочки являются известными функциями S0 и постоянны по толщине .
Толщины нижнего и верхнего слоев, обозначенные как h1 и h2, также являются
известными функциями дуговой координаты s0 .
Используя гипотезу о том, что напряженное состояние двухосное, запишем
физические соотношения в виде:
Ei
( ε mi + νεti ) − (1 + νi ) αiT ;
1 − νi2
Ei
( εti + νε mi ) − (1 + νi ) αiT .
σti =
1 − ν2
σmi =
(8 .15)
i
Здесь Т — изменение температуры . Приведем все внутренние силы и моменты
к отсчетной поверхности, используя интегралы:
( )
( )
h+
Nm =
∫
h+
σm dς;
Nt =
(−)
h
h
( )
h+
( )
h+
Mm =
∫ σt dς;
(−)
∫ σm ςdς;
(−)
h
Mt =
∫ σt ςdς,
(−)
h
(8 .16)
8.4. Уравнения, описывающие осесимметричную деформацию тонкостенных оболочек
195
Рис. 8.11. Положительные направления
силовых факторов, действующих на элемент
оболочки
В формулах (8 .16), основываясь
на предположении тонкостенности,
не учитывается изменение метрики поверхности, отстоящей на расстоянии ς
от отсчетной поверхности, по сравнению
с метрикой непосредственно самой отсчетной поверхности, т .е . пренебрегаем
величинами порядка ξ/ρi , по сравнению
с единицей .
Положительные направления силовых факторов представлены на рис . 8 .11 .
Отметим, что силовые факторы имеют смысл интенсивностей, т .е . отнесены
к единичной длине отсчетной поверхности .
Последовательно подставляя в выражения (8 .16) соотношения (8 .13) и (8 .15)
и проводя интегрирование, приходим к следующим выражениям для силовых
факторов:
N m = C1ε m + C2 εt + D1 κ mF + D2 κtF − B1T ;
N t = C1εt + C2 ε m + D1 κtF + D2 κ mF − B1T ;
(8 .17)
M m = − D1ε m − D2 εt − C3 κ mF − C4 κtF + B2T ;
M t = − D1εt − D2 ε m − C3 κtF − C4 κ mF + B2T .
Постоянные коэффициенты обозначают следующие комплексы:
E h
+ 2 22 ;
2
1 − ν1 1 − ν 2
1 E1h13 E2 h23
+
;
3 1 − ν12 1 − ν 22
C1 =
E1h1
C2 =
ν1E1h1
1 − ν12
+
ν 2 E2 h2
1 − µ 22
;
1 ν E h3 ν E h3
C4 = 1 1 21 + 2 2 22 ;
3 1 − ν1
1 − ν 2
1 ν E h2 ν E h2
1 E h2 E h2
D1 = 1 12 − 2 22 ; D2 = 1 1 21 − 2 2 22 ;
2 1 − ν1
2 1 − ν1 1 − ν 2
1 − ν 2
αEh α E h
1 α E h2 α E h2
B1 = 1 1 1 + 2 2 2 ; B2 = 1 1 21 + 2 2 22 .
1− ν
1− ν
2 1 − ν1
1 − ν 2
C3 =
(8 .18)
Отметим, что для нормального термобиметалла, т .е . термобиметалла, удовлетворяющего условию Виларсо [4, 8], справедливо соотношение:
h1
E2
=
.
h2
E1
(8 .19)
196
Глава 8. Исполнительные элементы робототехнических устройств
При дополнительном предположении о равенстве коэффициентов Пуассона
ν1 = ν2 выражения (8 .18) приобретают наиболее простой вид, поскольку коэффициенты Di обращаются в ноль .
Нормальная (Nm) и поперечная (Q) силы в площадке, внешняя нормаль которой совпадает с положительным направлением дуговой координаты s0 (на рис . 8 .12
обозначена пунктиром), связаны с горизонтальной (U) и вертикальной (V) составляющими внутреннего усилия при помощи матрицы поворота, зависящей
от текущего значения угла θ:
N m cos θ sin θ U
=
.
Q − sin θ cos θ V
(8 .20)
Рис. 8.12. К выводу уравнений равновесия
Рассмотрим условия равновесия элемента оболочки в деформированном
состоянии (см . рис . 8 .12) . Составляя уравнения равновесия элемента оболочки
на оси Х и Y декартовой системы координат, а также уравнение моментов относительно касательной в окружном направлении, после проведения необходимых
преобразований с учетом (8 .17), (8 .18), получаем соотношения:
Nt
cos θ
dU
U−
+ qu ;
= − (1 + ε m )
x0 + u
ds0
x0 + u
cos θ
dV
V + qv ;
= − (1 + ε m )
ds0
x0 + u
(8 .21)
dM m
cos θ
= − (1 + ε m )
( M m − M t ) − U sin θ + V cos θ .
+
x
u
ds0
0
Здесь qx и qy — интенсивности распределенной нагрузки, действующие в горизонтальном и вертикальном направлениях соответственно .
8.4. Уравнения, описывающие осесимметричную деформацию тонкостенных оболочек
197
Следуя алгоритму, изложенному в [9, 11], в качестве основной системы будем
рассматривать систему нелинейных дифференциальных уравнений шестого порядка (8 .14), (8 .21) . Неизвестные величины, производные которых входят в уравнения, будем называть основными неизвестными . Вектор основных неизвестных
в текущем сечении оболочки запишется в виде:
{X} = {u, v, θ, U , V , M m }T .
(8 .22)
Остальные неизвестные, входящие в уравнения (8 .14), (8 .21), будем называть
вспомогательными . При решении основной системы уравнений вспомогательные
неизвестные выражаются через основные уравнения с помощью алгебраических
соотношений . Ниже приведены такие выражения для ряда практически важных
случаев .
Изотропная осесимметричная оболочка
при силовом нагружении
В этом случае в качестве отсчетной поверхности используется срединная поверхность оболочки . Значения h (–) и h (+) принимают значения –h/2 и +h/2, соответственно . Поскольку χ = 0, выражение для еt приобретает вид:
εt =
u
.
x0
(8 .23)
В формулах (8 .18) коэффициенты Di и Bi обращаются в ноль, поэтому удобно
использовать привычные постоянные:
B=
Eh
1− ν
;
2
D=
Eh3
12 (1 − ν 2 )
(8 .24)
.
Принимая во внимания соотношения (8 .13) и (8 .24), получим следующие формулы для определения вспомогательных величин:
εm =
kmF =
1
(U cos θ + V sin θ ) − ν u ;
B
x0
Mm
x + u sin θ sin θ0
−µ 0
−
D
x0 x0 + u
x0
N t = ν (U cos θ + V sin θ ) + Eh
M t = νM m +
;
u
;
x0
(8 .25)
Eh x0 + u sin θ sin θ0
−
.
12 x0 x0 + u
x0
Изотропная осесимметричная оболочка, незамкнутая
в окружном направлении при силовом нагружении
При исследовании оболочек, незамкнутых в осевом направлении, следуя [6, 13],
в систему уравнений входит величина относительного изменения центрального
угла — χ, определяемая выражением (8 .7) . В зависимости от условий нагружения χ
может быть задано или являться искомой величиной .
198
Глава 8. Исполнительные элементы робототехнических устройств
Для нахождения решения систему следует дополнить условием, накладываемым на величину равнодействующей моментов внутренних сил в поперечном сечении . Из условия равновесия отсеченной части равнодействующая должна быть
равна внешнему моменту — М *, приложенному к отсеченной части .
∫ M m sin θ + N m ( x0 + u ) ds0 = M
∗
.
(8 .26)
s0
При отсутствии внешнего момента равнодействующая должна быть равна
нулю . Подчеркнем, что рассмотренный прием основывается на дополнительном предположении, что меридиональное сечение незамкнутой в окружном направлении оболочки остается плоским . Это справедливо для ряда тонкостенных
стержней-оболочек, например манометрических пружин, в зонах, достаточно
удаленных от торцов . Для более тщательных исследований незамкнутую в окружном направлении оболочку следует рассматривать как двумерную проблему и решать задачу для системы дифференциальных уравнений в частных производных .
Используя соотношения (8 .8), (8 .24), получаем формулы для определения
вспомогательных величин:
εm =
1
(U cos θ + V sin θ ) − ν χ + u (1 − χ ) ;
B
x0
κ mF =
Mm
x + u sin θ sin θ0
−µ 0
−
x0
D
x0 x0 + u
;
u
N t = µ (U cos θ + V sin θ ) + Eh χ +
(1 − χ ) ;
X0
Eh x0 + u sin θ sin θ0
M t = νM m +
−
.
x0
12 x0 x0 + u
(8 .27)
Биметаллическая осесимметричная оболочка
при термосиловом нагружении
При исследовании биметаллической оболочки под действием температурных
и силовых нагрузок, распределение температуры считаем заданной функцией зависящей только от координаты s0 и постоянной по толщине . Используя соотношения (8 .17), (8 .18) и полагая ν1 ≈ ν2 = ν, получаем следующие формулы для нахождения вспомогательных величин:
εm =
κ mF =
1 − ν2
u
T (1 + ν )
( E1h1α1 + E2 h2 α2 );
(U cos θ + V sin θ ) − ν +
E1h1 + E2 h2
x0 E1h1 + E2 h2
3 (1 − ν 2 )
E1h13
Mt =
x0 + u sin θ sin θ0
3T (1 − ν )
−
( E h2 α + E2 h22 α2 );
+
x0 2 ( E1h13 + E2 h13 ) 1 1 1
x0 x0 + u
(8 .28)
E h +E h u
T
N t = 1 1 2 2 2 + + νε m −
( E1h1α1 + E2 h2 α2 );
1− ν
x0
1− ν
+ E2 h23
Mm − ν
E1h13 + E2 h23 x0 + u sin θ sin θ0
T
F
−
( E1h12 α1 + E2 h21α2 ) .
+ νκ m − (
2
)
ν
x0
2
1
+
3 (1 − ν ) x0 x0 + u
8.5. Алгоритм сведения нелинейной краевой задачи к системе нелинейных уравнений
199
8.5. АЛГОРИТМ СВЕДЕНИЯ
НЕЛИНЕЙНОЙ КРАЕВОЙ ЗАДАЧИ
К СИСТЕМЕ НЕЛИНЕЙНЫХ УРАВНЕНИЙ
И ЗАДАЧЕ КОШИ
Для большого числа практических задач в качестве эффективных методов решения зарекомендовали себя методы, основанные на редукции, в общем случае,
двумерной проблемы к краевой задаче для системы обыкновенных уравнений .
Полученная система решается посредством ее сведения к системе нелинейных
уравнений и задачи Коши для начального вектора [9, 11] . Для одномерных задач,
естественно, первая стадия этого подхода отсутствует, что существенно упрощает
исследования .
Под разрешающей системой уравнений в случае одномерной нелинейной
краевой задачи будем подразумевать систему соотношений:
dX
= f ( s, X , Z, Q ) .
ds
(8 .29а)
g0 (X0, Q) = 0,
g1 (X1, Q) = 0 .
(8 .29b)
Здесь s — независимая переменная; X —вектор внутренних параметров системы,
компоненты которого стоят под знаком обыкновенных производных . Для повышения алгоритмичности при формулировке соотношений, кроме вектора X
и удобно ввести вектор дополнительных переменных Z, образуемый неизвестными величинами, не входящими под знак производной . Будем рассматривать частный случай нелинейной задачи, позволяющий в явном виде найти зависимость
производной вектора переменных X от самого вектора, значения независимой
координаты s и некоторого вектора «внешних» параметров Q .
Следуя работам [9, 11, 13], будем назвать компоненты вектора Xi (i = 1,
2, … , m) — «основными» неизвестными, a компоненты вектора Zj (j = 1,2, … , mz) —
«вспомогательными» . Вспомогательные неизвестные выражаются через основные неизвестные при помощи, в общем случае, нелинейных соотношений, не содержащих операции дифференцирования .
Fz (s, X, Z, Q) = 0 .
(8 .30)
Отметим, что при численной реализации, соотношения (8 .30) не обязательно
должны иметь аналитические выражения, важно, чтобы в распоряжении исследователя имелся тот или иной способ или алгоритм численного определения вспомогательных неизвестных через основные неизвестные .
Рассмотрим нелинейную двухточечную краевую задачу для системы обыкновенных дифференциальных уравнений относительно векторной функции X, содержащей в качестве компонент только основные неизвестные .
Система дифференциальных уравнений дополняется краевыми условиями
(8 .29b), количество которых соответствует порядку системы — m . В случае двухточечной краевой задачи граничные условия формулируются отдельно в точках s0 и s1 .
200
Глава 8. Исполнительные элементы робототехнических устройств
Используя возможности ЭВМ удается численно найти связь компонентов
векторов X0 и X1 основных переменных, заданных в начальной и конечной точках
интервала интегрирования s – [s0, s1] .
X1 = F (X0) .
(8 .31)
Граничные условия в этом случае можно трактовать как нелинейную векторную функцию, зависящую от вектора основных переменных, заданного только
в одной из краевых точек задачи, например в начале отрезка интегрирования — X0
g1 (F (X0), Q) = r (X0, Q) = 0 .
(8 .32)
Таким образом, нелинейная краевая задача для системы дифференциальных
уравнений сводится к решению системы нелинейных уравнений (32) относительно вектора X0, и задаче Коши для системы (29а) при начальном условии X (s0) = X0 .
Следует особо отметить, что система (8 .32) может быть не задана в явном виде,
а определена лишь алгоритмически, т .е . известен алгоритм численной реализации, позволяющий вычислить вектор r, называемый в дальнейшем изложении
«вектором невязки», для конкретных значений X0 и Q .
В тех задачах, где интегрирование системы (8 .32) вдоль всего интервала интегрирования [s0, s1] технически затруднено или невозможно из-за неустойчивости
численного счета, оказывается полезным применение приема деления интервала
интегрирования на отдельные отрезки — сегменты, с последующей стыковкой их
друг с другом [3, 8, 11] .
Пусть ns — общее число сегментов . Рассмотрим некоторое разбиение интеграла интегрирования
(8 .33)
s0 = a1 ≤ a2 ≤ . . . ≤ ais ≤ . . .ans ≤ ans +1 = s1 ,
в котором положение промежуточных точек ais, is = [2, … , ns], выбрано в соответствии с особенностями интегрирования системы уравнений (8 .29а) . Это означает, что точки ais следует совмещать с границами резкого изменения геометрии,
ребрами, точками приложения сосредоточенных нагрузок, а также концентрировать в тех местах интервала, где систему особенно трудно интегрировать, например в зонах краевого эффекта . Отметим, что вид правых частей уравнений (8 .29а)
может быть различным для каждого из сегментов .
Обозначим векторную функцию размерности — m основных неизвестных для
is-го сегмента через Xis (sis), где [аis ≤ sis ≤ ais + 1] . В качестве неизвестных начальных
параметров задачи Коши возьмем значения векторов Xis0 в начальных точках всех
сегментов
Xis 0 = Xis (ais), is = 1, 2, 3, … , ns .
(8 .34)
Общее число неизвестных подлежащих определению составит в этом случае
m ⋅ ns, и вектор неизвестных начальных параметров задачи Коши принимает вид:
{X0} = {X10, X20, … , Xis 0, … , Xns 0}T .
(8 .35)
Систему (8 .29а) можно записать следующим образом:
⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅
dX is
= fis ( sis , X is , Qis ),
dsis
⋅⋅⋅ ⋅ ⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅
is = 1, 2, … , ns .
(8 .36)
8.5. Алгоритм сведения нелинейной краевой задачи к системе нелинейных уравнений
201
Здесь вектор Qis , является подвектором для обобщенного вектора «внешних» параметров задачи QT = {Q1T, Q2T, … , QisT, … , QnsT } . Вопросы, связанные с введением
в процедуру счета вектора Q, будут обсуждены далее . Для однопараметрической
задачи считаем справедливыми соотношения (8 .31) . По своей сути, двухточечная
нелинейная краевая задача сводится к частному варианту многоточечной .
Дополнительные m (ns – 1) условий следуют из условий стыковки сегментов .
Как и в случае двухточечной задачи, используя возможности численного счета,
компоненты векторов Xis 1 в конечных точках сегментов можно определить через
значения векторов Xis 0 в начальных точках . Условия стыковки запишутся в виде:
Xis + 1,0 = [Ais (Xis 1, Qis)]Xis 1,
is = 1, 2, , … , n .
(8 .37)
где Xis 1 = Xis 1 (Xis 0, Qis) — вектор неизвестных на конце участка номер — is, определяемый посредством численного интегрирования; [Ais] — матричная функция
перехода, определяемая исходя из особенностей стыковки (is)-го и (is + 1)-го сегментов . В простейшем случае, на основании непрерывности компонент вектора
основных неизвестных следует, что
[Ais] = [Е],
(8 .38)
где [E] — единичная матрица размером m × m .
Запишем соотношения для векторов невязок условий в форме:
ris (Xis 0, Xis 1, Qis) = 0,
is = 1, 2, 3, … , ns .
(8 .39)
Исходные краевые условия отвечают соотношениям:
r1 (X1 0, Q1) = 0;
(8 .40)
rm (Xm 0, Qm) = 0 .
Отметим, что каждая из векторных функций невязок ris в соотношениях (8 .39)
имеет порядок — m, в то время как вектора невязок в соотношениях (8 .40) обеспечивают порядок m в сумме .
Система (8 .39)—(8 .40) в явном виде не задана, поэтому для ее решения требуется эффективный численный алгоритм, позволяющий вычислять вектор невязки для анализируемых значений X0 и Q .
Таким образом, как и в случае двухточечной задачи, проблема сводится к решению системы нелинейных операторных уравнений (8 .39)—(8 .40) относительно
вектора (8 .35) и задаче Коши для системы (8 .36) при начальных условиях
Xis 0 = Xis (ais), is = 1, 2, 3, … , ns .
(8 .41)
Метод сегментации допускает обобщение для многоточечных краевых задач с многосвязным или древовидным интервалом интегрирования . Отметим,
сходство рассмотренного алгоритма с алгоритмом анализа методом конечного
элемента, хотя, конечно, излагаемый в данном разделе метод не имеет к МКЭ
непосредственного отношения . Понятие «сегмент», введенное в предыдущем
разделе, то есть по существу некоторая часть конструкции, в определенном роде
сходная с понятием «конечный элемент» . Процедура численного, посредством
решения задачи Коши, определения взаимосвязи вектора основных неизвестных
заданного в начале сегмента с аналогичным вектором в конце сегмента, сходна
202
Глава 8. Исполнительные элементы робототехнических устройств
с численной процедурой построения матрицы жесткости конечного элемента .
Составление условий стыковки аналогично процедуре ассемблирования матриц
жесткости отдельных элементов в матрицу жесткости всей системы . Все это позволяет с успехом применить при численной реализации рассмотренного метода
ряд технических приемов, хорошо отработанных в МКЭ . Вектор основных неизвестных X может быть определен как в локальных, так и глобальных координатах . Например, вектор основных неизвестных задачи может быть представлен как
в координатной системе, связанной с деформированной конфигурацией сегмента, т .е . в локальной системе координат, так и в глобальной системе, используемой
для задания исходной конфигурации всей системы в целом .
В случае многосвязного интервала интегрирования удобно использовать нумерацию сегментов (is = 1, 2, … , ns) и нумерацию точек стыковки сегментов или
узловых точек (ip = 1, 2, … , np) . При описании топологии сегмента указывается его
начальная и конечная узловая точки, порядок следования узловых номеров при
этом определяет направление интегрирования .
При составлении условий стыковки рассматриваются все сегменты, сходящиеся в рассматриваемой узловой точке . В случае решения одномерных задач (плоский изгиб стержней и осесимметричная деформация оболочек), для каждой узловой точки составляются три уравнения равновесия и 3 ⋅ (kp – 1) геометрических
соотношения, где kp — число меридианов, сходящихся в рассматриваемой узловой точке . По аналогии с вышеизложенным, краевые условия и условия стыковки
можно записать с помощью векторной функции невязки
r (X, Q) = 0,
(8 .42)
порядок которой — m ⋅ ns, соответствует размерности вектора начальных параметров X0, подвекторы которого Xis 0 используются в качестве начальных векторов
при решении задачи Коши последовательно для каждого из сегментов .
8.6. ИСПОЛНИТЕЛЬНЫЕ
РОБОТОТЕХНИЧЕСКИЕ МЕХАНИЗМЫ
С РЕЛЕЙНОЙ УПРУГОЙ ХАРАКТЕРИСТИКОЙ
И НЕТРАДИЦИОННЫМИ СПОСОБАМИ
ПЕРЕМЕЩЕНИЯ
Разработка нового поколения исполнительных элементов робототехнических
систем требует создания методики расчета, которая бы позволила проводить
численные исследования процессов нелинейного деформирования и анализировать влияние различных параметров на упругую характеристику . Изложенная
в разд . 8 .4 математическая модель пригодна для этих целей и позволяет перейти
от задачи анализа к задаче синтеза исполнительных элементов с заданными свойствами [12, 13] .
Особый интерес представляет определение области значений параметров, при
которых упругая характеристика приобретает релейный (дискретный) характер,
то есть проявляется возможность появления упругого перескока или хлопка .
Упругий перескок допускает описание с позиций теории катастроф [16] .
В большинстве традиционных технических систем такое является нежелательным .
8.6. Исполнительные робототехнические механизмы с релейной упругой характеристикой
203
С другой стороны, новые перспективные конструкции требуют использования
именно таких элементов, которые в процессе работы реализуют упругий перескок . Попытки определить геометрические параметры системы экспериментальным путем являются трудоемкими, объемными и дорогостоящими . Решить эту
проблему позволяет параметрический анализ и использование приема смены подпространства управляющих параметров [11] .
Приведенный далее пример проектирования термобиметаллического (ТБ)
диска с дискретной характеристикой (рис . 8 .13а) дает представление о реализации алгоритма численного синтеза, основанного на использовании приема смены
подпространства управляющих параметров .
Посредством предварительного механического нагружения, проводимого с помощью регулировочного винта, требуется произвести настройку ТБ диска на переключение при заданном значении температуры T * . Независимыми параметрами
являются температура T и усилие F предварительного поджатия ТБ элемента .
Рис. 8.13. Синтез термобиметаллического элемента с заданной температурой
переключения
В недеформируемом состоянии купол прижимается к плоскости по внешнему
периметру силой F, распределенной по контуру отверстия в вершине . Геометрические и физико-механические характеристики ТБ диска следующие: диаметр ТБ
диска — 5 мм, радиус кривизны в недеформированном состоянии — 22,2 мм; толщина — 0,04 мм, диаметр центрального отверстия — 0,5 мм .
Физико-механические характеристики материалов:
Е1 = 1,50 ⋅ 105 МПа; Е2 = 1,35 ⋅ 105 МПа;
ν1 = ν2 = 0,3; α1 = 1,0 ⋅ 10 – 6 ⋅ 1/°С; α2 = 18,0 ⋅ 10 – 6 ⋅ 1/°С .
Результаты численного анализа представлены на рис . 8 .13б в трехмерном
пространстве: температура, усилие предварительного поджатия, прогиб (т .е . перемещение по нормали) в центральной точке элемента . Кривая 1 соответствует
204
Глава 8. Исполнительные элементы робототехнических устройств
процессу деформирования ТБ диска при отсутствии предварительного поджатия .
Кривая 2 соответствует силовому нагружению элемента при постоянной температуре . Кусочно-гладкие кривые 3 и 4 соответствуют сложному процессу деформирования . Прием смены пространства управляющих параметров был применен
в точках А и В .
Для определения усилия предварительного поджатия, обеспечивающего срабатывание при заданной температуре, использовалась следующая стратегия решения задачи синтеза .
На первой стадии процесса производилось нагружение конструкции температурой вдоль кривой 1 вплоть до достижения заданной температуры T * . В точке В
производилась смена параметра продолжения, и дальнейшее нагружение производилось по силе, пока не достигалась особая точка С, соответствующая предельной точке для зависимости перемещение — усилие . Усилие F, соответствующее
этой точке, соответствовало искомому усилию предварительного поджатия F *,
обеспечивающему прощелкивание элемента при требуемой температуре T * . Для
контроля была решена задача по пути нагружения 3, которая показала идентичность полученных результатов с удовлетворительной погрешностью
Предлагаемая стратегия численного исследования в определенной степени восполняет существующий пробел, связанный с недостаточной отработкой
приемов численного анализа процессов нелинейного деформирования упругих
конструкций [17, 18] и позволяет научно обоснованно назначать конструктивные
и технологические параметры проектируемых технических устройств .
С помощью разработанной численной методики, реализованной в виде пакета прикладных программ, проведены исследования ряда перспективных конструкций, к которым следует отнести новые типы экологически чистых исполнительных механизмов, технических устройств и систем
На основе принципа управляемой упругой деформации могут быть созданы
качественно новые конструкции мобильных мини- и микророботов специального назначения . Среди многочисленных микророботов, применяемых в медицине, можно выделить обширный класс роботов, использующий перистальтический принцип движения . Идея этого принципа позаимствована у самой природы
и проверена тысячелетиями эволюции . Множество животных, в частности разнообразные черви, используют его для передвижения как в почве, так и по поверхности . Кроме того, некоторые трубчатые органы животных, в том числе человека,
такие как гортань, пищевод, кишечник, мочеточники и др ., также работают по перистальтическому принципу: чередуя сужение и расширение, они способствуют
продвижению внутри себя биологического материала . Таким образом, можно надеяться, что применение столь естественного для живых организмов принципа
обеспечивает высокую эффективность медицинских микророботов с перистальтическим принципом движения .
На рис . 8 .14 представлен действующий макет эндовазального мини-робота,
предназначенного для проведения медицинских операций в кровеносных сосудах
[17, 18] . Робот представляет собой конструкцию, состоящую из последовательно
соединенных сильфонов, которые связаны с гибкими стержневыми элементами .
В соответствии с циклограммой движения во внутреннюю полость сильфонов подается давление . При этом гибкие элементы деформируются и последовательно
опираясь о стенки, перемещают робот вдоль трубчатого канала .
8.6. Исполнительные робототехнические механизмы с релейной упругой характеристикой
205
Рис. 8.14. Макет миниробота, использующего перистальтический принцип
движения
ЗАКЛЮЧЕНИЕ
Предлагаемая методика расчета и проектирования элементов управляемой упругой деформации опирается на идею мультипараметрического подхода при математическом моделировании на ЭВМ существенно нелинейных процессов . При
численном моделировании используется стратегия последовательного исследования однопараметрических нелинейных задач, принадлежащих многопараметрическому семейству, в которое погружена анализируемая задача, что позволяет
выйти на решение задачи численного синтеза конструкции . Алгоритм численного
проектирования основан на использовании метода продолжения решения по параметру [9, 19, 20] в сочетании с приемом смены подпространства управляющих
параметров [11] .
При проектировани нелинейных оболочечных конструкций в активных
операторах преобразования, обладающих свойствами управляемого изменения
структуры и параметров принцип управляемой упругой деформации, который
предоставляет дополнительные возможности для перемещения объектов и вывода движения в условиях вакуума, чистых и (или) агрессивных сред . Важным
фактором является также малая чувствительность предлагаемых механизмов
к воздействию радиационного излучения, которое оказывается губительным для
электронных устройств .
Деформирование конструкции может быть вызвано действием давления,
температуры или благодаря эффекту памяти формы . Важной, принципиальной
особенностью проектируемых устройств, существенно отличающих их от известных технических решений, является возможность реализации релейной характеристики, то есть дискретного отклика на монотонное изменение внешнего
воздействия .
С помощью разработанной численной методики, реализованной в виде пакета прикладных программ PURGA [13], проведены исследования ряда перспективных конструкций, к которым следует отнести новые типы экологически чистых
исполнительных механизмов, технических устройств и систем, не загрязняющих
окружающую среду и минимизирующих вмешательство человека в природные
экосистемы .
206
Глава 8. Исполнительные элементы робототехнических устройств
Литература
1 . Александрова А.Т . Новые способы передачи и формирования движения в вакууме . —
М .: Высшая школа, 1979 . — 69 с .
2 . Александрова А.Т ., Васин В.А ., Ивашов Е.Н ., Степанчиков С.В . Вакуумная механика
в электронном машиностроении: монография . — М .: МИЭМ . 2009 . — 145 с .
3 . Гаврюшин С.С . Анализ и синтез тонкостенных элементов робототехнических устройств
с предписанным законом деформирования // Известия высших учебных заведений .
Машиностроение, 2011 . — № 12 . — С . 12—19 .
4 . Андреева Л.Е . Упругие элементы приборов . — М .: Машиностроение, 1981 . — 392 с .
5 . Феодосьев В.И . Упругие элементы точного приборостроения . — М .: Оборонгиз, 1949 . —
343 с .
6 . Гаврюшин С.С ., Барышникова О.О . Нелинейные гибкие элементы в вакуумной технике
и технологии . Математическое моделирование сложных технических систем // Труды
МГТУ им . Н .Э . Баумана, № 568 . — М ., 1995 . — С . 51—62
7 . Патент СССР № 1797699 Манометрическая трубчатая пружина / Гаврюшин С .С .
№ 4942927/10 . Заявл . 06 .06 .91 . Опубл . 23 .02 .93 . Бюл . № 7 .
8 . Пономарев С.Д ., Андреева Л.Е . Расчет упругих элементов машин и приборов . — М .: Машиностроение, 1980 . — 326 с .
9 . Валишвили Н.В . Методы расчета оболочек вращения на ЭЦВМ . — М .: Машиностроение, 1976 . — 278 с .
10 . Григоренко Я.М ., Мукоед А.П . Решение нелинейных задач теории оболочек на ЭВМ . —
К .: Вища школа, 1983 . — 286 с .
11 . Гаврюшин С.С . Численное моделирование и анализ процессов нелинейного деформирования гибких оболочек // Изв . АН СССР . МТТ, 1994 . — № 1 . — С . 109—119 .
12 . Гаврюшин С.С . Элементы управляемой упругой деформации для функциональных
устройств робототехнического оборудования // Мехатроника, 2000 . — № 5 . — С . 16—18 .
13 . Гаврюшин С.С ., Барышникова О.О ., Борискин О.Ф . Численный анализ элементов конструкций машин и приборов . — М .: Изд-во МГТУ им . Н .Э . Баумана, 2014 — 479 с .
14 . Бидерман В.Л . Механика тонкостенных конструкций . — М .: Машиностроение, 1977 . —
488 с .
15 . Reissner E . On axisymmetric deformations of thin shells of revolution // Proc .Symp .Appl .
Math . — N .Y ., 1950 . — Vol . 3 . — P . 27—52 .
16 . Арнольд В.И . Теория катастроф . — М .: Наука, 1990 . —128 с .
17 . Патент РФ № 2218191 Эндовазальный мини-робот / Г .В . Саврасов, А .В . Покровский,
С .С . Гаврюшин, О .С . Нарайкин, А .С . Ющенко, В .И . Поспелов . — № 200210938/14 .
Заявл . 11 .04 .2002 . Опубл . 10 .12 .2003 . Бюл . № 34 .
18 . Саврасов Г.В ., Нарайкин О.С ., Гаврюшин С.С ., Ющенко А.С . и др . Внутрисосудистый микроробот // Биомедицинская радиоэлектроника, 2006 . — № 11 . — С . 44—48 .
19 . Григолюк Э.И ., Шалашилин В.И . Проблемы нелинейного деформирования: Метод продолжения решения по параметру в нелинейных задачах механики твердого деформируемого тела . — М .: Наука, 1988 . — 232 с .
20 . Шалашилин В.И ., Кузнецов Е.Б . Метод продолжения решения по параметру и наилучшая параметризация (в прикладной математике и механике) . — М .: Эдиториал УРСС,
1999 . — 224 с .
ГЛАВА 9
НОВЫЕ МЕХАНИЗМЫ
КОСМИЧЕСКОЙ РОБОТОТЕХНИКИ
Саяпин С.Н.
ВВЕДЕНИЕ
История формирования в ИМАШ РАН
научного направления «Космическая робототехника»
Космическая робототехника как самостоятельное направление стала развиваться
в ИМАШ РАН с середины 90-х гг . XX в . Появлению этого нового научного направления способствовали три основных фактора .
Во-первых, это фундаментальные принципы, заложенные в основу деятельности ИМАШ его директором (с 1954 по 1975 гг .) академиком Анатолием Аркадьевичем Благонравовым . Так, например, им сформулировано одно из важных предназначений ИМАШ — решение проблем машиностроения, не имеющих прецедента
и возникающих в тех или иных случаях впервые . Формирование и развитие в тот
период кибернетики и прогресс вычислительной техники практически сразу нашли отражение в новейших направлениях науки о машинах, в изучении которых
ИМАШ занял ведущее место . Одним из перспективных направлений исследований, получивших развитие в последние годы жизни академика А .А . Благонравова, явилась разработка проблем робототехники . Одними из первых привлекли
внимание к этой проблеме академики И .И . Артоболевский, А .А . Благонравов
и их коллеги по ИМАШ . Так, с 1967 г . по инициативе ИМАШ начали регулярно
созываться симпозиумы по теории и принципам устройства роботов и манипуляторов . Работа симпозиумов, научные сообщения и первые результаты исследований освещались в сборниках «Механика машин» . В дальнейшем начали публиковаться работы, в которых были заложены теории механических систем роботов
и манипуляторов, показаны возможные направления их дальнейшего развития
[1] . ИМАШ РАН и сегодня продолжает достойно следовать отмеченным принципам и продолжать свою историческую миссию .
Во-вторых, с начала 80-х гг . XX в . и по настоящее время учеными ИМАШ (д .т .н .
проф . В .А . Глазунов — директор ИМАШ РАН с 2015 г ., д .т .н . проф . А .Ф . Крайнев,
д .т .н . А .Ш . Колискор и др .) вместе с коллегами из других научных учреждений
ведутся активные работы по разработке и исследованию систем параллельной
структуры, в которых выходное звено — рабочий орган — соединен с основанием несколькими кинематическими цепями . Построенные на их основе механизмы представляют собой активные плоские или пространственные ферменные
208
Глава 9. Новые механизмы космической робототехники
конструкции, характеризующиеся повышенными показателями по нагрузочной
способности и по точности . В этой области ИМАШ РАН имеет основополагающие результаты мирового уровня [2, 3] . На рис . 9 .1 показан разработанный
в ИМАШ АН СССР l-координатный робот с 30 степенями подвижности и последовательной осевой компоновкой из пяти однотипных модулей параллельной
структуры с 6 d .o .f . каждый [4, 5] .
Рис. 9.1. L-координатный робот ИМАШ АН СССР с 30 степенями подвижности
В-третьих, развивающаяся космонавтика в силу специфики космических условий (вакуум, значительные перепады температур, высокий уровень солнечной
радиации, микрогравитация и др .) потребовала самого активного применения
робототехнических систем .
Сочетание в одном месте указанных трех факторов и с учетом накопленного опыта позволило появиться в ИМАШ РАН с середины 90-х гг . XX в . новому
приоритетному научному направлению — космической робототехнике на основе
плоских и пространственных механизмов параллельной структуры . Это направление в ИМАШ РАН было активно поддержано директором ИМАШ РАН (с 1975
по 2007 г .) академиком Фроловым Константином Васильевичем [6] . Проводимые
исследования охватывали широкий спектр проблем и задач области развития
передовой космической робототехники в России, начиная от систем наземной
космической техники до робототехнических устройств и систем в составе пилотируемых орбитальных космических станций (ОКС) и аппаратов (КА), а также
автоматических космических аппаратов и систем, удаленных на большие и сверхбольшие расстояния от Земли . При этом для дальних и сверхдальних космических
робототехнических систем потребовалась их интеллектуализация в части принятия решений в условиях неопределенности в режиме реального времени . В части
построения высокопроизводительной информационно-измерительной управляющей системы на основе нейросетевого управления к выполнению НИР были
привлечены Научный центр нейрокомпьютеров Российского агентства по системам управления (НЦ НК РАСУ) и специалисты Росавиакосмоса из ЦНИИМАШ .
Глава 9. Новые механизмы космической робототехники
209
В работе [7] обоснована эффективность применения пространственных механизмов параллельной структуры в космической технике . Показано, что в наибольшей степени функциональные возможности пространственных механизмов
с параллельной структурой используются в роевых робототехнических системах
с мобильными параллельными роботами на основе Платоновых тел и системах
активной виброзащиты и высокоточного наведения (САВВН) прецизионных
крупногабаритных упругих конструкций типа антенн СВЧ-связи и космических
радиотелескопов (КРТ), в средней степени — в системах высокоточной автоматической стыковки КА и в минимальной степени — в активных опорах антенных облучателей или вторичного зеркала . Ниже представлены концепции космических
робототехнических систем, построенных на основе механизмов параллельной
структуры и схемные решения на их основе, разработанные в ИМАШ РАН .
Система активной виброизоляции
бортового технологического оборудования КА
Первая НИР в области космической робототехники на основе пространственных
механизмов параллельной структуры была посвящена разработке и исследованию
системы активной виброизоляции кинематического принципа действия для защиты орбитального технологического оборудования от низкочастотных микродинамических воздействий в процессе проведения эксперимента . Необходимость в создании таких систем обуславливалась негативным воздействием микродинамических
возмущений от работающих систем КА на качество изготавливаемых в космосе
новых материалов и биомеханических препаратов . Для решения этой проблемы
ИМАШ РАН разработал методы и конструктивные решения на основе применения
механизмов с параллельной структурой [6, 9—11] . НИР была проведена в Лаборатории разработки и исследования средств виброзащиты систем «человек—машина»
ИМАШ РАН, начиная с 1994 г ., под руководством зав . лабораторией д .т .н ., проф .
А .В . Синева . НИР проводилась в рамках гранта РФФИ № 94-01-01071 «Создание
математических методов и технических решений виброизоляции оборудования
космических аппаратов от кинематических воздействий в условиях невесомости»
(основные исполнители НИР: докторант к .т .н . Л .А . Рыбак, гл . спец . А .И . Пашков, аспирант М .Н . Сидорова) и государственного контракта с Росавиакосмосом
(1999) «Проблемы виброакустики, микрогравитации, прочности и динамики процессов разделения перспективных упругих ракетно-космических объектов» (науч .
рук . академик Фролов К .В . Основные исполнители: д .т .н ., проф . А .В . Синев, д .т .н .
Л .А . Рыбак, гл . спец . А .И . Пашков, докторант к .т .н . Саяпин С .Н .) .
Общая схема разработанной концепции активной системы виброизоляции
кинематического принципа действия показана на рис . 9 .2а . По результатам теоретических исследований данной концепции в Лаборатории разработки и исследования средств виброзащиты систем «человек—машина» ИМАШ РАН был
разработан и изготовлен одномерный модуль системы активной кинематического
принципа действия . На рис . 9 .2 показаны структурная (б) и конструктивная (в)
схемы модуля [9, 11] .
Для исследования одномерного модуля системы виброзащиты от внешних
воздействий разработан комплекс измерений состояния объекта и управления
исполнительными механизмами в режиме реального времени, включая систему
регулирования и алгоритм управления . Алгоритм управления реализован для
210
Глава 9. Новые механизмы космической робототехники
системы, представляющей собой платформу, сотрясающуюся с малым ускорением, и закрепленной на ней модели одномерного модуля системы виброзащиты .
Система динамической компенсации изменения пространственных координат
платформы построена на алгоритме получения данных от датчиков смещения
платформы относительно системы отсчета и модели модуля относительно платформы в дискретные моменты времени, определяемые программной частотой .
Рис. 9.2. Общая схема активной системы виброизоляции кинематического принципа действия (а), структурная (б) и конструктивная (в) схемы активного
модуля
Глава 9. Новые механизмы космической робототехники
211
Экспериментальные исследования на измерительном комплексе показали,
что выбранная система регулирования и алгоритм управления справляются
с поставленной задачей уменьшения внешнего воздействия на охраняемый объект и удовлетворительно согласуются с результатами математического моделирования .
В процессе выполнения НИР получены следующие результаты: издана монография [9]; состоялись защиты кандидатской и докторской диссертаций [10, 11]
и по итогам выполнения госконтракта с Росавиакосмосом по теме «Космаш» выпушен Научный отчет «Проблемы виброакустики, микрогравитации, прочности
и динамики процессов разделения перспективных упругих ракетно-космических
объектов» [12] . На момент завершения НИР в России и США по ряду причин произошло ослабление интереса к дальнейшему развитию и, как следствие, финансированию названного направления в рамках реализации программы перспективных экспериментальных исследований на борту создаваемого орбитального
комплекса МКС [13] . Снижение приоритетности космического материаловедения
нашло свое отражение в Федеральной космической программе России на период
с 2000 по 2005 гг .
Интеллектуальная система активной виброзащиты
и высокоточного наведения крупногабаритных
прецизионных космических конструкций
В результате исследований, проведенных докторантом ИМАШ РАН к .т .н . С .Н . Саяпиным в рамках утвержденной темы докторской диссертации «Анализ и синтез
раскрываемых на орбите прецизионных крупногабаритных механизмов и космических радиотелескопов лепесткового типа» были выявлены две проблемы . Первая — проблема гравитационной и инерциальной чувствительности раскрываемых
на орбите прецизионных крупногабаритных конструкций КРТ, которые устанавливаются на КА и раскрываются после доставки на заданную орбиту (рис . 9 .3) .
Вторая проблема — высокоточное наведение КРТ на исследуемые объекты средствами самого КА . Выявленные Саяпиным С .Н . проблемы и их актуальность нашли свое отражение в отчете ИМАШ РАН о выполнении НИР «Космаш» [12] .
Впервые названные проблемы и пути их решения прозвучали в докладах Саяпина С .Н . на XXXIV Научных чтениях, посвященных разработке творческого
наследия К .Э . Циолковского (г . Калуга, 14—16 сентября 1999 г .) [15] и на VII Российском симпозиуме «Механика невесомости . Итоги и перспективы фундаментальных исследований гравитационно-чувствительных систем» (ИПМ РАН,
г . Москва, 11—14 апреля 2000 г .) [16] .
В докладах отмечено, что среди многих проблем, возникающих при создании
раскрываемых на орбите прецизионных крупногабаритных конструкций КРТ,
имеет место гравитационная чувствительность, обусловленная низкой жесткостью конструкции и высокими требованиями к геометрической точности ее основных параметров . Показано, что в условиях микрогравитации существенное
влияние на геометрическую стабильность конструкции антенны оказывают низкочастотные колебания от остаточных микроускорений, вызываемых действием
внешних и внутренних факторов . Были представлены принципиально новые
пути решения названных проблем за счет применения новых пространственных
212
Глава 9. Новые механизмы космической робототехники
орбитальных механизмов с параллельной структурой, обеспечивающих активную
виброизоляцию и высокоточное наведение подобных конструкций .
Рис. 9.3. а — общий вид КРТ; б — процесс раскрытия рефлектора КРТ:
1 — прецизионный складной рефлектор антенны, 2 — малонаправленная антенна,
3 — опорная система фокального блока, 4 — фокальный блок, 5 — звездный датчик,
6 — несущая конструкция космического аппарата, 7 — панель солнечных батарей,
8 — телеметрическая антенна, 9 — активная переходная ферма, 10 — платформа,
11 — основание
После защиты патентом РФ на изобретение приоритета и интеллектуальной собственности ИМАШ РАН [17] новый подход был успешно апробирован
Саяпиным С .Н . на 2-й Европейской конференции по структурному управлению
(«Second European Conference on Structural Control», Champs-sur-Marne, France,
July 3—6, 2000) [18] .
Для разработки и исследования путей решения указанных проблем был заключен государственный контракт с Росавиакосмосом на выполнение в 2000—
2003 гг . НИР «Разработка принципов построения комплекса эффективных
средств виброзащиты и высокоточного наведения прецизионных космических
конструкций и схемных решений для его реализации в составе базовых космических аппаратов» (Шифр темы: «Гаситель») . Основание для проведения НИР:
ФКПР на период до 2000 г . и ФКПР на 2001—2005 гг . Цель НИР — разработка
эффективного комплекса средств гашения колебаний упругих космических конструкций и их высокоточного наведения в режиме реального времени в условиях
микрогравитации, включающего активные системы с элементами искусственного интеллекта .
В процессе выполнения НИР получены следующие результаты: по итогам выполнения госконтракта с Росавиакосмосом по теме «Гаситель» выпушен Научный
отчет «Разработка принципов построения комплекса эффективных средств виброзащиты и высокоточного наведения прецизионных космических конструкций
и схемных решений для его реализации в составе базовых космических аппаратов» [19]; состоялась защита докторской диссертации [14] .
Глава 9. Новые механизмы космической робототехники
213
В работе [6] отмечено, что исследования, проведенные в ИМАШ РАН гл . научным сотрудником д .т .н . Саяпиным С .Н ., позволили поставить и решить новую
научно-техническую проблему: создать комплекс научно обоснованных методов
анализа и синтеза крупногабаритных прецизионных механизмов и конструкций
развернутых на орбите зеркальных антенн лепесткового типа и разработать схемно-технологические решения, обеспечивающие формирование их прецизионной
формы . Результаты этой работы реализованы в ряде отечественных и зарубежных
проектах по созданию космических систем, в том числе прецизионных зеркальных КГККА, раскрываемых на орбите [14] .
Следует отметить, что все типы крупногабаритных космических конструкций
антенн (КГККА) относятся к сложными космическими робототехническими системами, которые после доставки на орбиту обеспечивают в автоматическом или
полуавтоматическом режиме раскрытие КГККА в целом или ее составных модулей с последующим объединением, а также заданный уровень прецизионности
конструкции в части геометрической точности формообразующих элементов
и точности наведения антенны на объект . В качестве примера на рис . 9 .4 показана
кинематическая схема автоматически раскрываемой на орбите крупногабаритной
зеркальной антенны подобной антенне КРТ лепесткового типа, изображенной
на рис . 9 .3 .
В работе [14] сформулировано обоснование неизбежной необходимости решения этих проблем в конце первой — начале второй декады наступающего
XXI в . Это обусловлено ужесточением требований к прецизионности и точности
наведения перспективных КГККА со стороны потребителей .
Рассмотрим пути решения указанных проблем с помощью разработанной
в ИМАШ РАН робототехнической интеллектуальной системы активной виброзащиты и высокоточного наведения (ИСАВВН) применительно к создаваемому
в России криогенному космическому телескопу (ККТ) космической обсерватории (КО) «Миллиметрон» . Требуемая точность рабочей поверхности главного параболического зеркала (ГПЗ) ККТ диаметром 10 м после его раскрытия должна
быть не хуже 10 мкм при точности ориентации и стабилизации модуля служебных
систем (МСС) с ККТ — не хуже 1ʺ и 0,2′ соответственно . Показано, что точность
ориентации и стабилизации МСС с ККТ на порядок ниже требуемых, а упругие
колебания крупногабаритных элементов конструкции ККТ, вызванные воздействием микродинамических возмущений (МВ), способны привести к нарушению
требуемой прецизионности [20, 21] .
Также была выявлена проблема, связанная с удалением орбиты ККТ
на 1,5 млн км от Земли, которая не позволяет осуществлять управление системами
ККТ в режиме реального времени .
Таким образом, ИСАВВН ККТ должна адекватно реагировать на изменяющиеся во времени МВ и в режиме реального времени принимать оптимальные решения, обеспечивающие сохранение технических характеристик ККТ в процессе
эксплуатации, т .е . быть интеллектуальной .
Все известные до второй половины 90-х гг . XX в . отечественные и зарубежные
системы виброзащиты и высокоточного наведения прецизионных полезных нагрузок КА были подчинены одной общей трехуровневой концепции построения:
пассивная переходная ферма КА (1-й уровень), система виброзащиты (2-й уровень) и высокоточная поворотная платформа (3-й уровень) (рис . 9 .5) .
214
Глава 9. Новые механизмы космической робототехники
Рис. 9.4. Кинематическая схема раскрываемой на орбите прецизионной конструкции КРТ лепесткового типа
Рис. 9.5. Трехуровневый (известный подход) и одноуровневый (новый подход)
подходы к построению системы виброзащиты и высокоточного наведения прецизионных полезных нагрузок КА
Это ведет к резкому увеличению габаритно-массовых характеристик, что в ряде
случаев неприемлемо из-за дефицита полезного объема под обтекателем ракетыносителя . При этом в системе виброзащиты (2-й уровень) в области высоких, низких
и инфранизких частот предпочтительнее применение активных средств, которые
по сравнению с пассивными отличаются более низкими значениями габаритномассовых характеристик, что очень важно при создании космических систем .
Глава 9. Новые механизмы космической робототехники
215
Поэтому в основу концепции ИСАВВН был заложен принципиально новый подход, разработанный Саяпиным С .Н . и защищенный патентами РФ
[17, 22] . Суть подхода заключается в замене пассивной переходной фермы между КА и прецизионным объектом на активную ферму в виде пространственного
механизма параллельной структуры с 6 DOF [7, 8, 14—22] подобного платформе
Стюарта—Гауфа (см . рис . 9 .3, 9 .4) [23] .
Предлагаемая концепция ИСАВВН ККТ способна обеспечить:
• виброзащиту панелей солнечных батарей МСС от низкочастотных упругих
колебаний, вызванных раскрытием радиаторов, теплозащитных экранов,
криоэкрана и ГПЗ;
• виброзащиту крупногабаритных элементов ККТ от низкочастотных микродинамических воздействий, вызванных работой систем МСС;
• подавление низко- и высокочастотных колебаний упругой конструкции
ККТ, вызванных МВ;
• периодическое высокоточное угловое наведение оптической оси ККТ;
• генерирование вибрационных воздействий на конструкцию ККТ и МСС,
включая проведение вибродиагностики элементов их конструкций .
При этом одноуровневая ИСАВВН ККТ, в отличие от зарубежных аналогов
[24], способна осуществлять пространственную активную виброзащиту ККТ с одновременным его высокоточным наведением и стабилизацией [20, 21] .
ИСАВВН КТ относятся к пространственных активным виброзащитным системам «кинематического типа» [14] . Рассмотрим основные принципы такой системы с позиций механики .
Полагаем, что активный исполнительный элемент, оставаясь абсолютно жестким (в пределах наших допущений) направленно меняет свою длину и рассматривается как генератор относительного перемещения (скорости, ускорения) . Это
кинематическое изменение элемента происходит под воздействием сигналов от информационно-измерительных преобразователей (датчиков) механических величин
(ускорений, сил, возможно также, перемещений, скоростей и других параметров) .
Покажем возможность обеспечения защиты ККТ от вибраций со стороны
МСС и, наоборот, МСС со стороны ККТ с помощью одноуровневой пространственной ИСАВВН, построенной в виде платформы Стюарта—Гауфа .
На рис . 9 .6 изображена схема системы активной виброзащиты «кинематического типа» с 6 d .o .f ., на которой твердое тело 1 шарнирно прикреплено к основанию 2 активными элементами-стержнями li (i = 1—6) .
Рассмотрим вариант действия вибраций со стороны основания 2 . Принято
допущение об объекте как абсолютно твердом теле . По направлениям осей стержней li действуют со стороны основания 2 ускорения ai (i = 1—6), измеряемые акселерометрами ia (i = 1—6) .
Если каждый i-й стержень изменяет свою длину по закону:
s 2li = –ai (i = 1—6) или sli = –ai /s и li = –ai /s 2 (i = 1—6),
(9 .1)
то это управление приводит к тому, что твердое тело 1 остается в пространстве
неподвижным . Здесь и далее s — оператор дифференцирования .
Согласованным изменением длин активных элементов-стержней li достигается
пространственное позиционирование твердого тела 1 относительно основания 2,
что позволяет обеспечить высокоточное наведение ККТ на исследуемый объект .
216
Глава 9. Новые механизмы космической робототехники
Рис. 9.6. Схема системы активной виброзащиты «кинематического типа» с 6 d .o .f .:
1 — твердое тело (платформа); 2 — основание
Рассмотрим пример твердого тела на платформе Стюарта, когда к твердому
телу 1 приложен вектор вибрационных сил и моментов:
F = [Fx , Fy , Fz , Mx , My , Mz ]T .
(9 .2)
Силы и моменты приложены относительно декартовой системы координат
XYZ на твердом теле 1 . Эти силы передаются через активные элементы-стержни
li (i = 1—6) .
Ускорения ai′ (i = 1—6) вдоль осей активных элементов-стержней li измеряются
в точках крепления к твердому телу акселерометрами ia′ (i = 1—6) и образуют вектор:
a′ = [a1′, a2′, a3′, a4′, a5′, a6′]T,
(9 .3)
соответствующие векторы образуют скорости и перемещения этих точек v и l .
Последовательно с активными элементами-стержнями li установлены динамометры f i (i = 1—6), которые измеряют вектор сил:
f = [f1, f2, f3, f4, f5, f6]T .
(9 .4)
Принятые допущения: твердое тело 1 — абсолютно жесткое; основание 2 —
абсолютно жесткое и неподвижное; перемещения твердого тела — малые, т .е . геометрически задача может рассматриваться в линейной постановке . Задача состоит в защите от передачи вибрационных сил F на основание 2 . Важное значение
в этой задаче имеет линейная связь между векторами:
a′ (s) и Ẍ (s); v (s) и Ẋ (s), или l (s) и X (s), а также f (s) и F (s) .
Эта связь осуществляется через матрицу плюккеровых координат A:
a′ (s) = A Ẍ (s) = As2X (s), v (s) = A Ẋ (s) = AsX (s), l (s) = AX (s);
(9 .5)
F1(s) = ATf (s),
(9 .6)
где F1 (s) — сила, приложенная к твердому телу от активных элементов-стержней li .
Глава 9. Новые механизмы космической робототехники
217
Построим компенсирующее управление следующим образом .
Уравнение движения тела:
s 2MX + F1 = F,
(9 .7)
где M — матрица инерции твердого тела относительно системы координат XYZ .
Сила F определяется через измерение вектора ускорений a′ и вектора сил f
следующим образом с учетом (9 .4)—(9 .6):
F = MA–1a + A T f .
(9 .8)
Из (9 .8) определяется вектор кинематических ускорений для управления активными элементами-стержнями li :
ay = a′ + AM–1A T f .
(9 .9)
Задавая такой закон движения, мы обеспечим условие F1 = f = 0, т .е . изоляцию
основания 2 от вибрационных сил . Этот принцип определен как создание «управляемой податливости» [14] .
Приведенные аналитические формулы (9 .1)—(9 .9) показывают принципиальную возможность обеспечения защиты объекта от вибраций основания и основания от вибраций объекта путем компенсации сил и кинематических воздействий
с помощью активных устройств «кинематического типа» . В вопросах устойчивости проблема решается в рамках современной теории управления [25] или с использованием фильтров верхних частот, а также созданием каналов управления
по интегралам перемещений . Управление ИСАВВН в режиме реального времени
обеспечивается применением сверхвысокопроизводительной вычислительной
техники, реализующей методы нейронного управления [26] .
Ниже на рис . 9 .7 показаны общий вид шестистепенного динамического стенда
(ШДС) авиационного тренажера — полномасштабной физической модели пространственной САВВН КТ (а) и результаты ее физического моделирования (б) .
ШДС представляет собой пространственный механизм параллельной структуры
с 6 d .o .f . в виде неподвижного основания 1 и подвижной платформы 2 с 6 d .o .f ., соединенных между собой через шарниры Гука (3) шестью линейными приводами 4
с образованием замкнутой кинематической цепи .
Впервые в мировой практике в качестве полномасштабной физической модели пространственной САВН космического телескопа (КТ) был успешно применен ШДС авиационного тренажера [14] . Данное техническое решение защищено
патентом РФ на изобретение (заявитель ИМАШ РАН) [27] .
Возмущения, организованные в направлении вертикальной оси стенда, были
реализованы с помощью вибратора, выполненного на базе линейного гидропривода, установленного внутри кабины на платформе 3 ШДС — физической модели
через датчики силы . На рис . 9 .7б показаны графики зависимостей усилий P, передаваемых вибратором на датчики силы платформы 2 ШДС — полномасштабной
физической модели пространственной САВВН КТ и воспринимаемых платформой 2, от частоты f . Построенные графики наглядно демонстрируют возможность
практической реализации предлагаемой концепции САВВН КТ . Снижение эффекта виброизоляции в области частот ниже 5 Гц (рис . 9 .7б) связано с нестабильностью точного поддержания фаз задающими генераторами на этих частотах .
218
Глава 9. Новые механизмы космической робототехники
Рис. 9.7. Шестистепенной динамический стенд авиационного тренажера —
полномасштабная физическая модель пространственной САВВН КТ (а)
и графики зависимостей усилий P, передаваемых вибратором на датчики
силы подвижной платформы 2 и воспринимаемых платформой 3,
от частоты f (б):
1 — неподвижное основание; 2 — подвижная платформа с 6 d .o .f .; 3 — шарнир Гука
На рис . 9 .8 представлена структурная схема разработанной в ИМАШ РАН
концепции ИСАВВН раскрываемого на орбите ККТ КО «Миллиметрон», которая способна обеспечивать в режиме реального времени виброзащиту ККТ
с одновременным его высокоточным наведением на исследуемые объекты и др .
[7, 8, 12, 14—22] .
Система выполнена в виде пространственной активной переходной фермы,
механически соединяющей МСС с ККТ . ККТ включает в себя ГПЗ 1 с 24 раскрываемыми лепестками, теплозащитные экраны 2, опоры 3 контррефлектора 4
и астродатчики 5 . ККТ установлен на несущей конструкции 6 МСС, содержащего
панели солнечных батарей 7 и высокоинформативный радиокомплекс (ВИРК) 8,
через переходную ферму 9 .
Глава 9. Новые механизмы космической робототехники
219
Рис. 9.8. Структурная схема варианта концепции ИСАВВН раскрываемого на орбите
ККТ КО «Миллиметрон»
Платформа 10 и основание 11 переходной фермы 9 жестко прикреплены
к узлам стыковки неохлаждаемого отсека ККТ с одной стороны и к несущей
конструкции 6 МСС— с другой . Платформа 10 шарнирно связана с основанием 11 посредством подвески с шестью степенями свободы, выполненной в виде
пространственного манипулятора, включающего не менее шести одинаковых
единичных модулей активной виброизоляции (ЕМАВ) 12 . Манипулятор построен на основе параллельно соединенных приводных кинематических цепей
с возможностью образования пространственной фермы (переходной фермы 9)
при отключенных приводах ЕМАВ 12, являющихся, в свою очередь, стержнями фермы 9 . Каждый из стрежней снабжен приводом линейного перемещения,
позволяющим обеспечить манипулятору-ферме шестистепенную подвижность
в работающем состоянии и геометрическую неизменяемость в выключенном
состоянии . В местах шарнирного закрепления каждого из ЕМАВ 12 к платформе 10 и основанию 11 установлены совмещенные датчики пространственного
положения и ускорений 13 и 14, выполненные в виде миниатюрных трехосных
блоков гироскопов-акселерометров, позволяющих определять относительные перемещения ЕМАВ 12 и измерять составляющие ускорения, действующие на их
продольные оси . В контрольных точках теплозащитных экранов 2, радиаторов
рефрижераторов и панелей солнечных батарей 7 установлены совмещенные
220
Глава 9. Новые механизмы космической робототехники
датчики пространственного положения и ускорений 15—17 . Бортовая высокопроизводительная информационно-измерительная управляющая система
(БВИИУС) 18 включает нейрокомпьютер 19, программно-алгоритмическое обеспечение 20 и цифро-аналоговые преобразователи 21 . Входы БВИИУС 18 через
входные шины аналого-цифровых преобразователей (АЦП) подключены соответственно к выходам АЦП 22 совмещенных датчиков пространственного положения и ускорений 13—17, АЦП 23 — астродатчиков 5, АЦП 24 — датчиков относительной скорости 25 . Выходы БВИИУС 18 через выходные шины подключены
к соответствующим входам последовательно соединенных цифро-аналоговых
преобразователей (ЦАП) 21, усилителей мощности 26 и исполнительных органов
(ЕМАВ 12 и приводов поворота 27 панелей солнечных батарей 7), а также к входу
соединенных последовательно ВИРК 8, радиолинии 28 и наземного радиотехнического комплекса 29 .
Функционирование ИСАВВН в процессе эксплуатации ККТ реализовано
следующим образом . После выведения на орбиту космической обсерватории
и раскрытия ГПЗ 1, теплозащитных экранов 2, радиаторов рефрижераторов 30,
панелей солнечных батарей 7, антенны ВИРК 8 и других протяженных элементов, а также включения ЕМАВ 12 в активный режим, показания совмещенных
датчиков пространственного положения и ускорений сравнивают со значениями,
полученными при их наземной настройке . По результатам сравнения судят о деформациях и упругих колебаниях протяженных элементов конструкции космического телескопа и МСС, а также о взаимном расположении платформы 10 и основания 11 в процессе эксплуатации . При отклонениях, превышающих допустимые
значения, осуществляют выбор одного из следующих режимов (или их комбинаций) управления динамикой ККТ и МСС в режиме реального времени:
• первый режим — виброизоляция МСС и его протяженных элементов (панели солнечных батарей 7, антенна ВИРК 8 и др .) при раскрытии ГПЗ 1,
теплозащитных экранов 2 и радиаторов рефрижераторов 30;
• второй режим — виброизоляция прецизионного ГПЗ 1 и теплозащитных
экранов 2 ККТ от микродинамических воздействий, вызванных работой
МСС в процессе эксплуатации;
• третий режим — подавление колебаний протяженных элементов конструкций ККТ, вызванных их раскрытием и внешними воздействующими факторами;
• четвертый режим — подавление колебаний протяженных элементов конструкций МСС, например, панелей солнечных батарей и балки ВИРК с антенной, вызванных работой МСС в процессе эксплуатации;
• пятый режим — высокоточное наведение ККТ и на исследуемый объект
и его стабилизация в режиме реального времени;
• диагностика раскрытия складных элементов ККТ и МСС, а также контроль
ВВМВ на ККТ и МСС;
• восстановление координат центра масс космической обсерватории относительно базовой системы координат в случае их изменений в процессе эксплуатации, например из-за выработки запасов топлива в МСС .
При этом ведут непрерывную обработку векторной информации от астродатчиков 5, совмещенных датчиков пространственного положения и ускорений 13—17, а также датчиков относительной скорости 25 . На основании анализа
Глава 9. Новые механизмы космической робототехники
221
этой информации в БВИИУС 18 формируются в масштабе реального времени
управляющие команды, которые подаются на исполнительные органы (ЕМАВ 12
и приводы поворота 27 панелей солнечных батарей 7) . Обработанную информацию от датчиков и научной аппаратуры фокального блока 4 преобразуют в радиосигналы и через ВИРК 8 по радиолинии 28 передают в наземный радиотехнический комплекс 29 для дальнейшей обработки, анализа и формирования (при
необходимости) управляющих команд, а также для передачи их на МСС для проведения корректировки программ наблюдений .
Необходимо отметить, что для обеспечения с помощью одноуровневой
ИСАВВН виброзащиты криогенного космического телескопа «Миллиметрон»
необходимо каждый из ЕМАВ выполнять двухкаскадными . 1-й каскад — низкочастотный прецизионный линейный привод, способный обеспечивать точные
перемещения с амплитудой 10 мкм до 200 мм в диапазоне частот от 0,1 до 15 Гц
и 2-й каскад-прецизионный пьезопривод, способный обеспечивать прецизионные перемещения с амплитудой 1— 500 мкм в диапазоне частот от 15 до 100 Гц .
Робот параллельной структуры для ориентации антенны
космического телескопа
В ИМАШ РАН под научным руководством д .т .н ., профессора В .А . Глазунова (директор ИМАШ РАН с 2015 г .) в период с 2010 по 2013 г . проведена НИР, завершившаяся защитой кандидатской диссертации аспирантом ИМАШ РАН С .М . Демидовым [28] . Цель работы: разработка методов и средств для синтеза, анализа,
моделирования и управления роботом параллельной структуры, предназначенного для космического телескопа . Одним из главных положений, определяющих научную новизну работы, является решение задач кинематики робота параллельной
структуры предназначенного для космического телескопа, с учетом сохранения
положения центра масс, возможной потери управляемости или степени свободы .
На рис . 9 .9 показана кинематическая схема синтезированного механизма параллельной структуры с тремя степенями свободы, который позволяет осуществлять поворот антенны в пространстве с сохранением положения центра масс КО
«Миллиметрон» [28] .
Данный плоский механизм с тремя степенями свободы включает основание 1,
выходное звено 2, три кинематические цепи, каждая из которых содержит входную
вращательную кинематическую пару 3, 3׳, 3ʺ, промежуточную вращательную кинематическую пару 4, 4׳, 4ʺ и конечную вращательную кинематическую пару 5, 5׳, 5ʺ .
Механизм с тремя степенями свободы работает следующим образом: относительно основания 1 выходное звено 2 перемещается по трем координатам посредством трех соединительных кинематических цепей . При этом с каждой входной
вращательной кинематической пары 3, 3׳, 3ʺ, движение передается на промежуточную кинематическую пару 4, 4׳, 4ʺ и на конечную вращательную кинематическую пару 5, 5׳, 5ʺ .
Для структурного анализа использована формула Куцбаха:
W = λ (n – 1 – m) + w1 + w2 + … + wm .
(9 .10)
Здесь W — число степеней свободы робота; λ — размерность пространства, в котором функционирует робот; n — число всех звеньев робота, включая основание;
222
Глава 9. Новые механизмы космической робототехники
m — число всех сочленений (кинематических пар) робота; wi — число степеней
свободы соответствующего сочленения .
Рис. 9.9. Кинематическая схема механизма параллельной структуры с тремя степенями свободы:
1 — основание, 2 — выходное звено; 3, 3 ׳, 3 ʺ — входные вращательные кинематические пары; 4, 4׳, 4ʺ — промежуточные вращательные кинематические пары; 5, 5 ׳,
5ʺ — конечные вращательные кинематические пары
По формуле Куцбаха число степеней свободы представленного робота составит .
W = 3 (8 – 1 – 9) + 1 + 1 + 1 + 1 + 1 + 1 + 1 + 1 + 1 = 3 .
При этом: λ = 3; n = 8; m = 9 .
Таким образом, данный механизм имеет 3 степени свободы .
Кроме того, использованы геометрические соотношения, определяющие характер движения выходного звена . Здесь все кинематические пары параллельны
друг к другу, из чего следует, что все звенья перемещаются параллельно плоскости, перпендикулярно осям кинематических пар .
Также установлено, что нелинейные свойства синтезированного робота параллельной структуры обусловливают возможности его применения как виброгасителя .
Система стыковки космических аппаратов
На основе результатов, полученных в процессе разработки и исследования
ИСАВВН ККТ, в ИМАШ РАН разработана и защищена патентом на РФ на изобретение концепция построения интеллектуальной робототехнической адаптируемой системы стыковки (ИРАСС) КА [14, 29] .
Глава 9. Новые механизмы космической робототехники
223
При проведении стыковки КА с ОС или КА с КА могут иметь место следующие нештатные ситуации:
• 1 — в случае недостаточно точного сближения КА с ОС возникает опасность
нештатного соударения, способного привести к аварийной ситуации, а при
своевременной отмене процесса стыковки и проведении маневров для ее
повтора возникает опасность потери КА из-за нехватки запасов топлива;
• 2 — в случае недостаточного погашения скорости сближения КА с ОС неизбежно последует удар, способный привести к возникновению нештатной
ситуации в работе систем КА и ОС .
ИРАСС 1 (рис . 9 .10) предназначена для высокоточной стыковки космических
объектов независимо от возникновения указанных выше нештатных ситуаций .
На рис . 9 .10 показана возможность стыковки при помощи адаптивной герметичной несущей конструкции ИРАСС 1 к ОС 2 КА 3 в случае несоосного сближения .
Стыковочное устройство 4, герметично соединенное с жестким корпусом 5 через
переходной отсек 6, выполнено с возможностью его пространственного позиционирования . При сближении КА 3 с ОС 2 (верхняя часть рис . 9 .10) в случае несоосности стыковочных устройств 4 от бортовой системы управления (БСУ) подается
команда на линейные привода (ЛП) 7, которые по показаниям датчиков относительного перемещения осуществляют согласованное изменение своих длин . При
этом стыковочное устройство 4 ориентируется в пространстве, адаптируясь к стыковочному устройству приближающегося КА 3 с требуемой степенью соосности .
Рис. 9.10. Схема применения интеллектуальной робототехнической адаптируемой
системы стыковки КА
224
Глава 9. Новые механизмы космической робототехники
После стыковки и фиксации ЛП 7 выключаются и несущий каркас в виде приводного шестиподвижного кинематического соединения типа платформы Стюарта—Гауфа [23] становится пространственной фермой .
В случае недостаточного погашения скорости сближения КА 3 с ОС 2 при их
стыковке, по команде от БСУ в момент соударения их стыковочных устройств 4
включаются ЛП 7 и осуществляется согласованное уменьшение длин соединительных звеньев со скоростью, задаваемой по показаниям датчиков относительной скорости и относительного перемещения, а также акселерометров, установленных на платформе 8, в результате чего обеспечивается парирование ударной
нагрузки . Контроль механического ударного воздействия на ОС 2 осуществляется
по показаниям акселерометров, установленных на основании 9 . При этом, управление ЛП 7 ведется таким образом, чтобы показания акселерометров, установленных на основании 9, не выходили за допустимые пределы .
После завершения стыковки КА 3 с ОС 2 по команде от БСУ включаются ЛП 7
и согласованным изменением длин соединительных звеньев устройство стыковки 1 с КА 3 плавно переводится в исходное пространственное положение (нижняя
часть рис . 9 .10) . Сохранение герметичности переходного отсека 6 при пространственных перемещениях стыковочного узла 4 достигается за счет его выполнения
в виде упругой оболочковой конструкции сильфонного типа .
Предлагаемая ИРАСС 1 позволяет не только повысить надежность стыковки
ОС 2 с КА 3, но и расширить функциональные возможности самой ОС, в части
низкочастотной активной виброизоляции платформы 8 при необходимости обеспечения требуемого уровня микрогравитации на КА 3 в условиях совместного
с ОС 2 орбитального полета, а также ее высокоточного углового и линейного наведения в пространстве .
Разработка и исследование космических роевых робототехнических систем
на основе октаэдральных мобильных параллельных роботов .
В ИМАШ РАН главным научным сотрудником, д .т .н . Саяпиным С .Н . разработана концепция создания космической роевой робототехнической системы
на основе группы из интеллектуальных октаэдральных мобильных параллельных
роботов (МПР) с 12 d .o .f . Как правильный многогранник октаэдральный МПР
способен самообъединяться (разъединяться) с себеподобными МПР, входящими
в состав космической роевой робототехнической системы и образовывать пространственные линейные активные структуры и поверхности самых различных
топологий . Концепция интеллектуального октаэдрального МПР была разработана в ИМАШ РАН и защищена патентом РФ на изобретение (заявитель ИМАШ
РАН) главным научным сотрудником, д .т .н . Саяпиным С .Н . Впервые концепция
октаэдрального МПР названная «Октаэдральный додекапод» (ОД) (от греческих
слов «додека» — двенадцать и «под» — нога) и ее функциональные возможности
были представлены в 2008 г . на XXII International Congress of Theoretical and Applied Mechanics (ICTAM 2008) и на других международных конференциях [30—33] .
В настоящее время опубликован ряд работ, раскрывающих функциональные
возможности ОД ИМАШ РАН, включая Патенты РФ на изобретения в части ОД
ИМАШ РАН и его элементов [30—38] . На рис . 9 .11 представлены кинематическая
(a) и структурная (b) схемы ОД ИМАШ РАН с максимальной комплектацией и его
демонстрационная физическая модель (c) . В зависимости от выполняемых функциональных задач комплектацию можно уменьшить . Механизм параллельной
Глава 9. Новые механизмы космической робототехники
225
структуры выполнен в виде октаэдрального модуля (ОМ) 1, который при выключенных ЛП 2 становится пространственной фермой и имеет высокую удельную
жесткость . Каждая из восьми граней ОМ 1 обладает хватательными и распорными
способностями . ЛП 2 снабжены осевыми 3 и срединными 4 датчиками силы и датчиками относительного линейного перемещения 5 и относительной скорости 6 .
Рис. 9.11. Кинематическая (a) и структурная (б) схемы ОД ИМАШ РАН с максимальной комплектацией и его демонстрационная физическая модель (в)
Вершины 7 ОМ 1 соединены с концами ЛП 2 сферическими шарнирами . При
необходимости вершины 7 и срединные участки ЛП 2 могут быть снабжены радиальными упорами и схватами с датчиками температуры 8 . При этом радиальные
упоры и схваты служат для передачи распорных и сжимающих усилий от вершин 7
и срединных участков ЛП 2 к внутренней и наружной контактируемым поверхностям соответственно . В непосредственной близости от радиальных упоров вершин 7 установлены датчики пространственного положения 9 и ускорений 10, которые служат для оперативного контроля пространственного положения каждой
из вершин 7 и виброускорений вдоль каждой из осей стержней с ЛП 2 . При этом
датчики 9 и 10 могут быть выполнены в виде совмещенных миниатюрных трехосных блоков гироскопов-акселерометров . Система управления (СУ) 11 включает в себя нейрокомпьютер 12 с соответствующим программно-алгоритмическим
226
Глава 9. Новые механизмы космической робототехники
обеспечением (ПАО) 13, позволяющим организовать работу в масштабе реального времени, и цифро-аналоговые преобразователи (ЦАП) 14 . Входы СУ 11 через
шины данных аналого-цифровых преобразователей (АЦП) подключены соответственно к выходам: 15 датчиков силы 3 и 4; 16 датчиков относительного линейного
перемещения 5; 17 совмещенных датчиков пространственного положения и ускорений 9 и 10; 18 датчиков относительной скорости 6 и 19 датчиков температуры 8,
а выходы СУ 11 через шины выходных данных подключены к соответствующим
входам ПАО 13 и последовательно соединенных ЦАП 14, усилителей мощности 20
и ЛП 2 . При этом СУ 11 и система энергопитания могут быть автономного исполнения как на рис . 9 .11 или дистанционного исполнения . Оперативный контроль
передаваемых усилий и температур в местах контакта упоров вершин 7 и срединных участков ЛП 2 с внутренней и наружной поверхностями осуществляют с помощью датчиков силы 3, 4 и 8 . Датчики относительного линейного перемещения 5 и относительной скорости 6 (наблюдатели состояний) ЛП 2 регистрируют
их относительные перемещения и скорости .
Установлены следующие способы самоперемещения ОД ИМАШ РАН .
1 . Способ опрокидывания путем смещения проекции центра тяжести на горизонтальную плоскость за пределы опорной треугольной грани .
Достоинством способа опрокидывания является его независимость от неровностей поверхности, по которой перемещается МПР . Способность движения
по каменистой поверхности и преодолевать углубления и трещины соизмеримые
размерам граней МПР в исходном положении .
К недостаткам этого способа следует отнести невозможность перемещения
по крутым наклонным поверхностям, а также потребность в больших рабочих
ходах линейных приводов . Поэтому линейные приводы выполняют телескопическими с несколькими коленами, спаренными или комбинированными . При этом
для уменьшения рабочего хода линейных приводов для опрокидывания можно
использовать силу инерции, возникающую при остановке линейных приводов .
Способ непригоден для перемещения по поверхности космического объекта с микрогравитацией (астероиды, кометы и т .п .) . В этом случае перемещение
возможно путем использования силы инерции при условии наличия в вершинах
внедряемых в поверхность опорных стержней .
2 . Способ ползания по-пластунски, при котором сначала боковые ЛП симметрично удлиняются и фронтальная вершина контактируемой с поверхностью
треугольной грани выдвигается вперед, затем боковые ЛП поочередно укорачиваются и происходит подтягивание тыльных вершин до исходного положения .
В ИМАШ РАН разработана, исследована и защищена патентом РФ на изобретение концепция плоского МПР «Триангель» с 3 d .o .f . (рис . 9 .12) [38] . Концепция МПР «Триангель» успешно апробирована на международных конференциях .
МПР «Триангель» является прототипом активной треугольной грани ОД
ИМАШ РАН и на нем отработаны способ перемещения ОД ИМАШ РАН по-пластунски и стыковка с себеподобными модулями . МПР «Триангель имеет в вершинах цилиндрические шарниры, оси которых проходят через точки пересечения
продольных осей линейных приводов и перпендикулярны к ним . Поэтому параллельная структура плоского МПР «Триангель» обладает самой высокой удельной
Глава 9. Новые механизмы космической робототехники
227
жесткостью . На прототипе МПР «Триангель» также показана его способность
к самоперемещению по-пластунски без вакуумного прижатия опор (вершин)
к горизонтальной или наклонной контактируемой поверхности и без поочередного изменения силы трения между опорами и контактируемой поверхностью .
Установлено, что для такого перемещения угол между стержнями фронтальной
опоры A должен быть α ≤ 60⁰ (рис . 9 .12) .
Рис. 9.12. Цикрограмма перемещения по-пластунски МПР «Триангель» с 3
d .o .f . — прототип активной треугольной грани ОД ИМАШ РАН
Достоинством способа перемещения по-пластунски по сравнению с перемещением путем опрокидывания является малый рабочий ход линейного привода,
а также способность перемещаться по более крутым наклонным плоскостям .
3 . Передвижение прыжками за счет сил инерции .
Достоинство — возможность преодоления препятствий .
Недостаток — способ непригоден для перемещения по поверхности космического объекта с микрогравитацией (астероиды, кометы и т .п .) .
4 . Комбинирование способов по пп . 1—3 .
При самоперемещении ОД ИМАШ РАН по-пластунски хватательными и распорными способностями с возможностью манипулирования зажатым предметом
обладают верхняя и три несмежных боковых грани . Также в процессе самоперемещения по-пластунски с помощью согласованного взаимодействия линейных
приводов боковых граней можно обеспечить активную виброизоляцию верхней
грани с зажатым предметом от динамических воздействий со стороны нижней
грани в режиме реального времени .
На рис . 9 .13 показан пример реконфигурации плоской активной параллельной структуры, образованной объединением 20 треугольных МПР типа «Триангель», из одной топологии в другую .
Рис. 9.13. Реконфигурации плоской активной параллельной структуры, образованной объединением 20 треугольных МПР типа «Триангель», из одной
топологии в другую
228
Глава 9. Новые механизмы космической робототехники
ЗАКЛЮЧЕНИЕ
Космическая робототехника на основе применения механизмов параллельной
структуры является новым и актуальным научным направлением .
В силу своей универсальности космические параллельные роботы и робототехнические системы будут востребованы во многих отраслях экономики страны
в широком диапазоне от макроуровня до микро- и наноуровней .
В силу своей удаленности и необходимости принятия решений в режиме
реального времени разрабатываемые и перспективные космические робототехнические системы должны наделяться элементами искусственного интеллекта
и способностью к самообучению .
Анализ параллельных структур на основе Платоновых тел показал, что МПР
на основе тетраэдральной структуры обладают максимальной жесткостью и коэффициентом трансформации и способны перемещаться по поверхности опрокидыванием, ползанием по-пластунски и прыжками . Грани тетраэдрального МПР
не обладают хватательными и распорными способностями . Поэтому тетраэдральнеые МПР эффективно применять для индивидуального и коллективного мониторинга местности . Тетраэдральные МПР способны объединяться друг с другом
в многомодульные реконфигурируемые параллельные структуры и образовывать
активные пространственные конструкции самой разнообразной формы, обладающие хватательными, распорными и манипуляционными способностями .
Октаэдральный МПР также обладает высокой жесткостью и коэффициентом
трансформации и способны перемещаться по поверхности опрокидыванием,
ползанием по-пластунски и прыжками . Кроме того, грани октаэдрального МПР
обладают хватательными и распорными способностями и самыми разнообразными манипуляционными возможностями . Поэтому октаэдральный МПР имеет
наибольшую эффективность при индивидуальном применении . При коллективном применении октаэдральный МПР имеет наибольшую эффективность при
индивидуальном решении комплексных задач, включающих не только мониторинг местности, но и использование его манипуляционных возможностей .
С учетом накопленного в ИМАШ РАН опыта, имеющегося задела и своей диверсификационности научное направление по разработке и исследованию интеллектуальных космических роевых робототехнических систем на основе мобильных параллельных роботов является актуальным и перспективным .
Литература
1 . Фролов К.В ., Пархоменко А.А ., Усков М.К . Анатолий Аркадьевич Благонравов . — М .: Наука, 1982 . — 354 с .
2 . Глазунов В.А ., Колискор А.Ш ., Крайнев А.Ф . Пространственные механизмы параллельной структуры . — М .: Наука, 1991 . — 96 с .
3 . Глазунов В.А . Современные проблемы машиноведения . — М .—Ижевск: Институт компьютерных исследований, 2015 . — 40 с .
4 . Колискор А.Ш . Разработка и исследование промышленных роботов на основе
l-координат // Станки и инструмент, 1982 . — № 12 . — С . 21—24 .
Глава 9. Новые механизмы космической робототехники
229
5 . Манипуляционные системы роботов / А .И . Корендясев, Б .Л . Саламандра, Л .И . Тывес,
А .Ш . Колискор, Н .А . Серков и др .; под общ . ред . А .И . Корендясева . — М .: Машиностроение, 1989 . — 472 с .: ил .
6 . Фролов К.В . Современные проблемы и тенденции развития космической науки // Проблемы машиностроения и надежности машин, 2007 . — № 1 . — С . 3—13 .
7 . Саяпин С.Н . Перспективы и возможное применение пространственных механизмов
параллельной структуры в космической технике // Проблемы машиностроения и надежности машин, 2001 . — № 1 . — С . 17—26 .
8 . Галушкин А.И ., Саяпин С.Н ., Синев А.В ., Фролов К.В . Эффективность применения механизмов параллельной структуры в космической технике и их имитационное моделирование . Восьмой Всероссийский съезд по теоретической и прикладной механике .
Пермь, 23—29 августа 2001 года . Аннотации докладов . Екатеринбург: УрО РАН, 2001 . —
С . 174 .
9 . Рыбак Л.А ., Синeв А.В ., Пашков А.И . Синтез активных систем виброизоляции на космических объектах . — М .: Янус-К, 1997 . — 160 с .
10 . Сидорова М.Н . Геометрические задачи оптимального синтеза систем виброизоляции: Автореферат диссертации на соискание ученой степени кандидата техн . наук:
05 .02 .18 . — М .: МГАПИ, 1997 . — 24 с .
11 . Рыбак Л.А . Синтез активных систем низкочастотной виброизоляции для космических
объектов: Автореферат диссертации на соискание ученой степени доктора техн . наук:
05 .02 .18 . — М .: ИМАШ РАН им . А .А . Благонравова . 1998 . — 48 с .
12 . Проблемы виброакустики, микрогравитации, прочности и динамики процессов разделения перспективных упругих ракетно-космических объектов: отчет / Институт машиноведения им . А .А . Благонравова РАН (ИМАШ РАН); Рук работы акад К .В . Фролов .
Авторы: Синев А .В ., Рыбак Л .А ., Пашков А .И ., Саяпин С .Н . и др . Инв . № 02 .2 .00 105014
Всероссийского научно-технического информационного центра . — Москва, 1999 . —
157 с .
13 . Полежаев В.И . Гидромеханика и процессы тепломассообмена в условиях микрогравитации: история, этапы развития и современные направления фундаментальных и прикладных исследований // Препринт № 779 Института проблем механики Российской
академии наук, 2005 .
14 . Саяпин С.Н . Анализ и синтез раскрываемых на орбите прецизионных крупногабаритных механизмов и конструкций космических радиотелескопов лепесткового типа:
Дис . … д-ра техн . наук . — М .: ИМАШ РАН, 2003 . — 446 с .
15 . Саяпин С.Н ., Синев А.В . Некоторые проблемы создания крупногабаритных высокоточных антенн космических радиотелескопов // XXXIV научные чтения, посвященные
разработке творческого наследия К .Э . Циолковского . Калуга, 14—16 сентября 1999 г .
Тезисы докладов . М .: ИИЕТ РАН . 1999 . — С . 159—161 .
16 . Саяпин С.Н ., Синев А.В ., Трубников А.Г . Проблема гравитационной чувствительности высокоточных трансформируемых антенн космических радиотелескопов // Сб .
тр . VII Российского симпозиума «Механика невесомости . Итоги и перспективы фундаментальных исследований гравитационно-чувствительных систем» . 11—14 апреля
2000 г . — М .: ИПМ РАН, 2001 . — С . 463—474 .
17 . Саяпин С.Н ., Синев А.В ., Трубников А.Г . Способ подавления помех от колебаний упругой конструкции космической трансформируемой антенны в процессе эксплуатации
и устройство для его осуществления . Патент РФ на изобретение № 2161109 (заявка
№ 99119572/28 от 10 .09 .1999 г .), МПК B64G 1/00, 1/22, 3/00 . Опубл . 27 .12 .2000 . Бюл . № 36 .
18 . Sayapin S.N . Active vibration isolation and pointing system for high-precision large deployable space antennas (HLDSA) // Second European Conference on Structural Control .
ABSTRACTS . ENPC, Champs-sur-Marne, France . July 3—6, 2000 . — Р . 231 .
19 . Разработка принципов построения комплекса эффективных средств виброзащиты
и высокоточного наведения прецизионных космических конструкций и схемных решений для его реализации в составе базовых космических аппаратов: отчет / Институт
230
Глава 9. Новые механизмы космической робототехники
машиноведения им . А .А . Благонравова РАН (ИМАШ РАН); Рук . работы акад .
К .В . Фролов . Авторы: Синев А .В ., Саяпин С .Н ., Израилович М .Я . и др . Инв . № 02 .2 .00
105013 Всероссийского научно-технического информационного центра . — Москва,
2000 . — 108 с .
20 . Саяпин С.Н ., Артеменко Ю.Н ., Мышонкова Н.В . Проблемы прецизионности криогенного космического телескопа обсерватории «Миллиметрон» // Вестник МГТУ
им . Н .Э . Баумана . Сер .: Естественные науки . 2014 . — № 2 (53) . — С . 50—76 .
21 . Sayapin S.N ., Artemenko Yu.N . Intelligence System for Active Vibration Isolation and Pointing
of Ultrahigh-Precision Large Space Structures in Real Time . — In Book: Smart Electromechanical Systems: The Central Nervous System / Ed . A .E . Gorodetskiy . Ser .: Studies in Systems, Decision and Control . — Vol . 49 . — 2016 . — Ch . 10 . — Part II: Synthesis of Automatic
Control Systems . Springer, Cham, Switzerland, 277 р . — Pp . 103—115 .
22 . Саяпин С.Н ., Кокушкин В.В . Способ подавления помех от колебаний упругой конструкции космической трансформируемой антенны в процессе эксплуатации и устройство
для его осуществления . Патент РФ на изобретение № 2323136 // Бюл . изобр ., 2008 . —
№ 12 .
23 . Merlet J.-P . Parallel Robots . — 2nd ed . Series: Solid Mechanics and Its Applications, Dordrecht,
The Netherlands: Sringer, 2006 .
24 . Bronowicki A.-J . Vibration Isolator for Large Space Telescopes // J . of Spacecraft and Rockets .
January—February 2006 . — Vol . 43 . — No . 1,
25 . Квакернаак Х ., Сиван Р . Линейные оптимальные системы управления . — М .: Мир,
1977 . — 650 с .
26 . Омату С ., Халид М ., Юсоф Р . Нейроуправление и его приложения . Кн . 2 / Пер . с англ .
Н .В . Батина; Под ред . А .И . Галушкина, В .А . Птичкина . — М .: ИПРЖР, 2000 . — 272 с .
(Нейрокомпьютеры и их применение) . Omatu S ., Khalid M ., Yusof R . Neuro-Control and
its Applications: Springer .
27 . Фролов К.В ., Саяпин С.Н ., Синев А.В . и др . Физическая модель пространственной системы активной виброизоляции и наведения . Патент РФ на изобретение № 2224295 //
Бюл . изобр . 2004 . — № 5 .
28 . Демидов С.М . Синтез и моделирование системы управления движением космического
телескопа с помощью робота параллельной структуры: Автореферат диссертации на соискание ученой степени кандидата техн . наук: 05 .13 .01 . — М .: НИИЭИАЭЭ . 2013 . — 18 с .
29 . Саяпин С.Н ., Синев А.В . Устройство стыковки космического объекта . Патент РФ на изобретение № 2195417, МПК 7 B64G1/64 . Опубл . 27 .12 .2002 . Бюл . № 36 .
30 . Sayapin S., Siniov A. The adaptive spatial mobile robot — manipulator and way of diagnostics
of physical and mechanical properties and the geometrical form of a surface of contact and
trajectory of movement with his help // Abstracts book . XXII International Congress of Theoretical and Applied Mechanics . ICTAM 2008 . 25—29 August 2008 . Adelaide, Australia . —
Р . 217 .
31 . Sayapin S ., Siniov A. The adaptive spatial mobile robot — manipulator and way of diagnostics
of physical and mechanical properties and the geometrical form of a surface of contact and
trajectory of movement with his help // CD-ROM proceedings XXII International Congress
of Theoretical and Applied Mechanics . ICTAM 2008 . 25—29 August 2008 . Adelaide, Australia .
ISBN 978-0-9805 142-1-6 // Index of author 11555 .
32 . Саяпин С.Н ., Синев А.В . Адаптивный пространственный мобильный робот-манипулятор и способ контроля геометрической формы поверхности контакта и траектории движения с его помощью // Докл . уч-ков симп . по робототехнике и мехатронике . 4—6 ноября 2008 г . Москва, ВВЦ, павильон № 69, Россия . — М ., 2008 . — С . 121—123 .
33 . Саяпин С.Н ., Синев А.В ., Адаптивный пространственный мобильный робот-манипулятор и способ диагностики физических и механических свойств и геометрической формы поверхности контакта и траектории движения с его помощью // Сб . тр . конф . «Проблемы машиноведения», посвященной 70-летию Института машиноведения . Москва
13—14 ноября 2008 г . — М ., 2008 . — С . 464—466 .
Глава 9. Новые механизмы космической робототехники
231
34 . Саяпин С.Н ., Синев А.В . Адаптивный мобильный пространственный робот-манипулятор и способ организации движений и контроля физико-механических свойств и геометрической формы контактирующей поверхности и траектории перемещения с его
помощью . Патент РФ на изобретение № 2424893, МПК7 B25J 5/00; 13/08 . Опубл .
20 .07 .2011 . Бюл . № 21 .
35 . Саяпин С.Н . Додекапод как современный этап развития пространственных параллельных роботов // Проблемы машиностроения и надежности машин . 2012 . — № 6 . —
С . 31—45 .
36 . Sayapin S ., Karpenko A ., Hiep D.X . Dodekapod as universal intelligent structure for adaptive
parallel spatial self-moving modular robots . In the book: Nature-Inspired Mobile Robotics //
Proceedings of the 16th International Conference on Climbing and Walking Robots and the Support Technologies for Mobile Machines CLAWAR 2013 / Eds: Waldron K .J ., Tokhi M .O .,
Virk G .S . . World Scientific . ISBN 978-981-4525-52-7 . Singapore, 2013 . — P . 163—170 .
37 . Саяпин С.Н . Мобильный параллельный робот манипулятор «Октаэдральный додекапод»: История, настоящее и будущее // Проблемы машиностроения и автоматизации,
2018 . — № 3 . — Рp . 26—44 .
38 . Саяпин С.Н ., Саяпина М.С . Перемещающийся массажер и способ осуществления массажа с его помощью . Патент РФ на изобретение № 2551939 . Опубл . 10 .06 .2015 . Бюл . № 16 .
ГЛАВА 10
НОВЫЕ МЕХАНИЗМЫ
ВИБРАЦИОННЫХ
ВНУТРИТРУБНЫХ РОБОТОВ
Яцун С.Ф.
В данной главе рассмотрен мобильный внутритрубный робот . В таких роботах
в качестве движителя выступает корпус, который периодически изменяет форму,
совершая так называемое, червеподобное движение . Возможно оснащение таких
устройств системой управления что позволяет роботу автономно перемещаться
в узких щелях, трубопроводах при наличии сопротивляющихся сред и выполнять задачи мониторинга . Эти устройства просты по конструкции и не требуют
специальных движителей, таких как колеса, гусеницы или ноги, что позволяет
значительно уменьшить размеры робота и обеспечить их герметичность . Это делает вибрационные роботы перспективными для движения не только по поверхностям, но и внутри плотных сред, препятствующих проникновению робота . Такие микророботы найдут применение в медицине — например, для перемещения
диагностического датчика в сосудистой системе и внутренних полостях с целью
мониторинга пораженного участка и доставки лекарственного препарата к нему .
10.1. МЕХАНИЧЕСКАЯ МОДЕЛЬ РОБОТА
Анализ литературных источников показывает, что большой цикл работ [1—11] посвящен мобильным устройствам — роботам, представляющим собой цепь жестких звеньев, соединенных между собой вращательными шарнирами, в которых
расположены приводы . Эти приводы создают управляющие силы, внутренние
по отношению к многозвеннику . Между многозвенником и поверхностью, по которой он движется, действует сухое трение . Управляя моментами в шарнирах
и, тем самым, силой трения, приложенной к механизму, можно обеспечить его
перемещение из произвольного начального состояния в заданное конечное положение . В источнике [7] исследованы управляемые прямолинейные движения
по шероховатой плоскости системы двух тел, взаимодействующих между собой
посредством управляющей силы . В [13, 14] рассматривается прямолинейное движение по горизонтальной шероховатой плоскости тела с подвижной внутренней
массой, которая также перемещается вдоль прямой, параллельной линии движения тела . Необходимая для движения в заданном направлении асимметрия силы
трения обеспечивается зависимостью значения коэффициента трения от знака
скорости составляющих тел системы . В [15, 18] исследована динамика робота,
состоящего из системы двух тел, соединенных упругим элементом с линейной
10.1. Механическая модель робота
233
характеристикой . Движение возбуждается гармонической силой, действующей
между телами .
Рассмотрим поведение двухмассовой вибрационной системы, моделирующей
динамику вибрационного мобильного робота, состоящего из двух твердых тел,
связанных между собой упругим элементом и электромагнитным приводом . Под
действием электромагнитного привода тела совершают колебательное движение .
Для получения поступательного движения робота по шероховатой поверхности,
каждое тело снабжено устройством, создающим асимметрию силы трения . Такого
эффекта можно достигнуть, например, снабжая контактные поверхности робота
специальными чешуйчатыми (игольчатыми) накладками с нужной ориентацией
чешуек (иголок) . Асимметрию трения также можно получить, применив механизмы свободного хода . В качестве опорной поверхности можно использовать направляющие, выполненные в виде проволоки или трубы с различным профилем .
Схема робота, перемещающегося в трубе, приведена на рис .10 .1 .
Рис. 10.1. Схема двухмассового вибрационного робота, перемещающегося в трубе
Корпус робота состоит из двух частей 1 и 4, связанных между собой упругим
элементом 6 . Каждое тело снабжено механизмами свободного хода 5, обеспечивающими асимметрию силы трения между корпусом робота и опорной поверхностью . Электромагнитный привод состоит из П-образного сердечника с катушкой 2, установленного на теле 1 и якоря 3, закрепленного на теле 4 .
Движение робота происходит за счет периодического сближения тел под действием силы электромагнитного привода, возникающей в результате того, что
на катушку электромагнита подается импульсное электрическое напряжение .
При этом тело 1 приближается к телу 4, которое благодаря работе механизма свободного хода останавливается . После отключения электрического импульса, под
действием пружины 6, масса 4 отходит от тела 1, которое остается на месте благодаря работе собственного механизма свободного хода . Таким образом, происходит перемещение центра масс робота на один шаг .
234
Глава 10. Новые механизмы вибрационных внутритрубных роботов
10.2. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ
ВИБРАЦИОННОГО РОБОТА
Расчетная схема робота представлена на рис . 10 .2 . На массу m1 действуют силы:
электромагнитного привода Q1, упругого элемента P1, вязкого сопротивления R1 .
На массу m2 соответственно действуют силы: Q2, P2, R2 . Очевидно, что эти силы
попарно равны по модулю и противоположны по знаку . Кроме этих сил, на массы
m1 и m2 действуют силы сухого трения F1 и F2 .
Рис. 10.2. Расчетная схема робота
В качестве задающего воздействия выступают периодические силы Q1 и Q2 .
Эти силы являются внутренними и вызывают вибрационное движение масс m1
и m2 относительно центра масс системы . Движение центра масс происходит в результате того, что силы трения, действующие на корпус робота, являются внешними и имеют разные модули в зависимости от направления скорости . Поэтому
их интеграл за период не равен нулю, что приводит к возникновению поступательного движения центра масс робота в положительном направлении по оси ОХ .
Запишем дифференциальные уравнения движения масс робота:
m1 Xɺɺ1 = − P1 − R1 + F1 − Q1 ;
m2 Xɺɺ2 = − P2 − R2 + F2 − Q2 .
(10 .1)
Здесь двумя точками обозначены производные по времени от обобщенных координат .
Если сложить эти уравнения, то получим уравнение движения центра масс
робота:
m1 Xɺɺ1 + m2 Xɺɺ2 = F1 + F2 ,
10.2. Математическая модель вибрационного робота
235
так как m1 Xɺɺ1 + m2 Xɺɺ2 = mXɺɺc , то
(10 .2)
mXɺɺc = F1 + F2 ,
где m = m1 + m2 — масса робота; Хc — координата центра масс .
Анализ формулы (10 .2) показывает, что движение центра масс робота возможно в трех случаях, если:
1) F1 = 0 F2 ≠ 0,
2) F2 = 0 F1 ≠ 0
(10.3)
3) F1 ≠ 0 F2 ≠ 0.
Собственные частоты системы, представленной на рис . 10 .2, при отсутствии
сил сопротивления и постоянной жесткости упругого элемента определяются
по формуле [18]:
p12, 2 =
1 2
( λ1 + λ22 ) ∓ 14 ( λ12 + λ22 ) + mm1 λ42 ,
2
2
(10 .4)
где λ1, λ2 — парциальные частоты:
λ1 =
c
;
m1
λ2 =
c
.
m2
(10 .5)
Для исследования движения рассматриваемой системы с учетом нелинейных
свойств упругого элемента и ограниченной мощности привода получим дифференциальные уравнения, описывающие движение системы . Для этого найдем
силы, приложенные к массам (см . рис . 10 .2) .
В рассматриваемой схеме упругий элемент выполнен кусочно-линейным . Это
сделано для того, чтобы при перемещении масс навстречу друг другу сердечник
и якорь не соударялись между собой . Изменяя жесткость упругого ограничителя С2, можно управлять процессом соударения двух масс . Так, при увеличении
жесткости С2, время удара уменьшается и в пределе стремится к нулю .
Построим модель силы упругости . Как видно из рис . 10 .3 деформация основной пружины с жесткостью С будет равна X1 – X2, а дополнительная пружина
с жесткостью С2 и длиной ∆X включается в работу, если расстояние между массами Λ будет равно ∆X .
Значение Λ определим следующим образом:
Λ = ∆ + X1 – X2,
(10 .6)
где ∆ — расстояние между массами при недеформированной пружине; X1, X2 —
обобщенные координаты, ∆X — длина дополнительной пружины .
Если Λ > ∆X, то деформируется только пружина с жесткостью С, и имеет место
безударный режим движения . В противном случае, когда Λ < ∆X, происходит скачкообразное изменение жесткости, что приводит к быстрому изменению скорости
масс m1 и m2, поэтому такое движение можно отнести к виброударному .
Модель силы упругости представим в следующем виде:
∆ > ∆X ;
C ( X 1 − X 2 ),
P1 =
C ( X 1 − X 2 ) + C2 ( ∆ + X 1 − X 2 − ∆X ), Λ < ∆X .
P2 = –P1 .
(10 .7)
236
Глава 10. Новые механизмы вибрационных внутритрубных роботов
Рис. 10.3. Зависимость силы упругости от расстояния между массами
На рис . 10 .3 показаны зависимости сил упругости Р1, P2 от расстояния между
массами Λ . При Λ = ∆ система находится в положении статического равновесия
и силы упругости равны нулю .
При Λ = ∆X происходит соприкосновение массы m1 с пружиной С2, при этом
силы упругости равны Р10 и Р20, и в этой точке суммарная жесткость упругого элемента возрастает при дальнейшем уменьшении Λ .
Модель силы вязкого сопротивления представим в виде:
R1 = μ (V1 – V2), P2 = –P1 .
(10 .8)
Здесь μ — коэффициент вязкого сопротивления; Vi = dXi /dt — скорости масс m1
и m2 (i = 1, 2) .
Представим модель силы трения в следующей форме:
Fi − , Xɺ i < 0;
Fi = Fi + , Xɺ i > 0; i = 1, 2,
∗ ɺ
Fi , X i = 0,
(10 .9)
где F i*— cила трения покоя, определяемая из условия равновесия сил, действующих на остановившуюся i-ю массу; Xi — скорость i-й массы . Например, сила F1*
определяется по формуле:
F1* = R1 + P1 + Q1 .
10.2. Математическая модель вибрационного робота
237
Для определения силы электромагнитного привода воспользуемся формулой
Максвелла:
Q1 =
∂W
,
∂Λ
(10 .10)
где W — энергия магнитного поля, запасенная в воздушных зазорах электромагнита; Λ — относительное изменение воздушного зазора .
Будем считать, что энергия магнитного поля зависит только от величины магнитной энергии, запасенной в рабочих зазорах . Гистерезисными потерями, вихревыми токами и сопротивлением в сердечнике пренебрегаем .
Тогда энергия магнитного поля рассчитывается по формуле:
W =
1
B 2 dV ,
2µ 0 V∫
(10 .11)
где μ0 = 4π ⋅ 10–7 Гн/м — магнитная постоянная; B — индукция магнитного поля;
V — объем воздушного зазора .
Для определения объема воздушного зазора необходимо знать геометрию
магнитопровода . Данный робот оснащен электромагнитным приводом с П-образным сердечником, схема которого приведена на рис . 10 .4 . Полагая, что B = const, формулу
(10 .11) можно представить в виде:
W =
B 2V Φ 2 Λ
,
=
2µ 0 µ 0 S
(10 .12)
где Ф — магнитный поток, S — площадь воздушного зазора .
Рис. 10.4. Схема электромагнитного привода робота
с П-образным сердечником
Подставляя (10 .12) в (10 .10), получим:
Q1 =
Φ2
.
µ0 S
(10 .13)
Для определения потока Ф запишем следующее уравнение:
+ RI = u(t) .
Ф
(10 .14)
Данное уравнение устанавливает связь между напряжением электрического
питания и магнитным потоком .
Ток, возникающий в электрической цепи, определим по формуле:
I=
∂W 2ΦΛ
.
=
∂Φ µ 0 S
(10 .15)
238
Глава 10. Новые механизмы вибрационных внутритрубных роботов
В соответствии со схемой подключения, напряжение, поступающее на катушку электромагнита u(t), будем моделировать следующим образом:
U sin ( ωt ), U ( t ) > 0;
u (t ) = 0
0, U ( t ) < 0 .
(10 .16)
Система уравнений, описывающая динамику движения масс робота, имеет вид:
ɺ + RI = u ( t );
Φ
ɺɺ
m1 X 1 = − P1 − R1 + F1 − Q1 ;
ɺɺ
m2 X 2 = P2 + R2 + F2 + Q2 .
(10 .17)
Представим размерные переменные, входящие в систему уравнений (10 .17),
в безразмерном виде, для этого введем следующие обозначения:
τ = ωt ;
X = X0X ;
Xɺ = X 0 ωXɺ ;
Xɺɺ = X 0 ω2 Xɺɺ ;
Uɺ ( t ) = U 0U ;
Φ = Φ 0 Φ,
где τ — безразмерное время; X0 — масштаб длины; U0 — масштаб электрического
напряжения; Φ0 — масштаб магнитного потока . Переменные с чертой являются
безразмерными .
Система дифференциальных уравнений (10 .17) с учетом (10 .7)—(10 .9), (10 .13)
в безразмерной форме принимает вид:
(
)
ɺ = εu ( τ ) − β ∆ + ( X − X ) Φ;
Φ
1
2
ɺɺ
ɺ
ɺ
2
X 1 = − ς X 1 − X 2 − P1 − χΦ + F1 ;
ɺɺ
ɺ
ɺ
2
X 2 = mξ X 1 − X 2 − P2 + mχΦ + mF2 .
(
(
)
)
(10 .18)
Здесь приняты следующие обозначения:
ε=
ξ=
C
ω2 m1
m=
U0
;
Φ0ω
=
m1
;
m2
λ12
β=
;
χ=
∆=
∆
;
X0
ω2
2X 0R
;
µ0 S ω
( Φ0 )
2
µ 0 SX 0 ω2 m1
ς=
;
(10 .19)
µ
.
m1ω
Безразмерные параметры ε, β, ξ, χ, ζ, m̄, ∆̄ и ∆̄x определяют закон движения
масс робота .
Параметр β задается электрическими диссипативными свойствами электромагнитного привода робота, ζ — зависит от потерь в упруго-вязком элементе . Параметр ξ определяется отношением квадрата парциальной частоты первой массы
робота к квадрату частоты внешнего воздействия . Параметр χ задает амплитуду
электромагнитной силы, m̄ — параметр, определяемый отношением масс робота,
∆̄ – ∆̄х — безразмерный зазор, между массами определяемый в недеформированном положении пружины .
10.3. Результаты моделирования движения робота
239
10.3. РЕЗУЛЬТАТЫ МОДЕЛИРОВАНИЯ
ДВИЖЕНИЯ РОБОТА
Далее изучается влияние безразмерных параметров управляющего напряжения
ξ и ε на среднюю скорость установившегося движения робота . Остальные параметры приняты постоянными . Кроме этого получены диаграммы распределения
мгновенной скорости масс робота для различных частот .
На первом этапе будем считать, что при движении масс всегда Λ > ∆X, что
соответствует случаю, когда массы не соударяются между собой . Решение уравнений (10 .18) выполняется численным методом, алгоритм которого, основан на методе Эйлера с адаптивным шагом интегрирования .
Расчеты выполнены для следующих параметров:
U0 = 12 V; X0 = 0,01 м; m1 = m2 = 0,1 кг; ∆ = 1; ∆X = 0; β = 50; ɷ = 1 .
Результаты расчетов для этого случая приведены на рис . 10 .5 в виде зависимостей средней скорости установившегося движения робота от параметра ξ для
четырех значений амплитуды электрического питания . Анализ этих графиков
показал, что в области ξ = 0,5 наблюдается резкое увеличение скорости робота .
Это соответствует основному резонансу рассматриваемой системы, который наступает при совпадении собственной частоты и частоты внешнего воздействия
p = ω .
Рис. 10.5. Зависимость средней скорости виброробота Vc от безразмерного параметра ξ для различных уровней электрического питания ε
240
Глава 10. Новые механизмы вибрационных внутритрубных роботов
Так как m̄ = 1, то парциальные частоты равны λ1 = λ2 . Тогда, по формуле (10 .4)
определим, что
p12 = 0; p22 = 2λ12 p12 = 0 .
Второй пик увеличения скорости наблюдается при ξ = 2, что соответствует
резонансу, который наступает при условии p = 2ɷ . Третий пик соответствует условию p = 3ɷ, или ξ = 4,5 .
На рис . 10 .6—10 .8 приведены зависимости мгновенных скоростей масс робота
от времени . Анализ этих зависимостей показывает, что устойчивые периодические режимы устанавливаются приблизительно через 3 безразмерных периода .
В области ξ = [0,4; 0,7] колебания обеих масс происходят с частотой внешнего
периодического воздействия . На рис . 10 .6 показаны зависимости мгновенных
скоростей масс робота от времени τ для ξ = 0,6 .
Рис. 10.6. Зависимость мгновенных скоростей V1 и V2 от безразмерного времени τ
(ξ = 0,6; ε = 2)
Характер колебаний изменяется при переходе в область значений близких
к ξ = [1,0; 1,8] . В этом интервале система совершает два колебания за период
внешнего воздействия (рис . 10 .7) .
Рис.10.7. Зависимость мгновенных скоростей V1 и V2 от безразмерного времени τ
(ξ = 1,3; ε = 2)
В области ξ = 2 система также совершает два колебания за период внешнего воздействия (рис . 10 .8), но амплитуда второго колебания значительно выше,
чем в предыдущем случае . Этот факт объясняет рост скорости в этом диапазоне
10.3. Результаты моделирования движения робота
241
параметров . Наибольшее значение скорости установившегося движения робота
соответствует узкой области ξ = [0,5; 0,6], причем зона максимума практически
не зависит от напряжения питания, подаваемого на катушку электромагнита .
Таким образом, максимальные значения средней скорости робота реализуются
только в очень узком интервале частот . Этот факт затрудняет практическое использование резонансных режимов движения робота на практике, так как требует применения системы автоматического управления обеспечивающей резонансную настройку привода робота .
Рис.10.8. Зависимость мгновенных скоростей V1 и V2 от безразмерного времени τ
(ξ = 2; ε = 2)
Рис. 10.9. Зависимость средней скорости виброробота Vc от безразмерного параметра ξ для различных уровней электрического питания (уровни электрического питания даны в таблице справа, безразмерная масса 1,05)
242
Глава 10. Новые механизмы вибрационных внутритрубных роботов
При попытке увеличить среднюю скорость робота за счет увеличения амплитуды электрического питания система переходит в качественно новый режим колебаний, при котором происходит периодический удар между массами . Поэтому
такой режим движения назван виброударным (рис . 10 .9) .
Основной вывод, который удается сделать, анализируя полученные результаты, состоит в том, что виброударные режимы движения позволяют значительно
(приблизительно в 5 раз) увеличить среднюю скорость движения робота, при этом
существует широкая частотная область, в которой скорость робота практически
не изменяется . Это свойство характерно для системы с различным отношением
масс, которое, как показывают расчеты, практически не влияет на среднюю скорость движения .
10.4. ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ
Полученные теоретические результаты нашли применение при создании вибрационного робота для перемещения по внутренней поверхности трубопровода . Общий вид прототипа двухмассового внутритрубного робота представлен
на рис . 10 .10 . Робот состоит из двух модулей, связанных между собой упругими
элементами и электроприводом, также каждый из них снабжен фрикционным
механизмом, обеспечивающим силы трения, изменяющиеся по асимметричному
закону . Оба корпуса снабжены реверсивными механизмами свободного хода, обеспечивающими асимметрию силы трения между корпусами робота и опорной поверхностью . Эксперименты проводились для следующих параметров U0 = 2—23 В,
X0 = 0,01 м, F = 100 Н .
Рис. 10.10. Общий вид двухмассового внутритрубного робота
Для определения параметров движения робота в трубе модули движения снабжены датчиками перемещения и датчиками, позволяющими определять силы трения . Результаты экспериментальных исследований в виде графиков зависимостей
относительного перемещения одного модуля относительно другого приведены
10.4. Экспериментальные исследования
243
на рис . 10 .11 . Далее на рис . 10 .12 показаны зависимости силы трения, возникающей на контакте фрикционного элемента модулей с внутренней поверхностью
трубы от времени . Так же были получены зависимости перемещения каждого модуля в трубе .
Рис. 10.11. Зависимости относительного перемещения одного модуля относительно другого
Рис. 10.12. Зависимость силы трения действующей на модули робота при движении
На этих графиках видна разница между силой трения, возникающей при прямом и обратном движении модуля в трубе . При движении вперед ∆F1min = 2,4 Н .
При движении назад — достигает ∆F1max = 7,7 Н . На второй модуль действует сила
трения равная 2,6 Н для прямого движения, а для обратного ∆F2min = 7 Н . Таким
образом, сила трения при прямом движении приблизительно в 4 раза меньше
силы трения при обратном движении .
Анализируя графики (рис . 10 .13, 10 .13) абсолютного перемещения модулей робота, видно, что при снижении коэффициента трения со значения kfr = 0,6 до kfr = 0,4
происходит некоторый откат модуля в реверсивном направлении . Величина отката достигает 30—40% по отношению к относительному перемещению модулей .
Средняя скорость при этом также снижается . Сравнение экспериментальных
данных и теоретических зависимостей скорости от частоты электрического питания показана на графике см . рис . 10 .15 . Хорошо видно, что с ростом амплитуды
управляющего напряжения робот из безударного режима переходит в виброударный режим, что при водит к значительному росту скорости . На рисунке показаны
244
Глава 10. Новые механизмы вибрационных внутритрубных роботов
зависимости средней скорости виброробота Vc от безразмерного параметра ξ для
различных уровней электрического питания и графики, полученные экспериментально .
Рис.10.13. Зависимость абсолютного перемещения модулей робота . Коэффициент
трения при движении вперед kfr = 0,120, при движении назад kfr = 0,6
Рис. 10.14. Зависимость абсолютного перемещения модулей робота . Коэффициент
трения при движении вперед kfr = 0,120, при движении назад kfr = 0,4
Хорошо видно, что в целом экспериментальные данные подтвеждают теоретические зависимости как для безударных, так и для виброударных режимов .
Установлено, что двухмассовый виброробот при наличии асимметричного сухого трения на контакте его масс и шероховатой поверхности перемещается по поверхности . Исследовано влияние безразмерного параметра ξ на скорость установившегося движения робота . Установлено, что имеет место резонансный характер
зависимости скорости от безразмерного параметра ξ . Установлено, что в зависимости от величины параметра ξ, массы робота совершают различные режимы . Так,
в области ξ = [0,4; 0,8] массы колеблются асинхронно с частотой внешнего периодического воздействия, что обеспечивает максимальную скорость установившегося
движения робота . Выявлено, что с увеличением параметра ε, амплитуды колебаний
масс робота также возрастают, в тоже время, форма колебаний масс робота не изменяется . Экспериментальные исследования, в целом, подтверждают теоретические
предпосылки, принятые при разработке математических моделей внутритрубного
робота, как для вибрационных, так и для виброударных режимов движения .
10.4. Экспериментальные исследования
245
Рис. 10.15. Зависимость средней скорости виброробота Vc от безразмерного параметра ξ для различных уровней электрического питания (уровни электрического питания даны в таблице справа, безразмерная масса 1,05):]
1 — эксперимент; 2 — теория
Литература
1 . Черноусько Ф.Л . Движение многозвенника по горизонтальной плоскости // Приклад-
ная математика и механика, 2000 . — Т . 64 . — Вып . 1 . — С . 8—18 .
2 . Черноусько Ф.Л . Волнообразные движения многозвенника по горизонтальной плоскости // ПММ, 2000 . — Т . 64 . — Вып . 4 . — С . 5—15 .
3 . Черноусько Ф.Л . Движение плоского многозвенника по шероховатой горизонтальной
плоскости // Докл . РАН, 2000 . — Т . 370 . — 2 . — С . 186 —189 .
4 . Черноусько Ф.Л . О движении трехзвенника по плоскости // 1 ПММ, 2001 . — Т . 65 . —
Вып . 1 . — С . 15—20 .
5 . Черноусько Ф.Л . Управляемые движения двузвенника по горизонтальной плоскости //
ПММ, 2001 . — Т . 65 . — Вып . 4 . — С . 578—591 .
6 . Cмышляев А.C ., Черноусько Ф.Л . Оптимизация движения многозвенника по горизонтальной плоскости // Изв . РАН . ТиссУ, 2001 . — № 2 . — С . 176—184 .
7 . Черноусько Ф.Л . Оптимальное прямолинейное движение двухмассовой системы //
ПММ, 2002 . — Т . 66 . — Вып . 1 . — С . 3—9 .
8 . Chernousko F.L . Snake-like locomotions of multilink mechanisms // J . of Vibration and
Control, 2003 . — Vol . 9 . — No . 1—2 . — P . 235—256 .
9 . Фигурина Т.Ю . Квазистатические движения двузвенника по горизонтальной плоскости // МТТ, 2003 . — № 1 . — С . 31—41 .
246
Глава 10. Новые механизмы вибрационных внутритрубных роботов
10 . Фигурина Т.Ю . Управляемые квазистатические движения двузвенника по горизонтальной плоскости // Изв . РАН . ТисУ, 2004 . — № 3 . — С . 160—176 .
11 . Figurina T.Yu . Quasi-static motion of a two-link system along a horizontal plane // Multibody
System Dynamics, 2004 . — Vol . 11 . — No . 3 . — P . 251—272 .
12 . Фигурина Т.Ю . Управляемые медленные движения трехзвенника по горизонтальной
плоскости // Изв . РАН . ТисУ, 2005 . — № 3 . — С . 149—156 .
13 . Черноусько Ф.Л . О движении тела, содержащего подвижную внутреннюю массу // Доклады РАН, 2005 . — Т . 405 . — № 1 . — С . 1—5 .
14 . Черноусько Ф.Л . Анализ и оптимизация движения тела, управляемого посредством подвижной внутренней массы // ПММ, 2006 . — Т . 70 . — Вып . 6 . — С . 915—941 .
15 . Zimmermann K ., Zeidis I ., Steigenberger J ., Huang Jianjun . An approach to the modelling
of worm-like motion systems with a finite number of degrees of freedom // First Steps in Technical Realization . Proc . of the 4th International Conference of Climbing and Walking Robots,
Karlsruhe, 2001 . — P . 561—568 .
16 . Zimmermann K ., Zeidis I ., and Pivovarov M . Dynamics of a nonlinear oscillator in consideration
of non-symmetric Coulomb dry friction // Fifth Euromech . Nonlinear Dynamics Conference .
Book of Abstracts . Eindhoven Netherlands, August 7—12 2005 . — P . 308 .
17 . Zimmermann K ., Zeidis I ., Steigenberger J . Mathematical model of worm-like motion systems
with finite and infinite numbers of degrees of freedom // Theory and Practice of Robots and
Manipulators . Proceedings of the 14th CISM IFToMM Symposium (RoManSy 14), 2002 . —
P . 07—16 .
18 . Магнус К . Колебания . — М .: Мир, 1982 . — 304 с .
19 . Гранкин А.Н., Яцун С.Ф . Исследование виброударных режимов движения мобильного
микроробота с электромагнитным приводом // Известия Российской академии наук .
Теория и системы управления, 2009 . — № 1 . — С . 163—171 .
ГЛАВА 11
МЕХАНИЗМЫ КОНВЕРТОПЛАНОВ
Яцун С.Ф., Емельянова О.В., Ефимов С.В.
В данной главе рассмотрена конструкция летающего робота-конвертоплана трикоптерного типа, изучены основные закономерности его движения, алгоритмы
управления, составлена математическая модель, описывающая его пространственное движение . Предложены инструментальные средства проектирования,
разработан и изготовлен прототип конвертоплана трикоптерного типа .
Последние годы широкое распространение получили мультироторные беспилотные летательные аппараты (БПЛА) [1—3, 6, 9—10] . В то же время, как показали экспериментальные исследования, для эффективного использования таких
устройств важно обеспечить достаточную длительность нахождения БПЛА в воздухе . Одним из путей повышения этого важного показателя является переход
к конвертопланам, которые позволяют использовать как вертолетный режим движения при взлете и зависании, так и самолетный, при полете в горизонтальной
плоскости . Такие устройства отличаются повышенной маневренностью и скоростными характеристиками, а также пониженным энергопотреблением в горизонтальном полете, что позволяет осуществлять выполнение разведывательных
операций, транспортных работ и мониторинга окружающей среды на удаленных
и труднодоступных территориях . Также преимуществом конвертоплана являются скоростные характеристики, получаемые за счет того, что во время горизонтального полета в режимах максимальных скоростей несущие винты развернуты
по направлению движения аппарата, что улучшает аэродинамические характеристики, обеспечивая низкое энергопотребление, достигаемое за счет применения
летающего крыла .
11.1. КИНЕМАТИЧЕСКИЙ АНАЛИЗ КОНВЕРТОПЛАНА
Схема конвертоплана приведена на рис . 11 .1 . В соответствии с этой схемой рассмотрим движение БПЛА в неподвижной декартовой системе координат OX0 Y0 Z0,
тогда СX1Y1Z1, Аi xi yi zi (i = 1—3) — подвижные системы координат, проходящие
через центр масс корпуса аппарата С и центры масс Аi i-го электропривода с винтами, называемого в дальнейшем ротором . Ориентацию корпуса конвертоплана
в пространстве задают самолетные углы рысканья ψ, тангажа θ и крена φ . Конвертоплан состоит из трех пар управляемых винтов 1—3 с изменяемыми векторами тяги, электроприводы которых реализованы на основе бесколлекторных
электродвигателей, а также фюзеляжа 4, на котором закреплены блок питания
и плата управления, электрически связанные с приводами вращения винтов
[12—13, 19—21] .
248
Глава 11. Механизмы конвертопланов
Рис. 11.1. Расчетная схема конвертоплана (без учета
подъемной силы и сил сопротивления)
Отклонение векторов тяги поворотных приводов 1, 2 на угол β осуществляется
в плоскостях А1 x1 z1, A2 x2 z2, которые параллельны плоскости СX1Z1 . Угол β, может
изменяться от 0 до 90° . Привод 3 может поворачиваться на угол γ = ±90° в плоскости A3 y3 z3, параллельной СY1Z1
Далее будем обозначать символами (0) и (1) векторы, определенные в системах координат OX0 Y0 Z0 и CX1Y1Z1, соответственно . Положение центра масс кон(0)
вертоплана задается вектором r–OC
= [xC , yC , zC ]T, а ориентация конвертоплана
в пространстве — вектором ᾱ = [φ, ψ, θ]T [14] .
Абсолютную угловую скорость вращения роторов определяем как:
Ω̅ i = ω̄C + ω̄i ,
где Ω̅ i — абсолютная угловая скорость вращения i-го ротора в подвижной системе
координат; ω̄C , ω̄i — векторы угловых скоростей вращения корпуса конвертоплана и i-го ротора имеют вид:
ω C(1) =
ωX 1
ωY1 ;
ωZ 1
ω1(1)
ω1 sin ( β )
0
=
;
ω1 cos ( β )
ω(21)
ω 2 sin ( β )
=
0
;
ω 2 cos ( β )
0
ω3(1) = ω3 sin ( γ ) ,
ω3 cos ( γ )
11.1. Кинематический анализ конвертоплана
249
тогда
ωix + ωX1
ωX1
ωix
Ωi = ωiy + ωY1 = ωiy + ωY1 .
ωiz
ωZ1
ωiz + ωZ1
Если ω̄C ω̄i , то Ωi ≅ ωi .
Из кинематических уравнений Эйлера следует:
ɺ sin θ;
ϕɺ = ωX1 − ψ
ɺ
θ = ωY cos ϕ − ωZ sin ϕ;
1
1
1
ɺ =
ωZ1 cos ϕ + ωY1 sin ϕ .
ψ
cos θ
(
)
Будем считать, исходя из условий эксплуатации конвертоплана, что углы тангажа θ и крена φ находятся в пределах:
—15° < θ < 15°; –15° < φ < 15° .
Рассмотрев расчетную схему, запишем равенство [14]:
( )
( )
( )
rOA0i = rOC0 + rCA0i ,
( )
( )
0
1
где rCAi = T10 rCAi ; Т10 — матрица вращения .
Скорости точек Ai в абсолютной системе координат определим, продифференцировав предыдущее равенство по времени:
v A( 0 ) =
( 0)
rOA
i
=
( 0)
( 0)
rCA
rOC
+ i ,
dt
dt
dt
rOC
( )
= vC0 — скорость центра масс С .
где
dt
Скорости точек Ai относительно центра масс С определим, как:
i
(0)
( )
rCA0i
dt
( )
( )
= vCA0 i = Tɺ10 rCA1i .
Таким образом, абсолютные скорости Ai можно представить, как:
( )
( )
( )
v A0i = vC0 + Tɺ10 rCA1i ,
( )
где векторы rCA1 i для точек Ai имеют вид (рис . 11 .2):
( )
rCA1 1
A
a
= ;
2
h
( )
rCA1 2
c
a
= − ;
2
h
−d
( )
rCA1 3 = 0 .
h
Здесь a, b, c, d, h — геометрические размеры конвертоплана .
250
Глава 11. Механизмы конвертопланов
Рис. 11.2. Геометрические параметры конвертоплана, определяющие расположение центров масс корпуса конвертоплана С и роторов Аi:
1, 2, 3 — несущий винты; 4 — фюзеляж
11.2. ОПРЕДЕЛЕНИЕ СИЛ,
ДЕЙСТВУЮЩИХ НА КОНВЕРТОПЛАН
Теперь рассмотрим силы, приложенные к конвертоплану (рис . 11 .3), которые можно разделить на силы, задаваемые в абсолютной системе координат OX0Y0Z0: сила
тяжести G ̅, приложенная в центре масс С, и силы, определенные в подвижной системе координат СX1Y1Z1: силы, создаваемые винтами F i̅ , приложенные в центре
масс роторов A i̅ ; аэродинамические силы, действующие на поверхность крыла
(i = 1—3), называемые силой лобового сопротивления Qj̅ , направленной в сторону, противоположную оси СX1, и действующие на фюзеляж Q̅ ф, а также подъемные силы крыла — Pj̅ и фюзеляжа Pф̅ (j = 1, 2) .
Компенсация крутящего момента в каждом приводе происходит за счет оппозитно установленных винтов, вращающихся в противоположные стороны .
Возможность поворота хвостового привода позволяет получить горизонтальную
составляющую силы тяги хвостового привода, что обеспечивает поворот конвертоплана вокруг вертикальной оси СZ1 на заданный угол ψ .
Рассмотрим модель аэродинамических сил несущих винтов [8—10] . Определение результирующей подъемной силы винтов проводится в соответствии
с рис . 11 .4 .
11.2. Определение сил, действующих на конвертоплан
251
Рис. 11.3. Схема сил, действующих на конвертоплан в полете (без учета сил тяжести)
Рис. 11.4. Схема определения главного вектора аэродинамических сил:
H ̅i , S ̅i , F ̅i , T ̅i — продольная, поперечная, подъемная и результирующая силы
Аэродинамические силы H ̅i , S ̅i , F ̅i зависят от частоты вращения несущего
винта и определяются в соответствии со следующей формулой [7, 8]:
H i1
2
1 ρ S H ( ωi R )
Si =
2
1
Fi
cH
cS ,
cT
где сН , сS , cT — коэффициенты продольной, поперечной и тяговой сил, которые
зависят от геометрических параметров винта; ρ — плотность воздуха; R — приведенный радиус несущего винта; ωi — угловая скорость винта; SН = 0,9 πR 2 — площадь, отметаемая несущим винтом .
252
Глава 11. Механизмы конвертопланов
Для большинства винтов коэффициенты сН , сS (продольной и поперечной
сил) очень малы по сравнению с коэффициентом cT [7, 8], тогда приближенно модуль силы тяги винта определим как:
где b =
cT ρ S H R
Ti = Fi = bωi2,
2
— аэродинамическая составляющая .
2
Векторы силы тяги винтов в нулевой системе координат можно определить
в соответствии со следующей формулой [13, 19—21]:
( )
( )
Fi 0 = T10 Fi 1 ,
Подъемная сила крыла Pj(1) рассчитывается по следующей формуле [7, 8]:
cL ρS V 2
( )
Pj 1 =
2
= kV 2 ,
где сL — коэффициент подъемной силы; S — площадь крыла; V — скорость набегающего воздушного потока .
Кроме того, на крыло действует сила сопротивления Q ̅j(1), которая препятствует движению летательного аппарата и рассчитывается по формуле [7, 8]:
( )
Qj1 =
cD ρS V
2
2
= µ xV 2 ,
где сD — коэффициент сопротивления, зависящий от геометрии крыла .
В результате действия подъемной силы Pj̅ и силы сопротивления Q ̅j на крыло
формируется результирующая сила R ̅:
( )
( )
( )
R j1 = Q j1 + Pj 1 .
В абсолютной системе координат эти силы определим по формулам:
( )
( )
Pj 0 = T10 Pj 1 ;
( )
( )
Q j 0 = T10Q j1 .
С учетом основных рассчитанных аэродинамических характеристик крыльев
летательного аппарата в среде XFLR5 [9, 10], устойчивости и управляемости было
спроектировано крыло и составлена схема сил, действующих на конвертоплан
в полете (рис . 11 .5) .
Векторы сил тяги поворотных винтов определим в соответствии со схемами
рис . 11 .6а, б:
( )
F1 1
F1 sin ( β )
0
=
;
F1 cos ( β )
( )
F2 1
F2 sin ( β )
0
=
;
F2 cos ( β )
( )
F3 1
0
= F3 sin ( γ ) .
F3 cos ( γ )
Тогда сумму всех сил в подвижной системе координат представим в виде:
∑ Fi
(1)
F1 sin ( β ) + F2 sin ( β ) − Q1 − Q2 − QΦ ;
= F3 sin ( γ );
F1 cos ( β ) + F2 cos ( β ) + F3 cos ( γ ) + P1 + P2 + PΦ .
11.3. Математическая модель движения конвертоплана
253
Рис. 11.5. Схема аэродинамических сил, действующих на поверхность крыла
Рис. 11.6. Отклонение векторов тяги поворотных приводов:
а — поворот электродвигателей 1, 2; б — поворот электродвигателя 3
11.3. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ
ДВИЖЕНИЯ КОНВЕРТОПЛАНА
Для получения дифференциальных уравнений движения конвертоплана применим теоремы об изменении количества движения и об изменении кинетического
момента [16, 17] .
254
Глава 11. Механизмы конвертопланов
По теореме об изменении количества движения механической системы имеем:
dQ
( )
= ∑ Fi 0 .
dt
Вектор количества движения рассматриваемой механической системы, состоящей из корпуса и трех пар несущих винтов, определяется по формуле:
3
Q = mC vC + ∑ mi v A i .
i =1
Количество движения i-го элемента системы определим по формуле:
(
( )
mi v A i = mi vC + Tɺ10 rCA1 i
)
Внешние силы, действующие на конвертоплан, определим следующим образом:
( )
( )
∑ Fi 1
( )
= T10 ∑ Fi 1 = T10
∑ Fix1
( )
∑ Fiy1 .
( )
∑ Fiz1
С учетом вышеперечисленного получим:
dv
dv
dv
dQ
( )
( )
( )
= mC C + ∑ mi C + Tɺɺ10 rCA1 i = ( mC + ∑ mi ) C + Tɺɺ10 ∑ mi rCA1i = T10 ∑ Fi 1 + ∑ mi g .
dt
dt
d
t
d
t
При выполнении условий симметричности конструкции системы равенстве
масс роторов m1 = m2 = m3 = m:
1 2
2m l − l m
3 3
=
= 0 .
0
0
3m h
( m1 + m2 + m3 ) h
( m1 + m2 ) c − dm3
( )
Tɺɺ10 ∑ mi rCA1 i = Tɺɺ10
Таким образом, дифференциальные уравнения движения конвертоплана
в проекциях на координатные оси нулевой (неподвижной) системы координат
имеют вид:
dvCx
( )
= ∑ Fix0 ;
( mC + ∑ mi )
t
d
dv y
( )
( mC + ∑ mi ) C = ∑ Fiy0 ;
dt
dv z
( )
( mC + ∑ mi ) C = ∑ Fiz 0 + ∑ mi g .
dt
Представленная система дифференциальных уравнений описывает изменение обобщенных координат, определяющих положение центра масс конвертоплана в пространстве под действием сил тяги винтов, подъемной силы, сил сопротивления и сил веса .
11.3. Математическая модель движения конвертоплана
255
При рассмотрении вращательного движения конвертоплана относительно
центра масс С используем теорему об изменении кинетического момента [17]:
dL
= ∑ M Ce ,
dt
где ∑M̅Ce — сумма действующих на корпус конвертоплана моментов; L ̅ — кинетический момент или момент количества движения рассматриваемой механической
системы, который определяем следующим образом:
L = J C ω C + ∑ J i Ωi ,
где JC , Ji — тензор инерции корпуса и роторов; ω̅C — вектор угловой скорости корпуса конвертоплана; Ω̅i — вектор угловой скорости ротора .
Тензор инерции корпуса конвертоплана относительно центральных осей
инерции, проходящих через центр масс С имеет вид [15]:
J CX1
− J Cx1 y1
J C = − J Cy1 x1
− J Cx1z1
J CY1
− J Cz1 x1
− J Cy1z1 ,
− J Cz1 y1
J CZ1
где J CX1 , J CY1 , J CZ1 — осевые моменты инерции корпуса; J Cx1 y1 , J Cx1z1 , J Cy1z1 — центробежные моменты инерции .
Кинетический момент корпуса относительно центра масс конвертоплана
определяется следующим образом:
J CX1
− J Cx1 y1
LC = − J Cy1 x1
− J Cz1 x1
− J Cx1z1 ωX
1
J CY1
− J Cy1z1 ωY1 .
− J Cz1 y1
J Cz1
ωZ1
Тензоры инерции роторов, моделирующих электроприводы относительно
центральных осей инерции, проходящих через центр масс С, имеют вид [15]:
(
)
J i = TiT′i J Ai′Ti ′i + m E rA2i C − rAi C rATi C ,
Здесь предполагается, что массы роторов равны m1 = m2 = m3 = m; Ti ′i — матрицы
поворота систем координат (Аi xi yi zi)ʹ в Аi xi yi zi ; E ̅ — единичная матрица; rA i C —
радиус вектор, определяющий положение центра ротора в системе координат
СX1Y1Z1; J A1 — тензоры инерции роторов в системе координат (Аi xi yi zi)ʹ, которые
i
представим как:
J AX i
0
JAi = 0
J AYi
0
0
i
i
0
0 .
J AYi
i
Тензор инерции конвертоплана определим по формуле:
I = JC + ∑Ji .
256
Глава 11. Механизмы конвертопланов
Вышеописанные выражения позволяют построить систему дифференциальных уравнений, описывающих пространственное движение конвертоплана .
Для обобщения результатов в векторной форме введем переобозначения:
JC = J4 и ω̅̅C = Ω̅4 .
Тогда L ̅ = ∑Ji Ω̅i , i = 1—4 и дифференциальные уравнения движения конвертоплана можно представить следующим образом:
Γqɺ + Φ = M,
где Г — матрица системы,
mE
Γ=
0
0
1
m — масса аппарата; E ̅ — единичная матрица 3 × 3;
qɺ = vɺC ,
M = [F , M ] ; F
T
(0)
( )
( )
( )
= FX 0 , FY 0 , FZ 0
подвижной системы отчета:
( )
0
4
3
Φ=
;
ɺ Ω +Ω
J
L
Ji
i
4 ∑ i
∑
i =1
i =1
T
∑ J i Ωɺ i ;
( )
( )
FX 0 = ∑ FiX0 ;
(
T
)
— главный вектор внешних сил на оси не( )
FY 0 = ∑ FiY0 ;
( )
( )
FZ 0 = ∑ FiX0 + ∑ mi g .
Вектор главного момента внешних сил относительно подвижной системы отсчета представим как:
M = M X1 , MY1 , M Z1 T .
Тогда
mE
0
vɺC
0 4
ɺ
1 ∑ J i Ω i
i =1
(
)
0
4
F
3
= .
+
ɺ
J i Ω i + Ω 4 ∑ Li M
∑
i =1
i =1
(
)
Систему нелинейных дифференциальных уравнений необходимо дополнить
уравнениями, связывающими угловую скорость роторов и управляющих напряжений, поступающих на электродвигатели [5, 6, 18—21]:
−
ɺi =
ω
cE cM
c
η ωi − d ωi2 + M η U i
R
R
,
J Az i
где J Az i — момент инерции ротора вокруг продольной оси; d — аэродинамическая
постоянная; сЕ, cM —коэффициенты постоянной ЭДС и момента электродвигателя; Ui — управляющее напряжение (i = 1, 2, 3); η — КПД электропривода; R — активное сопротивление .
11.4. Моделирование движения конвертоплана
257
Кроме того, систему нелинейных дифференциальных уравнений необходимо
дополнить условиями перехода конвертоплана из одного режима в другой .
1 . Отрыв от поверхности происходит при выполнении условия:
Mg < F1z + F2z + F3z,
где M = ∑mi — масса конвертоплана .
2 . Вертикальный взлет или посадка:
z = z (t); x = A; y = B,
где A, B — координаты точки взлета; z (t) — заданный закон изменения
координаты от времени .
3 . Переход в горизонтальный режим:
z = H; β = ∑ai t i .
4 . Горизонтальный полет:
z = H; x = x (t); y = y (t); γ = ∑bi t i,
где Н — высота подъема аппарата; x (t), y (t) —заданные уравнения движения
аппарата в горизонтальной плоскости; аi , bi — постоянные, определяемые
из граничных условий .
5 . Касание с поверхностью: z = 0 .
11.4. МОДЕЛИРОВАНИЕ ДВИЖЕНИЯ КОНВЕРТОПЛАНА
Для моделирования движения конвертоплана разработан алгоритм, позволяющий исследовать различные виды управляемого движения . Основной задачей
моделирования является определение обобщенных координат, определяющих
положение центра масс и его ориентацию в пространстве для различных этапов
движения [1—4] . Общий алгоритм моделирования управляемого движения представлен на рис . 11 .7 .
На основании этого алгоритма разработана программа, в которой ранее полученные дифференциальные уравнения движения интегрируются для определения
самолетных углов и координат центра масс во времени [18, 20] .
В табл . 11 .1 представлены основные параметры, которые были приняты при
моделировании .
Результаты математического моделирования представлены на рис . 11 .8—11 .13 .
На рис . 11 .8а представлен график момента отрыва конвертоплана от поверхности при Мg < F1z + F2z + F3z; на рис . 11 .8б — график нарастания управляющего
напряжения U0 до номинального, при котором происходит отрыв аппарата и дальнейшее движение .
Далее при выполнении условия z = H начинается переходный процесс, при
котором вертикальный полет переходит в горизонтальный под действием сил тяги
передних винтов, которые поворачиваются на угол 0 ≤ β ≤ 90° (при этом γ = 0)
по закону:
β = a3t 3 + a2t 2 + a1t + d.
258
Глава 11. Механизмы конвертопланов
Рис. 11.7. Алгоритм управления движением конвертоплана
Рис. 11.8. Графики зависимостей:
а — времени отрыва конвертоплана от поверхности; б — напряжения U0
от времени
11.4. Моделирование движения конвертоплана
259
Таблица 1
Основные параметры для моделирования конвертоплана
Символ
Единицы
измерения
Значение
Плотность воздуха
ρ
кг/м3
1,204
Масса конвертоплана
m
кг
2,5
Радиус винта
R
м
Параметры
Сила тяжести
м/с
g
0,127
2
2
9,8
Аэродинамическая составляющая
Fn
м
0,023
Расстояние от центра А1 до А2 (передний вал)
а
м
0,45
Расстояние до центра А2 (задний вал)
b
м
0,39
Смещение центра масс
c
м
0,3
Расстояние от центра масс до А1 и А2
d
м
0,26
Площадь крыла
S
м
0,72
Плечо возникновения подъемной силы
h
м
0,05
Момент инерции относительно оси Х1
JХ
кг ∙ м2
8,1 ∙ 10–3
Момент инерции относительно оси Y1
JY
кг ∙ м2
8,1 ∙ 10–3
Момент инерции относительно оси Z1
JZ
кг ∙ м2
14,2 ∙ 10–3
Аэродинамическая постоянная
bz
Н ∙ с2
1,191
КПД двигателя
η
%
0,87
Сопротивление на обмотках ЭДВ
R
Ом
0,152
Крутящий момент пропеллера
μ
Н∙м
2,372 ∙ 10–6
Момент инерции ротора вокруг оси пропеллера
Jm
кг ∙ м2
2,09 ∙ 10–4
Индуктивность
L
Гн
5,6 ∙ 10–5
Коэффициент пропорциональности Се
Се
–
0,01
Коэффициент пропорциональности Сm
Сm
–
26,3 ∙ 10–3
Время взлета
t1
c
1—10
Время отклонения винтов на угол γ
t2
c
0,5—5
Время поворота вокруг оси z
t3
c
1—10
Время корректировки сигнала γ
t4
c
0,5—2
Время отклонения винтов на угол β
t5
c
2—5
Время горизонтального полета
t6
c
1—10
Время корректировки сигнала β
t7
c
0,5—5
Время посадки
Tk
c
5—20
1
1
1
260
Глава 11. Механизмы конвертопланов
Для заданных граничных условий
закон изменения угла в за время t1 имеет
вид (рис . 11 .9):
β(t ) =
1,5π
t12
t2 −
π
t13
t 3 .
Рассмотрим переходный процесс
и влияние коэффициентов подъемной
силы крыла k и сопротивления μх на движение аппарата в вертикальной плоскости . Моделирование проводилось при
Рис. 11.9. График изменения угла β
следующих параметрах: m = 2 кг; F = 15 Н;
за время t1 = 2 с
Н = 5 м .
Результаты математического моделирования в виде зависимостей z = z (t) приведены на рис . 11 .9, а в виде траектории движения в вертикальной плоскости —
на рис .11 .10 .
Рис. 11.10. Графики зависимости перемещений конвертоплана в переходном режиме:
а —вдоль вертикальной координаты Z; б — в вертикальной плоскости X0Z; при
коэффициентах μх = 0,1; 1 – k = 0,4; 2 – k = 0,6; 3 – k = 0,8
Хорошо видно, что в горизонтальном полете коэффициент подъемной силы
крыла k существенно влияет на характер движения конвертоплана и для обеспечения заданной высоты полета должен быть не менее k = 0,6 .
На рис . 11 .11 представлена зависимость
вертикальной координаты z = z (t) при изменении коэффициента сопротивления μх . Увеличение коэффициента сопротивления приводит
к уменьшению высоты и падению конвертоплана . Необходимо обеспечить μх < 0,1 .
Рис. 11.11. График зависимости перемещений конвертоплана в переходном режиме вдоль вертикальной координаты Z при коэффициентах k = 0,6:
1 – μх = 0,1; 2 – μх = 1; 3 – μх = 3
11.5. Экспериментальные исследования
261
На рис . 11 .12, 11 .13 представлены графики перемещения конвертоплана на этапах: взлета — I, горизонтального полета II и посадки III .
Рис. 11.12. Графики перемещения конвертоплана:
а — вдоль координатной оси X; б — вдоль координатной оси Y; X1, Y1 — фактическая траектория; Х, Y — заданная траектория; ∆Х, ∆Y — ошибка управления;
I, II, III — этапы полета: взлет, движение по траектории и посадка соответственно
Рис. 11.13. Пространственная траектория
движения конвертоплана:
I, II, III — зоны взлета, движения по траектории
и посадки соответственно; 1 — заданная траектория,
2 — фактическая траектория
Анализ графиков (см . рис . 11 .12, 11 .13)
показывает, что математическая модель
вполне адекватно отражает движение конвертоплана в различных режимах .
11.5. ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ
На рис . 11 .14 показан общий вид прототипа конвертоплана, который оснащен бесколлекторными электродвигателями Skyrc X2830 . Особенностью данных электродвигателей является применение высококачественных магнитов и подшипников,
а также точная балансировка для вращения без вибрации и возможности поднять
полезную груз весом 850 г с учетом правильного выбора несущих винтов, которые
были бы способны создавать необходимую подъемною силу [17, 23, 24] . По рекомендации производителя использованы пропеллеры 9450 диаметром 240 мм
и шагом 127 мм . Для реализации вращения приводов конвертоплана применены
сервоприводы фирмы Turnigy модель TGY-375DMG .
262
Глава 11. Механизмы конвертопланов
Рис. 11.14. Общий вид прототипа конвертоплана
Основные характеристики выбранного электропривода для прототипа конвертоплана представлены в табл . 11 .2 .
Таблица 11.2
Характеристики Skyrc X2830
Частота вращения, об ./мин
14 450
Аккумулятор, ячеек
4—6
Максимальная мощность, Вт
350
Максимальный ток, А
28
Ток холостого хода, А
0,4
Сопротивление обмоток
0,152
Количество полюсов
14
Размер вала, мм
3×2
Рекомендованные винты
DJI 9450
Создаваемая суммарная подъемная сила, гр .
2500
Также аппарат оснащен инерциальной навигационной системой, выполненной на базе MPU-6050 . Совместно с модулем MPU-6050 использован комплементарный фильтр, чтобы снизить погрешность при расчетах гироскопа и уменьшить
чувствительность акселерометра к внешним воздействиям, который работает
на базе фильтров верхних и нижних частот . Модель фильтра может быть представлена в виде:
αi = k1(αi – 1 + αgyro ∆t) + k2 αасс,
11.5. Экспериментальные исследования
263
где αi — выходной сигнал; αgyro — угол гироскопа; αacc — угол акселерометра;
k1, k2 — коэффициенты пропорциональности .
В соответствии с рис . 11 .15 схема реализации модуля MPU-6050 с учетом применения фильтра имеет вид:
Рис. 11.15. Схема реализации модуля MPU-6050 с учетом комплементарного
фильтра
Полученные результаты представлены в соответствии с рис . 11 .16 .
Действие ультразвукового дальномера HC-SR04 основано на принципе эхолокации . Он излучает звуковые импульсы в пространство и принимает отраженный
от препятствия сигнал . По времени распространения звуковой волны к препятствию и обратно определяется расстояние до объекта . В соответствии с рис . 11 .17
внутренняя структура реализации модуля HC-SR04 с учетом применения цифрового фильтра низких частот имеет вид:
Полученные результаты работы модуля HC-SR04 представлены на рис . 11 .18 .
GPS модуль GY-GPS6MV2 определяет с высокой точностью местоположение
объекта, позволяет найти положение конвертоплана по осям Х и Y . Особое внимание уделено переходным режимам движения из вертикального взлета в горизонтальный полет . Установлена зависимость сил тяги винтов от необходимой скорости поворота электроприводов .
Эксперименты проводились для определения основных параметров движения
аппарата в различных режимах в том числе, зоны взлета, движения по траектории
и посадки соответственно [1, 3, 4, 13, 14, 17] .
Результаты экспериментальных исследований в части движения аппарата
по траектории приведены на рис . 11 .19 .
Точность движения по траектории оцениваем относительной погрешностью
∆z =
z ( t ) − z1 ( t )
z (t )
,
которая не превышает 15% . В целом эксперименты подтвердили работоспособность математической модели, описывающей движение конвертоплана в различных режимах .
264
Глава 11. Механизмы конвертопланов
Рис. 11.16. Результаты измерения самолетных углов конвертоплана:
а, б, в — акселерометра; г, д, е — гироскопа; ж, з, и — гироскопа и акселерометра
11.5. Экспериментальные исследования
Рис. 11.17. Структурная схема
модуля HC-SR04
Рис. 11.18. Результаты использования модуля HC-SR04:
а — сигнал с применением фильтра низких частот; б — входной сигнал
Рис. 11.19. Результаты экспериментальных исследований в виде теоретической зависимости: z = z (t) и экспериментальной z1 = z1 (t)
265
266
Глава 11. Механизмы конвертопланов
ЗАКЛЮЧЕНИЕ
В главе проведен кинематический и динамический анализы конвертоплана . Составлена математическая модель, которая описывает взаимосвязанные электрические и механические процессы в электромеханической системе конвертоплана
и приводов винтов . Получены нелинейные дифференциальные уравнения, которые решаются совместно с кинематическими соотношениями . Численно найдено
решение нелинейных дифференциальных уравнений и проведено моделирование
режимов взлета, горизонтального полета, приземления, а также движение конвертоплана по заданной траектории . Разработан и изготовлен прототип, на котором проведены экспериментальные исследования, подтвердившие работоспособность математической модели .
Литература
1 . Salazar-Cruz S ., Kendoul F ., Lozano R ., Fantoni I . Real-time stabilization of a small three-rotor
aircraft // IEEE Transactions on aerospace and electronic systems, 2008 . — 44 (2) .
2 . Oosedo A ., o Abiko S ., Narasaki Sh ., Kuno A ., Konno A ., Uchiyama M . Flight control systems
of a quad tilt rotor unmanned aerial vehicle for a large attitude change // Robotics and Automation (ICRA), 2015 . IEEE International Conference on . — P . 2326—2331 .
3 . Emelyanova О.V ., Kazaryan G.K ., Martinez L.A.S ., Jatsun S.F . The synthesis of electric drives
characteristics of the UAV of «convertiplane — tricopter» type/MATEC // Web Conf ., 2017,
2016 . — Vol . 99 . Workshop on Contemporary Materials and Technologies in the Aviation Industry (CMTAI2016) DOI: http://dx .doi .org/10 .1051/matecconf/20179902002 .
4 . Jatsyn S.F ., Pavlovsky V.E ., Emelyanova O.V ., Savitsky A.S . Mathematical model of the quadrotor type unmanned aerial vehicle with neurocontrollerl // Advances in Robotics, Mechatronics and Circuits: proceedings of the 18th International Conference on Circuits (CSCC′14) and
proceedings of the 2014 International Conference on Mechatronics and Robotics, Structural
Analysis (MEROSTA 2014), Santorini Island, Greece, 2014 . — P . 46—50 .
5 . Афанасьев П.П ., Голубев И.С ., Новиков В.Н . и др . Беспилотные летательные аппараты . —
М .: МАИ, 2008 . — 650 с .
6 . Емельянова О.В . Синтез параметров электроприводов БПЛА типа конвертоплан—трикоптер / Г .К . Казарян, Л .А .С . Мартинез, С .Ф . Яцун, С .П . Стуканева: Сб . трудов //
IV Международная школа-конференция молодых ученых «Нелинейная динамика машин» . School-NDM, 2017 . — М .: ИМАШ РАН, 2017 . — С . 239—249 .
7 . Ефремов А.В ., Захарченко В.Ф ., Овчаренко В.Н . Динамика полета: учебник для студентов
высших учебных заведений / Под ред . Г .С . Бюшгенса . — М .: Машиностроение . — 776 с .
8 . Краснов Н.Ф . Аэродинамика профиля и крыла // Основы теории аэродинамики . — М .,
1976 .
9 . Мартинез Л.А.С ., Стуканева А.С. Оценка аэродинамических параметров крыла БПЛА
несущей формы: сб . науч . ст . Всеросс . науч . конф . перспективных разработок молодых
ученых . — В 2-х т . // Молодежь и наука: шаг к успеху— Т . 3 . — Курск: Изд-во Юго-Зап .
гос . ун-та ЗАО «Университетская книга», 2017 — C . 206—211 .
10 . Мартинез Л.А.С . Разработка конструкции конвертоплана: сб . науч . тр . 2-й Международной научно-практической конференции . — В 2-х т . — Т . 2 . — Курск: Изд-во ЮгоЗап . гос . ун-та ЗАО «Университетская книга», 2015 — С . 265—268 .
11 . Миль М.Л . и др . Вертолеты . — Т .1 и Т .2 . — М .: Машиностроение, 1967 .
12 . Павловский В.Е ., Яцун С.Ф ., Емельянова О.В ., Стуканева С.П . Математическое моделирование робота с переменным вектором тяги // Второй всероссйиский научно-практический сенимар «Беспилотные транспортные средства с элементами искусственного интеллекта» (БТС-ИИ-2015): тр . семинара . — СПб .: Политехника-сервис, 2015 . — С . 99—106 .
11.5. Экспериментальные исследования
267
13 . Павловский В.Е ., Яцун С.Ф ., Емельянова О.В ., Савицкий А.В . Моделирование движения
квадроротационного летающего робота . Моделирование и исследование процессов
управления квадрокоптером // Робототехника и техническая кибернетика: науч .-техн .
журнал, 2014 . — № 4 (5) . — СПб . — С . 49—57 .
14 . Павловский М.А ., Акинфеева Л.Ю ., Бойчук О.Ф . Теоретическая механика . Статика . Кинематика . — К .: Выща шк ., 1989 . — 351 с .
15 . Павловский М.А ., Акинфеева Л.Ю ., Бойчук О.Ф . Теоретическая механика . Динамика . —
К .: Выща шк ., 1990 . — 480 с .
16 . Попов Н.И ., Емельянова О.В ., Яцун С.Ф ., Савин А.И . Исследование колебаний квадрокоптера при внешних периодических воздействиях // Фундаментальные исследования,
2014 . — № 1 . — С . 28—32 .
17 . Попов Н.И ., Емельянова О.В . Динамические особенности мониторинга воздушных
линий электропередачи с помощью квадрокоптера // Современные проблемы науки
и образования, 2014 . — № 2 . URL: http://www .science-education .ru/116-12773 (Дата обращения: 16 .04 .2014) .
18 . Яцун С.Ф ., Емельянова О.В ., Казарян К.Г . Алгоритм управления беспилотным летательным аппаратом типа конвертоплан // Беспилотные транспортные средства с элементами искусственного интеллекта (БТС-ИИ-2016): тр . 3-го Всероссийского научно-практического семинара . — Иннополис: Перо, 2016 . — С . 147—157 .
19 . Яцун С.Ф ., Емельянова О.В ., Савин А.И . Математическое моделирование конвертоплана
с центрально расположенным управляемым приводом // Известия ЮЗГУ . Сер .: Техника и технологии, 2015 . — № 4 (17) . — С . 31—37 .
20 . Яцун С.Ф ., Емельянова О.В ., Савин А.И ., Стуканева С.П . Моделирование полета конвертоплана в различных режимах движения // Известия ЮЗГУ . Сер .: Техника и технологии, 2015 . — № 1 (14) . — С . 55—66 .
21 . Яцун С.Ф ., Емельянова О.В ., Савин А.И . Моделирование движения квадрокоптера при
отклонении осей несущих винтов относительно корпуса // Вибрационные технологии,
мехатроника и управляемые машины: сб . науч . ст . в 2 ч . — Ч . 1 . — Курск: Изд-во ЮгоЗап . гос . ун-та, 2014 . — С . 329—338 .
22 . Патент на полезную модель № 157967, МПК В64С 25/62 . Движитель воздушный с изменяемым вектором тяги [Текст] / Яцун С .Ф, Ефимов С .В, Мищенко В .Я, Яцун А .С,
Емельянова О .В, Мартинез А . (рФ) . № 2015131037/11 от 27 .07 .2015 .
23 . Патент на полезную модель № 164555, МПК В64С 27/08 . Летательный аппарат, выполненный по схеме трикоптера [Текст] / Яцун С .Ф, Мищенко В .Я, Емельянова О .В, Савин А .И . (рФ) . № 2015148004/11 от 09 .11 .2015 .
24 . Патент на полезную модель № 166334, МПК В64С 27/08 . Мультироторный аппарат
с изменяемым вектором тяги [Текст] / Яцун С .Ф, Мищенко В .Я, Емельянова О .В, Савин А .И . (рФ) . № 2016107088/11 от 29 .02 .2016 .
ГЛАВА 12
РАЗРАБОТКА РОБОТОВ
ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ
ДЛЯ СОВМЕСТНОГО
ОТНОСИТЕЛЬНОГО
МАНИПУЛИРОВАНИЯ
ТЕХНОЛОГИЧЕСКИМИ СИСТЕМАМИ
Пащенко В.Н.
В данной главе рассматривается синтез и анализ механизмов, выполняющих совместное относительное манипулирование . Подобные механизмы используются
для автоматизации технологических и вспомогательных операций в различных
областях промышленности, а также средств контроля, методов обработки, поверхностей деталей сложных форм .
В ряде случаев применение традиционных манипуляционных механизмов
оказывается малоэффективным для решения важных практических задач . Одним
из вариантов решения этой проблемы является создание технологических систем
на основе механизмов параллельной структуры, которые успешно применяются в различных областях промышленности [1—5] . В этих механизмах, в отличие
от механизмов последовательной структуры, выходное звено соединено с основанием несколькими кинематическими цепями, что позволяет обеспечить повышенную точность, грузоподъемность и жесткость конструкции [6, 7] . Такая структура механизма приводит к уменьшению размеров и масс подвижных звеньев .
Еще одним положительным моментом является то, что эти механизмы могут быть
использованы в агрессивных средах, поскольку приводы располагаются на внешней поверхности по отношению к выходному звену и кинематическим цепям .
К недостаткам таких механизмов можно отнести ограниченный рабочий объем ввиду интерференции звеньев кинематических цепей [8, 10] . Еще одним недостатком является кинематическая и динамическая связанность между степенями
свободы . Одной из возможностей устранения или хотя бы уменьшения значимости этих недостатков является разработка манипуляционных механизмов, обладающих общим структурным признаком — наличием двух выходных подвижных
звена и осуществляющих совместное относительное манипулирование [11, 12] .
Такие механизмы состоят из двух модулей, и общее число степеней свободы является суммой степеней свободы этих модулей . Такая организация позволит совместно отрабатывать каждую точку поверхности обрабатываемого тела с необходимой ориентацией выходного звена механизма совместного относительного
Глава 12. Разработка роботов параллельной структуры для манипулирования системами
269
манипулирования в подвижной системе координат и движение самой системы
координат . Кроме того, один из механизмов может обеспечить коррекцию некоторых перемещений другого .
В современной технике известны механизмы, в которых обеспечивается относительный поворот двух вращающихся тел, механизмы перемешивающих
устройств, механизмы обрабатывающих станков, в которых инструмент перемещается относительно подвижной детали . Искусственные системы с большим числом степеней свободы эквивалентны в какой-то мере руке человека .
Механизм совместного относительного манипулирования можно представить
в виде единой замкнутой цепи с общей кинематической парой или общим кинематическим соединением выходных звеньев . Таким механизмам присущи минимальные энергетические затраты и максимальная эффективность (точность,
быстродействие и т .п .) .
Механизмы относительного манипулирования можно использовать для осуществления технологических процессов, связанных с обработкой или сборкой
небольших изделий . На рис . 12 .1 показан механизм для лазерной резки, реализующий принцип совместного относительного манипулирования .
Рис. 12.1. Механизм для лазерной резки
На рис . 12 .2 изображен пространственный механизм, состоящий из совокупности плоских механизмов, предназначенных для обработки сложных поверхностей . Механизм состоит из двух механизмов, один из которых перемещает
инструмент, а другой — обрабатываемое изделие . В совокупности взаимное перемещение разных механизмов позволяет обработать заготовку
Такие механизмы применяются в медицине . В настоящее время известны хирургические установки, позволяющие не только выполнять операции, но обрабатывать открытые раны . Для такой обработки раны требуется равномерное сканирование луча лазера .
Существуют обрабатывающие механические комплексы, в которых заготовку
помещают на транспортную пластину, входящую в подвижную замкнутую систему (рис . 12 .3) . Эта система может подавать детали на обработку в нужной последовательности и правильно ориентировать их относительно робота, снабженного
режущим инструментом .
270
Глава 12. Разработка роботов параллельной структуры для манипулирования системами
Рис. 12.2. Пространственный механизм
Рис. 12.3. Система механизмов совместного относительного манипулирования
Для устройств совместного относительного манипулирования, для некоторых
частных схем решены задачи о положениях, рассмотрены вопросы функциональных возможностей, представлена геометрическая интерпретация .
12.1. СТРУКТУРНЫЙ СИНТЕЗ МЕХАНИЗМОВ
СОВМЕСТНОГО ОТНОСИТЕЛЬНОГО
МАНИПУЛИРОВАНИЯ
В данном параграфе рассматриваются задачи структурного синтеза механизмов
совместного относительного манипулирования .
Для структурного синтеза входным параметром является суммарное число
степеней свободы механизма один и механизма два .
Также при решении задачи структурного синтеза накладывается ряд ограничений — O1:
12.1. Структурный синтез механизмов совместного относительного манипулирования
271
1) максимальное и минимальное число степеней свободы механизма 1 (N1min,
N2max);
2) максимальное и минимальное число степеней свободы механизма 2 (N2min,
N2max);
3) множество движений, отрабатываемых механизмом 1 (M1 = [m1, m2, … , mi]) .
Например, в техническом задании должно быть указано, что механизм 1
должен отрабатывать поступательное движение вдоль оси X, поступательное
движение вдоль оси Y, и вращательное движение вдоль оси Z;
4) множество движений отрабатываемых механизмом 2 (M2 = [m1, m2, … , mi]) .
Множество кинематических пар, на которых строятся механизм 1 и механизм 2K . Например, в техническом задании должно быть указано, что для
построения механизмов необходимо использовать вращательную, поступательную и сферическую кинематические пары;
5) максимальная и минимальная длина кинематической цепи для каждого
из механизмов .
Результатом решения задачи структурного синтеза является структура механизма совместного относительного манипулирования (S), представленная в виде:
• набор кинематических цепей, из которых состоит первый механизм ([K1]);
• набор кинематических цепей, из которых состоит второй механизм ([K2]) .
Кинематическая цепь представляет собой упорядоченную последовательность кинематических пар . Например, K1 = [k1, k2, k3], где:
• k1 — вращательная кинематическая пара;
• k2 — поступательная кинематическая пара;
• k3 — сферическая кинематическая пара .
Таким образом, для решения задачи структурного синтеза необходимыми
входными параметрами, описанными в техническом задании, являются набор
движений, отрабатываемых первым механизмом, набор движений, отрабатываемых вторым механизмом, а также суммарное число степеней свободы механизма .
Структурный синтез устройств совместного относительного манипулирования (табл . 12 .1) проведем на основе анализа числа степеней свободы каждого
из модулей . Кроме того, учтем, какие именно движения способен выполнять каждый модуль .
Для решения задачи необходимо следующее .
1 . Составить набор перестановок без повторений из кинематических пар R, S,
T . Количество перестановок равно шести .
2 . Определить все кинематические цепи длиной один .
3 . Определить все кинематические цепи длиной два, с учетом порядка кинематических пар .
4 . Определить все кинематические цепи длиной три, с учетом порядка кинематических пар .
Определив множество {K}, составим все возможные конфигурации составляющих механизмов, с учетом того, что в конкретную конфигурацию могут входить
только идентичные кинематические цепи . Таким образом, получим множество
конфигураций первого механизма, состоящего из всех возможных конфигураций,
имеющих две степени подвижности и всех возможных конфигураций, имеющих
три степени подвижности . Количество степеней свободы механизма определяется
по формуле Чебышева для пространственных механизмов .
272
Глава 12. Разработка роботов параллельной структуры для манипулирования системами
Таблица 12.1
Структура
механизма
Кинематические
цепи первого
механизма
Кинематические
цепи второго
механизма
2—4
SR, SR
SR
[RX, RY, RZ, RZ, RX, RY, RZ, RZ]
[RX, RY, RZ, RZ]
2—4
RR
SRT, SRT
[RZ, RZ]
[RX, RY, RZ, RZ, TZ, RX, RY, RZ, RZ, TZ]
2—4
TT
STT, STT
[TZ, TZ]
[RX, RY, RZ, TZ, TZ, RX, RY, RZ, TZ, TZ]
2—4
RR
STR, STR
[RZ, RZ]
[RX, RY, RZ, TZ, RZ, RX, RY, RZ, TZ, RZ]
2—4
RR
RTS,RTS
[RZ, RZ]
[RZ, TZ, RX, RY, RZ, RZ, TZ, RX, RY, RZ]
2—4
TT
RSR, RSR
[TZ, TZ]
[RZ, RX, RY, RZ, RZ, RZ, RX, RY, RZ, RZ]
2—4
SR, SR
TTS, TTS
[RX, RY, RZ, RZ, RX, RY, RZ, RZ]
[TZ, TZ, RX, RY, RZ, TZ, TZ, RX, RY, RZ]
2—4
ST, ST
TSR, TSR
[RX, RY, RZ, TZ, RX, RY, RZ, TZ]
[TZ, RX, RY, RZ, RZ, TZ, RX, RY, RZ, RZ]
2—4
RR
TSR, TSR
[RZ, RZ]
[TZ, RX, RY, RZ, RZ, TZ, RX, RY, RZ, RZ]
2—4
RT
RST, RST
[RZ, TZ]
[RZ, RX, RY, RZ, TZ, RZ, RX, RY, RZ, TZ]
2—4
SR, SR
RRS, RRS
[RX, RY, RZ, RZ, RX, RY, RZ, RZ]
[RZ, RZ, RX, RY, RZ, RZ, RZ, RX, RY, RZ]
2—4
ST, ST
RTS, RTS
[RX, RY, RZ, TZ, RX, RY, RZ, TZ]
[RZ, TZ, RX, RY, RZ, RZ, TZ, RX, RY, RZ]
2—4
RS, RS
TRS, TRS
[RZ, RX, RY, RZ, RZ, RX, RY, RZ]
[TZ, RZ, RX, RY, RZ, TZ, RZ, RX, RY, RZ]
Группы движений
Аналогично определим множество конфигураций второго механизма . В результате получим набор возможных структур механизма совместного относительного манипулирования .
Например, имеет место запись SR, SR, что означает, что механизм состоит
из двух одинаковых кинематических цепей, каждая из которых состоит из S —
сферической кинематической пары, и R — вращательной кинематической пары .
Например, имеет место запись [TZ, RZ] [TZ, RX, RY, RZ] . Это означает, что
механизму позиционирования инструмента соответствует группа движений
[TZ, RZ], т .е . рабочий орган имеет поступательное движение вдоль оси Z и вращательное движение вокруг оси Z . Механизму соответствует группа движений
[TZ, RX, RY, RZ], т .е . выходное звено может осуществлять поступательное движение вдоль оси Z и вращательные движения вдоль осей X, Y, Z .
12.2. Структуры механизмов совместного относительного манипулирования
273
12.2. СТРУКТУРЫ МЕХАНИЗМОВ
СОВМЕСТНОГО ОТНОСИТЕЛЬНОГО
МАНИПУЛИРОВАНИЯ
В данном параграфе рассматриваются структуры механизмов совместного относительного манипулирования .
Рассмотрим более подробно механизм совместного относительного манипулирования с пятью степенями свободы (рис . 12 .4), состоящий из двух модулей .
Рис. 12.4. Механизм совместного относительного манипулирования
Механизм совместного относительного манипулирования — пространственный механизм — включает основание, выходное звено модуля установки инструмента, выполненного в виде шестизвенного механизма, выходное звено модуля
установки обрабатываемого объекта, выполненного в виде поворотного механизма .
Первый модуль, совершающий движение в вертикальной плоскости, представляет собой механизм параллельной структуры с тремя степенями свободы,
у которого в каждой из двух кинематических цепей содержится три вращательные
кинематические пары (точки C1, C2, C3, C4, C5, C6), одна из которых сопряжена
с выходным звеном (точки ), и одна сопряжена с основанием (точки C3C4) .
Введем следующие обозначения:
• X0, Y0, Z0 — базовая неподвижная система координат;
• X1, Y1, Z1 — система координат выходного звена поворотный механизма
• X2, Y2, Z2 — система координат выходного звена механизма совместного относительного манипулирования в целом;
• X3, Y3, Z3 — локальная система координат шестизвенного механизма;
• θ1, θ2, θ3, θ4 — обобщенные координаты плоского шестизвенного механизма;
• θ5, θ6 — обобщенные координаты поворотного механизма .
274
Глава 12. Разработка роботов параллельной структуры для манипулирования системами
Для определения числа степеней свободы воспользуемся известной структурной формулой Чебышева для плоских механизмов . В данном случае число степеней свободы равно трем .
Второй модуль, совершающий пространственное перемещение, представляет
собой механизм с двумя степенями свободы, кинематическая цепь содержит одну
вращательную пару, сопряженную с выходным звеном (точка B2), и одну поступательную пару, связанную с основанием (точка B1) .
Для определения числа степеней свободы второго модуля воспользуемся
структурной формулой Сомова — Малышева . Число степеней свободы механизма равно двум .
Таким образом, число степеней свободы механизма совместного относительного манипулирования равно пяти .
Исходя из структуры механизма совместного относительного манипулирования и количества степеней свободы, кинематическая развязка осуществляется следующим образом . Поскольку механизм выполнен в виде единой
пространственной конструкции, а кинематические пары расположены так,
что выходное звено модуля установки детали может перемещаться вдоль одной из горизонтальных осей и вращаться вокруг вертикальной оси, а выходное
звено модуля установки инструмента может перемещаться вдоль вертикальной
и одной из горизонтальных осей, и вращаться вокруг другой горизонтальной
оси, то тем самым степени свободы распределены между модулями по две и три
соответственно .
Механизм совместного относительного манипулирования представляет собой замкнутую технологическую систему . Рабочий орган закреплен на верхнем
механизме . Заготовка устанавливается на столе . В процессе совместной работы как верхний, так и нижний механизмы одновременно выступают в качестве
доводчика инструмента (например, резца) до определенной точки на обрабатываемой поверхности, так и достижения нужной ориентации обрабатываемой
поверхности, изменяя ее положения таким образом, что в каждой точке траектории выходное звено находиться под определенным углом к обрабатываемой
поверхности .
Рассмотрим еще одного представителя широкого класса механизмов совместного относительного манипулирования, также обладающего пятью степенями
свободы (рис . 12 .5) .
Данный механизм относительного манипулирования также состоит из двух
модулей . Верхний модуль совершает пространственное перемещение . В каждой
из двух кинематических цепей имеется одна приводная вращательная пара, связанная с основанием (точки B1, B2), и еще одна вращательная пара (точки C1, C2),
связанная с выходным звеном (точка A) .
Введем следующие обозначения:
• θ1, θ2, θ3 — обобщенные координаты пятизвенного механизма;
• θ4, θ5 — обобщенные координаты нижнего механизма;
• XYZ — базовая система координат;
• X2Y2Z2 — система координат выходного звена нижнего механизма (базовая система координат механизма совместного относительного манипулирования);
• X3Y3Z3 — базовая система координат верхнего механизма;
• X4Y4Z4 — система координат выходного звена верхнего механизма .
12.2. Структуры механизмов совместного относительного манипулирования
275
Рис. 12.5. Механизма совместного относительного манипулирования
Для определения числа степеней свободы воспользуемся известной структурной формулой Добровольского . В данном случае число степеней свободы механизма равно двум .
Кроме того, имеется приводная поступательная пара (точки C3, C4), осуществляющая перемещение пятизвенного механизма в горизонтальной плоскости . Таким образом верхний модуль обладает тремя степенями свободы .
Второй модуль, совершающий пространственное перемещение, представляет
собой механизм с двумя степенями свободы, кинематическая цепь содержит одну
вращательную пару, сопряженную с выходным звеном (точки C5, C6), и одну поступательную пару, связанную с основанием (точка C7) .
Для определения числа степеней свободы второго модуля воспользуемся
структурной формулой Сомова — Малышева . Второй модуль обладает двумя степенями свободы .
Тогда общее число степеней свободы механизма совместного относительного
манипулирования равно пяти .
Механизм совместного относительного манипулирования также представляет
собой замкнутую технологическую систему . Рабочий орган закреплен на верхнем
механизме . Заготовка устанавливается на столе . Однако в процессе совместной работы верхний механизм выступает в качестве доводчика инструмента (например,
резца) до определенной точки на обрабатываемой поверхности, в свою очередь
нижний механизм позволяет достичь нужной ориентации обрабатываемой поверхности, изменяя ее положения таким образом, что в каждой точке траектории выходное звено находиться под определенным углом к обрабатываемой поверхности .
Рассмотрим еще один механизм совместного относительного манипулирования (рис . 12 .6) .
Данный механизм относительного манипулирования также состоит из двух
модулей . Верхний модуль совершает движение в горизонтальной плоскости .
В каждой из двух кинематических цепей имеется одна приводная вращательная пара
(обобщенные координаты θ1, θ2), связанная с основанием (точки C1, C4), и еще две
вращательные пары (точки C2, C3, C5, C6), связанные с выходным звеном (точка Pu) .
276
Глава 12. Разработка роботов параллельной структуры для манипулирования системами
Рис. 12.6. Кинематическая схема механизма совместного относительного манипулирования
Нижний механизм состоит из нижней неподвижной и верхней подвижной
платформ, соединенных между собой шестью элементами . Из них три являются стержнями с шаровыми шарнирами на концах и три — сочленениями, каждое
из которых состоит из промежуточного звена, крепящегося к нижней платформе
активными одноподвижными вращательными кинематическими парами, и звена
с двумя шаровыми шарнирами, соединяющими промежуточное звено и верхнюю
платформу (рис . 12 .7) .
Шарниры расположены на одинаковом расстоянии от центра основания
и платформы и симметрично относительно трех радиусов, угол между которыми
равен 120° . За счет задания обобщенных координат происходит θ3, θ4 и θ5 пространственное перемещение выходного звена механизма .
Введем следующие обозначения:
• XYZ — базовая система координат;
• X2Y2Z2 — система координат выходного звена нижнего механизма (базовая система координат механизма совместного относительного манипулирования;
• X3Y3Z3 — базовая система координат верхнего механизма;
• X4Y4Z4 — система координат выходного звена верхнего механизма .
Найдем число степеней свободы верхнего механизма с помощью формулы
Сомова — Малышева . Число степеней свободы механизма равно двум .
Для нахождения числа степеней свободы нижнего механизма также воспользуемся формулой Сомова — Малышева .
12.3. Решение прямой задачи о положениях механизма совместного манипулирования
277
Таким образом, механизм совместного относительного манипулирования обладает пятью степенями свободы .
Рис. 12.7. Кинематическая схема нижнего механизма
12.3. РЕШЕНИЕ ПРЯМОЙ ЗАДАЧИ
О ПОЛОЖЕНИЯХ МЕХАНИЗМА
СОВМЕСТНОГО ОТНОСИТЕЛЬНОГО
МАНИПУЛИРОВАНИЯ
Перейдем к решению задач о положении механизмов совместного относительного манипулирования . При постановке задач считаем, что положение выходного звена верхнего модуля задано в системе координат выходного звена нижнего модуля .
12.3.1. Решение прямой задачи о положениях механизма
совместного относительного манипулирования,
включающего шестизвенный и поворотный механизм
Рассмотрим кинематическую структуру механизма совместного относительного
манипулирования (см . рис . 12 .4) .
Прямую задачу о положении механизма совместного относительного манипулирования сформулируем следующим образом: пусть известны обобщенные
координаты плоского шестизвенного механизма и обобщенные координаты поворотного механизма, найти положение и ориентацию выходного звена механизма совместного относительного манипулирования, то есть положение системы
278
Глава 12. Разработка роботов параллельной структуры для манипулирования системами
координат X3Y3Z3 в системе координат X1, Y1, Z1 . Данное положение определяется
с помощью матрицы однородного преобразования:
t11 t12
t
t
Tмсом = T –1поворотнTплоск = 21 22
0 t32
0 0
t13
t23
t33
0
t14
t24
,
t34
1
выражающей положение системы координат X2, Y2, Z2, относительно системы координат X1, Y1, Z1 .
Исходя из структуры поворотного механизма, выходное звено может осуществлять вращение вокруг оси Z0 и смещаться по оси X0 .
Тогда матрица однородных преобразований:
Tповоротн = ρX, Y ROZ =
1
0
=
0
0
0 0 θ5 cos ( θ6 ) − sin ( θ6 )
1 0 0 sin ( θ6 ) cos ( θ6 )
0 1 Z P1 0
0
0
0 0 1 0
0 0 cos ( θ6 ) − sin ( θ6 )
0 0 sin ( θ6 ) cos ( θ6 )
=
0
1 0 0
0 1 0
0
θ5
0 0
,
1 Z P1
0 1
0
где ρX, Z — матрица переноса по оси X0 и Z0; ROZ — матрица вращения вокруг оси Z0;
ZP1 — смещение по оси Z0 в точку P1 .
Определим матрицу однородных преобразований механизма параллельной
структуры в системе координат P0 X0 Y0 Z0 (рис . 12 .8) .
0
0
0
1
0 cos ( β ) − sin ( β ) Y P2
Tплоск = RY, Z ROX =
0 sin ( β ) cos ( β ) Z P2
0
0
0
1
,
где
C + C4
Y P2 = Re 3
2
L2 e iθ2 + L1e iθ1 + C1 + L4 e iθ4 + L5 e iθ3 + C6
=
Re
;
2
L2 e iθ2 + L1e iθ1 + C1 + L4 e iθ4 + L5 e iθ3 + C6
C + C4
Z P2 = Im 3
;
= Im
2
2
cos ( β ) =
sin ( β ) =
Re ( L4 e iθ4 + L5 e iθ3 + C6 ) − ( L2 e iθ2 + L1e iθ1 + C1 )
L3
Im ( L4 e iθ4 + L5 e iθ3 + C6 ) - ( L2 e iθ2 + L1e iθ1 + C1 )
L3
;
,
где β — угол поворота верхней платформы относительно рабочего органа (рис . 12 .9) .
12.3. Решение прямой задачи о положениях механизма совместного манипулирования
279
Рис. 12.8. Механизм параллельной структуры
Рис. 12.9. Выходное звено механизма совместного относительного манипулирования
Точки C1, C2, C3, C4, C5, C6 — точки с координатами Ci (0, Re (Ci ), Im (Ci )) получим из уравнений связи, составленных в полярных координатах:
C2 = L1e iθ1 + C1 ;
iθ
C3 = L2 e 2 + C2 ;
C4 = L4 e iθ4 + C5 ;
i θ3
C5 = L5 e + C6 ;
L = C − C .
3
4
3
Учитывая, что координаты точек C1 и C6 известны, из системы уравнений выразим координаты точек C3 и C4:
C3 = L2 e iθ2 + L1e iθ1 + C1 ;
C4 = L4 e iθ4 + LC5 e iθ3 + C6 .
280
Глава 12. Разработка роботов параллельной структуры для манипулирования системами
12.3.2. Решение прямой задачи о положениях механизма
параллельной структуры с тремя приводными парами
Рассмотрим кинематическую структуру механизма параллельной структуры
(см . рис . 12 .7) .
Для упрощения процедуры вычисления и уменьшения времени расчета предлагается метод выражения 6 точек, через 3 точки для получения аналитического
уравнения плоскости, в которой находится выходное звено механизма .
Шарниры платформы образуют шестиугольник b1b2b3b4b5b6, вписанный
в окружность .
Достроим шестиугольник до равностороннего треугольника W1W2W3
(рис . 12 .10) .
Рис. 12.10. Добавление виртуальных точек
Длина стороны полученного равностороннего треугольника равна:
W = W1b1 + b1b6 + b6W3 .
(12 .1)
Из треугольника PW1b1 по теореме синусов:
ϕ
W1b1 = b6W3 = 2 r sin B .
2
(12 .2)
Из треугольника Pb1b6 найдем длину
b1b6 = 2r sin 60° − ϕ
B
.
2
(12 .3)
ϕB
+ 4 r sin .
2
2
(12 .4)
Таким образом
W = 2r sin 60° − ϕ
B
12.3. Решение прямой задачи о положениях механизма совместного манипулирования
281
Выразим координаты крепления шарниров к верхней платформе b1 через координаты виртуальных точек Wi:
T
b1 = xW1 + K ( xW3 − xW1 ) yW1 + K ( yW3 − yW1 ) zW1 + K ( zW3 − zW1 ) ;
T
b2 = xW1 + K ( xW2 − xW1 ) yW1 + K ( yW2 − yW1 ) zW1 + K ( zW2 − zW1 ) ;
T
b3 = xW2 + K ( xW1 − xW2 ) yW2 + K ( yW1 − yW2 ) zW2 + K ( zW1 − zW2 ) ;
T
b4 = xW2 + K ( xW3 − xW2 ) yW2 + K ( yW3 − yW2 ) zW2 + K ( zW3 − zW2 ) ;
T
b5 = xW3 + K ( xW2 − xW3 ) yW3 + K ( yW2 − yW3 ) zW3 + K ( zW2 − zW3 ) ;
T
b6 = xW3 + K ( xW1 − xW3 ) yW3 + K ( yW1 − yW3 ) zW3 + K ( zW1 − zW3 ) ,
(12 .5)
(12 .6)
(12 .7)
(12 .8)
(12 .9)
(12 .10)
где
ϕ
r sin B
2
K=
ϕ
ϕ
2 r sin B + r sin 60° − B
2
2
.
(12 .11)
Вершины полученного треугольника являются виртуальными точками, координаты которых определяют плоскость, содержащую искомые шарниры .
Применяя данный метод, определим координаты шарнира, соединяющего
кривошип и шатун Ci :
C1 = RLKP sin ( α1 ) LKP cos ( α1 ) ;
(12 .12)
C2 = RZ RLKP sin ( α 2 ) LKP cos ( α 2 ) ;
(12 .13)
C3 = RZ RZ RLKP sin ( α3 ) LKP cos ( α3 ) ,
(12 .14)
cos (120° ) − sin (120° ) 0
RZ = sin (120° ) cos (120° ) 0 ,
0
0
1
(12 .15)
T
T
T
где
матрица вращения относительно оси Z (против часовой стрелки на 120°); αi — угол
поворота шарнира Ci , относительно положительного направления оси Z .
282
Глава 12. Разработка роботов параллельной структуры для манипулирования системами
По соотношениям (12 .5—12 .10) и (12 .12—12 .14) составим систему уравнений
и найдем значения координат виртуальных точек:
x − x )2 + ( y − y )2 + ( z − z )2 = W 2 ;
W2
W1
W2
W1
W2
( W1
x − x 2 + y − y 2 + z − z 2 =W 2;
( W2 W3 ) ( W2 W3 )
W3 )
( W2
2
2
2
2
( xW3 − xW1 ) + ( yW3 − yW1 ) + ( zW3 − zW1 ) = W ;
2
2
2
2
( X b1 − X C 1 ) + (Yb1 − YC 1 ) + ( Z b1 − Z C 1 ) = Lш ;
( X − X )2 + (Y − Y )2 + ( Z − Z )2 = L2ш ;
B2
b2
B2
b2
B2
b2
( X − X )2 + (Y − Y )2 + ( Z − Z )2 = L2ш ;
C3
b3
C3
b3
C3
b3
( X b 4 − X B 4 )2 + (Yb 4 − Y B 4 )2 + ( Z b 4 − Z B 4 )2 = L2ш;
2
2
2
( X b 5 − X C 5 ) + (Yb 5 − YC 5 ) + ( Z b 5 − Z C 5 ) = L2ш ;
2
2
2
2
( X b 6 − X B 6 ) + (Yb 6 − Y B 6 ) + ( Z b 6 − Z B 6 ) = Lш
.
(12 .16)
Решив систему уравнений (12 .16), получим значения координат виртуальных
точек для определения центра верхней платформы:
xp =
yp =
zp =
( xW
1
+ xW2 + xW3 )
;
(12 .17)
;
(12 .18)
.
(12 .19)
3
( yW
1
+ yW2 + yW3 )
3
( zW
1
+ zW2 + zW3 )
3
Определим коэффициенты канонического уравнения плоскости:
A p = ( yb2 − yb1 ) ( zb3 − zb1 ) − ( yb3 − yb1 ) ( zb2 − zb1 );
(12 .20)
B p = ( xW3 − xW1 ) ( zW2 − zW1 ) − ( xW2 − xW1 ) ( zW3 − zW1 );
(12 .20)
C p = ( xW2 − xW1 ) ( yW3 − yW1 ) − ( xW3 − xW1 ) ( yW2 − yW1 ) .
(12 .21)
На основе полученных результатов (12 .17)—(12 .21) получим косинусы направляющих осей:
cos ( αOX ) =
xb1 − x p
( xb
1
cos ( βOX ) =
2
2
2
2
2
− x p ) + ( yb1 − y p ) + ( zb1 − z p )
yb1 − y p
( xb
1
2
− x p ) + ( yb1 − y p ) + ( zb1 − z p )
;
(12 .22)
;
(12 .23)
12.3. Решение прямой задачи о положениях механизма совместного манипулирования
cos ( γOX ) =
zb − z p
1
( xb
1
2
2
− x p ) + ( yb1 − y p ) + ( zb1 − z p )
cos ( αOZ ) =
cos ( βOZ ) =
cos ( γOZ ) =
Ap
A p2
+ B p2 + C p2
Bp
A p2
+ B p2 + C p2
Cp
A p2 + B p2 + C p2
2
;
283
(12 .24)
;
(12 .25)
;
(12 .26)
;
(12 .27)
cos ( αOY ) = cos ( βOZ ) cos ( γOX ) − cos ( γOZ ) cos ( βOX );
(12 .28)
cos ( βOY ) = cos ( γOZ ) cos ( αOX ) − cos ( αOZ ) cos ( γOX );
(12 .29)
cos ( γOY ) = cos ( αOZ ) cos ( βOX ) − cos ( βOZ ) cos ( αOX ) .
(12 .30)
На основании полученных результатов (12 .17)—(12 .19) и (12 .22)—(12 .30) формируем матрицу, определяющую положение выходного звена механизма в пространстве:
cos ( αOX ) cos ( αOY ) cos ( αOZ ) x p
cos ( βOX ) cos ( βOY ) cos ( βOZ ) y p
.
T =
cos ( γOX ) cos ( γOY ) cos ( γOZ ) z p
0
0
0
1
В параграфе рассмотрен метод решения прямой задачи кинематики для манипулятора параллельной кинематики с тремя степенями свободы при помощи
метода виртуальных точек .
12.3.3. Решение прямой задачи о положениях механизма
совместного относительного манипулирования,
включающего пятизвенный и поворотный механизм
Рассмотрим решение прямой задачи о положении для механизм совместного относительного манипулирования, включающего пространственный пятизвенный
и поворотный механизмы (см . рис . 12 .5) .
Рассмотрим кинематическую цепь верхнего механизма и разделим ее на две
открытые (рис . 12 .11) .
Определим координаты шарниров B и D:
X B = l1 cos ( θ1 );
Y B = l1 sin ( θ1 ),
(12 .31),
X D = l4 cos ( θ2 ) + l AF ;
Y D = l4 sin ( θ2 ) .
(12 .32)
284
Глава 12. Разработка роботов параллельной структуры для манипулирования системами
Рис. 12.11. Открытая кинематическая цепь исследуемого механизма
Так как все звенья совершают только вращательные движения вокруг своих
шарниров, то можно представить, что точка B описывает две окружности радиусами 12 и 13, с центрами в шарнирах B и D одновременно . Тогда уравнения связи:
( X C − X B ) + (YC − YB )
2
= l22 ;
(12 .33)
( X C − X D ) + (YC − YD )
2
= l32 .
(12 .34)
2
2
Подставим (12 .30), (12 .31) в (12 .32), (12 .33) . Так как точка С для обоих разомкнутых кинематических цепей является общей, то решив полученную систему
уравнений относительно XС и YС, получим решение прямой задачи кинематики
для данного механизма:
x=
(
2
)
X B3 − X B2 X D + X D3 + X B − X D2 + (Y B − YD ) + X D (YB − YD 2 ) ∓
(
2 X B2 − 2 X B X D + X D2 + (Y B − YD )
(
∓ − X B2 − 2 X B X D + X D2 + (Y B − YD )
2
)(Y
2
)
(12 .35)
2
B
− YD ) ( −4l22 + X B2 − 2 X B X D + X D2 + Y B2 − 2Y BY D + Y D2 )
;
2
(YB − YD ) (YB + YD ) + X B2 (YB2 − YD2 ) + X D2 (YB2 − YD2 ) ∓
y=
2
2 ( X B2 − 2 X B X D + X D2 + (YB − YD ) ) (YB + Y D )
(
∓ X D − X B2 − 2 X B X D + X D2 + (Y B − YD )
(
2
)(Y
2
B
(
− YD ) −4l22 + X B2 − 2 X B X D + X D2 + YB2 − 2Y BYD + YD2
(12 .36)
(
± X B ∓2 X DYB2 ± 2 X DYD2 + − X B2 − 2 X B X D + X D2 +
2
2
+ (YB − YD ) (YB − YD ) ( −4l22 + X B2 − 2 X B X D + X D2 + Y B2 − 2Y BY D + YD2 )
)
) .
Рассмотрим кинематическую схему нижнего механизма (рис . 12 .12)
Поворотный механизм имеет две кинематические пары, предоставляющие
два вращательных движения, вокруг оси Y и вокруг оси Z .
12.3. Решение прямой задачи о положениях механизма совместного манипулирования
285
Рис. 12.12. Кинематическая схема нижнего механизма
Эти перемещения опишем с помощью матриц однородных преобразований:
cos ( θ4 )
0
Tz =
sin ( θ4 )
0
0 sin ( θ4 )
1
0
0 cos ( θ4 )
0
0
0
0
;
0
1
cos ( θ5 ) − sin ( θ5 )
sin ( θ5 ) cos ( θ5 )
Ty =
0
0
0
0
0 x0
0 y0
.
1 z0
0 1
При решении прямой задачи о положении для рассматриваемого механизма,
необходимо учесть смещение между системами координат выходного звена и неподвижной базовой:
0
0
Tсм =
0
0
0
0
0
0
0 x0
0 y0
,
1 z0
0 1
где x0, y0, z0 — расстояние между подвижной и неподвижной системами координат
нижнего механизма по соответствующим координатам .
Перемножив матрицы Tz , Ty , Tсм, получим матрицу однородных преобразований Tниз для нижнего механизма, описывающую перемещение выходного звена,
относительного его базовой системы координат:
cos ( θ4 ) cos ( θ5 ) − cos ( θ4 ) sin ( θ5 ) sin ( θ4 ) x0 cos ( θ4 ) + z0 sin ( θ4 )
sin ( θ5 )
cos ( θ5 )
0
y0
. (12 .37)
Tниз =
− cos ( θ5 ) sin ( θ4 ) sin ( θ5 ) sin ( θ4 ) sin ( θ4 ) z0 cos ( θ4 ) − x0 sin ( θ4 )
0
0
0
1
Перейдем к решению задач о положении для механизма совместного относительного манипулирования .
Для решение прямой задачи о положении осуществим следующий последовательный переход:
XYZ → X2Y2 Z2 → X3Y3 Z3 → X4Y4 Z4,
или
–1
Tмех = Tниз
T0Tверх,
(12 .38)
286
Глава 12. Разработка роботов параллельной структуры для манипулирования системами
где T0 — матрица перехода из неподвижной системы координат нижнего механизма в неподвижную систему координат верхнего механизма,
1
0
T0 =
0
0
0
1
0
0
0 x 1 0
0 y 0 1
=
1 z 0 0
0 1 0 0
0 −175,19
0 −97,34
,
θ3
1
0
1
(12 .39)
где x, y, z — расстояние между системами координат X3Y3Z3 и XYZ по соответствующим осям координат .
Tверх — матрица однородных преобразований для верхнего механизма:
1
0
Tверх =
0
0
0
1
0
0
0 x
0 y
,
0 0
0 1
(12 .40)
где координаты x, y описываются выражениями (12 .35), (12 .36) .
Tниз — матрица однородных преобразований для нижнего механизма .
Матрица Tмех описывает прямую задачу о положении для всего механизма
в целом:
t11 t12
t
t
Tмех = 21 22
t31 t32
0 0
t13
t23
t33
0
t14
t24
,
t34
1
(12 .41)
где, t11, t12, t13, t21, t22, t23, t31, t32, t33 — выражения, описывающие ориентацию выходного звена механизма X4Y4Z4 относительно базовой системы координат X2Y2Z2
в пространстве .
t14, t24, t34 — выражения, описывающие положение выходного звена механизма .
12.4. ПРОВЕРКА РЕШЕНИЕ ПРЯМОЙ ЗАДАЧИ
О ПОЛОЖЕНИЯХ МЕХАНИЗМА
СОВМЕСТНОГО ОТНОСИТЕЛЬНОГО
МАНИПУЛИРОВАНИЯ
В данном параграфе рассматриваются вопросы проверки правильности полученного решения .
Для проверки правильности решения прямой задачи кинематики приведем
выходное звено механизма в начальную точку траектории обработки, в качестве
обрабатываемого объекта выберем полусферу радиусом 30 мм .
Для предложенного способа проверки необходимы эталонные значения декартовых и обобщенных координат .
Воспользуемся разработанной упрощенной 3D-моделью механизма и приведем его выходное звено в точку на поверхности сферы .
12.4. Проверка решение прямой задачи о положениях механизма манипулирования
287
Воспользуемся встроенным инструментом анализа и замерим координаты
выходного звена всего механизма относительно его базовой системы координат
(рис . 12 .13) .
Рис. 12.13. Координаты выходного звена механизма относительно его базовой
системы координат в среде SolidWorks
Рис. 12.14. Приведенный механизм
Снимем значения обобщенных координат в данном положении (рис . 12 .14):
θ1 = 0,8652 рад;
θ2 = 0,1332 рад;
θ3 = 95,23 мм;
θ4 = –0,2416 рад;
θ5 = 0 рад .
288
Глава 12. Разработка роботов параллельной структуры для манипулирования системами
Перейдем к математическому решению .
Воспользуемся полученной матрицей однородных преобразований (12 .41) для
механизма совместного относительного манипулирования в целом и подставим
значения обобщенных координат . Вычислив значения выражений t14, t24, t34, определим значения декартовых координат:
x = 4,14 мм; y = 16,81 мм; z = 24,46 мм .
Таким образом, проведя сравнительный анализ теоретических координат
и полученных в результате 3D-моделирования механизма, можно сделать выводы
о погрешности:
• по x составляет 0,01 мм;
• по y составляет 0,05 мм;
• по z составляет 0,01 мм .
Полученная погрешность решения составляет в среднем составляет 0,05%, это
обеспечивает манипулирование механизмом с достаточно высокой точностью .
12.5. ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ
МЕХАНИЗМА СОВМЕСТНОГО
ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ
В данном параграфе рассматривается макет экспериментальной установки, имеющий схему, аналогичную механизму по рис . 12 .5 . Устройство включает в себя
шаговые двигатели и элементы системы управления (рис . 12 .15) .
Функциональная схема управления манипуляционным механизмом по возмущению представлена на рис . 12 .16 .
Измерения возмущающего действия L(t) осуществляются с помощью измерительного элемента (ИЭ), в качестве которого выступает гироскоп MPU-650
GY-521 . Преобразование измерения возмущающего действия производится с помощью преобразователя (П) . Функции сумматора, регулятора и преобразователя
выполняет микроконтроллер ArduinoMega . Измерительный элемент и преобразователь образуют связь по возмущению . Задающим устройством (ЗУ) в данной
системе является персональный компьютер . В качестве усилителя (У) выступает
драйвер шагового двигателя (в данном случае A4983) . Исполнительным устройством является шаговый двигатель PL42H48, объектом управления (ОУ) — звенья
исследуемого механизма .
Рассмотрим управления приводом механизма по возмущению . В табл . 12 .2
приведены технические характеристики выбранного шагового двигателя PL42H48 .
Уравнение движения ротора шагового двигателя:
J
d2θ
dt
2
+D
dθ
+ pnΦ M i A sin ( p ) θ + pnΦ M iB sin ( p ) ( θ − λ ) = 0,
dt
где J — момент инерции; D — коэффициент вязкого трения; p — число пар полюсов; n — число витков в обмотке; nФM — потокосцепление; iA и iB — ток в обмотках; θ — угол поворота ротора; λ — шаг зубцов статора .
12.5. Экспериментальное исследование механизма совместного манипулирования
289
Рис. 12.15. Экспериментальная установка
Рис. 12.16. Функциональная схема управления
Для определения передаточной функции шагового двигателя примем, что λ = 0,
∂θ = θ0 – θi , где θ0 — реальное положение ротора; θi — требуемое положение, и получим:
J
d 2 ( δθ )
dt
2
+D
d ( δθ )
+ 2 p2 nΦ M I 0 δθ = 0 .
dt
290
Глава 12. Разработка роботов параллельной структуры для манипулирования системами
Таблица 12.2
Технические характеристики
Наименование
характеристики
Числовое значение
характеристики
Наименование
характеристики
Числовое значение
характеристики
1,8° ± 5 %
Индуктивность фазы, мГн
1,8 ± 20 %
2
Сопротивление фазы, Ом
1 ± 10 %
Угловой шаг
Число фаз
Ток фазы, А
Момент инерции, г ∙ см2
2,4
70
После подстановки ∂θ = θ0 – θi :
J
d 2 θ0 ( t )
dt
2
+D
δθ0 ( t )
+ 2 p2 nΦ M I 0 θ0 ( t ) = 2 p2 nΦ M I 0 θi .
dt
Применим преобразование Лапласа:
( s 2 J + sD + 2 p2 nΦ M I 0 ) θ0 = 2 p2 nΦ M I 0 θi ,
или
s 2 θ0 =
2 p2 nΦ M θi
J
I0 −
2 p 2 nΦ M I 0
D
sθ0 −
θ0 ,
J
J
тогда передаточная функция примет вид:
G (s) =
2 p 2 nΦ M I 0
Js 2 + Ds + 2 p2 nΦ M I 0
=
ω2ΠP
s 2 + Ds J + ω2ΠP
.
Уравнение напряжения в обмотке статора:
U − ri − L
di
pλ dθ
+ pnΦ M sin
= 0 .
2 dt
dt
Применим преобразование Лапласа:
U r
sI = − I +
L L
pλ
pnΦ M sin
2 sθ .
L
Для данной работы примем требуемое положение θi = π/2 для каждого из трех
кривошипов .
Численно определим некоторые соотношения:
ω2ΠP =
D
= 0, 00005;
J
2 p 2 nΦ M I 0
r
= 555,5;
L
J
=
2 p2 LI 02
= 8, 2;
J
1
= 555,5;
L
K1 =
2 p2 nΦ M θi
= 12,9;
J
pλ
pλ
pnΦ M sin
pLI 0 sin
2 = 282, 2 .
2 =
K2 =
L
L
12.5. Экспериментальное исследование механизма совместного манипулирования
291
Поставим получившиеся числа в полученные ранее выражения:
G (s) =
ω2 P
s + Ds J + ω
2
=
2
P
8, 2
s + 0, 00005 s + 8, 2
2
;
C1 = RLKP sin ( α1 ) LKP co
os ( α1 ) ;
T
C2 = RZ RLKP sin ( α 2 ) LKP cos ( α 2 ) ;
T
C3 = RZ RZ RLKP sin ( α3 ) LKP cos ( α3 ) .
T
Общая передаточная функция системы:
1
L
W (s) =
;
r
D r
D r 2 2
3
+ K1 K 2 s + ω2ΠP
s + + s + ωΠP +
L
J L
J L
K1
W (s) =
7166
s + 555,5 s + 3649 s + 4555,1
3
2
.
На рис. 12.17—12.20 представлены переходная функция двигателя, импульсная
переходная функция двигателя, диаграмма Найквиста, диаграмма Боде соответственно.
Рис. 12.17. Переходная функция двигателя
292
Глава 12. Разработка роботов параллельной структуры для манипулирования системами
Таким образом, рассмотренные механизмы совместного относительного манипулирования представляют собой новый класс пространственных механизмов,
обладающих более положительными качествами по сравнению с механизмами
параллельной и последовательной структур.
Рис. 12.18. Импульсная переходная функция двигателя
Рис. 12.19. Диаграмма Найквиста
12.5. Экспериментальное исследование механизма совместного манипулирования
293
Рис. 12.20. Диаграмма Боде
Литература
1 . Глазунов В.А ., Чунихин А.Д . Развитие исследований механизмов параллельной структуры // Проблемы машиностроения и надежности машин, 2014 . — № 3 . С . 37—43 .
2 . Хейло С.В ., Глазунов В.А ., Ширинкин М.А ., Календарев А.В . Возможные применения
механизмов параллельной структуры// Проблемы машиностроения и надежности машин, 2013 . — № 5 . — С . 19—24 .
3 . Крайнев А.Ф ., Ковалев Л.К ., Васецкий В.Г ., Глазунов В.А . Разработка установок для лазерной резки на основе механизмов параллельной структуры // Проблемы машиностроения и надежности машин, 1994 . — № 6 . — С . 84—93 .
4 . Хейло С.В., Глазунов В.А. Манипуляционные механизмы параллельной структуры для
робототехнических комплексов предприятий текстильной промышленности // Вестник Московского государственного текстильного университета: Тематический сборник научных трудов «Инновационные технологии и материалы», 2012 . — С . 73—76 .
5 . Бушуев В.В ., Хольшев И.Г . Механизмы параллельной структуры в машиностроении //
Станки и инструмент, 2001 . — № 1 . — С . 3—8 .
6 . Глазунов В.А., Ласточкин А.Б., Терехова А.Н., Ву Нгок Бик. Об особенностях устройств
относительного манипулирования // Проблемы машиностроения и надежности машин, 2007 . — № 2 . — С . 77—85 .
7 . Глазунов В.А., Ласточкин А.Б., Шалюхин К.А., Данилин П.О. К анализу и классификации
устройств относительного манипулирования // Проблемы машиностроения и надежности машин, 2009 . — № 4 . — С . 81—85 .
8 . Пащенко В.Н . Построение рабочей зоны шестистепенного манипулятора параллельной
структуры на базе кривошипно-шатунного механизма // Интернет-журнал Науковедение . — 2016 . — Т . 8 . № 3 (34) . — С . 135 .
9 . Быков Р.Э ., Глазунов В.А ., Глазунова О.В ., Чан Дык Хай . Моделирование рабочего пространства механизма параллельной структуры с четырьмя кинематическими цепями //
Проблемы машиностроения и надежности машин, 2005 . — № 5 . — С . 10—15 .
294
Глава 12. Разработка роботов параллельной структуры для манипулирования системами
10 . Крайнев А.Ф ., Глазунов В.А ., Муницына Н.В . Построение рабочих зон манипулятора параллельной структуры и двухкритериальная оптимизация его параметров // Изв. вузов.
Машиностроение, 1994. — № 1—3. — С. 3—7.
11. Крайнев А.Ф., Глазунов В.А. Новые механизмы относительного манипулирования //
Проблемы машиностроения и надежности машин, 1994. — № 5. — С. 106—117.
12. Pashchenkova V.N., Sharapov I.V., Rashoyan G.V., Bykov A.I. Construction of a Working Area for
the Manipulation Mechanism of Simultaneous Relative Manipulation // Journal of Machinery
Manufacture and Reliability, 2017. — Vol. 46. — No. 3. — Рp. 225—231.
ГЛАВА 13
НОВЫЕ МЕХАНИЗМЫ
ДВУНОГИХ И МНОГОНОГИХ
ШАГАЮЩИХ РОБОТОВ
Горобцов А.С.
В данной главе рассмотрены шагающие роботы . Они составляют особый класс
роботов, именно двуногие шагающие роботы породили термин «робот», который
прочно укрепился во многих языках мира и охватывает в настоящее время широкую область управляемых машин . Особенностью шагающих роботов можно
считать сложную локомоцию движений — согласованных взаимных перемещений звеньев робота, обеспечивающих заданное конечное перемещение как всего
робота, так и его отдельных частей . Сложная локомоция таких роботов определяет и ключевые направлениях современных исследований в этой области, которые в первую очередь направлены на достижение устойчивого шагания, в отличие
от других мобильных роботов, например колесных, где большее значение имеет
планирование движения на основе информации, поступающей с приборов технического зрения и других датчиков ориентации и очувствления . Создание совершенных методов управления шагающими роботами позволит получить новый
класс машин с непревзойденными параметрами по проходимости и универсальности применения в различных сферах — технике, медицине и др .
13.1. МЕТОДЫ СИНТЕЗА УПРАВЛЕНИЯ
ШАГАЮЩИМИ РОБОТАМИ
Для многомерных пространственных робототехнических систем можно выделить
два направления решения задачи управления — это теоретические методы и методы, основанные на использовании человека в качестве управляющего звена . Второе направление интенсивно развивается, например, в медицине [1], а в области
шагающих роботов — в экзоскелетонах [2] .
К настоящему времени существуют различные опытные разработки по двуногим роботам, которые еще принято называть андроидами (рис . 13 .1) . Технические
характеристики таких роботов пока позволяют планировать ограниченные коммерческие применения, например, испытания костюмов химзащиты [3], протезы
нижних конечностей человека [4] .
Известные на настоящее время конструкции роботов-андроидов обладают схожими кинематическими схемами . Для конечностей это, как правило, шесть степеней свободы на одну ногу — две в стопе, одна в колене и три в бедре, три степени
свободы в руке две в плече и одна в локте . Конструкции кистей рук могут значительно различаться и содержать от 3 до 7 и более степеней свободы . Туловище может
296
Глава 13. Новые механизмы двуногих и многоногих шагающих роботов
иметь от 1 до 3 степеней свободы и состоять из двух частей . Голова и шея — до 4 степеней свободы . Каждая степень свободы в роботах обеспечивается, как правило,
кинематической парой 5-го класса (вращение двух тел относительно одной оси),
что позволяет применять приводы вращательного типа, но что приводит к увеличению числа звеньев робота . Следует отметить, что у высших живых организмов
в скелете присутствуют кинематические пары 3-го класса (сферический шарнир) —
бедренный сустав, голеностоп и др .
Рис. 13.1. Некоторые существующие образцы антропоморфных роботов:
а — Boston Dynamics; б — Boston Dynamics; в — Hubo; г — Honda; д — андроидная
техника; е — Google X
13.1. Методы синтеза управления шагающими роботами
297
Известные на настоящий момент конструкции шагающих роботов используют в большинстве случаев вращательные электроприводы постоянного тока .
Применение гидравлических поступательных приводов встречается значительно
реже (роботы Boston Dynamics), хотя удельная мощность таких приводов существенно выше, чем электрических .
Двуногие роботы-андроиды можно характеризовать как антропоморфные
роботы . Многоногие роботы относятся к зооморфным роботам и среди них
можно выделить четырех-, шести- и восьминогих роботов . Шести- и восьминогих роботов иногда называют инсектоморфными роботами . Известно достаточно большое количество конструкций многоногих роботов (рис . 13 .2) .
Кинематические схемы многоногих роботов, как правило, также построены
на сочленениях с вращательными кинематическими парами 5-го класса . Если
использовать терминологию анатомии животных, то можно выделить два вида
соединения опорных конечностей (ног) робота с корпусом (туловищем) — латеральный и парасагиттальный . При латеральном типе конечности направлены
вбок от туловища и точка опоры стопы смещена в горизонтальной плоскости
относительно проекции точки соединения ноги с корпусом во всех фазах шага .
Латеральное расположение ног характерно для относительно примитивных животных — рептилий . С энергетической точки зрения такой тип расположения
неэффективен, поскольку требует затрат на удержание собственного веса . Парасагиттальный тип крепления конечностей, обеспечивает близкое или совпадающее расположение стоп и проекций точек крепления ног к корпусу на горизонтальную плоскость, в этом случае при движении на вытянутых конечностях
минимизируются или полностью компенсируются затраты на поддержание
собственного веса . Парасагиттальный тип конечностей требует более сложной
локомоции движений и присущ более молодым в эволюционном смысле животным, в частности млекопитающим .
Рис. 13.2. Некоторые существующие примеры многоногих роботов .
В конструкциях шагающих роботов в большинстве случаев применяется латеральный способ расположения конечностей (см . рис . 13 .1, 13 .2) . Известные кинематические схемы двуногих роботов андроидов двигаются на согнутых коленях,
298
Глава 13. Новые механизмы двуногих и многоногих шагающих роботов
что не позволяет классифицировать крепление их конечностей как полностью
парасаггитальное . Такой же частичный парасагиттальный тип использован в четырехногих роботах семейства Boston Dynamic .
Основные направления, по которым идет совершенствование современных
шагающих роботов, это системы управления, силовые приводы и, в некоторой
степени, кинематические схемы роботов, в первую очередь многоногих . Системы управления движением роботов играют первоочередную роль, создание качественной системы управления позволит приступить к широкому внедрению
роботов даже на существующей элементной базе приводов . Рассмотрим характерные особенности систем управления шагающими роботами . На рис . 13 .3 показана типичная схема системы управления шагающим роботом . Такая схема
содержит алгоритмические и измерительные блоки . К алгоритмическим блокам
относятся блок генерации походки и формирования программного движения,
блок корректировки программного движения, а также интерфейс с регуляторами
приводов робота . Измерительные блоки — блоки сбора данных по окружающей
обстановке, измерения абсолютных и относительных параметров движения робота . Измерительные блоки формируют информацию для работы алгоритмических блоков .
Рис. 13.3. Обобщенная схема управления движением шагающего робота
Блок генерации походки лежит в основе системы управления роботом, и базируется на различных методах синтеза программного движения многомерных
механических систем . Теоретическая задача синтеза управления шагающими роботами в общем случае имеет ряд принципиальных сложностей, которые не позволяют получить удовлетворительное решение в общем случае . Основным теоретическим методом синтеза управляемого движения роботов является метод
13.1. Методы синтеза управления шагающими роботами
299
обратной задачи . В общем виде уравнения этого метода для робота как многозвенной механической системы записываются в виде:
M xɺɺ = f ( x, xɺ , t );
( )
Q1 x = 0;
Q2 ( x ) = w(t );
Q ( x ) = 0;
3
Q4 ( x, xɺɺ, z ( t ) ) = 0;
Q5 ( x, xɺɺ, z ( t ) ) < k .
(13 .1a)
(13 .1б)
(13 .1в)
(13 .1г)
(13 .1д)
(13 .1е)
Здесь x — вектор координат всей системы размерностью n ∙ 6; M — матрица инерции; f (x, ẋ, t) — вектор позиционных, диссипативных и внешних сил; Q1 (x) — выражения, определяющие уравнения связей кинематических пар системы; Q2 (x) —
выражения, определяющие перемещения заданных точек стоп и корпуса робота;
w (x) — функции программных перемещений точек стоп и корпуса; Q3 (x) — выражения, задающие дополнительные уравнения связей системы, для уменьшения
избыточных степеней свободы; Q4 (x, ẍ, z(t)) — выражения, определяющие условия устойчивости робота по опрокидыванию; z(t) — функция, задающая траекторию главного вектора реакций связей; Q5 (x, ẍ, z(t)) выражения, определяющие
условия устойчивости робота по скольжению; k — коэффициент трения опорной
поверхности .
Система (13 .1) описывает движение механической системы с голономными (уравнения (13 .1б)—(13 .1г)) и неголономными связями (уравнения (13 .1д)
и (13 .1е)) . Методы численного решения для механических систем с голономными
связями в настоящее время хорошо разработаны и реализованы в большом числе специализированных программ [5, 6] . Для связанных систем тел произвольной структуры уравнения голономных связей учитываются в дифференциальных
уравнениях движения тел с помощью множителей Лагранжа, а уравнения связей
после двойного дифференцирования приводят к дифференциальным уравнениям второго порядка . При таком подходе решается задача Коши для системы дифференциально алгебраических уравнений вида:
Mxɺɺ - DT p1 − D2T p2 − D3T p3 = f ( x, xɺ , t );
1
D1 xɺɺ = h1 ( x, xɺ );
ɺɺ ( t );
D2 xɺɺ = w
D xɺɺ = h ( x, xɺ ) .
3
3
(13 .2)
где D1, D2, D3 — матрицы переменных коэффициентов связей; p1, p2, p3 — векторы множителей Лагранжа, для уравнений связей (13 .1а)—(13 .1в); h1 (x, ẋ),
h3 (x, ẋ) — векторы правых частей вторых производных соответствующих уравнений связей . Система уравнений (13 .2) является разрешающей системой метода обратной задачи и может использоваться для определения программного движения
управляемой механической системы . Для получения однозначного решения (13 .2)
необходимо, чтобы число степеней свободы соответствующей механической системы было равно нулю . Этого можно добиться, например, за счет добавления
300
Глава 13. Новые механизмы двуногих и многоногих шагающих роботов
соответствующего числа уравнений связей типа (13 .1г) . Уравнения вида (13 .2) широко используются для роботов-манипуляторов с неподвижным закреплением,
поскольку для них условия устойчивости изначально выполнены .
Для шагающих роботов больший интерес представляет задача с учетом условий устойчивости по опрокидыванию . Если учесть это условие в (13 .2), то получится система:
Mxɺɺ − D1T p1 − D2T p2 − D3T p3 = f ( x, xɺ , t );
D1 xɺɺ = h1 ( x, xɺ );
ɺɺ ɺɺ ( )
D2 x = w t ;
D xɺɺ = h ( x, xɺ );
3
3
Q4 ( x, xɺɺ, z ( t ) ) = 0 .
(13 .3)
Уравнения (13 .3), при условии, что (13 .2) не имеет степеней свободы, являются избыточными . Однако (13 .2) может иметь точное решение в некоторых частных случаях . Например, если в первую подсистему (13 .3) будет входить уравнение,
не содержащее множителей Лагранжа, а только вторую производную некоторой
координаты, то такое уравнение можно исключить, а соответствующее ускорение находить из уравнений устойчивости по опрокидыванию . Физически это может соответствовать наличию в механической системе маховика, закрепленного
на оси, проходящей через его ц .м . В общем случае такой вариант малоинтересен,
но следует отметить, что на практике стабилизация таким методом известна — это
балансирование канатоходца с помощью шеста .
Строгий учет уравнения (13 .1д) с помощью множителей Лагранжа, с использованием уравнений Эйлера для условного экстремума дает:
T
T
Mxɺɺ − D1T p1 − D2T p2 − D3T p3 − D41
ɺɺp4 = f ( x, xɺ , t );
p4 − D42
D1 xɺɺ = h1 ( x, xɺ );
ɺɺ ɺɺ ( )
D2 x = w t ;
D xɺɺ = h ( x, xɺ );
3
3
Q4 ( x, xɺɺ, z ( t ) ) = 0 .
(13 .4)
Здесь D41 — матрица переменных коэффициентов связей, соответствующая производным от (13 .1д) по координатам; D41 — матрица переменных коэффициентов
связей, соответствующая производным от (13 .1д) по вторым производным от координат; p4 — вектор множителей Лагранжа, для уравнений связей (13 .1д) . Решение задачи Коши для (13 .4) осложняется необходимостью задания начальных
условий для множителей Лагранжа p4 и их первых производных . Кроме этого,
в уравнения (13 .1д) входит эмпирическая функция z(t), для которой может не существовать содержательных с практической точки зрения решений (13 .4) . К настоящему времени не разработано общих методов решения (13 .4), и тем более
(13 .1) . В известных момент работах по синтезу управляемого движения шагающих роботов рассматриваются различные приближенные методы решения (13 .4)
и нахождения функции траектории ТНМ z(t) . Строгое выражение уравнений,
13.1. Методы синтеза управления шагающими роботами
301
входящих в (13 .1д), в предположении, что внешние силы это только силы веса,
имеет вид:
n
n
n
n
i =1
i =1
i =1
i =1
∑ mi ( zɺɺi + g ) xi − ∑ mi xɺɺi zi − ∑ Ai J i Ωɺ i − z x ( t ) ∑ mi ( zɺɺi + g ) xi = 0,
(13 .5)
где mi — масса i-го тела; xi , zi — координаты ц .м . i-го тела; Ai — матрица перехода
из подвижной системы координат тела в неподвижную; Ji — матрица моментов
инерции тела; Ωi — трехмерный вектор угловых скоростей тела в подвижной системе координат; zx (t) — x координата ТНМ . Уравнение (13 .5) соответствует уравнению моментов относительно оси y неподвижной системы координат . Аналогично записывается уравнение моментов относительно оси x, в которое входит
y координата ТНМ . Различные варианты уравнений (13 .1)—(13 .5) используются
при синтезе управления шагающими роботами [7—33] .
Программное движение, которое вырабатывается в блоке генерации походки,
не обеспечивает устойчивого движения робота, в силу приближенного решения
порождающих уравнений . Для повышения устойчивости в систему управления
входит блок коррекции программного движения . Блок коррекции, как правило,
использует различные эмпирические алгоритмы . Так в [13] блок коррекции движения робота содержит обратные связи, модифицирующие программное движение робота по различным измеренным параметрам . В указанной системе управления можно выделить 3 группы обратных связей — поддержания равновесия,
коррекции генератора походки и предикторов падения .
Группа поддержания равновесия включает 4 контура .
Первый контур —демпфирование колебаний при опоре на одну ногу, которое
реализовано как дифференциальная обратная связь по угловой скорости крена
для привода продольного поворота стопы .
Второй контур — компенсация смещения ТНМ в фазе опоры на одной ноге .
Текущие координаты ТНМ получаются из данных датчиков усилий в стопе . Корректировка выполняется за счет продольных и поперечных смещений таза робота .
Величины таких смещений вычисляются в контуре с обратной связью, в котором
используется эмпирическая передаточная функция робота, полученная экспериментально, а передаточная функция обратной связи синтезирована с помощью
частотных методов теории автоматического управления .
Третий контур компенсирует непараллельность стопы поверхности при касании за счет ПД регулятора, на вход которого подается момент реакции стопы [14] .
Четвертый контур представляет собой корректор программного движения,
который изменяет фазу движения стоп в соответствии с фактическим моментом
начала опоры стопы .
Группа коррекции генератора походки состоит из двух контуров — корректора
программного движения таза робота и корректора положения торса робота . Корректор движения таза определяет корректирующие значения смещений на последующих шагах путем оценки ошибки координат ТНМ на предыдущих шагах .
Оценка ошибки определяется с помощью ПИ регулятора . Корректор положения
торса также определяет смещения торса в горизонтальной плоскости по эмпирическому алгоритму, используя в качестве входных параметров измеренные углы
крена и тангажа .
302
Глава 13. Новые механизмы двуногих и многоногих шагающих роботов
Группа предикторов падения содержит контур предсказания позиции наступания и падения набок .
Контур предсказания позиции наступания использует статистику движения
робота и увеличивает длину выполняемого шага и наклон торса в случае необходимости, чем уменьшается вероятность падения вперед .
Контур предсказания падения набок корректирует угол поперечного наклона
оси ступни по некоторому эмпирическому алгоритму .
Блок коррекции программного движения использует данные с блока измерений абсолютных параметров движения робота . К таким параметрам относятся
двумерные координаты ТНМ, опорные реакции в ступнях робота, угловые положения и угловые скорости корпуса робота и др .
Блок измерений относительных координат движения робота выдает параметры угловых координат приводов робота . Как правило, эти координаты считываются с соответствующих датчиков сервоприводов .
Измерительный блок планирования движения робота содержит приборы технического зрения, необходимые для выработки общих кинематических параметров движения робота — скорости, направления, параметров маневрирования
для обхода препятствий и т .д . В большинстве существующих конструкций шагающих роботов данный блок пока не играет существенной роли, поскольку для
совершенствования системы управления используются простые типы движений
в известных условиях, параметры которых назначаются исходя из возможностей
системы управления . Можно отметить, что указанный измерительный блок более
актуален в настоящее время для беспилотных автомобилей .
Структура связей блока коррекции программного движения может быть
различной . Так в роботе [13] данные корректора генератора походки поступают
на вход генератора походки, а выходы остальных контуров обратных связей подаются непосредственно на блок обратной задачи или на узел вычисления отклонений программных траекторий приводов от измеренных .
Экспериментальные данные по имеющимся конструкциям роботов показывают, что системы управления обеспечивают скорости движения от 0,1 до 1 м/с .
Важным контуром обратных связей является контур гашения колебаний при
опоре на одну ногу, для больших роботов это особенно актуально [20] . В отмеченной работе рассматриваются контуры гашения угловых колебаний относительно
точки опоры ноги в трех плоскостях — продольной, поперечной и горизонтальной . Колебания гасятся за счет введения демпфирования в контуры управления
поворотами ног в бедре . Собственные частоты колебаний поднятых ног составляли около 3 Гц .
13.2. РЕАЛИЗАЦИЯ МЕТОДОВ СИНТЕЗА УПРАВЛЕНИЯ
ШАГАЮЩИМИ РОБОТАМИ
НА НАТУРНЫХ И ВИРТУАЛЬНЫХ ОБРАЗЦАХ
Большое количество модификаций методов управления двуногими роботами
свидетельстсвует о принципиальной сложности задачи генерации походки шагающих роботов и актуальности решения этой задачи . В настоящей работе рассмотрена система генерации походки шагающих машин, созданная на основе
13.2. Реализация методов синтеза управления шагающими роботами
303
Рис. 13.5. Продольные и вертикальные программные перемещения стоп робота
Рис. 13.6. Вертикальные программные перемещения, скорости и ускорения левой
стопы робота
304
Глава 13. Новые механизмы двуногих и многоногих шагающих роботов
методов вычислительной механики, в частности методов расчета динамики связанных систем тел [5, 6] . Представлены также результаты применения этих методов на натурных и виртуальных моделях шагающих машин .
На рис . 13 .4 показана кинематическая схема робота андроида АР600Е и схема
его приводов . Для этого робота была реализована система управления на основе
разработанного генератора походок . В качестве входных величин системы управления задаются скорость, направление движения робота и параметры шага —
максимальная длина, минимальный период, высота подъема, относительные
фазы ног .
Рис. 13.4. Кинематическая схема робота андроида (слева) и схема приводов
(справа)
Блок генерации походки состоит из трех частей — генератора траекторий точек стоп, генератора траектории ц .м . и генератора дополнительных связей . Генератор траекторий точек стоп строит трехмерные траектории в неподвижной системе координат для одной точки на каждой стопе, лежащей на уровне опорной
поверхности в фазе опоры и совпадающей с проекцией центра шарнира стопы .
Траектория стопы на одном шаге состоит из четырех участков — подъема, переноса, опускания и опоры . Форма траектории —прямоугольная, на каждом участке
кинематические параметры интерполируются тригонометрическими функциями .
Для каждого участка вычисляются перемещения скорости и ускорения . Типичный
вид кинематических параметров траектории стопы показан на рис . 13 .5 и 13 .6 .
Интерполяция тригонометрическими функциями приводит к разрыву скоростей и скачкам ускорений (см . рис . 13 .6), тем не менее такая интерполяция широко
применяется в генераторах походок в известных системах управления двуногими
роботами [13—17] . В работах [18, 19, 26—28] рассматривается возможность использования других методов интерполяции — нелинейными автоколебательными циклами, дифференциальными уравнениями с дробными производными и др .
Генератор траекторий точек стоп использует данные по кинематическим параметрам движения робота . Движение робота задается по трем точкам корпуса
(торса) суммарно по шести направлениям, что однозначно определяет его пространственное положение . Связь траекторий точек стоп с движением корпуса
13.2. Реализация методов синтеза управления шагающими роботами
305
позволяет планировать перемещение стоп при движении робота в любом направлении, повороте и изменении высоты опорной поверхности [5] . Применяемый
алгоритм изменяет длину шага в зависимости от перемещения корпуса, а также
позволяет изменять вертикальную координату стопы в зависимости от высоты
опорной поверхности, например при шагании по ступенькам .
Генератор траектории ТНМ робота вычисляет ее параметры в пространстве
исходя из условия сохранения устойчивости робота от падения . Общепринятое
условие устойчивости — ТНМ лежит внутри полигона, образованного периметром стоп [13—23] . В рассматриваемой системе управления ТНМ совпадает с центром стопы при опоре на соответствующую ногу или перемещается по прямой,
соединяющей точки центров стоп в фазах опоры на обе стопы . Траектория интерполируется тригонометрическими функциями . Типичный вид траектории ТНП
показан на рис . 13 .7 .
Рис. 13.7. Программная траектория ТНМ по продольной и поперечной координате и программные траектории стоп
Генератор дополнительных связей служит для задания закономерностей взаимного движения звеньев робота . Это связано с наличием избыточных степеней
свободы в роботе и, следовательно, многозначности возможных движений .
В целом блок генерации походки вычисляет для заданного момента времени
параметры траекторий точек стоп, корпуса, ТНМ, а также параметры уравнений
дополнительных кинематических связей .
Блок обратной задачи по данным блока генерации походки вычисляет программные углы приводов робота . Блок обратной задачи использует систему моделирования динамики систем связанных тел ФРУНД [5, 6], в которой построена
полная динамическая модель робота (см . рис . 13 .6) .
306
Глава 13. Новые механизмы двуногих и многоногих шагающих роботов
Система моделирования ФРУНД имеет возможность связанного решения обратной и прямой задачи — параллельно интегрируются две системы уравнений,
при этом параметры программного движения приводов передаются в модель прямой задачи, в которой указанные программные значения реализуются с помощью
ПД регуляторов . Отметим, что решение обратной задачи является достаточно
сложной математической и вычислительной проблемой, не всегда корректной .
Для ее решения зачастую используются специализированные программы, например SL [17], или универсальные пакеты динамики систем тел (MBS-пакеты) .
Существуют классы шагающих машин, в которых упрощение решения обратной
задачи достигается за счет применения специальных конструктивных схем, например, шагающие машины с ортогональными движителями [34] .
Условия устойчивости (13 .1д) задаются в упрощенном виде путем отбрасывания составляющих, в которые входят вторые производные координат . Такое
допущение позволяет свести условия устойчивости к обычным геометрическим
условиям и решать систему хорошо разработанными методами динамики связанных систем тел . Недостаток такого подхода заключается в том, что действительная
траектория ТНМ, соответствующая уравнению (13 .5) отличается от программной . Разница особенно велика в моменты разгона корпуса робота и это является
одной из причин искажения управляемого движения робота по сравнению с программным . Не менее значимым источником отклонения управляемого движения
от программного следует считать упругость звеньев и шарниров робота, а также
податливость контакта стоп с опорной поверхностью .
При шагании по ровной поверхности, вертикальной координате ц .м . робота обычно присваивается постоянное значение, подобранное расчетным путем
из условия минимального угла сгиба ног в коленном суставе . Известные кинематические схемы роботов (см . рис . 13 .1) содержат стопу, выполненную в виде одного звена, при этом во время шагания плоскость стопы горизонтальна . Такая кинематическая схема позволяет изменять расстояние от ц .м . робота до места опоры
стопы в основном за счет сгиба ноги в колене . По этой же причине в позе готовности и во время шагания ноги согнуты в коленях, что также характерно для известных конструкций роботов и что, как уже отмечалось, неэффективно с энергетической точки зрения . Движения робота с опорой на прямые ноги конструктивно
можно добиться двумя путями — введением дополнительных звеньев в торсе или
в ступне . Кинематические схемы существующих роботов (см . рис . 13 .1) выбраны
из условия минимального количества шарниров и приводов, но такое условие
определяет возможность шагания только на согнутых ногах .
На рис . 13 .8 показаны расчетные положения робота в конце шага с разной высотой ц .м ., из которых видно, что при высоком расположении ц .м . взаимные повороты звеньев приобретают неприемлемо большие значения . Неразрешимость
этой проблемы в рамках существующих кинематических схем привела к появлению кинематических схем роботов без коленного сустава (см . рис . 13 .1е) .
С помощью представленной системы управления были проведены эксперименты с движением робота АР600 (рис . 13 .9—13 .11) .
Система управления позволяет выполнять различные типы движений — движение вперед (рис . 13 .9), движение вбок (рис . 13 .10), перешагивание ступеньки
(рис . 13 .11) . Разработанные методы синтеза управляемого движения дают возможность совместно с перемещением робота планировать выполнение различных операций, например: наклон, захват и подъем груза (рис . 13 .12) и перенос груза (рис . 13 .13) .
13.2. Реализация методов синтеза управления шагающими роботами
Рис. 13.8. Расчетные положения робота в конце шага левой ногой:
высота ц .м . 0,57 м (слева) и 0,61 м (справа)
Риc. 13.9. Движение робота вперед
307
308
Глава 13. Новые механизмы двуногих и многоногих шагающих роботов
Рис. 13.10. Движение робота вбок
Рис. 13.11. Перешагивание ступеньки
13.2. Реализация методов синтеза управления шагающими роботами
309
Рис. 13.12. Наклон, захват и подъем груза роботом
Рис. 13.13. Перенос захваченного груза боковым шагом
Используемый генератор походок может применяться для роботов с различным количеством ног — как двуногих, так и многоногих (рис . 13 .14, 13 .15) .
310
Глава 13. Новые механизмы двуногих и многоногих шагающих роботов
Рис. 13.14. Виртуальный концепт четырехногого робота с двухпальцевой стопой
Рис. 13.15. Виртуальный концепт шестиногого робота
Многоногие роботы небольшого размера могут быть изготовлены с помощью
технологий 3D-печати (рис . 13 .16) и использоваться для выполнения работ в группах роботов (рис . 13 .17) .
13.2. Реализация методов синтеза управления шагающими роботами
311
Рис. 13.16. Малоразмерный шестиногий робот, изготовленный методом 3D-печати
Рис. 13.17. Групповые выполнения заданий роботами
В отличие от роботов андроидов у многоногих роботов вопросы устойчивости по опрокидыванию не так актуальны . У четырехногих роботов даже при однопальцевой стопе походка диагональными двойками обеспечивает удовлетворительную устойчивость (рис . 13 .18) .
312
Глава 13. Новые механизмы двуногих и многоногих шагающих роботов
Риc. 13.18. Движение четырехногого робота с однопальцевой стопой
Шестиногие роботы позволяют реализовывать динамически устойчивые походки различного типа и при этом достигать высокой маневренности за счет разнообразного положения корпуса машины относительно направления движения
(рис . 13 .19, 13 .20) .
Рис. 13.19. Движение шестиногого робота с повернутым относительно поперечной
оси корпусом
13.2. Реализация методов синтеза управления шагающими роботами
313
Рис. 13.20. Движение шестиногого робота с повернутым относительно продольной
оси корпусом
Перспективной областью внедрения шагающих движителей может стать
использование их в качестве съемных устройств для повышения проходимости
и мобильности колесных машин (рис . 13 .21) .
Рис. 13.21. Съемный шагающий движитель для колесного транспортного средства
В заключение можно отметить, что существующая аппаратная и алгоритмическая база позволяет создавать тихоходные двуногие и многоногие шагающие
роботы . Для увеличения скорости движения роботов требуется развитие методов
управления локомоцией шагающих движителей .
314
Глава 13. Новые механизмы двуногих и многоногих шагающих роботов
Литература
1 . Liatsikos E ., Kallidonis P ., Tuerk I ., Anderson C . et al . Setup of da Vinci System for Kidney
Surgery // Laparoscopic and Robot-Assisted Surgery in Urology . Springer . 2011 .
2 . Лавровский Э.К ., Письменная Е.В ., Комаpо П.А . Упpавление ходьбой экзоскелетона нижних конечностей при вязкоупругой связи его с телом человека-опеpатоpа // Мехатроника, автоматизация, управление, 2015 . — Т . 16 . — № 2 . — С . 96—100 .
3 . Nelson G ., Saunders A ., Neville N ., Swilling B . et al . Petman: A humanoid robot for testing chemical protective clothing // J . of the Robotics Society of Japan, 2012 . — 30 (4) . —
Р . 372—377 .
4 . Jung-Yup, KimUn-Je Yang . Mechanical design of powered prosthetic leg and walking pattern
generation based on motion capture data // Advanced Robotics, 2015 . — Рр . 1061—1079 .
5 . Горобцов А.С . Синтез параметров управляемого движения многозвенных механических
систем произвольной структуры методом обратной задачи // Мехатроника, автоматизация, управление, 2004 . — № 6 . — C . 43—50, 2 с . обл .
6 . Горобцов А.С ., Карцов С.К ., Плетнев А.Е ., Поляков Ю.А . Компьютерные методы построения и исследования математических моделей динамики конструкций автомобилей:
монография . — М .: Машиностроение, 2011 . — 462 с .
7 . Крутько П.Д . Обратные задачи динамики управляемых систем . Нелинейные модели . —
М .: Наука, 1988 .
8 . Vukobratovic M ., Borovac B . Biped locomotion dynamics, stability . In: Control and Application . Springer-Verlag, Berlin, 1990 .
9 . Белецкий В.В . Двуногая ходьба . — М .: Наука, 1984 . — 286 с .
10 . Фоpмальский А.М . Пеpемещение антpопомоpфных механизмов . — М .: Наука, 1984 . —
368 с .
11 . Raibert M.H . Legged Robots That Balanced // MIT Press, Cambridge, Mass, USA, 1986 .
12 . Yamaguchi J ., Kinoshita N ., Takanishi A ., Kato I . Development of a biped walking robot adapting
to the human's living floor // Proceedings of the 1996 IEEE International Conference on Robotics & Automation . April 1996 . Minneapolis, Minnesota . — Рp . 232—239 .
13 . Mann G . Stability Control in an Actively-Balanced Bipedal Robot // School of Computer &
Information Science . Edith Cowan University .
14 . Yirose M ., Ogawa K . Honda Humanoids Robot Development // Phil . Trans . R . Soc . A, 2007 . —
365 . — Рр . 11—19 .
15 . Kim J.-Y ., Park I.-W ., Oh J.H . Experimtntal realization of dynamic walking of the biped humanoid robot KHR-2 using zero moment point feedback and inertial measurment // Advansed
Robotics, 2006 . — Vol . 20 . — No . 6 . — Рp . 707—736 .
16 . Kim J.H ., Oh J.H . Realization of dynamic walking for the humanoid robot platform KHR-1 //
Advanced Robotics, 2004 . — 18 . — Рр . 749—768 .
17 . Kim J.Y ., Park I.W ., Oh J.H ., Walking J . Control Algorithm of Biped Humanoid Robot on Uneven and Inclined Floor // J . of Intelligent & Robotic Systems, 2007 . — 48 . — Р . 457 .
18 . Park I.-W ., Kim J.-Y ., Oh J.H . Online Walking Pattern Generation and Its Application to a Biped Humanoid Robot — KHR-3 (HUBO) // Advanced Robotics, 2008 . — 22 . — Рp . 159—190 .
19 . Kima J.-Y ., Kimb J.-H . Error Analysis and Effective Adjustment of the Walking-Ready Posture
for a Biped Humanoid Robot // Advanced Robotics, 2010 . — 24 . — Рр . 2137—2169 .
20 . Carla M.A ., Pinto J.A ., Machado T . Fractional central pattern generators for bipedal locomotion // Nonlinear Dyn, 2010 . — 62 . — Рр . 27—37 .
21 . Di Gironimo G ., Pelliccia L ., Siciliano B . et al . Biomechanically-based motion control for a digital human // Int J Interact Des Manuf, 2012 . — 6 . — Р . 1 .
22 . Kim J.-Y ., Lee J ., Oh J.-H . Experimental realization of dynamic walking for a human-riding biped robot, HUBO FX-1 // Advanced Robotics, 2007 . — Vol . 21 . — No . 3—4 . — Рp . 461—484 .
23 . Englsberger J ., Werner A ., Ott Ch ., Henze B . et al . Overview of the torque-controlled humanoid
robot TORO . DOI : 10 .1109/HUMANOIDS .2014 .7041473 .
13.2. Реализация методов синтеза управления шагающими роботами
315
24 . Englsberger J ., Ott C ., Albu-Scha-Еffer A . Three-dimensional bipedal walking control using divergent component of motion // IEEE / RSJ Int . Conf . on Intell . Robots and Systems, 2013 .
25 . Pratt J ., Carff J ., Drakunov S ., Goswami A . Capture point: A step toward humanoid push recovery // IEEE-RAS Int . Conf . On Humanoid Robots, 2006 . — Рp . 200—207 .
26 . Englsberger J ., Koolen T ., Bertrand S ., Pratt J . et al . Trajectory generation for continuous leg
forces during double support and heel-to-toe shift based on divergent component of motion //
IEEE / RSJ Int . Conf . on Intell . Robots and Systems, 2014 .
27 . Zhou Ch ., Li Zh ., Wang X ., Tsagarakis N ., Caldwel D . Stabilization of bipedal walking based
on compliance control // Auton Robot, 2016 . — 40 . — Р . 1041 .
28 . Santos C.P ., Alves N ., Moreno J.C . Biped Locomotion Control through a Biomimetic CPGbased Controller // Journal of Intelligent & Robotic Systems .
29 . Kobayashi T ., Aoyama T ., Hasegawa Y ., Sekiyama K ., Fukuda T . Adaptive speed controller using
swing leg motion for 3-D limit-cycle-based bipedal gait // Nonlinear Dyn, 2016 . — 84:2285 . —
Р . 2304 .
30 . Dallali H ., Medrano-Cerda G ., Focchi M ., Boaventura T . et al . On the use of positive feedback
for improved torque control // Control Theory Tech . August 2015 . — Vol . 13 . — No . 3 . —
Рp . 266—285 .
31 . Sutyasadi P ., Parnichkun M . Gait Tracking Control of Quadruped Robot Using Differential
Evolution Based Structure Specified Mixed Sensitivity H∞ Robust Control // Journal of Control Science and Engineering, 2016 .
32 . Ijspeert A.J . Central pattern generators for locomotion control in animals and robots: a review //
Neural Netw ., 2008 . — 21 (4) . — Рр . 642—653 .
33 . Ковальчук А.К ., Кулаков Д.Б ., Семенов С.Е. Управление исполнительными системами
двуногих шагающих роботов . Теория и алгоритмы / Под ред . А .К . Ковальчука . — М .:
Изд-во МГОУ, 2007 . — 160 с . (Сер . Двуногие шагающие роботы) .
34 . Брискин Е.С ., Вершинина И.П ., Малолетов А.В ., Шаронов Н.Г . Об управлении движением
шагающей машины со сдвоенными ортогонально-поворотными движителями // Известия РАН . Теория и системы управления, 2014 . — № 3 . — C . 168—176 .
Производство книг на заказ
Издательство «ТЕХНОСФЕРА»
125319, Москва, а/я 91
тел.: (495) 234-01-10
e-mail: knigi@technosphera.ru
Реклама в книгах:
• модульная
• статьи
Подробная информация о книгах на сайте
http://www.technosphera.ru
Воробьев Евгений Иванович
Гаврюшин Сергей Сергеевич
Глазунов Виктор Аркадьевич
Горобцов Александр Сергеевич
Емельянова Оксана Викторовна
Ефимов Сергей Венегдитович
Носова Наталья Юрьевна
Пащенко Василий Николаевич
Петраков Андрей Алексеевич
Рашоян Гагик Володяевич
Саяпин Сергей Николаевич
Соколов Сергей Викторович
Тывес Леонид Иосифович
Филиппов Глеб Сергеевич
Хейло Сергей Валерьевич
Царьков Андрей Васильевич
Яцун Сергей Федорович
Новые механизмы в современной робототехнике
под редакцией В.А. Глазунова
Редактор-составитель – С.В. Хейло
Компьютерная верстка – Н.А. Попова
Корректор – Л.В. Бородина
Дизайн – Н.И. Семячкина
Выпускающий редактор – О.Н. Кулешова
Ответственный за выпуск – С.А. Орлов
Подписано в печать 30.10.18.
Формат 70×100/16. Печать офсетная.
Гарнитура Ньютон
Печ.л. 19,5. Тираж 1000 (1-ый завод 500 экз.) Зак. №Т-537
Бумага офсет №1, плотность 80 г/м²
Издательство «ТЕХНОСФЕРА»
Москва, ул. Краснопролетарская, д.16, стр.2
Отпечатано в полном соответствии с качеством
предоставленного электронного оригинал-макета
в типографии АО «Т 8 Издательские Технологии»
109316, г. Москва, Волгоградский проспект, д.42