/





















































Текст
СПК СССР
ГЛАВНОЕ УПфАВЛЕИИЕ ГРАЖДАНСКОГО ВОЗДУШНОГО ФЛОТА
КИЕВСКИЙ АВИАЦИОННЫЙ ИНСТИТУТ
им. К. Е. ВОРОШИЛОВА
•.fti
Инж.-механик M. К ЛУЦКИЙ
УРАВНОВЕШИВАНИЕ
АВИАЦИОННЫХ
Под редакцией
доц. Н. И. КОНОНЧУКА
СНК СССР
ГЛАВНОЕ УПРАВЛЕНИЕ ГРАЖДАНСКОГО ВОЗДУШНОГО ФЛОТА
КИЕВСКИЙ АВИАЦИОННЫЙ ИНСТИТУТ
им. К. Е. ВОРОШИЛОВА
► НА ПРАВАХ РУКОПИСИ
Инж.-механик М. К. ЛУЦКИЙ д-|э 5
УРАВНОВЕШИВАНИЕ
И
Под редакцией
доц. Н. И. КОНОНЧУКА
ИЗДАНИЕ НИС КАИ
КИЕВ —1936
Киев. Обллит. № 398. Зак. №200. Тираж 500. З1/» печ. листа. В 1 печ. листе 50 т. зн.
Формат бум. 62 X 64. Сдано в набор 10/XII 1936 Подписано к печати 5/III 1937,
4 республ. полигр. ф-ка УПКТ. Киев, пл. Калинина, 2.
ОТ АВТОРА
Настоящая брошюра составлена как пособие по соответст-
вующему разделу курса „Кинематика и динамика авиационных
двигателей“, читаемого в КАИ.
Последовательно рассмотрены и определены силы инерции
кривошипно-шатунно-поршневых механизмов рядных (одноряд-
ных, V-образных) и звездообразных двигателей с центральными
и прицепными шатунами. Указаны способы уравновешивания
неуравновешенных сил инерции в этих двигателях.
Брошюра не претендует на освещение вопросов уравнове-
шенности всевозможных типов двигателей, но охватывает в
конкретной и исчерпывающей форме вопросы уравновешенности
наиболее распространенных типов авиадвигателей, а именно:
1, 2, 4, 6, 8-цилиндровых рядных,
2, 8, 12, 16-цилиндровых V-образных,
3, 5, 7, 9-цилиндровых звездообразных, и
10, 14, 18-цилиндровых сдвоенных звездообразных.
Однако, общая методика определения неуравновешенных
сил инерции и их моментов вполне применима для исследова-
ния уравновешенности любого двигателя.
В брошюре нигде не принимались во внимание поправочные
пары сил инерции шатунов, действующие в плоскостях движения
шатунов, ввиду их малого практического значения.
Большая часть раздела — „Уравновешенность однорядных
двигателей" написана инженером Н. П. Резником, за что
автор приносит ему благодарность.
Автор
15-Х—36 г.
3
ОГЛАВЛЕНИЕ
стр.
1. Общие соображения об уравновешенности авиационных двигателей 5
11. Уравновешенность одиорядиых двигателей . . 9
Одноцилиндровый двигатель. 9
Двухцилиндровые двигатели. И
Четырехцилнндровый двигатель 14
Дополнительная теорема. 16
Шестицилиндровый двигатель , 19
Восьмицилиндровый двигатель......................... ... 20
111. Уравновешенность V-образных двигателей . .22
Двухцилиндровые V-образиые двигатели . .............. . 22
Восьмицилиндровый V-образный двигатель с углом развала
у =90° ........................................28
Дзенадцатицилиндровый V-образный двигатель с углом развала
у = 60°.............................................. 30
Шестнадцатицилиндровый V-образный двигатель с углом развала
у = 45°............................................ . 31
IV. Уравновешенность звездообразных двигателей . ... 33
Однорядная звезда с центральными шатунами....... . . 33
Однорядная звезда с прицепными шатунами (у = уе) . . 40
Двойная звезда......................................... 50
I. ОБЩИЕ СООБРАЖЕНИЯ ОБ УРАВНОВЕШЕННОСТИ
АВИАЦИОННЫХ ДВИГАТЕЛЕЙ
На раму двигателя при его раооте передаются усилия, кото-
рые слагаются из:
1. Веса двигателя;
2. Реакций отходящих газов;
3. Пары сил от момента внешнего сопротивления вращению
винта;
4. Центробежные сил инерции вращающихся масс двигателя;
5. Сил инерции поступательно движущихся масс;
6. Моментов nL от сил инерции шатунов.
Двигатель будет уравновешенным если, при установившемся
режиме рабсты, его опоры (рама, фундамент) испытывают не-
которые постоянные по величине и направлению усилия. В про-
тивном случае моторная установка будет подвержена вибрациям.
Поэтому на уравновешенность двигателя оказывают влияние
только переменные силы, а силы постоянные, с точки зрения
уравновешенности, значения ие имеют.
Исходя из этого, для достижения уравновешенности двига-
теля, необходимо из сил переменных по величине или по нап-
равлению создать такую комбинацию, которая привела бы к полу-
чению равнодействующих сил и моментов постоянных по вели-
чине и направлению, или, в частном случае, равных нулю.
Возвращаясь к перечисленным выше силам, мы видим, что
неуравновешенность двигателя могут вызвать только:
1. Реакции выхлопных газов;
2. Момент внешнего сопротивления вращению винта;
3. Силы инерции движущихся масс двигателя.
Реакция выхлопных газов в авиационных двигателях является
величиной незначительной — поэтому ее во внимание не при-
нимают.
Момент внешнего сопротивления вращению винта, даже при
установившемся режиме работы, является величиной переменной,
поэтому этот момент оказывает некоторое влияние на уравнове-
шенность мотора и может быть уравновешен лишь путем по-
становки 2-х равных противоположно-вращающихся винтов.
Из сил инерции движущихся деталей двигателя, на уравнове-
шенность последнего практически оказывают влияние только силы
инерции кривошипно-шатунно-поршневого механизма.
5
<0 около оси OZ, можно
Эти силы прямо пропорциональны квадратам чисел оборотов
коленчатого вала и достигают значительных величин.
Центробежная сила, вызываемая эксцентрично расположенны-
ми вращающимися массами коленчатого вала, являясь для посто-
янного числа оборотов величиной постоянной, периодически ме-
няет свое направление. Сила инерции поступательно движу-
щихся масс, действующая
вдоль оси цилиндра, пе-
риодически меняет свою
величину.
Моменты Пь сил инер-
ции шатунов, ввиду их
малой величины, суще-
ственного влияния на
уравновешенность неока-
зывают и в дальнейшем
не рассматриваются.
Суммируя все выше-
изложенное, мы приходим
- Z к заключению, что задача
уравновешивания авиа-
ционного двигателя сво-
дится к задаче уравно-
вешивания сил инерции
поступательно и враща-
тельно движущихся масс
двигателя и их моментов.
Силу инерции любой
массы М (фиг. 1), равно-
мерно вращающейся с по-
стоянной угловой скоро-
всегда уравновесить силами инер-
одной или нескольких масс, равномерно вращающихся
стыо
ции
около той же оси OZ, с той же угловой скоростью и>.
Допустим, что мы хотим уравновесить вращающуюся массу
М двумя массами и М2, лежащими в плоскости У2.
Если R, и R2 обозначают соответственно расстояния
центров тяжести масс М, Mj и М2 от оси вращения OZ, то цен-
тробежные силы инерции этих масс будут:
P=MRu-,
рг = MtR^,
p2-=m2r^.
Чтобы силы Ру и Р2 уравновешивали силу Р, необходимо
соблюсти следующее условие:
= О, т. е.
MR*»2 — MyRyrf — Mj/?2w2 —О.
(а)
6
Но при этом система из трех масс, будучи уравновешена
статически может оказаться динамически неуравно-
вешенной, т. е. будет подвержена действию некоторой пары сил.
Для сооблюдения динамической уравновешенности системы,
необходимо удовлетворить второе условие:
^хМом = О, т. е.
— -f- MJfy&b = О (Ь)
Сократив уравнения (а) и (£) на ад2, получим:
MR-MxRx-M.Jb = o, |
—MxRxa \-M2R2b = O. /
Фиг. 2.
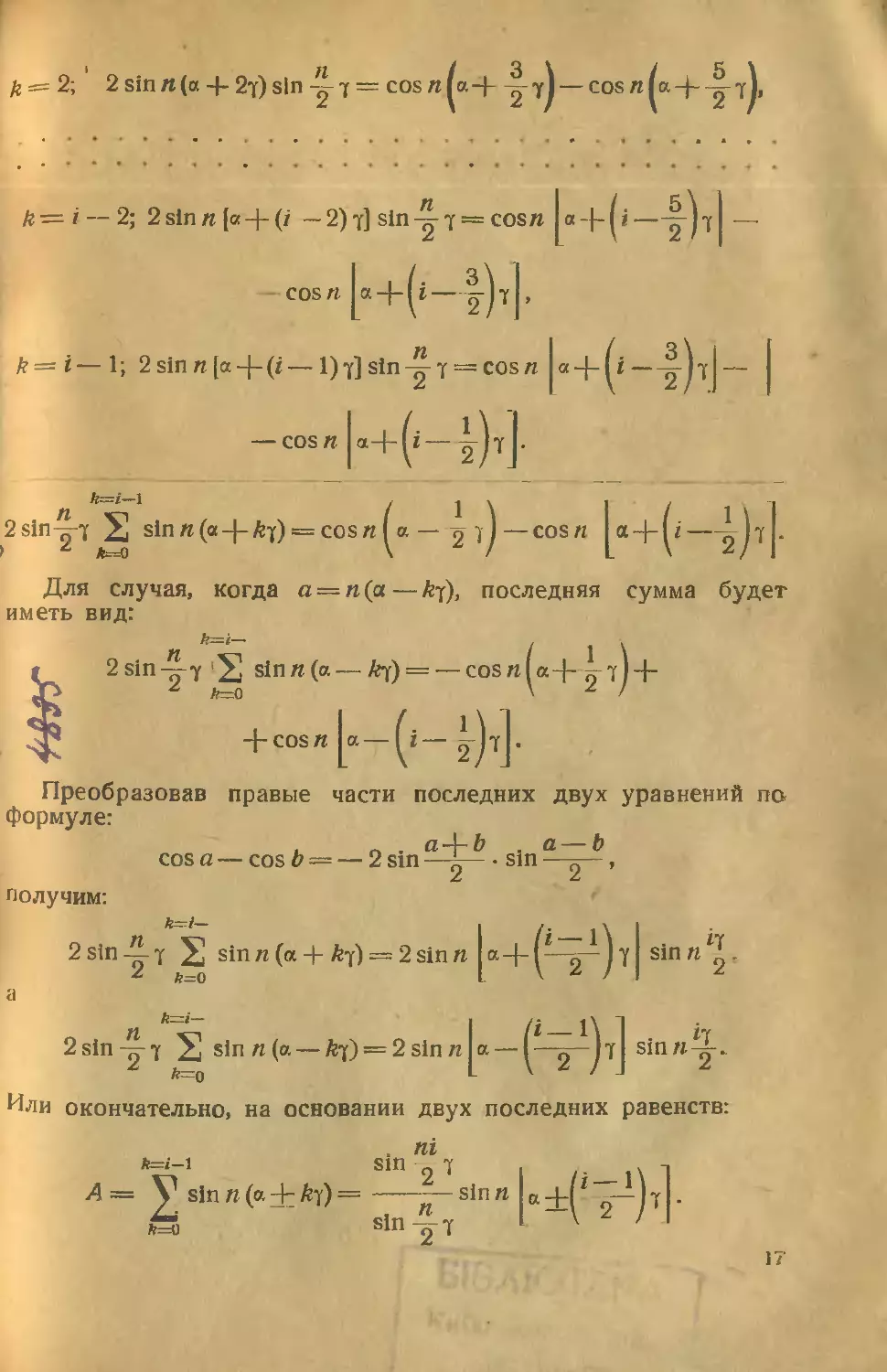
Выбор мест постановки противовесов для уравновешивания
сил инерции массы М, конфигурация и величина масс Мх и ТИ2
и положение их центров
тяжести зависят в каждом
отдельном случае от кон-
структивных возможностей
и подбираются таким обра-
зом, чтобы была сохранена
статическая и динамическая
уравновешенность системы,
т. е. удовлетворены урав-
нения (с).
Обычно с помощью про-
тивовесов уравновешивают-
ся коленчатые валы, имею-
щие одно или два колена.
Противовесы уравновеши-
вают полностью центробеж-
ные силы, развиваемые экс-
центрично расположенными массами колен вала и массами
шатунов, отнесенными к цапфе кривошипа.
Фиг. 2 показывает схемы расположения противовесов у
одноколенных и двухколенных вале в разных типов. Причем
вал d, показанный на фиг. 2, является статически уравновешен-
ным и без противовесов, но при вращении такого вала возни-
кает неуравновешенный момент, действующий в плоскости
кривошипов вала. Этот момент можно уравновесить соответст-
венным образом подобранными противовесами.
Коленчатые валы рядных многоцилиндровых двигателей
стремятся строить так, чтобы они были динамически уравнове-
шены без противовесов. Эго возможно при условии, когда:
а) число колен вала четное и не меньше 4-х;
в) центр тяжести коленчатого вала находится на оси вра-
щения;
7
с) коленчатый вал симметричен в отношении плоскости И,
проходящей через центр тяжести, перпендикулярно оси вра-
щения вала (см. фиг. З)1).
Для того, чтобы вспышки в рядном четырехтактном двигателе
чередовались через равные промежутки времени, необходимо
кривошипы разместить равномерно вокруг оси вала в каждой
из симметричных его половин.
тде I — число цилиндров в одном ряду.
Каждая пара колен, находящихся в одной плоскости, дает
равнодействующую силу инерции в плоскости V. Так как цен-
тробежные силы, создаваемые массами каждого колена, равны
между собою, то и равнодействующие R от сил инерции каждой
пары колен тоже равны между собою, расположены в одной
плоскости Г, и повернуты одна относительно другой на угол
~р Общая равнодействующая центробежных сил инерции всегда
будет равна нулю. Моменты этих сил тоже равны нулю.
Здесь имеется в виду только средняя часть вала, несущая кривошипы;
к нцы же вала во внимание не принимаются, т. к. их силы инерции уравнове-
8
Такое расположение кривошипов относительно плоскости V
создает благоприятные условия и в отношении уравновеши-
вания сил инерции поступательно движущихся масс, так
как эти силы от каждой пары симметрично расположенных
цилиндров будут давать равнодействующую, параллельную осям
цилиндров и лежащую в плоскости V, что представляет большие
удобства для определения общей (от всех цилиндров) равнодей-
ствующей. Моменты этих сил будут всегда равны нулю.
Итак, коленчатые валы или полностью уравновешены сами
собой, или легко уравновешиваются при помощи противовесов
[см, уравнения (с)].
II. УРАВНОВЕШЕННОСТЬ ОДНОРЯДНЫХ
ДВИГАТЕЛЕЙ
Одноцилиндровый двигатель
Сила инерции поступательно движущихся масс в общем виде
выразится так:
Р= Мп Ra>2 (cos а + 4р2 cos 2а — 16р4 cos 4а ф- 36р6 cos 6а —...).
При рассмотрении вопросов уравновешенности одноцилин-
дрового двигателя, обычно ограничиваются рассмотрением сил
инерции первого и второго порядков. Силами инерции высших
порядков, как величинами относительно малыми, пренебрегают.
Тогда силу инерции поступательно движущихся массМ, одно-
цилиндрового двигателя можно принять равной:
Р ~ Мп Рю2 cos а -|- к Мп R «>2 cos 2а.
Величину = Л4П 7?co2cos а называют силой инерции 1-го
порядка, Р2 = /?o2cos 2а называют силой инерции 2-го по-
рядка.
Направление силы Р, приложенной к оси пальца поршня
в точке А, принимаем за положительное, если она направлена
от центра 0 коленчатого вала (фиг. 4).
Сила инерции 1-го порядка неуравновешена; ее максималь-
ные значения будут при а = 0° и а =180° и равны:
Рутах = AfnRlO2.
Сила инерции 2-го порядка также неуравновешена; ее макси-
мальные значения будут при а = 0°, 90°, 180° и 270° и равны:
Р^тах — ^Л4П Р<»2.
Посмотрим; как можно уменьшить действие неуравновешен-
ной силы инерции Рх при помощи противовесов, надлежащим
образом подобранных и расположенных на продолжении щек
кривошипа.
9
Пусть Л1} — масса противовесов, RY— расстояние их центров
тяжести от оси О.
Центробежная сила инерции противовесов будет:
pnp = MiR^.
Вычитая из нее центробежную силу вращающихся масс,
получим:
Рпр — ?пр — Р»р,
где:
Рвр ~~ R<p~,
Мер—массы кривошипа и
шатуна, отнесенные к оси
| у цапфы кривошипа.
I „ Перенося силу Р'пр в
| точку О и разлагая ее по
I „ направлениям координат^
г р ных осей, получим:
р P'vnp^~PnpCO5°-
/! pnp = —Pysina.
Рв / 1 Вертикальная составляю-
/ I щая всегда направлена
противоположно силе инер-
(чКР-'р'' ции Р,.
я-__ pv \ Соответствующим под-
Р‘ ' '' бором величин противове-
'Рпр /' сов можно уменьшить и
'' -1-"" wf даже свести к нулю влия-
\ ние на двигатель силы инер-
\ Р7 ции первого порядка, но
появляющаяся при этом го-
Фиг. 4 ризонтальная составляющая
сила Р’ будет тем больше,
чем больше с помощью
противовесов будет уравновешиваться сила инерции 1-го по-
рядка поступательно движущихся масс.
Максимальное уравновешивание силы инерции 1-го порядка
и неизбежное увеличение при этом горизонтальной составляющей
Рхпр, представляет некоторый интерес в автомобильных двигате-
лях, так как горизонтальные колебания для автомобиля менее
опасны.
Обычно удовлетворяются уравновешиванием половины силы
инерции 1-го порядка,
ю
Таким образом неуравновешенными остаются: часть (поло-
ина) силы инерции 1-го порядка
2 Pi = 2^” cos а ~ cos
оставляющая центробежной силы инерции, действующей вдоль
си ОХ,
Рхпр == — Рпр sin а — g- Р\тах sin а;
I сила инерции 2-го порядка
Р2 = \Мп Рш2 cos 2а.
Геометрическая сумма сил-J Pi и дает постоянный по
величине векгор
Г/1 \2 I
Р = |А) + ( Р'хпр)2 = Рпр = ~Мп R^,
вращающийся с угловой скоростью w в сторону обратную вра-
щению коленчатого вала и составляющий с радиусом кривошипа
ipn а = 0° угол, равный 0°.
Двухцилиндровые двигатели
1. На фиг. 5 схематически представлен коленчатый вал двух-
цилиндрового
двигателя с расположением
кривошипов под углом
Фиг. 5.
J 360 , что обеспечивает равномерное чередование вспышек при
четырехтактном процессе.
Если принять, что поршни и шатуны имеют одинаковые веса,
го, с точки зрения действия сил инерции, этот двигатель анало-
гичен одноцилиндровому двигателю (фиг. 4), у которого те же
Длина шатуна и ход поршня, но поршень и шатун имеют как-бы
Удвоенный вес.
Таким образом, в отношении уравновешенности, такой дви-
гатель не отличается от одноцилиндрового. Все рассуждения,
П
относительно уравновешивания одноцилиндрового двигате,
целиком применимы и здесь.
2. Рассмотрим двухцилиндровый двигатель с расположени;
кривошипов под углом в 180° (фиг. 6).
При таком расположении кривошипов невозможно равн
мерное чередование вспышек в четырехтактном двигателе.
Вспышки будут чередоваться через 180° и 540°.
Сила инерции 1-го порядка для первого цилиндра будет:
= Мп Ru>2 cos а.
Сила инерции 1-го поряд
для второго цилиндра выразит
аналогично, но необходимо з
менить а через (а-ф-180е}, т.
Р\ = Мп Ru? cos (а + 180°) = -
= — Мп /?“2 cos а.
Суммируя силы инерции пе
вого порядка, мы приходим
заключению, что равиодейству!
щая их равна нулю. Но, пр
этом получается пара сил, мс
мент которой равен:
Мои 1 = аРх = аМп Ru>2 cos а,
где а — расстояние между осям
цилиндров.
Момент пары сил зависит о
расстояния а, поэтому для боль
шей уравновешенности двигателя желательно возможно болыш
сблизить оси цилиндров.
Силы инерции 2-го порядка будут:
Р2 = X Мп R^2 cos 2 а,
Рч = X Мп Ru>2 cos 2(а -ф-180°) = X cos 2а.
Следовательно, равнодействующая сил инерции 2-го поряди:
равна:
R2 = 2Х Мп Ru2 cos 2а.
Эта сила направлена по оси ОУ и остается неуравновешенной
Таким образом двухцилиндровый двигатель, у которого криво
шипы расположены под углом в 180°, недостаточно уравновешен
хотя силы инерции первого порядка и не дают равнодействующей
возникающая пара сил будет стремиться раскачивать мото
вокруг оси OZ. Эту пару можно при помощи противовесе
частично уравновесить, пользуясь методом, примененным дл
12
Мастичного уравновешивания сил инерции 1-го порядка поступа-
тельно движущихся масс в одноцилиндровом двигателе.
3. Двухцилиндровый двигатель с оппозитно ра-
сположенными цилиндрами (фиг. 7).
У данного двухцилиндрового двигателя поршни приходят
1 верхние мертвые точки одновременно и поэтому вспышки
К цилиндрах при работе по четырехтактному циклу можно чере-
довать через 360°, т. е. через равные промежутки времени.
Рассмотрим уравновешенность такого
двигателя.
//
Фиг. 7.
Силы инерции поступательно движущихся масс первого ци-
линдра будут:
Р = Мп /?о)2 (cos а -|- К cos 2а).
Силы инерции поступательно движущихся масс второго цилин-
дра выразятся той же формулой, но направлены будут в противо-
положную сторону. Сума проекций этих сил на ось ОУ равна нулю.
Найдем момент сил Ри— Р относительно оси ОТ (см. фиг. 8):
или окончательно:
2о Мом= аМп Ry? (cos а k cos 2а).
И так, двухцилиндровый двигатель с оппозитно расположен-
ными цилиндрами дает только неуравновешенный момент сил
инерции от поступательно движущихся масс.
13
При такой конструкции двигателя можно очень сильно сблизит
оси цилиндров, т. е. сделать плечо пары небольшим; следов,
тельно неуравновешенный момент сил инерции Р может бьп
сведен к минимуму.
Маломощные авиеточные двигатели чаще всего строятся п|
такой схеме.
Четырехцилиндровый двигатель
Мы видели, что в двухцилиндровом двигателе с располс
жением кривошипов под 180° получается момент пары от си,
инерции 1-го порядка; если соединить два таких двухцилиндровы
Фиг. 9.
двигателя таким образом, чтобы получающиеся моменты деист
вовали в противоположных направлениях, то эти моменты взаимнс
уравновесятся (фиг. 9).
Силы инерции возвратно-движущихся масс 1-го и 4-го ци
линдров действуют вдоль осей своих цилиндров и имеют сле-
дующий вид:
P==Af„/?oj2(cosa-|-4p2cos2a- - 16p4cos4a-|- ...).
Для 2-го и 3-го цилиндров силы инерции выразятся так же,
только вместо а необходимо поставить (а-|- 180°), т. е.:
Р' = Мп Ra>2 [cos(a 4- 180°) + 4р2 cos 2(а +180°) — 16р4 cos 4(а +
180°) 4~... ] = Мп (— COS а 4" 4рг COS 2а — 16р4 cos 4а4- .. )
Равнодействующая сил инерции поступательно-движущихся
масс всех цилиндров, будет:
R ~^Р= 4Мп R<»2 (4рг cos 2a — 16р4 cos 4a 4~.. .).
14
Следовательно силы инерции 1-го порядка поступательно-
движущихся масс рассматриваемого двигателя взаимно уравно-
вешиваются.
Равнодействующая сил инерции 2-го порядка, равна.
R2 = S Р., = 16р2 Мп A?w2 cos 2а 4) М„ Rio2 cos 2а.
Ее максимальные значения будут при
а = 0°, 90°, 180° и 270°;
(Rzk^^^MnRi»*.
Равнодействующая сил инерции 2-го порядка приложена
к середине коленчатого вала (фиг. 10).
Фит. Ю.
При^ к = (/?2)шах равняется Мп т. е. равняется максимуму
силы инерции первого порядка одного цилиндра. Носила инер-
ции 1-го порядка одного цилиндра имеет период, соответствую-
щий cos iot, а суммарная сила инерции 2-го порядка рассматри-
ваемого двигателя имеет двойную частоту, т. е. имеет период
соответствующий cos 2о> t.
Силы инерции 2-го порядка с помощью обычных противовесов
не могут быть уравновешены и поэтому присущи всем 4 цилин-
дровым рядным двигателям.
Равнодействующая сила инерции 4-го порядка равна:
Rt = 2 Pt = — 64р4 Мп Rio2 cos 4а.
Равнодействующая сила инерции 4-го порядка тоже прило-
жена к середине вала; ее максимальные значения будут при
а = 0°, 45°, 90°, 135°, 180°, 225°, 270°, 315 ;
(Я4)тах = 64р< Мп Rio2.
Моменты сил инерции всех порядков в данном двигателе
полностью уравновешиваются, следовательно четырехцилиндро-
15
вый рядный двигатель является значительно лучше уравнове-
шенным чем одно и двухцилиндровые рядные двигатели.
Дополнительная теорема
В дальнейшем нам придется суммировать ряд синусов и коси-
нусов такого вида:
Л=/—1
А — 5] slnn(a + ft7),
*=о
*=/—i
В~ V cosn(a + fcy);
Й=0
где:
i — число слагаемых;
2П
7 = ----постоянный угол;
п— любое целое число.
Произведем анализ этих сумм.
Известно, что:
2 sin a. sin b = cos (й — Ь) — cos (а 4 Ь).
Приняв
а = п (а + Ат),
h п
получим:
2 sin п (а + sin 7 = cos п
а±Н+тЬ -
— cos п
а±(л±4)т
\ /
Найдем сумму правых и левых частей этого уравнения для
разных значений Л, меняя его от /г = 0 до k — (i—1).
Чтобы не усложнять выводов, дальнейшие преобразования
сделаем для случая, когда а = п (аЦ-^'О-
Найдем:
Л =0;
2 sin па • sin 7 — cos п la —
1 \
“2
Л = 1;
2 sin п(а. 4- 7) sin 7 = cos п
16
1 л
A = 2; 2 sin Л (a + 2т) sin-2-7= cos n
cos л
A — i — 2; 2 sin n |a -J- (z — 2) y] sin у = cos л
- cosn
Л
A=i—1; 2sinn[a-|-(j—1) y] sin у — cos n
£
— cos n
k=i—\ , . , . .
Л i 1 । I / 1 \
2sino-y 2j sin л (a-|-Ay)«=cos л I a — 2 t)—cosn a + U—nil
z *=o \ ' L \ ’
Для случая, когда a — n(a—ky), последняя сумма будет
иметь еид"
2 sin—у >5] sin л (a — Ау) =— cosn I <х-|— уу) +
2 k-o \ '
, I ( 1V
-f-cosn a—I i— 2^ly .
Преобразовав правые части последних двух уравнений па
формуле:
, п . а-± b . а — b
cos а — cos b — — 2 sin —— sin —s,
2 2
получим:
k--i-
2 sin у sin л (а + Ау) = 2 sin л
*-о
а
iy
у sin л J .
k=i—
2sin-у у sin л (a — -Ay) = 2sinn
2 *=0
(i— 1\
а-Ьгл
sin л =^
Или окончательно, на основании двух последних равенств:
. ni
к= :i-l Sin 2 у
А = V sin п (о. 4у Ау) =-------sin л
slnTT
п
Аналогично получим, что:
cos п| а4-( Ц_1]т .
IL \ ^ / I
. ni
s'n^1
В — V cosn(a+;A7) =— ——
h» sin у
В этих выражениях числитель всегда равен нулю, ибо
. ni , ni 2п . п
sin — Y = sin - —sinnn=0.
2 2 i
Поэтому суммы А и В будут всегда равны нулю, кром<
случаев, когда знаменатель правой части уравнения тоже раве!
нулю.
Тогда указанные формулы приводят к неопределенностям
Знаменатель уравнения sin равен нулю, только тогда, когд
частное от деления п на i будет равно целому числу, ибо:
.пт , п 2к п
s,nT=sln2Y
Возвращаясь к первоначальным выражениям для А и L
„ п
найдем, что, если — равно целому числу, то
(. nk2v\ .
па ± —т—I ~ s*n ,1а>
то-есть каждый в отдельности член суммы А равен первом
члену, а поэтому:
А = tsln па.
Аналогично:
В — i cos па.
Итак, мы пришли к выводу, что:
k=i— 1
А — £ sin п (« + йу) — О,
k-O
k=i -1
В — У, COSп(a + = О,
fe=0
п
при v- = дробному числу; и
А= У, sin п (а+ £7) —sin на.
1 ।
В — COS П (a + k’[) — i cos na,
k-l'
n
при у = целому числу.
Шестицилиндровый двигатель
Расположение кривошипов коленчатого вала рассматри-
ваемого двигателя выполняется симметрично в отношении плос-
кости V, перпендикулярной к оси коленчатого вала в его
середине; кривошипы повернуты попарно на угол 120°.
?
Фиг. 11.
С точки зрения уравновешенности сил инерции и их момен-
тов коленчатый вал может иметь два равноценных располо-
жения кривошипов (см. фиг. 11).
Сумма проекций сил инерции 1-го порядка на ось, паралель-
ную осям цилиндров, дает:
7?,= ^= 41„/?^[2cosa+2cos(a4-120°) + 2cos(a-| 240)] =
— 2Af„/?w‘2 У cos (a Л?) = 0,
k—o
так как в нашем случае и =1, а i = 3 (см. дополнительную теорему).
Следовательно, силы инерции 1-го порядка взаимно уравно-
вешиваются и равнодействующая их равняется нулю.
Равнодействующая сил инерции 2-го порядка равна:
R, = IP, = \MnRrf [2 cos 2a 4- 2 cos 2 (a 4-120°) + 2 cos 2 (a+24O0)] =
fe=i—1
= S cos 2 (a + W = °-
*=o
19
Таким образом, силы инерции 2-го порядка тоже взаимна
уравновешиваются.
Аналогично получаем, что силы инерции 4-го порядка равнъ!
нулю. |
Силы инерции 6-го порядка дают равнодействующую:
/?6 = SP6 = 6Л4п/?о>‘236р6 cos 6а.
Следовательно в шестицилиндровом рядном двигателе силы
инерции всех порядков взаимно уравновешиваются, кроме поряд-)
ков кратных шести (см. дополнительную теорему).
Но сила инерции 6-го порядка обычно очень незначительна]
а частоты ее велики, поэтому ею, как правило, пренебрегают]
Моменты сил инерции всех порядков в этом двигателе равны нулю.
Отсюда можно сделать заключение, что двигатели, состоящие
из одного или нескольких шестицилиндровых рядбв с нормаль-
ными кривошипно-шатунными механизмами прекрасно уравно«
вешены.
Восьмицилиндровый двигатель
Рассматриваем этот двигатель, как состоящий из двух четы-
рехцилиндровых, так как их валы обычно строятся по одной
из схем, показанных на фиг. 12. Таким образом выводы, получен]
ные для четырехцилиндрового двигателя, могут быть использованы
в полной мере при анализе уравновешенности данного двигателя,
Фиг. 12.
Силы инерции 1-го порядка поступательно движущихся масс
и их моменты, как и в четырехцилиндровом двигателе, взаимно)
уравновешиваются и их равнодействующие равны нулю.
'авнодействующая сил инерции 2-го порядка от средних]
4-х цилиндров приложена в середине коленчатого вала и равна:1
/?2 — Y1P.J = 16р2Л4cos 2а 4ХЛ4п/?а>2 cos 2а.
20
Остальные четыре цилиндра дают вертикальную равнодей-
ствующую сил инерции 2-го порядка, расположенную тоже
в середине коленчатого вала; ее значение определится из пре-
дыдущего уравнения'заменой а через (а|-90°):
/?2 = 4а Мп Ru>’ COS 2 (а + 90е) = — 4).М„ /?w2C0S 2а-
Складывая полученные равнодействующие, приходим к вы-
воду» что равнодействующая сил инерции 2-го порядка посту-
пательно движущихся масс восьмицилиндрового двигателя равна
нулю.
Аналогично найдем, что равнодействующая сил инерции
4-го порядка будет равна:
/?4 = £Р4 = — 128 р4Л/л /?“2 cos 4а.
Эта сила приложена в середине мотора и направлена по
вертикали.
Сила инерции 4-го порядка не уравновешена, но она весьма
незначительна, частоты ее велики; этой силой в большинстве
случаев можно пренебречь.
Для иллюстрации наших выводов в отношении уравновешен-
ности рядных двигателей возьмем для примера данные мотора
Испано-Сюиза 12-У&rs и рассмотрим величины неуравновешенных
сил инерции от поступательно движущихся масс в 1, 4, 6-ти
цилиндровых двигателях.
Этот мотор имеет: R = 85 мм, L —275 мм, л — 0,309; масса посту-
пательно движущихся деталей в одном цилиндре—Мп —0,313
п = 2400 об/мин, Мп R<«2 = 1680 кг.
Одноцилиндровый двигатель.
Рл = МП Rw2 cos а = 0,313 • 5370 cos а — 1680 cos а.
Рупах = 1680 КГ.
Р.2 — Ш„ /?«>2 cos 2а = 0,309 1680 cos 2а.
Рtmax =513 КГ.
Четырехцилиндровый двигатель.
R2 = 16рг Мп /?<us cos2a = 1,27 • 1680 cos 2а.
Рчтах ==2175 КГ.
/?4 = 64p4 MnRu2 cos 4а = 0,0316 - 1680 cos 4а.
Rtml,x = 53,1 кг.
21
Шестицилиндровый двигатель.
/?й = 216р67И„ cos 6а = 0,0014 • 1680 cos 6а.
Remax = 2,35 КГ.
Восьмицилиндровы3 двигатель.
— — 128p„M,AW cos 4а = — 2.0,0316 • 1680 cos 4а.
Rtma/ = 106,2 КГ.
III. УРАВНОВЕШЕННОСТЬ V-ОБРАЗНЫХ
ДВИГАТЕЛЕЙ
Двухцилиндровые V-образные двигатели
Рассмотрим сначала ?бщий случай, когда угол развала между
осями цилиндров равен у. Вал одноколенный и оба шатуна кре-
пятся непосредственно к цапфе кривошипа.
Рассмотрим силы инерции поступательно движущихся i
только первого и второ! о порядков.
Ось ОУ (фиг. 13) приходит через ось вала и делит у
T пополам; ось ОХ перпендикулярна к оси ОУ.
22
Ведя отсчет углов от оси первого цилиндра, получим выра-
жение для сил инерции поступательно движущихся масс первого
цилиндра:
Р — Мп /?">2 (cos a -j- cos 2а).
Для второго цилиндра силы инерции выразятся такой же
формулой, если заменить « через угол («4 7), т. е.:
Р' = Мп /?ы2 [cos (а 4- 7) + X COS 2 (а 4- l)J-
Сумма проекций этих сил на ось ОУ будет равна:
- | [ COS а COS (a-J i) ] COS 4“
7 )
4- X [ cos 2а 4- cos 2 (а 4~ 7) ] cos
Аналогично находим сумму проекций этих сил на ось ОАГ:
Р ~ Мп Ru* {[cos а — cos (а 4-7)] sin ^4"
7 1
4- X [cos 2а — cos 2(а 4~ 7)]sin ~2 I
Заменив суммы косинусов их произведениями по формуле:
. , _ а-4-b а—b
cos а 4- cos о = 2 cos —— cos ,
» их разности по формуле:
, п . а-\-Ь , а—Ь
cos а — cos& = — 2 sin—у- ein —,
найдем, что суммы проекций сил инерции поступательно
движущихся масс первого порядка на оси ОУ и ОХ будут равны:
Ру — 2Мп Rafi cos2 у cos 4" ' >
Рх = 2Мп Ru* sin2 у sin
Аналогично, суммы проекций сил инерции, от поступательно
движущихся масс второго порядка на оси ОУ и ОХ, равны:
2 = 2Мп RoM cos 7 cos у cos (2а 4- 7),
2Л Pe = 2Мп R^ X sin 7 sin i sin (2а 4~ 7).
23
Рассмотрим конкретные случаи уравновешенности У-образных
двухцилиндр овых двигателей.
1. т = 45°.
Проекции сил инерции первого порядка, от поступательнс
движущихся масс обоих цилиндров, на оси ОУ и ОХ дадут:
2, Р, = 2Мп 0,852 cos (а + 22,5°),
и
2Л рх = 2Мп 0,146 sin (а 4- 22,5°).
Проекции сил инерции второго порядка будут;
Pt = 2Мп Ra>2k 0,653 cos (2а + 45°),
и
2лР8 = 2Л1„ Ro>2X 0,270 sin (2а 4-45°).
Равнодействующую всех сил SP можно получить, найд>
геометрическую сумму сил (2V Р, 4- 2У Р2) и (2Л Рг + 2Д. Р2).
Тогда:
Направление равнодействующей ЕР по отношению к оси О.У
определится при помощи угла <р, который находится из следую
щего соотношения:
tg<p =
\P^xPt
Конец вектора FP, при вращении коленчатого вала, опишет
замкнутую кривую, растянутую вдоль оси ОУ (см. фиг. 14).
Для уменьшения действия сил инерции на крепление мотора
краме или фундаменту, массы противовесов, уравновешивающих
центробежные силы вращающихся масс кривошипа, берут больше
на некоторую величину М'пр , которая подбирается таким обра-
зам, чтобы развиваемая ею сила инерции была равна полусумме
максимального и минимального значений равнодействующей сил
инерция поступательно движущихся масс двигателя.
На фигуре 14 построена окончательная векторная диаграмма
сил инерции, которые остаются неуравновешенными. Получена
эта диаграмма при помощи геометрического сложения вектора
сил инерции поступательно движущихся масс и вектора центре -
бежной силы дополнительных масс противовесов.
2. т = 90°.
В этом случае:
Pi = 2/Ия Rm2 0,5 cos (а 4~ 45°) = Мп Rm2 cos (а 4~ 45°),
2 = 2/W„ RUt" 0,5 sin (а 4- 45°) = Л4„ Rw2 sin (а4~ 45е);
24
и
SyP2 = 2Л1„ Rw2 к cos 90° cos 45° cos (2a + 90°) = 0,
Фиг. 14. Векторная диаграмма уравновешивания сил
инерции первого и второго порядков поступательно
движущихся масс двухцилиндрового V — образного
двигателя с X. = 45°, X = -т-.
Равнодействующая сил инерции 1-го порядка:
= у (S7 р\у y(yp~f = ;
Из фиг. 15 легко видеть, что 2Р1 совпадает по направлению
с радиусом кривошипа. Эта сила при помощи противовесов
полностью уравновешивается.
Так как 2^Р2 = 0, т0 равнодействующая сил инерции вто-
рого порядка 2Р2 будет равна:
SP2 = 2хР2 = УТX Мп Rd cos 2а.
Эта сила действует только вдоль оси ОХ и, обычно, оста-
ется неуравновешенной.
25
На фиг. 16 показана векторная диаграмма сил инерции пер
вого и второго порядков и окончательная векторная диаграмма
Фиг. 16. Векторная диаграмма уравновешивания
сил инерции первого порядка поступательно дви-
жущихся масс двухцилиндрового V — образного
двигателя с X = 90°, X =
оси CLY. Максимальное значение неуравновешенной силы инер-
ции второго порядка:
Р-2ты — 2 X Мп f^ta2.
26
3. 7 = 180°.
Оси цилиндров лежат в одной плоскости и цилиндры рас-
положены друг против друга. В этом случае:
2t Pi — 2М„ RtS1 sin (a -J- 90°) = 2Afn AVcos а;
SyP2 = 0;
Фиг. 17. Векторная диаграмма уравновешивания сил инерции посту-
пательно движущихся масс двухцилиндрового-двигателя с 1=180',
Сила при помощи обыкновенных противовесов не мо-
жет быть уравновешена, но может быть полностью или ча-
стично переведена из горизонтальной плоскости в верти-
кальную.
На фиг. 17 показана векторная диаграмма уравновешивания
сил инерции поступательно движущихся масс двухцилиндрового
^—образного двигателя при 7=180°, для случая, когда при
помощи дополнительных масс противовесов вдвое уменьшают
максимальное значение силы инерции ЕАР„ действующей вдоль
Оси ОХ.
Дополнительной массой противовеса должна быть создана
СИла Р'Пр равная ~(EVP,)тех» т.
P„p = M„R^.
27
Проекции силы Р Пр на оси ОХ и ОУ будут:
Рхпр — — Мп R^2 sin (« 4" 90°),
Рупр = — Мп /?ю2 cos (а 4~ 90°).
Легко доказать, что в этом случае вектор равнодействую
щей R (на фиг. 17—диагональ параллелограмма) является вели
чиной постоянной и вращается против направления вращени;
коленчатого вала со скоростью ш.
В самом деле, после частичного уравновешивания противове
сом силы S(P„ у нас осталась неуравновешенная сила P'J
равная:
рх = S.v Р, + РХПр = Мп Rtf sin (а -|- 90 )
и возникла сила Р'упр, действующая вдоль оси ОУ и равная:
Ру = — Мп Ro>2 cos (a -f- 90°).
Равнодействующая последних двух сил равна:
R + = Р'пр^ м„ R^.
Эта сила постоянна по величине, при а = 0° составляет с.
радиусом кривошипа угол 0° и вращается с угловой скорость»]
oj против направления вращения коленчатого вала.
Восьмицилиндровый V-образный двигатель с углом развал^
у = 90°
Коленчатый вал такого двигателя выполняется так же, как!
и четырех цилиндрового; вспышки чередуются через 90°, т. eJ
через равные промежутки времени.
Равнодействующие сил инерции такого двигателя легко опре«
делить, рассматривая его состоящим из двух групп цилиндров
по четыре в ряд.
Силы инерции поступательно движущихся масс одного ряда
цилиндров дают равнодействующую, расположенную в сере!
дине коленчатого вала в плоскости осей цилиндров и направ-1
ленную параллельно этим осям.
Величина равнодействующей для I-го ряда цилиндров сле-1
дующая:
2 р = 4 Ro>2 (4р3 cos 2а — 16р4 cos 4а 36p(i cos 6а —...).
Величину равнодействующей для И-го ряда цилиндрои
получим, заменив в предыдущем выражении а через (a-j-90°).
тогда:
cos 2 (а 4 90°) = — cos 2а;
cos 4 (а 4~ 90и) = cos 4а;
cos 6 (а 4 - 90е) = — cos 6а;
И т. д.
После этого, равнодействующая для П-го ряда цилиндров
будет иметь вид:
S Р' — 4Мп Роз2 (— 4р, cos 2а — 16р4 cos 4а — 36р„ cos 6я —...).
Найдем сумму проекций сил £Р и ЕР'на ось ОУ:
1/2
£ Р -= £ Р cos 45° 4- S Р* cos 45 = (S Р4- £ Р')
или окончательно:
2уР= 4/2 Л4„Рю2 (- 16р4cos 4а—...).
Найдем также сумму проекций сил 5Р и 2Р1 на ось ОХ:
SvP = SPsin45° — 2P'sin45° = (SP— 2Р')^у;
или окончательно:
S.. P = 4/2 Л4„ Р«2 (4 pg cos 2а 4- 36р6 cos 6а 4“—)•
Вертикальной равнодействующей (£УР), вследствие ее малой
величины, можш пренебречь.
29
Горизонтальная же равнодействующая (2ЛР) достаточна
велика.
Приближенно она равна:
2л 4 рЛ2Х Мп R<»2 cos 2а.
Необходимо заметить, что восьмицилиндровый V-образный
двигатель с углом развала между цилиндрами в 90° в отношении!
уравновешенности подобен рядному четырехцилиндровому дви|
гателю. Основная разница состоит лишь в том, что в случае
восьмицилиндрового V-образного двигателя неуравновешенная
равнодействующая сил инерции второго порядка действует в го4
ризонтальной плоскости, а в четырехцилиндровом рядном дви-
гателе— в вертикальной.
Двенадцатицилиндровый V-образный двигатель с углом
развала 7 = 60°
Коленчатый вал двенадцатицилиндрового V-образного двига-
теля выполняется таким же, как и для рядного шестицилиндрового
двигателя; вспышки чередуются через 60°, т. е. через равные
промежутки времени.
Равнодействующие сил инерции такого двигателя легко опре-
делить, рассматривая его состоящим из двух групп цилиндров
по шесть в ряд.
Силы инерции поступательно движущихся масс одного ряда]
дают равнодействующую, расположенную в плоскости симметрии,
вала и в плоскости осей ряда цилиндров.
Величина этой равнодействующей для I-го ряда цилиндров
следующая:
2 Р — 6 М п Ru>2 (36ре cos 6а —...).
Величину равнодействующей для II-го ряда получим, заменив
в предыдущем выражении а через (а-(-60°), тогда:
cos 6 (а -ф 60°) — cos 6а.
Равнодействующая сил инерции поступательно движущихся
масс второго ряда будует:
2 Р' = 6 Мп Rto2 (36р6 cos 6а —...).
Найдем сумму проекций равнодействующих 2^ и2/у н.я
ось ОУ (см. фиг. 19):
2, Р = (2 Р + 2 P'S cos 30° = 2 К? 6 Мп R^ (36Рв cos 6а
Сумма проекций равнодействующих 2Р и 2Р' на ось О А)
равна нулю, так как:
2лР=(2Р—2Pjsin30° = 0.
Следовательно, силы инерции поступательно движущихся
масс 12-цилиндрового V-образного двигателя с центральными
шатунами дают равнодействующую, направленную вдоль оси ОУ
и равную:
2 Р = 6 У З Мп /?аг (36Рб cos 6а —.).
Этой силой'' можно пренебречь вследствие ее ничтожной
величины и двигатель практически можно считать вполне
уравновешенным.
I/
Шестнадцатицилиндровый V-образный двигатель с углом
развала у = 45‘
Коленчатий вал шестнадцатицилиндрового V-образного двига-
теля выполняется таким же, как и для рядного восьмицилин-
дрового двигателя. Для получения возможно более равномерного
крутящего момента, вспышки в отдельных цилиндрах должны
чередоваться через равные промежутки времени, т. е. через
каждые 45° поворота коленчатого вала. Угол развала между
цилиндрами должен быть 45° (или 135°).
Рассмотрим случай, когда т = 45°.
Равнодействующую сил инерции такого двигателя легко опре-
делить, рассматривая его состоящим из двух групп цилиндров
по 8 в ряд.
31
Силы инерции поступательно движущихся масс одного
ряда
цилиндров дают равнодействующую, расположенную в плоско
сти симметрии
коленчатого вала и
плоскости осей
цилиндров
ряда.
Величина равнодействующей для Ьгс ряда цилиндров еле
дущая:
в
ЕР = 8Af„(— 16р4 cos4а — 64ряcos8а —. ..).
Фнг. 20.
Величину равнодействующей для П-го ряда цилиндров полу-
чим, заменив в предыдущем выражении а через (а + 45°), тогда
cos 4 (а + 45°) = — cos 4а;
cos 8 (а -|-45 ) = cos 8а.
После этого, равнодействующая для П-го ряда цилиндров бу
дет иметь вид:
ЕР' = 8Л4пРш2(16р4 cos 4а — 64 р8 cos 8а+ ...).
Найдем сумму проекций сил ЕР и ЕР' на ось ОУ (см. фиг. 20]
EVP = ЕР cos 22,5° + ЕР' cos 22,5° = (ЕР-|- ЕР') cos 22,5°,
или
2УР = 2.8 MnRa2 (— 64р8 cos 8а —...) cos 22,5е.
Найдем также сумму проекций сил ЕР и ЕР' на ось ОХ:
ЕГР = ЕР sin 22,5° — ЕР' sin 22,5° = (ЕР—ЕР') sin 22,5°,
32
или
Sr Р = 2.8 М„ Rtf (— 16р4 cos 4а —...) sin 22,5°.
Следовательно уравновешенность 16-ти цилиндрового I/—об-
разного двигателя подобна уравновешенности 8-цилиндрового
рядного двигателя. Здесь неуравновешенная сила 4-го порядка
действует в горизонтальной плоскости; неуравновешенная, дейст-
вующая в вертикальной плоскости сила инерции 8-го порядка,
ничтожна по величине.
IV. УРАВНОВЕШЕННОСТЬ ЗВЕЗДООБРАЗНЫХ
ДВИГАТЕЛЕЙ
Однорядная звезда с центральными шатунами
Оси всех цилиндров однорядной звезды находятся в одной
плоскости и угол между соседними осями равен:
гДе, I — число цилиндров звезды. Разберем случай кривошипно-
шатунного механизма с центральными шатунами.
Пронумеруем цилиндры — 1, 2, 3,... i в направлении вра-
щения коленчатого вала.
33
Первый цилиндр дает по направлению своей оси силу ине|
ции поступательно движущихся масс;
Pl = COS a-j-4р.2 cos 2а— 16р4 COS 4a-f- 36р6 COS 6а —. .. |J);
1)-5*й цилиндр Дс_ет по направлению своей оси силу
получаемую из предыдущего уравнения подстановкой вмест
а угла (a —Ат), т. е.
Р*41 == Мп jr?w,J [cos (а — Af) {- 4р2 cos 2 (а - - Ат) —
— 16рл cos 4(а —Ат) +...].
В дальнейших наших рассуждениях ограничимся силами инер
ц:ш только первого, второго и четвертого порядков.'Найяем сум
му проекций сил инерции поступательно движущихся масс от всех
цилиндров на ось ОУ, совпадающую с осью первого цилиндрс
ЪуР — Мп Ru>" [cos a -f- cos(a — т) cost 4“ cos (a — 2т) cos 2t + • • J+
4- Mn Ru2 4p2[cos 2a -1- cos 2 (a — t) cos T 4“
4“ COS 2 (a — 2т) cos 2t4~ • • J — Mr. /?o216 P4 [cos 4a 4"
4“ cos 4 (a — т) со$т4“со84(а— 2’;) cos2t4~- •]•
Произведение косинусов можно заменить их суммой по фор
муле:
cos a cos ft— g cosfcz-Р t) j -J cos (a — b).
At 2м
После замены получим:
= Мп Mo4[cos a 4~ i cos a 4~ < cos (a — 2т) 4~ -arcos a ~b
Al At Z
Ь 1 cos (a — 4t)4 .. • ] 4- M„4p, [ cos 2a 4~ cos (2a — t)+
At
4- * Cos(2a — 3т) 4~ 9 ccs(2a —2T)4-4-COs(2a—6t)4-. --J —
At At At
— MnRu>‘ 16p4 [cos 4a J-- , COS (4a — ®t) 4“ V cos
Ai Ai
4~^-COs(4a —6T)4--^cos(4a—1Jt)4- .. ].
’) Будем здесь и e дальнейшем принимать за положи! эльные силы,
направленные от оси вала.
34
Сгруппировав члены в квадратных скобках, получим:
Sv Р = Мп Rm1 | 1 i cos а
"+"“2 • | COS «4- cos (а
-27) +
+ cos (а — 4-() +... J | - М„ /?<в2 4р2 |y-£cos 2а + cos (2а — у) +
+ COS (2а — 2у) + COS (2а — Зу) +. . . |- у . COS 2а + COS (2а — Зу)+
+ COS (2а — бу) + COS (2а — 9у) + .. | } — Мп Rm’ 16р4 {-у | COS йа 4
4- cos (4а. — Зу) + cos (4а — бу) 4 ... j44y cos 4а
+ cos (4с---------------5у) —cos (4а— 10у) + ... j |,
или: *=/-!
£VP = Мп у i cos а + 2 cos 2 (у — ^'1)1 +
‘ k=0
4- M:t Roy 4рч
к—i—1 k=i— 1
1 \1 1 /2
у /, cos(2а — йу)+2 / cos3ly
£~0 /г=0
A=i-1
к~О
а — ky
к— i- 1
*2^ cos5(5 а —= 0 (а)
k~ о
Определим также сумму проекций сил инерции от поступа-
тельно движущихся масс на ось ОХ, перпендикулярную оси
первого цилиндра;
2ХР=MnRa>2[cos (а — у) sin у + cos (а — 2у) sin 2?+.. .] +
+Л4л Rm2 4р2 [cos 2 (а — у) sin 7 + cos 2 (а — 2у) sin 2у +... ]—
—MnRm216р4 [cos 1(а — у) siny + cos4(а — 2y)sin2y+...].
Произведение косинусов на синусы заменим их суммой по
Формуле:
cos a sin b — sin (а + Ь) — ~ sin (а — t).
35
После замены получим:
ХЛР = Мп [у Sin а — 2 sin (а “ 21) 4" 2 sin а — 1 sin(a — 4'()-
1Г 1 1
4- м„ Roy2 4р2 -% sin (2а 7) — — Sin(2a — 3?) 4~
+ 2 sin (2« — 2'у) — ~ sin(2a —67)+.. М„ Ray116р41 ~ sin(4a—З7)—
— ~ Sin (4а — 5'у) 4~ 4г sin (4а ~ 67) — sin (4а — 107)+- • • 1 •
X 2г J!
Добавив к первому члену правой части уравнения 4-sin a
и —sin а, ко второму члену4- ^ sin 2a иsin 2a, и т. д., и
сгруппировав соответствующим образом члены в квадратных
скобках, получим:
£* Р — М„ Roy2 j 2 i Sin a-2 I Sin a 4- Sin (a — 27) 4~
4- Sin (a — 47) 4- ... 11 4- Mn Roy- 4p3 Ц- [sin 2a 4- sin (2a — 7) 4-
4-sin (2a —27)4-...]—-
sin 2« 4- sin (2a — З7) 4~
4- sin (2a— 67) 4- ... 1 I — Mn Ru>216 p4
sin 4a 4~ sin (4a — З7) 4~
4-sin (4a — 67)4-. •
sin (4a -67)4-
или:
1 . 1 '
j-rsina— 2
sin (2a — Л7)—
a — k~i
Так как,
sin п (а —ky) — О,
л -а
cos п (а — ky) = О,
л
при . —дробному числу, и
V Г h л - •
4 sin л (а — «Y)=isin«a,
cos л (а — = L cos Л а
л
при -- = целому числу, то те суммы, где коэфициент п меньше
числа цилиндров I, всегда будут равны нулю.
Учитывая только силы инерции первого, второго и четвер-
того порядков, для звездообразных моторов с различным числом
цилиндров, формулы (а) и (&) примут следующий вид:
Трехцилиндровая звезда:
^уР — i- i М„ Ro? cos а -|- -i- i 4рг Мп Rio2 cos 2а —
i 16р4 М„ Ru>2 cos 4а,
ErP= i М„ Rid'2 sin а— i4 р, Мп Ri»~ sin 2а
Л
— 2 i 16р4 Мп Rm- sin 4а.
Пятицилиндровая звезда:
-УР = 1 i М„ Rio2 cos a — i 16р4 МП Rio2 cos 4a,
YrfP — 1 i Mn Rio’2 sin a 4- 2 i 16p4 M„ Rco2 sin 4a.
37
Для случая семицилиндроьой и девятицилиндровой звезды
оудем иметь:
SyP = 2" « cos а ,
YXP = g i М„ sin а.
Как видим, в случае 7 и 9-цилиндровой звезды, проекции сил
инерции второго и четвертого порядков от поступательно дви-
жущихся масс на оси Х-ов и К-ов равны 0.
Равнодействующая сил инерции первого порядка для звезды
с произвольным числом цилиндров „г будет равна:
= У(2уР1 Is + ^Л)2 = 2 1 Мп R(a2 ’
Эга сила постоянна по величине.
Так как:
SyPj -=EP1cos'z,
а
£ХР, = EPj sin а ,
то равнодействующая сил инерции первого порядка
может быть графически представлена вектором -Р, (см. фиг. 22
повернутым относительно оси ОУ на угол а.
Таким образом направление вектора SPj совпадает с напра
влением радиуса крииошипа.
Очевидно, что равнодействующая ^Рх всегда
направлена
оси коленчатого вала вдоль радиуса кривошипа и вращаете
вместе с кривошипом с угловой скоростью ®.
Равнодействующая сил инерции первого по
рядка всех цилиндров звездообразного мотор
постоянна по величине, равна половине произве
дения масс поступательно движущихся детале
38
всех цилиндров на Ru~, и всегда направлена от оси
вала вдоль радиуса кривошипа.
Эта равнодействующая суммируется с центробежной силой
вращающихся масс кривошипа и может быть полностью урав-
новешена при помощи противовесов, соответствующим образом
подобранных и расположенных на продолжении щек кривошипа.
Равнодействующая сил инерции второго порядка для 5, 7
и 9-цилиндровых звезд равна нулю.
Для трехцилиндровой звезды силы инерции второго порядка
от поступательно движущихся масс дадут равнодействующую,
равную:
Фиг. 23.
2^, = ]/(2Л)2 + (2лЛ)2 = 1 i tynMnR^ 11
£ £
Так как
SVP2 = SP2 cos 2а,
а
5жР2 = — SP2 sin 2а,
то равнодействующую сил инерции второго порядка 5Ра можно
представить вектором, повернутым относительно оси (см. фиг. 23)
ОУ на угол — 2а, т. е. в сторону, противоположную направлению
вращения кривошипа.
Очевидно, что равнодействующая 2Ра при а=0° направлена
от оси коленчатого вала вдоль радиуса кривошипа и при вра-
щении вала с угловой скоростью ш, вектор равнодействующей
вращается в противоположную сторону с угловой скоростью,
равной 2ш.
Обычно эта сила остается неуравновешенной.
В трехцилиндровой и пятицилиндровой звездах остается также
неуравновешенной равнодействующая сил инерции четвертого
порядка:
39
Так как 16р4 колеблется в пределах от 0,007 до 0,004, то рав-
нодействующая 4-го порядка настолько мала по своей величине,
что ею, при существующих в настоящее время числах оборотов
двигателей, всегда пренебрегают.
В заключение приведем сводную таблицу уравновешенности
звездообразных двигателей с центральными шатунами.
Сводная таблица
Порядок сил Чи.сяо цилиндров Примечание
3 5 7 9
1 3 2"ЛТп/?<а- 7 -^MnRw? 9 -yMnRv" Полностью уравновеши- вается с помошью про- тивовесов.
2 3 0 0 0 Вращается против напра- вления вращения колен- чатого вала со скоростью 2ш.
4 3 2-16р4>Ип/?ш« 5 2-16р4Л<л/?<и* 0 0 Вращается в направлении вращения коленчатого вала со скоростью 4<«. Вращается против напра- вления вращения колен- чатого вала со скоро- стью 4ш.
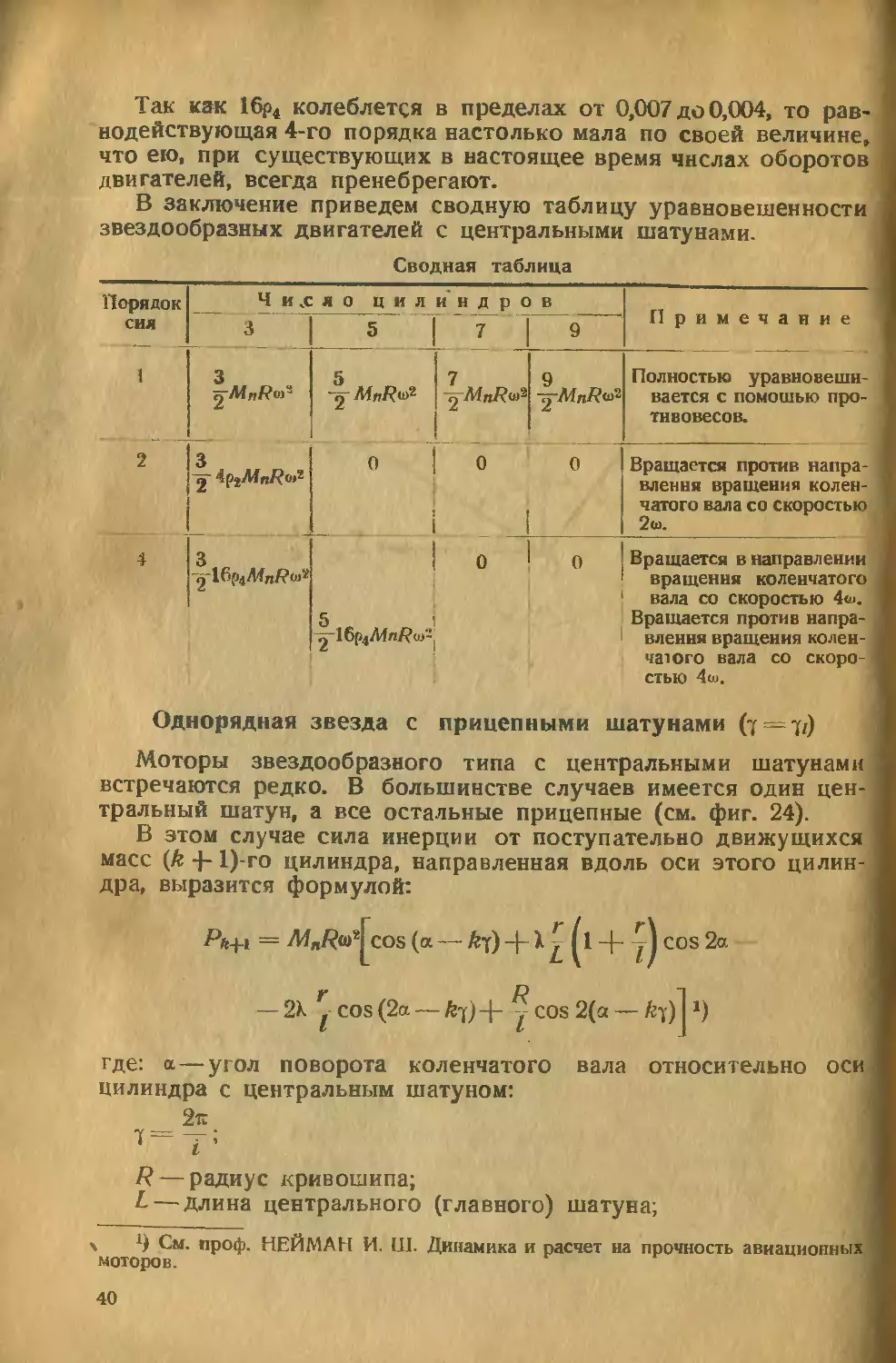
Однорядная звезда с прицепными шатунами (7 -70
Моторы звездообразного типа с центральными шатунами
встречаются редко. В большинстве случаев имеется один цен-
тральный шатун, а все остальные прицепные (см. фиг. 24).
В этом случае сила инерции от поступательно движущихся
масс (А 1)-го цилиндра, направленная вдоль оси этого цилин-
дра, выразится формулой:
= 7W„/?w^cos (а — йу) i cos 2а
— 2k Г. cos (2а — Й7) + у cos 2(а — /гу) м)
Л L
где: а — угол поворота коленчатого вала относительно оси
цилиндра с центральным шатуном:
2к
7= г;
R — радиус кривошипа;
L — длина центрального (главного) шатуна;
См. проф. НЕЙМАН И. Ш. Динамика и расчет на прочность авиационных
моторов.
40
г — расстояние от оси ^цапфы кривошипа до оси пальца
бокового шатуна;
I — длина прицепного (бокового) шатуна;
Сила инерции от поступательно движущихся масс в цилин-
дре с главным шатуном может быть выражена тоже при по-
мощи вышеприведенной формулы, если положить, что 7 = 0 и
r — L—Z; тогда из вышеприведенной формулы получим из-
вестное нам выражение:
Pj — Мп (cos а -[- >. cos 2а).
Принимая, что г величина постоянная и равная среднему
арифметическому всех значений г, включая и ry=L — I, т. е.
г =
найдем сумму проекций сил инерции от поступательно движу-
щихся масс всех цилиндров на ось ОУ, совпадающую с осью
первого цилиндра:
Svp= MnRu? [cos а -|~ COS ( а — т) COS у-[-cos (а — 2y)cos2y + •! +
+ Мп Ru- К Гг (1 [cos 2а j- cos 2а cos у -J-
41
4- cos 2a cos 2y 4- • • • ] — Л4„/?о>32К 4- [cos 2a 4-cos (2a — 7) cos 7 4-
I'
4“ cos (2a — 27) cos 27 4-. • -1 4~Mi/?u>2 у [cos 2a 4-
4~cos2 (a — 7)cos74-cos 2(a — 27)cos274~- •
Произведение косинусов первого, третьего и четвертого
членов уравнения заменим их суммой по формуле:
cos a cos b = 4_ cos (а 4 t)4—4 cos (° — ^)j
а у второго члена правой части уравнения вынесем за скобки
cos 2a, после этого получим:
Xv Р — Мп /?ю21 COS a 4- -4- cos a-]- 4- cos (a — 2 7) 4~ 4-COS a4~
I £ £ £
2 cos (a— 47)4- ... |4-Af„/?w2X-£-
cos 2a (1 4-COS7-I-
4 ^2 cos 2a +
-4T)4-...]
M,t R<&1 21 j-1 cos 2a
4- icos(2a— 21)-}-4-cos2a4- 1 cos(2a , ....
2 cos (2a —37)4-
4- cos 27 4.
, 1
r 2
4* M„ ~ |4os
4- I cos(2a —21)4-4 cos(2a —67)4-... |.
Сгруппировав члены в квадратных скобках, получим:
Sv Р~ MnRo>-1 i COSa-f- g [cos a 4* cos (a — 2i)4~ COS (a —
-41)4-... 14-Д№* 2
-(- COS 27 4-... )| - - Мп 24 -у - i cos 2a 4- [cos 2a 4*
4-COS (2a— 2y) 4-COS (2a — 4y)4-. . j| 4" М„/?ш2-у- | 4 [cos 2a4 |
+ cos (2a — 7) 4~ cos (2a — 21) 4 • • • I 4~ 4 [cos 2a cos (2a — 3y)4-
/л
42
или:
Х„ Р = М„ Rm~ j -i- i cos а
+
+ (14-
k=i-1
fe=i—1
— 7W„/?<u32k ^ l ^ r cos
I' I 2^
ferzO
R~l—1 k=r i—1
4-Mn Rm1 ~ COS(2a — #T)4~^r Cos3(-| a — k-[ j| (c)
A==q A=0
Определим также сумму проекций сил инерции от посту-
пательно движущихся масс всех цилиндров на ось ОХ, перпен-
дикулярную оси первого цилиндра.
ЕЛ Р — Мп R^1 [cos (a — у) sin у 4- cos (a — 2y) sin 2y4- - • J 4"
4- Mn RoM. 4-(14- J
[cos 2a sin 7 4~ cos 2“ sin 2y 4~ • • • 1
— Mn R(o22\ [cos (2a — y) sin у 4"cos (2a — 2т) sin 2y 4 • • • ) +
о
4~M,[cos2(a—t)sin74~cos2(a — 2y)sin2y ...
Произведение косинусов на синусы первого, третьего и
четвертого членов уравнения заменим их суммой по формуле:
cos a sin b = sin {а 4- Ь) —sin (я — &).
У второго члена вынесем за скобки cos 2 а. После этого
получим:
1Л Р МП R^2 — slna-----1 sin (а—2т)4- 4- Sina ySin(a—4т)-[-... 14*
4- Мл R^2 (i ~b ~j~
cos 2a(sinт-J- sin 2y 4"• •
43
I
— MnR^2)y
v sin (2a—7) —
I
I
i
I
I
I
I.
I
I
I
I
I
I
I
I
I
I
I
I
I* '
I.'
I
I
I
I
I
I
I
I
I
I
I
I
I
I ,
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I,
I
I
I
I
I .
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
s
A sin2a---~ sin(2a—27)4-4 sin2a —
. At £
— Asin (2a —47) + ..) 14- Mn R<i>2 7- A sin (2a— 7) —
----sin (2a — З7) 4- 4 sin(2a—27) 4 sin (2<* — 67) 4- I •
Cl At-Zi
Добавив к первому члену правой части уравнения 4- 4 sin a
и----|~sina, к тРетемУ и четвертому члену 4 Asin2a и—~ sin 2a
и сгруппировав соответствующим образом члены в квадратных
скобках, получим:
I 1 1
44 = Л4п/?ш2s-jr-isina---у sina4~sin(a—2у)4 sin(a—4у)4.
I " " L
! i
4- Af„ 7?ш2л-£- (1 Ayj cos 2a (sin 7 4 s>n 2; 4 • •) j —
r < 1 1 i
—Af„/?w22k-f- {7-isin2a-— |sin2a-|-sin(2a—27)-J-sin(2a—4y)4-.]} 4
t(22 1
4^4 Ro? -^41 s^n 2a A s*n (2° — y) A sin (2a — 27) 4-_t—
1
2
1 Г 1
-------------2 1 sin 2a + sin (2a — З7) 4~ sin (2a — 67) 4~ • • • ( 1;
или:
%XP = MnR&2 A i sina—
4^
+ MnR^~
— 4
K=i— 1
— MnRo>* 2л 414 «sin 2a —
4 2 sin2<a~M+
K=i—1
4
MnRo>2 IA sin (2a — /27)-------~ sin 3 a — k\ j
(rf)
44
Так как
«=i—1
Sinn (а + — О,
/<—о
л'—i—-1
cos п (а + fry) = О,
лг—Э
П л
При -т-= дробному числу, и
/г=/—1
2 sin я (а 4- frf) = i sin Л а,
л'=0
K=i—1
Cos Я (а + Ay) — /COS я а,
к=О
П - ч
при — — целому числу, то те суммы в выражениях (с) и (ф,
i
где коэфициент п меньше чиста цилиндров г, всегда будут
равны нулю.
Для звездообразных моторов, у которых число цилиндров
не менее трех, формулы (с) и (d) примут следующий вид:
1 г
ЕУР = i MnRm2, cos а — ik— MnR^ cos 2а
к—i—I
2 cos3 ^-|-a —fry j (c')
1 к
S.rP=-g- i MnRur sin a — i X-j- Mn R^2 sin 2a —
K=i—1
sinsf-^-a — j (rf')
Равнодействующая сил инерции первого порядка, как и
в случае звезды с центральными шатунами, равна:
ZP^ — iMrR^.
45
Эта равнодействующая суммируется с центро-
бежной силой вращающихся масс кривошипа и
может быть полностью уравновешена при помощи
противовесов, соответствующим образом подо-
бранных и расположенных на продолжении щек
кривошипа.
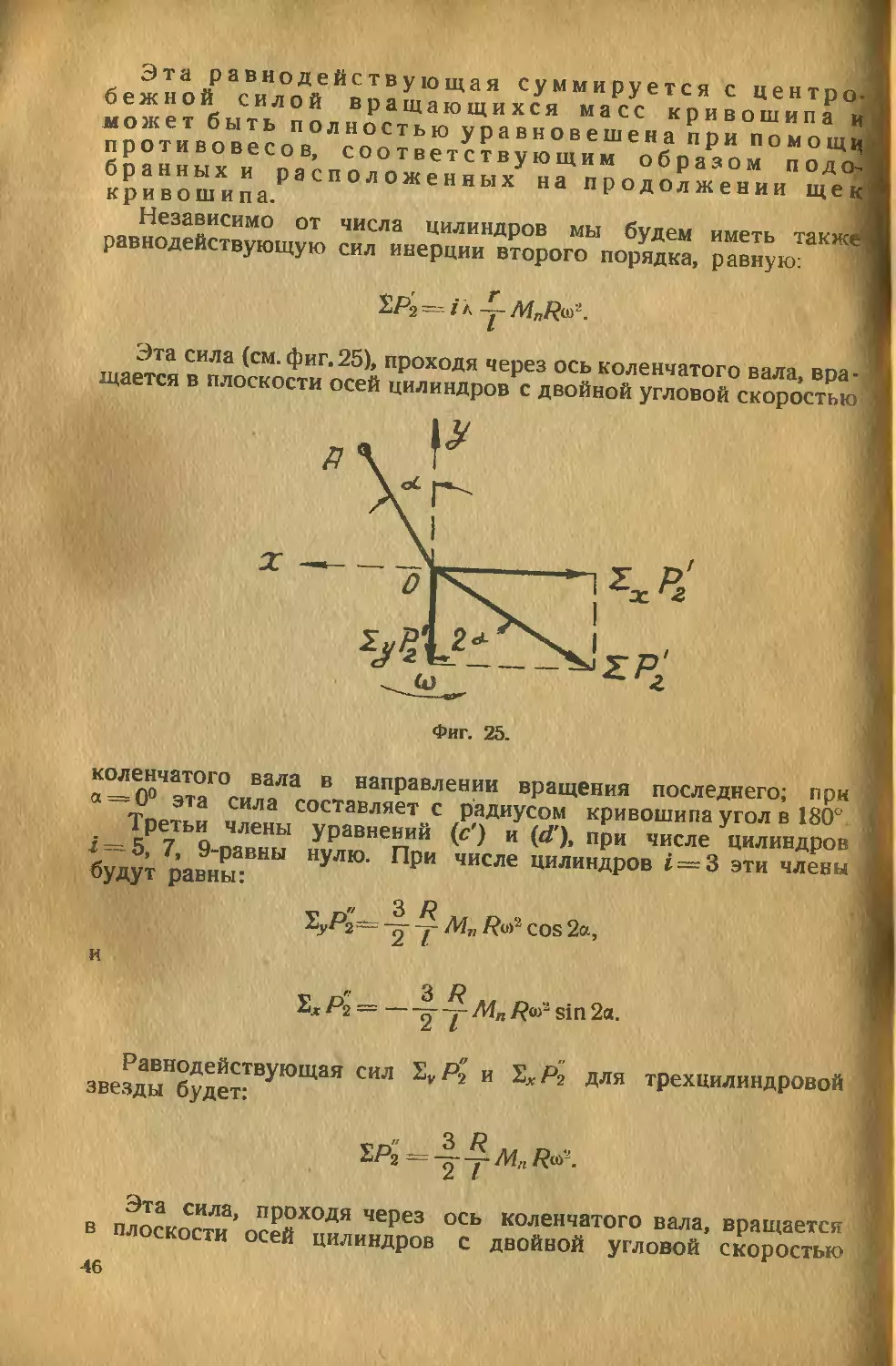
Независимо от числа цилиндров мы будем иметь также
равнодействующую сил инерции второго порядка, равную:
Эта сила (см. фиг.25), проходя через ось коленчатого вала, вра-
щается в плоскости осей цилиндров с двойной угловой скоростью
Фиг. 25.
коленчатого вала в направлении вращения последнего; при
а = 0° эта сила составляет с радиусом кривошипа угол в 180°
Третьи члены уравнений (с') и (d"), при числе цилиндров
i — 5, 7, 9-равны нулю. При числе цилиндров i = 3 эти члены
будут равны:
Q П
ЪУР2— -% y cos
и
^xP2 = -~~MnR^sin2a.
X L
Равнодействующая сил ^VP2 и SXP2 для трехцилиндровой
звезды будет:
£ I
Эта сила, проходя через ось коленчатого вала, вращается
в плоскости осей цилиндров с двойной угловой скоростью
-46
коленчатого вала (2ю) в сторону, обратную вращению послед-
него; при а = 0° эта сила составляет с радиусом кривошипа
угол в 0° (смотри фиг. 26).
Равнодействующие силы ЕР2 и обычно остаются не-
уравновешенными.
Проекции равнодействующих сил инерции второго порядка
для трехцилиндровой звезды можно сложить, после чего найдем:
Р.г = Р24-Ev Р2 = k11—у 1/И„ Р®2cos 2а,
, , Ч 7 Чг \
ЕлР2 = SVP2 4- £v Р2 — 4* 14-^- \Мп№ sin 2а.
Л \ If /
Векторная диаграмма неуравновешенных сил инерции второго
порядка для трехцилиндровой звезды представляет собою эллипс
(см. фиг. 27) с малой полуосью
(2уРг)шах ==2^
и с большой полуосью
(1\Р.)гаах = | к (r-Ь y)AW?a>2 .
Все сказанное выше об уравновешенности звезды с прицеп-
ными шатунами справедливо без оговорок лишь в том случае,
когда массы поступательно движущихся деталей во всех цилин-
драх равны между собою.
В действительности, массы поступательно-движущихся дета-
лей в главном цилиндре больше чем в боковых цилиндрах на
некоторую величину Д/И„.
Сила инерции, создаваемая этой массой, действует вдоль оси
главного цилиндра и равна:
ДР= AAfnP<o2(cos а 4“ 4р»cos 2“ — 16р4 cos 4а 4* • • •)>
47
или приближенно:
ДР = AAfn/?<n2(cos a -f~ X cos 2а).
Уравновесить силу ДР с помощью нормальных противовесов
невозможно.
Ниже приводим сводную таблицу уравновешенности звездо-
образных двигателей с прицепными шатунами.
Фиг. 27.
Для иллюстрации наших выводов, рассмотрим уравновешен-
ность двигателя „РАЙТ-ЦИКЛОН“ SGR—1820F—3, имеющего
такие данные: L — 349,25 мм; R — 87,35 мм; X = 0,25; гср = 70,06 мм;
/ = 280,57 мм; г = 9; масса поступательно движущихся деталей
в цилиндре с главным шатуном Мп = 0,3528масса посту-
сек
пательно-движущихся деталей в цилиндре с прицепным шатуном
Мп1 = 0,3330 — Д/Ив = Мп — Mni = 0,0198 п = 1950
сек2’ сек2 мин
Равнодействующая сил инерциц поступательно движущихся
масс первого порядка равна:
; 9 /4141CIV
EPj = ± MnlR^ = 6 0,3330.0,08735 | = 5460 кг.
2 2 \ ои /
Эта сила полностью уравновешена противовесами.
48
Сводная таблица
Порядок сил Число цилиндров Примечание
3 5 7 9
,"1 3 ~2 MnRv>2 5 "2 AlnR'^2 ^MnR<->* "2" ,Ил/?и>® Полностью уравно- вешивается с по- мощью противо- весов.
2 3>. ~ М,№ г 5 а MnR'o- Тк ( Мп/?ш3 9л у Л1л/?«2 Вращается в на- правлении вра- щения коленча- того вала со ско- ростью 2о).
2 3R 2Т MnRvP 0 0 0 Вращается против направления вра- щения коленча- того вала со ско- ростью 2ш.
Дополни- тельная сила &Р = \MnR'»2(COS « + A COS 2а) Действует вдоль оси главного ци- линдра.
Равнодействующ?я сил инерции поступательно движущихся
масс второго порядка равна:
SR=ZX ~ MnlR^=9.0,25 >^0,3330.0,08735(3,14* =663 кг.
I Zou,0/ \ Ov /
Вектор этой силы вращается в направ-
лении вращения коленчатого вала с угло-
вой скоростью 2w. Сила эта остается не-
уравновешенной.
Дополнительная сила, действующая
вдоль оси главного цилиндра, равна:
ДР = ДЛ1л/?«>2(СО8 а 4- k COS 2а) =
0,0198.0,08735. Р’14/?"") (cos « 4~
\ ои /
+ ) COS 2а) — 70(cos а } > COS 2а);
Фиг. 2F.
APmax==87,5 кг.
Эга сила может быть частично уравно
ведиена противовесами.
49
Двойная звезда
Коленчатый вал сдвоенной звезды изготовляется по схеме,
показанной на фиг. 28. Коивошипы вала лежат в одной плоскости,
но направлены в разные стороны. Каждая из спаренных звезд
имеет обычно 5, 7 или 9 цилиндров.
Для улучшения устовий охлаждения и равномерности кру-
тящего момента оси цилиндров одной звезды сдвигают относи-
т
тельно осей цилиндров другой звезды на угол равный
Силы инерции первого порядка поступательно движущихся
масс складываясь дают для каж^рй звезды равнодействующую,
направленную по радиусу соответствующего кривошипа и равную:
Пара сил с плечом ,,а“ дает момент
= iMnRo^a,
&
который действует в плоскости кривошипов вала,,
Этот момент, а также момент, создаваемый центробежными
силами вращающихся масс кривошипов, могут быть полностью
уравновешены при помощи соответствующим образом подоб-
ранных и помещенных, как показано на фиг. 28, противо-
весов.
В случае звезд с центральными шатунами, силы инерции
второго порядка уравновешиваются сами собой отдельно у каждой
звезды.
В случае звезд с прицепными шатунами, остаются неуравно-
вешенными силы инерцйи второго порядка, одинаковые у каждой
звезды и равные:
I'
Эти силы, проходя через ось коленчатого вала мотора, вра-
щаются каждая в плоскости осей цилиндров своей звезды
с двойной угловой скоростью коленчатого вала в направлении
вращения последнего.
Каждая из этих сил составляет с радиусом кривошипа соот-
ветствующей звезды угол в 180° в тот момент, когда радиус
этого кривошипа совпадает с осью главного цилиндра и соот-
ветствует ВМТ.
Найдем общую равнодействующую этих сил и их момент,
50
Проекции сил инерции поступательно движущихся масс
вого ряда на оси ОУХ и ОХх (см. фиг. 29, 30) дают:
Ру\ =' — i\— MnR^ cos 2а = — A cos 2а,
V
Pxi = — sin 2а = — A sin 2а.
V
nep-
Фиг. 29.
Проекции этих сил на оси ОУ и ОХ будут:
Ру = Pvi cos 2 — р S in = — Acos 2а cos - A sin 2 а sin
(ф Л ф \ { ф \
cos 2а cos;y — sin 2а sin у I — — A cos 12а + у I;
р' —РхХ cos sin — A sin 2а cos -— A cos 2а sin
= — A (sin 2а COS -g- + COS 2а sin 0 == — A sin ^2a +
t. e.:
py= — Acos(2a + |l —Asin^a+^-j.
51
Проекции сил инерции поступательно движущихся масс вто-
рого ряда цилиндров на свои оси ОУп и ОХп (см. фиг. 31) дают:
Руп — — A COS 2 (а 4- 180е + = — A*cos (2а 4~ 2<р);
Рхц — — A sin 2 (а 180е + ?) = — Asin(2а-|-2<р).
Проекции этих сил на оси ОУ и ОХ:
Р'у ~ Рун cos + Pxii sin | = — A cos (2а 4- 2<р) cos
Фиг. 30.
—Asin(2a4-2<₽)sin |= — A cos (2а4~2®)cos |-4-sin(2«4-2<p)sin| ==
(3 \
2а -|- — у 1;
р'' == Р.П1 cos — Pytt sin |- = — A sin (2а 4- 2?) cos | 4-
— A sin (2а 4- 2'р) cos -------
4- A cos (2а + 2?) sin ~ —
— cos (2а 4- 2?) sin |
Б2
Т. е.:
F>y — — A cos -J- 2 — & s,n 4“ ?> vj-
Суммы проекций сил инерции от поступательно движущихся
деталей обеих звезд на оси ОУ и ОХ дадут:
Ру = Ру + Ру = — A cos /2а 4-— A COS /2а 4~ |-=
— —A cos
Фиг. 31.
о '
2а 4-2 ?
= — 2 A cos (2а 4~ ?)cos —;
— A sin
Л sin
ф
== — 2 A sin (2а 4“ ?)cos
или окончательно:
Ру=я — 2_А cos |-cos 2 ^4"I-
Рх = — 2 A cos^- sin 2 / а 4- х-
2 \
53
Общая равнодействующая Сил Ру и Рх будет равна
Р = VPA + Pv2 = 2 A cos •
Как легко видеть, вектор Р вращается в сторону направления
вращения коленчатого вала с угловой скоростью 2ш, и при угле
/ . (ф \
21 a-f-2j —направлен в сторону против направления радиуса
первого кри ошипа.
Величина вектора равнодействующей сил инерции поступа-
тельно движущихся деталей обеих звезд зависит от угла у между
осями ^главных цилиндров: при = О, Р=24; при <р = 90°,
Р— при <р = 180°, Р=0; т. е. при увеличении угла у от 0°
до 180 , вектор Р уменьшается от максимального своего значе-
ния до нуля.
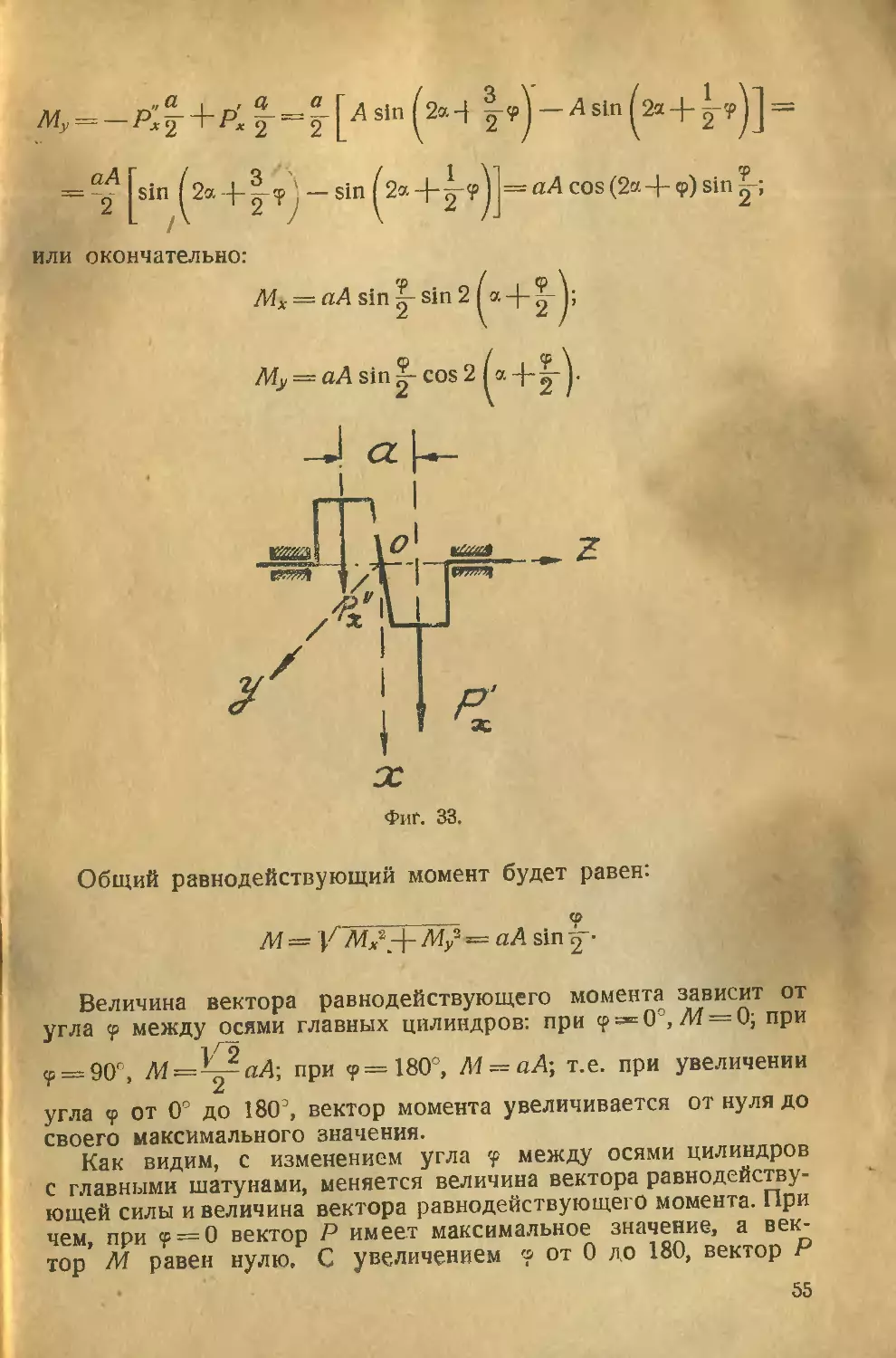
Найдем также моменты, создаваемые силами Ру и Ру отно-
сительно оси ОХ (см. фиг. 32) и силами Рх и /^относительно
оси ОУ (см. фиг. 33).
а '
Г
Q
2a+g ?
2а +^-<Р
A cos
— A cos
= uA sin (2а 4- sin
54
п"— X- Г>' а - а^
iviy —- Рх 2 i- 2 2
= a A cos (2а Ц - ф) sin ~
аА
2
sin
- /
2а + |-?у -sin^2a+^?
или окончательно:
Мх — аА sin sin 2
Общий равнодействующий момент будет равен:
М = утл^м} = аА sin у-
Величина вектора равнодействующего момента зависит от
угла ф между осями главных цилиндров: при ф = 0°, 7И = 0; при
i/~2
Ф —90е, М—^~аА\ при ф—180°, М = аА-, т.е. при увеличении
угла ф от 0° до 180°, вектор момента увеличивается от нуля до
своего максимального значения.
Как видим, с изменением угла ф между осями цилиндров
с главными шатунами, меняется величина вектора равнодейству-
ющей силы и величина вектора равнодействующего момента. При
чем, при ф = 0 вектор Р имеет максимальное значение, а век-
тор М равен нулю. С увеличением ® от 0 до 180, вектор Р
55
уменьшается до нуля, я момент /И растет до своего максималь-
ного значения.
При у равном^- вектор сил Р близок к своему максималь-
ному значению, а вектор М очень незначителен по своей вели-
чине.
На фиг. 34 показан график изменения равнодействующей
силы Р и момента М.
Равнодействующая сила Р и момент М всегда остйкотся не-
уравновешенными.