/




































































Текст
win»»!» чавь.-«aHnni'iM—iti».-
I
Е. П. ТОРБА
Сс>^ [д7Г~ <?
053-ё£
АЭРОДИНАМИКА САМОЛЕТА
АЭРОДИНАМИЧЕСКИЙ РАСЧЕТ
.... is-t-bh/J
J3 I _> -
3T2i® яе выломать
ЛЕНИНГРАДСКАЯ КРАСНОЗНАМЕННАЯ
ВОЕННО-ВОЗДУШНАЯ ИНЖЕНЕРНАЯ АКАДЕМИЯ
Ленинград— 1949
ОТ АВТОРА
Настоящая книга является первой частью общего курса „Аэро-
динамика самолета”. Написана она главным образом по мате-
риалам лекций, прочитанных автором в 1947/48 учебном году.
При этом была использована литература, список которой приво-
дится в конце.
В книге изложены только основные методы аэродинамиче-
ского расчета. Особое внимание при этом обращалось на расчет
летных характеристик, дальности и продолжительности полета
реактивных самолетов.
В последней заключительной главе, дана сводка приближен-
ных формул для прикидочных расчетов основных летных характе-
ристик самолетов с поршневыми и реактивными двигателями.
РЕЦЕНЗЕНТ
доктор технических наук
профессор КОСОУРОВ К. Ф.
qoiCTop ) • М.
Технические’редактор В. М. Никитина
Подписано к печати 10.2.49. Печатных листов 8,5. Авторских листов 9,0
В 1 печатном листе 46400 зн. Бумага 62X94. Зак.216/2114 Г 1334089
Типо-литография ЛКВВИА
ВВЕДЕНИЕ
1. Современная „Аэродинамика самолета'—обширная и очень
важная ветвь прикладной аэродинамики.
В курсе „Аэродинамика самолета" изучаются различные дви-
жения самолета—установившиеся и неустановившиеся, прямо-
линейные и криволинейные, вблизи и вдали от земли; рассматри-
ваются методы расчета этих движений и методы оценки летно-
эксплоатационных характеристик самолетов; исследуется устой-
чивость и управляемость самолета, изучаются методы определе-
ния летных характеристик самолета на основе летных испытаний.
В» соответствии с этим курс „Аэродинамика самолета" состоит
из четырех частей: 1) аэродинамический расчет; 2) устойчивость
и управляемость; 3) динамика полета; 4) летные испытания само-
летов.
2. „Аэродинамика самолета", или „Динамика самолета", как
ее иногда называют, базируется на законах теоретической аэро-
динамики, механики, на результатах и выводах эксперименталь-
ной аэродинамики, теории воздушных винтов и теории двигате-
лей.
„Динамика самолета", делавшая первые шаги в начале те-
кущего столетия, в связи с бурным развитием авиационной
науки и техники, особенно за последнее время, сложилась в само-
стоятельную, очень важную и обширную ветвь прикладной аэро-
динамики, в научную дисциплину—„Аэродинамика самолета".
Огромный вклад в разработку и развитие этой дисциплины
внесли русские советские ученые.
Трудами „отца русской авиации" Николая Егоровича Жуков-
ского и его блестящего соратника Сергея Алексеевича Чаплы-
гина были заложены основы современной аэродинамики.
Работы Н. Е. Жуковского „О подъемной силе крыла", „О при-
соединен: ых вихрях", „О вихревой теории винта" и другие, и ра-
боты С. А. Чаплыгина по теории крыла, „О газовых струях" и
другие—гордость русской и мировой науки. На основе этих тру-
дов создавалась и развивалась общая аэродинамика и ее при-
кладная ветвь—„Аэродинамика самолета".
Современник Н. Е. Жуковского и С. А. Чаплыгина—„Знаме-
нитый деятель науки", гениальный самородок—Константин Эду-
5
ардович Циолковский, устремляя свои мысли в будущее, впер-
вые в мире разработал научные основы реактивной техники. Еще
до появления реактивных самолетов в работе „Реактивный аэро-
план" (1930 г.) К. Э. Циолковский писал: ,3а эрой аэропланов
винтовых должна следовать эра аэропланов реактивных". На ра-
ботах К. Э. Циолковского базируется современная реактивная
техника.
3. Основоположником „Аэродинамики самолета", или „Дина-
мики полета" является Н. Е. Жуковский. Он заложил основы
„Динамики полета" и теории высшего пилотажа в работе „О па-
рении птиц". Эта работа была доложена в октябре 1891 г. на
заседании Московского математического общества и опублико-
вана в 1892 г. [1].
„Если бы у Н. Е. Жуковского была только эта работа, то
она одна навсегда сохранила бы его имя в летописях истории
авиации. Однако это было только начало", —пишет известный
историк по русской технике В. В. Данилевский.
В труде „О паревии птиц" после критического анализа работ
многих исследователей, объяснявших полет птиц, Н. Е. Жуков-
ский изложил разработанную им теорию полета птицы (планера}
по различным траекториям.
В этой работе, в частности, впервые была доказана возуож-1
ность осуществления петлевых движений в вертикальной плос-
кости.
Предсказанная в 1891 г. великим русским ученым Н. Е. Жу-
ковским мертвая петля была выполнена впервые на самолете
через 22 года русским летчиком П. Н. Нестеровым.
Независимо от Н. Е. Жуковского исследованием фугоидных i
движений птиц занимался английский ученый Ланчестер, кото-
рый, однако, получил результаты, аналогичные результатам
Н. Е. Жуковского только в 1897 г., т. е. па 6 лет позднее.
Вслед за первыми исследованиями Н. Е. Жуковского по ди-
намике полета появился еще ряд замечательных работ его в
этой области [1]: „О наивыгоднейшем угле наклона аэроплана"
(1897 г.), „Динамика аэропланов в элементарном изложении"
(1915—1916 г.), „Бомбометание с аэропланов" (1916 г.), „Аэроди-
намический расчет аэропланов" (1917 г.) и другие.
В этих работах Н. Е. Жуковский заложил основы современ-
ной динамики полета, устойчивости и управляемости самолетов,
аэродинамического расчета.
4. Большой вклад в разработку динамики полета в России,
внес один из учеников Н. Е. Жуковского, ныне заслуженный
деятель науки и техники, В. П. Ветчинкин, который известен
также своими работами по теории воздушных винтов и по реак-
тивной технике.
Теоретическими исследованиями по динамике полета В. П. Вет-
чинкин начал заниматся в 1916—17 г.г. Особенно плодотворна
была его деятельность в этой области в „Летучей лаборатории"^
6
основанной выдающимся летчиком Российским (1918—20 г.г.), и
в ЦАГИ. Из наиболее известных работ В. П. Ветчинкина необ-
ходимо отметить следующие [2]: „О парашютировании и посадке
самолета" (1918 г.), „О наивыгоднейшей спирали и о наиболее
безопасной скорости самолета" — в брошюре „Об аэродинами-
ческих и динамических свойствах самолетов и об указателях
скорости" (1921 г.), падении и планировании в среде пере-
менной плотности" (1923 г.), „О размерах органов управления"
и „Разбег аэропланов по земле и пробег при посадке" (1922 г.),
„Мертвые петли", „Виражи и спирали", „Таблицы виражей и спи-
ралей" (1923), „Выдерживание самолета параллельно земле",
„Об индуктивном сопротивлении крыльев самолета" (1924 г.)
и другие.
В этих работах В. П. Ветчинкивым были разрешены актуаль-
нейшие проблемы динамики полета.
Осенью 1925 г. по заданию НТК УВВС В. П. Ветчввкин при-
ступал к работе над своим капитальным трудом „Динамика по-
лета". Эта работа была закончена в 1927 г.
Труд В. П. Ветчинкина „Динамика полета" представляет наи-
более полное и систематическое изложение основных задач ди-
намики полета в мировой авиационной литературе и является
настольной книгой каждого специалиста, работающего в этой
области.
В 1933 г. эта книга В. П. Ветчинкина была переиздана под
названием „Динамика самолета" [2].
В 1935 г. в сборнике „Реактивное движение" [3] В. П. Вет-
чинкнным были опубликованы работы: „Вертикальное движение
ракет", „Несколько задач по динамике реактивного самолета".
В этих работах были заложены основы динамики реактивных
самолетов.
5. Многочисленные ученики и последователи Н. Е. Жуков-
ского в Советском Союзе продолжали разработку различных
проблем „Аэродинамики самолета". z
Особо следует отметить работы заслуженных деятелей науки
и техники В. С. Пышнова и А. Н. Журавченко по што-
пору самолета.
В работе „Штопор самолета" (1929 г.) В. С. Пышнов дал впер-
вые в мировой литературе капитальное исследование по теории
штопора самолета.
В ряде работ А. Н. Журавченко выполнил глубокие и все
сторонние теоретические и экспериментальные исследования што-
пора. Из этих работ необходимо отметить следующие: „Методы
решения задач штопора и устойчивости, управляемости самолета
при потере скорости" (1934 г.), „Прогноз штопора и действитель-
ный полет" (1935 г.), „Исследование штопора в аэродинамической
трубе с учетом его траектории" (1936 г.) и другие.
Огромной важности исследования в области аэродинамики
болкТпих скоротей полета выполнены советскими учеными
7
С. А- Христиановичем, М. В. Келдыш, Ф. И. Франклем, А. А. До-
родницыным, И. В. Остославским и другими.
6. Исключительна роль выдающихся русских летчиков в раз-
работке и совершенствовании высшего пилотажа и тактики воз-
душного боя, в развитии отечественной авиации.
В рядах русских изобретателей, конструкторов и летчиков на
заре авиации трудился замечательный летчик, основоположник
высшего пилотажа Петр Николаевич Нестеров. Начав работу в
авиации в 1910 г., П. Н. Нестеров действовал как революционер,
ломая установившиеся неверные представления о технике пило-
тирования. В те годы было распространено убеждение, что са-
молет в воздухе должен по возможности находиться в горизон-
тальном положении. Полет самолета с креном считали необхо-
димым избегать. Во многих авиационных школах учйли, что
даже при поворотах в воздухе следует избегать креи. В „Па-
мятке летчика", составленной в 1912 г., писали: „Боковая устой-
чивость самая ненадежная и потому все падения бывают набок".
Подобные неверные представления задумал сломать П. Н. Не-
стеров. Он решил превратить самолет в аппарат, сохраняющий
способность полета в любых условиях и выходящий из любого
положения.
„В воздухе везде опора",—утверждал Нестеров, убежденный
в том, что летчик должен и может быть хозяином самолета
при любых положениях его в воздухе. Рассуждая так, Нестеров
упорно работал теоретически и практически, взяв твердо курс
на всемерное использование и развитие маневренных качеств
самолета.
После многих предварительных'расчетов и опытов Нестеров
решил проделать опыт, ставший историческим. 27 августа (9 сен-
тября н. с.) 1913 г., поднявшись на самолете, заботливо снаря-
женном русскими техниками и рабочими, русский военный лет-
чик П. Н. Нестеров впервые в мире выполнил замкнутую петлю
в вертикальной плоскости.
Россия стала страной, где впервые были открыты совершенно
новые условия для развития авиации, исходя из всемерного ис-i
пользования и развития маневренности самолета.
Вслед за Нестеровым осуществили мертвую петлю Пегу и
Пуаре за рубежом. Пегу публично признал первенство Нестерова.
П. Н. Нестеровым впервые в мире была разработана теория
и практика глубоких виражей. Русскому основоположнику выс-
шего пилотажа П. Н. Нестерову принадлежит также слава соз-
Дания новой формы воздушного боя, широко применявшейся
советскими летчиками в борьбе с немецко-фашистской авиацией.
Это- воздушный таран.
Новатор-герой П. Н. Нестеров навсегда вошел в историю,
как творец самой мужественной формы воздушного боя.
7. Продолжателем героических традиций русских летчиков-1
новаторов был выдающийся летчик нашего времени Валерий ,
а
Павлович Чкалов. Горячий патриот Советской Родины и верный
сын русского народа он всегда дерзал и творил, неудержимо
стремился к новому, смотрел в будущее авиации.
С именем В. П. Чкалова связаны героические дальние пере-
леты по сталинским маршрутам, разработка новых приемов выс-
шего пилотажа и тактики воздушного боя, непрерывная работа
вместе с конструкторами над усовершенствованием новой боевой
авиационной техники и дерзновенное стремление вперед во славу
своей отчизны.
Советскому народу хорошо известны имена летчике в-героев
М. М. Громова и Г. Ф. Байдукова. С их именами связаны даль-
ние перелеты по сталинским маршрутам, высокая культура эк-
сплоатации самолетов, горячий патриотизм и преданность
Советской Родине.
В суровые годы Великой Отечественной войны сталинские
соколы показали всему миру чудеса героизма, мужества и твор-
ческого решения поставленных боевых задач. Непрерывно со-
вершенствуя свое мастерство в технике пилотирования, в при-
менении новых приемов ведения воздушного боя, онв громили
хваленую немецко-фашистскую авиацию, очищая небо от стер-
вятников с фашистской свастикой.
Выдающиеся советские летчики Покрышкин, Кожедуб и мно-
гие другие подняли тактику воздушного боя и высший пилотаж
на высоту, недосягаемую для летчиков-„ассов“ других стран.
Советские летчики первыми в мире овладели сложным искус-
ством высшего пилотажа на реактивных самолетах.
8. Буквально каждый шаг в развитии авиации в нашей стране
связан с именем Иосифа Виссарионовича Сталина. Именно бла-
годаря заботам товарища Сталина, большевистской партии и Со-
ветского правительства были созданы благоприятные условия,
в которых выдающиеся советские ученые и конструкторы в твор-
ческом содружестве создали для сталинской авиации первоклас-
сную боевую технику, громившую врагов в воздухе и на полях
сражений Великой Отечественной войны.
На пути дальнейшего прогресса авиации возникает ряд исклю-
чительных трудностей.
Советские ученые и конструкторы, инженеры и летчики
вместе со всем советским народом под руководством большевист-
ской партии н великого Сталина в преодолении этих трудностей
скажут свое решающее слово во славу социалистической Родины
и на благо всего передового, прогрессивного человечества.
ГЛАВА I
ОБЩИЕ СВЕДЕНИЯ. ОСНОВНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
САМОЛЕТА
§ 1. Основные задачи аэродинамического расчета самолета
1. В первой части курса „Аэродинамика самолета" в аэро-
динамическом расчете, рассматриваются плоские, симметричные
движения самолета без крена и скольжения, т. е. такие дви-
жения, при которых продольная плоскость симметрии самолета
совпадает с вертикальной плоскостью и с плоскостью полета.
К таким движениям относятся: горизонтальный полет, полет
по наклонным траекториям с набором высоты или со снижением,
В случае самолетов с винтомоторной группой и поршневыми
двигателями эти движения при постоянном угле атаки и при
фиксированном положении дросселя обычно принимаются уста-
новившимися и прямолинейными. Однако движение реактивных
самолетов, особенно с жидкостными реактивными двигатёлями
(ЖРД) при постоянных угле атаки и тяге следует рассматривать
как неустановившееся н криволинейное, вследствие существен-
ного изменения веса за счет расхода горючего. В этом случае,
как и для всякого ракетного летательного аппарата, при гори-
зонтальном полете с постоянной тягой имеет место разгон са-
молета до полного выгорания топлива с одновременным измене-
нием угла атаки, вследствие отклонения руля высоты летчиком
в соответствии с изменевием веса и скорости самолета.
Поэтому под максимальной скоростью ракетных летательных
аппаратов (с ЖРД), вообще говоря, следует понимать скорость
в конце активного участка пути, т. е. в момент, когда прекра-
щается работа двигателя, вследствие полного выгорания топлива
при непрерывном разгоне.
Далее, в аэродинамическом расчете изучаются методы рас-
чета указанных выше симметричных движений и методы опре-
деления основных летно-эксплоатационных характе’ристик само-
лета :1 скоростей главных режимов горизонтального полета (мак-
симальной, наивыгоднейшей и экономической скорости), верти-
кальных скоростей набора высоты, скороподъемности, потолка,
Дальности и продолжительности полета.
А Ю
Для расчета полета самолета необходимо зиать его аэроди-
намические характеристики.—характеристики винтов W
поршйёвыхвди реактивных двигателей? Результаты аэродИпдмст-
ческПгсГрасчста з рёшагощёгГстепени зависят от точности опре-
деления этих характ^11'О1Дд-------— "
’ “Методы расчета аэродинамических характеристик, характе-
ристики двигателей изучаются в специальных курсах—теорети-
ческой и экспериментальной аэродинамики, газовой динамики,
теории воздушных винтов и теории двигателей.
В настоящей главе мы напомним лишь основные положения
и представления, необходимые для отчетливого понимания даль-
нейшего материала.
§ 2. Некоторые сведения об аэродинамических
характеристиках
1. Для выполнения аэродинамического расчета из аэродина-
мических характеристик необходимо знать коэфициенты подъем-
ной силы (су) и коэфициенты лобового сопротивления самолета
Эти коэфициенты зависят от формы профиля крыла и от
его удлинения, от формы и угла атаки самолета, от скорости и
высоты полета или от основных критериев аэродинамического
подобия—числа Рейнольдса (Re) и числа Маха (Ма). Зависимость
между сх, су и углами атаки дается, как известно, в виде по-
ляры самолета.
Скорость полета современных реактивных самолетов изме-
няется в пределах от 160—180 км!час до скоростей, близких к
скорости звука.
Специальные летательные аппараты (например, ракеты даль-
него действия) достигли уже огромных скоростей полета (по-
рядка 5000—6000 км) час) и очень больших высот полета (до
100 км).
Таким образом, человечество уже вторглось в самые разно-
образные области скоростей и высот полета, в каждой из кото-
рых действуют различные^законы, управляющие силовым взаимо-
действием между средой и движущимся в ней летательным ап-
паратом.
В дальнейшем будем различать следующие области скоро-
стей полета:
1) область докризисных скоростей полета (область дозвуко-
вых скоростей, Ма < Ма,,,,);
2) область волнового кризиса, или трансзвуковая область
(околозвуковые скорости Макр<Ма<Ч);
3) область сверхзвуковых скоростей полета (Ма> 1).
Эти области показаны на фиг. 1, где приведена типичная
кривая зависимости сх от числа Маха для крыла при а = const
В каждой из этих областей качественная картина явлений раз-
лична.
Кратко рассмотрим особенности этих областей.
2. В первой области скорости полета и местные скорост
потока—дозвуковые, а число Маха полета Деньте критиче
ского числа Маха.
Основная причина возникновения лобового сопротивления
этой области—вязкость среды и в значительно меньшей степей;
—упругость воздуха.
" Вначале, при относительно малых скоростях полета, влиянщ
сжимаемости воздуха пренебрежимо мало; это влияние заметна
более тонкие профили с более задним положением наибольшей
толщины при уменьшении шероховатости и волнистости внешней;
поверхности самолета.
В случае самолета с ВМГ обдувка струей винта способст-
вует более раннему переходу ламинарного пограничного слоя в
турбулентный.
Поляру самолета при числах Маха Ма^Макр можно по-
строить в результате расчета, базирующегося на теории погранич-
ного слоя. Методы расчета и построения поляры самолета „при
Фиг. 1
11
111
На На
"Р
Но?!
от числа Маха около 0,4, и усиливаете
проявляется, начиная
при дальнейшем увеличении скорости полета.
Общее лобовое сопротивление самолета можно рассматривал
состоящим из „сопротивления трения“, „сопротивления давления'
и из индуктивного сопротивления. Для современных самолете,
на малых углах атаки (режим максимальной скорости) npt
Ма < МаЛ/, „сопротивление давления" и индуктивное сопротивле
ние значительно меньше „сопротивления трения", составляя
20 — 30% от общего лобового сопротивления самолета.
Таким образом, основную часть общего лобового сопротив
ления самолета в области докризисных скоростей полета на ма
лых углах атаки составляет сопротивление трения, зависяще;
от структуры пограничного слоя и, следовательно, от формы i
от состояния внешней поверхности и от числа Рейнольдса.
Для уменьшения сопротивления трения необходимо затянуть
переход ламинарного пограничного слоя в турбулентный к зад
ней кромке крыла. Это можно достигнуть путем перехода на
12
докризисных скоростях полета излагаются в специальных мате-
риалах и руководствах, к которым мы и отсылаем читателей |4, о].
3. В области волнового кризиса на поверхности летательного
аппарата возникают местные звуковые и сверхзвуковые скорости,
картина качественно изменяется—возникают скачки уплотнения,
и аэродинамические характеристики претерпевают резкие изме-
нения. При этом с увеличением числа Маха при постоянном угле
атаки сх резко увеличивается за счет волнового сопротивления,
а су вначале несколько возрастает, а затем резко уменьшается.
13
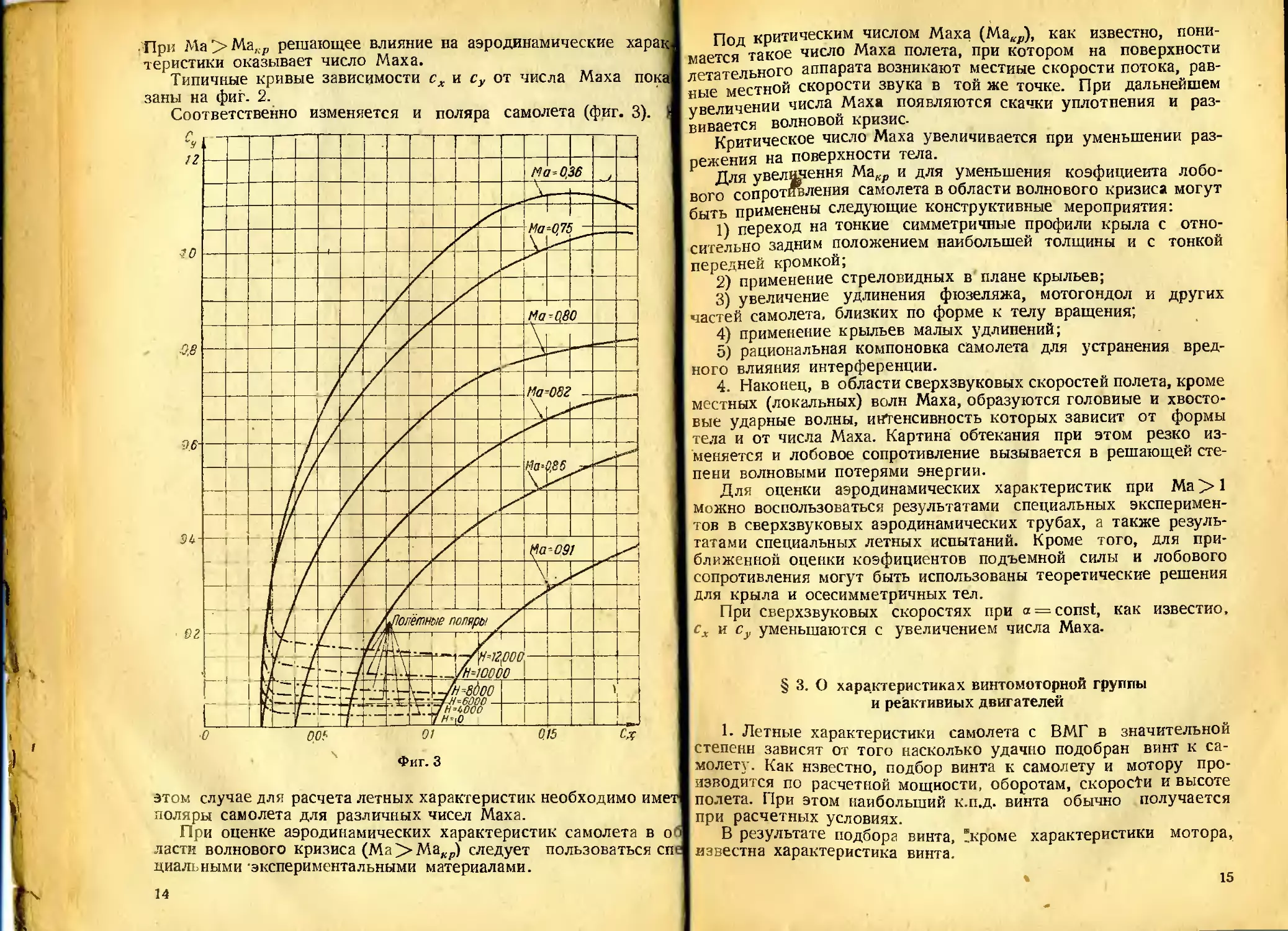
этом случае для расчета летных характеристик необходимо имет
поляры самолета для различных чисел Маха.
При оценке аэродинамических характеристик самолета в о1
ласти волнового кризиса (Ма > Макр) следует пользоваться спе
циальными экспериментальными материалами.
14
Под критическим числом Маха (Ма^), как известно, пони-
мается такое число Маха полета, при котором на поверхности
летательного аппарата возникают местные скорости потока, рав-
ные местной скорости звука в той же точке. При дальнейшем
величении числа Маха появляются скачки уплотнения и раз-
вивается волновой кризис.
Критическое число Маха увеличивается при уменьшении раз-
режения на поверхности тела.
Для увеличения Ма,,р и для уменьшения коэфициеита лобо-
вого сопротивления самолета в области волнового кризиса могут
быть применены следующие конструктивные мероприятия:
1) переход на тонкие симметричные профили крыла с отно-
сительно задним положением наибольшей толщины и с тонкой
передней кромкой;
2) применение стреловидных в плане крыльев;
3) увеличение удлинения фюзеляжа, мотогондол и других
частей самолета, близких по форме к телу вращения;
4) применение крыльев малых удлинений,
5) рациональная компоновка самолета для устранения вред-
ного влияния интерференции.
4. Наконец, в области сверхзвуковых скоростей полета, кроме
местных (локальных) волн Маха, образуются головные и хвосто-
вые ударные волны, интенсивность которых зависит от формы
тела и от числа Маха. Картина обтекания при этом резко из-
меняется и лобовое сопротивление вызывается в решающей сте-
пени волновыми потерями энергии.
Для оценки аэродинамических характеристик при Ma > 1
можно воспользоваться результатами специальных эксперимен-
тов в сверхзвуковых аэродинамических трубах, а также резуль-
татами специальных летных испытаний. Кроме того, для при-
ближенной оценки коэфициентов подъемной силы и лобового
сопротивления могут быть использованы теоретические решения
для крыла и осесимметричных тел.
При сверхзвуковых скоростях при а = const, как известно,
сх и су уменьшаются с увеличением числа Маха.
§ 3. О характеристиках винтомоторной группы
и реактивных двигателей
1. Летные характеристики самолета с ВМГ в значительной
степени зависят от того насколько удачно подобран винт к са-
молету. Как известно, подбор винта к самолету и мотору про-
изводится по расчетной мощности, оборотам, скорости и высоте
полета. При этом наибольший к.п.д. винта обычно получается
при расчетных условиях.
В результате подбора винта, "кроме характеристики мотора,
известна характеристика винта.
» 15
Пользуясь этими материалами, затем можно определить рас относительных тяг в зависимости от скорости при постоянной
полагаемую мощность Мр=Меч, или располагаемую тягу | ьЫСоте и в зависимости от высоты при постоянной скорости
Р=
р
75ЛГд,
Здесь коэфициент полезного действия винта с учетом влня
ния сжимаемости воздуха.
В результате можно построить характеристики винтомотор
ной группы?, в виде кри
вых Np—f(V) или Рр =
=f(V) для различны:
высот (фиг. 4).
Заметим, что тяга вин
та с увеличением скоро
сти полета уменьшается
2. Характеристики ре
активных двигателей су
щественно отличаются о
характеристик винтомо
торной группы с порв,
невым двигателем. Эт 1
главным образом и при
водит к существенно:
разнице в летиых харак
теристиках реактивны,
самолетов (особенно
ЖРД) по сравнению с лет
ними характеристикам
самолетов с ВМГ.
Основным отличие:
тяговых характеристи:
турбо-компрессорны:
воздушно-реактивны
двигателей (ТКВРД) о
характеристик ВМГ яе
ляется незначительное из
менение тяги при измене
нии скорости и боле<
медленное уменьшен»
тяги при увеличении вы
соты полета. Тяга жид
костного реактивног
двигателя (ЖРД) практг
чески не зависит от ско
рости полета и увеличивается с увеличением высоты.
Для сравнительной оценки тяговых характеристик различны;,
двигательных установок на ьфиг. 5 показаны типичные кривы»
16
полета. Эти особенности тяговых характеристик реактивных
двигателей необходимо иметь в виду при анализе летных харак-
теристик реактивных самолетов.
§ 4. Основные уравнения движения самолета
1. Как уже отмечалось, в аэродинамическом расчете рас-
сматривается плоское симметричное движет е самолета.
При таком движении центр тяжести самолета перемещается
ио траектории, лежащей в продольной плоскости симметрии
самолета. Это движение в общем случае может быть веустано-
вившимся и криволинейным. Составим основные уравнения та-
кого движения. Для этого предварительно рассмотрим силы,
действующие на самолет. Схема этих сил показана на фиг. 6.
На самолет, перемещающийся относительно воздуха с иекото
рой скоростью V, действуют силы: сила тяги винта или реак-
тивного двигателя Р, подъемная сила крыла У и горизонталь-
ного оперения Уго, лобовое сопротивление самолета X, сила
веса самолета G.
Сила тяги винта или реактивного двигателя в аэродинами-
ческом расчете принимается действующей по оси винта нлн ре-
активного двигателя, не проходящей в общем случае через центр
тяжести самолета1).
) На самом деле, при несовпадении оси винта или реактивного двигателя
с направлением полета, тяга винта или реактивного двигателя (ТКБРД) не
совпадает с направлением их осей и это учитывается при расчете устойчи-
вости и управляемости самолета. “ 1 ----*-----—---
2 Е. Торба
ify.
г ГЯф
।
Величина тяги зависит от режима полета, который характе-
ризуется углом наклона траектории 6, углом атаки самолета
(крыла) а и скоростью полета V. При этом величина тяги винта
или реактивного двигателя, потребная для полета на заданном
режиме, регулируется посредством дросселирования в пределах
возможных для данного двигателя.
Сила тяги направлена под углом а + ? к направлению движе
ния (к траектории центра тяжести самолета). Здесь <р — угод
установки оси винта или реактивного двигателя по отношении
к хорде крыла, расположенной в свою очередь под углом атакг
а к направлению движения. Заметим, что угол между хордо/
крыла и продольной осью самолета называют углом установи
Фиг. 6
крыла аус„. Как правило, аует = const, а угол атаки а в процесс
полета может изменяться по усмотрению летчика посредство!
отклонения ручки управления и, следовательно, руля высоты
При этом на горизонтальном оперении возникает дополнителг
ная подъемная сила и момент относительно поперечной оси с i
молета; под действием этого момента и происходит изменени
угла атаки.
Подъемная сила крыла направлена по нормали к траекторш
движения центра тяжести самолета и приложена в центре дав
ления, не совпадающем в общем 'случае с центром тяжести с i
молета. Величина подъемной силы определяется, как известно
по формуле
Y=0,5cj>VaS.
Подъемная сила горизонтального оперения приложена в центр
давления горизонтального оперения. Величина ее регулируете
посредством отклонения руля высоты из условий балансировк!
(уравновешивания) самолета на заданном режиме полета. Это'
18
вопрос подробно рассматривается при расчете продольной устой-
чивости и управляемости самолета.
Подъемная сила горизонтального оперения и остальных частей
самолета по сравнению с подъемной силой крыла мала. Поэтому
.. аэродинамическом расчете общая подъемная сила самолета
приближенно принимается равной подъемной силе крыла ’).
Лобовое сопротивление самолета направлено по траектории
против движения самолета и приложено в центре давления. Ве-
личина лобового сопротивления определяется, как известно, по
формуле:
X — 0,5слРИ5.
Напомним, что общий коэфициент лобового сопротивления
самолета сх складывается из коэфициента профильного сопро-
тивления крыла схр, из коэфициента индуктивного сопротивле-
ния с„ и из коэфициента вредных сопротивлений схар, а при
Ма > Маь(, необходимо еще учитывать коэфициент волнового со-
противления сл,-
Таким образом,
сл — схр++ схвр 4- схе.
Коэфициент профильного сопротивления зависит от формы
профиля крыла, от состояния поверхности, от числа Рейнольдса
и от числа Маха (учет влияния сжимаемости воздуха).
Коэфициент индуктивного сопротивления пропорционален
квадрату коэфициента подъемной силы и обратно пропорционален
удлинению крыла и выражается формулой:
ч — поправка йа влияние формы крыла в плане.
На угле атаки, соответствующем максимальному качеству
/ cv \
:амолета I I , как известно из экспериментальной аэродина-
С* max
мини, коэфициент индуктивного сопротивления равен сумме
□эфициентов профильного и вредных сопротивлений, т. е.
Сх1 — схр + с хер'
4то, конечно, в случае, когда Ма<Ма,,р, т. е. при =
Коэфициент вредных сопротивлений представляет сумму
-□эфициентов лобового сопротивления всех частей самолета,
) Однако при сравнительной оценке различных схем самолетов, в част-
ости, следует брать во внимание и подъемную силу от горизонтального
оперения. Например, при посадке самолета нормальной схемы, вследствие
• склонения руля -высоты вверх, общая подъемная сила самолета уменьшается,
при посадке самолета „утка*, вследствие отклонения руля высоты вниз.
ДОщая подъемная сила увеличивается.
19
кроме крыла. При этом все коэфициенты относятся к площади
крыла.
Эти коэфициенты зависят от внешней формы соответствующе
части самолета, находящейся в потоке, от числа Рейнольдса i
от числа Маха. ।
Коэфипиент волнового сопротивления зависит от числа Мах
и приближенно определяется по формуле Христиановича: (
с„~Л(Ма-Мак,,)а. j
Здесь А ~ 7—12 для профилей толщиной соответственно 144 10%
Расчет по этой формуле является прикидочным, а сама формул
применима до чисел Маха Ma^MaK/,+0,l. При более точны
расчетах для определения с„ необходимо пользоваться специал>
нымы экспериментальными материалами.
2. Уравнения движения самолета получим из условия ракш
весия сил и моментов, действующих на него в симметрично
полете. При этом условие равновесия сил сводится к равенстт
нулю суммы проекций сил на две взаимно перпендикулярнь
оси, а условие равновесия моментов сводится к равенству нул
суммы моментов относительно заданной оси. За оси коордищ
в аэродинамическом расчете удобно взять поточные оси с и
чалом координат в центре тяжести самолета. При этом ось х-с
направлена вперед по скорости полета, а ось у-ов— вверх I
нормали к траектории (фиг. 6).
При симметричном движении самолета (без крена и скол
жения) неуравновешенные моменты возможны только в продол
ной плоскости, т. е. относительно поперечной оси z, направле
ной по размаху крыла *). Поэтому условие равновесия моменте
запишется в виде равенства нулю суммы моментбв сил относ
тельно поперечной оси самолета.
Таким образом, условия равновесия самолета в симметричнс
полете можно представить в виде трех уравнений:
Pcos(a+4>) — X— GsinO--------——=0; (
, g dt
K+7’sin(a + 9) — G cos в—17-—=0; (
i) Влияние гироскопического момента винта при неустановившемся крмя
линейном движении самолета здесь не учитывается.
20
G dV
Здесь: — —тангенциальная сила инерции;
Ci db G V2 -
cL- i/_- =--------центрооежная сила инерции;
a dt g г
^Мг—сумма моментов аэродинамических сил от-
носительно поперечной оси Z, проходящей
через центр тяжести самолета;
Л—момент инерции самолета относительно по-
перечной оси z\
—угловая скорость вращения самолета.
Последнее уравнение (3) представляет условие равновесия
моментов сил, действующих на самолет. Это уравнение подробно
анализируется во второй части курса „Аэродинамика ‘ самолета"
при изучении продольной устойчивости и управляемости.
В аэродинамическом расчете принимается, что самолет упра-
вляем на всех режимах полета, т. е. усилия на ручке управления
и углы отклонения руля высоты таковы, что летчик имеет воз-
можность обеспечить равновесие продольных моментов на всех
углах атаки, скоростях полета и углах наклона траектории к го-
ризонту.
Первые два уравнения (1), (2) являются основными уравне-
ниями движения самолета, которые подробно изучаются в аэро-
динамическом расчете. К анализу этих уравнений в применении
к типовым случаям полета самолетов с различными двигателями
мы и перейдем.
ГЛАВА II
ГОРИЗОНТАЛЬНЫЙ ПОЛЕТ САМОЛЕТА
§ 5. Уравнения горизонтального полета
1. Как уже отмечалось, в общем случае горизонтальный полет
возможен только при переменном угле атаки, вследствие умень-
шения веса самолета из-за расхода горючего, на котором рабо-
тает двигатель. *)•
В случае самолетов с поршневыми или с турбокомпрессорными
воздушно-реактивными двигателями (ТКВРД) изменение веса за
счет расхода горючего получается сравнительно небольшим. Как
показывают расчеты, вес самолета истребителя с поршневым
дви гелем за одну минуту на режиме максимальной скорости
уменьшается примерно на 0,1%, а вес реактивного самолета
В аэродинамическом расчете рассматривается движение самолета отно-
ительно воздуха, находящегося в покое, т. е. в стандартной атмосфере без
восходящих или нисходящих токов воздуха.
21
с ТКВРД при тех же условиях уменьшается примерно на 0,5%
Поэтому можно принять - Ои тогда горизонтальный полы
самолета при постоянной тяге и угле атаки можно рассматривай
как установившееся движение, что обычно и принимается
в аэродинамическом расчете.
Допущение-^- = О при a = const находится в пределах точ-
ности исходных ма!ериалов, положенных в основу аэродинами-
ческого расчета (аэродинамические характеристики самолет
характеристики винта, двигателей и другие).
Это же допущение, с известным приближением, может быть еля, потребной для горизонтального полета:
принято и для реактивных самолетов с жидкостно-реактивными
двигателями (ЖРД). Целесообразность такого допущения и дли
самолетов с ЖРД оправдывается необходимостью сравнительна
оценки, например, максимальных скоростей горизонтально] (
полета самолетов с различными двигателями. При допущенв!
-^- = и максимальную скорость горизонтального полета самолета
с ЖРД следует рассматривать как скорость при заданной
весе в течение короткого отрезка времени.
При более точном расчете горизонтальный полет самолет!
с ЖРД при постоянной тяге следует представлять как неуста
иовившееся движение (разгон) с переменным углом атаки. Эи
задача рассматривается в третьей части курса — в динамим
полета.
о ы dV „
2. Итак, принимая = 0 и учитывая, что при горизонтал
ном полете 0 = 0, из уравнений (1), (2) получим уравнения гор]
зонтального установившегося полета в следующем виде:
Р cos (a + <р) — X = 0; t4
X4- Psin(a 4- a>)— G = 0. (5
Эти уравнения для целей аэродинамического расчета можно упро
стить.
В самом деле, угол атаки а в нормальном горизонтально»*
полете, особенно на больших скоростях, невелик, а угол <р бли-
зок к нулю и часто отрицательный. Учитывая это, можно при-
нять cos (а 4- ср) « 1, а sin (а + у) ~ 0, т. е. можно принять, что
тяга винта или реактивного двигателя направлена по траектории.
Тогда уравнения горизонтального установившегося полета прг
нимают еще более простой вид:
Р Х=0; (6,
У—0=0. (7
Таким образом, для установившегося горизонтального полета
еобходимо, чтобы тяга винта или реактивного двигателя равня-
лась лобовому сопротивлению самолета, а подъемная сила—весу
самолета.
§ 6 Тяга и скорость, потребные для горизонтального полета
1 Для определения тяги и скорости, необходимых для обес-
печения установившегося горизонтального полета на заданном
’ е атаки, воспользуемся уравнениями (4), (5). Из уравнения
, 4> получим выражение для тяги винта или реактивного двига-
' ____ппа ГППГПЛПТЯ ПТМПГЛ ПЛЛАТЯ '
р = X
" cos (и + <?) '
Подставляя это выражение в уравнение (5), получим:
Y 4- Xtg(a + $>) —0 = 0
(8)
(9)
O.Sc^pV’S + O.b^pV’Stgfc + «р)~0 = 0,
откуда скорость, потребная для горизонтального полета-
Выражение (8) для потребной тяги можно представить в другом
виде.
Из уравнения (9) следует:
0= У + Atg(a 4-®). (Н)
Разделив (8) на (11), получим:
Ь - 2L 1_____________
О ~ У Г , ч х . . .
cos (a -t- <f) + у sin(a-|-<p)
или L
_______________1_____________
(j q Г £ 3 ’
y cos (a + ?) + “Г Sin (a + 9)
I cy
откуда
Р„ = о ь----------------L------------ . (12)
y COS (a 4- <p) 4-- sin (a 4- <?)
Cj,
22
23
2. Выражения (8), (10), (12) можно значительно упростить, есл
принять
cos (к + <р) х 1, sin (а 4' у) » 0.
Тогда
Р„ = АЛ = 0,5схр1/2.5 (1
или
(1
Формулы (13), (14), (15) вытекают, очевидно, непосредственно и >
уравнений (6), (7).
Ошибка, которая получается при расчете по формулам (13
(14), (15) по сравнению с расчетом поточным формулам(8),(10), (Г.
не превышает 1—2°/0.
Выражения (13), (14), (15) для потребных тяги и скорости по:
воляют сделать следующие выводы:
1) Тяга, потребная для горизонтального полета, пропорцш
нальна весу самолета и при заданном весе G с изменением угл
атаки изменяется так же, как и обратное аэродинамическое кач<
ство самолета — (см. формулу 14).
При М;Г>Макв аэродинамическое качество на заданном ум
атаки существенно уменьшается с ростом скорости, что вызывав
резкое увеличение потребной тяги.
2) Минимум потребной тяги соответствует максимуму аэрс
динамического качества самолета j или наивыгоднейшем
углу атаки (кяо,„), при котором Существенное значение имее
индуктивное сопротивление (см. § 4).
3) В докризисной области скоростей полета (Ма < Ма р) пр
постоянном угле атаки и весе самолета тяга, потребная дл
горизонтального полета, не зависит от высоты (см. формулу 14
В области волнового кризиса (Ма > Мавр) при тех же усл >
виях тяга, потребная для горизонтального полета, изменяете
с изменением высоты. При этом с увеличением высоты полег
уменьшается скорость звука, усиливается влияние сжимаемое,
воздуха, аэродинамическое качество самолета уменьшается i
следовательно, при а = const увеличивается потребная тяга. Tai
будет до высоты Н— 11000л по международной стандартно!
атмосфере (MCA). При Н > 11000 л температура воздуха, а ели
довательно, и скорость звука — постоянны, поэтому вновь пр!
a —const и O = const потребная тяга не зависит от высоты полем
*24
4) Скорость, потребная для горизонтального полета, пропор-
циональна нагрузке иа квадратный метр площади крыла
1 степени 1/2 и увеличивается при уменьшении коэфициента
I одъемной силы су или при уменьшении угла атаки; при увели-
чении угла атаки, наоборот, скорость, потребная для горизон-
тального полета, уменьшается (см. формулу 15). ,
5) С изменением высоты скорость, потребная для горизон-
иного полета, при а = const также изменяется. При увеличе-
ши высоты потребная скорость увеличивается. В области докри-
зисных скоростей полета (Ма<Ма,./;) это имеет место за счет
уменьшения плотности воздуха р; в области волнового кризиса
Ма > Ма,..) вследствие совместного влияния уменьшения плот-
ости воздуха и изменения коэфициента подъемной силы при
= const (см. § 2).
§ 7 Расчет и анализ горизонтального полета по кривым
потребных и располагаемых тяг
1. Общая задача расчета горизонтального полета сводится
решению следующих частных: 1) определение зависимости
отребных тяг от скорости полета; 2) определение скоростей
равных режимов горизонтального полета; 3) определение диапа-
эна скоростей полета от минимальной до максимальной.
Для решения этих частных задач удобно воспользоваться
рафо-аналитическим методом, основанным на сравнении кривых
ависимости потребных и располагаемых тяг от скорости
полета.
Напомним, что под потребной понимается тяга, необходимая
ля преодоления лобового сопротивления самолета в установив-
аемся горизонтальном полете на заданном угле атаки, а под
асполагаемой понимается тяга, фактически развиваемая винтом
«ли реактивным двигателем при заданном положении сектора
аза (степени дросселирования) В аэродинамическом расчете
бычно пользуются кривыми располагаемых тяг при работе
двигателя на номинальной мощности (ВМГ) или тяге (РД).
2. Для построения кривой потребных тяг предварительно не-
обходимо выполнить расчет потребных тяг и скоростей по фор-
мулам (14), (15). Этот расчет удобно вести по одной из следую-
щих схем в зависимости от величины скоростей полета (чисел
Маха)
1) При докризисных скоростях полета (Ма<Макр) расчет
’едется по схеме, указанной в таблице 1. В этом случае при-
одится пользоваться обычно одной полярой самолета.
2) При больших скоростях полета, когда Ма)>Макр и суще-
лвенно проявляется влияние сжимаемости воздуха, расчет удоб-
iee вести по схеме, указанной в таблице 2.
25
В этом случае приходится уже пользоваться полярами
лета для нескольких значений числа Маха.
Т а б л и
Примечание
су
СХ
СУ
сх
Рп
1Z„ м/сек
У„ км/час
Расчет ведется по су
2G coAst
V»= *
V„ км/час = 3,6 l/„ м/a
Таблиц
cy
0,04
0,08
0,12
Примечание
V„ м/сек
Ma
Су
Су
Vn км/час
V,
>/ 2G const
Cj,pS ~~ Г Су
Ма= —
Определяется по „полесие,
поляре для соответствуют!
G
ух, су и Ма
-Pn = G^
СУ
V,, км/час — 3,6 V м/сек.
Так как расчетные числа Маха обычно не совпадают с
лани Маха,
для которых даны поляры самолета, то приходите
определять сх интерполированием по су и расчетному Ма, чт
снижает точность всего расчета. Для повышения точности ра<
чета удобно предварительно построить так называемые „поле
ные“ поляры для заданных высот. Для построения „полетной
поляры необходимо воспользоваться связью между су и числ
Маха в полете.
Как известно, для горизонтального полета необходимо:
Г=О
пн
1 суда
О,5сур V2S = О,
- 2G — 20
Су pl/®S pa’Ma=S ’
(16)
По формуле (16) для заданных значений -g-, высоты полета
(О2) и числа Маха определяется су. При этом су находятся
ля чисел Маха, для которых имеются поляры самолета.
Таким образом, на каждой из этих поляр по су будут изве-
гны точки, принадлежащие „полетной" поляре. Кривая, прове-
нная через эти тбчки и является „полетной" полярой самолета.
11 фиг. 3 показаны поляры при Ма = const и „полетные" поляры
G
ля нескольких высот при g- = const.
„Полетными" полярами и следует пользоваться при расчете
о таблице 2.
В результате расчета по таблицам 1 или 2 получается зависи-
ямость потребных тяг Рп от скоростей горизонтального полета.
>та зависимость для некоторого частного случая представлена
виде кривой потребных тяг на фиг. 7. На этой кривой иногда
азмечаются углы атаки.
Как видно по фиг. 7, вначале при увеличении скорости (умень-
шение угла атаки) потребная тяга уменьшается, достигает ми-
имальиого значения, а затем при дальнейшем увеличении ско-
ости—увеличивается.
Такой характер зависимости Pn(V„) объясняется тем, что
начале при уменьшении угла атаки сл уменьшается сильнее,
см су (качество увеличивается), или сх уменьшается сильнее,
ем увеличивается квадрат скорости полета, в результате полу-
"гтся уменьшение лобового сопротивления или потребной тяги,
тем при дальнейшем уменьшении угла атаки (увеличение
'.орости полета) одновременно с ростом квадрата скорости каче-
-во самолета уменьшается —в результате сильное увеличение
отребной тяги. Этот рост потребной тяги при увеличении ско-
ости полета усиливается, особенно для реактивных самолетов,
' ПоДСрВие влияния сжимаемости воздуха и волнового кризиса.
о. Рассмотрим некоторые точки на кривой потребных тяг,
"ответствующие главным режимам горизонтального полета.
предварительно на кривую потребных тяг (Р„) наложим кри-
ую максимальных располагаемых тяг винта или реактивного
вигателя (Рр). Эти кривые для различных двигателей показаны
27
Очевидно, что точки пересечения кривых потребных и рас . этом См. в главе VII). Однако для реактивных самолетов, как
лагаемых тяг, когда Рр — РП, соответствуют максимальной в т показано в главе VIII, режим наибольшей дальности су-
можной скорости горизонтального полета, при которой тяга, р ^„ственно отличается от режима полета с минимальной тягой,
виваемая винтом или реактивным двигателем, полностью испц г —„юпаиия няивыглгтнейптий” тепяет смысл в ппп-
зуется для преодоления лобового сопротивления самолета.
По фиг. 8 видно, что, вследствие особенностей протек»!
тяговых характеристик реактивных двигателей, максималь!
скорость реактивных самолетов с той же аэродинамикой, чт, ^невозможную минимальную ..скорость горизонтального по-^
самолетов с ВМГ, оказывается значительно больше. Если - ------- — ° *"* 17
учесть что реактивные самолеты, как правило, в аэродина
-пет показано в главе VIII, режим наибольшей дальности су-
’ этом случае название „наивыгоднейший” теряет смысл. В прп-
енении к реактивным самолетам этот режим мы будем назы-
режимом горизонтального полета с минимальной тягой.
Пользуясь кривой потребных тяг, можно определить теорети-
ка*1 как это показансГна “фиг. 8’”Очевидно^ что П^ соответ-г—Г-
^вует Сутах или критическому углу атаки акр и определяется
и формуле:
ческом отношении более совершенны, то эта разница окаже
, еще больше.
]В дальнейшем режим полета, соответствующий точке пере
чения кривых потребных и располагаемых тяг будем назыв;
режимом максимальной скорости горизонтального полета.
Далее, минимальная тяга, потребная для горизонтального
лета, определяется по минимуму кривой потребных тяг (фиг.
Как уже отмечалось, этот минимум будет при максималы
аэродинамическом качестве, т. е. при наивыгоднейшем угле ат
J Режим горизонтального полета с минимальной тягой п
У ятУиаЗЫйат'ь наивыгоднейшйьТГ^ скорость полета на анаиа—и
выгоднейшей скоростью V„auo.
Для самолетов с винтомоторной группой этот режим бли
к режиму полета с минимальным километровым расходом го[
чего, т. е. к режиму наибольшей дальности полета (подрой
28
(17)
Горизонтальный полет на VMi„ или на акр возможен, но опа-
ен, так как при незначительном увеличении угла атаки, вслед-
внешних возмущений, произойдет потеря подъемной силы
твие внешних возмущений, произойдет потеря подъемной силы
1 скорости с переходом самолета в штопор. Особенно опасно
'ТО ПРИ полете на небольшой высоте. Поэтому нормально по-
лет на Vmin недопустим.
29
Практически допустимая минимальная скорость горизонта!
ното полета больше теоретической минимальной скорости и 1
ответствует примерно экономическому углу атаки или эконоа
ческому режиму полета, о котором более подробно будет q
зано в следующем параграфе.
4. В нормальном горизонтальном полете на заданной вьцм
каждому углу атаки соответствует вполне определенная cJ
рость полета. При этом с уменьшением угла атаки (ручка ]
себя") скорость увеличивается, а при увеличении угла ат1
(ручка „на себя”), наоборот, скорость уменьшается.
Для изменения скорости горизонтального полета необходи
одновременно изменять положение сектора газа и ручки уп
вления рулем высоты в соответствии с потребной тягой и d
ростыо. Таким образом, при горизонтальном полете в диапа.тс
скоростей от практически допустимой минимальной до мак<
мальной тяга, развиваемая винтом или реактивным двигателе
должна изменяться так же, как и потребная тяга. Достигается э
за счет дросселирования двигателя.
Очевидно, что если тяга, развиваемая винтом или реакт:
ным двигателем, окажется больше или меньше по сравнен!
с потребной, то условие равновесия сил нарушается. В резу;
тате чего при Рр~>Рп самолет перейдет на полет по наклони
траектории с набором высоты, а при Рр<Р„,—со снижением,
В заключение этого параграфа заметим, что метод расче
по располагаемым и потребным тягам удобно применять ц
расчета летиых характеристик реактивных самолетов, когда :
рактеристика двигателя представляет собой кривую располап
мых тяг по скорости.
§ 8. Расчет и анализ горизонтального полета >ло кривым
потребных и располагаемых мощностей
1. В ряде случаев, особенно для самолетов с винтомоторн
группой, удобнее расчет горизонтального полета выполнять
потребным и располагаемым мощностям. Мощность, потребг
для горизонтального полета на заданном угле атаки, onpej
ляется следующим образом:
.. _XV_ cjV*S . .
-V„— 75 — 150 [-«.C.] (,
или
л/ - Gysi.
Nr~ 75 cv •
Для целей анализа выражение для потребной мощности удоб
представить в другом виде. х
/ 2G
Подставляя V =|/ — в (19), получим:
-30
м ,Z 2 с* -1 ГЧ
/V ---- ---=—.. I I /а
" 75 сЪ y^SU
£20) у
формулы (18), (19), (20) позволяют сделать ряд важных выводов.
1) Мошность, потребная для установившегося горизонталь-
0' полета при постоянном коэфициенте лобового сопротивле-
\я на заданном угле атаки (Ма<Ма„р), пропорциональна кубу
Серости (см. формулу 18).
’ В области волнового кризиса (Ма > Ма кр) при постоянном
1 ле атаки зависит от числа Маха и изменяется пропорцио-
ильно скорости в третьей и выше степени (см. § 2). Поэтому
ион Ма>Ма„р потребная мощность изменяется значительно
-ильнее с изменением скорости по сравнению с изменением по-
гребной мощности в докризисной области (Ма < Ма „Д
2) Мощность, потребная для горизонтального полета, пропор-
। локальна весу самолета в степени 3/2 и при заданном весе Q
, шеияегся с изменением угла атаки так же, как и -я- (см.
СУ
нормулу 20).
с
Величина —называется аэродинамическим коэфициентом
cy4 s
1ОЩНОСТИ. с
При Ма>Мак„ с увеличением скорости —быстро увели-
су *
I авается при а — const, что вызывает резкое увеличение потреб-
уй мощности.
3) Минимум потребной мощности соответствует минимуму
гэродинамического коэфициента мощности, т. е. (—1г ) Угол
' Су / min
ггаки, при полете иа котором требуется минимальная мощность,
изывается экономическим углом атаки.
4) С изменением высоты полета при а = const и при const
Су
отребная мощность изменяется так же,, как и потребная ско-
юсть (см. формулу 19 и § 7): При Ма/>Макр с увеличением
г*соты потребная мощность при а = const увеличивается до-
Q
'-пнительно за счет увеличения из-за влияния сжимаемости
’-'здуха. Су
Заметим, что формула (19) обычно применяется для аэроди-
«мического расчета, а формулы (18), (20) — для анализа.
Приближенный метод расчета горизонтального полета по
,'°РмУлам (15), (18), (19), (20) обычно называют методом мощностей,
этом методе, следовательно, принято допущение а + <f ~ 0,
п5‘ пРииято, что тяга винта или реактивного двигателя напра-
г на по траектории. Метод расчета горизонтального полета
тягам (д 7) является видоизмененным методом мощностей.
31
При значительной величине а + <? необходимо пользовал
более точным методом расчета. Таким методом является мет
тяг, предложенный Н. Е. Жуковским. Этот метод излагает
в главе VI.
3. Задача ^расчета^горизонтального полета по мощностям q
дится к определению зависимости потребной мощности от с . режимов горизонтального
рости полета и к определению скоростей главных режимов roj )лета на кривую потребных
ли увеличении скорости рост потребной мощности усили-
1ется, особенно для реактивных самолетов, вследствие влияния
кимаемости воздуха и водно-
го кризиса.
4. Для расчета скоростей глав-
/W —
3000 —
зонтального полета по кривым потребных и располагаемых мс
костей.
Для построения кривой потребных мощностей предв i_
тельно необходимо выполнить расчет по формулам (15), (1
Этот расчет удобно вести по одной из нижеследующих с.ч
в зависимости от величины скоростей полета (чисел Маха).
1) При докризисных скоростях полета (Ма < МаАр) расчет
дется по схеме, указанной в таблице 3. В этом случае аэродп ется по формуле:
мические коэфициенты сх и су определяются по одной поляр
,щностей необходимо наложить
швую располагаемых мощно-
ей винта или реактивного дви-
неля. Эти кривые для различ-
jx двигателей показаны на
иг. Ю. Располагаемая мощность
активного двигателя опреде-
Таблиц
Ыр = Д£-[л.с.]. (21)
2000
1000
WO
600V"fH
Фиг. 9
, у мощность иногда называют
Примечание I , овой ЫОЩНостыо. Как видно пофиг. 10, мощность реактивных
------------—1 шгателей с увеличением скорости увеличивается, а располагае-
_ ] 1Я мощность винтомоторной группы сначала увеличивается,
затем уменьшается с увеличением скорости. Мощность жид-
Таблица 4
V,, м/сек
N„
Vn км/час
/ 2G £?nst
Ил = V v,s~ = |/>7
__GV„ cj.
~ 75 cy
V„KM/4ac — 3fiVn м/сек
Cy 0,04
1л м/сек
Ma
0,08 ОД 2 и т. д.
Примечание
2) При Ma > Ma, 0, когда существенно проявляется влиян
сжимаемости воздуха на аэродинамические характеристю
расчет удобно вести по схеме, указанной в таблице 4. В эт
случае следует пользоваться „полетными" полярами (см. § 7),
В результате расчета по таблицам 3 или 4 получается зап
симость потребных мощностей 7V„ от скорости горизонтально
полета. Эта зависимость для некоторого частного случая пр<
ставлена на фиг. 9. На этой кривой так же, как и на кр щ
потребных тяг, иногда размечают углы атаки а.
Кривая потребных мощностей подобна по своему виду криз
потребных тяг (см. § 7).
32 •
км/час
Е. Торба
V —1 f *6 _ const
" V Cy'.S
Ма=—
а
Определяется по „полетной"
поляре для соответствующих
~ / су и Ма
S *
N
" 75 су
V„ км /час "3,6 V„ м/сек
33
костно-реактивного двигателя (ЖРД) с увеличением скоро
неограниченно увеличивается.
По точке пересечения кривых потребных и располагаем
мощностей, когда = определяется максимальная возм<
ная скорость горизонта
Фиг. 10
ного полета.
По фиг. 10 видно, |
максимальная скорость
ризонтального полета ре
тивных самолетов ока
вается больше, чем V
самолетов с ВМГ с той
аэродинамикой. Это объ
няется особенностями х»р
теристик реактивных дьи
телей.
Минимальная мощное
потребная для горизонта
ного полета, определяем
по минимуму кривой
требных мощностей. Э'
минимум соответству
(-^я) ИЛИ ЭКОНОМИ
скому углу атаки атск.
жим полета на авкт прин;
называть экономическим, а скорость полета — экономически
Полет па экономическом угле атаки близок к режиму по.Л
с минимальным часовым расходом горючего, т. е. к режи
с наибольшей продолжительностью полета (глава VII).
По кривой потребных мощностей можно определить так
и наивыгоднейшую скорость V„aua, при полете иа которой г
буется минимальная тяга (§ 7).
Очевидно, PnraiB=(75^-) Следовательно, точка, coon
v ' min
ствующая определяется по точке касания луча, провед
ного из начала координат (17=0, Л/п = 0) с кривой потреби
мощностей, так как тангенс -угла наклона этого луча к i
N
абсцисс равен (фиг. 10).
Как видно по фиг. 10, VHau.> т. е. я3..о„>анаи,.
Таким образом, скорость горизонтального полета с ми
мальной тягой оказывается больше скорости полета с минима
ной мощностью. Другими словами, режим наибольшей дально
полета будет при скорости большей, чем скорость при наибо
шей продолжительности полета.
Экономическая скорость, как уже отмечалось (§ 7), по ус
лиям безопасности принимается за практически допустимую ми-
имальную скорость горизонтального полета.
Очевидно, что по кривой потребных мощностей можно также
определить и теоретически возможную минимальную скорость
горизонтального полета
Для изменения режима полета необходимо одновременно
зменять положение сектора газа и ручки управления рулем
ысоты в соответствии с изменением потребной мощности и
корости, как это видно по кривой потребных мощностей.
При этом в диапазоне от VfKOH до Vmax для увеличения ско-
рости полета необходимо отклонить ручку „от себя' и увели-
чивать мощность, развиваемую двигателем, а при уменьшении
горости, наоборот, тянуть ручку „на себя" и уменьшать мощ-
ность, развиваемую двигателем посредством его дроссели-
рования.
Если i\Tf>Nn, то-самолет перейдет на полет по наклонной
траектории с набором высоты, а при Nf<Nn—со снижением.
§ 9. Скорость, тяга и мощность, потребные для горизон-
тального полета на различных высотах
1. Для горизонтального установившегося полета на различных
осотах на заданном угле атаки (<z = const) в общем случае тре-
буются различные скорость, тяга и мощность.
Это объясняется изменением плотности воздуха и скорости
пука с изменением высоты, а следовательно, различным прояв-
1йиием сжимаемости воздуха на различных высотах.
Кроме того, при подъеме с одной высоты на другую изме-
яется вес самолета за счет расхода горючего. Особенно суще-
гвенно проявляется это в случае реактивных самолетов с ЖРД.
1оэтому при рассмотрении горизонтального полета таких само-
етов на различных высотах необходимо учитывать изменение
1Х веса в процессе подъема.
Таким образом, говоря о влиянии высоты полета, мы будем
величать четыре случая:
1) Полет происходит на скоростях, соответствующих Ма < Макр,
- <- в докризисной области, когда ори а = const можно считать
. — const, сх~ const. Вес самолета при этом принимается по-
гояиным. г
Р°^ет происходит на скоростях, соответствующих Ма > Ма,.р,
амйчес ЛЭСТИ волнового кризиса, когда при а = const аэродн-
ения тго хаРактеРистики самолета претерпевают резкие изме-
ой высотИЗМрНении числа Маха или скорости полета на задан
, е’ Вес самолета при этом также принимается по-
1 -ллИНЫМ,
о пп!?^ЛТ пР°исх°Дит на скоростях, соответствующих Ма < Ма„„,
° При Ручном весе на различных высотах.
3'
35
4) Полет происходит на скоростях, соответствующих Ма > Ма
и при различном весе иа различных высотах.
Рассмотрим более подробно эти типичные случаи.
2. При полете в докризисной области на заданном угле ата
при G = const влияние изменения высоты будет проявлять
только через изменение плотности воздуха. Как же при эт
будут изменяться потребные для горизонтального полета ci
рость, тяга и мощность?
Потребная скорость на высоте Н определяется следуюш.1
образом:
^>=1/T~s ’
ИО
РН=РоД.
где
Д=
Ро
следовательно,
Чип» — Ч(о) j/^'д' 11
Таким образом, в докризисной области скорость, потреби
для горизонтального полета на высоте Н, больше скорое!
потребной для горизонтального полета при том же угле ат.н
на высоте Н— 0 в раз.
Для сохранения скорости горизонтального полета постояв и
на различных высотах необходимо с увеличением высоты у|
личивать угол атаки.
Тяга, потребная для горизонтального полета на высоте И'. 1
Дл(«) — — О,5слрс |S = Pr(IS),
или
РМ —р г ~
су
Таким образом, в докризисной области тяга, потребная V
горизонтального полета на заданном угле атаки, как уже oim
чалось (§ 7), не зависит от высоты полета.
Мощность, потребная для горизонтального полета на высоте |
Откуда следует, что в докризисной области мощность,
требная для горизонтального полета на высоте Н, больше м'Я
36
осТн потребной для горизонтального полета при том же угле
атаки на высоте /7=0 в Раз> т' е- изменяется с высотой
1вь же, как и потребная скорость.
На фнг. П показаны типичные кривые зависимости потреб-
ил тяги и мощности от скорости полета для двух высот при
Ма Ма,(₽ и G = const.
3 При полете на скоростях, соответствующих Ма > Ма„р,
влияние изменения высоты проявляется через измеиеиие плот-
Фиг. И
Фиг. 12
ностн воздуха и через изменение влияния сжимаемости воздуха.
Как известно, с увеличением числа Маха в области волнового
кризиса (Ма > Макр) су
уменьшается при a =const, Рпкг
а быстро увеличивает-
ся (см. §2).
В итоге при увеличе-
нии высоты скорость, по-
гребная для горизонталь-
ного полета на заданном
угле атаки при G=const,
увеличивается за счет
уменьшения р и с „ по-
гребная тяга при этом
увеличивается значитель-
УмееьИЛЬНее’ БслеДствие
гочкаШеНИЯ аэРодинамического качества самолета. В результате
соответствующая заданному углу атаки, перемещается
Очеви ВВерХ’ как это показано на фиг. 12.
полета 410 м°Щность, потребная для горизонтального
высоты б^3аДанном угле атаки ПРИ Ма>Макр с увеличением
удет сильно увеличиваться за счет увеличения потреб-
37
ной тяги и скорости (фиг. 13). Характер указанных изме|
иий в величинах потребной скорости, тяги и мощности завис
от особенностей влияния сжимаемости воздуха (числа Маха)
аэродинамические характеристики самолета.
4. С уменьшением веса самолета, при полете на заданы
высоте и угле атаки в докризисной области (при а. — const.
су — const, сх = const), потребные скорость тяга и мощное
уменьшаются.
Из выражений (14), (15), (19) при Н= const и a=const о»
видно:
Таким образом, при а = const, Н= const скорость, потребная
Фиг. 13
кривая опускается и несколько
зано на фиг. 14.
горизонтального полета, я
меняется пропорционалы
весу самолета в степени 1/
потребная тяга изменяете
пропорционально весу с
молета, а потребная moi
ность—пропорционально з
су самолета в степени 3/
Другими словами, щ
Ма < Макр точка в а крине
потребных тяг или мотп<
стей для заданного угла ат
ки с уменьшением веса с
молета перемещается влев
и сильнее вниз, в итоге вс
сдвигается влево, как это пок
5. При расчете горизонтального полета реактивных самолет э
на различных высотах необходимо учитывать изменение веса з
счет расхода горючего при наборе высоты. Совместное влияни
уменьшения веса и плотности воздуха при увеличении высоп
в докризисной области скоростей полета при a —const мозм
оценить по очевидным формулам:
38
Pn — Р„ (С„ И = 0) ;
(25а)
М,<с„н) =М.(С„ ^(д-) . (26а)
При Ма > Мак/> картина значительно усложняется, вследствие
1имодействия влияний сжимаемости, изменения плотности и
era самолета при изменении высоты полета.
Это взаимодействие оценивается на основе аэродинамического
и счета в каждом конкретном случае.
Заметим, что изменение веса за счет расхода горючего ври
ереходе на различные высоты определяется в результате рас-
ета подъема самолета, о чем подробно будет сказано в приме-
ении к реактивным самолетам в главе III и IV.
§ 10. О показаниях указателя скорости на различных
высотах полета
1. Показания указателя скорости, работающего от трубки
V"
ито, зависят от величины скоростного напора р -j-.
Указатель скорости обычно тарируется при условиях, соот-
тствующих высоте Н=0 по MCA, т. е. при р0 = 0,125.
пели указатель скорости—идеальный прибор, т. е. без по-
с“ П е< ли влияние сжимаемости воздуха мало, то ско-
, по „Указателю скорости V„e оказывается равной истинной
Йстин°нИяиСКОРОСТИ - "а ВЫСОТе И = °-
ли ско Ная воздУшная скорость при Р = ро (на высоте //=0),
нпик-г^.ТЬ- по идеальному указателю скорости называется
окачатг. ,,011 СК0Р°С|ью (Ц), следовательно, V„ =: Ц. Нетрудно
ость по’ ипшчП| П <Ма, р индикаторная скорость или ско-
ых высотах °°РУ С0ХРаняется постоянной при полете на разлнч-
s ч гопмчпин. На |1остоянном угле атаки. В самом деле, из усло-
’ горизонтального полета Y= G или 0,5cjPVsS=G следует,
эв
что при а = const, су — const и величина скоростного напора
храияется постоянной независимо от высоты полета.
Однако при изменении высоты полета плотность воздуха
меняется, следовательно, указатель скорости, протарироваи;
по плотности р0 = 0,125 (Н— 0), будет показывать скорость,
личную от истинной воздушной скорости.
С увеличением высоты плотность воздуха уменьшается,
довательно, при а = const скорость по прибору оказывается м<
ше, чем истинная воздушная скорость. Для определения I
по ~ ]/, при а = const воспользуемся соотношением:
6^
откуда
V„a = Vq/’ .
При полете на больших скоростях давление в критичес
точке трубки Пито (давление, передаваемое через динамичен
часть трубки Пито) вследствие влияния сжимаемости возд
увеличивается.
Это изменение давления можно определить, пользуясь вы
жением для давления в критической точке:
/, Ма2 Ма4 \
Ро — Ра "t" Яеж — Ра Ямж ( "Ь + 4q "Ь • • • 1 »
где п _ р\7г
Янеж — 2 ’
ра—атмосферное давление.
Таким образом, при полете с большой скоростью, когда
щественно проявляется влияние сжимаемости воздуха, скоро
по прибору оказывается больше.
Для определения истинной воздушной скорости по
казанням указателя скорости при точных расчетах необход
вводить ряд поправок на влияние частей самолета на рп
трубки Пито, учитывать инструментальные погрешности г
бора и влияние сжимаемости воздуха. Это производится ка
нове специальной тарировки указателя скорости в лаборато
и при летных испытаниях, например, на „мерной базе*. Мел
тарировки указателя скорости на самолете рассматриваются
четвертой части курса „Аэродинамика самолета"^
§11.0 построении кривых потребных тяг и мощностей
г ля различных высот полета
1. Для определения летных характеристик самолета на ;
личных высотах необходимо построить кривые потребных
или мощностей для этих высот. Данные для такого пострсе'
40
,случаются в результате расчета. При этом возможны четыре
лучая, указанные в предыдущем параграфе. Рассмотрим иеко-
орые особенности построения кривых погребных тяг и мощно-
ей в каждом из этих случаев. 4
2. При Ма < Макл и постоянном весе самолета при
\(ю = Р„.о) = const.
a = const:
Следовательно, для получения кривой потребных тяг в зави-
imocth от скорости для другой высоты Н > 0, необходимо
ривую для Н=0 сдвинуть вправо, увеличив скорость 17„(0) в
Z 1 раз (фиг. 15).
Одиако вместо этого можно оставить одну кривую Р„ = f(V}
ля всех высот, ио дополнительно построить так ”
• ысотный масштаб скоростей.
Этот масштаб стройтся следующим образом.
называемый
Фиг. 1Б
Для ряда высот дается свой масштаб скоростей, как это по-
казано па фиг. 16.
При этом, очевидно, на высоте Н— О истинная воздушная
скорость V = у ~ I/ Значения этой скорости и размечаются
на оси для Н=0.
Для других высот на соответствующей оси размечаются ин-
дикаторные скорости, которые определяются по формуле
41
Таким образом, для различных иысот получаются разлнч
значения индикаторных скоростей при = const. За эти
чения выбираются уже отмеченные на шкале для /7=0
Соединяя кривыми точки равных истинных воздушвых с
ростей, получим сетку кривых—высотный масштаб скорое:
Другими словами, вместо сдвига кривой потребных тяг вп р
при переходе к высоте /7>0 мы сдвигаем оси абсцисс для
ответствующих высот влево на ту же величину, оставляя
всех высот одну кривую потребных тяг. Схема пользования
сотиым масштабом скоростей показана стрелками на фиг. 16.
Высотные масштабы скоростей были предложены Н. Е. >М
ковскнм в работе „Аэродинамический расчет аэропланов"
1917 г. [I].
Высотными масштабами скоростей можно пользоваться тол
при скоростях полета, соответствующих докризисной облас'
когда аэродинамические характеристики самолета еще не д<
терпевают резких изменений.
3. Для построения кривых потребных мощностей для разл I
иых высот при Ма < Мак/, и Q — const воспользуемся форм
ламн: _
Ция) = V„(o) 1/ L ; А^п(И) = ^(о) n/l .
V А УД
По этим формулам видно, что для получения кривой потреби
мощности для высоты /7>0 необходимо каждую точку кри”
для Н=0 сдвинуть вправо и поднять, увеличив при этом V
и JV„(0) в |/ L раз (фиг. 17).
w й
вытекает графический метод построения кривых по-
ОтсюДа ностей для разЛИЧИых высот по кривой для Н—0.
ебиых м ТОЧ1{И> принадлежащие кривым потребных мош-
Очевид ’ алчных высот при а — const будут лежать на
СТеЙ/ичеГпроведеииом изначала координат (!/„=: О, N„ = 0)
Н0М 4KV соответствующую заданному углу атаки при Н=0.
Сложение указанных точек на луче определяется величиной
чиуса-вектора rH~r0 как это показано на фигуре 17,
вытекает из выражений для l7nW) и
4 Пои Ма>Ма„,, и при переменном весе кривые потребных
и мощностей для различных высот строятся в результате
•чета для каждой высоты с учетом влияния сжимаемости воз-
\а и переменности веса самолета. Эти расчеты удобно вы-
гиять по схемам, приведенным соответственно в таблицах 2 и 4.
В случае реактивного самолета с ЖРД, когда необходимо
и гывать изменение веса, расчет горизонтального полета на раз-
чяых высотах, как уже отмечалось, выполняется совместно с
счетом набора высоты (глава IV).
Фиг 1Я
§ 12. Главные режимы горизонтального полета иа
различных высотах
1. Под главными режимами горизонтального полета будем
тимать режимы, соответствующие максимальной скорости
’1ВОХ), наивыгоднейшей ско-
н:ти (VB0„,), или скорости при
нималыюй тяге, и экономн-
ской скорости (1/даож), или
орости при минимальной
>щности, потребной для по-
та.
Скорости главных режимов
ризонтального полета, как
вество, определяются по
чвым потребных и распола-
' МЫХ тяг или мощностей для
огветствующей высоты
При этом максимальная
орость зависит от аэроди-
мического совершенства,
3 и ОТ Эиерговооружен-
амолета или от тяги
1иьшеМ°Й виитом “ли реак-
Двигателем иа задан-
Ис™ Соте- .Уг°л атаки, соот-
•яяется^пб максимальной скорости, с увеличением высоты из-
ооычпо В сторону увеличения. Наивыгодпейшая в
43
экономическая скорости зависят практически только от аэро!
мимических и весовых характеристик самолета. Углы ата|
соответствующие наивыгоднейшей и экономической скорост
с увеличением высоты, при Ма<Ма„р, очевидно, ие изменяют
и эти режимы возможны пбчти до предельной высоты (потол
самолета), на которой возможен полет только на одном режь,
близком к экономическому.
'J5S 2. Таким образом, величина максимальной скорости на разд!
ных высотах определяется из условия Р,,~Рп или Np = N„ и, q
довательио, зависит от особенностей протекания кривых потр-
ных и располагаемых тя,
или мощностей на этих J
сотах. Очевидно, что .чЯ
кривых располагаемых ги
или мощностей существе
ио зависит от типа двея
теля, установленного на :а
молете.
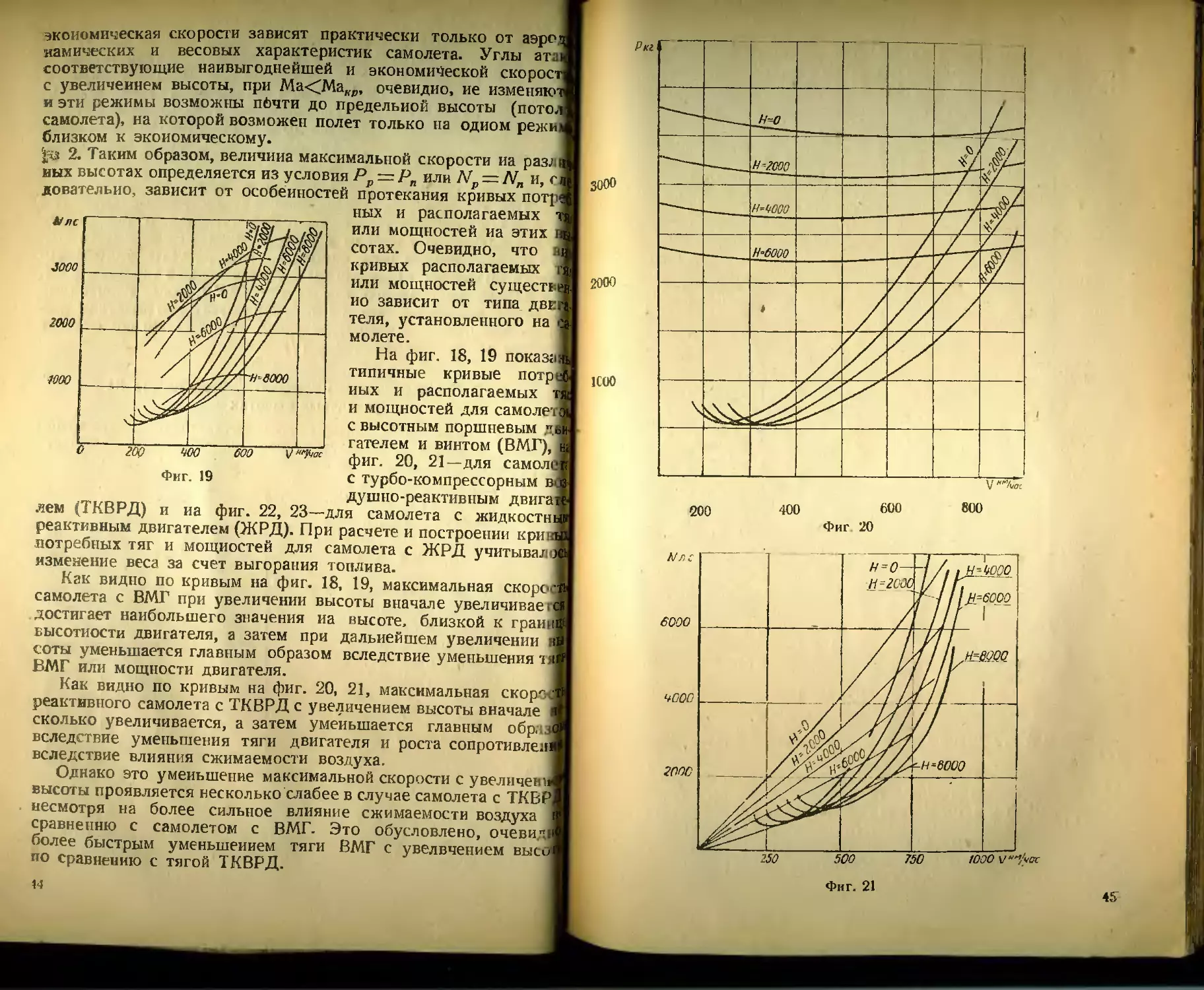
На фиг. 18, 19 показаА,
типичные кривые потрав
иых и располагаемых тщ
и мощностей для самолет»
с высотным поршневым дек
гателем и винтом (ВМГ), в;
фиг. 20, 21—для самоле!
с турбо-компрессорным в-в
Фиг. 19
душно-реактивным двигав
.тем (ТКВРД) и иа фиг. 22, 23—для самолета с жидкости ы
реактивным двигателем (ЖРД). При расчете и построении кри ли
потребных тяг и мощностей для самолета с ЖРД учитывал эй
изменение веса за счет выгорания топлива.
Как видно по кривым на фиг. 18, 19, максимальная скорое®
самолета с ВМГ при увеличении высоты вначале увеличивав се
достигает наибольшего значения иа высоте, близкой к граи»
высотности двигателя, а затем при дальнейшем увеличении <1
соты уменьшается главным образом вследствие уменьшения тяЯ
ВМГ или мощности двигателя.
Как видно по кривым на фиг. 20, 21, максимальная скорщи
реактивного самолета с ТКВРД с увеличением высоты вначале
сколько увеличивается, а затем уменьшается главным обр, Л
вследствие уменьшения тяги двигателя и роста сопротивлени
вследствие влияния сжимаемости воздуха.
Однако это уменьшение максимальной скорости с увеличен Л
высоты проявляется несколько слабее в случае самолета с ТКБРЯ
несмотря на более сильное влияние сжимаемости воздуха
сравнению с самолетом с ВМГ. Это обусловлено, очевиди
более быстрым уменьшением тяги ВМГ с увеличением высов
по сравнению с тягой ТКВРД. I
45
Необходимо отметить, что при увеличении тЯговооружен
стн максимальная скорость самолета с ТКВРД На высоте Н:
будет больше; в этом случае влияние сжимаемости проявляе
и Vmax уменьшается с увеличением высоты, начиная
сравнения на фиг. 24 приведены типичные кривые изм
сильнее
//=0.
Для . . _
нения максимальной скорости с изменением высоты для сам
лета с ВМГ и с ТКВРД. Там же показана кривая для самоле
с ЖРД. Максимальная скорость самолета с ЖРд вначале
увеличением высоты увеличивается, затем при дальнейшем ув
личеиии высоты почти не изменяется и даже несколько умен
шается. что объясняется усилением влияния сжнмаемости воздух
46
увеличением высоты, и, наконец, начиная с высоты //=11000 Л
«новь увеличивается. Это объясняется увеличением тяги ЖРД
s увеличением высоты и уменьшением веса самолета при этом
а учет выгорания топлива; кроме того, оказывает влияние умень-
шеине плотности воздуха с увеличением 'высоты и постоянство
скорости звука иа высотах //>11000 м по MCA.
3. Наивыгоднейшая и эко-
номическая скорость с увели-
чением высоты увеличивают-
ся, вследствие уменьшения
плотности воздуха. Величина
этих скоростей определяется
по формулам:
На фиг. 25 показаны кри-
зависимости скоростей
главных режимов горизонталь- тккРП
’ого полета от высоты для реактивного самолета с хквгм,-
Как видно по фиг. 25, иа некоторой предельной высоте г р
’витальный полет возможен только иа одной скорое™. г>
предельная высота полета называется теоретическим п
Подробнее о потолке самолета—в главе III, Iv-
47
§ 13. К вопросу о диапазоне скоростей горизонтального полета
1. Для оценки возможностей изменения скорости в гориз<
тальком полете удобно пользоваться понятием диапазона ско
стей полета.
Диапазон скоростей полета оценивается отношением
* min
Одной из основных задач авиационной науки и техн-
является расширение диапазона скоростей главным образом
счет увеличения максимальной скорости.
2. Максимальная скорость горизонтального полета опре
ляется, как скорость, при которой максимальная располагай
тяга или мощность равна соответственно потребным тяге :
мощности. Из этого условия можно получить выражение :
определения максимальной скорости.
В самом деле при V— Vmex:
P„=P„ = O,bcxfV*maxS
или
N —N -п — /V — С*р ^S'nax^
tvp-------------- P.O i
откуда
или
Формула (28) удобна для определения У„,„х реактивных само
тов, а формула (29)—для оценки Vmax самолетов с ВМГ и порш
выми двигателями. /
Как показывают эти формулы, максимальная скорость завис
от аэродинамического совершенства самолета (через с,) и вин
для самолетов с ВМГ (через 'гД от мощности или тяги двш
теля и от размеров самолета (через S)
Следует отметить, что с увеличением скорости, когда иг-
нает существенно проявляться влияние сжимаемости возду!
как известно, сх увеличивается, а ц, уменьшается, вследсп
чего требуется значительное увеличение тяги или мощное
двигателя для дальнейшего увеличения скорости.
Влияние веса на Vmax проявляется через индуктивное сои
тивление. В самом деле, как известно,
где
Сж сам — схрРежвр~^ Cxi +
48
1 —эффективное удлинение крыла, посредством которого
еСЬ *£тгя влияние интерференции крыла и частей самолета.
ИнТблнженпо ^=(0,7 ^0,8) (более подробно о X ф см. [4,5])
При увеличении веса самолета или при S = const потреб-
“ ля горизонтального полета су и угол атаки увеличиваются.
[ИЭто вызывает увеличение схр, с„р, сх! и, следовательно,
рньшеиие Vmax- ,, О
Однако уменьшение Vmax при увеличении за счет уве-
Q прн S = const — незн ачительно, так как величина ин-
ктив'ного сопротивления на режиме максимальной скорости
ла а сх и с„р изменяется мало. Если увеличить .за счет умень-
сиия S при О — const, то можно увеличить максимальную
просто, так как при этом уменьшение сопротивления трения,
следовательно, схр может оказаться более существенным, чем
сличение
Следует иметь в виду, что схр для современных самолетов
режиме максимальной скорости при Ма<Макр составляет
имерно 70 -80% от общего коэфициента лобового сопротп-
и ния самолета, a cxi— около 5—10%.
Таким образом, для увеличения 1/,„ог при всех прочих равных
Q
7>овиях следует увеличивать ту за счет уменьшения площади
>ыльев. л
3. Однако это находится в противоречии с требованиями для
меныпения или для сохранения минимальной, а следовательно,
посадочной скорости.
Как известно, теоретически возможная минимальная скорость
'рнзонтального полета определяется по формуле:
т,л" V cymaxPs • о
Как видно по этой формуле, при увеличении минимальная,
следовательно, и посадочная скорость увеличивается, что не-
шустимо по условиям безопасности при посадке.
1аким образом, возникает противоречие между требованием
’ Увеличения максимальной скорости и требованиями для
оро епия или сохранения на допустимом уровне минимальной
пР0ТИВ0Речие, как известно, частично разрешается глав-
оеразом посредством механизации крыла для увеличения
иол (при посадке) при одновременном увеличении максималь-
>fi скорости за счет увеличения 2 и тяги или кощиости дви-
Топе
Е» Торба
49
Для разрешения указанного противоречия предлагаются
другие решения; крыло с переменной площадью в полете, у и , ,р, что особенно опасно вблизи земли. Кроме того, управление
влёиие пограничным слоем и т. д.
4. Как показывают кривые на фиг. 25, с увеличением внес
полета диапазон скоростей уменьшается, что сужает маневр
ные возможности самолета и, наконец, на высоте теоретичес о!
потолка максимальная и минимальная скорость горизонтально!
полета совпадают. На этой высоте, очевидно, кривые максима,
ных располагаемых тяг или мощностей будут касаться крив
потребных тяг или мощностей, как это показано на фиг. 26.
§ 14. О вторых режимах горизонтального полета
Как уже отмечалось, по условиям безопасности полета!
практически допустимую минимальную скорость горизонтальи
полета принимается скорость, близкая к экономической.
Теоретически возможная минимальная скорость горизонта
ного полета соответствует максимальному значению коэфицив
подъемной силы, т. е. критическому углу атаки акр.
Для перехода от до Vraj„ необходимо ручку тят]
„на себя" и, наоборот, для перехода от до Vmax ручку .
обходимо отклонять „от себя" при одновременном перемещу
сектора газа в соответствующую сторону (в соответствии с]
менением потребной тяги или мощности).
Управление рулями, при которой отклонению ручки „на св
соответствует уменьшение скорости, а отклонению ручки J
себя" соответствует увеличение скорости, будем называть
мым или нормальным управлением.
Возникает вопрос, возможен ли горизонтальный полет!
угле атаки а>а„р?
Вообще говоря, такой полет возможен, но опасен. Само!
при этом будет крайне неустойчив и неуправляем в попере4!
отношении—в результате возможны авторотация и срыв в
50 I
17л’я«и для изменения скорости при а>акр меняе ся на обрат-
’ je *1. е. для увеличения скорости необходимо отклонять ручку
да’себя”, а для уменьшения скорости—„от себя".
Режимы горизонтального полета при а>акр, когда управле-
•е рулями для изменения скорости меняется иа обратное, иазы-
а10т вторыми режимами горизонтального полета. На этих ре-
зинах горизонтальный полег недопустим.
ГЛАВА III
РАСЧЕТ ПОДЪЕМА САМОЛЕТОВ € ПОРШНЕВЫМИ
• ДВИГАТЕЛЯМИ
§ 15. Основные уравнения и зависимости
I. В общем случае подъем самолета представляет неустано-
нившееся криволинейное движение с набором высоты.
Такое движение самолета, как известно (§ 4), определяется
псковными уравнениями:
Pcos(a + <р) — X — Gsin6-—0;
g dt
Г + Psin(a + <p) — Geos6 — ^-1/^=0.
(1)
(2)
Расчет
полняется
1) Вес
подъема самолетов с поршневыми двигателями вы-
при следующих допущениях:
,____самолета в процессе подъема принимается постоянным
(G = const).
2) Кривизна траектории считается пренебрежимо малой и,
следовательно, ~ 0.
i 3) Изменение скорости по траектории при наборе высоты
принимается незначительным и, следовательно, ~ 0.
«г
нем н^0Т°Рь>х случаях все же необходимо учитывать изме-
Мето СКоРости самолета по траектории в процессе подъема,
учета изменения кинетической энергии самолета при
I излагается в главе IV.
) Ввиду малости а + <р принимается
cos (а + <р) ~ 1, sin (а + <р) ~ 0.
,*етодИ боль’™х а и <р такое упрощение недопустимо. Точный
т”ги виаСЧета’ в КОТОРОМ учитывается влияние составляющих
сКого оНТа ^>cos(a+¥l) и Psin(e-f-y), метод тяг Н. Е. Жуков-
Рассматривается в главе VI'.
51
5) Влияние сжимаемости воздуха при наборе высоты
брежимо мало.
При этих допущениях уравнения подъема самолета
мают вид:
Р — Х — GsinB =0;
Y — Geos 6 = 0;
прсш
приш
(ЭД
(31
откуда потребна 1_тяг&
+ G sin 6,
потребная подъемная сила
у = Q cos &
(33
или
0,5 су р V2 S=О cos б
потребная скорость
2Gcos6 .
----ё—— v гор
с,?$
Скорость по траектории, потребная для подъема на заданно!
угле атаки, равна скорости, потребной для горизонтальном
полета при том же угле атаки, умноженной на J/cosfi. При
б=Ю°—20°, У cos 6» 0,992-^-0,956, следовательно, при угла.’1
наклона траектории до 20° с ошибкой, ие превышающей 4 —5*
можно принимать
V„ ~ К гор'
При расчете выражение для потребной тяги удобно предо
вить в другом виде.
Разделив все члены уравнения (32) на О и учтя уравнение (3
получим
-гт- cos 0 + sin 6,
О Y
откуда
V
P„ — Gi-£- cos6+ sinO I.
" /
Таким образом, при подъеме самолета тяга нинта уравно
шивает лобовое сопротивление и составляющую силы веса
траектории, а подъемная сила уравновешивает составляющ
силы веса по нормали к траектории.
Следовательно, тяга, потребная для установившегося подъе
больше, а скорость и подъемная сила меньше, чем в гориз
тальиом полете при том же у гле атаки.
4 2. Задача расчета подъема самолета сводится прежде вс<
определению вертикальных скоростей подъема и скоростей
52
траектории на различных высотах. Эта задача обычно решается
приближенным методом тяг или методом мощностей.
Основная разница между этими методами заключается глав-
ным образом в различном подходе к определению вертикальных
скоростей подъема.
§ 16. Расчет подъема самолета методом тяг ')
1. Расчет характеристик подъема самолета методом тяг выпол-
няется по кривым потребных_для подъема_тяг в зависимости от
скорости при различных углах наклона траектории к горизонту
(фиг. 37).
Для построения этих кривых необходимо предварительно вы-
полнить расчет потребных тяг и скоростей для различных углов
наклона траектории 0. Этот расчет выполняется по форму-
лам (34), (35).
При 6 < 20° можно принять cos 6 и 1 и тогда расчет выпол-
няется по более простым формулам:
Ул==./-2С , (34а)
V cy?s
(356)
В этом случае определяются потребные тяги и скорости при
б =0, а затем при построении кривых потребных тяг для 6 >0
- - СХ 11JX11 11V V > * t
к тягам, полученным для 0 = 0,
прибавляются величины G sin б.
Схема расчета показана в табли-
це 5. По этой схеме расчет вы-
полняется для ряда значений 0
на высоте И = 0.
Кривые потребных тяг пока-
заны на фиг. 27.
Для того чтобы ие перестраи-
вать этих кривых при переходе
к другим высотам, необходимо
построить высотный масштаб
скоростей (§ 11).
Далее, на сетку кривых по-
требных тяг для различных уг-
лов 6 накладывается сетка кри-
вых максимальных располагае-
Мых тяг для различных высот.
При построении кривых распо- Фиг. 27
’) Точный метод тяг излагается в главе VI.
53
латаемых тяг необходимо пользоваться высотным масштабом си
ростей. Если же влияние сжимаемости воздуха и изменение вес
оказывается существенным, как это имеет место для реактивны
самолетов, то в этом случае необходимо выполнять расчет и
указанной схеме (таблица 5) для различных высот и построение Kpt
вых потребных тяг производить по результатам такого расчет;
Таблица
а'
1 2 4 и т. д.
Примечание
с,
Сх
А
Сх
При В > 20 :
Рп — G ( ~ cos 0 4- sin о 1 ;
при 0 < 20е:
-{-sin
V,, м сек
1 f 2G cos 0 .
г
при 6 <20°:
Vn км/час
V'„ км/час. — 3,6 V„ м/сек
Пользуясь кривыми, приведенными иа фиг. 27, можно оцр
делить вертикальные скорости подъема Vy и скорости по тр|
ектории Vmp при наборе высоты.
2. Очевидно, что по точкам пересечения кривых потребив
тяг с кривой располагаемых тяг иа заданной высоте опрел
ляются скорости по траектории для ряда значений угла 0.
Зная скорость по траектории Vmp и угол наклона траектор!
к горизонту 6, нетрудно определить и вертикальную скорое
подъема на соответствующей высоте;
Vy = Vm„ SinfJ.
(3
54
Определив вертикальные скорости подъема для Сяля
нйй скорости по траектории на заданной высоте можно™
сТроить кривую зависимости Vy от VmB для этой высоты Такая
кривая показана иа фиг. 28. По этой кривой можно определит,
максимальное значение верти- г
калькой скорости подъема и V//»
скорость по траектории, при
которой будет Vymay.
Эту скорость по траекто-
рии мы в дальнейшем будем
называть нанвы годнейшей ско-
ростью набора высоты VHa6,
так как шри такой скорости
полета обеспечивается наибо-
лее быстрый подъем.
Проделав аналогичные ра-
счеты для ряда высот, можно
найти зависимость максималь-
ных вертикальных скоростей
Vyn,aX и наивыгоднейших скоростей 1/Лав от высоты полета. На
фиг. 29 показана кривая Vynay =f[H) для самолета с высотным
двигателем и кривая Vna6 = fi (AZ).
3. Пользуясь кривой =/(Н), определяют высоту, на ко-
торой 1/^=0.
Высота, на которой вертикальная скорость подъема равна
нулю, называется теоретическим потолком самолета.
Так как для достиже-
ния этой высоты требует-
ся бесконечно большое
время (см. § 19), то поль-
зуются еще понятием
практического потолка.
Практическим потол-
ком называется высота,
на которой вертикальная
скорость подъема само-
лета равна 0,5 лгсек.
Теоретический Н„, и
практический потолок
Нгр показаны на фиг. 29.
После расчета вертк-
приступают к расчету вре-
после рассмотрения расчета
®альных скоростей подъема обычно
^ИИ подъема. К этому МЫ вернемся 1н>чле
еРтикальных скоростей подъема методом мощностей.
§ 17. О режимах подъема
в 1- Для более наглядного представления характеристик набора
'Коты удобно построить полярную кривую в координатах:
55
радиус—вектор—скорость по траектории, аполярный угол—-yi«
наклона траектории к горизонту. Такая кривая изображена :
фиг. 30. Эту кривую будем называть указательницей траектори
(глиссад) подъема.
По указательнице траекторий подъема можно определить U
как проекцию радиуса-вектора при заданном угле 6 на верт|
каль.
Различают два характерных режима подъема: режим наиб<
лее быстрого подъема (1/утад) и режим наиболее крутого под
ема (^тал).
Скорости по траектории, соответствующие этим режима;
Фиг. 30
определяются по указательнице траекторий подъема, как з1
показано на фиг. 30.
Из чертежа на фиг. 30 видно, что скорость по траектори
соответствующая наиболее быстрому подъему, больше, чем са
рость при наиболее крутом подъеме, т. е.
PfVymax) > Р(0/Птг)
или
Щ&пах) ®(Vy max} -
2. Таким образом, при увеличении угла атаки до угла, С
ответствующего наиболее крутому подъему, угол наклона т|
ектории увеличивается, т. е. отклонению ручки „на себя" в эт!
случае соответствует увеличение угла В.
На углах атаки больше а^тах)', при отклонении ручки „
себя", наоборот, угол 6 уменьшается, а при отклонений рут:
„от себя"—увеличивается, т. е. имеет место „обратное" управ
ние рулями высоты по отношению к углу наклона траектор:
Режимы при углах атаки и>а(0„1ги) называют вторыми режима
подъема.
§ 18 Расчет подъема самолета методом мощностей
1- Значительно проще расчет вертикальных скоростей по;
ема выполняется методом мощностей. Однако эта простота .
стигается за счет некоторых дополнительных допущений. Р
смотрим их.
56
При наборе высоты необходимо затрачивать мощность на
преодоление лобового сопротивления и на перемещение веса
самолета по вертикали со скоростью Vy = l/mpsin6.
Напишем выражение для мощности, потребной при наборе
высоты:
к, _ _ X Vn , GV„ sin О
yV'!““75-“_75“+ 75---
ИЛИ
N = XV-n + 2-kk (37)
75 75 ' '
Далее, принимаем, что скорость по траектории при подъеме
равна скорости горизонтального полета при том же угле атаки,
Т. С- I- тр — )^горУ COS 6 ~ Vsop’
При таком допущении мощность, которую необходимо за-
тратить на преодоление лобового сопротивления при подъеме
lXV„\ -
I I равна мощности, потребной для горизонтального полета
\ 75 /
при том же угле атаки (Л<И(Я)Х,)). Учитывая, что при подъеме на
заданной высоте Np—N„, получим:
М = 7V > + --У*
*р п гор) г- >
откуда
75(JVP-/V„fe„)) 75A7V , ,
1/„ — —k р — [мсек],
у и О
(38)
где ДЛ’= Np—Nn (!ор)— избыток мощности винтомоторной группы
над мощностью, потребной для преодоления лобового сопроти-
вления самолета в горизонтальном полете
При указанных допущениях получается существенное упро-
щение и сокращение всей расчетной работы.
При расчете методом мощностей можно воспользоваться кри-
выми потребных и располагаемых мощностей, построенными уже
пРи расчете горизонтального полета. По этим кривым просто
Определяются избытки мощности (ДАО для различных скоростей
о траектории и, следовательно, вертикальные скорости подъема
.«по формуле (38).
Если расчет горизонтального полета производился по тягам,
° кривые потребных и располагаемых тяг также могут быть
пользованы для расчета подъема методом мощностей.
бьл этом случае избытки мощностей определяются через из-
Klt тяг и через скорость полета, т. е.
(Р ~Р ) V. АРП . 1
b.N = (£> =-ve- [л.с.].
7о 'Э
57
Следовательно, при расчете подъема методом мощностей «
кривым потребных и располагаемых тяг, построенных для гор
зонтального полета, вертикальную скорость подъема следу,
определять по формуле:
,. (P,-PnW* bPV. . ,
= = — [м/сек].
(3
Фиг. 31
2. Расчет максимальных вертикальных скоростей подъа
(Vyma*) и наивыгоднейших скоростей набора высоты
дом мощностей выполняется по следующей схеме:
1) По кривым потребных и располагаемых мощностей, (и;
тяг) определяются избытки мощностей для ряда значений см
рости полета на заданной е
соте Это проделывается д.
ряда высот. В результате стр
ятся кривые AW = /(V')> пом
эаниые на фиг. 31.
2) По этим кривым от-
деляются максимальные к
быткн мощности иа каждс
высоте и, следовательно, t
формуле (38) — максима.)
ные вертикальные скорое^
подъема.
Одновременно определяй
(ДЛОтах, т. е. наивыгоднейни
ся скорости, соответствующие
скорости набора высоты (14ов)-
3) В результате можно построить кривые изменения
с высотой и определить теоретический и практичеог
потолки, как и в методе тяг.
Метод мощностей ввиду его простоты принят как норил
ный метод аэродинамического расчета самолетов.
§ 19. Расчет времени подъема. Барограмма подъема
1. Важнейшей характеристикой подъема является время наб‘
заданной высоты. Очевидно, это время будет минимальным т
подъеме с максимальной вертикальной скоростью иа всех вы
тах или с наивыгоднейшей скоростью набора высоты V„a6.
Время набора высоты определяется по кривой
Посмотрим как это сделать.
Пусть за время dt самолет набирает высоту dH с вертикг.
ной скоростью подъема Vy.
Очевидно, dH = Vydt, следовательно,
dt
dH
’4 '
58
5ремя подъема от высоты /7= 0 до заданной высоты Н в об-
^ем случае определяется так:
(40)
о
В общем случае невозможно установить аналитическую зави-
имость максимальной вертикальной скорости [подъема от вы-
ты, поэтому время подъ-
ема по формуле (40) прихо-
дится определять прибли-
женными методами графи-
ческого1 или численного ин-
тегрирования.
2 Для графического ин-
тегрирования при опреде-
лении времени подъема по
формуле (40) удобно пред-
варительно построить вспо-
могательную кривую
v у max
Такая кривая показана
на фиг. 32.
Пользуясь этой кривой, графическое интегрирование ведется
по правилу трапеций. Для этого площадь, ограниченная кривой
р—~f(H) и осямикоордипат, разбивается на ряд элементарных
трапеций с высотой Д/7. Обычно интервалы высот Д/7 выби-
раются порядка 500—1000 м, а вблизи потолка уменьшаются до
100—200 м.
та Очевидно, время Л/ изменения высоты на Д/7 определится
(41)
Или в минутах А,,
д/-дн
120
(42)
h иЬ) |с“'
1 1 )
>Л+ /
ДерЬ соответствует высоте И, а высоте /7ч-Д/7.
Как Олиое время набора высоты от /7=0 до Н определяется,
умма элементарных времен Д/'
Д-+ -р--) (мин1
"уП V_Vn + l /
(43)
53
3. Приближенно время подъема удобно определять
схеме, приведенной в таблице 6. Расчет ведется по средней в-:
тикальпой скорости Vycp = 0,5( Vy„ + Гул-н) и построение вспо»
гагелыюй кривой р----—f(H) необязательно. В этом случае Д|
* у max
ин . . .. ьн
= р---- [сек] или в минутах М = —
Таблица
Н Vynxw] ЬН
м м/сек I м
VУ max ср
м/сек
мин
мин
Примечание
О
500
1000
и т. д.
20
25
30
500
500
0,370
0,303
0,370
0.673
ит.д.
Ру/пйхгр — Vут ах
ДГ = ™; I
Vу max ср
Д/—время набора заданной в)
соты Н.
Цифры, приведенные в таблице, носят иллюстративный харак’
времени набора различных вы
строится кривая зависимости i
Эта кривая показана на фиг.
и называется барограммой подъ«
самолета.
Можно показать, что кри!
асимптотически приб
жается к высоте теоретичеси
потолка, так как время подъема
теоретический потолок стремя
к бесконечности (типа логарши
ческой бесконечности) ввиду гг
что вертикальная скорость подъ<
на этой высоте равна нулю. Барограмму подъема обычно стр|
до высоты практического потолка.
Время набора практического потолка для самолетов истре
тедей с ВМГ составляет 20—30 минут.
§ 20 О траектории подъема самолета
1. Траектория подъема является плоской кривой в коорд
тах х и у, где х—расстояние, пройденное самолетом по п
зонтали при подъеме, а у—расстояние по вертикали.
। Для построения траектории подъема необходимо
-, )ОП1ие исходные данные:
-1 1) кривую Г, =/(//);
2) кривую VNa6=f(H);
3) барограмму подъема
4) кривую зависимости углов наклона траектории
Методы определения первых трех зависимостей
иметь сле-
от высоты
нами уже
рассмотрены.
Зависимость 6 = f(H) находится по кривым Vv = f(ff) и
vKae=f№-
Зная дл!я каждой высоты Н вертикальную скорость 1л. и ско-
рость по траектории можно опреде-
лить и угол наклона траектории к го-
ризонту:
sine —(44)
*наб
Кривая 0 =/(//) показана на фиг. 34.
2. Далее, все расчеты, необходимые для
построения траектории подъема, выпол-
няются по следующей схеме:
1) Для ряда высот у = Н по соответ-
ствующим кривым определяются t, 1/лаб, 0.
2) По VHa6 и е находится величина го-
ризонтальной составляющей скорости по
траектории для тех же высот:
^cosfi.
В методе мощностей V?op~ УиаЗ-
от В|, Затем строится вспомогательная кривая'зависимости
31 а кривая показана на фиг. 35.
6Т
4) Расстояние, проиденное самолетом по горизонтали П|
подъеме за время dt:
dx — V9oPdt.
следовательно,
t
x=(V^dt.
6
Этот интеграл определяется графически по площади, ограг
чениой кривой V„p=f(t) в заданных пределах для времени а
бора высоты.
Каждому значению у—Н соответствует определенное зная
ине t и, следовательно, х.
5) По найденным значением х и у производится построен,
траектории подъема, примерный вид которой показан на фнг. 3
ГЛАВА IV
РАСЧЕТ ПОДЪЕМА РЕАКТИВНЫХ САМОЛЕТОВ
§ 21. Некоторые особенности расчета подъема реактивных
самолетов. Основные уравнения
1. При расчете подъема реактивных самолетов необходим^
учитывать некоторые особенности, характерные для реактивнь
.самолетов.
Рассмотрим основные из них.
1) Тяговые характеристики реактивных двигателей, как у и
отмечалось в § 3, существенно отличаются от характеристик ВМ1
Незначительное изменение тяги по скорости и более медле!
ное падение тяги с увеличением высоты в случае ТКВРД п
сравнению с ВМГ приводит к сдвигу максимальных избытко
мощности на большие скорости полета и к улучшению характе
ристик скороподъемности самолета.
Наивыгоднейшлм режимом набора высоты для реактивны?
самолетов мы так же будем считать режим, при котором Bef
тикальная скорость подъема имеет максимальное значеняе, ;
это будет при скоростях, соответствующих максимальным из
быткам мощности.
Следовательно, нанвыгоднейшая скорость набора высоты ;
реактивных самолетов оказывается больше, чем у самолето!
с ВМГ.
Как показывают расчеты, 1/„а6 у реактивных самолетов больше
чем Ц«об У самолетов с ВМГ в 1,5—2 раза.
2) Вследствие этого, при подъеме реактивных самолетов влия
ние сжимаемости воздуха может оказаться существенным, осо
«52
,„нно для самолетов с ЖРД. Это необходимо учитывать при
остроении кривых потребных тяг или мощностей.
° з) В процессе набора высоты скорость по траектории подъема
реактивных самолетов изменяется сильнее, чем у самолетов
У ВМГ- При этом с увеличением высоты VKaS увеличивается.
Следовательно, при подъеме тяга или мощность реактивного
двигателя затрачивается ие только на преодоление лобового со-
противления и составляющей силы веса самолета, но еще до-
полнительно—на изменение его кинетической энергии.
Вертикальная скорость подъема при этом получается меньше,
чем при подъеме без ускорения.
При расчете избытков мощности и вертикальных скоростей
подъема реактивных самолетов, как правило, необходимо учи-
тывать это влияние изменения кинетической энергии.
4) 1*1ри подъеме реактивных самолетов, особенно с ЖРД, су-
щественно изменяется вес самолета за счет выгорания топлива.
Это необходимо учитывать при построении кривых потреб-
ных тяг или мощностей для различных высот.
Таким образом, при расчете подъема движение реактивных
самолетов, как правило, следует рассматривать как неустано-
вившееся1).
Кривизной траектории при этом так же, как и для самолетов
с ВМГ, можно пренебрегать, полагая ^0.
Следовательно, общие уравнения движения самолета (1), (2)
для случая подъема реактивных самолетов принимают вид’):
Р—Х— Gsine— — ^=0; (45)
g dt
Y—Qcosb-O. (31)
'2, Далее, в связи с тем, что у реактивных самолетов, имею-
щих гысокую степень тяговооруженности, углы наклона траек-
тории к горизонту больше, чем у самолетов с ВМГ (особенно
У самолетов с ЖРД), возникает вопрос о законности примене-
ния метода мощностей.
Как известно, для расчета подъема можно применить метод
г«г или метод мощностей.
Первый метод считается более точным и применяется при
^ьшнх углах наклона траектории. Метод мощностей значи-
тельно проще. Однако это упрощение получается в результате
пренебрежения влиянием угла наклона траектории на величину
скорости по траектории при подъеме. Эта скорость в методе
Мощностей принимается равной скорости горизонтального полета
’) Об исключениях из этого правила см. в §§ 22, 24.
’) Здесь также принимается cos («-(-?) ~ sin (а + Ч?) = "
63
при том же угле атаки. Такое допущение позволяет при рас
чете подъема использовать кривые потребных тяг или мощно
стей, построенные для расчета горизонтального полета, что вно-
сит значительное сокращение всей расчетной и графическо'
работы.
Как показывает подробный анализ, для расчета подъем!
реактивных самолетов можно также применить метод мощно
стей, естественно, с дополнениями, указанными выше.
При этом величина ошибки при определении вертикальных ско
ростей подъема самолетов с ТКВРД оказывается менее 1 % [5, G1
Такой неожиданный на первый взгляд результат объясняетсг
тем обстоятельством, что угол наклона траектории 0 влияе:
главным образом на величину коэфициента потребной подъемной
силы и, следовательно, на величину коэфициента индуктивногс
сопротивления, которое получается относительно небольшим z
реактивных самолетов на режимах набора высоты.
В методе мощностей су, потребный для полета на заданно il
. 2G
скорости, определяется по формуле су=- - а в методе тяг |
для случая полета с той же скоростью по наклонной траекто-1
2G cos О
РИИ’-^ = -Н7^-
Эта разница в су и приводит к различию в индуктивном со-
противлении при одной в той же скорости полета. При расчете!
подъема самолетов с ВМГ при больших углах в пренебрегать]
этим различием нельзя, так как наивыгоднейший подъем таких]
самолетов производится на углах атаки, при которых роль нндук-|
тивного сопротивления значительна. В случае реактивных само-1
летов, как уже отмечалось, наивыгоднейший подъем произво-
дится на больших скоростях по траектории, т. е. при малых
коэфициентах подъемной силы, когда роль индуктивного сопро
тивления мала, следовательно, ошибка в расчете вертикальных
скоростей У^при допущении cosO~l, как это принято в метола
мощностей, получается в этом случае значительно меньше.
Если учесть, что избытки мощности у реактивных самолетов
на больших скоростях полета больше, чем у самолетов с ВМГГ
то станет очевидным, что относительная ошибка при определе-
нии вертикальных скоростей подъема методом мощностей станет
еще меньше.
Итак, применяя метод мощностей, рассмотрим особенности
расчета подъема реактивных самолетов с учетом изменения ки-|
иетической энергии и веса в процессе подъема.
§ 22. Расчет подъема реактивных самолетов с ТКВРД
с учетом изменения кинетической энергии
1 Расчет вертикальных скоростей подъема реактивного само-
лета с ТКВРД с учетом изменения кинетической энергии выпол-
64
^яется последовательными приближениями. При этом обычно
„остаточно двух приближений.
J В первом приближении вертикальные скорости подъема опре-
деляются без учета изменения кинетической энергии; затем
заходится время подъема с учетом изменения кинетической
энергии, и по полученной таким образом зависимости
уточняются вертикальные скорости подъема на различных высо-
тах. При этом вес самолета принимается постоянным. Как учесть
изменение веса будет показано в следующем параграфе.
2. Для вывода расчетных выражений воспользуемся уравне-
нием (45).
Умножая все члены его на V и разделив на G, получим:
(P-X}V .. . n VdV _ ....
। ---IZsinS------— ~ О. (46)
О gdt
В этом уравнении V sin 6 = Vy,
(P-X)V _7MN
О — Q ’
dV __dV dH_ _dV_
dt dH di~dH ’
где ДАТ —избыток мощности.
Следовательно, уравнение (46) принимает вид:
™Vy_VyY™0> и s ан
откуда _75Д7У 1 Vy~ О 1 + VdV ' g dH
или у —75ДД/ (47) О 1 dV2 1 ' 1 + 2g dH
В этом выражении множителем-------- учитывается влия-
4 ' 2? dH
ние изменения кинетической энергии на величину вертикальной
скорости подъема.
Как видно по формуле (47), вертикальная скорость подъема
пРи неустановившемся движении оказывается мевьше, чем при
Установившемся движении с тем же избытком мощности ДА/ в
114- 1 dV'\
раза-
5
Е. Торба
65
Для самолетов со скоростями набора высоты VHa6
1 dV'1
400—500 км!час по прибору поправочный член 1 + ока;
2g ап
вается близким к единице и вертикальную скорость можно оп|
делить по формуле
_75ДЛ/
О
Однако для самолетов со скоростями набора высоты более
500 км!час по прибору поправка оказывается уже существенное
Например, при скорости набора высоты по прибору V„p= 600 км/чЛ
на высотах 7000— 8000 м вертикальная скорость подъема уменя
шается на 28% за счет влияния изменения кинетической энергии
|5, 6). |
Следовательно, при расчете подъема реактивных самолетов
учет изменения кинетической энергии необходим.
3. Для целей расчета выражение (47) представим в другом
виде.
Очевидно, полная энергия самолета, летящего со скоростыЛ
V на высоте Н. будет равна сумме потенциальной энергии GH
G /-
и кинетической g~%- Величина этой полной энергии эквива-
лентна потенциальной энергии самолета, находящегося на неко-
торой высоте, которую мы назовем эквивалентной высотой и
обозначим через Нвкв.
Таким образом,
G V1
GH^GH + ~~,
откуда
1 V”-
H,K,=H+j-^ .
(48)
Взяв производную от Нвк, по Н, получим
ан, UP
dH ~ 2g dH •
(49)
Очевидно, производная характеризует изменение полной
энергии самолета, отнесенной к 1 килограмму веса, при измене*
нии высоты полета.
Имея в виду (49). формулу (47) напишем в другом виде:
_ 75ДЛ/_
СdHtK,
dH
(5(
66
Разделяя переменные в этом выражении, получим:
dH _ dH,K, _ dHBK,
Vy Vy^m ~dt’
(51
75ДД/ ,
где: Vy^m--Q--------некоторая фиктивная вертикальная ско-
рость подъема, которая превращается в
действительную при ^^-*=1;
dH
dt = -ту--реальное время изменения высоты иа вели-
* у
чину dH при действительной вертикальной скорости подъема V
Интегрируя уравнение (51) в пределах от Н — Н^ до Н=Н„,
получим
Чг
t — I
№кя(2)
С
J ^уфакт
Некв (1)
(52)
Н,
Таким образом, мы получили выражение для вычисления вре-
мени набора высоты с учетом изменения кинетической энергии,
аналогичное выражению для случая установившегося набора
высоты. Только расчет необходимо вести по эквивалентной
высоте Нзк, и по фиктивной вертикальной скорости Ууфа,;т вместо
действительной высоты Н и действительной вертикальной ско-
рости Vy При этом пределы интегрирования определяются сле-
дующим образом:
Яаи(2)=На +-
При расчете времени набора высоты по формуле (52) пре-
делы интегрирования Hait,m, НВКв& и Vу фпкт~ f (НВК1) необхо-
димо выбрать так, чтобы получить tmin.
Вместо зависимости УуфиКт—/(Нвка)рассмотрим ДА/— fi(HBK^-
Пай: ем условия, которым должна удовлетворять эта функция,
чтОТы получить t^K.
Как известно, ДА'=Л^—Н„. При подъеме в общем случае
зависит от V, Н и 6. Но в методе мощностей принято
cos 6=1 и V~ VlBp, следовательно, ДА/ зависит только от V и Н.
Согласно выражению (48) V зависит от Неа1 и Н. Таким образом,
ЛА/ является также функцией Нт, и И.
Исходя из этого, найдем условия, при которых время набора
высоты будет минимальным. Для этого по кривым потребных
тяг или мощностей предварительно построим кривые A7V=/a(
для различных Н, как это показано на фиг. 37.
Пользуясь кривыми ДД/=/а(17), можно определить для рг
Фиг. 37
личных V при H=consl
избытки мощности A/V ]
1/3
Нзк, — И + р— и ностро!
ить кривые ^=/s(W8J
для различных значе!
ний Н. Такие кривые по!
строены на фиг. 38.
Очевидно, миш.маль!
ное время набора высота
Н = Нпр будет пропори
ционально площади, orJ
раниченной огибающей
кривых -дд,-=/3(НЭ1;«),
если пределы интегрироЛ
вания Нэо(1) и НвМ вы-
брать по точкам касания
этой огибающей и кри-
вых для крайних высот
Н = 0 и Н=Нпр.
Но, так как значений
1
или АД/,соответствую4
щие этим точкам, сказы!
я 1
ваются близкими к —4
(дА)„;аХ
или (Ь1\/)таХ, то для прак<
тических расчетов с до-
статочной точностью мо-
жно пределы йвтегриро^
вания 7/^(1, и 7/8)я(2) за-,
давать по скоростям
VKo6, соответствующим
(ЛЛ0т«т> ПОЛЬЗУЯСЬ ДЛ»!
этого кривыми ДА'rd
=/а(У) для различный
высот Н (фиг. 37).
В соответствии с этим расчет подъема реактивного самолета
с учетом изменения кинетической энергии при О — const выпол]
няется по следующей схеме:
1) По кривым потребных и располагаемых тяг или мощностей
определяются избытки мощности ДА' в зависимости от скорости
Фиг. 38
А (Яа,«)-
у факт
этим данным строится
на фиг. 39.
плошади, ограничен-
кривой, в заданных
для Нвке и опреде-
кривая ----------= ft(HSKe), как это
факт
ляя различных Н. Если расчет велся по тягам, то ДУ=
. По этим данным вычерчиваются кривые &.N—f2(y) и
00 ним определяются (\N)max, затем скорости, соответствующие
(ДА')лгал- которые принимаются за наивыгоднейшие скорости набора
высоты и, наконец, Нж, ==Н+ .
2) Далее, по (A/V)max определяются VrJ,fi5eKm = ^^^"ax и за-
1
тем р,-
3) По
показайо
4) По
аой этой
пределах
ляется время набора высоты.
Расчет времени набора при
этом выполняется по схеме,
приведенной в § 19, только
вместо действительной высоты
Н при расчете необходимо
брать Нвк,.
Переход от Нвке к Н про-
изводится по формуле:
Н=НВК,- (53)
В результате находится зави-
симость с учетом
изменения кинетической' энергии при G — const, и строится баро-
грамма подъема.
4. Получив барограмму, необходимо уточнить вертикальные
скорости подъема. Для этого, задавая ряд значений &Н, по ба-
рограмме можно определить соответствующие им Д/ и, следова-
.. Д/?
тельно. V„x. ,Т
^Полученные таким образом значения Vy относятся к высоте
вредней в заданном интервале ДН. В результате строится кривая
по которой определяются теоретический и практи-
ческий потолки.
Для сравнения на фиг. 40 приведены барограммы подъема и
кривые Vy—fjji) для самолетов с ВМГ и реактивного с ТКВРД.
5. В заключение заметим, что скорость набора высоты ре-
активных самолетов с ТКВРД может достигать значений, соот-
69
ветствующих числам Маха, при которых наступает волной!
кризис. Тогда нецелесообразно увеличивать скорость по трае
тории при увеличении высоты. В этом случае расчет подъо
ведется без учета изменения кинетической энергии,? и вертика/
иая скорость вычисляется по формуле
. _75AN
С
§ 23. О расчете изменения веса реактивного самолета
с ТКВРД прв подъеме
1. Для оценки изменения веса самолета с ТКВРД в процессе
подъема за счет расхода горючего необходимо иметь барограмму
подъема и кривые уделы
ных расходов горючего
Кривые удельных pad
ходов удобно иметь в та(
ком виде, как это пока-
зано на фиг. 41. Здеса
Ср — удельный расход го|
рючего в кг1кг час. На
сетку кривых cP(V) Й
Р (V) для различных Л
наносится кривая
Пользуясь кри-
вой Глоб=/(/7)и сетко!
кривых удельных расхС!
дов, показанных на фи-
гуре 41, можно для каж<
дой высоты полета определить номинальные удельные расходы ср
и тягу Р. Секундный расход горючего вычисляется по формуле!
70
_ £р_Р Г кг I
Ч~3600 [сек]’ (54)
Таким образом, находится зависимость q=.fx(Hy Эта зависи-
мость представлена иа фиг. 42. Пользуясь кривой /,(//) н
барограммой подъема /=/2(//), можно уже определить измене-
Нн
О.
Фиг. 42 Фиг. 43
ние веса самолета за счет расхода горючего в процессе подъема.
Очевидно, за время Д/ вес самолета изменится на величину
ДО=?Д/.
При этом М—время изменения высоты на Д/7, a q берется
по кривой q—fi(H) Для средней высоты в заданном интер-
вале Д/7.
Полное изменение веса при подъеме иа высоту, очевидно,
н
определится как сумма У qkt. На фиг. 43 показана примерная
н=о
зависимость веса самолета с ТКВРД от высоты.
Если обнаружится расхождение полученного значения веса
па высоте Н = Нпр с принятым вначале более, чем на 10%, то
весь расчрт времени подъема с учетом изменения кинетической
ЭвфИи необходимо повторить для среднего веса
При этом расчет вертикальных скоростей Vy выполняется по
н°вому# весу, а кривые потребных тяг или мощностей можно не
пзменять.
71
Следует иметь в виду, что начальный вес и0 при расчет
подъема необходимо задавать с учетом расхода горючего н
разбег и разгон самолета перед набором высоты. Задача о взлет
и разгоне реактивных самолетов рассматривается в 3-й част
курса.
§ 24. Расчет шодъема реактивного самолета с ЖРД
1. При расчете подъема реактивного самолета с ЖРД необхс
димо учитывать одновременно изменение веса и кииетическо
энергии его.
В этом случае задача расчета подъема, вообще говоря, сво,
дится к интегрированию диференциального уравнения движения
летательного аппарата с переменной массой. В такой постановке,
при некоторых допущениях, задача решается в аналитической
форме. Однако решения при этом получаются в довольно сложном
виде [3]. Эти решения будут рассмотрены в 3-й части курс!
«Аэродинамика самолета".
Для целей аэродинамического расчета можно воспользоваться
хотя и приближенным, но значительно более простым методом
последовательных приближений.
Точность расчета этим методом лежит обычно в пределах
точности исходных материалов (поляра самолета, характеристики
двигателя и другие). Перейдем к рассмотрению приближенного
метода расчета подъема реактивного самолета с ЖРД.
2. Как уже отмечалось в § 9, при учете изменения веса са-
молета за счет выгорания топлива, расчет горизонтального по-
лета на различных высотах выполняется одновременно с расчетом
подъема и, наоборот, расчет подъема выполняется одновременно
с расчетом горизонтального полета.
Для этого вначале необходимо построить кривые потребных
тяг для различных высот с учетом выгорания топлива. За>
метнм, что при выполнении аэродинамического расчета реактив-
ных самолетов удобнее пользоваться кривыми потребных и рас-
полагаемых тяг, так как характеристики реактивных двигателе^
обычно даются в тягах. Исключение представляют самолетг
с турбо-винтовыми установками, аэродинамический расчет коте
рых выполняется такими же методами, как и расчет самолете
с ВМГ.
В первом приближении изменение веса самолета ДО при п<
реходе с одной высоты на другую определяется по максимальны
избыткам мощности (A<V)mKX и по весу самолета на предшес:
вующей высоте. При этом (ДД%ах определяется по кривой АЛ/
=/(V) ДЛЯ 9Т°Й высоты.
Если расчет ведется методом мощностей по кривым потребны
тяг, то
75
72
Зная (A/V)max и вес Gn на предшествующей высоте Нп, можно
определить вертикальную скорость подъема по формуле
а затем и время изменения высоты иа величину Д/7=Н^.(— Н„:
После этого находится вес выгоревшего топлива и, следова-
тельно, изменение веса самолета при переходе с высоты Нп на
высоту /7„н:
ДО = ?Д/,
73
где д—секундный расход топлива, который принимается постояв
ным дли ЖРД на всех высотах.
Таким образом, в первом приближении изменение веса самс
лета при переходе с высоты Нп на высоту AT„+i определяется и
формуле:
ДО — Qn
75(ДЛ/)«„
(5-
где (ДЛ%«л
После этого
требных тяг для
определяется для высоты Нп.
выполняется расчет и построение кривой п<
высоты "
Нп+1 и для нового веса самолета =
= О„—ДО, а затем вновь определяется
изменение веса при переходе на еле-
дующую высоту.
Аналогичным образом выполняют-
ся расчеты для всех высот. В резуль-
тате в первом приближении полу-
чается сетка кривых потребных и рас-
полагаемых тяг для различных высот
с учетом изменения веса самолета
(фиг. 44).
Кроме того, известна кривая 0 =
—f(H) в первом приближении (фиг. 45)
3. Далее, выполняется расчет подъ
ема с учетом изменения кинетиче
ской энергии. Для этого по кривы)
потребных
(фиг. 44) прежде всего необходимо найти
... *PV
где ДЛ/ =-----.
75
Затем, имея эту зависимость, можно , „ ,____
ДД/=/(Р) для различных высот (фиг. 46).
После этого производится построение кривых ~—=/(АГяк
\ _ V уфкят
для различных высот Н и огибающей к этим кривым (фиг. 47
Здесь
_75ДЛ\
* у фикт q ’
лп.
1прибл.
А\ /НприЪл
Фиг. 45
и располагаемых тя
зависимость ^N=f(V
построить сетку крив]
1/2
Н,т = Н+ ;
о
а вес О определяется по кривой (фиг. 45).
Очевидно, время наивыгоднейшего набора высоты опред-
лится по площади, ограниченной огибающей в заданных пред
лах для Нак,. Это следует из формулы уже известной на
из § 22:
74
фиг. 47
При расчете времени t интегрирование выполняется графичесю
по правилу трапеций. Время М изменения эквивалентной высоп
иа величину определится по формуле:
__^^эке /
2 \ Vy фикт(\)
1
Vy факт (2)
[сек].
(58)
Время набора высоты от до Н,к, в этом случае вычисляется!
Нэке
по формуле t — У, М.
Произведя таким образом расчеты, найдем зависимость £=|
Заметим, что для определения Д^ необходимо выбирать такие!
которые соответствуют точкам касания огибающей и кри-
вых -р—1---=/(#,««) для заданных высот И.
-V фикт
Тогда по зависимости t = нам будет известна связь-'
i=f(H} пользуясь которой можно построить барограмму подъема
с учетом изменения веса и кинетическом
энергии самолета в первом приближении!
(фиг. 48).
4. После того как получена барограмма^
подъема, определяется изменение веса само-
лета в зависимости от высоты во втором
приближении. При этом изменение веса опре-1
деляется по формуле
ДО ' qbt,
где Д< определяется по барограмме подъему
по заданному изменению высоты
ДЛ/=Я„+1-Н„.
Фпг. 48
Выполняя, таким образом, расчет для всех высот, можно по
строить кривую О = /(/7) во втором приближении (фиг. 45).
Если получится расхождение в значениях веса G по первом;
и второму приближению более, чем на 5%, расчет необходим1
повторить, приняв изменение веса с высотой по второму при
ближению.
Расчет барограммы подъема повторяется до сходимости
сов самолета при последовательных приближениях с заданий
точностью.
5. После окончательного уточнения изменения веса сам»'
лета в зависимости от высоты и после построения окончатся!
ной барограммы производится уточнение вертикальных скорости
подъема. При этом Уутал. определяется по формуле:
76
rz
v у max
UH
M '
где AZ—определяется из барограммы подъема по заданному зна
чению АЛ/, Полученные таким образом величины V от-
носятся к высоте средней в интервале Д/Г. упал
В результате можно построить кривую
Кривые Vymax~f{l~n пока-
заны на фиг. 40 для сравнительной оценки
с аналогичными характеристиками для са-
молетов с ВМГ и с ТКВРД.
Как видно по фиг. 49, вертикальная
скорость подъема самолета с ЖРД с уве-
личением высоты неограниченно увеличи-
вается. Таким образом, в применении к са-
молету с ЖРД не существует потолка в
общепринятом смысле слова. Наибольшая
высота, которую может достигнуть само-
лет с ЖРД, ограничивается запасом топ-
Vy max —f(H) (фиг. 49).
Фиг. 49
лива.
6. в
Мн
заключение расчета определяются
наивыгоднейшие скорости набора вы-
соты V,aC и углы наклона траектории.
Наивыгоднейшая скорость набора
высоты при этом определяется по
формуле:
14о6 = Г2й(Я“-Н), (59)
которая получается из выражения (48)
Напомним, что HSh, и Н находятся
по точкам касания огибающей и кри-
вых -ту-!-= f(HeKa) для различных
* у факт
ВЫСОТ.
Кривая VHa6—f{H) показана на
фиг. 50.
После того как получена зависи-
мость . и = f(H) можно
определить углы наклона траектории
на различных высотах по известной
уже иам формуле
sin в — .
'/наб
Кривая 0 =ДН) показана также иа
фиг. 50 Траекторию набора высоты
можно построить методом, изложен-
ным в § 20.
7. Изложенный в настоящем параграфе приближенный метод
расчета подъема реактивных самолетов с ЖРД применим при
fi< Однако в процессе подъема самолета с ЖРД с выем
кой степенью тяговооруженности возможен пе.реход на верти,!
кальную траекторию, когда 0 = ^-. В этом случае для расчет^
подъема необходимо пользоваться специальным методом, kotoJ
рый излагается в следующем параграфе.
Заметим, что в процессе набора высоты на самолете с ЖРД
возможно достижение критической скорости, при которой иачиЗ
нается волновой кризис. С этого момента скорость по траекто!
dV п
рии изменяется незначительно и можно принять —= 0.
В этом случае расчет подъема выполняется без учета изме-
нения кинетической энергии, но с учетом, очевидно, изменения
веса по изложенному выше приближенному методу.
§ 25. Расчет вертикального подъема реактивного
самолета с ЖРД
1. Итак, при некоторых условиях возможен вертикальны!
подъем реактивного самолета с ЖРД. Каковы же эти условия?
Для ответа на этот вопрос предварительно найдем условие
иаивыгоднейшего набора высоты, т. е. найдем выражение для
скорости по траектории, при которой будет иметь место мак-'
симальное значение вертикальной скорости и, следовательно,
наиболее быстрый подъем.
Эту задачу будем решать приближенно, приняв —т? ~ 0, сх я=
и const, р =: const.
Тогда основное уравнение движения по наклонной траекто-
рии принимает вид:
Р-X-GslnO=0
или
Р — 0,5 Схр V2S — G = 0,
откуда
V> = -L(P- 0,5 схР V2S) V. (60)
Пользуясь уравнением (60), найдем скорость по траектори!
при которой будет (1^.)я,ж.
Условие максимума Vy запишется так:
dV
=Р — 3.0,5 слрУг5 = 0,
откуда скорость по траектории при (У,,)тад:
v"a£ V 3 0,6 слР5
(61)
Подставляя (61) в (60), получим приближенное выражение
для вертикальной скорости наиболее быстрого подъема:
V, ~ | ~ I /1_____f — . (62)
3 G у з 0,5сдр5
Уго/i наклона траектории определяется по формуле:
ъ
откуда
- л У у Р
sin е--у/- =- —,
vH:tB з G
Q
Р — g- О sin 0.
(64)
Таким образом, при установившемся наивыгоднейшем подъеме
реактивного самолета с ЖРД две трети тяги двигателя затрачи-
вается на преодоление составляющей силы веса по траектории,
а одна треть—на преодоление лобового сопротивления.
Из формулы (64) вытекает приближенное условие неустаповив-
шегося вертикального подъема. Для неустановившегося верти-
кального подъема, т. е. при sin0= 1, необходимо, чтобы двига-
тель развивал тягу, превышающую полуторное значение веса са-
молета, т. е. необходимо:
Р>|0. (63)
2. Расчет вертикального подъема в общем случае сводится к
интегрированию диференциального уравнения движения самолета,
в результате чего необходимо определить высоту, которую мо-
жет достигнуть самолет при заданном запасе топлива Gz и время,
необходимое для этого.
При вертикальном подъеме 6=-^-, с^, = 0, сх — схр + сх,р +
+Ь.=/(Ма).
•Уравнений вертикального подъема реактивного самолета с
ЖРД имеет вид
p_X-G —— 4т- = °
g dt
(65)
Или
2g ап
(66)
7»
так как
dt =
dH_
V ’
где
G=f(t), X=f(V, Ma, p).
Уравнение (66) в общем виде не интегрируется. Для практиче-
ских приближенных расчетов всю высоту подъема необходимо'
разбить на ряд небольших интервалов —Н„ порядка]
200—500 м. Тогда в каждом из этих интервалов можно приняты:
при этом
где
Р= const, сх = const,
G — Gtp = const, р = рер = const,
Pep — 2~ ""P1 Рлл)’
r _ r &G
Gcp = G„-----g-,
ЛГ- л/
LG — qU = q ;
v п
V
сх определяется по числу Маха Ма = " .
При этих допущениях уравнение (66) принимает вид:
т dV- „
a — bV2---——=0,
2 did
где
а — Р — Gep — const;
b = 0,5 cxpcpS = const.
Ив уравнения (67) получим
d\P
Ч (a — bV^) '
Интегрируя это уравнение в пределах от Н„ цоНп+\ и от начальной
скорости 1/Л на высоте Нп до конечной скорости VK на высотаI
ffn+i, получим:
о к
Здесь
f = -| In (b V2 - а) + const,
8»
следовательно,
2bmbV'-a
(69)
При расчете вертикального подъема приходится задавать Д/7
и определять Ук. Для этого удобнее выразить V, в зависимости
от АЛЛ Потенцируя уравнение (69), получвм
/>У„2-д
л ТП -— -
~bVKs-a
откуда
( 2^Н
ЬУ*-а\1-ет
Ьет
(70)
где
— ДЯ<1.
ТП
Время изменения высоты на величину Д/7 определим и резуль-
тате интегрирования уравнения (65), которое при допущениях,
указанных выше, принимает вид:
a — bV*- т— 0,
dt
(71)
откуда
df~ma-bV-
Интегрируя это уравнение, получим:
VK
. (‘ dV
t = m --------
J bVs a
V*
(72)
Здесь
' dV 1 , V’-c ,
y-,,:;--= —/—ln T7'7^ + const,
bV‘—a 2\/ab ^+c
следовательно,
где
f — m in + О
2]/ ab ( + c) (— c)
(73)
а = const.
Ъ
с =
6 Е. Торба
81
3. Пользуясь основными формулами (70) и (73), можно выпол
нить приближенный расчет вертикального подъема, начиная от
высоты, на которой *) = ^- до полного выгорания топлива.
Этот расчет рекомендуется выполнять в следующем порядке
1) Расчет начинается от высоты Нп, на которой в = Эта вы
сота, вес самолета, а также скорость в момент выхода самолет;
иа вертикальную траекторию известны в результате расчета
методом, изложенным в § 24.
2) Начиная от Нп, задаемся изменением высоты
\Н=Нп+,—Нп= 2004-500 м.
Определяем:
с, по Ма = — ;
х а
Gtp — G„
&G
2 ’
pCP=^(p«.+p*»+i); p=const.
3) По формуле (70) находим скорость VK. Такая скорост;
будет на высоте //n+i в конце интервала Д/Т. При расчете по
формуле (70), очевидно, следует принимать Уя = V„.
4) По формуле (73) определяется время изменения высоты от
Нп до Hn+i на величину ьН.
5) Определяется изменение веса самолета ДО за счет выгор;
ння топлива за время изменения высоты на Д/Т:
hG = qt.
В результате такого расчета на высоте будут известны
вес самолета Gn^i=G„— ЫЗ, скорость 14^1 — VK.
6) Прежде чем переходить к следующему интервалу Д/Т, не»
, х Д/Т
обходимо сравнить значения сх н t= р~, принятые при расчет*
в первом приближении с теми значениями, которые получаются
ио средней скорости полета Vc„ в интервале Д/Т. При этс
V =0,5(VK+VJ
Если обнаружится недопустимое расхождение, расчет необх
димо повторить по новым значениям ся и Gcp.
7) После этого расчет выполняется для новых интервал*
высот до полного выгорания топлива.
82
Следует иметь в виду, что постоянные коэфнциенты т а b
£, входящие в формулы (70) и (73), необходимо вычислять для
каждого интервала высот Д/7.
В результате расчета по изложенной схеме можно построить
кривую зависимости веса самолета G от высоты Н и барограмму
подъема F у
ГЛАВА V
ПОЛЕТ САМОЛЕТА ПО НАКЛОННОЙ ТРАЕКТОРИИ
СО СНИЖЕНИЕМ
§ 26. Основные понятия и уравнения
1. В аэродинамическом расчете движение по наклонной траек-
тории со снижением обычно рассматривается как установив-
шееся и прямолинейное.
Это близко к реальному полету на постоянном угле атаки
лрк небольших изменениях высоты. При больших же измене-
ниях высоты существенно изменяется плотность и аэродинами-
ческие характеристики (особенно прн больших углах наклона
траектории, когда скорости могут достигать больших величин),
вследствие чего, в этом случае, движение самолета следует счи-
тать уже как неустановнвшееся (например, разгон прн пикиро-
вании). Такне движения изучаются в 3-й части курса—в „Дина-
мике полета".
Итак, перейдем к рассмотрению установившихся движений
самолета по наклонной траектории со снижением.
2. Уравнения движения по наклонной траектории со сниже-
нием получаются нз уравнений для установившегося подъема
при 6<0. Учитывая это, из уравнений (30), (31) получим:
Р — X + Osin 6 = 0, (74)
У-(7cosO~0, (31)
откуда потребная тяга
P„ = X-Gsine (75)
Р — g(C— cos 6— sin (А , (76)
W )
а пРтребная скорость
= <34)
5*
83
Такны образом, прн установившемся полете по наклонно
траектории со снижением величина потребной тяги меньше ло
бового сопротивления ра величину составляющей силы веса п
траектории, а величина потребной подъемной силы и скорости,
так же, как и при подъеме, меньше, чем в горизонтальном по-
лете прн том же угле атаки.
3. При изучении полета самолета по наклонной траектории
со снижением различают два основных случая:
1) Снижение с работающим двигателем, когда
Р>0.
2) Снижение прн нулевой тяге двигателя или вннта (Р —0)-
Этот случай полета по наклонной траектории со снижением
обычно называют планированием.
Перейдем к более подробному рассмотрению указанные
случаев полета по наклонной траектории.
§ 27. О расчете снижения самолета при₽>0.
1. Расчет снижения с заданной высоты сводится к опреде4
лению вертикальной скорости снижения Vy, скорости по траек-1
тории Vmp, угла наклона траектории к горизонту 0 и времен!
снижения.
Расчет снижения принципиально может быть выполнен так.
же, как и расчет подъема!
Только вместо в>0 надо брати
6<0, в результате чего при
снижении l/j,<0.
Для определения характе-
ристик снижения можно вое*
пользоваться методом тяг или
мощностей.
2. Для расчета снижения
методом тяг необходимо так
же, как и при расчете подъема,
после предварительных вы-
числений по формулам (75) иле
(76) н (34) построить сетку крш
вых потребных тяг для р' .-и
личных углов наклона траею
тории на заданной высоте 4
наложить на нее кривую максимальных располагаемых тяг, кг1
это показано на фнг. 51.
Очевидно, по точкам пересечения этих кривых для заданного
угла наклона траектории 6 можно определить скорость уста нс
вившегося снижения Vmp.
Таким образом, для ряда значений углов 6 будут извести*
скорости по траектории снижения на заданной высоте.
По этим данным можно определить вертикальную скорость
снижения:
1/у= Е»р8ше<0.
Для суждения о характеристиках снижения удобно восполь-
зоваться так же, как и при подъеме, полярной кривой — указа-
сельницей траекторий (глиссад) снижения. Такая кривая показана
на фиг. 52. Эта кривая, очевидно, является продолжением ука-
зательницы траекторий подъема при максимальной тяге иа за-
данной высоте полета.
Пользуясь указательницей траекторий снижения, можно гра-
фически определить вертикальную скорость синження (ИД как
вертикальную проекцию скорости по траектории снижения (17ир).
Как йидно по фиг. 52, скорость по траектории снижения
быстро увеличивается с увеличением угла наклона траектории.
Особенно заметно это проявляется у реактивных самолетов, име-
ющих более высокое аэродинамическое качество и более высокие
нагрузки на квадратный метр площади крыла.
Для уменьшения скорости по траектории снижения необхо-
димо уменьшать тягу винта или реактивного двигателя вплоть
до перехода на снижение с Р~0, т. е. с переходом в плани-
рование.
При переходе на снижение с большим углом наклона траек-
тории (пикирование) скорость самолета увеличивается и проис-
ходит раскрутка винта, а следовательно, и двигателя на само-
лете с ВМГ. Явление раскрутки винта с аэродинамической точки
зрения, как известно, вызывается уменьшением углов атаки, под
вторыми работают сечения лопасти винта.
•Для предупреждения чрезмерного увеличения оборотов дви-
гателя, вследствие раскрутки винта, необходимо или дроссели-
ровать двигатель в случае винта фиксированного шага, или пе-
реводить лопасти винта иа большой угол установки („затяже-
лять“) в случае ВИШ.
3. Для расчета снижения методом мощностей можно вос-
пользоваться кривыми потребных н располагаемых мощностей,
85
построенных для расчета горизонтального полета. Очевидно,
снижение будет при отрицательном избытке мощности, т. е. при
Nn<0.
На фиг. 53 показана область снижения н кривая избытков
мощности в завнснмостн от скорости полета для одной нысоты.
Напомним, что в методе мощностей принято
cos(e+<p)~l, sin(«+<p);sO, cosfisal,
следовательно, скорость по траектории Vmp~VKp.
По отрицательным избыт-
кам мощности можно опреде-
лить вертикальную скорость
снижения Vy так же, как и
при расчете подъема:
Vy=™<0.
* G
Если расчет горизонталь-
ного полета выполнялся по
потребным н располагаемым
тягам, как это часто делается
при расчете летных характери-
стик реактивных самолетов, то
... APV
ДЛ/ = -7Г’
Наконец, задавая ряд зна-
чений скорости полета V =
избытков мощности (фиг. 53).
можно вы-
« Vwp в области отрицательных
и определив вертикальную скорость снижения Vj
числить и углы наклона траектории по формуле;
sin 6 = - у ,
•'wp
Расчет снижения методом мощностей можно
большой погрешности при определении Vmp,
наклона траектории не более 2СР.
Полет по наклонной траектории со снижением с работающим
двигателем обычно применяется, как боевой маневр, для увели-
чения скорости полета, т. е. для разгона самолета. В этом слу
чае углы наклона траектории могут быть значительными и для
расчета неустановившегося движения, как это имеет место при
разгоне, необходимо применять специальные методы расчета,
которые рассматриваются в динамике полета.
86
выполнять без
и 6 до углов
.При снижении перед посадкой обычно тяга винта или реак-
тивного двигателя близка к нулю и тогда самолет переходит
в планирование, к рассмотрению которого мы и перейдем.
§ 28. Планирование самолета (1Р = 0)
1. Планирование представляет собой установившийся полет
по наклонной траектории со снижением при Р=0.
При таком палете на самолет действуют две силы: полная
аэродинамическая сила R и сила веса G (фиг. 54). Очевидно,
в установившемся прямолинейном движении эти силы должны
уравновешиваться, т. е.
R = 0,5с R р 172S = G. (77)
Напомним, что cR=yjc2y + с\ и определяется по поляре само-
лета, построенной в равных масштабах для сх и су, как радиус-
вектор для Заданного угла атаки (фиг. 55).
Если полную аэродинамическую си-
лу R разложить на составляющие по
траектории полета и на нормаль к ней, т. е. на лобовое сопро-
тивление X и подъемную силу Y, то можно написать:
Х=0,5сЛрИ5= Gsinfi; (78)
У= 0,5сЛрV3S= G cos 6. (79)
Уравнения (77)—(79) являются основными уравнениями планиро-
вания.
Расчет планирования сводится к определеиию скорости по
траектории планирования угла наклона траектории к гори-
зонту (угла планирования) D, вертикальной скорости снижения
Vy для ряда углов атаки на заданной высоте.
Кроме того, определяется очень важная характеристика—даль-
ность планирования.
87
Расчетные формулы, необходимые для вычисления
характеристик планирования, получим из основных
(77), (78), (79).
2. Скорость по траектории планирования:
указанных
уравнений
(80)
или
или
.. __ .2Gcos О
/2(?sin0
V” '= \/~7~pS~ '
(82)
Обычно прн расчете планирования применяется формула (81).
Из уравнения (79) следует, что при с5. = 0, cos fj = 0, т. е. 6 = 9(Г.
Следовательно, углу атаки нулевой подъемной силы соответ-
ствует отвесное снижение или пикирование.
В этом случае по формуле (81) получается неопределенность
и тогда следует пользоваться формулой (82). Эта формула при-
меняется вообще для определения 1/„л при больших углах О,
когда су и cos 6 малы и, следовательно, скорости Vn, большие.
В этом случае при определении сх необходимо учитывать влия-
ние сжимаемости воздуха, что прежде всего относится к реак-
тивным самолетам.
Как видно по формулам (80), (81), (82), скорость планирования
пропорциональна нагрузке на квадратный метр площади крыла
— в степени 1/2, обратно пропорциональна плотности воздуха
в той же степени
до aKf.
3. Угол наклона траектории можно определить из уравнений
(78), (79). Разделив первое уравнение на второе, получим:
и уменьшается с увеличением угла атаки
(83)
Таким образом, угол наклона траектории пропорционален
обратному аэродинамическому качеству самолета.
Минимальное значение угла наклона траектории (более поло-
гое планирование) получается при (
,. _ . „ \ х h
, т. е. на угле атаки,
| - . mai
который принято называть нанвыгоднейшнм (»ftoo«).
Очевидно, при увеличении удлинения крыла и нрн улучше-(
нин аэродинамических форм самолета уменьшается.
В докризисной области скоростей полета (Ма < Макр) угол
наклона траектории зависит только от аэродинамического каче-
ства самолета или от угла атаки и не зависит от высоты и ско-
рости полета ^илк
Прн Ма > Макр
наклона траектории зависит от
I G
I или от -=-
различных углов атаки,
координатами: радиус-
0Т S/ на задзнном угле атаки= constJ.
(планирование прн больших углах 6) угол
"" высоты и скорости полета
на заданном угле атаки, так как в этом случае аэро-
динамическое качество самолета изменяется, вследствие измене-
ния слияния сжимаемости воздуха.
4. После определении и 0 для
можно построить полярную кривую с
вектор — скорость планирования
1/„л и полярный угол—угол на-
клона траектории 0 (фнг. 56).
Эта кривая называется ука-
зательницей траекторий (глиссад)
планирования! и применяется для
анализа различных режимов пла-
нирования; на ней обычно де-
лается разметка углов атаки.
По указательннце траекторий
планирования определяются ха-
рактерные режимы. К таким ре-
жимам относятся: режим наибо-
лее пологого планирования (0,„;„),
режим наиболее продолжитель-
ного планирования или наибо-
лее медленного снижения (V,
с заданной высоты, режим уста-
новившегося пикирования на данной
______________...г........ л___ высоте (6 = 90°).
Как видно по указательннце траекторий планирования (фиг. 56),
скорость по траектории, соответствующая наиболее пологому
планированию, больше, чем скорость, соответствующая наибо-
лее медленному снижению, т. е.
Vf/mr'1 Vvymi„
Или
пв иш <а V у min'
Вертикальная скорость планирования по указательннце траекто-
рий определяется как вертикальная проекция радиуса-вектора
(У*,)“ля заданного угла атаки, т. е.
Vy= VMsin6.
Предельный случай установившегося планирования при 0=90
Называется отвесным пикированием.
В практике под пикированием обычно понимают снижение
по крутой траектории.
5. По указательнице траекторий планирования (так же, как
по поляре самолета) видно, что планирование с одинаковыми
углами наклона траектории 0 возможно на двух режимах: нЫ
режиме большой скорости и малом угле атаки и на режиме
малой скорости и большом угле атаки.
В соответствии с этим различают первые режимы и вторы^
режимы планирования.
В области первых режимов планирования при увеличении
угла атаки (уменьшение скорости) угол наклона траектории пла-J
пирования уменьшается; в области вторых режимов планирова-1
ння прн увеличении угла атаки (уменьшение скорости) угол на-
клона траектории увеличивается.
Таким образом, на вторых режимах планирования управление!
рулем высоты по отношению к углу наклона траектории меняется
иа обратное: отклонению ручки „на себя" соответствует не умень-
шение, а увеличение угла наклона траектории к горизонту ик
наоборот, прн отклонении ручки „от себя" угол наклона траек-
тории уменьшается.
6. Важной характеристикой планирования является дальность^
планирования L с заданной высоты п. Очевидно, дальность пла-|
нировання
£=//ctg//=77--^ . (84)|
Сх
Дальность планирования зависит от высоты и от аэродииамиче-1
ского качества самолета и не зависит от скорости полета на
заданном угле атаки или не зависит от веса самолета (при Ма<4
<Мак,).
При изменении веса самолета, но при а = const, будут изме-
няться только скорость по траектории ¥„л и вертикальная ско-
рость снижения Vy, а следовательно, н продолжительность пла-1
нировання с заданной высоты.
Наибольшая дальность планирования получается прн плани-
ровании на наивыгоднейшем угле атаки-, когда аэродинамическое
качество самолета имеет максимальное значение, т. е.
с I
X х 1 max
<85)
7. Практический интерес представляет режим наиболее про-
должительного планирования (V’j,Ki„) с заданной высоты.
Найдем угол атаки, при котором будет планирование с
му ^еРтикальная скорость планирования определяется по фор-
i/nxSine,
so
где ,
следовательно,
V"A ~\/<Ss’
Сх
sin е — “ ,
При ® не более 20 ’ можно принять с R~ су, тогда
,/ ~ Сх 2С'
* су^\! Ps
Очевидно,
(86)
(87}
Таким образом, режим наиболее продолжительного планиро-
вания близок к режиму наиболее продолжительного горизонталь-
ного полета, т. е. соответствует экономическому углу атаки:
а,. - saa •
17у пип ыск
8. Для увеличения угла наклона траектории иа участке пла-
нирования при посадке применяются тормозные щитки. При откло-
нении щитков увеличиваются су и сх. Однако сх при этом уве-
личивается сильнее, в результате качество уменьшается, и угол
наклона траектории 6 увеличивается. Это необходимо для умень-
шения расстояния, пролетаемого самолетом по горизонтали и,
следовательно, для уменьшения размеров посадочной площадки
В качестве средства увеличения сх самолета применяются
также реверсивные винты, создающие прн отрицательных углах
установки лопастей отрицательную тягу.
9. При анализе планирования реактивных самолетов необхо-
димо учитывать следующие особенности:
1) Реактивные самолеты более „чувствительны” к изменению
наклона траектории. При увеличении угла 6 происходит более
быстрое увеличение скорости, вследствие более высокого аэро-
динамического качества и, как правило, более высоких нагрузок
На
реактивных самолетов.
2) Прн планировании реактивного самолета с ТКВРД обычно
Двигатель не выключается и развивает некоторую тягу, вслед-
ствие этого, а также вследствие более высокого аэродинамиче-
ского качества, планирование такого самолета, например, при по-
садке получается очень пологим с медленным торможением ско|
рости. I
3) При расчете планирования реактивного самолета с ТКВРЛ
при полностью убранном газе необходимо учитывать сопротивле!
яне авторотирующей турбины и компрессора двигателя. Коэфи-1
циент дополнительного сопротивления, вследствие авторотации!
определяется по приближенной формуле:
= 0,114-^-, (88)1
где: D — диаметр двигателя; S—площадь крыла.
4) При расчете планирования с большими углами наклон J
траектории или пикирования реактивных н вообще скоростных!
самолетов необходимо учитывать влияние сжимаемости воздуха.
Это влияние проявляется в существенном уменьшении скорости]
при 1 = const.
Для иллюстрации на фиг. 56 пунктиром показан участок ука-
зательиицы траекторий планирования с учетом влияния сжимае-
мости воздуха.
Учет влияния сжимаемости воздуха при расчете плаиирова*!
ния производится методом последовательных приближений.
ГЛАВА. VI
АЭРОДИНАМИЧЕСКИЙ РАСЧЕТ САМОЛЕТА МЕТОДОМ
ТЯГ Н Е. ЖУКОВСКОГО
§ 29. Основы метода тяг Н. Е. Жуковского
I. В 1917 г. „отец русской авиации" Николай Егорович Жу
ковский предложил точный метод аэродинамического расчета]
самолета, который в специальной литературе называется мето-
дом тяг Н. Е. Жуковского.
Этот метод был изложен в работе Н. Е. Жуковского „Аэро*
динамический расчет аэропланов", опубликованной в i-м выпуске]
трудов Авиационного расчетно-испытательного бюро в 1917 г. I
Метод Н. Е. Жуковского является графическим методом,]
основанным на точных уравнениях установившегося прямолнней-1
ного движения самолета в общем случае по наклонной траектории!
Эти уравнения представляют собой условия равновесия сил
в прямолинейном установившемся полете и записываются в сле-
дующем виде ’)
Рcos(п + ср) — X - Gsinb = 0; (891
Y + Pstn (а + ср) — Geos 9 = 0. (90)
I) Метод тяг Н. Е. Жуковского излагается в обозначениях, принятых в на
с тоя шей книге.
При этом 0 > 0 при наборе высоты, 6 < 0 при снижении.
В методе Н. Е. Жуковского дается графическое решение
уравнений (89), (90) посредством силовых треугольников с опреде-
лением потребных тяг и скоростей полета при различных углах
наклона траектории.
Перейдем к рассмотрению самого метода.
2. В установившемся прямолинейном полете иа самолет дей-
ствуют три силы: сила тяги Р, сила веса G и полная аэродина-
мическая сила R.
При этом всегда известны: направление и величина силы
веса О; направление силы тяги винта или реактивного двигателя Р,.
которая принимается направленной под углом а + tp к направле-
нию полета; направление полной аэродинамической силы R, если
имеется поляра самолета.
Для равновесия па заданном угле атаки необходимо, чтобы
силовой треугольник, составленный из этих сил, был замкнут.
Очевидно, различным углам наклона траектории 0 и углам атаки я
будут соответствовать различные силовые треугольники.
Такие Енловые треугольники и были использованы Н. Е. Жу-
ковским для определения потребных тяг и скоро,CTeit. Только
вместо сил он пользовался следующимикоэфйциентаМи этих сил:
1) коэфициент силы веса-- -------—
2) коэфициент тяги
_ 2G
Сс— pl/’-S ’
(91)
(92)
3) коэфициент полной аэродинамической силы
с ~-2R-
pV2S '
(93)
Очевидно, треугольники, построенные по коэфнциентам сил, будут
подобны силовым треугольникам.
Преимущество построения треугольников по коэфициентм
сил (безразмерные силы) связано с использованием поляры само-
лета. При этом нам известны: величина н направленне^с^на-
правлснйя"'т'с" и ip.
На фиг. 57 показано построение силового треугольника для
мучая подъема, а на фиг. 58 — для случая снижения.
л В основу всего построения кладется поляра самолета, по-
строенная в одинаковых масштабах для сх и с?. Начало коорди-
нат при этом выбирается в произвольной точке на траектории,
ось сл-ов направляется по траектории против полета, а ось
су-ов -по нормали к траектории. Далее вектор сс проводится
I 93
через начало координат под углом/) vK оси Суов, а вектор ср
иод углом а + направлению траектории и через точку i
поляре, соответствующую заданному углу атаки а.
В результате построения силовых треугольников для задан-
ных аиб будут известны коэфициенты сс н ср. Эти коэфици-
екты определяются в масштабе поляры самолета (по масштабу
для сх и Cj,).
'После этого легко определить потребныс/скорость и тягу;
потребная скорость из (91)
К = \А^|Х/С<Ж]: (94)
потребная тяга из (91) и (92)
Pn=G-^. (95)
_ । ьс
§ 30. Построение диаграммы Н. Е. Чуковского
1. Для расчета установившегося полета самолета по различ-
ным траекториям Н. Е. Жуковский предложил строить диа-
грамму, показанную на фиг. 59. Эт& диаграмма, как легко видеть,
представлнет собой совокупность силовых треугольников для
различных углов Она.
2. На этой диаграмме показаны область полета с набором
высоты (А > О) и область полета по наклонной траектории со
снижением (6 <0). Область режимов поле-
та с набором высоты находится слева от
оси с^-ов, а область режимов полета со
снижением—справа от этой оси. Очевид-
но, точки, принадлежащие силовым тре-
угольникам для горизонтального полета
(0 = 0) находятся на оси суов, которая
является границей между режимами по-
чета с набором высоты и со снижением.
Таким образом, метод тяг Н. Е. Жу-
ковского нвляется универсальным, так
как, пользуясь диаграммой Н. Е. Жу-
ковского, можно решать задачи, свя-
занные с расчетом режимов полета само-
лета по различным траекториям: подъем,
снижение, горизонтальный полет.
Фиг. 59
§ 31. Построение диаграмм потребных тяг и сетки
v Н. Е. Жуковского
1. Пользуясь диаграммой Н. Е. Жуковского, можно опреде-
лить коэфнциенты сс и ср для различных углов наклона траек-
тории н для всех углов атаки,
иа которых возможен нормаль-
ный полет.
Затем по формулам (94) и
(95) определяются потребные
скорости и тяги для полета
по траекториям с различными
углами наклона к горизонту.
Эти расчеты рекомендуется
выполнять для высоты Н = 0
по MCA. По известным Рк и
1/„ для различных а прн 6 =
— const можно построить диа-
грамму потребных тяг н сетку
Н. Е. Жуковского.
Сетка получается в резуль-
тате соединения кривыми то-
чек, соответствующих одина-
ковым углам атаки на различ-
ных кривых Такая
сетка показана на фнг. 60.
Фиг. 60
д 2. Для того чтобы можно было воспользоваться этой сеткой
для других высот //>0 внизу дается высотный масштаб ско-
ростей.
Методика построения этого масштаба нами уже изложена
- § 11.
94
§ 32. О расчете летных характеристик самолета по
диаграмме Н. Е. Жуковского. О применимости метода
1. Для расчета летных характеристик самолета на диаграмму
потребных тяг накладываются кривые располагаемых тяг для
различных высот При построении кривых располагаемых тяг
для высот 0 необходимо
пользоваться высотным масшта-
бом скоростей (фиг. 61).
2. По кривым потребных и
располагаемых тяг определяются
максимальные скорости по траек-
тории прн заданных углах 6 иа
различных высотах, скорости
главных режимов горизонталь-
ного полета, избытки тяги н, сле-
довательно, мощности.
Затем выполняются расчеты
характеристик подъема, горизон-
тального полета, снижения.
Методы этих расчетов изло-
жены в § § 7, 11, 12, 16, 27, 28.
3. Метод тяг Н. Е. Жуков-
ского принципиально является
точным методом, в котором учитывается влияние угла наклона
траектории 0 и составляющих тяги Pcos(a + y) и Psin(a+?) на
величину потребных скоростей н тяг. В этом существенное пре-
имущество метода тяг Н. Е. Жуковского по сравнению с при-
ближенным методом мощностей.
Однако следует иметь в виду, что точность расчетов по ме-
тоду тяг Н. Е. Жуковского значительно снижается вследстие
того, что основные расчетные величины этим методом опреде-
ляются в результате ряда графических построений, которые сами
по себе являются источником существенных ошибок.
К расчету методом тяг следует прибегать в случае больших
углов (а + <р) и 8 в применении к самолетам с поршневыми дви-
гателями и при сравнительно небольших скоростях полета (см.
дополнительно § § 16, 18, 21).
4. При скоростях полета, при которых Ма > Макр, расчет
методом тяг Н. Е. Жуковского значительно усложняется в связи1
с необходимостью учитывать влияние сжимаемости воздуха.
В этом случае приходится пользоваться несколькими поля-
рами для различных чисел Маха и строить диаграммы потреб-1
вых тяг для различных высот, так как высотным масштабом
скоростей уже пользоваться нельзя.
96
ГЛАВА VII
ДАЛЬНОСТЬ И ПРОДОЛЖИТЕЛЬНОСТЬ ПОЛЕТА
САМОЛЕТОВ С ПОРШНЕВЫМИ ДВИГАТЕЛЯМИ
§ 33. Основные понятия Постановка задачи
1. Дальность полета—расстояние по горизонтали, пройденное
самолетом относительно земли в заданном направлении. Разли-
чают дальность полета по прямой и по маршруту. В дальнейшем
мы будем иметь в виду дальность полета по маршруту, т. е.
действительный путь самолета относительно земли. Очевидно,
при безветрии дальность полета будет гавна воздушному пути
по горизонтали; при наличии ветра дальность полета может
Фиг. 62
быть больше или меньше воздушного пути по горизонтали
в зависимости от направления ветра.
В соответствии с этим различают скорости воздушно ю или
техническую и путевую.
Под воздушной скоростью понимается истинная скорость по-
лета сак олета относительно воздуха; под путевой скоростью
понимается скорость пслета самолета относительно земли.
Очевидно, воздушная скорость пслета не зависит от скорости
ветра, а путевая скорость пслета загиент от скорости ветра.
В дальнейшем мы будем рассматривать дальность полета прн
безветрии. О методе учета влияния ветра на дальность полета
сказано в § 39.
Обшая дальность полета определяется как расстояние по
аршруту, считая от места взлета до места посадки самолета.
Таким образом, весь полет на дальность или, как говорят, про-
филь полета состоит нз трех участков: подъем, основной этап
полета на дальность, снижение самолета (фиг. 62).
1 Е. Торба П
Дальность полета на участке подъема определяется по мате-1
риалам расчета подъема самолета. В результате расчета подъема,!
как известно, можно построить траекторию и определить рас-1
стояние, пройденное самолетом по горизонтали (см. § 20).
Кроме того, по барограмме подъема определяется время
подъема и, следовательно, расход горючего на этом участке.]
Дальность полета на участке снижения определяется по ма-
териалам расчета снижения или планирования (§§ 27, 28).
В дальнейшем рассматравиогся мето ты расчета дальности и
продолжительности полета на основном этапе. Высота (или вы-
соты), на которой прои «водится полет на дальность, определяется
как нанвыгоднейшая. На ней обеспечивается наибольшая даль-
ность полета при заданном запасе горючего или эта высота за-
дается по тактическим соображениям.
Располагаемый запас горючего Ог,р, который может быть из-
расходован на основном этапе полета, необходимо определять
с учетом расхода горючего на подъем самолета на заданную
высоту, на работу двигателя на земле и на полет по кругу перед
посадкой.
Расход горючего иа набор высоты определяется по прибли-
женной формуле: ,
Gapm * 1,25-~р [кг], (112)
где: t—время набора высоты в минутах;
Ne—мощность двигателя на режиме набора высоты;
с,—удельный расход горючего в KtjA.c.iac.
Расход горючего на работу двигателя на земле н для полета I
по кругу fG,0₽(2)) нормируется специальными инструкциями.
При отсутствии инструкций Огор(>) можно определять прибли- 1
жени о по эмпирической формуле [5]:
G,op(2)^0,0007A'„o^[K2], (113)1
гдесуммарная номинальная мощность двигателей на вы- I
соте /7=0;
t—время работы двигателя в минутах; для самолета I
с одним двигателем / = 15 минут, с двумя двигате- ]
лями t = 20 минут, с четырьмя—7=30 минут.
Таким образом, располагаемый запас горючего равен полному I
запасу горючего в баках за вычетом Giopm и т. е. Сг,р — I
— Gnojlli Сгор(У) Giop^2)-
Для определения дальности L и продолжительности Т полета I
на основном этапе необходимо знать, как будет показано ниже,
километре «ый расход (qL) и часовой расход (7г) горючего.
Километровым расходом горючего называется расход горю-
чего в килограммах на километр воздушного пути.
Часовым расходом горючего называется расход горючего I
килограммах за один час полета.
ss
2. При расчете дальности и продолжительности полета при-
ходится решать разнообразные задачи. Из них основными яв-
ляются следующие:
!) Определение наибольшей возможной дальности или про-
должительности полета при заданном запасе горючего. Эта за-
дача сводится к определению нанвыгоднейших высот, скоростей
полета и оборотов двигателя, прн которых обеспечиваются ми-
нимальные километровые или часовые расходы горючего, т. е.
к разработке профиля полета.
2) Определение дальности нлн продолжительности полета по
заданным высоте, скорости н запасу горючего, т. е. по задан-
ному профилю полета.
Все остальные -задачи, с которыми приходится встречаться
при расчете дальности и продолжительности полета, являются
производными от указанных основных.
К таким задачам, например, относятся следующие:
1) Определение запаса горючего, потребного для полета на
заданную дальность или продолжительность с заданной скоростью
(полет в строю сопровождение истребителем бомбардировщиков,
патрулирование в заданной зоне, полет на максимальной скорости,
толст к цели н обратно и другое).
2) Определение дальности или продолжительности полета с уче-
том изменения веса самолета за счет сбрасывания бомб или дру-
гих грузов по маршруту, или с учетом изменения лобового со-
противлении самолета н другое.
В дальнейшем мы будем рассматривать главным образом
первую из основных задач.
В результате решения этой задачи обычно получаются ма-
териалы, достаточные для разрешения остальных.
§ 34. Общие зависимости дальности и продолжительности
полета от параметров самолета
1. Допустим, что при горизонтальном полете на определенном
угле атаки на каждый километр воздушного пути расходуется
килограмм горючего. Тогда при расходе dQ,jp килограмм го-
рючего самолет пройдет расстояние
.. dG,,„
dL =----километров,
• де 4Омр<0.
Дальность полета L прн полном расходе располагаемого за-
паса горючего Сгор определится следующим образом:
7*
99
Очевидно, вес самолета изменяется на величину dO при
уменьшении запаса горючего на величину dGl0p, т.е. dG—dG!op,
следовательно:
6 кон
L==- ( (9®
J
@нач
где: Онач— начальный вес самолета, GKBH — GKm—Glop—вес само-
лета в конце полета на дальность.
Для интегрирования выражения (96) необходимо километро-
вый расход выразить через вес самолета G.
Воспользуемся для этого связью между километровым и ча-
совым расходом горючего:
где V—скорость самолета в км; час.
Далее, выразим часовой расход горючего через вес и аэро-
динамические характеристики самолета.
Очевидно,
ио
75 1), су ’
следовательно,
' _GV G сс
Чт~ 75 Су < •
Здесь:с,—удельный расход горючего в кг'л.с.час;
т;,—коэфициент полезного действия винта;
V—в м)сек.
Подставляя qT из (98) в (97), получим:
__________________________ О сх се
Як — 270 Су т1в
После подстановки qL из (99) в (96), выражение для дальности
представим в другом виде;
I @нач
L = 270 f -у- . (99)
J сх се и '
J @кон
Допустим, что полет происходит на постоянном угле атаки,
т- е. при = const и = const.
(98)
(99)
100
Такой полет, вообще говоря, возможен только с изменением
'зысоты, вследствие уменьшения веса самолета. Однако влиянием
этого обстоятельства на дальность в первом приближении мы
будем пренебрегать.
При этих допущениях окончательно:
/. = 270^- (100)
се ^кон '
ИЛИ
L - 270 -у In----J— , (101)
сх се 1 _ q qp ' '
где G ав = -~£- — относительный запас горючего.
При 6гор~--0,63, 1п---—1 и
1 @гор
Т. = 270Ь:Л (102)
t Сх Се
Эта величина характеризует некоторую условную предельную
дальность, и мы ее будем называть дальностной характеристи-
кой.
Дальвостной характеристикой можно воспользоваться для
сравнительной оценки дальности полета самолетов с различ-
ными двигателями.
Формулы (100), (101) позволяют сделать ряд общих выводов
о влиянии различных параметров самолета на дальность его по-
лета.
Как показывают эти формулы, максимальная дальность LmBX
яолучается при (CjL- — ]
'max
Если const, то Lmax получается при максимальном аэро-
динамическом качестве самолета , что соответствует ре-
4 ' тпал
жиму полета на нанвыгоднейшем угле атаки (акаа<).
Однако в действительности с изменением веса самолета, ско-
рости и высоты полета изменяется и поэтому режим иан*
большей дальности полета, в общем случае, не совпадает с
наивыгоднейшим режимом горизонтального полета или с режи-
мом минимальной тяги.
«в Увеличение коэфициента полезного действия винта н умень-
шение удельных расходов горючего приводит, естественно, к
увеличению дальности полета при том же запасе горючего (бо-
лее удачный подбор винта, оборотов двигателя, скорости н вы-
соты полета).
101
Очевидно, что при увеличении относительного запаса горю-
чего дальность полета увеличивается.
Таким образом, в общем случае для обеспечения наибольшей
дальности полета самолета с поршневым двигателем при задан-
ном запасе горючего необходимо определить наивыгоднейшие
обороты двигателя, скорость и высоту полета. Эта задача рас-
сматривается в следующем параграфе.
2. Далее, установим зависимость продолжительности полета
от некоторых параметров самолета.
Допустим, что прн горизонтальном полете на определенном
угле атаки за каждый час полета расходуется qT килограмм го-
рючего. Тогда d3iop килограмм горючего будет израсходовано
за время
dT —----^9>ор_ часов.
9т
Продолжительность полета Т прн полном расходе распола-
гаемого запаса горючего Gwp определится следующим образом:
J* j — ^кач
Т= - Г = [— (103)
@гор GKOH
Подставляя qr из (98) в (103), получим
@нач
T=75fc£T'v7r’ (104)
ио V= •] / ЛР _, следовательно,
V CypS
&нач
@HOH
Полагая, так же как и при выводе выражения для дальности
полета, что полет происходит на постоянном угле атаки, т е
3,2 ц
= const, ~ = const, окончательно получим:
Т=75Г2 (Ю6)
Эта формула позволяет сделать некоторые выводы о влиянии
параметров самолета на продолжительность его полета. При
102
= const наибольшая продолжительность полета получается
(с 31» X
при (-J'- ) , что соответствует режиму полета на экономи-
ческом угле атаки («,кон). Однако в действительности с измене-
нием веса самолета, скорости и высоты полета изменяется и
с,’
поэтому режим наибольшей продолжительности полета в общем
случае не совпадает с экономическим режимом, хдтя и близок
к нему.
Продолжительность так же, как и дальность полета, увели-
чивается с увеличением коэфициента полезного действия винта
и запаса горючего при уменьшении удельного расхода горючего.
3. Формулы для определё! ия дальности и продолжительности
полета можно несколько упростить, если расчет вести по сред-
нему весу самолета, под которым попим;ется
, Gep = - = Окд. - %- = G-Ul - 0,5Огор), (107)
где GKp — — относительный запас горючего.
^нач
В этом случае
(кв>
(,о9>
Следовательно,
- ^'°Р — 270^- Сх ct О,ор = 270 Су Tie Qop (ПО)
Gcp схсе (1 —0,5GfOP)
3,6 и 7^-^. 5®. — се V _75 )/2 <>*р л-= ОгоР_ сх (111)
Для оценки погрешности, которая получается при расчете даль-
ности полета по среднему весу, сравним величины
In---L— и --------~-п₽---,
1-G,O/, 1—0,5Огор
входящие в формулы (1С1) и (ПО) и зависящие только от веса
•самолета.
Пусть относительный запас горючего Пгор = 0,25,
тогда .
юз
a
----°’af- х 0,286.
1 — 0,bG„p
Таким образом, при расчете дальности полета по среднему
весу самолета (формула ПО) результаты получаются практически
такими же, как н по болге точной фздмуле (101).
По формулам (101), (106), (П0>, (111) можно выполнять прики-
дочные расчеты дтя предварительной оценки дальности и про-
должительности полета, а также для анализа влияния парамет-
ров самолета.
§ 35. О расчете дальности и продолжительности
полета на малых высотах
1. Итак, для расчета дальности полета необходимо Знать
километровые расходы горючего Qi. Эти расходы зависят от
скорости и высоты полета, от мощности н оборотов двигателя
или от удельных расходов горючего се.
Если на самолете установлен винт фиксированного шага (В ФШ),
то, как известно, определенному значению скорости полета на
заданной высоте соответствует вполне определенная величина
мощности Ne и оборотов п двигателя.
Этим же значениям Ne и п по характеристике двигателя со-
ответствуют определенная величина удельного расхода горючего
се, а следовательно, и вполне определенная величина километ-
рового расхода. Этот расход можно изменить только за счет
регулировки карбюратора.
Если же на самолете установлен винт изменяемого шага
(ВИШ), то при заданной скорости и высоте полета можно варьи-
ровать числом оборотов винта и двигателя. При изменении обо-
ротов вннта будут изменяться коэфициент мощности ₽=
и относительная поступь винта Х = —а следовательно, коэ-
пси
фнциент полезного действия винта, удельный расход горючего и
в связи с этим километровый расход горючего.
Как показывают расчеты и летные испытания самолетов, каж-
дой скорости полета на заданной высоте соответствуют вполне
определенные обороты двигателя, прн которых получается мини-
мальный километровый расход горючего, как это показано на
Таким образом, в случае ВИШ для получения минимальных
километровых расходов горючего на заданной высоте необхо-
димо выбирать оптимальные обороты двигателя. Эти обороты в
Дальнейшем мы будем называть наивыгоднейшими (ляоз,).
Мощность двигателя при наивыгоднейших оборотах на задан-
ной скорости и высоте полета, когда километровые расходы го-
104
рючего получаются минимальными, будем называть эксплоата-
днонной или крейсерской мощностью. При ^изменении скорости
полета, очевидно, изменяется и крейсерская мощность.
& Для самолетов, находящихся на вооружении, при расчете
дальности и продолжительности
полета следует пользоваться
специальными инструкциями, по-
лученными в результате летных
испытаний. По этим инструкциям
для заданной высоты полета н
полетному весу самолета опре-
деляются наивыгоднейшие ско-
рость и обороты двигателя из
условия обеспечения минималь-
ных километровых расходов и,
следовательно, наибольшей даль-
яости полета при заданном за-
пасе горючего.
В этом случае дальность по-
лета определяется по известным
с,в поо пнаи11аоо гооогюоггоогзооп^
Фиг. 63
запасу горючего и километро-
вому расходу:
Если профилем полета в соответствии с боевым заданием t
предусмотрен полет на различных высотах и к тому же длитель-
ный полет, в процессе которого существенно изменяется вес
самолета за счет расхода горючего или за счет сбрасывания
груза, то весь расчет, естественно, следует выполнять по этапам
для соответствующих высоты, скорости и полетного веса само-
лета. Обычно эту задачу приходится решать в связи с опреде-
лением потребного запаса горючего.
Продолжительность полета определяется по располагаемому
запасу горючего и часовому расходу:
Чт
или по дальности и скорости полета;
Т=^~
у
4 2- Если инструкций по расчету дальности полета нет, то при-
ходится пользоваться характеристиками двигателя, полученными
в результате специальных стендовых испытаний. Расчет даль-
ности полета в этом случае носит приближенный характер.
Как показывает анализ экспериментальных материалов 15]. обо-
роты двигателя при заданной мощности, соответствующие мини-
105
мяльным удельным расходам горючего сгт1п оказываются близкими
к наивыгоднейшим обе ротам, прн которых получаются минималь-
ные километровые расходы при той же мощности двигателя и
Фиг. 64
обороты двигателя прн минимальном удельном расходе можно
принять за наивыгоднейшие обороты, при которых получается
минимальней километро-
вый расход горючего.
Таким образом, зада-
ча определения наивыгод-
нейших оборотов двига-
теля, при которых полу-
чаются ЧЕлЛя, приводится
к задаче определения
оборотов двигателя, со-
ответствующих с,га,„ при
крейсерской мощности
Л^,яр, потребной для по-
лета с заданной крейсер-
ской скоростью VKp.
Метод определения V,
vKp по заданной NeKp излагается ниже.
Итак, для расчета дальности на различных скоростях полета
и, следовательно, прн различных значениях мощности двигателя
необходимо иметь зависимости
кр f (.^паив) И Cg т-1п------------f (tlHaua).
1Г6
Этн зависимости получаются в результате специальных испы-
таний двигателя на стенде. На фиг. 64 показаны кривые зави-
симости крейсерской мощности и минимальных удельных расхо-
дов горючего от оборотов, которые, очевидно, являются наивы-
годнейшимн. Этн кривые получены путем соответствующего
дросселирования двигателя.
Там же показаны внешняя характеристика двигателя и кри-
вая удельных расходов по внешней характеристике. Как известно,
эти кривые получаются при полном открытии дросселя, «о пре
различной нагрузке на двигатель.
Прн отсутствии материалов испытаний конкретного двигателя
кривые зависимости крейсерской мощности и минимальных
удельных расходов горючего от наивыгоднейших оборотов при-
ходится строить приближенно на основе обработки эксперимен-
тальных материалов для современных двигателей.
На фиг. 65, 66, 67 приведены вспомогательные кривые, полу-
ченные в результате такой обработки [5].
На фиг. 65 показана кривая зависимости относительной крей-
серской мощности от относительных наивыгоднейшиг
N е ном
оборотов —к3-*, а на фиг. 66, 67 кривые зависимости относи-
ло и с >
тельных удельных минимальных расходов -* - от относитель
''е ном
ной крейсерской мощности двигателя тН2'— •
ном
Кривые на фяг. 66 относятся к двигателям, работающим иа
богатой смеси, а кривые на фиг. 67 — к двигателям, работаю-
щим на бедной смеси.
Пользуясь кривой кр- — (фиг. 65), зная N,KaM,
е но ч ^ном '
пном и задаваясь рядом значений пнтв, можно определить со-
ответствующие им N,.Kp и, следовательно, построить кривую
= f'(^лалв)'
107
Далее, зная АГ,„„Л, семм и задаваясь рядом значений лмм и
Л/,„, по (кривым —'д =f( (фиг. 66 или 67) можно опре-
Г . пом ' •'Чном '
делить cemin и, следовательно, построить кривую с,И|Я=/(лязьв).
Эти кривые и кладутся в основу приближенного расчета
дальности и продолжительности полета.
3. В соответствии с изложенным выше, рассмотрим схему
практического расчета дальности и продолжительности полет
самолетов с поршневыми дви
гателямн на малых высотах
(об особенностях расчета на
больших высотах будет сказа-
но в следующем параграфе).!
Расчет рекомендуется вы-
полнять в следующем по рядкея
1) Определение зависимо-!
сти V*p=/(.V,K9).
Эта задача решается мето-
дом последовательных прибли-
жений по кривой потребных
мощностей для среднею веса
самолета и по характеристике
винта. Предварительно стро-
ится кривая потребных мощ-
ностей для среднего веса
п —О_________
^ср — ^нач 2
Если в процессе полета на дальность вес самолета будет
"изменяться значительно (более, чем на 15 — 20%), то необходимо
весь маршрут разбить на ряд участков с изменением веса в пре-
делах каждого из ннх не более, чем на 15—20%, и для каж-
дого веса построить кривые потребных мощностей.
Далее, задавая в первом приближении величину коэфициента
полезного действия винта т;,. по заданному значению Nepp на-
ходим располагаемую мощность BMI:
^р = ^екрЪо'
Затем по Np н кривой Nn = f(V) находим крейсерскую ско-
рость VKp (фиг. 68).
После этого необходимо уточнить и, следовательно, Уяр.
Для этого по известным NeKp, VKp, пнаи, (по фиг. 64 или 65)
иаходим
___ ^кр . о___75(V, нр
~ ntD ’ p/i/D5 ‘
Далее, по X и f и по характеристике вннта определяем коэфи-
диент полезного действия винта с поправками на влияние сжи<
лоз
маемости воздуха и взаимные влияния винта и частей самолета
(эти вопросы излагаются в курсе воздушных винтов).
Если найденное таким образом значение у, окажется близ-
ким к принятому в первом приближении, то расчет 14 в зави-
симости от NeKp на этом заканчивается, в противном случае
расчет необходимо повторить до сходимости в последователь-
ных значениях ч, с заданной точностью.
В результате такого расчета находится зависимость VKp =
(Фиг. 69).
2) Определение зависимости qL =f(V,PY
Для этого, задавая VKp, по кривой V, р = / (Л4 кр) (фиг. 69^
находим NCKp', затем по кривым NeKp = f(nHUl) и cimi„ —/(пняш)
(фнг. 64 или 65. 66, 67) находим пн1и, и cfnin.
После этого определяются километровые расходы
Л7 г
q,= ^^[кг/кл]
и строится кривая qL — f(VKp) (фиг. 70). Здесь VKp—вм]сек.
Пользуясь этой кривой, можно решать различные задачи,
связанные с расчетом дальности и продолжительности полета.
Очевидно, „
7 Г 7
Чцтйп
Если задана дальность полета L и скорость полета VKp, то
кривой qL-=f(VK^ можно определить qL в затем потребный
по
за-
пас горючего
G3Op —' LqL [кг].
Продолжительность полет? на заданной скорости опреде-
ляется по формуле
т—_____Ь._— ____— Ivacl.
3,6 vKP 3,6^14, 1 1
IOS
Для определения наибольшей продолжительности полета не-
обходимо построить кривую зависимости часовых расходов qT
от скорости полета VKp, при этом qT — qL- 3,61/кр.
Такая кривая показана на фиг. 71.
По этой кривой можно определить
Чтплп и, следовательно,
*7* __ ^ТОР
' ”>аХ ~ п
Мы рассмотрели приближенный
метод расчега дальности и про-
должительности полета, основан-
ный на применении характеристик,
полученных из стендовых испыта-
ний двигателей. Эти характеристики обычно приводятся к стан-
дартным условиям при г/ = 0и поэтому могут быть применены
к расчету дальности на малых высотах.
Перейдем к рассмотрению особенностей расчета дальности и
продолжительности полета на больших высотах.
§ 36. О расчете дальности и продолжительности
полета на больших высотах
1. Для расчета дальности полета на различных высотах и
особенно для определения наивыгоднейших высоты и скорости
полета из условия получения Lmax необходимо предварительно
получить зависимость qL = f(V) для различных Н.
При- отсутствии специальных инструкций по расчету даль-
ности эта зависимость может быть получена, если имеются кри-
вые NCKp=f(n^aue)w cemi„=f(nHm) для соответствующих высот.
Однако таких данных, как правило, нет. Поэтому расчет при-
ходится выполнять приближенно, полагая, что се зависит от
14, кр и п,и, и не зависит в первом приближении от высоты [5}.
При таких допущениях расчет дальности выполняется так,
как это изложено в предыдущем параграфе.
Все же, даже при таком допущении, расчет километровых
расходов, исходя из 14, кр = const прн пна, = const, можно вести
только до некоторой предельной высоты Нгр.
Предельная высота определяется по Н, начиная с которой
для сохранения NeKp~const необходимо увеличивать обороты
двигателя (фиг. 72).
В самом деле, если обратиться к высотной характеристике
двигателя (фиг. 72), то легко установить, что определенное зна-
чение 14, кр можно сохранить при постоянных оборотах двигателя
за счет его дросселирования до высоты Н = Н,р. При Н > Н„г
Для сохранения Л/, = const необходимо увеличивать обороты.
Тогда обороты будут отличаться от нанвыгоднейших и это по-
влечет за собой увеличение удельных расходов горючего.
При оценке увеличения с, на высотах Н > Н можно вос-
пользоваться графиком эксперимен-
тального происхождения, показан-
ном на фиг. 73 [5].
Для целей расчета километро-
вых расходов горючего при п>пк ,а,
удобно предварительно построить
так называемую комбинированную
диаграмму (фиг. 74).
Построение ее производится
следующим образом:
1) Для заданных значений NeKp
по кривой
(фиг. 65) определяются и за-
тем по кривой )
^еп.м \ пном /
Фиг. 72
(фиг. 66 или 67) находятся сепЛп.
По этим данным строится кривая cemin и на ней
отмечаются точки, соответствующие тем значениям N,„p, дли
которых велся расчет (фиг. 74).
2) Для тех же значений NeKp, но при различных значениих
—— >1, по графику —С-—=/( —) (фиг. 73) опреде-
ляются се. По этим данным производится построение семейства
кривых с,—/(и) для заданных значений ^„„(фиг. 74).
2. После построения комбинированной диаграммы '.(фиг. /4)
можно переходить к практическому расчету километровых рас-
ходов, дальности и продолжительности полета на различных
высотах.
Этот расчет рекомендуется выполнять в следующем порядке:
ш
1) Пользуясь высотной характеристикой двигателя для задан-
ного числа оборотов п, определяются значения NeKp иа различ-
ных высотах rl (фиг. 72).
2) По NeKp, Н н по кривой потребных мощностей и характе-
ристике винта методом последовательных приближений опреде-
ляется VKp (§ 35).
Проделав такой расчет для ряда значений NeKp и Н при.
/г = const, можно построить кривую VKp=f(d) при ra=const.
Фиг. 75
3) Аналогичным
образом
выполняется
расчет
для
других
зна-
чений п. По результатам этих расчетов производится построение
графика крейсерских режимов, который показан на фиг. 7а.
4) Для заданного значения V, и Н по графику крейсерских
режимов находится п.
их
Затем по и и Н и по высотной
определяется NtK .
5) По этим значением п и NeHp и
грамме (фиг. 74) определяются
удельные расходы горючего се.
6) Вычисляются километровые
расходы горючего:
__ Kjfie
- ^vKp
и производится построение кривых
$7 — f( VKp) Для РяДа высот Н (фи-
гура 76).
Пользуясь этими кривыми, мож-
но решать все задачи, связанные
с расчетом дальности н продол-
характеристике двигателя
по комбинированной диа-
жнтельности полета. В частности,
по этим кривым легко определяются наивыгоднейшая высота
наивыгоднейшая скорость полета VK ком и наивыгодпей-
шие обороты двигателя пкаи,, при которых обеспечивается наи-
большая дальность полета при заданном располагаемом запасе
горючего.
ГЛАВА VIII
ДАЛЬНОСТЬ И ПРОДОЛЖИТЕЛЬНОСТЬ ПОЛЕТА
САМОЛЕТОВ С РЕАКТИВНЫМИ ДВИГАТЕЛЯМИ
§ 37. Общие зависимости дальности и продолжительности
полета реактивных самолетов от их параметров
1. Режимы полета на дальность и методика расчета дальности
и продолжительности полета реактивных самолетов имеют ряд
специфических особенностей. Эти особенности связаны главным
образом с характеристиками реактивных двигателей по скорости
и по высоте.
Перейдем к выводам и рассмотрению общих зависимостей
дальности и продолжительности полета от некоторых парамет-
ров реактивных самолетов.
2. Дальность полета реактивного самолета с ТКВРД можно
определить следующим образом. Как известно (см. § 34):
8 E. Торба
dG,0P _ dG
4l <1l
113
Далее,
«
следовательно.
qr = cfP = cfi ; (112)
Ly
П13)
Принимая во внимание 17 = xj =4 \J ’ получим
q,'~ uj 7^7 cJ-^S. (114)
Здесь: P — тяга двигателя, ,
cp — удельный расход горючего в KijKi час,
д= Р«
Ро
Таким образом,
7.= 14,4
Ус, *_ d°
сх \/as \J а
(Н5)
Полагая а = const, ср = const и пренебрегая изменением высоты
полета при этом, получим
сх ср \/&S J V
^КОН
А = 28,8^г ~i^{xlGHm-^GK„-G,opy (116)
При расчете по среднему весу самолета Gep выражение для даль-
яости полета несколько упрощается. В этом случае
яли
4L
V с„ G.,
.. :ЯР
СР сх @ер
(117)
Сх c„y/^S yjQcp-
(118)
114
3. Формулы (116)—(118) позволяют сделать некоторые общие
выводы о зависимости дальности полета от параметров реактив-
ного самолета с ТКВРД.
Максимальная дальность полета Lmax на заданной высоте (Д) и
при_заданном располагаемом запасе горючего Glof получается при
ХА . Если ср — const, то Lmax получается при
\ ^х Ср!max ' ^х ' max
Как известно, Lmix для самолета с поршневым двигателем
при -*- = const получается при (—4
се ' сх' max _____
Сравним режимы полета (су и V) при ) ипри(— )•
Х *jr max ' max
Дли этого воспользуемся приближенным выражением для
коэфициента лобового сопротивления самолета:
Тогда
Максимум качества будет прн су, который определяется из урав-
нения d ( су \. -о tfcj С2 j
или с ’ Г — о -л —
откуда Cy=>y/i^^cxa. (119)
Далее, (\£у\ = ( ^У \ Сх max 1 с . с/ ) \ х0 ^ва/тах
Максимум ( нения ( буДет при су, который определяется из ураи- d / у! с у \ — л ^Су 1 с + ) \л+
8*
115
или
откуда
и
2^ /Г
2у/су
Л.Ф>
Зсу’ — кХ сх0 — О
СУ
с.
(120)
I оказывается в/3= 1,732
max
раз меньше по сравнению с су на режиме (~) • Следовательно,
, _ \ / max
будет в \/1,732 = 1,32
Таким образом, су на режиме
скорость полета на режиме
\ max
раз больше, чем скорость на режиме
4. Таким образом, при ср = const
таг
4. Таким образом, при ср = const максимальная дальность
полета реактивного самолета с ТКВРД будет при скорости зна-
чительно большей по сравнению со скоростью на режиме наиболь-
шей дальности самолета с поршневым
двигателем.
Однако в действитель-
ности с изменением ско-
рости полета изменяется
и тега, развиваемая дви-
гателем (за счет дрос-
сел| ровлния). При этом
с увеличением скорости
полета она приближается
к номинальной Ркоя.
В связи с этим будет
изменяться и удельный
расход горючего. Как из-
вестно, при уветичении
тяги, развиваемой ТКВРД,
ср уменьшается и, наоборот, при уменьшении тяги ТКВРД удельный
расход увеличивается. Типичная кривая зависимости относитель-
ного удельного расхода —р- от относительной тяги ~— по-
казана па фиг. 77. ср ном
Р
Относительная тяга —- характеризует степень дросеели-
рования.ТКВРД.
' Р с
При -.,— >0,25 зависимость —®— -
гр ’ Г
‘ пом ''Р НОМ
представлена приближенно в виде [5]:
, ) может быть
НОМ /
116
c„—l — m+~j=, (121)
где:т ~ 0,4 для двигателей типа ЮМО-С04;
т к 0,1 для двигателей типа „НИН”;
Р Г ' р
р НОМ 1 НОМ
Таким образом, если учесть уменьшение удельного расхода
горючего с увеличением тяги ТКВРД, то становится очевидным,
что режим наибольшей дальности полета реактивных самолетов
оказывается близким к режиму максимальной скорости полета.
На величину удельного расхода горючего и на тягу ТКВРД,
следовательно, и на дальность полета, оказывает существенное
влияние высота полета (через плотность воздуха).
Для современных ТКВРД номинальная тяга уменьшается с
увеличением высоты, что можно выразить приближенной зави-
симостью
Р , , „ 0,76
Гтол(я)_ ~ __ до,75 (122)
Рном (0) Ро
Удельный номинальный расход горючего уменьшается с уве-
личением высоты, следуя примерно закону
ном(н) ~ Рл °>2_ до.2 (123)
Сртол(0) Ро
' При увеличении высоты горизонтального полета режим работы
двигателя больше приближается к режиму номинальной тяги,
а это приводит к уменьшению удельных расходов горючего,
согласно (121).
Кроме того, прн увеличении высоты полета уменьшается
удельный расход горючего, согласно зависимости (123). Таким
образом, при увеличении высоты полета самолета с ТКВРД ки-
лометровый расход горючего существенно уменьшается за счет
совместного влияния изменения тяги и удельного расхода горю-
чего. Следует иметь в виду также непосредственное влияние
высоты через Д на километровый расход горючего согласно
формуле (114).
В итоге—наивыгоднейшая высота при полете на дальность
реактивного самолета с ТКВРД оказывается близкой к практи-
ческому потолку.
Таким образом, наивыголнейшие режимы полета на дальность
реактивных самолетов с ТКВРД являются более скоростными
и более высотными по сравнению с режимами полета на дальность
самолетов с поршневыми двигателями.
117
5. Так обстоит дело при числах Маха полета меньше крити-
ческого числа Маха для данного самолета. В этом случае сжи-
V Су
маемос*ть воздуха существенно не влияет на величину •
i/" с
Однако при Ма > Мак/, величина ~~ с увеличением ско-
рости и высоты полета уменьшается, вследствие влияния сжи-
маемости воздуха и волнового кризиса (уменьшение cv и увели
чение сл).
Это противоположное влияние на дальность полета может
оказаться сильнее, чем влияние изменения тяги двигателя и
удельных расходов горючего, в результате чего окажется невы-
годным увеличивать скорость на заданной высоте или увеличи-
вать и скорость и высоту одновременно. В этом случае может
оказаться более выгодным для уменьшения километровых рас-
ходов уменьшать и скорость н высоту полета, дросселируя дви
гатель.
Таким образом, уменьшать высоту и скорость полета, а
следовательно, дросселировать двигатель при полете на дальность
с минимальными километровыми расходами горючего, необхо-
димо тогда, когда скорость н высота полета ограничиваются
критическим числом Маха, т. е. аэродинамическими явлениями,
связанными с наступлением волнового кризиса.
В таких случаях задача о выборе наивыгоднейших высоты и
скорости полета, а также и степени дросселирования двигателя,
при которых обеспечивается максимальная дальность полета при
заданном располагаемом запасе горючего, решается в резуль-
тате специальных расчетов для вариантов скоростей и высот
полета (см. § 38).
Необходимо заметить, что задача о выборе наивыгоднейшей
высоты полета реактивного самолета на дальность должна ре-
шаться также и с учетом расхода горючего на набор высоты.
Очевидно, что от расхода горючего на участке набора высоты
зависит величина располагаемого запаса горючего для полета
на дальность на основном этапе, а следовательно, и общая даль-
ность полета.
6. Перейдем к рассмотрению продолжительности полета реак-
тивного самолета с ТКВРД.
Как известно,
clT dGron сКт
Ят Я т
где
Ят=срР=с„О^-
СУ
И8 I
следовательно,
@нач
Т— СУ 1 da
J сяс, О
@кон
с
Полагая -= cons), ср = const, получим
с 1 G
Г=£г.А1пг-а»"- [час]
Ст ср инач—Огор
или
Г=-«-—1п—L—.
С, С„ 1— п
Л р L
При расчете по среднему весу
у’ ^гир Су 1 ^»1О
Чт сх ср Gcp
(124)
(125)
(126)
(127)
При = const максимальная продолжительность полета реактив-
ного самолета с ТКВРД получается при ) , т. е. на ско-
'wax
рости, большей по сравнению с самолетом с пор-шневым двига-
телем. Если же учесть, что с увеличением скорости ср умень-
шается, то становится очевидным, что режим полета на макси-
мальную продолжительность может оказаться еще более скоро-
стным Эта задача решается в результате специальных расчётов
с учетом аэродинамических характеристик самолета и характе-
ристик реактивного двигателя (см. § 38).
Очевидно, чтопри увеличении относительного запаса горючего
продолжительность, как и дальность полета, увеличивается.
7. В заключение остановимся на вопросе о дальности полета
реактивного самолета с ЖРД.
Для расчета дальности полета самолета с ЖРД на основном
этапе, очевидно, можно применить формулу (116). Однако для
самолета с ЖРД удобнее выполнять расчет дальности полета по
другой формуле, в которой в явном виде представлена удельная
тяга Руй.
Как известно, удельная тяга ЖРД выражается через тягу
двигателя Р и секундный расход топлива q, т. е.
Р — Р Г кг 1
уд q [ кг)сек J .
Удельная тяга ЖРД практически от скорости и высоты полета
не зависит, т. е. можно принять = const.
119
Следовательно,
qT=3600 9 = 3600 = 3600 D°-
"уд "уд су
q-r 10г0 G сх
^-з,61/- I/ р~;^’
Таким образом,
или, учитывая
Ql
10И с у п_
V2, Р„ Ус,
@нач ,-- &ноч .-------
Г rfG_/2 Р„д Г V су dG
J qL~ 1000 J cx \/q'
GKOH GKQfi
Полагая на небольшом отрезке пути ^х- = const,
1 = -Sr Vc^ SO^-G oJ IM-
(128)
(129)
(130)
(131)
получим
(132)
Таким образом, максимальная дальность полета реактивного
самолета с ЖРД будет при (\ , т. е. на режиме, близком
' сх max
к режиму максимальной скорости.
Влияние высоты проявляется через р (формула 132). Для уве-
личения дальности полета необходимо увеличивать высоту полета.
Однако следует иметь в виду, что располагаемый запас топлива
на основном этапе Gr зависит от расхода топлива при наборе
высоты. Этот расход у самолетов с ЖРД знаиительно (в 10—12
раз) больше, чем у самолетов с ТКВРД, и это необходимо учи-
тывать при выборе высоты полета на максимальную дальность.
Наивыгоднейшая высота полета для самолета с ЖРД может
оказаться меньше, чем для самолета с ТКВРД за счет более
значительного расхода топлива при наборе высоты. Само собой
разумеется, что скорость и высота полета на максимальную даль-
ность могут быть ограничены аэродинамическими явлениями
lzc~
(через у-), связанными с возникновением волнового кризиса.
Следует отметить, что у самолетов с ЖРД, выполняющих
задачи истребителей перехватчиков, дальность полета небольшая,
порядка 200—400 км, поэтому при оценке дальности полета
120
таких самолетов можно пользоваться приближенными зависимо-
стями. Для самолетов с ЖРД, имеющих большую дальность
полета, требуется более точный учет влияния всех параметров.
§ 38. Расчет дальности и продолжительности полета реактив-
ных самолетов с ТКВРД
1. Задача расчета дальности полета сводится к определению
зависимости километровых расходов горючего от скорости по-
лета для нескольких значений высоты полета^ Н. В результате
такого расчета должны быть построены кривые qL~f (V) для за-
данных Н.
Для каждой высоты полета необходимо определить распола-
гаемый запас горючего с учетом расхода горючего на разбег,
разгон и взлет на заданную высоту (глава IV). Весь расчет вы-
полняется по среднему весу самолета
г - г _ 1Д0
^ср — *-?нач 2 ’
™e SAG = G,O,+G^6+...
Для повышения точности расчета следует весь маршрут по-
лета на дальность разбить на несколько участков с таким рас-
четом, чтобы на каждом участке вес менялся не более, чем на
10—15%. Тогда кривые qL—f(V) будут построены для несколь-
ких значений Gcp на каждой высоте.
2. После выбора Н и определения G,op и Ger дальнейший расчет
рекомендуется выполнять по следующей схеме:
1) Определение тяги, потребной для горизонтального полета
на заданных высотах Н с различными скоростями. Для этого
выбирается несколько значений скорости полета V, затем опре-
V е
деляются числа Маха полета Ма= — и величины потребных коэ-
фициентов подъемной силы
с __
у~ pvas ~ ра!Ма2$ ’
После этого по су и по поляре самолета для соответствую-
щего числа Маха находится сх.
Удобнее для этого воспользоваться „полетными' полярами
самолета, построенными для различных Н и -у (§ 7).
Потребная тяга определяется по формуле
P^Ct-
121
Очевидно, для горизонтального полета тяга двигателя Р должва
быть равна Р„.
2) Определение удельных расходон горючего для различных
значений V на каждой высоте И.
Зная для каждого значения V на заданной высоте потребную
р С / Р \
тягу двигателя, находим , а затем по кривой —р— =/( )
‘НОМ Срном ' нохх
с
(фиг. 77) определяем — ₽— и, следовательно, ср.
Срном
3) Определение километровых расходов горючего и построе-
ние кривых qL=f(V) для различных Н.
Очевидно,
где
V—в Mi сек.
После расчета qL построение кривых qL=f(V). Эти кривые длй
нескольких значений Н показаны на фиг. 78.
Очевидно,
^пах
т
* max
3. Пользуясь кривыми qL~
f(V)Rm заданных значений Н,
можно решать различные за-
дачи по расчету дальности и
продолжительности полета са-
молета. В частности, по этим
кривым легко определяются
наивыгоднейшие высота Нквш,
скорость полета и, сле-
довательно, степень дроссели-
Р
рования двигателя -р—
*но
0,00
min
G гор
При этом qTmin определяются по кривым ?Г=/(И), которые
легко можно построить, имея в виду qT=3,6VqL.
§ 39. Об учете влияния ветра на дальность полета
1. В процессе полета по заданному маршруту возможны
случаи:
1) полет при попутном или встречном ветре;
122
2) полет при попутно боковом нли встречно боковом ветре.
Очевидно, дальность полета, как расстояние, пройденное са-
молетом относительво земли, будет зависеть от величины и
направления ветра.
Прн рассмотрении дальности полета с учетом влияния ветра
мы воспользуйся понятиями: техническая и путевая скорость
самолета.
Как уже отмечалось, технической скоростью называется истин-
ная воздушная скорость самолета V, а путевой—скорость отно-
сительно земли V7,.
Для расчета дальности полета при ветре необходимо .знать
расход горючего на километр пути относительно земли. Рас-
смотрим указанные выше типичные случаи.
При встречном или попутном ветре, очевидно, путевая ско-
где W—скорость ветра.
При боковом ветре вектор путевой скорости отклоняется от
направления вектора технической скорости или от заданного на-
фиг. 79 Фиг. 80
правления на угол <р (фиг. 79). Для того чтобы сохранить задан-
ное направление полета необходимо, чтобы вектор технической
скорости был направлен под углом « к вектору путевой скоро-
сти или к направлению полета относительно земли, как это по-
казано на фиг. 80. Угол ш определяется из очевидного равенства
откуда
V sin if — W sin ф,
V7 - .
Sin Ф == — sin у.
V
Далее, по фиг. 80 определим путевую скорость:
l/a = V cos <р 4- W cos ф.
(134)
(135
Дальность полета при наличии ветра:
L& —
G,oP
12’
где
_ От__ V
QИз\~~ у 4l у
мяв
4l <•> ~ 4l У cos? + йГсоэф ’ (136)
следовательно,
Lw — O,oj_ V,^o (j/cosep + ^со8<|>) =
(w \ ,
cos? + -p costyl. (137)
При этом возможны частные случаи:
1)Ф = О, <р = 0... £ж=Ц1+ у);
2) ф = 180°, ? = 0... Л№=
Ц7
3) ф=90\ sin? = -yr... 1^=2. cos?.
Первые два случая соответствуют полету с попутным и встреч-
ным ветром. Третий случай соответствует полету с боковым
ветром.
ГЛАВА IX
ЗАКЛЮЧЕНИЕ
§ 40. О методах аэродинамического расчета самолетов
1. Мы рассмотрели основные методы аэродинамического рас-
чета самолетов с поршневыми и с реактивными двигателями.
Кроме этих общих методов разработан ряд других для ре-
шения частных задач и поэтому имеющих крайне ограниченное
применение. Из этих методов отметим следующие: логарифми-
ческий метод, метод оборотов, различные обобщенные методы
и другие *)•
2. Логарифмический метод является графическим и приме-
няется для аэродинамического расчета самолетов с относительно
небольшим диапазоном скоростей полета. При этом расчет вы-
’) Подробное изложение этих методов см. в [5,8].
124
лолняется графически в логарифмическом масштабе. Этот метод
представляет некоторые удобства при решении вариационвых
задач.
Логарифмический метод в настоящее время применяется
очень редко, что объясняется отсутствием наглядности и невы-
сокой точностью этого метода в приложении к аэродинамиче-
скому расчету современных сомолетов, имеющих значительный
диапазон скоростей.
3. Метод оборотов был предложен для аэродинамического
расчета самолетов с винтом фиксированного шага, поэтому его
применение в настоящее время крайне ограничено. Этот метод
был разработан впервые в СССР в 1931 г. В. С. Пышновым и
С. Г. Козловым.
4. Обобщенные методы аэродинамического расчета построены
на приближенных зависимостях, полученных в результате анали-
тической обработки материалов по летным характеристикам са-
молетов. Такие методы носят статистический характер и находят
применение только при эскизном проектировании самолетов для
прикидочных расчетов.
Необходимо подчеркнуть, что нормальным методом аэродина-
мического расчета современных самолетов с ВМГ и с ТКВРД
является метод мощностей.
В заключение изложим видоизмененный метод аэродинами-
ческого расчета по тягам, который представляет некоторые
удобства для расчета летных характеристик реактивных самоле-
тов при Ма>МаКр; затем приведем сводку приближенных фор-
мул для определения основных летных характеристик самолетов
§ 41. Видоизмененный метод аэродинамического расчете
реактивных самолетов по тягам при Ма > 1Лл„р *).
1. Для установившегося горизонтального полета, как известно'
Рр = P„z= X = 0,5cxpV’S;
G=Y=>0&rfV2S.
Очевидно, У=<1Ма, следовательно,
Р„ — X = 0,5cjrpa!Ma3S;
0= У=0,5с>ро‘-;Ма35.
Вводя обозначения _____
с\ = схМа3, (138).
с\ = су Ма3, (139)
1) Впервые этот метод был изложен в [5], откуда и заимствованы
фиг. 81, 82.
!2S
получим
Р„ = Л=:0,5с'хра35; (140)
G=Y=0,5c'yPasS. (141)
Уравнения (140), (141) кладутся в основу видоизмененного ме-
2. Все расчеты и построения этим методом выполняются в сле-
дующем порядке.
1) Перестроение поляры самолета в координатах с'у и
Ряг
аэ
Фнг. 82
(фиг. 81).
2) Определение с’у —
= Q^S для РазлнЧИЫХ
высот Н. Очевидно, с’у—
— const Для каждой вы-
соты.
3) Нанесение на поля-
ру самолета с' =/(</)
линий dy~ const.
- 4) Определение с * по
точкам пересечения ли-
ний с'у= const с поля-
рами самолета'с'д, = / (C'J
для различных чисел
Маха.
5) Расчет потребных
тяг по формуле Рп
- ХГ— — ...... V 11! л. Л- 1'10, //, rj
6) Построение кривых Ря=/(Ма) для различных высот п
—- 0,Scape'S при известных: Ма,
С
(фжг; 82).
7) Построение кривых Р„—/(Ма) для тех же высот Н
(фиг. 82).
По точкам пересечения кривых Р„=/(Ма) и Рр=/(Ма)
можно определить максимальные скорости горизонтального по-
лета реактивного самолета на различных высотах.
§ 42. Приближенные формулы для оценки основных
летных характеристик самолетов')
В этом параграфе приводится сводка приближенных формул
для прикидочной оценки основных летных характеристик само-
летов. Эти формулы и статистические коэфициенты, входящие
в них, следует рассматривать как временные.
1. Максимальная скорость горизонтального полета самолетов
с ВМГ.
« 3,6 j/ [км1чаС] (29)
«ЛЕ
v.u* 162
де 100 с колеблется в довольно широких пределах н опреде-
ляется по таблице 7.
Таблица 7
Тип самолета 100 е лт2 для моторов
ЖИДКОСТНОГО охлаждения воздушного охлаждения
Одномоторный истребитель 0,134-0.16 0,17 4-0,20
Одномоторный штурмовик или развед- чик 0,35-5-0,40 0,454-0,50
Двухмоторный скоростной бомбарди- ровщик или истребитель (S = 304- --50ju") 0,50 ч-0,55 0,65 4-0.70
Двухмоторный дальний бомбардиров- щик (S = 60 4- 8и ж2) 0.704-0,75. 0,904-0,95
Четырехмоторный! тяжелый бомбарди- ровщик (S = 1.50 4- 200 лА) 2,04-2,5 2,6 -4- 3,1
Формула (1-42) применима только при Ма < Ма<р.
») Вывод эти» формул см. в [5].
2. Максимальная скорость горизонтального полета реактивных
(28)
[км1 .
час]
где:Р — тяга реактивного двигателя;
схй—коэфициент лобового сопротивления самолета при
Ма< Ма,,;
Ма,,,, — критическое число Маха для корневого сечеиия крыла.,
В частности при схй — 0,018:
Формулы (143), (145)являются прикидочными и применимы при
Ма0> 1,08 Макр,
(144)
(145)
где Ма0—число Маха полета на заданной высоте, которое может
быть достигнуто при с_,0=const, т. е. без учета влияния сжимае-
мости.
3. Время подъема самолетов с ВМГ на высоту Н = 5000 м.
k
КГ [мин],
_г___ь
G
(146)
где:А3=1,84— при обычном винте;
fea=l,65— для винта, специально подобранного для режима
подъема;
ks = 0,05 -г- 0,08;
Nr — мощность двигателя в л. с. на расчетной высоте.
4. Время подъема реактивных самолетов с ТКВРД на высоту
Н- 5000 л.
г 0.S
^~с^гсг1мин1 <147>
F г0
118
или прн сл0 = 0,018
4обо« —[мин], (148}
р '5Р0'-5
1Л о д Ро
где q в 10; р = ; Ро = q ~~ относительная тяга двигателя иа
высоте Н = 0.
5. Теоретический потолок самолетов с ВМГ.
9-Уо.
Pd ' X
Нт ~ 15,3 — 0,036 (12,9-//,) [юи], (1.49)
где: Нр—расчетная высота в км-,
N,— мощность на расчетной высоте;
X — удлинение крыла.
Формула (149) является прикидочнсй и применима при
9S//S13.
6. Теоретический потолок реактивных с; молетов с ТКВРД.
Потолок определяется через относительную плотность А из
уравнения:
где Рв —тяга ТКВРД на высоте Н~0
Полагая
2. । 1)0
1“
(151)
получим
(152)
Формулой (152) можно пользоваться при
9 В. Торба
129
7. Дальность полета самолетов с ВМГ.
L ~ G‘°cV^~' F®' (I53)
t=X
V
v mi*
V — крейсерская скорость;
дГ — номинальная мощность двигателя;
с£ — удельный расход горючего йри номинальной мощности
двигателя;
Р(Е) • определяется по следующим статистическим данным:
Самолет 5=0,9 5=0,8
'Истребитель .... Г (5) = 1,38 1,52
Бомбардировщик . . F (У = 1.27 1,48
Кроме того, дальность полета самолетов с ВМГ можно оце-
нить по формулам (100), (101), (110).
8. Дальность полета реактивных самолетов с ТКВРД.
Самолеты с двигателями типа „Нин“:
L ~ ~с ~S ' G‘t + 1>ЗЗР«^ <154)
срномУи У О gP ’
Самолеты с двигателями типа ЮМО-004:
400 • Gro, <G^ , 1____
р ном\/г $ t1OH
(155)
Дальность полета самолетов с ТКВРД можно оценить также
по формулам (116)—(118).
Приложение
Фиг. 83. Зависимость темиературы воздуха Г°К и
скорости Звука а от высоты Н.
Приложение 2
Таблица международной стандартной атмосферы (MCA)
Нм ГК д = р« Ро 1 V & Рн мм рт. ст. Рм , м кг. сек^/м^
-1000 294,50 1,09964 0,9537 854,59 0,137418
— 500 291,25 1,04892 0,9764 806,17 0,131079
0 288,00 1,00000 1.00JO 760,00 0,124966
500 284,75 0.95281 1,024j 715,99 0,119073
1000 281,50 0.90711 1,0498 674.07 0,113395
1500 278,25 0,96366 1,и7Ь0 634,16 0,107928
2000 275,00 0,82154 1,1032 596,18 0,102664
25о0 271,75 0,78100 1,1316 560,07 0,097598
3000 264, .-.0 0,74202 1,1609 525,75 0,09’727
3C0J 265,25 0,7045» 1,1913 493,15 0,038043
4000 262,00 0,66853 1,2230 462,21 0,083543
4500 258,75 0,63393 1,2560 432,86 0.079220
5000 255,50 0,60073 1,2902 405,04 0,075071
5500 252,25 0,56887 1,3258 378,68 0,071090
бОоО 249,00 0,53833 1,3629 353,73 0,067273
6500 245,75 0,50906 1,4016 330,13 0,063615
7000 242,50 0,48101 1,4419 307,82 0,060110
7500 239,25 0,45417 1,4838 286,74 0,056756
8000 236,00 0,42848 1,5277 266,85 0,053546
«500 232,75 0,40393 15734 248,10 0,050478
екз* л«г—л-
Н М ГК Д = Ри РО ,/Т У & Рн ммрс. ст. Р« кг. сек?/м1
9000 229,50 0,38046 1,6212 230,42 0,047545
9500 226,25 0,35806 1,6711 213,78 0,044745
10.00 223,00 0,33668 1,7284 198,12 0,042073
10500 219,75 0,31628 1,7781 183,41 0,039524
11000 216,50 0,29677 1,8357 169,60 0.037086
11500 216,5 0,27433 1,9093 156,73 0,031282
12000 216,5 0,25352 1,9361 144,84 0,031681
12500 216.5 0,23428 -2,0660 133,85 0,029277
13000 216,5 0,21651 2,1491 123,69 0.027056
13500 216,5 0,20008 2,2356 114,31 0,0 5003
14000 216,5 0.18490 2,3256 105,64 0,023105
14500 216,5 0,17087 2,4192 97,62 0,021353
15000 216,5 0,15791 2,5164 90,22 0,019733
15500 216.5 0,14593 2,6178 83,37 0,018236
16000 216,5 0,13486 2,7231 77,05 0,016я53
16500 216,5 0,12463 2,8327 71,20 0,015574
17000 216 5 0.11517 2,9467 65,80 0,0 4392
17500 216,5 0,10643 3,0652 60,81 0.013300
18000 216,5 0,09836 3,1886 56,19 0,012.91
18500 216,5 0.0.(090 3,3168 51,98 0,011359
19000 216.5 0,08400 3,4503 47,99 0,010497
19500 216,5 0,07763 3,5891 44,35 0,009701
20000 216,5 0,07174 3,7336 40,99 0,008965
ЛИТЕРАТУРА
1?. Жуковский Н. Е., Полное собрание сочинений, том V, 1937.
2. Ветчиикин В. П., Динамика самолета, Госмашметиздат, 1933.
3. Сборник, Реактивное движение, ОНТИ, 1935.
4. Горощенко Б. Г., Расчет максимальной скорости полета, Оборонгнз*
5. Остославскнй И. В. нТнтов В. М., Аэродинамический расчет
самолетов, О борой г из, 1947.
6 Остославскнй И В. и Лебедев. О расчете подъема скорост-
ного самолета, ТВФ, № 8—9, 1946.
7. Пышное В. С., Аэродинамика самолета, Оборонгнз, 1943.
8. Журналы „Техника Воздушного Флота", „Вестник Воздушного Флота*
к другие.
9. Труды ЦАГИ. ЛИИ, НИИ-1 и другие.
ОГЛАВЛЕНИЕ
От автора..... . ................. 2
Введение........................... ... ............... 5
Га а в а К О5щ 1е сведения. Основные уравнения движения самолета
§ 1. Основные задачи аэродинамического расчета самолета........... 10
§ 2. Некоторые сведения об аэродинамических характеристиках .... 11
S 3. О характеристиках винтомоторной группы и реактивных двигателей 15
§ 4. Основные уравнения движения самолета.................. .... 17
Глава II. Горизонтальный полет самолета
§ S. Уравнения горизонтального полета........•.................... 21
§ б. Тяга и скорость, потребные для горизонтального полета .... 23
§ 7. Расчет и анализ горизонтального полета по кривым потребных и
располагаемых тяг................................................... 25
§ 8. Расчет и анализ горизонтального полета по кривым потребных
и располагаемых мощностей ......................................... 30
§ S. Скорость, тяга и мощность, потребные для горизонтального полета
на различных высотах................................................ 35
§ 10. О показаниях указателя скорости иа различных высотах полета 39
§ 11. О построении кривых потребных тяг и мощностей для различных
высот полета........................................................ ^0
§ 12. Главные режимы горизонтального полета на различных высотах 43
§ 13. К вопросу о диапазоне скоростей горизонтального полета ... 48
§ 14. О вторых режимах горизонтального полета...................... б0
Глава ill. Расчет подъема самолетов с поршневыми двигателями
i§ 15. Основные уравнения и зависимбсти.............
§ 16. Расчет подъема самолета методом тяг . ......
§ 17. О ре жимах подъема...........................
§ 18. Расчет подъема самолета методом мощностей . .
§ 19. Расчет времени подъема. Барограмма подъема . -
§ 20. О траектории подъема самолета................
51
53
55
56
58
60
Глава IV. Расчет подъема реактивных самолетов
§ 21. Некоторые особенности расчета подъема реактивных самолетов.
Основные уравнения............................ ............• ' ' '
§ 22. Расчет подъема реактивных самолетов с ТКВРД с учетом измене-
ния кинетической энергии ................................ткврл" ппн
§ 23. О расчете изменения веса реактивного самолета с гквид р
подъеме . .1........................................ ..............
§ 24. Расчет подзема реактивного самолета с ЖРД • • • ' Л,рд
§ 25. Расчет вергвгкального подъема реактивного самолета с л. . .
62
64
70
72
78
135
Глава V. Полет самолета по наклонной траектории со сниженнеу
§ ‘2 6. Основные понятия и уравнения. ......... ... 83
§ 27 О расчете снижения самолета при Р>0......................... 84
§ 28. Планирование самолета (Р = 0). ........................... 85
Глава VI. Аэродинамический расчет самолета
методом тяг Н. Е. Жуковского
§29. Основы метода тяг Н. Е Жуковского ........ ... . 92
§ 30 Построение диаграммы Н. Е. Жуковского...................... 94
§ 31. Построение диаграмм потребных тяг и сетки Н. Е. Жуковского 95
§ 32. О расчете летных характеристик самолета по диаграмме Н. Е. Жу-
ковского. О применимости метода.............................. 96
Глава VII. Дальность и продолжительность полета самолетов
с поршневыми двигателями
§ 33. Основные понятия. Постановка задачи........................ У7
§ 31. Общие зависимости дальности и продолжительности полета от
параметров самолета............................................. 99
1 § 35. О расчете дальности и продолжительности полета на малых вы-
сотах ...................................................... . 10*
1 § 36. О расчете дальности и продолжительности полета на больших
высотах ........................................................ НО
Глава VIII. Дальность и продолжительность полета самолетов
с реактивными двигателями
§ 37. Общие зависимости дальности и продолжительности полета реак-
тивных самолетов от их параметров............................... 113
§ 38. Расчет дальности и продолжительности полета реактивных ьсамо-
летов с 1КВРД . . . ... .......................... 121
§ 39. Обсучете влияния ветра на дальнссть полета................ 122
Глава IX. Заключение
§ 40. О методах аэродинамического расчета самолетов............ 124
§ 41. Видоизмененный метод аэродинамического расчета реактивных
самолетов по тягам при Ма > Макр .............................. 125
§ 42. Приближенные формулы для оцеики основных летных характе-
ристик самолетов.............................................. 127
Приложения .................................................. 131
.Л 7?".
/Г.
I .