/

































































































































































































Автор: Шаталов А.С. Соренков Э.И. Телига А.И.
Теги: компьютерные технологии электротехника информатика автоматика вычислительная техника
Год: 1976



Текст
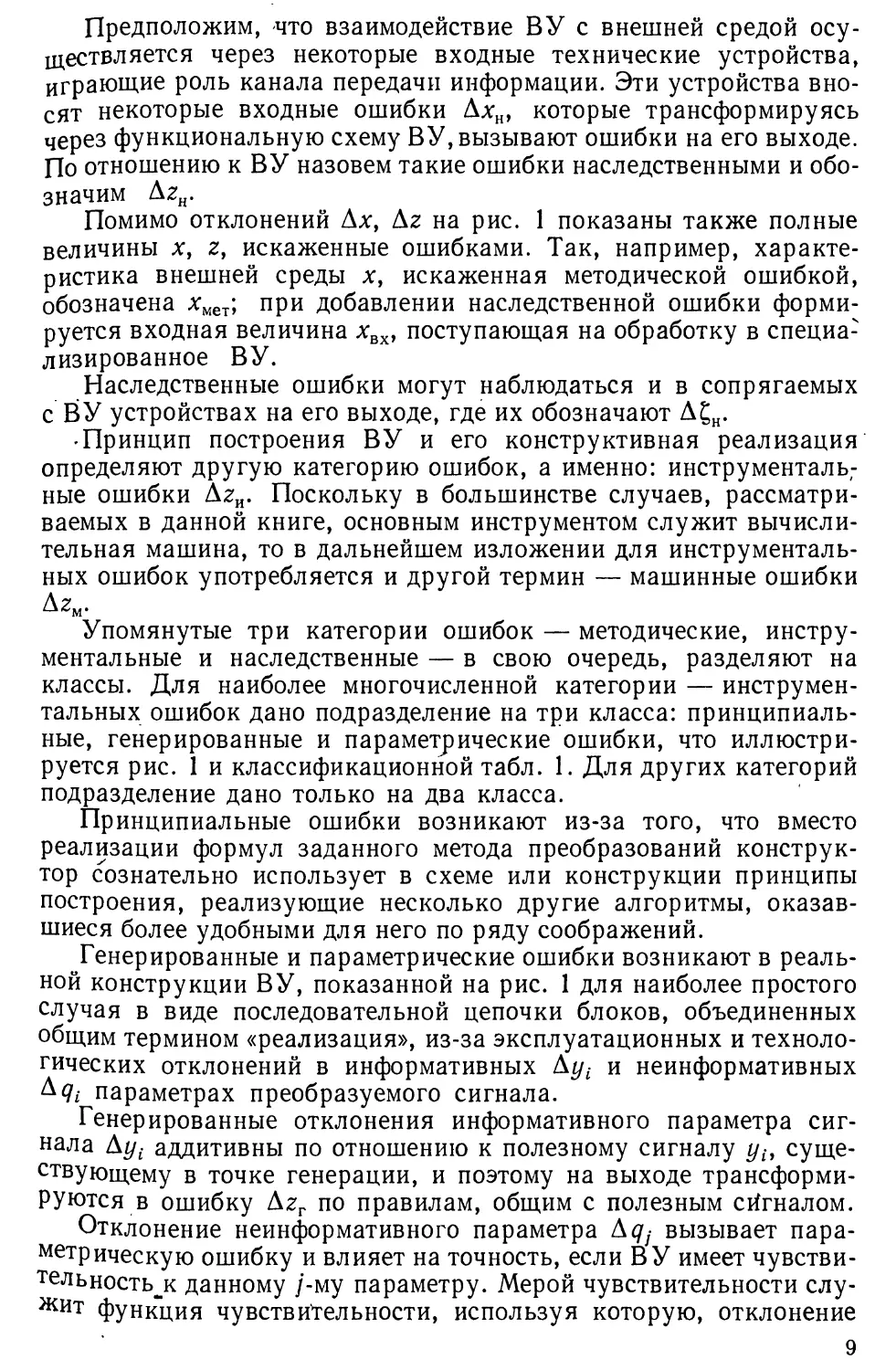
Э. И. СОРЕНКОВ, А. И. ТЕЛИГА, А. С. ШАТАЛОВ
точность
ВЫЧИСЛИТЕЛЬНЫХ
УСТРОЙСТВ И АЛГОРИТМОВ
Под общей редакцией д-ра техн, наук проф. А. С. Шаталова
МОСКВА
«МАШИНОСТРОЕНИЕ»
1976
6Ф7.3
С65
УДК 681.3.31
Рецензент д-р техн, наук проф. Б. Г. ДОСТУПОВ
Соренков Э. И., Телига А. И., Шаталов А. С.
С65 Точность вычислительных устройств и алгоритмов. М.» «Ма-
шиностроение», 1976.
200 с. с ил.
В книге с системных позиций изложены методы анализа и син-
теза точности вычислительных устройств специализированных
аналоговых и цифровых вычислительных машин, доведенные до
инженерных расчетов.
Рассмотрены ‘источники погрешностей различных видов и ме-
тоды масштабирования алгоритмов. Теоретические положения про-
иллюстрированы практическими примерами.
Книга предназначена для инженеров и научных работников —
разработчиков вычислительных средств автоматических систем,
она также может быть полезной студентам и аспирантам вузов
соответствующих специальностей.
30502-009
L 038 (01)-76
9-76
6Ф7.3
© Издательство «Машиностроение», 1976 г.
ПРЕДИСЛОВИЕ
Вопросам точности вычислительных машин уделяется большое
внимание в научно-технической и учебной литературе. При этом
до 50-х годов главным объектом исследований были аналоговые
машины. В связи с развитием универсальной цифровой вычисли-
тельной техники в конце 40-х и в первой половине 50-х годов за-
метно возрос интерес и к проблемам точности машин дискретного
счета. Однако существенный прогресс в начале 50-х годов в области
полупроводниковой техники позволил перейти к разработке и
освоению машин нового поколения, обладающих не только улуч-
шенными характеристиками по надежности, габаритам, быстро-
действию и т. д., но и имеющих более широкий формат команд и
представления чисел. Это на некоторое время позволило снять
с повестки дня вопросы точности решения задач на ЭВМ, чему
способствовала также разработка процессоров, оперирующих чис-
лами с плавающей запятой.
К концу 50-х годов появляется новая элементная база, основан-
ная на интегральной технологии и, как следствие, — машины
третьего поколения. Повышение надежности и степени микромини-
атюризации базовых приборов поставили на повестку дня вопрос
о более широком применении вычислительных машин в качестве
управляющих средств специализированного назначения. Харак-
терным, но не единственным примером этому может служить
разработка и освоение в это время бортовых машин (космических,
ракетных, самолетных и пр.).
В 60-е годы интенсивно изучаются возможности применения
цифровых машин и устройств для автоматической обработки не-
прерывных сигналов. За истекшее десятилетие определились и
области применения цифровой фильтрации сигналов — радио-,
гидро- и звуколокация, обнаружение сигналов, анализ спектра,
Цифровые методы измерения, моделирование динамических систем
на ЦВМ и т. д. Это обстоятельство обусловлено тем, что при по-
мощи специализированных устройств на интегральных микросхе-
мах можно получить более высокие результаты, не достижимые
при использовании аналоговых методов.
Вместе с тем следует отметить, что требования, предъявляемые
к современным объектам, на которых используются цифровые
устройства и машины, оказались — и остаются до сего времени —
более высокими по таким параметрам, как габариты, надежность
и быстродействие, чем те возможности, которые открылись в связи
с освоением машин третьего поколения. Этим, в частности, объяс-
няется большое количество публикаций в последние годы по иссле-
дованию вопросов точности и качества процессов управления и
обработки информации в малоразрядных цифровых автоматиче-
ских системах с учетом погрешностей, обусловленных дискрет-
ностью сигналов.
Среди них можно выделить фундаментальные работы, принад-
лежащие советским и зарубежным авторам — Я. 3. Цыпкину,
Л. Т. Кузину, Ю. Т. Ту, С. М. Федорову, В. П. Перову, В. Г. Гу-
севу, В. Г. Джури, Д. Кайзеру, Б. Голду и Ч. Рэйдеру, Лиу и
Конеко и др.
Главное внимание в этих работах уделено вопросам точности
работы цифровых и импульсных машин в системах автоматического
регулирования и управления процессами. В то же время список
работ, посвященных анализу точности цифровых специализирован-
ных машин и устройств в системах управления по исчислению пря-
мых открытых алгоритмов 1 и обработке сигналов, остается весьма
ограниченным.
Одной из задач данной книги является восполнение отмечен-
ного пробела в теории точности вычислений указанных алгорит-
мов малоразрядных управляющих машин и цифровых устройств.
Управляющие системы строят или на базе айалоговых вычисли-
телей, или цифровых машин, или по комбинированному принципу,
сочетающему преимущества обоих технических направлений в реа-
лизации вычислительного процесса. Использование цифровых ма-
шин и устройств невозможно без разработки сопрягающих уст-
ройств, учитывающих непрерывную природу объекта управления
и воздействий, которым подвержена система.
В силу сказанного в настоящее время целесообразна в извест-
ной мере интеграция научных и технических направлений в раз-
витии аналоговой и цифровой вычислительной техники.
В основу настоящей книги положен личный опыт авторов
в разработке специализированных управляющих машин и уст-
ройств непрерывного и дискретного действия, входящих как со-
ставная часть в автоматизированные системы управления.
Особенности этих систем заключаются прежде всего в том, что
входные величины непосредственно связаны с физическими пара-
метрами внешней среды; познание внешней среды ограничено сте-
пенью совершенства отображающей модели; к вычислительным
средствам, как и к остальным элементам автоматической системы,
предъявляются требования минимальных весов и габаритов, что
ограничивает масштабы аналоговых вычислителей или разрядность
цифровых машин и устройств. Точность вычислений является
1 То есть алгоритмов без обратной связи.
4
одним из основных требований, предъявляемых к специализиро-
ванным вычислителям. Степень соответствия требуемой точности
решения задач и точности, достижимой в данном вычислителе,
определяет рациональность его применения. Пользователям вы-
числительной техники важно правильно и обоснованно предъяв-
лять требования по точности, разработчикам — обеспечить ее
реализацию. Авторы стремились там, где это возможно, подходить
с единых, позиций к вопросам точности как аналоговых, так и циф-
ровых машин.
В частности, они исходили из предпосылки, что нет необхо-
димости существенно завышать требования по точности вычисле-
ний на машине по сравнению с той погрешностью, которую привно-
сят в систему управления датчики и преобразователи входной ин-
формации. Другими словами, принималось, что разрабатываемая
(или используемая) вычислительная машина оптимальна по точ-
ности, если внутренние шумы вычислений несущественно увеличи-
вают общую погрешность системы с учетом наследственных по-
грешностей, обусловленных ошибками входной информации.
Далее, оставаясь на позициях общепринятой фундаментальной
классификации ошибок, авторы с позиций системного подхода
стремились к упорядочиванию наименований ошибок для обоих
классов машин. В основе этого подхода лежит принцип классифи-
кации ошибок по природе их возникновения. При этом авторы,
исходя из личного практического и педагогического опыта, сочли
целесообразным в методологическом плане уточнить и расширить
эту классификацию (в рамках общепринятой). Главное же внима-
ние в работе уделено инструментальным ошибкам вычислений ана--
логовых и цифровых машин.
В классе машин непрерывного действия основное внимание
уделено расчету инструментальных погрешностей отдельных вы-
числительных устройств и методу расчета ошибок вычислителей,
построенных на основе различного рода сопряжения этих уст-
ройств. Разработка методики проводилась на основе выделения и
взаимного сравнения ошибок двух групп: наследственных и ма-
шинных.
В разделах, относящихся к цифровой технике, большое вни-
мание уделено статистическому описанию ошибок квантования и
усечения с учетом малой разрядности вычислителей. Здесь даны
точные выражения для характеристик ошибок с учетом разряд-
ности представления чисел и изучены статистические характери-
стики потока случайных ошибок на выходе арифметических опера-
ции. В частности, показано, в каких случаях можно принимать
равновероятный закон их распределения.
На примерах расчета ошибок решения типовых задач иллюстри-
руется методика анализа точности исчисления алгоритмов на мало-
Разрядных машинах с фиксированной запятой. Показано, что наи-
олее «тяжелыми», с точки зрения точности, являются, в частности,
перации сложения и деления операндов; что машинный алгоритм
5
вычислений в значительной мере оказывает влияние на точность
решения задач. Исходя из этого разработаны типовые рекоменда-
ции по программному синтезу точности вычислений.
Характерной чертой разработки специализированных вычисли-
телей в системе управления является необходимость масштабиро-
вания входных, выходных и промежуточных величин (для всех
аналоговых и, по крайней мере, цифровых машин с фиксированной
запятой). И хотя, этот вопрос не является новым и не может слу-
жить предметом «чистой науки», тем не менее большой практиче-
ский опыт показывает, что отсутствие системных пособий по этому
разделу проектирования приводит к значительным издержкам
разработок.
В настоящей работе разделу, посвященному вопросам точности,
предпослан раздел масштабирования в аналоговой и цифровой
технике, что необходимо было сделать в силу большой связи этих
вопросов. В частности, показана целесообразность введения поня-
тия о знаковом масштабе для удобства согласования знаков физи-
ческих величин (в аналоговой технике) и понятия «цена машинной
единицы» вместо цены младшего разряда (в цифровой технике).
Методы исследований точности, предлагаемые в книге, дове-
дены до расчетных формул, применение которых широко иллюстри-
ровано примерами.
Между авторами материал распределен следующим образом:
Э. И. Соренков — п. 3, 5 гл. I, гл. II, III, IV, VI, VII, VIII;
А. И. Телига — п. 2, 4, 6—9 гл. I, гл. V;
А. С. Шаталов — п. 1, гл. I.
Глава I
СПРАВОЧНЫЕ СВЕДЕНИЯ ИЗ ТЕОРИИ ТОЧНОСТИ
И ТЕОРИИ ВЕРОЯТНОСТЕЙ
1. КЛАССИФИКАЦИЯ ОШИБОК
Реальные ячейки аналоговых вычислительных устройств (АВУ),
моделирующие решение простейшей аналоговой операции, ячейки
арифметического устройства ЦВМ в совокупности с элементами
преобразования информации (кодирующим устройством) будем
объединять общим понятием «вычислительное устройство» (ВУ).
Точность вычислительного устройства обычно характеризуется
противоположной величиной — ошибкой или погрешностью. Чем
выше требуемая точность, тем меньше величина допустимых
ошибок.
Ошибкой \г вычислительного устройства (ВУ), реализующего
заданную математическую зависимость или операцию, будем назы-
вать разность между значением переменной z на выходе этого
устройства и значением этой переменной za6c на выходе идеального
устройства, т. е. устройства, реализующего заданную математиче-
скую зависимость с абсолютной точностью при абсолютно точных
значениях входных координат:
Az = z — za6c. (1)
Для аналогового отображения величин в АВМ практически
достижимая точность определяется ошибками порядка 0,05—
0,1%. Для цифрового отображения величин в ЦВМ общая оценка
ошибки обычно задается через разрядность и быстродействие ма-
шины; рост этих показателей, в принципе, неограниченно снижает
ошибку. Для определенного класса специализированных машин
она может быть в пределах 0,01—0,001%.
На практике пользуются понятиями абсолютной, относитель-
ной и приведенной ошибок.
Абсолютную ошибку Az определяют согласно выражению (1),
относительную и приведенную — по формулам
v=|4|
6z = I I,
I гтах I
где 2 — текущее значение координаты на выходе ВУ;
-гшах — максимальное значение той же' координаты.
7
Абсолютными ошибками обычно характеризуют точность управ-
ляющих вычислительных машин (ВМ); относительными и приве-
денными — точность моделирующих ВМ.
Для дальнейшей детализации оценок ошибок специализирован-
ных ВУ на рис. 1 приведена обобщенная блок-схема, поясняющая
с методических позиций различные категории ошибок, места и ус-
ловия их возникновения, а также трансформацию первичных оши-
бок на выход ВУ.
Рис. 1. Блок-схема формирования ошибок
Рассматриваемая схема отражает системный подход к вопросу
точности специализированного ВУ, не изолированного от сопря-
гаемых с ним выходных и входных технических устройств и от
внешней среды, взаимодействие с которой определяет как поста-
новку решаемой специализированной задачи, так и полноту и точ-
ность получения исходных данных.
Количественная мера для одной из участвующих в задании
характеристик внешней среды на схеме обозначена %. В общем слу-
чае нельзя рассчитывать на точное ее задание, а иногда и на прямое
измерение, а при косвенных методах неизбежен предварительный
переход к модели внешней среды. Этот переход сопровождается,
как правило, рядом допущений и приближений, что вносит в изме-
ряемую характеристику еще до создания ВУ методическую ошибку,
обозначенную Дхмет, а после трансформации ее на выход ВУ —
А^мет*
8
Предположим, что взаимодействие ВУ с внешней средой осу-
ществляется через некоторые входные технические устройства,
играющие роль канала передачи информации. Эти устройства вно-
сят некоторые входные ошибки Дхн, которые трансформируясь
через функциональную схему ВУ, вызывают ошибки на его выходе.
По отношению к ВУ назовем такие ошибки наследственными и обо-
значим Д?н.
Помимо отклонений Дх, Д? на рис. 1 показаны также полные
величины %, г, искаженные ошибками. Так, например, характе-
ристика внешней среды %, искаженная методической ошибкой,
обозначена хмет; при добавлении наследственной ошибки форми-
руется входная величина %вх, поступающая на обработку в специа-
лизированное ВУ.
Наследственные ошибки могут наблюдаться и в сопрягаемых
с ВУ устройствах на его выходе, где их обозначают Д£н.
’Принцип построения ВУ и его конструктивная реализация
определяют другую категорию ошибок, а именно: инструменталь-
ные ошибки Дги. Поскольку в большинстве случаев, рассматри-
ваемых в данной книге, основным инструментом служит вычисли-
тельная машина, то в дальнейшем изложении для инструменталь-
ных ошибок употребляется и другой термин — машинные ошибки
Д^М*
Упомянутые три категории ошибок — методические, инстру-
ментальные и наследственные — в свою очередь, разделяют на
классы. Для наиболее многочисленной категории — инструмен-
тальных ошибок дано подразделение на три класса: принципиаль-
ные, генерированные и параметрические ошибки, что иллюстри-
руется рис. 1 и классификационной табл. 1. Для других категорий
подразделение дано только на два класса.
Принципиальные ошибки возникают из-за того, что вместо
реализации формул заданного метода преобразований конструк-
тор сознательно использует в схеме или конструкции принципы
построения, реализующие несколько другие алгоритмы, оказав-
шиеся более удобными для него по ряду соображений.
Генерированные и параметрические ошибки возникают в реаль-
ной конструкции ВУ, показанной на рис. 1 для наиболее простого
случая в виде последовательной цепочки блоков, объединенных
общим термином «реализация», из-за эксплуатационных и техноло-
гических отклонений в информативных Ду4- и неинформативных
А?/ параметрах преобразуемого сигнала.
Генерированные отклонения информативного параметра сиг-
нала Ду. аддитивны по отношению к полезному сигналу yit суще-
ствующему в точке генерации, и поэтому на выходе трансформи-
руются в ошибку Дгг по правилам, общим с полезным сигналом.
Отклонение неинформативного параметра Ду7- вызывает пара-
метрическую ошибку и влияет на точность, если В У имеет чувстви-
тельность^ данному /-му параметру. Мерой чувствительности слу-
жит функция чувствительности, используя которую, отклонение
9
Классификация ошибок по этапам разработки и реализации ВУ Режим
стати
Этап Вид ошибки Источник ошибок
Разработка ТЗ на проектирование ВУ | Методические Систематические Декомпозиции Ограничения векторно-матричной модели, отображающей внешнюю сре- ду. Приближения, принимаемые при разделении взаимосвязанных явле- ний на автономные при постановке задачи ч
Аппроксимации Использование в алгоритмах ВУ удобных для аппроксимации «формул метода», приближенно отображающих явление в целом
Проектирование ВУ Инструментальные (машинные) | Принципиальные Нескомпенсированная систематиче- ская составляющая инструментальной ошибки, влияние нагрузки, позицион- ные ошибки следящих систем; приме- нение типовых устройств или подпро- грамм с заложенными в них зависимо- стями, приближенно аппроксимирую- щими метод формулами принципа
Случайные Дискретизация характеристик АВУ, ограничение числа разрядов ЦВУ; ограниченность числа учитываемых параметров; применение принципа рандомизации
Реализация и автономные испытания ВУ Генерированные Аддитивные по отношению к полез- ному сигналу термо-э. д. с.,< поляри- зационные заряды конденсаторов, дрейф УПТ, наводки и утечки, люфт в цепях передачи информативного па- раметра
Параметрические Технологические и эксплуатацион- ные отклонения сопротивлений, емко- стей, размеров и других неинформа- тивных параметров ВУ от номинала при наличии функций чувствительно- сти по этим параметрам
10
Таблица 1
работы
ческий динамический
Оценка ошибки Источник ошибок Оценка ошибки
первичной трансформи- рованной первичной трансформи- рованной
II Ах|| М [^гмет] Ограничения модели, отображающей изменение внешней среды во време- ни. Приближения при раздельном рассмотрении неавтономных частей яв- ления и распределения их во времени ||Дх(0 II [^2мет (О]
Ахмет М [А*мет] Ограничения в частот- ном составе выходного сигнала, связанные с его фильтрацией и использо- ванием в качестве аппрок- симирующей величины А-^мет (0 М [Дгмет (О] Я Кет (0]
ДР (х) ?{М[Д<ш М [Дгп] Запаздывание в-поступ- лении информации. Инер- ционность блоков и ка- налов ВУ. Динамические ошибки следящих систем и фильтров. Нестацио- нарность режимов в кана- лах амплитудно-модули- рованного сигнала AF(P) М [Дгп (/)]
F {Л1[Ду]} D [Дгп] Отклонение статисти- ческих величин по прин- ципу рандомизации в ди- намике от фактических D [Дгп (01 \
АУ D [Дzr] Накапливающиеся в каждом цикле _ счета ошибки округления ЦВУ, наводки, вызванные ди- намическим режимом АВУ О[Дгг(0]
д9 . ЩДг9] Изменение неинфор- мативных параметров, влияющих на динамиче- скую точность, при су- щественных значениях функций чувствительно- сти частных производных по этим параметрам Д<?(0 D [Дг, (01
11
Классификация ошибок по этапам разработки и реализации Режим
стати
Этап Вид ошибки Источник ошибок
Эксплуатация ВУ с сопрягаемыми устройствами Наследственные Систематические и случайные Трансформирован- ные на выход ошиб- ки входных ус- тройств Трансформированные через функ- циональную характеристику ВУ ошиб- ки входного канала и предшествую- щих ему технических устройств в ста- тике
Независимые от ВУ ошибки ус- тройств, сопрягае- мых с выходом ВУ Аддитивные по отношению к выход- ному сигналу ошибки сопрягаемых с ВУ последующих устройств в ста- тике
неинформативного параметра можно преобразовать в промежуточ-
ную ошибку
Л дУ! Л
Д^'— dq/ Д?'
и трансформировать ее на выход в виде ошибки Д^. Если функция
чувствительности по какому-либо параметру равна нулю, то откло-
нение будет локальным, не трансформирующимся на выход.
Для трансформации малых отклонений могут быть использо-
ваны упрощенные соотношения, развиваемые в традиционной тео-
рии точности, тогда в методической схеме на рис. 1 нижний канал
передачи отклонений будет отличаться от каждого из верхних
каналов передачи полного сигнала.
Дальнейшее изучение особенностей ошибок ВУ проведем в рам-
ках расширенной классификационной табл. 1, объединяющей тра-
диционные принципы теории точности с принципами системного
анализа, к которым прежде всего относится распределение различ-
ных категорий классов ошибок по этапам разработки и внедре-
ния ВУ.
Далее ошибки ВУ классифицируют по режимам работы, разде-
ляя на два подкласса — статические и динамические.
Как первичные, так и трансформированные ошибки по харак-
теру проявления могут быть систематическими и случайными.
Систематическими называют ошибки, которые остаются по-
стоянными или меняются по известному закону. К случайным отно-
сят ошибки, числовые значения которых заранее неизвестны и
подчиняются вероятностным законам распределения.
12
Продолжение табл. 1
работы
ческий динамический
Оценка ошибки - Источник ошибок Оценка ошибки
первичной трансфор- мированной первичной трансформи- рованной
Дхн М [Д2Н] D [Дгн] Трансформированные через операторную функ- цию передачи в ди- намике ошибки входных устройств В У •$д» М [Д2„ (/)] D (Дгн (/)]
А£н м [Д£н] D [ДСн] Аддитивные по отно- шению к выходному си- гналу ошибки сопрягае- мых с ВУ последующих устройств в динамике £д£ (со) М [Д£н (/)] D [Д£н (0]
В подклассах статических и динамических ошибок, разделяе-
мых по режиму работы ВУ, статические ошибки в основном яв-
ляются случайными величинами, имеющими определенные число-
вые вероятностные характеристики. Динамические ошибки суще-
ственно отличаются от статических тем, что носят характер слу-
чаййых процессов и, следовательно, характеризуются корреля-
ционными функциями и частотным спектром.
Категориям методических и принципиальных инструменталь-
ных ошибок свойственны главным образом систематические состав-
ляющие. Если в методической ошибке появляется случайная со-
ставляющая, отображающая степень незнания свойств внешней
среды, то ее следует объединить со случайной компонентой наслед-
ственной ошибки.
В принципиальных ошибках могут присутствовать как систе-
матическая, так и случайная составляющая, но с четко обозначен-
ными границами для случайной компоненты и причинной связью,
вводимой конструктором по принципиальным соображениям.
Примером может служить квантование, ограничение числа разря-
дов, устанавливающее случайные, но жестко ограниченные соот-
ношения между фактическим значением аналоговой величины вну-
три младшего разряда и дискретным отсчетом
К числу генерированных и параметрических инструменталь-
ных ошибок в классификационной таблице отнесена только слу-
чайная составляющая. Систематическую составляющую инстру-
ментальной ошибки этих классов необходимо выявлять в процессе
отработки и испытаний опытных образцов и компенсировать в про-
мышленной серии на основе принципов, используемых в точном
13
приборостроении. Сознательный отказ от компенсации (например,
в силу малости отклонений) переводит эту ошибку в класс принци-
пиальных ошибок.
Выявленное влияние изменений параметров внешней среды на
точность ВУ может быть систематизировано в форме поправочных
таблиц, по которым при эксплуатации осуществляется периодиче-
ский ввод поправок. Те параметры, которые имеют временной
градиент случайного характера, в промежутках между вводом
поправок порождают случайные ошибки.
Категория наследственных ошибок включает как систематиче-
скую, так и случайную составляющие, поскольку эти ошибки по-
рождаются самостоятельными и зачастую достаточно сложными
техническими устройствами. Если рассматривать случай, когда
наследственные ошибки не зависят от метода использования ВУ
и принципа его построения, то эти ошибки целесообразно сопостав-
лять с инструментальными по формуле
Ко'н 4" (1 4" 6) Он,
где б — некоторая малая величина.
Если, например, задаться б = 0,1, то допустимой величиной
инструментальной (машинной) погрешности является значение
ом = 0,5он, и дальнейшее повышение инструментальной точности
может и не потребоваться.
С другой стороны, возможно активное воздействие на входные
наследственные ошибки, поскольку ВУ участвует в их трансфор-
мации. При этом можно использовать принцип усреднения наслед-
ственной трансформированной ошибки по ансамблю последователь-
ных или параллельных (одновременных) реализаций. Так как
наследственная трансформированная ошибка в этом случае свя-
зана с принципом построения ВУ, то ее следует отнести к катего-
рии инструментальных ошибок.
В категорию наследственных ошибок включены также ошибки,
возникающие на выходе ВУ и вносимые последующими сопрягае-
мыми устройствами.
Рассмотрим подробнее на ряде примеров основные группы оши-
бок.
Как указывалось выше, методические ошибки обусловлены ме-
тодами решения или упрощения математических зависимостей,
закладываемых в вычислительное устройство..
Как правило, в основу модели внешней среды закладываются
данные и связи, установленные на определенном уровне ее позна-
ния, поэтому эта модель всегда будет приближенной в силу диа-
лектики самого процесса познания. Переход от объективных
свойств физической среды к параметрам упрощенной модели по-
рождает ошибки, называемые ошибками декомпозиции. С другой
стороны, при закладывании формулы модели стремятся прибли-
зить ее к удобной аппроксимирующей форме. При этом методиче-
14
ские ошибки аппроксимации возникают как разность между ап-
проксимирующей характеристикой и исходной.
Примером методической ошибки декомпозиции может служить
ошибка устройства определения углов наклона наземного объекта
относительно истинной вертикали в условиях, когда проекцией
скорости перемещения самого измерителя на ось его чувствитель-
ности пренебрегают.
Непосредственное измерение углов наклона с помощью физиче-
ского маятника, гироскопа или уровня характеризуется большими
баллистическими погрешностями при наличии линейных ускоре-
ний объекта. Углы наклона можно определять косвенно с помощью
измерения проекции угловой скорости со вращения Земли на на-
правление вертикальной оси объекта. Сравнивая эту проекцию
с расчетной вертикальной составляющей угловой скорости соо
суточного вращения Земли для данной широты места, можно опре-
делить угол наклона объекта относительно вертикали (горизонта)
т] по формуле:
(О
n = arccos---.
1 со0
Если на объект действуют внешние возмущения, вызванные
его перемещениями, измеритель угловой скорости может чувство-
вать добавочную составляющую угловой скорости Дсо вокруг
вертикальной оси. В этом случае измеряемый угол наклона будет
содержать методическую ошибку Дт] согласно зависимости
. А со + Дсо
т) Дт) = arccos —1.
(00
Примером методической ошибки аппроксимации может слу-
жить также разность между наблюдаемой во внешней среде харак-
теристикой, описываемой функцией у = sin %, и характеристи-
кой, задаваемой формулой метода у = х для последующего упро-
щения схемы или конструкции устройства (для малых х).
В ЦВУ, реализующих численные методы решения задач, та же
функция sin х может быть вычислена (с помощью операций сложе-
ния, вычитания, умножения и деления) разложением в ряд:
уЗ у 5 y2rt 1
sinx = x рр + рр • • •(— 1)" 1 (2п_1)| + • • ••
При этом методическая ошибка возникает при ограничении
разложения конечным числом членов.
При ограничении суммы первым членом методическая ошибка
Дмет = х Sin X = (—1)" (2n— i)| < ЗГ ’
п=2
Инструментальные ошибки будут предметом обсуждения всей
последующей книги. Здесь, при рассмотрении классификацион-
ных вопросов, остановимся только на пояснении класса принци-
15
пиальных ошибок систематического и случайного характера и их
детализации в подклассах, соответствующих статическому и дина-
мическому режимам.
Остановимся вначале на ошибках, вызванных различием алго-
ритма, соответствующего принципу построения схемы или кон-
струкции ВУ, и формул метода.
В ряде случаев повышение требований к точности зависимо-
стей приводит к необходимости использования сложной схемы
или конструкции АВУ. Реализация такой схемы вызывает, в свою
очередь, появление большого количества инструментальных оши-
бок, снижающих или сводящих к нулю эффект осуществления точ-
ных зависимостей. В таких случаях выгодно заданное преобразо-
вание произвести приближенно с помощью простых функциональ-
ных элементов. Умышленно вводимая при этом принципиальная
ошибка оправдывается снижением других классов инструменталь-
ной погрешности элементов.
Пример замены формулы метода более удобной формулой
принципа проиллюстрируем на аналоговом ВУ переменного тока.
Подобным устройством может служить вращающийся трансфор-
матор (ВТ) для воспроизведения линейной зависимости.
Как известно', ВТ предназначен для точного воспроизведения
функций sin х или cos х.
Можно показать, что линейная функция ах может быть описана
приближенно следующим образом:
____ 1,54а sin х
аХ 1 +0,54 cos х ’ '
при этом возникает принципиальная ошибка:
А /1,54 sin х \
Дхп = г т ------------х] а.
п \ 1 + 0,54 cos х )
Вблизи нуля имеем sin х х, cos х 1, следовательно, вместо
отношения
1,54 sin х
1 + 0,54 cos х
практически получим
1,54х _
1 + 0,54 — Х’
т. е. ошибка воспроизведения линейной функции отсутствует.
В точке х = 1 рад, sin 1 = 0,84147; cos 1 = 0,54030;
_ 1,54а-0,84147 _ 1,295854 _ . ппч
аХ~ 1 +0,54-0,5403 ~ 1,291762 а~ [>WM-
В точке х = 0,5 рад имеем ах = 0,501а.
Таким образом, принципиальная ошибка в диапазоне ±1 рад
имеет порядок 0,3%. При простой конструкции, которая сулит
16
малые инструментальные ошибки других классов, получается до-
пустимая в ряде случаев суммарная ошибка.
В ЦВУ принципиальную ошибку систематического характера
может вызвать принцип точного (по формулам метода) счета опор-
ных точек реализуемой функции и интерполяции между опорными
точками по более простым формулам принципа.
Примером случайной ошибки может служить ошибка счета при
назначенном заранее числе итераций.
Разберем другой пример принципиальной ошибки случайного
характера при введении в процесс счета принципа рандомизации.
Допустим, что осуществляется учет массы, некоторого вещества
в целых единицах дозируемой емкости, .но заполнение этой емко-
сти в отдельных случаях по свойствам внешней среды происходит
не полностью. Тогда'для интегрального учета поступления массы
в емкостях потребуется по наблюдаемому фактическому дробному
заполнению емкостей соответственно увеличить разрядность в еди-
ницах учета. Другой подход к интегральному учету поступаю-'
щей массы может основываться на отделении полностью заполнен-
ных емкостей от частично заполненных. Для первых ведется детер-
минированный учет в целых единицах, а для вторых степень за-
полнения емкости отождествляется с вероятностью появления це-
лой единицы, которая при серии замеров с частотой, равной вероят-
ности, входит в счет, а в остальных замерах, относительное число
которых дополняет вероятность до единицы, не полностью запол-
ненная емкость учитывается как нулевая.
Так, например, при степени заполнения 0,5 каждый раз при
учете емкости в счетчик вводится либо 1, либо 0 случайным обра-
зом по закону равной вероятности. При осуществлении принципа
рандомизации требуются соответствующие стохастические уст-
ройства, но экономится либо разрядность ВУ, либо устройства
для запоминания дробных долей.
Разность между фактической массой измеряемого вещества и
подсчитанной по принципу рандомизации будет принципиальной
ошибкой случайного характера.
Примером принципиальной инструментальной динамической
ошибки АВУ (или системы) может служить динамическая ошибка,
обусловленная порядком астатизма следящей системы.
Как известно, для снижения динамической ошибки следящей
системы следует повышать порядок астатизма. Однако это,
как правилу ведет к снижению запасов устойчивости сис-
темы.
Практически разработчики следящих систем реализуют поря-
док астатизма не более трех. Это означает, что система не будет
иметь динамических ошибок, если управляющий сигнал не содер-
жит производных выше второго порядка. Ошибка следящей си-
стемы при наличии в управляющем сигнале третьей и высшйх
производных является в этом случае динамической инструменталь-
ной принципиальной ошибкой.
2 Э. И. Соренков 17
2. ХАРАКТЕРИСТИКИ РАСПРЕДЕЛЕНИЯ ОШИБОК
Ошибки вычислительных устройств в основном являются слу-
чайными величинами или случайными функциями. Рассмотрим
их основные характеристики.
Как уже было отмечено, точное предсказание значений случай-
ных ошибок невозможно. Однако, если рассматривать совокуп-
ность большого их числа, то средние значения обнаруживают опре-
деленную устойчивость.
При работе ВУ в статическом режиме ошибки обычно являются
случайными величинами, принимающими в процессе работы един-
ственное, хотя и заранее неизвестное значение. Примерами таких
ошибок могут служить отклонения величин сопротивлений и емко-
стей от номинальных значений. Эти отклонения на выходе ВУ
могут вызывать ошибку наводки орудия при одном выстреле,
ошибку радиодальномера при одном измерении дальности и др.
Если же в процессе работы ВУ ошибки непрерывно изменяются
во времени, что характерно для динамического режима, то такие
ошибки являются случайными функциями; будем их обозначать
соответственно Дх (/) и Дг (/).
Такими ошибками являются, например, дрейф нуля решающего
усилителя постоянного тока; люфт зубчатых передач, модулиро-
ванный накапливающейся ошибкой шага зубчатого колеса; ошибка
радиодальномера при непрерывном изменении дальности и т. п.
Для оценки случайных ошибок используют аппарат теории
вероятностей и теории случайных функций.
Случайные величины (в том числе и ошибки) могут быть не-
прерывными и дискретными.
Следуя акад. В. М. Глушкову, под непрерывной случайной
величиной будем понимать такую величину, которая может при-
нимать любые значения в той или иной области (открытом множе-
стве) соответствующего векторного пространства (интервале веще-
ственной оси). Примером непрерывной случайной величины может
служить ошибка в размере детали в пределах допуска.
Дискретная случайная величина может принимать лишь ди-
скретные значения, т. е. такие множества, каждую точку которых
можно заключить в сферу (быть может очень малого радиуса), не
содержащую других точек того же множества. Примером дискрет-
ной случайной величины может служить величина на выходе пре-
образователя «аналог—код», применяемого для ввода информации
в специализированную ЦВМ, при случайном изменении входной
(аналоговой) величины.
Каждая случайная величина подчинена определенному закону
распределения. Под законом распределения случайной ошибки
понимают соотношение между возможными значениями ошибки и
соответствующими им вероятностями.
В данной главе приведены справочные сведения по основным
положениям теории вероятностей и теории случайных функций,
18
применяемые в последующих главах. Читателям, желающим более
подробно ознакомиться или обновить свои знания в этой области,
рекомендуем обратиться к литературе, специально посвященной
теоретико-вероятностным проблемам. 7
Для случайных ошибок, как и вообще для случайных величин,
различают два вида закона распределения.
Интегральная функция распределения F (Ах) устанавливает
связь между фиксированной величиной ошибки АХ и вероятностью
того, что любое ее значение Ах не превышает АХ:
Рис. 2. Интегральная функция распре-
деления ошибок
F (Ах) - Р (Ах < АХ).
Рис. 3. Дифференциальная функция
распределения ошибок
Пример интегральной функции распределения F (Ах) приведен
на рис. 2.
Часто интегральную функцию распределения называют просто
функцией распределения ошибки.
Дифференциальная функция распределения f (Ах) является
производной функции F (Ах):
dF(Ax) _
' d \х
и Называется плотностью распределения или плотностью вероят-
ности (рис. 3). Она определяет вероятность того, что случайная
ошибка Ах заключена в интервале Ахх — Дх2:
Д%2
Р (Ахх < Ах < Ах2) — j f (Ах) d Ах,
A%i
где величина f (Ах) d Ах является элементом вероятности и опре-
деляет вероятность попадания ошибки на элементарный участок
d Ах.
Графически Р (Ахх < Ах < Ах2) определяется площадью под
кривой распределения, опирающейся на отрезок Ахъ Ах2.
,2* 19
Следует отметить физическую размерность функции распреде-
ления F (Дх) и плотности распределения f (Дх): функция F (Дх)
безразмерна, функция f (Дх) имеет размерность, обратную размер-
ности ошибок Дх.
3. ЧИСЛОВЫЕ ХАРАКТЕРИСТИКИ СЛУЧАЙНЫХ ОШИБОК
Когда вид закона распределения случайной ошибки известен,
ее основными числовыми характеристиками являются математиче-
ское ожидание М [Дх] (средняя ошибка) и дисперсия D [Дх].
На практике широко используются следующие дополнительные
характеристики ошибок, которые могут быть непосредственно по-
лучены из основных:
среднеквадратическая ошибка о [Дх];
срединная ошибка Е [Дх];
максимальная вероятная ошибка 8тах [Дх].
Математическое ожидание или среднее значение ошибки опре-
деляется формулами:
для непрерывной случайной величины
М [Дх] = Дх = J Дх f (Дх) d Дх; (2)
—со
для дискретной случайной величины
М [Ах] — Ах = 2 &xiPh (3)
1=1
где Дхг- — дискретное значение ошибки;
pL — вероятность ее появления.
При большом числе опытов математическое ожидание М [Дх]
принимают приближающимся к среднему арифметическому
М [Дх] наблюденных значений.
Дисперсия ошибки определяется по формулам:
для непрерывных случайных величин
D [Дх] = о2 [Дх] = М [(Дх — М [Дх])2] =
= J (Ах — М [Ах])2 f (Ах) d Ьх. (4)
Для дискретных случайных величин
D [Дх] = о2 [Дх] = М [(Дх — М [Дх])2] =
= £ (Ах, —7И[Ах])2р,, (5)
1=1
Эта характеристика определяет разброс значений случайной
величины около математического ожидания. Дисперсия имеет
размерность квадрата случайной ошибки.
20
Среднеквадратическая ошибка (CKO) а [Дх ] является арифме-
тическим квадратным корнем из дисперсии:
а [Дх] = ]/D [Ах].
Размерность СКО совпадает с размерностью ошибки. Часто
СКО называют стандартом ошибки.
Срединной ошибкой Е называется половина длины участка,
симметричного относительно центра рассеивания, вероятность
попадания в который равна половине. Вероятность появления
ошибки меньше Е и больше Е одинакова и равна 0,5:
+£
J / (Ах) d Ах = 0,5.'
, —Е
В теории вероятностей эту величину называют медианой
случайной величины.
Срединная ошибка Е для закона распределения Гаусса связана
со среднеквадратической ошибкой соотношением
Е [Ах ] = 0,674а [Дх].
Максимальная вероятная ошибка етах определяет максимальное
отклонение величины ошибки от ее среднего значения. Она свя-
зана с другими числовыми характеристиками, например, со средне-
квадратической ошибкой:
8тах [Ах] = уо [Ах]. (6)
Коэффициент у зависит от вида закона распределения ошибки.
Ниже будут приведены значения у для некоторых законов распре-
деления.
Практически-предельная ошибка
g [Ах] = М [Ах] ± етах [Ах] (7)
определяет максимально возможное отклонение величины от ее
номинала.
Найдем выражения для математического ожидания и дисперсии
дискретных ошибок, представленных в двоичном коде:
т
^Хт== ^0» ^1> ^2» • • •> Ст== £/2 , (8)
i=0
где Cf = 0 или 1 для i = 0, 1,2, . . ., tn.
Согласно основному определению (3), математическое ожи-
дание
Так как cz принимают значение 1 или 0, то среднеарифметиче-
ское значение cz
21
где No (i) и (г) — число нулей и единиц в i-м разряде выраже-
ния (8) для ошибок, представленных ансам-
блем из N выборок;
Рг (fy) — частота события = 1.
Если N оо, то Pi (cz) —> Pi (cz), и окончательно получаем
т
М|Дхт] = ЕЛ(с()2-'.
i=0
(9)
Таким образом, для определения математического ожидания
дискретных ошибок достаточно знать вероятности ожидания появ-
ления единицы в разрядах числа Дх: Pt (cz) = Р (ct = 1).
Подстановка (8) в первый член выражения (5) дает
М [Дх2т] = М
+ 2М
i=0
i>i
Тогда общее выражение для дисперсии (5) принимает вид:
т т
D [Дхт] = S Л (с.) 2"2' + 2 S Л (сА) 2"(Ж) — М2 [Дхт]. (10)
i=0 i=0
i>t
В этом выражении fPj (czcz) = Р (CfCj = 1) есть вероятность
ожидания появления единицы в произведении двух любых разря-
дов мантиссы числа Дхт при j > i. Ниже будут определены значе-
ния вероятностей Рг (с^ и Р± для различных законов рас-
пределения ошибок.
При дальнейшем изложении часто будет возникать необходи-
мость в определении значений сумм типа (9) и (10)» Поэтому дадим
сводку их значений:
£ 2-' =2 [1— 2-(т+1)];
1=0
2 2-J = 1 —2~m;
i=l
^2-2l = 4[l-2-2(m+1)]
i=0
m
£2-2‘ = l(l-2-2m);
(П)
22
4. ЗАКОНЫ РАСПРЕДЕЛЕНИЯ СЛУЧАЙНЫХ ОШИБОК
Закон равной вероятности. Если возможные значения случай-
ных ошибок заключены в определенных пределах и одинаково
вероятны, то такие ошибки^распределены по закону равной вероят-
ности (равномерной плотности).
Рис. 5. Распределение ошибок по за-
кону Симпсона
/(Лф
Г
Рис. 4. Распределение ошибок по за-
кону равной вероятности
Кривая распределения такой ошибки f (Дх) приведена на
рис. 4. Величина 26 определяет поле рассеивания ошибок.
Числовые характеристики ошибок, распределенных по закону
равной вероятности, выражаются:
математическим ожиданием
М [Дх] = АХ1 + А*2 * * * * * ,
где Дхг и Дх2 — предельные значения ошибки Дх;
среднеквадратической величиной
_,гдгт_ Ах2 ^Х1 __ 8гпах [Ах]
1 х'~ 2Гз “ Гз *
В случае симметричного распределения М [Дх] = 0.
Для закона равной вероятности коэффициент у выражения (6)
равен ]/3.
Примером ошибки, распределенной по закону равной вероят-
ности, может служить угловое отклонение радиопеленгатора под
действием ветровой нагрузки. В силу того, что ветер может иметь
любое направление по отношению к пеленгу, отклонение радио-
пеленгатора в любую сторону в определенных пределах равно-
23
вероятно. По тому же закону распределена ошибка округления
чисел в ЦВМ при ограниченной длине разрядной сетки.
Закон Симпсона. Кривая распределения по закону Симпсона
показана на рис. 5. Такой закон называют «законом треугольника».
Характеристики ошибок, распределенных по этому закону,
связаны соотношением
ст[Дх] = --тахДАх] ,
Кб
т. е. для закона Симпсона коэффициент у == ]/б.
Сумма двух случайных величин, распределенных по закону
равномерной плотности, подчиняется закону Симпсона.
Нормальный закон распределения (закон Гаусса). Наиболее
часто встречается на практике нормальный закон распределения
ошибок.
В теории вероятностей доказывается, что сумма достаточно
большого числа независимых случайных величин, подчиненных
каким угодно законам распределения, при отсутствии явного пре-
обладания одной величины над другими, приближенно подчиняется
нормальному закону. Поэтому он является предельным законом
для суммы независимых равномерных ошибок.
Практически при суммировании двух и более случайных вели-
чин, распределенных по закону Симпсона, или трех и более — по
закону равной вероятности, суммарное рассеивание подчиняется
закону Гаусса.
Плотность вероятности для этого закона определяется форму-
лой
— (Дх—М)2
/(Дх) =—т=-е w
а К 2л
. Величины М и о, входящие в это выражение, являются соответ-
ственно математическим ожиданием и среднеквадратической вели-
чиной ошибки Дх.
График нормального закона приведен на рис. 6. Параметр
М [Дх] часто называют центром рассеивания. При изменении
центра рассеивания кривая распределения смещается вдоль оси
абсцисс, не изменяя своей формы. Если М [Дх] = 0, то кривая
расположена симметрично относительно оси ординат.
Параметр а [Дх] характеризует меру рассеивания и форму
кривой распределения. На рис. 7 показаны три кривых распреде-
ления, соответствующие трем значениям а: аг > а2 > аз-
В теории ошибок в качестве характеристики рассеивания для
нормального закона применяют так называемую меру точности h,
которая связана с величиной а соотношением
л=—1—.
аК2
Чем меньше рассеивание, тем выше мера точности.
24
Вероятность того, что величина рассеивания ошибки Дх относи-
тельно центра рассеивания будет заключена в пределах —а <
< Дх < а, определяется интегралом
р (Дх—Af)*
Р(— а<Дх<а) = —±=- е 2*2 dbx. (12)
а И 2л J
—а
В силу симметричности функции относительно центра рассеи-
вания М [Ах], выражение (12), можно переписать в виде:
Рис. 6. Нормальное распределение
ошибок
Рис. 7. Различные формы кривой нор-
мального распределения
Интеграл (13) носит название интеграла вероятности.
Вероятность попадания ошибки в интервал —о < Ах < о
составляет 0,683; в интервал —2а < Ах < 2а — 0,955 и в интер-
вал —Зо < Ах < За — 0,99.7, т. е. 99,7% ошибок, подчиненных
нормальному закону, заключено в интервале ±3а. Соответственно
коэффициент у выражения (6) равен 3. Это позволяет легко опре-
делять практически предельную ошибку (7)
Z [Ах] = М [Ах] ± За [Ах].
Такой способ оценки известен в теории точности как «правило
трех сигм».
5. КОРРЕЛЯЦИОННЫЕ МАТРИЦЫ ВЕРОЯТНОСТЕЙ
СЛУЧАЙНЫХ ДИСКРЕТНЫХ ОШИБОК
Основные числовые характеристики ошибок —М [Ах] и
D [Ах] выражаются через вероятности ожидания появления еди-
ницы в разрядах мантиссы числа Рг и через корреляционные
вероятности связей их разрядов —(ci-Cj). Упорядоченную
25
определенным образом совокупность этих вероятностей будем на-
зывать корреляционной матрицей.
Для каждого из трех рассмотренных законов распределения
ошибок далее определяются эти матрицы.
Закон равной вероятности. В соответствии с изложенными
общими положениями закон равной вероятности для двоичных
дискретных чисел описывается равномерной плотностью распре-
деления ошибок в интервале чисел от 0 до (1—2~т):
2m-l
/(Дх) = 2~т 2 6(Дх —Дх,),
i=0
где
( оо при Дх.- = Дх;
б(Дх— Дх£-)= л л
х [0 при Дх4- =£ Дх;
со
j б (Дх), dx = 1.
—со
Определим интересующие нас вероятности для случаев разряд-
ности ошибок т = 1, 2, 3 и обобщим полученные результаты.
1. т = 1, Дхх = 0, сх.
Так как значения цифры с1( равное 0 и 1, равновероятны, то
Pi (С1) = 0,5.
2. т = 2, Дх2 = 0, сх, с2.
Возможный минимальный набор чисел, удовлетворяющий всем
поставленным требованиям, выражается ансамблем
' о, 0 0
Дх2= 0, 0, 0 1 1 0
. о, 1 1
о, С1С2
Непосредственным подсчетом находим:
Л(сх) = у; Л(с2) = |;
(с2 • с2) = —.
Эту совокупность вероятностей удобно представить в виде ма-
трицы
II 0,5 ,0,25
В2 (pi • Cj) = | 0 5
В самом деле, общим элементом матрицы можно считать корре-
ляционную вероятность связей разрядов (Ci-Cj); тогда в силу
26
очевидного свойства Р (c^Ct = 1) — Р (ct =,1), вероятности
(с() являются частными случаями элементов матрицы при /.
•Присваивая индексу i номер строчки, а индексу / — номер столбца,
легко заполнить искомую матрицу; при этом элементы главной
диагонали матрицы представляют собой вероятности (сг).
3. т = 3, Ах3 = 0, CiC2c3.
В этом случае имеем минимальный ансамбль
О, О О О
О, 0 0 1
О, 0 1 О
О, 0 1 1
0,100
О, 1 0 1
0, 1 1 о
0, 1 1 1
О, СуС^с^
из которого следует, что
Р1(С1) = Л(с2) = А(с3) = 4;
Р1 (С1 ’ ^2) = “4" *>
Р1 (С1 *с з) = “4" >
Р1 (с2 • сз) = 4" •
Следовательно
В3
0,5 0,25
0,5
0,25
0,25
0,5
Обобщая полученные результаты для произвольного т, запи-
шем искомую матрицу в виде
0,5 0,25 0,5 0,25 •• 0,25- • • 0,25 • 0,25
Вт (ci' Сj) — 0,5 •• • 0,25
0,5
27
Характерной чертой полученной матрицы является зависимость
Р1(сгс,) = Р1(с1)Р1(с1). (14)
Закон Симпсона (закон треугольника). Аналогично предыду-
щему, рассмотрим три случая для tn = 1; 2; 3.
1. т = 1, Ахх = 0, сх.
Так как возможны всего два равновероятных набора {0, 0}
и {0; 1} при М [Ахх] = то для этого конкретного случая
Р1(с1) = 0,5 и В1(с, -с/) = ||0,5||.
2. т = 2, Ах2 = 0. схс2.
Рис. 8. Плотность вероятности Рис. 9. Плотность вероятности распределения
распределения дискретных оши- дискретных ошибок по закону Симпсона при
бок по закону Симпсона при т = 3
т = 2
График плотности вероятности распределения ошибок f (Лх2)
представлен на рис. 8.
Из рассмотрения графика f (Дх2) непосредственно следует
Pi (^1) = + "g" = ~2~»
Л (сг) 8 8 — 2 ’
Pi = (cvc2) = -^-.
Поэтому
5г (pi' Сj) —
1/2 1/8
1/2 •
3. т = 3, Дх3 = 0, сг с2 с3.
График плотности вероятности распределения ошибок приведен
на рис. 9.
28
Из этого графика следует матрица
B3(c(-cy) =
1/2 1/8
1/3
3/16
1/4
1/2
Аналогично можно показать, что
1/2 1/8
1/2
^4 (pi ' Cj) —
3/16
1/4
1/2
7/32
1/4
1/4
1/2
Вв (Ci-Cj) =
0,500 0,125
0,500
0,187 0,218 0,233 0,241 0,245 0,247
0,25 0,25 0,25 0,25 0,25 0,25
0,5 0,25 0,25 0,25 0,25 0,25
- 0,5
Закон Гаусса. Корреляционные матрицы при распределении
ошибок по закону Гаусса были определены с помощью ЭВМ мето-
дом статистического моделирования. При этом
110,48 0,019 11
в2(сгС/) = | 0>51 |;
0,49 0,044 0,081
В3 (pi ' £/) —
0,47 0,149 ;
0,51
0,53
Bt (Ci-Cj) =
0,064
0,51
0,49 0,08 0,12 0,13
0,110 0,120
0,170 0,190 .
0,47 0,210 ’
0,50
0,13 0,13 0,14 0,13
Вй (С{С/) —
0,49 0,17 0,20 0,18 0,18 0,18 0,20
0,52 0,22 0,23 0,23 0,21 0,23
0,52 0,24 0,25 0,24 0,24
0,51 0,26 0,23 0,23
0,51 0,42 0,23
0,49 0,25
0,48
29
Проанилизировав полученные матрицы, отметим их характер-
ные особенности.
1. Поразрядные вероятности Л (с,) не зависят от законов
распределения ошибок и равны 0,5. Это свойство следует из рассмо-
трения значений вероятностей, представленных главной диаго-
налью матриц.
2. При треугольном законе распределения ошибок матрица
вероятностей идентична матрице равновероятной плотности рас-
пределения ошибок за исключением первой строки —(сгс^.
3. Значения вероятностей матрицы ошибок, распределенных
по закону Гаусса, существенно отличаются от соответствующих
элементов матрицы ошибок всех других законов распределения
и это отличие возрастает с уменьшением индексов i и /.
6. ОЦЕНКИ ЧИСЛОВЫХ ХАРАКТЕРИСТИК СЛУЧАЙНЫХ
ОШИБОК НА ОСНОВЕ ЭКСПЕРИМЕНТА
Обработка результатов наблюдений над массовыми случай-
ными величинами является одной из задач математической
статистики. Круг таких задач весьма обширен.
Рис. 10. Гистограмма ошибок резисторов
Ниже рассмотрены неко-
торые вопросы, связанные
с оценкой числовых харак-
теристик ошибок на осно-
вании ограниченного числа
испытаний.
Гистограмма. В резуль-
тате проведения эксперимен-
тов по измерению фактиче-
ских ошибок обычно полу-
чают статистический ряд
(таблицу), в котором некото-
рому интервалу ошибок со-
ответствует частота их появ-
ления. Графически статиче-
ский ряд оформляют в виде
совокупности прямоугольников — гистограммы. Основанием пря-
моугольника служит интервал ошибки, а высота пропорциональна
частоте. На рис. 10 приведена гистограмма ошибок резисторов
типа ПТМН-0,5 = 0,25%, Общее число измерений N = 98.
При увеличении числа опытов и уменьшении величины интер-
валов ошибок гистограмма приближается к кривой графика плот-
ности распределения. Площадь под этой кривой с учетом масштаба
стремится к размерной единице.
Числовые статистические характеристики. Такие числовые
характеристики случайных величин, как математическое ожидание,
дисперсия и другие,।являются результатом наблюдения бесконеч-
ного числа опытов.
30
Статистические характеристики, полученные при реальных
измерениях конечного числа ошибок, являются их оценками.
Будем их обозначать теми же символами, но со знаком «—».
Среднее арифметическое значение М [Дх]—оценка матема-
тического ожидания М [Дх], определяется формулой
N
М[Дх1=^—,
где Дх/ — значение ошибки, полученное в i-м опыте;
N — число опытов.
Как уже отмечалось, при увеличении N среднее арифметиче-
ское стремится к математическому ожиданию.
Оценка дисперсии D определяется формулой Бесселя:
N
2 [Дхг-М[Дх]]2
В[Лх]= 1=1 . .
Пример 1. При изготовлении резисторов типа ПТМН-0,5 были определены
отклонения величин сопротивления от номинала в виде относительных ошибок:
«О [ЯЛ = -4^— 100% = — • 100% >
А ном *\ном
где Ri—фактически измеренное значение сопротивления;
Z?H0M — номинальное значение сопротивления.
Результаты измерений сведены в табл. 2.
Таблица 2
Номер измерения 1 2 3 4 5 6 7 8 9 10
Относи- тельная ошибка бо [/?]. % +0,1 —°»2 —0,1 +0,1 —0,1 —0,1 +0,3 —0,1 +0,1 —0,2
Найти оценки математического ожидания и среднеквадратического откло-
нения ошибки, резисторов.
1. В качестве оценки математического ожидания находим среднее арифмети-
ческое значение
ю
2
М [6К] = -Ly- = - 0,02%.
2. В качестве оценки дисперсии Ь [Л/?] находим величину Ь [6/?]. Расчет
сведен в табл. 3.
31
Таблица 3
Номер измерения 1 2 3 4 5
6„7?t— М [67?], % .... [6О7?(-М [6/?]]2, (%)2 ? . +0,12 0,0144 —0,18 0,0324 —0,08 ‘ 0,0064 +0,12 0,0144 —0,08 0,0064
Номер измерения 6 7 8 9 10
6„7?г-М [67?], % [o07?t—-М [6/?]2, (%)2 . . . —0,08 0,0064 +0,32 0,1024 —0,08 0,0064 +0,12 0,0144 —0,18 0,0324
По данным таблицы находим
ю
£ [6/?; - М [6Я]]2
5 I6/?l = J----[ОТЙ--------= = 0,026 [%]2.
3. Среднеквадратическое отклонение сопротивления резистора
о [67? ] = [67?] = 0,16%.
7. ЧИСЛОВЫЕ ХАРАКТЕРИСТИКИ ФУНКЦИЙ
СЛУЧАЙНЫХ ОШИБОК (ФУНКЦИОНАЛЬНЫЕ ПРЕОБРАЗОВАНИЯ
СЛУЧАЙНЫХ ВЕЛИЧИН)
На практике часто возникает необходимость определения чис-
ловых характеристик ошибок, являющихся., в свою очередь, функ-
циями других ошибок.
Ряд теорем теории вероятностей дает весьма простой аппарат
вычисления этих характеристик. Ниже приведена сводка расчет-
ных формул.
1. Математическое ожидание неслучайной (постоянной) ошибки
равно этой ошибке
М [С] = С.
2. Дисперсия неслучайной ошибки равна нулю:
D [С] = 0.
3. Математическое ожидание произведения неслучайной
ошибки на случайную <
М [С Дх] = С-М [Дх].
4. Дисперсия произведения неслучайной ошибки на случайную
D [С Дх] = C2D [Дх].
5. Математическое ожидание суммы случайных ошибок
М [Дх + Ду] = М [Дх] + М (Ду].
32
Пользуясь этим правилом, формулу (5) для дисперсии можно
записать в другом виде, что часто используется при расчетах -
D fАх] = М [Ах — М [Ах]]Е 2 3 =
= М [Ах2] — Мг [Ах].. (15)
6. Дисперсия суммы случайных ошибок
D [Ах + Az/] = D [Ах] +D [Az/] + '2К [Ах, Ау], (16)
где К [Ах, Az/] — корреляционный момент ошибок Ах, Аг/.
Корреляционный момент (или момент связи) характеризует
степень зависимости ошибок между собой и определяется форму-
лой
К [Ах, Ду] = М [(Ах — М [Ах]) (Ay — М [Ду])] =
= М [Дх-Ау] — М [ДхЬМ [Az/]. (17)
Для двух независимых ошибок Дх и Ау их корреляционный
момент равен нулю, т. е.
К [Дх, Ау] = 0. .
Иногда, в
г [Ах, Ау],
расчетах используют коэффициент корреляции
г [Ах, Ау] =
К[Дх, Дг/]
а[Дх]а[Ду]’
где ст [Дх, ], ст [Ау] —соответствующие среднеквадратические
ошибки.
Для независимых случайных ошибок коэффициент корреляции
обращается в нуль вместе с корреляционным моментом; для пол-
ностью зависимых (функционально связанных) случайных ошибок
коэффициент корреляции равен единице.
Для дисперсии суммы п случайных ошибок формула (16) при-
обретает вид
Г N 1 N
D
Е Ах,- =S £>[Л*»1+'2 2 /С7,
где Ki, j — корреляционный момент ошибок Дх,- и Ах^
Суммирование распространяется на возможные попарные со-
четания случайных ошибок (Ах1( Дх2, .'. ., Ах„).
Если случайные ошибки независимы (некоррелированы), то
Ktj = 0 при i j, и формула принимает вид
- N
S Ах,-
_ «=1
D
N
= LO[Axz],
i
7. Математическое ожидание произведения случайных ошибок
М [Ax-Ay] = М [AxbM [Ау] + К [Ах, Ау].
8. Дисперсия произведения случайных ошибок
D [Ах, Ку] = М2 [Ах]-D [Ау] + М2 [Ay] -D [Ах].
3 Э. И. Соренков 33
Пример 2. Найти числовые характеристики ошибки прямоугольных коор-
динат, значения и число повторений которых по результатам 1000 измерений при-
ведены в табл. 4.
Таблица 4
Решение. 1. Определим оценки математических ожиданий:
М[Дх] = [(- 16-8) + (- 12-44) + (- 8-112) + (- 4-22) +
4- (0-254) + (4-188) + (8-84) + (12-62) + (16-16) + (20-6)] = 0,1;
Л4[Дх2] = [(162-8) + (122-44) + (82-112) + (42 • 226) + (0 • 254) +
4- (42-188) 4- (82-84) 4- (122-62) 4- (162-16) 4- (202-6)] = 42,97;
М[Ду] = ТЖ К'22'2) + 18’2) + 14’38) + (- 10> 106) + (-6-226) +
4- (-2-268) 4- (2-202) 4- (6-96) 4- (10-38) 4- (14-14) 4- (18-8)] = 0,1;
М[Ду2] = ^-(222-2) 4- (182-2) + (142-38) 4-(102-106) 4- (62-226) 4-
4- (22-268) 4- (22-202) 4- (62-96) 4- (102-38) 4- (142-14) 4- (182-8) = 42,27.
2. По формуле (15) определяем дисперсии:
D [Дх] = М [Дх — М [Дх]] 2 = М [Дх2] — М2 [Дх] =
= 42,97 — 0,01 = 42,96;
D [Де/] = М [Ду2] — М2 [Ду] = 42,27 — 0,01 = 42,26.
34
3. Среднеквадратические ошибки соответственно равны:
0 [Дх] = V D [Дх] = V 42,96 = 6,58,
ст [At/] = V D [Ду] = К"42^6= 6,50.
4. Корреляционный момент ошибок Дх, Az/ определим по формуле (17)
К [Дх, Дг/] = М [Дх, Ьу} — М [Дх] -М [Дг/].
Первое из слагаемых находим по общему правилу, выполнив суммирова-
ние всех имеющихся произведений Дх-Дг/:
У) У ' &У]
М [Дх. Ду] = ‘ 1 $--------= JL [(_ 16)'(- 22)-2 + (- 16) (- 10)-4 +
+ (-16) (-2).2 + (- 12) (- 18) 2 + (- 12) (—14)-14 + • • • +
+ (20) (18)-2] =28,72.
Таким образом находим
К [Дх, Ду] = 28,72 — 0,1 -0,1 28,71.
5. Определяем коэффициент корреляции
гд . , К[Дх-Ду] 28,71 . й_„
а[Дх]-о[Ду] 6,58-6,50
8. понятия о СЛУЧАЙНЫХ ФУНКЦИЯХ
И ИХ ХАРАКТЕРИСТИКИ
Основные характеристики случайных функций
Рис. И. Реализация случайных функ-
ций ошибок
До сих пор были рассмотрены характеристики ошибок, которые
принимают, хотя заранее и неизвестное, но единственное значение,
т. е. ошибок, являющихся случайными величинами.
На практике, особенно при расчете и анализе систем управле-
ния, описываемых дифференциальными уравнениями, приходится
исследовать ошибки, непрерыв-
но изменяющиеся в процессе
работы. Такие ошибки явля-
ются случайными функциями.
На рис. 11 представлено
семейство кривых, определя-
ющих случайную угловую оши-
бку As (/) радиолокатора при
слежении за целью в несколь-
ких опытах. Каждый конкрет-
ный вид случайной функции
(кривые 1, 2, 3, 4 на рис. 11)
называется реализацией.
Для случайных функций разработан аппарат определения
основных характеристик, которые в общем случае представляют
собой не числа, а функции.
Математическое ожидание случайной функции М [х (()] пред-
ставляет собой неслучайную функцию, значения которой равны
математическому ожиданию случайной функции при каждом зна-
3* 35
чении аргумента. Аналогично определяется дйсперсия случайной
функции: D [х (/)]•
Однако при, примерно, одних и тех же математическом ожида-
нии и дисперсии случайные функции могут иметь совершенно
разный характер, что видно из рис. 12.
Если на рис. 12, а представлены плавные, «регулярные» слу-
чайные процессы, то на рис. 12, б они имеют резко изменчивый,'
«беспорядочный» характер, хотя среднее значение и разброс при-
мерно одинаковы. Поэтому для случайного процесса чрезвычайно
Рис. 12. Характер изменения случайных функций ошибок
важную роль играет корреляционная функция, которая характери-
зует степень зависимости между значениями случайной функции
при различных значениях аргумента.
Корреляционная функция определяется по формуле, анало-
гичной формуле (17) для корреляционного момента, с учетом того,
что входящие величины являются функциями аргумента t-.
К^х (М М = М {[Дх (М - МДл. (Ml х
X [Дх(М-Мдх(^)1}. (18)
Из формулы (18) видно, что при совпадении аргументов /х = /2
корреляционная функция обращается в дисперсию случайной
функции, т. е.
КДх (О 0 = М [Дх (О - -МДА (О}2 = D [Дх (О ].
Как и для случайных величин, точное определение характери-
стик случайных функций на практике невозможно, поэтому поль-
зуются оценками этих характеристик, полученными из опыта.
В дальнейшем будем рассматривать только стационарные,
эргодические случайные процессы, т. е. такие у которых математи-
ческое ожидание и дисперсия являются постоянными величинами:
М [Дх (t)] — М [Дх] = const,
D [Дх (01 — D [Дх] — const,
корреляционная функция зависит только от разности т = t2 — /х
и неограниченно убывает по модулю при | т | —> сю. Для таких про-
зе
цессов среднее по времени может быть заменено средним по множе-
ству наблюдений на разных отрезках времени.
В корреляционной теории широко используется понятие спек-
тральной плотности случайного процесса S (со), которая связана
с корреляционной функцией преобразованием Фурье:
ОО 00
S(co)== j К (т) е~ ;сот dr = 2 J К (т) cos шт dx, (19)
— оо О
и обратно —
— j 5 ((о) cos (от dco — -Ь j S (<о) cos сот d<s>.
—co О
Из этих формул видно, что дисперсия может быть получена по
спектральной плотности:
со
. Р[Дх] = ст2 [Дх] = АГ Дх(О) =^js (®)dco. (20)
О
Спектральная плотность
описывает частотный состав
стационарного процесса. На
рис. 13 показан пример кри-
вой спектральной плотности.
Площадь под этой кри-
вой равна дисперсии D [Дх]
случайной функции Дх (/), а
ординаты представляют со-
бой плотность распределения
дисперсий по частотам. Раз-
мерность спектральной плот-
ности равна произведению
Рис. 13. Спектральная плотность ошибок
(плотность распределения дисперсий)
квадрата размерности слу-
чайной величины на секунду (м2-с; град2-с и т. д.).
Размерность корреляционной функции равна квадрату раз-
мерности случайной величины.
Функциональные преобразования случайных процессов
При работе вычислительных машин ошибки, возникающие в от-
дельных ее устройствах, как правило, являются стационарными
случайными процессами.
Для того чтобы опредёлить влияние первичных ошибок на точ-
ность выходного процесса, необходимо так же, как это делалось
для случайных величин, определить характеристики случайных
процессов после их функциональных преобразований.
37
Ниже приведены формулы для математического ожидания и
корреляционных моментов для типовых преобразований случай-
ных процессов.
1. Сумма случайной функции х (t) с регулярной функцией f (/)
z(0 = x(t) + f (t):
M [z (t\] = M [x (t)] + f (t).
K2 (т) = Kx (t).
2. Произведение случайной функции x (t) на регулярную f (/)
z(t) = x (t)<f (t):
M [z (t)] = M [x(t)
Кг (t) = Kx (t).
3. Сумма двух случайных функций z (1) = x (/) + у (t):
M [z(t)] = M k (01 +Л4 [y (01,
Кг (T) = Kx (T) + Kk (т) + КЛДт) + Kux (t).
В последней формуле символами Кху (т), Кух (т) обозначены
взаимные корреляционные функции процессов х (t), у (0-
По аналогии с собственно корреляционной (автокорреляцион-
ной) функцией взаимная корреляционная функция определяется
выражением
^(^•^) = М [х^.у^)].
Для стационарных случайных процессов в случае веществен-
ных корреляционных функций
Kx,(T) = ^(-T).
Как и для случайных величин, взаимная корреляционная функ-
ция независимых процессов х (/) и у (/) равна нулю.
4. Производная и интеграл случайной функции
В этом случае
t
z2 = J х (т) du.
о
t
М2Д/) = J M(x)dr,
0
KZl(T)--
d2Kx(T) .
dx2 ’
t t
Кг2 (T)=f J/СЖТ2.
0 0
(21)
38
5. Преобразование стационарной случайной функции линейной
динамической системой.
Применение линейного однородного оператора L к случайной
функции х (О-
Результат действия линейного однородного оператора L на
случайную стационарную функцию х (7) подчиняется следующему
правилу.
Если z (t) = Lx.(t), где L — линейный вещественный однород-.
ный оператор, то математическое ожидание и корреляционная
функция случайной функции г (/) находятся следующим образом:
м [z(0] = LM [х(0]; |
Кг (т) = LLKX (т). J
Эти формулы показывают, что математическое ожидание ре-
зультата применения линейного оператора к случайной функции
z (0 равно результату применения этого оператора к математиче-
скому ожиданию х (0, а корреляционная функция определяется
в результате двойного применения этого оператора к исходной
функции.
Формулы (21) могут быть получены по этому правилу.
В самом деле, если — оператор дифференцирова-
ния, а Ьг = J dt — оператор интегрирования, то
^(t) = LLKx(t) = ^-2^(t);
ff <23)
KZi(x) = LLKx(x)=\ ]Kx(x)dx*.
о о
В прикладной теории случайных функций доказывается, что
пользуясь формулами (22), (23), можно находить спектральную
плотность решения линейного дифференциального уравнения
вида:
d^z (t) , dn~ lz(t) . , z,4
ao~dFT-^ai ^n-1 + +anz(t) =
Ul
, dmc (t) , i ,
— ^0 dim -]- ••• bmX (f),
где x (0 и z (t) — случайные функции.
Записав это уравнение в алгебраизованной операторной форме:
Qn (р) z (0 = Рт (р) х (0,
где Qn и Рт — полиномы степени п и т от р;
р = ----оператор дифференцирования,
39
можно путем формальной замены оператора р на /со получить спек-
тральную плотность случайного процесса z (0, связанную со спек-
тральной плотностью процесса х (0:
6г( )_ |Q„(/co)P ‘М®)-
Обозначив - — W (/со), эту формулу перепишем в виде
S2(co) = |F(/co)|2Sx(co). (24)
В теории автоматического регулирования выражение W (/со)
носит название частотной характеристики, а соответствующее ему
выражение W (р), полученное в результате подстановки /со = р —
передаточной функции динамической системы.
Формулу (24) широко используют при исследовании прохожде-
ния случайных сигналов через динамическую систему.
Как частный случай, легко могут быть получены спектральные
плотности производной и интеграла случайного процесса х (0,
корреляционные функции которых определяются выражениями
(21). В алгебраизованной форме операция дифференцирования
первого порядка записывается в следующем виде:
гЛ) = 1[Гх№ = РхЮ-
Соответствующие операторная передаточная функция и ча-
стотная характеристика
W (р) = р; W (/со) = /со; | W (/со) |2 = со2,
откуда получаем
SZl (со) = co2Sx (со). (25)
Аналогично, для дифференцирования второго порядка
S2, (со) = co4Sx (со)
и интегрирования
t 2
Z2 (t)=[x(t)dt= (4-)-1 х^) = ух(/);
ii
W(p) = ±; W(/co) = ±-;
IWco)l2 = ^r;
SZs(<0) = ^-.
40
Выражение (25) может отражать сущность реальных физиче-
ских процессов в том случае, если дисперсия процесса z (t) конечна,
т. е.
со
Dz= J co2Sx (со) d(d < оо.
— 00
Если это условие не выполняется, то случайный процесс (вер-
нее его аналитическую аппроксимацию) считают недифференцируе-
мым.
К недифференцируемым относятся, например, следующие про-
цессы.
1. Процесс с корреляционной функцией
• Кх (т) = а2е~ а 1 Ч а > О,
и соответствующей спектральной плотностью
Q , ч 2a2L
Л 4 7 гп2 4- гу.2
Спектральная плотность производной, согласно формуле (25),
имеет вид
S; (со) = 2ст2, 2°^22. .
v ' (со2 а2)
2. Процесс с корреляционной функцией
/Сх (т) = о2е_ а Ix I cos|3т, а > О,
и спектральной плотностью
Sx (со) = аа2 Г —»-т Д—Н----------2"i Д Гоч*
х v 7 L а2 + (со — р)2 1 а2 + (со + р)2
Производная этого процесса характеризуется выражением
S2(<o) = Sx (со) = 0бО2(02 Г - V I /1 nVa" Н-2 - I у1 I R42 ] •
24 7 47 L а* + (со — р)2 1 а2 + (со + р)2 J
Примеры дифференцируемых процессов.
1. Процесс с корреляционной функцией
/Сх (т) = а2е-а Iх! (cos|3t 4- sin |3 | т Q , а >> О
и спектральной плотностью
5Х (со) = 4а2о2
а2 4- Р2
(со2 — р2 — а2)2 4- 4а2со2
При со —> сю функция Sx(co) = (o2Sx (со) убывает как 1/со%
следовательно, процесс х (/) дифференцируемый.
41
2. Процесс, для которого kx (т) = о2е~а2т2 cos |3т,
д2 Г ~ --(^--Р)21
4а2 ^+е 4а2 Ь
При умножении последнего выражения на со2 Sz (со) убывает
по экспоненциальному закону.
9. МЕТОДЫ СУММИРОВАНИЯ СЛУЧАЙНЫХ ОШИБОК
Если первичные ошибки не зависят одна от другой, то полная
погрешность на выходе устройства является результатом действия
(функцией) первичных ошибок.
Существуют следующие методы расчета суммарных (накоплен-
ных) ошибок: максимума-минимума, квадратичного суммирования,
статистического суммирования (теоретико-вероятностный метод).
По методу максимума-минимума полную ошибку находят ариф-
метическим суммированием предельных значений всех ошибок:
отдельно складывают все положительные ошибки и отдельно —
все отрицательные. Этот метод дает завышенные значения суммар-
ных ошибок.
По методу квадратичного сложения значения всех ошибок
суммируются квадратично, т. е. вычисляется квадратный корень
из суммы их квадратов. Результаты расчетов по этому методу при
наличии систематических ошибок дают заниженные значения.
По теоретико-вероятностному методу осуществляется:
а) алгебраическое суммирование средних значений (или мате-
матических ожиданий) случайных Аг и систематических Ас состав-
ляющих ошибок:
w
М [Az] = S Mj [Az;],
N
ДС=ДДС/. (26)
б) квадратичное суммирование среднеквадратических значе-
ний случайных ошибок a [Az;l:
o2[Az0]= ScHAz/], (27)
/=1
здесь Azz — ошибка на выходе ВУ, вызванная действием
одной первичной ошибки Ах;-. При этом предполагается, что
первичные случайные ошибки взаимонезависимы.
Теоретико-вероятностный метод дает наиболее точные ре-
зультаты.
42
Следует отметить, что правило квадратичного сложения рас-
пространяется при нормальном законе распределения и на пре-
дельные ошибки. В самом деле, для нормального закона имеем
emax IAz0] = За [Аг] = 3 £ а2 [Аг/У] =
Г~Ы
= У S (За [А//;])2 = ]/ s 4ах [Аг;1. (28)
При сложении большого числа ошибок, закон распределения
которых отличается от нормального, распределение суммарной
ошибки остается близким к нормальному при отсутствии среди
составляющих ошибок преобладающих.
Формула (27) в этом случае остается справедливой, а вид
формулы (28) зависит от конкретных законов распределения пер-
вичных ошибок, в частности от коэффициента у. Так, например,
при сложении ошибок, следующих равномерному закону, предель-
ная ошибка
Каждая из составляющих ошибки Дгу по своему характеру
может принадлежать к одной из групп ошибок, рассмотренных
ранее; например, при наличии методической Дгм и инструменталь-
ной Д?и ошибок:
Д^О Ч~~
причем суммирование должно осуществляться статистически,
а именно по формулам (26) и (27).
Г лава II
МАСШТАБЫ ПРЕДСТАВЛЕНИЯ ВЕЛИЧИН
В ВЫЧИСЛИТЕЛЬНОЙ ТЕХНИКЕ
Ниже изложены некоторые способы расчета масштабов для
аналоговых и цифровых машин, проверенные на практическом
опыте авторов. Рекомендуемые расчетные формулы являются
общими при масштабировании задач как на аналоговых, так и
на цифровых машинах. Для АВМ более целесообразно пользо-
ваться понятием знакового масштаба переменной, в то время как
для цифровых машин—ценой машинной единицы. Оба варианта
отличаются единством методов и облегчают труд программиста-
разработчика; в частности, знаковый масштаб позволяет осуще-
ствлять автоматическое согласование знаков машинных и мате-
матических переменных при разработке сложных схем*
1. ОПРЕДЕЛЕНИЕ И НАЗНАЧЕНИЕ МАСШТАБОВ
Вычислительные машины всех классов при реализации алго-
ритмов решаемых задач выполняют операции над такими носи-
телями информации, как напряжение, цифровой код и т. д. Эти
машинные переменные соответствуют математическим величинам
решаемой задачи. Как правило, диапазоны изменения математи-
ческих и машинных переменных не совпадают; различаются эти
переменные и по физическим размерностям.
Приведение всех математических величин — исходных, про-
межуточных и конечных к диапазону изменения и размерностям
машинных переменных с учетом точности решения задач называют
масштабированием.
В дальнейшем все математические переменные будем обозначать
через х, у, z, а соответствующие им машинные переменные —
х, у, z.
Масштаб машинной переменной в вычислительной технике
определяется отношением:
где хтах — максимальное значение математической переменной
в отсчетных единицах (ое);
44
xQ — фиксированное значение машинной переменной в ма-
шинных единицах (ме) при х = хтах.
Основное назначение масштаба — установить количественную
связь между соответствующими переменными:
х = тХ'Х. (30)
Величину, обратную масштабу
1 х гпх
называют ценой машинной переменной (например, цена оборота
вала, цена машинной единицы кода и т. д.) или масштабным коэф-
фициентом.
В дальнейшем под масштабом будем понимать коэффициент,
устанавливающий связь между математической и соответству-
ющей ей в АВУ машинной величинами с учетом знаков пере-
менных. Таким образом, масштаб может иметь как положитель-
ный, так и отрицательный знаки. В самом деле, такая величина
как расстояние всегда положительна, а напряжение в приборе,
отображающее эту величину, может быть не только положитель-
ным, но и отрицательным.
Присвоение знака масштабу в аналоговой технике упрощает
согласование знаков переменных при разработке и эксплуатации
сложных вычислительных устройств.
Масштабирование задач имеет целью:
исключить выход машинных переменных за пределы рабочей
зоны функционирования устройств;
обеспечить согласование управляющих машин с входными
и выходными датчиками информации;
обеспечить возможно большую точность работы вычислитель-
ной машины.
Из-за разнообразия методов и способов расчета масштабов
часто масштабирование представляется как своего рода искусство
специалиста, основайное на личном опыте.
Рациональное масштабирование как один из важнейших
элементов программирования задач обеспечивает их решение
с высокой точностью. Категории вычислительной техники —
масштаб и точность — являются тесно связанными: в общем слу-
чае более крупный масштаб переменных обеспечивает и более вы-
сокую точность вычислений.
Инструментальные ошибки зарождаются на уровне машинных
переменных; их пересчет в отсчетные единицы математических ве-
личин может быть выполнен с помощью масштабов.
45
2. МАСШТАБЫ В АНАЛОГОВОЙ ВЫЧИСЛИТЕЛЬНОЙ ТЕХНИКЕ
Математическая и физическая модели АВУ.
Коэффициенты передачи
' (
Математической моделью АВУ будем называть формульную
блок-схему АВУ. Физической моделью АВУ будем называть тех-
ническую реализацию математической модели в виде физически
существующих устройств.
На математической модели (ММ) обычно изображаются мате-
матические зависимости, которые можно только вычислить, в то
б)
Рис. 14. Модели операции z = аху:
а — ММ; б — ФМ
время как в физической модели (ФМ) фигурируют физические по-
казатели, которые можно измерить прибором (вольтметром,
амперметром, угломером и т. п.).
На рис. 14, 15 изображены ММ и ФМ двух операций: z = аху
и z = ах sin у.
На рис. 15 показана также электрическая схема АВУ.
На этих моделях символами х, у изображены входы ММ;
х, у — входы ФМ; г, z — выходы соответственно ММ и ФМ.
Дальнейшие рассуждения упрощаются, если выходную вели-
чину рассматривать по отношению к одному входу, например
х (х), который будем называть основным; тогда второй вход (если
он существует) будем называть дополнительным у (у). Выводы
остаются в силе и для АВУ с тремя и более входами.
Все аналоговые вычислительные устройства можно разделить
на статические и динамические. Статические АВУ реализуют зави-
симости, описываемые конечными уравнениями (алгебраическими
и трансцендентными). Динамические АВУ воспроизводят зави-
симости, описываемые интегро-дифференциальными уравнениями.
Коэффициентом передачи ц будем называть отношение выход-
ной величины ММ к ее основной входной величине в установив-
шемся режиме работы АВУ (по окончании переходных процессов):
Н = (31)
46
Аналогично введем понятие о коэффициенте передачи k
для ФМ:
X
(32)
Например, для моделей на рис. 14 и 15 = ay, |i2 = a, sin у.
Для’схемы на рис. 15, в можно составить зависимость выходного
напряжения Uz (z) от входных величин Ux (х), гу (у) и параме-
Рис. 15. Модели операции z = ах sin у\
а — ММ; б — ФМ; в — электрическая схема АВУ
тров схемы:
Из этой формулы следует, что коэффициент передачи дан-
ной ФМ
k _ ' r«Rtt
4" Rnry гу
Используя понятие коэффициента передачи, все операции,
решаемые АВУ, можно записать в следующем виде:
статические АВУ
z = р (у) х — для ММ, (34}
z = k (у) х — для ФМ; ’ (35)
динамические АВУ
z = [л (р) х — для ММ, (36)
z = k (р) х — для ФМ. (37)
47
Формула связи масштабов
Выведем формулу, связывающую масштаб тг выходной вели-
чины АВУ с масштабом тх входной величины.
Для АВУ имеем
z = k (у) х,
где х = tnxx; z = mzz.
Откуда
m2z = k (у) тхх.
Используя (34), получим
тг|х (у) = mxk (у).
Находим требуемое соотношение
Эта формула справедлива как для статических, так и для
динамических АВУ. Назовем ее формулой связи масштабов. Она
позволяет рассчитывать выходные масштабы или определять тре-
буемый физический коэффициент передачи АВУ.
Физический коэффициент передачи k для пассивных АВУ
всегда положителен; для схем с операционным усилителем —
отрицателен. Поэтому формула (38) позволяет определять масштаб
не только по величине, но и по знаку.
В схеме прибора выходной масштаб каждого АВУ предопреде-
лен как по модулю, так и по знаку. Зная эти два параметра мас-
штаба АВУ, всегда можно в процессе эксплуатации восстановить
полные сведения о фигурирующей в процессе вычислений матема-
тической переменной, а в процессе разработки схемы прибора
достаточно просто согласовать знаки машинных переменных.
Ниже приведены примеры использования формул (34)—(38)
для АВУ нескольких типов.
Пример 3. Рассчитать масштаб на выходе потенциометрической схемы (рис. 15),
если заданы тх, а и г/Шах-
Согласно (38) имеем:
& (у)
т2 == —Т~ТтХ'
г Му)
Коэффициент передачи ФМ в соответствии с (33)
гу%п
гу +
k =--------------------------:-------5----
(/?п-^) +
Гу "Г
48
Числитель в последнем выражении определяет сопротивление между клем-
мой 2 и «землей», а знаменатель — между клеммой 1 и «землей».
Это отношение должно удовлетворять условию, учитывающему специфику
аналоговой техники:
гу%н
• гу + __ sin у
. . . гу^н (sin y)max
Так как у = Р^; р (у) = a sin у, то
sin 0А 1 тх
т2 = тх _ -д ч------------:---= —z . \.
(sin Р^ a sin у a(smy)^
Пример 4. Определить параметр С дифференцирующе-сглаживающего кон-
тура, представленного на рис. 16, если известно
тх = 10 мВ/м;~/и2 = —100 мВ/м/с; Ro = 1 Мом; b = 1.
а)
Рис. 16. Дифференцирующе-сглаживающее устройство:
а — ММ; б — ФМ; в — электрическая схема
ММ операции дифференцирования со сглаживанием является
z(p)=x(p)-j-^.
Определим р для- установившегося режима (/ -> оо). Согласно теории опе-
раторов сглаживающее звено в установившемся режиме имеет коэффициент,
передачи, равный единице (в знаменателе р = 0).
Тогда получим '
z(p)
Для определения коэффициента передачи ФМ воспользуемся свойством
операционных усилителей постоянного тока с обратной связью:
Uz (р) = *обр (Р)
Ux (р) zBX (р) ’
(39)
где z06p (р), zBX (р) — операторные импедансы цепей обратной связи и вход-
ной цепи соответственно.
Для схемы на рис. 16 имеем
2обр (р) — 2ВХ (р) — R Н •
Согласно (39)
U =___и
Uz Ux 1 + RCp ’
4 Э. И. Соренков
49
откуда получим
k = — RoCp.
С другой стороны, согласно формуле связи масштабов (38)
7 , mz ЮО мВ/(м/с) г .
/г = —р =------——р = — Ю р с .
тх Ю мВ/м
Приравнивая RbCp = 10 р, находим
Ю Юс ,
С = — = = 10 мкФ.
Rq 106 Ом
Пример 5. Рассчитать масштаб т2 на выходе потенциометрического датчика
функции f (у) = у2, если известны #тах и тЕ (рис. 17).
Рис. 17. Потенциометрический датчик:
а — ММ; б — ФМ; в — электрическая схема
В соответствии с ММ находим
Связь напряжений устанавливаем из ФМ датчика:
откуда
Закон намотки потенциометра при rH Rn определяется условием
Гу f(у)
Масштаб напряжения на выходе датчика
т = т 1 - тЕ
г Е Р(У) Е If (y)]tnax f (у) [P2]max "
Формула связи масштабов (38) справедлива не только для
АВУ, но и для аналоговых вычислительных схем. Пользуясь ею,
легко показать, что коэффициенты передачи р ММ и k ФМ
замкнутой системы автоматического регулирования должны совпа-
50
дать. В самом деле, разорвав в каком-либо месте цепь замкнутой
системы, ФМ которой представлена на рис. 18, получим
k
та" = та> — .
г
Но так как система замкнута, масштаб та- равен та'.
Отсюда следует, что k = р.
Выше были рассмотрены вопросы расчета масштабов АВУ,
решающих задачи умножения (деления), дифференцирования
(интегрирования) и функционального преобразования. Остается
рассмотреть вопросы расчета масштабов при решении задач алге-
браического суммирования, которые в настоящей работе объеди-
нены в понятие «Согласование знаков машинных переменных».
Рис. 18. ФМ замкнутой системы автоматического регулирования
Первым шагом в решении этой задачи должно быть определе-
ние понятий положительных и отрицательных математических
величин (входных для АВМ). Этот вопрос имеет принципиальное
значение при стыковке прибора с другими элементами системы,
в которой он должен работать.
Вторым шагом в решении задачи должно быть согласование
масштабов входных и выходных координат прибора как по вели-
чине, так и, что особо следует подчеркнуть, по знаку. Тем самым
устанавливается соответствие между знаками математических
и физических величин.
После согласования знаков электрических величин граничных
участков схемы приступают к согласованию знаков внутри схемы
прибора. Исходными данными для решения этой задачи являются
заданные математические уравнения, подлежащие реализации
в приборе.
Во избежание путаницы в формулах и уравнениях следует раз-
личать знаки действия (суммирование и вычитание) и знаки пере-
менных величин (плюс, минус). В математических формулах
знаки «—» и «+» являются знаками действия. В то же время сами
4* . 51
величины в процессе работы прибора могут принимать как поло-
жительные, так и отрицательные значения. Так как масштабы
величин, проставленные на схеме прибора, естественно, не ме-
няются, то можно заключить, что знаки масштабов имеют непо-
средственное отношение к знакам действия над величинами.
Отсюда следует рекомендация по согласованию знаков машин-
ных величин внутри схемы прибора:
для обеспечения суммирования двух и более величин необхо-
димо и достаточно, чтобы в точке сложения масштабы слагаемых
величин имели одинаковые знаки;
Рис. 19. Электрическая схема устройства, решающего зависимость z = Y (р) х;
у (?) = У1 (?) У2 (?) Уз (?)
для обеспечения вычитания двух величин знаки их масштабов
должны быть противоположными;
знак и значение масштаба суммы определяется по любому из
входов в соответствии с формулой
k
mz = tnK. —.
Непременным условием правильного алгебраического сумми-
рования (сложение, вычитание) является также равенство по
модулю масштабов величин, приведенных к выходу элемента
суммирования (ОУ, механический дифференциал и т. д.).
Следует особо подчеркнуть, что при прохождении математи-
ческой величины через ММ решающего усилителя ее знак не
меняется (если это не оговорено особо уравнением, например,
типа z = —х), знак же отображающего ее аналога в силу отрица-
тельности коэффициента передачи УПТ изменяется от усилителя
к усилителю. Это обстоятельство отражается на знаке масштаба.
На рис. 19 в качестве примера приведена схема прибора для
решения зависимости вида z = Y (р) х, на которой для иллю-
страции расставлены знаки математических и машинных величин
и соответствующие знаки масштабов.
Рассмотрим пример использования методики внутриприборного
согласования знаков электрических величин.
52
Пример 6. Схема упредителя, реализующего решение зависимости ху =
= х + хху> приведена на рис. 20; тУтах = 20 с.Имеем
kY мВ —Юс мВ
т. = т . — = Ю------• —:— = — 100 —— ;
Xi х м I м/с
k2 —2 I ПЛЛ мВ
т • — т • —- = — 100 — . -г— = 4- 200 —— ;
Xl |12 М/С 1 М/С
£о 1
— т • —= т • -----
*2 Ц Хи
^тах
= loo —.А
м 20
мВ
м ’
-- Ю С, &2 --------- 2, k$------ — ----, Jig - Ту.
Т^тах
Здесь для обеспечения алгебраического суммирования на ОУ3 величин х
и Дх по каналу Дх дополнительно поставлен ОУ2, приводящий масштаб т.
к положительному значению на входе ОУ3 в соответствии со знаком масштаба
координаты х.
Исходя из сказанного, рациональной является следующая
индексация принципиальных схем.
1. Во всех контрольных точках электрических схем необходимо
проставлять математические величины без указания их знаков.
2. В тех" же; контрольных точках указываются значения и
знаки масштабов" этих величин.
3. Все счетно-решающие устройства должны иметь указания
о коэффициентах передач р и k, а в необходимых случаях (алге-
браическое суммирование) — указание о решаемых зависимостях.
Выполнение этих рекомендаций упрощает проектные работы,
исключает путаницу в определении знаков переменных, а также
Дает исполнителям четкие ответы на технические вопросы, воз-
никающие при испытании аппаратуры, ее стыковке и регулировке.
*53
3. МАСШТАБЫ В ЦИФРОВОЙ
ВЫЧИСЛИТЕЛЬНОЙ ТЕХНИКЕ
ЦВМ выполняют операции над числами, представленными
в определенной системе счисления. Обычно используют двоичную
систему, оперирующую двумя цифрами — 0 и 1. Каждое число
(код) в этом случае представляется набором нулей и единиц,
который обычно называют машинным операндом.
Ввиду ограниченности разрядной сетки СЦВМ могут опериро-
вать только с числами определенного диапазона. В силу этого при
программировании решения задач на СЦВМ необходимо про-
водить масштабирование величин.
Масштабирование может осуществляться с постоянным и пе-
ременным масштабами и в режиме с плавающей запятой. На-
ибольших затрат машинного времени требует масштабирование
в режиме с плавающей запятой, при котором предусматривается
нормализация представления чисел; эти затраты окупаются
повышенной абсолютной, точностью решения задач и простотой
программирования.
Наименьшую точность имеет метод постоянных масштабов,
однако затраты машинного времени при этом методе также
наименьшие.
В тех случаях, когда процесс управления в основном ограничен
областью меньше предельной, часто оказывается целесообразным
проводить решение задачи с укрупненным масштабом, контро-
лируя ход ее решения по признаку переполнения разрядной сетки.
В последнем случае необходимо вводить автоматическую коррек-
тировку масштаба.
В данной книге изложена инженерная методика расчета по-
стоянных масштабов для специализированных ЦВМ.
Такие машины выполняются, как правило, с фиксированной
запятой, так как введение режима с плавающей запятой требует
существенных затрат производительности на нормализацию чисел
в процессе счета и увеличения оборудования.
В цифровых вычислительных машинах может быть использо-
вана как дробная, так и целочисленная арифметика; в зависи-
мости от этого конструкция ЦВМ выполняется с фиксацией запя-
той слева или справа соответственно. Это различие сказывается
в основном на функциональной схеме множительного устройства
арифметической части машины.
Дробная арифметика оперирует с числами по модулю, мень-
шими единицы; машинные числа задают при этом набором двоич-
ного кода, записываемого в следующем виде:
X = 0, ххх2Хз ... хп,
54
где п — число информационных разрядов мантиссы числа;
xt = 0 или 1.
В целочисленной арифметике все числа по модулю больше
единицы, и в этом смысле запятая фиксирована справа:
X = XiX2x3 • • • хп-„
При заданном значении п '
•^max ~ 1 ,
у ______ 9п ____ 1.
yYinax
при п 1
X 1 ’
Лтах 1>
С 2п
'max ~ •
(40)
(41)
(42)
(43)
Важно подчеркнуть, что максимальное значение машинного
числа в дробной арифметике не превосходит 1 и шри достаточно
большом п слабо зависит от числа разрядов его представления.
Связь машинных переменных с физическими величинами осу-
ществляется с помощью масштабов:
х = = тхх\
X - Мхх,
причем тх и Мх определяют либо из предельных соотношений
тх = ~ ,
*тах *тах
= ^тах 2”
Х Хтах хтах ’
либо из условий
тх ~ ( 2* *тах 2*=“1 J ’
( 9пх 2пх 2Пх )
М — -______—_________________}
( 2* Хтах 2й 1 J
(44)
(45)
методом подбора целого k.
Масштабы (44) будем называть простыми предельными, мас-
штабы (45) — двоичными. Двоичный масштаб, хотя несколько и
ухудшает точность представления чисел, тем не менее позволяет
55
существенно упростить согласование масштабов при выполнении
алгоритмических вычислений.
В цифровой вычислительной технике часто пользуются поня-
тием масштабных коэффициентов:
. = (46)
тх
Вх=4г- (47)
х мх v 7
По физическому смыслу Вх есть цена младшего разряда двоич-
ного представления, физической переменной в СЦВМ, использу-
ющей целочисленную арифметику; |3Х есть цена машинной единицы
(ЦМЕ) представления переменной хг в машине, использующей
дробную арифметику. В первом случае понятие цена младшего
разряда тождественна понятию цена машинной единицы.
Так, например, если хтах = 30 000 м, пх= 4, то предельные
масштабные коэффициенты соответственно равны:
п хтах _ 30 000 м _ 30 000-16 _ qqq _2L .
~ 1—2“4 ~ 15 — и ме ’
q *тах 30 000 М 30 000 2000 ——-
А 2/гх _ 1 ~ 24 — 1 ~ 15 ~ и ме ’
в то время как двоичные масштабы
Р5В = 32768 м(= 215);
В5в = 2048 м (=^- = 2и).
Выражения связи переменных имеют вид
х = $хх
х = ВхХ
В случае использования дробной арифметики при xmax < 1'
необходимость в масштабировании переменной х программистом
определяется следующими обстоятельствами: во-первых, х всегда
имеет некоторую размерность в отсчетных единицах физической
величины (м, кг, градус, °C и т. д.), в то время как машинная
переменная х — безразмерная (условно — ме); во-вторых, всегда
целесообразно в целях повышения точности расчетов и пред-
ставления величин в машине задавать переменные в максимально
возможном масштабе.
То же самое следует сказать и в отношении машин с цело-
численной арифметикой при представлении целых чисел х > 1.
56
Пример 7. Пусть xmax = 40 960 м, п — 12 разрядов. Записать число х =
= 6400 м в двоичном коде для машин с дробной и целочисленной арифметикой.
В первом случае имеем
Р = = «960 м 40960
1—2-" 1— 2—12
~ х 6400 м 5
Х ~ р ~ 40960 м ~ 32 ~ °’00101 дв- ед-
Во втором случае:
ь _ *тах 4096
2"-1 ~2^~ ° ’
X = -4- = .^° м == 640 = 1010000000 в. ед.
В Юм
В дальнейшем вопросы выбора и расчета масштабов изла-
гаются применительно к машинам с дробной арифметикой, как
получившим наибольшее практическое применение.
Решение любой задачи в ЦВМ представляет собой упорядо-
ченную последовательность выполнения элементарных арифме-
ческих операций. Поэтому естественно вначале рассмотреть
масштабирование этих операций.
Масштабирование операции изменения масштаба
переменных
Для общности задачу сформулируем следующим образом.
Пусть требуется выполнить операцию вида
z — ах, (48)
где а = . const,
не прибегая к машинному перемножению чисел а и х. Такую
задачу можно выполнить с помощью операции изменения мас-
штаба представления переменной х в машине.
Предположим, что первоначально переменная х представлена
в памяти машины ценой машинной единицы
х =
Приведем в соответствие переменной z машинное число z:
z = p2-z (49)
и одновременно допустим, что z связано с х соотношением
z = k-x, (50)
где k — произвольный машинный множитель.
Тогда, решая совместно (48)—(50), получим искомую связь
масштабных коэффициентов:
₽. = ₽«Т- (51)
57
Если k кратно 2 в некоторой степени, т. е. может быть пред-
ставлено в виде:
k =
то вместо операции умножения (50) в машине осуществляется
сдвиг числа х вправо, §сли инкремент сдвига г < 0, влево, если
г > 0, и на ноль разрядов, если г = 0.
Операция сдвига — характерная машинная операция. В отли-
чие от обычного умножения машинных чисел, при котором по-
следние представляются величинами, меньшими единицы, левый
сдвиг на г разрядов эквивалентен умножению на машинное число,
большее 1.
Рассмотрим операцию умножения (50) более детально для
тех случаев, когда множитель k представляет собой произвольное
действительное число.
Операция выполняется в два этапа.
На первом этапе вместо (50) выполняется операция
zr = kr - х,
где kr = kl$k\
— двоичный масштабный множитель, выбранный из уело-
вий: pft = 2Г, £-< 1-
Pfe
Так как при этой математической операции преобразования
информации не происходит, следует принять = х.
Из совместного решения двух последних уравнений с учетом
(51) получаем зависимость
На втором этапе осуществляется левый сдвиг числа zx на
г = log2pft разрядов; очевидно, как и ранее, z2 = х. Эта опера-
ция эквивалентна умножению машинных чисел:
Z2 = Zi&2 = Zi • Pfc,
хотя k2 > 1. При этом результат получается в искомой цене:
Рг2 = Рг = Рг1 = Р* = Р* ~ •
Следует отметить, что операция сдвига машинных чисел как
элемент вычислительного процесса применяется для следующих
целей:
выравнивания масштабов чисел перед выполнением операции
суммирования (при двоичном масштабе представления слагаемых);
повышения точности выполнения ряда математических опе-
раций;
выравнивания порядка делимого перед выполнением операции
деления;
58
изменения масштаба представления чисел при приеме и вы-
даче информации и др.
Для выравнивания масштабов чисел (согласования) в случае
использования предельных масштабов обычно применяется опера-
ция умножения (50) на произвольный множитель k.
Масштабирование операции алгебраического
суммирования двух переменных
Предположим, что исходные переменные х и у заданы ценами
представления в машине и пусть также известно максималь-
ное значение алгебраической суммы zmax.
Требуется найти цену Р2 результата выполнения операции и те
дополнительные операции над машинными числами, которые не-
обходимо осуществить; иными Словами — найти машинный алго-
ритм выполнения операции.
Очевидно, что справедливы следующие выкладки:
Pz Pz Рх Pz Pz/ Pz Pz Pz y
или окончательно:
z = xkx + yky.
Исходя из этого, можно рекомендовать следующую последо-
вательность выполнения этапов масштабирования операции:
1) расчет предельной цены машинной единицы
'Пр___ ^тах
2 “1— 2~п
2) выбор действительной цены результата операции из условия
Р2 = max
где символ шах { } означает выбор максимального значения из
трех величин рх, р"р;
3) определение машинных множителей
4) расчет новых значений машинных слагаемых, приведенных
к единому масштабу,
= yi=y-ky,
5) суммирование машинных переменных
2 = *1 + У1-
59
Пример 8. Пусть требуется сложить числа х = 200 м и у = 1200 м, если
xmax = 1Q ООО м, t/max — 30 000 м, п = 10 разрядов. Так как п = 10, то можно
принять, что Рх 10/000 м, Р^ = 30 000 м. Тогда
рпр = гтах = хтах + г?тах.^40000 м
2 1 — 2'" 1 — 2'10
В данном случае Р”р > Р^ > Pz, поэтому принимаем
Рг = ₽гР.
Вычисляем машинные множители
, = рх = 10 000 = 1 ,
х~ рг 40000 ~ 4 ’
Ру _ 30 000 3
у ~ Рг ~ 40 000 ~ 4 •
И далее
- - , х и 200 I
x1-x-kx- kx- 10000 4 -0,005;
~ ~ , У к 1 200 3 . . '
У1 - У-ky - ky - 30 000 4 - 0,03;
z = = 0,005 + 0,03 = 0,035.
Вычислив Рг и z, нетрудно определить искомый ответ:
z = ри-2 = 40 000-0,035 = 1400 м.
С точки зрения разработки программы работы СЦВМ весьма важно найти
множители kx и kyt которые записываются в постоянную память машины;
программа должна обеспечивать обращение к этим ячейкам для выполнения
дополнительных операций умножения, связанных с масштабированием задачи.
Что же касается параметров рх, Р^ и Р2, то они являются исходными данными
для расчетов kx и ky на этапе масштабирования и фиксируются на бланке про-
граммы для выполнения текущих и последующих расчетов.
Для сокращения времени выполнения операции алгебраиче-
ского суммирования двух чисел при условии |32 = (3"р часто ока-
зывается целесообразным выравнивание масштабов по удвоенной
цене наибольшей машинной единицы представления чисел х и у.
Пусть, например, рх> тогда можно считать, что |32 = 2fJv,
и коэффициенты выравнивания будут соответственно равны:
Выполнение частной операции = х • kx сведется к правому
сдвигу, который обычно экономнее по времени операции умно-
жения.
60
Теперь становится очевидным желательность выполнения до-
полнительного условия: отношение также должно быть
кратно двум. Использование двоичных масштабов представления
переменных автоматически обеспечивает требуемые соотношения
масштабов величин.
Масштабирование операции умножения
Рассмотрим алгоритм выполнения операции умножения двух
-переменных z = ху. Положим при этом заданными величины
машинных единиц [Зх, требуется определить цену машинной
единицы Р2. Составив систему уравнений:
z = ху; х = [V; у = $уу;
z = xy; z = P2z,
и решив ее, получим искомое соотношение:
Заметим, что при перемножении двух чисел с разрядностью пх
и пу результат получается в (пх + поразрядной сетке. Если
числа х и у меньше единицы, что всегда имеет место при исполь-
зовании дробной арифметики, результат z также будет меньше
единицы; в этом смысле при перемножении машинных перемен-
ных не может быть переполнения разрядной сетки.
Масштабирование операции деления
Пусть требуется выполнить деление чисел х и у, представлен-
ных в машине ценами единиц и и пределами их измене-
ний Xmax, Утах* УпИп'
Необходимо промасштабировать решение этой операции.
Поскольку конструкция СЦВМ допускает деление только
таких чисел х и у, при которых частное меньше единицы:
у
то необходимым условием правильного деления является
I % |тах < | У | пНп •
Из этого условия следует:
I *max I I //mln I
ИЛИ
61
где р7 — ограниченное снизу значение рх, приемлемое для вы-
полнения операции без переполнения разрядной сетки.
Другими словами, перед делением переменных цена машинной
единицы делимого должна быть приведена к ограниченному
снизу значению р7; только после этого можно приступать к испол-
нению самой программы деления.
Найдем цену рг переменной z на выходе операции.
Из системы уравнений
г = у; У = $уУ> х = рхх;
X • k Q
г = ——; z =
у
где k
^тах
нетрудно получить искомое соотношение
(52)
Пример 9. Определить делением на СЦВМ отношение xly для значений
х = 40, у = 16, /г=4, если хтах = 100, z/max — 60, г/пип = 20.
Имеем
о //max 60 60
^ = Г-2^г=ГЗТТ = -15 16 = 64:
р* Мтах =60_100 = 320
Х //mln 20
Принимаем Рх = 320.
х _ 40 _ 1 .
Х ~ ~ 320 ~ 8 ’
у 16 1
У - - 64 “ 4 ’
х_ = 1/8 _J_
г=;-1/4=2>
_ -220-5
рг~-р76Г-5-
z — p2-z = 5-0,5 = 2,5 как и должно быть.
В этом примере вместо предельной цены делимого
о хтах 100 1П7
P* = TTZ2^ = —j^~107 м
10
используется ограниченное снизу значение цены [3* = 320 м.
62
Решение всякой задачи с помощью ЦВМ сводится к последова-
тельному выполнению совокупности арифметических операций,
на которую разбивается исходный алгоритм. Зная правила мас-
штабирования отдельных операций, можно шаг за шагом решить
задачу масштабирования алгоритма в целом.
При этом в задачу масштабирования входит:
нахождение масштабов промежуточных и окончательных пе-
ременных;
определение машинных коэффициентов kit на которые необ-
ходимо умножать машинные операнды в процессе вычислений (для
исключения переполнения разрядной сетки СЦВМ и согласования
масштабов величин, участвующих в вычислениях).
Рассмотрим комплексный пример масштабирования типовой
задачи.
1 о2
Пример 10. .Дана функция z — 0,1-----—
хг/
и пределы изменения переменных в м:
^тах = Рх — ЮО;
//max = Рг/ = 300;
* mln = 20;
//mln = 60, п » 1.
Последовательность расчета.
1. Возведение в степень zx = х2:
рг1 = = 1002 м2 = 10 000 м2.
2. Умножение на постоянный коэффициент z2 — 3 х2 (изменение масштаба
представления):
Р22 = 3₽21 = 3-10 000 м2 = 30 000 м2.
3. Возведение в степень z3 = у2:
РгЗ = = 30°2 м2 = 90 000 М2-
4. Сложение z4 = z4 + z3.
Так как г2 > 0 и z3 >0, то
₽z4 = 3xmax + 1/max = 30 000 + 90 000 = I20 909 M2,
, ₽22 30 000 _ 1
2 Р24- 120 000 " 4’
_ Раз _ 90000 _ 3
3 ~ ~ 120 000 - 4 •
5. Вычисление произведения z5 — ху:
Р25 = Эх • Эг/ = 100-300 м2 = 30 000 м2.
6. Деление
63
Определение ограниченного снизу значения р24:
Pz4 > $у I Zmax |
о 2 I 2
u’xmax “I ^тах
3-10 000 + 90 000 о 120 000 Q innQ
--------20Т60........ = 1200“ ₽25 1OOf3z5’
Согласно (52)
Pze = ^z4 — ЮО м.
Pz5
Следовательно, переменные z4. должны приводиться к цене р4
умножение на коэффициент
претерпевая
k — -Р*4- —
4 ~ о* ~
Pz4
120 000
100-30 000 ’
7. Умножение на
постоянный множитель z7 = z = 0,lze:
Р27 = Pz = 0,1 ₽ze = °’l ’ 1°° = 1° M-
Итак, результат вычислений будет иметь цену представления машинных
чисел Р2 = 10 м.
Программу вычислений с учетом решения задачи масштабирования пред-
ставим в виде табл. 5.
Таблица 5
№ по пор. Математическая операция Цена машин- ной единицы результата Машинная операция Значение ki
1 Zx = X2 10 000 м2 ZY = X2
2 ^2 = Зх2 30 000 м2 < n" II <
3 z3 = У2 90 000 м2 «?> II <с > L3
4 Ч = г2 + Z3 120 000 м2 ^2 = 22^2 k — ^га 2 “ ₽г4
z3 — 2з^з k — ^гз 3 - ₽г1
г4 = 22 + 23
5 ^5= Х-у 30 000 м2 *5 ~ХУ
6 II «О 200 м z4 = Z4k4 k. — ^г1 R* Pz4
II м М у СЛ 1 ►£>. ч -
7 z = z7 = 0,1 z6 10 м > II
64
Масштабирование специальных задач
Рассмотрим процедуры масштабирования задач, решаемых на
ЦВМ итерационным способом, которые требуют применения спе-
циальных приемов.
Извлечение квадратного корня, г = ]/х. Известно, что, если
интервал изменения переменной х* * находится в пределах .1 >
>х*^0,5, то искомую функцию г можно определить по фор-
мулам 1
Ум = -^У:-----i = Q, 1, 2,... /; (53)
z* = х*у t. (54)
При этом будет обеспечено выполнение искомой задачи
г* = ]/"х* .
Наилучшим начальным приближением для у является число
у0 = 2 (2 — ]/2), а линейным приближением — величина у0 =
= 1,78773 — 0,80999%*.
Однако для ЦВМ с фиксированной запятой эти формулы непо-
средственно использовать нельзя, так как величина yt= 1/]/"х*
при значениях х* < 1 превосходит 1.
Для исключения переполнения разрядной сетки машины заме-
ним в выражениях (53), (54) х* на 2х*, тогда с учетом дополни-
тельной разбивки члена 3/2у,- на два члена рабочие формулы
примут вид:
Ум =У1—х*У1 + -^Уь 1 = 1. 2, . .., /; (55)
limyt = --I—= ; . (56)
V2 у x*
z* = ytx*, (57)
где %*, г* — нормализованные значения машинных переменных.
Пусть переменная х поступает в машину в цене |3Х. Как всегда,
значения машинной переменной
1 Линский В. С. Вычисление элементарных функций на автоматических
Цифровых машинах. «Вычислительная математика», 1957, № 2, с. 90—119.
• 5 Э. И Соренков ’ * 65
Чтобы воспользоваться формулами (55)—(57), необходимо нор-
мализовать числа х, сдвигая их влево и подсчитывая при этом
число сдвигов г; после нормализации будет иметь место соот-
ношение:
х* = 2гх.
При этом новая цена (3* = 2 Г|3Х, а переменная окажется в тре-
буемых пределах 1 > х* 0,5. Теперь уже можно воспользо-
ваться формулами итерации (55).
В.ыразим z* через переменные г и х.
Подставляя в
х
= Г2
(58)
вместо
%* = 2гх = 2гх/|Зх и z* = z/|3j,
получим
р; крх к2
Для того чтобы была выполнена требуемая задача z = ]/х ,
необходимо положить
(59)
Принципиально соотношение (59) является решением задачи
масштабирования. Однако в этом случае цена искомой машинной
единицы 0г/получается зависимой от числа сдвигов г, что для
управляющих специализированных машин обычно неприемлемо.
Как следует из (59) для получения ответа в постоянном мас-
штабе необходимо найденное число х сдвинуть вправо на /72 раз-
рядов. Однако такой сдвиг осуществим только при четном значе-
нии числа г, т. е. г — 2т. В этом благоприятном случае число пра-
вых сдвигов равно т и результат z = z*-2~m может быть про-
читан в цене ,
р2 = ]/<• (60)
Если же г нечетно (г = 2т + 1), то после сдвига числа г*
вправо на т разрядов получим цену машинной единицы
(61)
Чтобы избежать двузначности масштабов [см. формулы (60)
и (61)], нужно в тех случаях, когда г = 2т, после необходимого
66
сдвига числа z* на т разрядов вправо выполнить дополнитель-
ную операцию умножения операнда на ]/2 . В результате этого
всегда будем получать ответ в едином масштабе (61), не опасаясь
переполнения разрядной сетки при пг = 0 в силу свойства (58).
В качестве начального приближения в (55) могут быть приняты
и = J_ (1 > КГ') _ 2+KL
2 V ‘ 2 ) 4
ИЛИ
yQ = 1,78773 — 1,61998-х*.
Расчет обратных функций z = \!х без выполнения операции
деления. Решение поставленной задачи дает итерационная фор-
мула
zM = zi (2 — xzz), i = 0, 1,2, .. I.
В самом деле, при достаточно большом I это может
быть при выполнении условия 2 — xzz = l, следовательно,
lim 2г=-4г-. (62)
4->СО X
Чтобы воспользоваться этой формулой для машин с фиксиро-
ванной запятой, необходимо:
1) нормализовать числа х —> х*;
2) положить х 2х*:
= Zi (1 — xz^ 2.
Тогда
?* = -— (63)
2х*
В качестве начального значения можно принять z^= 0,6667.
Подставив
х* = 2'-х = 2г и z* = -4-
в (63), найдем
Для того чтобы получить решение требуемой задачи z = 1/х>
необходимо принять
РЖ 1.
2г+1 —
5*
67
отсюда получаем
Формула дает переменный масштаб результата вычислений,
что обычно неприемлемо для СЦВМ управляющего типа при ра-
боте с абонентами.
Стабилизируем цену машинной единицы результата вычисле-
ний; для этого преобразуем полученное выражение для Pz следу-
ющим образом:
Величина
является предельной ценой машинной единицы результата вы-
числений.
Подставим |3Х из (65) в (64):
Определив
получим алгоритм вычисления г в постоянной цене (65):
z = z*k = z*-2~(n-ry>.
Пример 11. Пусть требуется вычислить г — 1/х для х — 300/32 при
= ЮО, и = 5.
Величина
Выполним левый сдвиг, г — 3,
Q
х* = 0,11 дв. ед. = — .
Тогда (63)
_ 1 _____1 = _2_
оС* о 3 3
2х* 2-
68
Следовательно,
2 _ ?*.2-(5-3) _2 1 z~z z ~ 3 4
Этот результат получен в цене
2п+1 2S+1 б4
Поэтому Рх 100 100 _ 1 >64 32 Z-Z-Рг 6 • юо =- 300 ,
как и следовало ожидать, согласно исходным данным.
Глава III
ПЕРВИЧНЫЕ ИНСТРУМЕНТАЛЬНЫЕ ОШИБКИ
АНАЛОГОВЫХ ВЫЧИСЛИТЕЛЬНЫХ УСТРОЙСТВ
Инструментальные ошибки возникают в процессе изготовле-
ния, сборки, регулировки и эксплуатации аналоговых вычисли-
тельных устройств.
Как было указано в гл. I, инструментальные ошибки делят
на параметрические, вызванные неточным выполнением или изме-
нением параметров вычислительных устройств, принципиальные,
обусловленные недостатками самой схемы или конструкции
устройства, и генерированные, связанные с техникой исполнения
вычислительных устройств.
Рассмотрим эти подгруппы ошибок более подробно.
1. ПАРАМЕТРИЧЕСКИЕ ИНСТРУМЕНТАЛЬНЫЕ ОШИБКИ
Источниками первичных параметрических ошибок могут быть:
отклонения фактических значений параметров операционных
элементов и узлов (резисторов, конденсаторов, катушек индук-
тивностей) от их номинальных или расчетных значений (допуски
на изготовление);
дополнительные малые проводимости, емкости и индуктивности,
возникающие при монтаже устройства (паразитное параметры);
изменения параметров операционных элементов и узлов вслед-
ствие изменения внешних условий эксплуатации (температуры,
давления и т. п.);
эксплуатационный износ деталей (зазоры в зубчатых зацепле-
ниях, стирание контактов и др.).
Определим закон формирования инструментальных параметри-
ческих ошибок на выходе АВУ, для чего воспользуемся общим
выражением (35), описывающим его работу..
Предположим, что имеют место инструментальные ошибки *
параметров коэффициента передачи
k(q1 + \q1; q2 + \q2, .. q„ + &qn).
Дифференциал выражения (35) в конечных приращениях пер-
вого порядка получим в виде
Д?9 = х-Д£ (<?,)• (66)
70
В свою очередь,
п
(67)
где п — общее число параметров коэффициента передачи, име-
ющих инструментальные погрешности.
Для получения ошибки в отсчетных единицах выражение (66)
необходимо разделить на масштаб:
Тогда получим
а4=
Лг?
~т7
п
(68)
Так как
ТО
(у)
mxk (?)
—рл~; а<а-=
k(q)
Az9
__ . ^ (?)
Н?) dqt
(69)
Введем обозначение
Х (?,)
(70)
тогда формулу (69) можно записать в следующем виде:
п
\zq=z 2 (71)
(=1
где 8qi—относительная параметрическая погрешность элемен-
тов АВУ.
Выражения (70) и (71) являются искомыми. Коэффициент
(</() обычно называют относительным коэффициентом влияния;
он показывает, с каким «весом» каждая относительная инструмен-
тальная погрешность 8q, передается на выход АВУ.
Рассмотрим несколько примеров использования полученных
выражений.
71
Пример 12. Пусть делитель напряжения (рис. 21) используется для модели-
рования операции: z = рх.
Требуется определить ошибку Az^ на выходе делителя по заданным отно-
сительным величинам и 6/?2.
Из очевидного соотношения
г/ — II
u’~Ux r± + r2
находим
Vx Ri +R2 '
Определим коэффициенты влияния и 12; согласно (70)
л / р \ _ — ^2 _______.
11 17 k dRt R2 (Rr + Rtf Я1 + Я2 ’
Ri + R*
. / n j_ Rz dfe__________R%________Ri _ Ri
* (K2> ~ k dR2 ~ R2 (Ri + R2)2 R, + R2 •
+
В соответствии с формулой (71) запишем
Дг<7 = г (6^-6-^).
“Г А2
Пример 13. Определить инструментальную параметрическую погрешность
схемы копирования, изображенной на рис. 22 и решающей зависимость z — ах,
Рис. 21. Схема дели-
теля напряжений
Рис. 22. Схема копирования на базе ОУ
если имеются первичные ошибки сопротивлений 67? и 67?о, а также ошибка 6 Л
настройки операционного усилителя на требуемый коэффициент усиления А.
Для рассматриваемой схемы имеем
; __ Ux е ; ________ е . JJ ____ _ ДР. ; — /
I — ----, Iq — , и 2 — 1
72
Решив эту систему уравнений, получим
иг = -и.
Так как А > 1, то
k-Ц*.
их
Ro
(72)
R А
На основании (70) можно написать
%(А) =
A дк
k дА
1 /? + Ко
A R
Следовательно,
Аг, = ах (б/?0 - 6/? + R + R<> 4- М .
Оценим погрешность
X (Л) 6Л = R+RRa 6Л.
Полагая
R _^5; бЛ —20%; Л = 5-104,
1\
найдем
X (Л) бЛ - 57^4-20% = 0,002% .
Поэтому на практике инструментальной погрешностью схемы, обусловленной
уходом коэффициента усиления, при большом значении А обычно пренебрегают.
Статистические характеристики точности элементов АВУ,
к сожалению, до сих пор недостаточно изучены и систематизи-
рованы. В основном радиоэлектронная и приборостроительная
промышленность гарантирует лишь пределы возможных отклоне-
ний выходных параметров элементов. Это обстоятельство ослож-
няет проведение расчетов АВМ на точность при их разработке.
Тем не менее всегда, когда имеются достоверные и стабильные
данные, необходимо пользоваться статистическими характери-
стиками ошибок, полученными на основе обработки эксперимен-
тальных данных.
Ниже, в табл. 6 в качестве примера приведены некоторые
Данные по инструментальным ошибкам типовых и специальных
элементов и узлов.
73
Таблица 6
' Наименование элемента, тип Класс точности е [Дх] по ТУ о [Дх] Y
Резисторы:
ПТМН 0,25% 0,25% 0,10%
0,5% 0,5% 0,20%
1,0% 1% 0,40%
С2-13 ±0,1% 0,04%
±0,2% 0,08%
±0,5% 0,20% 0,4
±1,0% 0,4%
Конденсаторы:
МПГП, МПГЦ. . 01 1% 0,4%
02 2% 0,8%
1 5% 2%
II 10% — —
МПГО — 5% 2%
Блок проволочных ре- 10% 4%
зисторов с подгонкой коэффициента передачи 1 0,03% 0,015%
Блок RC с подгонкой
коэффициента передачи I 0,5% 0,25%
2 1% 0,5%
Сельсины:
СС-404 1 ±0,75° 0,375° 0,5
2 ±1,5° 0,75°
3 ±2,5° 1,25°
СС-405 1 ±0,25° 0,125°
2 ±0,5° 0,5°
3 ±0,75° 0,375°
БД-160 А А ±2,5' — —
Б ±5' — —
0 ±10' — —
1 ±20' — —
ВС-155А .... А ± 5' — —
Б ±10' — —
0 ±20' — —
1 ±30' — —
Тахогенераторы по- стоянного тока ТД-102 — 2,5% 1% 0,4
2. ПРИНЦИПИАЛЬНЫЕ И ГЕНЕРИРОВАННЫЕ
ИНСТРУМЕНТАЛЬНЫЕ ОШИБКИ ТИПОВЫХ
АНАЛОГОВЫХ ВЫЧИСЛИТЕЛЬНЫХ УСТРОЙСТВ
Воплощая алгоритм вычислений в реальной схеме АВУ, кон-
структор выбирает один из принципов реализации, приемлемый
по конструктивным соображениям и удовлетворяющий требова-
ниям надежности, технологичности, экономической целесообраз-
ности и другим условиям. Если принцип работы схемы (конструк-
ции) сознательно выбран таким, что при номинальных значениях
всех параметров схемы и сигналов не обеспечивается принципи-
74
ально точного формирования сигнала в соответствии с требуемой
формулой, такому АВУ присуща принципиальная инструмен-
тальная ошибка. •
Принципиальные ошибки конкретного АВУ обусловлены спе-
цифическими особенностями его схемы и конструкции, и для них
невозможно разработать единую методику расчета. Поэтому огра-
ничимся рассмотрением некоторых принципиальных ошибок типо-
вых операционных элементов и узлов аналоговой вычислительной
техники, природу которых достаточно пояснить на следующих
примерах: ошибка от ступенчатости в формировании сигнала;
ошибка от нагрузки.
Генерированные ошибки также обусловлены спецификой схемы
или конструкции АВУ и проявляются в наложении на полезный
информативный сигнал аддитивной помехи. Примерами таких
ошибок могут быть остаточная поляризация конденсаторов,
дрейф нуля УПТ и т. п.
Рассмотрим принципиальные и генерированные инструмен-
тальные ошибки некоторых АВУ.
Конденсаторы
Наиболее характерной генерированной погрешностью конден-
саторов является так называемая диэлектрическая абсорбция
(остаточная поляризация), которая заключается в том, что после
кратковременного замыкания его обкладок на выводах появляется
остаточное напряжение. Это накопление объемных зарядов в ди-
электрике принято характеризовать коэффициентом диэлектри-
ческой абсорбции
/га = ^-Ю0%.
^зао
Данные по предельным значениям коэффициента приве-
дены в табл. 7.
Таблица 7
Конденсатор Номинальное значение емкости, мкФ *а- %
Фторопластовый 0,01 — 1 0,1—0,01
Полистирольный (МПГП, МПГО) Полиэтилентерфталатный (К73П-2, 0,01—10 0,1-0,03
К73П-4 и др.) 0,01—10 0,8—0,2
Бумажный ' Танталовый оксиднополупровод- 0,1 — 10 1—0,6
никовый 1 — 100 5—2
На величину ka конденсатора влияют различные факторы,
в том числе время закорачивания его обкладок; особенно это
явление заметно на интервале времени до 2—3 мин.
75
Поскольку конденсаторы не являются самостоятельным вы-
числительном устройством, то его влияние на точность работы
схемы определяют при анализе работы схемы АВУ в целом.
Явление остаточной поляризации эквивалентно подключению
источника питания с э. д. с., равной U0CT = kaU3^ в точках
подключения конденсатора к схеме АВУ.
Рис. 23. Схема копирования
Операционные усилители постоянного тока (ОУ)
Операционные усилители постоянного тока без промежуточ-
ного преобразования сигнала имеют в основном две инструмен-
тальные погрешности: дрейф нуля и нелинейность основной
характеристики, обусловлен-
ная ограниченностью коэф-
фициента усиления А.
Первая относится к гене-
рированным, а вторая — к
принципиальным погрешно-
стям ОУ.
В АВУ, как правило,
используются операционные
усилители постоянного тока с глубокой обратной связью.
На рис; 23 показана схема копирования на базе такого уси-
лителя.
Операционный усилитель является линейной системой автома-
тического регулирования с обратной связью с коэффициентом
передачи прямого тракта kn = —А и коэффициентом передачи
обратной связи koc = R/RQ.
Функция передачи усилителя как схемы с обратной связью
имеет вид
&__
~ 1 + А^Ос ’
При большом коэффициенте усиления обеспечивается высокая
стабильность масштабного преобразования, так как
т. dk
lim -пг =
дА
При этом коэффициент передачи усилителя
Нт/г=Пт^^- = _^>. - (73)
Д->оо Д->оо j "
*0
Однако повышение коэффициента усиления приводит к одно-
временному усилению влияния внутренних помех в каскадах уси-
лителей, в частности дрейфа нуля.
76
Наиболее опасным является дрейф первого каскада. Чтобы
исключить влияние дрейфа этого каскада на погрешность схемы,
предварительный каскад формируют в следующем составе: моду-
лятор, усилитель, демодулятор (МДМ).
Для широко применяемых, типов ОУ погрешность дрейфа нуля
можно оценивать по формуле
(т \
(74)
/=1 )
где Де — э. д. с. дрейфа нуля во входной цепи усилителя;
Д/с—дрейф сеточного тока ОУ;
т — число входов ОУ;
D
kj = — — коэффициент передачи ОУ по j-му входу;
7?0; — сопротивления цепи обратной связи и /-го
входа соответствен но.
Погрешность Д{72др непосредственно суммируется с выходным
сигналом усилителя.
В табл. 8 приведены значения &е и Дгс для операционных
усилителей некоторых видов.
• Таблица 8
Тип Фирма США ^пит p едр де^дТ 1с ^ВЫХ AF А
В мВт ' мВ мкВ/°С нА В кГц ДБ
MC1556G LM747D Motorola National 45 60 6 — 30 500 ±12 1000 100 94
pA709 Fairchild 15 108 3 25 250 10 88
ZA801D1 Ze 1 tex 90 — — 0,025 ±10 4000 100
231 Analog Devices 270 0,01 0,1 0,05 500 140
Дрейф нуля проявляется обычно как сумма систематической
и случайной составляющих.
Величину ошибки дрейфа нуля в отсчетных единицах опреде-
ляют по формуле
\z .
др mz
Для ОУ с одним входом с учетом (74) получим
А /, г \ I Д|СЯ,
Дгдр = ~^k Н (1 —6) + И =
= -МДе(4- —П(75)
тх L \ k ) k J v ’
77
Из этого соотношения следует, что при заданном тх нужно
выбирать максимально возможный коэффициент передачи k,
или, что то же самое — стремиться к полному использованию
пределов работы ОУ по выходному напряжению.
Согласно (73) k =—R0/RBX. При ограниченном значении Ro
проектировщик может выбирать 7?вх так, чтобы обеспечить макси-
мальный коэффициент k. Однако существует рациональное зна-
чение йрац, превышение которого не дает практически ощутимого
выигрыша в точности за счет уменьшения ошибки дрейфа нуля.
Так, например, задавшись всего лишь 20%-ным превышением
составляющей ошибки от дрейфа нуля по сравнению с ошибкой
усилителя с бесконечно большим коэффициентом передачи k,
согласно (75) получим уравнение 1/&рац— 1 = 1,2. Его решение
дает значение k}
Пусть
z = ах.
Тогда
рац
> __г;
рац ~
далее заданы mz и
= а моделируемой зависимости
согласно (75)
так как
л ( 1
= — 1 — Ц
др т-z \ Г
А*с^вх
тх
=
ГПХ
Из соотношения для ДгдР видно, что увеличение тх приводит
к уменьшению ошибки при прочих равных условиях (А?вх = const).
Однако это повышение масштаба практически оправдано лишь
в некоторых пределах. По аналогии'С предыдущим, можно пока-
зать, что рациональным верхним значением тх является величина
(в предположении малого значения токовой составляющей)
рац = —5|im2.
Рассмотрим теперь принципиальную инструментальную^
ошибку ОУ, обусловленную нелинейностью основной характери-
стики.
Для простейшей схемы устройства (см. рис. 23), решающего
зависимость z = ах, выше было получено соотношение (72):
Ошибка, вызванная нелинейностью основной характеристики,
\и = и — (1 4- ——
^нл — И 1 т /?//?’
или в отсчетных единицах
_____ А^НЛ _ U1 / 1 I *о \ _ — ( ] I
^нл— — nikk Л\ ‘ R J R 4 \
Относительная погрешность измеряется величиной
б*нл=—==-г(1 —4-У
нл 2 А \ kJ
78
При встречающихся на практике
&mln = — °>2> А > 20 000
6гил 0,03%,
и этой погрешностью обычно пренебрегают.
Потенциометры
Потенциометры весьма широко используют в аналоговой вы-
числительной технике.
Основными источниками принципиальных инструментальных
погрешностей потенциометров являются:
дискретность воспроизводимой функции из-за конечного шага
намотки (разрешающая способность);
искажение функциональной зависимости при отклонении на-
грузки потенциометра от расчетного значения.
Разрешающая способность потенциометров определяется со-
отношением:
%==: М^скр ,100о/о)
где Д^/дИскр — дискретность функции потенциометра, В;
Un — напряжение питания потенциометра, В.
Ошибка на выходе потенциометрической схемы из-за дискрет-
ности функции определяется по общей формуле (71), в которой
следует положить 8q = an.
Для высокоточных потенциометров погрешность, вызываемая
дискретностью функции, как правило, не влияет на точность ра-
боты потенциометра в целом. Поэтому этой погрешностью на
практике часто пренебрегают.
Рассмотрим теперь ошибку, вызываемую включением потен-
циометра на неноминальную нагрузку.
Принципиальная ошибка от нагрузки возникает во всех элек-
трических устройствах при переходе от режима холостого хода
к рабочему режиму или от одного уровня нагрузки к другому,
если в конструкцию потенциометра (обмоточные данные, конфи-
гурация каркаса) и схему включения (компенсационные стабили-
зирующие реостаты) не заложен принцип независимости от на-
грузки.
Пусть имеется линейный потенциометр, реализующий зави-
симость
U =U — U
и г — х п — и х г)
Чу max
Нагрузим потенциометр сопротивлением 7?н. Тогда на выходе
потенциометра получим напряжение
ГуКн
и11 =П ________ГУ + _ JJ
Х + Х +
гу ~г
гу%н
79
Очевидно, что ошибка определяется разностью
ьиг = и*-иг = их
(«н^п “Ь ^пГу Гу)
или в отсчетных единицах:
д у b.Uz ~ Гу(.гу «п)
LX н - ------- iC о •
Рис. 24. График отно-
сительной погрешности
линейного потенцио-
метра от нагрузки
Принимая р^ = ry/?n; рн = RJR„, найдем выражение для
относительной погрешности от нагрузки:
Ry _ Ру (Ру —1)
и4Н . 9 •
Рн + Р// Р*/
Графики погрешности 6?н приведены на рис. 24.
Следящие системы
В качестве примера рассмотрим два вида принципиальных
инструментальных ошибок следящих систем: ошибки, обуслов-
ленные статическим моментом трения сервомеханизма, и ошибки,
связанные с преобразованием управляющего сигнала. Эти ошибки
проявляются как в статике, так и при установившемся динами-
ческом режиме.
Погрешность, обусловленная статическим моментом. Для опре-
деления количественной оценки этой ошибки рассмотрим струк-
турную схему типовой следящей системы, представленную на
рис. 25, где введены следующие обозначения: 0ВХ (р) — входной
сигнал; (р) — функция передачи разомкнутой следящей си-
стемы, полученная после исключения из нее передаточной функции
двигателя; Д0 — сигнал ошибки на входе отрабатывающего дви-
гателя; Удв (р) =-- - р ---функция передачи двигателя;
Л4СТ (р) — изображение возмущающего статического момента на-
грузки на выходе следящей системы; 0ВЫХ (р) — выходной сигнал
следящей системы.
80
Можно показать, что при Yr (р) = (усилительное звено)
величина погрешности, вызванной статическим моментом, в от-
счетных единицах
^=А-~ё,’ <76>
где /дв — коэффициент внутреннего демпфирования двигателя;
kv — добротность следящей системы (коэффициент усиления
по скорости).
Величина, определяемая формулой (76), является принци-
пиальной ошибкой следящей системы, построенной по структур-
ной схеме рис. 25, когда Y^p) = kr.
Рис. 25. Структурная схема типовой следящей
системы
Если структурную схему составить таким образом, чтобы пере-
даточная функция Y\ (р) содержала хотя бы одно звено интегриро-
вания, то, согласно теории автоматического регулирования, уста-
новившаяся моментная ошибка выразится соотношением
lim \zM (t) = lim р^ст.(р)----------=
/->00 p->0 1 Г1Уд0(р)
+ P
= 1 ^ст(р) Р2Кдв (p)
pit) Мдв P + У1 (P) ^дв (P) ’
где Y{ (p) получено из Y\ (p) выделением множителя 1/p. При по-
стоянной величине Л1ст (0 = Л4, Л1сч (р) = М1р и правая часть
выражения обращается в нуль.
Как и следовало ожидать, этот результат совпадает с извест-
ным правилом автоматики: для осуществления астатического ре-
гулирования координаты 0 по возмущению f в цепь регулирова-
ния необходимо ввести интегрирующее звено вне прямого участка
между точками приложения f и 0.
Для схемы на рис. 25 таким участком является звено Yr (р).
В табл. 9 приведены коэффициенты /дв для практических
расчетов моментной ошибки следящих систем некоторых типов.
Коэффициент /дв определяют по механической характеристике
Двигателя как отношение приращения момента к изменению угло-
вой скорости вращения ротора.
6 Э. И. Соренков 81
Таблица 9
Тип обрабатывающего двигателя Мощность ^НОМ’ Вт Коэффициент f
Г«см Г«см
рад/с об/с
Двухфазный индукционный: Д4Д-1ТА 1 0,004 0,025
ДИД-2ТА 2 0,007 0,044
Двигатель-генератор : ДГ-1ТА 1 0,006 0,037
ДГ-2ТА 2 0,010 0,063
ДА4-10/400 10 0,2 1,26
Пример 13. Определить \zm следящей системы с двигателем ДИД-2ТА,
исходя из условий: Л4СТ^ 10 Гем, kv ~ 100 1/с; = 2 ду/об (1 ду = 3,6х).
По формуле (76) и данным табл. 9, получим
Л*м = 2 100-0,044 ^4’5дУ‘
Погрешность следящей системы, вызванная преобразованием
управляющего сигнала *. На рис. 26, а приведена структурная
Рис. 26. Блок-схема следящей системы переменного тока
схема следящей системы переменного тока с двойным преобразова-
нием сигнала, часто используемая в аналоговых вычислительных
устройствах.
На рисунке приняты следующие обозначения:
Ml — задающий и отрабатывающий элементы счетно-реша-
ющей схемы, выполняющие роль модулятора [вращающийся
трансформатор (ВТ)]; У1 — предварительный усилитель; ДМ1 —
Данный подраздел написан С. Н. Тимачевым.
82
демодулятор, служащий для преобразования сигнала ошибки,
вырабатываемого в виде напряжения переменного тока, в напря-
жение постоянного тока; КЦ — корректирующая цепь следящей
системы; М2 — модулятор, преобразующий напряжение постоян-
ного тока, поступающее с выхода корректирующей цепи, в напря-
жение переменного тока; У2 — усилитель напряжения и мощ-
ности; Дв — двухфазный двигатель переменного тока.
Все перечисленные элементы характеризуются соответству-
ющими передаточными функциями. Как известно, двухфазный
двигатель переменного тока может быть заменен эквивалентной
схемой, состоящей из идеального демодулятора, на выходе кото-
рого отсутствуют все высшие гармоники, порождаемые процессом
демодуляции, и двигателя постоянного тока. Коэффициент пере-
дачи идеального демодулятора 2 = 2. Это показано на рис.
26,6, где ДМ2 — идеальный демодулятор; Дв — двигатель по-
стоянного тока. На выходе модулятора Ml формируется напря-
жение
1/М1 = &М1 [а3ад(0 — ®отр (01 COS (®с/ + фМ1),
где &М1 — коэффициент передачи модулятора;
азад (0 — Угол поворота задающего ВТ;
аотР (0 — Угол поворота отрабатывающего ВТ;
Tmi — фазовый сдвиг модулятора;
сос = 2л/с — несущая частота.
При отработке следящей системой угла аотр (/) = азад (/)
напряжение [7М1 —> 0, и, следовательно, управляющее напряже-
ние двигателя на выходе демодулятора ДМ2 также стремится
к нулю. Таким образом, схема на рис. 26, б может быть приведена
к схеме на рис. 26, в.
В данной схеме двигатель постоянного тока опущен, так как
работа схемы вполне определяется напряжением на выходе демо-
дулятора ДМ2.
Напряжение на выходе модулятора Ml запишем в виде
Цч1 = U cos (®с/ + фМ1),
где U = Uc+jUK;
Uc — синфазная составляющая' (полезный сигнал);
UK — квадратурная составляющая (помеха), сдвинутая отно-
сительно синфазной на 90°.
Тогда
. ^М1= Uc cos (act + фМ1) + UK sin (act + фМ1).
Последовательно рассматривая прохождение этого сигнала
через элементы схемы на рис. 26, в, получим на выходе демодуля-
тора ДМ2 напряжение, определяемое из следующего соотношения:
£/дМ2 = +ВД. (77)
6* 83
где
. А , ЛКц sin Дфо
sin Дф, Н ------------7—^
/г — 2/?хц COsAcp2
7 Л . ^кп cos Дфз
cos Дф, -]—----------
2#кц cosAfp2
COS Дфх COS ср2 +
Ло — &М1А^ДМ 1^КЦ^М2^2^Д
+ -4КЦ cos
2^КЦ
Дф1 = Фм1 + Ф1 — Фдмь
Дф2 — Фм2 + Ф2 -- фдм 2i
Дфз = фМ1 _|_ _|_ фДМ1 + фкц — фМ2— ФдмгЧ- Ф2,
£кц, сркц — параметры, характеризующие прохождение вто-
рой гармоники через корректирующую цепь;
йкц — коэффициент, характеризующий прохождение по-
стоянной составляющей через корректирующую
цепь.
Как следует из формулы (77), квадратурная составляющая UK
приводит к появлению погрешностй на выходе демодулятора
Д17 - kQkjU^
Для ее уменьшения необходимо, чтобы kjUK —> 0, в этом случае
напряжение {7ДМ2 определяется только полезным сигналом (7С.
Если (7К> Uc, что имеет место в практически применяемых
схемах, то необходимо, чтобы kj —> 0.
Для уменьшения погрешностей следящей системы, вызываемых
квадратурной помехой (7К на входе системы, необходимо выпол-
нить определенные условия по фазам опорных напряжений.
Согласно (77) выражение для коэффициента kj может быть
записано в виде
kl
sin (ФМ1 + Ф1 + Фдм 1 + ?КЦ - fpM2 +
• / t XI ^КЦ Ф,2 Фдм 2
Sin (ФМ1 Т ФХ ~ Фдм 1) + cos (фм2 + <р2 _ <рдм 2)
С°5 (фм1 + Ф1 + Фдм 1 + ФКЦ - ФМ2 +
cos Г® 4- со — со 4- ^КЦ_____________+ ф2 ~ Фдм г)_________
(Фм’+Ф1 рДМ1)+ 2£КЦ ^(Фмг + Ч’з-Фдмг)
Приравнивая числитель этого выражения к нулю, получим
sin (Фм1 + Ф1 —Фдмх) +
I £цц Sltl (f|)Mi + Ф1 + Фдм г + фкц ~ Фмг + Фг ~ Фдм г) _ q /?g\
2/7кц C0S(<₽M2 + fP2“Фдм 2)
84
Из уравнения (78) можно определить величину любого из углов,
входящих в выражение (77), при котором коэффициент будет
равен нулю.
Так, решая уравнение (78) относительно угла <рм1, получим
<Pmi = arctg
зт^ + фд^ + Ф,;-^ +
Sin (Ф1 - фдм J ----+Ч)2 -(РДМ2)
11 дм1) 26Кц С05(Фм2 + *Р2-ФдМ2)
cos(V1 + Vam1 + Vk-Vm2 +
/ У I ^КЦ +^2 <Рдм 2)
COS (Ф1 - фдм J ———2_фдм2)
Угол
sin (<рм1 + Ф1 - Фдм х) cos (ф2 - фдм 2) + sin (фм1 + фх +
_ + Фдм 1 + ^КЦ + Ф2 ~ Фдмг)
т М2-- ~
Sin (фм1 + фх - фдм х) sin (ф2 - фдм 2) + -р- cos (фм1 Ф1-F
+ ФДМ 1 + гркц + ^2 — Фдм 2)
Аналогичные выражения могут быть получены для определе-
ния углов epi, Фдм 1, ФКц, Ф2, Фдм 2- Это показывает, что вариа-
цией фаз опорных напряжений, входящих в выражение (77),
можно добиться минимального (или нулевого) коэффициента kj.
Обычно при реализации следящей системы с двойным преоб-
разованием с целью увеличения коэффициента усиления системы
и исключения влияния квадратурной помехи рекомендуется при-
нимать углы Дфх = Дф2 = 0; тогда выражение для определения
коэффициента можно записать в виде
k _ sin 1фкц+2 (фдм1 -Фм2)1
1 + J/** 1 cos [Фкц + 2 (Фдм1— Фиг)!
2«КЦ
•откуда находим условие равенства коэффициента kj нулю:
sin [фКЦ +2(<рдм1 —<рм2)] = 0.
2«КЦ
Следовательно, при реализации следящих систем с двойным
преобразованием следует стремиться или к возможному умень-
шению отношения £кц/2/гкц или к уменьшению sin [фкц +
+ (фдМ1 Фмг)!-
В частности, из этого следует, что фкц = —2.(фДмх— Фмг)-
Отношение ^кц^^кц и Угол Фкц зависят от типа применяемых
корректирующих цепей и в большинстве случаев являются по-
85
стоянными заданными величинами, зависящими от динамических
характеристик системы, и, следовательно, <не могут удовлетво-
рять вышеуказанным условиям.
Таким образом, для уменьшения погрешности следящей си-
стемы с двойным преобразованием сигнала от квадратурной помехи
необходимым условием является соблюдение требований к фазам
опорных
напряжении демодулятора и модулятора.
Для схем на рис. 26 этими усло-
виями являются
Фм2 — ФдМ 2 Фг’,
Фкц
Фдм1 = Фм2-------
Фкн
Фм1 = ФМ2----Ф1-
Вращающиеся трансформаторы
Вращающийся трансформатор
(ВТ) является весьма распростра-
ненным элементом аналоговых вы-
Рис. 27. Погрешности вращаю- числительных машин переменного
щихся трансформаторов от на- тока.
гРузки Примером принципиальной инст-
рументальной ошибки вращающегося
трансформатора является искажение синусоидального характера
э. д. с. при наличии нагрузки входной обмотки ВТ. Зависи-
мость э. д. с. синусной обмотки нагруженного ВТ от угла пово-
рота ротора а имеет вид
~E = kU . _ДП-а—
1 + b cos2 а
(79)
На рис. 27 представлены графики идеальной синусоидальной
зависимости (кривая /), зависимости (79) (кривая 2) и погреш-
ности (кривая 3).
Глава IV
ОШИБКИ РЕШЕНИЯ АЛГОРИТМОВ
АНАЛОГОВЫМИ ВЫЧИСЛИТЕЛЬНЫМИ СИСТЕМАМИ
Аналоговая специализированная вычислительная машина
представляет собой развернутую в пространстве совокупность
отдельных вычислительных систем (АВС), жестко запрограмми-
рованных для решения заданных алгоритмов. Эти системы, как
правило, представляют собой схемы с последовательным и парал-
лельным включением аналоговых устройств, а также схемы с об-
ратными связями.
Настоящая глава посвящается анализу формирования ин-
струментальных ошибок на выходе типовых вычислительных
систем.
Предположим, что входные ошибки систем являются след-
ствием инструментальных погрешностей датчиков информации
или трансформированных погрешностей предыдущих систем.
Согласно классификации, приведенной в гл. I, трансформирован-
ные на выход АВС входные инструментальные ошибки будем
называть наследственными, а выходные ошибки от внутренних
погрешностей АВС — машинными. Сравнение ошибок этих двух
групп позволяет формулировать оптимальные требования к точ-
ности реализации заданных алгоритмов.
1. ОШИБКИ НА ВЫХОДЕ СИСТЕМЫ ПОСЛЕДОВАТЕЛЬНО
(КАСКАДНО) ВКЛЮЧЕННЫХ АВУ
Пусть для реализации зависимости вида
i
2 = XHi (г/i) Щ (f/?) • • • Pz (f/z) = х П ji/ (z/;.)
выбрана физическая модель, которой соответствует математиче-
ская модель, изображенная на рис. 28. Требуется вычислить пол-
ную инструментальную погрешность работы системы.
Результаты, полученные в предыдущих разделах с учетом пе-
рехода к отсчетным единицам, позволяют решить задачу, опираясь
на ММ и не прибегая к ФМ.
87
Положим, что число каскадов I = 3. Полная инструменталь-
ная погрешность на выходе АВС
А^з Д?н3 -Ь AzM3,
где А?н3 — наследственная погрешность на выходе третьего
каскада;
Д?мз — машинная погрешность работы третьего каскада
Дгм3 = AZ43+ Дгп3, причем
Azq и Дгп — соответственно параметрическая и принципи-
альная составляющие машинной ошибки.
Наследственная погрешность третьего каскада Д?н3 слагается
из трансформированных ошибок входных координат у3 и z2:
б)
Рис. 28. Система последовательно включен-
ных АВУ:
а — ММ; б — ФМ
М,2 = +
Лгн3 = г2 + |л3 Az2,
где, в свою очередь,
Az2 = Azh2 + Azm2;
по аналогии можем
продолжить:
Azj = AzH1 + AzM1,
где
= x + Hi Лх'
Выполнив последовательные подстановки, получим
Д?з = Д^мхРгРз + А^мгРз + Д^мз + Д-ФхНгРз ~Ь
+ И2Н3Х Л*/1 + Ai/2 + z2 \ys.
Заметим, что
= и;
U Zo z
m2U,3 = х— = — = —
г 2ГЗ Hl Hl Hi
Lio Zq z
^1Рз = *Н1Мз — = — = — •
r r r H2 H2 H2
Поэтому, разбив полную инструментальную погрешность си-
стемы на наследственную и машинную, можем записать
/=1
з 3
П рг(уг). (80)
/=1 г=/+1
88
Так как
— ^Zqj Н- Агпд
и, в свою очередь,
ni
\zqj = Zj 2 \ (ft) бqh
1=1
то выражение для машинной составляющей ошибки системы можно
преобразовать
Дгм = Б zi 2 (<?<) Н ‘ п Иг (.уг) + S Дгп/ п Иг (г/г) =
/=1 1=1 Г=/+1 /=1 r=i+l
= z Е 2 Е дгп/ П рг(уг). (81)
/=i г=1 /=1 г=/+1
В этом преобразовании учтено соотношение
з
Zj П уг(уг) = Z.
г=Ж
Теперь уже нетрудно обобщить полученные искомые резуль-
таты (80) и (81) на случай I каскадов:
Лгн = z Е (z/y) kyt + Лдц (82)
/=1
I 21 II
Д*м = г Е ЕМ^)6<7/+Е дгя/ П ц,(уг), (83)
/=1 1=1 /=1 г=Ж
где
M.(y,.) = -L^M;
: V/ ду/
1 kj dqi
tij — число зарождающихся параметрических ошибок в /-м АВУ.
Из линейности выражений (82) и (83) относительно первичных
ошибок следует принцип независимости их действия, т. е. воз-
можность рассматривать действие каждой ошибки отдельно, пола-
гая все другие ошибки равными нулю.
Как упоминалось выше, обычно АВУ имеют два входа х и у,
применительно к которым получены расчетные выражения для
ошибок (82) и (83). Однако они без труда могут быть обобщены на
случай каскадного включения АВУ, каждое из которых имеет
mf + 1 входов:
Zj = (У1, у2, • • •. ymj)-
89
При этом выражение для наследственной погрешности системы
(82) запишется в виде
/=1 7 1=1
Пример 14. Пусть требуется рассчитать инструментальные ошибки на выходе
схемы, изображенной на рис. 29, при наличии погрешностей 6rx, 6r2, &R и 6/?о.
Возможен двоякий подход к решению этой задачи; во-первых, можно счи-
тать эту схему аналоговым вычислительным устройством, решающим зависи-
мость z2 = ах и, во-вторых, можно считать эту схему АВС, состоящей из двух
АВУ, которые решают задачи = atx, z2 = a2zt (aYa2 = а).
Рис. 29. Электрическая
схема решения зависи-
мости z — ах
В целях иллюстрации полученных результатов воспользуемся вторым под-
ходом.
Итак, будем "считать, что схема составлена путем последовательного соеди-
нения двух АВУ, ММ и ФМ которых решают зависимости
, Г2% Г2% .
21 ~ а1Х’ 1 ~ V2 + rxR + r2R Q ’
^2 — ^2^1 > ^2 —
Ro
R ‘
Тогда найдем
дг2
riR .
Q ’
dkY
i\(r2 + R) .
dkY
dR
Г2 (ri 4~ .
Q
Q
K(R0)=-^-
*2
UK2 __ i .
dRo ’
/?2 Ot\
90
Полную ошибку (Дим)2 найдем по формуле (83)
' п1
(Дгм)2 - z 2 £ X; (?/) б,?,- = г2 [%! (г2) бг2 + + %i(R) 6/? +
/=11=1
+ X, (R0)6R0 + Х2 (/?) 6/?] = г2 6г2 - Гг (f2 + R} 6rt +
+ Гг (flQ+ R) SR + 6R0—SR],
Приведение подобных членов дает
(Дгм)2 = z2 [ SR0 + 6г2 Г-£- 6R - Г1^± ^ 6^ ] .
2. ПРИНЦИПИАЛЬНЫЕ ИНСТРУМЕНТАЛЬНЫЕ ОШИБКИ
ПОТЕНЦИОМЕТРИЧЕСКИХ СИСТЕМ
Для воспроизведения сложных функциональных зависимо-
стей, представляющих собой произведение двух, трех и более
функций, часто используют каскадное включение потенциометри-
ческих АВУ без развязки их усилителями. При этом каждый по-
следующий потенциометр является переменной нагрузкой на пре-
дыдущий, так как входное сопротивление цепи потенциометра из-
меняется при перемещении его щетки. В этом случае неизбежно
появляются принципиальные ошибки АВС.
Для их исключения применяют схемы стабилизации нагрузок
путем введения дополнительных потенциометров, включенных
по схеме реостата, движок которого перемещается в функции
того же аргумента, что и движок основного потенциометра. При
этом реостат можно включать последовательно с потенциометром
(рис. 30) и параллельно ему (рис. 31). В первом случае стабилиза-
ция нагрузок достигается за счет уменьшения масштабов схемы,
во втором — за счет уменьшения нагрузки на предыдущий потен-
циометр.
Введение дополнительных реостатов не всегда оказывается
целесообразным, итютому часто идут на упрощение схемы, мирясь
с возникающими при этом ошибками.
На рис. 32 приведена схема АВС, состоящей из двух каскадно
соединенных потенциометров и не стабилизированной по нагрузке.
Коэффициент передачи этой схемы
£ — _ ГхГуЯ . /g^X
(Rni Гх) <Ху 4~ Я) ГХ 4“ ^П1 (^П2^ 4" ^Т\2ГУ Гу)
В целях усреднения ошибок текущее значение сопротивления
первого потенциометра рассчитывают на нагрузку, равную сред-
неарифметическому значению величины входного сопротивления
второго потенциометра при двух крайних положениях его движка:
- _ R™ + r^+r _R2n2 + 2Rn2R
*п2~ 2 2 (Rn2R) ’
91
При этом требуется, чтобы
Т J р_______ГХ^П2________ ___ р f1
х р р j_ р г _________ fl (X)max
z'nlrx rk
В этом случае коэффициент передачи АВС
__ ^2______________ГхКп2_______ . _____ГуК%П2______
Е (^п2^п1 + — гх) (^п2^ + Rn2ry — г»)
Определим погрешность работы схемы:
(Д172)п = Ek — Ей* = Е (k — й*);
дг — (A^z)n _ £р>* / д_____2 k — k*
- mz ~ mEk* Я ) — Z —•
Следовательно, относительная ошибка
О / ч k ------- k*
Szn (X, у) = - ,
где k и k* определяются формулами (84) и (85).
Рис. 30. Потенциометрическая АВС с
последовательно включенным реостатом
стабилизации нагрузки
Рис. 31. Потенциометрическая АВС с
параллельно включенным реостатом ста-
билизации нагрузки
Рис. 32. Потенциометрическая АВС,
нестабилизированная по нагрузке:
а — схема; б — график ошибок
На рис. 32, б приведен график этих ошибок. Каждая кривая
представляет собой закон изменения ошибки в зависимости от по-
ложения движка потенциометра 7?п1 при определенном положе-
нии движка потенциометра /?п2, т. е. при определенном отклоне-
нии фактического значения нагрузки от расчетной.
92
Для уменьшения принципиальных погрешностей этой схемы
часто перед вторым потенциометром включают масштабный рези-
стор, что уменьшает долю переменного сопротивления нагрузки
по отношению ко всему сопротивлению нагрузок, что, в свою
очередь, приводит к уменьшению масштаба схемы.
Уменьшения ошибок можно достигнуть также включением до-
резистора, сопротивление которого
полнительного шунтирующего
равно сопротивлению потен-
циометра #п2 (между концом
потенциометра и щеткой, как
показано на рис. 33). В этой
схеме сопротивление нагруз-
ки на потенциометр /?п1 при-
нимает одинаковые значения
при Гу = О И Гу = яп2.
Текущее значение сопро-
тивления гх первого потен-
циометра рассчитывают на
нагрузку, равную среднеари-
фметическому значению вход-
ного сопротивления второго
потенциометра при крайних
и среднем (ry = #п2/2) поло-
жениях его движка:
Rn2 =
Рис. 33. Потенциометрическая АВС с ча-
стичной стабилизацией нагрузки:
а — схема; б — график ошибок
^П2 р
|2 1
^П2 4" ^П2 ID
На рис. 33, б приведены графики принципиальных ошибок
этой схемы при тех же параметрах схемы, что и графики на
рис. 32, б, но при условии включения дополнительного сопротивле-
ния 7?д = 100 кОм. Как видно из сравнения этих графиков, ошибка
уменьшилась примерно в 2 раза.
3. ОШИБКИ СИСТЕМЫ С ПАРАЛЛЕЛЬНЫМ ВКЛЮЧЕНИЕМ
АВУ
Задача анализа ошибок системы с параллельным включением
АВУ сводится обычно к анализу ошибок суммирующего элемента
с большим числом входов, в качестве которого, как правило,
используют операционный усилитель. Многовходовый усилитель
в методических целях будем относить к АВС на том основании,
что согласно определению под АВУ понимают устройство с числом
входов не более двух.
93
Итак, пусть требуется решить зависимость
tn t
z = S
с учетом инструментальных ошибок всех видов.
Физический аналог решает зависимость вида
т хч
Uz = S ki*r
j=l
Взяв полный дифференциал от Uz и перейдя к отсчетным еди-
ницам, после несложных преобразований, получим
т
Дгн = 2
/=1
т
Д2М = S 2/ S (?<) + Д2П.
/=1 Z=1
где т — число параллельных входов усилителя;
rtj — число параметров устройства по /-му входу;
Z; — составляющая z по /-му входу;
Дгп — принципиальная ошибка ОУ, определяемая его дрей-
фом нуля;
Дху — ошибки ввода координат по каждому из входов сум-
матора; эти ошибки представляют собой совокупность
инструментальных ошибок предыдущего каскада
прибора.
Величину Дгг в простейшем случае можно рассчитать на осно-
вании формулы (74):
Дгг = Дгдр = — (1 — 2 kj] +
др \ J) 1 т2
Пример 15. Пусть требуется решить задачу суммирования Z — агхг + €Z2X2
с помощью АВС на базе ОУ, представленного на рис. 34, исходя из следующих
данных: известны ошибки ввода координат Ахх и Лх2, инструментальные погреш-
ности сопротивлений <5/?г, <3/?2 и известны также масштабы всех величин.
Определить составляющие погрешности схемы.
1. Определение наследственных ошибок:
т
Дгн = -j- Дх2а2.
/=1
2. Определение машинных ошибок.
Параметрическая ошибка
Аг,, == £ Zj (qt) (^) + а2х2 Х2 (qi) dqif
j=l i=l t=l i=l
Находим (qi).
По каналу xY коэффициент передачи — —Ro/Ri, следовательно, согласно
(70) можно написагь
(£i) = -1, (Яо) = +1.
94
Аналогично для k2 получим
*2 = --^ :Лг(/?2)=-1, %2(/?0) = +1.
Л2
На этом основании
&zq = (d/?o — dtfi) + а2х2 (д/?0 — 6/?2) =
= д/?о (ара + а2х^ — a1x1bR1 — a2x28R2 =
= z8Rq — a1x18Rl — a2x28R2.
Другой составляющей машинной ошибки является генерированная погреш-
ность ОУ.
Рис. 34. Схема операцион-
ного усилителя, решаю-
щего зависимость z =
+ arx± + а2х2
Как уже отмечалось, практически существенной ошибкой ОУ является
дрейф нуля. Расчетной формулой дрейфа нуля является (74); в ней сумма
С учетом этого можно написать
4. ОШИБКИ НА ВЫХОДЕ АВС
С ОБРАТНОЙ СВЯЗЬЮ
АВС с обратной связью (ОС) служат для решения уравнений.
В аналоговых вычислительных машинах к решению уравнений
прибегают в двух случаях: для аппаратурного упрощения реше-
ния задач и тогда, когда искомая функция не может быть приве-
дена к явному виду относительно z.
Аппаратурное упрощение решения задач достигается, как
правило, при замене действия деления умножением, обратной
тригонометрической функции — прямой функцией, операции из-
влечения квадратного корня — подбором корней уравнения и т» д.
Ниже, в табл. 10, приведены примеры тождественного преоб-
разования зависимостей к уравнениям, которые аппаратурно
проще реализуемы.
95
Таблица 10
Форма
Явная
. х
z = arctg —
У
— b ± Kb2 — 4ас
2а
Неявная
у sin г — х cos z — О
U22, + b2 + с — О
В аналоговой технике встречаются также задачи, решения
системы уравнений, число неизвестных которых соответствует
числу уравнений. Ниже ограничимся рассмотрением вопросов
точности АВС, решающих одно уравнение относительно иско-
мого Z.
Рис. 35. АВС с параллельным включе-
нием АВУ в цепи ОС
Рис. 36. АВС с последовательным
включением АВУ в цепи ОС
В большом числе случаев такие АВС состоят из отдельных
АВУ, определенным образом связанных между собой; будем раз-
личать АВС двух типов:
с параллельной схемой включения АВУ в цепи ОС (рис. 35);
с последовательной схемой включения АВУ в цепи ОС
(рис. 36).
В самом общем виде решаемое уравнение можно записать
в виде
ср (г, х2, . . ., хт) = О,
где х,- — входные независимые аргументы;
z — искомое решение.
Основываясь на аппарате, введенном в гл. III, в частных,
но весьма распространенных на практике случаях, это уравнение
можно записать в одном из двух видов:
для АВС с параллельной схемой включений АВУ в ОС
т
2 (?) = 0;
(86)
96
для АВС с последовательной схемой включения АВУ в цепи ОС
i
Z П р/ (<//) — Цхх = 0 (87)
/=0
или
Фос (У1 yi) — W = О,
где случаю j = 0 соответствует р0 сравнивающего устройства (сум-
матора).
Проиллюстрируем применение полученных результатов для
расчета инструментальных ошибок на примерах аналоговых
вычислительных систем с обратной связью.
Ошибки АВС с параллельной схемой включения АВУ
в цепи ОС
Наследственные ошибки. Если в (86) положить, что коор-
динаты Xj имеют ошибки Дх,-, то в результате отработки вели-
чина z получит некоторое приращение Д?н, общее для всех входов
АВУ; с учетом этого уравнение (86) перепишем в виде
т
S (X; + Дх;) И/ (z + Дгн) = 0,
/=1 .
из которого получаем уравнение ошибок'
т nl Л ( \
2 Л*/Н/ (?) + 2 х! д*н ° •
/=1 /=1
Отсюда находим
Ё Дх/Н/ (г)
Аг,=-~ '1 . ---• (88)
У « *
1 дг
/=1
Пример 16. Найти ошибку в определении координаты р при решении сле-
дующего уравнения:
х sin р — у cos р = 0
с учетом наличия ошибок Дх и Дг/. Согласно (88)
_ Дх sin р — А г/ cos р _ Аг/ cos р — Дх sin р
Ри ~ x£os р + z/ sin Р — d 9
Машинные инструментальные ошибки. Параметрические
ошибки. Выше указывалось, что параметрические ошибки АВУ
определяют по формуле
\zq=z £ Ш)6<7У.
1=1
7 Э. И. Соренков
97
В данном случае ошибки на выходе АВУ запишутся в виде:
^qi = Н/ (*) Xj Е К (<Л) (89)
г=1
где
k* — физический коэффициент передачи /-го АВУ с учетом
схемы сумматора по /-му входу.
Таким образом, %* учитывает ошибки /-го АВУ и /-го канала
передачи сумматора.
С учетом (89) можно написать уравнение (86) в следующем
виде:
*
т т nj
Е И/ (Z + teq) Xj + Е H/(z +Az9)%/ Е К = 0.
/=1 /=1 1=1
После преобразований получим уравнение ошибок
*
т т п /
Az<7 S + S(z) Х/ X8q‘+
/=1 /=1 /=1
*
т д П!
Н- ~а7~ xi S =
/=1 /=1
Отсюда с учетом того, что последний член имеет второй порядок
малости, получим
Принципиальные ошибки. Пусть известны на выходе каждого
АВУ принципиальные ошибки Azn/; тогда можно написать урав-
нение
§ И/ + Azn) + S Агп/ = 0,
/=1 /=о
где Д?п0 — ошибка на выходе сумматора (/ = 0).
Из этого соотношения следует уравнение ошибок:
т т
Дг" £х/-£-+ X Д2п/=о>
/=1 /=0
98
из которого находим искомое выражение:
т
2 Дг«/
л /=2.
— xi
dz 7
/=1
Если же первичные погрешности в АВС с параллельной схе-
мой включения АВУ в цепи ОС возникают на входе последних,
то, как нетрудно показать (по аналогии с предыдущим выводом),
(90)
Пример 17. Пусть при решении уравнения xsinp— у cosp = 0 имеют
место ошибки Дрх и Др!/установки потенциометров sin р и cos р в цепи отработки.
Требуется определить погрешность выработки угла р.
Согласно (90) получим:
АО х Дрх cos р + у Дрп sin р 1 гло о . до .
ДРп =--------—-------------------- =-----т- ДРх х cos р + Др/7 у sin р =
r xcosp + i/sinp d 1 г г rj
= — (Дрх cos2 р + Др^ sin2 р).
Ошибки АВС с последовательной схемой включения
АВУ в цепи ОС
Наследственные ошибки. Пусть координаты х и yt имеют
ошибки Дх, Д//;- (/ = 1, 2, 3, . . ., /). Тогда на основании (87)
можно написать уравнение ошибок:
i
AzH П ц,- (yj) 4- Z {|Лор4 (t/i) Аг/ф2 Ц/г) • • • Н< +
/=0
+ HoHi (t/1) Иг (t/2) At/2 • • • Hz + HoHi... И/ (уI) &У1} — Их Ax = 0.
Отсюда находим искомое соотношение
AzH = -^ Ах —z X М/^Ду,,
Нос /=1
где
Нос = HoHi Ы Из (г/з) - • - Hz Ы; '
М'.мл- 1
И/(^) ду.
(91)
(92)
Пример 18. Найти трансформированные значения ошибок схемы, решающей
уравнение относительно а:
R а cos е — х = 0
при наличии ошибок Дх, &R и Де.
7*
99
Полагаем
z = а, р,о = 1, р-j (е) = cos е, р2 (/?) =
На основании формул (91) и (92) получим
Лан =
1 • Дх — арос Де
L Pi
_р£
Р2
Рос
Дх Г sm 8 д , Д/? 1
-------а Де + —=г-
Рос----L COS 8-/? J
-7^—Х--------а [д/? — Де tg е].
R cos е 1 5 J
Машинные, инструментальные ошибки. Параметрические
ошибки. Пусть каждое из АВУ цепи ОС, в том числе и элемент
сравнения (суммирования), имеет первичные ошибки
ni
Эти ошибки действуют на выходе каждого из АВУ, как пока-
зано на рис. 37. Для частного случая I — 3 можно написать
Aza = Ае —,
9 Р
где
Ае = Az?x — Az90 — Azglp0 — Aza2p0Pi —
• — Azg3p0p1p2 — Az„p0p1p2p3.
После подстановки получим
AZg (1 --j- PoM'lP'sP's) — p (j-^qx Az^2p3Pi
— Az^PoP^a).
106
Отсюда для установившегося состояния системы (р —> 0)
находим
3 /-1
\Zq=^\ZqK- 2дг?/П рг (93)
Нос 4 /=о ч' г=о
1-1
При / = 0 принимается П рг = p_j = 1.
Обобщая результаты для I АВУ, после преобразований полу-
чим искомое соотношение:
пх I ni
^zq = -^-x^K (Qi) — z 2 X (94)
Hoc 1=1 /=0 1=1
В самом деле, параметрическая инструментальная ошибка
/-го АВУ
Az?/ = z-s 2 (95)
Но
Нос
Z/ = Zp;p/+1 . . . Pz = Z pyp/+1. . . Pz =
= z РоеР/Рм • • • pi z . (96)
H0H1 • • • H/H/+i • • HZ z-1 v ’
11 Hr
r=0
После подстановки выражений (96) и (95) в (93) получим со-
отношение (94).
Принципиальные ошибки. Эти ошибки действуют по той же
схеме, которая представлена на рис. 37. Используя соотношение
(94), можем написать:
1 Г 1-у /-1 ’
А^п= тг I"! Иг •
Hoc L /=0 r=0 J
При j = 0 здесь также принимают
/=1
П Рг= Н-1= 1-
г=0
Пример 19. Определить инструментальную точность работы отрабатывающей
следящей системы, схема которой представлена на рис. 38, полагая, что имеют
место ошибки A7?x, ДТ?2’ Д7?о, &Е и ошибки намотки потенциометра бг2.
Для данной схемы можно принять
z — х = 0; |lix = 1; Hi = Н Но = 1J Нос = И
тогда на основании формулы (94)
и . п.
пх / 1
Ъл = х Хх (qi) bq, — z 2 Б Ki 8qi-
1=1 /=о i=i
Условию j = 0 соответствует элемент сравнения, а условию / = 1—потенцио-
метр отработки.
101
Определение X (qi).
1. Определение Хх:
2. Определение Хо:
Хх (7?) = 1, Хх (7?т) = -1.
Хо (7?) = 1, Хо (7?0) = -1.
Рис. 38. Принципиальная схема отрабатывающей следящей системы:
СУ — сервоусилитель; М — двигатель
Имеем
U г — Е
Г2^0
+ Г2^П Г2
Отсюда
г _ &2 Е___________Г2^0______.
1~ вг ~ ег R0Rn+rzRn-rl ’
1 /р \ _ Гг^ц г*
л /п \ _ _ 7?n(7?o + rz)
«п^О + гг
^1 ___ 7?;____________________
К дгг - гг RnRQ + Rnrz-r* ’
, (F\ - Е 9kl - 1
(£) ~ k, дЕ ~ '
Следовательно,
Дг„ = х (6R - 6/?г) — г [(<57? - 6R0) + (£) б£ - XJ (гг) 6^ +
+ X(R0) 6R0 + Xj (7?п) 6Rn ] = -xSR, - г [6R0 [Xt (Ro) - 1 ] +
+ Xi (E) 6E + Ц (rz) Ьг*г + Xi (7?n) 6/?}n>f
в силу того, что 67? (х—z} = 0.
Глава V
ДИНАМИЧЕСКИЕ ОШИБКИ
1. ДИНАМИЧЕСКИЕ ВЫЧИСЛИТЕЛЬНЫЕ УСТРОЙСТВА
И ДИНАМИЧЕСКИЕ ОШИБКИ
Аналоговые вычислительные устройства, называемые динами-
ческими, описываются дифференциальными, интегро-дифферен-
циальными или дифференциально-разностными уравнениями и
являются, как правило, инерционными.
Характеристикой таких устройств является уже не коэффи-
циент передачи k, а передаточная функция W(p).
Как известно, передаточная функция W(p) устанавливает
связь между операторными преобразованиями (по Лапласу)
входной х (р) и выходной z (р) величин.
В дальнейшем будем пользоваться понятиями и аппаратом
операционного исчисления, принятыми в -теории автоматического
регулирования.
Ошибки статических и динамических АВУ в динамическом
режиме будем называть динамическими ошибками.
Динамическая погрешность АВУ связана с тем, что проте-
кающие в нем процессы зависят от времени. Если можно выразить
величину на выходе статического АВУ в виде зависимости от фи-
ксированных значений аргументов:
Z = и = F (0^; q^ q2- . . qn),
а на выходе динамического АВУ — в виде зависимости от теку-
щих (мгновенных) значений тех же аргументов и времени t:
z(t) = U(t) = Ft (©,; 7; qx- . . qn),
то под динамической погрешностью будем понимать разность
между изменяющейся во времени функций Ft и значениями функ-
ции F при фиксированных параметрах и аргументах для тех
мгновенных значений времени, для которых происходит оценка
ошибки, т. е.
AZ7 (0 = и [/; 0/, МО; • • qn(t)]_
— и (®У; <71....<?«)•
Полная погрешность, или эксплуатационная ошибка, вычисли-
тельного устройства в динамике является, как правило, неста-
ционарной случайной функцией времени Аг (/). Однако во многих
103
случаях инженерной практики динамические процессы, протекаю-
щие в течение сравнительно короткого отрезка времени решения
задачи, можно приближенно рассматривать как стационарные
случайные процессы, что позволяет применять к ним достаточно
хорошо разработанный аппарат корреляционной теории случай-
ных функций. Дальнейший материал изложен применительно
к таким процессам.
В этом случае корреляционная функция /С (т) является функ-
цией одного аргумента т = t2 — t19 а спектральная плотность
и дисперсия определяются выражениями (19) и (20).
Рассмотрим инструментальные динамические ошибки, а также
их трансформацию на выход АВС.
2. ИНСТРУМЕНТАЛЬНЫЕ ДИНАМИЧЕСКИЕ ОШИБКИ4
Как и в случае статических ошибок, динамические инстру-
ментальные ошибки можно разделить на параметрические, гене-
рированные и принципиальные (см. табл. 1).
Рассмотрим некоторые из этих ошибок.
Инструментальные параметрические ошибки
К инструментальным параметрическим ошибкам относятся
производственные ошибки параметров qt коэффициента передачи k
физической модели:
или
Az, = z X (<?,) 6^,
1=1
где % (gz) — коэффициент влияния погрешности параметра qt
на общую погрешность Az,.
Как указывалось ранее, сигнал на выходе динамического АВУ
определяется функцией передачи Ф (р, q), характеризуемой
параметрами
^вых (Р) = ^вх (Р) ® (Р> Р)-
Инструментальная параметрическая динамическая ошибка
в этом случае будет
Az, = z АФ (р, q),
где ДФ (р, q) — отклонение действительной функции передачи
от идеальной (эталонной), называемое часто
погрешностью осуществления системы.
Рассмотрим эту ошибку подробнее.
104
Пусть идеальная передаточная функция динамического АВУ
выражается формулой
ф (п\ — 1)' ’ ’ (aiP 4~ Г)
W (b1P+\)(b2p+\)...(biP+\) •
Соответствующая частотная характеристика
Ф (а _ (“i/® + 1) (а2/“ + 1) • • • + 1)
4 (й1/(о+1)(б2/й)+1)...(г,//ш+1) •
Модуль этой характеристики, называемый амплитудно-частот-
ной характеристикой,
| Ф (/со) | = Л (со)
У ф2 + 1 Уа^ + 1 • • -У ф2 + 1
У b\®>- +-1 ]/ ф2 + 1 • • -|/ф2 + 1
(97)
Отклонение амплитудно-частотной характеристики, вызван-
ное отклонениями параметров Да,, Ад;-, выражается ’ полным
дифференциалом:
п т
ЛЛ(»)=£афл»,-£фл(,,. (98)
Г=1 /=1
Продифференцировав выражение (97) по параметрам Ь}
и заменив дифференциалы в выражении (98) приращениями, полу-
чим следующее выражение для относительного отклонения ампли-
тудно-частотной характеристики:
п
£ л , ч АЛ (со) VI Я/СО2
т
Аналогичным образом определяют отклонение фазо-частотной
характеристики 6<р (со) от идеальной.
На высоких частотах при со —> оо выражение (99) сводится
к виду:
п tn п т
м = Е - S У = S 6о‘ - Е
1=1 /=1 7 1=1 /=1
Параметры су, bj частотной характеристики (97) являются
обычно постоянными времени типа RC, отклонения которых
за счет допусков Д/?, ДС соответственно равны
\cti = Ri \Ci
При гармоническом входном сигнале вида g (/) = fm sin со/
на выходе АВУ также будет гармонический сигнал вида
^вых (0 = (^вых)тах (w^ 4“ ф), (100)
105
где (z1,bIX)max и <р определяются по общим правилам с помощью
частотных характеристик динамического АВУ:
(^вых)тах == АпА (®),
ф = arg Ф (/со).
При наличии отклонений в частотных характеристиках
гВых (0 = fm 1А (®) + ЛА (со)] sin (со/ + ф + Лф).
Величины
Az, = fm ЛА (со);
л V 9Ф л (Ю1)
1=1
определяют инструментальные динамические амплитудные и фазо-
вые погрешности, вызванные отклонением параметров. Зная
зависимости (101), можно определить ошибки как при регулярном,
так и случайном сигнале.
При случайном входном воздействии со спектральной плотно-
стью Sx (со) дисперсия инструментальной динамической ошибки
определится общей формулой: .
D [Лг„1 =4'1।бЛ 12Ло-
о
(102)
Следует уточнить, что (со) в последнем выражении может
быть спектральной плотностью как полезного (управляющего)
сигнала, так и помехи, однако в обоих случаях величина, вычис-
ляемая по формуле (102), определяет динамическую ошибку
осуществления АВУ.
Пример 20. Пусть для операции дифференцирования используется диффе-
ренцирующе-сглаживающее устройство,, схема которого представлена на рис. 16,
с передаточной функцией
ф(р)=тт^’
где а = b = 7?С.
Определить амплитудную погрешность дифференцирования сигнала f =
= В sin со/, вызванную погрешностями резисторов 7?, Ro и конденсатора С;
В = 5°, со = 3,14 1/с.
Параметры схемы: Ro = 100 кОм, а = RoC = 0,1 с, R = 10 кОм; b —
= RC = 0,01 с, С = 1 мкФ.
Допуски на номиналы: 6Ro = 6R = 0,5%, 6С = 1%.
Соответствующая амплитудно-частотная характеристика:
А (ш) =
асо
/1 + 62со2
Полный дифференциал ДЛ (со) может быть получен по формуле
ДЛ (со) = . ...Ю________
V1 + &2ш2
Да —
бсо2
1 — 62С02
ДЬ,
106
где
Да = R0AC + ДРоС = (100-0,01 + 0,5-1) 10*3 = 0,0015 с;
Д&= RAC + ARC = (10-0,01+ 0,05-1) 10~3 = 0,00015 с,
так как
ARo = 6R-Ro = 0,005-100 = 0,5 кОм;
AR = 6R-R = 0,005-10= 0,05 кОм;
АС = 6С- С = 0,01 • 1 = 0,01 мкФ.
Подставив количественные значения параметров в выражение для полного
дифференциала, получим
4 14 О 01.4 142
АЛ (со) = - ___=- 0,0015 - • ’ ГН" 0,00015 = 0,00468.
К 1 —0,012-3,142 1 —0,012-3,142
Величину АЛ (со) подставляем в первое выражение (101).
Следует заметить, что поскольку для физической модели величина Ф (р)
безразмерна, для вычисления инструментальной ошибки дифференциатора
по формуле (101) вместо fm необходимо подставить fm:
&Zn = fm АЛ (и) = Дп^АЛ (ы) =
= 5°-3,14-0,00468 = 0,0757с.
Пример 21. Для схемы дифференцирующе-сглаживающего устройства
(см. рис. 16) определить инструментальную параметрическую погрешность диф-
ференцирования в установившемся режиме при наличии погрешностей рези-
стора Rо и конденсатора С.
Воспользовавшись результатами примера 4, запишем: Ф(р) = —RoCp.
По формуле (70) находим
MRo)=^^ = -4c(-C) = !;
к Oi\q — AgO
* (С) = Т = ~7Гс (“ Ro) = 1 •
Следовательно,
Дг9 = г (6R0 + 6С) = рх (6R0 + 6С).
Инструментальные генерированные ошибки
Во входных цепях и цепях обратной связи АВУ часто исполь-
зуют многовитковые резисторы и микропроволочные потенцио-
метры, представляющие собой элементы с распределенными пара-
метрами. При расчете динамических режи- мов необходимо учитывать имею- щиеся паразитные параметры (емко- сти), вызывающие погрешности. Это ППРтигадтга псппttlocdашлдм pvoai Таблица 11
Номина- льное со- противле- ние, Ом Эквивалентная емкость, пФ, резисторов типа
МВСГ мгп МРГ4
мещения, представленных на рис. 39. ю» Значения эквивалентной емкости Ю5 Сэ приведены в табл. 11 [23]. Рассмотрим для примера использование i замещения для определения генерированной грешности двух АВУ: копирующего (масштабнс 15 4 чриведе динами >го) и и 1 0,1 ИНЫХ [ческо нтегр: 1 0,2 схем й по- ирую-
щего.
107
Пример 22 *. Схема замещения копирующего звена приведена на рис. 40,
где введены обозначения: Сх — емкость резистора входной цепи С2 — ем-
кость резистора обратной связи Т?2; С3, С4 — емкости схемы замещения потен-
циометра; Св, С9 — емкости монтажных проводов.
0
Рис. 39. Схемы замещения
Рис. 40. Схема замещения копирующего звена
Передаточной функцией этого АВУ является выражение:
ф (п] =
К W ggz + Р (ёгС + gC2) + р2С2С ’
С= Сх+ С4+ Св+ С7; С7 = С3+ С6;
Si = ^- (f = 1, 2, 3, 4); g = gl + g3+gi-.
При отсутствии паразитных емкостей передаточная функция идеального
копирующего (масштабного) звена
фк (0) = .
v ' SS t.
Тогда, воспользовавшись введенным ранее понятием передаточной функции
ошибки, запишем
Д?к (р) = X (р) Фб (р).
При гармоническом х (/) модуль и фазу ошибки можно вычислить согласно
выражению (101), принимая ДА (со) = | Ф6 (/со) |, Дер (со) = аг§Ф$ (/со), при слу-
чайном стационарном х (t) — согласно выражению (102).
При х (/) произвольного вида, характеризуемом лишь тем свойством, что
его модуль ограничен, а сам сигнал имеет конечные значения всех своих произ-
водных на интервале времени наблюдения, для определения Дгк (/) можно вос-
пользоваться приведенным ранее методом коэффициентов ошибок, согласно
которому
со
Дгк(/) = 2 Cnx<n>(t)
п=0
ИЛИ
Yl®kn)(0)
AZk(Z)= ni x<n4t}- (103)
* В примерах 22, 23 использованы материалы работы [15].
108
Относительная динамическая инструментальная погрешность
6ZK (/) = = _^£К_(О_ = ____1___ V* _j_ ф(п) 7Q4 (П) 7^4 /|04ч
kU RK(/)]max Л*Фк(0) МФк(о) 2j nl 6 ( ) (°' ( '
п=0
Величина М, входящая в выражение (104), представляет собой предельное
значение модуля воздействия:
М = sup | х (/) |.
t
По формулам (103), (104) могут быть получены выражения, определяющие
абсолютную AzK (/) и относительную 6zK (/) инструментальные погрешности
копирующего звена как функции времени.
Однако в большинстве практических задач представляет интерес максималь-
ная величина погрешности за время работы | 6z (t) |max.
Для оценки этой величины удобно пользоваться известной формулой
|6z(0|max^—Ь1_------------, v (105)
i- S im a* 1'
где Ui, b(.— коэффициенты при pl полиномов порядка n и tn числителя и знаме-
нателя передаточной функции Ф$ (р)/Фк (0);
Q — параметр входного сигнала, характеризующий интенсивность
роста (или спада) воздействия:
Q = sup 1/ sup l^pl • (106)
0<£<ОО r 0</<oo I ™ I
Для некоторых элементарных воздействий значения параметра Q приведены
ниже: Вид сигнала Q 1(0 0 a
со
k sin со/
k cos со/
со
п
b
ktn(O<t<b\
п = 1, 2, . . .
Используя формулу (105) для копирующего звена, получим
Фд (р) = Фк (Р)-Фк (0) =
Фк(0)
Сх С
Фк(0)
^2 \ _|_
ё1 ё ё2 /
р
£1 ^7 _____ ^*2 I Q2
ё1 ёз g I
Q2
I ^7 I С1_Q___^2
I g3 ё1 ё ё2___________
1 — I — +1 □ — Iк
I g g2 I I g2g I
(107)
109
Для малых величин погрешностей можно упрощенно воспользоваться
только первым членом числителя
I (Отах | ~ | КзС, + R& - R2C2 -RC\Q. (108)
Из выражений (107), (108) видно влияние каждой паразитной емкости на
величину погрешности. Пользуясь полученными выражениями, можно компен-
сировать динамическую ошибку путем дополнительно включенных емкостей.
Аналогичным образом может быть найдена динамическая
ошибка, вызванная паразитными параметрами (емкостями) для
интегрирующего звена, представленного на рис. 41.
Ррс. 41. Схема замещения интегриру-
ющего звена
Пример 23. Передаточная функция этого АВУ имеет вид
(i+p-M(i+p^)
pceg (i + р —)
где
= = 1. 2, 3); g = gi + g2 + g3;
(Ю9)
С — С, + С2 + С3 + С4 + С5; С, — Сг + С3.
По аналогии с копирующим звеном передаточной функцией ошибки будет
разность между реальной передаточной функцией (108) и передаточной функцией
идеального интегратора:
Г ^7 С5 р2 | ( С7 । ^5 | Св \ р 1
Фб (Р) = Ф (Р) - Фи (Р) = Сб8 gl 83-------- V gl §3----------gj_l .
Изображение по Лапласу абсолютной ошибки интегратора
Дги (р) = х (р) Ф6 (р).
Как и для случая копирующего звена, найдем отношение
С? Се „2 । ( С? I _£з_ _ \
Фб(Р) = gigs \ gi gs g )
Ги (Р) , j А „
’ g Р
ПО
Введя параметр сигнала QH, аналогичный параметру Q для копирующего
звена, получим выражение максимальной относительной ошибки интегратора.
Не учитывая составляющие второго порядка малости, приближенно запи-
шем:
I & (^)и Imax^ I —— Н— ----~~ I
I gi ёз ё \
(НО)
Параметр для интегрирующего звена определяется выражением
(Н1)
Для первых четырех видов сигнала, приведенных выше, параметры Q и QH,4
вычисленные по формулам (106) и (111), совпадают; для последнего сигнала х (/) =
= ktn параметр
С помощью выражений типа (108), (НО) могут быть получены оценки дина-
мических погрешностей, обусловленных наличием паразитных параметров, для
довольно широкого класса входных сигналов, характеризующихся пара-
метрами М и Q.
Принципиальные инструментальные динамические
ошибки
В соответствии с терминологией, принятой в гл. I, к прин-
ципиальным динамическим ошибкам АВУ отнесём ошибки, выз-
ванные реализацией передаточных функций, приближенно аппро-
ксимирующих формулы метода.
Пусть Фэ (р) — заданная (эталонная) функция передачи АВУ.
Так, например, для следящих систем Фэ (р) = 1, для дифферен-
циатора первого порядка Фэ (р) = р, второго порядка Фэ (р) =
= р2, для интегратора Фэ (р) = 1/р и т. п.
Пусть также по ряду соображений в конструкцию АВУ зало-
жена другая, близкая к эталонной, но неравная ей функция Ф (р).
Тогда разность Ф6 (р) = Ф (р) — Фэ (р) является передаточной
функцией ошибки (влияния полезного сигнала на ошибку системы).
Для любого входного сигнала х £р) изображение ошибки
на выходе устройства имеет вид
Д (п) = х (р) Ф6 (р).
Для анализа процесса изменения ошибки во времени доста-
точно знать его вынужденную составляющую, которая предста-
вляет собой ряд
6 (/) = Сох (0 + С^х (0 + С2х (/) 4- • • • Сг-^г~^ (/). (Ц2)
111
Коэффициенты ошибки Со, С1( . . Сг_х удобно вычислять
одним из двух способов: дифференцированием передаточной
функции ошибки^
Сп =
' *пФ6 (р) '
n!dp(n) Jp4.0
где п = 0, 1, 2, . . г
или определяя каждый последующий член Сп по известным пре-
дыдущим Со, Сх, .... Сп_х\
Со = ПтФ6(р);
р->0
Сх=Нт4-[Ф6 (р) —Со].
р->0 Р
В общем виде
1 Г П-1 .
С„ = 1йп4 Фб(р)-2с(р‘
р L i=i
(113)
Пример 24. Определить принципиальную ошибку и сигнал на выходе реаль-
ного дифференцирующего звена с передаточной функцией Ф (р) = р/(Тр + 1)
при входном регулярном воздействии g (/) = /3/6.
Эталонная функция передачи дифференциатора Фэ (р) = р имеет неблаго-
приятную частотную характеристику в области высоких частот, в которой со-
ставляющие полезного сигнала часто отсутствуют, и входной тракт заполняется
преимущественно помехами. Поэтому реальный дифференциатор выполняют
в виде дифференцирующе-сглаживающего устройства (ДСУ) с некоторой постоян-
ной времени Т.
Для ДСУ имеем
/2
£(0 = -^; = h
Ф6(р)=Фэ(р)-Ф(р) =
Согласно (113) запишем коэффициенты ошибки:
Со = Фб (0) = 0;
г ^Фб(Р) I Т2Р2 + 2Тр |
1 dp |Р=о (Тр+1)2 |Р=о и’
с &Ф6(Р) I Т |
2 2! dp2 |р—О (Гр + 1)3|Р=о ’
z, I =__ZL_| __r2
3 31 dp3 |р=о (Тр 4-1)4|р=о
Подставляя в (112) значения коэффициентов ошибки и соответствующих
производных, получим выражение методической ошибки определения скорости
• /3 /2
= 0-g- + 0 — + Tt — T2 = Tt — Т2.
112
Из последнего выражения видно, что методическая ошибка в данном при-
мере линейно нарастает во времени.
Сигнал на выходе дифференциатора является суммой истинной производной
входной величины и методической ошибки:
. . /2-
G (0 = g (f) + « = -^ + П - Г2.
Коэффициенты ошибок Со, С1? С2, С3 называются соответственно коэффи-
циентами ошибок по положению, скорости, ускорению и т. д.
Из выражения для Ag видно, что реальный дифференциатор не имеет пер-
вых двух составляющих ошибки, т. е. является полностью компенсированным
по положению и по скорости, но имеет динамические отставания по ускорению
и по третьей производной.
Принципиальные инструментальные динамические ошибки
могут быть обусловлены недостатками, присущими конструкции
или схеме АВУ при его работе в динамике. Как уже указывалось,
в силу специфики этих ошибок и отсутствия общей теории расчета
их оценку следует производить для каждого конкретного АВУ.
Примером такой ошибки может служить погрешность потен-
циометра в динамическом режиме.
Динамические ошибки точных потенциометров, применяемых
в АВУ, возникают при движении его щетки и порождаются целым
рядом причин. Они носят случайный характер и в целом могут
быть описаны корреляционной функцией ошибок вида:
Кд2(0) = С2 (е-а,е| + T)e-v|e 1 cosy©), (114)
где © — угловая координата движка потенциометра (О 1).
Из выражения (114) видно, что корреляционная функция
К (©) зависит от положения движка потенциометра ©. .Для пере-
хода к временной корреляционной функции следует учесть закон
изменения входной величины ©. Тогда выражение (114) можно
записать в виде
КДг (т) = с2{ е-?1 т9' w т 1 + ne“v 1 х 1 cos [/nY<p' (/) т]),
здесь ср' (/) — средняя скорость изменения координаты; т —
масштабный коэффициент.
Спектральная плотность динамических ошибок потенциометра
находят по общей формуле. Опуская выкладки, приведем оконча-
тельное выражение:
' S = 9Г2 / атч>' 4- Г__________________________!______— Д.
Лг ' | (а/иф)2 + со'2 ‘ 2 [ (vzmp')2 + (со + jmtp')2
+ (v^)2-}-^ —дтр')2 ]} '
Динамическая ошибка, спектральная плотность которой опре-
деляется этим выражением, зарождается в потенциометре в дина-
мическом режиме. Если сигнал затем проходит через другие АВУ,
то эта ошибка трансформируется по общим правилам.
® Э. И. Соренков 113
В целом следует отметить, что у точных потенциометров вели-
чины динамических ошибок значительно меньше, чем статических,
и имеют более высокочастотный спектр. Их необходимо учитывать
только при работе с малоинерционными электронными устрой-
ствами.
3. ТРАНСФОРМАЦИЯ ДИНАМИЧЕСКИХ ОШИБОК
В данном разделе рассмотрены ошибки на выходе АВУ, выз-
ванные случайными ошибками на входе, в динамическом режиме,
т. е. наследственные динамические ошибки. При их вычислении
будем пользоваться аппаратом теории случайных функций, при-
веденным в п. 8 гл. I.
Для АВУ, являющегося дифференциатором порядка s, наслед-
ственная динамическая ошибка
AzH = |iopsAx, (Н5)
а для динамического АВУ с передаточной функцией W (р) —
в соответствии с выражением (24) наследственную ошибку находят
из выражения
5д,н (со) = 5дх(со) | Ц7(/со) |2.
Рассмотрим эти случаи подробнее.
Безынерционное АВУ
Если известны корреляционные функции первичных входных
ошибок, то корреляционная функция наследственной ошибки
может быть получена по общему правилу.
Так как
Az = Ах + 4^- Ау,
дх ' ду
ТО
Кь? (i)=M [Az (/) Az (t + т)] =
= (^- Дх(/) + (0) (-1 Дх(/ + т) + -g- Ду (/ + г))] =
= М [ (-g- )2 Дх (0 \х (t + т) + -g- -g- Ду (/) Дх (t + г) +
-g- Ц- Дх (0 Ду (/ + т) Ду (О •
Учитывая, что
М [x(t)x(t +т)] = Кх (т);
М [х (0 у (I +т)] = КА.у(т);
М [y(t)y(t +т)] = ^(т);
М [у (0 х (t +т)1 = К^(т),
114
получим
(т) = (» Яд, (Т) 4- (-^)>Ду (Т) 4-
+ V^y (т) + К^х (т)], (116)
где /СДх, — автокорреляционные функции первичных оши-
бок Дх, Ду;
К^у, — их взаимные корреляционные функции.
Если первичные ошибки АВУ Ду и Дх являются некорреля-
ционными (независимыми), тогда взаимные корреляционные функ-
ции
^дх(т) = ^дДт) = 0, (117)
а выражение (116) ограничивается двумя первыми членами.
В соответствии с общими выражениями может быть получена
спектральная плотность наследственной ошибки Sa?h (со) Но
спектральным плотностям первичных (входных) некорелирован-
ных ошибок (со) и S^y (со) для безынерционного АВУ:
Зд2„ (<>) = (0>) + (<0). (118)
Интегрируя выражение спектральной плотности (118), можно
вычислить дисперсию наследственной динамической ошибки сог-
ласно выражению (20).
Необходимо сделать следующее замечание. Даже при отсут-
ствии корреляции между первичными случайными ошибками Дх
и кух применение операции z (х, у), в результате которой обра-
зуются новые переменные z/( zk, может привести к образованию
взаимных корреляционных связей между ошибками Дг,-, &zk,
что необходимо учитывать при пользовании выражением (116).
Например, пусть необходимо решить зависимости:
Zj = d (/) sin р (t); .
, . z2 = d (0 cos p (/)•
Записав наследственные ошибки величин Дгх (t), &z2 (0
по общему правилу в виде полного дифференциала, получим
Дгх (/.) = Ad (i) sin р 4- d cos рдр (/);
Дг2 (0 = AcZ (t) cos p — d sin рдр (0.
Найдем выражение взаимной корреляционной функции ошибок
величин Zi и г2.
Согласно определению корреляционной функции имеем
ЛГдг„ дг2(т) = М [Дгх (/) Дг2 (t + г)] =
= М([Ad (0 sin р 4- d cos р (/) ] [Ad (t 4- О cos p —
8*
115
— d sin 0A0 (t + r) ]) = M [Ad (f) Ad (t + t) sin 0 cos 0 +
+ d cos2 0A0 (0 Ad (t + r) — Ad (/) Д0 (t + t) sin2 0d —
— d2 sin 0 cos 0Д0 (0 Д0 (t + t) ].
Взаимная корреляционная функция независимых ошибок
Адрд d ft) = Кь </др (т) = Л4 [Д0 (0 Л d т)] =
= М [Ad (0 Д0 (/-J-т)] = 0. .
Тогда
Х'дг1дгг (т) = Км (т) sin 0 cos 0 — d2 sin 0 cos 0 Кдр(т) =
= sin 0 cos 0 [Km (t) — d2K\f, (?)]•
Соответствующая взаимная спектральная плотность
5дг,дг2 (со) = sin 0 cos 0 [SAd (со) — d2SifJ (со)].
Дифференциатор
Для идеального дифференциатора (интегратора) порядка s
корреляционная функция наследственной ошибки имеет вид
a2s
Кдгн(т) = (-1ГНо^г*Дх(т). (И9)
Соответствующую спектральную плотность получим по извест-
ному правилу дифференцирования случайной функции
Sa2h (со) = p0g)2sSax(co). ' (120)
Инерционное АВУ
При вычислении наследственных ошибок на выходе инерцион-
ных устройств при воздействиях в виде случайных функций сле-
дует пользоваться общей формулой (24) преобразования случай-
ных процессов линейной динамической системой.
Пример вычислительной схемы с инерционными динамическими
звеньями Ф1(р), Ф2(р) представлен на рис. 42.
Учитывая взаимную корреляцию в величинах Azx и Д?2,
порождаемую вычислительной операцией z (х, у), аналогично
изложенному выше, можно записать спектральные плотности
ошибок на выходе динамических „звеньев:
SaZ1 вых (со) = SaZ1 (О)) IФ1 (/со) I2 + SaZ1az2 (со) IФ1 (/со) I2; 1 ?
Saz2 вых (О)) = Saz2 (СО) I ф2 (/СО) I2 + Sa21 Az2 («) | Ф2 (/«) |2, J ( '
где Sa21 (со), 5д22 (со) — спектральные плотности ошибок на
выходе АВУ, связанные со спектрами ошибок на входе (при отсут-
ствии корреляционной связи) соотношениями
Sa21 Н = 5д*и(4|)2 + 5дДо4(4У; .
,дг v V (122)
«дг,(ф) = 5дх(«>)(» + $дД<о)(->) .
116
Из соотношений (121) и (122) видно, что спектральная плотность
ошибок на выходе динамического АВУ, а следовательно, и диспер-
сия этих ошибок, определяется как видом решаемой операции
2 (х, у), так и передаточными функциями (частотными характе-
ристиками) АВУ. Это обстоятельство следует учитывать при ана-
лизе прохождения сигналов (ошибок) через динамические звенья
с узкой полосой пропускания.
В этом случае может оказаться, что нет необходимости стре-
миться к минимуму дисперсии ошибки на выходе АВУ. Ошибка
со значительной дисперсией может трансформироваться на выходе
динамического звена в меньшую ошибку, чем другая, меньшая по
дисперсии ошибка на выходе АВУ. Это имеет место в тех случаях,
Рис. 42. Пример прохождения ошибок через динамическую систему
когда спектр ошибки с большой дисперсией на выходе АВУ
является более высокочастотным, чем полоса пропускания после-
дующего динамического звена, а спектр ошибки с меньшей диспер-
сией лежит в пределах этой полосы пропускания. Естественно, что
в последнем случае целесообразно добиваться минимума средне-
квадратической ошибки на выходе АВУ.
Рассмотрим несколько примеров расчета наследственных дина-
мических ошибок.
Пример 25. АВУ решает зависимость
z = J xdt — р~1х.
Определить ошибку интегрирования при наличии ошибки входной величиныДх.
Согласно формуле (115) имеем:
Дгн = Р-1Д* = j Дх dt.
Если, например, Дх — систематическая ошибка в измерении скорости
Ди = 0,1 м/с, то наследственная ошибка в координате, накопленная за время
интегрирования Т = 10 мин, составит
т
Д?н = j Ди dt = ДиТ = 0,1 м/с-600 с = 60 м.
о
Пример 26. На вход идеального дифференциатора поступает величина х (/)
с ошибкой Дх (/). Ошибка на входе дифференциатора Дх (/) характеризуется:
117
корреляционной функцией
^(т) = а2е-“2^;
спектральной плотностью
с . . ло2 “4а2
5Лг(со) =-----— е
Лх 2а К л
Определить дисперсию ошибки на выходе дифференциатора.
В данном примере определим дисперсию ошибки двумя способами.
1-й способ (по спектральной плотности). Согласно формуле (120) имеем
_ 6)2
Sa2h(o>) = со25дх(<о) = <о2е 4“2 ;
2аи л
со со <д)2
D141 =т J 5дгт (ы) Iе 4“2 d“-
о о
Определенный интеграл в последнем выражении является табличным и ра-
вен- (2а)3 .
Тогда дисперсия
D [Д?н] = 2о2а2.
2-й способ (по корреляционной функции). Согласно формуле (119) имеем
„ _ ^Ах(т)
------
Дифференцируя /СДд. (т), получаем
dr
продифференцировав второй раз, получим
/Сдз (т) = 2а2о2е“а2т2 (1 — 2а2т2).
Согласно формуле (20) имеем
D [Дгн] = Кд2 (0) = 2а2о2.
Как и следовало ожидать, результаты расчета двумя способами совпали.
Пример 27. На вход реального интегратора с передаточной функцией
7>ТТ‘Г»"
поступает сигнал помехи с корреляционной функцией Кдх (т)=о2е “а(т).
Определить дисперсию ошибки на выходе интегратора.
Соответствующая спектральная плотность
с / \ _ 2а2<х
5дх (и) - (ав + .
Частотная характеристика рассматриваемого звена
w^-Ti^+T-
118
Квадрат модуля частотной характеристики
Спектральная плотность ошибки на выходе звена согласно (24):
е ( \ _ 2а2а
Лг (W) - (а2 + (Г2ш2 + .
Дисперсия ошибки
ОО оо
D [ Дг] = ~ J 5лг (со) d“ = ~л~ J (а2 + со2) (Taco2 + 1) •
О о
Взяв последний интеграл с помощью разложения на простые дроби, получим
ст2
Пример 28. АВУ решает зависимость z — d cos Р, dmin = 0, dmax = 100 км,
Р = 0 — 360°.
Ошибки входных величин являются случайными процессами с дисперсиями
D [Ad] — 2 м2; D [ДР] = 0,01 град2 и взаимно независимы.
Определить среднеквадратическую величину наследственной ошибки о [Агн].
Так как АВУ безынерционно, воспользуемся формулой (118).
Заменим спектральные плотности дисперсиями:
/ дх \ 2 / dz \ 2
D[AzH]=Z)[Ad]^) +D[^](^
dz о дх . . о
—- = cos Р; = — d sin Р;
dd dp
D [AzH] = D [Ad] cos2 p + d2 sin 2pD [Ар].
Переведя D [АР ] в радианы, получим
to 1Др]]Рад = л2р [А^2[град2]3-10-6 рад2-
1802
Для случая d = dmax; Р = 45° получим
D [AzH] = 2-0,72 + 100 000-0,72«З-10-e^ 1 + 0,15 м2 = 1,15 м2;
о [AzH] = /D [AzH] = /Ц5 = 1,07 м.
Пример 29. На входе дифференцирующе-сглаживающего устройства (ДСУ)
второго порядка с передаточной функцией
где Т — 0,4 с, действует флуктуация «белый шум» с уровнем S (со) = С2 = 0,4Х
X10"б рад2«с.
Определить дисперсию флуктуационной ошибки на выходе ДСУ.
Найдем амплитудно-частотную характеристику данного ДСУ
Я (О)) = | F (>) I = м ,
. / -t I Г2/Ш2+ * \
119
а затем дисперсию на выходе
Подставив числовые значения, получим
О 4-10“6
D [Лг] = 1,56-10-6 рад2/С2.
Глава VI
ЧИСЛОВЫЕ ХАРАКТЕРИСТИКИ ПЕРВИЧНЫХ
ИНСТРУМЕНТАЛЬНЫХ ОШИБОК СЦВМ
1. ПЕРВИЧНЫЕ ОШИБКИ СЦВМ
Источником первичных инструментальных ошибок СЦВМ
является ограниченная длина слова представления действитель-
ных чисел в машине.
К первичным ошибкам относятся ошибки оцифровки входных
данных и констант постоянного запоминающего устройства
(ошибки квантования по амплитуде); ошибки усечения машинного
слова (разрядной сетки).
Ошибки оцифровки возникают в результате преобразования
входной аналоговой величины в дискретные данные.
Предположим, что входные аналоговые величины заданы без
погрешностей, т. е. идеально точно. Непрерывную нормированную
до единицы машинную величину можно представить рядом в двоич-
ном счислении:
xH=Sa<2-i,
i=l
где а{ = 0 или 1.
В результате оцифровки аналоговая переменная хн предста-
вляется конечным числом разрядов п:
хп= L а/2-‘—7?,
«=1
где R — смещение; ниже будет показано, что при условии юсти-
' ровки преобразователей и округлении констант, зано-
симых в ПЗУ, R = —0,5 -2~п.
Ошибки усечения разрядной сетки возникают как результат
сокращения длины информационного слова после выполнения
операций умножения, деления, а также алгебраического суммиро-
вания с учетом масштабирования переменных; эти же ошибки
появляются при применении правых сдвигов к машинным опе-
рандам.
Таким образом, ошибки усечения появляются в результате
переработки информации в СЦВМ.
Будем различать процедуры простого усечения («отбрасывания»)
и усечения с округлением («округление»). Точность первой опера-
121
ции существенно йижё операций округления по вносимому смеще-
нию числа /?, тем не менее она заслуживает рассмотрения, так как
выполняется с меньшими затратами быстродействия или оборудо-
вания машины.
Существенным отличием процедуры усечения от квантования
по амплитуде (оцифровки) является зависимость точности операции
от числа отсекаемых разрядов т. Если т достаточно велико
(т > 1), то по своим характеристикам эти операции адэкватны;
в то же время при применении процедур усечения параметр т
может быть весьма ограниченным, при этом необходимо оценивать
вносимую погрешность. г
Ниже дан вывод основных формул для оценки возникающих
погрешностей при выполнении упомянутых выше процедур—оциф-
ровки и усечения. В качестве числовых характеристик погреш-
ностей используется математическое ожидание М [Ах] и диспер-
сия D [Ах].
При выводе искомых числовых характеристик первичных
ошибок Ах делается предположение о статистической природе
переменных; в частности, считается, что переменные заданы сле-
дующими вероятностными характеристиками.
1. Вероятностями ожидания появления единицы в каждом
разряде мантиссы числа:
Р la, = 1 ] - Л (а,).
Эту характеристику для краткости будем именовать «поразряд-
ной вероятностью».
Так как появление единицы или нуля в i-м разряде составляет
полную группу событий, то
Ро (аг) = (аД.
2. Вероятностями ожидания единицы в произведении двух
любых разрядов мантиссы
Р [a,af = 1 ] = Рг (а,а^,
i + j
Эту характеристику будем называть «корреляционной вероят-
ностью связи разрядов».
Очевидно, что имеют место свойства
Pi (а.а,) = Pi |
Pi (fli) = Pi (afit). |
С учетом этих свойств можно сделать заключение, что случай-
ное дискретное число хп считается заданным в статистическом
смысле, если известна в общем случае его корреляционная матрица
122
вероятностей
Рщ /) —
Л (ад) Л (ад) Л (ад) •Л(адг)
Pl (ад) Р1 (ад) ... Л (а2ат)
Л (ад) ... PJag^)
Р 1(^пг^пг)
состоящая из т (т + )/2 элементов.
В гл. I были получены матрицы для различных законов рас-
пределения случайных чисел указаны их свойства. Ниже,
в гл. VII будут рассмотрены законы распределения операндов
при исполнении арифметических операций в СЦВМ.
2. ЧИСЛОВЫЕ ХАРАКТЕРИСТИКИ ОШИБОК ОЦИФРОВКИ
Под ошибкой оцифровки (квантования) будем понимать раз-
ность
= хп — хн= 2 — R — У =
г=1 i=i
= t1[ai — ai]2-i— f — R = — S а{2~{— R. (123)
1 = 1 l=/2-|-l l=rt+l
Математическое ожидание этой ошибки
М[Д4(В = - S PMZ-i-R. (124)
1=П-|-1
Оцифровка осуществляется без систематической ошибки, если
выполняется операция юстировки, т. е. выдерживается условие
М [Ax„ ] = 0. Из этого условия находим величину смещения R:
R = — f P1(ai)2~i.
i=n-|-l
В п. 5 гл. I было показано, что для всех законов распределения
ошибок поразрядные вероятности равны 0,5 (i > п).
С учетом этого получаем
Таким образом,
R =— 2- ("+D = — 0,5 • 2-\ (125)
т. е. смещение равно половине дискрета квантования с обратным
знаком.
123
График зависимости хп = f (хн) приведен на рис. 43; там же
приведен и график ошибок.
С учетом (125) выражение для центрированной ошибки кванто-
вания (124) запишется в виде
Рис. 43. Графики зависимости кван-
тованной величины хп и ошибки
квантования Дхп от непрерывного
аргумента хн
(Дхл)кв = 2-<"+’>- 2
Найдем выражение для дисперсии
D[AxJKB = M (2- («+D-
со
—2 ^2-i' +
Или окончательно
S 00
Р[Дх„]кв = 2-2("+‘>-2-" 2 Л(а1)2“‘ +
+ S Л(«/)2-2Ч-2 2 P1(aiaj) 2~ . (126)
1=п4-1 1==л-}-1
Выражения (124) и (126) являются искомыми. Однако их можно
существенно упростить, воспользовавшись ' первым свойством
корреляционных матриц. Подставляя в эти выражения Рг (а() =
= 0,5' и воспользовавшись формулой (125), после очевидных
преобразований получим
М [Дх„]кв = 0;
л “ 1
D [Дх]кв = 2 Е Л (а,а/) 2" <*+'’)------i- 2~2 ("+1)
г=п4-1 *
i>i
(127)
Возможны и дальнейшие упрощения.
124
3. ЧИСЛОВЫЕ ХАРАКТЕРИСТИКИ ОШИБОК УСЕЧЕНИЯ
Ошибки «отбрасывания»
Как указывалось выше, ошибки «отбрасывания» возникают при
отбрасывании младших разрядов машинного операнда без предва-
рительного его округления; они имеют место при усечении разряд-
ной сетки после выполнения операций умножения, деления и при
правых сдвигах машинных чисел.
По сравнению с оцифровкой эта операция характеризуется
тем, что число отбрасываемых разрядов т конечно и может исчи-
сляться единицами; кроме того, закон распределения ошибок
такого усечения числа заранее (без дополнительных исследований)
нельзя принимать равновероятным. Этот вопрос служит темой
специального анализа в последующих главах книги.
Пусть в случайном машинном операнде
Хп-\-т = 0, ^1^2 • • • 11^1^2 • • • &m
подлежат отбрасыванию т младших разрядов; в результате такой
процедуры получим новый операнд хп = 0, ЬгЬ2.. . Ьп, отличаю-
щийся от исходного на случайную ошибку
Хп+т — 0» 00 ... 0 CL1CI2 . - . От
п
_i=i
Следовательно, на основании (9) математическое ожидание
ошибок усечения с отбрасыванием
tn
м [A2n,mUp=-2-« (128)
Выражение для дисперсии с учетом (10) имеет вид
{т т—1
2 Р, (а,) 2-2‘ + 2 2 Рг (a(aj) 2- «+Р -
1=1 1=1
/>1
Но
“ т 12^
Б л (а,)2-‘- .
L i=i J J
т 12 т tn— 1
2 л (az) 2-‘ = 2 я (а,) 2-2‘ + 2 2 Л («/) Л («/) 2" < W).
L i=i J i=i f=i
7>1
Далее, учитывая, что
т т
2 Л(а1)2-2‘- — 2 Pl(at)2-^ =
1=1 r = k
т т -
= Рг (а,)] 2-2‘ = 2 л (а.) Ро Ш 2-2‘,
f=l 4=1
125
выражение для дисперсии ошибок процедуры отбрасывания запи-
шем в следующем окончательном виде:
D [Ах„, т]0Тбр = 2~2" 12 Л (а,) Ро (а,) 2~2‘ + 2 2 1Л(«<«,) -
и=1 1=1
/>1‘
-Рг (а.) Л (а;)]2_(+/)]). (129)
Учтем теперь свойство корреляционных матриц: Р± (а;) =
= Ро (ai) = 0,5; тогда формулы (128) и (129) можно упростить
М [Ах„, т]отбр = - (1-2—);
D [Ax„,m]0T6p = 4-2-2(п+1>(1 -2-2«)+2-2«+> 2 х
х (Л (а.-Цу) -Л (ц() Л(ау)] 2- <‘+/>
(130)
Ошибки округления
Как отмечалось, первичные погрешности СЦВМ этого вида
возникают при усечении разрядной сетки СЦВМ с предваритель-
ной поправкой на остаток — путем добавления 1 в старший, из
отбрасываемых разрядов.
Математически получаемое значение округленного числа можно
записать следующим образом:
*п = 0, ^1^2 • • • (Ьп + #1)• (131)
В самом деле, если в исходном числе
т ==: 0, ^1^2 • • • ^л^1^2 • • •
fl] = 1, то имеет место перенос 1 в n-й разряд числа хп\ если
аг = 0, то перенос отсутствует, что и учитывается выражением
(131).
Ошибка округления равна разности
т — %п т — 0> ^1^2 • • • (Рп "Г" #1)
— 0, Ьф2... bna±a2.. .ат==2-п(ах — 0, ata2..ат) =
= 2———0,0а2а3.. =
= 2- (ах — 0, а2а3... ат) =
— 2-(п+о
/И— 1
«1—2 ai+i2_‘'
1=1
(132)
126
Это выражение для ошибок округления позволяет написать
формулу для математического ожидания ошибок в следующем
виде:
tn— 1
М[Дх„,т]окр=2-<"+» Л(«1)- 2 Л(й;+1)2-‘ .
(133)
Выражение для дисперсии ошибок округления найдем, исходя
из формулы (5):
£>[Дхл,т] = М[Д4,,«] —М2 [Дх„, J.
С учетом (132) математическое ожидание
“ / tn — 1
«Ж2
=2~2(п+1)м[а1 — 2а1 £ а,+12"‘+( 2 Ф+12~1
1=1 \ 1=1 * ) _
г tn— 1
= 2-2 (п+1) Р1 (й1) _ 2Р1 (а1) 2 Л (az+1) 2- ‘ -Н
( Г = 1
2-1
М[Д?П, m] =2“2(n+1,M
21
21
+ м
где, в свою очередь,
г / т— 1
т— 1
2 ai+i2_‘
21
m— 1
+ 2 X Л(ама/)2-<‘+''>.
Далее, с учетом выражения (133) можно записать .
2
1 Г 1
м2 [Дх„, J = 2- ("+1> Л (ах)- 2 Л (az+1) 2~
I L i=i
г т— 1
= 2-2(п+1) p2(ai)_2p1(ai) 2 Л(а(+1)2-1 +
I £=1
т— 1
+ 2^(az+1)2-2t’ +
1=1
+ 2 2 Л(й1+1)Л(а/)2-<‘-+/)1
Подставляя полученные выражения, после несложных преобра-
зований получаем выражение
| т— 1
D [Дхл, т]Окр = 2-2 ("+1) л (аО Ро (ах) + 2 Л (а1+1) Р» (ai+1) 2^ +
I 1=1
+ 2 2 [А(«,+1а/)-Л(а,+1)Л(а/)]2-<‘+/»1.
127
Объединив два первых члена, искомый ответ запишем в виде
D [Дх„, т]Окр = 2-2'! {Д Л («/) Ро (“,) 2~2‘ +
+ т- I [Л Л (а1+1) А («/)] 2- “+'•>]!. (134)
1=1 (
/Х+1 I
В полученных выражениях (133) и (134) учтем основное свой-
ство корреляционных матриц: Рх (а,) = Ро (а,) = 0,5; тогда с уче-
том формул (11) получим
М[Дх„.т]окр = 2-‘п+'"+1>;
D[Axn,m]01<p = 4-2‘'2('1+1)(1-2'2m)+ (135)
+ 2-2П+1
1=1
7 >i’4-l /
4. ВЫРАЖЕНИЯ ДЛЯ ЧИСЛОВЫХ ХАРАКТЕРИСТИК
ОШИБОК УСЕЧЕНИЯ В СЛУЧАЕ РАВНОМЕРНОЙ
ПЛОТНОСТИ ИХ РАСПРЕДЕЛЕНИЯ
Для большинства практических случаев (при достаточной
разрядности машинного слова) можно принять, что ошибки усече-
ния подчиняются закону равномерной плотности распределения.
Найдем выражения для числовых характеристик этих ошибок.
Характерной чертой корреляционных матриц вероятностей
рассматриваемого распределения ошибок является свойство (14)
Pi (a fl,} = Pr (a,) Pl (а,} = 0,25,
с учетом которого формулы для дисперсий ошибок оцифровки (127)
и усечения (130) и (135) принимают вид
£>[ЛхЛв = 4-2“2(Лх+1)- (136)
D]Дх„, т]отбр = 014«и = 4 2-2 ('l+1> 0 -2-2m). (137)
Уже при сравнительно небольших значениях параметра усе-
чения т можно пренебречь величиной 2~2,п по сравнению с едини-
цей; тогда формула (137) еще более упрощается:
Р[Д;„]^-±-2-2«. (138)
Выражения для математических ожиданий (130) и (135) при
т 1 также принимают более простой вид:
M[AxJ0T6p=2-('l+1';
M[Ax„]0Kp = 2-(rt+'n+1) ~0.
128
Иногда без достаточного обоснования для расчета дисперсий
ошибок усечения используют формулу (137) вместо точной — (130)..
В качестве примера дадим оценку методической погрешности,
возникающей при таком упрощенном подходе к расчету, в предпо-
ложении, что ошибки усечения подчиняются не закону равномер-
ной плотности распределения, а, например, закону распределения
Гаусса х. С учетом матрицы для В3 {cfij) (см. п. 5 гл. I) по формуле
(130) найдем
Г>отбр 2-2л {0,082 + 2 [(0,044 — 0,47-0,49) 2~3 +
+/(0,081 — 0,49-0,51) 2“4 + (0,149 — 0,47-0,51) 2-6]} =
= 2-2" (0,082 — 0,06) = 0,022-2-1 2".
Итак, вместо точного значения 0,022-2-2", полученного по
формуле (130), расчет по формуле (137) дает 0,083-2-2", что
примерно в 4 раза превышает истинное значение искомой вели-
чины.
Таким образом, подмена истинного закона распределения
ошибок законом равной вероятности в общем случае, без спе-
циального анализа недопустима.
1 Ниже, в гл. VII, будет показано, что только при достаточно большом числе
усекаемых разрядов операндов, входящих в поток случайных чисел на выходе
арифметических операций, ошибки подчиняются закону равномерной плотности
распределения.
9 э. И. Соренков
Г лава VII
ПРИНЦИПИАЛЬНЫЕ ИНСТРУМЕНТАЛЬНЫЕ
ОШИБКИ СЦВМ ПРИ ВЫПОЛНЕНИИ
ЭЛЕМЕНТАРНЫХ ВЫЧИСЛИТЕЛЬНЫХ
ОПЕРАЦИЙ
В настоящей главе будут рассмотрены вопросы формирования
инструментальных ошибок при выполнении на СЦВМ элементар-
ных вычислительных операций и дан вывод формул для определе-
ния их числовых характеристик.
Предварительно рассматриваются статистические характери-
стики потока случайных чисел на выходе арифметического устрой-
ства с целью определения законов распределения ошибок усече-
ния. В заключении главы дается графическая интерпретация
формирования ошибок выполнения операций, полезная для даль-
нейшего исследования вопросов точности исчисления алгоритмов.
1. источники ОШИБОК ВЫПОЛНЕНИЯ
ЭЛЕМЕНТАРНЫХ ОПЕРАЦИЙ
Выполнение вычислительного процесса, связанного с обработ-
кой числовой информации, распадается на последовательность
исполнения арифметических операций — умножения, сложения,
вычитания и деления. Принципиально на каждом такте этого
процесса зарождаются погрешности, которые, если не считать
методических ошибок, являются прямым следствием ограниченной
разрядности машины.
Если в машине предусмотрено выполнение операции умноже-
ния по принципиально точной схеме, а разрядная сетка не ограни-
чивается, то операция выполняется точно. Однако реальная
СЦВМ не может иметь ни оборудования, ни специализированной
программы, которые рассчитаны на бесконечное увеличение раз-
рядности операндов умножения \ не говоря уже о невозможности
вывода информации такого рода и ее нецелесообразности по точ-
ностным соображениям.
То же самое можно сказать и об операции деления: в общем
случае частное от деления двух чисел имеет бесконечное число
разрядов мантиссы.
Менее очевидна на первый взгляд потеря информационной
точности при выполнении операции алгебраического суммирова-
ния; однако, если иметь в виду при этом необходимость выравни-
1 Результат перемножения двух пх- и поразрядных чисел имеет (пх+ пу)
разрядов.
130
цания масштабов машинных переменных, что связано с умноже-
нием операндов на масштабные множители, то потеря точности
становится неизбежной.
Всякий раз, когда с арифметическими операциями связываются
процедуры оцифровки входной информации, констант программы
и усечения операндов, возникает инструментальная погрешность.
Эти первичные источники ошибок в цифровой технике часто назы-
вают зарождающимися и, согласно классификации ошибок,
приведенной в гл. I, их следует относить к классу принципиальных
для машин дискретного счета. В результате их проявления истин-
ная арифметическая операция заменяется псевдооперацией.
Ошибки усечения
Рис. 44. Блок-схема формирования выходной погрешности вычис-
лений:
АЦП аналого-цифровой преобразователь; ПЗУ — постоянное запоми-
нающее устройство; А У — арифметическое устройство
К элементарным машинным операциям, с точки зрения подхода
к анализу возникновения ошибок, будем относить операции оциф-
ровки непрерывных величин, усечения разрядной сетки операн-
дов умножения, изменения масштаба и деления.
На рис. 44 условно в виде блок-схемы показаны источники
ошибок и формирование выходной погрешности вычислений.
Если через F (х, у, k) обозначить функциональный оператор
преобразования информации в машине, то согласно теории оши-
бок, в общем случае выражение для выходной ошибки Дз выполне-
ния операции можно записать в виде
д;„ = ^д£ + ~Лу.. +-^-д£п + д^, (140)
дх х ду у dk
где &уПу — входные ошибки, обусловленные погрешно-
стями квантования по амплитуде, возникшими
при оцифровке исходной информации преоб-
разователями типа АЦП;
9*
131
kkn — ошибки оцифровки констант ПЗУ;
Д£п — ошибка, возникшая при усечении разрядной
сетки результата вычислений (ошибка усечения
операндов).
Согласно формуле (140), первичные инструментальные ошибки
пересчитываются на выход операции с весовыми коэффициентами,
соответственно равными
dF dF dF <
, —— и 1.
дх ду dk
Первые два члена выражения (140) характеризуют ошибку
на выходе операции, обусловленную действием входных ошибок;
эту составляющую будем называть наследственной погрешно-
стью Д?н:
dF д- , dF
Д?н = — &Х„ + —— ^Упп.
дх х ду у
Вторые два члена формулы (140) характеризуют ошибки,
зародившиеся в машине (в АУ и ПЗУ) в процессе исполнения
операций; будем по аналогии называть их совокупностьмашинной
ошибкой Д?м:
д;м^=-^д£„+д£,.
dk
Таким образом, полная выходная ошибка исполнения операции
в машине представляется суммой
Дг = Дгн+Дим. (141)
В силу случайного характера ошибок и их взаимной незави-'
симости имеют место статистические соотношения:
М [Д г] = М [ДГН] + М [ДГМ];
D [Дг] = D [Дгн] + D [Дгм]
и, в свою очередь, •
М [Дгн] = М
д?
дх
• М [Дх] + М
М [Дг/];
М [Дгм] = М
dF
dk
• Af[AZs] + М [Д£[;
(142)
£>[Дгн] =
р[д?м]=
132
2. СТАТИСТИЧЕСКИЕ ХАРАКТЕРИСТИКИ ПОТОКА
СЛУЧАЙНЫХ ОШИБОК ПРИ ВЫПОЛНЕНИИ
АРИФМЕТИЧЕСКИХ ОПЕРАЦИЙ
I
Для определения числовых характеристик зарождающихся
машинных ошибок согласно развитому в предыдущей главе методу
их расчета необходимо знать статистические характеристики по-
тока случайных чисел, образующегося на выходе арифметических
операций. Определим корреляционные матрицы вероятностей этих
случайных чисел.
Корреляционные матрицы можно найти методом статистиче-
ского моделирования с помощью ЭВМ. При этом предполагается,
что на вход арифметической операции сначала поступают случай-
нее числа, закон распределения которых подчиняется равномер-
ной плотности. Воспользуемся этим методом.
В память ЭВМ заносятся два поля массива чисел, возрастаю-
щих от 0 до (1—2п), и для каждого вида арифметического действия
осуществляется полный перебор полей. При этом на основе арифме-
тического оператора
z = F(x, у),
где х = 0, . а.„ у = 0, brb^b3 . . . bn.
образуется новый массив чисел
Z = 0, С1С2Сд ... сп+т,
который статистически обрабатывается с целью выявления значе-
ний вероятностей (с,) и Рх (cz-cz).
При этом для операций арифметического сложения и вычита-
ния без выравнивания масштабов машинных переменных т = О,
для операции умножения т = п, а для операции деления практи-
чески неограничено, т. е. т —> оо.
Как уже отмечалось, ошибки арифметических операций появля-
ются в результате применения к результатам вычислений процедур
усечения; следовательно, если иметь в виду алгебраическое сложе-
ние без выравнивания масштабов, то ошибки появляются только
при выполнении операций умножения и деления, для которых
параметр усечения т > 0.
Рассмотрим искомые корреляционные матрицы для арифмети-
ческих операций всех видов.
Операция перемножения двух чисел
. Результаты моделирования приведены в табл. 12, представлен-
ной в виде корреляционной матрицы для т разрядов «хвостовой»
части искомых результатов (для умножения nv = п).
Из таблицы следует, что корреляционная матрица более высо-
кого порядка разрядности чисел содержит предыдущую матрицу
и отличается от нее на одну верхнюю строку.
480 133
Таблица 12
k=b 7 6 5 4 1 3 2
1=1 2 3 1 4 5 1 1 6 7 1=8 i
0,49804 0,24804 0,49609 0,24609 0,2.4609 0,49219 0,24219 0,24219 0,24219 0,484375 0,234375 0,234375 0,234375 0,234375 0,46875 0,21875 0,21875 0,21875 0,21875 0,21875 0,4375 < 0,1875 0,1875 0,1875 0,1875 0,1875 0,1875 0,3750 b3 -B — 0,125 0,125 0,125 0,125 0,125 0,125 0,125 0,250 b3 + 1 2 3 4 5 6 7 8
-в,—
Bs—
Характерные свойства приведенной матрицы позволяют не
ограниченно развивать ее для любого значения_разрядности чисел.
В самом деле, построим новую матрицу ДВ (с;с.), как межстолбцо-
вую разность соседних по строчке вероятностей ДР. В результате
получим новую табл. 13; для удобства развития матрицы столбцы
пронумеруем справа—налево под индексом k.
Таблица 13
(cici) при k
ДР 7 6 5 1 1 4 1 3 1 1 2 1 i
ДР1 (ck-ct) 0,250 0,00195 0,00390 0,00781 0,015625 0,03215 0,0625 1
(сь-с2) 0,250 0,00390 0,00781 0,015625 0,03125 0,0625 2
(ca-c3) 0,250 0,00781 0,015625 0,03125 0,0625 3
ДВХ (CA-Cj 0,250 0,015625 0,03125 0,0625 4
ДВx * c5) 0,250 0,03125 0,0625 5
ДР1 (cft-ce) 0,250 0,0625 6
ДЛ (Cft-C?) 0,250 7
Характерные особенности новой матрицы ясны без комента-
риев:
ДР (сА • с/) = 0,0625 (143)
для k= 1, 2, 3, ..., (m — /).
С другой стороны, из условий построения матрицы ДВ (с^)
(.Ck-i-Cj) = Pi (ckCj) — Рх (Ck.i-Cj)
получаем
' Pi (Ck-Ci) = Pi (Q-i-C/) + ДР1 fe.i-Cy).
134
Из этой итерационной формулы следует последовательность
k = 2: Pi (с2-с/) = Рх (Ci-с,) + ДРХ (ci-cy);
k = 3: Py (c3-Cj) = Py (сус^ + APi (c2-cy) =
= Pl (cyCj) + ДРХ (Cy-Cj) + APX (c2-Cy);
, k = 4:PX (Cy'Cj) = Py (cyCj) + ДРХ (сз-Су) =
= Pi (Сус,) + ДРХ (cyCj) + ДРХ (c2-cy) + ДРХ (сз-су).
С учетом формулы (143) получим
Рх (е4Су) = Ру (сус^ + 0,0625 • 2° + 0,0625 • 2’1 + 0,0625 • 2~2.
Из матрицы В (cyCj) (табл. 12) находим, что для всех
Pi (,crcj) — 0,125; .следовательно, в общем виде запишем:
Ру (су с,} = 0,125 + 0,0625 (1 + 2-1 + 2’2 + . . . + 2-<*~2>)
или
Р1 {СуCj) = 0,0625 3 + ^2-1' = 0,0625[4 —22-*].
L i=i
Очевидно, что если k —> оо, то Рг = 0,25.
Это означает, что^с повышением разрядности перемножаемых
чисел первые, наиболее весомые в выражениях для дисперсии
(130) и (135) значения Pi (ct*cz) приближаются к величине 0,25.
Как видно из табл. 12, диагональные значения вероятностей
при возрастании разрядности чисел также стремятся к величине
0,5, поэтому
PiM Ро (с() —♦ 0,25.
При этом сумма в соотношениях (130) и (135)
стремится к нулю.
Таким образом, при достаточно большой разрядности перемно-
жаемых чисел дисперсия ошибок усечения «хвостовой» части
произведения может рассчитываться по упрощенным формулам
(137).
Другими словами, статистические характеристики ошибок
усечения произведения двух случайных чисел по мере роста их
разрядности приближаются по своим свойствам к ошибкам с равно-
мерной плотностью распределения.
Оценим методические погрешности, вносимые заменой точной
формулы (130) или (135) приближенной (137) при расчете ошибок
усечения произведения. Данные расчета сведены в табл. 14.
Как видим, эта погрешность практически равна 0 для п 8
разрядов.
135
Таблица 14
т == п 3 4 5 6 8
2лРТОчН 0,088 0,090 0,088 0,086 0,08328
2л7?Прибл 0,082 0,083 0,0831 0,0832 0,0833
g ^11рибл ^ТОЧН- % ^точн —6,8 —7,9 -5,7 —3,3 0,050
Операция деления
При статистическом моделировании операции деления искомой
процедуре подвергаются два поля чисел с равновероятностными
характеристиками распределения. При этом все частные больше 1
отбрасывались.
В качестве примера результатов обработки приведены две
корреляционные матрицы для т = 4 и 8 (табл. 15, 16).
Таблица 15
при i
7 1 2 3 4 5 6 7 8 9 10 11
1 0,326 0,119 0,148 0,148 0,237 0,104 0,193 0,119 0,237 0,148 0,163
2 0,326 0,119 0,148 0,148 0,237 0,104 0,193 0,119 0,237 0,148
3 0,326 0,119 0,148 0,148 0,237 0,104 0,193 0,119 0,237
4 0,326 0,119 0,148 0,148 0,237 0,104 0,193 0,119
5 0,326 0,119 0,148 0,148 0,237 0,104 0,193
6 0,326 0,119 0,148 0,148 0,237 0,104
7 0,326 0,119 0,148 0,148 0,237
8 0,326 0,119 0,148 0,148
9 0,326 0,119 0,148
10 0,326 Т),119
11 0,326
Таблица 16
В8 (cici) п₽и 1
7 1 2 3 4 5 6 7
1 0,481 0,233 0,235 0,235 0,241 0,235 0,246
2 0,481 0,233 0,235 , 0,235 0,241 0,235
3 0,481 . 0,233 0,235 0,235 0,241
4 0,481 0,233 0,235 0,235
5 0,481 0,233 0,235
6 0,481 0,233
7 0,481
136
Число разрядов мантиссы результата принималось равным 15,
при этом tmax = 15 — т.
Приближение по мере роста т значений вероятностей Рх (с<),
расположенных на главной диагонали корреляционных матриц,
к 0,5 и вероятностей связи разрядов (cz-cz) к 0,25 говорит
о том, что закон распределения ошибок усечения частного стре-
мится к равновероятному.
Оценим погрешности расчета ошибок усечения при замене
точной формулы (130) или (135) приближенной формулой (137).
Эти погрешности приведены в табл. 17.
Таблица 17
т 3 4 5 6 7 8
2лРточн 0,0823. 0,0946 0,0871 0,0864 0,0851 0,0839
2л2?прибл 0,0820 0,0830 0,0832^ 0,0833 0,0833 0,0833
g Т^прибл ^ТОЧН у Т^точн —0,4 — 1,7 —4,6 —3,6 —2 —0,7
Как видно из таблицы, при достаточно большом значении
т 8 погрешностью расчета по приближенной, но значительно
более простой формуле
р=-~2-(',+1)
можно пренебречь.
Операция сложения и вычитания
(без выравнивания масштабов)
^Процедура статистического моделирования операции сложения
и вычитания аналогична уже рассмотренным процедурам; отметим
лишь некоторые ее особенности.
При сложении двух чисел возможно переполнение мантиссы
результата; образующийся при этом разряд целой части числа
обозначим нулевым разрядом; следующий за ним старший разряд
мантиссы — первым номером и т. д.
При вычитании двух чисел возможен отрицательный резуль-
тат. Подсчет искомых вероятностей осуществляется по общему
результативному полю.
Искомые матрицы вероятностей сведены в таблицы (см. табл. 18,
19).
Полученные матрицы целесообразно применять для оценки
погрешностей, возникающих при правых сдвигах алгебраических
сумм. В этом случае распределение погрешностей усечения суммы
Двух чисел точно соответствует закону равномерной плотности
137
Таблица 18
Корреляционная матрица В8 суммы двух чисел при i
/ 0 1 2 3 4 5 6 7 8
0 0,498 0,125 0,187 0,218 0,233 0,241 0,245 0,247 0,248
1 0,5 0,25 0,25 0,25 0,25 0,25 0,25 0,25
2 0,5 0,25 0,25 0,25 0,25 0,25 0,25
3-5
6 0,5 0,25 0,25
7 0,5 0,25
8 0,5
Таблица 19
/ Корреляционные матрицы В& разности двух чисел при i
1 2 3 4 5 •. 6 7 8
1 0,2519 0,06347 0,09472 0,1103 0,1181 0,12217 0,1240 0,125
2 0,3769 0,15722 0,1728 0,1806 0,1845 0,1865 0,1875
3 0,4394 0,2041 0,2119 0,2158 0,2177 0,2188
4 0,4707 0,2275 0,2314 0,2333 0,2343
5 0,4863 0,2392 0,2412 0,2429
6 £ 0,4941 0,2451 0,2461
7 0,4980 0,2480
8 0,5
до п разрядов включительно. В значительной мере это относится
и к ошибкам усечения от правых сдвигов, применяемых к разности
двух чисел.
Во всех последующих рассуждениях, там, где нет оговорок,
принимается, что зарождающиеся первичные ошибки подчиняются
закону равномерной плотности и с достаточной точностью их
можно рассчитывать по упрощенным формулам.
3. ХАРАКТЕРИСТИКИ ОШИБОК УСЕЧЕНИЯ
МАШИННЫХ ЧИСЕЛ, ПРЕДСТАВЛЕННЫХ
В РАЗЛИЧНЫХ КОДАХ
Все сказанное выше относилось к ошибкам, полученным в ре-
зультате усечения положительных чисел. Однако СЦВМ оперирует
не только с положительными, но и с отрицательными операндами.
В цифровых машинах распространены три способа представле-
ния чисел: в прямом, обратном и дополнительном кодах. При этом
изображения положительных чисел совпадают во всех кодах,
а дополнительный и обратные коды отрицательных чисел отли-
чаются от прямого.
138
Прямой код. Если X— правильная двоичная дробь (положи-
тельная или отрицательная), то
' Хпр = X для Х>0;
Хпр = 1— Х = 1 + |Х| для Х<0.
Прямой код применяют обычно при умножении и делении
чисел.
Для аппаратурного удобства выполнения алгебраического
сложения разнознаковых чисел обычно прибегают к представле-
нию чисел в обратном или дополнительном кодах, имея в виду
замену операции машинного вычитания операцией сложения.
Обратный код
Х°=Х
для Х>0;
Х°=2 —2" + Х= 1,11... 1 -f-X для Х<0.
п
(144)
Дополнительный код
хд = х
Х« = 2 + X
для Х> 0;
для Х< 0.
(145)
Учитывая отмеченное выше свойство кодов положительных
чисел, можно заключить, что ошибка отбрасывания всегда отри-
цательна, поэтому влияние усечения этого вида на положительные
значения операндов всегда сводится к уменьшению значения
исходных чисел:
хч ZX т
А^отбр = -^Сг — Xn+tn = 2~п
t=i
Очевидно, что для положительных чисел во всех кодах имеет
место соотношение — 2~п (1 — 2-пг) Дхотбр 0-
Ошибки усечения положительных чисел типа округления
знакопеременные; в самом деле, из выражения (132) следуют
соотношения:
при аг = 1, а2 = . • = ат = 0
шах (Ахокр) = 2-” (1-0,1*) = 4 2-«;
при а± = 0, а2 = аз — • • • = ат = 1
min (Дхокр) = 2-" (0—0,011 ... 1*) =
= — •у2-«-0,111 ... 1= —±2-п(1 — 2-т+1).
т—1
* Здесь дроби в двоичном представлении
139
Очевидно, что
-4-2-"<Д^окр<4-2-«.
(146)
Рассмотрим теперь ошибки усечения отрицательных чисел.
При их представлении в прямом коде усечение по процедуре
отбрасывания уменьшает модуль мантиссы; ввиду отрицательного
значения самих чисел пределы ошибок удовлетворяют условию:
. 2“" (1 — 2“т) > Дхотбр 0.
При округлении отрицательных чисел в прямом коде остается
справедливым неравенство (146). При использовании дополнитель-
ного кода согласно (145)
Xn-f-m ~~ Хп-\-т 2. -
После отбрасывания т членов получим новое усеченное число
хй, связанное с исходным числом соотношением
— 2.
Очевидно, что зародившаяся ошибка
ДХотбр — Хп— Хп-^т — Хп— Х%-{-т —
п п-\-т т
= 2 а,2~1 — 2^2"' = —2“"2^27
i=l i=l i=l
Отсюда следует предельное соотношение
— 2-" (1 — 2"т) Дх5тбр С 0.
Ошибки округления отрицательных чисел, представленных
в дополнительном коде, также удовлетворяют соотношению (146).
При представлении отрицательных чисел в обратном коде
согласно (144)
х„+т - Х°п+т — 2 + 2 -(”+т).
После выполнения процедуры отбрасывания получим новое
число Хп, связанное с истинным значением формулой
хл=%п — 2-|-2 ”.
Следовательно, ошибка
Дхотбр = хп— Хп-\-т = Хп 4" 2 ”— Х«+т— 2 _
п n-j-m
- = 2 а -2~ *’ — 2 а\2~1 + 2-" (1 — 2~т) =
i=l i=l
tn
= — 2_” 2^2"' + г”"(i—2-"1).
i=l
140
Отсюда получаем пределы
2‘п(1—2-'п)^Дх°тбр>0.
Пределы изменения ошибок округления в обратном коде
по-прежнему удовлетворяют условию (146).
Полученные результаты по ошибкам округления и отбрасыва-
ния сведены в табл. 20 и 21.
Таблица 20
Знак Ошибки округления для прямого, обратного и допол- нительного кодов представления чисел
i о о A V < я < я — 0,5.2“Л<Дх^0,5.2-П — 0,5-2-Л==сЛх<0,5-2~П Таблица 21
Знак Ошибки отбрасывания
Код представления чисел
прямой | обратный | дополнительный
х > 0 — 2 П < Дх^ 0
х<0 0 Дх < 2 п 0^ Дх < 2 П 2 л<Дх^0
Из табл. 20 и 21 можно сделать следующие выводы.
1. Ошибки округления положительных и отрицательных чисел,
представленных любым машинным кодом, знакопеременны.
2. Ошибки отбрасывания для положительных чисел во всех
кодах и для отрицательных чисел в дополнительном коде — отри-
цательны.
Таким образом, если операциям деления и умножения подвер-
гаются пары однознаковых чисел, а операция алгебраического
сложения выполняется в дополнительном коде, то зарождающиеся
ошибки отбрасывания имеют одинаковый отрицательный знак;
это обстоятельство предопределяет тенденцию к возрастанию
ошибок накопления за счет систематических ошибок. Та же тен-
денция имеется при умножении и делении разнознаковых ошибок
и при использовании в операции суммирования обратных кодов.
4. ОШИБКИ ВЫПОЛНЕНИЯ ОПЕРАЦИИ УМНОЖЕНИЯ
При выполнении машинной операции умножения z = ху
разрядность произведения nz = пх + пу. Следовательно, коли-
чество усекаемых разрядов определяется величиной:
т == (пх 4- п4.)— п. при (nx-{- Пу)>п;
/п = 0 при (п*4- Пу)^п.
141
Очевидно, что зарождающаяся при усечении инструментальная
погрешность равна разности:
Л? - z(nx+ny) — Zn
при (nx + ni,)>n.
Числовые характеристики этой погрешности по ансамблю
реализаций могут быть определены на основании формул (130),
(135) и (137)
М|ЛЙо,р = 2 : >
О|Д5я1 = D |ДЙ = ± 2“!w+ ” [ 1
Важно подчеркнуть, что эти формулы справедливы при выпол-
нении условия (пх + пу) — п >0; в противном случае ошибки
принципиально равны нулю.
В частном, но распространенном случае пх = пу — п, тогда
М [ Д zM] =
М[Дйотбр=-2-(»+»(1-2 п);
М[ДЙокр = 2"(2п+1)^0;
Р[Д?М] = Р[Д£] = ± 2 2(п+1)(1-2-2«).
(147)
Часто на практике число усекаемых разрядов tn > 1; в этом
случае формулы еще более упрощаются:
М[ДКбР = - 2~(П+1)-’
М[Д:]окр~0;
Р[Д^ = ±2-2<г,+1)-
О
Рассмотрим теперь наследственные ошибки операции, обусло-
вленные ошибками входных данных Дх и Дг/.
В данном случае F (х, у) = ху,
поэтому
Д?н = z/Дх-}- xtXy.
На основании формул (142) получаем
М [Д?н] = 0;
dI4;hi_22-!<"«+’» + |2-2<"»+,>.
о о
142
Если в частном случае пх = nv = п0, то
£>[AzH] = 4- 2~2 <п»+п [х24- у2].
О
Максимальные оценки получаются при значениях х = хтах
1 и у = утзх «=< 1
£>[Дгн] = 4--2-(г,«+1).
О
Числовые характеристики полной ошибки на выходе операции
умножения получаются согласно соотношениям (142) по получен-
ным выше зависимостям.
Пример 30. Определить среднеквадратичное значение полной инструмен-
тальной ошибки при вычислении на СЦВМ значений h по формуле h= L& для
следующих исходных данных:
В£ = 100000—; nL = 12; п = 16;
Г ..Л > 7 7
Q К МИН О
₽е-5-^; «в-8:
L = ^шах> е = 0,625 мин.
Дисперсии
Д[ДЛм]=4-2-2<16+1Ч1-2-2-4]~4-2-34 ме2,
О о
ЩДйя] = 4-2-2 <12 + 1) + l^L.2-2(8+1)= 4-2-26 ме2.
ООО
Дисперсия полной ошибки
D[^h]=D[^hM] + D[^htt] =
Так как
рЛ = рдре= юо 000-5 150—,
r r L ме J ме
то
о [ДЛ] = Рла [Д/г] = 150 1/-|- 2'2в«^ 2,4 см.
В этом примере выходная ошибка в основном определяется погрешностью
оцифровки входных данных.
143
5. ОШИБКИ ВЫПОЛНЕНИЯ ОПЕРАЦИИ ИЗМЕНЕНИЯ
МАСШТАБА ПЕРЕМЕННЫХ
Операцию изменения масштаба используют при решении задачи
сложения нескольких (двух и более) переменных (в целях вырав-
нивания масштабов операндов), при выполнении операции деления
(для исключения переполнения разрядной сетки) и в некоторых
других случаях.
Собственно как таковой самостоятельной операции изменения
масштаба переменных система команд СЦВМ обычно не имеет,
эта операция обычно выполняется путем умножения машинной
переменной на некоторый постоянный коэффициент k:
'z = k-x, (148)
причем в самом общем случае k может быть любым действительным
числом, большим и меньшим единицы. Значение этого коэффи-
циента хранится в постоянной памяти машины с произвольным
местом фиксации запятой.
В области действительных переменных операции (148) соот-
ветствует тождество z = х.
При выполнении операции изменения масштаба изменяется
цена машинной единицы представления х:
& = ₽х--р ' (149>
При выполнении этой операции имеют место инструментальные
погрешности:
машинные, связанные с ошибками оцифровки коэффициента k
и ошибками усечения произведения;
наследственные, обусловленные ошибками, возникшими при
оцифровке переменной х.
В общей постановке задачи масштабирования необходимо
рассмотреть четыре варианта зарождения машинных ошибок.
Вариант I: k = 2+r > 1.
Вариант соответствует левому сдвигу операнда х на г разрядов.
Очевидно, поскольку переполнение разрядной сетки при масшта-
бировании исключено, левые сдвиги не содержат прецедента'для
зарождения ошибок, т. е. Дхм = 0.
Левые сдвиги реализуются на машине специальной командой,
а параметр сдвига г кодируется в памяти в целочисленном пред-
ставлении.
Вариант II: k — 2~r < 1.
144
Этот вариант реализуется правым сдвигом при целочисленном
задании аргумента г. Правый сдвиг при ограниченной длине
разрядной сетки машины тождественен усечению операнда;
.. 1Л~ |М[Дй>тбР = — 2~(п+1)(1 — 2-0;
М [Дгм] = < 1 * от0р ' '
IМ [ДС]0Кр = 2-O+V2-';
D [Дгм] = D [Д£] = » 2-2+i> (1 -2-20-
О
Эти формулы получены из выражений (130), (135) и (137)
путем замены т на г. Само собой разумеется, что они действи-
тельны для значений г п.
С учетом (149) формулы принимают вид
М [Дгм]отбр = - 2- ("+D (1-2-9 2^;'
М [Дгм]окр = 2“(Л+1)РХ;
£>[Дгм] = 4-2-2(п+1) (1 — 2-2г) 22гр2.
Они показывают, насколько существенно можно уменьшить
ошибку выполнения операций изменения масштаба методом пра-
вых сдвигов, применяя процедуру округления остатка; системати-
ческая ошибка при этом не зависит от параметра сдвига.
Вариант III: k >> 1 и является неправильной дробью.
Представим константу k в виде
k = аха2 . . ., аг, brb2 . . . Ьп_г,
где а, и Ь/ = 0 или 1.
. Допустим сначала, что значение k представлено абсолютно
точно в пределах n-разрядной сетки.
Возможны две схемы выполнения операции (148).
Первая схема:
1) Перенос запятой в выражении для k влево на г разрядов:
k’ = 0, ага2 . . . аг ЬХЬ2 . . . Ьп_г-,
2) выполнение операции умножения
z' = xk’-,
3) усечение результата z' до п разрядов;
4) левый восстанавливающий сдвиг на г разрядов.
Вторая схема:
1), 2) те же, что и в первой схеме;
3) сдвиг влево z' на г разрядов;
4) усечение результата до п разрядов.
Очевидно, что по второй схеме информационная точность
операции будет выше.
Ю Э. И. Соренков 145
В самом деле, числовые характеристики случайных ошибок
при использовании первой схемы соответственно равны
Л11[ДЙотбр = —2-<'’+1>(1_2-")2^—2-("+п2^;
^1№кР = 2-<2'1+1>2-
[Д?1 = 4- 2-2(n+1> (1 — 2 - 2rt) 22г 4-2“2 <п+1)22г,
поскольку количество усекаемых разрядов равно п. Эти формулы
получены на основе ранее выведенных соотношений (139) и (137).
При использовании второй схемы
М2[ДЙотбР~—2-<"+D;
Мг[^=2~^1^0; (150)
о2[Д^^4-2-2(,г+1>-
Вариант IV. k < 1 и является простой дробью.
Это тривиальный случай, совпадающий с обычным умноже-
нием. Поэтому формулы (150) для оценок погрешностей остаются
в силе и для этого случая.
Необходимо обратить внимание на то обстоятельство, что для
k > 1 цена машинной единицы |32 = $x/k уменьшается по сравне-
нию со случаем k < 1; следовательно, точность операции пере-
масштабирования при k > I, оцениваемая в отсчетных значениях
физической переменной, выше точности операции, в которой k < 1.
На основании изложенного выше можно заключить, что всякое
перемасштабирование операндов, связанное с увеличением абсо-
лютного значения машинных переменных (вариант I и III), более
предпочтительно по точности, чем уменьшающее значение этих
переменных.
Следует отметить,'что для значений k = 1 погрешности равны
нулю; формулы действительны для г ==£ п.
Результаты проведенного исследования инструментальных оши-
бок усечения, связанных с применением машинной операции
изменения масштаба переменных, сведены в табл. 22.
Таблица 22
Вариант Значение k М [А£]отбр м [ДДокр £»[ДЙ
I 2Г 0 0 0
II 2~г 2-(п+1)2-г 1 ,2-2(«+1)(1_2-2г) о
III ' k> 1 1 2“(П_Н) 2— (2п+1) J. 2-2(л+1)
IV k< 1 J 3
146
Из анализа этой таблицы можно сделать выводы.
1. Операция изменения масштаба процедурой правых сдвигов
машинного операнда предпочтительней процедуры умножения
переменной на правильную дробь; это преимущество тем заметней,
чем меньше значение г.
2. Применение процедуры округления при использовании как
правых сдвигов, так и усечения разрядной сетки, примерно в 2Г
(или 2Л) раз уменьшает систематическую ошибку результатов
операции. 1
3. Перемасштабирование операндов, вызывающее увеличение
последних, предпочтительнее по точности, чем событие противо-
положное.
4. В качестве типового случая расчета ошибок операции
Изменения масштаба переменных можно принять варианты III
и IV, если наличие левого сдвига не оговорено особо.
Рассмотрим теперь другую составляющую выходной машинной
погрешности, обусловленную неточным заданием константы k.
Согласно (140) для операции (148) получим
Az (А&) — Ak = x Ak.
Поскольку погрешность Ak обусловлена «-разрядной сеткой
СЦВМ (ПЗУ), то
М [Az (Д£)]отбр = — 2-<л + 1)*;
М [Az (ДЛ)]окр 2-<2л+1> 0,
D[Az(A£)] = 12~2<n+1).
С учетом результатов, полученных при рассмотрении вариан-
тов III и IV, можно написать
M[Azw]0T6p = -2-(f,+I);
М [AzM]0Kp = 2-2,! ~ 0;
Р[Д2М] ' 2~2(,i+1) [?+ 1],
О
(151)
где хтах у по условию задачи.
* Формула имеет чисто теоретический смысл; в самом деле, программисту
не составляет особого труда произвести процедуру округления константы k
перед зашивкой ее в ПЗУ; этим, самым будет исключена систематическая погреш-
ность при всех вычислениях. В дальнейшем мы всегда будем иметь в виду эту
возможность, не вводя в рассмотрение погрешности отбрасывания.
10* 147
Максимальная оценка дисперсии
£>max IMJ = 12-2("+ [ 1 + 4г]
для k + 2Г, г — 0, ±1, =t2, ...
Наследственную погрешность операции находят по формуле
Дгн = —— Дх — k Дх.
дх
Ее числовые статистические характеристики
/ М [AzH] = 0;
О[Дгн]=4-2_2("*+1)- (152)
Числовые характеристики полной выходной инструментальной
ошибки находят по формуле (142) с учетом полученных соотноше-
ний.
6. ОШИБКИ ВЫПОЛНЕНИЯ ОПЕРАЦИИ ДЕЛЕНИЯ
Пусть делимое х и делитель у заданы в СЦВМ ценами машинных
единиц своего представления и а также пределами измене-
ний xmln xmax, t/mln у г/тах; тогда очевидно, что
частное z будет изменяться в пределах
~ ____ xmln хтах
mln— t/max t/mln
^max*
Поскольку машина оперирует с числами, меньшими единицы,
то перед выполнением самой операции деления необходимо в общем
случае изменить цену машинной единицы представления пере-
менной х в соответствии с выражением
Рх 2^ | ^max | Pt/’
Практически это означает необходимость предварительного
умножения операнда х на машинный множитель
k = Р* -с Р*
Р* I 2max I Pt/
Рх з Рх
I -^max I о | *тах I
I i/mln I Р^
I I/mln I
Р.
Если и Р^ выбраны из
Рх *тах> Pt/ Утах, Т0
предельных соотношений, т. е.
k ^т1п.
i/max
i/mln ^>^7/
~Ут1п»
i/max
так как утах 1.
148
Таким образом, выполнение операции деления в машине
должно быть организовано в соответствии с выражением
z = -^-. (153)
у
При этом частное г будет иметь цену машинной единицы
В
Рг W
Возможны две программы реализации формулы (153J
Программа 1:
1) zx = x-k\
2) zx = zx : у.
Программа 2:
1) z2 = k -:y\
2). zn = z2-x.
Рассмотрим числовые характеристики ошибок решения задачи
по обоим вариантам программ.
Программа 1. Согласно формуле (140)
. Az, = Дгх 4--Д1/-4- +
У (у)2
где Дгх = Дх-£+ \kx 4- Д£х.
Подстановка дает
Дгх =Дх±— Ду^-+ д£44-д£х± + д£2,
У У2 У У -
где Д£х — погрешность усечения произведения (x-k) в «-разряд-
ной сетке СЦВМ;
Д£2 — погрешность усечения частного (zx : у) в той же сетке.
Первые два члена определяют наследственную погрешность
операции; три последних — машинную погрешность.
На основании (142) получаем
М IДгн] = 0;
DM »12-2^ (AV + ±2-2^+1) (|)?. (154)
•i \ y 6 \У J
Если nx = ny = n0, to
г / h \2 ~
DM= 1.2-2("’+1) у) (155)
d L \ у / \ J
149
Максимальные оценки ошибок имеют место при у = ymin
их — xmax — 1; с учетом этого обстоятельства
।—2(n04~l) 1 ।1 __
^Лпах [Д^н! — з
^min _
__ 1 п—2(По4~1)
— 3 z
При расчете машинных ошибок следует иметь в виду, что
М [Д£]отбр = М [д41отбр = - 2-(rt+1) (1 - 2~п) ~ - 2~(п+1);
D [ДЛ] = D [Д^] = 4 2“2 ("+1) (1 — 2~2") 4 2“2 ("+1) 1
О О
(156)
м [д£]отбр= - 2-(rt+1),
. £>[Д£2] = 4-2~2(п+1)-
о
Поэтому с учетом условия округления значения k:
М[Д4Хбр~-2“<л+1)Г1 + 4-1;
У
2 / 1 \2
£»[Дг1м] _|2-2("+1) '
(157)
L \ У / \у/ J
Для максимальных оценок положим х — хшах — 1; у = г/тщ —
= k, тогда
Afmax [Дг1м] X —2“(,г+1) Г1 +
Omax [Дг1м] = j2-2(,t+1) [2
#min
1 \2
I/mln
(158)
В этих формулах
'У. _ У mln _ Ут\п
Ут1а ~ “ Ушах '
Программа 2. В соответствии с программой 2 имеем
Дгп = Дг2х + Дх z2 + д£2,
где
Д?2=д£ 4— Д«/ 4- + Д^ь
У У2
— машинная погрешность псевдооперации деления (ошибка
усечения операнда);
Д£2 — погрешность псевдооперации умножения.
150
Подстановка дает
AzH = + А^ + ДС2.
У У У
Сравнение общих выражений для Дгг и Дгн показывает, что
наследственные погрешности у них равновелики; машинные
погрешности отличаются коэффициентами при Д£Р
Следовательно, выражения (156) для наследственных погреш-
ностей вычисления гх сохраняют силу и для второго варианта
расчета Дгн.
Числовые характеристики машинных погрешностей Д?п имеют
следующие выражения с учетом, что М [Дfe] = 0:
M[Az1Im]ot6p 2-(п+1) [2+1];
^1А211М] = |2-2(п+1)
4V + 24-1
у J
Максимальные оценки соответственно равны
А1тах[Дг11м] — —2 ,
Ятах 1Д211м] = 12-2<п+1) [(^~)2 +2] = . (159)
Покажем, что с точки зрения точности программа 2 деления
имеет безусловные преимущества перед программой 1 для всех
значений г/т1п. В самом деле, определим значения ут1п, для
которых имеют место неравенства, составленные из формул (158)
и (159):
2<-^—+1;
£/min
(1 \ 2 9
+2^v-+L
£/min / ^min
Решив эти неравенства, получим общее значение искомого:
У mln I •
Проведенный анализ ошибок операции деления позволяет
сделать следующие выводы.
С точки зрения информационной точности операция деления
является весьма «тяжелой» как по наследственным, так и машин-
ным ошибкам, при этом точность ухудшается с ростом отношения
Утах/Утш-
151
Из двух рассмотренных программ предпочтение следует отда-
вать программе с предварительным обращением делителя «г/»
в множитель Му». Например, при Ут^Ут^ — Ю
Дщах [А^1м] 2
Отах [Лгцм]
Главным источником повышенной машинной погрешности
выполнения операции деления по программе 2 являются ошибки
оцифровки константы k.
7. ОШИБКИ ВЫПОЛНЕНИЯ ОПЕРАЦИИ СУММИРОВАНИЯ
КАК СЛЕДСТВИЕ ОШИБОК МАСШТАБИРОВАНИЯ
Алгоритму алгебраического сложения г — х ± у в СЦВМ
соответствует машинный алгоритм вида
z = kxx ± kyy.
Очевидно, что
Дгн = \xkx ± \yky,
Дгм=А^2+Д^±(А^ + Ау. '
И, следовательно,
М [Дгн] = 0 (160)
(поскольку в самом начале было принято, что оцифровка входных
данных выполняется с юстировкой преобразователей),
D [Дгн] = 12-2 k* +12“2 (^+1) k*. (161)
О О
И далее
лл гдг 1 I 2 + *2 для знака (+) 1 и 62)
А1[Дгм]отбр-( 0 для знака (-)) ( }
(так как выше было принято, что оцифровка kx и ky в ПЗУ осу-
ществляется с. округлением),
П[Д?м] = 12-2(п+1) [2+ ? + ?]. (163)
О
Сравнение формул (160), (161) с (152) и (162), (163) с (151)
показывает, что операция алгебраического суммирования на ма-
шине является распространением результатов операции изменения
масштаба на случай двух переменных. Само суммирование пере-
менных с выравненными масштабами не вносит дополнительных
погрешностей (типа усечения). Ниже приведена табл. 23 макси-
мальных оценок погрешностей исчисления элементарных опера-
ций.
152
Таблица 23
Алгоритм операции Машинная операция ₽2 M [Az] D [Az]
Z = X Оцифровка z = [х ]кв ~xmax 0 _!_.2-2(Пх+1) 3
Z = X Усечение Z = [А7]ус ~xmax Мугбр = - 2-(n+1) (1- 2-m) 1 o~2 (n+1) (1 _2~~2tn) 3
Мокр = 2~ <n+'n+I>
Умножение z = x-y Умножение z = х-у Дгн 0 2 .0-2 (n0+l) 3
AzM 2— (n-H) 1 .9-2 («+П 3
Z = X Изменение масштаба г = k-x k^2r г = 0, 1, 2, ... Px k AzH 0 ..9—2 (ne4~l) 3-
_2- (n+D 1 о—2 (Л-Н) Г i t f 1 \ 1 з L \ k J J
Деление X z = — У Деление x-k z = —-— У k — //min Px Pit* Дгн 0 J_ 9—2 (ПоЧ-1) Г 1 1 ( Утах V 1 3 L + \ J/mln ) J
ДгМ1 —2“ (n+1) • Г 1 + Утах 1 L 1 //min J J 9-2 (n+1) Г 1 i 9 ( Угпях V ] 3 L + Umln/ J
AzMn _2-n _J_ 9—2 (n+1) Г r> । ( //шах \2 1 3 r+Wmrn/ J
8. ОПЕРАЦИОННЫЙ ГРАФ ОШИБОК
Удобным и наглядным средством для расчета выходных ошибок
исчисления алгоритмов является графический метод представле-
ния и передачи погрешностей.
Машинный граф ошибок удовлетворяет требованиям нагляд-
ности изображения, простоты построения, простоты трансформа-
ции ошибок из любой точки графика на выход, избирательности
трансформации. Преимущества использования графов особенно
проявляются при расчете ошибок сложных алгоритмов.
Граф ошибок операции умножения. Полная инструментальная
выходная погрешность исчисления на СЦВМ операции умножения
определяется формулой
Дг = Дх-«/ + ку-х + Д£.
Формирование этой погрешности можно толковать графически
так, как изображено на рис. 45.
Граф ошибок машинной операции изменения масштаба. Ошибка
выполнения этой операции определяется формулой
Д г = Дх • k + Д & х Д
График ошибок представлен на рис. 46.
154
Граф ошибок машинной операции деления. При выполнении
операции деления согласно программе 2
Дг = Дх 4-—+ д£г-
У У2 У
В соответствии с этим выражением на рис. 47 изображен опера-
ционный граф ошибок.
Граф ошибок машинной операции алгебраического суммиро-
вания. Как нам известно, для операции алгебраического сложе-
ния имеет место зависимость
&z = &x-kx ± ky-ky&kxx + ± (&kyy + Д^),
в соответствие которой может быть приведен граф, изображенный
на рис. 48. Из рисунка видно, что граф состоит из двух одинаковых
подграфов, каждый из которых представляет собой граф ошибок
операции изменения масштаба.
Глава VIII
ПРОГРАММНЫЕ МЕТОДЫ ПОВЫШЕНИЯ
ТОЧНОСТИ ВЫЧИСЛЕНИЙ ПРЯМЫХ
ОТКРЫТЫХ АЛГОРИТМОВ И РАСЧЕТ
НЕОБХОДИМОГО ЗАПАСА РАЗРЯДНОЙ СЕТКИ
СЦВМ
В предыдущей главе были получены выражения для оценки
погрешностей исчисления элементарных вычислительных опера-
ций. Естественно продолжить анализ этих погрешностей при
исчислении на СЦВМ прямых открытых алгоритмов, т. е. алго-
ритмов без обратных связей'по переменным.
Следует отметить, что выходная инструментальная точность
решения задач зависит от разрядности, (точности) датчиков вход-
ной информации и длины разрядной сетки СЦВМ; от типа решае-
мого алгоритма; от программы реализации задачи.
Зависимость точности от типа решаемого алгоритма объясня-
ется тем, что различные вычислительные задачи отличаются одна
от другой набором используемых элементарных вычислительных
операций (или как часто говорят «процентным содержанием алго-
ритмических операций»).
Программа реализации задачи на машине также существенно
сказывается на точности ее решения. В самом деле, рассматривая
операцию деления, мы уже отмечали зависимость точности от
последовательности выполнения машинных операций. Применяе-
мые программистом численные методы решения задач также
заметно сказываются на точности их решения; например, вычисле-
ние z = sin х может быть выполнено различными методами:
с помощью разложения в ряд Тейлора, полиномов Чебышева,
интерполяции табличных значений функции, занесенных в по-
стоянную память и т. д. Немаловажную роль играет также умелое
использование программистом оптимальных приемов масштаби-
рования переменных решаемой задачи.
Тем не менее первоисточником всех инструментальных ошибок
СЦВМ является ограниченность ее разрядной сетки. В процессе
проектирования СЦВМ (или подбора подходящей машины из
существующего ряда) всегда остро встает вопрос рационального
выбора достаточной разрядности машины, используемой для
решения задач в системе специального управления (этим термином
подчеркивается, что проектировщику системы заранее известен,
если не перечень алгоритмов, то во всяком случае их класс).
Вполне понятное желание проектанта выбрать повышенную
разрядность машины (с «запасом») вступает в противоречие с необ-
156
ходимостью выдержать на определенном уровне другие важные
характеристики СЦВМ — надежность, скорость выполнения
арифметических операций (быстродействие), массу, габариты
и стоимость, так как в конечном итоге с ростом разрядности
увеличивается количество оборудования машины.
Очевидно, что проектанту необходимо искать компромисс.
Основанием для поиска оптимальных значений параметров
СЦВМ может служить, на наш взгляд, практически существующее
ограничение по достоверной разрядности датчиков входной инфор-
мации: преобразователей типа ПВК («вал—код»), ПНК («напря-
жение—код»), ПАК («амплитуда—код») и других; очевидно, не-
целесообразно существенно развивать разрядность машины, если
точность входной информации ограничена существующей разряд-
ностью преобразователей. В настоящее время упомянутые пре-
образователи общего назначения из числа освоенных промышлен-
ностью имеют точность, определенную 8—13 разрядами.
В этом случае задача проектировщика СЦВМ, образно говоря,
состоит в том, чтобы инструментальные ошибки СЦВМ рациональ-
ным образом скрыть «под тенью» наследственных ошибок решения
задачи, предполагая, что последние сами по себе удовлетворяют
требованиям точности решения задачи в целом.
Таким образом, проблему рационального (или оптимального
выбора) разрядности машины можно свести к задаче определения
необходимого запаса (резерва) разрядности СЦВМ над разряд-
ностью преобразователей. Попытка решить эту проблему на
примерах типовых алгоритмов составляет одну из основных задач
настоящей главы.
Не менее важной задачей является также анализ всех инстру-
ментальных погрешностей исчисления алгоритмов. Этот анализ,
с одной стороны, является базисом для сформулированной выше
задачи синтеза разрядной сетки СЦВМ; с другой стороны, он
позволяет выявить источники и проследить формирование ошибок,
определяющих величину общей погрешности, с тем чтобы, исполь-
зуя программные методы, принять необходимые меры по уменьше-
нию этих ошибок. Общего рецепта по программным методам син-
теза машинных алгоритмов на сегодня, по-видимому, изложить
не представляется возможным. Тем не менее на конкретных при-
мерах можно показать, что в ряде случаев этими мерами удается
в десятки (и более) раз снизить уровень шумов, обусловленных
инструментальными ошибками.
При выбранной разрядности СЦВМ эти меры в критических
ситуациях (на этапе отладки программ) позволяют поднять точ-
ность вычислений.
Так как каждая элементарная машинная операция несет в себе
источники зарождающихся ошибок, которые являются входными
погрешностями для оставшейся части программы вычислений,
их надо трансформировать на выход вычислительного процесса
с целью определения выходной ошибки решения задачи в целом.
157
Проследить все возникающие инструментальные ошибки и осу-
ществить аналитическим путем их трансформацию на выход без
привлечения специального аппарата, по-видимому, не предста-
вляется возможным; трудности обнаруживаются практически уже
для сравнительно простых алгоритмов. Эта задача поддается реше-
нию с помощью машинного графа ошибок решения задач, осно-
ванного на использовании операционных графов, описанных
в предыдущей главе.
1. МАТЕМАТИЧЕСКАЯ ФОРМУЛИРОВКА ЗАДАЧИ
ОПРЕДЕЛЕНИЯ ТРЕБУЕМОГО ЗАПАСА РАЗРЯДНОЙ
СЕТКИ СЦВМ
Будем считать, что разрядность датчиков входной информации
— пх, пу и т. д. выбрана; это означает, что наследственная ошибка
на выходе алгоритма, обусловленная погрешностями входной
информации, является удовлетворительной с точки зрения задачи
управления.
Ограниченность разрядной сетки СЦВМ увеличивает эту по-
грешность; допустим возможность увеличения среднеквадрати-
ческого значения наследственной погрешности на некоторую малую
величину б при дополнительной оговорке: математическое ожида-
ние всех машинных ошибок равно нулю. При этом условии пред-
полагается применение процедур округления при выполнении
всех арифметических операций. Выдвинутое требование о допусти-
мости малого увеличения выходной среднеквадратической ошибки
можно записать математически в виде:
ст[Дг]<(1 + 6)ст[Дгн].
Используя соотношение (142), получим
КD [Дгн] + D [Дгм] (I + б) Vd [Дгн].
Возводя обе части в квадрат
D [Дги] 4- D [Д?н] < (1 + 26 + б2) D [Д?н],
и пренебрегая малой величиной второго порядка б2, после сокраще-
ний получаем искомое условие
D [Дгм] < 26D [Дгн]. (164)
Таким образом, в плане выдвинутого критерия оптимальным
значением машинных ошибок, характеризуемых дисперсией
D [Дгм], будет величина, составляющая определенную долю
(26) от дисперсии наследственных погрешностей D [Дгн], опре-
деляемых разрядностью датчиков входной информации,
158
Поскольку AzM = f-t (ri), a AzH = f2 (nx, tty), то из полученного
неравенства можно определить требуемую разрядность машины:
п 5г Ф (пх, пу, 6).
Преобразование этой зависимости приводит к искомому требова-
нию о необходимом запасе разрядной сетки An = п — пх,у.
Проиллюстрируем сначала применение полученного условия
(164) на примерах выполнения элементарных арифметических
операций. В частности, эта иллюстрация позволит выявить на-
иболее «трудные» операции с точки зрения точности вычислений.
2. СРАВНИТЕЛЬНЫЙ АНАЛИЗ ИНСТРУМЕНТАЛЬНОЙ
ТОЧНОСТИ ВЫПОЛНЕНИЯ НА СЦВМ
ЭЛЕМЕНТАРНЫХ ВЫЧИСЛИТЕЛЬНЫХ ОПЕРАЦИЙ
Необходимые зависимости D [AzH (пх, пу)] и D [AzM (п)]
для всех рассматриваемых операций получены в гл. VII.
Операция умножения
Из сводной табл. 23 находим
Dmax[AzH]=-|--2^("o+1) ;
£>[АГм]=4--2-2(Л+1> >
где пх = пи = По-
Применение условия (164) дает:
1 .2—2§ 2 . 2—(по“М)
3 3
или
1 ... 22м—2п0 __
4S ~~~~
где &п = п — п0.
Из этого неравенства находим искомое требование на резерв
разрядной сетки СЦВМ:
Ап 5г 0,5 log2 . (165)
При 6 = 1/64 получим Ап 5г 2 разряда.
При выводе (165) было принято, что пх — пу\ если же разряд-
ность одного из преобразователей, скажем пх значительно пре-
вышает Пу, то формула (165) принимает вид
An1>0,51og2-^-. (166)
159
Вывод формулы (165) был основан на принятии условия
D [Дгн] = [Д£н] = 4 2-2 (По+1) ’ (167)
в то время как на самом деле
D [Дгн] = 4 2-2 [? + ?]. (168)
О
Принимая допущение х — 1 и у = 1, исключают наложение
неоправданно жестких условий на разрядность машины. В самом
деле, отказ от условия (167) в пользу (168) приводит к выражению
Дп2 ^0,5 log---х-—-—,
26 [ха + у*\
для которого, вообще говоря, при малых значениях х и у требуется
иметь сколь угодно большой запас разрядности машины. Это
неоправданно жесткое условие должно быть отклонено в пользу
соотношения (165) 4 на том основании, что, поскольку считается
допустимой наследственная ошибка (167) величиной ашах [Дгн],
то постольку и увеличение ее всего на 6 за счет машинных ошибок
также допустимо.
Операция изменения масштаба
Согласно сводной табл. 23 имеем
£>[Дгн1 =-4 2-2t'I°+1> £2 ’
О
£>тах [AZM] = 4 2“2 ("+1> [ 1 + (4У ] ,
где п0 = пх.
Применение условия (164) после элементарных преобразований
приводит к искомому требованию:
А» >0,5 log2 l2tff •
Частные значения Дп (k) приведены в табл. 24.
Таблица 24
k 4,1 U 1,6 1,03 0,61 0,1 0,03
1/2 2 3 4,3 8,8 12,5
160
Опыт программирования показывает, что в большинстве
случаев приходится использовать (при масштабировании перемен-
ных) значения константы k < 1. Учитывая большую применяе-
мость операций масштабирования при программировании задач
управления, из табличных данных можно сделать вывод, что эта
операция накладывает высокие требования на необходимый запас
разрядной сетки СЦВМ. Это тем более досадный факт, что операция
масштабирования является чисто машинной и не связана с пре-
образованием полезной информации.
Операция деления
Из сводной табл. 23 имеем выборку необходимых формул:
= X2-[1
O™<|AW = 4-2-"«'[2 + (^y].
После подстановки в условие (164) и проведения преобразова-
ний получим
2 । / {/max \2
Дпп 0,5 log2...j- •
26 1 + (У™*. )
L \ t/mln / J
Обычно ymJymXn » 1, тогда
Дпп~0,5 log
Таким образом, в смысле поставленной задачи о сравнительном
соотношении наследственных и машинных ошибок операция
деления предъявляет к СЦВМ «нежесткие» требования по ее раз-
рядности. Это объясняется не тем, что машинные инструменталь-
ные погрешности малы, а тем, что их уровень сравним с уровнем
наследственных ошибок. Абсолютное же значение машинной
ошибки операции деления превосходит аналогичные ошибки всех
других элементарных операций, поскольку обычно отношение
УтаЛу min !•
Операция алгебраического суммирования будет рассмотрена
ниже на примере сложения N переменных с введением необходи-
мых дополнительных условий по масштабным коэффициентам.
3. АНАЛИЗ ТОЧНОСТИ ВЫЧИСЛЕНИЯ ЗНАЧЕНИЙ
СТЕПЕННОЙ ФУНКЦИИ
Пусть требуется оценить наследственные и машинные ошибки
при исчислении значений функции z = № для положительных
и целых значений q (^2).
И Э. И. Соренкор > 161
Будем считать цены машинных единиц и известными,
тогда переход к машинным переменным приводит к формуле
z = хч .
Составим программу вычислений:
1) = 1 -х;
2) z2 = z4x;
3) z3 = z2x и т. д.
Каждой из операций можно привести в соответствие опера-
ционный граф ошибок процедуры умножения, как показано
на рис. 49.
Объединяя элементарные гра-
фы по признаку общих вершин,
Рис. 50. Граф ошибок решения задачи
получим машинный граф ошибок исчисления задачи; этот граф
(для q = 4) приведен на рис. 50.
Согласно графу можно записать нагрузку устья Az4:
(AzH)4 = Ах (х3 4- х3 + х3 + х3) — 4х3Ах;
(Azm)4 = А£2х2 А£зХ А£4.
Нетрудно теперь обобщить результат для произвольного q:
AzH = ^х9-1Ах;
AzM=SA^?4
i=2
Полагая А£г случайными и независимыми величинами, для
дисперсии ошибок получим формулы:
d |4;,i4
О
162
D [AzM] = D [Ag] f ? {q~i} •
1=1
После подставки D [Д£] = — •2_2(n+,> и несложных преобразова-
О
ний-найдем
D [д2м] = ‘ . 2-2 (л+1) •
1-х2 5
д . D[&ZH] 22in”>
Рис. 51. Графики дисперсий ошибок
На рис. 51 построены графики дисперсий этих ошибок.
Из графиков следуют вы-
воды:
1) для малых значений х в
общей ошибке превалируют
ошибки округления, в то время
как для больших значений х
решающую роль играют ошиб-
ки наследственные;
2) с ростом q отношение
он£=1)
Рм(х= 1)
имеет тенденцию к возраста-
нию.
Поставим теперь вопрос-та-
ким образом: для какого значе-
ния х следует вести расчет не-
обходимого запаса разрядной
сетки СЦВМ?
Очевидно, что, исходя из
требуемой точности решения
задачи прежде всего необходимо
выбрать разрядность датчика
входной информации пх. При этом максимальная ошибка будет
иметь место при х = 1. Поскольку разрядность СЦВМ выбирают из
условия (164), то, хотя дисперсия шума округления и будет пре-
вышать наследственные ошибки при малых х < 1, абсолютная
величина этих погрешностей будет заведомо лежать в пределах
допустимой точности.
Следовательно, в интересах повышения точности требуемый
запас разрядной сетки целесообразно рассчитывать для больших
значений х, в том числе для х = 1. При этом расчетные формулы
дисперсий значительно упрощаются
D !а;н| = f 4- 2- <”-+1); D |4;,1 = (,-1)4-2-’....
11*
163
в силу того, что
lim.
х->1
1 — 22
1 — X2
«. _2(<7—1) „ 1
= lim——L = cl—
х->1
Для определения необходимого запаса разрядной сетки СЦВМ
воспользуемся условием (164); после преобразований получим
Таблица 25 искомую формулу
q 2 3 5 10
1,5 1,4 1,3 1
An>0,51og2-^-. (169)
В табл. 25 приведены част-
ные значения An (q) при
6 = 1/64.
Таблица подтверждает вывод 2, полученный при анализе гра-
фиков рис. 51, который дает основание выбирать необходимый
запас разрядной сетки по наименьшей степени д (т. е. для q = 2).
4. АНАЛИЗ ТОЧНОСТИ ВЫЧИСЛЕНИЯ
ОПРЕДЕЛЕННОГО ИНТЕГРАЛА
Будем считать известными параметры масштабирования
шаг дискретности вычислений h и предельное значение интег-
рала Zmax*
При интегрировании по способу прямоугольников вычисления
осуществляются по формуле
N-1
z = h^iyi(x), (170)
1=0
где h = b/N — шаг интегрирования, • 4
i)i — {Уо> У1> Уг> • •> Уы~1\ — значения подынтегральной
функции, хранящиеся в оперативной памяти машины.
Имея в виду соотношения
h = fixh;
У = Р^; (
z = p2z,
приведем формулу (170) к машинному алгоритму:
zs N—1 л
* = S Kyi
1=0
где =h^-$y.
164
В том случае, когда выбран предельный масштаб переменных,
т. е. ЦМЕ хтах , Pj, « утах и предельное соотношение отве-
чает формуле интегрирования:
ь=хтах
^max = J Утах Утах^тах РлРу>
О
произведений
записываемой
получим h'
В качестве истоков наследственных ошибок будем считать
погрешности Ду,- (nJ вычисления подынтегральной функции у,-,
хранящейся в ОЗУ.
Истоком зарождающихся инструментальных ошибок СЦВМ
являются погрешности усечения при округлении
и погрешности ^.hl округления величины hlt
в постоянную память СЦВМ.
Оценим при формальном
подходе к решению задачи
зарождающиеся погрешности.
Для этого прежде всего
составим программу вычисле-
ний на машине:
la) z6 = Mo;
16)
2а)
26)
За)
36)
Зарождающиеся ошибки имеют место только при выполнении
операций умножения (1а, 2а, За, . . .), так как при сложении
промежуточных результатов масштабы не выравниваются.
На рис. 52 построен машинный граф ошибок решаемой задачи.
На его основании находим:
*o=O +2о;
zi= /11У1!
22 = Л1У2;
?2 — zi + zj; И Т. Д.
Дг2 — /lj (Дуо + Дух 4- Дуг) 4 Д/h (Уо 4" У1 4~ У г) +
4" + А£1 + Д?2-
Нетрудно теперь распространить формулу для Дг2 на случай
суммирования (N — 1) переменных:
Л N-l ~ N-lЛ ЛГ-1
Дг = /г1 Ду,-Д/ii у,- +
1=0 i=0 i=0
165
Примем далее, что
О[ДЯ1]=О[Д^] = 12-2(л+1);
О
=4-2-2(vH)’
□
и математические ожидания ошибок округления равны нулю.
Тогда дисперсия наследственных ошибок
D [Д?н] = 4- 2“2 (172)
О
а дисперсия машинных ошибок, зарождающихся в результате
оцифровки hi и округления частных произведений, — •
Г /N-1 \ 2
D [Дгм] = 4 2-2 ("+1> Ц SJ. )
(173)
Поступим как и ранее, положив yt = 1; кроме того, примем
во внимание соотношения
= (174)
Но из предельного условия zmax = &ymax следует: pz b$y-,
при рациональном масштабировании принимают 02 = Ь$у.
Тогда
Подстановка у(- = 1 и /ц = 1/N в (172) и (173) дает
w = 42-2("s+i); <175>
Яшах 1Д?М] = 4 W + О 2"2 (ПН>- (176)
Определим теперь необходимый запас разрядной сетки СЦВМ.
Из условия (164) получаем
. An^0,51oga (177)
zo
где Дп = п — пу.
При N = 30 и 6 = 1/16 (—6%) требуемый запас весьма ве-
лик и составляет примерно 9 разрядов. Этот запас можно заметно
уменьшить, исходя из следующих соображений.
Заметим, что в двучлене (N 4- 1) выражения (176) первое сла-
гаемое обусловлено ошибкой оцифровки шага интегрирования Лх.
166
Ошибка оцифровки ДЯХ константы ПЗУ hr является случай-
ной величиной по ансамблю решаемых задач; в каждой конкрет-
ной задаче программист, определяя величину погрешности оциф-
ровки ДЛХ, переводит ее в разряд систематических, поддающихся
учету. Этот учет может быть осуществлен, например, пересчетом
ЦМЕ результата решения задачи в целом. В самом деле, из (174)
находим
Если в ПЗУ ввести величину h\ = hx — < hlt то резуль-
тат вычислений следует воспринимать в цене
При этом ошибка оцифровки /гх будет исключена полностью
и вместо (176) следует записать:
£maxlAz*M] =4-ЛГ.2-2(п+1). (178)
Необходимый запас разрядной сетки в этом случае определится
значением
An*^0,51og2-§-. (179)
При тех же параметрах N = 30 и 6 = 1/16 величина запаса
определяется уже величиной Дп = 6,4 разряда.
В заключение отметим, что применение метода Симпсона для
исчисления определенного интеграла, с точки зрения машинных
ошибок, равноценно применению метода прямоугольников.
В этом случае, как известно, используется соотношение:
г — у (Уо + tyi 4“ 2у2 4Уз 4- ... + 4yN_2 4~ ^w-i),
где N — нечетное.
Можно аналогичным образом показать, что наследственная
погрешность будет иметь дисперсию
которая весьма близка к оценке (175).
167
5. АНАЛИЗ ТОЧНОСТИ ВЫЧИСЛЕНИЯ СУММЫ
РАВНОДИАПАЗОННЫХ ВЕЛИЧИН
Выше была рассмотрена задача интегрирования функций, ко-
торая согласно (171) свелась по существу к задаче Af-кратного
сложения переменных yt с постоянным масштабным множителем
hr 1/N.
Дадим интерпретацию полученных результатов с позиций за-
дачи суммирования большого количества слагаемых.
В самом деле, пусть требуется сложить N переменных
г = S Уь
t=i
каждое из которых имеет цену машинной единицы 0У и изме-
няется в пределах 0 yt 0Г Так как возможен предельный
случай yt = утах = Pj,, i = 1, 2, 3, . . то 0г следует выбрать
из соотношения 0г = Nfiy. При этом выравнивающими множи-
телями ky. переменных yt будет служить коэффициент ky = 1/JV,
в качестве которого при интегрировании выступала величина
Улучшенный метод суммирования дает оценки погрешностей
в машинных единицах (175) и (178)
С[^) = А.2-г<“А0;
1ЛЙ-4 2-г <"+'.
Таким образом, дисперсия зарождающихся в машине погреш-
ностей пропорциональна числу слагаемых, в то время как диспер-
сия наследственных погрешностей обратно пропорциональна этой
величине. При этом, как и прежде, наследственные ошибки обус-
ловлены разрядностью датчиков входной информации.
Следовательно, суммирование большого числа равнодиапазон-
ных переменных приводит к необходимости иметь существенный
запас разрядности СЦВМ [см. формулу (179)].
Зарождающиеся ошибки обусловлены усечением разрядной
сетки после выполнения операций умножения переменных на
масштабный множитель ky. Исходя из этого, можно предложить
способ, существенно уменьшающий погрешности выполнения по-
ставленной задачи.
В самом деле, для каждого заданного значения числа слагае-
мых N можно указать минимальный множитель ky = 2“Глг,
использование которого при выравнивании масштаба слагаемых
сводит задачу умножения переменных к сдвигу последних на rN
разрядов вправо.
168
(180)
Если при этом потери информационной точности слагаемых
(дополнительных ошибок умножения) нежелательны, то величину
rN следует принять за необходимый запас разрядной сетки СЦВМ.
В качестве rN = f (N) следует принимать значения, указан-
ные в табл. 26.
Таблица 26
N 2 3—4 5-8 9—16 17—32 33-64
rN 1 2 3 4 5 6
При таком подходе к решению задачи ошибка множителя k*
и ошибки округления разультатов умножения будут равны нулю;
следовательно, в целом будут нулевыми инструментальные по-
грешности выполнения операции суммирования.
Следует,. однако, заметить, что получаемая при этом ЦМЕ
суммы
не будет в общем случае предельно возможной и может отличаться
от рг = р;/М в к = 2гн/К раз. Это отличие может достигать ве-
личины Amax = д.----, стремящейся к числу 2 по мере
2n +1
роста N.
Так как полученный результат в дальнейшем можно исполь-
зовать в алгоритмическом преобразовании информации, жела-
тельно оценить инструментальные погрешности приведения
ЦМЕ суммы р* к Рг.
Поскольку эта задача сводится к операции изменения мас-
штаба, то на основании (151) можно написать
О[Дгм] = 1 2~2 <n+1) [(?)2+ 1],
О
где п = пу -ф rN — длина разрядной сетки СЦВМ с учетом
необходимого запаса.
Из изложенного ясно, что z^ax = 1/Х, поэтому
D [Дг 1 — — 2-2 ("+1) •1
^max L^^mJ — 3 ^2
в цене машинной единицы Р2 = fiyN.
Таким образом, дисперсия инструментальных ошибок тем
больше, чем меньше z* отличается от z =1.
1 max max
480
169
Следовательно, приводить масштаб суммы к предельному
масштабу в тех случаях, когда они мало друг от друга отличаются,
весьма нецелесообразно по точностным соображениям.
Так как при этом D [Дин 1 определяется по (180), то из изве-
стного неравенства (164) находим дополнительное условие по
запасу разрядной сетки: '
An^0,51og2/V^^.
При % «=> 1
А^тах 0,5 log2 -g- .
Если окажется, что Дп > rN, то в качестве требуемого запаса
следует выбрать величину Дп; в противном случае оставить ве-
личину rN.
Например, если N = 100, 6 = 1/16, то rN = 7, Дп = 5,2;
в качестве необходимого запаса следует принять 7 разрядов.
6. АНАЛИЗ ТОЧНОСТИ ВЫЧИСЛЕНИЯ
ДВОЙНОГО ИНТЕГРАЛА
Пусть требуется вычислить значения двойного интеграла
Ь х
z2 = j dx J y(x)dx (181)
о о
при заданных значениях функции у (х) на интервале 0—b в точ-
ка\ Xi = 0; h\ -2h\ . . ., (N — 1) /1, h — шаг интегрирования,
N = b/h.
Будем считать известными:
P^ — ЦМЕ представления у;
р21 — ЦМЕ представления zr\
ь
Zi = J У (х) dx,
о
— ЦМЕ представления аргумента х,
Рг2 — ЦМЕ представления результата z2, предполагая, что
они выбраны из предельных соотношений:
Рг/ = Утах> Рх Хтах = Ь,
b
Pzx = Zi max J Утах ^Х = Утах^ “ РхРг/>
0
b х
Р;2 == ^2 max == J ^Хо J Утах ^Х = Утах 2 ’
0 0
170
Непрерывное интегрирование (181) заменим дискретным:
N i
z2 = S (182)
/=1 1=0
Вводя в рассмотрение машинные переменные
Z2 = Pz,-z2; zi = pZ1zi;
У=$уУ'> h = ^xh,
получим последовательность решения алгоритма (182) в машин-
ных кодах:
2i/ = S ^1Уь i=l,2, 3,.,. N,
1 = 1
W XX >х
Z2 = S hiZij,
где обозначено
h1 = h = h
Pz,
#max ____ 1 .
£/max^ N ’
(183)
(184)
Й — h — h Ут^Ь _ 2
n*~n p -n b - N
2 Утах ~2~
Вычисляемые промежуточные значения z^ хранятся в ОЗУ
в качестве исходных данных для суммирования по формуле(184);
константы hlt h2 являются нормирующими множителями для
исключения переполнения разрядной сетки СЦВМ при сложений
N переменных.
Дадим теперь оценку машинных погрешностей решения задачи.
Составим программу вычисления (183):
1а)
16) = о +
2a)^2 = ft1z/2,
26) z12 — Z11 + R
За) R3 = h1y3 и т. д.
и аналогично для (184):
la) Pi = h2z119^
16) г21 + Рj;
2а) Р 2 — /^2^12»
26) ^2 2 — ^21 + Р
За) Р3 — h2Zi3,
36) Z23 ~ ^22 + Р 3 ИТ. Д.
171
Эти программы дают основание для построения графа ошибок
(для W = 3), изображенного на рис. 53.
В соответствии с графом составим выражение для выходной
ошибки
Лг23—[3 Ai/i -|- 2 Ду2 + Ду3] +
+ S Д*]* + Д^2 (2ц + Z12 + г1з) +
1=1
+ [3//1 + 2у2 + у3] +
+ h-2 [3 Д£1 + 2 Д£2 4- Л£з],
где Д^- и Дт]/ — ошибки усечения произведений и
Рис. 53. Граф ошибок вычисления двойного интеграла
172
Обобщая результат для N шагов интегрирования, получим
Дг2 = 2 (N Ч- 1 — О Д*Л Ч~ £ Д'*]/ Ч-
i=l i=l
+ h2 2 (Af 4" 1 — 0 A£t- + А/^ 2 (Af -J- 1 — 0уi + АЛ2 S zu.
i=l t=l t=l
Наследственная ошибка определяется погрешностями At/Z;
ее дисперсия
d [д?2н]=± 2(N+1 ~ °2 42-2 (П!/+1)-
1=1
Имея в виду, что для Af 1
. ^(^+1—02=S(№ —2tW + t2) =
t=l i=l
= ^—2N N(N + ° + ^^ + 1)(2УУ+1) д^з
гг 2
с учетом соотношения й^ = получаем
D[Az2h] = 4f2-2(^+I).
Дисперсия инструментальных ошибок СЦВМ
D [Дг2м] = 2 D [Д^] + й2 2 GV + 1 — О2 D [Д&] +
1=1 1=1
+С[ДЙ!] й22 2 (w +1 _ i)2^? + d [Дй2] (2 *4 •
1=1 \ 1=1 /
Для максимальной оценки примем yxi =1; zu = 1. Тогда
- [Аг2м] = 4- 2-2 <"+1> [ N + А + 4 N + *4 =
= 4-N (-У- + w') 2-2 <n+1> ^4 2-2 (rt+1) • (185)
При выводе (185) принято
®-(4)’"-5>-и "»>•
Используя условие (164), находим требуемый запас разрядной
сетки решения задачи:
An>0,51og2-^-- (186)
173
Требуемый резерв (186) весьма близок к (177), полученному
при рассмотрении однократного интегрирования. Это объясняется
тем, что в общей погрешности, как это видно из формулы (185),
решающая роль принадлежит ошибкам A/i2: дисперсия этих
ошибок пропорциональна №.
Пользуясь теми же приемами, которые были рассмотрены при
однократном интегрировании, можно существенно уменьшить
ошибки, зарождающиеся в машине при решении задачи двукрат-
ного интегрирования.
Так, если исключить ошибки оцифровки Д/г2, то зарождаю-
щаяся погрешность
Отах [Дг;н]~4 N2-2(n+" (187)
при
Пример 31. Сравним среднеквадратические погрешности, вычисленные
с помощью формул (185) и (187), при следующих исходных данных:
*/тах = ЮО м/с2; W = 30; /I = 5 с; п = 16; 6 = 150 с.
Дисперсия по (185)
^тах PZ2iJ = Рг^тах Р22м] =
_ Утах^ N2 9—2(п+1)_ Ю02-1504 302 34 4 2
Тогда __________
атах [Az2m] — V~Dmax [Az2h] 150 M. •
Дисперсия no (187)
Dmax [Д4] - • V N2~~ <П+1> ~29°°
Тогда
°max [Дг2м] ~ 54 M'
Таким образом, среднеквадратическая погрешность уменьшается примерно
втрое.
Используя методику, изложенную выше, можно еще более снизить величины
инструментальных погрешностей решения задачи.
1. АНАЛИЗ ТОЧНОСТИ РЕШЕНИЯ ЗАДАЧИ
ЭКСТРАПОЛЯЦИИ (МНОГОКРАТНОЕ СЛОЖЕНИЕ
РАЗНОДИАПАЗОННЫХ ВЕЛИЧИН)
Дадим оценку погрешностей решения задачи
z = *о + V/,
если известны
Рх. /max. Pv. Рг = Рх(И< 0),- Vmln.
174
Пусть требуется определить набор значений г,- в интервале
I = 0 4- /тах через дискрет времени Т:
Zi = х0 VTi,
где
д г_ бпах _ гтах __ Рг
V — Т ~ Т | “ Т | V| ’
V в данном исчислении const.
Обозначим Y{ = VT-i — yi.
Возможны два варианта программы решения задачи.
А. Вычислить значение у = VT = const, записать в оператив-
ную память машины и, обращаясь на каждом такте вычислений
по этому адресу, определять текущее значение
i
Zi = ХО + S Ус.
Б. В целях повышения точности вычислений текущее значе-
i
ние суммы Y = У можно накапливать на крупномасштабном
регистре р^ (Р^ < PJ, на каждом такте выдавая результат
для определения
= х о + Y [.
Дадим анализ погрешностей обеих схем расчета.
Вариант А. Вводя масштабные соотношения для формулы
У =VT
У = Рх£Л v = PvV,
получим машинный алгоритм
где
JI _ у» РуР? _ гр Ру
1 Рх ~ Рх ’
Значение 7\ заносится в качестве константы в ПЗУ, а V —
является запомненным значением текущей скорости для данного
исчисления задачи. —
Напишем программу реализации решения
у = W
zi ~ *о + У>
г2 = + У\
^3 = ^2 + У И Т. Д.
175
Граф ошибок решения представлен на рис. 54.
Согласно графу имеем
Дг3 = Дх0 + Др • ЗЛ + Д7\ • Зр + ЗД£.
Для i тактов получим
Дг, = Дх0 + i [АРП + Д7\Р + Др].
Отсюда находим
D [Д г,] = D [ДЯ ] + i2T]D [Др] + i2P2Z) [Д Л] + ?D [Д£] =
_ _L.2-2(nx+1) _|_ t’27’^1..2_2(nv+1)-]-i2p2—.2-2("+1)+/2— •2-2(п+1>.
3 3 3 3
Первые два члена этого выра-
жения составляют наследствен-
ную погрешность; имея в виду,
что пх Пу, можем записать
Дисперсия инструментальной
погрешности СЦВМ
D [AzMt] = Р |-2-2 <"+» (Р2 + 1);
По формуле (164) можем найти
искомый запас разрядной сетки
В2
Ani^0,51og2—
от pv
(188)
Следует отметить, что запас разрядной сетки не зависит от
параметра экстраполяции i.
Вариант Б. Используя формулу Y = VT и масштабные соот-
ношения Y =Р!/У; V = 0уР; Т = р/Г, получим
Р = Т2Р,
где Т2 =
Ру Ру
L = -у2— число тактов сложения, удовлетворяющее
условию непереполнения разрядной сетки регистра
сумматора У: L-VT «5 L <N.
176
Программа вычислений будет иметь следующий вид:
1а) Ух = VT2,
16) Y'i = Y\ku,~
1в) Z1 = Хо + Yi\
2a) Y2 = Л + К
26) У2 =У^
2b) Z2 == Xq Y^\
За) Уз = Y2 + Уъ
36)' Уз
Зв) z3 = Хо + Уз И т. д.,
где &„ = — выравнивающий масштабный множитель.
Рх
Можно показать на основе построения графа, что дисперсии
наследственных и машинных ошибок выражаются формулами
d[4Jh,i~A^4-2_2(“v+1);
D [Д?М(] = | 2~2 (n+1) [i2^V2 +124 + У2 + 1].
Максимальные значения ошибок будут иметь место при
i = yq, — у,р , где Sz = zmax zmln,
^max — *0, ^mln — -^0 Ру
Тогда
dmaxlziid "з” 2 2
2
,2 \ 2
’ Г) ГЛ? 1 _1_ о—2(«+>) 9 I ( \ I ( Ру
Ь’шах lAZMd — з 2 р + + \ VTPx
Необходимый запас разрядной сетки СЦВМ
/ о2 \ 2 / й2 \2
Ру |
TVPx /
Дп2 Ss 0,51og2
26
(189)
2 т
Сравним выражения (188) и (189), положив для наглядности
V Тогда выигрыш за счет использования второго метода,
характеризуется разностью
Дщ — Дн2 0,5 (log2 Рх—log2p^+ l) = log2-|i + °>5-
12 Э. И. Соренков
177
Таким образом, вариант программы Б имеет преимущества
по точности вычислений и тем большие, чем больше ЦМЕ суммы
Рг = Рх отличается от ЦМЕ промежуточной суммы р^.
Найдем значение Ру=Р7ор/, при котором запас разрядной
сетки (189) минимальный.
Дифференцируя выражение Дп2 (Ру) и приравнивая его
нулю, после алгебраических преобразований получим
04
Ру°Р< F2 + p2-
Для предельного значения скорости
У = /пах — Рю
₽уор/ = /СТ?-
При этом сам минимум (189) будет равен:
Д^2 mln == 0,5 10g2 •
8. АНАЛИЗ ТОЧНОСТИ РЕШЕНИЯ КОМБИНИРОВАННОЙ
ЗАДАЧИ
Рассмотрим пример анализа точности решения на цифровой ма-
шине комбинированной задачи, в которой используются все
элементарные арифметические операции.
Пусть требуется оценить ошибки решения алгоритма
? = £+£ = _£. (190)
ay W ' 7
при следующих исходных данных: х = 0—10 000 м, а = 2000 м =
= const, а = 10 4-100, у = 100 4-5000 м.
Имеем
о _ __ 10 000 + 2000 i9
Pz — 2max ~ 10-100 —
_ _4VUU_ _ _ Q ЛАЛ
^min— Ю0-5000 — 250 U
Очевидно также, что ру = 12 000 м, рх = 10 000 м, ра = 100,
Р^ = 5000 м, Puz = 5-10+б м. Возможны по крайней мере две
программы реализации (190). Программа 1:
1) Vx = kxx, где kx = -Ь- =
ох О v , ~ ~ 2000 1 .
2) V — Vx + а, а — 12 000 — 6 ,
3) W = ay,
Vk
Z =
W
178
где k — масштабный множитель, предупреждающий возмож-
йость переполнения разрядной сетки СЦВМ при делении,
0,002.
U^mln ___ те? _____«mln . У mln
zs ™ mln ft ’ ft
W'max
В соответствии с этой программой составим граф ошибок,
который изображен на рис. 55; согласно графу имеем
Рис. 55. Граф ошибок решения комбинированной задачи
по программе 1
k
Примем, что ошибки оцифровки входных данных Дх, Дг/ и
Да определяются длиной разрядной сетки датчиков п0, а погреш-
ности оцифровки Да, Д&Л, Д& и ошибки усечения Д^ — длиной
разрядной сетки СЦВМ п.
Прежде чём записать выражения для числовых характеристик
выходной ошибки Дг, дадим сравнительную оценку коэффициен-
12* 179
тов трансформации на выход первичных ошибок в полученном
выражении (по их максимальным значениям).
Имея в виду, что k = ITmln, получим
= (2Л =—1—= 500;
\Hmax \WLx
/ akV \ _ Umax _ gQ. f \ __ /P \ _ gQQ.
\ Hmax ’ ^/max \ /max ’
= Pjnax^ 10;/_L\ = _= 500;
amln \w)max Wmln
I xk \ _~ <
I I -^max 1 >
\ W /
\ / max
( — \
I W I ~ 1'
С учетом этих значений, а также в предположении, что п0 п,
можно написать
to — A£2 ——H Afe ——f- A£3 .
WWW
Таким образом, при большом диапазоне изменения величины
W — ау решающее влияние на формирование выходной ошибки
частного оказывают погрешности оцифровки величины k и за-
рождающиеся погрешности при усечении произведений k
и а-у.
Дисперсия выходной ошибки при этом будет
Яшах [Л?м1~ 2-2 ("+D25. 10<
при
рг = —— = 12.
PuzW'mln
Рассмотрим возможные пути модернизации программы вы-
числения, позволяющие уменьшить погрешности исчисления за-
данного алгоритма
Если удастся исключить прямое умножение V на k, то при
этом устраняются погрешности оцифровки Д& и усечения полу-
ченного произведения. Напомним, что операция умножения
V-k является вспомогательной: она предназначена для исключе-
ния переполнения разрядной сетки частного.
180
Далее желательно исключить из программы вычислений опе-
рацию перемножения а на у, при этом погрешность усечения про-
изведения также будет исключена.
Используя изложенные соотношения, составим новую про-
грамму вычисления задачи по следующей схеме.
Программа 2:
1) Rx = а0/а;
2) Rz = у0/у, где а0 <ат1п, у0 < ymiD;
3) zx = VRi,
4) z2 = z1^2-
Операции 1—2 соответствуют операциям обращения: Rx =
= 1/а и — Му> а выбор коэффициентов а0 и у0 обусловлен
необходимостью исключения переполнения разрядной сетки
частных Ri и R2.
Окончательный результат вычислений будет получен в ЦМЕ:
Pu’/47o min
причем
Wo mln ^оУо ®mlnf/mln ^mln
и переполнение разрядной сетки не будет иметь места.
Построим снова граф ошибок, соответствующий программе
вычислений 2; он изображен на рис. 56.
Согласно графу
Д?2 = | VRz — *У — ) zx + bVR^ +
у. а2 у \ У/
Оценим снова коэффициенты трансформации ошибок на выход:
/ ао yg j ^тах \ а2 /шах “шт а, fe?) = = \ У2 / max ^mln /р р \ ао Уо \^1^2/тах — "k "X amln Ут1п г)тах 1 max 1, — = 10; mln = 50; ^1 max = 1»
181
Пренебрегая малыми значениями коэффициента (1 по сравне-
нию с 10 и 50), получим
Дг «=>—Да-10 — Дг/-50.
Следовательно, во-первых, значение ошибки Дг, получаемое
по новой программе, примерно на порядок меньше прежнего зна-
чения; во-вторых, выходная ошибка определяется в основном
входными ошибками переменных а и у.
Таким образом, программа вычислений 2 практически исклю-
чила машинные инструментальные погрешности решения задачи.
При этом:
Апах [Д?2] ~ 2-2 ~ 870 • 2-2 <п’+1).
Этот пример наглядно показывает, какие возможности, с точки
зрения повышения точности, заключены в программном синтезе
алгоритма счета. Поэтому в тех случаях, когда требуется повы-
182
сить точность вычислений, всегда целесообразно, исходя из ана-
лиза причин зарождения ошибок, подыскать программу, обеспе-
чивающую минимизацию погрешностей.
9. РАЗНОВИДНОСТИ МАСШТАБОВ. МАСШТАБЫ И ТОЧНОСТЬ
ВЫЧИСЛЕНИЙ. ПРОГРАММНЫЕ МЕТОДЫ ПОВЫШЕНИЯ
ТОЧНОСТИ РЕШЕНИЯ ЗАДАЧ
Помимо предельных и непредельных масштабов в цифровой
технике иногда используют так называемые двоичные масштабы.
Напомним, что понятие масштаба вводится как отношение
Хп
тх = ——.
*тах
Если х0 — 1—2'я = хОшах, то масштаб будет предельным;
в противном случае будет иметь место непредельный масштаб.
Двоичный масштаб является разновидностью непредельного
масштаба. Непредельный масштаб будем отмечать символом т”,
а двоичный оставляя за обозначением тх понятие предель-
ного масштаба.
Для диапазона изменения х от xmln до хшах введем в рассмотре-
ние фиктивную величину хтаХф^хтах, удовлетворяющую усло-
вию
9" 1
х . = —_____!_ 9гх 9гх Ор
лтах ф — ди
где гх — целое положительное число (минимально возможное).
Тогда двоичный масштаб определяется как отношение
/п® = /т-ал. — г 1_2'”] • 2"~ 1 2Г* — 2~Гх —.
Хщах ф 2Л ое
Так, например, если хтах = 1000 м, то, принимая хтахф =
= 1024 м, получим гх = 10 (при п 1); следовательно,
д __ п-ю _ 1 ме
т* 1 — Ю24 ое ’
Р” —-^-= 1024 —.
' mJ ме
Непредельные, в том числе двоичные масштабы, нельзя
использовать при масштабировании периодических величин,
например азимута, изменяющегося неограниченно с периодом 360°.
Величина двоичного масштаба зависит от единиц измерения
переменных. Так, если угол е измеряется в пределах от 0 до 50°,
то в «градусном» представлении
рд = 64 JTM
ме
183
в то время, как в «минутном» (е_= 50° = 50-60 = 3000')
Ре = 4096 — .
ме
Очевидно, что в первом случае етахф1 = 64°, во втором
8тахф2 ~ 68,27 .
Особенностью использования двоичных масштабов является
то обстоятельство, что при выполнении арифметических операций
умножения и деления масштаб результата также получается двоич-
ным. Так, для операции умножения
рг = р«р" = 2Гх2гу = 2г*+гу = р’.
Если при реализации операции деления величину k выбрать
подходящим образом, k = 2Г*, то также получим частное в двоич-
ном масштабе
р2 = --Д- = 2r*+rk~ry = Рд.
Рд2— *
Преимущества использования двоичных масштабов могут
проявляться при выполнении операций алгебраического сложения.
В самом деле, вместо выполнения операций умножения пере-
менных х и у на выравнивающие множители kx и ky в операции
Z = kxX + kyy,
h __ ft* h ___ •
x~ ₽2 ’ u~ p2 ’
в случае двоичных масштабов дело сводится к сдвигу бперандов
на величины
где
рд Рд
гх = log2, ry=log2-^-.
Если гх > 0 и Гу > 0, то процедура левых сдвигов, как
известно, не вносит погрешностей в задачу перемасштабирования
переменных.
Если гх < 0, то инструментальные ошибки правого сдвига,
характеризуемые
Мсдв [А?м]огбр = - 2-(n+1> (1 - 2-r);
ОСдв[Д2н]=4-2~2(,'+1,(1-2-2г),
несколько меньше оценок погрешностей прямого умножения:
Мумн[Агм]отбр = - 2-(n+1),
Яумн [AzM] = 4 2-2(п+1).
184
Это, однако, нельзя сказать про систематические ошибки при
наличии процедуры округления:
Мсдв[Дгм]окр = 2-<n+1);
Мумн[Дгм]окр==2~(п+1)2-п.
При достаточно большом значении |rx| 1 различия в точ-
ности выполнения операции выравнивания масштабов в задаче
суммирования методом правых сдвигов и прямого умножения
исчезают.
Таким образом, точностные преимущества двоичных масшта-
бов в операции алгебраического суммирования проявляются
только при наличии левых сдвигов операндов при их перемасшта-
бировании (гх > 0, гу > 0) или при малом числе правых сдвигов,
операндов и дополнительном условии, что арифметическое устрой-
ство выполняет усечение произведения тю схеме, отбрасывания.
При использовании двоичных масштабов повышается также
быстродействие СЦВМ в случае тсдв < тумн.
Если перечисленные условия не соблюдаются, то нет основа-
ний рекомендовать применение двоичных масштабов для повыше-
ния точностных характеристик работы машины. Более того
в большинстве случаев предельные масштабы имеют большие пре-
имущества перед непредельными, к которым относятся и двоич-
ные.
Следует иметь в виду, что точность выполнения операции де-
ления при использовании двоичных масштабов также не выше
в силу того, что нормирующий множитель k * * выбирают из усло-
вия
k = 2r'k<!-^< 1.
, £/max
Нетрудно показать, что чем больше по абсолютной величине
масштаб исходной информации, участвующей в операциях арифме-
тического счета,, тем выше инструментальная точность решения
задач. В самом деле, на основании связей
М [Дг] = Р2М [Дг];
D [Д2] = pfD [Дг]
можно перейти к оценке инструментальных ошибок выполнения
арифметических операций в отсчетных единицах.
х
* В машином алгоритме деления z = k .
h
185
1. Операция умножения
Поскольку рг = то
М[Дгм] = -2-
Р[Дгм] = 4-2"2(,,+1те-
2. Операция деления.
Так как
_ Рх
z Р<Л ’
то
l^max [AZjl]0T6p = 2 п ;
Цпах[Дги] = 4 -2-2 <«+» Г2 + (1 тйг •
о L \ i/mln / J '
- 3. Операция перемасштабирования переменных.
Поскольку р2 = fijk, то .
t M[Az]0/6p==-2~W-i)4-;
в2
Цпах[Дг]Ь4-2~2(п+1) I1 -К-
Так как рх = 1/тх, то приведенные формулы подтверждают
высказанное выше утверждение.
Операция перемасштабирования является чисто машинной
операцией, не. связанной с полезной обработкой информации;
при ее выполнении, как вынужденном шаге машинного счета,
зарождаются погрешности, величина которых обратно пропор-
циональная величине коэффициента k.
Покажем теперь, что наследственные погрешности зависят
только от разрядности входной информации и вида ее функцио-
нального преобразования; в частности это означает, что на вели-
чину этих погрешностей коэффициент перемасштабирования k
не влияет. На основании свободной табл. 23 получим следующие
формулы.
1. Для операции умножения
Цпах [Дгн] = 4 • 2“2 (n°+iWy-
2. Для операции деления
о2
Om,|4ZJ=4-2-!>"-+'’[l +(-£-)2]тГ- <191>
“min
Поясним вывод этой формулы.
186
Согласно (155)
D[Azh] = 4-2-2<',o+1)
О
21
ft2A2
№
2J_______
7 ^*2 ’•
при Р2 = Рх/р^’й; следовательно,
D [Дzu] = 4- • 2-2 <п»+1’ 1 + | -4
3 L \ у
откуда видно, что D [AzH] =h f (ty-
Формула (191) получается из (192) при подстановке
(192)
х=1, y=ymln= -“gS-
3. Для операции изменения * масштаба
Dmax[AzH] = J--2”2 (/!«+1)p2.
О
Следовательно, всякое перемасштабирование операндов, вы-
полняемое в конце вычислительного процесса (например, при
согласовании с масштабами абонентов), с точки зрения точности
вычислений является нежелательной операцией.
Из сказанного вытекают следующие очевидные рекомендации
по масштабированию.
Во-первых, все исходные данные для решения задачи (вход-
ные операнды) должны, по возможности, иметь минимальные цены
машинных единиц; это означает, что максимально возможному
значению переменной х = хтах должны соответствовать машин-
ные коды, близкие к единице, xmax = 1—2~пх. Если при этом
пх < /г, то при вводе информации в машину следует придержи-
ваться правила, «старший разряд датчика — в старший разряд
ОЗУ».
Во-вторых, следует подвергать тщательному анализу алго-
ритмы с целью ограничения максимальных значений функций;
например, при алгебраическом суммировании следует установить
не является ли по условиям течения реального процесса алгебраи-
ческая сумма разностью модулей двух величин; надо также поста-
вить под сомнение правдоподобность ситуации деления некоторой
переменной на произведение значений минимальных сомножи-
телей делителя и т. д.
В-третьих, в процессе программирования задачи необходимо
обращать внимание на возможность использования максимальных
значений машинных множителей k.
Тщательная алгоритмизация и программирование задач всегда
благоприятно сказывается на повышении точности их реализа-
ции на СЦВМ за счет сохранения крупных масштабов.
Поясним сказанное на характерном примере.
187
Пример 32. Пусть требуется промасштабировать функцию
f = у (Ю—5V) при = 2.
В результате прямого решения задачи получаем
1) zi=V, ₽21=5pv= Ю;
2) z2= 1 -zv 0z2= 10;
3) 7=72V, = №, = 2-10 = 20-
Итак, ЦМЕ pf = 20. Однако нетрудно убедиться, в том, что fmax = 5 при
V — 1 и, следовательно, ЦМЕ в 20 единиц является избыточной.
Здесь также после получения произведения f2n = z2V в 2п-разрядном пред-
ставлении следует выполнить сдвиг содержимого регистра на 2 разряда влево,
не опасаясь его переполнения, после чего осуществить его усечение до п разря-
дов. При этом точность будет существенно повышена.
Тем не менее всегда встречаются ситуации, в которых прихо-
дится иметь дело с заниженными значениями масштабов промежу-
точных и конечных величин.
В качестве примеров можно привести процедуру выравнивания
масштабов переменных при их суммировании (вычитании), согла-
сование масштабов выходных данных с абонентами и пр.
Тогда естественно возникают вопросы:
1. Если изменение масштаба является необходимостью, то
в каких точках частной подпрограммы вычислений целесообразно
принимать решение об этом изменении — в начале или конце
вычислительного процесса?
2. Целесообразно ли вообще, контролируя в процессе орга-
низации счета масштабы операндов, немедленно принимать меры
к их увеличению?
3. Если увеличение масштабов оказывается целесообразным,
то в каких случаях достаточно ограничиваться левыми сдвигами
операндов, приводящими, как известно, к частичному восстанов-
лению масштабов, а в каких разумно идти на полное их восста-
новление?
Попытаемся осветить эти актуальные для практики програм-
мирования вопросы.
Повышение точности вычислений за счет увеличения масштаба
операндов с помощью операции перемасштабирования ведет
к возникновению ошибок, связанных с применением этой машин-
ной операции; следовательно, заранее неясно, будет ли в целом
достигнута желаемая цель.
Покажем, что если алгоритм задачи управления представлен
набором операции умножения, то для повышения точности
вычислений необходимо:
увеличение масштаба операндов 1 осуществлять на входе ма-
шинного алгоритма;
1 Это равноценно увеличению масштаба их произведения, так как Рг = РхРу.
188
уменьшение масштаба произведения выполнять на выходе
Алгоритма.
Пусть требуется выполнить операцию умножения г = х-у
при условии, что р^ = утах, Рх = Рх > *тах, а результат дол-
жен быть представлен в ЦМЕ р*, отличной от р^ = PiPr/-
Программа 1 (перемасштабирование на входе операции):
о'
1) Х1 = xkx, рх, = ;
кх
2) ~ хгу, р21 = рХ1Р, = •
кх
Значение коэффициента kx получим из условия
|3n = p2*: ^=р;4^.
Учитывая только машинные погрешности, найдем выражение
для ошибок
== Д^Х^ “F
= У (Л&х* + A£i) + —
= \kxxy 4“ Л?2-
Отсюда получаем
D [Дг1м] = 4~2“2 (n+1> +? + 1];
Апах^]^2-2^1’
^г+2 рГ,
kx
(193)
так как xmax = Mkx.
Программа 2 (Перемасштабирование на выходе операции):
1) ху> Pz, = РхРу;
2)?2=гА,^ = р;-|<-’ =
Pz
Машинные погрешности соответственно равны
== ^^1м^х 4- ^^x^l “F Д^2 == ^^х^У 4" ^^1^х Н"“ A£>2’
Отсюда получаем
D [Дг2м] = -I-2“2 (n+1) [(ху)2 + + 1 ];
О
Omax[Az2Ml=4--2~2(,l+1)
4-+^+ И рг,
(194)
189
Составим неравенство Dmax [Az1M] < Draax [Az2m] и выяс-
ним, в каких случаях оно выполняется
С учетом формул (193) и (194) имеем
-^ + 2<-1- + ^ + 1,
kx «х
откуда получаем kx > 1.
Таким образом, при необходимости увеличения масштаба
результата перемножения операндов (kx > 1) операцию пере-
масштабирования переменных целесообразно вводить на входе
основной операции; в противном случае (kx < 1) операцию пере-
масштабирования нужно выполнять после операции умножения,
Общим для этих выводов является то обстоятельство, что для
выполнения собственно операции умножения отводится крупно-
масштабное представление операндов. Выводы не теряют силу и
в тех случаях, когда погрешность оцифровки константы kx при-
водится известными методами к нулевому значению.
Видоизменим несколько постановку задачи, отбросив необ-
ходимость приведения масштаба |32 к величине и сформулируем
ее следующим образом.
Пусть в процессе программирования задачи умножения пере-
менная х задана по-прежнему-непредельной ценой рх; имеет ли
смысл по точностным соображениям непреременное увеличение
масштаба этой переменной (на входе операции) до предельного
значения?
Дисперсия инструментальных ошибок операции умножения
оценивается величиной:
O[AzM] = 4-2-2(n+,)p;2p^ (195)
Дисперсия тех же ошибок при наличии дополнительной опе-
рации перемасштабирования на входе основной операции оцени-
вается формулой (193). Подставив р* = Рх-т^> получим
Dmax 1Дг1и] = -1-.2-2("+1)Г ’ + 21 . (196)
° L kx J kx .
Сравним эти оценки с помощью неравенства
^max <D [Azm].
Как нетрудно убедиться, оно удовлетворяется при
kx > yi + V2 1,56. (197)
где kx = рЖ-
Следовательно, на поставленный вопрос можно ответить
утвердительно при выполнении неравенства (197).
190
Если оба операнда имеют заниженные значения масштабов
на величину k — -j— = то вывод остается в силе для зна-
чений 4 1,32.
Аналогичным сравнением оценок (194) и (195) нетрудно пока-
зать, что всякое локальное перемасштабирование на выходе опе-
рации умножения (для любых значений kx) нецелесообразно по
точностным соображениям; следовательно, оно может быть вы-
звано только необходимостью согласования масштабов перемен-
ных.
Продолжим анализ. Пусть по-прежнему переменная х имеет
заниженный масштаб на величину kx = Рх/р*; представим этот
машинный коэффициент в виде произведения
kx = й12+\ (г = 0, 1,2,. . .),
k-L < 1 — есть дополнение степени 2Г до значения kx.
Выясним, в каких случаях достаточно ограничиться левыми г
сдвигами операнда х в целях увеличения его масштаба, не обеспе-
чивая заранее его предельного значения.
Так как левый сдвиг переменной х не вносит погрешностей
перемасштабирования, то дисперсию машинных ошибок после-
дующей операции умножения
D[Az3M]=4-2^(fl+1)
следует принять в качестве меры для оценки ошибок общей про-
граммы («сдвиг + умножение») с ценой результата
Р*з = РхР 1/2 г.
Таким образом,
D [Дгзм] = 4 2-2 <л+1)РЖ2“2г- (198)
О
Оценка погрешностей £)max [Az1M ] программы вычислений
«перемасштабирование + умножение» была получена ранее (см.
196).
Составим неравенство 41
^niax IЛ^1М] D [ДZgM]
и подставим в него выражения (196) и (198);
тогда получим уравнение
kx-2-22rkx— 2~^ <0,
решение которого дает искомый ответ
kx < 2r J<1 + 2~'/22'+ 1
или ______________
k1<]/'l+2-rV2ir+ 1.
191
Следовательно, выделять целую часть из общего коэффициента
kx, кратную степени 2Г, в целях применения процедуры левого
сдвига на г разрядов операнда целесообразно при выполнении
условий
2' <Л < 2Г + 2-"/22^+1.
В противном случае, когда
2'+2 > kx > 2Г У1 +2-'/22'+ 1, (199)
по точностным соображениям более целесообразно осуществлять
полное восстановление масштаба 0А путем умножения операнда
х на kx.
Частный случай соотношения (199) для г = О
2>^Л >]/’1 + /2^1,56
полностью совпадает с предыдущим результатом (197).
При г > 1 соотношение (199) упрощается:
2г+1>^>2г]/'2.
Следует также заметить, что если коэффициент kx удовлетво-
ряет условию (199), то нет никакого смысла заменять умножение
операнда х на kx двумя процедурами — сдвигом на г разрядов
с последующим умножением на дополнительный множитель
Специфична проблема решения вопроса об изменении мас-
штаба переменных при наличии в алгоритме операции деления.
Пусть переменная х в операции г = х/у имеет непредельный
масштаб, т. е. = Pi > Хщах при дополнительных условиях:
Pz/ //max, *max < //mln*
Вопрос поставим таким образом: в каких случаях целесооб-
разно вводить операцию увеличения масштаба х на входе алго-
ритма, в каких — на выходе.
Программа 1 (перемасштабирование на входе):
1) X, = xkx> = =
х Ут\п
2) £ = xjy, pZ1 = Ь- = р; /тах ,
у УттР</
где коэффициент kx выбран из условия
*тах
192
Можно показать, что
^Лг1м]=4-2-2("+1)[^ + Ч-+ 1' •
I k* г4п J
Программа 2 (перемасштабирование на выходе):
1) ZX = Xly, Pz, = Px/P//i
п\ Z __~ h R ____ Pz, _ Рх *тах
2) Z<2 — Z\Kx> Р?2 — ~~ь — •
Х Р//(/т1п
В этом случае
Яшах [Дг2М] = 4~2~2 ("+1) Гkx + + 1 •
d kr
(200)
(201)
Наложим на дисперсии ошибок требование: D [Дг1м] < D [Дг2м].
Подставляя выражения (200) и (201), получим
h \ 1 Ушах
кх ,
Уш1п yml“
или, поскольку
(/mln ,
__ (/mln _ (/max __ ^fninPx
Х 7 xmax (/max^max
*max -------—
Pz
искомое условие получим в форме:
Хшах<Р;^
#шах
(202)
Таким образом, процедуру увеличения масштаба делимого
на входе операции деления целесообразно применять только
в тех случаях (до величины, при которой удовлетворяется равен-
ство хшах = утШ), при которых выполняется условие (202).
Из предыдущего также ясно, что если xmax > t/mln, то перед
выполнением операции деления необходимо применять проце-
дуру уменьшения масштаба делимого в целях исключения пе-
реполнения разрядной сетки частного.
Продолжим исследование вопросов перемасштабирования опе-
рандов операции деления, приняв обратные условия:
Рх ’ Л-maxi Ру := Ру Углах-
В этом случае задача программиста заключается прежде всего
в устранении возможности переполнения разрядной сетки част-
ного. При этом возможны, по крайней мере, два пути реализации
программы.
Программа 1: 1) ух = yky, где ky = Py/t/max -
13 ,Э. И. Соренков 193
(этот шаг предусматривает-увеличение мантиссы у = утях до ~1);
2) Xr = xkx, где kx = у, . — -ml- .
' Л J/max
(этот шаг уменьшает мантиссу операнда Xj = хг шах до величины
У1 mln)>
Z xi й Р-Ч Рх
Z1 — ~> Pz,--о— — „ , •
i/j Р</, Ут1п
Программа 2. Подставив в выражение для программы 1
значения хх и ylt ролучим
?! = -4 = — > = —. где k = = ~^s~
У1 У ky у ky ₽у
В результате приходим к тривиальной программе:
1) x2 = xk;
2)Z2=4, Ргг = -^.
у ‘/min
Не проводя выкладок, напишем окончательные выражения
для дисперсий ошибок, полученных при реализации этих про-
грамм:
[2 (-Js.)’ + 1];
П„„|Д?и=4-2-и..+.1[(^=_)2Ч+1].
Из требования £>гаах [Аг2м ] < Dmax [Дг1м] получаем условие
ky < /2.
Следовательно, вторую упрощенную программу реализации
операции деления целесообразно применять при выполнении
условия
Р// 1^2 Z/max-
В противном случае более предпочтительным является пред-
варительное увеличение мантиссы z/max до величины, равной —1.
В заключение исследования вопросов перемасштабирования
операции деления отметим, что не имеет смысла рассматривать
вопросы изменения масштаба частного в силу того, что получае-
мый масштаб является максимально возможным (р2 = Px/ymln)
из условия исключения переполнения разрядной сетки.
Полученные результаты анализа изменения масштабов пере-
менных при выполнении операций умножения и деления дают
ответы на поставленные выше вопросы.
СПИСОК ЛИТЕРАТУРЫ
1. Абрахамс Д., Каверли Д. Анализ электрических цепей методом графов.
М., «Мир», 1967. 422 с.
2. Ахметжанов А. А. Высокоточные системы передачи угла автоматических
устройств. М., «Энергия», 1975, 287 с.
3. Березин И. С., Жидков И. П. Методы вычислений. М., «Наука», 1966. 632 с.
4. Бруевич Н. Г., Доступов Б. Г. Основы теории счетно-решающих устройств.
М., «Сов. радио», 1964. 818 с.
5. Быховский М. Л. Современное состояние проблемы точности электрических
цепей. — В кн.: Труды II Всесоюзного совещания по основным проблемам
теории механизмов и машин. М., АН СССР, 1960. с. 125—135.
6. Быховский М. Л. Основы динамической точности электрических и механи-
ческих цепей. М., изд. АН СССР, 1958. 157 с.
7. Васильев Б. В. Ошибки округления на вычислительной машине в режиме
с фиксированной запятой. — «Измерительная техника», 1962, № 11, с. 3—6.
8. Ванштейн, Оппенгейм. Сравнение шумов округЛения цифровых фильтров
при их реализации по методу с плавающей запятой и по методу с фиксиро-
ванной запятой. — ТИИЭР, 1969., №7, с. 72.
9. Вентцель Е. С. Теория вероятностей. М., «Наука», 1969. 412 с.
10. Витенберг И. М. Программирование аналоговых вычислительных машин.
М., «Машиностроение», 1972. 408 с.
11. Витенберг И. М. О методах повышения эффективности средств вычисли-
тельной техники при совместном использовании аналоговых и цифровых
вычислительных машин. — В кн.: Теория аналоговых и комбинированных
вычислительных машин. М., «Наука», 1969.
12. Гагуа М. Б. К оценке погрешностей. — В кн.: Труды вычисл. центра АН
Груз. ССР, Тбилиси, «Мецниереба», 1965, VI, № 3, с. 23—29.
13. Геллер С. И., Журавлев Ю. П. Основы логического проектирования ЦВМ.
М., «Сов. радио», 1969. 272 с.
14. Гнеденко Б. В. Курс теории вероятностей. М., «Наука», 1965. 400 с.
15. Годлевский В. С. Об оценке динамических погрешностей линейных блоков
АВМ. — «Автоматика и телемеханика», 1970, № 3, с. 155—161.
16. Гольд Б., Райдер Ч. Цифровая обработка сигналов. М., «Сов. радио», 1973.
368 с.
17. Грицевский П. Н., Мальченко А. Е. Основы импульсной и вычислитель-
ной техники. М., «Сов. радио», 1974, 294 с.
18. Горяйнов В. Т., Журавлев А. Г., Тихонов В. И. Примеры и задачи по ста-
тистической радиотехнике. М., «Сов. радио», 1970. 596 с.
19. Гусев В. Т. Методы исследования точности цифровых автоматических си-
стем. М., «Наука», 1973. 424 с.
20. Гутер О., Овчинский Б., Трединсковский П. Программирование и вычисли-
тельная математика. М., «Наука», 1965. 448 с.
21. Демидович Б., Марон И. Основы вычислительной математики. М., «Физмат-
гиз», 1963. 352 с.
13*
195
22. Дроздов Е. А., Комарницкий В. А., Пятибратов П. А. Многопрограммные
цифровые вычислительные машины. М.» Военное издательство Мин. Обороны
СССР. 1974. 408 с.
23. Иванов В. В. Оценки полной погрешности численного решения некоторых
задач на ЦВМ. Математические методы в специализированной вычислитель-
ной технике. 1968, вып. 1, с. 5—20.
24. Иванов В. И., Павлов С. М. Арифметическое устройство специализирован-
ной цифровой вычислительной машины (СЦВМ) — «Известия Ленингр.
электро-технического института», 1969, вып. 1, с. 64—67.
25. Кантарович Л. В., Крылов В. И. Приближенные методы высшего анализа.
М., Физматгиз, 1962. 708 с.
26. Ким Г. Д., Чибисов Д. М. Распределение ошибок округления при умноже-
нии двух чисел на ВМ с фиксированной запятой. — В кн.: «Математические
заметки», М., «Наука», 1967. с. 225—234.
27. Кузин Л. Т. Расчет и проектирование дискретных систем управления. М.,
Машгиз. 1962. 684 с.
28. Лебедев А. Н., Смолов В. Б., Сапожков К. А. Проектирование и расчет вы-
числительных машин непрерывного действия. М., «Машиностроение», 1966.
336 с.
29. Ледли Р. Программирование и использование вычислительных машин. М.,
«Мир», 1966. 644 с.
30. Лифшиц С. Е. О погрешностях округления при решении экономических
задач на ЭЦВМ. В кн.: Вычислительная техника и механизация управлен-
ческого труда. Труды Ленингр. инж-эконом, ин-та им. Тольятти, 1965, вып. 55,
сб. 1, с. 72—78.
31. Линский В. С. Вычисление элементарных функций на автоматических цифро-
вых машинах. — «Вычислительная математика», 1957, №2, с. 90—119.
32. Лученицер И. А. Масштабирование в системе цифровых измерений в абсо-
лютных единицах. «Труды ин-та автоматики», 1966, вып. 1, с. 194—201.
33. Милн В. Э. Численный анализ. М., Изд-во иностр, лит., 1951, 260 с.
34. Мисайловский С. В. О точности вычислений на цифровом дифференциальном
анализаторе. — В кн.: Вопросы вычислительной математики и вычисли-
тельной техники. М., Машгиз, 1963, с. 397—403.
35. Счетно-решающие устройства. М., «Машиностроение», 1966. 352 с. Авт.:
Доброгурский С. О., Казаков В. А., Соломонов Л. А., Титов В. К.
36. Мирский Г. Я. Аппаратурное определение характеристик случайных про-
цессов. М., «Энергия», 1967. 376 с.
37. Папернов А. А., Петрова Г. Н. К вопросу об округлении произведения при
умножении разрядов множителя. М., «Сов. радио», 1966, вып. 1, с. 5—15.
38. Романов А. Н., Фролов Г. А. Основы автоматизации систем управления.
М.,‘Военное издательство Мин. Обороны СССР, 1971, 248 с.
39. Свешников А. А. Прикладные методы теории случайных функций. М.,
«Наука», 1968. 464 с.
40. Солодовников В. В. Статистическая динамика линейных систем автомати-
ческого управления. М., Физматгиз, 1960. 686 с.
41. Смолов В. Б. Аналоговые вычислительные машины. М., «Высшая школа»,
1972, 408 с.
42. Техническая кибернетика. Теория автоматического регулирования. Кн. 2.
Под редакцией Солодовникова В. В., М., «Машиностроение», 1967. 680 с.
43. Хаски Г. Д., Корн Г. А. Вычислительная техника. Справочник. Т. 1, 2,
Л., «Энергия», 1965. 720 с.
44. Хемминг Р. В. Численные методы. М., «Наука», 1968. 400 с.
45. Хетагуров Я. А., Руднев Ю. П. Основы проектирования специализирован-
ных цифровых вычислительных машин. М., Изд. МИФИ, 1969, 172 с.
46. Храпченко В. М. Об оценке погрешностей двоичного умножения. «Проблемы
кибернетики», 1963, № 10, с. 165—177.
47. Чесноков А. А. Решающие усилители М.—Л., «Энергия», 1963. 64 с.
48. Чеснова М. К. Диэлектрическая абсорбция в конденсаторах различных ти-
пов.— «Вопросы радиоэлектроники», 1962, Серия III, вып. 4, с. 21—31.
196
49. Шилейко А. В. Об одном виде оценок качества численных методов решения
обыкновенных дифференциальных уравнений. В кн.: Вычислительная тех-
ника в управлении. М.» «Наука», 1964, с. 92—96.
50. Шаталов А. С., Гринберг Л. С., Шаталов Ю. А. Функциональные формиро-
ватели электрических величин. М., «Энергия», 1974. 386 с.
'51. Bristol Edgar Н. Compensation for truncation errors in accumulative addition
using random methods. «IEEE Trans. Electron. Comput.», 1967, v. 16, N 4,
518 p.
52. Ernst L. Albasing Error in Digital Solution of Linear Problems.
53. Error in Digital Computation, 1965, I, p. 131—184.
54. Hamming R. W., Mammel W. L. A note of the location of the binary point
in a computing machine «IEEE Trans. Electron. Comput.», 1965, v. 14, N 2,
p. 260—261.
55. Hiibner Dieter, MQhlberg Manfred. Fehler in digitalen Rechenanlagenihre
Erkennung und Behandlung. Teil 1. «Radio—Fernschen—Elektronik», 1969,
18, N 21, p. 671—673.
56. King Elwyn H. Guide to development and use of electronic computer programs:
engineering analysis. «J. Struct. Div. Proc. Amer. Roc. Covil Engrs», 1964,
90, N 6, p. 1, 25—34 p.
57. Pergel Jozsef. Egy biztonsagos programfuttatasta vonatkozd minimalizalasi
feladatrol. «Kozl. Magyar tud. akud. Szamitastechn. kozp.», 1967, 2, p. 48—62.
58. Takuhasi H., Ishibashi Y. A nem method for «exact calculation» by a digital
computer. «Inform. Process. Japan», 1961, v. 1, p. 28—52 p.
59. Widrow B. Statistical analysis of amplitude — quantized sampledata system
AIEE — Trans. (Application and Industry), 1960, v. 59, 555 p.
ОГЛАВЛЕНИЕ
Предисловие ........................................................ 3
Глава I. Справочные сведения из теории точности и теории вероят-
ностей ............................................................. 7
1. Классификация ошибок .............................. 7
2. Характеристики распределения ошибок.............г 18
3. Числовые характеристики случайных ошибок............ 20
4. Законы распределения случайных ошибок............... 23
5. Корреляционные матрицы вероятностей случайных ди-
скретных ошибок ...................................... 25
6. Оценки числовых характеристик случайных ошибок на
основе эксперимента.................................... 30
7. Числовые характеристики функций случайных ошибок
(функциональные преобразования случайных величин) . . 32
8. Понятия о случайных функциях и их характеристиках . . 35
Основные характеристики случайных функций............ 35
Функциональные преобразования случайных процессов . . 37
9. Методы суммирования случайных ошибок................ 42
Глава II. Масштабы представления величин в вычислительной тех-
нике .............................................................. 44
1. Определение и назначение масштабов................... 44
2. Масштабы в аналоговой вычислительной технике .... 46
Математическая и физическая модели АВУ. Коэффициенты
передачи .......................................46
Формула связи масштабов.............................. 48
3. Масштабы в цифровой вычислительной технике.......... 54
Масштабирование операции изменения масштаба пере-
менных .............................................. 57
Масштабирование операции алгебраического суммирова-
ния двух переменных .............................. - 59
Масштабирование операции умножения................... 61
Масштабирование операции деления .................... 61
Масштабирование специальных задач.................... 65
Глава III. Первичные инструментальные ошибки ^аналоговых вычисли-
тельных устройств .........................'....................... 70
1. Параметрические инструментальные ошибки.............. 70
2. Принципиальные и генерированные инструментальные
ошибки типовых аналоговых вычислительных устройств 74
Конденсаторы......................................... 75
Операционные усилители постоянного тока (ОУ) .... 76
Потенциометры .................................... 79
Следящие системы..................................... 80
Вращающиеся трансформаторы........................... 86
198
Глава IV. Ошибки решения алгоритмов аналоговыми вычислитель-
ными системами ..................................................... 87
1. Ошибки на выходе системы последовательно (каскадно)
включенных АВУ ........................................ 87
2. Принципиальные инструментальные ошибки потенцио-
метрических систем .................................... 91
3. Ошибки системы с параллельным включением АВУ ... 93
4. Ошибки на выходе АВС с обратной связью.............. 95
Ошибки АВС с параллельной схемой включения АВУ
в цепи ОС.......................................... 97
Ошибки АВС с последовательной схемой включения АВУ
в цепи ОС............................................ 99
Глава V. Динамические ошибки ..................................... 103
1. Динамические вычислительные устройства и динамиче-
ские ошибки............................................ ЮЗ
2. Инструментальные динамические ошибки............... 104
Инструментальные параметрические ошибки............. 104
Инструментальные генерированные ошибки.............. 107
Принципиальные инструментальные динамические ошибки 111
3. .Трансформация динамических ошибок................. 114
Безынерционное АВУ ................................. 114
Дифференциатор...................................... 116
Инерционное АВУ..................................... 116
Глава VI. Числовые характеристики первичных инструментальных
ошибок СЦВМ........................................................ 121
1. Первичные ошибки СЦВМ.............................. 121
2. Числовые характеристики ошибок оцифровки........... 123
3. Числовые характеристики ошибок усечения............ 125
Ошибки отбрасывания ................................ 125
Ошибки округления................................... 126
4. Выражения для числовых характеристик ошибок усече-
ния в случае равномерной плотности их распределения 128
Глава VII. Принципиальные инструментальные ошибки СЦВМ при
вы полнении элементарных вычислительных операций ... 130
1. Источники ошибок выполнения элементарных операций 130
2. Статистические характеристики потока случайных оши-
бок при выполнении арифметических операций............ 133
Операция перемножения двух чисел ................... 133
Операция деления.................................... 136
Операция сложения и вычитания (без выравнивания
масштабов)........................................ 137
3. Характеристики ошибок усечения машинных чисел, пред-
ставленных в различных кодах.......................... 138
4. Ошибки выполнения операции умножения............... 141
5. Ошибки выполнения операции изменения масштаба пере-
менных .............................................. 144
6. Ошибки выполнения операции деления................. 148
7. Ошибки выполнения операции суммирования как следст-
ствие ошибок масштабирования.......................... 152
8. Операционный граф ошибок........................... 154
Глава VIII. Программные методы повышения точности вычислений пря-
мых открытых алгоритмов и расчет необходимого запаса
разрядной сетки СЦВМ................................... 156
1. Математическая формулировка задачи определения тре-
буемого запаса разрядной сетки СЦВМ................... 158
199
2. Сравнительный анализ инструментальной точности выпол-
нения на СЦВМ элементарных вычислительных опера-
ций ................................................... 159
Операция умножения .................................... 159
Операция изменения масштаба......................... 160
Операция деления.................................... 161
3. Анализ точности вычисления значений степенной функ-
ции ................................................... 161
4. Анализ точности вычисления определенного интеграла . . 164
5. Анализ точности вычисления суммы равнодиапазонных
величин............................................ 168
6. Анализ точности вычисления двойного интеграла .... 170
7. Анализ точности решения задачи экстраполяции (много-
кратное сложение равнодиапазонных величин)......... 174
8. Анализ точности решения комбинированной задачи ... 178
9. Разновидности масштабов. Масштабы и точность вычисле-
ний. Программные методы повышения точности решения
задач ................................................. 183
Список литературы.................................................. 195
Эдуард Иванович Соренков,
Александр Иванович Телига,
Александр Степанович Шаталов
Точность вычислительных устройств и алгоритмов
Редактор издательства Т. В. Абизова
Технический редактор Н. В. Тимофеенко
Корректор О. Е. Мишина
Переплет художника Е. П. Пермякова
Сдано в набор 20/VIII 1975 г. Подписано к печати 6/II 1976 г. Т-03050
Формат 60X 9071# Бумага типографская № 3
Усл. печ. л. 12,5 Уч.-изд. л. 12,0
Тираж 13 000 экз. Заказ 480 Цена 74 коп.
Издательство «Машиностроение». 107885, Москва, Б-78, 1-й Басманный пер., д. 3
Ленинградская типография № 6 Союзполиграфпрома при Государственном комитете
Совета Министров СССР по делам издательств, полиграфии и книжной торговли,
193144, Ленинград, С-144, ул. Моисеенко, 10.
Э. Й.Соренков
А. И. Тел иг а
А. С. Шаталов
точность
УСТРОЙСТВ
И АЛГОРИТМОВ