/



























































Автор: Гершенович Г.Б.
Теги: механика авиация двигатели авиационное оборудование авиатехника
Год: 1946




Текст
—
МИНИСТЕРСТВО АВИАЦИОННОЙ ПРОМЫШЛЕННОСТИ СОЮЗА ССР
Л ЕТНО ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ
ТРУДЫ ЛИИ
№ 19
ИССЛЕДОВАНИЕ АВТОМАТИЧЕСКОГО
РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ
АВИАЦИОННЫХ МОТОРОВ
Г. Б. Гершенович
ЙЗДАТЕЛЬСТВО БЮРО НОВОЙ ТЕХНИКИ
19 4 6
ТРУДЫ ЛИИ
№ 19
~~0$У1 -оГ
I
ИССЛЕДОВАНИЕ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ
АВИАЦИОННЫХ МОТОРОВ
/ 03S1
[невский Инотмт
Г. Б. ГЕРШЕНОВИЧ
КРАТКОЕ СОДЕРЖАНИЕ
В вводной части работы разобраны специфические особенности и требо-
вания, которым должен удовлетворять авиационный регулятор температуры.
Первая часть посвящена исследованию динамики системы охлаждения авиацион-
ного мотора. Па основе ряда допущений выведено диференцнальное уравнение изме-
нения регулируемой температуры. Расчетным путем установлен порядок величин
коэфициентов этого уравнения н характер нх изменения в зависимости от различных
факторов. Приведены результаты летных экспериментов, подтверждающие правиль-
ность выводов теории и данных расчета.
Во второй части рассмотрены характеристики отдельных элементов регулятора.
Проведено теоретическое н экспериментальное исследование запаздывания авиацион-
ных приемников температуры различных типов. Исследовано поведение сервопривода
регулятора в полете.
В третьей части дан анализ авиационного регулятора температуры простейшего
типа. Подробно исследован вопрос устойчивости регулирования с помощью прибли-
женного метода н метода точных решений. На основе полученных результатов про-
ведена оценка возможности применения регулятора простейшего типа с точки зре-
ния устойчивости регулирования н заброса температуры при резкой смене тепловых
режимов. Устойчивость регулятора простейшего типа с различными характеристика-
ми сервопривода исследована в полете.
В четвертой части исследованы устойчивость н заброс температуры в регуля-
торе с обратной связью. Приведены результаты летных испытаний регулятора с
различной характеристикой обратной связи.
В пятой части проведена оценка влияния регулятора на скорость полета н
разобрано несколько вариантов регулятора, обеспечивающего минимальную потерю
скорости самолета.
Ел
г __ ..-rrifW ’V ’
»
ВВЕДЕНИЕ
В настоящей работе рассматривается автоматический регулятор, реагирующий на
изменение температуры воды, охлаждающей авиационный мотор, и воздействующий на
температуру путем управления заслонкой туннеля водорадиатора. Принцип действия и
основные элементы такого регулятора ясны из схемы, представленной на фиг. 1: чувстви-
тельный элемент регулятора (термометр) через посредство
реле включает сервопривод, поворачивающий заслонку,
которая изменяет обдув водорадиатора соответственно из-
менению температуры. Эта простейшая схема может быть
дополнена обратной связью, посредством которой серво-
привод воздействует на промежуточное звено между чув-
ствительным элементом и реле.
Автоматический регулятор температуры воды, охлаж-
дающей авиационный мотор, должен удовлетворять сле-
дующим основным требованиям:
1. При установившемся режиме полета регулятор
должен приводить систему охлаждения к устойчивому те-
Сервопривод
Реле
Чувствительный. элемент
Обратная
связь
иловому равновесию и не допускать незатухающих или мед-
Фиг. 1
ленно затухающих колебаний даже малой амплитуды. Это требование обусловливается
прежде всего ограниченностью срока службы электромотора, управляющего заслонкой.
2. Как при установившемся режиме, так и при резкой смене тепловых режимов
двигателя (например, пикирование с убранным газом с последующим набором высоты)
регулятор должен удерживать температуру воды в заданном диапазоне.
Изменение температуры воды, охлаждающей авиационный двигатель, допускается
в весьма широких пределах. В качестве типичного примера приведем выдержку из ин-
струкции по эксплоатации одного из двигателей, находящихся в настоящее время на
вооружении. Эта инструкция предписывает следующие температурные режимы двигателя:
минимальная допустимая температура .... 60° Ц,
диапазон рекомендуемых температур ... 80 — 90е Ц,
максимальная допустимая температура ... 110° Ц.
С другой стороны, как показывают результаты заводских испытаний, мощность и
экономичность двигателя мало зависят от температуры охлаждающей воды почти во всем
диапазоне допустимых температур. Резкое ухудшение работы двигателя наступает лишь
тогда, когда температура непосредственно близка к нижнему пределу (появляется опас-
ность остановки двигателя) или к верхнему пределу (появляется опасность перегрева
деталей двигателя и детонации). Очевидно, что значительное сужение, согласно инструк-
ции, диапазона рекомендуемых температур (80 — 90° Ц) по сравнению с диапазоном допу-
стимых температур (60—110°) вызвано стремлением гарантировать невозможность пере-
грева или переохлаждения при резкой смене тепловых режимов двигателя. При наличии
достаточно эффективного регулятора эта опасность в значительной степени уменьшается.
Поэтому пределы диапазона температур, допускаемых регулятором, могут быть расши-
рены и доведены тем ближе к максимальной и минимальной допустимой температурам,
чем эффективнее регулятор.
Таким образом, в отличие от большинства систем автоматического регулирования,
в которых требуется поддержание более или менее точного постоянства регулируемого
параметра, система охлаждения авиационного мотора допускает изменение регулируемой
температуры в широком диапазоне (40 — 59° Ц). Однако выход температуры за пределы
этого диапазона не допускается даже на короткое время.
3. В диапазоне допустимых температур регулятор должен управлять заслонкой
таким образом, чтобы обеспечить минимальную потерю скорости самолета.
Смысл этого требования будет более подробно пояснен в дальнейшем (часть V).
Отметим здесь, что оно отличается от тех требований, которые предъявляются к обыч-
ным регуляторам, поскольку оно налагает условие не только на регулируемый параметр
(температуру), но также и на координату регулирующего органа (положение заслонки).
Исследование регулируемой системы и выбор рациональной схемы регулятора будут
проведены под углом зрения изложенных выше трех основных требований.
I. ИССЛЕДОВАНИЕ ДИНАМИКИ СИСТЕМЫ ОХЛАЖДЕНИЯ
§ 1. (Основные допущения
Для исследования процесса тестирования температуры и, в частности, устойчиво-
сти регулирования требуется знание динамики системы охлаждения, т. е. знание законов,
которым подчиняется изменение регулируемой температуры во времени в зависимости от
положения заслонки и других факторов.
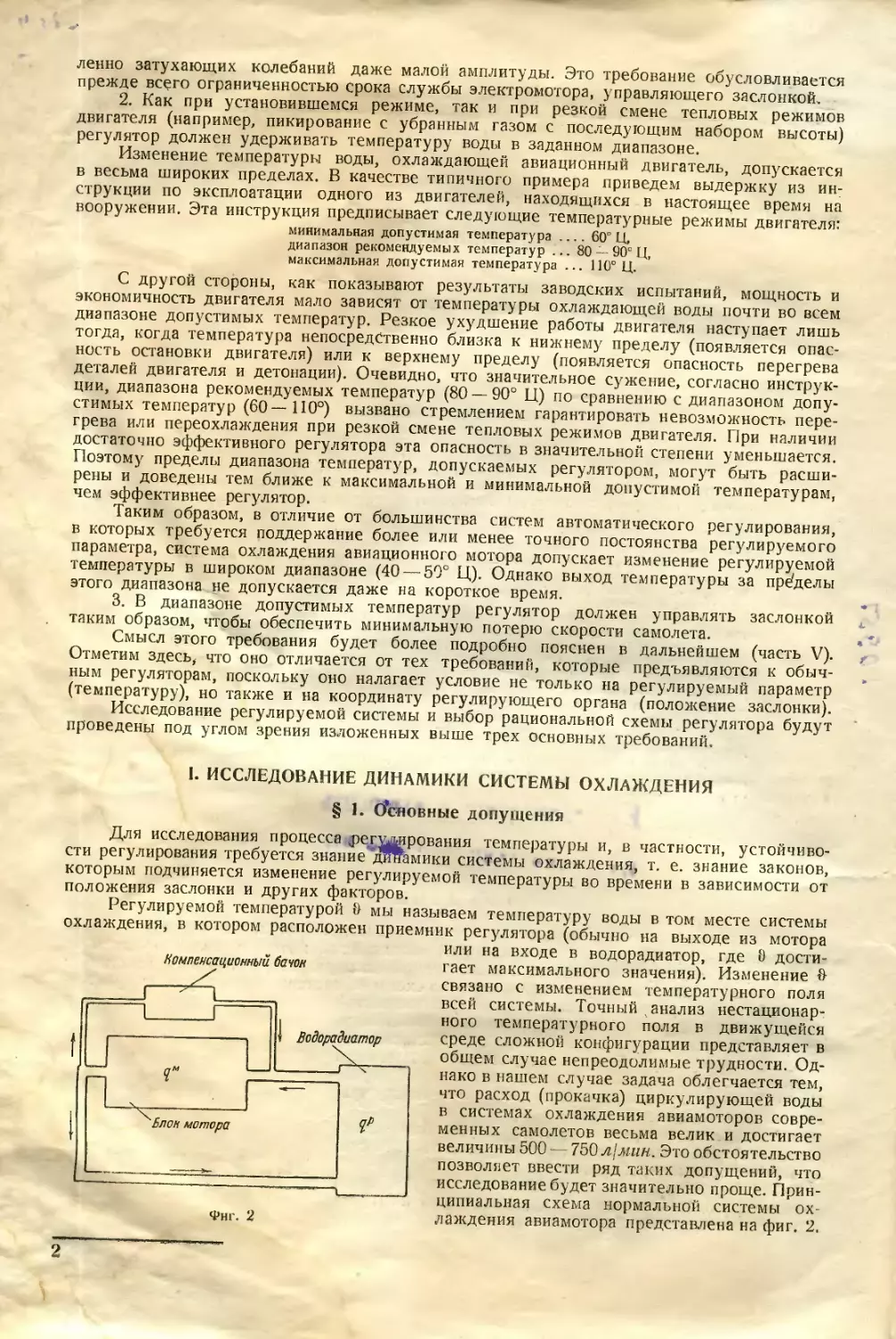
Регулируемой температурой & мы называем температуру воды в том месте системы
охлаждения, в котором расположен приемник регулятора (обычно на выходе из мотора
или на входе в водорадиатор, где 8 дости-
гает максимального значения). Изменение &
связано с изменением температурного поля
всей системы. Точный анализ нестационар-
ного температурного поля в движущейся
среде сложной конфигурации представляет в
общем случае непреодолимые трудности. Од-
нако в нашем случае задача облегчается тем,
что расход (прокачка) циркулирующей воды
в системах охлаждения авиамоторов совре-
менных самолетов весьма велик и достигает
величины 500 •— 750 л)мин. Это обстоятельство
позволяет ввести ряд таких допущений, что
исследование будет значительно проще. Прин-
ципиальная схема нормальной системы ох-
лаждения авиамотора представлена на фиг. 2.
2
Форма и расположение отдельных элементов системы могут быть различными в
зависимости от конструкции самолета. Однако емкости как всей системы в целом, так
и отдельных ее элементов примерно одинаковы у большинства современных самолетов
Средние значения этих величин приведены в табл. 1.
Таблица 1
Наименование
Емкость [л]
Радиатор .......................
Блок мотора ....................
Расширительный бачок ...........
Соединительные трубопроводы . .
25
30
10
10
Всего ... .... 75
Сопоставляя величин)? прокачки с емкостью системы1, легко установить, что вода,
циркулирующая в системе, совершает полный круговорот в течение 6 — 8 сек, причем
большая часть этого времени затрачивается на прохождение воды через водорадиатор и
блок мотора и только 0,8 —1,2 сек — на прохождение по соединительным трубам. Про-
должительность периода колебаний температуры при подходе системы к установившему-
ся тепловому режиму, как это следует из теоретического анализа и подтверждается
летными испытаниями, равна нескольким минутам. Запаздывание приемника в современ-
ных авиационных регуляторах температуры обычно укладывается в отрезок времени,
равный 1 мин.
Из сравнения приведенных величин ясно, что в первом приближении мы можем
пренебречь сдвигом во времени2 между охлаждением воды в радиаторе и ее нагревом
в блоке мотора и условно считать, что вся масса воды и весь процесс теплообмена
сосредоточены в одном месте.
Другим следствием большой скорости циркуляции воды, важным с точки зрения
упрощения задачи, является малый перепад температур в системе. Максимальная величина
этого перепада, равная разности температур на входе и выходе из радиатора (или мотора)
при установившемся тепловом режиме, не превышает 10—12° Ц.
Как показывают летные испытания, при которых производилась непрерывная регист-
рация температур воды на входе и выходе из радиатора, указанная величина остается
практически неизменной и при переходных тепловых режимах.
Ввиду этого в данном исследовании, как и при расчете установившегося теплового
режима, можно условно заменить действительное температурное поле равномерным полем,
характеризуемым некоторой средней температурой воды !1ср и приведенными к этой
температуре коэфициентами теплопередачи и теплоемкости.
Сущность изложенных допущений сводится к тому, что вместо системы, характери-
зуемой диференциальным уравнением в частных производных и переменными во времени
и пространстве краевыми условиями, рассматривается близкая к ней система с одной
степенью свободы, характеризуемая обыкновенным диференциальным уравнением первого
порядка.
При выводе как этого, так и других диференциальных уравнений мы будем поль-
зоваться хорошо известным методом малых колебаний, т. е. будем рассматривать изме-
нение системы в достаточно малой окрестности установившегося режима. Применимость
этого метода так же, как и справедливость принятых ранее допущений, подтверждается
сходимостью окончательных выводов приближенной теории с результатами летных
испытаний.
§ 2. Диференциальное уравнение, характеризующее процесс изменения
регулируемой температуры
При установившемся режиме работы системы охлаждения имеет место равенство:
?о = ^.
1 Расход воды через расширительный бачок, включенный параллельно основному контуру, составляет
10% общего расхода, т. е. приблизительно пропорционален емкости бачка. Ввиду этого мы можем относить
общий расход воды к емкости всей системы.
2 В американской литературе этот сдвиг получил название distance-velocity lag (см, например, Bristo
„Automatic control in continuous processes". TASME, Nov., 1936).
3
где q" — количество тепла, отдаваемого мотором в воду в единицу времени,
qp — количество тепла, рассеиваемое в единицу времени водорадиатором1 2 * при устано-
вившемся открытии туннеля водорадиатора.
Теплосодержание системы Qo постоянно и определяется установившимся значением
регулируемой температуры 80.
При отклонении температуры на величину ДУ и открытии туннеля на величину Д/
от установившихся значений величины q“ и qv получат приращения, которые выражаются
с точностью до малых второго порядка следующими формулами:
/ да"\
' (1а)
Приращение теплосодержания системы в единицу времени выразится следующим
уравнением:
^=ДГ_Д9Р. (2)
Имея в виду, что ДУ=Д&СР1 мы можем записать:
4Q_c4)> „ (3)
где с—приведенная теплоемкость системы.
Приравнивая правые части уравнений (2) и (3) и подставляя выражения (1а) и (16),
получим:
(4)
Уравнение (4) можно представить в следующем виде:
П^~ + Д»=-М/, (5)
где
С
—постоянная времени системы охлаждения, (6)
коэфициент эффективности заслонки туннеля водорадиатора. (7)
Уравнение в вариациях (4) описывает движение системы в окрестности определенного
установившегося режима, которому соответствуют определенные численные значения
величин q%, qj и, следовательно, коэфициентов Ts и Ь. Исследование этих коэфициентов
может быть проведено двумя путями:
1) путем расчета по заданным характеристикам системы охлаждения и величинам
параметров, определяющих установившийся режим,
2) путем соответствующей обработки кривой изменения температуры U, записанной
в полете при переходе от одного установившегося температурного режима к другому.
Последний способ служит одновременно проверкой применимости диференциального
уравнения (5) и формул (6) и (7).
1 Теплоотдачей в соединительных трубах пренебрегаем, как весьма малой по сравнению с теплоотдачей
водорадиатора.
2 Количество тепла цР изменяется синхронно с изменением открытия туннеля /. В этом отношении
регулируемая система охлаждения существенно отличается от обычных систем регулирования температуры,
в которых количество подводимой энергии отстает от положения органа управления tq и связано с последним
диференциальным уравнением вида Г "vj-f- т; (см. О р р el t „Vergleichende Betrachtung verschiedener Regel-
aufgaben*. Luftfahrtforschung 1939, LfgT 8, S. 449).
4
§ 3. Расчет коэфициентов уравнения изменения температуры
Для определения производной q% воспользуемся результатами исследования тепло-
отдачи мотора в воду.
В результате многочисленных экспериментов установлено, что теплоотдача мотора
в воду с ростом температуры воды в широком диапазоне убывает по линейному закону.
Некоторые авторы1 выражают эту зависимость формулой аналогичной закону охлаж-
дения Ньютона:
9«=АМ5М(ГМ-Эср), (8)
где kM—-коэфициент теплоотдачи, зависящий от факторов, определяющих режим работы
мотора,
sM — поверхность теплоотдачи, омываемая охлаждающей водой,
Тм — условная температура (temperature efficace) стенок цилиндров.
В ряде других источников результаты экспериментов представлены эмпирической
формулой:
Д^=-^АД&ср, (9)
имеющей вид уравнения в вариациях, соответствующего уравнению (8).
Колебания величин Тм и А, измеренных у моторов различной конструкции и мощ-
ности, лежат в пределах точности измерения. Поэтому с точностью, достаточной для
данного исследования, можно принять, что в любом авиационном моторе водяного охлаж-
дения Т" и А имеют одни и те же значения:
7'м = 300°Ц, А = 0,0033
Сравнивая уравнения (9) и (1а) и принимая согласно предыдущему Д&=Двср, получим:
^«=—0,0033^.
(W)
Величина q” зависит от режима работы двигателя. Верхний предел этой величины
может быть определен по заводским данным или по приближенной формуле:
gotnax==320A/j тах ,
где Мтах — индикаторная мощность [л. с.], развиваемая двигателем при полном открытии
дросселя на режиме высотного номинала.
С уменьшением мощности по дроссельной характеристике теплоотдача мотора в
воду уменьшается согласно приближенному уравнению:
/Xм / лг \т
go '
gomax W* max /
(И)
Согласно большинству исследований2 показатель степени равен т = 0,55 :--0,65, т. е.
в среднем он равен т=0,6.
Подставляя в уравнение (10) значение qo из уравнения (II), получим:
/ дг. \о.б
g”=- О.ООЗЗ^кх дл ~
\'»1 max /
(12)
С помощью формулы (12) можно оценить значение производной q'' для любого ре-
жима работы двигателя.
Для определения производных q& и qj рассмотрим процесс теплопередачи в радиа-
торной установке самолета.
Количество тепла, рассеиваемого радиатором в единицу времени, выражается сле-
дующей формулой:
qo = Ар sp (& — &р ), (13)
где Ар—общий коэфициент теплопередачи от воды к воздуху, *
sp — поверхность теплоотдачи радиатора,
8р—температура наружного воздуха.
1 Н. Champsaur. Mesure de quantites de chaleur evacuees par 1’eau, 1931.
Ведровн др. Определение максимальной скорости и т. д. ТВФ №№ 11—12,1942. Инструкции по прове-
дению летных испытаний достаточности систем охлаждения, 1944 г.
2 См., например, упоминаемую ранее работу Champsaur, а также Ажгихин. Теплоотдача в
стенки цилиндра авиационного двигателя. Труды ВВА, вып. № 79, 1941 г.
5
Уравнение в вариациях, соответствующее уравнению (13), имеет следующий вид:
\qp = kv sp ДЯ
dk?
sv (Я-- f}P ) Д/.
(M)
Сравнивая уравнения (14) и (16), будем иметь:
Ql = kP sr ,
(15)
sp (8- 8р ). (16)
На оснований уравнений (11) и (13) можно представить формулу (15) в следующем
виде:
/ N- \0,6
р___ *0 max | i |
° I)----ftP yAff щах у
(17)
Последняя формула содержит величины, связанные непосредственно с режимом ра-
боты двигателя (Л/;), атмосферными условиями и высотой полета (0р) и настройкой регу-
лятора (&).
Как показывают опыты1, общий коэфициент теплопередачи радиатора выражается
следующей эмпирической формулой:
kP = Л(р1/Р)')-8,
(18)
где А постоянный коэфициент,
р—плотность воздуха,
1/р—скорость воздушного потока перед фронтом радиатора.
Скорость I/р пропорциональна скорости полета V:
Пр = aV.
Зависимость коэфициента пропорциональности а, называемого коэфициентом расхода
воздуха, от положения заслонки будет разобрана ниже.
Подставляя значение в уравнения (13) и (16), получим:
<7М = qP = А (ар V)0’8 (8—Яр ), (19)
Л^1(р1/)°-8(Я ЯР). (20)
Для удобства анализа будем относить величины а, р и I/ к их значениям на опре-
деленном режиме, выбор которого будет обоснован в дальнейшем. На этом режиме
уравнение теплового баланса ймеет следующий вид:
Сах -Сах = 71 («П,ах , Р1, Итах)°’8(^-&₽), (21)
где атах — максимальный коэфициент расхода воздуха при полном открытии заслонки
туннеля,
Яр, piHllj — соответственно температура и плотность наружного воздуха и заданная темпе-
ратура воды, определение которых будет дано ниже.
Разделив обе части уравнения (19) на выражение для из уравнения (21), полу-
чим:
q« [а \°-8/ Р1/ у8 8—Яр
^max V^maxy yPjVmax у Я]" 8Р
(22)
а™ Заменяя отношение —-— его выражением из Сах уравнения (11), получим:
/ X 0.8 / Л 7 \ 0,6 / г / ' | а )=| | ( р1 111 ах \ &тах J \ N1 max J \ Р ? (23) / Я—ЯР
1 Марьямов. Экспериментальное исследование и расчет авиационных радиаторов. Труды ЦАГИ,
вып. 367. -
6
I a \0-8
Поступая аналогично с уравнением (20) и введя обозначение г=|——) , получим:
\^тах/
4'} Cax'PW
oV W ft—ftp
Р]Итаху il’f ft^
(24)
где г определяется по формуле (23) и функция 'Ь(г) зависимостью коэфициента расхода
воздуха от положения заслонки.
Коэфициент расхода воздуха при различных положениях заслонки определяется
продувкой радиаторной установки и задается в виде кривой:
где fa — отношение площади выходного сечения туннеля к фронтовой площади радиатора.
Аналитическое выражение этой зависимости имеет следующий вид:
где ра — коэфициент статического давления в выходном отверстии туннеля,
Ск и Сс — коэфпциенты потерь.
Формула (25), однако, не представляет особых преимуществ, так как_для пользова-
ния ею необходимо экспериментальным путем определить зависимости у и ра от fa. Ввиду
этого мы будем в дальнейшем пользоваться непосредственно экспериментальной кривой
(а +8 f
—------------------------------------------------------------------) и — /-
Omax J Jainax
На фиг. (3) показана типичная кривая r=!Pi(/) для нормальной радиаторной установ-
ки с герметизированным туннелем. В результате графического диференцирования этой
кривой построена кривая qjJ (/)=')> (г) (фиг. 4).
С помощью формул (17) и (24) легко получить выражения для постоянной времени
Ts и коэфициента эффективности заслонки Ь-.
С - с ( V16 {,Р (26'1
s 4^ANi^J 1+0,0033(0—Op) ’ 1 J
A= V'6 + _______________( Y’8=
qf—q$ 14 Y A) J (&!—ftp) 11+0,0033 (&—ftP)l \Р1Утах7
=W &-&p _______ (271
r 1+0,0033(ft-ftP) ’ k ‘
где г определяется из формулы (23).
7
При постоянном режиме работы системы (г. е. постоянных Nb р, V и 1)р) зависи-
мость коэфициента эффективности от положения заслонки выражается формулой:
Ь = къ (r) = kv'(f).
Коэфициент пропорциональности k имеет следующий вид:
— &₽
k 1 +0,0033(&— 8р) ~0,77
где &i — температура воды, соответствующая полному открытию заслонки /=1.
Анализ полученных формул показывает, что коэфициенты основного уравнения ре-
гулируемой системы, а следовательно, и ее устойчивость зависят от режима полета
(мощности мотора и скорости полета), атмосферных услойий (температуры и плотности
наружного воздуха) и заданной регулятором температуры воды.
Все указанные величины изменяются в весьма широких пределах: мощность мо-
тора—от максимума (на номинальном режиме) ди весьма малой величины (при планиро-
вании или пикировании); скорость полета—от максимума до весьма малой величины,
имеющей место при посадке и рулежке; температура наружного воздуха—в зависимости
от времени года в пределах от —30° до +30°. Изменение температуры воды допускается
в диапазоне 40-:-50°.
Ввиду этого чрезвычайно трудно представить в достаточно обозримом виде все
множество коэфициентов Ts и b для различных условий полета. •
Приводимый ниже расчет этих коэфициентов для ряда наиболее характерных режи-
мов является весьма грубой оценкой, дающей, однако, представление о порядке искомых
величин и характере их изменения в зависимости от различных факторов.
При проведении расчета приняты следующие ограничения:
1. Регулятор при всех условьях поддерживает постоянную температуру воды Я=90° Ц
2. Расчет проводится только для режимов горизонтального полета, совокупность
которых задается кривой потребных мощностей. Все остальные режимы (планирование,
пикирование и т. д.) не представляют интереса с точки зрения устойчивости, так как их
продолжительность по сравнению с периодом колебаний регулируемой температуры не-
велика.
3. Расчет проводится для полета у земли, где температура наружного воздуха под-
вержена наибольшим изменениям. Предполагается, что изменение температуры наруж-
ного воздуха с высотой компенсируется изменением плотности.
4. В соответствии с установившейся методикой испытаний достаточности систем
охлаждения1 в качестве расчетных условий принимаются следующие:
а) расчетные атмосферные температурные условия (РАТУ) &1 = + 30°Ц у земли.
Предполагается, что в этих условиях при полете на номинальном режиме для обеспече-
ния температуры 0=90° необходимо полное открытие заслонки f— 1. Уравнение тепло-
вого равновесия на этом режиме приведено было ранее [уравнение (21)];
Ь) стандартные условия (&р=+15иЦ у земли). В этих условиях на номинальном
режиме заданная температура устанавливается при положении заслонки, близком к поло-
жению „по потоку" (/=0,3-*-0,5);
с) зимние условия (&₽ 30° LJ, у земли).
5. Влияние скоростного наддува, атмосферных ус-
ловий и высоты (до расчетной высоты) на мощность и
теплоотдачу двигателя не учитывается.
В основу расчета положена кривая потребных мощ-
ностей для стандартных условий у земли, построенная в
относительных координатах — и — (см. фиг. 5).
max V max
Результаты расчетов приведены в виде графиков,
р м
Кривые фиг. 6 и 7 показывают изменение } У— и
^max (/max
V
----— в зависимости от величины ту—, определяющей
(/max Гщах
режим полета, для каждого из перечисленных в п. 4 трех
1 Инструкции по проведению летных испытаний для оценки
достаточности систем охлаждения 1944 г.
8
q.
типов атмосферных условии. Ila графиках фиг. 8, 9 и 10 наряду с кривыми —— приве-
*7тах
дены также вспомогательные кривые изменения величины г, построенные по формуле (23)
и дающие возможность путем сравнения с характеристикой туннеля определить
положение заслонки /, соответс вующее данному режиму полета и атмосферным условиям.
Для определения коэфициентов Ts и b
необходимо задаться величинами qmax и с.
По данным заводских испытаний вели-
чина теплоотдачи двигателей колеблется в
пределах 75 :100 кг кал,сек.
В ряде работ рекомендуется теплоем-
кость системы определять как сумму теплоем-
костей воды радиатора и мотора:
с=св GB -|- Ср Ср -|- гм GM .
Фиг. 6
Эта формула, очевидно, дает преувеличенное значение теплоемкости, так как не вся
масса двигателя участвует в процессе теплообмена. Кроме того, как установлено опы-
том, изменение температуры стенок цилиндров всегда меньше соответствующего измене-
ния температуры воды. Пользуясь приведенными ранее данными о емкости системы и
учитывая дополнительно теплоемкость радиатора и частично теплоемкость мотора, мы
можем считать, что теплоемкость системы на современных самолетах колеблется в
пределах 1004-150 кгкал[°Ц и в среднем равна 125 кгкал/°Ц
Значения коэфициентов Ts и b для различных режимов горизонтального полета и
атмосферных условий приведены на графиках (фиг. 11 и 12). Как видно из этих графи-
ков, коэфициенты Ts и b имеют наименьшую величину в полете с максимальной ско-
ростью в летних условиях и резко возрастают с понижением температуры наружного воз-
духа. При одних и тех же атмосферных условиях коэфициенты' Ts и b достигают макси-
мума на режиме, близком к режиму полета с экономической скоростью.
Проведенный расчет, как уже указывалось ранее, не претендует на точность и дает
лишь представление о порядке величин Т{ и />. В действительности могут иметь место
отклонения этих вечичин от значений, полученных расчетом. В частности, практически
неизбежная негерметичность туннеля водорадиатора приводит к значительному сниже-
нию коэфициента эффективности заслонки b для положений заслонки, близких к полному
закрытию.
2
9
Фиг. 9
§ 4. Результаты летных испытаний
«
Для подтверждения полученных выводов было проведено исследование переходных
температурных режимов системы охлаждения в полете. Ввиду ограниченного числа экспе-
риментов летные испытания не могли дать полной проверки результатов расчета и пре-
следовали более узкие цели, а именно:
1) проверить применимость диференциального уравнения (5);
2) установить опытным путем порядок основной динамической характеристики —
постоянной времени Д.
Переход системы охлаждения от одного установившегося режима с температурой
воды Н, к другому с температурой В2 можно осуществить путем быстрого изменения
в начальный момент одного или нескольких параметров, влияющих на тепловое состоя-
ние системы.
Изменение температуры й под действием такого возмущения может быть выражено
однородным диференциальным уравнением:
7;дй-[-Д!Ь=0 (28)
(где величина Ts соответствует новому значению температуры W,) и начальным условием:
(Д!))/=о i), ф. (29)
Решение диференциального уравнения (28) при начальном условии (29) имеет сле-
дующий вид:
t
ДЙ- (Й, —й2)е т* . (30)
Логарифмируя обе части уравнения, получим:
lnJb_Jk=_L_ (31а)
да т к
S
откуда
Формулы (31а и б) удобны для обработки результатов экспериментов.
Эксперименты производились следующим образом. В горизонтальном полете в те-
чение 2—3 минут поддерживался постоянный тепловой режим системы охлаждения. За-
тем система охлаждения приводилась к другому положению равновесия путем быстрого
изменения положения заслонки туннеля водорадиатора или сектора газа, или того и дру-
гого одновременно.
Изменение температуры воды в процессе подхода к новому установившемуся зна-
чению регистрировалось через интервалы в 15—20 секунд.
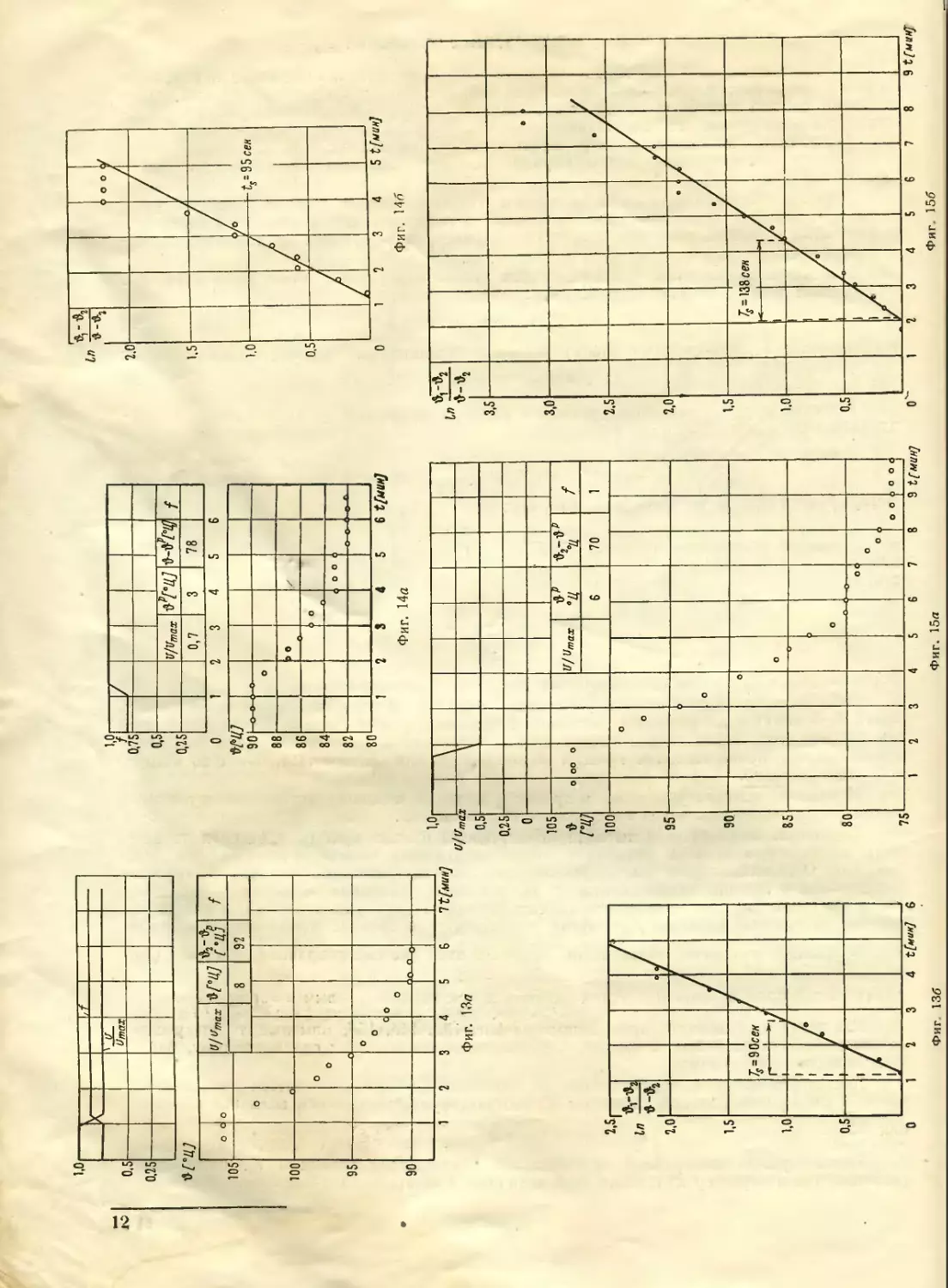
Первичные результаты испытаний представлены в виде кривых изменения по вре-
мени температуры воды и параметра, вызвавшего смену теплового режима (фиг. 13«,
14а, 15а). Остальные параметры, определяющие тепловое состояние системы, оставались
постоянными в течение эксперимента, и их значения приведены в таблицах фиг. 13<7,
14а и 15а. Для проверки сходимости данных эксперимента с уравнением (5) и для опре-
деления постоянной времени Ts графики перестроены в системе координат, в которой
по оси ординат отложено значение In —1 . В этой системе координат уравнение (30)
Д V
изображается прямой линией с углом наклона к оси абсцисс равным a arctg
Как видно из графиков, приведенных на фиг. 136, 146, 156, опытные точки распо-
лагаются достаточно близко к прямой, т. е. изменение температуры следует закону, близ-
кому к экспоненциальному.
Постоянная времени, подсчитанная по формуле 7"s=ctga, колеблется в пределах
90 л-138 см, причем большее значение Т соответствует наименьшей величине отноше-
V
НИЯ -р— .
V шах
Таким образом, эксперимент подтверждает как порядок величины Ts, полученной
расчетом, так и характер изменения этой величины в зависимости от режима полета.
11
7—
A
Umax
KO f
0,75 0,5 0,25
V/Wrnaz f
0,7 3 78
Фиг 136
Фиг. 15a
О
е 7
о < • /
.. = к 8 сел
**i / 1 An
—
1 /
O'* 1 2 3 4 5 6 7 8 9 tfwwj
Фиг. 156
II. ХАРАКТЕРИСТИКИ ЭЛЕМЕНТОВ РЕГУЛЯТОРА
Как уже указывалось в введении, регулятор состоит из следующих элементов
а) чувствительный элемент или приемник,
Ь) сервопривод управления заслонкой,
с) обратная связь между сервоприводом и приемником.
Мы рассмотрим характеристики каждого из этих элементов в отдельности.
§ 1. Исследование приемников
а) Классификация приемников
Приемником регулятора служит термометр, реагирующий на отклонение регули-
руемой температуры ДН от заданной величины So и дающий импульс сервоприводу при
помощи контактного устройства или золотника.
Важнейшей характеристикой термометра, как элемента регулятора, является его
запаздывание. Чтобы выявить природу запаздывания и его зависимость от принципа дей-
ствия и конструкции приемника, рассмотрим процесс теплообмена между охлаждающей
водой и приемником и выведем диференциальное уравнение координаты ДО (температуры
приемника).
Пренебрегая утечкой тепла из системы охлаждения через приемник, можно считать,
что при установившемся режиме перепад температур между охлаждающей водой и при-
емником равен нулю, т. е. 0о Оо.
При нарушении этого равенства возникает теплообмен путем конвекции от воды
к приемнику и путем конвекции и теплопроводности внутри приемника к его чувстви-
тельному элементу. В зависимости от конструкции приемника его запаздывание может
определяться преимущественно первым или вторым видом теплопередачи или обоими
видами одновременно. В соответствии с этим мы рассмотрим три типа приемников.
К приемникам первого типа отнесем
термометры, в которых чувствительный эле-
мент расположен близко к наружной по-
верхности приемника и отделен от этой
поверхности тонким слоем воздуха или ка-
кого-либо другого мало теплопроводного
вещества (фиг. 16—6).
В качестве примера можно привести
термометр с биметаллической спиральной
Фиг. 16
Фиг. 17
пружиной (см. фиг. 17) или
электрический термометр со-
противления (фиг. 18).
В приемниках второго
типа чувствительный элемент
(например, термопара) распо-
ложен на оси термометра и от-
делен от среды толстым за-
щитным кожухом из материала
с малой теплопроводностью
(фиг. 16—с).
Приемники этого типа об-
ладают большим запаздывани-
ем и не применяются в авиа-
Фиг. 18
13
ционных регуляторах температуры. Мы рассматриваем их, потому что присущие нм
свойства могут частично наблюдаться также в приемниках первого типа.
Чувствительный элемент в приемниках третьего типа заполняет почти все сечение
приемника (фиг. 16—о). Примером такого приемника может служить аэротермометр, за-
полненный низкокипящей жидкостью (фиг. 19).
Как видно из приведенных конструкций, приемники, применяемые в авиационных
регуляторах температуры, имеют
L 1П
длины к радиусу 75-~ Ю.
Л
обычно форму цилиндрического тела с отношением
Ь) Приемники первого типа
Ввиду малой теплоемкости промежуточных слоев, отделяющих чувствительный эле-
мент от воды, можно считать, что теплообмен между водой и чувствительным элементом
происходит без затрат на изменение теплосодержания промежуточных слоев. Это допу-
щение дает возможность охарактеризовать сложный процесс теплопередачи от поверх-
ности приемника к чувствительному элементу коэфициентом теплопередачи а', зависящим
от конструкции приемника. Коэфициент теплопередачи от среды к приемнику, зависящий
от условий обтекания приемника водой, обозначим через а". Согласно закону Ньютона
количество тепла, перетекающего в единицу времени от среды к чувствительному эле-
менту, равно:
bqr = — S0')^Fr^(A0'-A6), (32)
где Fr—площадь поверхности приемника,
ДО'—температура на поверхности.
Исключая ДО' из уравнений (32), получим:
Д^=Ггаг(ДЙ—ДО), (33)
где ал= —-—-—.------суммарный коэфициент теплопередачи.
--+-V
а а
Г г
С другой стороны, Д<7Г равно скорости изменения теплосодержания AQ,. приемника,
т. е.
rf(AQr) rf(A6)
q'~ dt r dt ’
где Cr общая теплоемкость приемника (чувствительного элемента).
Исключая Д(/г из уравнений (33) и (34), получим:
Сг — Л-Яг (д9 — д б)" °.
r at
или
т 4-до=дй,
r dt
где
т- ]__1Л
r~ Fr«r - < 1 а; )
Постоянная времени и ее связь с запаздыванием будут рассмотрены более по-
дробно в дальнейшем.
(34)
(35)
(36)
14
Решение уравнения (35) при Л 0-0 и начальном условии (Ле)<~0-(Аб)0 имеет вид:
де=.(Лб)0₽ Тг
и может быть представлено в координатах In и t прямой с угловым коэфициен-
том
с) Приемник второго типа
Приемник второго типа можно рассматривать, как однородный цилиндр, на оси ко-
торого сосредоточен чувствительный элемент. Координата приемника ДО равна темпера-
туре на его оси: ДО ДО(0, £).
Для сравнения с приемником первого типа исследуем изменение ДО при тех же
условиях, что и в предыдущем случае, т. е.
ДО 0, (Д0)г = о = (Д0)о.
Введем следующие обозначения:
>г— коэфициент теплопроводности приемника,
сг—удельная теплоемкость приемника,
— удельный вес приемника,
X,
а = —г----температуропроводность приемника,
а"
А =-г---относительный коэфициент теплопроводности приемника,
V
— радиус приемника,
L — длина приемника.
Изменение температурного поля приемника определяется уравнением теплопро-
водности
<3(Д6) /<32 (ДО) 1 d(A6)\
dt а di2 г dr J ’
краевым условием на поверхности приемника
=—h(M)r=R
и начальным условием
(Д0)г=:о-(Д0)о
(38)
(39)
(40)
дД6 \
dr I „
J Г-Н
Разыскивая, согласно методу Фурье, частное решение уравнения (38) в форме
ДО = <р(£)Ф(г), (41)
получим два обыкновенных диференциальных уравнения:
--^ + W?(0 0, (42)
[Ф('')]+-1.—^7[-Н'-)] + А2'Ь(г) = 0. (43)
Решение уравнения Бесселя (43), конечное на оси цилиндра, имеет вид:
ф(г) = А/0(Аг), (44)
где А произвольная постоянная,
/0— функция Бесселя нулевого порядка.
Параметр k определяется из пограничного условия:
[4 (^)]-А = - h [Л (Аг))г=я . (45)
15
Обозначив kr= р, можно представить уравнение (45) в виде:
где Jj—функция Бесселя первого порядка.
Уравнение (46) имеет бесчисленное множество корней значения которых вычи-
слены для ряда значений hR1.
Таким образом, частное решение (41) имеет вид:
_ 9 аЛ/
' п
е
(46)
ДО =
(47)
и решение уравнения (38), удовлетворяющее начальному условию (40), будет:
'2 at / \
— Р-.-7ТГ / Г \
е
л №
(48)
п-
Полагая в уравнении (48) г = 0, получим искомую
00 2
де(0’/> =(дв)Л
температуру на оси приемника:
2-?L
00 —
=№>£Апе nR
(49)
л 1
Бесконечный ряд в правой части уравнения (49) является знакопеременным, причем
абсолютные значения его членов образуют монотонно убывающую последовательность.
Из этих свойств ряда вытекает оценка:
(50)
at
Ki
, в пределе стре-
2 at
ДО(0,0<(АО)0Л^:’*
Ряд (49) сходится медленно при малых зна-
чениях t\ с течением времени сходимость его
улучшается. Таким образом, температура на оси
приемника ДО (0,7), оставаясь постоянно мень-
— о.2
ше выражения (АО^/Це '
мится к этому выражению.
Физический смысл этого явления заклю-
чается в следующем. В начальный момент вну-
тренняя часть приемника вследствие малой тем-
пературопроводности и отдаленности от поверх-
ности, омываемой водой, лишь в незначительной
степени участвует в процессе теплообмена. Ввиду
этого температура на оси приемника вначале из-
меняется сравнительно медленно. По мере рас-
пространения теплообмена на внутреннюю часть
приемника изменение Д& (0,7) ускоряется и в
дальнейшем, вследствие выравнивания темпера-
турного градиента, протекает по закону, близ-
кому к экспоненциальному.
В качестве примера на фиг. 20 показано
изменение ДО по времени (кривая Л) для при-
емника со следующими характеристиками:
/? = 0,04 м; Хг = 0,15 кг кал/м час°Ц;
сг = 0,5 кг кал\кг вес°Ц;
1000 кг вес!м3-, а." 1000 кг кал1м2 час°1\.
In д ( г • сравнения на этом же графике
—и.2 —
выражению (Дб^Д^ i R-.
По оси ординат отложена величина
9 at
проведена прямая > соответствующая
1 Греберн Эр к. Основы учения о теплообмене.
16
d) Приемники третьего типа
Координата Д6 приемника зависит не только от температуры на оси, но и от темпе-
ратуры всех остальных точек. В соответствии с этим будем считать, что координата Дб
в каждый момент пропорциональна приращению теплосодержания приемника AQr, т. е.
Исследуем изменение ДО при тех же начальных условиях, что и в двух предыдущих
случаях. Решение задачи сводится к определению &Qr в функции от t. Диференциал Д<2Г
равен
d (Д Qr) — ДО (г, t) cr-[dv, (51),
где dv- диференциал объема.
Интегрируя это выражение по объему цилиндра, получим:
(52)
где Сг—суммарная теплоемкость приемника.
Из уравнения (52) получим окончательно:
=(Д6)оУ-
4
и.2 I
“(WJ
9 at 00 <2 at
= (Д0)о Впе .
(53)
п=1
00 оо
V"ч 9 at я 2
Ряд В отличие от ряда 2, состоит из положительных членов и при
п 1
00
Clt л — % ~
одинаковых значениях величин hR и ^ сходится значительно быстрее ряда 2^Апе~у-п^.
R n=i
Поэтому кривая In = f(t) проходит выше прямой 1п = Р2> соответствующей
первому члену ряда и отличается от этой прямой в значительно меньшей степени, чем
в случае приемника второго типа.
На фиг. 20 приведена кривая In (кривая В) для применяемого в авиации
аэротермометра, заполненного метилхлоридом и для внешнего коэфициента теплопередачи
а" = 1000 кг кал/м2 час°Ц. Приблизительные значения характеристик приемника следующие:
/?=0,04 м; Хг = 0,15 кг кал]м час° Ц; сг = 0,5 кг кал 1кг вес° Ц; -[г=1000 кг eeciM2.
Ускоренное изменение Д6(/) вначале объясняется аналогично замедленному измене-
нию Дб (0, f) в случае приемника второго типа. В начальный момент изменение темпера-
туры Д6 определяется главным образом изменением теплосодержания внешних слоев
приемника, обладающих наибольшим объемом. Однако вскоре процесс теплообмена рас-
пространяется и на внутреннюю часть приемника, вследствие чего изменение темпера-
туры Д6 замедляется и приближается к экспоненциальному закону.
е) Связь постоянной Тг с запаздыванием
Проведенный анализ и экспериментальное исследование показывают, что в первом
приближении изменение температуры приемника любого типа Д6 может быть описано
уравнением:
гг-^-+дб=д»: (35)
Постоянная времени Тг характеризует запаздывание приемника, как это видно из
следующих примеров.
Пример 1-й. Температура воды меняется с постоянной скоростью g:
Уравнение (35) принимает следующий вид:
dA0
lr (дй)о + gt- (S4)
киевский Институт Гй€-
3---------------------------—. - -
Решение уравнения (49) при начальном условии (Д(ф=0 = (Д0)о будет:
t
Д6 = ЦД0)о - (Д8)о 4- Trg] е тг + (д»)о + gt _ Trg, (55)
откуда
___t
Д» - ДО = Trg + [(Д»)о - (Д0)о + Trg] е Гг . (55а)
При стремлении t к бесконечности второе слагаемое правой части уравнения (55а) стремится к нулю,
и, следовательно, в пределе координата приемника Д9 отстает от температуры среды на величину, пропор-
циональную постоянной времени Тг,
Пример 2 й. Температура воды изменяется по закону
Д» = (Д»)тах sin <»t.
Диференциальное уравнение изменения координаты ДО в этом случае будет:
с/Д6
гс-йг+Де = (л8)тах81пшА (56)
Считая попрежнему, что свободное изменение быстро затухает, представим частное решение уравне-
ния (52), соответствующее вынужденному изменению ДО, в виде:
Де = (Д0)тах51пш(7-г), (57)
где
,58)
и т определяется из уравнения:
tgu>T = o>7'r. (59)
При достаточно малом о> можно положить
ют г: ю 7 г, т - Тг.
т. е. синусоида ДО сдвинута относительно синусоиды ДО на время, равное постоянной Гг
i) Экспериментальное исследование приемников
Эксперименталг ное исследование приемников имело целью проверку применимости
диференциального уравнения (35) и определение постоянной Тг различных приемников.
Испытания производились по методике, сходной с методикой летных испытаний си-
стемы охлаждения.
Испытываемый приемник,
нагретый до температуры 61 =
= 90°Ц, переносился в непод-
вижную или движущуюся с
некоторой скоростью воду с
температурой &о=6о=5-г-1ОсЦ,
причем записывалось измене-
ние показания приемника во
времени. На основе этих дан-
ных строились эксперименталь-
ные кривые 1пЦ^Ь-=/(0.
Результаты эксперимен-
тов представлены графиками
фиг. 21. Как видно из этих гра-
фиков, экспериментальные точ-
ки располагаются достаточно
близко к прямой, что подтвер-
ждает применимость уравне-
ния (35) (для случая мгновен-
ного изменения ДО).
Постоянная времени Тг
в неподвижной воде равна:
электрический термометр
сопротивления 72 сек,
термометр с биметалличе-
ской пружиной—57 сек,
аэротермометр с метилхло-
ридовым заполнением—22 сек.
18
В последнем приемнике, как и следовало ожидать согласно выводам теории, наблю-
дается незначительное ускорение изменения ДЬ вначале. Как показывают опыты, запаз-
дывание аэротермометра может быть значительно снижено при надлежащем заполнении
и выборе сечения капиляра.
Чтобы убедиться в том, что уравнение (35) справедливо не только в случае мгно-
венного изменения ДН, но и для других видов функции Д») = /(0, приемники испытывались
в воде, температура которой изменялась по синусоидальному закону:
Д & =- (Дй)тах sin 0)t.
Результаты одного из таких экспериментов с биметаллическим приемником представ-
лены на фиг. 22.
Из опыта получены следующие величины: среднее отношение амплитуд =
' * max
— 0,5 и средний сдвиг во времени т=26 сек.
Расчет этих величин, исходя из величины ТГ = Ы сек по формулам (58) и (59), дает
„ . 7Г2^ _ . 2т57
7arctg rT 145 arctg
2т: 2"
= 27 сек.
На фиг. 23 представлена зависимость постоянной времени Тг электрического термо
метра от скорости обтекания его водой. Как видно из этого графика, Тг слегка умень-
шается в области малых скоростей обтекания и с дальнейшим увеличением скорости
обтекания остается практически неизменной. Этот результат свидетельствует о том, что
запаздывание приемника в воде мало зависит от условий обтекания и определяется в ос-
новном конструкцией и внутренним коэфициентом теплопередачи приемника (а').
Чтобы выявить влияние внешнего и внутреннего коэфициентов теплопередачи, было
проведено определение постоянной Тг при охлаждении приемников в воздухе. В резуль-
тате этих экспериментов получены следующие величины Тгвоза-
электрический термометр сопротивления...............Тг в03д = 350 сек
термометр с биметаллической пружиной................Л-возд = ^00 „
аэротермометр ............................ ....... Tf В03Д = 240 .
19
Зная величины Тг вод и Г,возд и коэфициенты теплопередачи а"вод и «''в03д, можно
оценить величину внутреннего коэфициента теплопередачи приемника а/.
Подставляя соответствующие величины в формулу (36), получим:
для воды
_с/1 1
1 г вод—р I / - Г " Н
1 г \Г Г VQJ1J
для воздуха
т _сг(\ 1 \
‘ Г ВОЗД - р I , Г I •
г \ “г °5-возд/
Поделив первое но а/, будем иметь: уравнение на второе и разрешая полученное уравнение относитель- I Тг ВОД 1;= . (А) * Г ВОД 1 1 ВОЗД возд ВОД
По данным Линевега 1 коэфициенты теплопередачи можно принять равными в среднем:
а"вод — 1000 кг кал/м2 час° Ц, а"возд = Ю кг кал/м2 час° Ц.
Пренебрегая в знаменателе формулы (А) величиной ,, , получим окончательно:
“г вод
a;=iof^y — 1 V (60)
у ‘ гвод J
Внутренние коэфициенты теплопередачи испытывавшихся приемников, вычисленные
по этой формуле, приводятся ниже:
электрический термометр сопротивления..............38,5 кг кал/м^ час° Ц
биметаллический термометр..........................42,5
аэротермометр ....................................99,0
Как уже указывалось ранее, расход циркулирующей воды в системах охлаждения
достигает 750 л/мин, что при диаметре трубы 50 мм соответствует скорости обтекания
6,5 м/сек. При этом коэфициент теплопередачи а, можно считать равным в среднем
5000 кг кал/м2 час° 112.
Сравнивая эту величину с приведенными выше величинами внутренних коэфици-
ентов теплопередачи, мы убеждаемся в том, что в формуле (36) действительно можно
пренебречь вторым слагаемым, т. е. запаздывание существующих приемников в усло-
виях эксплоатации на самолете определяется в основном внутренним коэфициентом теп-
лопередачи. Наилучшим из рассмотренных приемников с точки зрения запаздывания
является термометр с низкокипящей жидкостью.
§ 2. Сервопривод управления заслонкой
В авиационных регуляторах температуры применяются в основном два типа серво-
приводов: гидравлический (сервопоршень), управляемый золотником, и электрический
(электромотор), управляемый контактным устройством реле. Наибольшим распростране-
нием пользуется электромотор (обычно сериесный) с механическим редуктором.
Важнейшей характеристикой сервопривода является зависимость его скорости от
координаты приемника ДО.
Обычно принимают, что скорость электрического сервопривода постоянна по абсо-
лютной величине и меняет свой знак соответственно знаку координаты приемника ДО.
В действительности скорость и время перекладки заслонки могут несколько ме-
няться под действием аэродинамических нагрузок на заслонку и за счет перебега, свя-
занного с инерцией движущихся частей.
Чтобы исследовать влияние этих факторов, были проведены испытания электриче-
ского сервопривода заслонки одного из серийных авиационных регуляторов температуры
в полете. В процессе испытаний заслонка путем включения электромотора вручную
переводилась из положения полного открытия в положение полного закрытия и обратно,
причем записывались движение заслонки и изменение силы тока в якоре электромотора;
наблюдения производились на холостом ходу (на земле), а также на режиме горизон-
тального полета с максимальной скоростью и на режиме пикирования.
1 См Lienewcg. ATM Lief 80, 1938.
2 См. там же.
20
Результаты испытаний представлены табл. 2 и графиками фиг. 24—27.
Влияние аэродинамической нагрузки на время Тм , потребное для полной перекладки
заслонки, можно видеть из табл. 2.
Таблица 2
Режим работы Направление движения заслоики Время перекладки Гм [сек]
( Открытие
Холостой ХОД Закрытие 19
Горизонтальный полет со ско- I Открытие 19
ростью V = 590 км/час . . ( Закрытие 24
Пикирование со скоростью < Открытие 20
V — 620 км/час . Закрыт ие 25
Данные таблицы показывают, что нагрузки, действующие на заслонку в полете,
мало влияют на время ее перекладки. Заметное увеличение времени перекладки (на 5 сек)
наблюдается только при движении заслонки в сторону закрытия.
Как видно из графика фиг. 26, этот прирост времени связан с замедлением движе-
ния заслонки при ее подходе к положению полного закрытия. В этом положении на
заслонку действуют два момента:
а) момент аэродинамической нагрузки, препятствующий закрытию заслонки и
достигающий максимального значения при полном закрытии заслонки;
б) момент трения, действующий в ту же сторону.
При обратном движении заслонки из положения полного закрытия момент трения
вычитается из момента аэродинамической нагрузки, и поэтому увеличение силы тока
(см. график фиг. 25) и замедление хода заслонки будут меньше, чем в предыдущем
случае.
21
Как видно из кривых фиг.
ляет 1,5 — 2 сек, причем заслонка
хода. Сравнение кривых холостого
dAf
24 и 2G, при холостом ходе время перебега состав-
проходит за это время приблизительно 0,1 полного
хода с кривыми движения заслонки в полете пока-
зывает, что перебег электромотора в полете почти
полностью устраняется вследствие тормозящего
действия аэродинамической нагрузки. Последнее
обстоятельство подтверждается также тем, что
при работающем регуляторе наблюдаются смещения
заслонки, значительно меньшие 0,1 полного хода.
Учитывая изложенное, скорость сервоприво-
да в первом приближении можно считать постоян-
ной и независящей от нагрузки и пренебречь
явлением перебега. При этих условиях зависимость
скорости электрическою сервопривода от коорди-
наты приемника = F(A6) может быть пред-
ставлена графиком фиг. 28.
На фиг. 28 приняты следующие обозначения:
2(Д6)заСт — зона нечувствительности (зона застоя)
приемника в °Ц,
I max
'A,
S и TM
— максимальная скорость движения заслонки в долях полного
открытия в секунду,
— время полной перекладки заслонки [сек],
- соответствуют номинальным оборотам электромотора без на-
грузки.
При рассмотрении устойчивости имеют значение не абсолютные величины (Д6)заст и S,
а только величина их отношения -----, которую мы будем в дальнейшем называть
О
коэфициентом характеристики сервопривода. Геометрический смысл этого коэфициента
ясен из чертежа фиг. 28.
§ 3. Обратная связь
В простейшем регуляторе (без обратной связи) равновесие регулируемой системы
всегда устанавливается при вполне определенной температуре (с точностью до зоны за-
стоя). При этом в зависимости от теплового режима заслонка туннеля водорадиатора
может занимать различные положения.
С введением обратной связи равновесная температура может меняться в известных
пределах в зависимости от теплового режима. При этом каждому равновесному значе-
нию температуры соответствует вполне определенное положение заслонки. Характери-
стикой обратной связи служит зависимость:
«о=6о = ’И/о).
Разность между значениями температур 8' и 8", соответствующих полному откры-
тию f— 1 и полному закрытию /=0 туннеля водорадиатора, мы будем называть диапа-
зоном работы Е регулятора с обратной связью.
Скорость сервопривода в регуляторе с обратной связью ставится в зависимость от
„кординаты рассогласования" 9:
? = 8 -ф(/).
Переходя к соответствующему уравнению в вариациях, получим:
дф = де—^д/=да -Зд/,
б/ф -
где с — —так называемая степень неравномерности регулятора с обратной связью,
В частном случае, когда ф (/) линейна, во всем интервале /=0-ь 1 имеем:
ф(/) = о/+const,
и, следовательно,
£^Ф(1)-Ф(0) = в,
22
т. е. численные значения диапазона работы и степени неравномерности регулятора сов-
падают.
В качестве примера практического осуществления обратной связи с линейной харак-
теристикой рассмотрим схему регулятора температуры ЛИИ (см. фиг. 29).
Фиг. 29
Приемником регулятора служит термометр сопротивления R„ , являющийся одним
из плеч моста Уитстона. В состав сопротивления другого плеча входит переменное со-
противление реостата обратной связи. В диагональ моста включен гальванометр, стрелка
которого заменена лопаточкой. При отклонении температуры воды от заданной равно-
Фиг. 30
весне моста нарушается, и лопаточка перекрывает одно из
двух сопел (фиг. 30), через которые подается воздух в обе
полости пневматического реле. Шток пневмореле откло-
няется и замыкает при помощи контактов цепь той или
иной катушки электромагнитного реле, управляющего ра-
ботой сервомотора. Сервомотор вращает заслонку радиатора
и одновременно перемещает ползунок реостата обратной
связи. Таким образом, каждому положению заслонки соот-
ветствуют определенная настройка моста Уитстона и, следо-
вательно, определенная равновесная температура.
III. ИССЛЕДОВАНИЕ РЕГУЛЯТОРА ПРОСТЕЙШЕГО
ТИПА
§ 1. Исследование устойчивости регулирования.
Приближенный метод
В I и II частях настоящей работы были получены
уравнения, необходимые для исследования поведения систе-
мы охлаждения, управляемой автоматическим оегулятором:
уравнение температуры охлаждающей воды
Т^ДПД- Д»4-&Д/=0,
уравнение координаты приемника
т;дё +Д0 —Дй = 0,
и уравнение сервопривода
Д/=Г(Д6),
где Г(Д6) изображается ломаной линией (фиг. 28).
Для упрощения записи перейдем к новым обозначениям вариаций координат и зоны
застоя:
Дй=х, Д6=у, kf=z, (Дб)заст = т].
- £
Кроме того, введем безразмерное время t—•
23
В результате система диференциальных уравнений примет следующий вид:
-^-4-х ' bz = Q, (61а)
dt
-^--\-ау— ах—О, (61b)
dt
^=TsF(y), (61с)
dt
где а = 7--
(в дальнейшем для упрощения будем обозначать безразмерное время буквой t без черты
и операцию диференцирования по этому времени — точкой).
Исследование общего решения системы (61) представляет значительные трудности
вследствие нелинейности функции F (в следующем разделе это исследование будет про-
ведено для простейшего вида функции F для случая Tr = Qu частично для более общего
случая ТгфО). Однако для суждения об устойчивости регулируемой системы достаточно
ограничиться рассмотрением периодических решений.
Для отыскания периодических решений системы с одним нелинейным уравнением
типа (610 можно воспользоваться приближенным методом, основанным на понятии об
авторезонансе и близости искомого решения к синусоидальному. Этот метод в примене-
нии к системе с одной степенью свободы изложен в книге Андронова и Хайкина „Теория
колебаний" (гл. III, § 7).
Следуя этому методу, полагаем:
у = A sin <ut (62)
и подставляем это выражение в уравнение (61с).
Получим:
z— TSF(A sin wf).
Разлагая выражение F(A sin ш/) в ряд Фурье, будем иметь:
4 /
F(Aslnud)= — si/ 1----4^-sin«>£-!- высшие гармоники. (63)
kJ A л
Решение у системы (61), соответствующее вынужденным колебаниям под действием
возмущающей силы (63), имеет следующий вид:
у—Р(А, <о) sin wt/-Q(A, <о)cos<«£—|— высшие гармоники. (64)
Приравнивая в уравнениях (62) и (64) коэфициенты при членах с sinw£ и cos<»/,
получим два уравнения:
Q(A, «>) = 0 и А — Р(А,<о) = 0
для определения амплитуды и частоты периодических решений (автоколебаний) в первом
приближении.
Соответствующие выкладки и анализ результатов удобнее провести, пользуясь фор-
мальным видоизменением описанного метода, предложенным В. А. Котельниковым
Вводя обозначение
'-(Я (65)
и отбрасывая высшие гармоники, представим уравнение (63) в виде:
F(y) = W(A)y.
1 В. А. Котельников. Продольная устойчивость самолета с автопилотом типа Сперри. Труды
ЛИИ № 2.
24
Подставляя это выражение в уравнение (61с), получим:
z = Ts ‘I’(.4) у. (616)
Таким образом, задача сводится к исследованию упрощенной системы линейных ди-
ференциальных уравнений (61а), (61Ь) и (61d).
Характеристическое уравнение этой системы будет-
Е>3 + (1 +й)П2 + аО4-а7уТ(Д)6 = 0,
где D — оператор диференцирования по безразмерному времени.
Полагая D = u», что соответствует решению у~ A sin wt, получим:
— шЧ — (1 ф- a) <u2 - а<4 + аТД (Л) Ь = 0.
Разделяя действительную и мнимую части, будем иметь:
— <us ф- а 0, (66)
(1 + а) со3 ф- а7/Г (Л) Ь 0. (67)
Уравнения (65) и (66) представляют уравнения ф(Л,ы) 0 и Р(Л,о>) — Л = 0 в раскры-
том виде.
Разрешая уравнение (66) относительно <о, получим круговую частоту автоколебаний:
ш=/а ,
(68)
и подставляя выражение (68) в уравнение (67), получим уравнение для определения ам
плитуды автоколебаний:
1 4-й
Т(Л) = -1-^т . (69)
Последнее уравнение можно получить также, применяя к упрощенной линейной
системе критерий Гурвица и приравнивая нулю детерминант Гурвица второго порядка:
1 ф- а
ъ.ТЧЬ
(70)
Так как все коэфициенты характеристического уравнения положительны, то иссле-
дуемая система устойчива при Дг>0 и неустойчива при Д2<0, т. е. уравнение (70)
определяет границу устойчивости системы Г
Подставляя выражение для ’Г(Л) из формулы (65) в уравнение (69) и решая полу-
ченное уравнение относительно Л2, получим:
' №
W
(71)
где
( ^bTs V
k-(1+«)Л
При всяком значении №>4/12 уравнение (71) имеет два действительных корня, удов-
летворяющих следующим неравенствам:
Л? - ф- |/ ~ W >2ф, (72а)
- I -- W < 2т)г. (726)
1 Можно показать (см. приложение), что в самом общем случае системы с характеристическим урав-
нением порядка п границей периодической устойчивости может служить только условие bn_t = 0, где
А . — предпоследний детерминант Гурвица.
4
25
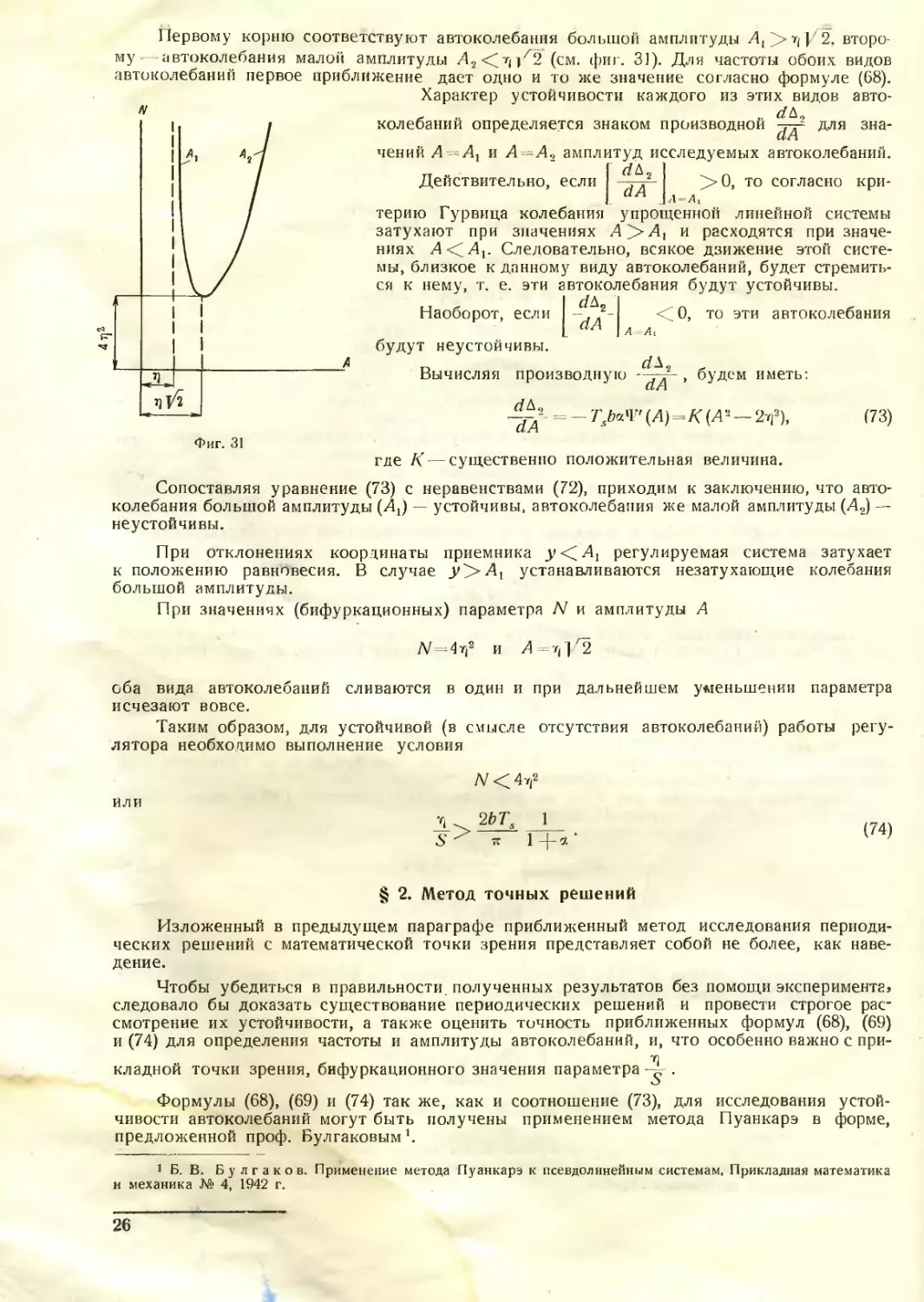
Первому корню соответствуют автоколебания большой амплитуды А^ц' 2, второ-
му- автоколебания малой амплитуды А2<С''щ/2 (см. фиг. 3J). Для частоты обоих видов
автоколебаний первое приближение дает одно и то же значение согласно формуле (68).
Характер устойчивости каждого из этих видов авто-
колебаний определяется знаком производной дЛЯ зна-
чений A = Aj и А=А2 амплитуд исследуемых автоколебании.
О, то согласно кри-
Действительно, если
терию Гурвица колебания
затухают при значениях
ниях А<САР Следовательно, всякое движение этой систе-
мы, близкое к данному виду автоколебаний, будет стремить-
ся к нему, т. е. эти автоколебания будут устойчивы.
О, то эти автоколебания
ал
упрощенной линейной системы
А > А1 и расходятся при значе-
д=л.
Наоборот, если
будут неустойчивы.
Вычисляя производную , будем иметь:
Ctrl
= -7>Т'(4)./((^-2*),
A А,
(73)
где К — существенно положительная величина.
Сопоставляя уравнение (73) с неравенствами (72), приходим к заключению, что авто-
колебания большой амплитуды (А) — устойчивы, автоколебания же малой амплитуды (А2) —
неустойчивы.
При отклонениях координаты приемника y<^At регулируемая система затухает
к положению равновесия. В случае y>At устанавливаются незатухающие колебания
большой амплитуды.
При значениях (бифуркационных) параметра N и амплитуды А
W=4Tjs и А =4.]^
оба вида автоколебаний сливаются в один и при дальнейшем уменьшении параметра
исчезают вовсе.
Таким образом, для устойчивой (в смысле отсутствия автоколебаний) работы регу-
лятора необходимо выполнение условия
N < 4-/J2
или
_L_
тг 1-f-a ‘
(74)
§ 2. Метод точных решений
Изложенный в предыдущем параграфе приближенный метод исследования периоди-
ческих решений с математической точки зрения представляет собой не более, как наве-
дение.
Чтобы убедиться в правильности полученных результатов без помощи эксперимента»
следовало бы доказать существование периодических решений и провести строгое рас-
смотрение их устойчивости, а также оценить точность приближенных формул (68), (69)
и (74) для определения частоты и амплитуды автоколебаний, и, что особенно важно с при-
кладной точки зрения, бифуркационного значения параметра-^,
о
Формулы (68), (69) и (74) так же, как и соотношение (73), для исследования устой-
чивости автоколебаний могут быть получены применением метода Пуанкарэ в форме,
предложенной проф. Булгаковым \
1 Б. В. Булгаков. Применение метода Пуанкарэ к псевдолинейным системам, Прикладная математика
и .механика № 4, 1942 г.
26
Следуя этому методу, необходимо представить уравнение (61с) в виде псевдолиней-
11НЮ уравнения:
hy = ^[F(y) /iy].
(75)
где р — малый параметр, равный для действительной системы р,,
h — средняя крутизна характеристики сервопривода, выбор которой в известной мере
произволен.
Существование периодических решений для системы с псевдолинейным уравнением
типа (75), как показано в статье проф. Булгакова, вытекает из теории Пуанкарэ только
при условии голоморфности функции F и малости параметра Однако в нашем случае
эта функция не только не голоморфна, но даже и не непрерывна; что касается р, то при
любом выборе h он не может быть принят сколь угодно малым.Таким образом, применение к
нашей системе метода Пуанкарэ в форме, предложенной проф. Булгаковым, не дает
строгого доказательства существования периодических решений и обоснования теории
первого приближения. Упомянутая работа не содержит также указаний на достаточно
эффективные методы оценки сходимости рядов, представляющих точное решение, и, сле-
довательно, оценки точности результатов первого приближения.
Разрешение этих вопросов в общем случае для системы со многими степенями сво-
боды и с нелинейной функцией F(y) произвольного вида, при современном состоянии
теории колебаний, невозможно.
Для решения указанных вопросов в данной конкретной задаче можно избрать прин-
ципиально иной путь. Опираясь на простой вид функции Д(у), можно исследовать сис-
тему уравнений непосредственно, не прибегая к синусоидальному приближению.
Такое исследование помимо теоретического значения оправдывается тем обстоятель-
ством, что сервоприводы с характеристикой вида и весьма распространены в прак-
тике автоматического регулирования. Можно указать на две работы, проведенные в этом
направлении: Tolle „Die Regelung den Kraftmaschinen", гл. VII, и О p p e 11 „Vergleichende
Betrachtung verschiedener Regelaufgaben. . . ч. II. В первой работе приводится точное гра-
фическое решение системы уравнений с нелинейной функцией вида <> для конкретных
числовых значений параметров системы. Графический метод, носящий преимущественно
качественный характер, используется также в исследовании Оппельта. Количественные
соотношения, необходимые для расчета и аначиза, в этой работе отсутствуют.
В данной работе получены конечные соотношения, которые дают возможность опре-
делить с любой степенью точности частоту периодических решений системы (61) и би-
фуркационное значение параметра, т. е. границы той области, в которой указанные перио-
дические решения существуют. Для частных случаев системы исследованы также неко-
торые свойства общего решения и характер устойчивости периодических решений.
Рассмотрим сначала простейший случай: приемник регулятора без запаздывания
Тг= 0 и сервопривод без зоны застоя (vj — 0).
Система дифереициальных уравнений имеет следующий вид:
х -(- х 1 bz = 0;
(76а)
* = Г5/(х),
(76b)
где
/(*)
s при %>0,
0 при х — 0,
— s при л: <Е 0. (7^>0; 6>>0; s>0).
При нулевых начальных условиях: л'(0) = z (0) =-0 система (76) имеет единственное
решение: х (£) = z (t) ЕЕ 0 и, следовательно, находится в равновесии.
Покажем, что всякое решение системы (76) при любых начальных данных и z0,
не равных одновременно нулю, есть колеблющееся и имеет бесчисленное множество
нулей.
Для определенности положим х0>0 и, следовательно, /(x) = s. Решение системы
(76), действительное до тех пор, пока х не изменит знака, будет.
^1(0 = (*о + bzo - bsTs) -bsTst + bTss - bz0,
Z1 [t) = Zb-\-sT/.
(77а)
(77b)
Функция x1 (f) принимает на концах интервала значения л(0) х0Е>0,
х(оо)<0 и, следовательно, имеет в этом интервале по крайней мере один нуль. Пусть
27
-наименьший из этих нулей. Легко видеть, что 1Л не может быть кратным нулем и
что х, (/) не имеет других положительных нулей. Допустим обратное, т. е. положим
Xj (Q — 0. В этом случае из уравнения (76а) следовало бы zl(£1) = 0, и система (76) имела
бы нетривиальное решение при нулевых начальных условиях z, (^) = xt = 0, что невоз-
можно. Отсюда ясно, что в точке tx должно быть соблюдено условие х(^)<С0. При t>tx
производная лу (/) =— (х0-\-bz^-\-bsTs{e~t—1) будет и подавно отрицательной. Следо-
вательно, функция xx{t), равная нулю при t = tlt монотонно убывает и не может обра-
щаться в нуль в интервале tx<Zt<Z<x>.
Аналогично, в том случае, когда х0<0, xx(t) имеет единственный корень tx, причем
-*1 (^i) > 0.
Таким образом, всякая кривая x{f), являющаяся решением системы (76), пересекает
ось х= 0 по крайней мере в одной точке. Остается показать, что за всякой точкой пере-
сечения следует новая точка пересечения.
Действительно, при начальных данных х(0) = 0, z(0)>0 на основании уравнения
(76а) будем иметь х(0)<^0. При значениях ^>0, достаточно близких к нулю, х<0 и
f{x) = — s. В этом случае решение системы (76), действительное до ближайшей перемены
знака .г, будет:
x2(7)=(6z0 । bsTs) e-f-\-bTsst—bsTs— bz0, (77c)
z.,(t) = z0-sTst. (77 d)
Аналогично предыдущему легко видеть, что уравнение х2(£)=0 имеет единственый
положительный простой корень С, причем х(£,)>0. Из этого в силу уравнения (76а)
следует z(£j)<0, т. е. значения z(t) на концах интервала имеют разные знаки. Непосред-
ственно ясно, что эти значения являются экстремальными.
Нетрудно произвести оценку амплитуд z и х. Так как экстремальные значения z на
концах интервала имеют разные знаки, то из уравнения (77b) следует:
М4)1 + ко1 = sTsx,
где т = £2 — tx.
Отсюда
|zmax| < STSX. (78)
Из уравнения (76а) следует, что экстремум х равен
Хщах bZ.
Отсюда
iXmax| < Ь |Zmax| < Ь TsST. (79)
С другой стороны, разлагая в ряд по степеням т выражение
легко убедиться в том, что при достаточно малом т |zmax | tTss с точностью до малых
второго порядка.
Продолжим решение х, (7) в область отрицательных t. При значениях доста-
точно близких к нулю, х>0 и /(x) = s. Решение, действительное в области t<^0 до
ближайшей перемены знака x(f), будет:
Xj(f) = (6z0 — ЬТ^е-1 — bsTsf-\-bsTs— bz0. (80)
Уравнение xt (£) = 0 либо не имеет ни одного действительного корня, кроме t = 0,
либо имеет единственный простой отрицательный корень. Действительно, производная
хх(1) — (bz0 — bsT^e~f — bsTs по заданию отрицательна при £ = 0 и, следовательно, zo^4O.
Если z0~J>sTs, то xx(t) будет всюду отрицательным, и в этом случае уравнение не имеет
ни одного корня, отличного от нуля. В случае z0<^sTs аналогично предыдущему легко
показать, что уравнение xx(t) — 0 имеет единственный и притом простой отрицательный
корень. Отметим тут же следующие выводы:
28
а) два соседних промежутка между тремя последовательными нулями взаимно одно-
значно определяют друг друга в силу единственности корней уравнений (77с) и (80);
Ь) каковы бы ни были начальные условия, амплитуда z, начиная со второго полуко-
лебания, не превышает величины s'/'s.
Итак, всякое решение x(t) и z (t) системы (76) имеет бесчисленное множество нулей.
Промежуток времени т между двумя соседними нулями функции х(1) будем называть
интервалом.
Функция x(t) в течение двух смежных интервалов и т2 может быть выражена
следующими уравнениями:
x(f) = (te0-{- bsTs)e~l Ц- bsTst — bsTs — bzu, 0<£<Tj, (81a)
x (t) = (bz0 + bsTJe~(+ bsTst — bsT. — bz0 — c2bsTse~^-^ — c2bsTs (t — tJ i ibsT^
(816)
Началом отсчета времени t -0 служит начало первого интервала, причем z(0)>0,
т. е. f(x) = — s.
Положив в уравнениях (81а) и (81b) соответственно t=rl и ^ = т1 + т2 и сгруппиро-
вав члены с z0 и s, получим:
(б-. 1) z0 + (е-^ -1 + О Ts s = 0, (82а)
(е-г,--2 — 1) z0 — 1 — 2 (е-т- — 1) (?! — т2)] T.S = 0. (82b)
Система линейных однородных уравнений (82) по переменным z0 и s может иметь
нетривиальные решения только при условии равенства нулю детерминанта этой системы, т. е.
^-т,-т2 _ 1 [е-Т1_Т2 — 1 —2(е~т= — 1) + т1—Тг1 Ts
Сокращая второй столбец на Ts и вычитая из него первый столбец, получим:
е~~1 — 1
e-T*-Ta— 1
Li
Ti — х2~ 2(е~Т2— 1)
(83)
Левая часть уравнения (83) содержит две тривиальные ветви = 0 и т2 = 0, Исклю-
чив их из рассмотрения делением обеих частей уравнения на выражение (е-т* — 1)(е_'=—1),
после несложных преобразований получим:
«Г т р—Tt
F +, -4 = + 2=0. (84)
Уравнение (84) определяет зависимость между двумя любыми смежными интервалами
и дает возможность построить бесконечную последовательность интервалов любого реше-
ния. Исходя из величины интервала, как это было показано ранее, легко оценить значе-
ния амплитуд х и z. Таким образом, в результате исследования уравнения (84) мы полу-
чим представление о характере общего решения данной системы.
В силу доказанной ранее взаимной однозначности функция т, = ©(Tj) является моно-
тонной. Полагая в уравнении (84) -tj -т2 = т, получим:
th" • • L = 0. (85)
Zu Zu
Уравнение (85) имеет единственный корень-г =0, т. е. кривая т2 = ©(т1) пересекает
биссектрису координатного угла в единственной точке т1 = т2 = 0. В этой точке кривая
ш^) касается биссектрисы, так как F’_ (0) = — (0). Наконец, устремляя -tj к бесконеч-
ности, получим из уравнения (84) в пределе уравнение:
т„е- + 2(1— (86)
единственный действительный корень которого равен т, = 1,593...
Итак, искомая кривая касается в начале координат биссектрисы координатного у1ла,
монотонно возрастает и стремится асимптотически к значению т2 = 1,593...
29
Вид этой кривой представлен графиком фиг. 32.
Анализ полученной кривой приводит к следующим выводам Всякое решение систе-
мы (76) стремится к положению равновесия, так как последовательность интервалов в
амплитуд стремится к нулю. Процесс затухания можно наглядно представить диаграммой
фиг. 33.
Фиг. 33
В отличие от соответствующей линейной системы данная система обнаруживает
следующие особенности. Вначале при больших отклонениях от положения равновесия
движение затухает весьма интенсивно. Как-бы велики ни были начальные отклонения, л*0
и z0 уже в первом интервале амплитуды оказываются меньше соответственно:
| Zmax |< 1,593 s Ту, I лгаах I < 1,593 b s Ts.
По мере приближения к положению равновесия затухание ослабевает и в пределе
становится равным нулю, причем частота колебаний неограниченно возрастает. Таким
образом, устойчивость системы при подходе к положению равновесия в известном смысле
находится на пределе, и можно ожидать, что при малейшем ухудшении системы, напри-
мер, введении запаздывания, она потеряет устойчивость.
Переходим к случаю, когда приемник регулятора обладает запаздыванием, характе-
ризуемым постоянной Тг / 0.
Система диференциальных уравнений имеет следующий вид:
х 1 д -ф b z = 0, (87а)
у -ф а у — а х — 0, (87b)
z=TJ(y), (87с)
где
тг
>о.
30
Найдем сначала периодические решения и будем искать их в форме, представлен-
ной графиком фиг. 34, т. е. будем считать, что наименьший период Т содержит только два
интервала, или одно полное
ный метод.
колебание. Для упрощения выкладок используем оператор-
функцию z(f) можно теперь рассматривать, как задан-
ную периодическую функцию времени. Ее изображение
будет:
/х,1 - 2 е р L* —г-в
z (t) р [Z (р) - г0] = s Ts-
= STsR{p).
Отсюда:
1 —2e~I,x'Are-I,T
р(1 — e~pT)
(88)
Представляя систему (87) в операторном виде и исполь-
зуя (88), получим:
1__9 р~Р^, -L р~РТ
р(Х хй)-\-X-\-b za-\-b sTsl =0.
Р(^~Л) + а F—аЛ' = 0.
Решение этой с истемы
в предположении, что л0>0, будет:
хор— bz0
~ Р + 1
bsTs
р(р4-1) ’
ЛР । a(x0P~bz0) h т R(p)
Р + а ' (P l~ 4 (Р+1) s Р (Р + 1)(р + «У
Переходя от изображений к оригиналам, получим:
x(O = (^o + &zo)e-/ - bz0 - b Tss(t-\-e^— 1),
х (t) = (х0 - b z0) е~‘ — bz0 — bs 7^(2-^ — — 2 е-и-") 4-1],
0<4<ц, (89а)
^<t<T, (89b)
. a x0 + b z0 t a(x0+&Z0) t
zo —! e e
0 <*<*., (89c)
t __ b z I a-Xo + &Zo e_a t _ °4*o + ^u)
01 1 — a 1 — a
1 Gt 2
+1-2 -----14- e-t + 4 _
a(l—a) 1—a a(l -a)
(89d)
0<^<T!, (89e)
z(t} = z^8 Ts(2^-t),
^<Zt<T. (89f)
Выражения (89а 0> очевидно, являются решением уравнений (87а) и (87b). Они
будут удовлетворять также уравнению (87с) при условии, если перемена знака /(у) сов-
падает с нулем y(t), т. е. если
у(тд) = 0. (90а)
Для того, чтобы эти решения
иолнение условий периодичности:
были периодическими, необходимо и достаточно вы-
x(T) = A,)t (90b)
У{Т)=уо = О, (90с)
Z(T) = z0. (90d)
31
Мы получили четыре уравнения для определения четырех неизвестных: Т, т1, х0 и г0.
Из уравнения (90) следует:
Т
т1 = т2- = т0== — .
Подставив полученное выражение в уравнения (90а—с) и сгруппировав члеиысл'о, z0
и s, будем иметь:
(е~г + 1)л04-6(е-7— l)z0— b Ts(e~T — 2 1) s = С), (91а)
а (е~а Г — е~7') х0 , b (е~" т — а с-7) г0 . b Ts
ol т
е 2 — 2ае 2-
s=0.
(91с)
Если потребовать, чтобы система уравнений
жно быть:
имела нетривиальные решения, то дол-
1
/ _аТ _Т
а 2 —е 21
а (е~аГ— е~г)
е~т — 1
_Г
е 2 — а е 2
7—ае—7
_7 1 -°-Е т 1 —а2
ае 2----- е 2 — (1— а)-й-+ —
а 2 1 а
7 1 7- , 2 —2 !-а2
ае~7-----е~а1 н---е 2-------
а 1 а а
Развертывая детерминант последнего уравнения, получим уравнение, определяющее
период:
а.Т а.Т ( Т Т\ , .
-----1 = 0. (92)
Уравнение (92) при любом а-^1 имеет единственный положительный простой корень,
при а = 1 оно обращается в тождество так же, как и исходные уравнения (91b и с). Чтобы
получить ответ, следовало бы вновь найти решение системы диференциальных уравнений
(87), которое в этом случае будет содержать вековые члены. Однако мы быстрее придем
к цели, если представим уравнение (92) в виде
Т a2th^--th—±-
4 а (а — 1)
и найдем предел правой части при а=1. Получим:
Т
4
(92а)
Уравнение (92а) также имеет единственный положительный простой ксрень.
Итак, система диференциальных уравнений (87) действительно имеет одно периоди-
ческое решение выбранной нами формы.
С помощью уравнений (92) и (92а) можно оценить степень точности линейного при-
2 к
ближения, которое дает для периода автоколебаний значение Т=—^=. Относительная
]/ а
погрешность очевидно равна
7 4^
47 =----,
где Т—корень уравнения (92) или (92а) при а=1.
32
Результаты вычислений представлены на графике, фиг. 35. Как видно из этого гра-
фика, А Т достигает минимального'значения 2,2% при а=1. В весьма широком диапа-
зоне изменения а (0,1:10) относительная погрешность не превышает 3,9%.
Прежде чем перейти к вопросу об устойчивости полученного периодического реше-
ния, выясним некоторые свойства общего решения. Как и в случае системы с приемни-
ком без запаздывания (7) —0), мы сведем задачу к изучению последовательности интер-
валов между нулями функции y(t), которые (нули) являются особыми точками^системы
[точками разрыва непрерывности /(у)1-
Опираясь на полученные ранее результаты, мы опустим доказательство наиболее
простых предложений.
При нулевых начальных условиях у (0) = л'(0) = г(0) = 0 система имеет единственное
тривиальное решение y(t) = х (t) = z(t) = 0, т. е. находится в равновесии.
Всякое решение y(t) при любых начальных условиях _у0, х0 и г0, не равных одно-
временно нулю, есть колеблющееся и имеет бесчисленное множество нулей.
Первый интервал между двумя первыми нулями содержит нуль функции x(t).
Начиная со второго интервала, любой интервал содержит нули функций xtf) и z(t).
Движение системы в любом из этих интервалов имеет вид, представленный графиками
фиг 36—а или Ь.
Последнее предложение дает возможность произвести оценку амплитуд действитель-
ную для любого интервала, за исключением первого.
Согласно фиг. 36 а имеем:
s 7> > | zraax | > • (93)
Полагая в уравнении (87а) х = 0 и используя уравнение (93), получим:
|х1яа1|<bs Fst. (94)
Аналогично
|Дтах| <bS TSX. , (95)
5
33
Рассмотрим три соседних интервала: 4, х2 и т8. Приняв начало интервала 4 за нача-
ло отчета f=0 и положив для определенности х(О)=у (0)4*0, мы сможем выразить изме-
нение y(t) в течение указанных трех интервалов следующими уравнениями:
= — at~ 1 -a(e~z- l)]z0 +
+ 1^[«(^-1)-4(e_oZ-1)-Z(1-a)]s> °<4<Ч, (96а)
л w=л (o - {“ - n - 4 -’1-
— — 4) (1 ~ 4! s> + (96b)
У. W = У? (0 + 1 {« [e-(/ - T1) -11 - 4 (/‘х,~Та) -1!-
-(*—Ч~Ч)(1—4}s. b+b<t<'zi T2-|-T3. (96c)
Введем обозначения:
$(f) = a(e-K< — e-Q,
^0=r^-ka/-i-4^-z-i)L
о(^ = 1^[«(е-'-1)-1-(е^-1)-/(П-7.)].
Применяя эти обозначения и положив в уравнениях (96а, b, с) t равным соответ-
ственно 4+4 и ч + ч + ч, получим систему трех однородных линейных уравнений
с неизвестными л0, г(| и s:
S (ч) А'о + С (т,) z0 + □ (4) s = 0,
5 (Т1 + Ч)) -*оЧ Zo+ [° (Т1 + Ч) — 2 з (4)] S = 0,
Е 41 + 4 4~ Ч) Ло 4" С ("1 + Ч 4- Ч) zo + la (ч 4- т2 - гз) — 2 а (т2 4- т8) 4- 2 о (т3) ] s = 0.
(97а)
(97b)
(97с)
Условие наличия ненулевых решений у этой системы приводит к уравнению:
Цч)
£(ч + ч)
£ (ч 4" ч 4" ч)
Чч)
<4ч + ч)
(ч 4~ ч 4" ч)
3(ч)
°(ч + ч) - 2а(тг)
3 (ч 4-Ч: + ч) — 2 а (т2 + т3)2 о (т3)
которое после подстановки и несложных преобразований принимает следующий вид:
-- 1
— 1
е-“х“ — 1
^(ч. ч,ч) =
g-i+tj — 1
— 1
е~^ — 1
— (ч — Ч) (1 — «) 4-2 a (ет‘ — 1) — (еэт- — 1)
--ч(1—а)
- ч (1 - 4 4- 2 а (е -1) - 4 (е-к4 - 1)
Заметим, что уравнения (97), а, следовательно, и уравнение (98) действительны по-
стольку, поскольку х0>0. Из этого вытекает, что допустимыми значениями 4 и х2 в урав-
нении (98) являются лишь те значения, при которых уравнения (97а) и (97b), разрешен-
ные относительно л0 и z0, дают положительный х0. Чтобы получить границу области
допустимых значений т, и т2, положим в уравнениях (97а) и (97b) х0 = О. Будем иметь:
C(4)2o4'3(q:i)s = O-
; (4 4- 4) z0 4 [о (4 4- 4) — 2 3(4)] 3 = 0.
31
Приравнивая нулю, подобно предыдущему, определитель этой системы, получим:
_ 1 _ а(е1)
а
а [е-(н+гД _ ]] 1
я
= 0. (99)
2
С~ “Тз _ 2 а ц-ч -]- (т„ — (1 — я)
Анализ этой кривой приведен ниже.
В силу единственности решения системы (87) при данных начальных условиях, вся-
кое решение определяется однозначно заданием двух интервалов. Таким образом, урав-
нение F т2, т3) = 0 в той области, в которой оно действительно, определяет любую из
трех переменных т2, т3 как однозначную функцию двух других. Пользуясь геометри-
ческой интерпретацией, можно сказать, что в указанной области поверхность F(x}, т21 т3)=0
в сечении всякой плоскостью, параллельной плоскости координат, дает монотонную
кривую.
Если в уравнении (98) положить т!=т2 = т3 = т, то в левой части получится выраже-
ние тождественное левой части уравнения (92) с точностью до множителя, существенно
отличного от нуля.
Это означает, что поверхность F т2, т3) = 0 содержит точку
Т
2
2 — .3
Т
где ----корень уравнения (92)
= т3 = т3 не имеет. Таким образом, требование равенства трех соседних
и следовало ожидать, приводит к полученному ранее периодическому решению.
Исследуемая поверхность имеет три тривиальные ветви: т1 = 0, т2 = 0 и т3 = 0. Мы
исключим их из
Рассмотрим
следующий вид:
и никаких других точек пересечения
'2
рассмотрения делением /’(тр тг, на произведение
сечение = const. В случае т, -- 0 уравнение
с прямой
интервалов, как
кривой пересечения имеет
ае“Та
еа'-* - - 1-
а —1
— 1
а — 1
Жъ.0) =
—J
^з
'2
е~'-
'8
J2 е~а^— 1
я
исключить из
рассмотрения тривиальные ветви
Это уравнение, если
тождественно уравнению (99).
Чтобы составить представление о виде кривой, найдем производную
координат, которое является трехкратной особой точкой кривой.
Вычисление производных третьего порядка дает:
-=0. (100)
t, = 0 и
начале
- 1
з
3
в
rfx2
3 = 0,
1
2
Л
«)2 «2. ^223 = " 0 ~ а)2“2> ^гзэ =
£
6
^ззз— 9,
откуда
= о ~я = 1 4-
Первое значение соответствует тривиальной ветви т2 = 0. Так как по смыслу
интервал есть величина существенно положительная, то отрицательное значение
водной следует отбросить. Итак, интересующая нас ветвь кривой действительно
дит через начало координат и в некоторой окрестности начала координат возрастает,
так как
задачи
произ-
прохо-
г/т3
0
35
Отсюда вследствие доказанной ранее однозначности ясно, что кривая в сечении xt — О,
как и во всяком другом сечении Tj — const = Л, является монотонно возрастающей.
При неограниченном возрастании т2 элемент определителя [уравнение (100) или (98)],
являющийся множителем при левом верхнем миноре, должен стремиться к нулю. Отсюда
следует, что корень уравнения /(т3, т2, й) = 0 при стремлении т2 к бесконечности в пре-
деле совпадает с одним из корней уравнения:
*з(« -1) + 2а(е--— 1)---“ (е—» - 1) о, а/1. (101)
или
т {-4(е~т — 1)4-2^ - - о, а 1. (101а)
Исследование этих уравне.ний показывает, что при любом а они имеют три различ-
ных положительных корня т', т" и т'", которые удовлетворяют неравенству
Т
где -----интервал периодического решения.
Корни Тд и т" должны быть отброшены, так как поверхность F(tj, т2, т3) проходит
Т
через точку Tj т2 = т3 = — и в любом сечении Tj = const дает монотонно возрастаю-
щую кривую.
Следовательно, предел т3 при стремлении т2 к бесконечности или, что то же, верхний
предел т3 равен наибольшему из корней уравнения (101), т. е. х'£. Мы установили сте-
дующее свойство общего решения: каково бы ни было начальное возмущение, третий
и все последующие интервалы не превосходят определенной вели-
чины."
Так как с величиной интервала связана амплитуда, то это означает, что при боль-
ших начальных отклонениях движение системы вначале затухает весьма интенсивно.
ОТ
Степень этой интенсивности можно охарактеризовать величиной отношения р — .
т
Результаты вычислений р представлены графиком (фиг. 37). Как "видно из этого графика,
Р имеет наименьшее значение 1,15 при а = 1 и в широком диапазоне изменения а (0,1 ч-10)
не превосходит величины 1,79.
Таким ооразом, как бы велико ни было начальное возмущение, уже с третьего ин-
тервала движение системы сравнительно мало отличается от режима автоколебаний
Уравнение (100) определяет нижний предел т3, когда т, стремится к нулю. В соот-
ветствии с этим уравнение (99), тождественное уравнению (100), определяет нижний пре-
дел т2 в зависимости от величины S. На фиг, 38 показана область допустимых значений
т, и т2.
36
Мы можем теперь вернуться к решению задачи об устойчивости положения равно-
весия и периодического решения исследуемой системы.
Всякое движение, близкое к равновесию, можно определить заданием двух беско-
нечно малых интервалов dx, и dx,, причем согласно предыдущему должно быть
4-lr2)dx,. Дадим оценку величины dx3.
Уравнение конуса касательных к поверхности Л(хн х2, х.() — О в начале координат
можно представить в следующем виде:
(k 1)2/ф-(А’’— ЗА- 2)/. + № —2fe-1 =0, (102)
где /=
dx3
dx2
т2=0
в сечении xt — kx2
интервал
допустимых значений k—
Он
Зависимость / (k) представлена графиком (фиг. 39). Как видно из графика,
всюду в интервале допустимых значений k и достигает максимума на конце этого ин-
тервала.
Фиг. 38
Подставляя нижний предел / в равенство dx3 = ydx2, получим:
dx3>(l + 1Л2)^’2> ^Т1-
(ЮЗ)
Неравенство (103) показывает, что положение равновесия не может быть устойчивым.
Для того, чтобы выяснить устойчивость режима автоколебаний, рассмотрим кривую,
образованную поверхностью F(xJtz2, тз) = 0 в сечении плоскостью хг = х2. Проекция этой
кривой на плоскость т, =0 изображена на графике (фиг. 40).
Как видно из чертежа, в точке т2=х3=ха производная -т-~ по абсолютной величи-
W"C2
не меньше единицы, откуда следует:
|<Ч
|^2
| ^3
Рассмотрим теперь движение, близкое к режиму автоколебаний, заданное двумя
интервалами Xj = хп-j-dxl и х2 = хаД-dx2. Третий интервал будет, очевидно, равен:
dr/
dz.
dx2.
На основании предыдущего имеем:
|^з1
<fcs I
dzx ' dx2
max [dxj, dx2] <max [dxj, dx2],
t. e. периодическое решение устойчиво.
Мы доказали устойчивость периодического решения в малом. Более подробное ис-
следование поверхности F(xu х,, х3) = 0 должно выявить единственность этого решения и
37
вместе с тем его устойчивость в большом. Для этого достаточно было бы показать спра-
ведливость следующего неравенства:
| Дт3| <; шах [Дт.2, AiJi,
где Ат = т ти.
В заключение рассмотрим влияние зоны застоя, связанной с наличием зазора между
контактами реле, управляющего сервоприводом. Отличие этой системы от предыдущей
заключается в том, что функция /(у) в правой части уравнения (87) заменяется функ-
цией F(y), которая имеет вид, представленный графи-
i ком (фиг, 28), т. е.
f (у) =
— s V< — TQ,
о -Ч<У<-^
S
Мы ограничимся здесь исследованием периодиче-
ских решений и границы устойчивости, т. е. границы
той области, в которой периодические решения не су-
ществуют.
Будем искать периодические решения в форме,
представленной на графике (см. фиг. 41). За начало от-
счета времени принят тот момент, когда у равен по-
ловине зоны застоя. Очевидно, что значения х0 и z0
в этот момент (начальные данные) не могут быть за-
даны произвольно и подлежат определению.
системы диференциальных уравнений:
х -ф х = — bz (t),
У Ц- а V — сое = О,
записанное в операторном виде, будет отличаться от полученного ранее только видом
Функции /?j(p):
Ч [р) = 1 — — е-л°о>+^з) _|_ g-p (-i+-2+'j) .
Воспользовавшись этим замечанием, получим:
х,\() = хйе-(-\-г0Ь(е-* — 1) — bsTs(te~f — 1), 0<£<т, (104а)
л2(^) = Xi(^) —1], <<< т, + т2, (104b)
хз(0 = x2(t)-]-sTsb [/ — т, — т2-|--- 1], т14-,с2</<т] + г2 + тз> (Ю4с)
x4(f) = xs(t)-sTsb[t — т!-т2 — т34-е-('~ч-ч-д_ 1], Т, (104d)
yi (Q = Y~^Se~a‘ ~ %0+ 1~к' 1 —31 (е-/ ~ 0] *о +
+ V (e~at~ 0“ ~a)ls> 0<^<ч, (Ю4е)
Л (0 = У1 (t) - j a (e-('-)-l] - J- k-« (/-.) 1] _ (t Ъ)(1 - a) | s,
^<^<^1+^, (104f)
Уз (0(0 - к k~(i-^ n - v k"a -1] - (< - (1 -«) 1 s-
+ 1 T2-f-T3, (104g)
У4 (0 = Уз (0 + | « [e- — 1] - 4 - 1] — (t - -tj - TS — T3) (1 — a) |,
-Нз <4 < (104h)
38
2I(0==2o(/)-i-sr/) 0'<^<т1, (1041)
2s(^) = 21(Z) + s7'jr-t1), + (104j)
z3(0 = z2(0 + s7;^-^ —^2). "4 4" T2 < ^ < Ti 4~ Ts 4~ тв» (Ю4к)
+ ^+^ + ^<^<7. (1041)
Выражения (104) будут удовлетворять также уравнению:
z(t)= TsF(y)
при условии, если
М»7!. (Ю5а)
J'('ti + 'i2)= - VJ, (105b)
У Ch + т2 + h) = - TQ. (105с)
Условия периодичности попрежнему имеют вид:
У(Т) = Ч (105d)
х (Л = х0, (105е)
z(7') = z0. Шесть уравнений (105) содержат шесть неизвестных: х0, z0, Tj,t2, т3 и т4. Из уравнений z(7') = z0, z0 = z0 — 7>(тв — Tj) вытекает: (105f)
Т1=Т3 = Т. (106)
В дальнейшем будем называть т, и т3 „интервалами движения" в отличие от „интер-
валов застоя" т2 и т4. Из уравнения (106) следует, что оба интервала движения равны
друг другу.
Используя уравнение (106) и введенные ранее обозначения, запишем уравнения (105)
в развернутом виде:
(е~' — 1) V + Е (4 л-0 -}- С (т) z0 о (т) s = 0,
(107а)
[е (^)-1]т14-Цт4-^хо-ЬС(т4-т2)г04-[з(т + г2)-з(т2)]8=0, (107b)
[е-(2Ч ч) — 1] тг; + Е (2т + т2) х0 4- С (2т т2) z0 4- [а (2т 4- т2) — о (т 4- т2) — а (т)] s = 0, (107с)
[е-№+ч> _ 1] п + ц2т 4- т2 4- т4) х0+с (2т+т2 4- т4) z0 4-
4-[а(2т4-т2-' Т4) —а(т4-т2 + т4) —а(т4-т4)-)-<5(т4)]5 = 0, (107d)
4 (2т 4“ Т2 4“ '0 ХО 4- 4 (2'С + г2 + "Ч) 20 4" [а1 + Т2 4~ h) —
— 31 (’ 4- 4- "Ч) — °1 (т 4- h) + 31 (h)l«= о, (107е)
где в дополнение к прежним приняты обозначения:
4(0 = ^, (108 а)
4(0 = Ь(е~‘- 1), (108b)
Oj (t) = = bTs 4 4- е~‘ - 1). (108c)
Уравнения (107) будут совместны и будут иметь нетривиальные решения при усло-
вии, если ранг г матрицы, составленной из коэфициептов этих уравнений:
е~х— 1 E(t) с (4 о(т)
СНИа) .— | 4- + ^) се 4-%) °е4-т2)—°е2)
] Ц2т + т2) С(2т4-т2) а(2т4-т2)~ з(т- гт2)-°е) (Ю9)
е-7 —1 Е(Л с(Л оСГ) —а(т4-т2Ч -Т4) —а(т4-т4)4-а(т4)
0 Е,(Л 4 (Л а1(Л — а1(’4-т2 4-т4)- О1 (т4-т4)4-О1 <т4)
будет меньше числа неизвестных, т. е. г- <4.
39
Число строк матрицы превосходит число столбцов' на единицу. Чтобы ранг матрицы
был меньше числа столбцов, достаточно соблюсти равенство нулю каких-либо двух опре
делителей четвертого порядка матрицы, т. е. выполнение. двух независимых условий.
Как показывают вычисления, первое из этих условий приводит к равенству
- - 0.
В периодическом решении оба „интервала застоя” так же, как и „интервалы дви-
жения", равны друг другу. Таким образом, число неизвестных интервалов периода сво-
дится к двум: х и 0.
Второе условие, связанное с рангом матрицы (109), приводит к уравнению:
X 6
cth_+th—
(НО)
При 6 0 это уравнение переходит в уравнение (92). Этого и следовало ожидать,
так как равенство 6 = 0 возможно только при отсутствии зоны застоя (т(=0).
Чтобы получить еще одно уравнение для определения т и 6, поступим следующим
образом. В первых двух и последнем из уравнений системы (107 а, b и е) произведем под-
становку х„ = х4 = 6 и разделим обе части уравнений на s.
Будем иметь:
- 1) V + Е СО + с = - = М,
_ 1] 2L+ е(т + е)^.+с (т + е)^_ _ _ [3(х + е) _ а (6)Ь
[2 (т + 6)] + Cj [2 (х + 6)] = - [ з, [2 (х + 6) ] - 31 (2 6 + х) - 01 (т + 6) + 3] (6)},
Разрешая эту систему относительно — , получим:
2L
S
(at аб т 6
thTthT „ thTthT
---------— (7^-------
, , , at , аб , , , т ,, 6
1 +th -- th l-f-th—th —
= Ф(т, 6).
OH)
Всякой nape действительных корней системы уравнений (ПО) и (111) соответствует
некоторое периодическое решение исходной системы диференциальных уравнений с
периодом Г=2(тф-6). Система уравнений (НО) и (111) может и не иметь действитель-
ных корней, и в этом случае периодические решения отсутствуют. Существование и
частота периодических решений определяются величинами a,bTs и t входящими в ка-
честве параметров в уравнения (110) и (111). Величина отношения у (коэфициента харак-
теристики сервопривода), как уже было установлено, имеет простой геометрический
смысл (см. фиг. 28).
Таким образом, задача сводится к исследованию уравнений (ПО) и (111).
Прежде всего заметим, что функция Ф (х, 6) симметрична. Бисекторная плоскость
t = 0 является плоскостью симметрии. Рассмотрим сечение поверхности -*1 —Ф(х, 6) этой
плоскостью. Уравнение кривой пересечения в проекции на плоскость х = 0 будет:
6 bTs ( at х
— — . I th — th at — a- th — th x
s 2a(l— a)\ 2 2
Вид этой кривой не зависит от величины а и показан на графике (фиг. 42).
Чтобы получить уравнение кривых в сечениях, перпендикулярных бисекгорной пло-
скости, положим в уравнении (111):
е = д—х.
40
Уравнение кривой пересечения в проекции на плоскость т = 0 будет:
Фиг. 42
График этой кривой, характер которой опять-таки не зависит от величины а, пока-
зан на фиг. 43.
д
Как видно из графика, кривая имеет максимум при т=б = —, т. е. в бисектор-
ной плоскости.
Верхний предел ~ лежит в бисекторной плос-
кости и равен:
г 4 а Ч- 1 т 1
. limsup — = —х—Ле.
s 2а 5
Отсюда следует, что периодические решения не
1 а) а ' 1 j
существуют в области 2а
Как показывает анализ уравнения (НО), со-
ответствующая кривая, независимо от величины
а, имеет вид, представленный на графике фиг. 44
(то — интервал периодического решения системы
без зоны застоя •»] = 0).
1 Это неравенство дает, однако, весьма грубую оценку
7i (
дел — больше критического значения
из очевидного неравенства (г 1)2^>2а
границы устойчивости. Точный верхний пре-
)к и , полученного из теории первого приближения. В самом деле,
4₽ИГ а 4- 1 2 1
— а следует >• — । j— , что и требовалось доказать.
6
41
На фиг. 45 приведено решение уравнений (110) — (111) для случая: а = 2, bTs = l.
Здесь А — кривая пересечения поверхностей —=хФ(-с, 0) и О(т, 0) = О, В и С—проек-
ции этой кривой соответственно на плоскости t — 0 и 0 = 0, которые показаны отдельно
на графике (фиг. 46). Как видно из последнего графика, в зависимости от величины
V]
-- возможны два случая:
1)
система
не имеет действительных корней т и 0;
2)
система имеет две пары действительных корней /, 0' и т", 0".
В первом случае периодические решения невозможны и, следовательно, область
V] . / 71 \ ,, „
— > ( — ) является устойчивой.
S \ S /Крит
Во втором случае имеются два периодических решения: одно с большим интерва-
лом движения т', малым интервалом застоя 0', другое, напротив, с малым интервалом
движения т" и большим интервалом застоя 0".
42
Первому решению
устойчивый режим. При
соответствует режим устойчивых автоколебаний, второму— не-
значениях —, близких к критическому, периоды обоих автоколе-
С уменьшением период неустойчивого автоколебательного режима 7" = т"-|-0"
неограниченно возрастает за счет увеличения интервала застоя б". Период устойчивых
автоколебаний 7', = т'-|-б/ меняется очень незначительно и в пределе при ~'==0 стре-
мится к периоду автоколебаний системы без зоны застоя.
Заметим, что теория первого приближения не дает ответа на вопрос о периоде
неустойчивых колебаний. Эго связано, повидимому с тем обстоятельством, что неустой-
чивые автоколебания при малых значениях -у по форме резко отличаются от синусои-
дальных.
Точные значения . , как показывают вычисления, очень мало отличаются от
{ s /
\ / Кри г
приближенной величины, определяемой по формуле (74).
С весьма большой точностью можно считать, что ( —) находится в бисекторной
плоскости и что, следовательно, граница устойчивости определяется уравнением:
•7=2ДГ 7) («> Т"111Т ” ,h Г2 } (S0)
Таким образом, доказано следующее:
1) влияние сервопривода на границу устойчивости регулятора в смысле отсутствия
автоколебаний определяется исключительно коэфициентом характеристики сервопри-
ъ
вода —,
s
2) точность формулы первого приближения для определения критического значения
'б
вполне достаточна для практических расчетов.
§ 3. Поведение регулятора простейшего типа при смене режимов
и оценка возможности его применения
Как установлено в предыдущих разделах, условие устойчивости регулирования для
регулятора простейшего типа с достаточной степенью точности выражается неравенством:
20 т; I
S ' к 1 +я '
(74)
43
Выясним, при каких условиях регулятор удовлетворяет также второму требованию,
т. е. удерживает температуру в заданном диапазоне в случае смены теплового режима.
В качестве расчетного случая примем’ мгновенный переход от планирования с убран-
ным газом к номинальному режиму.
Введем следующие обозначения:
диапазон допустимых температур...............2;
максимально допустимая температура .......... %в
минимально допустимая температура............хн
При проведении расчета принимаем следующие исходные данные.
В начальный момент температуры воды и приемника равны нижнему пределу зоны
застоя:
*0 = У о =-2------= н л 4 •'
Заслонка закрыта полностью z0 — 0.
Тепловое равновесие на номинальном режиме устанавливается при полностью откры-
той заслонке:
х=у = хк, z = \.
Регулятор будет удовлетворять поставлен-
ному требованию, если во время переходного ре-
жима температура воды не превзойдет максимально
допустимой, т. е.
Определим максимальное значение темпера-
туры ЛУпах.
В дальнейшем величины х и у будем ус-
ловно отсчитывать от нижнего предела зоны за-
стоя: X» 4- 5 — Т|.
Переходный режим разбивается на два этапа
(см. фиг. 47).
На первом этапе координата приемника у
проходит зону застоя, и заслонка остается за-
крытой.
Изменение х характеризуется диференциаль-
ным уравнением:
сх 4- q”x — qmm. (112)
Учитывая малость q%, можно с высокой
степенью точности представить решение этого
уравнения в виде:
Подставляя (ИЗ) в диференциальное уравнение (И2), координаты приемника у
получим:
'р ^У । qm»*t
T'dt+y~~
и, решая последнее уравнение, будет иметь:
y^JrV™* е ГГ-
Тr ffmax । <7max t
с 'с
(И4)'
Для того, чтобы определить продолжительность первого этапа tx, достаточно поло-
жить в уравнении (114) у = 2т|. Как мы увидим в дальнейшем, t\ в несколько раз бо^цше
Тг\ поэтому можно пренебречь первым слагаемым в правой части уравнения (114) ir ..р т-
ставить 1\ в виде:
Л —
2tq с
f/nlax
Отсюда приращение температуры х к концу первого этапа равно
,, ч о Tr ^тах
%(Q = 2tJ+ .
44
На втором этапе заслонка движется с постоянной скоростью s ~. Считая ха-
1 м
рактеристику заслонки линейной, запишем диференциальное уравнение изменения х на
втором этапе в виде:
схф- (q ” 4- #£) = tfmax (1 — st).
Аналогично предыдущему, вследствие малости коэфициента <7" 4“ *7» приращение х
на втором этапе с достаточной точностью выражается уравнением:
_ ffinax . I . _ S А
Х~ с 1 I/ 2 J-
При принятых предположениях приращение х достигает максимальной
конце второго этапа (к моменту полного открытия заслонки) и равно:
величины В
-^тах "
2т]-|-
Тг (/max [ <7тах
С ' 2cs
пределы диапазона допустимых темпера-
тур, т. е.
Это приращение не должно выходить за
2’l + Z4“+^«’‘ + E- <115>
Неравенство (115) дает в дополнение к ус-
ловию (74) второе условие, которому дол ж-
ны удовлетворять зона застоя и скорость
сервопривода х. Эта зависимость представ-
лена на графике (фиг. 48) двумя кривыми
1а и 16 для двух различных значений
тг{тг<т;).
На этом же графике приведены пря-
мые 2а и 26, соответствующие условию (74)
для тех же значений Тг. В области, рас-
положенной выше кривой 1а или 16, ре-
гулятор удерживает температуру в допу-
стимых пределах, но работает неустойчиво;
напротив, в области, лежащей ниже пря-
мой 2а или 26, регулятор работает устой-
чиво, но возможны отклонения темпера-
туры за пределы допустимых.
Регулятор может удовлетворить обоим
требованиям одновременно только при ус-
ловии, если прямая 2 пересекает или в
крайнем случае касается кривой 1.
Аналитическим выражением этого условия является уравнение
/ 2 \
“ 'Ь)С г зря
---А---тг\-^ = 0,
f/max-1Лпах
определяющее максимальную величину запаздывания приемника Т*.
Соответствующие этому значению Т',. зона застоя, скорость сервопривода и коэфи-
циент характеристики сервопривода определяются из формул:
Результаты расчета Т* представлены графиком фиг. 49. Для расчета приняты следую-
щие исходные данные (см. тепловые характеристики системы охлаждения).
?шах = 75 кг кал, сек, с 150 кг кал "Ц,
I I К 110 60 „I 1
b -но графику фиг. 12 для стандартных условии, ; 25°Ц.
45
Величина максимальной скорости роста температуры (л)тах= = 0,5°Ц/селг была
дополнительно проверена экспериментом.
Величины in.s и — колеблются в пределах:
s
7) =11,3-г-10, ГЦ,
s = 0,022 н- 0,025 1
сек,
-^^515 . 40 5 сек°Ц.
s
Расчет правилен при условии, если t, в несколько раз
*
больше Тг. Проверка дает величину —----------— 50 сек,
(/max
более чем в 5 раз превышающую (7^)П]ах = 9,5 сек, что
подтверждает правильность расчета.
Полученные результаты приводят к заключению о
том, что при существующих характеристиках системы
охлаждения регулятор температуры без обратной связи
неприменим, так как практически вряд ли возможно снизить постоянную времени прием-
ника до величин, полученных из расчета. Кроме того, при таких малых запаздываниях
приемника начали бы сказываться другие запаздывания в регулируемой системе, которыми
мы ввиду их малости пренебрегали (например, отставание регулируемой температуры от
температуры воды в радиаторе).
§ 4. Результаты летных испытаний
Объектом испытаний служил автоматический регулятор температуры с биметал-
лическим приемником (7). = 50 сек, 2т] = 6°Ц), в котором была устранена обратная связь.
Испытания проводились на двух режимах полета: режиме максимальной скорости и
режиме барражирования и при двух скоростях сервопривода заслонки: нормальной
с 1 1 .„11
— 5 ----и уменьшенной — 5
20 сек J 90 сек
Результаты испытаний представлены на фиг. 50 — 53. Во всех случаях наблюдаются
незатухающие колебания большой амплитуды. Регулируемая система настолько далека
от границы устойчивости (критического значения коэфициента характеристики серво-
привода), что уменьшение скорости сервопривода в 4,5 раза не приводит к сколько-
нибудь заметному улучшению устойчивости.
Величины амплитуд и периодов автоколебаний сведены в табл. 3.
Таблиц а 3
Скорость серво- привода Режим полета Амплитуда колебаний Период [сек]
заслонки регулируемой температуры
1 1 Максимальная скорость . . 0,5 9° 150
20 сек Барражирование 0,5 10° 170
1 1 Максимальная скорость 0,5 14э 250
90 сек Барражирование 0,5 15° 280
Минимальная величина периода' автоколебаний (для минимальной величины Т)
согласно теории первого приближения равна:
Т 2тг ф Ts Tr 2тг ।7 50 • 60 = 340 сек.
Расхождение между расчетной и действительной величинами периода автоколебаний
объясняется, очевидно, ограниченностью хода заслонки, которая вносит значительное
искажение в форму автоколебаний.
46
9 1[мин]
Относительное
Относительное
Относительное
IV. ИССЛЕДОВАНИЕ РЕГУЛЯТОРА С ОБРАТНОЙ СВЯЗЬЮ
§ 1. Исследование устойчивости регулирования
Противоречие, к которому приводит рассмотрение регулятора простейшего типа,
устраняется путем введения обратной связи (см. II, § 3).
В этом случае система диференциальных уравнений, характеризующих процесс
регулирования, имеет следующий вид:
x-\-x-\-bz =0,. у |~а_у— ах=0, V=y — зг, Z = TsF(у),
где v А© — координата рассогласования.
Исследуем устойчивость регулирования, пользуясь изложенным ранее методом
теории первого приближения.
Характеристическое уравнение упрощенной линейной системы уравнений будет:
Ds ф- (а 1 + Фа) £)2 ф- [а ф- Г Фа (а ф- 1)] D ф- Ts Ф а (Ь ф- о) =0, (116)
где попрежнему _________
'|f 4Ф|/ '-(ф-)’ (117)
После подстановки D ко уравнение (116) разбивается на два уравнения:
- и3 ф-[а ф-Г/Гс(а ф-1)]=0, (118)
Ts Та {Ь ф- а) - (а ф- 1 - Ts 0. (119)
Исключая а» и Ф из уравнений (118) (119), будем иметь
аы4ф-[з(а2ф-1) afe]w2- а2(/?ф-з) =0, (120)
Т* з» (а ф- 1 )Ф2 7^ [(а ф_ 1 )2 з — аё] Ф ф- а (а ф-1) - Д3=0, (121)
где Д2— детерминант Гурвица второго порядка для характеристического уравнения (116).
Уравнение (120) служит для определения частоты.
Уравнение (121) дает возможность определить амплитуду автоколебаний в зависи-
мости от величины степени неравномерности з, т. е. построить бифуркационную диа-
грамму системы по параметру а.
В области положительных значений ‘Г и з это уравнение изображается кривой,
представленной на фиг. 54.
48
Координаты характерных точек, отмеченных на графике, следующие:
3=0 ’К — -__--
= . О+«)(! +I_«)!
(1 4 “)(1 Ч~У7-)2 Ь j а
Кривая, изображающая уравнение (117) в области положительных А и ’I1' (см. фиг. 55),
имеет максимум в точке
A -q[/2, '! <Fraax —
71 7|
Сопоставление кривых фиг. 54 и 55 показывает, что бифуркационная диаграмма
(^—3) может иметь различный вид в зависимости от соотношения величины Wiax и ве-
личин Ч’о и ’Г*.
Возможны три случая:
Случай 1:
Ч ’ <Г ЦТ
шах * о.
(122)
Уравнения (117) и (121) не имеют действительных корней А ни при каком значении а.
Случай 2:
,Гб<’ГП1ах (123)
Уравнения (117), (121) имеют одну пару положительных корней А в интервале от
а = 0 до с = з2=<з(Фтах).
В этом интервале бифуркационная диаграмма (см. фиг. 56) имеет две ветви I и IV,
сливающиеся в точке бифуркации 2 при значении а а2.
Фиг. 57
Случай 3:
’l'max>U\ (124)
Уравнения (117), (121) имеют одну пару положи-
тельных корней А в интервале [0, з2] и две пары по
ложительных корней А в интервале [з2, а*]- в первом
интервале бифуркационная диаграмма (см. фиг. 5
содержит две ветви (I и IV) и во втором интервале—
четыре ветви, сливающиеся в трех точках бифуркации
1, 2 и 3 при значениях о= з2 и а=з*.
В случае 1 автоколебания системы отсутствуют
при любом с. Неравенство (122) представляет собой уже
установленное ранее условие отсутствия автоколебаний
в регуляторе простейшего типа (з= 0).
7
49
В случае 2 автоколебания регулируемой системы возможны в интервале [0, о2] и в
случае 3—в интервале [0, а*].
Чтобы выяснить характер устойчивости автоколебаний, соответствующих различным
ветвям бифуркационной диаграммы, рассмотрим производную:
б/Д2 rfA2 rf'P’
dA~‘
d&., -
Непосредственно очевидно, что Д2 и д~д ' одновременно обращаются в нуль толь-
и А
„ d Д,
ко в точках бифуркаций. В промежутках между этими точками знак производной —
постоянен, и, следовательно, сохраняется характер устойчивости автоколебаний.
б/Д„
Покажем, что в точках бифуркаций имеет место перемена знака - .
Действительно, в случае = 0, О (точки бифуркации 1 и 3) имеем:
Cl 'I Cl /А.
d2 Д2
dA2
d2 dA
d ’Г2 I dA
2
I >0.
d\ dA
В случае -fiO, = 0 (точка бифуркации 2) будем иметь:
tZ -I Cv/1
6/2 Д2 б/д2 d2 Ч‘
dA2 ~ dA dA2
Наконец, в случае слияния бифуркационных точек
б/Д2
dA
d 'Г о4
—7.- =0 )
dA /
легко по-
казать, что первой производной, отличной от нуля, является производная четвертого по-
<ДД2
рядка .
Мы можем теперь ограничиться определением устойчивости автоколебаний, соот-
ветствующих какой-нибудь одной ветви бифуркационной диаграммы. Для этого доста-
точно определить знак производной , ? в какой-либо точке этой ветви, отличной от
CL /1
точки бифуркаций.
Т-1 о d А 2 1Т. а । п - Т
Вычисление производной в точке Ч =—, о 0, принадлежащей ветви I,
дает:
Таким образом, автоколебания наименьшей амплитуды неустойчивы.
На основании выведенного выше правила смены устойчивости в точках бифуркаций
мы можем ожидать, что автоколебания, соответствующие ветви III, также неустойчивы,
автоколебания же, соответствующие ветвям II и IV, устойчивы.
Частоту автоколебаний можно определить, подставляя соответствующее значение Ч;
б уравнение (118). Согласно теории первого приближения автоколебания, соответствующие
ветвям I, IV и II, III, попарно имеют одинаковую частоту. По аналогии с регулятором
простейшего типа можно ожидать, что теория первого приближения дает весьма точные
результаты для автоколебаний большой амплитуды (/! _>'Д 2). В случае же автоколе-
баний малой амплитуды (Д<ДД/2) возможны значительные отклонения этой теории от
действительности. В частности, бифуркационное значение параметра а в точке I может
значительно отличаться от величины а*, как это показано пунктирной кривой на фиг. 57.
Наибольший практический интерес представляет определение порога автоколебаний,
т. е. минимальной величины степени неравномерности а, которая необходима для обес-
печения устойчивой работы регулятора (без автоколебаний).
50
Теоретический порог автоколебаний определяется из уравнения:
(l-j-a)(l + ]/а)2
(125)
Анализ формулы (125) приводит к следующим выводам.
Величина порога автоколебаний не зависит от
характеристики сервопривода (скорости сервопривода,
зоны застоя) и определяется исключительно характе-
ристиками системы охлаждения и инерционностью
приемника.
При а.— 1 (Тг = Ts), о* имеет максимум, равный
b
8 ‘
Таким образом, потребная степень неравномерно-
сти во всяком случае не превышает одной восьмой
коэфициента эффективности заслонки. В случае малой
инерционности приемника это правило дает, однако,
слишком грубую оценку з*, как это видно из графика
фиг. 58 (а), на котором показано изменение а* в зави-
симости от запаздывания Тг для режима -г-,—= 0,6 в
v max
стандартных условиях. Изменение з* в зависимости от
режима полета в стандартных условиях для регулятора
с биметаллическим приемником (7^ = 50 сек) представ-
лено на фиг. 58—Ь. Как видно из этой фигуры, с точки
зрения устойчивости регулирования наиболее благо-
приятным является режим максимальной скорости
( У" - = 1, полный газ), наименее благоприятным —
\ V max )
V on
I/ ^’6’
У max
режим, близкий к минимальной скорости
малый газ ). На последнем режиме и должна произ-
Фиг. 58
водиться проверка устойчивости регулирования.
В результате эксперимента установлено, что ус-
тойчивые автоколебания в интервале а2<а<^а* в дей-
ствительности не наблюдаются и что фактический порог
автоколебаний оказывается ближе к величине з2> чем
к а*.
Чтобы объяснить это расхождение, был проведен
расчет амплитуд автоколебаний
координаты рассогласования А и заслонки туннеля водорадиатора В* 1, а также периодов
этих колебаний в зависимости от а для двух предельных режимов полета в стандартных
условиях (полный и малый газ).
Регулятор, с которым проводился летный
данный расчет, имел следующие характеристики:
эксперимент и для которого проделан
запаздывание приемника Тг — 50 сек,
зона нечувствительности (застоя) 2т) = 6°,
скорость сервопривода з = 0,05 —1— .
Результаты расчета представлены в виде бифуркационных диаграмм фиг. 59.
Чтобы объяснить фактическое отсутствие в области з2<Са<Сс* незатухающих коле-
баний большой амплитуды (ветвь IV), рассмотрим фиг. 59—с.
Как видно из этой фигуры, теоретические амплитуды автоколебаний заслонки, соот-
ветствующих ветвям III и IV, выходят далеко за пределы максимального возможного
отклонения (0,5). Незатухающие автоколебания IV могут установиться в системе только
в случае ее отклонения за пределы неустойчивого автоколебательного цикла III, а это
невозможно вследствие ограниченности хода заслонки.
Причина отсутствия автоколебаний малой амплитуды (ветвь II) выясняется из рас-
смотрения нижней части бифуркационной диаграммы А- о, представленной в увеличен-
Ip
1 Теоретическая амплитуда автоколебаний заслонки определялась но формуле В = — А .
51
ном масштабе на фиг. 59 — а. Как видно из этой фигуры, амплитуды Л автоколебаний,
соответствующих ветвям I и II, весьма близки друг к другу.
Предположим, что в системе установились на некоторое время автоколебания, соот-
ветствующие ветви II. Тогда достаточно небольшого возмущения, направленного в сто-
рону уменьшения амплитуды А, чтобы система оказалась в устойчивой области между
ветвью I и положением равновесия. Так как возмущения такого рода всегда имеют
место в реальных условиях работы системы, то существование автоколебаний II в тече-
ние сколько-нибудь продолжительного времени становится мало вероятным.
В действительности, вместо периодических колебаний в рассматриваемой области
наблюдаются затухающие колебания, которые затухают тем медленнее, чем ближе с
к величине а2. Таким образом, хотя з2 и является фактическим порогом автоколебаний,
следует все же выбирать потребную степень неравномерности равной или не меньше з*
для наименее благоприятного режима с тем, чтобы обеспечить достаточно быстрое зату-
хание системы.
§ 2. Летные испытания регулятора с различной степенью неравномерности
Летные испытания проводились при следующих значениях степени неравномерности:
4°, 7’, 10° и 20°. Во всех экспериментах, за исключением первого, исследовано поведение
регулируемой системы на двух предельных режимах горизонтального полета: на режиме
максимальной скорости (полный газ) и режиме барражирования (малый газ).
В обоих случаях создавалось достаточно сильное начальное возмущение: режим
максимальной скорости следовал непосредственно после набора высоты; переход к режи-
му барражирования осуществлялся путем быстрого поворота рукоятки сектора газа из
положения „полный газ" в положение „малый газ". Продолжительность каждого режима
52
выбиралась с таким расчетом, чтобы полностью выявить характер поведения регулируе-
мой системы после возмущения. Во время эксперимента производилась непрерывная
запись температуры на выходе из мотора и открытия туннеля водорадиатора.
Результаты экспериментов представлены графиками фиг. 60—66, анализ этих резуль-
татов (см. табл. 4) подтверждает правильность основных выводов. Значительное откло-
нение величин амплитуд и периодов автоколебаний от расчетных, как и в случае регуля-
тора без обратной связи, объясняется искажением формы этих колебаний за счет ограни-
ченного хода заслонки.
Таблица 4
№ фиг. Степень неравно- мерности ° [°Ц] Характер поведения регулируемой системы Автоколебания Период [сек] Примечание
амплитуда
темпера- туры заслонки
Режим максимальной скорости (полный газ)
60 4 Незатухающие колебания 11 0,5 120 o<s2
61 7 Затухающие колебания С-.<Ъ<Ъ*
62 10 Затухание, близкое к апериодическому
63 20 То же а>а*
Режим минимальной скорости (малый газ)
64 7 Незатухающие колебания 8 0,5 140 °<С°2
65 10 Затухающие колебания с малым декре-
ментом затухания о2<с<а*
66 20 Затухание, близкое к апериодическому а>а*
Фиг. 60
Фиг. 61
53
И
13 t[MUn]
е
Относительное
s
Относительное
открытие
Фиг. 66
§ 3. Поведение регулятора с обратной связью при смене
тепловых режимов
В предыдущих разделах теоретически и экспериментально установлен порядок вели-
чины нижнего предела степени неравномерности о*, обусловливаемого требованием устой-
чивости регулирования. Верхний предел этой величины зп В * * * * * 1 * определяется диапазоном
допустимых температур 2В и требованием сохранения регулируемой температуры в пре-
делах этого диапазона при резкой смене тепловых режимов.
В качестве расчетного случая, как и в простейшем регуляторе, принимаем мгновен-
ный переход от пикирования с убранным газом к номинальному режиму.
Принимаем следующие исходные данные для расчета.
В начальный момент температуры воды и приемника равны нижнему пределу диа-
пазона работы минус половина зоны застоя:
*о=.Уо= -----ту ~’1=*н + ^"-тг-71- . О26)
J. Z
Заслонка закрыта полностью: zo=O.
После установления теплового равновесия на номинальном режиме температурь)
воды и приемника равны максимальной допустимой температуре и заслонка открыта
полностью:
х=у=хв, г = 1.
В дальнейшем величины х и у будем отсчитывать от величин (126).
Как и в случае простейшего регулятора, подход температуры воды к максималь-
ному значению разбивается на два этапа.
На первом этапе координата приемника у проходит зону застоя, и заслонка
остается закрытой.
Изменение х и у характеризуется следующими уравнениями:
& Тг
С
Утах
С
Тг Утах Утах t
с г С
(127)
(128)
В отличие от случая простейшего регулятора, где Тг заведомо должно было быть
весьма малым, в данном случае мы можем иметь дело с весьма большим запаздыванием
(50 сек и больше). Ввиду этого мы получим достаточно хорошее приближение, если
1 Здесь мы считаем характеристику обратной связи линейной, так что диапазон работы -регулятора
и степень неравномерности совпадают по величине.
55
в правой части уравнения (128) ограничимся первыми тремя членами разложения в ряд
по степеням t. Будем иметь:
у~Гг~2- (129)
Подставляя в уравнение (129) _у=2т] и разрешая его относительно t, получим про-
должительность первого этапа:
Z) = 2
Приращение температуры х к концу первого этапа будет-
Л
*(Л) = 2 |/
r ?niax
С
(130)
На втором этапе возможны два случая:
1.
(131)
Заслонка движется с постоянной скоростью s=-=-
I м
2. (132)
Заслонка следит за изменением координаты приемника, т. е.
(2*1 <У < ° + 2vj).
(133)
Процесс подхода заслонки к положению равновесия после смены тепловых режимов
для регулятора со степенью равномерности а = 20° и зоной застоя 2т]=6° был записан
в полете. Ступенчатая линия движения заслонки (см. фиг. 67) может быть с достаточной
степенью точности заменена плавной кривой.
В дальнейшем нас будут интересовать преимущественно значения а, большие чем 20°Ц.
Поэтому мы можем считать, что в течение всего второго этапа имеет место неравенство
(132), и заслонка движется согласно уравнению (133). Таким образом, поведение системы
на втором этапе выражается уравнениями:
1 -V —2/)
СХ— (/max
Тгу -у х.
При начальных условиях %(0)=?с(^), _у(0)=2-»].
1 Мы пренебрегаем попрежнему коэфнциентом
(134а)1
(134b)
56
При принятых предположениях температура достигает максимума к моменту полного
открытия заслонки, когда у -о L2v(.
В результате совместною решения уравнении (134а) и (134b) получим:
t
k \27< с J
sin kt-r В cos kt
+ = +2-G,
(135)
где
В = x (tt) — 2т] — a,
Ь2 _ q _______ i
vcTr (2Tr)2
Температура воды достигает максимума в момент времени
Лпах —1\ 4 -r-arctg-—
B+l
Этот максимум выражается следующей формулой:
Результаты расчета с помощью форму-
лы (136) представлены на графике (фиг. 68).
Как видно из этого графика, степень
неравномерности может быть принята тем
большей, чем меньше запаздывание прием-
ника Тг и зона застоя 2т).
Даже при том большом запаздывании,
каким обладает биметаллический приемник
испытывавшегося регулятора (7) = 50 сек),
и зоне застоя 2т] = 6’Ц температура воды
не превышает верхнего предела = 110 Ц,
если степень неравномерности с=зл<28сЦ.
Таким образом, выбирая степень неравномер-
ности в пределах между о* = 17° (см. преды-
дущий раздел) и ап 28" Ц, можно удовлетво-
рить одновременно первым двум требова-
ниям, предъявляемым к регулятору даже при
весьма большом запаздывании. С уменьше-
нием запаздывания диапазон допустимых ве-
личин степени неравномерности возрастает, и
степень неравномерное^ может быть дове-
дена для значений Тг <30 сек то величины
диапазона допустимых температур за выче-
том зоны застоя, т. е.
о3=25 —2т) = 50-6 = 44°Ц.
Фиг. 68
V. ВЫБОР РАЦИОНАЛЬНОЙ СХЕМЫ РЕГУЛЯТОРА ТЕМПЕРАТУРЫ
При выборе рациональной схемы регулятора, помимо устойчивости регулирования
и сохранения температуры в заданных пределах, необходимо также учесть влияние ре-
гулятора на скорость самолета.
На фиг. 69 показаны типичные кривые изменения максимальной скорости 1/гаах и
температуры охлаждающей воды & в зависимости от открытия туннеля /, полученные
8
57
экспериментальным путем в полете. Заметим, что кривая изменения температуры может1
быть получена также на основе характеристики туннеля r=y(f) (фиг. 3), именно:
{) — f)p =
— Ир
"W
где Ф — температура, соответствующая полному открытию туннеля/=1 на данном режиме.
Анализ кривых Ктах (/) и й(/) приводит к следующим выводам.
Движение заслонки в диапазоне от полного за-
крытия до установки по потоку практически не влияет
на скорость самолета в то время, как температура
охлаждающей воды благодаря большому коэфициенту
эффективности заслонки „й“ в этом диапазоне значи-
тельно меняется. На участке же от положения „по по-
току" до полного открытия имеет место противополож-
ное явление. При движении заслонки в сторону пол-
ного открытия скорость самолета заметно понижается,
температура же охлаждающей воды меняется сравни-
тельно мало.
Таким образом, можно указать оптимальное поло-
жение заслонки, совпадающее или близкое к положе-
нию „по потоку", при котором имеет место макси-
мальное рассеивание тепла водорадиатором без потери
скорости.
Для того, чтобы обеспечить минимальную потерю
скорости, авиационный регулятор температуры не дол-
жен допускать отклонения заслонки за пределы указан-
ного оптимального положения до тех пор, пока темпе-
ратура не достигнет или не подойдет достаточно близко
к максимальному допустимому значению.
Легко видеть, что регулятор с линейной харак-
теристикой обратной связи, вообще говоря, не удо-
влетворяет этому требованию.
На фиг. 69 нанесена линейная характеристика регулятора с диапазоном работы S = о =
= 20°, расположенным симметрично относительно диапазона допустимых температур: 2с =
= 50° =110° — 60°.
Положение равновесия системы на данном номинальном режиме определяется точ-
кой пересечения характеристики регулятора и кривой 0 (/). Абсцисса этой точки лежит
значительно правее оптимального положения заслснки. С точки зрения нормальной рабо-
ты двигателя, нет никакой необходимости в таком большом открытии, так как темпера-
тура, соответствующая оптимальному открытию, не выходит за допустимые пределы. Если
сохранить линейность характеристики во всем интервале движения заслонки, то откры-
тие заслонки на данном режиме может быть уменьшено только путем сужения диапа-
зона работы регулятора и перенесения его в область более высоких температур (пунктир-
ная прямая фиг. 69). Этот способ, однако, имеет тот недостаток, что регулятор будет
поддерживать высокую температуру воды и тогда, когда в этом нет необходимости,
т. е. на режимах с малой теплоотдачей двигателя. Кроме того, сужение диапазона рабо-
ты регулятора связано с уменьшением степени неравномерности и, следовательно, ухуд-
шает устойчивость регулирования.
Изложенные соображения приводят к необходимости введения нелинейной характе-
ристики обратной связи.
Могут быть предложены различные варианты.
1. Характеристика обратной связи с одинаковым запасом устойчивости во всем диа-
пазоне движения заслонки.
Как установлено ранее, граница устойчивости регулятора с обратной связью (в смыс-
ле отсутствия автоколебаний) выражается формулой:
_____ba___
(1+а)(1’+7¥
где m — постоянный коэфициент при условии постоянства режима работы системы (т. е.
при постоянных Nit р, V и <Н’ ).
Критическая степень неравномерности пропорциональна коэфициенту эффективности
заслонки, который при упомянутых условиях зависит только от положения заслонки:
b = kv'(f) (см. стр. 8).
58
Сущность данного варианта заключается в том, что степень неравномерности, задавае-
мая обратной связью, также пропорциональна коэфициенту эффективности заслонки, т. е.
<j-=Ab (f).
Коэфициент А определяется заданным диапазоном работы регулятора 2:
7=^/ -
о
или
о
откуда
Характеристика обратной связи выразится следующим уравнением
8 - й' = (&" — Й') (f).
Сравнение этой характеристики (кривая А фиг. 70) с линейной характеристикой по-
казывает, что таким путем можно получить значительное снижение потери скорости при
одновременном улучшении устойчивости регулирования.
Для практического осуществления описанного варианта необходимо приспособление,
изменяющее передаточное число передачи от сервопривода к чувствительному элементу
по сравнительно сложному закону.
Более простым решением с конструктивной точки зрения является применение ло-
маной характеристики обратной связи (кривая В фиг. 70). Для выполнения такой харак-
теристики достаточно предусмотреть выключение обратной связи на участке от опти-
мального положения заслонки до полного открытия. С точки зрения влияния на скорость
полета последний вариант, как видно из фиг. 70, оказывается даже лучше предыдущего.
Регулятор в последнем варианте будет работать неустойчиво на тех режимах, на кото-
рых для охлаждения системы требуется открытие заслонки больше оптимального, т. е.
на режиме набора высоты и режиме максимальной скорости в летних условиях. Однако
устойчивость регулирования на этих режимах не имеет практического значения, как это
видно из следующих соображений.
На наборе высоты ввиду его кратковременности может произойти не более двух
полных колебаний регулируемой системы. В горизонтальном же полете следует вообще
избегать таких режимов, при которых оптимальное открытие заслонки оказывается не-
достаточным, так как выигрыш мощности на этих режимах в существующих самолетах
сводится на-нет потерей скорости за счет большего открытия заслонки. Таким образом,
выход заслонки за пределы оптимального положения при работе описанного регулятора
служит летчику сигналом о необходимости несколько уменьшить газ.
Схема регулятора с ломаной характери-
стикой обратной связи (кривая В, фиг. 70)
показана на фиг. 71.
В качестве приемника регулятора ис-
пользован термопатрон аэротермометра 7, за-
полненный хлорэтилом. Давление паров хлор-
этила передается через капиляр 2 в силь-
фон 3.
В пределах наклонной части характери-
стики обратной связи (кривая В, фиг. 70) ре-
гулятор работает следующим образом.
При отклонении температуры от задан-
ной величины равновесие между давлением
в сильфоне 3 и натяжением пружины 4 на-
рушается. Рычаг 5 отклоняется и замыкает
при помощи контактов цепь той или иной ка-
тушки электромагнитного реле 6, управляю-
щего работой реверсивного электромотора 7.
Электромотор поворачивает заслонку 8 и,
одновременно, с помощью гибкого вала 9 и
шестеренной передачи возвращает рычаг 5
в нейтральное положение.
Фиг. 70
59
Для получения горизонтальной части характеристики (кривая В, фиг. 70) преду-
смотрено приспособление для выключения обратной связи. Принцип действия этого при-
способления заключается в еле сующем.
Прч достижении верхнего предела температуры и соответствующего ему положения
заслонки „по потоку" рычаг 14 упирается в упорный винт 10, как показано на схеме
фиг. 71. При этом дальнейшее вращение валика не меняет натяжения пружины, а вле-
чет за собой только вывинчивание червяка 11 из червячного колеса 12 в пределах люфта А.
При наличии зазора между рычагом 14 и упором 10 люфт выбирается дополнительной
пружиной 13.
Фиг. 71
ВЫВОДЫ
1. Наряду с общими требованиями, предъявляемыми к автоматическим регуляторам
(устойчивость и эффективность регулирования), к авиационному регулятору температуры
предъявляется дополнительное требование—обеспечение минимальной потери скорости
самолета.
Выбор рациональной схемы регулятора и его параметров в соответствии с указан-
ными требованиями вытекает из результатов исследования динамики регулируемой системы.
2. Основное диференциальное уравнение системы охлаждения, полученное в резуль-
тате приближенного теоретического анализа и проверенное с помошыо летного экспери-
мента имеет следующий вид:
ГЯД» Д1>=—&Д/,
где Дй и Д/—соответственно отклонения регулируемой температуры и относительного
открытия туннеля от установившихся значений,
Ts постоянная времени системы охлаждения,
b — коэфициент эффективности заслонки.
Постоянная времени и коэфициент эффективности заслонки изменяются в зависимости
от режима полета и атмосферных условий.
60
3. Основными характеристиками регулятора являются: запаздывание приемника,
характеристики сервопривода (скорость s и зона застоя 2vj) и характеристика обратной
связи (степень неравномерности с).
Как показывают точный математический анализ нестационарного температурного поля
и* экспериментальное исследование приемников различных типов, нестационарные теп-
ловые процессы в любом приемнике могут быть с достаточной для практики точностью
описаны следующим уравнением:
7;до + де -Д&.
Здесь ДО отклонение координаты (температуры) приемника от установившегося значения,
Тг запаздывание, зависящее главным образом от теплоемкости и внутренней тепло-
проводности приемника.
Наименьшим запаздыванием обладает приемник с пизкокипящей жидкостью.
Как показали летные испытания существующих регуляторов с электрическим серво-
приводом, аэродинамические нагрузки практически не влияют на скорость сервопривода,
но устраняют явление перебега, имеющее место на холостом ходу.
Таким образом, для характеристики сервопривода может быть принята ломаная ли-
ния, описываемая уравнением
при Д6>т(,
- Vj Д 6 7],
Д0<7],
где s абсолютная величина скорости перекладки заслонки,
2ч—зона нечувствительности приемника.
4. Развитый в настоящей работе метод точного исследования полученных выше ди-
ференциальных уравнений подтверждает правильность основных результатов приближен-
ной теории „эквивалентной линеаризации".
Проведенные вычисления показывают, что приближенный метод дает весьма точное
определение условия существования и периодов устойчивых автоколебаний и приводит
к существенной погрешности только в определении периода неустойчивых автоколебаний,
которые не представляют практического интереса.
5. Основным параметром, характеризующим регулятор простейшего типа, является
отношение (коэфициент характеристики сервопривода). Нижний предел этой величины
определяется требованием устойчивости регулирования (отсутствия автоколебаний), верх-
ний предел—требованием достаточной эффективности регулятора при смене тепловых
режимов. Одновременное выполнение этих двух условий невозможно, так как для этого
требуется снижение запаздывания приемника до практически недостижимой величины.
6. Указанное противоречие приводит к необходимости введения обратной связи.
При наличии обратной связи устойчивость регулирования зависит от величины степени
неравномерности о. Нижний предел этой величины определяется из уравнения:
bTsT^
{Ts+Tr}{\rTs+/Ty
Верхний предел з определяется из условия сохранения температуры в заданном диа-
пазоне. Разность между верхним и нижним пределами с достаточно велика даже при
значительном запаздывании Тг и возрастает с уменьшением Тг.
7. По данным летных испытаний, регулятор с линейной характеристикой обратной
связи приводит к существенному снижению максимальной скорости самолета за счет
чрезмерно большого открытия заслонки. Чтобы обеспечить минимальную потерю скорости,
регулятор не должен допускать отклонения заслонки за пределы положения „по потоку"
до тех пор, пока температура не достигнет или не подойдет достаточно близко к макси-
мальному допустимому значению. Для решения этой задачи предложено применение
соответствующей нелинейной характеристики обратной связи и разработана схема прак-
тического осуществления этой характеристики.
ПРИЛОЖЕНИЕ
В характеристическом уравнении
D'" + 6ZjDm-1 + tz2D'”-2 + a3D"I-34-. . . + а,„_3О3 + щ„ _2D2 + (i,„^1D + ат О
полагаем для определенности т нечетным.
Подставляя D (в частности, может быть ш = 0), получим:
й1>"‘ + а1шт~1 — iti2wm-2 +-ш,„_3со3 — a,„_2w2 + rtm-iO)4“tl!»n = 0,
или
шт — а2ш,п 2 -[•- -4 — . . . — ат _з«>3 |~ ат -i“ 0, (1)
aijco'"-1 — a3wm~3-\-a-wm~5 tfm-2w2j ат 0. (2)
Из ш==0 следует: «т 0.
Если ш / 0, то, сокращая уравнение (1) на «> и обозначая х = ш2, получим:
т—1 tn— 3 m—5
X —Ho-V ~ d4X % . . . dm —3^V ~dm —1 == 0,
т— 1 т —3 т—Ь
ахх 2 а3х 2 а-вх 2
2Х 4“ ат 0-
Необходимым и достаточным условием для наличия общего корня у этой системы яв-
ляется равенство нулю ее результанта.
Результант системы
Pv,x'n-\-Pix"l~'1 + • • .-\-Pm-ix -рто,
+ - • • ' <7« - 1А’ Л/m ()
по способу Эйлера 1 равен:
Ро Pl Pl • • Рт 0 0 . . 0 0
0 До Pl . . . Рт-1 Рт 0 ... 0 0
ООО 2 Pm -1 Pm
R = Vo 41 ‘12 • • • Чт 0 0 ... 0 0
о V0 «I . . . Чт -1 Чт 0 ... 0 0
0 0 0 ... • . 4 т -1 4 m
Подставляя
Ро = = 1, Pj = —<i2, Р, а4,..., рп = —d-m— 3, Pm dm—\,
Ро ai> Pl “^а3> Р’2 «з. • > Р'П —dm —2, Qm = n,n,
получим:
1 — а.. • ат —1 0 0 ... 0 0
0 1 — «2 . . — ат—з ат—1 0 ... 0 0
0 0 0 . . . • . . • • am 3 am~
R - «1 - "з «ъ • • ат 0 0 ... 0 0
() "1 яз * • ““ ат-2 ат о ... 0 0
0 0 0 • . . . . nm 2 am
1 См., например, Граве .Курс высшей алгебры".
62
Меняя местами строки и меняя знак всех членов некоторых строк, будем иметь
с точностью до знака
«1 — а-А <7Г1 . . "т 0 0 ... 0 0
1 а2 «4 . . • "т-1 0 0 0 0
0 (Ц "з ат —2 °т 0 . . о 0
/? = 0 — 1 <73 • пт-3 ~ ат—1 0 ... 0 0
0 0 0 . . • • • ~ат —2 °т
0 0 0 . . • • ат —3 ат -1
Заменяя строки столбцами и меняя знак всех членов некоторых столбцов, получим:
«1 1 0 0 ... 0 0
п3 «2 "1 1 ... 0 0
ал "4 "3 "2 ... 0 0
R = ‘>т 0 "т-1 0 "т-2 "т "т-3 • "т-1 • • - = » ,=о, т —1 ’
0 0 0 0 . . •
0 0 0 0 ... "т-2 "т-3
0 0 0 0 "т "т-1
где Am-i — предпоследний детерминант в условиях Гурвица.
Ввиду того, что корни суть непрерывные функции коэфициентов уравнения, на
границе области устойчивости (области, внутри которой выполняются условия Гурвица)
по меньшей мере один из корней либо равен нулю, либо чисто мнимый. В то же время
в силу необходимости и достаточности условий Гурвица на границе области устойчиво-
сти обращается в нуль по меньшей мере один из детерминантов Гурвица. Показано, что
среди детерминантов, обратившихся в нуль, обязательно будет или ат, или А,„_i или, что
то же, Дт-1 или Дт. Таким образом, для общего случая показано, что границами устой-
чивости служат гиперповерхности йт = 0 и Дт_1 = 0.
I Низкий Институт г?::
I БИБШ. Etx
Отв. редактор А. А. Горяйнов
Объем 8 печ. л., 42 880 зн. в печ. л.
Г-03293
Тип. изд-ва БНТ
Подписано к печати 15/Х1 1946 г-
Учетно-авторских листов 8,5
Зак. № 1177
ОГЛАВЛЕНИЕ
Cmjy.
Введение . ..... 1
I. Исследование динамики системы охлаждения . 2
§ I. Основные допущения .................. —
§ 2. Диференциал ьное уравнение, характери-
зующее процесс изменения регулируемой .
температуры............................... 3
§ 3. Расчет коэфициентов уравнения измене-
ния температуры........................... 5
§ 4. Результаты летных испытаний ..... 11
II. Характеристики элементов регулятора .... 13
§ 1. Исследование приемников.............. —
§ 2. Сервопривод управления заслонкой ... 20
§ 3. Обратная связь . ....................22
111. Исследование регулятора простейшего типа . 23
§ 1. •Исследование устойчивости регулирования.
Приближенный метод........................ —
§ 2. Метод точных решений................ 26
§ 3. Поведение регулятора простейшего типа
при смене режимов и оценка возможно-
сти его применения....................... 43
§ 4. Результаты летных испытаний......... 46
IV. Исследование регулятора с обратной связью . 48
§ 1. Исследование устойчивости регулирования —
§ 2. Летные испытания регулятора с различ-
ной степенью неравномерности ............ 52
§ 3. Поведение регулятора с обратной связью
при смене тепловых режимов............... 55
V. Выбор рациональной схемы регулятора темпе-
ратуры ...................................... 57
Выводы...................................... 60
Приложение................................... 62