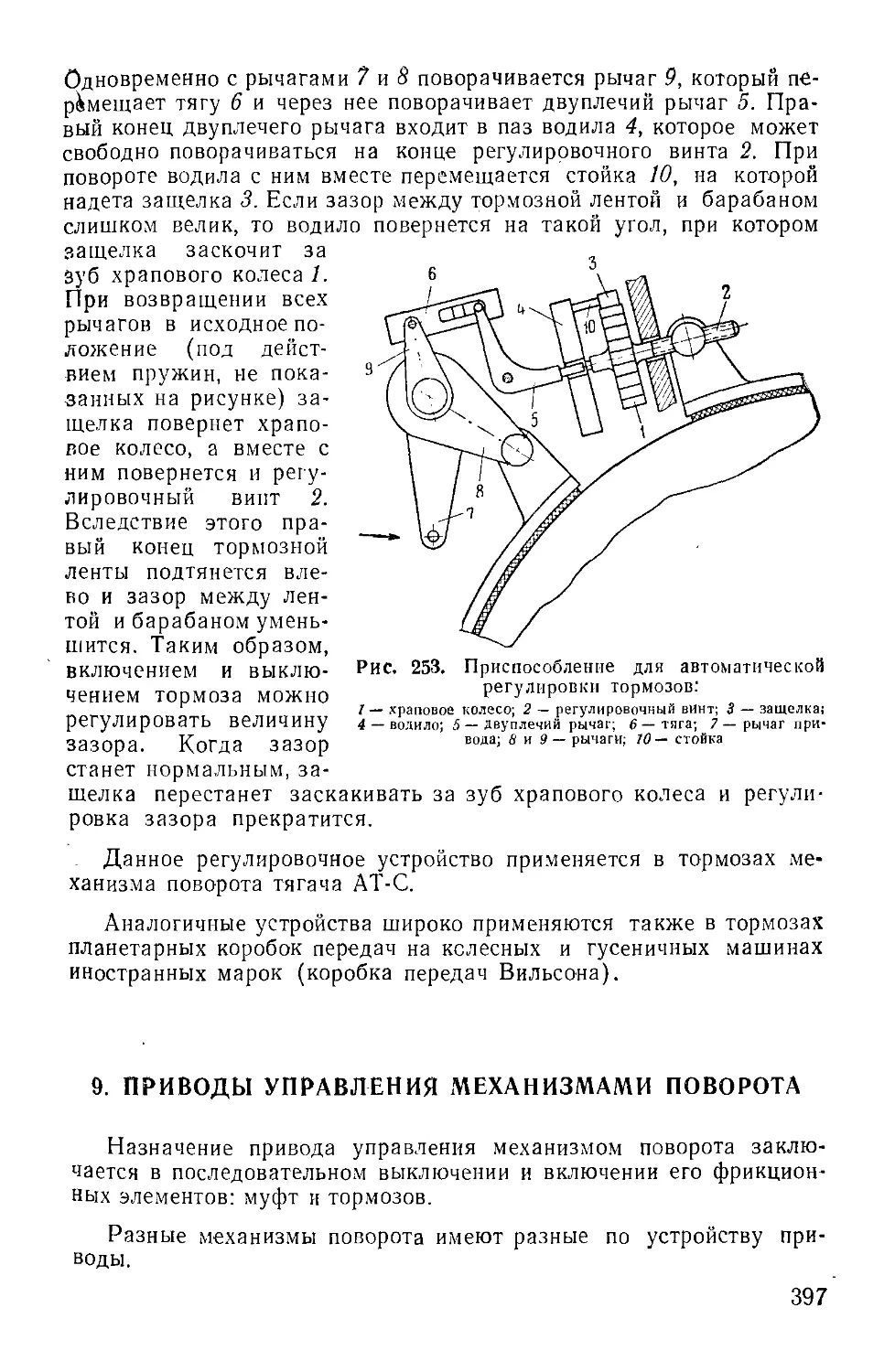
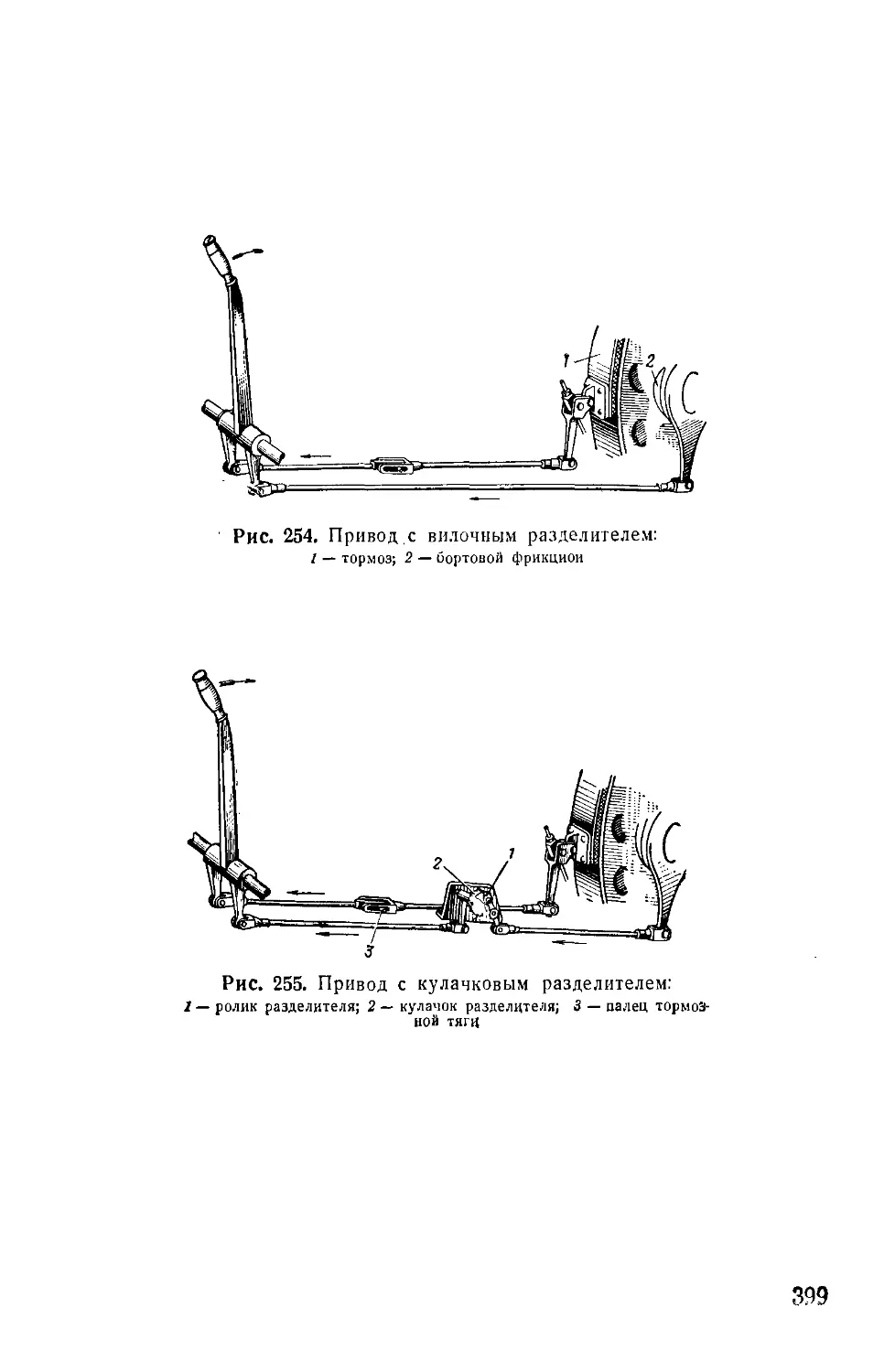
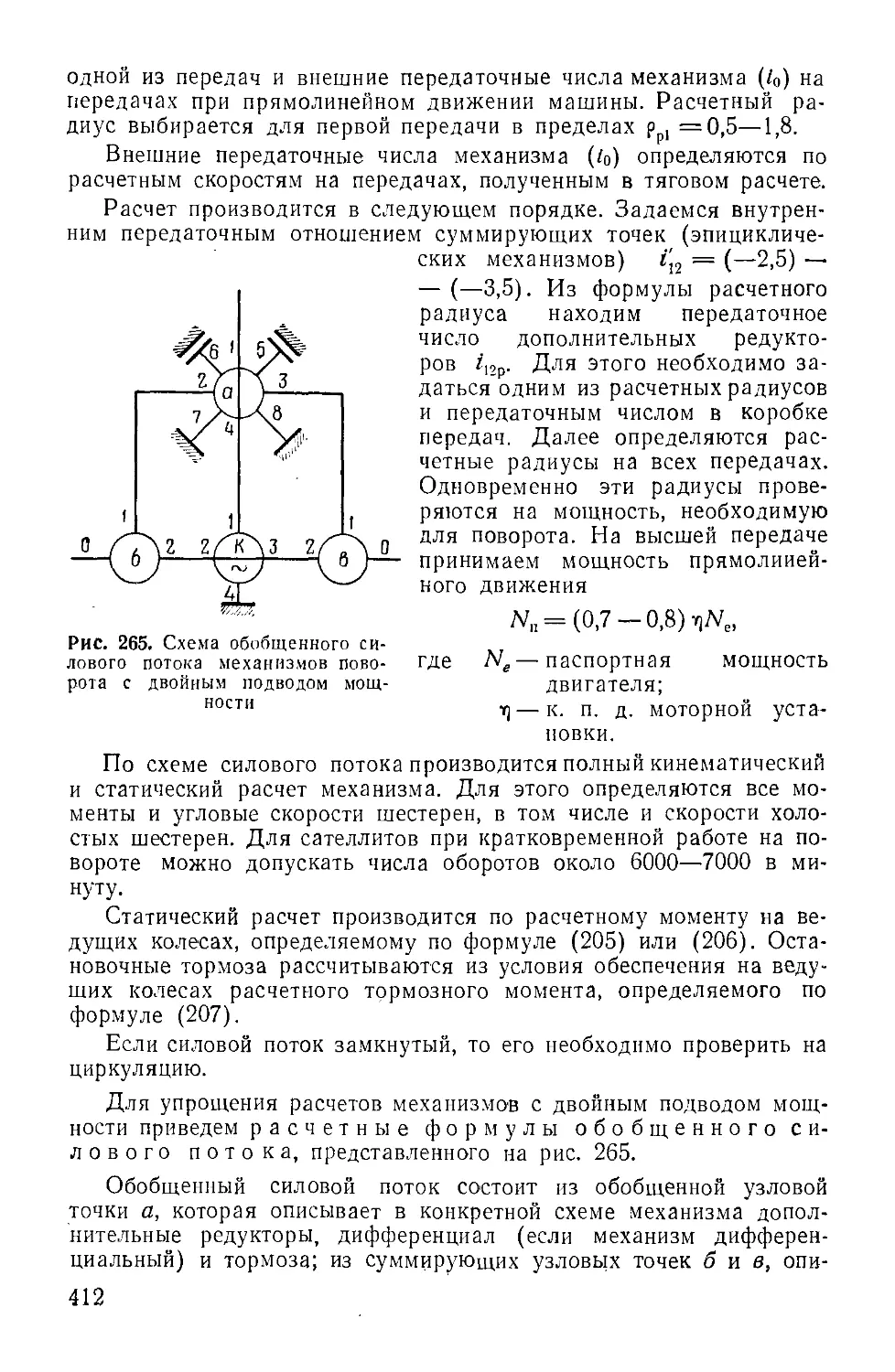
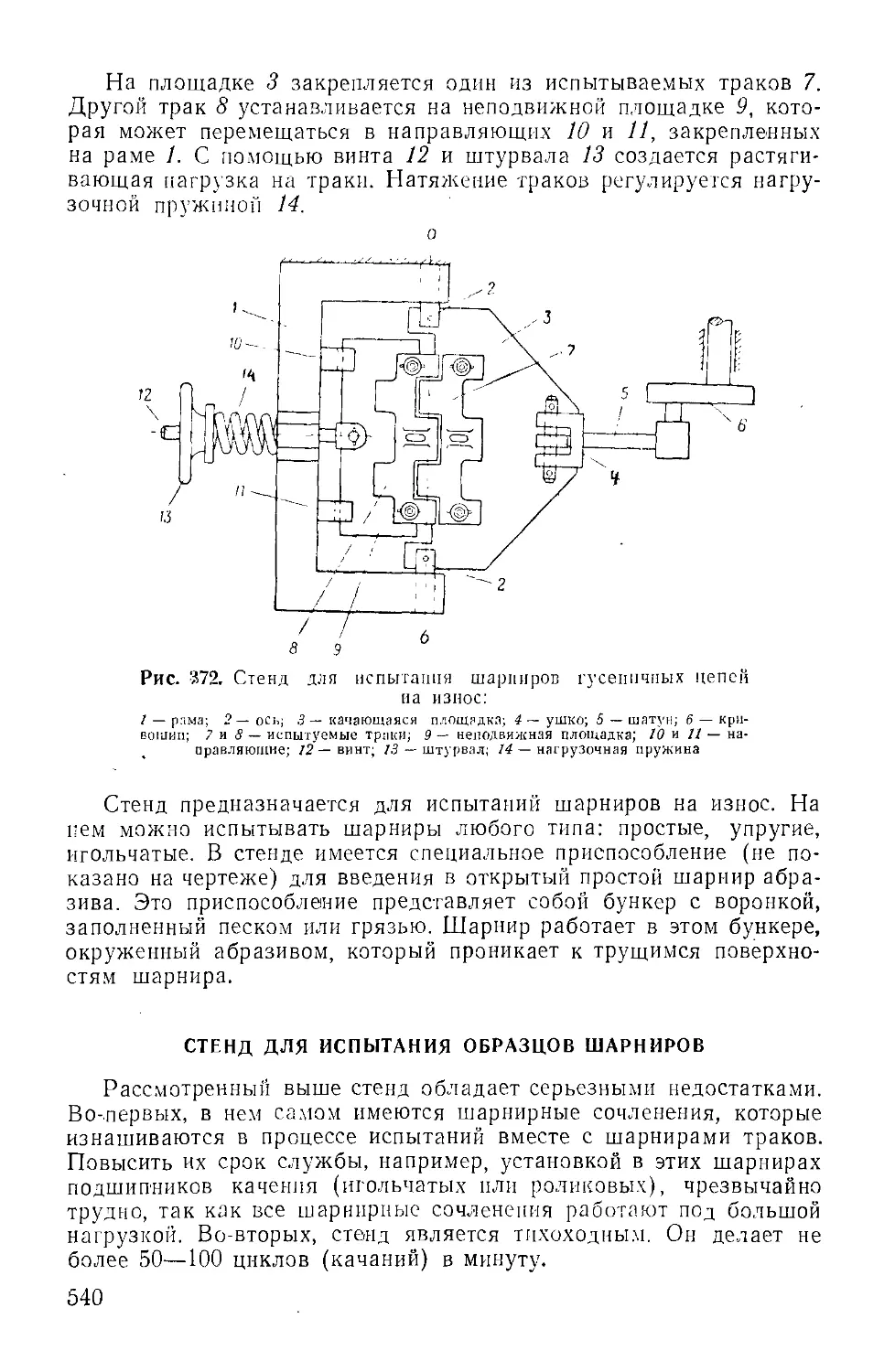
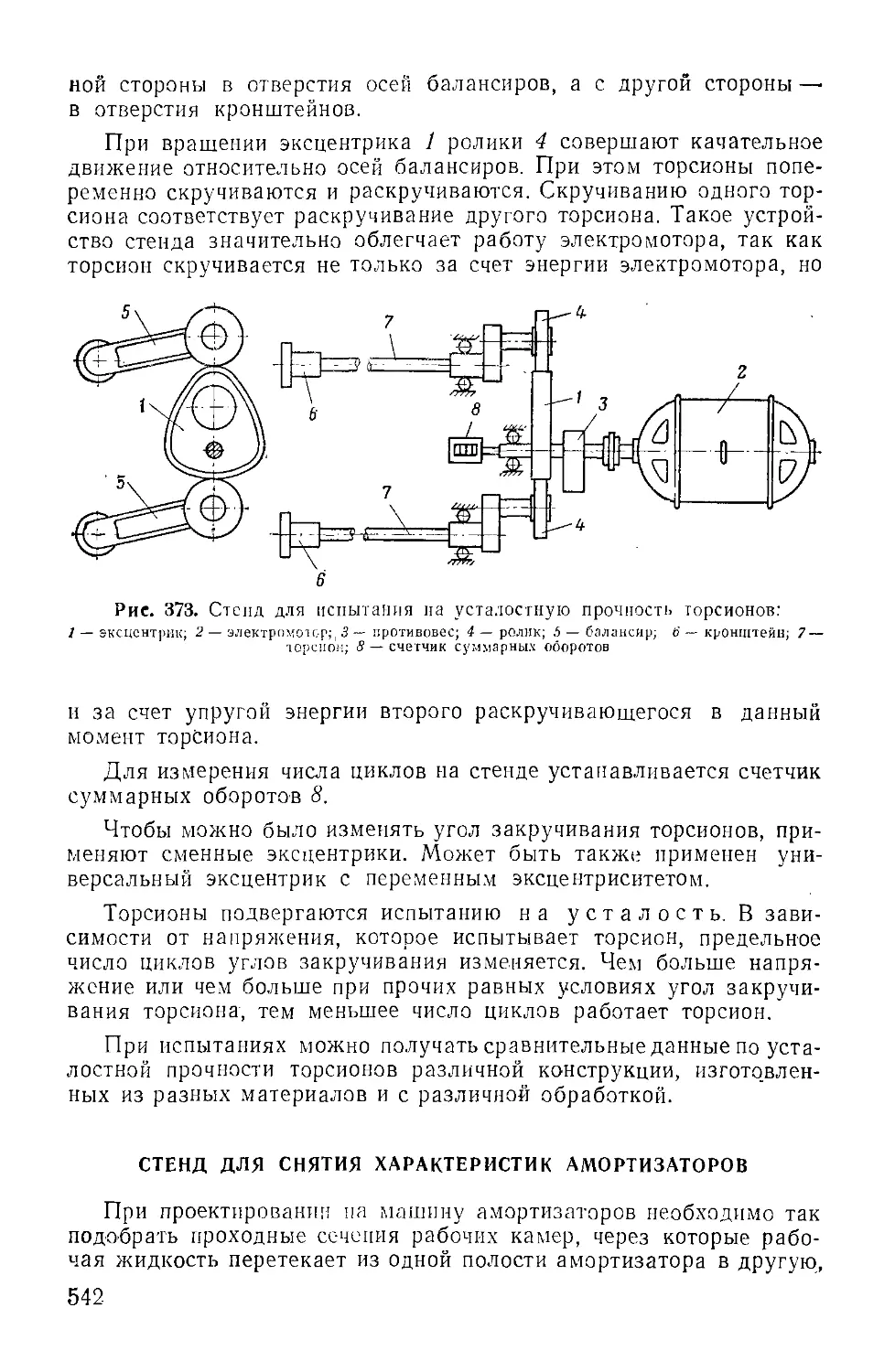
/





















































































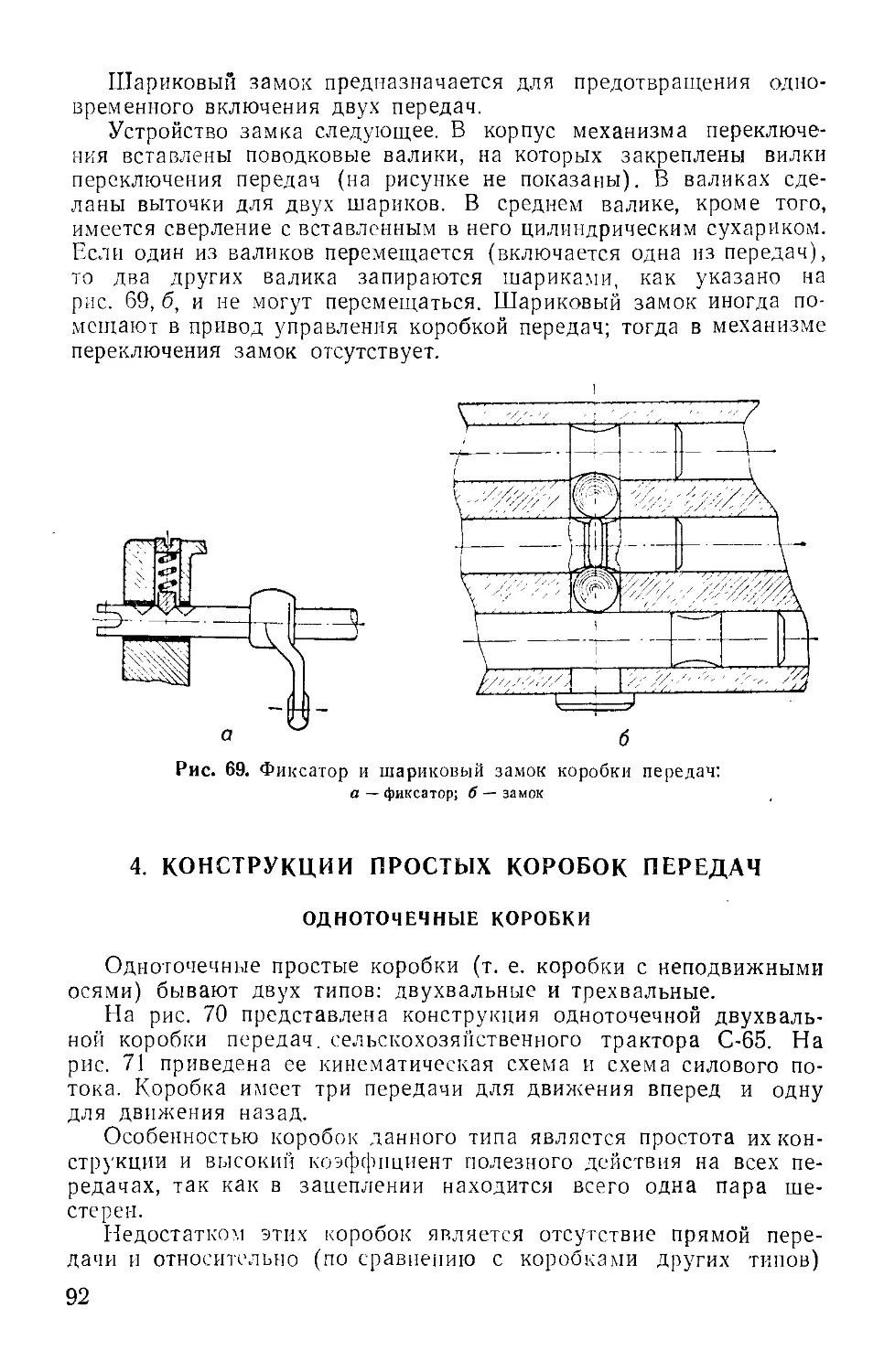






































































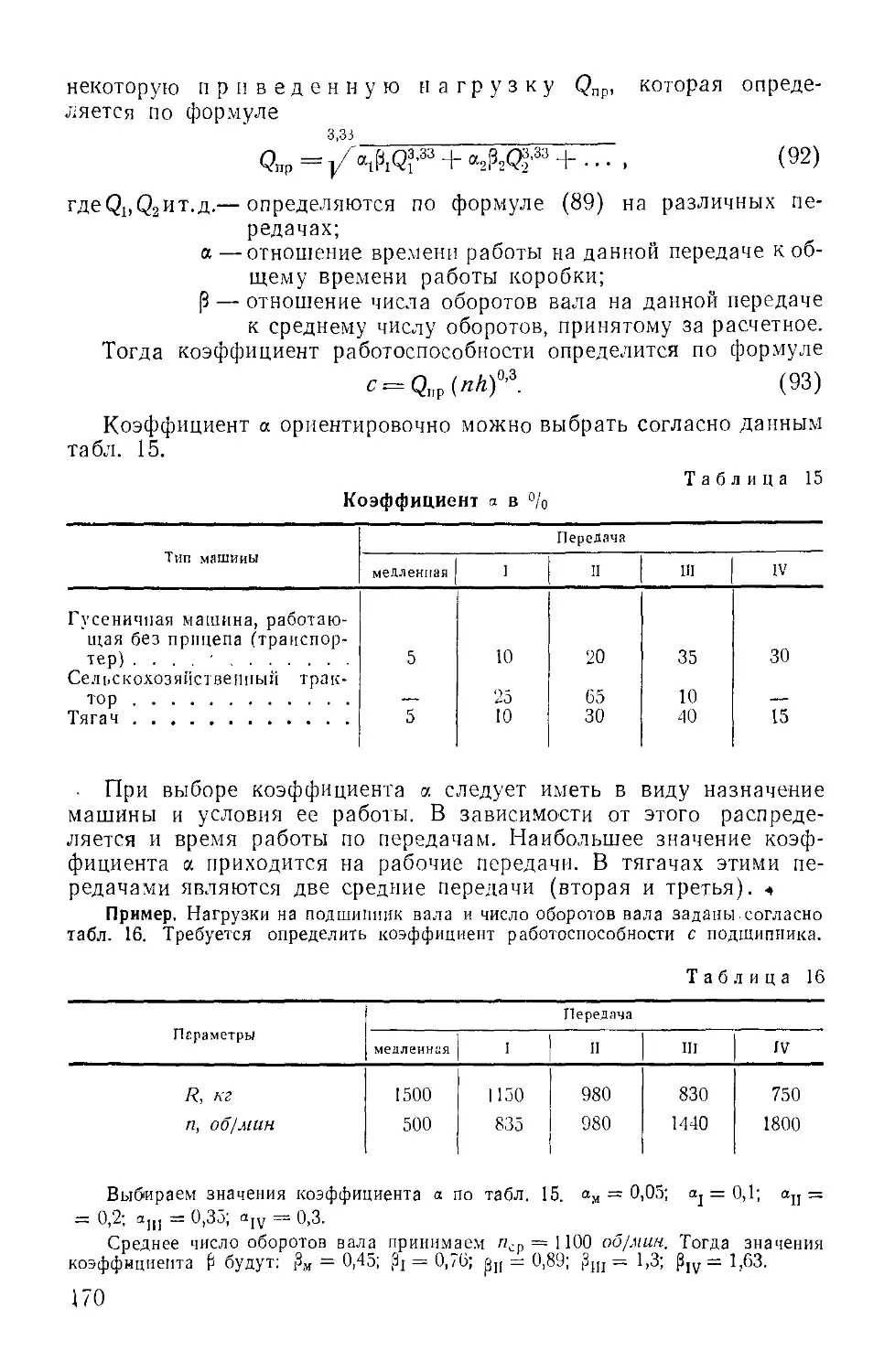

















































































































































































































































































































































































Текст
ГУСЕНИЧНЫЕ
ТЯГАЧИ
ЧАСТЬ ВТОРАЯ
КОНСТРУКЦИЯ
И РАСЧЕТ
PqsjqGTSM
ВОЕННОЕ ИЗДАТЕЛЬСТВО
МИНИСТЕРСТВА ОБОРОНЫ СОЮЗА ССР
МОСКВА — I960
АВТОТРАКТОРНОЕ УПРАВЛЕНИЕ
МИНИСТЕРСТВА ОБОРОНЫ СОЮЗА ССР
ГУСЕНИЧНЫЕ
ТЯГАЧИ
ЧАСТЬ ВТОРАЯ
КОНСТРУКЦИЯ и РАСЧЕТ
ВОЕННОЕ ИЗДАТЕЛЬСТВО
МИНИСТЕРСТВА ОБОРОНЫ СОЮЗА ССР
Москва — 1960
Профессор, доктор технических наук
А, С. АНТОНОВ
ГУСЕНИЧНЫЕ ТЯГАЧИ
Часть вторая. Конструкция и расчет
Книга предназначается для подготовки инже-
неров автотракторной специальности, а также для
инженеров, занимающихся конструированием и
расчетом гусеничных тягачей.
ГЛАВА I
ОБЩЕЕ УСТРОЙСТВО ГУСЕНИЧНЫХ ТЯГАЧЕЙ
1. ТИПЫ ГУСЕНИЧНЫХ МАШИН
Гусеничные машины можно классифицировать по двум основ-
ным признакам: по назначению и по устройству движителя.
По назначению машины разделяются на:
— тягачи;
— танки;
— самоходно-артиллерийские установки (САУ);
— транспортеры;
— сельскохозяйственные тракторы;
— машины специального назначения.
По устройству движителя машины разделяются на:
— гусеничные;
— полугусеничные;
— колесно-гусеничные;
— плавающие.
ТЯГАЧИ
Тягачи бывают двух типов: артиллерийские и эвакуационные.
Артиллерийским тягачом называется быстроходная
гусеничная машина, предназначенная для буксировки артиллерий-
ской системы и перевозки на своей грузовой платформе боеком-
плекта и орудийного расчета.
Прототипом современных артиллерийских тягачей можно счи-
тать артиллерийский тягач М-2 (рис. 1) послевоенного периода.
В этом тягаче была впервые применена общая компоновка, харак-
терная для конструкции современных тягачей. По этой компоновке
двигатель располагается в передней части тягача, в задней части
располагается грузовая платформа и в средней — кабина води-
теля. Такое расположение основных частей применяется во
всех современных отечественных тягачах: АТ-Л, АТ-С и АТ-Т
(рис. 2=—4).
Несколько иную компоновку имеют иностранные тягачи. В аме-
риканском артиллерийском тягаче Аллис-Чалмерс (рис. 5) впереди
расположена кабина водителя, посредине двигатель и сзади грузо-
вая платформа.
1* 3
Рис. 1. Артиллерийский тягач М-2
Рис. 2. Легкий артиллерийский тягач АТ-Л
4
Рис. 3. Средний артиллерийский тягач АТ-С
Рис. 4. Тяжелый артиллерийский тягач АТ-Т
5
Рис. 5. Американский артиллерийский тягач Аллис-Чалмерс
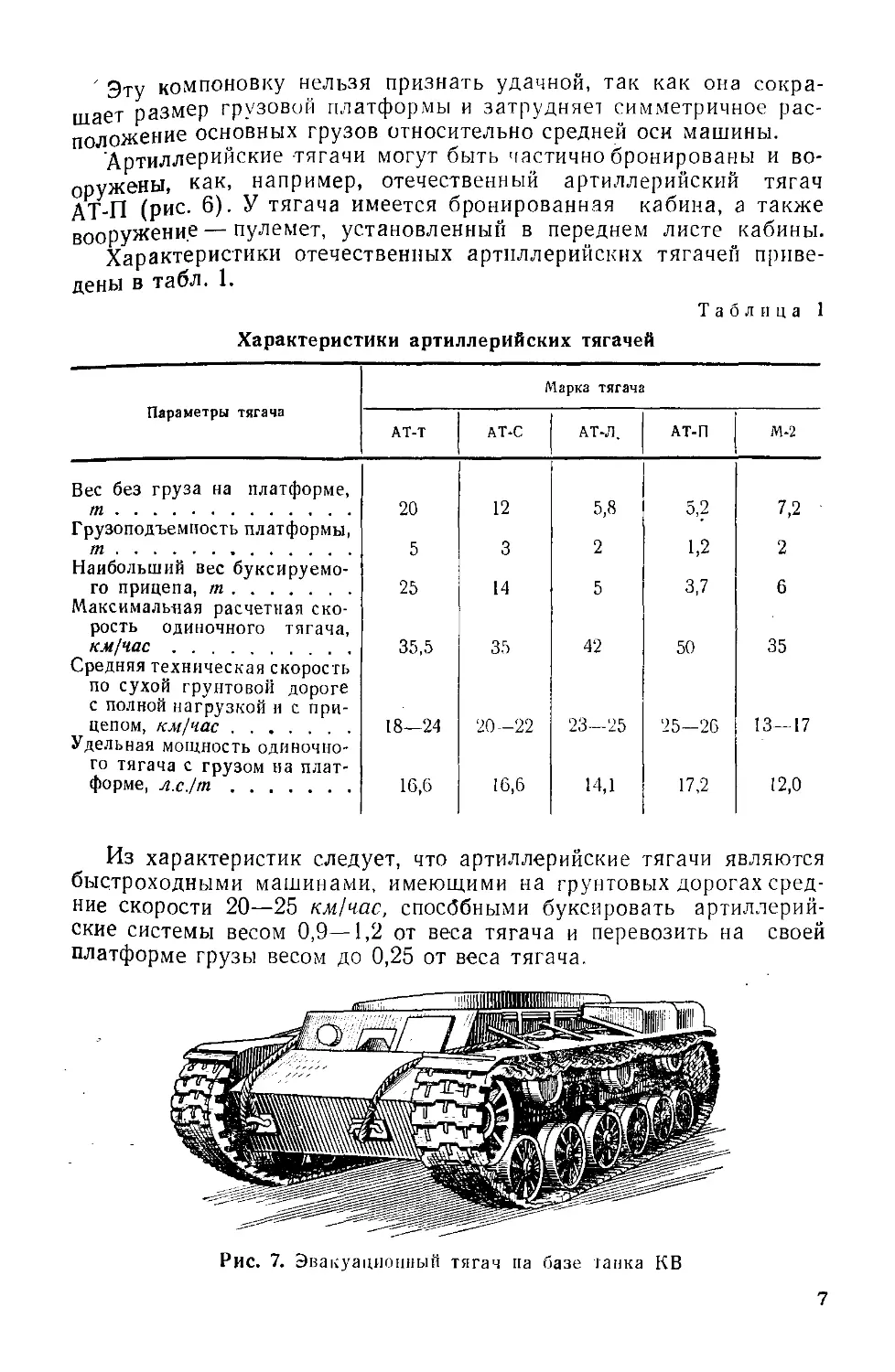
Рис. 6. Полубронированныи артиллерийским тягач АТ-П
6
' gTy компоновку нельзя признать удачной, так как она сокра-
щает размер грузовой платформы и затрудняет симметричное рас-
положение основных грузов относительно средней оси машины.
Артиллерийские -тягачи могут быть частично бронированы и во-
оружены, как, например, отечественный артиллерийский тягач
АТ-П (рис. 6). У тягача имеется бронированная кабина, а также
вооружение — пулемет, установленный в переднем листе кабины.
Характеристики отечественных артиллерийских тягачей приве-
дены в табл. 1.
Таблица 1
Характеристики артиллерийских тягачей
Параметры тягача Марка тягача
АТ-Т AT-C АТ-Л, АТ-П М-2
Вес без груза на платформе, tn 20 12 5,8 5,2 7,2
Грузоподъемность платформы, т ............. 5 3 2 1,2 2
Наибольший вес буксируемо- го прицепа, т 25 14 5 3,7 6
Максимальная расчетная ско- рость одиночного тягача, км/час 35,5 35 42 50 35
Средняя техническая скорость по сухой грунтовой дороге с полной нагрузкой и с при- цепом, км/час 18—24 20-22 23—25 25-26 13—17
Удельная мощность одиночно- го тягача с грузом на плат- форме, л.с./т 16,6 16,6 14,1 17,2 12,0
Из характеристик следует, что артиллерийские тягачи являются
быстроходными машинами, имеющими на грунтовых дорогах сред-
ние скорости 20—25 км/час, способными буксировать артиллерий-
ские системы весом 0,9—1,2 от веса тягача и перевозить на своей
платформе грузы весом до 0,25 от веса тягача.
Рис. 7. Эвакуационный тягач па базе ганка КВ
7
Эвакуационным тягачом называется гусеничная ма-
шина, обычно бронированная, предназначенная для эвакуации за-
стрявших или поврежденных на поле боя машин.
В Великую Отечественную войну в качестве эвакуационных тя-
гачей применялись танки со снятыми башней и вооружением
(рис. 7).
ТАНКИ
Танк — боевая гусеничная машина, имеющая броневую защиту
и пулеметно-артиллерийское вооружение, расположенное во враща-
ющейся башне.
Рис. 8. Танк Т-34
Типовым танком периода Великой Отечественной войны являлся
отечественный танк Т-34 (рис. 8).
Современные танки в основном напоминают танк Т-34, хотя, ко-
нечно, теперь их огневая мощь, броневая защита и подвижность
значительно возросли.
САМОХОДНО-АРТИЛЛЕРИЙСКИЕ УСТАНОВКИ (САУ)
Самоходно-артиллерийской установкой, или, сокращенно, САУ,
называется бронированная гусеничная машина, имеющая артилле-
рийское вооружение, установленное в невращающейся башне.
САУ появились в период второй мировой войны вначале как
средство артиллерийской поддержки танков, а позже стали приме-
няться также и как средство артиллерийской поддержки пехоты.
Конструктивно САУ создаются на базе танков с использованием
танковых агрегатов.
8
От танков САУ отличаются, кроме своего тактического назначе-
ния главным образом установкой вооружения в корпусе, что по-
зволяет ставить на машину пушки более крупного калибра, чем
в однотипных танках.
ТРАНСПОРТЕРЫ
Транспортеры — быстроходные гусеничные машины, предназна-
ченные для перевозки людей и грузов.
Транспортеры могут быть небронированные, полубронированные
или полностью бронированные.
По сравнению с танками и тягачами транспортеры обладают
большей подвижностью, маневренностью и проходимостью.
В транспортерах в качестве гусениц иногда применяют резиновые
ленты. В этом случае транспортеры используются как снегоходы
и болотоходы. Например, резиновые гусеницы имеют амери-
канские транспортеры-снегоходы «Бомбардир». Удельное давление
гусениц на грунт у этих транспортеров небольшое и составляет всего
0,05 кг/см2, что позволяет им двигаться по рыхлому снегу, где могут
проходить только лыжники.
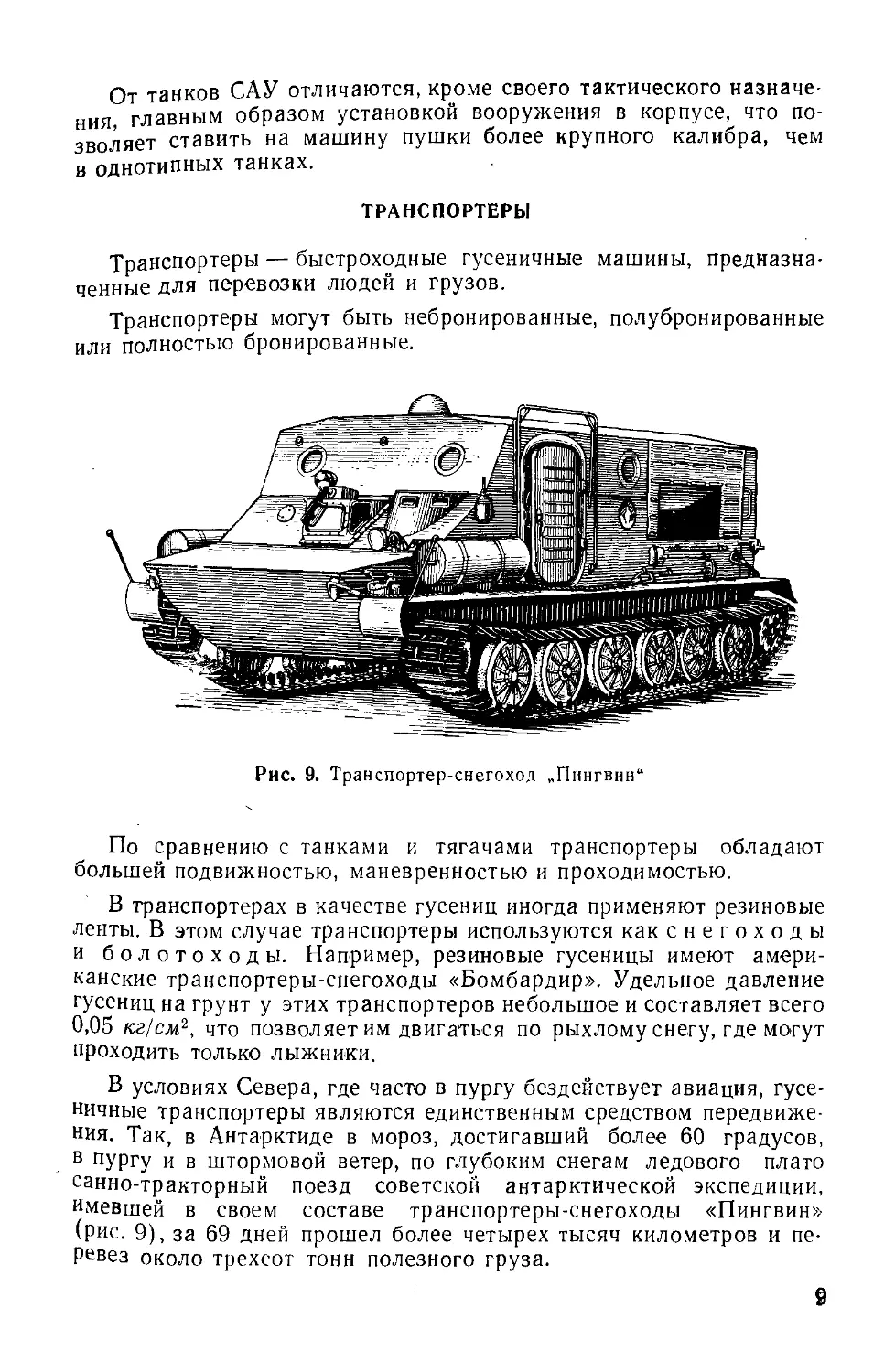
В условиях Севера, где часто в пургу бездействует авиация, гусе-
ничные транспортеры являются единственным средством передвиже-
ния. Так, в Антарктиде в мороз, достигавший более 60 градусов,
в пургу и в штормовой ветер, по глубоким снегам ледового плато
санно-тракторный поезд советской антарктической экспедиции,
имевшей в своем составе транспортеры-снегоходы «Пингвин»
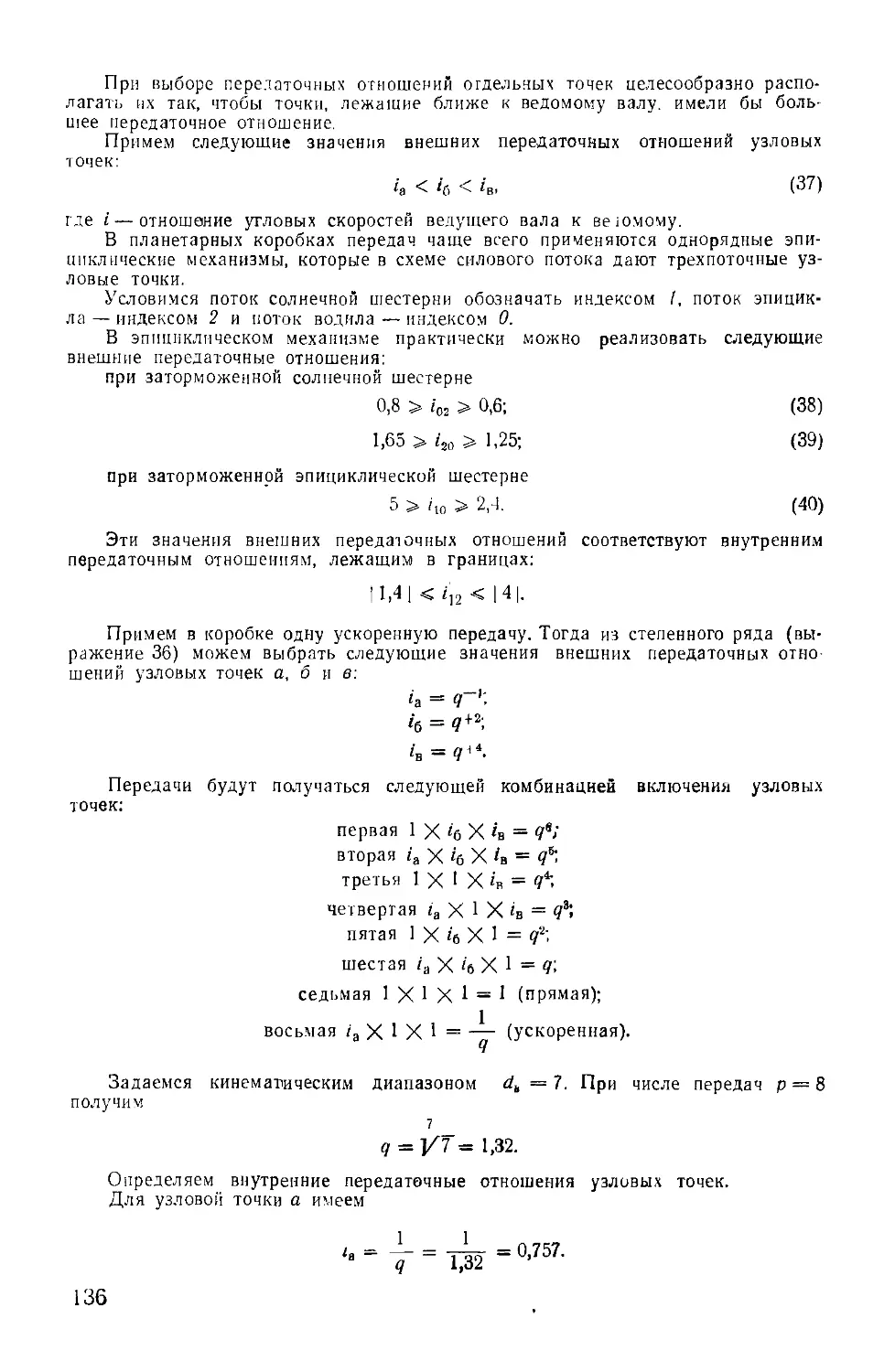
(рис. 9), за 69 дней прошел более четырех тысяч километров и пе-
ревез около трехсот тонн полезного груза.
9
СЕЛЬСКОХОЗЯЙСТВЕННЫЕ ТРАКТОРЫ
Сельскохозяйственный трактор предназначается главным обра-
зом для тяги различных сельскохозяйственных машин. Кроме того,
он может использоваться также как средство тяги инженерных и
землеройных машин. Иногда сельскохозяйственный трактор приме-
нялся в качестве эвакуационного тягача, а также для мехтяги ар-
тиллерии. Следует, однако, иметь в виду, что современная артилле-
рия высоко подвижна, как подвижны танковые и механизирован-
ные войска, которые она сопровождает. Сельскохозяйственные же
тракторы такой подвижностью не обладают.
Таблица 2
Характеристики сельскохозяйственных тракторов
Параметры трактора Марка трактора
стз-з С-60 С-65 С-80 ДТ-54
Вес, m 5,1 10,0 11,2 11,8 5,4
Вес прицепа, m Максимальная скорость, 4,5 10,0 10,0 10.0 4,5
км/час Средняя техническая скорость 8,0 5,9 6,95 9,65 7,9
поезда, км/час Удельная мощность трактора, 4,0 4,0 4,0 7,2 5,5
Л.С./ГП 10,2 6,0 5,8 7,9 10,0
Так, из табл. 2 следует, что средняя техническая скорость трак-
торного поезда составляет всего 4—7 км/час. Средняя же техниче-
ская скорость артиллерийского поезда составляет 18—26 км/час
(табл. 1), что примерно в пять раз выше скорости тракторного по-
езда. Удельная мощность сельскохозяйственных тракторов примерно
в 2—2,5 раза меньше удельной мощности артиллерийских тягачей,
что должно сказаться на маневренности тракторного поезда.
Отсюда следует, что сельскохозяйственный трактор
не может являться полноценным артиллерий-
ским тягачом.
В США до второй мировой войны уделялось большое внимание
использованию сельскохозяйственных тракторов в армии. Тракторы
оборудовались лебедками, имели максимальную скорость 13—
18 км/час при средней технической скорости до 10 км/час.
В послевоенный период в США от военной модернизации сель-
скохозяйственных тракторов отказались и начали производство спе-
циальных артиллерийских тягачей, обладающих высокими скорост-
ными и динамическими показателями. Так, например, тягач Аллис-
Чалмерс имеет следующие данные: вес — 16,7 т; вес прицепа — 14 т;
расчетная максимальная скорость — 55,6 км/час, средняя техниче-
ская скорость—12—14 км/час, удельная мощность — 12,5 л.с./т.
10
ПОЛУГУСЕНИЧНЫЕ И КОЛЕСНО-ГУСЕНИЧНЫЕ МАШИНЫ
В период второй мировой войны в ряде иностранных армий полу-
чили распространение полугусеничные машины, одна из
которых представлена на рис. 10.
Полугусеничная машина является промежуточным типом между
автомобилем и гусеничной машиной. Появление полугусеничных ма-
шин было вызвано стремлением использовать автомобильные за-
Рис. 10. Немецкий полугусеничный транспортер
воды для создания военных машин, обладающих более высокой про-
ходимостью, чем автомобили, но более легких и дешевых, чем гусе-
ничные машины.
Конструктивной особенностью полугусеничной машины является
наличие у нее передних управляемых колес и металлических (звен-
чатых) или резино-металлических гусениц. Применялись эти машины
главным образом в качестве транспортеров.
Полугусеничная машина вместе с положительными качествами
своих прототипов сочетает в себе и их отрицательные качества. Так,
полугусеничная машина обладает меньшей подвижностью, чем ко-
лесная машина, она менее надежна в работе, имеет больший мерт-
вый вес и в то же время имеет худшую проходимость, чем гусенич-
ная машина.
После войны производство полугусеничных машин было прекра-
щено.
Другой разновидностью гусеничных машин является колесно-
гусеничная машина. Эта машина имеет два независимых
Движителя — колесный движитель для движения по хорошим доро-
гам и гусеничный движитель для движения по плохим дорогам и по
местности.
Применение двух движителей имеет целью максимально сохра-
11
нить от износа гусеничный движитель, используя его только в тех
условиях движения, когда он действительно является необходимым.
Колесно-гусеничные машины строились двух вариантов: со
съемными гусеницами и с универсальным движителем (опытная
конструкция, рис. 11).
При наличии съемных гусениц машина могла двигаться на гусе-
ницах или на опорных катках, которые служили колесами; часть
этих катков получала привод от двигателя, т. е. являлась ведущей.
Рис. 11. Колесно-гусеничный бронетранспортер с универсальным
движителем
Машины со съемными гусеницами применялись в Советской
Армии в качестве танков до 1939 г. (танк БТ).
Универсальный движитель имеет гусеницы и поднимающиеся и
опускающиеся колеса. При опущенных колесах машина движется
на колесах, при приподнятых — на гусеницах. Подъем и опускание
колес осуществляются с места водителя специальным гидравличе-
ским приводом.
Универсальный движитель сложен по устройству и имеет боль-
шой вес, что увеличивает мертвый вес машины. Кроме того, вслед-
ствие наличия двух движителей увеличивается поперечный габарит
машины.
В настоящее время колесно-гусеничные машины не производятся.
Совершенствуются чисто гусеничное машины. Для этого повыша-
ются их подвижность, маневренность, проходимость, делается бо-
лее износостойким их движитель.
Параллельно с сухопутными машинами строят плавающие
машины (см. часть 1, гл. VIII).
Плавающие машины бывают двух типов:
12
— машины, в одинаковой мере приспособленные как для движе-
ния по суше, так и для движения по воде;
_ сухопутные машины, приспособленные к плаванию.
' Машины первого типа оборудованы специальными водоходными
механизмами и по существу являются специальными маши-
нами. В машинах второго тиРа в качестве водоходного движителя
используется обычный гусеничный движитель. По существу это сухо-
путные машины, но обладающие способностью плавать.
2. ОБЩИЕ ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ
К КОНСТРУКЦИИ ТЯГАЧЕЙ
К конструкции тягачей предъявляются следующие общие требо-
вания:
1. Высокая подвижность, маневренность и проходимость как оди-
ночного тягача, так и поезда при движении его по дорогам и на мест-
ности.
2. Устойчивость движения на обледенелых дорогах..
3. Отсутствие порчи дорог гусеницами.
4. Высокая топливная экономичность тягача.
5. Легкость управления тягачом.
6. Простота конструкции.
7. Надежность и долговечность в работе.
8. Простота обслуживания и ремонта.
Остановимся на каждом из этих требований в отдельности.
1. Под подвижностью понимается скоростная характери-
стика тягача (или поезда), оцениваемая максимальными и средними
техническими скоростями движения по грунтовым и шоссейным
дорогам.
Маневренность представляет собой способность тягача
к быстрому и резкому изменению курса движения. Маневренность
можно оценивать скоростью прямолинейного движения, скоростью
поворота и минимальным радиусом поворота. Чем выше скорость
прямолинейного движения, выше скорость поворота и меньше мини-
мальный расчетный радиус, тем выше маневренность машины.
Проходимость — способность к преодолению местных пре-
пятствий, встречаемых на пути движения тягача.
Проходимость можно оценивать средними техническими скоро-
стями движения тягача на местности.
Высокая подвижность тягача определяется следующими факто-
рами: высокой удельной мощностью, правильной разбивкой передач
(высокими значениями коэффициента использования мощности на
ходовых передачах), простотой и легкостью переключения передач,
правильным устройством подвески, обеспечивающей хорошую плав-
ность хода, и др.
Следует иметь в виду, что на средние скорости движения тягача,
а следовательно, и на его подвижность облегчение переключения пе-
редач и правильная разбивка передач могут оказать решающее вли-
13
яние: тягач, имеющий меньшую удельную мощность, может ока-
заться более подвижен, чем тягач, имеющий большую удельную
мощность.
Большое значение для повышения подвижности тягачей имело
бы решение проблемы непрерывности и автома-
тичности силовой передачи (см. гл. IV, V и VI).
Для современных гусеничных тягачей, работающих с колесным
прицепом, средние технические скорости составляют 20—25 км/час
при удельной мощности тягачей 15—17 л.с./т.
Максимальная скорость одиночного тягача составляет 40—
50 км/час, тягача с прицепом — 25—30 км/час.
Маневренность тягача определяется величиной удельной мощ-
ности и устройством его механизма поворота.
Чем выше удельная мощность и чем совершеннее механизм по-
ворота, тем выше маневренность тягача.
В старых гусеничных машинах, имевших несовершенные меха-
низмы поворота, часто требовалось при повороте из-за недостатка
мощности двигателя переходить на пониженную передачу. Современ-
ные механизмы поворота позволяют на дорогах поворачиваться ма-
шине на любой передаче без перехода на пониженную передачу, а
для некоторых механизмов при повороте требуется даже понижен-
ная мощность по сравнению с мощностью при прямолинейном
движении.
Важным параметром, оценивающим маневренность тягача, яв-
ляется минимальный расчетный радиус поворота.
Для одиночных гусеничных машин (транспортеры, танки) этот
радиус должен равняться половине ширины колеи машины или даже
быть равным нулю (поворот тягача вокруг центральной оси). Для
тягачей допускается, чтобы минимальный радиус превышал в 1,5—
2 раза ширину колеи.
В гл. VII первой части рассматривалась проходимость гусенич-
ных машин с точки зрения преодоления ими различных препятствий.
Здесь мы рассматриваем проходимость как подвижность на
местности, т. е. с точки зрения скорости преодоления того
или иного трудного участка местности.
Поэтому проходимость может оцениваться здесь общим пара-
метром — средней технической скоростью на мест-
ности.
Проходимость определяется следующими основными факторами:
удельной мощностью, удельным давлением гусениц на грунт, сцепле-
нием гусениц с грунтом и положением центра тяжести тягача.
Чем выше удельная мощность, тем выше проходимость тягачей
на местности, имеющей препятствия, д
Чем ниже удельное давление и выше' сцепление гусениц с грун-
том, тем выше проходимость на мягких грунтах.
Чем ниже расположен центр тяжести тягача и чем он ближе
к середине опорной базы, тем выше устойчивость, а следовательно,
и проходимость тягача на подъемах, спусках, при преодолении рвов
и других препятствий.
14
Положение центра тяжести определяется компоновкой тягача,
е взаимным расположением в корпусе его основных агрегатов.
2 На обледенелых дорогах гусеницы тягача скользят и он часто,
особенно с прицепом, теряет устойчивость движения. По-
теря устойчивости ухудшает подвижность поезда, так как водитель
в этом случае из-за опасения аварии ведет поезд на пониженных
скоростях.
Для обеспечения устойчивости движения повышают сцепление
гусениц с обледенелым грунтом, применяя различные средства по-
вышения проходимости.
3. Транспортная гусеничная машина для предотвращения
порчи дорог должна иметь специальные гусеницы.
Порча дорог происходит вследствие двух причин: из-за высоких
шпор на траках и из-за высокого удельного давления гусениц на
грунт.
Чтобы не портить асфальт, применяют специальные обрезинен-
ные снаружи асфальтоходные гусеницы.
4. Топливная экономичность тягача определяется
экономичностью его двигателя, коэффициентом полезного действия
тягача, а также правильной разбивкой передач.
Наиболее экономичные современные тягачи с дизельным двига-
телем расходуют 0,7—1,0 кг/тк-м горючего.
При сравнении экономичности тягачей следует учитывать их вес.
Обычно тяжелые тягачи более экономичны, чем легкие.
5. По сравнению с автомобилем гусеничный тягач имеет более
тяжелое управление. Это объясняется большими усилиями, требую-
щимися для выключения главного фрикциона (сцепления) и управ-
ления механизмом поворота, сложностью переключения передач
(в простых ступенчатых коробках). К этому добавляются также тя-
желые условия работы экипажа: сильная тряска, которую испыты-
вает тягач при движении по местности, и наличие тяжелого прицепа,
за которым приходится постоянно следить.
Следовательно, водитель тягача утомляется больше, чем води-
тель любой другой самоходной машины. Утомляемость же водителя
отражается на подвижности, маневренности и проходимости гусе-
ничного поезда. Поэтому облегчение управления тяга-
чом имеет первостепенное практическое значе-
ние.
Управление тягачом можно облегчить, применяя сервоуправле-
ние, преселектор ное управление или автоматическое переключение
передач.
Значительно облегчает управление машиной применение плане-
тарных коробок передач, а также гидродинамических, гидростати-
ческих или электрических силовых передач.
6. Тягач должен быть конструктивно прост. Обычно с
простотой конструкции связывается ее дешевизна, простота изго-
товления и обслуживания. Однако не следует смешивать простоту
с примитивностью. Чтобы не быть примитивной, конструкция
д 0 л ж н а быть современной.
15
Установка на машине более «сложного», но современного меха-
низма, имеющего больший гарантийный срок службы, более эконо-
мичную работу или более простое управление, не является услож-
нением машины.
Например, в гусеничных машинах в качестве механизма пово-
рота применяются бортовые фрикционы и зубчатые планетарные
механизмы. На первый взгляд бортовые фрикционы кажутся более
простым механизмом поворота, так как они представляют обычные
многодисковые фрикционные муфты. Однако в эксплуатации эти
муфты требуют постоянного наблюдения и ухода: вследствие буксо-
вания они быстро изнашиваются, их регулировка нарушается. В то
же время зубчатый механизм практически почти не изнашивается
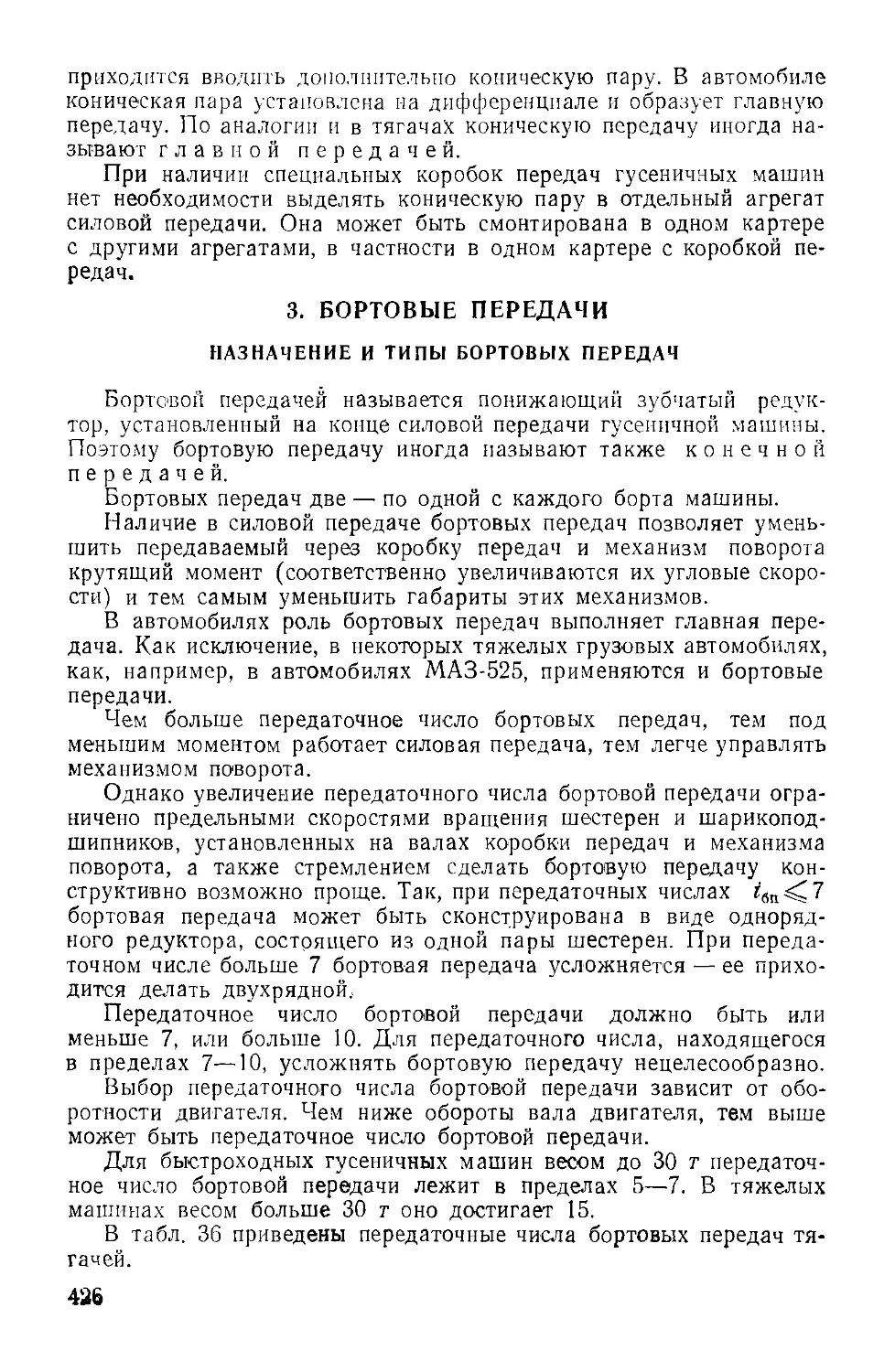
(по крайней мере в пределах гарантийного срока работы машины),
а имеющийся при этом в механизме фрикционный элемент (тормоз
или блокировочная муфта) работает здесь надежнее и долговечнее
и требует за собой меньше ухода. Кроме того, планетарный меха-
низм поворота облегчает управление машиной.
7. Под надежностью конструкции понимается ее безотказ-
ная работа в течение межремонтного срока.
Под долговечностью понимается гарантийный срок,
устанавливаемый заводом-изготовителем для машины или для ее
агрегатов. Обычно для гусеничных машин устанавливаются два га-
рантийных срока работы: по двигателю в мото-часах и по силовой
передаче и ходовой части в километрах.
Современные тягачи имеют следующие показатели долговечно-
сти: по двигателю — около 600 мото-часов, по агрегатам силовой
передачи и ходовой части — 5000—6000 км.
С развитием техники надежность и долговечность конструкций
повышается. Так, гарантийные сроки современных машин почти в
2—2,5 раза (а по движителю даже больше) выше гарантийных
сроков машин, выпускавшихся до Великой Отечественной
войны.
8. Тягач должен быть прост в обслуживании, т. е. к об-
служиваемым агрегатам и механизмам должен быть легкий доступ,
на обслуживание не должно затрачиваться много времени,
должен быть достаточно большой срок между двумя очередными
обслуживаниями. Демонтаж и монтаж машины, выполняемые при
ремонте, не должны вызывать затруднений. Следует также обра-
щать внимание на простоту взаимной центровки двигателя и меха-
низмов силовой передачи, а также агрегатов ходовой части.
В силовой передаче гусеничной машины имеется много фрик-
ционных элементов — муфт и тормозов. В процессе работы эти эле-
менты изнашиваются, их требуется периодически регулировать. Не-
обходимо упрощать регулировку фрикционных элементов, а места
регулировки делать доступными для обслуживания.
Применение автоматической регулировки тормозов, применение
центральной смазки, а также замена быстроизнашиваемых фрик-
ционных элементов силовой передачи гидравлическими или электри-
ческими элементами значительно упрощает обслуживание машины.
16
з ОСНОВНЫЕ ЧАСТИ ТЯГАЧА, ИХ НАЗНАЧЕНИЕ
И ОБЩАЯ КОМПОНОВКА ТЯГАЧА
ОСНОВНЫЕ ЧАСТИ ТЯГАЧА И ИХ НАЗНАЧЕНИЕ
Тягач состоит из следующих основных частей (рис. 12 и 13):
рамы 1, или корпуса, кабины 2, кузова 3, или грузовой платформы,
ходовой части 4, силовой установки 5, силовой передачи 6, лебед-
ки 7 и тягово-сцепного прибора 8.
В легких тягачах лебедка может отсутствовать.
Корпус является основой, на которой монтируются все
агрегаты тягача. Он представляет сварную из стальных листов от-
крытую сверху коробку (рис. 14). Рама состоит из двух продоль-
ных балок, соединенных между собой поперечинами и усиленных
растяжками и косынками (рис. 15). Коробчатая, или корпус-
ная, конструкция более жесткая. Кроме того, расположение
наиболее жизненных агрегатов тягача внутри корпуса позволяет
надежнее защитить их от повреждений.
Тягачи снабжаются закрытой кабиной автомобильного типа.
Нередко в качестве кабин гусеничных машин используются стан-
дартные кабины грузовых автомобилей. Так, например, в качестве
кабин тягачей АТ-Л и АТ-Т использовались стандартные кабины
грузового автомобиля ЗИЛ-150 с вваренной посредине вставкой.
Как исключение, на тягаче АТ-С применена специальная кабина
автобусного типа.
Иногда кабину изготовляют из дерева. Деревянные кабины по
надежности и в пожарном отношении уступают цельнометалличе-
ским.
В кабине помещаются сиденья водителя и членов экипажа, а
также органы управления тягачом и приборы контроля за работой
двигателя.
Кузов тягача представляет собой закрытую тентом грузовую
платформу для перевозки орудийного расчета и боеприпасов. Вну-
три кузова смонтированы откидные сиденья для расчета и имеются
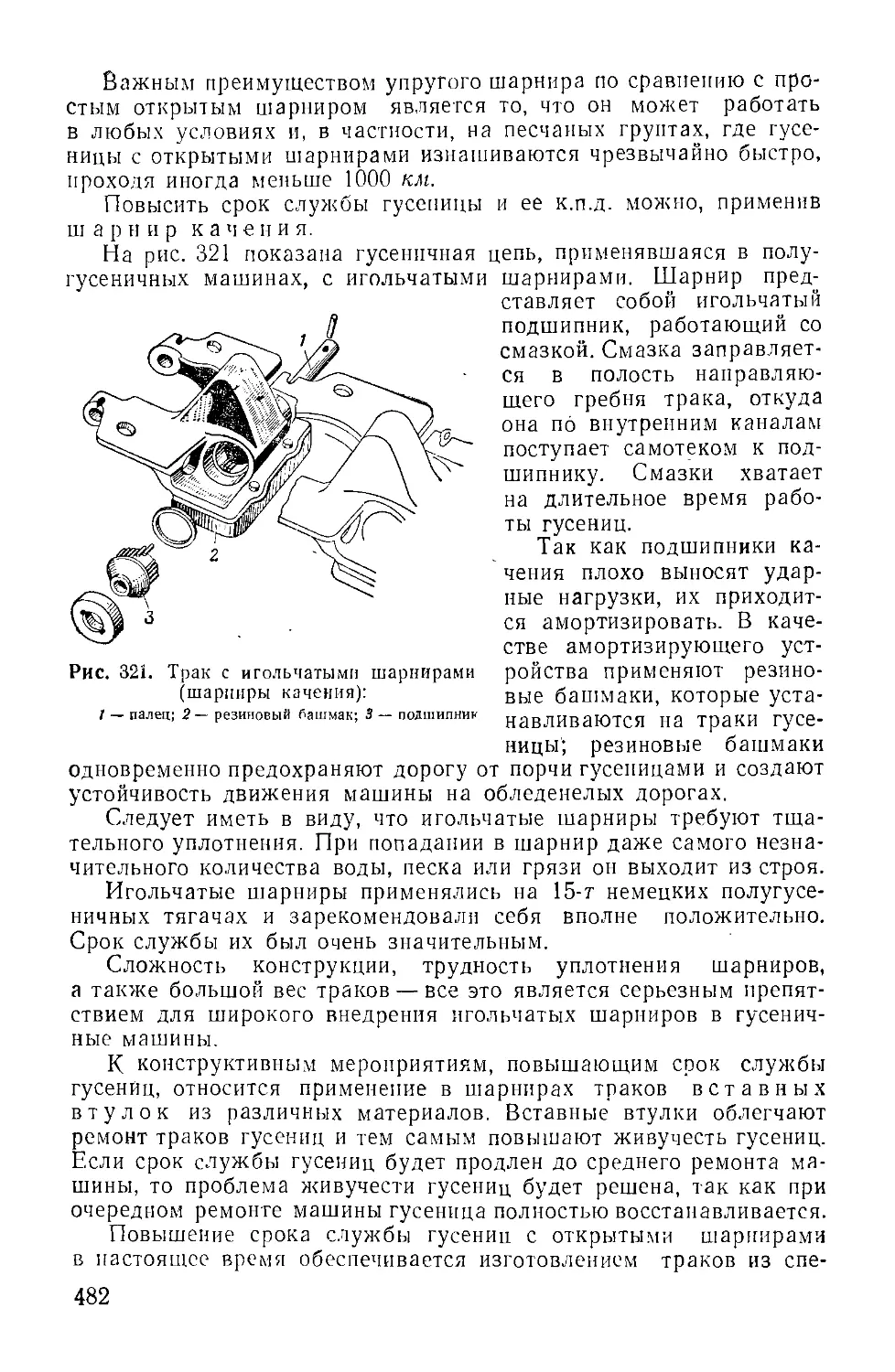
места для укладки боеприпасов. Кроме того, предусматриваются
ящики для укладки ЗИП, места для размещения шанцевого инстру-
мента, огнетушителей, стойки для металлических дуг, на которые
натягивается брезентовый тент, и т. д.
В полу грузовой платформы имеются люки для доступа к агре-
гатам, расположенным под платформой.
Для удобства загрузки и разгрузки кузова его задняя стенка де-
лается откидной (тягачи АТ-Т, АТ-С) или в ней имеется двухствор-
чатая дверь (тягачи АТ-Л, М-2).
Грузовые платформы изготовляются цельнометалличе-
скими (тягачи АТ-Л, АТ-Т), деревянными (тягач М-2) или с де-
ревянным полом и металлическими бортами (тягач АТ-С).
Кабина и кузов машин, предназначенных для работы на край-
нем Севере в условиях низкой температуры, должны утепляться и
иметь обогрев.
2-20 17
Рис. 12. Тягач АТ-Т (вид сбоку):
2 — рама, 2 — кабина, 5 — кузов (грузовая платформа); 4 — ходовая часть; .5 — силовая установка: 6 — силовая передача; 7 — лебедка; й — тягово-сцеи»
ной прибор
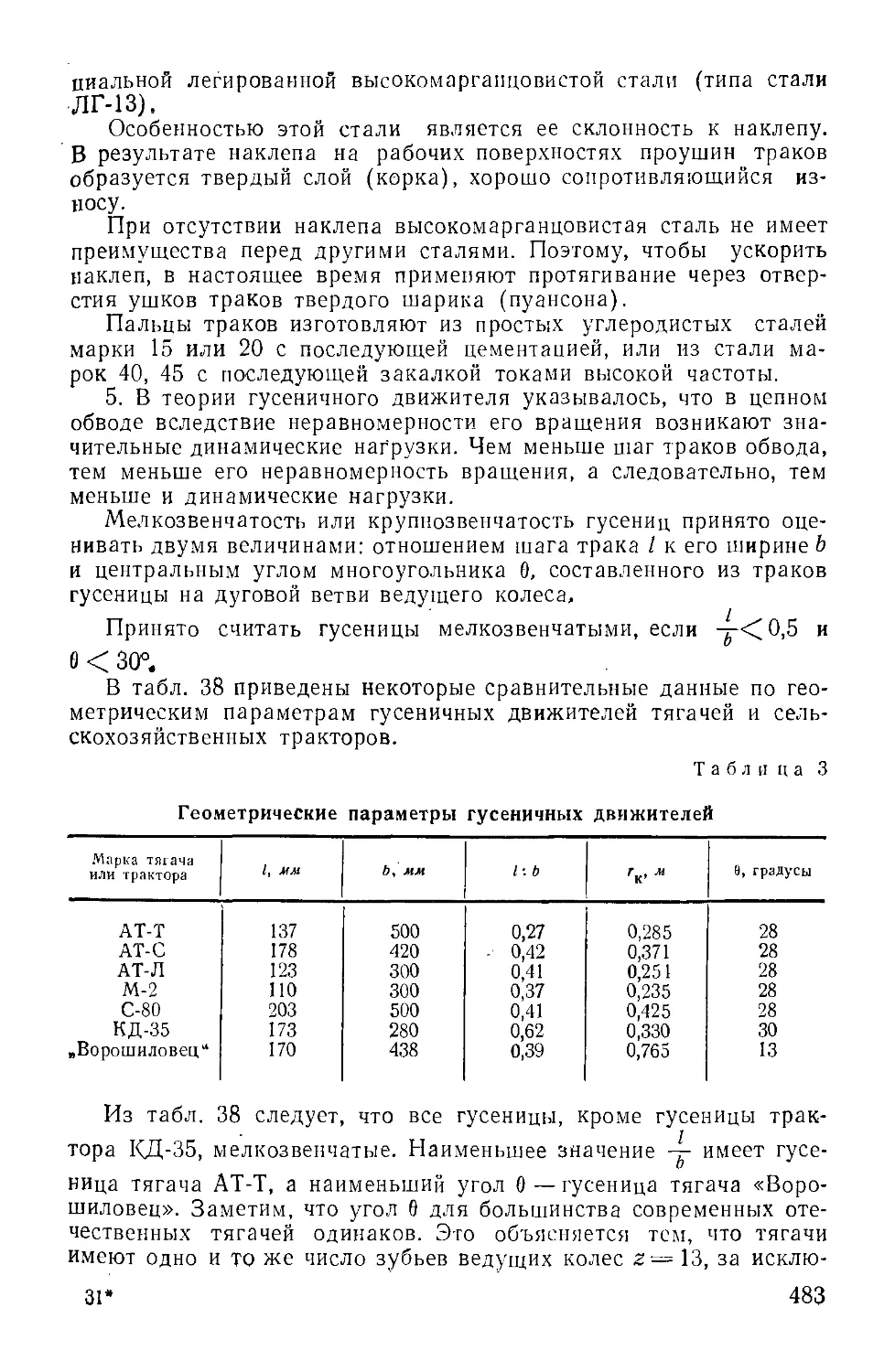
PqsjqGTSM
5
4
I
Рис. 13. Тягач АТ-Т (вид сверху) (наименование деталей то же, чю и на рис. 12)
Зак. 20
PqsjqGTSM
Рис. 14. Корпус тягача АТ-Т
Ходовой частью называется движитель и подвеска тягача.
Ходовая часть предназначается для передвижения и обеспечения
плавности хода тягача.
В силовую установку входит двигатель и обслуживаю-
щие его системы: питания, охлаждения, смазки, зажигания (для
карбюраторного двигателя), запуска и подогрева.
В современных быстроходных гусеничных тягачах в качестве
двигателя применяется чаще всего дизель.
Дизели применяются четырех- и двухтактные, быстроходные
(число оборотов вала двигателя составляет 1500—2000 об/мин).
Так, на тягаче АТ-Т установлен четырехтактный двенадцатицилин-
дровый дизель марки В-401 с V-образным расположением цилин-
дров; того же типа, но задросселированный дизель установлен на
тягаче АТ-С.
На тягачах АТ-Л и М-2 установлен двухтактный дизель
ЯАЗ-204.
На тягаче АТ-П применяется бензиновый шестицилиндровый
двигатель ЗИЛ-123Ф.
В системы обслуживания двигателя входят различные устрой-
ства и агрегаты.
Система питания горючим обычно состоит из топлив-
ных баков, топливораспределительного крана, ручного топливопод-
качивающего насоса, фильтров грубой и тонкой очистки, механиче-
ского топливоподкачивающего насоса, топливного насоса и форсу-
нок (в некоторых двигателях, например в двигателе ЯАЗ-204, насос
и форсунка конструктивно объединяются в один агрегат).
Система питания воздухом состоит из воздухоочисти-
теля и воздухопроводов.
Система охлаждения состоит из радиатора, водяного
насоса, вентиляторов или эжекторов.
Система смазки состоит из масляных баков, масляного
насоса, масляного радиатора, масляного фильтра.
Система запуска состоит из электростартера (основная
я* 19
Рис. 15. Рама тягача Я-12 (балочного типа)
система запуска), воздухопуска (запасная система запуска), акку-
муляторных батарей и баллонов со сжатым воздухом. В си ст ем у
подогрева входит котел-подогреватель, форсуночный распыли-
тель горючего, заправочный бачок с горючим.
В различных машинах могут быть некоторые различия в систе-
мах, но перечисленные здесь агрегаты являются типовыми.
Силовая передача служит для преобразования мощност-
ного потока, идущего от двигателя к движителю.
В силовую передачу входят следующие агрегаты: главный фрик-
цион, коробка передач, механизм поворота, бортовые передачи.
Иногда выделяется коническая пара — главная передача.
Лебедка предназначается для подтягивания грузов, вытаски-
вания застрявших машин, а также для самовытаскивания тягача.
Она устанавливается в средней или кормовой части корпуса или
рамы тягача и получает привод от силовой передачи, обычно от ко-
робки передач (см. рис. 13).
Тягово-сцепной прибор служит для присоединения к
тягачу буксируемого прицепа (артиллерийской системы).
В современных быстроходных тягачах применяются-тягово-сцеп-
ные приборы с пружинной амортизацией.
ОБЩАЯ КОМПОНОВКА ТЯГАЧА
Компоновкой называется размещение в процессе проектирования
машины всех ее узлов и агрегатов, их взаимоувязка и обеспечение
их взаимодействия.
Компоновка должна обеспечивать:
— удобство размещения экипажа, расчета и грузов;
— доступность и удобство обслуживания, удобство монтажа и
демонтажа основных агрегатов;
— правильную развеску грузов с целью получения необходимой
эпюры нагрузок на опорные катки, а также наиболее низкого поло-
жения центра тяжести машины;
— малогабаритность машины.
Компоновка прежде всего определяется размещением на машине
двигателя с его системами обслуживания, агрегатов силовой пере-
дачи, кабины и грузовой платформы.
На размещение двигателя и агрегатов силовой передачи решаю-
щее влияние оказывает выбор расположения ведущих колес — пе-
реднее и заднее.
Вначале в гусеничных тягачах предпочтение отдавалось зад-
нему расположению ведущих колес. Такое расположение было
заимствовано от танков и определялось условиями танковой компо-
новки машины, при которой двигатель и агрегаты силовой передачи
размещаются в кормовой части, а передняя и средняя части отво-
дятся под отделение управления и боевое отделение, где разме-
щается экипаж и вооружение танка.
В пользу заднего расположения ведущих колес, кроме того, вы-
21
двигаются следующие соображения. При переднем расположе-
нии происходит натяжение задней наклонной и верхней свободных
ветвей гусениц, вследствие чего перед передними опорными катками
собирается петля; при повороте машины гусеницы могут соскочить.
При заднем расположении ведущих колес петля значительно
меньше, так как меньше длина натягиваемой свободной ветви
(задней наклонной).
Кроме того, при передних' ведущих колесах больше шарниров
сопряжения работает под рабочим натяжением, вследствие чего
гусеницы должны быстрее изнашиваться.
Однако в тягачах предпочтение все же начали отдавать перед-
нему расположению ведущих колес, так как это значительно упро-
щает компоновку машины. Вопрос же об ускоренном износе гусе-
ниц при переднем расположении ведущих колес требует еще тща-
тельной экспериментальной проверки.
Компоновка тягача М-2
Тягач М-2 (рис. 16) имеет автомобильную компоновку с перед-
ним расположением двигателя и с задним расположением ведущих
колес, а также части агрегатов силовой передачи. Так как на тя-
гаче применен автомобильный двигатель, смонтированный заодно
с коробкой передач и расположенный продольно, то в силовую пере-
дачу введен специальный агрегат — коническая передача,
состоящая из пары конических шестерен, расположенных в отдель-
ном картере. Коническая передача вместе с механизмом поворота
помещается в кормовой части тягача.
При данной компоновке через весь корпус тянутся длинный
карданный вал и тяги привода управления механизмом поворота.
Силовая установка и силовая передача размещены по всей
длине корпуса. Такую внутреннюю компоновку тягача нельзя при-
знать удачной.
Компоновка тягача АТ-П
Тягач АТ-П (рис. 17) имеет перевернутую компоновку тягача
М-2. Ведущие колеса — передние, коническая передача (коническая
пара) и механизм поворота расположены в передней части тягача.
Вследствие этого отсутствуют карданный вал и длинные тяги при-
вода управления механизмом поворота. Компоновка более ком-
пактная, чем у тягача М-2.
Тягач АТ-П — специальная машина, предназначенная для дей-
ствий в зоне огня противника, поэтому она имеет броневую защиту
и вооружение (пулемет).
Чтобы лучше скрываться за складками местности, машина
должна быть низкой и короткой.
Уменьшение высоты тягача достигнуто за счет снижения грузо-
22
i г
Рис. 16. Компоновка тягача М-2:
/ — двигатель; 2 — коробка передач; 3 — карданный вал; 4— коническая передача; 5 — механизм поворота
Рис. 17. Компоновка тягача АТ-П:
/ — двигатель; 2 — коробка передач; 3 — коническая пара; 4 — механизм поворота
вой платформы и размещения сидений экипажа (механика-води-
теля и пулеметчика) непосредственно на полу корпуса, по обе сто-
роны от двигателя.
Максимально сокращена и длина тягача за счет сокращения
длины ходовой части. В свою очередь сокращение длины ходовой
части достигнуто за счет применения так называемого несущего
направляющего колеса, опущенного на землю.
Компоновка тягача АТ-Л
Тягач АТ-Л (рис. 18) имеет переднее расположение ведущих
колес. Вся силовая передача, за исключением бортовых передач,
заключена в одном агрегате — в механизме передач и поворота
Рис. 18. Компоновка тягача АТ-Л:
Z — двигатель; 2 — МПП; 3 — лебедка
24
(МПП). Этот механизм специально спроектирован для данного
тягача. Он имеет небольшую длину, благодаря чему значительно
сократилась и длина силовой установки и силовой передачи, а ком-
поновка агрегатов, входящих в силовую установку и силовую пе-
редачу, получилась чрезвычайно плотной.
Тягач оборудован лебедкой, расположенной в средней части
корпуса.
Компоновка тягача АТ-Л является типичной
для современных отечественных артиллерий-
ских тягачей.
Компоновка тягача АТ-С
Компоновка агрегатов силовой установки и силовой передачи
тягача АТ-С (рис. 19) напоминает компоновку тягача М-2. Распо-
ложение ведущих колес заднее. Двигатель вместе с главным фрик-
Рис. 19. Компоновка тягача АТ-С;
Z — двигатель; 2 — главный фрикцион; 3 — карданный вал; 4 — МПП
ционом располагается в передней части тягача; через весь кор-
пус тянется длинный карданный вал, который соединяет главный
фрикцион с передачей (МПП), расположенной в кормовой части
тягача.
В эту передачу входят коробка передач, коническая пара
и механизм поворота. В средней части машины расположена ле-
бедка с выдачей троса вперед (у тягача АТ-Л трос выдается
назад).
Вследствие того что тягач АТ-С имеет двойную кабину, длина
грузовой платформы сильно сократилась.
Компоновка тягача АТ-Т
По компоновке агрегатов силовой установки и силовой пере-
дачи тягач АТ-Т (рис. 20) родственен тягачу АТ-Л. Он также
имеет переднее расположение ведущих колес. Специально для
25
Рис. 20. Компоновка тягача АТ-Т.
I — двигатель; 2 — коробка передач; 3 ~ механизм поворота; 4 — лебедка
этого тягача спроектирована силовая передача (коробка передач
с конической парой), которая позволила сократить длину силовой
установки и силовой передачи.
Так как силовая установка и силовая передача тягача разме-
щены впереди, то в его средней части оказалось возможным распо-
ложить топливные баки большой емкости, а в кормовой части —
мощную двадцатитонную лебедку.
Вследствие того что кабина надвинута на двигатель, тягач
имеет очень длинную грузовую платформу (кузов).
Компоновку тягача АТ-Т, как и тягача АТ-Л, следует считать
образцовой.
Заметим, что в обоих тягачах применены специальные
агрегаты силовой передачи, спроектированные с уче-
том особенностей компоновки тягача. Это главным образом и поз-
волило значительно уплотнить компоновку этих тягачей.
ГЛАВА II
ГЛАВНЫЕ ФРИКЦИОНЫ
1. НАЗНАЧЕНИЕ И КЛАССИФИКАЦИЯ
ГЛАВНЫХ ФРИКЦИОНОВ
НАЗНАЧЕНИЕ ГЛАВНОГО ФРИКЦИОНА
В ступенчатых зубчатых коробках передач передачи переключа-
ются выключением пары ранее включенных шестерен и включением
новой пары шестерен, благодаря чему изменяется передаточное
число коробки.
Шестерни можно включать, вводя в зацепление зубья включае-
мых шестерен, при постоянном же зацеплении шестерен — вводя в
зацепление кулачки специальных соединительных (кулачковых)
муфт.
При переключении трудно уравнять окружные скорости вклю-
чаемых элементов (зубьев или кулачков) так, чтобы включение
происходило без удара.
Чтобы уменьшить величину удара, надо уменьшить маховую
массу, связанную с одной из переключаемых шестерен. Так как
наибольшая масса находится со стороны двигателя (в первую оче-
редь его маховик), то для уменьшения удара необходимо отклю-
чить двигатель от коробки передач. Это делается с помощью спе-
циальной фрикционной муфты, которую устанавливают между дви-
гателем и коробкой передач. В автомобилях эта муфта называется
сцеплением.
В силовой передаче гусеничных машин применяются фрикцион-
ные муфты различного назначения. Муфта, установленная между
Двигателем и коробкой передач, считается главной и носит назва-
ние г л а в н о г о фрикциона.
Кроме отключения коробки передач от двигателя, главный
фрикцион служит также для плавного соединения коробки с дви-
гателем после переключения передачи на ходу и при трогании ма-
шины с места.
Главный фрикцион является также устройством, предохраняю-
щим агрегаты силовой передачи от перегрузок, так как он ограни-
чивает динамические нагрузки, возникающие в силовой передаче
вследствие резкого изменения скорости движения тягача, напри-
мер, при наезде на местные препятствия, при резком изменении
сопротивления движению и т. д,
27
В зимнее время, когда масло в коробке передач застывает,
главный фрикцион позволяет отключать двигатель от силовой пе-
редачи и тем самым облегчает его прокручивание при запуске.
Главный фрикцион представляет собой выключаемую фрик-
ционную муфту. Однако принципиально мыслимо и другое
устройство главного фрикциона, например в виде электромагнит-
ной, гидродинамической или гидростатической муфты.
В настоящее время в самоходных машинах применяются глав-
ные фрикционы только двух типов: фрикционные муфты или муфты
смешанного типа в виде двух соединенных между собой муфт фрик-
ционного и гидродинамического типа (гидромуфта).
КЛАССИФИКАЦИЯ ГЛАВНЫХ ФРИКЦИОНОВ
Главные фрикционы можно классифицировать по следующим
признакам:
По устройству:
— дисковые (однодисковые и многодисковые);
— конусные;
— колодочные;
— пружинные и беспружинные.
По материалу трущихся поверхностей:
— без обшивки, работающие сталь по стали;
— с обшивкой в виде медно-асбестовых, асбобакелитовых или
металлокерамических накладок, работающих по стали или по чу-
гуну.
По характеру работы:
— сухие;
— работающие в масле.
По нагруженности или разгруженности осевыми усилиями:
— полностью разгруженные;
— полуразгруженные.
Кроме того, как указывалось выше, в качестве главных фрик-
ционов могут применяться гидромуфты.
В тягачах в настоящее время применяются только сухие диско-
вые фрикционы без обшивки или с фрикционной обшивкой.
На рис. 21 приведена принципиальная схема пружинного су-
хого однодискового фрикциона.
Фрикцион состоит из следующих трех групп деталей: веду-
щих деталей, в число которых входят маховик / двигателя и
нажимной диск 3; ведомых деталей, в число которых входят
ведомый диск 2 и ведомый вал фрикциона; деталей меха-
низма выключения, в число которых входят муфта выклю-
чения 5, рычаги выключения 6, нажимные пружины 4 и отжимные
пальцы 7.
Во включенном положении под действием пружин 4 ведомый
диск 2 фрикциона зажат между маховиком и нажимным диском 3,
благодаря чему все устройство вращается как одно целое.
28
При нажатии на муфту 5 рычаг 6 поворачивается и отводит
отжимные пальцы 7, которые связаны с нажимным диском 3. Вме-
сте с пальцами отводится и нажимной диск, благодаря чему пре-
кращается сжатие ведомого диска и фрикцион выключается.
Р При снятии усилия с муфты выключения под действием сжатых
пружин фрикцион возвращается в свое первоначальное положе-
ние, т. е. включается.
Конструктивно фрикционы могут значительно отличаться один
от другого, но любой фрикцион состоит из перечисленных трех
групп деталей.
Рис. 22. Схема многодискового
фрикциона:
/ — ведомый вал; 2 — ведомые диски; 3 —
ведущие диски; 4 —нажимной диск;
5 — пружина; 6 — отжимной диск; 7 — не-
подвижная поводковая чашка; 8 — по-
движная поводковая чашка; 9— ведущий
вал; 10 — маховик; // — шариковый меха-
низм выключения
Рис. 21. Схема пружинного
однодискового фрикциона:
/ — маховик; 2 — ведомый диск; 3 —
нажимной диск; 4 — пружина; 5 —
муфта выключения; 6 — рычаг;
7 — пален
Рассматриваемый здесь фрикцион принадлежит к типу полураз-
груженных фрикционов.
Полуразгруженным называется такой фрикцион, у которого при
выключении появляется осевая сила, передающаяся на вал сосед-
него агрегата, например на вал двигателя или на вал коробки
передач. Осевое усилие создает дополнительную нагрузку на под-
шипники вала и может явиться причиной их повышенного из-
носа.
В рассматриваемом фрикционе при выключении появляется
осевая сила, которая стремится сдвинуть маховик влево, в сто-
рону двигателя, т. е. нагружающая подшипники вала двигателя.
Во включенном положении усилие пружины на соседние агрегаты
не передается.
На рис. 22 приведена принципиальная схема многодискового
Фрикциона.
Этот фрикцион состоит из деталей следующих групп: веду-
29
щих деталей — маховика 10, отжимного диска 6, нажимного
диска 4, ведущих дисков 3; ведомых деталей — ведомых ди-
сков 2, ведомого вала 1 с посаженным на нем несущим диском;
деталей шарикового механизма выключения —
неподвижной поводковой чашки 7, подвижной поводковой чашки 8
и уложенных между ними в специальных лунках 2 (рис. 23) от-
жимных шариков 1.
Рис. 23. Устройство шарикового механизма выключения:
1 — шарик; 2 — лунка
Механизм выключения работает следующим образом.
При нажатии на педаль фрикциона подвижная поводковая
чашка поворачивается относительно неподвижной. Шарики нака-
тываются на наклонные поверхности лунок, вследствие чего непо-
движная чашка отжимается в осевом направлении. Неподвижная
чашка через шариковый подшипник воздействует на отжимной
диск 6 (см. рис. 22), связанный пальцами с нажимным диском 4.
При перемещений отжимного диска направо фрикцион выклю-
чается.
Фрикцион принадлежит к типу полностью разгруженных, так
как и во включенном и в выключенном положении он не передает
осевой нагрузки на соседние агрегаты. Действительно, при вклю-
чении усилие пружин замыкается внутри фрикциона. В выключен-
ном положении, когда чашки разведены, усилие, действующее на
шарики механизма выключения, с одной стороны передается через
левый упорный подшипник на буртик вала 9, стремясь сдвинуть
30
' влево а с другой стороны через правый упорный подшипник
ваЛ имной диск 6 и через пружины 5 на маховик 10. Так как
Ндховик посажен на вал, го эго усилие стремится.сдвинуть вал
вправо В результате оба усилия уравновешиваются.
2. ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ К ГЛАВНОМУ
ФРИКЦИОНУ
К конструкции главного фрикциона предъявляются следующие
основные требования.
Конструкция фрикциона должна обеспечивать:
полное (чистое) выключение фрикциона;
плавное и полное включение фрикциона;
минимальное усилие и минимальную работу, требующиеся
для выключения фрикциона;
— уравновешенность осевых усилий во включенном и выклю-
ченном положении;
— минимальные инерционные массы, связанные с ведомым ва-
лом фрикциона (массы ведомых деталей фрикциона);
— хороший отвод тепла;
— отсутствие замасливания фрикционных поверхностей.
Рассмотрим эти требования.
1. При отсутствии полного выключения фрикциона переключе-
ние передач в коробке будет сопровождаться сильным шумом и
усиленным износом переключаемых шестерен, а также нагревом и
износом самой фрикционной муфты.
2. Чем более плавно включается фрикцион, тем более плавно
изменяет свою скорость машина и, следовательно, меньше динами-
ческие нагрузки, возникающие в силовой передаче и в ходовой ча-
сти машины. Плавность включения фрикциона зависит от его
устройства, от усилия выключения, от хода педали выключения
и т. д. Чем больше усилие выключения и чем меньше ход педали,
тем резче водитель будет включать фрикцион.
Фрикцион должен включаться полностью. Неполное включение
фрикциона, например вследствие попадания в его механизм выклю-
чения посторонних предметов или вследствие нарушения регули-
ровки механизма выключения, может вызвать сгорание фрикциона.
3. Чем меньше требуется усилие для выключения фрикциона,
тем меньше будет и усилие на педали управления фрикционом, а
следовательно, легче будет управлять машиной.
Усилие на педали зависит от передаточного числа привода
Управления. Чем больше передаточное число привода, тем меньше
усилие на педали. Однако с увеличением передаточного числа уве-
личивается и ход педали. Ход педали не может быть больше опре-
клЛенн°й величины (около 200 мм), так как в противном случае вы-
огп ЧЭ1Ь Финкен будет неудобно. Поэтому передаточное число
необНИЧИВается определенным пределом. Чем меньше будет работа,
°димая для выключения главного фрикциона, тем большее
31
передаточное число можно осуществить в приводе, а следова
тельно, при заданном ходе педали получить меньшее усилие вы-
ключения фрикциона.
Таким образом, усилие на педали управления фрикционом в
конечном счете определяется работой, необходимой для выключе-
ния фрикциона.
4. В различных схемах механизмов выключения фрикциона
осевые усилия, возникающие вследствие действия нажимных пру-
жин, могут полностью уравновешиваться внутри фрикциона как
в выключенном, так и во включенном его положении. В некоторых
же типах механизмов выключения осевые усилия уравновешива-
ются только во включенном положении фрикциона. В фрикционах
тяжелых гусеничных машин осевое усилие при выключении может
достигать очень значительной величины.
5. При переключении передач вследствие неравенства окружных
скоростей включаемых шестерен в зубьях последних (или в ку-
лачках соединительных муфт, если переключение производится с по-
мощью кулачковых муфт) происходит удар. Сила удара зависит
от разности скоростей и масс деталей, связанных с включаемыми
шестернями. Чем меньше масса ведомых деталей фрикциона, свя-
занная с ведущим валом коробки передач, а следовательно, и с
одной из включаемых шестерен, тем меньше и сила удара. По-
этому необходимо уменьшать массу ведомых деталей фрикциона.
6. При частом переключении передач, например, при движении
машины на местности- в главном фрикционе выделяется большое
количество тепла, вследствие чего фрикцион перегревается и может
даже сгореть. Это тепло должно отводиться от фрикциона.
Отвод тепла обеспечивается рядом конструктивных мероприя-
тий. Так, если фрикцион с обшивкой, то ее прикрепляют к тонким
ведомым дискам фрикциона, тем самым изолируя эти диски от на-
грева. Ведущие же диски, наоборот, делаются массивными для
лучшего поглощения тепла.
Металлокерамическую обшивку, которая обладает удовлетво-
рительной теплопроводностью, прикрепляют к ведущим дискам,
чтобы не увеличивать вес ведомых дисков.
Для лучшего отвода тепла главный фрикцион часто размещают
так, чтобы он охлаждался потоком воздуха, идущим к радиаторам
(или от радиаторов) системы охлаждения двигателя. При этом
в деталях главного фрикциона предусматриваются специальные
вентиляционные отверстия для лучшей циркуляции воздуха внутри
фрикциона, а также охлаждающие ребра.
7. При проникании смазки к трущимся поверхностям фрик-
циона последние будут замасливаться и фрикцион начнет пробук-
совывать и нагреваться. Поэтому все подшипники фрикциона, из
которых масло может попасть к трущимся поверхностям, должны
тщательно изолироваться. Изоляция подшипников осуществляется
с помощью сальников, различных маслоотражательных устройств,
а также с помощью отводных канавок.
Кроме приведенных здесь специальных требований, к главным
32
з. КОНСТРУКЦИИ ГЛАВНЫХ ФРИКЦИОНОВ
Рассмотрим некоторые типовые конструкции главных фрикцио-
нов применяющиеся в быстроходных гусеничных машинах, в том
числе и в тягачах.
ОДНОДИСКОВЫЙ ФРИКЦИОН С ЦЕНТРАЛЬНОЙ ПРУЖИНОЙ
Данный фрикцион применяется на тягачах АТ-Л и М-2.
Принципиальная схема этого фрикциона ничем не отличается
от рассмотренной нами выше принципиальной схемы однодиско-
вого фрикциона. Поэтому рассмотрим здесь только особенности
его конструкции (рис. 24).
Наличие одной центральной пружины упрощает конструкцию
фрикциона и создает более равномерное сжатие фрикционых ди-
сков; причем наличие конической пружины по сравнению с цилин-
дрической (на некоторых фрикционах применяется цилиндрическая
центральная пружина, см. ниже) значительно уменьшает размер
фрикциона по длине.
Механизм выключения фрикциона рычажный. Рычаги упругие.
Наличие упругих рычагов создает равномерность в передаче уси-
лия от центральной пружины на нажимной диск и одновременно
обеспечивает плавность включения фрикциона.
В фрикционе имеются специальные пружинки, служащие для
оттяжки нажимного диска. Пружинки обеспечивают чистоту вы-
ключения фрикциона.
Хвостовик ведомого вала фрикциона установлен на шарико-
подшипнике, в котором нет уплотняющих сальников. Изоляция
подшипника от фрикционных дисков обеспечивается выполненной
в маховике специальной канавкой с отверстиями. При вытекании
из Подшипника смазка попадает в канавку и центробежной силой
выбрасывается из фрикциона наружу. Тем самым предотвра-
щается попадание смазки к трущимся поверхностям фрикциона,.
Кроме того, следует иметь в виду, что подшипник фрикциона сма-
зывается только при сборке густой смазкой и в небольшом коли-
честве.
Для предохранения от попадания смазки к фрикциону со сто-
роны коробки передач имеется тщательное уплотнение шарико-
вого подшипника с помощью маслоотражательного кольца п мас-
лосгонной резьбы.
3-20 33
Рис. 24. Однодисковый фрикцион с цен-
тральной пружиной:
/ — маховик; 2 — ведомый диск; 3 — нажимной диск;
4 — отжимной стакан; 5 — упругий рычаг; 6 — пру-
жина; 7 — муфта выключения
ДВУХДИСКОВЫЙ ФРИКЦИОН С ЦЕНТРАЛЬНОЙ ПРУЖИНОЙ
Фрикцион установлен на тягаче АТ-С. Он принадлежит к типу
сухих двухдисковых фрикционов (по числу ведомых дисков) с
центральной пружиной (рис. 25).
Ведомые диски имеют накладки из асбобакелита. Фрикцион
полуразгр уженный.
К ведущим деталям фрикциона относятся: маховик 1, ведущий
(средний) диск 2, нажимной диск 4, фланец маховика и детали
крепления.
К ведомым деталям относятся: два ведомых диска 3 внутрен-
ний барабан 5 и ведомый вал 6.
Рис. 25. Двухдисковый фрикцион с центральной пружиной:
баоя^аХ?вик> ведущий диск; 3 — ведомые диски, 4 — аэжпмной диск; 5 — внутренний
раоан; 6 — ведомый вал; 7 — муфта вы к тючегпьч; 8 — нажимной рычажок; 9 — пружин-
ная пластина; /0 — крестовина
35
Рис. 26. Механизм включения — выключения
беспружинного фрикциона
/ — крестовина; 2 — пружинная пластина; 3 — нажимной кула-
чок; 4 — ось нажимного кулачка; 5 — корпус фрикциона;
6 — нажимной диск
Механизм выключения состоит из трех нажимных рычажков 8,
пружинных пластин 9, крестовины 10, центральной пружины и
муфты выключения 7.
Под действием предварительно сжатой центральной пружины
крестовина 10 перемещается влево и через пластины 9 поворачи-
вает рычажки 8. Последние в свою очередь перемещают нажим-
ной диск 4, сжимая комплект фрикционных дисков. Фрикцион
включается.
При выключении фрикциона крестовина перемещается в обрат-
ном направлении, и фрикцион выключается.
Конструкция фрикциона сложная. Это объясняется тем, что
данный фрикцион является модификацией, причем усложненной,
беспружинного фрикциона, применяющегося в сельскохозяйствен-
ных тракторах.
На рис. 26 приведена принципиальная схема механизма вклю-
чения — выключения беспружинного фрикциона.
Механизм состоит из следующих деталей: крестовины 1, пру-
жинных пластин 2, нажимных кулачков 3, посаженных на оси 4,
установленные в корпусе 5 фрикциона.
При перемещении крестовины налево кулачки 3 поворачива-
ются п перемещают нажимной диск 6, который сжимает комплект
фрикционных дисков. Так как пластины 2 упругие, то при этом
происходит заклинивание рычажной системы, вследствие чего
фрикцион остается включенным.
Чтобы выключить фрикцион, необходимо приложить усилие и
переместить крестовину вправо.
Таким Трапом, фрикцион требует двухстороннего перемещения
крестовины, ио тогда он можсг управляться только рычагом, а не
36
палью. В быстроходных тягачах требуется педальное управление
фпикционом, поэтому в фрикцион и была введена центральная
ружина, что значительно усложнило его конструкцию.
МНОГОДИСКОВЫЙ ФРИКЦИОН С ШАРИКОВЫМ МЕХАНИЗМОМ
ВЫКЛЮЧЕНИЯ
На рис. 27 представлен многодисковый фрикцион с шариковым
механизмом выключения, установленный на тягаче АТ-Т.
фрикцион состоит из следующих основных деталей: ведущего 1
и ведомого 2 барабанов, ведущих 8 и ведомых 3 дисков, пружин 7
и нажимного диска 4. Ведущий (или наружный) барабан 1 связан
с коленчатым валом двигателя; в барабане имеются внутренние
шлицы, на которые надеты ведущие диски 8; между ведущими
дисками уложены ведо-
мые диски 3, которые с
помощью шлицев связаны
с ведомым (внутренним)
барабаном 2. Комплект
дисков сжимается пружи-
нами 7 через нажимной
диск 4. Фрикционные дис-
ки не имеют обшивки.
В данной конструк-
ции предусмотрено тща-
тельное уплотнение всех
подшипников от вытека-
ния-смазки. Подшипники
уплотняются фетровыми
сальниками и пружин-
ными кольцами.
Фрикцион принадле-
жит к типу полуразгру-
женных.
Многодисковый фрик-
цион значительно сложнее
однодискового. Однако он
Может передавать боль-
ший крутящий момент,
поэтому мно! одисковые
Фрикционы применяются
главным образом в тяже-
лых машинах.
Благодаря некоторой
Упругости, которой обла-
дает комплект дисков,
многодисковый фрикпион
включается более плавно,
Рис. 27. Многодисковый фрикцион с шарико-
вым механизмом выключения тягача АТ-Т:
1 — ведущий барабан; 2 — ведомый барабан; 3 — ведо-
мый диск; 4 — нажимной диск; 5—отжимной диск;
б — шариковый механизм выключения; 7 — пружина;
8 — ведущий диск
37
Рис. 28. Многодисковый фрикцион с шариковым механизмом
выключения:
/ — маховик; 2 —ведомый барабан; 3 — фрикционные диски; 4 — нажимной
диск; 5 — отжимной диск; 6 — шариковый механизм выключения; 7 — пружина:
зубчатая муфта
38
чём однодисковый. Выключение же однодискового фрикциона чище,
чем многодискового.
В многодисковом фрикционе ход выключения больше, чем в од-
нодисковом, поэтому при прочих равных условиях работа выклю-
чения многодискового фрикциона будет больше.
Многодисковые фрикционы не имеет большого смысла делать
с обшивкой, так как выбором соответствующего числа дисков
всегда может быть обеспечена передача нужного по величине кру-
тящего момента.
Однако иногда все же многодисковые фрикционы делают с об-
шивкой. Это объясняется следующими причинами.
Кроме увеличения примерно в 1,5—2 раза момента трения (при
одинаковом числе фрикционных дисков), обшивка допускает бо-
лее плавное включение фрикциона, а также исключает возмож-
ность заедания дисков и их коробления под действием высокой
температуры.
На рис. 28 представлен другой тип многодискового фрикциона.
фрикцион полуразгруженный, без обшивки, с шариковым меха-
низмом выключения 6. Конструктивно этот фрикцион, проще пре-
дыдущего и имеет меньший размер по оси.
Фрикцион установлен на носке коленчатого вала двигателя с
помощью двух центрирующих конусов, поджимаемых разрезной
резьбовой пробкой. В пробку входит внутренний конус, с помощью
которого пробка заклинивается на резьбе коленчатого вала.
Соединение ведомого вала фрикциона с ведущим валом ко-
робки передач осуществлено с помощью разъемной зубчатой
муфты 8. Такое соединение позволяет легко демонтировать и мон-
тировать коробку передач и двигатель, а также заменять изношен-
ные диски фрикциона, не демонтируя сам фрикцион и, следова-
тельно, не нарушая центровки двигателя и коробки передач.
МНОГОДИСКОВЫЙ ФРИКЦИОН С РЫЧАЖНЫМ МЕХАНИЗМОМ
ВЫКЛЮЧЕНИЯ
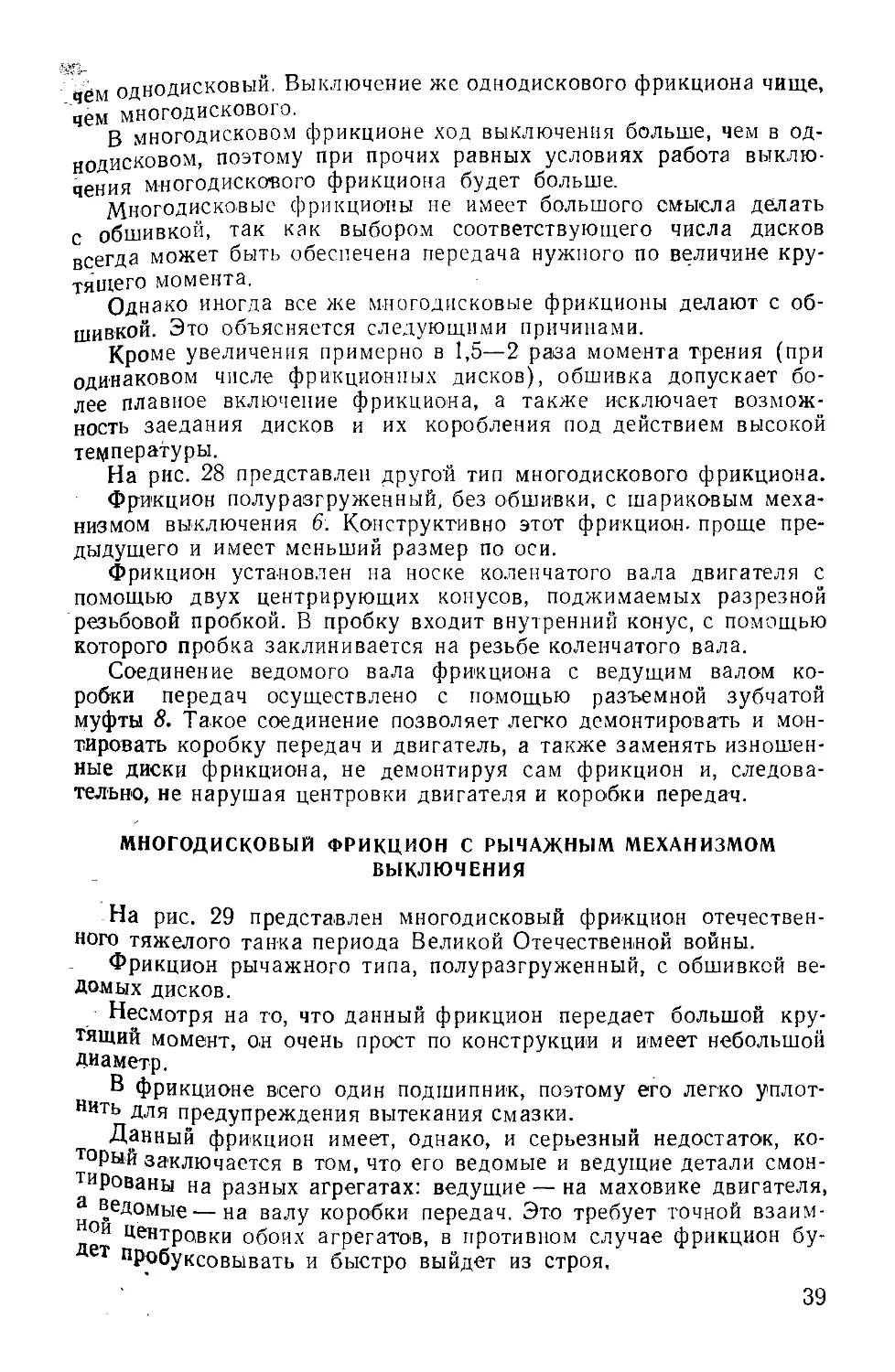
На рис. 29 представлен многодисковый фрикцион отечествен-
ного тяжелого танка периода Великой Отечественной войны.
Фрикцион рычажного типа, полуразгруженный, с обшивкой ве-
домых дисков.
Несмотря на то, что данный фрикцион передает большой кру-
тящий момент, он очень прост по конструкции и имеет небольшой
диаметр.
В фрикционе всего один подшипник, поэтому его легко уплот-
иить для предупреждения вытекания смазки.
Данный фрикцион имеет, однако, и серьезный недостаток, ко-
торый заключается в том, что его ведомые и ведущие детали смон-
тированы на разных агрегатах: ведущие — на маховике двигателя,
а ведомые—на валу коробки передач. Это требует точной взаим-
Ои центровки обоих агрегатов, в противном случае фрикцион бу-
т пробуксовывать и быстро выйдет из строя,
39
Рис. 29. Многодисковый фрикцион с рычажным меха-
низмом выключения.:
1 — ведущий Сара ан; 2 — ведомый ёараг.ан; 1 — ведущий диен, 4 - не-
дсмый диск, 5— нажимной диск; 6‘--рычаг механизма иык.'иочоиня.
7 — рычаг муфты выключения; 8 — пружина
40
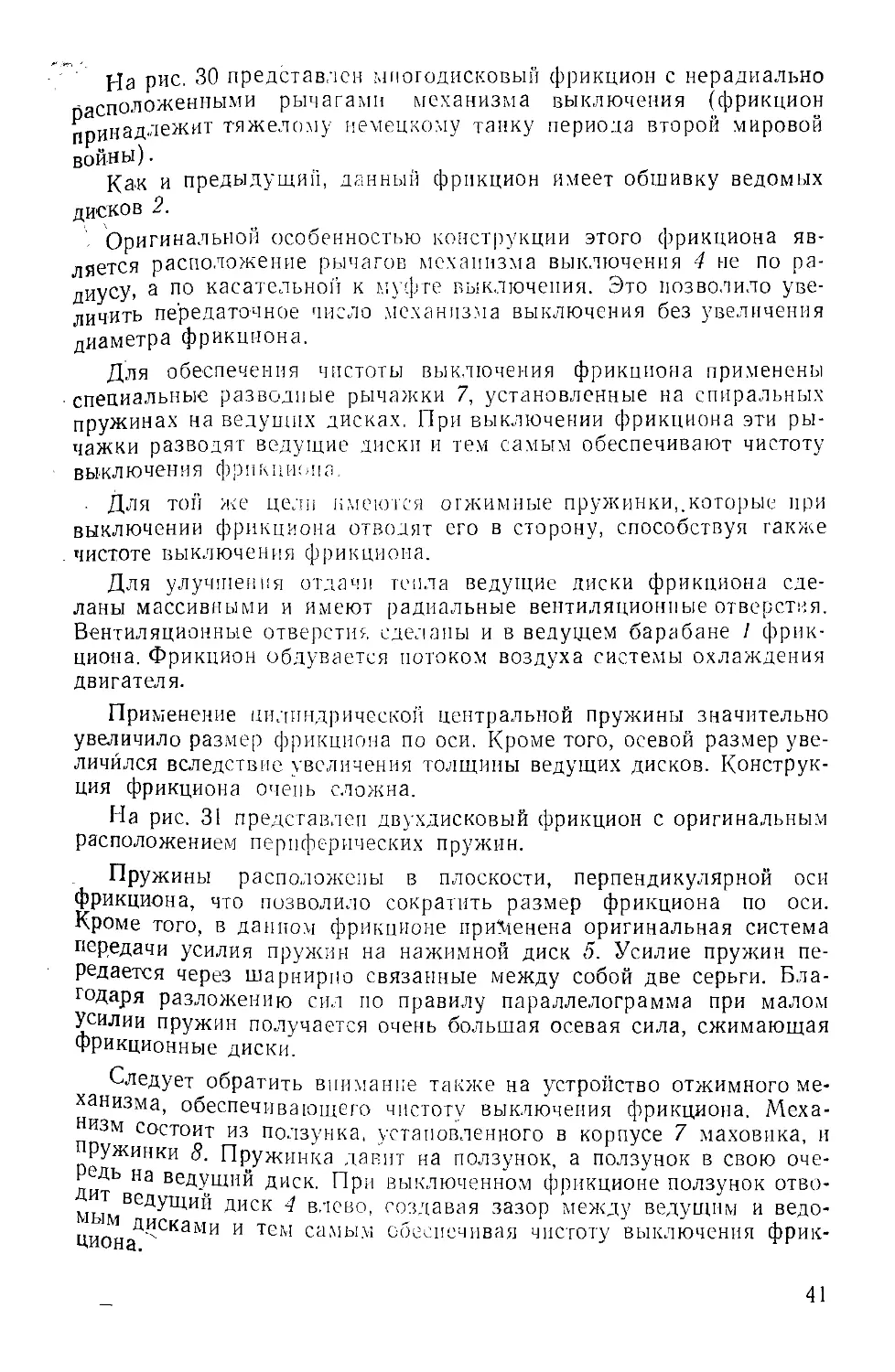
{4а рис. 30 представлен многодисковый
расположенными рычагами механизма
принадлежит тяжелому немецкому танку
войны).
Как и предыдущий, данный фрикцион
фрикцион с нерадиально
выключения (фрикцион
периода второй мировой
имеет обшивку ведомых
дисков 2.
Оригинальной особенностью конструкции этого фрикциона яв-
ляется расположение рычагов механизма выключения 4 не по ра-
диусу, а по касательной! к муфте выключения. Это позволило уве-
личить передаточное число механизма выключения без увеличения
диаметра фрикциона.
Для обеспечения чистоты выключения фрикциона применены
специальные разводные рычажки 7, установленные на спиральных
пружинах на ведущих дисках. При выключении фрикциона эти ры-
чажки разводят ведущие диски и тем самым обеспечивают чистоту
выключения фрикциона.
. Для тон же цели имеются отжимные пружинки,.которые при
выключении фрикциона отводят его в сторону, способствуя также
чистоте выключения фрикциона.
Для улучшения отдачи тепла ведущие диски фрикциона сде-
ланы массивными и имеют радиальные вентиляционные отверстия.
Вентиляционные отверстия сделаны и в ведущем барабане 1 фрик-
циона. Фрикцион обдувается потоком воздуха системы охлаждения
двигателя.
Применение цилиндрической центральной пружины значительно
увеличило размер фрикциона по оси. Кроме того, осевой размер уве-
личился вследствие увеличения толщины ведущих дисков. Конструк-
ция фрикциона очень сложна.
На рис. 31 представлен двухдисковый фрикцион с оригинальным
расположением периферических пружин.
Пружины расположены в плоскости, перпендикулярной оси
фрикциона, что позволило сократить размер фрикциона по оси.
Кроме того, в данном фрикционе применена оригинальная система
передачи усилия пружин на нажимной диск 5. Усилие пружин пе-
редается через шарнирно связанные между собой две серьги. Бла-
годаря разложению сил по правилу параллелограмма при малом
усилии пружин получается очень большая осевая сила, сжимающая
Фрикционные диски.
Следует обратить внимание также на устройство отжимного ме-
ханизма, обеспечивающего чистоту выключения фрикциона. Меха-
низм состоит из ползунка, установленного в корпусе 7 маховика, и
Ружинки 8. Пружинка давит на ползунок, а ползунок в свою оче-
дит*3 НЭ ведУщи® Диск. При выключенном фрикционе ползунок отво-
мымВеДУЩИЙ диск 4 влево, создавая зазор между ведущим и ведо-
ЦионаД'СКаМИ И TGM самь1м С'беспечивая чистоту выключения фрик-
41
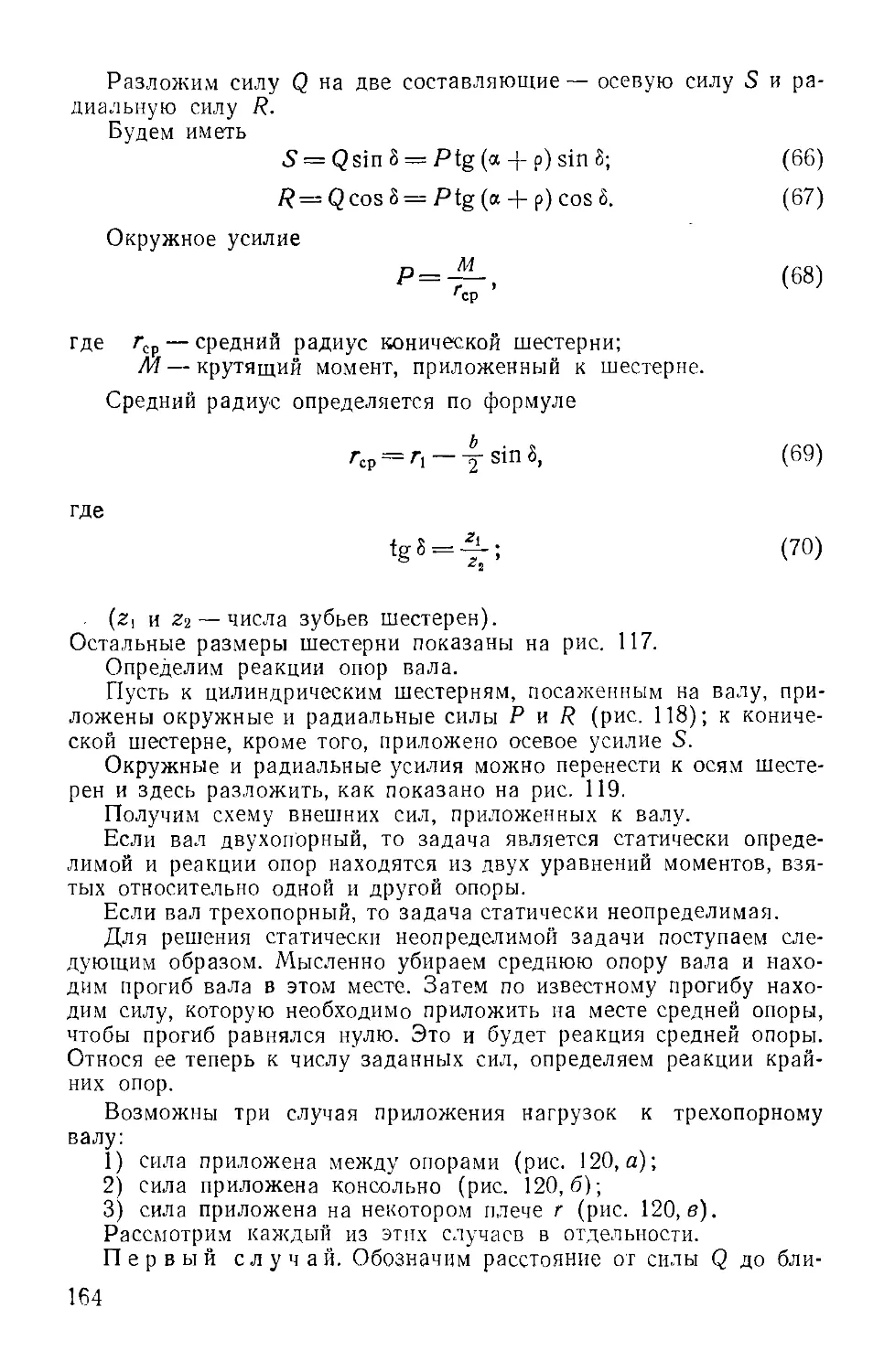
Рис. 30. Многодисковый фрикцион с нерадиально расположенными рычагами
механизма выключения:
/ — ведущий барабан; 2 — ведомый диск; 3 — ведомый вал; 4— рычаг механизма выключения}
4 — центральная пружина; 6 — опорный диск; 7 — разводные рычажки
42
7
Рис. 31. Двухдисковый фрикцион:
I — маховик; 2 — ведомый барабан; 3 — ведомый диск; 4 — ведущий диск; 5 — нажимной диск; 6 — рычажный механизм:
7 — корпус маховика; в — пружинка
4. ФРИКЦИОННЫЕ МАТЕРИАЛЫ
В главных фрикционах, как и в других фщщадонных элементах
силовых передач быстроходных гусеничных машин, применяются
следующие фрикционные пары трения: сталь по стали, чугун пи
стали, асбестовые материалы с различными, главным образом ме-
таллическими, примесями по стали, метал •’окгрж.иг.еские материалы
по стали.
Фрикционные пары из асбестовых г ог-тнллоксрамических
материалов могут работать как в масле, так и без масла (всухую).
Асбестовые материалы изготовляются из асбеста с добавле-
нием в него медной и цинковой стружки и пропитываются специ-
альными смолами,
Медь и цинк повышают теплопроводность материала и предо-
храняют его от задиров. Смолы являются связующими компонен-
тами.
За последние годы широкое применение в качестве фрикцион-
ного материала находит металл о к е р а м и к а. Особенностью
металлокерамики является почти полное отсутствие в ней органи-
ческих веществ — смол. Металлокерамические материалы бывают
на медной и на железной основе. Примерный состав металлокера-
мики на медной основе следующий: медь 60—75%, цинк 5—10%,
железо 5—10%, свинец 5—10%, олово 5—7%, кремний до 1,5%
и графит до 7%.
В материалах на железной основе вместо меди применяется
окись железа (Fe2O3) с добавлением небольшого количества смо-
листых веществ для прочности.
Фрикционные материалы должны обладать следующими свой-
ствами:
1. Иметь высокий коэффициент трения. В медно-асбестовых ма-
териалах максимальный коэффициент трения обычно не превы-
шает 0,4. В металлокерамических материалах он иногда рав-
няется 0,55 и даже более '.
2. Иметь неизменяющийся коэффициент трения при нагреве
до 200—250° С.
3. Обладать хорошей теплопроводностью.
4. Быть прочными и износоустойчивыми.
Износоустойчивость фрикционных материалов может оцени-
ваться величиной удельного износа, который определяется по
формуле
где g— вес изношенного материала в г;
М— момент трения в кгм\
ю—угловая скорость барабана стенда, на котором ведутся
испытания, в 1/сек;
Т— время испытания в часах.
1 Канд. техн, наук И. М. Зельцер мац. Фрикционы и тормоза гусеничных
машин. Изд. Академии БТВ, 1951 г.
44
Учитывая, что радиус барабана стенда — величина постоянная
й постоянна площадь испытываемых фрикционных образцов, мо-
мент будет характеризовать удельное давление и коэффициент тре-
ния, a w — скорость скольжения.
Если абсолютный износ пропорционален этим величинам, а
также пропорционален времени, то удельный износ А должен быть
величиной постоянной.
Зависимость коэффициента трения р и удельного износа А
фрикционных обшивок от скорости скольжения v и удельного дав-
ления q, полученная на барабанном стенде, приведена в табл. 3.
Таблица 3
Коэффициент трения и удельный износ фрикционных обшивок
(по И. М. Зельцерману)
Материал обшивок Скорость сколь- жения v в м/сек и удельное давление q в кг см* Коэффициент трения р. Удельный износ А в г л.с.час
Медно-асбестовая Закладка по стали V 1 1,8 ' 2,5 1 1,8 2,5
3 11 0,32 0,35 0,4 I 0,42 0,4 0,45 0,095 0,204 0,070 0,967 0,100 1,330
Металлокерамика на медной основе V 0,65 1,25 2 0,65 1,25 2
3 11 0,47 0,55 0,52 0,53 0,50 0,466 0,330 0,791 0,700 1,305
Металлокерамика на железной основе V 0,75 1,5 2,0 0,75 1,5 2,0
3 11 0,43 0,40 0,55 0,30 0,57 0,35 0,915 0,830 0,818 0,940 0,695 1,670
Из табл. 3 следует, что с увеличением скорости скольжения
Для разных материалов наблюдается как увеличение, так и паде-
ние коэффициента трения и удельного износа.
Для определения коэффициента трения при испытании фрик-
ционных обшивок была использована также дисковая муфта
с двумя парами поверхностей трения ’. Изменение удельных дав-
лений здесь достигалось заменой нажимных пружин и равнялось
0,67—2,24 кг/см2. Испытанию подвергались различные фрикцион-
Ные накладки, работающие по чугуну. Все испытания проводились
при сухом трении. 1
1 Канд, техн, наук Ю. Н. Кирдяшев. Диссертация. Ленинград, 1953 г.
45
В качестве фрикционных накладок использовались материалы:
1. Сталь 50Г (ГОСТ В —1050—41). Эта сталь применяется для
изготовления дисков трения; она имеет на поверхностях трения
твердость Яд = 229.
2. Асбобакелитовые ткани. Твердость на поверхностях трения
этого материала 77д = 17.
3. Асбокартонобакелит. Твердость на поверхностях трения
Нв = 17.
Фрикционные накладки из всех материалов имели наружный
диаметр 180 и внутренний диаметр 124 мм. Суммарная поверх-
ность трения для всех трущихся пар была одинаковой и равнялась
268 см2.
Результаты испытаний приведены в табл. 4.
Таблица 4
Коэффициент трения фрикционных материалов
(по Ю. Н. Кирдяшеву)
Фрикционный материал С користь с коль же- нин v в mi сек и удельное давление q в кг;см* Коэффициент трения р.
Сталь 50Г по чу- гуну V 0,67 1,34 2,24
4 28 0,298 0,094 0,253 0,085 0,185 0,071
Асбобакелитовые ткани по чугуну ? V 0,67 1,34 2,24
4 20 0,339 0,157 0,282 0,134 0,230 0,104
Асбокартонобаке- лит по чугуну Q V 0,67 1,34 2,24
4 20 0,332 0,156 0,279 0,131 0,222 0,104
Из табл. 4 следует, что коэффициент трения сильно зависит от
скорости скольжения и от удельного давления. С увеличением ско-
рости он уменьшается в 2—3 раза, а с увеличением удельного дав-
ления— в 2—2,5 раза.
Опыты Ю. Н. Кирдяшева показали, что падение коэффициентов
трения в зависимости от скоростей буксования при определен-
ных удельных давлениях получается более значительным для тру-
щихся поверхностей — сталь марки 50Г по чугуну и менее значи-
тельным для асбобакелитовых тканей и асбокартонобакелита по
чугуну. *
46
' Если скорость буксования меньше 4 м/сек, ко-
эффициенты трения всех испытанных фрикци-
онных материалов практически не Зависят от
скоростей буксования при данных удельных
давлениях.
Большие значения коэффициентов трения получаются при ис-
пользовании накладок с органическими компонентами. Величины
изменения коэффициентов трения в "зависимости от скоростей бук-
сования при данных удельных давлениях для накладок с органи-
ческими компонентами получились практически одинаковыми.
Коэффициенты трения металлических поверхностей не зависят
от температуры при повышении ее до 150°С.
Коэффициенты трения для накладок с органическими компонен-
тами практически не зависят от температуры при повышении ее
до 130—140° С; при дальнейшем повышении температуры проис-
ходит значительное снижение коэффициента трения.
Приведенные опытные данные по коэффициентам трения,
удельным давлениям и скоростям скольжения позволяют более
обоснованно выбирать их значение при расчете фрикционных эле-
ментов силовых передач тягачей.
5. РАСЧЕТ ГЛАВНОГО ФРИКЦИОНА ДИСКОВОГО ТИПА
Расчет главного фрикциона производится в следующей после-
довательности.
1. Определяем расчетный момент, или момент трения
фрикциона, по формуле
^ = Rnax. (1)
где р— коэффициент запаса;
7Итах — максимальный момент двигателя;
^=716,2^; (2)
/V
k—коэффициент приспособляемости двигателя;
- Ne — паспортная (номинальная) мощность в л. с.;
nN — число оборотов, соответствующее мощности Ne в об/мин.
Коэффициент приспособляемости определяется по характери-
стике двигателя. Для дизелей без корректора он равняется при-
мерно 1,1, для дизелей с корректором— 1,2—1,25. В карбюратор-
ных двигателях коэффициент приспособляемости обычно выше и
составляет 1,3—1,5.
Коэффициент запаса [3 выбирают в пределах 1,7—2,5. Чем
больше будет коэффициент запаса, тем надежнее работа фрикци-
Дна, тем реже его придется регулировать при износе. Однако при
слишком большом коэффициенте запаса получаются очень боль-
шие значения расчетных величин: момента трения, размеров фрик-
циона, усилий сжимающих пружин и т. д.
47
Для легких машин принимают коэффициент запаса ближе
к верхнему пределу, для тяжелых — к нижнему.
Для сельскохозяйственных тракторов, у которых фрикционом
пользуются редко, коэффициент запаса берут 2,5—3,5.
2. Определяем усилие пружин фрикциона.
Суммарное усилие пружин будет
р = (3)
|37М'С ’ v ’
где р—средний коэффициент трения фрикционных поверхностей;
—средний радиус дисков;
п — число пар трущихся поверхностей.
Здесь необходимо задаться коэффициентом трения р.
Для стальных дисков, работающих в условиях сухого трения
сталь по стали, можно принимать р = 0,18—0,20. Для других
фрикционных пар коэффициент трения следует определять из при-
веденных выше табл. 3 и 4, причем при минимальной скорости
скольжения и при соответствующем удельном давлении.
Удельное давление q в выполненных конструкциях фрикционов
обычно принимается в следующих пределах (в кг/сж2): для накла-
док сталь по стали 2—2,5; для асбестовых накладок 0,65—2,25;
для металлокерамических накладок 0,8—2; для металлокерамиче-
ских накладок, работающих в масле, 15—30.
Чем меньше будет принято удельное давление, тем меньше
будет износ фрикциона.
Необходимо далее задаться средним радиусом фрикционных
дисков
г _ О + гв
с 2 ’
где гц — радиус наружной окружности фрикционной поверхности
диска;
гв — радиус внутренней окружности.
Радиусом гс задаются из конструктивных соображений с уче-
том выполненных конструкций фрикционов (см. табл. 5).
Определяем число пар трущихся поверхностей п.
Удельное давление фрикционных поверхностей равно
Р
где F—площадь одной поверхности диска.
Приближенно F = 2кЬгс,
где Ь — ширина диска.
Подставляя в формулу для q значение Р и F, получим
преобразования
/г =_______
‘Znpqffy
после
(4)
где удельное давление q принимаем согласно приведенным выше
48
данным. Для дисков без фрикционных накладок можно принять
I) = (0,15—0,25)гс, для дисков с накладками Ь~ (0,3—0,4) гс.
3. Для обеспечения чистоты выключения фрикциона должен
быть принят зазор 8 между двумя дисками в выключенном поло-
жении фрикциона: для фрикционов, работающих в масле, 8 = 0,2—
0,3 мм\ для сухих фрикционов без накладок или с металлокерами-
ческими накладками 8 = 0,3—0,5: для сухих фрикционов с мяг-
кими (асбестовыми) накладками 8 = 0,5—0,6.
Ход выключения нажимного диска будет
5 = «б. (5)
4. Производим р а с чет пр у ж и н.
Для цилиндрических пружин с круглой проволокой имеем сле-
дующую расчетную формулу:
(6)
При выключении фрикциона пружины дополнительно поджи-
маются на величину хода нажимного диска S. При этом усилие
пружин изменяется от Р до Р . .
ах 8/;
Отсюда определяем диаметр проволоки
d= | 8Ршах . , (7)
' т:'гттах
.где РП.1Х следует принимать не выше \,2Р',
d — диаметр проволоки пружины в см\
D — средний диаметр пружины в см\
z — число пружин;
’ ттах— максимальное напряжение на кручение пружины.
Величину ттах принимают в пределах 4000—6000 кг/см2; у = 5—8;
число пружин z от 1 до 24.
: ' Предварительное сжатие пружины определяется по формуле
где I— число рабочих витков пружины;
О—модуль упругости второго рода (6^ 850 000 кг/сл2).
При полном сжатии пружин
max d-'z:.!
(9)
Разность/1|1ах — /равна ходу нажимного диска
Фрикциона
S = f р — Р\
/max J d*zG \ п1ах /
при выключении
4-20
49
Отсюда находим число рабочих витков пружины
I —d^zGS^ . J q .
где I равно полному числу витков /0 за вычетом двух витков, или
lo I —2.
Длина пружины в свободном состоянии будет
Z = kd +/max + (z’o - 1) Д, (П)
где Д — зазор между витками при полном сжатии пружины 0,5—
1,5 мм.
При расчете фрикциона следует пользоваться данными вы,пол
ненных конструкций.
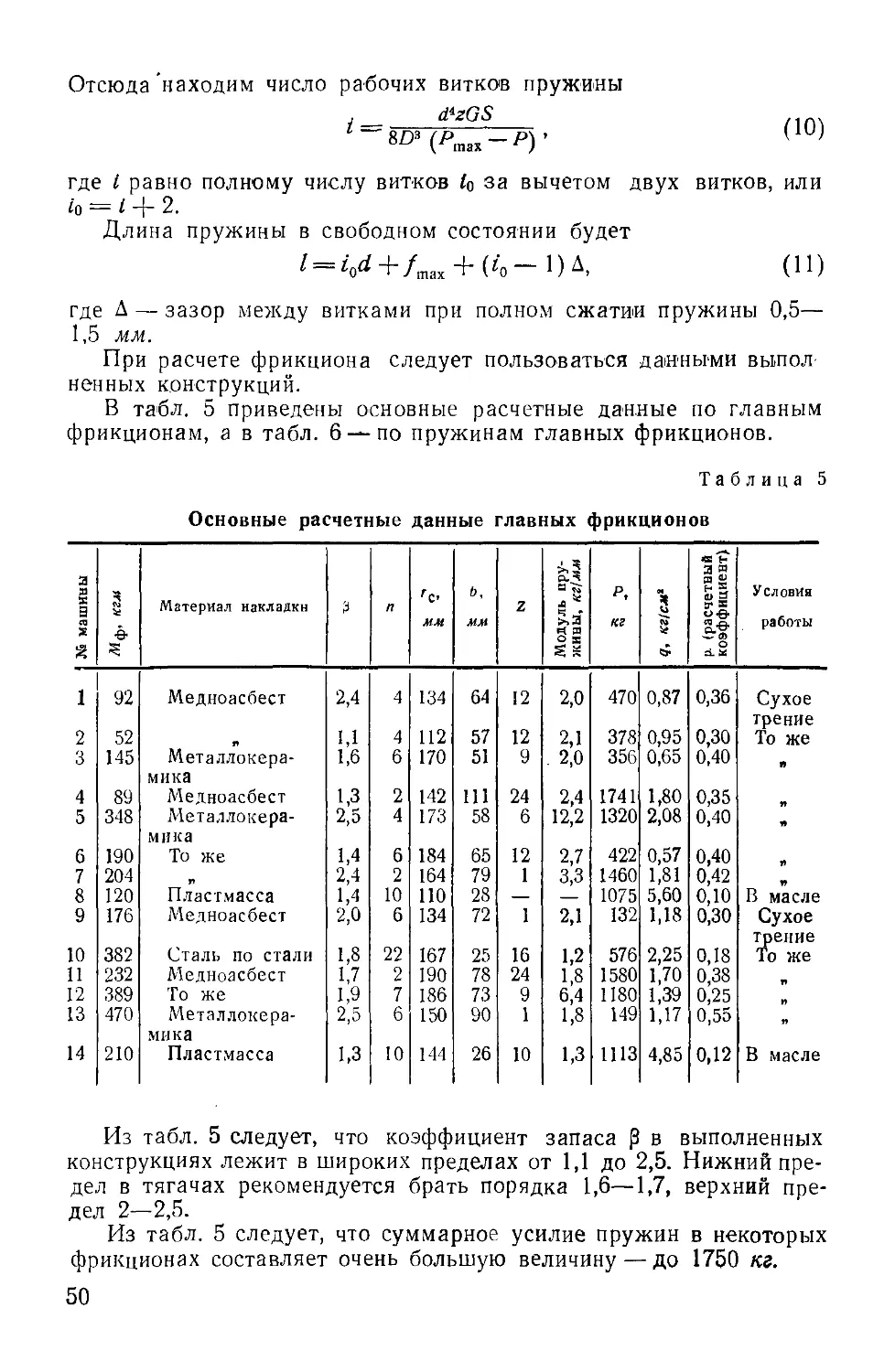
В табл. 5 приведены основные расчетные данные по главным
фрикционам, а в табл. 6 —по пружинам главных фрикционов.
Таблица 5
Основные расчетные данные главных фрикционов
№ машины I 3 к* е Материал накладки 3 п ГС’ мм ь, мм Z Модуль пру- жины, кг! мм pt кг 8 ie р. (расчетный коэффициент} Условия работы
1 92 Медноасбест 2,4 4 134 64 12 2,0 470 0,87 0,36 Сухое
2 52 1,1 4 112 57 12 2,1 378 0,95 0,30 трение То же
3 145 Металлокера- мика 1,6 6 170 51 9 2,0 356 0,65 0,40 1»
4 89 Медноасбест 1,3 2 142 111 24 2,4 1741 1,80 0,35
5 348 Металлокера- мика 2,5 4 173 58 6 12,2 1320 2,08 0,40
6 190 То же 1,4 6 184 65 12 2,7 422 0,57 0,40
7 204 Я 2,4 2 164 79 1 3,3 1460 1,81 0,42
8 120 Пластмасса 1,4 10 ПО 28 — 1075 5,60 0,10 В масле
9 176 Медноасбест 2,0 6 134 72 1 2,1 132 1,18 0,30 Сухое
10 382 Сталь по стали 1,8 22 167 25 16 1,2 576 2,25 0,18 Трение То же
11 232 Медноасбест 1,7 2 190 78 24 1,8 1580 1,70 0,38
12 389 То же 1,9 7 186 73 9 6,4 1180 1,39 0,25
13 470 Металлокера- мика 2,5 6 150 90 1 1,8 149 1,17 0,55 «
14 210 Пластмасса 1,3 10 144 26 10 1,3 1113 4,85 0,12 В масле
Из табл. 5 следует, что коэффициент запаса р в выполненных
конструкциях лежит в широких пределах от 1,1 до 2,5. Нижний пре-
дел в тягачах рекомендуется брать порядка 1,6—1,7, верхний пре-
дел 2—2,5.
Из табл. 5 следует, что суммарное усилие пружин в некоторых
фрикционах составляет очень большую величину — до 1750 кг.
50
Таблица 6
Расчетные данные по пружинам главных фрикционов
Расположение пружин £>, мм d, мм D d Z 1, мм Л мм Модуль, кг! мм тшах, кг!см*
Периферийное .... 23 33 4,0 4,8 5,8 6,9 8 6 76 73 19,8 20,0 2,0 2,0 4050 3650
27 4,8 5,7 9,5 76 26 2,4 4750
Центральное 72 8,5 8,5 6 158 63 2,1 4600
Периферийное .... 33 4,8 6,8 6,5 69 13 2,7 3840
26 4,0 6,5 12 105 30 1,2 4610
28 5,0 5,7 10 103 36 1,8 4000
Центральное 95 10 9,5 7 210 85 1,75 4840
Периферийное .... 30 6 5,0 8,5 91 21 6,4 5540
5. В фрикционе подвергаются прочностному
ведомый вал и фрикционные диски.
расчету
Ведомый вал рассчитывается на кручение по следующей фор-
муле:
з ____
<12>
V 0,2т ’
где т— напряжение кручения в кг/см2-,
d—диаметр вала в см\
Л1Ф — момент трения фрикциона в кгсм.
Если вал шлицованный, то диаметр d определяют по впадине
шлицев.
Расчет шлицев ведется на смятие с проверкой на срез по следую-
щим формулам;
а = ____ 8Мф .. „ч
см zl(D*-d*) >
а =
СР zlb(D + d) ’
(14)
где г—число шлицев;
I >— длина шлицев в см\
- b— ширина шлицев в см\
D—наружный диаметр вала в см;
d—внутренний диаметр вала в см.
Допустимые напряжения можно принимать в кг/сд12: т=800—1200;
о.,г= 500—700; осм = 1000—1500.
Ведомые и ведущие диски трения соединяются с ведомым
51
и ведущим барабанами фрикциона чаще всего при помощи зубьев
Расчет зубьев произвол'! г<-я на смятие по формуле
____Зм_ф___
ak ( Ь\ — D'r^ ni ’
(15;
где а—число зубьев одного диска;
/г— число дисков, находящихся в зацеплении с ведомым
или ведущим бграбаноч;
Dt и D.,— наружный и внутренний диаметры диска;
иг — толщина диска.
Напряжение асм не должно превышать 80 — 150 кг/сш2, где ниж-
ний предел относится к многодисковым, а верхний предел к одно-
дисковым и двухдисковым фрикционам.
В табл. 7 приведены в качестве примера материалы, применяю-
щиеся при изготовлении деталей главных фрикционов быстроходных
гусеничных машин.
Т а б л и ц а 7
Материалы деталей главных фрикционов
Наименование детали
Пружины .....................................
Внутренний барабан ..........................
Ведомые диски................................
Ведомый вал .................................
Внешний барабан..............................
Ведущие диски................................
Рычаги механизма выключения .................
Марка стали
65Г
12ХНЗА
50Г
45ХНМФА
40
50Г
45
Из табл. 7 следует, что для пружин и фрикционных дисков при-
меняются марганцовистые стали, для валов и барабанов—хромо-
никелевые, для остальных деталей — углеродистые.
6. РАСЧЕТ ГЛАВНОГО ФРИКЦИОНА НА РАБОТУ
БУКСОВАНИЯ И НА НАГРЕВ
При буксовании фрикциона выделяется большое количество
тепла, которое вызывает коробление фрикционных дисков, выплав-
ление органических компонентов фрикционных накладок и как ре-
зультат этого выход из строя фрикциона. Поэтому расчет сцеплении
автомобилей ведут на работу буксования и на нагрев.
Особенно важен расчет фрикционов на буксование и нагрев для
тягачей, работающих с прицепом, так как работа с прицепом усили-
вает буксование главного фрикциона.
Прежде чем приступить к расчету, рассмотрим некоторые допу-
щения, которые следует принять при определении работы буксова-
ния фрикциона.
52
процесс включения фрикциона ра -б;юасъ а на два этапа. Пер-
вый этап -- водиг('.'и> -irnyc: т1т п- даль, ч нличио включая фрикцион:
начинается буксование фрикциона. Вк-рсн этап — педаль отпущена
полностью, но фрикцион продолжает буксовать.
Работа буксования затрачивается и па первом и па втором этапе,
причем на первом этапе она зависит от субъективных факторов, от
того, насколько быстро илы медленно водитель включает фрикцион.
На втором этапе работа бул.'оаацсч 'лэсдошстса только объектив-
ными факторами, т. е. не за-
висит от водителя.
Как показали некоторые
экспериментальные исследо-
вания, первый этап буксова-
ния фрикциона при трогании
гусеничной машины с места
(когда работа буксования
имеет наибольшую величи-
ну) дает большую работу
буксования, чем второй этап.
Поэтому работа буксования
фрикциона определяется в
первую очередь субъектив-
ными факторами.
Чтобы сделать расчет
Рис. 32. График буксования главного
фрикциона
объективным, следует отказаться от рассмотрения первого этапа и
ограничиться рассмотрением только второго этапа буксования
фрикциона, хотя при этом расчет делается весьма условным.
Однако, имея сравнительные данные по многим фрикционам, рас-
считанным этим методом, можно все же оценивать работу фрик-
циона с точки зрения его износа и нагрева.
Примем в качестве допущения, что фрикцион включается
мгновенно. Рассмотрим случай трогания тягача с
места.
На рис. 32 представлен график буксования главного фрикциона.
Из графика можем определить угол буксования э. по площади за-
штрихованного треугольника.
Будем иметь
м1Ф
где Wj — угловая скорость ведущих деталей фрикциона в момент
включения;
t0—время буксования фрикциона.
Обозначим работу буксования буквой L. Эта работа равна про-
изведению момента! трепня фрикциона Л/ф на угол буксования а.
Или
2-Л^.
53
Тогда
2
Согласно формуле 44 (см. ч. 1) имеем
t_____________Mi ~ «Д________
0 Л/Ф-/Ид (/«Мф - Мд) 1В •
©! +
При трогании машины с места Ш2 = 0. Тогда получим
(16)
В эту формулу входит момент двигателя Л4Д. Примем как до-
пущение, что при трогании тягача с места водитель дает полную
подачу топлива и, следовательно, двигатель работает на внешней
характеристике. Так как при буксовании фрикциона обороты вала
двигателя снижаются, то момент по внешней характеристике бу-
дет изменяться. Примем приближенно некоторый средний момент
__44^ + 44тах ____(1 + k) Л4тах
— 2 — 2й
где MN— момент, соответствующий максимальной мощности дви-
гателя;
k — коэффициент приспособляемости двигателя.
Выразив момент ^тзх через Л4ф, получим
~ 28/г ^Ф’
(17)
где р — коэффициент запаса фрикциона.
Кроме того, в формулу (16) входят моменты инерции ®i и 02.
Величина этих моментов инерции может быть определена по фор-
мулам (см. ч. 1, гл. II, формулы (47) и (48):
®1 = т®т<
^2 - g ГК.
Отнесем работу буксования L к общей площади трущейся по-
верхности фрикциона Fo = 2Fn, где F = 2urc Ь, п — число пар тру-
щихся поверхностей; назовем величину -р- =/ удельной ра-
ботой буксования главного фрикциона.
54
Тогда после соответствующих преобразований получим формулу
удельной работы буксования
436-10—6 -nj
1+* Л- mr\,
2fe? У° Л4ф/ °
0, + 02
(18)
где пх—число оборотов вала двигателя при трогании тягача
с места;
z’o— общее передаточное число силовой передачи на той пе-
' редаче, с которой происходит трогание тягача с места;
- Мк—момент сопротивления движению, приложенный к веду-
. щим колесам.
Этот момент определяется по формуле
I ^ = (/0G + /01G,)rK. (19)
Из формулы (18) следует, что удельная работа буксования зави-
сит от числа оборотов вала двигателя и от передачи, на' которой
происходит трогание тягача с места. Чем выше ti\ и чем меньше
'(выше передача), тем больше I.
Чтобы удельная работа буксования могла быть параметром
уравнительной оценки фрикционов, необходимо задать условия, при
Которых происходит трогание тягача с места. В качестве таких усло-
вий примем трогание машины на второй передаче на горизонталь-
ном участке хорошей дороги. Обороты вала двигателя при этом при-
нимаем эксплуатационными.
В табл. 8 приведены расчетные данные по работе буксования
главных фрикционов гусеничных машин.
Таблица 8
Расчетные данные по работе буксования главных фрикционов
№ машины Вес машины, т /ц гк- м Ои кгм сек2 02 > кгм сек2 L, кгм кгм! см2
'Л- 1 11,0 40,7 0,325 0,12 0,10 2 043 0,95
2 8,8 40,0 0,320 0,20 0,25 1880 1,18
3 12,7 34,0 0,310 0,20 0,30 5 430 1,65
... 4 17,0 45,8 0,390 0,14 0,20 2 800 1,44
5 30,9 ?4,0 0,320 0,40 1,8 12 000 7,45
6 24,0 45,0 0,370 0,30 0,95 19 000 5,20
7 29,0 14,8 0,318 0,80 2,40 18 000 1,40
, 8 40,0 39,5 0,370 0,30 1,53 14 100 7,55
9 43,0 20,7 0,403 0,80 2,70 17 500 2,95
10 45,0 56,0 0,414 0,30 1,60 18 200 3,70
На основании этих данных можно рекомендовать следующие зна-
чения удельной работы буксования I (в кем/см?)-. для машин весом
До 15 т 1 —1,5, для машин весом до 30 т 1,5—2,5, для машин весом
свыше 30 т 2,5—4,0.
55
Для одиночной машины будем принимать коэффициент сопро-
тивления движению /о = 0,05.
Если рассчитывается тягач, работающий с колесным прицепом,
то надо принимать для тягача и колесного прицепа соответственно
= 5 + ф)°.«
/с 1+о,б~- (20)
С/ I
А, = О,6/о I
а приведенные выше нормы удельной работы относить к весу поезда
Gt) ~ G 4- G,.
Так, например, для тягача АТ-Т будем иметь G — 25 т, G} = 25 т,
тогда Go = 50 т. Следовательно, рекомендуемое значение удельной
работы буксования должно быть 2,5—4,0 кгм/см2.
Согласно формулам (20) находим:
ведущих
(21)
Л, =0,038.
Эти значения коэффициентов и следует принимать при расчете
главного фрикциона тягача АТ-Т на удельную работу буксования.
Рассмотрим расчет фрикциона на нагрев.
При расчете фрикциона на нагрев определяют температуру на-
грева одного из фрикционных дисков без теплоизолирующей об-
шивки. Таким диском может являться, например, один из
дисков, нажимной диск и т. д.
Температура нагрева диска определяется по формуле
I - __
427cQ ’
где s — коэффициент, учитывающий долю работы трения,
щуюся на данный диск (если фрикцион однодисковый,
с асбестовой обшивкой ведомого диска, плохо проводящей
тепло, то общая работа трения распределяется поровну ме-
жду маховиком двигателя и нажимным диском; тогда
е = 0,5);
L—работа буксования;
с — коэффициент теплоемкости стали (с = 0,115 кал/кг 1°С);
Q—вес диска в кг (для однодискового фрикциона Q — вес
нажимного диска).
Если фрикцион без обшивки или имеет теплопроводную металло-
керамическую обшивку, то расчет можно вести, исходя из следую-
щих соображений. Будем считать, что за время буксования тепло
успевает проникать только в толщу фрикционных дисков, нагревая
их равномерно. Условно примем, что маховик и нажимной диск на-
греваются только на толщину одного фрикционного диска. Тогда
56
комплект фрикционных дисков плюс два диска (маховик и пажим-
' ной диск) рассматриваем как один массивный диск. При этом коэф-
фициент е i: формуле (2!) принимает,i равным единице.
Допускаем, что при одном включении фрикциона температура
-может повышаться на 15—20° С.
Заметим, что расчет на нагрев, как и расчета буксование, носит
'условный характер п имеет ценность главным образом в качестве
сравнительного метода расчета.
Действительно, при расчел? допускается, что все тепло, выде-
ляющееся при б\ ucouauiifi i; фипкпионе. мгиовепдо распространяется
по массе металлических деталей фрикциона, вследствие чего темпе-
ратура этих деталей будет равномерной по всей толщине. В дей-
ствптельности так может быть определена лишь средняя темпера-
тура нагрева деталей. Эта температура, очевидно, будет отличаться
от истинной температуры, развивающейся на поверхности трения,
так как вследствие кратковременности процессе1, буксования фрик-
циона, измеряемого долями секунды, выделяющееся тепло не успе-
вает распространиться в глубь металлической .летали, в результате
чего деталь нагреется неравномерно. Как показали опыты,’ иногда
на поверхностях трения стальных дисков фрикционов температура
достигает такой величины, что происходит точечное сваривание
дисков (температура свыше 1000° С).
7. ПРИВОДЫ УПРАВЛЕНИЯ ГЛАВНЫМ ФРИКЦИОНОМ
Приводом управления называется устройство, предназначенное
для управления главным фрикционом с места водителя.
Приводы бывают двух типов: непосредственного действия п сер-
воприводы.
ПРИВОДЫ НЕПОСРЕДСТВЕННОГО ДЕЙСТВИЯ
Привод непосредственного действия состоит из педали, системы
рычагов, валиков, тяг, возвратных пружин и вилки выключения.
- На рис. 33 представлен привод управления главным фрикцио-
,ном тягача М-2, состоящий из педали 1, посаженной на передаточ-
ный валик 2, и вилки выключения 3, посаженной на валик 4. Пе-
' даль имеет возвратную пружину 5. Так как главный фрикцион на-
ходится в непосредственной близости от водителя, то в приводе нет
длинных тяг, которые бы дистанционно связывали педаль с вилкой
выключения.
На рис. 34 представлен дистанционный привод. Этот привод при-
меняется в том случае, когда двигатель с главным фрикционом рас-
положен далеко от водителя (например, в кормовой части машины),
как это обычно бывает в танках.
Привод состоит из педали 7, переходного рычага 2, двуплечего
рычага 3 с вертикально расположенной осью. Один конец двупле-
чего рычага связан через тягт с переходным рычагом, а другой —
с подвижной поводковой чашкой 4 механизма выключения главного
Фрикциона.
57
4
Рис. 33. Привод управления главным фрикцио-
ном тягача М-2:
Z — педаль выключения; 2 — передаточный валик; 5 — вилка
выключения; 4 — валик вилки; 5 — возвратная пружина
Рис. 34. Дистанционный привод:
Z — педаль выключения; .2 — переходной рычаг; а — двуплечий ры-
чаг; 4 — подвижная поводковая чашка
58
Ц Привод непосредственного действия должен быть достаточно
Жестким и иметь минимальный холостой ход.
Жесткость привода обеспечивается жесткостью его рычагов, ва-
ликов и особенно тяг; минимальный холостой ход обеспечивается
минимальным числом шарниров в приводе, а также величиной зазо-
лов в механизме выключения фрикциона. Холостой ход не должен
быть больше 15—20% общего хода педали привода.
Передаточное число привода должно обеспечить общий ход пе-
дали (холостой и рабочий) 150—200 мм. При большем ходе упра-
влять фрикционом будет неудобно.
Желательно, чтобы привод имел переменное передаточное число,
увеличивающееся с увеличением хода педали. Это позволит значи-
тельно уменьшить усилие на педали при выключении фрикциона, не
изменяя ее общего хода.
Расчет привода непосредственного действия
Задачей расчета привода является определение его передаточ-
ного числа, усилия, прикладываемого к педали, хода педали и гео-
метрических размеров рычагов и тяг.
Заданными величинами при расчете следует считать: среднее уси-
лие Р на ведомом конце привода (усилие Р определяется по уси-
лию пружин и передаточному числу механизма выключения), рабо-
чий ход с ведомого конца привода и полный ход S педали выклю-
чёния.
• Работа, затраченная на выключение фрикциона, равна
Л = (22)
где т] — общий к. п. д. привода.
Общий к. п. д. равен произведению механического к. п. д. (т;(/),
учитывающего потери на трение в шарнирах привода, и к. п. д. хода
(is). К. п. д. хода учитывает холостой ход привода, а также увели-
чение хода педали вследствие упругости привода.
К. п. д. хода определяется по формуле
riS = 1 - (а + Ь-^ , (23)
где а — коэффициент холостого хода, равный отношению холостого
хода к полному ходу (так, например, для тягача Я-12 хо-
лостой ход равен 18—25 мм, а полный ход— 125—132 мм,
для тягача М-2 — 25—35 и 150—170 мм\ примерно такое
же соотношение ходов и у других машин); этот коэффи-
циент обычно лежит в пределах 0,17—0,2; в приводах
с большим передаточным числом и с большим числом шар-
ниров коэффициент а может достигать 0,3, но не больше;
—коэффициент упругости привода; величина этого коэффи-
циента находится в пределах 0,005—0,05; для короткого
59
привода следует принимать верхний предел коэффициента
(£» = 0,05), для длинного привода — нижний предел
(Ь = 0,005);
L — общая длина последовательно включенных звеньев при-
вода;
51— полный ход педали.
Механический к. п. д. привода можег лежать в довольно ши-
роких пределах — от 0,4 до 0,95. Чем больше шарниров имеет при-
вод, тем ниже его к. п. д. Ориентировочно можно принять к. п. д.
одного шарнира -%, 0,95.
Т огда
^'.q = ЧшЧ.аЧЧ.З- • •
Определив общий к. п. д. привода (д —из формулы (22)
находим работу А.
Работа А не должна превосходить, в кгм: для легких машин — 2,
для средних машин — 4, для тяжелых машин — 7.
Определив работу Л, находим среднее усилие на педали привода
Qcp = 4' (24>
Передаточное число привода определяется по формуле.
(25)
Далее производится расчет деталей привода на прочность и опре-
деляются их геометрические размеры.
Расчет ведется на максимальное усилие, приложенное к педали,
которое ориентировочно можно принять равным 50 кг.
Расчет шарикового механизма выключения
Если фрикцион имеет шариковый механизм выключения, то по-
следний рассчитывается следующим образом.
На подвижную поводковую чашку действуют две реакции шарика:
нормальная N и касательная Т (рис. 35). Последняя является си-
лой трения, которую можно выразить через коэффициент трения /
согласно формуле
T = fN.
Проектируем силы Т и Р па оси X и У. Получим
N cos а — Т sin а = Р;
N sin у -J- Т cos у ~ Q.
Отсюда находим
О - ' ; ' Р.
1 /Ж"
G0
'ак как
Qr =~- qa,
то усилие на поводке будет
а
Я = ~7-
f + кЧ а р
1—ftga ’
(26)
где Р — суммарное усилие пружин
фрикциона. При полном выключении
Р=рт^> ^Да q = qiw
Угол а в выполненных конструк-
циях равен 9—11°.
Коэффициентом / задаемся. Его ве-
личину можно принять равной 0,005—
0,01; а и г берутся из конструктивных
соображений.
9
Рис. 35. Схема действия сил
при расчете шарикового ме-
ханизма выключения
СЕРВОПРИВОДЫ
Сервоприводы служат для облегчения управления главным
фрикционом, коробкой передач, механизмом поворота, остановоч-
ными тормозами, в том числе и тормозами прицепа.
< В гусеничных машинах могут применяться механические,
пневматические, гидравлические и электриче-
ские сервоприводы.
Электрический сервопривод применяется редко, так как он тре-
бует значительного расхода электроэнергии, которой машина не рас-
полагает.
Рассмотрим принцип действия механического, пневматического и
гидравлического сервопривода
Механический сервопривод
у. Наиболее простым механическим сервоприводом является привод
с сервирующей пружиной. К двуплечему рычагу подсоединена рабо-
тающая на растяжение пружина 4 (рис. 36). В остальном привод
такой же, как и привод непосредственного действия.
Привод работает следующим образом. При повороте педали 1 по
часовой стрелке начинает выбираться холостой ход. Пружина 4 при
этом растягивается, накапливая энергию. С. некоторого момента на-
чинается выключение фрикциона. Сервопружина к это:иу времени
получает максимальное растяжение и начинает сжиматься, отдавая
свою энергию на выключение фрикциона, т. е. облегчая его выклю-
чение.
1 Более потробио действие < ер нопрн во дои р::с.-\гагрг!иоется в книге К. А. Талу
♦Сервоприводы гусошпшых’ мшькя..-. Машпи, 1917 г.
61
Рис. 30. Привод главного фрикциона с сервопружиной:
1 — педаль выключения; 2 — рычаг; 3 — муфта выключения; 4 — сер-
вопружина
Рис. 37. Диаграмма усилий на педали
привода главного фрикциона
Рис. 38. Привод главного фрикциона с сер-
вопружиной тягача АТ-Т
62
На рис. 37 приведена диаграмма усилий на педали привода глав-
ного фрикциона. Из диаграммы видно, что сервопружина уменьшает
максимальное усилие выключения примерно на 35%.
На рис. 38 показан привод главного фрикциона с сервопружиной
гягача АТгТ.
Пневматический сервопривод
Пневматический сервопривод состоит из следующих основных
элементов: педали 1 (рис. 39), вилки выключения 2, компрессора 3
с воздухоочистителем 4, влагойаслоотделителя 5, регулирующего
Рис. 39. Принципиальная схема пневматического серво-
привода:
1 — педаль; 2 — вилка выключения; 3 — компрессор; 4 — воздухоочиститель;
5 — влагомаслоотделитель; 6 — регулирующее устройство; 7 — резервуар
сжатого воздуха; 5 — распределительное устройство; 9 — сервомотор
устройства 6, резервуара 7 сжатого воздуха, распределительного
устройства 8 и сервомотора 9.
Компрессор является источником сжатого воздуха, на кото-
ром работает вся пневматическая система. Компрессоры бывают
двух типов: поршневые и ротационные с давлением 6—10 ат. На
рис. 40 представлен общий вид двухцилиндрового поршневого ком-
прессора, установленного на тягаче АТ-Т (в сервоприводе тормозов
Тягача и прицепа).
На рис. 41 представлен общий вид ротационного компрессора, а
на рис. 42 его принципиальная схема.
Ротационный компрессор работает следующим образом. При вра-
щении вала 1 по ходу часовой стрелки эксцентрик 2 обкатывается
внутри корпуса компрессора. При этом воздух из объема А вытес-
няется через канал ползуна 3 и клапан 4 в воздушную магистраль.
Одновременно в объеме Б создается разрежение и воздух через
фильтр 5 засасывается в полость компрессора.
Резервуар сжатого воздуха, куда воздух нагнетается
компрессором, обеспечивает поддержание постоянного давления
в воздушной сети привода.
Воздух, подающийся в резервуар, предварительно очищается от
63
о
Рис. 40. Поршневой компрессор тягача АТ-Т
.влаги и масла в специальном устройстве — в л а г о м а с л о о т де-
ли т е л е.
Из резервуара воздух направляется к распределительному устрой-
ству, предназначенному для перепуска определенного количества
воздуха, соответствующего величине хода педали, к сервомотору.
Сервомотор представляет собой поршневое или диафраг-
менное устройство, в котором давление воздуха преобразуется в ме-
ханическое усилие па толкателе или штоке привода.
Рис. 41. Общий вид ротационного
компрессора
Рис. 42. Принципиальная схема
ротационного компрессора:
I — ведущий вал; 2 — эксцентрик; 3 — пол-
зун; 4 — клапан; 5 — воздушный фильтр
В сервомоторе поршневого типа воздух поступает под поршень 1
(рис. 43) и перемещает связанный с ним шток 2, который через си-
стему рычагов воздействует на толкатель 4. Толкатель тягой связан
|с механизмом включения главного фрикциона.
: В диафрагменном сервомоторе воздух поступает через штуцер 1
(рис. 44) в рабочую камеру мотора и отжимает диафрагму 2. С диа-
фрагмой связан шток 3, который и передает усилие на меха-
низм выключения фрикциона. После прекращения действия серво-
мотора воздух из рабочей камеры выпускается и диафрагма под
^Действием пружины 4 возвращается в свое первоначальное поло-
жение.
Гидравлический (масляный) сервопривод со-
стоит из следующих элементов: педали управления 1 (рис. 45),
вилки 2 муфты выключения, гидравлического насоса 3 с перепуск-
ным клапаном 4, резервуара рабочей жидкости (масла) 5, распре-
делительного устройства 6, сервомотора 7, аккумулятора давления 8,
перепускных клапанов 9.
5—20
65
Рис. 43. Поршневой сервомотор:
7 — поршень, 2— шюк; 3 — рычаг; 4— толкатель
Рис. 44. Диафрагменный сервомотор:
1 — штуцер; 2 — диафрагма; i — шток; 4 — пружина
66
При нажатии на педаль плунжер распределительного устрой-
ства 6, перемещаясь вправо, открывает канал сервомотора 7, одно-
временно перекрывая канал слива масла, связанный с резервуа-
ром 5. Масло, попадая в цилиндр сервомотора, перемещает поршень
и рычаги механической части привода. Аккумулятор давления 8
служит для поддержания постоянного давления в магистралях при-
вода.
э 8
Рис. 45. Принципиальная схема гидравлического сервопривода:
Z — педаль управления; 2 — вилка; 3 — гидравлический насос; 4 — перепускной клапан;
5 — резервуар рабочей жидкости; 6 — распределительное устройство; 7 — сервомотор;
8 — аккумулятор давления; 9 — перепускные клапаны
В современных гидравлических сервоприводах применяются на-
сосы шестеренчатого или плунжерного типа. Шестеренчатые насосы
изготовляются на давление от 5 до 25 ат, плунжерные на давление
25 ат и выше.
Гидравлический сервопривод обладает рядом преимуществ по
сравнению с пневматическим. Основное его преимущество заклю-
чается в том, что вследствие высокого давления, которое можно до-
пустить в гидроприводе, силовые агрегаты привода получаются
меньших размеров, чем соответствующие агрегаты пневматического
привода. В гидроприводе, кроме того, нет сложного и дорогого ком-
прессора, а также можно не опасаться замерзания влаги в масло-
проводящей системе.
Недостатком гидропривода является необходимость тщательного
уплотнения всей системы для предотвращения утечки масла, так как
система работает под высоким давлением; кроме того, в холодное
время масло загустевает, что отражается на работе привода.
5*
67
8. ГИДРОДИНАМИЧЕСКАЯ МУФТА
Гидродинамическая муфта или просто гидромуфта представляет
:®бой два лопастных колеса (рис. 46), внутри которых находится
забочая жидкость (масло). Одно колесо связано с валом двигателя
1 является насосом, другое связано с ведущим валом коробки
тередач и является турбиной.
Рис. 46. Лопастные колеса гидромуфты
Принцип работы гидромуфты заключается в сле-
1ующем. При вращении колеса насоса рабочая жидкость увлекается
юпатками насоса и под действием центробежных сил отбрасывается
с периферии. Создается поток жидкости, который ударяет в лопатки
урбины, приводя последнюю во вращение.
Гидромуфта, как и фрикционная муфта, не преобразует крутя-
ций момент двигателя (в схеме силового потока она является кине-
'ической узловой точкой); ее назначение заключается лишь в пере-
даче потока мощности от двигателя к силовой передаче.
В отличие от фрикционной муфты в гидромуфте передача по-
ока происходит не жесткой, а гидравлической связью, вследствие
iero наблюдается постоянное частичное буксование или скольжение
гуфты.
Скольжение определяется по формуле
5 = ^^-100%, (27)
пн
•де /?н — число оборотов колеса насоса;
/zT — число оборотов колеса турбины.
Скольжение создает потерю энергии в муфте, которая будет тем
юлыпе, чем больше скольжение. Так, если /’т -~0, то S — 100%, т. е.
5ся энергия двигателя переходит в тепло. На расчетном ре-
18
;^{ и м е работы гидромуфты, когда двигатель работает иа макси-
мальных оборотах, скольжение составляет 3—5%.
В самоходных машинах гидромуфта применяется как один из
-элементов главного фрикциона.
Основное преимущество гидромуфты по сравнению с обычной
фрикционной муфтой заключается в следующем. Гидромуфта вслед-
ствие отсутствия в ней жесткой связи позволяет начинать движение
машины с самой малой скоростью. Это бывает необходимо, напри-
мер, при трогании машины с места в тяжелых дорожных условиях,
когда имеется вероятность заглохания двигателя. С гидромуфтой
можно начинать движение машины сразу на той передаче, которая
допустима по сопротивлению движению. При обычной фрикционной
муфте трогание машины с места в этих условиях было бы возможно
только в том случае, если муфте (главному фрикциону) дать дли-
тельное буксование, что может вызвать ее сгорание. Трогание ма-
шины с места на повышенных передачах иногда сокращает время
разгона машины.
Гидромуфта повышает проходимость машины на неустойчивых
(мягких) грунтах, на предельных подъемах и т. д., когда запас сцеп-
ления движителя с грунтом очень мал и требуется медленное рав-
номерное движение машины, чтобы не сорвать верхний слежав-
‘шийся слой грунта и тем самым не уменьшить сцепление гусениц
с грунтом.
' На рис. 47 представлена сравнительная характеристика двига-
теля автомобиля «Победа» с гидромуфтой (сплошные кривые) и
с обычной фрикционной муфтой (пунктирные кривые).
Из характеристики следует, что при обычной муфте двигатель
при полностью открытой дроссельной заслонке не может вращать
первичного вала коробки передач с числом оборотов ниже 420 в ми-
нуту, в то время как с гидромуфтой вращение вала коробки начи-
нается с нулевого числа оборотов. При этом двигатель имеет
890 об/мин и развивает момент Л4кр на 10% выше, чем при
420 об/мин. Таким образом, автомобиль с гидромуфтой получает
большую приемистость при трогании с места. Кроме того, при дан-
ном моменте трогание с места на хорошей дороге может начинаться
С прямой передачи.
Кривая мощности N при гидромуфте располагается несколько
выше кривой мощности при обычной муфте. Это объясняется более
спокойной работой двигателя, отсутствием пульсации, вследствие
чего с двигателя снимается большая мощность.
Из характеристики следует, что работа двигателя с гидромуфтой
по расходу горючего менее экономична, чем с обычной муфтой
(пунктирные кривые часового расхода G и удельного расхода ge
лежат ниже соответствующих сплошных кривых). Это объясняется
наличием в гидромуфте постоянного скольжения S.
Сама по себе гидромуфта не может выполнить все функции глав-
ного фрикциона, так как она не удовлетворяет ряду требований,
предъявляемых к главному фрикциону.
Так, несмотря на гидравлическую связь, осуществляемую между
69
Рис. 47. Сравнительная характеристика двигателя автомобиля „Победа"
(опытная) с гидромуфтой и с обычной фрикционной муфтой
70
' лопастными колесами гидромуфты, ее характеристика все же очень
жесткая. Из графика (рис. 48) следует, что при постоянном числе
оборотов вала насоса /?,,= 1600 в минуту передаваемый гидромуф-
той момент резко возрастает с увеличением скольжения. Так, если
расчетный момент Л4тах будет передаваться при 5% скольжении
гидромуфты, то при увеличении скольжения до 10% передаваемый
момент возрастет более чем в два раза, а при 100% скольжении —
более чем в 20 раз.
Рис. 48. Опытная характеристика гидромуфты
Таким образом, если сразу остановить машину (S = 100%), то
инерционные силы перегрузят силовую передачу двадцатикратным
моментом.
Следовательно, гидромуфта не предохраняет силовую 'передачу
машины от перегрузки, а значит, не удовлетворяет одному из основ-
ных требований, предъявляемых к главному фрикциону.
Передаваемый через гидромуфту момент зависит от числа оборо-
тов колеса насоса и с уменьшением оборотов падает почти в ква-
дратичной зависимости. Меняя число оборотов вала двигателя,
можно регулировать передаваемый через гидромуфту момент.
Однако полностью прекратить передачу момента, т. е. полностью
отключить двигатель от силовой передачи, как это требуется при
переключении передач, нельзя: через гидромуфту всегда будет пе-
редаваться некоторый остаточный момент, соответствующий
минимальным оборотам вала двигателя.
71
Таким образом, гидромуфта не удовлетворяет и другому требо-
ванию, предъявленному к главному фрикциону: она не является пол-
ностью отключаемой муфтой.
Чтобы гидромуфта выполняла все функции главного фрикциона,
она должна полностью отключать двигатель от силовой передачи
и предохранять силовую передачу от динамических нагрузок. Для
этого последовательно с гидромуфтой устанавливается обычная вы-
ключаемая фрикционная муфта. Это, конечно, значительно услож-
няет весь агрегат.
В отечественных машинах гидромуфта применяется на автомо-
биле ГАЗ-12 и МАЗ-525. В гусеничных машинах гидромуфта не при-
меняется.
Недостатком гидромуфт, устанавливаемых на автомобилях, яв-
ляется то, что при наличии гидромуфты ухудшается торможение
машины двигателем. Чтобы устранить этот недостаток, необходимо
сделать муфту блокируемой, т. е. еще больше усложнить ее.
В гусеничных машинах гидромуфта не применяется главным об-
разом из-за ее сложности. Она значительно упростится, если ее осво-
бодить от дополнительной фрикционной муфты. Но это возможно
только в том случае, если отключение муфты и ограничение переда-
ваемого через нее момента будут осуществляться гидравлическим
способом, например перепуском гидравлического потока, примене-
нием заслонок, перекрывающих поток жидкости, применением кла-
панных устройств, откидных лопаток и т. д.
ПОДБОР ГИДРОМУФТЫ ПО ЗАКОНАМ ПОДОБИЯ
В настоящее время обычные гидромуфты с плоскими лопатками
не рассчитываются, а подбираются по законам подобия.
Согласно законам подобия две изогональные, т. е. имеющие гео-
метрически подобную лопастную систему, гидромуфты передают мо-
менты, пропорциональные квадрату числа оборотов насоса и пятой
степени активного диаметра
где п— число оборотов колеса насоса;
D — активный диаметр гидромуфты, т. е. наибольший диаметр
гидравлического потока жидкости (рис. 49).
Формула (28) справедлива при условии, что обе гидромуфты ра-
ботают на жидкости, имеющей один и тот же объемный вес (yi = ^2).
Если муфты работают на разных жидкостях, то в правую часть фор-
мулы (28) следует ввести множитель —.
7?
Согласно формуле (28) можем написать следующее выражение
момента, передаваемого через гидромуфту:
М = (29)
72
где М— момент, передаваемый гидромуфтой, в кгм-,
X—опытный коэффициент;
Y— объемный вес рабочей жидкости;
па — число оборотов насоса в об/мин-,
D— активный диаметр в м.
Величина тХ берется согласно исходной характери-
стике гидромуфты.
Рис. 49. Активный диаметр
гидромуфты
На рис. 50 представлена исходная характеристика гидромуфты.
Из этой характеристики величина уХ определяется в функции сколь-
жения S.
Из формулы (29) находим активный диаметр гидромуфты
/ м
D =
(30)
где М принимаем равным MN— моменту двигателя, соответствую-
щему его максимальной мощности;
/zh = /Za,— обороты вала двигателя, также соответствующие обо-
ротам при максимальной мощности (предполагается,
что гидромуфта и двигатель установлены на одном
валу).
Задаемся скольжением 5min =3—5% и определяем по исходной
характеристике величину 7 X.
Экспериментальные исследования показывают, что законы подо-
бия дают хорошие результаты при активных диаметрах гидромуфты
более 500 мм1. При меньших диаметрах следует вносить поправку
в коэффициент X.
1 В, В. Кадобнов. Конструкция и расчет гидродинамических передач.
Москва, 1955 г. Изд. Академии БТВ.
73
Рис. 51. График коэффициента X
На рис. 51 приведен график
коэффициента X в функции
активного диаметра гидро-
муфты.
Пример. Определим активный
диаметр гидромуфты, которая должна
передавать момент MN = 12 кгм при
числе оборотов вала двигателя п
равном 3000 в минуту.
Задаемся на расчетном режиме
работы гидромуфты трехпроцентным
скольжением (S = 3%). Тогда из
графика рис. 50 находим уХ =
= 30 • 10 4. Подставляем в форму-
лу (29). Получим
Согласно графику на рис. 51 вводим поправку. При П = 200 mi вели-
чина Х«50%. Тогда в предыдущую формулу подставляем вместо уХ = 30• 10-4
величину 0,5-30-10~4. Получим новое значение активного диаметра
5/ 12
° = Г 0,5-30-10"4-30002 = 0,246 М'
При D = 250 мм находим X = 70%.
Тогда
Б / Го
D = I 0,7-30-10-4 30011- = 0,23 М'
Окончательно принимаем активный диаметр D гидромуфты равным 230 .и.и.
Таким образом определяется основной размер гидромуфты. Остальные раз-
меры находятся в зависимости от конструктивных соображений.
ГЛАВА III
КОРОБКИ ПЕРЕДАЧ
1.НАЗНАЧЕНИЕ И КЛАССИФИКАЦИЯ КОРОБОК ПЕРЕДАЧ
НАЗНАЧЕНИЕ
Коробка передач предназначается:
— для изменения тягового усилия на гусеницах машины;
— для изменения скорости движения машины;
— для получения заднего хода;
— для отключения работающего двигателя от силовой передачи
на стоянках.
Два первых основных требования можно было бы обеспечить и
без коробки передач, если поставить на тягач двигатель большой
мощности.
Рассмотрим, какую характеристику должен иметь этот двигатель.
Возьмем предельные дорожные условия, в которых приходится ра-
ботать одиночному тягачу. Эти условия следующие:
— хорошая дорога, минимальная скорость движения (/Omin, ^„ij;
— хорошая дорога, максимальная скорость движения (/0 min,
— предельно тяжелая дорога, минимальная скорость движения
U max1 ^minA
Если двигатель будет обеспечивать движение тягача в этих усло-
виях, то он обеспечит движение тягача и во всех других условиях,
которые могут встретиться в эксплуатации машины.
Так как скорость v пропорциональна оборотам вала двигателя п,
а сопротивление движению /0 G пропорционально крутящему мо-
менту двигателя, то при оборотах /zmin двигатель должен развивать
момент /И'тах,а при оборотах/zmax— моментМт1п. Примем ориенти-
ровочно min = 0,05; /0 тах = 0,8; vm.a = 1 и ^шах = 10. Тогда можем
построить примерную (условную) характеристику двигателя тягача
(рис. 52, а).
Но двигатель, применяющийся в настоящее время на самоходных
машинах, имеет характеристику, представленную на рис. 52, б.
Чтобы двигатель с такой характеристикой мог обеспечить работу
машины, он должен иметь или коробку передач, которая позволяла
А М'тах
бы изменять момент Afmax в I раз, где I — -т.---передаточное
число коробки передач, или иметь мощность при равную AZ'max
75
Рис. 52. Сравнительные характеристики двигателей:
а — условная характеристика двигателя; б — действительная характери-
стика двигателя
(см. пунктирную линию на характеристике), т. е. во много раз пре-
вышающую мощность/Vmax при наличии коробки передач. Очевидно,
машина с таким двигателем будет неэкономична, а двигатель будет
иметь большие габариты.
В последние годы во многих странах ведется большая работа
по созданию газотурбинного двигателя, пригодного для
использования в колесных и
Газотурбинный двигатель
от характеристики двигателя
Рис. 53. Характеристика газотур-
бинного двигателя
гусеничных машинах,
имеет характеристику, отличающуюся
внутреннего сгорания.
На рис. 53 представлена харак-
теристика газотурбинного двигате-
ля, снятая при постоянном часовом
расходе горючего. М и N — внешняя
характеристика при полной подаче
горючего и М' и N' — при частичной
подаче горючего. Из характеристи-
ки следует, что в газотурбинном
двигателе кривая момента имеет
примерно такую же форму, как и в
рассмотренной нами выше характе-
ристике двигателя, работающего без
коробки передач. Однако здесь мо-
мент меняется в 16 раз, а по харак-
теристике газотурбинного двигате-
ля всего лишь в 2—2,5 раза. По-
этому хотя газотурбинный двигатель
и имеет более рациональную ха-
рактеристику, чем двигатель вну-
треннего сгорания, но эта характе-
76
ристика все же не исключает применения коробки передач в ма-
шинах, на которых может быть установлен газотурбинный двига-
тель. Только коробка в этом случае будет иметь меньшее число
ступеней (2—3 вместо 5—6).
Существует необоснованное мнение, что при использовании га-
зотурбинного двигателя в самоходных машинах не нужна будет си-
ловая передача. Наоборот, с применением газотурбинного двигателя
возникает необходимость не только продолжать разработку ранее
возникших вопросов, но начать разработку и новых проблем в об-
ласти силовой передачи, в частности проблему обеспечения работы
силовой передачи на высоких оборотах порядка 15 000—20000об/лгдн
и выше. При таких оборотах передача мощности зубчатыми меха-
низмами становится чрезвычайно затруднительной и возникает не-
обходимость замены зубчатой силовой передачи гидродинамической
или электрической.
В настоящее время в самоходных машинах применяются пока
исключительно двигатели внутреннего сгорания преимущественно
с зубчатыми коробками передач.
КЛАССИФИКАЦИЯ КОРОБОК ПЕРЕДАЧ
Применяющиеся в гусеничных машинах коробки передач можно
классифицировать по трем признакам:
А. По подвижности осей шестерен:
1) простые;
2) планетарные.
Б. По расположению валов:
1) с продольными валами;
2) с поперечными валами.
В. По схеме силового потока:
1) одноточечные;
2) многоточечные.
Простыми называются коробки, у которых все оси шестерен
неподвижны, т. е. расположены в неподвижном' корпусе или картере
коробки.
Простые коробки бывают'
а) с подвижными каретками;
б) с постоянным зацеплением шестерен.
Коробки первого типа применяются главным образом в автомо-
билях и сельскохозяйственных тракторах; коробки второго типа при-
меняются в быстроходных гусеничных машинах.
Планетарными называются коробки, у которых часть ше-
стерен (сателлиты) вращается не только вокруг собственных осей,
но и с осями участвует в переносном движении вокруг главной оси
механизма.
Коробки с продольными валами применяются глав-
ным образом в автомобилях; их обычно выполняют в паре с двига-
телем. В гусеничных тягачах коробки этого типа применяются только
77
при установке на тягаче автомобильного двигателя, а следова-
тельно, и автомобильной коробки передач.
Для гусеничных машин, в частности для тягачей, более типич-
ными являются коробки с поперечными валами и
встроенными в них коническими парами. Коробки этого типа при-
меняются на отечественных тягачах АТ-Л, АТ-С, АТ-Т.
Одноточечной называется коробка, которая в схеме сило-
вого потока дает одну простейшую механическую узловую точку.
Под простейшей точкой понимается механизм, имеющий один
корпус или одно водило (в планетарном варианте).
Рис. 54. Коробка передач:
а — на две передачи; б — с демультипликатором
В выключенном положении простейшая узловая точка имеет две
степени свободы.
Многоточечной называется коробка, которая описывается
схемой силового потока, состоящей из нескольких простейших ме-
ханических узловых точек.
Многоточечная коробка может быть с последовательным
ис параллельным силовым потоком.
Рассмотрим примеры одноточечной и многоточечной коробок.
Представим себе простой зубчатый механизм на две передачи
(рис. 54, а). Внешнее передаточное число этого механизма г'12 полу-
чим, если будем перемещать каретку вправо или влево. Данный ме-
ханизм, очевидно, представляет коробку на две передачи.
Добавим к этой коробке еще такую же (рис. 54,6). Теперь мо-
жем получить вместо двух четыре передачи, включая шестерни ка-
реток а и б.
Первая коробка представляет простейший механизм, так как она
имеет один корпус. Число степеней свободы у нее две. Вторая ко-
робка, рассматриваемая в целом, не является простейшим механиз-
мом, хотя и имеет один общий корпус, так как число степеней сво-
боды у нее больше двух. Ее можно представить состоящей из двух
простейших механизмов; каждый из механизмов будет иметь две
78
степени свободы и, следовательно, будет
описываться в схеме силового потока
простейшей узловой точкой.
Тогда первая коробка согласно опре-
делению будет являться одноточечной,
а вторая двухточечной.
Всякая коробка передач имеет, кроме
зубчатого механизма, еще переключаю-
щие устройства в виде подвижных каре-
ток, зубчатых муфт, блокировочных фрик-
ционов или тормозов (в планетарных ко-
робках). Все эти устройства в схеме си-
лового потока дают кинетические узло-
вые точки.
Как уже известно из первой части, ки-
нетические точки механического силово-
Рис. 55. Кинематическая
схема коробки передач и '
схема силового потока:
а — схем? коробки передач; б —
схема силового потока
го потока называются фрикционными
(хотя они не всегда описывают фрик-
ционные элементы коробки, например
зубчатые муфты).
Кроме того, в коробке имеются узлы.
описывающиеся разветвляющими узловыми точками.
На рис. 55 представлены кинематическая схема коробки на две
передачи и схема ее силового потока. Силовой поток состоит из
одной механической, двух фрикционных и одной разветвляющей
узловых точек. Поочередным включением фрикционных точек можно
получить в этой коробке две различные передачи. Так как коробка
простая, т. е. ее корпус постоянно заторможен, то механическая
точка имеет постоянно заторможенный нулевой поток.
Коробка принадлежит к типу простых одноточечных коробок.
На рис. 56 представлен силовой поток простой двухточечной ко-
робки, кинематическая схема которой изображена на рис. 54, б. Си-
ловой поток состоит из двух механических, четырех фрикционных и
двух разветвляющих узловых точек. Добавляя к силовому потоку
еще одну механическую точку, получим трехточечную коробку и т. д.
Рассматриваемый силовой поток является поел едователь-
н ы м потоком, так как механические узловые точки передают мощ-
ность последовательно от точки к точке. Заметим, что простые мно-
Рис. 56. Силовой поток простой двухточечной коробки передач
79
готочечные коробки могут иметь только последовательный силовой
поток. Параллельный силовой поток имеют лишь планетарные ко-
робки.
По схеме силового потока легко определяется число передач, ко-
торое можно получить в данной коробке. Для этого необходимо
определить число задающих кинематических параметров силового
потока или число его степеней свободы.
Согласно формуле 155 (см. ч. 1) имеем:
X =2 (сч + сЛ) -j- с — k — а =-- 2-2 + 2-4 2 — 9 — 2 = 3.
Чтобы поток имел одну степень свободы, должны быть одновре-
менно включены две фрикционные точки, одна нз которых связана
с механической точкой а, а другая с механической точкой б.
Число передач в коробке с последовательным силовым потоком
определяется по формуле
Р = РаРбРВ--; (31)
где р—общее число передач коробки;
ра, р6 и т. д. — число передач, которое можно получить в узловых
точках а, б и т. д.
Так, узловая точка а даетря =2 передачи, узловая точка б дает
р6 = 2 передачи. Тогда согласно формуле (31) получим
= АЛ = 2-2 = 4.
Если каждая узловая точка даст две передачи, то общее число
передач коробки, имеющей с„ механических узловых точек, будет
определяться по формуле
р = 2Са.
Для рассматриваемой двухточечной коробки получим р = 22= 4
передачи.
2. ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ К КОРОБКЕ ПЕРЕДАЧ
К коробке передач предъявляются следующие требования:
— в выбранном кинематическом диапазоне передач коробки пе-
редаточные числа (передачи) должны быть выбраны рационально;
— на ходовых передачах должен быть обеспечен высокий к. п. д.;
— коробка должна иметь безударное переключение передач;
— передачи должны переключаться быстро и легко;
— выключение и включение передач должно быть надежным,
т. е. не должно происходить самовыключения и самовключения пе-
редач;
— валы коробки должны быть достаточно жесткими, чтобы при
работе шестерен не было их перекоса, а следовательно, чтобы не на-
рушались условия их работы;
80
— в коробке должна быть обеспечена надежная смазка шесте-
рен и подшипников;
— коробка не должна перегреваться;
— коробка должна быть компактной, т. е. иметь малые габа-
риты.
Эти требования обеспечиваются рядом конструктивных меро-
приятий, которые рассматриваются ниже.
1. Рациональный выбор передаточных чисел коробки достигается
правильным выбором диапазона передач, числа передач, коэффи-
циентов использования мощности, а также введением в разбивку
передач замедленной или ускоренной (или той и другой) передачи.
2. Высокий к. п.д. коробки обеспечивается минимальным числом
последовательно включенных пар шестерен, качеством механической
обработки зубьев; правильным выбором сорта смазки и ее уровня
(при смазке разбрызгиванием).
Минимальное число последовательно работающих пар шестерен
определяется схемой коробки. В выполненных коробках оно бывает
от 1 до 4, при этом меньшее число приходится на ходовые или ра-
бочие передачи. Ходовыми передачами в тягачах являются средние
передачи, на которых тягач работает наибольшее время. На низшей
и высшей передачах тягач работает сравнительно редко.
На к. п.д. коробки значительное влияние оказывают гидравли-
ческие потери, вызванные взбалтыванием масла вращающимися ше-
стернями. Эти потери зависят от уровня смазки и от ее вязкости.
3. Безударное переключение передач достигается применением
синхронизаторов, т. е. механизмов, уравнивающих при пере-
ключении передач скорости валов (в простых коробках), или при-
менением планетарных коробок.
4. Легкое и быстрое переключение передач обеспечивается как
устройством механизма переключения самой коробки, так и устрой-
ством ее привода управления.
Для облегчения переключения передач и уменьшения времени
переключения в гусеничных машинах применяют иногда п р е с е-
лекторные (избирательные) устройства.
Значительно уменьшают время переключения также плане-
тарные коробки передач.
5. Надежное выключение или включение передач достигается
применением фиксаторов и замков в приводе управления.
6. При недостаточной жесткости валов коробки нарушается пра-
вильность зацепления шестерен, вследствие чего увеличивается износ
зубьев и снижается к. п. д. коробки. Изгиб валов приводит также
к нарушению правильности установки подшипников и к их повы-
шенному износу.
При большом числе передач (в коробках гусеничных машин
число передач прямого хода не менее 5, а в отдельных коробках до-
стигает 10) валы коробки получаются очень длинными, поэтому
Приходится вводить в коробку дополнительные средние
опоры. Таким образом, коробки гусеничных машин являются мно-
6—20
81
гоопорными (три и более опор). В многоопорных коробках легче
обеспечить жесткость картера коробки и жесткость ее валов.
В некоторых коробках применяются так называемые разрез-
ные валы, на которых устанавливается только одна шестерня.
Каждый такой вал в свою очередь установлен на двух подшипниках.
7. Надежная смазка шестерен и подшипников обеспечивается
достаточным подводом масла к полюсам зацепления шестерен и
к подшипникам, а также правильным выбором сорта масла, его вяз-
костью, зависящей от температуры нагрева масла в коробке.
В коробках передач смазка осуществляется двумя способами:
разбрызгиванием и поливом.
При разбрызгивании взвешенные в воздухе частицы масла, оса-
ждаясь на трущихся поверхностях шестерен и подшипников, сма-
зывают их.
Для улучшения смазки разбрызгиванием, особенно в тех местах,
куда масло проникает с трудом, применяют специальные корытца
или лотки, в которых масло скапливается; по каналам, сделанным
в стенках картера коробки, масло из корытца или с лотка стекает
к шестерням и подшипникам.
В некоторых коробках в целях уменьшения гидравлических по-
терь и в то же время обеспечения надежной смазки применяют
смазку поливом. Для этого с помощью насоса масло по трубкам
подводится непосредственно к полюсам зацепления шестерен и
к подшипникам и поливается на их трущиеся поверхности. При
этом, кроме смазки трущихся поверхностей, происходит их охлажде-
ние и смывание с них продуктов износа, что способствует повыше-
нию срока службы шестерен и подшипников.
8. Если допустить, что к. п.д. пары шестерен равен 0,98, то при
трех парах включенных шестерен в коробке будет тратиться до 6%
передаваемой через коробку мощности. При мощности двигателя
300—400 л. с. это составит потерю 18—24 л. с., что может вызвать
перегрев коробки. При перегреве коробки масло теряет свою вяз-
кость, масляная пленка, покрывающая поверхность трения зубьев
и подшипников, теряет прочность и разрывается. Трение из жидкост-
ного переходит в полужидкостное или даже в сухое. В результате
увеличивается износ трущихся поверхностей. Кроме того, при силь-
ном нагреве масло окисляется и разлагается. Появляющиеся в масле
продукты разложения способствуют увеличению износа.
В коробках передач тяжелых гусеничных машин иногда смазка
охлаждается в специальных масляных радиаторах. Чаще же всего
масло охлаждается в картере самой коробки. Для увеличения по-
верхности охлаждения коробка изготовляется с ребрами. Кроме того,
коробка может быть установлена в воздушном потоке вентилятора
системы охлаждения двигателя, что значительно повышает эффек-
тивность ее охлаждения.
9. Габариты коробки передач определяются степенью использо-
вания ее внутреннего объема. Чем лучше используется внутренний
объем, тем меньше габариты коробки, тем она компактнее.
Габариты коробки находятся в зависимости от количества ше-
82
стерен, приходящихся на передачу. В обычных коробках на одну
передачу приходятся две шестерни. Однако имеются коробки, в ко-
торых на одну передачу приходится одна, а иногда и менее одной
шестерни.
Габариты коробки зависят также от величины передаваемого че-
рез нее крутящего момента. Чем меньше этот момент, тем меньше
габариты коробки. В свою очередь величина передаваемого момента
зависит от величины передаточных чисел коробки. С уменьшением
передаточных чисел передаваемый момент уменьшается, а коробка
делается более скоростной. Следует, однако, иметь в виду, что чем
тихоходнее коробка, тем она надежнее в работе, так как с уменьше-
нием скоростей уменьшаются динамические нагрузки в коробке.
Для оценки компактности конструкции коробки могут служить
следующие параметры: полный объем V коробки, выраженный
в кубических метрах, объем щ, отнесенный к мощности N, переда-
ваемои через коробку (в и объем у2, отнесенный к мощно-
/ см/3 \
сти N, передаваемой через коробку, и к числу передач/? (в
В табл. 9 приведены объемные данные коробок передач гусенич-
ных машин.
Таблица 9
Объемные данные коробок передач
/V, л. с. р И, м* смг!л. с. V2, см*!л. с. р Примечания
125 5 0,079 630 126 Планетарная
140 4 0,043 310 77,5 Простая автомобильная
165 5 0,095 575 115 Простая
190 6 0,144 760 127
250 5 0,146 570 114
350 4 0,154 442 111
500 5 0,166 330 66 С поперечными валами, про- стая
600 8 0,189 315 39,4 То же
Из табл. 9 следует, что удельный объем коробок лежит в пре-
делах:
'^ = 315 — 760 см?)л. с.\
г?2 = 40 — 127 см?/л. с. р,
причем чем больше передаваемая через коробку мощность, тем
меньше ее удельный объем. Наименьший объем имеют специальные
коробки с поперечным расположением валов.
Коробка передач тягача АТ-Т (данных по ней в табл. 9 нет)
при мощности М = 415 л. с. и числе передач р = 5 имеет следую-
щую объемную характеристику:
V — 0,225 л/3; vf — 540 см?[л.с.\ v2 = 108 см^л.с.р.
6*
83
3. ЭЛЕМЕНТЫ КОНСТРУКЦИЙ ПРОСТЫХ КОРОБОК ПЕРЕДАЧ
Всякая простая коробка передач состоит ш следующих основ
пых элементов: картера, валов, опор валов, шестерен и механизма
переключения.
картер
Картер коробки является основой для монтажа всех ее де-
талей.
Картеры бывают разъемные или целые. Разъемный картер со-
стоит из двух половин: при горизонтальном разъеме из нижней и
верхней половин, а при вертикальном—из передней и задней.
На рис. 57 показан разъемный картер коробки передач тягача
АТ-Т. Картер имеет вертикальный разъем.
Если коробка передач автомобильного или тракторного типа
с короткими двухопорными валами, то картер не имеет разъема
и представляет собой цельную отливку. В отливке сделаны окна,
через которые внутрь картера вводятся валы с шестернями. Сна-
ружи окна закрываются крышками.
Картеры отливают из чугуна или из сплава алюминия. В тя-
желых гусеничных машинах картеры коробок передач отливают из
стали.
Картеры мощных коробок должны обладать большой прочно-
стью и жесткостью. Усиление картера достигают за счет ребер
жесткости, а также специальными мероприятиями.
Кроме того, внутри картера делают перегородки для средних
опор валов, которые также усиливают картер.
Если конические шестерни силовой передачи помещаются вну-
три коробки передач, то они создают значительную осевую нагрузку
на одну из стенок картера. Эта нагрузка может вызвать перенапря-
жение картера и, следовательно, его поломку.
Чтобы равномерно распределить осевую нагрузку на обе стенки,
иногда применяют так называемую струну. Струна — это
стальной стержень, пропущенный внутри полого вала. При работе
Рис. 57. Разъемный картер коробки передач тягача АТ-Т:
а — передняя половина картера; 6 — задняя половина картера
84
Рис. 58. Крепление коробки передач тягача АТ-Т:
1 — крепежный болт; 2 — кронштейн; 3 — крышка; 4 — концевая опора; 5 — болт; 6 — крон-
штейн; 7 — лапа
коробки осевое усилие, возникающее от конической шестерни, пере-
дается частично через подшипник на одну из стенок картера, а ча-
стично через струну на другую стенку картера. Таким образом осе-'
вое усилие распределяется между обеими стенками картера.
Картеры коробок передач имеют два способа крепле-
ния: к картеру маховика двигателя или к раме машины. Первым
способом крепятся обычно коробки легких тягачей; в этих тягачах
применяется автомобильный двигатель с автомобильной коробкой
передач (тягачи М-2, АТ-П).
Как исключение к двигателю крепится также картер специаль-
ной (неавтомобильной) коробки передач тягача АТ-Л. Картеры
тяжелых коробок, например коробки тягача АТ-Т, АТ-С, устанавли-
ваются на специальных кронштейнах на раме тягача. Крепятся ко-
робки обычно в трех точках: в центре и по боковым сторонам кар-
тера.
На рис. 58 показано крепление коробки передач тягача АТ-Т на
раме тягача. Передняя часть коробки установлена на двух крон-
штейнах 6, привернутых болтами 5 к вертикальному листу рамы тя-
гача. В гнезда кронштейнов входят концевые опоры 4 ведомого вала
коробки. Концевые опоры закрыты крышкой 3. В задней части кар-
тера имеется лапа 7, которой картер опирается на кронштейн 2,
приваренный к днищу рамы.
85
ВАЛЫ
Валы коробок передач обычно изготовляют шлицованными;
редко применяются валы со шпонками (коробка передач тягача
АТ-С).
Обычно валы изготовляются отдельно от шестерен из конструк-
ционных углеродистых, хромистых и хромоникелевых сталей. Если
вал изготавливается заодно с шестерней, то применяются хромони-
келевые и хромоникелевольфрамовые стали.
ОПОРЫ ВАЛОВ
Опорами для валов простых коробок передач являются под-
шипники качения.
Подшипники качения применяются шариковые, роликовые ци-
линдрические, роликовые конические, игольчатые, бочкообразные
(самоустанавливающиеся).
При наличии в коробке конической пары осевые усилия воспри-
нимаются или обычными радиально-упорными шарикоподшипника-
ми или коническими роликоподшипниками (рис. 59).
Конические подшипники требуют регулировки зазора, в эксплуа-
тации они менее надежны, чем шариковые и цилиндрические роли-
ковые подшипники; поэтому вместо конических подшипников в на-
стоящее время предпочитают устанавливать коническую пару на
роликоподшипнике и упорном шарикоподшипнике, как показано на
рис. 60. Вместо упорного подшипника может также применяться и
обычный радиально-упорный шарикоподшипник или комбинация
роликового, упорного и радиально-упорного подшипников. Иногда
(очень редко) для восприятия осевых нагрузок применяют бочко-
образные подшипники. Вообще же бочкообразные самоустанавли-
Рис. 59. Опора вала на копиче- Рис. 60. Опора вала на ролико-
скпх роликоподшипниках подшипнике и упорном шарико-
подшипнике
86
вающиеся подшипники ставят на
валы, подверженные значитель-
ному изгибу (рис. 61).
В целях уменьшения размера
опор, а следовательно, и габари-
тов коробки передач валы иногда
устанавливают на роликопод-
шипниках без внутренней
обоймы.
При установке опор вала сле-
дует иметь в виду, что под дей-
ствием температуры вал удли-
няется. Поэтому валы закрепля-
ют только с одного конца, а дру-
гой конец вала должен свободно
перемещаться в подшипнике.
Опоры у выходных концов вала
должны тщательно уплотняться,
Рис. 61. Опора вала на
бочкообразном подшипнике
в
Рис. 62. Типы уплотнений:
а ~ сальник с поджимной гайкой;
б — разрезные (поршневые) кольца и
маслосгонная резьба; в — лабиринт
В качестве уплотнения применяют сальники, маслоотражательные
кольца, разрезные кольца, лабиринты, маслосгонные резьбы
(рис. 62).
Наиболее падежными являются сальниковые уплотнения раз-
личных типов, особенно самоподжимные сальники.
В последнее время в тягачах начинают применяться так назы-
ваемые беззазорные, или торцовые, уплотнения
(рис. 63).
Торцовое уплотнение состоит из двух притертых одна к другой
стальных каленых шайб 2 и 3, имеющих высокую твердость. Шай-
ба 3 надета на вал 1 так, что она не может проворачиваться отно-
сительно вала (на валу имеется лыска, а в шайбе — соответствую-
щей формы отверстие). Шайба 2 установлена неподвижно в картере
механизма на резиновом кольце. Обе шайбы прижаты одна к дру-
87
1
Рис. 63. Торцовое уплотнение:
I — вал; 2 — неподвижная шайба; 3 ~ вращаю-
щаяся шайба; 4 — коническая пружина;
5 — резиновая манжета
гой конической пружиной 4, за-
ключенной в резиновую манже-
ту 5. Это уплотнение работает на-
дежно длительное время, не тре-
буя за собой наблюдения.
ШЕСТЕРНИ
В коробках передач применя-
ются цилиндрические и кониче-
ские шестерни с прямым, косым
и спиральным зубом.
Шестерни с косым и спираль-
ным зубом обладают повышенной
износоустойчивостью и бесшумно-
стью в работе. Они имеют посто-
янное зацепление и переключают-
ся с помощью кулачковых муфт.
На рис. 64 показаны цилиндрические и коническая шестерни
вала коробки передач тягача АТ-С. Шестерни имеют косые и спи-
ральные зубья. Косой зуб применяется на цилиндрических шестер-
нях, а спиральный — на конической.
Шестерни коробок передач обычно изготовляются из малоугле-
родистых легированных сталей. Часто для шестерен применяют
хромоникелевольфрамовую сталь.
Рис. 64. Вал с шестернями с косым и спиральным
зубом коробки передач тя|ача АТ-С
МЕХАНИЗМ ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ
Механизмом переключения передач называется устройство, слу-
жащее для переключения передач. В него входят муфты переклю-
чения, синхронизаторы, вилки, валики, фиксаторы, замки и другие
устройства коробки передач.
В настоящее время в быстроходных гусеничных машинах при-
меняют главным образом коробки передач с постоянным зацепле-
нием шестерен. Переключение передач в этих коробках осуще-
88
ствляется зубчатыми или кулачковыми муфтами (рис. 65, а). При-
меняется также переключение передач и каретками, т. е. подвиж-
ными шестернями (рис. 65,6).
Перемещение муфты и каретки осуществляется с помощью
вилок, валиков и рычагов.
Для уменьшения удара при переключении передач применяют
синхронизаторы.
Синхронизаторы бывают индивидуальные, на одну передачу, или
центральные, на все передачи. В коробках передач отечественных
машин применяют только индивидуальные синхронизаторы.
Индивидуальные синхронизаторы бывают пружинные и инер-
ционные. Преимущественным распространением пользуются инер-
ционные синхронизаторы.
На рис. 66 представ-
лен индивидуальный инер-
ционный синхронизатор
коробки передач тягача
АТ-Т, а на рис. 67 — его
принципиальная схема.
Синхронизатор распо-
ложен на валу коробки
передач между шестерня-
ми 1 и 2, находящимися
в постоянном зацеплении
с шестернями 3 и 4. Ше-
стерни 1 и 2 посажены
свободно (на подшипни-
ке) на валу 5 коробки.
Заодно с шестернями сде-
ланы конусы 6 и 7. Эти
конусы могут приходить
Рис. 65. Переключающее устройство:
а — муфта; б ~ каретка
в соприкосновение с ко-
нусами корпуса 8 синхронизатора. В теле корпуса выфрезерованы
четыре продольные прорези 9, в которые входят четыре пальца 10
подвижной муфты 11 (рис. 67, а). На наружной поверхности по-
движной муфты имеются зубья. Такие же, но только внутренние
зубья имеются на конусах 6 и 7. Своими концами пальцы 10
вставлены в кольцо переключения 12.
При перемещении кольца 12, например, влево конус корпуса 8
прижимается к конусу 6 и начинает притормаживать (или разго-
нять) шестерню 2 относительно вала 5. При этом возникают силы
инерции, которые прижимают корпус 8 к пальцам 10, не позволяя
им выйти из выемок прорезей 9. Когда скорости конусов 6 и кор-
пуса 8 сравняются, т. е. когда угловые скорости шестерни 2 и вала 5
будут равны, силы инерции исчезнут и пальцы 10 свободно выйдут
из впадины прорези 9. Тогда муфта 11 получит возможность сво-
бодно перемещаться по шлицам вала и своими зубьями заблокирует
вал 5 и шестерню 2. Передача будет включена.
Если бы прорезь в корпусе имела форму, представленную па
89
6
Рис. 66. Индивидуальный инер-
ционный синхронизатор ко-
робки передач тягача АТ-Т:
а —- симметричная прорезь, б - асим-
метричная прорезь
Рис. 67. Принципиальная схема инди-
видуального инерционного синхрони-
затора*
а — схема; б — прорезь; 7, 2, 3 и 4 — шестер-
ни; 5 — вал; 6 и 7—конусы; 8— корпус;
9 — прорезь; 10 — палеи; 7/ — подвижная
муфта; 12 — кольцо
I
а
6
Рис. 68. Принцип действия ди-
скового синхронизатора:
а — диски разжаты; б — диски сжаты
рис. 66, б, то синхронизатор был бы не инерционного, а пружинного
типа.
В пружинном синхронизаторе подвижная муфта //.посаженная
на шлицованном валу, имеет пружинные фиксаторы. Чтобы переме-
стить муфту по валу и тем самым ввести в зацепление зубья муфты
с зубьями включаемой шестерни, надо преодолеть усилие пружин
фиксаторов. Блокировка зубьев муфты // и конуса в этом случае
может происходить до полного уравнивания скоростей вала 5 и
шестерни 2, т. е. с ударом. Чем сильнее будут пружины фиксато-
ров, тем скорее будет происходить уравнивание скоростей и тем
меньше будет сила удара.
Инерционные синхронизаторы
обычно ставятся на высшие пере-
дачи, в которых имеется небольшой
разрыв в передаточных числах со-
седних передач. Пружинные синхро-
низаторы ставят на низшие переда-
чи, обычно имеющие больший раз-
рыв передаточных чисел. При инер-
ционном синхронизаторе требуется
больше времени на переключение
передачи. Установка его на низшей
передаче может сделать невозмож-
ным переключение передач во вре-
мя движения машины (прежде чем
произойдет переключение передачи,
машина остановится).
В некоторых коробках передач иностранных машин применяются
дисковые синхронизаторы (рис. 68).
Дисковый синхронизатор состоит из комплекта стальных дисков,
часть которых надета на шлицы вала, а часть на шлицы в ступице
шестерни. В шлицы вала уложена подвижная шпонка, которая
перемещается вдоль шлицев с помощью фиксатора кулачковой
муфты. При перемещении кулачковой муфты, например, справа на-
лево перемещается вместе с ней и шпонка, которая сжимает диски
синхронизатора, вследствие чего происходит уравнивание скоростей
вала и шестерни. После того как скорости сравняются, шариковый
фиксатор выходит из впадины в шпонке и кулачковая муфта бло-
кируется с шестерней, а следовательно, блокируется с шестерней
и вал коробки передач; происходит безударное включение пере-
дачи.
Коробка передач с дисковыми синхронизаторами устанавлива-
лась на немецких танках Т-П.
На рис. 69 представлены фиксатор и шариковый за-
м о к механизма переключения коробки передач. Фиксатор препят-
ствует самопроизвольному включению или выключению передачи.
Он состоит из конуса (или шарика), который под действием пру-
жинки утапливается г; [выемку поводкового валика. На поводковый
валик надета вилка переключения передачи.
91
Шариковый замок предназначается для предотвращения одно-
временного включения двух передач.
Устройство замка следующее. В корпус механизма переключе-
ния вставлены поводковые валики, на которых закреплены вилки
переключения передач (на рисунке не показаны). В валиках сде-
ланы выточки для двух шариков. В среднем валике, кроме того,
имеется сверление с вставленным в него цилиндрическим сухариком.
Если один из валиков перемещается (включается одна из передач),
то два других валика запираются шариками, как указано на
рис. 69, б, и не могут перемещаться. Шариковый замок иногда по-
мещают в привод управления коробкой передач; тогда в механизме
переключения замок отсутствует.
Рис. 69. Фиксатор и шариковый замок коробки передач:
а — фиксатор; б — замок
4. КОНСТРУКЦИИ ПРОСТЫХ КОРОБОК ПЕРЕДАЧ
ОДНОТОЧЕЧНЫЕ КОРОБКИ
Одноточечные простые коробки (т. е. коробки с неподвижными
осями) бывают двух типов: двухвальные и трехвальные.
На рис. 70 представлена конструкция одноточечной двухваль-
ной коробки передач, сельскохозяйственного трактора С-65. На
рис. 71 приведена ее кинематическая схема и схема силового по-
тока. Коробка имеет три передачи для движения вперед и одну
для движения назад.
Особенностью коробок данного типа является простота их кон-
струкции и высокий коэффициент полезного действия на всех пе-
редачах, так как в зацеплении находится всего одна пара ше-
стерен.
Недостатком этих коробок является отсутствие прямой пере-
дачи и относительно (по сравнению с коробками других типов)
92
2
Рис, 70. Коробка передач трактора С-65
93
малый кинематический диапазон скоростей. Кинематический диа-
пазон определяется отношением максимального передаточного
числа к минимальному передаточному числу
• бпах
«« = —j---•
‘mln
Обычно *niajI<3; imin > 0,5, тогда <7К<6.
Для сельскохозяйственных тракторов такой диапазон вполне
достаточен, для быстроходных же тягачей он мал.
Особенности конструкции рассматриваемой коробки следующие.
В коробке применяются двухопорные валы, вследствие чего ока-
залось возможным сделать неразъемный картер. Первичный вал
имеет два вывода (один конец вала используется для отвода мощ-
ности на стоянках). Первичный вал установлен на двухрядном ша-
рикоподшипнике и на спиральном роликоподшипнике, который
служит для восприятия динамических нагрузок. Вторичный вал
установлен на двух конических роликоподшипниках, воспринимаю-
щих осевую нагрузку от конической шестерни. Правая опора веду-
щего вала уплотнена обычным (несамоподжимным) фетровым
сальником. Передачи переключаются с помощью кареток.
Чтобы расширить кинематический диапазон двухвальной ко-
робки, в схему коробки иногда вводится перебор. Перебор пред-
ставляет собой ряд дополнительных шестерен, которые устанавли-
Рис. 71. Кинематическая схема и
схема силового потока коробки пе-
редач трактора С-65:
а — кинематическая схема; б — схема сило-
вою потока
ваются на одну из неходовых пе-
редач коробки, обычно на первую.
Введение дополнительных шесте-
рен позволяет увеличить переда-
точное число zmax, а следователь-
но, и кинематический диапазон
коробки. Коробки передач с пе-
ребором применяются как в
сельскохозяйственных тракторах
(ДТ-54), так и в быстроходных
гусеничных машинах, например в
тягаче АТ-С, а также в танках.
На рис. 72 представлена пя-
тискоростная одноточечная ко-
робка передач с перебором, уста-
новленная на тягаче АТ-С, а на
рис. 73 схема ее переключений.
В данной коробке передач пе-
ребор работает на первой переда-
че. В зацеплении на первой пере-
даче находятся три пары шесте-
рен, а на остальных передачах в
зацеплении находится одна пара.
К особенностям конструкции
94
Рис. 72. Коробка передач тягача АТ-С:
/ — верхний вал; 2— крышка с хвостовиком; 3 — нижний вал; 4 — промежуточный вал;
5 — узел промежуточной шестерни первой передачи
этой коробки передач относится в первую очередь наличие в ней
перебора. Кроме того, коробка имеет шестерни постоянного за-
цепления с косым зубом, что повышает надежность работы шесте-
рен и уменьшает их шум; передачи переключаются кулачковыми
муфтами без синхронизаторов. Часть шестерен установлена сво-
бодно на валах на цилиндрических роликоподшипниках (шестерни
первичного вала), а часть — на шпонках (шестерни вторичного
вала). Роликоподшипники не имеют обойм, что сокращает раз-
меры посаженных на них шестерен.
Ш понки в конструкциях коробок передач быстроходных машин
применяются редко. Изготовление валов со шпоночными канавками
дешевле, чем шлицованных валов, кроме того, при одном и том же
диаметре вала шпоночный вал прочнее шлицованного. Однако при
больших крутящих моментах, передаваемых через коробку пере-
дач, шпонки не являются достаточно надежным соединением шесте-
рен с валом, поэтому в большинстве конструкций коробок предпо-
чтение все же отдается шлицам.
В коробке передач тягача АТ С для восприятия осевых нагрузок
применяются обычные радиально-упорные шарикоподшипники. Они
95
устанавливаются в паре с цилиндрическими роликоподшипниками,
которые воспринимают на себя основную радиальную нагрузку.
В коробке передач применяется принудительная смазка поли-
вом, которая осуществляется с помощью специального шестеренча-
того насоса.
В систему смазки входит масляный радиатор для охлаждения
масла в коробке.
Рис. 73. Схема переключений коробки передач тягача АТ-С:
а — включена первая передача; б — включена вторая передача; в — включена третья пере-
дача; г — включена четвертая передача; д — включена пятая передача; е — включена пере-
дача заднего хода
Необходимость охлаждения масла объясняется тем, что коробка
передач располагается в одном картере с механизмом поворота
машины, тормоза которого работают в масле. При повороте ма-
шины тормоза нагреваются, вследствие чего будет нагреваться и
масло в коробке передач.
В быстроходных гусеничных машинах широко распространена
простая одноточечная коробка с поперечным расположением валов
и с конической парой, встроенной в картер коробки передач.
Примером такой коробки является коробка передач тягача АТ-Т,
представленная на рис. 74. На рис. 75 дана ее кинематическая схема
и схема силового потока.
Заметим, что узловая точка данной коребки является вектор-
н о и, так как она описывает механизм с непараллельными валами.
Коробка конструктивно проста и имеет высокий к. п. д. на всех
передачах. Установка конической пары в коробке сокращает габа-
риты силовой передачи. Коническая пара установлена до коробки;
96
Рис. 74. Коробка передач тягача АТ-Т:
а — без передней половины картера; б — вид сверху
7—20
97
это позволяет несколько увеличить кинематический диапазон ко-
робки за счет уменьшения Zmiu. Действительно
у ____ лдв
mln — 'кон«тах ’
где /гдв—число оборотов двигателя;
лтах—предельно допустимые обороты вторичного вала коробки
передач;
4он—передаточное число конической пары.
Из приведенной формулы следует, что чем больше 4он> тем
меньше Zmin.
Однако, чтобы не перегружать подшипники коробки передач
осевыми нагрузками и не увеличивать моменты на промежуточном
валу, обычно принимают /кон=1,0—1,5.
Осевые нагрузки, возникающие'вследствие установки в коробке
конической пары, требуют усиления подшипников, валов, картера.
Чтобы повысить жесткость валов, им дается третья опора. Эта
опора одновременно воспринимает и осевые усилия конической
пары, для чего в ней установлены конические подшипники. Третья
опора усиливает также картер коробки и делает его более жестким.
В коробках данного типа
иногда делают перебор на
высшую и низшую пере-
дачи.
На рис. 76 представле-
на одноточечная двухваль-
ная коробка с перебором на
первую и вторую переда-
чи. Перебор осуществляет-
ся между средней шестер-
ней, сидящей на шлицах
промежуточного вала, и ка-
реткой с двумя шестернями,
посаженной на том же валу
на цилиндрических ролико-
подшипниках (шестерни пе-
ребора на рисунке не пока-
заны, так как они установ-
лены на крышке картера ко-
робки передач). Коробка
имеет-пять передач для дви-
жения вперед и одну для
движения назад. Пятая пе-
редача ускоренная,первая—
замедленная.
Особенностью конструк-
ции данной' коробки передач
Рис. 75. Кинематическая схема и схема
силового потока коробки передач тяга-
ча АТ-Т:
а — кинематическая схема; б — схема силового по-
тока
98
Рис. 76. Одноточечная коробка передач с перебором на две
передачи
7*
99
Рис. 77. К инематическая схема и схема
силового потока коробки передач тягача
М-2:
а — кинематическая схема; б — схема силового
потока
является применение стру-
ны, разгружающей картер
коробки. Струна уста-
новлена на промежуточном
валу.
Коническая пара встрое-
на в коробку передач. Для
восприятия осевых усилий
применяются конические ро-
ликоподшипники.
Коробка компактна и
имеет минимальную объ-
емную характеристику (i>2==
Данная коробка приме-
нялась на тяжелом отече-
ственном танке КВ.
На рис. 77 приведена ки-
нематическая схема и схема
силового потока одноточеч-
ной трехвальной коробки
автомобильного типа. Эта коробка применяется на легких гусенич-
ных .тягачах М-2.
Особенностями этой коробки передач являются наличие прямой
передачи и несколько расширенный диапазон передаточных чисел
вследствие использования шестерен постоянного зацепления между
первичным 1 и промежуточным 3 валами. Передаточное число этих
шестерен обычно лежит в пределах /,|Э — 1,5—2,5.
Передаточное число гпз увеличивает Zraax, а следовательно, и
диапазон коробки передач.
Недостатком данной коробки с точки зрения применения ее в си-
ловых передачах гусеничных машин является отсутствие кониче-
ской пары. Кроме того, на всех передачах, кроме прямой, в данной
коробке работают одновременно две пары шестерен, это снижает
ее к. п. д. по сравнению с к. п. д. двухвальной коробки.
Серьезным недостатком автомобильных коробок, применяю-
щихся на тягачах, является несоответствие их разбивки
передач условиям работы в тягаче (см. данные в
табл. 25, часть 1, для тягача АТ-П с автомобильной коробкой пере-
дач). Так, если в автомобильной коробке высшей передачей яв-
ляется прямая, то в тягаче эта передача может использоваться
только при движении одиночной машины на максимальной скорости.
Но для тягача такая скорость не является рабочей, так как он дол-
жен работать с прицепом. Если все же автомобильная коробка при-
меняется в тягаче, то желательно, чтобы она имела ускоренную
передач у, тогда прямая передача может быть использована для
работы тягача с прицепом.
100
МНОГОТОЧЕЧНЫЕ КОРОБКИ
Одноточечная коробка, работающая с демультипликатором или
мультипликатором, может рассматриваться как двухточечная ко-
робка.
Демультипликатор может быть смонтирован в отдельном кар-
тере или вмонтирован в картер коробки передач (в последнем слу-
чае он обычно не называется демультипликатором).
На рис. 78,а показана кинематическая схема коробки передач
с демультипликатором, встроенным в общий картер коробки. Эту
коробку передач в схеме силового потока можно представить в виде
двухточечной (рис. 78,6). Для этого заменим кинематическую схему
коробки, представленную на рис. 78,а, кинематически эквивалент-
ной схемой, представленной на рис. 79. Объединив в узловую
точку а валы / и 2 с принадлежащими им шестернями, а в точ-
ку б валы 2 и 2' с принадлежащими им шестернями, получим двух-
точечную схему силового потока.
Из схемы силового потока следует, что коробка передач описы-
вается последовательным силовым потоком.
Находим, что = 3, т. е. коробка передач имеет в нейтраль-
ном положении три степени свободы.
Чтобы получить какую-либо передачу, необходимо одновременно
включить две муфты, тогда коробка передач будет иметь одну сте-
пень свободы.
Число передач данной коробки определяется по формуле (31)
^ = 2-3 = 6.
а б
Рис. 78. Кинематическая схема коробки передач с демуль-
типликатором, встроенным в общий картер коробки:
а — кинематическая схема; б — схема силового потока
101
Заметим, что в коробке е демультипликатором на каждую пере-
дачу приходится 10:6=1,7 шестерни, в коробке с демультипли-
катором, встроенным в общий картер (см. рис. 78), 8: 6 = 1,3 ше-
стерни. В одноточечных коробках на каждую передачу приходятся
две шестерни.
В возможности уменьшать количество ше-
стерен, приходящихся на одну передачу, за-
ключается основное преимущество многоточеч-
ных коробок.
I
Рис. 79. Эквивалентная схема коробки передач с демультипли-
катором
Дальнейшим совершенствованием конструкции двухточечных
коробок передач является так называемая коробка с раз-
резными валами. Это многоточечная коробка, позволяющая
при небольшом числе шестерен получить очень большое число пе-
редач.
На рис. 80 показана коробка передач с разрезными валами не-
мецкого танка Т-Ш, а на рис. 81 приведена ее кинематическая
схема.
Преобразуем кинематическую схему коробки. Представим ше-
стерни ряда 2 (рис. 82) в виде двух одинаковых рядов шестерен
и объединим'один ряд с шестернями ряда /, а другой с шестернями
ряда 3, как показано на рис. 83, а. Получим новую кинематическую
схему коробки, эквивалентную схеме, показанной на рис, 82.
Для этой схемы построим силовой поток, как показано на
рис. 83, б.
В этом силовом потоке узловые точки объединяют две пары со-
седних шестерен.
Заметим, что с включением нижней фрикционной точки силовой
поток идет, минуя механическую точку; при включении верхней
фрикционной точки поток идет через механическую точку. Пере-
дачи в коробке получаются включением различных фрикционных'
точек,
102
Рис. 80. Коробка передач с разрезными валами (немецкий танк T-III):
I и 2 — конусы
s
Переда- ча Через какие шестерни передается силовой поток
1 1-2-4-3-7-8-10-9
II 1-2-4-3-5-6-10-9
III 1-2-10-9
IV 7-8-10-9
V 1-2-4 -3
VI 1-2 -6-5
VII 1-2-8 -7
VIII Прямая
IX 3-4-6-5
X 3-4-8-7
Рис. 81. Кинематическая схема коробки передач с раз-
резными валами и таблица переключений передач
Рис. 82. Преобразование кинематической
схемы коробки передач с разрезными валами
104
Определим число степеней свободы силового потока. Будем
иметь
= 2 (4 + 8) + 8 — 23 — 4 = 5.
Следовательно, каждая передача получается одновременным
включением четырех фрикционных точек.
Рис. 83. Преобразованная кинематическая схема коробки пере-
дач с разрезными валами и схема ее силового потока:
а — кинематическая схема; б — схема силового потока
Так как механической точке принадлежат две фрикционные точ-
ки, то согласно формуле (31) число передач будет равно
/7 = 2\ (32)
где — число механических узловых точек.
Для рассматриваемой коробки передач — 4. Тогда
р = 24 = 16.
В коробке передач, представленной на рис. 80, использовано из
16 передач только 10.
Шестерен в коробке передач 10. Следовательно, на каждую пе-
редачу приходится одна шестерня.
Недостатком многоточечных коробок передач является кон-
структивная сложность их механизма переключения, так как на
каждой передаче приходится переключать одновременно несколько
105
муфт. Однако, если применить сервопривод (а в коробках с боль-
шим числом передач без него обойтись нельзя), одновременное пе-
реключение нескольких муфт не представит затруднений.
Рассматриваемая коробка имеет конструктивные особенности,
на которых здесь следует остановиться.
Все шестерни, находящиеся в постоянном зацеплении, установ-
лены каждая на своих подшипниках. Это устраняет возможность
их перекоса и обеспечивает высокую точность зацепления.
Для уменьшения габаритов коробки передач все роликоподшип-
ники выполнены без внутренней обоймы. Подшипники применяются
только шариковые или цилиндрические роликовые.
Коробка передач имеет многодисковый главный фрикцион, ра-
ботающий в масле и имеющий гидравлический сервопривод.
Наконец, коробка имеет центральные синхронизаторы, выполнен-
ные в виде двух конусов 1 и 2. Конус 1 представляет собой тормоз,
а конус 2— муфту. Конус 1 действует при переходе с низшей пере-
дачи на высшую, а конус 2 — с высшей на низшую.
Коробка имеет вакуумогидравлическое избирательное управле-
ние, позволяющее заранее выбирать ту передачу, на которой будет
совершаться движение машины. Это значительно облегчает управ-
ление коробкой и сокращает время переключения передач.
СОЕДИНЕНИЕ КОРОБКИ ПЕРЕДАЧ С СОСЕДНИМИ
АГРЕГАТАМИ
Коробка передач соединяется своим первичным валом с главным
фрикционом и вторичным — с механизмом поворота или с кониче-
ской передачей.
Главный фрикцион обычно крепится вместе с маховиком на
носке коленчатого вала двигателя; таким образом, центровка глав-
ного фрикциона осуществляется по валу двигателя. Если коробка
устанавливается на раме машины, то с главным фрикционом она
соединяется зубчатыми муфтами. Иногда коробка передач и глав-
ный фрикцион соединяются между собой непосредственно: внутрен-
ний барабан фрикциона крепится на шлицах первичного вала ко-
робки. Наконец, возможно жесткое соединение агрегатов, как на
тягаче АТ-Л. При таком способе нет необходимости вводить между
главным фрикционом и коробкой передач полужесткие соединения,
так как коробка центрируется по двигателю.
В тягаче АТ-Т главный фрикцион посажен на шлицованный ко-
нец первичного вала коробки передач. В этом случае соединитель-
ная муфта устанавливается между главным фрикционом и дви-
гателем (рис. 84).
С механизмом поворота коробка передач соединяется с помощью
зубчатых муфт; иногда механизм поворота жестко монтируется на
главном валу коробки..
106
Возможно соединение коробки с соседним агрегатом с помощью
карданного вала, как, например, в силовой передаче тягача М-2.
Рис. 84. Соединение коробки передач, с соседними
агрегатами (тягач АТ-Т)
5. КОНСТРУКЦИИ ПЛАНЕТАРНЫХ КОРОБОК
ПЕРЕДАЧ
Планетарные коробки передач применяются в самоходных ма-
шинах давно. Известна конструкция планетарной коробки, которая
еще в 20-е годы была установлена на американском автомобиле
«Форд Т». Широкую известность в свое время получила английская
планетарная коробка Вильсона, которая устанавливалась на англий-
ские танки «Матильда» периода второй мировой войны и приме-
няется в настоящее время на тяжелых английских грузовых авто-
мобилях фирмы Даймлер. Известна также планетарная коробка
передач типа Коталь, Прага и др.
Планетарные коробки в гусеничных машинах и в автомобилях
применялись в Чехословакии, Франции и Германии.
Планетарные механизмы широко применяются в отечественных
гусеничных машинах в качестве механизмов поворота и бортовых
передач. Из четырех отечественных тягачей на трех устанавлива-
ются планетарные механизмы поворота или бортовые передачи или
то и другое (тягачи АТ-Т, АТ-С и АТ-Л). Начинают применяться и
107
планетарные коробки передач в виде самостоятельного агрегата
силовой передачи или в виде элемента комплексных силовых
передач.
Наконец, широкое применение получили планетарные коробки
в гидромеханических передачах, а также в различных автоматизи-
рованных ступенчатых силовых передачах.
Планетарные коробки передач, как и вообще планетарные ме-
ханизмы, имеют ряд особенностей, благодаря которым их и начали
внедрять в силовую передачу самоходных машин.
Рассмотрим эти особенности.
В планетарном механизме мощность передается параллельными
потоками одновременно через несколько сателлитов. Это умень-
шает нагрузку на зубья шестерен и повышает прочность меха-
низма.
Выше отмечалось, что потери в любом зубчатом механизме опре-
деляются потерями на трение в полюсах зацепления его шестерен.
В планетарном механизме силовой поток передается двумя видами
движения: переносным и относительным (по отношению к водилу)
или он состоит из переносного и относительного потоков. Через по-
люса зацепления проходит только относительный поток. Следова-
тельно, потери в планетарном механизме зависят от величины от-
носительных потоков. Если нет циркуляции мощности, то как бы ни
был велик относительный поток, он составляет лишь часть переда-
ваемого через механизм общего потока. Поэтому потери в плане-
тарном механизме должны быть меньше потерь в простом меха-
низме. Следовательно, и к. п. д. планетарного механизма должен
быть выше к. п. д. простого механизма.
При одних и тех же геометрических размерах шестерен в пла-
нетарном механизме можно получить большее передаточное число,
чем в простом механизме.
Планетарный механизм является соосным механизмом.
Наконец, простейший планетарный механизм (точнее, диффе-
ренциальный механизм) имеет две степени свободы. Это позволяет
использовать его как суммирующую узловую точку в параллельных
силовых потоках, например в силовых потоках гидромеханических
или электромеханических передач. Эту задачу простая (неплане-
тарная) передача выполнить не может.
ОДНОТОЧЕЧНЫЕ ПЛАНЕТАРНЫЕ КОРОБКИ
Согласно данному выше определению одноточечной коробкой
называется такая коробка, которая в схеме силового потока опи-
сывается простейшей узловой точкой.
На рис. 85 показана конструктивная схема одноточечной плане-
тарной коробки передач.
В водиле 0 на шарикоподшипниках установлены валы сателли-
тов. Каждый вал сателлитов имеет по три шестерни. Шестерни са-
108
теллитов находятся в зацеплении с солнечными шестернями. Одна
солнечная шестерня посажена на валу I, на конце которого уста-
новлен тормоз Т1. Другая шестерня сидит на трубчатом валу 2,
на конце которого имеется барабан тормоза Т2, одновременно яв-
Рис. 85. Конструктивная схема одноточечной планетарной коробки передач:
Ф — фрикционная муфта, 77 и 7 2 — тормоза; 0—водило; / — вал; 2 — трубчатый вал; 3 — блок
шестерен; 4 и 5 — шестерни; 6 — коническая шестерня
ляющийся барабаном фрикционной муфты Ф. Третья солнечная
шестерня также имеет трубчатый вал, который заканчивается бло-
ком 3 шестерен, связанных с шестернями 4 и 5. Последние с по-
мощью кулачковых муфт могут блокироваться с ведомым ва-
лом коробки передач, на конце которого посажена коническая ше-
стерня 6.
Шестерни 3, 4 и 5 выполняют роль простого непланетарного де-
мультипликатора (точнее мультипликатора) и дают в схеме сило-
вого потока простую (непланетарную) узловую точку.
На рис. 86 приведены кинематическая схема планетарной части
коробки (без демультипликатора) и ее силовой поток.
Коробка имеет три передачи: две передачи получаются включе-
нием тормоза Т1 или Т2 и одна — прямая передача — получается
блокировкой с помощью фрикционной муфты Ф двух потоков 1 и 2
коробки (см. свойство 2 простейшего планетарного механизма,
раздел 4, гл. V, ч. 1).
Если добавить в планетарную коробку еще один ряд шестерен,
то число передач увеличится на одну.
109
Однако больше трех передач
в одноточечной коробке практи-
чески получить трудно, так как
валы коробки в этом случае де-
лаются «многослойными» (вот
почему в рассматриваемой ко-
робке применен дополнительно
простой демультипликатор, кото-
рый позволяет увеличить общее
число передач до шести, из них
две заднего хода).
Заметим, что в планетарной
коробке передача заднего хода
получается без введения в нее
промежуточных шестерен, а лишь
соответствующим подбором вну-
тренних передаточных отношений
планетарного механизма.
Так, согласно кинематической
характеристике механической уз-
ловой точки имеем
Ш1 ~г'1зшз + (г''1з— !) шо = 0-
Рис, 86. Кинематическая схема и
схема силового потока одноточечной
планетарной коробки передач:
а — кинематическая схема; б — схема сило-
вого потока (наименование деталей то же,
что и на рис. 85) ЗаТОрМОЗИМ ПОЛНОСТЬЮ ТОр-
моз Т1. Тогда со, =0 и из кине-
матической характеристики можно определить внешнее передаточ-
о <°Л
ное отношение механической точки /оз=— или передаточное число
о>э
коробки передач
Будем иметь
_ (13
{пз (Т1) — , •
Всегда можно так выбрать внутреннее передаточное отноше-
ние /'Та, чтобы внешнее передаточное отношение /оз было величиной
отрицательной, что будет соответствовать передаче заднего хода,
При включении тормоза Т2 аналогично получим
, _ ‘'i3
103 (Т2) , •
< 23 — I
Здесь можно подобрать /'гз так, чтобы /03(Т2| было величиной по-
ложительной, что будет соответствовать передаче прямого хода.
Одноточечные планетарные коробки в настоящее время приме-
няются главным образом в гидромеханических передачах, где тре-
1 Здесь и в дальнейшем под внешним передаточным отношением понимается
отношение угловых скоростей двух внешних потоков точки Передаточным числом
коробки будем называть отношение угловой скорости ведущего вала к угловой
скорости ведомого вала коробки.
110
буется небольшое число передач (2—3). В механических силовых
передачах чаще всего применяют многоточечные планетарные ко-
робки.
МНОГОТОЧЕЧНЫЕ ПЛАНЕТАРНЫЕ КОРОБКИ ПЕРЕДАЧ
С ПОСЛЕДОВАТЕЛЬНЫМ СИЛОВЫМ ПОТОКОМ
Многоточечной планетарной коробкой называется коробка, со-
стоящая из нескольких простейших планетарных механизмов. Как
указывалось выше, многоточечная коробка может быть с последо-
вательным и с параллельным силовым потоком.
На рис. 87 представлена конструктивная схема многоточечной
коробки передач типа Коталь. Эта коробка передач состоит из че-
тырех простейших планетарных механизмов, связанных между со-
бой валами. Передачи в коробке включаются электромагнитными
муфтами и электромагнитными тормозами.
На рис. 88 представлены кинематическая схема и схема сило-
вого потока коробки Коталь. Здесь каждый простейший механизм
обозначен отдельной механической узловой точкой. Число механи-
ческих узловых точек — четыре. Силовой поток последовательный.
Определим число степеней свободы и число передач коробки.
Предположим, что все фрикционные точки выключены. Тогда
будем иметь см = 4; сф = 8; ср = 8; к = 23; <р = 4. Отсюда
Хш = 2 (4 + 8) + 8 — 23 — 4 = 5.
Рис. 87. Конструктивная схема многоточечной планетарной коробки
передач типа Коталь
111
Следовательно, каждая передача получается одновременным
включением четырех фрикционных элементов.
Число передач определяется по формуле (32)
р = 24 = 16.
В коробке передач
только восемь передач.
типа Коталь практически используются
Рис. 88. Кинематическая схема и схема силового потока
коробки передач типа Коталь:
а — кинематическая схема; б — схема силового потока
Конструктивно коробка передач типа Коталь проще коробки
с разрезными валами, так как здесь не требуется установка синхро-
низаторов; роль синхронизаторов выполняют фрикционные элемен-
ты самой коробки (тормоза и муфты).
Значительно упрощает управление коробкой электромагнитный
привод. Механический и гидравлический привод был бы здесь зна-
чительно сложнее и менее надежен в работе.
В коробке, имеющей электромагнитный привод, легко устано-
вить автомат переключения передач.
Заметим, что наличие большого числа передач и автоматичность
их переключения в известной степени могут решать важную про-
блему непрерывности и автоматичности совре-
менных коробок передач.
112
МНОГОТОЧЕЧНЫЕ ПЛАНЕТАРНЫЕ КОРОБКИ ПЕРЕДАЧ
С ПАРАЛЛЕЛЬНЫМ СИЛОВЫМ ПОТОКОМ
На рис. 89 приведены примерная кинематическая схема и схема
силового потока трехточечной коробки передач с параллельным
силовым потоком.
Рис. 89. Кинематическая схема и схема силового потока
трехточечной коробки передач с параллельным силовым
потоком:
а — кинематическая схема; б — схема силового потока
Число степеней свободы коробки Хщ = 2. Тогда каждая передача
получается включением одного из фрикционных элементов — фрик-
ционной муфты или тормоза. Так как число тормозов в данной ко-
робке три и муфта одна, то число передач будет равно четырем.
Включение муфты обеспечивает блокировку всей коробки, т. е.
прямую передачу. Действительно, при включении муфты блокиру-
ются два потока узловых точек а и б. Согласно свойству -2 в
этом случае узловые точки а и б будут полностью заблокированы.
Вследствие этого будут заблокированы и потоки 0 и 2 узловой точ-
ки в. Следовательно, и сама точка в будет заблокирована. Но тогда
коробка должна иметь прямую передачу, так как все механи-
ческие точки превращаются в разветвляющие
точки, т. е. механизм блокируется в целом.
С включением одного из тормозов включается в работу та или
иная механическая точка, благодаря чему получаются различные
передачи в коробке.
Включим тормоз ТЗ. Тормоза Т1 и Т2 и фрикцион Ф будут вы-
ключены. Согласно свойству 7 элементарная узловая точка
8-20
113
Рис. 90. Пятиточечная планетарная коробка передач Прага
является холостой, если у
нее есть хотя бы один хо-
лостой поток. Но точка а
является элементарной и
имеет холостой поток 2а.
Следовательно, эта точка
холостая. Тогда работать
будут точки бив, через
которые и будет на дан-
ной передаче передавать-
ся силовой поток.
Аналогично получим
передачи при включении
других тормозов. При этом
работают различные точ-
ки и по-разному к ним
подводятся силовые пото-
ки, благодаря чему и по-
Рис. 91. Кинематическая схема и схема сило-
вого потока коробки передач Прага:
а — кинематическая схема; б — схема силового потока
лучаются различные пере-
дачи.
Число передач много-
точечной коробки . с. па-
раллельным силовым потоком и с двумя степенями свободы опре-
деляется по формуле
Р = сы + 1,
(33)
где сы— число переключаемых механических узловых точек. В это
число не входят узловые точки редукторов, так как редук-
торы не влияют на число передач коробки; с\, передач
получается включением тормозов и одна, прямая, пере-
дача — включением фрикционной муфты,
На рис. 90 представлена пятиточечная планетарная коробка пе-
редач Прага, а на рис. 91 —ее кинематическая схема и схема си-
лового потока.
Согласно формуле (33) коробка обеспечивает шесть передач,
включая прямую передачу и задний ход.
На рис. 92 приведены частные схемы силового потока на всех
шести передачах коробки передач Прага. Каждая передача полу-
чается включением какого-нибудь одного фрикционного элемента.
Из схем силовых потоков следует, что на разных передачах ра-
ботает разное число механических точек (от 1 до 3).
Заметим, что на некоторых передачах имеются замкнутые по-
токи. В замкнутых, потоках может происходить явление цир-
куляции мощностного фактора, сопровождающееся, как из-
вестно, большими потерями мощности. Поэтому коробки с парал-
лельными потоками должны при расчете проверяться на циркуля-
цию.
Недостатком коробок с параллельным силовым потоком и с
двумя степенями свободы является малое число передач, которое
S*
115
1
Рис. 92. Частные схемы си-
лового потока коробки пере-
дач Прага на различных
передачах
здесь можно получить на одну механиче-
скую узловую точку. Так, в коробке с по-
следовательным потоком при наличии че-
тырех точек можно получить 16 передач,
т. е. четыре передачи на точку, в то время
как в коробке с параллельным потоком
при тех же условиях можно получить
только пять передач, т. е. примерно одну
передачу на точку.
Малое число передач в коробке с па-
раллельным потоком объясняется тем,
что это — коробка с двумя степенями
свободы. Если в коробках с параллель-
ным потоком иметь более двух степеней
свободы, то число передач повысится.
В этом случае число передач уже не бу-
дет определяться числом механических
узловых точек, как это следует из фор-
мулы (33).
Конструктивно коробка с параллель-
ным силовым потоком и двумя степенями
свободы значительно сложнее коробки
с последовательным силовым потоком,
что объясняется, во-первых, большим
числом простейших планетарных меха-
низмов, которые входят в эту коробку
(при равном числе передач), и, во-вто-
рых, сложной конфигурацией деталей ко-
робки (валов и шестерен), которые
должны связывать между собой несколь-
ко простейших механизмов.
Характерной особенностью рассматри-
ваемых коробок является также много-
слойность их валов. Так коробка передач
Прага имеет пять трубчатых валов, в то
время как в коробке передач Коталь их
не более трех.
Преимуществом коробки с параллель-
ным потоком и с двумя степенями сво-
боды является простота ее управления. Для включения передачи
пало включить всего один фрикционный элемент, что значительно
упрощает устройство привода управления коробкой и уменьшает
число ее фрикционных элементов.
Это преимущество, однако, все же не окупает общую конструк-
тивную сложность коробок этого типа.
Отметим некоторые особенности конструкций планетарных ко-
робок передач.
Главные валы планетарных механизмов, входящих в коробку
116
передач, разгружены от радиальных усилий и могут устанавли-
ваться на бронзовых втулках, т. е. на подшипниках скольжения.
Валы сателлитов, наоборот, кроме радиальных нагрузок, воз-
никающих вследствие действия окружных усилий, нагружены
еще центробежными силами, величина которых может быть очень
значительной. Эти валы обязательно устанавливаются на подшип-
никах качения. Обычно их устанавливают на шариковые или роли-
ковые подшипники, которые помещают или в теле сателлитов (см.
рис. 90), или в теле водила (см. рис. 91). Первому способу уста-
новки подшипников следует отдать предпочтение, так как в этом
случае неподвижный палец, на котором установлены сателлиты,
будет являться деталью, жестко соединяющей разъемные части во-
дила.
Применяющиеся в планетарных коробках тормоза, как правило,
размещаются внутри картера коробки и работают в масле. При ра-
боте тормозов в масле требуются большие усилия для .сжатия их
фрикционных поверхностей, чем при работе сухих тормозов.
Внутреннее расположение тормозов, а также привода к ним за-
трудняет регулировку тормозов, поэтому в планетарных коробках
применяют автоматическое регулирование тормо-
зов.
Целесообразно в планетарных коробках применять тормоза с
гидравлическим приводом. Последний позволяет легко создавать
большие усилия и не требует регулировки.
Наконец, важной конструктивной особенностью планетарной ко-
робки передач является отсутствие в ней главного фрик-
циона.
Функции главного фрикциона здесь выполняют фрикционные
элементы самой коробки (тормоза, муфты).
ПЛАНЕТАРНАЯ КОРОБКА С АВТОМАТИЧЕСКИМ ПЕРЕКЛЮЧЕНИЕМ
ПЕРЕДАЧ
В планетарной коробке наиболее просто осуществить автомати-
ческое переключение передач, так как при переключении не тре-
буется выключать главный фрикцион, вследствие чего процесс пе-
реключения значительно упрощается.
Рассмотрим одну из автоматизированных современных плане-
тарных коробок—коробку передач Хоббса, известного англий-
ского изобретателя непрерывных импульсных передач.
На рис. 93 представлен продольный разрез коробки Хоббса, а на
рис. 94 — схемы ее переключений. Коробка имеет четыре передачи
для движения машины вперед и одну для движения назад. Со-
гласно схеме силового потока, представленной на рис. 95, коробка
передач принадлежит к типу одноточечных коробок.
В коробке Хоббса передачи переключаются с помощью диско-
вых муфт и дисковых тормозов. Для переключения передач приме-
няется гидравлический привод. Масло от пасоса подается к
диафрагменному устройству, давит на резиновую диафрагму и
117
Рис. 93. Коробка передач Хоббса с автоматическим переключением передач
a
6
Рис. 94. Схемы переключения передач коробки передач Хоббса: '
а — включена первая передача; б — включена вторая передача; в — включена третья передача; г — включена четвертая (прямая) передача; д — нейтраль-
ное положение передач; е — включена передача заднего хода
Рис. 95. Схема силового потока и таблица переключения передач
коробки передач Хоббса
Рис. 96. Гидравлический привод коробки передач Хоббса:
/—регулирующий клапан; 2 — обратный клапан; 3 и 4 — насосы
120
отжимает вместе с ней металлическое кольцо (нажимной диск),
которое, перемещаясь, сжимает диски муфты или тормоза. Таким
образом, включается фрикционный элемент.
Переключение передач может осуществляться вручную или ав-
томатически. На щитке водителя имеется рычажок управления, с
помощью которого коробка устанавливается па ручное или автома-
тическое управление.
Автомат переключения передач устроен следующим образом.
В системе гидравлического привода имеются два насоса и два кла-
пана— регулирующий и обратный. Насос 4 (рис. 96) связан с ве-
дущим, а насос 3 — с ведомым валом коробки передач. От насосов
маслопроводы идут к регулирующему клапану 1, от регулирующего
клапана — к фрикционным элементам коробки и к обратному кла-
пану, связанному с тягой управления дроссельной заслонкой.
Автомат работает следующим образом. При трогании машины
с места, обычно на второй передаче, насос 3 не работает и золотник
регулирующего клапана находится в нижнем положении. Насос 4
в это время связан с маслопроводом второй передачи. Как только
машина начнет двигаться, насос 3 заработает и погонит масло к зо-
лотнику регулирующего клапана. Золотник переместится вверх и
откроет сливные отверстия. Через эти отверстия масло потечет к
обратному клапану и через калиброванные отверстия, имеющиеся
в нем, будет стекать в магистраль привода.
Допустим, что на педаль управления дроссельной заслонкой ни-
какого воздействия не производится и сопротивление дороги таково,
что позволяет машине разгоняться. По мере разгона машины про-
изводительность насоса 3 увеличивается и золотник под давлением
масла поднимается, переключая передачи со второй на третью.
Если водитель выжимает до отказа педаль управления дроссельной
заслонкой, калиброванные отверстия обратного клапана частично
перекрываются и сток масла из регулировочного клапана затруд-
няется. Тогда давление под золотником увеличится, золотник под-
нимется еще выше, вследствие чего произойдет переключение на
высшую передачу (на прямую).
Допустим, что педаль управления дроссельной заслонкой пол-
ностью выжата, а сопротивление движению машины возросло.
Начнется снижение скорости машины и при этом будет уменьшаться
производительность насоса 3. В связи с этим золотник регулировоч-
ного клапана будет опускаться и в коробке произойдет переключе-
ние на низшую передачу.
В приводе коробки передач Хоббса, кроме рассмотренных здесь
клапанов, имеются еще дополнительные регулировочные клапаны,
расположенные во фрикционных муфтах. Эти клапаны изменяют да-
вление рабочей жидкости на нажимной диск пропорционально числу
оборотов двигателя, что обеспечивает плавное включение муфты.
Для смягчения включения муфт и тормозов служат воздуш-
ные полости в гидроприводе, которые являются амортизирую-
щим элементом привода, и без которого привод работал бы очень
жестко.
121
6. ПРИВОДЫ УПРАВЛЕНИЯ КОРОБКАМИ ПЕРЕДАЧ
ПРИВОДЫ УПРАВЛЕНИЯ ПРОСТЫМИ КОРОБКАМИ
Передачи в простых коробках переключаются с помощью ме-
ханизма переключения и привода управления.
Привод управления предназначается для связи механизма пере-
ключения, расположенного в коробке передач, с рычагом управле-
ния, расположенным в кабине водителя.
Механизм переключения был описан выше. Рассмотрим здесь
привод управления.
Привод управления состоит из кулисы, рычагов, тяг и замковых
устройств.
Основным элементом всякого привода является кулиса,
т. е. устройство, в котором расположен рычаг переключения пе-
редач.
Кулиса может монтироваться вне коробки передач (дистанцион-
ный привод) или на самой коробке (см. рис. 70).
В тягачах, имеющих специальные коробки передач, применяется
главным образом дистанционный привод.
Как и в механизме переключения, в приводе имеются замковые
и стопорные устройства, предотвращающие одновременное включе-
ние двух передач и самопроизвольное выключение передачи во
время движения машины-.
Замок может располагаться в кулисе, т. е. в приводе, или в ме-
ханизме переключения, т. е. в коробке передач. Это зависит от того,
имеются ли в приводе длинные тяги и большое число шарниров или
нет. При наличии длинных тяг и большого числа шарниров в при-
воде будут иметься зазоры, вследствие чего может быть нарушено
соответствие в работе кулисы и механизма переключения, в резуль-
тате чего будет неполное включение передач или одновременное
включение двух передач. Чтобы этого не произошло, замок ставят
непосредственно в коробке передач (в механизме переключения).
Рассмотрим устройство привода на примере конструкций тяга-
чей АТ-Т и АТ-С.
На рис. 97 представлен привод управления коробкой передач и
лебедкой тягача АТ-Т.
Привод устроен следующим образом.
Рычаг 1 кулисы установлен на оси 2 в опорном рычаге 3, кото-
рый может поворачиваться в трубе 4. Конец рычага 1 кулисы шар-
нирно связан с соединительным валиком 5. На конце соединитель-
ного валика приварен рычаг 6, который входит своим концом в паз
одного из трех поводков 7. Каждый из этих поводков связан с по-
мощью продольных тяг с соответствующими поводками механизма
переключения коробки передач
Рычаг кулисы может совершать два движения: поперечное и
продольное. При поперечном движении рычага соединительный ва-
лик 5 получает поступательное движение и его рычаг 6 устанав-
ливается в пазу соответствующего поводка. При продольном
122
Рис. 97. Привод управления коробкой передач и лебедкой тягача АТ-Т:
I__рычаг кулисы; 2 — ось; ? — опорный рычаг; 4 — труба; 5 — соединительный валик; 6 — рычаг,
7 — поводки; S — рычаг управления лебедкой; 9— рычаг поводка лебедки; 10 — ось рычага поводка
лебедки; 11 — поводковая коробка
123
Рис. 98. Стопорный механизм коробки передач:
/—поводок; 2 —рычаг; 3— шарик; 4 — стопор; 5 — валик;
6 — рычаг
движении рычаг 1 поворачивается, входя в прорезь кулисы, вместе
с ним поворачиваются соединительный валик 5 и рычаг 6. Переме-
щение рычага 6 вызывает перемещение поводка, а следовательно,
включение или выключение соответствующей передачи.
Кроме переключения передачи, привод обеспечивает также вклю-
чение лебедки. Для этого служит рычаг 8 управления лебедкой.
Рычаг 8 соединен с рычагом 9 поводка лебедки. Рычаг лебедки
может поворачиваться вокруг оси. Поворот рычага вызывает пе-
ремещение поводка лебедки, а следовательно, ее включение или
выключение.
В приводе имеются шариковый замок и стопорный
механизм, смонтированные в поводковой коробке 11.
Рис. 99. Принципиальная схема привода управления
тягача ЛТ-С:
/ — корпус кулисы; 2—рычаг кулисы; 3 — поводковый валик ку-
лисы; 4 — тяга; 5 — переводной валик; 6 — поводковый валик меха-
низма переключения; 7— вилка каретки; 8 — каретка
124
Рис. 100. Устройство привода управления коробкой передач тягача АТ-С
Устройство шарикового замка было рассмотрено выше.
Рассмотрим устройство стопорного механизма
(рис. 98).
В поводке 1 (поводок 7 на рис. 97) имеются три выреза, в кото-
рые может устанавливаться шарик 3. Шарик прижат стопором 4,
на который надета пружинка. В тело поводковой коробки вставлен
валик 5, имеющий радиальное сверление. На корпус валика надет
рычаг 6, связанный через тягу с педалью главного фрикциона. Если
фрикцион полностью не выключен, то стопор не может переме-
щаться в гнезде и шарик запирает поводок, не позволяя ему дви-
гаться в осевом направлении. При выключении фрикциона рычаг 6
поворачивается и сверление в валике 5 устанавливается против
стопора 4. В этом случае стопор может утапливаться в тело ва-
лика 5. При этом поводок 1 освобождается и может перемещаться.
Перемещение поводку сообщает рычаг 2 соединительного валика
(рычаг 6 на рис. 97).
Стопорный механизм служит для фиксации поводков в ней-
тральном или включенном положении.
Шариковый замок коробки передач помещается в поводках 1.
На рис. 99 представлена принципиальная схема, а на рис. 100
устройство привода управления (совместно с механизмом пере-
ключения) коробки передач тягача АТ-С.
Особенностью привода тягача АТ-С по сравнению с приводом
тягача АТ-Т является отсутствие длинных тяг, соединяющих ку-
лису с механизмом переключения. Кулиса связана с механизмом
переключения лишь соединительным валиком, имеющим то же на-
значение, что и соединительный валик в приводе коробки тя-
гача АТ-Т. В остальном оба привода совершенно аналогичны.
ПРИВОДЫ ПЛАНЕТАРНЫХ КОРОБОК ПЕРЕДАЧ
(Избирательный привод)
В планетарных коробках передач обычно применяется пресе-
лекторный, или, что то же самое, избирательный, привод управле-
ния коробкой.
Идея избирательного привода заключается в том, чтобы раз-
делить переключение передач на две операции: предварительную
и исполнительную. Избирательный привод позволяет заранее вы-
бирать передачу (предварительная операция). Процесс перехода на
новую передачу (исполнительная операция) занимает в этом случае
очень немного времени и сводится к выжиму и отпусканию педали
управления коробкой.
Таким образом, избирательный привод сокращает время пере-
ключения передач, что имеет большое значение для гусеничных ма-
шин и особенно для тягачей, работающих с тяжелым прицепом.
Избирательный привод, или и з б и р а т е л ь, может быть
пневматического, гидравлического или механического типа. В пла-
126
нетарных коробках передач обычно применяется механический из-
биратель кулачкового типа.
Рассмотрим кратко его устройство и принцип действия.
На рис. 101 представлена конструктивная схема избирателя.
Избиратель состоит из фигурного валика переключения, кулач-
кового валика, на который под разными углами посажены кулачки,
и клавиш.
Рис. 101. Механический избиратель коробки передач:
I - переводной валик коробки передач; 2'— рычаг избирателя; 3 — кулачок;
4 — клавиша; 5 — кулачковый валнк; 6 — прижимающая пружина; 7— валик
переключения: 8 — отжимная пружина; 9 — рычажок; 10 — возвратная
пружина
Клавиши соединены рычажками с переводными валиками ко-
робки передач.
В избирателе имеются следующие пружины: прижимающая пру-
жина, через которую кулачок прижимает клавишу к валику пере-
ключения, отжимная пружина, которая стремится вывести клавишу
из продольного паза валика переключения, и возвратная пружина.
Валик переключения связан рычагом и тягой с педалью управ-
ления коробкой.
На кулачковом валике имеется рычаг избирателя, поворотом ко-
торого избирается нужная передача.
Допустим, что в коробке включена какая-нибудь передача, на
которой происходит движение машины. Водителю требуется вклю-
чить другую передачу. Для этого он устанавливает рычаг избира-
теля на эту передачу. Соответствующий кулачок через пружину
прижмет клавишу данной передачи к валику переключения. Пере-
дача подготовлена к включению, однако переключение произойдет
127
>5
Рис. 102. Тормозная система с механическим избирателем плане-
тарной коробки передач Прага:
I — валик переключения; 2 — клавиша; 3 — рычаг избирателя; 4 — прижимная пру-
жина; 5 —кулачок; 6— рычажок; 7 — центральная (включающая) пружина; 8— ры-
чажок привода к педали
Рис. 103. Тормоз с избирателем
(наименование деталей то же, что
и на рис. 102)
128
только тогда, когда водитель выжмет и отпустит педаль управле-
ния. При выжиме педали валик переключения повернется, клавиша
под действием прижимающей пружины войдет в его паз и одновре-
менно под действием отжимной пружины из паза выйдет клавиша
ранее включенной передачи. При отпускании педали валик пере-
ключения повернется в прежнее положение, приподнимет введен-
ную в его паз клавишу и тем самым включит новую передачу.
В планетарной коробке передача включается торможением со-
ответствующей шестерни планетарного механизма, т. е. затяжкой
соответствующего тормоза.
На рис. 102 представлена тормозная система с механическим
избирателем планетарной коробки передач Прага, а на рис. 103—
тормоз с избирателем той же коробки.
Тормозная система планетарной коробки передач Прага рабо-
тает так же, как описанная выше принципиальная схема.
При нажатии на педаль управления планетарной коробкой пе-
редач перемещается рычажок 8, который через вертикальную
штангу воздействует на валик 1. Валик 1 поворачивается, при этом
сжимается центральная пружина 7 и освобождается клавиша 2 ра-
нее включенной передачи. Одновременно в паз валика 1 входит
клавиша новой передачи. При отпускании педали пружина 7, рас-
прямляясь, возвращает в прежнее положение валик 1 и поднимает
клавишу включаемой передачи. При этом через рычажок 6 проис-
ходит затягивание тормозной ленты.
Таким образом, переключение передач сводится к выжиму и
отпусканию педали, что значительно-упрощает управление короб-
кой передач.
Избирательный привод может быть применен не только в плане-
тарной, но и в простой коробке. Чаще всего, однако, здесь поль-
зуются пневматическим или гидравлическим избирателем.
7. КИНЕМАТИЧЕСКИЙ РАСЧЕТ КОРОБОК ПЕРЕДАЧ
ВЫБОР ТИПА КОРОБКИ ПЕРЕДАЧ
При проектировании силовой передачи тягача необходимо в пер-
вую очередь выбрать типы механизмов этой передачи, в частности
тип коробки передач.
Как указывалось выше, в быстроходных гусеничных машинах
применяются коробки передач следующих типов:
— простые одноточечные автомобильного типа;
— простые одноточечные и многоточечные специального типа;
— планетарные одноточечные;
— планетарные многоточечные с последовательным силовым
потоком;
— планетарные многоточечные с параллельным силовым по-
током.
Простые коробки автомобильного типа применяются
9—20 129
в тех случаях, когда машина создается на базе автомобильных
агрегатов, т. е. когда с автомобиля на гусеничную машину перено-
сится двигатель в комплекте с коробкой передач.
В общем же случае применять в тягаче автомобильную коробку
не рекомендуется. Коробка передач должна быть специального
т и п а, т. е. должна быть спроектирована специально для тягача
с учетом особенностей его компоновки и условий его работы, как
это, например, сделано в тягачах АТ-Л и АТ-Т.
До сих пор в отечественных гусеничных тягачах предпочтение
отдается простым одноточечным коробкам передач главным обра-
зом из-за их конструктивной и технологической простоты.
Однако простая одноточечная коробка имеет преимущество пе-
ред простыми и особенно планетарными многоточечными короб-
ками только в том случае, если ее число передач невелико и не
превышает 4—5, а также если в ней отсутствуют серво, избиратель-
ные или автоматические устройства.
В настоящее время развитие конструкций коробок передач идет
в сторону повышения их числа передач, а также в сторону облегче-
ния и даже автоматизации управления машиной, поэтому простые
коробки передач в гусеничных машинах начинают уступать место
планетарным коробкам. В гидромеханических передачах, напри-
мер, вместо простых коробок передач устанавливаются почти
исключительно планетарные. Из планетарных коробок при наличии
сервоуправления следует отдать предпочтение коробкам с последо-
вательным силовым потоком, как конструктивно наиболее простым.
ВЫБОР СХЕМЫ КОРОБКИ ПЕРЕДАЧ И ЕЕ КИНЕМАТИЧЕСКИЙ
РАСЧЕТ
После того как выбран тип коробки передач, следует выбрать
ее кинематическую схему и определить ее передаточные числа, т. е.
произвести кинематический расчет коробки.
Рассмотрим различные типы коробок передач.
Простая одноточечная коробка
При выборе кинематической схемы учитываются выполненные
ранее конструкции с их положительными и отрицательными сторо-
нами (см. выше анализ конструкций коробок передач).
Передаточные числа на передачах it определяются согласно
данным тягового расчета.
После определения передаточных чисел определяют размеры
шестерен и число их зубьев.
Выполненные конструкции специальных (неавтомобильных) ко-
робок передач характеризуются следующими данными. .
Передаточные числа пары шестерен составляют:
для низших передач —2,3—4,0;
130
для высших передач — 0,5—0,7;
для промежуточных передач — 1,6—2,9.
Число зубьев находится в пределах: минимальное 14—17, ма-
ксимальное 45—80.
Модуль зубьев составляет:
— для простых коробок передач, передающих крутящий момент
двигателя от 50 до 150 кгм, 4,5—6,5 мм\
— для простых коробок передач, передающих крутящий момент
двигателя от 150 до 200 кгм, 6,5—9 л*лт;
— для планетарных коробок передач, передающих крутящий мо-
мент двигателя порядка 80 кгм (например, коробка английского
танка Матильда), 2,5 мм.
Эти данные относятся к шестерням с прямым зубом. Для шесте-
рен с косым зубом модуль в нормальном сечении можно принимать
на 20—30% меньше.
Обычно все шестерни коробки передач имеют одинаковый модуль.
Задавшись ориентировочно модулем (в дальнейшем он должен
быть проверен в прочностном расчете), можно определить диаметр
начальной окружности шестерен
Do = mz
и расстояние между осями шестерен
л + г.) т
Ло — 2 ’
где z — число зубьев шестерен;
т — модуль в мм.
Планетарная одноточечная коробка передач
Согласно кинематической характеристике простейшей механиче-
ской узловой точки имеем
‘ “и-^Ь + ®-1)“р=о.
Пусть т будет индекс ведущего вала коробки передач, k — индекс
ведомого вала и р — индекс тормоза.
Так как при включенной передаче тормоз затянут полностью,
то о> = 0.
Тогда получим
/ — = /(₽)
9 - ТлА’
где it—внешнее передаточное число коробки передач на переда-
чах / = 1, 2, 3 и т. д., определяемое из тягового расчета.
Согласно формуле 134 (см. ч. 1) будем иметь
L = (34)
9*
131
Отсюда определяются внутренние передаточные отношения ко-
робки. При этом следует иметь в виду, что один из индексов tn, k
или р принадлежит водилу, т. е. является нулевым индексом (0).
Если т = 0, то t — 0; если k = 0, то i'kp = 0. Формулу (34)
можно переписать в таком виде:
‘nk ~~ 1
Отсюда, если р = 0, то Z , = 0.
Таким образом, из формулы (34) или (35) определяется всегда
только одно внутреннее передаточное отношение.
Определив внутренние передаточные отношения на всех переда-
чах, находим по формуле 135 (см. ч. 1) размеры шестерен и число
их зубьев.
После этого необходимо проверить относительные угловые ско-
рости сателлитов (см. ч. 1, стр. 136). Число оборотов сателлита
в относительном вращении не должно превышать 4000—4500 в ми-
нуту.
Коробка передач, кроме того, проверяется на соосность, а также
на условия соседства сателлитов и на условия сборки.
Эти вопросы рассмотрим ниже.
Простая многоточечная коробка передач
Как указывалось выше, простая многоточечная коробка передач
может быть только коробкой с последовательным силовым потоком.
Исследования доц. Е. И. Магидовича показали, что рациональ-
ная разбивка передач такой коробки с использованием всех воз-
можных комбинаций включений может быть выполнена только по
закону геометрической прогрессии.
Если коробка состоит из ся последовательно включенных меха-
нических узловых точек, каждая из которых имеет pi передач, то
внешние передаточные отношения этих точек подчиняются сле-
дующему закону:
первая точка: 1, q, q2, q3, ... qp'~'-,
вторая точка: 1, qp\ q'ip\ qZp',... q,p‘~X) p'-,
третья точка: 1, qp'p\ q2p'Pt, q2p'p\ ... q!1,~''"P‘P2\
последняя точка (<?м): 1,
• • .рСм_) 2р,Рг... ₽См_, (р,м_,) PlPl.. .Pctt_x
ч * ч » ч >
где <7 — знаменатель геометрической прогрессии.
132
От умножения всех передаточных отношений одной или несколь-
ких точек на постоянную величину прогрессия не нарушается. Все
показатели степени при q одной точки могут иметь положительное
или отрицательное значение.
В частном случае, когда каждая точка имеет по две передачи
(рис. 104), т. е. pi ~рг = р3 — .. . =РСа — 2, получим для первой
Рис. 104. Кинематическая схема и схема силового потока
трехточечной коробки передач (соосный вариант):
а — кинематическая схема; б — схема силового потока
точки: 1, q; для второй: 1, <?2; для третьей: 1, q4 и т. д. Общий ряд
передаточных чисел будет:
(36)
Допустим, мы имеем кинематическую схему коробки передач,
представленную на рис. 104, а. Составим для нее схему силового
потока (рис. 104, б).
Силовой поток имеет три узловые точки.
Тогда
133
Выбираем следующие передаточные отношения узловых точек:
га = ?+‘ = <7; г6 = 4г-2 = ~; г6 = ?+4 = ?4.
Согласно формуле (31) коробка должна иметь восемь передач.
Эти передачи получим соответствующими комбинациями включений
узловых точек, как показано в табл. 10.
Таблица 10
Комбинации включений передач в трехточечиой коробке
Работают точки Передаточное число коробки
Передача а б в
1 + + q X 1 X qi = q°
II + 1 X 1 X qi = qi
III + + + qX q~2Xq4 = q3
IV + + X q~- X q4 = q2
V .+ <7X 1 X 1 = <7
VI 1 X 1 X 1 = 1 (прямая)
VII + + q X q~2 X 1 = <7-1 (ускоренная)
VIII + 1 X <7~2 X 1 = q~2 (ускоренная)
Из табл. 10 следует, что из восьми передач две получаются уско-
ренные (VII и VIII передачи).
Рассмотренная коробка передач является соосной. Если ко-
робка несоосна, то в ее схеме силового потока появляется дополни-
тельная узловая точка у (рис. 105), выполняющая роль редуктора
в коробке передач. Порядок определения переда точных чисел в этой
коробке тот же, что п в соосной,
134
б
Рис. 105. Кинематическая схема и схема силового потока
многоточечной коробки (несооспый вариант):
а — кинематическая схема; б — схема силового потока
ПЛАНЕТАРНАЯ МНОГОТОЧЕЧНАЯ КОРОБКА ПЕРЕДАЧ
С ПОСЛЕДОВАТЕЛЬНЫМ СИЛОВЫМ ПОТОКОМ
Внешние передаточные отношения узловых точек планетарной
коробки передач определяются так же, как и в простой коробке: они
должны принадлежать степенному ряду,-представленному выраже-
нием (36). х
Рассмотрим подбор передаточных отношений планетарной ко-
робки передач на числовом примере.
Пример, Определим внешние передаточные отношения трехточечной плане-
тарной коробки передач, схема силового потока которой представлена на рис. 106.
Рис. 106. Схема силового потока трехточечиоп планетар-
ной коробки передач
135
При выборе передаточных отношений отдельных точек целесообразно распо-
лагать их так, чтобы точки, лежащие ближе к ведомому валу, имели бы боль-
шее передаточное отношение.
Примем следующие значения внешних передаточных отношений узловых
точек:
га < ‘б < гв, (37)
где i — отношение угловых скоростей ведущего вала к ветомому.
В планетарных коробках передач чаще всего применяются однорядные эпи-
циклические механизмы, которые в схеме силового потока дают трехпоточные уз-
ловые точки.
Условимся поток солнечной шестерни обозначать индексом /, поток эпицик-
ла — индексом 2 и поток водила — индексом 0.
В эпициклическом механизме практически можно реализовать следующие
внешние передаточные отношения:
при заторможенной солнечной шестерне
0,8 > /02 > 0,6; (38)
1,65 > /20 > 1,25; (39)
при заторможенной эпициклической шестерне
5 > /10 > 2,4. (40)
Эти значения внешних передаточных отношений соответствуют внутренним
передаточным отношениям, лежащим в границах:
11,4 1 < /12 < 1 4 |.
Примем в коробке одну ускоренную передачу. Тогда из степенного ряда (вы-
ражение 36) можем выбрать следующие значения внешних передаточных отно
шений узловых точек а, б и в:
ia =
'в = ?+2;
гв = q*.
Передачи будут получаться следующей комбинацией включения узловых
точек;
первая 1 X «6 X 4 = №
вторая /а X X = <7б;
третья 1 X I X «в = ''Л
четвертая га X 1 X «в =
пятая 1 X г'в X 1 = <72'.
шестая za X ‘б X 1 = Ч',
седьмая 1 X 1 X 1 = 1 (прямая);
восьмая za X 1 X 1 = (ускоренная).
Задаемся кинематическим диапазоном dt = 7. При числе передач р = 8
получим
7
q = VT = 1,32.
Определяем внутренние передаточные отношения узловых точек.
Для узловой точки а имеем
136
Согласно выражению (38) получим
/а = /02 = 0,757.
Это означает, что узловая точка а может быть представлена однорядным
эпициклом, у которого ведущий вал — водило, ведомый — эпицикл и тормозной —
солнце.
Из кинематической характеристики узловой точки, принимая »Та =0, по-
лучим
i - - °’757 - 3 11
'12а - (-а„ i 0,757 — 1 “ ’ •
Для узловой точки б имеем
/б = q> = 1,322 = 1,74.
Это передаточное отношение хотя и трудно, но все же возможно осуществить
в однорядном эпицикле. Тогда согласно условию (38) будем иметь
С “ ^206 = I >74.
Здесь ведущим валом является эпицикл, ведомым — водило и тормозным —
солнце. Из кинематической характеристики находим при ш1б = 0
112б = 1 ' ~ —1>35.
1 16
Для узловой точки в имеем
iB = 1,32“ = 3,04.
Согласно выражению (40) узловая точка в может представлять однорядный
эпицикл с ведущим валом — солнце, ведомым — водило и тормозным — эпицикл,
или
С — Нов = 3,04.
Из кинематической характеристики при ш2в = 0 получим
‘12в = 1 - «в = -2,04.
Если внутренние передаточные отношения узловых точек ока-
жутся слишком малы или слишком велики, так что их трудно или
невозможно реализовать в однорядном эпицикле, то придется ввести
в коробку передач двухрядные эпициклы, как это и сделано, напри-
мер, в планетарной коробке передач типа Коталь (см. рис. 87).
ПЛАНЕТАРНАЯ МНОГОТОЧЕЧНАЯ КОРОБКА ПЕРЕДАЧ С ДВУМЯ
СТЕПЕНЯМИ СВОБОДЫ И С ПАРАЛЛЕЛЬНЫМ СИЛОВЫМ ПОТОКОМ
Кинематический расчет коробок передач с параллельным сило-
вым потоком, т. е. отыскание кинематической схемы и внутренних
передаточных отношений по заданным из тягового расчета внеш-
ним передаточным числам,— специальная довольно сложная за-
дача синтеза планетарных механизмов.
Сложность задачи заключается в том, что при заданных внеш-
них передаточных числах можно построить огромное количество
кинематических схем коробок передач, которые все будут удовле-
творять поставленным условиям. Однако не все эти схемы могут
137
быть выполнены конструктивно (большие размеры сателлитов, от-
носительные скорости сателлитов имеют недопустимо высокие зна-
чения, невозможно вывести наружу фрикционные элементы, кото-
рыми приходится управлять при переключении передач, и т. д.).
Решение задачи заключается в отыскании таких схем, которые
можно было бы практически реализовать.
Рис. 107. Кинематическая схема шестискоростной коробки
и схема ее силового потока:
а — кинематическая схема; б — схема силового потока
Эта задача была решена проф. М. А. Крейнесом, который дал
аналитический метод отбраковки схем, т. е. метод оты-
скания из всех возможных схем нескольких наиболее рациональ-
ных, из которых и выбирается окончательная схема коробки.
Другой, более общий и наглядный метод отбраковки схем,
а следовательно, и метод синтезирования коробок, основанный на
теории силового потока, был предложен доц. Е. И. Маги-
довичем.
В практике конструирования передач часто пользуются мето-
дом создания того или иного механизма по прототипу. Кон-
струирование и расчет передачи по прототипу — это наиболее рас-
пространенный, хотя и не всегда наиболее рациональный метод,
широко применяющийся во всех областях техники.
Конечно, расчет по прототипу не может заменить аналитиче-
ского метода отбраковки схем. Однако, если прототип не сильно
отличается по передаточным числам от проектируемой коробки, то
этим методом расчета можно пользоваться.
138
Допустим, что в качестве прототипа имеется какая-нибудь схема
коробки, полученная на основании анализа схем уже выполненных
коробок или на основании отбраковки схем.
На рис. 107 представлена кинематическая схема шестискорост-
ноп коробки.
Составим для нее схему силового потока. По схеме силового по-
тока нетрудно определить число степеней свободы коробки. В дан-
ном случае коробка имеет две сте-
пени свободы. Следовательно, на
каждой передаче требуется вклю-
чить один фрикционный элемент.
Передачи получаются включе-
нием тормозов I, II, III, IV, VI и ЗХ
(задний ход) и фрикционной муф-
ты V—пятая (прямая) передача.
Изобразим теперь силовой по-
ток коробки в виде одной слож-
ной механической узло-
вой точки (рис. 108). Так как
мы рассматриваем коробку с дву-
мя степенями свободы, то данная
Рис. 108. Изображение планетарной
коробки передач с двумя степенями
свободы в одноточечной схеме сило-
вого потока
узловая точка также должна
иметь две степени свободы. Допустим, что проектируемая нами ко
робка будет иметь р передач, включая передачу заднего хода, но
без прямой передачи.
В планетарной коробке каждая передача получается торможе-
нием одного из звеньев коробки. Тогда рассматриваемая узловая
точка должна иметь р тормозных потоков, один поток ведущего
вала и один поток ведомого вала. Следовательно, узловая точка бу-
дет иметь р + 2 внешних потока. Торможение одного из р потоков
дает передачу в коробке. При этом остальные тормозные потоки бу-
дут холостыми, т. е. тормозные барабаны коробки будут вращаться
вхолостую.
Данная узловая точка должна описываться той же кинематиче-
ской характеристикой, что и простейшая узловая точка;
%+ 1)^=0.
Примем здесь индексы т= 1; k — 2. Индексом р будем обозна-
чать тормозные потоки, причем индекс р может иметь различные
значения, соответствующие передачам в коробке I, II и т. д.
Скорость произвольно взятого тормозного ротока определится
из кинематической характеристики по следующей формуле:
«, - г'фю. \
ШР ~ 1 _ jW *
1 *12
139
Примем здесь условно ш( = 1. Кроме того, и>2 = : 1 =
= о)2: со, =/21. Тогда формула перепишется в таком виде:
По этой формуле определяются скорости тормозных потоков
при каком-нибудь одном полностью заторможенном потоке, т. е. на
какой-нибудь одной передаче.
В формуле (41) Z2i будет величиной, обратной передаточному
числу коробки на этой передаче; — передаточное отношение
между подводимым и отводимым потоками при заторможенном по-
токе р= I, II, III и т. д., или это будут передаточные числа коробки
на передачах.
Таким образом, можно определить на одной из передач все ско-
рости внешних потоков: 1, 2, I, II и т. д. (римскими цифрами обо-
значаем тормозные потоки, т. е. потоки тормозных барабанов, а ин-
дексами 1 и 2 — подводимый и отводимый потоки).
Согласно схеме силового потока, представленной на рис. 107,
для всех узловых точек будут известны три угловые скорости. Так,
например, для узловой точки а известны скорость потока 2а, рав-
ная скорости отводимого потока: ш3 — iZl, где /21 задано на данной
передаче; скорость потока Оа, равная скорости потока 2ж: «>Оа =
= 721ж; скорость потока 1а, равная скорости тормозного потока VI:
Ш|а = 0,VI •
По скоростям трех потоков всегда можно определить внутрен-
нее передаточное отношение узловой точки
Рассмотрим решение этой задачи на числовом примере.
Пример. Определим внутренние передаточные отношения коробки передач,
кинематическая схема которой приведена на рис. 107.
Внешние передаточные числа коробки заданы из тягового расчета:
/(I2 = 6; 'I"’ = 2’5; ш
г'1/’ = 1,3; = 0,75: t[^ = -6.
Передаточное число векторной узловой точки ж примем равным единице.
Определим скорости тормозных потоков по формуле (41) на первой пере-
даче.
Будем иметь;
“и =
6
1 — 2,5
= —0,39;
140
[ 1,78
ж = -п=т;йг = ~°’9;
0,75
35-
“VI - 1 _ 0,75 “ 3’5’
По формуле (42) находим внутренние передаточные отношения:
_ ®V1 - «1 _ 3,5-1 _
'12а- — 0,167 — 1
.. “vi “ шШ _ 3,5 + 0,9
'120 o>lv- Шц, -2,6+ 0,9
. _ “vi -<“1 3,5-1 _
'12в - -^7=7^- = -оТГГГТ - -1’32’
. _ И, — u>3x _ 1 — 0,29
121 чц-Шз, 0 — 0,29 ’ ’
<01-01 1-0
'12д “ Ш|]_ Ш| -0,39 — 0 ’ ’
_ "о—<о2 _ 1—0,167 _ .
2« _ «и — Ш2 - —0,39 — 0,167 - ~1,1
Допустимые пределы внутреннего передаточного отношения однорядного
эпицикла
| I’4 | < *12 | < 4 | •
Все полученные передаточные отношения, кроме 112в> лежат в указанных
пределах.
Величину (]2в можно подправить, если уменьшить скорость с 0,9
до 0,8. При этом изменится передаточное отношение /12й, а также 1^.
Получим
3,5— 1 . .
'12в = _018 _ ! - м;
. _ 3,5 + 0,8_________________
12С1 “ —2,6 + 0,8 “ ’
141
Подставляем в формулу (41) вместо ш1п величину —0,8.
Находим
/(III) _
42 -
1 “ “ш 1+0,8 ог
г21 - а.]п 0,167 + 0,8 1,6
Выше было задано /^У1)= 1,78, т. е. потребовалось изменение на 4,5%.
Далее определяются размеры шестерен и их числа зубьев.
ПОДБОР ЧИСЕЛ ЗУБЬЕВ ШЕСТЕРЕН В ПЛАНЕТАРНЫХ КОРОБКАХ
ПЕРЕДАЧ
Числа зубьев шестерен определяются по внутренним передаточ-
ным отношениям. Так, для планетарного механизма абсолютная ве-
личина внутреннего передаточного отношения равна
где В и А — радиусы шестерен сателлитов и центральных шестерен.
Между радиусом центральной шестерни и числом ее зубьев суще-
ствует зависимость
2 >
где т—модуль шестерни;
z— число зубьев шестерни.
Аналогичная зависимость существует и для сателлита.
Так как из формулы (43) радиусы шестерен однозначно не опре-
деляются, то некоторыми из радиусов следует задаться. На выбор
этих радиусов накладывается ряд ограничений.
Одно из ограничений — это минимально допустимое число зубьев
^ = 10-14,
где 10 — для шестерен сателлитов;
14 — для шестерен главных валов с укороченным зубом; для
шестерен с нормальным зубом 2,min== 17.
Кроме того, в планетарных механизмах накладываются также
ограничения, связанные с необходимостью соблюдения следующих
условий:
— условия соосности механизма,
— условия сборки механизма,
— условия соседства сателлитов.
Условие соосности механизма
Согласно схеме планетарного механизма должно соблюдаться
следующее равенство радиусов центральных шестерен:
+ = (44)
142
где сумма радиусов относится к шестерням внешнего зацепления,
а разность — к шестерням внутреннего зацепления; Ло — расстоя-
ние между главной осью механизма и осью сателлитов.
Если модуль всех шестерен одинаковый (как это обычно и бы-
вает), то предыдущая формула может быть переписана в таком
виде:
+ = (45)
Условие сборки механизма
Возьмем какой-нибудь планетарный механизм, например меха-
низм с внешним зацеплением шестерен, имеющий четыре сателлита
(рис. 109). Допустим, что в шестернях сателлита зубья лежат на
одной прямой а — а'.
Соединим с шестернями одного из четырех сателлитов централь-
ные (в данном случае солнечные) шестерни. Повернем при непо-
движном водиле солнечную шестерню 1 на угол а,, равный углу
между осями двух соседних сателлитов. Тогда впадина между
зубьями переместится из точки а в точку б. Введем в зацепление
с солнечными шестернями шестерни второго сателлита. Так как
в точке б находится впадина солнечной шестерни 1, то в этой точке
будет находиться также и зуб большой шестерни сателлита. До-
пустим, что все сателлиты установлены симметрично. Тогда зуб
большой шестерни сателлита и зуб малой шестерни второго сател-
лита будут лежать на одной прямой (как и в первом сателлите),
или, иначе говоря, в точ-
ке б и б' будут нахо-
диться зубья сателли-
тов. Но тогда в этих же
точках должны быть
впадины солнечных ше-
стерен. При повороте
шестерни 1 на угол оц
шестерня 2 также по-
вернется, но на угол аг.
Впадина этой шестерни
из точки а' переместит-
ся в точку а". Таким
образом, в точках б'
и а" будут впадины
солнечной шестерни 2.
Между этими впадина-
ми размещается целое
число зубьев. Обозна-
чим его буквой а. Тогда
на дуге а"б' распола-
Рис. 109. Условие сборки планетарного меха-
низма
143
гается число зубьев а. Этой дуге соответствует центральный угол
а, — а2. Один зуб шестерни 2 определяется центральным углом —,
где г2 — число зубьев шестерни 2. Тогда условие сборки запишется
следующим равенством:
360а
— а2 = -г-»
г2
360 ,
где а, = -у , а л — число сателлитов;
Л
360 .
а2 <V21 z21;
i'2l — внутреннее передаточное отношение механизма.
Подставляя в предыдущую формулу значение а, и а2, получим
окончательно
гг(1— z'2I) = aX- (46)
Эта формула и выражает условие сборки планетар-
ного механизма. Она справедлива для механизма как с внеш-
ним, так и с внутренним зацеплением шестерен. В последнем случае
внутреннее передаточное отношение следует брать с отрицательным
знаком.
Условие соседства сателлитов
Диаметры шестерен сателлитов, лежащих в одной плоскости,
должны быть выбраны так, чтобы сателлиты не задевали один за
другой. Это условие, называемое условием соседства, будет
выполняться, если соблюдается следующее неравенство:
*>25тах, (47)
где с— расстояние между осями соседних сателлитов;
5тах— радиус наибольшего сателлита по внешней окружности
зубьев.
Расстояние с определяется по формуле
с = 2(Д ± В) sin-у-,
где А и В — радиусы центральной шестерни и шестерни сател-
лита (знак (-|-!) для внешнего и знак (—) для вну-
треннего зацепления шестерен);
Р — центральный угол между осями двух соседних са-
теллитов.
144
8. ПРИМЕРНЫЙ КИНЕМАТИЧЕСКИЙ РАСЧЕТ
МНОГОТОЧЕЧНОЙ ПЛАНЕТАРНОЙ КОРОБКИ ПЕРЕДАЧ
С ПОСЛЕДОВАТЕЛЬНЫМ СИЛОВЫМ ПОТОКОМ
Рассмотрим примерный расчет планетарной коробки передач
с последовательным силовым потоком.
Решение задачи ограничим построением кинематической схемы
коробки и определением числа зубьев шестерен.
Кинематический диапазон
скоростей коробки передач
примем равным dK= 8,5, число
передач р =8.
Определение числа
узловых точек. Прини-
маем, что каждая узловая точ-
ка имеет два включающих
устройства — тормоз и блоки-
ровочную муфту. Тогда число
передач будет равно
р = 2Сы,
где см — число механических узловых точек, входящих в силовой
поток.
Логарифмируя это выражение, найдем
г _ [gp _ 'ё8 _о
м~ Ig 2 - 1g 2
Построение схемы силового потока. Схема сило-
вого потока представлена на рис. НО. Здесь фрикционные точки на-
мечены пока предположительно, так как они могут быть располо-
жены между любыми двумя потоками узловой точки. В дальней-
шем, когда будет найдена кинематическая схема коробки передач
и будут определены все моменты, действующие в отдельных пото-
ках, место фрикционных точек можно будет уточнить окончательно.
Определение внешних передаточных отноше-
ний. Так как разбивка передач в коробке с последовательным по-
током производится только по закону геометрической прогрессии,
то знаменатель прогрессии
р-1_ 7 __
<7 = И^=И8,5 = 1,36.
Внешние передаточные отношения узловых точек должны опре-
деляться из следующего ряда:
<f', <7”2, • •. (Г** -1<
Примем, что шестая передача прямая. Тогда седьмая и восьмая
передачи будут повышающие. Остальные понижающие.
10—20
145
Принимаем внешние передаточные отношения узловых точек:
4 = <г2. *6 = ?+1, *в = ?+4-
Тогда восемь передач для движения вперед получим следующими
комбинациями включения узловых точек:
г1=Мв = ?+,?+4 = ?5;
«л = k =
= W* = q~2q+iq+i = qs\
hV=«a^B = ^-V4 = ^;
^=/6 = (7+1 = (7;
?VI—1—прямая; получается включением всех
фрикционных точек при выключенных
тормозных точках;
«vii = 4г’б= q~2q+l — первая повышающая;
г'уш = ia —q^2 — вторая повышающая.
Учитывая значение q, находим числовые значения передаточных
отношений узловых точек
га = 0,55; i6= 1,36; гв —3,40.
ниц, определяемых
Рис. 111. Кинематиче-
ская схема двухрядного
эпицикла
Выбор индексов потоков узловых точек. Вначале
схему силового потока строим без обозначения индексов потоков,
так как неизвестно, какими звеньями соединяются между со-
бой элементарные механизмы и какие звенья являются тормоз-
ными.
Определим теперь индексы потоков узловых точек а, б и в.
Для узловых точек бив можно принять однорядные эпи-
циклы, так как передаточные отношения i6 и iB лежат внутри гра-
условиями (39) и (40). Тогда z6 —?гоб и
гв = г10в-
Для узловой точки а следует принять
двухрядный эпицикл, так как ia не лежит в
границах неравенств (38), (39) и (40). При
двухрядном эпицикле будем иметь га = гога-
На рис. ПО обозначены потоки узловых
точек, соответствующие выбранным переда-
точным отношениям.
Определение внутренних пе-
редаточных отношений узло-
вых точек. Из кинематической характе-
ристики узловой точки а имеем
ш1а г12а 0)2а + (^I2a 0 0,0а =
146
Согласно схеме силового потока ш1а = 0 (при включении тор-
моза Га). Кроме того, '!>Оа = z„,a /а = 0,55. Тогда г12., =
=—1,2. Это внутреннее передаточное отношение можно реализо-
вать только в двухрядном эпицикле (рис. 111).
Аналогично имеем для узловой точки б
101б Ч2оШ'Г4 “Ь (^126 0 ш0б ~ 0>
где ш]б = 0;
(и26 : ~ = 1 >36.
Тогда i|'26=—2,78.
. Узловая точка б будет представлять однорядный эпицикл.
Для узловой точки в имеем
ш1в ^12в ш2в “Ь (^'12в 1) ш0в
где ш2в = 0;
Ш1В •’ шов = 3,4.
Тогда г"2в=—2,4.
Точка в также представляет однорядный эпицикл.
Подбор чисел зубьев шестерен. Внутреннее переда-
точное отношение узловой точки а определяется по формуле
В142
Z12a — В2л;-
Примем Ai = В2 = 1. Тогда
(48)
Из условия соосности имеем
Aj А2 — Д2*
Или 1-J-S1 = A2—1. Отсюда Д = А2 — 2. Подставляем зна-
чение Bi в формулу (48), тогда получаем
г'12а = -(Л-2)А2. (49)
Отсюда находим
А2 = 1 + И2Д = 2,48;
5( = 2,48 — 2 = 0,48.
Проверяем по формуле (48)
г'12а = —ДА2 = —0,48 • 2,48 = —1,19 « — 1,2.
Проверяем по условию соседства сателлитов. Примем число са-
теллитов 7 = 4.
Тогда
(\ = 2(А, + Д) sin -у-,
где А, = 1; Д = 0,48; sin 45° = 0,71.
ю# 147
Тогда Ci = 2,1. Примем Z?max равным Bt. Тогда 2Z?nax(|) =0,96,
или
с > 2В
I, z ,пах (!)•
Условие соседства выполняется.
Проверяем на условие соседства шестерню сателлита 2. Будем
иметь
с, = 2(А —B2)sin-|- = 2f2,48— 1)0,71 =2,1;
23fflax(2)~2B2 = 2.
Но тогда с2 ~ 25fflax(2).
Условие соседства не выполняется.
Следует принять вместо четырех сателлитов три. Будем иметь
X = 3.
Проверяем узловую точку на условие сборки.
Имеем
(1 ~ z21a )
-—;5-------- — а — целое число,
К
где г2 = zA2 — число зубьев эпициклической шестерни;
/,,]а — внутреннее передаточное отношение узловой
точки а;
X = 3 — число сателлитов.
Имеем i'vla = —1,2 =-----Тогда получим
2ai 0 + т) 11
3 ~ 18 2а2 ~ а‘
Пелые числа получим, если примем гА2= 18; 36, 54; 72 и т. д.
Проверяем остальные шестерни той же точки:
2А2 18 , 36 ,
= *вч = 2^- = -2Д8 = ДРобЫ W8 = дробь;
54 , 72
2,48 ~ ДРобь; 2,48 — 29 а’
0,48 18-0,48 , 36-0,48 ,
%А2 2 48 2 48 ~ ЛРООЬ, 2 дробь,
54-0,48 ,, 72-0,48 1 Л
2,48 дробь; 2148 14 а.
Итак, выбираем числа зубьев шестерен
гД2 = 72; гА, = гВ2 = 29; zS1=14.
Проверяем соосность
72 — 29 = 29 + 14 = 43.
148
Следовательно, условие соосности выполняется.
Проверяем внутреннее передаточное отношение
14.70’
/-------- ‘7. =--12
29-29 ’ •
Для узловой точки б
^=-4г=-2-78-
Примем Л, = 1. Тогда Л2 = 2,78. Кроме того,
Д, = В2 = А1~А' = 0,89.
Проверяем на условие соседства сателлитов; примем число са-
теллитов X = 4.
Получим
с = 2 (А, + В,) sin 4- = 2 (1 + 0,89) 0,71 = 2,68.
Но 2 Bi = 1,78. Следовательно, с > 2 Вь
Условие сборки
2 42 0 ~ г21б) = а
к
Для однорядного эпицикла имеем
Подставив полученные значения в уравнение условия сборки, по-
лучим
гА2 + *А1 _ „
4 — «•
Отсюда следует, что сумма чисел зубьев кратна 4. Подберем
числа зубьев согласно табл. 11.
Таблица 11
zD (задаемся! D 12 13 14 15 16 17 18 19 20
2а\ = -гд/0,89 дробь дробь дробь дробь 18 19 дробь дробь дробь
г А2 = ^2В + -?А| дробь дробь дробь дробь 50 53 дробь дробь дробь
2 Al + 2 А2 дробь дробь дробь дробь 08 72 дробь дробь дробь
149
Из табл. 11 следует, что сумма чисел зубьев шестерен А1 и А2
кратна 4 при числе зубьев сателлита 16 или 17. Для других значе-
ний чисел зубьев получим величины дробные.
Примем zB = 16; zAi = 18; гД2=50.
Проверяем на соосность
гА1 + 2в = — 2в = 18 + 16 = 50 — 16 = 34.
Проверяем на передаточное отношение
Для узловой точки в имеем
i —_____Лг- = —2 4
,'12в
Примем At = 1. Тогда А? = 2,4Ah
Проверяем на условие соседства. Число сателлитов примем
X = 4.
Будем иметь
с = 2(1 + 0,7)0,71 = 2,42.
Но 2В = 1,4. Следовательно, с > 2В.
Проверяем на условие сборки.
Составим табл. 12, аналогичную предыдущей.
Таблица 12
гв 12 13 14 15 16 17 18 19 20
г At = WW дробь дробь 20 дробь 22 дробь дробь 27 дробь
^42 “ 2Al ^В дробь дробь 48 дробь 54 дробь дробь 65 дробь
2 Al + <42 дробь дробь 68 дробь 76 дробь дробь 92 дробь
Выбираем гд=14; гА1=20; гА2 = 48.
Построение кинематической схемы коробки.
На основании схемы силового потока (см. рис. 110) и найденных
размеров шестерен узловых точек а, б и в строим кинематическую
схему коробки передач (рис. 112). Из конструктивных соображений
определяем место фрикционных муфт. Муфту узловой точки в удоб-
нее поставить между потоками 2 и 0, а не между потоками 2 и 1,
как это намечалось раньше (см. рис. ПО). Окончательная установка
муфт определится после статического расчета коробки, когда будут
150
Рис. 112. Построение кинематической схемы коробки пе-
редач и схемы силового потока:
а — кинематическая схема; б — схема силового потока
известны моменты, под которыми должны работать блокировочные
муфты. Если позволяет конструкция коробки, то желательно муфты
располагать там, где моменты будут наименьшими.
9. СТАТИЧЕСКИЙ РАСЧЕТ КОРОБОК ПЕРЕДАЧ
Под статическим расчетом будем понимать:
— расчет на определение коэффициента полезного действия ко-
робки передач;
— расчет на прочность зубьев шестерен и валов;
— расчет зубьев шестерен на износ и расчет на работоспособ-
ность подшипников;
— расчет валов на жесткость.
ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТА ПОЛЕЗНОГО ДЕЙСТВИЯ
КОРОБОК ПЕРЕДАЧ
В любом зубчатом механизме, в том числе и в коробке передач,
внутренние потери складываются из потерь в полюсах зацепления
шестерен, из потерь в подшипниках, из гидравлических потерь и
потерь в уплотнениях (сальниках).
151
Потери в полюсах зацепления зависят от окружных усилий и
относительных окружных скоростей шестерен; потери в подшипни-
ках зависят от нагрузки, приходящейся на подшипники, и от ско-
ростей движения элементов подшипника.
Гидравлические потери складываются из потерь на взбалтыва-
ние масла в картере механизма, а также из гидравлических потерь
в полюсах зацепления шестерен и в подшипниках.
Гидравлические потери определяются в первую очередь вязко-
стью масла, а следовательно, и факторами, от которых зависит
вязкость, например от температуры масла.
Существовавший до недавнего времени метод определения по-
терь в зубчатых механизмах, в том числе и в планетарных меха-
низмах, являлся условным методом. В основу этого метода была
положена гипотеза, что потери зависят только от относительной
мощности, передаваемой через полюса зацепления шестерен.
Эта гипотеза лишь приближенно оценивает потери в зубчатых
механизмах, так как она не учитывает многие факторы, влияющие
на потери, в частности такой фактор, как скорость. Ведь со-
вершенно очевидно, что при передаче одной и той же мощности
потоком с большой скоростью потери будут больше, чем при пе-
редаче потоком с малой скоростью, но с большим моментом уже
хотя бы потому, что при больших скоростях больше динамические
нагрузки в механизме.
Поэтому определение потерь только в функции, передаваемой
через полюс относительной мощности, следует считать имеющим
лишь сравнительное значение.
Неоднократные попытки учесть другие факторы (кроме пере-
даваемой мощности), влияющие на потери, приводили к очень слож-
ным формулам. Экспериментально эти формулы не были доста-
точно проверены и поэтому не получили практического применения.
В теории силового потока (гл. V, ч. 1) был приведен общий ме-
тод определения потерь в механизмах, а следовательно, и к. п. д.
механизмов с использованием формулы потерь, предложенной
И. Н. Корнилаевым. Этот метод применим к механизмам любых
типов. Им удобно пользоваться, когда, кроме к. п. д., необходимо
определять моменты и скорости всех звеньев механизма. Тогда
к. п. д. получается как простое отношение мощности, отводимой
от механизма, к мощности, подводимой к механизму.
Однако часто приходится в расчетах и особенно в исследованиях
коробок передач определять к. п. д. коробки, не производя ее ста-
тического расчета. В этом случае можно пользоваться различными
частными приближенными методами определения к. п. д.
Рассмотрим один из таких методов определения к. п. д. ко-
робок передач, составленных из элементарных зубчатых
механизмов.
Допустим, коробка описывается некоторым силовым потоком,
в который входят элементарные механические узловые точки. Бу-
дем вначале считать, что силовой поток коробки передач идеаль-
152
ный. Для идеального потока можно составить следующее уравнение
моментов:
Л?! = • • •)> (50)
где Л7] и Л12—моменты подводимого и отводимого от коробки
силовых потоков;
г'т»а> ’ внутренние передаточные отношения узловых то-
чек а, б и т. д.;
<р— некоторая функция, зависящая от схемы силового
потока.
Рассмотрим отдельную элементарную узловую точку. Пусть
в точке имеются потери. Тогда согласно формулам 162 (см. ч. 1)
можем написать
= i Мк —-------------(51)
V km ti у , ’ ' 7
Aw Aw ;
Xk mk
где m и k — индексы потоков центральных шестерен.
Для идеальной точки будем иметь
< = -^. (52)
lmk
Сравнивая выражения (51) и (52), видим, что моменты действи-
тельной точки отличаются от моментов идеальной точки наличием
перед передаточным отношением величины ~-
Обозначим — =Х.
Если в формуле (50) заменить imka через Ха /тка, a через
V Д < ^^2
Лб tmkb, то функция ср будет выражать отношение моментов =
М1
действительного силового потока.
ОЗ)
где ср— та же функция, что и в формуле (50).
Это положение впервые было отмечено проф. М. А. Крепнесом
в его работе «Коэффициент полезного действия и передаточное от-
ношение зубчатого механизма».
Так как в идеальной передаче подводимый поток равен отводи-
мому, то ж
Мо>2 — Л/ро,.
Отсюда
/Vlj 1
153
Умножая это выражение на выражение (53), получим
? (ХаЧгйа’ У-^ткв’ ’ ' *)
М,^ <?(‘тка’ 1тко< • • )
где в левой части — к. п. д. силового потока ц; в правой части в зна-
менателе — передаточное отношение силового потока /12; в числи-
теле — то же передаточное отношение, но выраженное с учетом по-
терь в узловых точках. _
Обозначим это передаточное отношение через Лг и назовем его
силовым передаточным отношением. В отличие от
него Z12 будем называть кинематическим передаточным
отношением.
Тогда к. п. д. силового потока будет выражаться формулой
Ч = (54)
42
где
^12 (^'тйа’ Тийо’ ’ ' •)’
Тз = ? (^тка’ ^П1к& ’ ’
В последнюю функцию входят величины
Нетрудно заметить, что для элементарных точек X = тцтр или
1 : т]|Т]9, где т]| — к. п. д. первого полюса и тр — к. п. д. второго по-
люса зацепления шестерен.
Чтобы определить, какую величину следует подставлять в фор-
мулу (54): т]|7]2 или 1 : т]|7р, необходимо поступать следующим обра-
зом. Подставляем мысленно в формулу (54) X =i)ii)2. Если с увели-
чением величины X к. п. д. силового потока ц будет увеличиваться,
то подстановка произведена правильно; если т; будет уменьшаться,
.. ’
то следует подставить X = —.
Так проверяются значения X для всех узловых точек.
При расчете можно принимать следующие значения к. п. д. по-
люсов зацепления шестерен:
при внешнем зацеплении шестерен т)вш= 0,975,
при внутреннем зацеплении шестерен т)вп =0,985.
Итак, к. п. д. коробки передач определяется следующим обра-
зом. Находим вначале кинематическое передаточное отношение си-
лового потока /|2. Подставляем в полученную функцию значения X
перед внутренними передаточными отношениями Получаем си-
ловое передаточное отношение 62. Тогда согласно формуле (54)
к. п. д. будет равен Zi2: j12.
154
Для определения Цг
рекомендуется пользо-
ваться обобщенной кине
магической характеристи-
кой узловой точки
'V — +
+ (^~ 1)^ = о.
где
tip)_ 1 ~ ''"р
1 lkp
С помощью этой харак-
теристики наиболее бы-
стро определяется кинема-
тическое передаточное от-
ношение силового пото-
ка 1\2-
Пример. Определим к. п. д.
планетарной коробки передач,
кинематическая схема и схема
силового потока которой пред-
ставлены на рис. 113.
Рис. 113. К определению к. п. д. коробки пе-
редач:
а — кинематическая схема; б — схема силового потока
Дано: г12а = — 2,96; г']26 = — 1,63;
112в ------1,58; г12г ~ 3,31.
Решение. Найдем к. и. д. на первой передаче. Выделяем из общего сило-
вого потока силовой поток на первой передаче (рис. 114).
Примем для узловой точки а индекс т = 1; р = 2; к = 0. Получим из кине-
матической характеристики
"’la ^lOa^oa = 0.
Для узловой точки б примем т = 0; к — 2; р — 1.
Получим
®06 ZfpgWjj — 0.
Рис. 114. Си .'юной поток па первой
передаче
НО
Отсюда находим
, '"la
4» 9 —
Ь «Об
/(2) <„
1 Юн0™
г02бш2б
/(2)
Тогда
/(2) = = J
10а 1 — i'
1 г02а
,-(1) _ 1 ~ ‘016 1
г02б - ----------Д----- --------т—
1 — г21б 1 — г21б
— Г
Аг _ (1 — (]2а) (1 — z2I6).
Находим силовое передаточное отношение
Аг = 0 ~ Хаг'12а) (1 — Хб*21б) •
Согласно формуле (54) получим
(! — Ха^2а) С1 — Хб^21б)
(1 — /'12а) (1 ~ *21б)
Подставляем сюда числовые значения 1'12а и 1216.
Будем иметь
(1 + ха2,9б) (1 + хбТ4з)
-----------------' .
<.+2да(1+та;
Вместо ха и хб следует подставить (т]|Т]2)q и (’1|г2)б. Для эпициклического ме-
ханизма 1^2 = 0,975 • 0,985 = 0,96. Тогда окончательно получаем
т]] = 0,956.
На остальных передачах к. п. д. определяется аналогично.
Изложенный метод определения потерь в коробках передач (и во-
обще в зубчатых механизмах), при котором к. п. д. полюсов зацеп-
ления принимают величиной постоянной, является приближенным,
так как он не учитывает влияние на к. п. д. таких факторов, как
скорость вращения шестерен, передаваемая мощность, устройство
механизма и т. д. Более точные результаты при определении потерь
и к. п. д. дает метод, основанный на формуле потерь, предложенной
И. И. Корнилаевым (формула 138, ч. 1).
Рассмотрим этот метод подробнее.
Пусть какой-либо сложный зубчатый механизм описывается схе-
мой силового потока, в которую в общем случае входят простые,
планетарные и дифференциальные узловые точки. При этом некото-
рые точки могут быть холостыми. Для каждого полюса зацепления
рабочих точек потери определятся по формуле
^ = -(Л//г^-ЬД^), (55)
156
а для полюсов зацепления холостых точек по формуле
Здесь А и В — опытные коэффициенты, имеющие следующие
значения:
А = 0,005; для конической пары шестерен В = 0,02; для цилин-
дрической пары шестерен с внешним зацеплением простого меха-
низма В = 0,015; для внешнего зацепления планетарного механизма
В = 0,01; для внутреннего зацепления В = 0,005;
k—показатель степени. Если механизм имеет «сухой» картер,
т. е. смазка шестерен и подшипников производится поливом, то
k= 1,5, если смазка производится разбрызгиванием, то k = 1,7;
т — модуль зубьев шестерен в мм;
vp— относительная окружная скорость в полюсе зацепления
в м/сек.-,
Np— относительная мощность, проходящая через полюс в л. с.
При определении потерь в планетарном механизме условно при-
нимают, что силовой поток проходит через один сателлит, т. е. не
разбивается на параллельные потоки.
Рассматривая силовой поток как идеальный, находим направле-
ние всех его связывающих потоков.
Зная направление связывающих потоков и подводимую к меха-
низму мощность, можно определить потери в первой узловой точке.
Если эта точка простая, то проходящий через ее полюса силовой
поток принимаем равным подводимому потоку. Так как скорости
шестерен известны, то по формуле (55) определятся потери в узловой
точке. Если узловая точка планетарная (или дифференциальная),
то следует выразить через абсолютный поток, проходящий через
точку, относительный поток, который после определения подстав-
ляется в формулу (55). Допустим, что мы имеем элементарную пла-
нетарную точку, у которой заторможен поток 2 (или 1). К узловой
точке подводится поток Af0 (по водилу). Можно написать
Ч = ШоЛ/о = - (/И, + М) ш0 = - + о>2Л42 Л-1 =
\ Ш1 ш2 )
к “2
Приближенно можно принять N\^N'2 = N'. Тогда
«о о>0 '
ш| ">2
Зная N' и относительные окружные скорости шестерен.
потери в планетарной узловой точке.
Вычтя из подводимого потока поток, теряемый в
157
(56')
находим
данной
узловой точке, найдем поток, подводимый ко второй узловой точке,
и т. д.
Если в силовом потоке имеются холостые узловые точки, то по-
тери в них определяются по формуле (56). Для этого необходимо
только определить относительные скорости v'=v в полюсах за-
цепления шестерен. Так как кинематика механизма известна, то
эти скорости определяются без затруднений.
Определив потери в отдельных узловых точках и в силовом по-
токе в целом, находим к. п. д. узловых точек и к. п. д. силового
потока по формуле
. r_ Nt
^=1 + лД-
где Nf—потери (величина отрицательная);
— подводимая мощность (величина положительная).
Пример. Определим потери мощности и к. п. д. в элементарном планетарном
механизме, пользуясь формулами Крейнеса и Корнилаева.
Дано: 112 = —.2,65; Ш2 = О; число оборотов ведущего вала По=И42 в ми-
нуту; мощность, подводимая к механизму, No = 100 л. с.; модуль шестерен меха-
низма т = 3,5 мм; радиус солнечной шестерни Л, = 0,075 м.
Механизм — однорядный эпицикл.
Решение. Согласно формуле (54) имеем
ъ = ^-.
loi
Определяем из кинематической характеристики
'м = Г-7^ = ttw = 0/27 ’•
Силовое передаточное отношение будет
тогда по Крейнесу
Ci
1
г12
''Ms
___1________
2.65
0,975-0,985
= 0.265,
_ 0,265
10 “ 0,274
= 0,97.
и Nt = — (1 - -г;) No = - (1 —0,97). 100 = - 3 л с.
Определяем теперь потери по формуле (55).
Согласно формуле (56') находим относительную мощность в полюсе за-
цеилсния
*' = *„ = - —— =. 160 Л с.
2,65-120 - 1
Определяем относительную скорость полюса
V = Wf/l, = -- = 2,65-120-0,075 = 24 м сек.
158
Учитывая, что в однорядном эпицикле относительные скорости в обоих полю
сах зацепления одинаковы, получим согласно формуле (55)
Nt = Npl + Nra=— [(0,005 3,5 - 24!-е + 0,01 • 160) +
+ (0,005-3,5-241-* + 0,005 160)] = -6,5 л. с;,
тогда
100 — 6,5
“ 100
= 0,93
Из сравнения обоих методов определения потерь мы видим, что
метод Крейнеса дает лишь грубое приближение к истинному зна-
чению потерь. Какие бы скорости ни имели шестерни механизма
(1л1/сек или 50 м/сек), к. п. д. механизма остается неизменным.
Не влияет также на к. п. д. механизма наличие холостых точек.
Особенно большую погрешность дает метод Крейнеса при опреде-
лении потерь, когда через механизм передается небольшая часть
от расчетной мощности. В этом случае методом Крейнеса пользо-
ваться нельзя.
Метод Корнилаева позволяет не только более правильно опреде-
лять потери в проектируемом механизме, но и рационально (с точки
зрения потерь) проектировать механизм. Для этого следует стре-
миться уменьшать число холостых точек и насколько возможно
снижать относительные окружные скорости шестерен.
Правильное определение потерь в зубчатых механизмах позво-
ляет более точно оценивать тепловой режим работы меха-
низма, что имеет очень важное значение в механизмах, передающих
большие мощности.
РАСЧЕТ ЗУБЬЕВ ШЕСТЕРЕН
Расчет зубьев шестерен на прочность, износ и усталость по-
дробно излагается в курсе «Детали машин». Кроме того, этому во-
просу посвящена обширная специальная литература. Поэтому огра-
ничимся здесь лишь приведением основных формул, которыми
обычно пользуются в расчетах зубчатых зацеплений шестеренчатых
механизмов силовых передач гусеничных машин. Формулы эти не
дают абсолютных значений напряжений в зубьях и, следовательно,
не выявляют действительную картину явлений, происходящих в ра-
ботающем зубе. Они позволяют лишь сравнительно оценивать проч-
ность и работоспособность зацепления. Ценность этих формул,
однако, в том, что ими давно пользуются при расчете шестерен си-
ловых передач и в области расчета накоплен большой опытный ма-
териал.
Расчет шестерен ведется одновременно по нескольким форму-
лам. Результаты расчета сравниваются с данными поверочных рас-
четов выполненных конструкций коробок передач.
159
Формула Баха,
пряжения в зубьях
Эта формула определяет изгибающие на-
<W) = 2-44^. <57)
где h— полная высота зуба в см;
т— модуль в см;
Р— окружное усилие, отнесенное к длине зуба.
Расчет ведут на статическую нагрузку Р =РС и на полную на-
грузку Р — Рп — Рс-г Рл, где —динамическая нагрузка, опре-
деляемая по Бакингему.
Имеем
Л--5-, (58)
где Л1— крутящий момент, приложенный к валу;
г— радиус шестерни по начальной окружности;
b— длина зуба.
р =-----v & = (59)
д v + 0,24 УРС +сГ
где v—окружная скорость шестерни в м/сек; 1— ошибка при изготовлении шестерен; с— коэффициент Бакингема. Величину 1 можно задавать согласно табл. 13 в зависимости от окружной скорости шестерен v. Таблица 13 Ошибка в зацеплении шестерен
и, м.'сек I 1,5 2 3 4 5 6 7
1, МЛ! 0,125 0,100 0,09 0,073 0,068 0,060 0,055 0,050
V, м/сек 8 9 10 12 14 16 18 20
1, МЛ1 0,045 0,042 0,038 0,030 0,025 0,021 0,010 0,015
Коэффициент Бакингема принимают для нормального профиля
зуба с = 116 000 кг/см2, для коррегированного — с — 120 000 ка/слр.
Нормальный зуб имеет высоту h — 2т, коррегированный (уко-
роченный) — h — 1,8m.
Коррегированные зубья дают большую прочность, меньшее под-
резание зуба, что позволяет уменьшать число зубьев гт.п, напри-
мер с 17 зубьев до 14 зубьев.
К недостаткам коррегированного зацепления относится меньшая
продолжительность зацепления и несколько больший износ зубьев.
160
В формулу статической нагрузки входит длина зуба Ь. Ею
обычно задаются.
В коробках отечественных машин принимают длину зуба, выра-
женную в частях от модуля > равной 5—8. В коробках ино-
странных машин эта величина обычно больше и достигает иногда 15.
Это позволяет уменьшать модуль шестерен. Так, при передаче через
коробку крутящего момента двигателя 100—150 кем модуль иногда
составляет всего 2,5—4,5 мм. В планетарных коробках, передающих
крутящий момент двигателя 80 кем, модуль равен 2,5 мм при от-
носительной длине зуба 10.
Для шестерен, изготовленных из хромоникелевых сталей, при-
нимают следующие допустимые напряжения изгиба при расчете ше-
стерен на полную нагрузку (в кг/см2):
для шестерен постоянного зацепления — 3000—4000;
для шестерен низших передач и заднего хода — 6000—8000;
для шестерен высших передач (ходовых) — 2500—3000;
для шестерен промежуточных передач — 4000—5000.
Формула Льюиса. Формула Льюиса, кроме изгиба зубьев,
учитывает также сжатие их от приложенного к зубу усилия
°из (Л) тсту • (60)
где
л 1 rt я 1)23 . 3,33 /й 1 \
_у = 0,154---—+ ^г (61)
(z — число зубьев меньшей шестерни).
Допустимые максимальные напряжения для ходовых передач не
должны превышать на полной нагрузке 5000 кг/см2.
Формула касательных напряжений. Эта формула
характеризует усталостные явления в зубьях
= 0.289ДЙ-- <б2>
где Е—модуль упругости материала (для хромоникелевых сталей
2,1-10° кг/с.ад2);
k—коэффициент продолжительности зацепления;
а— угол зацепления шестерен.
Для зубьев, имеющих высоту /г= 1,8 т и а = 20°, значения
коэффициента k приведены в табл. 14.
Таблица 14
Название показателя Число зубьев шестерен
веду- щей ведо- мой веду- щей ведо- мой веду- щей ведо- мой веду- щей ведо- мой веду- щей 30 ведо- мой 60
12 12 20 30 30 30 30 40
Коэффициент k ... 1,13 1,2 1,22 1,24 1,25
11—20
161
Касательное напряжение не должно превышать в кг/см2'.
для высших (ходовых) передач — 4500,
для низших передач — 6500.
В сельскохозяйственных тракторах принимают т11ах не выше—
3000.
Формула Герца. Формула Герца определяет контактное
смятие зубьев, в результате чего может происходить их поверх-
ностное выкрашивание
о = 606 1/ 2РЛо ,
см (Г) I МП 2а ’
(63)
где Ао—межосевое расстояние в см;
1\, ri — радиусы начальных окружностей шестерен в см;
а — угол зацепления.
Напряжения на смятие по Герцу при расчете на полную на-
грузку обычно лежат в пределах 10 000—30 000 кг/см2. Наиболее
часто встречающиеся в коробках напряжения 12 000—20 000 кг/см2.
При расчете зубчатого зацепления следует учитывать окружные
скорости в полюсе зацепления шестерен. Скорость для шестерен, ра-
ботающих под нагрузкой, составляет 15—25 м/сек, а в отдельных
случаях достигает 40—45 м/сек.
Для холостых шестерен окружная скорость может достигать
50—60 м/сек.
В коробках передач тягачей применяются шестерни с различной
формой зуба:
— цилиндрические с прямым зубом;
— цилиндрические с косым зубом;
— конические с прямым зубом;
— конические со спиральным зубом.
Шестерни с косыми и спиральными зубьями имеют большую
прочность, чем шестерни с прямыми зубьями, вследствие большей
длины зуба. Применяются они в коробках с постоянным зацепле-
нием, а также в конических передачах.
Расчет шестерен с косым и спиральным зубом производится
аналогично расчету шестерен с прямым зубом. Только в этом слу-
чае основные расчетные величины получают приведенное значе-
ние Г
РАСЧЕТ ВАЛОВ
Для расчета валов следует предварительно определить усилия,
приложенные к зубьям шестерен.
На зуб шестерен действует усилие Q, приложенное по нормали
к его рабочей поверхности (рис. 115).
Кроме нормальной силы, на зуб действует еще касательная сила
трения t. В результате сложения этих сил их равнодействующая Р'
отклоняется от нормали па угол трения р.
1 См. А. Д. Крюков. Планетарные передачи в транспортных машинах.
Машгиз, 1950 г.
162
Спроектируем силу Р' па ось аб, соединяющую центры шесте-
рен, и на касательную к начальной окружности.
Получим
/?= Р sill (а р);
Р== Р cos (а + р),
где а — угол зацепления
ным 20°.
зубьев. Чаще всего его принимают рав-
Рис. 115. Силы, действующие
на зуб цилиндрической ше-
стерни
Рис. 116. Силы, действующие на зуб кони-
ческой шестерни
Отсюда
/?=Ptg (а + р).
(64)
Сила Р — окружное усилие, действующее па зуб шестерни. Оно
определяется по формуле
Р = ^-, (65)
где М — крутящий момент, приложенный к шестерне;
г—радиус шестерни.
Угол трения принимают равным 5°.
Для конических шестерен с прямым зубом разложение сил, дей-
ствующих на зуб, производится по правилу параллелепипеда. Про-
ведем через точку п плоскость, перпендикулярную образующей на-
чального конуса зуба (рис. 116). Спроектируем сечение зуба, ле-
жащее в этой плоскости, на плоскость чертежа. На зуб действуют
окружное усилие Р и сила Q.
Тогда
Q = /3tg(a + p).
И*
163
Разложим силу Q на две составляющие— осевую силу S и ра-
диальную силу R.
Будем иметь
5 = Qsin 8 = Ptg (а р) sin 8; (66)
R= Qcos 8 = Ptg (а + p) cos 8. (67)
Окружное усилие
P = —, (68)
rcp
где rcp — средний радиус конической шестерни;
М— крутящий момент, приложенный к шестерне.
Средний радиус определяется по формуле
Др = Д — 4 sin 8, (69)
где
tg3 = ^; (70)
*2
(2j и г2— числа зубьев шестерен).
Остальные размеры шестерни показаны на рис. 117.
Определим реакции опор вала.
Пусть к цилиндрическим шестерням, посаженным на валу, при-
ложены окружные и радиальные силы Р и R (рис. 118); к кониче-
ской шестерне, кроме того, приложено осевое усилие S.
Окружные и радиальные усилия можно перенести к осям шесте-
рен и здесь разложить, как показано на рис. 119.
Получим схему внешних сил, приложенных к валу.
Если вал двухопорный, то задача является статически опреде-
лимой и реакции опор находятся из двух уравнений моментов, взя-
тых относительно одной и другой опоры.
Если вал трехопорный, то задача статически неопределимая.
Для решения статически неопределимой задачи поступаем сле-
дующим образом. Мысленно убираем среднюю опору вала и нахо-
дим прогиб вала в этом месте. Затем по известному прогибу нахо-
дим силу, которую необходимо приложить на месте средней опоры,
чтобы прогиб равнялся нулю. Это и будет реакция средней опоры.
Относя ее теперь к числу заданных сил, определяем реакции край-
них опор.
Возможны три случая приложения нагрузок к трехопорному
валу:
1) сила приложена междуопорами (рис. 120, а);
2) сила приложена консольно (рис. 120,6);
3) сила приложена на некотором плече г (рис. 120, в).
Рассмотрим каждый из этих случаев в отдельности.
Первый случай. Обозначим расстояние от силы Q до бли-
164
5/2
Рис. 117. Размеры конической ше-
стерни
Рис. 119. Проекции сил, действую-
щих на опоры вала
Рис. 120. Три случая приложения на-
грузок к трехопорному валу:
а — сила приложена между опорами; б — сила
приложена консольно; в — сила приложена
иа некотором плече г
165
жайшей крайней опоры через а. Тогда уравнение упругой
будет
У Qax (Е — а2 — х2)
У — &EU
Прогиб под средней опорой будет
Qal\l2 - а2 -
6ЁП
линии
(71)
(72)
Определим теперь из уравнения (71) реакцию средней опоры /?с,
которая дает прогиб, равный Ус. Подставим в уравнение (71) вме-
сто силы Q реакцию /?с, вместо а величину /2 и вместо х вели-
чину /[.
Получим
(73)
Из уравнений (72) и (73) найдем
Qa (Р~а2 — 12Л
{ <74>
Зная реакцию средней опоры, из уравнений статики определим
реакции крайних опор.
Второй случай. Уравнение упругой линии для второго слу-
чая будет
г = <75>
Подставим в уравнение (75) вместо х величину найдем про-
гиб под средней опорой
(76)
Решая уравнение (76) совместно'с уравнением (73), найдем
Qa(F-i\}
(77)
Третий случай. Уравнение упругой линии для этого случая
будет
„ Srx Г., / 2а + Z \ 2 „~1 Srx* ,„о.
У = 2ЁТр L(Z ~ НН - Т а J - 6Ё7Г • (78)
Подставляя в уравнение (78) х = Ц, получим
v Sri, Г.. ,2а + /\
Ус ~~ 2Е/Г2 [ С В /
Srl^
6EII
(79)
166
Решая уравнение (79) совместно с уравнением (73), найдем
= (Р-Ы-12). (80)
(81)
(82)
(83)
Если момент от осевой силы S приложен к концу вала (кон-
сольная нагрузка), то расчет реакций опор ведется по формуле (77).
В этом случае следует только заменить величину а величиной г и
силу Q силой S.
Мы рассмотрели действие на вал одной силы. Если к валу при-
ложено одновременно несколько сил, то надо найти реакцию каж-
дой силы и полученные реакции сложить геометрически.
Определив реакции опор, строим эпюры изгибающих моментов
и находим наибольший изгибающий момент. Складывая изгибаю-
щий и крутящий моменты, действующие на вал, находим расчет-
ный момент по следующей формуле:
ч=/<+<•
где Л4кр — момент, скручивающий вал.
Отсюда находим напряжение кручения
Мр
Т— «7 ’
где
~rf2)
W ~ I6dt
d\ —наружный диаметр вала;
d2 — внутренний диаметр вала.
Если валы шлицованные, то величина dt и d2 берется по сред-
ней высоте шлицев.
Допустимые напряжения для валов из хромоникелевых сталей
т = 2500—4000 кг/см2.
Шлицы валов рассчитываются на смятие и срез по следую-
щим формулам:
ь1/VI кр
ТсР = *(rf„ + dB) zlb ’ (85)
где <р —крутящий момент;
' d„ и <4 — наружный и внутренний диаметры шлицев;
I — длина шлицев;
г — число шлицев;
X — число работающих шлицев;
b — ширина шлицев.
Обычно принимают X = 0,5.
Поверочные расчеты показывают, что допустимые напряжения
167
°см и тср для подвижных шлицев 1500—2000 кг/см2, для неподвиж-
ных — 2000—2500 кг/см2.
Для отдельных случаев напряжения выходят за указанные пре-
делы и для неподвижных соединений иногда достигают величины
4000 кг/см2.
Так как точность зацепления шестерен зависит от жесткости ва-
лов, то последние проверяются на деформацию — на изгиб и
кручение.
Суммарный прогиб вала определяется по формуле
/=К7Г+А, (86)
где /— прогиб в плоскости валов (допускается в пределах
0,05—0,1 мм);
А—прогиб в перпендикулярной плоскости (допускается в пре-
делах 0,1—0,15 мм).
Стрелы прогиба/ и /2 определяются из уравнений упругой ли-
нии. В эти уравнения входят величины:
£ = 2,1 • 106 кг/см2 — модуль упругости хромоникелевых сталей;
I = (dj— d4) с.гг4 — экваториальный момент инерции сечения
вала.
Угол скручивания вала определяется по формуле
~ * (8Г>
где 6—угол скручивания в радианах;
— крутящий момент в кгсм;
I — длина скручиваемого участка вала в см;
G = 8,5-103—модуль упругости на кручение в кг/см2;
/р=0,1 (d4— d^)—полярный момент инерции полого вала в с.ц4.
Угол скручивания не должен превышать 0,25° на 1 м длины
вйл а.
При расчете валов сателлитов планетарных коробок передач не-
обходимо учитывать центробежную силу сателлита, которая опреде-
ляется по формуле
Р.'уА®'. (88)
где Q — вес сателлита в кг;
g— ускорение силы тяжести = 9,81 м/сек2;
До — радиус оси сателлита, отсчитываемый от главной оси ме-
ханизма, в м;
/?0 — число оборотов водила в минуту.
Эта сила геометрически складывается с силой, полученной
вследствие зацепления шестерен сателлита с центральными ше-
стернями и приведенной к оси сателлита.
168
ОПРЕДЕЛЕНИЕ РАБОТОСПОСОБНОСТИ ПОДШИПНИКОВ КАЧЕНИЯ
Подшипники качения, применяющиеся в коробках передач,
а также и в других механизмах машины, рассчитываются на ра-
ботоспособность.
Коэффициент работоспособности радиально-упорных подшипни-
ков определяется по формуле
с = (/? + mA) {nh)^k6kk = Q (дЛ)0’3, (89)
где R— радиальная нагрузка на подшипник в кг;
т — коэффициент, учитывающий влияние осевых усилий на ра-
ботоспособность подшипника (для однорядных шарико-
подшипников всех серий т = 1,5, для радиально-сфериче-
ских подшипников т = 3—3,5);
А — осевая нагрузка на подшипник в кг;
п — число оборотов вала в минуту;
h — продолжительность работы подшипника в часах;
^—коэффициент, учитывающий характер нагрузки (для спо-
койной нагрузки k6 = 1; при слабой динамической на-
грузке k6= 1,5; при нагрузке с ударами k6 = 2—3);
kk — коэффициент, учитывающий закрепление обоймы подшип-
ника (при вращении внутренней обоймы kk = 1; при вра-
щении наружной обоймы = 1,1; для сферических и дру-
гих подшипников качения =1,35);
Q — обобщенная нагрузка в кг.
Зная нагрузку, действующую на подшипник, среднее число обо-
ротов вала и задавая время работы подшипника, а также коэффи-
циенты, входящие в формулу (89), находят работоспособность под-
шипника (с) и по каталогу подбирают соответствующий этой,рабо-
тоспособности подшипник.
Коэффициент работоспособности упорных подшипников опреде-
ляется по формуле
c^Ak^nh)^. (90)
Коэффициент работоспособности конических роликоподшипников
определяется по формуле
с = [R — т (Л —S)] V* (91)
где S — осевая составляющая от радиальной нагрузки, появляю-
щаяся вследствие конусности роликов. Величину S принимают рав-
ной 0,6 7?, где R—радиальная нагрузка.
При расчете радиальных роликоподшипников нагрузку ЗиЛ
в формуле (91) принимают равной нулю.
В коробках передач подшипники на различных передачах рабо-
тают различное время. Поэтому за расчетную нагрузку принимают
1G9
некоторую приведенную нагрузку Qnp, которая опреде-
ляется по формуле
з,зз__________________
Qnp = /^W33 + a2W33 + -- - (92)
rfleQ1,Q2HT.fl.— определяются по формуле (89) на различных пе-
редачах;
а — отношение времени работы на данной передаче к об-
щему времени работы коробки;
Р — отношение числа оборотов вала на данной передаче
к среднему числу оборотов, принятому за расчетное.
Тогда коэффициент работоспособности определится по формуле
с = Qnp (лЛ)0,3 (93)
Коэффициент а ориентировочно можно выбрать согласно данным
табл. 15.
Таблица 15
Коэффициент а в %
Тип машины Передача
медленная 1 1 11 III IV
Гусеничная машина, работаю- щая без прицепа (транспор- тер) . . . . • 5 10 20 35 30
Сельскохозяйственный трак- тор 25 65 10
Тягач 5 10 30 40 15
При выборе коэффициента а следует иметь в виду назначение
машины и условия ее работы. В зависимости от этого распреде-
ляется и время работы по передачам. Наибольшее значение коэф-
фициента а приходится на рабочие передачи. В тягачах этими пе-
редачами являются две средние передачи (вторая и третья), л
Пример. Нагрузки на подшипник вала и число оборотов вала заданы, согласно
табл. 16. Требуется определить коэффициент работоспособности с подшипника.
Таблица 16
Параметры Передача
медленная | I II III IV
R, кг 1500 1150 980 830 750
п, об/мин 500 835 980 1440 1800
Выбираем значения коэффициента « по табл. 15. ам = 0,05; ^ = 0,1; =
— 0,2; а и । = 0,35; ct |у -=- 0,3.
Среднее число оборотов вала принимаем nep = 1100 об/мин. Тогда значения
коэффициента ₽ будут: S3M = 0,45; pj = 0,76; — 0,89; = 1,3; pIV = 1,63.
170
Задаемся коэффициентами: /г* — 1; Аб = 1,5; т — 0.
Тогда будем иметь для различных передач:
Qm = -RmM* = 1500-1,5-1 = 2250 кг\ Q, = 1730 кг; = 1470 кг; (?П] = 1240 кг\
QIV = 1120 кг.
Определяем приведенную нагрузку
3,33____________________________________
<2пр = “/ЭД3’33 = 1380 кг.
Примем А = 1000 час. Тогда коэффициент работоспособности подшипника
будет
с = Qlip(nA)n’3 = 1380 (1100-1 000)0’3 = 35500.
ГЛАВА IV
НЕПРЕРЫВНЫЕ МЕХАНИЧЕСКИЕ ТРАНСФОРМАТОРЫ
1. ОПРЕДЕЛЕНИЕ И КЛАССИФИКАЦИЯ
ТРАНСФОРМАТОРОВ
ОПРЕДЕЛЕНИЕ ТРАНСФОРМАТОРА
Необходимость преобразования силового потока первичного дви-
гателя, т. е. изменение его кинетического и динамического факторов,
требует установки в силовую передачу машины специального пре-
образующего устройства. В ступенчатых зубчатых силовых пере-
дачах такое устройство называют коробкой передач, в ги-
дромеханических силовых передачах — турбо- или гидро-
трансформатором, в электромеханических силовых переда-
чах это устройство не имеет специального названия. Оно состоит
из генератора, преобразующего механический силовой поток дви-
гателя в электрический силовой поток, и из электромотора, совер-
шающего обратное преобразование электрического силового потока
в механический силовой поток.
Чтобы ввести единую терминологию, будем называть преобра-
зующее устройство трансформатором независимо от того,
в силовой передаче какого типа оно применяется.
В самом общем случае трансформатором является
всякое механическое, гидравлическое или элек-
трическое устройство, которое преобразует ки-
нетический и динамический факторы силового
потока перви
тора
иного двигателя.
Рассмотрим трансформаторы, преобразую-
щие механический поток двигателя в механи-
ческий же поток движителя. При этом, преоб-
разование может происходить механическим,
гидравлическим, электрическим или смешан-
ным путем, т. е. внутренние потоки трансфор-
матора могут иметь различную форму энергии;
подводимый же к трансформатору и отводи-
мый от него потоки всегда механические.
Рассматриваемые трансформаторы должны
преобразовывать крутящий момент и угловую
скорость первичного двигателя. Тогда в схеме
силового потока трансформатор должен опи-
172
сываться динамической узловой точкой, т. е. узловой
точкой, имеющей не менее трех направленных потоков. Здесь будем
рассматривать трансформаторы, имеющие только три внешних
механических потока: подводимый 1, отводимый 2 и затор-
моженный 3 (рис. 121).
Обозначим буквой k отношение момента отводимого потока
к моменту подводимого потока и назовем эту величину коэффи-
циентом трансформации
* = <94)
Коэффициент k может иметь как положительное, так и отрица-
тельное значение.
Теперь можно дать более точное определение трансформатору.
Трансформатором будем называть такое пре-
образующее силовой поток устройство, которое
описывается динамической узловой точкой и
имеет переменный коэффициент трансформации
(k = var).
На схеме силового потока узловая точка трансформатора обо-
значается со специальным значком (~ ), как указано на рис. 121.
По значению коэффициента трансформации можно классифици-
ровать и другие передающие устройства силовой передачи. Так,
если коэффициент трансформации k ~ 1 или величина отличная от
единицы, но постоянная (6 = const), то преобразующее устройство
будет являться редуктором, если k — —1,— муфтой.
Всякая силовая передача состоит из трансформатора (или транс-
форматоров), редукторов и муфт.
В силовой передаче тягача трансформатором является коробка
передач; все остальные зубчатые механизмы — редукторы (главная
передача, бортовая передача).
Соединение нескольких трансформаторов или трансформаторов
и редукторов будем называть передачей.
КЛАССИФИКАЦИЯ ТРАНСФОРМАТОРОВ
Трансформаторы могут быть ступенчатые, т. е. со ступен-
чатым регулированием коэффициента трансформации, и непре-
рывные, т. е. с непрерывным регулированием коэффициента
трансформации.
К ступенчатым трансформаторам относятся зубчатые ко-
робки передач.
Кроме того, трансформаторы могут быть автоматические
и регулируемые.
Всякий регулируемый трансформатор можно автоматизировать,
если в его привод ввести автомат. Такой трансформатор будем
называть автоматизированным в отличие от автоматиче-
ского трансформатора, автоматизм которого обеспечивается его вну-
тренним устройством. Примером ступенчатого автоматизированного
трансформатора является рассмотренная выше коробка передач
173
Хоббса. Все остальные коробки принадлежат к типу ступенчатых
регулируемых трансформаторов, так как изменение их коэффи-
циента трансформации регулируется водителем.
Заметим, что всякий трансформатор имеет не менее двух степе-
ней свободы. В регулируемом трансформаторе при установившемся
движении все степени свободы, кроме одной, замыкаются водителем,
в автоматизированном и в автоматическом трансформаторе число
степеней свободы всегда две. Определенность движения при этом
определяется внешними сопротивлениями, которые преодолевает
машина.
Редуктор имеет всегда одну степень свободы и, следовательно,
не может регулироваться. В этом и заключается его принципиаль-
ное отличие от трансформатора.
Непрерывные трансформаторы можно разделить на следующие
три группы:
1. Механические: фрикционного типа; импульсного типа регу-
лируемые; импульсного типа автоматические (инерционные).
2. Гидравлические: гидростатического типа; гидродинамического
типа.
3. Электрические: постоянного тока; переменного тока
2. ХАРАКТЕРИСТИКИ ТРАНСФОРМАТОРА
Работа всякого трансформатора описывается его характеристи-
кой, т. е. функциональной зависимостью между его мощностными,
кинетическими и динамическими факторами. Наиболее важными
являются каноническая характеристика п харак-
теристика совместной работы трансформатора
с двигателем.
Канонической характеристикой называется зависимость, обычно
выражаемая графически, между моментами подводимого и отво-
Рис. 122. Каноническая характеристика
трансформатора
димого потоков, к. п. д. и
угловой! скоростью ведомого
вала трансформатора при
постоянной угловой скорости
ведущего вала.
На рис. 122 приведена
примерная каноническая ха-
рактеристика трансформа-
тора.
По оси абсцисс отложена
угловая скорость ведомого
вала Ш2, по оси ординат —
моменты Л!,, Л12 на ведущем
и ведомом валах и к. п. д.
трансформатора т;.
На каноническую харак-
теристику иногда также на-
носят коэффициент транс-
формации k.
174
Каноническая характеристика позволяет судить о преобразую-
щих свойствах трансформатора как такового, т. е. независимо от
работы двигателя, который в этом случае предполагается работаю-
щим на постоянных оборотах.
Характеристика, а следовательно, и работа трансформатора оце-
нивается следующими параметрами:
— коэффициентом полезного действия д;
— коэффициентом трансформации
— коэффициентом прозрачности (при прямой прозрачности)
М] max
1 nun
— коэффициентом приспособляемости
( _ ^2 max .
^2 min ’
(95)
(96)
— скоростным диапазоном
ш2 шах
(97)
Коэффициент полезного действия т, характеризует
экономичность трансформатора: чем выше к. п. д., тем экономичнее
трансформатор.
Следует различать дтах и i)min. Здесь т)т1н определяется как
эксплуатационная граница допустимого снижения к. п. д. при дли-
тельной работе трансформатора.
Коэффициент трансформации k характеризует преобразующие
свойства трансформатора. Коэффициент k изменяется с изменением
ч>2, т. е. с изменением угловой скорости ведомого вала. С уменьше-
нием ш2 коэффициент k увеличивается и достигает своего макси-
мума в положении «стоп» трансформатора («>2 = 0).
Прозрачностью называют изменение момента на ведущем
валу с изменением момента на ведомом валу. Если момент тах ле-
жит слева от момента /И1П]1П, то характеристика имеет прямую
прозрачность (рис. 122); если момент тах лежит справа от мо-
мента 7Wlmjn, то характеристика имеет обратную прозрачность.
Коэффициент прозрачности показывает, что
с увеличением нагрузки на ведомом валу трансформатора первич-
ный двигатель должен увеличивать (при прямой прозрачности) или
уменьшать (при обратной прозрачности) свой крутящий момент.
При прямой прозрачности коэффициент <?’> 1, при обратной
< 1, так как в этом случае
^1 min
max
175
Чтобы двигатель на всех режимах работы использовал полную
мощность, необходимо, чтобы трансформатор был непрозрач-
н ы й, т. е. его момент Mt должен быть величиной постоянной. В этом
случае при любом режиме работы трансформатора двигатель рабо-
тает на одной точке своей характеристики, т. е. при постоянных обо-
ротах, постоянном моменте, а следовательно, и при постоянной мощ-
ности.
Коэффициент приспособляемости ф характеризует
приспособляемость трансформатора, т. е. способность его изменять
момент на ведомом валу в зависимости от изменения внешнего со-
противления, приложенного к ведомому валу. Чем больше коэффи-
циент приспособляемости, тем шире диапазон сопротивлений, кото-
рые сможет преодолевать машина при движении.
Скоростной диапазон X характеризует пологость кри-
вой коэффициента полезного действия д в границах дт!п, в которых
трансформатор работает большую часть своего времени. В гусенич-
ных машинах дт|п не должен быть меньше 0,75, так как в противном
случае трансформатор будет иметь низкую топливную экономичность
и будет быстро перегреваться. Иногда трансформаторы оценивают
по максимальному значению коэффициента полезного действия дтах.
Такая оценка не является полной. Действительно, дтах может иметь
очень высокое значение, а преобразующие качества трансформатора
при этом могут быть низкими.
Так, если характеристика к. п. д. крутая, т. е. скоростной диапа-
зон X имеет малое значение, то малое значение будет иметь и коэф-
фициент приспособляемости ф, а следовательно, трансформатор бу-
дет плохо приспосабливаться к меняющимся на его ведомом валу
сопротивлениям. Только сочетание высокого значения дшах при вы-
соком значении X дает, удовлетворительную характеристику транс-
форматора.
Параметры k, с? и ф могут иметь максимальное значение (&тах,
<ртах и Фщах) ИЛй МОГУТ рассматриваться в границах эксплуатацион-
ного режима, т. е. в границах эксплуатационного изменения к. п. д.
В этом случае условимся приписывать им индекс д и ф^.
Различное протекание кривых характеристики трансформатора,
а следовательно, и изменение параметров характеристики зависит
от внутренних процессов, происходящих в трансформаторе. Влияя на
эти процессы, можно влиять и на характеристику трансформатора.
Заметим, что из трех величин характеристики Mh М2 и д неза-
висимыми являются только две, третья величина может быть одно-
значно, определена на основании двух других.
Рассмотрим, какой характер протекания должны иметь кри-
вые д, Mi и М2.
Для узловой точки трансформатора можем написать
176
Так как отводимый поток
(поток 2) может буть холо-
стым или зато р. м о ж е н-
н ы м, то т] должно меняться от
нуля до нуля, как это показано
на рис. 123. Если трансформа-
тор идеальный, то кривая г)
распрямляется в линию, парал-
лельную оси абсцисс (т]= 1).
Чем меньше внутренние по-
тери в трансформаторе, тем
полнее характеристика к. п. д.,
тем она положе в своей средней
части.
Момент Mi может иметь са-
мое различное протекание в за-
висимости от того, какой про-
зрачностью обладает трансфор-
матор. Если принять Af|=const
(трансформатор непрозрачный)
и а>1 = const (характеристика
каноническая), то из предыду-
щего уравнения получим
Рис. 123. Идеальная и действительная
канонические характеристики транс-
форматора:
1 — идеальная характеристика; 2 — действитель-
ная характеристика
М2 = а
дде
а = — — const.
Отсюда следует, что момент на ведомом валу трансформатора
еСТЬ фуНКЦИЯ К. П. Д. И УГЛОВОЙ СКОРОСТИ О>2. ЕСЛИ ПРИНЯТЬ т) = 1, то
М2 будет изменяться по гиперболе (см. пунктирную кривую на
рис. 123). Если т] задано в функции <о2, то можно определить М2 при
наличии потерь в трансформаторе. Получим кривую М2, обозначен-
ную на рис. 123 сплошной линией.
В области высокого к. п. д. обе кривые момента М2 сближаются.
Следовательно, в этой области действительный трансформатор при-
ближается к идеальному.
Рассмотрим теперь характеристику совместной работы трансфор-
матора и двигателя.
Характеристикой совместной работы называется
зависимость между моментом на ведущем валу трансформатора и
угловой скоростью этого вала при различной загрузке трансформа-
тора, т. е. при различных значениях о>2 и М2.
Допустим, что в результате расчета трансформатора получена
функциональная зависимость:
/Wj у (<!)], <»2, М%).
12—20
177
Пусть ш-> = const, Л^г = const; получаем 411 = ^(wi). Наносим се-
мейство кривых ЛЛ на график (рис. 124). Кроме loro, на этот же гра-
фик наносим кривую момента двигателя при работе последнего па
внешней характеристике /Идв и кривую удельного расхода горю-
чего ge. Полученный график и является характеристикой совместной
работы.
Рис. 124. Характеристика совместной работы трансфор-
матора и двигателя
Характеристика совместной работы дает представление о работе
трансформатора совместно с двигателем. Она позволяет правильно
выбирать режимы работы трансформатора с точки зрения загрузки
двигателя, а также экономичности работы двигателя.
Так, из характеристики видим, что наиболее экономичный режим
работы двигателя лежит при скоростях ведомого вала трансформа-
тора ш2 = 50—100 -^. При этом двигатель изменяет скорость вала
при работе на внешней характеристике в пределах Ш] = 225—300-^ ,
а трансформатор изменяет момент в пределах Л12 = 185—115 кгм,
185
что дает коэффициент приспособляемости ф = -щ = 1,6.
Таким образом, по характеристике совместной работы определя-
ются параметры силовой установки двигатель — трансформатор.
178
3. ФРИКЦИОННЫЕ ТРАНСФОРМАТОРЫ
ЛОБОВОЙ ФРИКЦИОННЫЙ ТРАНСФОРМАТОР
Первый непрерывный трансформатор, который в свое время был
установлен и эксплуатировался на автомобиле, представлял собой
широко известную в станкостроении лобовую фрикционную
передачу.
Рис. 125. Лобовой фрикционный трансформатор:
а — схема трансформатора; б — узловая точка трансформатора;
/ — ведущий вал; 2— ведомый вал
Лобовой трансформатор (рис. 125) состоит из двух колес, одно
из которых жестко связано с ведущим валом 1, а другое может
перемещаться вдоль ведомого вала 2 по шпонке. Колеса прижаты
одно к другому так, что между ними возникают силы трения, кото-
рые и передают крутящий момент двигателя.
Трансформатор принадлежит к типу регулируемых.
Идеальной характеристикой трансформатора является следую-
щая зависимость:
"2 Afj Г! ’
Отсюда коэффициент трансформации
так как = var, то и k = var. Следовательно, данное устройство
действительно является трансформатором.
Трансформатор применялся на легковом автомобиле. Результаты
испытания, однако, оказались отрицательными, так как фрикцион-
ные колеса быстро изнашивались. Поэтому трансформатор не по-
лучил дальнейшего применения в автомобилях.
Французский инженер де Паво сделал попытку автоматизировать
12* 179
лобовой трансформатор. Для этого ведомое фрикционное колесо
было надето на винт ведомого вала, а между колесом и корпусом
была введена пружина (рис. 126) Трансформатор де Лаво работал
следующим образом.
При увеличении момента сопротивления ведомый вал начинает
замедлять свое вращение. Вследствие этого ведомое колесо наверты-
вается на винт, перемещаясь к центру ведущего колеса. Радиус rt
уменьшается, а момент М2 соответственно возрастает. Радиус rt
установится вполне определенный в зависимости от соотношения
сил, приложенных к ведомому валу. Это соотношение автоматически
Рис. 126. Автоматический лобовой фрикционный трансформатор:
а — схема трансформатора; б — узловая точка трансформатора; / — ведущий
вал; 2 — ведомый вал
определяется характеристикой пружины и величиной сопротивления,
приложенного к ведомому валу.
Как показывают исследования, трансформатор де Лаво обладает
неудовлетворительной характеристикой, которая требует большого
запаса мощности двигателя. Кроме того, как всякий лобовой транс-
форматор, он будет быстро изнашиваться.
Трансформатор де Лаво применения в самоходной технике
также не получил.
Рассмотренные нами два трансформатора иллюстрируют прин-
цип непрерывных фрикционных трансформаторов: обкатывание
фрикционных тел вращения при наличии между ними фрикционной
связи, которая позволяет непрерывно изменять радиусы трения,
а следовательно, и коэффициент трансформации.
Во всех других, более сложных фрикционных трансформаторах
по существу используется тот же принцип. В них только стремятся
180
уменьшить проскальзывание фрикционных тел вращения, чтобы
уменьшить их износ.
Рассмотрим один из таких трансформаторов, получивших в на-
стоящее время довольно широкую известность.
ФРИКЦИОННЫЙ ТРАНСФОРМАТОР ТОРОИДНОГО ТИПА
Основным недостатком рассмотренного выше лобового трансфор-
матора является большое скольжение, которое возникает между его
фрикционными колесами. Колеса трансформатора имеют определен-
Рис. 127. Тороидный трансформатор:
а — конический редуктор; б — тороидный трансформатор; в — узловая
точка тороидного трансформатора; 1 — ведущий вал; 2— ведомый вал
ную толщину, вследствие чего скорость на их кромках различна, что
и вызывает частичное проскальзывание одного колеса относительно
другого.
В рассматриваемом ниже трансформаторе плоские колеса заме-
нены специальными телами вращения—тороидами, в которых
удается свести к минимуму проскальзывание или, как говорят, по-
высить обкатываем ость колес.
Рассмотрим работу тороидного трансформатора.
Возьмем три конических фрикционных колеса, соединенных
между собой, как указано на рис. 127, а. Если вращать ведущее ко-
лесо, связанное с валом 1, то его вращение через промежуточное ко-
лесо (ролик) передается на ведомое колесо, связанное с валом 2. При
пересечении образующих конических колес в точке а, лежащей на
главной оси механизма, скольжения на поверхностях соприкоснове-
ния колес не будет. С точки зрения обкатываемости и износа такой
механизм является идеальным. Однако в этом механизме нельзя по-
лучить переменное передаточное число, так как радиусы трения г,
181
Рис. 128. Разлп чное положение ролика тороидного тран-
сформатора
и г2 здесь являются величинами постоянными (механизм представ-
ляет собой редуктор, а не трансформатор).
Чтобы радиусы могли изменяться, промежуточный ролик должен
иметь возможность поворачиваться.
На рис. 127, б приведена схема трансформатора с поворачива-
ющимся роликом. Поворот ролика происходит вокруг оси а. Рабочие
поверхности ролика и колес имеют специальный профиль, что и по-
зволяет ролику поворачиваться.
На рис. 128 приведены три различных положения ролика: 1, 2 и 3.
Каждому из этих положений соответствуют определенные радиусы
г\, г' и т. д. Проведем касательные к образующим фрикционных ко-
лес, получим точки пересечения касательных Ь', Ь", Ь'", лежащие па
линии аб. Если бы линия аб совпадала с главной осью 1—2, то про-
скальзывания фрикционных колес не было бы. В действительности
кривая аб не совпадает с главной осью /—2, вследствие чего и по-
является проскальзывание колес. Но это проскальзывание значи-
тельно меньше, чем в лобовом трансформаторе.
О проскальзывании можно судить по к. п. д. трансформатора,
так как чем меньше проскальзывание, тем выше к. п. д. На рис. 129
представлена характеристика к. п. д. тороидного трансформатора,!
Т.
1,0 —-----—--------------—-------—-------
о.э ———'Г"
0,8--------------------------------------
071--------------------------------------
о 0,5 ’,0 1,5 2,0 2.5
Рис. 129. Характеристика коэффициента полезного
действия тороидного трансформатора
182
выраженная в функции передаточного числа Z2i- Как видим, к п. д.
имеет довольно высокое значение (ц 0,9) в скоростном диапа-
зоне X, равном примерно 2,5. Такой к. п. д. не дает ни один из су-
ществующих непрерывных трансформаторов.
Тороидный трансформатор применяется в промышленности как
стационарный трансформатор. Испытывался он и на самоходных ма-
шинах, например на сельскохозяйственном тракторе КД-35 (транс-
форматор НАТИ).
Трансформатор НАТИ (рис. 130) состоит из двух фрикционных
колес или чашек 1 и 2, имеющих форму тороидов, между которыми
установлены ролики 3.
Ролики смонтированы на осях, которые подвешены на специаль-
ных рамках. Оси через привод связаны со штурвалом 7, благодаря
чему они могут поворачиваться, а с ними могут поворачиваться и
ролики 3.
Для передачи мощности ролики прижимаются к тороидным чаш-
кам специальным механизмом самозатягивания. Этот меха-
низм сжимает фрикционные поверхности тороидов и роликов не
с постоянной силой, а с силой, пропорциональной передаваемому че-
рез трансформатор крутящему моменту, т. е. только с той силой, ко-
торая необходима для передачи крутящего момента.
Механизм самозатягивания устроен так же, как шариковый меха-
низм выключения главного фрикциона, рассмотренный выше; он со-
стоит из скошенных поверхностей и шариков, которые, накатываясь
на эти поверхности, стремятся отжимать их, создавая тем самым
сжатие фрикционных поверхностей тороидов и роликов.
В данном трансформаторе ведомый вал может вращаться только
в одном направлении, поэтому для получения заднего хода имеется
зубчатый редуктор 4 с отдельным рычагом 8 переключения.
При испытаниях на тракторе КД-35 трансформатор проработал
более 1000 часов, причем в очень тяжелых условиях почти беспре-
рывного изменения передаточного числа (до 100 регулирований
в час вместо 7—10 при ступенчатой коробке). Для сельскохозяйст-
венных тракторов такая долговечность трансформатора является,
однако, недостаточной. В тягачах с нею можно было бы мириться.
Однако для тягача трудно создать мощный малогабаритный и в то
же время надежно работающий трансформатор. Для этого надо до-
пустить высокие контактные напряжения фрикционных колес, зна-
чительно превышающие допустимые в стационарных трансформа-
торах и в трансформаторе НАТИ.
Тороидный трансформатор обладает, кроме того, и рядом других
серьезных недостатков.
Конструктивно трансформатор слишком сложен, он сложнее зуб-
чатой коробки. Вес трансформатора НАТИ при одних и тех же габа-
ритах в 2,5 раза больше веса зубчатой коробки. Регулирование
передаточного числа трансформатора требует значительного уси-
лия и применения самотормозящегося привода. Трансформатор
сам по себе не обеспечивает реверса, поэтому к нему требуется до-
полнительная зубчатая коробка на две передачи. Для предохранения
183
Рис. 130. Тороидный трансформатор НАТИ:
I и 2 — фрикционные чашки; 3 — ролик; 4 — зубчатый редуктор; 5 и 6 — механизм
самозатягивания; 7 — штурвал; 8 — рычаг переключения реверса
184
силовой передачи и двигателя от динамических нагрузок, а также
для кратковременного отключения двигателя необходимо дополни-
тельно к трансформатору иметь в силовой передаче еще фрик-
ционную муфту. В трансформаторе не должны замасливаться
фрикционные поверхности, поэтому чашки трансформатора и ро-
лики должны очень тщательно уплотняться.
Несмотря на указанные недостатки, тороидный трансформатор
все же представляет известный интерес с точки зрения возможности
применения его в силовой передаче тягачей; он может быть исполь-
зован как регулирующая узловая точка в параллельном силовом по-
токе и как регулирующий элемент механизма поворота.
Элементарный расчет тороидного трансформатора
В задачу расчета трансформатора входит:
1) определение передаточного числа;
2) определение диапазона регулирования;
3) определение силы прижатия фрикционных поверхностей;
4) определение давления на фрикционные поверхности;
5) расчет механизма самозатягивания.
Приведем здесь основные расчетные формулы.
1. Передаточное число трансформатора определяется по формуле
(см. рис. 131)
,• mi Ro — Ri c°s (3 + а)
12 «Ъ [Ко - Ri cos (₽ - а)] е ’ ’
где 5 — коэффициент, учитывающий проскальзывание рабочих по-
верхностей. Для трансформаторов, работающих всухую, £ =0,995;
для работающих в масле —не выше 0,95.
2. Скоростной диапазон трансформатора определяется по фор-
муле
1Г \2
Z (gg)
1 On in /
где готах и rmin — максимальный и минимальный радиусы чашек
(выбираются из конструктивных соображений).
Если задаться rmin (или rmaxj и скоростным диапазоном X, то по
формуле (99) определится величина Гтах (или гт1п).
3. Сила прижатия фрикционных поверхностей Q, необходимая
для передачи окружного усилия Р, определяется по формуле
Q = ^, (100)
где с— коэффициент запаса (1,25—1,5);
f—коэффициент сухого трения 0,15—0,20; при работе транс-
форматора в масле —0,05—0,1,
185
Рис. 132. Схема механизма самозатягива-
ния:
а — определение угла наклона поверхности качения
шариков: б — радиусы качения
Рис. 131. Схема тороидного
трансформатора для расчета
его передаточного числа
Сила Р при двух роликах определяется по формуле
Г> 441, 2
Ь-~ ‘Р\,Ч ’
(101)
где — момент, приложенный к ведущему 1 или ведомому 2
валу;
ri,2 — радиус трения; определяется из уравнений, приведенных
на рис. 131.
4. Давление на рабочие поверхности (контактное напряжение)
фрикционных колес находим по формуле контактных напряжений
р = 0,418 (102)
где Q —сила прижатия фрикционных поверхностей (была опреде-
лена выше);
Е— модуль упругости; для хромоникелевых сталей —
2,1 • 106 кг1см"\
b — длина контакта в см;
~----расчетная кривизна в см
Расчетная кривизна определяется по формуле
+ поз)
где величины Rt и Rz показаны на рис. 132.
Контактные напряжения р для закаленных до высокой твердости
сталей (твердость по Роквеллу 7^0) рекомендуется брать порядка
8000 кг/см2. Однако допускаются и большие напряжения при соот-
ветствующем выборе сталей фрикционных колес (до 20 000 кг/см2).
5. Расчет механизма самозатягивания заключается в определе-
186
нии угла наклона поверхности качения шариков (угол у, рис.132, а)
и радиуса окружности г, на которой размещаются шарики.
Условие работы трансформатора при самозатягивании опреде-
ляется следующим неравенством:
Р ____ г sin (3 — a) tg у
Q /?0 — R\ cos (3 — “)
(104)
где f— коэффициент трения на рабочих поверхностях чашек и роли-
ков (значение / см. выше.)
Задаваясь углом ’( и радиусом г, добиваются выполнения нера-
венства (104).
4. ИМПУЛЬСНЫЕ ТРАНСФОРМАТОРЫ
ПРИНЦИП ДЕЙСТВИЯ ИМПУЛЬСНОГО ТРАНСФОРМАТОРА
Допустим, что некоторый кривошипно-шатунный механизм, ки-
нематическая схема которого представлена на рис. 133, состоит из
двух кривошипов радиуса /т и г2, связанных между собой шатуном/.
Если Г1<^Г2, то при круговом вращении вала I (ведущего вала меха-
низма) вал 2 (ведомый вал) будет совершать знакопеременные ко-
лебательные вращения.
Обозначим угол поворота ведущего кривошипа через а, а ведо-
мого через р. Тогда можно построить диаграмму угловых перемеще-
ний ведомого вала в функции угловых перемещений ведущего вала,
как показано на рис. 134,а.
Из диаграммы следует, что угловые перемещения ведомого вала
меняют знак. Очевидно, данный механизм не может передавать
энергию, так как равные положительные и отрицательные угловые
перемещения взаимно исклю-
чаются.
Чтобы передача энергии
стала возможной, необходи-
мо на ведомом валу меха-
низма поставить муфту сво-
бодного хода, или автолог.
А в т о л о г обладает свой-
ством пропускать силовой
поток только одного знака
(рис. 134,6). Таким образом,
автолог является выпрями-
телем силового потока.
Автолов (рис. 135) со-
стоит из внутренней фигур-
ной обоймы 1, наружной ци-
линдрической обоймы 2 и
уложенных меж.зу обоймами
роликов 3, прижатых пру-
Рис. 133. Крпвошипно-шатупный меха-
низм имиульспогс а раисформа гора:
/ — ведущий вал; 2 — ведомый в; л
i .47
Рис. 134. Диаграмма угловых перемещений,
построенная:
а — без использования выпрямителя; б — с использова-
нием выпрямителя; в — при уменьшении радиуса криво-
шипа
жилками. При вращении вну-
тренней обоймы по стрелке
ролики заклиниваются меж-
ду обоймами и ведущий и
ведомый валы блокируются;
при обратном вращении вну-
тренней обоймы ролики рас-
клиниваются и валы разъ-
единяются.
Рассматриваемый им-
пульсный механизм с авто-
Рис. 135. Автолог (выпрями-
тель):
I — внутренняя обойма; 2— наружная
обойма; 3 — ролик
логом является трансформатором силового потока,
так как он способен изменять момент и скорость потока.
Действительно, изменим радиус одного из кривошипов. Тогда из-
менится амплитуда угловых колебаний ведомого вала. Так, если
уменьшить радиус rj, то амплитуда также уменьшится (см. рис.
134, е). Чем меньше угловые перемещения, тем больше передавае-
мый момент, и наоборот, чем больше угловые перемещения, тем
меньше передаваемый момент. Таким образом, в данном механизме
происходит преобразование крутящего момента и угловой скоро-
сти, что и является признаком трансформатора.
Так как передача силового потока совершается отдельными пор-
циями энергии, или импульсами, то такой трансформатор'называется
импульсным.
Основным элементом всякого импульсного трансформатора яв-
ляется кривошипно-шатунный механизм, или, как мы его в дальней-
шем будем называть, импульсатор.
Элементарный импульсный трансформатор состоит из одного им-
пульсатора и автолога (выпрямителя). Такой трансформатор обла-
дает существенным недостатком: он имеет большую неравномер-
188
ность хода. Так, если допустить, что трансформатор безынерцион-
ный, т. е. с его ведущим и ведомым валами не связаны никакие инер-
ционные массы, и, кроме того, принять, что звенья трансформатора
не обладают инерцией (такой трансформатор будем называть гео-
метрическим), то ведомый вал будет вращаться с останов-
ками. Такой трансформатор, конечно, нельзя применять в машинах.
Неравномерность хода трансформатора можно уменьшить, если
вместо одного импульсатора применить несколько импульсаторов,
соединив их вместе, как показано на рис. 136, а. Здесь кривошипно-
шатунные механизмы имеют один ведущий кривошип, на который
надето несколько шатунов; каждый шатун соединен со своим ведо-
мым кривошипом. На валы ведомых кривошипов надеты автологи.
Ведомая обойма автолога связана с зубчатой шестерней сумми-
рующего механизма, которая в свою очередь находится в за-
цеплении с центральной зубчатой шестерней, посаженной на ведо-
мом валу трансформа-
тора.
Элементарные им-
пульсаторы смещены
один относительного
другого на угол
(Ю5)
где п — число элемен-
тарных импульсаторов.
Угол <р назовем ф а-
з о в ы м углом.
При вращении цен-
трального кривошипа
каждый элементарный
импульсатор дает свою
кривую углового пере-
мещения ведомого ва-
ла, причем каждая кри-
вая смещена по отно-
шению к соседней кри-
вой на фазовый угол <р,
как показано на диа-
грамме (рис 136,6).
На центральную ше-
стерню суммирующего
механизма, а следова-
тельно, и на ведо-
мый вал геометрическо-
го трансформатора пе-
редаются только те им-
пульсы, перемещения
189
которых на диаграмме записаны внешними дугами аб, бв и т. д.,
лежащими между точками пересечения двух соседних кривых. Та-
ким образом, каждый импульсатор передает силовой поток только
на небольшом перемещении, определяемом дугами аб, бв и т. д.
Из диаграммы следует, что чем больше элементарных импульса-
торов имеет трансформатор, тем равномернее его ход. Однако кон-
структивно трудно осуществить трансформатор с числом элементар-
ных импульсаторов п более 5, т. е. с фазовым углом менее 72°.
Рис. 137. Силовой поток импульсного трансфор-
матора:
а — автолог включен; б — явтолог выключен
Рассмотрим работу геометрического трансформатора в машине.
С его ведущим валом будет связана масса маховика двигателя,
а с ведомым валом — редуцированная масса машины.
Составим силовой поток трансформатора. Для упрощения задачи
будем рассматривать элементарный трансформатор.
Силовой поток состоит из следующих узловых точек. Из механи-
ческой узловой точки импульсатора а (рис. 137), кинетической точки
муфты свободного хода б (знак<1 у узловой точки б показывает, что
эта точка может пропускать силовой поток только одного направле-
ния) и двух инерционных разветвляющих точек в и г, описывающих
инерционные массы двигателя и машины.
Допустим, что в некоторый момент времени муфта свободного
хода полностью включена. Тогда силовой поток идет от двигателя
к точке в (поток 7). Здесь к этому потоку добавляется инерционный
поток маховой массы двигателя, которая замедляет свое движение.
Оба потока, складываясь, идут к точке а. От точки а через пол-
ностью включенную кинетическую точку б поток подводится
к точке г. Здесь он разветвляется на два потока. Поток 1 идет на
разгон массы машины, поток 2 — на преодоление сопротивления
движению машины.
Так как при установившемся движении трансформатора масса
двигателя не может все время замедлять свое движение, а масса
190
машины все время разгоняться, то, очевидно, в какой-то момент вре-
мени направление инерционных потоков изменится. Этому моменту
соответствует выключение автолога. Инерционный поток точки в
станет отрицательным, а точки г положительным. С этого момента
маховая масса двигателя будет ускорять свое движение, а маховая
масса машины, наоборот, замедлять его. Силовой поток, проходящий
через трансформатор, становится холостым.
Таким образом, работа импульсного трансформатора склады-
вается из двух периодов: периода рабочего хода (рис. 137, а) и пе-
риода холостого хода (рис. 137,6). В течение обоих периодов инер-
ционные массы движутся неравномерно, то аккумулируя кинетиче-
скую энергию, то, наоборот, отдавая ее в сквозной силовой поток,
идущий от двигателя к движителю.
Только наличие инерционных масс позволяет, несмотря на пери-
одическое выключение точки б, т. е. несмотря на периодический раз-
рыв силового потока, поддерживать непрерывный поток энергии,
подводимый от двигателя и идущий на преодоление внешних сопро-
тивлений движению машины. Машина в этом случае движется хотя
и с переменной скоростью, но непрерывно (в геометрическом транс-
форматоре ведомый вал вращается с остановками).
ТИПЫ ИМПУЛЬСНЫХ ТРАНСФОРМАТОРОВ
Импульсные трансформаторы бывают различных видов, однако
все они сводятся к двум основным типам: регулируемого или авто-
матического трансформатора.
Регулируемые трансформаторы в свою очередь бывают криво-
шипно-шатунного типа и с качающейся шайбой.
Автоматические трансформаторы могут быть: с использованием
касательных сил инерции; с использованием центробежных сил
инерции; смешанного типа; гироскопического типа.
Рассмотрим как примеры некоторые типы импульсных трансфор-
маторов.
Автоматический импульсный трансформатор с качающейся шай-
бой де Лаво.
Устройство трансформатора следующее.
На ведущем валу 1 (рис. 138) установлен диск 10. К диску шар-
нирно присоединены одним концом штанги 5 и 12. Другим концом
штанга 5 шарнирно присоединяется к втулке 4, штанга 12 —
к втулке 2. Между втулками установлена спиральная пружина 3.
В зависимости от наклона диска 10 пружина 3 сжимается сильнее
или слабее.
Диск 10 установлен внутри качающейся шайбы 11. Эта шайба
может перемещаться (качаться) в направляющих, по которым ка-
тятся ролики 6, установленные на цапфах шайбы.
К качающейся шайбе шарнирно присоединены штанги 7, в свою
очередь присоединенные также к наружной обойме 8 автолога.
Внутренняя обойма 9 автолога посажена па ведомый вал трансфор-
матора.
191
При вращении ведущего вала 1 диск 10 приводится во вращение.
При расположении под некоторым углом а к осп вала 1 диск будет
вызывать качательные движения шайбы 11. Эти движения в свою
очередь вызовут возвратно-поступательные перемещения штанг 7,
которые через автологи передадут импульсы на ведомый вал транс-
форматора.
В зависимости от сопротивления на ведомом валу наклонная
шайба получает различную амплитуду качания. Чем больше сопро-
тивление на ведомом валу, тем меньше должен быть угол а, а сле-
довательно, тем сильнее сжимается пружина 3.
Рис. 138. Автоматический импульсный трансформатор:
Z — ведущий вал; 2 — втулка; 3 — пружина; 4 — втулка; 5 — штанга; 6 — ро-
лик; 7 — штанги; 8 — наружная обойма автолога; 9 — внутренняя обойма
автолога; 10 — качающийся диск; 11 — шайба; 12 — штанга
Момент (а следовательно, и скорость) регулируется автоматиче-
ски в зависимости от соотношения момента на ведомом валу и силы
сжатия пружины. Когда между моментом на валу и силой сжатия
пружины установится определенное равновесие, трансформатор пе-
рейдет на установившийся режим работы. Изменение момента сопро-
тивления на ведомом валу вызывает изменение сжатия пружины;
при этом изменяется наклон шайбы и трансформатор переходит па
новый режим работы.
Трансформатор де Лаво в свое время устанавливался на фран-
цузских легковых автомобилях и некоторое время находился
в эксплуатации.
Применением трансформатора де Лаво была доказана принци-
пиальная возможность использования в самоходных машинах им-
пульсных трансформаторов.
Правда, трансформатор де Лаво не показал высокой надежности
в работе. Наиболее слабым его звеном оказался автолог, который
часто выходил из строя. Однако, несмотря на это, за границей все
же продолжались попытки создать импульсный трансформатор. Им-
пульсные трансформаторы были разработаны и испытывались на
машинах румынским изобретателем Константинеско, английским
изобретателем Хоббсом и др.
192
Инерционный трансформатор Константинеско
В 1926 г. румынский инженер Константинеско спроектировал и
установил на легковой автомобиль инерционный импульсный транс-
форматор.
Как показали испытания, динамические качества автомобиля при
этом улучшились. Однако автологи трансформатора и здесь быстро
изнашивались. Кроме того, вследствие общей неуравновешенности
трансформатора и возникающих в результате этого больших дина-
мических нагрузок выходили из строя и другие звенья трансформа-
тора.
Конструктивно трансформатор Константинеско представлял со-
бой чрезвычайно сложный рычажный механизм с инерционным ма-
ятником. Уравновесить такой механизм было практически невоз-
можно.
В 1933 г. в Советском Союзе была разработана конструкция
инерционного трансформатора типа Константинеско. В этой кон-
струкции маятник был заменен уравновешенной маховой массой,
а система рычажного механизма — зубчатым дифференциальным
механизмом.
Устройство этого трансформатора показано на рис. 139.
На ведущем валу 1 посажена малая коническая шестерня, кото-
рая находится в зацеплении с большой конической шестерней 2.
Вращение от вала 1 передается на вал с большой конической шестер-
ней 2 и на малый кривошип 3, отсюда через шатун 5 на большой
кривошип 6. Два кривошипа и шатун образуют импульсатор транс-
форматора. У импульсатора имеется маховик 4. На ведомом валу 7
импульсатора посажена солнечная шестерня 9 дифференциального
механизма, связанная с йгестернями сателлитов 10 и 11. На валах
сателлитов, кроме того, посажены шестерни 12, которые находятся
в зацеплении со второй солнечной шестерней 13 дифференциального
механизма. На водило дифференциального механизма надет махо-
вик 14. Солнечная шестерня 13 представляет собой одно целое с ва-
лом 15. На валу 15 на шпонке посажены два автолога 16. Наружные
обоймы автологов связаны с шестернями, которые через кулачковую
муфту передают вращение на ведомый вал 8 трансформатора.
На рис. 140, а приведена кинематическая схема трансформатора.
Здесь а — кривошипно-шатунный механизм; б — дифференциальный
механизм, на водиле которого посажена маховая масса; в — ревер-
сивный механизм с автологами. На схеме реверсивный механизм
представлен в виде зубчатого механизма с коническими шестернями.
В действительности этот механизм имеет цилиндрические шестерни,
однако работа механизма от этого принципиально не меняется.
На рис. 140,6 показана схема силового потока трансформатора.
Силовой поток состоит из следующих узловых точек: узловой
точки а, описывающей импульсатор, узловой точки б, описывающей
инерционный дифференциальный механизм, узловой точки в, описы-
вающей простой реверсивный механизм, и двух кинетических то-
чек гид, описывающих два автолога.
13-20
193
6
3
Рис. 139. Автоматический инерционный
трансформатор, использующий касатель-
ные силы инерции:
Z— ведущий вал; 2 — большая коническая шестерня;
3 — малый кривошип; 4 — маховик; 5 — шатун;
6 — большой кривошип; 7 — ведомый вал импульса-
тора; 8 — ведомый вал трансформатора; 9 — солнеч-
ная шестерня дифференциального механизма; 10, II,
12— шестерни сателлитов; 13 — солнечная шестерня;
14 — маховик; 15 — вал; 16 — автолог
194
Рассмотрим работу трансформатора, пользуясь кинематической
схемой и схемой силового потока.
При вращении ведущего вала 1 ведомый вал импульсатора 2а со-
вершает знакопеременное колебательное движение. Такое же дви-
жение совершает и солнечная шестерня дифференциального меха-
низма, посаженная на валу 16. Допустим, что вторая солнечная ше-
стерня дифференциального механизма неподвижна. Тогда маховая
масса Об будет совершать знакопеременное колебательное движение,
Рис. 140. Кинематическая схема автоматического инерционного
трансформатора, использующего касательные силы инерции:
а — кинематическая схема- б — схема силового потока
как и ведущая солнечная шестерня. Инерционный момент колеблю-
щейся маховой массы создаст нагрузку на обе солнечные шестерни.
Таким образом, колебание маховой массы вызывает нагрузку (мо-
мент) как на ведущем, так и на ведомом валу дифференциального
механизма. Эта нагрузка может создать силовой поток, который
будет передаваться по валу 26, если последний вращается. При вра-
щении вала 26 попеременно включаются то автолог г, то автолог д,
в зависимости от направления вращения вала. При этом ведомый
вал вследствие наличия реверса в будет иметь только одностороннее
вращение.
Чем медленнее вращается ведомый вал трансформатора (при
увеличении приложенного к нему сопротивления), тем медленнее
вращается и ведомая солнечная шестерня дифференциального меха-
низма. Но в этом случае водило механизма совершает колебания
с большей амплитудой (наибольшая амплитуда будет при полно-
стью заторможенном ведомом вале). В результате инерционный мо-
мент маховой массы возрастает, а с ним должна возрасти и нагрузка
на ведомую шестерню, а следовательно, и на ведомый вал трансфор-
13* 195
матора. Таким образом, автоматически регулируются момент и ско-
рость на ведомом валу трансформатора.
В данном трансформаторе используются касательные
силы инерции маховика.
Инерционный трансформатор Хоббса
Рассмотрим другой тип инерционного трансформатора — транс-
форматор Хоббса,— в котором используются центробежные
силы инерции.
Трансформатор Хоббса состоит из трех основных элементов:
дифференциального механизма 1 (рис. 141), автолога 2 и упругого
вала 3.
На осях сателлитов эксцентрично посажены грузы, которые уча-
ствуют в переносном движении вместе с водилом дифференциаль-
ного механизма и в относительном движении по отношению к во-
дилу. При вращении вала двигателя и связанного с ним водила воз-
никает периодически изменяющаяся центробежная сила, которая
создает инерционные импульсы, передающиеся на солнечную ше-
стерню. На ступицу солнечной шестерни надета внутренняя обойма
автолога; наружная обойма автолога при этом заторможена.
С внутренней стороны на ступице имеются шлицы, в которые
вставлен упругий вал трансформатора; этот вал одновременно яв-
ляется и ведомым валом.
Работу трансформатора рассмотрим по кинематической схеме и
схеме силового потока, представленным на рис. 142.
Силовой поток трансформатора состоит из механической узловой
точки а с абсолютным инерционным потоком За, из трехпоточной
разветвляющей точки б с тормозным потоком 36 и из кинетической
упругой точки в с аккумулирующим потоком Зв потенциальной
формы энергии.
При вращении ведущего вала 1, а следовательно, и водила диф-
ференциального механизма сателлиты получают относительное вра-
щение, вследствие чего вращаются вокруг собственных осей и инер-
ционные грузы. Так как грузы установлены эксцентрично по отно-
шению к оси сателлитов, то при вращении они создают инерцион-
ный момент. Этот момент действует на солнечную шестерню. К сол-
нечной шестерне он прикладывается в виде знакопеременных им-
пульсов. Если бы автолог отсутствовал, то импульсы вызывали бы
знакопеременное вращение ведомого вала; в этом случае мощность
через трансформатор не передавалась бы. Наличие автолога гасит
на корпус импульсы одного знака, вследствие чего ведомый вал по-
лучает одностороннее вращение.
Чем большая нагрузка прикладывается к ведомому валу, тем он
медленнее вращается. При постоянной скорости водила (обороты
двигателя считаем постоянными) увеличивается скорость вращения
сателлитов, а следовательно, увеличивается и величина центробеж-
ных сил грузов. К солнечной шестерне в этом случае будет прикла-
дываться больший момент, который и уравновесит возросший мо-
196
Рис. 141. Инерционный трансформатор Хоббса*
Z — Дифференциальный механизм с грузами; 2—автолог; 3— упругий вал (ведомый!
мент на ведомом валу трансформатора. Таким образом, транс-
форматор автоматически реагирует на изменение нагрузки на ведо-
мом валу, т. е. является автоматическим. Автоматизм в дан-
ном случае обеспечивается центробежными силами.
Работу трансформатора можно проследить также по схеме сило-
вого потока.
Допустим, что в какой-то период времени инерционный поток
подводится к точке а. В этот период инерционные грузы отдают свою
кинетическую энергию ведомому валу дифференциального меха-
низма. От точки а поток 2а отводится и идет к точке в. Здесь по-
тенциальная энергия накапливается вследствие закрутки упругого
вала, а поток частично передается на ведомый вал трансформатора
(поток 2в).
Допустим теперь, что инерционный груз создает на солнечной
шестерне отрицательный поток 2а. Так как точка б пропускает им-
пульсы только одного знака, то этот поток может быть только затор-
моженным. Таким образом, точка б преграждает путь течению энер-
гии от двигателя. Мощность двигателя в этом случае идет на накоп-
ление энергии в аккумулирующем потоке За. Аккумулирующий же
поток упругой точки в будет при этом отдавать свою энергию ведо-
мому валу трансформатора. Следовательно, сопротивления, прило-
женные к ведомому валу в этот
Рис. 142. Кинематическая схема и
схема силового потока трансформа-
тора Хоббса:
а — кинематическая схем?; б — схемы сило-
вых потоков
период, преодолеваются только за
счет энергии, накопленной за пре-
дыдущий период времени в упру-
гой точке.
В следующий период цикл по-
вторяется.
На рис. 143 показан транс-
форматор Хоббса в сборе и в ра-
зобранном виде.
Как и трансформатор Кон-
стантинеско, трансформатор Хоб-
бса применялся в самоходных ма-
шинах. Зарубежные специалисты
считают, что основная причина,
почему импульсные трансформа-
торы не получили распростране-
ния на автомобилях,— это силь-
ный шум, который они создают
при работе. В действительности,
кроме шума, следует также отме-
тить и их малонадежную работу,
особенно работу автолога.
В импульсном трансформато-
ре для нас представляет интерес
не столько практическая возмож-
ность использования его в тяга-
чах (в настоящее время такой
возможности нет), сколько сама
198
Рис. 143. Общий вид трансформатора Хоббса:
а — трансформатор в сборе; 5 — отсек с инерционными грузами; в — инерционные грузы:
г — инерционный импульсатор; <?—солнечная шестерня
идея импульсной передачи механической энергии. Идея эта заслу-
живает внимания и должна теоретически и экспериментально раз-
рабатываться и дальше. Многие вопросы импульсных передач еще
совсем не исследованы, в частности не исследована передача сило-
вого потока несимметричными импульсами без автологов.
Заметим, что импульсная передача энергии не является исклю-
чительным свойством импульсных трансформаторов. Двигатель
внутреннего сгорания, его инерционный кривошипно-шатунный ме-
ханизм, а также фактически все зубчатые передачи передают энер-
гию импульсами. Поэтому нет основания отказываться от исполь-
зования импульсной передачи энергии и в трансформаторах
силовых передач самоходных машин.
ГЛАВА V
НЕПРЕРЫВНЫЕ ГИДРАВЛИЧЕСКИЕ
ТРАНСФОРМАТОРЫ
1. ГИДРОСТАТИЧЕСКИЙ ТРАНСФОРМАТОР
Преобразование гидравлического силового потока в гидротранс-
форматоре может совершаться за счет изменения его статического
или динамического напора. Соответственно этому гидротрансформа-
торы бывают гидростатич'еские или гидродинамиче-
ские.
Гидростатические, или, как их еще называют, объемные,
трансформаторы (их принцип работы основан на вытеснении
объема рабочей жидкости) давно применяются в качестве привода
в станках, а также в механизмах поворота артиллерийских башен
кораблей и танков.
Попытка ввести гидростатический трансформатор в силовую
передачу гусеничных машин относится еще к 1918 г., когда англи-
чане поставили на свои первые танки известную в станкостроении
гидростатическую передачу Джени. Попытка эта тогда не увенча-
лась успехом.
В 1955'г. в Лондоне демонстрировался английский колесный
трактор, на котором был смонтирован гидростатический трансфор-
матор. Трансформатор состоял из гидрогенератора или насоса, уста-
новленного на одном валу с двигателем, и двух гидромоторов, уста-
новленных в колесах трактора. Раздельно установленные гидромо-
торы позволяли не только изменять прямолинейное движение, но
и поворачивать машину.
За последние годы за границей ведется работа по созданию
гидростатического трансформатора для многоосных колесных тяга-
чей. Этот трансформатор должен иметь один насос и гидромоторы,
расположенные в колесах машины, что значительно упростит ее
силовую передачу.
Проводится также работа по созданию мощных (пока стацио-
нарных) гидростатических трансформаторов. Так, в Англии разра-
ботан трансформатор на 1000 л. с.
Гидростатические трансформаторы привлекают внимание кон-
структоров некоторыми своими положительными качествами, на
которых мы здесь кратко остановимся.
Гидростатический трансформатор является регулируемым.
Это позволяет использовать его в силовых передачах самоходных
машин не только как трансформатор прямолинейного движения,
(как коробку передач), но и как механизм поворота.
Трансформатор — дистанционная передача, т. е. его
2С0
генератор и мотор, могут быть установлены» на некотором расстоя-
нии один от другого, что облегчает компановку агрегатов силовой
передачи машины.
Трансформатор легко автоматизировать.
Наконец, гидростатические трансформаторы реверсивны,
что также является их достоинством.
Наряду с положительными качествами гидростатические
трансформаторы обладают и целым рядом недостатков, которые
пока мешают внедрению этих типов трансформаторов в самоходную
технику.
Основной и наиболее существенный недостаток гидростатиче-
ских трансформаторов — это их большие габариты при ма-
лом давлении рабочей жидкости или большое давление ра-
бочей жидкости при малых габаритах трансформатора. Современ-
ные трансформаторы, имеющие удовлетворительные для самоход-
ной машины габариты, рассчитываются на давления рабочей жид-
кости 150—200 ат. Уплотнение рабочей жидкости, работающей под
таким высоким давлением, является трудной задачей, особенно
если учитывать нестационарные условия эксплуатации трансфор-
матора.
Конструкция современных гидростатических трансформаторов
представляет собой довольно сложный механизме большим
числом механических звеньев, подвергающихся износу.
Наконец, гидростатический трансформатор, если в нем приме-
няются поршни и цилиндры, представляет механизм, изготовлен-
ный по высокому классу точности. Это предъявляет особые требо-
вания к изготовлению, а также к эксплуатации трансформатора
(в частности требование высокой степени очистки масла, применяю-
щегося в качестве рабочей жидкости).
ПРИНЦИП РАБОТЫ
Гидростатические трансформаторы бывают трех типов: коло-
вратные, с качающейся шайбой и зубчатые. Наи-
большим распространением пользуются трансформаторы с качаю-
щейся шайбой. По принципу своего действия они напоминают уже
рассмотренные нами выше механические регулируемые импульсные
трансформаторы с качающейся шайбой. Здесь только в импульса-
торе жесткие звенья заменены жидкостью и вследствие этого от-
сутствует автолог (муфта свободного хода), который заменен спе-
циальным золотниковым устройством, позволяющим менять на-
правление течения рабочей жидкости.
Трансформатор с качающейся шайбой сложен по устройству.
Значительно проще устроен коловратный трансформатор.
Зубчатые трансформаторы пока широкого распространения не
получили.
Рассмотрим принцип работы гидростатического трансформатора
на примере коловратного трансформатора.
На рис. 144 приведена принципиальная схема гидростатиче-
ского трансформатора коловратного типа с плоскими лопатками.
201
Трансформатор состоит из насоса а и гидромотара б, связанных
между собой трубопроводами. Насос имеет ротор 1 и статор 2.
Статор по отношению к ротору может смещаться, устанавливаясь
с некоторым эксцентриситетом е. В теле статора имеется прорезь, в
которую вставлены две лопатки, делящие рабочую полость насоса
пополам (в действительном трансформаторе число лопаток больше
двух). Полость заполнена рабочей жидкостью.
Рис. 144. Принципиальная схема гидростатического
трансформатора коловратного типа с плоскими
лопатками:
а — насос; б — гидромотор; Z — ротор; 2 — статор
Аналогично устроен и гидромотор.
Будем вращать ротор насоса по направлению стрелки. Допу-
стим, что ротор повернулся на угол а. Тогда из верхней половины
рабочей полости вытеснится объем жидкости Si и прибавится
объем жидкости S2. Так как Si S2, то разность объемов должна
быть компенсирована перетеканием части жидкости по верхней
трубе в рабочую полость мотора. Ротор мотора установлен так же
эксцентрично по отношению к статору, как и ротор насоса. Чтобы
в полости мотора мог поместиться новый объем жидкости, его ро-
тор должен повернуться. Тогда получим объем Flt который больше
объема Fi, что и компенсирует перетекание рабочей жидкости из
одной полости в другую.
Угол поворота мотора |3 определяется из равенства вытеснен-
ных объемов
Si S2 — Fx F2.
Аналогично перетекает жидкость и из нижних полостей транс-
форматора.
Чем больше эксцентриситет е, тем больший объем жидкости вы-
тесняется из насоса и поступает к мотору. При большем поступле-
нии жидкости в полость мотора его ротор должен поворачиваться
на больший угол. Таким образом, с изменением эксцентриситета
насоса изменяется и передаточное число трансформатора. Переда-
точное число можно регулировать также и изменением эксцентри-
ситета мотора.
При изменении эксцентриситета в обратную сторону достигается
реверсивность работы трансформатора.
202
ТИПЫ ТРАНСФОРМАТОРОВ
Гидростатический трансформатор коловратного типа
с плоскими лопатками показан на рис. 145.
Рис. 145. Гидростатический трансформатор коловратного типа с пло-
скими лопатками:
а — насос; б — мотор; / и 2 - направляющие; 3 и 4 — статоры: 5 и 6 — роторы
В кожухе трансформатора на направляющих 1 и 2 установ-
лены статоры 3 и 4 насоса и мотора. Вращением штурвалов ста-
торы могут перемещаться относительно роторов 5 и 6 и устанавли-
ваться с некоторым эксцентриситетом е.
Принцип работы трансформатора коловратного типа был рас-
смотрен выше.
Гидростатический трансформатор коловратного типа
с поршнями показан на рис. 146.
В роторе трансформатора имеются радиальные цилиндры
двух диаметров. В цилиндрах малого диаметра помещаются пор-
шни, а в цилиндрах большого диаметра — направляющие с уста-
новленными в них роликами. При вращении ротора ролики катят-
ся по цилиндрической поверхности статора; вследствие эксцентри-
ситета поршни утапливаются и выжимают рабочую жидкость че-
рез специальное золотниковое устройство в трубопроводы; по тру-
бопроводам жидкость перетекает к центру ротора мотора. Посту-
пающая в рабочее пространство мотора жидкость перемещает
в радиальном направлении его поршни. Так как ротор мотора уста-
новлен эксцентрично, то он также начнет вращаться.
На рис. 147 представлен гидростатический трансформатор
с качающейся шайбой (муфта Джени).
В этом трансформаторе имеются поршневой насос и поршневой
мотор. Поршни через штоки со сферическими шарнирами связаны
с наклонной шайбой. При вращении вала насоса шайба совершает
колебательные движения, вызывающие возвратно-поступательное
движение поршней, которые перегоняют жидкость к мотору. Пере-
203
Рис. 146. Гидростатический трансформатор коловратного типа с пор-
шнями
мешение поршней в моторе создает обратное колебательное дви-
жение наклонной шайбы мотора, которое преобразуется во вра-
щательное движение. z
Регулирование передаточного числа достигается изменением
угла наклона шайбы насоса.
Трансформатор с качающейся шайбой отличается от коловрат-
ного чисто конструктивными особенностями, которые позволяют
сократить диаметральный габарит трансформатора за счет неко-
торого увеличения осевого габарита. По принципу же действия оба
трансформатора идентичны.
2. РАСЧЕТ ГИДРОСТАТИЧЕСКОГО ТРАНСФОРМАТОРА
Рассмотрим определение основных расчетных параметров гид-
ростатического трансформатора коловратного типа с поршнями.
ОПРЕДЕЛЕНИЕ РАБОЧЕГО ОБЪЕМА И РАСЧЕТНОЙ МОЩНОСТИ НАСОСА
Рабочий объем насоса' определяется по формуле
2
н
Рис. 147. Гидростатический трансформатор с качаю-
щейся шайбой (муфта Джени)
204
где da — диаметр цилиндра, см;
е— эксцентриситет, см;
ги— число цилиндров насоса.
Примем приближенно, что расчетное давление в насосе посто-
янно и равно ра кг/см2. Тогда за один оборот вала насоса работа
одного поршня будет
p-ir-K,
а гн поршней
Р —г~ • 2s z .
г 4 нн
Допустим, что вал делает п об/мин. Тогда время одного обо-
, , 60 „
рота будетт = — секунд. Отсюда найдем среднюю мощность, ко-
пн
торую необходимо подводить к насосу со стороны двигателя (л. с.).
Д, __ РПв ен 2н
н — 9-10%
Здесь т)н — общий к.п.д. насоса, учитывающий механические и
гидравлические потери в насосе.
К механическим потерям относятся: потери на трение в под-
шипниках роторов, потери в сальниках, потери в цилиндрах, поте-
ри в направляющих роликах поршней.
К гидравлическим потерям относятся: потери на трение жидко-
сти о стенки каналов и объемные потери, связанные с утечкой жид-
кости через зазоры в поршнях, в золотниках и т. д.
Задаваясь в формуле (107) расчетной мощностью двигателя
(Л^ = расчетным давлением (рн) и к.п.д. (т)н), можем опре-
делить геометрические размеры насоса. Для этого из трех вели-
чин dH, ен и гн двумя следует задаться.
ОПРЕДЕЛЕНИЕ ОБЪЕМНОГО РАСХОДА РАБОЧЕЙ ЖИДКОСТИ,
ЦИРКУЛИРУЮЩЕЙ В ТРАНСФОРМАТОРЕ
За один оборот вала насоса через насос пройдет VH см3 рабо-
чей жидкости.
За лн об/мин средний весовой расход жидкости будет
<108)
где Q — в кг/сек,
7 — объемный вес рабочей жидкости в кг/см3.
205
При этом утечкой жидкости пренебрегаем. Допустим, что жи-
вое сечение потока жидкости в магистральных трубопроводах,
связывающих насос с мотором, будет S см2. Тогда скорость потока
в трубопроводе будет определяться формулой
с = (109)
где с — в м/сек.
При расчете гидростатического трансформатора принимают
в нагнетающих трубопроводах с «С 6 м/сек, в отсасывающих —
с < 3 м/сек.
ОПРЕДЕЛЕНИЕ РАЗМЕРОВ МОТОРА
Если пренебречь утечкой, то расход жидкости в насосе и в мо-
торе должен быть одинаков.
Согласно формуле (108) получим
У 6-Ю7 ~ 6-Ю7 •
Отсюда находим
Но
*М ’ 2
Подставив в предыдущую формулу величину Ум, получим
d4 мг = (ПО)
Необходимо задаться передаточным числом трансформатора на
расчетном режиме /нм = Тогда определится произведение
Пм
трех величин (%, sM и гм. Если задать две из этих величин, то из
формулы (НО) получим третью величину.
ОПРЕДЕЛЕНИЕ МОЩНОСТИ НА ВЕДОМОМ ВАЛУ ТРАНСФОРМАТОРА
Мощность на валу мотора определяется по формуле, аналогич-
ной формуле (107)
д, __ Рпм ем ’l-rn Z1 1 1 А
м — 9-10е •
Здесь па — теоретическое число оборотов мотора,
т)ы — общий к.п.д. мотора,
т)тп — гидравлический к.п.д. трубопроводов.
206
ИСХОДНЫЕ ДАННЫЕ ДЛЯ РАСЧЕТА ГИДРОСТАТИЧЕСКОГО
ТРАНСФОРМАТОРА
При расчете трансформатора необходимо задаться числом ци-
линдров (z), а также максимальным расчетным эксцентриситетом
насоса и мотора (ешах).
Число цилиндров выбирается из условий наибольшей равно-
мерности работы гидравлического агрегата.
. Как известно, вследствие конечного числа цилиндров гидравли-
ческого агрегата расход рабочей жидкости имеет переменное зна-
чение. Вследствие этого переменное значение будут иметь и все
кинематические и силовые параметры агрегата. Неравномерность
расхода зависит от числа и четности цилиндров. Чем больше ци-
линдров имеет агрегат, тем выше равномерность его работы. Кроме
того, равномерность зависит от того, имеет ли агрегат четное или
нечетное число цилиндров. При нечетном числе цилин-
дров равномерность выше.
Приведем некоторые данные по равномерности хода некоторых
типов насосов (эти данные могут быть распространены и на мо-
торы) .
Для 4-х цилиндрового насоса колебания расхода от расчетной
величины, принятой за 100%, составляют;
максимальный расход — 124,1%,
минимальный расход — 78,5%,
общее колебание расхода — 45,6%.
Для 6-ти цилиндрового насоса:
максимальный расход— 106,1%,
минимальный расход — 83,8%,
общее колебание расхода — 22,9%.
Для 10-ти цилиндрового насоса:
максимальный расход—101,4%,
минимальный расход — 95,8%,
общее колебание расхода — 5,6%.
Значительно меньшую неравномерность имеют насосы с нечет-
ным числом цилиндров.
Для 5-ти цилиндрового насоса:
максимальный расход—101,8%,
минимальный расход — 94,8%,
общее колебание расхода — 7%.
Для 7-ми цилиндрового насоса:
максимальный расход—101,2%,
минимальный расход — 97,2%,
общее колебание расхода—4%.
Поэтому следует выбирать как в насосе, так и в моторе нечетное
число цилиндров.
207
Эксцентриситет в авиационных гидростатических передачах
принимают не более 10 мм. При этом цилиндры гидравлических
агрегатов имеют диаметр около 20 мм.
Для мощных гидростатических трансформаторов силовых пере-
дач диаметр цилиндров и эксцентриситет следует выбирать
большим.
Как мы указывали выше, расчетное давление обычно прини-
мают в пределах 150—200 кг/см2. При этом следует иметь в виду,
что если магистральные трубопроводы алюминиевые, то давление
в нагнетающем трубопроводе нельзя брать больше 150 ка/си2.
Для стальных труб давление можно принимать 200 кг/сл2 и более.
СИЛОВОЙ ПОТОК ГИДРОСТАТИЧЕСКОГО ТРАНСФОРМАТОРА
Передачу и трансформацию энергии в гидростатическом транс-'
форматоре можно представить в виде схемы силового потока.
Тогда расчет трансформатора будет вестись методом сило-
вого потока.
Рассмотрим силовой поток гидростатического трансформатора.
Гидравлический агрегат — насос или мотор — имеет следую-
щие внешние силовые потоки: механический вращательный поток,
подводимый по валу агрегата, и механический вращательный поток
заторможенного статора агрегата.
Кроме того;к агрегату подводятся два гидростатических посту-
пательных потока — один поток нагнетающий и другой отсасываю-
щий. Эти потоки оказывают также механическое воздействие на
агрегат, однако это воздействие выражается не моментом, а силой.
Следовательно, эти потоки неоднотипны с вращательными по-
токами.
Если гидравлический агрегат представить в виде узловой точки,
то она должна иметь два вращательных механических потока
(один из которых заторможен) и четыре поступательных механи-
ческих потока: один поступательный поток нагнетания, другой
заторможенный потО'К реактивный, вызванный действием нагнета-
ющего потока, и два аналогичных потока отсасывающих.
Нас здесь не интересует механическое воздействие поступатель-
ных потоков на агрегат. Поэтому пренебрежем ими. Тогда четыре
поступательных механических потока можно заменить двумя- по-
ступательными гидравлйческими потоками: нагнетающим и отса-
сывающим.
Согласно принятому допущению, эти потоки механического воз-
действия на узловую точку не оказывают. Они только переносят
энергию и, следовательно, рассматриваются как не механиче-
ские потоки.
Гидравлический агрегат будет описываться в схеме силового
потока кинетической узловой точкой, имеющей два механических
(вращательных) и два гидравлических (поступательных) потока
(рис. 148, а).
208
узловой
ч Назовем эту точку гидростатической
1ГОЧКОЙ.
\ Условимся обозначать механический незаторможенный поток
- той же буквой, что и узловую точку (Н—насос, М—мотор), за-
торможенный поток буквой С (статор), а гидравлические потоки:
роток, подводимый к узловой точке, цифрой 1 и отводимый — циф-
рой 2.
поток гидростатического транс-
форматора:
а — гидростатическая узлов: я точка насоса; б — силовой поток
трансформатора; в — узловая точка гидростатического транс-
форматора; г — силовой поток трансформатора с холостым пото-
ком на всасывании
Рис. 148. Силовой
Силовой поток гидростатического трансформатора будет со-
стоять из двух узловых точек Н и М, связанных между собой
гидравлическими потоками.
В гидравлических потоках имеются кинетические точки а и б,
характеризующие потери в магистральных трубопроводах
(рис. 148, б).
Гидростатический трансформатор можно изображать также од-
ной механической узловой точкой — ГСТ, как пока-
зано на рис. 148,в. Эта точка будет иметь только механические
вращательные потоки (здесь, как и выше, механические поступа-
тельные потоки не рассматриваются).
Механические силовые потоки узловых точек имеют кинетиче-
ский фактор и = и, где — угловая скорость вращения вала; ди-
намический фактор q — М, где М — крутящий момент, приложен-
ный к валу.
Гидравлические потоки будут иметь кинетический фактор и—Н,
где Н — напор жидкости; динамический фактор q = Q, где Q —
средний весовой расход жидкости. Тогда мощностной фактор
гидравлического потока будет равен
N=HQ.
14—20
209
Характеристикой гидростатической узловой точки яв/
ляется зависимость между средним весовым расходом и угловой
скоростью механического потока, полученная на основании фор-
мулы (108) !
Q = Д<ч, (а)
(КЗ \ '
~сёк )’ i
w—угловая скорость вала агрегата
А—коэффициент пропорциональности или коэффициент рас-
хода.
Чтобы определить коэффициент А, следует расход Q в формуле
(а) приравнять расходу Q в формуле (108). После преобразования
получим
А = ^_
к-10’ •
(б)
Здесь Vfi в см3, у в
В характеристику должно еще войти уравнение диссипативной
функции (уравнение потерь) Nt. Эта функция точно может быть
определена только экспериментально.
По данным проф. Т. М. Башта 1 объемный и механический к. п. д.
поршневых насосов и моторов зависит от многих факторов: от экс-
центриситета (е), от давления жидкости (р), от расхода (Q). С
увеличением г увеличивается механический к. п. д„ объемный к. п. д.
от эксцентриситета не зависит. С увеличением р объемный к. п. д.
падает, а механический и общий к. п. д. возрастает. С увеличением
расхода значения всех трех к. п. д. возрастают.
Так для насоса, который имел гн = 5; dH — 1,2 см; — 0,732 см;
па — 1000 об/мин получены следующие опытные значения к. п. д.
Давление масла в кг/см'1' 10 20 30 40 50 60 70 80
Объемный к. п. д. 0,99 0,99 0,99 0,98 0,98 0,98 ' 0,98 0,97
Механический к. п. д. 0,29 0,43 0,52 0,60 0.65 0,69 0,73 0,76
Общий к. п. д. 0,26 0,42 0,51 0,59 0,64 0,67 0,72 0,75
Для насоса повышенной мощности, который имел гн — 5;
=3,67 см; sn =0,9 см; па= 1000 об/мин, к.п.д. имел следую-
щие значения:
1 Т. М. Б а ш т а. Самолетные гидравлические приводы и агрегаты. Оборон-
гиз, 1951 г.
210
авление масла в кг/см1 10 20 30 40 50 60 70 80
с бъемный к. п. д. 0,99 0,99 0,99 0,99 0,99 0,99 0,99 0,98
м еханический к. п д. 0,66 0,81 0,89 0,93 0,96 0,97 0,97 0,98
Общий к. п. д. 0,65 0,80 0,88 0,92 0,95 0,96 0,96 0,97
Как видно из этой таблицы, при достаточно высоком давлении
жидкости гидростатические агрегаты обладают очень высоким об-
щим к. п. д.
Если задаться к. п. д. агрегата, то можно определить диссипа-
тивную функцию NlH и NtM по общеизвестной формуле
где W—подводимая к агрегату мощность.
Необходимо также определить потери в узловых точках а и б,
т. е. потери в магистральных трубопроводах. Эти потери опреде-
ляются по формуле гидродинамики
(в)
где ДЯ — потерянный напор жидкости в метрах водяного столба,
с—скорость течения жидкости в трубопроводе в м/сек,
X — коэффициент сопротивления,
d — диаметр трубы в м,
g = 9,81 м/сек \
L — длина магистрального трубопровода в м.
Коэффициент сопротивления в свою очередь определяется по
формуле:
для турбулентного потока
. 0,3164 . .
(О
VRe
для ламинарного потока
14»
211
Характер турбулентного или ламинарного потока определяется'
значением числа Рейнольдса
(е)
где р. — кинематическая вязкость. Ориентировочно ее можно при-
нимать для бакинских масел
р = 0,1 • 10'4 м21сек,
для воды
и = 0,3- 1СГ~6 м21сек,
при температуре жидкости около 90°.
Если число Рейнольдса больше 2300, то поток турбулентный,
если меньше — ламинарный.
Составляя уравнения силового потока и решая их, найдем ки-
нематические, динамические и мощностные факторы гидростатиче-
ского трансформатора.
Рассмотрим расчет трансформатора методом силового потока на
числовом примере.
Пример. Произведем расчет гидростатического трансформатора для следую-
щих данных: Лн = НО л. с.; пи = 1800 об/мин. Примем расчетное передаточ-
ное число трансформатора гнм = 3; давление р = 220 кг/см2.
В первом приближении потоком всасывания пренебрежем, т. е. будем рас-
сматривать этот поток как холостой — рис. 148, г.
Напишем систему уравнений силового потока.
Уравнение мощностей узловой точки Н
+ ^2н С?2н + Ntn = °- W
Уравнение равновесия для узловых точек Н и М не составляем, так как они
дают очевидные из схемы силового потока зависимости (Л4Н = — Л4СМ ; Л4М =
= —^см ; О1П = —(?2п ; —02м ).
Для узловой точки М уравнение мощностей будет
"м Мгл +^1м^?1м +jV/M=°- (3)
Для узловой точки а имеем:
Л71а = Я2а + (и)
£?1а + Ога = 0- (к)
Уравнения связей:
^2н = ^la )
Н - Н \ (л)
“1м — “га J
£?2н = —’ $Ia 1
„ 1 (и)
‘ Ф1М = ^2а I
Уравнения характеристик узловых точек Н и М
Qin = - Ап “н >
<?1м = ^м0)ч •
212
Подставляем (?2н и 0iM в уравнения (м), (з) и (ж) Получим
(?1а = ЛН “п <И)
С?2а = — Лм <»., , (О)
“м^м + ^1мЛмшм +Л7ч=0 1 .
} (п)
N4 — ИЧи Лншн + Ntu = 0 I
Величины Qla и Q2a из уравнений (н) и (о) подставляем в уравнение (к).
Получим
/4„ю —А • <о ~ 0.
п п ММ
Отсюда находим
Лм • /„х
Л ~ ш ~~ гнм’ (р)
Ла “м
Обозначим Н2н = Я1а = Н— расчетный напор. Тогда из уравнения (и) по-
лучим
я2а =Я1М = н-\нл.
Из уравнений (п) находим
+(/-/-Д^)Л;„<вм +^м=0 |
+ [ (с)
Потери в узловых точках Н и М можно выразить следующими формулами;
Дн =-’1н^н>
=-Чм(Я-ДНа)Лм0,м.
Тогда уравнения (с) перепишутся в таком виде:
ЧЛн-^н^н =°. (Т)
“A + 1)м (Я - ДЯа) Лм о>м = 0. (у)
Решаем уравнения (р), (т) и (у) относительно Я4М ; Лм и Лн, Получим:
Л4М
. ЧнД,
— гнм
Т]м (Я — Д/7а) iHM 7!HNa
Н<В„
(Ф)
Определим предварительно потерю напора в магистральном трубопроводе.
Дано; L = 2 м\ d = 0,04 м; g = 9,81 . Примем р = 0,1 • 10-4 ~— •
с.1/2 r ’ сек
Зададимся ориентировочно скоростью течения жидкости в трубопроводе
с ~ 6 м)сек.
213
Получим согласно уравнению (е)
^ = ТО^ = 24000-
Течение жидкости турбулентное.
По формуле (г) находим
Л = Jil'L'lL = 0,0254.
У24000
Из уравнения (в) получим
? ЧА
д/7=0-0254- WW=2’020 м-
Определим расчетный напор, выразив его через расчетное давление.
Будем иметь
t
где у — объемный вес рабочей жидкости. Примем у = 870 -^-. Выше было
принято расчетное давление р = 220 = 220-104 .
Тогда
220-10»
Н ~ 870
= 2530 м.
Как видим, потеря напора в магистральном трубопроводе величина совер-
шенно ничтожная, которой можно пренебречь (АА7, as 2 м). Тогда в выражении
момента Л7М (формула ф) падение напора можно принять равным нулю.
Зададимся = 0,95; т;м = 0,95. Из уравнений (ф) получим
0,95-110-75
2530-188
= 0,0165 кг,
Лм = 3-0,0165 = 0,0495 кг,
По формуле
0,95-3-0,95-110-75
188
= 119 кгм.
(б) получим
л-107Л
(/ =----------5-
н 5у
3,11-107-0,0165
5-870
= 119 см*.
М„
Тогда Км = гнмКн = 3-119 = 357 см3. Зная рабочий объем агрегата, находим
по формуле (106) его геометрические параметры. Для этого зададимся г и е,
определим rf.
3. ГИДРОДИНАМИЧЕСКИЙ ТРАНСФОРМАТОР
Гидродинамический трансформатор был изобретен в Германии
Фетингером в 1907 г. Он получил применение в силовых передачах
военных кораблей, где заменил зубчатые передачи.
214
В 1928 г. был создан в Швеции первый автомобильный (авто-
бусный) гидротрансформатор системы Лисхольм-Смит, с которого
фактически и началось применение гидротрансформаторов в само-
ходных машинах, сначала в автобусах (в Англии), потом в авто-
мобилях, танках и гусеничных тягачах (в США).
В настоящее время около половины всех колесных машин США
и почти все гусеничные машины выпускаются с гидротрансформа-
торами.
Что же обеспечило гидротрансформаторам такое широкое при-
менение в самоходной транспортной и военной технике?
В первую очередь их автоматичность.
Машина с гидротрансформатором управляется при прямолиней-
ном движении одной педалью — педалью подачи горючего. Хотя
имеется еще рычаг переключения передач в вспомогательном сту-
пенчатом (зубчатом) трансформаторе, но этим рычагом пользуются
редко.
Как уже отмечалось выше, автоматичность управления имеет
очень большое значение для гусеничных машин, особенно для тяга-
чей, работающих с прицепом.
Второе важное качество, которое придает гидротрансформатор
машине,— это повышение ее проходимости по мягким
неустойчивым грунтам. Как показывают испытания, тягач, снабжен-
ный гидродинамическим трансформатором, обладает лучшей про-
ходимостью по мягким грунтам (песок, снег, болото), а также на
крутых предельных подъемах, чем тягач, имеющий обычную зуб-
чатую коробку передач. Это явление объясняется более спокойной
работой машины, имеющей гидродинамический трансформатор,
т. е. более спокойной передачей на грунт тягового усилия от гусениц.
Необходимо отметить еще одно важное качество гидротрансфор-
матора. Так как гидротрансформатор может работать даже при
полностью заторможенном ведомом вале, то при застревании ма-
шины на препятствии, когда ее гусеницы прекращают вращаться
или пробуксовывают с очень малой скоростью, на них будет созда-
ваться сила тяги. Эта сила тяги облегчает вытаскивание застрявшей
машины с помощью вспомогательных средств (с помощью другого
тягача или лебедки). От вспомогательного средства в этом случае
требуется только сила, равная разности между сопротивлением дви-
жению застрявшей машины и силой тяги, создаваемой на ее гусе-
ницах работающим двигателем. При обычной (зубчатой) коробке
такая сила тяги может создаваться на гусеницах только за счет
пробуксовки главного фрикциона, что может привести к его сгора-
нию. В этом отношении машина с гидропередачей не обладает
этим недостатком.
По сравнению с другими типами непрерывных и автоматических
трансформаторов гидротрансформатор имеет серьезные преимуще-
ства. Он чрезвычайно прост и обычно состоит из трех — четырех ло-
пастных колес и муфт свободного хода. Кроме того, гидротрансфор-
215
матор полностью уравновешен, работает без динамиче-
ских нагрузок и шума. Больше того, в известной мере он яв-
ляется гасителем динамических нагрузок (крутиль-
ных колебаний), возникающих в силовой передаче машины вслед-
ствие периодической неравномерности работы ее двигателя и дви-
жителя.
Трансформатор обладает высокой износоустойчиво-
стью, с которой может сравниться износоустойчивость только
электрических машин. Практически в трансформаторе изнаши-
ваются только подшипники, нагруженные осевым усилием, лопаст-
ная же система колес не изнашивается.
Наряду с положительными качествами, присущими гидротранс-
форматору, следует отметить и его недостатки — в первую очередь
это слишком узкий скоростной диапазон на эксплуатационном ре-
жиме (XJ и низкий коэффициент приспособляемости (<р^) транс-
форматора.
В выполненных конструкциях трансформаторов Хт — 1,75 — 2,7
и ^=1,65 — 3,5.
Отсюда возникает необходимость в расширении диапазона ре-
гулирования силовой передачи с помощью дополнительного двух-
трехступенчатого зубчатого трансформатора
(коробки передач). Получающаяся при этом гидромеханиче-
ская передача уже не может считаться конструктивно про-
стой.
Заметим, однако, что даже при наличии зубчатого трансформа-
тора гидромеханическая передача имеет небольшие размеры и легко
вписывается в габариты обычной зубчатой коробки передач. Это
объясняется тем, что сам гидротрансформатор занимает немного
места, а число передач дополнительного ступенчатого трансформа-
тора в два раза меньше числа передач зубчатой коробки.
Опыты и расчет показывают, что к. п. д. гидромеханической пе-
редачи даже с тремя ступенями ниже, чем к. п. д. зубчатой коробки
передач. Вследствие этого топливная экономичность машины с гид-
ромеханической передачей ниже (Примерно на 5—10%) топливной
экономичности машины со ступенчатой зубчатой коробкой передач.
ПРИНЦИП РАБОТЫ
Как уже отмечалось, трансформатор состоит из системы лопаст-
ных колес, внутри которых циркулирует рабочая жидкость.
Напомним принцип работы простейшего трансформатора, состоя-
щего из трех лопастных колес: колеса насоса, турбины и направ-
ляющего аппарата.
Вследствие вращения кол^а насоса в рабочей жидкости возни-
кают центробежные силы, которые стремятся перемещать поток
жидкости по каналам от центра насоса к его периферии. Приобретя
определенную скорость, а следовательно, и запас кинетической энер-
216
гии, поток жидкости выходит из каналов насоса и попадает в ка-
налы турбины. Здесь он, теряя скорость, отдает большую часть
своей энергии колесу турбины, приводя его во вращение.
Отработавший, т. е. потерявший часть своей энергии, поток по
неподвижным каналам направляющего аппарата возвращается к
колесу насоса. В насосе он снова получает запас энергии; поды-
маясь по каналам насоса, поток попадает в турбину и снова отдает
ей свою энергию и т. д.
Особую роль в преобразовании энергии в гидротрансформаторе
играет направляющий аппарат.
Рассматривая гидротрансформатор как динамическую узловую
точку силового потока, можем для нее написать следующее уравне-
ние равновесия:
/Мн “Ь ^т = О’
где М — момент на валу насоса (//), турбины (Т) и на направля-
ющем аппарате (Л).
Из этого равенства следует, что при МА =# 0 моменты на валу
насоса и турбины неравны между собой; они могут изменяться, так
как согласно определению трансформатора
Если момент на направляющем аппарате будет равен нулю (а
это то же самое, как если бы отсутствовал направляющий аппарат),
т. е. если/ИА=0, то согласно уравнению равновесия будем иметь
/Ин 4- /Ит = О
Н 1 1
или
Му
Следовательно, трансформатор превращается в муфту (а его дина-
мическая узловая точка — в кинетическую узловую точку).
Итак, только при наличии направляющего ап-
парата может существовать трансформатор.
Из уравнения равновесия также следует, что в зависимости от
знака момента на направляющем аппарате момент на турбине мо-
жет быть больше или меньше момента на насосе (трансформатор
понижающий или повышающий). Так, примем Л4Н = +100;
/ИА =+150; тогда Л'1т =.—250 и k — —2,5. Если принять
/ИА =—50, то Л4Т =—50 и k — —0,5. В первом случае транс-
форматор понижающий (по скорости ведомого вала), во вто-
ром случае — повышающий.
Величина и знак момента на направляющем аппарате зависят
от углов входа и выхода потока жидкости из каналов направляю-
щего аппарата. Всегда можно так подобрать углы наклона лопаток,"
217
чтобы на направляющем аппарате получить нужный момент, а сле-
довательно, и соответствующую трансформацию силового потока.
Из характеристики трансформатора, полученной расчетным или
опытным путем, известно, что с уменьшением угловой скорости тур-
бины крутящий момент на валу турбины автоматически возрастает,
следовательно, трансформатор автоматически приспосаб-
ливается к изменяющейся на его ведомом валу нагрузке.
Рис. 149. Движение потока рабочей жидкости через
лопастное колесо
Выясним причину этого явления.
Допустим, что со стороны колеса насоса в колесо турбины вхо-
дит поток жидкости с абсолютной скоростью Vi (рис. 149).
Момент, создаваемый на колесе входным потоком гидродина-
мической узловой точки, выражается формулой
1 g
При выходе из колеса поток создает на нем момент
М2 = — ,
2 g ,
где Vr и v2— проекции абсолютных скоростей потока на направле-
ние окружной скорости колеса.
Для понижающего трансформатора моменты Mi и М2 на колесе
турбины должны суммироваться. Но тогда скорость v2 должна
иметь обратный знак по сравнению со скоростью щ.
На рис. 149 показано графическое определение скорости v2 с по-
мощью параллелограмма скоростейявТак, если задаться окружной
скоростью и2 и меридиональной скоростью vm2, то, зная направле-
ние лопаток на выходе, найдем относительную скорость W2 и абсо-
лютную V2. Проектируя V2 на ось, перпендикулярную меридио-
нальной скорости, найдем v2.
Уменьшим угловую скорость колеса турбины. Тогда уменьшится
218
и окружная скорость. Она будет теперь равна и'.2 [и'2<.и^. В пер-
вом приближении можно принять, что расход Q, а следова-
тельно, и скорость vmi с изменением угловой скорости колеса не
меняются. Зная скорости и2, vm2 и направление лопаток на вы-
ходе, получим новое значение абсолютной скорости на выходе V2.
Проектируя эту скорость на ось, перпендикулярную меридиональ-
ной скорости, получимКак следует из рис. 149, v'2Z>v2. Сле-
довательно, момент М.2 будет больше момента М2. Но тогда уве-
личивается по абсолютной величине и момент механического потока
на валу колеса турбины, который будет равен
1^1 = 1^14-1^1.
Мы приняли, что с изменением угловой скорости колеса турбины
расход остается неизменным. В действительности он может увели-
чиваться или уменьшаться в зависимости от сопротивлений, кото-
рые встречает поток при своем движении в круге циркуляции. Если
расход увеличивается, то это еще больше будет увеличивать момент
на валу турбины; если уменьшается, то все же с уменьшением ско-
рости ведомого вала ®т момент на этом валу будет возрастать,
хотя и медленнее, чем в первом случае, так как влияние расхода
на момент меньше, чем влияние окружных скоростей.
Отсюда следует, что причиной автоматичности трансформатора
является не изменение расхода, как это иногда считают, а измене-
ние скорости v2, которое вызывается изменением окружной скоро-
сти «2, т. е. в конечном счете скорости вращения ведомого вала
трансформатора.
4. ТИПЫ ГИДРОДИНАМИЧЕСКИХ ТРАНСФОРМАТОРОВ
КЛАССИФИКАЦИЯ
Гидродинамические трансформаторы, или, как мы их сокращенно
будем называть, гидротрансформаторы, бывают следующих типов:
— одноступенчатые;
— многоступенчатые;
— реверсивные;
— комплексные;
— полимерические;
— с поворачивающимися лопатками;
— дифференциальные.
Рассмотрим каждый из этих типов.
Одноступенчатый гидротрансформатор
Одноступенчатый гидротрансформатор состоит из трех лопаст-
ных колес: колеса насоса, турбины и направляющего аппарата.
Гидротрансформатор может быть Прямого и обратного хода.
219
526мм-
Рис. 150. Одноступенчатый гидротрансформатор прямого хода ВАТТ-1:
А — колесо направляющего аппарата; Н — колесо насоса; Т — колесо турбины
400мм-
Рис. 151. Лопастные колеса гидротрансформатора:
а — колесо турбины; б — колесо насоса
В самоходных машинах обычно применяют трансформаторы пря-
мого хода.
На рис. 150 представлен одноступенчатый гидротрансформатор
прямого хода ВАТТ-1. Два лопастных колеса этого трансформа-
тора показаны на рис. 151.
Прямой ход получается в трансформаторах, имеющих структур-
ную формулу (направление гидравлического потока)
Н^Т-^А^Н (112)
или
Н^А^Т^Н. (ИЗ)
Обратный ход получается только в трансформаторах, имеющих
структурную формулу (ИЗ), т. е. если рядом с насосом находится
не турбина, а направляющий аппарат.
На рис. 152, а дана условно развертка лопастных колес односту-
пенчатого трансформатора прямого хода, а на рис. 152, б—обрат-
Рис. 152. Развертка лопастной системы
гидротрансформатора:
а — прямого хода; б — обратного хода
ного хода. Стрелками показано направление течения жидкости и
направление окружных скоростей колес «н и иу.
221
Из рис. 152, а видно, что при ударе в лопатки колеса турбины
жидкость может вращать это колесо только в ту сторону, куда
вращается колесо насоса.
Из рис. 152,6 видно, что поток жидкости в направляющем
аппарате меняет свое направление и вызывает обратное направле-
ние вращения колеса турбины.
В трансформаторе этого типа может быть также и прямое вра-
щение колеса турбины, если соответствующим образом изогнуть ло-
патки направляющего аппарата.
Многоступенчатый гидротрансформатор
Многоступенчатость гидротрансформатора определяется числом
рабочих колес в его турбине. На рис. 153 показано устройство трех-
ступенчатого гидротрансформатора Лисхольм-Смит.
В многоступенчатом гидротрансформаторе направляющий аппа-
рат, как и турбина, имеет несколько колес.
На рис. 154 показаны кинематическая схема трехступенчатого
гидротрансформатора и схема его силового потока. В трансформа-
торе имеются: одно насосное колесо, три связанных между собой
колеса турбины и два колеса направляющего аппарата. В схеме си-
лового потока соответственно получим шесть гидродинамических
узловых точек и одну разветвляющую механическую точку, сумми-
рующую механические потоки турбинных колес.
На схеме силового потока механические потоки обозначаются
теми же буквами, что и узловые точки, которым они принадлежат,
а гидравлические потоки — цифрами 1 и 2, в зависимости от того,
входящий это поток (1) или выходящий (2).
В дальнейшем мы будем пользоваться этими обозначениями.
Рис. 153. Трехступенчатый гидротрансформатор
Лисхольм-Смит;
I — крышка; 2 — насос; 3 — направляющий аппарат; 4 — турбина
222
Рис. 154. Кинематическая схема и схема силового потока трех-
ступенчатого гидротрансформатора:
а — кинематическая схема; б — схема силового потока
223
Реверсивный гидротрансформатор
На рис. 155 показано устройство одноступенчатого реверсивного
гидротрансформатора, позволяющего получать как прямой, так и
обратный ход.
Рис. 155. Реверсивный гидротрансформатор:
7 — насос; 2 — турбина; 3 и 4 — направляющий аппарат
В трансформаторе имеются два связанных между собой колеса
направляющего аппарата 3 и 4, имеющие различный наклон лопа-
ток. Колеса могут сдвигаться, устанавливаясь над колесом насоса 1
и турбины 2. В зависимости от того, какое из колес направляющего
аппарата введено в круг циркуляции жидкости, получается прямой
или обратный ход трансформатора.
Заметим, что трансформатор и на притом и на обратном ходу
имеет структурную формулу
А->Т^Н.
Комплексный гидротрансформатор
Новая идея в развитие гидротрансформаторов была внесена
изобретением так называемого комплексного трансфор-
матора.
224
Напишем уравнение рав-
новесия для одноступенчато-
го трансформатора1 прямого
хода
/f] 4- Л4Т + Л1А = 0.
Отсюда получим
^л = -(^н + Мт). (114)
В трансформаторе пря-
мого хода моменты Л1н и
Мг всегда противоположны
по знаку. Действительно,
из уравнения мощностей
имеем
Л4„сон 4- Л4то> = 0.
П П 11
Рис. 156. Каноническая характеристика
простого (некомплексного) трансформатора
Так как «н и <»т имеют
один знак, то Л4Н и Л4Т имеют противоположные знаки.
Из равенства (114) для абсолютных величин моментов получим
|Л>Д = |Л1т |-|М„|.
На рис. 156 представлена каноническая характеристика простого
(некомплексного) трансформатора. Отрезки между кривыми Л7Т и
/Ин определяют абсолютную величину момента на направляющем
аппарате Л4А.
Из характеристики следует, что с увеличением угловой скорости
вала турбины <u.r момент /ЙА падает. При достижении определен-
ной скорости (точка а) он становится равным нулю. В случае даль-
нейшего увеличения щт знак момента
Рис. 157. Каноническая характеристика
комплексного гидротрансформатора
Л4а меняется.
Если колесо направляю-
щего аппарата установить
на муфте свободного
хода, то, достигнув нуля,
момент Л1А уже не сможет
изменить свой знак (так
как муфта свободного хода
передает момент только
одного знака) и будет оста-
ваться равным нулю. Но
тогда, начиная с некоторых
оборотов ведомого вала,
трансформатор превратится
в гидромуфту.
Такой трансформатор и
называется комплексным.
На рис. 157 представлена
15-20
225
Рис. 158. Одноступенчатый комплексный гидротрансформатор Трилок:
Z— кулачковая муфта; 2, 3, 4 и 5 — кулачки; 6— текстолитовое кольцо; А — направляющий аппарат: Т — тур-
бина; Н — насос
каноническая характеристика комплексного гидродинамического
трансформатора. Заметим, что кривая к. п. д. (тд) в этой характе-
ристике имеет две ветви: одна ветвь криволинейная (до точки б),
характерная для трансформаторов, и другая ветвь прямолинейная
(после точки б), характерная для муфт.
Так как к. п. д. муфты с уменьшением скольжения увеличи-
вается, достигая чтах = 0,95—0,97, то эго дает возможность значи-
тельно расширить скоростной диапазон трансформатора X за счет
его работы на режиме гидромуфты. При этом следует иметь в виду,
что приспособляемость трансформатора, оцениваемая коэффициен-
том приспособляемости ф, в этом случае не повышается, а остается
такой же, как и у обычного некомплексного трансформатора, т. е.
диапазон трансформирования момента не увеличивается.
Применение комплексного трансформатора позволяет улучшить
правую часть характеристики, расширив область высоких к. п. д. в
сторону больших скоростей ведомого вала.
На рис. 158 показано устройство одноступенчатого комплексного
гидротрансформатора Трилок.
Направляющий аппарат трансформатора соединен с трубчатым
валом. На валу посажена кулачковая муфтй 1. Кулачки 3 и 4 муфты
могут соединяться с кулачками 2 и 5. При включении кулачков 4
и 5 колесо направляющего аппарата останавливается. При включе-
нии кулачков 2 и 3 направляющий аппарат блокируется с турби-
ной Т. В первом случае передача работает как трансформатор, во
втором — как муфта.
Переход с одного режима на другой происходит автоматически.
Для этого служит специальное винтовое устройство с тормозным
кожаным или текстолитовым кольцом 6. При изменении направле-
ния момента на направляющем аппарате муфта перемещается в осе-
вом направлении, вследствие чего включаются кулачки 2 и 3 —
трансформатор переходит на режим гидромуфты.
Трансформатор Трилок — один из первых комплексных транс-
форматоров. Дальнейшее развитие комплексных трансформаторов
показало, что блокировка направляющего аппарата с турбиной не
. обязательна. Поэтому в современных комплексных трансформато-
рах колесо направляющего аппарата при отключении не блоки-
руется, а свободно вращается в потоке рабочей жидкости.
Полимерический гидротрансформатор
Комплексный трансформатор улучшает правую часть характе-
ристики, позволяя машине работать на повышенных скоростях при
к. п. д., большем, чем это имело бы место в обычном трансформа-
торе. Недостатком характеристики комплексного трансформатора,
однако, остается спад кривой к. п. д. по правую сторону от vjmax
(рис. 159).
Чтобы устранить и этот недостаток, был предложен полиме-
рический гидротрансформатор.
15*
227
В полимерическом транс-
форматоре имеются два рядом
стоящих колеса направляюще-
го аппарата, которые установ-
лены на муфтах свободного
хода (рис. 160).
Трансформатор работает
следующим образом.
Вначале, когда скорость ве-
домого вала низкая, оба коле-
са направляющего аппарата
неподвижны и представляют
как бы одно колесо, работаю-
щее под нагрузкой момента MA.
Рис. 159. Характеристика полимери- При уменьшении нагрузки
ческого гидротрансформатора на ведомом валу трансформа-
тора уменьшается нагрузка и
на колеса направляющего аппарата. При достижении определен-
ной величины нагрузки на ведомый вал вначале исчезает нагрузка
на одно колесо направляющего аппарата и колесо начинает сво-
бодно вращаться в потоке жидкости, потом исчезает нагрузка и на
второе колесо, которое также начинает свободно вращаться,—
трансформатор превращается в гидромуфту.
При отключении колес направляющего аппарата изменяется ло-
пастная система трансформатора, а следовательно, должна ме-
няться и характеристика трансформатора. Всегда можно так подо-
брать углы наклона лопаток колес направляющего аппарата, чтобы
получить нужную (оптимальную) характеристику трансформатора
(см. рис. 159), т. е. по возможности уменьшить спад кривой к. п. д4
после чтах.
Полимерический трансформатор
ный трансформатор, но переход на
исходит не сразу, а через ступень
правляющего аппарата.
представляет собой комплекс-
режим гидромуфты в нем про-
отключения одного колеса на-
Рис. 160. Кинематическая схема и схема силового потока поли-
мери чес кого гидротрансформатора:
а — кинематическая схема; б — схема силового потока
228
Гидротрансформатор с поворачивающимися лопатками
Развитие гидротрансформаторов определялось в прошлом и оп-
ределяется в настоящем стремлением улучшить характеристику
к. п. д. трансформатора, сделать ее положе в эксплуатационном диа-
пазоне оборотов трансформатора.
Одним из средств улучшения характеристики к. п. д. является
применение гидротрансформаторов с поворачивающимися лопат-
ками.
Основные потери в трансформаторе происходят из-за удара по-
тока жидкости в лопатки. В зависимости от наклона лопаток в экс-
плуатационном диапазоне оборотов ведомого вала потери могут
быть больше или меньше. Если лопатки сделать поворачивающи-
мися, то можно регулировать эти потери, сводя их к мини-
муму. Поворот лопаток, кроме того, будет оказывать влияние и на
другие характеристики трансформатора, например на характери-
стику коэффициента трансформации.
Трансформатор с поворачивающимися лопатками является регу-
лируемым трансформатором или, вернее, автоматически регули-
руемым трансформатором.
Регулируемый трансформатор более экономичен, чем автомати-
ческий. Действительно, во всяком автоматическом трансформаторе
имеется только один режим наибольшей экономичности, на который
трансформатор и рассчитывался.
Этот режим выбирается при расчете из условий работы машины
в некоторых «средних» дорожных условиях. Но «средних» дорож-
ных условий как таковых не существует, существуют действитель-
ные, причем самые разнообразные условия работы машины. По-
этому автоматический трансформатор практически почти не рабо-
тает на режиме наибольшей экономичности. Регулируемый же
трансформатор позволяет иметь несколько режимов наибольшей
экономичности и при движении машины выбирать тот режим, кото-
рый наиболее соответствует данным дорожным условиям.
Поворачивающиеся лопатки регулируемого трансформатора де-
лают на колесе направляющего аппарата, так как это колесо не-
подвижно и к нему легко осуществить привод.
Дифференциальный гидротрансформатор
В последнее время появился еще один тип гидродинамического
трансформатора, который можно назвать дифференциаль-
ным. В дифференциальном трансформаторе имеется несколько
колес турбины. Эти колеса связаны между собой не жестко, как это
имеет место в многоступенчатом трансформаторе, а через дифферен-
циальные (планетарные) зубчатые механизмы.
Наличие дифференциальных связей между турбинными коле-
сами расширяет возможности воздействия на характеристику транс-
форматора и улучшает ее динамические и экономические пара-
метры,
229
ЭЛЕМЕНТЫ КОНСТРУКЦИИ
ментам дооавляются еще
Рис. 161. Лопастное колесо:
7 — чаша; 2 — лопатки; 3 — торовое
кольцо
Всякий трансформатор состоит из следующих основных элемен-
тов: лопастных колес, уплотнений, системы подпитки и охла-
ждения.
В комплексном и полимерическом трансформаторах к этим эле-
элоги (муфты свободного хода).
Лопастные колеса состоят
из чаш, торовых колец и лопа-
ток.
На рис. 161 в качестве примера
представлено лопастное колесо на-
правляющего аппарата трансфор-
матора.
Колеса бывают трех типов: с
клепаными лопатками (рис. 162),
с приваренными лопатками
(рис. 161) и литые (рис. 163).
Приваренные лопатки изготовля-
ются из тонкой листовой стали и
привариваются к чаше колеса и к
торовому кольцу точечной сваркой
(после чего по стыку лопатки про-
паивают медью).
На рис. 164 показана лопатка
гидротрансформатора Крайслер. Лопатка отштампована из листо-
вой стали толщиной 0,8 мм. Для жесткости лопатка отбортована.
Колеса отливают из чугуна или силумина. Преимуществом ли-
тых колес является легкость их изготовления в массовом произ-
водстве.
Лопатки бывают плоские и объемные (аэродинамические). Объ-
емные лопатки позволяют делать каналы колес с постоянной пло-
щадью живых сечений, что уменьшает диффузорность каналов, а
следовательно, и потери на диффузорность.
Для изоляции рабочей полости трансформатора применяются
различные типы уплотнений: лабиринтные, манжетные,
сильфонные, кольцевые.
На рис. 165 показано уплотнение рабочей полости трансформа-
тора Лисхольм-Смит. Лабиринтное угиотнение 3 препятствует жид-
кости, просочившейся из рабочей полости, проникать в полость ко-
жуха трансформатора и распространяться на периферию, где жид-
кость будет иметь большие окружные скорости и, следовательно,
будет давать большие потери энергии на трение.
Манжетное (сальниковое) 2 и сильфонное 1, или беззазорное,
уплотнения препятствуют жидкости вытекать наружу, изолируя
внутренние полости трансформатора.
На рис. 166 показано устройство беззазорного (торцового) уп-
лотнения с диафрагмой.
Уплотняющее кольцо 1, изготовленное ИЗ Закаленной стали,
230
Разрез по а 6
Рис. 162. Колесо с клепаными лопат-
ками
Рис. 163. Литые колеса
Рис. 164. Штампованная ло-
патка гидротрансформатора
Крайслер
231
3
Рис. 165. Уплотнение рабочей полости трансформатора
Лисхольм-Смит:
I — сильфонное уплотнение; 3. — манжетное уплотнение; «3 — лаби-
ринтное уплотнение
Рис. 166. Беззазорное уплотнение
с диафрагмой:
1 — уплотняющее кольцо; 2 — упругая диа-
фрагма; 3 — корпус уплотнения; 4 — бронзо-
вое кольцо
притерто к бронзовому кольцу 4. Просочившаяся жидкость давит
на диафрагму 2, установленную в кольце /ив корпусе 3, и при-
жимает уплотняющее кольцо 1 к бронзовому кольцу 4.
Так как в рабочей полости трансформатора имеется значитель-
ная потеря энергии, а отвод тепла через наружные поверхности
трансформатора недостаточен, то масло, на котором работает транс-
форматор, будет перегреваться.
Перегрев масла может вызвать ка в и та ци о н н ы е я вл е н и я.
Явление кавитации возникает вследствие того, что в текущей
жидкости появляются зоны низкого давления. При нагревании жид-
кости в зонах низкого давления образуется водяной пар (даже
в масле всегда имеется конденсат воды), пузырьки которого со-
здают высокое давление на жидкость, вследствие чего возникают
местные гидравлические удары большой силы, которые могут по-
степенно разрушать рабочие колеса. Кавитация, кроме того, нару-
шает поток рабочей жидкости, вызывая в ней большие потери,
вследствие чего еще больше увеличивается нагрев трансформатора
и резко падает его к. п. д.
Чтобы избежать этих явлений, в трансформаторе применяется
система подпитки и охлаждения.
Систему подпитки и охлаждения составляют: шестеренчатый
(или плунжерный) насос, фильтр, бачок, радиатор и маслопроводы.
С помощью шестеренчатого насоса 5 (рис. 167) жидкость заби-
рается из масляного бака, прогоняется через радиатор 1 и частично
охлажденная снова поступает в круг циркуляции трансформатора,
откуда снова сливается в бак. Внутри трансформатора жидкость
подводится в ту область каналов лопастных колес, где имеется наи-
меньшее давление, и где, следовательно, можно больше всего ожи-
дать кавитационные явления.
Давление подпитки небольшое и, как правило, не превышает
2—4 ат.
Если трансформатор работает совместно с дизелем, то в каче-
стве рабочей жидкости трансформатора иногда используют дизель-
ное топливо. Тогда система подпитки трансформатора и система пи-
тания двигателя могут составлять одну систему (рис. 167).
Систему подпитки и охлаждения иногда объединяют с системой
смазки силовой передачи. Так, например, сделано в американских
гидромеханических силовых передачах Кросс-Драйв, устанавливае-
мых на гусеничные машины.
Чаше всего, однако, система подпитки является самостоятель-
ной, так как трансформатор наиболее экономично работает не на
дизельном топливе или на смазке силовой передачи, а на специаль-
ных маслах.
В комплексных трансформаторах применяются муфты сво-
бодного хода, которые служат для отключения колес направ-
ляющего аппарата при переходе трансформатора на режим гидро-
муфты.
Устройство муфты свободного хода было описано выше (см. раз-
дел «Импульсные трансформаторы»),
233
Рис. 167. Система подпитки и охлаждения трансформатора
и питания двигателя:
/—радиатор; 2 — питательный бак; 3 — топливный бак; 4— сливной
бак; .5 — насос; 6 — фильтр; 7 — форсунка
- Здесь следует только отметить, что условия работы муфты сво-
бодного хода в гидропередачах значительно легче, чем в импульс-
ных передачах; здесь муфта работает вполне надежно долгое
время. Обследование одного из автобусов, на котором был уста-
новлен комплексный трансформатор, показало, что после пробега
машины на 20 000 км муфта свободного хода была годна к даль-
нейшей эксплуатации.
5. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ ТРАНСФОРМАТОРОВ
Рассмотрим основные характеристики некоторых типов транс-
форматоров, кинематические схемы которых приведены на рис. 168.
Трансформатор ВАТТ-1 (опытный). Одноступенчатый,
прямого хода, на 30 л. с. при числе оборотов колеса насоса
1540 об/мин.
Колеса стальные, точеные; лопатки плоские штампованные, при-
варены к чашам точечной сваркой и пропаяны оловом.
Трансформатор МВТУ, Одноступенчатый, прямого хода,
мощностью 315 л. с. при 2000 об/мин вала насоса.
Трансформатор применяется на тепловозах. В силовой передаче
234
трансформатор устанавливается С двумя гидромуфтами. При ско-
ростях тепловоза до 24 км/час работает как трансформатор; при
скоростях с 24 по 37 км/час работает первая гидромуфта и при
скоростях свыше 37 км/час — вторая гидромуфта. Отключение того
или иного агрегата осуществляется выпуском жидкости из его
рабочей полости.
Колеса насоса и направляющего аппарата отлиты из серого чу-
гуна, а турбинное колесо — из силумина.
Рабочей жидкостью является турбинное масло.
Рабочая полость в меридиональной плоскости почти круглая;
имеются спрямленные участки при входе в турбину и в аппарат.
Линии токов жидкости по тору и по чаше по длине одинаковые, что
создает благоприятные условия для течения жидкости и умень-
шает гидравлические потери.
Трансформатор AEG. Одноступенчатый, прямого хода,
мощностью 40 л. с. при 3600 об/мин колеса насоса. Применяется на
автомобилях.
Вал насоса соединяется непосредственно с валом двигателя. На
турбинном валу установлена фрикционная муфта для блокировки
трансформатора. Направляющий аппарат связан с корпусом через
Марка Кинематическая схема Тиа
ВАТТ-1, МВТУ -В Одноступенчатый
AE.G ж 1 Одноступенчатый с блокиробкой
Лисхольм- -Смит ^4 t— Многоступенчатый
ВАТТ-2, Аллисон, Крайслер Комплексный , полимерический
Рис. 168. Кинематические схемы трансформаторов
235
специальный колодочный тормоз. Управление тормозом осущест-
вляется автоматически с помощью гидравлического привода.
При трогании машины с места направляющий аппарат затормо-
жен, фрикционная муфта выключена. Передача работает как транс-
форматор. При достижении турбиной 1900—2000 об/мин тормоз вы-
ключается и включается фрикцион. Мощность от двигателя идет
по механической ветви, минуя трансформатор. Машина движется
на прямой передаче.
Чаша и торовое кольцо насосного колеса стальные. Лопатки
штампованные, стальные, шлифованные, толщиной 0,5 мм, прикле-
пываются к чаше и торовому кольцу.
Чаша и торовое кольцо турбины стальные. Лопатки алюминие-
вые, литые, имеют аэродинамическую форму, крепятся на заклепках.
Чаша направляющего аппарата стальная, внутри полированная.
Тор алюминиевый, состоит из двух частей. Лопатки литые, алюми-
ниевые, аэродинамической формы, прикрепляются к чаше специаль-
ными усиками, которые отлиты заодно с лопатками. Внутренние
усики лопатки зажимаются между двумя кольцами тора стяжными
болтами, а наружные входят в пазы чаши направляющего аппа-
рата и здесь также зажимаются.
Рабочая полость трансформатора в меридиональной плоскости
сжата к центру с одной стороны. Это сделано для того, чтобы по-
ток жидкости поворачивался главным образом в тех местах, где
отсутствуют лопатки рабочих колес. На участке от выхода из на-
соса и включая выход из турбины поток жидкости в меридиональ-
ной плоскости движется прямолинейно.
В лопастной системе направляющего аппарата жидкость пово-
рачивается, но на большом радиусе. Такое устройство рабочей по-
лости объясняется стремлением уменьшить потери на поворот по-
тока, а также создать условия для формирования равноскорост-
ного потока по разным линиям токов жидкости.
Расстояния между кромками лопаток двух соседних колес в
этом трансформаторе очень большие. Например, между выходной
кромкой лопатки направляющего аппарата и входной кромкой ло-
патки насоса по средней линии потока расстояние составляет
115 мм, или 0,45 активного диаметра D. Такое расположение кромок
лопаток объясняется несколькими причинами. Во-первых, стремле-
нием уменьшить стеснение потока в местах перехода из одного ко-
леса в другое, во-вторых, стремлением уменьшить влияние вихрей,
образующихся при сходе с лопаток, и, в-третьих, стремлением умень-
шить сопротивление трения вследствие уменьшения длины ло-
паток.
Трансформатор Л исхольм-Смит. Трехступенчатый,
прямого хода, мощностью 340 л. с. при 1800 об/мин колеса насоса.
Трансформаторы типа Лисхольм-Смит применялись на- амери-
канских танках и самоходных установках. В настоящее время они
вытесняются более совершенными трансформаторами Аллисон (см,
ниже) и Крайслер, имеющими более высокий к. п. д.
236
Особенностью рассматриваемого трансформатора является уст-
ройство его рабочих колес. Колеса клепаные, имеют короткие ло-
патки аэродинамической формы Лопатки насосного колеса и напра-
вляющего аппарата изготовляются из латуни или бронзы; они
имеют усики, которые вставляются в соответствующие пазы чаши и
торового кольца и здесь расклепываются. Поверхность лопаток по-
лируется. Аналогично устроены и лопатки турбинных колес первой
и второй ступеней. Лопатки третьей ступени стальные, полые, по-
верхность их также полированная.
Рабочая полость трансформатора в меридиональном сечении по
форме приближается к четырехугольнику с закругленными углами.
Лопатки располагаются на прямых участках рабочей полости. По-
ворот потока происходит на участках, где нет лопаток. Это умень-
шает потери в трансформаторе.
Применение трехступенчатого турбинного колеса позволило
улучшить к. п. д. трансформатора, сделав его кривую более поло-
гой. Одновременно увеличился и коэффициент трансформации.
Трансформатор конструктивно очень сложен. Он имеет шесть ло-
пастных колес с 308 лопатками.
Как показали опыты И. С. Новохатько и др., полировка лопа-
ток в гидротрансформаторах практически не оказывает влияния на
к. п. д. трансформатора. В настоящее время в гидротрансформато-
рах часто применяют литые колеса, поверхность которых имеет
большую шероховатость.
Трансформатор ВАТТ-2. Опытный, комплексный, мощ-
ностью 60 л. с. при 1700 об!мин колеса насоса.
Трансформатор устанавливается в гидромеханическую передачу
на 110 л. с. с параллельным силовым потоком. -Передача предназ-
начается для легкого гусеничного тягача.
Трансформатор Аллисон. Одноступенчатый, гТолимери-
ческий, мощностью 580 л. с. при 2400 об/мин насосного колеса.
В трансформаторе имеются четыре лопастных колеса: колесо на-
соса, турбины и два колеса направляющего аппарата; последние
установлены на муфтах свободного хода.
Трансформатор работает следующим образом.
При ZTH, находящемся в пределах 0—0,65, оба колеса направля-
ющего аппарата заторможены. При ZTH = 0,65—0,84 выключается
колесо А1 (колесо А2 остается заторможенным); при z'TH = 0,84 и
выше выключается колесо А2 и трансформатор переходит на режим
гидромуфты. При этом выключенные колеса вращаются свободно в
потоке рабочей жидкости, не блокируясь ни с насосным колесом, ни
с колесом турбины.
Рабочая полость трансформатора в меридиональной плоскости
представляет овал с большой осью, параллельной главной оси
трансформатора.
Трансформатор Крайслер. Одноступенчатый, полиме-
рический, мощностью 235 л. с. при 1500 об/мин колеса насоса. При-
меняется на автомобилях и гусеничных машинах.
237
Рабочие колеса насоса и турбины стальные; колеса направляю-
щего аппарата отлиты из силумина и механической обработке не
подвергаются.
Лопатки насоса и турбины выштампованы из листовой стали.
Для жесткости лопатки отбортованы под 90°. К тору и чаше ло-
патки крепятся точечной сваркой и
Рис. 169. Диаметры лопастных колес транс-
форматора
затем пропаиваются медью.
Рабочая полость в ме-
ридиональной плоскости
круглая. Зазор между
кромками лопаток состав-
ляет 5—15 мм.
Трансформатор Край-
слер работает так же, как
и трансформатор Алли-
сон: при /тн = 0—0,7 оба
колеса направляющего
аппарата неподвижны;
при 7ТН = 0,7—0,88 коле-
со А1 выключается (и
свободно вращается в по-
токе жидкости); при
/тн =0,88 и выше трансформатор переходит на режим гидро-
муфты.
Максимальный к. п. д. трансформатора составляет 0,92. Это
высшее значение к. п. д., достигнутое современными гидродинами-
ческими трансформаторами, применяющимися в транспортных ма-
шинах.
В табл. 17 приведены параметры сравнительной оценки различ-
ных гидротрансформаторов. В первых шести строках приводятся
относительные геометрические параметры лопастных колес (рис.
169), в седьмой строке — относительная ширина рабочей полости
трансформатора, в строках с 8 по 15—параметры сравнительной
оценки характеристик (см. гл. IV, раздел 2 «Характеристики транс-
форматора»), Эксплуатационное значение параметров определялось
ПРИ ^min ~ 0,75. Для комплексных и полимерических трансформа-
торов правой границей при определении эксплуатационных пара-
метров являлся режим гидромуфты.
В последней строке приведен коэффициент мощности,
определяемый по формуле
11,5- 10WH
л — н
N
где D— активный диаметр в м;
Nu—мощность, подводимая к насосу на расчетном режиме,
в л. с.\
— угловая скорость насоса в 1/сек;
Y — объемный вес рабочей жидкости в кг/м\
(115)
238
Таблица 17
Параметры сравнительной оценки гидротрансформаторов
(по данным канд. техн, наук И. С. Новохатько)
Параметры Гидротрансформатор системы
МВТУ ВАТТ-1 AEG Фетин- гер Трилок Аллисон Край- слер Лис- хольм- Смит
Тип
одно- ступен- чатый одно- ступен- чатый одно- ступен- чатый Одно- ступен- чатый ком- плекс- ный полиме- рический полиме- рический трех- ступен- чатый
Р1н: D 0,40 0,36 0,41 0,51 0,44 0,65 0,50 0,55
Dsa : D 0,68 0,65 0,68 0,92 0,94 0,98 1,00 0,83
(D: D 0,73 0,70 0,77 1,00 0,98 1,00 0,99 0,84
D2t (I) : D 1,00 1,00 0,89 1,00 0,93 0,65 0,50 0,91
^1т (11) : ® — — — — — — — 0,89
^2т (И) : ® — — — — — — — 0,80
B.D 0,42 0,41 0,37 — 0,36 0,32 0,36 0,38
1,00 0,67 0,88 0,85 0,92 1,25 2,18 1,10
1,00 0,70 1,00 0,97 0,95 1,34 1,86 1,06
3,33 2,10 4,00 2,28 3,12 5,00 5,45 5,00
1,92 1,65 2,40 1,85 1,78 2,90 3,45 2,50
X 1,96 2,20 2,34 1,70 2,15 2,29 2,09 2,37
ь max 4,76 4,80 5,60 4,60 2,70 5,00 2,55 5,18
*5 так 0,8 0,82 0,85 0,83 0,81 0,84 0,92 0,82
Tv 1,35 1,43 0,95 2,15 2,06 2,10 5,00 1,97
Коэффициент мощности характеризует нагруженность лопаст-
ной системы трансформатора. Он определяет, какую мощность в
л. с. передавал бы трансформатор, подобный проектируемому, но
имеющий активный диаметр 1 м при 100 об/мин.
Чем совершеннее трансформатор с точки зрения его гидродина-
мических качеств, тем большее значение коэффициента мощности
он допускает. Последний зависит от формы рабочей полости, от рас-
положения колес, от параметров лопастной системы.
239
Из табл. 17 можно сделать следующие выводы.
1. Одноступенчатые трансформаторы имеют характеристики или
непрозрачные (<р=1), или с обратной прозрачностью (?<Д).
Общий коэффициент прозрачности при этом находится в пределах:
<р = 0,67—0,88.
2. Трансформаторы комплексные, полимерические и многосту-
пенчатые имеют прямую прозрачность; при этом ®= 1,1—2,18.
3. Наибольшей приспособляемостью обладают полимерические,
многоступенчатые и комплексные трансформаторы, наименьшей —
одноступенчатые. Согласно данным табл. 17 имеем 'l' = 1,65—3,45
и ф = 2,1—5,45.
Наибольшей эксплуатационной приспособляемостью обладает
трансформатор Крайслер; он имеет = 3,45.
4. Скоростной диапазон находится в границах X = 1,70—2,37.
5. Максимальный коэффициент трансформации достигает вели-
чины Атах = 5,6. Однако у ряда трансформаторов он составляет
2,5—2,7.
£>2Н
6. Для одноступенчатых трансформаторов, у которых 0,7
и - дТ ~ 1, коэффициент мощности находится в пределах 1 —1,4;
О2Н
при увеличении —~ 0,9 коэффициент мощности возрастает до 2,2.
Для комплексных, полимерических и многоступенчатых транс-
форматоров, у которых —^-^0,85— 0,95 и —0,9, коэф-
фициент мощности Лд/^2.
Очень высокий коэффициент мощности у трансформатора Крайс-
лер: величина Ддг у этого трансформатора достигает 5, а геометри-
ей __________________ет_____, е-г п к
ческие размеры -р-~—и —g-^0,o.
Отсюда следует, что увеличение диаметра насосного колеса на
выходе (D^.D) вызывает возрастание коэффициента мощно-
сти AN.
Приведенные данные могут быть использованы при расчете и
конструировании трансформаторов.
6. ГИДРОМЕХАНИЧЕСКИЕ ПЕРЕДАЧИ
Согласно табл. 17 эксплуатационный коэффициент приспособ-
ляемости ф в лучших конструкциях трансформаторов не превы-
шает 3,45. Силовой же диапазон тягача, т. е. его коэффициент при-
способляемости, должен быть около 10. Отсюда следует, что один
гидродинамический трансформатор недостаточен для трансформа-
ции силового потока машины и к нему должен быть добавлен еще
вспомогательный трансформатор. Так как вспомога-
240
тельный трансформатор будет работать реже, чем основной гидро-
динамический трансформатор, то в качестве вспомогательного транс-
форматора обычно применяют зубчатую коробку пере-
дач на 2—3 степени. Чаще всего в качестве дополнительного
трансформатора устанавливают трехступенчатую планетарную ко-
робку передач.
Таким образом, в тягачах может применяться только гидро-
механическая непрерывно-ступенчатая пере-
дача.
Рис. 170. Узловые точки гидротрансформатора:
а — узловая точка простого трансформатора; б — узловая точка комплексного
трансформатора; в — узловая точка полимерического трансформатора
Гидромеханические передачи имеют различные схемы, которые
можно свести в три основные группы:
— передачи с последовательным силовым потоком;
— передачи с параллельным силовым потоком;
— комплексные передачи.
Прежде чем рассматривать эти передачи, примем некоторые
условные обозначения.
Условимся обозначать в схеме силового потока узловую точку
гидродинамического трансформатора, как указано на рис. 170.
Здесь знак треугольника (рис. 170,6 и в) обозначает автолог.
Узловая точка трансформатора имеет только внешние механи-
ческие потоки, диссипативные потоки на узловой точке условно не
обозначаем, хотя они, конечно, всегда имеются.
Кроме того, условимся обозначать гидромеханическую передачу
буквами ГМП.
На рис. 171 представлены схемы силового потока трех основных
типов ГМП.
В ГМП с последовательным силовым потоком коробка
передач установлена последовательно с гидротрансформатором;
здесь вся мощность двигателя проходит через трансформатор.
В ГМП с параллельным силовым потоком имеется раз-
ветвление потока мощности двигателя на две ветви — гидравличе-
скую и механическую. Обе эти ветви за трансформатором соединя-
ются в суммирующей узловой точке с, представляющей собой зуб-
чатый дифференциальный механизм, далее поток идет к коробке
передач.
Особенностью схемы ГМП с параллельным потоком является то,
16-20 241
Рис. 171. Схемы силового потока трех основных
типов ГМП:
я —ГМП с последовательным силовым потоком; б — ГМП с парал-
лельным силовым потоком; в — комплексная ГМП
что поток двигателя лишь частично проходит через гидротрансфор-
матор, остальная же часть потока идет по механической ветви.
Вследствие этого уменьшаются потери в ГМП и возрастает ее
к. п. д. В некоторых гидромеханических передачах >)тах достигает
0,94, в то время как тдтах самого гидротрансформатора не превы-
шает 0,85.
Следует, однако, иметь в виду, что так как в этих передачах
силовой поток обычно разветвленный, то диапазон ре-
гулирования передачи по сравнению с переда-
чей с последовательным потоком будет меньше
(см. ч. 1, гл. V, раздел 5 «Замкнутые силовые потоки»).
Таким образом, выигрывая в к.п.д., мы проигрываем в коэф-
фициенте приспособляемости ГМП.
Комплексной ГМП будем называть передачу, которая вы-
242
полняет не только функции трансформатора прямолинейного дви-
жения, но и функции механизма поворота машины.
Согласно схеме силового потока (рис. 171, в) поток двигателя
идет на гидротрансформатор, а от него на коробку передач. Здесь
он разветвляется на две суммирующие точки (дифференциальные
механизмы) d и с2. Одновременно к суммирующим точкам подво-
дится поток от разветвляющей узловой точки а. Этот поток прохо-
дит через узловую точку д, представляющую обычный дифферен-
циал, применяющийся в автомобилях. Суммируясь в узловых точ-
ках cl и с2, потоки идут к гусеницам.
На рис. 171,в показана схема силового потока при прямолиней-
ном движении машины. Чтобы осуществлялся поворот, необходимо
притормозить соответствующие потоки с одного борта передачи.
Тогда общий силовой поток изменит свое направление и потечет от
одной гусеницы к другой, что и будет являться признаком поворота
машины.
Комплексные ГМП широко применяются на американских гусе-
ничных машинах; это известные передачи Кросс-Драйв.
Конструктивно, а также и по схеме силового потока ГМП могут
значительно отличаться друг от друга. Однако все они в той или
иной мере варьируют рассмотренные выше три основные схемы си-
ловых потоков.
Рассмотрим кратко некоторые гидромеханические передачи,
применяющиеся на колесных и гусеничных машинах.
ГИДРОМЕХАНИЧЕСКАЯ ПЕРЕДАЧА АВТОМОБИЛЯ «ВОЛГА»
Гидромеханическая передача (опытная) автомобиля «Волга»со-
стоит из одноступенчатого комплексного гидротрансформатора а
(рис. 172) и одноточечной планетарной коробки передач б.
Для перехода со второй передачи на третью (прямая) и наобо-
рот применяется специальный центробежный автомат.
Передача имеет следующие параметры: активный диаметр гидро-
трансформатора D = 0,28 м, мощность двигателя Ne = 70 л. с.,
число оборотов насоса лн=3600 об/мин. Порядок переключения
передач и получаемые при этом передаточные числа I приведены
в таблице на рис. 172.
Из схемы силового потока (рис. 172, в) следует, что данная
ГМП является передачей с последовательным силовым потоком.
ГИДРОМЕХАНИЧЕСКАЯ ПЕРЕДАЧА ГРУЗОВОГО АВТОМОБИЛЯ МАЗ-525
На рис. 173 представлены кинематическая схема и схема сило-
вого потока гидромеханической передачи грузового автомобиля
МАЗ-525.
Передача состоит из одноступенчатого комплексного гидротранс-
форматора а и одноточечной планетарной коробки передач б, уста-
новленных в последовательном силовом потоке.
16*
243
Рис. 172. Кинематическая схема и схема силового потока гидромеханической
передачи автомобиля „Волга11:
а — одноступенчатый комплексный гидротрансформатор; б — одноточечная планетарная коробка
передач; в — схема силового потока гидромеханической передачи
244
Рис. 173. Кинематическая схема и схема силового потока гидро-
механической передачи грузового автомобиля МАЗ-525 (опыт-
ный образец):
а — одноступенчатый комплексный гидротрансформатор; б — одноточечная пла-
нетарная коробка передач; в — схема силового потока
Переключение передач приведено в таблице на рис. 173.
При включении тормоза Т1 или одной из фрикционных муфт
(Ф1, Ф2 или ФЗ) можно получить ту или иную передачу в ко-
робке.
При включении муфты Ф4 происходит блокировка гидротранс-
форматора. Силовой поток в этом случае идет только по верхней
механической ветви. Трансформатор же как таковой отключается.
Эта ступень в передаче необходима для запуска двигателя бук-
сиром, для торможения машины двигателем и главное — для дви-
жения машины на высших скоростях.
При включении муфты Ф2 блокируется механическая узловая
точка. Если при этом сблокирован и трансформатор, то получается
245
прямая передача. Включение остальных фрикционных эле-
ментов дает повышенную или замедленную передачу (передаточное
число точки б z < 1).
ГИДРОМЕХАНИЧЕСКАЯ ПЕРЕДАЧА ПАУЭРМАТИК
Гидромеханическая передача Пауэрматик (модель 1956 г.) из-
готовляется фирмой Шевроле совместно с фирмой Аллисон и пред-
назначается для грузовых автомобилей средней и большой грузо-
подъемности.
а
Рис. 174. Кинематическая схема и схема силового
потока гидромеханической передачи Пауэрматик:
а— схема гидромеханической передачи; б — схема силового
потока
Гидромеханическая передача (рис. 174, а) имеет гидротрансфор-
матор типа Аллисон и шестиступенчатую планетарную коробку пе-
редач. Коробка в свою очередь имеет два диапазона передач —
низший и высший. Диапазон низших передач состоит из двух сту-
пеней, а высших передач — из четырех ступеней. Гидротрансфор-
матор используется только на первых ступенях каждого диапазона.
На остальных ступенях он отключается (блокируется) с помощью
муфты ФЗ.
На рис. 174, б приведена схема силового потока ГМП.
Силовой поток состоит из одной узловой точки гидротрансфор-
матора и четырех механических узловых точек. Силовой поток как
ГМП в целом, так и планетарной коробки последовательный. Ко-
робка передач имеет четыре степени свободы, следовательно, каж-
дая передача получается включением трех фрикционных элемен-
тов. Переключение передач автоматизировано.
246
ГИДРОМЕХАНИЧЕСКАЯ ПЕРЕДАЧА АМЕРИКАНСКОГО ТАНКА М-26
И САМОХОДНОЙ УСТАНОВКИ СУ-Т-70
Гидромеханическая передача (рис. 175, а) состоит из планетар-
ного редуктора, установленного между двигателем и гидротранс-
форматором, трехступенчатого гидротрансформатора системы Лис-
хольм-Смит и трехступенчатой коробки передач. Мощность пере-
дачи 500 л. с. Включение передач осуществляется: первой ступе-
Рис. 175. Кинематическая схема и схема силового по-
тока гидромеханической передачи американского танка
М-26 и самоходной установки СУ-Т-70:
а—схема гидромеханической передачи; б — схема силового потока
ни — фрикционами Ф1 и Ф2, второй ступени — тормозом Т2 и
фрикционом Ф2, третьей ступени — тормозом Т1 и фрикцио-
ном Ф2, заднего хода — тормозом Т1 и фрикционом Ф1.
Гидромеханическая передача с последовательным силовым по-
током.
ГИДРОМЕХАНИЧЕСКАЯ ПЕРЕДАЧА ФОЙТ-ДИВАБУС
Гидромеханическая передача Фойт-Дивабус (рис. 176, а) со-
стоит из одноступенчатого гидротрансформатора Фетингер и пла-
нетарной коробки передач на две ступени (вперед).
Как следует из схемы силового потока (рис. 176, б), данная ГМП
принадлежит к типу передач с параллельным силовым
потоком. Действительно, поток мощности в суммирующей узло-
вой точке с разветвляется на две ветви: один поток идет к транс-
форматору, а другой — по механической ветви. Далее потоки со-
единяются в разветвляющей точке и идут к коробке передач. Таким
образом, имеется замкнутый или параллельный силовой поток.
247
Разветвление потоков улучшает к. п. д. передачи. По данным
фирмы, гидротрансформатор имеет 7]тах= 0,85, а ГМП 7)тах= 0,94.
Если необходимо (например, при движении на высшей передаче,
при запуске двигателя буксиром, при торможении машины двигате-
лем), трансформатор может отключаться. Для этого включается
тормоз Т1. Чтобы при этом не было проворачивания турбины, а сле-
довательно, не было лишних потерь мощности, последняя отклю-
чается, так как она установлена на автологе.
Рис. 176. Кинематическая схема и схема силового по-
тока гидромеханической передачи Фойт-Дивабус:
а — схема гидромеханической передачи; б — схема силового потока
ГМП Фойт-Дивабус применяется на загородных автобусах. Ав-
тобусы с этой передачей обладают хорошей приемистостью (выше,
чем с шестискоростной коробкой передач) и вполне удовлетвори-
тельной топливной экономичностью.
гидромеханическая передача с вращающимся
НАПРАВЛЯЮЩИМ АППАРАТОМ
На французских грузовых автомобилях и автобусах применяется
оригинальная гидромеханическая передача (ряс. 177, а) с парал-
лельным силовым потоком и с вращающимся направляющим аппа-
ратом.
ГМП имеет три режима движения.
Первый режим: включен тормоз Т; при трогании машины с ме-
ста включается низшая передача.
На этом режиме направляющий аппарат получает вращение,
направленное в сторону, противоположную направлению вращения
насоса и турбины. Так как момент на направляющем аппарате при
понижающем трансформаторе всегда совпадает по знаку с момен-
том на насосе, то поток направляющего аппарата должен быть
248
отрицательный. Тогда,как
это показано на рис.
177,6, передача будет с
параллельным разветв-
ленным силовым потоком.
Второй режим: затор-
можен тормоз ТА (тор-
моз Т выключен); рабо-
тает один гидротрансфор-
матор (узловая точка с
холостая), передавая всю
мощность двигателя. Ма-
шина имеет средние ско-
рости движения.
Третий режим: вклю-
чена муфта Ф; трансфор-
матор сблокирован, узло-
вая точка с холостая,
включена прямая переда-
ча. Машина движется на
высшей скорости.
На рис. 178 представ-
лена характеристика ги-
дромеханической пере-
Рис. 177. Кинематическая схема и схема сило-
вого потока гидромеханической передачи
с вращающимся направляющим аппаратом:
а—схема гидромеханической передачи; б — схема сило-
вого потока
дачи с вращающимся направляющим аппаратом.
Из характеристики следует, что кривая к. п. д. на первом режиме
сдвигается влево и в области малых передаточных чисел 0,1—0,4
имеет достаточно высокое значение (д = 0,6—0,8). Коэффициент
трансформации к достигает при этом 10 (на стопе), что обеспечивает
Рис. 178. Характеристика гидромеха-
нической передачи с вращающимся
направляющим аппаратом
машине высокую приемистость.
Гидромеханическая передача
конструктивно проста. Она со-
стоит из трансформатора и эле-
ментарного дифференциального
механизма (имеется еще один
дифференциальный механизм, не
показанный на рисунке, для по-
лучения заднего хода).
Дорожные испытания автобу-
са с этой передачей показали ее
хорошую топливную экономич-
ность. Так, при движении со ско-
ростью 30 км/час с полной нагруз-
кой расход горючего был на 18%
ниже, чем при движении с той
же скоростью со ступенчатой ко-
робкой и с гидромуфтой, а
при движении со скоростью
50 км/час — на 8% ниже.
249
ГИДРОМЕХАНИЧЕСКАЯ ПЕРЕДАЧА КРОСС-ДРАЙВ
Гидромеханическая передача Кросс-Драйв (рис. 179) состоит
из одноступенчатого полимерического гидротрансформатора а типа
Аллисон, планетарных механизмов бив, простого цилиндрического
дифференциала г, зубчатых редукторов д и е, установленных между
планетарными механизмами и дифференциалом, конического редук-
тора ж, бортовых пеоедач з и и.
Рис. 179. Кинематическая схема гидромеханической передачи Кросс-
Драйв (первый вариант)
Передача имеет семь фрикционных элементов: шесть тормозов и
одну муфту.
Гидромеханическая передача Кросс-Драйв применяется на аме-
риканских гусеничных машинах.
Включением тормоза Т1 осуществляется прямолинейное движе-
ние машины на замедленной передаче; включением муфты Ф —
также прямолинейное движение на ускоренной передаче.
Поворот машины осуществляется включением тормозов Т2 или
ТЗ, установленных на полуосях дифференциала г. При этом одно-
временно могут быть включены тормоз TJ или муфта Ф или только
тормоз Т2 или тормоз ТЗ (табл. 18).
Таблица 18
Переключение передач в ГМП Кросс-Драйв
(первый вариант1)
Режим движения ф Т1 Т2 ТЗ Т4
Прямолинейное, замедленное +
1 Знак «+» означает включение того или иного фрикционного элемента.
250
Режим движения ф Г1 Т2 тз Т4
Прямолинейное, ускоренное +
Прямолинейное, задний ход +
Поворот направо, замедленный + +
Поворот направо, ускоренный + +
Поворот налево, замедленный + +
Поворот налево, ускоренный + +
Поворот при нейтрали, направо +
Поворот при нейтрали, налево +
Передача Кросс-Драйв имеет хорошую тяговую характеристику,
благодаря чему машина обладает высокими средними скоростями
движения; передача управляется с помощью следящей гидравли-
ческой системы, что позволило свести все органы управления маши-
ной к одному рычагу; в передаче применяются работающие в масле
металлокерамические фрикционные элементы, обладающие ста-
бильным коэффициентом трения.
Недостатком передачи является сложность конструкции.
На рис. 180 представлен второй вариант ГМП Кросс-Драйв.
Особенностью этой передачи является установка гидротрансформа-
тора в последовательном силовом потоке (в первом
варианте он стоял в параллельном потоке), а также наличие бло-
кировочного фрикциона между насосом и турбиной. Схема передачи
второго варианта по сравнению со схемой передачи первого ва-
рианта несколько улучшена: возможно торможение машины двига-
телем, допускается запуск двигателя буксиром. Однако и во вто-
ром варианте передача остается все же очень сложной.
251
От двигателя
Рис. 180. Схема гидромеханической передачи Кросс-Драйв (второй
вариант)
В табл. 19 приведен порядок включения фрикционных элементов
передачи на различных режимах движения машины.
Таблица 19
Переключение передач в ГМП Кросс-Драйв
(второй вариант1)
Режим движения ф Т1 Т2 ФП ФЛ
Прямолинейное, замедленное +
Прямолинейное, ускоренное +
Прямолинейное, задний ход +
Поворот направо, замедленный + +
Поворот направо, ускоренный + +
Поворот налево, замедленный + +
Поворот налево, ускоренный + +
Поворот при нейтрали, направо +
Поворот при нейтрали, налево +
Мы рассмотрели ГМП, применяющиеся на современных автомо-
билях и гусеничных машинах. Некоторые из этих передач очень
сложные. Как правило, все ГМП менее экономичны, чем обычные
зубчатые коробки передач.
Несмотря на это ГМП получают все более широкое распростра-
нение и все больше вытесняют зубчатые коробки передач. Главное
преимущество ГМП — это простота и автоматичность управления
машиной. При наличии ГМП повышается проходимость и маневрен-
ность гусеничных машин, а также облегчается их поворот.
1 Знак «+» означает включение того или иного фрикционного элемента.
253
7. РАСЧЕТ ГИДРОМЕХАНИЧЕСКИХ ПЕРЕДАЧ
В самоходных машинах применяются исключительно гидроме-
ханические передачи, т. е. передачи, состоящие из двух типов транс-
форматоров— непрерывного гидродинамического и ступенчатого
зубчатого, установленных в последовательном или параллельном
силовом потоке. Ступенчатый трансформатор, или, как мы его в
дальнейшем будем называть, коробка передач, является
вспомогательным механизмом, позволяющим расширять силовой
диапазон основного гидродинамического трансформатора.
Так как ГМП представляет единую гидромеханическую переда-
ющую систему, то ее расчет целесообразно вести общим методом —
методом теории силового потока. Этот метод дает наиболее простое
решение задачи и по существу не отличается от метода расчета
обычных зубчатых передач. Здесь имеется только одна особенность
в определении диссипативной функции, или функции гидравличе-
ских потерь.
Следует заметить, что определение потерь в гидродинамическом
трансформаторе является наиболее сложной и наименее точной
частью решаемой задачи. Даже в неподвижных трубах определе-
ние потерь представляет известную трудность. Лопастная же си-
стема трансформатора находится во вращении, что оказывает
влияние на течение жидкости в каналах ее рабочих колес, вызы-
вает нарушение структуры потока и его завихрение. Это в свою
очередь ведет к увеличению гидравлических потерь. Кроме того,
при выходе потока жидкости из одного колеса и входе его в дру-
гое колесо происходит гидравлический удар, вызывающий ударные
потери в гидравлическом трансформаторе.
Все эти явления, складываясь, создают чрезвычайно сложную
картину потерь, которая не поддается точному математическому
описанию. Отсюда и возникает трудность определения диссипатив-
ной функции. Она может определяться лишь приближенно по эм-
пирическим формулам. Чем точнее будет определена диссипативная
функция, тем точнее будет и расчет гидродинамического трансфор-
матора, а следовательно, потребуется меньше времени и на его до-
водку.
Заметим, что создание нового типа трансформатора — это дли-
тельная и трудоемкая расчетно-экспериментальная работа, иногда
продолжающаяся несколько лет. Так, разработка конструкции аме-
риканской гидромеханической передачи Кросс-Драйв продолжа-
лась 8 лет. Не меньше времени потребовалось и на создание гидро-
передачи Лисхольм-Смит.
Процесс создания ГМП и особенно ее основного элемента —
гидродинамического трансформатора — по сложности и длительно-
сти почти такой же, как процесс создания двигателя внутреннего
сгорания. И в том и в другом случае требуется значительное время
на доводку агрегата до его оптимальных параметров.
Для сокращения времени, потребного на проектирование гидро-
254
динамического трансформатора, конструкторы иногда становятся
на путь копирования готовых, уже испытанных и оправдавших себя
в эксплуатации образцов. Для этого трансформатор подбирается
по законам подобия по имеющемуся прототипу.
Путь этот, конечно, наиболее простой и скорее всего приводя-
щий к созданию трансформатора. Однако он имеет и свою отрица-
тельную сторону: копированием нельзя создать ничего принципиаль-
но нового. Больше того, копирование, создавая иллюзию техниче-
ского развития, на самом деле тормозит это развитие, так как от-
учает конструктора от самостоятельного творческого мышления.
Чтобы создавать гидродинамические трансформаторы новых типов,
надо уметь их рассчитывать.
В настоящей главе излагаются как метод подобия, на котором
основан подбор (копирование) гидродинамического трансформатора
по известному прототипу, так и общий метод расчета ГМП любых
типов, в том числе и расчет гидродинамического трансформатора.
ПОРЯДОК РАСЧЕТА ГИДРОМЕХАНИЧЕСКИХ ПЕРЕДАЧ
Расчет гидромеханических передач, как и передач других ти-
пов, ведется в два этапа. Сначала производится предвари-
тельный расчет, потом поверочный расчет.
Задача предварительного расчета заключается в определении
по исходным данным на проектирование геометрических параметров
трансформатора и передаточных чисел вспомогательной коробки
передач.
Задача поверочного расчета заключается в построении характе-
ристик передачи по заданным геометрическим и кинематическим
параметрам.
Если в процессе поверочного расчета выяснится неудовлетвори-
тельность основных характеристик передачи, то в геометрию транс-
форматора и в передаточные числа коробки передач должны быть
внесены соответствующие коррективы и поверочный расчет должен
быть произведен заново.
Важным этапом в расчете ГМП является выяснение условий
совместной работы двигателя и гидродинамиче-
ского трансформатора при установке последнего как в по-
следовательном, так и в параллельном силовом потоке.
Остановимся на этом вопросе подробнее.
Допустим, что мы имеем характеристику момента двигателя Ма
и каноническую характеристику трансформатора, соединенного не-
посредственно с двигатедем. Согласно закону подобия можем напи-
сать для моментов насоса
/ ' \ 2
/ й)ц \
-4-Ин, (цб)
где /Ин—момент насоса, определенный по канонической характе-
ристике при заданном передаточном числе zTH;
255
Л/ц — момент насоса при работе трансформатора на неканони-
ческом режиме, т. е. при вращении насоса со скоростью
чщ (произвольная угловая скорость);
<»н — скорость вращения насоса на каноническом режиме.
Поставим теперь следующие условия совместной работы двига-
теля и гидродинамического трансформатора.
Пусть при максимальной нагрузке на турбину трансформатора
его насос снижает угловую скорость до <инПпп> а ПРИ минимальной
нагрузке повышает угловую скорость до wH тах. При этом канониче-
ский режим трансформатора определяется скоростью шн. Так как
вал насоса соединен непосредственно с валом двигателя, то
(Пи = (О И 0JTT (О
ШН тш д тш Н max д max
Пусть наибольшей нагрузке соответствует передаточное число
ZTHmin, а наименьшей нагрузке г'тн max. Этим передаточным числам
по канонической характеристике соответствуют моменты /Ин тах и
min > а к валУ насоса должны быть приложены моменты
max = /Ид max И ^Н min = Ч min’ ГДС ~ МОМСНТ НЭ ВЭЛу
двигателя.
Согласно равенству (116) можем написать
/И
д max I ш I "’Н max’
\ н /
/о) \ 2
/И = / _д та*. ) М
д mm I согт I Н min*
\ н /
Поделим первое равенство на второе. Получим
max / min V Z^H max
^д min у max у min
max
где jr,---------= — коэффициент приспособляемости двигателя;
/ид min
max
—-------- — диапазон рабочих оборотов двигателя;
д min
^Н тах , , „
—----= ср — коэффициент прозрачности канонической
/1Н min
характеристики трансформатора.
Тогда окончательно получим формулу
? = 017)
По этой формуле определяется, какой прозрачностью должен
обладать трансформатор, чтобы была использована приспособляе-
мость двигателя.
Допустим, что коэффициент приспособляемости двигателя
1,25, диапазон рабочих оборотов </д = 1,67. Тогда трансформа-
256
тор должен обладать прямой прозрачностью с коэффициентом про-
зрачности
= 1,25-1,672 = 3,48.
Это очень высокая прозрачность, однако только обладая такой
прозрачностью трансформатор сможет использовать полностью при-
способляемость двигателя.
Если трансформатор поставлен в параллельном силовом потоке
(рис. 171,6), то его коэффициент прозрачности определяется по
следующей формуле:
(И8)
йтах “Ь
где &min и &тах—минимальный и максимальный коэффициенты
трансформации гидродинамического трансформа-
тора;
т)с — к. п. д. механической узловой точки;
Z'I2c — внутреннее передаточное отношение механиче-
ской узловой точки.
Пусть k^ = 1,25; </д=1,67; т)с = 0,96; Z)2c =—2,4.
При установке трансформатора в параллельном потоке послед-
ний может, работать на режиме тормоза, когда турбина получает
обратное вращение. При этом коэффициент трансформации полу-
чает очень высокое значение и может достигать абсолютной вели-
чины ^тах = 5 - 7‘
Примем k. =—1; & „ =—5. Получим
1 ГП1П ' ГПал **
_ 1 _ 0 96.2 4
'р=1’251’б72^4^1Н>== 1’58-
Отсюда следует, что от трансформатора, установленного в па-
раллельном силовом потоке, требуется меньшая прозрачность
(а иногда даже обратная прозрачность).
По формулам (117) и (118) оценивается возможность совмест-
ной работы двигателя и трансформатора с точки зрения использова-
ния приспособляемости двигателя. Поэтому эти формулы являются
исходными при расчете ГМП.
После того как в результате расчета будет получена удовлетво-
рительная характеристика ГМП, производится проектирование ло-
пастной системы гидродинамического трансформатора и передачи
в целом. Затем строится и испытывается опытный образец транс-
форматора. На опытном образце лопастная система трансформа-
тора окончательно доводится до получения расчетной характери-
стики.
При расчете трансформатора должен быть одновременно произ-
веден расчет и его системы подпитки и охлаждения. Система под-
питки и охлаждения рассчитывается по формулам теплотехники.
Здесь мы расчет этой системы не рассматриваем.
17—20 257
8. ПРЕДВАРИТЕЛЬНЫЙ РАСЧЕТ ГИДРОМЕХАНИЧЕСКОЙ
ПЕРЕДАЧИ
ИСХОДНЫЕ ДАННЫЕ И ВЫБОР СХЕМЫ ГИДРОМЕХАНИЧЕСКОЙ
ПЕРЕДАЧИ
В качестве исходных данных для расчета гидромеханической
передачи должны быть заданы:
— вес тягача (с грузом на платформе) G;
— вес прицепа Gi;
— характеристика двигателя (желательно внешняя и частич-
ная);
— максимальная скорость движения машины
— максимальная скорость движения поезда Т'тах.
На основании исследования выполненных конструкций ГМП
выбирают ту или иную схему передачи: с последовательным или
с параллельным силовым потоком (см. рис. 171).
Если выбрана схема с последовательным силовым потоком, то
трансформатор должен рассчитываться на полную мощность дви-
гателя.
Если выбрана схема с параллельным силовым потоком, то сле-
дует задаться величиной коэффициента циркуляции
(коэффициента нагрузки) г. Тогда мощность, которая будет ответ-
вляться в трансформатор, определится по формуле
Nn = sNe. (Н8')
Необходимо также решить вопрос, как будет соединяться ГМП
с двигателем: непосредственно или через редуктор. Если через ре-
дуктор, то надо задаться его передаточным числом. В дальней-
шем будем считать, что двигатель соединяется с ГМП непосред-
ственно.
Из параллельных схем силового потока может быть выбрана
схема, представленная на рис. 171,6, имеющая разветвляющую
узловую точку впереди механической (схема РМ), или обратная
схема, имеющая механическую узловую точку впереди разветвляю-
щей (схема МР). Чаще всего в ГМП применяется первая схема,
имеющая ряд положительных качеств. Здесь мы рассматриваем
только эту схему, хотя метод расчета является общим и справедлив
также и для обратной схемы силового потока.
После того как выбрана схема ГМП, приступают к ее расчету.
В расчете в первую очередь определяются геометрические пара-
метры гидродинамического трансформатора.' Эти параметры можно
подобрать методом подобия, взяв за основу параметры имеющегося
прототипа трансформатора, или рассчитать трансформатор методом
силового потока.
Рассмотрим оба метода.
258
ОПРЕДЕЛЕНИЕ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ТРАНСФОРМАТОРА
МЕТОДОМ ПОДОБИЯ
Зная мощность, подводимую к насосу трансформатора 2VH, и
угловую скорость насоса ®Н) равную угловой скорости вала двига-
теля ®N, можно найти геометрические параметры
трансформатора.
Допустим, что имеется трансформатор с удовлетворяющей нас
характеристикой (прототип). Необходимо пересчитать этот транс-
форматор на новую мощность и новые обороты вала насоса, соот-
ветствующие мощности и оборотам двигателя, для которого проек-
тируется трансформатор.
Согласно закону подобия имеем
5 ______________
/ yr ТТ / (Отт
D = D'l/ -------М —
У 1 Мн \ ”’н
(118-
где D — активный диаметр проектируемого трансформатора;
D' — активный диаметр прототипа;
у — объемный вес рабочей жидкости проектируемого транс-
форматора;
у' —объемный вес рабочей жидкости прототипа;
/Ин — крутящий момент на расчетном режиме проектируемого
трансформатора Т (на валу насоса);
А/ц — крутящий момент на расчетном режиме прототипа;
<«н — угловая скорость вала насоса проектируемого транс-
форматора;
®н' — угловая скорость вала насоса прототипа.
Величины в правой части формулы (118") известны или могут
быть определены согласно исходным данным. Затем определяется
активный диаметр трансформатора.
Диаметры колес трансформатора определяются из равенств:
£,Н ^1Н ^2Н ^2H .
D ~ ’ ~D D ’
Э]Т О1Т
7Г = -Д- и т- д-
Число лопаток и углы их наклона берутся те же, что и у про-
тотипа, так как согласно законам подобия оба трансформатора
должны быть изогональны, т. е. геометрически подобны.
Зная каноническую характеристику прототипа, можно по ней по-
строить каноническую характеристику проектируе-
мого трансформатора. Для этого имеются следующие
расчетные формулы, устанавливающие связь между параметрами
обоих трансформаторов:
17*
259
2
/Ит = /г/Ин;
шт = г'тн0)н>
wH = const.
Задаваясь произвольно передаточным числом г‘тн, из канониче-
ской характеристики прототипа находим /И}[. Тогда получаем из
первой формулы величину /Ин в функциигтн; далее из характери-
стики прототипа берем коэффициент трансформации k. Тогда из
второй формулы получим момент /Ит в функции zTH. Угловая ско-
рость вала насоса % должна быть задана. Она равняется скоро-
сти вала двигателя на расчетном режиме.
Заметим, что величины z'TH и k могут иметь как положительное,
так и отрицательное значение. Если трансформатор прямого хода,
то zTH >0, a k < 0.
ОПРЕДЕЛЕНИЕ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ТРАНСФОРМАТОРА
МЕТОДОМ СИЛОВОГО ПОТОКА
Если прототип отсутствует, то трансформатор можно рассчитать
методом силового потока по выбранным исходным данным.
Рассмотрим в качестве примера расчет одноступенчатого транс-
форматора прямого хода со структурной формулой силового потока
Н — -> Т — > А — > Н.
Составляем для этого трансформатора схему силового потока.
Из схемы можем написать следующую систему уравнений:
— уравнения моментов узловых точек Н и Т (узловых точек
насоса и турбины):
+ ^,Н + ^2Н =0‘>
Л4Т 4" /И1Т “Ь ^2т =
— уравнения связывающих потоков:
^2Н + ^1Т ~
/И2Т + /И1А — 0;
^2А “Ь Чн = 0‘.
— уравнение внешних мощностей:
7)г /Ин<1)н 4- Л4Т<»Г = 0,
где т)г—гидравлический к. п. д. трансформатора.
260
Гидравлические моменты /И1Н, /И2Н, /И1Т и т. д. могут быть вы-
ражены через геометрические параметры узловых точек:
/Wu = a1K<nKQ — Z»IKQ2; (119)
= - a^Q + £2kQ3, (120)
где к — индекс соответствующего рабочего колеса (к=Н,Т или Л);
Согласно формулам 143 (см. ч. 1) имеем:
—
fl1.2K-------------------------- g
А —_______________
1/1 9 - !
£7^1,2к tg ₽i,2k
Зададимся следующим условием работы трансформатора на рас-
четном режиме. Примем, что поток рабочей жидкости,
выходящий из одного колеса, входит в каналы
другого колеса без удара в лопатки. Тогда углы Р'К1
т. е. углы входа потока в каналы колеса, будут равны углам наклона
лопаток. Обозначим углы наклона лопаток через 0, (Р'к = |31к).
Углы выхода потока из колеса ₽2к—не равны углам наклона
лопаток на выходе р2к, так как при выходе потока имеет место его
отклонение от профиля лопаток.
Подставляя в исходную систему уравнений значение гидравли-
ческих моментов, выраженных через геометрические параметры, по-
лучим после соответствующих преобразований значение вели-
чин ^,2к:
(122)
Здесь все величины, входящие в правую часть равенств должны
быть заданы
Кроме того, должны быть заданы радиусы лопастных,
колес.
261
Для этого вначале определяем по формуле
метр трансформатора
(115) активный диа-
D = 10
б / 11,57УН
V ’
(123)
где D—активный диаметр в ж;
7VH — мощность на валу насоса в л. с.\
<»н — угловая скорость вращения колеса насоса в 1/сек;
An— коэффициент мощности;
у — объемный вес рабочей жидкости в кг!м\
Рис. 181. Формы рабочей полости:
а — круглая; б — прямоугольная; в — овальная
Коэффициент мощности зависит от формы рабочей полости,
взаимного расположения колес, их радиусов и от гидродинамиче-
ских качеств лопастной системы.
Коэффициентом мощности AN можно задаться согласно данным
табл. 17 по аналогии с уже выполненными трансформаторами.
Если при принятом коэффициенте мощности активный диаметр
получается слишком большим, то следует увеличить коэффициент
мощности. Наоборот, если диаметр получается слишком малым, то
коэффициент мощности можно уменьшить. В этом случае будет
большая гарантия получить трансформатор с высокими экономиче-
скими показателями (с высоким к. п. д.).
Заметим, что увеличение коэффициента мощности Л/v ведет
к увеличению нагрузки на лопастную систему трансформатора, по-
этому не следует слишком отходить от опытных данных, приведен-
ных в табл. 17.
Если при данном типе трансформатора не удается получить удо-
влетворительное значение коэффициента мощности, то следует вы-
брать другой тип трансформатора, имеющий большее значение коэф-
фициента мощности.
Определив активный диаметр трансформатора, можно наметить
общие размеры его рабочей полости и радиусы колес.
Форма рабочей полости принимается или круглая, или овальная,
или прямоугольная со скругленными углами (рис. 181).
Наиболее рациональной является круглая полость. Однако
262
в круглой полости не всегда удается получить каналы без диффу-
зорности (диффузорность увеличивает потери в трансформаторе),
поэтому круглую полость заменяют овальной (или какой-нибудь
другой формы). При цилиндрической лопастной системе, например
в трансформаторе Лисхольм-Смит (см. рис. 153), рабочая полость
получается прямоугольной.
Чтобы расширить каналы в местах большого сужения (на малых
радиусах) и тем самым уменьшить гидравлические потери, лопатки
в этом месте обрезают (рис. 181).
Для уменьшения потерь на поворот потока в местах резких по-
воротов струи жидкости в меридиональном сечении лопатки, как пра-
вило, не ставят.
Выбрав форму рабочей полости и зная активный диаметр транс-
форматора, можно по аналогии с выполненными конструкциями
трансформаторов определить размеры рабочих колес — радиусы ко-
лес и ширину каналов.
Ориентировочно ширина каналов насосного колеса определяется
по формуле
Д2Н = (0,050 — 0,065) D,
где D — активный диаметр трансформатора.
Радиусы рабочих колес отсчитываются от торца лопаток по сред-
ней линии тока жидкости до главной оси трансформатора.
Соотношения между радиусами колес и активным диаметром
приведены в табл. 17, откуда они и могут быть ориентировочно опре-
делены.
Если радиусы колес будут заданы, то в формулах (121) опреде-
лятся значения параметров <?ь2в.
Зададимся угловой скоростью wH. Обычно принимают на расчет-
ном режиме для понижающего
<»Т== ^тцМн.
Далее необходимо задаться
Из формул (121) находим
^2А =
трансформатора /тн = 0,5—0,6. Тогда
величинами Z»'2A, Q, v)r.
r,>\
£Т^2а‘8₽2а ’
(124)
Здесь надо задаться объемным весом рабочей жидкости 7, пло-
щадью живого сечения каналов на выходе из колеса направляющего
аппарата F2A и углом ₽2А-
Живое сечение каналов определяется по формуле
^1,2« = 2~Г|12к S12k ф112к,
где г— радиус колеса;
В— ширина каналов (выбирается из чертежа рабочей полости);
ф— коэффициент стеснения потока.
, _ । 8гк
—' лОЬ2к sin 01>2К ’
(125)
U26)
263
где 3—толщина лопаток;
гк — число лопаток колеса k;
L)—диаметр колеса;
Р—угол наклона лопаток.
Число лопаток можно определить по формуле
(127)
где t—расстояние между лопатками по наибольшему диаметру
колеса, или шаг лопаток.
Шаг t определяется из равенства
Z = (128)
где /0 — длина лопатки по средней линии тока в меридиональной
плоскости (определяется из чертежа рабочей полости);
4—приведенный шаг.
Для современных трансформаторов приведенный шаг находится
в пределах 0,35—0,85.
Задаемся углом р.,А. Этот угол можно принять равным углу р2А.
В выполненных конструкциях трансформаторов угол р2А обычно на-
ходится в пределах 140—160°.
Далее задаемся расходом Q. Расход Q определяет лопастную си-
стему трансформатора, углы наклона лопаток, а также нагрузку на
лопатки, скорости потока и т. д.
Между расходом и меридиональной скоростью существует зави-
симость
_ Q
В выполненных конструкциях принимают
~ (0,1 J 0,30) и,н,
где м2Н = г2Н(он — окружная скорость колеса насоса.
Тогда можем написать
Q = (0,15-0,30) TF2Hr2H«>H. (129)
Задаемся расходом Q так, чтобы он не выходил из границ, уста-
навливаемых формулой (129).
Желательно также проверить принятую величину расхода Q по
коэффициенту быстроходности.
Q= <13«)
где ns — коэффициент быстроходности; его величина лежит в пре-
делах 100—250 в зависимости от отношения ^h-^ih!
где D2h — диаметр насосного колеса на выходе;
£)'н — диаметр насосного колеса на входе у тора.
264
Так, для одноступенчатых трансформаторов типа ВАТТ-1 имеем
прИ £)2Н :£)'н = 1,8 — 2 ns = 120- 140; при Г>211 :Г>'1Н = 1,2 — 1,6
л5 = 250 — 150.
Если рассчитывается трансформатор какого-нибудь другого типа,
то для него следует предварительно определить коэффициент бы-
строходности прототипа и сравнить его с коэффициентом быстро-
ходности проектируемого трансформатора.
В заключение необходимо задаться к. п. д. трансформатора на
расчетном режиме ?]г. Ориентировочно его можно принять равным
0,9—0,95.
Таким образом, после того как все величины в правой части ра-
венств (122) будут определены, найдем геометрические параметры.
Согласно формулам (121) определяем
tpr 8' = ——
lgPl-2K
(131)
Здесь индекс 1 относится к входу потока в колесо и индекс 2 —
к выходу потока из колеса. Для углов с индексом 1 штрих опу-
скается, так как на расчетном, режиме принимаем безударный вход
потока в рабочее колесо. Тогда по формуле (131) будут опреде-
ляться углы наклона лопаток на входе р1к.
Поток жидкости, выходя из каналов колеса насоса, отклоняется
от профиля лопаток в сторону, обратную направлению вращения
колеса. Отклонение потока происходит также и в колесе турбины.
Здесь поток отклоняется в сторону вращения колеса. Тогда можем
написать для углов 0 и р':
^2Н = Ран + дРн!
р2т = р;т —дрт,
где Дрн, Дрт — абсолютные значения отклонения потока;
Р2Н, Р2Т — углы наклона лопаток;
Р2Н, Ргт — гидравлические углы или углы потока жидкости,
. выходящей из колеса.
В предварительном расчете, когда определяются углы наклона
лопаток, можно ориентировочно принимать Дрн= 15— 20°, Дрт ==
= 3—5°.
Более точно углы 0' определяются по формулам:
tg р2Н = —--------------0.----------—-----
2Н п , Р <?GH(i-rH)
( Рн)Инад 2H + tIK7 + -THtgfeA-’ЛГ
(132)
0<2Н I Р-Т
Ат Пё.32Н
где коэффициент рн в первом приближении можно принять рав-
ным коэффициенту рт, рн = рт = 0,8 — 0,82,
265
При расчете угол Р,21 имеет малую величину. Однако не следует
допускать, чтобы угол 1^., был меньше 17°, так как при малых углах
будут большие относительные скорости потока жидкости и, как
результат этого, большие потери в трансформаторе.
Если по расчету получается .угол меньше 17°, то его следует
увеличить. Для этого можно пойти на допущение ударных потерь
на расчетном режиме или на изменение расхода.
В табл. 20 приведены геометрические параметры лопастных си-
стем выполненных трансформаторов.
Таблица 20
Геометрические параметры лопастных систел трансформаторов
Активный диа- Колеса Число лопаток Углы -в градусах
метр D, мм Z
и 17 31 38
510 т 18 141 17
А 22 39 151
И 23 58 44
260 Т 64 128 22
А 38 56 150
Н 21 56 54
лее т 23 122 19
ЧОО Л1 37 45 90
А2 31 90 113
И 35 90 90
ло 1 7 33 138 30
А1 21 57 79
А2 19 НО 143
И 17 38 46
И 74 70 32
С.1 (\ Г2 69 70 30
УЗ 14 90 90
Л1 68 113 144
А'2 62 105 144
В заключение расчета рекомендуется построить диаграмму
скоростей, которая дает наглядное представление о распределе-
нии скоростей в потоке и позволяет проконтролировать правиль-
ность произведенного расчета.
Диаграмма строится следующим образом.
266
Определяем окружные скорости колес:
и2Н — г2нюн! мп /’н(йг>
M2T = ^2TWT> М1А = О’ М2А
Н1Н = Г1НШН-
Находим меридиональные скорости по формулам:
Vm 2Н = Q • V^2H > Vm IT = Q ‘ IT’
^2Т = Q : ТЛт! !А = Q : тЛа!
^2A = Q:T/?2A; ^1H=Q:7^|H-
Кроме того, известны углы- |^н; Р1Т; ^т; PiaI Pw Pih- По ско-
ростям и, vm и углу относительной скорости 0' можно построив
скоростные параллелограммы, как показано на рис. 182.
Из диаграммы видно, какую величину и какое направление
имеют абсолютные V и относительные W скорости потока. При от-
сутствии ударных потерь векторы абсолютных скоростей двух со-
седних колес должны быть параллельны. Если векторы непарал-
лельны, то, следовательно, имеют место ударные потери в колесах
трансформатора.
267
ОПРЕДЕЛЕНИЕ ПЕРЕДАТОЧНЫХ ЧИСЕЛ ВСПОМОГАТЕЛЬНОЙ
КОРОБКИ ПЕРЕДАЧ И ДИФФЕРЕНЦИАЛЬНОГО МЕХАНИЗМА
Дальнейшим этапом предварительного расчета является опреде-
ление передаточных чисел вспомогательной коробки передач (г’кп).
Вначале следует задаться числом передач в коробке. Число пе-
редач при движении вперед может быть принято 2—3. Если машина
имеет большую удельную мощность, то число передач можно при-
нять равным 2.
Для тягачей рекомендуется принимать три передачи: первая пе-
редача должна обеспечивать движение поезда в наиболее тяжелых
условиях; вторая — движение поезда с максимальной скоростью
(t'max); третья — движение одиночной машины с максимальной
скоростью (^тах).
Для первой передачи принимаем следующие расчетные
данные: угол подъема дороги при движении поезда 20—25°. При
этом гидродинамический трансформатор должен иметь к. п. д. не
ниже 0,75. Выбор более низкого к. п. д. поведет при движении ма-
шины на затяжном подъеме к перегреву трансформатора.
Вторую передачу рекомендуется выбирать прямой. Эта
передача рассчитывается на работу на режиме гидромуфты (пред-
полагаем, что трансформатор комплексный), что обычно соответ-
ствует передаточному числу /тн — 0,9.
Третья передача должна выбираться из условия работы
комплексного трансформатора на режиме гидромуфты при /тн = 0,9.
Передаточные числа в дополнительной коробке передач, опреде-
ляются по следующим формулам.
Для первой передачи
,
К" °’ W6n%in ’
где гк — радиус ведущего колеса;
«>д — угловая скорость вала двигателя;
• Zn j — передаточное число между ведомым и ведущим валом
гидродинамического или гидромеханического трансфор-
матора ';
г'гп — передаточное число главной передачи;
/6п — передаточное число бортовой передачи;
^min — минимальная скорость движения поезда в км/час.
Минимальная скорость в свою очередь определяется по формуле
1 Гидромеханическим трансформатором называется гидропередача, состоящая
из гидродинамического трансформатора, расположенного в параллельном сило-
вом потоке, и суммирующего дифференциального механизма.
268
пае —общий к. п. д. машины;
\ 7] = 7]т7]м;
; т]т—к. п. д. трансформатора;
I т]и — механический к. п. д. машины;
Na — мощность, снимаемая с двигателя при вращении его вала
с угловой скоростью с%;
^оп max — максимальное сопротивление движению поезда.
Для второй передачи имеем
3,(5/*,.со । i11
= (134)
'гп'бп'-'тах
где z'max—максимальная скорость поезда в хороших условиях
движения. Обычно 77max задается техническими условиями на
проектирование машины (тягача).
Для третьей передачи
I ________ 3'6ГкСОдгЦ1 ;
кп(1И)— irni6nvmax ‘
(135)
Здесь T/max также задается техническими условиями на проекти-
рование тягача.
В формулы (133), (134) и (135) входит передаточное число
ia ,, которым на расчетном режиме следует задаться. Если транс-
форматор стоит в параллельном потоке, то необходимо определить
внутреннее передаточное число суммирующего механизма. Выберем
в качестве суммирующего механизма однорядный эпицикл. Валы ме-
ханизма присоединим к трансформатору и к коробке, как указано
на рисунке 171, б (0—водило,/—солнечная шестерня, 2—эпицикл).
Принимаем узловую точку с идеальной. Составим для нее урав-
нение моментов
/Цс + ^21С^2С — 0.
Отсюда
/' ^2С
,2с ~ М/с •
(136)
Из схемы силового потока находим
Л/1С
; (l-e)7Vg .
/И2с
COj
269
Подставляя величины /И1с и Л7,с в уравнение (136), получим
Здесь принимают е =0,6 — 0,7.
Остальные величины имеют то же значение, что и для после-
довательного потока.
Передаточное отношение г,2с должно находиться в следующих
пределах:
< | Z'l2c | < 4-
Правильность выбора передаточных чисел суммирующего меха-
низма и коробки передач окончательно выясняется после построе-
ния тягово-экономической характеристики машины (см. ниже).
9. ПОВЕРОЧНЫЙ РАСЧЕТ ГИДРОМЕХАНИЧЕСКОЙ
ПЕРЕДАЧИ
После того как произведен предварительный расчет гидромеха-
нической передачи и определены все параметры ее узловых точек,
необходимо произвести полный поверочный расчет передачи и полу-
чить тягово-экономическую характеристику ма-
шины. Тягово-экономической характеристикой будем называть
зависимость между удельной силой тяги по двигателю и к. п. д.
трансформатора тдт, выраженных в функции скорости движения
машины V, причем под к. п. д. трансформатора дг при установке
его в последовательном силовом потоке понимается гидравлический
к. п. д. (>)т = т]г). При установке гидротрансформатора в парал-
лельном силовом потоке под т)т понимается к. п. д. гидромеханиче-
ского трансформатора без учета механических потерь в суммирую-
щей узловой точке. Таким образом, и в этом случае т;т учитывает
только гидравлические потери в гидротрансформаторе.
Тягово-экономическая характеристика является паспортом
машины. Она позволяет судить о тяговых и скоростных качест-
вах машины, а также об экономичности работы гидротрансформа-
тора на различных режимах движения машины и о его тепловом
режиме.
Поверочный расчет ГМП производится в следующей последова-
тельности.
Если ГМП с последовательным силовым потоком, то вначале
строится каноническая характеристика гидродинамического транс-
форматора, а по ней тягово-экономическая характеристика ма-
шины.
Если ГМП с параллельным силовым потоком, то вначале
строится каноническая характеристика гидромеханического транс-
форматора и уже по ней тягово-экономическая характеристика
машины.
270
ПОСТРОЕНИЕ КАНОНИЧЕСКОЙ ХАРАКТЕРИСТИКИ
ГИДРОТРАНСФОРМАТОРА
Ранее был определен диссипативный поток односту-
пенчатого трансформатора со структурной формулой Н -> Т
-j А-> И
Nt = [(^2Н ^2а) Q Я2НШн] “hQ + [(Ат ^2н) Q "Ь
Ч- ^2Н^Н ^2‘Г^ТJ "’.Q’
Из этой формулы можно определить расход Q, если нам будет
известна д и с с и п а т и в н а я функция потерь в трансформа-
торе.
Потери в трансформаторе складываются из потерь внешних и
внутренних.
К внешним потерям относятся потери в подшипниках рабочих
колес, в уплотнениях, дисковые потери (потери на трение поверх-
ностей колес о просочившуюся в картер рабочую жидкость или о
воздух) и объемные, или щелевые, потери (потери на утечку рабо-
чей жидкости через щели).
Наибольшее влияние на диссипативную функцию внешние по-
тери оказывают на расчетном режиме, когда внутренние потери
имеют наименьшее значение. Однако и здесь они составляют срав-
нительно небольшой процент от внутренних потерь. Чтобы не
усложнять определение диссипативной функции, рекомендуется
вначале не учитывать внешние потери. В дальнейшем, когда будет
определена функция к. п. д. трансформатора, его максимальное
значение может быть снижено на 3—4%. Соответственно пони-
зится и вся кривая к. п. д., а следовательно, и кривая момента /Ит.
Внутренние потери складываются из потерь на трение жидко-
сти в каналах, из ударных потерь, а также из диффузорных потерь
и потерь на искривление потока в каналах. Учитывать следует
только потери на трение и ударные потери как основные, всегда
имеющие место при работе трансформатора. Диффузорные потери
появляются, когда каналы трансформатора спроектированы непра-
вильно (с большой диффузорностью); следовательно, эти потери
носят случайный характер. Потери на искривление потока могут
быть учтены несколько повышенным значением коэффициента со-
противления течению потока по каналам рабочих колес X, следо-
вательно, как самостоятельные потери они также могут не учиты-
ваться.
Следует иметь в виду следующее обстоятельство. Так как весь
расчет гидродинамического трансформатора ведется нами по
струйной теории, то лопастная система трансформатора
должна проектироваться так, чтобы ее гидравлические потоки
имели по возможности равномерное поле скоростей. Можно так
спроектировать лопастную систему, что течение жидкости в ней не
будет описываться струйной теорией; в этом случае между расче-
том и опытом будет большое расхождение.
271
Итак, общие потери в трансформаторе нами определяются
только потерями на трение жидкости о стенки каналов и ударными
потерями. 1
Остановимся на определении этих потерь.
Потери на трение могут быть определены по формуде
Дарси-Вейсбаха. Эта формула после соответствующих преобразо-
ваний запишется в таком виде:
MP = ^Q3, (138)
где WTp— мощность, потерянная на трение в каналах, в кгм/сек;
X—коэффициент сопротивления движению жидкости;
I — длина канала (лопатки) по средней линии тока в м;
g—ускорение 9,81 м/сек2;
d— приведенный диаметр канала в м;
v — коэффициент формы каналов в м2кг~2;
Q—весовой расход жидкости в кг/сек.
Коэффициент формы каналов и приведенный
диаметр определяются по следующим формулам:
1 1 ’ 1
Л? sin2 Pj р/ sin2 F2„ sin2
v = -1---P----. (139)
где Fb F2... Fn—площадь живого сечения канала в м2;
Р1> ?з • • • —Угол наклона лопатки по средней линии тока;
п.— число сечений, на которые разбивается канал;
г—число лопаток;
5ср— средняя ширина каналов в м;
у—объемный вес рабочей жидкости в кг/см2.
Коэффициент сопротивления X определяется по формуле Ми-
зеса
^ = 0,01+4/4 + /^-’ <141>
где S— абсолютная шероховатость стенок каналов в м;
d — приведенный диаметр каналов в м;
Re—число Рейнольдса.
Абсолютная шероховатость, или высота бугорков неровностей
поверхности каналов, определяется согласно табл. 21.
272
Таблица 21
Значение абсолютной шероховатости
(по данным каид гехн. наук 11 С Новохатько)
Класс обработки поверхности $ в м
V з 4-10—6
VV 4 2-Ю-6
W 5 1 • 10~6
VV 6 (6—10) 10—6
VVV 7 (3—6) 10-6
Число Рейнольдса определяется по формуле
^ = 4^, (142)
Г*
где 1Гср — средняя относительная скорость жидкости в ка.нале;
^ep = Q^; (143)
' d—приведенный диаметр;
|д— коэффициент кинематической вязкости. Значение р. сле-
дует брать из соответствующих таблиц.
Ориентировочно можно принять р = 0,1 • /сек для бакин-
ских масел (при температуре 90° С) и для воды р, = 0,3 • 10”6 м2/сек.
Потери на трение определяются для каждого колеса трансфор-
матора в отдельности и потом суммируются.
Рассмотрим теперь ударные потери.
При входе в рабочее колесо поток жидкости в общем случае
встречает лопатки колеса под некоторым углом атаки. Вследствие
резкого изменения скорости потока происходит гидравлический
удар жидкости о лопатки, сопровождающийся ударными поте-
рями.
Согласно теореме Карно-Борда потеря энергии жидко-
сти на удар пропорциональна квадрату поте-
рянной при ударе скорости.
После преобразования формулы Карно-Борда потери могут
быть выражены в следующем виде:
= (144)
Где Л7уя — мощность ударных потерь в кгм/сек-,
£ — коэффициент ударных потерь; проведенные нами ис-
следования показали, что этот коэффициент в практи-
ческих расчетах можно принимать равным единице;
Д1/— потерянная на удар скорость в м/сек.
18-20 2 73
Величину потерянной скорости можно определить по
следующей формуле:
Д Кб = (r9awa— rl6w6)— /--— ---F 5— \ —, (145)
6 ' 2а “ 16 67 I Л2а tg ,%а ^1б tg 3i6 ) т ’ v ’
где а — индекс колеса,
б — индекс колеса,
из которого выходит поток;
в которое входит поток (рис. 183, а).
Остальные обозначе-
Рис. 183. Определение скорости, потерянной
на удар:
а — силовой поток; б — график скоростей
ния те же, что и в преды-
дущих формулах.
Формула (145) выве-
дена на основании гра-
фика скоростей, представ-
ленного на рис. 183,6.
Ударные потери опре-
деляются для отдельных
колес и потом суммиру-
ются.
Определив потери на
трение и ударные потери,
находим общие потери, а
Диссипативная функция
лом будет выражаться равенством
следовательно, и диссипа-
тивную функцию.
для трансформатора в це-
(146)
Диссипативная функция по формуле (146) выражает зависи-
мость N, от <»н, wT и Q. Аналогичную зависимость дает и дис-
сипативный поток. Задаваясь wH = const и принимая различные
значения wT, решаем совместно уравнения 146 и 180 (см. ч. 1).
Находим расход Q и Nt как функцию <»т или /тн.
Подставляя в формулы 179 (см. ч. 1) значения гидравлических
моментов (формула 142, см. ч. 1), получим
/Ин (^2А ^2н) 4“ fl2HWnQ> (147)
Л/т==(^2Н ^2т) Q2 "4" (^2Т0)Т ^2HWh) Q- (148)
Кроме того, имеем
7]г kiTa. (149)
Таким образом, будет определена каноническая харак-
теристика гидротрансформатора (рис. 184).
274
Рис. 1S4. Каноническая характеристика гидро-
трансформатора
ПОСТРОЕНИЕ ТЯГОВО-ЭКОНОМИЧЕСКОЙ ХАРАКТЕРИСТИКИ
МАШИНЫ, ИМЕЮЩЕЙ ГИДРОМЕХАНИЧЕСКУЮ ПЕРЕДАЧУ
С ПОСЛЕДОВАТЕЛЬНЫМ СИЛОВЫМ ПОТОКОМ
Допустим, что у нас имеется каноническая характеристика
трансформатора (исходная характеристика).
Пользуясь законом подобия, можем написать следующую за-
висимость между моментами:
Здесь значения величин <»н и /Ин определяются по канониче-
ской характеристике, величина /И'н соответствует переменной угло-
вой скорости вала насоса «щ. Допустим, что насос гидротрансфор-
матора соединен непосредственно с валом двигателя. Обозначим
угловую скорость последнего через <од. Тогда <»'н = <од, М'н =
Здесь <»д — произвольная (текущая) угловая скорость,
Тогда можем записать
л,. = Й)’л,н- (150)
Представим момент двигателя следующей функцией от <ид:
Л1д = Г1+Д(1-^]Л1т1п,
I— \ maX/'J
(151)
где
18*
275
A,— коэффициент приспособляемости двигателя на произволь-
ной (частичной или внешней) характеристике;
<7Д — диапазон оборотов вала двигателя;
'д М - ’
пип
штах
штт
Приравняем уравнения (150) и (151). Решая квадратное урав-
нение, получим
д
2 , л.
} + (1 + Л) Мн
(152)
Задаваясь значениями ZTH> находим по канонической характери-
стике момент /Ин. Кроме того, должны быть заданы по внешней
характеристике двигателя момент (Vfmin, угловая скорость wmax
и определен коэффициент А. Угловая скорость шн задана канониче-
ской характеристикой гидротрансформатора.
Подставляя данные величины в формулу (152), получим угло-
вую скорость вала двигателя при совместной работе его с транс-
форматором.
Определяем теперь скорость движения машины и
удельную силу тяги:
Г
V = ;—
*гп*бп*кп
__ ___ ^ГП^бП^КП^М ( 03 Д V ДА
^~G~ rKG
(154)
CD >р
где величиной zTH = — задаемся, Мт
1 п 0J Н 1
ской характеристики по заданной ZTH;
определяем из канониче-
т)м—механический к. п. д. силовой передачи и движителя ма-
шины (задаемся).
Строим график <рд в функции и. На график наносим кривые
к. п. д. гидродинамического трансформатора
т)т — kiy^.
(155)
Коэффициент т)т можно непосредственно брать из канонической
характеристики гидротрансформатора.
276
-'На рис. 185 представлена примерная тягово-экономнческая ха-
рактеристика гидромеханической передачи с последовательным си-
ловым потоком. Здесь нижние кривые дают значения удельной
силы тяги <рд, верхние — к. п. д. гидродинамического трансформа-
тора т]т. Заштрихованная часть
теряемой в гидродинамическом
= 1—Чт, выраженной в частях
матору мощности двигателя.
графика характеризует величину
трансформаторе, мощности -тт- =
/V А
от подводимой к гидротрансфор-
Рис. 185. Тягово-экономическая характеристика гидромеханиче-
ской передачи с последовательным силовым потоком
Тягово-экономическая характеристика дает полное представле-
ние о тяговых и экономических качествах проектируемой ГМП.
Так, из представленной здесь примерной характеристики следует,
что в диапазоне скоростей от 3 до 36 км/час удельная сила тяги
изменяется от 0,75 до 0,05. При этом к. п. д. 7)т на небольшом диа-
пазоне скоростей 3—4 км/час имеет значение 0,75, на всем же
остальном диапазоне он выше 0,8. Если система охлаждения рас-
считана на мощность около 20% от мощности двигателя, то в дан-
ном случае трансформатор будет работать в нормальном тепловом
режиме на всем диапазоне работы ГМП. Заметим, что не следует
допускать ни перегрева, ни переохлаждения масла в трансформа-
торе, так как при пониженной температуре масла повышается его
вязкость, увеличивается внутреннее трение, а следовательно, воз-
растают гидравлические потери в трансформаторе.
Тягово-экономическая характеристика может строиться по
внешней или частичной характеристике двигателя. В последнем
случае следует только принять другие значения величин Ад, </д,
соответствующие этой характеристике. Таким образом, рассматри-
277
ваемый метод построения тягово-экономической характеристики
является общим методом, если только характеристика мо-
мента (внешняя или частичная) позволяет рассматривать ее как
прямую линию.
ПОСТРОЕНИЕ ТЯГОВО-ЭКОНОМИЧЕСКОЙ ХАРАКТЕРИСТИКИ МАШИНЫ,
ИМЕЮЩЕЙ ГИДРОМЕХАНИЧЕСКУЮ ПЕРЕДАЧУ С ПАРАЛЛЕЛЬНЫМ
СИЛОВЫМ ПОТОКОМ
Рис. 186. Схема силового потока ГМП
с параллельным потоком:
а — схема силового потока ГМП с параллельным
потоком; приведенная схема силового потока
с ГМТ (с последовательным потоком)
На рис. 186, а представлена схема силового потока ГМП с па-
раллельным потоком. Ее можно заменить схемой с последователь-
ным потоком (рис. 186,6), если представить узловые точки гидро-
динамического трансформа-
тора (ГТ) и дифференциаль-
ного механизма (с) в виде
одной узловой точки гидро-
механического трансформа-
тора (ГМТ). Эту узловую
точку назовем гидроме-
ханической узловой
точкой.
Чтобы от параллельного
потока перейти к последова-
тельному, необходимо опре-
делить каноническую харак-
теристику гидромеханиче-
ского трансформатора.
Допустим, что ведущий и
ведомый валы трансформа-
тора имеют угловые скоро-
сти <яи и оэт; здесь штрих
показывает, что трансфор-
матор работает не на кано-
ническом режиме, т. е. угловая скорость его насоса не равна угло-
вой скорости по канонической характеристике (<»н).
Крутящие моменты на режиме «н пусть будути Л1'г
Решая уравнения силового потока, найдем скорости и моменты
потоков на входе в гидромеханический трансформатор и на выходе
из него
<»; = <»н;
'12сшТ “’ ШН
0)ц — шос — 7 .
г12с 1
Мт
7W, = Л41а = Л7Н -----у------
д; Ч2с
278
= л/ос
Xt Л4Т.
ъ Z|‘21 /
Так как трансформатор задан канонической характеристикой,
то в этих уравнениях надо заменить моменты /Ин и /И., момен-
тами /Ин и /Ит. Это можно сделать, воспользовавшись законами
подобия:
Подставляя в предыдущие уравнения AfH и /Ит, после преобра-
зования получим
./ CD-
— г12с —:
(156)
(157)
(158)
где k =
Мт
коэффициент трансформации; определяется по ис-
ходной характеристике; следует иметь в виду, что для трансфор-
матора прямого хода й<0; Z, и Х2—коэффициенты потерь в сум-
мируюшей точке с. При данной схеме силового потока
Чо —
есть к. п. д. узловой точки с. Его можно ориентировочно принять
равным 0,96.
Кроме того, имеем к. п. д. гидромеханического трансформатора
4iMn
М j(D|
(159)
Формулы (156—159) являются общими, описывающими работу
гидромеханического трансформатора на неканоническом режиме,
т. е. при переменных оборотах ведущего вала (о)’ = var). При этом
в формулы подставляются величины «)н, w.r, Л4Н и /Ит, взятые из
канонической характеристики гидродинамического трансформа-
тора (ГТ).
Если требуется построить каноническую характер и-
279
стику гидромеханического трансформатора, то в формулах
(156—159) следует принять <о( = const.
Каноническую характеристику гидромеханического трансфор-
матора надо строить при той же угловой скорости, что и канони-
ческую характеристику гидродинамического трансформатора, т. е.
при' <»н = и, = const.
Тогда из формул (157) и (158) находим ординаты канониче-
ской характеристики гидромеханического трансформатора
(160)
(161)
Из предыдущего имеем
1 —
W11 = —1—7— WH'
1 - г12с
(162)
Задаваясь гтн по канонической характеристике, находим 7ИН>
Мг и k.
По формулам (160) и (161) определяются ординаты и по фор-
муле (162)—абсцисса канонической характеристики гидромехани-
ческого трансформатора. При этом по оси абсцисс откладывается
передаточное число
_ “н _ “п
а>н — а>. •
П 1
Учитывая формулы (160) и (161), из формул (157) и (158) мо-
жем написать
/Wi:
где оэг = <»н.
Полученные зависимости выражают закон подобия
гидромеханического трансформатора.
Так как гидромеханический трансформатор подчиняется тому
же закону подобия, что и гидродинамический, то все выведенные
выше формулы для последовательного силового потока справед-
ливы и для параллельного силового потока. Тогда на основании
формул (152), (153), (154) по аналогии можем написать
V М
Т лГ' +(!+'’)
I \ i и ।
^min
Л4,
А____“i AT„in
2 ’ “max ’ М1
(163)
(164)
'к'п, 1
—:—'•—
Г П*бп*кп
(165)
Определим условный к. п. д. гидромеханического транс-
форматора (т)т), т. е.- к. п. д. без учета потерь в механической
узловой точке
МцШц
7)т =-------
Л4]Ш|
Из формул (157) и (158), принимая механическую узловую
точку идеальной, получим
м; 1 + _l
*12с
“II
ш.
кроме того, — = Zu Окончательно получаем условный к. п. д.
“1
__ (1 ~г12с) йгП, I
k + г12с
(166)
Чтобы определить по канонической характеристике гидродина-
мического трансформатора коэффициент трансформации k, необ-
ходимо знать передаточное число /тн.
Выразим /тН через in
Обозначим в формуле (162)
“п __ “п
(Upj со( П, I’
Тогда после преобразования получим
гтн
1 ~ ( 1 ~ <2с) 'и. ।
*12с
(166')
Задаваясь ZH ? находим по формуле (166') z‘TH. Зная 7тн,по ка-
нонической характеристике гидродинамического трансформатора
определяем k. Тогда по формуле (166) определяется к. п. д.
281
10. ПРИМЕРНЫЙ РАСЧЕТ ГИДРОМЕХАНИЧЕСКОЙ
ПЕРЕДАЧИ С ПАРАЛЛЕЛЬНЫМ СИЛОВЫМ ПОТОКОМ
Рассмотрим в качестве примера расчет ГМП ВАТТ-2 для лег-
кого гусеничного тягача.
ПРЕДВАРИТЕЛЬНЫЙ РАСЧЕТ ГИДРОМЕХАНИЧЕСКОГО
ТРАНСФОРМАТОРА
1. Расчетная схема гидромеханического трансформатора и
схема его силового потока представлены на рис. 187. Определим
согласно этой схеме внутреннее передаточное отношение Z'2c. За-
дадимся в формуле (137) следующими величинами: т)т = 0,9;
е = 0,6; /тн = 0,5. Тогда получим fI2c = —2,7. Кроме того, прини-
маем т)с=0,96.
Определим теперь коэффициент прозрачности гидромеханиче-
ского трансформатора согласно формуле (118). Примем Ад — 1,26;
<7д=1,54. Учитывая, что на стопе ведомого вала гидромеханиче-
ского трансформатора турбина получает обратное вращение, при-
мем &тах = —5. Минимальное значение коэффициента трансфор-
мации примем на режиме гидромуфты fe[llin =—1. Тогда согласно
формуле (118) получим для гидромеханического трансформатора
m — । 26 • 1 542 ~5 ~0,96'2,7____________14?
<р 1,20 1,04 _1_0;д6.217
Следовательно, трансформатор должен иметь прямую прозрач-
ность.
2. Как показывает теоретический анализ, коэффициент прозрач-
ности зависит от отношения диаметров -д~ (рис. 188). С увеличе-
Д 1
нием -JJ- коэффициент прозрачности также увеличивается. Так,
при ~ = 2,1—2,2 имеем <р=1,1 — 1,4; при-^- = 3,2—3,3 имеем
<р = 2,5—3,1. Дальнейшее увеличение не приводит к увеличе-
нию <р. Принимаем -^-=2,16. Ширину канала на выходе из на-
соса принимаем Вт = 0,0557). У существующих трансформаторов
Т?2н = (0,05—0,065)7). Величина Т?2Н влияет на площадь живого
сечения /\,н, а следовательно, и на меридиональную скорость vm.
3. Принимаем согласно характеристике двигателя Д), = 110 л. с.
при лд = /гн = 1700 об/мин. Коэффициент циркуляции примем
е = 0,6 Тогда определяем момент на валу насоса/Ин = 28,0 кгм.
Задаемся числом оборотов турбины на расчетном режиме
пу = 850 об/мин и к. п. д, т)г = 0,9.
4. По конструктивным соображениям выбираем активный диа-
282
Рис. 187. Кинематическая схема и
схема силового потока опытного ги-
дромеханического трансформатора
ВАТТ-2:
а — кинематическая схема; б — схема сило-
вого потока
6
Рис. 188. Построение рабочей полости трансформатора
ВАТТ-2
283
метр трансформатора D = 0,364 м. Проверяем этот диаметр на
коэффициент мощности по формуле (123).
Получаем
. 11,5-105-110-0,6 9 „д
1783-0.36Р 887 —
Согласно табл. 17 трансформатор Аллисон имеет коэффициент
мощности An = 2,1. Его размеры приближаются к размерам про-
ектируемого гидродинамического трансформатора. Поэтому можно
считать, что активный диаметр выбран правильно.
Выше мы приняли -р- =2,16. Тогда D\ = yjg- = 0,168 м.
Далее находим радиус меридионального сечения круга цирку-
ляции
n D — D, 0,364 — 0,168 лп,п
R =-----д—- = -------!— = 0,049 м
и ширину каналов
Д = 0,055-0,364 = 0,02 м.
Площадь живого сечения определяем по формуле (125).
Принимаем 8 = 2 мм; гн = 21;
г . Р~В2Н_ 0,364 — 0,02 _ 0 о
Сн . 2 2 0,172 Ж.
Задаемся ориентировочно Ли =60°. Тогда по формуле (126)
находим
ф = 1__________________= 0 94
v 1 3,14-2 0,172 sin 60° ’ ’
Из формулы (125)
= 2-3,14-0,172-0,02-0,94 = 0,0201 м2.
Принимаем для всех сечений
Л.’к = Const.
5. По данным D, D}, В,м и F строим меридиональное сечение
рабочей полости трансформатора. Принимаем ее в виде эллипса
(рис. 188).
6. Задаемся весовым расходом Q — 115 кг/сек.
Проверяем расход по формуле (129)
Q= (0,15 —0,30) 887-0,0201-0,172-178 = 78— Г65 кг]сек.
Следовательно, принятый нами расход лежит в допустимых
пределах.
Проверим расход по формуле (130) на коэффициент быстро-
ходности
__ Л Г155-1,3(>4-]784 =
П* г 8872-1103-0,63 К1'
284
Коэффициент быстроходности также находится в допустимых
'пределах.
7. Из чертежа рабочей полости находим:
г1Н = 0,112 ж; г1Т = 0,172 м\ г1д = 0,109 ж;
г2Н = 0,172 м; г„т = 0,112 м; г, =0,109 м.
По формулам (121) определяем параметры
а1Н = 12,8-10~4; а1Т = 30,2-10“4; й1д = 12,1 • IO”4;
а2Н = 30,2-10-4; а2т = 12,8-10~4; а2д = 12,1 • 10~4.
Задаемся Р2Д = 159°.
Тогда по формулам (122) определятся параметры Ь12х:
,, _____________ 0,109 _ 1R9 10—4-
— 887-9,81-0,0201 (—0,384) — ~1Ь'2’ 1и 1
£,н = -16,2-10-4+ 12-8'1(^4'178 = з,6-10-*;
= -16,2-10-4 + 221^^121. _ 2L. = 9,4 - ю-4;
£1Т = - 16,2-10-4 + 30’2'111°f89 - ттк = '-14 • 10”4;
a- mo ш-4 , 12,8-10-4-89 / по 178 ) 28 1Л7 ш-4.
£2Т=—16,2-10 4Н-----------jyg------|1— 0,9 -89-)т[5Г= Ю,7-10 4;
£1А = -16,2-Ю-4- 1-0,9-^ -]2L=0,8-10-4.
* Л О г* 110
Определяем углы наклона лопаток на входе и гидравлические
углы на выходе из рабочих колес:
tg ₽1Н = 887-9,81-0,0201-3,6-IO-4 = 1,78; =
tg ₽2Н = 887-9,81-0,0201-9,4-IO'4 = 1 >04‘> ₽2Н = 46°1
tg Pit = 887-9,81 -0,0201 (-14-10—*) = —0>702! Pit = 145°1
tg Р-2Т = 887-9,81-0,0201-10,7-IO*4 = °>61 Р-2Т= 31°:
tg Р1А ~ 887,9,81 ’о,О2О1 -0,8 = 7’8’ Р|а = 874°'
Чтобы перейти от гидравлических углов р.',Л, (32Н, ?2Т к углам
наклона лопаток Р2Д, P21J и р2Т, примем поправку Д?А =—2°; Дрн =
285
= 18°; Дрг = 8°. Тогда будем иметь Р2а=157°; р2Н — 64°;
Р2Т = 23°.
Задаемся числом лопаток гн = 21; гт = 23; гА==25.
В табл. 22 приведены сводные данные по геометрическим пара-
метрам проектируемого трансформатора.
Таблица 22
Геометрические параметры проектируемого трансформатора
Узловая точка № потока Параметры
г 3е F г Вср t 1» ^0
и 1 2 0,112 0,172 61° 64° 0,0201 21 26 45 90 0,485
т 1 2 0,172 6JT2 145° 23° 0,0201 23 26 44 138 0,318
А 1 2 0,109 0,109 83° 157° 0,0201 25 32 25 75 0,344
Здесь г—радиус рабочего колеса в м; р — угол наклона лопа-
ток в градусах; F—площадь живого сечения каналов в ж2; z —
число лопаток; 5ср — средняя ширина каналов в мм; 10—длина
лопатки по средней линии тока, взятая из меридиональной проек-
ции рабочей полости, в мм; t—шаг лопаток в мм; 10 — приведен-
ный шаг лопаток.
ПОВЕРОЧНЫЙ РАСЧЕТ
1. Определяем диссипативный поток по формуле 180 (см. ч. 1)
= [(^2Н ^2д) Q ^2HWH ! WH Q “b
“Ь [(^2т ^гн) Q “Ь ^2HWH ^2TWI'] WtQ-
В эту формулу входят параметры Z»2H, Д,т и Д,А учитывающие
отклонение потока. Принимая рн = 0,79 и рт = 0,82, по форму-
лам (132) находим:
tg₽211 (1 -0,79). 178-0,172.887-0.0201 ~
=______М____.
114 + 0.038Q ’
286
tg ₽2T =
Q
0119 1 78°’172'Л 887 0 0901 ^°’82(? °>172Q/ 0,82 114^0,038Q\
(1-0,82) v О, r. 0,112-178 w ;887 • 0,0201 + (—--------$----)
_ Q
0,354а>т + 1,38(2 + 24 '
Принимаем//,А =—16,2-10 4 = const (т. е. отклонение Др2А =
=—2° не зависит от расхода Q).
Тогда по формулам (122) получаем:
_ 0,172(114 + 0,038(2) _ 0,112 .
2Н 887-9,81 -0,0201(2 ~ Q
0,112 (0,354шт + 1,38(2 + 24)
^2Т= 887-9,81-0,0201(2
0,00023™ г
Q
+ 0,00089.
Подставляем в формулу диссипативного потока параметры а
и Ь'. Получаем
Nt = 0,282Q3 — 75.8Q + (0,427 + 0,00085Q — 0,00105<»т) <o.rQ.
Задаемся значениями расхода Q и угловой скоростью <»т. Вычис-
ляем величины потерь Nt.
Результаты вычислений сведены в табл. 23. Здесь Nt дано
в л. с,
Таблица 23
Диссипативный поток Nt
Q, кг!сек О) , Т’ i/cetc
п 30 60 90 120 150
75 -55 —40,5 -29,2 -19,2 -11,1 -4,5
95 -62,2 —44 -28,3 -15,2 -4,1 +4,5
115 —66,5 -42,3 -24 -6,9 +6,9 —
135 -67,4 -38,7 -15,6 +5 — —
155 -67 -33 -5,3 + 14,1 — —
2. Определяем потери на трение жидкости о стенки каналов.
По формуле (139) находим коэффициенты формы каналов:
sin2 61° + sin2 64°
2-0,02012-8872
= 0,00402;
287
si:;- 1 I > + sin2 83° + sin’2 43° + sin2 23°
VT~ 4 - 0,02012 - 8872
= 0,0101;
sin2 83° sin2 90° + sin2 126° + sin2 I,/0
4-0,02012-8872
Здесь углы наклона лопаток в средних сечениях берутся ориен-
тировочно. Более точно эти углы надо определять из конформных
разверток лопаток [3].
Определяем приведенные диаметры по формуле (140):
d
н
__________2-0,026__________
1 + 887 • 21 • 0,02621/0,00402
_________2-0,026___________
1 + 887-23-0,0262 ]/(XOYoT
dA
__________2-0,032_________
1 + 887-25-0,0322 ]/0,0084
= 0,0289 ж;
= 0,0218 м\
= 0,0208 м.
Определяем по формулам (142) и (143) число Рейнольдса
о __ dQ ]/3>
е~~
Тогда
/?(,н = K0.00402Q = 183Q;
Rel = ISOftlOlQ = 2! 9Q;
У 0?)684Q = 191Q.
Задаемся шероховатостью стенок каналов S = 3-10~6. Получим
по формуле (141) коэффициент сопротивления:
Хт = 0,01 + 4 /gg + j/gg = 0,057 + И;
Хд = 0,0! + 4 /gg + J/gg = 0,058 + .
Потеря мощности на трение жидкости о стенки каналов опреде-
ляется по формуле (138).
288
Будем иметь:
1,090 -0,00 402 Q3 2-9,81-0,028:1 ' == (0,318 + \ VQ) Q310‘:
У = Т.057 0,138-0,0101 Q3 2-9,81-0,0218 = (1,86 + k Vq) Q3-10“4;
чРл-(°да+^=) 0,075-0,0084 Q3 2-9,81-0,0208 = (0,87 + \ VQ) Q3 • IO"4
В табл. 24 приведены результаты вычисления потерь на трение.
Таблица 2-1
Мощности, потерянные иа трение жидкости о стенки каналов
Q, кг/сек •^’тр H’ л‘ с‘ Л'тр Т’ л- с- ^тр А’ л' с' Xi Л^гр, л. С.
75 0,2 1,3 0,6 2,1
95 0,5 2,6 1,2 4,3
115 0,8 4,3 2,1 7,2
135 1,3 7,2 3,4 4,9
155 1,8 10,8 5,1 17,7
3. Определяем ударные потери.
Согласно формуле (145) находим потерянные на удар скорости:
, , / 1 1 О
Д ут = г.,н <йн — Лт<от — --------------,---ъ—, — =
Т- Н *Т И /-2H‘g₽2H Л1т‘ё?ГГ ) 1
__I л 1 ул 17о____л 17Q \______! Н4 + 0,038Q____ ______J________-, Q ___
0,0201 Q 0,0201 (—0,701) . 887
= 24,2— 0,172 <йт — 0,0825 Q;
ДУ, = (r>T<DT Г. , (О.) /---J----,- -FT—Д-д—\ — =
А Ur г 1А У ( /?2Т tg ?2Т Л1А‘ё₽1А ) 7
„ , /0,354шг + 1..38Q + 21 1 \ Q
— (0, 2 (О— 0) — ( 0,0201 Q 0,0201 -7,3) 887 =
= 0,082wr — 0.07Q- 1,35;
'а) (л2а181!!л Ла'ВЗ.н Т-
- (0 - 0,112.178) -( ь „,0, ('_WM| - = 0,178<? - 20.
Результаты вычисления потерянных на удар скоростей сведены
в табл. 25.
19-20
289
Та б л и ц a 25
Потерянные на гидравлический удар скорости
\ “т AVT, м/сек м/сек alZH.
<? (i 30 60 90 120 150 0 30 60 90 120 150 шеек
75 18,0 12,8 7,’7 2,5 —2,6 -7,8 —6,6 -4,2 —1,8 0,7 3,2 5,7 —6,6
95 16,4 11,2 6,1 0,9 -4,2 —9,4 -8,0 —5,1 —3,2 —1,7 1,8 4,3 -3,7
115 14,7 9,5 4,4 —0,8 —5,9 — Н,1 —9,4 -6,9 —4,5 —2 0,5 3,0 0,5
135 13,1 7,9 2,8 —2,4 —7,5 — 12,7 — 10.8 —8,4 —6 —3,5 -1,0 1,5 4,0
155 Н,4 6,2 1,1 —4,! —9,2 — 14,4 — 12,2 —9,7 — 7,3 -4,8 —2,3 0,2 7,6
Таблица 26
<с>
*
Мощности, потерянные на удар, определяются по формуле (144).
Принимаем £ = 1.
Результаты вычислений сведены в табл. 26.
По данным, приведенным в табл. 24 и 26, находим диссипатив-
ную функцию гидравлических потерь, см. табл. 27.
Таблица 27
Диссипативная функция гидравлических потерь Nt
Q, м/сек со-у, \!сек
0 30 60 90 120 150
75 23,0 13,5 7,5 4,6 5,2 9,1
95 26,4 15,1 8,0 5,0 6,2 11,8
115 31,4 17,5 10,3 7,6 9,9 17,5
135 39,8 25,5 17,4 15,0 18,6 28,4
155 53,2 37,7 29,5 28,0 33,3 45,7
Согласно данным табл. 23 и 27 строим кривые диссипативного
потока и диссипативной функции гидравлических потерь, как по-
казано на рис. 189. В точках пересечения соответствующих кривых
находим значения расхода Q в функции <иг. Получим характери-
стику расхода Q (рис. 190).
Из формулы 179 (см. ч. 1) имеем:
/Ин = < а —- тИ2Н;
М.г = /И9Н — /И,т,
где
^2А ~ ^2aQ2>
/И2Н = ^2HWH Q2 “Ь ^2hQ2> '
ТИ22.=== — tT2 j.<o.pQ Zy-j. Q-.
Тогда
Л4Н = 0,426 Q — 0,00166 Q2;
Мт = 0,00105 <от Q — 0,00085 Q2 — 0,427 Q.
Кроме того,
»г==--------------------------k =
шнМн Л4Н
В.табл. 28 приведены расчетные данные характеристики проек-
тируемого гидродинамического трансформатора.
292
Рис. 190. Характеристика весового расхода
293
Таблица 28
Расчетные данные характеристики гидродинамического трансформатора
toy, 1/сек 1 ти Q. кг!сек МН, кгм мт, кгм k
0 0 161 25,6 -92,3 -3,6 0
30 0,168 150 26,8 -77,3 -2,88 0,48
60 0,336 133 27,6 -63,7 -2,31 0,78
90 0,505 115 27,2 -49,6 — 1,82 0,92
120 0,674 90 25,0 — 31,0 -1,35 0,91
150 0,842 62 20,0 -20,0 — 1 0,84
По полученным расчетом данным трансформатор был спроекти-
рован и построен (рис. 191). В период стендовых испытаний и до-
водки углы наклона лопаток подверглись некоторому изменению:
р1Н на +1°(62°); Р1Т на +1°(146°); ?1А на —30° (54°). Значитель-
ное отклонение р 4 от расчетного, как показали опыты, обеспечи-
вает повышение Атах и незначительно ухудшает характеристику
трансформатора в области гтн = 0,7—0,9.
На рис. 192 представлены опытная и расчетная характеристики
гидромеханического трансформатора. Как видим, опытная и рас-
четная характеристики близко подходят одна к другой. Это гово-
рит о том, что расчет произведен достаточно точно.
Трансформатор имеет высокий к. п. д. (около 0,89), причем это
полный к. п. д. (а не гидравлический).
На рис. 193 приведена каноническая характеристика проекти-
руемого гидромеханического трансформатора, построенная по дан-
ным канонической характеристики и по приведенным выше форму-
лам.
Из характеристики следует, что, во-первых, минимальное эк-
сплуатационное значение к. п. д. гидромеханического трансформа-
тора ^]гмт min, равное 0,75, соответствует, = 0,4; тогда в диапазоне
Zj, | = 0,4—0,95 трансформатор будет иметь к. п. д. больше 0,75;
во-вторых, коэффициент прозрачности трансформатора ? = 262 =
= 3,15. Необходимо было иметь прозрачность <р = =
= 1,26-1,542 = 3.
Опытный гидромеханический трансформатор имеет прозрач-
ность несколько больше расчетной, вследствие чего можно ожидать
небольшой перегрузки двигателя. Эта перегрузка, однако, нахо-
дится в допустимых пределах.
294
io
сл
Ф 4 46 мм
Рис. 191. Общий вид гидромеханического трансформатора ВАТТ-2
— Опытные характеристики
— Расчетные характеристики
Рис. 192. Опытная и расчетная характеристики гидроме-
ханического трансформатора ВАТТ-2
Рис. 193. Каноническая характеристика ги-
дромеханического трансформатора ВАТТ-2
296
ОПРЕДЕЛЕНИЕ СОВМЕСТНОЙ РАБОТЫ ДВИГАТЕЛЯ ЯАЗ-204
И ГИДРОМЕХАНИЧЕСКОГО ТРАНСФОРМАТОРА ВАТТ-2
Согласно внешней характеристике двигателя ЯАЗ-204, представ-
ленной на рис. 194, имеем
, — 43,5 — 1 21 • /7 _2160___1 я
йд зб — <7Д — 12оо ~
Тогда
^ = Т2?п-г1= 0,474.
1 — 0,556 ’
Кроме того, Л4т1 = 36 кгм-, ш = 226-^-; <», = 178 —
r mni ,пах сек ' f сек
Подставив эти значения в формулу (163), получим
Г 0?4742 /178\2/ 36\2 ' 36
~Т~ (йб) (м;) +(! +°-474)д^ —
_ 0,474 178 36
2 ’ 226 ' AfjJ®!-
Принимаем
i!U=0; 0,4; 0,64; 0,86; 0,89.
(167)
Рис. 194. Внешняя характеристика двигателя ЯАЗ-204
297
По канонической характеристике ГМТ (см. рис. 193) определяем
соответственно
47, = —82,5; 63,5; 47,5; 26,2; 22,2.
Из формулы (167) находим
<»д = 128; 145; 165; 210; 226,
или
лд = 1220; 1380; 1570; 2000; 2160,
Положение точек, соответствующих этим оборотам, обозначено
на характеристике двигателя (рис. 194).
Согласно закону подобия имеем
/ со. \3 / сОд \2
Л,'='и-=ил7'=(га)
Отсюда получим
/Ид = 43; 42; 41; 36,5; 36.
Из полученных данных можно сделать следующие выводы:
1. Трогание машины с места происходит при <»д = 128 1/сек
(лд = 1220 об/мин), что близко к /Итах.
2. Работа гидромеханического трансформатора на оптимальном
режиме соответствует <»д = 165 \/сек (лд= 1580 об/мин), т. е.
наиболее экономичному режиму работы двигателя.
3. При<од = 210 \/сек (лд = 2000 об/мин) гидромеханический
трансформатор переходит на режим гидромуфты и в диапазоне
<»д = 210 — 226 \/сек используется наиболее экономичный режим
работы трансформатора (режим гидромуфты).
Таким образом, обеспечена благоприятная работа двигателя и
гидромеханического трансформатора.
ОПРЕДЕЛЕНИЕ ПЕРЕДАТОЧНЫХ ЧИСЕЛ В ДОПОЛНИТЕЛЬНОЙ
КОРОБКЕ передач
1. Определим максимальную скорость одиночного тягача ^тах и
поезда +вах при движении по хорошей дороге.
Принимаем для одиночного тягача /==0,04 и 1 = 1,5%; для тя-
гача с прицепом / = 0,05; /1=0,025; 1=2%.
Кроме того, полный вес тягача G = 9000 кг, вес прицепа Gi =
= 7000 кг.
Сопротивление движению будет равно
/?0 т1п = (0,04 + 0,015) 9000 = 490 кг;
/?Оп шт = (0,05 + 0,02) 9000 + (0,025 + 0,02) 7000 =
= 630 +315 = 945 кг.
298
Общий к. п. д. тягача
v) = ад™?,
где 71м — механический к. п. д.; приближенно величина т)„ может
быть определена по формуле 58 (см. ч. 1): 7]м = 0,85 — 0,0055 v\
г)гмт—к. п. д. гидромеханического трансформатора; принимаем
Чгмт = °-89 при шд = и^.
Для одиночной машины скорость ориентировочно равна
35 км/час, для поезда — 20 км/час.
Тогда
7] =0,85 — 0,0055-35 = 0,66;
ты = 0,85 — 0,0055 • 20 = 0,74,
•М ' ' ’ ’
или
7] = 0,89-0,66 = 0,59;
П’ = 0,89-0,74 =0,61.
Тогда
V
270т|1\' 270-0,59-110 о_ о ,
^тах = =-----4§б-----= 35’8
Л0 min '
270х]'^ 270-0,61-110 1ПО ,
,ах = о----— =--------------отд---= 19,2 км час.
iax «0 min + «01 min 945
Определим минимальную скорость движения поезда из ус-
преодоления угла подъема а'тах = 18° при f = f\ = 0,08. При-
I1MT
2.
ЛОВИЯ
чем гидромеханический трансформатор должен работать при т),
= 0,75, что соответствует /и , = 0,4 (по канонической характери-
стике трансформатора). Но согласно совместной работе при /ц>1 =
= 0,4 имеем ш„ = 145— и Л7. = 42 кгм.
я сек д
Тогда двигатель будет развивать мощность
Д/д = -^=-75-= 82 л. с.
Сопротивление движению поезда равно:
#0 max = (/ COS a'max + sin a'max) G =
= (0,08-0,95 4-0,31)9000 = 3110 кг-,
#01 max = (/. COS amax + Sin amax) G, =
= (0,08-0,95 4-0,31)7000 = 2420 кг.
Принимаем т)м = 0,85, тогда т] = 0,85 • 0,75 = 0,64. Определяем
минимальную скорость
270^д 270.0,64-82 .
^min— Д01]тах ~ 3110 + 2420 ~2,6 км!час-
299
3. Определим передаточные числа в коробке передач.
Первая передача определяется из условия движения поезда с
минимальной скоростью t'min. Режим движения был определен
выше; а.пах = 18°; / = /1 = °>°8; шд = 145 i ; дпл = °’4-
Тогда согласно формуле (133)
__ 3>6/"ко>д/цг1 _
ZKn (I) '
‘гп ‘6п umin
__ 3,6-0,23-145-0,4 _ 9 „
— 1,06-6-2,6 — 2>у>
где /гп —передаточное число главной передачи (принимаем 1,06);
z’6n —передаточное число бортовых передач (принимаем 6).
Вторая передача определяется из условия движения поезда с
максимальной скоростью &твх.
Выше мы определяли Т'тах, исходя из условия работы гидроме-
ханического трансформатора с к. п. д., равным 0,89. Но этому
к. п. д. соответствует по канонической характеристике /ц , = 0,89.
Согласно условия совместной работы двигателя с гидромехани-
ческим трансформатором угловая скорость вала двигателя «>д =
= 226 —.
сек
По формуле (134) находим
_ З,6гк<од/П1 _ 3,6-0,23-226-0,89 „7
гкпШ)— - - ' — 1,06-6-19,2 — 1,бЛ
'гп'бп^щах ’
Третья передача определяется из условия движения одиночного
тягача. При этом режим работы гидромеханического трансформа-
тора тот же, что и на второй передаче.
Будем иметь по формуле (135)
_ 3,6 гк<0д/п> j _ 3,6 - 0,23 • 226 • 0,89 _ _ „
кп (Ш) ~ 4nWmax ~ 1,06-6-35,8
4. Построим тягово-экономическую характеристику.
Согласно формулам (164) и (165) имеем:
rKiu [ 0,23 -zn j n 'ц, 1шд
V = - = 'I ле с- = 0,036 —; ;
^гп^бп^кп 4,06-6zKrl ZKn
i /- / г / шл \
________ ‘rn 'on ‘КП 71М / _1 дл
‘Д ГКС/ I о>( I п
ЬОб-б/кп'Тч ( дл —Q 0031 i ti (—М
0.23-9000 I <oj I /И/и и>0Ш1гкпт)м1 щ I
300
Согласно предыдущему:
zn , = 0; 0,4; 0,64; 0,86; 0,89;
Шд = 128; 145; 165: 210; 226.
Отсюда определяем скорость v на передачах:
^ = 0; 2,6; 4,7; 8,1; 9;
^„ = 0; 5,5; 10,0; 17,2; 19,2:
г/ш = 0; 10,3; 18,7; 32,2; 35,8.
Здесь скорости даны в км/час.
Определяем механический к. п. д. по формуле 58 (см. ч. 1)
7]м = 0,85 — 0,0055^.
Будем иметь:
7]м (1) = 0,85; 0,83; 0,82; 0,80; 0,80;
7]м да = 0,85; 0,82; 0,79; 0,75; 0,74;
7i„/TIn =0,85; 0,79; 0,75; 0,67; 0,65.
/ сод\2
Определяем отношение (—I . Здесь — 178 1/сек. Вели-
чина Ыд была определена выше.
Получим
(—'j =0,52; 0,67; 0,87; 1,39; 1,62.
Согласно канонической характеристике ГМТ определяем /Ии
Л4ц = 194; 118; 69; 26; 22.
Тогда получим удельную силу тяги:
Тд (1) = 0,77; 0,59; 0,44; 0,26; 0,26;
(П) = 0,36; 0,28; 0,20; 0,12; 0,11;
Ъ (ш) = °>19; 0,И; 0,10; 0,06; 0,05.
Определяем далее к. п. д. гидродинамического трансформатора.
Для этого необходимо вначале вычислить по формуле (166') пере-
даточное число
1 — (1 — б?,-) zn , 1 — 3,7 z,. ,
*тн = _ AL = 1,37/ц ,- 0,37.
‘12с
Подставляя сюда принятые значения /п р получим
ZTH= —0,37; 0,18; 0,51; 0,81; 0,85.
Из канонической характеристики гидродинамического трансфор-
матора определяем коэффициент трансформации
А=(—5); (—2,9); (—1,8); (-1,05); (-1,0).
301
Рис. 195. Тягово-экономическая характеристика тягача с гидромеха-
нической передачей ВАТТ-2
По формуле (166) определяем к. п. д.
О — zI2c) 4l,I 3-7^П,1
й+7 ~ £ — 2,7 •
+ *1 2с
Подставив сюда значения k и /п ,, получим
т]т — 0; 0,77; 0,95; 0,89; 0,89.
Наносим величины <рд и *1т на график. Получим тягово-
экономическую характеристику тягача (рис. 195).
Из характеристики следует, что ГМП с параллельным силовым
потоком обладает высокой экономичностью. В диапазоне скоростей
от 4 до 36 км/час условный к. п. д. имеет нижнюю границу при-
мерно 0,9.
При т]т = 0,8, что соответствует l'min = 3,0 км/час, удельная сила
тяги Тд = 0,55. При г>1Пах = 36 км/час <рд = 0,05. Тогда кинематиче-
ский диапазон ГМП будет dK = 12 и силовой dc=ll.
Как видим, тяговые, скоростные и экономические показатели
спроектированной ГМП очень высокие.
ГЛАВА VI
НЕПРЕРЫВНЫЕ ЭЛЕКТРИЧЕСКИЕ
ТРАНСФОРМАТОРЫ
1. ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА КАК ТРАНСФОРМАТОР
СИЛОВОГО ПОТОКА
ЭЛЕКТРИЧЕСКИЙ ТРАНСФОРМАТОР
Преобразование мощностного потока первичного двигателя мо-
жет производиться не только механическим и гидравлическим спо-
собами, но и электрическим с помощью электрических машин по-
стоянного или переменного тока.
Рассмотрим принцип преобразования механического потока пер-
вичного двигателя в электрический поток и снова в механический
с помощью машин постоянного тока.
Для описания явления
силового потока.
преобразования воспользуемся методом
Ранее было показано, что электрическая машина — генератор
или мотор электрического тока — в схеме силового потока описы-
вается электромеханической узловой точкой, представляющей со-
бой кинетическую точку с двумя механическими и двумя электри-
ческими направленными по-
токами.
Пусть генератор и мотор
соединены между собой, как
указано на рис. 196.
Если привести во враще-
ние генератор Г, то он на-
чнет вырабатывать электри-
ческую энергию и посылать
ее в электромотор М, вслед-
ствие чего последний будет
вращаться, совершая меха-
ническую работу.
Таким образом, механи-
ческий поток, подводимый к
генератору, преобразуется в
электрический, который в мо-
торе снова преобразуется в
механический поток.
Рис. 196. Электротрансформатор и схема
его силового потока:
а — электротрансформатор; б — схема силового по-
тока
303
Схема преобразования энергии на рис. 196, б представлена в
виде схемы силового потока. Здесь имеются две кинетические точ-
ки— генератора и мотора, которые связаны между собой электри-
ческими потоками. Диссипативные потоки на узловых точках
условно не обозначены.
Посмотрим, является ли данная передача в преобразовании ме-
ханического потока первичного двигателя трансформатором, или
это есть редуктор или муфта.
Согласно формуле 150 (см. ч. I) характеристикой электрических
узловых точек является зависимость
М = стФ1,
где М — момент механического потока;
ст—постоянный коэффициент машины;
Ф—магнитный поток обмотки возбуждения;
/ — ток, проходящий через якорь машины.
Для мотора и генератора можем написать:
Ч =Ст« Фм 4;
Мг = с Фг / .
г тг г г
Отсюда находим коэффициент трансформации
М с Ф I
г _ Мм _ ты м м
Из схемы силового потока следует, что /м = /г. Тогда оконча-
тельно получим коэффициент трансформации
k = cJl^L - . (168)
с„,г Фг
Так как -^ = const, то k может быть величиной переменной
стг
только в том случае, если будет меняться отношение магнитных по-
токов электрических машин.
Фи
Таким образом, при ~ф~ — var получаем электрический
Ф№
трансформатор (ЭТ), при — const — электрический
редуктор и при
£гам=1; 1 (169)
стг
электрическую муфту.
Если обмотки машин имеют независимое возбуждение (от ка-
кого-нибудь постороннего источника тока), то трансформатор будет
Ф
регулируемый, так как величина может регулироваться.
Если обмотки возбуждения включить в цепь якорного тока так,
304
чтобы ток якоря влиял на магнитный поток полюсов статора (при-
чем в разных машинах по-разному), то можно получить автома-
тический трансформатор.
Наконец, можно иметь и третий тип трансформатора — авто-
матизированный, если автоматизировать с помощью спе-
циального автомата источник независимого возбуждения.
Электротрансформатор
(как и гидротрансформа-
тор) в схеме силового по-
тока электромеханиче-
ской передачи можно обо-
значать одной узловой
точкой (рис. 197), имею-
щей только механические
Рис. 198. Примерная каноническая характе-
ристика электротрансформатора
Рис. 197. Узловая точка
электротрансформатора
и диссипативный потоки. Такая точка описывается канониче-
ской характеристикой. На рис. 198 представлена пример-
ная каноническая характеристика электротрансформатора. По
внешнему виду она ничем не отличается от характеристики гидро-
трансформатора.
Следует заметить, что между электротрансформатором и гидро-
трансформатором существует аналогия. Оба трансформатора не-
прерывные, автоматические или регулируемые. Оба имеют подоб-
ные силовые потоки, характеризующиеся наличием замкнутого
потока. Характеристикой замкнутого потока является зависи-
мость динамического фактора потока от скорости ведомого вала
трансформатора. Для гидротрансформатора — это функция рас-
хода
Q=F(uT);
для электрического — функция силы тока, проходящего через якори
обеих машин:
/=ср(Ш2).
На рис. 199 приведена зависимость тока I в функции угловой
скорости вала электромотора. Аналогичную зависимость обычно
имеет и расход Q в функции угловой скорости турбины.
20—20
305
Рис. 199. Зависимость тока от угловой ско-
рости вала электромотора
ЭЛЕКТРОМЕХАНИЧЕСКИЙ ТРАНСФОРМАТОР
Рассмотренный нами электрический трансформатор (ЭТ) анало-
гичен гидродинамическому трансформатору (ГТ). Если гидродина-
мический трансформатор установлен в замкнутом механическом
силовом потоке, то такая передача нами выше была названа гидро-
механическим трансформатором (ГМТ). Для электропередач ана-
логично будем иметь электромеханический трансфор-
матор (ЭМТ).
На рис. 200 приведены кинематическая схема и схема силового
потока электромеханического трансформатора.
Трансформатор состоит
из планетарного эпицикли-
ческого механизма с и трех
электромашин: генерато-
ра Г, мотора М и возбуди-
теля В.
Эпициклический меха-
низм помещен внутри поло-
го якоря мотора. С телом
якоря соединена эпицикли-
ческая шестерня. Солнечная
шестерня 1 связана с якорем
генератора, а водило, яв-
ляющееся ведомым звеном
трансформатора,
с возбудителем,
всех трех машин
заторможены.
Силовой поток
стоять из одной суммирую-
щей узловой точки с, раз-
ветвляющей точки р (через
которую подводится мощ-
ность от первичного двига-
теля) и двух кинетических
О
Рис. 200. Кинематическая схема и схема
силового потока электромеханического
трансформатора:
а — кинематическая схема; б — схема силового
потока
соединено
Статоры
постоянно
будет со-
306
точек электромеханиче-
ского типа Г и М. Точку
возбудителя на схему си-
лового потока не наносим,
так как возбудитель яв-
ляется вспомогательным
агрегатом трансформа-
тора.
Если обозначить элек-
Рис. 201. Схема силового потока электроме-
ханического трансформатора
трический трансформатор
в виде одной узловой точки (ЭТ), то схему силового потока можно
представить, как указано на рис. 201. Эта схема аналогична схеме
силового потока гидромеханического трансформатора.
Рассмотрим работу электромеханического трансформатора,
пользуясь схемой силового потока.
Допустим, что первичный двигатель вращает ведущий вал I
с постоянной угловой скоростью <Dj = ш2с = const. Из кинематиче-
ской характеристики узловой точки с имеем
ш1с ^12сШ2с “И (^'12с 1) Ш0с О’
Зададимся каким-нибудь значением внутреннего передаточного
отношения г'Пс, например ^2с = — 2,5.Кроме того, примем скорость
«)2с =1. Тогда получим
«>1С + 2;5— 3,5ш0с = 0.
Скорость о>ос равна скорости ведомого вала «>п и пропорцио-
нальна скорости движения машины, на которой установлен транс-
форматор. На основании полученной зависимости строим график
Рис. 202. График угловых скоростей
эпициклического механизма
(рис. 202).
Из графика следует, что при
шп = шос = О (трогание машины
с места) солнечная шестерня вра-
щается с наибольшей скоростью.
Тогда генератор вырабатывает
наибольшую электрическую мощ-
ность и посылает ее к электромо-
тору. В свою очередь электромо-
тор вырабатывает механическую
мощность, поток которой в раз-
ветвляющей точке р складывает-
ся с потоком, идущим по валу I
от первичного двигателя. Оба по-
тока будут подводиться к точ-
ке с в виде потока 2 с. В точке с
поток разветвляется: один поток
идет на генератор (1с), а другой
на движитель (Ос). Машина тро-
гается с места.
20*
307
Рис. 203. Конструкция электромеханического трансформатора
С увеличением скорости ю(1 скорость о>|С уменьшается. С умень-
шением скорости ш1с падает мощность, отводимая от точки с в
электрическую цепь, и растет поток, передаваемый по механической
ветви 2 с. В момент, когда машина достигает скорости, близкой
к максимальной (к расчетной), скорость вращения генератора де-
лается почти равной нулю и мощность электрического потока па-
дает до минимальной величины (примерно 5% величины механи-
ческого потока). Таким образом, почти вся мощность двигателя пе-
редается механическим потоком.
При дальнейшем увеличении скорости ведомого вала трансфор-
матора скорость вала генератора может изменить свой знак. Тогда
генератор превратится в мотор, а мотор—в генератор (на схеме
рис. 201 потоки 1ЭТ и 2ЭТ поменяются местами). Силовой поток из
циркулирующего превратится в разветвленный.
Таким образом, электромеханический трансформатор может ра-
ботать как в циркулирующем, так ив разветвленном сило-
вом потоке. Это свойство получено за счет обратимости его
машин.
Заметим, что гидромеханический трансформатор этим свойством
не обладает, так как его гидромашины необратимы: насос не может
стать турбиной, а турбина насосом.
На рис. 203 представлена конструкция электромеханического
трансформатора, который применялся в автомобилях в качестве ко-
робки передач. Устройство этого трансформатора соответствует
рассмотренной выше схеме.
2. ЭЛЕКТРОМЕХАНИЧЕСКИЕ И ЭЛЕКТРИЧЕСКИЕ
ПЕРЕДАЧИ
Если силовой диапазон электрического или электромеханиче-
ского трансформатора меньше силового диапазона силовой пере-
дачи машины, то к электрическому трансформатору добавляется
вспомогательный трансформатор зубчатого типа на 2—3 ступени.
Такую передачу будем называть электромеханической
(ЭМП).
Электромеханическая передача является частью силовой пере-
дачи машины, куда могут входить также механизмы поворота, бор-
товые передачи, главная передача.
Электромеханические передачи бывают двух типов: с после-
довательным и с параллельным силовым по-
током.
На рис. 204 представлена силовая передача гусеничной машины,
состоящая из электрического трансформатора (мотор-генератора),
механической коробки передач (КП), механизма поворота (МП)
и бортовых передач (БП).
Электрический трансформатор в этой передаче имеет последо-
вательный силовой поток.
На рис. 205 представлена электромеханическая передача с па-
раллельным силовым потоком. Кроме агрегатов, которые имеются
309
в силовой передаче с последовательным силовым потоком, в данной
электромеханической передаче имеются еще два дифференциальных
механизма (ДМ), выполняющих роль суммирующих точек сило-
вого потока, и два зубчатых редуктора (Р).
В силовой передаче с последовательным силовым потоком мощ-
ность от первичного двигателя идет на генератор. Здесь механиче-
ский поток преобразуется в электрический и подводится к электро-
мотору. В электромоторе электрический поток снова превращается
Рис. 204. Электромеханическая пе-
редача с последовательным силовым
потоком
Рис. 205. Электромеханическая пе-
редача с параллельным силовым по-,
током
в механический и далее через дополнительную коробку передач
разветвляется на гусеницы.
В силовой передаче с параллельным силовым потоком мощность
от первичного двигателя идет двумя параллельными потоками.
Один поток направляется к электрическим машинам, где происхо-
дит его электромеханическое преобразование, после чего он подво-
дится к зубчатым дифференциальным механизмам. Второй поток
идет через редуктор, также на дифференциальные механизмы.
В дифференциальных механизмах оба механических потока сум-
мируются и идут к гусеницам.
В силовой передаче с параллельным потоком через электриче-
ские машины обычно проходит только часть общего потока мощно-
сти. Так как в механической ветви потери значительно меньше,
чем в электрической, то общий к. п. д. электропередачи с парал-
лельным потоком будет выше, чем с последовательным. Кроме того,
при параллельном потоке расчетная мощность электрических машин
будет меньше, чем мощность первичного двигателя.
Учитывая, что замкнутый поток в электромеханических транс-
форматорах обратимый, электромеханическая пере-
дача может работать как' с разветвленным по-
током, так и с циркуляцией мощности.
310
к Все положения теории замкнутых передач применимы и к элек-
тромеханическим передачам. Напомним, что в разветвленных по-
токах имеет место сужение внешнего диапазона регулирования,
а в циркулирующих, наоборот, расширение внешнего диапазона ре-
гулирования по сравнению с диапазоном регулирующей узловой
точки, т. е. в данном случае по сравнению с диапазоном электриче-
ского трансформатора.
Разветвленный поток, имеющий более высокий к. п. д., целесо-
образно использовать на высших скоростях движения машины,
а циркулирующий — на низших скоростях.
Кроме рассмотренных двух типов электромеханической пере-
дачи, обеспечивающей прямолинейное движение машины, имеются
еще комплексные электрические передачи, которые обеспечивают
как прямолинейное движение, так и поворот машины, причем непо-
средственно электрическим путем. В передачах этого типа отсут-
ствует зубчатый трансформатор и механизм поворота. Условимся
называть эти передачи просто электропередачами в отли-
чие от электромеханических передач.
Внешним признаком электропередачи, применяющейся в сило-
вой передаче гусеничных машин, обычно является наличие одного
основного генератора и двух тяговых электромоторов, установлен-
ных по бортам машины. В электромеханической передаче имеется
один основной генератор и один тяговый электромотор.
В силовой передаче колесных машин электропередача имеет
один генератор и один электромотор.
3. ТИПЫ ЭЛЕКТРОПЕРЕДАЧ ГУСЕНИЧНЫХ
И КОЛЕСНЫХ МАШИН
ОБЩЕЕ УСТРОЙСТВО ЭЛЕКТРОПЕРЕДАЧИ ГУСЕНИЧНОЙ МАШИНЫ
И ПРИНЦИП ЕЕ РАБОТЫ
Электропередача состоит из следующих агрегатов:
1) основного генератора, приводимого во вращение первичным
двигателем;
2) возбудителя, или вспомогательного генератора, якорь кото-
рого связан с якорем основного генератора;
3) двух электромоторов.
В основном генераторе (рис. 206) имеются две обмотки возбуж-
дения, одна из которых питается током от возбудителя, другая —
сериесная — током якоря. Через сериесную обмотку проходит
весь ток, создаваемый в якоре генератора и идущий к электро-
моторам.
Основной является обмотка, связанная с возбудителем. Сам
возбудитель имеет постороннее возбуждение, поэтому при постоян-
ных оборотах двигателя он вырабатывает ток постоянной величины,
не зависящий от режима работы электромоторов. Этот ток создает
постоянный магнитный поток полюсов генератора<
311
co
to
Рис. 206. Принципиальная схема электропередачи гусеничных машин:
f—двигатель; 2 —основной генератор; 3 — основная обмотка возбуждения; 4— возбудитель; .6— тормоз; 6 — бортовая передача; 7 — ведущее коле-
со; 8 — электромотор; 9 — аккумуляторная батарея; 10— реостат; 11 — переключатель; 12 — регулирующая обмотка возбуждения
Ток в сериесной обмотке идет в направлении, противоположном
току основной обмотки; на полюса машины он оказывает размаг-
ничивающее действие. Чем больше ток в сериесной обмотке, тем
сильнее ее размагничивающее действие, тем сильнее ослабляется
магнитный поток обмотки возбуждения.
Обмотки возбуждения электромоторов питаются током от акку-
муляторных батарей и, следовательно, имеют постоянный магнит-
ный поток.
Допустим, что на валу мотора увеличился крутящий момент
М = стФ1.
Тогда, вследствие того что ст = const и Ф = const, должен воз-
расти ток I.
Если бы на основном генераторе не было сериесной обмотки, то
с возрастанием тока в якоре при постоянном магнитном потоке
основной обмотки возбуждения должен был бы возрасти момент
на валу якоря, а следовательно, должна была бы возрасти нагруз-
ка на двигатель. Так как сериесная обмотка уменьшает магнитный
поток возбуждения, то момент не будет возрастать пропорционально
току и двигатель не будет перегружаться. Характеристика электро-
трансформатора будет непрозрачной (или близкой к непрозрачной).
Магнитный поток обмотки возбуждения моторов можно регули-
ровать реостатами. С помощью, реостатов можно влиять на силы
тяги на гусеницах, а также на скорость движения машины.
В схеме силовой передачи имеются переключатели, которые по-
зволяют изменять направление тока в обмотках возбуждения элек-
тромоторов. При изменении направления тока якорь меняет на-
правление своего вращения и машина начинает двигаться задним
ходом. Если с помощью реостатов изменять по-разному ток в об-
мотках возбуждения моторов, то на гусеницах будут создаваться
разные по величине силы тяги, в результате чего машина будет по-
ворачиваться.
Таким образом, электропередача обеспечивает как прямолиней-
ное движение, так и поворот гусеничной машины.
Примерно по такому же принципу работают и все другие элек-
тропередачи.
ЭЛЕКТРОПЕРЕДАЧА АВТОБУСА ЗИЛ-154
Электропередача состоит из генератора 6 (рис. 207), электро-
мотора /, переключателя 2 хода, выключателя 5 цепи подпитки,
реле напряжения 14 и режимного переключателя 15.
Генератор типа ДК-505А мощностью 50 кет представляет собой
четырехполюсную компаундную электрическую машину постоян-
ного тока. В генераторе имеются четыре главных полюса с шунто-
выми и сериесными обмотками возбуждения, кроме того, имеются
четыре дополнительных полюса с сериесными обмотками.
Электромотор — скоростная тяговая машина на 3100 об/мин.
Получение заднего хода машины осуществляется с t помощью
313
Рис. 207. Схема электропередачи автобуса ЗИЛ-154:
/ — электромотор; 2 — переключатель кода; 3 — выключатель шунтировки цепи возбужде-
ния генератора; 4 — предохранитель 80 а\ 5—• выключатель цепи подпитки; 6 — генератор;
7~ колодка зажимов силовых проводов; 8 — панель реле шунтировки поля электромотора;
9 — сопротивление шунтировки поля электромотора; 10 — колодка главных зажимов; 11 —
панель предохранителей 20 а, 350 9\ 12— выключатель силовых сопротивлений; 13 — щи-
ток сопротивлений; 14 — реле напряжения; Z5 — режимный переключатель
переключателя 2 хода и дополнительных регулирующих устройств
(реле механизма подпитки, сопротивлений, режимного переключа-
теля). Переключатель 2 хода пересоединяет концы обмотки воз-
буждения электродвигателя и тем самым изменяет направление его
вращения.
Рассмотрим работу электропередачи.
При работе двигателя на холостом ходу ток, вырабатываемый
генератором и посылаемый в электромотор, недостаточен, чтобы
создать момент на валу двигателя, необходимый для преодоления
момента сопротивления движению машины. При нажатии на пе-
даль подачи горючего замыкаются контакты выключателя 5 и вклю-
чается цепь подпитки шунтовой обмотки возбуждения генератора
(от аккумуляторной батареи). Одновременно возрастают обороты
дизеля. Ток, поступающий в тяговый электромотор /, быстро воз-
растает, и машина начинает двигаться. Как только напряжение
в генераторе достигает величины, достаточной для эффективного
самовозбуждения, реле напряжения 14 размыкает цепь подпитки
и генератор переходит на режим самовозбуждения.
Питание шунтовой обмотки генератора производится через со-
противление, величину которого водитель может изменять при по-
мощи режимного переключателя 15. Это дает возможность полу-
чить два режима движения автобуса: городской, когда разгон авто-
буса начинается при пониженных оборотах дизеля (сопротивление
311
в цепи возбуждения уменьшено), и загородный, когда разгон на-
чинается при повышенных оборотах дизеля (сопротивление в цепи
возбуждения увеличено).
Наличие режимного переключателя улучшает тяговые и эконо-
мические показатели электропередачи.
ЭЛЕКТРОПЕРЕДАЧА САМОХОДНОЙ АРТИЛЛЕРИЙСКОЙ
УСТАНОВКИ ФЕРДИНАНД
Во вторую мировую войну в Германии была создана тяжелая
самоходная артиллерийская установка Фердинанд, на которой была
применена электропередача.
Электропередача состояла из двух генераторов 2 (рис. 208) по-
стоянного тока, изготовленных фирмой Сименс, мощностью по
210—250 кет при 2500—3000 об/мин и двух электромоторов 12,
мощностью по 230 кет каждый при 1300 об/мин. Генераторы жестко
соединяются с бензиновыми двигателями 1 фирмы Майбах мощ-
ностью 300 л. с. при , 3000 об/мин.
Управление передачей осуществлялось с помощью двух рыча-
гов 4 контроллеров 3 й педалью 6.
Передача имела следующую электрическую характеристику:
ток в якорной цепи 650 а, напряжение генераторов 325—385 в, на-
пряжение электромоторов 385 в (при 1300 об/мин').
В генераторе имеются три обмотки: обмотка независимого воз-
буждения, обмотка противокомпаундная и шунтовая обмотка са-
мовозбуждения.
Рис. 208. Электропередача немецкой артиллерийской самоходной уста-
новки Фердинанд:
7 — двигатель; 2 — генератор; 3 — контроллер; 4 — рычаги контроллеров; 5 — педаль
привода пневмогидравлических тормозов; 6 — педаль привода управления дроссельной
заслонкой; 7 — баллоны пневмотормозной системы; 8 — ящик с коммутационной аппа-
ратурой; 9 — аккумуляторная батарея; 10 — направляющее колесо; //—компрессор
пневмотормозной системы; 12 — электромотор; 13 — бортовая передача; 14 — ведущее-
колесо; 75 — остановочный тормоз на валах электромоторов
315
Противокомпаундная обмотка предназначается для создания
магнитного потока, ослабляющего основной магнитный поток об-
мотки возбуждения и тем самым уменьшающего момент генератора
при возрастании якорного тока в цепи электромотор — генератор.
Кроме трех основных обмоток, имеются еще дополнительные
обмотки, улучшающие характеристику генератора.
В электромоторах также три основных обмотки: сериесная, ко-
торая создает крутое нарастание момента на валу двигателя при
возрастании якорного тока, независимая и шунтовая обмотка само-
возбуждения.
Кроме того, имеются еще дополнительные обмотки.
Рассматриваемая электропередача отличается от передачи, пред-
ставленной на рис. 206, только тем, что она имеет две независимые
электросиловые установки, каждая из которых управляет своей
гусеницей. Это значительно упрощает схему электропередачи, так
как последняя работает при повороте машины совершенно так же,
как и при ее прямолинейном движении.
Выбор данной схемы объясняется, кроме того, стремлением ис-
пользовать вместо одного мощного двигателя два маломощных дви-
гателя.
В остальном электропередача Фердинанд принципиально не от-
личается от рассмотренной выше электрической передачи и рабо-
тает по тому же принципу.
ЭЛЕКТРОПЕРЕДАЧА ДИЗЕЛЬ-ЭЛЕКТРИЧЕСКОГО ТРАКТОРА ДЭТ-250
В 1956 г. отечественной промышленностью был выпущен опыт-
ный образец сверхмощного гусеничного трактора ДЭТ-250 весом
25 г с максимальной скоростью движения около 20 км/час.
На тракторе (рис. 209) была установлена электромеханическая
передача.
Рис. 209. Трактор ДЭТ-2Ы) с электромеханической
передачей
316
Силовая установка
трактора состоит из дви-
гателя— дизеля 1 (рис.
210), расположенного в
передней части машины,
карданного вала 2, разда-
точного редуктора 3, двух
основных генераторов 4
и 5 постоянного тока, двух
вспомогательных генера-
торов 6 и 7, электромото-
ра 8 постоянного тока, ко-
нической передачи 9, двух-
ступенчатых планетарных
механизмов поворота 10
и 11 и бортовых пере-
дач 12 и 13.
В электропередаче при-
меняются генераторы ти-
па ДК-509А. Это четырех-
полюсные машины с тре-
мя обмотками возбужде-
ния: сериесной, шунтовой
и независимой. Генерато-
ры могут давать как по-
стоянный, так и перемен-
ный электрический ток.
Для этого якорь с одной
стороны снабжен коллек-
тором (для снятия по-
стоянного тока), а с дру-
гой— контактными коль-
цами (для снятия трехфаз-
ного переменного тока).
На постоянном токе
Рис. 210. Схема силовой установки трактора
ДЭТ-250:
Z — дизель; 2 — карданный вал; 3 — редуктор; 4 и 5 —
основные генераторы; 6 и 7 — вспомогательные генера-
торы; 8 — электромотор; 9 — коническая пара; 10 и 11 —
двухступенчатые планетарные механизмы поворота; 12 и
13 — бортовые передачи
один генератор может развивать мощность 103 кет при напряже-
нии 515 в и токе 200 а. На переменном токе напряжением 220 в
генератор развивает мощность 45 кет.
Трактор может использоваться в качестве подвижной электро-
станции переменного тока. В этом случае один или оба генератора
переводятся на переменный ток. Переменный ток может использо-
ваться также и в прицепе трактора при его движении; тогда один
генератор работает как силовой на постоянном токе и питает элек-
тромотор, а другой работает на переменном токе и питает электро-
оборудование прицепа.
Электромотор, применяющийся в данной передаче,— тяговый,
тепловозный типа ДК-304Т. Машина четырехполюсная, сериесная,
постоянного тока. Мощность электромотора 153 кет при длитель-
ном использовании тока силой 360 а.
317
Вспомогательные генераторы Г-74 служат: один для зарядки
аккумуляторных батарей, другой для питания независимой обмотки
возбуждения генератора и для питания цепи управления.
Для поддержания постоянного напряжения вспомогательных
генераторов при изменении числа оборотов двигателя каждый ге-
нератор снабжен реле РРТ-31.
Мощность вспомогательных генераторов 3 кет, напряжение
27—29 в.
В качестве механизма поворота на тракторе применяется двух-
ступенчатый планетарный механизм. Механизм имеет блокировоч-
ные муфты и тормозы. При включении муфт механизм блокируется
и крутящий момент с ведомого вала конической передачи пере-
дается на бортовые передачи. При включении тормозов Т1 меха-
низм дает пониженную передачу; скорость движения машины в этом
случае снижается в 1,54 раза.
Управление трактором осуществляется двумя фрикционными
муфтами Ф, двумя тормозами Т1 планетарного механизма, двумя
остановочными тормозами Т2, контроллером управления и реверсом.
Контроллер управления КВ-27 предназначается для управления
движением трактора. Он представляет собой электрический аппа-
рат, состоящий из набора сопротивлений. В контроллере имеются
пять положений, в которые может устанавливаться по желанию
водителя рычаг управления. Управление контроллером механиче-
ское — педалью подачи горючего. Нажимая на педаль, водитель
увеличивает подачу горючего и одновременно ток в обмотке воз-
буждения. Обороты двигателя возрастают. Вместе с тем увеличи-
вается напряжение генератора и вследствие этого увеличиваются
обороты электромотора. Трактор повышает скорость движения.
Для получения заднего хода служит реверс ПР-762. Это элек-
трический аппарат, изменяющий направление тока в обмотке воз-
буждения тягового электродвигателя. Вследствие изменения на-
правления тока изменяется направление вращения якоря электро-
двигателя, а с ним и направление движения машины.
Реверс имеет пневматический привод.
Двухступенчатый планетарный механизм поворота служит од-
новременно трансформатором прямолинейного движения трактора.
Он имеет две передачи. Так, если включены муфты Ф, то трактор
двигается на «транспортном режиме» со скоростью 3,08—
19,2 км/час. Если муфты выключены и включены тормоза Т1, то
трактор двигается на «рабочем режиме» со скоростью 2—
12,45 км/час.
Поворот трактора осуществляется с помощью рычагов управле-
ния. Для этого с одного борта выключается фрикционная муфта и
затягивается один из тормозов Т1 или Т2. При полной затяжке
тормозов трактор поворачивается на соответствующем расчетном
радиусе.
Включение блокирующих муфт и выключение тормозов Т1 про-
исходит с помощью гидропривода. Остановочный тормоз вклю-
чается с помощью пневмопривода,
318
Трактор имеет двойное торможение: остановочными тормозами
Т2 и двигателем. При торможении двигателем электродвигатель
переходит на генераторный режим, а генераторы — на режим дви-
гателя. При этом дизель работает как тормоз.
В качестве средства запуска двигателя служит электро-
инерционный стартер. Он представляет собой небольшой
маховичок, приводимый во вращение электромотором. Когда ма-
ховичок накопит достаточную кинетическую энергию, он соеди-
няется с помощью храповика с коленчатым валом двигателя и, от-
давая ему свою энергию, прокручивает коленчатый вал — двига-
тель запускается.
Применение электропередачи ца тракторе ДЭТ-250 упростило
и облегчило управление этой тяжелой машиной и значительно по-
высило ее маневренность и проходимость.
4. ПРЕДВАРИТЕЛЬНЫЙ РАСЧЕТ ЭЛЕКТРОМЕХАНИЧЕСКОЙ
ПЕРЕДАЧИ
Задачей расчета электропередачи является определение ее основ-
ных характеристических параметров, по которым могут быть подо-
браны электрические машины — электромоторы и генераторы. Для
подбора электромашин пользуются каталогами.
Расчетом определяются также параметры фрикционно-зубчатых
передач, входящих в силовую передачу, например передаточные
числа зубчатого трансформатора, бортовых передач, механизма
поворота и др.
Расчет передачи носит вначале характер предваритель-
ного расчета. После того как на основании предварительного
расчета выбраны электрические машины, а следовательно, опреде-
лены их характеристики, производится поверочный расчет.
В результате поверочного расчета выявляются те коррективы, кото-
рые следует внести в результаты предварительного расчета. Затем,
если это необходимо, производится повторный, корректирующий,
расчет, из которого окончательно определяются все параметры
электропередачи.
Рассмотрим здесь расчет вновь проектируемой электромеханиче-
ской передачи с параллельным силовым потоком
как общий случай расчета.
ВЫБОР СХЕМЫ ПЕРЕДАЧИ
В начале расчета выбирается схема передачи. Выбор схемы опре-
деляется принятым типом передачи. Если передача электромехани-
ческая, то к ней необходимо выбрать тот или иной механизм пово-
рота, а также определить расположение зубчатых передач и фрик-
ционных элементов. При выборе схемы силовой передачи обычно
принимают какой-нибудь прототип, в качестве которого берут одну
из уже выполненных передач.
319
Рис. 211. Схема электромеханической передачи с па-
раллельным силовым потоком
Произведем расчет электромеханической передачи, кинематиче-
ская схема которой представлена на рис. 211.
Передача состоит из генератора Г постоянного тока, связан-
ного с двигателем внутреннего сгорания Д, электромотором М и
фрикционно-зубчатой передачи.
В фрикционно-зубчатую передачу входят две фрикционные
муфты Фа и Фб с установленными на их ведомых барабанах тор-
мозами Та и Тб\ два зубчатых редуктора а и б; два эпициклических
механизма П и Л; два остановочных тормоза Т„ и ТА; две борто-
вые передачи бп и две конические передачи ж и е.
На рис. 212 приведена схема силового потока выбранной элек-
тромеханической передачи. Здесь обозначения узловых точек соот-
Рис. 212. Схема силового потока электромехапиче
ской передачи
320
ветствуют обозначениям, принятым на кинематической схеме. Для
упрощения схемы силового потока из нее исключены узловые точки
бортовых передач и тормозные точки остановочных тормозов.
Рассмотрим работу силовой передачи при прямолинейном дви-
жении машины и при повороте.
При прямолинейном движении механический поток
от двигателя подводится к точке ж. Здесь он разветвляется на три
потока: два потока через фрикционные точки Фа и Фб и механиче-
ские точки а и б подводятся к суммирующим точкам п и л\ третий,
механический, поток в узловой точке Г преобразуется в электри-
ческий поток и подводится к узловой точке М. В точке М электри-
ческий поток снова преобразуется в механический поток и подво-
дится к точке е. В точке е механический поток разветвляется на
два потока, идущих к суммирующим точкам. От суммирующих то-
чек потоки идут к гусеницам.
Таким образом, силовой поток после точки ж преобразуется в
два потока различной формы энергии — в механический и электри-
ческий. В электрическом потоке должна происходить непрерывная
автоматическая трансформация его параметров в зависимости от
условий движения машины.
Поворот машины происходит отключением одной из фрикцион-
ных муфт Фа или Фб и притормаживанием тормоза Та или Тб.
Допустим, что отключена и заторможена правая гусеница (вы-
ключена муфта Фа и заторможен тормоз Та). Тогда в точке ж ме-
ханический поток разветвится на два потока. Один пойдет на забе-
гающую гусеницу непосредственно через точки б и л, а другой —
после преобразования в точках Г и М, причем к этому потоку в
точке е добавится циркулирующий поток, идущий от отстающей
гусеницы через точку п.
Поворот машины будет совершаться с циркуляцией мощ-
ности между отстающей и забегающей гусеницами.
РАСЧЕТНАЯ СХЕМА СИЛОВОГО ПОТОКА
Расчет электромеханической передачи ведется на условия
прямолинейного движения машины с проверкой
на поворот.
Из условий прямолинейного движения определяются основные
параметры передачи и подбираются по этим параметрам электри-
ческие машины. После этого производится поверочный рас-
чет на различные режимы движения машины, в том числе и на
режим поворота.
Рассмотрим вначале прямолинейное движение ма-
шины. При прямолинейном движении схема силового потока мо-
жет быть упрощена, как показано на рис. 213. Эта схема получена
из схемы, представленной на рис. 212, перегибом последней по
оси ж—е.
21—20
321
Рис. 213. Упрощенная схема
силового потока
На схеме (рис. 213) узловые точ-
ки а и б заменены узловой точкой Р1
(первый редуктор). Передаточное чис-
ло конической пары ж включено в пе-
редаточное число точки Р1, поэтому
точку ж рассматриваем как развет-
вляющую.
Узловые точки Г и М заменены
одной электромеханической точкой Т
(узловая точка электрического транс-
форматора).
Точки пил объединены в одну ме-
ханическую точку с.
Точка е на упрощенной схеме обо-
значена буквой Р2 (второй редуктор).
Так как при прямолинейном дви-
жении машины фрикционные муфты
полностью включены, а тормоза полностью выключены, то фрик-
ционные и тормозные точки Ф и Т преобразуются в направленные
потоки и на схеме силового потока не обозначаются.
ИСХОДНЫЕ ДАННЫЕ ДЛЯ РАСЧЕТА
Чтобы произвести расчет, необходимо задаться исходными дан-
ными. Примем в качестве исходных данных следующие величины:
1) мощность двигателя Ne и число оборотов его вала на рас-
четном режиме nN\
2) скорости движения одиночного тягача ятах и t?m|n и скорость
движения поезда ^1пах;
3) тяговые усилия по двигателю РЛ и Р'^, соответствующие
скоростям движения одиночного тягача и V. и поезда Т',’,1V;
1 Шал ПИП Шал ’
тяговое усилие по сцеплению Рс;
4) радиус ведущих колес и передаточное число бортовых
передач /бп.
Кроме того, должны быть заданы характеристики к.п.д. гене-
ратора и электромотора в зависимости от нагрузок этих машин. При
отсутствии характеристик машин конкретных марок для прибли-
женного расчета может быть использована типовая характе-
ристика 7)г, т)н = f , представленная на рис. 214.
На типовой характеристике приняты следующие обозначения:
Мх — текущее значение момента на валу машины (генератора
или электромотора);
Л7р — расчетное значение момента на режиме, соответствующем
паспортной мощности и оборотам машины;
v], — к. п. д. генератора;
т)н — к. п. д. электромотора.
322
Исходные данные в первых четырех пунктах определяются на
основании тягового расчета тягача. Типовая характеристика по-
лучена на основании анализа характеристик ряда электрических
машин. При этом характеристика электромотора снималась при
постоянном напряжении.
Произведем в качестве примера расчет электропередачи для
гусеничного тягача АТ-Т.
Рис. 214. Типовая характеристика электромашин
Примем следующие исходные данные для расчета: Л/г = 415 л. с.:
nN= 1600 об/ман; Р = 2000 кг-, Р . = 15000 кг-, Р , =
zv ' ’ azf max > д& min ’ дя' max
= 3350 кг-, Рс= 17 200 кг; ^тах = 35,5 км/час; fmin = 5,4 км/час;
г'тах= 24 км/час; г* = 0,28 м; z6n = 6,78.
Приведенные здесь величины скоростей&тах, г?тах, г»т1п являются
ориентировочными. Их точное значение определяется дальнейшим
расчетом.
ПОРЯДОК ПРЕДВАРИТЕЛЬНОГО РАСЧЕТА
В предварительном расчете примем, что электротрансформатор
имеет непрозрачную характеристику или Ne = const
И nN — const.
Условимся обозначать коэффициенты циркуляции силового по-
тока в двух параллельных ветвях через sg и еи, где
с _ .
Э — м >
1ж
21
323
^2ж
еи N, ’
<V 1ж
Здесь коэффициент еэ характеризует ту часть мощности, кото-
рая ответвляется в электрическую ветвь, а е, — в механическую
ветвь. При этом между обоими коэффициентами существует извест-
ная зависимость
% + — 1 •
Коэффициенты еэ и ем могут иметь как положительное, так
и отрицательное значение. Если оба коэффициента положительны,
то поток разветвленный, если один из коэффициентов отри-
цательный, то поток циркулирующий.
Согласно данному выше определению коэффициентов еэ и ем
при циркуляции потока по часовой стрелке (Т-> Ж Р1 -* С ->
-> Р2 -> Т) коэффициент ем имеет отрицательное значение, при
циркуляции потока против часовой стрелки — положительное зна-
чение. Соответственно коэффициент еэ будет иметь положительное
или отрицательное значение.
На расчетном режиме силовой поток следует принимать раз-
ветвленным. При этом рекомендуется брать коэффициент е9
в пределах 0,3—0,5.
Расчетный режим движения машины или режим длительной ра-
боты электрических машин определяется скоростью
^ = (0,8-1)^. (170)
Примем для дальнейших расчетов, что е9 = 0,4; ем = 0,6;
vp = 0,8 -i'max — 19,2 км/час.
Мощность генератора определяется по формуле
М = еДл = (171)
где т)' — к.п.д. моторной установки с учетом потерь на вентиля-
тор; принимаем т/ — 0,9;
т)г — к.п.д. генератора на оптимальном режиме; по типовой
характеристике т]г = 0,95.
Будем иметь
Л/г = 0,4-0,9-0,95-415-0,736= 103 кет.
Определив Л/г = 103 кет и зная число оборотов n[ = nN =
= 1600 об/мин, подбираем по каталогу генератор.
Если по данной мощности в каталоге нельзя подобрать генера-
тор с соответствующим числом оборотов, то следует между гене-
ратором и двигателем ввести зубчатый редуктор.
Допустим, что по каталогу подобран генератор мощностью
Л/г = 100 кет при лг = 1500 об/мин. Примем эти данные в каче-
стве расчетных.
324
Определяем передаточные отношения узловых
точек Pl, Р2 и с.
Внутренним передаточным отношением суммирующей узловой
точки задаемся. Его можно выбирать в границах
^ = (-2)-(-4).
Примем для дальнейших расчетов z]2c = — 2,5.
Для определения передаточного отношения z21p] составим сле-
дующее уравнение моментов:
4“ г21р1^2р1 = О-
Принимаем механизм идеальным. Из схемы силового потока
получим:
ЛЛ ---- -- ЛЛ --- --- , 1^ — ; /U .
'TJjpj 'и2ж . е,м .л Ем'*Щж»
ш2ж шдг
^2р1 = 'Klc-
Для узловой точки с можем написать;
+ ^21с^2с = 0;
^0с + 7И1С + ^2с — 0*
Решая эти уравнения, найдем
Л41с=-^-МОс.
1 — *21с
Тогда
^1Р1_ sm0—'21с) /И1Ж
Ир,” /21с • Не-
определим отношение моментов тг*.
Л7ос
Будем иметь:
(172)
где т]0 — к. п. д. передачи на расчетном режиме;
юос — угловая скорость водила точки с.
Скорость «)Ос можно выразить через расчетную скорость движе-
ния машины
*бп^р
Ш0с = -^-
г к
Или получим
м =
гбпир
325k
Тогда
— 2,65 .
VКПМ
Подставив это выражение в формулу (172), получим окончательно
; _ 2,65 (1 — i21c) Z6ne„Vp /1704
г21р1-----------~~7> , 11' л)
rlorKlHcnN
где vp—скорость машины на расчетном режиме в км/час-,
nN — число оборотов двигателя на расчетном режиме в мин;
!\ — радиус ведущих колес в м.
Определим к. п. д. силовой передачи на расчетном режиме -цр.
Для параллельных потоков можем написать выражение мощ-
ностей
^ic = MippiW,
+>с = еэЧ,чиЧр2ч'Ч-
Обозначим через тк к. п. д. точки с
у, —---------------------------------
730 Nle + •
Отсюда
М)е Чс (zVjc + ^2с) Чс (®мЧР1 + ®эЧгЧмЧр2) Ч
Окончательно будем иметь
Чо = —^=(М1₽1+ М]гВДр2)Чс- (174)
В первом приближении примем
Чр1 Чр2 Че 1-
Кроме того, имеем согласно типовой характеристике inr = 0,95:
Ч» = 0,92.
Тогда 7]0 = 0,6+ 0,4 • 0,95 • 0,92 = 0,95.
По формуле (173) находим
, _ 2,65 (1 + 0,4) 6,78 0,6-19,2
^р1 0,95-0,28 (—0,4) 1600 ~
Редуктор Р1 повышающий.
Определяем передаточное отношение точки Р2.
Имеем
^2с +Р2^м
Л1С = +p+/V (175)
2,65/’бПГр
Лое = --------
' к
где пя — число оборотов вала электромотора.
326
Подставляем эти выражения в кинематическую характеристику
точки с. Тогда получим передаточное отношение
Z2Ip2
''12с"м
(176)
Для, предварительного определения г21р2 примем предельные
обороты электромотора лм тах = 4000 в минуту при &тах =
= 35,5 км[час.
Тогда
_ 1,68-1600 2,65(—2,5—1)6,78-35,5 _ п „
Z2iP2 — -2,5-4000 + -2,5-0,28-4000 —
Редуктор Р2 понижающий.
Подставив в уравнение (176) значение z2|p2 и г'р=19,2 км/час,
определим расчетные обороты электромотора
1,68-1600 , 2,65 (-3,5)6,78-19,2 . ,,
= =2УД53 + --2,5.Ь,^-0Г53— = 1230 об1М11Н'
Допустим, что нами подобран по каталогу электромотор мощ-
ностью N„ = 100 кет при п„ = 1000 об!мин.
Уточняем передаточное отношение редуктора Р2 по данным рас-
четных режимов электромотора и машины
_ 1,68-1600 2,65(—2,5—1)6,78-19,2 _ „
Z2iP2 — —2,5-1000 + -2,5-0 28-1000 — и>сю.
Определим моменты на валах электромотора
и генератора. Для электромотора
1,36/^716,2
(177)
где Nu— электрическая мощность электромотора;
т]0] — к. п. д. электромотора на оптимальном режиме;
пя— число оборотов электромотора.
По типовой характеристике на расчетном режиме имеем *1м =
= 0,92.
Тогда получим
1,36-100-0,92-716,2 п„
АД = -------щД-------- = 90 кгм.
1000
Аналогично для генератора
1,36^716,2
МГ =---------—-
r «r’lr
На расчетном режиме
(178)
7]г — 0,95,
327
тогда
.. 1,36-100 716,2 со с
^г— 1500-0,95 —68,5 кгм.
Полученные расчетные параметры сведены в табл. 29.
Таблица 29
Расчетные параметры электромеханической передачи
А1г. кет "г’ об/мин 2ИГ, кгм кет % об1мин м , м’ кгм Sipi Slp2 ‘21 с
100 1500 68,5 100 1000 90 1,68 0,65 —0,4
5. ПОВЕРОЧНЫЙ
РАСЧЕТ ЭЛЕКТРОМЕХАНИЧЕСКОЙ
ПЕРЕДАЧИ
производим для движения машин на сле-
Поверочный расчет
дующих режимах: 1) на режиме максимальной скорости; 2) на ре-
жиме трогания с места; 3) на режиме «Стоп» электромотора; 4) на
режиме минимальной скорости; 5) на режиме поворота.
Определим все кинематические и статические параметры сило-
вого потока на режиме максимальной скорости. Для
этого при наличии характеристики трансформатора M=f(n) не-
обходимо знать два параметра. Так как характеристика данного
трансформатора М = f (и) неизвестна, то необходимо задать еще
один параметр. При поверочных расчетах передачи на заданном ре-
жиме движения принимаем в качестве задающих параметров число
оборотов двигателя nN= 1600 в минуту, мощность на валу двига-
теля А), = 415 л. с. и силу тяги по двигателю " "
=2000 кг.
Определим моменты на валах электромотора и
Составив уравнения статики для узловой точки с, будем иметь
(см. рис. 212):
р __ р
;г» шах *'0
генератора.
откуда
Но
+ ^2с — 0;
+ *210^20 — 0,
Л42с = —
44рс
1 — '12с
Мое
1 ~ '21с
^ос —
'бп
2000-0,28 „„
---т=Б— = — 83 кгм.
О,/ о
328
Следовательно,
Мс = — г~г б * = 23,6 кгм\
IC 1 4- 2,5 ’ ’
/И2с = — = 59 кгм.
Определим моменты потоков узловой точки ж
/И2ж = — /И1с/2,d1 = — 23,6 • 1,68 = — 39,6 кгм.
£,п\ JL. С. I р 1 г I >
Из условия непрозрачности характеристики передачи и равно-
весия точки ж находим
г, = ^Зж = ^Лж ^2ж>
НО
716,716,2.415-0,9 ,
= /Ид, = ——- = 167 кгм.
11к " nN 1600
Следовательно,
М = 167 — 39,6 = 127,4 кгм.
Коэффициент нагрузки генератора по моменту
, М( 127,4 й
=м; = Ж5 = 1-86’
По типовой характеристике при =£ = 1,86 имеем т]г=0,94.
Определим момент на валу электромотора
Л7р1 = — г2|р2^2с = — 0,65 59 = — 38,2 кгм.
Коэффициент нагрузки электромотора по моменту
k = = -0,42.
По типовой характеристике к. п. д. электромотора будет т]м = 0,8.
Определяем коэффициенты циркуляции ем и еэ Так как для
ки ж имеем «>1Ж =
точ-
= «>3ж, то
/И,ж 39,6 Л
= — йГ* = -fib = 0,24;
/И1Ж 167 ’ ’
es = 1 — 0,24 = 0,76.
Определим общий к. п. д. электрического трансформатора и
передачи:
s
м
всеи
— Чг71м = 0,94 • 0,8 = 0,75;
7)о = О,24 + 0,76-0,94-0,8 = 0,24 + 0,57 = 0,81.
329
Определим коэффициент трансформации электрического транс-
форматора и передачи в целом
Мм _38,2 _ п „
— мг — 127,4 V'6'
k = = — 0,5.
пр ЛГ1Ж 1с>7 ’
Передаточное число электрического трансформатора и пере-
дачи
z,„ = — = = 0,62.
12пР пОс тю 0,81
Число оборотов электромотора при &тах
«Г 1600 ,ЛПП ,,
л .— = -ц-г = 4000 об мин.
z12t 0’4
Отсюда следует, что нагрузка генератора по моменту лежит в
допустимых пределах; максимальные обороты электромотора не
выше допустимых; циркуляция мощности отсутствует (так как
коэффициенты % и ем оба положительные).
Определяем режим трогания с места.
На режиме трогания с места скорость машины v = 0, сила
тяги Р== Р,.= 17 200 кг.
Находим момент на ведомом валу передачи
Момент на валу электромотора
/И = i = 0,65 = — 330 кгм.
1 ~ 'Фе 1 + 0’^
Коэффициент нагрузки электромотора по моменту
t ________________________ —330 q
— 90 — — 3,6.
Такая перегрузка электромотора кратковременно допустима.
По типовой характеристике при ^=3,6 находим т;м = 0,68.
Определяем момент на. валу генератора. На основании уравне-
ний статики имеем:
ТИ2ж = 2W]cz2ipi = ? ^2ipi = тц-25 = 340 кгм\
/Иг = — /И3ж = М1Ж + = 167 — 340 = — 173 кгм.
330
Перемена знака момента /И при неизменном направлении вра-'
щения генератора показывает, что генератор в данном слу-
чае работает в моторном режиме.
Коэффициент нагрузки генератора по моменту
£ — ~173 —_____о 52
< ~ 68,5 —
Эту перегрузку как кратковременную можно считать допу-
стимой.
По типовой характеристике при ^ = ^ = 2,52 находим
4. =0,9.
Определим коэффициенты циркуляции:
ем = 1 — s3= 1 + 1,04 = 2,04.
Значения еэ = —1,04 и ем =2,04 показывают, что в замкну-
том потоке передачи происходит циркуляция мощности.
Циркуляция происходит по часовой стрелке, т. е. от узловой точки
трансформатора Т к разветвляющей точке ж.
Заметим, что через механическую ветвь проходит силовой по-
ток, превышающий по мощностному фактору подводимый от дви-
гателя поток больше чем в два раза.
Определим обороты электромотора. Составим уравнения кине-
матики узловой точки с
пк — *12с«2с + (гЫс — 1 ) «Ос = 0.
Так как машина стоит на месте, то л0г = 0
Тогда
«м
Л/v'atpi 1600-1,68 1ССА Л/„ „
----------- = ---о- п» = — 1650 об МИН.
; I —2,5-0,65 '
‘12с'г>рг
Электромотор вращается в обратную сторону. Так как при этом
знак момента не изменился, то электромотор работает в г е н е р а-
торномрежиме.
Определим к. п. д. электрического трансформатора и пере-
дачи:
7]т = 7],т]м = 0,68-0,9 = 0,61;
*
7]0 = = 0, так как NOc = 0.
' * 1ж
Коэффициент трансформации электрического трансформатора
и передачи будет:
_/Им ,-330__ . q.
» Мг — —173
331
, МоС -710
пр М11К 167
— 4,25.
Кинематическое передаточное число трансформатора и передачи
i
12т "м
_ 1600 _
— -1670 ~
— 0,96;
*12пР = ^ = °°> так как лос = 0.
Силовой будет: диапазон электрического трансформатора и передачи • max 1,9 р п rfCT = k . = -0,3 = 6’2; т min ’
max —4,25 о -
спр =/Г— = Т=оУ = 8-5'
пр min ’
Режим «Стоп» электромотора. При переходе элек-
трической машины из режима работы электромотора в режим ра-
боты генератора имеется положение, при котором обороты якоря
машины равны нулю, а ток, проходящий через якорь, не равен
нулю.
На этом режиме лм — 0, следовательно, п2с = 0.
Определим скорость машины.
Из уравнения кинематики точки с имеем:
л1с = «Лр! = 1600-1,68 = 2700 об/мин-,
пОс =---------= ™ об/мин.
Скорость машины
А АА 2лг„пОс 0,06-2-3,14-0,28-770 1А >
v = 0,06 —---------------------------= 12 км/час.
/(5п О,/о
Так как эта «корость находится в зоне рабочих скоростей ма-
шины -т-'Рщах), т0 необходимо обеспечить охлаждение затор-
моженного электромотора посторонним вентилятором.
Несмотря на то, что к. п. д. электрического трансформатора
на этом режиме равен нулю (тгг = 0, так как лм — 0), к. п. д. всей
передачи будет близок к единице, потому что силовой поток идет
в основном по механической ветви.
Для определения нагрузки электромотора по моменту зада-
димся к. п. д. передачи = 0,9 и определим момент на валу элек-
тромотора:
. 716,2Л^'г10 _ 716,2-415-0,9-0,9
=----------------------------770-----= — 313 кгм-,
332
440с з —313-0,65 ,
Л4м — - г21р2 —: i~4 — — 145 кгм.
1 ‘21 с
Коэффициент нагрузки электромотора по моменту
, Мх -145 , с
k- = м; = ^сг = -1'6-
Такая перегрузка электромотора по моменту допустима при
обеспечении нормального охлаждения его обмоток.
Рассмотрим режим движения на минимальной
скорости (^т1п) при преодолении максимальных сопротивле-
ний.
Потребная для движения сила тяги /эдг/п11п = 15000 кг. Опре-
делим моменты на валах силовой передачи
рм>т\пгк 15000-0,28 „оп
Мос =------=------------678—= ~ 620 кг^
Согласно уравнениям статики силового потока имеем:
МОс 620 . . о
/И,. =-------= — = 443 кгм-.
ь- 1 ______1,4 ’
1 г2|с
.. AfOr 620
Л41с =-------V—= v^=177 кгм.
1 1 —Л, 3,5
1 ‘12с ’
Момент на валу электромотора
Л7м = — 0,65-443 = — 288 кгм.
Коэффициент нагрузки электромотора по моменту
М,-288_
« 90
Кратковременно такую перегрузку можно допустить. Для обес-
печения же длительного движения при ^min = 5,4 км/час необхо-
димо ввести вторую ступень в редукторе Р2 (с z21p2<0,65). При
расчете второй ступени редуктора необходимо задаться максималь-
ными оборотами электромотора при трогании машины с места,
Определим момент на валу генератора:
/И2ж = — Л41сг21р1 = — 177 • 1,68 = — 296 кгм-,
/И = 167 — 296 = — 129 кгм.
Коэффициент нагрузки генератора по моменту
k — . ~122_ =________________________1 g
г 68,5
Коэффициенты циркуляции
129 Л 77
% 167 °’77;
е —______?9_ = 1 77
М 167
333
Отрицательное значение еэ показывает, что в замкнутом потоке
циркулирует мощность (против часовой стрелки). Тогда генератор
должен работать на моторном режиме, а электромотор — на гене-
раторном режиме.
Определим к. п. д. электрического трансформатора и передачи
в целом. Воспользуемся типовой характеристикой (рис. 214).
Для электромотора, работающего в генераторном режиме, на-
ходим по кривой т), при =3,2 т)м =0,82; для генератора, рабо-
тающего в моторном режиме, находим по кривой при k. = 1,9
т)г =0,9. Тогда к. п. д. трансформатора будет 7]т = 0,82 • 0,9 = 0,74
и к. п. д. передачи в целом
rln= 1 —(1 — 7]т)еэ= 1 -0,26-0,77 = 0,8.
Определим коэффициент трансформации электрического транс-
форматора и передачи в целом.
Так как коэффициент трансформации есть отношение момента
отводимого потока к моменту подводимого потока, то
167
число трансформатора г'21Т. Будем
= /Иос = —620
Определяем передаточное
иметь
— 0J4- — °’61’
Число оборотов вала электромотора будет
лм = z?| г л, = — 0,61 • 1600 = — 975 об/мин.
Согласно схеме силового потока имеем:
л1с= 1600-1,68 = 2700 об/мин-,
л2с =— 975-0,65 = — 634 об/мин.
Из кинематической характеристики узловой точки с получим
2700 — 2,5-634 — (2,5 + 1)л0с = 0.
Или лОс = 320 об/мин.
Находим скорость движения машины
лл0сгкЗ,6 3,14.320-0,28-3,6 _ ,
~ЗОЦ/Г =-------30+78-----= 5 км^ас-
Режим поворота. При повороте машины схему силового
потока можно представить, как показано на рис, 215,
334
Рис. 215. Силовой поток электропередачи при
повороте машины
Силовой поток будет состоять из следующих узловых точек:
узловой точки электрического трансформатора Т, состоящего из
двух электрических машин — генератора и электромотора, трех
узловых точек редукторов Pl, Р2 и двух узловых точек сл и сп
планетарных механизмов.
Допустим, что поворот машины совершается при полностью за-
торможенном тормозе Тр1 (на рис. 212 — тормоз Та). При этом
правая фрикционная муфта полностью выключена, а левая — пол-
ностью включена; тормоз левого борта расторможен. Тогда на схеме
силового потока фрикционные и тормозные узловые точки будут
отсутствовать.
Примем в качестве задающих параметров силового потока обо-
роты вала двигателя, момент на валу двигателя и момент на валу
электромотора. Причем момент на валу электромотора опреде-
ляется из условий поворота машины.
Поворот можно регулировать с помощью тормозов или измене-
нием Параметров силового потока двигателя. Можно также регули-
ровать поворот изменением магнитного потока в обмотках возбуж-
дения электрических машин.
Примем для расчета следующие условия поворота: коэффициент
сопротивления повороту р =0,7; коэффициент сопротивления каче-
нию /=0,15; вес тягача G = 25r; -4- = 1,42.
О
Определим силы тяги на отстающей и забегающей гусеницах:
р pG L 1 fG _
П — 4 • в + 2 ’
р — L । fG .
Ъ 4 ’ В 2 1
p\ = — —245000 1,42 + -!15 22500Q = — 6200 + 1870 = - 4330 кг-,
Рг= 6200 4- 1870 = 8070 кг.
335
Определяем моменты на ведомых валах суммирующих точек сп
и сл;
.. ZVk 4300-0,28 ._п
^оси — — 6,78 ~~ 179 КгМ'’
.. PsrK 8070-0,28 „о.
Я- — — г-би — 678 — 334 кгм.
Из уравнений статики получим
Д4,сп = —= —128 кгж;
1-/21с 1,4
Д4 = _ _Mo£3_ = _ = 239 кгм.
Момент на валу электромотора
Мм = — (ТИ2сп + Л4,сл) z21p, = — (239 — 128) 0,65 = — 72,1 кгм.
Коэффициент нагрузки электромотора по моменту
. 72,1 л о
— 90 °>8-
Определим момент на валу генератора.
Так как правая механическая ветвь разомкнута, то механиче-
ский поток идет от двигат®ля только через левую ветвь (рис. 215).
Будем иметь:
Мг — — /И3ж = /И]ж + ТИ2ж;
7И1Ж — Л4д =167 кгм-, /И2ж = 7WlcJlz2]pi;
., Мосл —334 „ _ _
= — ГТ77 = — ттад = 95,5 кгМ}
/И2ж = — 95,5 • 1,68 = — 160 кгм\
/Иг = 167— 160 = 7 кгм\
7
=бад= °’1'
По типовой характеристике находим к. п. д. генератора и элек-
тромотора т)г = 0,6 и т)м = 0,9.
Определяем коэффициенты циркуляции:
Af. 7
% = ^ = Т67=°>04;
ем = 1 — 0,004 = 0,96.
Определим к. п. д. электрического трансформатора и передачи
в целом
>1т = № м = 0,6 • 0,9 — 0,54;
7]о = 0,96 + 0,04 • 0,54 = 0,98.
336
При этом мы пренебрегли потерями в механических узловых
точках.
Определим
передачи:
коэффициенты трансформации трансформатора и
/И,, __7? 1
k = = = — 10,3;
т Мг 7 ’ ’
l _____ 44осл __ 334___ q
пр — м1ж ~ 167 —
Передаточное число трансформатора
«г _ -10,3
1
_________ 19
0,54 ’
Z12t п
Число оборотов электромотора
пг I600 ол Л!
Пм = = = 84 об1М11Н-
Определим относительный радиус поворота машины:
1 I ^ОСП
t 1 Т
__ 1 . ____“ОСЛ
Р — 2 t п0С[|
^Осл
Для определения лОсл и лОсп составим уравнения кинематиче-
ских характеристик точек с:
^1сл ^12с^2сл (^12с 1) ^Осл 6,
^1сп ^12с^2сп + (^12с 1) ^Осп 0.
Кроме того, имеем
л2сл — /г2сп = лмг21р2= 84 • 0,65 = 54 об!мин\
Л1еп = 0;
л1сл = ллАр1 = 1600-1,68 = 2700 об]мин.
Peinasf эти уравнения, получим:
лосл = 8О6 об [мин-,
Л0сп = 38 Об/мин..
Отсюда определяется радиус поворота машины:
38
1 + 806 _ А «
р — 2 38 — 0,55-
1 — 806
Скорость поступательного движения забегающей гусеницы ма-
шины при повороте будет равна
ЧослГк 806-0,28 ,
— 2,65/6п ~ 2,65-6,78 — 12,6 км!11ас-
22—20
337
Рис. 216. Характеристика совместной работы двигателя и электроме-
ханического трансформатора
338
Так как радиус поворота машины р=0,5, то скорость центра
симметрии машины будет
VPJ 12,6 с о
ус = ~2~ — — = 6,3 км/час.
Определим критический радиус поворота по заносу при vc —
= 6,3 км/час.
Согласно формуле 116 (см. ч. 1) имеем
/б^зу
_____ v2 ___ \3,6 / __р 17
Р*Р — “0,7-9,81 -2,64 — и>1Л
Следовательно, поворот машины будет происходить без заноса.
Результаты поверочного расчета представлены на рис. 216 ха-
рактеристикой совместной работы двигателя и электромеханиче-
ского трансформатора, установленного в параллельном силовом по-
токе. На этой характеристике нанесены скорость машины и, числа
оборотов двигателя лд = nN = const, электромотора моменты:
на валу двигателя Л4Д, генератора Мг и электромотора Л4М; коэф-
фициент циркуляции еэ, к. п. д. электрического трансформатора т)т
и всей передачи tjo в зависимости от силы тяги Р.
Из характеристики следует, что электромеханическая силовая
передача с параллельным силовым потоком обеспечивает высокий
к. п. д. (т)о > 0,9) при широком диапазоне ее регулирования.
При различных скоростях движения машины электромотор пе-
реходит в генераторный режим, а генератор в моторный режим ра-
боты, При трогании машины с места и при движении на малых ско-
ростях имеет место циркуляция мощности с коэффициентом цир-
куляции е = 1. Наличие циркуляции мощности позволяет значи-
тельно расширить диапазон регулирования передачи, не снижая ее
к. п. д. на ходовых скоростях.
Мы рассмотрели порядок примерного расчета электромеханиче-
ской передачи, пользуясь типовой характеристикой электромашин.
В действительном расчете в распоряжении конструктора может
быть характеристика, выраженная не в относительных, а в абсо-
лютных величинах. Это, однако, не внесет принципиальных изме-
нений в порядок расчета.
22*
ГЛАВА VII
МЕХАНИЗМЫ ПОВОРОТА
1. НАЗНАЧЕНИЕ И КЛАССИФИКАЦИЯ МЕХАНИЗМОВ
ПОВОРОТА
НАЗНАЧЕНИЕ МЕХАНИЗМОВ ПОВОРОТА
Механизм поворота предназначается для придания забегающей
и отстающей гусеницам машины различных скоростей перематыва-
ния, вследствие чего, как это известно из теории поворота, происхо-
дит поворот машины, т. е. ее движение по некоторой криволинейной
траектории.
Поворот машины может быть нерегулируемый и регу-
лируемый.
Рассмотрим пример нерегулируемого поворота. Допу-
стим, что при прямолинейном движении машины одна из гусениц
отключена от силовой передачи. Тогда на эту гусеницу будет дей-
ствовать только сопротивление качению Rt (рис. 217). На другую,
не отключенную от силовой передачи гусеницу, будет действовать
сила тяги Р2 и сила сопротивления качению Д2. Примем, кроме
того, что к машине приложена еще сила сопротивления на крю-
ке /?к. Допустим, что движение происходит на горизонтальном
участке пути.
Согласно схеме внешних сил можем определить величину мо-
мента, который будет стремиться поворачивать машину:
<= (4-я« +
Если момент М„ равен или больше момента сопротивления по-
вороту
М
го машина будет поворачиваться, в противном случае она будет
двигаться прямолинейно даже при отключенной от силовой пере-
дачи одной из гусениц.
При достаточно большом сопротивлении /?1 и при малом коэф-
фициенте сопротивления повороту р возможен поворот машины и
без сопротивления на крюке; в этом случае поворачивающий мо-
мент
Ma=RB.
340
Рис. 217. Нерегу-
лируемый поворот
гусеничной маши-
ны
Поворот машины под действием момента Мп совершается без
-участия водителя; водитель лишь выжидает, когда машина повер-
нется на нужный угол или когда радиус поворота достигнет нуж-
ной величины, после чего он снова подключает отстающую гусе-
ницу к силовой передаче, переходя на прямолинейное движение.
Нерегулируемый поворот применяется при движении сельскохо-
зяйственных тракторов. Поворот трактора осуществляется отклю-
.чением отстающей гусеницы (без ее приторма-
живания). Машина поворачивается благодаря
большому сопротивлению на крюке.
В быстроходных гусеничных машинах транс-
портного типа, которым приходится часто дви-
гаться по дорогам, поворот должен быть
р е г у л и р у е м ы й, т. е. водитель должен иметь
возможность воздействовать на скорости гу-
сениц и через них на траекторию поворота.
Обычно это воздействие осуществляется притор-
маживанием отстающей гусеницы. Притормажи-
вая отстающую гусеницу, водитель меняет реак-
цию грунта, приложенную к этой гусенице, и
тем самым изменяет величину поворачивающего
момента.
Таким образом, назначение механиз-
ма поворота заключается не толь-
ко в том, чтобы осуществить поворот
машины, но и в том, чтобы обеспе-
чить регулируемый поворот.
Заметим, что даже в сельскохозяйственных тракторах предусмо-
трены тормоза (хотя и с независимым управлением), с помощью
которых можно в случае необходимости регулировать поворот трак-
тора.
КЛАССИФИКАЦИЯ МЕХАНИЗМОВ ПОВОРОТА
Все существующие механизмы поворота можно разделить на
две группы:
1) с одинарным подводом мощности;
2) с двойным подводом мощности.
В каждую из этих групп входят: 1) независимые и 2) диффе-
ренциальные механизмы поворота.
Независимыми называются такие механизмы поворота,
У которых изменение скорости отстающей гусеницы не влияет на
скорость забегающей гусеницы.
В дифференциальных механизмах поворота,
наоборот, изменение скорости отстающей гусеницы влияет на ско-
рость забегающей гусеницы.
Механизмы с одинарным подводом мощности —
341
это такие механизмы, к которым мощность от двигателя через ко-
робку передач подводится одним потоком.
Незадолго до второй мировой войны в танках начали применять
механизмы поворота нового типа — механизмы с двойным
подводом мощности или с расчетными радиу-
сами на передачах.
На рис. 218 приведены две схемы силового потока — механизма
поворота с одинарным (рис. 218, а) и с двойным (рис. 218, б) под-
водом мощности. В механизме
с одинарным подводом силовой
поток идет от двигателя через
коробку передач (узловая точ-
ка к) к механизму поворота (точ-
ки а и б),
В механизме с двойным под-
водом мощности силовой поток
разветвляется: один поток идет
непосредственно к точкам а и б,
другой подводится к этим точкам
через коробку передач (точ-
ка к). Точки а и б являются сум-
мирующими точками, они пред-
ставляют собой дифференциаль-
ные механизмы.
Вследствие того, что силовой
поток при повороте машины про-
ходит через коробку передач, рас-
четный радиус будет зависеть от
передачи в коробке. Подбирая
соответствующим образом пере-
даточные отношения точки к, а
Рис. 218. Схема силового потока ме-
ханизма поворота:
а — с одинарным подводом мощности; б —
С ДВОЙНЫМ подводом МОЩНОСТИ
и б, можно получить расчетные радиусы тем больше, чем выше
включенная передача. При повороте на высших передачах двига-
тель имеет малый запас мощности, который может быть исполь-
зован для поворота. Увеличение на этих передачах расчетных ра-
диусов позволит уменьшить потребную на поворот мощность,
а следовательно, позволит совершать поворот на более высоких
скоростях движения. В этом и заключается идея механизма по-
ворота с двойным подводом мощности.
Заметим, что механизм с двойным подводом включает в себя
коробку передач, которая теперь обеспечивает не только прямоли-
нейное движение машины, но и ее поворот; таким образом, коробка
передач в данном случае является частью механизма поворота.
Поэтому механизм поворота с двойным подводом иногда называют
механизмом поворота и передач (МПП).
В табл. 30 приведены различные типы механизмов поворота,
которые могут применяться в гусеничных машинах.
342
Таблица 30
Типы механизмов поворота гусеничных машин (классификация)
Регулируемые механизмы поворота
с одинарным подводом мощности С ДВОЙНЫМ подводом мощности
независимые бортовые фрикционы одноступенчатый планетарный двухступенчатый планет арпый независимые
диффеицпальные простой дифференциал дифференциальные
двойной дифференциал
Из таблицы следует, что в гусеничных машинах могут приме-
няться самые разнообразные механизмы поворота. Это является
показателем того, что «лучшего механизма» поворота как такового
не существует: все механизмы имеют свои достоинства и свои не-
достатки и выбор механизма поворота для данной машины дик-
туется конкретными условиями его работы в машине.
2. ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ К МЕХАНИЗМАМ
ПОВОРОТА
Механизм поворота гусеничных машин должен удовлетворять
следующим основным требованиям:
1) обеспечивать непрерывный регулируемый поворот машины
с любым заданным радиусом поворота;
2) иметь малые тормозные потери;
3) обеспечивать плавный поворот машины на всех передачах
без переключения последних;
4) обеспечивать устойчивое прямолинейное движение машины;
5) быть легким в управлении;
6) обеспечивать поворот машины с заданным минимальным ра-
диусом.
Кроме того, механизм поворота должен быть прост по устрой-
ству, удобен в обслуживании и уходе, надежен в работе, монтаж и
Демонтаж механизма поворота не должен вызывать затруднений.
Рассмотрим подробнее основные требования.
1. Как указывалось выше, в быстроходных гусеничных машинах
транспортного типа должны применяться регулируемые ме-
ханизмы поворота, так как только в этом случае машина
Сможет точно вписываться в профиль дороги.
343
Регулируемые механизмы могут быть с силовым или с к и-
нематическим регулированием.
Силовое регулирование достигается введением в механизм по-
ворота тормоза. Притормаживая отстающую гусеницу, водитель
воздействует на величину силы тяги на этой гусенице, а следова-
тельно, и на величину поворачивающего момента и тем самым ре-
гулирует поворот машины.
Силовое регулирование имеет существенные недостатки. -
Во-первых, вследствие пробуксовки при повороте тормоза в нем
выделяется большая тормозная мощность (WT), тормоз нагре-
вается и изнашивается.
Во-вторых, нагрев тормоза изменяет коэффициент трения его
фрикционных обшивок. Так как регулирование силовое, то незави-
симо от водителя будет изменяться регулирующая поворот тормоз-
ная сила, что в свою очередь будет изменять степень пробуксовки
тормоза. В результате (независимо от водителя) будет изменяться
и радиус поворота машины, что при некоторых обстоятельствах
может нарушить курс движения машины.
Кинематическое регулирование достигается введением в меха-
низм поворота какого-нибудь непрерывного регулируемого транс-
форматора, например фрикционного, гидростатического или элек-
трического. Трансформатор позволяет непрерывно изменять переда-
точное число между забегающей и отстающей гусеницами и тем
самым непрерывно регулировать поворот машины.
Такой способ регулирования поворота мы называем кинема-
тическим, потому что водитель воздействует на кинематический
параметр механизма поворота — на его передаточное число.
Механизм поворота с кинематическим регулированием не дает
тормозных потерь (Л^т), имеющих место при силовом регулирова-
нии, и позволяет точно регулировать поворот машины, что для бы-
строходных гусеничных машин, особенно транспортного типа, ра-
ботающих не только на местности, но и на дорогах, имеет большое
значение.
Заметим, что автомобиль имеет кинематическое регулирование
поворота. Только при кинематическом регулировании возможно его
безопасное движение по дорогам на высоких скоростях.
В гусеничных машинах в настоящее время применяются меха-
низмы поворота только с силовым регулированием, что объясняется
отсутствием надежно работающего мощного непрерывного и регу-
лируемого трансформатора.
2. Из теории поворота известно, что в отличие от колёсной ма-
шины поворот гусеничной машины сопровождается большими внеш-
ними и внутренними потерями мощности (No, Внешние потери
зависят от взаимодействия гусениц с грунтом, т. е. от сопротивле-
ния повороту гусениц. Внутренние или тормозные потери опреде-
ляются исключительно устройством механизма поворота и являются
потерями в его фрикционных элементах (в тормозах или в фрик-
ционных муфтах в механизмах с силовым регулированием). В за-
344
висимости от устройства механизма поворота эти потери могут быть
больше или меньше. Поэтому к механизму поворота и предъяв-
ляется требование минимальных тормозных потерь.
Большие тормозные потери вызывают снижение не только ма-
невренности и экономичности машины, но и ее износоустойчивости,
так как усиливается износ фрикционных элементов силовой пере-
дачи; вследствие износа фрикционных элементов нарушается и ре-
гулировка механизма поворота.
Стремление уменьшить тормозные потери явилось основной при-
чиной развития механизмов поворота гусеничных машин и появле-
ния за последнее время целого ряда новых типов механизмов по-
ворота.
Ранее было сказано, что тормозные потери зависят от циркуля-
ции мощности между забегающей и отстающей гусеницами и умень-
шаются с увеличением циркулирующей мощности. Таким образом,
наличие в механизме поворота циркуляции мощ-
ности является показателем его экономичности.
3. Машина должна поворачиваться на всех передачах в любых
условиях движения (если этому не препятствует занос) без пере-
ключения передач в ступенчатой коробке. Иначе говоря, машийа
должна совершать поворот на той передаче, на которой происхо-
дит ее прямолинейное движение.
Это требование вытекает из необходимости облегчить
управление машиной и обеспечить ей высокие средние
скорости движения.
Кроме того, переключение передач при повороте в быстроходной
машине нежелательно и по тем соображениям, что оно всегда свя-
зано с нарушением плавности хода машины. Это вызывает в свою
очередь динамические нагрузки в силовой передаче и в ходовой
части, а при работе машины с прицепом нарушает устойчивость
движения поезда.
В современных механизмах поворота при движении на высших
передачах, когда запас мощности двигателя недостаточен, поворот
совершается или переключением передачи в коробке, или введением
нового передаточного числа в механизме поворота (что равно-
сильно переключению передачи в коробке), или, наконец, использо-
ванием сил инерции машины. Во всех этих случаях нарушается
равномерность движения гусеничного поезда.
Выполнение плавного поворота машины на всех передачах без
переключения передач возможно лишь с механизмами поворота,
ь которых будет установлен непрерывный трансформатор (напри-
мер, гидротрансформатор, электро- или фрикционный трансфор-
матор).
4. ^ Механизм поворота должен обеспечивать устойчивое прямо-
линейное движение машины.
„Если благодаря устройству механизма поворота при прямоли-
нейном движении машину будет уводить в сторону, то водитель
вынужден будет периодически включать и выключать фрикцион-
345
ные элементы механизма поворота, что будет вызывать их нагрев
и усиленный износ.
Все независимые механизмы поворота, имеющие при прямоли-
нейном движении одну степень свободы, обеспечивают устойчивое
движение машины. Дифференциальные механизмы, если в них не
предусмотрена специальная блокировка, имеют как при прямоли-
нейном движении машины, так и при повороте две степени свободы,
что не позволяет им обеспечивать выполнение устойчивого прямоли-
нейного движения машины.
Следует заметить, что в гусеничных машинах иностранных ма-
рок чаще всего предпочтение отдается все же дифференциальным,
а не независимым механизмам. Это объясняется тем, что в диффе-
ренциальном механизме не происходит при осуществлении поворота
разрыва мощностного потока, а следовательно, поворот совершается
более плавно.
5. Управление машиной должно быть легким. При движении на
местности иногда приходится за час работы делать до 100 поворо-
тов. Если при управлении машиной с помощью механизма поворота
будет требоваться затрата больших усилий,, это будет утомлять
водителя. В тяжелых танках прежних выпусков усилие на рычагах
управления иногда превышало 30 кг, что чрезвычайно затрудняло
управление танком.
Современные средние и тяжелые гусенич-
ные машины должны иметь сервированное
управление.
6. Гусеничная машина должна разворачиваться на минимальной
площадке, т. е. должна иметь возможно меныпий радиус поворота.
Желательно иметь pmin < 1,8, что обеспечит разворот поезда на
дорогах без маневрирования, т. е. с одного заезда. Для транспорте-
ров желательно иметь pmin = 0 или по крайней мере 0,5.
3. ПАРАМЕТРЫ СРАВНИТЕЛЬНОЙ ОЦЕНКИ МЕХАНИЗМОВ
ПОВОРОТА
Обычно механизмы поворота, как и другие механизмы машины,
оцениваются главным образом с конструктивной стороны, т. е.
с точки зрения простоты или сложности их конструкции. Такая
оценка является односторонней. Простота конструкции не может
являться ее самоцелью. Всякий механизм машины, в том числе и
механизм поворота, должен оцениваться в первую очередь с точки
зрения выполнения им основных требований, определяющих его на-
значение.
С точки зрения удовлетворения основным требованиям механизм
поворота может быть оценен некоторыми параметрами, к числу ко-
торых относятся следующие:
1) коэффициент потребной мощности (ф);
2) кинематический фактор поворота (дД;
3) расчетный радиус поворота (рр);
346
". 4) минимальный радиус поворота (рш1п);
v 5) коэффициент тормозного момента (отт);
6) число механических, фрикционных и тормозных узловых то-
чек в схеме силового потока, механизма (см, сф, ст);
7) число степеней свободы механизма поворота при прямолиней-
ном движении машины (Хш).
Рассмотрим каждый из этих параметров в отдельности.
1. Ранее была приведена формула 120 (см. ч. 1) мощности No.
Подставим рт = рр| получим Л/д Обозначим отношение мощности
(Л/д), необходимой для поворота, к мощности при прямолинейном
движении (Л/п) через ф. Тогда получим
* = + (179)
к \ Рр ’ VK 7
Эту величину назовем коэффициентом мощности, не-
обходимой для поворота, или коэффициентом по-
требной мощности. Коэффициент ф показывает, во сколько
раз потребная на поворот мощность больше мощности при прямоли-
нейном движении, если машина при повороте и при прямолинейном
движении двигалась на одной и той же передаче и с одним и тем
же числом оборотов двигателя.
2. Из формулы (179) следует, что если принять кинематический
фактор qK, характеризующий устройство механизма поворота, рав-
ным или больше динамического фактора <7Д, характеризующего
грунт, то коэффициент мощности, потребной для поворота, будет
р
ПРИ — 1 равен или меньше единицы, т. е. потребная для пово-
рота мощность будет равна или меньше мощности, потребной для
прямолинейного движения.
Чем меньше коэффициент ф, тем легче обеспечить в данном ме-
ханизме поворота выполнение требования 3.
Для большинства существующих механизмов поворота коэффи-
циент 'ф больше единицы,,следовательно, в этих механизмах для по-
ворота требуется мощность большая, чем для прямолинейного дви-
жения.
3. Коэффициент ф зависит также от расчетного радиуса рр.
С увеличением расчетного радиуса коэффициент потребной мощ-
ности уменьшается.
Кинематический фактор поворота и расчетный радиус характе-
ризуют устройство механизма поворота и, следовательно, также
являются параметрами сравнительной оценки механизмов поворота.
Кинематический фактор поворота и расчетный радиус определя-
ются по формулам 123 и 124 (см. ч. 1):
_ J___Узр —Г'п .
~~ 2 ~ Г’зр — Vip ’
__ V2p + Vlp
рр 2 (v2p — vlp) •
347
Чем больше qK и рр, тем меньше ф, т. е. тем меньше требуется
для поворота мощность двигателя, а следовательно, меньше будет
и тормозная мощность. Надо, однако, иметь в виду, что с увеличе-
нием qh уменьшается средняя скорость поворота, увеличивается
вероятность наката прицепа и затрудняется выход тягача из по-
ворота.
4. Если механизм поворота имеет один расчетный радиус, то
pp = pmin. Следовательно, в этом случае выбирать расчетный радиус
слишком большим нельзя, так как это поведет к невыполнению
требования 6.
5. Коэффициентом тормозного момента будем
называть отношение момента на тормозе меха-
низма поворота 1 к мо менту, приложенному к ве-
дущему колесу отстающей гусеницы.
Обозначим тормозной момент через Л4Т и момент на ведущем ко-
лесе через где Р\ — сила тяги на отстающей гусенице,
— радиус ведущего колеса. Тогда
= <18°)
Коэффициент тормозного момента характеризует легкость управ-
ления машиной при повороте.
6. Фрикционно-зубчатые механизмы поворота состоят из плане-
тарных механизмов, фрикционных муфт и тормозов. Соответственно
этому силовой поток механизма поворота будет состоять из механи-
ческих, фрикционных и тормозных узловых точек. Так как с точки
зрения простоты конструкции, а также с точки зрения износоустой-
чивости, простоты ухода и обслуживания все эти три типа устройств
неравноценны, то число и тип узловых точек, входящих в механизм
поворота, могут являться оценочными параметрами простоты кон-
струкции механизма поворота, а также его износоустойчивости, про-
стоты ухода за ним и обслуживания.
Из трех элементов механизма поворота наиболее простым в кон-
структивном отношении является тормоз, особенно если это тормоз
ленточного типа; на второе и третье место по простоте могут быть
поставлены фрикционная муфта и зубчатый механизм.
В качестве зубчатого механизма в механизмах поворота гусенич-
ных машин применяется или дифференциал, или эпициклический ме-
ханизм. Конструкция этих механизмов довольно проста и по про-
стоте не уступает многодисковой фрикционной муфте.
Преимущество муфты по сравнению с зубчатым механизмом за-
ключается лишь в том, что она может при прямолинейном движе-
нии машины блокироваться (а следовательно, не изнашиваться).
Следует, однако, заметить, что дифференциальные меха-
низмы поворота при прямолинейном движении машины вра-
щаются как одно целое и, следовательно, как и сблокированная
1 Предполагается, что поворот машины осуществляется притормаживанием
отстающей гусеницы.
348
фрикционная муфта, не подвергаются износу (в зубьях шестерен).
В этом отношении зубчатый механизм равноценен фрикционной
муфте.
В настоящее время срок службы планетарного зубчатого меха-
низма приближается к гарантийному сроку службы машины (без
замены рабочих деталей — шестерен и подшипников, а также и без
регулировки); фрикционная же муфта требует за собой постоянного
ухода и регулировки.
t 7. Число степеней свободы механизма поворота характеризует
устойчивость прямолинейного движения машины.
Машина будет иметь устойчивое движение, если механизм поворота
при прямолинейном движении имеет одну степень свободы. При на-
личии двух степеней свободы прямолинейное движение машины де-
лается неустойчивым.
4. ТИПЫ НЕЗАВИСИМЫХ МЕХАНИЗМОВ ПОВОРОТА
С ОДИНАРНЫМ ПОДВОДОМ МОЩНОСТИ и их
СРАВНИТЕЛЬНАЯ ОЦЕНКА
Согласно табл. 30 к независимым механизмам с одинарным под-
водом мощности относятся бортовые фрикционы, одноступенчатый
и двухступенчатый планетарные механизмы. Рассмотрим их прин-
ципиальные схемы и дадим им сравнительную оценку.
БОРТОВЫЕ ФРИКЦИОНЫ
Механизм поворота «Бортовые фрикционы» представляет собой
две многодисковые фрикционные муфты и два тормоза, установлен-
ные по бортам машины.
На рис. 219 представле-
ны кинематическая схема
(рис. 219, а) механизма пово-
рота и схема его силового по-
тока (рис. 219,6). На схеме
силового потока коническая
пара, которая не относится к
механизму поворота, будет
впредь обозначаться развет-
вляющейся узловой точкой.
Из схемы силового пото-
ка следует, что силовой по-
ток через включенную фрик-
ционную точку передается
от двигателя на забегаю-
щую гусеницу 2. От отстаю-
щей гусеницы силовой поток
идет в тормоз (при его ча-
стичном включении), где и
преобразуется в тепло (t).
Рис. 219. Кинематическая схема и схема
силового потока механизма поворота „Бор-
товые фрикционы1*:
а — кинематическая схема; б— схема силового по
тока
349
Так как правая фрикционная точка полностью выключена и, сле-
довательно, не может передавать силовой поток, то в данном меха-
низме поворота циркуляция мощности отсутствует. .
Определим оценочные параметры механизма поворота.
Включим полностью правую тормозную и левую фрикционную
точки. Машина будет поворачиваться с расчетным радиусом
Рр = pmin = 0,5. Другого расчетного радиуса механизм поворота не
имеет.
Обозначим скорость прямолинейного движения машины через vn,
скорость забегающей гусеницы через и2р и отстающей через
Будем иметь vlp = 0; = 1, так
. Н V2P
ницы 2 при повороте остается той
как скорость забегающей гусе-
же, что и при прямолинейном
движении.
Согласно формуле 123 (см. ч. 1) получим ^=0,5. Подставляем
р
рр и q* в формулу (179) и принимаем в этой формуле 7г =1,
получим коэффициент потребной мощности
<|> = 0,5 + q„.
(181)
Для удобства сравнения механизмов поворота примем некоторое
среднее значение динамического фактора qA = 2,5. Тогда численное
значение коэффициента потребной мощности будет ф = 3. Следова-
тельно, для поворота требуется мощность, втри раза боль-
шая, чем для прямолинейного движения.
Определим теперь коэффициент тормозного момента.
Между тормозом и ведущим колесом отстающей гусеницы нахо-
дится бортовая передача с передаточным числом /бп. Момент на тор-
р f
мозе будет равен М^=-р. Тогда согласно формуле (180) по-
*бп
лучим
/пт = ^-. (182)
*бп
Отсюда следует, что чем больше передаточное число бортовой пере-
дачи, тем меньше коэффициент тормозного момента, тем легче бу-
дет управлять машиной.
Конструктивно механизм поворота оценивается наличием двух
фрикционных (сф = 2) и двух тормозных узловых точек (ст = 2).
Механические узловые точки в данном механизме поворота отсут-
ствуют (см = 0).
При прямолинейном движении машины обе фрикционные точки
включены и обе тормозные точки выключены. Согласно формуле 155
(см. ч. 1) находим число задающих параметров силового потока или
число степеней свободы механизма поворота \, = 1.
350
ОДНОСТУПЕНЧАТЫЙ ПЛАНЕТАРНЫЙ МЕХАНИЗМ
Одноступенчатый планетарный механизм поворота состоит из
двух элементарных планетарных механизмов и четырех тормозов.
Два тормоза принадлежат планетарным механизмам, два являются
установочными тормозами машины и одновременно используются
при повороте.
На рис. 220 представле-
ны кинематическая схема и
схема силового потока одно-
ступенчатого планетарного
механизма поворота.
Силовой поток состоит из
двух механических узловых
точек, четырех тормозных
и трех разветвляющих точек,
из которых одна описывает
подвод силового потока к
механизму поворота.
Механизм поворота рабо-
тает следующим образом.
При прямолинейном
движении машины пол-
ностью включены тормоза
планетарных механизмов и
полностью выключены оста-
новочные тормоза. При по-
Рис. 220. К ннематнческая схема п схема
силового потока одноступенчатого плане-
тарного механизма поворота:
а — кинематическая схеме; б — схема силового
потока
вороте, например, направо выключен тормоз правого планетар-
ного механизма и частично или полностью включен правый оста-
новочный тормоз. На левом борту полностью включен тормоз пла-
нетарного механизма и полностью выключен остановочный
тормоз.
Силовой поток идет через левую механическую точку на забегаю-
щую гусеницу 2. С правой отстающей гусеницы силовой поток идет
в правый остановочный тормоз (при его частичном включении), где
и рассеивается, превращаясь в тепло (/).
Так как правая механическая точка является холостой, то цир-
куляция мощности в данном механизме поворота отсутствует.
Определим оценочные параметры механизма поворота.
Как следует из схемы силового потока, механизм имеет один
расчетный радиус при полностью включенном остановочном тормозе
с одного борта и при полностью включенной планетарной передаче
с другого борта. В этом случае = 0; тл,р = г>п. Тогда рр = pmIn= 0,5.
Кинематический фактор и коэффициент потребной мощности будут
равны: q* = 0,5; ф = 3 (при q., = 2,5).
Таким образом, параметры рр, qK и ф имеют то же значение, что
и для бортовых фрикционов. Следовательно, по маневренности ма-
шины (рш1п) и экономичности (ф, q*, рр) оба механизма равноценны.
351
Коэффициент тормозного момента определяется по формуле
/и (183)
*бп
где г6п—передаточное число бортовой передачи.
Передаточное число 4>и отличается от передаточного числа бор-
товой передачи при бортовых фрикционах i6n, так как в данном слу-
чае при определении z6n должно учитываться передаточное число
планетарного механизма.
Обозначим передаточное число планетарного механизма черезгпм,
тогда
Еслиг„м> 1, то z6n<z6n и, следовательно, коэффициент тормоз-
ного момента будет больше, чем при бортовых фрикционах.
Согласно схеме силового потока механизм поворота имеет две
механические и четыре тормозные точки. Следовательно, вместо
двух фрикционных точек бортовых фрикционов здесь имеются две
механические и две тормозные точки.
Из схемы силового потока определяется число степеней свободы
механизма при прямолинейном движении машины: = 1.
ДВУХСТУПЕНЧАТЫЙ ПЛАНЕТАРНЫЙ МЕХАНИЗМ
Двухступенчатый планетарный механизм поворота представляет
собой фрикционно-зубчатый механизм, имеющий две ступени вклю-
чений или два внешних передаточных отношения. При этом одно из
передаточных отношений может быть равно единице.
На рис. 221 представлена конструктивная схема механизма по-
ворота, а на рис. 222 его кинематическая схема и схема силового
потока.
Механизм поворота состоит из двух планетарных механизмов
типа однорядных эпициклов, двух блокировочных муфт, двух тормо-
зов планетарных механизмов Т1 и двух остановочных тормозов Т2.
При прямолинейном движении машины с обоих бортов включа-
ются одноименные фрикционные элементы, муфты Ф или тормоза Т1.
При повороте включаются разноименные элементы Ф, Т1 или Т2.
В зависимости от включенных элементов машина получает тот или
иной режим движения.
Порядок включения фрикционных элементов и режимы движения
машины приведены в табл. 31.
352
Рис. 221. Конструктивная схема двухступенчатого планетар-
ного механизма поворота'
I — водило; 2 — остановочный тормоз; 3 — фрикцион; 4 — тормоз солнечной
шестерни; 5 — эпицикл; б — привод от коробки передач
Рис. 222. Кинематическая схема и схема силового потока
' двухступенчатого планетарного механизма поворота
с блокировочной муфтой
а — кинематическая схема; б — схема силового потока
23—20
.35.1
Таблица 31
Таблица включений фрикционных элементов и режимы движения
машины с двухступенчатым планетарным механизмом поворота’
Режим движения машины Левый борт Правый борт
П Т2 ф Т1 ТЬ ф
Поворот направо с низшим расчетным радиусом на ускоренной передаче 4- +
То же на замедленной передаче + 4-
Поворот направо с высшим расчетным радиусом на ускоренной передаче + 4-
Прямолинейное движение на ускорен- ной передаче 4- 4-
Прямолинейное движение на замед- ленной передаче + +
Режим 1. С левого борта включена фрикционная муфта Ф,
с правого борта — остановочный тормоз Т2, тогда v2p = vn; vlp = 0.
Машина поворачивается направо с минимальным расчетным радиу-
сом рр1 = pmln = 0,5. При этом кинематический фактор =0,5.
Режим 2. С левого борта включен тормоз планетарного меха-
низма Т1, с правого борта — остановочный тормоз Т2. Машина по-
ворачивается направо. Если передаточное число планетарного меха-
низма равно znM, то v2p = —, где vn имеет то же значение, что и
н гпм
в предыдущем случае. Так как vlp = 0, то расчетный радиус
Рр, = 0,5.
Кинематический фактор поворота согласно формуле 123 (см. ч. 1)
будет
^2 = «пи —0,5. (184)
Чем больше/пм, тем выше кинематический фактор.
Режим 3. С левого борта включена муфта Ф, с правого — тор-
моз планетарного механизма Т1. Машина поворачивается направо.
Скорость отстающей гусеницы V. = , скорость забегающей гу-
н *пм
сеницы t'2p==z,n. Тогда из формулы 124 (см. ч. 1) получим
Р₽2 = 0,5 + г-Ц. (185)
'пм 1
Из формулы 123 (см. ч. 1) =0,5.
1 Знак «+» означает включение того или иного фрикционного элемента.
354
На третьем режиме происходит увеличение расчетного радиуса
при минимальном значении кинематического фактора.
Таким образом, в двухступенчатом планетарном механизме пово-
рота облегчение поворота достигается или за счет увеличения кине-
матического фактора (за счет снижения средней скорости пово-
рота), или за счет увеличения расчетного радиуса (за счет увели-
чения циркулирующей мощности).
Режимы 4 и 5. При включении с обоих оборотов одноименных
фрикционных элементов Ф или Т1 машина будет двигаться прямо-
линейно. При этом, если включены муфты, скорость машины будет
выше, чем если включены тормоза планетарных механизмов Т1.
Определим коэффициент потребной мощности (ф)
и коэффициент тормозного момента (/пт) на различ-
ных режимах движения.
р
Подставляем в формулу (179) значение дк, рр и-^=1. Полу-
чим для режима 1
ф = 0,5 + 7д. (186)
При да — 2,5 ф = 3. Коэффициент потребной мощности тот же,
что и для бортовых фрикционов.
Определяем коэффициент тормозного момента. Следует- иметь
в виду, что в двухступенчатом механизме, имеющем блокировочные
муфты, ходовым режимом прямолинейного движения является ре-
жим 4. Тогда бортовая передача должна иметь такое же передаточ-
ное число, как и при бортовых фрикционах. Следовательно, для ре-
жима 1
1
Для режима 2
тт = — .
«би
коэффициент потребной мощности будет
0,5 + ?д
ф = —------
*ПМ
Так как znM обычно больше единицы, то
(187)
' При = 2,5 Ф = Л
‘пм
коэффициент потребной мощности будет меньше, чем при бортовых
фрикционах, в гпм раз.
Коэффициент тормозного момента на данном режиме тот же, что
и на режиме 1, т. е. mT = J-.
гбп
На р ежиме 3 будем иметь
Ян — 0,5
Ф=1+— j - (188)
1 +
При ?,= 2,5| = 3-1
*пм
Отсюда следует, что коэффициент потребной мощности на ре-
жиме 3 меньше, чем на режиме 1. В зависимости от величины пере-
23* 355
даточного числа гпм коэффициент ф на режиме 3 может быть больше
или меньше, чем на режиме 2. Так, приг’Пм=3 получим для ре-
жима 2 коэффициент ф = 1 и для режима 3 коэффициент ф = 2,3.
При гпм = 1,5 для режима 2 коэффициент ф = 2, а для режима 3
коэффициент ф = 1,7.
Обозначим индексом т ведущий вал планетарного механизма,
индексом k — ведомый и индексом р — тормозной вал. Решая урав-
нения статики идеального силового потока, получим
Жр = Л4т1 = (^-1)Л4А,
где
МА=^;
Л ‘бп
Mi — момент на ведущем колесе отстающей гусеницы.
Тогда окончательно будем иметь
__МТ1 _ lkm 1
т ign
(189)
Выразим коэффициент тормозного момента через расчетный ра-
диус.
Из кинематической характеристики при <»р = 0 получим
^SL =1 = tw
где гпм— передаточное число планетарного механизма.
На режиме 3 расчетный радиус определяется по формул©
Рр2 = 0,5 + -т-^—[ = 0,5 + („/ -
п“ lmk 1
Тогда из формулы (180) после элементарных преобразований
получим
™ 1
- (0,5 + рР2) Z6n •
Отсюда следует, что с увеличением расчетного ра-
диуса коэффициент тормозного момента умень-
шается и, следовательно, облегчается управле-
ние машиной.
Двухступенчатый планетарный механизм сложнее одноступенча-
того и сложнее бортовых фрикционов; он имеет см = 2, сф = 2 и
сТ = 4.
При прямолинейном движении механизм сблокирован, поэтому
имеет одну степень свободы = 1).
Мы рассмотрели двухступенчатый планетарный механизм пово-
рота с блокировочными муфтами. Возможна схема двухступенчатого
механизма и без блокировочных муфт, как показано на рис. 223.
В этом случае сф = 0, а ст = 6-
356
В табл. 32 приведены параметры сравнительной оценки трех рас-
смотренных выше механизмов поворота.
При составлении таблицы было принято: динамический фактор
?. = 2.5 " т-1-
Рис. 223. Кинематическая схема и схема силового потока
двухступенчатого планетарного механизма поворота без
блокировочных муфт:
а — кинематическая схема; б — схема силового потока
Таблица 32
Параметры сравнительной оценки независимых механизмов
поворота с одинарным подводом мощности
Режим авиже- _ НИЯ ₽р> ₽ра Ф /Я т '"ф ст
Бортовые фрикционы
1 0,5 — 0,5 3 1 z*6n 0 2 2 1
Одноступенчатый планетарный механизм
1 0,5 — 0,5 3 1 ^бп 2 0 4 1
Двухступенчатый планетарный механизм
1 0,5 0,5 0,5 3 1 *бп 2 2 4 1
2 0,5 0,5 гпм 0,5 3 *пм 1 *611 2 2 4 1
3 0,5 0,5 +-г-^—г *ПМ 1 0,5 Рр? + 2,5 Рр? + 0,5 1 (0,5 + рр2) Zgn 2 2 4 1
QK-7
Из табл. 32 можно сделать следующие выводы.
1. С точки зрения экономичности (расхода мощности) бортовые
фрикционы и одноступенчатый планетарный механизм совершенно
равноценны.
2. По легкости управления бортовые фрикционы имеют преиму-
щество по сравнению с одноступенчатым планетарным механизмом
(Z6n < ?'бп)-
3. Двухступенчатый планетарный механизм и по экономичности
и по легкости управления превосходит бортовые фрикционы и одно-
ступенчатый механизм. Коэффициент потребной мощности ф и коэф-
фициент тормозного момента ту зависят от передаточного числа ме-
ханической узловой точки или от расчетного радиуса: чем больше
расчетный радиус, тем меньше коэффициенты ф итт.
4. По простоте конструкции на первом месте стоит бортовой
фрикцион (он имеет четыре узловые точки), на втором месте — одно-
ступенчатый планетарный механизм (он имеет шесть узловых то-
чек) и на третьем месте — двухступенчатый планетарный механизм
(он имеет восемь узловых точек).
5. Все три механизма при прямолинейном движении машины
имеют одну степень свободы.
5. ТИПЫ ДИФФЕРЕНЦИАЛЬНЫХ МЕХАНИЗМОВ ПОВОРОТА
С ОДИНАРНЫМ ПОДВОДОМ МОЩНОСТИ И ИХ
СРАВНИТЕЛЬНАЯ ОЦЕНКА
К дифференциальным механизмам с одинарным подводом мощ-
ности относятся два механизма: простой и двойной дифференциалы.
ПРОСТОЙ ДИФФЕРЕНЦИАЛ
Механизм поворота «Простой дифференциал» состоит из элемен-
тарного дифференциального механизма, имеющего внутреннее пере-
даточное отношение =—1. и ДВУХ тормозов, установленных на
его полуосях.
На рис. 224 представлены кинематическая схема и схема сило-
вого потока этого механизма.
Простой дифференциал выполняется в двух вариантах — с кони-
ческими и с цилиндрическими шестернями. С точки зрения кинема-
тики оба варианта равноценны. 7
Определим параметры сравнительной оценки механизма.
Поворот машины осуществляется торможением одной из полу-
осей. Расчетный радиус получается при полном торможении по-
луоси, т. е. при'Р1р=0. Внутреннее передаточное отношение диффе-
ренциала равно *('2= — 1. Тогда между скоростями полуосей уста-
навливается следующая зависимость:
О), -|- О>2 = 2ш0,
358
или
^2 = 2vcpt
где v— средняя скорость поворота машины.
При повороте на расчетном радиусе получим v2p = 2vn, или
= 2. Тогда рр = pmln = 0,5; qx = 0.
fn
Коэффициент потребной мощности будет
ф=1+2<?д. (191)
При <7Д = 2,5 Ф = 6. Таким об-
разом, мощность, потребная для
поворота, при простом диффе-
ренциале в два раза больше, чем
при бортовых фрикционах. Это
объясняется тем, что при данном
механизме средняя скорость пово-
рота машины равна скорости пря-
молинейного движения = 0).
У независимых же механизмов
поворота эта скорость была в два
раза ниже (<?к —0,5).
Из схемы силового потока, а
Рис. 224. Кинематическая схема и
схема силового потока механизма
поворота „Простой дифференциал":
а — кинематическая схема; б — схема сило-
вого потока
также из свойства элементарной
узловой точки, имеющей вну-
треннее передаточное отношение
1а = —1, следует, что в простом
дифференциале не может быть
циркуляции мощности, так как в механической узловой точке проис-
ходит разветвление силового потока, вследствие чего через эту точку
поток от отстающей гусеницы на забегающую проходить не может.
Из схемы силового потока видно, что в тормозной точке сумми-
руются два потока, один идет от двигателя, другой — от отстающей
гусеницы. Это приводит к большим тормозным потерям в механизме
"Поворота и к увеличению его коэффициента потребной мощности.
Определим коэффициент тормозного момента.
Из уравнения моментов идеальной механической узловой точки
имеем
+ Z21a^2a = 9.
При /21а = — 1 получим /И1а = /И2а.
Для правой разветвляющей точки можем написать
/И16 + ^26 + = 0,
где
М = — М = _ М = 4^ ;
Ю 1а 4Л /_ »
*бп
Л72б = —/Ит, /И86 = 4^-.
359
Моменты Мх, М2 и Л7Т—величины положительные.
Тогда получим
Отсюда
/пт =
м2
Z6n
(192)
Заметим, что зависит от величины передаточного числа кони-
ческой пары дифференциала. Чем больше это передаточное число,
тем меньше z6n и, следовательно, больше значение коэффициента
тормозного момента.
Примем ориентировочно M2 = 1,5Mi. Тогда
Обозначим передаточное число конической пары дифференциала
через г’кп и передаточное число бортовой передачи при механизме по-
ворота «Бортовые фрикционы» через 16п. Будем иметь
гбп = Win-
Отсюда
Из формулы следует, что коэффициент тормозного момента за-
висит от передаточного числа конической пары дифференциала. Если
на гусеничной машине в качестве механизма поворота применяется
автомобильный дифференциал, то г'кп =4 — 5. В этом
случае коэффициент тормозного момента будет в 8—10 раз больше,
чем для бортовых фрикционов.
Как видим, простой дифференциал обладает существенными не-
достатками по сравнению с бортовыми фрикционами: он потребляет
на поворот в два раза большую мощность и дает в несколько раз
более тяжелое управление машиной.
Из схемы силового потока следует, что механизм имеет при пря-
молинейном движении две степени свободы = 2J, что также сле-
дует отнести к его недостаткам.
Конструктивно механизм поворота чрезвычайно прост: он описы-
вается одной механической и двумя тормозными точками (см = 1,
ст = 2). В свое время это привлекало к нему внимание конструкто-
ров. Однако вследствие присущих механизму серьезных недостатков
в настоящее время как самостоятельный механизм поворота он в гу-
сеничных машинах не применяется.
360
ДВОЙНОЙ ДИФФЕРЕНЦИАЛ
Двойной дифференциал отличается от простого дифференциала
наличием в его кинематической схеме дополнительных тормозных
сателлитов и тормозных солнечных шестерен, с которыми связаны
тормоза.
В схеме силового потока двойной дифференциал описывается
не элементарной, а простейшей пятипоточной узловой точкой
(рис. 225,6). Внутреннее переда-
точное отношение этой точки
f12=—1, как и в простом диф-
ференциале.
При прямолинейном движении
машины мощность подводится от
/двигателя потоком 0 и отводится
потоками 1 и 2. Потоки 3 и 4
холостые.
При повороте машины один
поток — 3 или 4 — притормажи-
вается, поток 2 отводится на за-
бегающую гусеницу, а поток 1
подводится'от отстающей гусени-
цы. В механизме имеет место
Рис. 225. Кинематическая схема и
схема силового потока механизма
поворота „Двойной дифференциал":
а — кинематическая схема; б — схема сило
вого потока
циркуляция мощности от отстаю-
щей гусеницы к забегающей.
Двойной дифференциал, как и
простой, бывает двух типов —
конический и цилиндри-
ческий. Оба типа кинемати-
чески равноценны.
Определим параметры сравнительной оценки ме-
ханизма.
Составляем кинематическую характеристику узловой точки. Бу-
дем считать, что машина поворачивается направо. Тогда поток 3
будет тормозным потоком, а поток 4 — холостым.
Так как узловая точка имеет три ненулевых потока, то уравнений
кинематической характеристики будет два (холостой поток не учи-
тываем) :
Ш1 "Т 012 1) “о —
Ш1 ^з^з “Ь (г\з 1) “о 0-
Примем здесь <о3 = 0 и г12 =— 1; тогда из первого уравнения
получим
“1 + ш2 = 2<«о>
из второго
“i + (zi3 — 1) «>0 = 0.
361
Так как угловые скорости ом, <02 и и>0 пропорциональны линей-
ным скоростям vlp, v2p и vn> то можем написать
. ^ip + ^2Р = 2vn;
^1р = ( 1 — Z'13)
Отсюда находим:
^ip = 0 ^13) ^n>
^2р = (1 +*"13)^п.
Из формулы 124 (см. ч. 1) получим расчетный радиус
Рр = ^Г- <193)
2Z13
Из формулы 123 (см. ч. 1) находим кинематический фактор
^ = 0-
Коэффициент потребной мощности будет
ф = 1 + 2г^д. (194)
Или, если заменить /13 на рр, то получим
ф=1 + ^. (195)
Рр
2 5
Примем = 2,5, тогда ф=1 Ч—Обычно рр^2.
Примем рр = 2,5, тогда получим коэффициент потребной мощ-
ности ф = 2.
Для двухступенчатого планетарного механизма при повороте на
втором расчетном радиусе рр2 = 2,5 имеем ф = 1,66.
Таким образом, коэффициент потребной мощности двойного диф-
ференциала хотя и больше, чем у двухступенчатого планетарного
механизма, но незначительно. Чем меньше будем принимать расчет-
ный радиус, тем больше будет разница в коэффициентах потребной
мощности, причем в пользу двухступенчатого механизма. При рр = 1,
двойной дифференциал превращается в простой дифференциал.
По сравнению с другими механизмами поворота (бортовые фрик-
ционы, одноступенчатый планетарный механизм, простой диффе-
ренциал) двойной дифференциал имеет меньший коэффициент по-
требной мощности.
Определим коэффициент тормозного момента.
Из уравнения моментов узловой точки напишем
^la + z21a^2a + г’з1а^« =
362
где
= ; М _ лк . Д7 = _Д7 .
j d • ' £d • ~ Od 1f
*бп *бп
*21a= ка = 2рр.
Подставив эти величины в предыдущее уравнение, получим
1+^г
т^^ГГ- (196)
бпРр
Здесь М, и М2 — абсолютные значения моментов на ведущих ко-
лесах машины.
При определении z6n следует учитывать передаточное число ко-
нической пары. Коническая пара уменьшает передаточное число бор-
товой передачи и увеличивает коэффициент тормозного момента. Так,
в тягаче АТ-С, где установлен двойной дифференциал, z'6n=3,57,
что значительно меньше передаточного числа бортовых передач ма-
шин, имеющих бортовые фрикционы или двухступенчатый планетар-
ный механизм поворота, для которых z6n — 5,5 — 6,5. Чтобы умень-
шить коэффициент тормозного момента, следует уменьшить переда-
точное число конической пары, т. е. увеличить передаточное число
бортовой передачи.
Примем в формуле (196) = 1,5, тогда
z6n Рр
Коэффициент тормозного момента двойного дифференциала есть
функция расчетного радиуса. С увеличением расчетного радиуса
коэффициент тормозного момента уменьшается. Коэффициент тор-
мозного момента двойного дифференциала несколько больше, чем
У двухступенчатого планетарного механизма поворота, но значи-
тельно меньше, чем у остальных механизмов поворота. Это объ-
ясняется тем, что у этих механизмов расчетный радиус меньше, чем
У двойного дифференциала.
Конструктивная характеристика двойного дифференциала опре-
деляется следующими показателями: см=1; сф=0; ст==2. Из
этого можно заключить, что механизм поворота очень прост.
Число степеней свободы при прямолинейном движении =2.
В табл. 33 приведены параметры сравнительной оценки диффе-
ренциальных механизмов поворота с одинарным подводом мощ-
ности.
363
Таблица 33
Параметры сравнительной оценки дифференциальных механизмов
поворота с одинарным подводом мощности
Рр Як Ф см СФ ст
Простой дифференциал
0,5 0 6 2,5 'бп 1 0 2 2
Двойной дифференциал
Сравнивая данные табл. 33 с данными табл. 32, можно сделать
следующие выводы.
Двойной дифференциал по экономичности и легкости управления
близок к двухступенчатому механизму поворота. При этом конструк-
тивно он проще двухступенчатого механизма. Его основной недо-
статок: он не обеспечивает устойчивость прямолинейного движения
машины (\, = 2). Кроме того, его минимальный радиус больше 0,5.
Впрочем, для тягачей, работающих с прицепом, этот недостаток не
является существенным, так как минимальный радиус поворота тя-
гача все равно ограничен устройством его сцепного прибора и
обычно бывает больше 0,5.
Чтобы механизм поворота при прямолинейном движении машины
имел одну степень свободы, нужно ввести в его силовой поток
еще фрикционную точку, или, иначе говоря, установить между
какими-нибудь двумя валами дифференциала блокировочную муфту.
Тогда согласно свойству 2 механической узловой точки блоки-
ровка двух потоков будет блокировать и всю узловую точку.
Можно устранить и второй недостаток двойного дифференциала,
если на полуоси 1 и 2 поставить остановочные тормоза. Тогда меха-
низм получит второй расчетный радиус pmin = 0,5. Однако при этом
двойной дифференциал превратится в простой дифференциал.
Блокировка двойного дифференциала и введение двух остановоч-
ных тормозов усложнит конструкцию дифференциала и его приво-
дов управления. Механизм в этом случае теряет свое основное пре-
имущество — простоту конструкции.
364
6. ТИПЫ МЕХАНИЗМОВ ПОВОРОТА С ДВОЙНЫМ
ПОДВОДОМ МОЩНОСТИ И ИХ СРАВНИТЕЛЬНАЯ
ОЦЕНКА
Механизмы с двойным подводом мощности или с расчет-
ными радиусами на передачах выполняются в двух ва-
риантах: как независимые и как дифференциальные.
НЕЗАВИСИМЫЙ МЕХАНИЗМ
На рис. 226 представлена кинематическая схема независимого
механизма с двойным подводом мощности.
Поток мощности идет от двигателя через коническую пару ко-
робки передач (обведена пунктиром) на поперечный вал, а отсюда
через промежуточную шестерню и включенную фрикционную
муфту — к солнечной шестерне планетарного механизма. Другой по-
ток идет через коническую пару на одну из включенных пар шесте-
рен коробки передач и далее к эпициклу планетарного механизма.
Оба потока суммируются в планетарном механизме и через его
водило передаются на гусеницы машины.
Так как, идя на левую и правую гусеницы, потоки разветвляются
совершенно симметрично, то гусеницы будут вращаться с одинако-
вой скоростью, а машина будет двигаться прямолинейно.
Для осуществления поворота необходимо выключить с одного
борта фрикцион и включить тормоз. Тогда на этот борт будет идти
только один поток через коробку передач. Поток через промежуточ-
ную шестерню прерывается. Машина совершает поворот с не-
которым расчетным радиусом. При этом величина расчетного ра-
диуса зависит от скорости вращения эпицикла, т. е. от передаточ-
Рис. 226. Кинематическая схема независимого механизма поворота
с двойным подводом мощности
365
ного числа включенной в коробке пары шестерен. Следовательно, на
каждой передаче будет свой расчетный радиус.
Механизм поворота может выполняться в двух вариантах —
с промежуточной шестерней, установленной между поперечным ва-
лом и солнечной шестерней, и без промежуточной шестерни. Нали-
чие промежуточной шестерни вносит в передачу ряд особенностей.
Во-первых, это приводит к взаимно-противоположному вращению
солнечной шестерни и эпицикла, что снижает обороты водила, т. е.
ведомого вала механизма. Во-вторых, при промежуточной шестерне
замкнутый поток может быть циркулирующим, что при прямолиней-
От двигателя
Рис. 227. Схема силового потока независимого механизма поворота
с двойным подводом мощности
ном движении позволяет расширить диапазон регулирования сило-
вой передачи или при заданном диапазоне регулирования умень-
шить диапазон регулирования коробки передач. Силовая передача
без промежуточной шестерни дает только разветвленный поток, что,
как известно, сужает внешний диапазон регулирования силовой пе-
редачи.
На рис. 227 представлена схема силового потока независимого
механизма.
Силовой поток состоит из механической узловой точки к, описы-
вающей простую коробку передач; суммирующих точек пил, опи-
сывающих планетарные механизмы; механических точек пр и лр,
описывающих простые редукторы (включая сюда и редуктор про-
межуточной шестерни, если он имеется в механизме поворота);
фрикционных точек фп и фл, описывающих фрикционные муфты;
разветвляющей точки а, описывающей разветвление потока в ко-
робке передач на конической паре.
Представленный на схеме силовой поток описывает поворот ма-
шины, причем поворот происходит в сторону правой гусеницы (п).
Из схемы силового потока следует, что мощность от двигателя
разветвляется в точке а на два потока. Один идет к коробке пере-
366
дач к, а другой — к планетарному механизму л. Проходя через
коробку, поток также подходит к точке л. Здесь складываются
два потока 1л и 2л, и суммарный поток Ол идет через забегающую
гусеницу 2 и грунт к отстающей гусенице 1. Отсюда поток подво-
дится к точке п и снова возвращается в коробку передач.
Определим параметры сравнительной оценки ме-
ханизма.
Из схемы силового потока находим:
при прямолинейном движении, когда включены обе муфты фл
и фп и выключены оба тормоза тл и тп:
112^1к — (21р
Ш0л(п) “..пи,! 1 ml’
'12 — 1
при повороте, когда включена муфта фл и тормоз тп:
г12г21к
“on = —------Г “1>
'12 — 1
'l2Z21K (21р
“ол = — :— “i.
'12 — 1
где г'12 — внутреннее передаточное отношение суммирующих точек
л и п\
/2и —передаточное отношение коробки передач;
z2]p — передаточное отношение редукторов.
Отсюда находим:
vn _ а>0п(П) 1.
VO2 Ш0Л ’
ftp MfUl J
^2р °>0Л 1 '21'12К^21р
Из формул 123 и 124 (см. ч. 1) получим кинематический фактор
и расчетный радиус
^ = 0,5;
р 0,5--^-. (197)
*12К
Подставляя в формулу (179) значения и рр и принимая
Ру___1
—1, получим
'12(12р
'12к
367
Определим коэффициент тормозного момента.
Из схемы силового потока находим
Л?2п “Ь ^12^1п == 9>
Моп + + М2п = О,.
где Л41п = Л4Т. Исключив из этих уравнений /И2п> получим
= ~оп ;
*12 — 1
кроме того, /И1 = /бпЛ40п. Тогда окончательно
1
тт = -г-,---------г-----.
( *12 ~ 1) *вп
(199)
ДИФФЕРЕНЦИАЛЬНЫЙ МЕХАНИЗМ
На рис. 228 представлена кинематическая схема дифференциаль-
ного механизма, а на рис. 229 — схема его силового потока.
Механизм состоит из простого дифференциала д, двух редук-
торов лр и пр, двух планетарных механизмов л и и и простой
коробки передач к.
На полуосях дифференциала установлены два тормоза тл и тп.
При прямолинейном движении машины тормоза выключены; при по-
вороте включается один из тормозов, причем при повороте направо
включается левый тормоз тл и при повороте налево — правый тор-
моз тп.
Из схемы силового потока находим:
при прямолинейном движении машины, когда включены оба тор-
моза:
z12z21k — zalp
<i>„ , , = о>л ,. = —;-«)<;
Ол(п) Оп(П) I I’
'12 1
при повороте, когда включен тормоз тл:
J12J21K - 2ZJlp
шоп = --—®i;
'12р — 1
112гик
®0л = ----
'12 ~ 1
Отсюда находим:
fn m0n(n) _ j 'sip .
V’P m°” ’
V1P _ mon _ I ______2 <21p
Vjp ’
368
Dm двигателя
Рис. 228. Кинематическая схема дифференциального механизма поворота
с двойным подводом мощности
От двигателя
Рис. 229. Схема силового потока дифференциального механизма
поворота с двойным подводом мощности
24-?0
369
Из формул 123 и 124 (см. ч. 1) получим
<7к =0;
Рр=4(2?^-1)- (20°)
н Z \ *12К 7
р
Подставляя в формулу (179) qK, рр и принимая -^ = 1, по-
лучим
Ф = 1+---------------• (201)
1 f '12'12р Л
2 \ /12К /
Определим теперь коэффициент тормозного мо-
мента.
Определяя моменты узловых точек л и лр, можем написать:
^лр = ^21р^2лр = ^21р^Лл = ? Г ^Ол'
'12 ~ 1
то же для узловых точек п, пр и д:
= ^1д ~ Мпр = г21р^2пр = г21р^1п = ~ Г ^0п-
'|2 — 1
Составляем уравнение равновесия разветвляющей узловой точки.
Получим
^тл = Млр + ^2д = (М)п - Чл).
(12 — 1
Момент на ведущем колесе отстающей гусеницы A/Ii = /бп7Иоп- Тогда окончательно получим коэффициент тормозного момента ^ = р-1Ри. О+тгО- (202) ( '12 — 1) 'бп V М°п > Здесь взято абсолютное значение моментов 7ИОЛ и /Иоп. Таблица 34 Параметры сравнительной оценки механизмов поворота с двойным подводом мощности
Pmin Рр <7к * от, см СФ ст
Независимый механизм
0,5 — —-— '12к max 0,5 Д- *12К 0,5 1+.7дг *12К 1 ( '12 — 1) 'бп 2 2 4 1
Дифференциальный механизм
а 1 2'i2k max 2 а _L 2/i2K 2 0 1 + —5— — 1 *12К 2,5/2ip ( 'l2 ~ 1 ) 'бп 3 0 4 2
370
В табл. 34 приведены параметры сравнительной оценки меха-
низмов. Здесь обозначено в = 1'кг12ри принято <?д = 2,5.
В конструктивную характеристику механизма включены только
механические точки л, п и д. Коробка передач не учитывалась, так
как она входит во все силовые передачи и, следовательно, в срав-
нительную оценку механизмов поворота не должна включаться.
Простые редукторы лр и пр хотя и являются принадлежностью дан-
ного механизма, но вследствие простоты конструкции не могут
определять сложность механизма в целом, а следовательно, их
также можно не включать в конструктивную характеристику меха-
.низма.
К числу тормозных точек добавлены две точки остановочных
тормозов.
Сравнивая данный механизм поворота с механизмами, рассмот-
ренными выше (с одинарным подводом мощности), можно сделать
следующие выводы: механизм с двойным подводом мощности более
экономичен, чем любой из механизмов с одинарным подводом мощ-
ности; по простоте конструкции он примерно равноценен двухсту-
пенчатому планетарному механизму.
Из табл. 34 следует, что коэффициент тормозного момента ме-
ханизмов с двойным подводом мощности не зависит от передаточ-
ного числа коробки передач, а следовательно, и от расчетного ра-
диуса. Это является недостатком рассматриваемого механизма по-
ворота.
Дифференциальный механизм уступает независимому механизму
как по параметру ф, так и по параметру т. Его преимущество
заключается в том, что он не разрывает при повороте машины си-
лового потока, идущего от двигателя к гусеницам и, следова-
тельно, не нарушает равномерности движения машины.
Как всякий дифференциальный механизм, данный механизм при
прямолинейном движении имеет две степени свободы.
Конструктивно дифференциальный механизм проще независи-
мого, так как у него отсутствуют две фрикционные муфты, которые
здесь заменены простым дифференциалом.
7. КОНСТРУКЦИИ МЕХАНИЗМОВ ПОВОРОТА
БОРТОВЫЕ ФРИКЦИОНЫ
На рис. 230 представлена конструктивная схема механизма по-
ворота «Бортовые фрикционы». Механизм состоит из двух фрик-
ционных муфт с тормозами, расположенных между конической па-
рой 1 и бортовой передачей 4. Внутренние барабаны муфт надеты
на поперечный вал 2, а внешние — на ведущие валы бортовых
передач. Внешний барабан 3 используется как тормозной. На него
надет ленточный тормоз 6.
24*
371
Рис. 230. Конструктивная схема механизма поворота „Бортовые фрик-
ционы “
Z—коническая пара; ^ — поперечный аал; 3— внешний барабан, 4—бортовая передача;
5 — ведущее колесо; 6 — ленточный тормоз
Рис. 231. Конструкция муфты бортового фрик-
циона:
/ — нажимной диск; 2 — ведомый барабан; 3 — отжимной
палец; 4 — пружина; 5 — ведомый диск; 6 — ведущий ба-
рабан; 7 — выжимная муфта; 8 — ведущий вал; 9 — вилка
выключения; 10 — диск выключения; 11 — ведущий Диск;
12 — ленточный тормоз
372
Рис. 232. Бортовой фрикцион с выключающим сер-
воустройством:
Z— нажимной диск; 2— ось; 3 — ролик; 4 — тормозной барабан;
5 — выступ тормозного барабана; 6 — ведомый барабан; 7 — вал
бортовой передачи; 8 — выступ ведомого барабана; 9 — ребро
тормозного барабана
Устройство Муфты в сборе показано на рис. 231. Это многоди-
сковая фрикционная муфта пружинного типа, аналогичная муфте
главного фрикциона.
На рис. 232 показана оригинальная конструкция бортового
фрикциона с выключающим сервоустройством.
На нажимном диске 1 установлены оси 2, на которые надеты
ролики 3. Ролики помещаются между скошенными выступами 5,
расположенными на торце тормозного барабана 4. Тормозной ба-
рабан установлен свободно на ступице ведомого барабана 6, с ко-
торой он может соединяться через выступы 8. Ведомый барабан
надет на шлицы первичного вала 7 бортовой передачи.
При торможении барабана 4 ролики 3 набегают на выступы 5 и
отжимают диск 1. Фрикцион выключается. После выключения
фрикциона выступы 8 ведомого барабана зацепляются за ребра 9
тормозного барабана, вследствие чего вал 7, а следовательно, и
отстающая гусеница затормаживаются.
373
В данном фрикционе для выключения его и для торможения от-
стающей гусеницы используется инерция машины, что значительно
облегчает управление машиной при повороте.
ОДНОСТУПЕНЧАТЫЙ ПЛАНЕТАРНЫЙ МЕХАНИЗМ
На рис. 233 представлена конструкция одноступенчатого плане-
тарного механизма поворота в сборе с бортовой передачей.
Механизм выполнен по наиболее распространенной схеме, а
именно: ведущим элементом является солнечная шестерня, ведо-
мым — водило и тормозным — эпициклическая шестерня. Последняя
заключена 1з оребренный картер, который используется в качестве
тормозного барабана. Рядом с планетарным механизмом на валу
водила на шлицах надет остановочный тормоз. Вал водила яв-
Рис. 233. Конструкция одноступенчатого планетарного механизма поворота
(первый вариант)
374
Рис. 234. Конструкция одноступенчатого планетарного механизма
поворота (второй вариант)
ляется ведущим валом бортовой передачи. На хвостовике вала во-
дила посажена ведущая шестерня бортовой передачи, которая на-
ходится в зацеплении с ведомой шестерней, имеющей внутренние
зубья. При таком устройстве бортовой передачи прочность ее ше-
стерен повышается, а габариты уменьшаются.
Представленный здесь механизм поворота конструктивно ком-
пактен и прост.
На рис. 234 представлен другой тип одноступенчатого механиз-
ма в сборе с бортовой передачей. Здесь ведущим элементом яв-
ляется эпициклическая шестерня, ведомым — водило, а тормоз-
ным — солнечная шестерня.
375
Рис. 235. Конструкция двухступенчатого планетарного механизма поворота
тягача АТ-Т:
1 — поводок; 2 и 16 — пальцы; 3 и 5 — сальники; 4 — уплотнительные кольца; 6 — неподвижная
чашка; 7 —шарик; Л—радиально-упорный шарикоподшипник; 9 — ведущий вал бортовой пере-
дачи; 10 — регулировочное кольцо; П — кольцо; 12 — сальник; 13 — подшипник, 14 — подвиж-
ная чашка; 15 — подшипниковая коробка; 17 — пружина; 18 — пробка; 19 — внутренний бара-
бан; 20— нажимной диск; 21 — диск трения с внутренними зубьями; 22 — диск трения с на-
ружными зубьями; 23 — лента малого тормоза; 24 — барабан малого тормоза; 25 — наружный
барабан фрикциона; 7.6 — лента остановочного тормоза; 27 — сателлит; 28 — пружинное кольцо;
29 — эпициклическая шестерня; 30— барабан остановочного тормоза; 31 — кольцо; 32 — пробка;
33, 4/ и 43 — шарикоподшипники; 34 — ось сателлита; 35 — планка; 36 — водило; 37 и 46 —
уплотнительные кольца; 38— зубчатая ступица; 39 — гайка; 40 — распорная втулка; 42 — сол-
нечная шестерня; 44 — болт ступицы; 45 — маслоотражатель
376
Для этой схемы требуется введение понижающего редуктора.
В качестве понижающего редуктора использованы две шестерни
внешнего зацепления, одна из которых является венцом эпицикли-
ческой шестерни.
Конструктивно данный механизм сложнее рассмотренного выше.
ДВУХСТУПЕНЧАТЫЙ ПЛАНЕТАРНЫЙ МЕХАНИЗМ
На рис. 235 представлена конструкция двухступенчатого плане-
тарного механизма поворота, установленного на тягаче АТ-Т. Ме-
ханизм выполнен по схеме, представленной на рис. 222. Это меха-
низм с блокировочной муфтой.
Рис. 236. Конструктивная схема двухступенчатого планетарного механизма
поворота без блокировочных муфт
На рис. 236 приведена конструктивная схема двухступенчатого
планетарного механизма без блокировочных муфт. Механизм со-
стоит из двух однорядных эпициклов а и б и трех тормозов Tl, Т2
т/i ТЗ с. каждого борта машины. Принципиальная схема этого меха-
низма представлена на рис. 223.
Заметим, что данный механизм применялся еще на первых анг-
лийских танках (1918 г.).
В настоящее время применяются двухступенчатые планетарные
механизмы только с блокировочными муфтами.
ПРОСТОЙ ДИФФЕРЕНЦИАЛ
В механизмах поворота современных гусеничных машин простой
дифференциал применяется лишь как часть общей конструкции
сложных механизмов, например, дифференциальных механизмов с
,377
Рис. 237. Цилиндрический простой дифференциал-
I и 4 — полуоси; 2 — полуосевая шестерня; 3 — коробка сателлитов;
5 — сателлит
Рис. 238. Конический простой дифференциал:
/н 5— полуоси; 2 — коробка сателлитов; 4 — полуосевая шестерня;
5 — сателлит
двойным подводом мощности. Как самостоятельный механизм по-
ворота он не применяется.
На рис. 237 показана конструкция простого цилиндри-
ческого, а на рис. 238 конического дифференциалов.
Конический дифференциал конструктивно несколько проще ци-
линдрического. Однако он имеет недостатки, к числу которых отно-
сятся повышенное трение в зубьях конических шестерен и наличие
осевых нагрузок на подшипники, возникающих вследствие примене-
ния конических шестерен. Вследствие этого в механизмах поворота
применяется главным образом цилиндрический дифференциал.
ДВОЙНОЙ ДИФФЕРЕНЦИАЛ
На рис. 239 представлена конструкция двойного цилиндриче-
ского, а на рис. 240 двойного конического дифференциалов. В со-
временных гусеничных машинах применяется только цилиндриче-
ский дифференциал.
На рис. 241 приведена конструкция двойного цилиндрического
дифференциала тягача АТ-С.
На полуоси 1 и 18 дифференциала надеты солнечные шестерни
11 и 12. Эти шестерни находятся в постоянном зацеплении с ше-
стернями сателлитов. У шестерен сателлитов имеются зубья двой-
ной ширины, что позволяет их сцеплять с шестернями соседних
сателлитов. На валу 13 сателлитов надеты на шпонке шестерни
тормозных сателлитов 7. Тормозные сателлиты находятся в зацеп-
лении с тормозными солнечными шестернями 31, которые через
фланцы соединены с тормозными барабанами 28 и 22. Тормоза
имеют фрикционную обшивку и работают в масле.
Сателлиты дифференциала установлены в коробке 27 сателли-
тов. К коробке с помощью заклепок прикреплена коническая ше-
стерня 10.
Дифференциал помещается в общем картере с коробкой пе-
редач.
Следует отметить, что в дифференциале тягача АТ-С принято
слишком большое передаточное число конической пары. Это сделано
по аналогии с автомобильными дифференциалами, где передаточ-
ное число стремятся брать возможно большим. В гусеничных же
машинах имеется бортовая передача, поэтому нет необходимости
увеличивать передаточное число конической пары. Наоборот, его
следует всячески уменьшать, так как при большом передаточном
числе увеличивается коэффициент тормозного момента и перегру-
жается сам дифференциал.
Выше отмечалось, что желательно иметь дифференциал
с блокировкой при прямолинейном движении
машины. Блокировку можно осуществить введением в схему
дифференциала фрикционной муфты или самотормозящихся
379
Рис. 239. Цилиндрический двойной дифференциал:
7 — тормозной сателлит; 2 и .6 — полуоси; 8 — полуосевая шестерня;
4 — коробка сателлитов; 6 — тормозная шестерня; 7 — ленточный тор-
моз; 8 — ведущий сателлит
Рис. 240. Конический двойной дифференциал:
7 — тормозная солнечная шестерня-, 2 и 4 полуоси: 3 полуосе*
вая шестерня; 5 — коробка свтеллитов; & — ведущий сателлит; 7 —
тормозной сателлит
00
Рис. 241. Конструкция двойного цилиндрического дифференциала тягача АТ-С:
1 и 18— полуоси; 2 и 4 — проволока; 5, 16 и 30 — болты; 5 и Z4 — переходные втулки; 6 — коронная гайка; 7 — тормозной сателлит;
8 — винт; 9—бронзовая втулка; 10— ведомая коническая шестерня; 11 и 12 — солнечные шестерни полуосей; 13 — вал; 15— болт
с прямой накаткой; 17 — подшипник, 19 — боковина; 20 И 32 — подшипники; 21 — фланец; 22 и 28 — тормозные барабаны; 23 — самоза-
клинивающаяся гайка; 24 — стяжной болт; 25 — водило; 26 — заклепка; 27 — коробка сателлитов; 29 — фланец; 31 — тормозная солнечная
шестерня
Рис. 242. Червячный конический дифференциал с автоблокировкой:
I — коробка сателлитов; 2 — коническая шестерня; 3 — крестовина; 4 — оолуосевая коническая
шестерня; 5 — сателлит; 6 — червячная шестерня; 7 — червяк; 8 — вал червяка; 9 —• цилиндри-
ческая шестерня; 10 — тормоз
червячных пар, как это сделано, например, в дифференциале,
представленном на рис. 242.
В коробке 1 сателлитов, получающей вращение от конической
шестерни 2, установлена крестовина 3. На крестовине свободно по-
сажены конические сателлиты 5, на хвостовике которых закреплены
червячные шестерни 6. Конические сателлиты находятся в зацепле-
нии с полуосевыми коническими шестернями 4, а червячные ше-
стерни— с червяками 7. На конце вала 8 червяка посажены ци-
линдрические шестерни, которые сцепляются с цилиндрическими ше-
стернями 9 тормозов 10.
При прямолинейном движении дифференциал заблокирован, так
как червячные пары самотормозятся (автоблокируются).
Если включить один из тормозов, то цилиндрическая шестерня
червяка будет обкатываться по неподвижной шестерне тормоза,
вследствие чего червяки начнут вращаться. Вращение червяков пе-
редается на червячные шестерни и далее на сателлиты и полуосе-
вые шестерни. Машина будет совершать поворот.
Серьезным недостатком червячного дифференциала является его
низкий к. п. д. при повороте и повышенный износ червячных пар.
Червячный дифференциал устанавливался на сельскохозяйствен-
ных тракторах марки Ганомаг.
382
МЕХАНИЗМ С ДВОЙНЫМ ПОДВОДОМ МОЩНОСТИ
Независимый механизм поворота с двойным подводом
мощности установлен на легком отечественном тягаче АТ-Л, Он со-
стоит из пятиступенчатой коробки передач, двух элементарных диф-
ференциальных механизмов эпициклического типа, двух фрикцион-
ных муфт и четырех тормозов (из них два остановочные).
Рассмотрим работу механизма по кинематической схеме, пред-
ставленной на рис. 243.
При прямолинейном движении машины включены муфты 18 и
одна из пар шестерен в коробке передач.
Вращение от вала / передается на вал //, с вала II через муф-
ты 18 на солнечные шестерни 17 эпициклических механизмов
С другой стороны с вала // через включенные в коробке передач
шестерни на вал /// эпициклов 15. Суммируясь в эпициклических
механизмах, вращение передается на ведомые валы IV механизма.
При повороте машины выключена одна из муфт 18 и включен
тормоз Т1 или Т2. Если включен тормоз Т1, то поворот происходит
на расчетном радиусе, большем 0,5. При включенном тормозе Т2
поворот происходит на расчетном радиусе 0,5, т. е. вокруг затор-
моженной гусеницы.
Допустим, что включен правый тормоз Т1. Вращение передается
через включенную левую муфту на вал IV, как и при прямоли-
нейном движении. С другой стороны солнечная шестерня правого
эпицикла заторможена. На правый борт вращение передается от
вала III через эпицикл на водило и на правый вал IV. Так как ско-
рости левого и правого валов IV различны, причем скорость правого
вала зависит от включенной в коробке передачи, машина совершает
поворот на том или ином расчетном радиусе.
Допустим, что рычаг переключения коробки передач поставлен
в нейтральное положение, с левого борта включена
муфта, а с правого — тормоз Т1. Механизм в этом случае будет
Рис. 243. Кинематическая схема механизма поворота тягача АТ-Л
383
Рис. 244. Кинематическая схема независимого механизма поворота с двойным
подводом мощности танка T-V „Пантера”
384
иметь две степени свободы. При этом на гусеницах будут созда-
ваться равные по величине и противоположные по знаку силы тяги.
Машина будет поворачиваться вокруг центральной оси, т. е. с ра-
диусом, равным нулю.
На рис. 244 представлена кинематическая схема независимого
механизма поворота с двойным подводом мощности, применявше-
гося во время второй мировой войны на немецком танке Т-V «Пан-
тера».
, Механизм состоит из двух эпициклических механизмов а, двух
фрикционных муфт Ф и четырех тормозов Т1 и Т2. Один из тормо-
зов Т1 установлен на валу солнечной шестерни планетарного меха-
низма, другой, остановочный, тормоз Т2— на ведущем валу бор-
товой передачи.
Мощность от двигателя подводится к механизму поворота двумя
потоками. Один поток по валу 1 передается на редуктор б, далее
через коническую пару в и фрикцион Ф к солнечным шестерням
Эпициклических механизмов а. Другой поток идет по валу 1 через
.главный фрикцион д на коробку передач е и далее на вал 2; через
коническую пару ж поток подводится к эпициклам.
Прямолинейное движение машины осуществляется включением
обеих фрикционных муфт или тормозов Т1 (при выключенных
муфтах).
Если с одного борта включена фрикционная муфта, а с дру-
гого— тормоз Т1 или Т2, то машина будет совершать поворот. При
этом на каждой передаче в коробке число расчетных радиусов бу-
дет равно двум: один радиус получается включением тормоза Т1,
другой — тормоза Т2.
В табл. 35 приведены значения расчетных радиусов при включе-
нии тормоза Т1.
Таблица 35
Значение расчетных радиусов механизма поворота с двойным подводом
мощности немецкого танка Т-V „Пантера"
Расчетный радиус Передачи
I II III IV V VI VII
Рр 1,8 4,2 6,9 П,1 16,2 23,1 31,0
Из табл. 35 следует, что в данном механизме расчетный радиус
на высших передачах может быть очень большим.
Согласно данным табл. 34 расчетный радиус независимого ме-
ханизма равен
Подставим сюда р =31. Получим Д = 30,5. Подставив эту
И Z12K
25-20 385
Рис. 245. Конструктивная схема дифференциального механизма поворота с двойным подводом мощности:
/ — коробка передач; 2—ведущий вал коробки передач; 3 — ведомый вал коробки передач; 4 — венец планетарного механизма; 5 — тормозу
й — водило; 7— промежуточная шестерня; 8 — полуось; 9 — простой дифференциал
величину в формулу коэффициента потребной мощности, найдем
ф = 1,06.
Таким образом, мощность, потребная для поворо-
та, почти равна мощности, необходимой для пря-
молинейного движения.
На рис. 245 представлена конструктивная схема дифференци-
ального механизма поворота с двойным подводом мощности. Этот
механизм применялся во вторую мировую войну на английском
танке MK-IV.
Кинематическая схема и схема силового потока этого механизма
были представлены на рис. 228 и 229.
Отметим, что конструктивно дифференциальный механизм не-
сколько проще независимого механизма, так как в нем отсутствуют
две фрикционные муфты, хотя вместо муфт здесь имеется простой
дифференциал. Но дифференциал в производстве проще и дешевле
фрикционных муфт.
8. КОНСТРУКЦИИ ТОРМОЗОВ
Одним из основных элементов всякого механизма поворота яв-
ляются тормоза, с помощью которых регулируется поворот ма-
шины.
В гусеничных машинах могут применяться остановочные тормо-
за, тормоза механизма поворота и тормоза планетарных коробок
передач.
Остановочные тормоза служат для торможения машины. Одно-
временно ими пользуются и для регулирования поворота, т. е. они
являются и тормозами механизма поворота. Вследствие этого они
имеют общий привод и управляются рычагами механизма поворота.
По конструктивному признаку тормоза делятся на ленточ-
ные, колодочные и дисковые. В гусеничных машинах
главным образом применяются ленточные тормоза.
ЛЕНТОЧНЫЕ ТОРМОЗА
Ленточные тормоза наиболее просты по устройству. В качестве
тормозного барабана ленточных тормозов используются внешние
барабаны фрикционных муфт или наружная поверхность эпицикли-
ческих шестерен (в планетарных механизмах поворота). Кроме того,
ленточный тормоз обладает значительным серводей-
ствием, которое позволяет получать от него большой тормозной
момент.
Серводействие в ленточном тормозе создается за счет сил тре-
ния, возникающих между лентой и тормозным барабаном. При вра-
щении барабана силы трения могут отбрасывать или, наоборот, на-
вивать ленту на барабан. В первом случае они мешают затягива-
нию ленты на барабане, во втором способствуют затягиванию лен-
ты, т. е. создают серводействие.
25* 38?
Серводействие зависит от положения точки закрепления ленты.
Когда точка закрепления находится в начале ленты (если смотреть
по направлению вращения тормозного барабана), то тормоз обла-
дает наибольшим серводействием (лента навивается на тормоз-
ной барабан). Такой тормоз называется простым (рис. 246, а).
Недостатком простого тормоза является то, что при обратном
вращении барабана силы трения отбрасывают ленту, препятствуя
торможению барабана. Таким образом, при движении машины впе-
ред имеется серводействие, облегчающее торможение машины, а на
заднем ходу (например, при торможении машины на подъеме), на-
оборот, силы трения препятствуют торможению машины.
Рис. 246. Типы ленточных тормозов:
а — простой; б — двойной; в — плавающий
Если точка закрепления расположена посредине ленты, как по-
казано на рис. 246,6, то тормоз не обладает серводействием. Дей-
ствительно, половина ленты отбрасывается от барабана силами
трения, а вторая половина, наоборот, навивается на барабан. В ре-
зультате общий эффект серводействия равен нулю.
Тормоз без серводействия называется двойным.
Наконец, имеется третий тип ленточного тормоза — плаваю-
щий тормоз (рис. 246, в).
В плавающем тормозе нет постоянно закрепленной точки.
Тормозная лента «плавает» на барабане. В зависимости от направ-
ления вращения барабана лента поворачивается и упирается в огра-
ничитель. Упор всегда создается в начале ленты. Таким образом,
плавающий тормоз обладает серводействием простого тормоза, при-
чем как при вращении вперед, так и при обратном вращении тор-
мозного барабана.
В гусеничных машинах в настоящее время применяются только
двойные или плавающие тормоза.
Плавающие тормоза ставят на тяжелые и средние машины; на
легкие машины ставят двойные тормоза, т. е. тормоза без серводей-
ствия.
Следует иметь в виду,, что плавающий тормоз обладает свой-
ством резко захватывать тормозной барабан, т. е. резко тормозить
388
CO
Рис. 247. Двойной ленточный тормоз тягача М-2: . ,
/- тормозной барабан; 2 и 3 — тормозные ленты; 4 — ось; 5 и 6 — регулировочные болты; 7 — шпилька; S, 9 и 10- оттяжные пружины
отстающую гусеницу. Если плавающий тормоз установлен на лег-
кой машине, то это приводит к тому, что при повороте машину
вследствие резкого торможения отстающей гусеницы забрасывает.
Поэтому на легкие машины ставить тормоза плавающего типа не
рекомендуется.
Рис. 248. Плавающий ленточный тормоз:
I и 2 — пальцы; 3 — башмак
На рис. 247 представлен двойной ленточный тормоз тягача
М-2. Тормоз состоит из тормозного барабана / (он же барабан
бортового фрикциона), двух стальных тормозных лент 2 и 3 и ры-
чажной системы. Неподвижной точкой тормозных лент является
ось 4; так как обе ленты имеют одинаковую длину, то тормоз не
обладает серводействием.
Для регулировки тормоза служат регулировочные болты 5 и 6
и шпилька 7. Провисание ленты регулируется оттяжными пружи-
нами 8, 9 и 10.
Тормозные ленты имеют фрикционную обшивку.
Конструкция плавающего тормоза представлена на
рис. 248. Тормоз имеет одну сплошную ленту с чугунными наклад-
890
ками. По концам ленты приклепаны наконечники, в которых уста-
новлены пальцы 1 и 2. При вращении тормозного барабана по ча-
совой стрелке палец 1 приходит в соприкосновение с башмаками 3,
благодаря чему создается упор в начале ленты. При обратном вра-
щении тормозного барабана упор создается на противоположном
конце ленты.
КОЛОДОЧНЫЕ ТОРМОЗА
_ Между лентой тормоза и тормозным барабаном имеется боль-
шой зазор. Это приводит к большому холостому ходу приводов
управления, что в свою очередь уменьшает рабочий ход привода, а
следовательно, уменьшает его передаточное число, т. е. в конечном
итоге увеличивает потребное на рычаге управления усилие.
Другим недостатком ленточного тормоза является невозмож-
ность использовать для торможения внутреннюю поверхность тор-
мозных барабанов.
Этими недостатками не обладает колодочный тормоз,
В колодочном тормозе зазор между тормозным барабаном и ко-
лодками примерно в три раза меньше, чем зазор в ленточном тор-
мозе. Кроме того, при наличии отдельного тормозного барабана
тормозные колодки могут располагаться внутри барабана, вслед-
ствие чего сокращается диаметральный габарит тормоза. Колодки,
расположенные внутри барабана, легче защитить от попадания на
них масла, воды, грязи.
Колодочные тормоза, как и ленточные, бывают с серводействием
(плавающего типа) и без серводействия.
На рис. 249 приведена конструкция плавающего колодочного
тормоза. Тормоз имеет две внутренние колодки 1, связанные между
собой регулировочным валиком 2; с другого конца на колодках
имеются ролики 3, между которыми расположен разводной кулак 4.
Разводной кулак посажен на оси рычага 5 управления тормозом.
При повороте рычага 5 кулак разводит колодки.
Регулировочный валик 2 представляет собой втулку с внутрен-
ней резьбой левого и правого вращения; во втулку ввернуты вин-
ты 7, подвешенные на шарнирах к соответствующим колодкам.
Снаружи на регулировочный валик надета червячная шестер-
ня 8, которая находится в зацеплении с червяком 9. Червяк служит
для регулировки зазора в тормозе.
В колодках тормоза имеются вентиляционные отверстия, через
которые циркулирует воздух. Для охлаждения служат также ребра
на наружной поверхности тормозного барабана.
Тормоз имеет гидравлический сервопривод 6.
На рис. 250 приведена конструктивная схема колодочно-
ленточного тормоза. Тормоз работает следующим обра-
зом. При перемещении рычага 1 затягивается лента 2 на тормозном
барабане 3. Придя в соприкосновение с вращающимся барабаном,
лента перемещается им и поворачивает рычаг 4 с разводным кула-
ком. Кулак, воздействуя на колодки 5, разводит их, поворачивая
лл «
to
Рис. 249. Плавающий колодочный тормоз:
колодка; 2— регулировочный валик; 3— ролики; 4— кулак; 5— рычаг; 6— цилиндр гидравлического сервопривода^
7—винт; S — червячная шестерня; 9— червяк
вокруг осей 6, и тормо-
зит барабан. Таким об-
разом, тормоз работает
с серводействием. Сер-
водействие здесь соз-
дает ленточный тормоз.
Колодочный тормоз
сам по себе серводей-
ствием не обладает.
ДИСКОВЫЕ ТОРМОЗА
Особенностью диско-
вого тормоза по срав-
нению с ленточным и
Рис. 250.
1 — рычаг;
Схема колодочно-ленточного тормоза:
2 — лента; 3 — тормозной барабан; 4 — рычаг;
5 — колодка; 6 — оси
колодочным является
большая поверхность
торможения и отсут-
ствие радиальных усилий, действующих на тормозной барабан,
а следовательно, и на его опоры. Существенным недостатком лен-
точного тормоза является неравномерность распределения удель-
ного давления вдоль ленты. Так, для плавающих тормозов макси-
мальное удельное давление почти в шесть раз больше минималь-
ного удельного давления. Это создает неравномерный износ
тормозной ленты. В дисковых тормозах удельное давление равно-
мерно распределяется по всей поверхности трения.
Заметим, однако, что в дисковом тормозе, в отличие от ленточ-
ных и колодочных тормозов, изменяется скорость скольжения фрик-
ционных поверхностей вдоль радиуса, что может также являться
причиной неравномерного износа тормоза.
Рис. 251. Принципиальная схема дискового тормоза:
7 и 2 — тормозные диски; 3 — тормозной барабан; 4 — шарик; 5— кронштейн;
6— неподвижный упор; 7 — выступ; 8 — фланец; 9 — вал механизма поворота;
/р — вал бортовой передачи
393
Рис. 252. Диско
Z— рычаг; 2 — разводной кулак; 3 и 4 — тормоз
394
вый тормоз:
яые диски; 5 — шарик; 6 — тормозной барабан
395
Дисковые тормоза бывают с гидравлическим и механическим
приводом. Тормоза с гидравлическим приводом применяются глав-
ным образом в планетарных коробках передач. В механизмах по-
ворота применяются тормоза с шариковым (механическим) при-
водом.
На рис. 251 представлена принципиальная схема дискового тор-
моза с шариковым приводом.
Тормоз состоит из двух дисков 1 и 2, установленных внутри
тормозного барабана 3. На внутренней поверхности дисков имеются
скосы, между которыми уложены шарики 4. На левом диске
имеется выступ 7, который при повороте диска приходит в сопри-
косновение с неподвижным упором б, расположенным на кронштей-
не 5. Барабан тормоза связан с фланцем 8. Через шлицевое соеди-
нение фланец связан с валом механизма поворота 9 и с валом бор-
товой передачи 10.
Тормоз работает следующим образом. При перемещении тор-
мозного рычага (не показан на схеме) диски 1 и 2 расходятся в осе-
вом направлении. После соприкосновения с тормозным барабаном
диск 2 перемещается им и поворачивается на некоторый угол.
Когда выступ 7 придет в соприкосновение с упором б, диск 2 оста-
новится. Диск 1 также остановится, так как он связан с диском 2
через шарики. Так как вращающийся барабан стремится повернуть
диск 1, то шарики 4 будут расклинивать оба диска и тормозить ба-
рабан.
На рис. 252 представлена конструкция дискового тормоза, работа
которого была рассмотрена на предыдущей схеме.
Дисковый тормоз имеет довольно сложное устройство. Это объяс-
няется главным образом сложностью механического (шарикового)
привода. Конструкция тормоза значительно упростится, если тормоз-
ные диски разводить с помощью жидкости (масла), накачиваемой
специальным насосом в рабочий цилиндр тормоза.
Примером тормозов с гидравлическим приводом служат диско-
вые тормоза коробки передач Хоббса, рассмотренной выше (рис. 93).
В дисковых тормозах в качестве фрикционных материалов часто
используется металлокерамика, работающая в масле.
АВТОМАТИЧЕСКАЯ РЕГУЛИРОВКА ТОРМОЗОВ
В тех случаях, когда тормоза работают в масляной ванне и до-
ступ к ним затруднен, применяется автоматическая регу-
лировка тормозов.
Приспособление для автоматической регулировки показано на
рис. 253. Оно состоит из храпового колеса /, сделанного заодно с
регулировочным винтом 2, защелки 3, водила 4, двуплечего ры-
чага 5 и тяги 6.
Приспособление работает следующим образом. При повороте ры-
чага 7 привода поворачивается сидящий с ним на одной оси рычаг 8,
который затягивает на барабане свободный конец тормозной ленты.
396
Одновременно с рычагами 7 и 8 поворачивается рычаг 9, который пе-
ремещает тягу б и через нее поворачивает двуплечий рычаг 5. Пра-
вый конец двуплечего рычага входит в паз водила 4, которое может
свободно поворачиваться на конце регулировочного винта 2. При
повороте водила с ним вместе перемещается стойка 10, на которой
надета защелка 3. Если зазор между тормозной лентой и барабаном
слишком велик, то водило повернется на такой угол, при котором
защелка заскочит за
зуб храпового колеса 1.
При возвращении всех
рычагов в исходное по-
ложение (под дейст-
вием пружин, не пока-
занных на рисунке) за-
щелка повернет храпо-
вое колесо, а вместе с
ним повернется и регу-
лировочный винт 2.
Вследствие этого пра-
вый конец тормозной
ленты подтянется вле-
во и зазор между лен-
той и барабаном умень-
шится. Таким образом,
включением и выклю-
чением тормоза можно
регулировать величину
зазора. Когда зазор
Рис. 253. Приспособление для автоматической
регулировки тормозов:
7 — храповое колесо; 2 — регулировочный винт; 3 — защелка;
4 — водило; 5 — двуплечий рычаг; 6 — тяга; 7 — рычаг при-
вода; 8 и 9 — рычаги; 70 — стойка
станет нормальным, за-
щелка перестанет заскакивать за зуб храпового колеса и регули-
ровка зазора прекратится.
Данное регулировочное устройство применяется в тормозах ме-
ханизма поворота тягача АТ-С.
Аналогичные устройства широко применяются также в тормозах
планетарных коробок передач на колесных и гусеничных машинах
иностранных марок (коробка передач Вильсона).
9. ПРИВОДЫ УПРАВЛЕНИЯ МЕХАНИЗМАМИ ПОВОРОТА
Назначение привода управления механизмом поворота заклю-
чается в последовательном выключении и включении его фрикцион-
ных элементов: муфт и тормозов.
Разные механизмы поворота имеют разные по устройству при-
воды.
397
ПРИВОД УПРАВЛЕНИЯ МЕХАНИЗМОМ ПОВОРОТА
«БОРТОВЫЕ ФРИКЦИОНЫ»
Назначение привода — выключать фрикционную муфту со сто-
роны отстающей гусеницы и включать с этой же стороны тормоз.
Привод должен работать так, чтобы обеспечить последовательное
выключение муфты и включение тормоза без перекрытия.
Это достигается применением разделителя.
Разделитель представляет собой вилку с прорезью. На рис. 254
показан привод с разделителем в виде вилки с прорезью.
Привод работает следующим образом. При повороте рычага
управления перемещается тяга, связанная с механизмом выключе-
ния фрикционной муфты (нижняя тяга) .Муфта выключается. Одно-
временно перемещается вторая тяга, на конце которой имеется па-
лец, установленный в прорези вилки. Вилка навернута на конец тяги,
связанной с тормозом. При перемещении передней тормозной тяги
задняя тормозная тяга не перемещается, пока не будет выбран зазор
в прорези вилки. После выбора зазора (к этому времени муфта пол-
ностью выключится) начнет затягиваться тормоз.
Рассмотренный' привод имеет один недостаток: при затягивании
тормоза фрикцион продолжает выключаться, вследствие чего на
рычаге управления складываются две силы — сила выключения
фрикциона и сила затягивания тормоза.
Чтобы избежать этого, в приводах управления тяжелых гусенич-
ных машин применяют специальное устройство — кулачковый
разделитель усилий.
Привод с кулачковым разделителем представлен на рис. 255.
В разрезанную тягу выключения фрикционной муфты введен рычаг,
на котором надет кулачок. Поверхность кулачка имеет два профиля.
Одна поверхность цилиндрическая, ось которой совпадает с осью ры-
чага, другая поверхность плоская. К плоской поверхности прижи-
мается ролик, посаженный на конец второго рычага кулачкового раз-
делителя. Этот рычаг связан с тягой, идущей к механизму выключе-
ния фрикциона.
При повороте рычага управления поворачивается кулачковый
разделитель. Вначале он перемещает ролик и поворачивает рычаг,
связанный с тягой. Фрикционная муфта выключается. Далее ролик
выкатывается на цилиндрическую поверхность, после чего выключе-
ние муфты прекращается.
Тормозная тяга имеет вилку с прорезью. Пока происходит выклю-
чение муфты, тормоз не затягивается. После того как муфта будет
полностью выключена, начинает затягиваться тормоз.
Усилия выключения муфты и затягивания тормоза в данном
приводе не складываются.
В легких машинах иногда применяют привод без разделителя.
Такой привод имеет, например, тягач М-2 (рис. 256).
Привод устроен следующим образом. С рычагом 1 управления
связана тяга 2, идущая к рычагу 3, посаженному на валик 4. На ва-
лике, кроме того, посажены рычаги 5 и 6. С рычагом 5 связана
398
Рис. 254. Привод.с вилочным разделителем:
/ — тормоз; 2 — бортовой фрикцион
Рис. 255. Привод с кулачковым разделителем:
1 — ролик разделителя; 2 — кулачок разделителя; 3 — палец тормоз-
ной тяги
399
Рис. 256- Привод без разделителя тягача М-2:
/ — рычаг управления; 2— тяга; 3, 5, 6 и 9 — рычаги; 4 — валик; 7 и 8 — тяги
тяга 7, идущая к механизму выключения фрикциона; с рычагом 6
связана тяга 8, идущая к рычагу 9 тормоза.
При повороте рычага управления выключается фрикционная
муфта и одновременно выбирается зазор в тормозе. Затем затяги-
вается тормоз при продолжающемся выключении муфты.
ПРИВОД УПРАВЛЕНИЯ ДВУХСТУПЕНЧАТЫМ ПЛАНЕТАРНЫМ
МЕХАНИЗМОМ ПОВОРОТА
Привод управления двухступенчатым планетарным механизмом
поворота может быть выполнен в виде системы кулачков-разделите-
лей, аналогичных тем, которые применяются в приводе управления
бортовыми фрикционами, и системы рычагов и тяг.
На рис. 257 представлен привод управления двухступенчатым
планетарным механизмом поворота тяжелого тягача АТ-Т, а на
рис. 258 показана его работа.
В исходном положении рычага управления фрикционная муфта
включена, тормоза выключены. При повороте рычага управления
продольная тяга 17 перемещается по стрелке и поворачивает тру-
бу 34. На трубе посажены кулак-разделитель 32 и рычаг 35 остано-
вочного тормоза. При повороте кулака-разделителя поворачивается
рычаг 26 и перемещается тяга 28. В результате блокировочная
муфта выключается. Одновременно под действием пружины 22 опу-
скается конец рычага 19 с роликом, перемещается вверх тяга 20 и
тормоз планетарного механизма включается. Если дальше повора-
чивать рычаг управления, то рычаг 35 выберет зазор в прорези
тяги 58 и затянет остановочный тормоз. При этом будут выклю-
чены блокировочный фрикцион и тормоз планетарного механизма.
У тягача АТ-Т имеется отдельный пневматический привод на
остановочные тормоза, управляемые от педали 62.
10. РАСЧЕТ МЕХАНИЗМОВ ПОВОРОТА
Задачей расчета механизмов поворота является определение мо-
ментов фрикционных муфт и тормозов, а также, если в механизме
поворота имеются зубчатые механизмы,— передаточных чисел,
угловых скоростей и крутящих моментов этих механизмов.
В качестве исходных данных для расчета принимаются:
1) для расчета фрикционных муфт, зубчатых механизмов и их
тормозов — максимальный момент двигателя (/Идтах), максималь-
ный момент на ведущем колесе машины по сцеплению (/И х) и
число оборотов вала двигателя, соответствующее его максимальной
мощности (лд,);
2) для расчета остановочных тормозов — максимальный тормоз-
ной момент (Mt maJ.
Момент двигателя Л4Д |Пах и число оборотов nN определяются по
внешней характеристике двигателя.
26-20 401
1
Рис. 257. Привод управления двух-
ступенчатым планетарным механиз-
мом поворота тяжелого тягача АТ-Т:
1 и 2 — рычаги управления; 3 — рычажок;
4 _ тяга; 5 — пружина; 6 — защелка; 7 — гре-
бенка; 8 — резиновый ролик; 9 — шайба;
10 — болт; 11 — труба; 12 — кронштейн;
13 — валик; 74, 75, 21, 26 и 30—рычаги;
16*17 — продольные тяги; 18 — ось; 19 — ры-
чаг малого тормоза; 20 — тяга малого тормоза;
22 — пружина; 23 — планка; 24-* 33 — пальцы;
25 — двуплечий рычаг малых тормозных лент;
27 — валик блокировочного фрикциона; 28 —
тяга блокировочного фрикциона; 29 — повод-
ковая чашка фрикциона; 31 — ролик рычага
малого тормоза; 32 — кулак-разделитель;
34 — труба; 35 — рычаг остановочного тормоза;
36 — валик; 37 н 38 — валики; 39, 42 и 59 —
валики; 40 и 48 — рычаги; 41 — муфта; 44 —
пружина сервоустройства; 45 — лента боль-
шого тормоза; 46 — лента малого тормоза;
47— валик привода ножного тормоза; 43 —
труба; 49, 50, 54 и 55 — рычаги; 57 — двупле-
чий рычаг; 52 — валик привода ножного тор-
моза; 53 — коромысло; 56 — корпус блокиро-
вочного устройства; 57 — тяга; 58— тяга оста-
новочного тормоза; 60 — валнк с муфтами;
61 — двуплечий рычаг остановочного тормоза
Рис. 258. Схема работы привода к двухступенчатому планетарному механизму поворота тягача АТ-Т
• — исходное положение; б — первое положение; в — второе положение (наименование деталей!—61 то же, что на рис. 257); 62— педаль тормоза
о
Момент Ч гаах определяется из следующих условий. Предпола-
гаем, что машина движется параллельно основанию 30° подъема.
Тогда сила тяги по сцеплению наиболее нагруженной гусеницы бу-
дет равна 0,65®G, а момент
Чп.ах = 0,65^0, (203)
где ср— коэффициент сцепления;
гк — радиус ведущего колеса в м;
G— полный вес машины в кг.
Чтобы не вводить в расчетные формулы коэффициентов запаса,
примем значение = 1, что несколько больше его действительного
значения.
Вначале расчет производится на оба момента Л4 тах и М* тах>
после чего в качестве расчетного момента выбирается меньший.
Тормоз должен обеспечить полное торможение гусениц при дви-
жении машины на горизонтальном участке пути. Тогда
= (204)
Рассмотрим расчет конкретных механизмов.
БОРТОВЫЕ ФРИКЦИОНЫ
Фрикционная муфта рассчитывается на момент
Час = ^4™ (205)
или на момент
Чра£ = -^Ч (206)
*бп
где im—передаточное число силовой передачи от двигателя До
бортовой передачи;
гбп— передаточное число бортовой передачи.
Из двух моментов выбирается наименьший, который и принимается
в качестве расчетного. На этот момент ведется дальнейший расчет
муфты по тем же формулам, что и при расчете муфты главного
фрикциона.
Расчетный момент тормоза определяется по формуле
(207)
*бп
Далее необходимо определить параметры тормоза.
Рассмотрим здесь только расчет ленточного тормоза,
как наименее известный. Выделим на абсолютно гибкой ленте эле-
ментарную дугу da (рис. 259).
На дугу действуют касательные силы трения между лентой и
барабаном и нормальные реакции барабана. Чтобы дуга ленты на-
ходилась в равновесии, необходимо приложить к ее концам еще
силы натяжения Sx и Sv — dSx\ здесь dSx — сила трения, действую-
щая на дугу со стороны барабана при вращении его против часо-
вой стрелки (в направлении скорости ш).
404
Силы и — dSx прижимают Дугу к барабану с силой dV.
Приближенно можно считать, что сила d¥ направлена по радиусу
барабана. Тогда
d/=2Svsin-f-.
_ .da da „
Заменим sin через Получим
dY=Sxdv..
Элементарная площадь дуги равна
dF = brd'i,
Рис. 259. Схема сил, действую-
щих на элементарную дугу ленты
Рис. 260. Схема сил, действую-
щих на ленту тормоза
где Ь — ширина ленты;
г—радиус барабана.
Тогда удельное давление ленты на барабан будет
= = (208)
Так как dSx по абсолютной величине равна силе трения, то
dSx = \>-qxdF = р brdv. = \±SxdrJ..
Интегрируя это выражение, получим формулу Эйлера
s; = Se^, (209)
где S—заданная сила натяжения ленты;
Р — коэффициент трения;
а —угол обхвата лентой тормозного барабана;
е —основание натуральных логарифмов (л? = 2,718).
Пусть лента тормоза прикреплена в точке а (рис. 260) к внеш-
ней опоре и не может поворачиваться вместе с барабаном. В точ-
ках б и в к ленте приложены затягивающие тормоз усилия со сто-
405
Рис. 261. Рычажный меха-
низм ленточного тормоза
роны привода Si и S4. Мысленно разре-
жем ленту в точке а. Тогда дуга аб бу-
дет удерживаться на месте силами Si
и S2 (где S2 — реакция опоры а), а
дуга ав— силами S3 и S4 (где S3 — вто-
рая реакция опоры а, действующая на
дугу ав).
Тормозной момент будет равен
^ = (S1-S2)r + (S8-S4)r.
Из формулы (208) определяем
S]=S2^;
S3 = S/J’!.
Тогда тормозной момент будет
м, = [(>-7^ + -1)5,] г.
(2Ю)
Приведем эту формулу к виду, более удобному для пользования.
Пусть затяжка тормоза осуществляется с помощью рычажного
механизма, представленного на рис. 261.
Составим уравнения моментов сил, действующих на механизм,
относительно точек гиб.
Будем иметь
Рт = 8}п-, Pl — S4k.
Отсюда
Обозначим т : п = а; I: k = Ь. Тогда
S, = аР,
S, = ЬР,
где а и b — передаточные числа рычажного механизма.
Тогда получим выражение тормозного м о мед т а в таком
виде:
^ = [(1 —-^}а + ^2-^Ь~]гР- (211)
Формула (211) является общей для трех видов тормозов: про-
стого, двойного и плавающего.
Примем для простого или плавающего тормоза щ — 0; «2 = а,
где а — угол обхвата лентой тормозного барабана. Получим фор-
мулу тормозного момента
Mt = (e^—\)brP. (212)
406
Здесь предполагаем, что простой тормоз работает при движении
машины вперед. Для двойного тормоза принимаем
ai = а2 = 4г •
Кроме того, подбираем плечи рычагов привода так, чтобы а — Ь.
Тогда
Л’ — 1
Mt = ^-~-arP. (213)
Для простого тормоза при обратном вращении тормозного бара-
бана следует подставить в формулу (210) вместо угла ах угол а,
а вместо угла аа угол а2 = 0.
Тогда получим
<214)
Приравняем M't к Mt и а к Ь. Получим
Р:Р=^°.
Примем ориентировочно р. = 0,3; а = 330°. Тогда Р': Р = 5,6.
Следовательно, при обратном вращении тормозного барабана про-
стого тормоза требуется усилие затяжки ленты в 5,6 раза больше,
чем при прямом вращении тормозного барабана.
Это и является причиной того, почему в настоящее время про-
стой тормоз не применяется в гусеничных машинах.
Примем для двойного тормоза р. =0,3; а = 330° и а = Ь и срав-
ним его с плавающим тормозом. Получим соотношение сил Р и Р',
равное 2,4, в пользу плавающего тормоза; т. е. при одном и том же
тормозном моменте на затяжку двойного тормоза требуется усилие
в 2,4 раза большее, чем на затяжку плавающего тормоза.
Выбрав тип тормоза и определив его тормозной момент, при-
равняем его к расчетному моменту по формуле (207). Из получен-
ного равенства определится необходимое усилие Р на затяжку
ленты. Определив усилие Р, найдем наибольшее усилие натяжения
ленты 5тах. Подставив в формулу (208) вместо Sx величину 5шах,
получим максимальное удельное давление <?1Пах.
Для лент с фрикционной обшивкой типа ферродо ориентиро-
вочно можно допускать <7тах до 8 кг/см2, для лент с чугунными и
металло-керамическими накладками допускается <?тах = 25 кг/см2
и выше (при работе .тормозов в масле).
Далее расчет элементов тормоза на прочность производится по
формулам курса «Детали машин».
407
ОДНОСТУПЕНЧАТЫЙ ПЛАНЕТАРНЫЙ МЕХАНИЗМ ПОВОРОТА
Задачей расчета является определение внутреннего передаточ-
ного отношения планетарного механизма, моментов, приложенных
к валам, в том числе и тормозных, и чисел оборотов шестерен и
валов.
Зададимся внешним передаточным числом механических узловых
точек а и б при полностью включенном тормозе Т1 (рис. 262). Обо-
значим в общем случае это
передаточное число через
zn„ = zV*, где значение ин-
дексов указано на рис. 262.
Выбираем znM = 3—3,5.
Согласно формуле 134
(см. ч. 1) имеем
Рис. 262. Схема силового потока односту-
пенчатого планетарного механизма пово-
рота
получим внутреннее передаточное
Отсюда, если задаться
значением индексов m, kwp,
юшение механизма. Обычно
принимают т=\; /г = О и р = 2, т. е. ведущий элемент — солнеч-
ная шестерня, ведомый — водило и тормозной—эпицикл. Тогда
z'mp = z'12; z^ = ZQ2 = 0. Отсюда znM = 1 z12, или z12 1 znM,
где zn51 задано.
Зная внутреннее передаточное отношение, по формуле 135 (см.
ч. 1) находим размеры шестерен.
Определим моменты планетарного механизма. В качестве рас-
четного момента примем момент на ведомом валу механизма
(Ч-)
44рас = таХ)
или
44 рас —
44<p max
Си
Из этих двух моментов выбираем наименьший.
Согласно формулам 163 (см. ч. 1) имеем для идеального ме-
ханизма
^0— ( hm 1)
(215)
где m и k — индексы центральных шестерен 1 или 2.
По формулам (215) находим значение двух моментов по третьему
заданному (/Ирас).
408
Момент На тормозе Т2 определяется так же, как и для бортового
фрикциона, т. е. по формуле (207).
Числа оборотов всех шестерен механизма определяются из урав-
нения кинематической характеристики. При этом необходимо опре-
делить и относительные скорости сателлитов.
Пример. Дано: G = 8000 кг-, гк = 0,25 м; тах = 40 кгм-, nN = 2000 об/лшн;
Vmax = 40 км!час-
Требуется произвести расчет одноступенчатого планетарного механизма по-
ворота.
Решение. Определяем общее передаточное число силовой передачи на
высшей передаче. Будем иметь
^"дА3’6 3,14-2000-0,25-3,6
3(Чпах ~ 30-40 ''
Задаемся передаточными числами конической пары (Цп)'. коробки передач
планетарного механизма (/пм): 1кП = 1; <к min - 0,6; /nil = 3,0.
Тогда находим передаточное число бортовой передачи
/6п = - = У- =2,61.
;КПгк П1П?И» 1 ’0,6’3
Принимаем k =* 0, т = 1 и р=2. Тогда
;(2) _ ; - 1 ~'12 _ 1 /
40 — ‘пм — — I — i12-
1 ~ *02
Отсюда находим внутреннее передаточное отношение
Z'12 = 4 — (пм = 1 — 3 — ~ 2.
Определим теперь моменты. Зададимся кинематическим диапазоном скоро-
стей силовой передачи dK = 7. Тогда /к max = dKiK mi|1 = 7-0,6 — 4,2.
Находим по формуле (205) момент на ведомом валу механизма
44 рас = Л/оа == А44^ max = 'кпгк щах'пм4^ max = 1 -4,2-3-40 — 505 К2М.
По формуле (206) находим
.. .. 0 65erKG 0,65-1-0,25-8000
Мрас = Л40а = —----------------------------
= 500 кгм.
Этот момент и берем в качестве расчетного.
Из формулы (215) определяем
,, Л^оа —500
М1а =---------~:— = 167 кгм-,
/12 — 1
Л4Т1 = Л7,а — — *12ТИ1а = 2-167 = 334 кгм.
Момент на тормозе Т2 определяем по формуле (207)
,, .. 0,5<?GrK 0,5-8000-0,25 „о„
Мт2 = Мт - —Ч-—— - -4----- = 383 к'гм.
‘6П 2,61
409
ДВУХСТУПЕНЧАТЫЙ ПЛАНЕТАРНЫЙ МЕХАНИЗМ ПОВОРОТА
При расчете двухступенчатого планетарного механизма задан-
ными величинами считаем второй расчетный радиус р2р и моменты
на ведущих колесах. Искомыми величийами будут: внутреннее и
внешнее передаточное отношение механической узловой точки ПМ,
тормозные моменты Т1 и Т2 и момент фрикционной точки Ф
(рис, 263).
Рис. 263. Схема силового потока двухступен-
чатого планетарного механизма поворота
Согласно формуле (185) определяем
'» = 1 + Лй • (216)
Находим внутреннее передаточное отношение планетарного ме-
ханизма из формулы
= = (217)
Определяем теперь моменты силового потока. Моменты остано-
вочных тормозов находим по формуле (207), моменты узловой
точки б — по формулам (215), как для одноступенчатого меха-
низма.
Определим момент блокировочной муфты Ф.
Примем индексы /г = 0; р = 1; ш = 2.
Составим уравнения моментов узловых точек а и в:
7И]а + г21-^2а = 0j
Ма + 7И1а + Л72а = 0.
Исключаем отсюда Л72а. Получим
^а=А1ф=-^-.
/]2 — 1
Для разветвляющей узловой точки в имеем
7W1B -f- Л72в -ф Л43в = 0.
410
- . Учитывая связывающие потоки, можем записать'
: -<а —Л4ф + Л72 = 0,
где М2 — момент на ведомом валу механизма.
1 Исключая из полученных уравнений момент А/Оа, будем иметь'
окончательно
Л*Ф=Л-, (218)
/12
где момент М2 приравнивается к расчетному моменту А/рас, кото-
рый определяется по формуле (205) или (206),
ДВОЙНОЙ ДИФФЕРЕНЦИАЛ
При расчете двойного дифференциала определяемыми величина-
ми являются внутренние передаточные отношения г,3 =и момен-
ты, приложенные к механизму, в том числе и тормозные моменты.
В качестве заданных величин принимаем расчетный радиус и мо-
менты на ведущих колесах.
Внутренние передаточные отношения механизма определяются
согласно формуле (193)
г13 = Z24 = “2р^‘ (219)
Определяем моменты силового потока (рис. 264).
Составим уравнение моментов идеальной механической узловой
точки а
^Аа 4“ С1а ^2а 4“ Z31a ^За = 9.
Подставляем сюда i'2la = —1; г31а = 2рр и Л43а = Л/т> получим
дл _______________________ 44га Л41а
т 2Рр
где
М,а = 4^
2 ‘бп
Окончательно
М,
2<6tiPp ’
(220)
где Л41 и М2— абсолютные величины
крутящих моментов на ведущих колесах
при повороте машины на расчетном ра-
диусе.
МЕХАНИЗМЫ ПОВОРОТА С ДВОЙНЫМ
ПОДВОДОМ мощности
Исходными данными для расчета ме-
ханизма поворота с двойным подводом
Мощности служат расчетный радиус на
Рис. 264, Схема силового
потока двойного дифферен-
циала
411
Рис. 265. Схема обобщенного си-
лового потока механизмов пово-
рота с двойным подводом мощ-
ности
одной из передач и внешние передаточные числа механизма (Zo) на
передачах при прямолинейном движении машины. Расчетный ра-
диус выбирается для первой передачи в пределах рр1 =0,5—1,8.
Внешние передаточные числа механизма (z0) определяются по
расчетным скоростям на передачах, полученным в тяговом расчете.
Расчет производится в следующем порядке. Задаемся внутрен-
ним передаточным отношением суммирующих точек (эпицикличе-
ских механизмов) i'12 = (—2,5) —
— (—3,5). Из формулы расчетного
радиуса находим передаточное
число дополнительных редукто-
ров Z,2p. Для этого необходимо за-
даться одним из расчетных радиусов
и передаточным числом в коробке
передач. Далее определяются рас-
четные радиусы на всех передачах.
Одновременно эти радиусы прове-
ряются на мощность, необходимую
для поворота. На высшей передаче
принимаем мощность прямолиней-
ного движения
N„ = (0,7-0,8m,
где Ne—паспортная мощность
двигателя;
г; — к. п. д. моторной уста-
новки.
По схеме силового потока производится полный кинематический
и статический расчет механизма. Для этого определяются все мо-
менты и угловые скорости шестерен, в том числе и скорости холо-
стых шестерен. Для сателлитов при кратковременной работе на по-
вороте можно допускать числа оборотов около 6000—7000 в ми-
нуту.
Статический расчет производится по расчетному моменту на ве-
дущих колесах, определяемому по формуле (205) или (206). Оста-
новочные тормоза рассчитываются из условия обеспечения на веду-
щих колесах расчетного тормозного момента, определяемого по
формуле (207).
Если силовой поток замкнутый, то его необходимо проверить на
циркуляцию.
Для упрощения расчетов механизмов с двойным подводом мощ-
ности приведем расчетные формулы обобщенного си-
лового потока, представленного на рис. 265.
Обобщенный силовой поток состоит из обобщенной узловой
точки а, которая описывает в конкретной схеме механизма допол-
нительные редукторы, дифференциал (если механизм дифферен-
циальный) и тормоза; из суммирующих узловых точек бив, опи-
412
сывающих дифференциальные механизмы; из узловой точки к, опи-
сывающей коробку передач,
Обозначим через t'l2 внутреннее передаточное отношение
узловых точек бив; z,|a и z‘8la внешние передаточные отноше-
ния узловой точки а при повороте машины; причем считаем, что
отстающая гусеница находится со стороны узловой точки в.
Обозначим через Iq передаточное число механизма при прямоли-
нейном движении машины. Примем Zo = .
“об
Составив уравнения силового потока и решив их, получим сле-
дующую систему расчетных формул:
^1а = + (Д70б + Д70в);
'12 ~ 1 '12 ~ 1
^и =------?^(А/Об + Л/Ов);
'12 — 1
<5 = -^;
'12 1
•^26 ~ ~ г
'12 -1
'12 1
Л о
ми = — /Иов;
'12 ~ '
'12г21к '21а
0)0б = т
'12 ~ 1
'12г21к — 'з1а
о)0п — ~ ? J 0)lai
'12 ~ 1
2'12'21к—'з1а 'з’.а
('з1а '21а)
,. __ '12 — 1
'о — .- .
'12г21к '21а
Здесь задающими параметрами приняты: угловая скорость
вала 1а и моменты на валах эпициклических механизмов и
Д70в. Внешние передаточные отношения z,Ia и z8(a определяются
из конкретной схемы механизма сравнением ее с обобщенной схе-
мой. Так, например, сопоставляя обобщенную схему силового потока
со схемой, представленной на рис. 229, можем написать;
(221)
(222)
(223)
(224)
(225)
(226)
(227)
(228)
(229)
(230)
413
, “1П Щр“1Д ___ 41р2“0Д _ п ,
3,а~^~ “од “ “од ~
Аналогично определяется внешнее передаточное отношение и для
независимого механизма. Так, согласно схеме силового потока, пред-
ставленной на рис. 227, будем иметь:
• ___“1л _ ^21р“1а .
21а~“1а~ “la 21f”
; ___“1п
318 “ “.а
= 0.
Пользуясь формулами (221—230), находим основные кинемати-
ческие и статические величины силового потока. Остальные недо-
стающие величины определяются непосредственно из схемы силового
потока. Задающие моменты Л4о0 и Л70В могут быть выражены че-
рез моменты на забегающей и отстающей гусеницах. Момент на
забегающей гусенице определяется по сцеплению (см. формулу 203),
а момент на отстающей гусенице — по отношению сил тяги -р-—
= гДе ”2 и определяются по условию поворота на тяже-
лое
лом грунте (см, ч, 1),
ГЛАВА VIII
КАРДАННЫЕ, КОНИЧЕСКИЕ И БОРТОВЫЕ ПЕРЕДАЧИ
1. КАРДАННЫЕ ПЕРЕДАЧИ
НАЗНАЧЕНИЕ И ТИПЫ КАРДАННЫХ ПЕРЕДАЧ
Карданная передача служит для соединения между собой валов
двигателя и агрегатов силовой передачи, когда эти агрегаты рас-
положены несоосно один к другому или когда вследствие неточ-
ности монтажа соосность может быть нарушена.
В гусеничных машинах агрегаты, соединяемые карданной пере-
дачей, монтируются на жестком основании — на раме или. на днище
корпуса — ив процессе работы не перемещаются один относительно
другого.
В гусеничных машинах применяются карданные передачи сле-
дующих типов:
1) с эластичными муфтами;
2) с зубчатыми муфтами.
КОНСТРУКЦИЯ КАРДАННЫХ ПЕРЕДАЧ
На рис. 266 представлена карданная передача с эластичной
муфтой, установленная между коробкой передач и конической
передачей легкого тягача Я-12.
Передача состоит из двух эластичных муфт, связанных между
собой трубчатым карданным валом. В качестве эластичного эле-
Рис. 266. Карданная передача с эластичной муфтой (тягач Я-12)
415
Рис. 267. Карданная передача, соединяющая бортовые фрикционы с бортовыми передачами (тягач Я-12)
мента муфты применяются диски, изготовленные из прорезиненной
ткани. В дисках имеются отверстия, в которые входят соединитель-
ные болты. Между прорезиненными дисками уложены стальные
шайбы.
На рис. 267 представлена аналогичная карданная передача, со-
единяющая бортовые фрикционы с бортовыми передачами.
Рис. 268. Карданная передача трактора ДТ-54:
/ — резиновая втулка; 2 — стальные сетки; 3 — трубчатый палеи; 4 — парусиновая
ткань
На рис. 268 представлен другой тип карданной передачи, при-
меняющейся на тракторе ДТ-54. Здесь эластичный элемент состоит
из четырех резиновых втулок 1, которые привулканизированы
к стальной сетке 2. Сетка припаяна в четырех местах к трубчатому
пальцу 3. Снаружи резиновая втулка покрыта парусиновой тканью 4
и заключена в штампованный кожух.
Передача применяется для соединения главного фрикциона с ко-
робкой передач.
Карданные передачи с эластичной муфтой применяются при не-
больших углах перекоса между агрегатами, обычно не превышаю-
щих 4°.
На рис. 269 представлена карданная передача с зубчатыми муф-
тами тягача М-2. Она соединяет коробку передач с главной пере-
дачей. На рис. 270 показана карданная передача того же тягача,
соединяющая бортовые фрикционы с бортовой передачей.
Карданная передача состоит из двух зубчатых муфт и полого
карданного вала. Муфта состоит из двух зубчатых деталей, одна из
которых имеет внутренние, а другая наружные зубья. Деталь с на-
ружными зубьями вставляется в деталь с внутренними зубьями. Так
как между зубьями обеих деталей имеются зазоры, то передача
27 —20 4 1 7
Рис. 269. Карданная передача с зубчатой муфтой (тягач М-2)
I — коробка передач; 2 — главная передача
Рис, 270. Карданная передача, соединяющая бортовые фрикционы с бортовыми передачами (тягач М-2)
о
Рис. 271. Карданная передача трактора СТЗ-З
5
2
Рис. 272. Силовая передача
тягача АТ-П:
/ — коробка передач; 2—коническая
передача; 3 и 4— бортовые фрикционы;
5 и 6 — бортовые передачи; 7 и 8 —
зубчатые муфты; 9 — карданный вал
может работать под некоторым углом. Угол этот небольшой, он
лишь компенсирует несоосность в установке двух соединяемых агре-
гатов. Для увеличения допустимого угла несоосности зубья муфты
иногда запиливаются (закругляются).
Аналогичное устройство имеет карданная передача трактора
СТЗ-З, представленная на рис. 271.
На рис. 272 приведена силовая передача тягача АТ-П. В силовой
передаче имеются карданные передачи между коробкой передач 1
и конической передачей 2, а также между бортовыми фрикцио-
нами 3 п 4 и бортовыми передачами 5 и б.
Карданные передачи состоят из зубчатых муфт 7 и 8, соединен-
ных валом 9.
Рис. 273. Карданная передача тягача АТ-С:
/ — карданный вал; 2— соединительная труГ'а: 3 и 4— муфты
На рис. 273 представлена карданная передача тягача АТ-С. Она
соединяет главный фрикцион с валом коробки передач. На шлицо-
ванный конец карданного вала 1 надевается зубчатая муфта с на-
ружными зубьями. Муфта соединяется с зубьями, нарезанными в ве-
домом барабане главного фрикциона.
Карданный вал состоит из двух половин, соединенных трубой 2.
На правую половину вала на двух шпонках надета муфта 3 с вну-
тренними зубьями. Муфта соединяется с зубчатой муфтой 4, поса-
женной на шлицованный конец вала коробки передач. Зубчатая
муфта закрыта самоподжимным сальником.
2. КОНИЧЕСКИЕ ПЕРЕДАЧИ
НАЗНАЧЕНИЕ КОНИЧЕСКИХ ПЕРЕДАЧ
При продольном расположении двигателя в силовую передачу
вводится коническая пара, которая разветвляет мощностной поток,
идущий от двигателя, на бортовые передачи и далее на ведущие ко-
леса машины.
Коническая пара чаще всего монтируется в коробке передач, но
иногда она выделяется в отдельный агрегат со своим картером, об-
разуя так называемую коническую передачу.
Коническая передача располагается между коробкой передач и
механизмом поворота, как это, например, сделано в тягаче АТ-П.
422
В конической передаче может реализовываться некоторое пере-
даточное чимо. Учитывая, что коническая передача расположена до
механизма поворота, в быстроходных гусеничных машинах, осо-
бенно в средних и тяжелых, осуществлять в конической передаче
большое передаточное число нежелательно, так как при этом умень-
шается передаточное число бортовой передачи и, следовательно, уве-
личивается нагрузка на агрегаты силовой передачи, расположенные
до бортовой передачи, а также увеличивается коэффициент тормоз-
ного момента, вследствие чего управление машиной затрудняется.
Кроме того, увеличиваются габариты механизма поворота, которому
приходится работать под большим крутящим моментом.
В выполненных конструкциях передаточное число конической
пары равно: для тягача АТ-Т—1,56; для тягача АТ-С — 2,37; для
тягача АТ-Л—1,08; для тягача М-2—1,06; для тягача АТ-П — 1,6.
КОНСТРУКЦИЯ КОНИЧЕСКИХ ПЕРЕДАЧ
На рис. 274 представлена коническая передача тягача М-2. Она
состоит из пары конических шестерен, расположенных в отдельном
картере. Ведущая шестерня 1 сделана заодно с валом 2, па кото-
рый надевается с помощью шлицев зубчатая муфта 3 карданной пе-
редачи. Ведомая коническая шестерня 4 надета на шлицы ведомого
вала 5. На концы этого вала надеваются внутренние (ведущие)
барабаны 6 бортовых фрикционов.
Таким образом, бортовые фрикционы смонтированы на ведомых
валах конической передачи.
Восприятие осевых усилий в данной передаче осуществляется ко-
ническими роликоподшипниками 7.
На рис. 275 представлена коническая передача тягача АТ-П.
Передача состоит из картера 1, в котором на двух конических
подшипниках установлена ведущая коническая шестерня 2. С со-
седним агрегатом (коробкой передач) эта шестерня соединяется
с помошью зубчатой муфты. Ведомая коническая шестерня 3 при-
клепана к фланцу поперечного вала 4. Вал установлен на двух ко-
нических подшипниках 5, расположенных в специальных стаканах.
Стаканы своими фланцами крепятся к картеру конической передачи.
На поперечном валу установлены бортовые фрикционы.
В тягачах АТ-Т, АТ-С и АТ-Л коническая пара не имеет отдель-
ного картера. В тягаче АТ-Т коническая пара смонтирована в ко-
робке передач. В тягаче АТ-С коробка передач, механизм поворо-
та — двойной дифференциал — и коническая пара расположены
в одном картере. В тягаче АТ-Л коническая пара также смонтиро-
вана в главной передаче, в которой объединены коробка передач и
механизм поворота.
Установка конической пары в отдельном картере характерна
только для силовых передач, в которых применяется автомобильный
двигатель, смонтированный заодно с автомобильной коробкой пере-
дач: так как автомобильная коробка имеет продольные валы, то
423
Рис. 274. Коническая передача тягача М-2'
1 -
ведущая шестерня; 2
; ведомый вал; 6
ведущий вал, j — зубчатая муфта;
— внутренний барабан бортового фри
4 - ведомая коническая шестерня;
канона; 7 ~ роликоподшипник
4^
Рис. 275. Коническая передача тягача АТ-П
I— картер; 2—ведущая коническая шестерня; 3 — ведомая коническая шестерня; •? —поперечный вал; Л — конический подшипник
приходится вводить дополнительно коническую пару. В автомобиле
коническая пара установлена на дифференциале и образует главную
передачу. По аналогии и в тягачах коническую передачу иногда на-
зывают главной передачей.
При наличии специальных коробок передач гусеничных машин
нет необходимости выделять коническую пару в отдельный агрегат
силовой передачи. Она может быть смонтирована в одном картере
с другими агрегатами, в частности в одном картере с коробкой пе-
редач.
3. БОРТОВЫЕ ПЕРЕДАЧИ
НАЗНАЧЕНИЕ И ТИПЫ БОРТОВЫХ ПЕРЕДАЧ
Бортовой передачей называется понижающий зубчатый редук-
тор, установленный на конце силовой передачи гусеничной машины.
Поэтому бортовую передачу иногда называют также конечной
передачей.
Бортовых передач две — по одной с каждого борта машины.
Наличие в силовой передаче бортовых передач позволяет умень-
шить передаваемый через коробку передач и механизм поворота
крутящий момент (соответственно увеличиваются их угловые скоро-
сти) и тем самым уменьшить габариты этих механизмов.
В автомобилях роль бортовых передач выполняет главная пере-
дача. Как исключение, в некоторых тяжелых грузовых автомобилях,
как, например, в автомобилях МАЗ-525, применяются и бортовые
передачи.
Чем больше передаточное число бортовых передач, тем под
меньшим моментом работает силовая передача, тем легче управлять
механизмом поворота.
Однако увеличение передаточного числа бортовой передачи огра-
ничено предельными скоростями вращения шестерен и шарикопод-
шипников, установленных на валах коробки передач и механизма
поворота, а также стремлением сделать бортовую передачу кон-
структивно возможно проще. Так, при передаточных числах гбп^7
бортовая передача может быть сконструирована в виде одноряд-
ного редуктора, состоящего из одной пары шестерен. При переда-
точном числе больше 7 бортовая передача усложняется — ее прихо-
дится делать двухрядной,-
Передаточное число бортовой передачи должно быть или
меньше 7, или больше 10. Для передаточного числа, находящегося
в пределах 7—10, усложнять бортовую передачу нецелесообразно.
Выбор передаточного числа бортовой передачи зависит от обо-
ротности двигателя. Чем ниже обороты вала двигателя, тем выше
может быть передаточное число бортовой передачи.
Для быстроходных гусеничных машин весом до 30 т передаточ-
ное число бортовой передачи лежит в пределах 5—7. В тяжелых
машинах весом больше 30 т оно достигает 15.
В табл. 36 приведены передаточные числа бортовых передач тя-
гачей.
426
Таблица 36
Бортовые передачи тягачей
Марка тягача Гип передачи Передаточное число
АТ-Т Однорядная простая 6,78
ЛТ-С Однорядная простая 3,57
лт-л Однорядная планетарная 5,50
АТ-П Однорядная простая 5,44
М-2 Однорядная простая 6,0
Из табл. 36 следует, что все отечественные тягачи имеют одно-
рядные передачи с передаточным числом менее 7 и более 5, исклю-
чение представляет только бортовая передача тягача АТ-С, которая
имеет передаточное число ниже 5. Это объясняется тем, что кони-
ческая пара тягача АТ-С имеет очень большое передаточное
число (2,37) и берет на себя значительную часть общего постоян-
ного передаточного числа силовой передачи.
Бортовые передачи бывают следующих типов: простые, плане-
тарные, смешанные.
Простые и планетарные передачи можно, кроме того, разделить
на однорядные и двухрядные.
На рис. 276 приведены кинематические схемы простых бортовых
передач. Здесь к числу простых передач относятся также соосные
передачи с несколькими шестернями, расположенными, как ше-
стерни сателлитов в планетарной передаче.
Эта передача, как и планетарная, передает мощность разветвлен-
ным потоком одновременно через несколько шестерен. Ее отличие
Рис. 276. Кинематические схемы простых бортовых передач:
а — однорядная; 6 — двухрядная; в — однорядная соосная; 1 — двухрядная
соосная
427
Рис. 277. Кинематические схемы
планетарной п смешанной борто-
вых передач:
а — планетарная; <: — смешанная
от планетарной передачи заклю-
чается лишь в том, что она имеет
постоянно заторможенное водило
(рис. 276, в и г).
На рис. 277 представлены кине-
матические схемы планетарной и
смешанной бортовых передач.
Конструктивно наиболее просты-
ми передачами являются одноряд-
ные. На второе место можно поста-
вить двухрядные простые. Далее
по степени сложности идут соосные
простые, планетарные однорядные,
планетарные двухрядные и смешан-
ные.
ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ К БОРТОВЫМ ПЕРЕДАЧАМ
Бортовая передача является самым нагруженным механизмом
силовой передачи, постоянно передающим силовой поток. К ведо-
мому валу передачи может прикладываться очень большой крутя-
щий момент. Так, в тяжелом тягаче весом 20 т крутящий момент
на ведомом валу достигает почти 3000 кгм. В этих условиях работы
шестерни бортовой передачи и ее подшипники могут быстро изна-
шиваться. Поэтому к бортовым передачам предъявляются следую-
щие основные требования:
1. Шестерни и подшипники должны обладать высокой износо-
устойчивостью. Износоустойчивость шестерен зависит от многих
причин: от конструкции передачи — простая или планетарная; от
нагруженности ведомого вала радиальными усилиями, возникаю-
щими вследствие работы ведущего колеса — нагруженная или раз-
груженная передача; от правильного выбора марки стали для ва-
лов и шестерен и их термической обработки; от жесткости валов.
2. Шестерни и подшипники должны надежно смазываться. На-
дежность смазки в первую очередь определяется правильным выбо-
ром сорта смазки. В бортовой передаче тягача АТ-Т, например, при-
меняется осерненная смазка, состоящая из 67% летнего трансмис-
сионного автотракторного масла, 30% смазки УТ (консталина) и
3% комовой серы. В бортовой передаче тягача АТ-С применяется
масло МТ-16п (по ГОСТ 6360—52). К подшипникам должен быть
хороший доступ для смазки.
3. Внутри картера передачи, не должно создаваться повышен-
ного давления. Для этого картер сообщают с атмосферой с по-
мощью сапуна.
4. Бортовая передача не должна перегреваться. При перегреве
смазка начинает пробиваться сквозь уплотнения. Кроме того, мас-
ляная пленка теряет свою эластичность и прерывается. Вследствие
этого трение в подшипниках и в зубьях шестерен переходит из жид-
костного в полусухое,
128
Перегрев бортовой передачи может являться следствием непра-
вильного монтажа шестерен (после ремонта), в результате чего по-
вышаются потерн на трение, а также вследствие неправильного
выбора уровня смазки (уровень смазки в картере передачи превы-
шает допустимый по техническим условиям).
5. Внутренняя полость бортовой передачи должна иметь надеж-
ное уплотнение. Передача располагается снаружи корпуса машины.
При движении по грязи, а также при преодолении водных преград
внутрь передачи может попадать вода, грязь, песок. В результате
подшипники и шестерни передачи будут быстро изнашиваться.
КОНСТРУКЦИИ БОРТОВЫХ ПЕРЕДАЧ
На рис. 278 представлена простая однорядная бортовая пере-
дача тягача М-2.
Передача состоит из двух цилиндрических шестерен, установлен-
ных в стальном картере. Картер крепится к раме машины.
Ведущая шестерня 1 установлена на двух шарикоподшипниках,
а ведомая 2, несущая на себе радиальную нагрузку от ведущего
колеса, на конических роликоподшипниках.
Внутренняя полость передачи тщательно уплотнена. Хорошее
уплотнение предупреждает вытекание смазки и попадание внутрь
передачи воды и грязи.
Со стороны корпуса машины бортовая передача закрыта кожу-
хом 3 из листовой стали. В кожух вварен сапун 4.
Ведущий и ведомый валы передачи уплотнены самоподжимными
сальниками 5 и 6. Уплотнение ведомого вала защищено от загряз-'
нения предохранительным козырьком.
Передача принадлежит к типу нагруженных, так как ра-
диальное усилие от ведущего колеса создает изгибающее усилие па
ведомом валу передачи. Учитывая, что ведомый вал установлен на
двух мощных роликоподшипниках, а передаваемый крутящий мо-
мент невелик, нагруженность передачи здесь допустима.
Так как бортовые фрикционы в тягаче М-2 смонтированы на
конической передаче, то ведущий вал бортовой передачи разгружен
от изгибающих усилий. Это позволило поставить его на обычные
шарикоподшипники.
На рис. 279 приведена бортовая передача шеститонной гусенич-
ной машины (танк Виккерс).
Устройство передачи имеет следующие особенности. Ведомая
шестерня соединена непосредственно (безвально) со ступицей ве-
дущего колеса. Таким образом, ведомый вал отсутствует. Ведущее
колесо установлено на опорно-упорных шарикоподшипниках на
трубе, проходящей сквозь корпус машины. Радиальные усилия от
ведущего колеса воспринимает не вал бортовой передачи, а труба.
Следовательно, передача является разгруженной.
Вал ведущей шестерни установлен консольно на самоустанавли-
вающемся бочкообразном подшипнике.
429
Рис. 278. Бортовая передача тягача М-2:
Z— ведущая шестерня, 2 — ведомая шестерня; 3 — кожух; 4 — сапун; 5 — вну-
тренний сальник; 6 — наружный сальник
430
Рис. 279. Бортовая передача безваль-
ного типа (танк Виккерс)
431
Рис. 280. Бортовая передача
трехтонной машины
Уплотнение передачи следует признать неудовлетворительным.
Действительно, со стороны корпуса передача уплотнена простым
сальником. Со стороны ведущего колеса торцовое уплотнение вы-
полнено с помощью двух асбестовых шнуров, уложенных в коль-
цевые выточки. Это уплотнение недостаточно надежно, так как оно
не защищает передачу от проникновения внутрь нее воды и
грязи. При работе бортовой передачи шнуры могут легко повре-
диться и уплотнение выйдет из строя.
Серьезным конструктивным недо-
статком рассматриваемой передачи яв-
ляется консольная установка ведущей
шестерни. В данной конструкции точ-
ность зацепления шестерен зависит не
от точности их изготовления, а от точ-
ности установки бортовой передачи по
отношению к механизму поворота, с
которым она сопрягается.
На рис. 280 приведена бортовая
передача легкой трехтонной быстро-
ходной машины. Передача простая, од-
норядная.
Эта передача во многом напоми-
нает только что рассмотренную. Ведо-
мая шестерня также установлена без-
вально на ступице ведущего колеса.
Ведущее колесо установлено на спи-
ральных (упругих) подшипниках на
поперечной трубе. Передача разгру-
женная.
Применение упругих подшипников
преследовало цель уменьшить влияние
на долговечность передачи ударных
нагрузок, действующих со стороны дви-
жителя. Однако ни в одной из после-
дующих конструкций бортовых пере-
дач упругие подшипники больше не
применялись.
Осевые усилия в данной передаче
воспринимаются упорными шайбами,
а не подшипниками качения, как
обычно.
Ведущий вал бортовой передачи
установлен на конических роликопод-
шипниках.
На рис. 281 представлена соосная простая одноряд-
ная бортовая передача.
На конце ведущего вала имеется изготовленная с ним заодно
центральная шестерня 1. С этой шестерней находятся в постоянном
зацеплении три симметрично расположенные промежуточные ше-
432
Рис. 281. Соосная простая однорядная
бортовая передача
/ — центральная шестерня; 2 — трубчатый крон-
штейн; 3 — промежуточная шестерня; 4 — ше-
стерня с внутренними зубьями; 5 — ступица ве-
дущего колеса
433
стерни 3, оси которых установлены на трубчатом кронштейне 2.
Одновременно промежуточные шестерни сцепляются с шестерней 4,
имеющей внутренние зубья. Эта шестерня установлена в ступице 5
ведущего колеса.
Конструктивно данная бортовая передача напоминает одноряд-
ную эпициклическую передачу. Однако эта передача не планетар-
ная, а простая, так как ее водило постоянно заторможено (закреп-
лено) .
Передача соосна; мощность передается на ведущее колесо тремя
параллельными потоками через три промежуточные шестерни. Так
как в зацеплении одновременно участвуют три шестерни, то это по-
вышает прочность и износоустойчивость передачи. Передача раз-
i руженная.
На рис. 282 показана простая однорядная передача с вну-
тренним зацеплением шестерен.
По сравнению с передачами с внешним зацеплением эта пере-
дача более прочна и позволяет получить большее передаточное
число при одних и тех же габаритах. Ведомая шестерня безваль-
ная, прикреплена к ступице ведущего колеса. Ведущее колесо уста-
новлено на двухрядном шарико- и роликоподшипнике на специаль-
ном кронштейне. Таким образом, передача разгружена.
Конструктивным недостатком передачи является консольная
установка ведущей шестерни и отсутствие общего картера, что за-
трудняет точную установку шестерен.
На рис. 283 приведена бортовая передача тягача АТ-Т. Пере-
дача простая, однорядная, нагруженная.
Ведомый вал передачи установлен на мощных ролико- и шари-
коподшипниках, которые воспринимают, кроме усилий от шестерен,
также и радиальные усилия от ведущего колеса.
Ведущий вал установлен на роликоподшипниках.
С наружной стороны передача тщательно уплотнена войлочным
сальником и самоподжимным сальником с резиновой манжетой.
Кроме того, уплотнение имеет лабиринт. С внутренней стороны пе-
редача уплотнена сальниковым'кольцом и уплотняющими коль-
цами. Передача имеет сапун.
На рис. 284 представлена бортовая передача тягача АТ-С. Пе-
редача простая однорядная со спиральным зубом.
По сравнению с передачей тягача АТ-Т данная передача более
сложная.
На рис. 285 приведена планетарная передача тягача
АТ-Л. Она представляет собой однорядный эпициклический меха-
низм с заторможенной эпициклической шестерней. Вал 1 солнечной
шестерни является ведущим, а вал водила 5 — ведомым.
Передача имеет стальной литой картер 6, установленный на бол-
тах на раме машины.
На рис. 286 представлена смешанная бортовая пере-
дача тяжелого танка. Передача имеет два ряда шестерен — про-
стой ряд и эпициклический.
434
Рис. 282. Простая однорядная передача с внутренним зацепле-
нием шестерен
435
О
Рис. 283. Бортовая передача тягача АТ-Т
Рис. 284. Бортовая передача тягача АТ-С
437
Рис. 285. Планетарная бортовая передача тягача АТ-Л:
/— ведущий вал солнечной шестерни; 2 — сателлит; 3 — ось сателлита; 4 — эпициклическая ше-
стерня; .5 — водило; 6 — картер; 7 — крышка картера; 5 — барабан остановочного тормоза; 9 — муф-
та карданного вала; 10 — карданный вал; //, 12 и 13 — подшипники; 14— пробка заливного отвер-
стия; 15 — ступица ведущего колеса; /6 — венец ведущего колеса
438
с©
Рис. 286. Смешанна л бортовая передача тяжелою тапка
Передача pasrpj-жена, так как ведущее колесо установлено на
специальном кронштейне, который воспринимает радиальные уси-
лия от ведущего колеса.
ПОРЯДОК РАСЧЕТА БОРТОВЫХ ПЕРЕДАЧ
Бортовая передача рассчитывается, как обычный зубчатый ре-
дуктор. Расчетный момент, на который производится расчет деталей
передачи (валов, шестерен, подшипников), определяется по фор-
муле
4ac = Z0max4max (231)
или по формуле
Чае=О-65'^0’ (232)
где <? — коэффициент сцепления гусениц с грунтом; при расчете
следует принимать у = 1;
G — вес машины;
— радиус ведущего колеса;
zOmax—общее максимальное передаточное число силовой пере-
дачи;
/ИДтах — максимальный крутящий момент двигателя.
Расчет ведется по наименьшему значению момента УИрас.
Валы и шестерни бортовых передач изготовляются из сталей'
тех же марок, что и валы и шестерни коробок передач. При расчете
валов и шестерен допустимые напряжения следует брать по ниж-
нему пределу допустимых напряжений, принимаемых при расчете
валов и шестерен коробок передач.
ГЛАВА IX
ПОДВЕСКИ
1. ТИПЫ ПОДВЕСОК и ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ
К ПОДВЕСКЕ
ТИПЫ ПОДВЕСОК
Подвески можно классифицировать по двум признакам: 1) по
кинематической схеме и 2) по типу упругого элемента.
Как уже отмечалось, по кинематической схеме различаются
подвески:
1) независимые,
2) балансирные,
3) смешанные.
Наиболее распространенным типом подвесок в гусеничных ма-
шинах являются независимые подвески
Независимая подвеска конструктивно проста, имеет малый вес
неподрессоренных деталей, обладает большой работоспособностью.
По упругому элементу подвески можно разделить на следую-
щие типы:
— с торсионными рессорами;
— с листовыми рессорами;
— с спиральными рессорами;
— с резиновыми упругими элементами;
— с гидравлическими и гидропневматическими упругими эле-
ментами.
В современных подвесках применяются главным образом ме-
таллические упругие элементы. Наиболее распространенным упру-
гим элементом является работающий на скручивание стальной
стержень — торсион; реже применяются спиральные рессоры и ли-
стовые рессоры. Гидравлические и гидропневматические упругие
элементы пока применяются только в опытных конструкциях.
Торсионная подвеска является типовой подвеской современных
быстроходных гусеничных машин.
Торсионные подвески бывают с круглыми и призматическими
торсионами, а также с одинарным и пучковым торсионом (не-
сколько торсноиов, соединенных в один пучок).
Спиральные рессоры бывают цилиндрические или конические,
с круглым или прямоугольным сечением проволоки.
441
ОСНОВНЫЕ ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ К ПОДВЕСКЕ
К подвеске можно предъявить три основных требований:
1) подвеска должна обеспечивать машине высокие скорости
движения по дорогам и на местности (главное требование);
2) должна обеспечивать заданную эпюру нагрузок на опорные
катки и нормальный дифферент корпуса;
3) должна обладать простотой конструкции, легкостью и на-
дежностью в работе.
Остановимся на каждом из этих требований.
1. От устройства подвески зависят скорости движения машины
на дорогах и особенно на местности. Чем совершеннее подвеска,
тем она допускает более высокие скорости движения машины (по
пробиванию).
Подвеска должна обеспечивать машине те скорости движения,
которые позволяет ей иметь мощность двигателя. В действитель-
ности скорость машин определяется мощностью двигателя только
на хороших дорогах. Как уже указывалось выше (см. гл. VI, ч. 1),
на местности скорость движения ограничивается ходовыми каче-
ствами подвески.
Ходовые качества подвески определяются параметрами
плавности хода. В первую очередь работоспособностью V,
коэффициентом динамичности у и статическим модулем жестко-
сти подвески катка тс.
Для современных тягачей значение этих параметров лежит
в пределах v = 0,3—0,5 м; — 1,5—3,5; /ис — 75—200 кг/см (в за-
висимости от веса машины; чем тяжелее машина, тем больше ве-
личина /пс).
2. Правильное распределение нагрузок по опорным каткам
имеет значение для повышения проходимости машины по мягким
грунтам и для повышения срока службы подшипников, и особенно
резиновых бандажей опорных катков. Бандажи опорных катков
при больших нагрузках и при высоких скоростях движения могут
отслаиваться от ступицы катка.
Для лучшей проходимости по мягким грунтам и для нормаль-
ной работы подшипников и резиновых бандажей отдельные катки
не должны перегружаться, или, иначе говоря, эпюра нагрузок
на катки должна быть равномерной.
В неподвижной и движущейся машине нагрузки на катки раз-
личны. Даже если машина равномерно движется по горизонталь-
ному участку пути, то по сравнению с неподвижной машиной ее
задние катки перегружаются тяговым усилием, создаваемым гу-
сеницами. Еще больше будут перегружаться задние катки, если
машина работает с прицепом, движется на подъем и т. д.
Чтобы эпюра нагрузок при движении машины была равно-
мерной, следует в статическом положении, т. е. у неподвижной
машины, несколько перегрузить передние опорные катки.
В движении же эпюра нагрузок выравняется и станет равно-
мерной.
л то
Степень перегрузки катков характеризуется коэффициен-
том перегрузки J3, равным отношению наибольшей нагрузки,
приходящейся на катки, к наименьшей нагрузке.
Эпюра нагрузок на катки зависит от положения центра тяже-
сти машины, числа и взаимного расположения опорных катков и
характеристик подвесок катков.
При распределении нагрузок по каткам следует обеспечить нор-
мальный дифферент рамы машины. Если машина стоит на гори-
зонтальном участке пути, то ее рама должна быть расположена
примерно горизонтально (допустимые отклонения ее передних то-
чек ориентировочно не должны превышать +50 мм). При движе-
нии машины дифферент не должен выходить за пределы, при ко-
торых допустима нормальная работа ходовой части машины: при
очень большом дифференте задние опорные катки и задние колеса
могут соприкасаться, что приведет к ударам и, следовательно,
к нарушению работы движителя машины.
3. Простота конструкции подвески определяется в пер-
вую очередь количеством и простотой ее рабочих деталей. Наибо-
лее простыми подвесками являются независимые, особенно тор-
сионные, и парнобалансирные подвески.
Детали подвески должны быть взаимозаменяемыми. Для этого
подвески катков при независимой схеме или подвески кареток при
балансирной схеме должны быть одинаковые.
Надежность в работе подвески зависит главным образом от
запаса прочности ее деталей и от запаса ее удельной потенциаль-
ной энергии (работоспособности). Кроме того, она зависит также
от характера работы упругих элементов. Упругий элемент должен
работать только на расчетную нагрузку. Так, листовые рессоры
должны работать на поперечный изгиб, винтовые рессоры — на
сжатие и торсионные — на кручение. Недопустимо, чтобы листовая
рессора, кроме поперечного изгиба, работала на продольный из-
гиб или на кручение, а винтовая и торсионная работали бы на
изгиб.
Правильная работа упругого элемента обеспечивается устрой-
ством кинематических звеньев подвески. Эти звенья воспринимают
на себя те нагрузки, на которые не рассчитана работа упругого
элемента.
Упругий элемент не должен перегружаться. Для этого опорные
катки имеют ограничители хода, или упоры (буфера).
Упоры ограничивают деформацию упругого элемента и тем самым
предохраняют его от поломки.
Упоры устанавливаются в первую очередь у передних и задних
катков, получающих наибольшие перемещения. Средине катки упо-
ров могут не иметь, так как их перемещения ограничиваются гусе-
ницами. Лучше, однако, чтобы п они имели упоры, так как при
быстром движении машины возможен отрыв катка от гусеницы
443
Неподрессоренные детали подвески должны иметь минималь-
ный вес.
От веса неподрессоренных деталей зависят динамические
нагрузки в ходовой части машины. Чем меньше вес неподрессо-
ренных деталей, тем меньше динамические нагрузки и тем на-
дежнее работа подвески.
Для быстроходных транспортных машин, имеющих независи-
мую подвеску, вес неподрессоренных деталей составляет около
8—15% веса машины. Вес же неподрессоренных деталей балан-
сирных подвесок составляет 15% веса машины и выше.
2. КОНСТРУКЦИИ ПОДВЕСОК
НЕЗАВИСИМАЯ ТОРСИОННАЯ ПОДВЕСКА
Торсионная подвеска может быть симметричной и асим-
метричной. В асимметричной подвеске оси торсионов смещены
одна относительно другой, а следовательно, смещены и оси опор-
ных катков левого и правого борта машины. Заметим, однако, что
это не влияет на характер движения машины.
У торсионов имеются шлицованные- головки, которыми они
устанавливаются с одной стороны в балансире катка, а с другой —
в неподвижном кронштейне. Число шлицев на обоих концах тор-
сиона различное, что позволяет точно устанавливать балансир под
заданным углом, благодаря чему регулируется эпюра нагрузок на
катки.
Рис. 287. Асимметричная торсионная подвеска с амор'
тпзатором тягача АТ-ГР
I — амортизатор; 2 — балансир; 3 — буфер; 4 — торсион
444
Рис. 288. Асимметричная торсионная подвеска тягача АТ-Л
На рис. 287 представлена конструкция асимметричной торсион-
ной подвески тягача АТ-П (второй торсион не показан).
Подвеска устроена аналогично только что рассмотренной. Осо-
бенностью подвески является наличие амортизатора 1.
Амортизатор устроен следующим образом. Рычаг амортиза-
тора связан с балансиром 2 подвески. При перемещении балан-
сира рычаг амортизатора получает качательное движение, вслед-
ствие чего перемещается в цилиндре амортизатора поршень, кото-
рый перегоняет масло из одной полости цилиндра в другую, на
что затрачивается энергия колебательного движения рамы.
Для ограничения хода катка служит буфер 3. Он представляет
собой коническую ленточную пружину, надетую на стержень. Пру-
жина имеет вогнутую характеристику.
На рис. 288 приведена асимметричная торсионная подвеска тя-
гача АТ-Л.
У торсионов подвески имеются шлицованные головки, одна из
которых входит в балансир катка, а другая в кронштейн, закреплен-
ный на корпусе машины. От осевого перемещения торсионы удер-
живаются ограничительным кольцом (со стороны балансира) и
упорной пластинкой (с противоположной стороны). Балансир со-
стоит из трех деталей: тела балансира, оси катка, впрессованной
в тело балансира, и трубчатой оси (также впрессованной в тело
балансира и дополнительно закрепленной здесь фиксатором). Труб-
чатая ось балансира устанавливается в кронштейне подвески на
стальных цементированных и закаленных втулках.
Применение закаленных втулок позволило отказаться от уплот-
445
Рис. 289. Конструктивная схема симметрич-
ной торсионной подвески:
/ — торсион; 2 — торсионная труба; 3 — шлицевое соеди-
нение; 4 — шлицы торсионной трубы; 5—кронштейн;
6 — шлицованная головка торсиона; 7 — балансир
нения оси балансира (в
конструкциях подвесок
других машин оси балан-
сиров всегда имеют уплот-
нения, см. рис. 292).
Балансир фиксируется
от осевого смешения огра-
ничителем, который пред-
ставляет собой скобу, за-
крепленную в кронштейне.
В скобу входит направ-
ляющее ребро балансира.
У подвески имеется ре-
зино-металлический огра-
ничитель хода катка. Он
установлен против оси
катка, благодаря чему
ось балансира и сам балансир при пробивании подвески полно-
стью разгружены от удара (как в подвеске тягача АТ-П).
На рис. 289 представлена конструктивная схема симметрич-
ной торсионной подвески.
Упругими элементами подвески являются торсион / и торсион-
ная труба 2. Оба элемента соединены между собой последовательно
через шлицевое соединение 3. Торсионная труба 2 с помощью шли-
цев 4 закреплена в кронштейне 5. Второй конец торсиона имеет
шлицованную головку 6, с помощью которой он соединяется с труб-
чатой осью балансира 7.
При повороте балансира скручиваются торсион 1 и труба 2. Об-
щая длина упругого элемента получается такой же, как и в асимме-
тричной подвеске.
Аналогично устроена подвеска симметричного катка, располо-
женного на другом борту машины.
Рис. 290. Торсионная подвеска с расположением юр-
сионов в балансире:
Z — балансир, 2 — трубчатый торсион; 3 - стержневой торсион;
4 й 5 — конические шестерни
446
В рассмотренных схемах подвесок торсионы располагаются вну-
три рамы или корпуса машины, занимая часть его полезного объема.
На рис. 290 представлена конструктивная схема подвески, у ко-
торой торсион вынесен из корпуса машины и по-
мещен в полом балансире.
Подвеска устроена следующим образом. В полом балансире 1
установлен трубчатый торсион 2. Шлицами он жестко связан с ба-
лансиром. Внутри трубчатого торсиона помещается стержневой тор-
сион 3, который ±лицами соединен с трубчатым торсионом. На
Рис. 291. П учковый торсион
конце стержневого торсиона посажена коническая шестерня 4, ко-
торая находится в зацеплении с конической шестерней 5. Ше-
стерня 5’неподвижно закреплена на корпусе машины.
При перемещении опорного катка, а следовательно, и балан-
сира 1 коническая шестерня 4 обкатывается по неподвижной ше-
стерне 5 и закручивает торсионы.
В реальной конструкции подвески конические шестерни могут
быть заменены парой кулаков. Один кулак связан с торсионом,
другой неподвижно закреплен на корпусе машины. Подбирая про-
филь кулаков, можно получать нужную характеристику подвески,
например вогнутую или выпукло-вогнутую.
Заметим, что трубчато-стержневой торсион в данной подвеске
может быть заменен пучковым торсионоМ1 эквивалентным по жест-
кости трубчато-стержневому и имеющим равную с ним длину.
Пучковый торсион (рис. 291) представляет собой ряд стержней,
работающих в параллельном пучке. Каждый стержень имеет гране-
ную головку. Стержни собираются в одной обойме. По сравнению
с одностержневой рессорой пучковая рессора при' одной и той же
длине примерно в два раза мягче или при одной и той же жест-
кости в два раза короче одностержневой рессоры.
Кроме круглых стержней, в торсионных подвесках применяют
иногда шестигранные стержни или полосы прямоугольного сечения.
На рис. 292 представлена пучковая торсионная подвеска тягача
АТ-С, в которой в качестве торсионов применены стальные полосы,
работающие на скручивание. Торсион состоит из трех полос, сло-
женных вместе в один пучок и вставленных в призматические отвер-
447
Рис. 292. Пучковая торсионная подвеска тягача АТ-С с призматическими торсионами
стия осей балансиров. Торсионы закрепляются пальцами для
предотвращения осевого перемещения.
Эту подвеску можно сделать симметричной, если посредине
пучка торсионов установить кронштейн с призматическим отвер-
стием, т. е. закрепить торсион посредине.
Некруглые торсионы при прочих равных условиях обладают
большей жесткостью, чем круглые. Кроме того, торсионы, как пра-
вило, подвергаются механической обработке. Некруглые торсионы
обрабатывать значительно труднее, чем круглые. Поэтому некруг-
лые торсионы применяются редко.
НЕЗАВИСИМАЯ ПОДВЕСКА СО СПИРАЛЬНЫМИ РЕССОРАМИ
На рис. 293 представлена принципиальная схема независимой
подвески со спиральными рессорами.
Рис. 293. Принципиальная схема независимей) подвески со спиральными
рессорами
Здесь подвеска катка может иметь вертикальную или горизон-
тальную рессору. Рессоры установлены па штоке, который может
перемещаться в регулировочном стакане. Регулировочный стакан
в свою очередь установлен в кронштейнах, закрепленных на кор-
пусе машины. Рессора с одной стороны упирается в балансир под-
вески, а с другой — в регулировочный стакан. Завертывая или вы-
вертывая регулировочные стаканы, можно регулировать подвеску,
т. е. изменять нагрузку па опорные катки.
НЕЗАВИСИМАЯ ПОДВЕСКА С ЛИСТОВЫМИ РЕССОРАМИ
Независимая подвеска с листовыми рессорами по устройству
очень проста. Она состоит из балансира и упругого элемента, т. е.
из того же числа деталей, что и торсионная подвеска.
ПАРНО-БАЛАНСИРНАЯ ПОДВЕСКА С ТОРСИОННОЙ РЕССОРОЙ
На рис. 294 представлена конструктивная схема парно-балан-
сирной подвески с торсионной рессорой. Подвеска состоит из тор-
сиона 1, балансира 2 упругого элемента и балансира 3 тележки.
29—20
449
Если сравнивать данную подвеску с независимой торсионной по
числу деталей, приходящихся на один опорный каток, то следует
признать парно-балансирную подвеску проще независимой. Здесь
на пару опорных катков приходятся один упругий элемент и один
балансир упругого элемента, хотя появляется дополнительно ба-
лансир тележки. Однако эта деталь очень простая.
Парно-балансирную подвеску обычно делают с опорными кат-
ками малого диаметра, и поэтому число катков здесь больше, чем
в независимой подвеске. Балансирная подвеска имеет некоторые
Рис. 294. Конструктивная схема парпо-балан-
спрноп подвески с торсионной рессорой:
I — торсион; 2 — балансир упруюго элемента; 3 — балан-
сир тележки
кинематические преимущества по сравнению с независимой. Она
дает меньшее угловое перемещение раме машины, однако при этом
балансирная подвеска жестче независимой, что является ее недо-
статком.
ПАРНО-БАЛАНСИРНАЯ ПОДВЕСКА СО СПИРАЛЬНОЙ РЕССОРОЙ
Представленная на рис. 295 парно-балансирная подвеска имеет
в качестве упругого элемента составную спиральную рессору, уста-
новленную горизонтально между двумя балансирами тележки.
Тележка устроена следующим образом. Она имеет основной ба-
лансир, посаженный на ось кронштейна, и дополнительный балан-
сир, посаженный на палец, установленный в вилке основного ба-
лансира. Так как расстояние от оси опорных катков до оси тележки
неодинаковое, то подвеска будет несимметричной—нагрузки
по опорным каткам в этой подвеске распределяются неравномерно.
В рассматриваемой подвеске это, однако, допустимо,так как опор-
ные катки не обрезинены и могут нести различную нагрузку (под-
веска принадлежит тихоходному сельскохозяйственному трактору).
Перегруженными являются внутренние катки. Это позволяет, как
известно, несколько уменьшить момент сопротивления повороту
машины.
На рис. 296 показана парно-балансирная подвеска со спираль-
450
Рис. 295. Несимметричная парно-балансирная подвеска
со спиральной рессорой
Рис. 296. Симметричная парно-балансирная подвеска со спиральной
горизонтальной рессорой и амортизатором
29'
451
ной горизонтально!” рессорой и амортизатором. Подвеска принад-
лежит легкой быстроходной машине.
Оба балансира подвески связаны между собой направляющим
стаканом, внутри которого движется шток. Стакан со штоком ис-
пользован в качестве амортизатора подвески. Для этого в поршне
штока имеются небольшие отверстия. Стакан заполнен маслом.
При перемещении штока масло перетекает из одной полости ста-
кана в другую, на что затрачивается энергия колебательного дви-
жения корпуса машины, и происходит гашение колебаний.
Тележка подвески симметрична, и, следовательно, нагрузки
между опорными катками распределяются равномерно (катки об-
резинены) .
ПАРНО-БАЛАНСИРНАЯ ПОДВЕСКА С ЛИСТОВОЙ РЕССОРОЙ
На рис. 297 показана конструкция парно-балансирной подвески
с четвертной листовой рессорой. Подвеска имеет с каждого борта
по два балансира и по два упругих элемента. В данной конструк-
ции рессора выполняет роль упругого элемента и кинематического
звена. Если подвеску сделать независимой, то потребовалось бы
четыре балансира и четыре упругих элемента, т. е. восемь деталей
вместо четырех.
Рис. 297. Парно-балансирная подвеска с четвертной рес-
сорой
ПОДВЕСКА С ХАРАКТЕРИСТИКОЙ ПЕРЕМЕННОГО МОДУЛЯ
Характеристику с переменным модулем можно получить приме-
нением специальной конической рессоры или неметаллических
упругих элементов, например резиновых.
На рис. 298 показана парно-балансирная подвеска с ленточной
конической рессорой.
Рессора устроена таким образом, что по мере ее поджатия верх-
ние витки доходят до упора и выключаются из работы.
В связи с этим жесткость рессоры увеличивается; характери-
стика подвески получается вогнутой.
Вогнутую характеристику имеют также подвески с резиновыми
упругими элементами.
Устройство резинового упругого элемента показано на рис.299.
Упругий элемент состоит из резиновых колец 1, надетых на на-
правляющую трубу 2, внутри которой расположен шток 3. Между
452
Рис. 298. Парно-бадансирная подвеска с ленточной конической рессорой
Рис. 299. Парно-балансирная подвеска с
I — резиновое кольцо; 2 — направляющая труба;
резиновым упругим элементом:
3 — шток; 4 — металлическая тарелка
453
резиновыми кольцами проложены металлические тарелки 4. Та-
релки имеют отогнутые края. При большом сжатии резины та-
релки препятствуют боковому выпучиванию резины и увеличивают
жесткость упругого элемента. Кроме того, металлические тарелки
улучшают отвод тепла от внутренних слоев резины.
Благодаря большому внутреннему трению резиновый упругий
элемент выполняет роль амортизатора.
При резиновом упругом элементе не нужны ограничители хода
катков, так как их задачу решает сам упругий элемент.
От подвески с резиновым упругим элементом при принятой
в настоящее время жесткости трудно, однако, получить большую
работоспособность. Подвеска получается или слишком жесткой,
или чрезмерно увеличивается размер ее упругих элементов.
3. УПРУГИЕ ЭЛЕМЕНТЫ ПОДВЕСОК
В современных подвесках применяются главным образом сталь-
ные упругие элементы или рессоры.
В подвесках могут применяться следующие рессоры:
— цилиндрические спиральные круглого и прямоугольного се-
чения;
— конические прямоугольного сечения;
— торсионные;
— листовые.
Упругие элементы характеризуются следующими расчетными
величинами: модулем жесткости /пр, стрелой прогиба f и напряже-
нием кручения ~ или изгиба а.
Ниже приводятся расчетные формулы, по которым могут быть
определены эти величины для различных упругих элементов.
ЦИЛИНДРИЧЕСКАЯ РЕССОРА КРУГЛОГО СЕЧЕНИЯ (рис. 300)
Модуль жесткости
^“TiSr. ' (233)
где /пр—в кг/см\
а—диаметр проволоки в см\
О—модуль упругости второго рода (G = 800 000 кг/сл/2);
п—число рабочих витков рессоры;
D—диаметр рессоры в см.
Стрела прогиба рессоры определяется по формуле
(234)
где /— стрела прогиба в см;
Q — нагрузка на рессору в кг.
454
Напряжение кручения
8DQ
rd3 ’
где т—напряжение кручения в кг!см2.
При расчете следует принимать т. при статиче-
ской нагрузке 3500—4000 кг/см2, при динамической
нагрузке (при полном использовании рабочего хо-
да)— 8000—9000 кг/см2.
(235)
Рис. 300.
Цилиндри-
ческая рес-
сора кругло-
го сечения
ЦИЛИНДРИЧЕСКАЯ РЕССОРА ПРЯМОУГОЛЬНОГО
СЕЧЕНИЯ (рис. 301)
Модуль жесткости
tn„ — —, ,
Р т.пи3 ’
(236)
где Z — отношение сторон прямоугольника сечения (i = > 1
т] — коэффициент, определяемый из графика (рис. 302).
Рис. 301. Цилиндриче-
ская рессора прямо-
угольного сечения
Рис. 302. График коэффициен-
тов \ И г,,
Остальные обозначения те же, что и в предыдущих формулах.
Стрела прогиба определяется по формуле
/ = <237)
Напряжение кручения
1'0
2т/&3 •
(238)
т =
КОНИЧЕСКАЯ РЕССОРА ПРЯМОУГОЛЬНОГО СЕЧЕНИЯ
(рис. 303)
Модуль жесткости
_ ‘WiG
lllv ~ т.п + r'G + й '
(239)
455
РИС. 303. Кон ическая
рессора прямоугольного
сечения
Стрела прогиба
, _ т.п (R* + r=) (R + г) Q
><№
Напряжение кручения
т = + И Q
(240)
(241)
где г— напряжение кручения в кг/см2-,
Ъ— коэффициент, определяемый из
графика (см. рис. 302).
При достаточно большом значении отно-
шения i = -у наибольшую деформацию по-
лучают витки большего диаметра. Вслед-
ствие этого они раньше выбирают зазор и
выключаются из работы. Рессора по мере
делается более жесткой, следовательно, имеет
увеличения нагрузки
нелинейную (вогнутую) характеристику.
ТОРСИОННАЯ РЕССОРА (рис. 304)
Под модулем жесткости торсионной рессоры следует понимать
отношение момента, скручивающего торсион, к углу скручивания
торсиона, или момент, закручивающий торсион на один радиан.
Модуль жесткости выражается формулой
М r.d'G
(242)
где тр— в кгсм;
I—рабочая длина торсиона в слг;
а — угол скручивания в радианах;
Л4— момент скручивания в кгсм. '
Под стрелой прогиба будем понимать угол скручивания тор-
сиона а, выраженный в радианах:
32/Л4
а = --777V-
T.d4G
Напряжение кручения определяется по формуле
16Л4
(243)
(244)
В пучковом торсион е, кроме скручивания, имеется и из-
гиб стержней. Изгибом можно пренебречь. Тогда для пучкового
торсиона
стержней
с круглым сечением
модуль жесткости
= - = “^7L. (245)
L —
т,
где п — число стержней в пучке.
456
Рис. 304. Торсионная рессора
Угол скручивания
_ 321М
а -nd'G
(246)
Напряжение кручения
Формулу (247) можно применить и для стержней шестигран-
ного сечения, если принять d равным диаметру вписанной окруж-
ности шестигранника, а вместо коэффициента 2 принять коэффи-
циент 1,65.
Для стержней прямоугольного сечения можно пользоваться
формулами проф. С. А. Бернштейна1.
Заметим, что длина и диаметр торсионов в пучковой рессоре
могут быть уменьшены по сравнению с одиночной рессорой
в Vп раз, где п — число стержней в пучке. При п = 1 получим
уменьшение почти в два раза.
ЧЕТВЕРТНАЯ ЭЛЛИПТИЧЕСКАЯ ЛИСТОВАЯ РЕССОРА
(рис. 305)
Модуль жесткости
ЬИЗпЕ
43/э >
(248)
где гг — число листов;
Е—модуль упругости первого рода, равный 2,2-10° кг/см2-,
Р — коэффициент, учитывающий отклонение рессоры от балки
равного сопротивления ({3 = 1,25—1,35);
h — толщина листа в см-,
I—длина коренного листа в ел/;
b—ширина листа в см.
Стрела прогиба
Напряжение изгиба
№Ьп ’
где о в кг/см2.
Допустимые напряжения на изгиб
можно принимать равными напряже-
нию на кручение: при статической
нагрузке а = 3500—4000 кг/см2, при
максимальной деформации 8000—
9000 кг/см2.
(250)
Рис. 305. Четвертая эллип-
тическая листовая рессора
1 Труды Академии БТВ Сборник № 6 (57), 1948 г.
457
ПОЛУЭЛЛИПТИЧЕСКАЯ ЛИСТОВАЯ РЕССОРА
(рис. 306)
Модуль жесткости
(251)
AbhlnE
р/3
Рис. 306. Полуэллиптпческая листовая
рессора
Стрела прогиба
' ЛЫтРпЕ ’
Напряжение изгиба
_ 31Q
° 2h?bn
(252)
(253)
кантилеверная листовая рессора
(рис. 307)
Модуль жесткости
Ь№пЕ
Р 4(3/2 (/] + Zj)
Стрела прогиба
4^ (Ц + /г) Q
' Ь№пЕ
(254)
(255)
Рис. 307. Кантилеверная листо-
вая рессора
Напряжение изгиба
6/,(?
nbh3 '
(256)
При равной длине I листовых
рессор и при одинаковом напря-
жении изгиба четвертная рессора в
четыре раза мягче полуэллиптиче-
ской и в 1:1]_ раза мягче кантиле-
верной.
458
4. ПРЕДВАРИТЕЛЬНЫЙ РАСЧЕТ ПОДВЕСКИ
Расчет вновь проектируемой подвески выполняется в два этапа:
вначале производится предварительный расчет, затем
поверочный расчет.
Задачей предварительного расчета является определение гео-
метрических параметров подвески — размеров кинематических
звеньев, их углов наклона, размеров упругих элементов, а также
нагрузок на опорные катки и дифферента рамы. При этом прини-
маются следующие условия расчета. Предполагается, что
машина неподвижна и стоит на горизонтальной площадке. Харак
теристики подвесок катков принимаются линейными и одинаковыми.
После того как в результате предварительного расчета опреде-
лена геометрия подвески и найдены действительные характери-
стики подвесок катков, производится поверочный расчет подвески.
Задача поверочного расчета заключается в том, чтобы опре-
делить действительные нагрузки на катки, действительный диффе-
рент рамы, причем не только для неподвижной машины, но и для
машины, находящейся в движении.
В результате поверочного расчета может выявиться необходи-
мость в изменении геометрии подвески и ее основных параметров
(расположения опорных катков, изменения жесткостей упругих
элементов и т. д.). В этом случае должен производиться коррек-
тирующий расчет, т. е. расчет, уточняющий параметры под-
вески.
Рассмотрим предварительный расчет подвески.
РАССТАНОВКА ОПОРНЫХ КАТКОВ МАШИНЫ
Подвеска может быть независимая, балансирная или смешан-
ная. Кроме того, подвески левого и правого бортов машины могут
быть симметричные или асимметричные (рис. 308).
В балансирных, а также в смешанных подвесках следует рас-
сматривать вместо подвесок катков подвески тележек, тогда схема
балансирной подвески сведется к схеме независимой подвески.
После расчета подвесок тележек расчет подвесок катков не пред-
ставляет затруднений.
Асимметричная подвеска рассчитывается так же, как и симме-
тричная, но координата катков берется средняя (см. рис. 308,г).
Таким образом, достаточно провести расчет симметричной не-
зависимой подвески, чтобы потом применить его к подвеске лю-
бого другого типа.
Расстановка опорных катков определяет эпюру нагрузок на
опорные катки. Эпюра зависит от трех факторов:
1) взаимного расположения опорных катков;
2) модулей жесткости подвесок катков;
3) положения центра тяжести машины.
Наиболее просто заданную эпюру нагрузок можно получить'
459
Д 1»_ д .. д - . д
Рис. 308. Типы подвесок:
а — независимая; 6 — балансирная; в — смешан-
ная; г — асимметричная
смещением в ту или иную сто-
рону средних катков, т. е. со-
ответствующей расстанов-
кой катков.
Если в результате расста-
новки катков не удается полу-
чить нужную эпюру нагрузок,
то смещают центр тяжести ма-
шины или изменяют жесткость
подвесок катков, т. е. прини-
мают неодинаковые модули
жесткостей по отдельным кат-
кам.
Заметим, что здесь речь
идет о модулях жесткости при-
веденных упругих элементов,
которые можно изменять, из-
меняя размеры кинематиче-
ских звеньев подвески и сохра-
няя при этом размеры дейст-
вительных упругих элементов.
К различным модулям же-
сткости прибегают иногда и
для повышения плавности хода
машины.
Будем характеризовать эпю-
ру нагрузок на опорные
катки коэффициентом пере-
грузки р.
Пусть
где Р, — нагрузка на наименее нагруженный каток;
Рп— нагрузка на наиболее нагруженный каток.
Предполагаем, что нагрузки изменяются по трапеции (или
в частном случае — по прямоугольнику), как показано на
рис. 308, а.
Так как расчет производится при линейных характеристиках
приведенных упругих элементов, то можем написать:
Рх = m^hy,
Р„ = mnhn.
Кроме того, известно, что hi = hn — cL, где с — дифферент рамы,
L — опорная база машины.
Тогда коэффициент перегрузки выразится следующей фор-
мулой:
₽ = • (257)
460
Из формул 220 и 221 (см. ч. 1) определим
с _ q S S т1‘1
hn~ т1Ц - £ mfi
При одинаковых модулях (ш; = const) получим
(258)
(259)
qn - 2 !i
Заметим, что дифферент с имеет положительное значение при
наклоне рамы в сторону наиболее нагруженного катка. Если диф-
ферент получится отрицательный, то, следовательно, неверно вы-
бран наиболее нагруженный каток (он будет в действительности
располагаться на противоположном конце опорной базы машины).
При расстановке катков поступаем следующим образом. Рас-
ставляем катки вначале на одинаковом расстоянии один от дру-
гого. По формуле (257) находим коэффициент перегрузки. Если
коэффициент перегрузки мал, то смещаем катки в сторону пер-
вого катка. Затем проверяем коэффициент р. Таким образом на-
ходим положение катков.
Если смещением катков не удается получить нужное значе-
ние р., то изменяем q (положение центра тяжести машины) или
модули катков.
Рассмотрим расстановку катков на примере.
Пример. Приведем расстановку опорных катков тягача, предназначенного для
буксировки тяжелых прицепов.
Дано: число опорных катков с одного борта п = 5; база L = 3 .и; положение
центра тяжести машин </=1,35 л от переднего катка; подвеска симметричная.
Задаемся коэффициентом перегрузки ₽ = 1,3.
Решение. Принимаем модули жесткости одинаковыми для всех катков.
Вначале расставляем катки на одинаковом расстоянии один от другого. Бу-
дем иметь:
/] = 3 лг, /2 = 2,25 м\ /3 = 1,5 .и; /4 = 0,75 м.
Тогда
h = 3 + 2,25 + 1,5 + 0,75 = 7,5 лг,
2 /• = 3- + 2,25= + 1,52 + 0,752 = 16,9 лА
Подставляя полученные данные в формулу (259), получим
По формуле (257) определяем коэффициент перегрузки
8 =---------- — 1.12
р 1-0,109
Такая перегрузка очень незначительна, поэтому нужно задаться новыми
значениями величин I. Сдвинем средние катки назад.
Примем: /| = 3 Л1; /2 = 2,5 м; 13 = 2 м\ Ц = 1,5 м
Получим: £/, = 9 лц £// = 21,5 Тогда -^-=+0,24.
"п
₽ = 1,32. Коэффициент перегрузки близок к заданному На этом значении
коэффициента можно остановиться.
461
ОПРЕДЕЛЕНИЕ СТАТИЧЕСКИХ НАГРУЗОК НА ОПОРНЫЕ КАТКИ
Нагрузка на n-ый опорный каток определяется по следующей
формуле (при nii = const):
р = hnG__________
Эту формулу можем переписать в таком виде:
^==-7—1--------г- (260)
\ ап /
Величина ~ была определена выше (см. формулу 259). На-
,1п
грузки на остальные катки определяются по следующей формуле:
д = (1--£''И <26,)
Определив -Д по формуле (259) и Р„ по формуле (260), най-
Пп
дем нагрузки на все опорные катки по формуле (261), так как
соответствующие значения плеч Ц уже известны.
ПОСТРОЕНИЕ КИНЕМАТИЧЕСКОЙ СХЕМЫ ПОДВЕСКИ
Исходными данными для построения кинематической схемы яв-
ляются:
D—диаметр опорных катков;
k—клиренс под статической нагрузкой;
#min— клиренс под динамической нагрузкой (минимальное рас-
стояние между днищем машины и грунтом при полностью выбран-
ных рабочих ходах катков);
— коэффициент динамичности;
/шах — максимальная деформация упругого элемента (для тор-
Сиона %iax)-
Рассмотрим вначале построение кинематической схемы торси-
онной подвески.
1. Определяем рабочий ход катка.
Согласно рис. 309 будем иметь
= (262)
Клиренс под статической нагрузкой k обычно находится в преде-
лах 0,35—0,45 м. Так для тягача М-2 # = 0,37 м, для тягача АТ-С
k = 0,40 м, для тягача АТ-Т # = 0,43 м.
Клиренс под динамической нагрузкой #min = 0,15—0,25 м и ра-
бочий ход Лр = 0,1 — 0,2 м.
2. Выбираем коэффициент динамичности.
Коэффициент динамичности для современных тягачей находится
462
в пределах 1,5--—3,5; причем верхний предел имеют очень жесткие
подвески. Отнесем коэффициент динамичности к п катку. Примем
/гс = hn. Тогда
Рис. 309. Определение рабочего Рис. 310. Построение кинематической
хода катка схемы подвески
3. Определяем плечо балансира подвески по следующей прибли-
женной формуле:
Л;2 + Лр
Л = —:-----------
Sln “max
(264)
где я1пи—максимальный угол закрутки торсиона от свободного по-
ложения до упора в ограничитель (рис. 310).
Формула (264) дает точный результат, если угол ал ф- атах = 90°.
Обычно угол атах выбирается в пределах 40—50°; угол аэ нахо-
дится в пределах 40—60°.
4. Выбираем величину Ь, исходя из конструктивных соображений.
Величина b должна быть выбрана так, чтобы можно было в корпусе
машины установить кронштейн торсиона. В легких машинах
b равно 30—60 мм, в тяжелых — 90—100 мм. Зная Ь, строим схему
подвески, как указано на рис. 310
Для этого за базовую линию принимаем линию клиренса (днище
корпуса или рамы). Откладываем от этой линии величину статиче-
ского клиренса k, находим линию грунта. Зная D и а, определяем
положение оси катка.
От линии, проведенной через ось катка, откладываем /гс и hp.
Определяем углы а0 и ар. Одновременно определяются и углы at и
а
max’
Эти углы могут быть определены также по следующим форму-
лам;
k — 0,5£> + Ь + hn
COS % —---:———И-
463
cos (a0 + ac) =
k — 0,5/) + b t
a 1
(266)
k — 0,5/9 + b — hp
cos (a0 + amaJ =----------------------------
(267)
Если по формуле (265) получим слишком малый угол аэ, то сле-
дует увеличить длину балансира а.
Пример. Определим кинематические параметры подвески по следующим дан-
ным: 0 = 0,4 м; 6 = 0,3 м; 6nlin=0,15 м.
Кроме того, примем 6 = 0,1 м.
Решение. По формуле (262) находим
hp = 0,3 — 0,15 = 0,15 .и.
Задаемся коэффициентом ср = 2. Тогда согласно формуле (263) определим
0 1 5
h„ = = о,О75 .и.
“ 2
Полный ход катка будет равен
Ар + Лс = 0,15 + 0,075 = 0,225 м.
В выполненных конструкциях величина полного хода находится в пределах
175—250 мм (для независимых подвесок).
Задаемся углом а|П11Х = 50°. По формуле (264) находим
0,0/5 -f- 0,15 п
а = ----:--ioo-- = °>293 м-
sin 40°
Округлим величину а до 0,3 м.
Из формул (265—267) находим: а0 = 23°30'; ас = 2Г30'; атах = 57°.
Угол <з.о получен слишком малый, а угол ятах — слишком большой.
Увеличим длину балансира до величины а = 0,38 м. Получим новые значе-
ния .углов: ао = 43°30'; ас=14°30'; атах =39°. Эти углы и принимаем в каче-
стве расчетных.
Рассмотрим построение кинематической схемы балансирной
подвески.
Как и для независимой подвески, заданными величинами будем
считать D, k, kmia, ф и /тах; по формулам (262) и (263) опреде-
ляются, кроме того, величины hp и hn.
Задачу решаем графически. Для этого на чертеже в мас-
штабе наносим выбранную геометрическую схему тележки. Задавая
/max упругому элементу, находим остальные величины. Если они зна-
чительно отличаются от принятых, то изменяем размеры кинемати-
ческих звеньев подвески и вычерчиваем схему еще раз.
Рассмотрим построение кинематической схемы на примере.
Пример. Определим геометрические размеры звеньев симметричной парно-
балансирной подвески, приняв в качестве прототипа подвеску, представленную
на рис. 296.
Решение. Изобразим подвеску в масштабе в виде кинематической схемы
(рис. 311),
464
l„ =487
Рис. 311. Кинематическая схема балансирной
подвески
Из схемы определяется длина упругого элемента под статической нагрузкой
7) /о
где /о — длина упругого элемента в свободном состоянии;
/с — стрела статической деформации упругого элемента.
Зададимся /0 = 487 мм. Тогда
/с = 487 —385 = 102 мм.
Задаемся длиной упругого элемента в полностью сжатом состоянии/о—/тах =
= 192 мм. Тогда
/тах = 487 - 192 = 295 мм.
Построением определяются величины Лс = hn= 48 aim- Лр= 66 мм.
Тогда
9 = 1,38.
Полный
ход тележки
Лтах = Лс + Лр = 144 мм.
Определим полный ход катка.
Выше мы перемещали оба катка
тележки. Теперь один из катков'оста-
вим неподвижным, а другой переме-
стим так, чтобы упругий элемент сде-
формировался на величину/тах.
Согласно построению (рис. 312)
получим Ар = 118 мм. Тогда полный
ход по катку будет
^тах = + Ар = 48 4- 118 = 166 мм.
В выполненных конструкциях пол-
ный ход по катку составляет 200—
225 мм.
Следует задаться новыми дан-
ными и получить большее значение
^тах'
Таким образом определяются все
геометрические параметры подвески и
ее кинематическая схема.
Рис. 312. Графическое определение
рабочего хода катка
30-20
465
РАСЧЕТ УПРУГОГО ЭЛЕМЕНТА ПОДВЕСКИ
Упругий элемент подвески рассчитывается по формулам, приве-
денным в разделе 3 «Упругие элементы подвесок» данной главы.
Рассмотрим в качестве примера расчет торсиона незави-
симой подвески и спиральной рессоры парно-ба-
лансирной подвески.
Рабочей длиной торсиона I следует задаться по конструктивным
соображениям (по соображениям размещения торсиона на раме ма-
шины) .
Из формулы (243) определяем диаметр торсиона
, 4 '§2ШТ
d = г —,
' пасО
где ?.г.— угол закрутки торсиона под статической нагрузкой;
Л4С— момент закрутки торсиона под статической нагрузкой.
Момент Л4С определяется по формуле
Л4С = sin (а0 + ас), (268)
где а—плечо балансира;
Рп — статическая нагрузка на каток п;
<х0 и ас—углы наклона балансира.
По формуле (244) определяется напряжение скручивания тор-
сиона под статической нагрузкой:
16Лф
Тс ~ rcd3 '
Величина напряжения должна лежать в пределах тс = 3500 —
4000 кг/см"1.
Если напряжение выйдет из указанных пределов, то следует из-
менить диаметр торсиона d или в крайнем случае длину балансира.
Заметим, что с изменением диаметра d изменяется угол ас и мо-
мент Л4С согласно формуле (268).
Далее необходимо проверить торсион на максимальную деформа-
цию “max-
Подставляем в формулу (243)атах и находим Затем из
формулы (244) находим
Можно также определить ттах из отношения
ттах атал
Тс ас
Максимальное напряжение должно находиться в пределах
Ттах = 8000 — 9000 KZfcM2.
Аналогично определяется диаметр стержней пучковой торсион-
ной подвески.
466
Пример. Определим размеры торсионной подвески.
Дано: а0 = 43°30'; «с = 14°30'; атах = 39°; а = 0,38 л; Рп = 1100 кг.
Решение. По формуле (268) находим
Л4С = 1100-0,38 sin (43°30' + 14°30') = 354 кгм.
Рабочую длину торсиона I по конструктивным соображениям принимаем рав-
ной 1,05 м.
По формуле (243) находим
л ,4/ 32 105-35 400
d~V 3,14-0,252-800 000 ~ 3,7 СМ'
Определяем статическое напряжение
16-35 400
те = о 1 , = 3570 кг/см2.
о, 14 • o,/d
Напряжение находится в пределах допустимого.
Определяем максимальное напряжение. Будем иметь
Tmux
0,68-3,7-800 000
1Л05
= 9800 кг/см2.
Максимальное напряжение несколько
до 9000 кг/см'2, уменьшив угол ятах на 3°,
выше допустимого. Его можно снизить
т. е. приняв «тах =36° вместо 39°.
Рассмотрим порядок определения геометрических размеров
упругого элемента балансирной подвески (см. рис. 311).
Чтобы определить размеры упругого элемента, надо знать стати-
ческую нагрузку на рессору Qc.
Нагрузка Qc определяется из условий равновесия балансира те-
лежки.
Составим уравнение моментов внешних сил, действующих на пра-
вый балансир. Так как к тележке приложена нагрузка Ре = Рп, то
на один каток действует сила у Р„. Кроме того, со стороны рес-
соры на балансир действует силафс. Балансир подвешен к корпусу
в шарнире а. В этом месте на балансир действует реакция шар-
нира. Никакие другие силы на балансир тележки не действуют.
Чтобы не определять реакцию шарнира, следует составить уравне-
ние моментов относительно точки а. Согласно рис. 311 будем иметь
Отсюда находим
О = — Р
Че х2 ^п-
Далее определяем геометрические размеры упругого элемента по
формулам, приведенным в разделе 3 «Упругие элементы подвесок»
данной главы.
зо» 467
ПОСТРОЕНИЕ ХАРАКТЕРИСТИКИ ПОДВЕСКИ
В общем случае для любого вида подвески характеристика стро-
ится графоаналитическим методом, изложенным в тео-
рии подрессоривания. Для торсионной подвески характеристику
можно построить по формулам 203 (см. ч. 1):
hk = a |cos % — cos (% + aj]
р __________М_______
k a Sin (ak + а0)
(270)
где аА — текущее значение угла наклона балансира.
Момент М в общем случае для пучкового торсиона опреде-
ляется по формуле (245)
Л4 = ' (271)
где п — число стержней в пучковом торсионе; для одностержневого
торсиона следует принять п = 1.
Задаваясь последовательным значением углов получим hk и
Pk. По этим данным строится характеристика подвески катка.
5. РАСЧЕТ ПОДВЕСКИ НА ПЛАВНОСТЬ ХОДА
В предварительном расчете определяются следующие параметры
плавности хода подвески: модуль жесткости подвески катка под ста-
тической нагрузкой (/пс), частота и период свободных колебаний
корпуса машины (к, Т), работоспособность подвески (v).
Модуль жесткости подвески. Принимаем, что все под-
вески катков имеют одинаковые характеристики, а следовательно, и
одинаковый модуль жесткости.
Тогда можем написать для n-го катка
Если характеристики будут нелинейными и разными для разных
катков, то следует определить средний модуль
1
ОТСП = ------
СР П
(272)
где п— число опорных катков по одному борту машины;
Pt—статические нагрузки на кагки, определяемые из ранее
найденных характеристик;
ht— статические перемещения катков.
Для выполненных конструкций тягачей имеем следующие значе-
ния модулей жесткости:
468
для 1ягача АТ-Л тс — 68,5 кг/с.ч\
для тягача М-2 т~ 180 кг/слг,
для тягача АТ-Т т, = 193 кг см\
для тягача АТ-С шс = 194 кг/см (по тележке).
Частота и период свободных колебаний кор-
пуса машины. Согласно теории подрессорпвания частоты сво-
бодных колебаний определяются по следующим приближенным фор-
мулам, полученным на основании формул 238, 240 и 241 (см. ч. 1):
(273)
(274)
В табл. 37 приведены опытные данные по частотам и периодам
свободных колебаний для тягачей, движущихся без прицепа.
Таблица 37
Частоты и периоды свободных колебаний тягачей
Марка тягача Частота, кол, мин Период, сек
4 Г, и
АТ-Л 103 62 0,58 0,91
М-2 155 79 0,39 0,76
АТ-Т 93 58 0,65 1,03
АТ-С 108 86 0,56 0,70
Величины с индексом 1 относятся к вертикальным и с индексом 2 к угло-
вым колебаниям.
Работоспособн
деляется по формуле
ость. Работоспособность подвески опре-
(1 + с?)2/гр
2ср
(275)
где ф— коэффициент динамичности;
/гр— рабочий ход катка.
Формула (275) является общей формулой для независимой и ба-
лансирной подвесок.
Работоспособность подвески имеет следующие значения:
для 1ягача АТ-Л ч =0,37 лг,
для тягача М-2 ч = 0,41 .и;
для тягача АТ-Т ч = 0,31 л/;
для тягача АТ-С м =0,18 м.
469
Здесь все данные приведены для тягачей без груза на платформе.
При наличии груза на платформе тягача значение работоспособ-
ности подвески несколько уменьшится.
Пример. Определим параметры плавности хода тягача, имеющего следующие
р а с ч е т н ы е д а н н ы е: Р п = 1100 кг\ hn— 75 мм; G = 8000 кг; а, — 1,5 м;
«2 = 1,05 м; а3 = 0,6 м; «[ = 0,15 м; аз =1,5 л; Лр = 150 лл; п = 5; =
= 2,02 т м сек'1.
Решение. Определяем модуль жесткости
Рп 1100 VI7 ,
тс = у2- = -=-=- = 147 кг см.
7,5
Находим частоты колебаний kx и й2. Согласно расчетным данным имеем:
= птс — 5-147 = 736 кг/см, пли 73 600 кгм',
^a^nt = т^а? = 147-100 (1,52 + 1,052 + 0,62 + 0.15'-' + 1,52) = 88 000 кгм.
По формулам (273) и (274) получим
/ 30 / 2-88 000 й,
*2-3,14 I 2,02-1000 89 к0Л!мин-
Периоды будут равны:,
Т\ =. 0,47 сек; Т., = 0,68 сек.
Определим коэффициент динамичности
ЛР 150
?= Л? = УЗ
Подставив ср в формулу (275), получим
(1+2)2150
ч = --------- - 338 мм.
В заключение заметим, что иногда в целях уменьшения вероят-
ности пробивания подвески, а следовательно, повышения плавности
хода машины жесткость подвесок крайних катков принимают выше,
чем жесткость подвесок средних катков. В результате этого увели-
чивается выражение а2т1 в формуле (274), а с ним увеличивается
частота колебаний. При этом уменьшается амплитуда колебаний.
С уменьшением же амплитуды уменьшается и вероятность пробива-
ния подвески.
Действенным средством повышения плавности хода машины яв-
ляется применение амортизаторов.
6. ПОВЕРОЧНЫЙ РАСЧЕТ ПОДВЕСКИ
Определив в предварительном расчете все геометрические пара-
метры подвески, произведем поверочный расчет подвески.
Задача поверочного расчета заключается в том, чтобы оконча-
470
тельно убедиться в правильности выбора геометрических параметров
подвески, причем с учетом нелинейности характеристик, и прове-
рить влияние на работу подвески движения машины.
Примем следующие четыре условия движения:
а) машина движется с прицепом по хорошей горизонтальной
дороге (Ли = 0,07);
б) машина движется с прицепом на подъем 20°;
в) машина без прицепа резко трогается с места;
г) машина без прицепа движется на подъем 40°.
Рис, 313. Четыре случая движения гусеничной машины:
а — машина движется с прицепом по горизонтальной дороге; б — машина
движется с прицепом на подъем 20°; в — машина без прицепа резко тро-
гается с места; г — машина без прицепа движется на подъем 40°
Первое условие позволяет оценить правильность выбора коэффи-
циента перегрузки катков р. По второму условию проверяется пре-
дельный дифферент рамы при движении машины с прицепом, а по
третьему условию — при движении без прицепа. Четвертое условие
касается одиночных машин, работающих без прицепа,— транспор-
теров или одиночных тягачей. Оно вытекает из следующих условий
движения машины.
При трогании машины с места к ее раме прикладывается сила
инерции поступательного движения. Под действием этой силы рама
получает дифферент. После того как исчезнет сила инерции, рама
придет в колебательное движение, причем с начальной амплитудой,
равной углу дифферента. Если подвеска очень мягкая, то дифферент
может получить значительную величину и, следовательно, будет про-
исходить сильное раскачивание рамы, которое в свою очередь будет
препятствовать разгону машины.
На рис. 313 представлены указанные четыре случая движения
машины. •
Согласно рисунку и формулам 222 и 223 (см. ч. 1) можем опре-
делить равнодействующую внешних сил Q, приложенную к раме, и
и ее координату q.
471
Будем иметь:
Для первого случая движения:
Q = G + Qx6
__ IjG — Йк/?к — /к<?>6
4 G + Q„b
Для второго случая движения:
Q= 0,94(7+ Qxfi
_ 0,94/cG — 0,34/zcG - - /iKRK - /к(?хб
q ~ o,94G + о™
Для третьего случая движения:
Q = 0,77(7
_ (\TlhcG — 0,t>4ftcG
q — O.77G
Для четвертого случая движения:
Q=(7
/CG — йс/
q =-----—J
(276)
(277)
(278)
(279)
где RK — сопротивление на крюке;
Qx6—хоботовое давление;
/ — сила инерции.
Эти величины определяются из тягового расчета машины.
Зная величины Q и q, а также характеристики подвесок катков
(которые определяются в предварительном расчете), можем произ-
вести поверочный расчет подвески по методу, изложенному в раз-
деле 6 «Расчет подвески с нелинейными характеристиками упругих
элементов» главы VI (см. ч. 1).
В результате расчета получаем хода катков ht, нагрузки на
катки Pt, дифферент рамы (корпуса) с.
Если эти величины нас удовлетворяют, то расчет можно счи-
тать законченным. Если же полученные величины нас не удовле-
творяют, то расчет нужно повторить, внеся в него соответствую-
щие коррективы,
ГЛАВА X
ГУСЕНИЧНЫЕ ДВИЖИТЕЛИ
1. ГУСЕНИЧНЫЙ И КОЛЕСНЫЙ ДВИЖИТЕЛЬ
Гусеничный движитель по сравнению с колесным движителем
обладает более высокой проходимостью, особенно при движении на
болотистом грунте, при движении по снегу, по сыпучим пескам,
а также при преодолении различных препятствий на местности: кру-
тых подъемов, рвов, порогов, эскарпов и т. д.
Вместе с тем гусеничный движитель обладает и серьезными недо-
статками. Гусеничный движитель сложнее колесного, имеет меньший
к. п. д. и меньшую износоустойчивость. Срок службы гусениц ма-
шин первых выпусков (1916—1918 гг.) не превышал нескольких
сот километров, в то время как срок службы пневматических шин
автомобилей составлял десятки тысяч километров.
Почти с первых же дней появления гусеничного движителя воз-
никла проблема повышения его срока службы и к. п. д. Параллельно
с этим возникла идея вообще отказаться от гусеничного движителя,
заменив его более простым и надежным колесным движителем.
Еще первые танки 1915—1916 гг. в России и в Англии пытались
делать на базе колесного движителя с гигантскими (десятиметро-
выми) колесами. Эти попытки не увенчались успехом, и танки на
полях сражений первой мировой войны появились все Же как гусе-
ничные, а не как колесные машины.
Однако мысль заменить гусеничный движитель колесным не
была оставлена. В 30-х годах текущего столетия итальянские
фирмы Павези и Ансальдо снова возвращаются к идее колесного
движителя в боевых машинах. Они строят бронированные машины
с большими колесами. Машины эти, однако, распространения не
получили и остались лишь опытными конструкциями.
За последнее время в США и в Англии появился ряд предложе-
ний, повышающих проходимость колесного движителя по мягким
грунтам. Это все те же «большие колеса», но их диаметр теперь со-
ставляет не 10, а 2—3 м. Кроме того, появились новые шины пере-
менного давления, арочные шины.
Испытания проходимости по мягкому грунту машин с такими
шинами показали неплохие результаты. Однако проходимость
колесных машин даже с такими шинами все же
значительно ниже проходимости гусеничных ма-
шин.
Следует иметь в виду, что проходимость машин на местности, и
473
особенно проходимость военных машин, не определяется одной
только проходимостью по мягкому грунту. Военная машина должна
также преодолевать рвы, эскарпы, контрэскарпы, отвесные стенки,
надолбы и т. д. Для преодоления этих препятствий колесная машина
с одной активной (ведущей) осью, даже снабженная специальными
шинами, непригодна. Приходится создавать машины с двумя, тремя
и большим числом активных осей. Увеличение числа активных осей
значительно усложняет силовую передачу машины. Если гусеница
получает привод от силовой передачи в одном месте — на ведущем
колесе, то каждое активное колесо колесного движителя требует
свой отдельный привод.
Так как колеса вследствие различной деформации шин, а следо-
вательно, и разных радиусов качения имеют разные угловые ско-
рости, то в силовую передачу машины вводят дифференциалы — по
одному дифференциалу на каждую ось (осевые дифференциалы) и
по одному дифференциалу между каждой парой осей (межосевые
дифференциалы). Например, в силовой передаче четырехосной ма-
шины должно быть шесть дифференциалов, в то время как гусенич-
ная машина имеет всего один «дифференциал» — это ее механизм
поворота, который связывает между собой обе гусеницы машины.
Но даже и при наличии четырех активных осей колесная машина
все же по проходимости уступает гусеничной машине.
Проходимость машины в известной мере определяется ее пово-
ротливостью, которая в свою очередь зависит от минимального ради-
уса поворота. Колесная машина не может иметь минимальный ра-
диус, равный или даже меньший половины ширины колеи машины,
как это имеет гусеничная машина. Следовательно, и по поворотли-
вости колесный движитель уступает гусеничному.
Наличие пневматических шин в колесных машинах ограничивает
определенными пределами нагрузку на ось одного колеса. В тех слу-
чаях, когда в тяжелых военных машинах требуется повысить на-
грузку на ось, приходится увеличивать диаметр колес. Так, в некото-
рых опытных американских машинах диаметр колес достигает 3 м,
общая же ширина их более 2 м. Увеличение диаметра колес- приво-
дит к повышению центра тяжести машины, а следовательно, к сни-
жению ее устойчивости, а значит, и проходимости; кроме того, при
большой ширине и высоте колес увеличиваются габариты машины,
что для военных машин крайне не желательно.
Гусеничный движитель в этом отношении имеет значительные
преимущества. Габариты движителя 50-тонной гусеничной машины
примерно такие же, как 5-тонного грузовика. Размеры гусеничного
движителя не влияют на положение центра тяжести машины. Устой-
чивость гусеничных машин выше, чем колесных.
Таким образом, по проходимости, поворотливости, устойчивости
и по простоте конструкции гусеничный движитель, как движитель
боевых и транспортных военных машин, имеет преимущества перед
колесным движителем. Он уступает ему лишь в живучести. Но про-
блема живучести вполне разрешима даже при современном уровне
развития техники,
474
В настоящее время гусеницы с упругим шарниром работают до
пробега 10 000 км, а с игольчатыми шарнирами еще больше, иногда
превосходя по живучести даже автомобильные шины. Еще и в на-
стоящее время эксплуатируются тягачи, выпущенные в 1942—43 гг.
и имеющие гусеницы с игольчатыми подшипниками, работающими
со смазкой.
2. ТИПЫ ГУСЕНИЦ
В гусеничных машинах могут применяться гусеничные ленты
или гусеничные цепи (гусеницы).
ГУСЕНИЧНЫЕ ЛЕНТЫ
Гусеничная лента изготовляется из обрезиненной полотняной
ткани, внутрь которой для уменьшения вытягиваемости вставляются
стальные тросы. Такая гусеница бесшумна в движении, не портит
дорог, обеспечивает машине хорошую устойчивость при движении
на обледенелых дорогах. Гусеничная лента, однако, имеет и серьез-
ные недостатки. Резина гусениц подвержена быстрому механиче-
скому износу, особенно при движении по каменистым грунтам. На
обрезиненной гусенице трудно сделать грунтозацепы, так как при
крутых поворотах машины они быстро срезаются. Трудно осущест-
вить также достаточно надежное зацепление гусениц с ведущими ко-
лесами. Если гусеничная лента не имеет тросовой основы, то она
подвержена еще и сильному растяжению.
Поэтому резиновые ленты применяются только в снегоходах.
Так, американская фирма Бомбардир в настоящее время выпускает
снегоходы на резиновых лентах.
В тягачах, транспортерах и танках применяются только металли-
ческие плоскозвенчатые гусеничные цепи.
ГУСЕНИЧНЫЕ ЦЕПИ
Гусеничная цепь состоит из плоских траков (звеньев) равного
шага, связанных между собой шарнирами.
На рис. 314 показан трак гусеничной цепи. Трак имеет следую-
щие элементы: беговые дорожки 1, направляющие гребни 2 и 3,
грунтозацепы, или шпоры 4, шарниры, цевки 9.
Беговые дорожки являются поверхностями качения опорных кат-
ков. Направляющие гребни предохраняют катки от соскакивания
с беговых дорожек. Грунтозацепы предназначаются для повышения
сцепления гусениц с грунтом. Отдельные траки соединяются между
собой шарнирами. Шарнир состоит из проушин 8 и пальца 6, кото-
рый вставляется в проушины и фиксируется в них с помощью сто-
пора 7. Цевка является элементом зацепления ведущего колеса с гу-
сеницей, с помощью которого осуществляется передача вращения
и тягового усилия с ведущего колеса на гусеницу.
475
1
Рис. 314. Трак гусеничной цепи трактора СТЗ-З:
1 — беговая дорожка; 2 и 5— направляющие гребни; 4 — шпора;
5 — стопорная шайба; 6 — палец шарнира; 7 — стопор; 8 — про-
ушина; 9 — цевка
Кроме цевочного зацепления (рис. 315,а), в гусеничных маши-
нах может применяться гребневое и зубовое зацепления.
В цевочном зацеплении ведущим элементом колеса является зуб,
который зацепляется за цевку; в гребневом зацеплении — ролик, ко-
торый зацепляется за гребень трака, и, наконец в зубовом зацепле-
нии ведущим элементом является зуб, который зацепляется за зуб
трака.
В цевочном зацеплении теоретически предполагается обкатка
зуба по цевке без скольжения (в действительности некоторое сколь-
жение все же имеет место); в гребневом зацеплении ролик обкаты-
вается по гребню. И в цевочном и в гребневом зацеплениях имеется
контактное сопряжение ведущего и ведомого элементов зацепления.
В зубовом зацеплении осуществлено сопряжение этих элементов
по площади, что теоретически должно уменьшить износ рабочих
элементов зацепления.
Гребневое и зубовое зацепления в настоящее время применяются
редко. Недостатком гребневого зацепления является наличие мо-
мента Ph (рис. 315,6), выворачивающеготраки при сходе их с веду-
щего колеса. Кроме того, наличие на траках высоких массивных
гребней увеличивает вес гусеницы. Наконец, гусеница при гребневом
зацеплении получается крупнозвенчатой. Опыт эксплуатации гусе-
ниц с гребневым зацеплением показывает, что гнезда осей роликов
Рис. 315. Типы з.тцеплеппя гусениц с ведущим колесом:
а — цевочное; 6 — ipciujeBue; в — зубовое
476
Рис. 316. Цевочные поверхности
траков:
а — стенки окна посредине трака; б—Стен-
ки двух окон; в — поверхность выступов;
г — поверхность соединительного пальца;
I — окно; 2 — выступ; 3 — соединитель»
ный палеи
равномерности перс-
ей цевочное за пепле-
ведущего колеса при работе разбиваются вследствие больших дина-
мических нагрузок, которые действуют на ведущее колесо.
Особенностью зубового зацепления является, кроме наличия кон-
такта зубьев по площади, также отсутствие относительного сколь-
жения ведущего и ведомого элементов зацепления при переходе со
свободной ветви гусеничного обвода на дуговую ветвь и обратно.
При зубовом зацеплении теоретически вход и выход из зацепления
должны совершаться мгновенно. В этом случае износа ведущих и
ведомых элементов не должно бы
быть. В действительности, как по-
казывают опыты, зубовое зацепление
не имеет никаких преимуществ сточ-
ки зрения уменьшения износа по
сравнению с гребневым зацеплением
и особенно с цевочным. Кроме того,
оно плохо работает при забивании
зубьев ведущего колеса грязью. При
износе быстро нарушается зацепле-
ние ведущего колеса с гусеницей, и
износ прогрессивно увеличивается.
Наконец, в зубовом зацеплении,
как и в гребневом, на траки при их
выходе из зацепления действует вы-
ворачивающий момент.
Многолетний опыт эксплуатации
быстроходных гусеничных машин
показывает, что с точки зрения
матывания гусеничных цеп
н и е имеет преимущество перед гребневым и зу-
бовым зацеплениями, вследствие чего в настоящее время
оно является наиболее распространенным зацеплением.
Недостаток цевочного зацепления заключается в повышенном
износе зубьев ведущих колес (цевки траков изнашиваются незна-
чительно, так как их примерно в 10 раз больше, чем зубьев веду-
щего колеса).
Для уменьшения износа ведущие колеса делают с двумя ря-
дами зубьев. В этом случае трак имеет две цевочные поверхности.
Цевочные поверхности могут располагаться на траке различно
(рис. 316).
3. ОСНОВНЫЕ ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ
К ГУСЕНИЧНЫМ ЦЕПЯМ
Гусеничные цепи должны:
1) иметь хорошее сцепление с грунтом при движении по мяг-
кому грунту и незначительное сопротивление повороту;
2) не допускать скольжения при движении на обледенелых до-
рогах;
477
ТР
Рис. 317. Формы опорной
поверхности траков:
а — с выпуклой шпорой; б — с впа-
динами
3) не допускать разрушения покрытия дорог;
4) иметь высокую износоустойчивость шарниров траков;
5) быть мелкозвенчатыми, а траки должны иметь небольшой вес;
6) обладать достаточной прочностью.
Рассмотрим эти требования.
1. Для обеспечения сцепления гусениц с грунтом наружной по-
верхности траков придают специальную форму в виде впадин и
выступов (рис. 317), образующих так называемые естествен-
ные шпоры, с помощью которых гусеница зацепляется за грунт.
Форма поверхности трака должна быть такой, чтобы грунт не заби-
вался в отверстия и впадины трака; в про-'
тивном случае шпоры загрунтовываются
и перестают зацепляться за грунт.
Для повышения сцепления гусениц с
грунтом в особо трудных условиях дви-
жения применяют съемные шпоры.
Съемные шпоры устанавливаются через
6—10 траков. После преодоления тяже-
лого участка пути съемные шпоры сни-
мают, так как они увеличивают сопро-
тивление качению машины и создают
тряску при движении машины по твер-
дому грунту.
Гусеницы должны иметь небольшое сопротивление повороту.
Сопротивление повороту зависит от сопротивления поперечному
скольжению гусениц, поэтому опорной (наружной) поверхности
траков придают такую форму, чтобы сопротивление повороту было
наименьшим. Для этого иногда приподнимают края траков, делают
шевронные шпоры и т. д. В большинстве случаев, однако, настоя-
щее требование не выполняется, так как указанные мероприятия,
усложняя трак, не облегчают поворот машины.
2. Опыт эксплуатации показывает, что на обледенелых дорогах
гусеничная машина, особенно работающая с тяжелым прицепом,
имеет поперечное скольжение, вследствие чего она часто теряет
управление. Это явление объясняется низкими сцепными качест-
вами стальных траков при взаимодействии их с обледенелым по-
лотном дороги. Даже наличие естественных шпор не увеличивает
сцепления, так как естественная шпора, имея слишком большую
опорную площадь, не может врезаться в твердую обледенелую по-
верхность дороги, а следовательно, не может создавать достаточ-
ного сопротивления поперечному сдвигу гусеницы. Силы же трения
на льду малы, чтобы удерживать гусеницы от скольжения.
Не увеличивает сцепления в этом случае и установка съемных
шпор. Движение машины с установленными на гусеницах съем-
ными шпорами возможно только при скоростях не выше 10 км!час.
Целесообразно было бы для обеспечения устойчивого движения
по обледенелым дорогам применять траки с шероховатой
опорной поверхностью. Шероховатость может быть создана
за счет небольших выступов высотой 4—5 мм, расположенных один
478
от другого на 1—2 см на опорных поверхностях шпор. Такие вы-
ступы легко создать как на литых, так и на штампованных траках.
Во время Великой Отечественной войны для повышения устой-
чивости движения гусеничных машин на обледенелых дорогах
иногда на опорную поверхность траков с помощью электросварки
наваривали небольшие кусочки металла (от электрода), благодаря
чему поверхность траков приобретала «шероховатость» и значи-
тельно увеличивалось сопротивление скольжению гусениц по льду
устойчивость движения машины повышалась.
Рис. 318. Трак трактора С-80:
1 — палец, 2 — втулка; 3 — рельс; 4 — башмак: 5 — замыкающая
втулка? в — шайба; 7 — замыкающий палец; <5 — стопорный палец:
9 — шпора
3. Причиной порчи дорог являются в первую очередь шпоры на
траках гусениц. Чем выше шпоры, тем больше они портят дороги.
Таким образом, с одной стороны, чтобы обеспечить проходимость
машины по мягкому грунту, требуется установить на гусеницах
высокие шпоры, с другой стороны, чтобы гусеницы не портили до-
рог, шпоры должны быть низкими или лучше, чтобы их вообще
не было.
В сельскохозяйственных тракторах, которые работают главным
образом на местности и не предназначены для движения в колон-
нах по дорогам, шпоры делают очень высокими (рис. 318). В бы-
строходных машинах, наоборот, шпоры уменьшают. В начальный
период второй мировой войны американцы на своих танках приме-
няли гладкие обрезиненные гусеницы. Такие гусеницы не портили
дороги (даже асфальтированное шоссе). Зато сцепление этих гусе-
ниц на местности часто было недостаточным. Поэтому в ходе войны
американцы были вынуждены отказаться от гладких гусениц и пе-
рейти к гусеницам с естественными шпорами, которые применялись
в то время на отечественных танках.
Чтобы естественные шпоры не портили дорог и в то же время
создавали хорошее сцепление с мягким грунтом, они должны
легко врезаться в грунт и не врезаться в твердую поверхность до-
роги. Для этого плошадь опорной поверхности шпоры должна
иметь определенную величину. Обычно она составляет около 10%'
от общей опорной поверхности трака,
479
Увеличить сцепление с грунтом на мягких грунтах возможно
с помощью съемных шпор, как это делается в отечественных
тягачах. Съемные шпоры должны при этом легко и быстро монти-
роваться и демонтироваться на траках гусениц. Если для монтажа
и демонтажа съемных шпор будет затрачиваться много времени,
то применение их будет нецелесообразно.
Следует отметить, что выполнение настоящего требования осо-
бенно важно для транспортных машин, которые длительное время
работают как на местности,
так и на дорогах.
Так как транспортным
машинам приходится дви-
гаться не только по грунто-
вым дорогам, но и по ас-
фальтированным шоссе, не-
обходимо в транспортных
машинах иметь асфаль-
тоходную гусеницу.
В качестве асфальтоходпых
гусениц в США, например,
применяются обрезиненные
гусеницы.
Заметим, что обрезинен-
ные гусеницы, кроме того,
обеспечивают устойчивое
движение машины на обле-
денелых дорогах.
4. Срок службы совре-
Рис. 319. Принципиальна" схема устрой-
ства закрытого шарнира гусеипьы трак-
тора С-80:
I — втулка; 2 и 4 — траки; 3 — палой
менной гусснипы с простыми
открытыми шарнирами составляет в зимнее время не более
10 000 км, а в летнее время — не более 5000—6000 км.
Сокращение почти в два раза срока службы гусениц летом
объясняется попаданием в ее шарниры абразива (песка). Зимой
абразив отсутствует и срок службы гусеницы, естественно, повы-
шается.
Отсюда следует, что шарниры гусениц должны быть закры-
т ы м и. Опыты показали, что закрытый шарнир изнашивается
в 2—2,5 раза медленнее, чем открытый.
Гусеницы с закрытыми шарнирами применяются на сельскохо-
зяйственном тракторе С-80 (см. рис. 318).
Принципиальное устройство шарнира гусеницы трактора С-80
показано на рис. 319.
Втулка 1 запрессована в тело трака 2. Во втулку свободно по-
сажен палец 3. На концы пальца напрессованы ушки другого
трака 4; втулка 1 входит в кольцевую выточку трака, образуя ла-
биринтное уплотнение. Траки неразборные. Для снятия и надева-
ния гусениц в полевых условиях служит замыкающее звено с обыч-
ным плавающим пальцем.
В быстроходных машинах траки такого типа не применяются,
480
так как гусеница получается слишком сложной и тяжелой. Кроме
того, в быстроходных военных машинах желательно, чтобы гусе-
ницы были разборные.
Повысить срок службы гусениц можно также, применив
упругие шарниры (сайлент-блоки).
Упругий шарнир устроен следующим образом. В металлическую
втулку / (рис. 320), состоящую из двух половинок, вставлена и
привулканизирована к ней резиновая втулка 2. Втулка 1 запрессо-
вана в проушины 3 трака.
Внутрь резиновой! втулки
под давлением запрессо-
вывается палец 4. Одно-
временно палец запрессо-
вывается в другой трак 5
с помощью втулок 6. Та-
ким образом, палец мо-
жет поворачиваться толь-
ко вместе с траком. Пово-
рот одного трака относи-
тельно другого происхо-
дит в результате скручи-
вания резиновой втулки.
В упругом шарни-
ре нет внешнего
трения. В нем проис-
ходит только трение
в слоях резины (вну-
Рис. 320. Упругий шарнир (сайлент-блок)
гусеницы трактора Катерппллер-бО:
/ — металлическая втулка; 2 — резиновая птулка; 3— про-
ушина трака; 4— палец: 5— соединяемый трак;
6 — втулка
треннее трение). Кроме того, упругий шарнир является закрытым,
а следовательно, он защищен от попадания в него абразива.
Упругие шарниры бывают двух типов: с одним или с двумя со-
единительными пальцами. Шарнир с одним соединительным паль-
цем является Неразборным. Гусеница с такими шарнирами
должна иметь одно разборное звено.
Рассмотренный шарнир принадлежит к первому типу; он при-
менялся на американских сельскохозяйственных тракторах Катер-
пиллер-60. Шарнир с двумя пальцами будет рассмотрен ниже.
Американская фирма Гудрич в 1933 г. проводила испытание
скручивающихся резиновых втулок. Резиновую втулку закручивали
на угол 12,5° со скоростью 50 циклов в минуту в течение 750 часов,
затем ее подвергали дополнительной закрутке на угол 17,5° в тече-
ние 500 часов. В общей сложности втулка проработала 1250 часов,
сделав за это время 3,75 миллиона циклов. Разборка шарнира по-
казала, что резина втулки находится еще в хорошем состоянии.
Лишь по краям втулки на участке длиной примерно 12 мм наблю-
далось небольшое отслоение резины.
На своих танках американцы начали применять гусеницы
с упругими шарнирами еще до войны. По американским данным,
гусеницы с упругим шарниром проходят около 6000 миль (около
10 000 клг).
31-20
481
гусеничных машинах, с игольчатыми
Рис. 321. Трак с игольчатыми шарнирами
(шарниры качения):
I — палец; 2 — резиновый башмак; 3 — подшипник
Важным преимуществом упругого шарнира по сравнению с про-
стым открытым шарниром является то, что он может работать
в любых условиях и, в частности, на песчаных грунтах, где гусе-
ницы с открытыми шарнирами изнашиваются чрезвычайно быстро,
проходя иногда меньше 1000 км.
Повысить срок службы гусеницы и ее к.п.д. можно, применив
шарнир к а ч е и и я.
На рис. 321 показана гусеничная цепь, применявшаяся в полу-
шарнирами. Шарнир пред-
ставляет собой игольчатый
подшипник, работающий со
смазкой. Смазка заправляет-
ся в полость направляю-
щего гребня трака, откуда
она по внутренним каналам
поступает самотеком к под-
шипнику. Смазки хватает
на длительное время рабо-
ты гусениц.
Так как подшипники ка-
чения плохо выносят удар-
ные нагрузки, их приходит-
ся амортизировать. В каче-
стве амортизирующего уст-
ройства применяют резино-
вые башмаки, которые уста-
навливаются на траки гусе-
ницы; резиновые башмаки
одновременно предохраняют дорогу от порчи гусеницами и создают
устойчивость движения машины на обледенелых дорогах.
Следует иметь в виду, что игольчатые шарниры требуют тща-
тельного уплотнения. При попадании в шарнир даже самого незна-
чительного количества воды, песка или грязи он выходит из строя.
Игольчатые шарниры применялись на 15-т немецких полугусе-
ничных тягачах и зарекомендовали себя вполне положительно.
Срок службы их был очень значительным.
Сложность конструкции, трудность уплотнения шарниров,
а также большой вес траков — все это является серьезным препят-
ствием для широкого внедрения игольчатых шарниров в гусенич-
ные машины.
К конструктивным мероприятиям, повышающим срок службы
гусениц, относится применение в шарнирах траков вставных
втулок из различных материалов. Вставные втулки облегчают
ремонт траков гусениц и тем самым повышают живучесть гусениц.
Если срок службы гусениц будет продлен до среднего ремонта ма-
шины, то проблема живучести гусениц будет решена, так как при
очередном ремонте машины гусеница полностью восстанавливается.
Повышение срока службы гусениц с открытыми шарнирами
в настоящее время обеспечивается изготовлением траков из спе-
482
циальной легированной высокомаргапцовистой стали (типа стали
ЛГ-13).
Особенностью этой стали является ее склонность к наклепу.
В результате наклепа на рабочих поверхностях проушин траков
образуется твердый слой (корка), хорошо сопротивляющийся из-
носу.
При отсутствии наклепа высокомарганцовистая сталь не имеет
преимущества перед другими сталями. Поэтому, чтобы ускорить
наклеп, в настоящее время применяют протягивание через отвер-
стия ушков траков твердого шарика (пуансона).
Пальцы траков изготовляют из простых углеродистых сталей
марки 15 или 20 с последующей цементацией, или из стали ма-
рок 40, 45 с последующей закалкой токами высокой частоты.
5. В теории гусеничного движителя указывалось, что в цепном
обводе вследствие неравномерности его вращения возникают зна-
чительные динамические нагрузки. Чем меньше шаг траков обвода,
тем меньше его неравномерность вращения, а следовательно, тем
меньше и динамические нагрузки.
Мелкозвенчатость или крупнозвенчатость гусениц принято оце-
нивать двумя величинами: отношением шага трака I к его ширине b
и центральным углом многоугольника 0, составленного из траков
гусеницы на дуговой ветви ведущего колеса.
Принято считать гусеницы мелкозвенчатыми, если -у<^ 0,5 и
0 < 30°.
В табл. 38 приведены некоторые сравнительные данные по гео-
метрическим параметрам гусеничных движителей тягачей и сель-
скохозяйственных тракторов.
Таблица 3
Геометрические параметры гусеничных движителей
Марка тягача или трактора /, мм Ь, мм 1: b ГК’М 8, градусы
АТ-Т 137 500 0,27 0,285 28
АТ-С 178 420 0,42 0,371 28
АТ-Л 123 300 0,41 0,251 28
М-2 ПО 300 0,37 0,235 28
С-80 203 500 0,41 0,425 28
КД-35 173 280 0,62 0,330 30
„Ворошиловец" 170 438 0,39 0,765 13
Из табл. 38 следует, что все гусеницы, кроме гусеницы трак-
тора КД-35, мелкозвенчатые. Наименьшее значение имеет гусе-
ница тягача АТ-Т, а наименьший угол 0—гусеница тягача «Воро-
шиловец». Заметим, что угол 9 для большинства современных оте-
чественных тягачей одинаков. Эго объясняется тем, что тягачи
имеют одно и то же число зубьев ведущих колес z = 13, за исклю-
31* 483
чением тягача АТ-П, параметры которого не приведены в табл.38;
для него z=15.
На динамические нагрузки в гусеничном обводе оказывает
влияние вес гусениц. Чем больше вес.гусениц, тем больше динами-
ческие нагрузки.
Вес гусениц влияет также на трение в шарнирах, а следова-
тельно, и на их к. п. д. и износ.
В табл. 39 приведены весовые характеристики гусениц тягачей
и сельскохозяйственных тракторов.
Таблица 39
Весовые характеристики гусениц тягачей и сельскохозяйственных
тракторов
Марка тягача или трактора г'тах- км/час G, кг Q. кг (Q б; X 100»
АТ-Т 35 25 000 2 430 9,7
АТ-С 35 15 000 1 480 9,9
АТ-Л 42 7 800 790 10,1
М-2 35 9 000 875 9,7
С-80 10 11 400 2 620 23,0
ДТ-54 8 5 400 750 13,9
КД-35 9 3 850 475 12,4
Из табл. 39 следует, что относительный вес гусениц тягачей
(Q : G) составляет около 10% полного веса машины (G). В сель-
скохозяйственных тракторах относительный вес иногда дости-
гает 23%.
Траки гусениц изготовляют литые или штампованные.
Штампованные траки легче литых. Так, литой трак тягача АТ-С
весит 11,6 кг, в то время как штампованный только 8,95 кг, т. е.
на 25% меньше.
Уменьшение веса гусениц в быстроходных машинах дости-
гается приданием тракам специальной коробчатой или ребристой
формы, а также созданием в траках отверстий.
Проведенные нами в свое время опыты показали, что неболь-
шие отверстия в траках диаметром 2,5—3 см не влияют на несу-
щую способность гусениц при движении машины по мягкому грун-
ту, даже если эти отверстия расположены близко одно к другому.
При таких «решетчатых» траках (если, конечно, они удовлетво-
ряют условиям прочности) можно облегчить гусеницы, не снижая
проходимости машины на мягком грунте.
Для сравнительной оценки траков по весовым показателям
484
пользуются отношением веса трака к площади его опорной поверх-
ности:
Например, для тягача АТ-Т а = 0,017 кг/см2, для тягача АТ-С
а = 0,016 кг/см1, для тягача АТ-Л « = 0,0135 кг/см2.
6. Траки гусениц быстроходной машины должны обладать
большим запасом прочности, так как они работают в условиях
значительных динамических нагрузок. Кроме того, при движении
по неровностям местности гусеница подвергается не только рас-
тяжению, но и скручиванию и изгибу.
Прочность траков обеспечивается применением в качестве ма-
териала трака высококачественных сталей, соответствующей их
термической обработкой, приданием тракам специальной формы,
усилением их ребрами жесткости и т. д.
Испытание траков на разрыв показывает, что траки рвутся от
усилия, превышающего в 1,5—2 раза вес машины. Так как расчет-
ное тяговое усилие, которое может возникать на гусенице в наи-
более тяжелых условиях движения, составляет 0,65 веса машины,
то запас прочности гусениц достигает 2,5=3.
Испытание траков на разрывной машине показывает, что раз-
рыв трака чаще всего происходит по ушкам. Причем рвутся в пер-
вую очередь крайние ушки. Разрыв по телу трака происходит
редко, да и то только в том случае, если сечение трака ослаблено
отверстиями.
4. КОНСТРУКЦИИ ТРАКОВ
ТРАКИ ТЯГАЧА АТ-Т
На рис. 322 представлены траки гусеницы тягача АТ-Т. Гусе-
ница для облегчения имеет траки двух типов: трак 1 с направляю-
щим гребнем и трак 5 без направляющего гребня. При большом
диаметре опорных катков, как это имеется в тягаче АТ-Т, нет необ-
ходимости на каждом траке иметь направляющий гребень.
Траки литые, мелкозвенчатые, с двойной беговой дорожкой, с
открытым шарниром. Плавающий палец фиксируется от выпаде-
ния из шарнира с одной стороны головкой, а с другой — расклеп-
кой.
Зацепление с ведущими колесами цевочное. Цевками служат
боковые выступы на траке, за которые и цепляются зубья веду-
щего колеса.
Гусеницы тягача АТ-Т имеют съемные шпоры (рис. 323).
Шпоры устанавливаются по одной через каждые 10 траков.
485
Рис. 322. Трак гусеницы тягача АТ-Т:
7—трак с гребнем; 2—проушина; 3 — гре-
бень; 4 — палец; 5 — трак без гребня; 6 —
съемная шпора (грунтозацеп)
Рис. 323. Установка на траке тягача АТ-Т съемной шпоры:
I — трак; 2 — шпора; 3 — валик; 4 — шплинт; 5 — замковая шайб.ч;
б — полукольцо; 7 ~ регулировочная шайба; 3 — головка пальца;
9—расклепка пальца
486
Рис. 324. Гусеница в сборе тягача АТ-Л:
а — вид гусеницы сбоку, 6 — вид гусеницы сверху; в — вид трака снизу; г — поперечный разрез трака; В — вид трака сверху
ТРАКИ ТЯГАЧА АТ-Л
На рис. 324 показана гусеница в сборе тягача АТ-Л. Гусеница
состоит из литых траков двух типов — с гребнем и без гребня.
Траки без гребней имеют пазы, в которые устанавливаются съем-
ные шпоры. Шпоры крепятся к траку с помощью пальцев, которые
после установки шплинтуются.
В отличие от гусеницы тягача АТ-Т гусеница тягача АТ-Л имеет
одинарную беговую дорожку, поэтому на каждом ее траке два на-
правляющих гребня. Гребни имеют открытую коробчатую форму.
Трак значительно облегчен, его относительный вес на 15—20%
меньше, чем вес траков тягачей АТ-Т и АТ-С.
Шарниры простые, открытые. Соединительный палец фикси-
руется расклепкой.
ТРАКИ ТЯГАЧА АТ-С
На рис. 325 представлена гусеница в сборе тягача АТ-С. Гусе-
ница с зубовым зацеплением, с простым открытым шарниром. Па-
лец шарнира фиксируется стопорным (пружинным) кольцом.
Траки имеют одну беговую дорожку, ограниченную двумя ря-
дами направляющих гребней, сделанных заодно с зубьями траков.
Так как траки имеют одинаковое количество ушков, то они мо-
гут соединяться .между собой любой стороной.
488
На траки надеваются съемные шпоры (по одной шпоре на
7—8 траков). Шпоры закрепляются с помощью двух болтов (на
рисунке не показаны).
ТРАКИ ТЯГАЧА АТ-П
Траки тягача АТ-П литые, с одинарной беговой дорожкой, об-
легченного типа (рис. 326).
На опорной поверхности трака имеются ш и п ы. Удельное дав-
ление шипов составляет примерно 100 ка/елг2, что позволяет ши-
пам врезаться в обледенелый покров дороги. Таким образом,
шипы являются средством противоскольжения гусениц.
в сборе
Рис. 326. Трак гусеницы тягача АТ-П с установленной съемной шпорой:
а — поперечный разрез; б — гусеница
Оригинально устроена съемная шпора. Она очень просто мон-
тируется на траке. Для этого необходимо ввести в зацепление с
траком имеющиеся на шпоре кулачки и завернуть один винт.
Следует обратить внимание на форму трака. Трак имеет сквоз-
ные отверстия, через которые грунт легко вываливается наружу,
не забивая опорную поверхность трака. Отверстия, кроме того, об-
легчают трак.
ТРАК С УШИРИТЕЛЕМ
На рис. 327 представлен трак одного из немецких танков пе-
риода второй мировой войны.
С левой стороны трака имеется специальная площадка-у ш и-
ритель для повышения проходимости машины на мягких грун-
тах. Площадка несколько приподнята над опорной плоскостью
трака и скруглена. При движении машины по твердому грунту
уширитель не касается дороги. При движении по мягкому грунту
трак погружается в грунт и уширитель приходит в соприкоснове-
ние с грунтом, причем чем мягче грунт, тем больше погружается
в грунт уширитель. Полное погружение уширителя в грунт почти
вдвое увеличивает площадь опорной поверхности гусениц, а сле-
довательно, в два раза снижает удельное давление гусениц на
грунт.
489
6
Рис. 327. Трак с уширителем:
а — вил снизу; б — поперечный разрез; в — вид сверху
Второй особенностью данного трака является установка на нем
съемных шипов. По краям трака имеются овальные отвер-
стия, в которые вставляются съемные шипы. Шипы являются
средством противоскольжения гусениц на обледенелых дорогах.
К недостаткам данного трака следует отнести неудачную
форму его опорной поверхности, образующую замкнутые полости,
куда легко будет забиваться грунт.
Трак литой, облегченный, коробчатой формы, с двойной бего-
вой дорожкой.
ТРАК С НЕСИММЕТРИЧНЫМ РАСПОЛОЖЕНИЕМ
НАПРАВЛЯЮЩЕГО ГРЕБНЯ
На рис. 328 представлен трак гусеницы тяжелого немецкого
танка Т-VI («Тигр»), Особенностью трака является несимметрич-
ное расположение направляющего гребня, что позволяет значи-
тельно уширить гусеницу. Другой особенностью трака является
малое отношение шага трака к его ширине. В данном случае
-у = 0,18, что значительно ниже величин, приведенных в табл. 38.
490
Рис. 328. Трак с несимметричным расположением направляющего
гребня:
а — вид сбоку; б — вид сверху; в — вид снизу
ГУСЕНИЦА С УПРУГИМИ ШАРНИРАМИ
На танках, артиллерийских тягачах и снегоболотоходах амери-
канцы широко применяют гусеницы с упругими шарнирами.
На рис. 329 представлена конструкция упругого шарнира гу-
сеницы американского легкого и среднего танка периода второй
мировой воины.
Резиновые втулки 1 привулканизированы к пальцу 2 и запрес-
сованы вместе с пальцем в металлический каркас 3 трака. Каркас
заполнен резиной, таким образом, гусеницы обрезинены с вну-
тренней и с внешней стороны. По концам пальца имеются вырезы,
в которые входит соединительная планка 4. Соединительная
планка фиксируется хомутом 5. При повороте одного трака отно-
сительно другого резиновые втулки скручиваются. Чтобы разо-
брать гусеницу, надо снять хомут 5 и вынуть планку 4. Таким об-
разом, гусеница является разборной.
Для уменьшения деформации резиновых втулок шарниров
траки собирают под некоторым углом (примерно И —13°) один к
другому, т. е. гусенице дается предварительное искривление, при-
ближающее ее по форме к обводу.
Резиновые кольца, из которых состоит упругая втулка трака,
имеют специальную форму (рис. 330), обеспечивающую после за-
прессовки неравномерное распределение давления по поверхности
втулки; давление будет больше по краям втулки, где наиболее ве-
роятно отслаивание резины.
491
Рис. 329. Гусеница с упругими шарнирами:
а — вид сбоку; б — вид сверху; I — резинсвся втулке; 2
палец; 3—каркас трака; 4 — соединительная планка; 5
хомут
Рис. 330. Резиновые втулки упру-
гого шарнира
4S2
5. РАСЧЕТ НА ПРОЧНОСТЬ ШАРНИРОВ ТРАКОВ
В траках гусеничных цепей расчету на прочность подвергаются
шарниры траков — проушины и пальцы. Рассмотрим расчет про-
стых шарниров с плавающими пальцами.
ОПРЕДЕЛЕНИЕ НАГРУЗОК НА ПРОУШИНЫ
Прежде чем производить расчет шарнира на прочность, необхо-
димо определить нагрузки на проушины.
Рис. 331. Расчетная схема шарнира траков гусеницы:
а — схема шарнира; б — схема приложения нагрузок; Z — верхний
трак. 2 — нижний трак
Будем рассматривать палец как разрезную многоопорную
балку, каждый участок которой лежит свободно на двух опорах
(рис. 331). При этом консольными участками пренебрегаем.
Под действием растягивающей нагрузки палец деформируется.
Величина деформации должна быть одинаковой для всех участков
пальца, так как при растяжении один трак смещается по отноше-
нию к другому на одну и ту же величину f.
Стрела прогиба балки, лежащей на двух опорах и нагруженной
по краям сосредоточенными силами, определяется по формулам;
, /Д2 / . 36; \
J ЬЕ1 2 ) ’
где Pt и Р\ — нагрузка на средние проушины траков;
/ и /'— максимальный прогиб балки на участке между
опорой и близлежащей нагрузкой; эта величина и
493
будет равна перемещению одного трака по отно-
шению к другому (заметим, что в одном из тра-
ков (/) имеются крайние проушины, в которых па-
лец нагружается консольно; всем расчетным вели-
чинам, связанным с этим траком, условимся при-
писывать штрих);
с—торцовый зазор между проушинами (обычно
с = 0,5—2 мм);
bt и b'l—ширина проушин, мм\
Е— модуль упругости первого рода, кг/см2-,
I— момент инерции сечения пальца, см\
Обозначим
1
с + ~
Так как /" = 00451 и f'= const, то можем написать следующие
соотношения между нагрузками для обоих траков;
Р}:Р2-....:Р„^:Рп = В1:В2:...:В„^:Вп-,
Р 2- • • • • • ^п-1 = Bs:...: Вп1.
Кроме того, имеем
Pl + P2 + ... + Pn = p-
Р\+Р'2 + ... + Рп=.р,
где Р — сила, растягивающая траки.
Решая приведенную систему уравнений, получим формулы, по
которым определяются нагрузки на средние проушины
траков:
P^-t^-Bf; (280)
. Bi + В2
t=tl
Pl = -7^~-BtP, (281)
S Bt
494
Нагрузки на крайние проушины получим из равенств
(282)
При расчете принимаем Р = 0,65 G.
Пример. Определим нагрузки на проушины траков.
Дано: bt = b2 = 68 мм; bt = 45 мм; Ь> = 64 мм; = 45 мм; с = 2 мм;
Р — 5000 кг.
Решение. Bt = В, = ;
2 + —
R _ ‘ __!_•
2 “ 3-64 ~ 98 ’
2 + 2
1=2
2- Bt = 98 ’
/=2
Из формул (280), (281) и (282) получим:
^=^=«1 = 2500 .3;
2500
= 1250 кг.
Результаты вычислений проверяем на сумму сил:
t=n
Pt = Р-,
t=i
t=n
^p't=p-
1=1
В данном случае:
t=n
2 Д/ = Л + Л = 2500 + 2500 = 5000 кг;
f=l
t~n
^p't = Pi + Pi + P3 = 1250 + 2500 + 1250 = 5000 кг.
495
РАСЧЕТ ПАЛЬЦА НА ПРОЧНОСТЬ
Рассматриваем палец как неразрезную балку, лежащую на двух
опорах (рис. 332). Из рисунка имеем: Pt — нагрузка на проу-
шину, bt—ширина проушины, /z—расстояние между двумя проу-
шинами (/,= bt 4- 2с); Л1Г— реактивный момент отброшенной части
пальца.
Приближенно изгибающий мо-
мент определяется по формуле
м .= р, <283>
из < 8/. П-
Тогда напряжение изгиба бу-
дет
= (284)
где d — диаметр пальца.
Кроме того, палец проверяем
на срез. Напряжение среза определяется по формуле
т = 0,85 d-P .
’ аг
(285)
Допустимые напряжения: оиз = 500—800 ; т = 700—1200 ^2.
РАСЧЕТ ПРОУШИНЫ НА ПРОЧНОСТЬ
Проушина трака рассчитывается на разрыв. Максимальное
напряжение разрыва определяется по формуле Ляме и проверяется
по формуле Тимошенко.
Напряжение разрыва будет равно
а Ъ
р 2(7? —/-)£, ’
где R—радиус наружной поверхности проушины (рпс. 333);
г—радиус отверстия.
Допускаемые напряжения: ор = 300—400 •
Согласно формуле Ляме имеем
о =------± С2—. р. (287)
max 2(/?2 — r2)rbl
Исследования проф. Тимошенко показали, что между а' и
удельным давлением q = существует определен-
ная зависимость. Так, при — = 2
= 3,85. (288)
496
С увеличением у отношение —~~ уменьшается.
Формула (288) может давать значения о'па1[, значительно отли-
чающиеся от значений о полученных по формуле Ляме.
Рассмотрим числовой пример на определение напряжений в
пальце и проушине трака.
Рис. 333. Проушина трака
Пример. Д а н о: = 2500 кг-, b — 64 мм-, R = 20 мм-, г = 10 мм-, с = 2 мм.
Решение: определяем I = Ь 2с = 64 -|- 2 • 2 = 68 мм\ по формуле (283)
находим
6 82 — 6 42
/Пи:, = 2500 = 25 1 кг см.
О • 0,4
По формуле (284)
251
’из = -0 j-з = 317 кг/см2.
Напряжение на срез определяется по формуле (285)
т = 0,85 = 530 кг/см2.
22
Находим напряжения в проушине:
на разрыв:
2500 .
’₽ ~ 2(2 — 1)6,4 ~ ' ° лг/С'1'-’
по Ляме
(J
max
(22 + Р) 2500
2 (2= — I2) 1-6,4
= 326 кг/см2.
Проверяем максимальное напряжение по Тимошенко.
Имеем;
_R
г
2 „ 2500 1П= , ,
Т = 2; 4 = ТТбТ = 195 кг!см
Тогда согласно формуле (288)
а’ = 3,85<7 = 3,85-195 = 750 кг/см2.
111 d Л • '
Отсюда ’тах > ’max'
Как видим, ио формуле Тимошенко напряжение выше, чем по формуле Ляме.
Напряжения в пальце и в проушине лежат в допустимых пределах
32-20
497
6. ВЕДУЩИЕ КОЛЕСА
НАЗНАЧЕНИЕ И ТИПЫ ВЕДУЩИХ КОЛЕС
Ведущие колеса предназначаются для перематывания гусениц
и создания на них тягового усилия. Вместе с гусеницами ведущие
колеса образуют механизм, преобразующий вращательное движе-
ние конечного вала силовой передачи в поступательное движение
машины.
Ведущие колеса бывают трех типов:
1) с цевочным зацеплением;
2) с гребневым зацеплением'
3) с зубовым зацеплением.
Как уже отмечалось выше, в быстроходных гусеничных маши-
нах в настоящее время применяется главным образом цевочное за-
цепление.
Цевочное зацепление может быть нормальное и спе-
циальное. При нормальном зацеплении шаг ведущего ко-
леса I' принимают меньшим шага гусеницы /; в специальном зацеп-
лении, наоборот, шаг ведущего колеса делают на 1—5% больше
шага гусеницы.
В процессе работы машины шарниры траков и зубья ведущих
колес изнашиваются, причем шарниры изнашиваются быстрее
зубьев, поэтому шаг гусеницы увеличивается по сравнению с ша-
Рис. 334. Однорядное ведущее колесо Рис. 335. Двухрядное веду-
щее колесо
498
гом ведущих колес и специальное зацепление переходит в нормаль-
ное зацепление, т. е. устанавливается неравенство
Применение специального зацепления повышает срок службы
ведущего колеса.
При нормальном зацеплении передача окружного усилия с ве-
дущего колеса на гусеницу осуществляется несколькими зубьями,
при специальном зацеплении — одним зубом. Это перегружает
зубья ведущего колеса и способствует их быстрому износу. Кроме
того, если /'>/, гусеница может проскальзывать по ведущему ко-
лесу при торможении, а это в свою очередь может вызвать соска-
кивание гусеницы или даже поломку зубьев ведущих колес.
Ведущие колеса бывают с одним зубчатым венцом (одноряд-
ные), с двумя зубчатыми венцами (двухрядные), с необрезиненным
или обрезиненным ободом. Зубчатые венцы могут быть также
цельные или съемные.
В современных тягачах применяются однорядные и двухрядные
колеса с необрезиненным ободом со съемными венцами.
На рис. 334 показано однорядное ведущее колесо со съемным
венцом, а на рис. 335 — двухрядное ведущее колесо со съемными
венцами.
При однорядном зацеплении трак ослабляется вследствие нали-
чия на нем посредине цевочного отверстия, поэтому однорядное за-
цепление в тягачах применяется редко.
ОСНОВНЫЕ ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ К ВЕДУЩИМ КОЛЕСАМ
К ведущим колесам предъявляются три основных требования:
1) рабочие элементы колеса (зуб, ролик) должны быть износо-
устойчивыми;
2) ступица колеса не должна забиваться грязью или снегом;
3) вода и грязь не должны проникать к подшипникам ко-
леса.
1. При передаче тягового усилия зубья ведущих колес нагру-
жаются большими статическими и динамическими нагрузками, а
так как зубья обычно работают в условиях абразивного трения,
они быстро изнашиваются.
Стремление повысить срок службы ведущих колес, т. е. умень-
шить износ их рабочих элементов, и приводит к созданию различ-
ных типов зацепления. В роликовом зацеплении трение скольжения
заменяется трением качения, в зубовом зацеплении переходят от
контактной передачи тягового усилия к передаче тягового усилия
через опорную площадку.
В настоящее время для повышения срока службы зубчатых вен-
цов их изготовляют из специальных сталей (высокомарганцови-
стых). Так, в тягачах АТ-Т, АТ-С и АТ-Л зубчатые венцы изготов-
ляются из литой марганцовистой стали и подвергаются предвари-
тельному наклепу с помощью дробеструйного аппарата.
32*
499
2. При попадании в ступицу грязи или мокрого плотного снега
повышается сопротивление перематыванию гусеницы, так как на-
правляющие гребни траков врезаются в снег. При сильном заби-
вании ступицы возможно сбрасывание гусеницы с ведущего ко-
леса или даже разрыв гусеницы.
Чтобы грязь или снег не набивались в ступицу, в ней делаются
сквозные отверстия. Иногда на корпусе машины устанавливают
также специальные снего-грязеочистители, представляющие собой
укрепленный на кронштейне скребок.
3. Ходовая часть гусеничной машины работает в условиях по-
стоянного загрязнения. Кроме того, гусеничной машине часто при-
ходится преодолевать вброд водные преграды. Все подшипники хо-
довой части, в частности подшипники ведущего колеса, должны
тщательно уплотняться. В противном случае они будут быстро из-
нашиваться.
7. КОНСТРУКЦИИ ВЕДУЩИХ КОЛЕС
ВЕДУЩЕЕ КОЛЕСО ТЯГАЧА АТ-Т
Ведущее колесо тягача АТ-Т (см. рис. 283) состоит из ступицы
с двумя съемными венцами, закрепленными на фланцах болтами.
В ступице нарезаны шлицы, которыми она соединяется с ведомым
валом бортовой передачи. От осевого перемещения ведущее колесо
закрепляется пробкой, ввернутой в торец вала.
Ведущее колесо тщательно уплотнено. Уплотнение создается
несколькими уплотняющими устройствами. На специальном фланце
картера бортовой передачи надето на болтах штампованное кольцо,
которое своей наружной поверхностью прижимается к внутренней
поверхности ступицы. Кроме того, внутри ступицы установлены ла-
биринтное уплотнение, простой и самоподжимнои сальники.
В целях предохранения ступицы от забивания снегом или
грязью в ней сделаны окна, которые одновременно являются сред-
ством облегчения ведущего колеса.
ВЕДУЩЕЕ КОЛЕСО ТЯГАЧА АТ-С
Ведущее колесо тягача АТ-С (рис. 336) состоит из ступицы и
двух приклепанных к ней зубчатых литых венцов.
Ступица соединяется с ведомым валом бортовой передачи во-
семью болтами (см. рис. 284). Между телом ступицы и болтами
установлены конические втулки, которые центрируют ведущее ко-
лесо относительно оси ведомого вала бортовой передачи.
Так как зацепление в этом колесе зубовое, то зубьям венцов
придан специальный профиль.
Ведущее колесо имеет довольно сложную систему уплотнения, со-
стоящую из отражательного кольца, лабиринта, пружинных колец
500
и торцового или беззазорного
уплотнения. Последнее в свою
очередь состоит из двух притер-
тых один к другому стальных
колец, имеющих с торца концен-
тричные выточки треугольного
профиля; кольца прижаты одно
к другому пружиной.
Для предотвращения забива-
ния ведущего колеса снегом и
грязью в зубчатых венцах пред-
усмотрены окна.
ВЕДУЩЕЕ КОЛЕСО ТЯГАЧА АТ-Л
Рис. 336. Ведущее колесо тяга-
ча АТ-С
По своей конструкции веду-
щее колесо тягача АТ-Л анало-
гично ведущему колесу тягача
АТ-Т. Оно состоит из ступицы 15
(см. рис. 285) и двух съемных венцов 16. Ступица посажена на ве-
домый вал бортовой передачи и соединяется с ним шлицами. От
осевого смещения колесо удерживается специальным кольцом, за-
крепленным на торце ведомого вала бортовой передачи.
От попадания воды и грязи подшипники ведущего колеса защи-
щены глухой крышкой, установленной с наружной стороны колеса,
и уплотнением, установленным с внутренней стороны колеса.
Уплотнение состоит из лабиринта и самоподжимного сальника.
Для очистки от грязи и снега в ступице колеса имеются окна.
ВЕДУЩЕЕ КОЛЕСО С РАЗГРУЖЕННЫМ ВАЛОМ
Рассмотренные выше ведущие колеса монтируются непосредст-
венно на ведомом валу бортовой передачи, что, как известно, соз-
дает на валу изгибающую нагрузку. На рис. 337 представлено ве-
дущее колесо тяжелого танка, установленное на подшипниках на
кронштейне, вследствие чего вал бортовой передачи разгружен от
изгибающих усилий. Соединение вала с колесом осуществляется
блокировочным кольцом.
ОДНОРЯДНОЕ ВЕДУЩЕЕ КОЛЕСО
В легких гусеничных машинах иногда применяют однорядные
ведущие колеса, т. е. колеса с однорядным зацеплением (см. рис.
281). Как уже отмечалось выше, однорядное зацепление подвер-
жено большему износу, чем двухрядное; кроме того, при одноряд-
ном зацеплении ослабляются траки гусениц. Это зацепление имеет
и ряд других недостатков. Например, при однорядном зацеплении
траки имеют всегда два ряда направляющих гребней, так как по-
501
Рис. 337. Ведущее колесо тяжелого танка
502
ставить один направляющий гребень
посредине трака нельзя. Трак с двумя
направляющими гребнями тяжелее тра-
ка с одним направляющим гребнем.
Наконец, однорядное зацепление при-
водит к необходимости установки на
машине одинарных опорных катков.
Такие катки при движении машины по
неровностям местности позволяют опор-
ным ветвям гусениц скручиваться.
Однорядное зацепление в настоя-
щее время применяется очень редко.
ВЕДУЩЕЕ КОЛЕСО С ГРЕБНЕВЫМ
ЗАЦЕПЛЕНИЕМ
Между двумя штампованными ди-
сками, на которые надеты обрезинен-
ные бандажи, установлены на осях че-
тыре ведущих ролика 1 (рис. 338).
При вращении колеса ролики зацеп-
ляются за гребни траков и перематы-
вают .гусеницу (трак с гребнем на ри-
сунке показан пунктиром).
Ведущее колесо надето на ведомый
вал бортовой передачи и закреплено
от осевого смещения крышкой 2 и
струной 3.
Так как при гребневом зацеплении
на траки действует выворачивающий
момент и происходит удар траков об
обод колеса, что вызывает шум пере-
матываемых гусениц, то в данной кон-
струкции применяются обрезиненные
бандажи.
Рис. 338. Ведущее колесо
с гребневым зацеплением:
Z — ролик; 2 — крышка; 3 — струна
У траков с гребным зацеплением гребень высокий. Это увеличи-
вает вес гусениц.
В настоящее время гребневое зацепление полностью вытеснено
цевочным зацеплением.
8. РАСЧЕТ ЦЕВОЧНОГО ЗАЦЕПЛЕНИЯ ВЕДУЩЕГО КОЛЕСА
Задачей расчета является определение профиля зубь-
ев и их прочностных размеров.
Профилирование зубьев ведущих колес цепных передач стан-
дартизовано (ГОСТ 591—41 и 592—41). Для зубьев ведущих ко-
лес устанавливаются два профиля: выпуклый — для колес, имею-
щих 9—19 зубьев, и прямолинейный — для колес, у которых
больше 19 зубьев.
503
В тягачах обычно у венцов имеется 13—15 зубьев, поэтому
зубья должны иметь выпуклый профиль.
Рассмотрим один из способов профилирования зуба.
ПРОФИЛИРОВАНИЕ ЗУБА
Определяем шаг трака гусеничной цепи по формуле
7 0-9
I — 2r.. sin =-,
к 2 ’
где гк- радиус ведущего колеса по начальной окружности — вели-
чина заданная;
я - /я 360 /
0 — центральный угол (0 = —^—у;
z— число зубьев ведущего колеса.
Шаг ведущего колеса I' принимают несколько большим шага
трака гусеницы /, так как по мере работы гусеницы шарниры изна-
шиваются и шаг гусеницы увеличивается.
В выполненных конструкциях/'выбирается на 1—5% большим/
или
/' = (1,01 — 1,05)/.
Далее построение профиля зуба проводим в такой последова-
тельности (рис. 339):
1) из произвольно взятого центра проводим дугу окружности
радиуса гк;
2) на дуге откладываем хорду аб, равную шагу трака /;
504
3) из точки а и б проводим окружность диаметром цевки
0,3 /;
4) откладываем на дуге радиуса /у точку 6j так, чтобы расстоя-
ние бб, равнялось 1—5% от /;
5) из точки б, радиусом I проводим дугу 1—1, а из точки а ра-
диусом (0,9—1,2) d— дугу 2—2; получаем точку т;
6) из точки т радиусом /—0,5cf проводим дугу 3—3, а из точ-
ки а тем же радиусом — дугу 4—4; в пересечении обеих дуг полу-
чаем точку п;
7) соединяем точки п и а; в пересечении с окружностью цевки
получим точку г; из точки п радиусом пг проводим дугу гв;
8) радиусом г = гк + (0,8—1,2) d проводим дугу, которая с
дугой гв определит положение точки в; дуга гв есть профиль го-
ловки зуба;
9) откладываем на продолжении линии аг точку е (ег = 0,6 d);
соединяем эту точку с центром колеса; проводим из точки е дугу
радиусом ее; получаем точку к; точка к определяет внутренний ра-
диус колеса /у; кроме того, определяется профиль ножки зуба (ду-
га кг); таким образом, одна сторона профиля зуба построена.
10) чтобы построить другую сторону профиля зуба, поступаем
следующим образом: накладываем кальку на полученный профиль
зуба и переносим профиль на кальку; перевернем кальку и пере-
несем профиль на чертеж; получим другую сторону профиля зуба
(пунктирная линия).
Ширина зуба по дуге центров цевок не должна выходить за-ире-
делы (0,3—0,4) I.
РАСЧЕТ ЗУБА ВЕДУЩЕГО КОЛЕСА НА ПРОЧНОСТЬ
Расчет зуба производится на изгиб по формуле Баха и на кон-
тактное напряжение по формуле Герца.
Допустим, что зуб ведущего колеса изгибается силон Р (рис.
340), приложенной к его вершине, Тогда напряжение изгиба опре-
делится по формуле
= (289)
где IF—момент сопротивления у основания зуба;
(290)
где Р — толщина зуба в см;
а—ширина зуба в см.
Кроме расчета на прочность, зуб следует проверить па контакт-
кое напряжение по формуле
1/ NE ~~ гп + Rn
г Ь ГцА’п ’
(291)
505
Рис. 340. Зуб ведущего
колеса
Расчетную силу Р
где
cos у ’
(292)
Р— окружное усилие на зубе;
у— угол давления;
Ь— толщина зуба;
Е— модуль упругости первого рода;
ru— радиус цевки;
/?п— радиус профиля зуба.
Все геометрические параметры зуба опре-
деляются из построения (см. рис. 339).
принимаем равной 0,65G, где1 G—полный
вес тягача.
Допустимые напряжения сИз = 4000— 5000 кг/см2-, ссм =
= 20000 —25 000 кг/см2.
9. ОПОРНЫЕ КАТКИ
НАЗНАЧЕНИЕ И ТИПЫ ОПОРНЫХ КАТКОВ
Опорные катки служат для поддержания
направления его движения по гусеницам.
Катки бывают:
1) одинарные и парные;
2) с наружной и внутренней амортиза-
цией и без амортизации;
3) малого и большого диаметра.
Одинарные катки (рис. 341, а) имеют
более простую конструкцию, чем парные
(рис. 341,6). Это упрощает и облегчает хо-
довую часть. Однако при применении пар-
ных катков опорная ветвь гусеницы меньше
скручивается при наезде на неровности до-
роги. Кроме того, у парных катков больше
площадь беговой дорожки, а следователь-
но, больше ширина резинового бандажа.
Удельное давление на бандаж в этом случае
будет меньше и бандаж будет работать в
лучших условиях.
На рис. 341 показаны опорные катки с
наружной амортизацией.
Опорный каток с наружной амортиза-
цией состоит из ступицы с подшипниками,
металлических ободов и надетых на ободы
резиновых бандажей.
В тяжелых гусеничных машинах, когда
нагрузка на опорные катки велика, приме-
няют катки с внутренней аморти-
зацией (рис. 342).
корпуса машины и
Рис. 341. Опорный ка-
ток с наружной аморги-
зацией:
а — одинарный; б — парный
506
Каток с внутренней амортизацией устроен следующим образом.
В выточке металлического обода уложены два резиновых кольца,
которые снаружи сжаты двумя металлическими дисками. Диски
закреплены на ступице на шпонках. Давление со стороны ступицы
на обод передается через резиновые кольца, благодаря чему про-
исходит амортизация катка.
Так как в данном катке одновременно работает больший объем
резины, чем в катке с наружной амортизацией, то нагрузку на ка-
ток здесь можно допускать большую.
Рис. 342. Опорный каток с
внутренней амортизацией;
1 — резиновое кольцо; 2 —ступица
Рис. 343. Ходовая часть гусеничной
машины с опорными катками большого
диаметра
В тихоходных сельскохозяйственных тракторах, а также в быст-
роходных тяжелых машинах иногда полностью отказываются от
амортизации опорных катков.
Под катками малого диаметра условимся понимать та-
кие катки, которые не вписываются полностью в гусеничный обвод,
при этом для поддержания верхней ветви обвода следует устанав-
ливать поддерживающие катки. При опорных катках большого
диаметра (рис. 343) поддерживающие катки не требуются.
ОСНОВНЫЕ ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ К ОПОРНЫМ
КАТКАМ
Опорные катки должны удовлетворять следующим основным
требованиям:
1) амортизировать удары, приходящиеся на ходовую часть ма-
шины при ее движении, и заглушать шум перематываемых гусениц;
2) при наличии амортизирующей резины последняя не должна
перегреваться при движении машины;
3) работать даже в том случае, если резиновый бандаж от-
слоится от металлического обода;
4) иметь надежное уплотнение;
5) быть легкими;
6) воспринимать значительные боковые усилия, возникающие
со стороны гусеницы при повороте машины.
Остановимся на этих требованиях подробнее.
1. При наличии амортизации опорных катков уменьшаются
507
ударные нагрузки, приходящиеся на гусеницу, и особенно на под-
шипники катков, и тем самым увеличивается их срок службы.
При отсутствии амортизации катки, перекатываясь по гусенице,
создают сильный шум.
2. При качении катка резиновый бандаж (или резиновое коль-
цо) получает периодическое сжатие. Вследствие большого внутрен-.
____________ него трения, которое имеет рези-
Ж7
Рис. 344. Опорный каток:
Z — ступица; 2 — резиновый бандаж; 3 — гре-
бень трака
4. Уплотнение подшипников
на, внутри бандажа выделяется
тепло. Бандаж нагревается и мо-
жет отслоиться от ступицы или
даже расплавиться.
Резиновые бандажи поэтому
следует рассчитывать на
нагрев,
3. Опорный каток должен ра-
ботать (а машина должна иметь
возможность двигаться) даже при
полном отслоении резинового бан-
дажа.
Это требование будет выпол-
нено, если зазор между гребнем и
ступицей будет больше высоты Н
(рис. 344). В противном случае
при отслоении бандажа каток бу-
дет наезжать на гребни траков и
машина не сможет двигаться.
опорных катков должно быть на-
дежным, так как по сравнению с другими узлами движителя опор-
ные катки наиболее подвержены загрязнению. Уплотнение не
должно допускать проникновения к подшипникам качения даже са-
мого небольшого количества воды или грязи. Вода вымывает кон-
систентную смазку подшипников и вызывает их коррозию; загряз-
нение же подшипников приводит к их быстрому разрушению.
5. Чем легче опорный каток, тем меньше динамические нагруз-
ки, приходящиеся на ходовую часть машины, тем больше будет
срок ее службы.
6. При повороте машины гусеницы получают поперечное сме-
щение, которое через опорные катки передается на раму, На опор-
ные катки при этом действуют большие осевые силы, воспринимае-
мые подшипниками катков. При расчете и установке подшипников
эти осевые силы должны учитываться.
10. КОНСТРУКЦИИ ОПОРНЫХ КАТКОВ
ОПОРНЫЙ КАТОК ТЯГАЧА АТ-Т
Опорный каток тягача АТ-Т (рис, 345) парный, большого диа-
метра, с наружной амортизацией. Ступица катка литая, с ребрами.
Па ступицу папрессов.'шы и приварены металлические ободы с ре-
зиновыми бандажами.
508
Каток посажен на ось балансира на двух шарикоподшипниках.
Подшипники запрессованы в стуципу и закреплены на оси балан-
сира гайкой.
С наружной стороны каток закрыт глухой крышкой; с внутрен-
ней стороны имеется уплотнение лабиринтного типа и самоподжим-
ной резиновый сальник. Конструкция катка облегченная.
ОПОРНЫЙ КАТОК ТЯГАЧА АТ-С
На ряс. 346 показаны балансир-
ная тележка тягача АТ-С и разрез
по оси одного из опорных катков.
Каток без амортизации, литой,
одинарный, малого диаметра.
На оси тележки каток установ-
лен на двух подшипниках: шарико-
вом и роликовом. Установка роли-
коподшипника объясняется нали-
чием больших динамических нагру-
зок, которые испытывает иеобрези-
неиный каток. Шарикоподшипник
служит для восприятия как радиаль-
ных, так и осевых нагрузок,
С внутренней стороны опорного
катка имеется торцовое уплотнение;
с наружной стороны каток закрыт
крышкой.
Торцовое уплотнение состоит из
Рис. 345. Опорный каток тяга-
ча АТ-Т
двух притертых одно к другому за-
каленных стальных колец. Кольца
прижаты одно к другому спираль-
ной пружиной, закрытой снаружи
резиновой манжетой. Одно из колец неподвижно, другое вращается
вместе с катком.
Чтобы в уплотнение не попадали крупные частицы, которые мо-
гут повредить резиновую манжету пружины, имеется дополнитель-
ное лабиринтное уплотнение.
Применение торцового уплотнения позволило использовать в
ходовой части тягача АТ-С более жидкую смазку.
Торцовые уплотнения узлов ходовой части находят все большее
распространение в гусеничных машинах.
Особенностью рассматриваемых катков является наличие у них
грязеочистителей (скребков). К кронштейну оси тележки прива-
рены две пластинки, которые очищают опорные поверхности кат-
ков от грязи и снега.
Следует заметить, что отсутствие амортизации в опорных кат-
ках тягача АТ-С нельзя считать типичным для быстроходных гусе-
ничных тягачей].
509
510
Рис. 346. Балансирная тележка тягача АТ-С:
а — балансирная тележка; б — опорный каток' (разрез)
6
Рис. 347. Опорный каток тягача АТ-Л
511
ОПОРНЫЙ КАТОК ТЯГАЧА АТ-Л
Опорный каток тягача АТ-Л малого диаметра, одинарный, ли-
той, со спицами (рис. 347). Поверхность катка обрезинена. Каток
установлен на двух шарикоподшипниках. Ступица с наружной сто-
роны закрыта глухой крышкой, с внутренней уплотнена лабирин-
том и самоподжимным сальником.
ОПОРНЫЙ КАТОК ТЯГАЧА М-2
На рис. 348 представлен одинарный опорный каток тягача М-2.
Он состоит из двух тонких штампованных дисков тарельчатой
формы, приваренных с одной стороны к ступице катка, а с дру-
гой — к металлическому ободу. К ободу катка привулканизирован
резиновый бандаж. Для более плотного соединения бандажа с обо-
дом в теле обода имеются специальные выточки. В ступице со сто-
роны балансира имеется уплотнение, состоящее из самоподжимного
сальника и отражательной крышки, образующей лабиринт.
Следует отметить, что в конструкции тягача АТ-П, который соз-
давался после тягача М-2, самоподжимные сальники заменены
торцовым уплотнением. В эксплуатации такое уплотнение оказа-
лось более надежным.
11. РАСЧЕТ РЕЗИНОВОГО БАНДАЖА ОПОРНОГО КАТКА
НА УДЕЛЬНОЕ ДАВЛЕНИЕ И НАГРЕВ
РАСЧЕТ НА УДЕЛЬНОЕ ДАВЛЕНИЕ
От величины удельного давления резинового бандажа на неде-
формирующуюся плоскость гусениц в известной мере зависит сте-
пень нагрева резины. Чем больше удельное давление, тем сильнее
сжимается резина, тем больше тепла выделяется в бандаже.
Для определения удельного давления должны быть известны
площадь отпечатка резины на плоскость беговой дорожки трака и
нагрузка на каток (рис. 349).
Согласно формуле Герца
/0 = 1,52 ,, (293)
где /0 — длина отпечатка на плоскость трака в см\
D— наружный диаметр катка в см-,
b— ширина резинового бандажа у опорной поверхности в см\
Q—нагрузка на бандаж в кг-,
Е—модуль упругости резины в кг/см 2.
Среднее удельное давленье q ель огиошеппе радиальной па-
512
грузки Q на бандаж к площади от-
печатка Ыо. Тогда
<7 = 0,66]/-^-. (294)
Здесь модуль упругости для
резины можно принимать Е —
= 100 кг/см2.
В табл. 40 приведены значения
удельного давления для опорных
катков, подсчитанные по формуле
(294).
Рис. 349. Схема резинового бан-
дажа
Таблица 40
Параметры резиновых бандажей опорных катков
Вес машины, кг Максимальная скорость, км) час Q, кг D, мм Ь, мм q, кг/см2
3 000 35 350 530 60 6,8
8 000 30 . 250 305 51 8,2
13 000 72 820 830 82 7,2
40 000 40 1750 950 120 8,1
2 800 45 230 240 60 8,2
9 000 35 900 515 112 8,3
Из табл. 40 следует, что удельное давление лежит в довольно
узких пределах (7—8 кг/m2). Эту величину удельного давления
и следует брать при расчете резинового бандажа.
Пример, Определим удельное давление на резиновый бандаж опорных катков
тягачей М-2 и АТ-Т.
Для тягача М-2: G = 9000 кг; D = 515 льи; Ь — 112 мм; число опорных кат-
ков 2л = 10; катки одинарные.
Для тягача АТ-Т: 0 = 25 000 кг; D = 830 мм; 2Ь = 225 мм; число опор-
ных катков 2л = 10; катки парные.
Нагрузку на каток принимаем равной весу машины, деленному на число
катков.
Тогда
Q АТ-Т
25000
10
= 2500 кг.
Задаемся
ляем:
модулем упругости Е — 100 кг;сл{-. По формуле (294) опреде-
. п/ уЛ-юо о_ , ,
?М-2 = °>66 J/ Ji 2.51 5 = 8>3 кг/см1;
nKR 2500-100 7 С , ,
?Ат-т = °-66 У -22 5.83~ = 7’6 кг/см
33—20
513
РАСЧЕТ НА НАГРЕВ
Q
Рис. 350. Деформа-
ция резинового бан-
дажа при качении
При расчете бандажа на удельное давление не учитываются
многие факторы, имеющие важное значение при работе бандажа и
влияющие на его тепловой режим.
Так, при расчете не учитывается высота бандажа, характер теп-
лоотдачи, а также такой важный фактор, как скорость качения
катка, или, что то же самое, скорость движения машины.
Влияние этих факторов может быть учтено
в предлагаемом ниже методе расчета бандажа
на нагрев.
Теплообразование в бандаже происходит
вследствие перехода работы внутреннего тре-
ния резины в тепло. Величина выделяющегося
в единицу времени тепла зависит от свойств
данного сорта резины, жесткости бандажа и
скорости качения катка.
При качении катка по беговой дорожке ра-
боту деформации в каждый данный момент
совершает участок резины, расположенный под
осью катка (участок а на рис. 350). В следую-
щий момент этот участок выходит из-под оси катка (положениеб)
и резина-распрямляется. За время сжатия и распрямления резины
выделяется некоторое количество тепла. Это тепло частично от-
дается в окружающую среду (в воздух, в гусеницу, в ступицу),
пока рассматриваемый участок вновь не окажется под осью катка.
В наступившем вновь периоде сжатия теплоотдача продолжается,
но бандаж получает новую порцию тепла и т. д.
Если в период сжатия бандажа теплообразование больше, чем
теплоотдача, то температура бандажа увеличивается. По мере на-
грева бандажа интенсивность теплоотдачи увеличивается как ре-
зультат увеличившегося перепада температур между бандажом и
окружающей средой. Через некоторое время установится тепловое
равновесие (если до этого бандаж не разрушится), т. е. от бандажа
будет отводиться в окружающую среду столько тепла, сколько к
нему подводится.
Па рис. 351 приведен опытный график повышения температуры
в резиновых бандажах опорных катков.
График получен испытанием катков на барабанном стенде. Тем-
пература внутри бандажа замерялась игольчатой термопарой, вво-
димой внутрь резинового массива на среднем диаметре бандажа.
Окружная скорость бандажа составляла 30 км/час, удельное дав-
ление на бандаж <7 = 11 кг/см'1, Испытания проводились при тем-
пературе окружающего воздуха 18° С. Бандажи были изготовлены
из натурального каучука. •
На графике по оси абсцисс отложено время работы бандажа в
часах, по оси ординат — температура внутри бандажа в °C и твер-
дость резины бандажа по Шору.
Бандажи I и II проработали 8 часов, после чего отслоились
514
от металлического обода.
Бандажи III и IV прора-
ботали всего 2 часа и так-
же отслоились,
Из графика следует,
что для испытываемых
бандажей установивший-
ся тепловой режим насту-
пил примерно через 30—
60 минут работы, после
чего температура, достиг-
нув 100—120° С, переста-
ла повышаться.
Теплоотдача бандажа
зависит от следующих
факторов: перепада тем*
ператур внутри и снару-
жи бандажа, величины
поверхности охлаждения,
свойств резины, формы
Рис. 351. Опытный график повышения тем-
пературы в резиновых бандажах опорных
катков (по данным автора)
бандажа и массы металлической ступицы.
На рис. 352 показаны изотермы (линии постоянных температур)
в массиве резинового бандажа, полученные также опытным путем.
Из рассмотрения изотерм можно сделать следующие выводы:
1. Наиболее интенсивно отдает тепло опорная поверхность бан-
дажа. Боковые поверхности бандажа отдают меньше тепла. Дейст-
вительно, изотермы, пересекающие опорную поверхность, показы-
вают примерно 14° С, а боковые поверхности — 32° С. Это является
следствием того, что опорная поверхность соприкасается с метал-
лическою поверхностью траков и отдает им свое тепло. Боковая же
поверхность отдает тепло воздуху.
2. Еще меньше тепла отдается в ступицу: поверхность ступицы
пересекает изотерма, показывающая 54° С.
Причиной плохого отвода тепла в массу ступицы является, во-
первых, меньшая площадь поверхности теплоотвода и изолирующие
свойства рогового слоя, который отделяет резину от металла сту-
пицы (этот слой служит для лучшего соединения бандажа со сту-
пицей) .
3. Очаг наибольшей
температуры лежит на оси
симметрии бандажа бли-
же к ступице катка в зо-
не, ограниченной изотер-
мой 62°.
В зависимости от мас-
сы ступицы и ее формы
положение очага макси-
мальной температуры ме-
няется. Катки большого
зз ‘
515
диаметра с массивной ступицей имеют очаг максимальной темпе-
ратуры, смещенный к опорной поверхности бандажа или находя-
щийся примерно посредине сечения бандажа.
Значительное влияние на теплоотдачу оказывает высота рези-
нового массива. Чем ниже эта высота, тем лучше теплоотдача, так
как очаг максимальной температуры лежит ближе к опорной по-
верхности и к ступице катка. Кроме того, в таком бандаже меньше
теплообразование, так как бандаж жестче, а жесткий бандаж
меньше деформируется.
Резиновые бандажи в опорных катках машин старых марок (до-
военного времени) имели относительную высоту массива по отно-
шению к диаметру катка до 25%. В настоящее время относитель-
ная высота массива снижена более чем в два раза и не превосхо-
дит 12%.
Значения относительных высот резинового бандажа составляют;
для тягача М-2 — 8%; для тягача АТ-П *- 7%; для тягача АТ-Т —
7%; для тагача АТ-Л—-9%.
Следует иметь в виду, что с уменьшением высоты бандажа по-
вышается жесткость резины и увеличиваются напряжения в ре-
зине, вследствие чего в резиновом массиве могут появиться тре-
щины. Таким образом, снижать высоту бандажа ниже определен-
ного предела нельзя.
Расчет бандажа на нагрев рекомендуем вести по следующей
формуле температурного перепада:
M=~Qu, (295)
где AZ—перепад температур между максимальной температурой
внутри резинового бандажа (Zmax) и температурой окру-
жающего воздуха (t0); тогда
= + ' (296)
k—коэффициент, определяющий влияние геометрических па-
раметре в бандажа и положение очага максимальных тем-
ператур ; этот коэффициент можно определить по следую-
щей эмпирической формуле:
4=-К£[°’5-7ГТжЬ ТО
н 1 ;
где а — коэффициент, характеризующий положение очага макси-
мальной температуры; в первом приближении согласно
опытньим данным можно принять среднее значение этого
коэффициента равным 0,555;
Q— нагрузк а в кг, приходящаяся на бандаж;
516
v—скорость движения машины в км/час-,
А ,
-jj— относительная высота бандажа.
Из формулы (295) следует, что нагрев бандажа прямо
пропорционален скорости движения машины (и)
и нагрузке на каток (Q) и обратно пропорциона-
лен ширине бандажа (b).
Формула (295) проверялась на бандажах, имевших относитель-
ную высоту резинового массива h -.D=l—12%; диаметр D ~
— 300 — 800 мм; относительную ширину-^-= 10 — 20%; нагрузку
на бандаж Q — 250—750 кг и скорость движения машины и — 20 —
— 70 км/час.
Перепад температур Д/ можно выразить через удельное давле-
ние q. Для этого определим из формулы (294) величину Q и под-
ставим ее в формулу (295). При этом примем Е — 100 кг/см 2.
После соответствующих преобразований получим
Lt = 0,023kDq2v. (298)
Отсюда следует, что температура нагрева бандажа
есть к в а др а тич н аяфункция удельного давления.
Температура плавления резины около 120° С. Максимальная
температура воздуха может достигать 40 и даже 50° С. Тогда пе-
репад температур, при котором произойдет разрушение бандажа,
составит примерно 70—80° С. Допустимый перепад следует при-
нять порядка 50—60° С. Больший перепад можно допускать при
расчете на максимальную скорость движения, предполагая, что на
этой скорости машина будет двигаться недолго. В этом случае пе-
репад можно допустить порядка 70—75° С.
Пример. Определим температурный перепад в резиновом бандаже опорных
катков тягача М-2, если Q = 9000 кг; V = 35 км/час, А : D = 0,078; А =112 мм.
Решение; Определяем коэффициенты: А = 1 — 2 • 0,555 • 0,078 = 0,914; В =
= 1 — 2 • 0,078 = 0,844.
Отсюда
k = 1 - 0.9HI Го ч 2'0.9142 1 _ о пов
Тогда получаем
1— 0,8442 L (1+0,914)2
. , 0,026-900-35
Д/ =------------= 73.
перепад можно считать нормальным.
Температурный
На рис. 353 представлена номограмма для определения темпе-
ратурного перепада в резиновом бандаже опорных катков.
Номограммой пользуемся следующим образом. .Откладываем на
оси абсцисс нагрузку Q. Из точки, характеризующей данную на-
грузку, проводам перпендикуляр до пересечения с лучом соответ-
ствующей скорости V. Получим точку а. Проводим через эту точку
:517
tn
>—к ’
co:
Рис. 353. Номограмма к расчету резиновых бандажей на нагрев
прямую, параллельную оси абсцисс, до пересечения с лучом h : D.
Получим точку б. Восстанавливаем из этой точки перпендикуляр до
пересечения с лучом Ь. Получаем точку в, ордината которой и дает
значение температурного перепада
На номограмме в качестве примера определен температурный
перепад для следующих расчетных данных: Q — 800 кг; v —
= 20 км/час; h:D = 7%; b = 60 мм. Из номограммы получаем
Д^ = 61°С.
12. НАПРАВЛЯЮЩИЕ КОЛЕСА И МЕХАНИЗМЫ НАТЯЖЕНИЯ
ГУСЕНИЦ
НАЗНАЧЕНИЕ И ТИПЫ
Направляющее колесо служит для направления вращения гусе-
ницы и для изменения ее натяжения при износе, замене траков или
при изменении условий эксплуатации машины.
Натяжение или ослабление гусеницы достигается перемеще-
нием оси направляющего колеса с помощью специального меха-
низма— механизма натяжения. Направляющее колесо и меха-
низм натяжения представляют собой один агрегат. В дальнейшем
мы будем рассматривать оба устройства как одно целое и назы-
вать это устройство механизмом натяжения.
Механизмы натяжения бывают следующих трех типов:
1) кривошипного; 2) салазочного и 3) телескопического.
Кроме того, различают механизмы с ручным и механическим
приводом.
В сельскохозяйственных тракторах применяются еще меха-
низмы натяжения с пружинной амортизацией.
В механизме натяжения направляющее колесо может быть
приподнято над грунтом или может опираться на грунт. В послед-
нем случае направляющее колесо, кроме своего прямого назначе-
ния, выполняет также роль опорного катка машины. Такое на-
правляющее колесо называют несущим.
Рассмотрим различные типы механизмов натяжения.
На рис. 354 представлен механизм натяжения кривошипного
типа с ручным приводом. Он состоит из направляющего колеса,
кривошипа и фиксирующего устройства.
Натяжение или ослабление гусеницы осуществляется поворо-
том (в данном случае с помощью рычага)' кривошипа 6; затем по-
ложение кривошипа фиксируется. Для этого вводится в зацепле-
ние зубчатое соединение 3, устроенное на торце кривошипа, и за-
тягивается крепежная гайка /.
Зубчатое соединение, кроме того, воспринимает динамические
нагрузки, возникающие в гусеничном движителе при движении ма-
шины, и, следовательно, разгружает от этих усилий крепежную
гайку (или другое фиксирующее устройство).
Механизм с ручным приводом применяется в легких гусенич-
ных машинах,
519
Рис, 354. Механизм натяжения гусениц
кривошипного типа с ручным приво-
дом:
1 — крепежная гайка; 2 — ось кривошипа; 3 —
зубчатое соединение; 4 — направляющее колесо;
5 — ось направляющего колеса; 6 — кривошип
Рис. 355. Механизм натяжения гу-
сениц с червячным приводом:
1 — червяк; 2 — червячное колесо; 3 — криво-
шип; 4 — направляющее колесо
На рис. 355 показан механизм натяжения с червячным
приводом. Червяк служит для поворота кривошипа (после того
как будет освобождено зубчатое соединение). В остальном устрой-
ство механизма то же, что и механизма, рассмотренного выше.
На рис. 356 представлен механизм натяжения кривошипного
типа с винтовым приводом.
К кривошипу шарнирно присоединен винт; такой же винт уста-
новлен на корпусе машины. Винты имеют левую и правую резьбу.
Рис. 356. Механизм натяжения гусе-
ниц с винтовым приводом:
1 — кривошип; 2 — гайка; 3 — винт
На винты надета гайка (также с
левой и правой резьбой). При вра-
щении гайки винты ввертываются
в гайку или вывертываются из
нее, вследствие чего кривошип по-
ворачивается и ось направляюще-
го колеса перемещается. Винты
самотормозящиеся, поэтому они
одновременно служат и фикси-
рующим устройством.
В данном механизме динами-
ческие усилия воспринимает сам
винтовой привод.
На рис. 357 показан меха-
низм натяжения салазочного
типа.
В прорези направляющей ра-
мы 2 перемещается ось направля-
ющего колеса /. С обоих концов
оси надеты ползуны с зубьями.
Такие же зубья имеет и рама.
520
Ползуны связаны с направляющей рамой натяжными винтами 5.
Если вывести ползуны из зацепления с рамой, то вращением гаек
натяжных винтов можно перемещать ось направляющего колеса,
Затем положение оси фиксируется зубчатым соединением 3.
Назначение зубчатого соединения принципиально то же, что
и в механизмах, представленных на рис. 354 и 355.
Рассматриваемое направляющее колесо является несущим.
Несущее колесо подрессоривается.
Рис. 357. Механизм натяжения гусениц салазоч-
ного типа:
7 — направляющее колесо; 2 — направляющая рама; 3 — зуб-
чгтое соединение; 4 — крепежная гайка; 5 — натяжной вннт
В крупнозвенчатых гусеничных обводах, например в сельскохо-
зяйственных тракторах, проявляется большая неравномерность
движения обвода. Вследствие этого в обводе возникают значитель-
ные динамические нагрузки. При попадании в обвод посторонних
предметов динамические нагрузки еще больше возрастают и мо-
гут достичь величины, опасной для прочности движителя.
Чтобы ограничить возрастание динамических нагрузок, в меха-
низм натяжения вводится специальное амортизирующее
устройство (рис. 358),
Здесь с кривошипом 1 через шарнир 2 связана направляю-
щая 3, в которой установлен шток 4. На резьбу штока навинчена
гайка 5. Гайка упирается во вторую направляющую 6. Между на-
правляющими 3 и 6 установлена спиральная пружина 7. Гайкой 5
в пружине создается предварительный натяг. Шток 4 вращением
гайки 8, установленной в сферической опоре 9, может переме-
щаться и поворачивать кривошип. При этом пружина 7 не рабо-
тает, а усилие от штока 4 передается через направляющую 3 на
кривошип 1.
Если нагрузка на направляющее колесо превысит расчетную, то
пружина сожмется и дальнейшее увеличение нагрузки будет огра-
ничено. Таким образом, пружина выполняет роль амортизатора
динамических нагрузок, возникающих в гусеничном движителе.
В быстроходных гусеничных машинах пружинные амортиза-
521
Рис. 358. Механизм натяжения гусениц с амортизирующей пружи-
ной (трактор СТЗ-З):
I — кривошип; 2 — шарнир; 3 — направляющая; 4 — шток; 5 — гайка; 6 — направляю-
щая; 7 — пружина; 8 — гайка со сферической опорой; 9— сферическая опора
торы не применяют, так как здес^ гусеницы мелкозвенчатые и их
неравномерность движения вполне компенсируется упругостью са-
мого гусеничного обвода, которая создается вследствие наличия
в обводе свободно провисающих ветвей.
ОСНОВНЫЕ ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ К МЕХАНИЗМУ
НАТЯЖЕНИЯ ГУСЕНИЦ
Механизм натяжения должен удовлетворять следующим основ-
ным требованиям:
1) обеспечивать нужный натяг гусениц; при этом натяжение
гусениц должно осуществляться вручную;
2) гусеницы должны фиксироваться в натянутом положении;
3) привод механизма, особенно, в тяжелых машинах, должен
быть разгружен от динамических усилий, возникающих в работаю-
щем гусеничном движителе;
4) подшипники направляющего колеса должны быть защи-
щены от воды и грязи.
13. КОНСТРУКЦИЯ и РАСЧЕТ МЕХАНИЗМА НАТЯЖЕНИЯ
ГУСЕНИЦ
МЕХАНИЗМ НАТЯЖЕНИЯ ГУСЕНИЦ ТЯГАЧА АТ-С
Механизм натяжения гусениц тягача АТ-С принадлежит к
типу кривошипных с винтовым приводом (рис. 359).
522
Разрез по ЯВСД
ел
со
Рис. 359. Механизм натяжения гусениц тягача АТ-С
Устройство механизма следующее. В шаровой опоре установ-
лена гайка, которая навертывается на конец винта. Винт через па-
лец связан с вилкой, посаженной на шлицы оси кривошипа. Ввер-
тывая или вывертывая гайку, поворачивают кривошип и тем самым
перемещают ось направляющего колеса.
В механизме имеется фиксирующее устройство. Оно состоит из
собачки, которая своим скошенным концом утапливается в отвер-
стие гайки, благодаря чему гайка может вращаться только в одну
сторону — в сторону, соответствующую натяжению гусеницы. Что-
бы можно было отпустить гусеницу, т. е. вращать гайку в обрат-
ную сторону, необходимо фиксатор вывести из отверстия в гайке.
Фиксатор не предохраняет механизм натяжения от динамиче-
ских нагрузок. Последние воспринимаются винтовым приводом.
Направляющее колесо литое. Подшипники направляющего ко-
леса имеют торцовое уплотнение.
МЕХАНИЗМ НАТЯЖЕНИЯ ГУСЕНИЦ ТЯГАЧА АТ-Л
Механизм натяжения гусениц тягача АТ-Л представляет собой
механизм с кривошипом и с винтовым приводом (рис. 360). На
конце натяжного винта имеется шестигранник. После того как гу-
Рис. 360. Механизм натяжения гусениц тягача АТ-Л
сеница натянута, закрывается крышка, с внутренней стороны ко-
торой приварена планка с вырезом под шестигранник натяжного
винта. Эта планка и является фиксатором механизма натяжения.
В данном механизме, как и в предыдущем, требование 3 не вы-
полняется.
МЕХАНИЗМ НАТЯЖЕНИЯ ГУСЕНИЦ ТЯГАЧА АТ-П
Механизм натяжения гусениц тягача АТ-П представляет собой
механизм телескопического типа с несущим направляющим коле-
сом.
Устройство механизма следующее. На подрессоренный тор-
сионом балансир 1 (рис. 361) на шлицах надета труба 2.
524
Рис. 361. Механизм натяжения тягача АТ-П:
1 — балансир; 2—труба; 3 —» втулка; 4 —гайка; 5 — винт; 6 — наружная гайка;
7 — гайка винта
525
Снаружи на трубу налета втулка 3- с установленной на ней осью
направляющего колеса. В гулка закреплена на трубе гайкой 6.
Внутри балансира вверну га и зафиксирована от проворачивания
шпильками гайка 4. В гайку ввертывается натяжной винт 5. На
наружную резьбу винта надета гайка 7, зафиксированная на винте
двумя пальцами.
Для натяжения гусеницы из гайки 7 вынимают шплинт. Гайка
поворачивается ключом. Одновременно с ней поворачивается
винт 5, который ввертывается в гайку балансира, вследствие чего
труба 2 перемещается относительно балансира /, а следовательно,
перемещается и направляющее колесо. После того как натяжение
гусеницы будет закончено, шплинт необходимо снова поставить на
место; шплинт фиксирует натяжной винт от проворачивания.
В данном механизме требование 3 также не выполняется.'
МЕХАНИЗМ НАТЯЖЕНИЯ ГУСЕНИЦ САЛАЗОЧНОГО ТИПА
На одном из английских танков применялся механизм натяже-
ния гусениц.салазочного типа (рис. 362). Устройство этого меха-
низма аналогично рассмотренному выше (см. рис. 357). В качестве
некоторых особенностей этого устройства следует указать на при-
менение зубчатых венцов направляющего колеса и обрезиненных
бандажей. При конструировании направляющего колеса, очевидно,
предполагалось, что зубчатые направляющие колеса будут лучше
направлять гусеницы при их перематывании. Однако ни в одной
последующей конструкции англичане зубчатых направляющих ко-
лес больше не применяли.
Хотя обрезиненные бандажи и уменьшают шум перематывае-
мых гусениц, однако в современных тягачах обрезиненные направ-
ляющие колеса также не применяются.
РАСЧЕТ МЕХАНИЗМА НАТЯЖЕНИЯ
В механизме натяжения расчету подвергаются ось направляю-
щего колеса, несущая нагрузку от натяжения гусеницы, и привод
механизма.
При переднем расположении ведущего колеса ось направляю-
щего колеса нагружается равнодействующей от сил натяжения
двух ветвей гусеницы. Величина этой силы определяется из
рис. 363;
/?=2P0cos-J-, (299)
где у —угол между задней наклонной ветвью и верхней спрям-
ленной ветвью обвода; приближенно этот угол можно
принимать равным углу наклона задней ветви;
Ро—натяжение в обводе,
526
сд
to
Рис. 363. Силы, действующие на ось направляющего
колеса
Натяжение в обводе складывается из предварительного натя-
жения
р = а(1
8/0
и натяжения от силы тяги Р. Примем расчетное значение силы
тяги равным 0,65 G. Тогда
Ро = -^ + 0,65G, (300)
где а—длина одного из пролетов свободно провисающей ветви;
/0— относительная стрела провиса свободной ветви;
q— погонный вес цепи;
G— вес машины.
Когда ведущим является заднее колесо, ось направляющего ко-
леса подвергается меньшей нагрузке, чем в том случае, когда ве-
дущим является переднее колесо. При» движении машины вперед
ось направляющего колеса нагружена только предварительным
натяжением обвода. При'движении назад к предварительному на-
тяжению добавляется еще сила тяги, действующая в обводе, но
эта сила имеет меньшее значение, чем при движении машины впе-
ред (меньше 0,65 G).
Все же расчет оси направляющего колеса рекомендуется и в
этом случае (когда ведущим колесом является заднее) вести по
формулам (299) и (300). Здесь только угол 7 принимается рав-
ным углу наклона передних ветвей.
Расчет механизма натяжения
гусениц складывается из опреде-
ления передаточного числа при-
вода и из прочностного расчета
деталей привода. Рассмотрим
здесь только определение пе-
редаточного числа при-
вода.
Так как натяжение гусеницы
проводится на неподвижной ма-
шине, то в гусеничном обводе
* действуют только силы предвари-
тельного натяжения,
Рис. 364. Силы, действующие на
ось кривошипа
528
К оси направляющего\колеса будет приложена сила
/?' = 2Р' cos ,
где
Р' — а<^
8/0 •
Допустим, что механизм натяжения кривошипного типа
(рис. 364). Пусть ось кривошипа находится в точке а. Эксцентри-
ситет кривошипа обозначим буквой г. Тогда момент от натяжения
гусеницы, который необходимо преодолеть, будет равен М =
= R'e sin 9.
Максимальное его значение будет
(301)
Примем условно, что натяжение гусеницы осуществляется с по-
мощью рычага, имеющего длину I. На конце рычага перпендику-
лярно к нему приложена (от руки) сила Q.
Если обозначить к. п. д. приводя через т], то должно соблю-
даться следующее равенство моментов:
Отношение I к s есть общее передаточное число при-
вода. После подстановки в полученное равенство силы R' будем
иметь:
z a? cos 1
l = = AfaQ •
Если привод винтовой, червячный или шестеренчатый, то I есть
длина условного рычага.
По формуле (301) определяется передаточное число привода,
после чего строится схема привода и находятся его геометриче-
ские размеры. Далее производится прочностной расчет привода.
Пример. Определим передаточное число механизма натяжения для гусенич-
ного движителя, имеющего следующие данные: длина пролета гусеничной цепи
0,95 ж, вес трака 11 кг, шаг трака 0,137 м.
Решение. Определяем вес погонного метра длины гусеницы
И
7 = ~6Т37~ = 73 кг,М'
Задаемся относительной стрелой провиса /о=О,О1. Примем к.п.д. привода
т] = 0,5 и. угол у = 20°. Необходимо, кроме того, задаться усилием, которое будет
прикладываться к рычагу механизма натяжения. Примем Q=20 кг. Тогда по
формуле (301) получим передаточное число
, I _ 0,95-73.0,98 _ „
' е — 4.0,01.0,5.20 — 1/и-
34-20
529
14. ПОДДЕРЖИВАЮЩИЕ КАТКИ
Поддерживающие катки, или, как их иногда называют, ролики,
предназначаются для поддержания свободно провисающей верх-
ней ветви гусеничного обвода, для уменьшения ее раскачивания
при перематывании гусеницы и для придания направления ее дви-
жению.
Поддерживающих катков бывает два, три или четыре в зави-
симости от длины верхней опорной ветви обвода. Так, на тягаче
АТ-П два поддерживающих катка, на тягаче АТ-Л — три и на тя-
гаче АТ-С — четыре.
Иногда поддерживающие катки заменяются направляю-
щими полозьями, выполняющими ту же роль, что и поддер-
живающие катки.
В тех случаях, когда опорные катки большого диаметра, под-
держивающие катки отсутствуют.
На рис. 365 показан поддерживающий каток тягача АТ-С.
Каток установлен на оси 7 на шарико- и роликоподшипниках.
С наружной и внутренней стороны подшипники закрыты крыш-
ками 21 и 12. В крышке 21 имеется пробка 18 для смазки подшип-
ников. В крышке 12 установлено торцовое уплотнение.
Ось поддерживающего катка располагается в кронштейне9, ко-
торый своим фланцем приварен к продольному швеллеру 8 рамы.
РЙс. 365. Поддерживающий каток тягача АТ-С:
Z и 16 — подшипники; 2 — кольцо; 3 и 4 — шайбы; 5 — манжета; 6 — пыль-
ннк; 7 — ось; 8 — продольный швеллер рамы; 9 — кронштейн; 10 — пружи-
на; 11 — болт; 12 и 21 — Крышки; 13 — каток; 14 и 15 — распорные втулки;
17 — резиновое кольцо; 18 — пробка; 19 — гайка; 20 — замковая шайба; 22 —
стопорное кольцо
530
Рис. 366. Поддерживающий каток тягача АТ-Л:
1 — распорная втулка; 2 — каток; 3 — пыльник; 4 — сальник; 5 — ось; 6 — подшипники;
7 — прокладка; 8 и 12 — стопорные шайбы; 9 — болт; 10— гайка; 11 — крышка; 75 —
пробка; 14 — втулка; 75 — шплинт
Рис. 367. Обрезиненный поддерживающий каток:
I — кронштейн; 2 — ступица; 3 и 4 — металлические ободы
с резиновым бандажом; 5 и 6 — крышки
34*
531
На рис. 366 показана конструкция поддерживающего катка тя-
гача АТ-Л. Каток устроен аналогично катку тягача АТ-С.
Рассмотренные катки необрезиненные. Иногда в танках приме-
няют катки с резиновыми бандажами (рис. 367). Резиновые бан-
дажи в этом случае съемные, что позволяет их заменить при вы-
ходе резины из строя.
Поддерживающие катки не рассчитываются, так как статиче-
ская нагрузка, приходящаяся на них, равна весу верхней ветви гу-
сеницы, т. е. является незначительной. Динамическая же нагрузка,
возникающая вследствие набегания на каток верхней ветви гусе-
ницы, пока теоретическому определению не поддается. Таким обра-
зом, геометрические размеры опорного катка выбираются только
из конструктивных соображений.
ГЛАВА XI
МЕТОДЫ ИСПЫТАНИЙ ГУСЕНИЧНЫХ МАШИН
И ИХ МЕХАНИЗМОВ
1. ВИДЫ И ЗАДАЧИ ИСПЫТАНИЙ
Разработка новой конструкции машины или ее нового меха-
низма, а также выпуск машин на производстве или после ремонта
требуют проведения определенных видов испытаний по заранее
установленной методике.
В основном испытания бывают трех видов:
1) контрольные;
2) испытания новых образцов;
3) научно-исследовательские.
КОНТРОЛЬНЫЕ ИСПЫТАНИЯ
Контрольные испытания являются заводскими испытаниями;
они проводятся при выпуске продукции на заводе или на ремонт-
ном предприятии.
Задача контрольных испытаний — проверить соответствие вы-
пускаемой продукции техническим условиям на изготовление или
на ремонт.
Контрольные испытания проводятся выборочным порядком по
одной машине (или по одному механизму) из определенного коли-
чества машин.
Испытание отдельных узлов машины проводится как последняя
контрольная операция аппаратом ОТК (отдел технического конт-
роля). на специализированных стендах. Испытания целых машин
проводятся на заводском полигоне или на специально отведенных
для этого трассах пробегом.
ИСПЫТАНИЯ НОВЫХ ОБРАЗЦОВ
Испытания ставят задачу проверить соответствие выпущенного
промышленностью нового образца машины техническим условиям
на проектирование.
Машина может подвергаться испытаниям трех видов: завод-
ским, полигонным и эксплуатационным.
В процессе заводских испытаний завод-изготовитель устраняет
533
замеченные дефекты, доводит машину, после чего она поступает
на полигонные испытания. Во время полигонных испытании дли-
тельными пробегами наиболее полно выявляются все ее слабые
места. После испытаний специальная комиссия дает свое заключе-
ние о возможности приемки машины и ввода ее в эксплуатацию.
Если машина прошла полигонные испытания, но выявилась не-
обходимость проверки некоторых показателей в условиях эксплуа-
тации, она может поступить на эксплуатационные испытания. Экс-
плуатационные испытания проводятся там, где в дальнейшем ма-
шина будет эксплуатироваться.
НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЕ ИСПЫТАНИЯ
Научно-исследовательские испытания — самый широкий вид ис-
пытании машин и их агрегатов. Научно-исследовательские испыта-
ния проводятся в целях решения какой-нибудь научно-технической
задачи или проблемы, связанной с усовершенствованием конструк-
ции машины или изучением ее ходовых качеств, а также с целью
получения экспериментальных данных, необходимых для расчета
машин.
Научно-исследовательские испытания имеют разнообразную
тематику, охватывают широкий круг решаемых задач и обычно со-
четаются с теоретическими исследованиями.
Научно-исследовательские испытания могут быть лаборатор-
ные и ходовые.
Лабораторные испытания позволяют исследовать тот
или иной вопрос, то или иное явление в изолированном виде при
отсутствии влияния на это явление побочных факторов.
Ходовые и с п ы т а н и я — испытания в естественных усло-
виях работы механизма или машины в целом — производятся на
местности на специально оборудованных или естественных
трассах.
Для проведения лабораторных испытаний необходима хорошо
оборудованная лаборатория, оснащенная современной испыта-
тельной техникой — аппаратурой и стендами.
Так как лабораторные исследования в качестве заключитель-
ного этапа обычно требуют проведения ходовых испытаний, то ла-
боратория должна быть связана с испытательным поли-
гоном. Лучше, если лаборатория находится на территории испы-
тательного полигона. Это приближает лабораторные испытания к
ходовым испытаниям и устанавливает между ними тесную органи-
ческую связь, что для практических результатов научно-исследова-
тельской работы часто имеет решающее значение.
В методике испытания самоходных машин гусеничного и колес-
ного типа в настоящее время наметились следующие основные на-
правления.
В области лабораторных испытаний:
1) применение специальных стендов для испытания агрегатов
моторной установки, силовой передачи и ходовой части;
534
2) применение универсальных стендов для испытания машины
в целом, испытания силовой установки или ходовой части;
3) модельные испытания — испытания методом механического
или электрического моделирования машины в целом или ее от-
дельных частей: двигателя, силовой передачи, подвески и т. д.
В области ходовых испытаний:
1) применение специальной аппаратуры, устанавливаемой на
серийные машины;
2) применение динамометрических ходовых лабораторий;
3) применение метода топливно-мощностной характеристики
и др.
Рассмотрим основные методы и основное оборудование, приме-
няющиеся при испытаниях гусеничных машин.
2. ИСПЫТАНИЯ ЗУБЧАТЫХ МЕХАНИЗМОВ
И ФРИКЦИОННЫХ ЭЛЕМЕНТОВ СИЛОВОЙ ПЕРЕДАЧИ
СТЕНДЫ ДЛЯ ИСПЫТАНИЯ ЗУБЧАТЫХ МЕХАНИЗМОВ
СИЛОВОЙ ПЕРЕДАЧИ
Зубчатые механизмы силовой передачи — коробка передач,
бортовые передачи — испытываются на износ, на нагрев, на к. п. д.,
на условия смазки и т. д.
Для испытания зубчатых механизмов применяются два вида
стендов:
1) тормозные стенды;
2) стенды с замкнутым силовым потоком.
В тормозном стенде вся мощность, проходящая при испыта-
ниях через механизм, поглощается в тормозе, где она и превра-
щается в тепло.
В стенде с замкнутым силовым потоком происходит циркуля-
ция мощности, т. е. частичное возвращение потока мощности к ис-
пытываемому механизму. В стенде с циркуляцией рассеивается
только часть мощности, проходящей через испытываемый меха-
низм, которая идет на трение в механизме и в редукторах стенда.
В общей сложности эта мощность составляет примерно 10—15%
мощности, проходящей через механизм.
Только эту мощность и должен компенсировать двигатель. Так
как испытания зубчатых механизмов часто требуют длительного
времени (например, испытания механизма на износ), то примене-
ние стенда с замкнутым силовым потоком экономически более це-
лесообразно, чем тормозного стенда, особенно при испытании ме-
ханизмов тяжелых машин, где потребная мощность силовых уста-
новок стенда измеряется сотнями лошадиных сил.
На рис. 368 представлен тормозной стенд для испытания коро-
бок передач.
Стенд состоит из электромотора 3, применяющегося в качестве
первичного двигателя, тормозного генератора 2 и балансирной
рамы 4. От проворачивания рама удерживается динамометром 5,
535
Рис. 368. Тормозной стенд для испытания коробок передач:
/ — испытываемые коробкн передач; 2— генератор; 3 — электромотор; 4— рама; 5—динамо-
метр
нако применение в стенде
условно представленным на рисунке в вертикальной плоскости.
На стенде зеркально установлены одна к другой две испыты-
ваемые коробки передач /..Зеркальное расположение коробок по-
зволяет иметь в стенде постоянное передаточное число, равное еди-
нице.
Если бы испытывалась одна коробка, то потребовалось введе-
ние в стенд еще специальной коробки, что усложнило бы конструк-
цию стенда.
Электрический тормоз может быть заменен гидротормозом. Од-
двух электрических машин позволяет
легко использовать данный стенд как
стенд с замкнутым силовым
потоком. Для этого необходимо ре-
куперировать (возвратить) электриче-
скую мощность тормозного генератора
обратно к электромотору.
На рис. 369 представлены две схе-
мы силового потока стенда: без реку-
перации и с рекуперацией.
В стенде без рекуперации электри-
ческая мощность от сети идет в элек-
тромотор М, отсюда в виде механиче-
ского потока — в испытываемый меха-
низм и, пройдя через него, подводится
к тормозному генератору Г. В тормоз-
ном генераторе механическая мощ-
ность преобразовывается в электриче-
скую мощность и рассеивается в рео-
стате Р.
В стенде с рекуперацией электри-
ческая мощность от генератора Г воз-
вращается к электромотору М.
В замкнутом контуре электрического
а
Рис. 369. Схемы силового по-
тока стенда испытания коро-
бок передач:
а — без рекуперации; б — с рекупера-
цией
536
силового потока возникает циркуляция электрической мощности.
Таким образом, стенд работает по принципу замкнутого силового
потока с циркуляцией электрической мощности.
При испытаниях коробок па к. п. д. потери определяются с по-
мощью динамометра. Для этого замеряется момент на балансир-
ной раме. Произведение момента на угловую скорость вала элек-
тромотора 3 (см. рис. 368) определит суммарную мощность потерь
в коробках.. Отсюда легко определяется к. п. д. коробок (при испы-
тании трением в шариковых подшипниках балансирной рамы можно
пренебречь).
На данном стенде можно проводить испытания коробок пере-
дач также ина износ.
Для ускорения износных испытаний механизм нагружается
большим моментом, чем тот, под которым он обычно работает в
эксплуатации. Чаще всего в качестве нагрузочного момента прини-
мают максимальный расчетный момент.
Износ механизма можно форсировать также подмешиванием
в смазку специальных абразивных присадок, ускоряющих износ ше-
стерен и подшипников.
Для исследования деформаций и напряжений в зубьях шестерен,
в валах и в картере работающего механизма пользуются элек-
трическими методами измерений. Для этого на испы-
тываемую деталь наклеивают тензодатчики, т. е. небольшие элек-
трические сопротивления. К тензодатчику подводится электрический
ток через сбалансированный измерительный мостик (мостик Уит-
стона). При работе детали сопротивление датчика изменяется,
вследствие чего балансировка мостика Уитстона нарушается и через
него начинает течь электрический ток, который усиливается и под-
водится на осциллограф. В осциллографе производится соответству-
ющая запись тока, которая в дальнейшем расшифровывается.
При исследовании механизма на износ применяют метод м е-
ч е н ы х атомов. Для этого в деталь, которая подвергается из-
носу, тем или иным способом вводят радиоактивные соли. При из-
носе детали продукты износа делаются также радиоактивными.
Если их отводить из механизма и измерять их степень радиоактив-
ности, то по ней можно определить и степень износа детали.
Метод меченых атомов в настоящее время получает все более
широкое и разнообразное применение в испытательной технике.
При исследовании работы зубчатых механизмов широко приме-
няется оптический метод определения напряжений.
Идея этого метода заключается в том, что большинство про-
зрачных материалов под действием приложенных к ним усилий и,
следовательно, возникших деформаций становятся двоякопрелом-
ляющими. С помощью поляризационного света в этих материалах
можно замерить деформацию (напряжение).
Если изготовить из прозрачного материала модель испытывае-
мой детали (например, шестерни) и нагрузить ее силами соответ-
ственно тому, как нагружается деталь, то по картине напряжений
в прозрачной модели можно судить о напряжениях и в детали.
537
СТЕНД ДЛЯ ИСПЫТАНИЯ ФРИКЦИОННЫХ МУФТ И ТОРМОЗОВ
Для испытания фрикционных элементов силовой передачи—
тормозов, фрикционных муфт, а также образцов фракционных об-
шивок служит инерционный стенд, представленный на
рис. 370.
Стенд состоит из маховика 1 с переменной массой (набор чугун-
ных дисков), испытываемого тормоза 2, бегового барабана 3 для
испытания фрикционных образцов, испытываемой фрикционной
муфты 4. Стенд приводится в действие балансирным электромото-
ром 5 постоянного тока.
Рис. 370. Инерционный стенд для испытания фрикционных элементов:
Z — маховик; 2 — тормоз; 3 — барабан; 4 — фрикционная муфта; 5 — электромотор; 6 — гири;
7 — рычаг; 8 — нажимная муфта; 9 — тахограф
С помощью электромотора маховик 1 разгоняется до определен-
ного числа оборотов, после чего электромотор отключается и вклю-
чается тормоз. Накопленная маховиком кинетическая энергия по-
глощается тормозом.
На стенде могут также испытываться фрикционные диски муфт
или дисковых тормозов. При испытании муфты последняя работает
в режиме тормоза, так как ее ведомые элементы полностью затор-
можены.
Нагрузка на диски испытываемой фрикционной муфты создает-
ся с помощью гирь 6. Гири через двуплечий рычаг 7 передают на-
грузку на нажимную муфту 8, которая и сжимает фрикционные
диски.
Образцы фрикционных обшивок испытываются на стенде при
постоянной скорости вращения бегового барабана. Скорость регу-
лируется электромотором.
Стенд может быть оборудован тахографом 9—прибором, запи-
сывающим скорость вращения маховика, а следовательно, и дета-
лей тормоза.
На рис. 371 представлен образец записи тахографа. Здесь по оси
абсцисс откладывается время t в секундах, а по оси ординат —
число оборотов маховика п в минуту. Из записи видно, что на
участке аб происходил разгон маховика, на участке бв — его рав-
номерное вращение и на участке вг — торможение,
538
Запись дает полную картину движения инерционной системы
стенда и позволяет по наклону линии вг определять силу ее тормо-
жения.
С помощью испытательных стендов можно определять коэффи-
циенты трения фрикционных материалов, а также износ и нагрев
тормозов и муфт.
Работа фрикционных элементов, несмотря на их большое зна-
чение в силовой передаче гусеничных машин, исследована пока не-
достаточно. До сих пор объектом исследования являлись главным
образом не сами фрикционные элементы, а лишь их фрикционные
обшивки, к тому же исследуемые на небольших образцах. Между
тем опыт показывает, что не всегда можно результаты испытания
образцов переносить на муфту
или тормоз.
Хотя испытание фрикционных
образцов и является вполне за-
конным этапом в исследовании
фрикционных элементов, однако
в настоящее время центр тяже-
сти исследования желательно пе- Рис. 371. Образец записи тахографа
ренести на испытания самих фрик-
ционных муфт и тормозов. Здесь особенно важно исследовать ра-
боту фрикционных элементов механизмов поворота. Как
показывают опыты, при движении машины на равнинной местности
ст 5 до 25% общей длины пути приходится на поворот. При ра-
боте в горных условиях этот процент повышается до 40—80%.
Как правило, поворот гусеничной машины является неустано-
вившимся: на расчетном радиусе машина поворачивается чрезвы-
чайно редко. Из общего числа поворотов, определенных за некото-
рое время, на поворот с расчетным радиусом приходится меньше
-1%. Так как неустановившийся поворот совершается с помощью
включения и выключения фрикционных элементов механизма по-
ворота, то отсюда следует, что фрикционные элементы работают
длительное время. В фрикционных-элементах механизма поворота
выделяется большая мощность. Эта мощность, превращаясь в тепло,
создает чрезвычайно напряженный тепловой режим работы фрик-
ционных элементов. Чтобы правильно рассчитывать фрикционные
элементы, необходимо точно знать, как происходит в них тепло-
передача.
3. ИСПЫТАНИЯ ХОДОВОЙ ЧАСТИ МАШИНЫ
СТЕНД ДЛЯ ИСПЫТАНИЯ ШАРНИРОВ ГУСЕНИЧНЫХ ЦЕПЕЙ НА ИЗНОС
Устройство, стенда показано на рис. 372. В неподвижной раме 1
установлена на двух осях 2 качающаяся площадка 3. Площадка
имеет ушко 4, с которым шарнирно связан шатун 5. Головка ша-
туна надета на ось кривошипа 6. Кривошип приводится во враще-
ние от электромотора. При вращении кривошипа 6 площадка 3 со-
вершает карательные движения относительно оси аб.
539
На площадке 3 закрепляется один из испытываемых траков 7.
Другой трак 8 устанавливается на неподвижной площадке 9, кото-
рая может перемещаться в направляющих 10 и И, закрепленных
на раме /. С помощью винта 12 и штурвала 13 создается растяги-
вающая нагрузка на траки. Натяжение траков регулируется нагру-
зочной пружиной 14.
Рис. 372. Стенд для испытания шарниров гусеничных цепей
иа износ:
Z — рама; 2 — ось; 3 — качающаяся площадка; 4 — ушко; 5 — шатун; 6 — кри-
вошип; 7 и 8 — испытуемые траки; 9 — неподвижная площадка; 10 и 11 — на-
правляющие; /2—винт; 13 — штурвал; 14 — нагрузочная пружина
Стенд предназначается для испытаний шарниров на износ. На
нем можно испытывать шарниры любого типа: простые, упругие,
игольчатые. В стенде имеется специальное приспособление (не по-
казано на чертеже) для введения в открытый простой шарнир абра-
зива. Это приспособление представляет собой бункер с воронкой,
заполненный песком или грязью. Шарнир работает в этом бункере,
окруженный абразивом, который проникает к трущимся поверхно-
стям шарнира.
СТЕНД ДЛЯ ИСПЫТАНИЯ ОБРАЗЦОВ ШАРНИРОВ
Рассмотренный выше стенд обладает серьезными недостатками.
Во-.первых, в нем самом имеются шарнирные сочленения, которые
изнашиваются в процессе испытаний вместе с шарнирами траков.
Повысить их срок службы, например, установкой в этих шарнирах
подшипников качения (игольчатых или роликовых), чрезвычайно
трудно, так как все шарнирные сочленения работают под большой
нагрузкой. Во-вторых, стенд является тихоходным. Он делает не
более 50—100 циклов (качаний) в минуту.
540
Тихоходность стенда объясняется двумя причинами: во-первых,
большими инерционными массами качающихся деталей, которые
не позволяют повысить скорость стенда, и, во-вторых, быстрым на-
греванием испытываемого шарнира, работающего в условиях тре-
ния скольжения или даже абразивного трения скольжения.
Для испытания шарнира до полного износа требуется несколько
миллионов циклов. При числе циклов 50—100 в минуту на испы-
тание одного шарнира потребуется очень много времени.
Многие задачи, связанные с испытанием шарниров на износ, не
требуют испытания всего шарнира в целом. Достаточно подверг-
нуть испытанию только вырезанный из шарнира образец. Обра-
зец будет представлять собой кольцо, вырезанное из ушка трака,
и вставленный в это кольцо кусок пальца. Если ограничиться шири-
ной образца 15—20 мм, то нагрузку на образец можно дать не бо-
лее 1,5—2 т (нагрузка на трак тяжелой машины может достигать
десятков тонн). В действительности испытания будут проводиться
даже под меньшей нагрузкой. Картина износа шарнира по испы-
танию образца дает представление об износе шарнира в целом.
Метод испытания образцов значительно упрощает конструкцию
испытательного стенда, а также позволяет повысить скорость испы-
тания и удешевить весь процесс испытания шарниров на износ. Для
ускорения испытаний, а также для получения сравнительных дан-
ных стенд может иметь несколько испытательных головок, позво-
ляющих одновременно испытывать несколько образцов.
На стенде образцов исследуется влияние на износ шарниров
различных факторов: материала проушин и пальца, термической
обработки, поверхностного упрочения материала, абразива, на-
грузки и т. д.
На стенде могут испытываться образцы не только простых шар-
ниров, но и упругих шарниров и шарниров качения.
После того как в процессе испытаний образцов будут выявлены
те или иные закономерности и сделаны соответствующие выводы,
можно перейти к испытанию трака в целом на стенде шарниров
или даже на машине.
Заметим, что стендовые испытания траков (и тем более образ-
цов шарниров) не всегда дают сравнимые результаты с испыта-
нием траков на машине. Это объясняется тем, что трак на стенде
работает в условиях статических, а на машине — в условиях дина-
мических нагрузок. Поэтому на стендовые испытания следует смо-
треть лишь как на сравнительные испытания.
СТЕНД ДЛЯ ИСПЫТАНИЯ НА УСТАЛОСТНУЮ ПРОЧНОСТЬ
ТОРСИОНОВ
Принципиальная схема стенда представлена на рис. 373. Стенд
состоит из следующих элементов: эксцентрика /, электромотора 2,
противовеса 3, роликов 4, балансиров 5, кронштейнов 6.
Торсионы 7 вставляются своими шлицованными головками с од-'
541
ной стороны в отверстия осей балансиров, а с другой стороны —
в отверстия кронштейнов.
При вращении эксцентрика 1 ролики 4 совершают качательное
движение относительно осей балансиров. При этом торсионы попе-
ременно скручиваются и раскручиваются. Скручиванию одного тор-
сиона соответствует раскручивание другого торсиона. Такое устрой-
ство стенда значительно облегчает работу электромотора, так как
торсион скручивается не только за счет энергии электромотора, но
Рие. 373. Стенд для испытания па усталостную прочность торсионов:
1 — эксцентрик; 2 — электромотор;, 3 — противовес; 4 — ролик; 5 — балансир; 6 — кронштейн; 7 —
торсион; S — счетчик суммарных оборотов
и за счет упругой энергии второго раскручивающегося в данный
момент торсиона.
Для измерения числа циклов на стенде устанавливается счетчик
суммарных оборотов 8.
Чтобы можно было изменять угол закручивания торсионов, при-
меняют сменные эксцентрики. Может быть также применен уни-
версальный эксцентрик с переменным эксцентриситетом.
Торсионы подвергаются испытанию на усталость. В зави-
симости от напряжения, которое испытывает торсион, предельное
число циклов углов закручивания изменяется. Чем больше напря-
жение или чем больше при прочих равных условиях угол закручи-
вания торсиона, тем меньшее число циклов работает торсион.
При испытаниях можно получать сравнительные данные по уста-
лостной прочности торсионов различной конструкции, изготовлен-
ных из разных материалов и с различной обработкой.
СТЕНД ДЛЯ СНЯТИЯ ХАРАКТЕРИСТИК АМОРТИЗАТОРОВ
При проектировании па машину амортизаторов необходимо так
подобрать проходные сечения рабочих камер, через которые рабо-
чая жидкость перетекает из одной полости амортизатора в другую,
542
чтобы получить нужную характеристику амортизатора. Исследова-
ние характеристик проводится на специальных стендах.
Стенд (рис. 374) состоит из маховика, эксцентрика 1 с круго-
вым пазом, ролика 2, помещенного в пазу эксцентрика, балансира 3
и штока 4.
Шток 4 присоединен шарнирно к балансиру 3 и к рычагу 5 амор-
тизатора 6.
В эксцентрике имеется прямоугольная прорезь, благодаря чему
он может устанавливаться
тетом.
Стенд приводится во
вращение от электромото-
ра постоянного тока.
При работе стенда ба-
лансир 3 совершает кача-
тельные движения, кото-
рые передаются через шток .
на рычаг 5 амортизатора.
Характеристика амор-
тизатора снимается сле-
дующим образом. Махо-
вик стенда раскручивает-
ся до определенного числа
оборотов. Это число обо-
ротов поддерживается по-
стоянным. С помощью
электрических приборов
замеряется мощность, ко-
торую потребляет элек-
тромотор. По этой мощно-
сти может быть вычисле-
на мощность, потребляе-
мая амортизатором.
при монтаже с разным эксцентриси-
Рис. 374. Стенд для испытания амортизаторов!
а — образец записи тахографа; б — схема стенда; / —
эксцентрик; 2 — ролик; 3 — балансир; 4 — шток; 5 — ры-
чаг; 6 — амортизатор
Сопротивления амортизатора вычисляются по записи с по-
мощью тахографа числа оборотов вала стенда п в функции вре-
мени t. Образец записи приведен на рис. 374, а. Левый участок
кривой характеризует разгон стенда, средний — установившееся
движение и правый — затухание движения при отключенном элек-
тромоторе. Из кривой затухания можно определить ускорение и,
зная приведенный момент инерции системы, вычислить сопротив-
ление амортизатора.
Сопротивление амортизатора может быть замерено и электри-
ческим методом. Для этого на штоке 4 устанавливается электро-
тензометр и производится запись показания его осциллогра-
фом.
На стенде можно проводить испытания амортизатора и на на-
грев.
543
СТЕНД ДЛЯ ИСПЫТАНИЯ РЕЗИНОВЫХ БАНДАЖЕЙ
ОПОРНЫХ КАТКОВ НА НАГРЕВ
Стенд состоит из бегового барабана 1 (рис. 375), кронштейна 2
и нагрузочного приспособления 3. Опорный каток 4 устанавливается
в кронштейне 2. Нагрузка на каток создается с помощью нагрузоч-
ного приспособления, которое состоит из гайки, имеющей левую в
правую резьбу, и двух винюв. Один винт закреплен в фундаменте,
другой связан с пружиной, поглощающей динамические нагрузки
рамы при испытании. Пружина подвешена па кронштейне 2.
Беговой барабан приводится во вращение от электромотора по-
стоянного тока 5, позволяющего регулировать скорость вращения
барабана.
Так как беговой барабан имеет большой диаметр (около 2 м),
то поверхность, по которой катится каток, можно приближенно счи-
тать за плоскость, соответствующую плоскости беговой дорожки
гусеницы.
При вращении бегового барабана резиновый бандаж нагре-
вается. Температура нагрева замеряется с помощью игольчатой
термопары и присоединенного к ней гальванометра (рис. 376).
Для замера температур стенд останавливается, игла термопары
вводится в массив бандажа на определенную глубину. Гальвано-
метр при этом показывает напряжение, пропорциональное темпера-
туре нагрева термопары. Предварительно гальванометр тарируется.
По замеру температур на различной глубине резинового мас-
сива строят диаграмму изотерм (рис. 376, а). Диаграмма
Рис. 375. Стенд для испытания резиновых бандажей
опорных катков на нагрев:
I— беговой барабан; 2 — кронштейн; 3— нагрузочное приспособле-
ние; 4 — опорный каток; 5 — электромотор
544
дает представление о распределе-
нии температуры внутри резиново-
го массива при установившемся
тепловом режиме в зависимости
от скорости качения бандажа, на-
грузки на бандаж и различной
формы бандажа. По диаграмме
изотерм, кроме того, можно опре-
делить положение очага макси-
мальной температуры, что бывает
необходимо при определении
эмпирических коэффициентов для
расчета бандажа на нагрев.
4. КОМПЛЕКСНЫЕ
ИСПЫТАНИЯ
Комплексные испытания'вклю-
чают работу не одного агрегата
машины, а группы взаимодейст-
вующих между собой агрегатов,
например, силовой передачи, гусе-
ничного движителя, силовой уста-
новки или даже машины в целом.
Комплексные испытания могут
быть лабораторные и ходовые.
Лабораторные испытания прово-
дятся на специальных стендах.
За последние годы в испыта-
тельную технику самоходных ма-
Рис. 376. Игольчатая термопара с
гальванометром для определения
температуры нагрева резиновых бан-
дажей опорных катков:
а — диаграмма изотерм; б — термопара с
гальванометром
шин внедряются методы моделирования, а также м е-
тоды динамических аналогий. Этими методами иссле-
дуются различные колебательные процессы, происходящие в ма-
шине, например, колебания рамы (корпуса) машины на упругой
подвеске, крутильные колебания в силовой передаче и др.
На основе теории силового потока разработаны методы механи-
ческого и электрического моделирования силовых установок гусе-
ничных машин и созданы специальные стенды для испытания этих
установок. На этих стендах можно исследовать как установив-
шиеся, так и неустановившиеся процессы, протекающие в силовой
установке при работе машины.
Цель лабораторных комплексных испытаний—максимально со-
кратить дорогие и трудоемкие ходовые испытания машин, исполь-
зовав ходовые испытания только в качестве контрольных испы-
таний.
Рассмотрим некоторые стенды, применяющиеся при комплекс-
ных испытаниях.
35-20
545
ГУСЕНИЧНЫЙ СТЕНД
Гусеничный стенд предназначается для испытания целых машин.
Он состоит из рамы / (рис. 377), на которой установлены два ве-
дущих колеса 2, два направляющих колеса 3, катки 4 и 5, поддер-
живающие верхнюю и нижнюю ветви гусениц, и гусениц 6.
Ведущие колеса связаны с двумя коробками передач 7. К ко-
робкам присоединены электрические машины постоянного тока 8.
Машины могут работать на режиме электромотора или генера-
тора.
Г 5 в
Рис. 377. Гусеничный стенд для комплексного испытания машин:
1 — рама; 2 — ведущее колесо; 3 — направляющее колесо; 4 и 6 — катки, поддерживающие верх-
нюю и нижнюю ветвн гусениц; 6 — гусеница; 7 — коробки передач; 8 — электрическая машина
9 — испытуемая машина; Z0 — кронштейн; ZZ — динамометр
Испытуемая машина 9 устанавливается на гусеницы стенда
и крепится с помощью троса к одному из кронштейнов 10, установ-
ленных на фундаменте стенда. Для предотвращения бокового сме-
щения она закрепляется поперечными растяжками.
На гусеничном стенде можно определять тяговую характери-
стику машины, к. п. д. движителя и силовой передачи, исследовать
тепловой режим агрегатов силовой передачи, тепловой режим си-
стемы охлаждения двигателя и др.
Машину можно испытывать на двух режимах: 1) когда движи-
тель машины приводится во вращение от гусениц стенда; 2) когда
он приводит во вращение гусеницы стенда. В первом случае элек-
тромашины стенда работают на режиме электродвигателей, а дви-
гатель машины отключен или используется как тормоз; во втором
случае электромашины работают на режиме генераторов; одновре-
менно работает двигатель машины, приводя во вращение всю уста-
новку,
На кронштейне 10 установлен динамометр 11. Динамометр за-
меряет силу тяги, которую может развивать машина на крюке. За-
давшись или предварительно определив потери на перекатывание
гусениц машины по гусеницам стенда, по силе тяги на крюке можно
определить тяговую характеристику машины.
546
БЕЗГУСЕНИЧНЫЙ СТЕНД
Стенд состоит из двух тележек 1 и 2 (рис. 378), на которых
смонтированы коробки передач 3 и 4 и электрические машины 5 и 6.
Тележки установлены на домкратах 7 и 8.
С испытываемой машины снимаются гусеницы и ведущие ко-
леса. Машина вывешивается на домкратах 9 и закрепляется на
фундаменте стенда.
С помощью соединительных муфт 10 и И к ведомым валам бор-
товых передач машины подсоединяются тележки 1 и 2.
Рис. 378. Безгусеничный стенд:
/ н 2 — тележки; 3 и 4 — коробки передач; 5 н 6 — электрические машины; 7 и 3 — домкраты те-
лежек; 9 — домкраты машины; 10 н Z/ — соединительные муфты
Электрическими машинами, работающими на режиме электро-
моторов или генераторов, прокручивается или, наоборот, тормо-
зится силовая установка испытываемой машины. С помощью кру-
тильных динамометров и тахометров определяются моменты и число
оборотов на валах ведущих колес.
На стенде можно проводить испытания на износ агрегатов си-
ловой передачи, снимать тяговые характеристики, испытывать сило-
вую передачу на к. п. д., испытывать на тепловой режим агрегаты
силовой передачи и систему охлаждения двигателя.
Стенд позволяет испытывать силовую передачу не только при
прямолинейном движении (при одинаковых скоростях вращения
валов ведущих колес), но и при повороте (при разных скоростях
вращения валов ведущих колес).
УНИВЕРСАЛЬНЫЙ СТЕНД ИСПЫТАНИЙ СИЛОВЫХ УСТАНОВОК
Из теории силового потока следует, что если две передающие
энергию системы описываются подобными силовыми потоками, то
будут подобны и сами передающие системы, т. е. энергия в этих
системах будет передаваться и преобразовываться одинаково.
Силовые потоки подобны, если они состоят из однотипных узло-
вых точек, имеющих одинаковые характеристики и одинаково свя-
занных между собой направленными потоками.
35*
547
Рассмотрим как общий случай движения поворот одиночной
гусеничной машины. Пусть поворот совершается на горизонталь-
ном участке пути; при этом поперечными силами, действующими
на машину, пренебрегаем. Тогда можно написать следующие диф-
ференциальные уравнения движения машины:
+
где G—вес машины;
rh—радиус ведущих колес;
g—ускорение земного тяготения;
Ми Л12—моменты, приложенные к ведущим колесам;
R, — сила сопротивления качению отстающей гусеницы;
R., — сила сопротивления качению забегающей гусеницы;
В—ширина колеи машины;
Л7С— момент сопротивления повороту машины;
0 — момент инерции машины, взятый относительно оси, про-
ходящей через центр тяжести и перпендикулярной пло-
скости грунта;
w — угловая скорость поворота машины.
Можно также составить силовой поток вращательного движе-
ния, который будет описываться аналогичной системой диф-
ференциальных уравнений.
Заметим, что в приведенные выше дифференциальные уравне-
ния входят члены трех видов, характеризующие сопротивления:
/ rKG dv 2rK9 du> \
инерционные -у- • и —~ j, сопротивление качению гу-
/2г \
сениц (гк/?) и rKR2) и сопротивление повороту (—^-Л7С).
Необходимо составить такой силовой поток, в который входили
бы узловые точки, описывающие данные сопротивления.
На рис. 379 представлена схема такого силового потока. В этом
силовом потоке имеются тормозные точки г и ж, описывающие со-
противление качению гусеничной машины, кинетическая точка д,
описывающая сопротивление повороту, и инерционная точка е, опи-
сывающая инерционные явления. В точке е инерционный поток О
описывает поступательное движение машины, инерционный по-
ток с — вращательное движение машины.
Силовой поток, состоящий из узловых точек г, ж, д и е, есть
внешний силовой поток, проходящий между ведущими
колесами машины. Кроме того, имеется еще внутренний си-
ловой поток силовой передачи. В него входят узловые точки,
описывающие маховую массу двигателя а, коробку передач б и
механизм поворота в.
К внутреннему силовому потоку энергия подводится от двига-
теля. Внутренний силовой поток передает энергию во внешний си-
ловой поток. Здесь она частично рассеивается, частично аккумули-
548
Рис. 379. Схема силового потока повора-
чивающейся гусеничной машины
руется в инерционной точке и частично рекуперируется обратно
во внутренний поток.
Рассматриваемая схема силового потока описывает как поворот,
так и прямолинейное движение и, следовательно, дает общую кар-
тину движения машины.
На основании полученной схемы силового потока может быть
составлена схема испытательного стенда, на котором будет имити-
роваться движение гусенич-
ной машины и могут испыты-
ваться в лабораторных усло-
виях силовые установки (си-
ловая передача и двигатель
с обслуживающими его си-
стемамй) гусеничных машин.
На рис. 380 приведена
конструкция универсаль-
ного стенда, разрабо-
танная канд. техн, наук
А. Н. Сковородниковым по
принципиальной схеме, пред-
ложенной автором.
Стенд состоит из двига-
теля внутреннего сгорания 1
в сборе с коробкой передач,
бортовых фрикционов 2, тор-
мозов 3, имитирующих со-
противление прямолинейно-
му движению машины, бор-
товых редукторов 4, махо-
вой массы 5 поступательного
движения, дифференциала 6,
редуктора 7, тормора 8,
имитирующего потери при
повороте, электрогенератора
имитирует сопротивление повороту машины.
Массой, имитирующей массу машины при повороте, является
масса якоря генератора и всех связанных с его валом вращающихся
деталей.
На стенде можно исследовать работу силовой передачи гусенич-
ной машины, причем не только в условиях равномерного движе-
ния, но и в условиях разгона, переключения передач, торможения,
равномерного и неравномерного поворота. Кроме того, стенд может
являться тренажером для исследования вопросов управления ма-
шиной.
Стенд оборудован специальным датчиком пути, предложенным
А. Н. Сковородниковым.
Датчик устроен следующим образом. По столику 1 (рис. 381)
движется бумажная лента. Поперек столика установлен ходовой
винт 2 с надетым на него ползуном 3. Подача бумаги связана с
549
9, который совместно с тормозом 8
Рис. 380. Универсаль-
ный стенд:
/ — двигатель; 2—бортовой
фрикцион; 3— тормоз со-
противления при прямоли-
нейном движении; 4 — ре-
дуктор; 5 — маховая масса
поступательного движе-
ния; 6 — дифференциал;
7 — редуктор; 8 — тормоз
сопротивления при пово-
роте; 9 — электрогенера-
тор
вращением маховой массы 5 (см.
рис, 380) при помощи гибкого
валика. Так как угловая скорость
массы 5 пропорциональна посту-
пательной скорости машины, то
перемещение бумажной ленты бу-
дет также пропорционально по-
ступательной скорости машины.
Ходовой винт связан с якорем
генератора. Вращение якоря про-
порционально угловой скорости
поворота машины, поэтому пере-
мещение ползуна будет’ пропор-
ционально угловой скорости по-
ворота машины.
При имитации на стенде пря-
молинейного движения якорь ге-
нератора, а следовательно, и пол-
зун стоят на месте. Перемещать-
ся будет только бумажная лента.
Тогда на ленте будет записы-
ваться прямая линия, параллель-
ная продольной оси столика, про-
ходимый машиной путь S.
Если на стенде имитируется
Рис. 381. Датчик пути уииверсаль-
поворот машины, то масса якоря ного стенда:
вращается, а с ней получает попе- столик; - ходовой винт; з - ползун
речное перемещение S и ползун.
При равномерном повороте с постоянным радиусом R машина
поворачивается по дуге окружности ktS = <?R, где — угол пово-
рота, R—радиус поворота машины и б, —коэффициент пропор-
циональности. Но ср = k2 S,r где k2 — коэффициент пропорцио-
нальности поперечного перемещения ползуна. Тогда
k\ S kt , ГА
-Г2- • • tg а = R,
или
/?stg а,
т. е. радиус поворота машины пропорционален тангенсу угла на-
клона прямой (например, оа), записываемой датчиком пути.
Таким образом, на ленте прибора фиксируется характер дви-
жения машины.
Чтобы определить скорость движения машины, необходимо на
ленте делать отметку времени (ступенчатая линия на рис. 381).
Для этого служит электрический отметчик времени (на рис. 381
не показан). По отметке времени определяются скорость прямоли-
нейного движения машины, скорость поворота, время и путь раз-
гона, время и путь торможения машины, время переключения пе-
редач и другие скоростные параметры движения.
551
Рассмотрим методику испытания силовой передачи. Допустим,
что испытывается механизм поворота гусеничной машины,
силовая передача которой установлена на стенде. Необходимо ис-
следовать нагрев тормозов механизма.
На ленту датчика пути наносится условный профиль дороги.
Профилем задаются на основании статистических данных ходовых
испытаний гусеничных машин или выбирают условия движения ма-
шины в зависимости от поставленной задачи испытаний.
Испытатель находится на месте управления стендом.
Запуск двигателя, включение и выключение передач, а также
повороты производятся так же, как на действительной машине,
теми же кнопками, рычагами и педалями.
С началом движения машины (т. е. с включением стенда) на
столике датчика пути начинает перемещаться лента с нанесенным
на ней профилем дороги. Испытатель должен следить, чтобы перо
ползуна двигалось по нанесенной на ленту кривой. Для этого он
управляет движением ползуна с помощью рычагов управления ма-
шиной так же, как если бы перед ним расстилалась действитель-
ная дорога (кривая пути может быть спроектирована с помощью
проекционного фонаря на экран) и он вел бы по ней машину.
На ленту, кроме того, нанесены величины сопротивления дви-
жению, соответствующие характеру грунта и вертикальному про-
филю пути, по которому осуществляется движение. Соответственно
этим величинам через дистанционный привод создается нагрузка
на тормоза 3 и 8 и на электрогенератор 9 (см. рис. 380). Поэтому
испытатель одновременно управляет и коробкой передач.
Измерительная аппаратура, установленная в агрегатах силовой
передачи, фиксирует работу того или иного агрегата, например в
данном случае замеряется нагрев тормозов механизмов поворота
и исследуется влияние на нагрев условий движения машины, спо-
соба торможения отстающей гусеницы (рывком или плавно). На
стенде могут испытываться новые механизмы и определяться их
оптимальные параметры.
Мы рассмотрели испытания на стенде силовой установки тягача,
работающего без прицепа. Однако, допуская упрощения, можно
испытывать также и тягач, работающий с прицепом. Если пре-
небречь влиянием на поворот поперечной силы (это допущение мы
приняли выше), то наличие прицепа скажется лишь в увеличении
массы поезда, что на стенде предусмотрено установкой дополни-
тельных дисков на соответствующие маховики и увеличением силы
сопротивления на тормозах 3.
МОДЕЛИРОВАНИЕ КРУТИЛЬНЫХ КОЛЕБАНИЙ
СИЛОВОЙ ПЕРЕДАЧИ ГУСЕНИЧНОЙ МАШИНЫ
При проектировании новой машины необходимо проверять си-
ловую передачу и двигатель на крутильные колебания. При выяв-
лении резонансных частот и узлов, подверженных наибольшим ди-
намическим нагрузкам, в силовую передачу должны быть своевре-
менно внесены коррективы — это предотвратит при эксплуатации
552
возможные поломки валов и увеличит срок службы силовой пере-
дачи.
По сравнению с силовой передачей колесных машин силовая
передача гусеничных машин более сложна. Наличие планетарных
механизмов с разветвленными потоками мощности и сложная ди-
намическая схема силовой передачи затрудняют ее расчет.
Для облегчения расчета, а следовательно, и исследований си-
ловой передачи на крутильные колебания можно применить экспе-
риментально-расчетный метод моделирования, или метод дина-
мических аналогий.
Этот метод заключается в следующем. Всякую даже самую
сложную силовую передачу можно представить в виде схемы сило-
вого потока. Всегда можно также создать электрическую или ме-
ханическую цепь, схема силового потока которой будет подобна
схеме силового потока силовой передачи. При этом достаточно
знать лишь схему исследуемой передачи и ее динамические пара-
метры (жесткость валов, массы и т. д.). Для этого служит спе-
циальный стенд с изменяемыми (по желанию экспериментатора)
динамическими параметрами. На стенде можно воспроизводить
аналогичные схемы, а следовательно, и те динамические явления,
которые будут возникать в действительной силовой передаче ма-
шины при ее работе.
Таким образом, еще до создания силовой передачи конструктор
может выявить, какие динамические явления возникнут в проекти-
руемой им силовой передаче: с какими амплитудами и частотами
будет она работать, возможно ли появление в ней резонансных ко-
лебаний и т. д.
В зависимости от полученных результатов можно изменять
жесткости или маховые массы силовой передачи (или даже пе-
рейти к другой схеме) и, таким образом, избежать резонансных
явлений.
Общий вид стенда для механического моделирования крутиль-
ных колебаний, возникающих в силовой передаче гусеничных ма-
шин, спроектированного и построенного под руководством
канд. техн, наук П. Я. Волчка, представлен на рис. 382.
Стенд состоит из фрикционных, упругих и инерционных элемен-
тов. Фрикционные элементы имитируют фрикционные тормоза и
муфты силовой передачи, а также различные сопротивления, не за-
висящие от времени; упругие элементы (пружины) имитируют упру-
гость валов, а инерционные элементы — маховые массы силовой
передачи.
Фрикционные, упругие и инерционные элементы стенда имеют
переменные характеристики, которые можно задавать по желанию
экспериментатора. Кроме того, эти элементы могут по-разному со-
единяться между собой, давая различные схемы силового потока.
В конструкции стенда предусмотрены возбудители сложных (не-
синусоидальных) колебаний, соответствующих переменной состав-
ляющей крутящего момента двигателя, колебаниям подвески, дви-
жителя, переменной нагрузке на крюке.
553
Любые колебательные процессы, в том числе и крутильные ко-
лебания, можно исследовать также методом электрического
моделирования.
В теории силового потока было показано, что между механиче-
скими и электрическими явлениями существует полная аналогия.
Так, инерционные явления аналогичны емкостным явлениям в це-
пях переменного электрического тока, упругие явления — индук-
Рис. 382. Общий вид стенда для механического моделирования крутильных
колебаний
тивным явлениям. На основании этих аналогий можно создать
стенд электрического моделирования. В этот
стенд войдет набор емкостей, индуктивностей и сопротивлений (для
имитации диссипативных явлений). Составляя схему электрического
силового потока, аналогичную схеме силового потока силовой пере-
дачи или подвески машины (при исследовании подвесок машины),
и используя в качестве фиксирующего прибора осциллограф, можно
исследовать по электрическому силовому потоку явления, происхо-
дящие в механическом силовом потоке, т. е. в силовой передаче гу-
сеничной машины.
Электрическое моделирование проще и удобнее механического
моделирования. Однако некоторые явления при электрическом мо-
делировании трудно воспроизвести (например, зазоры в механиз-
ме), поэтому, кроме стенда электрического моделирования, полезно
иметь в лаборатории и стенд механического моделирования. Стенд
механического моделирования удобно строить по аналогиям, приня-
тым в теории силового потока. При создании стенда электрического
моделирования можно пользоваться как аналогиями силового по-
тока (инерционные явления аналогичны емкостным, упругие — ин-
дуктивным), так и аналогиями Максвелла (инерционные явления
аналогичны индуктивным, упругие — емкостным).
554
5. ХОДОВЫЕ ИСПЫТАНИЯ МАШИН
Ходовые испытания обычно проводятся на испытательных по-
лигонах, оборудованных специальными испытательными площад-
ками и трассами.
На испытательных площадках и трассах создаются местные
препятствия: крутые подъемы, спуски, отвесные стенки, рвы, а так-
же бетонированные площадки и дорожки для исследования вопро-
сов поворота и разгона машины.
Испытательных трасс обычно бывает несколько. Они проходят
по дорогам и по пересеченной местности, имеют различную протя-
женность и различной сложности профиль.
На территории полигона, кроме того, должны иметься участки
заболоченной местности, водные преграды, бассейны, а также раз-
личные испытательные камеры: пылевые, холодильные, климатиче-
ские и т. д. При ходовых испытаниях испытываются как машина
в целом, так и ее агрегаты и оборудование. На этих испытаниях
проводится также наблюдение за состоянием организма водителя
и членов экипажа машины.
При испытаниях используется самая разнообразная измеритель-
ная аппаратура и оборудование: динамометрические прицепы, хо-
довые измерительные лаборатории и т. д.
Динамометрические прицепы служат для создания на крюке
машины сопротивления. Обычно это колесная или гусеничная ма-
шина, оборудованная специальными гидравлическими или электри-
ческими тормозами. Прицеп подключается к испытываемой машине
через динамометр и при испытаниях притормаживает машину. На
динамометре при этом фиксируется сила сопротивления движению
прицепа.
Ходовая лаборатория создается на базе колесной или
гусеничной машины, оборудованной различной, главным образом
электроизмерительной, аппаратурой.
Так как электроизмерительная аппаратура требует .тщательного
ухода и наблюдения, а также защиты от влажности и резкого из-
менения температур, она размещается в специальном закрытом и
обогреваемом кузове.
Рассмотрим кратко основные требования, которые предъявля-
ются к измерительной аппаратуре, применяющейся
при ходовых испытаниях гусеничных машин.
Особенностью ходовых испытаний по сравнению с лаборатор-
ными испытаниями является трудность размещения аппаратуры в
машине. Гусеничная машина имеет очень плотную, компоновку, и
в ней не всегда можно найти место, чтобы установить тот или иной
прибор, поэтому аппаратура, применяющаяся при ходовых испы-
таниях, прежде всего должна быть компактной.
При испытаниях на местности на машину действуют значитель-
ные динамические ускорения, величина которых при пробивании
подвески может достигать 6 g и более. Поэтому измерительная
555
аппаратура должна надежно работать в условиях больших динами-
ческих перегрузок.
Наконец, аппаратура должна фиксировать мгновенные процес-
сы, а следовательно, она должна быть самопишущей.
К этим трем требованиям надо добавить также требование до-
статочной точности измерений искомых величин.
Электроизмерительная аппаратура полностью удовлетворяет
первому и третьему требованиям. В меньшей мере она удовлетво-
ряет второму и четвертому требованиям. Поэтому наравне с электро-
измерительной аппаратурой при ходовых испытаниях могут приме-
няться и другая аппаратура и другие методы измерений.
ХОДОВАЯ ЛАБОРАТОРИЯ
В ходовой лаборатории сосредоточена вся измерительная аппа-
ратура, необходимая для проведения испытаний как машины в це-
лом (например, при испытании на экономичность, маневренность,
проходимость), так и ее агрегатов (например, при испытании на
прочность, износ, нагрев и т. д.).
В качестве примера ходовой лаборатории рассмотрим ходовую
лабораторию ВАТТ, разработанную канд. техн, наук П. Я. Волчком.
Ходовая лаборатория предназначается для комплексной записи
следующих механических параметров, характеризующих работу гу-
сеничных машин и их агрегатов:
— времени, пути, скорости, ускорения движения машины при
разгоне, торможении и при установившемся движении;
— крутящих моментов на валах силовой передачи;
— тяговых усилий на крюке тягача;
— толкающих усилий прицепа;
— чисел оборотов валов двигателя, силовой передачи, ведущих
колес;
— усилий на рычагах, педалях и тягах органов управления ма-
шиной;
— относительных угловых и линейных перемещений машины
(балансиров подвески, рычагов управления педалей, тяг);
— моментов включения и выключения органов управления ма-
шиной (фрикционных и зубчатых муфт, тормозов и т. д.);
— напряжений в деталях агрегатов и в корпусе машины;
— температур масла в агрегатах силовой передачи.
Ходовая лаборатория предназначается прежде всего для иссле-
дования динамических процессов:
— крутильных колебаний валов силовой передачи;
— неравномерного движения машины;
— колебаний корпуса;
— работы автоматических силовых передач и т. д.
Рассмотрим основные электроизмерительные приборы, которыми
оборудована ходовая лаборатория, и принцип их действия.
Принцип работы всякого электроизмерительного прибора заклю-
556
чается в преобразовании механических величин (скорости, силы,
момента и т. д.) в электрический ток и регистрации тока осцилло-
графом.
Механические величины преобразуются в электрический ток в
датчиках или преобразователях.
Датчики пути, времени, суммарных оборотов, моментов включе-
ния органов управления машиной работают по принципу замыка-
ния контактов.
Для записи скорости машины и числа оборотов валов применя-
ются датчики индукционного типа.
Запись относительных перемещений производится реостатными
датчиками.
Для измерения тяговых усилий, крутящих моментов, напряже-
ний применяются проволочные тензодатчики, работающие совмест-
но с ламповым усилителем.
На рис. 383 представлена общая монтажная схема оборудова-
ния лаборатории ВАТТ.
Вся аппаратура, за исключением датчиков, размещается в спе-
циальном съемном фургоне, который на время испытаний устанав-
ливается на тягач.
С помощью ходовой лаборатории можно исследовать как сам
тягач, на базе которого смонтирована лаборатория, так и какую-
либо другую машину. В зависимости от этого датчики устанавли-
ваются или на базовой машине, или на испытываемой машине, ко-
торая в этом случае движется параллельно ходовой лаборатории.
Обе машины связаны между собой многожильным электрическим
кабелем, по которому электрические импульсы от датчиков пере-
даются на осциллограф, установленный в ходовой лаборатории.
Так как вся измерительная аппаратура смонтирована в съем-
ном фургоне, то его можно устанавливать не только на базовую
машину, но и на любую другую машину колесного или гусеничного
типа.
Осциллограф, применяющийся в ходовой лаборатории
ВАТТ, имеет следующие данные:
— чувствительность шлейфов 50 мм/ма;
— собственная частота шлейфов 135 гц;
— ширина ленты 200 мм;
— скорость подачи ленты 40 см/сек;
— напряжение тока питания 12 в.
Ламповый усилитель служит для обеспечения работы
тензометрических датчиков.
В ходовой лаборатории применен четырехканальный ламповый
усилитель серийного выпуска.
Датчик времени. В качестве датчика времени применены
электроконтактные часы МЧ-62 серийного производства. Датчик
времени наносит отметку на осциллограмму.
Датчик скорости вращения валов. Датчиком слу-
жит малогабаритное таходинамо ЭД1 постоянного тока серийного
выпуска.
557
крутящих моментов
Рис. 383. Монтажная схема оборудования ходовой лаборатории ВАТТ
В таходинамо имеются постоянные магниты, что обеспечивает
линейную зависимость между скоростью вращения вала и индук-
тируемой ЭДС.
Таходинамо включается в шлейф осциллографа, который и за-
писывает на осциллограмме скорость вращения вала.
Скорость валов можно также измерять контактными датчиками.
Прибор для записи пути и скорости движе-
ния машины. В аппаратуре ходовой лаборатории находится
прибор для записи пути и скорости движения машины (рис. 384).
Он состоит из мотоциклетного колеса, установленного в вилке. Ось
колеса имеет контактное устройство для определения числа обо-
ротов колеса (датчик пути). Колесо крепится к подножке или к
658
Рис. 384. Прибор для записи пути и скорости движения машины!
а — вид сбоку; б — вид сверху
Рис. 385. Общий вид датчика тяговых усилий
Рис. 386. Устройство датчика тяговых усилий
560
корпусу машины и при движении машины катится по дороге, отме-
чая пройденный машиной путь. К дороге колесо прижимается спе-
циальной пружиной.
Для измерения скорости движения машины на оси колеса уста-
новлено таходинамо (датчик скорости). Оба датчика включены
в шлейфы осциллографа.
Датчик тяговых усилий (рис. 385) предназначен для
записи тяговых и толкающих усилий на крюке тягача.
Чувствительным элементом датчика является стержень
(рис. 386). На ослабленную часть стержня наклеивается проволоч-
Рис. 387. СХзщпй вид датчика крутящих
моментов
ный тензодатчик, представляющий собой электрическое сопротив-
ление, состоящее из нескольких витков очень тонкой константано-
вой проволоки. Тензодатчик включается в измерительный мостик,
к которому подводится питание. Мостик балансируется так, чтобы
в измерителе отсутствовал ток. При деформации детали под дей-
ствием нагрузки проволока тензодатчика, наклеенного на деталь,
растягивается и сопротивление ее меняется. Вследствие этого балан-
сировка мостика нарушается и по нему начинает течь ток. Ток этот
усиливают ламповым усилителем и направляют в шлейф осцилло-
графа, где и производится его запись, соответствующая значениям
тягового усилия.
Так как напряжения в стальном стержне распределяются нерав-
номерно, то на стержень наклеивается еще компенсационный дат-
чик. Кроме того, компенсационный датчик применяется для ком-
пенсации возможных изменений температур в приборе.
Датчик крутящих моментов. На рис. 387 представлен
общий вид датчика крутящих моментов.
Датчик состоит из вала (рис. 388), на который наклеены четыре
проволочных тензодатчика, образующих мостиковую схему. Концы
диагоналей моста соединяются с вращающимися кольцами токо-
съемного приспособления: неподвижные кольца токосъемника под-
соединяются к усилителю и через него к осциллографу.
36—20
561
Рис. 388. Устройство датчика крутящих моментов
сл
СП
GJ
Рис. 389. Да1чик линейных ускорений
Датчик имеет сменную разъемную переходную втулку, которая
позволяет крепить его на валах различных диаметров (до 50 мм).
Датчик линейных ускорений. Датчик линейных
ускорений работает по принципу изгиба стальной пластинки под
действием инерционного груза. Одним концом стальная пластинка
закреплена на корпусе прибора, а на другом конце помещается
инерционный грузик в виде небольшого шарика (рис. 389). Прибор
размещается так, чтобы плоскость пластинки была перпендику-
лярна действующему ускорению.
Рис. 390. Датчик относительных перемещений
деталей
Если машине, а следовательно, и основанию прибора сообщается
линейное ускорение, то грузик под действием инерции своей массы
изгибает пластинку пропорционально ускорению.
На обеих сторонах пластинки наклеены проволочные тензодат-
чики. Изгиб пластинки вызывает растяжение проволоки тензодат-
чиков и изменение ее электрического сопротивления.
Датчик относительных перемещений деталей
(рис. 390) состоит из следующих узлов: корпуса, проволочного рео-
стата с ползунком, поворотного рычага. Ползунок реостата может
поворачиваться на +45°. Рычаг присоединяется к испытываемой
детали. При повороте детали (например, при повороте педали глав-
ного фрикциона) ползунок реостата перемещается. Вследствие
этого изменяется сопротивление реостата. Реостат включен в изме-
рительный мостик, который сбалансирован на отсутствие тока. Из-
менение сопротивления нарушает балансировку мостика и вызы-
вает в нем ток. Величина тока будет пропорциональна углу пово-
рота испытываемой детали.
На рис. 391 показан образец записи на осциллограмме различ-
ных скоростных и тяговых параметров гусеничного тягача,
Б64
8 ПО. , ilp6.n.Q
Л uintll Ill'll 11 lllA ill'll Ih. *1 1 1 11 1Ml 1 *i 1 1 4 11 11 'll tlthA It Xl'tlbA 111 tt*tl lilt
Рис. 391. Образец записи на осциллограмме различных скоростных и тяговых параметров гусеничной машины
от при испытании
СП
сл
проходившего ходовые испытания. На рис. 391 приведены следую-
щие обозначения:
Рир — тяговое усилие на крюке;
/Икр — крутящий момент на полуоси;
лдв — число оборотов вала двигателя;
nQ—отметки оборотов полуоси;
т — отметки времени;
г'о — скорость движения машины.
Осциллограмма дает полную картину динамики машины.
ХОДОВЫЕ ИСПЫТАНИЯ ГУСЕНИЧНЫХ МАШИН С ПОМОЩЬЮ
ТОПЛИВНО-МОЩНОСТНОЙ ХАРАКТЕРИСТИКИ
В измерительной технике обычно замеряют скорость и силу или
угловую скорость и момент. Определив опытным путем эти вели-
чины, находят мощность как произведение скорости на силу и при
установившемся движении — работу как произведение мощности
на время.
Точность замеров определяется точностью замеряемых величин,
т. е. скорости и силы. Если скорость определяется без труда и с вы-
сокой точностью, то этого нельзя сказать об определении силы.
Силу в машине замерять сложно, и точность замера ее обычно бы-
вает невелика, особенно когда замеряется передаваемый от двига-
теля не постоянный (меняющийся) крутящий момент. Определе-
ние момента связано всегда с большими трудностями. Эти трудно-
сти остаются и при электрическом методе измерения.
Во многих случаях, однако, можно отказаться от замера мо-
мента (силы) и заменить его замером мощности. Тогда
замеряемыми величинами будут мощность и скорость, а момент
будет определяться по формуле М == N : ш.
Мощность же достаточно точно и просто определяется непосред-
ственно по расходу горючего с помощью расходомера.
Указанный метод был разработан и практически внедрен в испы-
тания гусеничных машин инж. И. Н. Корнилаевым.
Рассмотрим этот метод более подробно ввиду его большого
практического значения для испытания гусеничных машин.
На рис. 392 представлен объемный расходомер ДО 0,3-2.
Устройство расходомера следующее. В корпусе 5 помещается мер-
ная чашка 9. Чашка прорезью надета на перегородку 8 и может
получать поступательное и качательное перемещение, как указано
на рисунке. В крышке корпуса имеются профильные окна А и В.
Горючее поступает через входное отверстие 12 и отжимает
чашку 9 в положение I. Через профильное окно А горючее запол-
няет внутренний объем чашки. Одновременно чашка продолжает
поворачиваться, отжимаемая горючим, и занимает положение II.
В этом положении чашка полностью заполнена горючим. В поло-
жениях III и IV горючее вытесняется из чашки и подается через
выходное отверстие 13 к топливной аппаратуре двигателя.
566
Рис. 392. Объемный расходомер ДО 0,3-2:
7, 2, 3 н 4— камеры расходомера; 5 — корпус; б — внутренняя стенка корпуса; 7 — ось корпуса; 8— перегородка корпуса; 9— мерная чашка; 10 — ось
мерной чашки; 11 — профильное окно мерной чашки; 12— входное отверстие; 13 — выходное отверстие; 14— сетка; 15 — рычаг; А — профильное окно
СЛ в крышке корпуса для сообщения полости камеры 1 и 2; В — профильное окно в крышке корпуса для сообщения полости камеры 3 и 4; 1. 11 III и
Р? IV — положения чашки
С чашкой 9 связан рычаг 15, который через систему шестерен
воздействует на электрокоптактное устройство и размыкает кон-
такт, посылая импульс на суммарный счетчик. Один импульс соот-
ветствует расходу 100 см3 горючего.
На машине расходомер устанавливается со специальным прибо-
ром конструкции инж. И. П. Зуева.
Прибор состоит из двух суммарных электроимпульсных счетчи-
ков 3 (рис. 393), трех секундомеров 2 и системы реле.
Рис. 393. Прибор для снятия топливно-мощностной характе-
ристики:
Z — кнопка автоматического включения; 2 — секундомеры; 3 — электро-
импульсные счетчики; 4— остановочный выключатель; 5 — выключатель
зажигания; 6 — датчик суммарных оборотов двигателя; 7—лампа щитка
приборов; 8 — датчик расхода горючего; 9 — пусковой выключатель; Z0 —
сигнальные лампы
Один из суммарных счетчиков связан с расходомером. Он от-
считывает число порций горючего, поступающего к двигателю. Од-
новременно секундомер отсчитывает время. Таким образом заме-
ряется секундный расход горючего.
Для повышения точности замера благодаря наличию электри-
ческих реле секундомер включается только в момент подачи им-
пульса от расходомера на суммарный счетчик. Таким образом, это
повышает точность замера. Секундомером отсчитывается время
выдачи расходомером только целых порций горючего.
Второй счетчик связан с валом двигателя и отсчитывает его
число оборотов. При этом второй секундомер фиксирует время. Во-
дитель при испытаниях должен, наблюдая за тахометром, поддер-
живать примерно постоянные (заданные) обороты вала двигателя.
Данный счетчик контролирует эти обороты, фиксируя средние обо-
роты за все время опыта.
Третий секундомер фиксирует продолжительность опыта. Он
включается, как только будет нажата соответствующая кнопка
прибора. По этому секундомеру замеряется скорость движения ма-
шины на мерном испытательном участке.
568
N дв. св.лс
70
Рис. 394. Исходная топливно-мощностная характеристика
Рис. 395. Топливно-мощностная характеристика
Методика ходовых испытаний машины заклю-
чается в следующем. С машины, которая должна испытываться,
демонтируется двигатель и устанавливается на тормозном испыта-
тельном стенде. На стенде с помощью рассмотренного выше при-
бора и измерительной аппаратуры самого стенда снимается топ-
ливно-мощностная характеристика двигателя, пред-
ставляющая зависимость свободной мощности (Л^дВСВ) от расхода
горючего (Q) при постоянных числах оборотов вала двигателя
(рис. 394).
Исходную топливно-мощностную характеристику можно пере-
строить как функцию расхода, по оборотам Q—п (рис. 395).
После снятия топливно-мощностной характеристики двигатель
снова монтируется на машине, после чего проводят ее ходовые
испытания.
При ходовых испытаниях с помощью прибора замеряется рас-
ход горючего. По топливно-мощностной характеристике находится
свободная мощность двигателя, которую он затрачивает на преодо-
ление тех или иных сопротивлений.
С помощью топливно-мощностной характеристики можно опре-
делять внутренние потери в силовой передаче, в ходовой части, со-
противление движению машины на разных грунтах и т. д.
Рассмотренный метод, являясь достаточно точным, позволяет
решать задачи,' которые другими методами решить часто бывает
трудно, а иногда и невозможно.
ЛИТЕРАТУРА
1. Аптонов А, С. Теория гусеничного движителя. Машгиз, 1949 г.
2. Антонов А. С., Артамонов Б. А., Коробков Б. М., М а г и д о-
в и ч Е. И. Танк. Воениздат, 1954 г.
3. Антонов А. С., Новохатько И. С., Григоренко Л. В Гидро-
механические передачи транспортных машин. ВАТТ, 1959 г.
4. Б и н о в и ч Я. Е., Груздев Н. И., Иванов И. И., Прокофьев А. А.
Теория танков. Воениздат, 1939 г.
5. Благонравов А. И. Танки и тракторы. Госиздат оборонной промыш-
ленности, 1940 г.
6. Зельцерман И. М. Фрикционы и тормоза гусеничных машин. ВАБТМВ,
1951 г.
7. Карельских Д. К. и Кристи М. К. Теория, конструкция и расчет
тракторов. Машгиз, 1940 г.
8. Крюков А. Д. Планетарные передачи в транспортных машинах. Маш-
гиз, 1950 г.
9. Кудрявцев А. П. Проектирование, постройка и испытание гидравли-
ческих турбопередач. Машгиз, 1947 г..
10. Львов Е. Д. Теория трактора. Машгиз, 1952 г.
11. Лапидус В. И. и Петров В. А. Гидравлические трансмиссии авто-
мобилей. Машгиз, 1957 г.
12. Руденко Н. Ф. Планетарные передачи. Машгиз, 1947 г.
13. Талу К. А, Сервоприводы гусеничных машин. Машгиз, 1947 г.
14. Та у рок В. Г. Механические бесступенчатые передачи. Машгиз, 1947 г.
15. Мальцев В. Ф. Импульсивные бесступенчатые передачи. Машгиз, 1.951 г.
16. Олсон Г. Динамические аналогии. Госиздат иностранной литературы,
1947 г.
ОГЛАВЛЕНИЕ
Стр.
Глава I. Общее устройство гусеничных тягачей....................... 3
1. Типы гусеничных машин...................................... —
2. Общие требования, предъявляемые к конструкции тягачей . . 13
3. Основные части тягача, их назначение и общая компоновка
тягача . ....................................................... 17
Глава II. Главные фрикционы....................................... 27
1. Назначение и классификация главных фрикционов............. —
2. Требования, предъявляемые к главному фрикциону........... 31
3. Конструкции главных фрикционов........................... 33
4. Фрикционные материалы.................................... 44
5. Расчет главного фрикциона дискового типа................. 47
6. Расчет главного фрикциона на работу буксования и на нагрев 52
7. Приводы управления главным фрикционом.................... 57
8. Гидродинамическая муфта.................................. 68
Глава III. Коробки передач........................................ 75
1. Назначение и классификация коробок передач................ —
2 Требования, предъявляемые к коробке передач............... 80
3. Элементы конструкций простых коробок передач............. 84
4. Конструкции простых коробок передач...................... 92
5. Конструкции планетарных коробок передач................. 107
6. Приводы управления коробками передач...........• .... 122
7. Кинематический расчет коробок передач................... 129
8. Примерный кинематический расчет многоточечной планетарной
коробки передач с последовательным силовым потоком............. 145
9. Статический расчет коробок передач...................... 151
Глава IV. Непрерывные механические трансформаторы............... 172
1. Определение и классификация трансформаторов ........... —
2. Характеристики трансформатора .......................... 174
3. Фрикционные трансформаторы.............................. 179
4. Импульсные трансформаторы............................... 187
Глава V. Непрерывные гидравлические трансформаторы. . . . 200
1. Гидростатический трансформатор............................ —
2. Расчет гидростатического трансформатора................ 204
3. Гидродинамический трансформатор........................ 214
4. Типы гидродинамических трансформаторов................. 219
5. Основные характеристики трансформаторов................ 234
6. Гидромеханические передачи ............................ 240
7. Расчет гидромеханических передач ...................... 254
8. Предварительный расчет гидромеханической передачи .... 258
9. Поверочный расчет гидромеханической передачи........... 270
10. Примерный расчет гидромеханической передачи с параллель
ным силовым потоком.............................................. 282
573,
Стр.
Глава VI. Непрерывные электрические трансформаторы .... 303
1. Электрическая передача как трансформатор силового потока . —
2. Электромеханические и электрические передачи........... 309
3. Типы электропередач гусеничных и колесных машин .... 311
4. Предварительный расчет электромеханической передачи . . . 319
5. Поверочный расчет электромеханической передачи......... 328
Глава VII. Механизмы поворота.................................... 340
1. Назначение и классификация механизмов поворота .......... —
2. Требования, предъявляемые к механизмам поворота........ 343
3. Параметры сравнительной оценки механизмов поворота .... 316
4. Типы независимых механизмов поворота с одинарным подводом
мощности и их сравнительная оценка............................ 349
5. Типы дифференциальных механизмов поворота с одинарным
подводом мощности и их сравнительная оценка................... 358
6. Типы механизмов поворота с двойным подводом мощности и их
сравнительная оценка .......................................... 365
7. Конструкции механизмов поворота........................ 371
8. Конструкции тормозов................................... 387
9. Приводы управления механизмами поворота................ 397
10. Расчет механизмов поворота............................. 401
Глава VIII. Кардаииые, конические и бортовые передачи........... 415
1. Карданные передачи....................................... —
2. Конические передачи.................................... 422
3. Бортовые передачи...................................... 426
Глава IX. Подвески............................................... 441
1. Типы подвесок и требования, предъявляемые к подвеске ... —
2 Конструкции подвесок.................................... 444
3. Упругие элементы подвесок.............................. 454
4. Предварительный расчет подвески........................ 459
5. Расчет подвески на плавность хода................. . 468
6. Поверочный расчет подвески............................. 470
Глава X. Гусеничные движители.................................... 473
1. Гусеничный и колесный движитель....................... —
2. Типы гусениц........................................... 475
3. Основные требования, предъявляемые к гусеничным цепям . . 477
4. Конструкции траков..................................... 485
5. Расчет на прочность шарниров траков ................... 493
6. Ведущие колеса....................................... 498
7. Конструкции ведущих колес.............................. 500
8. Расчет цевочного зацепления ведущего колеса............ 503
9. Опорные катки......................................., . 506
10. Конструкции опорных катков............................. 508
11. Расчет резинового бандажа опорного катка па удельное давле-
ние и нагрев.................................................. 512
12. Направляющие колеса и механизмы натяжения гусениц . . . 519
13. Конструкция и расчет механизма натяжения г\сепии...... 522
14. Поддерживающие катки................................... 530
574
Стр.
Глава XI Методы испытаний гусеничных машин и их механизмов 533
1. Виды и задачи iiciibiiainin. ... ... —
2. Испытания зубчатых механизмов а фрикционных элементов
силовоН передачи .... 535
3 Испытания ходовой части машины............................ 539
4. Комплексные испытания..................................... 5-15
5. Ходовые испытания машин................................... 555
Антонов Александр Сергеевич
ГУСЕНИЧНЫЕ ТЯГАЧИ. Часть 2.
Под наблюдением редактора ииженер-полковиика Косоротова Б. В,
Технический редактор Срибнис Н* В, Корректор Ларин В. В.
Сдано в набор 7.1.1959. Г-57048 Подписано к печати 1.12.1959.
Формат бумаги 60X92*/^ — 36 печ. л. 36 усл. печ. л. -f- 1 вкл. — '/* печ. л- = 0,25 усл. печ. л.
35,791 уч.-иэд. л.
Военное издательство Министерства обороны Союза ССР
Москва, К-9, Тверской бульвар, 18
Изд. № 8/826 Зак. № 20
2-я типография Военного издательства Министерстиа обороны Союза ССР
Ленинград, Д-65, Дворцовая пл., 10.
Продаже не подлежит
PqsjqGTSM