
























































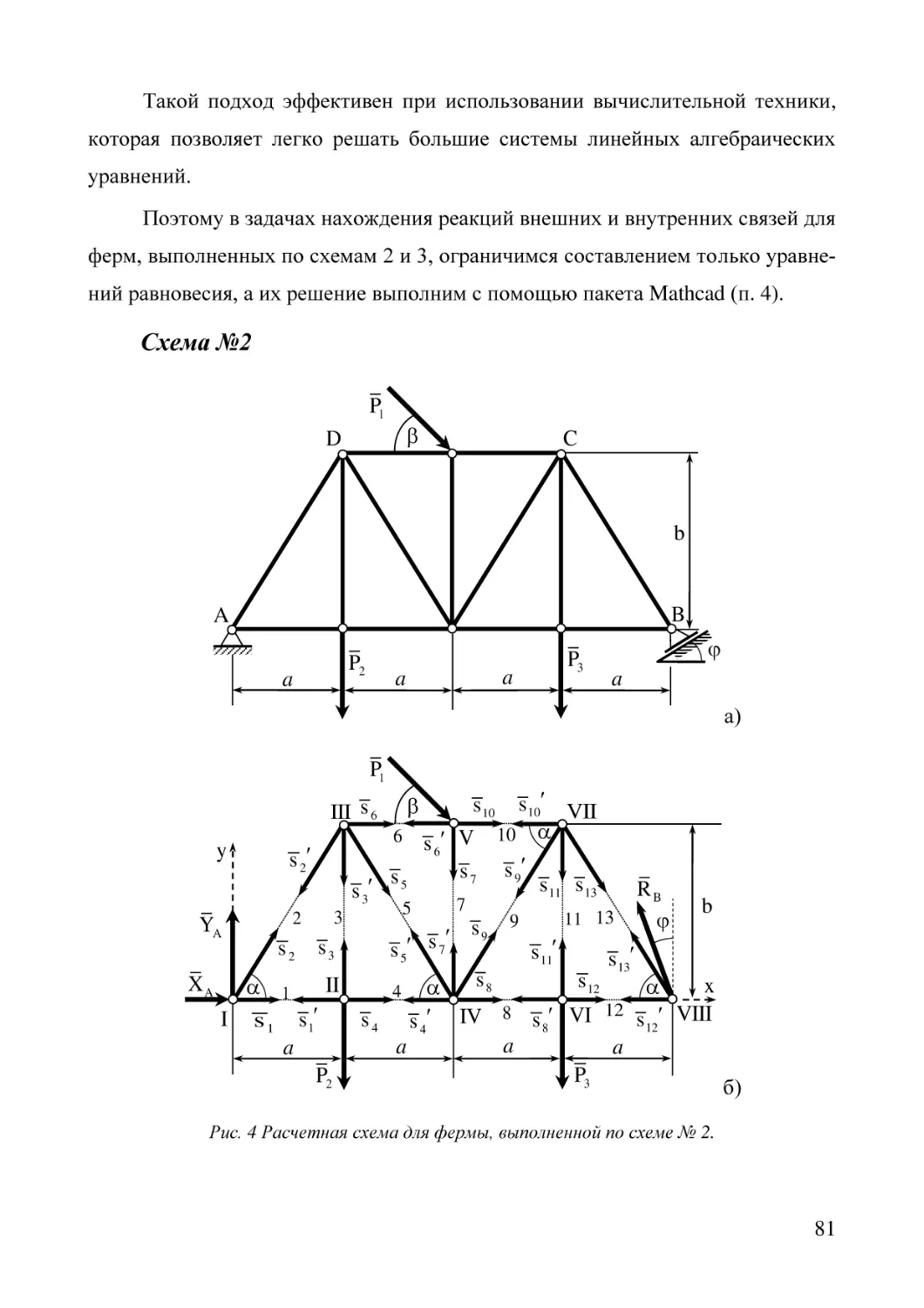














































































































































Автор: Бертяев В.Д. Булатов Л.А. Митяев А.Г.
Теги: колебания тел колебания тел с распределенными массой и упругостью возбуждение колебаний физика механика теоретическая механика учебное пособие
ISBN: 978-5-7679-3227-6
Год: 2015



В.Д. Бертяев, Л.А. Булатов, А.Г. Митяев
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
КУРСОВЫЕ РАБОТЫ
С ИСПОЛЬЗОВАНИЕМ MATHCAD
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИИ
ФГБОУ ВО «ТУЛЬСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ»
Кафедра теоретической механики
В.Д. Бертяев, Л.А. Булатов, А.Г. Митяев
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
КУРСОВЫЕ РАБОТЫ
С ИСПОЛЬЗОВАНИЕМ MATHCAD
Учебное пособие
Рекомендовано УМО вузов по университетскому политехническому образованию в
качестве учебного пособия для студентов высших учебных заведений, обучающихся
по машиностроительным специальностям
Тула,
Изд-во ТулГУ,
2015
УДК 534.1 + 538.56
Бертяев В.Д., Булатов Л. А., Митяев А. Г. Теоретическая механика: курсовые работы с
использованием Mathcad: учеб. пособие / 2–е изд., перераб. Тула: Изд-во ТулГУ, 2015.
312с.
ISBN–978–5–7679–3227–6
Данный сборник содержит 7 заданий по всем основным разделам теоретической
механики (кинематика – 1, статика – 3, динамика и аналитическая механика – 3). В нем
приведены альбомы заданий и примеры их выполнения, на основе которых, студенты
(особенно заочных и вечерних форм обучения) смогут выполнить их самостоятельно.
Все задания при выполнении требуют проведения определенного вида исследований и
принятия на их основе практических рекомендаций.
Предназначено для студентов высших учебных заведений очной, очно-заочной и
заочной форм обучения для машиностроительных, строительных и приборостроительных направлений подготовки.
Рецензенты:
Дубинин В.Д., з ав. кафедрой теоретической механик МГТУ им.
Н.Э. Баумана
Борисевич В.Б., зав. кафедрой теоретической механики Московского автомобильно-дорожного института (государственный технический университет)
Печатается по решению библиотечно-издательского совета Тульского государственного университета
ISBN–978–5–7679–3227–6
©
©
В.Д. Бертяев, Л.А. Булатов, А.Г. Митяев 2015
Изд-во ТулГУ, 2015
ВВЕДЕНИЕ
Теоретическая механика, являющаяся одной из фундаментальных дисциплин, играет существенную роль в подготовке бакалавров и специалистов всех
инженерных направлений и специальностей подготовки.
На законах и принципах теоретической механики базируется целый ряд
естественнонаучных и общетехнических дисциплин, таких как сопротивление
материалов, теория машин и механизмов, детали машин, строительная механика
и др. Решение инженерных и научных задач, проектирование новых машин, конструкций и сооружений также осуществляется на основе теорем и принципов
теоретической механики.
Хорошие знания теоретической механики требуют не только глубокого
усвоения теории, но и умения грамотно поставить задачу, решить ее, проанализировать результаты и при необходимости выбрать оптимальный вариант решения. Все вышеизложенное наиболее успешно может быть достигнуто при помощи курсового проектирования.
Данный сборник содержит 7 заданий по всем основным разделам теоретической механики (кинематика – 1, статика – 3, динамика и аналитическая механика – 3). В нем приведены альбомы заданий и примеры их выполнения, на основе которых, студенты (особенно заочных и вечерних форм обучения) смогут
выполнить их самостоятельно. Все задания при выполнении требуют проведения
определенного вида исследований и принятия на их основе практических рекомендаций.
3
Предлагаемые курсовые работы дают возможность после изучения изложенного материала, самостоятельно решать более сложные и математически
трудоемкие задачи механики.
Выполнение курсовых работ осуществляется на примере использования
математического пакета Mathcad, который представляет собой эффективное
средство для аналитических преобразований и численного решения теоретических и практических задач. Область его применения простирается от простейших
вычислений до расчета сложных задач в различных отраслях знаний. С помощью
Mathcad можно с успехом решать задачи механики абсолютно твердых и деформируемых тел. Пакет имеет чрезвычайно удобный математико-ориентированный интерфейс и прекрасные средства графики.
Использование Mathcad в теоретической механике позволяет проводить
анализ поведения механических систем в соответствии с поставленной задачей,
что дает возможность решать реальные инженерные задачи учащимися младших
курсов не знакомых еще с численными методами и программированием, но имеющих базовые знания в курсе информатики.
4
Общие положения
Процедура постановки и решения задач теоретической механики включает
в себя пять основных этапов:
1) Формулировку задачи;
2) Построение расчетной схемы;
3) Построение математической модели;
4) Реализация математической модели (решение задачи);
5) Анализ результатов и принятие решений.
Первые три этапа включает в себя постановка задачи.
Формулировка задачи — это условие (текст) задачи. Она осуществляется
руководителем работ совместно с исполнителем.
Расчетная схема — это рисунок, на котором изображены: рационально выбранная система координат; упрощенная схема механической системы в произвольном или заданном положении; механические характеристики и т.п. (в зависимости от применяемого метода).
Математическая модель — это система алгебраических и / или дифференциальных уравнений (уникальная для каждого применяемого метода), а также
начальных условий, описывающих кинематическое поведение механической системы.
Реализация математической модели — это решение поставленной задачи
выбранным, на этапе постановки, методом.
Анализ полученных результатов — это сравнение решений, полученных
разными методами, определение критических состояний механической системы
и нахождение оптимальных параметров для ее функционирования.
5
Требования к оформлению и защите1
Работа представляется к защите в виде пояснительной записки. Пояснительная записка, объемом 25-30 листов, аккуратно оформляется на листах формата А4. Каждый лист должен быть пронумерован. Разделы и параграфы должны
быть озаглавлены и пронумерованы. Формулы, на которые есть ссылки в тексте
пояснительной записки, обязательно нумеруются. Листы должны быть скреплены между собой. Пояснительная записка включает в себя:
1) Титульный лист.
2) Аннотация (Краткое содержание работы).
3) Оглавление с нумерацией страниц каждого раздела.
4) Схема механизма (конструкции) и необходимые численные данные для выполнения задания (на отдельном листе).
5) Постановка задачи. Описание подхода к решению задачи, формулировка
математической модели и методов решения, использованных в процессе
работы над проектом.
6) Решение полученной системы уравнений.
7) Анализ результатов.
8) Выводы
9) Список литературы.
При защите работы оцениваются: оформление пояснительной записки;
правильность постановки и решения задач механики; самостоятельность выполнения задания; грамотный анализ полученного решения.
При защите необходимо уметь прокомментировать любой метод решения,
уметь определять механические характеристики системы по требованию преподавателя.
1
Работы, не отвечающие всем перечисленным требованиям, не проверяются, а возвращаются для переделки.
6
1. КИНЕМАТИКА
Данное задание посвящено применению основных теорем и принципов кинематики к исследованию механических систем. Студенты, выполняя то или
иное задание, должны получить навыки и умения:
o нахождения геометрических связей, наложенных на заданный механизм и
формулировку их в математическом виде;
o составления уравнений движения произвольной точки механизма и определения ее траектории, скорости, ускорения;
o применения теорем о сложении скоростей и ускорений в плоском движении
твердого тела и в сложном движении точки;
o решения поставленной задачи аналитическим и графическим способом.
K1. КИНЕМАТИКА ПЛОСКИХ МЕХАНИЗМОВ
Плоские механизмы имеют широкое применение в технике. Кинематическое исследование этих механизмов играет важную роль на этапе предварительного проектирования узлов и звеньев сложных машин. Проектируя новую машину или прибор, разработчик должен уметь создавать такие кинематические
схемы, чтобы выходные звенья механизма совершали движения, требуемые технологическим процессом. При этом часто приходится искать способы получения
заданных движений всего механизма или его отдельных звеньев в зависимости
от тех или иных ограничений, определяемых условиями функционирования машины.
Цель курсовой работы
Приобретение навыков кинематического расчёта плоского шарнирного механизма с использованием различных методов.
Содержание курсовой работы
Объектом исследования является плоский многозвенный шарнирный механизм с одной степенью свободы, ведущее звено которого движется по закону
7
t 0 t ,
где 0
2 рад
– угловая скорость; T – период вращения ведущего звена.
с
T
Требуется: применяя различные методы и теоремы кинематики определить: закон движения ведомых звеньев механизма; угловые скорости, угловые
ускорения звеньев, совершающих вращательные и плоское движение; закон движения, траектория, а также скорости и ускорения заданных точек, и звеньев совершающих поступательные движения.
Схемы механизмов, а также геометрические характеристики тел приведены в альбоме заданий.
Методы исследований:
o аналитический метод;
o геометрические (графический и графоаналитический) методы.
1. С помощью аналитического метода составить уравнения геометрических связей механизма, получить зависимости углов поворотов ведомых звеньев от времени или от угла поворота ведущего звена.
2. Получить системы разрешающих уравнений для определения угловых скоростей и ускорений ведомых звеньев, а также линейной скорости и ускорения
звена, движущегося поступательно.
3. Записать уравнения для вычисления координат, линейных скоростей и ускорений точек, определенных в задании.
4. Используя основные теоремы плоскопараллельного движения твёрдого тела,
выполнить расчёт скоростей и ускорений всех звеньев и всех узловых точек
(шарниров) механизма для заданного его положения.
5. Используя основные теоремы составного движения точки при вращательном
переносном движении, выполнить расчёт скоростей и ускорений всех звеньев и
всех узловых точек (шарниров) механизма для заданного его положения.
6. Сравнить решения, полученные разными геометрическими методами.
8
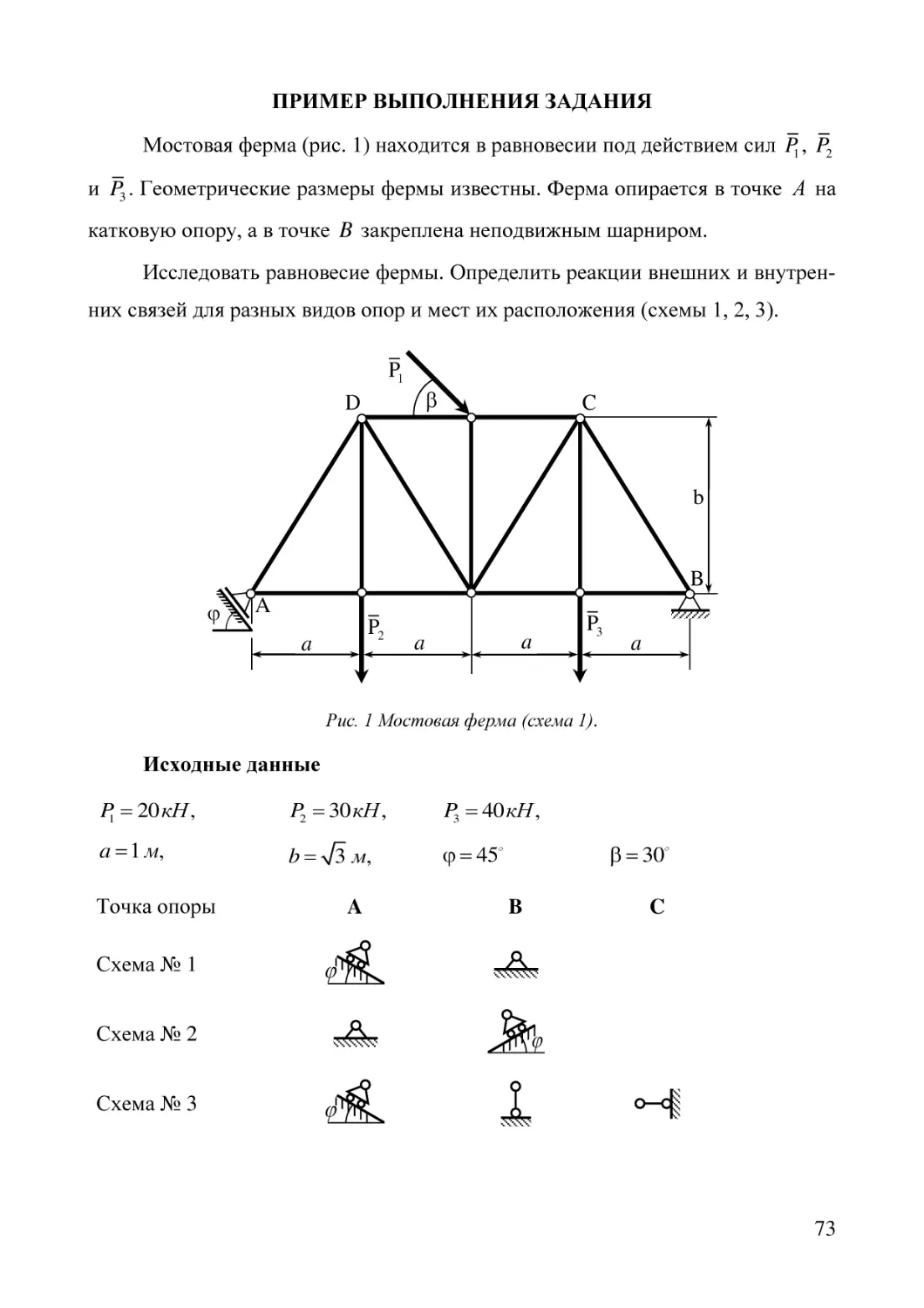
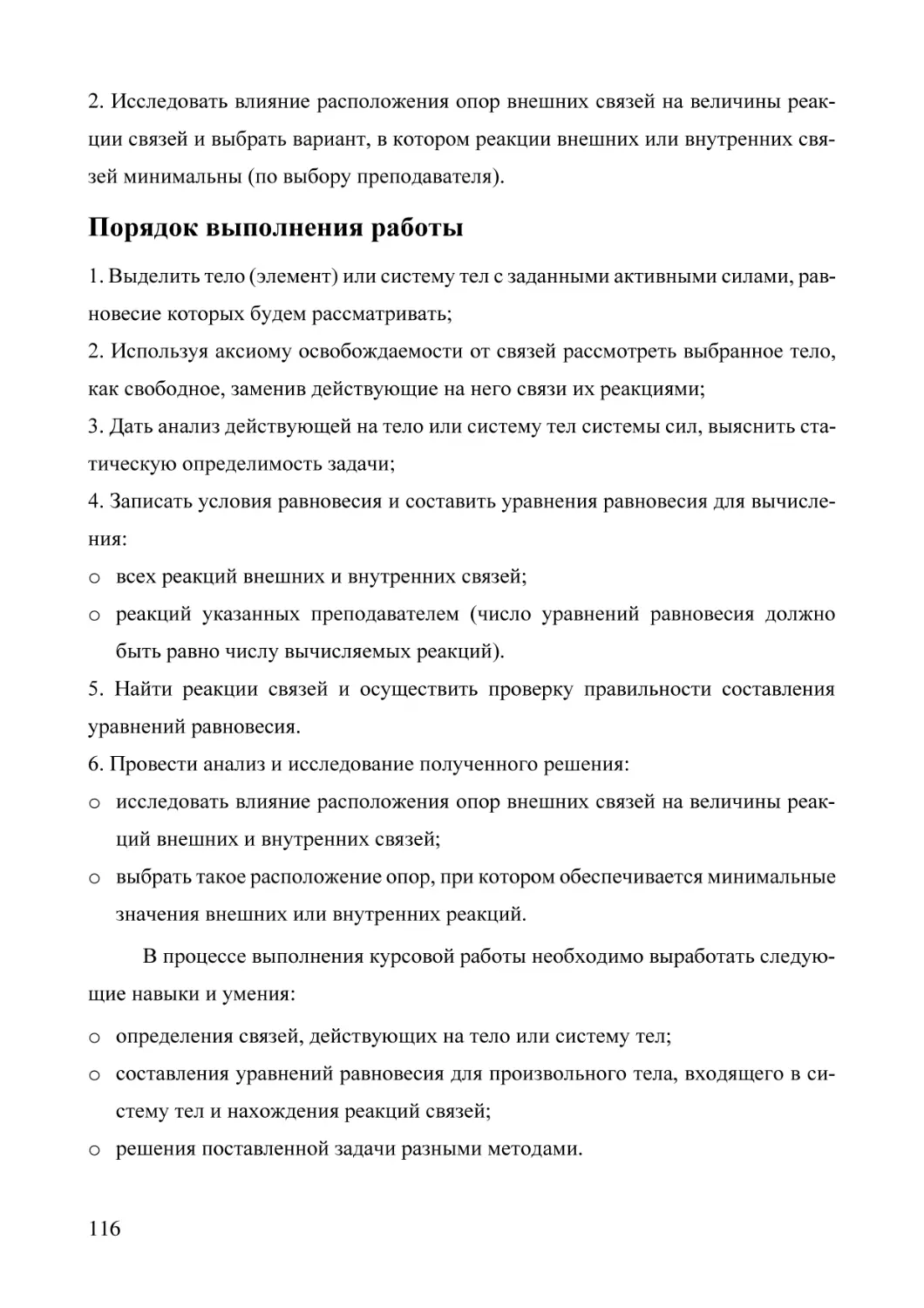
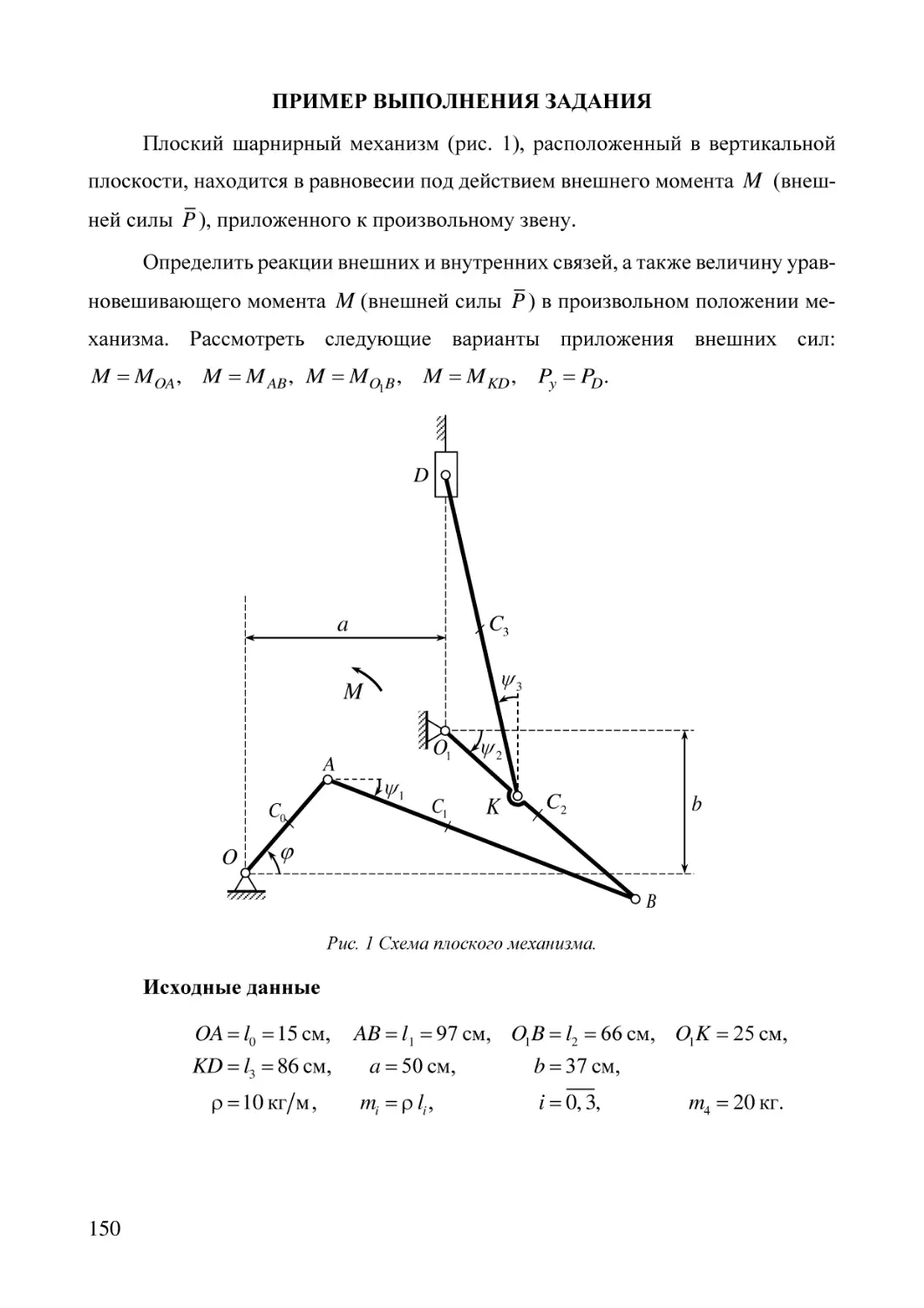
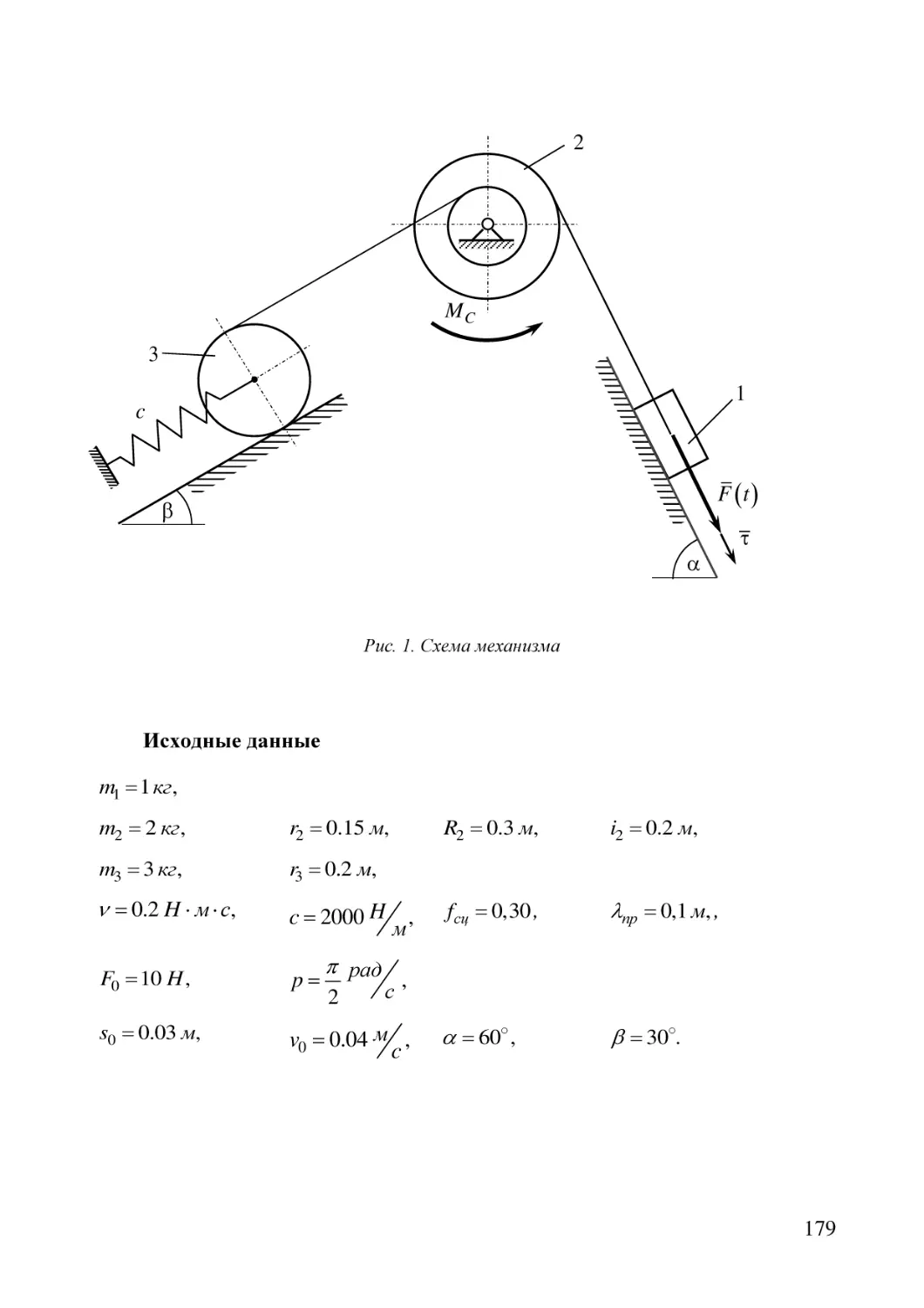
ПРИМЕР ВЫПОЛНЕНИЯ ЗАДАНИЯ
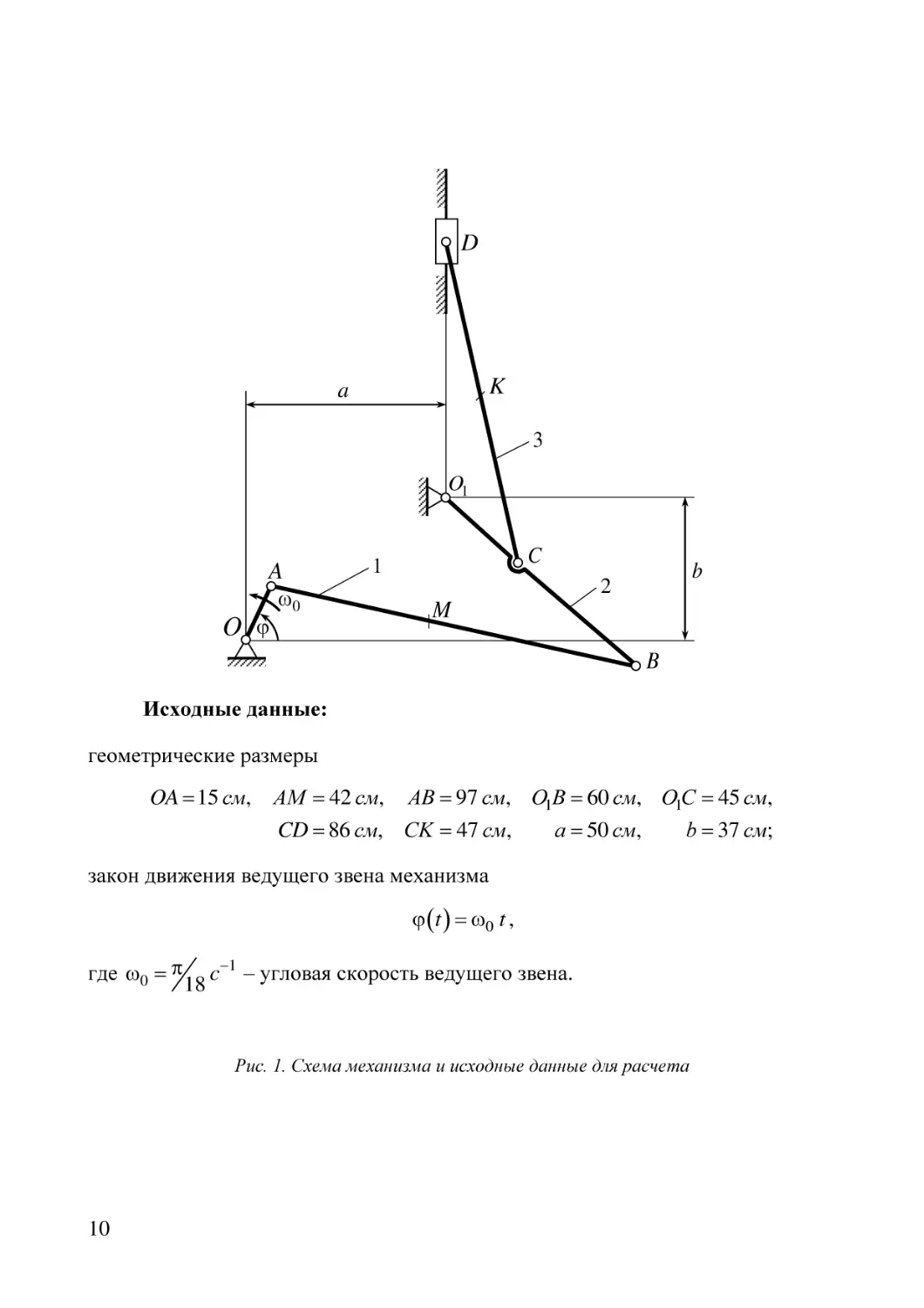
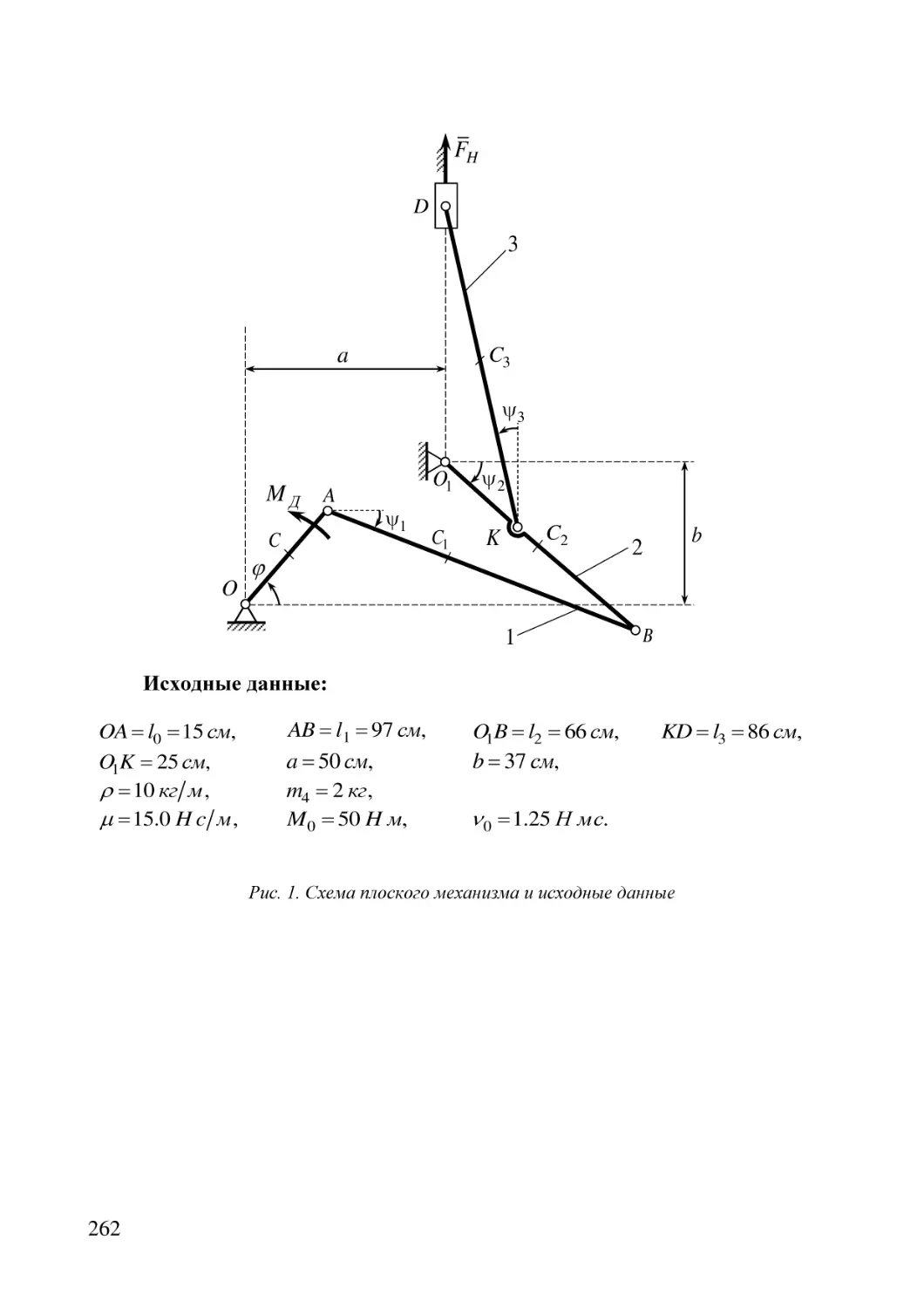
Провести кинематическое исследование плоского шарнирного многозвенного механизма с одной степенью свободы, для которого известны все геометрические размеры и закон движения ведущего звена (рис. 1).
Определить законы движения всех звеньев механизма, угловые скорости и
ускорения ведомых звеньев, а также линейные скорость и ускорение звена, движущегося поступательно. Вычислить скорости и ускорения всех узловых точек
механизма, а также точек M и K , в зависимости от значения угла поворота ведущего звена t . Произвести визуализацию механизма, изобразить траектории,
векторы скоростей и ускорений всех его заданных точек, если даны:
o геометрические размеры
OA, AM , AB, O1B, O1C, CD, CK , a, b;
o закон движения ведущего звена механизма
t 0 t ,
где 0 – угловая скорость ведущего звена.
9
D
K
a
3
O1
A
O
0
C
1
b
2
M
B
Исходные данные:
геометрические размеры
OA 15 см,
AM 42 см, AB 97 см, O1B 60 см, O1C 45 см,
CD 86 см, CK 47 см,
a 50 см,
b 37 см;
закон движения ведущего звена механизма
t 0 t ,
где 0
18
c 1 – угловая скорость ведущего звена.
Рис. 1. Схема механизма и исходные данные для расчета
10
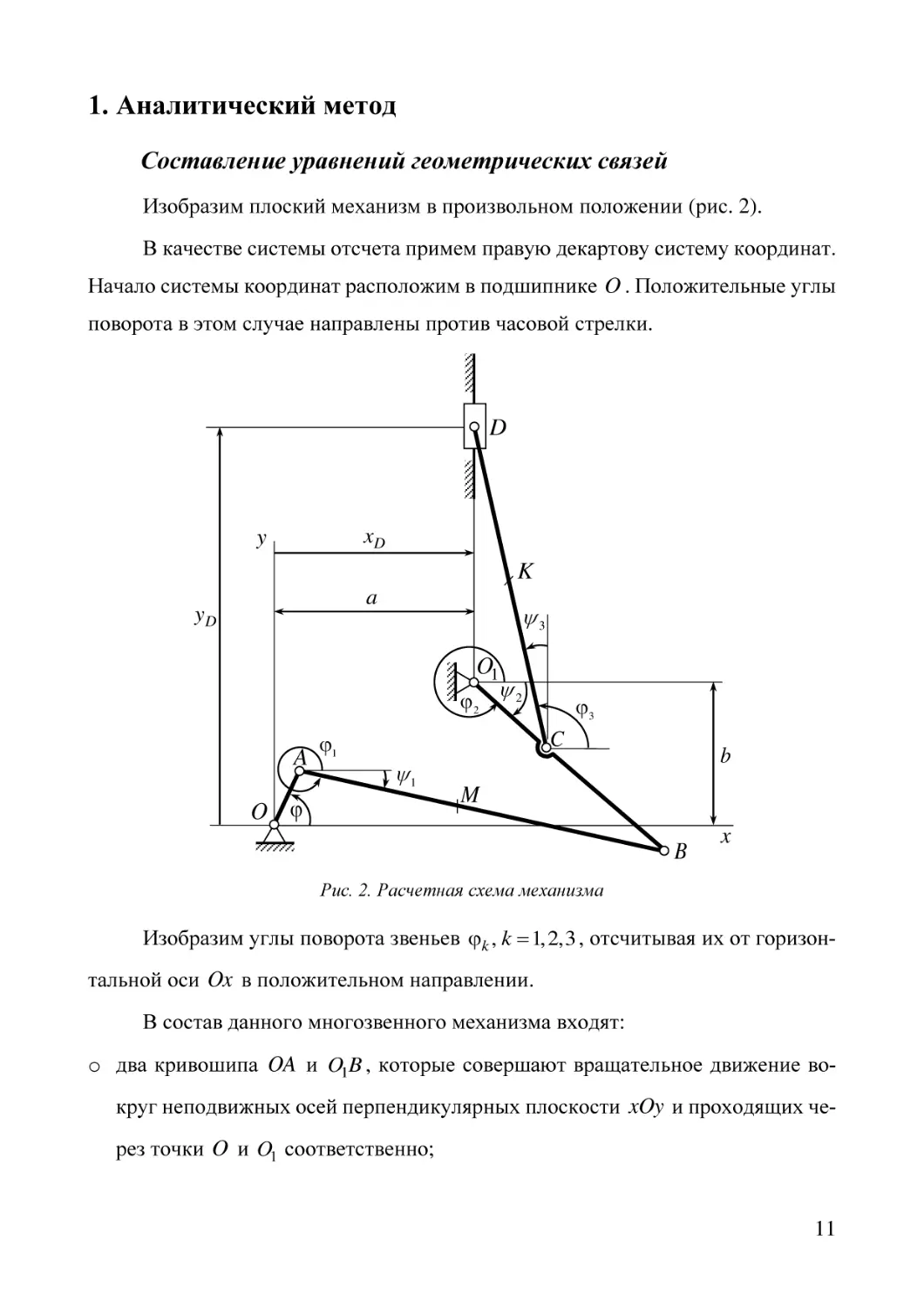
1. Аналитический метод
Составление уравнений геометрических связей
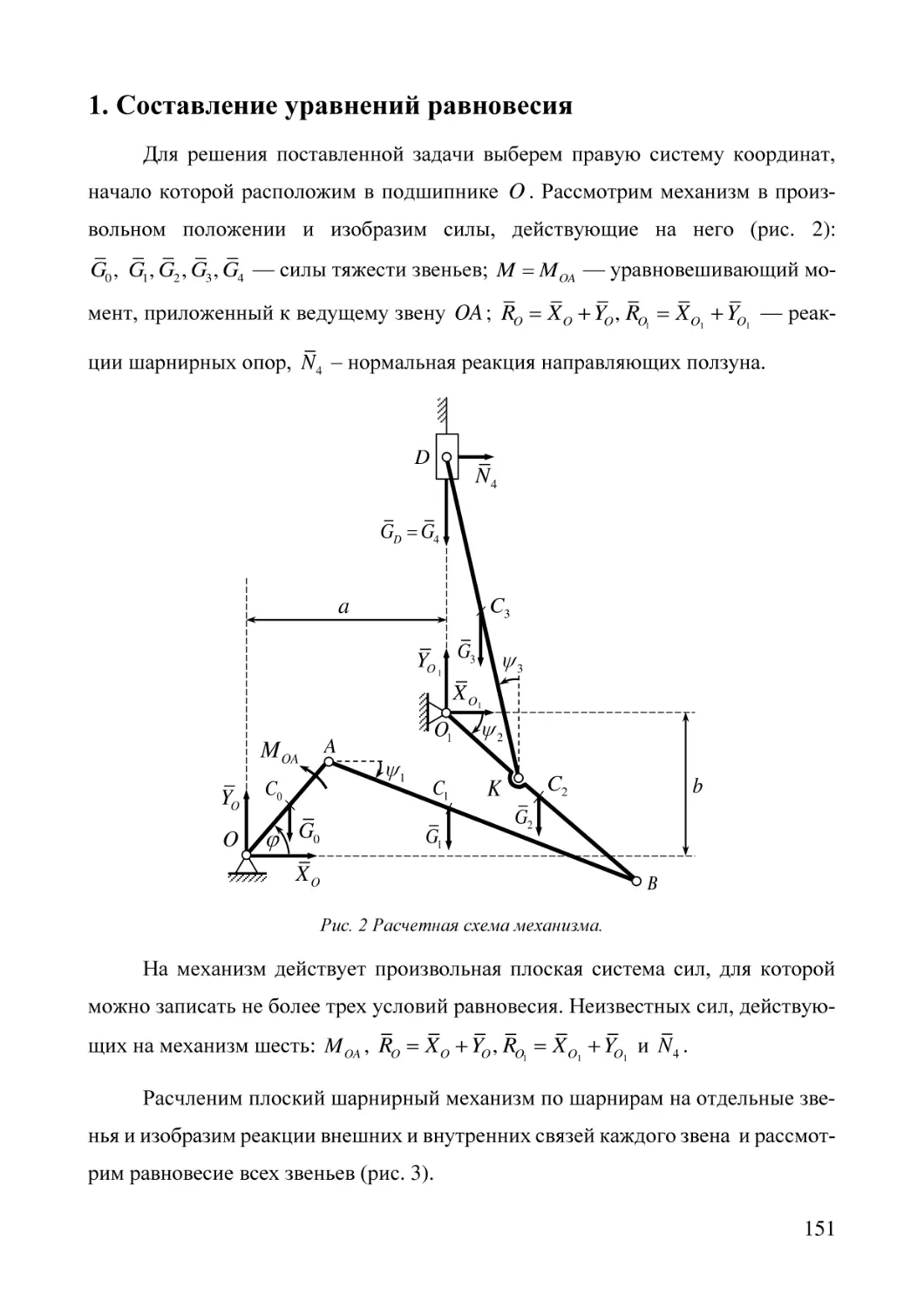
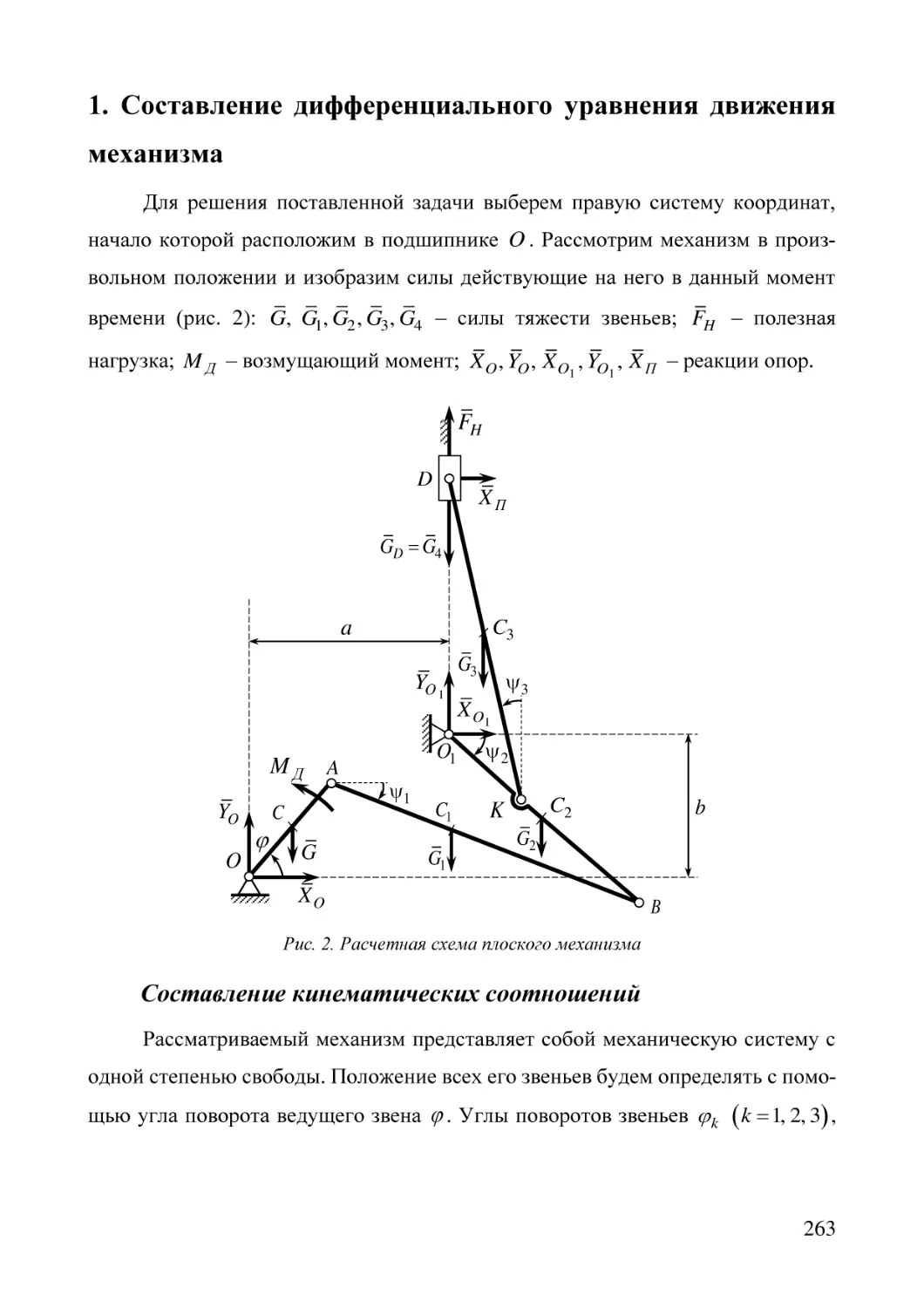
Изобразим плоский механизм в произвольном положении (рис. 2).
В качестве системы отсчета примем правую декартову систему координат.
Начало системы координат расположим в подшипнике O . Положительные углы
поворота в этом случае направлены против часовой стрелки.
D
xD
y
K
a
yD
3
O1
2
3
2
A
1
C
1
O
b
M
B
x
Рис. 2. Расчетная схема механизма
Изобразим углы поворота звеньев k , k 1,2,3 , отсчитывая их от горизонтальной оси Ox в положительном направлении.
В состав данного многозвенного механизма входят:
o два кривошипа OA и O1B , которые совершают вращательное движение вокруг неподвижных осей перпендикулярных плоскости xOy и проходящих через точки O и O1 соответственно;
11
o два шатуна AB и CD , совершающих плоскопараллельное движение в плоскости xOy ;
o ползун D движется возвратно-поступательно вдоль направляющей параллельной оси Oy ;
o неподвижное звено OO1 .
Для составления уравнений геометрических связей выделим точки механизма, траектории которых известны. К этим точкам относятся шарниры A , B ,
C и D . Точки A , B , и C движутся по окружностям радиусов OA , O1B и O1C
соответственно, а ползун D – по прямолинейной траектории параллельной оси
Oy (рис. 2).
Шарнир A принадлежит одновременно шатуну AB и кривошипу OA , для
которого известен закон вращательного движения и, следовательно, закон движения точки A определен. Шарнир B принадлежит одновременно шатуну AB и
кривошипу O1B , а шарнир C – шатуну CD и кривошипу O1B . Из двух точек C
и B , одновременно принадлежащих кривошипу O1B , одна является зависимой,
т. е. определение закона движения одной точки приводит к возможности определения закона движения для другой.
Так как закон плоскопараллельного движения твердого тела можно определить по двум любым точкам этого тела, в качестве базовых точек, при составлении уравнений геометрических связей, примем точки B и D .
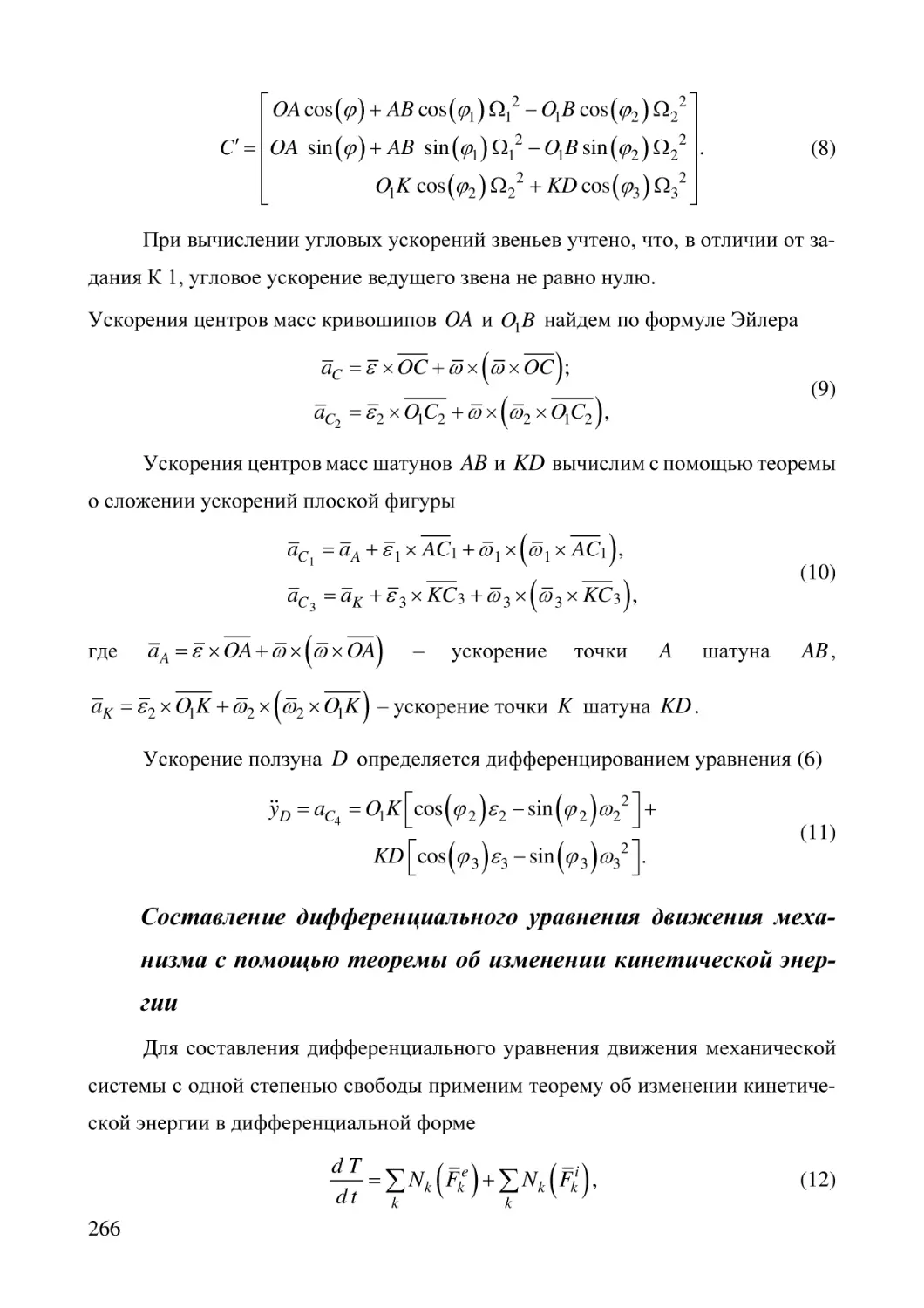
Построим для этих точек векторные контуры, с помощью которых можно
составить уравнения геометрических связей (рис. 3):
для точки B (рис. 3 а)
rB rA AB rO1 B ,
(1)
для точки D (рис. 3 б)
rD rO1 C CD .
(2)
Для получения уравнений геометрических связей запишем соотношения
(1), (2) в проекциях на оси координат Ox и Oy
12
OA cos AB cos 1 a O1B cos 2 ,
OA sin AB sin 1 b O1B sin 2 ,
a a O1C cos 2 CD cos 3 ,
yD b O1C sin 2 CD sin 3 .
O1 A
2 O1
A
y
rA
rO1
1
D
B
AB
x
rD
rB
O
CD
D
a)
B
2
y
rO1
O
x
O1
C
C
3
б)
Рис. 3. Векторные контуры для базовых точек механизма
Перенося слагаемые с неизвестными функциями в одну сторону, получим
уравнения геометрических связей в координатной форме
AB cos 1 O1B cos 2 a OA cos ,
AB sin 1 O1B sin 2 b OA sin ,
O1C cos 2 CD cos 3 0,
(3)
O1C sin 2 CD sin 3 yD b.
В уравнениях (3) задаваемой функцией является закон вращения ведущего
звена t , а определяемыми функциями времени являются
1 t , 2 t , 2 t ,
yD t .
Система (3) представляет замкнутую систему уравнений для определения
законов движения всех звеньев многозвенного механизма.
13
Решение уравнений (3) можно найти различными методами, как аналитическими, так и численными. Подробно о решении систем нелинейных уравнений
численными методами изложено в работе [1].
Определение законов движения звеньев механизма
Аналитические методы при решении нелинейных систем уравнений типа
(3) применяются в тех случаях, когда необходимо получить (если это возможно)
выражения для искомых функций в параметрическом виде.
Для нахождения законов движения звеньев механизма в аналитической
форме запишем первые два уравнения системы (3) в следующем виде (рис. 2,
рис. 3 а, рис. 4)
AB cos 1 O1B cos 2 a OA cos xO1 A O1 A cos ,
AB sin 1 O1B sin 2 b OA sin yO1 A O1 A sin ,
(4)
где xO1 A O1 A cos , yO1 A O1 A sin – проекции вектора O1 A на оси координат; O1 A – его модуль (рис. 4)
O1 A xO1 A2 yO1 A2 O1 A2 OA2 2 OA OO1 cos ;
– угол, определяемый выражениями
cos
OA cos a
OA sin b
, sin
,
O1 A
O1 A
b
OO1 a 2 b2 , arctg – модуль и направление вектора rO1 .
a
Для нахождения угловой координаты 2 приведем уравнения (4) к виду
AB cos 1 O1B cos 2 O1 A cos ,
AB sin 1 O1B sin 2 O1 A sin ,
и, воспользовавшись тригонометрической формулой cos2 sin 2 1, получим AB2 O1B2 O1 A2 2 O1B O1 A cos 2 cos sin 2 sin .
Используя формулы приведения, найдем
14
O1B 2 O1 A2 AB 2
cos 2
cos 2 .
2 O1B O1 A
Так как cos 2 является четной функцией углового аргумента, то угол 2 может иметь два значения 2 2 или 2 2 , что соответствует двум положением четырехзвенника OABO1 относительно O1 A при одной и той же угловой координате ведущего звена (рис. 4).
B'
2 '
y
O
A
1
2
2
O1
x
B
Рис. 4. Определение угловых координат звеньев
Учитывая начальное положение механизма (рис. 2) принимаем
O1B 2 O1 A2 AB 2
2 arccos
.
2
O
B
O
A
1
1
(5)
Для нахождения угловой координаты 1 уравнения (4) перепишем в следующем виде
AB cos 1 O1 A cos O1B cos 2 ,
AB sin 1 O1 A sin O1B sin 2 .
Используя процедуру, изложенную выше, получим
15
AB2 O1 A2 2 AB O1 A cos 1 cos sin 1 sin O1B 2 .
Окончательно, угловая координата 1 равна
O B 2 O1 A2 AB 2
1 arccos 1
.
2
AB
O
A
1
(6)
Для нахождения остальных неизвестных величин используем оставшиеся
два уравнения системы (3). Из третьего уравнения (3) найдем угловую координату звена CD
OC
3 arccos 1 cos 2 ,
CD
(7)
а из четвертого – вертикальную координату ползуна D
yD b O1C sin 2 CD sin 3 .
(8)
Уравнения (5) – (8) позволяют определить угловые координаты звеньев совершающих вращательные и плоскопараллельные движения, а также закон движения звена движущегося поступательно.
Определение угловых и линейных скоростей звеньев
Для определения угловых и линейных скоростей звеньев механизма продифференцируем по времени уравнения геометрических связей (3). При этом
следует учесть, что производные по времени от функций t , 1 t , 2 t ,
3 t и yD t равны
t 0 , 1 t 1, 2 t 2 , 3 t 3 , yD t vD .
Перенося слагаемые с неизвестными в одну сторону, получим
AB sin 1 1 O1B sin 2 2
OA sin 0 ,
AB cos 1 1 O1B cos 2 2
OA cos 0 ,
O1C sin 2 2 CD sin 3 3
0,
(9)
O1C cos 2 2 CD cos 3 3 vD 0.
Система уравнений (9) является линейной относительно неизвестных уг16
ловых и линейных скоростей звеньев, поэтому ее можно представить в матричной форме
A XV B ,
(10)
где A – матрица коэффициентов левых частей уравнений:
O1B sin 2
0
0
AB sin 1
AB
cos
O
B
cos
0
0
1
1
2
,
A
0
O1C sin 2 CD sin 3 0
0
O1C cos 2
CD cos 3 1
X V – вектор неизвестных угловых и линейных скоростей звеньев, B – век-
тор правых частей уравнений:
1
XV 2
3
vD
OA sin 0
OA cos 0
B
0
0
Решение уравнений (10) будет иметь вид
XV A1 B .
(11)
Заметим, что система уравнений (9) легко распадается на две части: систему
трех уравнений относительно угловых скоростей ведомых звеньев 1, 2 , 3 и уравнение, позволяющее определить скорость ползуна D vD . В этом случае, задача
определения неизвестных угловых скоростей упрощается. Неизвестные угловые
скорости, в этом случае, можно определить из решения
X A1 B
(11')
OA sin 0
AB sin 1
O1B sin 2
0
где A AB cos 1 O1B cos 2
0
, B OA cos 0 ,
0
0
O1C sin 2 CD sin 3
1
X 2 – вектор, составленный из неизвестных угловых скоростей;
3
17
а скорость ползуна D из соотношения
vD O1C cos 2 2 CD cos 3 3
(11'')
Определение угловых и линейных ускорений звеньев
Для определения угловых и линейных ускорений звеньев механизма дважды
продифференцируем по времени уравнения геометрических связей (3) или один раз
уравнения (9). Представляя, как и ранее, линейную относительно угловых и линейных ускорений звеньев, систему уравнений в матричной форме, получим
A Xa C ,
(12)
где C – вектор правых частей уравнений:
AB cos 2 12 O1B cos 2 2 2 OA cos 0 2
AB sin 2 12 O1B sin 2 2 2 OA sin 0 2
C
,
2
2
O
C
cos
CD
cos
3 3
1
2
2
2
2
O
C
sin
CD
sin
1
2
2
3
3
1
X a 2 – вектор неизвестных угловых и линейных ускорений звеньев.
3
aD
Решение уравнений (12) будет иметь вид
X a A1 C .
(13)
По аналогии с (11') и (11'') решение (13) можно записать следующим образом. Неизвестные угловые ускорения определятся из решения
X A1 C
(13')
AB cos 2 12 O1B cos 2 2 2 OA cos 0 2
1
где C AB sin 2 12 O1B sin 2 2 2 OA sin 0 2 , X 2 ,
O1C cos 2 2 2 CD cos 3 32
3
а ускорение ползуна D из соотношения
aD O1C cos 2 2 CD cos 3 3 O1C sin 2 22 CD sin 3 32. (13'')
18
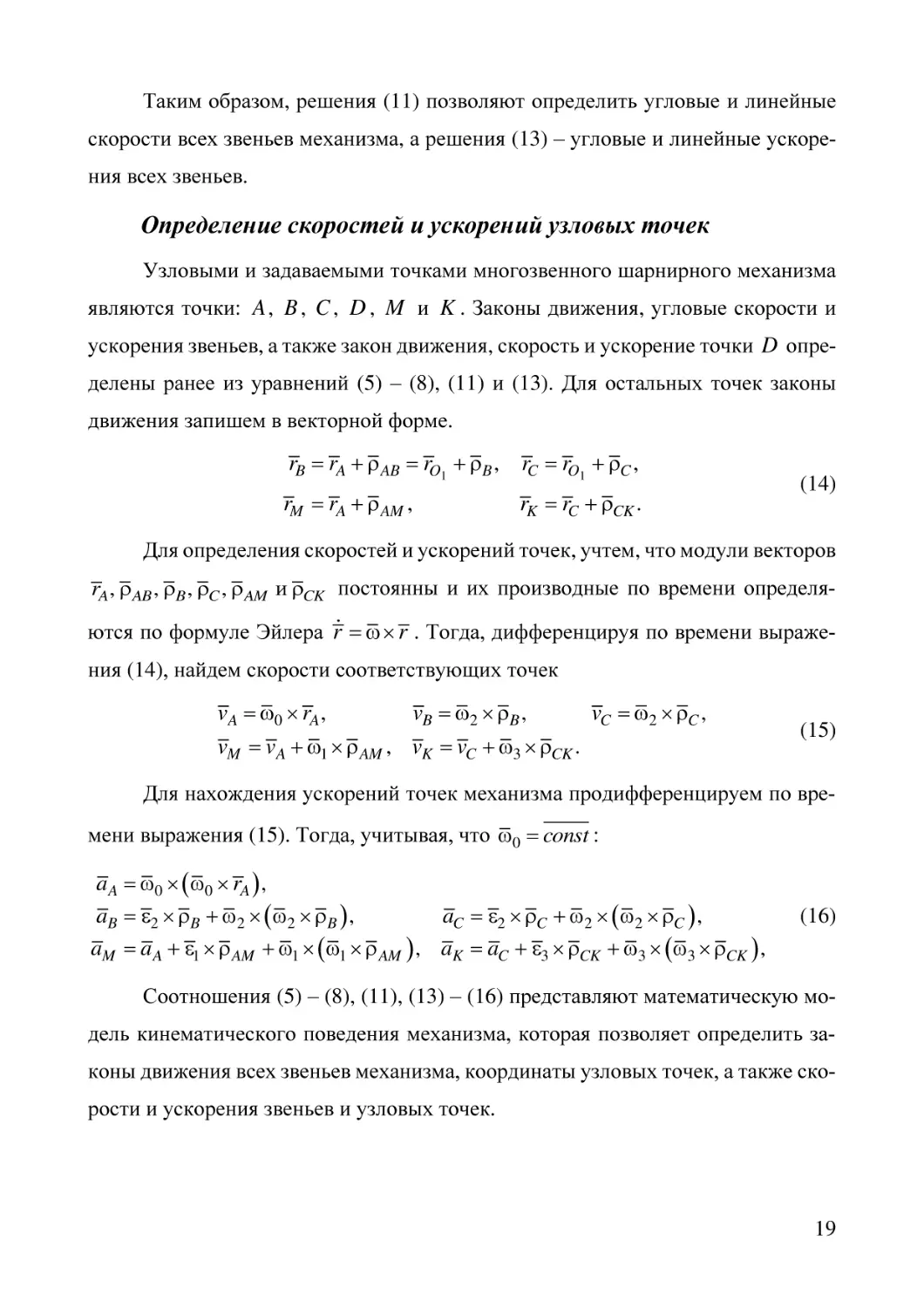
Таким образом, решения (11) позволяют определить угловые и линейные
скорости всех звеньев механизма, а решения (13) – угловые и линейные ускорения всех звеньев.
Определение скоростей и ускорений узловых точек
Узловыми и задаваемыми точками многозвенного шарнирного механизма
являются точки: A , B , C , D , M и K . Законы движения, угловые скорости и
ускорения звеньев, а также закон движения, скорость и ускорение точки D определены ранее из уравнений (5) – (8), (11) и (13). Для остальных точек законы
движения запишем в векторной форме.
rB rA AB rO1 B ,
rC rO1 C ,
rM rA AM ,
rK rC CK .
(14)
Для определения скоростей и ускорений точек, учтем, что модули векторов
rA , AB , B , C , AM и CK постоянны и их производные по времени определя-
ются по формуле Эйлера r r . Тогда, дифференцируя по времени выражения (14), найдем скорости соответствующих точек
v A 0 rA ,
vB 2 B ,
vC 2 C ,
vM v A 1 AM , vK vC 3 CK .
(15)
Для нахождения ускорений точек механизма продифференцируем по времени выражения (15). Тогда, учитывая, что 0 const :
a A 0 0 rA ,
aB 2 B 2 2 B ,
aC 2 C 2 2 C ,
aM a A 1 AM 1 1 AM , aK aC 3 CK 3 3 CK ,
(16)
Соотношения (5) – (8), (11), (13) – (16) представляют математическую модель кинематического поведения механизма, которая позволяет определить законы движения всех звеньев механизма, координаты узловых точек, а также скорости и ускорения звеньев и узловых точек.
19
2. Результаты расчетов
Ниже представлен общий вид документа Mathcad, в котором производится
кинематический расчет плоского механизма методами кинематики точки. В документе присутствуют скрытые зоны Area . Внутри каждой расположены необходимые формулы для расчета. Все скрытые зоны имеют названия, соответствующие тем процедурам, по которым производится расчет кинематических характеристик механизма. К большинству процедур в документе даны необходимые пояснения.
Осуществление подключения документа "user_fun.mcd", в котором содержатся созданные ранее функции пользователя [1].
Reference:C:\Program Files\Mathsoft\user_fun.mcd
Ввод исходных данных
a 50
b 37
CB O1B O1C
o
T
18
2
o
OA 15
AB 97
O1C 45
CD 86
AM 42
CK 47
N 360
O1B 60
T
N
Создание элемента управления "Slider" для отображения механизма
при различных значениях угла поворота ведущего звена.
T 0.5
Задание момента времени, для которого производится расчет
В скрытой области "Расчет механизма" содержатся все формулы математической модели
Расчет механизма
mV 10
ma 60
Задаются масштабы для отображения векторов скоростей и ускорений на графике.
В скрытой области "Формирование механизма и векторов" содержатся
формулы позволяющие отобразить механизм и искомые векторы на графике.
20
Форм-ние механизма и векторов
Вывод значений угловых и линейных координат звеньев
0 ( Tk)
deg
1 ( Tk)
deg
65
357.4885
2 ( Tk)
deg
3 ( Tk)
332.5527
deg
117.6685
yD(Tk) 92.4238
Отображение механизма, траекторий узловых точек, векторов скоростей и ускорений.
R( T k)T 2
T
Y
Vy
ay
R( T k)T 1 XT Vx ax
Результаты расчетов
21
Расчет механизма
ORIGIN 1
0 ( t) o t
Задание закона движения ведущего звена ОА
Вычисление вспомогательных величин
b
atan
a
O1A ( t)
2
2
2
2
2
a b OA 2 OA a b cos 0 ( t)
( t) angle OA cos 0 ( t) a OA sin 0 ( t) b
Вычисление угловых и линейных координат ведомых звеньев
O1B2 AB2 O1A(t)2
2 O1A( t) AB
1( t) ( t) acos
O1A(t)2 O1B2 AB2
2( t) ( t) acos
2 O1A( t) O1B
O1C cos (t)
2
CD
3(t) acos
yD ( t) b O1C sin 2 ( t) CD sin 3 ( t)
Задание рассчитываемого момента времени
T 0.5
Tk T
Вычисление вспомогательных угловых координат
( t)
0 ( t)
deg
1 ( t) 1 ( t) 2
2 ( t) 2 ( t) 2
3 ( t) 3 ( t)
2
Задание векторов определяющих положение узловых точек на плоскости
OAcos 0( t)
RA ( t) OA sin 0 ( t)
0
a
RO1 ( t) b
0
AMcos 1( t)
AM ( t) AMsin 1( t)
0
O1Bcos 2( t)
B( t) O1Bsin 2 ( t)
0
O1C cos 2( t)
C( t) O1C sin 2( t)
0
ABcos 1( t)
AB ( t) ABsin 1( t)
0
22
CK cos 3( t)
CK( t) CK sin 3( t)
0
CDcos 3( t)
CD( t) CDsin 3( t)
0
a
RD ( t) yD ( t)
0
RB( t) RO1 ( t) B( t)
RC( t) RO1 ( t) C( t)
RM ( t) RA ( t) AM ( t)
RK ( t) RC( t) CK( t)
Формирование массива данных для отображения траекторий узловых точек механизма
T
T
T
T
T
T
Rt(t) stack RA (t) RM (t) RB(t) RC( t) RK(t) RD(t)
tti 0.5 ( i 1)
i 1 73
i
1
X Rt tti
i
2
Y Rt tti
Формирование матрицы коэффициентов и вектора правых частей для
определения угловых и линейных скоростей звеньев механизма
0
ABsin 1( t) O1Bsin 2( t)
ABcos 1( t) O1Bcos 2( t)
0
A( t)
0
O1C sin 2( t) CDsin 3( t)
0
O1C cos 2( t) CDcos 3( t)
0
0
0
1
OAsin 0( t) o
OAcos 0( t) o
B( t)
0
0
Вычисление угловых и линейных скоростей звеньев механизма
( t) A(t)
1
B( t)
Формирование векторов скоростей звеньев механизма
0
0 ( t) 0
o
23
0
1 ( t) 0
( t)
1
0
2 ( t) 0
( t)
2
0
3 ( t) 0
( t)
3
0
VD ( t) ( t) 4
0
Вычисление скоростей узловых точек механизма
VA ( t) 0 ( t) RA ( t)
VM ( t) VA ( t) 1 ( t) AM ( t)
VB(t) VB(t) Tau1 RB t
VB( t) 2 ( t) B( t)
VC( t) 2 ( t) C( t)
VK ( t) VC( t) 3 ( t) CK( t)
VK(t) VK(t) Tau1 RK t
V(t) augment VA (t) VM (t) VB(t) VC(t) VK(t) VD(t)
Формирование матрицы коэффициентов и вектора правых частей для
определения угловых и линейных ускорений звеньев механизма
OAcos ( t) 2 ABcos ( t) ( t) 1 2 O1Bcos ( t) ( t) 2 2
0
o
1
2
2
2
2
OAsin 0( t) o ABsin 1( t) ( t) 1 O1Bsin 2( t) ( t) 2
C ( t)
2
2
O1C cos 2( t) ( t) 2 CDcos 3( t) ( t) 3
2
2
O1C sin 2( t) ( t) 2 CDsin 3( t) ( t) 3
Вычисление угловых и линейных ускорений звеньев механизма
( t) A( t)
1
C ( t)
Формирование векторов ускорений звеньев механизма
0
0( t) 0
0
0
1( t) 0
( t)
1
24
0
2( t) 0
( t)
2
0
3( t) 0
( t)
3
0
aD ( t) ( t) 4
0
Вычисление ускорений узловых точек механизма
aA ( t) 0 ( t) RA ( t) 0 ( t) 0 ( t) RA ( t)
aM ( t) aA ( t) 1 ( t) AM ( t) 1 ( t) 1 ( t) AM ( t)
aB( t) 2 ( t) B( t) 2 ( t) 2 ( t) B( t)
aC( t) 2 ( t) C( t) 2 ( t) 2 ( t) C( t)
aK ( t) aC( t) 3 ( t) CK( t) 3 ( t) 3 ( t) CK( t)
a (t) augment aA (t) aM (t) aB(t) aC(t) aK(t) aD(t)
Расчет механизма
Форм-ние механизма и векторов
Формирование векторов скоростей узловых точек для их отображения на
графике с использованием функции пользователя, вычисляющей координаты шаблона вектора, рисуемого по 7 базовым точкам.
va ( t) vect or7 RA ( t) RA ( t) VA ( t) VA ( t) mV
1
2
1
2
vm( t) vect or7 RM ( t) RM ( t) VM ( t) VM ( t) mV
1
2
1
2
vb ( t) vect or7 RB( t) RB( t) VB( t) VB( t) mV
1
2
1
2
vc ( t) vect or7 RC( t) RC( t) VC( t) VC( t) mV
1
2
1
2
vk ( t) vect or7 RK ( t) RK ( t) VK ( t) VK ( t) mV
1
2
1
2
vd ( t) vect or7 RD ( t) RD ( t) VD ( t) VD ( t) mV
1
2
1
2
Формирование массива данных для отображения векторов скоростей
1
1
1
1
1
1
Vx augment va ( Tk) vb ( Tk) vc ( Tk) vm( Tk) vk ( Tk) vd ( Tk)
2
2
2
2
2
2
Vy augment va ( Tk) vb ( Tk) vc ( Tk) vm( Tk) vk ( Tk) vd ( Tk)
Формирование векторов ускорений узловых точек для их отображения на
графике с использованием функции пользователя, вычисляющей координаты шаблона вектора, рисуемого по 5 базовым точкам.
25
aa ( t) vector5 RA ( t) RA ( t) aA ( t) aA ( t) ma
1
2
1
2
am( t) vect or5 RM ( t) RM ( t) aM ( t) aM ( t) ma
1
2
1
2
ab ( t) vect or5 RB( t) RB( t) aB( t) aB( t) ma
1
2
1
2
1
1
1
ac ( t) vector5 RC( t) RC( t) aC( t) aC( t) ma
2
1
2
ak ( t) vector5 RK ( t) RK ( t) aK ( t) aK ( t) ma
2
1
2
ad ( t) vect or5 RD ( t) RD ( t) aD ( t) aD ( t) ma
2
1
2
Формирование массива данных для отображения векторов ускорений
1
1
1
1
1
1
ax augment aa ( Tk) ab ( Tk) ac ( Tk) am( Tk) ak ( Tk) ad ( Tk)
2
2
2
2
2
2
ay augment aa ( Tk) ab ( Tk) ac ( Tk) am( Tk) ak ( Tk) ad ( Tk)
Формирование массива данных для отображения механизма на графике
0
R( t) augment 0 RA ( t) RB( t) RO1( t) RC( t) RD( t)
0
Форм-ние механизма и векторов
Результаты расчетов
Значения координат звеньев и узловых точек в момент времени
0 ( Tk)
deg
2 ( Tk)
deg
65
27.4473
t 0 0.5 36
26
Tk 6.5
3 ( Tk)
deg
27.6685
1 ( Tk)
deg
2.5115
yD(Tk) 92.4238
Графики изменения координат звеньев механизма.
40
105
20
100
1 ( t)
deg
0
2 ( t)
90
180
95
360
yD ( t )
deg
3 ( t)
270
20
90
40
85
60
80
deg
0
90
180
Значения угловых скоростей звеньев в момент времени
(Tk)2 0.0956
2.4904
VM ( Tk) 1.5773
0
2.6446
VB( Tk) 5.0916
0
1.9834
VC( Tk) 3.8187
0
VA (Tk) 2.618
VM (Tk) 2.9479
VB( Tk) 5.7374
VC( Tk) 4.3031
Tk 6.5
(Tk)3 0.026
Значения скоростей узловых точек в момент времени
2.3727
VA ( Tk) 1.1064
0
360
( t)
( t)
(Tk)1 0.064
270
Tk 6.5
0.9063
0.4226
VA ( Tk)
0
VA ( Tk)
0.8448
0.5351
VM ( Tk)
0
VM ( Tk)
0.4609
0.8874
VB( Tk)
0
VB( Tk)
0.4609
0.8874
VC( Tk)
0
VC( Tk)
27
0.8995
VK( Tk) 3.2504
0
0.2667
0.9638
VK ( Tk)
0
VK ( Tk)
VK(Tk) 3.3725
0
VD( Tk) 2.7788
0
0
1
VD ( Tk)
0
VD ( Tk)
VD(Tk) 2.7788
Графики изменения скоростей звеньев и точек механизма.
0.1
4
2
0.05
VM ( t)
( t) 1
0
VB( t)
( t) 2
0
90
180
( t) 3
270
360
90
0.05
2
2
6
( t)
( t)
Значения угловых ускорений звеньев в момент времени
( Tk) 2 0.0029
28
aA (Tk) 0.4569
aM ( Tk) 0.4043
Tk 6.5
( Tk) 3 0.0052
Значения ускорений узловых точек в момент времени
0.3554
aM ( Tk) 0.1928
0
360
4
0.1
0.1931
aA ( Tk) 0.4141
0
270
VK( t)
VD ( t)
(Tk)1 0.0051
180
Tk 6.5
0.4226
0.9063
aA ( Tk)
0
aA ( Tk)
0.8789
0.4769
aM ( Tk)
0
aM ( Tk)
0.5679
aB( Tk) 0.097
0
0.9857
0.1683
aB( Tk)
0
aB( Tk)
aB(Tk) 0.5761
0.4259
aC( Tk) 0.0727
0
0.9857
0.1683
aC( Tk)
0
aC( Tk)
aC(Tk) 0.4321
0.1931
aK( Tk) 0.1588
0
0.7725
0.635
aK ( Tk)
0
aK ( Tk)
aK(Tk) 0.25
0
aD( Tk) 0.2302
0
0
1
aD ( Tk)
0
aD ( Tk)
aD(Tk) 0.2302
Графики изменения ускорений звеньев и точек механизма.
0.02
1.5
0.01
1
aM ( t)
( t) 1
0
( t) 2
90
180
270
360
aB( t)
0.5
aK ( t)
( t) 3 0.01
aD ( t)
0
2
90
180
270
360
0.5
0.02
1
0.03
( t)
( t)
Результаты расчетов
29
3. Определение кинематических характеристик механизма
в заданном положении с помощью теорем плоского движения твердого тела
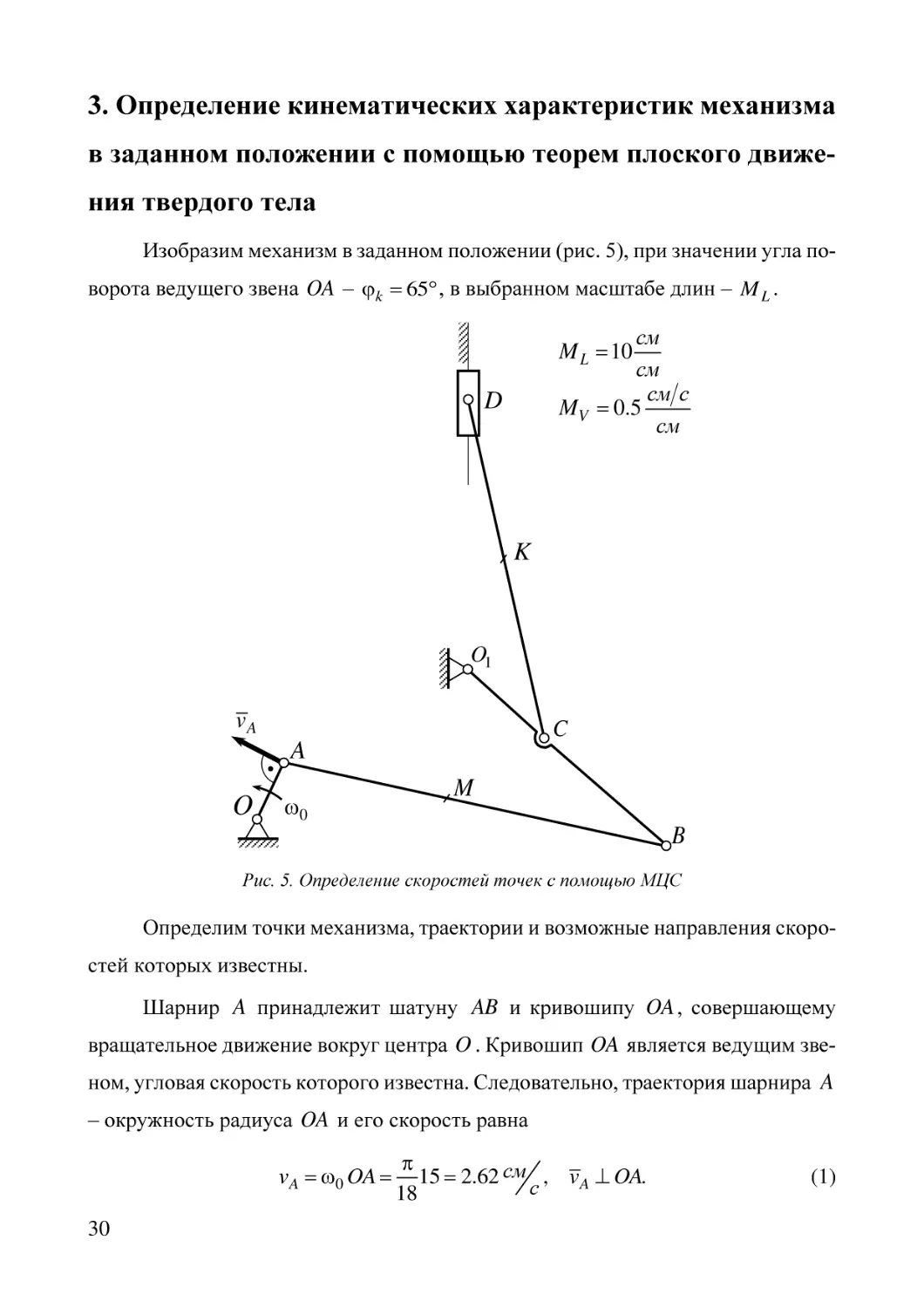
Изобразим механизм в заданном положении (рис. 5), при значении угла поворота ведущего звена OA – k 65 , в выбранном масштабе длин – M L .
см
см
см c
MV 0.5
см
M L 10
D
K
O1
vA
C
A
O
0
M
B
Рис. 5. Определение скоростей точек с помощью МЦС
Определим точки механизма, траектории и возможные направления скоростей которых известны.
Шарнир A принадлежит шатуну AB и кривошипу OA , совершающему
вращательное движение вокруг центра O . Кривошип OA является ведущим звеном, угловая скорость которого известна. Следовательно, траектория шарнира A
– окружность радиуса OA и его скорость равна
v A 0 OA
30
15 2.62 см , v A OA.
с
18
(1)
Шарнир B принадлежит шатуну AB и кривошипу O1B , совершающего
вращательное движение вокруг подшипника O1 . Следовательно, траектория
точки B – окружность радиуса O1B и скорость шарнира vB O1B .
Шарнир C принадлежит шатуну CD и кривошипу O1B , совершающего
вращательное движение вокруг подшипника O1 . Следовательно, траектория
точки C – окружность радиуса O1C и скорость шарнира vC O1B .
Точка D принадлежит шатуну CD и ползуну D , совершающему возвратно поступательное движение вдоль вертикальной направляющей. Следовательно, траектория точки D – прямая линия и скорость ползуна vD Oy .
Определение скоростей точек и угловых скоростей звеньев с
помощью мгновенных центров скоростей (МЦС)
Определим положение МЦС для звеньев AB и CD , совершающих плоское
движение (рис. 6). Для этого из точки A проведем перпендикуляр к скорости v A
, а из точки B – перпендикуляр к возможному направлению скорости vB . Точка
пересечения перпендикуляров – PAB является МЦС звена AB для заданного положения механизма.
Аналогично определяем положение мгновенного центра скоростей для
звена CD – PCD .
Измеряем на чертеже расстояния от узловых точек механизма до МЦС соответствующего звена. В соответствие с выбранным масштабом длин эти расстояния равны
APAB 48 см,
MPAB 55.5 см,
BPAB 99 см,
CPCD 132.5 см, KPCD 102 см,
DPCD 85 см
Так как скорость точки A известна (1), то мгновенную угловую скорость
звена AB вычисляем согласно выражению
vA 0 OA AB AB.
31
AB 1 0
Тогда
OA
15
0.0545 c 1
APAB 18 48
Направление мгновенной угловой скорости звена определяем по направлению скорости точки A при мгновенном вращении звена вокруг МЦС PAB .
см
см
см c
MV 0,5
см
M L 10
PCD
D
3
vD
1
PAB
K
vK
O1
2
vA
A
O
M
0
C
vC
B
vM
vB
Рис. 6. Определение скоростей точек с помощью МЦС
Модули скоростей точек B и M равны
vB AB BPAB 0.0545 99 5.400 см , vB BPAB ,
с
vM AB MPAB 0.0545 55.5 3.027 см , vM MPAB ,
с
а направление скоростей определяется направлением вращения звена AB вокруг
МЦС PAB .
32
Угловую скорость звена O1B вокруг подшипника O1 определим из соотношения
vB AB BPAB O1BO1B
O1B 2
vB 5.40
0.0818 c 1
O1B 66
Скорость точки C равна
vC O1B O1B 0.0818 25 2.045 c 1, vC CPCD
Мгновенную угловую скорость звена CD вокруг МЦС PCD определим из
соотношения
vC CDCPCD O1B O1C CD 3
vC
2.045
0.0154 c 1 ,
CPCD 132.5
а модули скоростей точек D и K выражениями
1.309 см , vD DPCD ,
с
0.0154 102 1.571 см , vK KPCD
с
vD CD DPCD 0.0154 85
vK CD KPCD
Направление скоростей точек vD , vK определяется направлением мгновенного вращения звена CD вокруг МЦС – PCD .
На рис. 6 изображены угловые скорости звеньев и векторы скоростей узловых точек в выбранном масштабе скоростей MV .
Определение скоростей точек и угловых скоростей звеньев с
помощью теоремы о сложении скоростей
При неизвестной угловой скорости твердого тела совершающего плоскопараллельное движение теорему о сложении скоростей можно применять для тех
точек звена, у которого известны: для одной – модуль и направление вектора
скорости, а для другой – возможное направление вектора скорости, т.е. траектория движения.
Так как для звена AB вектор скорости шарнира A известен и по модулю и
по направлению (1), а для шарнира B известна траектория движения, запишем
теорему о сложении скоростей для точки B , приняв точку A за полюс:
33
vB vA vBA ,
где
(2)
– скорость полюса,
v A 0 OA 2.62 см , v A OA.
с
vBA BA AB ? vBA AB – скорость точки B при вращательном движе-
нии звена AB вокруг полюса A . (относительная скорость точки B в поступательном переносном движении)
Изображаем в выбранном масштабе скоростей MV (рис. 7) векторный треугольник скоростей, соответствующий уравнению (2).
M L 10
см
см
CD
D
CD
vD
vC
cм
MV 1 с
см
vDC
K
vK CD
vC
vKC
AB
O1
vA
A
O
0
2
C
vA
vMA
3
vC
M
vM
AB
vA
1
B
vBA
O1B
vB
AB
Рис. 7. Определение скоростей с помощью теоремы о сложении скоростей
Откладываем в точке B вектор скорости полюса – v A . Из конца вектора v A
34
проводим возможное направление вектора vBA – прямую, перпендикулярную
звену AB . Из точки B проводим направление вектора vB O1B до пересечения
с прямой, определяющей направление вектора vBA . В точке пересечения данных
прямых сходятся концы неизвестных векторов vBA и vB .
Измеряя указанные векторы, в соответствии с выбранным масштабом скоростей, получаем
vB 5.53 см , vBA 5.47 см
с
с
Угловая скорость звена AB равна
AB 1
vBA
0.0603 с 1
BA
Так как угловая скорость звена найдена, для точки M можно записать теорему о сложении скоростей, приняв точку A за полюс:
vM vA vMA
где
v A 0 OA 2.62 см с ,
v A OA,
vMA AB AM 2.53 см с , vMA AB.
Для нахождения скорости vM изображаем в точке M вектор скорости полюса – v A , а из его конца проводим перпендикулярно AB вектор относительной
скорости vMA (рис. 7). Соединяя точку M с концом вектора vMA , находим вектор
скорости точки M – vM . После измерения получим
vM 3.13 см .
с
Угловая скорость звена O1B равна
O1B 2
vB
0.0838 с 1 ,
O1B
Следовательно, скорость точки C равна
vC O1B O1C 2.07 см ,
c
vC O1B .
Приняв точку C за полюс, применим теорему о сложении скоростей к
35
точке D звена CD , траектория которой известна
vD vC vDC ,
здесь vDC CD CD ? см с , vCD CD – относительная скорость точки D .
Скорости vD , vDC определяем графически, аналогично методу, изложенному ранее, построив в масштабе треугольник скоростей (рис. 7)
vD 1.33 см , vDC 1.33 см .
с
с
Следовательно, угловая скорость звена CD равна
CD 3
vDC
0.0155 с 1 .
CD
Скорость точки K вычисляем по аналогии с определением скорости точки M
vK vC vKC ,
где
vC 2.067 см с ,
vC O1B,
vKC CD CK 0.73 см с , vKC CD.
В этом случае (рис. 7)
vK 1.60 см .
с
Следующий метод, являющийся графической интерпретацией теоремы о
сложении скоростей, называется планом скоростей. Особенностью метода является возможность быстрого определения скорости любой точки механизма.
Построим план скоростей в масштабе MV (рис. 8).
Из произвольно выбранного полюса O проводим луч " Oa ", изображающий в выбранном масштабе скорость точки A – v A .
Для определения скорости точки B через полюс O проводим прямую, параллельную скорости vB vB O1B , а через точку " a " – прямую, перпендикулярную AB , т. е. параллельно скорости vBA . Получаем точку "b " : отрезок "Ob "
определяет скорость точки B , а отрезок " ab " – скорость vBA . Измеряем длину
лучей Ob, ab и, пользуясь масштабом скоростей находим
36
vB 5.30 см , vBA 5.53 см .
с
с
OA
a
MV1 0.5
см
с
см
O
m
c
d
k
CD
D
O2 D
K
O1
O1B
vA
b
y
C
A
O 0 x
AB
M
B
Рис. 8. План скоростей
Для определения угловой скорости звена AB найдем с учетом выбранного
масштаба скоростей отношение
AB
ab
0.057 c 1 .
AB
Для определения скорости точки M делим отрезок ab плана скоростей в
отношении
am AM
ab AB
Луч Om изображает скорость точки M – vM , а отрезок a m – относительную скорость vMA . Пользуясь масштабом скоростей, получаем
vM 3.00 см , vMA 2.40 см .
с
с
Продолжая построение плана скоростей на рис. 8, находим скорости точек
37
vA , vM , vB , vC , vK , vD , а также угловые скорости звеньев AB 1, O1B 2 ,
CD 3 :
vC 2.00 см , O1B 0.08 c 1,
с
vD 1.30 см , CD 0.0151 c 1,
с
vK 1.53 см .
с
Определение ускорений точек и угловых ускорений звеньев с помощью теоремы о сложении ускорений
Ускорения точек и угловые ускорения звеньев, совершающих плоскопараллельное движение, будем определять с использованием теоремы о сложениях
ускорений в плоском движении. Данную теорему реализуем графически, в виде
отдельных многоугольников ускорений на схеме механизма (рис. 9) и с помощью
плана ускорений (рис. 10), построенных в масштабе ускорений M a .
Вращение ведущего звена OA является равномерным с угловой скоростью
0 18 c 1 , поэтому полное ускорение точки A равно ее центростремительной
составляющей
Ц
aA aA , aA
Ц
2
0 OA 15 0.4569 см 2 , a A Ц О
с
18
2
(3)
Определение ускорений начинаем с точки B , траектория которой известна. Взяв за полюс точку A , применим, с учетом (3), теорему о сложении
ускорений к точке B звена AB :
aB a A aBA a AЦ aBAЦ aBAВР ,
где
(4)
aBA – ускорение точки B при вращательном движении звена AB вокруг
Ц
полюса A ; aBA
– центростремительное ускорение точки B при вращаВР
тельном движении звена AB вокруг полюса A ; aBA
– вращательное уско-
рение точки B при вращательном движении звена AB вокруг полюса A
.
38
Ц
aDС
CD
ВР
aDC
aC
см
aD
M a 0.05
с2
см
D
CD
3
AB
aВЦ
O1B
b
aВВР
aB
aC
c
O1
C
A
0
2
O
1
B
ВР
aВА
aA
Ц
aВА
aA
AB
OA
Рис. 9. Определение ускорений
39
Для точки B звена O1B имеем
aB aBЦ aBВР ,
где
(5)
aBЦ – центростремительное ускорение точки B при вращательном движе-
нии звена O1B ; aBВР – вращательное ускорение точки B при вращательном движении звена O1B .
Приравнивая (4) и (5), получим векторное уравнение, которое решаем графически с учетом выбранного масштаба ускорений (рис. 9):
Ц
ВР
aB aBЦ aBВР a AЦ aBA
aBA
.
Здесь
aBA Ц AB 2 AB 0.3151 см
aBA ВР AB AB ? см
с
с
2,
aBA Ц AB A,
aBA ВР AB,
2,
aB Ц O1B 2 O1B 0.4255 см
aB ВР O1B O1B ? см
с
2,
с
2,
aB Ц O1B O1,
aB ВР O1B.
Построив в точке B механизма замкнутый многоугольник ускорений на
рис. 9 в масштабе ускорений, измеряем значения неизвестных векторов:
aB ВР 0,0620 см
с
2;
aBA ВР 0.6078 см
с
2
; aB 0.4502 см
с2
.
Построение многоугольника ускорений проводим следующим образом:
Из точки B проводим, в масштабе ускорений, вектор ускорения полюса
a A a A Ц . Из конца вектора a A Ц откладываем параллельно BA вектор ускорения
aBA Ц , из конца которого проводим линию AB , определяющую возможное
направление вектора aBA ВР . Из точки В , в направлении прямой O1B , откладываем вектор aB Ц , а из его конца линию перпендикулярную O1B , определяющую
возможное направление вектора aB ВР .
Данная линия проводится до пересечения с прямой, перпендикулярной AB
, характеризующей направление вектора aBA ВР .
40
Точка "b" пересечения этих прямых является точкой, в которой сходятся
концы векторов aBA ВР , aB ВР и aB .
Угловые ускорения звеньев определяем по формулам
aBA ВР
AB 1
0.063 с 2 ,
AB
aB ВР
O1B 2
0.0009 с 2 .
O1B
Направления угловых ускорений, которые определяем по направлению
векторов aBA ВР и aB ВР соответственно, показаны на рис. 9.
Полное ускорение точки C звена O1B , совершающего вращательное движение, определим по формуле
aC aCЦ aCВР ,
где
aC Ц O1B 2 O1C 0.1612 см
aC
ВР
O1B O1C 0.0225 см
2,
aC Ц O1B O1,
2,
aC ВР O1B,
с
с
aC O1C O1B 4 O1B 2 0.1724 см
O B
1 2 8.
,
arctg
2
2
O B
с
1
Изображаем вектор aС в масштабе ускорений M a на рис. 9.
Ускорение точки D звена CD определим с использованием теоремы о сложении ускорений, приняв точку C за полюс
Ц
ВР
aD aC aDC aCЦ aCВР aDC
aDC
,
где
aDC Ц CD 2 CD 0.0196 см
aDC ВР CD CD ? см
aD ? см
с2
,
с
2,
с
2,
aDC Ц CD C ,
aDC ВР CD,
aD Oy .
Аналогично способу, изложенному ранее, изображаем многоугольник
41
ускорений для точки D (рис. 9). Измеряя неизвестные векторы, получаем значения ускорений:
aDC ВР 0.1433 см
с2
; aD 0.1018 см
с2
.
Затем вычисляем угловое ускорение звена CD
CD
aDC ВР
3
0.0017 с 2
CD
и изображаем его направление на рис. 9.
Для определения ускорений точек M и K строим план ускорений (рис.
10), который проводим следующим образом:
Из произвольной точки O проводим, в масштабе ускорений M a , отрезок
"O a " , определяющий модуль и направление вектора ускорения полюса a A a A Ц
. Из конца вектора a A Ц откладываем вектор ускорения aBA Ц , из конца которого
проводим линию AB , определяющую возможное направление вектора aBA ВР .
Из точки O , в направлении прямой O1B , откладываем вектор aB Ц , а из его
конца линию, определяющую возможное направление вектора aB ВР . Данная линия проводится до пересечения с прямой, перпендикулярной AB , характеризующей направление вектора aBA ВР . Точка пересечения этих прямых "b " является
точкой, в которой сходятся концы векторов aBA ВР , aB ВР и aB . Отрезок "Ob "
определяет модуль и направление вектора ускорения точки B .
Для нахождения ускорения точки M звена AB разделим отрезок " ab " точкой " m" в соотношении
am AM aMA
.
ab
AB aBA
42
AB
см
с2
см
M a 0.05
b
O1B
CD
d
k
c
O
CD
D
m
K
O1
vA
y
C
A
O 0 x
M
B
a
AB
OA
Рис. 10. План ускорений
Измеряя длины отрезков " a m" и "O m" , вычисляем, с использованием масштаба ускорений, ускорения
aMA M a a m 0,2923 см
с2
, aM M a O m 0,3029 см
с2
.
Треугольник oa m на плане ускорений определяет теорему о сложении
ускорений для точки M
Ц
ВР
aM a A aMA
aMA
.
Ускорение точки C определим, разделив отрезок "Ob " на плане ускорений
43
в соотношении
Oc O1C aC
.
Ob O1B aB
Измеряя длину отрезка "oc " , получим
aC M a Oc 0,1667 см
с2
.
Для нахождения ускорения точки D проведем из точки C отрезок, задающий, в масштабе ускорений, модуль и направление вектора aDC Ц , а из его конца
линию, определяющую направление ускорения aDC ВР .
Поскольку траектория ползуна D – прямая параллельная оси Oy , ускорение точки D направлено вдоль траектории. Из точки O плана ускорений проводим линию, характеризующую направление ускорения ползуна D .
Точка " d " , полученная в результате пересечения проведенных линий определяет концы векторов ускорений aD , aDC ВР и aDC . Измеряя в масштабе ускорений, получим:
aDC M A c d 0,1387 см
aDC ВР
0,1373 см
с
с
2,
aD M A o d 0,1008 см
2 , DC 3
с2
,
aDC ВР
0.0016 c 2 .
CD
Ускорение точки K получим по аналогии с определением ускорения точки
M звена AB . Имеем
ck CK aKC
.
cd CD aDC
Измеряя длины отрезков "c k " и "O k " , вычисляем, с использованием масштаба ускорений, ускорения
aKC M a c k 0,0758 см
44
с2
, aK M a O k 0,1167 см
с2
.
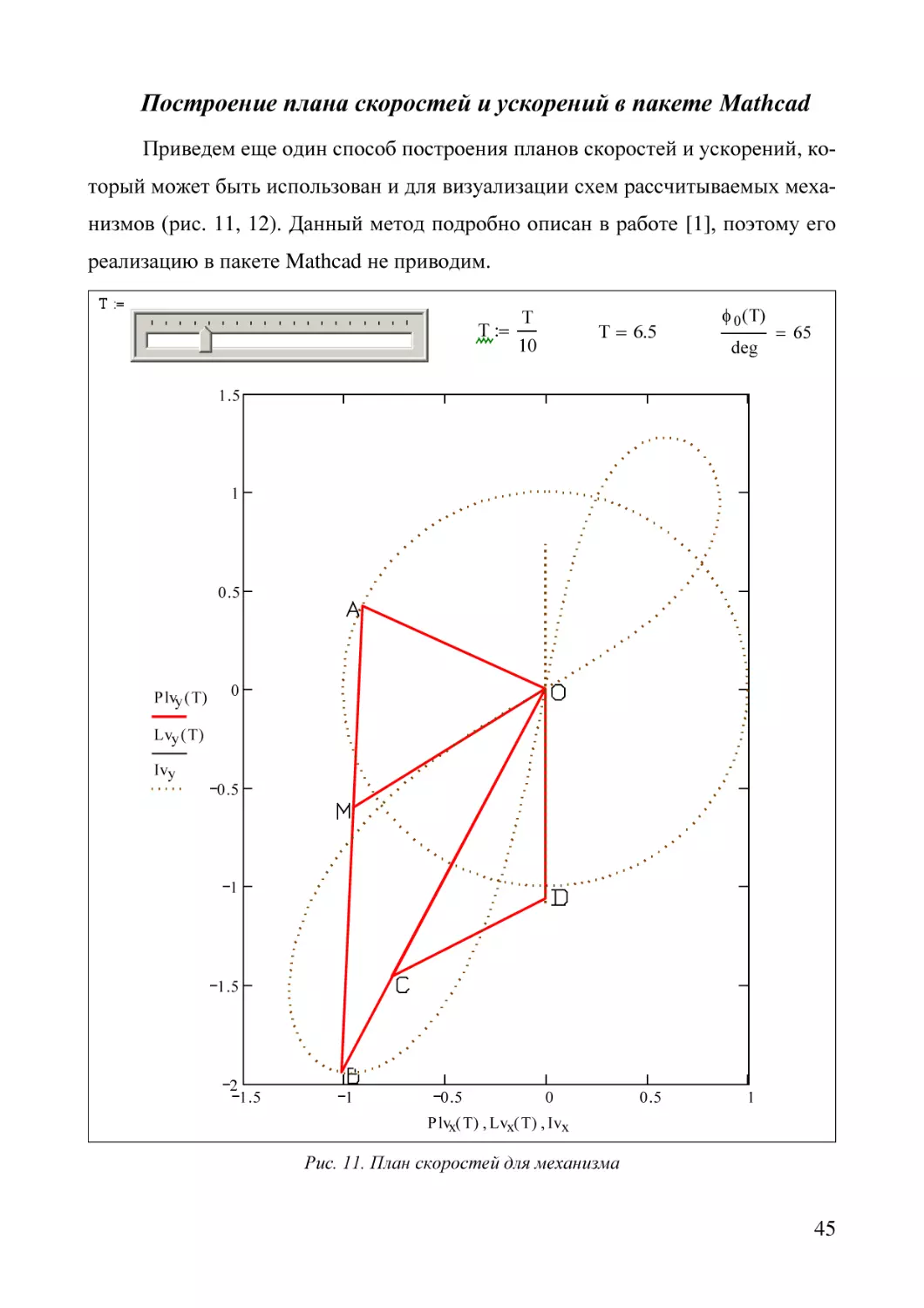
Построение плана скоростей и ускорений в пакете Mathcad
Приведем еще один способ построения планов скоростей и ускорений, который может быть использован и для визуализации схем рассчитываемых механизмов (рис. 11, 12). Данный метод подробно описан в работе [1], поэтому его
реализацию в пакете Mathcad не приводим.
T
T
10
T 6.5
0 ( T)
deg
65
1.5
1
0.5
Plvy ( T )
0
Lvy ( T )
Ivy
0.5
1
1.5
2
1.5
1
0.5
0
0.5
1
Plvx( T ) Lvx( T ) Ivx
Рис. 11. План скоростей для механизма
45
T
T
10
0 ( T)
T 6.5
deg
65
1.5
1
0.5
0
Play ( T)
0.5
Lay ( T)
Iay
1
1.5
2
2.5
3
2
1.5
1
0.5
0
0.5
1
1.5
Plax( T) Lax( T ) Iax
Рис. 12. План ускорений для механизма
Графические методы позволяют построить планы скоростей и ускорений
только для заданного положения ведущего звена. Применение вычислительной
техники позволило производить построение указанных планов для любого положения механизма. Это позволяет произвести качественную и количественную
оценку полей скоростей и ускорений любых точек механизма, определить те положения механизма, в которых скорости и ускорения точек принимают экстремальные значения. А затем, при необходимости, изменить, соответствующим образом его геометрические размеры.
46
4. Определение кинематических характеристик механизма
в заданном положении с помощью теорем сложного движения точки
Изобразим механизм в заданном положении (рис. 13), при значении угла
поворота ведущего звена OA – k 65 , в выбранном масштабе длин – M L .
Изображенный на рисунке механизм составлен из двух базовых механизмов:
шарнирного четырехзвенника OABO1 и кривошипно-шатунного механизма
O1CD , в каждом из которых шатуны AB и CD совершают плоское движение, а
кривошипы OA и O1C вращательное движение вокруг неподвижных осей Oz и
O1z соответственно.
Определим, измерив в масштабе длины M L , положения узловых точек базовых механизмов:
OA 15 см, OM 48 см,
OB 102 см,
O1C 25 см, O1K 35.5 см, O1D 68 см.
Для нахождения скоростей и ускорений этих точек, а также угловых скоростей и ускорений звеньев представим плоское движение шатунов AB и CD в
виде двух вращений.
В качестве переносного вращения примем:
o для шатуна AB – вращение вместе с кривошипом OA вокруг неподвижной
оси Oz с переносной угловой скоростью
AB e 0
18
c 1 ;
o для шатуна CD – вращение вместе с кривошипом O1C вокруг неподвижной
оси O1z с неизвестной пока переносной угловой скоростью
CDe 2 .
Относительным вращением в этом случае является:
o для шатуна AB – вращение звена вокруг подвижной оси Az с относительной
47
угловой скоростью AB r ;
o для шатуна CD – вращение звена вокруг подвижной оси Cz с относительной
угловой скоростью CD r ;
Определение скоростей точек и угловых скоростей звеньев с
помощью теоремы о сложении скоростей при переносном вращательном движении
Так как закон движения кривошипа OA задан, а для шарнира B известна
траектория движения, вычисление скоростей начинаем с точки B , вектор скорости которой, определим согласно теореме о сложении скоростей при составном
движении:
vB vB e vB r
где v e e OB OB 17.8 см ,
B
AB
0
с
vB r AB r OB ? ,
vB e OB
(1)
–
переносная
скорость
точки B ,
vB r AB
– относительная скорость
точки B ,
vB ?,
vB O1B
– абсолютная скорость
точки B .
Направление переносной скорости vB e , определяется направлением угловой переносной скорости и показано на рис.13.
Решение уравнения (1) найдем графически, построив векторный треугольник скоростей (рис.13).
Для этого, из точки B проводим вектор переносной скорости – vB e .
Из конца вектора vB e проводим линию, перпендикулярную звену AB , характеризующую возможное направление вектора относительной скорости vB r .
Из точки B проводим перпендикуляр к кривошипу O1B , который определяет возможное направление абсолютной скорости шарнира B , до пересечения
48
с прямой, характеризующей направление вектора vB r .
Точка пересечения данных прямых определяет концы неизвестных векторов относительной vB r и абсолютной vB скорости шарнира B .
см
см
ML 5
MV 0.75
OM
PCD
PAB
vB e
CD
O1D
vD r
vD
1
с
см
vD e
D
3
см
r
CD
vM e
K
vK
CD
vK e
vK r
O1K
O1
vA
0
A
rAB
vB r
vM r
O1B
C
M
2
vC
O
B
vM
AB
vB
OB
AB
Рис. 13. Определение скоростей точек механизма
Измеряя указанные векторы, в соответствии с выбранным масштабом скоростей, получаем
vB r
r
r
см
см
vB 5.4
, vB 22.4
, AB
0.2306 c 1 .
с
с
AB
49
Направление относительной угловой скорости шатуна AB , определяемое
направлением относительной скорости точки B – vB r , показано на рис. 13. Так
как относительная AB r и переносная AB e угловые скорости направлены в разные стороны, то абсолютная угловая скорость AB звена AB равна
AB 1 ABe AB r 0.056 c1 .
Знак " " у величины угловой скорости шатуна AB показывает, что AB направлено по часовой стрелке. Мгновенный центр вращения звена AB лежит на прямой OA и его положение определяется соотношением
OP ABe OA APAB ABe APAB AB r .
Разрешая данное уравнение относительно неизвестной AP , получим
APAB
OA
AB r
1
AB e
47 см .
Величина APAB определяет положение мгновенного центра вращения
звена AB при заданном положении механизма.
Зная величину и направление относительной угловой скорости звена AB ,
скорость точки M найдем из уравнения
vM vM e vM r
где
(2)
vM e AB e OM 8.38 см ,
с
vM e OM
– переносная скорость,
vM r AB r AM 9.68 см ,
с
vM r AM
– относительная скорость,
vM ?,
– абсолютная скорость.
Направление векторов переносной vM e и относительной vM r скоростей
точки M показано на рис. 13. Решение уравнения (2) найдем, построив векторный треугольник скоростей. Измерением получено
vM 3.05 см .
с
50
Угловую скорость звена O1B найдем по формуле
2 O1B
vB
0.0819 c 1 .
O1B
Скорости точек D и K , а также относительную и абсолютную угловые
скорости звена CD найдем аналогично. Построив треугольники скоростей для
этих точек (рис.13) и измеряя неизвестные векторы, получим
vD r 5.74 см , vD e 5.59 см , vD 1.31 см ,
с
с
с
CD r 0.0667 c 1,
vK r 2.58 см , vK e 3.14 см , vK 1.55 см ,
с
с
с
3 CD CD e CD r 0.0152 c 1
Знак " " у величины угловой скорости шатуна CD показывает, что CD направлено по часовой стрелке. Мгновенный центр вращения звена CD лежит на прямой O1C и его положение определяется соотношением
O1PCD CDe CPCD CD r O1C O1PCD CD r .
Разрешая данное уравнение относительно неизвестной O1P , получим
O1PCD
CD r
O1C
109.7 см .
CDe CD r
Величина O1PCD определяет положение мгновенного центра вращения
звена CD при заданном положении механизма.
Определение ускорений точек и угловых ускорений звеньев с помощью теоремы о сложении ускорений при переносном вращательном движении
Так как для шарнира B известна траектория движения, а закон движения
кривошипа OA задан, вычисление ускорений начинаем с точки B . Абсолютное
ускорение точки B определим согласно теореме о сложении ускорений при непоступательном переносном движении:
51
aB aBe aB r aBc aBe Ц aBe ВР aB r Ц aB r ВР aBc
где aBe aBe Ц aBe ВР
– переносное ускорение точки,
aB r aB r Ц aB r ВР
– относительное ускорение точки,
aBc 2 ABe vB r
aB c vB r
– ускорение Кориолиса,
aB c 2 AB e vB r 7.81 см
aB e Ц AB e
2
(3)
OB 3.10 см
с
2
с2
,
aBe Ц O OB
– переносное
центростремительное ускорение точки,
aBe ВР ABe OB 0 , т.к.
ABe const
– переносное
aB r Ц A AB
– относительное
вращательное ускорение точки,
aB r Ц AB r
2
AB 5.16 см
с
2
центростремительное ускорение точки,
aB r ВР AB r AB ?
aB r ВР AB
– относительное
вращательное ускорение точки.
Направление ускорения Кориолиса aB c , которое можно определить по правилу векторного произведения векторов или методом Жуковского, показано на
рис.14.
В уравнении (3) учтено, что переносное и относительное движения шатуна
AB являются вращениями вокруг осей Oz и Az соответственно.
Поскольку абсолютное движение кривошипа O1B – вращение вокруг оси
O1z , то абсолютное ускорение точки B можно записать в виде
aB aB Ц aB ВР ,
где a Ц 2 O B 0.443 см
B
2
1
с
2
aB Ц O1 O1B
– центростремительная составляющая абсолютного ускорения точки,
aB ВР 2 O1B ?
52
aB ВР O1B
(4)
– вращательная составляющая абсолютного ускорения точки,
Приравняем правые части уравнений (3), (4) и учтем коммутативность векторов. Получим
aB Ц aB ВР aB r Ц aBe Ц aBc aB r ВР
(5)
Решение уравнения (5) найдем, построив векторный многоугольник ускорений (рис.14).
Для этого, из точки B проводим параллельно звену AB вектор относительного центростремительного ускорения – aB r Ц .
Из конца вектора aB r Ц проводим параллельно отрезку OB по направлению к точке O , вектор переносного центростремительного ускорения – aB e Ц .
Из конца вектора aB e Ц откладываем вектор ускорения Кориолиса aB c , из
конца которого проводим линию AB , определяющую возможное направление
вектора aB r ВР .
Из точки В , в направлении прямой O1B , откладываем вектор aB Ц , а из его
конца линию, определяющую возможное направление вектора aB ВР , которая
проводится до пересечения с прямой, характеризующей направление вектора
aB r ВР .
В точке пересечения этих прямых сходятся концы векторов aB r ВР , aB ВР и
aB . Измеряя данные векторы в масштабе ускорений, получим
aB r ВР 0.597 см
с
2
, aB ВР 0.06 см
с
2
, aB 0.45 см
с2
.
Угловые ускорения звеньев определяем по формулам
aB r ВР
0.0063 с 2 ,
AB
aB ВР
2
0.0009 с 2 .
O1B
AB r 1
O1B
53
см
M a 0.6
O1B
с
см
aB
2
B
Ц
vB r AB
aB r ВР
C
aB c
K
D
O1
M
aB r Ц
AB r 1
см
точка B M a 1 0.4
с
см
A
2
O
OB
B
O1B
aB
ABe 0
O1B
aB Ц
ВР
aB
aB
aB r ВР
AB
rЦ
aB c
AB r
AB
AB
aB e Ц
Рис. 14. Определение ускорений точки
54
B
AB
Направления угловых ускорений, которые определяем по направлению
векторов aB r ВР и aB ВР соответственно, показаны на рис. 14.
Полное ускорение точки C звена O1B , совершающего вращательное движение, определим из соотношения
aB O1B
OC
, тогда aC aB 1 0.172 см 2 .
с
aC O1C
O1B
Изображаем вектор a С параллельно вектору a B в масштабе ускорений на
рис.15.
Так как угловое относительное ускорение шатуна AB определено, найдем
ускорение точки M .
aM aM e Ц aM e ВР aM r Ц aM r ВР aM c
где
aM e Ц AB e
2
OM 1.46 см
с
2
aM e Ц O OM – переносное
центростремительное ускорение точки,
aM e ВР ABe OM 0 т.к.
ABe const
– переносное
aM r Ц A AB
– относительное
вращательное ускорение точки,
aM r Ц AB r
2
AM 2.23 см
с
2
центростремительное ускорение точки,
aM r ВР AB r AM 0.26 см
с2
aМ r ВР AB
– относительное
вращательное ускорение точки.
aM c 2 ABe vM r
aB c vB r
aM c 2 AB e vM r 3.38 см
aM ?
– ускорение Кориолиса:
с2
– абсолютное ускорение точки
55
см
M a 1 0.4
с2
см
B
O1B
aB Ц
AB
D
aB r Ц
aB
C
K
aB r ВР
aC aB
O1
O1B
M
aB c
vM r AB
AB
aM
2
aM r ВР
AB r 1
AB
aM c
A
см
M a 0.25
с
см
O
2
aM r Ц
OB
aM e Ц
Рис. 15. Определение ускорений точек
56
M иC
AB e 0
aD e ВР
см
M a 1 0.05
O1D
D
aD c
aK c
aD r Ц
2 CDe
aK
O1D
K
CD
aD r ВР
CD r
aK
eЦ
aD
CD
vD r СD
D
O1
O1K
с2
см
CD r
C
aD e Ц
O1K
aK
vK r
e ВР
K
3
aK r Ц
CD
aK r ВР
O1
CD
C
2 CDe
A
O
CDe 2
M
O1D
Рис. 16. Определение ускорений точек
CD
aC aB B
DиK
57
Изображаем многоугольник ускорений для точки M (рис.15). Измеряя неизвестный вектор ускорения a M , получим
aM 0.31 см
с2
.
Для определения ускорения точки D примем в качестве переносного движения вращение вместе с кривошипом O1C . В этом случае имеем
aD aDe Ц aDe ВР aD r Ц aD r ВР aDc
где
aDe Ц CD e
2
O1D 0.458 см
с
aDe Ц O1 O1D – переносное
2
центростремительное ускорение точки, CDe 2 ,
aDe ВР CDe O1D 0.062 см
с
aDe ВР O1D
2
– переносное
вращательное ускорение точки, CDe 2 ,
aD r Ц CD r
2
CD 0.383 см
с
aD r Ц C CD
2
– относительное
центростремительное ускорение точки,
aD r ВР CD r CD ?
aD r ВР CD
– относительное
вращательное ускорение точки.
aDc 2 CDe vD r
aDc vD r
aDc 2 CDe vD r 0.940 см
aD ?
– ускорение Кориолиса
с2
– абсолютное ускорение точки
aD O1 y
Аналогично способу, изложенному ранее, изображаем многоугольник
ускорений для точки D (рис.16). Измеряя неизвестные векторы, получаем значения ускорений:
aD r ВР 0.067 см
с
2
; aD 0.105 см
с2
.
Затем вычисляем угловое относительное ускорение звена CD
CD r
58
aD r ВР
0.00078 с 2 .
CD
Направление относительного углового ускорения определяем по направлению
вектора aD r ВР и изображаем его на рис.16 по часовой стрелке.
Так как относительное и переносное угловые ускорения шатуна CD
направлены в одну сторону, направление абсолютного углового ускорения звена
совпадает с переносным или относительным угловым ускорением, а его величина равна
CD 3 CDe CD r 0.00168 c2
Ускорение точки K найдем аналогично определению ускорения точки M
. Построив многоугольник ускорений для этой точки (рис.16)
aK aK e Ц aK e ВР aK r Ц aK r ВР aK c
где
aK e Ц CDe
2
O1K 0.212 см
aK e ВР CDe O1K 0.029 см
aK r Ц CD r
2
aK c 2 CDe vK r 0.514 см
с2
с
2
с
aK e Ц O1 O1K
aK e ВР O1K
с2
CK 0.209 см
aK r ВР CD r CK 0.037 см
с
2
2
aK r Ц C CD
aK r ВР CD
aDc vD r
aK ?
измерением получим
aK 0.116 см
с2
.
59
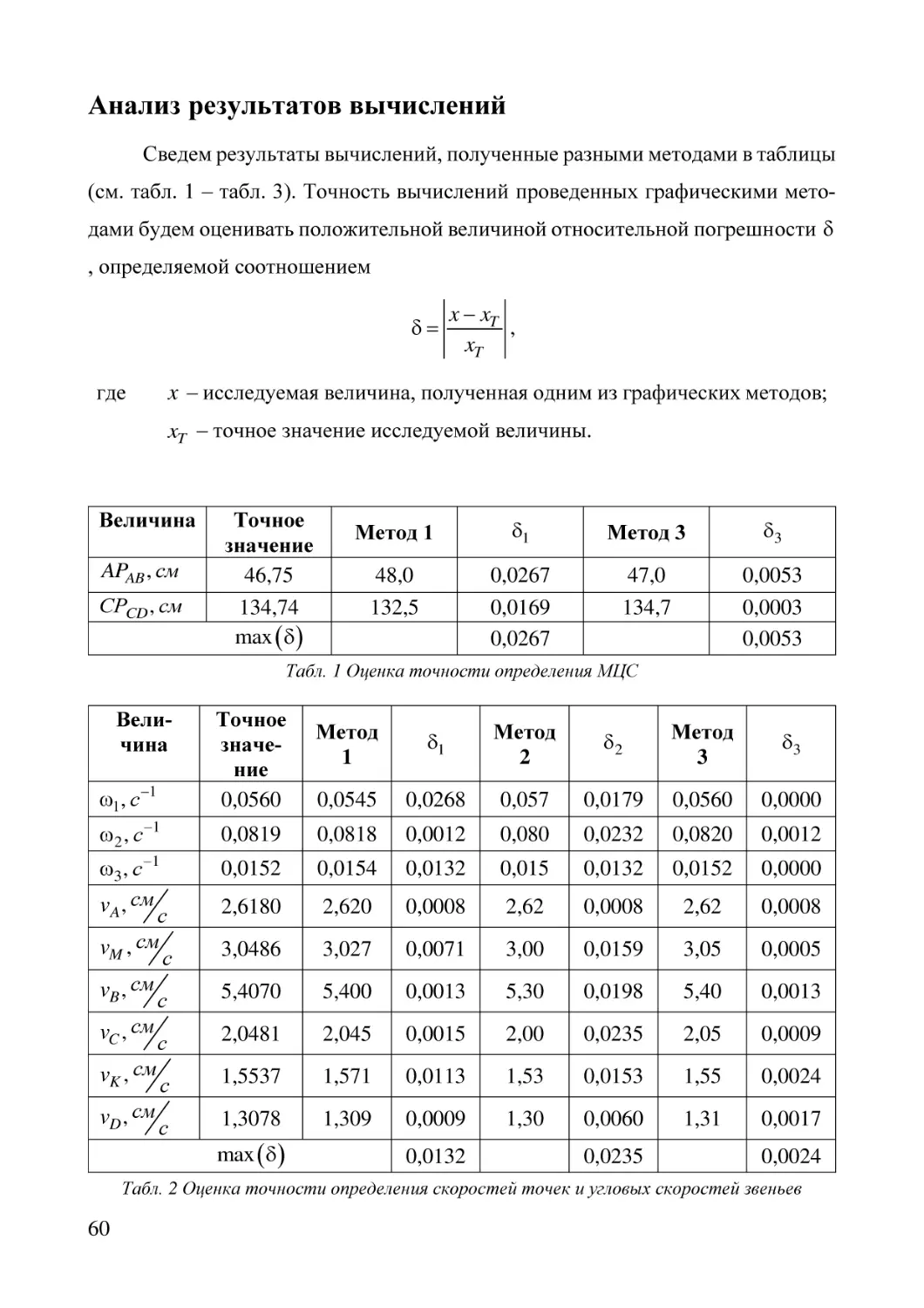
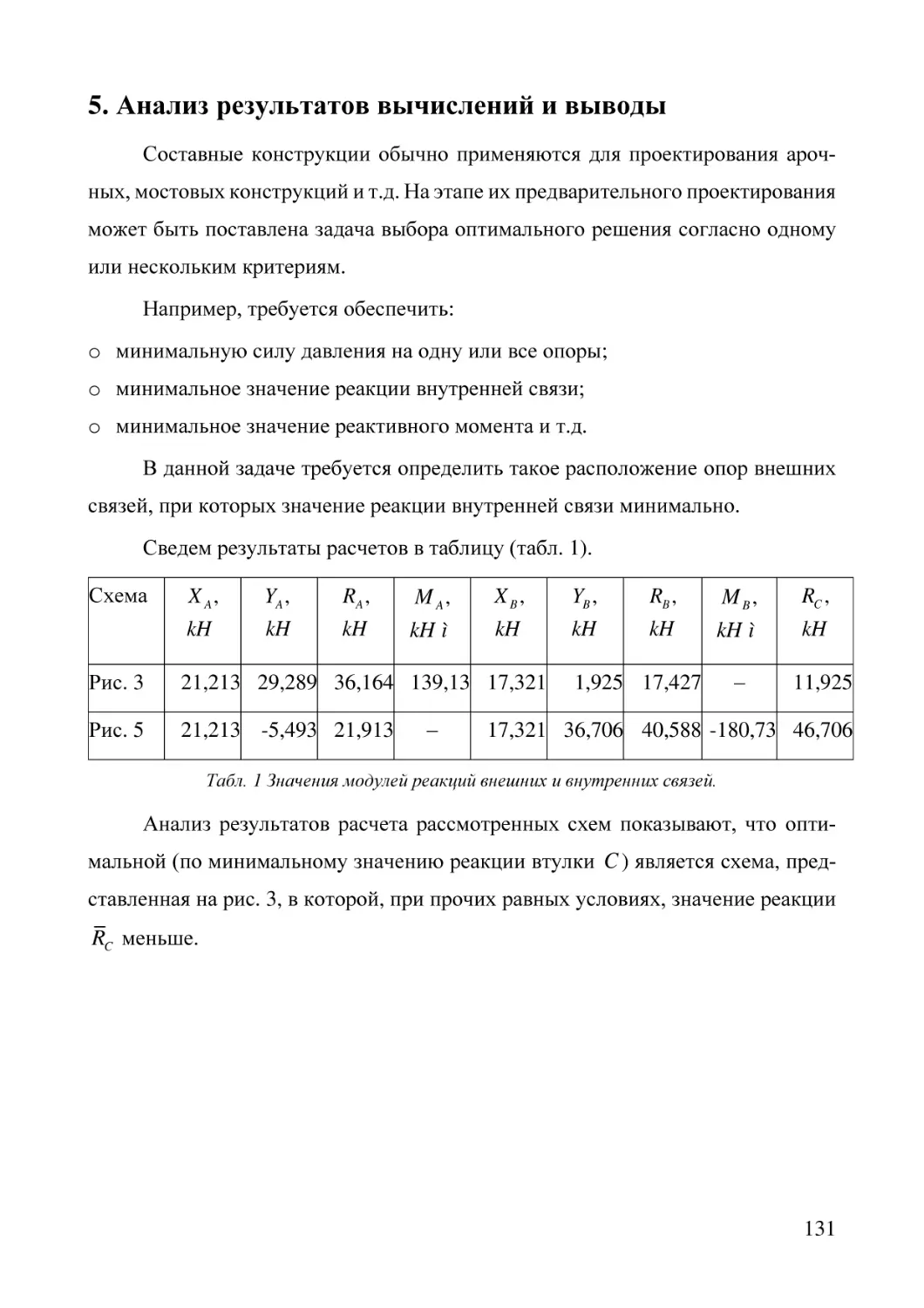
Анализ результатов вычислений
Сведем результаты вычислений, полученные разными методами в таблицы
(см. табл. 1 – табл. 3). Точность вычислений проведенных графическими методами будем оценивать положительной величиной относительной погрешности
, определяемой соотношением
где
x xT
,
xT
x – исследуемая величина, полученная одним из графических методов;
xT – точное значение исследуемой величины.
Величина
APAB , см
СРCD , см
Точное
значение
46,75
134,74
max
Метод 1
1
Метод 3
3
48,0
132,5
0,0267
0,0169
0,0267
47,0
134,7
0,0053
0,0003
0,0053
Табл. 1 Оценка точности определения МЦС
Величина
1, с 1
Точное
значение
0,0560
2 , с 1
0,0819
0,0818
0,0012
0,080
0,0232
0,0820
0,0012
3 , с 1
v A , см
с
vM , см
с
vB , см
с
vC , см
с
vK , см
с
vD , см
с
0,0152
0,0154
0,0132
0,015
0,0132
0,0152
0,0000
2,6180
2,620
0,0008
2,62
0,0008
2,62
0,0008
3,0486
3,027
0,0071
3,00
0,0159
3,05
0,0005
5,4070
5,400
0,0013
5,30
0,0198
5,40
0,0013
2,0481
2,045
0,0015
2,00
0,0235
2,05
0,0009
1,5537
1,571
0,0113
1,53
0,0153
1,55
0,0024
1,3078
1,309
0,0009
1,30
0,0060
1,31
0,0017
max
Метод
1
1
Метод
2
2
Метод
3
3
0,0545
0,0268
0,057
0,0179
0,0560
0,0000
0,0132
0,0235
0,0024
Табл. 2 Оценка точности определения скоростей точек и угловых скоростей звеньев
60
1, с 2
Точное
значение
0,0062
Метод
1
0,0061
2 , с 2
0,0009
3 , с 2
a , см
Величина
A
с2
aM , см 2
с
aB , см 2
с
aC , см 2
с
aK , см 2
с
aD , см 2
с
0,0161
Метод
2
0,0063
0,0161
Метод
3
0,0063
0,0161
0,0009
0,0000
0,0009
0,0000
0,0009
0,0000
0,0017
0,0016
0,0588
0,0017
0,0000
0,0017
0,0000
0,4569
0,4569
0,0000
0,4569
0,0000
0,4569
0,0000
0,3076
0,3029
0,0153
–
–
0,310
0,0078
0,4470
0,4502
0,0072
0,4502
0,0072
0,450
0,0067
0,1693
0,1667
0,0154
0,1724
0,0183
0,170
0,0041
0,1148
0,1167
0,0166
–
–
0,116
0,0105
0,1001
0,1008
0,0070
0,1018
0,0170
0,105
0,0490
max
1
0,0588
2
0,0183
3
0,0490
Табл. 3 Оценка точности определения ускорений точек и угловых ускорений звеньев
Анализ вычисленных значений кинематических параметров многозвенного шарнирного механизма позволяет сделать следующие выводы:
o Все три графических метода с допустимой степенью точности определяют кинематические параметры механизма;
o Увеличение погрешности при вычислении ускорений связано с накоплением
ошибок графических методов при определении скоростей точек и угловых
скоростей звеньев;
o Наиболее громоздкими и трудоемкими являются графоаналитические и графические методы при исследовании ряда различных положений механизма.
o Данные методы целесообразно использовать в качестве ориентировочных
расчетов при отладке программ для численного моделирования системы.
61
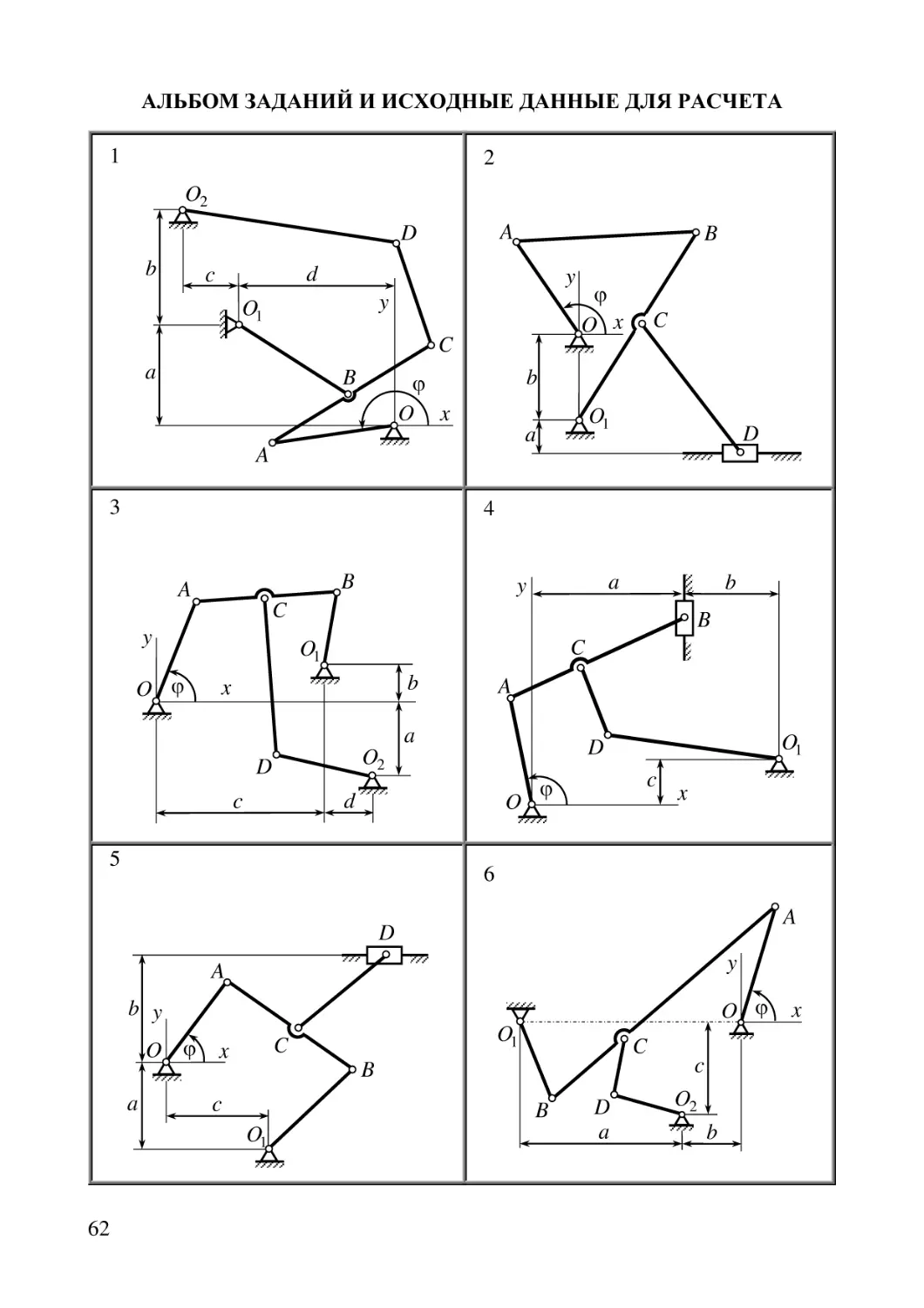
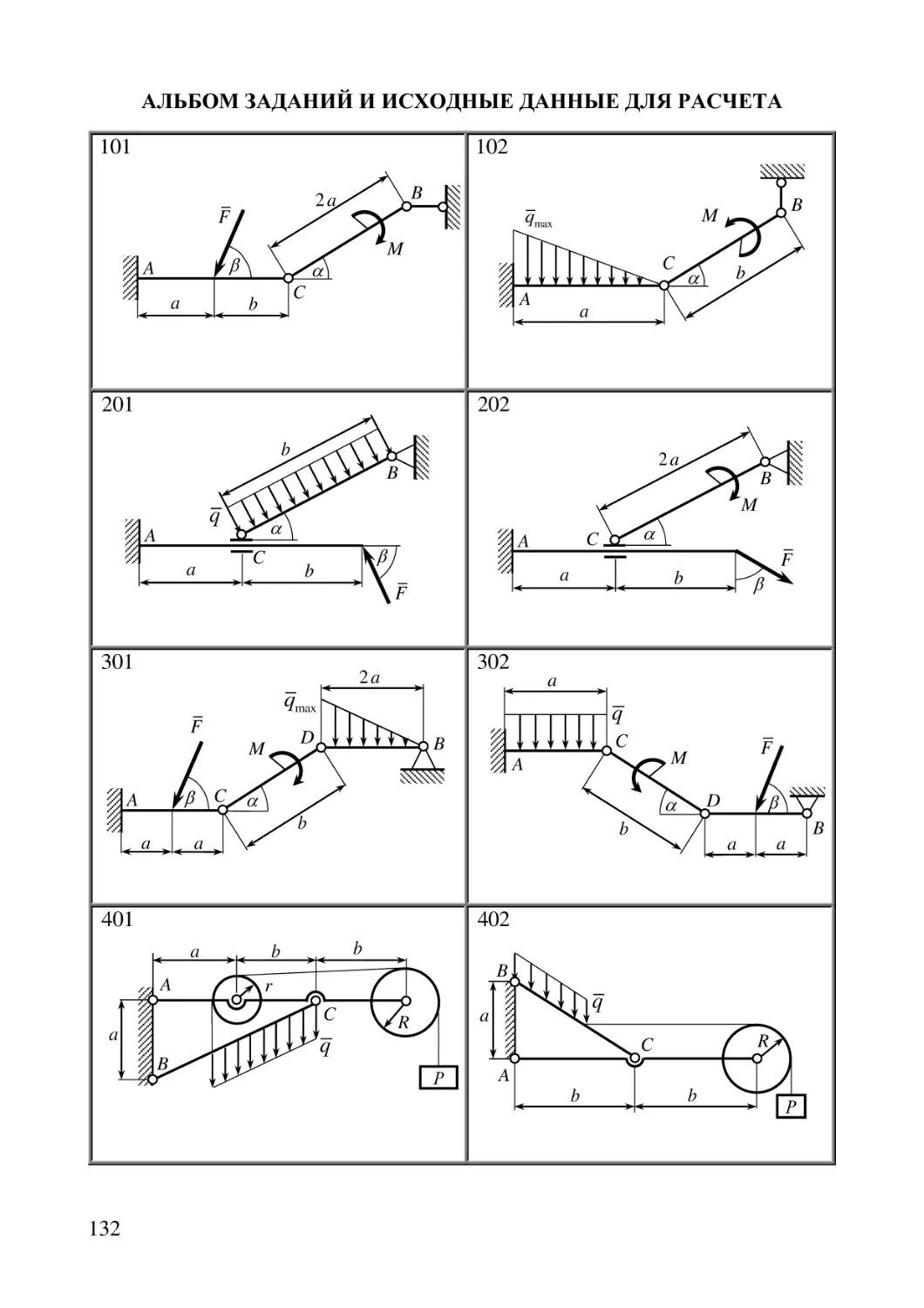
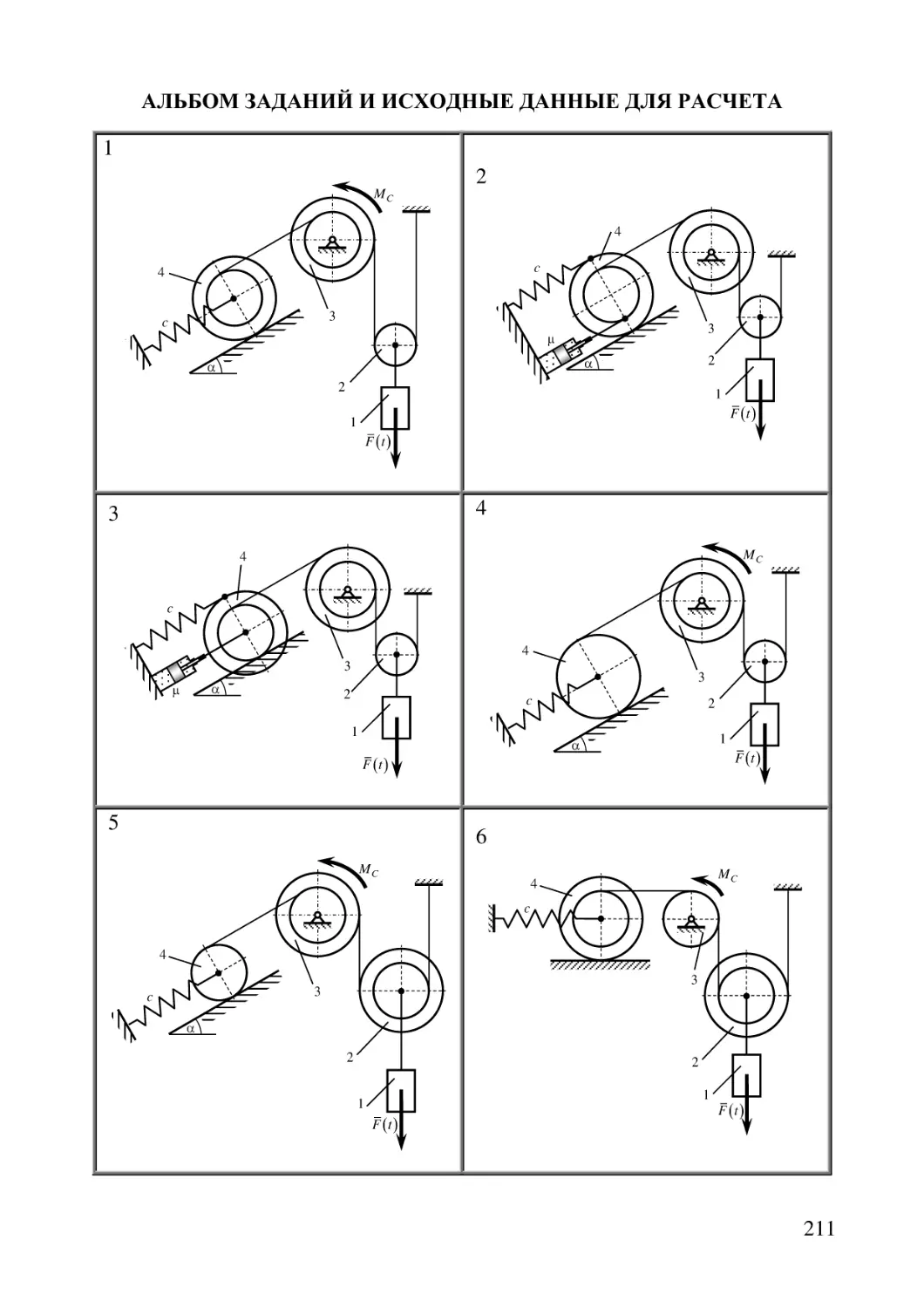
АЛЬБОМ ЗАДАНИЙ И ИСХОДНЫЕ ДАННЫЕ ДЛЯ РАСЧЕТА
1
2
O2
A
D
b
B
d
c
y
y
O1
O x
C
C
a
O x
B
b
O1
a
D
A
3
4
B
A
a
y
b
C
y
B
C
O1
O
b
x
A
a
D
c
d
O
5
O1
D
O2
c
x
6
A
D
y
A
O
b y
O
a
C
B
c
B
O1
62
O1
C
x
D
a
c
O2
b
x
7
8
C
c
y
O1
a
D
B
d
b
O1
A
y
O
x
c
x
O
C
O2
a
D
b
A
10
9
C
b
A
y
C
y
D
O1
B
a
O
c
x
O2
D
O d
x
O1
B
b
a
A
11
12
B
a
y
A
O1
D
A
y
O
x
a
O1
O
C
x
b
C
B
63
13
14
a
y
B
O1
O
C
y
A
O2
D
b
C
O
d
b
O1
D
B
x
a
A
15
16
a
y
A
y
B
O1
O
O
x
C
x
B
C
b
A
c
c
O1
D
O2
a
D
17
b
18
A
A
D
y
C
O x
C
y
O
B
x
O1
a
B
D
a
64
c
x
b
O1
19
20
O1
O1
a
y
D
C
A
A
y
b
a
C
O
x
O
x
B
B
22
21
a
a
y
O1
y
B
D
b
O1
c
A
O
b
x
O2
C
C
O
A
x
D
B
24
23
A
C
a
y
O
x
O2
A
O2
y
B
O
D
c
C
b
O1
D
B
x
a
O1
b
65
25
26
a
y
O1
D
O1
D
B
b
x
O
b
y
C
B
O
x
C
A
A
a
28
27
A
O2
D
y
O
C
c
x
C
y
O1
A
a
O
a
x
30
29
B
a
y
A
O1
x
O
C
c
O1
O2
y
A
O
66
b
D
b
B
O1
B
B
b
D
x
b
a
C
D
Значение угла поворота ведущего звена при t Tk – k ,град.
№
0
1
2
3
4
5
6
7
8
9
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
330
135
195
255
300
300
210
315
225
270
315
240
345
120
225
330
90
345
240
60
165
135
180
285
90
120
15
195
255
120
0
75
0
60
285
150
285
330
135
150
45
300
300
120
300
240
165
75
45
285
195
30
285
300
60
195
300
180
135
315
105
210
165
45
135
105
330
225
165
45
210
210
120
315
135
15
195
45
15
45
105
90
0
30
300
180
255
150
15
210
300
150
0
30
30
165
75
90
255
210
0
15
180
195
315
195
150
90
90
315
270
330
270
60
60
105
255
210
15
210
165
90
0
15
15
240
120
90
210
210
105
345
315
105
315
330
165
75
240
0
345
285
0
75
315
60
45
300
45
90
240
195
300
225
45
60
180
60
180
150
255
75
30
225
345
330
75
105
45
210
270
15
75
285
330
270
90
270
270
90
210
165
255
225
285
195
30
60
90
240
225
270
45
210
180
285
165
345
240
150
120
135
30
120
120
45
105
135
75
345
150
75
180
270
90
210
90
105
135
300
300
135
75
135
105
30
150
255
60
345
105
165
15
225
315
60
240
45
60
345
255
150
120
75
90
270
225
150
315
45
165
240
195
45
45
150
240
135
75
315
285
105
330
15
300
180
120
0
255
345
330
150
165
180
330
30
75
240
105
210
330
75
225
15
75
150
45
150
315
210
345
225
60
45
195
255
105
30
210
240
67
№
a
b
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
18
15
10
20
25
65
10
27
19
55
50
15
17
42
50
36
96
40
42
40
20
50
60
36
55
50
35
70
55
70
45
38
15
20
15
10
50
18
20
25
–
60
54
20
10
22
–
70
40
68
60
25
50
40
22
40
45
30
20
20
Геометрические размеры механизмов, [см]
d OA AB CD O1C O2 D AC O1B O1D BC
c
18
–
40
22
50
40
10
30
28
–
–
–
–
40
30
15
–
–
–
–
–
10
–
10
–
–
20
–
30
–
23
–
54
–
–
–
–
30
21
–
–
–
–
10
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
14
15
15
12
20
10
16
14
10
15
15
20
15
10
12
10
15
20
17
22
20
15
12
16
20
25
10
30
13
19
21
51
42
76
60
80
50
–
40
70
50
60
50
50
50
45
90
78
70
60
80
47
50
45
40
65
50
55
60
47
46
60
70
25
70
50
60
63
30
33
–
60
40
60
45
60
75
40
–
50
50
35
60
45
42
70
54
70
70
81
–
33
–
–
–
–
–
20
31
–
–
–
–
–
–
40
–
–
30
–
–
–
–
15
–
–
–
–
14
–
32
–
32
–
–
25
–
25
25
–
–
–
–
20
20
–
–
–
–
–
–
45
32
20
–
–
28
–
33
–
42
19
21
38
30
25
80
55
–
35
–
15
15
25
30
–
42
40
–
30
40
22
30
–
15
35
–
30
–
–
28
66
28
–
30
30
35
–
–
–
30
–
–
20
20
20
28
–
–
–
–
20
30
26
–
30
23
–
–
–
–
–
–
20
–
–
–
–
–
24
–
35
24
–
–
–
–
30
–
20
30
–
–
–
30
–
–
25
–
36
–
–
–
–
–
–
30
–
62
35
60
45
–
–
–
20
48
–
40
–
–
–
–
–
25
–
22
25
39
30
2. СТАТИКА
Курсовые работы по статике посвящены применению основных теорем и
методов статики к исследованию равновесия механических систем. Студенты,
выполняя то или иное задание, должны получить навыки и умения: составления
уравнений равновесия для рассматриваемых тел, нахождения реакций внешних
и внутренних связей, анализа результатов расчета и исследования конструкций.
В данном разделе представлены три курсовых работы разной степени
сложности:
В 1-ой работе "Исследование равновесия плоских шарнирных ферм" рассматривается равновесие плоской шарнирной фермы. Составление уравнений
равновесия и проверочные расчеты проводятся различными методами. Исследуется влияние вида и расположения опор на величины реакций внешних
и внутренних связей.
Во 2-ой работе "Равновесие тел под действием произвольной плоской системы сил" рассматривается равновесие плоских составных конструкций. Составление уравнений равновесия и проверочные расчеты проводятся различными методами. Исследуется влияние геометрических параметров на величины реакций связей, определяются области их допустимых значений.
В 3-ей работе "Равновесие плоских шарнирных механизмов" изучается равновесие плоских многозвенных шарнирных механизмов. Совместно решается нелинейная система, в которую входят: система нелинейных уравнений
геометрических связей и система уравнений равновесия. Исследуются факторы, обеспечивающие равновесие механизма в зависимости от положения
ведущего звена.
69
С 1. ИССЛЕДОВАНИЕ РАВНОВЕСИЯ ПЛОСКИХ
ШАРНИРНЫХ ФЕРМ
Фермой называется геометрически неизменяемая конструкция, образованная прямолинейными стержнями, соединенными друг с другом идеальными
шарнирами, которые называются узлами фермы. Если стержни, образующие
ферму, лежат в одной плоскости, то такая ферма называется плоской. Плоская
ферма является статически определимой, если число узлов n и число стержней
N удовлетворяют равенству
N 2 n 3.
При N 2 n 3 , ферма является статически неопределимой, а при
N 2 n 3 ферма имеет дополнительные степени свободы, т.е. является механизмом.
При расчете ферм методами теоретической механики все действующие на
ферму силы приводятся к ее узлам, а стержни считаются невесомыми и абсолютно жесткими. Тогда усилия в стержнях фермы будут направлены вдоль их
осей, и стержни могут быть только сжаты или растянуты. Расчет статически
определимых ферм сводится к определению усилий в стержнях фермы. В этом
случае все активные силы и реакции опор являются внешними силами для всей
фермы, рассматриваемой как твердое тело; усилия в стержнях — внутренними
силами (внутренними реакциями).
При проектировании ферм обычно задаются критические режимы внешних воздействий на них. Тогда внешние силы можно считать не изменяемыми.
Конструктивные параметры ферм (их геометрические размеры) определяются
условиями их функционирования и, следовательно, варьируются в очень узком
диапазоне. Актуальной становится такая задача исследования фермы, при которой могут изменяться вид опор и место их расположения.
70
Цель курсовой работы
Целью курсовой работы является выработка навыков расчета и исследования равновесия плоских шарнирных ферм.
Содержание курсовой работы
Объектом исследования является плоская шарнирная ферма, представляющая собой совокупность прямолинейных стержней, соединенных друг с другом
идеальными шарнирами. Схемы ферм и таблицы исходных данных приведены в
альбоме заданий.
Задаваемыми параметрами являются:
o геометрические характеристики фермы;
o плоская система активных сил, приложенных узлам фермы.
При составлении математической модели принимаются следующие допущения:
o стержни, образующие ферму, являются невесомыми, абсолютно жесткими
и прямолинейными;
o соединительные шарниры – идеальные (Трение в них отсутствует).
Требуется:
1. Сформировать систему уравнений для определения реакций внешних и внутренних связей.
2. Найти значения реакций внешних и внутренних связей.
3. Провести численный анализ полученного решения для разных видов опор и
мест их расположения с использованием ЭВМ и выбрать оптимальный вариант.
Порядок выполнения работы
1. Выделить тело (элемент) или систему тел с заданными активными силами, равновесие которых будем рассматривать.
2. Используя аксиому освобождаемости от связей рассмотреть выбранное тело,
как свободное, заменив действующие на него связи их реакциями.
3. Дать анализ полученной системы сил, выяснить статическую определимость
71
фермы.
4. Записать условия равновесия и составить уравнения равновесия:
o с помощью метода вырезания узлов;
o методом Риттера.
5. Определить реакции внешних и внутренних связей и осуществить проверку
правильности составления уравнений равновесия.
6. Провести анализ и исследование полученного решения:
o исследовать влияние вида опор и места их расположения на величины реакций внешних и внутренних связей;
o выбрать такое расположение опор, при котором обеспечивается минимальное количество сжатых или растянутых стержней (по указанию преподавателя);
o определить область допустимых значений ориентации опорной плоскости
катковой опоры.
В процессе выполнения курсовой работы необходимо выработать следующие навыки и умения:
o определения связей, действующих на тело или систему тел;
o составления уравнений равновесия для произвольного тела, входящего в систему тел и нахождения реакций связей;
o решения поставленной задачи разными методами.
72
ПРИМЕР ВЫПОЛНЕНИЯ ЗАДАНИЯ
Мостовая ферма (рис. 1) находится в равновесии под действием сил P1 , P2
и P3 . Геометрические размеры фермы известны. Ферма опирается в точке А на
катковую опору, а в точке B закреплена неподвижным шарниром.
Исследовать равновесие фермы. Определить реакции внешних и внутренних связей для разных видов опор и мест их расположения (схемы 1, 2, 3).
P1
D
C
b
B
A
P2
a
a
a
P3
a
Рис. 1 Мостовая ферма (схема 1).
Исходные данные
P1 20 кН ,
P2 30 кН ,
P3 40 кН ,
a 1 м,
b 3 м,
45
Точка опоры
Схема № 1
A
B
C
Схема № 2
Схема № 3
30
73
1. Определение реакций внешних связей
Для определения реакций внешних связей рассмотрим мостовую ферму
ABCD (рис. 2) содержащую 8 узлов, соединенных 13 стержнями. Ферма находится в равновесии под действием активных сил P1 , P2 , P3 и связей приложенных
в точках A и B .
Освободим ферму от опор, заменив их действие силами реакций связей
RA , RB . Проведем систему координат xAy и изобразим действующие на нее
внешние силы: активные P1 , P2 , P3 и реакции связей (рис. 2).
P1
D
C
y RA
YB
A
B
a
a
a
b
x
XB
a
P3
P2
Рис. 2 Расчетная схема для определения реакций внешних связей.
Реакцию RA катковой опоры направим перпендикулярно опорной плоскости, а реакцию неподвижной шарнирной опоры B – RB изобразим двумя составляющими X B и YB , т. е. RB X B YB , направив их в положительном направлении
координатных осей. Так как все указанные силы расположены в плоскости xAy ,
то ферма находится в равновесии под действием произвольной плоской системы
сил.
Условия равновесия фермы можно записать в виде
Fkx 0, Fky 0, M B Fk 0 или
k
74
k
k
Fkx 0, M À Fk 0, M B Fk 0.
k
k
k
Так как на ферму действует произвольная плоская система сил и выполняется условие N 2 n 3 2 8 3 13 , то ферма является статически определимой и расчет фермы можно осуществить методами теоретической механики.
Составим уравнения равновесия системы сил, действующих на ферму:
Fkx 0
X B P1 cos RA sin 0,
M A Fk 0
YB 4a P3 3a P2 a P1 cos b P1 sin 2a 0,
k
k
(1)
M B Fk 0 P3 a P2 3a RA cos 4a P1 cos b P1 sin 2a 0.
k
Последовательно решая систему уравнений (1), из третьего уравнения
найдем реакцию RA
RA
1
b
P3 3P2 2 P1 sin P1 cos .
4cos
a
Из второго уравнения этой системы – YB
1
3
1
b
YB P2 P3 P1 sin P1 cos ,
4
4
2
4a
а из первого уравнения
X B P1 cos RA sin .
Окончательно значение реакции X B будет иметь вид
1
b
1
X B P1 cos tg 2sin cos tg P3 3P2 .
4
a
4
Подставив численные значения, получим
RA 30 2 кН 42.426 кН ,
X B 10 3 3 кН 41.321кН , YB 50 кН .
Так как значение X B получилось отрицательным, реакция X B направлена
противоположно направлению, выбранному на расчетной схеме.
75
Проверить вычисления можно составлением уравнения моментов относительно какой-либо точки в плоскости действия сил (например, точки C )
M C Fk 0
k
X Bb YB a P2 2a RA cos 3a RA sin b P1 sin a 0.
Подставляя в данное уравнение величины найденных реакций, получим
P1 cos b RA sin b P1 sin a P2 a P3 a RA cos a P2 2a RA cos 3a
RA sin b P1 sin a
P1 cos b 2 P1 sin a 3P2 a P3 a 4 RA a cos
b
P1 cos b 2 P1 sin a 3P2 a P3 a a P3 3P2 2 P1 sin P1 cos
a
P1 cos b 2 P1 sin a 3P2 a P3a P3a 3P2 a 2 Pa
1 sin P1 b cos 0.
Полученное тождество показывает, что система уравнений (1) составлена
корректно.
Проведя анализ значений найденных реакций, укажем, что угол наклона
опорной плоскости катковой опоры не может быть равен , так как в данном
2
случае реакции RA , X B стремятся к бесконечности.
С физической точки зрения это означает, что у фермы появляется дополнительная степень свободы (возможность вращения вокруг шарнира B ) и обеспечить ее равновесие, в этом случае, можно, добавив дополнительную связь.
2. Определение усилий в стержнях фермы методом
вырезания узлов
Метод вырезания узлов сводится к последовательному рассмотрению равновесия каждого узлового соединения фермы.
Пронумеруем узлы фермы римскими цифрами, а стержни – арабскими
(рис. 3). Стержни, сходящиеся в узлах, являются для каждого узлового соединения связями. Отбросим связи и заменим их действия реакциями – усилиями в
стержнях, которые будем обозначать символом Sk , k 1,13 . На рис. 3 показаны
76
пронумерованные узлы фермы с приложенными к ним активными и реактивными силами. Здесь учтена аксиома о равенстве сил действия и противодействия,
т. е. Sk Sk . Реактивные силы изображены на рис. 3 в предположении, что
стержни растянуты, т. е. направлены от узлов. Тогда реакция будет положительной, если стержень растянут, и отрицательной, если он сжат.
P1
III s 6
y
s 6 V
s7
6
s 2
s
s 3 5
RA
s 10
s 10 VII
10
s 9
7
s 11 s 13
13 YB
b
9
s
9
s2 s3
s 5 s 7
s 11
s 13
s8
s 12
II
I 1
x
4
12
s 12 VIII X
s 4 s 4 IV 8 s 8 VI
s 1 s 1
B
a
a
a
a
P3
P2
3
2
5
11
Рис. 3 Расчетная схема для нахождения усилий в стержнях фермы.
Рассмотрим теперь равновесие узлов фермы. Системы сил, действующие
на каждый узел, являются сходящимися плоскими системами сил. Равновесие
таких систем сил возможно, если их равнодействующая равна нулю. Это условие
можно записать в виде
Fkx 0, Fky 0.
k
k
Так как в каждом рассматриваемом узле должно быть не более двух неизвестных реакций, выберем следующую последовательность решения
I II III V IV VI VII VIII .
Составим уравнения равновесия для каждого из узлов и последовательно найдем
реакции стержней фермы.
Узел I
Fkx 0 RA sin S1 S2 cos 0,
(2)
k
Fky 0
k
RA cos S2 sin 0.
77
Из уравнений (2) с учетом найденных ранее реакций внешних связей
найдем реакции S1 и S2 :
cos
10 3 3 kH 12.68 kH ,
sin
cos
S 2 RA
20 3 kH 34.64 kH .
sin
S1 RA
Fkx 0 S1 S4 0,
Узел II
(3)
k
Fky 0
k
S3 P2 0.
Из уравнений (3), с учетом (2)
S3 P2 30 kH , S4 S1 10 3 3 kH 12.68 kH .
Fkx 0 S2 cos S5 cos S6 0,
Узел III
(4)
k
Fky 0
k
S2 sin S5 sin S3 0.
Из уравнений (4), с учетом (2) и (3)
S5 S2 S3
Узел V
1
0 kH , S6 S2 S5 cos 10 3 kH 17.32 kH .
sin
Fkx 0 S10 S6 P1 cos 0,
(5)
k
Fky 0
k
S7 P1 sin 0;
Из уравнений (5), с учетом (4)
S7 P1 sin 10 kH ,
S10 S6 P1 cos 20 3 kH 34.64 kH .
Узел IV
Fkx 0 S8 S4 S5 cos S9 cos 0,
k
Fky 0
k
S7 S5 sin S9 sin 0;
Из уравнений (6), с учетом (5)
S9 S5 S 7
1
3
20
kH 11.55 kH ,
sin
3
S8 S4 S5 S9 cos 20
78
3
30 kH 18.45 kH .
3
(6)
Fkx 0 S8 S12 0,
Узел VI
(7)
k
Fky 0
S11 P3 0;
k
Из уравнений (7), с учетом (6)
S11 P3 40 kH ,
3
S12 S8 10 2
3 kH 18.45 kH .
3
Fkx 0 S10 S13 cos S9 cos 0,
Узел VII
(8)
k
Fky 0
k
S11 S13 sin S9 sin 0;
Из первого уравнения системы (8), с учетом (5) и (6)
S13 S9 S10
1
3
100
kH 57.74 kH .
cos
3
Fkx 0 S12 S13 cos X B 0,
Узел VIII
(9)
k
Fky 0
S13 sin YB 0;
k
Последнее уравнение системы (8) и уравнения (9) могут служить, при
найденных ранее реакциях внешних связей, проверочными. Действительно
3 3
3 3
20
0,
3 2
3 2
3
31
S12 S13 cos X B 0 20
30 100
30 10 3 0,
3
3 2
3 3
S13 sin YB 0
100
50 0.
3 2
S11 S13 sin S9 sin 0
40 100
Результаты расчета сведем в таблицу.
S13
-57,74
S12
-18,45
S11
40,00
S10
-34,64
S9
11,55
S8
-18,45
S7
-10,00
S6
-17,32
S5
0
S4
-12,68
S3
30,00
S2
-34,64
Значение
реакции,
kH
S1
-12,68
Реакция
стержня
79
Отрицательные значения реакций стержней 1, 2, 4, 6, 7, 8,10,12 и13 показывают, что направления этих реакций противоположны принятым на расчетной
схеме и, следовательно, они сжаты. Стержни при некоторых значениях сжимающих усилий могут потерять прямолинейную форму (изогнуться) и при дальнейших расчетах их необходимо проверять помимо прочности еще и на устойчивость. Значения реакций стержней 3, 9 и 11 положительны. Следовательно, эти
стержни растянуты. Реакция стержня 5 равна нулю. Этот стержень ненагружен:
он требуется для придания ферме необходимой жесткости – геометрической неизменяемости системы.
Выбор последовательности расчета, предложенной для нахождения искомых реакций, обусловлен тем, что решение уравнений равновесия (2) – (9) осуществлялось в зависимости от найденных на предыдущем этапе решений, т. е.
«вручную». Такая последовательность неединственная. Можно указать и другие
последовательности решения, например
I II III V IV VII VI VIII и т. д.
При использовании метода вырезания узлов можно обойтись без предварительного нахождения реакций внешних связей (реакций опор фермы). Действительно, статически определенная и геометрически неизменяемая ферма содержит 2n 3 стержня, где n – число узлов; так как три уравнения необходимы
для нахождения реакций опор, то для вычисления всех неизвестных сил (реакций
опор и реакций стержней) нужно 2n уравнений.
Применительно к рассматриваемой ферме имеем 8 узлов и 16 неизвестных
величин Sk , k 1,13; RA , X B , YB . Рассмотрев равновесие всех узлов фермы, получим замкнутую систему 16 линейных алгебраических уравнений (2) – (9), относительно 16 неизвестных величин (реакций внешних и внутренних связей).
Уравнения (1), в этом случае, могут служить для проверки расчета: при
подстановке в них найденных значений реакций опор они должны обратиться в
тождества.
80
Такой подход эффективен при использовании вычислительной техники,
которая позволяет легко решать большие системы линейных алгебраических
уравнений.
Поэтому в задачах нахождения реакций внешних и внутренних связей для
ферм, выполненных по схемам 2 и 3, ограничимся составлением только уравнений равновесия, а их решение выполним с помощью пакета Mathcad (п. 4).
Схема №2
P1
D
C
b
B
A
P2
a
P3
a
a
a
а)
P1
III s 6
y
YA
2
s2
XA
6
s 2
s
s 3 5
3
s3
s 10
s 6 V
s7
5
s 5 s 7
7
s9
s 10 VII
10
s 9
s 11 s 13
11 13
9
s 11
RB
b
s 13
s8
s 12
II
x
1
4
I s 1 s 1
s 4 s 4 IV 8 s 8 VI 12 s 12 VIII
a
a
a
a
P3
P2
б)
Рис. 4 Расчетная схема для фермы, выполненной по схеме № 2.
81
Рассмотрим мостовую ферму ABCD (рис. 4 а), которая находится в равновесии под действием активных сил P1 , P2 , P3 и связей приложенных в точках A
и B . В точке À расположена неподвижная шарнирная опора, в точке Â – катковая опора, угол наклона опорной плоскости которой равен .
Как и ранее, воспользуемся для нахождения реакций внешних и внутренних связей методом вырезания узлов. Рассмотрим равновесие каждого узла
фермы. Отбросим связи и заменим их действия реакциями: внутренними –
Sk , k 1,13 и внешними – X A , YA è RB (рис. 4 б). Записывая уравнения равнове-
сия для каждого узла, получим
Узел I
Fkx 0
X A S1 S2 cos 0,
Fky 0
YA S2 sin 0.
k
k
Узел II
Fkx 0 S1 S4 0,
(10)
(11)
k
Fky 0
k
Узел III
S3 P2 0.
Fkx 0 S2 cos S5 cos S6 0,
(12)
k
Fky 0
k
Узел IV
S2 sin S5 sin S3 0.
Fkx 0 S8 S4 S5 cos S9 cos 0,
(13)
k
Fky 0
k
Узел V
S7 S5 sin S9 sin 0;
Fkx 0 S10 S6 P1 cos 0,
(14)
k
Fky 0
k
Узел VI
S7 P1 sin 0;
Fkx 0 S8 S12 0,
(15)
k
Fky 0
k
Узел VII
S11 P3 0;
Fkx 0 S10 S13 cos S9 cos 0,
k
Fky 0
k
82
S11 S13 sin S9 sin 0;
(16)
Fkx 0 S12 S13 cos RB sin 0,
Узел VIII
(17)
k
Fky 0
S13 sin RB cos 0;
k
Уравнения (10) – (17) является замкнутой системой 16 линейных алгебраических
уравнений относительно 16 неизвестных реакций X A , YA , RB и Sk , k 1,13 .
Схема №3
P1
D
C
b
B
A
P2
a
P3
a
a
a
а)
P1
III s 6
6
s 2
y
s
s 3 5
RA
2
s2
3
s3
s 10
s 6 V
s7
5
s 5 s 7
7
s9
s 10 VII
10
s 9
s 11 s 13
11
9
s 11
RC
13 R B
b
s 13
s8
s 12
II
I 1
4
s 4 s 4 IV 8 s 8 VI 12 s 12 VIII
s 1 s 1
a
a
a
a
P3
P2
x
б)
Рис. 5 Расчетная схема для фермы, выполненной по схеме № 3.
Рассмотрим мостовую ферму ABCD (рис. 5 а), которая находится в равновесии под действием активных сил P1 , P2 , P3 и связей приложенных в точках
83
A, B и C . В точке À расположена катковая опора, угол наклона опорной плоскости которой равен , в точке Â – горизонтальная катковая опора, а в точке C
– невесомый стержень.
Воспользуемся для нахождения реакций внешних и внутренних связей методом вырезания узлов. Рассмотрим равновесие каждого узла фермы. Отбросим
связи и заменим их действия реакциями: внутренними – Sk , k 1,13 и внешними – RA , RB è RC (рис. 5 б). Записывая уравнения равновесия для каждого узла,
получим
Узел I
Fkx 0 RA sin S1 S2 cos 0,
(18)
k
Fky 0
k
Узел II
RA cos S2 sin 0.
Fkx 0 S1 S4 0,
(19)
k
Fky 0
k
Узел III
S3 P2 0.
Fkx 0 S2 cos S5 cos S6 0,
(20)
k
Fky 0
k
Узел IV
S2 sin S5 sin S3 0.
Fkx 0 S8 S4 S5 cos S9 cos 0,
(21)
k
Fky 0
k
Узел V
S7 S5 sin S9 sin 0;
Fkx 0 S10 S6 P1 cos 0,
(22)
k
Fky 0
k
Узел VI
S7 P1 sin 0;
Fkx 0 S8 S12 0,
(23)
k
Fky 0
k
Узел VII
S11 P3 0;
Fkx 0 S10 S13 cos S9 cos RC 0,
(24)
k
Fky 0
k
Узел VIII
S11 S13 sin S9 sin 0;
Fkx 0 S12 S13 cos 0,
k
Fky 0
k
84
S13 sin RB 0;
(25)
Уравнения (18) –(25) является замкнутой системой 16 линейных алгебраических уравнений относительно 16 неизвестных реакций
RA , RB , RC
и
Sk , k 1,13 .
3. Определение усилий методом Риттера
Метод Риттера (метод сечений) в общем случае предполагает предварительное определение реакций опор фермы. Этот метод позволяет оперативно
найти реакцию конкретного стержня, не вычисляя реакции других стержней.
При этом должна существовать возможность рассечения фермы на две части по
трем стержням, среди которых находится искомый стержень. Отбросив ту часть
фермы, на которую действует больше сил, рассматривают равновесие оставшейся части. Для произвольной плоской системы сил составляют такие уравнения равновесия, в которые входит только одна неизвестная реакция. Обычно, для
этого используют третью основную форму условий равновесия: уравнения моментов сил относительно точек пересечения линий действия двух неизвестных
сил (точки Риттера). В тех случаях, когда реакции двух стержней параллельны
(точка Риттера находится в бесконечности) составляют уравнение равновесия в
виде проекций сил на ось перпендикулярную этим стержням.
В качестве проверки найденного ранее решения, вычислим реакции в
стержнях 4, 5, 6 (рис. 6), а также в стержнях 8, 11 и 13 (рис. 7).
А
III
s6
y
V
VII
s5
RA
b
I
a
a
P2
x
VIII
VI
IV
s4
a
II
a
А
Рис. 6 Расчетная схема для определения реакций S4 , S5 , S6 .
85
Для определения реакций стержней 4, 5 и 6 проведем сечение A A по
этим стержням, и рассмотрим равновесие левой части фермы. Расчетная схема
изображена на рис. 6. На левую часть фермы действуют известные силы P2 , RA ,
а также реакции отброшенной части S4 , S5 , S6 .
Для нахождения реакции S 4 составим уравнение моментов относительно
узла III , в котором пересекаются линии действия сил S5 и S6 (точка Риттера):
M III Fk 0 S4b RA cos a RA sin b 0.
(26)
k
Стержни 4 и 6 параллельны. Поэтому для нахождения реакции S5 независимо от реакций S4 и S6 составим уравнение проекций сил на ось перпендикулярную параллельным стержням
Fky 0 RA cos S5 sin P2 0.
(27)
k
Чтобы найти реакцию S 6 независимо от реакций S4 и S5 , составим уравнение моментов относительно узла IV , в котором пересекаются линии действия
сил S4 и S5 :
M IV Fk 0 P2a RA cos 2a S6b 0.
(28)
k
Из уравнения (26)
2 1
a
S4 RA cos sin 30 2
1 10
2 3
b
3 3 kH 12.68 kH .
Из уравнения (27)
S5 RA cos P2
2
1
2
30 2
30
0 kH
sin
2
3
Из уравнения (28)
S6
a
1
2
P2 2RA cos 30 2 30 2 10 3 kH 17.32 kH .
b
2
3
Для определения реакций стержней 8, 11 и 13 проведем сечение Б Б , и
рассмотрим равновесие правой части фермы. Расчетная схема изображена на
86
рис. 7, левая часть отброшена. На правую часть фермы действуют известные
силы P3 , X B и YB , а также реакции отброшенной части S8 , S11 , S13 .
Б
III
V
VII
YB
y
s 11
I
II
s 8
IV
Б
x
VIII
VI
a
a
a
s 13
b
a
XB
P3
Рис. 7 Расчетная схема для определения реакций S8 , S11 , S13 .
Для нахождения реакций S8 , S11 , S13 составим уравнения моментов относительно точек Риттера VI , VII и VIII соответственно:
MVI Fk 0 S13 a sin YB a 0 ,
(29)
MVII Fk 0
(30)
k
k
X Bb YB a S8b 0
MVIII Fk 0 P3a S11a 0
(31)
k
Из уравнения (29)
S13
YB
2
50
kH 57.74 kH .
sin
3
Из уравнения (30)
S8 X B YB
Из уравнения (31)
a 20 30 3
kH 18.45 kH .
b
3
S11 P3 40 kH .
Значения реакций стержней 4, 5, 6, 8, 11 и 13, полученные методом Риттера, полностью совпадают со значениями этих реакций полученных методом
вырезания узлов.
87
4. Результаты расчетов
Решения систем линейных алгебраических уравнений (2) – (9), (10) – (17)
или (18) – (25) можно легко реализовать в пакете Mathcad или других математически ориентированных пакетах. Для этого система уравнений приводится к матричной форме
A S B ,
где B – вектор правых частей, полностью определенный действующими на
ферму активными силами;
S – вектор неизвестных реакций внешних и внутренних связей S, задающийся в
соответствии с обозначениями, принятыми на рис. 3, рис. 4 или рис. 5;
A – матрица коэффициентов, которая формируется на основе двух матриц: постоянной AS – независящей от расположения опор фермы и переменной AR
– зависящей от их расположения.
Решение сформированной системы уравнений ищется в виде
S A1 B
Ниже приведен пример документа Mathcad, в котором реализована процедура вычисления реакций внешних и внутренних связей фермы с опорами расположенными по схемам 1, 2 и 3.
Расчет фермы выполненной по схеме №1 (рис. 3)
1. Ввод исходных данных
ORIGIN 1
P ( 20 30 40 )
T
a 1
b
3
2. Формирование вектора правых частей
b
a *
atan
6*
B и матрицы коэффициентов A
B 0 0 0 P2 0 0 0 0 P1cos( ) P1sin ( ) 0 P3 0 0 0 0
T
88
Формирование переменной части матрицы
A – AR
T
sin ( ) cos( ) 0 0 0 0 0 0 0 0 0 0 0 0 0 0
AR1( ) 0
0
0 0 0 0 0 0 0 0 0 0 0 0 1 0
0
0 0 0 0 0 0 0 0 0 0 0 0 0 1
0
Формирование постоянной части матрицы
1 cos ( )
0 sin ( )
1
0
0
0
0 cos ( )
0 sin ( )
0
0
0
0
AS
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
A – AS
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
cos ( )
1
0
0
0
0
0
0
0
1
0
sin ( )
0
0
0
0
0
0
0
0
0
1 cos ( )
0
0
1
cos ( )
0
0
0
0
0
0
sin ( )
0
1
0
sin ( )
0
0
0
0
0
0
0
1
0
0
0
1
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
1
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
cos ( ) 1
0
0
cos ( )
0
0
0
0
0
0
sin ( )
0
1
0
sin ( )
0
0
0
0
0
0
0
0
0
1 cos ( )
0
0
0
0
0
0
0
0
0
0
Формирование матрицы
sin ( )
A , вычисление определителя матрицы, нахож-
дение критических значений ориентации опорной плоскости из уравнения
A кр 0
A1 ( ) augment ( AS AR1( ) )
A1( )
3 3 cos( )
4
A1 ( ) solve
2
3. Решение системы линейных алгебраических уравнений A S B
S1 ( ) A1( )
1
S ( ) S1 ( )
B
Формирование реакций внешних связей
RA ( ) S ( ) 14
XB( ) S ( ) 15
YB( ) S ( ) 16
RB( )
2
XB( ) YB( )
2
89
Вычисление реакций внутренних и внешних связей
10 3 30 tan( )
20 3
30
10 3 30 tan( )
0
10
3
10
20 3 30 tan( )
3
20 3
S ( ) simplify
3
20 3
40
20 3
3 30 tan( )
100 3
3
30
cos ( )
30 tan( ) 10 3
50
1
S
4
1
-12.679
2
-34.641
3
30
4
-12.679
5
-5.329·10 -15
6
-17.321
7
-10
8
-18.453
9
11.547
10
-34.641
11
40
12
-18.453
13
-57.735
14
42.426
15
-47.321
16
50
4. Построение графиков функций реакций внешних и внутренних связей
88
180
87
180
88
180
200
100
RA ( )
XB( )
0
YB( )
100
200
90
60
30
0
deg
90
30
60
90
200
S( )
S( )
S( )
S( )
S( )
S( )
S( )
S( )
S( )
S( )
S( )
1
2
3
100
4
5
6
7
0
8
9
10
11
S( ) 100
12
S( )
13
200
90
60
30
0
30
60
90
deg
Расчет фермы, выполненной по схеме № 2 (рис. 4)
1. Ввод исходных данных
………
2. Формирование вектора правых частей
B и матрицы коэффициентов A
………
Формирование переменной части матрицы
A – AR
0
0
1 0 0 0 0 0 0 0 0 0 0 0 0 0
AR2( ) 0 1 0 0 0 0 0 0 0 0 0 0 0 0
0
0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 sin ( ) cos( )
T
………
91
Формирование матрицы
A , вычисление определителя матрицы, нахож-
дение критических значений ориентации опорной плоскости из уравнения
A кр 0
A2 ( ) augment ( AS AR2( ) )
A2( )
3 3 cos( )
4
A2 ( ) solve
2
3. Решение системы линейных алгебраических уравнений A S B
S2 ( ) A2( )
1
S ( ) S2 ( )
B
Формирование реакций внешних связей
XA ( ) S ( ) 14
YA ( ) S ( ) 15
RA ( )
2
XA ( ) YA ( )
2
RB( ) S ( ) 16
Вычисление реакций внутренних и внешних связей
S ( ) simplify
92
20 3 50 tan( )
20 3
30
20 3 50 tan( )
0
10 3
10
50 3
50 tan( )
3
20 3
3
20 3
40
50 3
50 tan( )
3
100 3
3
50 tan( ) 10 3
30
50
cos ( )
1
S
4
1
-15.359
2
-34.641
3
30
4
-15.359
5
1.776·10-15
6
-17.321
7
-10
8
-21.132
9
11.547
10
-34.641
11
40
12
-21.132
13
-57.735
14
32.679
15
30
16
70.711
4. Построение графиков функций реакций внешних и внутренних связей
88
180
87
180
88
180
200
100
XA ( )
YA ( )
0
RB( )
100
200
90
60
30
0
30
60
90
deg
200
S( )
S( )
S( )
S( )
S( )
S( )
S( )
S( )
S( )
S( )
S( )
1
2
3
100
4
5
6
7
0
8
9
10
11
S( ) 100
12
S( )
13
200
90
60
30
0
30
60
90
deg
93
Расчет фермы, выполненной по схеме № 3 (рис. 5)
1. Ввод исходных данных
………
2. Формирование вектора правых частей
B и матрицы коэффициентов A
………
Формирование переменной части матрицы
A – AR
T
sin ( ) cos( ) 0 0 0 0 0 0 0 0 0 0 0 0 0 0
AR3( ) 0
0
0 0 0 0 0 0 0 0 0 0 1 0 0 0
0
0 0 0 0 0 0 0 0 0 0 0 0 0 1
0
………
Формирование матрицы
A , вычисление определителя матрицы, нахож-
дение критических значений ориентации опорной плоскости из урав-
A кр 0
нения
A3 ( ) augment ( AS AR3( ) )
A3( )
atan 4
deg
3 3 cos( ) 9 sin ( )
4
16
3
3
66.587
3. Решение системы линейных алгебраических уравнений A S B
S3 ( ) A3( )
1
S ( ) S3 ( )
B
Формирование реакций внешних связей
RA ( ) S ( ) 14
94
RB( ) S ( ) 15
RC ( ) S ( ) 16
Вычисление реакций внутренних и внешних связей
150 cos ( ) 150 3 sin ( )
3 sin ( ) 4 3 cos ( )
300 cos ( )
3 sin ( ) 4 3 cos ( )
30
150 cos ( ) 150 3 sin ( )
3 sin ( ) 4 3 cos ( )
60 cos ( ) 60 3 sin ( )
3 sin ( ) 4 3 cos ( )
180 cos ( ) 30 3 sin ( )
3 sin ( ) 4 3 cos ( )
10
170 cos ( ) 80 3 sin ( )
3 sin ( ) 4 3 cos ( )
S ( ) simplify
20 cos ( ) 80 3 sin ( )
3 sin ( ) 4 3 cos ( )
300 cos ( )
3 sin ( ) 4 3 cos ( )
40
170 cos ( ) 80 3 sin ( )
3 sin ( ) 4 3 cos ( )
340 cos ( ) 160 3 sin ( )
3 sin ( ) 4 3 cos ( )
150 3
3 sin ( ) 4 3 cos ( )
120 cos ( ) 120 3 sin ( )
3 sin ( ) 4 3 cos ( )
240 sin ( ) 170 3 cos ( )
3 sin ( ) 4 3 cos ( )
1
S
4
1
-27.954
2
-76.371
3
30
4
-27.954
5
41.73
6
-59.05
7
-10
8
8.003
9
-30.183
10
-76.371
11
40
12
8.003
13
-16.005
14
93.535
15
-83.46
16
13.861
95
4. Построение графиков функций реакций внешних и внутренних связей
200
100
RA ( )
RB( )
0
RC( )
100
200
90
60
30
0
30
60
90
deg
200
S( )
S( )
S( )
S( )
S( )
S( )
S( )
S( )
S( )
S( )
S( )
1
2
3
100
4
5
6
7
0
8
9
10
11
S( ) 100
12
S( )
13
200
90
60
30
0
deg
96
30
60
90
5. Анализ результатов вычислений
Методы теоретической механики при расчете ферм обычно применяются
на этапе предварительного проектирования. Именно на этом этапе может быть
поставлена задача выбора оптимального решения согласно одному или нескольким критериям.
Например, требуется обеспечить:
o минимальную силу давления на одну или все опоры;
o минимальное количество стержней, испытывающих сжимающие усилия;
o минимальное количество стержней, в которых сжимающие усилия не превышают некоторого предельного значения S np .
Также возможна комбинация этих критериев.
При такой постановке задачи расчет следует производить при экстремальных значениях действующих на ферму активных сил. В качестве влияющих параметров можно выбрать ориентацию опорной плоскости, характеризуемую углом , и (или) характерный размер фермы a или b (определяется преподавателем).
Рассмотрим задачу выбора схемы расположения внешних связей, действующих на ферму, при которых сжимающие усилия не превышают некоторого предельного значения S np , а количество сжатых стержней минимально. В качестве
такого критерия примем максимальное значение, не зависящее от угла , сжимающего усилия в стержнях фермы.
При анализе следует учесть:
o свойства катковых опор. Катковая опора является неудерживающей связью
и, следовательно, ее реакция может быть только положительной (если она
направлена перпендикулярно опорной плоскости вверх).
o особенности мостовых ферм. Для них ориентация опорной плоскости катковой опоры может характеризоваться только положительными значениями
углов .
97
Учет вышесказанного требует исключения таких состояний, при которых
o углы , характеризующие ориентацию опорных плоскостей, отрицательны;
o реакции катковых опор неположительны.
Иными словами, область допустимых значений указанных величин определяется неравенствами
0 2,
R 0.
В некоторых случаях, если это обосновано критериями выбора, катковую
опору можно заменить двухсторонней (удерживающей) связью, например
стержнем. Угол , определяющий его положение, может изменяться в интервале
0 или .
2
2
Для ускорения процедуры выбора значений углов , соответствующих
принятым критериям, воспользуемся возможностью трассировки графиков
функций (рис. 8), имеющейся в Mathcad.
Рис. 8 Использование опции "Trace" для определения координат точек на графиках.
Значения аргумента функций Sk в этом случае могут быть найдены
с точностью , величина которой определяется заданием шага ранжированной
переменной , при построении графиков функций [1]. В нашем случае 1 .
Для рассматриваемой фермы анализ результатов расчетов, проведенных в
п. 4, дает следующее.
98
Схема 1
1. Реакция опорной плоскости RA положительна при всех допустимых значениях ориентации опорной плоскости
RA 0 [0, [
2
2. Количество стержней, реакция которых не зависит от – 9 (2, 3, 5, 6, 7,
9, 10, 11, 13), из них сжатых – 5 (2, 6, 7, 10, 13) (рис. 9).
3. Максимальное значение сжимающего усилия, величина которого не зависит от угла , равно Sпр S13 100
3
kH 57.735 kH (рис. 9).
3
200
S( )
S( )
S( )
S( )
S( )
S( )
S( )
S( )
S( )
S( )
S( )
1
2
3
100
4
5
6
7
0
8
9
10
11
S( ) 100
12
S( )
13
1
200
90
60
30
0
2
30
60
90
deg
Рис. 9 Предельные значения углов
.
99
4. Максимальное значение угла , при котором количество сжатых стержней минимально равно 1 21 . Количество сжатых стержней в этом случае
равно N1 5 (2, 6, 7, 10, 13) см. рис. 10.
5. Максимальное значение угла , при котором сжимающие усилия не превышают предельного значения Sk Sпр равно 2 66 . Количество сжатых
стержней в этом случае равно N 2 9 (1, 2, 4, 6, 7, 8, 10, 12, 13) см. рис. 10
1
S
1
1
5.805
1
-50.061
2
-34.641
2
-34.641
3
30
3
30
4
5.805
4
-50.061
5
-3.553·10-15
5
0
6
-17.321
6
-17.321
7
-10
7
-10
8
-55.834
9
11.547
21
8
180
0.031
S
66
180
9
11.547
10
-34.641
10
-34.641
11
40
11
40
12
0.031
12
-55.834
13
-57.735
13
-57.735
14
32.134
14
73.758
15
-28.836
15
-84.702
16
50
16
50
б) 66
а) 21
Рис. 10 Реакции фермы при разных значениях
.
6. Область допустимых значений для угла , при которой
o значения сжимающих усилий в стержнях фермы не превышает S пр N 2 9
0 2 66 ;
o количество сжатых стержней минимально, а усилия в них не превышают
предельное значение S пр N1 5
0 1 21 .
100
Схема 2
1. Реакция опорной плоскости RB положительна при всех допустимых значениях ориентации опорной плоскости
RB 0 [0, [
2
2. Количество стержней, реакция которых не зависит от – 9 (2, 3, 5, 6, 7,
9, 10, 11, 13), из них сжатых – 5 (2, 6, 7, 10, 13) (рис. 11).
3. Максимальное значение сжимающего усилия, величина которого не зависит от угла , равно Sпр S13 100
3
kH 57.735 kH (рис. 11).
3
200
S( )
S( )
S( )
S( )
S( )
S( )
S( )
S( )
S( )
S( )
S( )
1
2
3
100
4
5
6
7
0
8
9
10
11
S( ) 100
12
S( )
13
200
90
1
60
30
0
2
30
60
90
deg
Рис. 11 Предельные значения углов
.
101
4. Максимальное значение угла , при котором количество сжатых стержней минимально равно 1 29 . Количество сжатых стержней в этом случае
равно N1 5 (2, 6, 7, 10, 13) см. рис. 12.
5. Максимальное значение угла , при котором сжимающие усилия не превышают предельного значения Sk Sпр равно 2 60 . Количество сжатых
стержней в этом случае равно N 2 9 (1, 2, 4, 6, 7, 8, 10, 12, 13) см. рис. 12
1
S
1
1
6.926
1
-51.962
2
-34.641
2
-34.641
3
30
3
30
4
6.926
4
-51.962
5
1.776·10-15
5
-7.105·10-15
6
-17.321
6
-17.321
7
-10
7
-10
29
8
180
1.152
9
11.547
10
11
S
60
8
180
-57.735
9
11.547
-34.641
10
-34.641
40
11
40
12
1.152
12
-57.735
13
-57.735
13
-57.735
14
10.395
14
69.282
15
30
15
30
16
57.168
16
100
а) 29
б) 60
Рис. 12 Реакции фермы при разных значениях
.
6. Область допустимых значений для угла , в которой
o значения сжимающих усилий в стержнях фермы не превышает S пр N 2 9
0 2 60 ;
o количество сжатых стержней минимально, а усилия в них не превышают
предельное значение S пр N1 5
0 1 29 .
102
Схема 3
1. Реакция опорной плоскости RA положительна при всех допустимых значениях ориентации опорной плоскости (рис. 13)
RA 0 [0, кр [ и ]кр , [, кр 66,587 . .
2
2. Реакция опорной плоскости RB положительна при значениях угла не
превышающих величину 2пр (рис. 13)
RВ 0 [0, 2пр ], 2пр 50 .
При замене опоры B стержнем сжимающее усилие будет меньше S пр при
3пр 59 .
200
RA ( )
RB( )
100
3пр
0
RC( )
100
100
200
90
3
3
1пр 2пр
60
30
0
30
60
90
deg
Рис. 13 Предельные значения углов
.
3. Стержень С при разных значениях испытывает сжимающие и растягивающие усилия. В тоже время, сжимающее усилие в стержне RС не будет превышать предельного значения S пр при значениях угла меньших величины 1пр
(рис. 13)
RС 0, RС Sпр
[0, 1пр ], 1пр 36 .
4. Количество стержней, реакция которых не зависит от – 3 (3, 7, 11), из
них сжатых – 1 (7) (рис. 14).
103
200
S( )
S( )
S( )
S( )
S( )
S( )
S( )
S( )
S( )
S( )
S( )
1
2
3
100
4
5
6
7
0
8
9
100
10
3
3
11
S( ) 100
12
S( )
13
200
90
0
60
30
1
0
2
30
60
90
deg
Рис. 14 Предельные значения углов
.
5. Максимальное значение сжимающего усилия, величина которого не зависит от угла , равно S S10 10 kH (рис. 14).
6. Максимальное значение угла , при котором количество сжатых стержней минимально равно 1 8 . Количество сжатых стержней в этом случае равно
N1 6 (2, 6, 7, 10, 13, С ) см. рис. 14, 15.
7. Минимальное значение угла , при котором количество сжатых стержней минимально равно 0 30 .
104
8. Максимальное значение угла , при котором сжимающие усилия не превышают предельного значения Sk Sпр равно 2 30 . Количество сжатых
стержней в этом случае равно N 2 7 (2, 6, 7, 9, 10, 13, С ) см. рис. 14, 15.
1
1
1
1
21.651
1
17.442
1
1.711·10-14
2
-43.301
2
-46.107
2
-57.735
3
30
3
30
3
30
4
21.651
4
17.442
4
1.711·10-14
5
8.66
5
11.466
5
23.094
6
-25.981
6
-28.787
6
-40.415
7
-10
S ( 0) 8
24.537
9
2.887
S
7
-10
2
8
45
23.134
9
0.081
S
6
7
-10
8
17.321
9
-11.547
10
-43.301
10
-46.107
10
-57.735
11
40
11
40
11
40
12
24.537
12
23.134
12
17.321
13
-49.075
13
-46.269
13
-34.641
14
37.5
14
40.322
14
57.735
15
-17.321
15
-22.932
15
-46.188
16
42.5
16
40.07
16
30
а) 0 0
б) 2 8
Рис. 15 Реакции фермы при разных значениях
в) 2 30
.
9. Область допустимых значений для угла , в которой
o значения сжимающих усилий в стержнях фермы не превышает S пр N 2 7
0 2 30 ;
o количество сжатых стержней минимально, а усилия в них не превышают
предельное значение S пр N1 6
0 1 8 .
105
6. Выводы
Сведем результаты анализа в таблицу (табл. 1).
Ферма
N1 min k Sk Sпр , Sk 0
N2 max k Sk Sпр , Sk 0
0 1
N1
0 2
N2
Схема № 1
0 21
5
0 66
9
Схема № 2
0 29
5
0 60
9
Схема № 3
08
6
0 30
7
Табл. 1 Области допустимых значений
и количество сжатых стержней.
Результаты анализа рассмотренных схем показывают, что при выполнении
условия Sk Snp , Sk 0, количество стержней испытывающих сжимающие усилия близкие к предельному значению равно усилия в kH :
для схемы № 1 – 5 S1 S4 50,061;
S8 S12 55,834;
для схемы № 2 – 5 S1 S4 51,962;
S8 S12 S13 Snp 57,753 ;
для схемы № 3 – 3 S2 S10 Snp 57,735;
S13 Snp 57,753 ;
RC 46,188 .
При этом в условиях обеспечивающих минимальное число сжатых стержней, их количество равно:
для схемы № 1 – 1 S13 Snp 57,753 ;
для схемы № 2 – 1 S13 Snp 57,753 ;
для схемы № 3 – 3 S2 S10 46,107;
S13 46,269 .
Таким образом, оптимальной является схема 2, в которой при прочих равных условиях, область допустимых значений угла шире
0 29 .
106
АЛЬБОМ ЗАДАНИЙ И ИСХОДНЫЕ ДАННЫЕ ДЛЯ РАСЧЕТА
1
2
P2
P1
P1
P3
D
b
A
P5
P4
a
b
A
P4
a
a
3
P5
a
a
4
P2
P1
D
P1
P3
C
b
B
A
a
P4
a
a
P5
a
P2
D
P3
C
b
B
A
P5
P4
a
5
a
a
6
P2
P1
2b
C
D
P4
3a
P5
P2
C
D
2b
A
3a
P3
P1
P3
B
B
a
a
P3
C
D
C
B
P2
B
A
a
a
P4
a
P5
107
7
8
P1
P1
P3
P2
D
C
A
B
P5
a
P4 b
C
D
P3
b
A
B
b
a
a
P2
9
a
a
P4
a
P5
10
P2
P1
P1
a
D
D
C
P2
P3
b
A
B
a
a
b
A
P4
a
P5
P4
P3
P5
B
a
a
a
11
12
P3
P2
P1
P2
D
b
C
B
P1
P3
b
A
B
a
a
P4
P5
A
b
a
D
C
a
P4
2a
108
C
2b
P5
a
13
14
P2
P1
D
b
P1
P3
C
B
P5
P4
a
a
P2
C
a
B
b
A
2a
b
P5
P4
P3
A
b
a
2b
D
15
16
P2
B
P3
D
P1
B
P4
2b
2b
D
P4
P3
P5
a
a
P2
P4
a
2b
17
P2
A
A
P5
P1
3a
C
C
18
P1
P2
a
P3
a
C
D
P1
A
P4
D
b
2b
A
B
C
P3
b
P5
a
a
P5
B
a
109
19
20
P1
A
P2
P1
P3
b
C
B
P5
P4
a
a
D
B
C
a
a
a
21
A
P4
a
P5
a
22
a
a
a
P1
A
a
P2
a
P3
P1
P4
C
P4
a
P5
D
b
b
D
a
A
B
B
P5
P2
23
C
P3
24
P1
P2
P3
B
b
D
a
A
P4
3a
P5
P2
C
b
D
P1
A
P3
C
P5
P4
a
110
P3
b
D
P2
a
a
a
B
25
26
P2
D
P1
2b
P3
A
B
A
a
P5
a
a
2b
B
P4
P3
P2
C
D
C
P4
P1
P5
2a
a
a
a
27
28
P2
A
b
D
P1
C
P5
2a
B
D
P3
B
P2
C
A
P3
3b
P1
29
P5
a
a
P4
a
P4
a
30
P1
C
D
b P
3
b
P5
a
P2
P4
A
a
P2
a
b
a
P3
P1
B
B
a
C
D
P4
b
P5
A
a
111
Схема № 2
№
1
A
B
Схема № 3
C
D
C
4
5
6
D
3
7
8
9
10
12
13
14
15
112
B
2
11
A
Схема № 2
№
A
B
16
17
18
19
20
A
B
D
22
24
25
26
28
29
30
C
27
D
21
23
C
Схема № 3
113
№
0
1
2
3
4
5
6
7
8
9
a,
м
0,2
0,3
0.5
0,4
1,1
0,6
0,9
0,7
1,0
0,8
b,
м
0,3
0,4
0,6
0,5
1,3
0,9
1,3
1,1
1,5
1,0
P1,
кН
100
150
200
250
300
250
200
150
100
250
P2 ,
кН
150
200
250
300
100
300
200
100
150
100
P3 ,
кН
200
250
300
100
150
100
250
300
250
100
P4 ,
кН
250
300
100
150
250
150
150
100
150
200
P5 ,
кН
300
100
150
200
250
200
100
300
200
150
,
180
30
45
60
75
90
15
120
150
135
,
15
45
60
135
90
150
120
75
180
30
114
С 2. РАВНОВЕСИЕ СОСТАВНЫХ КОНСТРУКЦИЙ
В статике наряду с равновесием одного тела рассматриваются равновесие
сочлененных систем тел, т.е. совокупности твердых тел касающихся друг друга
своими поверхностями или соединенных друг с другом шарнирами, гибкими нитями или стержнями.
Важной задачей статики системы твердых тел является определение внешних и внутренних реакций связей. Основным способом их нахождения является
способ расчленения, при котором рассматривается равновесие отдельных тел системы.
Цель курсовой работы
Целью курсовой работы является выработка навыков расчета и исследования равновесия плоских составных конструкций.
Содержание курсовой работы
Объектом исследования является плоская составная конструкция, представляющая собой совокупность абсолютно твердых тел, соединенных друг с
другом идеальными связями. Схемы конструкций и таблицы исходных данных
приведены в альбоме заданий.
Задаваемыми параметрами являются:
o геометрические характеристики конструкции;
o система активных сил, приложенных к ее телам.
Требуется:
1. Найти:
o во всех конструкциях — реакции внешних и внутренних связей;
o в одной конструкции — часть реакций, составляя для этого минимально необходимое число уравнений равновесия (по выбору преподавателя).
115
2. Исследовать влияние расположения опор внешних связей на величины реакции связей и выбрать вариант, в котором реакции внешних или внутренних связей минимальны (по выбору преподавателя).
Порядок выполнения работы
1. Выделить тело (элемент) или систему тел с заданными активными силами, равновесие которых будем рассматривать;
2. Используя аксиому освобождаемости от связей рассмотреть выбранное тело,
как свободное, заменив действующие на него связи их реакциями;
3. Дать анализ действующей на тело или систему тел системы сил, выяснить статическую определимость задачи;
4. Записать условия равновесия и составить уравнения равновесия для вычисления:
o всех реакций внешних и внутренних связей;
o реакций указанных преподавателем (число уравнений равновесия должно
быть равно числу вычисляемых реакций).
5. Найти реакции связей и осуществить проверку правильности составления
уравнений равновесия.
6. Провести анализ и исследование полученного решения:
o исследовать влияние расположения опор внешних связей на величины реакций внешних и внутренних связей;
o выбрать такое расположение опор, при котором обеспечивается минимальные
значения внешних или внутренних реакций.
В процессе выполнения курсовой работы необходимо выработать следующие навыки и умения:
o определения связей, действующих на тело или систему тел;
o составления уравнений равновесия для произвольного тела, входящего в систему тел и нахождения реакций связей;
o решения поставленной задачи разными методами.
116
ПРИМЕР ВЫПОЛНЕНИЯ ЗАДАНИЯ
Составная конструкция ABCD (рис. 1) находится в равновесии под действием распределенной нагрузки изменяющейся по линейному закону qmax , сил
F1 è F2 , пар сил с моментами M1 è M 2 . Геометрические размеры всех звеньев из-
вестны. На конструкцию действуют внешние связи: в точке А – жесткая заделка,
а в точке B – неподвижный шарнир. Внутренней связью является втулка, расположенная в точке C
Исследовать равновесие составной конструкции. Определить реакции внешних
и внутренних связей, а также момент в заделке A и реакцию опоры B , составляя
минимально необходимое число уравнений равновесия.
B
b
qmax
b
F1
M1
A
C
a
F2
M2 D
b
Рис. 1 Схема составной конструкции.
Исходные данные
qmax 10 kH м
F1 20 kH ,
F2 30 kH ,
,
M1 10 kH м ,
M 2 15 kH м
,
a 4 м,
b 3 м,
30 ,
60 ,
45 .
117
1. Определение реакций внешних и внутренних связей
Рассмотрим равновесие всей конструкции, освободив ее от связей в точках
A и B (рис. 2).
YB
y
b
B X
B
x
b
YA
XA
Q
a
3
F1
M1
A
C
MA
F2
M2 D
a
b
Рис. 2 Расчетная схема для всей конструкции.
На рис. 2 обозначено:
X A , YA — составляющие реакции RA заделки A RA X A2 YA2 ;
M A — момент в заделке A ;
X B , YB — составляющие реакции RB шарнира B RB X B2 YB2 ;
Q — равнодействующая распределенной нагрузки, модуль которой равен
1
Q qmax a 20 kH .
2
Конструкция находится в равновесии под действием произвольной плоской системы сил, для которой можно записать три независимых условия равновесия, например:
F
kx
k
0,
F
ky
k
0,
M F 0.
A
Неизвестных реакций, действующих на конструкцию – 5
118
(1)
k
k
X
B
, YB ,
X
A
, YA , M A и решить задачу определения реакций с помощью уравнений рав-
новесия соответствующих условиям (1) невозможно. Поэтому расчленим конструкцию по внутренней связи в точке C и рассмотрим равновесие каждого тела
(балка BC и балка ACD ) отдельно. Расчетные схемы тел изображены на рис. 3.
На балку ACD действует реакция внутренней связи RC со стороны балки BC .
На балку BC кроме активных сил и реакций внешних связей действует реакция
внутренней связи RC со стороны балки ACD RC RC .
YB
b
B XB
y
b
x
F1
C
a
3
YA
XA
a)
M1
RC
Q
F2
RC
A
D
C
MA
a
M2
b
á)
Рис. 3 Расчетная схема для звеньев конструкции:
а) балка
BC , б) балка ACD .
Балка BC (рис. 3 а) находится в равновесии под действием произвольной
плоской системы сил. Для определения трех неизвестных реакций X B , YB , RC
можно записать три независимых условия равновесия, например:
F
kx
k
0,
F
ky
k
0,
M F 0.
B
k
(2)
k
Балка ACD (рис. 3 б) находится в равновесии под действием произвольной
плоской системы сил. Для определения трех оставшихся неизвестных реакций
119
X
A
, YA , M A можно также записать три независимых условия равновесия,
например:
F
0,
kx
k
F
ky
0,
k
M F 0.
A
k
(3)
k
Задача нахождения реакций связей в этом случае становится статически
определимой и ее можно решить, составив 6 уравнений соответствующих условиям равновесия (2) и (3):
Çâåí î BC
F 0
F 0
M F 0
kx
X B F1 cos 0,
ky
YB RC F1 sin ,
k
M 1 RC 2 b cos F1 sin b 0;
k
k
B
k
Çâåí î ACD
F
F
X A F2 cos 0,
kx
0
ky
0 YA Q RC F2 sin 0,
k
(4)
k
M F 0
A
k
k
a
M A Q RC a M 2 F2 sin a b 0.
3
Решая систему уравнений (4) и учитывая, что значения RC RC , получим
RC F1
sin
M1
11.925 kH ,
2cos 2 b cos
X B F1 cos 17.321 kH ,
YB RC F1 sin F1
sin 2
M1
1.925 kH ,
2cos
2 b cos
(5)
X A F2 cos 21.213 kH ,
YA Q RC F2 sin 29.289 kH ,
a
M A Q RC a M 2 F2 sin a b 139.128 kH ì .
3
Кроме этих уравнений равновесия можно составить и другие 6 уравнений
для условий равновесия (1) и (2) или (1) и (3), рассмотрев, например, схемы на
рис. 2 и рис.3 а или рис. 2 и рис.3 б соответственно.
120
2. Определение M A , X B , YB оптимальным способом
Для нахождения реакций X B , YB и момента в заделке M A оптимальным
способом рассмотрим расчетные схемы, представленные на рис. 2 и рис. 3.
Расчетная схема, представленная на рис. 2, содержит все три неизвестных,
подлежащих определению – момент в заделке M A и реакции X B , YB . Однако
только одно из уравнений равновесия составленных для конструкции ABCD будет содержать искомые величины
M F 0
A
k
k
a
M 2 F2 sin a b X B 2 b sin
3
YB a 2 b cos F1 cos b sin
MA Q
(6)
F1 sin (a b cos ) 0
Расчетная схема, представленная на рис. 3 а, содержит все две неизвестных, подлежащих определению – реакции X B , YB . Для балки BC можно составить два уравнения равновесия которые будут содержать искомые величины
F 0
M F 0
kx
X B F1 cos 0,
k
M 1 F1 sin b X B 2 b sin YB 2 b cos 0.
k
C
(7)
k
Система уравнений (6) – (7) содержит только те неизвестные, которые
нужно определить. Из первого уравнения системы (7) найдем реакцию X B
X B F1 cos 17.321 kH .
Из второго уравнения системы (7) – реакцию YA
YB X B
sin 2
sin
sin
M1
M1
F1
F1
1.925 kH .
cos
2cos 2 b cos
2cos
2 b cos
Из уравнения (6) – момент в заделке M A
a
M 2 F2 sin a b X B 2 b sin YB (a 2 b cos )
3
F1 b sin a sin 139.128 kH .
MA Q
121
Расчетная схема, представленная на рис. 3 б, содержит только одну неизвестную, подлежащую определению – момент в заделке M A . Любое из уравнений равновесия составленных для балки ACD будет содержать неизвестные, которые определять не нужно. Поэтому равновесие балки ACD рассматривать не
требуется.
3. Альтернативное расположение опор внешних связей
Пусть в данной задаче требуется выбрать оптимальную схему расположения опор внешних связей, обеспечивающих минимальное значение реакции
внутренней связи (втулка C ).
Для исследования влияния расположения опор внешних связей на величины реакции внутренней связи рассмотрим равновесие конструкции ABCD с
другим расположением опор: в точке A – неподвижная шарнирная опора; в точке
B – жесткая заделка (рис. 4).
b
B
qmax
b
F1
M1
A
C
a
F2
M2 D
b
Рис. 4 Конструкция с альтернативным расположением опор внешних связей.
Расчленим конструкцию по внутренней связи в точке C и рассмотрим равновесие каждого тела (балка BC и балка ACD ) отдельно. Расчетные схемы тел
изображены на рис. 5.
На балку ACD (рис. 5 б) кроме активных сил: равнодействующей распределенной нагрузки Q , силы F2 и пары сил с моментом M 2 действует реакция
122
RC втулки C со стороны балки BC и реакции неподвижной шарнирной опоры
X A , YA .
Балка ACD находится в равновесии под действием произвольной плоской
системы сил и для ее равновесия можно записать три независимых условия равновесия, например:
F
kx
F
0,
ky
k
0,
k
M F 0.
A
(8)
k
k
На балку BC (рис. 5 а) кроме активных сил: силы F1 и пары сил действует
реакция RC втулки C со стороны балки ACD RC RC и реакции жесткой заделки X B , YB , M B .
YB
B XB
b
MB
y
b
x
F1
C
a
3
YA
XA
RC
Q
RC
A
a)
M1
F1
M2
D
C
б)
a
b
Рис. 5. Расчетная схема для звеньев конструкции.
Балка CB , как и балка ACD , находится в равновесии под действием произвольной плоской системы сил и для ее равновесия можно записать три независимых условия равновесия, например:
F
kx
k
0,
F
ky
k
0,
M F 0.
B
k
(9)
k
123
Задача нахождения 6 реакций связей в этом случае становится статически
определимой и ее можно решить, составив 6 уравнений соответствующих условиям равновесия (8) и (9):
F
F
Звено ACD
X A F2 cos 0,
kx
0
ky
0 YA Q RC F2 sin 0,
k
k
M F 0
F 0
F 0
M F 0
A
kx
a
RC a Q M 2 F2 sin a b 0;
3
X B F1 cos 0,
ky
YB RC F1 sin ,
k
M B M 1 RC 2 b cos F1 sin b 0.
k
k
Звено BC
k
k
B
(10)
k
Окончательную проверку правильности составления уравнений равновесия (4) и (10), а также их решения осуществим далее с помощью пакета Mathcad.
При выполнении курсовой работы исследование влияния расположения
опор внешних связей на значения реакций провести только для задач 1хх, 2хх и
3хх. Для задачи 4хх достаточно осуществить проверку составления уравнений
равновесия и вычислить значения реакций связей.
124
4. Результаты расчетов
Решения систем линейных алгебраических уравнений (4) и (10) не сложно
реализовать в пакете Mathcad, в котором для этого существует несколько способов [1, 10]. Так как кроме решения системы линейных алгебраических уравнений, требуется осуществить проверку их составления, воспользуемся возможностями символьных вычислений Mathcad. Численное решение полученных уравнений произведем с помощью блока решения Given Find .
Ниже приведен пример документа Mathcad, в котором реализованы процедуры составления уравнений равновесия, а также вычисления реакций внешних
и внутренних связей конструкции в символьном и численном виде.
Расчет
составной
конструкции
согласно
расчетной
схеме
представленной на рис. 3.
Символьное решение
1. Задание векторов, определяющих положения точек приложения сил
(Начало системы координат совмещаем с точкой А)
ORIGIN 1
0
rA 0
0
a b cos( )
rF b sin ( )
0
a
rC 0
0
2a
3
rQ
0
0
a 2b cos( )
rB 2b sin ( )
0
ab
rD 0
0
2. Задание векторов сил и моментов пар сил, действующих на конструкцию
0
Q_ Q
0
F1 cos ( )
F1 F1 sin ( )
0
0
M2 0
M2
0
MA 0
MA
F2 cos ( )
F2 F2 sin ( )
0
XA
RA YA
0
0
M1 0
M1
XB
RB YB
0
125
0
RC RC
0
0
RC' RC
0
3. Составление уравнений равновесия для звеньев конструкции
Формирование главного вектора и главного момента внешних сил:
для балки AD:
M_ADA MA rQ Q_ rC RC M2 rD F2
P_AD RA Q_ RC F2
для балки BС:
M_BCC M1 rB rC RB rF rC F1
P_BC RC' F1 RB
Составление уравнений равновесия:
для балки AD:
P_AD1
0 simplify XA F2 cos ( )
P_AD2
0 simplify RC Q YA F2 sin ( )
0 simplify M2 MA
M_ADA
3
0
2Q a
3
0
RC a F2 a sin ( ) F2 b sin ( )
0
для балки BС:
P_BC1
0 simplify XB F1 cos ( )
P_BC2
0 simplify YB RC F1 sin ( )
M_BCC
3
0
0
0 simplify 2YBb cos( ) 2XBb sin ( ) M1 F1 b sin ( )
0
4. Решение уравнений равновесия с помощью блока Given - Find
XA
YA MA RC XB YB ( 0 0 0 0 0 0 )
Given
XA F2 cos ( )
M2 MA
2Q a
3
RC Q YA F2 sin ( )
0
RC a F2 a sin ( ) F2 b sin ( )
XB F1 cos ( )
0
2 YB b cos ( ) 2 XB b sin ( ) M1 F1 b sin ( )
126
0
0
YB RC F1 sin ( )
0
0
F2 cos ( )
F1 sin ( )
M1
Q F2 sin ( )
XA
2 cos ( )
2 b cos ( )
Y
A
M1 a
F1 a sin ( )
2Q a
M
M2 F2 a sin ( ) F2 b sin ( )
2 b cos ( )
2 cos ( )
A simplify 3
Find
RC
M1 F1 b sin ( )
2 b cos ( )
XB
F1 cos ( )
YB
M1 F1 b sin ( 2 )
2 b cos ( )
Численное решение
1. Ввод исходных данных
ORIGIN 1
qmax 10
F1 20
a 4
b 3
Q
1
2
F2 30
M1 10
6
3
M2 15
4
qmaxa
2. Решение уравнений равновесия с помощью блока Given – Find
Уравнения равновесия должны быть скопированы в блок Given
XA YA MA RC XB YB ( 0 0 0 0 0 0 )
Given
XA F2 cos ( )
M2 MA
2Q a
3
RC Q YA F2 sin ( )
0
RC a F2 a sin ( ) F2 b sin ( )
XB F1 cos ( )
0
2 YB b cos ( ) 2 XB b sin ( ) M1 F1 b sin ( )
XA
XA
YA
YA
M
M
A Find A
RC
RC
XB
XB
YB
YB
0
0
YB RC F1 sin ( )
0
0
XA
21.213
YA 29.289
M
A 139.128
RC 11.925
17.321
XB
1.925
YB
127
RA
2
2
XA YA
RA 36.164
Расчет
RB
MA 139.128
составной
2
2
XB YB
RB 17.427
конструкции
RC 11.925
согласно
расчетной
схеме
представленной на рис. 5.
Символьное решение
1. Задание векторов, определяющих положения точек приложения сил
………
2. Задание векторов сил и моментов пар сил, действующих на конструкцию
………
0
MB 0
MB
………
3. Составление уравнений равновесия для звеньев конструкции
Формирование главного вектора и главного момента внешних сил:
для балки AD:
P_AD RA Q_ RC F2
M_ADA rQ Q_ rC RC M2 rD F2
для балки BС:
P_BC RC' F1 RB
M_BCC M1 MB rB rC RB rF rC F1
Составление уравнений равновесия:
для балки AD:
P_AD1
0 simplify XA F2 cos ( )
P_AD2
0 simplify RC Q YA F2 sin ( )
M_ADA
3
0 simplify M2
2Q a
3
0
RC a F2 a sin ( ) F2 b sin ( )
для балки BС:
P_BC1
128
0
0 simplify XB F1 cos ( )
0
0
0 simplify YB RC F1 sin ( )
P_BC2
M_BCC
3
0
0 simplify MB M1 2XBb sin ( ) 2YBb cos( ) F1 b sin ( )
0
4. Решение уравнений равновесия с помощью блока Given - Find
XA
YA MB RC XB YB ( 0 0 0 0 0 0 )
Given
XA F2 cos ( )
M2
2Q a
3
RC Q YA F2 sin ( )
0
RC a F2 a sin ( ) F2 b sin ( )
XB F1 cos ( )
0
0
YB RC F1 sin ( ) 0
F2 cos ( )
MB M1 2XBb sin ( ) 2YBb cos ( ) F1 b sin ( ) 0
Q a
M2
F2 b sin ( )
3
XA
a
Y
2
A
2 M2 b cos ( )
2 F2 b s
4 Q b cos ( )
M
F1 b sin ( ) 2 F2 b sin ( ) cos ( )
M1
B
3
a
Find
simplify
RC
2Q a
M2 F2 a sin ( ) F2 b sin ( )
3
XB
a
Y
B
F1 cos ( )
0
F2 b sin ( )
F2 cos2( Q
) M2
F2 sin ( ) F1 sin ( )
3
a
a
Q a
M2
F2 b sin ( )
3
a
2
2 M2 b cos ( )
2 F2 b sin ( ) cos ( )
4 Q b cos ( )
F1 b sin ( ) 2 F2 b sin ( ) cos ( )
M1
3
a
a
simplify
2
Q
a
M2 F2 a sin ( ) F2 b sin ( )
3
a
F1 cos ( )
M2
F2 b sin ( )
2
Q
F2 sin ( ) F1 sin ( )
3
a
a
129
Численное решение
1. Ввод исходных данных
………
2. Решение уравнений равновесия с помощью блока Given - Find
XA
YA MB RC XB YB ( 0 0 0 0 0 0 )
Given
XA F2 cos ( )
M2
2Q a
0
RC a F2 a sin ( ) F2 b sin ( )
3
XB F1 cos ( )
0
RC Q YA F2 sin ( )
0
YB RC F1 sin ( )
0
0
MB M1 2XBb sin ( ) 2YBb cos ( ) F1 b sin ( )
XA
XA
YA
YA
M
M
B Find B
RC
RC
XB
XB
YB
YB
RA
2
RA 21.913
130
2
XA YA
0
XA
21.213
YA 5.493
M
B 180.732
RC 46.706
17.321
XB
36.706
YB
RB
2
2
XB YB
RB 40.588
MB 180.732
RC 46.706
5. Анализ результатов вычислений и выводы
Составные конструкции обычно применяются для проектирования арочных, мостовых конструкций и т.д. На этапе их предварительного проектирования
может быть поставлена задача выбора оптимального решения согласно одному
или нескольким критериям.
Например, требуется обеспечить:
o минимальную силу давления на одну или все опоры;
o минимальное значение реакции внутренней связи;
o минимальное значение реактивного момента и т.д.
В данной задаче требуется определить такое расположение опор внешних
связей, при которых значение реакции внутренней связи минимально.
Сведем результаты расчетов в таблицу (табл. 1).
Схема
X A,
YA ,
RA ,
M A,
XB,
YB ,
RB ,
MB,
RC ,
kH
kH
kH
kH ì
kH
kH
kH
kH ì
kH
Рис. 3
21,213 29,289 36,164 139,13 17,321
Рис. 5
21,213 -5,493 21,913
–
1,925 17,427
–
11,925
17,321 36,706 40,588 -180,73 46,706
Табл. 1 Значения модулей реакций внешних и внутренних связей.
Анализ результатов расчета рассмотренных схем показывают, что оптимальной (по минимальному значению реакции втулки C ) является схема, представленная на рис. 3, в которой, при прочих равных условиях, значение реакции
RC меньше.
131
АЛЬБОМ ЗАДАНИЙ И ИСХОДНЫЕ ДАННЫЕ ДЛЯ РАСЧЕТА
101
102
B
2a
A
a
M
C
C
b
A
201
b
a
202
b
2a
B
q
a
B
M
A
C
b
C
A
F
a
301
302
2a
a
qmax
F
q
D
M
C
B
b
a
F
M
A
C
A
b
F
D
b
a
401
a
a
402
a
A
b
b
B
r
C
a
q
a
R
q
B
R
C
Р
A
b
132
B
M
qmax
F
b
Р
B
103
104
F
a
a
C
A
b
B
q
A
B
C
a
b
a
q
203
F
204
B
b
B
b
M
M
C
a
a
qmax
303
a
D
C
a
304
b
B
M
B
a
M
A
qmax
b
F
q
A
C
A
D
b
F
q
b
A
C
b
a
403
404
B
a
a
a
a
M
A
2a
r
R
C
b
R
A
F
a
b
Р
Р
C
a
B
F
133
105
106
a
B
b
C
M
C
a
A
A
q
a
b
B
a
F
F
205
206
a
a
a
q
A
C
M
a
M
A
C
F
B
b
B
b
305
306
F
a
q
D
qmax
A
b
B
qmax
D
F
b
b
C
C
405
A
b
406
R
F
R
F
B
C
B
C
a
b
a
Р
M
Р
b
A
M
134
a
q
B
a
a
b
a
A
107
108
a
b
q
C
b
A
B
M
qmax
B
M
C
A
a
207
a
208
a
a
a
A
C
M
M
B
F
B
b
307
C
A
b
308
a
a
M
A
q
C
b
C
qmax
q
B
D
b
D
B
A
M
b
b
407
408
a
a
a
A
R
a
B
C
qmax
B
qmax
a
r
M
R
C
A
Р
b
a
Р
135
109
110
a
a
B
F
C
M
b
M
A
A
C
B
b
b
209
a
210
C
a
b
M
q
a
M
b
B
A
C
q
A
B
309
310
qmax
qmax
b
A
a
b
q
C
q
C
a
A
F
M
B
B
D
D
a
a
409
410
R
B
M
R
F
a
a
a
Р
2b
B
q
q
A
C
C
a
136
a
A
Р
2b
111
112
a
qmax
C
qmax
A
M
B
b
b
B
b
M
C
b
211
212
2а
A
C
a
b
q
A
2b
B
F
B
311
b
F
M
A
a
a
q
C
F
q
F
b
B
D
411
412
C
а
B
F
A
r
A
a
C
C
a
a
а
а
a
R
b
a
M
b
A
D
B
а
R
a
C
312
a
Р
A
a
b
Р
q
B
137
114
113
A
A
a
B
qmax
b
M
M
2a
C
B
qmax
b
C
b
b
213
q
214
B
A
B
A
b
a
M
M
b
C
313
C
314
а
a
C
b
A
C
A
F
B
D
q
а
a
F
B
a
b
D
M
a
M
q
414
413
R
R
D
D
a
C
a
q
B
b
a
C
q
Р
A
138
a
q
Р
A
B
b
a
115
116
C
2b
a
2b
a
M
a
C
M
A
F
B
215
A
F
B
a
216
B
B
q
q
b F
F b
2a
C
2a
C
a
a
A
A
315
316
qmax
b
b
b
b
D
B
B
M
M
qmax
q
C
q
D
a
a
A
A
415
a
C
a
416
a
A
a
a
r
a
a
a
r
C
R
R
q
A
C
b
b
Р
B
Р
q
B
139
117
118
A
a
b
A
b
F
C
b
b
C
b
b
qmax
B
qmax
B
217
218
a
a
A
C
M
b
b
317
318
а
C
q
B
b
A
B
A
F
F
B
a
a
C
M
A
M
M
C
q
а
b
D
B
D
а
b
417
418
R
a
qmax
b
C
C
Р
A
B
2a
R
D
D
qmax
140
a
F
b
a
Р
A
B
2a
119
120
F
b
q
b
a
b
C
a
F
C
a
q
a
b
A
A
B
B
219
220
B
B
b
M
F
F
C
319
320
а
qmax
A
b
M
D
C
b
M
q
b
a
a
M
A
A
a
B
B
q
D
а
b
qmax
а
b
419
420
a
a
b
r
R
a
A
A
b
a
r
C
C
b
Р
A
C
C
qmax
B
R
b
B
qmax
Р
141
121
122
A
M
q
q
a
C
B
221
b
C
B
222
A
A
B
b
B
a
a
b
M
M
qmax
C
C
321
322
a
a
a
q
M
A
2b
B
qmax
B
F
qmax
a
D
D
2b
F
M
C
A
C
2a
2a
421
422
B
B
q
q
F
R
Р
2a
b
b
F
M
A
C
142
A
M
a
b
a
a
R
M
A
C
a
a
2a
Р
123
124
qmax
M
C
b
B
qmax
M
B
a
C
a
b
A
A
224
223
q
A
a
B
B
q
A
a
a F
b
b
F a
C
C
323
324
b
a
q
C
M
A
A
F
B
a
a
a
b
q
C
F
M
D
D
B
2a
2a
423
424
2a
A
b
B
2a
B
A
R
b
R
M
b
M
b
Р
Р
C
C
143
125
126
A
b
b
B
C
a
M
M
F
B
A
C
a
F
a
a
225
226
B
B
q
q
a
a
b
b
C
C
A
A
M
M
325
326
a
a
q
q
qmax
qmax
A
C
A
C
a
a
b
B
b
M
M
425
426
R
q
q
R
C
C
B
a
Р
B
a
a
M
M
2b
144
B
D
D
A
A
2b
a
Р
127
128
b
A
b
F
F
A
M
M
B
C
a
B
227
C
a
a
a
228
qmax
C
qmax
b
b
B
B
M
M
C
a
a
A
327
D
q
A
B
a
a
D
B
M
M
328
a
a
A
F
F
2b
2b
q
A
C
C
2a
2a
427
428
a
a
A
A
B
q
R
b
R
a
b
M
M
Р
B
q
C
C
a
Р
145
129
130
b
а
a
B
q
C
M
A
M
C
B
q
а
a
229
b
230
A
A
a
b
C
M
M
B
B
a
C
b
qmax
qmax
329
330
F
q
C
B
B
b
b
a
a
2b
M
2a
F
C
2a
2b
M
D
D
A
A
429
430
a
A
r
a
a
a
C
R
A
C
qmax
Р
B
a
a
r
R
qmax
b
146
A
b
Р
B
№
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
F
кН
P
кН
14
16
13
18
16
12
15
13
13
16
18
16
16
18
13
13
13
10
19
14
18
17
11
17
18
17
19
20
13
12
11
14
15
13
12
10
14
8
14
13
8
6
7
8
14
11
11
14
7
12
7
8
9
13
13
6
11
8
8
6
q
кН
м
4,0
2,0
5,2
3,6
2,8
5,2
4,4
4,0
5,6
5,2
4,4
2,4
2,8
4,0
5,2
3,6
3,2
3,2
4,4
2,8
5,2
6,0
4,8
5,6
4,4
5,6
2,4
4,8
3,2
4,8
qmax
кН
м
9,0
7,5
8,0
6,5
7,0
8,0
9,5
5,5
9,5
5,5
6,0
9,5
8,5
7,0
9,0
9,5
9,0
5,0
9,0
5,5
7,0
6,0
9,5
7,5
6,0
8,0
8,5
5,5
9,5
7,5
M
кН м
21
23
23
18
25
22
25
16
22
16
20
21
21
16
19
25
20
20
17
23
21
21
23
20
25
23
21
22
18
24
a
м
b
м
r
м
R
м
1,5
1,2
1,3
1,2
1,0
1,1
1,1
1,3
1,4
1,4
1,0
1,3
1,3
1,5
1,0
1,4
1,3
1,5
1,4
1,1
1,2
1,1
1,2
1,1
1,2
1,3
1,3
1,2
1,1
1,0
1,8
1,9
1,1
1,0
1,7
1,1
1,5
1,8
1,2
1,2
1,4
1,9
1,5
1,5
1,3
1,0
1,4
1,0
1,8
1,8
1,1
2,0
1,0
1,1
1,9
1,6
1,2
1,1
1,6
1,8
0,20
0,30
0,30
0,15
0,15
0,15
0,15
0,15
0,20
0,25
0,25
0,25
0,25
0,10
0,15
0,10
0,20
0,30
0,20
0,15
0,15
0,25
0,10
0,20
0,15
0,25
0,25
0,10
0,25
0,20
0,90
0,95
0,55
0,80
0,50
0,90
1,00
0,80
0,90
0,90
0,55
0,70
0,55
0,70
0,95
0,85
1,00
0,50
0,75
0,60
0,70
0,70
0,65
0,65
0,55
0,75
0,75
0,80
0,60
0,90
град град
30
15
60
75
45
30
60
15
30
45
45
45
30
30
30
60
45
75
30
60
60
45
60
60
60
45
45
60
60
45
90
135
30
90
150
75
60
15
135
150
150
135
75
15
30
135
45
120
30
45
60
135
45
60
150
60
150
150
75
150
147
С 3. РАВНОВЕСИЕ ПЛОСКИХ ШАРНИРНЫХ МЕХАНИЗМОВ
В статике наряду с равновесием составных конструкций, т. е. механических систем, у которых число степеней свободы равно нулю, рассматривается
равновесие механизмов – систем, число степеней свободы, которых отлично от
нуля. Среди них можно выделить класс плоских шарнирных механизмов с одной
степенью свободы.
Важной задачей статики плоских шарнирных механизмов является определение не только реакций внешних и внутренних связей, но и нахождение систем сил, обеспечивающих их равновесие. Основным способом их нахождения,
как и ранее, является способ расчленения, при котором рассматривается равновесие отдельных звеньев механизма.
Цель курсовой работы
Целью курсовой работы является выработка навыков расчета и исследования равновесия плоских шарнирных механизмов.
Содержание курсовой работы
Объектом исследования является плоский шарнирный механизм, расположенный в вертикальной плоскости и представляющий собой совокупность абсолютно жестких стержневых звеньев, соединенных друг с другом идеальными
шарнирами. Звенья механизма моделируются сплошными однородными стержнями, массы которых пропорциональны их длине. Погонная плотность каждого
стержня равна .
Схемы механизмов и таблицы исходных данных приведены в альбоме
заданий, представленном в работе К1.
Задаваемыми параметрами являются:
o геометрические размеры звеньев механизма;
o массовые характеристики механизма.
148
Требуется:
1. Определить:
o условия равновесия механизма под действием системы внешних сил в произвольном положении;
o реакции внешних и внутренних связей;
o величину уравновешивающего момента пары сил M (уравновешивающей
силы P ), обеспечивающую равновесие механизма в произвольном положении.
2. Исследовать влияние положения ведущего звена на величины:
o реакций внешних и внутренних связей,
o уравновешивающего момента M (уравновешивающей силы P ), действующего на произвольное звено
и выбрать оптимальный вариант его приложения
Порядок выполнения работы
Порядок выполнения работ аналогичен порядку работ на равновесие составных конструкций.
149
ПРИМЕР ВЫПОЛНЕНИЯ ЗАДАНИЯ
Плоский шарнирный механизм (рис. 1), расположенный в вертикальной
плоскости, находится в равновесии под действием внешнего момента M (внешней силы P ), приложенного к произвольному звену.
Определить реакции внешних и внутренних связей, а также величину уравновешивающего момента M (внешней силы P ) в произвольном положении механизма. Рассмотреть следующие варианты приложения внешних сил:
M M OA , M M AB , M M O1B , M M KD ,
Py PD .
D
a
C3
3
M
A
C0
O
1
O1
2
C1
K
C2
b
B
Рис. 1 Схема плоского механизма.
Исходные данные
OA l0 15 см,
KD l3 86 см,
10 кг м,
150
AB l 1 97 см, O1B l2 66 см, O1K 25 см,
a 50 см,
mi li ,
b 37 см,
i 0, 3,
m4 20 кг.
1. Составление уравнений равновесия
Для решения поставленной задачи выберем правую систему координат,
начало которой расположим в подшипнике O . Рассмотрим механизм в произвольном положении и изобразим силы, действующие на него (рис. 2):
G0 , G1, G2 , G3 , G4 — силы тяжести звеньев; M M OA — уравновешивающий мо-
мент, приложенный к ведущему звену OA ; RO X O YO , RO1 X O1 YO1 — реакции шарнирных опор, N 4 – нормальная реакция направляющих ползуна.
D
N4
GD G4
a
C3
YO 1 G3
3
X O1
M OA
YO
C0
O
G0
A
1
O1
2
C1
K
G1
C2
b
G2
XO
B
Рис. 2 Расчетная схема механизма.
На механизм действует произвольная плоская система сил, для которой
можно записать не более трех условий равновесия. Неизвестных сил, действующих на механизм шесть: M OA , RO X O YO , RO1 X O1 YO1 и N 4 .
Расчленим плоский шарнирный механизм по шарнирам на отдельные звенья и изобразим реакции внешних и внутренних связей каждого звена и рассмотрим равновесие всех звеньев (рис. 3).
151
YD
XD
D
X D
N4
D
GD
C3
YD
YA
A
M OA
YO
O
3
G3
YO 1
X O1
XA
C0
O1
G0
X
O
YA
YK
XK
K
X A A
X K
2 YK
C2
G2
1
X B
B
C1
YB
G1
YB
B
XB
Рис. 3 Расчетные схемы звеньев плоского механизма.
На кривошип OA действуют внешние силы RO X O YO , G0 , пара сил с
моментом M OA , а также реакция шарнира A RA X A YA .
На шатун AB кроме силы тяжести G1 действуют реакции RA RA ,
RB X B YB .
На кривошип O1B действуют силы RO1 X O1 YO1 , G2 и внутренние реакции RK X K YK , RB RB .
На шатун KD кроме силы тяжести G3 действуют реакции RK RK ,
RD X D YD .
На ползун действуют силы G4 , N 4 и реакция RD RD .
152
Таким образом, на звенья механизма действует четырнадцать неизвестных
сил: пара сил M OA , а также реакции внешних и внутренних связей RO X O YO ,
RO1 X O1 YO1 , RA X A YA , RB X B YB , RK X K YK , RD X D YD и N 4 .
Звенья OA, AB, O1B è KD механизма находятся в равновесии под действием произвольных плоских систем сил, а ползун D под действием плоской
сходящейся системы сил. Для каждого звена запишем следующие условия равновесия:
Кривошип OA
F
0,
F
0,
F
0,
F
0,
k
Шатун AB
k
k
M F 0;
(2)
M F 0;
(3)
M F 0;
(4)
A
k
k
O1
k
Шатун KD
(1)
k
k
k
Кривошип O1B
M F 0;
O
k
k
k
k
K
k
k
k
F
Ползун D
k
0.
(5)
k
Каждое из условий, обеспечивающее равенства нулю главного вектора системы сил
F
k
0 , на плоскости эквивалентно двум уравнениям равновесия, а
k
условия равновесия моментов
M F 0 , на плоскости эквивалентно одному
i
k
k
уравнению равновесия. Таким образом, условиям равновесия в векторной форме
(1) – (5) соответствуют 14 линейных алгебраических уравнений равновесия с 14ю неизвестными, и задача является статически определимой.
Составляя уравнения равновесия, соответствующие условиям (1) – (5), в
векторной форме получим:
Кривошип OA
F 0;
M F 0;
k
RO RA G0 0,
(6)
k
O
k
M OA C0 G0 A RA 0;
k
153
Шатун AB
F 0;
M F 0;
k
RA RB G1 0,
(7)
k
A
k
C1 G1 AB RB 0;
k
Кривошип O1B
F 0;
M F 0;
k
RO1 RK RB G2 0,
(8)
k
O1
k
C2 G2 K RK O1B RB 0;
k
Шатун KD
F 0;
M F 0;
k
RK RD G3 0,
(9)
k
K
k
C3 G3 KD RD 0;
k
Ползун D
F
k
0;
RD N 4 G4 0.
(10)
k
Здесь i – радиус-векторы, определяющие положения соответствующих точек
механизма на плоскости.
Ориентация векторов i на плоскости задается с помощью углов и
k k 1, 3 , которые можно определить с помощью уравнений геометрических
связей, записанных для узловых точек плоского механизма.
Ниже приведен пример документа Mathcad, в котором реализована процедура составления уравнений равновесия в символьном виде.
154
Составление уравнений равновесия звеньев плоского шарнирного механизма
Формирование радиус-векторов, определяющих точки приложения сил
cos ( )
cos ( )
a
L0
rA ( ) sin( ) L0
rC0( ) sin( )
rO1 ( ) b
2
0
0
0
cos 1( )
cos 1( )
cos 2( )
L1
AB ( ) sin 1 ( ) L1
C1( ) sin 1 ( )
K ( ) sin 2 ( ) O1K
2
0
0
0
cos
(
)
cos
(
)
cos
(
)
2
2
3
L2
L3
B ( ) sin 2 ( ) L2
C2( ) sin 2 ( )
C3( ) sin 3 ( )
2
2
0
0
0
cos 3 ( )
a
D( )
0
sin 3 ( ) L3 rD ( ) yD ( )
0
Формирование векторов активных сил
0
G0 m0 g
0
0
G3 m3 g
0
0
G1 m1 g
0
0
G4 m4 g
0
0
G2 m2 g
0
Формирование векторов неизвестных сил и реакций связей
XO
RO YO
0
XB
RB YB
0
N
N4 0
0
XA
RA YA
0
XK
RK YK
0
0
MOA 0
M
XO1
RO1 YO1
0
XD
RD YD
0
R'B RB
R'K RK
R'D RD
R'A RA
155
Вычисление главных векторов и главных моментов внешних сил, действующих на звенья плоского механизма
M M Fk
P Fk
Звено
k
OA
POA RO RA G0
AB
P
G R R'
k
MO MOA rA ( ) RA rC0( ) G0
M
( ) G
( ) R
AB
1
B
A
A
C1 X X
1
AB
B
A
O
PO1B RO1 RK G2 R'B MO1 KY(A ) YR
C2( ) G2 B( ) R'B
O1B
gm
OK
0
m0cos ( )
MK C3( ) G3 D( )L0gRD
KD PKD G3 R'K RD M L X
sin
(
)
L
Y
cos
(
)
0 A
0 A
2
P
G
R'
N
D
D
4
D
4
XB XA
Формирование
уравнений равновесия
YB YA gm1
UR POA POA MO PAB PAB MA PO1B PO1B MO1 PKD PLKD
D1 ( P
) D2
K3 P
1 g2mM
1 cos
1
2
3
1
1
L1 Y2Bcos3 1 ( )1 L1 X2Bsin 3 1 ( ) 1
2
Формирование
системы уравнений равновесия
XK XB XO1
T
UR
XA XO YK YB YO1 gm2
Y
Y
g
m
L2 gm2 cos
A
O
0
L2 XBsin 2 ( ) L2 YBcos 2 ( ) O1K XK sin 2 ( ) O1K YK cos 2 ( )
L0 gm0 cos ( )
2
M
L
X
sin
(
) L0 YA cos ( )
0
A
2
XD XK
XB XA
YD YK gm3
Y
Y
g
m
B
A
1
L1 gm1 cos 1 ( ) L3 gm3 cos 3 ( )
Bsin
L1 YBcos L13( Y
) Dcos
L1 X
3(
)1()L3XD sin 2 3( )
2
XK XB XO1
N XD
T
UR
YK YB YO1 gm2
Y
g
m
D
4
L2 gm2cos 2 ( )
L2XBsin 2( ) L2YBcos 2( ) O1K XK sin 2( ) O1K YK cos 2( )
2
XD XK
YD YK gm3
L3 gm3 cos 3 ( )
L
Y
cos
3 ( ) L3 XD sin 3 ( )
3
D
2
N XD
YD gm4
156
157
Рис. 4. Матрица коэффициентов А и вектор правой части В.
Решение полученной системы уравнений может быть найдено в Mathcad с
помощью блока решений Given Find . Однако наиболее эффективным способом решения и анализа результатов вычислений систем линейных алгебраических уравнений является матричный метод. Для его применения представим
уравнения равновесия в матричной форме:
A R B,
где A – матрица коэффициентов при неизвестных величинах, R – вектор неизвестных, B – вектор правой части (известных слагаемых в уравнениях равновесия) системы алгебраических уравнений (рис. 4).
Этому уравнению соответствует решение вида R A1 B.
При этом определитель матрицы A не должен быть равен нулю
det A 0.
Уравнения равновесия для других вариантов приложения уравновешивающих сил составляются аналогично.
158
2. Составление уравнений геометрических связей
Рассматриваемый механизм представляет собой механическую систему с
одной степенью свободы. Положение его звеньев будем определять с помощью
угла поворота ведущего звена . Углы, характеризующие ориентацию звеньев
механизма на плоскости k k 1, 2, 3 , отсчитываемые от горизонтальной оси
O x в положительном направлении (см. задание К1 рис. 2 разд. 1), связаны с острыми углами k , изображенными на рисунках 1, 2 и 3, соотношениями
1 2 1 , 2 2 2 , 3
1.
2
Уравнения геометрических связей, позволяющие определить положение
звеньев механизма на плоскости в зависимости от угла поворота ведущего звена
имеют вид (см. задание К1, разд. 1):
AB cos 1 O1B cos 2 a OA cos ,
AB sin 1 O1B sin 2 b OA sin ,
O1K cos 2 KD cos 3 0,
(11)
O1K sin 2 KD sin 3 b yD .
Решение системы уравнений (11) было получено ранее (см. К1, разд. 1):
O B 2 O1 A2 AB 2
1 arccos 1
,
2
AB
O
A
1
OK
3 arccos 1 cos 2 ,
KD
O B 2 O1 A2 AB 2
2 arccos 1
,
2
O
B
O
A
1
1
(12)
yD b O1K sin 2 KD sin 3 .
b
где O1 A O1 A2 OA2 2 OA OO1 cos O , OO1 a 2 b2 , arctg ,
a
cos
OA cos a
OA sin b
, sin
.
O1 A
O1 A
Выражения (12) позволяют определить положения всех узловых точек
(шарнирных соединений) плоского механизма при произвольном значении угла
поворота ведущего звена.
159
3. Результаты расчетов
Решение системы линейных алгебраических уравнений (6) – (10) совместно с выражениями (12) можно реализовать в пакете Mathcad, в котором для
этого существует несколько способов [1, 10].
Ниже приведен пример документа Mathcad, в котором вычисления реакций
внешних и внутренних связей механизма, а также величины уравновешивающего момента M (силы P ), представлены матричным методом.
Расчет плоского механизма при действии момента M M OA ,
приложенного к звену ОА.
Ввод исходных данных
a .50
b .37
OA .15
O1K .25
KB O1B O1K
L0 OA
L1 AB
KD .86
L2 O1B
AB .97
L3 KD
g 9.81
m0 OA
m2 O1B
m3 KD
10
m1 AB
O1B .66
m4 20
ORIGIN 1
Вычисление вспомогательных функций
b
atan
a
O1A( )
( )
2
2
2
2
angle(OAcos( ) a OAsin( ) b)
2
a b OA 2 OA a b cos ( )
Решение уравнений геометрических связей
O1B2 AB2 O1A( )2
1( ) ( ) acos
2 O1A( ) AB
O1A( )2 O1B2 AB2
2( ) ( ) acos
2 O1A( ) O1B
3( )
O1K cos ( )
2
KD
acos
yD( ) b O1K sin 2( ) KDsin 3( )
160
Решение системы уравнений равновесия
0 0
0 0
0 0
0 0
0 0
0 0
1 0
0 1
0 0
0 0
0 0
0 0
0 0
0 0
1
0
0
0
0
0
0
0
0
0
0
0
1
A
0
0
O1K sin 20
1
0
0
0
0
0
0
0
0
0
0
0
01
00
00
1
00
10
00
0 L00sin( ) L0 cos
0 ( )
00
0
01
00
10
0
00
01
00
0
00
00
L1sin0 1
0
00
00
10
0
10
00
00
O1K
0 cos0 2
00
L2sin0 2
0
00
01
00
0
10
00
01
0
00
0
00
01
0
00
00
L3sin
0 3 L3cos
0 3
00
…
01
0
m
g
0
1
)
(
cos
m
g
L
0
0
0 0 0
0 0 2 0
0
0
0 00
0 0
0 0
0
0
0 1 0
0 0
0 gm1
0
0
1
0 0 0
0 0 L1 g0m1 cos 1 ( ) 0
0
2
0 0 1
0 0
0
0
0
0
L01cos
0 B1( ) 0 0
0
0
0
gm2
0 0 0
1 0
1
0
0
1
0 01
0 1 2 L2 g0m2 cos 2 ( ) 1
0
2 0 0 O1K sin 2 O1K cos
0L20cos
0
2
0
0 0 0
0 0
1gm3
0
1
0 0 0
0 0 1
0
1
0
)
(
cos
m
g
L
3
3
3
0 0 0
0 02
0
0
L3sin
1 0 0
0 0
0 0
0
1
0 0 0
0 0
0 gm4
0
0
A simplify L1L2L3sin 1 2 sin 3
R( ) A( )
1
B( )
Формирование реакций внешних и внутренних связей
XO( ) R( )1
YO( ) R( )2
XA ( ) R( )3
YA ( ) R( )4
XB( ) R( ) 5
YB( ) R( ) 6
XK( ) R( )9
YK( ) R( )10
YO1( ) R( )8
XO1( ) R( )7
XD( ) R( )11
YD( ) R( )12
N ( ) R( )13
M( ) R( )14
XO ( )
Y
(
)
O
RA ( )
XK ( )
Y
(
)
K
RO1 ( )
RO ( )
RK ( )
XA ( )
Y
(
)
A
XO1( )
Y
(
)
O1
XB( )
Y
(
)
B
RB( )
XD ( )
Y
(
)
D
RD ( )
161
Построение графиков функций
0
2
180
Зависимость момента пары сил, обеспечивающего равновесие механизма,
от угла поворота ведущего звена
40
20
M( )
0
45
90
135
180
225
270
315
360
20
40
deg
Зависимость реакций внешних и внутренних связей от угла поворота
ведущего звена
600
RO ( )
480
RA ( )
RO1 ( ) 360
RB( )
RK ( )
RD ( )
240
N ( )
120
0
45
90
135
180
deg
162
225
270
315
360
1
1
Расчет плоского механизма при действии момента M M AB ,
приложенного к звену АВ.
Ввод исходных данных
… … …
Решение системы уравнений равновесия
0 0
1
0
0
0
0
0
01 0
0 0
0 0
0 0
0 0
0 0
1 0
0 1
s 2 0 0
0 0
0 0
0 0
0 0
0 0
00 00 0
0
0
0
0
0
1
0
0
0
00 0 0 0
0
0
0
00 1
00 0 L0sin( 0) L0cos ( ) 0 0
0
00 00 0
0
0
0
1 0
0
0
1
0
00 00 0
0
0
0
00 0
00 0
0
0
1
0
0
0
10 00 0
0
0
0
0
0
0
0 L1sin 1 0L1cos 0 11 0 0
0
0
0
00 0
10 0
0
0
0
0 1
0
00 01 0
1
0
0
A
0
1
0
0
0
0
1 0 0 0 1
0
1
0
00 0
O1K0sin0 2 O1K
0 cos 20
0L2sin 2 0L2cos0 20 0 0 O1K sin 2 O1K cos 2
0
0
0
0
1
0
0
00 00 0
1
0
1
01 0
00 0
0 1
0
0
0
1
00 00 0
0
1
0
0
0
0 L3sin 30 L3cos 30 0 0 0 0
0
0
L3sin
00 0
00 0
0
0
0
1 0
0
01 00 0
0
0
1
0
0
0
1
0 0 0 0… 0…
0
0
0
00 0
… 0 … …0
A( ) simplify L0L2L3sin 3( ) sin 2( )
… … …
Зависимость момента пары сил, обеспечивающего равновесие механизма,
от угла поворота ведущего звена
3
110
500
M( )
0
45
90
135
180
225
270
315
360
500
3
110
deg
163
Расчет плоского механизма при действии момента M M O1B ,
приложенного к звену О1В.
0
Ввод исходных данных
… … …
Решение системы уравнений равновесия
0
1
0
0 0
0
0 0
10 0
0
0 0
0
0 0
0
0 0
1
0 0
s 1
0 0
0
1 0
1
0 1
os 2 0 0
0
0 0
0
0 0
0
0 0
0
0 0
0
0 0
0 0 0 0 0
0
0
0
0
0
0
0 0 0 0 0
1
0
0
0 0
0
0 1
0
0
0
0 0 0 0 0
0
0 0 L0sin( )0 L0cos ( ) 0 0
0
0
0
0 0 0 0 0
0
1 0
0
0 1
0 0
0 0
0
0
0
1 0 0 0 0
1
0
0
0 0
0
0
0
0
0L1sin 1 0L1cos 0 10 0 0
0
0
0
0 0
01 0
0
0
1
0 0 0 1 0
0
0
0
0 1
0
A
0
1
0
0
0
0 1 0 0 0 1
0 0
1
0 0
0sin0 2 O1K
0
L
0 cos 20
0 2sin 2 0L2cos 0 21 0 0 O1K sin 2 O1K cos 2
O1K
1
0
1
0 0 0 0 0
0
0
0
1 0
0
01 0
0 0
0
1
0
0 0 0 0 0
0
0 1
1
0 0
L3sin
0
0
0 L3sin 03 L3cos 30 0 0 0 0
0
0
0 0
0 0
1
0
0
0 1 0 0 0
0
0
0
1 0
0
0
0
0
0
0
1 0 0 0 0 …0 …
0
0 0
… 0… …0
A( ) simplify L0L1L3sin 3( ) sin 1( )
… … …
Зависимость момента пары сил, обеспечивающего равновесие механизма,
от угла поворота ведущего звена
3
110
500
M( )
0
45
90
135
180
500
3
110
deg
164
225
270
315
360
Расчет плоского механизма при действии момента M M KD ,
приложенного к звену KD.
Ввод исходных данных
… … …
Решение системы уравнений равновесия
0 0
1 0
0
0
0
0
01 0
0 0
0
0
0
0 0
0 0
0
0
0
0 0
0
0
0
0 0
0
0
0
0 0
0
0
0
0 0
0
0
0
1 0
1
0
0
0 1
0
1
0
0 0
0 0
0 0
1
2
0 0
1 0
0 1
0 0
0 0
0 0
0 0
0 0
0 0
00 0
00 1
0 0
1
0
0
0
00 0
00 0 L0sin( 0) L0cos ( ) 0
0
0
00 0
1 0
0
0
1
0
00 0
00 0
00 0
0 0
1
0
0
0
10 0
00 0
0 0
0
0L1sin 1 0 L1cos 0 10
10 0
0 0
0
0
1
0
00 0
A
0
0
0
0
1
0
0
0
0
1
0
0
O1K sin
0 0 2 O1K
0 cos 2 0
0L2sin 2 0L2cos0 02
10 0
0 0
0
1
0
0
00 0
00 0
0 1
0
0
0
1
00 0
0 0
0 L3sin 30 L3cos 3 0 0 1
00 0
00 0
0 0
0
1
0
0
01 0
0
0
0
0
0
0
0
0
1
0
0
0
… … …
0 0 O1K sin 2 O1K cos 2
0 0
1
0
1
0 0
0
1
0
0 0
0
0
L3sin
0 0
0
0
1
0… 0…
0
0
0
A( ) simplify L0L1O1K sin 2( ) sin 1( )
… … …
Зависимость момента пары сил, обеспечивающего равновесие механизма,
от угла поворота ведущего звена
3
110
500
M( )
0
45
90
135
180
0
225
270
315
360
500
3
110
deg
165
Расчет плоского механизма при действии силы P PD , приложенной к ползуну D.
0
Ввод исходных данных
… … …
Решение системы уравнений равновесия
0 0
1
0
0
0 0
0
10 0
0
0 0
0
0 0
0
0 0
1
0 0
s 1
0 0
0
1 0
1
0 1
os 2 0 0
0
0 0
0
0 0
0
0 0
0
0 0
0
0 0
0 0 0 0 0
0
0
0
0
0
1
0 0
0
0 0 0 0 0
0
0
0
0 1
0 0 L0sin( )0 L0cos ( ) 0 0
0
0 0 0 0 0
0
0
0
1 0
0
0 1
0
0 0 0 0 0
0
0
0
0 0
0 0
0
0
1
0 0
0
1 0 0 0 0
0
0
0
0
0
0
0L1sin 1 0L1cos 0 10 0 0
0
0
0
0 0
01 0
0
0
0
0 1
0
0 0 0 1 0
1
0
0
A
0
1
0
0 0
0 1 0 0 0 1
0
1
0
0 0
0sin0 2 O1K
O1K
0 cos 20
L
0 2sin 2 0L2cos 0 20 0 0 O1K sin 2 O1K cos 2
0
0
0
0
1 0
0
0 0 0 0 0
1
0
1
01 0
0 0
0 1
0
0 0
1
0 0 0 0 0
0
1
0
0
0
0 L3sin 03 L3cos 30 0 0 0 0
0
0
L3sin
0 0
0 0
0
0
0
1 0
0
0 1 0 0 0
0
0
1
0
0
0
1 0 0 1 0 …0 …
0
0
0
0 0
… 0… …0
A( ) simplify
L0 L1 L3 O1K cos 1( ) 2( ) 3( ) cos 1( ) 2( ) 3( )
2
… … …
Зависимость силы, приложенной к ползуну и удерживающей механизм в
равновесии, от угла поворота ведущего звена
3
1 10
500
M( )
0
45
90
135
180
500
3
1 10
deg
166
225
270
315
360
4. Анализ результатов вычислений и выводы
Плоские шарнирные механизмы широко используются при дискретном
цикле осуществления различных операций, когда возникает необходимость возврата выходного звена в исходное положение после внешнего возмущения. Поэтому необходимо определить величину внешнего воздействия обеспечивающее
требуемое положение выходного звена механизма. Также необходима предварительная оценка прочности шарнирных соединений.
Анализ результатов расчета рассмотренных схем приложения удерживающих пар сил с моментом M (силы P ) показывает, что в некоторых положениях
механизма величина внешнего воздействия, а также реакции внешних и внутренних связей становятся бесконечно большими. Данная ситуация возможна при равенстве нулю определителя матрицы коэффициентов A . Т.е. система линейных
алгебраических уравнений становится вырожденной.
Сведем уравнения, обеспечивающие выполнение условия det A 0 и его
возможные решения в таблицу.
Схема
M M OA
M M AB
M M O1B
M M KD
P PD
det A 0
sin 1 2 sin 3 0
sin 2 sin 3 0
sin 1 sin 3 0
sin 1 sin 2 0
sin 1 sin 2 3 0
где
Решения
1 2 0 n, 3 0 n
2 0 n, 3 0 n
1 0 n, 3 0 n
1 0 n, 2 0 n
1 0 n, 2 3 0 n
n 1, 2,
Возможные решения уравнения det A 0 изобразим на графиках (рис. 5,
рис. 6) из которых следует, что решения
1 2 0 n, 3 0 n, 2 0 n, 2 3 0 n n 1, 2,
невозможны.
Таким образом, корни уравнения det A 0 имеют вид (рис. 6)
1 0 n, 2 0 n n 1, 2,
167
6
5
3( )
4
2( )
1( ) 2( )
2( ) 3( )
3
2
1
0
45
90
135
180
225
270
315
360
deg
Рис. 5 Зависимость углов поворота 2 , 3 и разностей 1 2 , 2 3 от угла поворота
ведущего звена.
7
2
6
5
1( ) 4
2( )
3
2
1
0
45
90
135
180
225
270
315
360
deg
Рис. 6 Зависимость разностей 1 , 2 от угла поворота ведущего звена.
При значениях угла поворота ведущего звена 0 2 , решения уравнения det A 0 имеют вид
1 2, 1 ,
2 0, 2 .
168
Найдем значения углов поворота ведущего звена, при которых det A 0
1
6.424
1
4 deg
1 164.193
kp root 1 ( )
2
2
deg
1 120.686
kp root 2 ( )
3
2
deg
kp root 1 ( ) 2 0
kp root 2 ( ) 2
4
1
deg
334.097
Таким образом, условия 1 2 0 n, 3 0 n n 1, 2,
не вы-
полняются ни при каких значениях и, следовательно, значения момента пары
сил, приложенного к ведущему звену, конечны при любых значениях .
Изобразим положения механизма при найденных значениях углов êð и
рассмотрим физические причины обеспечивающие выполнение условия
det A 0 .
Для изображения механизма, воспользуемся результатами, приведенными
в работе Ê1 , позволяющими отобразить его положение при заданном угле поворота ведущего звена.
Для условий 1 2 кр1 , 1 , кр2 .
При значении êð1 6,424 кривошип O1B занимает крайнее верхнее
положение; при значении êð2 164,193 кривошип O1B занимает крайнее
нижнее положение (в этих случаях в точке B расположен мгновенный центр вращений). Возможные угловые скорости звеньев O1B , KD и скорость ползуна D
одновременно равны нулю.
Для условий 2 кр3 , 2 0, кр4 .
При значениях êð3 120,686 и êð4 334,097 мгновенный центр вращений звена AB находится в бесконечности. Возможная угловая скорость звена
AB в этих случаях равна нулю.
169
M M O1B , M M KD , P PD
0 kp deg
i
i 1
0
deg
6.424
1 0
deg
2 0
deg
3 0
deg
366.424
338.239
105.663
1 0 0
deg
2 0 0
deg
360
331.815
M M O1B , M M KD , P PD
i 2
0
deg
164.193
1 0
deg
2 0
deg
3 0
deg
344.193
295.968
97.313
1 0 0
deg
2 0 0
deg
180
131.775
В точке B расположен мгновенный центр вращений (крайнее положение
кривошипа O1B ). Возможные угловые скорости звеньев O1B , KD и
скорость ползуна
170
D равны нулю.
M M AB
i 3
0
deg
120.686
1 0
deg
2 0
deg
3 0
deg
340.325
300.686
98.531
1 0 0
deg
2 0 0
deg
219.639
180
M M AB
i 4
0
deg
334.097
1 0
deg
2 0
deg
3 0
deg
368.729
334.097
105.159
1 0 0
deg
2 0 0
deg
34.632
0
Мгновенный центр вращений звена AB находится в бесконечности.
Возможная угловая скорость звена AB равна нулю.
171
5. Выводы
Результаты анализа рассмотренных схем приложения внешних сил, удерживающих механизм в положении равновесия, позволяют определить область
допустимых значений углов поворота, при которых значения сил конечны. Результаты сведем в таблицу
Схема
Область допустимых значений для угла .
M M AB
0 2 1 n , n 1, 2,
кр3 2 n, кр4 2 n, n 1, 2,
M M O1B
кр1 2 n, кр2 2 n, n 1, 2,
M M KD
кр1 2 n, кр2 2 n, n 1, 2,
P PD
кр1 2 n, кр2 2 n, n 1, 2,
M M OA
Таким образом, оптимальной является схема, в которой удерживающими
механизм в положении равновесия силами является пара сил с моментом
M M OA приложенная к ведущему звену OA .
172
3. ДИНАМИКА
Курсовые работы по динамике посвящены применению основных теорем
и принципов механики к исследованию материальных систем. Студенты, выполняя то или иное задание, должны получить навыки и умения: составления дифференциальных уравнений движения механической системы, нахождения динамических реакций внешних и внутренних связей, аналитического или численного интегрирования найденных уравнений движения, анализа результатов расчета и исследования механических систем.
В данном разделе представлены три курсовых работы разной степени
сложности:
В первой работе "Исследование механической системы с упругой связью"
изучаются малые линейные колебания системы с одной степенью свободы.
Дифференциальное уравнение движения интегрируется аналитическим способом. Проводится численное исследование влияния внутренних параметров
системы на динамические реакции. Определяется область допустимых значений внутренних параметров системы, обеспечивающее соответствие движения принятым допущениям.
Во второй работе "Исследование движения механизма с кулисным приводом" рассматривается нелинейная механическая система. Дифференциальное уравнение движения механизма интегрируется численными методами.
Исследуется влияние конструктивных элементов на поведение механизма.
В третьей работе "Динамика плоских шарнирных механизмов" изучается динамическое поведение многозвенных плоских шарнирных механизмов. Совместно решается система уравнений, в которую входят: нелинейное дифференциальное уравнение движения механизма и система нелинейных уравнений геометрических связей. Исследуются факторы, влияющие на неравномерность вращения ведущего звена.
173
Д 1. ИССЛЕДОВАНИЕ ДВИЖЕНИЯ МЕХАНИЧЕСКОЙ
СИСТЕМЫ С УПРУГОЙ СВЯЗЬЮ
Исследование динамического поведения механической системы начинается с выбора физической модели, для которой составляется математическая модель.
Наличие упругих связей в механической системе в сочетании с внешним
периодическим воздействием может привести к дополнительным колебаниям ее
элементов. Если задачу удается свести к малым колебаниям, то с высокой степенью точности математическая модель может быть представлена линейной моделью.
Выделение линейных моделей в особый класс вызывается рядом причин:
с помощью линейных моделей исследуется широкий круг явлений, происходящих в различных механических системах;
интегрирование линейных дифференциальных уравнений с постоянными коэффициентами хорошо отработано.
Поэтому инженер–исследователь стремится по возможности описать пове-
дение системы с помощью линейной модели для облегчения процедуры анализа
ее движения.
При проектировании механических систем обычно используют критические режимы внешних воздействий на них. В этом случае внешние факторы:
– коэффициент демпфирования, F0 , p – амплитуда и частота возмущающей
силы, изменяются незначительно. Конструктивные параметры механических систем (их геометрические размеры) определяются условиями их функционирования и, следовательно, могут изменяться в очень узком диапазоне. Актуальной
становится такая задача исследования механической системы, при которой могут
изменяться массовые параметры системы и жесткость упругого элемента.
174
Цель курсовой работы
Исследование и анализ динамического поведения механической системы с
упругими связями с помощью основных теорем и принципов теоретической механики.
Содержание курсовой работы
Объектом исследования является механическая система с одной степенью
свободы, представляющая собой совокупность тел, связанных друг с другом посредством нитей. Схемы заданий и исходные данные приведены в альбоме заданий.
Система снабжена упругой связью (пружиной) с коэффициентом жесткости c и демпфирующим устройством, в котором возникает сопротивление движению. В вариантах 1, 4 6, 8 16, 22, 25, 27, 29 демпфирующее устройство на
схемах не показано, оно связано с телом 3, вращающимся вокруг неподвижной
оси. Сопротивление движению в этих вариантах моделируется парой сил с моментом M C 3 , где 3 – угловая скорость вращения тела 3, – коэффициент сопротивления 0 . В остальных вариантах демпфер на схемах показан,
он связан с телом 2 (варианты 7, 18, 23, 26) или с телом 4 (варианты 2, 3, 17, 19
21, 28, 30). Сопротивление в этом случае моделируется силой RC v , где
v - скорость точки крепления демпфера (скорость поршня демпфера) к телу 2
или 4 (в зависимости от варианта), – коэффициент сопротивления 0 .
Во всех вариантах к грузу 1 приложена возмущающая гармоническая сила,
проекция которой на касательную к траектории центра масс груза 1 равна
F (t ) F0 sin pt ,
где F0 , p – амплитуда и круговая частота возмущающей силы.
При составлении математической модели принимаются следующие допущения:
175
тела, входящие в систему, считаются абсолютно твердыми, нити – нерастяжимыми, идеально гибкими и безынерционными;
проскальзывание нитей на блоках и катках отсутствует; катки движутся без
скольжения;
трение в подшипнике блока 3 не учитывается, сопротивление качению катка
4 отсутствует;
реакция упругой связи подчиняется линейному закону: Fynp c , где –
удлинение пружины; масса пружины и демпфера не учитывается;
массу пружины, поршня и штока демпфера не учитывать;
во всех вариантах возникающие в системе колебания являются малыми.
Требуется:
1. Составить дифференциальное уравнение движения системы.
2. Сформировать систему уравнений для определения динамических реакций
внешних и внутренних связей.
3. Найти закон движения системы, т. е. проинтегрировать дифференциальное
уравнение движения при заданных начальных условиях.
4. Провести численный анализ полученного решения с использованием ЭВМ.
Порядок выполнения работы
1. Составить дифференциальное уравнение движения системы одним из следующих способов (по указанию преподавателя):
с помощью теоремы об изменении кинетической энергии в дифференциальной форме;
методом общего уравнения динамики;
с помощью уравнений Лагранжа второго рода.
2. Определить динамические реакции внешних и внутренних связей и осуществить проверку правильности составления дифференциального уравнения движения. Для этого следует использовать (по указанию преподавателя):
теорему об изменении количества движения и теорему об изменении кинетического момента в дифференциальных формах;
176
дифференциальные уравнения поступательного, вращательного и плоского
движений твердого тела;
метод кинетостатики (принцип Даламбера).
3. Интегрируя дифференциальное уравнение движения системы при заданных
начальных условиях, найти закон движения груза 1.
4. Провести анализ результатов расчета механической системы. Для этого
проверить соответствие расчетов предположениям, принятым при построении математической модели;
по указанию преподавателя исследовать влияние двух из основных внутренних параметров механической системы m1, m2 , m3 , c на динамические характеристики системы;
определить область допустимых значений указанных параметров, обеспечивающих адекватность поведения системы ее математической модели.
177
ПРИМЕР ВЫПОЛНЕНИЯ ЗАДАНИЯ
Груз 1, расположенный на гладкой наклонной плоскости, прикреплен к
нити, навитой на большую ступень блока 2 (рис. 1). Нить, намотанная на каток
3, навита на малую ступень блока. Каток расположен на шероховатой наклонной
плоскости. Центр катка связан с пружиной, другой конец которой закреплен
неподвижно. Нити и пружина, массы которых не учитываются, параллельны соответствующим плоскостям. Нити являются нерастяжимыми и абсолютно гибкими. Сопротивление, возникающее в подшипниках блока, пропорционально
первой степени угловой скорости блока: M С 2 . Качение катка происходит
без скольжения, сопротивление качению отсутствует. Каток – однородный круговой цилиндр. Центр масс блока расположен на оси его вращения. К грузу приложена возмущающая сила F (t ) F0 sin pt . При движении системы нити всегда
натянуты.
Исследовать движение механической системы. Определить реакции внешних и внутренних связей, если
m1, m 2 , m 3 – массы груза, блока и катка,
c – коэффициент жесткости пружины,
– коэффициент демпфирования,
r2 , R 2 , i 2 – радиусы ступеней блока 2 и его радиус инерции относительно оси,
проходящей через центр масс,
r3 – радиус катка 3,
, – углы наклона опорных плоскостей к горизонту,
f сц – предельное значение коэффициента сцепления катка 3 и опорной плоско-
сти,
np – предельное значение удлинения пружины;
s 0 , v 0 – начальная координата и начальная скорость груза.
178
2
MC
3
1
c
F t
Рис. 1. Схема механизма
Исходные данные
m1 1 кг,
m2 2 кг,
r2 0.15 м,
m3 3 кг,
r3 0.2 м,
0.2 H м с,
c 2000 H
F0 10 H ,
p
s0 0.03 м,
v0 0.04 м ,
c
м
,
R2 0.3 м,
i2 0.2 м,
fсц 0,30 ,
пр 0,1 м, ,
60 ,
30 .
рад
,
с
2
179
1. Составление дифференциального уравнения движения
механической системы.
Рассматриваемая механическая система имеет одну степень свободы: это
обеспечивается условиями, принятыми при формулировке задания, – тела являются абсолютно твердыми, нити – нерастяжимыми и всегда натянутыми, проскальзывание при движении катка отсутствует. Следовательно, для задания положения системы нужен один параметр. Будем определять положение системы
с помощью координаты s , задающей положение центра масс груза (рис.2).
Начало отсчета координаты s совместим с положением центра масс груза при
равновесии системы. Углы поворота блока 2 и катка 3 отсчитываем по ходу
часовой стрелки. Положение центра масс катка С 3 определяем координатой s 3 ,
отсчитываемой от положения центра масс катка при равновесии системы: если
s 0 , то 2 0, 3 0 и s3 0 и наоборот, причем нулевому значению координаты s соответствуют нулевые значения координат 2 , 3 и s 3 .
Y2
2
vB
B
X2
vD
vA
MC
D
3
N3 C3
A
v3
s
G2
N1
Fñö
Fупр
P мцс
G3
G1
Рис. 2. Расчетная схема
180
F t
v1
Для составления дифференциального уравнения движения системы используем теорему об изменении кинетической энергии механической системы в
дифференциальной форме:
dT
N ke N ki ,
dt
k
k
где: T – кинетическая энергия системы,
N ke
(1)
– сумма мощностей внешних сил,
k
N ki
– сумма мощностей внутренних сил.
k
Пусть в произвольный момент система занимает положение, в котором
s 0 , а скорость груза v 1 направлена вдоль опорной плоскости в положительном
направлении координаты s .
Вычислим кинетическую энергию системы как сумму кинетических энергий тел, образующих механическую систему.
Груз 1 совершает поступательное движение. Его кинетическая энергия:
1
T1 m1v12 ,
2
Блок 2 совершает вращательное движение вокруг неподвижной оси. Его
кинетическая энергия
T2
1
IC2 22 ,
2
где IC2 m2 i22 – момент инерции блока 2 относительно оси вращения, 2 – модуль угловой скорости.
Каток 3 совершают плоскопараллельное движение, поэтому его кинетическая энергия равна:
1
1
T3 m3v32 IC3 32 ,
2
2
где IC3 m3 r32 2 – момент инерции катка 3 относительно оси, проходящей через
центр масс, v3 – модуль скорости центра масс, 3 – модуль угловой скорости
181
катка.
Кинетическая энергия всего механизма в этом случае будет равна:
1
1
1
T m1 v12 IC2 22 m3vC23 IC3 32 .
2
2
2
(2)
Так как система имеет одну степень свободы то величины 2 , 3 и v C3
легко выражаются через v 1 . Нити, соединяющие тела системы нерастяжимы и
натянуты, следовательно v1 v A и vB vD . Тогда
v1 v A
2 O2 A 2 R2 ;
2 r2 2 O2 B vB vD 3 PD 3 2 r3 ;
v3
3 PC3 3 r3.
Таким образом v1 v s, 2
r2
1
r
v, 3
v, v3 2 v.
R2
2 R2 r3
2 R2
(3)
Подставляя (3) в выражение (2) и учитывая выражения для моментов инерции I C2 и I C3 , окончательно получим:
где величина
1
1
T mnp v 2 mnp s 2
2
2
(4)
i22 3
r22
mnp m1 m 2 2 m 3 2 2.17 кг
R2 8
R2
(5)
называется приведенной массой.
Теперь вычислим правую часть уравнения (1) – сумму мощностей внешних
и внутренних сил, при этом учтем, что мощность силы равна скалярному произведению вектора силы на скорость точки приложения силы, а мощность пары
сил – скалярному произведению вектора пары на угловую скорость твердого
тела, к которому приложена пара:
N F F v F v cos F , v Fv v,
N M M M cos M , M .
182
Здесь F v – проекции вектора силы F на направление скорости точки приложения силы, а M – проекции вектора пары сил M на направление угловой скорости твердого тела.
Вычислим сумму мощностей внутренних сил, учитывая, что рассматриваемая нами механическая система является неизменяемой, так как входящие в систему тела абсолютно твердые, а нити – абсолютно гибкие и нерастяжимые. Следовательно, скорости их точек относительно друг друга равны нулю и сумма
мощностей внутренних сил также будет равна нулю
N ki 0.
(6)
k
Вычислим сумму мощностей внешних сил. Для этого изобразим их на расчетной
схеме
(рис.2).
Внешними
силами
являются:
силы
тяжести
Gk mk g , k 1,3 , нормальные реакции опорных плоскостей N1, N3 , сила сцеп-
ления Fсц , упругая реакция пружины Fупр , реакции подшипника блока 2 X 2 , Y2 ,
силы сопротивления с моментом M C 2 и возмущающая сила F t .
Заметим, что мощности сил N3 , Fсц , G2 , X 2 , Y2 равны нулю, так как эти
силы приложены в точках, скорости которых равны нулю. Мощность силы N1
также равна нулю, так как N 1 v 1 .
Сумма мощностей остальных сил равна:
N P1 G1 v1 m1 g v sin ,
N F t F t v1 F t v,
N M С M C 2 22 ,
N Fупр Fупр v3 Fупрv v3 ,
3
N P3 G3 v3 m3 g v3 sin .
или
Nke Fynpv3
v3 22 m1 g v sin F t v m3 g v3 sin .
k
С учетом кинематических соотношений (3) сумму мощностей внешних сил
183
преобразуем к виду:
Nke Fnp v Fnp s
(7)
k
r
Fnp Fynpv m3 g sin 2 2 v m1 g sin F t
3
2 R2 R
2
где
называется приведенной силой.
Упругую силу считаем пропорциональной удлинению пружины. Полное
удлинение пружины равно сумме статического ст и динамического s3 удлинений ст s3 .
r
Fynpv c ст s3 c ст 2 s .
3
2 R2
Тогда
Приведенная сила в развернутой форме будет определяться выражением:
r
Fnp c ст m3 g sin 2 cпр s пр s m1 g sin F t
2R
(8)
2
2
где cnp
r
c 2 – приведенная жесткость, np 2 – приведенный коэффиR2
2 R2
циент сопротивления.
Подставляя выражения (4), (6) и (7) в (1), получаем после сокращения на s
дифференциальное уравнение движения системы
mпр s Fпр .
(9)
Учтем, что при равновесии системы (возмущающая сила отсутствует) скорость и ускорение груза равны нулю по определению s 0, s 0 , а координата
груза равна нулю в силу постановки задачи (начало отсчета совпадает с положением равновесия груза 1 s 0 ). В этом случае уравнение (9) приводится к виду
Fnp
s 0, s 0
0 , и условием равновесия системы будет служить уравнение
c ст m3 g sin
184
r2
m1 g sin 0,
2 R2
из которого определяется статическое удлинение пружины
ст
g
R2
2 m1 sin m3 sin .
с
r2
(10)
Подставляя (10) в уравнение (9) и учитывая формулу (8) для приведенной
силы, получаем дифференциальное уравнение движения системы
mnp s F0 sin pt cпр s пр s.
Представим данное уравнение в виде:
s 2 n s k 2 s h0 sin pt ,
(11)
где введены коэффициенты, имеющие определенный физический смысл:
cпр
k
n
mпр
пр
2 mпр
h0
r2
2 R2
c
7.589 рад – частота собственных колебаний,
с
mnp
2
2 R2 mnp
0.512 рад
с
– показатель степени затухания колебаний.
F0
4.61 м 2 – относительная амплитуда возмущающей силы.
с
mпр
Начальные условия:
s t 0 s0 , s t 0 s0 v0
(12)
Уравнения (11), (12) представляют математическую модель для решения
второй задачи динамики.
2. Определение реакций внешних и внутренних связей
Для решения этой задачи расчленим механизм на отдельные части и построим расчетные схемы для каждого тела (рис.3). На расчетных схемах, помимо
ранее введенных сил, показаны реакции (силы натяжения) нитей, связывающих
груз и блок, блок и каток: T12 T 21, T 23 T 32 .
К каждому телу, изображенному на расчетной схеме (рис.3), применим две
основные теоремы механики материальной системы:
185
теорему об изменении количества движения
d mvC
Fke
dt
k
(13)
и теорему об изменении кинетического момента относительно оси z , проходящей через центр масс твердого тела
d LCz
dt
M Ce z Fke .
k
(14)
Для каждого тела данные уравнения запишем в проекциях на оси координат соответственно схемам (рис.3):
y2
2
B
Y2
X2
x2
T23
T32
D
y3
3 N
3
v3
x3
C3
MC
G2
y1
T12
s
N1
Fñö
P мцс
Fупр
T21
G3
F t
G1
v1
x1
Рис. 3. Расчетные схемы каждого тела механизма
Тело 1 движется поступательно, поэтому уравнение (14) для него удовлетворяется тождественно 0 0 . Учитывая, что x C1 v1, yC1 0 , получим
d m1v1
T12 m1 g sin F t ,
dt
0 N1 m1 g cos .
(15)
Тело 2 вращается вокруг неподвижной оси, причем v C2 0 , поэтому уравнения (13) и (14) примут вид:
186
0 Y2 m2 g T23 sin T21 sin ,
0 X 2 T23 cos T21 cos ,
d J 2 z 2
dt
(16)
T21 R2 T23 r2 M C ,
Тело 3 совершает плоскопараллельное движение. Тогда, записывая уравнения (13) и (14) с учетом того, что x C3 v 3 , yC3 0 , получаем:
d m3v3
T32 Fynp Fсц P3 sin ,
dt
0 N3 m3 g cos ,
d J C3 z 3
dt
(17)
T32 r3 Fсц r3.
Из системы уравнений (15) – (17) c учетом кинематических соотношений
(3) можно получить формулы для реакций связей:
N1 m1 g cos ,
T12 m1 s m1 g sin F t ,
R2
i2 2
T23 T21
s m2
s,
r2 r2 R2
R2r2
X 2 T23 cos T21 cos ,
(18)
Y2 m2 g T23 sin T21 sin ,
1
r
Fсц T32 m3 2 s ,
4 R2
N3 m3 g cos
и дифференциальное уравнение движения системы
2
r
mnp s F t c 2 s 2 s.
R2
2 R2
(19)
Уравнение (19) полностью совпадает с дифференциальным уравнением
(11), что подтверждает правильность решения данной задачи.
187
3. Определение закона движения системы
Дифференциальное уравнение (11)
s 2 n s k 2 s h0 sin pt
относится к классу линейных неоднородных дифференциальных уравнений второго порядка с постоянными коэффициентами. Общее решение неоднородного
дифференциального уравнения (11) складывается из общего решения s однородного уравнения
s 2 n s k 2 s 0.
(20)
соответствующего данному неоднородному уравнению, и частного решения s* ,
зависящего от правой части уравнения (11), т.е.
s s s
(21)
Решение однородного уравнения (20) ищем в виде функции
s A e t ,
(22)
где A и – неопределенные постоянные величины.
Подставляя (22) в (20), получим:
2
2 n k 2 A e t 0
Так как мы ищем нетривиальное решение, то Ae t 0 . Следовательно,
должно выполняться условие
2 2 n k2 0
Данное уравнение (характеристическое уравнение) имеет два корня:
1,2 n n2 k 2 .
Вид общего решения уравнения (20) зависит от типа корней его характеристического уравнения. Возможны следующие случаи:
1) n k – корни характеристического уравнения комплексные сопряженные.
Общее решение однородного уравнения имеет вид
188
s e nt A1 cos k 1t A 2 sin k 1t ,
где k 1
(23)
k 2 n2 , а A1, A 2 – постоянные интегрирования.
2) n k – корни характеристического уравнения действительные и различные.
Общее решение однородного уравнения имеет вид
s e nt A1ek2t A 2ek2t . k 2
n2 k 2
3) n k – корни характеристического уравнения кратные.
Общее решение однородного уравнения имеет вид
s e nt A1 A 2t .
В рассматриваемом случае n 0,512 рад , k 7,589 рад . Поскольку
с
с
n k , то общее решение однородного уравнения (20) имеет вид.
s ent A1 sin(k1t ) A2 cos(k 1t ) или s A0 ent sin k1 t 0 .
(24)
Здесь k1 k 2 n2 7.57 с1 , а коэффициенты A0 , A1, A2 , 0 связаны между собой соотношениями
A1 A0 cos 0 ,
A2 A0 sin 0 .
Определим частное решение неоднородного дифференциального уравнения (11). Данное решение ищем в виде правой части
s* B1 sin pt B2 cos pt или s* B0 sin pt 0 ,
(25)
где коэффициенты B 0 , B1, B 2 , 0 связаны между собой соотношениями
B0 B12 B22 , 0 arctg B2 B1 .
Подставляя (25) в уравнение (11), найдем выражения для коэффициентов
B1, B2 , а также B0 , 0 :
B1 h0
k
k 2 p2
2
p
2 2
4n p
2 2
0.084 м, B2 h0
k
2n p
2
p
2 2
4n p
0.002 м,
2 2
189
B0 h0
k
1
2
p
2 2
2np
0.084 м, 0 arctg 2
0.029 рад.
2
2 2
k
p
4n p
Общее решение неоднородного уравнения (11) запишем в виде
s A0 ent sin k1t 0 B1 sin pt B2 cos pt .
(26)
Константы A0 и 0 определяются из начальных условий (12)
A0
s0 B2 2
1
2
s n s0 n B2 B1 p 0.034 м
2 0
k1
k1 s0 B2
0 arctg
1.866 рад.
s0 n s0 n B2 p B1
(27)
Подставляя (27) в (26), получаем закон движения механизма, выраженный
через перемещение груза
s(t ) 0.034 e0.512 t sin 7.57 t 1.866 0.084 sin 0.5 t 0.029 , м.
Из последней формулы следует, что движение системы представляет собой
наложение двух движений:
1) собственного движения (первое слагаемое справа), которое представляет собой затухающие колебания частоты k 1 7.57 рад , так как множитель
с
e 0.512 t 0 при t ;
2) вынужденных колебаний постоянной амплитуды B 0 0,084 м (второе слагаемое справа), происходящих с частотой возмущающей силы p 0.5 рад ,
с
причем фаза вынужденных колебаний отстает от фазы возмущающей силы на
величину 0 0,029 .
Поскольку по истечении некоторого промежутка времени собственное
движение затухает, то определяющим движением системы являются вынужденные колебания.
190
4. Результаты расчетов
Ниже приведен пример документа Mathcad, в котором реализована процедура вычисления закона движения груза, его скорости и ускорения, а также динамических реакций внешних и внутренних связей.
Расчет механической системы с упругой связью
1. Ввод исходных данных
c 2000
0.2
F0 10
fсц 0.3
g 9.81
ПР 0.1
s0 0.03
v0 0.04
m3 3
r3 0.2
m2 2
r2 0.15
p
3
R2 0.3
2
6
i2 0.2
m1 1
2. Вычисление постоянных величин
2
r2
mnp m1 m2
m3
2
8
R2
R2
i2
k
1 r2
c
2 R2
B0
A0
3
n
mnp
2
k1
2
2 R2 mnp
F0
1
k
mnp
2
p
2
2
( 2 n p)
s0 B0 sin 0 2
2
2
k n
2
2
0 atan2 k p 2 n p
2
1
2
k1
v0 B0 cos 0 p n s0 B0 sin 0
2
0 atan2v0 B0 cos 0 p n s0 B0 sin 0 k1 s0 B0 sin 0
3. Определение функций
Кинематические соотношения
Закон движения груза 1
n t
s ( t) A0 e
s t
sin k1 t 0 B0 sin p t 0
Скорость груза 1
v t
191
n t
v(t) A0 e
k1 cos k1 t 0 n sin k1 t 0 B0 p cos p t 0
a t
Ускорение груза 1
a ( t)
F0
mnp
2
sin( p t) 2 n v( t) k s ( t)
Реакции связей
T12 t
Сила натяжения нити
T12(t) m1 g sin F0 sin(p t) m1 a(t)
Сила сцепления
Fсц ( t) T23( t) m3
Сила натяжения нити
T23( t) T12( t)
R2
r2
T23 t
2
R2 r2
v( t) m2
i2
R2 r2
FСЦ t
и величина ее предельного значения
a ( t)
F'сц fсц m3 g cos
r2
4 R2
Реакции опоры блока 2
X 2 t , Y2 t
X2(t) T23(t) cos T12(t) cos
Y2(t) m2 g T23(t) sin T12(t) sin
4. Результаты расчета
mnp 2.17
k 7.589
CT 0.01
z 0.207
n 0.512
k1 7.572
A0 0.034
0 1.866
B0 0.084
0 0.029
F'сц 7.646
Графики движения груза 1 s s t и центра масс катка 3 s3 s3 t
ПР
0.1
s ( t)
S 3 ( t)
0
ПР
0.1
0
2
4
6
t
192
a ( t)
8
10
12
Графики сил натяжения нитей T12 T12 t , T23 T23 t .
60
40
T 12( t)
T 23( t)
20
0
20
0
2
4
6
8
10
t
Графики силы сцепления Fсц Fсц t
60
40
Fсц ( t) 20
F' сц
0
F' сц
20
0
2
4
6
8
10
12
10
12
t
Графики реакций опор блока 2 X 2 X 2 t , Y2 Y2 t .
60
40
X2 ( t)
Y2 ( t)
20
0
20
0
2
4
6
8
t
193
5. Анализ результатов вычислений
Математическая модель, описывающая поведение исследуемой механической системы, построена при следующих основных допущениях:
каток 3 движется без проскальзывания, т.е. модуль силы сцепления Fсц подчинен следующему ограничению
fсц N3 ,
Fсц Fсц
fсц N3 fсц m3 g cos – предельное значение силы сцепления; в
где Fсц
7.65 H ;
нашем случае Fсц
кинематические связи, наложенные систему, являются голономными (интегрируемыми), поэтому нити при движении системы всегда натянуты, т. е.
T12 0 , T23 0 ;
колебания системы являются линейными, т.е. предполагается, что удлинение
пружины (перемещение центра масс катка 3) не превышает своего предельного значения
s3 пр .
Анализ результатов расчета (в свете перечисленных требований к поведению механической системы) приводит к логическому выводу:
так как в некоторые моменты времени силы натяжения (реакции) нитей T12 , T23 становятся отрицательными, а сила сцепления Fсц превышает свое предельное значение Fсц , то математическая модель системы не соответствует ее реальному
поведению, – нити провисают, тела движутся рывками, а каток
– с проскальзыванием.
Данное заключение позволяет сформулировать задачу исследования:
обеспечить соответствие математической модели реальному
поведению системы.
194
Иными словами, необходимо удовлетворить следующим условиям:
10) нити должны быть натянутыми при движении системы;
11) величина силы сцепления должна обеспечивать движение катка без проскальзывания;
12) перемещение центра масс катка не должно превышать величины предельного значения удлинения пружины.
Данные условия представим в математическом виде
min T12 0,
min T23 0,
max Fсц
min Fсц fсц N3 ,
min s3 пр ,
fсц N3 , max s3 пр .
(28)
Для определения значений внутренних параметров механической системы
– масс тел m 1 , m2 , m3 и коэффициента жесткости пружины c , – обеспечивающих ее функционирование в соответствие с предложенной математической моделью, выберем в качестве анализируемых величин
реакции нитей сил натяжения канатов T12 , T23 ,
силу сцепления катка с опорной плоскостью Fсц ,
перемещение центра масс катка s3 .
Исследуем изменение этих функций, в зависимости от масс тел входящих
в механическую систему, а также жесткости упругого элемента, т.е.
T12 T12 m1, m2 , m3 , c, t , Fсц Fсц m1, m2 , m3 , c, t ,
T23 T23 m1, m2 , m3 , c, t ,
s3 s3 m1, m2 , m3 , c, t .
Ограничимся состоянием установившегося движения. В этом случае закон
движения груза, его скорость и ускорение имеют вид
s yст t B0 sin pt 0 B1 sin pt B2 cos pt ,
v yст t B1 p cos pt B2 p sin pt ,
a yст t B1 p 2 sin pt B2 p 2 cos pt .
195
Функции T12 , T23 , Fсц представим в виде
T12 m1 g sin C sin pt ,
T23 m1 g sin
R2
D sin pt ,
r2
Fсц m1 g sin
R2
E sin pt
r2
(29)
где коэффициенты, входящие в эти выражения, равны:
C1 F0 m1 p 2 B1,
C2 m1 p 2 B2 ,
C2
,
C
1
arctg
C C12 C22 ,
R2
p B2
i22
R2
p B1
i22
2
D1 C1
m2
p B1, D2 C1
m2
p 2 B2 ,
r2
R2 r2
R2 r2
r2
R2 r2
R2 r2
D2
,
D1
arctg
D D12 D22 ,
E1 D1 m3
r2 2
p B1,
4 R2
E2 D2 m3
r2 2
p B2 ,
4 R2
E2
.
E
1
arctg
E E12 E22 ,
В качестве примера получим первую формулу – выражение для силы T12 :
T12 m1 g sin F0 sin pt m1a yст t
m1 g sin F0 sin pt m1 p 2 B1 sin pt B2 cos pt
m1 g sin F0 m1 p 2 B1 sin pt m1 p 2 B2 cos pt
m1 g sin C1 sin pt C2 cos pt
m1 g sin C sin pt .
Остальные формулы в соотношениях (29) определяются аналогично.
Условия (28), обеспечивающие адекватность движения системы математической модели (11), (12) можно теперь представить в виде
196
min T12 m1 g sin C 0, min T23 m1 g sin
R2
D 0,
r2
Fmax f сц m3 g cos m1 g sin
R2
E 0,
r2
Fmin f сц m3 g cos m1 g sin
R2
1 r
E 0, S пр 2 B0 0.
r2
2 R2
(30)
где Fmax fсц N3 max Fсц , Fmin fсц N3 min Fсц
Заметим, что оценка, определяемая неравенствами (30), является нижней
оценкой для механической системы, так как в условиях неустановившегося режима движения возможны ситуации, когда
max Fсц max Fсц
min Tij min Tij уст ,
уст
, max s max s .
min Tij min Tij уст ,
3
3 уст
Так как все коэффициенты, входящие в соотношения (30) являются функциями внутренних параметров механической системы m1, m2 , m3 и с , то вычисление зависимостей
min T12 m1, m2 , m3 , c , min T23 m1, m2 , m3 , c ,
Fmin m1, m2 , m3 , с ,
Fmax m1, m2 , m3 , с
представим в виде процедуры S M1, M 2 , M 3 , C пакета Mathcad, приведенной на
рис. 4. Выражение для функции S m1, m2 , m3 , c , в силу несложности ее преобразования, получим позже.
В дальнейшем, ограничимся исследованием влияния масс m1 и m3 . Установим интервалы их изменения. Для э0того рассмотрим механическую систему
в состоянии резонанса. Если z p k 1 , то 4R22 p 2mпр r22c , и зависимость
m1 рез m1 рез m3 имеет вид
m1 рез
1 r22 c
i22 3
r22
m2 2 m3 2 ,
4 R22 p 2
8 R2
R2
197
откуда следует: 1) если m 3 0 , то m1 рез 49,49 кг ; 2) если m1 рез 0 , то
m3 530.9 кг . Поэтому ограничимся исследованием механической системы
внутри интервала
0 m1 60 100 кг,
0 m3 600 700 кг.
S M1 M2 M3 C
2
r2
3
mpr M1 M2
M3
2
8
R2
R2
i2
n
1 r2
2 R22 mpr 2 R2
k k1
2
C
mpr
2
2
k n
2
2
F0
F0
k p
2np
B1 B2 m
2
2
mpr 2
pr 2 2
2
k p2 (2 n p)2
k p
( 2 n p)
C1
C2 F0 M1 p B1 M1 p B2
2
2
2
R2
B2 p
i2
2
C
M2
B1 p
1
R2 r2
R2 r2
D1 r2
2
D2 R2
B1 p
i2
2
C
M
B
p
2
2
2 r
R2 r2
R2 r2
2
r
r
E1 E2 D1 M3 4 R2 B1 p2 D2 M3 4 R2 B2 p2
2
2
2
2
2
2
2
2
( C D E ) C1 C2
D1 D2
E1 E2
M1 g sin C
R2
M
g
sin
D
1
r2
R2
f
M
g
cos
M
g
sin
E
сц
3
1
r2
R2
f
M
g
cos
M
g
sin
E
сц
3
1
r2
Рис. 4. Процедура вычисления функций, входящих в условия (30)
198
Рассмотрим теперь последнее неравенство в условиях (30) – S 0 . Учитывая выражение для амплитуды B0 представим его в виде
2 2 2
mпр
sПР k p 2
где S ПР 2
2
4 n2 p 2 F02 ,
R2
пр – предельное значение перемещения груза 1.
r2
Подставляя вместо коэффициентов k и n их выражения, найдем, из уравнения S 0 , предельные значения массы груза 1
m1ПР m3 m1РЕЗ m3 m.
2
p sПР
F0
1
где m
2
.
sПР p 2
F
R
0 2
Рассматривая вновь неравенство S 0 , заключаем, что оно выполняется
в двух случаях:
13) при z 1, если m1 m3 m1РЕЗ m3 m;
14) при z 1, если m1 m3 m1РЕЗ m3 m.
Тем самым из области допустимых значений внутренних параметров механической системы исключается околорезонансная зона, ширина которой равна
2 m , не зависящая от параметров m1, m2 , m3 и с .
Исследуем теперь зависимости min T12 , min T23 , Fmin и Fmax . Для
этого изобразим их на плоскости m1, m3 линиями уровня fi m1, m3 ci (рис. 5
– рис. 8) и будем искать те из них, для которых выполняются условия
fi m1, m3 0 , т. е.:
min T12 m1, m3 0,
min T12 m1, m3 0,
Fmax m1, m3 0,
Fmin m1, m3 0.
199
Из графиков на рис. 5 – рис. 8 видно, что неравенства (30) выполняются
при следующих значениях массы груза 1:
m1 m1min m3 ;
m1 m1min m3 ;
m1 m1max m3 ,
где величины m1min m3 , m1min m3 и m1max m3 определяются из уравнений
min T12 m1min m3 , m3 0
m
рис. 5 ;
min T23
m , m 0
рис. 6 ;
Fmax m1max m3 , m3 0
рис. 7 .
1min
3
3
(31)
Из рис. 8 следует, что условие Fmin m1, m3 0 выполняется всегда для
рассматриваемых интервалов изменения масс m1, m3 .
Зависимости m1min m3 , m1min m3 и m1max m3 являются нелинейными. Более того, вблизи резонансных состояний z 1 два последних уравнения системы (31) имеют по три действительных корня (рис. 9).
Приведем фрагмент документа Mathcad, в котором проводится реализация
описанного выше анализа.
... ... ... ...
Формирование функций (30), в зависимости от параметров m1 и m3
S12 M1 M3 S M1 m2 M3 c 0
S23 M1 M3 S M1 m2 M3 c 1
max M1 M3 S M1 m2 M3 c 2
min M1 M3 S M1 m2 M3 c 3
Формирование двумерных матриц для построения графиков функций
min T12 m1, m3 , min T23 m1, m3 , Fmax m1, m3 и Fmin m1, m3
minT12 CreateMesh S12 0 60 0 550 120 1100
minT23 CreateMesh S23 0 60 0 550 120 1100
Fmax CreateM esh max 0 100 0 550 150 1100
200
Fmin CreateM esh min 0 100 0 550 150 550
min T12 m1, m3 0
minT12
min T12 m1, m3 0
Рис. 5. График функции min T12 m1, m3
min T23 m1, m3 0
minT23
min T23 m1, m3 0
Рис. 6. График функции min T23 m1, m3
201
Fmax m1, m3 0
F max
Fmax m1, m3 0
Рис. 7. График функции Fmax m1, m3
Fmin m1, m3 0
F min
202
Рис. 8. График функции Fmin m1, m3
T12 0, T23 0, FСЦ FСЦ
minT12 minT23 F max
Рис. 9. Линии уровня вблизи резонансного состояния для значений
а) min T12 m1, m3 0 , б) min T23 m1, m3 0 , в) Fmax m1, m3 0 .
Найдем область допустимых значений масс m1 и m3 , которые обеспечивают выполнение условий (30) и являются решениями уравнений (31).
Ниже представлен фрагмент документа Mathcad, реализующего поставленную задачу.
... ... ... ...
Вычисление массы груза 1 при резонансе как функции массы катка 3
m1РЕЗ m3
1 r2
2
2
r2
M1rez M3
m2
M3
2 8
4 R2 p2
R2
R2
i2
c
3
2
Вычисление предельного значения массы груза 1 в дорезонансной области m1
m3 .
ПР max
m
F0
2
Snp p
1
F0 R22
2
M1np_max M3 M1rez M3 m
Snp p
Вычисление предельного значения массы груза 1 в послерезонансной
области m1
m3 .
ПР min
M1np_min M3 M1rez M3 m
203
Нахождение величины m1
из уравнения min T12 m1
Нахождение величины m1
из уравнения min T23 m1
min
M1min1 M3 root S12 M1 M3 M1 0 3
min
M1min2_1 M3 root S23 M1 M3 M1 0 2.8
M1min2_2 M3 root S23 M1 M3 M1 2.8 M1rez M3 0.26
M1min2_3 M3 root S23 M1 M3 M1 M1rez M3 0.26 50
min
min
m3 , m3 0
m3 , m3 0
из уравнения Fmax m1 m3 , m3 0
max
M 1max_1 M3 root max M1 M3 M1 0 M1rez M3
M 1max_2 M3 root max M1 M3 M1 M1rez M3 32
Нахождение величины m1
max
M 1max_3 M3 root max M1 M3 M1 32 100
60
T12 0, T23 0, FСЦ FСЦ
m1
II
50
m1ПР min
SC3 ПР
m1РЕЗ
40
T12 0, T23 0, FСЦ FСЦ
AII
30
m1ПР max
AI
20
m1max
SC3 ПР
10
CI
0
m1min
I
0
T12 0, T23 0, FСЦ FСЦ
100
200
300
BII
BI
400
500
600
m3
700
Рис. 10. Области допустимых значений для масс m1 и m3 .
Как видно из графика (рис. 10), область допустимых значений масс m1 и m3
разбивается на две подобласти:
Подобласть I – состояние дорезонансного режима z 1 , для которого значения масс ограничены: сверху – линиями m1max m3 , m1РЕЗ m3 m , снизу
204
– линией m1min
m3 ;
Подобласть II – состояние послерезонансного режима z 1 , для которого
значения масс ограничены: сверху – кривой m1max m3 ; снизу – линиями
m1РЕЗ m3 m, m1min
m3 .
Вычислим координаты узловых точек каждой подобласти. При нахождении этих координат можно использовать два способа:
Численный, при котором определяются корни уравнений, связывающих ко
ординаты узловых точек. Например: m1max m3 m1min
m3 m3 ;
С помощью опции "Trace" из контекстного меню свойств 2–D графиков.
Ниже представлен документ Mathcad, в котором реализуется численный
метод.
Нахождение координат узловых точек в подобласти I , z 1
Формирование уравнений для определения искомых координат
M3T12_I_1 root M1max_1 M3 M1min1 M3 M3 10 20
M3T23_I_1 root M1max_1 M3 M1min2_1 M3 M3 10 20
M3пр_I root M1max_1 M3 M1np_max M3 M3 150 200
M3T12_I_2 root M1np_max M3 M1min1 M3 M3 400 450
M3T23_I_2 root M1np_max M3 M1min2_1 M3 M3 400 450
Вычисление координат узловых точек
M3T12_I_1 16.413
M1min1 M3T12_I_1 1.207
M3T23_I_1 16.567
M1min2_1 M3T23_I_1 1.23
M3пр_I 183.231
M1max_1 M3пр_I 22.363
M3T12_I_2 407.619
M3T23_I_2 406.517
M1min1 M3T12_I_2 1.327
M1min2_1 M3T23_I_2 1.43
Нахождение координат узловых точек в подобласти II , z 1
Формирование уравнений для определения искомых координат
M3пр_II root M1max_3 M3 M1np_min M3 M3 265 300
M3T12_II root M1np_min M3 M1min1 M3 M3 600 650
M3T23_II root M1np_min M3 M1min2_1 M3 M3 600 650
Вычисление координат узловых точек
M3пр_II 265.964
M1max_3 M3пр_II 35.068
M3T12_II 628.74
M3T23_II 629.828
M1min1 M3T12_II 1.058
M1min2_3 M3T23_II 0.956
205
6. Результаты анализа
С целью подтверждения проведенных исследований произведем расчет
механической системы в дорезонансном и послерезонансном режимах.
Расчет механической системы с упругой связью для z < 1.
1. Ввод исходных данных
m3 50
... ... ...
m1 5
4. Результаты расчета
mnp 10.576
k 3.438
CT 0.038
z 0.457
n 0.105
k1 3.436
A0 0.047
0 2.355
B0 0.101
0 0.035
F'сц 127.436
Графики движения груза 1 s s t и центра масс катка 3 s3 s3 t
ПР
0.1
s ( t)
S 3 ( t)
0
ПР
0.1
0
2
4
6
8
10
12
t
График сил натяжения канатов T12 T12 t , T23 T23 t .
120
100
T 12( t) 80
T 23( t)
60
40
20
0
2
4
6
t
206
8
10
График силы сцепления Fсц Fсц t
150
F' сц
Fсц ( t) 100
50
0
2
4
6
8
10
t
Расчет механической системы с упругой связью для z > 1.
1. Ввод исходных данных
m3 550
m1 50
... ... ...
4. Результаты расчета
mnp 102.451
k 1.105
CT 0.499
z 1.422
n 0.011
k1 1.105
A0 0.151
0 0.214
B0 0.078
0 3.114
F'сц 1401.792
Графики движения груза 1 s s t и центра масс катка 3 s3 s3 t
0.2
s ( t)
S 3 ( t)
ПР
0.1
0
ПР
0.1
0.2
0
5
10
15
20
25
t
207
График сил натяжения канатов T12 T12 t , T23 T23 t .
1000
T 12( t)
800
T 23( t)
600
400
0
5
10
15
20
25
15
20
25
t
График силы сцепления Fсц Fсц t
900
880
860
Fсц ( t)
840
820
800
0
5
10
t
208
Выводы
В результате решения дифференциального уравнения движения системы
(11) при начальных условиях (12) пределен закон движения системы s s(t ) , на
основании которого по разработанному алгоритму вычислены значения реакций
связей.
Анализ результатов расчета показал, что в некоторые моменты времени
натяжения нитей становятся отрицательными, а сила сцепления превышает свое
предельное значение, и, следовательно, принятая математическая модель не соответствует поведению механической системы: нити провисают, тела движутся
рывками, а каток 3 – с проскальзыванием.
Для устранения этой ситуации были сформулированы критерии, удовлетворение которых обеспечивает адекватность движения системы математической модели, т.е. выполнение условий
fсц N3 , s3 пр .
T12 0 , T23 0 , Fсц Fсц
Исследование влияния масс груза 1 и катка 3 на движение системы позволило определить область допустимых значений m1 и m3 , внутри которой выполняются указанные условия. Эта область разбивается на две подобласти:
подобласть I – состояние дорезонансного режима z 1 , для которого значения масс ограничены следующими соотношениями
16,57 кг m3 407,62 кг,
m
при 16,57 кг m3 183,23 кг,
m
m1MAX m3 1max 3
m1РЕЗ m3 m при 183,23 кг m3 406,52 кг,
m1MIN m3 m1min
m3 .
209
подобласть II – состояние послерезонансного режима z 1 , для которого
для которого значения масс ограничены следующими соотношениями
265,96 кг m3 ,
m1MAX m3 m1max m3 ,
m1РЕЗ m3 m при 265,96 кг m3 628,74 кг,
m1MIN m3
при 628,74 кг m3 .
m1min m3
Результаты расчетов скорректированной механической системы представлены в виде графиков изменения характерных параметров в зависимости от времени.
210
АЛЬБОМ ЗАДАНИЙ И ИСХОДНЫЕ ДАННЫЕ ДЛЯ РАСЧЕТА
1
2
MC
4
c
4
3
c
3
2
2
1
1
F t
F t
4
3
MC
4
c
4
3
3
2
c
1
1
F t
5
2
F t
6
MC
MC
4
c
4
3
3
c
2
2
1
1
F t
F t
211
8
7
4
c
c
MC
4
3
3
2
2
1
1
F t
9
F t
10
MC
MC
4
c
4
3
c
3
2
2
1
1
F t
F t
12
11
MC
MC
4
c
4
3
3
c
212
2
1
2
F t
1
F t
13
14
MC
4
MC
c
4
3
c
3
2
2
1
1
F t
F t
16
15
MC
MC
4
4
c
c
3
3
2
1
2
F t
17
1
F t
18
c
c
4
4
3
3
2
2
1
1
F t
F t
213
20
19
c
c
4
3
3
4
2
2
1
1
F t
F t
22
21
MC
4
c
c
4
3
3
2
2
1
1
F t
23
F t
24
MC
c
4
3
2
1
214
3
c
4
2
1
F t
F t
26
25
MC
4
c
4
c
3
3
2
2
1
1
F t
27
F t
28
MC
4
c
4
c
3
3
2
2
1
1
F t
F t
29
30
MC
4
4
3
3
c
c
2
2
1
1
F t
F t
215
Вариант
0
1
2
3
4
5
6
7
8
9
m1
m2
m
2m
m
3m
4m
2m
3m
4m
2m
m
3m
m
2m
4m
2m
m
4m
2m
m
4m
m3
2m
3m
4m
m
m
3m
2m
5m
4m
2m
m4
, кг/с
, Н м с
с, Н/м
f сц
5m
4m
5m
2m
3m
4m
m
m
5m
3m
0.5
1.0
1.5 0.75 1.25
1.0 0.75 1.25
0.5
1.5
1
0.5 0.75 1.25
1.5
2
0.5 0.75
1 1.25
1500 2000 3000 3500 4000 2500 2500 2000 3500 4000
0.20
0.25
0.30
0.15
0.10
0.25
0.30
0.20
0.15
0.10
F0 , Н
50
20
30
40
60
50
40
30
20
50
р, с-1
2
5
2
2
3
2
3
3
x0 , м
0.1
0.05
0.03
0
0.02
0.06
0.07
0
0.08
0.09
0.03
0
0.06
0.05
0.07
0
0.05
0.10
0.02
0
30
45
60
45
60
30
45
60
30
45
r
1.5 r
2r
1.5 r
r
2r
r
2r
1.5 r
r
1.5r
3r
3r
2r
2r
3r
1.5r
3r
3r
2r
i2
r*
R*
r**
R**
2r
R*
r*
2r
r**
R**
r3
2r
r
1.5 r
r
2 r 1.5 r
1.5 r
r
2r
2r
R3
3r
2r
2r
1.5 r
3r
2r
3r
2r
4r
3r
i3
r*
2r
R*
r**
R**
2r
r*
r
r**
3r
r4
r
1.5 r 1.5 r
r
1.5 r 1.5 r
r
1.5 r
2r
r
2r
2r
3r
2r
2r
r*
r
R*
2 r R**
2r
Во всех вариантах задания принять: m = 1 кг, r = 0.10 м.
r**
2.5 r
R*
x0 , м/с
o
r2
R2
R4
2r
3r
2r
3r
2r
3r
i4
3
2
На груз 1 действует возмущающая сила F(t) = F0sin(pt).
На блок действует момент M C k или сила сопротивления R vk .
Для тел цилиндрической формы введены следующие обозначения:
r*, R* – сплошной однородный цилиндр радиуса "rk" или "Rk" соответственно,
r**, R** – масса цилиндра распределена по ободу радиуса "rk" или "Rk".
При отсутствии у тел цилиндрической формы одного из радиусов в качестве поперечного размера следует использовать обозначение "Rk".
216
Д 2. ИССЛЕДОВАНИЕ ДВИЖЕНИЯ МЕХАНИЗМА
С КУЛИСНЫМ ПРИВОДОМ
Развитие современной техники ставит перед инженерами самые разнообразные задачи, связанные с проектированием, производством и эксплуатацией
всевозможных машин и механизмов.
Исследования поведения любой механической системы всегда начинается
с выбора физической модели. Переходя от реальной системы к ее физической
схеме, обычно упрощают систему, пренебрегая несущественными для данной задачи факторами. Одним из важных факторов, влияющих на поведение системы,
являются конструктивные особенности механизма. Актуальной становится такая
задача исследования механической системы, при которой оценивается влияние
ее конструктивных элементов на динамические характеристики механизма.
Цель курсовой работы
Исследование и анализ динамического поведения механизма с кулисным
приводом с помощью основных теорем и принципов теоретической механики.
Содержание курсовой работы
Объектом исследования является механизм с кулисным приводом, который приводится в движение электродвигателем, развивающим момент, приложенный к маховику
M Д M 0 0
где M 0 , 0 – постоянные величины.
Полезная нагрузка моделируется для разных вариантов либо силой FH ,
либо моментом M H
FH v3 , M H 1 3
где 1, – постоянные величины.
Схемы механизмов и исходные данные для расчета приведены в альбоме заданий.
217
При составлении математической модели принимаются следующие допущения:
o Элементы конструкций механизма считаются абсолютно твердыми.
o Проскальзывание между телами отсутствует. Каток движется без скольжения.
o Трение в подшипниках не учитывается; ползуны скользят по направляющим
без трения; трение между пальцем A маховика 1 и прорезью кулисы отсутствует. Сопротивление качению не учитывается.
Требуется:
1. Составить дифференциальное уравнение движения механизма.
2. Составить уравнения для определения динамических реакций внешних и внутренних связей.
3. Проинтегрировать при нулевых начальных условиях
t 0
0,
t 0
0 диф-
ференциальное уравнение движения маховика на ЭВМ на отрезке времени [0, ].
Величину рекомендуется принимать из промежутка 0,5 10,0 с.
4. Построить графики функций (t ), z z (t ), z z (t ) и определяемых динамических реакций. Определить предельную угловую скорость маховика.
5. Проанализировать полученные результаты.
Порядок выполнения работы
1. Составить дифференциальное уравнение движения механизма одним из следующих способов (по указанию преподавателя):
o с помощью теоремы об изменении кинетической энергии в дифференциальной форме;
o методом общего уравнения динамики;
o с помощью уравнений Лагранжа второго рода [1, §§ 19.2, 19.3].
2. Определить динамические реакции внешних и внутренних связей. Для их
определения следует использовать (по указанию преподавателя):
o теоремы об изменении количества движения и кинетического момента в дифференциальных формах;
218
o дифференциальные уравнения движения твердого тела;
o метод кинетостатики (принцип Даламбера).
3. Численное интегрирование дифференциального уравнения движения при заданных начальных условиях рекомендуется провести в одной из математических
сред (например, Mathcad). Там же провести определение указанных динамических реакций и построение графиков.
4. Провести анализ результатов расчета движения механизма. Проверить соответствие расчетов принятым, при построении математической модели, предположениям. Исследовать влияние конструктивных элементов на динамические
характеристики механизма. Определить область допустимых значений указанных параметров, обеспечивающих адекватность поведения системы ее математической модели.
ПРИМЕР ВЫПОЛНЕНИЯ ЗАДАНИЯ
Схема механизма с кривошипно-кулисным приводом приведена на рис.1.
Со стороны электромотора к маховику 1 приложен вращающий момент
M Д M 0 0 . Маховик 1, связан с кулисой 2, имеющей вертикальные направ-
ляющие. Кулиса соединена с катком 3 невесомым стержнем 4. Полезная нагрузка
моделируется моментом M H 1 3 , приложенным к катку. Механизм расположен в вертикальной плоскости. Каток 3 – сплошной однородный цилиндр движется без отрыва от вертикальной плоскости. Проскальзывание при качении тела
3, отсутствует. Сопротивлением движению пренебречь.
Требуется
1. Составить дифференциальное уравнение движения механизма методом уравнений Лагранжа второго рода.
2. Определить динамические реакции внешних и внутренних связей.
3. Провести численное интегрирование дифференциального уравнения движения при заданных начальных условиях с помощью пакета Mathcad.
4. Провести анализ результатов вычислений.
219
h
MH
D
2
C3
4
3
C2
B
l
A
O
MД
1
Исходные данные
I1 1.5 кг м2
OA r1 0.06 м
m1 50 кг
m2 12 кг
OB 0.25 м
BD 0.6 м
l 0.5 м
R3 0.10 м
сплошной цилиндр
m3 18 кг
M 0 40 Н м
0 1.0 Н мc
1 6 Н мc
45
t 0
0
t 0
0
fСЦ 0.3
Рис. 1. Схема механизма и исходные данные
220
h 0.5 м
1. Составление дифференциального уравнения движения
механизма
Рассматриваемая механическая система при принятых допущениях имеет
одну степень свободы. Примем за обобщенную координату угол поворота маховика (рис. 2). За положительное направление отсчета обобщенной координаты
примем направление, противоположное движению часовой стрелки. Угол поворота катка 3 будем отсчитывать так же.
y
vC3
D
C3
P3 мцс
3
v2 vC2
C2
B
O
vA
yC2
A
x
Рис. 2. Расчетная схема механизма (кинематическая)
Запишем уравнение Лагранжа второго рода
d T T
Q
d t
(1)
где T – кинетическая энергия механизма, – обобщенная координата, – обобщенная скорость, Q – обобщенная сила, соответствующая обобщенной координате .
Для вычисления кинетической энергии механизма составим кинематическую расчетную схему (рис. 2). Выберем правую систему координат xOy , начало
221
которой расположим в подшипнике O маховика 1 и рассмотрим механизм в произвольный момент времени. Изобразим для этого положения скорости тел входящих в систему (рис. 2):
o Маховик 1 совершает вращательное движение вокруг оси, проходящей через
точку O перпендикулярно плоскости чертежа, с угловой скоростью ;
o Кулиса 2 и стержень 4 совершают поступательные движения в плоскости чертежа, имея при этом скорость vC2 ;
o Каток 3 совершает плоское движение, двигаясь по вертикальной плоскости
без проскальзывания со скоростью центра масс vC3 и угловой скоростью 3 .
Вычислим кинетическую энергию механизма как сумму кинетических
энергий тел, входящих в ее состав
T T1 T2 T3 .
Кинетическая энергия маховика, вращающегося вокруг неподвижной оси
1
T1 I1 12 .
2
Кинетическая энергия поступательно движущейся кулисы 2
1
T2 m2 vC2 2 .
2
Кинетическая энергия катка 3, совершающего плоское движение
1
1
T3 I3 32 m3 vC23 ,
2
2
где I3 12 m3 R32 – момент инерции сплошного однородного катка относительно
оси, проходящей через его центр масс.
Таким образом, кинетическая энергия механизма
1
1
1
1
T I1 12 m2 vC2 2 I3 32 m3 vC23 .
2
2
2
2
(2)
Выразим линейные и угловые скорости vC2 , vC3 , 3 через обобщенную координату и обобщенную скорость .
222
Координаты центра масс кулисы (рис. 2)
xC2 0;
yC2 r1 sin l ,
(3)
откуда
vC2 x xC2 0; vC2 y yC2 r1 cos и vC2 r1 cos .
(4)
Стержень, соединяющий кулису и каток, совершает поступательное движение, поэтому
vC3 vC2
(5)
Точка P3 является мгновенным центром скоростей катка. Поэтому
3
vC3 y
C3 P3
vC3
R3
r1
cos
R3
(6)
Подставив формулы (4) – (6) в выражение (2), получим
1
T I пр 2
2
(7)
Здесь I пр – так называемый приведенный момент инерции механизма, вычисляемый по формуле
I пр I1 m0 r12 cos2 ,
где m0 m2 m3
(8)
I3
3
m2 m3.
2
2
R3
Как видно из выражения (8), приведенный момент инерции является функцией обобщенной координаты .
Вычислим производные от кинетической энергии, входящие в уравнение
Лагранжа (1):
T 1 d I np 2
;
2 d
Однако производную
T
I np ;
d I np
dt
d I np
d T
.
I np
d t
dt
можно вычислить так
d I np
dt
d I np
d
(9)
, где
223
d I np
d
m0 r12 sin 2
(10)
Таким образом, левая часть уравнения (1) с учетом формул (9) и (10) может
быть записана в виде
d T T
1 d I np 2
I
.
np
d t
2 d
(11)
Для вычисления обобщенной силы Q , соответствующей обобщенной координате , составим расчетную схему и изобразим силы, действующие в данный
момент
времени
Gk mk g, k 1, 3 ; M
H
(рис.
3):
G1, G2 , G3
–
силы
тяжести
звеньев
– полезная нагрузка; M Д – момент, передаваемый элек-
тродвигателем. Остальные связи, наложенные на систему, являются идеальными. Поэтому их реакции на расчетной схеме не изображаем.
s3 yC3
P3 мцс
3
MH
y
D
C3
s2 yC2
G3
C2 G
2
yC2
B
MД
O
G1
A
x
Рис. 3. Расчетная схема механизма (силовая)
Сообщим маховику возможное перемещение в направлении возрастания обобщенной координаты. Возможные перемещения точек кулисы будут
224
равны возможному перемещению его центра масс s2 yC2 . Возможным перемещением катка является поворот на угол 3 вокруг мгновенного центра
скоростей, при этом центр масс катка имеет перемещение yC3 s2 , т. е. возможные перемещения центров масс кулисы и катка равны.
Вычислим сумму элементарных работ задаваемых сил на возможных перемещениях точек их приложения:
A M Д G2 yC2 G3 yC3 M H 3.
Представим задаваемые силы и возможные перемещения в векторной
форме
M Д M Д k , MH MH k ,
Gn mn g j ,
k , 3 3 k , yCn yCn j , n 2, 3.
Выражая, с учетом последних соотношений, скалярные произведения в выражении суммы элементарных работ, получим
A M Д m2 g yC2 m3 g yC3 M H 3.
(12)
Выразим величины yC2 , yC3 и 3 через вариацию обобщенной координаты. Имеем
yC2 yC3 r1 cos , 3
yC3
R3
r1
cos .
R3
(13)
Подставим (13) в формулу(12). Тогда
A M Д m2 m3 g r1 cos M H
r1
cos .
R3
Коэффициент при вариации в правой части последней формулы есть,
по определению, обобщенная сила
Q
A
r
M Д m2 m3 g r1 cos M H 1 cos
R3
(14)
Перепишем последнее равенство с учетом выражений для M Д и M H , а
225
также формулы (6):
r12
Q M 0 m2 m3 g r1 cos 0 1 2 cos2 .
R3
(15)
Заметим, что обобщенная сила является функцией обобщенной координаты и обобщенной скорости, т. е. Q Q , .
Теперь можно записать дифференциальное уравнение движения машины,
приравнивая согласно (1) правую часть соотношения (11) обобщенной силе:
I np
1 d I np 2
Q , .
2 d
(16)
Данное уравнение представляет математическую модель машины.
2. Определение реакций внешних и внутренних связей
После интегрирования дифференциального уравнения (16) закон движения
механизма будет известен. Располагая линейными и угловыми ускорениями тел,
составляющих механизм, можно определить реакции внешних и внутренних связей. Для определения искомых реакций расчленим систему на составные части и
составим расчетные схемы для каждого тела (рис. 4).
Запишем также кинематические соотношения, связывающие угловые и линейные ускорения тел, входящих в механизм
yC
yC2 yC3 r1 cos 2 sin , 3 3 .
R3
(17)
Эти соотношения получены дифференцированием по времени кинематических соотношений (3) – (6).
Определение реакций связей катка 3
Для вычисления реакций связей (силы сцепления FСЦ , нормального давления на плоскость N3 и усилия в стержне 4 – S 4 ) действующих на каток 3 запишем дифференциальные уравнения плоского движения твердого тела
226
m3 xC3 Fkxe , m3 yC3 Fkey , I33 M C3 z Fke
k
k
k
Расчетная схема изображена на рис. 4 a). На ней показаны силы, действующие на каток 3: полезная нагрузка, моделируемая моментом M H , сила тяжести
G3 m3 g , реакции опорной плоскости N3 и FСЦ , усилие стержня 4 – S 4 (стер-
жень предполагается сжатым).
3 3
N3
P3
y
D
MH
C3
aC3
S4
FСЦ
S 4
a)
G3
N A
Y1
NB
ND
aC2 yC2
C2 G
2 N
A
B
A
A
MД
O
G1
X1
O
x б)
в)
Рис. 4. Расчетная схема механизма
Дифференциальные уравнения движения катка 3 имеет вид
0 N3 S4 sin ,
m3 yC3 S4 cos FСЦ m3 g ,
I3 3 FСЦ R3 M H .
Решая данную систему уравнений относительно неизвестных реакций
N3 , FСЦ , S4 , получим
FСЦ
m3 yC3 FСЦ m3 g
I3
M
3 H , S4
, N3 S4 sin .
R3
R3
cos
С учетом соотношений (17), искомые величины будут равны
227
FСЦ
S4 S4
I3
M
y H,
2 C3
R3
R3
(18)
I3
1
MH
m
g
m
y
3
3
C ,
cos
R3
R32 3
(19)
I
M
N3 tg m3 g H m3 32 yC3 .
R3
R3
(20)
Следует отметить, что величина силы сцепления не должна превышать
своего предельного значения FСЦ , определяемого выражением FСЦ fСЦ N3 ,
где fСЦ – коэффициент трения сцепления. Т.е. должно выполняться условие
FСЦ FСЦ FСЦ .
В тоже время при определении усилий в стержнях важными являются сжимающие усилия, которые могут привести к потере устойчивости стержня, т. е. к
нарушению его прямолинейности.
При этом должно выполняться условие S Sпр , где Sпр – предельное значение сжимающего усилия, при котором происходит его искривление.
Определение реакций связей кулисы 2
Для нахождения реакций связей, действующих на кулису 2, запишем для
нее теорему о движении центра масс (в проекциях на оси координат Ox, Oy ) и
теорему об изменении кинетического момента (относительно оси C2 z , проходящей через центр масс кулисы) в дифференциальных формах:
d
d
m2 xC Fkxe ,
m2 yC Fkey ,
dt
dt
k
k
d LC2 z
dt
M C2 z Fke .
k
Расчетная схема изображена на рис. 4 б. На ней показаны силы, действующие на кулису 2: сила тяжести G2 m2 g , реакции направляющих кулисы
N B , N D , усилие стержня 4 – S 4 , а также сила давления пальца маховика A на
прорезь кулисы N A .
228
Подставляя выражения сил, действующих на кулису в данные уравнения,
с учетом кинематических соотношений (3) – (6), получим
0 N D S4 sin N B ,
m2 yC2 N A S4 cos m2 g ,
0 N A r1 cos N D C2 D N B C2 B.
Давление в точке A , с учетом соотношений (17) и (19) будет равно
N A m2 yC2 S4 cos m2 g.
(21)
Решая совместно первое и третье уравнения полученной системы, найдем
r1
C D
cos S4 2 sin ,
BD
BD
r
C B
N B N A 1 cos S4 2 sin .
BD
BD
NB N A
(22)
где учтено, что
OD OB BD, ОС2 r1 sin l , C2 B OC2 OB, C2 D OD OC2.
Следует отметить, что величина давления пальца на прорезь кулисы
обычно используется при расчетах на срез. При этом должно выполняться условие N N пр , где N пр – предельное значение нормального давления, обеспечивающее отсутствие среза.
Определение реакций подшипника маховика 1 и проверка составления дифференциального уравнения движения
Для нахождения реакций подшипника маховика и проверки найденного
дифференциального уравнения движения механизма, запишем для маховика 1
(рис. 4 в) теорему о движении центра масс (в проекциях на оси координат Ox, Oy
) и теорему об изменении кинетического момента (относительно оси Oz ) в дифференциальных формах
d
m1 xC1 Fkxe ,
dt
k
d
m1 yC1 Fkye ,
dt
k
d LOz
M Oz Fke .
dt
k
229
Так как кинетический момент маховика равен LOz I1 , а координаты его
центра масс равны нулю xC1 xO 0, yC1 yO 0 , получим
0 X1,
0 Y1 N A m1 g ,
I1 M Д N A r1 cos .
Первые два уравнения данной системы позволяют определить реакции
подшипника маховика
X1 0,
Y1 m1g N A.
(23)
Подставляя выражение (21) в третье уравнение, раскрывая скобки и учитывая соотношения кинематических связей (17), найдем
I 2
I 2
1
2
2
I1 m2 m3 32 r1 cos m2 m3 32 r1 sin 2
2
R3
R3
r
M Д m2 m3 g r1 cos M H 1 cos .
R3
Выражение в квадратных скобках в левой части уравнения (коэффициент
при угловом ускорении маховика ) равно приведенному моменту инерции механизма I пр (8), а коэффициент при квадрате угловой скорости 2 равен
1 d I пр
(10). Соотношение в правой части уравнения равно обобщенной
2 d
силе Q , (14). Таким образом, окончательно получаем дифференциальное
уравнение
I np
1 d I np 2
Q , ,
2 d
которое полностью совпадает с уравнением движения механизма (16).
Следовательно, составление дифференциального уравнения движения механизма произведено верно.
230
3. Результаты расчетов
Дифференциальное уравнение движения механизма (16) является нелинейным. Получить аналитическое решение этого уравнения не представляется возможным. Поэтому воспользуемся процедурой численного интегрирования данного уравнения. Для этого дифференциальное уравнение второго порядка (16)
представим в виде системы двух дифференциальных уравнений первого порядка. Введем новые переменные , . Тогда имеем
,
1 d I np 2
.
Q ,
I np
2 d
1
(24)
Эти соотношения позволяет вычислять угловое ускорение маховика, если
известны его угол поворота и угловая скорость; в частности, можно вычислить
угловое ускорение в начальный момент по заданным начальным значениям угла
поворота и угловой скорости маховика.
Для интегрирования системы уравнений (24) при заданных начальных
условиях используем встроенную в пакет Mathcad процедуру-функцию rkfixed
реализующую метод Рунге-Кутта [1] и имеющую следующий вид:
rkfixed(u, T0, Tk, N, D),
0
где: u
- вектор начальных условий; T0 , Tk – граничные точки интервала,
0
на котором ищется решение дифференциального уравнения. Начальные условия,
заданные в векторе u – это значение решения в точке T0 ; N – число точек (не
считая начальной точки), в которых ищется приближенное решение. При помощи этого аргумента определяется число строк N 1 в матрице, возвращаемой
t , U
функцией rkfixed; D t ,U
– вектор, элементами которого является уг t ,U
ловая скорость и угловое ускорение маховика, определяемых уравнениями (24).
Матрица, получаемая в результате решения, содержит три столбца; первый
231
– для значений времени t , второй – для значений угла поворота t , третий –
для значений угловой скорости t .
Ниже приведен пример документа Mathcad, в котором реализована процедура интегрирования дифференциального уравнения движения маховика и вычисления реакций внешних и внутренних связей.
Динамический расчет механизма с кулисным приводом
1. Ввод исходных данных
g 9.8
M0 40
f 0.3
0 1.
1 6.
r1 0.06
R3 0.1
BD 0.6
OB 0.25
I1 1.5
m1 50
m2 12
m3 18
l 0.5
2. Вычисление постоянных величин
2
I3
m3 R3
OD OB BD
I3
m0 m2 m2
2
R3
2
3. Определение функций
Координата центра масс кулисы
Приведенный момент инерции
I пр
Производная
d I пр
d
OC l r1cos
Inp I1 m0r1 cos
2
2
I'np m0r1 sin 2
2
Момент от двигателя
MD M0 0
Полезная нагрузка
MH 1
r1
R3
cos
Обобщенная сила
2
r1
2
Q M0 m2 m3 gr1cos 0 1
cos
2
R3
Угловое ускорение маховика
1
Q I'np
Inp
4. Процедура интегрирования дифференциальных уравнений
Начальный момент времени
232
T0 0
2
2
4
Конечный момент времени
Tk 10
Число узловых точек
N Tk200
0
NU
0
Задание начальных условий
Формирование системы дифференциальных
уравнений
Применение процедуры функции rkfixed.
Вывод результатов вычислений.
0
z
1
0
5·10-3
0
1.721·10-4
0
0.069
2
0.01
0.137
3
0.015
6.862·10-4
1.539·10-3
4
0.02
0.271
5
0.025
2.727·10-3
4.247·10-3
6
0.03
0.402
7
0.035
6.096·10-3
8.271·10-3
8
0.04
0.011
0.531
9
0.045
0.014
0.595
10
0.05
0.017
0.658
11
0.055
0.02
0.72
12
0.06
0.024
0.782
13
0.065
0.028
0.843
14
0.07
0.032
0.904
15
0.075
0.037
0.964
z rkfixed U T0 Tk N D
0.204
в выделенном столбце:
номера узловых точек 0-N,
в выделенной строке:
0 - время t ,
1 - угол ,
2 - угловая скорость
0.337
0.467
1
z
График движения
1 U0 U1
U1
2
0
1
0
t z
D( t U)
1
2
z
t
200
150
100
50
0
0
2
4
6
8
10
t
Вычисление средней угловой скорости
max 20.389
cp supsmoot ht
max cp 19.336
График изменения угловой скорости t и величины
ср
233
25
20
cp
15
10
5
0
0
2
4
6
8
10
t
21
20
cp
19
18
8
8.5
9
9.5
10
t
cp supsmootht
Вычисление среднего углового ускорения
График углового ускорения
t и величины ср
40
20
cp
0
20
40
0
2
4
6
t
234
8
10
5. Вычисление линейных ускорений тел, входящих в механизм
2
aC3 r1 cos sin
Ускорение центра масс катка 3
6. Вычисление реакций внешних и внутренних связей
Нормальное давление катка 3
max N3 1123.75
MH
I3
aC3
N 3 tan m3 g
m3
2
R3
R3
min N3 732.561
mean N3 180.14
График зависимости нормального давления N 3 катка на вертикальную
плоскость от времени
1500
1000
500
N3
0
500
1000
0
2
4
6
8
10
t
MH
I3
FSC
aC3
R3
R32
Сила сцепления катка 3
График зависимости силы сцепления катка с вертикальной плоскостью
FСЦ от времени
1000
500
FSC
0
500
1000
0
2
4
6
8
10
t
235
Предельное значение силы сцепления
max FSC 711.7
min FSC 709.927
F'SC fN3
max F'SC 337.125
min F'SC 219.768
График зависимости силы сцепления катка с вертикальной плоскостью
и ее предельных значений от времени
1000
500
FSC
F' SC
0
F' SC
500
1000
0
2
4
6
8
10
t
1000
500
FSC
F' SC
0
F' SC
500
1000
8
8.5
9
9.5
10
t
Усилие в стержне 4
MH
I3
1
aC3
S4
m3 g
m3
2
R3
cos
R3
График зависимости усилия в стержне 4 от времени
2000
1000
S4
0
1000
2000
0
2
4
6
t
236
8
10
Давление пальца маховика
на прорезь кулисы
MH
I3
aC3
N A m2 m3 g
m2 m3
2
R3
R3
max NA 1477.811
min NA 816.348
График зависимости давления пальца маховика на прорезь кулисы от
времени
2000
1000
NA
0
1000
0
2
4
6
8
10
t
Давление кулисы на
направляющую в точке B
r1
OD OC
NB NA
cos S4sin
BD
BD
График зависимости давления кулисы на направляющую в точке B от
времени
1000
500
NB
0
500
0
2
4
6
8
10
t
Давление кулисы на
направляющую в точке D
r
1
OC OB
ND NA
cos S4sin
BD
BD
237
График зависимости давления кулисы на направляющую в точке D от
времени
400
200
0
ND
200
400
600
0
2
4
6
8
10
t
Y1 m1g NA
Вертикальная составляющая реакции подшипника маховика 1
График зависимости вертикальной составляющей реакции подшипника
маховика 1 от времени
2000
1000
Y1
0
1000
0
2
4
6
8
10
t
Вычисление среднего момента электродвигателя
min MDcp 20.664
238
mean MD 22.394
MDcp supsmooth t MD
min MD 19.611
График зависимости момента электродвигателя, передаваемого маховику 1 от времени
45
40
35
MD
30
MDcp
25
20
15
0
2
4
6
8
10
t
22
21
MD
MDcp
20
19
8
8.5
9
9.5
10
t
239
4. Анализ результатов вычислений
Математическая модель, описывающая поведение исследуемого механизма (механической системы), построена при следующих основных допущениях:
o Каток 3 движется вдоль вертикальной плоскости без отрыва от нее, т.е. на каток наложены дополнительные связи, которые можно описать следующими
уравнениями:
геометрическими xC3 const R3 ;
силовыми N3 0 , т. к. связь в точке касания катка с плоскостью является
неудерживающей.
o Каток 3 движется без проскальзывания, т.е. модуль силы сцепления FСЦ подчинен следующему ограничению
fСЦ N3 ,
FСЦ FСЦ
– предельное значение силы сцепления.
где FСЦ
Анализ результатов расчета, с учетом сформулированных требований к поведению механической системы, позволяют сделать следующие выводы (величину времени начала установившегося режима движения механизма, период неравномерности вращения маховика и др. можно получить, используя опцию 2Dграфиков "Trace", которая позволяет снимать значения координат функций
прямо на графике [1]):
1. Время неустановившегося движения механизма невелико и составляет
около 4,5 с.
2. В установившемся режиме движение маховика близко к равномерному
вращению, средняя угловая скорость которого порядка cp 19.3 рад с .
Амплитуда
неравномерного
вращения
составляет
приблизительно
0.9 рад с , а его период – 0.325 c . Таким образом коэффициент неравно-
мерности движения механизма приблизительно равен
240
max min
0.096.
cp
3. В установившемся режиме среднее угловое ускорение маховика приблизительно равно cp 0 рад с 2 . Амплитуда изменения углового ускорения
составляет приблизительно 26 рад с 2 , а коэффициент динамичности
max
0.067.
2
cp
4. Среднее значение силы нормального давления на вертикальную плоскость
N3 в установившемся режиме составляет приблизительно 180 Н, что
близко к величине m3 g tg (см. (20)) а амплитуда ее изменения – около
930 Н.
5. Величина силы нормального давления на вертикальную плоскость N3 с
периодичностью 0,325 с. принимает отрицательные значения, что может
привести к отрыву катка от вертикальной плоскости. Такое поведение
силы N3 противоречит математической модели механизма и требует изменения ее параметров.
6. Максимальные и минимальные значения силы сцепления имеют приблизительно следующие значения max FСЦ 712 H , min FСЦ 710 H . В
тоже время предельные значения силы сцепления изменяются в интервале
337 H , min FСЦ
220 H , что не соответствует условиям
max FСЦ
движения катка без проскальзывания.
7. При заданных параметрах механизма и внешних нагрузок указанные условия не выполняются.
На основании выводов по результатам расчета движения механизма сформулируем задачу исследования.
Требуется обеспечить соответствие движения механизма ее математической модели в рамках принятых при постановке задачи допущениях.
241
Т.е. необходимо удовлетворить следующим условиям:
15) Сила нормального давления катка 3 о вертикальную плоскость должна
быть положительной;
16) Величина силы сцепления должна обеспечивать движение катка 3 без проскальзывания.
Данные условия представим в математическом виде
min FСЦ max fСЦ N3 .
min N3 0, max FСЦ min fСЦ N3 ,
(25)
В дальнейшем будем считать, что расчетный режим движения механизма
является штатным, т.е. входные M Д и выходные нагрузки M H , а также средняя
угловая скорость изменяться не должны.
Вид графиков изменения величин N3 t , FСЦ t , t и t показывает,
что в дальнейшем исследовании следует ограничиться диапазоном установившегося режима движения механизма.
Для выполнения условий (25) выявим влияние параметров механизма и
внешних нагрузок на величины углового ускорения и угловой скорости маховика, силы нормального давления N3 , силы сцепления FСЦ .
Анализ зависимостей (18) – (20) показывает, что величина нормальной реакции опоры N3 зависит от прижимного усилия F S4 sin катка на вертикальную плоскость; прижимное усилие зависит от кинематических и инерционных (массы и момента инерции) параметров катка 3; сила сцепления также пропорциональна кинематическим и инерционным параметрам катка. В тоже время
инерционные параметры катка влияют на угловое ускорение механизма и, следовательно, на его угловую скорость.
Таким образом, изменение инерционных параметров катка (массы и / или
момента инерции) приводит не только к изменению прижимного усилия, но и к
изменению силы сцепления и кинематических параметров всего механизма.
242
Следует отметить, что в некоторых вариантах схем задания следует изменять инерционные параметры катка.
Подытоживая вышесказанное, нужно поставить цель изменения прижимного усилия таким образом, чтобы оно не влияло на кинематические параметры
механизма. Данную проблему можно решить, добавив в механизм новый конструкционный элемент, который осуществляет поджим катка 3 к вертикальной
плоскости. Вариантов, обеспечивающих такое решение, по–крайней мере – два
(рис.5):
o Предварительно сжатый упругий стержень, поджимающий каток 3 со стороны кулисы 2 (рис.5 а);
o Предварительно растянутый упругий стержень, обеспечивающий внешнее
поджатие катка 3 (рис.5 б).
MH
D
2
E
C3
c
3
MH
C2
4
c
D
2
C3
E
3
a)
C2
4
б)
Рис. 5. Дополнительный конструктивный элемент
Оба стержня моделируются упругой пружиной, сила упругости которой,
определяется выражением F c , где c – коэффициент жесткости стержня,
– предварительное удлинение / сжатие стержня, в зависимости от схемы крепления.
Так как точка крепления пружины совпадает с центром масс катка в обоих
случаях, то расчетные схемы для них будут одинаковы (рис. 6). Отличие этой
схемы от предыдущей (рис. 4 а) заключается в наличии силы F , которая обеспечивает поджим катка 3 к вертикальной плоскости.
243
y
3 3
N3
P3
F
aC3
C3
FСЦ
MH
x
S4
G3
Рис. 6. Расчетная схема катка с дополнительным
конструктивным элементом
Записывая для катка 3 дифференциальные уравнения плоского движения
твердого тела, получим
0 N3 F S4 sin ,
m3 yC3 S4 cos FСЦ m3 g ,
I 3 3 FСЦ R3 M H .
Из этих уравнений можно найти величину нормальной реакции катка N3
M
3
N3 F S4 sin F m3 g H m3 yC3 tg
R3 2
и остальные реакции, действующие на каток 3 FСЦ , S4 , значения которых совпадают с предыдущим решением (см. формулы (18), (19)).
Оценим теперь величину прижимного усилия F . Так как значения силы
сцепления FСЦ и реакции стержня 4 S 4 не изменяются в связи с появлением дополнительного конструктивного элемента, то в расчетах можно использовать ре0
зультаты предыдущего решения, которые обозначим символом " " . Подставляя
экстремальные значения сил FСЦ , S4 в условия (25), получим
0
N3 F min S4 sin F min N3 0,
0
0
min FСЦ min FСЦ
min fСЦ N3 fСЦ F fСЦ min N3 .
0
0
max FСЦ max FСЦ
min fСЦ N3 fСЦ F fСЦ min N3 ,
244
Разрешая данные неравенства относительно силы F , получим соотношения позволяющие найти минимальное значение величины прижимного усилия,
обеспечивающего выполнение условий (25)
0
0
0
0
max FСЦ
fСЦ min N3
min FСЦ
fСЦ min N3
, F
,
F
fСЦ
fСЦ
0
F min N3 .
Экстремальные значения силы сцепления FСЦ и нормальной реакции вертикальной плоскости N3 в предыдущем решении равны
0
0
0
min N3 732.651 H , max FСЦ
711.7 H , min FСЦ
709.927 H .
Тогда минимальное значение прижимного усилия должно удовлетворять
следующим неравенствам
F 3104.893 H , F 3098.984 H , F 732.651 H .
В качестве минимального значения прижимного усилия принимаем с небольшим запасом F 3200 H . Задавая теперь в качестве величины предварительного удлинения (сжатия) прижимного стержня 0.002 м , получим значение модуля упругости стержня
c
F
1 600 000 H
м
.
Для схемы механизма с предварительно растянутым стержнем (рис. 5 б)
закон движения ведущего звена, а также реакции внешних и внутренних связей
остаются неизменными, кроме нормальной реакции опорной плоскости N3 . При
этом максимальные сжимающие усилия стержня 4 и силы нормального давления
пальца на прорезь кулисы 2 равны
S4max 1589.222 H ,
N Amax 1477.811 H .
Оценим теперь, какое влияние оказывает на механизм предварительно
сжатый стержень. Для этого рассмотрим кулису 2 и составим для нее расчетную
245
схему (рис. 7), на которой изобразим действующие на кулису силы: силу тяжести
G2 m2 g , реакции направляющих кулисы N B , N D , усилие стержня 4 – S 4 , при-
жимное усилие F , а также силу давления пальца маховика A на прорезь кулисы
NA.
y
D
ND
E
aC2 yC2
F
S 4
NB
C2
B
G2 N A
A
O
x
Рис. 7. Расчетная схема кулисы 2 в случае внутреннего поджима (рис.5 а).
Применяя, как и ранее теорему о движении центра масс и теорему об изменении кинетического момента механической системы, получим следующие
уравнения
0 N D F S4 sin N B ,
m2 yC2 N A S4 cos m2 g ,
0 N A r1 cos N D C2 D N B C2 B F C2 E.
Решение данной системы показывает, что величина силы давления пальца
на прорезь кулисы N A полностью совпадает с формулой (21), а остальные реакции равны
r1
C D
ED
cos S4 2 sin F
,
BD
BD
BD
r
C B
EB
N B N A 1 cos S4 2 sin F
,
BD
BD
BD
NB N A
где ED OD OE, EB OE OB, C2 E h cos .
Таким образом, для схемы механизма с предварительно сжатым стержнем
246
(рис. 5 а), закон движения ведущего звена, а также реакции связей остаются неизменными, кроме нормальных реакций опорной плоскости N3 и направляющих
N B , N D . Максимальные значения сжимающих усилий в стержне 4 и прижимном
стержне, а также силы нормального давления пальца на прорезь кулисы 2 равны
S4max 1589.222 H ,
N Amax 1477.811 H , F 3200 H .
Сравнивая предельные значения сжимающих усилий для разных конструктивных схем, делаем вывод, что поскольку эти значения меньше для схемы с
предварительно растянутым стержнем (рис. 5 б), то данная схема предпочтительнее.
247
5. Результаты анализа
С целью подтверждения проведенных исследований произведем расчет
конструктивно измененного механизма.
Динамический расчет механизма с кулисным приводом
1. Ввод исходных данных
… … … …
0.002
h 0.5
c 1600000
2. Вычисление постоянных величин
CE hcos
F c
… … … …
3. Определение функций
… … … …
OE OC CE
… … … …
6. Вычисление реакций внешних и внутренних связей
Нормальное давление
катка 3
max N3 4323.75
MH
I3
aC3 F
N 3 tan m3 g
m3
2
R3
R3
min N3 2467.439
mean N3 3380.14
График зависимости нормального давления N 3 катка на вертикальную
плоскость от времени
4500
4000
3500
N3
3000
2500
2000
0
2
4
6
8
10
t
…………
Предельное значение силы сцепления
max FSC 711.7
248
min FSC 709.927
F'SC fN3
max F'SC 1297.125 min F'SC 740.232
График зависимости силы сцепления катка с вертикальной плоскостью
и ее предельных значений от времени
2000
1000
FSC
F' SC
0
F' SC
1000
2000
0
2
4
6
8
10
t
2000
1000
FSC
F' SC
0
F' SC
1000
2000
8
8.5
9
9.5
10
t
…………
Давление кулисы
r1
OD OC
OD OE
на направляющую
NB NA
cos S4sin
F
в точке B
BD
BD
BD
График зависимости давления кулисы на направляющую в точке B от
времени
600
400
200
NB
0
200
400
0
2
4
6
8
10
t
249
Давление кулисы
на направляющую
в точке D
r1
OC OB
OE OB
ND NA
cos S4sin
F
BD
BD
BD
График зависимости давления кулисы на направляющую в точке D от
времени
2500
3000
ND
3500
4000
0
2
4
6
t
…………
250
8
10
Выводы
В результате решения полученного дифференциального уравнения движения механизма были определены: закон движения маховика 1, его угловые скорость и ускорение как функции времени t . На основании найденного закона движения по разработанному алгоритму были вычислены значения реакций внешних и внутренних связей.
Проведенный анализ результатов расчета показал, что в некоторые моменты времени значения нормальной реакции опорной плоскости становятся отрицательными, а сила сцепления превышает свое предельное значение. Следовательно, математическая модель не соответствует поведению механической системы: каток 3 может двигаться не только с проскальзыванием, но и с отрывом
от вертикальной плоскости. Таким образом, механизм может получить дополнительную степень свободы.
С целью устранения этой ситуации были сформулированы критерии, удовлетворение которых обеспечивает адекватность движения системы математической модели.
Проведенные исследования показали, что конструкционное внесение в
схему механизма предварительно напряженных упругих стержней позволяет
обеспечить адекватность математической модели ее реальному движению.
Было найдено минимальное значение прижимного усилия, обеспечивающего выполнение необходимых для этого условий
N3 0, FСЦ FСЦ
при F 3105 H .
Произведена сравнительная оценка разных конструкционных элементов
внесенных в механизм и сделан вывод о предпочтительности схемы с предварительно растянутым стержнем, в связи с необходимостью дальнейших расчетов
на устойчивость сжатых стержней и срез пальца маховика 1.
251
АЛЬБОМ ЗАДАНИЙ И ИСХОДНЫЕ ДАННЫЕ ДЛЯ РАСЧЕТА
1
2
l
MД
O
A
1
MД
A
2
O
3
B
C2
l
C2
FH
1
3
2
MH
B
3
4
MH
MД
C2
B
2
A
O
C2
l
FH
B
3
3
1
A
O
l
2
MД
1
5
6
A
C2
D
252
A
O
MД
FH
3
1
l
O
2
2
C2
B
B
1
MД
MH
l
3
7
8
B
MД
MH
C2
2
B
A
C2
O
2
l
3
O
A
1
FH
3
l
MД
1
9
10
l
2
B
MД
D
MД
O
C2
MH
A
1
O
A
1
l
2
3
FH
C2
B
11
12
l
1
1
MД
O
A
MH
A
O
D
l
C2
C2
B
2
MД
2
3
3
3
MH
B
253
13
14
MД
2
FH
A
B
O
A
1
MД
O
3
l
1
2l
2
C2
3
MH
B
15
16
1
1
A
2
O
C2
D
MД
3
A
B
O
B
C2
2
FH
l
MД
FH
l
3
17
18
B
2
3
FH
C2
2
C2
l
1
254
3
D
A
O
MH
B
l
A
O
MД
MД
1
19
20
MH
1
1
MД
O
A
3
FH
C2
l
B
C2
O
2
l
MД
2
3
A
D
B
21
22
MH
l
B
C2
2
B C
2
l
2
A
O
A
3
O
3
1
MH
MД
1
MД
23
24
1
1
O
A
D
C2
2
B
MД
MД
O
A
FH
l
l
2
MH
3
C2
3
B
255
25
26
FH
MД
B
2
B
C2
1
3
A
O
O
FH
l
2
3
A
C2
l
MД
1
27
28
MH
1
MД
2
O
O
A
A
C3
B
3
1
l
2
MД
MH
2l
C2
B
3
29
30
FH
B
FH
1
2
3
C2
B
D
A
O
C
2
3
D
2
O
l
256
l
A
MД
MД
1
№
M0
0
1
I1
m1
m2
m3
R3
r3
i3 OB
l
H м кг м / с кг / с кг м2
кг
м
–
–
–
1 - 50 0,8 – 344 1,4 51 21 24 0,18 –
–
–
–
2 102 3,3 – 331 2,0 55 15 20 0,13 –
1,5 50 20 24 0,12 –
– 0,12 –
3 - 34 0,3 9,56 –
26 0,2 3,48 –
1,7 56 26 20 0,09 –
– 0,09 –
4
–
5 105 3,5 – 639 2,0 49 10 20 0,12 0,08 0,09 –
1,4 54 24 24 0,18 –
– 0,10 –
6 - 53 0,8 4,72 –
1,5 51 20 20 0,09 –
– 0,12 0,08
7 - 27 0,2 20,6 –
–
8 108 3,5 – 222 2,0 60 10 15 0,10 0,08 0,08 –
1,4 53 15 30 0,09 –
– 0,15 0,05
9 - 27 0,2 20,6 –
–
10 110 3,8 – 571 2,0 62 12 20 0,18 0,08 0,12 –
37 0,4 11,5 –
1,7 52 22 32 0,12 –
– 0,12 0,06
11
–
12 112 3,7 – 246 2,0 54 14 12 0,16 0,12 0,14 –
–
–
–
13 113 3,7 – 342 2,0 58 12 10 0,12 –
–
14 114 3,8 – 856 2,0 57 15 28 0,10 0,06 0,08 –
–
15 115 3,9 – 2234 2,0 63 16 30 0,20 0,06 0,14 –
–
16 116 3,9 – 2654 2,0 48 18 16 0,10 0,05 0,08 –
39 0,4 6,95 –
1,4 63 23 32 0,12 –
– 0,12 –
17
–
–
–
18 118 3,9 – 337 2,0 64 12 10 0,08 –
–
19 119 3,9 – 3231 2,0 59 20 40 0,14 0,07 0,08 –
2,0 70 10 12 0,10 –
–
–
–
20 120 4,0 3,24 –
–
–
–
21 121 4,0 – 1380 2,0 67 24 16 0,07 –
–
22 122 4,1 – 700 2,0 72 12 18 0,18 0,06 0,12 –
65 1,0 5,36 –
1,4 57 17 16 0,18 –
– 0,10 –
23
1,7 65 25 36 0,09 –
– 0,16 0,08
24 - 31 0,2 49,2 –
63 1,0 35,4 –
1,4 64 24 32 0,18 –
– 0,14 –
25
–
26 126 4,2 – 5440 2,0 58 18 26 0,18 0,09 0,10 –
1,5 56 26 24 0,12 –
– 0,16 –
27 - 36 0,4 29,9 –
–
–
–
28 128 4,3 – 1308 2,0 71 22 16 0,15 –
–
–
–
29 129 4,2 – 101 2,0 67 12 10 0,05 –
1,5 49 15 20 0,12 –
– 0,10 –
30 - 41 0,4 6,10 –
Радиус маховика R1 = 0.36 м, OA = r1 = 0.06 м. Тела, радиус инерции которых
не задан в таблице, считать круглыми однородными цилиндрами.
257
Д 3. ДИНАМИКА ПЛОСКИХ ШАРНИРНЫХ МЕХАНИЗМОВ
Плоские шарнирные механизмы широко распространены в современном
машиностроении в связи с присущими им достоинствами: высокой технологичностью изготовления, возможностью выполнения шарнирных соединений на
подшипниках качения, небольшим износом соприкасающихся поверхностей,
долговечностью, надежностью в работе и ремонтоспособностью.
Без глубокого знания кинематических и динамических характеристик механизмов, входящих в современный агрегат, невозможно спроектировать машину с параметрами, близкими к оптимальным, что, безусловно, отражается на
производительности, надежности, долговечности машины, и на качестве выпускаемой продукции. Знание кинематических и динамических свойств и возможностей механизмов необходимо для разработки новых технологических процессов.
Цель курсовой работы
Исследование и анализ динамического поведения плоского шарнирного
механизма с помощью основных теорем и принципов теоретической механики.
Содержание курсовой работы
Объектом исследования является плоский шарнирный механизм, который
приводится в движение электродвигателем, развивающим момент, приложенный
к ведущему звену (кривошипу OA )
M Д M 0 0
где M 0 , 0 – постоянные величины.
Полезная нагрузка моделируется для разных вариантов либо силой FH ,
либо моментом M H
FH v , M H
где , – постоянные величины, а v, – линейная или угловая скорость ведомого звена.
258
Схемы механизмов и исходные данные для расчета приведены в альбоме заданий.
При составлении математической модели принимаются следующие допущения:
o Звенья механизма считаются абсолютно твердыми, сплошными и однородными стержнями.
o Проскальзывание между звеньями отсутствует.
o Трение в подшипниках и шарнирах не учитывается; ползуны скользят по
направляющим без трения.
Требуется:
1. Составить дифференциальное уравнение движения механизма.
2. Составить уравнения для определения динамических реакций внешних и внутренних связей.
3. Проинтегрировать при нулевых начальных условиях
t 0
0,
t 0
0 диф-
ференциальное уравнение движения кривошипа OA на отрезке времени [0, ].
Величину рекомендуется принимать из промежутка 0,5 10,0 с.
4. Построить графики функций (t ), z z (t ), z z (t ) и определяемых динамических реакций. Найти предельную угловую скорость кривошипа.
5. Проанализировать полученные результаты.
Порядок выполнения работы
1. Составить дифференциальное уравнение движения механизма одним из следующих способов (по указанию преподавателя):
o с помощью теоремы об изменении кинетической энергии в дифференциальной форме;
o методом общего уравнения динамики;
o с помощью уравнений Лагранжа второго рода.
2. Определить динамические реакции внешних и внутренних связей. Для их
определения следует использовать (по указанию преподавателя):
259
o теоремы об изменении количества движения и кинетического момента в дифференциальных формах;
o дифференциальные уравнения движения твердого тела;
o метод кинетостатики (принцип Даламбера).
3. Численное интегрирование дифференциального уравнения движения при заданных начальных условиях рекомендуется провести в одной из математических
сред (например, Mathcad). Там же провести определение указанных динамических реакций и построение графиков.
4. Провести анализ результатов расчета движения механизма. Исследовать факторы, влияющие на неравномерность движения механизма
260
ПРИМЕР ВЫПОЛНЕНИЯ ЗАДАНИЯ
Плоский шарнирный механизм (рис. 1), расположенный в вертикальной
плоскости, движется под действием внешнего момента M Д , приложенного к ведущему звену (кривошипу OA ) и изменяющемуся по закону M Д M 0 0 .
На ползун D действует полезная нагрузка FH , величина которой задается соотношением
FH vD .
Звенья механизма моделируются сплошными однородными стержнями,
массы которых пропорциональны их длине. Погонная плотность каждого
стержня равна . Соединение стержней осуществлено идеальными шарнирами.
Движение механизма начинается из состояния покоя, а начальное значение угла
поворота ведущего звена равно 0 .
Требуется
o Составить дифференциальное уравнение движения механизма с помощью
теоремы об изменении кинетической энергии;
o Определить динамические реакции внешних и внутренних связей;
o Провести численное интегрирование дифференциального уравнения движения при заданных начальных условиях с помощью пакета Mathcad;
o Провести анализ результатов вычислений.
261
FH
D
3
a
C3
3
MД A
C
1
O1
2
C1
K
C2
b
2
O
1
B
Исходные данные:
OA l0 15 см,
O1K 25 см,
10 кг м ,
15.0 H c м ,
AB l 1 97 см,
a 50 см,
m4 2 кг,
M 0 50 H м,
O1B l2 66 см,
b 37 см,
KD l3 86 см,
0 1.25 Н мс.
Рис. 1. Схема плоского механизма и исходные данные
262
1. Составление дифференциального уравнения движения
механизма
Для решения поставленной задачи выберем правую систему координат,
начало которой расположим в подшипнике O . Рассмотрим механизм в произвольном положении и изобразим силы действующие на него в данный момент
времени (рис. 2): G, G1, G2 , G3 , G4 – силы тяжести звеньев; FH – полезная
нагрузка; M Д – возмущающий момент; X O , YO , X O1 , YO1 , X П – реакции опор.
FH
D
XП
GD G4
a
C3
YO 1
G3
3
X O1
MД A
YO
O
C
G
1
O1
2
C1
K
G1
C2
b
G2
XO
B
Рис. 2. Расчетная схема плоского механизма
Составление кинематических соотношений
Рассматриваемый механизм представляет собой механическую систему с
одной степенью свободы. Положение всех его звеньев будем определять с помощью угла поворота ведущего звена . Углы поворотов звеньев k
k 1, 2, 3 ,
263
отсчитываемые от горизонтальной оси O x в положительном направлении, связаны с острыми углами k , изображенными на рис. 2 (см. К 1, рис. 2), соотношениями
1 2 1, 2 2 2 , 3
2
1 .
Выразим кинематические характеристики всех тел механизма через кинематические параметры ведущего звена с помощью уравнений геометрических
связей (К 1, (3))
AB cos 1 O1B cos 2 a OA cos ,
AB sin 1 O1B sin 2 b OA sin ,
O1K cos 2 KD cos 3 0,
(1)
O1K sin 2 KD sin 3 yD b.
Угловые координаты звеньев механизма и координата ползуна D будут в
этом случае определяться соотношениями (К 1, (5) – (8)):
O1B 2 O1 A2 AB 2
1 arccos
,
2
AB
O
A
1
O1B 2 O1 A2 AB 2
2 arccos
,
2
O
B
O
A
1
1
OK
3 arccos 1 cos 2 ,
KD
(2)
yD b O1K sin 2 KD sin 3 .
Угловые скорости звеньев можно получить из соотношений (К 1, (11'))
X A1 B ,
(3)
1
где X 2 – вектор угловых скоростей звеньев, отнесенных к угловой ско
3
dk dk
рости ведущего звена k
k ;
dt
d
264
AB sin 1
O1B sin 2
0
A AB cos 1 O1B cos 2
0
– матрица коэффициентов си
0
O1K sin 2 KD sin 3
стемы уравнений A X B ;
OA sin
B OA cos – вектор правых частей системы уравнений A X B .
0
Скорости центров масс кривошипов OA и O1B найдем по формуле Эйлера
vC OC; vC2 2 O1C2 ,
(4)
а скорости центров масс шатунов AB и KD вычислим с помощью теоремы о
сложении скоростей плоской фигуры
vC1 v A 1 AC1, vC 3 vK 3 KC 3 ,
(5)
где v A OA – скорость точки A шатуна AB , vK 2 O1K – скорость точки
K шатуна KD .
Скорость ползуна D определяется простым дифференцированием четвертого уравнения системы (11)
yD vC4 O1K cos 2 2 KD cos 3 3 .
(6)
Угловые ускорения механизма связаны между собой аналогичными с (3)
выражениями (К 1, (13'))
X A1 C
(7)
1
где X 2 – вектор неизвестных угловых ускорений звеньев;
3
C C 2 B – вектор правых частей системы уравнений A X C ; а
265
OA cos AB cos 1 12 O1B cos 2 2 2
C OA sin AB sin 1 12 O1B sin 2 2 2 .
O1K cos 2 2 2 KD cos 3 32
(8)
При вычислении угловых ускорений звеньев учтено, что, в отличии от задания К 1, угловое ускорение ведущего звена не равно нулю.
Ускорения центров масс кривошипов OA и O1B найдем по формуле Эйлера
aC OC OC ;
(9)
aC2 2 O1C2 2 O1C2 ,
Ускорения центров масс шатунов AB и KD вычислим с помощью теоремы
о сложении ускорений плоской фигуры
aC 1 a A 1 AC1 1 1 AC1 ,
(10)
aC 3 aK 3 KC 3 3 3 KC 3 ,
где
a A OA OA
–
ускорение
точки
A
шатуна
AB ,
aK 2 O1K 2 2 O1K – ускорение точки K шатуна KD .
Ускорение ползуна D определяется дифференцированием уравнения (6)
KD cos 3 3 sin 3 32 .
yD aC4 O1K cos 2 2 sin 2 22
(11)
Составление дифференциального уравнения движения механизма с помощью теоремы об изменении кинетической энергии
Для составления дифференциального уравнения движения механической
системы с одной степенью свободы применим теорему об изменении кинетической энергии в дифференциальной форме
dT
N k Fke N k Fki ,
dt
k
k
266
(12)
где T – кинетическая энергия системы;
N k Fke
– сумма мощностей внешних
k
сил;
N k Fki – сумма мощностей внутренних сил.
k
Вычислим кинетическую энергию системы как сумму кинетических энергий тел, образующих механическую систему
T T0 T1 T2 T3 T4 ,
1
где T0 IOz 2 – кинетическая энергия кривошипа OA , совершающего враща2
тельное движение вокруг оси O z ;
1
1
T1 m1vC21 I1C z 12 – кинетическая энергия шатуна AB , совершающего плос2
2 1
кое движение;
T2
1
I 2O z 22 – кинетическая энергия кривошипа O1B , совершающего враща2 1
тельное движение вокруг оси O1 z ;
1
1
T3 m3vC23 I3C z 32 – кинетическая энергия шатуна KD , совершающего
2
2 3
плоское движение;
1
1
T4 m4vD2 m4vC2 4 – кинетическая энергия ползуна D , который движется по2
2
ступательно.
Моменты инерции сплошных однородных стержней, составляющих механизм, относительно осей проходящих через их центры масс равны
1
1
1
1
IOz m0l02 , I1C z m1l12 , I 2O z m2l22 , I3C z m3l32 .
1
1
3
3
12
3
12
Подставляя кинематические соотношения (3) – (6) в выражение кинетической энергии системы, окончательно получаем:
1
T I np 2
2
(13)
267
где
I пр IOz m1VC21 I1C z 21 I 2O z 22 m3VC23 I3C z 23 m4VC24
1
1
3
(14)
– приведенный момент инерции механизма, а величины VCk , k 1, 4 – скорости
v
точек механизма, отнесенные к угловой скорости ведущего звена VCk Ck .
Для рассматриваемой механической системы, состоящей из абсолютно
твердых тел, соединенных идеальными шарнирами сумма мощностей внутренних сил равна нулю
Nk Fki 0 .
k
Сумма мощностей внешних сил будет равна
Nk Fke N M Д
k
N FH NG NG NG NG NG ,
1
2
3
4
где NG G vC , NG G1 vC1 , NG G2 vC2 , NG G3 vC3 , NG G4 vC4 – мощ1
2
3
4
ности сил тяжести звеньев; N M Д M Д – мощность момента приводящего механизм в движение; N FH FH vD – мощность полезной нагрузки.
Мощности сил X O , YO , X O1 , YO1 , X П равны нулю, т.к. реакция опорной
плоскости X П перпендикулярна скорости точки D , а остальные силы приложены к неподвижным точкам.
Учитывая выражения для движущегося момента M Д и полезной нагрузки
FH , окончательно получим
0
пр 2 ,
Nk Fke M пр , M пр
(15)
0
M пр , M пр
пр
(16)
k
где
0
– приведенный момент внешних сил, а величины M пр
и пр равны
0
M пр
M 0 G VC Gk VCk ,
k
пр 0 VC24 .
268
Подставляя найденные выражение кинетической энергии (13) и мощности
внешних сил (15) в теорему об изменении кинетической энергии (12), получим
дифференциальное уравнение движения механизма
1
I np I np 2 M пр , ,
2
(17)
d
где I np
I np – производная момента инерции механизма по углу поd
ворота ведущего звена.
Решив данное дифференциальное уравнение второго порядка с указанными в задаче начальными условиями, найдем закон движения ведущего звена
t , его угловую скорость t и угловое ускорение t .
2. Нахождение реакций внешних и внутренних связей
Для определения реакций внешних и внутренних связей расчленим плоский шарнирный механизм на отдельные звенья и изобразим реакции внешних и
внутренних связей каждого звена (рис. 3).
Применив к каждому телу, изображенному на расчетной схеме, теорему о
движении центра масс (в проекциях на оси координат) и теорему об изменении
кинетического момента (для кривошипов относительно осей вращения, для шатунов относительно осей проходящих через центр масс) получим следующую
систему уравнений:
Кривошип
m aCx X O X A ,
OA
m aC y YO YA m g ,
(18)
IOz M Д m g xC YA x A X A y A ;
Шатун AB
m1 aC1x X B X A ,
m1 aC1y YB YA m1 g ,
YB xB xC ;
I1C z 1 X A yC1 y A YA xC1 x A X B yB yC1
1
(19)
1
269
X D
FH
YD
XП
XD
D
D
YO 1
G4
YD
O1
2
YO
aC
O
C2
G2
X B
XO
X A A
1
YA
aC 1
3
G3
B
YB
XA
C
aC3
2
A
G
C3
XK
K
aC2
MД
3
2 YK
aC4
YA
3
X O1
X K
YK
C1
1
1
YB
G1
B
XB
Рис. 3. Расчетные схемы звеньев плоского механизма
Кривошип
m2 aC2 x X O1 X B X K ,
O1B
m2 aC2 y YO1 YB YK m2 g ,
X B yB yO YB xB xO m2 g xC
(20)
I 2O z 2 X K yK yO1 YK xK xO1
1
1
Шатун KD
1
2
xO1 ;
m3 aC3x X D X K ,
m3 aC3 y YD YK m3 g ,
X D yD yC YD xD xC ;
I 3C z 3 X K yC3 yK YK xC3 xK
3
3
Ползун D
270
,
0 XП XD
m4 aC4 YD m4 g FH .
(21)
3
(22)
Первое уравнение системы (5) позволяет определить реакцию опорной
плоскости X П , а второе, после подстановки найденных величин, дифференциальное уравнение движения механизма (17).
Оставшиеся двенадцать соотношений представляют собой систему линейных алгебраических уравнений относительно неизвестных реакций.
3. Результаты расчетов
Решение поставленной задачи сводится к численному интегрированию
дифференциального уравнения движения механизма (17) и решению системы
двенадцати линейных алгебраических уравнений (1) – (21) относительно неизвестных динамических реакций внешних и внутренних связей.
Задача интегрирования дифференциального уравнения (17) связана с большим количеством предварительных вычислений и может быть условно разбита
на пять блоков:
o решение системы уравнений геометрических связей (1) или вычисление геометрических соотношений (11);
o вычисление кинематических соотношений по формулам (3) – (11);
o вычисление приведенного момента инерции механизма I np и приведенного момента внешних сил M пр , ;
o вычисление производной от приведенного момента инерции по углу поворота
ведущего звена I np ;
o численное интегрирование дифференциального уравнения.
Все это может быть проведено в Mathcad несколькими способами использующими различные встроенные процедуры–функции. Отличие этих способов и
методов заключается во времени вычислений, которое требуется для нахождения: решения системы уравнений геометрических связей, приведенного момента
инерции механизма I np и его производной I np , приведенного момента
271
внешних сил M пр , , а также решения дифференциального уравнения движения (17). Подробно о методах решения данного дифференциального уравнения
изложено в [1]. Ниже рассмотрен алгоритм и приведет пример документа
Mathcad, в котором обеспечивается минимальное время вычислений.
Алгоритм вычислений
Угловые координаты звеньев k k 1, 3
и положение ползуна D
yD yC4 вычисляются в явном виде по формулам (11).
Угловые скорости звеньев k k 1, 3 , отнесенных к угловой скорости
кривошипа, вычисляются в явном виде по формулам (3).
Скорости центров масс звеньев VCk k 1, 4 , отнесенных к угловой скорости кривошипа, вычисляются в явном виде по формулам (4) – (6), которые примут следующий вид
VC k OC ;
VC1 k OA 1 AC1,
VC2 2 O1C2 ,
(23)
VC3 2 O1K 3 KC 3 ,
VC4 O1K cos 2 2 KD cos 3 3.
Далее, по формулам (14) и (16) вычисляется приведенный момент инерции
I np и коэффициенты в приведенном моменте внешних сил M пр , .
Для вычисления производной I np от приведенного момента инерции
по углу поворота ведущего звена воспользуемся явным представлением этой
производной
I пр 2m1VC1VC1 2 I1C z 11 2 I 2O z 22
1
1
2m3VC3VC3 2 I 3C z 33 2m4VC4VC4 .
3
272
Производные k k 1, 3 можно найти, продифференцировав по систему уравнений A X B . Получим
A X A X B
A X C ,
X A1 C ,
откуда
1
где вектор X 2 , а матрица C определена соотношением (8).
3
Производные VCk k 1, 4 находятся дифференцированием по углу поворота кривошипа OA выражений (23).
Для численного интегрирования дифференциального уравнения второго
порядка (17) представим его в виде системы двух дифференциальных уравнений
первого порядка. Введя новые переменные , , получим
,
1
0
M
I np 2 .
пр
пр
I np
2
1
(24)
Эти соотношения позволяет вычислять угловое ускорение кривошипа,
если известны его угол поворота и угловая скорость; в частности, можно вычислить угловое ускорение в начальный момент по заданным начальным значениям
угла поворота и угловой скорости кривошипа.
Для интегрирования системы уравнений (24) при заданных начальных
условиях используем встроенную в пакет Mathcad процедуру-функцию rkfixed
реализующую метод Рунге-Кутта [1] и имеющую следующий вид:
rkfixed(u, T0, Tk, N, D),
0
где: u
- вектор начальных условий; T0 , Tk – граничные точки интервала,
0
на котором ищется решение дифференциального уравнения. Начальные условия,
273
заданные в векторе u – это значение решения в точке T0 ; N – число точек (не
считая начальной точки), в которых ищется приближенное решение. При помощи этого аргумента определяется число строк N 1 в матрице, возвращаемой
t , U
функцией rkfixed ; D t ,U
– вектор, элементами которого является
t
,
U
угловая скорость и угловое ускорение маховика, определяемых уравнениями
(24).
Матрица, получаемая в результате решения, содержит три столбца; первый
– для значений времени t , второй – для значений угла поворота t , третий –
для значений угловой скорости t .
Решение системы линейных алгебраических уравнений (1) – (21), для
нахождения динамических реакций внешних и внутренних связей сложностей не
вызывает и реализуется любым из методов реализованных в Mathcad [1, 5].
Ниже приведен пример документа Mathcad, в котором реализована процедура интегрирования дифференциального уравнения движения маховика и вычисления реакций внешних и внутренних связей.
Динамический расчет плоского шарнирного механизма
1. Ввод исходных данных
a .50
b .37
OA .15
AB .97
O1K .25
O1B .66
KD .86
M0 50
0 1.25
15.
10
g 9.81
2. Вычисление постоянных величин и вспомогательных функций
m0 OA
m1 AB
m2 O1B
m3 KD
L0 OA
L1 AB
L2 O1B
L3 KD
ORIGIN 1
b
atan
a
274
O1A
a b OA 2 OA a b cos
2
2
2
2
2
m4 2
angle OA cos a OA sin b
3. Определение угловых координат звеньев и вертикальной координаты
ползуна
D как функции угла поворота ведущего звена
O1B2 AB2 O1A 2
O1A 2 O1B2 AB2
2 acos
1 acos
2 O1A O1B
2 O1A AB
O1K cos
2
KD
yD b O1K sin 2 KDsin 3
3 acos
4. Определение положения узловых точек механизма радиус-векторами
cos
RA sin L0
0
a
RO1 b
0
cos
L0
RC sin
0 2
cos 3
D sin 3 L3
0
a
y
RD D
0
cos 1
L1
C1 sin 1
2
0
cos 2
B sin 2 L2
0
cos 2
K sin 2 O1K
0
cos 2
L2
C2 sin 2
2
0
cos 3
L3
C3 sin 3
2
0
RC1 RA C1
RB RO1 B
RK RO1 K
RC3 RK C3
5. Блок вычисления приведенного момента инерции механизма
Определение матрицы коэффициентов, вектора правых частей системы
нелинейных уравнений относительно угловых скоростей звеньев, а
также вектора неизвестных приведенных угловых скоростей.
0
ABsin 1 O1Bsin 2
AB
cos
O1B
cos
0
A
1
2
0
O1K
sin
KD
sin
2
3
275
OAsin
B OA cos
0
' A
1
B
Определение законов изменения скоростей звеньев отнесенных к угловой скорости кривошипа в векторной форме.
0
0
0
0
'
1
0
1
1
0
'
2
2
0
'
3
3
0
Определение скоростей узловых точек механизма отнесенных к угловой
скорости кривошипа
VA RA
VC1 VA 1 C1
VC RC
VB 2 B
VC2 2 C2
VC3 VK 3 C3
VK 2 K
O1K cos 2 ' 2 KDcos 3 ' 3
VD 0 0
Вычисление моментов инерции кривошипов относительно оси вращения,
шатунов – относительно осей, проходящих через центр масс.
T
1
1
1
1
2
2
2
2
m0L0
JzC1
m1L1
JzO1 m2L2
JzC3
m3L3
3
12
3
12
Вычисление приведенного момента инерции механизма
JzO
Jnp JzO m1 VC1 VC1 JzC1 1 1
JzO1 2 2 m4 VD VD
m3 VC3 VC3 JzC3 3 3
6. Блок вычисления производной от приведенного момента инерции по
углу поворота ведущего звена
Вычисление производных k k 1, 3
OAcos ABcos ' 1 2 O1Bcos ' 2 2
1
2
2
2
C' OAsin ABsin 1 ' 1 O1Bsin 2 ' 2
2
2
O1K cos 2 ' 2 KDcos 3 ' 3
'' A
1
C'
Формирование производных k k 1, 3
276
в виде векторов
0
' 0
0
0
0
0
'1 0 '2 0 '3 0
''
''
''
1
2
3
Вычисление производных VC k 1, 4
k
V'A ' RA RA
V'C1 V'A '1 C1 1 1 C1
V'K '2 K 2 2 K
V'C3 V'K '3 C3 3 3 C3
0
2
2
O1K
sin
'
KD
sin
'
2
3
2
3
V'D
O1K cos 2 '' 2 KDcos 3 '' 3
0
Вычисление производной I np
J'np 2 m1 VC1 V'C1 2 JzC1 1 '1
2 JzO1 2 '2 2 m4 VD V'D
2 m3 VC3 V'C3 2 JzC3 3 '3
Отображение приведенного момента инерции и его производной на графике за один оборот кривошипа
0 0.01 2
1.5
1
Jnp 0.5
J'np
0
45
90
135
180
225
270
315
360
0.5
1
180
277
7. Блок вычисления приведенного момента внешних сил и углового
ускорения звена
Формирование векторов сил тяжести звеньев механизма
0
G m0g
0
0
G1 m1 g
0
0
G2 m2 g
0
0
G3 m3 g
0
0
G4 m4 g
0
Вычисление коэффициентов в выражении приведенного момента внешних
сил
M0пр GVC G1VC1 G2VC2 G3VC3 G4VD M0
пр 0 VD VD
Вычисление углового ускорения кривошипа OA
1
2
M0пр пр J'np
2
OA
Jnp
8. Процедура интегрирования дифференциальных уравнений
Конечный момент времени
T 2.2
Число узловых точек
N 500T
Формирование системы дифференциальных
уравнений
Применение процедуры функции rkfixed.
OA U1 U2
0
rkfixed 0 T N D
0
D( t U)
U2
Вывод результатов вычислений.
Формирование векторов искомых величин
1
t
2
3
Вычисление средней угловой скорости
max cp 35.4382
cp supsmoot ht
max 69.3093
График изменения угловой скорости
278
OA
t и величины ср
80
60
cp
40
20
0
0
0.25
0.5
0.75
1
1.25
1.5
1.75
2
t
cp supsmootht
Вычисление среднего углового ускорения
min 5126.4989
max 3955.7691
График углового ускорения
t и величины ср
5
1000
cp
0
1000
5
0
0.25
0.5
0.75
1
1.25
1.5
1.75
2
t
Вычисление момента M Д , и его среднего значения
MДср supsmootht
MД
MД M0 0
50
MД
MДср
0
50
0
0.25
0.5
0.75
1
1.25
1.5
1.75
2
t
279
9. Процедура вычисления реакций внешних и внутренних связей
Вычисление угловых ускорений звеньев механизма
2
Формирование вектора правых частей системы
C ( i) C' i i B i i
уравнений (7)
E( i) A i
Нахождение угловых ускорений звеньев
0
0 ( i) 0
i
0
1 ( i) 0
E( i)
1
0
2 ( i) 0
E( i)
2
1
C ( i)
0
3 ( i) 0
E( i)
3
Вычисление ускорений узловых точек и центров масс звеньев
aC(i) 0(i) RC i i i RC i i
2
aA (i) 0(i) RA i i i RA i i
2
aC1(i) aA (i) 1(i) C1 i 1 i 1 i C1 i i
aC2(i) 2(i) C2 i 2 i 2 i C2 i i
aK(i) 2(i) K i 2 i 2 i K i i
2
2
2
aC3(i) aK(i) 3(i) C3 i 3 i 3 i C3 i i
2
0
2
2
O1K sin 2 i ' i 2 i KDsin 3 i ' i 3 i
aD( i)
O1K cos 2 i E(i)2 KDcos 3 i E(i)3
0
Для системы линейных алгебраических уравнений (1) – (21)относительно реакций внешних и внутренних связей осуществляется формирование матрицы коэффициентов V при неизвестных реакциях и вектора
правых частей H для каждого момента времени задаваемого вектором
решений t
i 1 N
280
Vi
f( i j) 0
V matrix( 12 12 f)
V1 1
V4 3
V6 3
V1 3 V2 2 V2 4 V3 12 ( 1 1 1 1 1 )
V6 5
V6 6 AB i C1 i
2
2
V7 5
V9 5
V4 5 V5 4 V5 6 ( 1 1 1 1 )
V6 4 C1 i
2
C1 i
1
AB
i 1 C1 i 1
V7 7 V7 9 V8 6 V8 8 V8 10 ( 1 1 1 1 1 1 )
V9 6 V9 9 V9 10 B i B i K i K i
2
1
2
1
V10 9
V12 9
V12 11
V10 11 V11 10 V11 12 ( 1 1 1 1 )
V12 10 C3 i C3 i
2
1
V12 12 D i C3 i
2
2
D
i 1 C3 i 1
V
m0 aC( i)
1
m0 g m0 aC( i)
2
m4aD ( i) i i m4g
2
m1 aC1( i)
1
m1 g m1 aC1( i)
2
JzC1E( i) 1
Hi
m
a
(
i
)
2
C2
1
m2 g m2 aC2( i)
2
JzO1E( i) 2 m2g C2 i 1
m3 aC3( i)
1
m3 g m3 aC3( i)
2
JzC3E( i) 3
i
1
Ri Vi Hi
XO Ri1 i
i
YO Ri2 i
i
XA Ri3 i
i
YA Ri4 i
i
XB Ri5 i
i
YB Ri6 i
i
XO1 Ri7 i
i
YO1 Ri8 i
i
XK Ri9 i
YK Ri10 i
XD Ri11 i
YD Ri12 i
i
i
i
i
281
XOi
RO
i
YO
i
XKi
RK
i
YK
i
XA i
RA
i
YA
i
XDi
RD
i
YD
i
XBi
RB
i
YB
i
XO1i
RO1
i
YO1
i
XП XD
i
i
Графики реакций внешних и внутренних связей
4
3 10
4
2 10
RO
i
RO1
i
4
1 10
0
0
0.25
0.5
0.75
1
1.25
1.5
1.75
2
1.25
1.5
1.75
2
ti
4
3 10
4
RA 2 10
i
RB
i
4
1 10
0
0
0.25
0.5
0.75
1
ti
6000
RK
i
4000
RD
i
XП 2000
i
0
0
0.25
0.5
0.75
1
ti
282
1.25
1.5
1.75
2
4. Анализ результатов вычислений
Анализ результатов вычислений позволяет сделать следующие выводы
(величину времени начала установившегося режима движения механизма, период неравномерности вращения маховика и др. можно получить, используя опцию 2D-графиков "Trace", которая позволяет снимать значения координат функций прямо на графике [1, 5]):
1. Время неустановившегося движения механизма невелико и составляет
около 1 с.
2. В установившемся режиме движение маховика близко к равномерному вращению, средняя угловая скорость которого порядка cp 35.5 рад с . Максимальные и минимальные значения угловой скорости в установившемся
режиме приблизительно равны max 69. рад с min 21. рад с , а его период – 0.18 c . Таким образом коэффициент неравномерности движения механизма приблизительно равен
max min
1.35.
cp
3. В установившемся режиме среднее угловое ускорение маховика приблизительно равно cp 0 рад с 2 . Амплитуда изменения углового ускорения
значительна и составляет около 5000 рад с 2 , а коэффициент динамичности
в этом случае
max
4.1.
2
cp
4. При заданных геометрических и инерционных параметрах механизма градиенты углового ускорения ведущего звена, а также реакций внешних и
внутренних связей в сочленениях звеньев механизма имеют большие значения. Это может привести к разрывам механизма в местах сочленений и
нарушению его работоспособности.
283
На основании выводов по результатам расчета движения механизма сформулируем задачу исследования.
Выявить факторы, влияющие на неравномерность движения механизма и
найти такие решения, при которых неравномерность установившегося движения
исчезает или становится незначительной.
Анализ дифференциального уравнения движения механизма показывает,
что основными факторами, влияющими на неравномерность движения, являются:
o величина приведенного момента инерции I пр (чем больше I пр , тем
меньше амплитуда угловых ускорений);
(чем меньше амплитуда и чем
o характер изменения производной I пр
больше период ее изменения, тем меньше градиенты углового ускорения);
Таким образом, для уменьшения неравномерности движения необходимо
обеспечить:
I np const , что может быть получено за счет увеличения
приведенного момента инерции механизма и уменьшения амплитуды его изменения.
Это достигается постановкой на ведущее звено массивного маховика и
(или) облегчением остальных звеньев механизма.
В качестве примера произведем следующие изменения в конструкции механизма:
Заменим ведущее звено сплошным маховиком радиуса OA и массой 10m0
Введем новые данные для расчета
……………
……………
m0 100 OA
……………
Определим положения центра масс маховика
0
……………
RC 0
0
……………
Вычислим момент инерции маховика относительно оси вращения.
284
1
2
m0L0
……………
2
Отображение приведенного момента инерции и его производной на
графике за один оборот кривошипа
JzO
1.5
1
Jnp 0.5
J'np
0
45
90
135
180
225
270
315
360
0.5
1
180
……………
Численное решение дифференциального уравнения с измененными исходными данными
Конечный момент времени
T 4.2
……………
max cp 38.0469
max 53.5454
График изменения угловой скорости
t и величины ср
60
40
cp
20
0
0
0.5
1
1.5
2
2.5
3
3.5
4
t
……………
min 1924.2479
max 1308.4323
График углового ускорения t и величины
ср
285
2
1
1000
cp
0
1000
1
2
0
0.5
1
1.5
2
2.5
3
3.5
4
t
……………
Замена однородного стержня массой m0 сплошным маховиком массой
10m0 приводит к увеличению приведенного момента инерции не только за счет
изменения массы ведущего звена, но и за счет увеличения момента инерции маховика по сравнению со стержнем в 1,5 раза. Т. е. момент инерции ведущего
звена увеличился в 15 раз.
Кроме этого центр масс маховика неподвижен и расположен в начале координат, в то время как центр масс кривошипа движется по окружности радиуса
1 OA .
2
В этом случае траектория центра масс механизма приближается к началу
координат.
В результате замены кривошипа сплошным маховиком с массой в 10 раз больше
o Время неустановившегося движения механизма составляет около 1.5 с.
o В установившемся режиме движения средняя угловая скорость маховика приблизительно равна cp 38 рад с . Максимальные и минимальные значения
угловой скорости в установившемся режиме равны max 53.5 рад с
min 26.6 рад с .
o Коэффициент неравномерности движения механизма становится равным
max min
0.71.
cp
o Коэффициент динамичности в этом случае
286
max
1.33.
2
cp
Таким образом, увеличение массы и момента инерции ведущего звена с
изменением его формы приводит к существенному уменьшению коэффициента
неравномерности ( в 2 раза) и коэффициента динамичности ( в 3 раза). При
этом не изменялось отклонение амплитуды приведенного момента инерции от
своего среднего значения.
Следует отметить, что увеличение массы ведущего звена без изменения его
формы приводит к значительно меньшему уменьшению коэффициентов неравномерности 0.86 и динамичности 1.76 . Это можно проверить непосредственным расчетом и не вызывает сложности в вычислениях.
Уменьшим массы всех остальных звеньев, используя для этого
материал с погонной плотностью 0.1 .
Введем новые данные для расчета
……………
……………
m0 100 OA
1.
Определим положения центра масс маховика
0
RC 0
……………
……………
0
Вычислим момент инерции маховика относительно оси вращения.
1
2
JzO m0L0
……………
2
Отображение приведенного момента инерции и его производной на
графике за один оборот кривошипа
……………
0.2
Jnp
J'np
0.1
0
45
90
135
180
225
270
315
360
0.1
……………
max cp 39.1965
max 42.3114
180
287
t и величины ср
График изменения угловой скорости
50
40
30
cp
20
10
0
0
0.5
1
1.5
2
2.5
3
3.5
4
t
……………
min 421.6425
max 271.7034
График углового ускорения t и величины
ср
0.4
0.2
1000
cp
0
0.2
1000
0.4
0.6
0
0.5
1
1.5
2
2.5
3
3.5
4
Уменьшение погонной плотности tзвеньев механизма, исключая ведущее
звено и ползун, приводит к уменьшению их масс и, следовательно, к уменьшению амплитуды приведенного момента инерции механизма. При этом среднее
уменьшилось со значения 0.835 до
значение амплитуды производной I пр
значения 0.099 , т. е. приблизительно в 8.5 раз.
В результате уменьшения масс звеньев механизма
o Время неустановившегося движения механизма составляет около 1 с.;
o В установившемся режиме движения средняя угловая скорость маховика приблизительно равна cp 39 рад с . Максимальные и минимальные значения
288
угловой скорости в установившемся режиме равны max 42.3 рад с
min 35 рад с ;
o Коэффициент неравномерности движения механизма становится равным
max min
0.19;
cp
o Коэффициент динамичности в этом случае
max
0.27.
2
cp
Таким образом, уменьшение массы звеньев приводит к существенному, по
сравнению с предыдущим случаем, уменьшению коэффициента неравномерности ( в 4 раза) и коэффициента динамичности ( в 5 раза).
Изменим распределение массы маховика (по ободу)
Введем новые данные для расчета
……………
……………
m0 100 OA
……………
1.
2
JzO m0 L0
Приведенный момент инерции, его производная за 1 оборот
0.6
0.4
Jnp
J'np
0.2
0
45
90
135
180
225
270
315
360
0.2
Численное решение дифференциального уравнения с измененными ис180
ходными данными
max cp 39.2275
max 40.851
График изменения угловой скорости
t и величины ср
289
50
40
30
cp
20
10
0
min
0
0.5
237.7635
1
1.5
max
График углового ускорения
2
146.8796
t
2.5
3
3.5
4
t и величины ср
0.1
0
1000
cp
0.1
1000
0.2
0.3
0
0.5
1
1.5
2
2.5
3
3.5
4
t
Изменение распределения массы маховика
со сплошного на тонкостенный
цилиндр приводит не только к увеличению момента инерции маховика в два
раза, но и к увеличению среднего значения приведенного момента инерции механизма
В результате увеличения момента инерции маховика в два раза
o Время неустановившегося движения механизма составляет около 1.5 с.
o В установившемся режиме движения средняя угловая скорость маховика приблизительно равна cp 39.2 рад с . Максимальные и минимальные значения
угловой скорости в установившемся режиме равны max 40.8 рад с
min 36.7 рад с .
o Коэффициент неравномерности движения механизма становится равным
290
max min
0.105.
cp
o Коэффициент динамичности в этом случае
max
0.15.
2
cp
Таким образом, увеличение момента инерции ведущего звена в 2 раза без
изменения его массы, приводит к уменьшению коэффициента неравномерности
( в 2 раза) и коэффициента динамичности ( в 2 раза). При этом не изменялось
отклонение амплитуды приведенного момента инерции от своего среднего значения.
Задача дальнейшего уменьшения неравномерности и значений реакций
связей решается аналогично и не вызывает трудностей.
291
5. Результаты анализа
С целью подтверждения проведенных исследований произведем расчет
конструктивно измененного механизма.
Динамический расчет плоского шарнирного механизма
1. Ввод исходных данных
……………
……………
1.
2. Вычисление постоянных величин и вспомогательных функций
m0 200 OA
……………
m1 AB
m2 O1B
m3 KD
m4 2
4. Определение положения узловых точек механизма радиус-векторами
0
RC 0
0
……………
……………
5. Блок вычисления приведенного момента инерции механизма
……………
Вычисление моментов инерции ……………
2
……………
JzO m0 L0
6. Блок вычисления производной от приведенного момента инерции по
углу поворота ведущего звена
……………
Отображение приведенного момента инерции и его производной на графике за один оборот кривошипа
1
Jnp
0.5
J'np
0
45
90
135
180
0.5
……………
292
180
225
270
315
360
8. Процедура интегрирования дифференциальных уравнений
T 8.2
Конечный момент времени
……………
Вывод результатов вычислений.
……………
max 40.0615
max cp 39.2503
График изменения угловой скорости
t и величины ср
Для интервала времени 0 t 4 c
50
40
cp
30
20
10
0
0
0.5
1
1.5
2
2.5
3
3.5
4
t
Для интервала времени 7 t 8 c
41
40
cp
39
38
37
7
7.1
7.2
7.3
7.4
7.5
7.6
7.7
7.8
7.9
t
……………
293
min 128.0535
max 79.5953
t и величины ср
Для интервала времени 0 t 4 c
График углового ускорения
0.05
0
1000
cp
0.05
1000
0.1
0.15
0
0.5
1
1.5
2
2.5
3
3.5
4
t
Для интервала времени 7 t 8 c
10
5
10
0
cp
5
10
10
15
7
7.2
7.4
7.6
7.8
8
t
Вычисление момента M Д , и его среднего значения
MДср supsmootht
MД
MД M0 0
60
40
MД
MДср
20
0
20
0
0.5
1
1.5
2
t
294
2.5
3
3.5
4
Для интервала времени 7 t 8 c
3
2
MД
MДср
1
0
1
7
7.1
7.2
7.3
7.4
7.5
7.6
7.7
7.8
7.9
t
9. Процедура вычисления реакций внешних и внутренних связей
……………
Графики реакций внешних и внутренних связей
Для интервала времени 0 t 4 c
Модули реакций RO , RO .
1
1500
1000
RO
i
RO1
i
500
0
0
0.5
1
1.5
2
2.5
3
3.5
4
ti
Модули реакций RA , RB .
1500
RA
RB
1000
i
i
500
0
0
0.5
1
1.5
2
2.5
3
3.5
4
ti
295
Модули реакций RK , RD , X .
600
RK
i
400
RD
i
XП 200
i
0
0
0.5
1
1.5
2
2.5
3
3.5
4
ti
Для интервала времени 7 t 8 c
Модули реакций RO , RO .
1
1500
1000
RO
i
RO1
i
500
0
7
7.1
7.2
7.3
7.4
7.5
7.6
7.7
7.8
7.9
ti
Модули реакций RA , RB .
1500
RA
RB
1000
i
i
500
0
7
7.1
7.2
7.3
7.4
7.5
ti
296
7.6
7.7
7.8
7.9
Модули реакций RK , RD , X .
600
RK
i
400
RD
i
XП 200
i
0
7
7.1
7.2
7.3
7.4
7.5
7.6
7.7
7.8
7.9
ti
В результате уменьшения масс звеньев механизма, с одновременным увеличением массы ведущего звена и замены однородного стержня маховиком с
массой распределенной по его ободу
o Время неустановившегося движения механизма составляет около 3 с.;
o В установившемся режиме движения средняя угловая скорость маховика составляет cp 39.25 рад с . Максимальные и минимальные значения угловой
скорости
в
установившемся
режиме
равны
max 40.06 рад с
min 37.9 рад с ;
o Коэффициент неравномерности движения механизма становится равным
max min
0.055;
cp
o Коэффициент динамичности в этом случае
max
0.083.
2
cp
Такое уменьшение, по сравнению с первоначальным случаем, коэффициентов неравномерности ( в 24.5 раза) и динамичности ( в 50 раз) приводит к
уменьшению максимальных значений модулей реакций внешних и внутренних
связей приблизительно от 20 до 10 раз.
297
Выводы
В результате решения полученного дифференциального уравнения движения механизма были определены: закон движения ведущего звена 1, его угловые
скорость и ускорение как функции времени t . На основании найденного закона
движения по разработанному алгоритму были вычислены значения реакций
внешних и внутренних связей.
Проведенный анализ результатов расчета показал, что
o В установившемся режиме движение маховика близко к равномерному вращению, средняя угловая скорость которого порядка cp 35.5 рад с . Максимальные и минимальные значения угловой скорости в установившемся режиме приблизительно равны max 69. рад с min 21. рад с , а его период
– 0.18 c . Таким образом коэффициент неравномерности движения механизма
приблизительно равен
max min
1.35.
cp
o В установившемся режиме среднее угловое ускорение маховика приблизительно равно cp 0 рад с 2 . Амплитуда изменения углового ускорения значительна и составляет около 5000 рад с 2 , а коэффициент динамичности в
этом случае
max
4.1.
2
cp
o При заданных геометрических и инерционных параметрах механизма градиенты углового ускорения ведущего звена, а также реакций внешних и внутренних связей в сочленениях звеньев механизма имеют большие значения.
Это может привести к разрывам механизма в местах сочленений и нарушению
его работоспособности.
С целью устранения этой ситуации был сформулирован критерий, удовлетворение которого позволит уменьшить значение этих коэффициентов.
298
Проведенные исследования показали, что уменьшения масс звеньев механизма, с одновременным увеличением массы ведущего звена и замены кривошипа маховиком с массой распределенной по его ободу значительно снизили величины данных коэффициентов.
Таким образом, увеличение массы ведущего звена в 20 раз с одновременным уменьшением масс звеньев в 10 раз позволило добиться следующего:
o В установившемся режиме движения средняя угловая скорость маховика составляет cp 39.25 рад с . Максимальные и минимальные значения угловой
скорости
в
установившемся
режиме
равны
max 40.06 рад с
min 37.9 рад с ;
o Коэффициент неравномерности движения механизма становится равным
max min
0.055;
cp
o Коэффициент динамичности в этом случае
max
0.083.
2
cp
Такое уменьшение, по сравнению с первоначальным случаем, коэффициентов неравномерности ( в 24.5 раза) и динамичности ( в 50 раз) приводит к
уменьшению максимальных значений модулей реакций внешних и внутренних
связей приблизительно от 20 до 10 раз.
299
АЛЬБОМ ЗАДАНИЙ И ИСХОДНЫЕ ДАННЫЕ ДЛЯ РАСЧЕТА
1
O2
2
MH
D
b
A
B
d
c
y
y
O1
MД
K
a
O x
B
O1
a
3
K
b
MД
A
O x
D FH
4
MД
y
B
A
a
y
b
K
B
K
O1
O
b
x
MH
O1
D
O2
d
c
O
5
MH
MД
a
D
c
A
x
6
A
D FH
MД
y
A
b y
O
a
B
c
O1
300
O1
K
x
O
K
MH
B
D
a
c
O2
b
MД
x
7
8
K
c
a
y
D
O1
FH
B
A
y
d
b
O
O1
MД
x
K
c
x
O
MH
O2
MД
D
a
A
b
10
9
K
b
y
MД
A
K
y
D
MH
O1
O
c
B
a
O2
D
O
d
MД
11
O1
MH
a
x
A
B
x
b
12
B
a
y
A
y
O
O1
D
A
MД
x
a
MH
b
K
FH
O1
D
O
MД
x
B
301
13
14
a
y MД
B
O1
MH
K
y
O
A
O2
D
b
K
O
MД
c
MH
x
d
b
O1
D
B
x
A
15
a
16
a
y
A
y MД
B
K
O1
O
x
x
b
A
FH
B
K
MД
MД
D
c
c
O1
O2
MH
D
a
17
b
18
FH
A
D
K
MД
MД
O1
A
K
y
O x
y
O x
B
MH
D
B
a
302
O
a
O1
b
19
20
O1
O1
a
y
MH
A
K
A
D
MH
y
b
a
MД
O
K
MД
x
x
O
B
B
22
21
a
y
O1
c
MH
O
A
b
x
O2
K
MД
K
MД
b
B
D
O
a
y
O1
MH
A
x
D
B
24
23
A
K
MД
y
a
O x
MH
O2
y
MД
b
B
O
D
MH
A
O2
O1
D
B
K
x
a
c
O1
b
303
25
26
a
y
FH
O1
D
O1
MH
b
K
B
MД
MД
O
x
K
A
A
a
28
27
O2
A
MH
D
y
MД
O
K
c
x
MH
K
b
D
y
O1
B
O1
B
b
a
A
a
MД
O
x
30
29
B
MД O
x
O
c
MH
y
A
K
A
y
MД
a
O1
304
b
y
x
O
D
B
O1
O2
B
b
D
x
a
b
MH
K
D
№
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
mB mD
KD O1K AK BK
кг / м
Н м кг м / с кг / с
см
кг
–
–
–
10
46
–
42
–
100 3,1 20,1
75,4
–
5
10
60
33
19
–
102 3,3 –
–
–
–
10
70
–
21
–
134 5,3 22,5
–
8
–
10
25
–
38
–
136 5,2 23,8
73,2
–
6
10
70
–
30
–
105 3,5 –
–
–
–
10
50
–
25
–
153 4,8 24,3
74,1
–
7
10
60
–
80
30
137 4,2 –
–
–
–
10
63
20
55
–
108 3,5 21,3
–
–
–
10
30
31
–
62
135 5,1
–
7
–
10
33
–
35
35
110 3,8 25,4
83,5
–
8
10
–
–
–
60
147 4,9 –
–
–
–
10
60
–
15
45
112 3,7 27,9
–
6
–
10
40
–
15
–
113 3,7 26,7
–
–
–
10
–
–
25
–
114 3,8 26,5
–
–
–
10
45
–
30
–
115 3,9 27,1
86,7
–
9
10
60
40
–
20
116 3,9 –
76,9
–
7
10
75
–
42
48
139 4,4 –
–
5
–
10
40
–
40
–
118 3,9 25,3
–
4
–
10
–
30
–
40
119 3,9 24,8
–
9
–
10
50
–
30
–
120 4,0 31,2
–
8
–
10
50
–
40
–
121 4,0 27,6
–
–
–
10
35
–
22
–
122 4,1 24,7
–
–
–
10
60
–
30
–
145 5,0 23,8
–
–
–
10
45
15
–
–
131 4,6 26,4
–
7
–
10
42
–
15
25
143 4,9 32,4
69,7
–
8
10
60
–
35
–
126 4,2 –
–
–
–
10
54
–
–
22
146 5,4 33,1
–
6
–
10
70
–
30
25
128 4,3 31,7
–
–
–
10
70
14
–
39
129 4,2 31,3
–
5
–
10
81
–
–
30
124 3,4 30,8
M0
0
305
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ
Основная
1. Бертяев В. Д. Теоретическая механика на базе Mathcad. Практикум: Учебное
пособие. / В. Д. Бертяев – СПб: БХВ – Санкт-Петербург, 2005. 752 с.
2. Бутенин Н. В. и др. Курс теоретической механики: Учебное пособие: в 2-х т. /
Н. В. Бутенин, Я. Л. Лунц, Д. Р. Меркин. 5-е изд., исп. – СПб: Лань. 1998. 729 с.
3. Курс теоретической механики: Учебник для вузов/ В.И. Дронг, В.В. Дубинин,
М.М. Ильин и др.; Под ред. К. С. Колесникова. 3-е изд., стер. М.: Изд-во МГТУ
им. Н. Э. Баумана, 2005. 735 с.
4. Краткий курс теоретической механики: учеб. пособие / В.Д Бертяев и др. –
Ростов-на-Дону: Изд-во Феникс, 2011. 196 с.
5. Тарг С. М. Краткий курс теоретической механики: Учебник для втузов /
С. М. Тарг. 15-е изд., стер. – М.: ВШ, 2005. 415 с.
6. Яблонский А. А. Курс теоретической механики. Учеб. пособие для вузов /
А. А. Яблонский, В. М. Никифорова. 13-е изд., исп. – М.: ИнтегралПресс, 2006. 603с.
306
Дополнительная
1. Бать М.И и др. Теоретическая механика в примерах и задачах: Учеб. пособие
для вузов. В 2-х т./М.И. Бать, Г.Ю. Джанелидзе, А.С. Кельзон. 9-е изд., перераб.
– М.: Наука, 1990. 670 с.
2. Бертяев В. Д. и др. Кинематика плоских механизмов (с использованием пакета
MathCAD): Учебное пособие. /В. Д. Бертяев, Л. А. Булатов, А. Г.Митяев/ – Тула:
ТулГУ, 2003, 112 с.
3. Исследование колебаний механических систем и основы виброзащиты: Учебное пособие для вузов / В. Д. Бертяев, Л. А. Булатов и др.; Под общ. ред.
В. Д. Бертяева – Тула: ТулГУ, 2002. 140 с.
4. Исследование колебаний механической системы с гибкой упругой связью:
Учебное пособие. / В. Д. Бертяев, Л. А. Булатов, А. Г.Митяев, А. Б. Каплун –
Тула: ТулГУ, 2002. 108 с.
5. Кирьянов Д. В. Самоучитель MathCAD 11 / Д. В. Кирьянов – СПб: БХВ – Петербург, 2003. 538 с.
6. Лойцянский Л. Г., Лурье А. И. Курс теоретической механики, ч. 1 и 2. – М.:
1954 и последующие издания. 698 с.
7. Новожилов И. В., Зацепин М. Ф. Типовые расчеты по теоретической механике
на базе ЭВМ: Учебное пособие./ И. В. Новожилов, М. Ф. Зацепин. – М.: ВШ,
1986. 136 с.
8. Сборник заданий для курсовых работ по теоретической механике: Учеб. пособие для студ. втузов / А.А. Яблонский, С. С. Норейко, С. А. Вольфсон и др.; Под
общ. ред. А. А. Яблонского. 16-е изд., стер. – М.: Интеграл Пресс, 2007. 384 с.
307
ОГЛАВЛЕНИЕ
ВВЕДЕНИЕ .............................................................................................................................3
Общие положения ............................................................................................... 5
Требования к оформлению и защите ................................................................ 6
1. КИНЕМАТИКА ..................................................................................................................7
K1. КИНЕМАТИКА ПЛОСКИХ МЕХАНИЗМОВ ............................................................7
Цель курсовой работы......................................................................................... 7
Содержание курсовой работы ............................................................................ 7
Пример выполнения задания ............................................................................................9
1. Аналитический метод ................................................................................... 11
2. Результаты расчетов...................................................................................... 20
3. Определение кинематических характеристик механизма в заданном
положении с помощью теорем плоского движения твердого тела .............. 30
4. Определение кинематических характеристик механизма в заданном
положении с помощью теорем сложного движения точки .......................... 47
Анализ результатов вычислений ..................................................................... 60
АЛЬБОМ ЗАДАНИЙ И ИСХОДНЫЕ ДАННЫЕ ДЛЯ РАСЧЕТА ............................62
2. СТАТИКА .........................................................................................................................69
С 1. ИССЛЕДОВАНИЕ РАВНОВЕСИЯ ПЛОСКИХ ШАРНИРНЫХ ФЕРМ ...............70
Цель курсовой работы....................................................................................... 71
Содержание курсовой работы .......................................................................... 71
Порядок выполнения работы ........................................................................... 71
Пример выполнения задания ..........................................................................................73
1. Определение реакций внешних связей ....................................................... 74
2. Определение усилий в стержнях фермы методом вырезания узлов ...... 76
3. Определение усилий методом Риттера ....................................................... 85
308
4. Результаты расчетов...................................................................................... 88
5. Анализ результатов вычислений ................................................................. 97
6. Выводы ......................................................................................................... 106
АЛЬБОМ ЗАДАНИЙ И ИСХОДНЫЕ ДАННЫЕ ДЛЯ РАСЧЕТА ..........................107
С 2. РАВНОВЕСИЕ СОСТАВНЫХ КОНСТРУКЦИЙ ..................................................115
Цель курсовой работы..................................................................................... 115
Содержание курсовой работы ........................................................................ 115
Порядок выполнения работы ......................................................................... 116
Пример выполнения задания ........................................................................................117
1. Определение реакций внешних и внутренних связей ............................. 118
2. Определение M A , X B , YB оптимальным способом ................................. 121
3. Альтернативное расположение опор внешних связей ............................ 122
4. Результаты расчетов.................................................................................... 125
5. Анализ результатов вычислений и выводы .............................................. 131
АЛЬБОМ ЗАДАНИЙ И ИСХОДНЫЕ ДАННЫЕ ДЛЯ РАСЧЕТА ..........................132
С 3. РАВНОВЕСИЕ ПЛОСКИХ ШАРНИРНЫХ МЕХАНИЗМОВ ..............................148
Цель курсовой работы..................................................................................... 148
Содержание курсовой работы ........................................................................ 148
Порядок выполнения работы ......................................................................... 149
Пример выполнения задания ........................................................................................150
1. Составление уравнений равновесия .......................................................... 151
2. Составление уравнений геометрических связей ...................................... 159
3. Результаты расчетов.................................................................................... 160
4. Анализ результатов вычислений и выводы .............................................. 167
5. Выводы ......................................................................................................... 172
309
3. ДИНАМИКА...................................................................................................................173
Д 1. ИССЛЕДОВАНИЕ ДВИЖЕНИЯ МЕХАНИЧЕСКОЙ СИСТЕМЫ С УПРУГОЙ
СВЯЗЬЮ..............................................................................................................................174
Цель курсовой работы..................................................................................... 175
Содержание курсовой работы ........................................................................ 175
Порядок выполнения работы ......................................................................... 176
Пример выполнения задания ........................................................................................178
1. Составление дифференциального уравнения движения механической
системы. ............................................................................................................ 180
2. Определение реакций внешних и внутренних связей ............................. 185
3. Определение закона движения системы ................................................... 188
4. Результаты расчетов.................................................................................... 191
5. Анализ результатов вычислений ............................................................... 194
6. Результаты анализа ..................................................................................... 206
Выводы ............................................................................................................. 209
АЛЬБОМ ЗАДАНИЙ И ИСХОДНЫЕ ДАННЫЕ ДЛЯ РАСЧЕТА ..........................211
Д 2. ИССЛЕДОВАНИЕ ДВИЖЕНИЯ МЕХАНИЗМА С КУЛИСНЫМ ПРИВОДОМ
..............................................................................................................................................217
Цель курсовой работы..................................................................................... 217
Содержание курсовой работы ........................................................................ 217
Порядок выполнения работы ......................................................................... 218
Пример выполнения задания ........................................................................................219
1. Составление дифференциального уравнения движения механизма ..... 221
2. Определение реакций внешних и внутренних связей ............................. 226
3. Результаты расчетов.................................................................................... 231
4. Анализ результатов вычислений ............................................................... 240
310
5. Результаты анализа ..................................................................................... 248
Выводы ............................................................................................................. 251
АЛЬБОМ ЗАДАНИЙ И ИСХОДНЫЕ ДАННЫЕ ДЛЯ РАСЧЕТА ..........................252
Д 3. ДИНАМИКА ПЛОСКИХ ШАРНИРНЫХ МЕХАНИЗМОВ .................................258
Цель курсовой работы..................................................................................... 258
Содержание курсовой работы ........................................................................ 258
Порядок выполнения работы ......................................................................... 259
Пример выполнения задания ........................................................................................261
1. Составление дифференциального уравнения движения механизма ..... 263
2. Нахождение реакций внешних и внутренних связей .............................. 269
3. Результаты расчетов.................................................................................... 271
4. Анализ результатов вычислений ............................................................... 283
5. Результаты анализа ..................................................................................... 292
Выводы ............................................................................................................. 298
АЛЬБОМ ЗАДАНИЙ И ИСХОДНЫЕ ДАННЫЕ ДЛЯ РАСЧЕТА ..........................300
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ ............................................................306
Основная ........................................................................................................... 306
Дополнительная ............................................................................................... 307
ОГЛАВЛЕНИЕ ...................................................................................................................308
311
Учебное издание
Виталий Дмитриевич Бертяев,
Леонид Алексеевич Булатов,
Анатолий Григорьевич Митяев
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
КУРСОВЫЕ РАБОТЫ С ИСПОЛЬЗОВАНИЕМ MATHCAD
Учебное пособие
Авторское редактирование
Авторское редактирование
Изд. лиц. ЛР № 020300 от 12.02.97. Подписано в печать 2.11.15
Формат бумаги 6084 1/16 . Бумага офсетная.
Усл. печ. л. 14.5, Уч. – изд. л. 15.6.
Тираж 250 экз. Заказ № ___
Оригинал-макет отпечатан на кафедре «Теоретическая механика»
Тульского государственного университета
Тульский государственный университет
300600, Тула, просп. Ленина, 92.
Отпечатано в издательстве ТулГУ
300012, г. Тула, просп. Ленина, 95.